
































































































































































































































































































































Автор: Пашкевич М.Ф. Мрочек Ж.А. Кожуро Л.М. Пашкевич В.М.
Теги: формообразование со снятием стружки молоты и прессы разделительные операции без образования стружки, дробление и измельчение, обработка листового материала, изготовление резьбы отдельные машиностроительные и металлообрабатывающие процессы и производства машиностроение механика автоматизация приборостроение детали машин
ISBN: 985-6610-97-4
Год: 2002



ТЕХНОЛОГИЧЕСКАЯ
ОСНАСТКАУтверждено Министерством образования Республики
Беларусь в качестве учебника по дисциплине
«Технологическая оснастка» для студентов машиностро¬
ительных специальностей высших учебных заведенийМинск
«Адукацыя i выхаванне»
УДК 621.9.07(075.8)ББК 34.63-5я73
Т38Авторы: М.Ф.Пашкевич, Ж.А. Мрочек,Л.М. Кожуро, В.М. Пашкевич
Рецензенты: кафедра «Металлорежущие станки и инстру¬
менты» Гомельского государственного техни¬
ческого университета им. П.О. Сухого; про¬
ректор по учебной работе Белорусского инсти¬
тута повышения квалификации и переподго¬
товки кадров Госстандарта Республики Бела¬
русь, доктор технических наук ИЛ, ИвановТехнологическая оснастка: Учебник для студентов
Т38 машиностроит. специальностей вузов/М. Ф. Пашкевич,
Ж. А. Мрочек, JI. М. Кожуро, В. М. Пашкевич. - Мн.:
Адукацыя i выхаванне, 2002. - 320 с.: ил.ISBN 985-6610-97-4.Изложены основные вопросы теоретического раздела учеб¬
ной дисциплины «Технологическая оснастка» в соответствии с
учебным планом специальноСГй*Т0^.Ш|00 - Технология, обо¬
рудование и автоматизаций^м&шййостроения.Предназначается для студентов машиностроительных спе¬
циальностей вузов.УДК 621.9.07(075.8)
ББК 34.63-5я73ISBN 985-6610-97-4© Коллектив авторов, 2002
© Издательство
«Адукацыя i выхаванне», 2002
ВведениеИзвестно, что в машиностроении себестоимость и сроки
подготовки производства в наибольшей мере определяются
затратами и временем на проектирование и изготовление тех¬
нологической оснастки. Поэтому при подготовке инженеров-
механиков по специальности «Технология, оборудование и
автоматизация машиностроения» уделяется самое присталь¬
ное внимание изучению вопросов расчета и проектирования
оснастки. Кроме того, этим вопросам посвящена специаль¬
ная учебная дисциплина «Технологическая оснастка».В общей массе технологической оснастки наибольший
удельный вес составляют приспособления — станочные для
деталей и инструментов, контрольные и сборочные. В этой
связи данный учебник в наибольшей мере отражает вопросы,
связанные с изучением именно этого вида технологической
оснастки.За последние годы учебная литература по технологичес¬
кой оснастке почти не переиздавалась, а имеющиеся книги
по станочным приспособлениям и отдельные методики их
расчета несколько устарели, и поэтому встала задача по их
обновлению. В рамках решения данной задачи авторы не ста¬
вили перед собой цель коренным образом переработать книги
по приспособлениям, так как и в настоящее время они нахо¬
дят применение в учебном процессе и практике проектирова¬
ния приспособлений. В настоящей книге сделана попытка
изложить вопросы расчета и конструирования приспособле¬
ний в логической последовательности, проиллюстрировав их
необходимыми расчетными и конструктивными схемами. В
более удобной и наиболее подходящей к конструированию
приспособлений интерпретации изложена теория базирова¬
ния, приведены принципы математического описания раз¬
личных схем базирования заготовок в приспособлениях, на
основе которого разработана методика расчета погрешностей3
базирования с учетом погрешностей формы и расположения
базовых поверхностей.Введен отдельный раздел, посвященный поводковым за¬
жимным устройствам. В данном разделе содержатся экспе¬
риментальные исследования этих устройств и дается оценка
технологических возможностей, а также описание их новых
конструкций для использования в системах адаптивного уп¬
равления технологическими процессами точения и шлифова¬
ния в качестве эффективных первичных преобразователей мо¬
мента и мощности. Приведено подробное описание конструк¬
ций приспособлений для электроэрозионных станков. От¬
дельный раздел книги посвящен рассмотрению и описанию
типовых конструкций специальных станочных приспособ¬
лений для установки деталей различных типов на столах
металлорежущих станков.В разделе, посвященном контрольным приспособлениям,
изложены наиболее эффективные методы и средства контро¬
ля линейных и угловых размеров, фасонных поверхностей,
методы и средства контроля отклонений формы и располо¬
жения поверхностей, а также контроля погрешностей зубча¬
тых колес и передач в сборе.По мнению авторов, данная книга окажется полезной
инженерам-конструкторам технологической оснастки и бу¬
дет служить ценным пособием для студентов и молодых спе¬
циалистов, изучающих вопросы расчета и проектирования
приспособлений.Авторы4
1. ПРИСПОСОБЛЕНИЯ В МАШИНОСТРОЕНИИ
КАК ОСНОВНАЯ СОСТАВЛЯЮЩАЯ
ТЕХНОЛОГИЧЕСКОЙ ОСНАСТКИ1.1. ОСНОВНЫЕ ЗАДАЧИ ДИСЦИПЛИНЫСовокупность всех орудий производства, необходимых на
предприятии для изготовления выпускаемых изделий, назы¬
вается технологической оснасткой. В состав этих орудий про¬
изводства включаются оборудование, инструмент, приспособ¬
ления и различные устройства, использующиеся при изго¬
товлении, сборке, контроле, хранении и перемещении про¬
дукции на всех стадиях ее изготовления.Отдельные виды технологической оснастки, такие, как
оборудование, инструмент, транспортирующие и ориентиру¬
ющие устройства, изучаются в соответствующих учебных
дисциплинах. Принципы и методы расчета и конструирова¬
ния станочных, сборочных и контрольных приспособлений,
приспособлений для установки и фиксации режущего инст¬
румента на станках, а также приспособлений для расшире¬
ния технологических возможностей металлорежущих стан¬
ков и другого оборудования изучаются при прохождении дис¬
циплины “Технологическая оснастка”, входящей в цикл спе¬
циальных дисциплин учебного плана подготовки инженеров-
механиков по специальности “Технология, оборудование и
автоматизация машиностроения”. Настоящая работа посвя¬
щена вопросам расчета и конструирования приспособлений,
являющихся основной и наиболее широкой составляющей ча¬
стью технологической оснастки.Использование приспособлений позволяет решить три ос¬
новные задачи:• обеспечить базирование обрабатываемых на станках заго¬
товок деталей без выверки их положения, что ускоряет процесс
обработки и возможность автоматического получения размеров;• увеличить производительность и облегчить условия тру¬
да рабочих за счет механизации, а также за счет использова¬
ния многоместной, многопозиционной и непрерывной обра¬
боток;• расширить технологические возможности станков, уве¬
личив при этом их производительность и точность обработки.5
Увеличение производительности при использовании при¬
способлений происходит за счет устранения разметки и со¬
кращения штучного времени. Штучное время определяется
соотношением= *0 + К + Кь + *П-При использовании приспособлений сокращаются все со¬
ставляющие штучного времени: основное время to уменьша¬
ется в результате возможного повышения режимов резания,
а также за счет использования многоинструментальной обра¬
ботки и многоместных приспособлений; вспомогательное вре¬
мя tB уменьшают, используя установку заготовок без вывер¬
ки и быстродействующие механизированные зажимы, а так¬
же путем частичного перекрытия длительности вспомогатель¬
ного времени основным; время обслуживания рабочего места
to6 сокращается за счет использования устройств для быстрой
смены инструмента и отвода стружки; облегчение условий
труда способствует при этом сокращению времени перерывов
tn для отдыха рабочего.Таким образом, использование приспособлений снижает
трудоемкость изготовления деталей, а следовательно, и себе¬
стоимость.1.2. КЛАССИФИКАЦИЯ ПРИСПОСОБЛЕНИЙПриспособлениями в машиностроении называются вспо¬
могательные устройства для технологического оборудования,
используемые при механической обработке, сборке и контро¬
ле изделий [1; 2]. В крупносерийном и массовом производ¬
стве на каждую деталь средней сложности приходится до
десяти приспособлений. Наибольшую их часть составляют
приспособления для установки и закрепления обрабатывае¬
мых заготовок на станках.По целевому назначению приспособления условно делят¬
ся на пять групп:• станочные приспособления для установки и закрепле¬
ния заготовок на станках. Они обеспечивают их ориентацию
относительно инструмента без выверки и разметки. Ориента¬
ция заготовок в приспособлении осуществляется за счет вза¬
имодействия их базовых поверхностей с установочными эле¬6
ментами приспособления. При этом обеспечиваются задан¬
ные размеры, увеличивается производительность труда, по¬
вышается точность, сокращается брак.Станочные приспособления составляют 80 — 90 % всех при¬
способлений. В свою очередь их делят на токарные, фрезерные,
сверлильные, расточные, протяжные, строгальные и т.д.;• станочные приспособления для установки и закрепле¬
ния обрабатывающих инструментов. К ним относятся патро¬
ны для сверл, зенкеров, разверток, метчиков и других конце¬
вых инструментов; инструментальные державки для токар-
но-револьверных станков, станков с ЧПУ и автоматов. Эти
приспособления также называются вспомогательным инст¬
рументом, который большей своей частью стандартизован;• контрольные приспособления, служащие для проверки
точности заготовок, деталей и узлов машин. Приспособления
для проверки точности деталей применяются на промежу¬
точных этапах обработки, а также при окончательной при¬
емке. С их помощью выявляются точность размеров, взаим¬
ное расположение поверхностей, а также правильность их
геометрической формы;• сборочные приспособления, используемые при узловой и
общей сборке изделия. Они являются средством механиза¬
ции ручного труда, а также дополнительными устройствами
сборочного оборудования. Примеры универсальных сбороч¬
ных приспособлений: плиты, угольники, пластины, домкра¬
ты, струбцины, клинья и т.д.Сборочные приспособления используются также для со¬
единения деталей и изделий, обеспечивая при этом правиль¬
ное взаимное положение деталей и ,сборочных единиц, а так¬
же для предварительного деформирования собираемых упру¬
гих элементов (пружин, рессор); запрессовки, вальцовки, гиб¬
ки и других сборочных операций;• приспособления для захвата предназначены для пере¬
мещения заготовок большого веса и собираемых изделий. В
автоматизированном производстве такие приспособления ис¬
пользуются и для легких деталей и узлов.По степени специализации (ГОСТ 14.305—73 “Правила
выбора технологической оснастки”) станочные приспособле¬
ния подразделяются на шесть групп: универсально-сборные
приспособления (УСП), сборно-разборные приспособления7
(СРП), универсально-наладочные приспособления (УНП), уни¬
версальные безналадочные приспособления (УБП), специали¬
зированные наладочные приспособления (СНП), неразборные
специальные приспособления (НСП).Универсально-сборные приспособления (УСП) собирают из
заранее изготовленных деталей и сборочных единиц без по¬
следующей доработки. В комплект УСП входят: базовые и
корпусные детали (плиты прямоугольные, плиты круглые,
угольники); установочные детали (пальцы, призмы, штыри
и др.); направляющие детали (кондукторные втулки, колон¬
ки); крепежные детали (болты, винты, шпильки, гайки, шай¬
бы); разные детали (вилки, хомутики, оси, рукоятки, опо¬
ры); сборочные единицы (поворотные головки, кронштейны,
фиксаторы, подвижные призмы, кулачковые и тисковые за¬
жимы). Базовые и корпусные детали покрыты сеткой пазов:
шпоночных (для взаимной ориентации деталей) и Т-образ-
ных (для крепежных болтов). Для этих деталей применяется
ширина пазов 8, 12 и 16 мм. Основные элементы УСП изго¬
тавливаются по 5—6-му квалитету точности с отклонением
плоскостей и пазов от параллельности и перпендикулярнос¬
ти не более 10 мкм на длине 200 мм. Точность обработки на
УСП не превышает 9-го квалитета вследствие их невысокой
жесткости (наличие большого количества стыков).Из комплекта деталей УСП можно собирать токарные,
сверлильные, фрезерные и другие приспособления. Так, на¬
пример, из комплекта, состоящего из 4 — 4,5 тысяч дета¬
лей, можно одновременно скомпоновать около 300 приспо¬
соблений средней сложности и до 1700 компоновок приспо¬
соблений в год. Срок окупаемости комплекта составляет 2 —3 года. Достоинством УСП является сравнительно большой
срок службы (порядка 10 лет), что дает возможность много¬
кратно применять детали и сборочные единицы в разных ком¬
поновках и создавать парк обратимых элементов, находящих¬
ся в постоянном обороте: сборка приспособления — эксплуа¬
тация — разборка — сборка приспособлений новой конст¬
рукции и т.д.Главным достоинством УСП является быстрота сборки.
За 2 — 5 часов можно скомпоновать приспособление средней
сложности (с учетом квалификации слесаря-сборщика).8
УСП является одноцелевым по назначению, но универ¬
сальным по изготовлению. УСП эффективно применяют в
условиях единичного и мелкосерийного производства.На рис. 1.1, 1.2, 1.3 приведены схемы универсально-сбор-
ных приспособлений, собранных из стандартных деталей.Рис. 1.1. Схема кондуктора, собранного из стандартных деталей,
для сверления отверстийРис. 1.2. Схема приспособления, собранного из стандартных деталей,
для фрезерования и шлифования клиновой планки
Рис. 1.3 . Схема приспособления, собранного из стандартных деталей,
для расточки на токарном станкеСборно-разборные приспособления (СРП) используются в
мелкосерийном и серийном производстве. СРП представляют
собой компоновку, состоящую из готовой базовой части (пли¬
ты, угольника, планшайбы), сборочных единиц (зажимных,
установочных и т.д.) и наладочного элемента, чаще всего спе¬
циального, с помощью которого заготовку “связывают” с ус¬
тановочными элементами приспособления. Система СРП, как
и система УСП, основана на нормализации ее элементов. Здесь
главным образом стандартизируются функциональные сбо¬
рочные единицы (зажимные, установочные, корпусные, под¬
вижные губки, планшайбы, оправки, патроны) и некоторые
детали (неподвижные губки, прямоугольные и круглые пли¬
ты, подставки к опорам). Специальные сменные наладки про¬
ектируются и изготавливаются заводами-потребителями для
своих нужд. При этом учитываются специфика конкретной
обрабатываемой заготовки, особенности ее базирования и зак¬
репления в приспособлении. СРП, несмотря на определенное
сходство с УСП, имеют существенное различие: они содер¬
жат помимо стандартных деталей и узлов специальную на¬
ладку. Точность обработки на СРП (8, 9-й квалитеты) обес¬
печивается точностью изготовления и установки составляю¬
щих базовых элементов. Шероховатость поверхностей дета¬
лей по параметру Ra в этом случае должна быть в пределах
1,25 — 0,63 мкм. Пазы и базовые отверстия деталей СРП
обрабатываются по 7-му квалитету точности.10
Универсально-наладочные приспособления (УНП) состо¬
ят из двух частей. Одна часть — постоянная, базовая; вторая —
меняющаяся, представляющая собой сменные наладки.Базовая часть имеет универсальное назначение и пред¬
назначена для многократного использования. В базовую часть
приспособлений входят: корпус с элементами для базирова¬
ния и закрепления сменных наладок, зажимной механизм с
ручным или механизированным приводом. Сменные налад¬
ки представляют собой сборочные единицы, предназначен¬
ные для установки заготовок. Базовая часть приспособлений
обычно стандартная. Она изготавливается на заводах техно¬
логической оснастки и поставляется по заявкам заводов-по-
требителей. Сменные наладки проектируются и изготавлива¬
ются в инструментальных цехах завода-потребителя. При
смене объекта производства базовая часть, если она не изно¬
шена физически, используется в комплекте с другими налад¬
ками для обработки новых деталей, сменные же наладки ути¬
лизируются. Благодаря неоднократному использованию ба¬
зовой части приспособления достигается значительное сокра¬
щение расхода металла, что имеет существенное экологичес¬
кое значение.УНП применяют в условиях многономенклатурного мел¬
косерийного, серийного и крупносерийного производства.На рис. 1.4 приведены примеры наладок трехкулачковых
патронов.Универсальные безналадочные приспособления (УБП)
представляют собой законченный механизм долговременного
действия с постоянными установочными элементами и пред¬
назначены для многократного использования без доработки.
Большинство конструкций УБП поставляются совместно со
станками и являются их принадлежностью (универсальные
токарные патроны, машинные тиски с постоянными губка¬
ми, поворотные столы, делительные головки, оправки, план¬
шайбы, магнитные плиты, люнеты, поводковые устройства и
т.д.). Большинство УБП стандартизовано.Точность обработки в этих приспособлениях не выше 9-го
квалитета. Для подготовки УБП к работе требуются наимень¬
шие затраты времени по сравнению с другими видами оснаст¬
ки, кроме специальной. УБП имеют ряд преимуществ, кото¬
рые целесообразно использовать: минимальные затраты вре-11
Рис. 1.4. Схемы наладок трехкулачковых патронов:
а - для установки детали по двум цилиндрическим и торцовой поверхностям. В этом
случае два кулачка делаются жесткими, а один - с качающимся элементом; б - для
закрепления заготовки со сложным контуром. Здесь кулачки выполняются соответствую¬
щей конфигурациимени для подготовки приспособлений к работе; относительно
высокая универсальность. Эти приспособления используются
в условиях единичного и мелкосерийного производства, а так¬
же в серийном производстве при оснащении малотрудоемких
операций.Специализированные наладочные приспособления (СНП)
эффективно используются в условиях мелкосерийного и круп¬
носерийного производств. Состоят они из специализирован¬
ной, чаще всего механизированной базовой сборочной еди¬
ницы и специальных сменных наладок для установки заго¬
товок, близких по схемам базирования, закреплению и ха¬
рактеру обработки. На рисунке 1.5 приведены примеры ис¬
пользования стандартизованных планшайб в сочетании со спе¬
циальными сменными наладками.В этом случае специализированное наладочное приспособ¬
ление для обработки колец (рис. 1.5, а) комплектуется из
планшайбы 2, переходного фланца 1 и комплекта прихватов 9.
Обрабатываемая деталь 4 закрепляется либо прихватами, либо12
центральным зажимом, состоящим из опорной втулки 3, шай¬
бы-прихвата 5, шайбы 6, гайки 7 и винта 8.На рис. 1.5, б показано СНП для обработки заготовок де¬
талей типа крышек и фланцев. Оно состоит из ступенчатой
планшайбы 2, переходного фланца 1 и набора прихватов 4.
Деталь 3 центрируется либо непосредственно на планшайбе,
либо посредством специального переходного кольца.Приспособления типов УНП и СНП целесообразно исполь¬
зовать в условиях серийного производства: УНП — на много¬
номенклатурных участках, СНП — на специализированных
участках.Неразборные специальные приспособления (НСП) исполь¬
зуются для выполнения определенной операции при обработ¬
ке конкретных заготовок. Они являются одноцелевыми. При
смене объекта производства такие приспособления приходится
утилизировать независимо от степени их физического изно¬
са. Эти приспособления трудоемкие и дорогие в изготовле¬
нии. Изготавливаются они в условиях единичного производ¬
ят бРис. 1.5. Примеры использования стандартизованных планшайб:
а - при обработке заготовок типа колец; б - при обработке заготовок типа крышек ифланцев213
ства. Обычно такие приспособления используются в крупно¬
серийном и массовом производстве.К приспособлениям этой группы предъявляются требо¬
вания высокой точности, производительности, максимальной
степени использования стандартных деталей и сборочных
единиц, что способствует резкому сокращению сроков проек¬
тирования и изготовления приспособлений.По степени механизации и автоматизации приспособле¬
ния можно классифицировать на ручные, механизированные,
полуавтоматические, автоматические.В автоматизированном производстве приспособление яв¬
ляется элементом сложного транспортирующего и загрузоч¬
но-разгрузочного комплекса.1.3. СТРУКТУРА ПРИСПОСОБЛЕНИЙНесмотря на большие различия в конструктивном испол¬
нении приспособлений они имеют практически одинаковую
структуру.Установочные элементы служат для ориентации заготов¬
ки в пространстве. Выбираются установочные элементы в
зависимости от формы заготовки детали, обрабатываемой
поверхности и заданного способа базирования. К установоч¬
ным элементам относятся опоры, опорные пластины, при¬
змы, втулки, цанги, оправки, пальцы, сухари, кулачки раз¬
жимных устройств и другие элементы.Зажимные элементы и устройства предназначены для
обеспечения надежного контакта базовых поверхностей заго¬
товки с установочными элементами. Они предотвращают сме¬
щение заготовки от действия сил резания при обработке. В
приспособлениях широко используются простейшие зажим¬
ные устройства (винтовые, эксцентриковые, клиновые, ры¬
чажные, цанговые), а также комбинации этих устройств.
Зажимные элементы и устройства в ряде случаев исполняют
функции и установочных элементов (кулачки и призмы в
патронах, губки в тисках).Силовые приводы обеспечивают воздействие зажимных
элементов на закрепляемые заготовки с заданным усилием в
определенном направлении. Силовые приводы работают в
сочетании с простейшими зажимными устройствами. Наи¬14
большее распространение получили пневматические, гидрав¬
лические, пневмогидравлические, механические, вакуумные,
магнитные, электромагнитные, электромеханические, а так¬
же ручные приводы зажимных устройств.Элементы для определения положения или направления
инструментов служат для установки инструментов (высот¬
ные и угловые установы), направления сверл, зенкеров, бор-
штанг (кондукторные втулки), обеспечения заданной траек¬
тории перемещения инструмента (копиры). Эти элементы
должны иметь повышенные точность, качество отделки и
высокую износостойкость.Конструкции и основные размеры высотных (ГОСТ
13443—68, ГОСТ 13444—68) и угловых (ГОСТ 13445—68,
ГОСТ 13446—68) установов приведены в справочнике [1].Установы располагают в непосредственной близости от
зоны обработки таким образом, чтобы их рабочие поверхнос¬
ти не мешали обработке, т.е. были ниже обрабатываемой по¬
верхности заготовки на некоторую величину, определяемую
толщиной используемого щупа [1].Кондукторные втулки располагают в кондукторной пли¬
те, которая в зависимости от конструкции приспособления
может быть неподвижной, подвижной, откидной, поворот¬
ной и съемной.Вспомогательные устройства и элементы приспособле¬
ний служат для расширения их технологических возможно¬
стей, повышения быстродействия, удобства управления и об¬
служивания.К вспомогательным устройствам относятся поворотные и
делительные устройства, выталкиватели, защелки и откид¬
ные винты, подъемные механизмы, тормозные и прижим¬
ные устройства, рукоятки, маховики, сухари, крепежные и
другие детали.С помощью поворотных, делительных и подъемных уст¬
ройств обрабатываемой заготовке придаются различные по¬
ложения относительно базовых поверхностей станка. Дели¬
тельные устройства состоят из дисков и фиксаторов. Фикса¬
торы бывают с шариками, цилиндрическими и коническими
пальцами.Выталкиватели используют для ускорения снятия дета¬
лей с приспособления.15
Подъемные механизмы или устройства используются в
приспособлениях при наладке.Корпусы — базовые элементы приспособления. Они обес¬
печивают заданное относительное расположение всех элемен¬
тов и устройств приспособлений, объединяя их в единое це¬
лое, и воспринимают силы обработки и закрепления заготов¬
ки. Корпусы приспособлений снабжают установочными эле¬
ментами, которые обеспечивают базирование приспособления,
т. е. требуемое его положение на станке без выверки.16
2. ОСНОВЫ ПРОЕКТИРОВАНИЯ СПЕЦИАЛЬНЫХ
СТАНОЧНЫХ ПРИСПОСОБЛЕНИЙ2.1. ИСХОДНЫЕ ДАННЫЕ И ПОСЛЕДОВАТЕЛЬНОСТЬ
ПРОЕКТИРОВАНИЯ ПРИСПОСОБЛЕНИЙПри разработке конструкции приспособления исходными
данными являются: технологический процесс изготовления
детали; объем годового выпуска; сведения об используемом
оборудовании и размерах его рабочей зоны; справочные ма¬
териалы, включающие нормализованные узлы станочных
приспособлений; конструкторская документация на станоч¬
ные приспособления для обработки деталей аналогичных ти¬
пов; чертеж заготовки, детали и инструмента.Перед проектированием приспособления необходимо оз¬
накомиться с характеристикой станка, используемого на дан¬
ной операции (основные размеры, связанные с размещением
приспособления, размеры стола, пределы его рабочих пере¬
мещений, размеры и расположение Т-образных пазов, наи¬
меньшее расстояние от стола до шпинделя, размер конуса
шпинделя и т.д.), а также с расположением органов управле¬
ния.При проектировании приспособлений выполняется не¬
сколько последовательных этапов работы:• в соответствии с технологическим процессом уточняют
способ базирования заготовки в приспособлении и выбирают
конструкцию установочных элементов;• решают задачу закрепления заготовки и выбора зажим¬
ных элементов;• выполняют силовой расчет приспособления, на основе
которого выбирают привод зажимных устройств. На основе
силового расчета ведут расчет деталей приспособлений на
прочность и жесткость, осуществляют окончательный вы¬
бор их размеров;• выполняют эскизный проект приспособления, для чего
на листе чертежной бумаги тонкими штрихпунктирными или
синими линиями изображают контуры обрабатываемой дета¬
ли в требуемом количестве проекций и удобном масштабе.
Общий вид приспособления вычерчивают последовательным
нанесением его элементов вокруг контуров детали. При этомL7
деталь считается прозрачной. Сначала наносят установочные
элементы, затем — зажимные устройства и приводы, элемен¬
ты для направления и контроля положения инструмента, а
также вспомогательные устройства и детали. Последним
вычерчивают корпус приспособления, который объединяет
все перечисленные элементы в единое целое;• выполняют расчет приспособления на точность, при ко¬
тором выбирают расчетный параметр и определяют его вели¬
чину. Заканчивают этот расчет разбивкой значения расчет¬
ного параметра на допуски размеров деталей приспособле¬
ния, входящих в соответствующую размерную цепь, т.е. тех
деталей, которые определяют требуемую точность обработки
заготовки на данной операции. Если окажется, что точность
отдельных деталей приспособления, ответственных за точ¬
ность обработки на данной операции, технологически недо¬
стижима, то в этом случае или уточняют конструкцию при¬
способления в части изменения схемы установки (если по¬
грешности базирования и закрепления не равны нулю), умень¬
шения количества стыков и, следовательно, звеньев размер¬
ной цепи, формирующей выполняемый размер заготовки,
или же решают вопрос о расширении допуска на выполняе¬
мый размер;• вычерчивают вспомогательные устройства и детали и
ведут корректировку конструкции корпуса;• выполняют рабочие чертежи приспособления.2.2. ВЫБОР СПОСОБА БАЗИРОВАНИЯ ЗАГОТОВОК
В ПРИСПОСОБЛЕНИИТеория базирования заготовок при их обработке на метал¬
лорежущих станках основана на понятиях и определениях
стандарта [ 3 ]. Основным его положением является правило
шести точек, согласно которому для обеспечения неподвиж¬
ности тела в пространстве на него необходимо и достаточно
наложить, по меньшей мере, шесть связей.Другим узловым положением этого стандарта является
понятие об опорной точке, которая символизирует одну связь.
На основе этих понятий любая схема установки заготовки на
станке сводится к теоретической схеме базирования — схеме
расположения опорных точек на базах заготовки, а базы (по¬18
верхности заготовки) в зависимости от количества опорных
точек подразделяются на установочную, направляющую, опор¬
ную, двойную направляющую, двойную опорную и т.д. При
этом опорные точки располагаются как на реальных поверх¬
ностях заготовки, так и на воображаемых плоскостях и осях
(на скрытых базах).В большинстве своем теоретические схемы базирования
[3] не соответствуют реальным схемам установки. Напри¬
мер, при установке заготовки на магнитной плите совершен¬
но очевидно, что если заготовка неподвижна, то на нее на¬
ложено, по меньшей мере, шесть связей, лишающих ее
шести степеней свободы. А вот найти шесть опорных точек
невозможно, поэтому опорные точки указаны на плоскостях
симметрии заготовок.При установке заготовки в трехкулачковом патроне по
теоретической схеме базирования указано, как всегда, шесть
опорных точек, в том числе и опорная точка на торце и на
воображаемой линии, перпендикулярной оси заготовки. Здесь
также схема базирования не соответствует реальности.При установке заготовки корпуса на столе станка на три
специально выполненные точечные опоры эта заготовка не¬
подвижна. На нее наложено шесть связей. Но опор только
три. На теоретической схеме базирования [3] недостающие
три опорные точки показаны на линиях разметки.Схема установки заготовки, приведенная на странице 13
стандарта [3], свидетельствует о другом. Здесь налицо семь
опорных точек: три на опорной плоскости и по две в призма¬
тических зажимах. Но на основе понятия о скрытых базах
на теоретической схеме базирования изображено лишь шесть
опорных точек.Точно такие же теоретические схемы базирования, толь¬
ко с другими обозначениями, приведены в [4] . Здесь, при
протягивании, опорные точки располагаются даже на обра¬
батываемых поверхностях. Но почему тогда при сверлении,
зенкеровании, развертывании и хонинговании отверстий
обрабатываемые поверхности не являются базами?В источниках [ 3; 4 ] нет пояснения, почему при одной и
той же установке заготовки в виде втулки на оправку в одном
случае (когда заготовка короткая) на ее торце располагаются
три опорные точки, а во втором (когда заготовка длинная) —19
только одна. Сами понятия длинной и короткой заготовок не
определены.Несколько иначе теоретические схемы базирования пред¬
ставлены в учебнике [ 5 ] по технологии машиностроения.
На этих схемах приведено по 3, 4, 5 и 6 опорных точек и
указывается число лишаемых степеней свободы при базиро¬
вании (по количеству опорных точек). И в этом случае так¬
же возникают существенные возражения.В этом учебнике значительное внимание уделено описа¬
нию скрытых (условных) баз. О скрытых базах идет речь и в
разделе о базирующей роли направленных зажимов. Оказы¬
вается, что при различных скоростях встречного перемеще¬
ния направленных зажимов скрытые базы могут переме¬
щаться и занимать положение не только в плоскости симмет¬
рии, но и любое другое положение по длине заготовки. А
как найти положение такой базы не известно.Стремление свести к правилу шести точек любую схему
установки прослеживается и в учебнике [ 6 ]. Приведенная в
нем (рис. 3, б) схема установки сводится к шести точкам и
указывается, что в этом примере правило шести точек рас¬
сматривается формально, путем выделения на сплошных ус¬
тановочных элементах условных точечных опор.Таким образом, многие положения рассматриваемого стан¬
дарта неоднозначны, они даже у специалистов не находят
единого понимания. Эти разночтения понятий приводят к
путанице, особенно среди студентов и начинающих специа¬
листов. Причина этого состоит в том, что как в стандарте,
так и в учебниках не разграничены понятия неподвижности
заготовки в пространстве и определенности ее положения в
выбранной системе координат.В дальнейшем изложении представленного учебника бу¬
дут использоваться понятия и термины, известные из суще¬
ствующей теории базирования и стандарта [ 3 ]. Основные из
них приведем ниже, с тем чтобы конкретизировать их и при¬
дать им однозначность в случае обработки заготовок с ис¬
пользованием металлорежущих станков.База — поверхность, сочетание поверхностей, линия или
точка заготовки, детали или сборочной единицы, используе¬
мые для базирования.20
Комплект баз — совокупность поверхностей заготовки,
детали или сборочной единицы, использующаяся для их ба¬
зирования.Основная база — поверхность, линия или точка заготов¬
ки, детали или сборочной единицы, используемые для опре¬
деления их положения в изделии, приспособлении или на
столе металлорежущего станка.Вспомогательная база — поверхность, линия или точка
заготовки, детали или сборочной единицы, используемые для
определения положения других деталей или сборочных еди¬
ниц.Технологическая база — название основной базы заготов¬
ки при ее обработке на станке.Измерительная база — название поверхности, линии или
точки заготовки, используемой при определении выполняе¬
мого размера.Система координат основных баз — система координат
детали или сборочной единицы, служащая для определения
положения основных баз.Система координат вспомогательных баз — система ко¬
ординат детали или сборочной единицы, служащая для опре¬
деления положения вспомогательных баз.Базирование — придание определенного положения сис¬
теме координат основных баз заготовки в системе координат
вспомогательных баз станка (при изготовлении).Базирование — придание определенного положения сис¬
теме координат основных баз присоединяемой детали или сбо¬
рочной единицы в системе координат вспомогательных баз
другой детали или сборочной единицы (при сборке).Схема базирования — схема расположения системы ко¬
ординат основных баз заготовки в системе координат вспомо¬
гательных баз станка (при изготовлении).Схема базирования — схема расположения системы ко¬
ординат основных баз присоединяемой детали или сборочной
единицы в системе координат вспомогательных баз другой
детали или сборочной единицы (при сборке).Закрепление — приложение сил к заготовке для обеспе¬
чения неподвижности ее основных баз относительно вспомо¬
гательных баз приспособления при действии сил резания.21
Закрепление — приложение сил к присоединяемой дета¬
ли или сборочной единице для обеспечения их неподвижнос¬
ти относительно другой детали или сборочной единицы (при
сборке).Установка — совокупность базирования и закрепления
заготовки или сборочной единицы.Погрешность базирования — смещения и повороты сис¬
темы координат основных баз заготовки относительно систе¬
мы координат вспомогательных баз станка, характеризую¬
щие отклонение фактически достигнутого положения при
базировании от требуемого.Погрешность закрепления — смещения и повороты сис¬
темы координат основных баз заготовки относительно систе¬
мы координат вспомогательных баз станка, происходящие в
результате действия сил закрепления.Погрешность установки — смещения и повороты систе¬
мы координат основных баз заготовки относительно системы
координат вспомогательных баз станка, характеризующие
отклонение фактически достигнутого положения при уста¬
новке от требуемого.На основе анализа положений теории базирования можно
сформулировать два основных принципа базирования, т.е.
придание заготовке или изделию требуемого положения от¬
носительно выбранной системы координат:• для придания заготовке полной определенности поло¬
жения или полной ориентации в выбранной системе коорди¬
нат (для обеспечения полного базирования) необходимо при¬
дать системе координат технологических баз заготовки опре¬
деленность положения в шести направлениях (вдоль и вок¬
руг трех координатных осей), что достигается либо с помо¬
щью специальных опорных устройств, либо выверкой;• для достижения требуемой точности обработки на дан¬
ной операции необходимо при базировании придать заготов¬
ке определенность положения с соответствующей точностью
лишь в направлениях выполняемых размеров и направлени¬
ях, определяющих расположение обрабатываемых поверхно¬
стей, в то время как в других направлениях строгой опреде¬
ленности положения заготовки может не быть (неполное ба¬
зирование).22
Таким образом, при полном базировании заготовок в при¬
способлении все заготовки обрабатываемой партии занимают
относительно системы координат станка одно и то же поло¬
жение. При неполном базировании каждая заготовка в неко¬
торых направлениях относительно осей координат станка
может занимать произвольное положение.Следовательно, при базировании требуется ориентировать
систему координат основных баз заготовки в системе коорди¬
нат станка, т.е. связывать с направлениями движений подач.
Например, для токарного станка (рис. 2.1) такой системой
координат является система x0y0z0, в которой ось х0 совпада¬
ет с линией центров станка, т.е. с направлением продольной
подачи, ось у0 соответствует направлению поперечной пода¬
чи, а ось zQ — вертикальная ось, перпендикулярная плоско¬
сти подач. Точно так же, для фрезерного станка (рис. 2.2)
ориентацию заготовок или системы координат основных баз
заготовок при базировании также осуществляют в системе
координат станка xQyQz0, оси которой х0 и у0 соответствуют
продольной и поперечной подачам, а ось zQ также, как и в
первом примере, перпендикулярна плоскости подач. Для
плоскошлифовального станка (рис. 2.3) система координат
xQyQzQ также связана с направлениями рабочих подач сто¬
ла.При рассмотрении базирования заготовок система коор¬
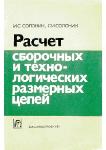
динат x0yQzQ, связанная со станком, может смещаться вдольРис. 2.1. Схема системы координат токарного станка
(ось у0 соответствует направлению поперечной подачи суппорта станка
и на схеме не указана)23
Рис. 2.2. Схема системы координат вертикально-фрезерного станка
(ось х0 соответствует направлению продольной подачи стола станка
и на схеме не указана)Рис. 2.3. Схема системы координат плоскошлифовального станка
(ось х0 соответствует направлению поперечного перемещения стола станка
и на схеме не указана)24
одной, двух или трех осей координат, т.е. ее начало может со¬
вмещаться с началом системы координат основных баз детали.На рис. 2.4 представлена
схема базирования призмати¬
ческой заготовки, т.е. схема
совмещения системы коорди¬
нат xyz основных баз заготов¬
ки с системой координат
вспомогательных баз приспо¬
собления, которая совпадает
с системой координат x0yQz0
станка. Здесь требуемая ори¬
ентация системы координат
xyz в системе координат xQyQzQ
осуществляется автоматичес¬
ки с помощью специального
опорного устройства, выпол¬
ненного в виде координатно¬
го угла.На рис. 2.5 изображена схема базирования призматичес¬
кой заготовки на столе станка. Совмещение системы коорди¬
нат основных баз заготовки xyz с системой координат xQyQzQ
вспомогательных баз приспособления (стола) в этом случае
осуществляется путем выверки.Рисунки 2.4 и 2.5 являются примерами полного базиро¬
вания заготовки. Здесь положение системы координат xyz
основных баз детали в системе координат xQy0zQ станка стро¬
го определено во всех шести направлениях — вдоль и вок¬
руг трех координатных осей.На рис. 2.6 приведен пример, иллюстрирующий второй
принцип базирования, т.е. неполное базирование. Здесь за¬
готовка (пластина) установлена своей опорной плоскостью
на магнитной плите без выверки положения системы коор¬
динат xyz основных баз в системе координат xQyQzQ станка.
Поэтому система координат xyz оказалась повернутой на не¬
который угол вокруг оси г0, а относительно других осей х0 и
у0 она не повернута, т.е. занимает строго определенное по¬
ложение. Система координат xyz занимает также произволь¬
ное положение вдоль осей х0 и у0, а вдоль оси z0 она не имеет
смещения. Таким образом, в данном примере заготовка име-Рис. 2.4. Схема базирования
призматической детали с использо¬
ванием координатного угла25
Рис. 2.5. Схема полного базирования призматической заготовки
на столе станка путем выверкиет строгую определенность
положения вдоль оси zQ (не
имеет смещения основной
базы) и вокруг осей х0 и у0
(не имеет поворотов основ¬
ной базы вокруг этих осей).Поэтому при обработке
плоскости этой заготовки в
размер h методом автома¬
тического получения разме¬
ра на настроенном станке
несмотря на неполное бази¬
рование будет обеспечивать¬
ся требуемая точность вы¬
полняемого размера h и со¬
ответствующая точность
расположения обрабатывае¬
мой плоскости относитель¬
но основной базы.Рис. 2.6. Схема неполного базирования
заготовки на магнитной плите без
выверки (h - размер обработки)26
2.3. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ СХЕМ
БАЗИРОВАНИЯРассмотрим базирование заготовок на станке с позиции
сформулированных принципов. Свяжем с основными базами
заготовки систему координат x1ylz1 (рис. 2.7). Ее положе¬
ние в системе координат станка xQyQzQ определяется шестью
независимыми координатами: а, Ь, с — координатами ее
начала Ог и а, (3, у — углами последовательных поворотов
системы координат x1y1z1 с ее исходного положения x10y1Qz1Q,
в котором ее оси параллельны осям системы координат xQyQzQ,
вокруг оси х10, затем вокруг нового положения оси у10, т.е.
вокруг оси уп, и затем вокруг нового положения оси z1Q (т.е.
вокруг z12) соответственно. Эти повороты переводят систему
координат x10ylQz1Q в xjyxzv В этом общем случае базирова¬
ния положение заготовки определено вектором смещения
г (а, Ь, с) ее основных баз и вектором поворотов ф (а, (3, у).На рис. 2.8 представлен пример базирования призмати¬
ческой заготовки для обработки некоторой поверхности А,
расположенной под углом а к ее основанию. В этом случае
система координат xxyxzv связанная с основными базамиРис. 2.7. Схема базирования заготовки при расчете погрешностей и
определении координат точек обрабатываемых поверхностей27
Рис. 2.8. Схема базирования призматической заготовкизаготовки, должна быть повернутой вокруг оси х0 на угол а.
В данном случае г (О, Ь, с) , (р (а, 0, 0). Точно так же
векторами гиф могут быть описаны другие схемы базиро¬
вания. Ниже приведем некоторые из них.Базирование призматической заготовки по одной плоско¬
сти (рис. 2.9) описывается вектором смещения г (а, Ъ, 0) и
вектором относительных поворотов ф (0, 0, у). В этом слу¬
чае параметры а, & и у могут принимать произвольные зна¬
чения, т.е. в направлениях осей х0 и у0 система координат
x1ylz1 может зани¬
мать произвольное
положение, а также
может быть произ¬
вольно повернутой
вокруг оси zQ.Базирование
призматической за¬
готовки по двум
плоскостям (рис.2.10) осуществляет¬
ся в случае г (0, Ь,0) , ф (0, 0, 0), т.е.
параметр Ъ смеще-Рис. 2.9. Схема базирования призматической
заготовки по одной плоскости28
Рис. 2.10. Схема базирования призматической заготовки
по двум плоскостямния вдоль оси у0 может быть произвольным, а другие пара¬
метры векторов гиф имеют строго определенные значения.
Система координат xly1zl может занимать неопределенное
положение в направлении оси у0При базировании призматической заготовки по трем плос¬
костям система координат x1i/121 в системе x0y0zQ всегда
занимает строго определенное положение, т. е. координаты
векторов г и ф имеют строго определенные значения (см.
рис. 2.4, 2.5).Базирование цилиндрической детали по одной плоскости
(рис. 2.11) выполняется при г (а, Ь, 0) и ф ( 0, 0, у )• Система
координат основных баз детали x1ylz1 занимает произволь¬
ные положения в направлении осей х0 и у0 (значения а и Ъ
неопределенные), а также произвольное угловое положение
относительно оси zQ. Следует также заметить, что деталь в
этом случае занимает произвольное положение относительно
своей оси. Любая ее образующая может располагаться в плос¬
кости Х0у0.На рисунке 2.12 представлена схема базирования цилин¬
дрической заготовки по двум плоскостям. В этом случае
г (0, Ь, 0), ф (0, 0, 0), т.е. система координат x1y1zl не совме¬
щена с системой координат x0yQzQ вдоль оси у0. Здесь так же,
как и в предыдущем случае, деталь занимает произвольное
положение относительно своей оси.29
Рис. 2.11. Схема базирования цилиндрической
заготовки по одной плоскостиПри базировании ци¬
линдрической заготовки
по наружной поверхнос¬
ти (в трехкулачковом
патроне, цанге) положе¬
ние системы координат
x1ylz1 в системе x0yQzQ ха¬
рактеризуется ее смеще¬
нием на произвольную
величину а в направле¬
нии оси х0 и поворотом
на произвольный угол
а вокруг этой же оси
(рис. 2.13). Остальные
параметры векторов г и
ф нулевые, и системы
координат x0yQzQ и
xly1zl в соответствую¬
щих направлениях пол¬
ностью совмещены.При базировании за¬
готовок типа втулок на
оправках (рис. 2.14 )
системы координатРис. 2.12. Схема базирования цилиндри¬
ческой заготовки по двум плоскостямРис. 2.13. Схема базирования цилиндри¬
ческой детали в трехкулачковом патроне30
Рис. 2.14. Схема базирования цилиндрической детали (втулки)на оправкеx0y0z0 и х1у121 совмещены по всем направлениям, за исключе¬
нием направления xQ. Вектор смещения имеет координаты
г (а, 0, 0), а вектор относительных поворотов, соответственно,
Ф(а ,0,0). Параметры а и а имеют неопределенные значения.
При наличии на оправке упора значение параметра а строго
определено, а значение а остается неопределенным.Точно так же можно рассматривать базирование заготовок
в других случаях, т.е. рассматривать положения системы
координат х1у1г1 основных баз детали в системе координат
х0у020 станка, достигнутые с помощью специальных устройств
или путем выверки. При этом в случае автоматического по¬
лучения размеров на настроенных станках базирование
также должно осуществляться автоматически, т.е. с помо¬
щью специальных устройств.Итак, в самом общем случае любая схема базирования
заготовки на станке может быть описана вектором смеще¬
ния начала системы координат баз заготовки г (а, Ъ, с) и
вектором ее поворотов ф (а, (3, у) относительно системы ко¬
ординат станка. При этом, если координаты этих векторов
имеют строго определенные неизменные величины при бази¬
ровании всех деталей обрабатываемой партии, то имеет мес¬
то полное базирование. Если же отдельные координаты век¬
торов гиф могут принимать произвольные значения, то
базирование является неполным.31
2.4. ВЫБОР УСТАНОВОЧНЫХ ЭЛЕМЕНТОВ
ПРИСПОСОБЛЕНИЙУстановочные элементы приспособлений выбирают в за¬
висимости от формы обрабатываемой детали, обрабатывае¬
мой поверхности, а также принятого способа базирования. К
установочным элементам относятся точечные опоры различ¬
ных типов, опорные пластины, призмы, втулки, цанги, оп¬
равки, пальцы, кулачки и т.д. Обозначения (условные) уста¬
новочных элементов на схемах установок выполняются в со¬
ответствии с ГОСТ 3.1107-81.Для базирования заготовки по плоскости чаще всего ис¬
пользуются точечные опоры, которые являются стандартны¬
ми деталями приспособления. Точечные опоры могут быть
неподвижными, подвижными, плавающими и регулируемы¬
ми (ГОСТ 13440-68, ГОСТ 13442-68). Размеры точечных
опор и опорных пластин следует выбирать в соответствии с
ГОСТ 4743-68.По внешним цилиндрическим поверхностям заготовки
устанавливают в призмы (ГОСТ 12195-66, ГОСТ 12197-66),
цанги (ГОСТ 2876-80, ГОСТ 2877-80), самоцентрирующие
кулачковые патроны (ГОСТ 34351-80), а также мембранные
патроны (ГОСТ 16157-70) [2].По внутренним цилиндрическим поверхностям заготовки
устанавливают на оправки различных типов: гладкие, ци¬
линдрические (ГОСТ 16898-76), конические, кулачковые,
разжимные, резьбовые и т.д., установочные пальцы (ГОСТ
16898-71, ГОСТ 16899-71, ГОСТ 12209-66, ГОСТ 12210- 66),
сухари и кулачки разжимных устройств и др. Размеры та¬
ких установочных элементов рассчитывают и подбирают по
соответствующим рекомендациям [1; 2].Для установки цилиндрических заготовок по центровым
гнездам и фаскам центральных отверстий используются цен¬
тры: упорные (ГОСТ 13214-79, ГОСТ 2575-79, ГОСТ 18259 -
72), вращающиеся (ГОСТ 8742-75), поводковые (ГОСТ 18257 -
72). Их конструкции и размеры выбираются в соответствии
со справочными данными [2].Так как базирование заготовок осуществляется по несколь¬
ким поверхностям (комплекту баз), часто в приспособлении
используется несколько установочных элементов.32
Установочные элементы должны обладать высокой изно¬
состойкостью, поэтому их изготавливают из углеродистых и
легированных сталей (У7, У8, У10А, 65Г) с закалкой до твер¬
дости 56 — 61 HRC, или из конструкционных или конст¬
рукционных легированных сталей (20Х, 15ХН) с цемента¬
цией на глубину 0,8 — 1,2 мм и последующей закалкой до
той же твердости. Иногда используются твердосплавные на¬
пайки и другие твердые и износостойкие армирующие эле¬
менты.Материалы и термообработку установочных элементов
назначают в соответствии с рекомендациями справочной ли¬
тературы. После выбора они вычерчиваются на конструктив¬
ной схеме или эскизе приспособления.2.5. ВЫБОР СХЕМЫ ЗАКРЕПЛЕНИЯ
ЗАГОТОВКИНеобходимость закрепления заготовки обусловлена тре¬
бованием предотвращения ее смещения под действием сил
резания. Схема закрепления заготовки выбирается в зависи¬
мости от направления сил, возникающих при обработке. По¬
этому всегда желательно опорные устройства приспособле¬
ния располагать так, чтобы силы резания способствовали зак¬
реплению заготовки. В этом случае потребуется минималь¬
ная сила закрепления и, как следствие, малогабаритные за¬
жимные устройства. Зажимные элементы и устройства при¬
способления должны быть просты по конструкции, надежны
в работе и удобны в эксплуатации. Лучше всего их выпол¬
нять сменными. Эти устройства должны быть износостойки¬
ми, обладать достаточным ходом, чтобы не мешать установке
и снятию детали. Они не должны вызывать чрезмерной де¬
формации детали и порчи ее поверхности, а также самопро¬
извольно отключаться. Закрепление и открепление заготов¬
ки в приспособлении следует выполнять с минимальными
затратами сил. При ручном закреплении усилие на рукоятке
или маховике зажимного устройства не должно превышать
150 Н.При выборе способа закрепления заготовки и конструк¬
ции зажимных устройств следует помнить, что эффективность
закрепления в большой мере зависит от места приложения и33
направления силы. Сила закрепления должна направляться
перпендикулярно плоскости установочных элементов, что¬
бы обеспечить контакт базовых поверхностей детали с опо¬
рами и исключить сдвиг при закреплении. При базировании
заготовки по нескольким базовым поверхностям усилие
закрепления должно быть направлено к базовой поверхности
наибольшей протяженности. Направление силы закрепления
заготовки должно также, по возможности, совпадать с на¬
правлением силы тяжести заготовки и силы резания.На практике редко можно выбрать направление силы за¬
жима, удовлетворяющее всем перечисленным требованиям.
Поэтому после анализа возможных вариантов расположе¬
ния зажимных устройств следует принять наиболее подходя¬
щее решение.После разработки конструкции зажимных устройств при¬
способления они вычерчиваются на конструктивной схеме.
При этом выбирается их наиболее удобное с точки зрения
эксплуатации расположение относительно обрабатываемых
поверхностей заготовки и установочных элементов приспо¬
собления.2.6. ВЫБОР РАЗЛИЧНЫХ ДЕТАЛЕЙ
И УСТРОЙСТВ СПЕЦИАЛЬНЫХ СТАНОЧНЫХ
ПРИСПОСОБЛЕНИЙДетали приспособлений для направления рабочего ин¬
струмента. К таким деталям относятся кондукторные втул¬
ки, которые используют в сверлильных и расточных приспо¬
соблениях, и копиры. Конструкции и размеры кондуктор¬
ных втулок стандартизованы [2]. Постоянные кондукторные
втулки используются для мелкосерийного производства
при обработке одним инструментом. Сменные - в массовом
и крупносерийном производстве, быстросменные с замком -
при обработке несколькими инструментами.Сменные и быстросменные втулки устанавливают в по¬
стоянные, которые запрессованы в корпус приспособления.Использование кондукторных втулок позволяет устранить
разметку, уменьшить увод оси сверла, разбивку отверстия.
Точность диаметра отверстий повышается на 50 % по сравне¬
нию с обработкой без кондуктора.34
При изготовлении кондукторных втулок диаметром до 25
применяют стали У10А, У12А, 9ХС, а свыше 25 - сталь 20Х
или 20 с последующей цементацией на глубину h= 0,8 — 1,2
и закалкой до HRC 62 — 65.Срок службы соответствует 10 — 15 тыс. сверлений приI < d, где I — длина сверления, d - диаметр сверла.Средняя интенсивность износа кондукторных втулок ди¬
аметром 10 — 20 мм составляет (на 10 м пути резания): 3 — 5 мкм
для серого чугуна; 4 — 6 мкм для стали 40; 1 — 2 мкм для
алюминиевых сплавов.Посадки в кондукторных втулках сверл и зенкеров — F8/n6;
разверток — G7/n6 в системе вала. Посадки сменных вту¬
лок - H7/h6; H7/g6.Часто используются высокие втулки, у которых длина рав¬
на шагу винтовой линии сверла. Такие втулки повышают
точность направления сверл.Расстояние от торца кондукторной втулки до поверхнос¬
ти обрабатываемой заготовки (т) обычно принимают рав¬
ным: т = (0,3 — 0,5)d — при сверлении чугуна; т = (0,5 —
1,0)<2 — при сверлении стали; т = 0,3с? — для зенкеров.Шероховатость посадочных поверхностей Ra = 1,25 —
0,12 мкм, а отверстия под инструмент — Ra = 0,32 — 0,08 мкм.
Для направления борштанг в расточных приспособлениях
используются неподвижные и вращающиеся кондукторные
втулки.Копиры применяются при обработке фасонных и слож-
нопрофилированных поверхностей. Роль копиров — направ¬
лять режущий инструмент для получения заданной траек¬
тории его движения относительно заготовки. Обработку с
копирами ведут на фрезерных, токарных, строгальных, шли¬
фовальных станках.На фрезерных станках обработку по копиру ведут при
неподвижной связи заготовки и копира. Они вращаются вок¬
руг общей оси. Оси ролика и фрезы неподвижны. Заготовка
и копир установлены на шпиндель приспособления и враща¬
ются с постоянной угловой скоростью. Стол фрезерного стан¬
ка не соединен с винтом продольной подачи и поджимается
к копиру грузом или с помощью пневмоцилиндра. Копир и
Ролик изготавливают из инструментальных углеродистых35
или цементируемых сталей. Твердость их рабочих поверх¬
ностей после закалки HRC 58 — 62.Детали приспособлений для настройки технологической
системы на выдерживаемый размер. К ним относятся вы¬
сотные и угловые установы, которые служат для контроля
положения инструмента при настройке [1]. Их закрепляют
на корпусе приспособления. Эталонные поверхности распо¬
лагают ниже обрабатываемых поверхностей, чтобы не ме¬
шать проходу режущего инструмента. При настройке исполь¬
зуются щупы. Погрешность изготовления установа 0,01 —
0,02 мм. Толщина щупа 2 — 3 мм. Погрешность изготовле¬
ния щупа 0,01 — 0,02 мм. Погрешность установки инстру¬
мента по щупу 0,02 — 0,03 мм.Установы изготавливаются из стали 20Х с цементацией
на глубину 0,8—1,2 мм и последующей закалкой до HRC
55—60.Поворотные и делительные устройства. Такие устройства
используются в многопозиционных приспособлениях для при¬
дания заготовке различных положений относительно инст¬
румента.Делительное устройство состоит из диска, закрепленного
на поворотной части приспособления, и фиксатора. Управле¬
ние фиксаторами в простейших приспособлениях осуществ¬
ляется рычагом, рукояткой и т.д.Устройства поворота выполняются механическими, пнев¬
матическими, гидравлическими, пневмогидравлическими. В
приспособлениях для обработки тяжелых заготовок поворот
осуществляется электродвигателем, пневматическими или
гидравлическими приводами. В них используются тормоз¬
ные устройства, сблокированные с фиксаторами. Широко
применяются также поворотные столы различных конструк¬
ций.36
з. РАСЧЕТ СИЛ ЗАКРЕПЛЕНИЯ ЗАГОТОВОК
В ПРИСПОСОБЛЕНИЯХ3.1. МЕТОДИКА РАСЧЕТА СИЛ ЗАКРЕПЛЕНИЯНа заготовку при обработке в приспособлениях действуют
силы резания, объемные силы (вес, центробежные и инерци¬
онные силы) и силы закрепления. Под действием этих сил
заготовка должна находиться в фиксированном положении и
в равновесии. Задача силового расчета состоит в определении
всех действующих на заготовку сил и обеспечении их рав¬
новесия, т.е. обеспечении неподвижности заготовки путем
уравновешивания сдвигающих заготовку сил силами закреп¬
ления с достаточным по их величине запасом.При определении потребных сил закрепления заготовки
иногда следует учитывать упругие характеристики зажим¬
ных устройств. Самотормозящие зажимные механизмы (вин¬
товые, клиновые, эксцентриковые и т.п.) отличаются линей¬
ной зависимостью между приложенной силой и упругим пе¬
ремещением (1-й тип). Пневматические, гидравлические,
пневмогидравлические зажимные механизмы прямого дей¬
ствия имеют сложную зависимость между приложенной
силой и упругими перемещениями (2-й тип). Определение сил
закрепления для механизмов 1-го типа связано с учетом же¬
сткости системы зажимных и установочных элементов. Зна¬
чения величины жесткости входят в расчетные зависимости
для определения сил закрепления. Для механизмов 2-го
типа при определении сил закрепления величины жесткости
зажимных и установочных элементов не учитываются
[1; 6; 7].При выполнении силового расчета вначале определяются
силы, действующие на поверхность заготовки, и силы реза¬
ния в их наиболее неблагоприятных направлениях по отно¬
шению к заготовке. Определяются точки приложения и на¬
правления сил закрепления. Затем составляются уравнения
равновесия сил, по которым вычисляются силы закрепления
заготовки. С учетом величины сил закрепления ведется рас¬
чет зажимных механизмов и их приводов.В том случае, когда заготовка имеет значительные разме-
„ Ры, является массивной, устанавливается ее вес, который37
учитывается при определении силы закрепления. Масса заго¬
товки обычно приводится в технической документации.Силы резания определяются по известным формулам тео¬
рии резания материалов. Исходными данными при этом яв¬
ляются сведения о виде обработки, инструменте, режимах
резания, материале заготовки. Формулы для определения сил
резания приводятся в справочнике [ 8 ] .При точении силы резания Рг, Ру и Рх (Н) вычисляются
по единой формулеР =10CtxSyVnK, (3.1)2, У, X р р’ V 'где t — глубина резания при наружном точении и растачива¬
нии. При отрезании, прорезании, фасонном точении t — дли¬
на лезвия резца.В формуле (3.1) и других эмпирических зависимостях,
которые приводятся ниже, коэффициенты и показатели сте¬
пени выбираются по рекомендациям [ 8 ]. Величину попра¬
вочного коэффициента Кр, учитывающего фактические усло¬
вия резания, определяют по формуле Кр = К^ К^.
Значения входящих в эту формулу коэффициентов также
приведены в [ 8 ] .При строгании составляющие силы резания определяют
по формулам для точения.При сверлении крутящий момент (Н • м) и осевая сила (Н)
рассчитываются по формуламMKp=10CmD^S»Kf, (3.2)
P=10CD^S«K, (3.3)о р р v 'а при рассверливании и зенкеровании — по формуламМ = ЮС ГР txS»K , (3.4)кр , т т v 'Р0 = 10CptxS»Kp. (3.5)При развертывании крутящий момент определяется по
формуле (Н*м)MKp=Cmt*S/Dz/(2-100). (3.6)При фрезеровании главная составляющая силы резания —
окружная сила (Н) — рассчитывается по формуле38
10CPi*S/ BnZil 1па_ w Jjlj л(3.7)где Z — число зубьев фрезы; n — частота вращения фре-ЗЫ, МИН"1.При резьбонарезании резцами сила резания Pz (Н) опре¬
деляется по формулегде р — шаг резьбы, мм; i — число рабочих ходов.При нарезании резьбы метчиками и резьбовыми голов-
ками крутящий момент (Н*м) вычисляется по формулегде D — номинальный диаметр резьбы, мм.При шлифовании определяется эффективная мощность Nсоответственно при шлифовании периферией круга с продоль¬
ной подачей, врезном шлифовании периферией круга и шли¬
фовании торцом круга.Здесь d — диаметр шлифования, мм; b — ширина шли¬
фования, мм, равная длине шлифуемого участка (при круг¬
лом врезном шлифовании) и поперечному размеру поверхно¬
сти заготовки (при плоском шлифовании торцом круга).Сила закрепления заготовки определяется из условий рав¬
новесия сил, которые суммируются на основе рассмотрения
схемы действия всех сил на заготовку, включая силы трения
на поверхностях контакта заготовки с установочными и за¬
жимными элементами. Условие равновесия сил — это ра¬
венство нулю суммы проекций всех сил на направление воз¬
можного сдвига заготовки и (или) равенство нулю суммы
моментов всех сил относительно оси, вокруг которой возмо¬
жен поворот заготовки. При этом учитывается коэффициент
запаса К, т.е. в уравнения равновесия включаются значения
„ сДвигающей силы (силы резания) и вращающего момента(3.8)(3.9)N = CNV3rtxSyd°,N = cNv;spyd°b\N = CNV3rtxb2,(3.10)(3.11)(3.12)39
(момента резания), увеличенные в К раз. Коэффициент запа¬
са является комплексной величиной, представляемой в виде
произведения* = (злз)где К0 = 1,5 — гарантированный коэффициент запаса; Кг =
= 1,0 — 1,8 учитывает степень затупления инструмента. Мень¬
шие значения Кг принимаются для токарных работ при силе
Р2, большей, чем сила Ру. Для черновых токарных работ при¬
нимаются К1 = 1,4; наибольшие значения Кх принимаются
для сил резания при фрезеровании; К2 = 1,0 — 1,2 — коэф¬
фициент, учитывающий неравномерный припуск. Для отде¬
лочных операций К2 = 1,0, для черновых — К2 = 1,2; К3 =
1,0 — 1,2 — коэффициент, учитывающий прерывистость
резания; К4 — коэффициент, учитывающий непостоянство
сил закрепления. Для пневматических и гидравлических за¬
жимов К4 = 1; для ручного привода К4 = 1,3; для зажим¬
ных устройств типа мембранных патронов, где усилие зак¬
репления зависит от фактического размера заготовки, КА = 1,2;
Кь = 1 — 1,2 — коэффициент, учитывающий непостоянство
сил закрепления при ручном приводе; К6 = 1 — 1,5 — коэф¬
фициент, учитывающий непостоянство положения сил на
поверхностях контакта установочных элементов с заготовкой:
для точечных опор К6 = 1; для опорных пластин К6 = 1,5.Установлено, что при использовании в зажимных устрой¬
ствах приспособления самотормозящих механизмов расчет¬
ные формулы для определения сил закрепления учитывают
жесткость jx зажимных элементов и жесткость j2 системы
установочных элементов с помощью коэффициентов С1 = Д:
:(Л + ]2) и С2 = j2/(j1 + j2).Обычно величины jx и у2 при проектировании приспособ¬
лений не известны. Определить их расчетным путем практи¬
чески невозможно, поэтому на стадии проектирования при¬
способлений рекомендуется [1; 6; 7] принимать значения
соотношений Сг и С2 равными Сг = 0,3 — 0,4; С2 = 0,6 — 0,7.
