/



















































































































































































































Автор: Апатенок Р.Ф. Маркина А.М. Хейнман В.Б.
Теги: алгебра математика линейная алгебра аналитическая геометрия
ISBN: 5-339-00329-9
Год: 1990




Текст
Р. Ф. АПАТЕНОК Л. М. МАРКИНА
В. Б. ХЕЙНМАН
СБОРНИК
ЗАДАЧ
ПО ЛИНЕЙНОЙ
АЛГЕБРЕ
И АНАЛИТИЧЕСКОЙ
ГЕОМЕТРИИ
Под редакцией В. Т. Воднева
Допущено Министерством
народного образования БССР
в качестве учебного пособия
для студентов инженерно-технических
специальностей вузов
Минск
«Вышэйшая школа»
1990
A76
@75.8)
Рецензенты: кафедра высшей математики инженер но-строитеЛ)
ного факультета Рижского политехнического института; д-р физ.-мат. нау:
проф. О. В. Мантуров
к '5£2О4О00О-—010
М304@3)-90 И~ТО
ISHN 5-339-00329-9 © Коллектив авторов, 199(
ПРЕДИСЛОВИЕ
Данный сборник задач включает все вопросы разделов
«Линейная алгебра» и «Аналитическая геометрия», пред-
предусмотренных программой курса «Высшая математика» для
инженерно-технических специальностей высших учебных
заведений. Он образует единый комплекс с учебным посо-
пособием «Элементы линейной алгебры и аналитической геомет-
геометрии» тех же авторов под редакцией В. Т. Воднева (Мн.:
Выш. шк., 1986).
При написании пособия авторы учитывали, что одна из
важнейших задач высшего образования состоит в том, чтобы
побудить студентов к самостоятельному овладению знания-
знаниями. Необходимо переходить от системы обучения, когда
студентов только учат, к системе, когда они еще и сами
учатся. В связи с этим авторы отошли от традиционной
формы построения задачника. Вместо кратких теоретических
сведений в начале каждого параграфа (кроме § 6.5, 6.6 и
гл. 7) дается система контрольных вопросов, иллюстрирую-
иллюстрирующих узловые моменты теоретических положений и направ-
направленных на раскрытие сути отдельных теорем и формул. При-
Приводятся решения с объяснениями типовых задач, а также
задачи и упражнения для самостоятельного решения. С на-
нашей точки зрения такая структура активизирует самостоя-
самостоятельную работу студентов, позволяет контролировать усвое-
усвоение теоретического материала. Подразумевается, что сту-
студент изучит теоретический материал по учебному пособию,
ответит на помещенные в задачнике вопросы, ознакомится
с приведенными решениями задач, а затем приступит к са-
самостоятельному решению задач.
В § 6.5, 6.6 и во всех параграфах гл. 7 вместо контроль-
контрольных вопросов даются краткие теоретические сведения. Такая
структура обусловлена тем, что рассматриваемый материал,
имеющий большое прикладное значение, не содержится в
упоминаемом учебном пособии.
В предлагаемом сборнике даются задачи на приложение
методов линейной алгебры и аналитической геометрии в тех-
технике, физике, механике, что способствует установлению
3
межпредметных связей, помогает студентам уяснить ролг
математических знаний при изучении общетехнических \
специальных дисциплин, вырабатывает навыки применения
этих знаний к решению задач прикладного характера. Теоре-
Теоретические вопросы и задачи для самостоятельного решения
снабжены ответами. Для удобства читателя в начале книп-
помещен список основных обозначений.
В задачнике имеются два типовых расчета: 1) элементь
векторной алгебры и аналитической геометрии; 2) элементь,
линейной алгебры. Каждый типовой расчет включает теоре-
теоретические вопросы, теоретические упражнения и 30 варианте!,
задач для самостоятельного решения.
Авторы выражают искреннюю благодарность рецензеь
там — сотрудникам кафедры высшей математики инж'
нерно-строительного факультета Рижского политехнической
института, возглавляемой канд. физ.-мат. наук Е. В. Са/-
линеном, и зав. кафедрой геометрии Московского облас
ного педагогического института д-ру физ.-мат. наук, проа.
О. В. Мантурову — за ценные замечания и советы, спосоо
ствовавшие улучшению пособия.
Все отзывы и пожелания просьба направлять по адресу
220048, Минск, проспект Машерова, 11, издательство «Вы
шэйшая школа».
Авторь
ОСНОВНЫЕ ОБОЗНАЧЕНИЯ
Z — множество целых чисел
Q — множество рациональных чисел
R — множество действительных чисел
С — множество комплексных чисел
z — число, сопряженное с данным числом z
\а, Ь, с, ...)— множество, состоящее из элементов а, Ь, с, ...
0 — пустое множество
[а, Ь\ — замкнутый промежуток (отрезок, сегмент, числовой отре-
отрезок) с началом а и концом b, a < Ь
]а, Ь[ — открытый промежуток (интервал, открытый числовой от-
отрезок) с началом а и концом Ь, а<.Ь
6 — знак принадлежности
V — квантор общности
Н — квантор существования
R" — арифметическое действительное я-мерное пространство,
евклидово я-мерное пространство
С" — арифметическое комплексное я-мерное пространство
R/iW — линейное вещественное пространство, элементами которого
являются многочлены с вещественными коэффициентами,
степень каждого из которых не превышает я
Сп(х) — линейное вещественное (комплексное) пространство, эле-
элементами которого являются многочлены с комплексными
коэффициентами, степень каждого из которых не превышает п
Rmxn — линейное вещественное пространство вещественных число-
числовых матриц размеров т X п
Cmxn—линейное вещественное (комплексное) пространство комп-
комплексных матриц размеров лХл
С\а, ь\{С\а, ь) — линейное вещественное пространство вещественных функций,
имеющих непрерывную производную k-то корядка на
[а, Ь\ (]о, Ь\)
Е„— евклидово пространство размерности п
Е" — евклидово пространство, элементами которого являются
всевозможные упорядоченные n-ки вещественных чисел.
Операция скалярного умножения определена следующим
образом:
((а,; <х2; ...; а„), (р,; р2; ...; р„)) = а,р, + <х2р2 + ... + а„Р*
Ца,ь\ — евклидово пространство вещественных функций, непре-
непрерывных на [а, Ь\. Операция, скалярного умножения введена
следующим образом:
ь
(/W. g{x)) = \f(x)g(x)dx
U" — унитарное пространство, элементами которого являются вс^
возможные гс-ки комплексных чисел. Операция скалярног
умножения введена следующим образом:
((а,; а2; ...; а„), (р,; р2; ...; Р«)) = °hPi + <МЬ + ... + (ХлР»
О — нулевая матрица
Е— единичная матрица
А — матрица, обратная матрице А
Ат— матрица, транспонированная к матрице А
(а, Ь) — скалярное произведение векторов а и Ь в R3
[а, Ь] •• - векторное произведение вектора а на вектор Ь в R3
(а, Ь, с) =
= ([а, Ь], с) — смешанное произведение векторов а, Ь, с в R3
1. МАТРИЦЫ И ОПРЕДЕЛИТЕЛИ
1.1. МАТРИЦА. ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ.
ЛИНЕЙНЫЕ ОПЕРАЦИИ НАД МАТРИЦАМИ
Теоретические вопросы
.1. Что называется матрицей размеров ту, п.?
.2. Что называется элементами матрицы?
.3. Как обозначается элемент, стоящий в г-й строке
и /-м столбце матрицы А ?
1.4. Какая матрица называется квадратной?
1.5. Что называется порядком квадратной матрицы?
1.6. Какая матрица называется нулевой?
1.7. Какая матрица называется диагональной?
1.8. Какая матрица называется единичной?
1.9. Какие матрицы называются равными?
1.10. Что называется суммой двух матриц?
1.11. Можно ли складывать матрицы разных размеров?
1.12. Что называется суммой k матриц, где k(z N, k > 2?
1.13. Что называется произведением числа а на матри-
матрицу А?
1.14. Какая матрица называется противоположной ма-
матрице А?
1.15. Что называется разностью двух матриц?
1.16. Какие операции над матрицами называются ли-
линейными?
1.17. Каковы свойства линейных операций над матри-
матрицами?
Задачи и упражнения
1.18. Даны матрицы:
'2 1
Q I
О 1
О 4
С =
— 2 3
5 8
— 1 3
в =
1
-1
3
-1
1
2
0
3
4
5"
2 .
-4
Можно ли сложить матрицу А: с матрицей В; с матрицей С?
Найти: А + С; 2A — 3C + D.
Решение. Матрицу А нельзя сложить с матрицей В, так как мат-
матрица А имеет размеры 3X2, матрица В — размеры 2 X 3, а складывать
можно только матрицы одинаковых размеров. Матрицы А и С имеют одина-
одинаковые размеры, следовательно, их можно складывать.
Так как при слойсении матриц складываются соответствующие эле-
элементы, то
0
8
— 1
4"
7
7
Поскольку умножение матрицы на число есть операция, состоящая
в том, что каждый элемент матрицы умножается на это число, то
4 2
6 -2
О 8
— ЗС =
следовательно,
2Л - ЗС + D =
13
6 -9
-15 -24
3 -9
— 2
■10 —24
4 -5
1.19. Указать размеры матриц:
а)
-1 4
5 0
б)
"l
2
8
4"
-5
6
в)
;
О)
аз
С)
^2
с3
1.20. Чему равны в матрице А элементы Огз, 034, если
А =
0-2 4
1 3 -1
-3 8 15 10
1.21. Определить, какие из матриц
3-2
4 0
, В =
5
0
7
4
2
-1
-3
1
0
2
3
4
, с =
си
Си
С 31
с\г
£22
С32
С|3
С23
СЗЗ
являются квадратными, и указать порядок каждой квадрат-
квадратной матрицы.'
1.22. Какие элементы в матрице
7 4 0
2-13
5 0 8
составляют главную диагональ, а какие — побочную?
1.23. Указать, какие из матриц
~2 Ol „ ГО 2
А =
О 3
В =
3 О
/-I __
1 О О
О 1 О
О О 1
являются диагональными.
1.24. Написать единичную матрицу четвертого порядка.
1.25. Указать, какие из матриц
А =
3
2
— 4
2 -
0
5
4
5
1
2
4
-6
0
1
3
1
0
0
о"
0
0
5
2
0 -
, F
7
4
-3
=
у *-*
3
5
0
— 1
2
2 '
0
1 -6
1 3
0 0 0
о"
1
0
3
4
0
являются: а) верхней треугольной; б) нижней треугольной;
в) трапециевидной; г) симметрической.
1.26. Найти A -f- В, если:
А =
1.27. Дано:
2 1 -
3 2
-1 3 4
2 7 5
3
8
2
4
0
Найти: а) ЗЛ; б) —2Л.
1.28. Даны матрицы:
А =
2
4
0
0
3
7
— 1
5
— 4
, в =
1
3
5
2
1
— 7
з"
4
4
0 0 0
2 -2 1
3 4 5
Найти: а) 2А + 3S — С; б) Л — S + 2С.
1.29. Доказать, что сумма двух симметрических матриц
является симметрической матрицей.
1.30. Найти матрицу X, если:
а) 2
" —1
2
0
з"
4
5
2
— 3
— 7
8
9
2. Зак. 5115.
1.31. Матрицы А и В имеют вид
Будет ли матрица Л + В такого же вида?
1.32. Матрицы Лий имеют вид
О а
Y
Будет ли матрица А + В такого же вида?
1.2. УМНОЖЕНИЕ МАТРИЦ
Теоретические вопросы
1.33. В каком случае матрицу Л можно умножить на мат-
матрицу б?
1.34. Что называется произведением матрицы А на мат-
матрицу б?
1.35. Каковы должны быть размеры матриц Л, В и С,
чтобы существовало произведение (АВ)С^
1.36. Что называется произведением п матриц, где п £ N,
1.37. В каком случае существуют произведения АВ и В А}
1.38. Пусть существуют произведения АВ и В А. Спра-
Справедливо ли равенство АВ = ВА?
1.39. Возможно ли равенство АВ = О, если Лий — не-
ненулевые матрицы?
1.40. Каковы свойства произведения матриц?
Задачи и упражнения
1.41. Даны матрицы:
^ 1 — 1 2 0
й =
0 2 41' "~ 5 7 9-1
1 3 4 5 15
Существует ли произведение: АВ; ВА?
Решение. Так как матрица А имеет размеры 2X3, а матрица
Б — размеры 3 X 4, то число столбцов матрицы А равно числу строк матри-
матрицы В, следовательно, АВ существует.
10
Число столбцов матрицы В ие равно числу строк матрицы А, следова-
следовательно, ВА не существует.
1.42. Даны матрицы:
1 0 -2
А =
3 9-5
, В =
1
5
0
2
6
3
4
7
— 1
, с=
1
2
3
Найти: АС; АВ.
Решение. Используя определение произведения матриц, находим:
._ Г1 • I +0-2 + (-2K1 Г-51
/IС =
АВ =
(-2H
5 + ( —5H
-2K
-5K
— 1—4 61
42 45 80 Г
1.43. Даны матрицы
3
А =
в =
-1 0
3-2
Найти
если С = АВ.
1.44. Известно, что Азх9ВпХп = С5Х!. Найти тип.
1.45. Известно, что Л5хтВ7Хп = С5хь. Найти тип.
1.46. Даны матрицы А1х-Л, B4xi. СЛх5. Существуют ли
произведения: а) АВ; б) АС; в) ВА; г) СА; д) ЛВС?
В задачах 1.47—1.52 выполнить указанные действия.
1.47. [-1 2 2 3]
0
-3
1
1.48.
1.49.
2 -1
3 5
5 -1
3 4
3 2
3 0
6 1
0 2
-1 0
1 5
1.50.
1.51.
1.52.
3
2
3
3
2
-1
-1
0
5
0
1
3
0
0
-1
0
1
1
1
4
—
l"
0
1
2'
3
1
2
2
1
2
0
2
3
"-1
2
5
3
-4
0
1
-2
0 -3
4 5
Г
-2
0
[
1
Г
5
2
Г-
1
1
-1
-12 7
4 0 6
1.53. Доказать, что произведение двух матриц вида
1 I 1 -Р'
где
I, является матрицей того же вида.
1.3. МНОГОЧЛЕНЫ ОТ МАТРИЦ
Теоретические вопросы
1.54. В каком случае существует произведение АА?
1.55. Что называется целой положительной степены
квадратной матрицы Л?
1.56. Что называется нулевой степенью квадратной ма~
рицы Л?
1.57. Что называется первой степенью квадратной ма~
рицы Л?
1.58. Что называется многочленом от квадратно
матрицы Л?
1.59. В каком случае квадратная матрица А называете
корнем многочлена Р(х) = аох + а\Хк~'-)-■•• + а*?
Задачи и упражнения
1.60. Найти Л2, если Л= '
Решен и'е. Согласно определению, Л2 = АА. Следовательно, .
-21 Г1 -21 Г-5 -10]
4J 1.3 4J 15 ЮГ
12
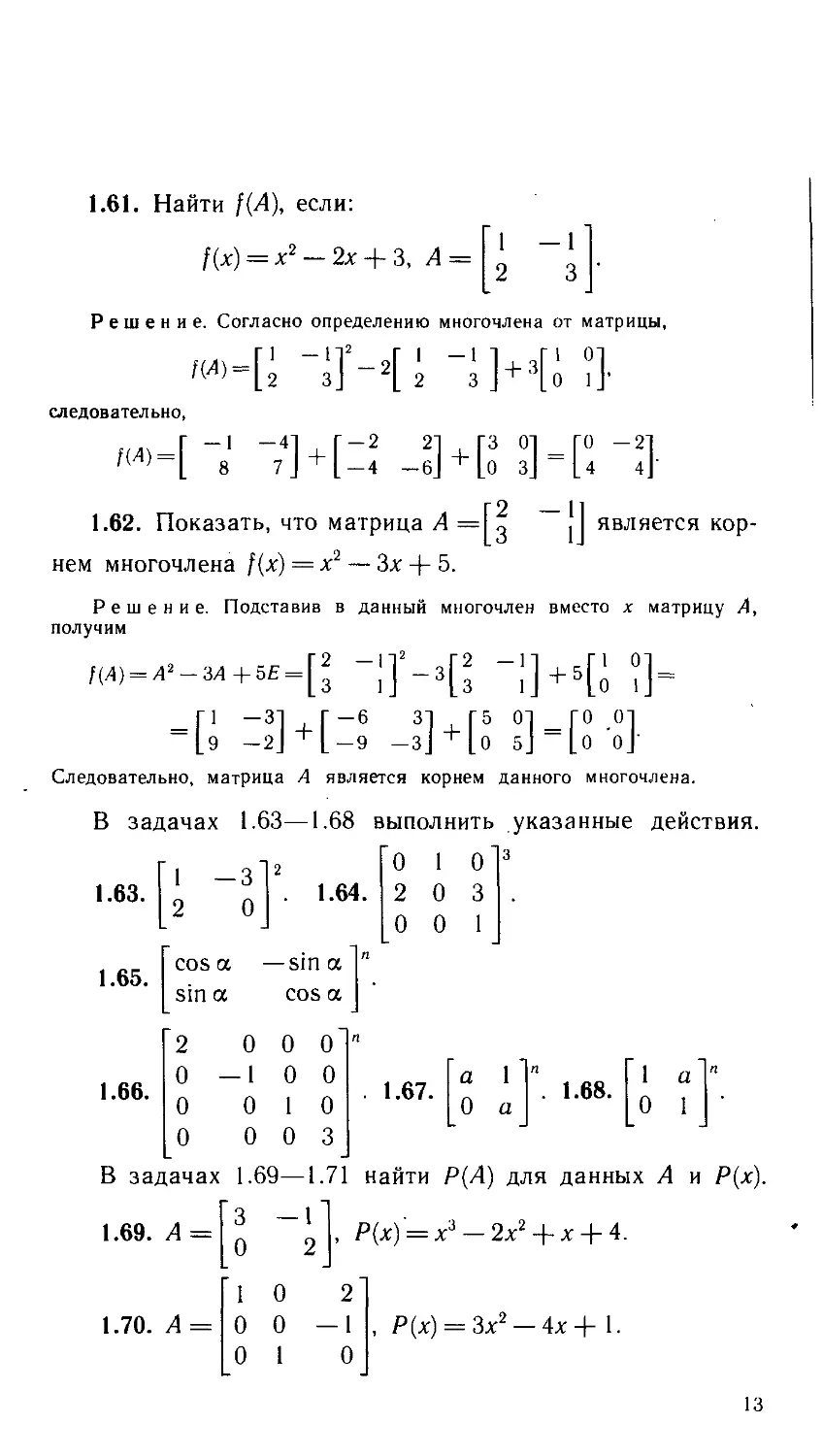
1.61. Найти f(A), если:
f(x) = х2 - 2х + 3, А =
1 -1
2 3J"
Решение. Согласно определению многочлена от матрицы,
«ч; "M
следовательно,
[о | ]
о | является кор-
корнем многочлена f(x) = х2 — Зх + 5.
Решение. Подставив в данный многочлен вместо л: матрицу А,
получим
г, -31 Г-6 31 Г5 01 ГО .01
[9 -2j^L-9 -3J+Lo 5j Lo О]'
Следовательно, матрица А является корнем данного многочлена.
В задачах 1.63—1.68 выполнить указанные действия.
1.63.
1.65.
1 -3
1.64.
0 1 0
2 0 3
0 0 1
cos a —sin а
sin а
cos а
1.66.
1.68.
1 а Г
0 1
2 0 0 0"
0-100 Га 1
0 0 10- !'67- I 0 а
0 0 0 3J
В задачах 1.69—1.71 найти Р(А) для данных А и Р(х).
'З -1
1.69. А =
1.70. А =
0
1 0 2
0 0-1
0 1 0
, Р(х) = х6 — 2хг + х + 4.
13
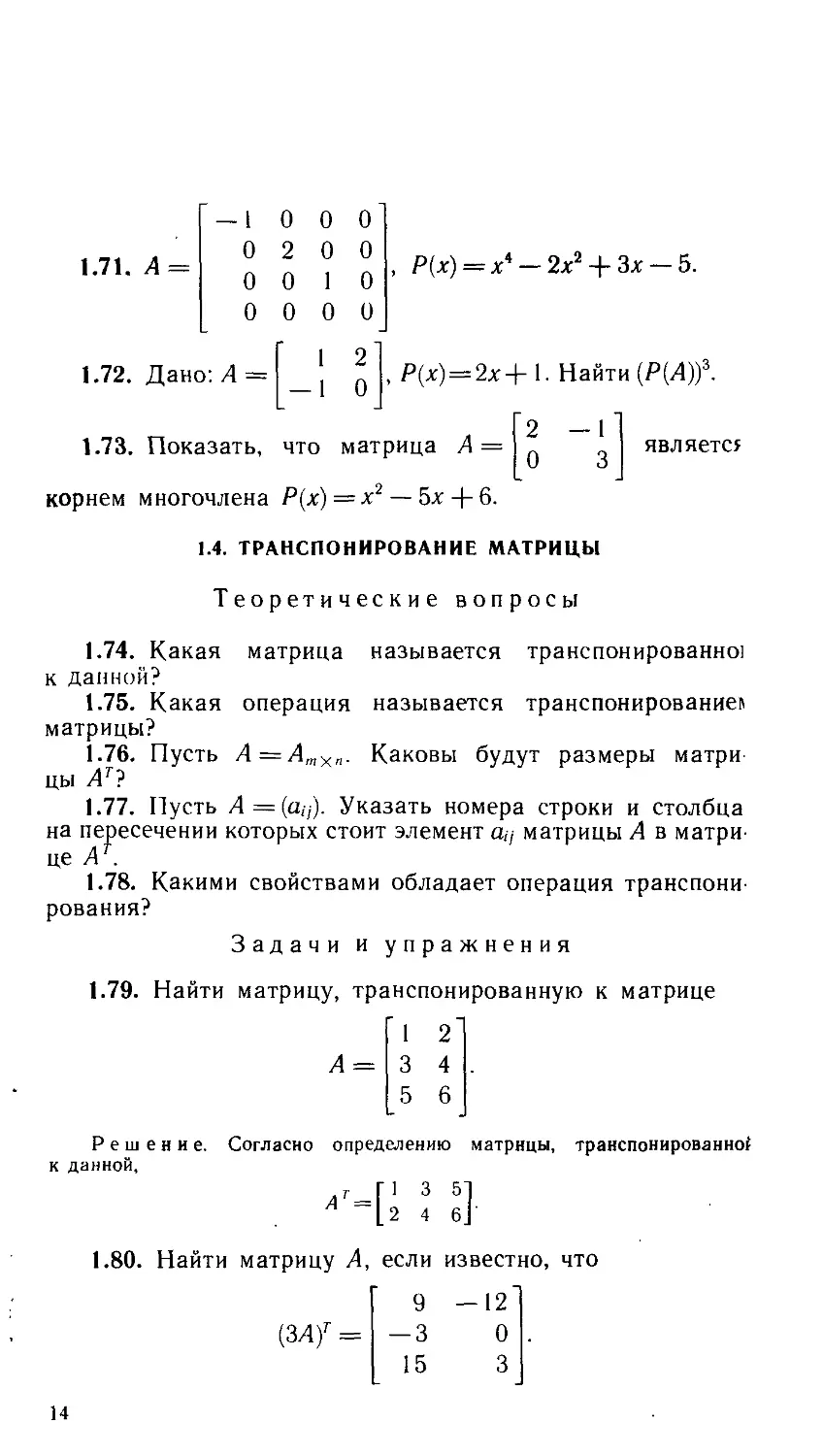
1.71. Л =
-10 0 0
0 2 0 0
0 0 10
0 0 0 0
— 5.
1.72. Дано: Л ^[j [Н, Р(х) = 2х+ 1. Найти (Р(Л)K.
Г2 _П
1.73. Показать, что матрица Л = „ „ являете?
корнем многочлена Р(х) = х2 — 5х + 6.
1.4. ТРАНСПОНИРОВАНИЕ МАТРИЦЫ
Теоретические вопросы
1.74. Какая матрица называется транспонированно]
к данной?
1.75. Какая операция называется транспонированиек
матрицы?
1.76. Пусть А = АтХп. Каковы будут размеры матри
цы Ат?
1.77. Пусть A = (ciij). Указать номера строки и столбца
на пересечении которых стоит элемент а,-,- матрицы А в матри-
матрице А.
1.78. Какими свойствами обладает операция транспони-
транспонирования?
Задачи и упражнения
1.79. Найти матрицу, транспонированную к матрице
"l 2
А= 3 4
5 6
Решение. Согласно определению матрицы, транспонированной
к данной,
г Г1 3 б"!
~|.2 4 6J
1.80. Найти матрицу Л, если известно, что
9 -12'
-3 0
15 3
14
Решение. Так как ((ЗА)) = ЗЛ, то
-3
О
Г 9 -3 15]
■~~L-I2 0 3J'
следовательно,
■I
Г
3 -1 5
4 О I
1.81. Найти матрицу, транспонированную к данной:
а)
2 -1
7 5
О 2
О
1
1
5
-3
7
б)
4
— 1
О
1.82. Даны матрицы:
О -1
2 1
3
— 1
4
2
— 1
-6
О
1
Найти: а) 2А-ВТ; б) 2ВТ+ ЗА.
1.83. В каком случае для матрицы А = Лтх„существует
Ат + А?
1.84. Для каких матриц справедливо равенство:
а) От = О, где О — нулевая матрица;
б) Ет = Е, где Е — единичная матрица?
1.85. Найти (АВ)Т, если:
А- 3 '
1.86. Найти матрицу А, если
1.87. Найти матрицу В, если
5
5
11
13
— 1
6
(А + В)т =
-2
4
4
6
2
0
8
0
1
— 1
5
О 2
3 4
О О
1.88. Найти В А, если
{АТВТ)Т =
-5
4
15
1.5. ОПРЕДЕЛИТЕЛЬ МАТРИЦЫ
Теоретические вопросы
1.89. Что называется определителем матрицы л-ro по-
порядка?
1.90. Чему равен определитель матрицы:
a) [an|; б) Га,,
в)
#21
#23
1.91. Перечислить основные свойства определителей.
1.92. Доказать свойство det Л = det AT непосредственным
вычислением определителей, если А — матрица третьего
порядка.
Задачи и упражнения
1.93. Вычислить:
а)
2 —:
б)
2 —2 1
3 4 2
-1 0 1
Решение, а) Так как определитель второго порядка равен произ-
произведению элементов главной диагонали минус произведение элементов
побочной диагонали, то
2 -1
3 4
= 2-4-3(—1) = 11.
6} Используя правило треугольников, получаем
2 -2 1
4 2
= 2-4- I +( — 2)-2(— 1) -f- 3 - 0 - 1 — 1-4(— 1) —
о l
— 3( — 2I — 2-0-2 = (
= 22.
1.94. Используя свойства определителей, вычислить
2-103
-1 3 5 4
4-206
1 2 3 4
Решение. Так как элементы третьей строки пропорциональны со-
отретствующим элементам первой строки, то данный определитель равен
нулю.
16
< В задачах 1.95—1.101 вычислить определители.
1.95.
1.97.
1.99.
7
4
3
1
0 -
a b
0 О
-5
2
1.96.
0
4
1
2
7
3
1.1
00.
1.98.
а
ka
— 4
0
5
b
kb
1.102. Даны матрицы:
а Ь~\
с d\
А =
В =
С =
ах Ь{ С\
а2 Ь2 с2
а3 Ьз Сз
2
— 2
1.101.
-1
3
4
а
а
е
b
b
f
с
с
g
a + kc b + kd
с d
c{
1епосредственно вычислив определители, показать, что
let A = det В, det С = — det D.
1.103. При каком значении а равны нулю следующие
определители:
а)
г)
1 а
3 5
б)
3-а 2
2 -а
в)
1 2 а
— 1 0 4
1 2-3
3-а О О
2 а О
10 —5 1
Д)
1 2 5
0 7 а
0 0-1
1.104. Пусть А — матрица порядка п. Испо.1 . ;уя свой-
свойства определителей, доказать, что det(a^)==a" det A.
В задачах 1.105—1.110 вычислить определители, поль-
пользуясь свойствами определителей.
1.105.
1
13
0
7
1
1
17
— 4
0
0
0
0
8
— 7
24
-3
1.106.
1
4
5
2
-3
-3
8
5
17
1.107.
1.109.
1—1 5
2-2 7
4 -4 15
121 283
221 183
1.108.
1.110.
1 17
3 7
2 34
71 8
2 5
-8 12
4 10
3 -1
-15 8
0 6 9
1 7 10
1.111. Пусть А — квадратная матрица четвертого пс
рядка и det Л = 2. Найти detC^).
1.112. Найти det/4 и det В, если:
— 1
2
-3
3
1
4
0
-1
1
, в =
— 1
2
-3
1.113. Найти det/4 и det В, если:
А =
3
0
7
— 1 "
3
1
, в =
2
1
4 + а
3
1
4
3
10
7
1.114. Вычислить
2 4—3
1 -2 0
2 + а 4 —2а —3
За
-1+а
1 +4а
— 1
3
1 +3а
1.6. МИНОРЫ И АЛГЕБРАИЧЕСКИЕ ДОПОЛНЕНИЯ.
РАЗЛОЖЕНИЕ ОПРЕДЕЛИТЕЛЯ ПО ЭЛЕМЕНТАМ
СТРОКИ (СТОЛБЦА)
Теоретические вопросы
1.115. Что называется минором порядках матрицы АтХп
1.116. Какие значения может принимать число s — поря
док минора матрицы Лтх„?
1.117. Что называется минором, дополнительным к ми
нору М? Для каких матриц существует минор, дополнитель
ный к минору М?
1.118. Что называется алгебраическим дополнением ми
нора матрицы?
1.119. Что называется алгебраическим дополнением эле
18
мента a.ij матрицы А порядка я? Как обозначается алгебра-
алгебраическое дополнение элемента а,-, матрицы А = (а,;)?
1.120. Сформулировать теорему о разложении опреде-
определителя по элементам строки.
1.121. Сформулировать теорему Лапласа.
Задачи и упражнения
1.122. Найти алгебраические дополнения элементов вто-
второй строки матрицы
А =
1 -2
3
3 -1
2 4
Решение. Алгебраическое дополнение к элементу, стоящему во
второй строке и первом столбце, обозначается Л2|. Согласно определению
алгебраического дополнения элемента,
=w_n2H
= (-i):
-2 3
2 4
= (-l)(-14)=14.
Аналогично находим:
1
О
1.123. Вычислить
4 А I I \2 + 3 J -^ о
, Л23 = (—U ,, „ = —2.
-2 1 3
1 1 1
0 0 5
разложением по элементам: а) первой строки; б) третьей
строки.
Решение, а) Применив теорему о разложении определителя к пер-
первой строке, получим
1 1
0 5
1 1
0 5
1 1
о о
= -10-5= -15.
б) Применив теорему о разложении определителя к третьей строке,
получим
д = 0 + 0 + 5(—IN
2 1
= 5(-3)= -15.
19
1.124. Дана матрица
2
0
5
-1
1
— 1
7
4
1
— 1
3
2
3
2
4
4"
-3
1
6
8
Найти минор М, выбрав: а) вторую и четвертую строки, пер-
первый и третий столбцы; б) первую и вторую строки, первый
и четвертый столбцы.
1.125. Дана матрица
an al2 ai3 an
«21 «22 агз «24
аз[ азг азз аз4
аи а4г а4з Он
Записать минор, дополнительный к минору М, если элементы
минора М расположены в первой и третьей строках, втором
и четвертом столбцах.
1.126. Дана матрица
2
1
4
1
3
0
2
1
2
0
— 1
3
— 4
5
7
4
0
3
-1
1
5
7
5
4
5
Найти минор, дополнительный к минору М, если элементы
минора М расположены во второй, четвертой и пятой стро-
строках, первом, третьем и пятом столбцах.
1.127. Даны матрица
an
«23
аи
и ее минор
минора.
20
аи
а3\
Найти алгебраическое дополнение
1.128. Дана матрица
3
2
3
-7
4
1
— 1
0
-7
5
4
5
1
2
6
1
Найти алгебраическое дополнение: а) минора
2 5
3 4
б) элемента 6; в) элемента 0.
В задачах 1.129—1.134 вычислить определители.
1.129.
1.131.
1.133.
3
0
3
2
2
0
0
0
0
1 -7
0
1 -
3
-4
3
0
0
0
-2
(
,
1ок
)
3 -
1
азат
an
0
0
0
2
-4
7
9
15
1
0
0
2
3
-1
2
2
0
5
0
11
17
-4
— 1
0
г
—
1.130.
6
-78
3
5
5 3
2
4 6
С
ь, что
a.
a2
0
0
) 1
1.132.
1.134.
■ а2п
■ Clin
■ ппп
— СЦ\О2
— 4
2
1
5
0
0
0
-2
2
1
-1
5
1"'ппп-
3
2
1
3
0
0
1
4
3
2
2
8
7
0
0
0
0
2
3
5
—
I
3
0
I
2
-8
1
4
4
10
17
6
4
5
1
1
1.136. Доказать, что
О 0 ... О 0 а\п
О 0 ... О а2„-1 О
О 0 ... азп-2 О О
ап\ О
О
О
О
п(П-\)
=(-1)
а\
21
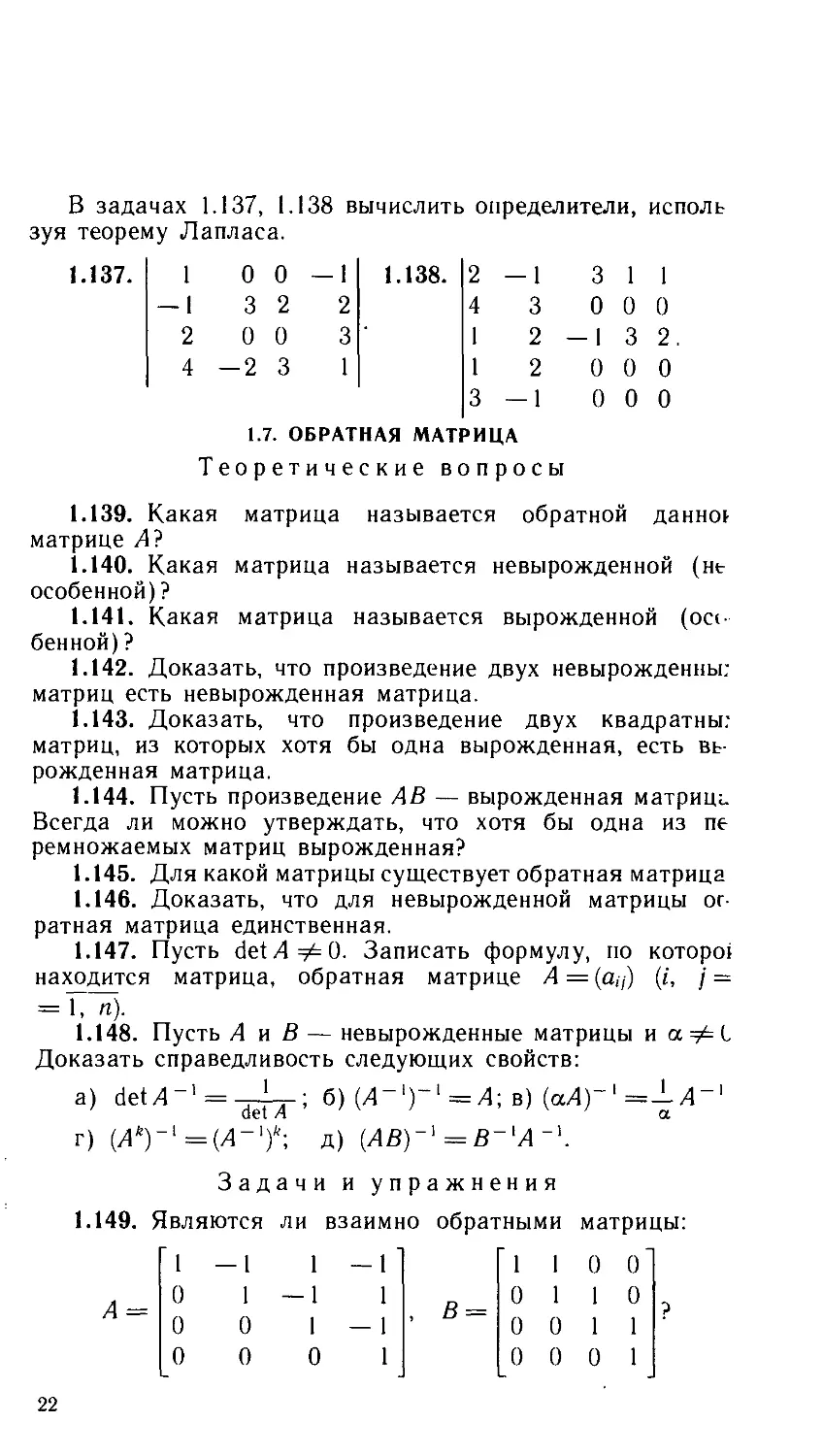
В задачах 1.137, 1.138 вычислить определители, исполь
зуя теорему Лапласа.
1.137.
1
1
2
4
0
3
0
-2
0
2
0
3
-1
2
3
1
1.138.
2
4
1
1
3
-1
3
2
2
— 1
3
0
— 1
0
0
1
0
3
0
0
1
0
2
0
0
1.7. ОБРАТНАЯ МАТРИЦА
Теоретические вопросы
1.139. Какая матрица называется обратной данно»
матрице А?
1.140. Какая матрица называется невырожденной (нь
особенной)?
1.141. Какая матрица называется вырожденной (оа-
бенной)?
1.142. Доказать, что произведение двух невырожденны;
матриц есть невырожденная матрица.
1.143. Доказать, что произведение двух квадратны:
матриц, из которых хотя бы одна вырожденная, есть вь-
рожденная матрица.
1.144. Пусть произведение АВ — вырожденная матрищ.
Всегда ли можно утверждать, что хотя бы одна из пе
ремножаемых матриц вырожденная?
1.145. Для какой матрицы существует обратная матрица
1.146. Доказать, что для невырожденной матрицы or-
ратная матрица единственная.
1.147. Пусть det/1^0. Записать формулу, по которо*
находится матрица, обратная матрице А = (a,-/) {i, j =
1.148. Пусть А а В — невырожденные матрицы иа^(,
Доказать справедливость следующих свойств:
a) detА~' = -Д-г; б) (Л)" = А; в) (аА)~1 =— А~]
det
г)
д)
Задачи и упражнения
1.149. Являются ли взаимно обратными
1
0
0
0
— 1
1
0
0
1
— 1
1
0
-1
1
— 1
в =
ы
1
0
0
0
ИИ
1
1
0
0
матрицы
0
1
1
0
о"
0
1
1
22
Решение. Так как
АВ =
1
0
0
0
0
1
0
0
0
0
1
0
0
0
0
1
, ВА =
10 0 0
0 10 0
0 0 10
0 0 0 1
то, согласно определению, матрицы А и В взаимно обратные.
1.150. Выяснить, существует ли матрица, обратная
матрице
А =
и если существует, найти ее.
1Решенне. Поскольку det А = 12 Ф 0, то А"' существует и может быть
| найдена но формуле
li An Лз1
1
1
1
— 1
1
1
2
-2
4
det Л
где Aij — алгебраическое дополнение к элементу а,,-. Так как
Л31 =
то
1
1
— 1
1
— 1
1
— 2
4
2
4
2
-2
= 6,
= 6,
= 0,
/4|2 =
Л22 =
/432 =
4 ~' =
-
1
1
—
1
12
1 -
1
2
4
2
4
=
2
1 -2
6
— 6
С
= —
2 ,
= 4,
6
2
-2
6,
4,з =
А-п=-
...
о"
4
2
1
1
1
1
1
1
1
1
-1
1
— 1
1
-О,
._ о
= 2,
1 2
1.151. Дана матрица А = о . Используя определе-
[3 8J
ние обратной матрицы, выяснить, является ли матрица В
обратной матрице А, если:
а) В =
1 3
2 8
•>"-1-1 ~\%\
23
в) В =
4 —1
-3/2 1/2
; г) в =
В задачах 1.152—1.155 выяснить, при каких значения:
к существует матрица, обратная данной.
1.152.
1.154.
2
0
Х-2
-1
к
к — 1
4
0
2
2
3
5
к'
0
к
-1
3
1
1
1
.153.
.155.
2
'к
3
-X
1
1
к2
1
2 —
1
- 1
4
0
0
2
1.156. Пусть det/l^O. Записать формулу, по которо!
находится матрица, обратная матрице:
а) А =
п22
б) А =
Gil Gl2
O2i O22
1.157. Пусть В = {bij) — матрица, обратная невырожден
ной матрице
А =
Найти в матрице В элемент: а) Ь32; б) Ь2\\ в) 622.
В задачах 1.158—1.173 найти матрицы, обратные дан
ным, если они существуют.
-3
0
— 1
2
1
7
6
0
1
1.158.
1.161.
1.164.
-1 21 1.159. [2 -3 | 1.160.
-3 5 Г 1-4
О З] 1.162.
5 4Г
3
1
2
0
2
4
Г
3
1
1
.163.
2 0 0
0 1/20
0 0 1/3
1.165.
dx
0
0
0
0
d-2
0
0
0
0
d3
0
0
0
0
1.166.
-3 1
15 -5
-1 3
2 -5
1 -2
-10 12 -10
-17 б 7
8 0 8
24
1.167.
1.169.
1.170.
1.172.
-3 1 <
-5 -3 i
— 4 —1 ;
3 —5 —35
3 —5 —6
-7 2 14
0 0 0 1/3
0 0 1/4 0
0 1/6 0 0
1/12 0 0 0
1 0 0 О"
-110 0
1—1 10
-1 1-11
1.168.
13 -3 -7
12 23 9
-5 -4 13
1.171.
1.173.
-3 0 0
1 0 0
0 2 1
0 1 1
0
-5
0
0
-1 3
0 2
3 4
7 8
В задачах 1.174—1.178 решить матричные уравнения.
1.174. X
10 26
-10 -7
1.175.