Меньшие значения в первом соотношении и большие во вто¬
ром берутся для зажимных систем пониженной жесткости,
однако всегда значения Сх и С2 выбираются так, чтобы их
сумма была равна единице, т.е.40
Анализ расчетных зависимостей для определения сил зак¬
репления заготовок показывает, что с учетом жесткости за¬
жимных и установочных элементов для механизмов 1-го типа
силы закрепления несколько выше, чем без учета жесткости
для механизмов 2-го типа. Это превышение невелико, оно
составляет 10 — 20% и учитывается только в отдельных
схемах силового воздействия на заготовку, когда составляю¬
щая силы резания направлена по линии действия силы зак¬
репления. В других случаях жесткость не учитывается и
расчетные формулы для сил закрепления в любых зажимных
механизмах используются одни и те же.Следовательно, можно рекомендовать на стадии проекти¬
рования приспособлений не учитывать жесткость зажимных
и установочных элементов, а расчет сил закрепления вести
по наиболее простым формулам для зажимных механиз¬
мов 2-го типа.При определении сил закрепления примем следующие
допущения:• влиянием жесткостей зажимных и опорных устройств
на распределение сил будем пренебрегать;• силы, распределенные по площадке ограниченных раз¬
меров, будем считать сосредоточенными в центре тяжести этой
площадки;• силы, распределенные по кольцевой площадке малой
ширины, будем считать распределенными вдоль средней
окружности кольца;• весом заготовки будем пренебрегать;• будем руководствоваться принципом независимости дей¬
ствия сил.3.2. РАСЧЕТ СИЛ ЗАКРЕПЛЕНИЯ ПРИЗМАТИЧЕСКИХ
ЗАГОТОВОК ПРИ БАЗИРОВАНИИ ПО ОДНОЙ,ДВУМ ИЛИ ТРЕМ ПЛОСКОСТЯМПример 3.2.1. Призматическая заготовка базируется
По одной, двум или трем плоскостям. Сила резания Р извес-
■ Тна и направлена перпендикулярно к одной из базовых плос¬
i Z| Wу>£1Р</Рис. 3.1. Расчетная схема сил закреп¬
ления призматических заготовок
(пример 3.2.1)костей, сила закрепления W прижимает заготовку к этой плос¬
кости и направлена по направлению силы Р (рис. 3.1). Этот
случай имеет место при протягивании. Требуется определить
силу закрепления заготовки W.Нетрудно видеть, что при
Р = constW = 0 (3.15)Если же сила Р являет¬
ся нестабильной, т. е. когда
имеют место вибрации, то
следует принятьW> 0 (3.16)для предупреждения вибра¬
ций и выборки возможно су¬
ществующих первоначаль¬
ных зазоров между базовы¬
ми поверхностями заготов¬
ки и установочными элементами приспособления. Значение
W выбирается на основе анализа изменения сил резания и
условий осуществления процесса в конкретных условиях.Пример 3.2.2. Заготовка базируется так же, как в приме¬
ре 3.2.1. Силы Р и W направлены навстречу друг другу
(рис. 3.2). Этот случай может быть реализован, например, в
приспособлении при сверлении. Требуется определить силу
закрепления заготовки W.Составив условие си¬
лового равновесия заго¬
товки,ХУ = -Р + Ж = О,
получимW = P,а с учетом коэффициента
запаса К, рассчитываемо¬
го по формуле (3.13), мож¬
но принятьW = KP. (3.17)Пример 3.2.3. Призма-^ Рис. 3.2. Расчетная схема сил закреп-тическая заготовка бази- ления призматических заготовокруется ПО ОДНОЙ ПЛОСКО- (пример 3.2.2)42
сти, к которой она прижимается силой W. Сила резания Р
известна. Она направлена параллельно базовой плоскости. Эта
схема соответствует, например, случаю растачивания детали
на горизонтально-расточ-
ном станке (рис. 3.3). Тре¬
буется определить силу
закрепления заготовки W.При действии силы Р
между основной базой де¬
тали и вспомогательной
базой приспособления воз¬
никает сила трения F2,F2 = Wfvгде f2 — коэффициент тре¬
ния на опорной поверхно¬
сти.Между зажимающим элементом и поверхностью заготов¬
ки возникает сила трения FvF^w-A,где f1 — коэффициент трения на поверхности АВ.Из условия равновесия действующих на заготовку силIX = P-Wfx-Wf2= ОполучимW = P/(f1+f2),или, с учетом коэффициента запаса К, сила закрепления бу¬
детW = KP/(f1 + f2). (3.18)Пример 3.2.4. Заготовка базируется так же, как в приме¬
ре 3.2.3. При обработке действуют две силы — Рг и Р2 так,
как показано на рис. 3.4. Требуется определить силу закреп¬
ления заготовки W.В этом случае Fx = Wfv F2 = (W + P2)fr Тогда условие
силового равновесия заготовки можно записать так:ZX = P1-W/1-(W + P2)/2= о,откуда найдемРис. 3.3. Расчетная схема сил закреп¬
ления призматических заготовок
(пример 3.2.3)43
W = (Pl-P2f2)/(fl + f2) = 0.(3.19)Если учесть коэффициенты запаса Кх для силы Р1 и К2 для
силы Р2, каждый из которых может быть найден как произве¬
дение соответствующих коэффициентов, входящих в форму¬
лу (3.13), то формулу (3.19) можно представить в видеW = (K1P1-K2P2f2)/(f1 + f2) = оСледует заметить,
что в полученной зави¬
симости использован
принцип Сен-Венана,
согласно которому дей¬
ствие на заготовку силы
Р2 не может оказать вли¬
яния на результат дей¬
ствия силы W в месте
взаимодействия прихва¬
та с заготовкой, т.е. сила
Р2 не вызывает измене¬
ния значения силы Fv
обусловленной действием
силы W.Пример 3.2.5. Рас¬
сматривается тот же слу¬
чай, что и в примере3.2.4, только сила Р2
направлена цверх (рис.3.5). Требуется опреде¬
лить силу закрепления
заготовки W.Условие равновесия
заготовки имеет вид1X=P1-F1-F2(3.20)Рис. 3.4. Расчетная схема сил закреп¬
ления призматических заготовок
(пример 3.2.4)J| W- F,р,тЬО 1=2Рис. 3.5. Расчетная схема сил закрепле¬
ния призматических заготовок
(пример 3.2.5)p1-w/1-(wr-pJ)/2= 0.Отсюда, как и в предыдущем случае, получим
W = (K1PL+K2P2f2)/(f1 + f2).(3.21)44
3.3. РАСЧЕТ СИЛ ЗАКРЕПЛЕНИЯ
ЦИЛИНДРИЧЕСКИХ ЗАГОТОВОК ПРИ БАЗИРОВАНИИ
ПО НАРУЖНОЙ ПОВЕРХНОСТИПример 3.3.1. Цилиндрическая заготовка базируется в
трехкулачковом (в общем случае — в z - кулачковом) патро¬
не по наружной цилиндрической поверхности диаметром DQ.
Ведется обработка проходным резцом ступени диаметром D
(рис. 3.6). Требуется определить силу закрепления заготов¬
ки W.Главная составляющая Р z
силы резания образует момент
резания, воздействующий на
заготовку в направлении глав¬
ного рабочего движения резца,
равный Мр = Рг (D0 + D)/4 и
стремящийся провернуть заго¬
товку.Составляющая Рх силы ре¬
зания направлена по подаче и
стремится сдвинуть заготовку в
осевом направлении. Действи¬
ем составляющей Ру силы реза¬
ния будем пренебрегать.Составим два условия рав¬
новесия действующих на заготовку силЪтх = КМр - zWfD0 /2 = 0, (3.22)XX = -КРХ +zWf1 = 0, (3.23)где / и fx — коэффициенты трения на поверхностях контакта
кулачков с заготовкой в окружном и осевом направлениях
соответственно.Из уравнения (3.22) получимW = 2KMJzfD0, (3.24)а из уравнения (3.23)W = KPx/zfx. (3.25)Из вычисленных по полученным зависимостям величин
^ следует принимать в качестве окончательного результата- большее значение.Рис. 3.6. Расчетная схема сил
закрепления цилиндрических
заготовок (пример 3.3.1)45
При выборе значений / и fl можно руководствоваться сле¬
дующими рекомендациями:• для кулачков с гладкой поверхностью /=0,16 — 0,18;• для кулачков с кольцевыми (поперечными) канавками
на рабочей поверхности f = 0,3 — 0,4;• для кулачков с продольными и поперечными канавка¬
ми на рабочей поверхности f = 0,4 — 0,5;• для кулачков с рифлеными рабочими поверхностями
/= 0,7 — 1,0.Пример 3.3.2. Цилиндри¬
ческая заготовка (втулка)
базируется наружной ци¬
линдрической поверхностью
в призме (рис. 3.7) без упо¬
ра в торец. Производится,
например, растачивание
центрального отверстия на
горизонтально-расточном
станке. Момент Мр и сила
подачи (в данном случае Ру)
известны. Радиальной силой
Рх будем пренебрегать. Тре¬
буется определить силу зак¬
репления W.Составим два условия
равновесия:Ъту = Мр - Мт = 0, (3.26)lY = Py-FTy= 0, (3.27)где Мт = 2FtQR + FR — это момент трения, образуемый сила¬
ми трения Ft0 и Ft ? действующими в окружном направле¬
нии, причем Fr0 = Nf, a Ft = Wf; f — коэффициент трения в
окружном направлении; F = 2Nfx + Wfx — сила трения в
осевом направлении; / — коэффициент трения в осевом на¬
правлении.Из рисунка 3.7 следует, чтоРис. 3.7. Расчетная схема сил закреп¬
ления цилиндрических заготовок
(пример 3.3.2)
Тогда" р sina
откуда (с учетом коэффициента запаса) получимКМ„ sin a
w - р Хту = Мр - - WfR = О,W =W =fR(l + sin a)(3.29)Из соотношенияZy = Py-W(-7b- + f1) = 0sinaнайдемW =(3.30)/i(l + sin a)Из двух найденных значений W следует выбрать наиболь¬
шее.Пример 3.3.3. Цилиндрическая заготовка базируется по
наружной цилиндрической поверхности в призме (рис. 3.8).
Ведется обработка шести отверстий шестью инструментами
одновременно. Каждый инструмент воздействует на заго¬
товку моментом Мр. и силой Pxi. Требуется определить силу
закрепления W.Расчет силы закрепления в этом случае такой же, как и в
примере 3.2. Различие состоит в том, что значение моментаРис. 3.8. Расчетная схема сил закрепления цилиндрической заготовки(пример 3.3.2)WI a'^ S S /////A 77777////Г//7777/77777747
Мр в формуле (3.29) следует принимать равным сумме момен¬
тов М ., а значение силы Р в формуле (3.30) — равным сумме
сил рЦ.3.4. РАСЧЕТ СИЛ ЗАКРЕПЛЕНИЯ
ЦИЛИНДРИЧЕСКИХ ЗАГОТОВОК ПРИ БАЗИРОВАНИИ
ПО ВНУТРЕННЕЙ ПОВЕРХНОСТИПример 3.4.1. Заготов¬
ка в виде втулки базиру¬
ется по внутренней ци¬
линдрической поверхнос¬
ти на цилиндрическом
пальце с зазором, а так¬
же по торцу на трех то¬
чечных опорах (рис. 3.9).На заготовку действует,
как и в примере 3.3.1,
момент резания М и силаР . Силой Р пренебрега-Рис. 3.9. Расчетная схема сил закреп¬
ления цилиндрической заготовки
(пример 3.4.1)ем. Требуется определить
силу закрепления заго¬
товки W.Очевидно, на каждую опору действует сила W/3 + Рх/3 =
= (W + Рх)/3. В этом случае, суммируя силы на опорах, усло¬
вие силового равновесия можно представить в видеЪтх = Mp-W%D1 / 2 - (W + Px)f2 D2 / 2 = 0, (3.31)где fx и f2 — коэффициенты трения на поверхностях взаи¬
модействия с заготовкой зажимов и опор соответственно.Из этого условия с учетом коэффициентов запаса полу¬
чим соотношение для W:2(*хМр - K2Pxf2D2 / 2)— • (3.32)WftD2В соответствии с рассмотренным примером можно рас¬
считать также силу закрепления заготовки при ее базирова¬
нии по плоскости для сверления, зенкерования и разверты¬
вания отверстий, когда на заготовку действует момент и осе¬
вая (прижимающая заготовку к базовой плоскости) сила.48
Пример 3.4.2. Цилиндри¬
ческая заготовка в виде втул¬
ки базируется по центрально¬
му отверстию (на жесткой ци¬
линдрической оправке с зазо¬
ром) и торцу (рис. 3.10). Сила
закрепления W создается гай¬
кой. Диаметральные размеры
указаны на схеме. Выполня¬
ется обтачивание втулки. Вра¬
щающий момент Мр и сила
Рх известны. Силой Ру пре¬
небрегаем. Требуется опреде¬
лить силу W.Составляем условие равновесия сил в виде
Zmx = Мр - МТ1 - Мт2 = 0,где Mrl = Wfl(D2 + D3)/4, Мт2 = (W + Px)f2(D1 + D2)/4 -
моменты трения на правом и левом торцах заготовки соответ¬
ственно.Тогда с учетом коэффициентов запаса можно записать
Ътпх = К1Мр - Wf1(D2 + D3)/4 - (W + K2Px)f2{A + D2)/4,
откуда получимРис. 3.10. Расчетная схема сил
закрепления цилиндрической
заготовки (пример 3.4.2)W =4(КгМ9 - K2Pxf2(Dx +D2)/4)(3.33)Если Dx = D3/1 (А + А) + /2(А + А)и f1==f2== f> то получаем следующеепростое соотношениеW = ■2К1Мр~ К2РХ / 2.(3.34)й(А + А)В рассматриваемом примере предполагалось, что ширина
кольцевой площадки контакта заготовки как с буртиком оп¬
равки, так и с шайбой мала, а потому момент трения на этих
площадках принимался равным силе трения W • f, помно¬
женной на средний радиус кольцевой площадки, равный
(А + А)/4- Это приближенный расчет. Для получения точно¬
го результата определим значения Мт1 и Мт2. Рассмотрим
Рисунок 3.11, на котором представлен торец буртика оправ¬
ки. Будем полагать, что по всему торцу удельные касатель¬49
ные силы распределены
равномерно. Интенсив¬
ность этих сил4 f2(W + Px)71(Д2-Д2)- (3,35)Выделим элементар¬
ную кольцевую площад¬
ку dF радиусом р и ши¬
риной dp. Элементарный
момент трения на этой
площадке величиной dF=
= 2npdp будетРис. 3.11. Расчетная схема для
определения моментов трения
при установке<2Мт2 = TdFp = x2np2dp.LT2 — UU/JL- p — U/[J. (3.36)Для определения Мт2 проинтегрируем (3.36) по р в преде¬
лах от D2/2 до DJ2:А/2А/2Мт2 = 2ят J р2dp = 2лт —D2/2 ^А/2= g(A3-A3). (3-37)Подставив в зависимость (3.37) соотношение для т, полу¬
чим_ (W + рх)/2(А8 - А3)
з(а2-А2)(3.38)Аналогично найдемМт1 =Щ(Д33 - £>23)
3(£»з2-£»22)Подставим Мт1 и1 Мт2 в условие равновесия и положив
D3 = Dp = /2 = /, получим (с учетом коэффициента запаса)1у,3К,мр(Д,-А,)-
2f(D,- -D,')(3.39)Пример 3.4.3. Цилиндрическая заготовка в виде втулки
базируется по внутренней цилиндрической поверхности на
цанговой оправке (рис. 3.12), имеющей z лепестков. На заго¬50
товку действует момент резания Мр и сила Рх. Как и в преды¬
дущих случаях, силой Ру пренебрегаем. Требуется опреде¬
лить W на каждом из лепестков.Составим условия равновесия(3.40)(3.41)Ътх = Мр - Мт = 0,Zx = —Рх + FTX = 0,
где Мт = WfzD/2 — сум¬
марный момент, образу¬
емый силами трения в
окружном направлении
цанговой оправки; Ftx == Wfxz — суммарная
сила трения в осевом на¬
правлении; / и fx — ко¬
эффициенты трения
между оправкой и заго¬
товкой в окружном и
осевом направлениях со¬
ответственно.Из условия равновесия (3.40) получим значение силы W,
при котором будет исключен поворот заготовки,W = 2КМр / zfD, (3.42)а из условия (3.41) — ее значение, соответствующее отсут¬
ствию осевого смещения заготовкиW = КРХ /zfx. (3.43)Из двух значений W выбирается наибольшее.Рис. 3.12. Расчетная схема сил закрепле¬
ния цилиндрической заготовки
(пример 3.4.3)3.5. РАСЧЕТ СИЛ ЗАКРЕПЛЕНИЯ
КОРПУСНЫХ ЗАГОТОВОК ПРИ БАЗИРОВАНИИ
ПО ОПОРНОЙ ПЛОСКОСТИПример 3.5.1. В корпусе, установленном на точечные
неподвижные опоры А, В, С, Д Е, F, одновременно растачи¬
ваются четыре отверстия с параллельными осями (рис.
^•13, 3.14). Силы Рг,Р2,Р3 и Р4 известны. Требуется опреде¬
лить силу закрепления заготовки W.Если резцы расположены так, как показано на рис. 3.13,
т9 наибольшая сдвигающая сила равна сумме51
Рис. 3.13. Расчетная схема 1 сил закрепления
заготовки корпуса (пример 3.5.1)Рис. 3.14. Расчетная схема 2 сил закрепления заготовки корпуса
(пример 3.5.1)Р = Рг+Р2+Рг + Р4.Силу закрепления W можно получить из различных ус¬
ловий силового равновесия корпуса. Первое условие —Zy = P-Wf1-Wf2= О, (3.44)где и /2 — коэффициенты трения соответственно между
заготовкой и зажимным элементом и между заготовкой и
опорами А, Б и С.52
Из условия (3.44) с учетом коэффициента запаса получим
W = KP/(f^f2). (3.45)Второе условие — равенство нулю моментов всех сил
относительно опоры А, т.е.ZmA=PH-WL = 0. (3.46)Из этого условия находим (с учетом коэффициента запаса)
W = КРН/L . (3.47)Если же резцы установить так, как на рисунке 3.14, то
второе условие равновесия (3.46) приобретает видX т А = Рг I, + Р2l2 - Р3 k - Р414 - WL = 0, (3.48)откуда находимW = K(P1ll +P2l2 -P3k -P4I4)/L • (3.49)Сравнивая (3.47) и (3.49), видим, что во втором случае .
сила W может быть существенно снижена.В общем случае, при расчете силы закрепления заготов¬
ки, подвергаемой многоинструментальной обработке, следует
ориентироваться на самые неблагоприятные направления сил
резания.Пример 3.5.2. Кор¬
пус базируется по трем
плоскостям на точечные
неподвижные опоры,
расположенные так, как
показано на рис. 3.15.Сила резания Р стремит¬
ся повернуть заготовку
относительно опоры 4.Требуется найти силу
закрепления W.Вначале рассмотрим
задачу при условии, что
сила W приложена в
точке С заготовки, гори¬
зонтальная проекция ко¬
торой С' совпадает с цен¬
тром тяжести опорного
треугольника 1-2-3.Рис. 3.15. Расчетная схема сил закреп¬
ления заготовки корпуса
(пример 3.5.2)53
Смещению заготовки препятствуют силы трения в местах
ее контакта с опорами. Условие силового равновесия будет
иметь вид (с учетом коэффициента запаса К)lmi=KPa-W(lf1(r1 + r2+ra) + fir) = 0, (3.50)откуда найдем значение Ww _ 3 КРа
fi(ri + r2 + r3) + 3f2r ' (3.51)Если же точка С/ не совпадает с центром тяжести тре¬
угольника, то реакции опор становятся различными по вели¬
чине и соотношение (3.50) в этом случае можно представить
в видеХяг4 = КРа-W(fx (агх + Ъг2 + сгъ) + /2г) = 0, (3.52)
откуда получимw_ КРаЬ(аг1+Ьг2+сг3) + Г2г’ (3-53)где коэффициенты а, Ъ и с могут быть найдены из условия
равновесия опорного треугольника с учетом равенства а + Ъ ++ с — 1.Рассматривая условие равновесия (3.52), следует иметь в
виду, что определять коэффициенты а, & и с из условий рав¬
новесия надо при соблюдении требования расположения точ¬
ки С' внутри опорного треугольника. Если точка С" распола¬
гается за его пределами, то наиболее удаленная опора оказы¬
вается ненагруженной, т.е. к ней заготовка не прижимается
при действии силы закрепления. Этот случай противоречит
изначальной идее расположения трех точечных опор на базо¬
вой плоскости. Предельным здесь является положение точки
С на границе опорного треугольника. Например, при распо¬
ложении точки С" на линии 2-3 опора 1 не работает, т.е. сило¬
вого контакта с заготовкой она не имеет. И в этом положении
силы закрепления W уже нарушают требование использова¬
ния на данной базовой плоскости трех опор. А использование
лишь двух точечных опор приводит к неустойчивому поло¬
жению заготовки и возможным ее перекосам относительно
этой плоскости.54
Следовательно, если при использовании одного зажимно¬
го элемента силу W невозможно расположить внутри опорно¬
го треугольника, то необходимо предусмотреть несколько за¬
жимных элементов, равнодействующая усилий закрепления
которых будет располагаться внутри опорного треугольника.Пример 3.5.3. Корпус базируется по трем плоскостям на
две опорные пластины и три неподвижные точечные опоры
(рис. 3.16). Сила Р стремится повернуть заготовку вокруг
точки 3. Требуется определить силу закрепления W.Как и в предыдущем
примере, вначале будем
полагать, что точка С'(горизонтальная проек¬
ция точки приложения
силы W) совпадает с
центром тяжести опор¬
ных пластин. В этом
случае каждая из опор¬
ных пластин восприни¬
мает усилие W/2, а
удельное давление q на
их поверхностях можно
считать постоянным. В
этой связи силы треният = qfx можно привести к результирующим силам, приложен¬
ным в центрах тяжести пластин.Условие равновесия можно представить в видеРис. 3.16. Расчетная схема сил закрепле¬
ния заготовки корпуса (пример 3.5.3)2 т3 = КРа -W W■yfa-yfo-W/jr =0,откуда найдемW = -2 КРа(3.54)(3.55)fM+r2)-2f2rЕсли точка С' не совпадает с центром тяжести опорных
пластин, то решение задачи сильно усложняется. Ее точное
Решение сложно для практического применения, а потому
чаще всего используют результаты приближенных решений.Усть, например, точка С' смещена так, как это представле-
150 на рис. 3.17.55
Рис. 3.17. Расчетная схема сил закрепления заготовки корпуса
(пример 3.5.3)В связи с несимметричным расположением силы W опор¬
ные пластины будут воспринимать неодинаковые части W, т.е.W. = -A-W, W2 = ——W (3 56)1l1+l2 k+h ’Удельное давление q на поверхностях пластин будет не¬
равномерным по длине, так как имеет место их внецентрен-
ное нагружение. Поэтому для установления закона распреде¬
ления q на пластинах можно использовать теорию внецент-
ренного сжатия коротких стержней.Каждая из пластин испытывает сжатие силами Wx или
W2 и изгиб в плоскости хОу моментамиM^W.b, M2=w2b, (3.57)где b — расстояние от точки С' до горизонтальной оси сим¬
метрии опорных пластин.Удельное давление от сил9.1=^/^, qw2=W2/F2, (3.58)где F1 и F2 - площади опорных пластин.Удельные давления от моментов6 W.b 6 W2bQm~ ch2 ’ Чмг~ ch2 ‘ ( }56
На рисунке 3.17 приведены эпюры распределения удель¬
ных давлений для пластины 2, а также эпюра суммарного
удельного давления. Для пластины 1 эпюры имеют такой жевид*Нетрудно видеть, что результирующее давление вдоль
пластины 2 распределяется по линейному закону, причемW2 6 W2b<?min2=^ (3.60)W2 6 W2bЯт&х2 “ p ^2 * (3.61)Для пластины 1 эти давления будут вычисляться по та¬
ким же зависимостям:W. 6 Wxb(3.62)W. 6 Wxb?maxl + (3.63)Будем полагать, что по ширине пластин давление q рас¬
пределено равномерно. А если так, то можно найти положе¬
ние центра тяжести эпюры q и считать, что равнодействую¬
щая давления q приложена в этой точке.Эпюру суммарного давления q можно разбить на два тре¬
угольника, как это показано пунктирной линией. Положе¬
ние центра тяжести каждого из них определяется расстояни¬
ем Л/3 от соответствующего основания. Точки 01? 02, 03, 04,
характеризующие положения центров тяжести эпюр давле¬
ний, показаны на осях симметрии пластин 1 и 2. Там же
представлены радиусы этих точек, необходимые для опреде¬
ления условия силового равновесия, которое в данном случае
можно представить в видеheIms = КРа - — /1(r1gmml + r2gmaxl +Z (3.64)+ r3?mi„2 + rWmax2) " Wfr = 0-Преобразовав это равенство, получим более простое для
Расчетов57
Подставив в полученное условие равновесия значения всех
параметров, а также значения W1 и W2 в долях W, можно
вычислить требуемое усилие закрепления W.Следует заметить, что в связи с внецентренным приложе¬
нием силы закрепления W относительно опорных пластин
возможен перекос заготовки. Поэтому наиболее предпочти¬
тельным является тот вариант закрепления, при котором сила
W проходит через общий центр тяжести опорных пластин.
4. РАСЧЕТ И КОНСТРУИРОВАНИЕ ПОВОДКО¬
ВЫХ ЗАЖИМНЫХ УСТРОЙСТВ4.1. ТИПОВЫЕ КОНСТРУКЦИИ поводковых
ЗАЖИМНЫХ УСТРОЙСТВ ТОРЦОВОГО ТИПАПоводковые устройства используются для передачи вра¬
щающего момента от шпинделя станка к заготовке при обра¬
ботке на токарных, фрезерных и шлифовальных станках.
Наибольшее распространение из поводковых устройств полу¬
чили поводковые хомутики, а также поводковые центры,
которые используют для передачи вращения торцовую по¬
верхность заготовки.Различают торцовые поводковые устройства фрикционные
и деформирующие [9]. На рис. 4.1 приведена конструкция
фрикционного поводкового центра с ведущим кольцевым эле¬
ментом. Такое устройство представляет собой конический кор¬
пус 1, в котором установлен подпружиненный центр 4, рас¬
положенный одновременно в центральном отверстии обоймы
2. Обойма имеет кольцевую канавку, в которой размещается
поводок 3 в виде кольца. Торцовая поверхность 6 и цилинд¬
рические поверхности 5 поводка приклеены к соответствую¬
щим поверхностям кольцевой канавки обоймы 2. При вра¬
щении шпинделя станка с поводковым центром вращение на
деталь передается за счет сил трения на ее торцовой поверх-ведущим элементом59
ности, имеющей силовое взаимодействие с кольцевым повод¬
ком 3. Поводок 3 должен быть изготовлен из фрикционного
материала, и лучше всего из эластичного и упругого, такого,
как резина.На рис. 4.2 приведена типовая конструкция торцового
поводкового центра с коническими поводками. В данном слу¬
чае вращение на деталь передается тремя коническими по¬
водками 4, размещенными в корпусе 1 и обойме 2. Поводки
снабжены кольцами 5, предохраняющими их от выпадения
из обоймы 2. Пространственные отклонения торцовой повер¬
хности детали здесь компенсируются за счет того, что повод¬
ковый центр снабжен самоустанавливающимся диском 3,
являющимся опорой для поводков. Заостренные концы по¬
водков снабжены площадками на вершинах диаметром 1,2 —1,5 мм, что предотвращает их поломку при перегрузках и
делает более прочными.12 3 4Рис. 4.2. Конструкция деформирующего поводкового
центра с коническими поводками4.2. РАСЧЕТ ФРИКЦИОННЫХ ПОВОДКОВЫХ
ЦЕНТРОВМетодику расчета поводковых центров будем рассматри¬
вать на примерах.Пример 4.2.1. Цилиндрическая заготовка (вал) базирует¬
ся на токарном станке в центрах. Производится обработка
проходным резцом наружной поверхности. Момент сил реза¬60
ни я М известен. Известны также силы Рх и Р . Требуется оп¬
ределить силу Q поджатия заготовки к жесткому переднему
центру с заданным углом при вершине 2а, при которой будет
обеспечиваться обработка. Здесь ведущим элементом являет¬
ся передний центр (рис. 4.3).Решение данной задачи будем вести с учетом следующих
допущений:• жесткость звеньев технологической системы является
достаточной и не оказывает влияния на распределение кон¬
тактных напряжений на поверхности ведущего центра;• контактные напряжения на рабочей поверхности веду¬
щего центра распределены равномерно;• радиальная составляющая сила резания Р, внося неко¬
торые изменения в равномерность распределения контактных
напряжений, не приводит к изменению результирующей силы
трения на контактной поверхности ведущего центра.Рассмотрим расчетную схему, приведенную на рис. 4.4. В
любой точке А контактной поверхности ведущего центра с
заготовкой действует нормальное давление, которое, как видно
из схемы, равно g/sina. Это нормальное давление предопре¬
деляет появление касательных сил т, которые, если задан угол
тРения ф, будут равныNQРис. 4.3. Схема фрикционного поводкового устройства
с ведущим гладким передним центромат = -r^tgcp.(4.1)sin a61
QРис. 4.4. Расчетная схема поводкового устройства,
представленного на рис. 4.3Учитывая допущение о равномерном распределении кон¬
тактных напряжений, найдем результирующий вращающий
момент от касательных сил, приведенных к центру средней
окружности поверхности контакта. Для этого умножим пра¬
вую часть соотношения (4.1) на площадь S поверхности кон¬
такта ведущего центра с заготовкой и радиусом средней ок¬
ружности i?c, равным Дс=(£>ц+ d )/4:где Q = qS — сила поджатия заготовки к переднему центру.Осуществление обработки в центрах будет возможным
лишь в том случае, если найденный момент сил трения на
рабочей поверхности ведущего центра будет равным или не¬
сколько превышать момент сил резания М , который равен
PD/2, где D — диаметр обрабатываемой поверхности. С уче¬
том коэффициента запаса К получим условие осуществления
резания(4.2)КМ„ sin а
Q = 2——.tg<P#cПодставив значение М , получим
п _ КРг sin aR
tg<pi?0 ’Q =(4.4)(4.3)где R — радиус обрабатываемой поверхности.62
Полученные зависимости не учитывают влияния состав¬
ляющей силы резания Рх, которая может быть направлена
как в направлении силы Q, так и против нее. Последнее, как
известно, имеет место при больших значениях отрицатель¬
ных углов наклона главной режущей кромки и, в частности,
при обратной схеме ротационного резания. С учетом этой со¬
ставляющей формулы (4.3) и (4.4) принимают видЛ КМ. sin аQ = 5 ± рх (4 5)tgcpRc *’Л КР sinaRв—5л-*'- <4-6>где нижний и верхний знаки соответствуют направлениям
силы Рх по подаче и против нее соответственно.Для упрощения в формулах (4.3) — (4.6) за величину Rc
можно принять гц— минимальный радиус центрового гнез¬
да, т.е. считать силу трения приведенной к минимальному
радиусу так же, как в этих формулах считается сила Рz при¬
веденной к радиусу обрабатываемой поверхности. Некоторое
увеличение силы Q, вызванное этой заменой, компенсирует¬
ся выбором либо соответствующего коэффициента запаса -ЙГ,
либо угла трения ср.Пример 4.2.2. Исходные условия задачи те же, что и в
примере 4.2.1. Ведущим элементом является кольцо. Перед¬
ний центр выполнен плавающим (подпружиненным). Рас¬
четная схема приведена на рис. 4.5. Требуется определить
силу Q.QРис. 4.5. Схема фрикционного поводкового устройства
с кольцевым ведущим элементом63
Будем считать принятые выше допущения действитель¬
ными и для рассматриваемого случая. В любой точке контак¬
та кольцевого элемента с деталью действует нормальное дав¬
ление а, при котором элементарные касательные силы будут
равныт = otgcp, (4.7)где ф — угол трения на поверхности контакта.Как и в предыдущем случае, найдем вращающий момент
от сил трения, приведенных к среднему радиусу поверхности
контакта, умножив правую часть равенства (4.7) на площадь
S и радиус средней окружности:(48)4Условие осуществления резания — равенство момента сил
ния момен
вия получимтрения моменту сил резания, т.е. Мв = КМр. Из этого уелоп КМ*Q = ~—(4.9)
tgq>Rcили, подставив значение Мр = PR,Л КРгН(4-10)С учетом составляющей силы резания Рх формулы (4.9) и
(4.10) примут видКМЬQ = V±P*’ (4.11)tgCp-Re Vп КР RQ = u±Pf (4.12)tgcpi?c v4.3. РАСЧЕТ ДЕФОРМИРУЮЩИХ ПОВОДКОВЫХ
ЦЕНТРОВПример 4.3.1. Исходные условия задачи те же, что и в
примере 4.2.2. Вращение от шпинделя к заготовке передает¬
ся клиновыми поводками. Передний центр выполнен плава¬
ющим, т. е. подпружиненным (рис. 4.6). Требуется опреде¬
лить силу Q.64
В основу определе¬
ния силы Q может быть
положено решение за¬
дачи о внедрении сим-метричного неде-формируемого клина с
углом раствора 2(3 в по-
лубесконечное жест¬
копластическое про¬
странство. Эта задача
решена Хиллом [10;11; 12]. Расчетная схема приведена на рис. 4.7. Задача реше¬
на в предположении, что трение на поверхностях контакта
отсутствует.При внедрении клина материал выдавливается по обе его
стороны, образуя наплывы ACG (см. рис. 4.7). Вдоль линии
АВ контактное давление р постоянно. Величина силы F, при¬
ходящаяся на единицу длины клина, зависит от глубины его
внедрения Н. Длина АС, равная BG, не известна. Не известно
и давление р. В силу несжимаемости среды площади тре¬
угольников OBG и ACG равны.Решение задачи выполняется методом линий скольжения.
Давление р является наименьшим главным напряжением, его
абсолютное значение определяется по формулер =2ft(l + V), (4.13)Рис. 4.7. Расчетная схема поводкового устройства
с клиновыми поводками□тОСсмнQРис. 4.6. Схема деформирующего поводково¬
го устройства с клиновыми поводками65
где k — напряжение текучести при сдвиге, величина которо¬
го зависит от принятого условия пластичности; \|/ — угол цен¬
трированного веера DAE, определяющийся из уравненияcos(2(3 - V) = tg.Ж2(4.14)Решение уравнения (4.14) для различных значений 2\3 дает
следующие результаты:2(3°15202530354045505560708090Ф°1,62,73,95,437,088,8710,812,915,0617,3422,227,432,94Аппроксимируя значения полиномом второй степени, по¬
лучимФ= -2,219 + 0,37(3 + 0,009(З2. (4.15)Если принять, что при внедрении клина выполняется ус¬
ловие пластичности Треска, то значение k принимается рав¬
ным k = атс /2. Если же принято условие пластичности Мизе-
са, то & = атс / -Уз* гДе атс— напряжение текучести матери¬
ала заготовки при его одноосном сжатии.Значение а тс приближенно можно определить по величи¬
не твердости, согласно [13], по соотношениюсгтс = 14 + 0,34 НВ, (4,16)где НВ — твердость по Бринеллю.В приведенном соотношении значение атс определяется в
килограмм-силах на квадратный миллиметр. Для перевода в
единицы измерения СИ (Па или Н/м2) необходимо получен¬
ное по (4.16) значение умножить на 107.Известно, что указанные выше условия пластичности вы¬
полняются не всегда. Это зависит как от обрабатываемого
материала, так и от условий его деформирования. Поэтому
не всегда удается выбрать наиболее приемлемые значения k
для определения величин главных напряжений, при кото¬
рых происходит пластическое деформирование. Лучше всего
значение k определять экспериментальным путем.С помощью схемы, представленной на рис. 4.7, легко по¬
лучим усилие F на единицу длины (в направлении оси z)
клина66
F = 2plsin& (4.17)где I = АВ — длина контакта клина с материалом заготовки.Подставив р из (4.13), I = i?/cos(3 и умножив (4.17) на
длину В клина (в направлении оси г), получим усилие, дей¬
ствующее на клиновой поводок и соответствующее его вне¬
дрению в материал заготовки на глубину Н, т.е.F = 4/е(1 + \(/) —sin РБ. (4Л8)cos р v 'Величину I можно также определить, зная наибольшую
толщину 2а клина, состоящую в контакте с материалом заго¬
товки, т.е.l-а/sin(3. (4.19)Тогда усилие F будетF = 4k(l + y)aB. (4.20)Из формулы (4.18) легко получить значение Н:H~4fe(l + (p)tgp5‘ (4*21)Пользуясь схемой (см. рис. 4.7), можно также определитьI из h. Нетрудно видеть, что /cos(3 - Zsin(P - ф) = h, откудаhcosP-sin(P-9) (4.22)Подставив (4.22) в (4.18), получимF = Щ1 + у) — sin рБ, (4.23)cos р - sm(p - \|/) v 'откудаh _ F(cosp-sin(P-\|/)) (4 24)4fe(l + \(/) sin (3 ВЕсли поводков т, то суммарная сила поджатия Q, необхо¬
димая для внедрения всех поводков на глубину й, будет рав¬
наQ-Fm. (4.25)Определим значение силы Q, необходимой для осуществ¬
ления резания с заданной силой Рг при известном диаметре
обработки (заготовки) D .67
Для определения вращающего момента, развиваемого од¬
ним поводком, необходимо найти усилие Рв, направленное в
сторону вращения этого поводка. Будем считать, что предель¬
ным является такое усилие Рв, которое соответствует пласти¬
ческому течению обрабатываемого материала, т.е. когда на
рабочей поверхности клинового поводка нормальное давле¬
ние достигнет величины, определяемой соотношением (4.13).
Тогда величину Рв найдем по зависимостиРв = pcosPZE, (4.26)подставив в которую р из (4.13) и I = Н/cos(3, получимРв = 2Л(1 + \|/)ЯБ. (4.27)Длину I = АВ можно представить в виде (4.19). ТогдаРъ = 2fc(l + \|/)actg(35. (4.28)Момент, развиваемый одним поводком, размещенным на
расстоянии Rn от оси вращения поводкового устройства, бу¬
детМв = 2k(l + \|s)HBRa9 (4.29)илиМв = 2Ц1 + \|/)actg(3Btfn. (4.30)Если поводков т и все они внедрены в металл заготовки
на одинаковую глубину Н, то суммарный момент, передавае¬
мый этими поводками, будет определяться произведениемМв = Мвт. (4.31)Для осуществления процесса резания необходимо, чтобы
этот момент был не меньше момента сил резания, равногоМр =PZR3, (4.32)т.е. чтобы выполнялось условие2ft(l + \|f)HBRum = PZR3. (4.33)Из условия (4.33) найдем требуемую для осуществления
резания глубину Н внедрения в металл клиновых поводков:я = PzR>2k(l + \|i)BRnm ' (4>34)Найдем силу Q, необходимую для внедрения всех т по¬
водков на глубину Н. Для этого в зависимость (4.18) подста¬68
Qвим H по (4.34) и умножим на т. Преобразовав, получим:Q = 2Pztg$RJRn. (4.35)С учетом коэффициента запаса К формула (4.35) примет
видQ =2 KPztgPRJRn. (4.36)С учетом силы Рх формулу (4.36) можно записать таким
образомQ = 2KPztg$RJRa±Px. (4.37)Пример 4.3.2. Решается та же задача, что и в примере4.3.1, только вращение от шпинделя к заготовке передается
коническими поводками (рис. 4.8). Также требуется опреде¬
лить силу Q.Решение задачи
можно выполнить,
используя схему,
приведенную на
рис. 4.7, и сохра¬
нив принятое выше
допущение об от¬
сутствии трения на
поверхности кон¬
такта конуса с ма¬
териалом заготов¬
ки. Тогда давление р, равномерно распределенное вдоль АВ,
будет определяться по соотношению (4.13), а усилие F, дей¬
ствующее на конический поводок, будетF = psin$-S, (4.38)где S — площадь боковой поверхности конуса, состоящая в
контакте с материалом заготовки.Подставив в (4.38) р в соответствии с (4. 13) и величину
S = nal = nl2sin(3, получимF = 2nk(l + \|f)l2 sin2 (3. (4.39)Заменив I в соответствии с (4.22), найдемh2 sin2 (3Рис. 4.8. Схема деформирующего поводкового
устройства с коническими поводкамиF = 2nk(l + \|/)(cosP-sin((3-\|/))2(4.40)откуда69
, _ cosP-sin(|3-y) " sinp У 2nk(l + \\i) ' (4>41)Здесь также значение напряжения текучести при сдвиге
k принимается равным атс /2 или атс / ^/з в зависимости от
принятого условия пластичности или определяется экспери¬
ментальным путем.Для определения момента, развиваемого коническими
поводками, воспользуемся, как и в предыдущем случае, схе¬
мой на рис. 4.7. Также будем считать предельным усилие Рв,
соответствующее пластическому течению металла. Следова¬
тельно,Рв = pcos(3-S, (4.42)где S = На — площадь осевого сечения конического поводка.
Следовательно, аналогично предыдущему, приняв а = iiftgp,
получимРв = 2k(l + v) sin рЯ2. (4.43)Тогда момент, развиваемый т поводками, будет равен:Мв = 2k(l + у) sin P# 2Дпт. (4.44)Запишем условие осуществления резания с учетом (4.32)2k(l + v) sin Р H2Rnm = Р2Д3. (4.45)Из этого условия найдем величину Я2:JJ2 _ 2й(1 + \|/) sin РRnm ^ 'Теперь можно найти силу Q, подставив в зависимость (4.39)
значения I = Я/ cosP, Я2 в соответствии с (4.46) и умножив
на т. После преобразований получим‘ nP2R3tg$Q = * ft (4.47)Rn cos р v 'С учетом составляющей Рх формулу (4.47) можно пред¬
ставить в видеTiP2R3tgfiв*-^±р'- <4-48>70
Пример 4.3.3. Решается та же задача, что и в примере4.3.1, только вращение от шпинделя к заготовке передается
рифленым центром (рис. 4.9). Требуется определить силу Q
поджатия заготовки к рифленому центру.Рифления центра
можно рассматривать
как клиновые поводки,
внедряющиеся в кони¬
ческую поверхность
центрового гнезда или
кромку центрального
отверстия с фаской или
без фаски.Рассмотрим случай
внедрения рифленийцентра (клиновых поводков) в коническую поверхность цент¬
рового гнезда. Схема приведена на рис. 4.10, а.Из схемы следует, что ширина клина В переменная. Она
изменяется от b до b + с/sina. При этом для простоты (в связи
с малостью с) будем считать(2>Ц-Ч)Рис. 4.9. Схема деформирующего повод¬
кового устройства с рифленым центромВ =2 sin a(4.49)А-А71
Из рис. 4.10, а следует, что Н = ccosa, а длина контакта
клина с материалом заготовки I = Н/cos(3. По аналогии с (4.18)
получим усилие, действующее на одно рифление в перпенди¬
кулярном к ширине клина направленииD -dF = 4k(l + \j/)tgpccosa — -. (л 5(у|2 sina v * }По соотношению (4.27) получим усилие Рв, развиваемое
одним поводком в направлении его вращения, подставив зна¬
чения Н и В,D -dР„ = 2k(l + y)ccosa -г—- • (4.51)cl sinaОпределим момент, приведенный к среднему радиусу цен¬
трового гнезда, развиваемый рифленым центром с числом
рифлений т. Для этого умножим (4.51) на т и средний ради¬
ус центрового гнезда RcD -dМ = 2&(1 + \|/)ccosa — -mR . (4. 52)2 sina v * 'Запишем условие осуществления резания, приравняв (4.52)
и (4.32),D -d2Щ + \(/)ccosa—^—5- mRc = PZR3, (4.53)2 sinaоткуда найдемР2Д, sin аk(l + X|/)ccosa(D4 - d^Rjn (4.54)Найдем осевую силу Q, умножив (4.50) на т, sina и под¬
ставив значение с. После преобразований получим_ 2tgpP2i?3sina
Q • (4.55)С учетом коэффициента запаса К формула (4.55) прини-
мает вид2Ktg$P R sina
Q = -ф- • (4.56)КсС учетом составляющей Рх силы резания формулу (4.56)
можно представить в виде72
g = 2*tePPfi,sinatp> (4 57)Теперь рассмотрим случай внедрения рифлений ведущего
центра в центральное отверстие диаметра 1)ц, которое не име¬
ет фаски. Приведем выкладки, аналогичные предыдущим.Наибольшая ширина клина, находящаяся в контакте с
заготовкой (рис. 4.10, б):В = -А-. (4.58)sin a v 'Глубина внедрения клина в металлН = ccosa, (4.59)а длина контакта поперечного сечения клина с заготовкойI = Н / cos (3. (4.60)По аналогии с предыдущим имеем:F - 4&(1 + \j/)tg(3ccosa ■ ° ■■■■, (4.61)sinaРв = 2k(l + \|/)ccosa ——, (4.62)sina■л л- с\ т /•* \ 2 cosa —М = 2k(l + \|/)с mRc. (4.63)sinaИз условия осуществления процесса резаният /ч ч 2 cos a „ „ _2k(l + \)i)c2 mRc = PZR3, (4.64)sinaнайдем2 PR sinaс 2k{l + \|/)cosa/n#c
Умножив (4.61) на m, sina и подставив с2, получим(4.65)Л 2tg|3Pi? sinaQ = y—’ <4-66)где Лс= (D + c)/2 — средний радиус контакта рифления с
центральным отверстием.С учетом коэффициента К и силы Рх равенство (4.66) при¬
нимает вид2Ktg$PzR3 sin a
Q = ±px• (4.67)73
Пример 4.3.4. Решается та же задача, что и в примере
4.3.3, только вращение от шпинделя к заготовке передается
поводками со сферическими концами, схема внедрения кото¬
рых в заготовку представлена на рис. 4.11. Требуется опреде¬
лить силу Q поджатия заготовки к поводкам.Задача определения усилия деформирования при внедре¬
нии сферического пуансона в полупространство решена Пран-
дтлем и Хиллом [11; 12] . Согласно этому решению (рис. 4.11),
также выполненному методом линий скольжения в предпо¬
ложении отсутствия контактного трения, давление р, соот¬
ветствующее началу внедрения поводка, равнор = 2fc(l + 7i/4), (4.68)а суммарное усилие, приходящееся при этом на один пово¬
док, будет определяться по формулеF = 2k(l + n/4)na\ (4.69)где а — радиус сферического поводка.По мере внедрения поводка удельное усилие увеличивает¬
ся. Его предельное значение становится равнымр = 2/г(1 + Зя/4). (4.70)Суммарное предельное усилие, действующее на один по¬
водок,F = 2лк(1 + 3п/4)а2. (4.71)Рис. 4.11. Расчетная схема поводкового устройства
со сферическими поводками74
Примем условие пластичности Треска k = сгтс/2. Тогда уси¬
лие, приходящееся на один поводок для начала его внедре¬
ния в обрабатываемый материал, будет определяться по соот¬
ношениюFH = 5,61атса2. (4.72)Предельное усилие, при котором происходит безостано¬
вочное перемещение внедряющегося поводка,■Fnp =10,54сттса2. (4.73)Определим момент, развиваемый сферическими поводка¬
ми. Силу Рв найдем из предположения, что состояние плас¬
тического течения металла имеет место при нормальных на¬
пряжениях на боковой поверхности поводка, определяемых
по (4.68). ТогдаРв = 4fe(l + я/4)Яа, (4.74)а искомый момент, развиваемый т поводками, расположен¬
ными на расстоянии Rn от оси заготовки,Мв = 4*(1 + n/4)aHRnm. (4.75)Условие резания в этом случае:4£(1 + к / 4)aHRnm = РД, (4.76)откуда найдем Н:тт _ /л4й(1 + n/4)aRnm ’ ^ ^Умножив (4.69) на яг, получим соотношение для Q. Заме¬
нив if на а в соотношении (4.76), найдем значение Q, необхо¬
димое для внедрения всех сферических поводков с радиусом
сферы р в металл на глубину а. Преобразовав, получим^ яРЛ
в = (4.78)С учетом коэффициента запаса К и составляющей силы
резания Рх формулу (4.78) можно представить окончательно
в видеЛ пКР R ^ п(4-79)75
4.4. ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ
ФРИКЦИОННЫХ ПОВОДКОВЫХ ЦЕНТРОВМетодика экспериментальных исследований. Эксперимен¬
тальные исследования фрикционных поводковых центров
проводились с использованием установки, собранной на базе
токарно-винторезного станка 1К62 (рис. 4.12).1 2 3 4 5Рис. 4.12. Схема экспериментальной установки для исследования
работоспособности поводковых центровВ трехкулачковом патроне или пиноли шпинделя уста¬
новлено поводковое устройство, в данном случае — ведущий
центр 13, взаимодействующий с центровым гнездом заготов¬
ки 12, установленной на специальной оправке 11. Заготовка
12 установлена с помощью двух торцовых шпонок 2 на оп¬
равке без возможности свободного вращения. На суппорте
(верхних салазках) закреплен порошковый электромагнит¬
ный тормоз 9 типа ПТ16М1 с возможностью свободного про¬
дольного перемещения по направляющим 7. Оправка 11 не¬
подвижно связана с валом электромагнитного тормоза жест¬
кой муфтой 10. Правый конец вала тормоза может взаимо¬
действовать с вращающимся центром 5, расположенным в
задней бабке станка, через динамометр сжатия 4 типа ДОСМ.Данная наладка дает возможность обеспечивать силовое
взаимодействие заготовки 12 с ведущим центром 13 путем
поджатия заготовки к этому центру задней бабкой через вра¬
щающийся центр 5, динамометр 4, электромагнитный тор¬76
моз 9 и оправку 11. Осевая сила поджатия Q измеряется с
помощью динамометра 4 по показаниям индикатора, кото¬
рым снабжен динамометр (на рис. 4.12 индикатор не пока¬
зан). В зависимости от величины силы Q жесткий центр 13
может передать вращающий момент Мв, который измеряется
с помощью электромагнитного тормоза 9.С помощью задней бабки создается нагружение системы
силой Q. Включается вращение шпинделя станка, при кото¬
ром, в силу наличия сил трения на поверхности контакта
ведущего центра 13 с деталью 12, происходит вращение дета¬
ли. Стрелка индикатора 3 электротормоза устанавливается
на ноль. Затем подачей напряжения на обмотку электромаг¬
нитного тормоза создается возрастающий тормозной момент,
препятствующий вращению заготовки совместно с центром
13. В момент времени, соответствующий повороту заготовки
относительно центра, фиксируется показание индикатора 3
и определяется наибольший вращающий момент, который
может передать ведущий центр при заданном значении осе¬
вой силы.В измерительной системе установки используется указа¬
тель, или датчик поворота детали, который состоит из то¬
косъемника 1, изолированного от центра, нормально разомк¬
нутых контактов 15, скользящего контакта 14, источника
питания 6 и контрольной лампочки 8.При совместном вращении центра 13 и заготовки 12 кон¬
такты 15 остаются разомкнутыми, лампочка 8 не светится.
Когда под действием тормозного момента вращение детали
12 остановлено, контакты 15 на непродолжительное время
замыкаются и лампочка 8 загорается. Это свидетельствует о
происшедшем повороте ведущего центра 13 относительно де¬
тали 12.При проведении эксперимента использовались стальные
и чугунные заготовки, изготовленные из материала одной
поставки. В обоих комплектах заготовок были выполнены
центральные гнезда без предохранительного конуса центро¬
выми сверлами различных диаметров. Для оценки влияния
твердости заготовок и их материала на вращающий момент,
передаваемый ведущим центром, использовались еще два
комплекта заготовок — стальные с различной твердостью и77
чугунные, также имеющие различную твердость. Во всех за¬
готовках были выполнены одинаковые центровые гнезда.
Использовался ведущий центр 13 с твердосплавной рабочей
частью.При проведении исследований устанавливались зависи¬
мости величин вращающих моментов, развиваемых ведущим
центром, от осевой силы, среднего диаметра центрового гнез¬
да и твердости заготовки из стали и чугуна, а также анало¬
гичные зависимости коэффициента трения.Экспериментальные исследования поводковых центров с
ведущим кольцевым элементом проводились на той же уста¬
новке. Поводковое экспериментальное устройство снабжено
кольцевым поводком i, который представляет кольцо с че¬
тырьмя отверстиями. Этими отверстиями кольцо надевается
на штифты 2 (рис. 4.13).Поводки изготавливались
из различных материалов:
стали 45 (НВ 230), зака¬
ленной стали 45 (HRC 40 —42), чугуна СЧ20, тексто¬
лита, ретинакса, а также
твердой резины. Заготовки
изготавливались из стали
45 и серого чугуна СЧ20,
термически обработанных
до различной твердости.Проводились исследова¬
ния с разными поводками,
при которых устанавлива¬
лись зависимости Мв = f(Q)
и / = F(Q) Для стальных и
чугунных заготовок. *Экспериментальные исследования поводковых центров со
штырьковыми ведущими поводками с гладкой торцовой по¬
верхностью проводились на той же установке. Отличие со¬
стояло только в ведущем устройстве (рис. 4.14), которое вы¬
полнялось с подпружиненным центром 1. Подпружиненный
центр может выступать в роли жесткого, если его подпереть
винтом, завернутым в центральное отверстие оправки 2 (на
чертеже не показан). Центр от вращения удерживают торцо¬Рис. 4.13. Схема поводкового экспери¬
ментального устройства с кольцевым
ведущим элементом78
вые шпонки 3, кото¬
рые также предотвра¬
щают вращение обой¬
мы 5, прикрепленной
к оправке 2 двумя
винтами и служащей
для установки в ней
поводков 6. Эти по¬
водки своими нерабо¬
чими концами упи¬
раются в торец оправ¬
ки 2. Обойма 5 имеет
изолированный то¬
косъемник 4 датчика
поворота. При прове¬
дении исследований
использовались цилиндрические поводки, устанавливаемые
в отверстия обоймы 5. Таких отверстий в обойме 12. Поводки
имели плоскую рабочую поверхность. Они изготавливались
из стали ШХ15 (ролики игольчатых подшипников).Нагружение поводков осуществлялось задней бабкой стан¬
ка. Измерение осевой силы выполнялось динамометром, а
определение вращающего момента — с помощью тормоза
ПТ16М1. Устанавливались зависимости Мв = /(Q), Мв = f(m),
Мв = /(НВ), а также f = F(Q), f = f(m), f = /(HB) для стали и
чугуна (rti — число поводков).Исследование поводкового устройства с гладким веду¬
щим центром. Экспериментальные исследования были посвя¬
щены оценке влияния осевой силы Q поджатия заготовки к
ведущему переднему центру на величину передаваемого вра¬
щающего момента. Измерения момента проводились при сту¬
пенчато изменяющейся силе Q от 981 до 9810 Н, различных
диаметрах центровых гнезд (1,5; 2,0; 2,5; 3,15; 4,0; 5,0; 6,3),
выполненных стандартными сверлами, и разных материалах
(сталь 45, серый чугун СЧ20), термообработанных до различ¬
ной твердости (сталь 45 — НВ 229; НВ 241; НВ 255; НВ 321;
чугун СЧ 20 — НВ 170; НВ 197; НВ 207). Ведущий центр с
углом при вершине 60° имел рабочую часть из твердого спла¬
ва Т15К6. В одной серии экспериментов центровые гнезда
- после сверления подвергались притирке путем нагруженияРис. 4.14. Схема поводкового эксперимен¬
тального устройства со штырьковыми
ведущими элементами79
заготовки осевой силой Q = 9810 Н и последующего ее тормо¬
жения, что обеспечивало относительное скольжение гладко¬
го центра и рабочей поверхности центрового гнезда. Продол¬
жительность притирки — одна минута. Влияние осевой силы
и размеров центровых гнезд в заготовках из стали 45 (НВ
229) после притирки на передаваемый момент представлено
на рис. 4.15. Видно, что
зависимости Мв = f(Q)
для рассматриваемых
размеров центровых
гнезд близки к линей¬
ным, с увеличением Q,
а также, что значения
Мв с увеличением раз¬
меров центровых гнезд
растут.Для того чтобы по
формуле (4.3) можно
было определить Q при
известных М , R и а,в7 с 7надо располагать значе¬
нием коэффициента
трения f = tgcp. Поэто¬
му по эксперименталь¬
ным данным были определены соответствующие коэффици¬
енты трения по зависимости, вытекающей из (4.3) при К = 1
иа = 30°Рис. 4.15. Зависимости вращающего
момента, передаваемого гладким
ведущим центром, от осевой силы и
размеров центровых гнезд
(1-d = 2; 2-d = 3,1; 3-d = 4; 4-d = 5)'и 7 II 7 7 II п'f =500 • МвQRс(4.80)Здесь f является коэффициентом трения, приведенным к
среднему радиусу цейтрового гнезда i?c. Вычисления показа¬
ли, что значения коэффициентов трения на рабочих поверх¬
ностях предварительно сдеформированных и притертых по
взаимодействующему центру центровых гнезд весьма велики
(0,32 — 0,64). Они выходят за пределы тех значений, кото¬
рые рекомендуются в технической литературе.Несколько другие результаты были получены при оценке
момента, передаваемого гладким ведущим центром из твер¬
дого сплава Т15К6 без притирки центровых гнезд. Заготовка80
была та же, из стали 45, НВ 229. Здесь значения f также
достаточно велики, хотя и меньше, чем для предварительно
сдсформированных и притертых центровых гнезд. Эти резуль¬
таты получены при отсутствии смазки в центровых гнездах:
эксперимент проводился с соблюдением условий сухого тре¬
ния, сразу после центровки заготовки и измерения £>ц на
микроскопе МИМ1. При этом попадание какого-либо смазоч¬
ного материала в центровое гнездо было исключено, а рабо¬
чая поверхность ведущего центра промывалась ацетоном.Если же смазочный материал может попасть в центровое
гнездо, то величины f окажутся многократно ниже.Анализ показал, что в диапазоне исследованных разме¬
ров центровых гнезд значения коэффициентов трения для
каждой отдельной ступени нагрузки близки. Однако по по¬
лученным данным трудно установить однозначную и четкую
связь между значениями коэффициента трения и размерами
центрового гнезда, так как при различных нагрузках эти свя¬
зи разные, хотя тенденция к некоторому возрастанию f с уве¬
личением диаметра центрового гнезда наблюдается.Для всех размеров центровых гнезд как после притирки в
паре с ведущим центром, так и без нее наблюдается одна и та
же закономерность — с увеличением силы Q коэффициент
трения увеличивается. Исходя из сказанного, для рассмот¬
ренных малых размеров центровых гнезд, выполненных стан¬
дартными сверлами диаметром от 1,5 до 5 мм с углом кони¬
ческой рабочей поверхности 60° в стальных заготовках, ко¬
эффициент трения f можно определять в зависимости от осе¬
вой силы Q по следующим эмпирическим формулам, кото¬
рые получены путем вычисления средних значений / на каж¬
дом уровне Q и аппроксимации экспериментальных данных
полиномом третьей степени:• для центровых гнезд, предварительно притертых по вза¬
имодействующему с ними ведущему центру/=0,2211Q - 0,0289Q2 + 0,0013Q3; (4.81)• для непритертых центровых гнезд/= 0,1431Q - 0,0149Q2 + 0,0005Q3. (4.82)Значения Q в этих формулах принимаются в килоньюто-
Чдх (кН).81
Аппроксимация экспериментальных данных для чугун¬
ных заготовок из СЧ 20 с твердостью НВ 170 — 207 полино¬
мом третьей степени позволила получить следующую форму¬
лу:f = ОД59Q - 0,0205Q2 + 0,0010Q3. (4.83)При вычислениях по этой формуле значения Q подстав¬
ляются также в килоньютонах (кН).Для оценки влияния материала и твердости заготовки на
передаваемый ведущим центром момент исследования про¬
водились с заготовками из стали 45, термообработанной до
твердостей НВ 229, НВ 241, НВ 255 и НВ 321. Измерения
передаваемого момента проводились при различных диамет¬
рах центровых гнезд, выполненных сверлами диаметрами 2,0;
2,5; 4,0; 5,0 и при ступенчатом нагружении осевой силой Q,
равной 1962, 3924, 5886, 7848 и 9810 Н. Точно такие же
исследования проводились и с заготовками из серого чугуна
СЧ 20, термообработанного до твердости НВ 170, НВ 197 и
НВ 207.Анализ экспериментальных данных показал, что для
стальных заготовок, в пределах исследованного диапазона
изменения твердости, существенного влияния на вращающий
момент, развиваемый гладким центром из твердого сплава
Т15К6, не обнаружено. Для чугунных заготовок отмечено
некоторое увеличение передаваемого вращающего момента при
увеличении твердости. Однако это увеличение для рассмот¬
ренных диаметров центровых гнезд (до 5,0 мм) несущественно.Коэффициент трения, приведенный к среднему радиусу
конической поверхности центрового гнезда, увеличивается с
увеличением осевой силы для обоих исследуемых материа¬
лов. Значение этого коэффициента для стали после притирки
центровых гнезд несколько выше, чем для чугуна. В обоих
случаях значения приведенного коэффициента трения для
одного и того же центрового гнезда увеличиваются с умень¬
шением его приведенного радиуса.Исследование поводкового центра с ведущим кольцевым
элементом. Исследования проводились в соответствии с из¬
ложенной методикой. Были изготовлены кольца с наиболь¬
шим диаметром 60 и наименьшим — 40 (ширина кольца 10 мм)
из различных материалов — стали 45 (незакаленной), стали82
45 (закаленной до 40 — 42 HRC), чугуна СЧ 20, текстолита,
резины, ретинакса марки Б, асбестового материала ЭМ-2. При
исследованиях проводились измерения момента, соответству¬
ющего повороту ведущего фрикционного кольца относитель¬
но заготовки, к которой это кольцо было прижато с опреде¬
ленной силой Q. Заготовки были изготовлены из стали 45 и
серого чугуна СЧ 20. Торцы заготовок, к которым прижима¬
лись кольцевые поводки, подвергались шлифовке до шерохо¬
ватости Ra = 1,25 мкм. По результатам измерений были пост¬
роены графики зависимостей Мв = f(Q) для поводков из всех
перечисленных выше материалов. Эти графики для загото¬
вок из стали 45 представлены на рис. 4.16. Такой же видQРис. 4.16. Зависимости вращающего момента, передаваемого кольцевым
поводком, от осевой силы и материала поводка:1 - сталь 45; 2 - сталь 45 HRC 40 — 42; 3 - СЧ 20; 4 - текстолит; 5 - резина;6 - ретинакс; 7 - асбестовый материалимеют аналогичные зависимости при взаимодействии кольце¬
вых поводков с чугунными заготовками. Различие состоит в
том, что при трении о чугунную заготовку поводки развивают
несколько меньший вращающий момент.Анализ результатов на представленных графиках свиде¬
тельствует о том, что кольцевые поводки при взаимодействии
с торцом стальной заготовки развивают вращающий момент,
зависящий от силы Q этого взаимодействия, а также от мате¬
риала, из которого изготовлен поводок. Самые малые момен¬
ты развивают поводки из стали 45 (как незакаленной, так и
закаленной) и чугуна СЧ 20 (линии 1—3 на рис. 4.16). Несколь¬83
ко большие значения Мв развивает текстолитовый поводок (ли¬
ния 4), а самые большие моменты способны передавать повод¬
ки из резины, ретинакса марки Б и асбестового материала ЭМ-2
(линии 5, 6, 7 соответственно).При проведении исследований было выявлено, что повод¬
ки из ретинакса, асбестового материала и резины при значи¬
тельных нагрузках разрушаются. Поэтому кольцевые повод¬
ки из этих материалов следует закреплять в кольцевой ка¬
навке, например, с помощью клея, оставляя лишь одну рабо¬
чую поверхность, взаимодействующую с торцом ведомой этим
поводком заготовки, свободной.Для того чтобы при расчете поводковых устройств с коль¬
цевыми ведущими элементами можно было использовать по¬
лученные выше зависимости, необходимо располагать вели¬
чинами коэффициента f трения на поверхности контакта по¬
водка с заготовкой, или угла трения (р. Установим эти значе¬
ния для различных материалов поводков и проанализируем
их изменения в зависимости от осевой силы Q. Для этого по
экспериментальным значениям момента, развиваемого повод¬
ком при известной нормальной силе Q, определим касатель¬
ную силу, приведенную к плечу момента (среднему радиусу
кольцевого поводка — Rc = 25 мм), а по ней — коэффициент
трения, разделив касательную силу на нормальную Q. Коэф¬
фициент трения будем определять по соотношению. М-103 40-Мв/=—2 = L- (4.84)25-Q Q К}В данное соотношение Мв следует подставлять в ньютон-
метрах (Н*м), a Q — в ньютонах (Н).После вычислений были построены графики изменения
коэффициентов тренця в зависимости от силы Q для различ¬
ных материалов поводка (рис. 4.17). Графические зависимо¬
сти 1 — 4 показывают, что коэффициенты трения для повод¬
ков из стали 45 (закаленной и незакаленной), чугуна СЧ 20 и
текстолита практически не изменяются с увеличением Q.
Поэтому при расчетах можно использовать следующие зна¬
чения коэффициентов трения поводков по стали: для кольце¬
вых поводков из стали 45 незакаленной — 0,10 — 0,13; за¬
каленной — 0,12 — 0,15; для поводков из чугуна СЧ 20 — 0,11 —
0,13; для поводков из текстолита — 0,17 — 0,19.84
1,00,80,60,4f0,2
01962 3924 5886 7848 9810 11772 13734 15696 HQ "Рис. 4.17. Изменение коэффициента трения на поверхности контакта
поводка со стальной заготовкой в зависимости от осевой силы
и материала поводка:1 - сталь 45; 2 - сталь 45 HRC 40 — 42; 3 - СЧ 20; 4 - текстолит; 5 - резина;6 - ретинакс; 7 - асбестовый материалКоэффициенты трения для поводков из резины (линия 5),
ретинакса (линия 6) и асбестового материала (линия 7) зави¬
сят от силы Q. Полученные экспериментальные данные обра¬
ботаны методом наименьших квадратов и аппроксимирова¬
ны полиномами четвертой и второй степени. В результате
получены следующие эмпирические зависимости для опреде¬
ления коэффициентов трения по стали:
для резиновых кольцевых поводков/= 0,727Q - 0,256Q2 + 0,037 Q3 - 0,002 Q4;для поводков из ретинакса марки Б/ = 0,52Q - 0,242Q2 + 0,046Q3 - 0,003Q4;для поводков из асбестового материала ЭМ-2/= 0,274Q- 0,032Q2,где Q принимается в килоньютонах (кН).Исследования по вращению заготовок из серого чугуна
СЧ20 кольцевыми поводками из тех же материалов показа¬
ли, что передаваемый момент (и, следовательно, коэффици¬
ент трения) незначительно уменьшается, что, по-видимому,
обусловлено смазочными свойствами графита, содержащего¬(4.85)(4.86)(4.87)tx:'7/15=&=-4- i1 31, ■-85
ся в сером чугуне. Однако на этапе проектирования поводко¬
вых устройств значения f можно принимать такими же, как
и для стали.Обращает на себя внимание экспериментально установ¬
ленный факт, что с увеличением силы Q наблюдается возра¬
стание коэффициента трения, если кольцевой поводок вы¬
полнен узким. Использовались заготовки из серого чугуна
СЧ20 твердостью НВ170. Кольцевые поводки изготавлива¬
лись из стали 45 в состоянии поставки с шириной кольцевых
площадок 2,5 мм при их средних диаметрах £>с, равных 42,
62, 72, 82 мм. На рис. 4.18 представлены графики зависимо¬
стей Мв = /(Q). Линии 1—4 соответствуют кольцевым повод¬
кам со средними диаметрами 42, 62, 72, 82 соответственно.
Для каждой пары Q и Мв были определены значения /, а
также были найдены средние значения /с для каждой вели¬
чины Q как средние арифметические четырех значений (для
различных Dc). График зависимости /с = f(Q) приведен на рис.
4.19. Путем математической обработки этот график может
быть с высокой степенью приближения аппроксимирован по¬
линомом третьей степени/с = 0,1840Q - 0,0302Q2 + 0,0019Q3 . (4.88)Также экспериментально установлено, что момент, пере¬
даваемый одним кольцевым поводком, больше, чем момент,
передаваемый несколькими одинаковыми концентрично рас-QРис. 4.18. Зависимости вращающего момента от осевой силы и среднего
диаметра кольцевого поводка шириной 2,5 мм:1 - D —42; 2-D =62; 3-D =72; 4 - D =82С С С с86
0,80,6 ”°981 1962 2943 3924 4905 5886 6869 Hо Рис. 4.19. Зависимость среднего значения коэффициента трения от осевой
силы для кольцевых поводков из стали с шириной колец 2,5 ммположенными кольцевыми поводками. Это обусловлено тем,
что с увеличением числа кольцевых поводков уменьшается
удельное нормальное давление, приходящееся на единицу
контактной поверхности, что приводит к уменьшению при¬
веденного коэффициента трения, отнесенного к среднему ди¬
аметру кольцевых поводков. Например, при совместной ра¬
боте пяти стальных кольцевых поводков шириной по 2,5 мм
со средними диаметрами 42, 52, 62, 72 и 82 мм коэффициент
трения по чугуну, приведенный к среднему диаметру 62, с
увеличением силы Q от 981 до 9810 Н увеличился с 0,21 до
0,3, а при совместной работе двух поводков со средними диа¬
метрами 42 и 52, приведенными к среднему диаметру 47, ко¬
эффициент трения возрос с 0,14 при Q = 981 Н до 0,60 при
Q = 6867 Н.Таким образом, для повышения эффективности поводков
кольцевой формы из стали их ширину следует выбирать ог¬
раниченной, добиваясь достаточно больших значений удель¬
ных нормальных давлений.Несколько иначе обстоит дело с резиновыми поводками.
Здесь при увеличении нормальной силы наблюдается суще¬
ственное уменьшение коэффициента трения. Были проведе¬
ны исследования с резиновыми поводками, изготовленными
в виде колец круглого поперечного сечения с диаметром 6 мм
со средними диаметрами Dc = 32; 38; 45; 55; 60; 70 мм. Такие
кольца располагались в ручьях радиусного профиля, выпол¬87
ненных на торцовой поверхности поводкового устройства. По
результатам измерений передаваемого такими поводками
момента были проведены расчеты значений коэффициента
трения f и соответствующих распределенных нагрузок qv
приходящихся на единицу длины поводка (gx = Q/nDc). На
рис. 4.20 представлены результаты расчета в виде связи между
/идг Эта зависимость между средним значением f и распре¬
деленной нагрузкой может быть аппроксимирована степен¬
ной функциейf-afv (4.89)Определив параметры а их этой функции, получим зави¬
симость/= мг^-0’3260 , (4.90)которая дает удовлетворительно согласующиеся с экспери¬
ментами результаты. В формулу (4.90) значения q1 подстав¬
ляются в ньютонах на миллиметр (Н/мм).Исследование поводкового устройства, снабженного
штырьковыми поводками. При исследовании использовались
поводки из стали ШХ15 (ролики игольчатых подшипников)
диаметром 5 мм. Поводковое устройство с плавающим цент¬
ром позволяло устанавливать различное число поводков (до
12). Исследовались поводки с плоскими торцами и сферичес¬
кими. Определялось влияние количества поводков, осевой
силы, материала и твердости заготовок на величину развива¬я, Рис. 4.20. Зависимость среднего значения коэффициента трения
резинового поводка от величины удельной нагрузки88
емого вращающего момента. Было установлено, что, как и в
рассмотренных выше поводковых устройствах, увеличение
осевой силы приводит к увеличению передаваемого момента
независимо от иных условий. Однако при одной и той же
осевой силе передаваемый момент уменьшается с увеличени¬
ем числа штырьковых поводков z. Этот вывод хорошо иллю¬
стрируется графиками зависимостей передаваемого момента
от осевой силы и числа поводков, представленными на рис.
4.21. Графические зависимости получены при вращении за¬
готовки из стали 45 твердостью НВ 229. Они свидетельству¬
ют о том, что при разработке таких конструкций поводковых
устройств нецелесообразно принимать число поводков боль¬
ше трех. Хотя эффективность поводкового устройства с дву¬
мя поводками выше, но при наличии трех поводков есть га¬
рантия того, что даже при большой неплоскостности торца
два поводка из трех будут взаимодействовать с поверхностью
заготовки или детали, не вызывая при этом слишком боль¬
ших несимметричных нагрузок. Поэтому при проектирова¬
нии, по-видимому, следует отдавать предпочтение трем штырь¬
ковым поводкам. Уменьшение передаваемого момента при
увеличении числа поводков объясняется уменьшением удель¬
ных нормальных сил на поверхностях контакта поводков с981 1962 2943 3924 НQ ^Рис. 4.21. Графики зависимостей передаваемого момента от осевой силы
и числа штырьковых поводков:1 - z = 2; 2 - z = 3; 3 - z = 4; 4 - z = 689
заготовкой. При этом, как было отмечено выше, наблюдает¬
ся снижение коэффициента трения, приведенного к средне¬
му радиусу расположения поводков. Вычисления показали,
что коэффициент трения при двух штырьковых поводках с
плоскими торцами увеличивается с 0,16 до 0,26 при увеличе¬
нии Q от 981 до 4905 Н, а при шести поводках — с 0,13 до
0,17. Таким образом, на стадии проектирования поводковых
устройств с тремя штырьковыми поводками, имеющими плос¬
кие торцы, можно рекомендовать принимать значения коэф¬
фициента трения в диапазоне 0,14 — 0,22. При этом мень¬
шие значения соответствуют меньшим значениям осевой силы
(до 2000 Н), а большие — большим значениям осевой силы
(до 5000 Н).Исследование влияния материала заготовки на передава¬
емый штырьковыми поводками момент показало, что для за¬
готовок из серого чугуна СЧ 20 этот момент несколько ниже,
чем для заготовок из стали 45. Это объясняется тем, что ко¬
эффициент трения для чугунных заготовок несколько мень¬
ше, чем для стальных. Для поводкового устройства с тремя
поводками его значения составляют 0,13 — 0,20 (при возра¬
стании значения силы Q от 1000 до 5000 Н). Твердость сталь¬
ных заготовок при ее увеличении от НВ229 до НВ321 не ока¬
зывает существенного влияния на передаваемый штырько¬
выми поводками момент. Поэтому влиянием твердости на пе¬
редаваемый поводками момент в этом случае можно пренеб¬
регать.Увеличение твердости заготовки из чугуна от НВ170 до
НВ207 приводит к увеличению передаваемого момента на 15 —
20 %, что объясняется происходящим при этом соответству¬
ющим повышением коэффициента трения.Влияние рассмотренных факторов на величину передава¬
емого момента при сферической форме торцовых поверхнос¬
тей поводков такое же, как и при плоской форме. Однако
величины передаваемых моментов, как правило, выше на 20 —
40 %, что объясняется увеличением удельных нормальных
сил на поверхностях взаимодействия штырьков с заготовкой
и, как следствие, возрастанием значений коэффициента тре¬
ния. Поэтому при расчете поводковых устройств с тремя по¬
водками со сферическими торцами следует выбирать значе¬
ния коэффициентов трения из диапазона 0,20 — 0,24.90
Анализ экспериментальных данных показал, что значе¬
ние коэффициента трения f зависит от удельного нормально¬
го давления, численно равного для поводков с плоскими тор¬
цами q = AQm/nd2 (Н/мм2), где т — число штырьковых по¬
водков. Выполняя вычисления по экспериментальным дан¬
ным, полученным для стальных заготовок, построим экспе¬
риментальную зависимость (рис. 4.22). Аппроксимация этой
зависимости полиномом второй степени дает следующую фор¬
мулуf = 0,1212 + 6,1295 • 10~Aq + 4,845 • 10"6g2, (4.91)позволяющую определить f при известном количестве повод¬
ков с плоскими торцами и суммарной площади их контакта с
заготовкой, т.е. при известном q (Н/мм2).ЯРис. 4.22. Зависимость коэффициента трения от удельного нормального
давления на торцах штырьковых поводков4.5. ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ
ДЕФОРМИРУЮЩИХ ПОВОДКОВЫХ ЦЕНТРОВМетодика экспериментальных исследований. Эксперимен¬
тальные исследования деформирующих поводковых устройств
проводились по двум направлениям: исследование глубины
внедрения поводков в обрабатываемый материал и исследо¬
вание влияния различных факторов на вращающий момент,
развиваемый деформирующими поводковыми устройствами.Исследования по первому направлению выполнялись с
использованием установки, схема которой приведена на рис.4.J23. Эта установка представляет устройство, использующее-91
Рис. 4.23. Схема экспериментальной установки для исследования
деформирующих поводковых устройствс я для исследования фрикционных поводковых устройств (см.
рис. 4.12), но без тормоза.Установка содержит основание 12, на котором закреплены
стойки 1,4, 6, 7. В стойке 1 устанавливается в оправке 2 пово¬
док 3. В стойке 4 — оправка 5 со сменным образцом 13, в стой¬
ке 6 крепится толкатель 10, который воздействует через дина¬
мометр сжатия 11 и оправку 5 на образец 13, прижимая его к
индентору-поводку 3 и обеспечивая внедрение последнего в
материал образца. Стойка 7 служит для создания осевой силы
F посредством винта 8. Для уменьшения сил трения на повер¬
хностях контакта взаимодействующих элементов между ними
установлены шары 9.При проведении исследований использовались различные
поводки 3 и образцы 13 с различной твердостью. Эти образ¬
цы представляли собой призмы достаточного сечения, кото¬
рые могут, перемещаясь в направлении, перпендикулярном
плоскости чертежа, менять свое положение и место контакта
с индентором 3 по своей длине.Нагружение осуществляется с помощью винта 8, путем
его вращения. Динамометр 11 служит для определения вели¬
чины осевой силы. При проведении экспериментов определя¬
лась глубина внедрения поводка в образец. Измерение осу¬
ществлялось с помощью индикаторного устройства (рис. 4.24).
Устройство содержит основание 1, направляющую колонку 292
и траверсу 3, в которой зак¬
реплена переходная втулка5, служащая для размеще¬
ния в ней щупа 6 и индика¬
тора 4, воспринимающего
перемещение щупа. Поря¬
док измерения глубины
внедрения поводка поня¬
тен: щуп 6 вначале устанав¬
ливается возле кратера, по¬
лучившегося при внедре¬
нии в металл образца 7 ин-
дентора, а затем устанавли¬
вается непосредственно в
кратер. По разностям пока¬
заний индикатора судили о
величине внедрения. Здесь
величиной выпучивания
металла (см. рис. 4.7) пре¬
небрегали вследствие мало¬
сти.Исследования по второму направлению, т.е. по оценке вли¬
яния различных факторов на вращающий момент, развивае¬
мый поводковыми устройствами, выполнялись на токарно-
винторезном станке 1К62, на базе которого была собрана уста¬
новка (см. рис. 4.12). Использовалось при этом поводковое ус¬
тройство, изображенное на рис. 4.14. Это устройство позволя¬
ет пользоваться сменными поводками. Количество поводков
может быть различным. Типы поводков также различные — в
виде конусов, двускосых клиньев и цилиндрических поводков
со сферическими поверхностями. Использовались заготовки из
стали 45 с различной твердостью НВ. Осевое усилие Q на уста¬
новке создавалось вращением маховика задней бабки. Изме¬
рялось оно динамометром ДОСМ. Момент сопротивления вра¬
щению создавался электромагнитным тормозом ПТ16М1.При проведении экспериментов сменные клиновые повод¬
ки вставлялись в отверстия поводкового устройства таким об¬
разом, чтобы направления их лезвий были радиальными по
отношению к центру. В результате исследований были уста¬
новлены эмпирические зависимости вращающего момента МвРис. 4.24. Схема индикаторного
устройства для измерения глубины
внедрения поводка в образец93
от различных факторов и таким образом уточнялись получен¬
ные аналитические формулы. На этой же установке проводи¬
лись также исследования рифленых центров. При этом риф¬
леные центры помещались на место гладкого центра в повод¬
ковое устройство (см. рис. 4.14) и подпирались винтом, завер¬
нутым в резьбовое отверстие оправки 2. Поводки 5 при этом из
устройства удалялись.При проведении экспериментов оценивалось влияние раз¬
личных факторов на передаваемый рифленым центром мо¬
мент Мв и на основе полученных данных уточнялись соответ¬
ствующие аналитические зависимости.Исследование глубины внедрения в металл клиновых
поводков. Исследования проводились в соответствии с изло¬
женной выше методикой. Устанавливались глубины h вне¬
дрения клиновых поводков из твердого сплава Т15К6 с дли¬
ной лезвия В = 4 мм в стальные заготовки из стали 45 и
чугунные из серого чугуна СЧ20 в зависимости от твердости
заготовок НВ, угла заострения клина 2Р и осевой силы F,
приходящейся на один поводок.Результаты исследований для стальных заготовок с твер¬
достью поверхности НВ229, НВ241, НВ255 и НВ321 при уг¬
лах заострения клиньев 30°,45°, 60° и 90°, после математи¬
ческой обработки экспериментальных данных, позволили
получить следующие эмпирические зависимости. Для кли¬
новых поводков с углом заострения 2(3= 30°:при НВ229 h = -0,186 + 0,064F + 0,003F2; (4.92)при НВ241 h = -0,0274 - 0,012F + 0,01F2; (4.93)при HB255 h = -0,050 + 0,0006F + 0,007F2; (4.94)при HB321 h = 0,011 - 0,015F + 0,006F2. (4.95)Для клиновых поводков с углом 2Р= 45° получены для
тех же заготовок следующие зависимости:h = -0,130 + 0,046jF + 0,003F2; (4.96)h = -0,089 + 0,028F + 0,004F2; (4.97)h = -0,134 + 0,051jF + 0,001jF2; (4.98)h = -0,01 + 0,005jF2. (4.99)Для клиновых поводков с 2р = 60° соответствующие эм¬
пирические зависимости выглядят так:94
h= -0,09 + 0,034f + 0,002F2;(4.100)h = -0,09 + 0,034F + 0,002F2;(4.101)h = -0,122 + 0,038F + 0,002F2;(4.102)h = 0,024 - 0,01IF + 0,005F2 .(4.103)Для клиновых поводков с 2(3 — 90°:h = -0,005 + 0,001F + 0,004^2;(4.104)h = -0,030 + 0,014F + 0,002F2;(4.105)h = -0,079 + 0,035F;(4.106)h = -0,021 + 0,006F + 0,003.F2.(4.107)В этих эмпирических формулах значения осевой силы F,
приходящейся на один поводок, принимаются в килоньюто¬
нах (кН), значения h получают в миллиметрах (мм).Следует иметь в виду, что эмпирические зависимости
(4.92) — (4.107) справедливы в рамках тех условий, которые
были реализованы при проведении эксперимента. Для дру¬
гих условий они могут давать существенные отклонения, и
пользоваться ими целесообразно только при весьма прибли¬
женной оценке значений Л.Анализ показал, что расчетные значения глубины вне¬
дрения поводков в материал заготовок многократно превы¬
шают экспериментальные, причем величина этого превыше¬
ния при различных силах F различная и с увеличением F
возрастает. Связь между расчетными Лр и эксперименталь¬
ными значениями Лэ можно выразить соотношениемК - /йр, (4.108)где значения Лр получали по формуле (4.24).Коэффициент f существенно зависит от осевой силы F,
приходящейся на один клиновой поводок и от угла заостре¬
ния клина. Были определены средние значения f для различ¬
ных F и 2р. Аппроксимация экспериментальных данных ли¬
нейными зависимостями позволила получить следующие эм¬
пирические формулы типа f = f(F) для клиновых поводков с
углами заострения 30°, 45°, 60° и 90° соответственноf = -0,068 + 0,031F; (4.109)f = -0,063 + 0,043-F; (4.110)f = -0,084 + 0,058F; (4.111)/ = -0,024 +0,076F. (4.112)95
Значения F в эти формулы так же, как и ранее, следует под¬
ставлять в килоньютонах (кН).По экспериментальным данным получены линейные за¬
висимости типа f =/(Р) для каждого из заданных значений
осевой силы F, приходящейся на один поводок (для F = 2943;
3924; 4905; 5886; 6867 Н). Эти зависимости таковы:f = -0,070 + 0,0055Р;
f = -0,064 + 0,0073Р;
f = -0,045 + 0,0092Р;
f = -0,037 + 0,0102Р;/= -0,034 + 0,0114р.В зависимостях Р принимается в градусах.Полученные формулы позволяют определить средние зна¬
чения /, а также с высокой точностью найти глубину внедре¬
ния клинового поводка в заготовку:F (cos Р - sin (Р - ф)) f4ft (1 + (p)sin(3B • <4Л18>Экспериментальные исследования по оценке глубины вне¬
дрения клиновых поводков из твердого сплава Т15К6 в заго¬
товки из серого чугуна СЧ20, термообработанного до твердо¬
стей НВ170, НВ197 и HB207, позволили получить следую¬
щие эмпирические зависимости:• для клиновых поводков с углом заострения 2Р = 45°
при НВ170 h = -0,0343 + 0,012F + 0,003Р2; (4.119)
при HB197 h = -0,0886 + 0,0366 F + 0,0001F2; (4.120)
при НВ207 h = -0,076 + 0,0285F; (4.121)• для поводков с углом заострения 2Р = 60° и тех же твер¬
достейh = -0,0283 + 0,0076.F + 0,00302?2; (4.122)h = -0,0303 + 0,0076^ + 0,0030F2; (4.123)h = -0,0306 - 0,0192.F + 0,0044F2; (4.124)• для поводков с углом заострения 2Р = 90°h = 0,01 - 0,0132F + 0,0052F2; (4.125)h = -0,044 + 0,0137.F + 0,0030.F2; (4.126)h = -0,020 + 0,0036f + 0,0022F2. (4.127)По этим зависимостям можно определить h для клиновых
поводков и заготовок из чугуна СЧ20, принимая F в кило¬
ньютонах (кН).(4.113)(4.114)(4.115)(4.116)(4.117)96
Исследование глубины внедрения в металл конических
поводков. Исследования проводились с коническими поводка¬
ми из твердого сплава Т15К6, имеющими углы при вершине
2(3, равные 45°, 60° и 90°. Заготовки из стали имели твердость
НВ229, НВ241, НВ255 и НВ321, а из чугуна — НВ170, НВ197
и НВ207. Устанавливались зависимости глубины h внедрения
конических поводков в заготовку от осевой силы F, приходя¬
щейся на один поводок. Оценивался также поправочный ко¬
эффициент / к расчетной зависимости (4.41), полученной с до¬
пущением об отсутствии трения на рабочей поверхности повод¬
ка при его внедрении в пластичный металл. Математической
обработкой экспериментальных данных получены следующие
аппроксимирующие полиномы для заготовок с твердостью
НВ229, НВ241, НВ255 и НВ321 соответственно:• для поводков с 2(3 = 45°h = -0,124 + 0,327f - 0,0245f2;(4.128)h = -0,136 + 0,324F - 0,0230.F2;(4.129)h = -0,096 + 0,268F - 0,0141F2;(4.130)h = -0,144 - 0,284F - 0,0238F2;(4.131)поводков с 2P = 60°h = 0,054 + 0,205F - 0,009F2;(4.132)h = 0,018 + 0,233^ - 0,0141F2;(4.133)h = -0,036 + 0,202F - 0,0193F2;(4.134)h = -0,01 + 0,202F - 0,0119F2-,(4.135)поводков с 2P = 90°h = 0,026 + 0,137.F - 0,0074f2;(4.136)h = -0,010 + 0,119f - 0,0030F2;(4.137)h = -0,018 + 0,129F - 0,0052i?2;(4.138)h = 0,04 + 0,067.F + 0,0022F2.(4.139)В полученных эмпирических формулах величина силы
F принимается в килоньютонах (кН). Значения h получают в
миллиметрах (мм). Как и в случае клиновых поводков, экс¬
периментальные значения Лэ значительно меньше расчетных
значений Лр. Связь между ними можно выразить соотноше¬
нием Лэ = hj, в котором коэффициент f больше всего зависит
от осевой силы F и угла заострения поводка 2(3. При измене¬
нии твердости в рассмотренных пределах коэффициент f из¬
меняется несущественно, а потому влиянием твердости заго¬97
товки на величину f будем пренебрегать. Определены средние
значения f в зависимости от F и 2(3 и получены эмпирические
формулы типа f = f(F) для определения f на основе аппрокси¬
мации средних экспериментальных значений полиномами вто¬
рой степени для различных углов заострения поводков 20, рав¬ных 45°, 60° и 90° соответственно:/= 0,012 + 0,1772?- 0,0192?2; (4.140)/= 0,23 + 0,1532? - 0,0162?2; (4.141)/= 0,236 + 0,1752? - 0,01592?2. (4.142)В полученные формулы величина силы F подставляется в
килоньютонах (кН).Получены также зависимости / = /((3) в виде полиномов вто¬
рой степени для значений осевой силы F, приходящейся на один
поводок, равных 981, 1962, 2943, 3924, 4905 Н соответственно:f = -1,2 + 0,0867р - 0,0011р2; (4.143)/ = -0,80 + 0,0687(3 - 0,00083р2; (4.144)/ = -0,71 + 0,0667(3 - 0,00083(32; (4.145)f = -0,62 + 0,0617(3 - 0,00071(32; (4.146)f = -0,47 + 0,0527р - 0,00056Р2. (4.147)В этих формулах значения Р принимаются в градусах.Таким образом, зависимость (4.41) для расчета глубины
внедрения конического поводка в материал приобретает види cosP-sin(P~(p) j Fsinp "у 2я&(1 + У]/)’ (4.148)Результаты аналогичных исследований глубины внедре¬
ния конических поводков в чугунные заготовки позволили
получить следующие эмпирические зависимости для загото¬
вок твердостью НВ170, НВ197 и НВ207 соответственно и по¬водков с углом 2Р = 45°:h = 0,018 + 0,112 F + 0,0062?2; (4.149)h = -0,020 + 0,2092? - 0,0132?2; (4.150)h = 0,046 + 0,0672? + 0,0022?2. (4.151)
Для поводков с углом заострения 2Р = 60°:h = -0,090 + 0,1992? - 0,0072?2; (4.152)h = -0,012 + 0,1522? - 0,003 2?2; (4.153)h = -0,024 + 0,1442? - 0,0112?2. (4.154)98
Для поводков с углом заострения 2(3 = 90°:h = -0,058 + 0Д36Р+ 0,004F2;
h = -0,040 + 0,198F - 0,010F2;
h = -0,020 + 0,133F - 0,001 F2.(4.155)(4.156)(4.157)В эти формулы значения F подставляются в килоньюто¬
нах (кН).Исследование момента, развиваемого поводковыми уст¬
ройствами с клиновыми и коническими поводками. Экспе¬
риментальные исследования проводились с использованием
установки, которая разработана для исследования фрикци¬
онных поводковых устройств. Использовалось поводковое ус¬
тройство (см. рис. 4.14) со сменными поводками. При отлад¬
ке методики экспериментальных исследований было обнару¬
жено, что предельная величина момента, передаваемого на
заготовку как клиновыми, так и коническими поводками,
заточенными с углами 2(3 = 30°, 45°, 60°, 75°, 90°, определя¬
ется чаще всего не резанием заготовки поводками, а их по¬
ломкой или пластическим деформированием. Поэтому повод¬
ки изготавливались из стали ШХ15 (ролики игольчатых под¬
шипников), из твердого сплава Т15К6 и углеродистой стали
У10А. Поводки из стали ШХ15 имели твердость 63 — 65 HRC,
а из стали У10А были закалены до твердости 45 — 55 HRC.Было установлено, что поводки, имеющие твердость 45 —
48 HRC, чаще всего выходят из строя в результате поломок
со значительными пластическими деформациями рабочей ча¬
сти. Поводки из сталей, имеющие большую твердость, при
соответствующих передаваемых моментах подвергаются хруп¬
кому разрушению, сопровождающемуся обламыванием кром¬
ки клина у клиновых поводков или вершины конуса у кони¬
ческих поводков. При этом обламывание рабочих частей про¬
исходит на уровне торцовой поверхности заготовки, т.е. об¬
ламывается часть клина или конуса, внедрившаяся в мате¬
риал заготовки. Перемещения клинового или конического
поводка в материале заготовки, т.е. резания материала по¬
водком, не происходит. Этот процесс резания имел место в
тех случаях, когда поводки нагружались относительно ма¬
лыми осевыми силами и были внедрены в заготовку на ма¬
лую глубину. Твердосплавные поводки в виде клиньев, а также
конические поводки в большинстве случаев имели хрупкое99
разрушение и только при небольших осевых силах разруше¬
ния поводков не происходило, а имело место резание заготов¬
ки. Во всех случаях большим значениям углов заточки 2(3
соответствовали большие величины предельных моментов, при
равных значениях осевой силы, приходящихся на один по¬
водок.Результаты экспериментов по оценке предельного мо¬
мента, передаваемого заготовке из стали 45 с НВ229 поводко¬
вым устройством с двумя твердосплавными клиновыми повод¬
ками с длиной клина В = 4 мм и углом заострения 2(3 = 30°,
45°, 60° и 90°, установленными на диаметре Dn = 50 мм, по¬
зволили установить величину наибольшей вращающей силы
Рв, приходящейся на один поводок. Эта сила определялась по
значению момента Мв, найденного экспериментально,_ Мв •10*Р»=—D * (4.158)пЭкспериментальные данные показали, что предельные
значения Мв и Рв при увеличении Q и 2(3 увеличиваются. Это
обусловлено тем, что с возрастанием Q глубина внедрения
клина в заготовку увеличивается, а с увеличением 2(3 возрас¬
тает прочность клинового поводка. Вместе с тем сравнение
возможностей клиновых поводков в части передаваемого мо¬
мента с кольцевыми фрикционными поводками того же диа¬
метра Dn, например, из резины, свидетельствует о том, что
клиновые поводки при относительно небольших значениях
сил Q уступают по своим возможностям фрикционным по¬
водкам из резины. А если учесть высокую вероятность хруп¬
кого разрушения клиновых поводков, а следовательно, их
низкую долговечность, а также более высокую стоимость по¬
водковых устройств с деформирующими поводками, то ста¬
новится очевидным, что такие устройства менее эффективны
по сравнению с фрикционными поводковыми устройствами.Были проведены исследования поводкового устройства с
коническими поводками. В устройстве на диаметре Dn уста¬
навливались два конических поводка с рабочей частью из
твердого сплава Т15К6. Поводки выполнялись с углами за¬
точки 2(3 = 45°, 60°, 75°, 90°. Измерялись величины вращаю¬
щего момента Мв, развиваемого поводковым устройством, в
зависимости от осевой силы Q. Пределы изменения силы —100
от 981 до 4905 Н. Использовались заготовки из стали 45 с
твердостью НВ229. Определялись также расчетные значения
вращающего момента Мвр по формулеQD • 10 cos(3м«’-—^ • <415э»По величинам Мв и Мв определялся коэффициент К
(К = М /М ).4 Д В' вр'Анализ показал, что в достаточно широком диапазоне
изменения Q и 2(3 экспериментальные величины вращающе¬
го момента превышают расчетные от 1,25 до 4 раз. При этом
значения Кд с возрастанием 2Р существенно увеличиваются.
При увеличении Q коэффициент Кд также имеет тенденцию
к некоторому увеличению. Аппроксимация эксперименталь¬
ных значений Кд позволила получить соотношения при уг¬
лах заточки поводков 2(3 = 45°; 60°; 75° и 90° соответственно:(4.160)(4.161)(4.162)Кд = 1,268 + 0,0245Q;Кд = 2,089 + 0,0520Q;Кд = 2,285 + 0,1295Q;Кд = 3,20 + 0,1529Q. (4.163)В полученные линейные зависимости величины Q под¬
ставляются в килоньютонах (кН).Для каждого из значений Q 981, 1962, 2943, 3924 и 4905 Н
были получены соотношения для коэффициента Кд в виде
Кд = /((3), которые имеют вид соответственно:Кд = - 1,055 + 0,102(3; (4.164)Кд = - 0,22 + 0,073(3; (4.165)Кд = - 0,56 + 0,090(3; (4.166)Кд= - 1,225 + 0Д15Р; (4.167)Кд= 0,364 + 0,0544Р. (4.168)В этих зависимостях Р принимается в градусах.Следует подчеркнуть, что полученные выше эмпиричес¬
кие зависимости справедливы лишь для конических повод¬
ков из твердого сплава Т15К6. Поводки из других материа¬
лов не способны развивать такие значительные моменты, так
как их прочностные характеристики ниже соответствующих
"характеристик твердого сплава.101
При проведении экспериментов было установлено, что ко¬
нические поводки из инструментальной углеродистой стали
У10А, закаленной до твердости 50 — 55 HRC, при углах за¬
точки 2(3, равных 45°, 60° и 75° и осевых силах 1962 Н полу¬
чают хрупкое разрушение (обламывание вершин) при враща¬
ющих моментах Мв = 45 — 55 Н*м (при Dn = 50 мм) или
значениях вращающей силы, приходящейся на один пово¬
док, Рв = 900 — 1100 Н. Поводки с углом заточки 2р = 75°
при Q = 4905 Н разрушались при достижении вращающего
момента Мв = 115 Н*м, т.е. при величине Рв, приходящейся
на один поводок, равной 2300 Н. Поводки с углом заточки
2Р = 90° разрушались реже. Но такие поводки с 2Р = 90°
даже при больших осевых силах имеют малую глубину вне¬
дрения в металл заготовки, а потому способны передавать
ограниченную величину момента.Эксперименты показали, что конические поводки, имею¬
щие небольшую площадку на вершине, т.е. поводки в виде
усеченного конуса, не разрушаются. При малых значениях Q
они работают как фрикционные штырьковые поводки, а при
больших величинах Q внедряются в заготовку и, являясь бо¬
лее прочными по сравнению с коническими, передают доста¬
точно большой вращающий момент, не разрушаясь.На рис. 4.25 представлены графики зависимостей враща¬
ющего момента, передаваемого поводковым устройством сQ Рис. 4.25. Зависимости вращающего момента, передаваемого поводковым
центром с двумя коническими поводками, от осевой силы:1 - поводки с углом при вершине 90°: 2 - поводки с углом при вершине 45°
и площадкой на вершине102
двумя коническими поводками из стали У10А, установлен¬
ными на диаметре £>п = 50 мм, от осевой силы Q.Зависимость 1 иллюстрирует изменение величины момента
вращения для конических поводков с углом 2(3 = 90°, а зави¬
симость 2 — для конических поводков с 2(3 = 45° и площад¬
кой на вершине диаметром dn = 1,40 мм. Аппроксимация
этих зависимостей полиномами дает следующие соотноше¬
ния для конических поводков с 2Р = 90° и 2(3 = 45° и площад¬
кой 0 1,4 на вершине соответственно:Мв = - 11,87 + 42,02Q- 2,815Q2; (4.169)Мъ = - 56,16 + 60,57Q - 3,8Q2. (4.170)В эти формулы значения Q подставляют в килоньютонах
(кН).Были вычислены коэффициенты ЛГд, по которым найдены
соответствующие полиномы К = f(Q). Для конических по¬
водков с 2Р = 90° соотношение для Кя имеет видКл = 4,73 + 0,288Q - 0,069Q2, (4.171)а для поводков с 2Р = 45° и площадкой 0 1,4 на вершине —
соответственноКд = -0,584 + 1,119Q - 0,128Q2. (4.172)Таким образом, для определения момента, передаваемого
поводковым устройством с коническими поводками, можно
пользоваться зависимостью (4.159), учитывающей поправоч¬
ный коэффициент Кд, т.е.,, QD,-lO-’coaps:, 2jitg(? ’ <4Л73>где Q — осевая сила, действующая на поводковое устрой¬
ство, например, со стороны задней бабки токарного станка (Н);
Dn — диаметр, на котором расположены поводки (мм); Кя —
поправочный коэффициент, учитывающий особенности дефор¬
мирования материала заготовки поводками.Результат расчета Мвр получается в ньютон-метрах (Н • м),
и если значения Кл определены правильно, то результаты рас¬
чета будут давать хорошее совпадение с экспериментальны¬
ми значениями вращающего момента.103
Определение момента, развиваемого рифленым центром.В качестве поводкового устройства при экспериментах ис¬
пользовался рифленый передний центр, установленный в
шпинделе станка (см. рис. 4.14). Центр был изготовлен из
инструментальной углеродистой стали У10А с углом при вер¬
шине 2а= 60°. На его рабочей конической поверхности были
выполнены рифления — зубья с углом заточки в нормальном
сечении 2(3 = 60°. Количество рифлений — 6. Применялись
заготовки из стали 45 с твердостью НВ229, а также из серого
чугуна СЧ20 с твердостью НВ170. Экспериментальными ис¬
следованиями устанавливались зависимости величины вра¬
щающего момента Мв, развиваемого рифленым центром, от
осевой силы Q поджатия заготовки к центру и диаметра
центрального отверстия в заготовке <2. При этом эксперимен¬
тальные значения Мв сравнивались с расчетными Мвр. В ре¬
зультате этого сравнения оценивался поправочный коэффи¬
циент К , учитывающий особенности деформирования мате¬
риала заготовки рифлениями ведущего центра. Расчетные
значения Мвр определялись по формулеВ связи с малостью глубины внедрения рифлений в мате¬
риал заготовки значение Rc принималось равным d/2. Резуль¬
таты анализа показали, что расчетные значения вращающего
момента могут как превышать экспериментальные в 1,5 раза
(при диаметре отверстия d — 8 мм), так и быть меньше их в1,6 раза (при d = 12 мм). Иными словами, значения коэффи¬
циента Кд существенно зависят как от осевой силы Q, так и
от диаметра центрального отверстия. Путем математической
обработки данных получены аппроксимирующие полиномы
для К как функции £?'для d — 8; 10; 12 мм соответственно:Таким образом, при использовании рифленого центра в
качестве поводкового устройства развиваемый им вращающий
момент можно определить по соотношениюОД-10-82tgPsina(4.174)Ка = 0,563 + 0,07Q - 0,002Q2;Кл = 0,844 - 0,0008Q + 0,018Q2;
К = 0,742 + 0,2404Q - 0,0156Q2.(4.175)(4.176)(4.177)104
_ QRf • 10p 2tg(3 sin a(4.178)в которое значение Кд подставляется по результатам вычисле¬
ний по зависимостям (4.175), (4.176), (4.177).Аналогичные экспериментальные данные были получены
для образцов из серого чугуна СЧ20 (НВ170). Расчетные зна¬
чения вращающего момента вычислялись по той же зависи¬
мости (4.174). Были найдены соответствующие полиномы,
отражающие связь Кд = f(Q) для диаметров центрального от¬
верстия d = 8; 10; 12 мм:Кд = 0,094 - 0,26Q - 0,024Q2; (4.179)Кд = 0,078 + 0,257Q + 0,058Q2; (4.180)Кд = 0,06 + 0,403Q - 0,058Q2. (4.181)Экспериментальные данные показали, что для чугунных
заготовок расчетные значения вращающего момента превы¬
шают экспериментальные от 1,25 до 3,4 раза. Для того чтобы
обеспечивалось практическое совпадение расчетных и экспе¬
риментальных значений, следует учитывать деформационный
коэффициент Кд, определяемый по соотношениям (4.179),
(4.180), (4.181), а расчет выполнять по той же, что и для
стали, формуле (4.178).Была проведена также оценка влияния твердости сталь¬
ных заготовок на передаваемый рифленым центром момент.
Измерялся передаваемый момент при неизменном диаметре
центрального отверстия в заготовке d = 10 мм и изменяю¬
щейся величине осе¬
вой силы от 981 до
5886 Н. Эти зависи¬
мости представлены
в виде графиков на
рис. 4.26. Зависи¬
мость 1 соответству¬
ет твердости заготов¬
ки НВ229, а зависи¬
мость 2 — НВ321. Из
результатов исследо¬
ваний, представлен¬
ных на рисунке, сле¬QРис. 4.26. Зависимость вращающего момента,
передаваемого рифленым центром, от осевой
силы и твердости заготовки:1 - НВ229; 2 - НВ321105
дует, что увеличение твердости заготовки вызывает снижение
передаваемого рифленым центром момента. Величина этого
снижения весьма существенна (при Q = 4905 Н снижение со¬
ставляет 28 %). Это, по-видимому, объясняется тем, что при
увеличении твердости заготовки существенно снижается глу¬
бина внедрения рифлений в материал.4.6. ОЦЕНКА ТЕХНОЛОГИЧЕСКИХ ВОЗМОЖНОСТЕЙОценка допускаемых режимов резания при использова¬
нии поводковых устройств с гладким ведущим центром. Зна¬
чения глубины резания t и подачи S определяют величины
сил резания, а следовательно, и момента резания при обра¬
ботке. Поэтому величины t и S, допускаемые при использо¬
вании поводковых устройств, можно определить по получен¬
ным выше формулам (4.4) или (4.6). Будем полагать в фор¬
муле (4.6) К = 1, Rc = 1,6 гц, где гц — радиус центровочного
сверла, численно равный <2ц/2, а = 30°. Силу Рх, способству¬
ющую закреплению заготовки, если она направлена в сторо¬
ну подачи, учитывать пока не будем. Согласно [8], при обра¬
ботке конструкционных сталей ав = 750 МПа твердосплавны¬
ми проходными резцами стандартной геометрии Рг = 3000£х
xS0,75 V0,15 (Н). Тогда, с учетом принятого, зависимость (4.6)
можно записать так:Из полученной зависимости при известных диаметре об¬
рабатываемой заготовки D и диаметре центровочного сверла
<2ц, которым выполнялась зацентровка, и принятых значени¬
ях Q и / = f(Q) можно определить t, задаваясь величиной S,
или же найти допускаемое значение S, задаваясь глубиной
резания t. Так, для глубины резания, допускаемой поводко¬
вым устройством с гладким ведущим центром, можно запи¬
сатьПОВОДКОВЫХ ЦЕНТРОВQ =1500tS°,75v~0,15R 938tS0,751T°’15Df 1»6гцк(4.182)(4.183)106
а для подачиS "’1938tDv'0'16 (4.184)В формулы (4.183) и (4.184) значения Q подставляются в
ньютонах (Н). Преобразуем теперь формулы (4.183) и (4.184)
с учетом полиномов, определяющих значения f для стали и
чугуна. После преобразований получим формулы в случае то¬
чения в центрах стальных заготовок(0,1526 Q2 - 0,0159 Q3 +0,0005 Q4)
t - S0,75 Dv~°’15 9 (4.185)S = °’\51(0,1526Q2 -0,0159 Q3 -Ю,0005 Q4) dtDv-» ' <4Л86)При точении чугунных заготовок твердосплавными про¬
ходными резцами стандартной геометрии, согласно [8], Рг =
= 920iS0'75. После аналогичных преобразований получим (так¬
же без учета составляющей Рх)(0,553Q2-0,0713 Q3+0,0035 Q4) <L
t= , (4.187)s = 0.7^(0,533Q2 -0,0713Q3 +0,0035 Q4) d4При вычислении t и S по формулам (4.185) — (4.188) зна¬
чения Q необходимо подставлять в килоньютонах (кН).В случае нарезания резьбы на токарных станках главная
составляющая силы резания определяется, согласно [8], по
формулам Рг = 1480p1>7/i0J1 — для углеродистой стали иР =
= 1030р1*8//0*82 — для чугуна, где р — шаг нарезаемой резьбы,
i — число рабочих ходов.Тогда можно получить соотношения для определения чис¬
ла рабочих ходов при резьбонарезании:• для стальных заготовокDpI = 0,71 ±- ; (А 189}V d (0,3094 Q2 - 0,0322 Q3 + 0,0028 Q4) v ’ }107
• для чугунных заготовок. = oJ Dp^ 1 °’8]j da(О,494Q2 -0,0637 Q3 +0,0032 Q4) ' (4-190)Значения i, полученные по формулам (4.189) и (4.190),
округляются до ближайшего большего целого числа, и в за¬
висимости от его величины назначают глубину резания при
резьбонарезании путем деления высоты резьбы на число i.
Число чистовых рабочих ходов определяют в соответствии с
рекомендациями [8].При круглом наружном шлифовании с поперечной пода¬
чей на каждый двойной ход определяется эффективная мощ¬
ность. При шлифовании сталей (закаленных и незакаленных)
кругами зернистостью 50 и твердостью СМ2 мощность (в ки¬
ловаттах) определяется по формуле [8]N = 2,20 i;3°’5*(x£)0’55, (4.191)где V3 — скорость заготовки, м/мин, t — глубина шлифова¬
ния (поперечная подача на каждый ход), мм, S = %В — про¬
дольная подача в долях ширины круга мм, % = 0,2 — 0,7.По величине N, если она задана в киловаттах, и значе¬
нию ик, заданной в метрах в секунду можно определить вели¬
чину (Н) главной составляющей силы резания Рг по формулеО W-103Р,= » (4.192)укили, подставив (4.191), получимР2= 2,2F0’5*°’50cБ)0'55 • 103/i>k. (4.193)Подставим в (4.4) соотношение (4.193). После преобразо¬
вания получим_ , 1100v°'5*°'5(xB)0,55-DQf 1,6 da = 2 ^ . (4.194)Из этой зависимости можно найти значение глубины ре¬
зания t, при котором поводковое устройство с гладким веду¬
щим центром сможет обеспечить вращение заготовки:' Л о(4.195)688и30,5(хБ)0>55£»108
В полученную формулу (4.195) значение Q подставляется в
ньютонах (Н) (в отличие от формул для /, где Q учитывается в
килоньютонах (кН); из — в метрах в минуту; ик - в метрах в
секунду; с1ц, D и В - в миллиметрах.Оценка допускаемых режимов резания фрикционным по¬
водковым устройством с кольцевыми и штырьковыми веду¬
щими элементами. Подставим в (4.10) соотношение для Pz в
соответствии с [8] для случая обработки конструкционных
сталей твердосплавными проходными резцами. Принимая
К = 1, получимЛ 3000*S 0'7V°'16DQ = — , (4.196)где D — диаметр обрабатываемой заготовки, мм; Dc — сред¬
ний диаметр кольцевого поводка, или диаметр окружности,
на которой установлены штырьковые поводки, мм.Из (4.196) получим соотношения для t и S, допускаемых
поводковым устройством:QfDv0Д5• = ШГз(4197>(4.198)V зооош v }в которых значения Q подставляются в ньютонах, а величи¬
ны f принимаются в соответствии с изложенным выше.При точении заготовок из чугуна формулы для t и S не¬
сколько изменяются:QfD' = (4Л99>s = "1 ШБ- (4-200)При нарезании резьб на токарных станках получим зави¬
симости для определения числа рабочих ходов резца. Для
стальных заготовок1480р1'7,=1 ~шг'' (4-201)109
для чугунных заготовок1030p17D1 = 1 -щБГ' (4-202)Полученные по формулам (4.201) и (4.202) значения i сле¬
дует округлять до ближайшего большего целого числа. Деле¬
нием высоты резьбы на i находят глубину резания при резь-
бонарезании. Для круглого наружного шлифования с попе¬
речной подачей предельная глубина резания t, при которой
кольцевой поводок сможет вращать заготовку, определяется
по формуле, аналогичной (4.195):t =\2200 F3 ’ (хР) ’ D(4.203)При определении t по этой формуле параметры процесса
шлифования (ик, из, %В) выбираются в соответствии с реко¬
мендациями [8].Определение режимов резания, допускаемых поводковым
устройством с коническими поводками. Как отмечалось выше,
силу поджатия заготовки к коническим поводкам торцового
деформирующего поводкового устройства можно определить
из формулыQ _ JttgPP;DDn cos P Кя (4.204)Если в формулу (4.204) подставить соотношение для Рг,
как это рассматривалось ранее, то для обработки стальных
заготовок можно записать^^k(S000,S"‘^‘>’ (4.205)откуда получимQDn cos РКД3000 пD tgPS и'75 v 4,15 ’ (4.206)QDn cos РК* = °’1зоооЛе№*™' <4'207)110
Соотношения (4.206) и (4.207) служат для определения зна¬
чений t и S при использовании поводковых устройств с кони¬
ческими поводками. При обработке чугунных заготовок ана¬
логичным образом получим следующие зависимости:QDn cos РKR
1 ~ 920 nDtgpS0'75 ’ (4.208)\QDn cos р.К\,~ V 9207tX»tgpf ' (4.209)При нарезании резьбы на токарных станках, как и ранее,
получим:|14807LDtgPp1,7,mi QB.cos&r <4-210)1030ntgPp187
° \ QD„ cosftAT,, <4-21»для стальных и чугунных заготовок соответственно.Для круглого наружного шлифования с поперечной пода¬
чей на каждый ход, с учетом (4.193) для Р , получим/QDn cos $окКдf [ 2,27tDtgPu°’5(xjB)0’55-103 J (4.212)Определение режимов резания, допускаемых рифленым
центром. Из (4.178) можно определить силу Q, положив Мв =
= PD/2_ 2tgP sin <xDP« = ^ • (4.213)дгде d — диаметр отверстия, в которое входит рифленый центр.Подставим в (4.213) соотношения для Рг. При токарной
обработке стальных заготовок^ 2tgP sin aD 4. о o,75 -o,i5^.Q = — (3000*S v ); (4.214)дпри точении чугунае = 2tsg^naP (920ts“">. (4.215)111
Из (4.214) и (4.215) найдем t и S. Для сталиQdKRt ~ 6000tg(3sinaDS0 75у -°д5 ’ (4.216)QdKR~ \ 6000tgpsin aDtv~015' (4.217)Для чугунаt = __QdKA1840tgPsinaDS0,75 ’ (4.218)QdK.S = O.TS. я(4.219)|1840tgPsin aDtАналогичными выкладками можно определить режимы
резания, допускаемые рифленым центром, при других видах
обработки на металлорежущих станках.4.7. ИЗМЕРИТЕЛЬНЫЕ ЦЕНТРЫ И ИЗМЕРИТЕЛЬНЫЕ
ПОВОДКОВЫЕ ЦЕНТРЫПри использовании торцовых поводковых центров весьма
желательно располагать сведениями о величине осевой силы,
с которой задний вращающийся центр поджимает заготовку
к переднему центру. Для этой цели используются измери¬
тельные вращающиеся центры (рис. 4.27). Осевое усилие,
создаваемое таким цент¬
ром, регистрируется инди¬
катором 3. При перемеще¬
нии центрового валика 1
кольцо 2 воздействует на
наконечник индикатора 3,
который показывает де¬
формацию тарельчатых
пружин 4 и величину осе¬
вого давления. Перед экс¬
плуатацией измеритель¬
ный центр тарируют.Рис. 4.27. Схема конструкции измери¬
тельного вращающегося центра для
определения силы поджатия заготовки
к торцовому поводковому устройству112
В данном вращающемся центре существует упругая связь
детали с корпусом центра в осевом направлении, которая
предопределяет пропорциональность величины осевых пере¬
мещений центра действующим осевым усилиям. Измеритель¬
ная система, позволяющая регистрировать малые величины
осевых перемещений, обеспечивает возможность измерения
осевых сил.Недостатком такого измерительного центра является то,
что он не позволяет измерять момент и мощность, затрачива¬
емые на резание или вращение заготовки при ее обработке,
например, на токарном станке. А располагать этими величи¬
нами — непременное условие для реализации идеи адаптивно¬
го управления технологическими процессами обработки. Это
обусловлено тем, что в данном вращающемся центре нет упру¬
гой связи детали с корпусом центра в окружном направлении,
т.е. такой центр не может передавать вращающий момент.Рассмотренные выше конструкции поводковых центров
также не позволяют измерять передаваемый момент. В них
нет упругой связи обрабатываемой детали с корпусом центра
в окружном направлении, хотя такой центр передает враща¬
ющий момент. Поэтому обеспечение возможности измерения
затрачиваемых на резание мощности и момента с помощью
поводкового центра является актуальной задачей. Поставлен¬
ная задача решена следующим образом (рис. 4.28, а). Повод¬
ковый измерительный центр содержит корпус 1 с коничес¬
ким хвостовиком, плавающий подпружиненный центр 7,
поводковую втулку 4, снабженную поводками в виде зубцов
на ее торце и установленную на подшипнике 8. Корпус 1 и
поводковая втулка 4 выполнены с выступами (разрез А - А),
между которыми размещены пружины 5. Поводковый изме¬
рительный центр снабжен измерительной системой, которая
включает диски 3 и 2 и стандартный фотодатчик 6, напри¬
мер, типа ДФ-1. Диски 3 и 2 могут поворачиваться относи¬
тельно друг друга при настройке и неподвижно закреплять¬
ся на поводковой втулке 4 и корпусе 1 соответственно. В не¬
рабочем состоянии диски 3 и 2 располагают относительно
друга друг так, чтобы прорези одного из них были перекры¬
ты выступами другого почти полностью, т.е. чтобы остава¬
лись минимальные просветы, характеризующие минималь¬
ную ширину исходных импульсов (рис. 4.28, б).113
5 4 3 2А-АТ ITРис. 4.28. Схема конструкции поводкового измерительного центра
для адаптивного управления при измерении величины момента
и мощности резанияПри работе поводковый измерительный центр устанавли¬
вают в шпиндель станка, а деталь устанавливают центровым
гнездом на плавающий центр 7 и поджимают к поводковой
втулке 4 так, чтобы зубцы на ее торце получили силовой
контакт с деталью и могли передавать требуемый для реза¬
ния момент. При вращении шпинделя станка вращается по¬
водковый измерительный центр и диски 3 и 2 , размещенные
в проеме фотодатчика 6. Диски установлены относительно
друг друга так, что их выступы и прорези образуют мини¬
мальные просветы, а потому при их перемещении в проеме
фотодатчика последний формирует последовательность пря¬
моугольных импульсов, длительность которых т пропорцио¬
нальна ширине просветов, образованных дисками 3 и 2.При вращении шпинделя станка и осуществлении реза¬
ния деталь стремится повернуть поводковую втулку 4 отно¬
сительно корпуса 1. Этот поворот проходит при сжатии пру¬114
жин 5. Чем больше момент резания, тем больше деформиру¬
ются пружины 5 и тем на больший угол поворачивается по¬
водковая втулка 4 относительно корпуса 1, а также диск 3
относительно диска 2. Следовательно, при увеличении мо¬
мента увеличиваются просветы, образованные дисками 3 и2, а поэтому пропорционально моменту возрастает длитель¬
ность формируемых фотодатчиком импульсов.Последовательность импульсов может быть зарегистриро¬
вана и записана измерительными средствами. Лучше всего
для этого использовать измерительные системы, построенные
для работы совместно с ПЭВМ, которые позволяют вести об¬
работку зарегистрированных сигналов с помощью той же
ПЭВМ по соответствующим программам.Таким образом, в рассматриваемом поводковом измери¬
тельном центре формируется последовательность импульсов,
которая несет информацию. Поскольку момент М на шпин¬
деле станка пропорционален средней длительности т импуль¬
сов, постольку можно записать М = Кмт, где Ки — тарировоч-
ный коэффициент момента.Частота вращения шпинделя обратно пропорциональнасреднему периоду следования импульсов, т.е. со = , где —тарировочный коэффициент частоты.Но так как мощность равна произведению N = Мсо, то
К тN = Кмт = KN —, где KN — тарировочный коэффициент
мощности.Из изложенного следует, что данный поводковый измери¬
тельный центр позволяет решить поставленную задачу — обес¬
печить возможность измерения затрачиваемых на резание
момента и мощности.115
5. СИЛОВОЙ РАСЧЕТ ЗАЖИМНЫХ
МЕХАНИЗМОВ5.1. РАСЧЕТ РЫЧАЖНЫХ МЕХАНИЗМОВК элементарным зажимам относятся простейшие механиз¬
мы, используемые для закрепления заготовок и выполняю¬
щие роль промежуточных звеньев в сложных зажимных уст¬
ройствах или системах.При конструировании приспособлений с обеспечением
требуемого усилия закрепления заготовки устанавливают ос¬
новные размеры зажимного устройства и определяют исход¬
ную силу (момент) на рукоятке или силовом узле привода.Рычажные механизмы используют в сочетании с другими
элементарными зажимами, образуя более сложные зажим¬
ные системы. С помощью выбора длины и формы рычагов
изменяют величину и направление передаваемой силы.Наиболее широко используются в зажимных устройствах
рычаги трех типов, схемы которых представлены на рис. 5.1,5.2, 5.3.При расчете рычажных механизмов обычно определяют
исходную силу Q на ведущем плече рычага, достаточную для
обеспечения требуемого зажимного усилия W. Значение силы
Q будем определять из условий равновесия рычагов.Для типа рычага (рис. 5.1) имеемZMj =Ql1-W(l1+l2) = О,(5.1)откуда получимq = whJ-k
к(5.2)WQ2vtxx-xxxxxxxxРис. 5.1. Схема рычага первого типа116
Аналогичным образом, для рычага (рис. 5.2) найдемQ = W(5.3)Рис. 5.2. Схема рычага второго типаа для рычага, изображенного на рис. 5.3, соответственно,Q = W —. (5.4)кДля любого простого механизма можно определить пере¬
даточное отношение сил х и передаточное отношение переме¬
щений /п. Передаточное отношение силi = W/Q. (5.5)Передаточное отношение перемещенийk=Sw/SQ, (5.6)где Sw — перемещение ведомого звена; SQ— перемещение
ведущего звена.117
Передаточное отношение i\ как правило, больше едини¬
цы. Оно характеризует выигрыш в силе. Передаточное отно¬
шение in меньше единицы, и оно характеризует проигрыш пути.Для рассмотренных выше рычажных механизмов (рис. 5.1,
5.2,5.3), передаточные отношения сил будут равны соответ¬
ственноН=к/(к+к)> ' (5.7)h =(h +h)/k> (5-8)
h=k/k- ' (5-9)5.2. РАСЧЕТ КЛИНОВЫХ МЕХАНИЗМОВКлиновые механизмы используют в качестве промежуточ¬
ного звена в сложных зажимных системах. Они просты в
изготовлении, компактны, позволяют увеличивать и изме¬
нять направление передаваемой силы зажимаРассмотрим вначале идеаль¬
ный односкосый клин (рис.5.4). В идеальном механизме
трение отсутствует. Поэтому
из представленной на рис. 5.4
схемы сил находим силу Q
приводаQ = Wtga, (5.10)
где а — угол скоса клина.Если клиновой механизм
не идеальный, то на рабочих
поверхностях клина имеют
место силы трения (рис. 5.5).Т©гда величину силщ Q мож¬
но представить суммойQ = Q1+F2, (5.11)где FРис. 5.4. Расчетная схема идеаль¬
ного односкосого клина2 сила трения на гори¬
зонтальной плоскости клина.
Из схемы сил имеем:=Wrtg(a + <p1); (5.12)Рис. 5.5. Расчетная схема реального
односкосого клина118
F2=Wtgq>2, (5.13)где (Pj и ф2 — углы трения на скосе и основании клина.Подставив (5.12) и (5.13) в уравнение (5.11), получим окон¬
чательноQ = W (tg(a + фх) + tg(p2). (5.14)Из полученной зависимости следует, что при одном и том
же значении W величина Q тем меньше, чем меньше угол
скоса клина и углы трения на его рабочих поверхностях.