2 3
-1 4
9 10-
1 -5
1.176. X
1
0
1
2
4
0
j
-2
2
=
1
= 1
1.177.
1.178.
-1 2
0 1
X
1 О
2 4
-2
14
20
-2
1
5
-7
-12
-12
-4
1
2
0
-1
4
1
о"
-1
2
1
1
0
2
4
5
=:
-1 6
-1 2
5 12
1.179. Доказать, что если А и В — невырожденные
матрицы одинакового порядка, то АВ и В~М~1 — взаимно
обратные матрицы.
1.180. Доказать, что матричное уравнение АХ = В, где
А, В — квадратные матрицы одинакового порядка, причем
det/l=O, a detfi^O, не имеет решения.
25
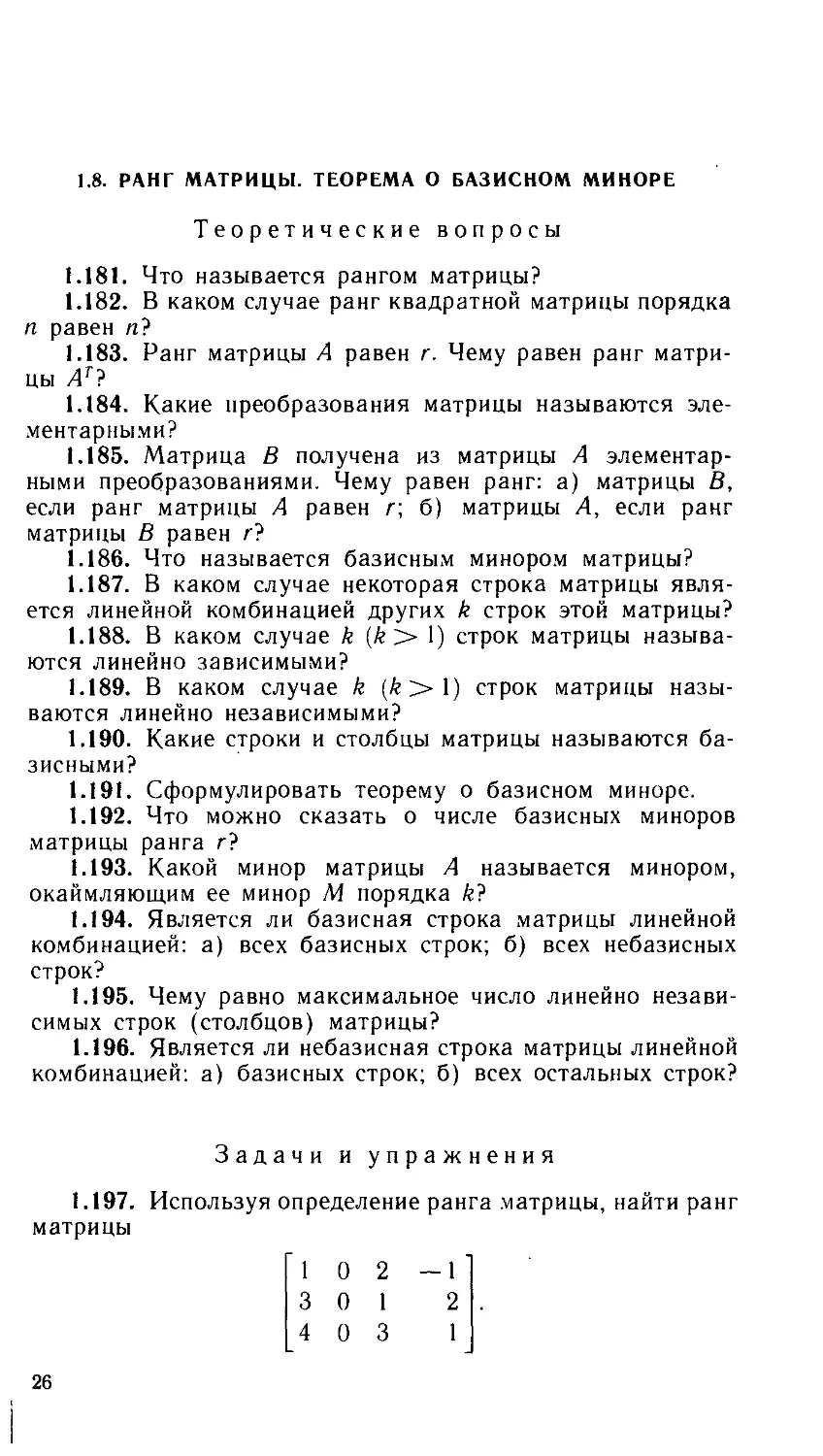
1.8. РАНГ МАТРИЦЫ. ТЕОРЕМА О БАЗИСНОМ МИНОРЕ
Теоретические вопросы
1.181. Что называется рангом матрицы?
1.182. В каком случае ранг квадратной матрицы порядка
п равен п?
1.183. Ранг матрицы А равен г. Чему равен ранг матри-
матрицы Ат?
1.184. Какие преобразования матрицы называются эле-
элементарными?
1.185. Матрица В получена из матрицы А элементар-
элементарными преобразованиями. Чему равен ранг: а) матрицы В,
если ранг матрицы А равен г; б) матрицы А, если ранг
матрицы В равен г?
1.186. Что называется базисным минором матрицы?
1.187. В каком случае некоторая строка матрицы явля-
является линейной комбинацией других k строк этой матрицы?
1.188. В каком случае k (k> 1) строк матрицы называ-
называются линейно зависимыми?
1.189. В каком случае k (k>\) строк матрицы назы-
называются линейно независимыми?
1.190. Какие строки и столбцы матрицы называются ба-
базисными?
1.191. Сформулировать теорему о базисном миноре.
1.192. Что можно сказать о числе базисных миноров
матрицы ранга г?
1.193. Какой минор матрицы А называется минором,
окаймляющим ее минор М порядка k?
1.194. Является ли базисная строка матрицы линейной
комбинацией: а) всех базисных строк; б) всех небазисных
строк?
1.195. Чему равно максимальное число линейно незави-
независимых строк (столбцов) матрицы?
1.196. Является ли небазисная строка матрицы линейной
комбинацией: а) базисных строк; б) всех остальных строк?
Задачи и упражнения
1.197. Используя определение ранга матрицы, найти ранг
матрицы
0 2-1
3 0 1 2
l4 0 3 1
26
Решение. Среди миноров первого порядка есть отличный от нуля,
так как матрица ненулевая. Среди миноров второго порядка также есть
Все миноры третьего порядка равны
отличные от нуля, например
нулю. Следовательно, г = 2.
3 I
1.198. Используя теорему об инвариантности ранга
матрицы относительно элементарных преобразований, найти
ранг матрицы
1 -1 2 3 4
5 17 2 1
4 1111
10 1 10 6 б
Решение. Находим
1-1 2 3
0 6 —3 —13
0 5-7 -11
0 0 0 0
О2 — 5S |
S3-4S,
4
— 19
-15
О
s,-s3
— 1
2
1 4
5 -7
0 0
3 4
-2 —4
-11 -15
О О
a - 5S2
2
4
-27
0
3 4
-2 —4
-1 5
0 0
Получили трапециевидную матрицу, ранг которой равен трем (числу не-
ненулевых строк). Следовательно, по указанной теореме ранг данной матрицы
тоже равен трем.
1.199. Используя тот факт, что ранг матрицы совпадает
с максимальным числом линейно независимых ее строк,
найти ранг матрицы
2
1
3
— 1
1
-2
3
2
5'
4
1
о
5
7
12
Решение. Строки матрицы линейно зависимы, так как последняя
строка является суммой первых двух. Элементы первых двух строк не-
непропорциональны, поэтому эти строки линейно независимы. Таким образом,
максимальное число линейно независимых строк равно двум, следова-
следовательно, ранг матрицы равен двум.
27
1.200. Используя метод окаймляющих миноров, найти
ранг матрицы
" -12 3 \
2-246 3
0 2 0 0—1
Решение. Среди миноров первого порядка есть отличный от нуля,
например 1. Среди окаймляющих его миноров есть отличный от нуля, на-
например
М,=
2 3
Среди миноров, окаймляющих минор М\, есть отличный от нуля, например
1 4 -I
2 3 -2
0-1 2
Так как миноров порядка выше трех у данной матрицы нет, то ее ранг
равен трем.
1.201. Найти один из базисных миноров матрицы
1 -2 5 4
2—417
3 -6 6 И
Решение. Для того чтобы найти базисный минор матрицы, нужно
найти ранг матрицы, а затем выделить в матрице отличный от нуля минор,
порядок которого совпадает с рангом матрицы.
Ранг матрицы равен двум, так как третья строка является суммой
первых двух строк, которые линейно независимы. В качестве базисного
минора можно взять, например,
между столбцами
1.202.
матрицы
Найти
4
1 7
1
2
линейную
1 -1
5 2
3
4
4
7
2
3
1
6
зависимость
2
3
1
3
13
7
Решение. Из доказательства теоремы о базисном мииоре вытекает
следующий способ отыскания линейной зависимости между столбцами
матрицы. Находим ранг матрицы. Так как S3 = —2S, -(- Si и
то г = 2. Выделяем базисный минор, например
28
— 1
¥=0,
1 —1
5 2
доставляем окаймляющий его минор, например
1
5
3
-1
2
4
2
3
— 1
Алгебраические дополнения к элементам последней строки являются коэф-
Бициентами линейной зависимости между столбцами Ki, К?, Кз матрицы,
коэффициент при столбце Ка равен нулю. Найдя алгебраические дополне-
-|ия к элементам последней строки, получим линейную зависимость между
толбцами: —7Ki + IKi + 7Кз = 0 или К) — Ki — Кз = 0. Заметим, что
;оэффициенты линейной зависимости между столбцами матрицы опреде-
тяются неоднозначно. Например, если выберем окаймляющий минор
1 -I 3
5 2 13
3 4 7
-о аналогично найдем — 19Ki + 2Кг + 7Id = 0.
1.203. Пусть в матрице Л2оХ5о существует отличный от
чуля минор порядка 10, а все миноры порядка 11 равны нулю.
-1ему равен ранг матрицы А?
1.204. Может ли быть ранг матрицы АЖхц равным семи?
1.205. Чему равен ранг матрицы Л;3х6( если среди ее ми-
-юров третьего порядка имеется отличный от нуля?
В задачах 1.206 — 1.215 найти ранг г матрицы и указать
_>дин из базисных миноров М.
1.206. | 1 0
0 3
1.208. | 2 -1
4 -2
1.207.
1.209.
1
0
0
1
-1
2
0
0
0
2
3
5
0
0
5
1.210.
1.212.
-2 -1
4 2-6
2 1 -3
2 1—4'
4 2 0
1 —3 4
3
6
3
1
1
.211.
.213.
1
2
0
3
4
0
-1
2
1
0 0
0 0
0 2
3
-6
-3
0
0
3
5
0
— 5
29
1
2
3
4
-2
-4
-6
-8
3
6
9
12
1.214. 1 —2 3 1.215. 0 0 0 0
0 0 10
0 0 0 0
10 0 0
1.216. Пусть М -- минор порядка k матрицы АтХп. Flpi
каком значении k не существует миноров, окаймляющи;
минор М?
1.217. Доказать, что две строки матрицы линейно завь
симы тогда и только тогда, когда их соответствующие эл^
менты пропорциональны.
1.218. Доказать, что если в матрице есть нулевая строкг.
то все ее строки линейно зависимы.
1.219. В матрице Дахи) одна из строк является линейной
комбинацией остальных двух. Каковы возможные значение
ранга матрицы?
1.220. Может ли в матрице Л4х7 максимальное числ<
линейно независимых столбцов быть равным шести?
В задачах 1.221 —1.223 найти ранг матрицы методол
окаймляющих миноров.
1.221.
1-2-1 0
4 3 7 11
5 1 б 11
1.222.
1
2
4
1
3
2
4
-8
2
б
-3
-б
12
3
-9
4
1
1
6
12
1.223.
1 —1
2 0
3 -1
1 -1
1 3
2 2
1.224. При каких значениях X равен двум ранг матрицы
1 3 -4
X 0 1
4 3-3
1.225. При каких значениях X равен трем ранг матрицы
"l -1 2'
0 2 1
3 X -1
30
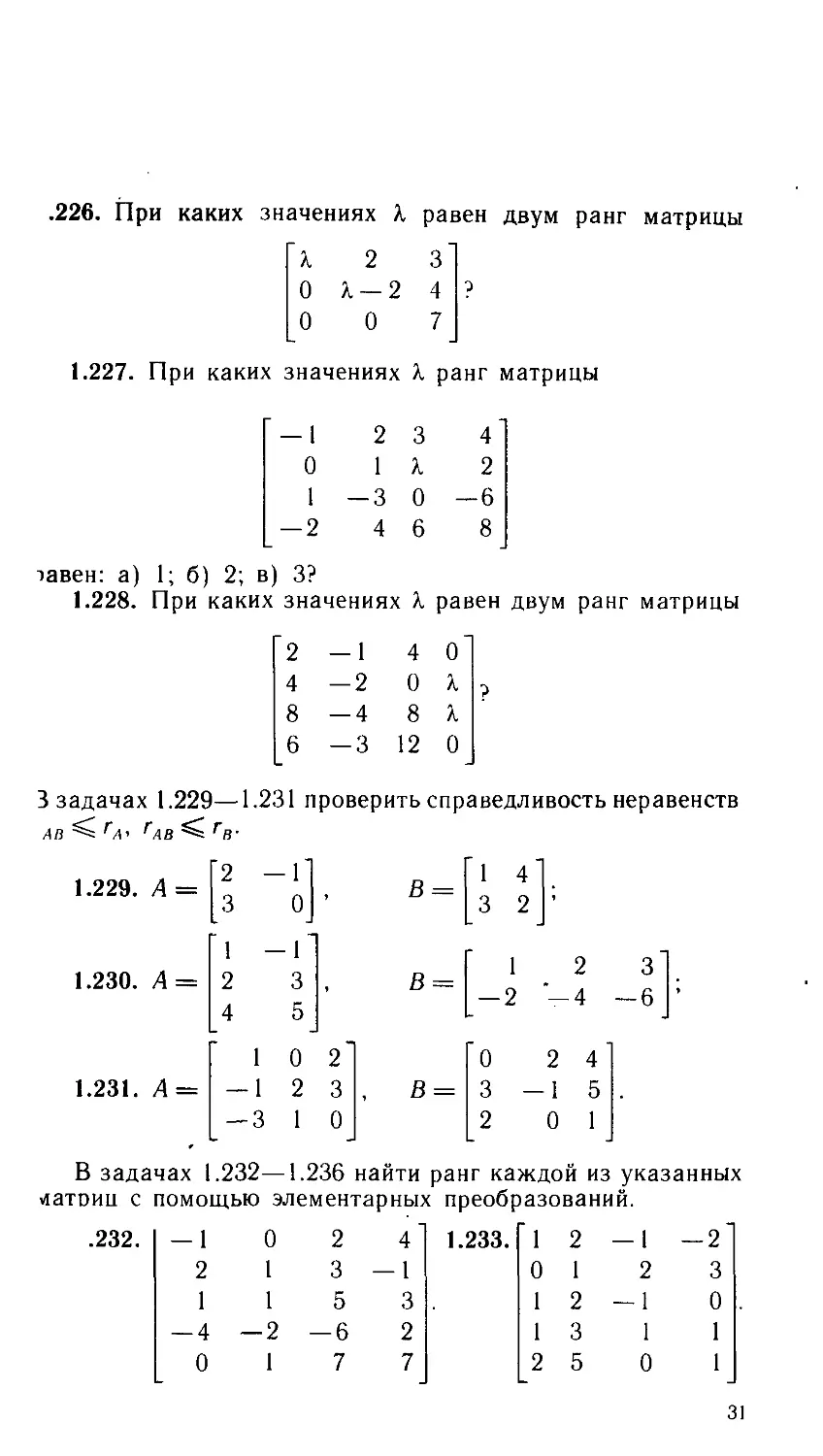
.226. При каких значениях к равен двум ранг матрицы
'к 2 3"
О к —2 4
0 0 7
1.227. При каких значениях к ранг матрицы
1
0
1
2
2
1
-3
4
3
к
0
6
4
2
-6
8
1авен: а) 1; б) 2; в) 3?
1.228. При каких значениях к равен двум ранг матрицы
2
4
8
6
-1
-2
— 4
— 3
4
0
8
12
0
Я.
Я,
0
3 задачах 1.229—1.231 проверить справедливость неравенств
1.229. A =
1.230. A =
1.231. A =
2
3
1
2
4
—
„
1
1
3
-1
oj
-Г
3
5
0
2
1
2
3
0
1 4
3 2
1 2 3
-2 "-4 -6
О 2 4
3-15
2 О 1
В задачах 1.232—1.236 найти ранг каждой из указанных
с помощью элементарных преобразований.
.232.
-1
2
1
— 4
0
0
1
1
2
1
2
3
5
-6
7
4
-1
3
2
7
1.233.
1
0
1
1
2
2
1
2
3
5
-1
2
-1
1
0
-2
3
0
1
1
31
1.234.
1
-1
1
2
4
8
3
0
6
1.235.
0
0
1
1
1
2
3
6
2
4
-2
4
— l"
2
4
1
1
.236.
В задачах 1.237
венства ^ +
1.237. Д =
1.238. Л =
1.239. Л =
1.240. А =
1.241. Л =
24 14 17 15
23 13 16 14
47 27 33 29
3 0 0 5
1.241 проверить справедливость нера-
нера1 2 3
-1 -2 —3
1 0 4
О 1
2 -1
1
1
2
1 -
2
2
4
0
3
з"
1
3
, в =
о
•
— 1 4
3 1
0 1
2 5
1 1
2 2
О
— 1
2
-1
-10 0
2 1 1
0 3 1
-3 0 0
1
-2
0
3
В =
1
2
3
j
— 1
2
1
3
4
, в =
3 1
6 2
1
2
-1
-1
-2
1
2
-1
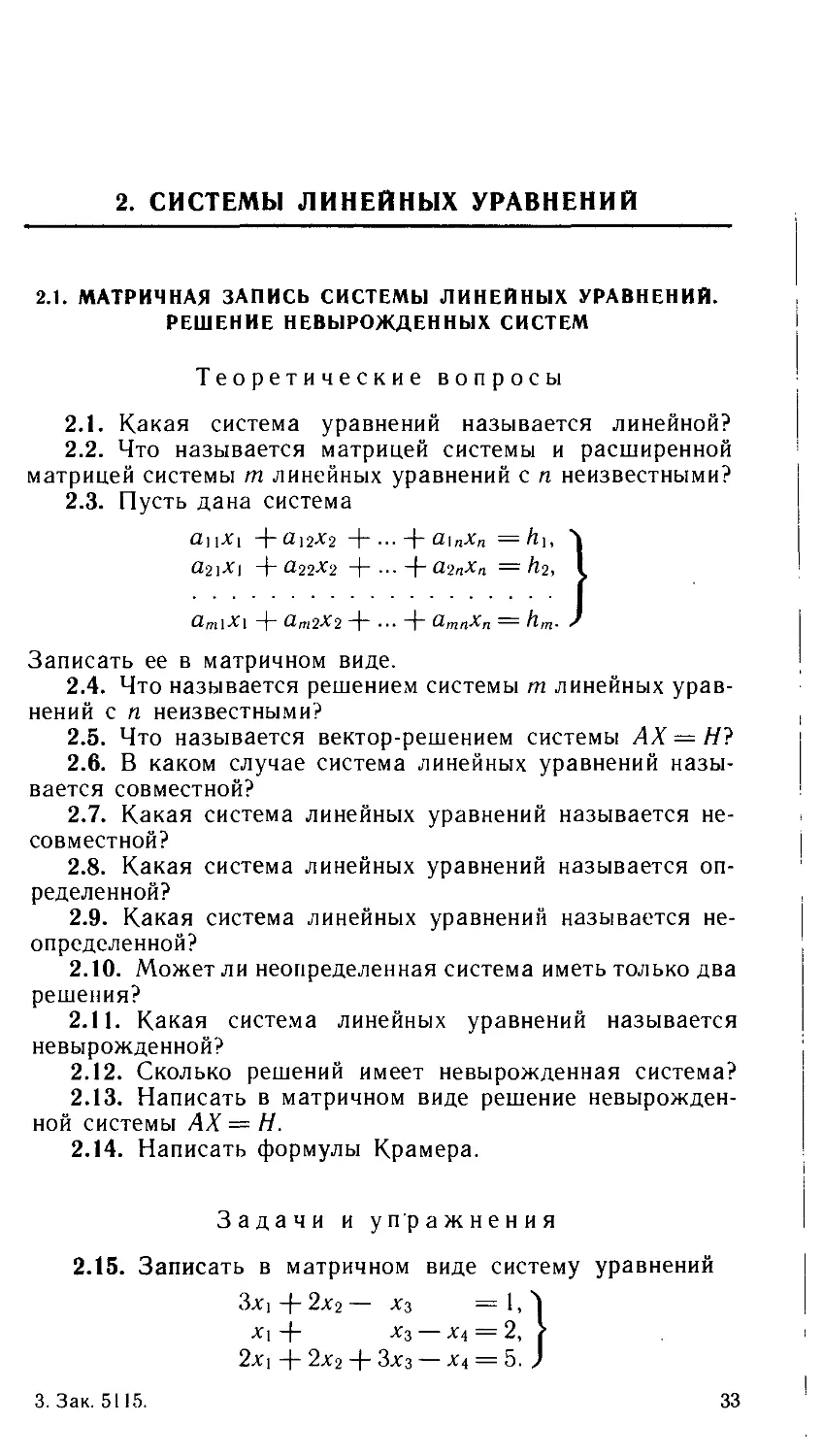
2. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
2.1. МАТРИЧНАЯ ЗАПИСЬ СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ.
РЕШЕНИЕ НЕВЫРОЖДЕННЫХ СИСТЕМ
Теоретические вопросы
2.1. Какая система уравнений называется линейной?
2.2. Что называется матрицей системы и расширенной
матрицей системы т линейных уравнений с п неизвестными?
2.3. Пусть дана система
f «22*2 + ••• + а2пхп = h2,
ат\Х\ + ат2*2 + ... + атпхп = hm.
Записать ее в матричном виде.
2.4. Что называется решением системы т линейных урав-
уравнений с п неизвестными?
2.5. Что называется вектор-решением системы АХ = Н?
2.6. В каком случае система линейных уравнений назы-
называется совместной?
2.7. Какая система линейных уравнений называется не-
несовместной?
2.8. Какая система линейных уравнений называется оп-
определенной?
2.9. Какая система линейных уравнений называется не-
неопределенной?
2.10. Может ли неопределенная система иметь только два
решения?
2.11. Какая система линейных уравнений называется
невырожденной?
2.12. Сколько решений имеет невырожденная система?
2.13. Написать в матричном виде решение невырожден-
невырожденной системы АХ = Н.
2.14. Написать формулы Крамера.
Задачи и упражнения
2.15. Записать в матричном виде систему уравнений
3. Зак. 5115. 33
, x =
X\
x2
Хз
H =
1 "
2
5
Решение. Для данной системы
3 2—1 О
10 1-1
2 2 3-1
Следовательно, в матричном виде система запишется так:
3 2—1 О
10 1—1
2 2 3-1
2.16. Выяснить, является ли система
*,+2*2-*3=-3,
X,
Х-1
Хз
—
V
2
5
+ 2X2 — *3 = —и, ^
— *2 + *з = 5, >
— 2*2 —*з= 3 )
3*1 — 2*2
невырожденной, и если является, то решить ее по формулам
Крамера.
Решение. Так как определитель данной системы
= 14=^0,
1 2 -1
2 -1 1
3 -2 -1
то система является невырожденной. Для данной системы формулы Кра-
Крамера имеют вид
х,= ± (/=ГЗ),
где А, — определитель, полученный из определителя А заменой г'-го столбца
столбцом нз свободных членов системы. Следовательно,
—з
5
2 -I
3-2-1
= 14, А2 =
Аз =
Итак,*! =
1 2 -;
2 -1 Е
3 -2 J
> — — 1, Хз = 2.
1 -3 -1
2 5 I
3 3—1
= 28.
= -И,
В задачах 2.17—2.21 выяснить, являются ли невырожден-
невырожденными системы.
2.17.2*1+3*2=
*i
*2
= 1Д
= 2]
2.18. *i— 2*2 =
2л:
i— 2*2 = 3,1
,-4*2= 1.)
34
2.19. Xi + x2 — jc3 =
2x,+ x2
3x> — 2x2
2.21.
—3x3
— x3
= 3 Л 2.20.
= о'.)
x^=\Л
хл = 3. /
2х, - х2 +Зх3 = 2,
Xi + 2X2 — Х3= 3,
3xi+ х2 —2х3= 1.
В задачах 2.22—2.25 решить системы, используя формулы
Крамера.
2.22. х, + 2х2 = 8,1 2.23. 2х, — Зх2 + х3 =
3xl+4x2=18.) xi +
3xi + 2х2 -\- охз
2.24. 2х,— х2 +2хз=1, Л 2.25. 7х, — 2х2 — Зх3= — 3,
Зх] + zX2 — Хз== 9, г Xi + 5x2 + х3 === 14,
х\ — 4х2 + 3ха=—5.J 3x1 + 4x2 + 2x3= 10.
•+^з= 5Л
,-хз= -3,[
1 + 3X3- 1.J
В задачах 2.26—2.28 решить системы матричным спо-
способом.
= 0,-) 2.27. Зх,+ х-
Xi—2Х;
2.26. х, — 2х
2х,
2.28.
— 2х2 + х3 =ОЛ
_ Хз— 1=0, [
+ 2х2 — хз — 4 = 0.J
-2х,+2х2- хз =
X) — ЗХ2 + Хз =
Qy, I Го 4- 9го —
+ х3=
+ 2хз=
— х3=
5.
2.29. Решить систему АХ = Н, если:
-1 2 0
3 1 1
1 0 2
2.30. Решить систему ЕХ = Н, где Е — единичная матри-
матрица четвертого порядка,
Н =
2.31. Решить систему
1 —2 3
4 9 1
6 5 4
2
3
-1
.5
Xi
Х2
Хз
=
4
17
16
35
2.2. РЕШЕНИЕ ПРОИЗВОЛЬНЫХ СИСТЕМ ЛИНЕЙНЫХ УРАВНЕНИР
Теоретические вопросы
2.32. Сформулировать теорему Кронекера — Капелл!
(критерий совместности системы).
2.33. В каком случае система линейных уравнений имее-
единственное решение?
2.34. В каком случае система линейных уравнений имее:
бесконечное множество решений?
2.35. Пусть АХ = Н — система п линейных уравнений
с п неизвестными и det Д = 0. Что можно сказать о решена
такой системы?
2.36. Какие неизвестные совместной системы линейны)
уравнений называются базисными и какие — свободными:
2.37. Сколько базисных неизвестных может иметь систе
ма линейных уравнений?
2.38. Сколько свободных неизвестных может иметь со
вместная система линейных уравнений?
Задачи и упражнения
2.39. Решить систему
Xl — 2X2 + .
3xi — x2 +
Решение. Находим ранги матриц
2
А =
Х4= 1,
• Х4 = 2,
2х4 = 0.
1
-2
1
— 1
1
0
1
1
2
, Л —
2 1
1 -2
3 -1
-1 1 1
1 1 2
0 2 0
Получаем гд = 2, гд=3. Так как г&ФгА, то, согласно теореме Кроне
кера — Капелли, данная система несовместна.
2.40. Решить систему
Ov _1_ ^v» 9г„
<-Л 1 ~|~~ (JA2 <-АЗ ■
4xi + Х2 ■+■ 4хз = '
Решение. Находим ранги матриц
1
2
4
— 1
3
1
3
-2
4
, А =
1
2
4
— 1
3
1
3
2
4
1
2
4
Получаем гА = гд = /• = 2. Следовательно, система совместна. Так как
36
/ < n = 3, то система имеет бесконечно много решений. В качестве базисного
минора можно взять, например, минор
Тогда базисными неизвестными будут Х\ и *2. Данная система равносильна
системе
*i —
3*3 =
— xi = 1 — Зхз,
2*, + 3*2 — 2*з = 2 J 2*,+3*2 = 2 +
По формулам Крамера находнм:
1-3*з—1
2 + 2*з 3 5 - 7*з
Зхз,1
2*3.}
*1 =
*2 '
1 1-3*3
2 2 + 2*з
8*з
5 "
2 3
Следовательно, множество решений имеет вид
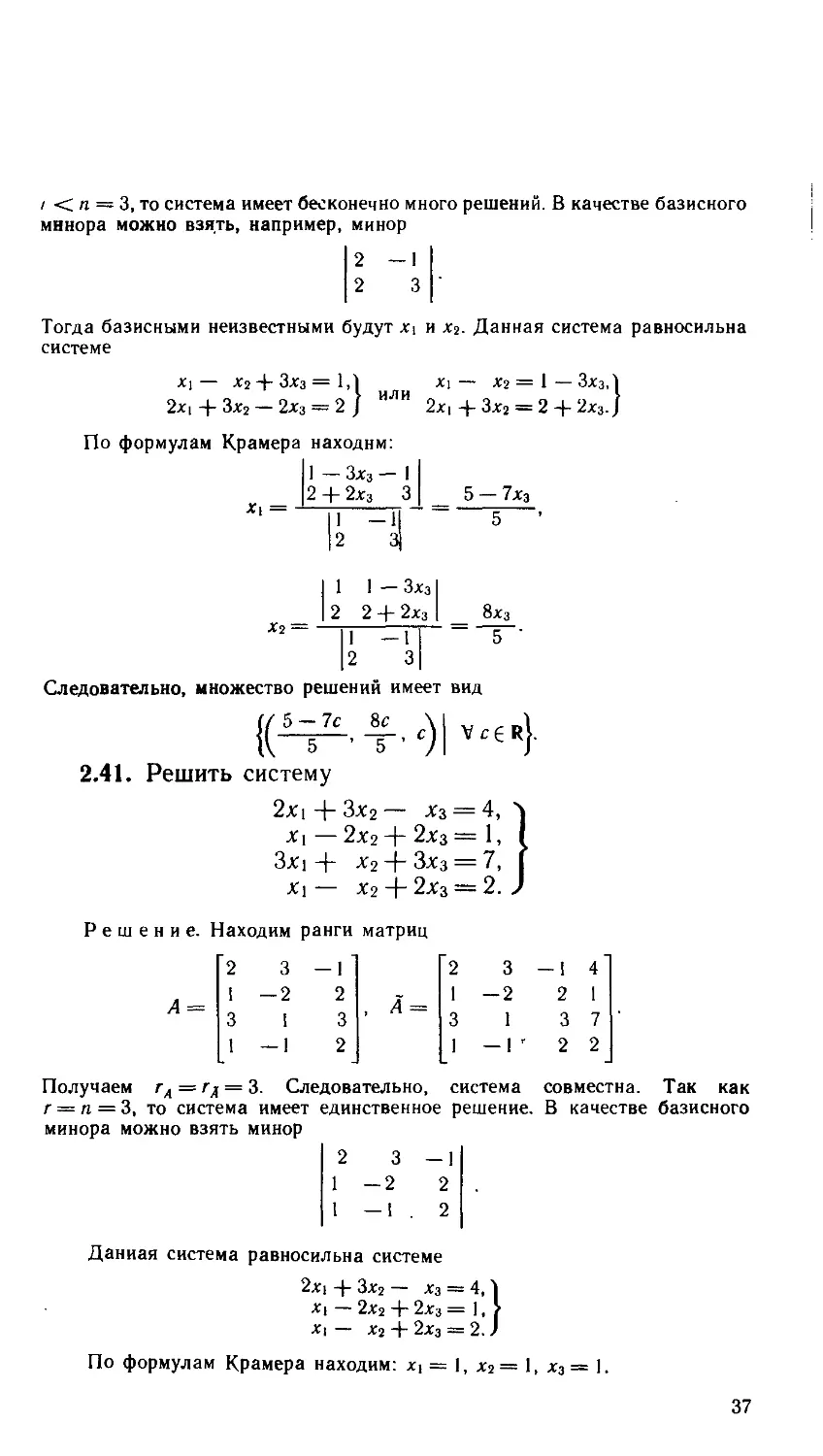
2.41. Решить систему
2xi +
х2 + Зхз =
1 = М
1=1.
, = 7, [
Решение. Находим ранги матриц
2
1
3
1
3
-2
1
1
— 1
2
3
2
, л =
2
1
3
1
3
-2
1
— 1 '
— 1
2
3
2
4
1
7
2
Получаем гЛ = /д = 3. Следовательно, система совместна. Так как
г = п = 3, то система имеет единственное решение. В качестве базисного
минора можно взять минор
2 3-1
1 —2 2
— 1 . 2
Данная система равносильна системе
2*, + 3*2 — *3 = 4,
*, - 2*2 + 2*з = 1,
*i — *2 + 2*3 = 2.
По формулам Крамера находим: х1 = 1, *2= 1, *3 = I.
37
2.42. Даны система АХ = Н и гл = гл = 3. В каком случае
неизвестные хь хг, х3 являются базисными?
2.43. Дана совместная система
023X3 + 0:24X4
0.31X1 + a32X2 + аззхз + 0:34X4
a4ixi + 042X2 + 0:43X3 +
Известно, что гА=гд = 2, М=
А А
Я25Х5 = h
\ = Из,
. Если в ка-
качестве базисного минора взят минор М, то какие неизвестные
являются базисными и какие свободными? Записать систему,
эквивалентную данной.
2.44. Дана система
4
2
2
0
2
1
3
4
3
0
3
3
-1
3
2
5
Показать, что гА = гА = 2. Выбрав М =
Xl
Х2
Хз
Х4
ра
в М
Г
2
3
5
"о
3
за ба-
базисный минор, записать систему, эквивалентную данной.
В задачах 2.45—2.56 исследовать каждую из указанных
систем и в случае совместности решить ее.
2.45. 2х, + Зх2 — хз = 1,1 2.46. х, + Зх2 — х3 = 3,
Xi + 2x2 + Зхз = 2.) 2xi+ х2 + 2хз = I
х\ — х2 + Зхз = 3,
2.47.
2х,
Зх2
5х2
5хз =
6х3 =
2.48.
— 2х2 + Зхз + х4 =
- 4хз — х4
Зх2 + хз + 5х,
2.49. х, —
2.51. х,— 5х2 + 3хз-
2*i — 10х2 +
4X1 — 20X2 + бХз + Х4
— 2,1
3.)
= 2Л 2.50.
2.52.
2х, —
хз
3х2=
Х4 Х$ —
38
2.53.
4 :
2.56.
О 3
О 5
1
2
Х\
х2
2 -3
4 -6
-2 3
1
2
2
X]~\
*2
Хз
.54.
=
0
L°
1
2
3
2 -1
4 -2
6 -3
3
6
9
*i
*2
*3
.=
Г1 "
2
3
2.57. Подобрать параметр к так, чтобы система
— Зх2 + х3 = 5, 1
+ Я*2 — *3 = 1 . f
— 2хо 4- jc, = 2 J
3*. - 2*2 +
имела единственное решение.
2.58. При каком значении параметра
система
| 2+ 3
лс, + 2л:2 + Злгз = 2
3*1— *2 + 2х3 = 3
а
имеет единственное решение?
2.59. При каком значении параметра X несовместна
система
2*,
*1
3*.
3*
2*
2 + кх3=1,Л
2— *з = 3, \
2 — 3*з = 4?J
2.60. В системе АХ = Н rA<Ln, где п — число неизвест-
неизвестных. Достаточно ли этого, чтобы знать, каково множество
решений этой системы?
2.61. Известно, что система (А — kE)X — H, где Е —
единичная матрица, имеет единственное решение. Что можно
сказать об определителе матрицы А — kEl
2.62. Дана система АХ = И с п неизвестными. Известно,
что ИфО и гл = п. Следует ли отсюда, что система имеет
единственное решение?
2.63. Что можно сказать о множестве решений системы
АХ = Н, если deM = 0?
2.3. ОДНОРОДНЫЕ СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
Теоретические вопросы
2.64. Какая система линейных уравнений называется
'однородной?
39
2.65. Какое решение однородной системы называется ну-
нулевым или тривиальным?
2.66. Может ли однородная система линейных уравнений
быть несовместной?
2.67. Сформулировать необходимое и достаточное усло-
условие того, чтобы однородная система линейных уравнений
имела только тривиальное решение.
2.68. Сформулировать необходимое и достаточное усло-
условие того, чтобы однородная система линейных уравнений
имела нетривиальное решение.
2.69. Что называется фундаментальной системой решений
однородной системы линейных уравнений?
2.70. При каком условии однородная система линейных
уравнений имеет фундаментальную систему решений?
2.71. Сколько решений-содержит фундаментальная си-
система решений однородной системы линейных уравнений?
2.72. Сколько фундаментальных систем решений может
иметь однородная система линейных уравнений?
2.73. Какая система фундаментальных решений называ-
называется нормированной?
Задачи и упражнения
2.74. Дана система
— Х2
- 2х2
2x4
Х5 = 0, 1
2л:5 = 0. J
Найти: а) множество решений системы; б) нормированную
фундаментальную систему решений.
Решение, а) Так как число уравнений меньше числа неизвестных,
то система имеет бесконечное множество решений. Ранг матрицы системы
равен двум. В качестве базисного минора возьмем, например,
Тогда базисными неизвестными будут х\ и а:3. Запишем систему в виде
2.Х\ -р оХз =z=: Х% -\- Х\ — -^5» 1
4х, + хз = 2х2— 2х4 —2x5.J
Отсюда
Х2 +
2X2 —
Х4
2X4
2
4
2
1
— х5
-2х5
3
1
2X2-
2
4
3
1
X
2х
3
1
-5х2 +
— х5
-2х5
7х4 + 5х5
-10
4X4
5 '
40
Следовательно, множество решений системы имеет вид
4с2
с,,
—
с2, c.,J|V с,, с2, сз 6 R|
б) Положив ci = 1, с-2 = 0, Сз = 0, получим A/2, 1, 0, 0, 0). Поло-
Положив с, =0, С2 = 1, С) = 0, получим ( — 7/10, 0, 4/5, 1, 0). Положив с, =0,
с2 = 0, с.э = 1, получим (— 1/2, 0, 0, 0, 1). Найденные три решения образуют
нормированную фундаментальную систему решений данной системы.
2.75. Известно, что однородная система линейных уравне-
уравнений имеет 10 свободных неизвестных. Сколько решений содер-
содержит каждая фундаментальная система решений этой си-
системы?
2.76. Пусть множество решений некоторой системы ли-
линейных однородных уравнений имеет вид х\ =■ 2с\ + Зс2 — сз,
Х2 = С\, хз = С2, Х4 = 2ci — С2 + Сз, хъ = Сз V С\, С2, Сз 6 R. Най-
Найти нормированную фундаментальную систему решений.
2.77. Пусть множество решений некоторой однородной
системы линейных уравнений имеет вид
{(ci, 5ci+c2, c2, 3ci — c2)lVci, c26R}-
Сколько решений содержит фундаментальная система
решений?
В задачах 2.78—2.83 решить системы.
2 78 9ri -A- Yn г, — 0 ч 2 79 v-i -4— 9г.> xi —
Xi—х2 + Хз = 0.) 3xi— х2 + 2хз =
2.80. Зх, — х2 + 2х3 + х4 = 0Л
х, + 2x2 — 4х3 — 2х4 = 0.J
2.81.
xi + 2х2 — Зхз + х4 = 0Л
2xi + 4х2 — х3 — х4 = 0, >
Зх, + 6х2 — 4хз =0.)
2.82.3xi+ х2 —2х3+ х4
6X1+3*2+ X;s — 2Х4
ХГ+ 2Х2 — Х3 + Х4
2.83. 2х, + 3x2 — 4хз = 0,
— 4хз = 0, \
+ Зхз = 0, I
— х3 = 0, |
— 5*з = 0. )
3xi+ х2-
5xi +4x2 — 5х3 = 1
2.84. Дана система двух линейно независимых уравнений
агх + Ьгу + С22 = 0.J
Доказать, что ее решения могут быть найдены по фор-
формулам:
:4.3ак. 5115. 41
01 C\
Ь<2 Сч
P, У =
C\
C2
a.
Q2
Л 7
a\
Q2
&2
P V/dER-
2.85. Используя формулы, приведенные в задаче 2.84,
решить следующие системы:
а) 2х + 3г/— г = ОЛ б) Х\ + 5х2 + Зх3 = 0,|
В задачах 2.86, 2.87 найти нормированную фундамен-
фундаментальную систему решений по заданному множеству решений
однородной системы.
2.86. xi=2ci+3c2, x2 = 3ci — c2, x3 = Ci, x4 = с2 Vci,
C2 6R-
+ 2C2 — Сз VCl, C2, Сз £ R.
В задачах 2.88—2.91 найти нормированную фундамен-
фундаментальную систему решений заданных систем.
+ Х2 —ЗХ3+ Х4 = 0,\
— Х2+ Хз —2X4 = 0./
+ Х2 + ЗХз — 2Х4+ Х5 = ОД
<о = 0.1
• - 4х3 = 0, ■
Зх, + 4х2 •
Х| +ЗХ2-
010
2.88.
2.89.
2.90.
с2 _ 4х3 = 0, ^|
с2 - х3 = 0, \
с2 + Зхз = 0.)
2.91.
0
0
4
О
1
5
3
4
5
37
Xl
Х2
Хз
Х4
0
0
0
0
2.92. Что можно сказать о множестве решений системы
АХ = О, если: a) det/1^0; б) det/l = O?
2.93. Система АХ = О имеет единственное решение. Что
можно сказать о множестве решений системы АХ = И
(И ф О)?
2.94. Неоднородная система АХ — И имеет бесконечное
множество решений. Что можно сказать о множестве реше-
решений системы АХ = О?
2.95. Неоднородная система АХ = И имеет единственное
решение. Что можно сказать о множестве решений системы
АХ = О?
2.4. МЕТОД ГАУССА
Теоретические вопросы
2.96. Что называется прямым ходом метода Гаусса?
2.97. Что называется обратным ходом метода Гаусса?
42
2.98. Каково множество решений системы, если прямой
ход метода Гаусса приводит матрицу системы к треугольному
виду и все элементы главной диагонали отличны от нуля?
2.99. Совместна или несовместна система, если расши-
расширенная матрица системы после /г-го хода метода Гаусса
содержит строку, все элементы которой, кроме последнего,
равны нулю?