Клиновой механизм является самотормозящим, еслиa < <pj + ф2. (5.15)Если клиновой механизм используется в роли механиз-
ма-усилителя, то в нем обычно принимают a > 10° (несамо-
тормозящий клиновой механизм). W \Для повышения эффек¬
тивности клинового механиз¬
ма стремятся снизить углы
трения Достигается этозаменой трения скольжения
трением качения за счет при¬
менения вращающихся роли¬
ков. Например, для клино¬
вого механизма с роликом на
наклонной поверхности (рис.5.6), соотношение для силы Q
можно представить в видеQ = W(tg( a + (pnp) + tg(p2), (5.16)где српр — приведенный угол трения качения на наклонной по¬
верхности клина.Для клинового механизма с одним скосом и трением сколь¬
жения на обеих поверхностях клина передаточное отноше¬
ние сил будетi = l/(tg(a + <рх) + tg(p2). (5.17)Числовые значения i для этого случая в зависимости от
угла скоса клина а, принимаемого в градусах, можно выб¬
рать из соотношенияi = 4,599 -0,2454а + 0,005а2. (5.18)Рис. 5.6. Расчетная схема односко-
сого клина с ролцком на наклон¬
ной поверхности119
Для клинового механизма с роликом на наклонной поверх¬
ности и трением скольжения на опорнойI = 5,943 -0,3538а + 0,007а2, (5.19)а для клинового механизма с роликами на наклонной и
опорной поверхностяхi = 8,185 -0,8775а + 0,013а2. (5.20)5.3. РАСЧЕТ КЛИНОПЛУНЖЕРНЫХ
МЕХАНИЗМОВКлиноплунжерные ме¬
ханизмы используются в
качестве усилителей при¬
водов зажимных механиз¬
мов (одно- и двухплунжер¬
ных) или в качестве цент¬
рирующих механизмов
патронов и оправок (мно¬
гоплунжерные). Одноплун¬
жерный клиновой меха¬
низм представлен на рис.5.7.Из условия силового
равновесия следуют такие
исходные соотношения:Рис. 5.7. Расчетная схема
одноплунжерного клинового
механизмаQ = Q1+F3; = W;tg(a+ <!>!);Fs = N3tg<?з = Wl tgcp3; W = W1-F2;
F2 = N2 tg(p2 = Q1 tg(p2 = Wi tg(a + 9x)tg(p2.Из этих соотношений легко получаем зависимости:Q = W1(tg(a + (p1) + tg93); (5.21)
W =W1(1- tg(a + Ф1 )tgcp2), (5.22)откуда окончательно находимtg(a + <рх) + tg(p3Q = W1 - tg(a + <pj)tg92(5.23)120
Передаточное отношение сил для рассмотренного клино¬
плунжерного механизма будет. _ l-tg(a + 9x)tg(p2tg(a + 9j + tg93 ' (5-24)Численные значения i для данного случая в зависимос¬
ти от утла скоса клина можно выбирать из соотношенияi = 4,535 - 0,2438а + 0,0048а2. (5.25)5.4. РАСЧЕТ ВИНТОВЫХ МЕХАНИЗМОВВинтовые механизмы используются в приспособлениях с
ручным приводом, а также в приспособлениях механизиро¬
ванного типа. Они просты, компактны и надежны в работе.Диаметр винта определяют из условия прочности винта
на растяжениеa = W/S<[a], (5.26)где S — площадь поперечного сечения стержня винта, кото¬
рая определяется по внутреннему диаметру dx резьбы, т.е.
S = Tcdj/4; [a] — допускаемое напряжение растяжения (или
сжатия); для винтов, например, из стали 45, после улучше¬
ния, [а] = 150—170 МПа (для статических условий работы).Из соотношения (5.26) получим значение внутреннего
диаметра резьбы4 = ^4W/(n[o]). (5.27)Установим связь между усилием Q на ключе винтового
механизма и усилием закрепления W заготовки (рис. 5.8).Из условия силового равновесия винта можно записатьQгЪ = QU (5.28)где — момент сопротивления повороту винта в резьбе
гайки, приведенный к среднему диаметру резьбы; QI — мо¬
мент, необходимый для поворота винта рычажным меха¬
низмом.Витки резьбы винта представляют собой клин, сформи¬
рованный на поверхности стержня винта, а гайка является
одноопорным плунжером. Следовательно, как и для клино¬
вого механизма,121
zРис. 5.8. Варианты винтовых механизмов:
а — расчетная схема; б — зажим винтом; в — зажим гайкойQx = Wtg(a + (p), (5.29)где а — угол подъема резьбы, ф — угол трения в резьбе.Из (5.28) с учетом (5.29) найдемQ = Wtg(a + q>)rcp/l (5.30)Передаточное отношение сил в этом случае будет* = Z/rcptg( сс + ф). (5.31)Полученная формула не учитывает трения на торцовой
поверхности винта, т.е. эту формулу можно использовать,
если пренебречь трением на торце винта. Если же винт опи¬
рается своим плоским торцом, то трение следует учитывать.Используя методику определения момента трения на тор¬
це, представленную выше при выводе формулы (3.38), мож¬
но получить следующую зависимостьRQ = Щг2 tg(a + ф) + — tgcpJ/Z, (5.32)Огде R - радиус торцовой поверхности винта; фх - угол трения.122
5.5. РАСЧЕТ ЭКСЦЕНТРИКОВЫХ МЕХАНИЗМОВЭксцентриковые механизмы по сравнению с резьбовыми
являются быстродействующими, однако по силе зажима
значительно уступают им. Обычно эксцентрики развивают
силу зажима в 10—15 раз больше, чем сила, приложенная к
рукоятке.Рассмотрим силовую схему эксцентрикового механизма,
представленную на рис. 5.9. Условие силового равновесия
эксцентрика можно записать в видеX wic — Ql — — 0. (5.33)Рассматривая эксцентрик
как круг, на который навернут
клин, можно установить связь
между силой закрепления W
заготовки и силой воздействия
эксцентрика Qv аналогичную(5.16), т.е.Qj = W^gfa + cpJ + tgcp,,), (5.34)
где и ф2 — углы трения на
поверхности воздействия экс¬
центрика на заготовку и на оси
его вращения соответственно. Подставив значение Qx в уравне¬
ние равновесия (5.33), получимQl - W(tg(a + фх) + tgcp2)p = 0 , (5.35)откуда окончательно найдемQ = W-^-(tg(a + (Pj) + tgcp2), (5.36)где р — расстояние от оси вращения эксцентрика до точки
его соприкосновения с поверхностью.Передаточное отношение сил для эксцентрикового ме¬
ханизма определяется соотношениемг = I / p(tg(a + фх) + tgcp2). (5.37)Если необходимо определить момент на эксцентрике
для обеспечения требуемого усилия W, то в этом случае
следует пользоваться зависимостьюМ = Wp(tg(a + ср!) + t gcp2). (5.38)Рис. 5.9. Расчетная схема эксцент¬
рикового механизма123
5.6. РАСЧЕТ КОМБИНИРОВАННЫХ ЗАЖИМНЫХ
МЕХАНИЗМОВКомбинированные зажимные механизмы содержат не¬
сколько последовательно сблокированных простых меха¬
низмов. Как правило, комбинированные механизмы пред¬
ставляют собой систему из клиновых, рычажных и клино¬
рычажных механизмов. На рис. 5.10 представлена схема од¬
ного из таких механизмов.Для того, чтобы ком¬
бинированный механизм
был самотормозящим,
достаточно иметь в нем
хотя бы один самотормо-
зящий простой меха¬
низм. Для комбиниро¬
ванных зажимных меха¬
низмов передаточные от¬
ношения сил и переме¬
щений определяются по
формулам(5.39)WTT/M',ss 1Рис. 5.10. Схема комбинированного
механизма (сочетание клиноплунжер¬
ного и рычажного механизмов)*П = ^П1^П2 • • *hik9 (5.40)
где k - номер простого
механизма, k= 1,2,3,...Для случая, представленного на рисунке, вначале опре¬
деляем силу Qp на ведущем плече рычагаQp=W/ip =Wl2/ll. (5.41)Эта сила представляет собой усилие Wx на ведомом звене
клиноплунжерного механизма. По величине этого усилия
определяется сила Q на ведущем звене клиноплунжерного
механизма (она равна усилию на штоке поршня пневмоци¬
линдра)Q = wi/h =Wr1(tg(a + <p1) + tg%),или, подставив (5.41) и (5.22), получим окончательно4 (tg (ос + фх) + tg(p3 )Q = Wi1(l-tg(a + 91)tg92)’(5.42)(5.43)124
где <Pj, ф2 и ф3 — углы трения на поверхностях и цапфе ролика
клиноплунжерного механизма.По полученному значению Q ведется расчет пневмоци¬
линдра.5.7. РАСЧЕТ ЦЕНТРИРУЮЩИХ ЦАНГОВЫХ
ЗАЖИМОВЦанговые зажимные устройства (или цанги) являются
центрирующими зажимами. Их используют для установки
заготовок по наружным и внутренним цилиндрическим по¬
верхностям.Они представляют
собой разрезные пружи¬
нящие гильзы. Одна из
конструктивных разно¬
видностей цанг пред¬
ставлена на рис. 5.11.Угол конуса цанги 2а == 30 — 40°. Угол кону¬
са сжимающей втулки
изготавливают на 1°
меньше угла конуса цан¬
ги. Материал У10А или
легированные инструментальные стали. Рабочие поверхнос¬
ти лепестков подвергают закалке до 58—62HRC. Цанги обес¬
печивают концентричность установки заготовки до 0,002 —0,05 мм. Базовая поверхность закрепляемой заготовки долж¬
на быть обработана по 6 — 9-му квалитетам точности.При закреплении заготовка смещается в осевом направле¬
нии на величинуX = A/2tga, (5.44)где А — наибольший зазор между поверхностью заготовки и
цангой.Если упор отсутствует, то сила затяжки цанги определя¬
ется по формулеQ = (W + W')tg(a + ф), (5.45)где W — требуемое усилие закрепления заготовки; W' — сила,
необходимая для сжатия лепестков цанги до выборки зазора А;
Ф — угол трения между цангой и втулкой.Рис. 5.11. Схема цангового зажима с упором,
ограничивающим осевое перемещение
заготовки125
Если имеется упор, предотвращающий осевое перемеще¬
ние детали, то возникает трение между цангой и заготов¬
кой. В этом случаеQ = (W + W')[ tg(cc + ф) + tCTj. (5.46)Силу W* можно найти, рассматривая лепесток цанги как
консольно закрепленную балку, по соотношениюттг, 3Е - I у - п рг*—, (5.47)где Е — модуль упругости материала цанги; I — длина лепе¬
стка от места заделки (утолщения в хвостовой части
цанги) до середины конуса; у — прогиб лепестка, равный Д/2;
п — число лепестков цанги; I — момент инерции сечения
лепестка цанги (сектора кольца) в месте его заделки, равный2)3 # gI = (oq + sin СЦ cos (Xj - 2 sin2 ax / cq),8где D — наружный диаметр лепестка цанги в месте заделки;S — толщина стенки лепестка; a — половина угла сектора
лепестка.Если принять Е = 2,2 • 105 МПа, то получим следующие
соотношения для силы W':• для трехлепестковой цанги. D3w'= 6 • lo3 —р——; (5.48)w'= 2 103—-s—. (5.49)• для четырехлепестковои цангиASD3
IsСилу W закрепления заготовки в цанге определяют по
формулеW = К^М2 / R2 +Р2Х /Д, (5.50)где М — момент, развиваемый силами резания; R - радиус
базовой поверхности заготовки; f1 — коэффициент трения
между заготовкой и цангой; Рх — осевая сила, сдвигающая
заготовку.Для цанговых зажимов, когда деталь устанавливается
без упора в торец, а следовательно, когда трение скольже¬126
ния имеет место только на конической поверхности цанги,
числовые значения i можно определять по формулеi =7,981- 0,56а + 0,013а2, (5.51)где а — половина угла при вершине конической поверхно¬
сти цангового зажима (в градусах).Если же деталь устанавливается в цангу до упора, тогда
имеет место трение скольжения между цилиндрическими
поверхностями цанги и зажимаемой детали. В этом случаеi = 4,599 - 0,2454а + 0,005а2. (5.52)Для закрепления колец и втулок при обработке наружной
поверхности помимо цанговых зажимов используются цент¬
рирующие замыкающиеся центры с прорезями, представлен¬
ные на рис. 5.12. Передний 1 и задний вращающийся 4 цен¬
тры имеют насадки 2 и 3 с прорезями. При замыкании на¬
садка 3 центрируется по хвостовику if. Используются цент¬
ры различных габаритных размеров. Это позволяет вести об¬
работку деталей с диаметрами отверстий от 8 до 125 мм.Обрабатываемая детальРис. 5.12. Схема закрепления заготовки в виде кольца с помощью
центрирующих замыкающихся центров с прорезями5.8. РАСЧЕТ РАЗЖИМНЫХ ОПРАВОКРазжимные оправки с выдвижными радиальными кулач¬
ками (рис. 5.13) используются для закрепления толстостен¬
ных заготовок с обработанным или необработанным отвер¬
стием. Точность центрирования на оправке 0,005 — 0,1мм.
Силу на штоке для такой оправки можно определить, ис¬
пользуя формулу для клиноплунжерного механизма127
Q =(W + W')tg(a + 91) + tgcp31 - tg(a + cp1)tgcp2 ’(5.53)где W' — суммарная сила, с которой пружина стягивает су-заготовки. При снятииосевой силы пружины возвращаются в исходное положение,
и заготовка легко снимается с оправки.Разжимная оправка, изображенная на рисунке, предназ¬
начена для обработки втулок с внутренним диаметром 40 —
200 мм. Фланец 1 оправки крепится к переходному фланцу,
закрепленному на шпинделе станка. Корпус 2 оправки вин¬
тами прикреплен к фланцу 1. Оправка имеет упорную шайбу3, набор дистанционных колец 4, шайбу 5, гайку 6 и контр¬
гайку 7.хари.f^TV1 ч ч ч-Л- VРазжимные оправки с
тарельчатыми пружинами
или упругими шайбами
(рис. 5.14) обеспечивают
точность центрирования в
пределах 0,01 — 0,02 мм.
От осевой силы, вызывае¬
мой штоком, упругие
шайбы частично сплющи¬
ваются, и их наружный
диаметр увеличивается,
обеспечивая закреплениеРис. 5.13. Схема разжимной кулач¬
ковой оправки1 2 3 4 45678Рис. 5.14. Схема разжимной оправки с упругими шайбами
и механизированным приводом128
Q2 = „ ™ ■ № - m - X/ 2) + 82), (5.55)Обрабатываемая деталь зажимается и центрируется дву¬
мя сменными зажимными устройствами 9. Тяга 8, связан¬
ная со штоком механизированного привода, при его вклю¬
чении закрепляет деталь.Упругие шайбы могут быть также выполнены в виде на¬
бора тарельчатых пружин. Для оправок с тарельчатыми пру¬
жинами величину осевой силы определяют как суммуQ = Qx + Q2, (5.54)где Qx — сила, необходимая для выборки зазора между та¬
рельчатыми пружинами и заготовкой; Q2 — сила, обеспечи¬
вающая закрепление заготовки для передачи необходимого
момента.4£5Я
(1-\i2)D2Aгде Е, [I — модуль упругости и коэффициент Пуассона мате¬
риала пружины"; 8 — толщина пружины; X — осадка пружи¬
ны, причем X = I (sinP - sinPj); h — высота пружины; А —
коэффициент, зависящий от отношения D/d = т (при т= 2 -
- А = 0,68; при т — 3 — А — 0,79; при т = 4 - А = 0,8); d -
внутренний диаметр пружины; I — длина образующей кону¬
са пружины; Р — угол наклона образующей в свободном со¬
стоянии; Рх — угол наклона образующей после деформации
пружины и выборки радиальных зазорово А “ dicos р, = — ;Hl 21Dx и dx — диаметры базы заготовки и оправки, на
которую насажены пружины.Q2 =tgP1W’, (5.56)где W — равномерно распределенная по окружности ради¬
альная сила закрепления заготовки.Методика расчета таких оправок изложена в [2].На рис. 5.15 приведена схема шпиндельной оправки с гоф¬
рированными втулками. Под действием осевого усилия гоф¬
рированная втулка упруго деформируется. При этом ее на¬
ружный диаметр увеличивается, а внутренний — уменьша¬
ется. Внутренней поверхностью втулка устанавливается на
валу оправки, а наружным — точно центрирует и крепит
заготовку [2].129
LРис. 5.15. Схема разжимной оправки с гофрированными втулкамиНа рисунке 5.16
приведена конструк¬
ция самозажимной
оправки с роликами.
Такие оправки ис¬
пользуют для закреп¬
ления толстостенных
заготовок при их об¬
работке с большими
силами резания. При
обработке усилие зак¬
репления заготовки
повышается автомати¬
чески с увеличением
крутящего момента.
Базовые поверхности
заготовок должны
быть обработаны с точ¬
ностью не ниже 12-го
квалитета. На самоза¬
жимных оправках
нельзя обрабатывать
тонкостенные заготов¬
ки и заготовки с окон¬
чательно сформиро¬
ванным отверстием.На рисунке 5.17
представлена конст-Рис. 5.16. Схема самозажимной оправки с
роликамиРис. 5.17. Схема разжимной оправки с
упругими кольцами130
рукция разжимной оправки с упругими кольцами. Оправка
содержит жесткую центральную часть, выполненную в виде
вала 10 с шайбой 2 и хвостовиком 1 (предназначенным для
установки на станке), нажимную втулку 6 с гайкой 5, слу¬
жащей для сжатия пружинящей разжимной части оправки.
Выполнена она в виде набора центрирующих втулок 3 и уп¬
ругих колец 0, размещенных между втулками 8.Надежность закрепления детали 4 повышается, если на
торцах фланцев хвостовика 1 и нажимной втулки 6 закре¬
пить фрикционные накладки 7.5.9. РАСЧЕТ МЕМБРАННЫХ ПАТРОНОВМембранные патроны используются для точной цент¬
ровки заготовок по цилиндрической поверхности. Они со¬
стоят из круглой, привернутой к корпусу или планшайбе
станка мембрайы с симметрично расположенными кулач¬
ками. Число кулачков от 6 до 12. Если на мембрану воз¬
действует шток, то она прогибается, а кулачки раздвигают¬
ся. При освобождении мембраны она стремится вернуться в
исходное положение и сжимает установленную в кулачках
заготовку.Мембранный патрон,
представленный на рис.5.18, используется для
шлифования отверстий
зубчатых колес. Базиро¬
вание колеса осуществ¬
ляется по торцу и зубь¬
ям через ролики 4. Пат¬
рон имеет плоскую мем¬
брану 2 с прикрепленны¬
ми к ней кулачками 3 и
шестью противовесами1. Противовесы 1 препят¬
ствуют раскрытию сты¬
ков между мембраной и
кулачками и снижению
усилий закрепления за¬
готовки под действием2 з 4Рис. 5.18. Схема мембранного патрона
для шлифования отверстия цилиндричес¬
кой заготовки131
сил инерции. Центральное отверстие 6 мембраны служит для
размещения устройства активного контроля или для подачи
охлаждающей жидкости в зону резания. Торцовые упоры 5
жестко установлены в корпусе приспособления. Конструк¬
ция данного патрона стандартизирована (ГОСТ 16157—70).Мембранные патроны мо¬
гут иметь число кулачков 3 —12 (рис. 5.19). Патроны с ма¬
лым числом кулачков надеж¬
нее крепят заготовку, а с боль¬
шим обеспечивают лучшую
круглость обработанной поверх¬
ности. Однако увеличение чис¬
ла кулачков свыше 12 неце¬
лесообразно.Материал мембраны —
сталь (65Г, 55С2, ЗОХГС,У8А), закаленная до твердо¬
сти 40 — 45 HRC.Мембранные патроны обес¬
печивают точность центриро¬
вания 0,003 — 0,005 мм.Радиальная сила на одном
кулачкеW = КМр /zfr, (5.57)где z — число кулачков; г —
радиус базовой поверхности
заготовки; f — коэффициент
трения.Силы W создают момент М, изгибающий мембрану. При
большом числе z кулачков момент М можно представить
равномерно распределенным по окружности радиусом г:М = Wzl/2nr, (5.58)где I — вылет кулачков от их середины до средней плоскости
мембраны.Момент закрепления Мз заготовки определяется в зави¬
симости от отношения т = D/d диаметра D мембраны к ди¬
аметру d базовой поверхности по формулеРис. 5.19. Схема мембранного
патрона с коробчатой
мембраной132
М3 = М(1,666- 0,94m + 0,196m2). (5.59)Угол разжима кулачков при закреплении заготовки с
наименьшим диаметромф =Маг/В( 1 + ц), (5.60)где В — Eh3/12(1 - ц2) — цилиндрическая жесткость мембра¬
ны; h — толщина мембраны; Е и ц, — упругие постоянные
материалы мембраны (модуль упругости и коэффициент
Пуассона).Наибольший угол разжима кулачковФшах=Ф + '21 > (5.61)где Тd — допуск на диаметр заготовки; Д — зазор между
заготовкой и кулачками (Д = 0,001 — 0,3 мм).Силу на штоке для разжима кулачков можно определить
по формулеQ = 4гсВфюах / rlzm. (5.62)По величине силы Q проверяют напряжение в мембранеа =3Q(l + n)f, D . d2о Лlz— + ■d0 4 D(5.63)2 nh2где d0 — диаметр круга контакта штока и мембраны (6 — 10 мм).133
6. ВЫБОР И РАСЧЕТ ПРИВОДОВ ЗАЖИМНЫХ
УСТРОЙСТВ6.1. ОСНОВНЫЕ СХЕМЫ ПРИВОДАПривод приспособления обеспечивает воздействие зажим¬
ных элементов на закрепляемую заготовку с заданной силой
в определенном направлении.Наиболее широко используются пневмо- и гидроприводы.
Пневмопривод имеет преимущество перед гидравлическим:
использует магистраль сжатого воздуха, имеющуюся на каж¬
дом предприятии. В пневмоприводах не существует возврат¬
ных трубопроводов, что упрощает арматуру и аппаратуру.
Отработавший сжатый воздух выпускается в атмосферу. Не¬
достаток — низкое рабочее давление сжатого воздуха (0,4 —
0,63 МПа). В этой связи приходится использовать пневмоци¬
линдры большого диаметра и механизмы усиления.Гидропривод отличается малыми диаметрами гидроцилин¬
дров, так как использует жидкость под большим давлением
(15 — 20 МПа). При этом силы закрепления можно переда¬
вать непосредственно от гидроцилиндра, исключая использо¬
вание механизмов-усилителей. В ряде случаев применяется
пневмогидропривод, при котором не требуется наличия гид¬
ростанции.В любом станочном приспособлении может быть исполь¬
зован магнитный привод, который представляет собой уст¬
ройство подведения к рабочему зазору магнитного потока,
применяемого для закрепления ферромагнитной заготовки.Ручной или механический привод используется достаточ¬
но часто и особенно в тех случаях, когда разрабатывают при¬
способление, предназначенное для применения в серийном
производстве. В крупносерийном и массовом производстве,
как правило, используются пневматический и гидравличес¬
кий приводы.После предварительного выбора привода он схематически
вычерчивается на конструктивной схеме приспособления.
Расположение привода определяется требованием свободного
доступа при его техническом обслуживании, свободой уста¬
новки заготовки в приспособлении, а также беспрепятствен¬134
ного ее удаления после обработки. Если привод по каким-
либо причинам невозможно установить в непосредственной
близости от зажимных элементов, то его располагают на не¬
котором удалении, а связь с зажимными элементами осуще¬
ствляют с помощью простейших передаточных механизмов.Если в приспособлении используются два и более зажим¬
ных элемента, то привод следует располагать относительно
детали так, чтобы его срабатывание вызывало одновремен¬
ную или, если необходимо, последовательную работу зажим¬
ных устройств.Пневматические приводы бывают чаще всего поршневы¬
ми, диафрагменными и вакуумными. Расчет таких приводов
сводится либо к определению развиваемой силы Q на штоке,
если заданы их параметры и давление воздуха р, либо к оп¬
ределению параметров, если заданы величины требуемой силы
на штоке и давление.6.2. ПНЕВМАТИЧЕСКИЙ ПОРШНЕВОЙ ПРИВОДВ соответствии со схемой, приведенной на рис. 6.1, сила
на штоке поршневого пневмоцилиндра определяется в соот¬
ветствии с формуламиtlD2Q = —m (6.1)n(D2 -d2)Q = -±— Lpr\, (6.2)для толкающей и тянущей силы соответственно.////в ±7ZZZZ72
/ iA QV/7///777т//<L///t///%-Ту-г?Т7//)/ТТТ77ГteРис. 6.1. Расчетная схема пневмопривода135
Иногда пневмоцилиндры выполняют одностороннего дей¬
ствия, когда возврат поршня в исходное положение осуще¬
ствляется усилием пружины. В этом случаеtlD2 _Q = —P4-Pn, (6.3)где Рп — сила сопротивления возвратной пружины при край¬
нем рабочем положении поршня; г\ — КПД, принимаемый
обычно равным 0,85 — 0,95.При решении обратной задачи по приведенным зависимо¬
стям определяется диаметр цилиндра D. Диаметр штока d
принимается в долях диаметра цилиндра Dd = (0,24 — 0,26)D (6.4)для пневмоцилиндров с креплением на удлиненных стяж¬
ках.На рис. 6.2 приведена конструкция вращающегося пнев¬
моцилиндра двустороннего действия. Пневмоцилиндр исполь¬
зуется для закрепления деталей во вращающихся патронах.
Он имеет воздухоподводящую муфту 1 и цилиндр 2. Для при¬
соединения тяги используется резьбовое отверстие в штоке.
Сжатый воздух подается через ниппель 6 и центральное от-Рис. 6.2. Конструктивная схема вращающегося пневмоцилиндра
двустороннего действия136
верстие в стержне 5 в правую полость цилиндра. Поршень 3
движется влево и создает на штоке 4 тянущую силу. Через
ниппель 7 и радиальные отверстия в стержне 5 сжатый воз¬
дух подается в левую полость цилиндра. При этом поршень 3
движется вправо, создавая на штоке 4 толкающую силу.6.3. ПНЕВМАТИЧЕСКИЙ ДИАФРАГМЕННЫЙ
ПРИВОДДиафрагменный привод (пневмокамера) схематично пред¬
ставлен на рис. 6.3. В данном случае это привод односторон¬
него действия. Пневмокамера состоит из двух штампован¬
ных чашек, между которыми установлена резинотканевая
диафрагма. При впуске сжатого воздуха в надштоковую по¬
лость диафрагма, сжимая пружину, перемещает шток, свя¬
занный с зажимным устройством приспособления.Силы на штоке непо¬
стоянны по величине, а
в конце свободного хода
снижаются до нуля, так
как давление сжатого
воздуха уравновешива¬
ется упругим растяже¬
нием диафрагмы. Наи¬
большая сила на штоке
имеет место в момент
впуска сжатого воздуха
в камеру. Для некоторо¬
го промежуточного по¬
ложения штока силу Q
можно определить при¬
ближенно по формуле
(для пневмокамер с вы¬
пуклой диафрагмой)Q — Jгде С — коэффициент, зависящий от отношения D/ d и вели¬
чины т перемещения штока в долях L (L — ход штока).Коэффициент С можно определить для пневмокамер с вы¬
пуклой диафрагмой по формулам:Рис. 6.3. Конструктивная схема диафраг-
менного пневмопривода одностороннего
действия- ГпП2137
• при D/d = 1,25С = 0,788 + 0,0634т - 0,763т2;(6.6)• при D/ d =1,5С = 0,772 - 0,244т - 0,460т2;(6.7)• при D/ d = 1,75С = 0,751 - 0,465т - 0,241т2;(6.8)• при D/ d = 2,0С = 0,733 - 0,613т - 0,103т2.(6.9)Для пневмокамер с защемленной диафрагмойQ = CpD2 (1 - тп),(6.10)где С изменяется от 0,65 до 0,53 при увеличении отношения
D/ d от 1,25 до 3.Величину С можно вычислить по формулеС = 0,696 - 0,06 (D/ d). (6.11)6.4. ВАКУУМНЫЙ ПРИВОДВакуумные приспособления используются для закрепле¬
ния плоских заготовок. Схема вакуумного приспособления
представлена на рис. 6.4.В корпусе 1 приспособления выполнена полость — ваку¬
умная камера. Заготовка 3 устанавливается на уплотнитель¬
ное кольцо 2, и при разрежении в камере это кольцо дефор¬
мируется, а заготовка прижимается к рабочей поверхности
корпуса. Сила закрепления заготовки определяется по фор¬
мулеW = (p& ~p0)Fk, (6.12)где ра — атмосферное давление (0,1 МПа); ро — остаточное
давление в камере после разрежения (ро= 0,01 МПа); F —138
активная площадь вакуумной камеры; k — коэффициент гер¬
метичности вакуумной системы.6.5. ГИДРАВЛИЧЕСКИЙ ПРИВОДГидравлический привод, как и пневматический, выпол¬
няется в виде поршневого цилиндра, приводимого в действие
от отдельного насоса. Рабочей жидкостью обычно служит
индустриальное масло под давлением 10 — 15 МПа.Гидроцилиндры выполняют одностороннего и двусторон¬
него действия. Расчет гидравлического привода практически
не отличается от расчета пневматического, математические
соотношения для которого приведены выше.Наиболее широко в станочных приспособлениях приме¬
няются гидроцилиндры с фланцевым креплением. Они так¬
же бывают одностороннего и двустороннего действия.На рис. 6.5 показан пример использования в приспособ¬
лении стандартного гидроцилиндра одностороннего действия
для закрепления за¬
готовки Г-образным
прихватом. На рис.6.6 приведена схе¬
ма приспособления
тисочного типа, в
котором использу¬
ется стандартный
гидроцилиндр дву¬
стороннего деЙСТ- Рис. 6.5. Пример использования и установки в
вия приспособлении гидроцилиндра односторонне¬го действияРис. 6.6. Пример использования и установки в приспособлении
гидроцилиндра двустороннего действия139
6.6. ПНЕВМОГИДРАВЛИЧЕСКИЙ ПРИВОДПневмогидравлический привод содержит пневматический
цилиндр и гидравлический усилитель. Принципиальная схе¬
ма такого привода приведена на рис. 6.7. Сжатый воздух по¬
ступает в пневмоцилиндр 8 диаметром D. Шток 7 поршня
пневмоцилиндра диаметром d является поршнем главного
гидроцилиндра 5,
связанного трубо¬
проводом 4 с рабо¬
чим гидроцилинд¬
ром 3 диаметром Dv
При рабочем переме¬
щении поршня пнев¬
моцилиндра масло,
вытесненное из глав¬
ного гидроцилиндра,
осуществляет давле¬
ние на поршень ра¬
бочего гидроцилинд¬
ра 3, который при
перемещении воз¬
действует своимштоком 1 на ведущее звено зажимного механизма приспособ¬
ления. Обратное движение поршней цилиндров при отклю¬
чении подачи воздуха осуществляется пружинами 2 и 9. Ре¬
зервуар 6 служит для подачи масла в систему и восполнения
возможных утечек.Сила на штоке 7 определяется по соотношениюР = рЩ~, (6.13)Рис. 6.7. Принципиальная схема пневмо-
гидравлического приводагде р — давление воздуха в пневмоцилиндре.Сила Р производит сжатие жидкости, следовательно, дав¬
ление жидкости рж можно определить по зависимости^2(6.14)4 Р 4pnD ,.2Таким образом, давление жидкости оказывается в (D/d)2
раз больше, чем давление воздуха.140
Теперь можно определить силу Q, зная значение рнnD2iQ = р-Dd(6.15)где Г| — общий КПД пневмогидропривода (г| = 0,80 — 0,85).По полученным зависимостям можно вычислить размеры
пневмо- и гидроцилиндров при заданных р и Q.6.7. ЭЛЕКТРОМАГНИТНЫЙ И МАГНИТНЫЙ ПРИВОДЫЭлектромагнитные и магнитные приводы используются для
закрепления ферромагнитных заготовок.На рис. 6.8 показана конструктивная схема электромаг¬
нитной плиты. В корпусе 1 плиты размещены электромагни¬
ты 2, которые закреплены с помощью крышки 3. Их сердеч¬
ники от крышки изолированы прокладками 4 из немагнит¬
ного материала. Магнитный поток замыкается через заготов¬
ку 5, прижимая ее к крышке электромагнитной плиты.5Электромагнитные плиты
являются нормализованными
приспособлениями, чаще все¬
го использующимися на плос¬
кошлифовальных станках.На рис. 6.9 изображена
схема магнитного приспособ¬
ления — магнитной призмы.
В изображенном на рисунке
положении постоянного маг¬
нита 3 магнитный поток за¬Рис. 6.9. Схема магнитной призмы
с постоянными магнитами141
мыкается через ферромагнитную заготовку i, прижимая ее к
призме. Если же магнит 3 повернуть на 90° по ходу или про¬
тив хода часовой стрелки, то его полюсы будут расположены
вертикально и магнитный поток будет замыкаться через ле¬
вую 4 и правую 2 части призмы, которые выполняются изо¬
лированными друг от друга.Расчет магнитных и электромагнитных приводов приве¬
ден в [1].6.8. ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОДЭлектромеханический привод отличается высоким быст¬
родействием, хорошо поддается автоматизации и позволяет
получить значительные и стабильные силы. На рис. 6.10
приведена схема одной из возможных разновидностей элект¬
ромеханического привода.Такой привод содержит асинхронный электродвигатель 1,
редуктор 2 с муфтой 3 и пружиной 4 для регулировки пере¬
даваемого крутящего момента, винта 5, гайки 6 и штока 7.
Зажимной механизм включает Г-образные рычаги 8 и кулач¬
ки 9.В электрических приводах обязательно наличие самотор-
мозящих механизмов (винтового, червячного и т.д.). Чаще
всего используются два самотормозящих механизма — в при¬
водном и зажимном устройствах. В данном устройстве при-Рис. 6.10. Схема электромеханического привода142
вода ограничение передаваемого момента осуществляется
муфтой. Угол а скоса муфты установлен в пределах 30 — 45°.
Сила предварительной затяжки пружины 4 выбирается по
соотношениюРпр = Mtg(cc - Ф)/г, (6.16)где М — передаваемый крутящий момент; г — средний ра¬
диус зубьев муфты; ф — угол трения на поверхностях кон¬
такта зубьев, полумуфт.Закрепление заготовки с помощью данного привода осу¬
ществляется при вращении винта 5, вызывающем перемеще¬
ние гайки 6 со штоком 7. По достижении необходимой силы
закрепления муфта срабатывает и электродвигатель отклю¬
чается. Открепление заготовки осуществляется реверсирова¬
нием электродвигателя.6.9. ПРИВОД ЗАЖИМНЫХ УСТРОЙСТВ
ПРИСПОСОБЛЕНИЙ, ИСПОЛЬЗУЮЩИЙ МЕХАНИЗМ
ПОДАЧИ СТАНКАЗажимные устройства, которые используют для закрепле¬
ния заготовок усилие подачи, используются чаще всего на
сверлильных станках. На рис. 6.11 показано сверлильное
приспособление к многошпиндельному сверлильному станку,
которое использует силу пода¬
чи. При опускании шпиндель¬
ной головки 1 кондукторная
плита 3 подходит к заготовке и
перемещающимися вместе с ней
опорами 4 прижимает заготов¬
ку. При дальнейшем опускании
головки пружины 2 сжимают¬
ся и сила закрепления, воздей¬
ствующая на заготовку, растет.В конце рабочего хода сверлиль¬
ной головки сила закрепления
наибольшая.В данном приспособлении
закрепление заготовки происхо¬
дит автоматически, и рабочий
освобождается от этой работы.Рис. 6.11. Схема привода
зажимного устройства приспособ¬
ления, использующего механизм
подачи станка143
Однако механизм подачи здесь испытывает дополнительную
нагрузку от пружин 2.6.10. ПРИВОД ЗАЖИМНЫХ УСТРОЙСТВ
ОТ СИЛ РЕЗАНИЯСилы резания для закрепления заготовок используются
преимущественно в кулачковых патронах.На рис. 6.12 показана схема
патрона с эксцентриками 3, с по¬
мощью которых заготовка 1
удерживается от поворота при об¬
работке, когда возникает враща¬
ющий момент. Предварительное
закрепление заготовки выполня¬
ется рукояткой 2. Эксцентрики
связаны зубчатой передачей 4 —5, поэтому их поворот от руко¬
ятки происходит на одинаковый
угол и обеспечивается достаточ¬
но точное центрирование. Такие
приспособления используются
при сверлении.Величину эксцентриситета эксцентриков можно опреде¬
лить по следующей зависимости:е = (S + 0, 5Td ) /(1 - cos а), (6.17)где S = 0,2 — 0,4 — минимальный радиальный зазор между
заготовкой и эксцентриками; ТD — допуск на диаметр заго¬
товки, которым она взаимодействует с эксцентриками; а —
допускаемый угол поворота эксцентриков.Условие заклинивания системы/ (г - ё) > р + й, (6.18)где f — коэффициент трения между заготовкой и эксцентри¬
ками; г — радиус эксцентриков; р — радиус круга трения
цапфы эксцентриков; k - коэффициент трения качения меж¬
ду заготовкой и эксцентриками (для необработанных загото¬
вок принимают &=0,03 — 0,05).При воздействии на заготовку момента резания М возни¬
кают силы Q, нормальные к ее поверхности. Эти силы опре-144
деляются с использованием зависимости
_ M(r - е cos а,)
в = »«р+*> • (619)где R — радиус заготовки; аг — угол поворота эксцентриков
от их нулевого положения.Если известен действительный радиус заготовки R и ми¬
нимальный ее радиус Rmin, то угол оц можно определить из
соотношенияSx+ R - Rmin =е(1- cos (Xj). (6.20)Усилие на рукоятке для открепления заготовки можно
вычислить по формулеN = 3Q(p - esinotj)/ lr\, (6.21)где I — длина рукоятки; Г| =0,8 — 0,9 — КПД передаточного
механизма.Если радиус а цапфры известен, а также известен коэффи¬
циент трения в цапфре fv то можно определить значение р:р = afx . (6.22)На рис. 6.13 приведена схема поводкового патрона с дву¬
мя эксцентриковыми кулачками для токарных станков. Сила
закрепления заготовки в таком патроне тем больше, чем боль¬
ше момент резания. Кулач¬
ки смонтированы на плава¬
ющем основании, в связи с
чем при закреплении загото¬
вок устраняется односторон¬
нее давление на передний
центр.Угол поворота кулачков
а = 20 — 30°. Центры О, Ох
и 02 не лежат на одной пря¬
мой, поэтому и происходит
зажим заготовки при ее
стремлении повернуться внаправлении действующих Рис> 6ЛЗ. Схема поводковогосил патрона с двумя эксцентриковымикулачками145
7. РАСЧЕТ СТАНОЧНЫХ ПРИСПОСОБЛЕНИЙ
НА ТОЧНОСТЬ7.1. МЕТОДИКА РАСЧЕТА ТОЧНОСТИ ПРИСПОСОБЛЕНИЙИзвестно, что точность обработки заготовок в приспособ¬
лении зависит от точности изготовления приспособления, точ¬
ности его установки на станке, износа установочных элемен¬
тов и жесткости.Для оценки точности приспособления необходимо устано¬
вить, какую часть допуска выполняемого размера заготовки
в данном приспособлении можно отнести на приспособление.
И эту часть допуска выполняемого размера заготовки можно
распределить на допуски размеров деталей приспособления,
ответственных за формирование выполняемого размера, ког¬
да составляют соответствующую размерную цепь приспособ¬
ления.Расчет приспособления на точность заключается в опреде¬
лении точности изготовления приспособления по определен¬
ному параметру. В качестве расчетных параметров могут вы¬
ступать: допуски линейных и угловых размеров; допуски па¬
раллельности или перпендикулярности рабочей поверхности
установочных элементов по отношению к поверхности корпу¬
са приспособления, контактирующей со станком; допуск со¬
осности и перпендикулярности осей цилиндрических поверх¬
ностей приспособления или допуски межцентровых расстоя¬
ний между кондукторными втулками (для кондукторов) и т.п.
Чаще всего расчетный параметр определяет точность поло¬
жения рабочих поверхностей установочных элементов при¬
способления относительно опорных поверхностей корпуса,
которыми приспособление соединяется со станком (столом или
шпинделем). Это означает, что расчетный параметр должен
связывать по точности относительное расположение двух по¬
верхностей приспособления — поверхностей, контактирую¬
щих с заготовкой, и поверхностей, контактирующих с эле¬
ментами станка.Направление расчетного параметра приспособления дол¬
жно совпадать с направлением выполняемого размера при
обработке заготовки в данном приспособлении. Если при об¬
работке выдерживается несколько размеров в различных на¬146
правлениях, то расчет приспособления на точность можно
вести в направлении наиболее точного по допуску размера.Точность изготовления приспособления характеризуется
величиной выбранного расчетного параметра. Этот параметр
составляет некоторую часть допуска выполняемого размера
при обработке заготовки в данном приспособлении.Известно [5 — 7], что погрешность обработки, определяю¬
щая величину допуска Т, выполняемого на данной операции
размера, складывается из погрешности базирования заготов¬
ки еб, погрешности ее закрепления ез, погрешности установ¬
ки приспособления на станке sy, погрешности, связанной с
износом элементов приспособления 8и , а также погрешности
от перекоса инструмента бп и погрешности, вызываемой дру¬
гими факторами, не зависящими от приспособления. Тогда,
если известна эта сумма, т.е. допуск Т на обработку, погреш¬
ность изготовления приспособления 8пр по выбранному рас¬
четному параметру, или допуск на изготовление приспособ¬
ления Тпр, будет определяться зависимостьютпр = т - KTJ(KT1e6f +sl+ s2 + е2и +е2п+ (КТ2со)2, (7.1)где Кт =1 — 1,2 — коэффициент, учитывающий отклонение
рассеяния случайных погрешностей от закона нормального
распределения; КТ1 = 0,8 — 0,85 — коэффициент, учитываю¬
щий возможность уменьшения 8б при работе на настроенных
станках; КТ2 = 0,6 — 0,8 — коэффициент, учитывающий долю
погрешности обработки, вызванную факторами, не зависящи¬
ми от приспособления; со — экономическая точность обработ¬
ки [7].Составляющие погрешности обработки, входящие в эту
зависимость, определяются известным образом в соответствии
с [1; 4; 7].Иногда, на начальном этапе проектирования приспособле¬
ния, величину допуска на изготовление приспособления при¬
нимают равной= (0,2-0,3)Г.Методика расчета точности сверлильных приспособлений
несколько отличается от изложенной. Эти приспособления
имеют особенности, которые характеризуются особенностя¬147
ми их типовых конструкций. Подробно методика расчета свер¬
лильных приспособлений на точность изложена в [14].После определения допуска на изготовление приспособле¬
ния выявляется размерная цепь приспособления, формирую¬
щая точность изготовления детали по выбранному парамет¬
ру. Решением прямой задачи определяются допуски звеньев
этой размерной цепи, т.е. по найденному допуску на изготов¬
ление приспособления Тпр определяются допуски на изготов¬
ление отдельных его деталей, ответственных за допуск вы¬
полняемого размера. Кроме того, на заключительном этапе
расчета приспособления на точность формулируются техни¬
ческие требования к приспособлению.В результате расчета размерной цепи может иметь место
такой случай, когда отдельные детали приспособления долж¬
ны иметь высокую, технологически недостижимую точность.
В этом случае следует принять технические решения, кото¬
рые способны расширить допуск на изготовление приспособ¬
ления или уменьшить длину размерной цепи. Ниже излага¬
ются методики расчета отдельных составляющих погрешнос¬
ти обработки, входящих в формулу (7.1) расчета допуска на
изготовление приспособления по принятому параметру точ¬
ности.7.2. МЕТОДИКА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТОЧЕК
ОБРАБАТЫВАЕМЫХ ПОВЕРХНОСТЕЙДля того чтобы определить погрешность базирования и
закрепления заготовок при их обработке, необходимо оценить
влияние смещений и поворотов системы координат техноло¬
гических баз детали в системе координат станка на фактичес¬
кие величины выполняемых размеров, а также на располо¬
жение обрабатываемых поверхностей. Иначе, необходимо
уметь определять координаты точек обрабатываемых поверх¬
ностей в системе координат станка и системе координат ос¬
новных баз детали.При расчете погрешностей и определении координат то¬
чек обрабатываемых поверхностей будем рассматривать три
системы координат: x0y0z0 — система координат вспомогатель¬
ных баз станка; xlylz1 — система координат основных баз
детали; xyz — система координат основных баз приспособле¬148
ния; x11y11zn — система координат вспомогательных баз при¬
способления, с которой совмещается система координат ос¬
новных баз детали xlylzl при базировании.Рассмотрим схему базирования заготовки, представленную
на рисунке 2.7. Если значения координат вектора смещения
г известны, т.е. величины а0, bQ и cQ заданы, а также заданы
значения координат вектора поворотов ср , т.е. углов а, (3 и у,
то всегда можно определить координаты любой точки детали
в системе координат xQy0z0 по ее координатам в системе xxyxzx
и наоборот. Для этого требуется располагать направляющи¬
ми косинусами осей координат одной системы в другой, т.е.
матрицей преобразования пространства, состоящего в его пос¬
ледовательных поворотах на угол а вокруг оси х0, угол Р вок¬
руг нового положения оси у0 и угол у вокруг нового положе¬
ния оси z0. Пусть, например, угол а задан, Р = 0, у = 0. Если
угол а положительный (поворот осуществляется против хода
часовой стрелки, если смотреть с конца оси), то матрица пре¬
образования пространства будет выглядеть так:апа12а13100А =а21а22со=0cos аsin а<*31а32азз0- sin аcos аСтроки матрицы А составлены из направляющих косину¬
сов единичных векторов (ортов) еп, е21, е31 осей координат xv
уг и zxb системе координат x0yQzQ, а столбцы этой матрицы
представляют собой направляющие косинусы ортов е10, е20 и
е30осей координат х0, у0 и z0 соответственно в системе коорди¬
нат xly1z1 (см. рис. 2.8).Пусть, например, известны координаты некоторой точки
А в системе xQy0zQ, т.е. х0А, yQA, zQA. Тогда в системе координат
x1y1zl координаты этой точки х1А, у1А и z1A можно определить,
умножив координаты х0А, у0А и zQA на элементы матрицы А,
расположенные в соответствующих строках. С учетом коор¬
динат начала а0, bQ, с0 получимА = (%0А Оо)Оц (У0А ~~ fy))^12 ^ (^0А ~~ ^0 )^13 » (^«3)У\А = (*^0А ^о)^21 ^ (УоА “ fy))^22 (^0А ~ ^0 )^23 > (7.4)%1А = (**4) А “ Яо)а31 (У 0 А ^о)^32 (^0А ^0 )^33 (^«5)149
или, используя более короткую запись,ПАУха= АУоа -Ь0(7.6)Если же требуется определить координаты х0А, у0А и zQA
точки А в системе координат x0y0z0 по ее координатам хы, уы
и ги, то в этом случае следует проводить вычисления по фор¬
мулам(7.7)Х0А ~ Х1Ааи + У\Аа21 + ZlAa31 + а0>
Уоа = х\Аа\2 + У\Аа22 + ziAa32 +Z0A = Х1Аа13 + У\Аа2Ъ ZlAa33 + С0>или, в сокращенной записи,(7.8)(7.9)*0А*1А<*0Уоа= АтУха+Ьо20а*1Асо(7.Ю)где Ат — транспонированная матрица преобразования, кото¬
рая получена из матрицы А путем замены в ней строк столб¬
цами, т.е.ахха2ХазхАт =^12°22°32ахзй23azz(7.U)В том случае, когда система координат xlylzl повернута
лишь на угол (3 относительно оси у0 в положительном направ¬
лении, т.е. при а = 0,1 Р * 0, у = 0, матрица В такого преобра¬
зования будет выглядеть так:(7.12)Если одновременно а^ОиР^О, ау=0, то матрицу ре¬
зультирующего преобразования пространства, состоящего вcos(30-sinPВ =010sinP0cosp150
его последовательных поворотах на углы а и (3, можно полу¬
чить перемножением матриц А и В, т.е.cosPsin a sin P- cos a sin PL =0cos asinasin Э- sin a cos Pcos a cos p(7.13)Если пространство х1у1г1 повернуто лишь на угол у вокруг
оси г0 также в положительном направлении, аа = 0и(3 = 0, то
матрица С этого преобразования будет:С =cosy
-sin у
ОsmycosyОО01(7.14)При последовательных поворотах пространства на углы (3
и у, если а = О, матрица М результирующего преобразования
может быть получена перемножением матриц В и С, т.е.(7.15)Если же пространство xly1z1 повернуто на углы а и у, а
Р = 0, то матрица N результирующего преобразования может
быть получена как произведение матриц А и С:cosPcosysin у- sin P cos уM =- cos P sin уcosysin P sin уsinP0cosPcosycos a sin уsinasinyN =-sin уcos a cos уsin a cos у0-sinacos a(7.16)В том случае, когда имеют место последовательные пово¬
роты на углы а, (3 и у, матрица К результирующего преобра¬
зования может быть представлена произведением матриц А,
В и С, т.е.к =cosPcosy sin a sin Р cos у + cos a sin у - cos а sin (3 cos у + sinasiny
-cosPsiny -sinasinpsiny + cosacosy cos a sin P sin у + sin a cos у
sinP -sin a cos P cos a cos p(7.17)Полученные матрицы преобразования пространства (7.12) —(7.17) позволяют определить координаты любой точки А де-151
тали при любом способе ее базирования по уравнениям (7.6)
или (7.10), в которые вместо матриц А и Ат подставляются
соответственно матрицы Б, L, М, N, К или транспонирован¬
ные Вт, LT, Ст, Мт, NT, Кт, в зависимости от того, в какой
системе координат проводятся вычисления.Таким образом, на основе изложенного метода можно оп¬
ределить координаты любой точки обрабатываемой поверх¬
ности детали в системе координат x0yQzQ, связанной со стан¬
ком, по ее координатам в системе координат xyz основных
баз детали и, наоборот, определить координаты любой точки
обрабатываемой поверхности детали в системе координат xyz
по ее координатам в системе xQyQzQ. В дальнейшем, на базе
эторбметода, в учебнике представлена универсальная мето-
дхшаграсчета погрешностей установки заготовок в приспособ¬
лениях при различных способах их базирования.7.3. МЕТОДИКА РАСЧЕТА ПОГРЕШНОСТИ
БАЗИРОВАНИЯ ЗАГОТОВКИ В ПРИСПОСОБЛЕНИИБазирование заготовок состоит в совмещении системы
координат x1y1z1 их основных технологических баз с систе¬
мой координат x0y0z0 вспомогательных технологических баз
станка, положение осей в которой определяется направле¬
ниями рабочих движений инструмента относительно заго¬
товки.Если заготовка базируется непосредственно на столе стан¬
ка, то совмещение системы координат xlylzl с системой xQy0zQ
осуществляется, как правило, путем выверки. Для исключе¬
ния выверки при базировании заготовок используются при¬
способления. В этом случае базирование заготовки представ¬
ляет собой сочетание ее базирования в приспособлении и ба¬
зирования приспособления на станке. И тогда в математичес¬
ком описании базирование заготовки можно рассматривать
как совмещение системы координат основных технологичес¬
ких баз детали xlylzl с системой координат xnynzn вспомога¬
тельных баз приспособления и системы координат xyz основ¬
ных баз приспособления с системой координат x0y0z0 вспомо¬
гательных баз станка [1; 2].Если ведется обработка поверхностей заготовки, располо¬
женных под определенными углами к координатной системе152
ее основных баз, то в этом случае система координат вспомо¬
гательных баз приспособления xnyuzn поворачивается отно¬
сительно системы координат его основных баз xyz на соответ¬
ствующие углы. При этом ориентация обрабатываемых по¬
верхностей определяется направлениями рабочих движений
инструмента, т.е. соответствует ориентации системы коорди¬
нат х0у0г0, а основные (технологические) базы заготовки (сис¬
тема координат л^у^) относительно вспомогательных баз стан¬
ка (системы координат xQy0zQ) оказываются повернутыми на
соответствующие углы.Таким образом, при базировании заготовок на станках (в
приспособлении или без такового) осуществляется совмеще¬
ние системы координат х1у1г1 основных баз заготовки с систе¬
мой координат xQyQzQ вспомогательных баз станка и с систе¬
мой координат xnynzn вспомогательных баз приспособления.
Погрешность такого совмещения определяет отклонение фак¬
тически достигнутого положения заготовки от требуемого, т.е.
погрешность базирования.Если в процессе базирования система координат x1y1z1 ос¬
новных баз заготовки не получает смещений и поворотов от¬
носительно системы координат xQyQzQ вспомогательных баз
станка, то погрешность базирования отсутствует. Однако чаще
всего имеют место погрешности, т.е. при базировании не дос¬
тигается точного совмещения систем координат xlylzl и x0yQzQ.
Обусловлено это самыми разными причинами: погрешностя¬
ми формы поверхностей, играющих роль основных баз заго¬
товки; погрешностями их расположения; погрешностями ба¬
зирования приспособления; другими причинами.Погрешности выполняемых размеров зависят как от сме¬
щений базовых поверхностей заготовки в направлении этих
размеров, так и от их поворотов, причем на отклонение раз¬
мера в направлении какой-либо координатной оси влияют
смещения вдоль этой оси, а также смещения и повороты вок¬
руг двух других осей.Итак, погрешность базирования определяется смещения¬
ми и поворотами координатной системы х1у1г1 относительно
системы xQy0zQ. Если базирование осуществляется на столе
станка без приспособления, то рассматриваются смещения и
повороты системы x1y1zl относительно системы xQyQz0 непос¬
редственно. Если же базирование проводится в приспособле¬153
нии, то смещения и повороты системы координат детали x1y1zl
в системе координат станка x0y0z0 определяются суммой сме¬
щений и поворотов координатной системы xyz; основных баз
приспособления в координатной системе x0yQzQ; вспомогатель¬
ных баз станка и системы координат основных баз детали
x1ylz1 в системе координат вспомогательных баз приспособле¬
ния xnynziv В этом наиболее общем случае погрешность ба¬
зирования детали определяется вектором едс смещений и век¬
тором а (ф, 4х, 0) поворотов. При этом вектор смещений можно
представить векторной суммой, т.е.где 8д с (8ДЛГо, еДУо, еД2Ь) — вектор смещений детали относительно
системы координат станка; 8пс (£ПХо, £пУо, еп2о) — вектор сме¬
щений приспособления относительно системы координат стан¬
ка; £д п (едх, 8ду, 8дг ) — вектор смещений детали относительно
системы координат приспособления.Приведенную векторную сумму можно представить в ко¬
ординатной форме:Каждое из слагаемых 8дл., гду и ед2 в уравнениях (7.18) —(7.20) включает в себя составляющую погрешности базирова¬
ния, обусловленную несовпадением технологической и изме¬
рительной баз детали, а также составляющую этой погреш¬
ности, связанную с относительным смещением технологичес¬
кой базы в направлении выполняемого размера в связи с име¬
ющими место погрешностями ее формы.Погрешности, связанные с базированием приспособления
(первые слагаемые уравнений), чаще всего могут быть ском¬
пенсированы настройкой, однако в каждом конкретном слу¬
чае их влияние на точность выполняемого размера должно
рассматриваться отдельно.Если координатная система x1ylzl не только смещена, но
и повернута относительно системы x0y0z0, то погрешности раз¬
меров детали, обусловленные погрешностями ее базирования8 =8 +8Д^О П20 Д2£_„ = 8_„ + 8_„;
дх0 n*0 дх ’(7.18)(7.19)(7.20)154
относительно осей х0, у0 и z0, могут быть определены по фор¬
мулам, аналогичным (7.6), т.е.= п(7.21)Д 20где 71 — матрица преобразования пространства, состоящего в
его последовательных поворотах на углы Ф, V и 0 вокруг ко¬
ординатных осей х0, у0 и ^соответственно.Углы поворота Ф, V и 0 определяются на основе погреш¬
ностей формы и расположения поверхностей заготовки и при¬
способления, использующихся в качестве технологических баз
на рассматриваемой операции.Матрица п имеет такой же вид, что и приведенная выше
матрица К:|| cos\|/cos0 sincpsin\j/cos0 + cos(psin0 -cos(psin\j/cos0 + sincpsinQ
-cos\|/sin0 - sin фету sin 0 + cos<pcos0 coscpsin\|/sin0 + sin(pcos0
sin \\f - sin ф cos \j/ cos ф cos \y(7.22)Однако матрица тт, в отличие от матрицы К, характеризу¬
ется малыми значениями углов поворота. Известно, что для
малых углов т имеют место соотношения cost = 1, sinx = tgx = т.
Поэтому, исключая из матрицы малые величины высших
порядков малости (произведения синусов), получим(7.23)Подставив в (7.21) матрицу (7.23) и выполнив формаль¬
ные преобразования, получим формулы для расчета погреш¬
ностей базирования в направлениях осей xv yxvLZx:
д =е +с е_е у.^1 ДЛ'О ДУо Д2о *10-VЯ =-01ФV-Ф1=гАУо -е^в + е^ф;А, = £„, + 8„r W - 8„2\ дг0 д.Х(\ т д,Ф-(7.24)(7.25)(7.26)ДХ0 т у0Если система координат x1ylzl не повернута относительно
системы x0yQzQ, то имеет место преобразование пространства,155
при котором10071 =010001(7.27)и тогда зависимость (7.21) сводится к видуд8*1д*од—8У\ДУод,8*1Д *0(7.28)Можно также решить и обратную задачу. Если, напри¬
мер, известны погрешности размеров детали в направлении
осей xv у1и zv а также погрешности углового расположения
обрабатываемых поверхностей относительно системы коорди¬
нат станка, то можно определить допустимые величины сме¬
щений заготовки при ее базировании в направлениях х0, у0 и
20, при которых достигается заданная точность обработки.
Расчет этих смещений следует выполнять по формулам(7.29)где ят— транспонированная матрица преобразования простран¬
ства xly1zv состоящего в его поворотах вокруг осей х0, у0 и z0
на углы, определяемые вектором а.Выполнив формальные преобразования в соответствии с
(7.29), получим формулы для расчета погрешностей базиро¬
вания в направлениях осей х0, у0иг0:елх~=А-\д + Агт (7.30)8Дд*оЪп»"кIIд„ДУоУ\8 „ДД20*1^ДУо(7.31)едго -Д*ж + Дй<р. (7.32)Несколько усложняется решение задачи определения по¬
грешностей базирования в том случае когда ведется обработ¬
ка поверхностей детали, расположенных под углом к ее ос¬
новным технологическим базам. В этом случае в соответствии
с изложенным порядком вначале рассчитываются погрешно-156
сти базирования детали относительно вспомогательных баз
приспособления, с которыми совмещаются основные базы де¬
тали. Иными словами, вначале определяются смещения и по¬
вороты системы координат xly1zl основных баз детали отно¬
сительно системы координат xnynzn вспомогательных баз при¬
способления, т.е. определяются составляющие вектора сме¬
щения едх1, г v 8д21 и углы поворота фх, \|/lf 0t, по которым
можно определить смещения в направлениях осей хп, уп, zn.
По аналогии с (7.24) — (7.26) эти смещения равны:А — 8_г + £хп Д*1 ДУ\•e«Vi5Д =8Уп тА =8 +8 \1/, — 8 ф,.*11 дг1 Д^1^1 ДУ1^1ед*Ах*11= jtД„Д УУн8Д2А,,(7.33)(7.34)(7.35)По найденным значениям Дх11, Ау11, Аг11 определяются сме¬
щения детали относительно системы координат xyz основных
баз приспособления. При этом используется соответствующая
матрица поворотов (в самом общем случае — матрица К). По
аналогии с (7.10)(7.36)Затем определяются смещения приспособления относитель¬
но системы координат станка. Их суммируют со смещениями
заготовки. Эти суммарные смещения определяют совместно с
поворотами погрешности базирования.Как видно из изложенного, исходными данными для рас¬
чета погрешности базирования являются: допуски на линей¬
ные и угловые размеры заготовки; допуски на отклонения
формы и расположения базовых поверхностей заготовки; ха¬
рактеристики точности изготовления приспособления и по¬
грешности его базирования на станке.Составляющие вектора суммарного смещения в направле¬
нии координатных осей включают смещения в направлении
соответствующих осей измерительной базы относительно тех¬
нологической (если они не совпадают), а также смещения тех¬
нологической базы, вызванные погрешностями ее формы и
расположения.157
Углыф, V и 0 также определяются погрешностями фор¬
мы и расположения поверхностей заготовки, использующих¬
ся в качестве технологических баз на рассматриваемой опе¬
рации.Известно [8], что при нормировании допусков формы и
расположения поверхностей было установлено 16 степеней
точности (первая самая точная). При этом в зависимости от
соотношения между допуском размера и допуском формы и
расположения установлены три уровня относительной геомет¬
рической точности:А — нормальная относительная геометрическая точность
(допуски формы и расположения в среднем составляют 60 %
от допуска размера);В — повышенная относительная геометрическая точность
(допуски формы и расположения в среднем составляют 40 %
от допуска размера);С — высокая относительная геометрическая точность (до¬
пуски формы и расположения в среднем составляют 25 % от
допуска размера).Для цилиндричности, круглости и профиля продольного
сечения цилиндрических поверхностей относительная геомет¬
рическая точность для А, Б и С составляет соответственно 30,
20 и 12 % от допуска размера, так как эти отклонения отно¬
сят к радиусу.Таким образом, при расчете точности обработки, величи¬
ны погрешностей формы и расположения базовых поверхнос¬
тей следует принимать равными 60 % от допуска на соответ¬
ствующий размер.7.4. РАСЧЕТ ПОГРЕШНОСТЕЙ БАЗИРОВАНИЯ
ЗАГОТОВКИ В ЦЕНТРАХРассмотрим пример расчета погрешности базирования при
обработке ступенчатого валика на токарном станке в цент¬
рах. Схема базирования приведена на рис. 7.1. Передний центр
жесткий. Подрезка торцовых поверхностей выполняется па¬
раллельно двумя резцами, настроенными на размер 12. Допус¬
ки на размеры соответствуют 14-му квалитету точности.Для размера /2 погрешность базирования отсутствует. Для
размера /3 погрешность в осевом направлении будет состоять158
из изменений общей длины вала (допуска Tt на длину) и сме¬
щения заготовки влево или вправо на величину А в связи с
изменением размера диаметра центрового гнезда от £>тах до
Dmin. Нетрудно видеть, чтоД = Anax _ Anin _ Тр2tg(3 2tg(3 2tg(3 ‘Рис. 7.1. Схема к расчету погрешностей базирования заготовки в центрах159
Следовательно,Ч =Tl+TD/2tg$. (7.37)Если бы передний центр был плавающим (подпружинен¬
ным) и использовался упор в левый торец, то погрешность
базирования включала бы лишь смещения измерительной базы
(правого торца) в пределах допуска Тх на длину вала.Для размера 1г погрешность базирования равна смещению
левого торца, обусловленному колебаниями диаметра центро¬
вого гнезда, т.е.еЫь =Tl+TD/2tg$. (7.38)Для всех диаметральных размеров вала погрешности ба¬
зирования определяются погрешностями формы и располо¬
жения базовых поверхностей приспособления (переднего и
заднего центров), а также погрешностями формы и располо¬
жения базовых поверхностей детали (центровых гнезд). Про¬
анализируем эти погрешности. Допуск по 14-му квалитету точ¬
ности для диаметров от 6 до 10 составляет 360 мкм [15]. Сле¬
довательно, допуск круглости центрового гнезда для нормальной
относительной точности составляет Тк = 0,3 • 360/2 = 54 мкм.Погрешности формы и расположения конической поверх¬
ности центров соответствуют 6-му квалитету точности, они
невелики, и поэтому ими можно пренебречь.Таким образом, отклонение от круглости центровых гнезд
может достигать 54 мкм. Эта погрешность вызывает несовпа¬
дение оси центров станка и оси вала, приводящее к эксцент¬
ричному расположению припуска и, следовательно, измене¬
нию величины силы резания. Это, в свою очередь, приводит
к колебаниям величины взаимного отжатия резца и заготов¬
ки и, как следствие, к погрешностям формы обрабатываемой
поверхности.В справочной литературе нет сведений о том, в какой мере
погрешности формы центровых гнезд влияют на погрешность
формы обрабатываемых цилиндрических поверхностей. Од¬
нако в рассматриваемом случае существует опасность того,
что требуемая точность формы обрабатываемой поверхности
не будет достигнута при точении. В этом* случае потребуется
более точное выполнение центровых гнезд, например, по форме
R (с дуговой образующей).160
7.5. РАСЧЕТ ПОГРЕШНОСТЕЙ БАЗИРОВАНИЯ
ЦИЛИНДРИЧЕСКОЙ ЗАГОТОВКИ В ПРИЗМЕСхема базирования в призме приведена на рис. 7.2. По¬
грешности базирования в этом случае зависят от допуска на
диаметр цилиндрической поверхности, а также от погрешно-Рис. 7.2. Схема для определения погрешностей базирования
цилиндрической заготовки в призместей ее формы. Определим погрешности базирования для раз¬
меров Hv Н2 и Н3. Погрешность базирования для размера Н:
определяется разностью Cmax - Cmin Из расчетной схемы нахо¬
димГ — А — 7? — ~^max _ ршах max . шах >sinaR.О D JD _ min _ рmin _ min . min *sinaСледовательно,«W, = (-Rmax - Rmin W / Sin (X - 1) = ^- (1 / SU1 <X - 1). (7.39)Погрешность базирования для размера Н2 определяется
разностью Lmax - L^n Из расчетной схемы следует, что4,ах = ^+^=4^+^;sinaLmin= B + Rmin=Z*±- + Rmin,
sm a161
а потомуебя2 = (RmaK - дт1п )(1 / sin а +1) = ^ (1 / sin а +1). (7.40)Погрешность базирования для размера Н3 определяется
величиной СХС2, т.е. разностью ( А - В ). ПоэтомуР _ ^max ^min __ / гг j \
ьбЯ3 - ; - — . (7.41)sm a sin а 2 sin аЕсли рабочие поверхности призмы получили износ, опре¬
деляемый глубиной лунок А, то в этом случае ось заготовки
получает смещение вниз на величинуви = Д /sina. (7.42)Теперь определим погрешности базирования заготовок в
призме, обусловленные погрешностями формы базовой поверх¬
ности. Если базовая поверхность имеет конусообразность, ось
заготовки х1 располагается под некоторым углом \|/ к оси xQ
(рис. 7.3).В сечении 1-1 заготовка имеет диаметр Dmin, а в сечении
2-2 — диаметр Dmax Конусообразность А определяется соот¬
ношениемA = (D-Dmin)/2, (7.43)Рис. 7.3. Схема для расчета погрешностей базирования цилиндрической
заготовки в призме при наличии конусности базовой поверхности162
следовательно, смещение заготовки в направлении оси z0, т.е.
погрешность базирования, обусловленная кону сообразностью,
составитеб2о = A/sina. (7.44)Угол \|/ поворота оси хг вокруг у0 определяется на длине L
по соотношению\(/ = arctg(/n/n/L). (7.45)Если заготовка в попе¬
речном сечении имеет по¬
грешность формы в виде эл-
липсности, то ее ось зани¬
мает различные положения
по высоте и в горизонталь¬
ном направлении для раз¬
личных угловых положе¬
ний. Линиями АВ на рис.7.4 показана траектория
движения оси заготовки,
если последнюю вращать в
призме. Для двух указан¬
ных положений ось заготов¬
ки лежит на оси симметрии
призмы.Перемещение оси заго¬
товки в горизонтальном на¬
правлении определяется со¬
отношениему = V2(a - Ь), (7.46)где а и b — большая и малая полуоси эллипса.Смещение по вертикали в несколько раз меньше величи¬
ны у. Теперь рассмотрим числовой пример расчета погрешно¬
сти базирования цилиндрической заготовки в призме длиной
120 мм (рис. 7.5) при фрезеровании лыски за один рабочий
ход на вертикально-фрезерном станке. Выдерживаемые раз¬
меры (мм): А= 5 0Д2; А2= 3 5 0 25; А3= 75 03; I = 40. Длина при¬
змы Znp = 120 мм. Угол призмы а = 90°. Заготовка предвари¬
тельно обработана по цилиндрической поверхности по 14-му
квалитету точности до диаметра D = 80 0 74.Рис. 7.4. Схема для расчета погрешно¬
сти базирования цилиндрической
заготовки в призме при эллипсности
базовой поверхности163
Q IУ77ТТ7ТГ7777^Г77тП77Т7Г777)Рис. 7.5. Схема базирования цилиндрической заготовки в призме
(к расчету погрешностей базирования)Согласно (7.39)—(7.41), погрешности базирования без учета
погрешностей формы базовой поверхности составляют:/АбА, ““+ 1sina
' 1 Л
sina' 1= 0,5 • 0,74 (1 / sin 45° + l) = 0,89 мм;= 0,5 • 0,74 / sin 45° = 0,39 мм;Абл =0,57^ — 1 = 0,5-0,74(l/sin45°-l) = 0,15 мм.3 sinaСудя по полученным значениям погрешностей, при задан¬
ном способе базирования заготовки, размеры Аг и А2 не будут
выдержаны при методе автоматического получения размеров
на настроенном станке. Для достижения требуемой точности
этих размеров необходимо обработать базовую поверхность
деталей с более высокой точностью.Найденные погрешности базирования будут еще больши¬
ми, если учесть погрешности формы базовой поверхности.
Такими погрешностями могут быть отклонения от круглости
(овальность или огранка) и отклонения профиля продольного
сечения (конусообразность, бочкообразность или седлообраз-
ность). Рассмотрим влияние на погрешности базирования
овальности и кону сообразности.164
При нормальной относительной точности допуск круглости
(овальность) составит TD = 0,6 TJ2 = 0,6 *0,74/2 = 0,22 мм.
Тогда погрешности базирования, вызванные овальностью, со¬
ставят:Дм, = 0,5 0,22(1/sin45°+ 1) = 0,27 мм;ДМ2 = 0,5 0,22(1 /sin45°) = 0,16ММ;ДМз = 0,5 • 0,22(1 / sin 45° -1) = 0,05 мм.Допуск конусообразности также составляет ТВк = 0,6 • Тв/2 =
= 0,6 *0,74/2 = 0,22 мм. Для длины фрезерования I = 40 мм
он будет ТВк = 0,22*40/120 = 0,07 мм. Следовательно, по¬
грешности базирования, вызванные конусностью, будут сле¬
дующими:Д^ = 0,5 • 0,07(1 / sin 45° + 1) = 0,08 мм;Д^ =0,5 0,07(1 /sin45°) =0,05 мм;ДМз = 0,5 • 0,07(1 / sin 45° -1) = 0,014 мм.В самом неблагоприятном случае эти погрешности будут
складываться, и суммарные погрешности базирования заго¬
товки в призме составят:Дм, = 0,89 + 0,27 + 0,08 = 1,24 мм;
а2= 0.39 + 0,16 + 0,05 = 0,6 мм;А6Аз= 0,15 + 0,05 + 0,014 = 0,214 мм.Из рассматриваемого примера следует, что погрешности
формы базовой поверхности могут вносить весьма существен¬
ную долю в погрешности базирования заготовок в призмах.7.6. РАСЧЕТ ПОГРЕШНОСТЕЙ БАЗИРОВАНИЯ ВТУЛКИ
НА ЖЕСТКОЙ ОПРАВКЕПредположим, что необходимо определить погрешность
базирования втулки на жесткой оправке с зазором и упором в
торец (рис. 7.6) при точении наружной цилиндрической по¬
верхности диаметром (в миллиметрах) D = 65 019 . Заданные
размеры (в миллиметрах): donp= З0 0 03; <20ТВ= 30+0ДЗ; I = 50.165
Рис. 7.6. Схема для расчета погрешностей базирования втулки
на жесткой оправкеНаружная поверхность партии заготовок предварительно об¬
работана в размер D3 = 66 0 3.В данном случае при обработке наружного диаметра партии
втулок на настроенном станке погрешность базирования бу¬
дет определяться смещением оси заготовки относительно ли¬
нии центров станка, а также ее поворотом на некоторый угол
к линии центров. Величины смещения и поворота определя¬
ются зазором между оправкой и поверхностью базового от¬
верстия, а также отклонением от перпендикулярности торца
заготовки к оси отверстия, т.е. биением торца.Смещение оси заготовки относительно линии центров стан¬
ка приведет к отклонению от соосности обработанной поверхно¬
сти и базового отверстия, а торцовое биение — к отклонению от
цилиндричности обработанной поверхности (конусности).Погрешность базирования, обусловленную смещением за¬
готовки относительно лрнии центров станка, можно предста¬
вить в видеА = А0 + А0бсм см.з см.о ’гдеДсмз — смещение отверстия заготовки относительно оси
оправки; Д°мо — смещение оси цилиндрической поверхности
оправки относительно линии центров станка.При нормальной относительной точности допуск смеще¬
ния оси цилиндрической поверхности оправки относительно
оси центровых гнезд (радиальное биение) составит:166
А0 = 0,6*30 /2 = 9 мкм.СМ.О 7 'Смещение А°мз определяется суммой смещений оси заго¬
товки относительно оси оправки за счет зазора AD и за счет
отклонения от круглости оправки Т,опр.a = d0mTBX “ Ср = 30>13 - 29>97 =160 мкм;Гопр = 0,6 • 30 / 2 = 9 мкм.Тогда наибольшая погрешность базирования, обусловлен¬
ная указанными смещениями, составит:Дб см = 9 + 160 + 9 = 178 мкм.Видно, что даже без учета других составляющих погреш¬
ности требуемая точность обработки не будет достигнута, так
как допускаемое радиальное биение этой поверхности (откло¬
нение от соосности с отверстием) составляетTcD = 0,6 • 190 /2 = 57 мкмчто в 3 раза меньше погрешности базирования.Оценим величину полученной конусности обработанной
поверхности. При нормальной относительной точности бие¬
ние торца относительно оси отверстия составит:Tnd = 0,6 • 130 / 2 = 39 мкм
на диаметре 30 мм. Это торцовое биение, отнесенное к длине
детали I = 50 мм, определит конусность:. 0,039Ак = 50 = 55 мкм.30Следует заметить, что величина конусности не может пре¬
восходить величину зазора между втулкой и оправкой, т.е.
наибольшая конусность может достигать лишь значения, рав¬
ного величине зазора.7.7. ПРИМЕР РАСЧЕТА ПОГРЕШНОСТЕЙ
БАЗИРОВАНИЯ ЗАГОТОВКИ КОРПУСАТребуется определить погрешности базирования корпу¬
са, установленного в приспособлении на две опорные плас¬
тины и два пальца (цилиндрический и срезанный) при фре¬
зеровании углубления с размерами А, Б и С в направлении167
осей координат (рис. 7.7). Решение задачи необходимо вы¬
полнить в общем виде.Выберем три системы координат: x0y0z0, связанную со стан¬
ком; хгу^х, связанную с основными технологическими база¬
ми детали, и xyz, связанную со вспомогательными базами
приспособления.При базировании заготовки по плоскости и двум отвер¬
стиям на точность установки влияют: точность диаметраль¬
ных размеров базовых отверстий и пальцев; точность распо¬
ложения и геометрической формы базовых поверхностей; точ¬
ность установки приспособления на столе станка.Найдем смещения детали в положительных направлени¬
ях осей х0, у0 и zQ и ее повороты вокруг этих осей, обусловлен¬ное. 7.7. Схема для расчета погрешностей базирования корпуснойзаготовки:1 - обрабатываемая заготовка; 2 - основание приспособления; 3 - установочная шпонка;
4 - опорная пластина; 5 - цилиндрический палец; 6 - срезанный палец;7 - Т-образный паз стола168
ные точностными характеристиками базирующих поверхно¬
стей, т.е. найдем координаты вектора смещения 8 и вектора
относительных поворотов а.Координата вектора смещения 8Хо , характеризующая вме¬
сте с поворотами погрешность размера С, измеренного в на¬
правлении оси х0, определяется как сумма смещений в этом
направлении технологической базы заготовки (оси базового
отверстия) и измерительной базы данного размера. При этом
наибольшее смещение £д*0тах определяется суммой наиболь¬
ших зазоров между шпонкой приспособления и пазом стола
Smax, между цилиндрическим пальцем и базирующим отвер¬
стием Slmax и верхним предельным отклонением ADb расстояния
D от центра отверстия до измерительной базы размера С, т.е.— S + S, + А .ДЛОшах max Imax D вНаименьшее смещение определяется суммой минимальных
зазоров и нижнего предельного отклонения Д£>н размера D.Координата вектора смещения 8уо, характеризующая по¬
грешность размера В, выполняемого в направлении оси у0,
также определяется как сумма смещений в этом направле¬
нии технологической базы детали и измерительной базы дан¬
ного размера. Нетрудно установить, что аналогично предыду¬
щему соотношению8 — S + Д ,yomax Imax Lb7где ALb — верхнее отклонение размера L, характеризующее
смещение измерительной базы размера В относительно тех¬
нологической.Координату вектора смещения 82q также легко определить.
Эта величина будет характеризовать погрешность размера А,
выполняемого в направлении оси г0, и включать в себя сме¬
щение измерительной базы размера А, связанное с колебани¬
ем размера Н в пределах заданного допуска на этот размер.
Таким образом,^z0 max ~ ^Яв’где ДЯв — верхнее отклонение размера Н, связывающего тех¬
нологическую базу с измерительной базой размера А.Теперь определим углы поворота детали относительно осей
координат х0, у0 и 20, обусловленные погрешностями формы
и расположения базовых поверхностей.169
Поворот детали вокруг оси х0 происходит в том случае,
когда имеют место непараллельность опорных поверхностей
основания приспособления, различная высота опорных плас¬
тин, а также отклонение от плоскостности основания детали.Отклонение от параллельности опорных поверхностей ос¬
нования Дп на длине Lv определяющей расстояние между
опорными пластинами, предопределяет угол поворотаФ!= arctg (Дп/ Lj).Изменение высоты двух опорных пластин в пределах до¬
пуска Ти дает на длине Lx угол поворота(р2= arct g(7’n/L1),а отклонение от плоскостности основания детали Дд на длинедает уголФз= arctg (Дд/Lj).Если направления поворотов совпали (самый неблагопри¬
ятный случай), то результирующий угол поворота будет оп¬
ределяться суммойФ == Ф1 + Ф2 + Фз*Поворот детали вокруг оси у0 происходит тогда, когда ос¬
нование приспособления имеет непараллельность плоско¬
стей Дп в направлении х0, опорные пластины также имеют
отклонения До от параллельности оснований, а основание де¬
тали имеет отклонение от плоскостности Дд в этом направле¬
нии. При одинаковых направлениях поворотов результирую¬
щий угол поворота Ж, отнесенный к ширине детали Е, мож¬
но определить по соотношениюV = arctg (Дп+ До+ Д )/Е.Угол поворота детали 0 вокруг оси zQ имеет место в том
случае, когда существуют зазоры Sx между базовыми отвер¬
стиями и пальцами, зазоры S между направляющими шпон¬
ками приспособления и пазом стола станка, а также непарал¬
лельность Д плоскости xQyQ симметрии шпонок и линии, соеди¬
няющей оси установочных пальцев. Нетрудно установить, что
его наибольшее значение можно определить по зависимости0= arctg ((Slmax + Smax + A)/L1).170
После определения координат вектора смещения детали
в и составляющих Ф, V, 0 вектора а относительного пово-д.срота можно рассчитать погрешности базирования детали в
направлении любой координатной оси по формулам (7.24) —
(7.26):\хл = ('S’max + ^lmax + ^Db) + (^lmax += “(®max + ^lmax + ^£>в)® + (®1 шах + ^1в) “ ^ЯвФ>= (^max + ^lmax + ^Db)V “ (^1 max + ^1в)ф “ ^Яв*7.8, РАСЧЕТ ПОГРЕШНОСТЕЙ ЗАКРЕПЛЕНИЯ
ЗАГОТОВОК В ПРИСПОСОБЛЕНИЯХПогрешность закрепления заготовки Дз представляет со¬
бой разность наибольшей и наименьшей проекций смещения
измерительной базы на направление выполняемого размера
при приложении к заготовке силы закрепления. Если вели¬
чина указанного смещения постоянна для партии заготовок,
то погрешность закрепления равна нулю и поле допуска вы¬
полняемого размера не изменяется. Согласно определению,А = (г/ - у . ) cosa , (7.47)з v~max ^min' ’ 4 7где а — угол между направлением выполняемого размера и
направлением смещения измерительной базы.В соответствии с приведенным соотношением погрешность
закрепления для размеров А, В и С (рис. 7.8) не равна нулю,
так как а = 0. Для раз¬
мера D погрешность зак¬
репления равна нулю,
так как измерительная
база (правая боковая по¬
верхность) перемещает¬
ся при закреплении в сво¬
ей плоскости (ос = 90°).Таким образом, наи¬
большая погрешность
закрепления заготовки в
приспособлении достига¬
ется при направленииРис. 7.8. Схема для определения
погрешностей закрепления171
зажимного усилия, перпендикулярном технологической (ус¬
тановочной) базе. В этом случае погрешность закрепления за¬
висит от шероховатости опорных поверхностей заготовок и
наличия контактных деформаций поверхностей стыка «по¬
верхность заготовки — поверхность установочного элемента
приспособления». Эти деформации в отдельных случаях мо¬
гут достигать больших значений и в общем случае записыва¬
ются нелинейным законом видаY = CQ\ (7.48)где Сип — эмпирические коэффициент и показатель степе¬
ни, характеризующие вид контакта, материал заготовки,
шероховатость и состояние ее поверхностного слоя (обычно
п < 1); Q — сила, действующая на контактный элемент при¬
способления (опору).Контактные деформации поверхностей стыка сопровож¬
даются перемещением технологической базы заготовки отно¬
сительно положения установленного на станке инструмента
и поэтому вызывают появление погрешности обработки, обус¬
ловленной закреплением заготовки.Погрешность закрепления в основном возникает в связи с
изменением контактных перемещений в стыке заготовки с
установочными элементами. Деформациями жестких загото¬
вок и корпуса при расчетах приспособления пренебрегают.При обработке партии заготовок сила Q изменяется от Qmax
до Qmin, а коэффициент С — от Стах до Cmin. На рис. 7.9 пока¬
зан график с двумя предельными зависимостями у при Стах и
Cmin. Нетрудно видеть, что при Qmax и Qmin получим следующее
значение у:угу -у .= С Qn -С . Qn . . (7.49)и 1 v шах и min max ^ max min^ min v 'Эта величина характеризует поле рассеяния перемещений
заготовки в результате ее деформации при контакте с опора¬
ми приспособления. При распределении величин Q и С по
нормальному закону распределение величины уг также под¬
чиняется нормальному закону. На рис. 7.9 показано поле рас¬
сеяния yv а также поле рассеяния положения заготовки у2,
происходящее в результате упругих деформаций элементов
приспособления, через которые передается сила зажима. Ве¬
личину у2 можно определить по соотношению172
rminРис. 7.9. Схема к оценке рассеяния погрешностей закрепления(7.50)где J - жесткость системы элементов приспособления, через
которые передается сила зажима.Поскольку уг и у2 представляют собой поля рассеяния слу¬
чайных величин, то, принимая распределение в обоих случа¬
ях по нормальному закону, получим их сумму, которая опре¬
деляет погрешность закрепления заготовки в приспособлении,
т.е.Для весьма жесткого по конструкции приспособления при¬
нимаютИз приведенных зависимостей следует, что 8з = 0 при по¬
стоянной силе закрепления заготовок (Q = const), а также
при смещении заготовок перпендикулярно выдерживаемому
размеру (а = 90°). Величину 8з уменьшают, стабилизируя силу
закрепления (применение пневматических и гидравлических
зажимов вместо ручных), повышая жесткость стыка между
опорами приспособления и базовой поверхностью заготовки,
улучшая качество базовых поверхностей (снижая шерохова-8.(Q -Q )2-у1 cos а. (7.51)е « (С Qn -С Qn. ) cos а.y max^max ^mm^min / ^ ^(7.52)173
тость), а также увеличивая жесткость приспособления в на¬
правлении передачи силы закрепления.На погрешность закрепления наибольшее влияние оказы¬
вают следующие факторы: непостоянство сил закрепления,
неодинаковая по величине шероховатость и волнистость ба¬
зовых поверхностей заготовок, а также наличие стыков в на¬
правлении действующих сил закрепления.Для расчета погрешности закрепления заготовки в при¬
способлении в [1] приведены соответствующие формулы для
расчета контактных перемещений в стыках между заготов¬
кой и опорами приспособления при различных типах опор, а
также формулы для расчета погрешностей закрепления заго¬
товок на указанных типах опор из-за непостоянства силы зак¬
репления, неоднородности шероховатости и волнистости.
Приводится также методика расчета погрешностей закрепле¬
ния заготовок в центрах в зависимости от радиальной и осе¬
вой (к заготовке) составляющих силы резания и диаметра
центрового гнезда.7.9. РАСЧЕТ ПОГРЕШНОСТИ УСТАНОВКИ
ПРИСПОСОБЛЕНИЙ В ШПИНДЕЛЕ
И НА СТОЛЕ СТАНКАПогрешность установки приспособления на станке зави¬
сит от смещений или перекосов корпуса приспособления на
столе, планшайбе или шпинделе станка. Смещения и переко¬
сы возникают из-за зазоров в сопряжениях поверхностей стан¬
ка и приспособления. Для уменьшения этих зазоров следует
повышать точность посадочных мест приспособления, разно¬
сить на большие расстояния ориентирующие элементы (уста¬
новочные шпонки), подгонять посадочные места к станку.В каждом конкретном случае расчет погрешностей уста¬
новки приспособления на станке выполняется в зависимости
от схемы установки и заданной точности изготовления поса¬
дочных элементов.Так, например, при установке приспособления в виде план¬
шайбы на шпинделе станка по торцу и центрирующему пояс¬
ку (рис. 7.10) погрешность установки 8у в осевом направле¬
нии шпинделя равна торцовому биению А опорной поверхно¬
сти приспособления. Погрешность 8у в радиальном направле-174
нии определяется величи¬
ной S зазора в сопряжении
центрирующего пояска с
посадочным отверстием
приспособления. Угол по¬
ворота оси приспособления
относительно оси шпинде¬
ля определяется величи¬
ной Д торцового биения и
диаметром центрирующего
пояска, т.е. величиной
\j/ = arctg(A / D).При установке приспо¬
собления по наружной ко¬
нической поверхности
шпинделя (рис. 7.11), по¬
грешность в направлении
оси х0 составляет 0,03 —
0,06 мм. Угол поворота оси
приспособления Ж опреде¬
ляется погрешностью поло¬
вины угла конуса, прини¬
маемой 2 — 8'.В случае установки
приспособления, напри¬
мер, оправки, по коничес¬
кому отверстию шпинделя
(рис. 7.12) погрешность в
направлении оси х0 со-Рис. 7.10. Схема для определения
погрешности установки планшайбы
при базировании по цилиндрическому
пояску и торцуРис. 7.11. Схема для определения
погрешности установки планшайбы
при базировании по конической
поверхности шпинделяРис. 7.12. Схема для определения погрешности установки оправкив шпинделе175
ставляет 0,01 — 0,2 мм при конусе Морзе № 0 — № 3 и 0,2 —
0,5 мм при конусе Морзе от № 4 до № 6. Угол поворота V
принимается равным погрешности половины угла конуса а.При базировании приспособления на столе станка по
Т-образному пазу (рис. 7. 13) погрешность гу в направлении
оси у0 определяется величиной зазора S между шпонкой и
рабочей поверхностью Т-образного паза. Погрешность уста¬
новки относительно оси z0 определяется углом 0 поворота
вокруг этой оси, численно равным0 = arctg (ZS/ZJ, (7.53)где I — длина обрабатываемой заготовки.Рис. 7.13. Схема для определения погрешности базирования
приспособления на столе станка7.10. РАСЧЕТ ПОГРЕШНОСТИ ОБРАБОТКИ, СВЯЗАННОЙ
С ИЗНОСОМ ЭЛЕМЕНТОВ ПРИСПОСОБЛЕНИЯНа износ влияют размеры и конструкция установочных
элементов, материал и йасса обрабатываемой детали, состоя¬
ние ее базовых поверхностей. Наиболее интенсивно изнаши¬
ваются опоры с малыми поверхностями контакта, а наименее
интенсивно — опорные пластины, имеющие значительные пло¬
щади контакта с обрабатываемой деталью.Износ установочных элементов можно определить по фор¬
мулеи = и0КгК2К3К4, (7.54)176
где U0 — средний износ установочных элементов для чугун¬
ной заготовки при усилии закрепления W = 10 кН и базовом
числе установок N = 100 ООО; Kv К2, К3, К4 — коэффициен¬
ты, учитывающие влияние материала заготовки, оборудова¬
ния, условий обработки и числа установок заготовки, если
условия отличаются от принятых при определении UQ.Для расчета U рекомендуется принимать следующие зна¬
чения среднего износа UQ. Для постоянных опор со сферичес¬
кой головкой: из стали 20 (цементация, закалка) — 170 мкм;
из стали 40Х закаленной — 155 мкм; из стали У10А зака¬
ленной — 145 мкм.Для постоянных опор с плоской головкой из сталей 20,
40Х, У10А и твердого сплава ВК8 — 85; 75; 70; 14 мкм соот¬
ветственно, а для постоянных опор с насеченной головкой из
сталей 20, 40Х, У10А — 145; 135; 130 мкм соответственно.Для гладких опорных пластин из сталей 20, 40Х, У10А,
45; 40; 38; 25 мкм соответственно, а для твердосплавных
опорных пластин из твердого сплава ВК8 UQ = 12 мкм.Для призм, изготовленных из сталей 20, 40Х, У10А, 45 и
твердого сплава ВК8, значения UQ следует принимать 125;
115; 110; 65 и 18 мкм соответственно.Для срезанных установочных пальцев из тех же материа¬
лов — 100; 90; 85; 50 мкм, а для цилиндрических — 65; 55; 50;
25 мкм. Для цилиндрических оправок — 60; 50; 45; 25 мкм.Коэффициенты выбираются в соответствии с приведенны¬
ми ниже рекомендациями. Кг = 1 — для чугунных заготовок;
%! = 0,97 — для незакаленной стали; = 0,91 — для зака¬
ленной стали; К2 = 1,0 — для универсального оборудования;
К2 = 1,25 — для специального оборудования; К2 = 1,57 — для
автоматических линий.Для точения, фрезерования, сверления, зенкерования и
других условий обработки лезвийными инструментами: ста¬
ли с охлаждением К3 = 0,94; стали без охлаждения К3 = 1,0;
чугуна без охлаждения К3 = 1,12.Для шлифования: стали с охлаждением К3= 1,32; чугуна
без охлаждения К3 = 1,58.Коэффициент jКА, учитывающий N для числа установок
NxlO3: при N< 5 К4 = 2,8; при N< 10 К4 = 2,4; при N< 20 К4 =
= 1,8; при N<40 К4 = 1,3; при iV<50 — 100 К4 = 1; при
^<150 К= 0,9.— 4 7177
7.11. РАСЧЕТ ПОГРЕШНОСТИ ОБРАБОТКИ ОТ ПЕРЕКОСА
ИЛИ СМЕЩЕНИЯ ИНСТРУМЕНТАПогрешность от смещения инструмента Еп может быть оп¬
ределена по формулегде Дн— погрешность настройки инструмента по щупу, зави¬
сящая от точности механизма перемещения инструмента; Тщ —
допуск на изготовление щупа.В общем случае Дн зависит от погрешности регулирова¬
ния Др положения инструмента (по лимбу, эталону, жесткому
упору и т.п.) и погрешности измерения размера детали Дизм.Для поверхностей вращения с учетом того, что Дн и Др
относятся к радиусу, а Дизм — к диаметру, получимгде К = 1,14 — 1,731 Ки = 1 — коэффициенты, учитывающие
отклонения закона распределения Др и Дизм от нормального.Слагаемые погрешности Дн определяют по рекомендаци¬
ям, приведенным в [14; 15].При сверлении отверстий погрешность от смещения и пе¬
рекоса инструмента 8п можно определить по формулегде ль — расстояние от поверхности заготовки до кондуктор¬
ной втулки; L — длина кондукторной втулки; S — макси¬
мальный диаметральный зазор между кондукторной втулкой
и инструментом.При использовании сверлильных приспособлений с под¬
вижной кондукторной плитойгде 8п — погрешность перекоса инструмента от зазоров в кон¬
дукторных втулках; 8п — погрешность положения кондук¬
торной плиты относительно приспособления:8 = Д + Т ,п н ' гц>(7.55)(7.56)а для плоских поверхностей(7.57)£п = 0,5<S + Sm / L,(7.58)(7.59)178
^rTL + 0’25XSmax> (7.60)где TL — допуск на координаты расположения направляю¬
щих элементов кондукторной плиты (скалки, оси, пальцы и
т.д.); £Smax — сумма максимальных зазоров в сопряжениях
направляющих элементов кондукторной плиты и приспособ¬
ления (втулки-скалки, втулки-пальцы и т.д.).При обработке нескольких отверстий допуск на координа¬
ты расположения кондукторных втулок приближенно при¬
нимается равнымTLK = (0,2 - 0,5)TLD, (7.61)где TLD — допуск на координаты расположения обрабатывае¬
мых отверстий.179
8. КОНТРОЛЬНЫЕ ПРИСПОСОБЛЕНИЯ8.1. НАЗНАЧЕНИЕ И ТИПЫ КОНТРОЛЬНЫХ
ПРИСПОСОБЛЕНИЙКонтрольные приспособления служат для определения
точности деталей и узлов машин на промежуточных этапах
изготовления и при окончательной приемке. Они способству¬
ют повышению производительности труда контролеров, а так¬
же повышению качества и объективности контроля.Контроль и измерение обработанных деталей занимают
определяющее место в обеспечении качества изделий. Поэто¬
му совершенствование методов и средств измерения является
непременным условием повышения точности изготовления
деталей, их надежности и долговечности.В контрольно-измерительных приборах и приспособлени¬
ях используют прямое и косвенное, а также абсолютное и
относительное измерения. При прямом измерении искомое
значение находят непосредственно из процесса измерения
путем считывания результата со шкалы измерительного ин¬
струмента или устройства (например, измерение диаметра вала
микрометром). Косвенное измерение заключается в оценке
проверяемой величины не непосредственно, а по результатам
прямых измерений другой величины, находящейся с первой
в определенной зависимости. Примером является измерение
конусности цилиндрической детали, когда путем прямых из¬
мерений получают величины диаметров вала на длине L, а
конусность определяется соотношением К = (<2max - <2min)/L.Абсолютное измерение основано на прямых измерениях
(например, измерения штангенциркулем, микрометром). При
относительном измерении определяемую величину сравнива¬
ют с известным значением меры или эталона (например, кон¬
троль толщины детали на индикаторном приборе с помощью
набора концевых мер, по которым прибор настраивается на
нулевое показание индикатора).Все средства измерения, используемые в машиностроении,
разделяются на три основные группы: меры (концевые, угло¬
вые, штриховые); измерительные инструменты и приборы;
контрольные приспособления и калибры.180
Погрешность измерения при контроле должна быть по
возможности малой. Но чрезмерное повышение точности из¬
мерения удорожает и усложняет приспособление.Погрешность измерения допускают в пределах 8 — 30 %
от поля допуска (для ответственных изделий авиации — 8 %,
менее ответственных — 12 — 20 %, неответственных — 30 %).
Общая погрешность измерений определяется суммой погреш¬
ности, свойственной самой схеме, погрешности установки, по¬
грешности настройки приспособления по эталону, погрешно¬
стей от износа деталей приспособления и колебаний темпера¬
туры.Контрольные приспособления бывают:• стационарные (для мелких деталей);• переносные (для крупных деталей);• одномерные (за одну установку проверяется один пара¬
метр);• многомерные (за одну установку проверяется несколько
параметров);• пассивные, которые используют для контроля после об¬
работки детали;• активные, которые установлены на станке и контроли¬
руют деталь в процессе обработки, давая сигнал на органы
станка или рабочему на прекращение обработки или измене¬
ние условий ее проведения. Они часто являются составной
частью станка. Наиболее широкое использование приборы
активного контроля получили на станках, выполняющих
финишные операции.8.2. ОСНОВНЫЕ ЭЛЕМЕНТЫ КОНТРОЛЬНЫХ
ПРИСПОСОБЛЕНИЙЛюбое контрольное приспособление содержит установоч¬
ные, зажимные, измерительные, вспомогательные элементы
и корпус. На установочные элементы (опоры) ставят прове¬
ряемую деталь или узел своими измерительными базами в
процессе контроля.При установке на плоскости используют постоянные опо¬
ры со сферическими и плоскими головками, а также опорные
пластины. Они такие же, как и в станочных приспособлени¬
ях. Их конструкции стандартизованы. Используют также181
специальные опоры в зависимости от формы опорной повер¬
хности.Для установки на необработанные поверхности использу¬
ют опоры со сферическими головками, а на обработанные —
опоры с гладкой и достаточно протяженной поверхностью.
Твердость материала опор HRC 55 — 60.Для установки на внешние цилиндрические поверхности
используют призмы. Чтобы устранить быстрое изнашивание,
используют призмы с роликами или переставными валика¬
ми. Иногда на рабочие поверхности призм напаивают пласти¬
ны из твердого сплава.Пользуясь призмой, можно проверить правильность ци¬
линдрической поверхности, а также эллипсность поперечно¬
го сечения. Конусность обнаруживается по разности показа¬
ний индикатора при измерении в двух различных сечениях
детали.Для проверки радиального и осевого биения втулок ис¬
пользуют цилиндрические оправки. При этом имеет место
погрешность из-за радиального зазора. Для уменьшения по¬
грешности используют конические оправки с конусностью
1:1000 или 1:10000, или разжимные оправки, или оправки с
разжимными шариками, а для точного центрирования — втул¬
ки с гидропластмассой, гофрированные втулки и патроны
мембранного типа.Наружная поверхность контрольных оправок имеет ше¬
роховатость Ra = 0,4 — 0,1 мкм, погрешность формы не превы¬
шает 5 мкм, HRC 55 — 60. Оправки с диаметром более 60 мм
выполняют полыми. При проверке поверхностей деталей на
биение оправки устанавливают в центрах или в призмах.Следует иметь в виду, что при выборе схем контрольного
приспособления надо совмещать установочную и одну из из¬
мерительных баз детали, придавая им строго фиксированное
положение. Другая измерительная база должна при этом кон¬
тактировать с измерительным элементом приспособления. При
несоблюдении этого требования возникает погрешность бази¬
рования еб и погрешность положения измерительного элемен¬
та в.Для повышения производительности контроля использу¬
ют многомерные приспособления, которые позволяют одно¬
временно измерять несколько размеров за одну установку.182
Это возможно, если одна поверхность детали является изме¬
рительной и установочной базой для всех проверяемых раз¬
меров. Иногда эти условия обеспечивают пересчетом разме¬
ров и допусков детали.Зажимные устройства в контрольном приспособлении пре¬
дупреждают смещение установленной для проверки детали
или узла относительно измерительного устройства и обеспе¬
чивают плотный контакт установочных баз детали с опорны¬
ми или установочными элементами. Работа зажимного уст¬
ройства в контрольных приспособлениях существенно отли¬
чается от работы такого устройства в станочном приспособле¬
нии. Здесь силы закрепления должны быть небольшими, а
их величина — стабильной. Необходимость в зажимных уст¬
ройствах отпадает, если деталь занимает устойчивое положе¬
ние на опорах, а силы измерительного устройства малы и не
нарушают этой устойчивости. Для повышения производитель¬
ности зажимные устройства выполняют быстродействующи¬
ми и удобными для обслуживания.В контрольных приспособлениях используют ручные за¬
жимные устройства (рычажные, пружинные, винтовые, экс¬
центриковые), а также пневматические зажимы и комбини¬
рованные зажимные устройства. Влияние зажимного устрой¬
ства на показания измерительного прибора не должно превы¬
шать 5 % величины контролируемого параметра. Сила зак¬
репления должна быть постоянной, тогда вызванную этой си¬
лой погрешность £з можно учесть при настройке контрольно¬
го приспособления.Погрешность установки детали в контрольном приспособ¬
лении определяется так же, как и в станочном приспособле¬
нии:где 8пр — регламентированная погрешность изготовления при¬
способления с учетом износа поверхностей опор и измери¬
тельного устройства.Измерительные устройства контрольных приспособлений
делятся на предельные (бесшкальные) и отсчетные (шкаль¬
ные).При использовании предельных измерительных устройств
не получают числовые значения контролируемого размера.(8.1)183
Детали делят на три категории: годные; брак по выходу за
нижнюю границу поля допуска; брак по выходу за верхнюю
границу поля допуска. Иногда, используя предельные изме¬
рительные устройства, детали делят на несколько групп —
для селективной сборки.В качестве простейших измерительных устройств исполь¬
зуют встроенные в контрольные приспособления жестко зак¬
репленные (8 — 9-й квалитет) и выдвижные (11-й квалитет и
грубее) предельные элементы (скобы, пробки, щупы).Широкое распространение получили электроконтактные
датчики. Их используют как предельные измерительные уст¬
ройства на контрольно-сортировочных автоматах. Точность
измерения 1 мкм (1-й класс), 3 мкм (2-й класс). Предел изме¬
рения 1 мм, сила в контакте с деталью 1 — 2 Н. Датчики
настраивают и периодически проверяют по эталону.В качестве отсчетных измерителей обычно используют
индикаторы с рычажной или зубчатой передачей. Индикато¬
ры часового типа имеют цену деления 0,01 мм и пределы
измерения 0 — 5 или 0 — 10 мм. Малогабаритные имеют
пределы измерения 0 — 2 или 0 — 3 мм. Сила прижатия
измерительного наконечника 0,8 — 2 Н. По точности инди¬
каторы бывают нулевого, первого и второго классов с погреш¬
ностями показаний 0,01, 0,015 и 0,02 мм за один оборот. Для
более точных измерений используют индикаторы с ценой де¬
ления 0,002 мм и о,осд. ММ.Используются также датчики емкостные, индуктивные,
фотоэлектрические, пьезоэлектрические и другие. Наиболее
широко их применяют в приборах активного контроля. Они
основаны на трансформации перемещения измерительного
щупа в электрический сигнал.Получили также распространение пневматические мик¬
рометры. Они обеспечивают точность 0,5 — 0,2 мкм. Бывают
двух типов — с манометрами и воздушными расходомерами
(ротаметрами).Вспомогательные устройства контрольных приспособлений
имеют различное назначение. В контрольных приспособле¬
ниях для проверки радиального или осевого биения исполь¬
зуют поворотные устройства, а в контрольных приспособле¬
ниях для проверки прямолинейности или параллельности —
ползуны для перемещения измерительных средств. С целью184
контроля цилиндричности или соосности валов применяют
механизмы для их вращения. Для установки и снятия дета¬
лей используют подъемные устройства, выталкиватели и т.д.
Многие из этих вспомогательных устройств аналогичны вспо¬
могательным устройствам в станочных приспособлениях.
Специфическими являются передаточные устройства между
контактирующим элементом и отсчетным измерителем (ин¬
дикатором). Это стержни, рычаги, которые работают в паре с
индикатором, вынесенным в удобное место.Для изменения направления линейного перемещения и
передаточного отношения служат рычажные передачи. Их
монтируют на цилиндрических, конических и шаровых цап¬
фах. Конические и шаровые цапфы позволяют регулировать
зазоры, возникающие в процессе изнашивания. Иногда Г-об-
разные или угловые рычаги прикрепляют на плоских сталь¬
ных пружинах, которые имеют толщину 0,2 — 0,3 мм. Эта
система рычагов на пружинах не требует регулировки, так
как ее изнашивания не происходит.Если измерительное устройство приспособления мешает
установке и снятию контролируемых изделий, то его снабжа¬
ют рычажком для отвода или выполняют в виде отводимого
узла.Корпус контрольного приспособления является базовой
деталью. Это чаще всего массивная деталь в виде плиты, на
которой располагаются все детали и устройства приспособле¬
ния. Это отливки из серого чугуна марок СЧ15, СЧ25, СЧЗО,
которые отличаются повышенной стойкостью к короблению.
Отливки подвергают старению, с тем чтобы исключить со
временем появление деформаций от остаточных напряжений.8.3. ТИПОВЫЕ МЕТОДЫ И СРЕДСТВА КОНТРОЛЯ
ЛИНЕЙНЫХ РАЗМЕРОВТребования точности к изготавливаемым деталям контро¬
лируются как на промежуточных (операционных) этапах об¬
работки, так и после окончательной обработки детали. Невы¬
полнение операционных размеров может привести к браку,
так как на последующей операции не всегда удается достиг¬
нуть требуемой точности размеров и геометрической формы
обрабатываемых поверхностей.185
Для контроля диаметров валов и отверстий используют
гладкие калибры-скобы и калибры-пробки. Если в процессе
контроля необходимо определить действительные размеры
валов и отверстий, то используют универсальные измеритель¬
ные инструменты и приборы: штангенциркули, микрометры,
рычажные микрометры, рычажные скобы, микрометричес¬
кие и рычажные нутромеры и др. Для измерения больших
диаметров валов и длин деталей применяют линейные скобы
с микрометрическими головками [16]. Такая скоба (рис. 8.1)
имеет микрометрическую головку 2, которая перемещается
по трубе 3 на кронштейне 2. Индикатор 5 закреплен во вто¬
ром кронштейне 4. Кронштейны 2 и 4 фиксируются в требуе¬
мых положениях на трубе 3 с помощью винтовых зажимов 6.
Настройка линейной скобы и процесс измерения не отлича¬
ются от обычных скоб. Такие скобы чаще всего используют
для измерения диаметров наружных поверхностей дисков,
фланцев, крышек и т.п.6Рис. 8.1. Конструктивная схема скобы для контроля больших линейных
размеров и диаметровДля изменения больших диаметров валов широко исполь¬
зуются приспособления, основанные на косвенных методах
измерений. При измерении больших диаметров в серийном
производстве это специальные ленты, имеющие определен¬
ную длину. Опоясывая такой лентой измеряемую деталь, про¬
веряют зазор а между торцами ленты с помощью щупа. При
этом диаметр определяют по формуле
При таком методе измерения требуется хорошее натяже¬
ние ленты до ее полного прилегания к поверхности вала, что
обеспечивают специальные натяжные устройства.Большой диаметр
вала можно контроли¬
ровать в соответствии
со схемой, представ¬
ленной на рис. 8.2.Здесь для контроля
диаметра детали 1 ис¬
пользуется штанген¬
циркуль 2. Определя¬
емый диаметр D рас¬
считывается по фор¬
мулеРис. 8.2. Схема косвенного метода измере¬
ния большого наружного диаметраD = (l2/4h) + h,(8.3)где I — длина хорды (отсчет по шкале штангенциркуля); h —
высота сегмента (вылет губок штангенциркуля).Измерение диаметра вала можно проводить также с помо¬
щью седлообразного приспособления с клиновыми вставками
(рис. 8.3). В данном случае рассчитывают отклонение
AD диаметра детали от номи¬
нального:ЫЗ- 2sin<a/2> Aft,1 - sin(oc / 2)(8.4)где а — угол между измеритель¬
ными плоскостями клиновых
вставок; Ah — величина откло¬
нения, отсчитанная по шкале из¬
мерительного прибора.Седлообразные приспособле¬
ния перед измерением настраи¬
вают на нулевое деление по ка¬
либрам или шаблонам, радиусы
которых равны номинальному
для измеряемой детали.К косвенным методам изме¬
рения больших диаметров отно¬Рис. 8.3. Схема косвенного
измерения большого диаметра
вала седлообразным прибором с
клиновыми вставками187
Рис. 8.4. Схема косвенного определения
диаметров обрабатываемой на карусельном
станке деталисятся измерения де¬
тали на станке от до¬
полнительных изме¬
рительных баз. На
рис. 8.4 показана
схема определения
размеров детали 4 от
дополнительных баз
токарно-карусельно-
го станка. На колон¬
не 1 станка закрепля¬
ется закаленная пла¬
стина 2. РасстояниеА от оси вращения планшайбы станка до пластины 2 строго
определено, что обеспечивается с помощью контрольной оп¬
равки 3 диаметром d, от которой определяется размер а. Тог¬
да А = а + 0,5d. Как видно из рисунка,D = 2(A-Z), (8.5)D, =2 l^+d. (8.6)В приспособлениях для измерения диаметров малых от¬
верстий используют аттестованные проволочки диаметром от
0,5 до 3 мм, пневматические измерительные приборы (для
отверстий диаметром более 2 мм), микроскопы-нутромеры (для
отверстий диаметром 1,6 —16 мм) и нутромеры с ко¬
нусной иглой.Схема измерения диа¬
метра отверстия нутроме¬
ром с конусной иглой при¬
ведена на рис. 8.5. В конт¬
ролируемое отверстие’ дета¬
ли 1 вставляется конусная
игла 2, связанная с отчет¬
ным устройством 3. Переме¬
щение иглы при различных
величинах диаметра отвер¬
стия вызовет соответствую¬
щее изменение показаний
отсчетного устройства 3. Не¬Рис. 8.5. Схема измерения малого
отверстия конусной иглой188
достатком является то, что результат измерения может изме¬
няться за счет фасок или заусенцев в отверстии.В контрольных приспособлениях для контроля линейных
размеров могут применяться пневматические измерительные
устройства. Их используют для контроля наружных и внут¬
ренних цилиндрических поверхностей, конусов, размеров по
высоте деталей, а также для контроля отклонений формы и
расположения поверхностей. Различают устройства низкого
давления (0,01 МПа) и высокого давления (0,1 МПа). Прин¬
цип действия пневматических устройств основан на измене¬
нии давления воздуха (манометрические) или изменении рас¬
хода сжатого воздуха (расходомерные). В этих устройствах
шкалы проградуированы в микрометрах, что значительно уп¬
рощает измерения.Пневматический прибор с водяным манометром (рис. 8.6, а)
устроен следующим образом. Сжатый воздух через кран 3
поступает в трубку 4, опущенную в баллон 1 с водой. Этот
баллон сообщается со стеклянной трубкой 2. Верхняя часть
трубки 4 через сопло 5 соединена с рабочей камерой 6, из
которой воздух через шланг 7 подводится к выходному соплу
измерительной пробки 10, закрепленной на стойке 8. Баллон 1
сообщается с атмосферой, поэтому в трубке 4 устанавливает¬
ся постоянное давление, равное высоте водяного столба Н.
Воздух с этим постоянным рабочим давлением будет выхо¬
дить из сопла измерительной пробки 10. В зависимости от
диаметра измеряемого отверстия в детали 9 будет изменяться
величина зазора А и, следовательно, будет изменяться давле¬
ние в камере 6. Изменение давления вызовет изменение ве-Рис. 8.6. Схемы пневматических измерительных приборов
с водяным манометром (а) и расходомером (б)189
личины h разности между уровнями воды в баллоне 1 ив
стеклянной трубке 2. Шкала 11 проградуирована с необходи¬
мой ценой деления (0,5 — 5 мкм), что позволяет непосред¬
ственно отсчитывать отклонения размера детали.Схема расходомерного пневматического прибора показана
на рисунке 8.6, б. Сжатый воздух от сети через систему филь¬
тров и стабилизатор давления попадает в прозрачную трубку13 с коническим отверстием, в котором находится поплавок
12. Воздух увлекает поплавок вверх до тех пор, пока сила
тяжести поплавка не будет уравновешена напором, уменьша¬
ющимся по мере расширения трубки. При введении пробки14 в контролируемое отверстие детали 15 поплавок 12 будет
изменять свое положение по высоте трубки. Шкала 16 позво¬
ляет оценить отклонение диам;етра отверстия относительно
эталона.Описанные пневматические измерительные приборы ши¬
роко используются в конструкциях многомерных контрольных
приспособлений, а также в устройствах активного контроля.
На рис. 8.7 показаны различные схемы использования пнев-Рис. 8.7. Конструктивные схемы пневмоизмерительных устройств дляконтроля:а - диаметра отверстий; б - диаметра стержней; в - высоты детали; г - толщины
детали; д - перпендикулярности торца; е - глубины выточки; ж - перпендикулярности
торца отверстий; з - эксцентричности; и - конусности190
моизмерительных устройств в контрольных приспособлени¬
ях для контроля различных параметров контролируемой де¬
тали 1.8.4. МЕТОДЫ И СРЕДСТВА КОНТРОЛЯ И ИЗМЕРЕНИЯ
УГЛОВ И КОНУСОВДля контроля угловых размеров деталей используют срав¬
нение контролируемых углов с угловыми мерами, измери¬
тельными угольниками или с угловыми шаблонами. О годно¬
сти детали судят по просвету между поверхностью детали и
измерительными поверхностями средства измерения. Однако
в некоторых случаях определение годности детали является
недостаточным и необходимо знать действительный угловой
размер детали. В таких случаях требуется непосредственное
измерение угловых размеров с помощью механических или
оптических угломерных приборов.В контрольных приспособлениях для измерения углов и
конусов чаще всего используются косвенные методы, к кото¬
рым относятся тригонометрические методы. Среди них наи¬
большее распространение получили измерения с помощью
синусной линейки. На рис. 8.8 показана схема измерения уг¬
лов синусной линейкой.Синусную линейку3 устанавливают под
углом 2а, равным из¬
меряемому углу на¬
ружного конуса. Угол
2а получают подведе¬
нием под один из ро¬
ликов линейки блока 4
концевых мер длины.Затем на синусную ли¬
нейку устанавливают
(базируют и закрепля¬
ют) измеряемую де¬
таль 1. Измерения вы¬
полняют индикатором2 в двух точках на рас¬
стоянии I. Разность по¬1 2Рис. 8.8. Схема измерения угла конической
поверхности детали с помощью синусной
линейки191
казаний индикатора, отнесенная к расстоянию I, дает откло¬
нение угла конуса от номинального 2 а.Зависимость между углом 2а установки линейки, рассто¬
янием L между осями роликов и размером h блока концевых
мер определяется формулой /i = Lsin2a, откуда действитель¬
ное значение конуса будетгде h — размер блока концевых мер, при котором измери¬
тельная головка покажет строго одинаковые показания в двух
точках на расстоянии LАналогично измеряют углы внутреннего конуса, но при
двух положениях детали на синусной линейке. Измеряют при
этом действительные значения углов на двух диаметрально
противоположных образующих. Для этого деталь устанавли¬
вают в двух положениях при наклоне синусной линейки в
одну, а затем в другую сторону.Синусные линейки используют для точных измерений
конусов прецизионных деталей и калибров.Другими примерами косвенных измерений конусов явля¬
ются измерения на универсальном микроскопе (с помощью
аттестованных шариков или колец). На рис. 8.9 приведены
схемы измерений угла конуса 2 с помощью колец 1 и 3 и угла
конусного отверстия 4 с помощью шариков 5 и б. Значения
измеряемых углов определяются по формулам:• для наружного конусаРис. 8.9. Схемы измерения углов конусов с помощью аттестованных колеци шариковsin 2ад = \ /Ь,(8.7)(8.8)а192
для внутреннего конусаD-dsm а = . (q о\2(H-h)-(D-d)Для контроля диаметров конических деталей через конт¬
роль базорасстояния используют калибры-пробки и калибры-
втулки. На калибрах-пробках у большего диаметра нанесены
две риски, расстояние между которыми равно допускаемому
изменению базорасстояния контролируемой детали. На ка¬
либре-втулке выполнен уступ, также равный допускаемому
изменению базорасстояния контролируемого конуса.8.5. МЕТОДЫ, СРЕДСТВА КОНТРОЛЯ И ИЗМЕРЕНИЯ
ОТКЛОНЕНИЙ ФОРМЫ И РАСПОЛОЖЕНИЯ
ПОВЕРХНОСТЕЙКонтроль формы поверхности затруднителен, поэтому его
часто заменяют проверкой реального профиля в сечении плос¬
костью, ориентированной в заданном направлении. Отклоне¬
ния от прямолинейности и плоскостности измеряются с по¬
мощью поверочных линеек различных типов (рис. 8.10, а, б).
Чаще всего используются лекальные линейки 1, которые на¬
кладывают на измеряемую поверхность детали 2 в требуемом
направлении и определяют величину просвета, применяя для
сравнения образец просвета. Образцы просвета получают, ук¬
ладывая лекальную линейку 4 на две концевые меры 3, а
между лекальной линейкой и концевыми мерами 5 устанав¬
ливается образцовый (эталонный) просвет. Правильная оцен¬
ка видимого просвета требует навыка, и погрешности измерения
при достаточно хорошем навыке составляют 1 — 3 мкм.Рис. 8.10. Схема измерения отклонений поверхностей от прямолинейностии плоскостности193
Контроль плоскостности выполняют также на поверочных
плитах на краску. Часто определяют отклонение от плоско¬
стности следующим образом. Измеряемую деталь укладыва¬
ют на контрольную плиту и выверяют с помощью прокладок
так, чтобы расстояния от трех разных точек проверяемой по¬
верхности до поверхности плиты были одинаковыми. Затем
контроль осуществляют с использованием индикатора.Схемы основных способов измерения отклонений формы
цилиндрических деталей в поперечном сечении показаны на
рис. 8.11. Проверку отклонений от круглости выполняют на
кругломерах (рис. 8.11, а). Отклонение детали 2 от правиль¬
ной цилиндрической формы вызывает радиальные перемеще¬
ния наконечника измерительного устройства 3 при враще¬
нии поворотного столика 1. Перемещение наконечника изме¬
рительного устройства 3 с помощью электронной схемы за¬
писывается в виде круглограммы 5 на бумажном диске (рис.8.11, б). Отклонения от круглости А определяют как наиболь¬
шую разность расстояний между прилегающей окружностью4 и действительным профилем детали 5.Овальность гладкой цилиндрической или конической де¬
тали определяют измерением диаметров в двух взаимно пер-а бз45Рис. 8.11. Схемы контроля формы цилиндрических деталей194
пендикулярных направлениях или отклонений диаметров в
этих направлениях.Более высокую точность измерения обеспечивают мето¬
ды, при которых деталь в процессе измерения совершает пол¬
ный оборот, а отклонения диаметров определяют измеритель¬
ной головкой. Для этих измерений наиболее широко исполь¬
зуются двухконтактные приборы (рис. 8.11, в) или измери¬
тельные устройства с центрами и индикатором 7 на стойке
(рис. 8.11, г). При измерении двухконтактным прибором
овальность детали 6 равна полуразности показаний прибора,
а при измерении в центрах — разности показаний.В продольном сечении цилиндрических деталей измеря¬
ют конусообразность, бочкообразность, седлообразность и изог¬
нутость. Для определения конусообразности диаметры дета¬
ли измеряют у ее торцов, для определения бочкообразности и
седлообразности — у торцов и в середине. Значения этих по¬
грешностей определяются как полуразность наибольшего и
наименьшего измеряемых диаметров детали.Изогнутость вала определяется при его вращении на двух
опорах. При этом наконечник измерительной головки уста¬
навливают в середине длины вала.Схемы измерения отклонений от параллельности приве¬
дены на рис. 8.12. При выполнении измерений по схеме а
проверяемую деталь 2 устанавливают базовой поверхностью
на трех мерных прокладках или на поверочную плиту 3, а
измерительную головку 1 перемещают по плите, определяя
наибольшую разность показаний на длине L. По этой разно¬
сти судят о непараллельное™ плоскостей.При измерении по схеме б в отверстие проверяемой дета¬
ли 5 вставляют плотно (без зазора) контрольный валик 4. По
разности показаний измерительной головки 6 на длине L судято действительном значении отклонения от параллельностигде Ди — разность измеряемых высот.Отклонение от параллельности осей отверстий детали 9
можно определить с помощью двух контрольных оправок 8 и11 (схема в). На заданной длине L с помощью концевых мер
длины 7 и 10 (или измерительных инструментов) измеряют 1Х195
Рис. 8.12. Схемы измерения отклонений поверхностей от параллельности:
а - измерение отклонений от параллельности плоскостей; б - измерение отклонений от
параллельности оси отверстия плоскости; в - измерение отклонений от параллельностиосей двух отверстийи ^или 12 и 12. По разности размеров устанавливают отклоне¬
ние от параллельности осей.Схемы измерения отклонений от перпендикулярности при¬
водятся на рис. 8.13. Проверяемую деталь 1 устанавливают
на контрольной плите. К измеряемой поверхности 2 подводят
угольник 3 и между деталью и вертикальной плоскостью
угольника помещают два блока концевых мер длины 4 и 5,
расположенных на расстоянии /. По разности размеров бло¬
ков концевых мер с учетом расстояний I судят об отклонении
от перпендикулярности (рис. 8.13, а).* Иногда используют простейшие приспособления. На ри¬
сунке 8.13, б используется индикатор S, закрепленный на
стойке 9. Индикатор устанавливают на ноль по эталонному
угольнику с помощью регулировочного стержня 7. Отклоне-196
а б вРис. 8.13. Схемы измерения отклонений поверхности
от перпендикулярностиние плоскости 5 от перпендикуляра к основанию будет фик¬
сироваться индикатором с подвижным наконечником 6.Для измерения отклонений от перпендикулярности оси
отверстия к верхней плоскости детали 12 (рис. 8.13, в) ис¬
пользуют приспособление Л, которое центрируется в отвер¬
стии детали. Поворачивая приспособление на 360°, по инди¬
катору 10 определяют отклонение от перпендикулярности оси
отверстия к поверхности детали.Радиальное и торцовое биение цилиндрических поверхно¬
стей проверяют на призмах, в центрах или с помощью специ¬
альных контрольных приспособлений. На рис. 8.14, а приве¬
дена схема измерения торцового биения индикатором 4 дета¬
ли 3, которая установлена на призме 2 и прижата к непод¬
вижному упору 1. Схема на рисунке 8.14, б отличается тем,
что торцовое биение детали 6, также расположенной на при-аi4, 5 6.А—2Д-7 8 9 Ю 11 I12-®Рис. 8.14. Схемы контроля торцового и радиального биения поверхностей197
зме 5, измеряется индикатором 8 при расположении упора 7
на периферии проверяемой торцовой поверхности. Величина
биения А для первой схемы определяется как разность между
наибольшим и наименьшим отсчетами индикатора за один
оборот детали, а для второй схемы — как половина разности
показаний индикатора.Радиальное биение проверяют при расположении детали
на призме 10 (рис. 8.14, в), если нет центровых гнезд или
когда на чертеже детали указано допускаемое радиальное
биение цилиндрической поверхности 11 относительно базо¬
вой поверхности 9. Величина биения равна разности наиболь¬
шего и наименьшего показаний индикатора 12.Для проверки биения втулок, фланцев, дисков и других
деталей, имеющих центральное отверстие, их насаживают на
оправки, а затем устанавливают в центрах.Измерение отклонений от соосности цилиндрических повер¬
хностей ступенчатой детали относительно базовой поверхности
проводится аналогично схеме, приведенной на рис. 8.14, в.
Измерение отклонений от соосности поверхностей многосту¬
пенчатых валов целесообразно проводить при их установке в
центрах. Величину отклонения от соосности определяют за
один полный оборот вала как половину разности показаний
индикатора.Измерение отклонений
от симметричности двух
лысок А и В относительно
оси детали проводится в со¬
ответствии со схемой, пока¬
занной на рис. 8.15. Изме¬
ряемую деталь 1 устанавли¬
вают на призму (или в цент¬
рах) и с помощью индика¬
тора 2 снимают показания,
определяющие размеры а и
Ъ расположения лысок отно¬
сительно оси детали. Откло¬
нение от симметричности
равно разности показаний
индикатора.симметричностиРис. 8.15. Схема измерения
отклонения поверхности от198
Измерение расстояний I
между осями отверстий в дета¬
ли 1 проводится с помощью кон¬
трольных пробок или клиньев
2 (рис. 8.16). Расстояние I опре¬
деляют по формулам1 = 1,+
i = k-dj + d2 й
2 ’
di ~ь d2(8.11)Рис. 8.16. Схема измерения
расстояния между осями
отверстий в детали8.6. МЕТОДЫ, СРЕДСТВА КОНТРОЛЯ И ИЗМЕРЕНИЯ
ФАСОННЫХ ПОВЕРХНОСТЕЙ И ПРОФИЛЕЙМетоды измерения и контроля фасонных поверхностей раз¬
деляют на универсально-координатные и методы сравнения с
образцом.Универсально-координатный метод измерения характе¬
ризуется численной оценкой расположения точек фасонной
поверхности относительно заданных баз и относительно друг
друга. По результатам измерений судят о соответствии изме¬
ренных координат точек реальной поверхности заданным ко¬
ординатам и, соответственно, о годности детали. Пример из¬
мерения фасонной поверхности в прямоугольных координа¬
тах показан на рис. 8.17.Данный метод измерения относится к контактным. Здесь
при неправильном выборе формы измерительного наконеч¬
ника могут возникнуть значительные погрешности. Более
точные результаты измерений дают бесконтактные методы,
основанные на использовании оптических устройств.Метод сравнения с образцом характеризуется тем, что
расположение точки профиля или поверхности контролируе¬
мой детали сравнивают с аналогичными точками образца (эта¬
лона, шаблона и т.д.) На этом методе основан контроль про-199
Рис. 8.17. Схема измерения фасонной поверхности детали:1 — контрольный установ; 2 — базовый установ; 3 — мерная линейка;4 — подвижной установфильными калибрами или шаблонами, которые бывают на¬
кладными и прикладными. Примером таких шаблонов явля¬
ются резьбомеры для контроля шага резьбы.Особые трудности возникают при контроле параметров
периодических профилей, например, параметров периодичес¬
ких канавок, выполненных на торцовых поверхностях дис¬
ков. С такими деталями приходится иметь дело при изготов¬
лении планетарных шариковых и роликовых передач [17].
Для их контроля используются специальные контрольные
приспособления (рис. 8.18). С помощью такого приспособле-1 2 3 4 5 6 7 8 9 Ю 11 12Рис. 8.18. Схема приспособления для контроля деталей зацепления
планетарных шариковых и роликовых передач200
ния могут быть измерены радиус, на котором располагается
контролируемый элемент (отверстие, канавка, прорезь), и угол
между этими элементами.Приспособление содержит плиту 15, на которой винтами
13 закреплена цилиндрическая стойка 16. В стойке выполне¬
на V-образная кольцевая канавка для шариков 14, образую¬
щих подшипник. В центральном отверстии стойки установ¬
лена цапфа лимба 1, который может свободно вращаться вок¬
руг своей оси, опираясь на шарики 14. Круговой лимб имеет
360 делений. На лимбе винтами 5 закреплено основание 2,
предназначенное для базирования контролируемой детали.