Задачи и упражнения
2.100. Решить методом Гаусса систему
Xi+2x2— х3 + Х4 = 5/
3Xi — Х'2 + Хз — 2X4 = '
2х, + Хг + Зхз — 5x4 = 2,
4xi — 3x2+ 2х4 = 5.-
Решение. Расширенная матрица системы имеет вид
1 2—1 1 fa'
,_ 3 -1 1 -2 4
А~ 2 1 3 —5 12
4-3 0 2 \5
Произведя над строками матрицы А элементарные преобразования,
получим
2 -1 1
-7 4 -5
-3 5 -7
— 11 4 —2
— 15
-S2/7
-S,/7
1 2 -1
0 1 -4/7
0—3 5
0—11 4
1
5/7
j
-2
5
11/7
— 8
-15
12-1 1 \ 5
0 1 —4/7 5/7 \ 11/7
0 0 23/7 —34/7 1-23/7
0 0 -16/7 41/7 16/7
S,+ 16S3/23
S,+ 16Sj/23
1
0
0
0
Этой матрице соответствует
Х\ +2x2
XI
2
1
0
0
j
-4/7
23/7
U "
система
—
хз+-
4
—*з +
23
-j-Хз —
■
1
5/7
-34/7
399/161
5
тх*~
34
у *4 =
399
161 **~
5,
11
7
~
0.
1 11/7
-23/7
\ о J
23
7'
J
43
Осуществляя обратный ход, находим: х4 = 0, хз = — 1, *г= 1, Xi =2.
В задачах 2.101—2.106 решить системы методом Гаусса.
2.101. 2х,— Х2+ х3 = 0Л 2.102. Xi + 2x2 + 2x3= 2Л
Х| + 2X2 + Х3 =4, / ЗХ[ — Х2+ Хз= — 3, f
oXi— X2~r^X3 = Z./ ZXi-|-ZX2— X3 = О./
2.103. 3xi+ x2— x3 = ;
x, + 2x2— x3 =
2.104. 2x,+3x2 —
X|+2X2 +
'3xi +5x2
x4 = 2,
- x4=l
__ о
i)
2.105. 2xi+ x2— x3+ x4 =
3x,+2x2+ хз+ x4= 2,
Xi — x2 + хз — 2x4 = —
2.106. X,—X2+ X3 =
%
+ Х3=1,~|
—Зхз = 2, >
— x3 = 5.J
4X1 —X2-
2.107. Решить методом Гаусса — Жордана систему, рас-
рассмотренную в примере 2.100.
Решение. Метод Гаусса — Жордана представляет собой модифика-
модификацию метода Гаусса. Вместо того чтобы исключить х» только в уравнениях
с номерами k-\-1, ..., п, исключают хк также в уравнениях с номерами 1, ...,
k— 1.
При решении системы методом Гаусса — Жордана выбирают разре-
разрешающее уравнение и разрешающее неизвестное. В качестве разрешающего
уравнения можно взять любое уравнение системы, а в качестве разре-
разрешающего неизвестного - - неизвестное, коэффициент при котором в выбран-
выбранном уравнении отличен от нуля. Далее делим обе части разрешающего
уравнения на коэффициент при разрешающем неизвестном и исключаем
разрешающее неизвестное из всех уравнений системы, кроме разрешаю-
разрешающего. Указанные преобразования производим до тех пор, пока каждое
уравнение системы будет использовано в качестве разрешающего.
Произведем соответствующие элементарные преобразования над стро-
строками расширенной матрицы А данной системы, подчеркивая коэффициенты
при разрешающем неизвестном. Получим
1 2-1 15
3—1 J_, -2 4
2 1 3—5 2
4—3 0 2 5j
4 10-1 9
3 -1 J, -2 4
-7 4 0 1 -10
4-302 5
44
4 J^ 0 —1 9
7 0 J^ -3 13
-23 0 0 5 -46
16 0 0 -1 32
-5,
-S,
4 JL
7 0 JL
-23 0 0
-16 0 0
0 -1
9
13
-46
-32
-12 J_, 0 0 —23
-41 0 J_, 0 —83
57 0 0 0 114
-16 0 0 J_, -32
— 12 J_, 0 0 —23
— 41 0 J_, 0 —83
_L 0 0 0 2
— 16 0 0 1 —32
Sj/57
Этой матрице соответствует система
— 12х,+*2
— 41a:i -4-
= —23.
= -83,
= 2,
i = — 32
a, I
12, )
откуда Xi = 2, xi = 1,
— 1, л:4 = 0.
В задачах 2.108—2.110 решить системы методом Гаусса-
Жордана.
2.108. Зх,—
xi+2x2— х3 =
2х, — Зх2-|-5хз =
2.109. Зх,—2х2+ хз— х4 = 0,1
3xi — 2х2— х3+ х4 = 0,
2
+ 2хз= 7 Л
- *з= 2, \
+ 5хз= 11.J
2.110.
х2—
x2 —
— х5=
3. АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ
3.1. ОПРЕДЕЛЕНИЕ ВЕКТОРА. ЛИНЕЙНЫЕ ОПЕРАЦИИ НАД
ВЕКТОРАМИ
Теоретические вопросы
3.1. Что называется направленным отрезком?
3.2. Какие два направленных отрезка называются экви-
эквивалентными?
3.3. Что называется вектором и представителем вектора?
3.4. Что называется длиной направленного отрезка и
длиной вектора?
3.5. Какие два вектора называются ортогональными?
3.6. Какие два вектора называются коллинеарными?
3.7. Какие векторы называются компланарными?
3.8. Какие операции над векторами называются линей-
линейными?
3.9. Что называется суммой двух векторов?
3.10. Что называется суммой п векторов (п > 2)?
3.11. Дать определение произведения вектора а на чис-
число а.
3.12. Какими свойствами обладают линейные операции
над векторами?
3.13. Какой вектор называется противоположным век-
вектору а?
3.14. Что называется разностью двух векторов?
Задачи и упражнения
3.15. Известно, что-!—-|=—. Выразить вектор АС через
~АВ, если ~АС \\~AB.
Решение. В соответствии с условием задачи изобразим АС и СВ
(рис. 3.1). Так как векторы АС и СВ противоположно направлены и
длина вектора АС в три раза больше длины вектора АВ, то АС =
= -ЗАВ.
3.16. Пусть |а| = |Ь|. Следует ли отсюда, что а = Ь?
3.17. За начало всех векторов, имеющих одну и ту же
длину г, взята точка А. Где будут находиться концы этих
векторов?
46
Рис 3.1
Рис. 3.2
Рис. 3.3
3.18. Сколько векторов изображено на рис. 3.2 (ABCD —
параллелограмм)?
3.19. На рис. 3.3 изображен правильный шестиугольник
ABCDEF. Ось / перпендикулярна к стороне АВ. Найти углы,
которые образуют векторы АВ, ВС, CD, DE, EF, FA
с осью /.
3.20. На рис. 3.4 изображены векторы а, Ь, с. Какой из
них является суммой всех остальных векторов?
а
Рис. 3.5
3.21. На рис. 3.5 изображены векторы а, Ь, с, d. Является
ли вектор d суммой всех остальных векторов?
3.22. Может ли длина вектора а — b быть больше длины
каждого из векторов а, Ь?
3.23. Известно, что &Фо и Ь = Х,а. Каким должно быть
число X, чтобы выполнялись следующие условия:
a) a|fb и |Ы == 1; б) afj-b и |Ь| = 1; в) Ь = о?
3.24. Выразить вектор ВА через вектор АВ.
В задачах 3.25—3.35 определить, для каких векторов а
и b выполняются следующие условия.
3.25. |а + Ы = |а| + |Ь|. 3.26.
3.27. |а + Ы = |а| —|Ь|. 3.28.
2.29. |а —Ы = |а| + |Ь|. 3.30.
|а + Ы==||а|-|Ь
|а + Ы = |а-Ы.
|а + Ы=0.
47
3.31. а/|а| =Ь/1Ы. 3.32. a=|a|b. 3.33. a+|b|b = o.
3.34. Вектор a + b делит угол между векторами а и b по-
пополам.
3.35. Векторы а + Ь и a —b ортогональны.
3.36. Определить, для каких векторов a, b и с выполня-
выполняются следующие условия:
а) а + Ь-г-с = о; б) а + Ь = с; в) а —Ь = с.
3.37. Используя чертеж, проверить справедливость сле-
следующих тождеств:
a) (a + b) + (a —b)=2a; б) (a — b) + b = a;
в) a+i-(b-a) = -I-(a + b).
3.38. Вектор а образует с осью / угол ф. Какой угол с
осью / образует вектор ia (X Ф 0)?
3.39. Выразить вектор а через коллинеарный с ним
вектор е, если |е| = 1.
3.40. Показать, что векторы, совпадающие с медианами
любого треугольника, в свою очередь могут быть сторо-
сторонами другого треугольника.
3.41. Показать, что если А, В, С, D — середины сторон
четырехугольника, что AB-\-CD = o.
3.2. РАЗЛОЖЕНИЕ ВЕКТОРА ПО БАЗИСУ.
ЛИНЕЙНЫЕ ОПЕРАЦИИ НАД ВЕКТОРАМИ, ЗАДАННЫМИ
КООРДИНАТАМИ
Теоретические вопросы
3.42. Что называется линейной комбинацией векторов?
3.43. Что называется базисом на плоскости?
3.44. Что называется базисом в пространстве?
3.45. Что называется разложением вектора по базису в
пространстве?
3.46. Что называется координатами вектора а в базисе
ei, е2, е3?
3.47. Пусть даны координаты векторов а и b в некотором
базисе. Чему равны координаты вектора а + b в том же
базисе?
3.48. Пусть даны координаты вектора а в некотором ба-
базисе. Чему равны координаты вектора Ха в том же базисе?
3.49. В чем заключается необходимое и достаточное усло-
условие коллинеарности двух ненулевых векторов а и Ь?
48
Задачи и упражнения
3.50. В базисе еь е2, ез даны векторы a = 2ei—
b = e, -f Зе2 — 4ез. Найти вектор с = 2а + ЗЬ.
Решение. Так как при умножении вектора на число каждая коор-
координата вектора умножается на это число, а при сложении векторов
соответствующие координаты складываются, то c = 2Bei —ег + ез)-|-3(ei +
+ Зе2 - 4ея) = 7е, + 7е2 - 10е3.
3.51. Доказать, что три вектора компланарны тогда и
только тогда, когда хотя бы один из них является линейной
-комбинацией остальных.
3.52. Даны координаты векторов а и b в некотором
базисе. Найти координаты вектора с в том же базисе,
если:
а) аB, —1), ЬA, 2), c = 2a-fb;
б) аA, 3), Ь( —2, —1), с = а —ЗЬ.
3.53. Дан базис ei, е2, ез. Доказать, что векторы 2ei,
ei+ег, ез — е2 также образуют базис.
3.54. Даны векторы a = 2ei -fe2 — 3e3, b = Зеi — 4е2 +
-\-2e-i, где ei, е2, ез — базис. Найти в том же базисе коор-
координаты следующих векторов:
а) 2а + Ь; б) а —ЗЬ; в) а —Ь/2.
3.55. Проверить, являются ли коллинеарными векторы
а и Ь, заданные координатами в некотором базисе,
если:
а) а( —3,2,5),Ь(9, —6, — 15); б) аA, 2, — 3), ЬB, 4, 1);
в) аA,0, — 2), Ь( — 4, 0, 8); г) а@, — 3, 1), ЬA, — 6, 2).
3.56. Даны векторы а = 3ei -f e2 + ae3, b = ei — ре2 + 4ез,
где ei, е2, ез — базис. При каких значениях аир векторы
а и b коллинеарны?
В задачах 3.57—3.60 векторы а, Ь, с, d заданы коорди-
координатами в некотором базисе. Выяснить, является ли вектор d
линейной комбинацией векторов а, Ь, с.
3.57. аB, 0, -2), ЬC, — 1, 1), с( —2, 1, 0), d(l, 1, 1).
3.58. аB, 2, 2), ЬA, 1, 1), с@, — 1, 1), dB, — 1, 3).
3.59. аF, 0, 5), ЬB, — 1, 3), сD, 1, 2), d( —2, -2, 1).
3.60. аA, -1, 0), ЬC, 3, 3), сB, 4, 3), d(—1,2, 0). '
3.61. Даны векторы a = 2ei —е2, Ь = е, + Зе2, где ei, e2 —
базис. Показать, что векторы a, b образуют базис, и найти
координаты вектора c = 3ei—2е2 в базисе а, Ь.
3.62. Найти координаты вектора d=ei-f8e2 — 5ез в б?
зисе а, Ь, с, где a = ei+e2, Ь = 2е: — е2 + е3, с = е2 —е
49
3.3. ДЕКАРТОВА ПРЯМОУГОЛЬНАЯ СИСТЕМА КООРДИНАТ.
ДЕЛЕНИЕ ОТРЕЗКА В ДАННОМ ОТНОШЕНИИ
Теоретические вопросы
3.63. Какой базис называется ортонормированным?
3.64. Что называется декартовой прямоугольной системой
координат в пространстве?
3.65. Что называется радиусом-вектором точки М относи-
относительно декартовой прямоугольной системы координат
(О; i, j, k)?
3.66. Что называется координатами Точки М в декарто-
декартовой прямоугольной системе координат (О; i, j, k)?
3.67. Пусть в декартовой прямоугольной системе коорди-
координат даны точки А(х\, у\, z\) и В(х-2, уч, z2). Чему равны коорди-
координаты вектора АВ в этой системе координат?
3.68. Что значит разделить отрезок АВ в отношении
3.69. Пусть в декартовой прямоугольной системе коорди-
координат даны точки A(xi, y\, z\) и В(х2, у 2, г2). Чему равны
координаты точки С(х, у, z), делящей отрезок АВ в отно-
отношении X?
Задачи и упражнения
3.70. Точка СB, 2, 4) делит отрезок АВ в отношении
X, = 2/3. Найти координаты точки В, если Д( — 2, 4, 0).
Решение. Пусть В(хв, у в, z в). Так как точка С делит отрезок АВ
в отношении А = 2/3, то
o_ 4 + 2j/fi/3 0 + 2гй/3
1+2/3 ' 1+2/3 ' 1+2/3 '
откуда хя = 8, ув = — 1, ги = 10.
3.71. Показать, что четырехугольник с вершинами в
точках ДC, 2), В( —1, 6), С( — 2, 3), DB, —1) является
параллелограммом.
3.72. Показать, что четырехугольник ABCD является
трапецией, если Л B, —3, 1), ВC, 5, 7), С( — 1, 0, 2), D(l, 16, 14).
3.73. Зная вершину ДA, 0, 5) треугольника и векторы,
совпадающие с двумя его сторонами: АВ( — 2, 2, —1) и
ВСB, 1, —4), найти координаты вершин В и С.
3.74. Даны точки Д(—1, 2, 1), ВB, 1, —3), СC, 0, 5).
Подобрать точку D так, чтобы четырехугольник ABCD был
параллелограммом.
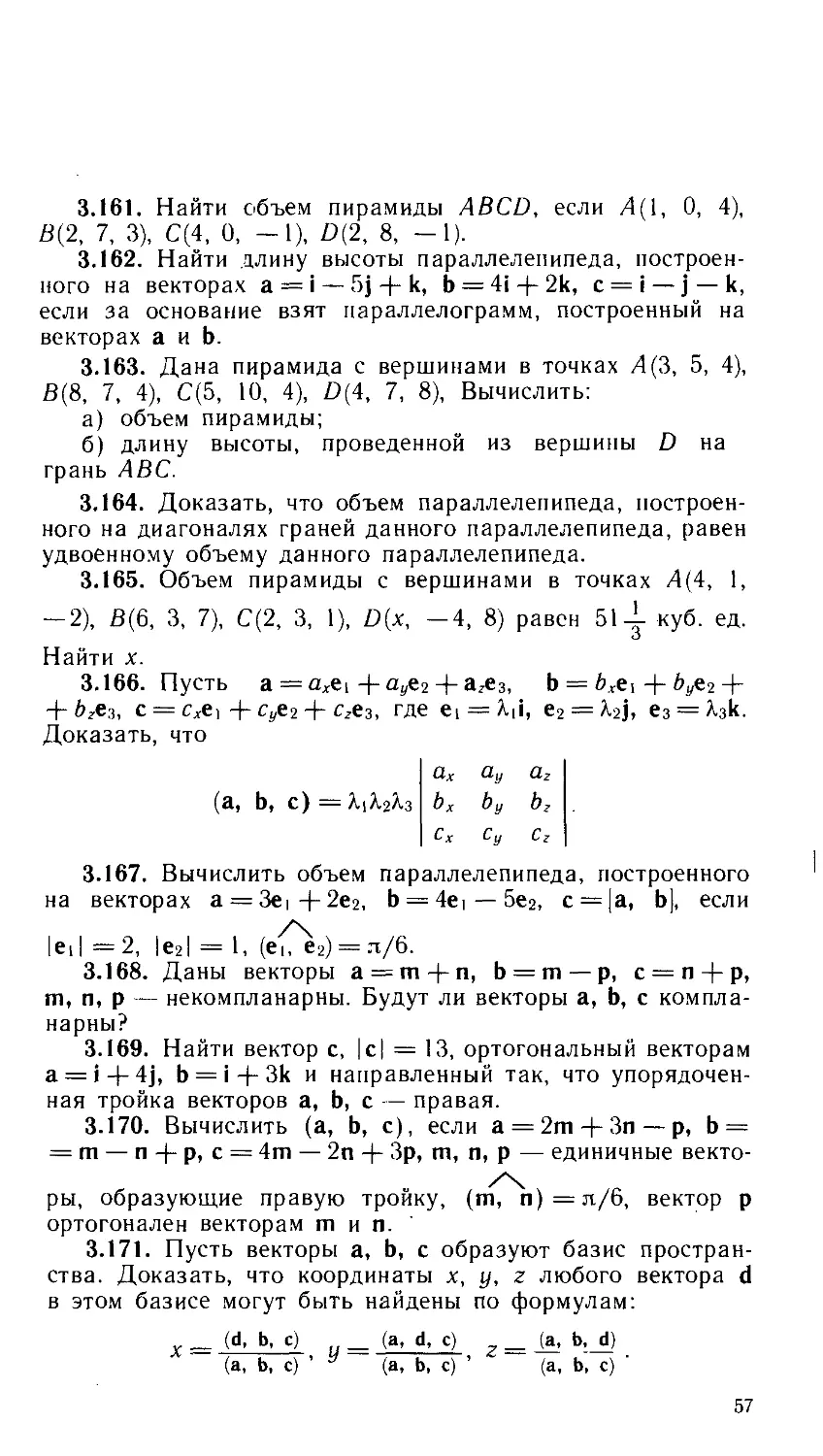
3.75. Даны вершины треугольника ДD, —1, 2),
50
B@, 1, —3), СF, 5, 3). Найти координаты вектора AD, если
AD — медиана треугольника.
3.76. Найти центр масс однородного стержня АВ, если
ЛC, 4, -2), В@, 1, 3).
3.77. В точках А)(Х), у\) и А2{х2, уч) помещены соответст-
соответственно массы гп\ и т.ч. Найти координаты центра масс этой
системы.
3.78. В точках А\{х\, У\, Zi), А2(х2, у-2, г2), ..., А„(хп, уп, гп)
помещены соответственно массы т\, т2, ..., mn. Доказать, что
центром масс этой системы является точка
р( т,х, + ГП2Х2 + ... + т„х„ m\t)\ + т2у2 +■■•+ т„у„
mi
■ т„г„
3.79. Даны точки А{— 1, 0, 2), ВB, 3, —4), СB, 3, 4). Найти
координаты вектора /ID, если известно, что точка D делит
отрезок ВС в отношении X = 3.
3.4. СКАЛЯРНОЕ ПРОИЗВЕДЕНИЕ ВЕКТОРОВ
Теоретические вопросы
3.80. Что называется скалярным произведением двух
векторов?
3.81. Как выражается скалярное произведение двух век-
векторов с использованием проекции одного вектора на
другой?
3.82. Перечислить основные свойства скалярного произ-
произведения.
3.83. Как выражается скалярное произведение через
координаты векторов в декартовой системе координат?
3.84. Как выражается длина вектора через его коорди-
координаты в декартовой прямоугольной системе координат?
3.85. Как выражается расстояние между точками М\ и М2
через их координаты в декартовой прямоугольной системе
координат?
3.86. Чему равен угол ф между ненулевыми векто-
векторами а и Ь?
3.87. В чем заключается необходимое и достаточное усло-
условие ортогональности векторов а и Ь?
3.88. Что называется направляющими косинусами
вектора?
51
Задачи и упражнения
3.89. Найти Bа + Ь, а —ЗЬ), если |а| = 1, |Ь|=2,
(а, Ь) = л/6.
Решение. Используя свойства и определение скалярного произве-
произведения, имеем
Bа + Ь, а — ЗЬ)=2(а, а) — 6(a, b) + (b, a)—3(b, Ь) =
/ч
= 2|a|2 — 5|a| ihi cos (a, b) — 3!Ы2 = 2 —5-1 -2 cos (л/6)— 3-4 =
= - 10A +-у5/2)« - 18,65.
3.90. Найти угол ip между векторами АВ и АС, если
А(—1, 3, 5), ВB, 1, -1), С@, 2, 1).
Решение. Так как каждая координата вектора равна разности
соответствующих координат его конца и начала, то ЛВC, —2, —6), АСA,
— 1, —4). Используя формулу для определения угла между векторами, имеем
cos „ = 3-l±^Zl)r+JZ^T-4) = -^ « 0,9725,
У9 + 4 + 36 V1 + 1 + 16 21 V2
Ф« 13°30'.
3.91. Что представляет собой скалярное произведение
вектора на единичный вектор?
3.92. Каким свойством, не имеющим места для произве-
произведения чисел, обладает скалярное произведение векторов?
3.93. Чему равно скалярное произведение двух колли-
неарных векторов?
3.94. В равностороннем треугольнике ABC длины сторон
равны единице. Вычислить (АВ, ВС)-f-(ВС, ~СА)-\-(СА,
АВ).
3.95. Показать, что (а + ЬJ + (а — ЬJ = 2(|а|2 + |Ь|2),
и дать геометрическое истолкование этого равенства.
3.96. Найти (а + 2Ь, За — Ь), если |а|=2, |Ь|=3,
(а. Ь) = 2л/3.
3.97. Найти Bа-ЬJ, если |а| = 1, |Ь| = 2, (а, Ь) = л/4.
3.98. Найти угол между векторами а и Ь, если |а| =2,
1Ы=3, (ОЬ) = 3.
3.99. Найти (т + 2п, т — п), если т = 2а + Ь, п = а — ЗЬ,
|а| = 1Ы = 1, (а, Ь) = я/3.
3.100. Найти длину вектора 2гл-{-п> если |ш| =
|п| =2, (т, п) = Зл/4.
3.101. Показать, что векторы m = a(b, с) — Ь(а, с) и с
ортогональны.
52
3.102. Найти угол между диагональю куба и его ребром.
3.103. Найти единичный вектор е, направление которого
совпадает с направлением вектора аB, 4, —4).
3.104. Найти единичный векторе, направленный противо-
противоположно вектору а = 2i — j + 2k.
3.105. Даны векторы а = 2i + 2j — к и b = 121 — 4j — 3k.
Найти длины векторов и косинус угла между ними.
3.106. Найти угол между биссектрисами углов хОу и
yOz декартовой прямоугольной системы координат Oxyz.
3.107. Три вершины параллелограмма находятся в точках
ЛA, —2, 1), В{2, —2,-1), СB, 0, 0). Найти четвертую верши-
вершину этого параллелограмма и углы между его диагоналями.
3.108. Средствами векторной алгебры доказать, что
диагонали ромба взаимно перпендикулярны.
3.109. Найти cos a, cos p, cosy — направляющие коси-
косинусы вектора а = ах\ + ау\ -\- агк.
3.110. Доказать, что cos2 a + cos2p + cos2 у = 1, где
cos а, cos p, cosy — направляющие косинусы вектора.
3.111. Найти направляющие косинусы вектора аA2,
-3, 4).
3.112. Даны векторы a = i+j —k, b = 2i -(- 3j — к.
Найти: длины этих векторов; косинус угла между ними;
направляющие косинусы векторов а и Ь.
3.113. Найти направляющие косинусы вектора АВ, если
ЛC, 4, -5), В(—1, 8, -3).
3.114. Пусть ос, р, у —углы, образуемые вектором соот-
соответственно с осями Ox, Oy, Oz. Найти угол у, если известно,
что а = л/6, р = л/4.
3.115. Даны точки ЛA, —2, 5), ВC, — 1, 4), СA, 2, 2),
D{— 1, 1, 3). Показать, что четырехугольник ABCD является
параллелограммом, и вычислить его углы.
3.116. Дан треугольник с вершинами в точках Л(—1,
1, 3), ВC, 3, —4), СB, 1, —1). Найти проекцию стороны
АВ на сторону АС.
3.117. Даны векторы а = 2i — j + k, b = i —3j + 6k.
Найти npa(a + b).
3.118. Каким должно быть число ос, чтобы векторы а =
= 2\ — 3j — к и b = oci— 2j—4к были ортогональны?
3.119. Найти вектор Ь, коллинеарный вектору а = 2i —
—j -f- 5k и удовлетворяющий условию (а, Ь) = 60.
3.120. Найти вектор Ь, ортогональный вектору а = i+
+ 2j — к и удовлетворяющий условиям (b, i) = 3, (b, j) = 2.
3.121. Дан вектор а = 5i -(- 2j -(- 3k. Найти вектор b,
удовлетворяющий условиям (b, i) = 2, (b, k) = — 1, (a, b) = 3.
. 53
3.5. ВЕКТОРНОЕ ПРОИЗВЕДЕНИЕ ВЕКТОРОВ
Теоретические вопросы
3.122. В каком случае векторы а, Ь, с, взятые в указанном
порядке, образуют правую тройку?
3.123. Что называется векторным произведением двух
векторов?
3.124. Каков геометрический смысл модуля векторного
произведения двух неколлинеарных векторов?
3.125. Перечислить основные свойства векторного произ-
произведения.
3.126. Записать формулу, по которой вычисляется вектор-
векторное произведение векторов а = ах\ + а.у] -\- azk и b = bx\ +
Ь к
Задачи и упражнения
3.127. Даны векторы m = а + 2Ь, п = За — Ь. Найти
[гл, п), если [а, Ь| = р.
Решение. Используя свойства и определение векторного произ-
произведения, имеем
|m, п] = (а + 2Ь, За —Ь) = 3|а. а| —(а, Ь) +
+ 6[Ь, а] — 2[b, bj = Зо — р — 6р — 2о = — 7р.
3.128. Вычислить площадь S параллелограмма, сторо-
сторонами которого служат векторы а = 2i + 3j — k, b = i —
- 3j + 2k.
Решение. Известно, что 5 = i[a, bjl- Так как
i j k
la, b] =
2 3-1
I —3 2
= 3i — 5j — 9k,
то
S = V9 + 25 + 81 = Vll5« 10,72 кв. ед.
3.129. Пусть векторы а, Ь, с образуют правую тройку.
Какую тройку образуют векторы:
а) Ь, а, с; б) Ь, с, а; в) с, Ь, а?
3.130. Каким должен быть вектор е, удовлетворяющий
условию (a, b] = Se, где а и b — неколлинеарные векторы,
S — площадь параллелограмма, построенного на векторах
аи Ь.
3.131. Найти |[а, Ь)|, если |а| =2, |Ь| =3, (а, Ь) = л/6.
3.132. Упростить выражение [a -j- b, 2с — a] + [b + 2с,
a-bj.
3.133. Вычислить площадь параллелограмма, сторонами
54
которого служат векторы a = 2m + 3n, b = m — 2п, если
| rn I == I n j = 1, (m, п) = л/4.
3.134. Вычислить площадь параллелограмма, построен-
построенного на векторах а и Ь, если известно, что |а| = 15, \Ь\ =
= 8 и (а, Ь) = 96.
3.135. Вычислить площадь параллелограмма, построен-
построенного на векторах а = 2т — Зп и Ь = т+п> если известно,
/Ч
что |mI =4, |п| =3 и (т, п) = л/6.
3.136. Доказать справедливость тождества [а — Ь, а+
-+- Ь] = 2[а, Ь) и выяснить его геометрический смысл в случае,
когда векторы а и b неколлинеарны.
3.137. Вычислить площадь параллелограмма, диагона-
диагоналями которого служат векторы а = Зт — п, b = m-(-5n,
если |т| =2, |п| =3, (т, п) = л/6.
3.138. Вычислить площадь параллелограмма, сторонами
которого являются векторы а = 2i + 3j — k, b = i — j + k.
3.139. Найти длину высоты AD треугольника ABC, если
~AB = 2i - j + k, AC = 31 - 4j + k.
3.140. Дан треугольник с вершинами в точках /4D, 2, 5),
В@, 7, 2), С@, 2, 7). Вычислить длину его высоты В£>.
3.141. Даны векторы а = 2i + j — k, b = i — j + 3k, c =
= j +k. Найти:
a) [[a, b|, с]; б) |a, [b, c||.
3.142. Известно, что a-r-b + c = o. Доказать, что (а,
b] = [c, a| = [b, c].
3.6. СМЕШАННОЕ ПРОИЗВЕДЕНИЕ ВЕКТОРОВ
Теоретические вопросы
3.143. Что называется смешанным произведением трех
векторов?
3.144. Каков геометрический смысл модуля смешанного
произведения трех некопланарных векторов?
3.145. В чем заключается необходимое и достаточное
условие компланарности трех векторов?
3.146. Записать формулу, по которой вычисляется сме-
смешанное произведение векторов а = ал -\-ау\ -j-azk, Ь =
— bx\ + by) + bzk, c = cx\ + су] + сгк.
Задачи и упражнения
3.147. Найти смешанное произведение векторов а =
= 3i + j — k, b = 2i — 3k, с = i + j + k.
55
Решение. Используя формулу для вычисления смешанного произ
ведения, имеем
3 1-1
(a, b, c) =
2 0 —3
1 I 1
= —10.
3.148. Доказать, что при перестановке любых двух мно
жителей смешанное произведение трех некомпланарны:
векторов меняет знак.
3.149. Доказать, что смешанное произведение трех векто
ров, из которых два коллинеарны, равно нулю.
3.150. Доказать, что |(а, Ь, с)К |а| |Ь| |с|. В каког
случае имеет место равенство?
3.151. Доказать, что (a, b, c) = (b, с, а) = (с, а, Ь), т. е
при круговой перестановке перемножаемых векторов сме
шанное произведение не меняется.
3.152. Доказать, что смешанное произведение не изме
нится, если к одному из множителей прибавить вектор, кол
линеарный другому множителю.
3.153. Доказать компланарность векторов а, Ь, с, есл1
известно, что |а, ЬЦ-|Ь, с)-)-[с, а] = о.
3.154. Упростить выражения:
а) (а + b, b + с, с); б) (а + b + с, а — b-j-с, а — b — с)
3.155. Вычислить объем параллелепипеда, построенного
на векторах:
а) а = 2i + j - k, b = i + j + 3k, с = 31 - 4j + 2k;
б) a = 3i + 6j — 8k, b=—2i + 4j —6k, с = 5i + 2j — k
3.156. Вычислить объем параллелепипеда, построенного
на векторах a = e( + 2e2 + e3, b = ei + 3e2, c = 2ei—5e2 +
+ вз, где ei, е2, вз — попарно ортогональные векторы \
|е,| = 1, |е2| =2, |е3| =5.
3.157. Являются ли компланарными векторы а = 5i —
— j + 4k, b = 2i + 3j — k, с = 4i + 3j + 2k?
3.158. Проверить, лежат ли точки Л, В, С, D в одной
плоскости, если:
а) Л@, 2, —1), ВC, 1, 1), СB, —1, 0), £>( — 4, 1,2);
б) ЛE, 5, 4), ВC, 8, 4), СC, 5, 10), DE, 8, 2);
в) ЛC, 1, 4), В(-1, 1, 6), СE, 2, 2), D(—1,6, 1).
3.159. Выяснить, при каком значении а компланарны
векторы а, Ь, с, если:
а) а = (а+ l)i + 7j — 3k, b = i + aj — k, с = 8i + 3j — 7k;
б) a = i + aj + k, b = i + (a+l)j + k, c = i + aj-k;
в) a = i —2j + k, b = 7i + aj — 13k, c = 3i+j —2k.
3.160. Выяснить ориентацию тройки векторов:
а) а = i - j + 2k, Ь = 3i + 4j + к, с = — 2i + 3j - k;
б) a = 5i + j—2k, b= —3i + 2k, c = 2i+j —k.
56
3.161. Найти объем пирамиды ABCD, если ЛA, 0, 4),
ВB, 7, 3), СD, О, -1), D{2, 8, -1).
3.162. Найти длину высоты параллелепипеда, построен-
построенного на векторах a = i — 5j -(- k, b = 4i -+- 2k, c = i— j — k,
если за основание взят параллелограмм, построенный на
векторах а и Ь.
3.163. Дана пирамида с вершинами в точках ЛC, 5, 4),
В(8, 7, 4), СE, 10, 4), DD, 7, 8), Вычислить:
а) объем пирамиды;
б) длину высоты, проведенной из вершины D на
грань ABC.
3.164. Доказать, что объем параллелепипеда, построен-
построенного на диагоналях граней данного параллелепипеда, равен
удвоенному объему данного параллелепипеда.
3.165. Объем пирамиды с вершинами в точках ЛD, 1,
-2), ВF, 3, 7), СB, 3, 1), D(x, -4, 8) равен 51 i- куб. ед.
О
Найти х.
3.166. Пусть а = axti-\-ayt2-\-aze3, Ь =
где ei = A.,
bye2-{-
Доказать, что
(а, Ь, с) =
аг
Ьг
3.167. Вычислить объем параллелепипеда, построенного
на векторах a = 3ei+2e2, b = 4ei — 5ег, с = (а, Ь], если
е,|=2, |е2| = 1, ( /
3.168. Даны векторы a^m-f-n, b = m — р, с = п + р,
гл, п, р — некомпланарны. Будут ли векторы а, Ь, с компла-
компланарны?
3.169. Найти вектор с, |с| = 13, ортогональный векторам
а = i -h 4j, b = i + 3k и направленный так, что упорядочен-
упорядоченная тройка векторов а, Ь, с — правая.
3.170. Вычислить (а, Ь, с), если а^2т + 3п — р, Ь =
= т — п + Р> с = 4т — 2п + Зр, т, п, р — единичные векто-
векторы, образующие правую тройку, (гл, п)=л/6, вектор р
ортогонален векторам тип.'
3.171. Пусть векторы а, Ь, с образуют базис простран-
пространства. Доказать, что координаты х, у, z любого вектора d
в этом базисе могут быть найдены по формулам:
х =
(d' b' c) и = (а> d> c) z = JL. b,_d_)
(а, Ь, с) ' у (а, Ь, с) ' (а, Ь, с)
57
3.7. ПРЕОБРАЗОВАНИЕ КООРДИНАТ.
ПОЛЯРНАЯ СИСТЕМА КООРДИНАТ
Теоретические вопросы
3.172. В чем заключается задача преобразования ко-
координат точки при переходе от одной системы координат
к другой?
3.173. Записать формулы преобразования координат при
параллельном переносе осей координат: а) на плоскости,
б) в пространстве.
3.174. Записать формулы преобразования координат при
повороте осей координат на плоскости.
3.175. Как задается полярная система координат на
плоскости?
3.176. Как определяются координаты точки в полярной
системе координат?
3.177. Какие значения могут принимать полярные ко-
координаты р и 0 произвольной точки плоскости?
3.178. Как связаны координаты р, G точки в полярной
системе координат с координатами х, у той же точки в
декартовой прямоугольной системе координат, если полюс
совпадает с началом координат прямоугольной декартовой
системы координат, полярная ось — с осью абсцисс, масшаб-
ная единица в обеих системах одна и та же?
Задачи и упражнения
3.179. В системе координат (О; i, j) даны уравнение ли-
линии х2-\-у2 = 5 и точка О'B, 3). Найти уравнение этой ли-
линии в системе координат (О'; i, j).
Решение. Так как в данном случае формулы преобразования ко-
координат при параллельном переносе осей координат имеют вид х — х' +2,
' + 3, то в системе координат (О'; i, j) получаем уравнение (х' +
3J 5
3.180. Доказать, что в полярной системе координат рас-
расстояние d между точками Afi(pi, 8i) и ЛЬ(р2, (Ь) определяет-
определяется формулой
d =Vpi - 2pipa cos(82 - в,) + pi.
Решение. Наряду с данной полярной системой координат рас-
рассмотрим прямоугольную декартову систему координат, начало координат
которой совпадает с полюсом, ось абсцисс — с полярной осью, масштабная
единица в обеих системах одна и та же. Пусть в этой прямоугольной декарто-
декартовой системе координат х\, у\ -- координаты точки /Wi, а хг, Уч — координаты
точки ЛЬ- Тогда
d = лЦхг-х^ + ^-у,K.
58
Так как Xi=picos6], уi = pi sin в|, лг2 = рг cos 62, (/2 = рг sin 62, то
d = т/(р2 cos 62 — Pi cos OiJ + (рг sin 62 — pi sin O1J =
= VP2 ~ 2pip2(cos tii cos 02 + sin 6i sin 82) + (if
или d = ~VP? ~ 2p!p2 cos(82 — 81) + рг.
3.181. В системе координат @; i, j) даны точки А(— 1, 1),
£D, —2), С( —3, —3), О'A, —2). Найти координаты точек
А, В, С в системе координат (О'\ i, j).
3.182. В системе координат (О; i, j) точка А имеет ко-
координаты B, 4), а в системе (О'; i, j) — ( — 3, 0). Найти ко-
координаты точки О' в системе координат (О; i, j).
3.183. В системе координат (О; i, j) даны точки ЛB, —3),
О'(— 1, 2). В системе координат (О'; i, j) дана точка ВF,
— 1). Найти \АВ\.
3.184. Система координат (О; i', j') получена из системы
(О; i, j) поворотом осей на угол ф = я/3. Найти координаты
точек А и В в системе (О; i, j), если в системе (О; i', j')
лA, Уз), вDУз, о).
3.185. Написать формулы преобразования координат,
если новая система координат получается из старой изме-
изменением направлений осей на противоположные (начало ко-
координат сохраняется).
3.186. В системе координат (О; i, j) даны уравнение линии
х2 -\-у2-\- 14л: — Юу + 49 = 0 и точка О( —7, 5). Написать
уравнение данной линии в системе координат (О'; i, j).
3.187. В системе координат (О'; i, j) дано уравнение линии
у' = 2х' + 5. Найти уравнение этой линии в системе коорди-
координат (О; i, j), если в этой системе О'C, —1).
3.188. В системе координат (О; i, j) дано уравнение линии
у== '*]_„ • Найти координаты точки О', такой, чтобы в си-
системе координат (О'; i, j) уравнение этой линии имело вид
х'у' = А.
3.189. В системе координат (О; i, j) линия определяется
уравнением у = 4л:2 — Зл:+1. Какой вид примет уравнение
этой линии, если направления осей изменить на противопо-
противоположные (начало координат сохраняется)?
3.190. В системе координат (О; i, j) дано уравнение ли-
линии х2 — у'2 = а2. Какой вид примет уравнение этой линии в
системе координат, полученной из старой поворотом осей
ia угол ф = л/4 (начало координат сохраняется)?
3.191. В системе координат (О; i, j) дано уравнение линии
л:2 + 2ху + 2у2 -\- 4 = 0. На какой угол надо повернуть оси
координат, чтобы полученное после преобразования урав-
уравнение не содержало произведения текущих координат?
59
3.192. Построить в полярной системе координат точки
Л B, -л/6), ВC, л/2), С(л/2, 5л/3), D(l, 7л/6), £(-3, л/3),
F( —2, -л/4).
3.193. Найти полярные координаты точек, симметричных
точкам /4A, л/6), ВB, —л/3), СC, 0): а) относительно
полярной оси; б) относительно полюса.
3.194*. В полярной системе координат даны точки Л E,
л/2), В(8, 5л/6), СC, 7л/6). Найти координаты этих точек
в декартовой прямоугольной системе координат.
3.195. В декартовой прямоугольной системе координат
даны точки ЛA, —1), В(—-уЗ, 1), С( — 2, 0). Найти коорди-
координаты этих точек в полярной системе координат.
3.196. Найти уравнения линий в декартовой прямоуголь-
прямоугольной системе координат, если в полярной системе координат
эти линии заданы уравнениями:
а) р = 3/D — cos 6); б) р = 2/A + sin 6).
3.197. Найти уравнения линий в полярной системе ко-
координат, если в декартовой прямоугольной системе коорди-
координат эти линии заданы уравнениями:
а) х'2+у2 = 3х; б) х2 + у2 = 9; в) y=-\Jbx.
3.8. ПРЯМАЯ В R2
Теоретические вопросы
3.198. Записать общее уравнение прямой.
3.199. Каков геометрический смысл коэффициентов при
х и у в общем уравнении прямой?
3.200. Записать уравнение прямой, проходящей через
точку (xq, уо) перпендикулярно к вектору п(Л, В).
3.201. Записать каноническое уравнение прямой и ука-
указать геометрический смысл входящих в него параметров.
3.202. Записать параметрические уравнения прямой.
3.203. Записать уравнение прямой с угловым коэффи-
коэффициентом и указать геометрический смысл входящих в него
параметров.
3.204. Уравнения каких прямых не могут быть записаны
в виде уравнения с угловым коэффициентом?
3.205. Записать уравнение прямой, проходящей через
точку (хо, уо) и образующей с осью абсцисс угол, тангенс ко-
которого равен k.
* В задачах 3.194—3.197 даны декартова прямоугольная система
координат и полярная система координат, полюс которой находится в на-
начале координат, а полярная ось сонаправлена с осью Ох.
60
3.206. Записать уравнение прямой, проходящей через
ТОЧКИ (Хи У\) И (Х2, У2).
3.207. Чему равно расстояние d от точки (jcj, y\) до прямой
Ах + Ву + С = 0?
3.208. Записать формулы, по которым можно найти
угол ф между прямыми.
3.209. Записать условие параллельности и условие пер-
перпендикулярности двух прямых, заданных уравнениями:
3.210. Записать условие параллельности и условие пер-
перпендикулярности двух прямых, заданных уравнениями:
X — X2 у — уг
3.211. Записать условие параллельности и условие
перпендикулярности двух прямых, заданных уравнениями:
х = X] -f- т,Ц х = х2-\- т21Л
y — yi + riitj y = yi-\-n2t.)
3.212. Записать условие параллельности и условие пер-
перпендикулярности двух прямых, заданных уравнениями у =
= k\x + Ь\, у = k2x + b2.
Задачи и упражнения
3.213. Составить уравнение прямой, проходящей через
точку М{\, 2): а) перпендикулярно к вектору пC, —5);
б) параллельно вектору s@, —1);
в) под углом ф = Зл/4 к оси Ох; г) и точку ЛгC, 5).
Р е ш е и и е. При составлении уравнения прямой надо прежде всего
выбрать тот вид уравнения, который быстрее приводит к цели.
; а) Так как координаты точки М(хо, уо), через которую проходит пря-
: мая, и координаты вектора п(Л, В), перпендикулярного к прямой, фигу-
■ рируют в уравнении А(х — хо)-\-В(у — уо) = О, то имеем 3(дг—1) —
"• — 5(i/ — 2) = 0 или 3-е — Ъу + 7 = 0.
j б) Так как координаты точки М(х0, уо), через которую проходит пря-
3 мая, и координаты вектора s(m, n), параллельного прямой, фигурируют
•; х — Хо У — Уо
в уравнении = — —_ то имеем
m n
х—\ у—2
— " или -с— 1 =0.
0-1
' в) Так как координаты точки М(хо, уо), через которую проходит пря-
прямая, и угол ф, образованный прямой с осью Ох, фигурируют в уравнении
' У — Уо = k(x — jto), где k = tg ф, то имеем у — 2 = — 1 (х — 1) или х + у —
\ -3 = 0.
г) Так как координаты точек М(х\, yi) и N(xi, yi), через которые про-
■Л 61
ходит прямая, фигурируют в уравнении = — —,то имеем
*а — xi у? — i/i
-f£^- = -J^y или 3* - 2у + 1 = 0.
3.214. Найти расстояние d между прямыми Зх— 4у +
+ 5 = 0 и Qx — Sy — 13 = 0.
Решение. Данные прямые параллельны, так как-^- = —— Ф —— .
Чтобы найти расстояние между ними, возьмем на одной из прямых неко-
некоторую точку и найдем расстояние от нее до другой прямой. Положив, на-
например, в первом уравнении дг= 1, получим у = 2. Таким образом, точка
A,2) лежит на первой прямой. Используя формулу для определения рас-
расстояния от точки до прямой, получаем
rf=_l6.|--8.2-l3|__9a
У36 + 64
3.215. Найти один из векторов, перпендикулярных к пря-
прямой Ъх — Зу + 15 = 0.
3.216. По уравнению прямой 3(х— 2) -f-4(y -\- 5) = 0
найти один из векторов, перпендикулярных к прямой, и одну
из точек, через которую проходит прямая.
3.217. Написать уравнение прямой, проходящей через
точку А(—1, 2) перпендикулярно к вектору:
а) п(— 1, 4); б) МТМ2, если М,B, —7), М2C, 2).
3.218. При каком значении С точка МC, —2) принадле-
принадлежит прямой 2л; + 5у + С = 0?
3.219. Точка М имеет ординату, равную 2. Найти абсцис-
абсциссу точки М, если известно, что она принадлежит прямой
Зх — 4у + 20 = 0.
3.220. Написать уравнение прямой, проходящей через
точку пересечения прямых Зх — 2у — 4 = 0, 2х — у — 3 = 0
параллельно оси: а) ординат; б) абсцисс.
3.221. Указать особенности расположения на плоскости
прямых:
а) 2х — Зу = 0; б) 4х + 5 = 0; в) у— 1 =<0; г) х = 0.
3.222. Определить, при каком значении параметра а пря-
прямая (а2 — 9)х + (За — 6) у + (а + 3) = 0:
а) параллельна оси Ох; б) параллельна оси Оу;
в) проходит через начало координат;
г) совпадает с осью Ох; д) совпадает с осью Оу.
3.223. Написать каноническое и параметрические урав-
уравнения прямой, проходящей через точку ЛC, —2) парал-
параллельно: а) вектору s(l, 5); б) вектору М\М2, если М{(—1,2),
М2C, 1); в) оси Оу.
62
3.224. Написать уравнение прямой, зная, что она обра-
образует с осью абсцисс угол ф = 5л/6 и отсекает на оси ординат
отрезок b = —3/4.
3.225. Найти уравнение прямой, проходящей через точку
А(—1, 8) и образующей с осью абсцисс угол, равный Зл/4.
3.226. Определить угловой коэффициент k для каждой из
прямых:
а) Зх — у+ 4 = 0; б) 2х + 3у — 6 = 0;
в) 4х —5у —8 = 0; г) х + 5у — 3 = 0;
д) у + 3 = 0; е) 5х + 2у = 0.
3.227. Найти угловой коэффициент k прямой и отрезок Ь,
|Отсекаемый ею на оси ординат, зная, что прямая проходит
^через точки ЛB, —1) и В{ — 1, 2).
X 3.228. Найти один из углов между прямыми:
х а) 2х + 3у — 5 = 0 и х — Зу — 7 = 0;
I б) у=1х+\ и y=-Lx — 3;
* ' а 2 5
; В) Х = 4,
г) 4л:+10(/ — 3 = 0 и ± = I±J
±
Д) у=-±х + 2 и
е) Зх — у + 5 = 0 и 2х — 5 = 0.
3.229. Найти уравнение прямой, проходящей через точку
М( 1, —2-уЗ) и составляющей угол л/3 с прямой jc + 5д/3у —
— 15 = 0.
3.230. Написать уравнения катетов прямоугольного
равнобедренного треугольника, если известно, что у = Зх +
+ 7 — уравнение его гипотенузы, а СD, 1) — вершина пря-
прямого угла.
3.231. Написать уравнение прямой, проходящей через
точку Л@, —2) и образующей с осью Ох угол, в два раза
больший угла, который прямая у = х образует с осью Ох.
3.232. Найти уравнение прямой, проходящей через точку
А{\, —2) и точку пересечения прямых 2х-\-Зу — 4 = 0,
Зх — Ьу+ 13 = 0.
3.233. Определить, при каком значении параметра а
прямые (а — \)х + 2а(/+ 5 = 0 и ах + 4ау — 6 = 0: а) па-
параллельны; б) совпадают; в) взаимно перпендикулярны.
3.234. Написать уравнение прямой, проходящей через
точку А(— 1, 3):
а) параллельно прямой \х — Ъу
б) перпендикулярно к прямой
х+\ _ у—2
— 1 '
63
в) параллельно биссектрисе второго координатного угла
г) перпендикулярно к прямой Зх— 2у + 1 = 0.
3.235. Найти проекцию точки /1B, 6) на прямую Зх ■+■
+ 4у — 5 = 0.
3.236. Найти длину высоты, проведенной из вершины А.
треугольника ABC, если:
а) ЛD, -3), 6A, 1), С(-3, -2);
б) А{—\, 3), 6B, 4), СC, 0).
3.237. Найти площадь треугольника, заключенного межд}
осями координат и прямой 2х -\- Зу— 12 = 0.
3.238. Найти расстояние между прямыми \2х — Ъу —
-26 = 0 и 12х-5(/+13 = 0.
3.239. Луч света направлен по прямой 2х-\-у — 4 = 0
Дойдя до оси Ох, он от нее отразился. Найти уравиенш
отраженного луча.
3.240. Найти точку В, симметричную точке Л (8, 12) отно
сительно прямой х — 2у + 6 = 0.
3.241. Даны уравнения двух сторон параллелограмм;
х — 2у + 2 = 0, 5х + 2у + 22 = 0 и точка пересечения еп
диагоналей МB, —1). Найти координаты вершин наралле
лограмма.
3.242. Даны уравнения двух сторон прямоугольник;
х — Зу + 6 = 0, ?>х-\- у — 12 = 0 и точка пересечения его диа
гоналей ЕG, 2). Составить уравнения двух других сторо!
прямоугольника.
3.243. Даны вершины треугольника А( — 2, 1), 6A, — 1)
СC, 5). Составить уравнение перпендикуляра, опушенной
из вершины В на медиану, проведенную из вершины А
3.244. Дана прямая Ах + Зу + 1 = 0. Найти уравнена
прямой, параллельной данной и удаленной от нее на расстоя
ние, равное трем.
3.245. Найти уравнение прямой, лежащей посередин
между данными прямыми Зх + 2у — 5 = 0, &х + \у + 3 = С
3.246. Найти уравнение прямой, параллельной прямо
2х + Зу -\- 1 = 0 и отсекающей от координатного угла тре
угольник площадью 3 кв. ед.
3.9. ПЛОСКОСТЬ В R3
Теоретические вопросы
3.247. Записать общее уравнение плоскости.
3.248. Каков геометрический смысл коэффициентов пр
х, у, z в общем уравнении плоскости?
3.249. Записать уравнение плоскости, проходящей чере
точку М(ха, г/о, го) перпендикулярно к вектору п(Л, В, С
64
3.250. Записать уравнение плоскости, проходящей через
точки Afi(xi, yi, z\), М2{х2, {/г, z2), M3(x3, уз, z3).
3.251. Записать формулу, по которой находят угол ф
между плоскостями А\х + Biy + C\z + Di = 0 и Л2л: -f- ^гу +
+ C2z + D2 = 0.
3.252. Записать условия параллельности плоскостей
Bly + Ciz + D{=0 и 42jt + B2(/-|-C2z + D2 = 0.
3.253. Записать условие перпендикулярности плоскостей
Bty + Ciz + Di =0 и А2х + В2у + C2z + D2 = 0.
3.254. Записать формулу, по которой вычисляется рас-
расстояние от точки М(х\, у\, z\) до плоскости Ах + By -\- Cz -4-
+ D = 0.
Задачи и упражнения
3.255. Указать особенности в расположении плоскости
3jc — 2z + 5 = 0 относительно системы координат.
Решение. В общем уравнении плоскости коэффициенты прн
х, у, г являются координатами нормального вектора этой плоскости.
Так как в данном уравнении коэффициент при у равен нулю, то нор-
нормальный вектор пC, 0, —2) перпендикулярен к оси О у; следовательно,
данная плоскость параллельна оси Оу.
3.256. Составить уравнение плоскости, проходящей через
точку Af A, —5, 8) параллельно плоскости Зх — Ау -\- Юг —
— 5 = 0.
Решение. Способ I. Уравнение любой плоскости, проходящей
через точку МA, —5, 8), имеет вид А(х — I) + В (у + 5) + С {г — 8) = 0.
Так как А, В, С — координаты нормального вектора плоскости и иско-
искомая плоскость параллельна плоскости 'Зх — 4у-\- Юг — 5 = 0, то можно по-
положить /1=3, fl=— 4, С =10. Таким образом, 3(х — I) — 4(г/ + 5) +
+ Ю(г — 8) = 0 или Зх — 4у-\-Юг—103 = 0 уравнение искомой плос-
плоскости.
Способ 2. Используем уравнение А(х — I) + В(у + 5) + С(г — 8) =
= 0. Так как искомая плоскость параллельна плоскости Зл: — 4у -\- Юг —
ABC
— 5 = 0, то — = —— = —. Положив /1=3, В = —4, С = 10, получим
3(х— \) — 4(i/+ 5)+ 10B — 8) = 0 или Зх — 4у + Юг— ЮЗ = 0.
Способ 3. Будем искать уравнение плоскости в виде Ах-\-By-\-
А R С
+ Сг -4- D = 0. Используя условие — = —— = — параллельности
о — 4 1U
плоскостей, полагаем /1=3, В = — 4, С = 10. Имеем Зх — 4у-\-Юг-\-
-\-D = Q. Так как плоскость проходит через точку М(|, —5, 8), то
3-1 — 4( —5)+IO-8 + D^O, откуда В =—103. Итак, Зх — 4у — \0г—
— 103 = 0 — уравнение искомой плоскости.
3.257. Составить уравнение плоскости, проходящей через
точку М перпендикулярно к вектору п, если:
а) МC, 5, -1), пA3, 2, 1);
б) М@, —4, 5), пC, —2, 4);
5. Зак. 5115. 65
в) M(-l, 0, 2), пB, -3, 0);
г) М@, 0, 0), п( —3, 2, 1);
д) МB, 0, 0), п@, 7, 0);
е) МB, 0, 1), п = М|М2> где М,@, 3, 2), М2( — 1, 0, 1);
ж) М@, 3, - 1), п = М,М2, где М,A, — 1, 0), М2C, 0, 2).
3.258. Указать особенности в расположении относительно
системы координат Oxyz плоскости, заданной уравнением:
а) Зу + 2г— 1=0; б) 2х -f у — Ъг = 0;
в) 2л: — у— 1 =0; г) 2х + у = 0;
Д) х + г = 0; е) Зу — 4z = 0;
ж) 2л:+ 3 = 0; з) г + 4 = 0; и) у = 0.
3.259. Составить уравнение плоскости, проходящей через
точку М параллельно векторам Si и S2, если:
а) МB, — 1, 3), s,B, — 1, 3), s2C, 0, 1);
б) МA, 0, -2), s,( —2, 5, 4), s2C, I, 7).
3.260. Написать уравнение плоскости, проходящей через
три точки М\, Mi, ЛЬ, если:
а) М,A, 3, 4), М2C, 0, 2), М3B, 5, 7);
б) М,( —1, 2, 5), М2C, 1, 4), М3A, 1, 7).
3.261. Найти длины отрезков, отсекаемых на осях коорди-
координат плоскостью Зл: — 2у + г — 6 = 0.
3.262. Составить уравнение плоскости, перпендикулярной
к вектору пE, —2, 1) и отсекающей на оси Ог отрезок, длина
которого равна трем.
3.263. Составить уравнение плоскости, проходящей через
точку М( — 3, 5, 1) параллельно биссектрисам координатных
углов хОу и yOz.
3.264. Проверить, лежат ли точки Mi, M2, М3, М4 в одной
плоскости, если:
а) М,B, -1, 3), М2A, 4, 5), М3B, 0, 5), М4A, 2, 3);
б) М,A, 2, 5), М2@, 0, 2), М3(-2, -4, 0), М4C, 6, 2).
3.265. Найти угол между плоскостями:
а) х + 2у — г + 5 = 0 и 2л: — y + z — 3 = 0;
б) 2л: —г/ + 2г+10 = 0 и х— у + 5 = 0;
в) ^x + y-z + 7 = 0 иу = 0.
3.266. Определить, при каком значении параметра a
плоскость ах -\- Bа — \)у -\- z — 5 = 0:
а) параллельна плоскости 2x-\-3y-\-z — 4 = 0;
б) параллельна плоскости у — z -f- 7 = 0;
в) параллельна плоскости 2л: — y + 3z = 0;
г) перпендикулярна к плоскости Зл: + у — z = 0;
д) перпендикулярна к плоскости Oxz.
66
3.267. Составить уравнение плоскости, проходящей через
точку М(—1, 2, 3), параллельно:
а) плоскости Зх + 2у — z + 1 = 0;
б) плоскости Oyz;
в) плоскости, проходящей через точки М\(\, 0, —2),
М2C, 4, 5), М3(—1, 2, 0).
3.268. Составить уравнение плоскости, проходящей через
точку М(\, 0, —2) перпендикулярно к плоскостям х — 2у +
+ z + 5 = 0 и 2х — y + 3z— 1=0.
3.269. Составить уравнение плоскости, проходящей через
начало координат перпендикулярно к плоскостям 2х — у +
+ 5г + 3 = 0 и 4х + Ъу — 2z — 7 = 0.
3.270. Составить уравнение плоскости, проходящей
через точки Afi(l, 2, 3) и М2B, 1, 1) перпендикулярно
к плоскости Зх + 4у + г — 6 = 0.
3.271. Составить уравнение плоскости, проходящей
через точки М\{\, 1, 1) и М2B, 2, 2) перпендикулярно
к плоскости х + у — г = 0.
3.272. Найти расстояние от точки МB, 1, 1) до плоскости
х + у-г+1=0.
3.273. Найти расстояние между плоскостями:
а) 2х — 3y + 6z — 21 =0 и Ах — 6у + \2г + 35 = 0;
б) х — 2у + г — 1 = 0 и 2х — \у + 2г — 1 = 0.
3.274. Найти точку пересечения плоскостей х + у + г —
— 6 = 0, 2х — у + г — 3 = 0, х + 2у — г — 2 = 0.
3.275. Составить уравнение плоскости, проходящей
через точку пересечения плоскостей 2х + у — г — 2 = 0,
х — Зг/ + г + 1=0, jc+y + z — 3 = 0 параллельно плоскости
х + у + 2г = 0.
3.10. ПРЯМАЯ В R1
Теоретические вопросы
3.276. Записать канонические уравнения прямой и ука-
указать геометрический смысл входящих в него параметров.
3.277. Записать параметрические уравнения прямой.
3.278. Записать уравнения прямой, проходящей через точ-
точки М\(Х\, у\, Z\) И М2(Х2, Уч, Z2).
3.279. Записать общие уравнения прямой.
3.280. Записать формулу, по которой находится угол ф
между прямыми:
х — х\ у — У' __ г —г| х — Х2 __ у — j/2 __ г — г2
mi п\ pi m2 «2 Pa
I 3.281. Даны прямые ^—^ = JLZlL = i^£L и i^fi =
! r mi я, pi m2
2L =1=*.: Записать:
«2 P2
67
а) условия параллельности прямых;
б) условие перпендикулярности прямых.
Задачи и упражнения
3.282. Показать, что уравнения
х— 1 _ у + 3 _ 2 — 5 к — 3 _ у— 1 _ г — 6
2 4 i 2 4 1
определяют одну и ту же прямую.
Решение. Так как данные прямые имеют один и тот же
направляющий вектор sB, 4, I), то они параллельны. Из уравнений первой
прямой видно, что ока проходит через точку N(\, —3, 5). Подставив
координаты этой точки в уравнения второй прямой, получим
1-3 -3-1 5-6
.__ _^__„__ НИЦ ._, ,. 1 1 __. ___ 1
^ ——- , — - 1 ПЛИ —■— £ — — I —— | (
откуда следует, что и вторая прямая проходит через точку Лф, —3, 5). Сле-
Следовательно, оба уравнения определяют одну и ту же прямую.
3.283. Составить канонические уравнения прямой, за-
заданной общими уравнениями
х — у -\- Зг — 5 = 0,
Зх + 2у— г
= 0,1
= 0./
Решение. Способ /. Чтобы составить канонические уравнения
прямой, используем уравнение прямой, проходящей через две точки.
Координаты точки, лежащей на данной прямой, должны удовлетворять
системе уравнений
х— у + Зг — 5 = 0Л
Зх + 2у— г = 0.)
Легко убедиться в том, что в качестве свободного неизвестного можно
взять г. Положив 2 = 0, получим систему
У =
= 0,
из которой найдем х = 2, у——3. Таким образом, точка MiB, —3, 0)
лежит на данной прямой.
Положив 2=1, получим систему j из которой найдем
3* + Лу = 1,}
jc=1, у—— I. Таким образом, точка М2О, —1, 1) также лежит на
прямой.
Уравнения прямой
х-2 _ «/ + 3 _ 2 иди *-Я__*±1_А
1 _ 2 ~ -1 + 3 ~ 1 " - I ~ 2 ~ 1 '
проходящей через точки MiB, —3, 0) и AJ2<1, —1, 1), являются канони-
каноническими уравнениями данной прямой.
68
Способ 2. Чтобы составить канонические уравнения
х — хр _ у — уо _ г — г0
m n р
иадо зиать координаты хо, уо, г0 некоторой точки этой прямой и координаты
т, п, р направляющего вектора прямой. В качестве хо, уо, го возьмем,
например, координаты точки B, —3, 0), принадлежащей прямой, а в ка-
качестве направляющего вектора — вектор s = [ni, n2], где П|A, —1, 3),
п2C, 2, —I). Таким обрачом,
i j
s=[ni, n2|
=5i+IOj+5k.
2 —1
Следовательно, каноническими уравнениями будут
*-2 _ у + 3 _ г х-2 _ у + 3 __ 2
___ _ _ „ли —-j - ( .
3.284. Составить уравнения прямой, проходящей через
точку М параллельно вектору s, если:
а) М(-\, 3, 9), sB, -4, 7);
б) М@, -2, 4), sC, 1, —5);
в) МA, 5, 0), 8@, — 1, 2);
г) МD, 8, -3), s = M,M2, гдеМ,B, — 1, 3), М2D, 0, 1).
3.285. Составить уравнения прямой, проходящей через
точку МD, —3, 2):
а) параллельно оси Ох; б) параллельно оси Oz;
в) перпендикулярно к плоскости х — Зг/ + 2г — 5 = 0;
г) перпендикулярно к плоскости Oxz.
3.286. Составить уравнения прямой, проходящей через
точку М перпендикулярно к векторам ai и а2, если:
а) М{Ъ, —3, 9), а,C, — 1, 5), а2@, — 1, 2);
б) М@, 2, -1), а,B, 0, -3), а2A, 1, -3);
в) МC,.4, -2), а,C, 4, 0), а2@, 0, 2).
3.287. Записать в каноническом виде уравнения прямых:
a) x = 2t+ lA б) х = Ы, "|
у= t — 3, > у= 1 — 2t, \
2 — 3t 5- J z = 3" I
в) x = 7t — 5, "| r) jt = 2, ^
f/=-^ + 3,> y=—b, \
д) 2л: + у + z - 1 = 0Л
Зх + 2y + г — 2 = 0-J
е) Ъх — 2y + bz— 10 = 0,1
2x+ y- z =0;J
69
ж) 2x + 3y — 5z+ 14 = 0,1
2х + 3у + z— 4 = 0J
з) х + 4 = 0,} и) z = 2x+ 1,1
у — 5 = 0;/ 2 = Зу — 2 j
3.288. Записать уравнения оси Оу: а) в параметрическом
виде; б) в каноническом виде; в) общими уравнениями.
3.289. Составить уравнения сторон треугольника с верши-
вершинами в точках А{ — 3, 2, 1), вA, — 1, 0), СB, 3, —5).
3.290. Дан треугольник с вершинами в точках Л@, —2,
5), йC, 4, 1), СA, 0, —5). Составить уравнения медианы AD.
3.291. Найти угол между прямыми:
„\ х— 1 _ у —5 __ г х _ у _ 5.
Л> ~ ~ 12 3 ~ ~Г'
б) * + 2 = .£. = г+' и осью Ох;
О 4- U
В) ^~/±9г = (9'1 и осью Оу;
бд: — 3y + 2z = 2J w'
г) х + 2у + г-1=0,1 лг-у- г- 1=0,1
х-2у + г+1=0/ их-у + 2г+1=0Ц
д) х + у =
х-у =
3.292. Найти уравнения прямой, проходящей через точку
МB, —5, 4) параллельно прямой
х + 1 _ у — 2 __ г + 5
2 —3 4 '
3.293. Найти уравнения прямой, проходящей через точку
М(—1, 2, 1) параллельно прямой
х + у — 2г — 1 = 0,1
* 4- 2у - г + 1 = 0 J
3.294. Найти угол между прямой х~ „ Т|'}ИПРЯМОИ>
проходящей через точки А( — 1, 2, 4) и й@, 1, 0).
3.295. Составить уравнения прямой, проходящей через
точку МC, —1, 2) перпендикулярно к прямым:
я\ х—\ __ у-7 _ г —3 „ х __ у __ г .
А) __ . __ и т —-^ — _,
61 ^ + 9 —У-'3 _ г+ 15 -t + З _ у-4 _ г + 8 .
— 12 3
г~=Г и y = OJ
70
3.296. Известно, что прямые
Pi
х — х2 у — уг г — г2
не параллельны. Доказать, что они пересекаются тогда и
только тогда, когда
Ш\ п\ р\ =0.
ttl2 U2 Р2
3.297. Выяснить, пересекаются ли данные прямые, и в
случае положительного ответа найти точку их пересечения:
х — 2 _^ у + Ъ __ г —4 * — 3 __ у + 3 _ г —5 .
2 3 ' —2 3^
1
i
б) х + Зу — 4z + 7 = 0,l
-5 = 0J
Зл:+ г/+ 22
х — y
2
— 6 = 0,
= 0,1
= 0;1
в)
72 — 2 = 0,1 4х + 2у+ 3г+I =0,1
х + у - 42 + 3 = 0J 9х + Ъу + 22 + 9 = 0.J
3.11. ПРЯМАЯ И ПЛОСКОСТЬ В R3
Теоретические вопросы
3.298. Записать формулу, по которой находится угол ц>
г~г° и плоскостью Ах +
между прямой х~Хо =М.~У°
3.299. Даны прямая
- хй у — (/о г — го
И ПЛОСКОСТЬ
Р
Л* + By + С2 + D = 0. Записать: а) условие параллель-
параллельности прямой и плоскости; б) условие перпендикулярности
прямой и плоскости.
1J
Задачи и упражнения
3.300. Найти проекцию точки М(\, —3, 2) на плоскость
2х + 5у — 32— 19 = 0.
Решение. Проекция точки М на данную плоскость есть точка пере-
пересечения с данной плоскостью прямой, проходящей через точку М перпенди-
перпендикулярно к данной плоскости. Уравнения прямой, проходящей через точку
УИA, —3, 2) перпендикулярно к плоскости 2х + 5г/ — Зг — 19 = 0, имеет вид
*— I
г —2
— 3
x = 2t+l, Л
у = Ы-3, \
z=-3/ + 2.J
71
Координаты точки пересечения этой прямой с данной плоскостью нахо-
находим из системы
Отсюда 2Bt+ 1L-5E/ — 3) — 3( — 3/4-2) — 19 = 0 или 38Г — 38 = 0.
Таким образом, /=1 и х = 3, у = 2, г=—I. Итак, C, 2, —1) -иско-
-искомая проекция.
3.301. Написать уравнение плоскости, проходящей через
две параллельные прямые
х-1 _ У + 3 =_г_ _х_ _ у-1 __ г + 2
2 -13 2-1 3 '
Решение. Способ 1. Так как искомая плоскость проходит через
данные прямые, то очевидно, что она проходит через точки /И,A, —3, 0)
и УИ2@, 1, —2). Уравнение плоскости, проходящей через точку М\(\, —3, 0),
имеет вид А (х —1L- В(у 4- 3) + Сг = 0. Так как точка УИ2 лежит на плоско-
плоскости, то —А 4- 4В — 1С = 0. Используя условие параллельности прямой
и плоскости, имеем 1А — В 4- ЗС = 0. Таким образом, Л, В и С находим
из системы
—-4 4-4S — 2С
2/4 — В 4- ЗС
= 0,1
= 0.)
Решив эту систему, получим А = 10&, В = —k, С = —Ik Vk £ R. Положив,
например, £=1, имеем Л = 10, В=—1, С=— 7. Следовательно,
10(лг — 1) — (у 4-3) — 7г = 0 или 10* — у — 7г — 13 = 0 -- уравнение иско-
искомой плоскости.
Способ '2. Так как искомая плоскость проходит через данные пря-
прямые, то очевидно, что она проходит через точки УЙi A, —3, 0) и УИ2@, 1, —2).
Для того чтобы составить уравнение плоскости, нужно найти еще одну
точку, принадлежащую искомой плоскости. Такой точкой является, на-
например, точка /ИзC, —4, 3) (так как она лежит на первой прямой). Ис-
Используя уравнение плоскости, проходящей через три точки, имеем
х— I у 4-3 г
— 1 4—2
2-1 3
или i0x — y — 7z— 13 = 0.
3.302. Доказать, что прямая
= 0
х~Хо = у~Уо = г~г"
т п р
принадлежит плоскости Ах -\- By -)- Cz -\- D = 0 тогда и
только тогда, когда выполняются условия: Am -\- Вп -\- Ср =
= 0, Ах0 + Ву0 + Czo + D=O.
3.303. Дана прямая A.lX + о'У t ?'г t n' = nl Д°"а-
зать, что уравнение любой плоскости (кроме А2х -\- В2у -\-
4- C2z 4- £>2 = 0), проходящей через данную прямую, может
быть записано в виде
А а 4- Bii/ 4- C,z 4- £>i + ЦЛ2х + В2у + C2z 4- D2) = 0,
где X — произвольный параметр (К 6 R).
72
3.304. Найти угол между прямой и плоские i
.а) JLI±= 1+1=1. и x + 2y-z + 5 = 0;
б) х=1, )
y = t — 2A н x + 2y + z — 1=0;
Z = t + 5 J
в) x + y~
- 1 = 0/ И гХ У
x + 2y _ 32
3.305. Найти значение параметра а, при котором:'
а) прямая х~ = у + =—?— параллельна плоскости
ах + 2у — 62 + 7 = 0;
б) прямая *~~' = у + 7 = г~ параллельна плоско-
плоскости 2х4-8г/— 152 4-3 = 0;
в) прямая х~ = ^^*7 = г~' перпендикулярна к
плоскости 2х 4- 8г/ — 16г 4- 7 = 0;
г) прямая х~ ' =A+i. = г~5 перпендикулярна к
плоскости ах -\- у — 62 4- ' =0.
3.306. Найти уравнения перпендикуляра, проведенного из
точки ЛC, —5, 1) на плоскость:
а) 2х — у 4- 52 + 3 = 0; б) Зх — 2z 4- 4 = 0; в) у — 1 = 0.
3.307. Дан треугольник с вершинами в точках Л( — 5,
2, 1), ВE, 6, 3), СA, —2, —3). Составить уравнение плоскости,
проходящей через вершину А перпендикулярно к медиане
AD этого треугольника.
3.308. Составить уравнение плоскости, проходящей через
точку ЛA, —4, 5) перпендикулярно к прямой х~ =
_ У + 3 __ г + 2
-1 4 '
3.309. Написать уравнение плоскости, проходящей через
точку МB, 0, —3) параллельно прямым х~2 = у +' =
О 1
= г и — — у — г
Т 1 ~Т ~Т-
* 3.310. Найти точку пересечения прямой и плоскости:
6. Зак. 5115. 73
3.311. Найти проекцию точки /4C, —1, 4) на плоскость
2х + у —2 + 5 = 0.
3.312. Найти проекцию точки Л B, 1, 1) на плоскость
х + у + Зг + 5 = 0.
3.313. Найти проекцию точки Л B, 3, 1) на прямую + 7
= JL±JL
2 3 '
3.314. При каких значениях параметров аир прямая
-i-^— = j = -?- принадлежит плоскости 2ах -)- Зу — рг —
-5 = 0?
3.315. Написать уравнение плоскости, проходящей через
точку МA, 3, 5) и прямую *~' = i-±J_ = 2~2 ,
3.316. Написать уравнение плоскости, проходящей через
прямую -*~~ = ^7 =4- параллельно прямой *~)~' =
О J 1 1
J_ = _L
i 1 '
3.317. Написать уравнение плоскости, проходящей через
параллельные прямые *~ =-Lz_ =i и I = ^~ =
z о I ^ о
_ г + 2
I
3.318. Написать уравнение плоскости, проходящей через
пересекающиеся прямые -^— = М^И— = -ill— и —t-— =
О 1 I 1
_ У- 1 =J_
2 1 '
3.319. Написать уравнение плоскости, проходящей через
прямую *~~ =Xi_ = г + перпендикулярно к плоскости
х — у+ 2г — 5 = 0.
3.12. ЭЛЛИПС. ГИПЕРБОЛА. ПАРАБОЛА
Теоретические вопросы
3.320. Что называется эллипсом? Какие точки называют-
называются фокусами эллипса?
3.321. Записать каноническое уравнение эллипса. •
3.322. Какие точки называются вершинами эллипса?
3.323. Для эллипса, заданного каноническим уравнением
2 „2
— +s_ = 1, указать: а) оси симметрии; б) вершины.
74
3.324. Что называется осями эллипса?
3.325. Какая ось эллипса называется большой осью и
какая — малой?
3.326. Пусть 2а и 26 — соответственно большая и малая
оси эллипса, а 2с — расстояние между его фокусами. Какова
зависимость между а, Ь и с?
3.327. Что называется гиперболой? Какие точки назы-
называются фокусами гиперболы?
3.328. Записать каноническое уравнение гиперболы.
3.329. Какие точки называются вершинами гиперболы?
3.330. Для гиперболы, заданной каноническим уравне-
„2 2
нием — — »_ = I, указать: а) оси симметрии; б) вершины.
а1 Ь
3.331. Указать вершины гиперболы, заданной канони-
2 2
ческим уравнением ^ — — = 1.
3.332. Что называется действительной осью гиперболы?
Какова действительная ось гиперболы ^-. — L. = 1?
х2
3.333. Что называется мнимой осью гиперболы — —
3.334. Пусть 2а и 2Ь — соответственно действительная
и мнимая оси гиперболы, а 2с — расстояние между ее фо-
фокусами. Какова зависимость между а, Ъ, с?
3.335. Что называется асимптотой кривой?
х2
3.336- Записать уравнения асимптот гиперболы — —
3.337. Что называется параболой? Какая точка назы-
называется фокусом параболы и какая прямая — директрисой?
3.338. Записать каноническое уравнение параболы.
3.339. Какая точка называется вершиной параболы?
3.340. Что называется эксцентриситетом эллипса?
3.341. Чему равен эксцентриситет е эллипса, заданного
„2 2
уравнением — -)- ^ = 1, где а > Ь?
3.342. Что называется эксцентриситетом гиперболы?
3.343. Чему равен эксцентриситет е гиперболы, заданной
'2 2
уравнением — — =_ == 1?
а Ь
.Ш
75
Задачи и упражнения
3.344. Составить каноническое уравнение эллипса, рас-
расстояние между фокусами которого, лежащими на оси Ох,
равно 24, а эксцентриситет равен 3/4.
Решение. Чтобы составить каноническое уравнение эллипса
—; + ~ = 1, надо найти а2 и Ь2. Так как эксцентриситет г = с/а, а 1с =
а о
= 24, то имеем 3/4= 12/а, откуда а = 16. Используя соотношение а2 —
— с2 = б2, получаем Ь2 = 256 — 144 = 112. Таким образом, искомое уравне-
уравнение имеет вид
х2 и2
~256~ + Tl2" = L
3.345. Дана гипербола 9х2—16г/2=144. Найти эксцен-
эксцентриситет гиперболы и уравнения ее асимптот.
Решение. Разделив обе части данного уравнения на 144, получим
х2 у2 ,
каноническое уравнение гиперболы — — = 1, из которого видим, что
а2 =16, Ь2 = 9. Используя соотношение а2 -f- Ь2 = с1, получаем с'2 =
= 16 + 9 = 25. Так как эксцентриситет г = с/а, то имеем е = 5/4. Под-
Подставив в уравнения асимптот гиперболы у = ± — х значения а = 4, Ь = 3,
получим уравнения асимптот данной гиперболы у = ± -т- х-
3.346. Составить уравнение параболы, симметричной от-
относительно оси Ох и проходящей через точки О@, 0) и Л B, 3).
Решение. Так как парабола симметрична относительно оси Ох и
проходит через начало координат, то ее уравнение имеет вид у2 = 2рх.
Учитывая, что парабола проходит через точку Л B, 3), имеем 9 = 4р, от-
откуда р = 9/4. Следовательно, у2 = 9х/2 — искомое уравнение.
2 2
3.347. При каком соотношении а и Ь эллипс — -|- £_ = 1
а Ь
является окружностью?
3.348. Чему равен эксцентриситет е окружности?
3.349. Доказать, что если ординаты всех точек окруж-
окружности х2-\-у2 = а1 сократить в k раз, то полученная при
2 2
этом линия будет эллипсом — + ^ = 1, где Ь = —.
а1 Ь2 k
3.350. Составить каноническое уравнение эллипса, фо-
фокусы которого лежат на оси Ох, если известно, что:
а) расстояние между фокусами равно 8, малая полуось
равна 3;
б) большая ось равна 26, эксцентриситет равен 5/13;
в) сумма полуосей равна 18, расстояние между фокусами
равно 24;
76
Г) раССТОЯНИЯ ОТ ОДНОГО ИЗ фокуСОВ ЭЛЛИПСа ДО Кинциь
его большой оси равны 10 и 2.
3.351. Составить каноническое уравнение эллипса, фоку-
фокусы которого лежат на оси Оу, если известно, что:
а) расстояние между фокусами равно 6, большая ось
равна 12;
б) малая полуось равна 6, эксцентриситет равен 4/5.
3.352. Найти координаты фокусов и эксцентриситет эл-
эллипса:
а) 4х2 + г/2 = 4; б) 16л:2 + 25у2 = 400.
3.353. Составить каноническое уравнение эллипса, прохо-
проходящего через точки М,(зУз/2, —1) и М2( — 1, 4-^/2/3),
и найти его эксцентриситет.
3.354. На эллипсе х2 + 4г/2 = 40 найти точку, расстояние
от которой до большой оси равно 3.
2 2
3.355. Найти точки пересечения эллипса ^- + |- = 1
с прямой х — 2г/ + 9 = 0.
3.356. Составить каноническое уравнение гиперболы, фо-
фокусы которой лежат на оси Ох, если известно, что:
а) расстояние между фокусами равно 30, расстояние
между вершинами равно 24;
б) действительная ось равна 12, эксцентриситет равен
5/3;
в) мнимая ось равна 2 и гипербола проходит через точку
М( — 3, д/5/2).
3.357. Составить каноническое уравнение гиперболы,
фокусы которой лежат на оси Оу, если известно, что:
а) мнимая полуось равна 5, эксцентриситет равен 13/12;
б) действительная полуось равна 4 и гипербола прохо-
проходит через точку МB, 4-\/2).
3.358. Дана гипербола 4х2 — у2 — 16. Найти координаты
фокусов, эксцентриситет и уравнения асимптот.
3.359. Дана гипербола 9г/2 — 16х2 = 144. Найти коорди-
координаты фокусов, эксцентриситет и уравнения асимптот.
3.360. Найти уравнение гиперболы, если ее асимптоты
заданы уравнениями х ± 2у = 0, а расстояние между верши-
вершинами, лежащими на оси Ох, равно 4.
3.361. Найти уравнение гиперболы, вершины которой
находятся в фокусах, а фокусы — в вершинах эллипса
6л:2 + 5у2 = 30.
3.362. Составить уравнение эллипса, если известно, что
! он проходит через точку МF, 4), а фокусы его совпадают
с фокусами гиперболы у2 — л:2 = 8.
3.363. Составить уравнение гиперболы, асимптоты кото-
77
рой заданы уравнениями г/=±х/2, а расстояние между
фокусами равно 4л/5, если фокусы гиперболы лежат: а) на
оси Ох; б) на оси Оу.
3.364. Составить каноническое уравнение параболы, если
известно, что:
а) парабола симметрична относительно оси Ох и про-
проходит через точку МD, —2);
б) парабола симметрична относительно оси Оу и прохо-
проходит через точку МA, —2);
в) парабола симметрична относительно оси Ох и фокус
находится в точке (— 3, 0);
г) парабола симметрична относительно оси Оу и фокус
находится в точке @, 5);
д) парабола симметрична относительно оси Ох и прохо-
проходит через точку МB, —3).
3.365. Найти координаты фокуса и уравнение директри-
директрисы параболы:
а) у2 = 28х; б) 16х + у2 = 0; в) 2х2 + 3у = ().
3.366. Написать уравнение параболы, проходящей через
точки @, 0) и (— 2, 4), если парабола симметрична: а) отно-
относительно оси Ох; б) относительно оси Оу.
3.367. Найти длину хорды, образованной пересечением
параболы у2 = 2х с прямой 6х — у — 4 = 0.
3.368. Найти длину хорды, образованной пересечением
параболы х2 = 4у с прямой, проходящей через фокус дан-
данной параболы под углом л/6 к оси Ох.
3.369. Написать уравнение параболы, проходящей через
точки пересечения прямой х — у = 0 и кривой х2-\-у +
+ 8г/ = 0, если парабола симметрична: а) относительно
оси Ох; б) относительно оси Оу.
3.370. Составить канонические уравнения парабол, фо-
фокусы которых совпадают с фокусами гиперболы х2 — у2 = 8.
3.371. Найти длину общей хорды параболы у = 2х2 и
окружности х2 + у2 = 5.
3.372. Доказать, что параметрические уравнения
х = a cos t,\
у = Ь sin t j
определяют эллипс.
3.373. Доказать, что параметрические уравнения:
а) ХЦ/|Си/} определяют гиперболу;
определяют параболу.
78
3.13. УПРОЩЕНИЕ ОБЩЕГО УРАВНЕНИЯ КРИВОЙ BlupuiU
ПОРЯДКА В СЛУЧАЕ ОТСУТСТВИЯ ЧЛЕНА
С ПРОИЗВЕДЕНИЕМ ху*
Теоретические вопросы
3.374. Доказать, что уравнение (* ~ *а)* + &-уъ? = 1
определяет эллипс, центр которого находится в точке (х0,
уо), а оси симметрии параллельны координатным осям.
3.375. Доказать, что уравнения {х ~ *о)' — ^~У°)г =
= ± 1 определяют гиперболы, центры которых находятся
в точке (х0, уо), а оси симметрии параллельны координат-
координатным осям.
3.376. Доказать, что уравнение (у — уоJ = а(х — х0)
определяет параболу, вершина которой находится в точке
(хо, уо), а ось симметрии параллельна оси Ох.
3.377. Доказать, что уравнение (х — х0J = а (у — у0) опре-
определяет параболу, вершина которой находится в точке
(*о, у о), а ось симметрии параллельна оси Оу.
3.378. Написать общее уравнение кривой второго порядка
на плоскости.
3.379. В каком случае уравнение Ах2 -)- Су2 -)- Dx +
+ Еу + F = 0 является уравнением эллиптического типа?
3.380. Какую фигуру определяет уравнение эллипти-
эллиптического типа?
3.381. В каком случае уравнение Ах2 + Су2 -\- Dx -\-
-\- Еу -\- F = 0 является уравнением гиперболического типа?
3.382. Какую фигуру определяет уравнение гиперболи-
гиперболического типа?
3.383. В каком случае уравнение Ах2 + Су2 -\- Dx +
-\- Еу -\- F = 0 является уравнением параболического типа?
3.384. Какую фигуру определяет уравнение параболи-
параболического типа?
Задачи и упражнения
3.385. Выяснить, какая фигура соответствует данному
уравнению:
а) Зх2— у2 — 6х+ Ау— 7 = 0;
б) х2 + 2у2-2х+ 12у + 23 = 0.
Решение, а) Так как ЛС = 3(—1)<0, то уравнение определяет
* Вопрос об упрощении общего уравнения кривой второго порядка
рассмотрен в § 6.3.