Закрепление детали осуществляется с помощью быстросмен¬
ной шайбы 3 и гайки 4. На стойке закреплен лимб с ценой
деления 0,05 градуса.На вертикальной плоской стойке 12, установленной в про¬
дольном пазу плиты 15у закреплен кронштейн 10. В направ¬
ляющих отверстиях кронштейна перемещается ползун 8. Во
втором кронштейне закреплен индикатор. В отверстии пол¬
зуна установлен измерительный шток 9 с головкой 6, кото¬
рая соприкасается с контролируемой поверхностью. При не¬
обходимости головка может быть заменена калибром с про¬
филем, соответствующим измеряемому.Калибр с измерительным штоком могут совершать ради¬
альные, по отношению к детали, перемещения, величина ко¬
торых определяется по показаниям индикатора. Непрерыв¬
ный контакт калибра с измеряемой поверхностью поддержи¬
вается пружиной 11. Положение измерительного штока по
высоте регулируется винтом 7. При необходимости индика¬
тор может устанавливаться в дополнительном кронштейне, а
измерительный шток при этом освобождается для свободного
перемещения в вертикальном направлении. В зависимости
от габаритов контролируемых деталей стойка 12 может сме¬
щаться вдоль паза.При измерении периодических канавок контролируемую
деталь устанавливают на основание 2 и закрепляют. Калибр
вводят в канавку, и положение измерительного штока фик¬
сируют винтом 7. Определяют положение наиболее удален¬
ной от центра точки периодической поверхности, поворачи¬
вая лимб. Шкала индикатора устанавливается на ноль, и
фиксируется угловое положение лимба, которое является на¬201
чалом отсчета полярного угла. Медленно поворачивая деталь
с лимбом, следят за показаниями индикатора, которые через
определенный угол поворота снимаются и заносятся в табли¬
цу измерений. Разность между измеренными величинами
радиуса и расчетными (номинальными) дает действительные
отклонения периодической поверхности от требуемой.При измерении шага периодической канавки в любом ее
сечении осевое положение ползуна 8 фиксируется так, чтобы
калибр находился в нужном сечении. Измерительный шток
освобождают, чтобы он мог свободно перемещаться в верти¬
кальном направлении. Первоначально калибр опускается в
канавку в любом месте. По лимбу фиксируется начало отсче¬
та. Затем деталь поворачивают и опускают калибр в канавку,
фиксируя его соприкосновение с деталью по показаниям ин¬
дикатора. Угловое положение калибра, т.е. шаг периодичес¬
кой канавки, фиксируют по угловой шкале. Разность между
соседними показаниями углового лимба дает погрешность
шага, выраженную в угловой мере. Для перевода в линейные
единицы используют соотношениеА = Ш)Афг’ (8Л2)где Аф — погрешность шага в градусах, г — радиус окруж¬
ности, на которой выполнялись измерения.При контроле радиальных прорезей сепаратора последний
устанавливают на основании 2 и закрепляют с помощью гай¬
ки 4 с шайбой 3. Измерительный шток с калибром вводят в
радиальную прорезь сепаратора на самом малом или самом
большом удалении от центра детали и перемещают вместе с
ползуном в радиальном направлении. Если прорезь не имеет
отклонений расположения от радиального направления, то
угловой лимб поворачиваться не будет, в противном случае
радиальное перемещение калибра вызовет поворот лимба на
величину угловой погрешности Аф. Эта погрешность может
быть переведена в линейные единицы по формуле (8.12). Из¬
мерение погрешности шага расположения прорезей проводится
так, как при измерении шага периодических канавок.В приспособлении используется стандартная угловая шка¬
ла, в которой 1 мм по дуге диска соответствует 1 градусу.
Длина окружности диска с угловой шкалой равна 360 мм, а202
диаметр. 360 - - .
d = =114,65 мм.71Для повышения точности измерения в приспособлении
используется нониус. Расчетная схема нониуса приведена на
рис. 8.19. Если принять величину отсчета по нониусу
с = 0,05 мм, то число делений нониуса определяется по фор¬
мулеп = а/ с,где а — интервал делений основной шкалы.Тогдап = 1/0,05 = 20.Интервал делений нониуса рассчитываем по формулет-1Ъ = а,пгде г — модуль.Приняв г = 2, получим, 2-20-1 , 1 _Ъ 1 = 1,95 мм.20Определим длину нониусаI = (гп - 1)а = (2 • 20 - 1) • 1 = 39 мм .Таким образом, длина нониуса 39 мм обеспечивает точ¬
ность отсчета угла по лимбу измерительного диска 0,05 гра¬
дуса, или 3 угловых минуты.Шкала О Ю1-1.1 П I J ' П J 1,1 I J IНониус' ' I ' I I I20 50 401.1 М п 1.1 II <1 N II h25SO7S1.9539Рис. 8.19. Расчетная схема нониуса контрольного приспособления203
8.7. МЕТОДЫ, СРЕДСТВА КОНТРОЛЯ И ИЗМЕРЕНИЯ
ПОГРЕШНОСТЕЙ ЗУБЧАТЫХ КОЛЕС
И ПЕРЕДАЧ В СБОРЕПри изготовлении зубчатых передач контролируется ряд
нормируемых показателей их точности в зависимости от при¬
нятой степени точности. Для достаточно высоких степеней
точности (например, 6-й) контролируемыми показателями зуб¬
чатых колес являются кинематическая погрешность, откло¬
нение шага зацепления, погрешность профиля зуба и погреш¬
ность направления зуба.Контроль кинематической погрешности заключается в
определении разности действительных и номинальных угло¬
вых положений проверяемого колеса при однопрофильном его
зацеплении с точным измерительным колесом, которое не
менее чем на две степени точнее проверяемого, и тогда его
погрешностями пренебрегают.Схема одного из приборов
для измерения кинематичес¬
ких погрешностей зубчатых
колес приведена на рис. 8.20.Контролируемое колесо 4
устанавливают на вал 5, вок¬
руг которого поворачивается
полый шпиндель 3 с закреп¬
ленным на нем измеритель¬
ным колесом 2. Колесо 2 яв¬
ляется точной копией коле¬
са 4 (оно имеет те же число
зубьев, модуль, шаг, угол
наклона). Колеса 2 и 4 нахо¬
дятся в однопрофильном (од¬
ностороннем) зацеплении с
промежуточным широким
колесом 7, которое насаже¬
но на вал 6, связанный с
электродвигателем.При вращении колеса 7 будут вращаться колеса 2 и 4.
Если у проверяемого колеса 4 нет погрешностей, то его вра¬
щение будет синхронным с вращением точного колеса 2. Еслис] о[/7>с [1 114^i,)<"yi][Рис. 8.20. Схема прибора для
измерения кинематических
погрешностей зубчатых колес204
существуют погрешности, то возникает разность углов пово¬
рота колес 4 и 2, а также шпинделя 3 и вала 5. Эта разность
углов поворота будет зафиксирована электроиндуктивным
датчиком 1 и записана в виде диаграммы. По этой диаграмме
определяют кинематические погрешности контролируемого
колеса. При изменении направления вращения промежуточ¬
ного колеса 7 контакт зубьев происходит по противополож¬
ным поверхностям и будет измерена кинематическая погреш¬
ность по второй стороне зуба.По диаграмме, записанной при измерении кинематичес¬
кой погрешности, определяют циклическую погрешность,
которая характеризует плавность работы зубчатого колеса и
передачи.Контроль пятна контакта выполняется либо в собранной
передаче, либо для отдельных зубчатых колес в паре с измери¬
тельным колесом. Боковые поверхности зубьев измерительно¬
го колеса покрывают тонким слоем краски и по оставленным
на контролируемом колесе следам судят о полноте контакта
зубьев. Пятно контакта нормируется по высоте и длине зуба.Рассмотренные показатели точности зубчатых колес яв¬
ляются комплексными. Существуют еще дифференцирован¬
ные показатели, к которым относятся радиальное биение зуб¬
чатого венца, колебание длины общей нормали, отклонение
шага зацепления, накопленная погрешность шага и другие.
Данные показатели точности зубчатых колес контролируют¬
ся известными стандартными средствами, а сам процесс кон¬
троля затруднений не вызывает.Известно, что достаточно точно изготовленные зубчатые
колеса в передаче в сборе могут давать меньшую кинемати¬
ческую точность, чем менее точные колеса. Поэтому являет¬
ся целесообразным выполнять контроль кинематической точ¬
ности передач в сборе. Ниже приводится несколько схем кон¬
трольных приспособлений, которые позволяют решить дан¬
ную задачу.На рис. 8.21 изображена схема контрольного приспособ¬
ления, в котором эталонная передача имитируется двумя дис¬
ками, закрепленными на ведущем и ведомом валах контро¬
лируемой передачи.Контрольное приспособление содержит контролируемую
передачу 3, на ведущем валу которой закреплен диск 2, а на205
ведомом — диск 8. Диски2 и 8 имитируют эталонную
передачу с точным переда¬
точным отношением, рав¬
ным передаточному отно¬
шению U контролируемой
передачи, т.е.U = DJDr (8.13)Измерительное устрой¬
ство имеет подвижное осно¬
вание 4 у на котором уста¬
новлен индикатор 5. Гибкая
нить 6 связывает диск 2 с
подвижным основанием 4
измерительного устройства,
а нить 7 связывает диск 8 с
измерительным наконечни¬
ком индикатора 5. Для при¬
дания определенного на¬
правления гибкой нити 6
используются ролики 9 и11. Радиальное биение дис¬
ков 2 и 8 регистрируется
индикаторами 1 и 10.Работает приспособление следующим образом. При пово¬
роте ведущего вала контролируемой передачи, а следователь¬
но, и ведущего диска 2 эталонной передачи, на некоторый
угол ф2 нить 6у наматываясь на диск 2, вызывает перемеще¬
ние подвижного основания 4 измерительного устройства, вме¬
сте с которым перемещается и индикатор 5. Величина этого
перемещенияг2=Д2ср2 = 1)2Ф2/2. (8.14)В результате поворота ведущего диска 2 получит поворот
и ведомый диск 8 на угол ф8, который связан с углом ср2 пере¬
даточным отношением, т.е.ср8 = Ф2/С7. (8.15)При этом нить 7, наматываясь на диск 8, вызовет переме¬
щение измерительного наконечника индикатора 5 на величи¬
ну4Рис. 8.21. Схема приспособления с
эталонной передачей в виде двух
дисков для контроля кинематичес¬
кой погрешности зубчатых передач206
l8 - Z)8cp8/2 = D8q>2/2U. (8.16)Диски 2и8 образуют эталонную передачу с точным пере¬
даточным отношением, определяемым по (8.13). Из (8.13)
следует, чтоD8=D2U. (8.17)Подставив (8.17) в (8.16), получимl8 = D2Uq2/2U = D2%/2. (8.18)Сравнивая (8.18) и (8.14), находим, что /2= 18. Это означа¬
ет, что при идеально точной контролируемой передаче 3 при
любом угле поворота ее ведущего вала индикатор 5 измери¬
тельного устройства не даст показаний. Если же передача 3
имеет кинематические погрешности, то при повороте диска 2
на некоторый угол (р2 диск 8 повернется на угол ф8, не подчи¬
няющийся соотношению (8.15), а следовательно, А = 18 - 12 Ф О
и индикатор 5 измерительного устройства зафиксирует эту
разность, т. е. кинематическую погрешность передачи А, при¬
веденную к диаметру Dg.На величину А = Z8 — Z2 оказывают влияние радиальные
биения дисков 2 и 8. Поэтому их измерение и учет при опре¬
делении А позволяют оценить кинематическую погрешность
контролируемой передачи с высокой точностью.Как было отмечено, в данном приспособлении эталонная
передача имитируется двумя дисками 2 и <?, отношение диа¬
метров которых дает точное передаточное отношение. Эти
диски не находятся в зацеплении, а потому расположение
валов контролируемой передачи, ее габариты не связаны с
размерами эталонной передачи.Таким образом, с помощью представленного приспособле¬
ния решается задача контроля кинематических погрешнос¬
тей зубчатых передач в сборе. Однако оно обладает существен¬
ным недостатком: при больших передаточных отношениях
требуется изготовить диски с большим отношением диамет¬
ров, что может оказаться технически трудно выполнимым.
Для того чтобы исключить такие трудности, требуется точ¬
ную передачу имитировать другим путем, что и сделано в
контрольном приспособлении, приведенном на рис. 8.22. Это
приспособление позволяет измерять кинематические погреш¬
ности передач с большими передаточными отношениями.207
Контрольное при¬
способление содер¬
жит контролируемую
передачу 3 с ведущим
4 и ведомым 9 вала¬
ми. С ведущим валом4 контролируемой пе¬
редачи соединен винт5 эталонной винтовой
передачи, ведомое
звено 6 которой несет
индикатор 7 и может
при вращении винта
перемещаться вдоль
направляющих 8. На
ведомом валу 9 конт¬
ролируемой передачи
закреплен измери¬
тельный диск 10. Гибкая нить 2, перекинутая через направ¬
ляющий ролик 1, связывает наружную цилиндрическую по¬
верхность диска 10 с наконечником индикатора 7 измери¬
тельного устройства. Индикатор 11 служит для оценки ради¬
ального биения диска.Работает приспособление следующим образом. При пово¬
роте ведущего вала 4 контролируемой передачи, а следователь¬
но, и винта 5 эталонной винтовой передачи по направляющим
8 перемещается ведомое звено 6 с индикатором 7. Если, напри¬
мер, ведущий вал 4 совершил N полных оборотов, то ведомое
звено 6 переместится на величинуlx=tN, (8.19)где t — шаг резьбы.Ведомый вал 9 при этом повернется на угол ср, равныйф = 2nN/U, (8.20)где U — передаточное отношение контролируемой передачи.При повороте измерительного диска 10 ка. угол ф нить 2
будет наматываться на этот диск и вызовет перемещение из¬
мерительного наконечника индикатора 7 на величину12 = £>ф/2, (8.21)
где D — диаметр диска 10.Рис. 8.22. Схема приспособления с эталонной
винтовой передачей для контроля кинемати¬
ческой погрешности зубчатых передач208
Перемещения 1Х и 12 будут равны при условии, что
tN = JDcp/2 = nDN/U, т.е. приf = теО/С/. (8.22)Таким образом, если контролируемая передача 3 абсолют¬
но точная, то при t =nD/U — 12. Если кинематические по¬
грешности имеют место, то 1Х Ф 12 и индикатор 7 покажет зна¬
чение кинематической погрешностиД = I, - 12, (8.23)отнесенной к диаметру D измерительного диска 10. Значение
кинематической погрешности Д корректируется с учетом ра¬
диального биения измерительного диска.Диаметр D измерительного диска выбирается из условия
обеспечения требуемой точности измерения (р0угла поворота
ведомого вала контролируемой передачи в зависимости от
цены деления 5 измерительного индикатора, т.е. 5 = D<p0/2,
откудаD - 25/Фо. (8.24)Таким образом, представленное приспособление позволя¬
ет вести контроль кинематической точности передач с боль¬
шими передаточными отношениями.Общим недостатком контрольных приспособлений, при¬
веденных на рис. 8.21 и 8.22, является сложность реализа¬
ции и отсутствие автоматической записи результатов контро¬
ля, а потому высокая продолжительность контроля. Приво¬
димые ниже схемы контрольных приспособлений лишены этих
недостатков.Контрольное приспособление для контроля кинематичес¬
кой точности зубчатых передач, приведенное на рис. 8.23,
содержит контролируемую зубчатую передачу, составленную
из промежуточного 4 и контролируемого 8 колес, насажен¬
ных на ведущий 3 и ведомый 5 валы соответственно, установ¬
ленный на ведущем валу делительный диск 2 с некоторым
числом делений Nv фиксатор 1 делительного диска, измери¬
тельный диск 6, закрепленный на ведомом валу контролиру¬
емой передачи и размещенный в щелевом проеме фотоэлект¬
рического преобразователя 7, регулируемый источник посто¬
янного напряжения 9, имитирующий эталонную передачу,
блок сравнения электрических сигналов 10, выполненный на209
двух резисторах 12 и11, и регистратор 13. В
отличие от рассмотрен¬
ных ранее, представ¬
ленное контрольное
приспособление не свя¬
зано с применением
эталонного (или изме¬
рительного) колеса, об¬
разующего с промежу¬
точным колесом эта¬
лонную передачу, по
отношению к которой
оценивается точность
угла поворота контро¬
лируемого колеса.Здесь эталонная пере¬
дача представлена ре¬
гулируемым источни¬
ком постоянного на¬
пряжения 9. Величина
установленного напряжения этого источника имитирует точ¬
ные углы поворота ведомого вала 5 контролируемой переда¬
чи, соответствующие одинаковым углам поворота ее ведуще¬
го вала 3, при условии, что контролируемая передача абсо¬
лютно точная.Одинаковые углы поворота ведущего вала 3 в данном уст¬
ройстве реализуются с помощью делительного диска 2 и фик¬
сатора 1. Поскольку контролируемая передача имеет кине¬
матические погрешности, постольку равным углам поворота
ее ведущего вала соответствуют неравные углы поворота ве¬
домого вала. Углы поворота ведомого вала преобразуются в
напряжения, пропорциональные этим углам. Это обеспечива¬
ют фотоэлектрический преобразователь 7 и измерительный
диск 6, установленный на ведомом валу контролируемой пе¬
редачи. Схема перекрытия светового потока 7 фотоэлектри¬
ческого преобразователя лепестком измерительного диска 6
показана на рис. 8.24. В зависимости от погрешности Аф угла
поворота ведомого вала контролируемой передачи, а вместе с---\10Рис. 8.23. Схема приспособления с эталон¬
ной передачей в виде регулируемого
источника постоянного напряжения для
контроля кинематической погрешности
зубчатых колес210
ним и погрешности поворо¬
та измерительного диска
световой поток перекрыва¬
ется больше или меньше, и
фотодатчик формирует мень¬
ший или больший сигнал по
сравнению с сигналом, ус¬
тановленным эталонной пе¬
редачей - источником по¬
стоянного напряжения 9.Для сравнения этих сигна¬
лов приспособление снабже¬
но блоком сравнения 10, вы¬
полненным в виде вычита¬
ющего элемента. По разно¬
сти сравниваемых сигналов
можно судить о кинемати¬
ческой погрешности контро¬
лируемой передачи. Поэтому в приспособлении предусмотрен
регистратор 13 разности сравниваемых сигналов.Для того чтобы обеспечить повороты измерительного дис¬
ка 6 на один угловой шаг при повороте делительного диска 2
на одно деление, необходимо, чтобы число делений Nx дели¬
тельного диска 2 и число прорезей N2 измерительного диска
выбирались по соотношениюN2 = Nt U, (8.25)где U — передаточное отношение контролируемой передачи.При выполнении контроля кинематической погрешности
зубчатой передачи (см. рис. 8.23), составленной из зубчатых
колес 4 и S, осуществляют повороты ведущего вала 3 переда¬
чи на равные углы с помощью делительного диска 2 с фикса¬
тором 1. Углы поворота составляютфх =360°/^1- (8.26)При этом ведомый вал 5 контролируемой передачи пово¬
рачивается на уголф2 = 360°/^ U. (8.27)Вместе с ведомым валом поворачивается и закрепленный
на нем измерительный диск 6 на тот же угол 360°/ДГ1 • U. НаРис. 8.24. Схема перекрытия светово¬
го потока лепестком измерительного
диска в приспособлении,
представленном на рис. 8.23211
измерительном диске выполнены радиальные прорези. Их
число N2 = Nx • U. Следовательно, при повороте делительного
диска 2 на один угловой шаг, равный 360° / , измеритель¬
ный диск 6 повернется также на один угловой шаг, равный
360°/N2.Если контролируемая передача идеально точная, то рав¬
ным углам поворота делительного диска 360° / Nx будут соот¬
ветствовать одинаковые углы поворота измерительного дис¬
ка, равные 360°/Д^2. Если же имеют место кинематические
погрешности передачи, то равным углам поворота делитель¬
ного диска 360° / Nx будут соответствовать неодинаковые углы
поворота измерительного диска ср2 = 360° / N2± Аф, где Аф —
угловая погрешность поворота, определяющая кинематичес¬
кую погрешность передачи.Измерительный диск 6 расположен в щелевом проеме фо¬
тоэлектрического преобразователя 7, и если углы поворота
измерительного диска ф2 одинаковые, то при каждом поворо¬
те делительного диска на угол фх измерительный диск 6 будет
перекрывать световой поток фотоэлектрического преобразо¬
вателя 7 на одну и ту же величину. На рис. 8.24 сплошными
прямыми линиями показано расположение измерительного
диска 6 относительно светового потока 7 преобразователя при
отсутствии погрешностей. Пунктирными прямыми изображе¬
ны возможные положения измерительного диска 6 относи¬
тельно светового потока 7 при наличии кинематических по¬
грешностей +Аф и - Аф. При этом, если угол поворота измери¬
тельного диска ф2 меньше номинального (при идеально точ¬
ной передаче) на -Аф, то световой поток фотоэлектрического
преобразователя оказывается перекрытым в большой степе¬
ни, и этот преобразователь формирует электрический сигнал
U меньше номинального Е/н (рис. 8.25, а), а если угол ф2 боль¬
ше номинального на +Аф, то световой поток перекрыт в мень¬
шей степени, и преобразователь формирует электрический
сигнал U больше номинального UH (рис. 8.25, б). Сформиро¬
ванный фотоэлектрическим преобразователем сигнал от кон¬
тролируемой передачи поступает в блок 10 сравнения сигна¬
лов, на резистор 12. Сигнал от эталонной передачи U= UH
поступает на резистор 11 блока сравнения в противофазе, и
на выходе этого блока образуется сигнал, равный разности212
U-UH (рис. 8.25, в). Этот
сигнал регистрируется
регистратором 13.Эталонная передача
в данном устройстве
имитируется регулируе¬
мым источником 9 по¬
стоянного напряжения.Величина эталонного
сигнала U9 устанавлива¬
ется такой, чтобы в ис¬
ходном положении кон¬
тролируемой передачи
результирующий сиг¬
нал, поступающий на
регистратор, был рав¬
ным нулю, т.е. U - Ud = 0.В качестве регистратора
может служить любой
вольтметр, отградуиро¬
ванный либо в линей¬
ных, либо в угловых
единицах угла поворота
ведомого вала передачи.По измеренной величи¬
не сигнала можно су¬
дить о величине кинема¬
тической погрешности
контролируемой передачи.Еще более высокое быстродействие достигается на стенде
для контроля кинематической точности передач (рис. 8.26),
который содержит основание 1, привод 2, нагружатель (элек¬
тротормоз) 7 с обмоткой возбуждения §, контролируемую пе¬
редачу 5, датчики 3 и 6 частоты вращения валов, интерфейс
аналогового ввода информации 13, ЭВМ 0, сумматор 10, ис¬
точник 11 регулируемого напряжения, генератор 12 случай¬
ных сигналов и маховик 4.В данном стенде обеспечивается равномерность вращения
ведущего вала в связи с тем, что на нем закреплен маховик 4.ииИиЧ,tвРис. 8.25. Сигналы, формируемые
фотоэлектрическим преобразователем
в приспособлении (рис. 8.23)213
Рис. 8.26. Схема стенда для контроля кинематической погрешности
зубчатых передач в сбореДатчик 3 частоты вращения ведущего вала формирует после¬
довательность электрических сигналов одинаковой длитель¬
ности, пропорциональной диаметру отверстий в диске. Не¬
трудно видеть, что период следования импульсов от этого дат¬
чикаrjy _ 271 _ 27130 __ 601 NxODj N^nn^ ’Аналогично для датчика 6 получим
т 60 = 60
N2 Tl2 N2 TilЗдесь п1 и п2 — частоты вращения ведущего и ведомого
валов контролируемо^ передачи соответственно.Определим теперь длительность импульсов, поступающих
от датчиков:d 60 dTi =1 Vx nD^
d 60 d214
Если передача не имеет кинематических погрешностей, то
должны обеспечиваться равенства Тх = Т2 и = т2. Следова-гп гг 60 60U
тельно, Т. = Г возможно в том случае, если = ,Ni>h N2niоткуда следует, что N2 = NxU. Равенство тх = х2 выполняется
D ^в том случае, когда 1 1 = 1, откуда D. = D.U.D2n2Поскольку контролируемая передача всегда имеет кине¬
матические погрешности, постольку указанные выше равен¬
ства будут нарушаться, и равным углам поворота ведущего
вала будут соответствовать неравные углы поворота ведомого
вала. Это означает, что последовательности импульсов с по¬
стоянной длительностью тх и постоянным периодом Тх (рис.8.27) будет соответствовать последовательность импульсов с
неодинаковой длительностью т2 и непостоянным периодом Т2.При выполнении контроля включают привод 2 и подают
на нагружатель 7 постоянное напряжение, или напряжение
от генератора случайных сигналов, или одновременно оба ука¬
занных напряжения в зависимости от того, при каком виде
нагружения ведется контроль. На обмотке 8 возбуждения элек¬
тротормоза появляется напряжение, а на ведомом валу пере-3IРис. 8.27. Сигналы, генерируемые датчиками частоты вращения при
контроле кинематической погрешности передач на стенде215
дачи 5 — момент, пропорциональный напряжению, приложен¬
ному к обмотке возбуждения.Сигналы от датчиков 3 и 6 частоты вращения валов (рис.8.27) подаются непосредственно на шину ЭВМ 9. Осуществить
такую связь ЭВМ с датчиками позволяет интерфейс 13 анало¬
гового ввода информации. Управление процессом автомати¬
ческого съема информации осуществляется с помощью про¬
граммного комплекса, включающего управляющую програм¬
му, программу записи данных в порт, программу чтения дан¬
ных из порта, а также программу записи файлов на магнит¬
ный диск. Обработка информации, полученной на стенде и
записанной на магнитный диск, выполняется той же ЭВМ по
специальной программе, которая предусматривает вычисле¬
ние длительности разностных импульсов Ux-U29 пропорцио¬
нальной местным кинематическим погрешностям, а также вы¬
числения значений этих погрешностей за один оборот ведо¬
мого вала на основе данных тарировки. ЭВМ осуществляет
также (по той же или отдельной программе) вычисления наи¬
большей кинематической погрешности передачи, а также
вычисления амплитуд и графическое представление гармо¬
нических составляющих кинематической погрешности.Исследования кинематической точности могут проводить¬
ся при различных видах и уровнях нагружения передачи.Таким образом, предлагаемый стенд обеспечивает возмож¬
ность определения на нем кинематических погрешностей пе¬
редач при их работе на холостом ходу и под нагрузкой. Это
обстоятельство выгодно отличает данный стенд от рассмот¬
ренных выше контрольных приспособлений, которые не по¬
зволяют контролировать кинематическую точность передач
под нагрузкой.216
9. СБОРОЧНЫЕ ПРИСПОСОБЛЕНИЯ9.1. НАЗНАЧЕНИЕ И ТИПЫ СБОРОЧНЫХ
ПРИСПОСОБЛЕНИЙСборочные приспособления используют при узловой и об¬
щей сборке изделий. Они бывают универсальными и специ¬
альными.Универсальные сборочные приспособления используются
в единичном и мелкосерийном производстве: плиты, сбороч¬
ные балки, призмы, угольники, струбцины, домкраты, кли¬
нья, прихваты и т.п. Служат они для установки и закрепле¬
ния базовых узлов или деталей.Специальные сборочные приспособления используются в
крупносерийном и массовом производстве для выполнения
определенных сборочных операций. Различают два типа спе¬
циальных сборочных приспособлений.Первый тип — приспособления для неподвижной уста¬
новки и закрепления базовых деталей и узлов. Приспособле¬
ния этого типа обеспечивают необходимую устойчивость де¬
тали в процессе сборки и повышают производительность про¬
цесса. Их часто выполняют поворотными. Такие приспособ¬
ления позволяют осуществлять поворот детали на требуемый
угол и последующую ее фиксацию в этом положении. При¬
способления первого типа должны надежно удерживать зак¬
репляемый узел или базовую деталь от смещения под дей¬
ствием сил и моментов, возникающих при выполнении сбо¬
рочных операций. Требований точной установки закрепляе¬
мых узлов и деталей не предъявляется.На рис. 9.1 показано приспособление первого типа для
закрепления картера редуктора заднего моста автомобиля при
его сборке.На рис. 9.2 показано поворотное приспособление первого
типа для сборки коробки передач, корпус 1 которой базиру¬
ется на призматических опорах и закрепляется зажимом 2.
Вокруг вертикальной оси верхняя часть 3 приспособления с
опорами может поворачиваться и фиксироваться в требуемом
положении зажимом 4.Они могут быть одно- и многоместными. Одноместные
приспособления позволяют закрепить лишь одно собираемое217
Ш////////////7Р777777777у У////////77777У7/7/?/Рис. 9.1. Схема приспособления для сборки узла типа редуктораизделие, многоместное — несколько. Примером является ис¬
пользование многошпиндельного гайковерта. Специальные
приспособления могут быть также стационарными и пере¬
движными. Стационарные устанавливают на верстаках, стен¬
дах, передвижные — на тележках или плитах конвейеров.Второй тип сборочных приспособлений — это приспо¬
собления для точной и быстрой установки соединяемых дета¬
лей или частей изделия. Их применяют для сварки, пайки,
клепки, склеивания, развальцовки и других сборочных опе¬
раций. При использовании приспособлений этого типа исклю¬
чается выверка взаимного положения собираемых изделий
(деталей).Наряду с описанными типами сборочных приспособлений
применяют приспособления для предварительного деформи-zb777/yyy/yyy/////A>y> 7^777777777777777^77,Рис. 9.2. Схема сборочного поворотного приспособления218
рования собираемых упругих элементов (пружин, рессор, раз¬
резных колец и т.д.), а также для выполнения соединений с
натягом, когда необходимо приложение в процессе сборки
больших сил. Приведение их в действие осуществляется вруч¬
ную при использовании усилителей (рычагов, винтов, комби¬
нированных устройств) или от силовых узлов (пневмо-, гид-
ро- или электроприводов).На рис. 9.3 приведена конструктивная схема приспособ¬
ления для сборки составного коленчатого вала. В этом при¬
способлении обеспечивается соосность его коренных шеек 1 и4. Они устанавливаются и закрепляются в призмах 2 и 3,
которые обеспечивают их соосность. После установки шатун¬
ной шейки 6 осуществляется ее затяжка гайками 5 и 7.6Рис. 9.3. Конструктивная схема приспособления для сборки составногоколенчатого валаНа рис. 9.4 изображена схема сборочного приспособления
для установки поршневых колец на поршень. Кольца 4 уста¬
навливают разрезами вниз между подвижными полукольца¬
ми 6. С помощью рычага 1 коническая оправка вводится в
поршневые кольца 4 и разжимает их. Нажатием на педаль с
помощью рычагов 2 и ползуна 7 полукольца 6 и кольца 4
сжимаются и удерживаются в зафиксированном положении,
а оправка 3 отводится влево. Поршень 5 вводится в разжатые
кольца, и после освобождения педали кольца садятся в свои
канавки.219
Рис. 9.4. Схема сборочного приспособления для установки
колец на поршень двигателя внутреннего сгорания (ДВС)Сборочные приспособления могут также иметь механизи¬
рованный привод. На рис. 9.5 представлено сборочное при¬
способление с пневмоприводом, предназначенное для сборки
муфты сцепления автомобиля. При сборке включается пнев¬
моцилиндр 5, воздействует на кожух 3 муфты и осаживает
пружины 1 в направлении
нажимного диска 2. Пос¬
ле этого заворачиваются
гайки и фиксируются спе¬
циальными пластинами
от самоотвинчивания. Со¬
бранную муфту снимают
с приспособления, осво¬
бождая прихваты 4.Еще одно механизиро¬
ванное приспособление,
устанавливаемое на столе
пресса 4, показано на рис.9.6. Это приспособление
служит для напрессовки
тонкого диска 2 на вал 3.Избежать перекосов по¬
зволяет подвижная гиль¬
за 5, которая при опуска¬
нии ползуна 1 пресса иРис. 9.5. Схема приспособления
для сборки узла типа муфты
сцепления автомобиля220
Рис. 9.6. Схема приспособления
для напрессовки
тонких дисков на валсжатии пружины перемещается
вниз совместно с диском 2.Отдельный тип приспособле¬
ний составляют приспособления
для изменения положения соби¬
раемого изделия. При больших
размерах изделий для измене¬
ния их положения при сборке
используют поворотные и
подъемные устройства (напри¬
мер, при сборке автомобилей,
двигателей, коробок скоростей и
т.д.), а также приспособления
для перевертывания изделия,
проходящего сборку на рольган¬
ге. Такие приспособления весь¬
ма разнообразны по своим кон¬
струкциям.На рис. 9.7 показана
схема поворотного приспо¬
собления для корпуса 3
собираемого изделия. Кор-
пус-основание 1 приспособ¬
ления снабжен роликами
2, на которых может пово¬
рачиваться в требуемое по¬
ложение базовая деталь 3
собираемого изделия.Приспособление, пока¬
занное на рис. 9.8, служит
для перевертывания изде¬
лия, собираемого на роль¬
ганге. Собираемый узел
или массивная базовая де¬
таль 3 перемещается порольгангу в клеть 1 приспособления. Клеть поворачивается
вокруг оси 2 и фиксируется в новом положении (после пово¬
рота на 180°) с помощью фиксатора 4.Рис. 9.7. Схема сборочного поворотного
приспособления221
1Рис. 9.8. Схема приспособления для переворачивания
изделия, собираемого на рольганге9.2. ЭЛЕМЕНТЫ СБОРОЧНЫХ ПРИСПОСОБЛЕНИЙВсякое специальное сборочное приспособление состоит из
корпуса, установочных и зажимных устройств. Установоч¬
ные и зажимные элементы те же, что и в станочных приспо¬
соблениях. Их облицовывают резиной, пластмассой (это ис¬
ключает порчу поверхностей деталей), иногда в зажимные
элементы вставляют мягкие вставки. Привод осуществляет¬
ся от силовых узлов, например гидроцилиндров. Для неболь¬
ших сил используют вакуумные зажимные устройства, для
больших сил — пружинные зажимные устройства. Методика
расчета сил закрепления та же, что и для станочных приспо¬
соблений.К вспомогательным устройствам сборочных приспособле¬
ний относятся поворотные и делительные механизмы, фикса¬
торы, выталкиватели и т.п. Их функции и устройство те же,
что и в станочных приспособлениях.Базовые детали при сборке не следует устанавливать на
магнитной плите, для того чтобы избежать их намагничива¬
ния.222
10. ПРИСПОСОБЛЕНИЯ
ДЛЯ АВТОМАТИЗИРОВАННОГО ПРОИЗВОДСТВА И
СПЕЦИАЛЬНЫХ ТЕХНОЛОГИЙ10.1. АВТОМАТИЗАЦИЯ ПРИСПОСОБЛЕНИЙВ большинстве случаев механической обработки и сборки
доля вспомогательного времени в штучном превышает 40 %.
Это вызывает стремление автоматизировать работу приспо¬
соблений.Иногда осуществляют частичную автоматизацию. При этом
автоматизируют один или несколько приемов:• установку и снятие заготовок посредством загрузочных
устройств;• закрепление и открепление заготовок;• съем и выталкивание заготовки из рабочей зоны;• вращение, фиксацию и закрепление поворотных частей
многопозиционных приспособлений;• измерение выполняемых в процессе обработки размеров.При полной автоматизации приспособления и цикла обра¬
ботки технологическая операция может выполняться без уча¬
стия рабочего. Он должен лишь загружать заготовки в бун¬
кер и следить за работой станка.Автоматизация приспособлений позволяет автоматизиро¬
вать технологический процесс и превратить универсальные
станки в автоматы и полуавтоматы. Однако в этих случаях
надо иметь дополнительные управляющие и транспортирую¬
щие устройства.При автоматизации станочных приспособлений первосте¬
пенно важный вопрос - удаление стружки. Мелкую стружку
сдувают, отсасывают, смывают охлаждающей жидкостью. Для
измельчения стружки используют инструменты со стружко-
ломами.В автоматизированных приспособлениях применяют бло¬
кировочные и предохранительные устройства, а также конт¬
рольные габариты для исключения неправильной установки
деталей.Привод автоматизированных приспособлений выполняют
механическим, пневматическим, гидравлическим, пневмогид-
равлическим, электрическим и комбинированным.223
Пневмопривод используют при незначительных усилиях,
возникающих в процессе сборки. Гидроприводы обладают
известными преимуществами. Но для них нужна насосная
станция, и если таковой нет на станке, то чаще всего прибе¬
гают к другим видам приводов. Электропривод отличается
наибольшей скоростью срабатывания, высоким КПД, малым
расходом энергии. Он относится к наиболее эффективным
приводам.Управление приводами осуществляется кулачками, упо¬
рами, сервозолотниками и конечными выключателями. Воз¬
действие на эти элементы производят перемещающиеся эле¬
менты станка.На рис. 10.1 приве¬
дена схема пневмати¬
ческого приспособле¬
ния для сверления от¬
верстий в цилиндри¬
ческих заготовках с
подачей их из магази¬
на.Механизм подачи
вертикально-сверлиль-
ного станка изменен
для получения непре¬
рывного возвратно-по¬
ступательного движе¬
ния шпинделя. На вал
реечного колеса (на
рисунке не показано) насажен кулачок подачи 3. Кулачок 2
управляет золотником 1, регулирующим поступление возду¬
ха в пневмоцилиндр 4 зажимного устройства. Отработавший
воздух, выходя через шланг 5, очищает приспособление от
стружки. Обратный ход шпинделя осуществляется пружи¬
ной или грузом.На рис. 10.2, а, б показано автоматизированное приспо¬
собление к двустороннему станку для снятия фасок в отвер¬
стиях втулок.Приспособление имеет два гидроцилиндра. Цилиндр 1
используется для закрепления заготовок, цилиндр 3 - для
подачи заготовок с лотка 2 на рабочую позицию 4 и выталки-Рис. 10.1. Схема автоматизированного
приспособления для сверления отверстий
в цилиндрических заготовках224
Рис. 10.2. Схема автоматизированного приспособления
для снятия фасок во втулкахвания из нее обработанных деталей. Управление цилиндрами
( рис. 10.2, б) 1 и 3 осуществляется золотниками б и 7, на
которые действует кулачок 5, закрепленный на одной из
шпиндельных бабок.На рис. 10.3 представлена схема автоматизированного при¬
способления к плоскошлифовальному станку для обработки
торцов колец. Заготов¬
ки 1 из магазина 2 по¬
даются на электромаг¬
нитный стол 4 с помо¬
щью сепаратора 3, пе¬
риодически поворачи¬
вающегося на угол 60°.Этот же сепаратор сбра¬
сывает обработанное
кольцо. Подача посто¬
янного тока и выклю¬
чение его в нужный мо¬
мент осуществляются
прерывателем 5.На рис. 10.4 показа¬
на схема кондуктора к
многошпиндельному
сверлильному станку сРис. 10.3. Схема автоматизированного
приспособления к плоскошлифовальному
станку225
магазином для плос¬
ких заготовок. При
опускании шпинделей
автоматический золот¬
ник впускает сжатый
воздух в левую по¬
лость цилиндра 1, и
ползун 2, перемеща¬
ясь вправо, прижима¬
ет нижнюю заготовку
3 к упору 5. При
подъеме шпинделей
воздух подается в пра¬
вую полость цилинд¬
ра. В процессе переме¬
щения ползуна влево
собачка 4 сталкивает
обработанную деталь в
желоб 6.Рис. 10.4. Схема автоматизированного приспо¬
собления, управляемого движением подачи
шпинделей10.2. ПРИСПОСОБЛЕНИЯ ДЛЯ ОСНАЩЕНИЯ
АВТОМАТИЧЕСКИХ ЛИНИЙНа автоматических линиях (АЛ) используют стационар¬
ные приспособления и приспособления-спутники.Стационарные приспособления жестко закреплены на стан¬
ках АЛ. В них подаются, устанавливаются, закрепляются и
обрабатываются заготовки. После обработки заготовки уда¬
ляются из приспособлений и передаются на транспортирую¬
щее устройство для перемещения на следующую позицию АЛ
без потери ориентации.Установка заготовок в приспособлении АЛ осуществля¬
ется движением транспортирующего устройства линии или
механической руки (автооператора).Установочные элементы приспособлений для корпусных
деталей часто выполняют в виде опорных пластин, которые
являются продолжением направляющих планок транспор¬
тирующего устройства и располагаются с ними на одном уров¬
не. В этом случае заготовка перемещается по прямолиней¬
ным траекториям, приспособления располагаются на одной226
прямой. В качестве установочных элементов используются
два выдвижных пальца с коническими фасками, которые
выравнивают заготовку. Если применяются не пальцы, а упо¬
ры, то точная фиксация заготовки осуществляется досылате-
лями - дополнительными прижимными устройствами.В приспособлениях часто предусматривается автоматичес¬
кий контроль положения заготовки. Он осуществляется с ис¬
пользованием пневматических, электрических или других
датчиков. Нередко контроль осуществляется по положению
фиксатора.Работа приспособлений AJI четко согласуется с действия¬
ми агрегата и транспортирующего устройства. Это осуществ¬
ляют механизмы синхронизации.Приспособления-спутники — это устройства, которые со¬
провождают закрепленную в них заготовку по всем позици¬
ям AJI. С их помощью решается просто задача ввода загото¬
вок в рабочие зоны всех позиций AJI. Приспособления-спут-
ники используют при обработке трудно транспортируемых
заготовок сложной конфигурации. Все стадии обработки де¬
тали выполняются в этом случае при одном закреплении за¬
готовки. Приспособление-спутник в простейшем случае - это
плита прямоугольной формы, которая с закрепленной на ней
заготовкой последовательно перемещается по всей трассе АЛ
с помощью шагового транспортера. В начале АЛ на спутнике
устанавливается и закрепляется заготовка, а в конце линии
она снимается. Возврат спутников в исходное положение про¬
водится специальным транспортом.На рис. 10.5 показана схема приспособления для обработ¬
ки корпусной заготовки на автоматической линии. Заготовка1 перемещается по планкам 2 шаговым транспортером с со¬
бачками 3 на строго определенное расстояние. Штанга транс¬
портера проходит снизу под приспособлением, а его планки
лежат на одном уровне с опорными планками приспособле¬
ния. Окончательная фиксация заготовки происходит по двум
базовым отверстиям выдвижными пальцами 4, а крепление —
посредством гидроцилиндра 5. Управление гидроцилиндра¬
ми шагового транспортера, выдвижных пальцев и зажима про¬
водится механизмом синхронизации автоматической линии.На рис. 10.6 приведена схема приспособления-спутника.
К его корпусу 1 прикреплены стальные закаленные планки227
Рис. 10.5. Схема приспособления для обработки заготовки корпуса на
автоматической линии2, которыми он скользит по направляющим транспортирую¬
щего устройства 3. Палец 4 и втулка 5 служат для фиксации
спутника на позиции линии.Точность фиксации спутников должна быть не менее0,05 мм. Более точная фиксация может быть получена, когда
спутники на рабочих позициях линии прижимаются к боко¬
вым и торцовому упорам специальными гидроцилиндрами.
После открепления спутник возвращается на трассу транс¬
портера.5Рис. 10.6. Схема приспособления-спутника для автоматической линии228
На каждой рабочей позиции линии спутник прижимается
к жесткому основанию с помощью пневмо- или гидроцилинд¬
ров. Закрепление заготовки на спутнике осуществляется пос¬
ле ее установки на те или иные базы резьбовыми прихватами
вручную или с помощью вспомогательных агрегатов. В каче¬
стве последних используются электрические или пневмати¬
ческие гайковерты, смонтированные на стационарных стой¬
ках в начале и в конце (для открепления заготовок) линий.
На рис. 10.7 показан способ крепления заготовки на плите
спутника с помощью пружинных Г-образных прихватов 1.
При установке и снятии заготовки 2 эти прихваты отжима¬
ются вверх с помощью пневмо- или гидроцилиндра 3. Этот
способ крепления обеспечи¬
вает постоянную, но недо¬
статочно большую силу зак¬
репления.Кроме рассмотренных
приспособлений для автома¬
тизированного производства
используются поворотные
стационарные приспособле¬
ния и спутники для много¬
позиционной обработки, а
также для многоместной об¬
работки. Точность изготов¬
ления устройств для пере¬
мещения, установки и фик¬
сации заготовок на спутни¬
ках по основным размерам, влияющим на точность обработ¬
ки, принимают 0,1 — 0,2 допуска на выдерживаемый раз¬
мер.10.3. ПРИСПОСОБЛЕНИЯ ДЛЯ СТАНКОВ'С ПРОГРАММНЫМ УПРАВЛЕНИЕМПриспособления для станков с ЧПУ должны быть просты¬
ми и надежными, жесткими, быстродействующими, быстро
переналаживаемыми, пригодными для групповой обработки,
а также они должны обеспечивать возможность подвода ин¬
струмента со всех сторон заготовки.Рис. 10.7. Схема крепления заготовки
на плите приспособления-спутника229
Установку заготовок ведут на предварительно обработан¬
ных базах. Зажимные устройства должны быть просты. Это
ручные или с приводом механического или гидравлического
типа. Они точны, надежны. Это особенно важно, когда обслу¬
живание станка ведется роботом.При обработке на расточных, фрезерных и сверлильных
станках заготовка устанавливается непосредственно на стол.
Для фрезерных станков применяют механогидравлические
тиски. Используются также базовые плиты из набора УСП.При токарной обработке заготовки устанавливают в само-
центрирующие патроны с гидравлическим или электричес¬
ким приводом. Широко используются поводковые центры,
позволяющие вести обработку поверхности заготовки по всей
ее длине за одну установку. Для участков станков с программ¬
ным управлением от ЭВМ применяют универсальные и пере¬
налаживаемые приспособления-спутники.10.4. ПРИСПОСОБЛЕНИЯ ДЛЯ ЭЛЕКГРОЭРОЗИОННЫХ
СТАНКОВЭлектроэрозионная обработка находит широкое использо¬
вание в машиностроении для получения сложных поверхнос¬
тей и отверстий. Разработана специальная установка Л ЭФ-
25, на которой обработка осуществляется методом прямого
копирования. Установка может быть использована для изго¬
товления узких щелей и пазов, отверстий и полостей раз¬
личного профиля в стальных, твердосплавных изделиях и
изделиях из различных металлов и сплавов. В качестве ма¬
териала обрабатывающих электродов-инструментов могут ис¬
пользоваться инструментальные стали. При этом не исклю¬
чается применение электродов-инструментов, изготовленных
из меди, латуни, графита и других эрозионностойких мате¬
риалов.Общий вид установки представлен на рис. 10.8. Установ¬
ка состоит из основных узлов: корпуса 13, основания 6, рабо¬
чей головки 1, ванны 18, станции прокачки и очистки ди¬
электрической жидкости 10.Корпус установки 13 представляет собой полую сварную
конструкцию коробчатой формы. На несущей части корпуса
установлены направляющие 5 типа «ласточкин хвост», по230
Рис. 10.8. Конструктивная схема электроэрозионной установки231
которым перемещается с помощью винта 14 и гайки 15 стол16. К столу установки винтами жестко закрепляется поддон17, выполненный из текстолита. На наружной поверхности
поддона выполнены пазы, в которых скапливается диэлект¬
рическая жидкость, проникающая через крепеж, с помощью
которого к поддону прикреплена ванна 18.Ванна представляет собой литую алюминиевую деталь. В
передней стенке ванны имеется проем, обеспечивающий сво¬
бодный доступ оператора к обрабатываемой детали и элект-
роду-инструменту 3. Перед заполнением ванны диэлектричес¬
кой жидкостью проем герметично закрывается дверью 4 со
специальным запором. В ванне устанавливается стол 19, на
поверхности которого выполнены Т-образные пазы, с помо¬
щью которых и крепежа осуществляется закрепление обра¬
батываемой детали в ванне. В столе также выполнено отвер¬
стие для подачи диэлектрической жидкости в ванну. В ванне
имеется устройство, позволяющее регулировать уровень диэ¬
лектрической жидкости и при необходимости сливать ее че¬
рез паз, выполненный на наружной поверхности трубы 20.
Подача диэлектрической жидкости в зону обработки осуще¬
ствляется насосом через фильтр из отдельной емкости через
входной ниппель и каналы в корпусе ванны.На верхней части основания установки закреплена плита
23 с направляющими, несущая на себе каретку 22. На перед¬
ней части каретки укреплена планшайба 21 с двумя верти¬
кальными Т-образными пазами. На планшайбе крепится с по¬
мощью болтов рабочая головка установки. Установочное по¬
перечное перемещение рабочей головки относительно рабочего
стола осуществляется с помощью винтовой пары 24, 25.В нижней внутренней части корпуса установки размещен
выдвижной инструментальный ящик 12.Корпус установки закрепляется на сварном основании 6,
которое выполнено со съемными боковыми стенками. Внут¬
ри основания размещена станция прокачки и очистки ди¬
электрической жидкости. Станция прокачки состоит из ем¬
кости 9, имеющей две секции для отстоя и забора диэлект¬
рической жидкости. Ее подача в зону обработки осуществ¬
ляется с помощью насоса 11. После окончания работы уста¬
новки жидкость сливается в емкость через шланг 7 и фильтр
очистки 8.232
Перед началом работы на установке следует обеспечить
параллельность оси электрода-инструмента направлению по¬
дачи. Выверка установки электрода-инструмента, закреплен¬
ного в электрододержателе, осуществляется с помощью при¬
способления 2 и индикатора.Обрабатываемое изделие устанавливается и закрепляется
на рабочем столе. Ввиду отсутствия значительных механи¬
ческих усилий во время обработки применять сильную за¬
тяжку болтов не следует. Однако закрепление приспособле¬
ний и технологической оснастки на рабочем столе установки
должно исключать возможность их смещений и вибраций.Электрод-инструмент устанавливается относительно обраба¬
тываемой детали координатными перемещениями стола и рабо¬
чей головки. Ванна наполняется диэлектрической жидкостью,
и устанавливается необходимый ее уровень в ванне. При работе
установки высота диэлектрической жидкости над поверхностью
обрабатываемого изделия должна быть не менее 30 мм.Установка нашла применение для электроэрозионного
формирования в деталях типа пластин и оболочек толщиной
до 0,1 мм отверстий и пазов (рис. 10.9). Для обработки заго¬
товки, показанной на рис. 10.9, а, используется двухместное
приспособление (рис. 10.10). Приспособление предназначено
для установки и закрепления тонких пластин 3 и 5 опреде¬
ленного размера, а также для точного направления электро-
да-инструмента, имеющего профиль уголка. Приспособление
состоит из плиты 6, направляющих призм 2 и 7, электричес¬
ки изолированных от корпуса приспособления текстолитовы¬
ми втулками 1 и прокладками 12. Для базирования обраба¬
тываемых заготовок по двум взаимно перпендикулярным
плоскостям служат установочные пластины 4. Прижим 10
может перемещаться в горизонтальном направлении по скал¬
ке 9. Резьбовым концом скалка 9 ввернута в направляющую
призму 7. Базой для другого конца скалки 9 является опораS, изолированная от корпуса приспособления.Электрод-инструмент, имеющий профиль прошиваемого
отверстия, устанавливается по направляющим призмам в ис¬
ходное положение для обработки партии деталей. Обрабаты¬
ваемые пластины устанавливаются на плоскость плиты при¬
способления до упора в установы и вращением винта 11 зак¬
репляются. Затем проводится их обработка.233
Рис. 10.9. Примеры деталей, обрабатываемых с использованием электро-
эрозионной установкиАРис. 10.10. Схема приспособления для обработки заготовки типа пластин с
использованием электроэрозионной установки234
Для обработки тонкостенных заготовок типа стаканов (см.
рис. 10.9, б) в двух фиксированных положениях для прошив¬
ки четырех пазов или щелей, расположенных по окружности
под углом 90°, используется приспособление, представленное
на рис. 10.11.Приспособление состоит из корпуса 1, сменной текстоли¬
товой втулки-кондуктора 2 и подпружиненного пружиной 7
клинового ползуна 9. Направление ползуна осуществляется с
помощью шпильки S, перемещающейся по горизонтальному
пазу вместе с ползуном. Гайка 6 позволяет менять жесткость
пружины.Обрабатываемая заготовка 3 устанавливается своим на¬
ружным диаметром в глухое отверстие текстолитовой втул-
ки-кондуктора до упора. При установке заготовки ползун от¬
водится ручкой 5 в крайнее левое положение. После установ¬
ки с помощью пружины ползун клиновой частью закрепляет
заготовку в исходном для обработки положении. Далее вы¬
полняется прошивка двух пазов, расположенных на одной
оси. После обработки ползун отводится, деталь поворачива¬
ется на 90°.Точная установка обрабатываемого изделия достигается с
помощью стержня 4, который устанавливается в горизонталь¬
ные пазы текстолитовой втулки и в изготовленные пазы заго¬
товки. После закрепления заготовки стержень извлекается и
выполняется последующая обработка.hrРис. 10.11. Схема приспособления для обработки заготовок типа стаканов
с использованием электроэрозионной установки235
Для изготовления восьми пазов, расположенных под уг¬
лом 90° с двух сторон тонкостенной втулки (см. рис. 10.9,в),
используется приспособление, состоящее из корпуса 1 (рис.
10.12), кондукторов 3 и 7, электрически изолированных от
корпуса с помощью текстолитовой прокладки 2 и втулок 4. В
чугунной втулке 5 вращается вертикальная оправка 6, кото¬
рая фиксируется винтом 12, пружиной 11с шариковым фик¬
сатором 10 в четырех положениях. Поджим оправки б к верх¬
нему торцу втулки 5 осуществляется гайкой через шайбы 13,
15 и упругим элементом 14.Обрабатываемая заготовка 8 устанавливается по внутрен¬
нему диаметру на оправку и закрепляется винтом 9. Элект-
род-инструмент устанавливается по кондуктору 3, и прово¬
дится последовательное изготовление четырех пазов в верх¬
нем торце заготовки. Затем заготовка снимается с оправки,
переворачивается на 180°, устанавливается изготовленными
пазами на 'базирующие выступы оправки и закрепляется.
Перед началом обработки следующих четырех пазов элект¬
род-инструмент устанавливается по кондуктору 7.При обработке партии деталей целесообразно изготавли¬
вать пазы сначала в одном торце каждой заготовки, а затем вРис. 10.12. Схема приспособления для формообразования восьми пазов в
тонкостенной втулке с использованием электроэрозионной обработки236
другом. Это исключает необходимость замены электрода-ин¬
струмента при обработке каждой заготовки.Для изготовления трех Г-образных пазов (см. рис. 10.9,г),
расположенных по окружности под углом 120°, используют
приспособление (рис. 10.13). Оно состоит из сварного корпуса1, оправки 2 у вращающейся в чугунной втулке 12 и фиксиру¬
ющейся в трех положениях с помощью собачки 6. Последняя
подпружинена пружиной 7. Поджим оправки к торцу втулки
осуществляется гайкой через шайбы 10 л 11 и упругий эле¬
мент 9.Обрабатываемая заготовка 4 устанавливается по внутрен¬
нему диаметру на оправку до упора в торец. Подвижный ус¬
танов 3 находится при этом в горизонтальном положении.
Затем он ставится в вертикальном положении, а обрабатыва¬
емая заготовка поворачивается вокруг своей оси по ходу ча¬
совой стрелки до упора одним из трех буртов в установочную
плоскость установа и фиксируется в этом положении с помо¬
щью винта 8. Электрод-инструмент 5 выставляется по уста¬
новочной плоскости для изготовления первого паза. После
установки электрода-инструмента в исходное для обработки
положение установ отводится в горизонтальную плоскость.
После изготовления первого паза освобождают оправку, ко¬
торая поворачивается вместе с заготовкой на 120° и фиксиру¬
ется в этом положении для изготовления второго паза.5Рис. 10.13. Схема приспособления для формообразования трех Г-образных
пазов в тонкостенной втулке с использованием электроэрозионнойобработки237
При обработке партии деталей установка и выверка элек¬
трода-инструмента необходима только перед изготовлением
первого паза в первой заготовке.Использование стальных профилированных электродов-
инструментов для прошивки узких пазов в тонкостенных де¬
талях дает значительную экономию за счет уменьшения сто¬
имости технологического оборудования, а также сокращения
числа операторов-станочников.10.5. ПРИСПОСОБЛЕНИЯ ДЛЯ ЭЛЕКГРОЭРОЗИОННОГО
СПОСОБА ИЗГОТОВЛЕНИЯ МАТРИЦ
ВЫРУБНЫХ ШТАМПОВИспользование стальных электродов-пуансонов для чис¬
товой обработки матриц вырубных штампов обладает рядом
преимуществ перед другими технологическими вариантами.
Во-первых, отпадает необходимость в изготовлении высоко¬
точного электрода - инструмента для финишной обработки:
его функцию выполняет рабочий пуансон. Это имеет большое
значение при единичном и мелкосерийном изготовлении штам¬
пов, т.е. тогда, когда затраты на производство электродов-
инструментов относительно велики. Отпадает необходимость
в переустановках электрода-инструмента, что способствует
повышению точности изготовления и расположения рабочих
полостей относительно друг друга в многоместных штампах.
Обеспечивается эквидистантность профилей пуансона и мат¬
рицы. В большинстве случаев использование электродов-пу-
ансонов позволяет полностью исключать слесарные работы
по обеспечению необходимого сопряжения пуансона и матри¬
цы.Электроэрозионное изготовление полостей в матрицах про¬
водится после их термообработки, что предотвращает возник¬
новение термических деформаций.Формообразование полостей с помощью стальных элект¬
родов можно проводить в сплошной заготовке матрицы, а так¬
же в заготовке, имеющей технологическое отверстие или пред¬
варительно подготовленную полость с припуском под финиш¬
ную обработку. Формообразование рабочей полости в сплош¬
ной заготовке требует значительных затрат времени. Поэто¬
му в большинстве случаев необходимо предварительное уда¬238
ление основной массы материала из заготовки, которое про¬
водится как механическими средствами, так и электроэро-
зионной обработкой на черновых или получистовых режи¬
мах.Эффективность предварительной операции зависит от фор¬
мы и размеров полости, а также от соответствующей техни¬
ческой базы предприятия. При изготовлении в заготовках
полостей сложной формы, а также малых размеров предва¬
рительное удаление материала предпочтительнее выполнять
электроэрозионным методом.Известно, что в практике изготовления штампов достиже¬
ние эквидистантности профиля пуансона и матрицы и получе¬
ние малых зазоров между ними вызывает большие затрудне¬
ния, поэтому наиболее важное значение придается вариантам,
связанным с утоныпением удлиненной части пуансона.Операция утоныпения может быть выполнена различны¬
ми способами, в том числе резанием, электрообработкой, хи¬
мическим травлением. Методы механической обработки, в
частности шлифование, следует использовать при простых
формах пуансонов и не слишком жестких допусках на разме¬
ры. При утоньшении сложнопрофильных или имеющих жес¬
ткие допуски на размеры пуансонов обработка шлифованием
может быть связана с погрешностями, которые в конечном
итоге приводят к неравномерности зазора между пуансоном и
матрицей.В ряде случаев утоныпение удлиненной части пуансона
может быть проведено с помощью электроэрозионной обра¬
ботки. Однако наиболее эффективным способом утоныпения
электродов является химическое травление, с помощью кото¬
рого можно обеспечить равномерный съем металла по пери¬
метру пуансона, а также получать ступенчатое утоныпение с
различным числом ступеней.Использование стальных электродов вообще и электродов-
пуансонов, в частности, существенно расширяет возможнос¬
ти электротехнологии и позволяет получить ряд новых вари¬
антов обработки металла путем использования метода вырез¬
ки непрофилированным электродом и метода обратного ко¬
пирования.Известно, что во многопуансонных штампах расположе¬
ние пуансонов и расстояния между ними должны быть стро¬239
го выдержаны. Кроме того, в штампах последовательного дей¬
ствия необходимо строго согласовывать расположение выруб¬
ных и пробивных пуансонов относительно друг друга. Эти
требования необходимо учитывать при выборе схемы обра¬
ботки и соответствующего технологического варианта. Обра¬
ботку рабочих полостей можно проводить последовательно
отдельными электродами или их блоками, а также одновре¬
менно всеми электродами. Когда количество пуансонов вели¬
ко и их точная установка и выверка затруднены, то электро¬
ды можно скомпоновать на нескольких пластинах-держате-
лях. В этом случае обработка проводится последовательно
каждой группой электродов. По такой схеме обрабатывались
детали 8-пуансонного штампа (рис. 10.14, а, б).Рис. 10.14. Общий вид рабочих элементов 8-пуансонного штампаНаличие отверстий под направляющие колонки позволя¬
ет точно фиксировать положение матрицы, съемника и пуан-
сондержателя. Технологические отверстия и отверстия под
колонки в пуансондержателе, съемнике и матрице выполня¬
ются на координатно-расточном станке. После этого заготов¬
ка подвергается соответствующей термообработке и шлифо¬
ванию по плоскостям. Пуансоны изготавливаются удлинен¬
ными, с цилиндрическими хвостовиками с обоих концов: с
одного конца - для крепления в блоке (или в электрододер-
жателе), с другого - для базирования по технологическим
отверстиям в матрице.Схема расположения матрицы, съемника и пуансонов по¬
казана на рис. 10.15. На рис. 10.16 показана схема раскроя
полосы (а) и схема расположения пробивных и вырубных240
пуансонов (б), собирае¬
мых в одном блоке. Для
штампа используются
два блока. Пуансоны ус¬
танавливаются строго
перпендикулярно плос¬
кости съемника (и матри¬
цы) и базируются по ко¬
ординатным отверстиям.Электроэрозионное
утоныпение пуансонов
путем прошивки съемни¬
ка выполняется на чис¬
товом режиме. Для точ¬
ного совмещения рабочих
полостей обработка осу¬
ществляется с обратной
стороны съемника, мат¬
рицы и пуансонодержате-
ля. После обработки
съемника этим же бло¬
ком пуансонов-электро¬
дов обрабатывается мат¬
рица, а затем - пуансо--ЕШ-ф-ъ с-Ф-13Рис. 10.15. Схема расположения матри¬
цы, съемника и пуансонов при электро-
эрозионной обработкеРис. 10.16. Схема раскроя полосы и расположения пуансонов в пуансоно-держателе241
нодержатель (также фиксируемый штифтами), установлен¬
ный на обрабатываемую матрицу. Аналогично выполняется
обработка вторым блоком пуансонов. После этого удаляется
эрозированная часть пуансонов, а также хвостовики. Пуансо¬
ны запрессовываются в пуансонодержатель своими концами,
которые граничат с эрозированной частью. Длительность про¬
цесса электроэрозионной обработки матрицы (см. рис. 10.14)
составляет примерно 25 часов. При сборке штампа не требу¬
ется слесарная подгонка.Рассмотренный вариант обработки матрицы является од¬
ним из простейших, так как не требует другой специальной
оснастки и может быть эффективно использован при единич¬
ном изготовлении малых и средних вырубных штампов с
высотой рабочего пояска до 5 — 6 мм и зазорами 0,04 — 0,06 мм.