79
фигуру гиперболического типа. Дополнив члены, содержащие х2
а также у2 и у, до полных квадратов, получим
Этому уравнению соответствует гипербола, центр которой наход;
в точке 01 A, 2), а действительная и мнимая полуоси равны соответств(
б) Так как ЛС = 2>0, то уравнение определяет фигуру эллш
ческого типа. Дополнив члены, содержащие х2 и х, а также у2 и
до полных квадратов, получим (х— IJ + 2(у + ЗJ + 4 = 0. Очевщ
что этому уравнению соответствует пустое множество.
В задачах 3.386—3.400 выяснить, какая фигура со
ветствует каждому из данных уравнений, и (в случае i
пустого множества) изобразить ее в системе координат О-
3.386. х2 + у2 — Ах + 6у + 1 = 0.
3.387. 4х2 + 25г/2 + 4х — 1 Оу — 8 = 0.
3.388. 4х2 + г/2 - 40х + 2у + 101 = 0.
3.389. 2х2 + 3у2 + 6х + 6г/ + 25 = 0.
3.390. Зх2 - 4г/2 - 12х - 8г/ + 20 = 0.
3.391. х2— у2+ 2х — 2у = 0.
3.392. 2х2 — Ау2 + 5х — 6у — 1=0.
3.393. х2 + у2 - х = 0. 3.394. г/2 - Зл: - Ау + 10 = 0.
3.395. х2 — 6х + 2у + 11 = 0.
3.396. Зх2 + V + 12х - Ау + 1 = 0.
3.397. х2 —2х —3 = 0. 3.398. г/2 + 4г/ + 4 = 0.
3.399. 2у2 — Ау + 5 = 0. 3.400. 2х2 — 12л: — Зу + 18 = (
В задачах 3.401—3.405 фигура задана уравнением г =
= г(ф) в полярной системе координат. Найти уравнение дан
ной фигуры в прямоугольной декартовой системе координат
у которой начало координат совпадает с полюсом, а по
ложительная полуось абсцисс — с полярной осью. Выяснить
какая фигура соответствует каждому из полученных урав
нений, и изобразить ее в системе координат Оху.
3.401. г== 3. .3.402. г=. 2. .3.403. г = ■ 2
2 — sincp' * ' 1—sincp' " ' 2 — cosip
3.404. r = —-l . 3.405. r =
COS ф I — COS ф
3.14. НЕКОТОРЫЕ КРИВЫЕ, ВСТРЕЧАЮЩИЕСЯ В МАТЕМАТИКЕ
И ПРИЛОЖЕНИЯХ
Теоретические вопросы
3.406. Что называется уравнением линии на плоскости
в заданной системе координат Оху?
80
3.407. Какой вид имеет уравнение линии пч _
в полярной системе координат?
3.408. Каким образом можно составить уравнение задан-
заданной линии на плоскости?
Задачи и упражнения
3.409. Составить уравнение плоской линии, для каждой
точки которой произведение расстояний до двух данных
точек есть величина постоянная, равная а2 (овал Кассини,
рис. 3.6).
Рис. 3.6
Решение. Пусть F\ и f\ — данные точки. Обозначим расстояние
между ними 2с. Выберем декартову прямоугольную систему координат
так, как указано на рис. 3.6, т. е. ось абсцисс проведем через точки
fi и f2, а начало координат поместим посередине между F\ и f2. В этой
системе координат точки F\ и Fz имеют координаты соответственно
— с, 0 и с, 0. Чтобы составить уравнение линии, возьмем на ней произ-
произвольную точку М(х, у) и, исходя из свойств линии, установим зависи-
зависимость между координатами х, у.
По условию задачи MF\ ■ MF2 = а2. Так как
MF,
то
^ сJ + у2
Это уравнение является искомым, так как ему удовлетворяют коорди-
координаты любой точки, лежащей на овале Кассини, и не удовлетворяют
координаты точек, не принадлежащих овалу Кассини.
Для упрощения полученного уравнения возведем обе его части в
квадрат. Имеем
{х2 - 2сх + с2 + у2) (х2 + 2сх + с2 + у2) = а\
или
+с2- 2сх) {(х2 + у2) + с2 + 2сх) = а\
(А:2 + уу _ 2с2 (х2 - у2) =а*-с4
81
3.410. Составить уравнение линии, произведение рас-
расстояний от каждой точки которой до двух данных точек
равно квадрату половины расстояния между данными точ-
точками (лемниската Бернулли, рис. 3.7).
Рис. 3.7
3.411. Из начала координат проведен луч, пересекающий
окружность х2 + у2 = ш/ и прямую у = а соответственно в
точках А и В. Из точки А проведена прямая параллельно
оси Ох, а из точки В — параллельно оси Оу. Точка М пере-
пересечения этих прямых при вращении луча описывает линию
(локон Аньези, рис. 3.8). Составить ее уравнение.
3.412. Даны окружность х2 + у2 = ах и прямая х = а.
Из начала координат проведен луч, пересекающий данную
окружность в точке А и данную прямую в точке В. На это\
луче отложен отрезок ОМ=АВ. При вращении луча точка Л
описывает линию (циссоида Диоклеса, рис. 3.9). Составит!
ее уравнение.
Рис. 3.9
Рис. 3.10
3.413. Из точки А( — а, 0), где а>0, проведен луч al
где В — точка пересечения луча с осью Оу. По обе сторонь
от точки В на луче отложены отрезки ВМ и BN, равные
ОВ. При вращении луча точки М и N описываю-
линию (строфоида, рис. 3.10). Составить ее
82
3.414. Точка М, совпадающая с полюсом полисной си-
системы координат, движется равномерно со скоростью v по
лучу, совпадающему с полярной осью. Кроме того, этот
луч вращается вокруг полюса с угловой скоростью со (ы =
=const). Составить уравнение линии, которую описывает
точка М (спираль Архимеда, рис. 3.11).
3.415. Из точки А( — а, 0), где а>0, проведен луч, пере-
пересекающий ось Оу в точке В. На этом луче по обе стороны от
точки В отложены отрезки ВМ = BN = / A<Са). При враще-
вращении луча точки М и Л/ описывают линию (конхоида Нико-
меда, рис. 3.12). Составить уравнение этой линии в полярной
системе координат, полюс которой находится в точке А,
а полярная ось направлена в положительном направлении
оси Ох. Записать уравнение конхоиды в данной декартовой
системе координат.
3.416. Из полюса О полярной системы координат про-
проведен луч, пересекающий окружность р = a cos G в точке А.
На этом луче по обе стороны от точки А отложены отрезки
AM = AN = I. При вращении луча точки М и N описывают
линию (улитка Паскаля, рис. 3.13). Составить уравнение этой
линии. Записать уравнение улитки Паскаля в декартовой
прямоугольной системе координат, начало координат которой
находится в полюсе, а направление оси Ох совпадает
с направлением полярной оси.
3.417. Окружность радиуса а катится без 'скольжения по
оси Ох. Некоторая точка М окружности описывает линию
(циклоида, рис. 3.14). Составить параметрические уравнения
этой линии, приняв за параметр / угол, на который поворачи-
поворачивается катящаяся окружность вокруг своего центра. Запи-
Записать уравнение циклоиды в виде F(x, y) = 0.
3.418. Окружность радиуса а катится без скольжения по
окружности х -f у2 = а , оставаясь вне ее. Некоторая точка М
катящейся окружности описывает линию (кардиоида,
рис. 3.15). Составить параметрические уравнения этой
линии, приняв за параметр / угол наклона к оси Ох радиуса
неподвижной окружности, проведенного в точку касания
с подвижной окружностью. При этом считать, что в на-
начальный момент (/ = 0) точка М совпадает с точкой А (а, 0).
Записать уравнение кардиоиды в полярной системе коор-
координат, полюс которой находится в точке А (а, 0), а полярная
ось направлена в положительном направлении оси Ох.
3.419. Окружность радиуса а катится без скольжения по
окружности х -\-у2 = b , оставаясь вне ее. Некоторая точка М
катящейся окружности описывает линию (эпициклоида,
рис. 3.16). Составить параметрические уравнения этой
линии, приняв за параметр / угол наклона к оси Ох радиуса
83
Рис. 3.11
Рис. 3.12
М
Рис. 3.13
Рис. 3.14
ч
Рис. 3.15
Рис. 3.16
84
неподвижной окружности, проведенного в точку касания
• подвижной окружностью. При этом считать, что в началь-
начальный момент (/ = 0) точка М совпадает с точкой А(Ь, 0),
^де b > 0.
3.420. Окружность радиуса а катится без скольжения
ю окружности х2 -\-у2 = Ь2, оставаясь внутри нее. Некоторая
-очка М катящейся окружности описывает линию (гипо-
шклоида, рис. 3.17). Составить параметрические уравнения
:той линии, приняв за параметр / угол наклона к оси Ох
эадиуса неподвижной окружности, проведенного в точку ка-
•ания с подвижной окружностью. При этом считать, что
з начальный момент (/ = 0) точка М совпадает с точкой
л(Ь, 0), где Ь >0. Записать уравнение гипоциклоиды в случае,
<огда Ь — 4а (астроида, рис. 3.18).
f A
f <
0
1——
b.
-----
-—'
У
/
Рис. 3.17
Рис. 3.18
3.421. Отрезок длиной 2а движется так, что его концы все
время находятся на координатных осях. При этом точка
М — основание перпендикуляра, проведенного из начала
координат на этот отрезок,— опишет линию (четырехлепест-
ковая роза, рис. 3.19). Составить уравнение этой линии
Рис. 3.19
85
в поинрпои chui'.yk1 координат, полюс которой находится
в начале координат, а полярная ось совпадает с положи-
положительной полуосью Ох.
3.15. ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА В R'
Теоретические вопросы
3.422. Какая поверхность называется эллипсоидом?
3.423. Какая поверхность называется однополостным ги-
гиперболоидом?
3.424. Какая поверхность называется двуполостным ги-
гиперболоидом?
3.425. Какая поверхность называется эллиптическим па-
параболоидом?
3.426. Какая поверхность называется гиперболическим
параболоидом?
3.427. Какая поверхность называется цилиндрической?
Дать определения образующей и направляющей.
3.428. Какую поверхность определяет в R3 уравнение
F(x, y) = Q, если в R2 это уравнение определяет некоторую
линию?
3.429. Какая поверхность называется конической? Дать
определения образующей, направляющей и вершины кони-
конической поверхности.
3.430. Какая поверхность называется поверхностью
вращения?
3.431. Пусть в плоскости Оху линия задана уравнением
F(x, f/) = 0. Написать уравнение поверхности, полученной
вращением этой линии:
а) вокруг оси Ох\ б) вокруг оси Оу.
Задачи и упражнения
3.432. Выяснить, какую поверхность в R3 определяет
уравнение 2
Решение. Так как в данном уравнении отсутствует у, а на плоскости
Oxz ему соответствует парабола, то уравнение х -)-Зг = 0 в R1 определяет
цилиндрическую поверхность. Образующая этой цилиндрической поверх-
поверхности параллельна оси Оу, а направляющей является парабола, заданная
уравнением х2 + Зг = 0 в плоскости Oxz.
3.433. При каком соотношении между a, b и с эллипсоид
хг и2 г2
—г + -2- + —- = 1 является шаровой поверхностью?
а Ь1 с1
3.434. Дана шаровая поверхность х2 + у2-j-z1 = а2. Дока-
Доказать, что если ординаты всех точек этой поверхности
86
ократить в k\ раз, а аппликаты — в k% раз, то полученная
той этом поверхность будет эллипсоидом -^- + -^- +
т4 . f. f
с1 k, k2
В задачах 3.435 — 3.449 определить вид поверхности и
1зобразить ее.
3.435. x = y'2 + 2z2. 3.436. 3x2 + y2 + 2z2 = 6.
3.437. 2x2—y2 + z2 = 4. 3.438. z = 3 —jc2 —i/2.
3.439. t/ = xz — z2. 3.440. x = 2y'2 + (z—\f.
3.441. 2x2-i/2 + 3z2 = 0. 3.442. zl = Ax.
; 3.443. x2 + y2 = (z —2J. 3.444. y = 3x2 + z2.
3.445. jci/=1. 3.446. t/2 + 4z2 = 4.
3.447. jc2 + (t/— lJ + z2 = l. 3.448. x2 + z2 = 5.
3.449. x2 — 3t/2 — z'2 = 9.
3.450. Найти проекцию на плоскость Оху линии пересече-
пересечения параболоида z = x2-\-2у2 и плоскости 2 = 4.
3.451. Найти проекцию на плоскость Oyz линии пересе-
-■ения двуполостного гиперболоида х2 — у2 — z2=l и плос-
плоскости х = 5.
3.452. Найти проекцию на плоскость Оху линии пересе-
^ния параболоида z = x2-\-y2 и плоскости 2х — 2y-\-z = 7.
3.453. Доказать, что линия пересечения двух параболи-
jecKHX цилиндров z2 = x и t/2 = 4 — х лежит на круговом
цилиндре. Найти уравнение этого цилиндра.
3.454. Найти уравнение поверхности, образованной вра-
_цением линии:
■•}
а) ^-^=
f вокруг оси Оу\
z = 0
x2 = 4z \
., 'I вокруг оси Oz.
4. ЛИНЕЙНЫЕ ПРОСТРАНСТВА
4.1. ОПРЕДЕЛЕНИЕ ЛИНЕЙНОГО ПРОСТРАНСТВА
И ПОДПРОСТРАНСТВА
Теоретические вопросы
4.1. Как определяется операция сложения (внутренняя
операция) на множестве V?
4.2. Как определяется операция умножения элемента
множества V на число a£R (внешняя операция)? Что
называется произведением числа a£R на элемент х £ V?
4.3. Что называется вещественным линейным простран-
пространством?
4.4. Какое линейное пространство называется комплекс-
комплексным?
4.5. Что называется арифметическим действительным
пространством? Как оно обозначается?
4.6. Что называется разностью х — у элементов хну про-
пространства V?
4.7. Какое множество V\ элементов линейного пространст-
пространства называется подпространством пространства V?
Задачи и упражнения*
4.8. Выяснить, является ли вещественным линейным
пространством множество всех вещественных матриц второго
порядка.
Решение. Так как прн сложении вещественных матриц второго
порядка, а также умножении матрицы на вещественное число получаются
вещественные матрицы второго порядка, то введенные операции являются
операциями на данном множестве. Аксиомы I—VIII линейного про-
пространства выполняются. Действительно, указанные в аксиомах I — VIII
операции над матрицами второго порядка сводятся к соответствующим
операциям над вещественными числами, для которых аксиомы I—VIII,
как известно, имеют место. Следовательно, множество всех вещественных
матриц второго порядка является вещественным линейным пространством.
4.9. Является ли множество R всех вещественных чисел:
а) вещественным линейным пространством;
б) комплексным линейным пространством?
* В задачах этой главы будем считать, что для элементов рассмат-
рассматриваемых множеств операции сложения элементов и умножения элемента
на число введены так, как это делается в соответствующих разделах
математики (если нет специальных указаний).
4.10. Является ли множество С всех комплексных
чисел:
а) вещественным линейным пространством;
< б) комплексным линейным пространством?
'• 4.11. Является ли множество Z всех целых чисел:
■ а) вещественным линейным пространством;
|? б) комплексным линейным пространством?
I 4.12. Является ли множество Q всех рациональных чисел:
а) вещественным линейным пространством;
б) комплексным линейным пространством?
4.13. Каким должно быть число а, чтобы множество, со-
состоящее из одного этого числа, являлось вещественным
линейным пространством?
4.14. Является ли вещественным линейным пространством
множество всех многочленов от одной переменной с вещест-
вещественными коэффициентами:
а) степени не выше п\ б) степени п;
в) степени выше «?
4.15. Является ли множество всех вещественных
матриц размеров тХп:
а) вещественным линейным пространством;
б) комплексным линейным пространством?
4.16. Пусть М — множество всех вещественных матриц
вида [а.\ аг|. Является ли это множество вещественным
линейным пространством, если операция сложения определе-
определена обычным способом (как в матричном исчислении), а опе-
операция умножения на число a£R — равенством а\а.\ аг] =
= |а, сш2]?
4.17. Пусть Р — множество положительных чисел, в ко-
котором операция сложения определена равенством «х -f- у» =
= ху, а операция умножения на число a£ R — равенством
«ах» = ха. Является ли множество Р с указанными опера-
операциями вещественным линейным пространством?
4.18. Является ли вещественным линейным простран-
пространством:
а) множество всех вещественных функций, область опре-
определения которых — вся числовая прямая;
б) множество всех числовых последовательностей (ап),
где ап 6 R?
4.19. Является ли вещественным линейным пространст-
пространством множество:
а) всех связанных векторов единичной длины;
б) всех вращений на плоскости вокруг точки О;
в) всех симметрии относительно плоскости Оху?
4.20. Является ли вещественным линейным пространст-
пространством множество решений:
89
а) системы линейных однородных уравнений;
б) однородного линейного дифференцированного уравне
ния «-го порядка с постоянными коэффициентами?
В задачах 4.21—4.23 выяснить, является ли подмно
жество L элементов линейного пространства V его под-
4.21. L — множество рациональных чисел, V—мно-
V—множество вещественных чисел.
4.22. V— множество квадратных матриц А = (а//) треть-
третьего порядка (ciij £ R), L — множество матриц вида:
а)
О а О
0 0 0
0 0 0
а 0 0
0 6 0
0 0с
(а € R);
(а, 6, с е R);
б)
г)
О 1 О
0 0 0
0 0 0
a b с
0 0 0
0 0 0
(а, b, c6R).
4.23. V — множество многочленов с вещественными
коэффициентами, степень каждого из которых не выше
трех, L — множество многочленов вида;
а) ax2 + bx + c (a, b, с 6 R);
б) ах2 + Ьх + с (а, Ь, с £ R, аф 0);
в) ах'2 + b (a, be R).
4.2. ЛИНЕЙНАЯ ЗАВИСИМОСТЬ И ЛИНЕЙНАЯ
НЕЗАВИСИМОСТЬ ВЕКТОРОВ
Теоретические вопросы
4.24. Что называется линейной комбинацией векторов
xi, X2, ..., хг? Что называется коэффициентами линейной
комбинации векторов?
4.25. Какая линейная комбинация векторов называется
тривиальной и какая — нетривиальной?
4.26. Какая система векторов называется линейно неза-
независимой?
4.27. Какая система векторов называется линейно за-
зависимой?
4.28. Какие два вектора линейного пространства называ-
называются коллинеарными?
4.29. Какие три вектора линейного пространства называ-
называются компланарными?
90
Задачи и упражнения
4.30. Выяснить, является ли линейно независимой система
векторов
'2 О] \\ 2] ГО -1
о о]- [о oj- [i о
линейного вещественного пространства квадратных матриц
второго порядка.
Решение. Данная система векторов является линейно незави-
независимой, так как равенство
Г1 21, Г° -
j + [
'1 Г° °1
oj=[_o oj
—аз] Го (Л
0 J L0 0 J
2a2 —
справедливо только тогда, когда ai = <хг = осз = 0.
Действительно, указанное равенство матриц выполняется только
тогда, когда
а.2
2<х2
= 0Л
- а3 = 0, }
аз = 0, J
а эта система имеет единственное решение — нулевое.
4.31. Выяснить, является ли линейно независимой си-
система векторов в пространстве R2.
a) x,=3i + j, x2 = i-j; б) х, =2i, x2 = 3j;
в) xi = i — 2j, x2 = 2j — i;
г) x,=i + j, x2 = 2j, x3 = 4i — j.
4.32. Выяснить, является ли линейно независимой си-
система векторов в пространстве R3:
а) xi =2i +j, x2 = j + 3k;
б) xi = i — 2j + 3k, x2 = 4i + j, x3 = 5i — j + 3k;
в) xi = j — 3k, x2 = 21 + 4j, x3 = 5k.
4.33. Выяснить, является ли линейно независимой си-
система векторов в линейном пространстве квадратных матриц
данного порядка:
1 0] ГО 2] б) Г —1 2] [~2 -4
-1 1 N 1 0 Г 0 3 ' 0 -6
а)
в)
0 1000 010
0 0 Г 1 0 ' 0 1 ' 0 0
91
1
0
0
2
-1
1
0
1
0
1
0
1
о"
0
0
0
3
2
>
»
"о
0
0
-1
0
0
1
0
0
2
-]
Г
0
0
1
— 2
1
'о
1
1
—
0
0
1
1
1
1
0
0
1
2
С
с
1
> 1
) 3
г)
Д)
4.34. Выяснить, является ли линейно независимой си-
система векторов в линейном пространстве многочленов с
вещественными коэффициентами, степень каждого из кото-
которых не выше п:
а) х2 + 1, 2х -3;
б) х3 - 2х2 + 2, х2 + 5, 5;
в) 2х + 3, х—1, Зх + 2, Ах+1.
4.35. Доказать, что система векторов хь хг, ..., хт, о
некоторого линейного пространства является линейно за-
зависимой.
4.36. Доказать, что если векторы xi и хг коллинеарны,
то xi =Х\2 (\2ф0, A,£R).
4.37. Доказать, что если Xi=A,X2 (A-6R), то векторы xi
и х2 коллинеарны.
4.38. Доказать, что если система векторов xi, хг, ..-, хт
линейно зависима, то один из этих векторов является линей-
линейной комбинацией остальных.
4.3. РАЗМЕРНОСТЬ И БАЗИС ЛИНЕЙНОГО ПРОСТРАНСТВА.
КООРДИНАТЫ ВЕКТОРА
Теоретические вопросы
4.39. Что называется размерностью линейного простран-
пространства? Как обозначается размерность линейного простран-
пространства?
4.40. Что называется базисом n-мерного линейного про-
пространства?
4.41. Указать размерность и базис линейного простран-
пространства V, если известно, что в этом пространстве существует п
линейно независимых векторов ei, ег, .... еп и любой вектор
х£ V линейно выражается через еь ег, .-., е„.
4.42. Что называется разложением вектора х линейного
пространства по базису еь ег, ..., ея этого пространства?
Что называется координатами вектора х в базисе ei,e2,..... еп?
4.43. Чему равны координаты нулевого вектора в любом
базисе?
92
4.44. Пусть два вектора равны между собой. Как свя-
связаны их координаты в одном и том же базисе?
4.45. Даны координаты двух векторов в некотором ба-
базисе. Чему равны координаты суммы этих векторов в том же
базисе?
4.46. Даны координаты вектора в некотором базисе. Че-
Чему равны координаты произведения вектора на число в том
же базисе?
4.47. Что называется матрицей системы векторов Х|, Хг, ...,
хш в данном базисе?
4.48. Как определить, является ли система т векторов
«-мерного линейного пространства линейно независимой,
если известны координаты векторов в некотором базисе?
4.49. Как определить, образует ли система п векторов
n-мерного линейного пространства базис этого пространства,
если известны координаты векторов в некотором базисе?
Задачи и упражнения
4.50. Показать, что в линейном вещественном простран-
пространстве вещественных квадратных матриц второго порядка
векторы
~i о! Го 21 Го ol Го о
е'~[о oj* e2~L° о
образуют базис, и найти в указанном базисе координаты
вектора
Г 2 6
Х=[-3 5
Решение. Векторы ei, ег, е3, е* линейно независимы, так как ра-
равенство
Г1 01 ГО 21 , ГО 01 , ГО 01 Г° °1
°"Lo oJ+Чо oJ+a3L3 oJ+a4Lo -iJ=Lo oj
а, 2а2
Г0 01
L0 Oj
справедливо только при а.\ = п2 = а3 = «4 = 0.
Легко убедиться в том, что любой вектор рассматриваемого простран-
пространства линейно выражается через векторы ei, в2, е3, е4. Следовательно,
векторы ei, ег, ез, е4 образуют базис.
Обозначим координаты вектора х в данном базисе через Pi, 02, Рз> 04-
Тогда
= р,е, + Ms
93
Г 2 61 Л1 °
[-3 5j=pl[0 o
° 2
Г 2 61 Г
L-3 5J 1
2р
откуда р, = 2, 2р2 = 6, Зр3 = — 3, — р4 = 5. Следовательно, р, = 2, р2 = Z
Pi=—1, fU=—5 — искомые координаты.
4.51. Известно, что любой вектор х £ V линейно выража
ется через векторы ei, e2, ..., е„ этого пространства. Образую
ли векторы ei, е-2, .... е„ базис пространства V?
4.52. Выяснить, образует ли базис в арифметическои
пространстве R3 = {x = (ai; аг; аз\ш(:И} данная систем;
векторов:
а) A; 0; 0), @; 1; 0), @; 0; 1);
б) A; 2; -7), @; 3; 1), @; 0; 1);
в) A; 0; 0), @; 1; 0), A; 1; 0);
г) C; 0; 5), A; 2; -1);
д) A; 2; -1), B; 3; 4), (-1; 7; 2), C; 4; 6).
4.53. Выяснить, образует ли базис в линейном простран
стве квадратных матриц А = (ац) (сщ 6 R) второго порядке
данная система векторов:
а)
б)
в)
г)
Д)
1 0
о о
1 0
о о
1 0
о о
-1 0
о о
2 3
0 4
О 1
о о
О 1
о о
О 1
о о
О —1
о о
t 7
2 4
"о
1
'о
1
"о
0
"о
1
"з
0
°1
о"
0
о"
1
о"
0
4"
7
О О
О 1
1
1
"о
0
0
0
-1
0
1
0
-1
о"
5
4.54. Выяснить, образует ли базис в линейном простран-
пространстве многочленов с вещественными коэффициентами, сте-
степень каждого из которых не выше двух, данная система
векторов:
а) 1, х, х2; б) 3, х — 2, х+ 1;
в) 1, (х —2), (х — 2J; г) 3* + 3, х2-\, х2 + 3* + 2.
4.55. Образует ли базис n-мерного линейного простран-
94
ства система п векторов, среди которых есть нулевой вектор?
4.56. Доказать, что если ei, е2, ез, е4 — базис линейного
4
пространства, то еь х = S а,е, (а2 Ф 0), е3, е4 — также базис
этого пространства.
4.57. Найти размерность и один из базисов линейного
Пространства решений системы:
a) x, + 2x2 - Зхз = 0,1
+ 2л:4 - 2x5 = 0 J
б) 3Xi — Х2+
Х\ + ЗХ2 —
4.58. Указать координаты векторов а, Ь, с в базисе еь
е2, ез, е4, если: а = 2ei —е2 + Зе» + 5e4, b = 4е2 — еь с = ез^
4.59. Найти координаты вектора C, 1, —2, 5, 6)£R5
в базисе:
а) A; 0; 0; 0; 0), @; 1; 0; 0; 0), @; 0; 1; 0; 0),
@; 0; 0; 1; 0), @; 0; 0; 0; 1);
б) @; 1; 0; 0; 0), @; 0; 0; 1; 0), A; 0; 0; 0; 0),
@; 0; 0; 0; 1), @; 0; 1; 0; 0).
4.60. Найти координаты каждого из указанных векторов
пространства R2(x) в базисе х2, х, 1:
а) Зх2-2х + 5; б) Ах— 1; в) Bх + ЗJ.
4.61. Найти координаты каждого из указанных векторов
пространства R2X2 в базисе
1 0l [О О] [О ll [О 0
0 0J* [l 0J' [о 0 |' I 0 1
а) I -1 2] б) ГЗ -4
[ 5 lj' [7 12
4.62. Даны координаты векторов а и b в некотором ба-
базисе. Найти координаты вектора с в этом же базисе, если:
а) а(—1, 3, 4, 1), ЬB, 0, 1, -1), с = За-Ь;
б) а@, 2, 4, 7), Ь(—1, 8, 5, —3), с = 2а + ЗЬ.
4.63. Даны векторы a = ei +e2, b = 2ei — е2, где еь е2 —
базис. Доказать, что векторы а и b образуют базис. Найти
координаты вектора с = 2е, — 4е2 в базисе а, Ь.
4.64. Даны векторы а = 2ei + Зе2 + е3, b = — Зе, + 2е2 +
+ 4е3, с = в| —е2 — без, где ei, е2, ез — базис. Доказать, что
векторы а, Ь, с образуют базис. Найти координаты вектора
d = 4е, + е2 — 9е3 в базисе а, Ь, с.
В задачах 4.65—4.70 выяснить, является ли вектор d
95
линейной комбинацией остальных векторов, и если является
то найти эту линейную комбинацию.
4.65. а,B, -3, 4), а2C, — 1, 4), dE, 3, 4).
4.66. aiB, -3, 4), а2C, — 1, 4), d@, 0, 9).
4.67.
4.68.
а, =
а,=
1
-3
1
-3
2~
4
2~
1
, а2 =
, а2 =
3 7
2 1
О 7
2 —1
1 4
2 3
2 39
4 -3
4.69. а, = 2 + х + х2, а2 = 3 + Ъх, d = 1 — Зх + 2х2.
4.70. а, = 1 + х + х2, а2 = 1 — х, d = 2 + 4х + Зх2.
4.71. Найти максимальное число линейно независимы)
векторов в системе:
а) xiB, — 1, 3, 4), х2A, 5, 1, 3), хэ(—1, 0, 2, 5), х4@
-6, 4, 6), х6A, 6, -2, 1);
б) xi(—1, 2, 0, 7), х2A, 3, — 1, 0), х3D, 1, 2, 5), х4D
6, 1, 12), хвG, 14, 2, 31).
4.72. Найти все значения X, при которых вектор d явля
ется линейной комбинацией векторов ai, a2, аз, если:
а) а,B, -1, 3), а2C, 1, 4), а3A, -1, 2), d(8, X, 12)
б) а,C, 1, -2), а2B, 1, 0), а3A, — 3, 5), й(Х, 10, 11)
в) а,C, X, 4), а2(Х, 1, 3), а3@, 5, 1), dC —ЗЯ., Х + 2, -4)
4.4. МАТРИЦА ПЕРЕХОДА ОТ БАЗИСА К БАЗИСХ
ПРЕОБРАЗОВАНИЕ КООРДИНАТ ВЕКТОРА
Теоретические вопросы
4.73. Что называется матрицей перехода от одного ба-
базиса к другому?
4.74. Всякая ли матрица Т порядка п может быть матри-
матрицей перехода от одного базиса к другому в «-мерном про-
пространстве?
4.75. Пусть Т — матрица перехода от базиса ei, e2, ..., е„
линейного пространства V к базису е{, е2, ..., е« того же
пространства. Какова матрица перехода от базиса е(, е2, ...,
ел к базису еь е2, ..., е„?
4.76. В чем заключается задача преобразования ко-
координат?
4.77. Какие формулы называются формулами преобра-
преобразования координат?
4.78. Записать формулы преобразования координат
вектора х, если известна матрица Т перехода от базиса ei,
е2, ..., е„ к базису е(, е2, ..., ея.
96
Задачи и упражнения
4.79. В линейном вещественном пространстве веществен-
вещественных квадратных матриц второго порядка найти матрицу
перехода от базиса
о
о
Js базису
\ ,\2 О
1е'~ о о
о
1 2
О О Г
о о
0 2
3 0
°
О О
О —1
Решение. Легко видеть, что e( = 2ei, e£ = ei + 2e2, ез = 2ег + Зез,
ej = —е4. Матрица
7" =
2 10 0
0 2 2 0
0 0 3 0
0 0 0-1
в j-м (I = 1, 4) столбце которой стоят координаты вектора е/ в базисе ei,
ег. е3, в4, является матрицей перехода от базиса ei, в2, ез, ev к базису
е{, в2, ез, ei
Г3 _2]
4.80. Дана матрица Т = перехода от базиса
еь е2 к базису е(, ег. Найти координаты вектора а = 4ei + ег
в базисе е(, ej.
Решение. Известно, что X' = Т~'Х, где X и X' — матрицы-столбцы
из координат вектора а соответственно в базисах ei, в2 и е(, ei. Так как
ТО
2 2
10
Следовательно, координатами вектора а в базисе ej, e'2 будут 5/4, —1/8.
4.81. В пространстве Е3 найти матрицу перехода от
базиса i, j, k к базису:
a) i, j, -k; б) j, i, k.
4.82. Найти матрицу перехода от базиса ei, e2, ез, е4,
е5 к базису е2, е3> еь е5, е4.
4.83. В пространстве R3(x) найти матрицу перехода от
базиса х2, х, 1 к базису (х + 1 J, (х -\- 1), 1.
4.84. В пространстве Ег найти матрицу перехода от ба-
базиса a, b к базису а + b, а — Ь.
7. Зак.51 15.
97
4.85. Дана матрица
2
1
г
— 1
-2
1
0
1
0
перехода от базиса е,, е2, е3 к базису е'\, ej, ез. Найти кс
ординаты вектора:
а) е2 в базисе ei, е2, е3;
б) е3 в базисе ef, е2, е3.
4.86. Найти матрицу перехода от базиса ei, е2, е3 к ба
зису а, Ь, с и матрицу перехода от базиса а, Ь, с к базис;
ei, ег, ез, если:
а) а = 2е,+2е3, b = 3e3 —e2, c = 3ei+е3;
б) а = е,+е2 + е3, b = e3, с = е,+2е2 + 3е3;
в) а = е, — Зе2 + 2е3, b = 2е, + 4е2 + е3, с = Зе2;
г) а = 5е2, Ь = 2е, +3е2 + е3, с = 2е2 —е, — 2е3.
4.87. Даны два базиса: ei, e2 и е[,е2. Найти координаты
вектора х в базисе ei, e2, если:
а) е{ = 2е,+ 3е2, е2 = е2 —еь х = е, — Зе2;
б) е!=е2 —еь е£ = 3е2, х = 2е{ + 4е2.
4.88. Даны два базиса: ei, е2 и е[, е2. Найти координаты
вектора х в базисе е[, е2, если:
а) е( = ei + Зе2, е2 = е, — е2, х = 2ei — 5e2;
б) е, =2е, +3е2, е^ = et + 4е2, х = 5е,+7е2.
4.89. Даны два базиса: ei, e2, ез и е[, е2, е3. Найти
координаты вектора х в базисе ef, e2, ез, если:
е2 = 3е,+4е3, е^ = е3, x = 3ei —
а) е[ = е,+е2
-2е2 + е3;
б) е, =2е( +2е.2
— 2е2 + 2е3, х = 2е,
£ = — 2е, +е2
2е2
4.90. Найти матрицу перехода от базиса ai, a2 к базису
bi, b2 по указанным разложениям этих векторов в базисе
ei, e2:
а) ai=e, + 4e2, a2 = 3ei+5e2, bi=7ei+e2, Ь2 = е2;
б) ai =ei — е2, a2 = 2ei +5e2, b( = 2ei — 3e2, b2 = 5e2 —
-3e,.
4.91. Найти матрицу перехода от базиса ai, a2, a3 к ба-
базису bi, b2, b3 по указанным разложениям этих векторов
в базисе ei, e2, е3:
а) а, ==3е, + 2е2 + е3, а2 = е, — 2е
+ 3е3, bi=e(-be2, Ь2 = е,—е3, Ь3 =
б) a,=ei+e3, a2 = 2ei+e2, a3 = 3e, + 2e2, bi=3e,+
+ 2е2> b2 = ei +7e2 + e3, Ь3 = 4е3 —2ei.
98
4.5. СКАЛЯРНОЕ ПРОИЗВЕДЕНИЕ ВЕКТОРОВ.
ОПРЕДЕЛЕНИЕ ЕВКЛИДОВА ПРОСТРАНСТВА.
НОРМА ВЕКТОРА. УГОЛ МЕЖДУ ВЕКТОРАМИ
Теоретические вопросы
4.92. Что называется скалярным умножением векторов
и скалярным произведением в вещественном линейном про-
пространстве?
4.93. Что называется скалярным квадратом вектора х?
4.94. Что называется евклидовым пространством?
4.95. Как определяются размерность и базис евклидова
пространства?
4.96. Записать в евклидовом пространстве неравенство
Коши — Буняковского. Для каких векторов неравенство
Коши — Буняковского превращается в равенство?
4.97. Что называется нормой (длиной) вектора х линей-
линейного пространства V? Какое линейное пространство назы-
называется нормированным?
4.98. Каким равенством можно определить норму (длину)
вектора в евклидовом пространстве?
4.99. Что называется углом между ненулевыми векторами
х и у евклидова пространства?
4.100. Если х#о иу=^о, то —1^ ' * ^ 1 и число
—^-^— можно рассматривать как синус или косинус не-
некоторого угла. Почему угол ср между векторами х и у евкли-
евклидова пространства определяется равенством cosср =
а не Равенством
Задачи и упражнения
4.101. В евклидовом пространстве Е2 даны векторы х =
= A; -3), у = B; 3). Найти (х, у), cos(x, у).
Решение. Так как в пространстве Е2 скалярное произведение векто-
векторов x = (*i; х-г) и у = (уь У2) определяется равенством (х, у) = х,у, + х2у2,
•fciix, у) = 1 • 2 + (— 3K = — 7. По определению
, ^ > (х. У)
cos х, у = | , ,, ,
|х| |у|
а |х| =V(X> y)=yx2\+xl, следовательно,
cos(x, у)=х 061
Г==х 0,61.
V'30
99
4.102. Доказать, что для любого вектора х евклидо
пространства имеет место равенство (х, о) = 0.
4.103. Пусть (а, х) = (Ь, х) для любого вектора х евклидо
пространства. Доказать, что а = Ь.
4.104. Пусть у — фиксированный вектор евклидова пр
странства Е. Доказать, что множество всех элементов х это
пространства, для которых (х, у) = 0, является линейнь
подпространством пространства Е.
4.105. Является ли евклидовым пространство R2, ее;
паре векторов x = (xi\ х2), у = (г/ь г/г) поставлено в соотве
ствие число:
а) х\у\ -\-х2у2; б) х\хчу\уч;
в) За:,*/, + Ьххуг + х2у2; г) 2x\yi + хху2 + х2у\ + Ъх2у2':
4.106. Является ли евклидовым пространство R", ее/
паре векторов х = (леi; x2; ...; х„), у = (у\\ у2\ ■■■', уп) поставлен
в соответствие число:
а) (Х1+Х2+...+Хп)(у\+У2 +
б) х\у\ + х2у2-\-... -\-хпуп?
4.107. Является ли евклидовым пространством множ<
ство всех функций вида a* cos kx + bk sin kx, где k — любе
натуральное число, a.k, bk — любые вещественные числг
если каждой паре функций ап cos пх + bn sin nx, am cos mx -\
-\- bm sin mx поставлено в соответствие число
л
\ {а„ cos nx + Ь„ sin nx) (am cos mx + bm sin mx)dx?
— л
4.108. Является ли евклидовым пространство С^ь-(а < Ь
если каждой паре функций f(x), g(x) этого пространен)
поставлено в соответствие число:
a) \f(x)g(x)dx- б) \p(x)f(x)g(x)dx,
а а
где р(х) — фиксированная положительная непрерывная н;
отрезке \а, Ь\ функция?
4.109. Даны векторы евклидова пространства Е". Найт1
длины векторов х, у, скалярное произведение векторов
косинус угла ф между векторами, если:
а) х = B; -1), у = @; -3);
б) х = @; 3; 1), у = (—1; 0; 2);
в) х = E; 0; -12; 0), у = (-3; 1; 0; 2).
4.110. В евклидовом пространстве, рассмотренном в за
даче 4.108а, найти:
а) длину вектора cosx + sinx, если а=—л, b = л;
б) длину вектора f(x) = x\
в) скалярное произведение векторов sin 2x, sin Зх, если
а = —л, b = л;
100
г) скалярное произведение векторов f(x) = x, g(x) = ex;
д) угол между векторами sin* и cos*, если а=—л,
6 = л;
е) угол между векторами /(*)=1 и g{x) = x.
4.111. В евклидовом пространстве, рассмотренном в за-
задаче 4.108а, записать:
а) неравенство Коши — Буняковского для функций f(x),
g(x) этого пространства;
б) неравенство треугольника.
4.6. ОРТОНОРМИРОВАННЫЙ БАЗИС.
ВЫРАЖЕНИЕ СКАЛЯРНОГО ПРОИЗВЕДЕНИЯ ВЕКТОРОВ ЧЕРЕЗ
КООРДИНАТЫ В ОРТОНОРМИРОВАННОМ БАЗИСЕ
Теоретические вопросы
4.112. Какие два вектора евклидова пространства назы-
называются ортогональными?
4.113. Какая система векторов называется ортогональ-
ортогональной?
4.114. В каком случае ортогональная система векторов
линейно независима?
4.115. Какой базис евклидова «-мерного пространства
(n ^ 2) называется ортогональным?
4.116. Какой вектор евклидова пространства называется
нормированным или единичным?
4.117. Что называется нормированием данного вектора?
4.118. Какая система векторов называется ортонорми-
рованной?
4.119. Какой базис евклидова «-мерного (л ^2) про-
пространства называется ортонормированным?
4.120. Что называется ортогонализацией данного базиса?
4.121. Записать формулу, по которой вычисляется ска-
скалярное произведение векторов через их координаты в орто-
нормированном базисе.
4.122. Записать формулу, по которой вычисляется норма
(длина) вектора через его координаты в ортонормированном
базисе.
Задачи и упражнения
4.123. В евклидовом пространстве Е3 по данному орто-
ортогональному базису d =A; — 1; 0), ег = @; 0; 2), ез = (— 1;
— 1; 0) построить ортонорм-ированный базис.
101
Решение. Чтобы построить по данному ортогональному баз
ортонормированный базис, надо каждый базисный вектор пронормировг
т. е. найти векторы d = -;—г, ti = -—-, ез = -;—г- Следовательно, е
kil |e2| leal
= -4^A; -•: 0) = (~; L; о), е£ = @; 0; 1), ei = (
Л/2 ч V2 Л/2 ' Ч \
; 0) — искомый базис.
Л/2 '
4.124. Являются ли ортогональными в евклидовом пр
странстве следующие системы векторов:
а) @; 1; 0), ( — 6; 0; 4); б) B; 1; —4), C; 0; 5);
в) (-1; 0; 0), @; 5; 0), {0; 0; 9);
г) A; 1; 3), v-l; -2; !•), G; -4; -1);
д) B; 1; -1), (-1; 2; 0), @; 1; 1)?
4.125. Установить, образует ли каждая из указаны
систем векторов ортогональный базис в евклидовом пр
странсте Е":
а) (-1; 3), F; 2); б) E; 1), C; -1);
в) A; 0; 0), @; 7; 0), @; 0; 2);
г) @; 0; 0; 5), @; 0; — 1; 0), @; 2; 0; 0), C; 0; 0; (
д) (-2; 3; 0; 0), C; 2;. 1; 1), @; 0; 1; 0), (-1;
-5; 0);
е) A; 1; 0; —1; -1), A; 0; -1; 0; 1), A; —1;
-1; 1), A; -1; 0; 1; -1);
ж) A; 3; 2; 3; 1), A; 1; 0; —1; -1), A; 0; —1; 0;
A; -1; 2; —1; 1), A; —1; 0; 1; -1).
4.126. Является ли нормированным каждый из вект
ров евклидова пространства Е":
а) (—1; 2); б) C/5; 4/5); в) (лДТ^ л[уЬ\ л/1/2
г) A; -2; 0); д) @; -12/13; 5/13); е) A; 0; 2; С
ж) (-1/2; 1/2; -1/2; 1/2)?
4.127. Пронормировать следующие векторы, заданнь
координатами в ортонормированием базисе:
а) A, 3); б) @; -3, 4); в) A, 1, -2); г) @, -12, 5, (
4.128. Какие из данных систем векторов являются орт
тональными в евклидовом пространстве L(_i \\.
а) 1, х2; б) х\ х3;
в) 1, sin лх, cos nx, sin 2nx, cos 2nx, ..., sin nnx, cos пю
4.129. В евклидовом пространстве £[-и] пронормир»
вать следующие векторы:
а) 1; б) xi\ в) cos л:.
4.130. В евклидовом пространстве Е" по данному орт<
тональному базису построить один из ортонормированны
a) gl=C; -1), 8Г2 = A; 3);
102
б) g,=B; 0; 0), *2 = @, -3; 0), g3 = @; 0; 5);
в) g.=(l; 1; 1; 1), g2 = (l; 1; -1; -1), g3 = (l; -1;
1; -1); g4-(l; -1; -1; 1).
4.131. В евклидовом пространстве Е по данному базису
построить ортонормированный:
а) g,=(l; 2; 3), g2 = @; 3; -2), g3 = @; 1; -1);
б) g, = (l; 2; 3), g2 = @; 2; 0), g3 = @; 0; 3);
в) g,=(l; 0; 0), g2 = @; 1; -1), g3 = (l; 1; 1).
4.132. В евклидовом пространстве Е4 по данному базису
построить ортонормированный:
а) g,=(l; 1; 0; 0), g2 = @; 0; 1; 1), g3 = (l; 0; 1; 1),
g4 = @; 1; 0; -1);
б) g,=(l; 0; 1; 2), g2 = (-l; 0; -1; 0), g3 = @; 0;
2; 1), g4 = @; 1; 1; 1).
4.133. В евклидовом пространстве многочленов степени
не выше первой, рассматриваемых на отрезке [ — 1, 11 (опера-
(операция скалярного умножения введена так же, как в L_i,i|),
по данному базису gi = l, g2 = x построить ортонормиро-
ортонормированный.
4.134. В евклидовом пространстве Е3 даны два ортого-
ортогональных вектора а и Ь. Найти вектор с, такой, что векторы а,
Ь, с образуют ортогональный базис (используя векторное
произведение), если:
а) а = 21 + 3j - k, b = -i + j + к;
б) а= i — 2j-r-k, b = 5i + 3j + k.
4.135. Даны векторы et, e2, e3, образующие ортогональ-
ортогональный базис. Найти (a, b), |a|, |b|, если:
а) а = 2е, — Зе2 + е3, b = e,+4e2 —e3, |ei|=3, Ie2| =
= 2, |еэ|=4;
б) а=е, +е2 — е3, b = ei+e2 + e3, |e,|=2, |е2| = 1,
|е3|=3.
4.136. Даны векторы d, е2, e3, d, e5, образующие ортонор-
ортонормированный базис. Найти угол ф между векторами а и Ь,
если:
а) a = 2et — е2 + е3 — е4 + е5, b = 3et +e2 — 4е4 — е5;
б) а = 9е, + 2е3 - 6е4, b = 7е, + 6е2 + 6е5.
4.7. УНИТАРНЫЕ ПРОСТРАНСТВА
Теоретические вопросы
4.137. Что называется скалярным умножением векторов
и скалярным произведением в комплексном линейном про-
пространстве?
4.138. Что называется унитарным пространством?
4.139. Записать формулу, по которой вычисляется ска-
103
лярное произведение векторов через их координаты в орто-
нормированном базисе унитарного пространства.
4.140. Записать формулу, по которой вычисляется норма
(длина) вектора через его координаты в ортонормирован-
ном базисе унитарного пространства.
Задачи и упражнения
4.141. Пусть в пространстве С" паре векторов x = (jci;
х-2\ ...; х„), У = (у\'< уг\ •••; уп) поставлено в соответствие число
Х\у\ + х2у2 + ... + х„уп (здесь Ук комплексно сопряжено с у к).
Выяснить, является ли данное пространство унитарным, и
если является, то найти длину вектора а = (/; 3 — /) 6 С2 и
скалярное произведение а на b = C — /, 21).
Решение. Проверим, является ли введенная операция скалярным
умножением векторов. Для простоты положим п = 2. Условие (х, у) =
= (у, х) справедливо. Действительно,
(X, у) =_Х\У\ + *2</2,_(у._Х) ^#1*1 +j/2*2 =
=ф\Х\ + у2х2 = JCij/i + хгуг = (х, у).
Условие (х + у, г) = (х, г) -+- (у, z) также выполняется. Действительно,
для трех векторов х = (лсг, х2), У = {у\\ У2), z = (z\\ г2) имеем:
(х + у, z) = (х, + (/iJ,_= (Х2 + уг)гг,_
(х, г) + (у, г) = xiz, + х&гЛ-У\г\ + у2г2 =
= (хх + y,)z, + (х2 + у?)г2 = (х + у, г).
Условие (be, у) = >-(х, у) выполняется, так как
(be у) = Х*|</| + Ьс2</2 = Цх\у\ + х2у2) = >.(х, у).
Условие (х, х) 5= 0, где равенство достигается только в том случае,
когда х = о, выполнено, так как
(х, х) = Xlx, + х2х2 = |*i|2+ U2|2>0,
причем равенство имеет место тогда и только тогда, когда х\ = х2 = 0,
т. е. х = о.
Таким образом, введенная операция является скалярным умножением
векторов, а рассматриваемое пространство— унитарным.
Так как, согласно определению, |а|2 = (а, а) = а2 = г(—i) + C —
— f)C + i)= 11, то |а| =л[и.
Скалярное произведение (a, b) = iC + i) + C — i){ — 2t)=—3 — 3i.
4.142. Доказать, что в унитарном пространстве имеет
место равенство (х, ку) = К(х, у).
4.143. Является ли унитарным комплексное линейное про-
пространство С, если каждой паре векторов x = ai + Pi/, y =
= о&2 + foi (i =V— 0 поставлено в соответствие число Р1Р2?
4.144. Является ли унитарным комплексное линейное
104
Пространство С, если каждой паре векторов х = at -\-
у«=а2+р2/ поставлено в соответствие число
(а, + р,х)(а2 + hi) = («i«2 + piP2) + (a2Pi - а,р2)*?
4.145. Пусть в комплексном линейном пространстве
комплексных матриц размеров 1Х« паре векторов а =
= [ai a2... aB], b = [Pi р2 -. ря] поставлено в соответствие
число aipi + a2p2 + ••• + aBpn. Является ли данное простран-
пространство с введенной таким образом операцией унитарным?
4.146. Пусть d, е2, ..., е„ — базис я-мерного комплексного
линейного пространства. Является ли данное пространство
унитарным, если каждой паре векторов а = а,е, + а2е2 + ... +
+ а„е„, b = Piei + р2е2 + ... + р„е„ этого пространства
поставлено в соответствие число aipi + a2|32~|- ... + а„р„?
4.147. В унитарном пространстве, рассмотренном в за-
задаче 4.144, найти:
а) длину вектора х = 3 — 4/;
б) скалярное произведение векторов х = 3 + i, у = 4 — 2/.
4.148. В унитарном пространстве, рассмотренном в за-
задаче 4.145, найти:
а) длину вектора [/ 21 Зг ... ш];
б) скалярное произведение векторов а = [/ / ... /],
Ь = [/, 2/ ... nl\.
4.149. В унитарном пространстве, рассмотренном в за-
задаче 4.145, выяснить, являются ли ортогональными векторы
а и Ь, если:
а) а = 1* 2 /], Ь = [/ -1 /];
г б) а = [1 — * 2 t], b = [3 2 — 1 /]■
в) а = [3 + * -1+/ 2|, Ь = [-3-)-5/ 18 11].
4.150. Даны векторы et и е2, образующие ортонорми-
Йованный базис. Найти (а, Ь), если:
'■■ а) а = /е,+(/-1)е2, Ь = B + /)е,+C + /)е2;
б) а = 5е, — C + 4/)е2, b = 3/е, +(г — 2)е2.
;; 4.151. Даны векторы еь е2, образующие ортогональный
базис унитарного пространства. Найти (a, b), |a|, |b|, если:
а) а = е,+D + /)е2, Ь=-2е,+C-1)е2, |е,|=2,
,1*21=3;
: б) а = A+/)е,+B-/)е2, b = A +/)е, + B + 1)е2,
;|e,| = l/V2, Ie2| = l.
4.152. В унитарном пространстве, рассмотренном в за-
задаче 4.145, по данному базису построить ортонормирован-
ный:
а) [1 1 /], [/ 1 1], [/ / /J;
б) \2i 2 /], [0 / 3|, [0 0 5|.
8. Зак. 5115.
5. ЛИНЕЙНЫЕ ОПЕРАТОРЫ
5.1. ОПРЕДЕЛЕНИЕ ЛИНЕЙНОГО ОПЕРАТОРА.
МАТРИЦА ЛИНЕЙНОГО ОПЕРАТОРА. СВЯЗЬ МЕЖДУ
КООРДИНАТАМИ ВЕКТОРА И ЕГО ОБРАЗА
Теоретические вопросы
5.1. Что называется оператором, действующим из ли-
линейного пространства V в линейное пространство W (отобра-
(отображением пространства V в пространство W)?
5.2. Что называется оператором пространства V?
5.3. Что называется образом вектора и прообразом
вектора?
5.4. Какие операторы называются равными?
5.5. Какой оператор называется линейным?
5.6. Какой оператор пространства V называется тожде-
тождественным?
5.7. Что называется матрицей линейного оператора
пространства V в данном базисе?
5.8. Записать формулу для определения в базисе d, e2
еп координат образа вектора х, если известны координаты
вектора х и матрица А оператора в этом базисе.
Задачи и упражнения
5.9. Является ли линейным оператор /: Е2->Ег, если
Vx6E2/(x) = i-3j?
Решение. По определению оператор /: Е2->-Е2 является линейным,
если V xi, х2£Е2 выполняются условия: 1) f(x, +\г) = f(\i) + Кхг)>
2) f(lxl) = lf{x]). В нашем примере f(x,) = i-3j, /(x2) = i-3j, f(x, +
+ x2) = i — 3j. Следовательно, f(xi) + /(x2) = 2i — 6j Ф f(xt + x2). Условие
I не выполняется. Таким образом, данный оператор не является линейным.
5.10. Является ли линейным оператор /: Ег-^Ег, если
известно, чтоУ х 6 Е2 f(x) = (npOvx)j.
Решение. Оператор будет линейным в том случае, если выполняются
условия 1 и 2 (см. задачу 5.9). В нашем примере
! (xi + х2) = (про9(х, + x2))j = (про9х, + npOj,x2)j =
= (про9Х|)} + (npoi,xs)j = /(x>) + f (*2)'
!(i.x) = (npOi,X.x)j = Цпро,хI = X/(x). ,
Таким образом, данный оператор является линейным.
106
I-. 5.11. Найти матрицу оператора /: R3-»-R3 в базисе et = .
= A; 0; 0), е2 = @; 1; 0), е3 = @; 0; 1), если известно, что
:тот оператор переводит всякий вектор x = (oci; a2; а3) в
зектор у = Cа,; аг + а3; —а3).
Решение. Найдем образы f(ei), /(е2), /(ез) базисных векторов. Со-
Согласно условию задачи, если х = aiei + а2е2 + «звз, то f(x) — 3aiei +
— (а2 + а3)е2— «звз- Следовательно, /(ei) = 3ei, /(е2) = е2, /(ез) = е2 — е3.
'.аписывая координаты образа каждого вектора еь ег, ез соответственно
з столбцы матрицы, получаем
0 0
0 1 1
0 0 —1
Жго матрица оператора / в данном базисе.
5.12. Дана матрица
1-12
2 10
0 0 5
1инейного оператора f в базисе ei, ег, е3. Найти /(х), если
: = 2е,-е2 + 3е3.
Решение. Способ 1. Известно, что координаты образа f(x) и
прообраза х связаны соотношением Y = AX, где Y — столбец из координат
>браза, X — столбец из координат прообраза. В нашем примере
1/1
1/2
Уз
_
1
2
0
-1
1
0
2
0
5
2
— 1
3
=
9
3
15
Таким образом, f(x) = 9ei + Зе2 + 15е3.
Способ 2. Используя определение матрицы оператора f в базисе
еь е2, е3, имеем: Де,) = е, + 2е2, [(е2) = —е,+е2, Де3) = 2ei -f- 5e3. Так
как оператор / линейный, то
f (х) = IBе, - е2 + Зе3) = 2/(е,) - /(е2) + 3f(e3).
Подставляя /(ei), /(e2), /(ез) в последнее равенство, находим
/(х) = 2(е, + 2е2) - (-е, + е2) + 3Bе, + 5е3)
-|ли /(х) = 9е, +3е2+ 15е3.
5.13. Дан линейный оператор./: Е3-^Е3. Каков геометри-
геометрический смысл условий линейности оператора (/(xi+x2) =
/() + К) /(^) ^())?
))
5.14. Может ли линейный оператор перевести пару не-
ненулевых коллинеарных векторов в пару неколлинеарных?
5.15. Является ли линейным каждый из операторов /: R->-
->-R, заданный следующим образом: V a£R
107
a) f(o) = 3a; 6) /(a) = 2*; в) /(a)-2a+ 5;
r) /(a) = a3; д) /(a) = a/5?
5.16. Является ли линейным оператор /, переводящий вся-
всякий вектор x(oci, a г) в вектор у, заданный координатами в том
же базисе, что и вектор х, если:
а) У(а1 + «2, ai — а2); б) y(ai, aia2); в) yBai+3а2) а2);
г) уA, а, + а2); д) у(а?, а|)?
5.17. Является ли линейным оператор /: Е3->-Е3, если
Vx6E3:
а) /(x)=|x|i; б) /(х) = 21 + 3J - к;
в) /(x) = (i, x)x; r) /(x) = (i, x)j;
д) f(x) = (а, х)а, где а — фиксированный вектор этого
пространства;
е) /(х) = [а, х|, где а — фиксированный вектор этого
пространства?
5.18. Установить, является ли линейным оператор f: Е2->
->-Е2, и в случае линейности оператора найти его матрицу
в базисе i, j, если Vx£E2:
а) f(x) = кх, где к — фиксированное вещественное число;
б) /(х) — вектор, симметричный вектору х относительно
оси ординат;
в) f(x) — вектор, симметричный вектору х относительно
начала координат;
г) /(х) = х + а, где а — фиксированный вектор этого
пространства;
д) f(x) — ортогональная проекция вектора х на биссект-
биссектрису первого и третьего координатных углов.
5.19. Является ли линейным оператор /: Rn(x)^-Rn(x),
если
V Я(х) = аохп + щхп -' + ... + а„ f(P(x)) = Р'(х)?
5.20. Является ли линейным оператор /: RnX/i-^Rnxi.
еслиУ А еЯпхп:
а) f(A) = E -\-А, где Е — единичная матрица порядка п;
б) f(A) = aA (a6R);
в) f(A) = A\ г) f(A) = AT;
д) f(A) = АВ, где В — фиксированная квадратная матри-
матрица порядка /г?
5.21. Найти матрицу линейного оператора, переводящего
любой вектор x(ai, a2, а3, а4) в вектор у, заданный коорди-
координатами в том же базисе, что и вектор х, если:
а) yBoci +3a2 — а3 + а4, а2 + а3, а,, а2);
б) у(а2 —а3 + а4, оч + а4, а2 + 2а3 — а4, а3 + а4);
в) y(ai — а4, а2 + а3 + а4, а, — 2а2 + а3, 2ai+a2 —
- 2а3 + За4).
5.22. Найти в базисе i, j, k матрицу линейного оператора
108
If: E3-»-E3, переводящего каждый вектор х в вектор у =
| =[х, aj, если:
a) a = 2i+j —к; б) а= — i + 2j + 3k.
5.23. Найти в ортонормированном базисе еи е2, е3, е4
'матрицу линейного оператора / евклидова пространства, пе-
переводящего каждый вектор х в вектор /(х) = (а, х)а, если:
5.24. Дан оператор /, переводящий каждый вектор х
в вектор /(х) = (прОхх)а, где а — фиксированный вектор
пространства Е3. Доказать, что оператор f является линей-
линейным. Найти матрицу этого оператора в базисе i, j, k, если:
\ a) a = 3i + 2j + к; б) а = i — 3j — 2k.
5.25. Дан линейный оператор /: R2xs->-R2x2, переводя-
переводящий любую матрицу А £ R2x2 в вектор
-1 3
2 4
Найти матрицу этого оператора в базисе
1 о] Го il Го ol Го
О oj' [О 0 |' [] 0J' [о
5.26. Даны координаты вектора х и матрица А линейного
оператора f в базисе et, e2, е3. Найти координаты вектора
;. у = /(х) в этом же базисе, если:
%'■■
а) х = ei, A =
2
2
1
б) хB, -1, 3), А =
в) хA, 1, -1), А =
-2
3
1
О
1
— 1
О
1
1
5.27. Дан линейный оператор f: E2->-E2 с матрицей
ch ф sh i
sh ф ch i
А =
(ф = const,
R)
в базисе i, j. Доказать, что векторы, параллельные прямым
у = х, у=—х, переходят в векторы, параллельные этим
прямым.
109
5.28. В пространстве Е2 даны векторы at и а2. Оператор
/ переводит эти векторы в векторы bt и Ь2 соответственно.
Найти матрицу оператора / в базисе еь е2, если:
а) ai = 2ei—3e2, a2 = ei+4e2, b,=ei, b2 = et — e2;
б) at = d — e2, a2 = ei + &г, bi = 3ei — e2, b2 = 6ei — 2ег-
5.2. ПРЕОБРАЗОВАНИЕ МАТРИЦЫ ЛИНЕЙНОГО ОПЕРАТОРА
ПРИ ПЕРЕХОДЕ К НОВОМУ БАЗИСУ
Теоретические вопросы
5.29. Записать формулу для- нахождения матрицы В
линейного оператора / в базисе е!, е2, ..., е'„, если известны
матрица А линейного оператора f в базисе еь е2, ..., е„ и
матрица Т перехода от базиса ei, e2, ..., е„ к базису е(, е2, ..., е'п.
5.30. Как связаны ранги матриц линейного оператора f
в различных базисах?
5.31. Пусть матрица оператора f в некотором базисе
является невырожденной. Существует ли базис, в котором
матрица этого оператора вырожденная?
Задачи и упражнения
5.32. Даны два базиса d, e2 и е'ь е2 линейного простран-
л Г' -2] s ,
ства и матрица А = оператора / в базисе еь е2.
|1 JJ
Найти матрицу этого оператора в базисе е{, е2, если е( =
= d — е2, е2 = 3d — 4е2.
Решение. Способ 1. Известно, что если А — матрица оператора
f в базисе ei, ег, а 7— матрица перехода от базиса еь ег к базису е[, ei,
то матрица В оператора / в базисе е[, ei находится по формуле В =
__ j- ^АТ. В нашем случае
т Г 1 31
Следовательно,
т-| Г 4 3
T =L
\ аи
_: _
Способ 2. Для того чтобы найти матрицу оператора / в базисе
ei, e2, надо сначала найти образы ДеД /(ег) этих векторов. Используя ли-
линейность оператора, получим:
/(e2) = /(Зе, - 4e2) = 3f (e,) - 4/(e2).
110
I Так как в столбцах матрицы А оператора f в базисе ei, е2 расположены
координаты f(ei), f(e2) в базисе ei, е2, то /(ei) = ei +e2, /(е2) = —2е, + Зег.
Следовательно,
f(e{) = (е, + е2) — ( —2е, + Зе2), /(е£) = 3(е, + е2) - 4(-2е, + Зе2)
или /(е{) = Зе, — 2е2, /(е2) = 11е, — 9е2.
Из системы
! „' 2' > находим ei = 4е[ — е2, е2 = 3е1—е2. Сле-
е2 = Jei — 4е2 J
довательио, f (е[) = 3Dе! - е2) — 2Cе{ - е2), f (е5) = 11 Def - е$) — 9Cе{ -
— е2) или /(е() = 6et — е2, /(е2) = 17ef — 2е2. Таким образом, I „I —
матрица оператора / в базисе е[, ei-
5.33. Даны два базиса ei, е2, ..., еп и ef, t% ..., t'n линей-
линейного пространства и матрица А линейного оператора в базисе
еь ег, ..., ел. Найти матрицу этого оператора в базисе е(,
ег, ..., е'п, если:
а) А =
б) Л =
в) Л =
г) А =
д) Л =
е) А —
ж) А =
-1
1 —1
г = е, —е2;
=3ei — 2е2, е2 = 2е, - е2;
1
0
0
2
1
0
1
0
1
0
1
0
3
2
0
1
3
0
1
1
0
2
1
1
1
2
1
0
0
1
]-
-1
1
2
1
1 "
1
5
0
1
0
1
, el =ei +e2, e'2 = e
= e2 + e3;
, el =ei + 2e2, e2 =
= —e, +e2 — e3;
, el = e, + 2e2,
е'з = 2e3 + 5в4.
;i=e'i— e2, e2 = e2;
' e
1 ■'Cl -f- C2, C2 С) -
е3 =
= 2ei— e2, e3 =
е2 = 3ei + 5e2,
ei = е3 + 2е4;
ill
5.34. В пространстве Ег дан базис е i = i -+- J, ег = i— j
Найти в базисе ei, ег матрицу:
а) оператора симметрии относительно оси Ох;
б) оператора симметрии относительно оси Оу;
в) оператора, ортогонально проектирующего всякий век
тор а этого пространства на ось Ох;
г) оператора, переводящего всякий вектор а этого про
странства в вектор Ха, где X g R и X ф 0;
д) оператора, ортогонально проектирующего всякий век
тор а этого пространства на биссектрису первого и третьей
координатных углов.
5.35. В пространстве Е3 дан базис ei=i+j+k, e2 =
= 2i — 3j -f- k, е,з = —5i + 3j — 2k. Найти в этом базисе мат
рицу оператора, ортогонально проектирующего всяки!
вектор а этого пространства:
а) на плоскость Оху; б) на ось Ох.
5.3. ЯДРО И ОБЛАСТЬ ЗНАЧЕНИЙ ЛИНЕЙНОГО ОПЕРАТОРА
Теоретические вопросы
5.36. Что называется ядром линейного оператора?
5.37. Как обозначается ядро линейного оператора?
5.38. Что называется областью значений (образом) ли
нейного оператора?
5.39. Как обозначается область значений линейного one
ратора?
5.40. Что называется рангом оператора /?
5.41. Что называется дефектом оператора /?
5.42. Пусть А — матрица линейного оператора /: V-+-V
где V — линейное вещественное пространство размерности п
Как найти:
а) ранг г и дефект оператора /;
б) ядро оператора f;
в) область значений оператора /?
Задачи и упражнения
5.43. Найти ядро и область значений линейного опера
тора /: V-*-V, заданного в некотором базисе еь ег, ез мат
рицей
' —1 2 3~
А= 1 1 0
0 3 3
112
; Решение. Ядро оператора — это множество векторов пространства,
которые переводятся оператором в нулевой вектор. Поэтому если х при-
принадлежит ядру, то
-1 2
I I
О 3
з"
0
3
~ Х\~
хг
Хз
—
0
0
= и ■>
где xi, хг, хз — координаты вектора х в базисе ei, ег, ез.
Ранг матрицы полученной однородной системы равен двум. Решив
эту систему, получим х, = — Зс, х% = Зс, х3 = — Зс Vc € R или х\ = —/, Хч =
= l,jj= —t V t £ R. Таким образом, ядро оператора является одномерным
пространством
{(-/, t, -0I V /£R).
Область значений оператора — это множество образов всех век-
векторов данного пространства. Следовательно, если oci, ocj, аз — коорди-
координаты в базисе ei, в2, ез произвольного вектора х g V, pi, p2, рз координаты
его образа в том же базисе, то
-1 2
1 1
0 3
3
0
3
ОС]
0С2
аз
Р.
h
Рз
" — Г
1
0
а,+
1
3
а2 +
'з"
0
3
а3.
' —1"
1
0
+
з"
0
3
=
1
3
1
1
0
з"
0
3
Так как
и столбцы
f
линейно независимы, то область значений оператора / есть пространство
размерности 2. В качестве базиса этого пространства можно взять
векторы е! = — ei + е2, ei = Зе, + Зе3.
5.44. Найти ядро и область значений тождественного
оператора.
5.45. В каком случае ядро линейного оператора / линей-
линейного пространства V состоит только из нулевого вектора?
5.46. Найти ядро и область значений линейного опера-
оператора /: 1/-> V, если V х 6 V /(х) = о.
5.47. В пространстве Ег дан линейный оператор /, орто-
ортогонально проектирующий всякий вектор а этого простран-
пространства на ось Ох. Найти ядро и область значений оператора /.
1;ИЗ
5.48. В пространстве Ез дан линейный оператор /, орто-
ортогонально проектирующий всякий вектор а этого пространства
на плоскость Оху. Найти ядро, область значений, ранг и
дефект оператора /.
5.49. Пусть а — фиксированный ненулевой вектор евкли-
евклидова пространства Ез. Найти ядро, область значений,
ранг и дефект линейного оператора /: Ез->Ез, если Vx (E Ез:
а) Дх) = (х, а)а; б) f(x) = [a, xj.
5.50. Найти ядро, область значений, ранг и дефект ли-
линейного оператора /: V->~V, матрица которого равна А,
если:
А =
в) А =
-1
3
0
2
0
1
4 1 2
8 2 4
12 3 6
б) А =
г) А =
1
3
4
0
0
0
0
0
0
-1
1
0
о'
0
0
2"
-1
1
5.51. Найти ядро, область значений, ранг и дефект
оператора f: Ез-»-Ез, если Vx £ Ез f(x) = kx, где k — фиксиро-
фиксированное вещественное число, k^O.
5.4. ОПЕРАЦИИ НАД ЛИНЕЙНЫМИ ОПЕРАТОРАМИ.
ВЗАИМНО ОБРАТНЫЕ ОПЕРАТОРЫ
Теоретические вопросы
5.52. Что называется суммой двух операторов?
5.53. Является ли сумма двух линейных операторов ли-
линейным оператором?
5.54. Операторы fug заданы в некотором базисе
соответственно матрицами А и В. Чему равна матрица опе-
оператора f-\-g в этом же базисе?
5.55. Что называется произведением двух операторов?
5.56. Является ли произведение двух линейных операторов
линейным оператором?
5.57. Операторы fug заданы в некотором базисе соот-
соответственно матрицами А и В. Чему равна матрица оператора
5.58. Какой линейный оператор называется невырожден-
невырожденным?
5.59. Какой линейный оператор называется вырожден-
вырожденным?
5.60. Какие линейные операторы называются взаимно об-
обратными?
114
5.61. Какой линейный оператор называется обратным
данному линейному оператору?
5.62. Какой линейный оператор имеет обратный?
5.63. Невырожденный оператор / в некотором базисе за-
задан матрицей А. Чему равна в этом же базисе матрица
оператора, обратного оператору f?
Задачи и упражнения
5.64. Оператор / в базисе в|, ег имеет матрицу
_ Г з 11 , ,
А = \ 0 , а оператор g в базисе el = ei — е2, е2 = ei
Lb z J
о \ 1 21 и -
матрицу о= _ . Найти матрицу оператора:
L г 6J
а) / + ё в базисе е\, е£; б) f°g в базисе еь в2.
i Р е ш е н и е. а) Матрица D оператора / + g в базисе е{, ei равна сумме
матриц операторов / и g в этом базисе. Так как оператор / задан матри-
матрицей А в базисе ei, e2, то сначала найдем матрицу С этого оператора в базисе
е(, в2. Формула, выражающая зависимость между матрицами А и С опера-
оператора / соответственно в базисах ei, ег и е(, ег, имеет вид С = Г 'AT, где
Т — матрица перехода от базиса ei, ег к базису е(, ег. Так как е' =в| — ег,
ег = ei + е2, то Т = I . Тогда
I _ .
-' = if1
' Ч-Г-'/2 -3/21
j [ J [-1 lj L 5/2 П/2 J
Таким образом,
2[. .] [5 2J [-
г]+\ ' 2]=Г1/2 >/21
2J ^^ [_ — 2 3] \_\/2 17/2 J
—1/2 -3/2
5/2 11/2
б) Матрица Н оператора jog в базисе ei, ег равна AS, где S — матрица
оператора g в базисе ei, ег. Матрицу S находим по формуле S = Тг ВТ\,
где Т\ — матрица перехода от базиса ei, ег к базису ei, ег. Так как Т\ =
= Т~\ а 7ТТ = Т, то
Следовательно,
115
2[-1 lj [-2 3J [l lj [-1 2j-
.1 Г 2 3] Г5 1.1
2j [-1 2j [8 19 J
5.65. Даны линейные операторы f, g, h. Доказать, что:
a) f + g-g + f; б) (f+g) + h = f + (g+Ky;
в) f°(g + h) = f°g + f°h; г) f°(g°h) = (fog)oh.
5.66. Пусть в пространстве Е2 даны прямые U и /j, пере-
пересекающиеся под углом а, / — оператор симметрии относи-
относительно /i, g — оператор симметрии относительно /2. Доказать,
что f°g — оператор поворота на угол 2а.
5.67. Даны линейные операторы fug соответственно
с матрицами
А =
О
-1
3
4
0
1
2
, в =
— 1
4
2
3
0
3
1
— 1
4
в некотором базисе. Найти в этом же базисе матрицу опе-
оператора:
3) f + g; б) fog; в) g°f.
5;68. Оператор / в базисе ei, е2 имеет матрицу А =
Г 1 2]
= . о Ь а оператор g в базисе е\ = 2ei — е2, ег =
= е, —е2
матрицу В =
-1
4
Найти матрицу опе-
базисе el, e2;
базисе е'\, е2.
ратора:
а) / + Я в базисе ei, е2; б) f-j-g в
в) /°g в базисе ei, e2; r) g°f в
5.69. Пусть в пространстве Е2 / — оператор поворота
на угол а=й=0, g — симметрия относительно оси Оу. Равны
ли между собой операторы f°g и g°f?
5.70. Пусть в пространстве Е2 f — симметрия относитель-
относительно оси Ox, g — симметрия относительно оси Оу, h — сим-
симметрия относительно биссектрисы первого и третьего коорди-
координатных углов, ф — поворот на угол а. По данному вектору а
построить вектор b и найти матрицу указанного оператора в
базисе i, j, если:
a) b = f°g{a); б) b=g°f{a);
в) Ь = /°А(а); г) Ь = £°ф(а);
д) Ь = Ф°£(а); е) b = (<p°#)°f(a).
5.71. Пусть в пространстве Ез / — симметрия относи-
относительно плоскости Оху, h — оператор, ортогонально проек-
проектирующий всякий вектор на плоскость Oyz, g — оператор,
переводящий всякий вектор х в вектор Ъс, где к £ R. В базисе
i, j, k найти матрицу оператора:
a) f°g; б) g°f; в) f°h; г) h°f;
д) g°h; e) f°(g°f)\ ж) (ft°f)°g.
116
5.72. Является ли невырожденным линейный оператор /:
V-+V, если:
а) существует ненулевой вектор х 6 V, для которого
f(x) = o;
б) f°f — l, где / — тождественный оператор;
в) f(x) = o только в том случае, если х = о.
5.73. Является ли невырожденным линейный оператор
/: Ез->Ез, если для фиксированного ненулевого вектора
а£Е3 и V х£Е3:
а) /(х) = [х, а]; б) /(х) = (а, х)а.
5.74. В пространстве Ег найти оператор / , обратный
оператору /, если:
а) / — симметрия относительно оси Ох;
б) / — поворот на угол а.
5.75. Являются ли операторы fug взаимно обратными,
если известно, что fog = /y где / — тождественный опе-
оператор?
5.76. В некотором базисе пространства V задана матрица
А линейного оператора. Выяснить, существует ли оператор,
обратный данному, и если существует, найти его матрицу
в том же базисе, если:
а) Л =
в) А =
1
0
3
2
1
3
-2
0
1
-3
1
-2
5
4
7
3
2
5
; б)
; г)
А =
А =
3
2
1
0
2
0
1
0
0
-1
3
2
4
2
-5
7
4
1
5.5. СОБСТВЕННЫЕ ВЕКТОРЫ. ХАРАКТЕРИСТИЧЕСКОЕ
УРАВНЕНИЕ
Теоретические вопросы
5.77. Что называется собственным вектором и собствен-
собственным значением линейного оператора?
5.78. Что называется характеристическим уравнением
линейного оператора?
5.79. Что называется характеристическим уравнением
матрицы порядка п?
5.80. Что называется характеристическими числами ли-
линейного оператора (матрицы)?
5.81. Что называется спектром линейного оператора?
5.82. Какой спектр оператора называется простым?
5.83. Как найти собственные значения линейного опера-
117
тора, если известна матрица А этого оператора в некотором
базисе?
5.84. Как найти собственные векторы линейного опера-
оператора / вещественного пространства, имеющего в некотором
базисе матрицу Л?
5.85. Пусть k — кратность собственного значения X ли-
линейного оператора, т — максимальное число линейно неза-
независимых собственных векторов с собственным значением к.
Каково соотношение между т и k?
5.86. Пусть X — собственное значение линейного опера-
оператора f гс-мерного пространства V, А — матрица оператора
в некотором базисе. Чему равно максимальное число линейно
независимых собственных векторов оператора / с собствен-
собственным значением X?
Задачи и упражнения
5.87. Найти связь между собственными значениями
взаимно обратных линейных операторов.
Решение. Пусть /' и g - взаимно обратные линейные операторы,
к — собственное значение оператора /, а х — собственный вектор этого
оператора с собственным значением к. Оператор / имеет обратный оператор
g, поэтому / — невырожденный и кФО.
Так как fug — взаимно обратные операторы, то gf(\) = x. С другой
стороны, gf(x) = g(/(x)) = g(Xx) = kg(x). Из этих равенств следует, что
kg(x) — х, хфо, откуда g(x)=— х, хфо. Следовательно, х — собствен-
А.
ный вектор оператора g с собственным значением \/к. Таким образом,
собственные значения взаимно обратных операторов взаимно обратны.
5.88. Найти собственные векторы линейного оператора
f вещественного пространства, если в некотором базисе
он задан матрицей
2
1
-3
0
1
0
3
1
4
Решение. Найдем сначала собственные значения оператора /.
Характеристическое уравнение имеет вид
2-Я. О 3
1 1-Я. I
-3 О 4-
= 0
или A—к)(к2 — 6Л. + 17) = 0. Корнями этого уравнения являются kt = 1,
к?. з = 3 ± 2"у2/. Так как пространство вещественное, то только вещест-
вещественный корень К\ = 1 является собственным значением. Обозначим через
118
Xi, X2, x3 координаты собственного вектора х с собственным значением
X = 1. Тогда
2- 1
1
-3
0
1 — 1
0
4
3
1
— 1
X\ 1
l
0
0
о
или
*1 -
*l -
-3*,-
1-3*3 =
- *з =
- 3*з =
°1
0 г
-0.)
Решив эту систему, получим х\ = х3 = 0, *2 = с Ус £ R.
Таким образом, {@, с, 0) V с £ R, с Ф 0}—множество собственных
векторов данного оператора.
5.89. Дать геометрическую интерпретацию собственного
вектора линейного оператора /: Ез->-Е3.
5.90. Найти собственные векторы и собственные значения
линейного оператора /: Ег-^-Ег, если
а) / — симметрия относительно оси Ох;
б) / — симметрия относительно оси Оу;
в) f — оператор подобия (/(х) = kx);
г) f — оператор, ортогонально проектирующий v x g Ег
на ось Ох.
5.91. Пусть х — собственный вектор линейных опера-
операторов / и g с собственными значениями соответственно к]
и ^2- Доказать, что х является собственным вектором опера-
операторов fog и / -f- g с собственными значениями соответст-
соответственно к\%2 И А.| + А,2.
5.92. Пусть xi, X2 — неколлинеарные собственные векто-
векторы линейного оператора / с собственными значениями со-
соответственно к] и А,2 (куфкъ). Является ли вектор Xi + хг
собственным вектором оператора /?
5.93. В некотором базисе пространства заданы векторы
Xi, X2, хз и матрица А оператора f. Пользуясь определением,
установить, какие из данных векторов являются собствен-
собственными векторами оператора /, и найти их собственные значе-
значения, если:
a) A =
б) А =
в) А =
3
3
3
0
0
]•
11
5
1
x,-
7
-4
1
1
.з]
, x.
, X2 =
=
3
0
0
[3
[if*
, X2 =
5
0
0
9
3
2
7'
-2
-1
, X| =
— 4"
1
1
X2 =
X3 =
0
-2
0
0
0
Хз =
1
0
-1
0
0
2
5.94. Найти характеристическое уравнение и спектр ли-
линейного оператора, заданного матрицей А в некотором ба-
базисе, если:
119
a)
в)
д)
ж)
д
А =
А =
А =
1
~2
0
2
4
0
0
— 2'
4
I 0
0 0
-7 3
1 5
4 2
0 5
»
"—3 2 С
-2
15 —7 '
0 С
с
) if"
) 0
1 0
) 4
б)
г)
е)
; з)
А =
А =
А =
А =
о
о
1
0
1
0
1
5
1
0
1 1
3
— 2
2
0
2
0
0
9
2 -
5
-1
0
0
1
0
19
— 5
2
0
1
0
0
0
-2
4
5
о"
30
12
5
о"
12
3
6
5.95. Найти собственные значения линейного оператора
вещественного линейного пространства, заданного матрицей
А в некотором базисе, если:
а) А =
в) А =
5.96. Доказать, что матрицы А и Ат имеют одинаковые
собственные значения.
5.97. Пусть А,1 и А,2 — характеристические числа линей-
линейного оператора, заданного матрицей
0
з
1
0
0
0
0
2
3 •
oj'
0
2
0
б)
г)
А =
А =
2
1
3
0
0
4
1
3
\]
2
3
1
\_а2[ а2г J
в некотором базисе. Доказать, что а\\ -\-а<ц = Х\ + ta.
5.98. Пусть Х\, А,2, А,3 — характеристические числа ли-
линейного оператора, заданного матрицей
аи п[2 а,3
А = а2| Й22 «23
#31 Й32 #33
в некотором базисе. Доказать, что ац +а2г + азз
120
5.99. Доказать, что определитель матрицы равен произ-
произведению ее характеристических чисел.
5.100. Может ли невырожденный линейный оператор
иметь собственное значение, равное нулю?
5.101. Доказать, что если к является собственным зна-
значением матрицы А, то к — \i — собственное значение матри-
матрицы А — \iE.
5.102. Доказать, что если к ф 0 является собственным
значением матрицы Л, то \/к — собственное значение матри-
матрицы Л.
5.103. Пусть А = \а Ь.\, где с ^= 0 и Л к В (т Ф
S] - г
=^= 0). Доказать, что спектры матриц А и В различны.
5.104. Найти матрицу А, если известны ее собственные
значения к] и к2 и соответствующие им собственные векторы
X] и х2:
а) к] =3, А,2 = 1, xi =
б) к] = 1, к2 = —5, X] =
5.105. Найти собственные векторы линейного оператора,
заданного в некотором базисе матрицей А, если:
А =
в) А =
Д) А =
2 1
0 2
2
0
0
4
7
3
19
-5
2
0
-2
0
30
-12
5
9
6
;
б) А =
г) А =
е) А =
3 -1
2 0
-3 2
-2 1
15 -7
4 -1 -1
1 2 -1
1 -1 2
5.106. Найти собственные векторы линейного оператора
/, если:
a)fte,)=-e,, f(e2) = -2е, +4е2 + 5е3, /(е3)=12е, +
+ Зе2 + 6е3;
б) /(е,) = 5е, - Зе2 + 12е3, f(e2) = -7е, + е2 + 6е3, /(е3) =
= -Зе3;
в) /(е,) = е,, /(е2) = 8е, + 5е2 + Зе3, /(е3) = 23е, + 7
121
5.6. ДИАГОНАЛИЗИРУЕМОСТЬ ЛИНЕЙНОГО ОПЕРАТОРА
Теоретические вопросы
5.107. Каковы необходимые и достаточные условия того,
чтобы в пространстве V размерности п существовал базис,
состоящий из собственных векторов линейного оператора /?
5.108. В каком случае линейный оператор называется
оператором простой структуры?
5.109. Пусть eb ег, ..., е„ — базис пространства V, со-
состоящий из собственных векторов линейного оператора /.
Записать матрицу А оператора / в этом базисе.
5.110. Какой оператор называется диагонализируемым?
5.111. Какая матрица называется диагонализируемой
в комплексном пространстве?
5.112. Какая матрица называется диагонализируемой в
вещественном пространстве?
5.113. Какая матрица называется матрицей, диагонали-
зирующей матрицу А?
5.114. Каковы необходимые и достаточные условия диаго-
нализируемости матрицы (оператора)?
5.115. Как найти матрицу Т, диагонализирующую матри-
матрицу А?
Задачи и упражнения
5.116. Линейный оператор вещественного пространства
в некотором базисе задан матрицей
-10 54 36
А = 0—1 0
— 3 18 11
Показать, что данный оператор диагонализируем. Найти
матрицу Т, диагонализирующую матрицу А.
Решение. Известно, что оператор линейного пространства диаго-
диагонализируем, если выполняются следующие условия: все его характеристи-
характеристические числа вещественные и кратность /л, каждого корня Xi совпадает
с числом п — Га-ке, где п — порядок матрицы А; гА_к£— ранг матрицы
А — XiE. Решив характеристическое уравнение
54
—10 — К
0
-3
18
36
0
и_к
= 0,
получим характеристические числа Х[ = —1, Х2 = 2, кратность которых
равна соответственно mi =2, /л2 = 1. Таким образом, все характеристиче-
характеристические числа — вещественные. Так как ранг матрицы
"-9 54
А — Х{Е = А —(—!)£ =
0 0
— 3 18
36
0
12
122
равен единице, то п — r/4_Xi£=3—1=2 и т\ = п — rA_kiE. Легко уие-
диться в том, что и гп2 = п — гА_иЕ. Таким образом, данный оператор
диагонализируем.