Недостатком этого варианта является повышенная длитель¬
ность обработки вследствие необходимости удаления больших
припусков на чистовом режиме.При изготовлении рабочих полостей с высотой пояска,
превышающей 5 мм, а также при необходимости обеспечить
зазор между пуансоном и матрицей меньше 0,05 мм (на сто¬
рону) рассмотренный вариант оказывается малоэффективным.
В таких случаях следует использовать электроды-пуансоны,
имеющие строго цилиндрическую поверхность утоньшенной
части. Такое утоныпение может быть обеспечено путем хи¬
мического травления, а также посредством электроэрозион¬
ной обработки пуансона плас¬
тиной, имеющей полость с про¬
филем, эквидистантным про¬
филю пуансона (рис. 10.17).Предварительное удаление
основной массы материала из
матрицы и съемника выпол¬
няется методом вырезки про¬
волочным электродом. Окон¬
чательное формообразование
полостей матрицы проводит¬
ся одновременно всеми элек¬
тродами, при этом на обработ¬
ку потребуется 7 часов ма¬
шинного времени. ЗатратыРис. 10.17. Пример формы пластины
с эквидистантным профилем для
электроэрозионной обработки
пуансонов242
времени на утонынение электродов электроэрозионным спо¬
собом составляют 23 часа. Слесарная подгонка рабочих дета¬
лей штампа не требуется.При серийном производстве одноместных, и особенно мно¬
гоместных матриц штампов, имеющих полости одинаковых
размеров, предварительное удаление материала из матрицы
следует проводить, используя промежуточные электроды и
соответственно получистовые режимы обработки. При изго¬
товлении промежуточных электродов для достижения иден¬
тичности их размеров необходима специальная оснастка. Рас¬
считываются эти размеры таким образом, чтобы после полу-
чистовой обработки остающийся припуск на чистовую обра¬
ботку составлял 0,2 — 0,3 мм (на сторону). Опыт показывает,
что такая величина припуска вполне достаточна для компен¬
сации погрешностей, возможных как за счет установки, так
и за счет неравномерности износа электродов при предвари¬
тельной обработке.По этому варианту изготовля¬
ются матрицы 23-пуансонных
штампов для вырубки железа
якоря и статора электродвигате¬
лей (рис. 10.18). Выполнение
рабочих полостей в этих матри¬
цах проводится в два этапа. Пред¬
варительно заготовка обрабаты¬
вается с обратной стороны с по¬
мощью медных электродов. Раз¬
работан ряд приспособлений для
набора и крепления электродов,
используемых при предваритель¬
ной и чистовой обработке. На
рис. 10.19 показано приспособ¬
ление для набора электродов. На
основании 6 жестко установлен
центрирующий палец 4, на ко¬
торый надеваются мастер-матри-
ца 1 и обойма 2 с гайкой 5. Мас¬
тер-матрица имеет пазы (по чис¬
лу пуансонов), изготовленные с
высокой точностью. Обойма пред¬Рис. 10.18. Эскиз матрицы
23-пуансонного штампа
для вырубки железа якоря и
статора электродвигателей243
ставляет собой ци¬
линдр с буртиком,
имеющим сквозной
паз по образующей, и
свободно вращаю¬
щийся относительно
мастер-матрицы. Для
набора электродов в
приспособлении паз
обоймы совмещают с
одним из пазов мас-
тер-матрицы, в кото¬
рой устанавливают
электрод. Затем обой¬
му поворачивают до
совмещения другого
паза с соответствую¬
щим пазом на мастер-
матрице и устанавли¬
вают следующий
электрод. Таким об¬
разом, заполняют все
пазы, после чего
обойма фиксируется
винтом 7 и гайкой 5.Электроды-инстру-
менты поджимаются с незначительным усилием к базовым
поверхностям пазов мастер-матрицы винтами 3. Электро-
додержателем для набора черновых электродов является
диск с овальными отверстиями, выполненными по коорди¬
натам пазов в мастертматрице, а для набора чистовых элек-
тродов-пуансонов используется пуансонодержатель штам¬
па. Электрододержатель устанавливается на торец мастер-
матрицы таким образом, чтобы электроды были располо¬
жены с равномерными зазорами относительно поверхности
овальных отверстий, и закрепляется разрезной шайбой 9 и
гайкой 8. Крепление черновых электродов в электрододер-
жателе проводится путем заливки в отверстия легкоплав¬
кого сплава, а чистовых электродов - путем заливки сти-
ракрилом.Рис. 10.19. Схема приспособления для
набора и крепления электродов в элект-
рододержателе электроэрозионного станка244
На рис. 10.20 пред¬
ставлено приспособление
для предварительной об¬
работки матрицы с об¬
ратной стороны. Матри¬
ца 4 устанавливается в
приспособлении и цент¬
рируется относительно
электродов по пальцу 2,
фиксируется шпонкой 3
и закрепляется гайкой 5.
Опорной плоскостью для
матрицы служит чаша 1
с прорезями, изготовлен¬
ными для выхода элект¬
родов-инструментов.
Электроды для предвари¬
тельной обработки могут
быть изготовлены путем
горячего выдавливания
через фильеру, профиль
которой сформирован
электроэрозионным спо¬
собом.При чистовой обра¬
ботке матрица устанав¬
ливалась и закреплялась
в приспособлении, схема
которого показана на
рис. 10.21. С лицевой
стороны матрицы обра¬
ботка выполнялась одно¬
временно всеми электро-
дами-пуансонами, удли¬
ненная часть которых
утоньшалась химичес¬
ким травлением. В про¬
цессе чистовой обработки
питание каждого элект-
рода-инструмента прово-Рис. 10.20. Приспособление для предва¬
рительной обработки заготовки матрицы
с использованием электроэрозионной
обработкиРис. 10.21. Схема приспособления для
чистовой электроэрозионной обработки
заготовки матрицы вырубного штампа245
дилось от своего контура, т.е. была использована многокон¬
турная схема обработки.Процесс обработки матриц осуществляется с прокачкой
через обрабатываемое отверстие диэлектрика (керосина). Ха¬
рактерной особенностью рассматриваемого варианта обработ¬
ки является рациональное распределение остающегося при¬
пуска под чистовую обработку по высоте рабочего пояска по¬
лости матрицы. Наибольший припуск- образуется с лицевой
стороны вследствие появления конусности после предвари¬
тельной обработки. Это способствует увеличению стабильнос¬
ти обработки и уменьшению конусности в рабочей полости.
Длительность обработки матрицы на получистовом режиме
при толщине ее 30 мм составила 3 — 3,5 часа, а длительность
чистовой обработки при высоте рабочего пояска 20 мм -12 —
15 часов.Точность расположения полостей в матрице обеспечива¬
ется использованием описанных приспособлений, а также
жесткостью конструкции установки. Рассмотренный вариант
обработки является наиболее совершенным и позволяет по¬
лучать высококачественное сопряжение пуансона с матри¬
цей.Для получения наиболее эффективных результатов обра¬
ботки следует уделять особое внимание выбору марок сталей
для пуансонов и матрицы. Основным методом при этом сле¬
дует считать экспериментальное определение эрозионных ха¬
рактеристик инструментальных сталей при использовании
имеющегося оборудования. Опыт показывает, что обработку
сталей стальными электродами целесообразно проводить толь¬
ко на чистовых режимах. При обработке на установках с RC-
генераторами стали образуют по убыванию относительной
стойкости следующий,ряд: 7ХЗ-Х12М, 9 ХС-У8А, Р18-Х12М,
Р18-У8А, Х12М-Х12М. Руководствуясь этим и учитывая та¬
кой важный фактор, как производительность, следует реко¬
мендовать пары сталей в следующем порядке: Х12М-Х12М,
7ХЗ-Х12М, 9ХС-У8А. (Первая марка - материал пуансона,
вторая - материал матрицы.)Известно, что рабочие полости в матрице пробивного штам¬
па при слесарно-механическом способе изготовления обычно
выполняют в соответствии с формой и размерами пуансона.
При изготовлении вырубных штампов, наоборот, сначала246
выполняется рабочая полость в матрице, а размеры пуансо¬
нов подгоняют таким образом, чтобы обеспечить требуемый
зазор.В отличие от слесарно-механического способа технология
электроэрозионного изготовления рабочих полостей в матри¬
цах предусматривает одинаковый способ достижения требуе¬
мого зазора как для пробивных, так и для вырубных штам¬
пов. Это связано с тем, что при обработке между электродом
и деталью автоматически образуется зазор, величина которо¬
го обусловлена напряжением на электродах и их электроэро¬
зионной стойкостью. Поэтому пробивные электроды-пуансо¬
ны изготавливаются по чертежам рабочего пуансона, а вы¬
рубные изготавливаются с размерами, меньшими соответству¬
ющих размеров рабочей полости на величину зазора, кото¬
рый задан в чертежах штампа при вырубке, т.е.Дм= Дн’ Дп = Дн ~ ^где Дм — размер полости в матрице; Дн — номинальный раз¬
мер вырубаемой детали; Дп — размер сечения пуансона; 8 —
зазор между пуансоном и матрицей.При пробивке отверстия Дп = Дн, а Дм = Дн + 8.При этом электроды-пуансоны изготавливаются удлинен¬
ными на определенную величину. Исходя из данных по обра¬
батываемости сталей и их относительному износу, длина элек-
трода-инструмента определяется по формулеL = L + КН,где L — длина пуансона, указанная на чертеже; Н — высота
рабочего пояска матрицы; К — коэффициент, зависящий от
формы профиля. Этот коэффициент К изменяется (при рабо¬
те с RC-генератором) от 2 до 4, принимая наибольшее значе¬
ние при наличии остроугольных элементов в соответствии с
соотношениемК = 4 - 0,025а,
где а — величина угла остроугольного элемента, которое спра¬
ведливо в пределах углов от 5 до 80°.Для крепления электродов в электрододержателе необхо¬
дим хвостовик, диаметр которого не должен превышать раз¬
мера сечения пуансона. Длина хвостовика выбирается в зави¬
симости от размеров электрододержателя и обычно составля¬
ет 15 — 20 мм.247
Для получения необходимого зазора между пуансоном и
матрицей и обеспечения заданных размеров полости матри¬
цы в большинстве случаев приходится прибегать к утоныпе-
нию удлиненной части электрода на величину, определяемую
по графикам зависимости величины зазора от рабочего на¬
пряжения для данной пары сталей. Опыт показывает, что
наиболее эффективным методом утоныпения является хими¬
ческое травление. Для обеспечения стабильного и равномер¬
ного утоныпения электродов при небольших затратах време¬
ни следует использовать 10%-ный раствор серной кислоты.
Равномерность съема металла как с боковых поверхностей,
так и с острых кромок достигается при сообщении травителю
циркуляции вдоль боковых поверхностей пуансонов. Схема
устройства для травления электродов приведена на рис. 10.22.
В сосуд 2 с раствором серной кислоты погружаются утоньша¬
емой частью электроды-пуансоны 5.Температура раство¬
ра поддерживается в не¬
обходимых пределах с
помощью нагревателя 4
и контролируется термо¬
метром 1. Циркуляция
раствора обеспечивается
вращением мешалки 3
от электродвигателя 6,
установленного на крон¬
штейне. Стравливание
слоя толщиной до 0,2 мм
практически не искажа¬
ет формы электродов.Обычно максимальная
величина требуемого
утоныпения не превы¬
шает 0,08 мм. Только в
случае ступенчатого
утоныпения величина
его на первой ступени
может быть большей -0,1 — 0,15 ММ (на сторо- Рис 10 22, Схема установки дляну). травления поверхности электродов248
Зависимость интенсивности травления инструментальных
сталей от температуры травителя показана на рис. 10.23 (тра-
витель — 10%-ный раствор H2S04; время травления 15 мин).
Для получения стабильных результатов процесс травления
ведут при определенной температуре. Поскольку съем метал¬
ла происходит пропорционально времени травления, то тол¬
щину S3 удаляемого слоя можно определить для соответству¬
ющей температуры травителя из следующей формулы:t = KS3,где t — время травления; К — коэффициент, определяемый
по графикам, аналогичным приведенным на рис. 10.23.Стали одной и той же марки, но различных поставок мо¬
гут иметь несколько различающиеся коэффициенты. В слу¬
чае отсутствия специальной оснастки при единичном изго¬
товлении штампов для утоньшения электродов-пуансонов
можно использовать про¬
межуточные детали, из¬
готавливаемые из меди,
латуни или других эро¬
зионностойких и легко-
обрабатываемых мате¬
риалов. В промежуточ¬
ных деталях - сплош¬
ных или разрезных —
по отпечатку пуансона
изготавливается полость
(слесарным или иным
методом). Размеры ее
должны быть меньше
соответствующих разме¬
ров пуансонов на 0,1 —0,3 мм. Толщина проме¬
жуточных деталей-элек-
тродов должна состав¬
лять 10 — 20 мм. Элек-
троэрозионное утоныпе-
ние проводится на мяг¬
ком режиме. Оконча¬
тельное формообразова¬S, мкмРис. 10.23. Зависимость интенсивности
травления инструментальных сталей от
температуры травителя (10 %-ный раствор
H2S04; время травления - 15 мин; 1 - ХВГ;
2 - 9ХС; 3 - X12M; 4 - 14X15; 5 - У8А)249
ние полости матрицы утоньшенным пуансоном в этом случае
выполняется с обратной стороны матрицы.При изготовлении штампов с малыми зазорами между
пуансоном и матрицей можно использовать промежуточные
детали с размерами полости, равными соответствующим раз¬
мерам пуансона. Для изготовления таких деталей необходи¬
мо располагать приспособлениями для прессования деталей
из порошков. На рис. 10.24 приведена конструкция одного
из таких приспособлений.На плите 7 закреплен матрицедержатель 5 с запрессован¬
ной матрицей 4. Матрицедержатель установлен на направля¬
ющих планках 6, между которыми перемещаются ползушки11 с пружинами 10. Перемещение ползушек осуществляется
при движении верхней плиты 15 по двум направляющим ко¬
лонкам 16 при нажатии клиньев 14 на ролики 12. Перемеще¬
ние верхней плиты ограничивается кольцом 17.В прямоугольных пазах пуансонодержателя размещены два
фиксатора 3, находящиеся под постоянным воздействием пру¬
жин 2. Усилие пружин и длина пути перемещения фиксато¬
ров регулируются.Прессование промежуточных деталей-электродов выпол¬
няется следующим образом: пуансон-оправка 1 своим хвосто¬
виком устанавливается на ползушках. В матрицу засыпают
металлический порошок и надевают на пуансон-оправку до-Рис. 10.24. Схема приспособления для прессования
электродов-инструментов250
полнительную шайбу 8. При перемещении пуансона 13 вниз
происходит прессование материала, клинья надавливают на
ролики и раздвигают ползушки. Одновременно фиксаторы на¬
жимают на хвостовик пуансона-оправки и раздвигаются. При
дальнейшем перемещении пуансона 13 вниз происходит зах¬
ват пуансона-оправки за буртик и возврат ползушек в их пер¬
воначальное положение. Пружины 10 и 2 препятствуют са¬
мопроизвольному отходу фиксатора и ползушек.При обратном ходе пуансона происходит съем спрессован¬
ного промежуточного электрода-детали 9 и шайб 8 с пуансо¬
на-оправки с помощью ползушек. Шайбы и изделие падают
через отверстие в плите. Затем процесс прессования повторя¬
ется. Использование спрессованных деталей-электродов по¬
зволяет осуществлять электроэрозионное утоныпение на ве¬
личину, близкую к величине межэлектродного зазора. Пос¬
ледующая обработка матрицы утоньшенным на эту величину
пуансоном-электродом теоретически может обеспечить безза¬
зорное сопряжение матрицы и пуансона. Однако на практике
недостаточно точное выполнение приспособления и недоста¬
точная жесткость имеющегося оборудования при использова¬
нии данного варианта пока не позволяют получать беззазор¬
ное сопряжение.Наличие приспособлений для опрессовки пуансона позво¬
ляет выполнять повторную опрессовку утоньшенного пуансо¬
на, что дает возможность регулировать в известных пределах
результатирующее утоныпение пуансона.Форму полостей в обрабатываемых заготовках рабочих
элементов штампов определяют из конфигурации вырубае¬
мой детали. Поскольку чистовая обработка проводится на
режимах с невысокой скоростью съема металла, предвари¬
тельной обработкой полости следует обеспечить минималь¬
ные припуски. Величина оставляемых припусков должна обес¬
печивать устранение возможных дефектов, вызываемых пред¬
варительной обработкой, неточностью изготовления промежу¬
точных электродов, а также погрешностью их установки. Опыт
показывает, что достаточная величина этого припуска состав¬
ляет 0,2 — 0,3 мм. Формирование предварительных полостей
целесообразно проводить с помощью электроэрозионной об¬
работки, учитывая, что заготовка матрицы прежде должна
пройти положенную ей термообработку. Удаление основной251
массы материала может быть проведено как с помощью про¬
межуточных электродов на получистовом режиме, так и вы¬
резкой (по отпечатку) непрофилированным электродом.В качестве материала промежуточных электродов целесо¬
образно использовать медь и другие сравнительно недорогие
материалы с хорошими эрозионностойкими свойствами. Рас¬
чет размеров этих электродов следует проводить исходя из
заданных размеров полости. Поскольку после обработки про¬
межуточными электродами остается дефектный слой, а так¬
же возможны погрешности при их установке, то при опреде¬
лении размеров электродов эти факторы необходимо учиты¬
вать. Кроме того, следует учитывать величину межэлектрод-
ного промежутка, которая при получистовых режимах нахо¬
дится в пределах 0,2 — 0,3 мм. Таким образом, размеры про¬
межуточного электрода Дпэ рассчитываются по формулеД„-Д,-<8 + 4).где Дн — значение соответствующего размера полости (по чер¬
тежу); 8 — величина припуска, оставляемого под чистовую
обработку; А — величина образующегося межэлектродного
зазора при выбранном режиме предварительной обработки.В большинстве случаев размеры промежуточного электро¬
да должны быть меньше соответствующих размеров полости
на 0,4 — 0,5 мм на сторону. В случае изготовления полостей
с остроугольными элементами или тонкими стенками обра¬
ботку осуществляют на мягких режимах. При этом размеры
изготовляемых электродов должны быть меньше соответству¬
ющих размеров полости на 0,25 — 0,3 мм.Длина электродов устанавливается исходя из их жесткос¬
ти и необходимости повторного использования.252
11. КОНСТРУКЦИИ СПЕЦИАЛЬНЫХ СТАНОЧНЫХ
И КОНТРОЛЬНЫХ ПРИСПОСОБЛЕНИЙ11.1. ПРИСПОСОБЛЕНИЕ ДЛЯ УСТАНОВКИ
ЗАГОТОВКИ КАРТЕРА ДВС НА СТОЛЕ ГОРИЗОНТАЛЬНО¬
РАСТОЧНОГО СТАНКАПриспособление используется при растачивании отверстий
0110 и 060 мм в заготовке картера и предназначено для пол¬
ного базирования заготовки картера плоскостью, конической
внутренней поверхностью и наружной цилиндрической по¬
верхностью, а также для закрепления силами, направленны¬
ми по нормали к плоскости [18].В этом приспособлении (рис. 11.1) заготовка опирается на
три установочные сегментные пластины 6, расположенные по
окружности, на подпружиненный конус 4 и на неподвижную
опору 2. Зажим заготовки осуществляется с помощью трех
прихватов 7, связанных с пневмоприводом и расположенных
по окружности, обеспечивая приложение сил зажима по нор¬
мали к опорным пластинам. Приспособление снабжено уст-Рис. 11.1. Схема приспособления для растачивания отверстий в заготовкекартера ДВС253
ройствами 1, обеспечивающими направление режущего инст¬
румента при растачивании отверстий.Заготовка устанавливается на опорные сегментные плас¬
тины 6 и входит в контакт с подпружиненным конусом 4,
который поворотом вокруг оси подводит заготовку к опорно¬
му элементу 2. На торцовую поверхность верхнего патрубка
картера устанавливается вилка 3, и включается пневмосис¬
тема зажима заготовки. Сжатый воздух поступает в верхнюю
полость цилиндра 5, и заготовка зажимается тремя прихва¬
тами 7. Съем заготовки осуществляется после разжима и по¬
воротов прихватов с помощью рукояток 8.Основные технические требования к расположению
установочных элементов• Отклонение от перпендикулярности оси поверхности В относи¬
тельно поверхности Б не более Тх на длине 1г;• отклонение от параллельности поверхности Б относительно по¬
верхности А не более Т2 на длине 12;• отклонение от соосности поверхностей Г и Д не более Т3 на длине Z3;• отклонение от параллельности оси поверхности Д относительно
поверхности А не более Т4 на длине Z4.11.2. ПРИСПОСОБЛЕНИЕ ДЛЯ УСТАНОВКИ
ЗАГОТОВКИ ВИЛКИ КАРДАННОГО ВАЛА НА СТОЛЕ
КАРУСЕЛЬНО-ФРЕЗЕРНОГО СТАНКАПриспособление используется для фрезерования плоско¬
сти вилки карданного вала. В приспособлении полное базиро¬
вание заготовки реализуется с помощью жесткого цилиндри¬
ческого пальца 5, плоское основание 6 которого служит опо¬
рой заготовки (рис. 11.2). Подпружиненная призма 7 реали¬
зует опору цилиндрической поверхности заготовки. Закреп¬
ление заготовки осуществляется с помощью прихвата 3, свя¬
занного с диафрагменным пневмоприводом 11. Приспособле¬
ние установлено на поворотном столе 10 карусельно-фрезер-
ного станка.Заготовка поверхностями отверстий проушин базируется
на жесткий цилиндрический палец 5, устанавливается на¬
ружной цилиндрической поверхностью в призму 7 с пружи¬
ной 8 и прихватом 3 подводится к плоскости основания ци¬
линдрического пальца 5. Закрепление заготовки осуществля-254
Рис. 11.2. Схема приспособления для фрезерования плоскости вилкикарданного валается с помощью диафрагменного пневмопривода 11. Усилие
зажима передается на прихват 3 через рычаг 1 и болт 2. Воз¬
дух поступает ко всем пневмокамерам 11 по каналам через
золотник 9. При повороте стола 10 рабочие полости пневмо¬
камер в загрузочной позиции соединяются последовательно с
атмосферой, под действием пружины 4 заготовка освобожда¬
ется, а затем снимается со станка.Основные технические требования к расположению
установочных элементов• Отклонение от перпендикулярности оси поверхности Б относи¬
тельно поверхности В не более Т1 на длине 1г;• отклонение от параллельности поверхности В относительно по¬
верхности А не более Т2 на длине /2.255
11.3. ПРИСПОСОБЛЕНИЕ ДЛЯ УСТАНОВКИ ЗАГОТОВКИ
ВТУЛКИ НА СТОЛЕ ФРЕЗЕРНОГО СТАНКАПриспособление используется для фрезерования пазов в
заготовке втулки и предназначено для базирования заготов¬
ки плоскостью торца, внутренней цилиндрической поверхнос¬
тью отверстия меньшего диаметра и плоскостью бобышки.В приспособлении (рис. 11.3) заготовка своим торцом опи¬
рается на опорную пластину 4, а отверстием устанавливается
на жесткий цилиндрический палец 3. В окружном направле¬
нии заготовка получает ориентацию с помощью подводимого
опорного элемента 5, который разворачивает заготовку и ори¬
ентирует плоскость ее бобышки. Зажим заготовки осуществ¬
ляется прихватами 2, приводимыми в движение вручную с
помощью винтов 1.Заготовку отверстием устанавливают на цилиндрический
палец 3 и на опорную пластину 4. Затем поворотом вокруг
пальца 3 подводят плоскость бобышки к подвижному опор¬
ному элементу 5 и вращением винта 6 доводят плоскость опор¬
ного элемента 5 до контакта с плоскостью бобышки. Прихва-Рис. 11.3. Схема приспособления для фрезерования пазов в заготовкевтулки256
ты 2 набрасывают на заготовку, которую зажимают с помо¬
щью винтов 1.Основные технические требования к расположению
установочных элементов• Отклонение от параллельности поверхности Б относительно по¬
верхности Г не более Тг на длине• отклонение от перпендикулярности оси поверхности В относи¬
тельно поверхности Б не более Т2 на длине 12.11.4. ДЕВЯТИМЕСТНОЕ ПРИСПОСОБЛЕНИЕ
ДЛЯ УСТАНОВКИ ЗАГОТОВОК ВТУЛОК НА СТОЛЕ
ФРЕЗЕРНОГО СТАНКАПриспособление используется при обработке пазов на тор¬
цовых поверхностях девяти втулок и предназначено для ба¬
зирования заготовок плоскостью торца, внутренней цилинд¬
рической поверхностью и боковой плоскостью шпоночного
паза, а также для закрепления заготовок силами, направлен¬
ными по нормали к опорной плоскости.В приспособлении (рис. 11.4) заготовки своими торцами
опираются на опорную пластину 3, внутренними цилиндри¬
ческими поверхностями базируются на жестких цилиндри¬
ческих пальцах 1, а их ориентация в окружном направлении
обеспечивается с помощью цилиндрических штифтов 2, ко¬
торые при базировании заготовок входят в шпоночные пазы.
Зажим заготовок осуществляется с помощью винтов 4, кото¬
рые плоскостью головки действуют на торцовую поверхность
втулки.Заготовку по отверстию базируют на цилиндрическом паль¬
це 1 таким образом, чтобы шрифт 2 вошел в шпоночный паз,
и устанавливают торцом на опорную пластину 3. В резьбовое
отверстие вворачивают винт 4 и зажимают втулку. При съе¬
ме винт 4 выворачивают, и заготовку снимают.Основные технические требования к расположению
установочных элементов• Отклонение от параллельности поверхности А относительно по¬
верхности Б не более Тг на длине 1г;• отклонение от перпендикулярности оси поверхности В относи¬
тельно поверхности А не более Т2 на длине 12.257
Рис. 11.4. Схема девятиместного приспособления
для обработки втулок11.5. ПРИСПОСОБЛЕНИЕ ДЛЯ УСТАНОВКИ ЗАГОТОВКИ
ЗУБЧАТОГО КОЛЕСА НА СТОЛЕ РАДИАЛЬНО¬
СВЕРЛИЛЬНОГО СТАНКАПриспособление используется при сверлении отверстий и
нарезании резьбы на радиально-сверлильном станке и пред¬
назначено для базирования заготовки внутренней цилиндри¬
ческой поверхностью, плоскостью торца и боковой плоско¬
стью шпоночного паза, а также для ее закрепления распреде¬
ленными по окружности силами, направленными по норма¬
ли к плоскости торца.258
В приспособлении (рис. 11.5) заготовка базируется отвер¬
стием на жесткой цилиндрической оправке 2, торцом опира¬
ется на пластину 4, а в шпоночный паз ее входит призмати¬
ческая шпонка 3. Зажим заготовки осуществляется с помо¬
щью прихвата 14, выполненного в виде накидного крюка и
связанного со штоком, который перемещается вручную с по¬
мощью рукоятки. Приспособление закрепляется на столе стан¬
ка с помощью прихватов.Заготовку поверхностью отверстия устанавливают на же¬
сткую цилиндрическую оправку 2 так, чтобы установочный
элемент 3 вошел в шпоночный паз, и доводят ее до контакта
с установочным элементом 4, играющим роль опорной плас¬
тины. Поворачивая вокруг оси винта 15 прихват 14, его на¬
кидывают на шток 1 и, вращая рукоятку 11, зажимают заго¬
товку.Кондукторную плиту 7 поворачивают вокруг оси 8, опус¬
кают на плиту 6 и фиксируют в этом положении поворотом
стопорного винта 5.После обработки одного отверстия заготовку поворачива¬
ют на 180°. Для этого поворотом рукоятки 10 выводят фикса¬
тор 13 т отверстия втулки 12 и с помощью рукоятки 9 по-Рис. 11.5. Схема приспособления для сверления отверстий и нарезания
резьбы в заготовке зубчатого колеса259
ворачивают втулку 12, шток 1 и заготовку. Поворот осуще¬
ствляют до тех пор, пока фиксатор не войдет в отверстие во
втулке 12.Для съема заготовки стопорный винт 5 поворачивают так,
чтобы плоскость его головки располагалась вдоль паза кон¬
дукторной плиты 7, которую откидывают. Поворотом руко¬
ятки 11 открепляют заготовку и снимают прихват 14 со што¬
ка 1.Основные технические требования к расположению устано¬
вочных элементов• Отклонение от параллельности оси поверхности В относительно
поверхности А не более Тх на длине I ;• отклонение от перпендикулярности поверхности Б относительно
поверхности В не более Т2 на длине 12;• отклонение от перпендикулярности оси кондукторных втулок
относительно поверхности А не более Т3 на длине /3.11.6. ШЕСТИМЕСТНОЕ ПРИСПОСОБЛЕНИЕ
ДЛЯ УСТАНОВКИ ЗАГОТОВОК КОНИЧЕСКИХ ЗУБЧАТЫХ
КОЛЕС НА СТОЛЕ ПРОДОЛЬНО-ФРЕЗЕРНОГО СТАНКАПриспособление (рис. 11.6) используется при фрезерова¬
нии лысок в заготовках конических зубчатых колес и пред¬
назначено для базирования заготовок внутренней цилиндри¬
ческой поверхностью, плоскостью торцовой поверхности и
боковой плоскостью шпоночного паза. Закрепление заготов¬
ки осуществляется силой, направленной по нормали к опор¬
ному торцу.В приспособлении (рис. 11.7) заготовка устанавливается
на жесткую цилиндрическую оправку 2, опорную пластину 4
и на призматическую шпонку 1, закрепленную на оправке.
Зажим заготовки осуществляется с помощью съемной шайбы
3 и гидропривода.Заготовку устанавливают отверстием на цилиндрическую
оправку 2, которая является штоком гидроцилиндра 5, одно¬
временно ориентируя шпоночным пазом относительно уста¬
новочного элемента 1 (призматическая шпонка), доводят ее
до контакта с опорной втулкой 4. Съемную шайбу 3 устанав¬
ливают на шток 2 гидроцилиндра 5. Поворотом рукоятки (на
схеме рукоятка не показана) включают гидропривод и осу-260
Рис. 11.6. Схема шестиместного приспособления для
фрезерования лысок на заготовках конических зубчатых колесРис. 11.7. Схема базирования и закрепления заготовки в фрезерном
приспособлении (см. рис. 11.6)261
ществляют зажим заготовок. Для съема заготовок отключа¬
ют давление в гидроцилиндрах 5 и снимают шайбы 3.Основные технические требования к расположению
установочных элементов• Отклонение от параллельности оси поверхности Б относительно
поверхности Д не более Тг на длине• отклонение от перпендикулярности оси поверхности Б относи¬
тельно поверхности В не более Т2 на длине 12;• отклонение от перпендикулярности поверхности Г относительно
оси поверхности Б не более Т3 на длине /3.11.7. ПРИСПОСОБЛЕНИЕ ДЛЯ УСТАНОВКИ
ЗАГОТОВКИ ВТУЛКИ НА СТОЛЕ СВЕРЛИЛЬНОГО СТАНКА
ПРИ СВЕРЛЕНИИ ОТВЕРСТИЯ В ТОРЦЕПриспособление (рис. 11.8) используется при сверлении
отверстий и предназначено для базирования заготовки плос¬
костью и внутренней цилиндрической поверхностью и для ее
закрепления равномерно распределенными силами, обеспе¬
чивающими центрирование заготовки по оси отверстия.В приспособлении заготовка опирается на опорную плас¬
тину 2, закрепляется с помощью конического элемента 6,
выполненного совместно с кондукторной плитой 5. После
приложения сил зажима положение заготовки фиксируется.Рис. 11.8. Схема приспособления для сверления
отверстия в заготовке втулки262
Заготовка устанавливается на опорную пластину 2 с пред¬
варительной ориентацией по отверстию с помощью жесткой
цилиндрической оправки 1. Поворотом рукоятки 3 переме¬
щают скалку 4 вместе с кондукторной плитой 5. Одновремен¬
но с этим конический элемент 6 входит в отверстие заготов¬
ки, обеспечивая ее центрирование и закрепление. Для съема
заготовки рукояткой 3 поднимают скалку 4 вместе с кондук¬
торной плитой 5 и коническим элементом 6.В данном приспособлении обеспечивается неполное бази¬
рование: заготовка в окружном направлении занимает произ¬
вольное положение.Основные технические требования к расположению
установочных элементов• Отклонение от параллельности поверхности Б относительно по¬
верхности А не более Тх на длине /х;• отклонение от соосности поверхности Д относительно поверхнос¬
ти Г не более Т2 на длине /2;• отклонение от перпендикулярности оси поверхности Д относи¬
тельно поверхности Б не более Т3 на длине Z3;• отклонение от перпендикулярности осей кондукторных втулок
относительно поверхности А не более Т4 на длине /4.11.8. ПРИСПОСОБЛЕНИЕ ДЛЯ УСТАНОВКИ
ЗАГОТОВКИ ШАТУНА ДВС НА СТОЛЕ ВЕРТИКАЛЬНО¬
ФРЕЗЕРНОГО СТАНКА С ЧПУПриспособление (рис. 11.9) используется при фрезерова¬
нии плоскости и сверлении отверстия в заготовке шатуна и
предназначено для базирования заготовки плоскостью, внут¬
ренней цилиндрической поверхностью и боковыми поверхно¬
стями головки. Закрепление заготовки осуществляется одно¬
временно двумя силами, направленными по нормали к опор¬
ной плоскости.В приспособлении заготовка опирается на опорные плас¬
тины 2, 5, 6, устанавливается на жесткий цилиндрический
палец 19 имеющий коническую заходную часть, а боковыми
поверхностями головки опирается на самоцентрирующие ус¬
тановочные элементы 3 и S, синхронное перемещение кото¬
рых обеспечивается с помощью гидропривода. Зажим заго¬
товки осуществляется одновременно прихватами 4 и 7 с по¬
мощью гидропривода.263
Рис. 11.9. Схема приспособления для фрезерования плоскости
в заготовке шатуна ДВСЗаготовку устанавливают отверстием на жесткий палец 1
и плоскостью на опорные пластины 2, 5, 6. Поворачивая ру¬
коятку гидравлического крана, перемещают установочные
элементы 3, 8 с помощью качающихся гидроцилиндров (на
схеме не показаны). Рабочая жидкость подается в полости
гидроцилиндров 9, и происходит зажим заготовки Г-образ-
ными прихватами 4 и 7.При съеме заготовки рукоятку гидравлического крана
поворачивают в противоположную сторону, при этом прихва¬
ты 4 и 7 поднимаются, а установочные элементы 3 и 8 отво¬
дятся от заготовки.Основные технические требования к расположению
установочных элементов• Отклонение от параллельности поверхности Д относительно по¬
верхности Г не более Т1 на длине / ;• отклонение от перпендикулярности оси поверхности В относи¬
тельно поверхности Д не более Т2 на длине 12.264
11.9. ПРИСПОСОБЛЕНИЕ ДЛЯ УСТАНОВКИ ЗАГОТОВКИ
ВТУЛКИ В ШПИНДЕЛЕ ТОКАРНОГО СТАНКАПриспособление (рис. 11.10) используется при растачива¬
нии отверстия на токарном станке и предназначено для бази¬
рования заготовки плоскостью и внутренней цилиндричес¬
кой поверхностью.В приспособлении заготовка опирается на опорную плас¬
тину 4 и на короткую жесткую цилиндрическую оправку 3.
Закрепление заготовки осуществляется с помощью Г-образ-
ных прихватов 2 и 1, соединенных с тягой пневмопривода.Заготовку устанавливают отверстием на цилиндрическую
оправку 3 и доводят до контакта с опорной пластиной 4. Удер¬
живая заготовку в этом положении, включают кран пневмо¬
системы (на схеме не показан). Под действием давления воз¬
духа тяга 6 движется влево, и с помощью коромысла 5 и
прихватов 2 и 1 происходит закрепление заготовки. Прихва¬
ты 2 и 1 связаны с тягой 6 через качающееся коромысло 5.
Это компенсирует непараллельность торцов заготовки.Для съема заготовки переключают кран пневмосистемы и
отводят прихваты 2 и 1 от заготовки.Рис. 11.10. Схема токарного приспособления для растачивания отверстияв заготовке втулки265
Основные технические требования к расположению
установочных элементов• Отклонение от перпендикулярности поверхности Г относительно
поверхности В не более Тх на длине 1г;• отклонение от перпендикулярности поверхности В относительно
оси поверхности Д не более Т2 на длине 12;• отклонение от соосности поверхности Г относительно поверхнос¬
ти Д не более Т3 на длине Z3.11.10. ПРИСПОСОБЛЕНИЕ ДЛЯ УСТАНОВКИ ЗАГОТОВКИ
ВТУЛКИ НА СТОЛЕ СВЕРЛИЛЬНОГО СТАНКА ПРИ
ОДНОВРЕМЕННОМ СВЕРЛЕНИИ НЕСКОЛЬКИХ
ОТВЕРСТИЙ В ТОРЦЕПриспособление (рис. 11.11) используется при сверлении
отверстий в заготовке втулки и предназначено для ее базиро¬
вания плоскостью торцовой поверхности, внутренней цилин¬
дрической поверхностью и закрепления.В приспособлении заготовка опирается на опорную шайбу2 и устанавливается на короткий жесткий цилиндрический
палец 1. Зажим заготовки осуществляется с помощью нажим¬
ной пяты 6, встроенной в кондукторную плиту 7.Заготовку устанавливают отверстием на цилиндрический
палец 1 и доводят до контакта с опорной пластиной 2. Затем
поворотом рукоятки 3 и винта 4 опускают шток 5 с кондук-Рис. 11.11. Схема приспособления для сверления отверстий в заготовкевтулки266
торной плитой 7 и зажимают заготовку нажимной пятой 6.
Для съема заготовки поворотом рукоятки 3 поднимают кон¬
дукторную плиту на требуемое расстояние.Основные технические требования к расположению
установочных элементов• Отклонение от параллельности поверхности Б относительно по¬
верхности А не более Т1 на длине 1Х\• отклонение от перпендикулярности оси поверхности В относи¬
тельно поверхности А не более Т2 на длине 12;• отклонение от перпендикулярности осей отверстий кондуктор¬
ных втулок относительно поверхности А не более Т4 на длине 14.11.11. ПРИСПОСОБЛЕНИЕ ДЛЯ УСТАНОВКИ ЗАГОТОВКИ
ВТУЛКИ НА СТОЛЕ СВЕРЛИЛЬНОГО СТАНКА ПРИ
СВЕРЛЕНИИ И РАЗВЕРТЫВАНИИ ОТВЕРСТИЙПриспособление (рис. 11.12) используется при сверлении
и развертывании радиальных отверстий в заготовке и пред¬
назначено для ее базирования торцовой плоскостью, внутрен¬
ней цилиндрической поверхностью и для закрепления рас¬
пределенными по торцам силами, направленными по норма¬
ли к этим торцам.В приспособлении заготовка опирается на торец фланца
цилиндрической оправки 1. Закрепление осуществляется с
помощью съемной разрезной шайбы 6 и ручного винтового
привода. Приспособление снабжено кондукторной плитой 4,
кондукторной втулкой 5, делительным и поворотным меха¬
низмами, позволяющими обработать восемь отверстий.Заготовку устанавливают отверстием на цилиндрическую
оправку 1 и доводят до контакта с торцовой поверхностью ее
фланца. На шток 8 устанавливают съемную шайбу 6 и пово¬
ротом маховика 11 с помощью винта 10 закрепляют заготов¬
ку. Для обработки режущий инструмент направляют в отвер¬
стие кондукторной втулки 5. После обработки одного отвер¬
стия заготовку поворачивают на 1/8 часть окружности. Для
этого поворотом рукоятки 7 отводят фиксатор 9 и вращают
диск 2 с помощью рукояток 3. Диск вращают до тех пор,
пока фиксатор 9 под действием пружины не войдет в новое
делительное отверстие, зафиксировав диск и заготовку в тре¬
буемом положении.267
Рис. 11.12. Схема приспособления для сверления и развертывания отвер¬
стий в заготовке втулкиОсновные технические требования к расположению
установочных элементов• Отклонение от перпендикулярности поверхности А относительно
поверхности Б не более Тг на длине 1Х\• отклонение от параллельности поверхности А относительно по¬
верхности В не более Т2 на длине /2;• отклонение от параллельности оси кондукторной втулки относи¬
тельно поверхности А не более Т3 на длине /3;• отклонение от перпендикулярности оси поверхности Г относи¬
тельно поверхности А не бблее ТА на длине /4.11.12. ЧЕТЫРЕХМЕСТНОЕ ПРИСПОСОБЛЕНИЕ
ДЛЯ УСТАНОВКИ ЗАГОТОВОК СТУПЕНЧАТЫХ ВАЛОВ
НА СТОЛЕ ФРЕЗЕРНОГО СТАНКАПриспособление (рис. 11.13) используется при фрезеро¬
вании шпоночных канавок и предназначено для базирования
заготовок наружной цилиндрической поверхностью и плос¬
костью (упор в торец) и для их закрепления.268
Рис. 11.13. Схема четырехместного приспособления для фрезерования
шпоночных канавок в заготовках валовВ приспособлении заготовки устанавливаются на V-образ-
ные и торцовые поверхности призм 1. Усилие зажима переда¬
ется от рычага пневмокамеры на прижимы 2 и 3 с помощью
рычага 4 и коромысла 5.Основные технические требования к расположению
установочных элементов• Отклонение от параллельности оси призмы относительно поверх¬
ности Б не более Т1 на длине 1г;• отклонение от параллельности оси призмы относительно поверх¬
ности В не более Т2 на длине 12.11.13. ПРИСПОСОБЛЕНИЕ ДЛЯ УСТАНОВКИ
ЦИЛИНДРИЧЕСКИХ ЗАГОТОВОК НА СТОЛАХ ФРЕЗЕР¬
НЫХ И СВЕРЛИЛЬНЫХ СТАНКОВПриспособление (рис. 11.14) используется при фрезерова¬
нии пазов, лысок и сверлении отверстий. Предназначено для
базирования заготовок наружной цилиндрической поверхно¬
стью, плоскостью (упор в торец) и для их закрепления.В приспособлении заготовка устанавливается в губки тис¬
ков 1 и упирается в упор 2. Закрепление заготовки осуществ¬
ляется перемещением губок тисков к заготовке.После установки заготовки включают кран пневмосисте¬
мы. С помощью реечной зубчатой передачи поступательное
движение штока пневмоцилиндра через зубчатый сектор 3269
Рис. 11.14. Схема приспособления для фрезерования пазов и лысок взаготовках валовпреобразуется во вращательное движение ходового винта 4 с
правой и левой резьбой. При этом одновременно происходит
перемещение губок тисков к заготовке и ее зажим.Основные технические требования к расположению
установочных элементов• Отклонение от параллельности осей призм губок относительно
поверхности А не более Тх на длине 1^• отклонение от перпендикулярности осей призм губок относительно
поверхности Б не более Т2 на длине 1Г11.14. ВОСЬМИМЕСТНОЕ ПРИСПОСОБЛЕНИЕ
ДЛЯ УСТАНОВКИ ЗАГОТОВОК ВАЛОВ НА СТОЛАХ
ФРЕЗЕРНЫХ СТАНКОВПриспособление (рис. 11.15) используется при фрезерова¬
нии пазов и предназначено для базирования заготовок валов
наружной цилиндрической поверхностью, торцовой плоско¬
стью и для их закрепления.В приспособлении заготовка устанавливается в призму 1
и опирается на опорную пластину 2. Закрепление заготовки
осуществляется прижимом 3 с помощью винта 5, системы
каналов с гидропластмассой и восьми плунжеров 4.После установки заготовок завинчивают винт 5 вращени¬
ем рукоятки по ходу часовой стрелки. При этом повышается
давление в каналах с гидропластмассой и происходит выдви¬
жение плунжеров до контакта прижимов с заготовками, что
обеспечивает прижим всех заготовок с равным усилием. При
обратном движении винта осуществляют разжим заготовок.270
Рис. 11.15. Схема восьмиместного приспособления для фрезерования пазовв заготовках валовОсновные технические требования к расположению
установочных элементов• Отклонение от перпендикулярности поверхности В относительно
поверхности Д не более Тг на длине• отклонение от параллельности поверхности Г относительно по¬
верхности Б не более Т2 на длине /2.11.15. ПРИСПОСОБЛЕНИЕ ДЛЯ УСТАНОВКИ
ЗАГОТОВОК ДЛИННЫХ ВАЛОВ НА СТОЛАХ
ФРЕЗЕРНЫХ СТАНКОВПриспособление (рис. 11.16) используется при фрезерова¬
нии длинных валов и предназначено для их базирования на¬
ружной цилиндрической поверхностью, плоскостью (с упо¬
ром в торец) и для закрепления заготовки.В приспособлении заготовка устанавливается на две при¬
змы 1 и упирается торцом в торцовую поверхность второй
призмы. Под действием давления сжатого воздуха, подавае¬
мого в межпоршневое пространство цилиндра, поршни со
штоками одновременно расходятся, поворачивая рычаги и
осуществляя зажим заготовки. Приспособление компонуется
на столе станка из двух одинаковых узлов, каждый из кото¬
рых состоит из корпуса 4, установочных призм 1, спаренного
пневмоцилиндра, выполненного в корпусе приспособления,
двух штоков 3 и двух рычагов 2, осуществляющих зажим
заготовки.271
EH ШРис. 11.16. Схема приспособления для фрезерования валовОсновные технические требования к расположению
установочных элементов• Отклонение от параллельности осей призм относительно поверх¬
ности А не более Тх на длине 1Х\• отклонение от параллельности осей призм относительно направ¬
ляющей базы приспособления (поверхность Б ) не более Т2 на длине 12.11.16. ПРИСПОСОБЛЕНИЕ ДЛЯ УСТАНОВКИ
ЦИЛИНДРИЧЕСКИХ ЗАГОТОВОК НА СТОЛАХ
ГОРИЗОНТАЛЬНО-ФРЕЗЕРНЫХ СТАНКОВПриспособление (рис. 11.17) используется при фрезерова¬
нии шестигранников, квадратов, лысок и предназначено для
базирования заготовки по наружной цилиндрической повер¬
хности, плоскости торца и ее закрепления.В приспособлении заготовка устанавливается в цангу 1 и
опирается на регулировочный винт 5. Закрепление заготовки
осуществляется вращением по ходу часовой стрелки гайки 2,
сжимающей цангу.Для поворота заготовки при фрезеровании многогранни¬
ков приспособление снабжено делительным механизмом, со-272
1 2Рис. 11.17. Схема приспособления для фрезерования шестигранникастоящим из диска 3, рычага 4 и стопорного механизма с экс¬
центриком и рукояткой 6.Заготовку устанавливают и зажимают цангой. При пере¬
ходе на обработку другой плоскости цангу с заготовкой осво¬
бождают рукояткой 6 у рычаг 4 выводят из зацепления с дис¬
ком 3 и поворачивают заготовку с цангой на необходимый
угол, фиксируемый рычагом 4. Затем зажимают заготовку
рычагом 6.Основные технические требования к расположению
установочных элементов• Отклонение от перпендикулярности оси цанги относительно по¬
верхности А не более Тх на длине 1Х\• отклонение от перпендикулярности торца винта 5 относительно
оси цанги Б не более Т2 на длине 1Г11.17. ПРИСПОСОБЛЕНИЕ ДЛЯ УСТАНОВКИ ЗАГОТОВКИ
ШАТУНА ДВС НА СТОЛЕ ГОРИЗОНТАЛЬНО¬
ФРЕЗЕРНОГО СТАНКАПриспособление (рис. 11.18) используется при фрезерова¬
нии боковых плоскостей головок шатуна и предназначено для273
Рис. 11.18. Схема приспособления для фрезерования боковых плоскостейголовок шатуна ДВСбазирования заготовки плоскостью, двумя цилиндрически¬
ми внутренними поверхностями и для закрепления силами,
направленными по нормали к плоскости.В приспособлении заготовка опирается на опорные плас¬
тины 5, 7 и 11, смонтированные на корпусе 6 и два устано¬
вочных пальца — установочный цилиндрический палец 3 и
срезанный установочный палец 9, состоящий из двух полу¬
пальцев. Прижим заготовки осуществляется с помощью трех
поворачивающихся прихватов 4, 8 и 10, каждый из которых
соединен со штоком 2 соответствующего пневмоцилиндра 1.Основные технические требования к расположению
установочных элементов• Отклонение от перпендикулярности поверхности В относительно
поверхности Б не более Г на длине• отклонение от параллельности оси, на которой расположены при¬
хваты 8 и 9, относительно поверхности Б не более Т2 на длине /2;• отклонение от параллельности поверхности В относительно по¬
верхности Г не более Т3 на длине /3.274
11.18. ПРИСПОСОБЛЕНИЕ ДЛЯ УСТАНОВКИ
ПРИЗМАТИЧЕСКИХ ЗАГОТОВОК НА СТОЛАХ
СВЕРЛИЛЬНЫХ СТАНКОВПриспособление (рис. 11.19) используется при сверле¬
нии отверстий и предназначено для базирования призмати¬
ческой заготовки тремя плоскостями и последующего ее зак¬
репления. Приспособление содержит корпус 3, установочные
планки 1, 2 и 9, кондукторную плиту 4, кондукторную втул¬
ку 5, пяту 8, шток 7 и пневмоцилиндр 6. В приспособлении
заготовка базируется с помощью установочных планок (по
трем плоскостям), которые образуют координатный угол.После базирования осуществляется прижим заготовки
пятой 8, закрепленной на конце штока пневмоцилиндра. При
включении пневмосистемы шток с пятой перемещается и при¬
жимает заготовку. Снятие заготовки осуществляется после
отжима и отвода штока с пятой вправо.А-АРис. 11.19. Схема приспособления для сверления отверстий
в призматической заготовке275
Основные технические требования к расположению
установочных элементов• Отклонение от перпендикулярности поверхности Д относительно
поверхности В не более Тх на длине 1г\• отклонение от перпендикулярности поверхности Г относительно
поверхности В не более Т2 на длине /2;• отклонение от перпендикулярности поверхности В относительно
поверхности Ж не более Т3 на длине /3;• отклонение от перпендикулярности поверхности Б относительно
поверхности Ж не более Т4 на длине Z4.11.19. КОНТРОЛЬНЫЕ ПРИСПОСОБЛЕНИЯВ данном параграфе рассмотрены специальные конт¬
рольные приспособления для контроля размеров и формы по¬
верхностей деталей гидроаппаратуры и, в частности, деталей
гидравлического распределителя. Эти детали отличаются вы¬
сокими требованиями к размерам и форме рабочих поверх¬
ностей, а в силу сравнительно малых размеров этих поверх¬
ностей использовать стандартные средства контроля не пред¬
ставляется возможным. В этой связи разработаны простей¬
шие индикаторные средства контроля, схемы которых и опи¬
сания приводятся ниже.Согласно определению, отклонение от круглости - это
наибольшее расстояние от точек реального профиля до при¬
легающей окружности. Следовательно, данное отклонение
следует контролировать по отношению к прилегающей ок¬
ружности. Реализовать такую схему контроля для валов можно
с помощью призмы, выполненной в виде полуокружности, а
для отверстий — с помощью оправки, в одном из сечений
которой выполнена узкая ступень треугольного или трапеце¬
идального профиля, имитирующая вписанную в отверстие
окружность.Отклонение профиля продольного сечения — это наиболь¬
шее расстояние от образующих реальной поверхности, лежа¬
щих в плоскости, проходящей через ее ось, до соответствую¬
щей стороны прилегающего (номинального) профиля в пре¬
делах нормируемого участка. Данное отклонение следует кон¬
тролировать по отношению к прилегающей прямой, лежащей
в плоскости, проходящей через ось номинального профиля.
Реализация этой схемы контроля для валов возможна на опор¬276
ном ноже (лекальной линейке с двусторонним скосом), а для
отверстий — на оправке, имеющей одну опорную грань, ими¬
тирующую прилегающую прямую.Приспособление для контроля линейных размеров корпуса
гидравлического распределителяКорпус представляет собой призматическую деталь с цен¬
тральным отверстием 014Н9, расточками и перепускными
каналами (рис. 11.20). Контролю в данном приспособлении
подлежат расстояния от базового торца до расточек (см. эс¬
киз детали).Схема контрольного приспособления представлена на рис.
11.21. Приспособление содержит основание 1, на котором зак¬
реплена неподвижная стойка 2 и поворотная 15. Последняя
имеет возможность поворачиваться вокруг оси 14, закреплен¬
ной в основании 1. В поворотной стойке 15 размещен подпру¬
жиненный центр 13, а. в неподвижной стойке 2 закреплена
оправка 12. В оправке выполнено центральное отверстие для
размещения в нем стержня 9, снабженного на одном конце
кривошипом с пальцем 10. В оправке выполнено отверстие,
перпендикулярное оси. В этом отверстии установлен выдвиж-277
ной измерительный палец 11. На втором конце стержня 9
закреплен барабан 3, служащий для поворота стержня. Бара¬
бан относительно оправки 12 имеет два фиксированных угло¬
вых положения. Фиксация осуществляется пружиной 4 и
шариком 5 при его попадании в диаметрально противопо¬
ложные лунки, выполненные на торце оправки 12.В неподвижной стойке 2 установлен рычаг б, с помощью
которого отклонение контролируемого размера передается на
закрепленный в кронштейне 7 индикатор 8.В изображенном на конструктивной схеме положении ба¬
рабана 3, когда шарик 5 находится в верхней лунке, палец10 кривошипа удерживает измерительный палец 11 в поло¬
жении, наиболее выступающем из оправки 12. В этом поло¬
жении палец 11 входит в соответствующую расточку корпуса
при контроле соответствующего размера. Если повернуть ба¬
рабан 3 на 180°, то шарик 5 попадет в диаметрально противо¬
положную лунку, при этом во время поворота барабана будет
поворачиваться ось 9 с кривошипом, и палец 10 кривошипа,
расположенный в кольцевой канавке измерительного пальца
11, переместит этот палец по его оси и он окажется утоплен¬
ным в оправку. В этом положении из оправки можно снять
контролируемую деталь или переместить ее в новое положе-Рис. 11.21. Схема приспособления для контроля линейных размеров
корпуса гидрораспределителя278
ние. Приспособление позволяет контролировать все линей¬
ные размеры за одну установку детали.Перед измерениями (до установки детали на оправку) про¬
водится наладка приспособления, связанная с установкой
индикатора на ноль. Эта наладка выполняется для наиболь¬
шего контролируемого размера либо по шаблону, либо по на¬
бору концевых мер длиной 95,5 мм.Наладку по шаблону осуществляют следующим образом.
Поворотом барабана 3 измерительный стержень 11 устанав¬
ливается в рабочее положение. Шаблон, представляющий со¬
бой полувтулку, размещается на оправке (рис. 11.22) и сво¬
им правым торцом прижимается к выступающему измери¬
тельному пальцу 11. В этом положении шаблон фиксируется
на оправке 12 пружинным фиксатором (см. разрез А — А на
рис. 11.22), а стрелка индикатора устанавливается на ноль.
После этого шаблон снимается. Приспособление готово к из¬
мерениям.Точно так же можно выполнить наладку приспособления
по набору концевых мер.При проведении измерений поступают так. Поворотом ба¬
рабана 3 измерительный палец 11 перемещается в утоплен¬
ное в оправку 12 положение. Освобождается стойка 15 и по-А-АРис.11.22. Схема подготовки приспособления к измерениям279
ворачивается вправо. При этом центр 13 отводится от оправ¬
ки. На оправку надевается контролируемая деталь таким об¬
разом, чтобы базовый торец детали (торец, от которого ведет¬
ся отсчет измеряемых размеров) касался углового рычага 6, а
его плечо, обращенное к детали, оказалось в вертикальном
положении. В этом положении детали кольцевая расточка
отверстия шириной 4±0,1, находящаяся на расстоянии
95,5±0,05 (см. эскиз детали), будет находиться над выдвиж¬
ным измерительным пальцем 11. Поворотом барабана 3 в
фиксированное положение измерительный палец 11 выдви¬
гается, деталь прижимается измерительной базой к пальцу
11 (вправо), и по индикатору отсчитывается фактическое от¬
клонение контролируемого размера 95,5. Затем барабан 3 по¬
ворачивается во второе фиксированное положение, при кото¬
ром измерительный палец оказывается в утопленном поло¬
жении. Деталь смещается вправо для контроля следующего
линейного размера (рис. 11.23).Между деталью и рычагом 6 на оправку устанавливается
шаблон соответствующего размера таким образом, чтобы по¬
казание индикатора было нулевым. Деталь перемещается
влево до соприкосновения с шаблоном. В этом положении
детали барабан 3 поворачивается в первое фиксированное
положение, и измерительный наконечник 11 оказывается вРис. 11.23. Схема наладки приспособления для контроля линейных
размеров корпуса280
соответствующей расточке. Шаблон фиксируется на оправке
пружинным фиксатором, деталь прижимается измерительной
базой контролируемого размера к пальцу 11 (при контроле,
например, размера 92,5±0,05 деталь подается влево), шаблон
удерживается в соприкосновении с деталью, и выполняется
отсчет показаний индикатора, характеризующих фактичес¬
кое отклонение размера 92,5.Таким же образом проводятся измерения отклонений дру¬
гих контролируемых размеров. Для каждого контролируемого
размера используется свой шаблон. Номинальные размеры
шаблонов для каждого контролируемого размера приведены
ниже, а на рис. 11.24 представлена конструкция шаблонов.Контролируемыйразмер95,592,57066513621Номинальный
размер шаблона L95,56,525,533486378 и 1 // 1 0,005Рис. 11.24. Конструкция шаблонов для контроля линейных
размеров корпусаНаибольшая погрешность измерений в данном приспособ¬
лении может быть представлена суммой элементарных погреш¬
ностей: 8Х — погрешность настройки приспособления на исход¬
ный размер 95,5; 52 — погрешность используемого для измере¬
ния шаблона; 83 — погрешность, обусловленная смещением
измерительной базы от зазора, с которым посажен измеритель¬
ный палец 11 в отверстие оправки; 84 — погрешность диаметра
рабочего конца измерительного пальца 0 3,5js7; S5 — погреш¬
ность, вызванная отклонением от соосности поверхностей из¬
мерительного пальца 11.281
Погрешности 53 и S4 оказывают влияние на те размеры,
измерительная база которых является правой поверхностью
соответствующей расточки в центральном отверстии детали,
т.е. эти погрешности следует учитывать при оценке точности
измерения размеров 21, 36, 51, 66 и 92,5. Для размеров 70
и 95,5 эти погрешности учитывать не следует, так как они не
оказывают влияния на контролируемые размеры.Если рассматривать перечисленные погрешности как век¬
торы, то можно утверждать, что все эти векторы, кроме 55,
являются ко л линеарными, поэтому их следует суммировать
алгебраически. Вектор S5 имеет направление случайного ха¬
рактера и, кроме того, его направление может не быть посто¬
янным, так как при измерениях палец 11 может поворачи¬
ваться, занимая произвольное положение. Поэтому погреш¬
ность 85 следует суммировать геометрически с алгебраичес¬
кой суммой прочих погрешностей. Следовательно, суммар¬
ная погрешность измерения может быть определена так:Ди = + 52 + 83 + 84 )2 + 85 — для всех размеров, кроме
70 и 95,5;Ди = ^(8Х + 82 )2 + 85 — для размеров 70 и 95,5.Таким образом, действительное значение измеряемого от¬
клонения (О) контролируемого размера будет определяться
показанием индикатора (Пи), которое должно быть скоррек¬
тировано на величину погрешности измерения Ди, т.е.О = П ± А ,И — И 9где величина Ди определяется по фактически измеренным
значениям элементарных погрешностей 81? S2, 83, 84, 85.По результатам контроля можно сразу найти истинные
значения контролируемых размеров после непосредственно¬
го измерения:• фактический размер настройки приспособления = 95,5
(с точностью на порядок выше контролируемого параметра
точности);• фактический размер шаблона Ь2 (с такой же точностью,
как и размер настройки);• показания индикатора Пи;282
• фактический диаметр рабочего конца измерительного
пальца И (<2=3,5 jg7);• фактическая величина зазора S в соединении 0 6 H7/g6
пальца 11 с оправкой 12 (эта величина может быть измерена
непосредственно по индикатору 8 при перемещении измери¬
тельного пальца влево и вправо).Из размерной цепи, представленной на рис. 11.25, можно
найти фактические значения контролируемых размеров 70 и
95,5 по соотношениямА = Li — L2 - Пи ,
если показания индикатора соответствуют уменьшению кон¬
тролируемого размера, илиА = Lx - L2 + Пи,
если показания индикатора соответствуют увеличению конт¬
ролируемого размера.Рис. 11.25. Схема размерной цепи для определения истинного значения
размеров 70 и 95,5Из схемы размерной цепи, представленной на рис. 11.26,
получим соответственно:A = (L1+d-S)-L2-Пи;A = (L1+d-S)-L2+ Пи.Как следует из полученных равенств, точность измере¬
ния размера А зависит от точности измеренных величин,
входящих в эти равенства.283
L, +d+sШадлоиДетальLz А (контролируемыйразмер)ИзмерительныйпалецРис. 11.26. Схема размерной цепи для определения истинного значения
размеров 21; 36; 51; 66; 92,5Приспособление для контроля круглости и профиля
продольного сечения отверстия корпуса гидравлического
распределителяВ этом приспособлении контролируются круглость и про¬
филь продольного сечения отверстия корпуса, допуски на
которые составляют 0,0012 мм (см. рис. 11.20).Схема приспособления представлена на рис. 11.27. При¬
способление содержит основание 1, на котором размещены
стойки 2 и 12. Стойка 2 неподвижная, а стойка 12 может
поворачиваться вокруг горизонтальной оси. В поворотной стой¬
ке 12 размещен подпружиненный центр 11, а в неподвижной
стойке 2 закреплена оправка 7.В оправке выполнено центральное отверстие для разме¬
щения в нем измерительного рычага S, имеющего возмож¬
ность поворачиваться вокруг оси 9. В коротком плече рычага
8 закреплен измерительный стержень 10. Этот стержень раз¬
мещен в радиальном отверстии оправки, и в среднем положе¬
нии рычага 8 совместно с базовой кольцевой поверхностью
оправки дает размер 014f7, при котором возможна свобод¬
ная установка детали на эту оправку. Длинное плечо рычага
8 подпружинено пружиной 3. Оно может перемещаться в
вертикальном направлении по направляющим составной втул¬
ки 4. На стойке 2 закреплен кронштейн 5, предназначенный
для удержания индикатора 6 и регулировки его положения
на рычаге 8.284
1112Puc. 11.27. Схема приспособления для контроля круглости и профиля
продольного сечения отверстия корпуса гидрораспределителяДля контроля круглости отверстия 014Н9 используется
оправка, имеющая вид, представленный на схеме, т.е. имеет
в средней части базирующую ступень, или ленточку, шири¬
ной 2 — 3 мм и диаметром 014f7. Справа и слева от базиру¬
ющей ленточки диаметр оправки занижен до размера 014Ы2Для контроля профиля продольного сечения отверстия
014Н9 используется такая же оправка, имеющая базирую¬
щую ленточку шириной 2 — 3 мм по всей длине (см. сече¬
ние А — А на схеме). Эта ленточка имитирует прилегающую
прямую к профилю продольного сечения контролируемого от¬
верстия. Измерительный стержень 10 располагается при этом
в диаметрально противоположном к ленточке отверстии.Приспособления позволяют контролировать отклонения от
круглости и профиля продольного сечения отверстия на каж¬
дой его рабочей ступени.Вначале осуществляется наладка приспособления на
10-кратное увеличение показаний индикатора, а затем на¬
стройка индикатора на ноль, соответствующий номинально-285
му размеру контролируемого отверстия (014). Для этого ис¬
пользуются эталонные кольца, а наладка ведется так, как это
было описано выше.При проведении контроля на оправку у неподвижной стой¬
ки 2 помещают упор, определяющий такое положение конт¬
ролируемой детали, при котором контролируемая ступень
отверстия будет располагаться на измерительном стержне
10. Конструкция упоров и способ их закрепления на оправке
те же, что и в приспособлении для контроля линейных раз¬
меров корпуса. Если расстояние от неподвижной стойки 2 до
измерительного стержня 10 составляет 110 мм, то длины упо¬
ров должны быть такими, как указано в таблице.Расстояние от торца
до контролируемого
сечения29233853688394102Длина упора1081018772574227168Упор закрепляют на оправке, обеспечив при этом плотное
прилегание его левого торца к стойке (или буртику оправки,
если таковой имеется). Подвижную стойку 12 освобождают и
поворачивают вправо. Длинное плечо рычага 8 подают вниз,
на оправку надевают деталь, перемещая ее влево до упора,
рычаг 8 освобождают. Стойку 12 поворачивают влево так,
чтобы центр 11 поддерживал свободный конец оправки. Стой¬
ку закрепляют. Прижимая деталь к упору (влево), вращают
ее на оправке, обеспечивая контакт отверстия с базирующей
ленточкой. Фиксируют наибольшее и наименьшее показания
индикатора. Затем упор заменяют новым, опускают вниз длин¬
ное плечо рычага §, деталь подают влево до упора и снова,
поворачивая контролируемую деталь и обеспечивая ее плот¬
ный контакт с базирующим элементом оправки, фиксируют
наибольшее и наименьшее показания индикатора.При контроле круглости наименьшее показание индика¬
тора дает отклонение действительного диаметра отверстия от
номинального, а разность наибольшего и наименьшего пока¬
заний — отклонение от круглости. При контроле профиля
продольного сечения разность наибольшего и наименьшего
показаний индикатора во всех поперечных сечениях детали в286
пределах контролируемой длины дает наибольшее отклонение
профиля продольного сечения.Расчеты показывают, что погрешность измерения с уче¬
том 10-кратного увеличения перемещений составляет около2 %.При сборке приспособления требуется отрегулировать по¬
ложение измерительного стержня, а также добиться выпол¬
нения размера 014f7 при среднем положении рычага 8 в на¬
правляющих втулки 4. Это лучше всего сделать, используя
втулку в качестве притира.Базирующие ленточки на оправке (как кольцевая, так
и продольная) должны иметь высокую точность формы: от¬
клонения от круглости и прямолинейности не должны пре¬
вышать 1 мкм.Приспособление для контроля круглости золотника
гидравлического распределителяЭскиз золотника представлен на рис. 11.28. Контролю
подлежат наружные поверхности 014f9, допуск круглости
на которые составляет 0,0012 мм.Схема контрольного приспособления приведена на рис.