Матрица Т, диагонализирующая матрицу А, в данном случае есть
матрица третьего порядка, столбцами которой являются координаты трех
линейно независимых собственных векторов матрицы А.
Координаты аь а2, аз собственных векторов с собственным значением
к\ = — 1 находим из системы
=°л
= 0.)
Имеем
— 9ai + 54a2 + 36a3
Oai -+- Oa2 -+- Оаз
— octi —r~ 1 oct2 —r~ 1*«ссз
= 6a2 + 4аз. Таким образом,
{Fs+ 4/, s, t) Ms, te R, \s\ + \t\ Ф0]
есть множество собственных векторов с собственным значением ki = —1.
Координаты Pi, p2, Рз собственных векторов с собственным значением
к2 = 2 находим из системы
— 12Pi + 54 р2 + Збр3 = О,
— зр2 = о,
-Зр, + 18р2+ 9рз = 0.
Имеем р2 = 0, pi = ЗРз. Таким образом,
((Зр, о, р) v р е R, р ф о)
есть множество собственных векторов с собственным значением Х2 = 2.
Положив s = 0, /=1, затем s=l, <=^0 и р=1, получим линейно неза-
независимые собственные векторы D, 0, 1), F, 1,0), C, 0, 1). Следовательно,
Т =
5.117. Доказать, что линейный оператор диагонализируем
тогда и только тогда, когда он является оператором простой
структуры.
5.118. Чему равно максимальное число линейно незави-
независимых собственных векторов линейного оператора /, задан-
заданного в некотором базисе матрицей А, если:
4
0
1
6
1
0
3
0
1
а) А =
в) А =
i >
;Д) А =
1 -
1
1
— 1
3
-2
0
0
0
-1
3
0
1
0
0
1
0
0
0
2
1
J
0
0
1
0
0
0
0
3
б)
г)
;е)
А =
А =
А =
2
0
5
0
0
3
0
0
0
0
-3
1
5
0
1
3
0
0
0
1
5
;
0
0
-5
0
0
0
1
-5
123
5.119. Выяснить, приводится ли в вещественном прос
ранстве матрица к диагональному виду (в случае привода
мости записать диагональный вид матрицы с точностью д(
расположения диагональных элементов):
., ■
б)
3
10
е)
1 -1 -1
1 -1 -1
1 -1 -1
0 1 -1
1 0 -1
2 -1 -1
д)
3
0
0
*
5
3
0
ж)
1
5
3
2
0
0
3
;
0
0
0
0
0
0
0
0
0
0
0
2
з)
1 -1 -1
1 —1
1 —1
1 -1 -1
1
и)
1 -3 3
-2 -6 13
-1 -4 8
5.120. В некотором базисе еь ег, ..., е„ линейный опера
тор / задан матрицей А. В вещественном линейном простран-
пространстве найти базис, в котором матрица оператора f имее~
диагональный вид, если:
а) А =
в) А =
Д) А =
ж) А =
1
J
2 0 2
0 4 0
2 0 2
7 0
10 -19
12 -24
— 1 1
1 —1
1 -1
1 -1
б) А =
г) A =
2 4 6
4 2 6
—4 —4 —8
o"
10
13
1
-1
— 1
-1
; e) A =
1
— 1
j
-1
;з) А =
5 6
-1 0
1 2
-1 1
1 —1
0 0
0 0
3
1
— 1
0 0
0
-1
0
1
1 —1
124
5.121. Найти матрицу Т, диагонализирующую данную
матрицу А, и записать соответствующую диагональную
матрицу, если:
4l б)Л=Л6 2
а) А =
в) А =
д) А =
ж) А =
4 1
4
2
0
1
2
2
-2
3
-2
-2
-1
2
о"
-2
2
-3
-3
4
2
0
0
0
0
2
0
0
-3
2
-1
2
-3
2
-3
4
г) Л =
А =
2 3
-9
0
-3
5
6
6
54
0
18
-6
— 7
-6
36
0
12
2
2
1
5.7. ОРТОГОНАЛЬНЫЕ МАТРИЦЫ. ОРТОГОНАЛЬНЫЙ ОПЕРАТОР
Теоретические вопросы
5.122. Какая вещественная матрица называется ортого-
ортогональной?
5.123. Каково необходимое и достаточное условие орто-
ортогональности матрицы А?
5.124. Чему равен определитель ортогональной матрицы?
5.125. Может ли вырожденная матрица быть ортого-
ортогональной?
5.126. Пусть А и В — ортогональные матрицы одинако-
одинакового порядка. Является ли матрица АВ ортогональной?
I 5.127. Пусть А — ортогональная матрица. Является ли
ортогональной матрица:
Ф а) Ат; б) Л?
* 5.128. Является ли ортогональной матрица перехода от
||)дного ортонормированного базиса к другому ортонормиро-
г$анному?
; 5.129. Какой линейный оператор называется ортогональ-
ортогональным?
-1 5.130. Каково необходимое и достаточное условие орто-
ортогональности оператора?
; 5.131. Перечислить основные свойства ортогональных
•операторов.
S 125
Задачи и упраждения
5.132. Выяснить, является ли ортогональным оператор
/: Ез-»-Ез, заданный в некотором ортонормированном базисе
матрицей
1/д/б 2/л/5 -
-2/д/б 1/V5 2/д/зо
1/л/б 0
5/д/зо
Решение. Оператор является ортогональным тогда и только тогда,
когда в некотором ортонормированном базисе его матрица ортогональна,
т. е. выполняются условия
Z
O, i
Так как
з
I
W 4-
6 V5
л/б/ V5 Л/6
■^ л/б v V3(v v л/б7 V30 л/б
У at2at3 = 2 / | \ 1 2
= 0,
fe^ 1
3
+
'30
1 1
3
Z2 2 11,
ак2ак2 = -—+=l,
V5 V5 V5 V5
+
V5 V5 V5 V5
,
_
л/зо
то оператор является ортогональным.
5.133. Выяснить, является ли ортогональным оператор
симметрии относительно плоскости Oyz в пространстве сво-
свободных векторов.
Решение. Ясно, что оператор симметрии сохраняет длину. Но вся-
всякий оператор, сохраняющий длину, является ортогональным. Таким образом,
данный оператор является ортогональным.
126
5.134. Выяснить, является ли матрица А ортогональной,
и если является, то найти обратную ей:
a) A
в) А
г) А
д) А
e) A
5.135
—
=
=
1 А'
-2 2
ЛЙГ
0
L2/V5"
1 0
0 -1
1 0
2/У1з~
0
з/УТз"
1/V3
1/V3
_1/л/з
2/Ve
-1Л/б
-l/Ve
-Г
0
1
;
0 -3/
1
0 2/
1/>/2
— 1/V2
0
б)
л =
2/д/зЬ"
5/д/зЬ"
-1/л/зо"
1/д/То^ — з/уТсГ
з/д/То" i/УТо^
;
л/кГ
0
i/л/б"
-2/д/б
. Какому условию должны удовлетворять а и
была ортогональ-
(а, P6R), чтобы матрица А =
ной? Н LP а.
5.136. Выяснить, является ли ортогональным оператор
/: E2-vE2, если
а) / — симметрия относительно оси Оу\
б) f — оператор, переводящий всякий вектор х в вектор
кх, где к g R, к Ф 0;
в) / — поворот на угол а;
г) f — 8°h, где g — симметрия относительно оси Ox, h —
поворот на угол а.
5.137. В пространстве многочленов R3@ не выше второй
степени скалярное произведение определено равенством
(х, у) = ociPi + а2р2 + азРз, где х = аи2 + а2/-(-аз; y = Pi^2 +
+ р2? + р3. Оператор /: R3@~*-R3@ задан следующим обра-
образом: ](?)=-?, /(/)=—1, f{\) = t (t2, t, 1—базис прост-
пространства R3(t)). Используя определение, доказать, что f явля-
является ортогональным.
5.138. В евклидовом пространстве задан ортогональный
оператор /\ Чему равна длина вектора /(х), если длина векто-
вектора х равна трем?
i 127
5.139. Пусть /: En-vEn и g: Е„^-Е„ — ортогональные
операторы соответственно с матрицами Л и В в некотором
базисе. Чему равен AeiAB?
5.140. Оператор /: Е3-»-Ез в некотором ортонормирован-
ном базисе задан матрицей А. Выяснить, является ли опе-
оператор / ортогональным, если:
а) А =
А =
0 2
1 -1
1 О
2/Ve
б) Л =
\/л[ъ -6/770"
2/7б 3/7™
О
2/
-1
3/
-1/7з о
-1/7з 1/72
1/7б 1/7з i/Тг
5.141. При каких условиях диагональная матрица будет
ортогональной?
5.142. Доказать, что каждое собственное значение орто-
ортогонального оператора по модулю равно единице.
5.143. Будет ли ортогональным оператор /: Е3-»-Ез, если
f(\) = |х, а], где а — фиксированный вектор пространства Ез?
5.8. СОПРЯЖЕННЫЙ И САМОСОПРЯЖЕННЫЙ ОПЕРАТОРЫ
Теоретические вопросы
5.144. Какой оператор называется сопряженным опе-
оператору {?
5.145. Как обозначается оператор, сопряженный опера-
оператору /?
5.146. Какие операторы называются взаимно сопряжен-
сопряженными?
5.147. Как связаны между собой в ортонормированном
базисе матрицы взаимно сопряженных операторов евкли-
евклидова пространства?
5.148. Перечислить основные свойства сопряженногс
оператора евклидова пространства.
5.149. Какой оператор называется самосопряженным
(или симметрическим)?
5.150. Какой вид имеет матрица самосопряженного опе-
оператора евклидова пространства в ортонормированием
базисе?
5.151. Каким условием связаны собственные векторь
самосопряженного оператора евклидова пространства, со-
соответствующие различным собственным значениям?
128
5.152. Может ли комплексное число быть характеристи-
характеристическим числом самосопряженного оператора евклидова
пространства?
5.153. Сформулировать теорему о полноте собственных
векторов самосопряженного оператора евклидова прост-
пространства.
5.154. Сформулировать свойства самосопряженного опе-
оператора, следующие из теоремы о полноте собственных векто-
векторов самосопряженного оператора евклидова пространства.
5.155. Является ли симметрическая матрица диагона-
лизируемой в вещественном пространстве?
5.156. Как найти ортогональную матрицу Т, диагона-
лизирующую симметоическую матрицу А?
Задачи и упражнения
5.157. Найти ортогональную матрицу Т, диагонализи-
рующую симметрическую матрицу
3-1 1
А= -1 5 -1
1 -1 3
Решение. Известно, что ортогональная матрица Т, диагонализи-
руюшая симметрическую матрицу А третьего порядка, имеет следующее
строение: в столбцах ее расположены координаты трех ортонормированных
собственных столбцов матрицы А. Решив уравнение
3-Х -1 1
— 1 5 — X —1 =0,
1 -1 3-Х
получим Я.1 = 2, ta = 3, Х3 = 6. Координаты ai, аг, аз собственного столбца
матрицы А с собственным значением Xi = 2 находятся из системы
1 -1 1] Г«,1 Го
-1 3 -1 a2 = 0
1-1 1а, 0
или
ai — (*2 + аз = 0, ~|
— ai + За2 — а3 = 0, >
ai — а2 + а3 = 0. )
Решив эту систему, получим а3 =
0
— к
(Vai 6 R), а2 = 0. Следовательно,
V k e R, к Ф О,
,есть собственный столбец матрицы А с собственным значением Х\ = 2.
9. Зак.5115 129
Аналогично находим собственные столбцы
Vmg R,
О, Х3 =
-2/
/
v i e r,
с собственными значениями соответственно к2 = 3 и Я,3 = 6.
Ь Л2, Хз»
1/Л/2"
0
получаем
1/л/з"
1/V6
-2/Ve
Следовательно,
О 1/V3~ -2/л/б"
5.158. Пусть /: Е„^-Е„ и g: Е„^-Е„ — линейные опера-
операторы. Доказать справедливость следующих равенств:
а) (/ + 8)* = /* + g*; б) (а/)* = а/* (а Е R);
в) (/*) =(/" )*. гДе / — невырожденный оператор.
5.159. Пусть /: Е„-^Е„ и g: Е„^-Еп — линейные опера-
операторы. Доказать, что если fog = go[t то и f*°g* = g*of*.
5.160. Пусть /: E|-*Ei — линейный оператор. Найти
сопряженный с ним оператор /*.
5.161. Оператор /: Е„-»-Еп имеет в некотором ортонор-
мированном базисе матрицу А. Найти матрицу сопряжен-
сопряженного оператора в том же базисе, если:
2
4
0
3
1
-з!
— 1
4
0
; б) а =
2
-5
-3
-13 2
0 1 4
3 -1 -2
а) А =
в) А =
5.162. Пусть \: Е2-*-Е2 — оператор поворота на угол а.
Найти сопряженный с ним оператор /*.
5.163. Оператор /: Е„->-Еп имеет в некотором ортонор-
ортонормированием базисе матрицу А. Выяснить, является ли опе-
оператор / самосопряженным, если:
а) А =
2 -1
1 3
б) А =
3 1
4 -1
1 -1
130
1
-1
1
— 1
2
-2
1
2
3
; г)
А =
0
2
-4
2
— 1
1
— 4
1
3
в) А =
5.164. При каком значении а оператор, заданный матри-
матрицей А в некотором ортонормированном базисе, является
одновременно ортогональным и самосопряженным, если:
а) А =
1/V2 а
1/V2 -1Д/2
б) А =
1Д/5 2/д/б'
5.165. Пусть /: Е2->Е2— оператор проектирования на
ось Ох. Доказать, что / . самосопряженный оператор.
5.166. Пусть /: Е3->Ез — оператор проектирования на
плоскость Оху. Доказать, что / — самосопряженный опе-
оператор.
5.167. Пусть х — собственный вектор с собственным
значением К\ оператора /: Е„->Е„, у — собственный вектор
с собственным значением к2 (Х\ ф к2) оператора /*. Доказать,
что векторы х и у ортогональны.
5.168. Линейный оператор /: Е„->Е„ в некотором орто-
ортонормированном базисе ei, e2, ..., е„ имеет матрицу А. Найти
матрицу сопряженного оператора f* в ортонормированном
базисе е(, е2, ..., е'п, если:
а) А =
3 1
4 2
е,=
:в| —
л/2
—^
л/2
б) А =
1 -2
-Le,+_ ?2,
Л/5 Л/5
Л/5
Л/5
в) А =
-10 0
0 1 1
0 2 1
е( =
= _L(-e,+e2), e5 = -L(-ei -e2 + 2e3).
Л/2 Л/6
5.169. Найти ортогональную матрицу, диагонализирую-
щую симметрическую матрицу А, и записать диагональный
вид этой матрицы, если:
131
a)
г.)
e)
A =
A =
A =
1
1
1
1
1
0
1
1
1
5
1
1
4
2
1"
1
5
0'
2
0
Д) A =
ж) /4 =
V
4
1
-2
0
J; .,
-2
1
0
A =
O"
0
4
3 0 2
0 5 0
2 0 3
3 1
1 3
6. КВАДРАТИЧНЫЕ ФОРМЫ И ИХ ПРИМЕНЕНИЯ
в.1. ОПРЕДЕЛЕНИЕ И МАТРИЧНАЯ ЗАПИСЬ
КВАДРАТИЧНОЙ ФОРМЫ
Теоретические вопросы
6.1. Что называется квадратичной формой п перемен-
переменных Х\, Х2, ..., хп? Что называется коэффициентом квадра-
квадратичной формы?
6.2. Какая квадратичная форма называется веществен-
вещественной?
6.3. Что называется матрицей квадратичной формы?
6.4. Что называется рангом квадратичной формы?
6.5. Какая квадратичная форма называется невырож-
невырожденной?
6.6. Как записать квадратичную форму п переменных
Х\, Х2, .... хп в матричном виде?
6.7. Что представляет собой L(x\, Xi, ■■-, хп) — квадра-
квадратичная форма переменных х\, Хч, ..-, хп, если рассматривать
Х\, Хч, ..., хп как координаты вектора х в ортонормирован-
ном базисе, а матрицу А — как матрицу самосопряженного
оператора / в том же базисе? Что называется матрицей
квадратичной формы в базисе?
Задачи и упражнения
6.8. Дана матрица
^2-1 О"
А =
-13 5
О 5-2
квадратичной формы L(x\, x2, х3). Записать эту квадратич-
квадратичную форму в виде
3 3
i-l ;=1
Решение. Так как аи =2, а2г = 3, а3з = — 2, ai2 = e»i=—1,
fli3 = аз1 = 0> а2з = аз2= •*• то
Цх\, хг, х3) = 2х\ + 3x1 — 2x1 — 2х\Хг + \йхгхъ.
6.9. Записать матрицу квадратичной формы L(x\, Jt2, ■■■,
Хп), если:
133
а) L(x\, X2) = 2x?— xI
б) L(x\, x2) = x?+ 3x1 —x,x2;
в) L{x\, x2) = xf — 2x1; r) L{x\, хг) =
д) L(x,, x2, x3) = x? — 2x1 + xi — 6x,x3;
е) L{xu x2, x3) = 4xf + xl — 2х2хз;
ж) L(xb x2, x3) = 3x'i — xi + 5xf;
з) L(xb x2, x3) = xix2 —2xtx3;
и) L(x\, х2, хз, х4) = х! — 2х| + Зх4 + 4xix2 — 2х3х4;
к) L(xi, х2, хз, х4) = Зх? + xl — xl + 2х4 — х,х4.
6.10. Найти ранг квадратичной формы L(x\, х2, ..., хп]
если:
а) L(xb x2) = x? + 4xl + 4xix2;
б) L{x\, х2) = х? + 2х| — 6х,х2;
в) L{x\, х2, Хз) = xf — 2x1 — Зхз + 4xix2 + 6xix3 + 2х2х3
г) L{x\, х2, Хз) = 2xf — 3x1 — Зхз — 2xix2 + 2xix3 — 8х2х3
д) L(xb х2) хз, х4) = 2х? — xl + 3x1 + xi
6.11. Записать квадратичную форму L{x\, x2, ..., х„) :
матричном виде, если:
а) Цх\, х2) = 3х? + 2x1 — 6х,х2;
б) L{x\, x2) = xl + 3xix2; в) L{x\, х2) = 2x1 — х\\
г) Цхи х2, х3) = х? — Зх! + Хз — 4х2х3;
д) L(x,, х2, хз) = 5х? + 2xix3 — х2х3;
е) L(xu x2, x3) = xix2 + 3xix3 — 2х2х3.
6.12. Записать квадратичную форму L(x\, Хг, ..., х„) в вид
п п
2 2 ai;X,Xj по заданной матрице А, если:
а)
в)
д)
А =
А =
А =
—
—
"о
5
0
1
2
2
2
0
.1
-2
1
— 1
5 0"
-3 0
0 0
о"
— 1
0
*
б)
; г)
е)
А =
А =
А =
0
1
"з
0
2
'_
0
-2
1
1 3
3 0
0 4
1 0
2
1
1
0
4
2
5
1
0
5
0
134
6.2. ПРИВЕДЕНИЕ КВАДРАТИЧНОЙ ФОРМЫ
К КАНОНИЧЕСКОМУ ВИДУ
Теоретические вопросы
6.13. Какая квадратичная форма называется канони-
канонической (имеет канонический вид)?
6.14. Какой вид имеет матрица канонической квадра-
квадратичной формы?
6.15. В каком случае говорят, что квадратичная форма
приводится к каноническому виду?
6.16. Всякая ли квадратичная форма приводится к ка-
каноническому виду?
6.17. Как найти ортогональную матрицу, приводящую
квадратичную форму к каноническому виду?
6.18. Чему равны коэффициенты канонической квадра-
п
тичной формы 2 biyf, к которой приводится данная квад-
1 = 1
п п
ратичная форма 2 2 cUjXiXj с помощью ортогональной
i=i/=i
матрицы?
6.19. В чем суть метода Лагранжа приведения квадра-
квадратичной формы к каноническому виду?
6.20. Какие миноры называются главными угловыми ми-
минорами матрицы?
6.21. В каком случае применим метод Якоби приведения
квадратичной формы к каноническому виду?
6.22. Какой вид имеет невырожденное преобразование
(оператор), приводящее методом Якоби к каноническому
виду квадратичную форму, главные угловые миноры матри-
матрицы А которой отличны от нуля?
6.23. Как определяются коэффициенты канонической
П
квадратичной формы 2 fyi/f.K которой приводится методом
Якоби данная квадратичная форма 2 2 CUjXiXj?
(=1 ; = 1
6.24. Единственным ли образом определяется канони-
канонический вид для данной квадратичной формы?
6.25. В чем заключается закон инерции квадратичных
форм?
135
Задачи и упражнения
6.26. Найти ортогональную матрицу, приводящую к ка-
каноническому виду квадратичную форму х'\— 2хг-\- Ьх\Х%
и записать канонический вид квадратичной формы.
Решение. Матрица данной квадратичной формы
Решив характеристическое уравнение
= 0,
I -Л 2
2 -2-Х
получим Х| = 2, Хг = —3. Следовательно, канонический вид данной квадра-
квадратичной формы 2yi — 3i/|.
Столбцами ортогональной матрицы, приводящей квадратичную форму
к каноническому виду, являются ортонормированные собственные вектор-
столбцы матрицы А.
Сначала находим нормированный собственный вектор-столбец матри-
матрицы А с собственным значением Х\ = 2. Для этого составляем систему
-а,
2<*|
[2 Л
V / 6 R, / Ф 0,
является собственным вектор-столбцом матрицы А. Столбец I пг
Ll/yoJ
является нормированным собственным вектор-столбцом матрицы А.
Координаты fii и (Ь собственного вектор-столбца матрицы А с собст-
собственным значением Лг = —3 найдем из системы
2fJ, + p2 =
решив которую, получим $2 =—2pi. Следовательно, вектор-столбец
Vs£R, s Ф 0, является собственным вектор-столбцом матрицы А.
Вектор-столбец I г\ является нормированным собственным вектор-
столбцом матрицы А. Следовательно, искомая матрица
Г2Д/5 1/V51
L1/V5 -УШ
6.27. Изменится ли ранг квадратичной формы при не-
невырожденном линейном преобразовании?
6.28. Всякую ли квадратичную форму можно привести
к каноническому виду методом Лагранжа?
6.29. Найти ортогональное преобразование, приводящее
к каноническому виду квадратичную форму L(x\, x2, ..., хп),
136
и записать соответствующий канонический вид квадратич-
квадратичной формы, если:
а) Цхи *2) = 2*? + 2*i + 2jf,jf2;
б) Цхи х2) = х\
в) L(xi, x2) =
г) L(xi, х2, хз) = Зх\ + 3x1 —
д) L(xu х2, хз) = 7х2 + 1х\ + 7x1 + 2ххх2 + 2х\хъ + 2х2х3;
е) L{xi, x2, Хз) =
ж) L(xu x2,
6.30. Привести квадратичную форму L(x\, x2, ..., х„) к
каноническому виду методом Лагранжа и записать соот-
соответствующее преобразование, если:
а) L(x\, X2) = x2i+
б) L{xu x2, хз) =
в) L(xu х2, х3) — 4х'( -\- 2х2 + '4x1 — Ах\х2 —
г) L(xi, x2, Хз) = х2 — Ахз —
д) L(xu x2, хз) = х2-\-Хз
е) L(xi, x2, хз) = Х\Х2 —
6.31. Привести квадратичную форму L{x\, x2, ■■-, хп) к
каноническому виду методом Якоби и записать соответст-
соответствующее преобразование, если:
а) Цх\, х2, Хз) = Х\—х2-\-Зхз + 4х\Х2-\-2х2Хз\
б) L(xi, х2, хз) = 2х\ + х\ + б*! — 2х\Х2\
в) L(X\, х2, хз) = 2х2 — x2i + Л + Sxix2 — 2х2хъ.
6.32. Привести квадратичную форму L{x\, x2, ..., х„) к
каноническому виду: 1) с помощью ортогонального преоб-
преобразования; 2) методом Лагранжа; 3) методом Якоби (если
этот метод применим), и записать соответствующее пре-
преобразование, если:
а) L(xi, x2) = x2 + x2
б) L(xx, x2) = ?>x2 — 4х\ — [
в) Цхи jc2, хз) = х\ + 2х\ + 2х\ + 2х2х3.
6.33. Как можно определить число k ненулевых коэф-
коэффициентов в канонической квадратичной форме, к которой
приводится квадратичная форма
П п
Цх\, х2, ..., хп) = Ъ HaijXiXj,
не находя канонической квадратичной формы?
6.34. Пусть квадратичная форма
п п
ЦХ\, Х2, ..., Х„) = 2 2 CLijXjXj
10. Зак. 5115. 137
приводится к квадратичной форме
п п
уз, ••- ул) = 2 2
с помощью ортогонального преобразования. Доказать, что
det A = det В, где А = (а,;), В = (б,,).
6.3. УПРОЩЕНИЕ УРАВНЕНИЙ ФИГУР ВТОРОГО ПОРЯДКА
НА ПЛОСКОСТИ
Теоретические вопросы
6.35. Записать общее уравнение фигуры второго порядка
на плоскости.
6.36. Записать общее уравнение ах2 + Ьху -+- су2 -\-dx-\-
+ £t/ + f = O в матричном виде.
6.37. Что называется квадратичной формой, соответст-
соответствующей уравнению ах2 -+- Ьху -\- су2 -\- dx + gy + / = 0? За-
Записать матрицу А этой квадратичной формы.
6.38. Пусть в системе координат @; i, j) фигура задана
уравнением ах2 + Ьху + су2 + dx -\- gy -f- / = 0 или
1. Как найти такой ортонормированный базис i', j', чтобы
квадратичная форма, соответствующая уравнению данной
фигуры в системе координат @; V, j'), имела канонический
вид?
2. Записать соответствующий канонический вид квад-
квадратичной формы.
3. Записать уравнение данной фигуры в системе коор-
координат @; V, У).
6.39. При каком условии уравнение ах2 -\- Ьху + су2 -\-
+ dx -\- gy -\- f = 0 определяет фигуру:
а) эллиптического типа; б) гиперболического типа;
в) параболического типа?
Задачи и упражнения
6.40. Привести к каноническому виду уравнение
5х2 + бху + Ьу2 - 16* - 16«/ + 16 = 0.
Решение. Квадратичная форма L(x, у) — 5х2 + бху + 5i/2, соответ-
соответствующая данному уравнению, имеет матрицу
Г5 31
|з
138
-Г5
L3
Чтобы найти матрицу Г ортогонального оператора, приводящего квад-
квадратичную форму L(x, у) к каноническому виду, найдем ортонормированные
собственные вектор-столбцы матрицы А.
Корнями характеристического уравнения
\5~Х 3 =0
| 3 5-Х
матрицы А будут Xt = 8, Х2 = 2.
Сначала найдем нормированный собственный вектор-столбец матрицы
А с собственным значением Xi = 8. Для этого составим систему
— Зои -|- 3<х2 = 0Л
За, — Зсс2=0,/
из которой найдем а.\ = <х2. Следовательно, столбец
V/6R. 1Ф0,
является собственным столбцом матрицы А. Столбец I г\ — норми-
нормированный собственный столбец матрицы А.
Координаты р\ и рг собственного вектор-столбца матрицы А с соб-
собственным значением Х2 = 2 найдем из системы
= ол
= 0./
Решив ее, получим Pi = — fJ2. Следовательно, столбец
V s 6 R, вфО,
Г/лЛ
является собственным столбцом матрицы А. Столбец /— — норми
j
рованныи собственный столбец матрицы А.
Ортогональный оператор, приводящий квадратичную форму L{x, y) =
= 5л:2 + Ъху + Ьу* к каноническому виду 8л:' + 2у', имеет матрицу
\}/л]2
Базисными векторами новой системы координат @; Г, j') являются:
д/2 V2 V2 V2
В системе координат @; i', j') уравнение данной фигуры имеет вид
J [y'
Или &х'' + 2у''— 1б1Дл:'— 16ту2~1/Ч- 16 = 0, или 4х''+ у1' —
139
— 8~y2i/' + 8 = 0. Это уравнение можно записать в виде
5> ^
8 + 32 ~
Полученному уравнению, а следовательно, и исходному, соответствует
эллипс.
6.41. Записать данное уравнение второго порядка в
матричном виде и выяснить, фигуру какого типа (эллипти-
(эллиптического, гиперболического, параболического) оно опреде-
определяет:
а) х2 — Зху + 2у2 — Ах + 5 = 0;
б) 4х2+ 4ху + у2 — х + 5у = 0;
в) Зх2 — 2ху + у2 + 2х — у — 1 = 0;
г) 2у2 + ху-Зх + 4у + 3 = 0.
6.42. Фигуру какого типа определяет уравнение ах2+
+ Ьху + су2 + dx + gy + f = 0, где \а\ + \Ь\ + \с\ =^0, если
а) ос<0; б) ас = 0.
6.43. Доказать, что если уравнение ах2 + Ьху + су2 +
+ dx + gy + f — 0, где ос =И= 0, определяет фигуру парабо-
параболического типа, то оно может быть записано в виде (а\Х-\-
2 f
y y
6.44. Построить в системе координат Оху (О; i, j) фигуру,
определяемую данным уравнением, предварительно приведя
его к каноническому виду:
а) Зх2 - 2ху-\-Зу2 - 4х-\- \2у + 10 = 0;
б) х2 + бху + у'2 + 4^2л: + 8л[2у —1=0;
в) 5х2+ 12ху + 3л/\3х — 36 = 0;
г) л:2 — 2ху + у2 + 4х — 4у + 4 = 0;
д) 3x2 + 2-^[2xy + 4y2+-sj6x + 2sj3y-\=0;
е) х2 + 4*«/ + t/2 + 3-\/2х + 3^j2y + 6 = 0;
ж) 9х2-24ху\ 16/- 10л: + 55у = 0;
) /
ж) 9х2-24ху-\- 16/-
з) 7x2 + 48xy —7у2—10л:+10t/ = 0;
и) х2 — 2ху + у2 + 2^[2х +^у = 0;
к) Эх2 —24ху+16у2—15л: + 20у + 6 = 0;
л) 4л:2 — 8 \J8xy + \2у'2 + 4^[бх + 4^31/ — 9 = 0.
6.4. УПРОЩЕНИЕ УРАВНЕНИЙ ФИГУР ВТОРОГО ПОРЯДКА
В ПРОСТРАНСТВЕ
Теоретические вопросы
6.45. Записать общее уравнение фигуры второго порядка
в пространстве.
140
6.46. Записать общее уравнение аих2-\-а^у2-\-а3ъ22-\-
-j- 2ai2xy -f- 2а\ъхг -\- 2a^yz -\- bx -\- су -\- dz -\- f = 0 в матрич-
матричном виде.
6.47. Что называется квадратичной формой, соответст-
соответствующей уравнению аих2 -\-a22y2 -\-a^z2 -\-2а.\2ху -\-2a\?,xz -j-
-\- 2п2зуг -f- Ьх -j- су -+- dz -j- f = 0? Записать матрицу Л этой
квадратичной формы.
6.48. Пусть в системе координат @; i, j, k) фигура зада-
задана уравнением ацх2 -{- а22У2 -f- азз^2 -(- 2ai2xi/ -j- 2ai3xz -j-
-f- bx -j- су -у- fite -f- f = 0 или
Их у
аи
3
а 2з
"зз
■\Ь с d\
1. Как найти такой ортонормированный базис i', j', k',
чтобы квадратичная форма, соответствующая уравнению
данной фигуры в системе координат (О; i', j', k'), имела
канонический вид?
2. Записать соответствующий вид квадратичной формы.
3. Записать уравнение данной фигуры в системе ко-
координат @; i', j', k')-
Задачи и упражнения
6.49. Привести к каноническому виду уравнение 6х2 —
- 2у2 + б25 + 4x2 + 8х — Ау - 82 + 1 = 0.
Решение. Квадратичная форма L{x, у, z) = 6x2 — 2у2 + 6г2 +
+ 4хг, соответствующая данному уравнению, имеет матрицу
А =
6 0
0 —2
2 0
Найдем матрицу Т ортогонального оператора, приводящего квадра-
квадратичную форму L(x, у, г) = 6х2 — 2у2 + 6г2 + 4хг к каноническому виду.
Корнями характеристического уравнения
6-К
0
0 2
-2-Х 0
0 6-Л
= 0
матрицы А являются Я| = 8, А.2 = 4, Хз =—2. Для нахождения собствен-
собственных вектор-столбцов матрицы А с собственным значением Xi = 8 составим
систему
— 2а, + 2а3 = <
— 10а2 = (
2а.— 2а3 = 1
141
решив которую, получим собственный вектор-столбец
У
о
/
Вектор-столбец
1/V2"
является нормированным собственным
вектор-столбцом матрицы А.
Аналогично находим нормированные собственные вектор-столбцы
1/-\/2~
0
-I/V?
"о
1
0
матрицы А с собственными значениями соответственно Кз = 4 и Хз = —2.
Ортогональный оператор, приводящий квадратичную форму L(x, у, г)
к каноническому виду 8л/ + 4f/'' — 2z'', имеет матрицу
1/-\/2~ l/V2" О
0 0 1
1/-\/2~ -1/V2" 0
Базисными векторами новой системы координат (О; i', j', k') являются
i' = —pr i H pr k, j' = —— i k, k' = j. В системе координат (О;
д/2 V2 1/2 -у2
''. J'. »') уравнение данной фигуры примет вид
8х''+4у'' — 2г'' + [8 —4 —8]
Это уравнение можно записать в виде
0
1
0
х'
У'
г'
+ 1=0.
(z'
0,625
1,25
2,5
Полученному уравнению, а следовательно, и исходному, соответствует
однополостный гиперболоид.
6.50. Записать данное уравнение второго порядка в
матричном виде:
а) Зх2 — У2 + 2z2 + Axz — 6yz + 2х -f У — 5 = 0;
б) у2 — 2? + ^У — 2x2 +л:-f 2«/ — 32 = 0;
в) 2ху — 4xz — 3yz + 3x — y + 2z—l=0;
г) х2 + 3(/2 - 4ху + lyz — bz + 10 = 0.
6.51. Привести к каноническому виду данное уравнение
фигуры второго порядка:
а) 2х2 + у2 — 4ju/ — 4уг + 2х — у + 1 = 0;
142
б) х2 — 2i/2 -f z2 -f 4xi/ — 8x2 — Ayz — \Ax — Ay -f 142 -f
16 = 0;
в) Зх2 + 3z2 -f 2x2 — 5 = 0; r) yz = 2\
д) x2 + 2«2 + 322 - 4xi/ - 4y2 + 34x + 2y - 100 = 0;
e) x2 + y1 — 2>z2 — 2xi/ — 6x2 — Gyz -f 2x -f 2y -f 42 = 0.
6.5. ЗНАКООПРЕДЕЛЕННЫЕ КВАДРАТИЧНЫЕ ФОРМЫ
Краткие теоретические сведения
Квадратичная форма L(x\, Х2, ..., х„) называется положительно опре-
определенной, если для любой совокупности значений переменных xf, xf, ...,
х*, из которых хотя бы одно отлично от нуля, имеет место неравенство
ЦхТ, х$, ..., х?) > 0,
и отрицательно определенной, если
ЦхГ. х$ х*п) < 0.
Положительно и отрицательно определенные квадратичные формы
называются знакоопределенными. Например, квадратичная форма
Цхи х2, х3) = х2, + х\ + х\
является положительно определенной, а
Цхи х2. хз) = — 2х? — х\ — Зх§
отрицательно определенной.
Квадратичная форма L{x,, х2, х3) = [х\ + х,J + xl не является знако-
определенной, так как при х\ = —х^ Ф 0, х3 = 0 имеем L(xt, х2, хз) = 0.
Главными угловыми минорами квадратной матрицы
A =
называются миноры:
Д| = ац, Дг =
аи
a2i
д» =
ац
О21
а„|
аи
ап\
022 •••
а„2 ...
. л,=
О|2 •■•
an ...
а„2
аи
аПп
ап ад 2 а]з
аз1 азг азз
а2*
а„„
т. е. миноры, стоящие в верхнем левом углу матрицы А.
Критерий Сильвестра: для того чтобы квадратичная форма была
положительно определенной, необходимо и достаточно, чтобы все главные
угловые миноры матрицы этой формы были положительными; для того
чтобы квадратичная форма была отрицательно определенной, необходимо
и достаточно, чтобы главные угловые миноры четного порядка матрицы
этой формы были положительными, а нечетного—отрицательными.
143
Задачи и упражнения
6.52. Исследовать на знакоопределенность квадратич-
квадратичную форму Цхи *2, хз) = 5*? + 3*1 -\- 3*1 — 4*i*2 + 2*,*3 —
— 4X2*3.
Решение. Матрица квадратичной формы L(x\, х-г, х3) имеет вид
А =
5 -2
— 2
3 -2
Ее главные угловые миноры
Д] = 5, Дг
5 -2
-2 3
I —2
II. Дз =
5 —2
-2 3
I -2
= 18
положительны. Следовательно, данная квадратичная форма является
положительно определенной.
6.53. Доказать, что квадратичная форма
п п
L{X\, X2, -.., *п) = 2 2 uijXiXj
i = l /=1
не является положительно определенной, если существует
а** ^ 0, и не является отрицательно определенной, если су-
существует CLkk ^ 0.
6.54. Доказать, что для того чтобы квадратичная форма
была положительно определенной, необходимо и доста-
достаточно, чтобы в ее каноническом виде все коэффициенты
были положительными.
6.55. Доказать, что знакоопределенная форма является
невырожденной.
В задачах 6.56—6.61 исследовать на знакоопределен-
знакоопределенность каждую из данных квадратичных форм.
6.56. *? + 2*| — 2*,*2. 6.57. х\ \
2х\ —
*?
6.58. х\ — Ъх\ + Ъх\ — +
6.59. 6*? + 3*1 + 5*з + 2*,*2'+ 4*1*з —
6.60. — 8*? — 5*1 — 6*§ -f 4*i*2 — 2*1*з + 2*2*з.
6.61. *? — 2*1 + 3*з — 4*1 + *1*4 + 6*2*з.
В задачах 6.62—6.68 исследовать, при каких значениях
к является знакоопределенной каждая из данных квадра-
квадратичных форм.
6.62. *? + 2*! + Xxl
6.63. 2*? — 3*2 + 4*§ + Я* 1*2 + *2*3-
6.64. Я*? + 3*2 — 4*1*2- 6.65. —3*f-f Я*1 — 4*i*2.
6.66. 2х\ + *i + 4*1 + 2*i*2 + 2Я1*1*з — 4*2*з.
144
6.67. 5x? + 6*2 + bxi + 2x,x2 + 4xix3 + 6x2X3.
6.68. kx2i 4- bri 4- ^3 4- 2xix2 4- 2x1x3 4-
6.6. ПРИМЕНЕНИЕ КВАДРАТИЧНЫХ ФОРМ
К ИССЛЕДОВАНИЮ ФУНКЦИЙ НЕСКОЛЬКИХ
ПЕРЕМЕННЫХ НА ЭКСТРЕМУМ
Краткие теоретические сведения
Пусть дана функция /(Р) = j(xt, х2, ..., х„). Если Ро — стационарная
точка этой функции, то (-£!—) =q ( д' \ =о ( ^ \ = 0 или
\OXiJPo ' \дх2/Ро ' "' \дХп/Р<1
d/(P0) = 0. Тогда если d2f(Po) > 0, то точка Ро является точкой минимума,
а если d2f(Po)<0,— точкой максимума.
Так как d2f(Po) — квадратичная форма п переменных dx\, dx2, ....
dxn, то если d2f(Po) — положительно определенная квадратичная форма,
' стационарная точка Ро является точкой минимума, если d2f(Po) — отрица-
отрицательно определенная квадратичная форма, Ро является точкой максимума.
Если d2f(Po)=}^O и не является знакоопределенной квадратичной формой,
то в точке Ро нет экстремума. Если d f(P0) = 0, нужны дополнительные
исследования.
Задачи и упражнения
6.69. Исследовать на экстремум функцию f(x\, x2, х3) =
= х\ + х1 + х\ + 12х,х2 + 2х3.
Решение. Для нахождения стационарных точек найдем:
дх\ ' ' дх2 2 '' дхз 3
Решив систему
получим две стационарные точки: Pi@, 0, —I), Р2B4, —144, —1). Изве-
Известно, что
+ 2 dl dxtdx3 + 2 ,дI dx2dx3.
дххдхз дхгдхз
Для дайной функции d2f = 6x\dx2 + 2dx2 + 2dx\ + 24dX]dx2. Матрица этой
квадратичной формы имеет вид
[6х, 12 0
12 2 0
0 0 2_j
145
В точке Я, @, 0,-1)
А =
О 12 О
12 2 О
0 0 2
Так как Д| = 0, то критерий Сильвестра не выполняется и квадра-
квадратичная форма d2f(Pi) ие является знакоопределеииой. Следовательно,
в точке Р\ экстремума нет. В точке Я2B4, —144, —1)
А =
144 12 0
12 2 О
0 0 2
Так как Д| = 144, Дг = 144, Дз = 288, то квадратичная форма d2f(P2)
является положительно определенной. Следовательно, Рг — точка минимума
и /тШ = /(Я2)=-6913.
В задачах 6.70—6.75 исследовать функцию на экстремум.
6.70. и = х2 + у3 + z2 + xz — \2у.
и = х2 4; у3 4- xz — z.
6.71.
6.72.
и =
-х2-
6.73.
6.74.
6.75.
и = х2 -f У2 + z2 — 6л: -f 4i/ — 2г.
ц = *wzD — л: — у — 2).
й — х -\- у2 -\- z2 — xy -\-2z -\-х.
7. ПРИМЕНЕНИЕ МАТРИЦ К ТЕОРИИ
ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
7.1. БЛОЧНЫЕ МАТРИЦЫ. МАТРИЦЫ ЖОРДАНА
Краткие теоретические сведения
В основном курсе линейной алгебры рассматривались матрицы, эле-
элементами которых являются числа. Можно рассматривать матрицы, эле-
элементами которых являются в свою очередь матрицы. К таким матрицам
, относятся блочные матрицы.
: Пусть дана матрица
А =
Он
Q22
Oml
ат„
Разобьем ее горизонтальными и вертикальными прямыми на несколько
матриц. Полученные при этом матрицы называются блоками (клетками)
матрицы А. В технической литературе иногда блоки называют субматри-
субматрицами. Используя блоки, на которые разбита матрица, можно записать
■ее в виде матрицы, элементами которой являются блоки. В этом случае
говорят, что матрица записана в виде блочной. Очевидно, что данная
матрица может быть записана в виде блочной не единственным образом.