11.29. Приспособление состоит из основания 1, на котором
закреплены установочные призмы 5,7 и б. К призмам 5 и 6
прикреплены элементы измерительной системы, включающей
кронштейн 10, в котором выполнены направляющие пазы,130+0,377 ±0.1
62, £±0,1
46,6 ±0,132 ±0,1Оо,ооа0,00f2щШа!«а7Н-УУл33,S±0,f99±aif72-Ф-40Puc. 11.28. Эскиз золотника гидрораспределителя287
Рис. 11.29. Схема приспособления для контроля круглости
золотника гидрораспределителяслужащие для размещения измерительного рычага 4, снабжен¬
ного измерительным стержнем 9. Рычаг 4 закреплен на оси 8 и
опирается своим длинным плечом на пружину 3.Направляющий паз в кронштейне 10 над опорой 5 закрыт
пластиной 11, которая ограничивает ход длинного плеча ры¬
чага 4 под действием пружины. К кронштейну 10 прикреп¬
лен второй кронштейн 12, служащий для закрепления в нем
индикатора 2.Каждая из призм 5, 7 и 6 представляет собой полувтулку,
в отверстии которой выполнен трапециевидный выступ, яв¬
ляющийся базирующим элементом призмы. Диаметр приле¬
гающего к золотнику отверстия, образованного базирующим
элементом призмы, определяется диаметром контролируемо¬
го золотника, т.е. 014Н7.После сборки приспособления осуществляется отладка его
измерительной системы, в которой используется рычаг 4 с от¬288
ношением плеч 1:10 для 10-кратного повышения чувствитель¬
ности. Для отладки используют 2 — 3 набора концевых мер,
дающих близкие размеры, отличающиеся, например, на 1—2 мкм.
Фиксируя эти размеры с помощью индикатора 2, добиваются
такого его положения на измерительном рычаге 4, при кото¬
ром обеспечивается 10-кратное увеличение отклонения.Перед контролем деталей приспособление настраивают.
Настройка ведется по эталонному валику (эталону 014), ус¬
танавливаемому на опоры 7 и 6. По точному значению разме¬
ра эталона, измеренного с точностью до 0,0005 мм, стрелку
индикатора устанавливают таким образом, чтобы нулевое
показание соответствовало номинальному размеру (014) кон¬
тролируемой детали.При контроле левое (длинное) плечо измерительного ры¬
чага 4 опускают вниз, при этом измерительный стержень 9
займет предельное верхнее положение. Золотник располага¬
ют в призме 7 и, сообщая ему осевое перемещение влево, по¬
мещают его первую ступень на базирующий элемент призмы6 (см. схему приспособления). Освобождают левое плечо из¬
мерительного рычага 4, измерительный стержень 9 при этом
опускается на контролируемую поверхность золотника. Зо¬
лотник поворачивают вокруг оси на 360° и фиксируют наи¬
большее и наименьшее показания индикатора. Перемещая
левое плечо рычага 4 вниз, освобождают измерительный стер¬
жень 9 и деталь перемещают влево для контроля круглости
в другом сечении золотника. Снова вращают деталь вокруг
оси и снова фиксируют предельные показания индикатора. И
таким образом ведут контроль во всех характерных сечениях
золотника на всех его ступенях. Наибольшее показание ин¬
дикатора дает отклонение действительного размера от номи¬
нального, а разность наибольшего и наименьшего показаний -
отклонение от круглости.В этом же приспособлении, если его снабдить такими же
двумя ножевыми опорами, как и призмы 5 и 7, но на 0,1 —
0,2 мм выше последних, можно измерить изогнутость оси зо¬
лотника. Изогнутость определяется при вращении детали, ба¬
зирующейся на двух разнесенных ножевых опорах, под нако¬
нечником измерительного индикатора. При этом разность
между наибольшим и наименьшим показаниями индикатора
равна удвоенной величине изогнутости.289
Рис. 11.30. Схема для расчета
погрешности измеренияПогрешность измерения
состоит из суммы погрешно¬
сти базирования и погрешно¬
сти отсчета средства измере¬
ния.Контролируемый диа¬
метр в партии заготовок име¬
ет поле рассеяния, равное
допуску на размер. В этой
связи при измерении воз¬
можно смещение заготовки
в призме на величину А, рав¬
ную отклонению диаметра от
номинала (рис. 11.30).При наличии смещения А
измерительная ножка инди¬
катора получит смещение
5И, равное8И = R - л/д2 - А2.В нашем случае при контроле вала 014f9 (lo’o59 )в призме014М7(°О>О18) Д=14/2=7 мм, Д=0,02 мм, следовательно, при
непосредственном измерении индикатором без рычажногомеханизма, 8И = 0,00003 мм.Погрешность отсчета для индикатора с ценой деления
0,001 мм составляет 0,0005 мм. Следовательно, погрешность
измерения составляет 0,00053 мм или (0,00053/0,0012)100 =
= 44,17 % от величины контролируемого параметра, т.е. это
большая погрешность. При наличии еще других неизбежных
погрешностей случайного характера точность измерения ока¬
жется еще ниже. В этой связи в данном приспособлении пре¬
дусмотрена рычажная система, имеющая коэффициент пере¬
дачи, или передаточное отношение перемещений, in = 10 . При
этом погрешность измерения уменьшается в 10 раз и состав¬
ляет 4,4 %.Призмы 5, 7 и б приспособления с установочными эле¬
ментами являются ответственными за базирование детали.
Они должны быть достаточно точными. Поэтому после их290
термообработки до HRC = 55 — 60, следует выполнить шли¬
фовку отверстия одновременно в двух призмах до размера014М7 (^о,018) • В этом случае наибольший зазор (см. рис.11.30) составитА = (13,982 -13,941) / 2 = 0,02 мм.Для компенсации погрешности базирования измеритель¬
ный стержень 9 (см. рис. 11.29) должен иметь на сферичес¬
кой рабочей поверхности площадку диаметром 0,5 — 1 мм.Приспособление для контроля профиля продольного сечения
золотника гидравлического распределителяКонтролю в данном приспособлении подлежит профиль
продольного сечения наружной поверхности золотника. До¬
пуск составляет 0,0012 мм. Схема приспособления представ¬
лена на рис. 11.31.Приспособление состоит из основания 1, на котором зак¬
реплена стандартная лекальная линейка 2 с двустороннимРис. 11.31. Схема приспособления для контроля профиля продольного
сечения золотника гидрораспределителя291
скосом типа ЛД длиной 320 мм класса точности 0 (допуск пря¬
молинейности 1,6 мкм). Линейка закреплена с помощью пла¬
нок 14 и 13. Направляющая пластина 3, закрепленная на план¬
ке 13, служит для обеспечения базирования контролируемой
детали таким образом, чтобы расстояние от плоскости симмет¬
рии лекальной линейки до направляющей пластины 3 состав-„ -0,008ляло величину, равную радиусу золотника, т.е. 7_0 029 , по всей
длине.К направляющей пластине 3 прикреплен кронштейн 4 из¬
мерительной системы, который служит для размещения в
его пазах измерительного рычага 5. Рычаг 5 снабжен измери¬
тельным стержнем 10. Этот рычаг может поворачиваться вок¬
руг оси 9 под воздействием пружины 8. Угол поворота рыча¬
га невелик: если на линейке не установлена контролируемая
деталь, то этот угол поворота определяется свободным ходом
левого конца рычага, а если деталь установлена, то угол по¬
ворота определяется отклонением диаметра контролируемого
золотника от номинала. К кронштейну 4 прикреплен вто¬
рой кронштейн 6, служащий для закрепления в нем инди¬
катора 7.Постоянный контакт контролируемой детали с лекальной
линейкой 2 и направляющей пластиной 3 обеспечивается пру¬
жинными прижимами 11, которые имеют возможность с по¬
мощью ручки 12 поворачиваться вправо и влево вокруг гори¬
зонтальной оси.Вначале осуществляется отладка измерительной системы
для обеспечения 10-кратного повышения чувствительности
путем регулировки положения индикатора на измерительном
плече рычага 5 при использовании наборов концевых мер.
Перед контролем деталей выполняют настройку приспособ¬
ления, при которой стрелку индикатора устанавливают на
ноль в положении измерительного штока индикатора, соот¬
ветствующем номинальному размеру (014) контролируемой
детали. Настройку ведут либо по набору концевых мер, либо
по эталону, действительный диаметр которого определен с точ¬
ностью до 0,0005 мм.При контроле профиля продольного сечения прижимы 11
переводят в горизонтальное положение, левое плечо измери¬
тельного рычага 5 опускают вниз, при этом измерительный292
стержень 10 окажется в крайнем верхнем положении, на
лекальную линейку 2 кладут контролируемую деталь так,
чтобы ее первая ступень оказалась под стержнем 10 (см. чер¬
теж приспособления). Освобождают рычаг 5, правый прижим11 переводят в рабочее (вертикальное) положение. Поворачи¬
вая контролируемую деталь на 360°, фиксируют наибольшее
и наименьшее показания индикатора. Затем перемещают кон¬
тролируемую деталь влево, и в новом положении измери¬
тельного стержня снова выполняют измерения. Таким обра¬
зом проводится контроль в различных сечениях золотника
по его длине, на всех его ступенях. Разность наибольшего и
наименьшего показаний индикатора во всех поперечных се¬
чениях детали в пределах ее длины дает отклонение профиля
продольного сечения.Путем поворота контролируемой детали на лекальной ли¬
нейке и оценки просвета между рабочей кромкой линейки и
образующей контролируемой детали судят также об изогну¬
тости оси детали.Погрешность измерения определяется погрешностью ба¬
зирования и погрешностью отсчета. Как было показано выше,
погрешность базирования можно исключить в том случае, если
наконечник индикатора будет иметь плоскую торцовую по¬
верхность, диаметр который больше поля рассеяния размера7 :°0Z • Поэтому погрешность измерения будет определятьсяпогрешностью отсчета средства измерения. Для индикатора с
ценой деления 0,001 мм эта погрешность отсчета составляет
0,0005 мм.Таким образом, с учетом 10-кратного увеличения переме¬
щений за счет использования рычажной системы погрешность
измерения составит [0,1(0,0005/0,0012)100]=4,17% от вели¬
чины контролируемого параметра.Лекальная линейка 2, используемая в качестве устано¬
вочного элемента приспособления, обладает высокой прямо¬
линейностью. В пределах длины 160 мм контролируемой
детали отклонение от прямолинейности составляет(160/320) 1,6=0,8 мкм.Анализ показывает, что вероятность совпадения отклоне¬
ний от прямолинейности лекальной линейки и образующей293
контролируемой детали приближается к нулю. Поэтому по¬
грешность формы установочного элемента приспособления (ле¬
кальной линейки), составляющая 0,8 мкм, не будет оказы¬
вать влияния на точность контроля профиля продольного се¬
чения.Для исключения влияния на результат контроля погреш¬
ности базирования следует ограничивать рассеяние размера7 X (см. чертеж приспособления) допуском, составляющимполовину допуска 014f9, т.е. принять этот размер 7 Iq’с^9 по
всей длине лекальной линейки.Приспособление для контроля круглости клапанаЭскиз клапана представлен на рис. 11.32. Величина до¬
пуска круглости наружной поверхности клапана составляет
0,003 мм, поэтому для контроля можно использовать инди¬
катор с ценой деления 0,001 мм.Схема приспособления для контроля круглости клапана
представлена на рис. 11.33. Приспособление содержит осно-гидравлического распределителя24-422Ш2Г\ Л/7Л*4*0,22$ta23/+Q3Рис. 11.32. Эскиз клапана гидрораспределителя294
вание 1 и закреплен¬
ную на основании стой¬
ку 2, к которой при¬
креплена призма 3 с
двумя установочными
элементами в виде по¬
луокружностей. К при¬
зме прикреплен кронш¬
тейн 4, служащий для
фиксации в нем инди¬
катора 5. Установоч¬
ные элементы призмы
являются полуокруж¬
ностями, изготовлен¬
ными в соответствии с
диаметром контролиру¬
емого клапана, т.е.
представляют собой
разрезанную втулку по
диаметральной плоско¬
сти отверстия 017Н7.Перед работой при¬
способление настраивают по эталонной детали, выполненной
в виде валика 017. Валик устанавливают в призму 3, а стрелку
индикатора при этом устанавливают на ноль. Зная действи¬
тельный диаметр эталона, корректируют показания индика¬
тора так, чтобы нулевое показание соответствовало номиналь¬
ному размеру 017. Затем вместо эталона в призму устанавли¬
вают контролируемую деталь и поворачивают ее на 360°, фик¬
сируя наибольшее и наименьшее показания индикатора. Наи¬
большее показание индикатора дает отклонение действитель¬
ного размера от номинального, а разность наибольших и наи¬
меньших показаний — отклонение от круглости.Так как контролируемый диаметр в партии заготовок имеет
поле рассеяния, равное допуску на размер, то при измерении
возможно смещение заготовки в призме на величину А, рав¬
ную отклонению диаметра от номинала (рис. 11.30). Как было
показано выше, при наличии смещения Д измерительная нож¬
ка индикатора получит смещение 8и, равное 8И = R- *Jr2 - А2.Рис. 11.33. Схема приспособления для
контроля круглости клапана гидрорас¬
пределителя295
В нашем случае R= 17/2=8,5 мм. Допуск на диаметр состав¬
ляет 0,043 мм (поверхность обрабатывается по сопрягаемой де¬
тали). Следовательно, Д=0,022 мм, 8и = 0,00003 мм = 0,03 мкм.Таким образом, погрешность измерения, вызванная по¬
грешностью базирования заготовки, пренебрежимо мала по
сравнению с погрешностью средства измерения - индика¬
тора.Если использовать индикатор с ценой деления 0,001 мм,
то погрешность измерения, обусловленная погрешностью ба¬
зирования и погрешностью отсчета, составляет 0,00053 мм,
т.е. (0,00053/0,003)100=18 % от величины контролируемого
параметра.Наиболее ответственной деталью приспособления являет¬
ся призма 3 с установочными элементами, выполненными в
виде трапециевидных выступов в отверстии. Поэтому после
термообработки до HRC=55 — 60 выполняется шлифовка от¬
верстия одновременно в двух призмах до размера 017Н7.Приспособление для контроля профиля продольного
сечения клапана гидравлического распределителяКонтролю подлежит профиль продольного сечения. Допуск
составляет 0,003 мм (см. рис. 11.32). Схема приспособления
представлена на рис. 11.34.Приспособление содержит основание 1, на котором зак¬
реплена стойка 2. К стойке прикрепляется опорная пластина
5, снабженная узким установочным элементом (опорным но¬
жом). На этом ноже размещается одна из образующих конт¬
ролируемой детали. Другой образующей контролируемая де¬
таль опирается на направляющую пластину 6. К стойке 2
также прикреплен кронштейн 7 для закрепления в нем инди¬
катора 8. Для того чтобы при измерении заготовка имела по¬
стоянный контакт с установочными пластинами 5 и б, в при¬
способлении предусмотрена поворотная пластинчатая пружина
3, которая может с помощью ручки 4 поворачиваться вокруг
горизонтальной оси после установки детали и прижимать
последнюю к установочным пластинам.Вначале осуществляют настройку приспособления на раз¬
мер 17 либо по набору концевых мер, либо по эталону. Если
используется эталон, то он располагается в приспособлении296
точно так же, как и
контролируемая де¬
таль, а стрелка индика¬
тора устанавливается
на ноль. Затем, зная
точный размер эталона,
вводят коррекцию в по¬
казания индикатора
таким образом, чтобы
нулевое показание соот¬
ветствовало номиналь¬
ному размеру (017)
контролируемой дета¬
ли.После настройки в
приспособление уста¬
навливают контролиру¬
емую деталь. Переме¬
щая деталь в осевом на¬
правлении, проводят
контроль в различных
сечениях в пределах
длины детали. При кон¬
троле деталь поворачи¬
вают вокруг оси на 360° и фиксируют наибольшее и наимень¬
шее показания индикатора. Разность наибольшего и наимень¬
шего показаний индикатора во всех поперечных сечениях де¬
тали (в пределах длины детали) даст отклонение профиля про¬
дольного сечения.Погрешность измерения определяется погрешностью бази¬
рования и погрешностью отсчета средства измерения. Погреш¬
ность базирования обусловлена рассеянием диаметров конт¬
ролируемых деталей, в результате чего размер 8,5 будет
иметь также отклонения от номинала, численно равные по¬
ловине допуска на контролируемый диаметр. Иными слова¬
ми, диаметральная плоскость детали может смещаться, и
наконечник индикатора (если он острый) также окажется
смещенным относительно диаметральной плоскости. Это при¬
ведет к появлению погрешности измерения. Исключить эту
погрешность можно в том случае, если наконечник индика¬Рис. 11.34. Схема приспособления для
контроля профиля продольного сече¬
ния клапана гидрораспределителя297
тора будет иметь плоскую торцовую поверхность, диаметр ко¬
торой больше поля рассеяния размера 8,5.Таким образом, без учета погрешности базирования (ее
можно исключить) погрешность измерения будет определяться
погрешностью отсчета средства измерения, составляющей 0,5
деления отсчетной шкалы (для индикатора с ценой деления0,001 мм эта погрешность равна 0,0005 мм). В результате
погрешность измерения составит (0,0005/0,003)100=16,7 %
от величины контролируемого параметра.Для обеспечения требуемой точности контроля необходи¬
мо, чтобы установочные элементы приспособления были дос¬
таточно точными. Так, опорная пластина 5 должна иметь
опорный нож (узкую ленточку шириной 0,5 — 1 мм), ха¬
рактеризующийся высокой прямолинейностью. Отклонение
от прямолинейности не должно превышать 0,0005 мм на дли¬
не контролируемого размера (на длине 29 мм). Также должно
быть ограничено отклонение от плоскостности рабочей повер¬
хности направляющей пластины 4. Оно не должно превышать
25 % от половины допуска контролируемого размера 017Н7,
т.е. 0,005 мм. Такое отклонение не вызовет значительной
погрешности базирования.Приспособление для контроля круглости отверстия втулки
гидрораспределителяЭскиз втулки представлен на рис. 11.35. Как следует из эс¬
киза, допуск круглости отверстия 017Н9 составляет 0,003 мм.Схема контрольного приспособления приведена на рис. 11.36.Приспособление содержит основание 1, на котором зак¬
реплена стойка 2. В отверстии стойки 2 установлена оправка
3, снабженная центральным отверстием для размещения в
нем рычага б, длинное плечо которого подпружинено пружи¬
ной 7 и может свободно перемещаться в вертикальном на¬
правлении по направляющим составной крышки 8, повора¬
чиваясь вокруг оси 9. В коротком плече рычага 6 закреплен
измерительный стержень 10. Отношение плеч рычага 1:10,
поэтому измерительная система характеризуется передаточ¬
ным отношением перемещений ia = 10.Оправка 3 выполнена ступенчатой, так как отверстие в
контролируемой детали ступенчатое, а при изменении тре-298
02SM941&22.О22ОцвозШ/I1ia©\фоА&Рис. 11.35. Эскиз втулки гидрораспределителяРис. 11.36. Схема приспособления для контроля круглости отверстия
втулки гидрораспределителя299
буется исключить поворот детали относительно базирующей,
треугольного профиля, ступени оправки. Эта ступень оправки
имитирует окружность, прилегающую к действительному про¬
филю отверстия в контролируемой детали. Относительно этой
прилегающей окружности измеряется отклонение действи¬
тельного профиля. В базирующей ступени оправки выполнено
радиальное отверстие, через которое проходит измерительный
стержень 10, опирающийся на контролируемую поверхность
втулки.На стойке 2 закреплен кронштейн 4 для удержания инди¬
катора 5 и придания ему требуемого положения при наладке.Прежде чем использовать приспособление, требуется вы¬
полнить его наладку, которая состоит в обеспечении 10-крат-
ного увеличения перемещений. Это достигается регулиров¬
кой положения индикатора 5 относительно измерительного
рычага 6. Наладка осуществляется с помощью 2—3 эталон¬
ных колец, имеющих отверстия, диаметры которых отлича¬
ются от номинального, например, на 0,01; 0,02; 0,03 мм.Каждый раз, перед работой, приспособление настраивают
на нулевое показание индикатора, соответствующее номиналь¬
ному значению контролируемого размера (017). Для этого
используют эталонное кольцо, диаметр отверстия в котором
измерен с высокой точностью, например, с точностью 0,0005 мм.
Кольцо надевают на оправку, и показание индикатора уста¬
навливают на ноль. Затем, зная точный размер эталона, вво¬
дят поправку и шкалу индикатора устанавливают таким об¬
разом, чтобы нулевое показание стрелки индикатора соответ¬
ствовало номинальному значению контролируемого размера.
После настройки приспособления на ноль можно выполнять
контроль деталей. При контроле деталь устанавливают та¬
ким образом, чтобы базирующая ступень оправки располага¬
лась в требуемом сечении детали. Деталь вращают на оправ¬
ке, исключая ее осевое перемещение, и обеспечивают такое
ее положение, чтобы верхняя часть профиля отверстия имела
постоянный контакт с верхней частью базирующей ступени
оправки. Фиксируют наибольшее и наименьшее показания
индикатора в пределах поворота детали на 360°. Наименьшее
показание индикатора дает отклонение действительного диа¬
метра отверстия от номинального, а разность наибольшего и
наименьшего показаний - отклонение от круглости.300
Как и в контрольцых приспособлениях, рассмотренных
выше, погрешность контроля круглости также зависит от по¬
грешности базирования детали на оправке и от погрешности
отсчета показаний индикатора. Погрешность базирования
зависит от наибольшего зазора А между отверстием детали и
базирующей ступенью оправки, т.е. от наибольшего зазора вН9сопряжении 017 равного А = (17,043 - 16,966)/2 = 0,039 мм.
Эта погрешность равна6И = 8,5 - л/8,52 - 0,0392 = 0,00009 мм.Погрешность отсчета для индикатора с ценой деления0,001 мм составляет 0,0005 мм. Тогда суммарная погреш¬
ность измерения будет равной 0,00059 мм, что составляет
(0,00059/0,003)100=19,7 %. С учетом 10-кратного увеличе¬
ния перемещений погрешность измерения составит около2 %.Наиболее ответственным элементом приспособления яв¬
ляется оправка, а особенно ее базирующая (треугольного или
трапецеидального профиля) ступень 017f7, которая имити¬
рует прилегающую к отверстию окружность. Эта ступень оп¬
равки должна быть в пределах верхней полуокружности
сплошной. Поэтому отверстие под измерительный стержень10 не должно быть сквозным. Стержень 10 лучше всего вы¬
полнять с резьбовым концом, обеспечивающим точную регу¬
лировку вылета. После регулировки стержень 10 можно фик¬
сировать масляной краской. Точное выполнение исходного
размера оправки 017f7 достигается путем фиксации длинно¬
го плеча рычага 6 в среднем положении и притирки измери¬
тельного стержня 10 с помощью кольца-притира.Пружина 7 подбирается таким образом, чтобы обеспечить
достаточное усилие воздействия стержня 10 на контролируе¬
мую поверхность отверстия втулки, при котором зазоры меж¬
ду осью 9У рычагом 6 и оправкой 3 будут закрыты.Для того чтобы при контроле круглости отверстия в опре¬
деленном поперечном сечении втулки исключить осевое пе¬
ремещение детали, можно воспользоваться полувтулками,
которые устанавливаются на оправку 3 между контролируе¬
мой деталью и стойкой 2.301
Приспособление для контроля профиля продольного сечения
отверстия втулки гидрораспределителяДопуск профиля продольного сечения отверстия втулки
составляет 0,003 мм (см. рис. 11.35). Контроль ведется в при¬
способлении, схема которого приведена на рис. 11.37.Приспособление содержит основание 1, на котором зак¬
реплена стойка 2. В этой стойке закрепляется оправка 3, ко¬
торая выполнена ступенчатой, так как на ней базируется кон¬
тролируемая втулка, имеющая ступенчатое отверстие 015Н14
и 017Н9. Ступени оправки выполнены с полем допуска f7,
т.е. 015f7 и 017f7.К стойке 2 прикреплен кронштейн 8 для закрепления в
нем индикатора 7. Оправка 3 имеет центральное отверстие, в
котором расположен рычаг 6, подпружиненный пружиной 4.
Длинное плечо рычага 6 может перемещаться по направляю¬
щим составной крышки 5 в вертикальном направлении, пово¬
рачиваясь вокруг оси 9.В коротком плече рыча¬
га 6 расположен изме¬
рительный стержень
10. Отношение плеч ры¬
чага 6 может выбирать¬
ся любым. В данном
случае оно составляет
1:10, поэтому переда¬
точное отношение пере¬
мещений в приспособ¬
лении равно 10, что
обеспечивает измере¬
ния с высокой точнос¬
тью.Оправка выполнена
так, что она имеет ба¬
зирующее ребро вдоль
поверхности 017f7 (см.А—А на рис. 11.37).Вначале осуществ¬
ляется наладка приспо-делителяРис. 11.37. Схема приспособления для
контроля профиля продольного
сечения отверстия втулки гидрораспре-302
собления. Она состоит в обеспечении 10-кратного увеличения
перемещений. Это достигается регулировкой положения ин¬
дикатора 7 относительно измерительного рычага 6. Наладка
выполняется с помощью 2 — 3 эталонных колец, имеющих
отверстия, близко отстоящие от номинала (017) и отличающи¬
еся друг от друга на 0,01; 0,02; 0,03 мм.Перед началом работы приспособление следует настроить
на нулевое показание индикатора, которое должно соответ¬
ствовать номинальному значению контролируемого размера
(017). Настройка выполняется в соответствии с методикой,
изложенной выше.После настройки приспособления на ноль можно осуще¬
ствлять контроль деталей. Деталь устанавливается на оправ¬
ку, и верхняя образующая отверстия детали удерживается на
базирующем ребре оправки. При вращении детали на оправ¬
ке фиксируются наибольшее и наименьшее показания инди¬
катора. Измерения проводятся в различных поперечных се¬
чениях детали по всей длине контролируемого отверстия.
Разность наибольшего и наименьшего показаний индикатора
во всех поперечных сечениях детали в пределах контролиру¬
емой длины дает наибольшее отклонение профиля продоль¬
ного сечения.Погрешность измерения определяется суммой погрешнос¬
ти базирования контролируемой детали на оправке и погреш¬
ности отсчета показаний индикатора. С учетом 10-кратного
увеличения показаний индикатора погрешность измерения
составляет около 2 %.Оправка 3 является наиболее ответственным элементом
приспособления. После термообработки до твердости HRC =
= 55—60 и шлифовки ее ступеней до 015f7 и 017f7 требует¬
ся обеспечить высокую прямолинейность опорной ленточки.
Ее ширина должна быть небольшой, в пределах 1 мм, а пря¬
молинейность - в пределах 1 мкм. Это требование точности
можно обеспечить притиркой.Как указывалось выше, стержень 10 следует выполнять с
резьбой для регулировки вылета. Точное выполнение исход¬
ного размера 017f7 и закругление стержня 10 по контроли¬
руемому отверстию проводится с помощью кольца-притира.303
12. ПРИСПОСОБЛЕНИЯ ДЛЯ УСТАНОВКИ
РЕЖУЩЕГО ИНСТРУМЕНТА12.1. ОСНОВНЫЕ ТИПЫ ПРИСПОСОБЛЕНИЙ
ДЛЯ РЕЖУЩЕГО ИНСТРУМЕНТА И ВСПОМОГАТЕЛЬНЫЙИНСТРУМЕНТОбработку на настроенных станках обычно ведут, точно
устанавливая и фиксируя режущий инструмент. Для ускоре¬
ния установки и фиксации режущего инструмента использу¬
ются соответствующие приспособления. К таким приспособ¬
лениям относятся:• переходные втулки и патроны для концевого инстру¬
мента;• оправки для цилиндрических и дисковых фрез;• расточные скалки и приспособления для растачивания
на сверлильных станках канавок в отверстиях;• державки инструмента для сверлильных и токарно-ре-
вольверных станков;• инструментальные державки для станков с ЧПУ и авто¬
матов;• многошпиндельные головки к сверлильным станкам и
поворотные многошпиндельные головки к фрезерным стан¬
кам;• специальные резцедержатели к токарным станкам и
другие.Многие из этих приспособлений нормализованы и стан¬
дартизованы. Большинство из них называют вспомогатель¬
ным инструментом.Вспомогательный инструмент классифицируют в соответ¬
ствии с его назначением для различных групп станков и
степенью его автоматизации. Различают вспомогательный
инструмент для станков сверлильно-расточной и фрезерной
групп, для станков токарной группы, для станков с ЧПУ,
автоматов и полуавтоматов.Вспомогательный инструмент для станков сверлильно-ра¬
сточной и фрезерной групп - это хвостовики для крепления
инструментальных блоков в шпинделе станков (конические
и цилиндрические), быстродействующие патроны для креп¬
ления вспомогательного инструмента, универсальные пере¬304
ходные втулки и патроны, вспомогательный инструмент для
крепления режущего инструмента в шпинделе станка.Для станков сверлильно-расточной и фрезерной групп с
ЧПУ разработаны системы унифицированного вспомогатель¬
ного инструмента. В систему включены оправки для насад¬
ных фрез, цанговые патроны для крепления инструмента с
цилиндрическим хвостовиком, нерегулируемые переходные
втулки для инструмента с конусом Морзе от 2 до 5, расточ¬
ные оправки для черновой и чистовой обработки, патроны
для метчиков, сменные плашкодержатели, быстродействую¬
щие переходные патроны, быстросменные системы оправок
для станков сверлильной группы, для автоматической и руч¬
ной смены инструмента.Вспомогательный инструмент для фрезерных станков
включает также многошпиндельные угловые и ускоритель¬
ные головки, регулируемые угловые головки с устройства¬
ми для крепления концевого инструмента.Вспомогательный инструмент для токарных станков — это
хвостовики для крепления инструментальных блоков на стан¬
ках (с зубчатым венцом, с базирующей призмой, с лыской и
рифлениями и т.д.).Широко используются также специальные приспособле¬
ния: специальные патроны для смены инструментов на свер¬
лильном станке без остановки шпинделя; многошпиндельные
сверлильные, резьбонарезные и фрезерные головки; многорез¬
цовые державки для универсальных токарных станков.Особую группу составляют приспособления, расширяющие
технологические возможности металлорежущих станков: при¬
способления для протачивания кольцевых канавок и нареза¬
ния резьбы на вертикально-сверлильных станках; долбле¬
ния шпоночных пазов на поперечно-строгальных станках;
точения сферических поверхностей; поворотные головки для
фрезерных станков и т.д.12.2. КОНСТРУКЦИИ ПРИСПОСОБЛЕНИЙ ДЛЯ
УСТАНОВКИ РЕЖУЩЕГО ИНСТРУМЕНТА И РАСШИРЕНИЯ
ТЕХНОЛОГИЧЕСКИХ ВОЗМОЖНОСТЕЙ СТАНКОВДля станков токарной группы с ЧПУ широко использу¬
ются револьверные головки, позволяющие крепить режу¬
щие инструменты или непосредственно в гнездах этой го-305
ловки или с помощью вспомогательно¬
го инструмента. Способы установки ре¬
жущих инструментов в револьверной
головке различны. Широко использу¬
ется центрирование по конусу или
цилиндрическим хвостовиком с креп¬
лением винтами за фланец, прижим¬
ными винтами за лыску, зажимными
сухарями за цилиндрический хвосто¬
вик и рифленым клином за рифления
на лыске цилиндрического хвостови¬
ка. На рис. 12.1 приведена конструк¬
ция быстросменного патрона для сме¬
ны сверл, зенкеров, разверток, цеко-
вок без остановки шпинделя станка.Вращение от шпинделя станка пе¬
редается через конус 1 и шар 3 на смен¬
ный инструмент с туго посаженной ци¬
линдрической втулкой 5, имеющей
лунку под шар. Для смены инструмен¬
та надо поднять втулку 2. Под дей¬
ствием центробежной силы
шар западает в выточку 4,
инструмент разъединяется с
корпусом патрона и легко из¬
влекается.В другой конструкции
быстросменного патрона
(рис. 12.2) для смены инст¬
румента 1 необходимо при¬
тормозить втулку 2 рукой.При этом зазор между упо¬
рами а корпуса патрона и
внутренним скосом Ъ втулки
увеличивается, и инструмент
выпадает, так как его выступ
с не задерживается этим ско¬
сом. При установке нового
инструмента имеющимся на
нем выступом нажимают наРис. 12.1. Схема быстро¬
сменного патрона с
фиксацией инструмента
шаромРис. 12.2. Схема конструкции
быстросменного патрона с регули¬
руемым зазором для выступа
переходной втулки инструмента306
скос d, втулка отходит, преодо¬
левая действие пружин 3, и за¬
щелкивается, фиксируя положе¬
ние инструмента.Вертикально-сверлильные и
радиально-сверлильные станки
оснащают также многошпиндель¬
ными револьверными головками
(рис. 12.3). Корпус головки рас¬
трубом 3 устанавливают на шпин¬
дельную гильзу 2 станка и зак¬
репляют стяжным винтом 1. В
корпусе головки смонтирован по¬
воротный диск 7 с наклонно рас¬
положенной осью. В гнездах это¬
го диска устанавливают шпинде¬
ли 6 головки; некоторые из них
могут иметь ускоряющую или за¬
медляющую зубчатую передачу.Поворотный диск фиксируется
в определенных положениях с помощью вытяжного фиксато¬
ра. Центральный вал 4 головки связан со шпинделем станка
коническим хвостовиком. Вращение от этого вала на отдель¬
ные шпиндели головки передается муфтой 5 с торцовыми
выступами.Для смены инструмента следует повернуть диск 7, пред¬
варительно удалив фиксатор. Одновременно происходит
подъем муфты 5 и рассоединение вала 4 с нижним шпинде¬
лем. Поворот диска осуществляется без остановки шпинделя
станка. Извлечение фиксатора, рассоединение муфты и пово¬
рот диска происходят автоматически при подъеме шпинделя
станка. При этом переключающий валик 9 упирается в торец
шпиндельной бабки, перемещается вниз и приводит в дей¬
ствие механизм, состоящий из рычажной системы и зубча¬
той передачи с храповым устройством для вращения диска
только в одну сторону (на схеме не показано). При опуска¬
нии шпинделя происходит фиксация диска и включение
муфты центрального вала с вновь установленным шпинде¬
лем. Поворот диска возможен также рукояткой 8. С помо¬
щью головок этого типа можно сверлить, развертывать и зен-Рис. 12.3. Схема револьвер¬
ной головки сверлильного
станка307
керовать отверстия, цековать бо¬
бышки, а также нарезать внут¬
реннюю резьбу.На рис. 12.4 показана схема
реверсивной головки для нареза¬
ния резьб на сверлильном стан¬
ке. Корпус головки 2 имеет раз¬
рез и закреплен на шпиндельной
трубе станка винтовой стяжкой1. Вращение при нарезании резь¬
бы от валика 3, связанного со
шпинделем станка, передается
через муфту 5 на валик 6. При
подъеме головки в начале обрат¬
ного хода муфта переключается
в нижнее положение, передача
вращения на валик 6 при этомРис. 12.5. Вариант схемы реверсив¬
ного патрона (рис. 12.4) сверлиль¬
ного станкаРис. 12.4. Схема реверсивной
головки (патрона)
для нарезания резьбыпроисходит в обратном на¬
правлении, посредством ко¬
нических зубчатых колес 4,8 и 7.Схема более совершен¬
ной конструкции реверсив¬
ного патрона показана на
рис. 12.5. Вращение от
шпинделя сверлильного
станка через конус 21, диск11 и фрикционные про¬
кладки 13, подтягиваемые
гайкой 12, передается на
корпус патрона 10. При на¬
резании резьбы момент на
валик 15 метчика передает-308
с я зубьями 9 и 19. Нижняя часть
патрона 14 предохраняется от вра¬
щения шпилькой 17, скользящей
по вертикальному пазу станины
или корпуса приспособления.
Нижний упор 16 устанавливают
по высоте в зависимости от глуби¬
ны нарезаемой резьбы. Когда
шпилька 17 коснется неподвижной
плоскости упора 16, патрон оста¬
навливается. Метчик, продолжая
ввинчиваться, сместит валик 15
вниз, обеспечивая сцепление зубь¬
ев 19 и 20. Передача вращения на
инструмент происходит через зуб¬
чатые колеса 18 в обратную сторо¬
ну с большей скоростью. Поломка
метчика предупреждается пробук¬
совкой диска 11 между фрикцион¬
ными прокладками 13.На рис. 12.6 показана схема при¬
способления для растачивания на
вертикально-сверлильном станке ко¬
нических отверстий. Втулку 10 вер¬
хней частью устанавливают в пат¬
рон станка и направляют кондуктор¬
ными втулками 2 и 5, запрессован¬
ными в корпус приспособления, где
закреплена заготовка 4. Во втулке
10 помещен валик 7 с пружиной 1.
При опускании шпинделя станка
валик доходит до упора 6. Дальней¬
шее опускание шпинделя станка со
втулкой 10 вызывает радиальное пе¬
ремещение пластины 8 с расточным
резцом 0, так как штифт 3, запрес¬
сованный в валике 7, скользит по
наклонному пазу пластин. Таким об¬
разом, вершины резца будет описы¬
вать коническую поверхность. ПриРис. 12.6. Схема приспособ¬
ления для растачивания
конических отверстий с
использованием вертикаль¬
но-сверлильного станкаРис. 12.7. Вариант схемы
приспособления для растачи¬
вания (рис. 12.6) выемок на
внутренней цилиндрической
поверхности втулок309
подъеме шпинделя пружина 1 воз¬
вращает валик 7 и пластину в ис¬
ходное положение.Для растачивания выемок на
цилиндрической поверхности вту¬
лок используются специальные
скалки 2 (рис. 12.7) с продольным
пазом, в котором на оси 5 закреп¬
лена качающаяся подпружинен¬
ная державка 3 с резцом 4. При
подаче скалки вниз выступ дер¬
жавки отклоняется вправо кондук¬
торной втулкой 6. Резец врезается
в стенку отверстия и при дальней¬
шем опускании скалки протачива¬
ет выемку, длину которой ограни¬
чивают предварительной установ¬
кой упора 1.На рис. 12.8 показана схема
приспособления для растачивания
кольцевых канавок на сверлиль¬
ном станке. Центральный валик i,связанный со шпинделем станка, имеет в нижней части пря¬
моугольное окно, куда вставлена расточная пластина 7. За¬
прессованный в валике штифт 5 проходит через сквозную
наклонную прорезь расточной пластины.На рис. 12.9 показана схе- 2ма поворотной головки к го¬
ризонтально-фрезерному
станку. Корпус головки зак¬
репляется на вертикальных
направляющих станины с по¬
мощью клина и винтов. Вра¬
щение от шпинделя станка
через конический хвостовик1, конические зубчатые коле¬
са 2 и 3 передается на шпин¬
дель 4 головки. Поворотную
часть II головки можно уста¬
навливать под любым углом кРис. 12.8. Вариант схемы
приспособления (рис. 12.6,
12.7) для растачивания
кольцевых канавок на
сверлильном станкеРис. 12.9. Конструктивная схема
поворотной головки к горизон¬
тально-фрезерному станку310
горизонтальной плоскости, поль¬
зуясь градуировкой на цилиндри¬
ческом пояске а.На рис. 12.10 представлена
схема универсальной поворотной
головки к горизонтально-фрезер-
ному станку. Она состоит из не-точной поворотной вокруг оси а-■Ф-ir*r:а части II и поворотной вокругУъ/IРис. 12.10. Конструктивная
схема универсальной
поворотной головки к
горизонтально-фрезерному
станкуоси Ъ-Ь части III, несущей рабо¬
чий шпиндель головки. Механизм
головки состоит из хвостовика 1,
соединяемого со шпинделем стан¬
ка, промежуточного валика 4 и
шпинделя 6, несущих две пары
конических зубчатых колес 2, 3
и 7, 5. Возможность поворота вокруг двух осей позволяет ус¬
танавливать шпиндели головки под любым углом к горизон¬
тальной и вертикальной плоскостям.Шпиндели головок рассмотренных типов имеют коничес¬
кие отверстия для закрепления инструментов. Они использу¬
ются в условиях единичного и мелкосерийного производства,
расширяя технологические возможности горизонтально-фре-
зерных станков.На рис. 12.11 показана
схема двухшпиндельной го¬
ловки к горизонтально-фре-
зерному станку. Ее корпус
крепится на станке так же,
как и в рассмотренных
выше конструкциях. Мо¬
мент от шпинделей станка
через ведущий хвостовик 1
передается на шпиндели 2 и3 цилиндрическими зубча¬
тыми колесами. Головки
подобной конструкции МО- Рис 1211 Конструктивная схема
гут быть выполнены В MHO- двухшпиндельной головки кГОШПИНДеЛБНОМ исполнении горизонтально-фрезерному станку311
для горизонтальных и вертикальных фрезерных станков. В
сочетании с многоместными приспособлениями эти головки в
несколько раз повышают производительность фрезерных стан¬
ков. Один станок, оснащенный многошпиндельной головкой,
заменяет несколько обычных универсальных станков. Затра¬
ты на изготовление специальных фрезерных головок обычно
окупаются за короткое время.Для сокращения времени обработки на токарных станках
используются специальные поворотные резцедержатели, не¬
сущие несколько инструментов. С помощью таких резцедер¬
жателей можно вести одновременную обработку нескольких
поверхностей (рис. 12.12), используя продольную или попе-Рис. 12.12. Схемы поворотных резцедержателей
к токарным станкамречную подачу суппорта. Путем предварительной настройки
станка для работы по упорам обеспечивается автоматическое
получение требуемых размеров на детали. В условиях серий¬
ного производства целесообразно изугеть несколько сменных
резцедержателей в зависимости от числа заготовок, обраба¬
тываемых на станке. Устройства для крепления режущего
инструмента на токарно-револьверном станке (резцедержате¬
ли, расточные скалки, плашкодержатели, державки для креп¬
ления самоустанавливающихся разверток, суппорты для про¬
тачивания кольцевых канавок в отверстиях) в значительной
степени нормализованы и стандартизованы.312
13. ОБЩИЕ ВОПРОСЫ ПРОИЗВОДСТВА И
ЭКСПЛУАТАЦИИ ПРИСПОСОБЛЕНИЙ
В МАШИНОСТРОЕНИИ13.1. СПЕЦИФИКА ИЗГОТОВЛЕНИЯ
ПРИСПОСОБЛЕНИЙИзготовление универсальных приспособлений, которые
стандартизованы (патроны, плиты), осуществляется на спе¬
циализированных заводах по принципам крупносерийного
или поточно-массового производства. Аналогичным образом
изготавливаются нормализованные приспособления, отдель¬
ные узлы и детали к ним. Специальные приспособления из¬
готавливаются индивидуально или малыми партиями в инст¬
рументальных цехах машиностроительных заводов.Заготовки для специальных приспособлений выполняют
методами единичного производства (литьем, ковкой или из
сортового материала). Корпусы, стойки, кронштейны часто
выполняют сварными. Литые заготовки обязательно подвер¬
гают старению.Сварные заготовки нагревают до 600—650 °С и выдержи¬
вают 1,5—2 ч для снятия остаточных напряжений.Детали с точно координированными отверстиями (корпу¬
сы, сверлильные и расточные приспособления, накладные
кондукторы, делительные устройства) обрабатываются на
координатно-расточных станках — обычных или с ЧПУ. На
этих же станках ведут шлифовку отверстий, используя спе¬
циальные планетарные головки.На заводах, у которых отсутствуют координатно-расточ-
ные станки, точно расположенные отверстия получают на
станках универсального типа, проводя точную установку
заготовки с помощью специального инструмента и мерных
плиток.При обработке наклонных площадок используются си¬
нусные плиты, установленные на три сферические опоры.
Сборку специальных приспособлений проводят с выполнени¬
ем пригоночных работ и обработкой по месту. Используют
шабрение, притирку. В процессе сборки применяют регули¬
ровку и точную выверку.313
13.2. РАСЧЕТ ЭКОНОМИЧЕСКОЙ ЭФФЕКТИВНОСТИ
ИСПОЛЬЗОВАНИЯ ПРИСПОСОБЛЕНИЙ
И СРОК ИХ ОКУПАЕМОСТИОпределение экономической эффективности основано на
сопоставлении приведенных затрат по базовой и новой тех¬
нике. Приведенные затраты на единицу продукции вычис¬
ляют по формуле3 = С + Е К,н в7где С — себестоимость единицы продукции, руб.; Ен — нор¬
мативный коэффициент эффективности капитальных вло¬
жений (Ен = 0,15); Кв — удельные капитальные вложения в
производственные фонды.Применительно к расчету экономической эффективно¬
сти использования приспособлений при условии, что в
сравниваемых вариантах расходы на электрическую энер¬
гию, амортизацию станка и инструмент одинаковые, приве¬
денными затратами можно считать технологическую себесто¬
имость Ст обработки заготовки в приспособлении.В качестве себестоимости единицы продукции можно ис¬
пользовать стоимость операции S0, включающую основную
зарплату и накладные расходы. Вместо удельных капиталь¬
ных вложений целесообразно использовать себестоимость из¬
готовления приспособления А с учетом затрат на его проекти¬
рование и эксплуатацию, выражаемых в виде долей себестои¬
мости qn и дэ. Обычно принимают qu = 0,5, дэ = 0,2 — 0,3.Вместо нормативного коэффициента Ен можно прини¬
мать отношение 1 /1с (1с — срок службы приспособления).С учетом сказанного формула приведенных затрат на
единицу продукции примет вид:CT,= S0+^(iy^ + 93)ИЛИ„ т Z ч А 1 + дп чСт =: L (1 н ) н ( h q ),т 3 100 N 1Сгде L3— основная заработная плата, в руб.; Z — процент
накладных расходов; N — годовой объем выпуска деталей,
штук; А — себестоимость изготовления приспособления.314
где tmr — штучное время на обработку заготовки, ч; S1—часовая
ставка рабочего самого низкого разряда, руб.; тп — тарифный
коэффициент для данного разряда работы.Себестоимость изготовления приспособления определяет¬
ся соотношениемA = ZnCn>п пгде Zn — количество деталей в приспособлении; Сп — удель¬
ная себестоимость (приходящаяся на одну деталь), прини¬
маемая в зависимости от группы сложности приспособления
(Сп = 1,1 — для приспособлений 1-й группы сложности, име¬
ющих до 5 деталей; Сп = 7 — для приспособлений 6-й груп¬
пы сложности, имеющих до 60—95 деталей).Срок службы приспособления /с = 2—3 года для простых
приспособлений и 1с = 4—5 лет для сложных приспособлений.Для сравнения двух вариантов приспособления сопостав¬
ляются два значения себестоимости обработки заготовки с
использованием первого варианта приспособления (существу¬
ющего) и второго (проектируемого).Наиболее эффективным будет тот вариант, при ис¬
пользовании которого технологическая себестоимость обра¬
ботки заготовки минимальная.Экономический эффект Э от использования более про¬
грессивного варианта приспособления можно определить по
формулам:• на одну деталь Э = Ст1 - Ст2;• на годовой объем Эг = 9N.Срок окупаемости определяется отношением дополнитель¬
ных годовых затрат к годовому экономическому эффекту и
рассчитывается по формуле10=(а2-а)(ЦЯз- + я3)/эг.КИспользование приспособления на предприятии следует
считать экономически целесообразным, если l0 < 1.315
СПИСОК ЛИТЕРАТУРЫ1. Станочные приспособления: Справочник: В 2 т. /Ред. совет:
Б.Н. Вардашкин (пред.) и др. — М.: Машиностроение, 1984. Т.1 /Под ред.
Б.Н. Вардашкина. — 1984. — 592 с.2. Станочные приспособления: Справочник: В 2 т. /Ред. совет:
Б.Н. Вардашкин (пред.) и др. — М.: Машиностроение, 1984. Т.2 /Под ред.
Б.Н. Вардашкина. — 1984. — 656 с.3. ГОСТ 21495—76. Базирование и базы в машиностроении. Термины
и определения. — М.: Изд-во стандартов, 1976. — 35 с.4. Обработка металлов резанием: Справочник технолога/ А.А. Панов,
В.В. Аникин, Н.Г. Бойм и др.; Под общ. ред. А.А. Панова. — М.: Маши¬
ностроение, 1988. — 736 с.5. МаталинАА Технология машиностроения: Учеб. для машиностро-
ит. вузов по спец. “Технология машиностроения, металлорежущие станки
и инструменты”. — Л.: Машиностроение, Ленингр. отд-ние, 1985. — 496 с.6. Корсаков B.C. Основы конструирования приспособлений: Учеб. для
вузов. — 2-е изд., перераб. и доп. — М.: Машиностроение, 1983. — 277 с.7. Горохов В А. Проектирование и расчет приспособлений: Учеб. по¬
собие. — Мн.: Выш. шк., 1986. — 238 с.8. Справочник технолога-машиностроителя: В 2 т. / Под ред. А.Г. Ко¬
си л овой и Р.К. Мещерякова. — T.2.— 3-е изд., перераб. и доп. — М.: Ма¬
шиностроение, 1985. — 496 с.9. Пашкевич М.Ф., Беляев ГЛ., Мрочек Ж А. и др. Технологическая
оснастка. Проектирование поводковых устройств: Учеб. пособие по тех¬
нологической оснастке для машиностроительных вузов / Под ред. М.Ф. Паш¬
кевича. — Мн.: БГПА, 1998. — 180 с.10. Качанов JIM. Основы теории пластичности: Учеб. пособие для уни¬
верситетов. — М.: Изд-во технико-теоретической литературы, 1956. — 324 с.11. Джонсон У., Меллор 7JJB. Теория пластичности для инженеров/ Пер.
с англ. — М.: Машиностроение, 1979. — 567 с.12. Сторожев MJ3., Попов ПА. Теория обработки металлов давлени¬
ем: Учеб. для вузов. — Изд. 3-е, перераб. и доп. — М.: Машиностроение,
1971. — 424 с.13. Кроха ВА. Упрочнение металлов при холодной пластической де¬
формации: Справочник. — М.: Машиностроение, 1980. — 157 с.14. Микитянский ВВ. Точность приспособлений в машиностроении. —
М.: Машиностроение, 1984. — 128 с.15. Справочник технолога-машиностроителя: В 2 т. / Под ред. А.Г. Ко-
силовой и Р.К. Мещерякова. — Т.1. — Изд. 4-е, перераб. и доп. — М.:
Машиностроение, 1985. — 496 с.16. Коваленко АБ. Контроль деталей, обработанных на металлорежу¬
щих станках. — М.: Машиностроение, 1980. — 167 с.17. Пашкевич М.Ф., Геращенко ВЛ. Планетарные шариковые и ро¬
ликовые редукторы и их испытания. - Мн.: БелНИИНТИ, 1992.—248 с.18. Альбом по проектированию приспособлений: Учеб. пособие для сту¬
дентов машиностроительных специальностей вузов/ Б.М. Базров, А.И. Со¬
рокин, В.А. Губарь и др. — М.: Машиностроение, 1991. — 121 с.316
ОГЛАВЛЕНИЕВведение 31. Приспособления в машиностроении как основная
составляющая технологической оснастки 51.1. Основные задачи дисциплины 51.2. Классификация приспособлений 61.3. Структура приспособлений 142. Основы проектирования специальных станочных приспособлений ..172.1. Исходные данные и последовательностьпроектирования приспособлений 172.2. Выбор способа базирования заготовок в приспособлении 182.3. Математическое описание схем базирования 272.4. Выбор установочных элементов приспособлений 322.5. Выбор схемы закрепления заготовки 332.6. Выбор различных деталей и устройств специальныхстаночных приспособлений 343. Расчет сил закрепления заготовок в приспособлениях 373.1. Методика расчета сил закрепления 373.2. Расчет сил закрепления призматических заготовок при
базировании по одной, двум или трем плоскостям 413.3. Расчет сил закрепления цилиндрических заготовокпри базировании по наружной поверхности 453.4. Расчет сил закрепления цилиндрических заготовокпри базировании по внутренней поверхности 483.5. Расчет сил закрепления корпусных заготовокпри базировании по опорной плоскости 514. Расчет и конструирование поводковых зажимных устройств 594.1. Типовые конструкции поводковых зажимныхустройств торцового типа 594.2. Расчет фрикционных поводковых центров 604.3. Расчет деформирующих поводковых центров 644.4. Экспериментальные исследования фрикционныхповодковых центров 764.5. Экспериментальные исследования деформирующихповодковых центров 914.6. Оценка технологических возможностей поводковых центров 1064.7. Измерительные центры и измерительные поводковые центры 1125. Силовой расчет зажимных механизмов 1165.1. Расчет рычажных механизмов 1165.2. Расчет клиновых механизмов 1185.3. Расчет клиноплунжерных механизмов 1205.4. Расчет винтовых механизмов 1215.5. Расчет эксцентриковых механизмов 1235.6. Расчет комбинированных зажимных механизмов 1245.7. Расчет центрирующих цанговых зажимов 1255.8. Расчет разжимных оправок 1275.9. Расчет мембранных патронов 1316. Выбор и расчет приводов зажимных устройств 1346.1. Основные схемы привода 1346.2. Пневматический поршневой привод 1356.3. Пневматический диафрагменный привод 137317
6.4. Вакуумный привод 1386.5. Гидравлический привод 1396.6. Пневмогидравлический привод 1406.7. Электромагнитный и магнитный приводы 1416.8. Электромеханический привод 1426.9. Привод зажимных устройств приспособлений,использующий механизм подачи станка 1436.10.Привод зажимных устройств от сил резания 1447. Расчет станочных приспособлений на точность 1467.1. Методика расчета точности приспособлений 1467.2. Методика определения координат точекобрабатываемых поверхностей 1487.3. Методика расчета погрешности базированиязаготовки в приспособлении 1527.4. Расчет погрешностей базирования заготовки в центрах 1587.5. Расчет погрешностей базирования цилиндрическойзаготовки в призме 1617.6. Расчет погрешностей базирования втулки на жесткой оправке.... 1657.7. Пример расчета погрешностей базирования заготовки корпуса ... 1677.8. Расчет погрешностей закрепления заготовокв приспособлениях 1717.9. Расчет погрешности установки приспособленийв шпинделе и на столе станка 1747.10. Расчет погрешности обработки, связаннойс износом элементов приспособления 1767.11. Расчет погрешности обработки от перекосаили смещения инструмента 1788. Контрольные приспособления 1808.1. Назначение и типы контрольных приспособлений 1808.2. Основные элементы контрольных приспособлений 1818.3. Типовые методы и средства контроля линейных размеров 1858.4. Методы и средства контроля и измерения углов и конусов 1918.5. Методы, средства контроля и измерения отклоненийформы и расположения поверхностей 1938.6. Методы, средства контроля и измерения фасонных
поверхностей и профилей 1998.7. Методы, средства контроля и измеренияпогрешностей зубчатых колес и передач в сборе 2049. Сборочные приспособления 2179.1. Назначение и типы сборочных приспособлений 2179.2. Элементы сборочных приспособлений 22210. Приспособления для автоматизированногопроизводства и специальных технологий 22310.1. Автоматизация приспособлений 22310.2. Приспособления для оснащения автоматических линий 22610.3. Приспособления для станков с программным управлением 22910.4. Приспособления для электроэрозионных станков 23010.5. Приспособления для электроэрозионного способаизготовления матриц вырубных штампов 238318
11. Конструкции специальных станочных и контрольных
приспособлений 25311.1. Приспособление для установки заготовки картераДВС на столе горизонтально-расточного станка 25311.2. Приспособление для установки заготовки вилки кар¬
данного вала на столе карусельно-фрезерного станка 25411.3. Приспособление для установки заготовки втулкина столе фрезерного станка 25611.4. Девятиместное приспособление для установки заготовоквтулок на столе фрезерного станка 25711.5. Приспособление для установки заготовки зубчатогоколеса на столе радиально-сверлильного станка 25811.6. Шестиместное приспособление для установки заготовок
конических зубчатых колес на столе продольно¬
фрезерного станка 26011.7. Приспособление для установки заготовки втулки на столе
сверлильного станка при сверлении отверстия в торце 26211.8. Приспособление для установки заготовки шатунаДВС на столе вертикально-фрезерного станка с ЧПУ 26311.9. Приспособление для установки заготовки втулкив шпинделе токарного станка 26511.10. Приспособление для установки заготовки втулки
на столе сверлильного станка при одновременномсверлении нескольких отверстий в торце 26611.11. Приспособление для установки заготовки втулки на столе
сверлильного станка при сверлении и развертывании отверстий ... 26711.12. Четырехместное приспособление для установки заготовок
ступенчатых валов на столе фрезерного станка 26811.13. Приспособление для установки цилиндрических заготовокна столах фрезерных и сверлильных станков 26911.14. Восьмиместное приспособление для установкизаготовок валов на столах фрезерных станков 27011.15. Приспособление для установки заготовок длинныхвалов на столах фрезерных станков 27111.16. Приспособление для установки цилиндрическихзаготовок на столах горизонтально-фрезерных станков 27211.17. Приспособление для установки заготовки шатунаДВС на столе горизонтально-фрезерного станка 27311.18. Приспособление для установки призматическихзаготовок на столах сверлильных станков 27511.19. Контрольные приспособления 27612. Приспособления для установки режущего инструмента 30412.1. Основные типы приспособлений для режущегоинструмента и вспомогательный инструмент 30412.2. Конструкции приспособлений для установки режущего инстру¬
мента и расширения технологических возможностей станков ... 30513. Общие вопросы производства и эксплуатации
приспособлений в машиностроении 31313.1. Специфика изготовления приспособлений 31313.2. Расчет экономической эффективности использования
приспособлений и срок их окупаемости 314Список литературы 316319
Учебное изданиеПашкевич Михаил Федорович
Мрочек Жорж Адамович
Кожуро Лев Михайлович
Пашкевич Виктор МихайловичТЕХНОЛОГИЧЕСКАЯ
ОСНАСТКАУчебникРедактор Е.А. ПастуьиенкоХудожник обложки К. К. ШестовскийХудожник Н.В. СоколоваКомпьютерный набор Н.В. СоколоваКомпьютерная верстка Н.В. СоколоваКорректор Е.В. ПолянскаяПодписано в печать 05.07.2002. Формат 60x90V16. Бумага офсетная.
Гарнитура Школьная, Печать офсетная. Уел. печ. л. 20.
Уч.-изд. л. 18. Тираж 1360 экз. Заказ 3557.Издательство «Адукацыя i выхаванне».
Лицензия JIB Jsfe 25 от 25.08.1997.
220004, Минск, ул. Короля, 16.Республиканское унитарное предприятие
«Полиграфический комбинат имени Я. Коласа».
220600, Минск, ул. Красная, 23.