Например, пусть данная матрица А разбита на блоки следующим
образом:
А =
"II
п2\
пз\
041
012
Я22
Я32
Q42
3
п2Ъ
азз
а43
п\а
4
а34
О44
5
аг5
аз5
U45
Введем обозначения:
В = В|хз = |ап
U2I 2 3
Q31 2 3
], F Ьх2
5
a35j'
G=G|x3 = |1 042 3], К — KlX2 = [4 045]-
матрицу А можно записать в виде блочной:
В С
^2X3 ^2X2
или А =
D F
а к
Эту же матрицу можно записать в виде следующей блочной матрицы:
147
где
_
аи
_ Газ|
Q32
Газз
\_а,з
Язь!
a45j
Блочная матрица, каждая строка которой содержит v блоков, а каж-
каждый столбец — ц блоков, называется блочной матрицей размеров ц X v.
Среди блочных матриц особую роль играют матрицы Жордана. В этом
и следующих параграфах данной главы даются краткие сведения о жорда-
новых матрицах и приведении данной матрицы к жордановой форме.
С более подробным изложением этих вопросов и другими методами при-
приведения матрицы к жордановой форме можно ознакомиться, например,
в книгах [10, 12, 15].
Матрица порядка m вида
а
0
0
0
0
1
а
0
0
0
0 ...
1 ...
а ...
0 ...
0 ...
0
0
0
а
0
0
0
0
1
а
или
а
1
0
0
0
0
а
1
0
0
0
0
а.
0
0
... 0
... 0
... 0
... а
... 1
0
0
0
0
а
называется жордановой клеткой порядка m с собственным числом а со-
соответственно верхнего или нижнего вида и обозначается Jm(a). Например,
->-[■
У,B)=
-1
0
0
0
1
2
0
1
— 1
о"
1
2
или У2(— 1) =
или /3B) =
Заметим, что при m = 1 жорданова клетка имеет вид
/,(«) = [а].
Матрицей Жордана называется матрица вида
2
1
0
0
2
1
0
0
2
О
О
О
lm.(a.2)
О
О
о
G.1)
где /m,(ai), Ут,(а2) /m,(at) — жордановы клетки верхнего (нижнего)
вида; О — нулевые матрицы соответствующих размеров. Матрица Жорда-
Жордана G.1) обозначается так:
-UM].
G.2)
Заметим, что диагональная матрица является матрицей Жордана, каждая
клетка которой — первого порядка.
148
Задачи и упражнения
"Л. Является ли матрица
А =
3
О
о
о
о
LO
матрицей Жордана?
Решение. Разобьем
О
-2
О
О
О
О
О
1
-2
О
О
о
о
о
о
4
О
о
о
о
о
1
4.
О
матрицу А на блоки следующим образом:
О
О
О
О
О
О
су
О
О
О
О
О
1
— 2
О
О
0
О
О
О
4
О
О
О
0
0
1
4
О
.0'
0
0
0
1
4
Очевидно, что блоки, стоящие на диагонали, являются клетками Жордаиа:
^Следовательно,
А =
/iC) О
О
О У2( — 2) О
О О У3D)
есть матрица' Жордаиа.
, /зD) =
= [У,C), /,(-2).
4
0
0
1
4
0
0
1
4
7.2. Записать в развернутом виде матрицы Жордана:
а) /,A0); б) /2(-7); в) /3E); г) /4(-2); д) /5(П);
е) [/2C), /,AI; ж) [/2@), /2(-1)];
з) [/,(-4), /з(-3)]; и) [/2(-2), /.@), /3F)].
В задачах 7.3—7.14 выяснить, является ли матрицей
Жордана каждая из данных матриц, и если является, то за-
записать ее в виде G.2).
7.3.
7.6.
1
0
4
0
0
0
-2J
1 1 "
4 1
0 4
7
7.
4.
7.
3
0
5
0
0
1
3
0
5
0
1
|-
о'
0
6
7
7
.5.
.8.
5
0
3
0
0
1
5J
0
4
0
I"
1
0
9
149
7.9.
7.11.
7.13.
-2
0
0
0
0
0
"з
1
0
0
I
-2
0
-6
0
3
0
0
0
0
0
0
0
7
0
1
-6
0
0
0
2
0
0
0
1
—6
о"
0
1
-2
7.10.
7.12
7.14
12
С
С
С
)
)
)
"о
0
0
0
0
1
12
0
0
-1
0
0
0
1
0
0
0
0
0
0
7
0
2
0
0
0
1
0
0
0
0
0
1
2
0
0
0
0
1
0
0
0
1
-7
0
0
0
5
0
0
0
1
1
7.15. Найти произведение матриц:
а) [/.(-2), /2C)][/2B), /,E)]; б) 1/2A), /2(- 1)][/,C), /3(
в) [/2D), /,(-7))[/з(-1)]; г) [УзB)][/зC)].
7.2. ПРИВЕДЕНИЕ МАТРИЦЫ К ЖОРДАНОВОЙ ФОРМЕ
Краткие теоретические сведения
Если существует невырожденная матрица Т, такая, что G = T~'AT —
жордаиова матрица, то матрица G называется жордановой формой матри-
матрицы А. При этом матрица А называется приводящейся к жордановой
форме, а Т — матрицей, приводящей матрицу А к жордановой форме.
Если Т — вещественная матрица, то будем говорить, что матрица А
приводится к жордановой форме в вещественном пространстве, если же
Т—комплексная матрица,— то в комплексном пространстве.
Справедливы следующие теоремы.
Теорема 7.1. Всякая квадратная числовая матрица приводится в
комплексном пространстве к жордановой форме, и эта форма единствен-
единственная (с точностью до расположения блоков).
Теорема 7.2. Вещественная квадратная матрица приводится в вещест-
вещественном пространстве к жордановой форме тогда и только тогда, когда
все характеристические числа матрицы вещественны.
Теорема 7.3. Число m клеток Жордана в жордановой форме матрицы
А совпадает с максимальным числом линейно независимых собственных
векторов этой матрицы, т. е.
пг =
где k — число различных собственных значений матрицы А; п — ее по-
порядок; Xt — собственные значения матрицы.
Жордановы клетки имеют вид Уа(Л,). Если А,, — корень характеристи-
характеристического уравнения матрицы А кратности s и J/,,{h), Jh,(h), •••, Jh,(h) —
150
клетки Жордана с собственным значением Л, жордановой формы матрицы
/
А, то 2 hi = s. В частности, если h — простой корень характеристиче-
ского уравнения матрицы А, то ему соответствует одна Жорданова клетка
/i(M-
Теорема 7.4. Пусть gh(K)— число клеток Жордана порядка h с собст-
собственным числом Xi в жордановой форме матрицы А. Имеет место формула
'(л-мт • - 2rM. Kfl. + гD_л,£|— G-3)
Задачи и упражнения
7.16. Выяснить, приводится ли матрица
-1 3
А =
3 -4
2 7
к жордановой форме в вещественном пространстве.
Решение. Характеристическое уравнение данной матрицы имеет
вид
5 — X -1 3
о г—к —4
о
7 — Х
= 0
или E — ^)(Я.2— 10Х.-(-29) = 0. Корнями этого уравнения являются A.i =5,
12 з = 5 ± 2/. Так как среди корней характеристического уравнения есть
комплексные, то данная матрица в вещественном пространстве не приво-
приводится к жордановой форме.
7.17. Найти жорданову форму матрицы
2 0 0"
А =
1 3 1
-1 -1 1
Решение. Характеристическое уравнение
2-^ 0 0
1 3-Х 1 =0
—1 —1 1-Х
Данной матрицы имеет корень Л = 2 кратности s = 3. Так как матрица
0 0 о'
■2£ =
1 1 1
-1 -1 -1
Шмеет ранг г= 1, то число т клеток Жордана в жордановой форме матри-
матрицы А определяется равенством т = 3 — гд_2Е=3 — 1 =2.
Поскольку А — матрица третьего порядка, а в жордановой форме —
151
две клетки Жордана, то (с точностью до расположения блоков) жордано-
ва форма имеет вид
2
0
0
0
2
0
о"
1
2
[/,B).
7.18. Найти жорданову форму матрицы
1 0 1
А =
О
1 1
1 -1 1
Решение. Характеристическое уравнение
— X 0 1
0 1-Х I
1 -1 1-X
= 0
1
0
0
1
1
0
0
1
1
дайной матрицы имеет корень X = 1 кратности s = 3. Так как матрица
0 0 1
А — £= 0 0 1
1 -1 0
имеет ранг г = 2, то число т клеток Жордана в жордановой форме матри-
матрицы А определяется равенством т=3 — 2=1. Следовательно, жорданова
форма матрицы А имеет вид
\h(\)\ =
7.19. Найти жорданову форму матрицы
1 3 4
А = 0 2 2
0 1 3
Решение. Характеристическое уравнение
1 -X 3 4
0 2—к 2 =0
0 1 3-Х.
данной матрицы имеет корни Xt = 4 и Хг = 1 кратности s = 2.
Ранг каждой из матриц
А — 4£ =
-3
3 4
.0 -2 2
0 1-1
и Л —
1£ =
0
0
0
3
1
1
4"
2
2
равен двум, следовательно, т = C — 2) + C — 2) = 2.
152
Так как простому корню Ai = 4 соответствует клетка Жордана Л D),
то второму корню Л.2 = 1 соответствует клетка Жордана УгA).
Итак, жорданова форма матрицы А имеет вид
4
0
0
0
1
0
о"
1
1
7.20. Найти жорданову форму матрицы
2 0 0 О'
4 2 0 0
3-120
А =
— 1
-1
2
1 2
Решение. Характеристическое уравнение данной матрицы имеет
корень Л = 2 кратности s = 4. Так как ранг матрицы
0
4
3
1
0
0
— 1
2
0
0
0
1
0
0
0
0
равен трем, то т = 4 — 3=1. Следовательно, жорданова форма матри-
матрицы А содержит одну клетку Жордана /4B) и имеет вид
2
0
0
0
1
2
0
0
0
1
2
0
0
0
1
2
7.21. Найти жорданову форму матрицы
1-303
-2 -6 0 13
0—313
-1-4 0 8
А =
Решение. Характеристическое уравнение данной матрицы имеет
корень X! = 1 кратности s = 4. Так" как ранг матрицы
А — Е =
равен двум, то т = 4 — 2 = 2. Следовательно, жорданова форма матрицы
А состоит из двух клеток Жордана. Логически возможны случаи: 1) две
клетки порядка 2; 2) одна клетка порядка 1 и одна клетка порядка 3.
Определим количество клеток второго порядка. Формула G.3) при-
принимает вид
0
2
0
1
-3
— 7
2
— 4
0
0
0
0
3
13
3
7
153
Так как
3
1
3
1
9
3
9
3
0
0
0
0
— 18
-6
-18
— 6
— Ь) =
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
(А - Ef =
то r,A_E)i=\, r{A_Ey = Q и g2(l) = 2 — 2 = 0. Это означает, что клеток
порядка 2. не существует. Поэтому имеет место второй случай. Таким
образом, жорданова форма матрицы А имеет вид (с точностью до распо-
расположения блоков)
1
0
0
0
1
1
0
0
0
1
1
0
0
0
0
1
7.22. Доказать, что вещественная симметрическая матри-
матрица приводится к жордановой форме в вещественном прост-
пространстве. Сколько клеток Жордана содержит жорданова
форма вещественной симметрической матрицы?
7.23. Найти корни А,,- характеристического уравнения
матрицы Л и их кратности s,, а также указать порядок п
матрицы А, если ее жорданова форма имеет вид:
а) [7,B), У,B), У2(-1)]; б) [У2@), У3E)];
в) [У,(-3), У,A), У2A), У3@)|; г) [У,D), /,D), 7,D)].
В задачах 7.24—7.29 выяснить, приводится ли матрица
к жордановой форме в вещественном пространстве.
7.25.
7.27.
7.24. 1-1 -5
5 -2
7.26. 10—1
1 1 0
0 2 2
7.28. 2,5 0 -0,5
0 2,5 0
0,5 0 1,5
0 0,5 0
В задачах 7.30—7.41 найти с точностью до расположе-
расположения блоков жорданову форму матрицы.
0
-о,
0
1,
5
5
7.29.
3
1
1
0
1
2
5
0
4
3
J-
2
-1
0
-1
4
0
-3
3
4
1
0
— 1
7.30.
1 -1
0 1
5 3
7.31.
3
0
0
2
10
7
2
-5
-2
154
7.32.
7.34.
7.36.
.38.
-.40.
0
0
0
2
0
0
-1
0
3
0
3
0
-3
3
0
0
0
0
0
0
0
0
3
0
0
0
1
0
4
з"
0
0
-1
1
0
А
с
1
0
1
1 "
1
2
\
\
-3
1
2
3
0
0
2
6
5
-6
1
-1
1
1
0
1 "
0
0
1
1
-1
1
1
1
7.33.
7.35.
7.37.
7.39.
7.41.
1
0
0
"l
0
1
0
0
—
—
0
0
1
3
5
0
1
0
3
3
2
-1
0
0
0
1
0
-1 О"
2 0
0 1
2"
4
5
3
3
-3
-3
1
0 -
0
0
0
1
-1
7
17
3
0 -4
о"
0
0
2
1
-6
j
•.3. НАХОЖДЕНИЕ МАТРИЦЫ, ПРИВОДЯЩЕЙ ДАННУЮ
МАТРИЦУ К ЖОРДАНОВОЙ ФОРМЕ
Краткие теоретические сведения
Существуют различные методы нахождения матрицы 7", приводящей
латрицу А к жордановой форме ] = Т AT. Рассмотрим один из них.
Если жорданова форма матрицы А порядка п диагональна, то столб-
jaMH матрицы Т являются координаты п линейно независимых собствен-
собственных векторов матрицы А (см. [1, § 5.13]).
Пусть жорданова форма матрицы А не является диагональной. Если
— линейный оператор, матрица которого в базисе
G.4)
ei, e2,
е„
-сть Л, а в базисе (жордамовом)
ef, ti, ..., е'„
G.5)
тератор / имеет жорданову матрицу J, то матрица Т есть матрица пере-
перегода от базиса G.4) к базису G.5) (см. [1, § 4.6]).
Для нахождения матрицы Т поступаем следующим образом.
1. Находим жорданову форму данной матрицы.
2. Находим координаты базисных векторов е{, ti t'n в базисе в|,
9, ..., е„. Для этого:
а) по матрице У оператора f в базисе G.5) записываем образы ба-
:исных векторов е(, ei, ■ ■■, е'„ в том же базисе G.5). Из этой записи видим,
155
является вектор е/ (» = 1, п) собственным вектором оператора f нли нет;
б) координаты тех векторов базиса G.5) в базисе G.4), которые
являются собственными векторами оператора f, находим по известному
правилу (см. |1, § 5.11, 5.12J); координаты векторов базиса G.5), которые
не являются собственными векторами оператора f, находим нз соответ-
соответствующих соотношений п. 2а, записав их в координатной форме.
3. Составляем матрицу Т перехода от базиса G.4) к базнсу G.5).
Задачи и упражнения
7.42. Найти матрицу Т, приводящую матрицу
1 3 4
А =
0 2 2
0 1 3
к жордановой форме в вещественном пространстве.
Решение. 1. Жордановой формой матрицы А является матрица
4
0
0
0
1
0
0
1
1
(см. задачу 7.19).
2а. Из определения матрицы оператора в данном базисе и внда матри-
матрицы J имеем:
f(е!) = 4е(, f (е2) = е2, f (e3) = е2 + ei G.6)
Из этих равенств следует, что е{ и ej — собственные веторы оператора f
с собственными значениями соответственно 4 и 1. Вектор ез не является
собственным вектором оператора /.
26. Обозначим координаты вектора е( в базнсе ei, е2, е3 через х\, х% хз.
Эти координаты найдем из системы
(А - 4£)
Х\
Х2
Хз
=
"о"
0
0
— 3x1 + Зл:2 + 4*3 = О,
Ох, — 2*2 + 2х3 = 0,
Решив эту систему, получим хх = 71, х2 = 3/, х3 = 3/ (/ 6 R). Таким образом,
е, = 7/е, + 3/е2 + 3/е3, где / Ф 0.
Координаты ух, Уг, Уз вектора е2 в базисе ei, e2, е3 найдем из системы
(А-Е)
Уз
=
о"
0
0
или
+ У2 +
+ У2 +
, = 0,}
» = o.J
156
Решив эту систему, получим yi = р, У2 = Уз = 0 (р 6 R). Таким образом,
е£ = ре, + 0е2 + 0е3 (р ф 0). G.7)
; Обозначим координаты вектора ез через z\, г2, Z3. С учетом формул
|G.6) и G.7) найдем эти координаты из системы
22
_23_
=
Р
0
0
+
21
Zi
23 _
или
Ог, + 3z2 + 4г3 = p,
02, + 22+223 = 0,
Ог, + 22 -f 2г3 = 0.
Решив ее, получим 2,=s, г2 = р, z3 =—р/2 (s, p 6 R). Таким образом,
ез = 5е, +ре2 ^-е3, где I5I + Ipl ^ °-
3. Матрица 7", приводящая матрицу Л к жордановой форме, является
матрицей перехода от базиса е,, е2, е3 к базису е(, е2, е$ и имеет вид
Т =
11 р
3/ 0
(det T Ф 0).
3/ 0 -р/2
7.43. Найти матрицу Т, приводящую матрицу
0
А =
1
1 1
1
о
.1 -1
к жордановой форме в вещественном пространстве.
Решение. 1. Жордановой формой матрицы А является матрица
1
0
0
1
1
0
0
1
1
(см. задачу 7.18).
2а. Из определения матрицы оператора в данном базисе и вида
матрицы / имеем:
/(e1) = ei, f(e'2) = ei+e'2, /(ei) = e2 + e$.
Из этих равенств следует, что ei — собственный вектор оператора
/ с собственным значением 1, а е2 и ез не являются собственными век-
векторами оператора j.
26. Координаты Х\, х% хз вектора ei в базисе е,, ег, ез находим из
системы
(А-Е)
Х\
Х2
хз
=
0
0
0
157
или
0*i + 0*2 + *з = 0,
0*i + 0*2 + *з = О,
*1 — *2 + 0*3 :== 0.
Решив эту систему, получим *i = *2 = р, *з = 0 (р б R). Таким образом,
el = pei + рег, где р Ф 0.
Координаты уи у2, уз вектора ti найдем из системы
м
</2 =
"Pi
Р +
У'~
У2
Уз
</| + Уз =р +У1,
У2 + Уз — р + Уч,
откуда yt=:y2~s, </з = р (s, p 6 R). Таким образом, ег2 = :
где I s | + | р | =^= 0.
Координаты Zi, z2, гз вектора ез найдем из системы
2|
22
2з
pi
"Г
к
+
2|
Zi
Z3
ИЛИ
2| +23 = S + Z|,
22 + 2з = S + 22,
Z| — 22 + 2з = р
откуда 2i=p + /, 2г = /, z3 = s (p, /, s £ R). Таким образом, ез =
3. Матрица Т, приводящая матрицу А к жордановой форме, имеет вид
р s р + 1
р s /
0 р s
(det T Ф 0).
В задачах 7.44—7.56 найти жорданову форму матрицы А
и матрицу Т, приводящую ее к этой жордановой форме.
7.44. А =
7.46. А =
7.48. А =
7.50. А =
1 2
-1 4
-1 7
0 -1
0 0
5 0
0 О
О О
О О
7.45. А =
7.47. А =
7.49. А =
7.51. А =
3 1
— 1 1
1 15
2 2
0
0
4
0
0
0
0
1
0
0
1
2
5
158
7.52.
7.54.
7.56.
A =
A =
A =
3
2
0
|-
2
0
0
0
0
3
2
-1
0
1
3
2
0
0
0
0
3
(
—
(
)
)
1
1
2
0
7.53.
o-
0
-1
o"
1
3
2
A =
3
0
0
7.55. A
1
2
2
1
1
1
0
1
1
5
0
0
0
5
7.57. Пусть J и J\ — соответственно верхняя и нижняя
жордановы формы матрицы А. Известно, что S~lAS = J,
Si/TSi =/,. Доказать, что S, =(Sr)"'.
7.4. МАТРИЧНАЯ ЭКСПОНЕНТА
Краткие теоретические сведения
Рассмотрим матрицу
F(t)-
MO MO ••• MO
/2,@ /22 @ ... MO
MO MO ••■
где fij(() (i=i, т, /=1, п) — произвольные функции, определенные на
некотором интервале ]а, Ь\. Для таких матриц операции сложения,
умножения матрицы на число, умножения матриц, транспонирования
матрицы, нахождения матрицы, обратной для матриц вида F(t), опре-
определяются так же, как и для числовых матриц.
Пусть fij(t) — дифференцируемые функции на интервале \а, b\. I
изводной матрицы F(t) называется матрица, каждый элемент/которой к„
вен производной соответствующего элемента матрицы F{ff\Производную
матрицы F(t) = (fjj(t)) будем обозначать F'(t), . Таким образов- -— =
= (/.y@)-
Например,
если
/
4t)-\e'
{l> ~ sin t
e
cos
F\t)
_ Г e' 2t 01
"" [cost —sin t I
159
Если соответствующие операции над матрицами имеют место, то
справедливы следующие свойства.
1. Пусть С — числовая матрица, тогда =0.
9
2.
3-
Fttw dFl i
5. Если F'l{t)— матрица, обратная матрице F(t), то
Заметим, что для матрицы F(t) обратная матрица существует
при тех значениях t, при которых det F(t) ф 0.
Пусть
Л =
xnt(t) xn2(t)
где ХцA) (i = 1, п, у = 1, п) — непрерывные функции.
Экспонента й" определяется равенством
е* = ехр X = Е + X + -1- X2 + -L X3 +...+ ~ Хк +...,
где Е — единичная матрица порядка п.
Если X = At, где А — квадратная числовая матрица, то е* принима-
принимает вид
еА< = exp At = Е + At + -L АЧ1 + -L Л¥ +... + -L АН* +...
Этот ряд сходится для любых Ant.
Имеют место следующие свойства.
1. Если А и В — числовые матрицы и АВ = ВА, то
gAtglit _ gBtgAl __ g
2. е'М}7' = (еА')т.
i 2. а,
3. dete'" = e 1 = 1 . где а„ (i = 1, п) — диагональные элементы мат-
матрицы А.
4. det eAl Ф0 для любых Ant.
5. (eAt)~l=e-Al. 6. -!LeM = AeM.
Укажем некоторые способы вычисления матричной экспоненты
1. Пусть матрица А — жорданова. Тогда:
а) если
~h 0 ... 0 1
0 X, ... 0
то
160
0 0
б) если
то
и
V,
где п — порядок матрицы А;
в) если
о
о
еА' =
А =
о At „U
е
■
X
0
0
0
0
0
1,1
0
0
1
X
0
0
1
0
0
0
0
1
0
0
е
2!
'
0
... 0
... 0
... 1
... 0
0
о'
О
1
X
,.-1
(я-1I
(n-2)!
1
О
Jm,(X2)
то
о
о
О
о
о
О
О
о
о
2. Пусть матрица
нахождения еА1:
не является жордановой. Укажем два способа
а) ем = Те"Т~\ где J — жорданова форма матрицы А; Т — матрица,
приводящая матрицу А к этой жордановой форме, т. е. / = 7"~'.Л7';
б) пусть X), Х2 Xs — характеристические числа матрицы А, крат-
кратности которых равны соответственно mi, mi, ..., ms (mi + m2+...+
+ ms = n, где п — порядок матрицы А); тогда
+ eXl'(Qi + Qit+...+ Qmjm-~\ G.8)
где Gi, G2 Gm , Qi, Q2 Qm, — матрицы порядка п. Для их
нахождения составляем матричные равенства:
{1=1, n).
11. Зак. 5115.
G.9)
161
Взяв в качестве ft(x), }г(х), ..., ]п(х) полиномы степеней соответс-
венно 0, 1, 2, ..., п— 1, получим систему л матричных уравнений. Решиг
ее, найдем матрицы G\, Ог, .... ОШ|, ..., Qu Q2 Qm, и, подставив их t
равенство G.8), получим ем.
Заметим, что если характеристическое уравнение матрицы А имее"
один корень Ai кратности п, то в качестве f(x) берем последовательно поль
номы 1, х — Х,, (x — hf (x — hT "'•
Задачи и упражнения
7.58. Найти еА1, если
'5 О О
А =
0 5 0
0 0-3
Решение. Согласно способу, изложенному в п. 1а,
О еЬ1
О 0 е
О
О
-31
7.59. Найти eAt, если
2 10 0 0
0 2 10 0
0 0 2 10
0 0 0 2 1
0 0 0 0 2
Решение. Согласно способу, рассмотренному в
1 / f/v. е/ъ\ tyw
0 1 / /2/2! /3/3!
еА1 = е21 0 0 1 t {2/2\
0 0 0 1 /
0 0 0 0 1
7.60. Найти ем, если
7 1 0 0 0
0 7 0 0 0
А= 0 0—2 10
0 0 0—2 1
0 0 0 0 2
п. 16,
162
е ш е н и е. Согласно способу, изложенному в п. 1в,
ten О
О е1
О 0 е
О О
О О
О О
О О
-21 *„-2<
te W
О е~2
О О
te'
7.61. Найти ем, если
А =
О 1
1 1
1 -1 1
Решение. Так как матрица не является жордановой, то для нахожде-
нахождения ем надо воспользоваться способом, рассмотренным в п. 2.
Способ I. Согласно способу, изложенному в п. 2а,
Латрица У - жорданова форма матрицы А, была найдена в задаче
~. 18 и имеет вид
J =
1
0
0
1
1
0
о"
1
1
Следовательно,
1 / t'2/2
О 1 /
О 0 1
Матрица Т, приводящая матрицу А к жордановой форме, найдена
задаче 7.43 и имеет вид
Т =
Р s р + 1
р s I
О р s
(det T Ф 0).
Так как нам нужна олна из матриц 7". то. положив 1 = 0, p = s=l,
имеем:
т =
!
1
0
Таким образом,
в ^' = с1
1 1
1 1
0 1
1
1
0
1
1
0
1
' Т
'\
0
0
-1
—
1
1 |
1
1 -1
/ *2/2'
1 /
0
1
_ 1
1
1
1
0
0
1
-1
•
— 1
1
0
163
или
/2/2
-t*/2
Способ 2. Применим способ, рассмотренный в п. 26. Так каь
матрица А имеет только одно характеристическое число Х=1 кратное™
т = 3, то, согласно равенству G.8),
eA' = e'(Gl + G2t + Git2). G.10'.
Матричные равенства G.9) для нахождения матриц Gi, G2, G3 при-
принимают вид
(i = l, 3),
G.11)
где fi(x), f?(x), fi(x) — полиномы степеней соответственно 0, 1, 2.
Так как матрица А имеет только один корень X = 1 кратности 3, тс
можно положить fi(x)=\, /2(*) = х — I, f3(x) = (x— IJ. Равенства G.11)
примут вид
Е ^ Gj,
А—Е = G2,
(А - Ef = 2G3.
Решив эту систему, получим:
G,=
Подставив найденные значения Gi, G2, G3 в равенство G.10), будем
иметь
"О 0 Г
0 0 1
1 -1 0
1
0
0
0
1
0
0
0
1
, О2 =
0
0
1
0
0
— 1
1
1
0
1
1
Z
1
1
0
— 1
-1
0
0
0
0
1+/2/2 -/2/2 /
*2/2 1-/2/2 /
В задачах 7.62—7.81 найти ем.
1 0 О"
7.62. А =
7.64. А =
0 2 0
0 0 3
а 0 0
0 Ъ 0
0 0с
7.63. А =
7.65. А =
1
0
0
2
0
0
1
1
0
1
-2
0
0
0
2
0
1
-2
164
7.66. A =
7.68. A =
7.70. A =
7.72. A =
7.74. A =
7.76. A =
7.78. Л =
7.80. Л =
0
-1
0
0
1
5
0
0
0
1
1
0
5
0
7.67. A =
7.69. A =
8 10 0
0 8 0 0
0 0 7 1
0 0 0 7
1 2
-1 4 Г
3 1
-1 1
1 15
2 2
0 0
0 0
1
0
0
3
2
0
7.71.
. 7.73.
. 7.75.
1
Л =
А =
А =
—
0
0
0
1
0
0
5
0
0
0
7
-1
0
0
1 "
2
3
-1
0
1
3
2
I
0
3
2
0
-1
0
7.77.
7.79.
7.81.
Л =
Л =
Л =
0
0
4
3
0
0
5
0
1
0
0
1
1
2
2
1
5
0
1
2
5
1
1
1
о"
0
5
7.5. МАТРИЧНЫЙ СПОСОБ РЕШЕНИЯ СИСТЕМЫ ЛИНЕЙНЫХ
ОДНОРОДНЫХ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
ПЕРВОГО ПОРЯДКА С ПОСТОЯННЫМИ КОЭФФИЦИЕНТАМИ
Краткие теоретические сведения
Рассмотрим систему л линейных однородных дифференциальных
уравнений первого порядка
dt
dx2
dt :
dxn
dt
165
awe.
где коэффициенты ац (l=\,n; j=\,n) — постоянные, ац 6 R. Данну
систему можно записать в матричном виде:
dX
dt
a\i ац
Д21 Q22
где А =
= AX,
G.1:
ап\
а„
Пусть вектор-столбцы
Xll
X21
Xnl
X12
X-22
Х„2
л rt —
G.1.
где хц — функции от t, удовлетворяют матричному уравнению G.12;
т. е. являются его решениями. Будем называть их вектор-решениям
системы G.12).
Если вектор-решения Х\, Хг, ..., Хп линейно независимы, т. е. матриц
Х)п
X21
G.U
невырожденная, то говорят, что система векторов G.13) образуе
фундаментальную систему решений, а матрица G.14) называется фуь
даментальной. матрицей системы G.12).
Фундаментальная матрица G.14) называется нормированной пр
/ = /о, если Ф(/о) = £.
Пусть Ф(/) — фундаментальная матрица системы G.12), тогд
где С =
; с\, С2 с„ — произвольные постоянные, является общим р«
шением системы G.12).
Для системы G.12) Ф(/) = еА1, и ее общее решение имеет вид
Х = еА'С.
G.1!
Формулой G.15) удобно пользоваться в том случае, когда матриц
А жорданова. Если матрица А не является жордановой, то удобн
пользоваться формулой
Х=Те"С, G. К
где У — жорданова форма матрицы А; Т — матрица, приводящая мат
рицу Л к жордановой форме У = 7""'Л 7". В частности, если матрица
til tl2 ... tin
/21 /22 ... tin
tnl tn2 . . . tnn
166
приводит
матрицу
А
к
У
диагональному
= Т~'АТ =
X,
0
0
виду
0 ...
к2 ...
0 ...
0
0
то формула G.16) принимает вид
Х = с,Х,
где
у
лп —
G.17)
G.18)
Если вещественная матрица А приводится к диагональному виду
в комплексном пространстве, то, чтобы выделить вещественное решение,
надо поступить следующим образом. Пусть, например, Xi,2 = a±E<,
тогда соответствующие им вещественные вектор-решения Х\ и Хг в выра-
выражениях G.18) могут быть найдены в виде:
х = Re
Задачи и упражнения
7.82. Найти общее решение системы
G.19)
G.20)
dx3 _2
dt 3'
Решение. Запишем систему в матричном виде:
dX
где А ■■
2
0
0
1
2
0
о"
1
2
; Х =
X]
Х2
Хъ
167
Так как матрица А жорданова и
О 1
О 0
1
то, согласно формуле G.15), общее решение данной системы имеет вид
X = е"
1 /
О 1
о о
х =
c3t)
<?"сз
Отсюда х, = е2'( с, + с2/ + сз у 1, х2 — е2'(с2 + Ы), хъ = сзе3'.
7.83. Найти общее решение системы
dX
= АХ,
где А =
dt
1 0 1
О 1 1
1 -1 1
Хз
Решение. Так как матрица А не является жордановой, то для
нахождения общего решения данной системы воспользуемся формулой
G.16). Легко убедиться в том, что
У == 7--МГ =
является жордаиовой формой матрицы А; при этом
'l
0
0
1
1
0
о"
1
1
Т =
Так как
1
1
0
0
0
1
Г
0
0
то, согласно формуле G.16),
168
Xl
хг
Хз
=
'l
1
0
0
0
1
г
0
0
ё
1 t
О О
7.84. Найти общее решение системы
dt
где А =
5
4
4
4
5
4
6
б
-5
Х\
XI
Хз
Решение. Легко убедиться, что матрица А приводится к диагональ-
диагональной матрице
1
0
0
0
1
0
о"
0
3
где Т =
1
1
. Следовательно, согласно формулам G.17)
3
-1 3 1
0—4 —1
и G.18), общее решение данной системы имеет вид
Х =
X]
Х2
Хз
= С]
Г
-1
0
е' + с2
3"
3
-4
е' + сз
Г
1
— 1
xi = с,е' + Зс2е' + с3е3', х2 = —с,е' + Зс2е' + с3е3',
х3= — 4с2е' —с3е3'.
7.85. Найти общее решение системы
dX
dt
= АХ,
t
Решение. Характеристическое уравнение
1-Х —1
2 3-
матрицы А имеет корни Xi,2 = 2±i. Следовательно, матрица А приводится
к диагональному виду в комплексном пространстве.
12. Зак. 5115.
169
Легко убедиться в том, что матрица
Т =
приводит матрицу А к диагональному виду.
Согласно формулам G.19), G.20),
_ ,'_ . 1 е2' (cos t+i sin /)) =
= [ C0S ' I e2'
L —cos t + sin / J
Xi = Im
= Im
sin/
—cos / — sin t
Таким образом, общее решение данной системы
COS
или
OS / 1 21 , Г sin ' 1 21
/ + sin/Je +C2[-cos/-sin(Je
xi = (ci cos / + С2 sin /)e2', .
= ((ci — с2) sin f — (с, + с2) cos () е2'.
Задачи и упражнения
В задачах 7.86—7.108 решить систему -^— = АХ, где
X — вектор-столбец, А — данная матрица.
7.87. А =
7.89. А =
7.91. Л =
7.93. А =
7.86.
7.88.
7.90.
7.92.
А =
А =
А =
А =
2
0
'2
0
0
0
0
2
-1
0
0
7
0
0
1
2
0
0
]■
0
3
0
1
7
0
0
1
2
0
0
0
3
о'
1
7
0
0
0
-1
5 1
0 5
2 0 0
0 1 1
0 0 1
3
0
0
0
10 0
-300
0 5 1
0 0 5
1 2
-1 4 Г
170
"•##•
7.94. Л =
7.96. A =
7.98. A =
7.100. A =
7.102. Л =
7.103. A =
7.104. Л =
7.105. A =
7.106. Л =
7.108. Л =
3 1
-1 1
1 15
2 2
3 0
2 3
0 2
" —1
0
1
o"
0
3
0
1
0
o'
0
— 1
2 3
0 2
0 0
0 0
4
-5
-6
3
-1
1
5
4
— 4
4
5
7.95. Л =
7.97. A =
7.99. Л =
. 7.101. A =
0 1
-1 0
3—10
5 1 0
1 2 4
1 0
-1 1
2 3
0 2
-2 2
7 -5
6 -4
— 1 1
5 —1
-1 3
-4 -5
0
0
4
"з
0
0
-1
0
0
0
1
1
2
2
7
-1
Г
2
5
1 "
1
1
7.107. Л =
5 1 0
0 5 0
1 0 5
-5
5
7.6. МЕТОД ВАРИАЦИИ РЕШЕНИЯ СИСТЕМЫ ЛИНЕЙНЫХ
НЕОДНОРОДНЫХ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
ПЕРВОГО ПОРЯДКА С ПОСТОЯННЫМИ КОЭФФИЦИЕНТАМИ
Краткие теоретические сведения
Рассмотрим систему п линейных неоднородных дифференциальных
уравнений первого порядка
dt
dt
dt
+ 012*2
= 021*1 + ^22*2 + ■•■ + ОцпХп + j
а„„хп + fn(t).
где коэффициенты a,-,- (i = 1, n; / = 1, n) — постоянные, a,, £ R.
Данную систему можно записать в виде
dt
=AX + F(t),
G.21)
где А =
021 2
а„\
а„п
; х =
Х\
*2
Хп
■ F(t) =
hit)
МО
ш
Общее решение системы G.21) может быть найдено по формуле
X = eA'\(eA')-]F(t)dt.
Задачи и упражнения
7.109. Найти общее решение системы
G.22)
dt
Решение. Для данной системы
[2 П
„I — жорданова форма матрицы А, а Т =
= _ . 01 матРица- приводящая матрицу А к жордановой форме, то
•"-[-! "i][i'.]••-[-! '-!}•"■
172
Используя формулу G.22), имеем
-' -.
'Ui':;]j[_r_j--^[._: 'z[\[-W
=e2f~'fe+ y/ltcc\tCcjt X)\
Таким образом, x\ = (t — t*/2 — /3/6 + C\ + c2< — c2)e2',
3/6 — ci — C2<)e*'.
7.110. Дана система G.21). Известно, что Х — ^'С, где
С — произвольная числовая матрица-столбец, является об-
общим решением системы —^- = АХ. Используя метод ва-
вариации*, доказать что общее решение системы G.21) может
быть найдено по формуле G.22).
7.1 П. Найти общее решение системы
AL
п —2t2)e2i~\
. _„,2ч , I,
если известно общее решение х\ =
= e2t
= e2t((cl+c2)t
системы -g- =
[
= e2'({c2-cl)t g
= АХ.
А У
В задачах 7.112—7.117 решить систему -—— = АХ-\-
-\- F{t), где X — вектор-столбец, а А и F(t) — данные мат-
матрицы.
7.112. А=
7.113. А =
7.114. А =
. ^@ =
l}<l-
5 -3
1 1
5 4
4 5
— 4 —4
6'
6
— 5
./="@ =
5e"'
V
* Метод вариации состоит в том, что общее решение системы G.21)
ищут в виде X = eA'C(t), где C(t) — матрица-столбец, элементами которой
являются функции от t.
173
7.
7.
7.
115.
116.
117.
A =
A =
A =
гз
0
1
1
-1
3
1
2
1
3
-1
1
0
1
0
—
0
2
1
-1 "
0
1
1
5
1
1
— 1
3
•
F{t) =
F(t) =
te1
ее'
fe<
e2' cos
e2'sin i
e2'
, F(t) =
У''
e5'
1
t
7.7. ИСПОЛЬЗОВАНИЕ ИДЕИ МЕТОДА ГАУССА ДЛЯ РЕШЕНИЯ
ЛИНЕЙНЫХ СИСТЕМ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
С ПОСТОЯННЫМИ КОЭФФИЦИЕНТАМИ
Краткие теоретические сведения
Рассмотрим оператор D* (k = 0, 1, 2, ...), который функции f(t) ставит
в соответствие ее производную /г-го порядка, т. е.
D°{(t) = f(t), D/(/)=-^-, D2/@=-^-, ...
dt dr
Дифференциальным оператором k-го порядка назовем оператор вида
или
D"
a*,
где а,- («' = 1, /г) — вещественные числа.
Известно, что дифференциальный оператор является линейным. С по-
помощью дифференциального оператора система
dx,
—^- =аидг, + 012*2 + ••■ + а]пхп + f\(t),
1Г
dxn
= ani*i
сп
может быть записана в виде
Одг, =a,i*i -
Dxt —
Dxn =
ai2*2 + ...
fn(t)
.. + alnxn+h(t), ч
..+а*л, + /*@, I
... + пппХп + jn(t) )
174
или
(D —
—ai\x\ -f (D — 022)^2 — ■•• — а?„хп = j
D-ann)xn = fn(t).)
G.23)
— а„1ЛГ| — а„2дг2 — ... + {D —
Эту систему можно записать символически в виде
D—аи —
— Oli.
— 022
—ап\
—а„2
D—an
Xl
МО
В алгебре для решения систем линейных алгебраических уравнений
используется метод Гаусса. При этом операции, приводящие к равно-
равносильным системам, сводятся к элементарным преобразованиям над стро-
строками расширенной матрицы системы. Используем идею метода Гаусса для
решения системы дифференциальных уравнений G.23).
Расширенную матрицу
D — Оц — 0|2
— в21 0 — 022
МО
h{t)
— а„\ —
D-ann\fn(t)
системы G.23) с помощью элементарных преобразований над строками,
а также умножения строки на дифференциальный оператор преобразуем
так, чтобы матрица
— 021 D — 022
D — а„„
G.24)
системы G.23) привелась, вообще говоря, к треугольному виду. Эти
преобразования соответствуют прямому ходу метода Гаусса. Заметим, что
если данная система дифференциальных уравнений является однородной,
т. е. fi(t)=f2(t)= ... =/„@ = 0, то указанные преобразования прямого
хода производятся над матрицей G.24).
Задачи и упражнения
7.118. Найти общее решение системы
dx,
Решение. С использованием дифференциального оператора запи-
запишем данную систему в виде
I-D-1 3 I Г*,1
L -3 D-lJ UJ
175
г, * ГО —1 3 1
Преобразуем матрицу „ к треугольному виду:
\D—\ 3
[ -3 D —
-3 D- 1
— П 9
Г-3 D-l 1
s,L 0 D2-2D+10_T
Прямой ход закончен.
Данная система эквивалентна системе
Отсюда
Г-3 D-l 1 p,l Г01
[ 0 D2-2D+10j L^J LOj"
(D2 —2D + 10)дг2 = 0
G.25)
Из первого уравнения системы G.25) получим дгг = е'(С\ cos 3/ -f-
+ С2 sin 3/). Подставив найденное дгг во второе уравнение системы G.25),
будем иметь х\ = е'( — Зс{ sin 3t + Зс2 cos 30-
7.119. Найти общее решение системы
= X
~dT ~ Xl ~^~X2 — ■
*S-=2*,-*,.
Решение. С использованием дифференциального оператора запи-
запишем данную систему в виде
D-1 1 —1
-1 D-1 1
О 1 D — 2
Х\
*2
Хз
=
о"
0
0
Матрицу этой системы преобразуем к треугольному виду:
D —1 1 —1
-1 D-1 1
О 1 D—2
-1 D- 1 1
D— 1 1 —1
О 1 D—2
-1 D—1 1
0 D2 — 2D + 2 D — 2
0 1 D — 2
176
— 1 D— 1 1
О 1 D - 2
0 D2 — 2D + 2 D — 2
-1 D- 1
0 1
0 0 — i
D — 2
Таким образом, данная система эквивалентна системе
-Г D-l
0 1
0 0 —I
1
D — 2
4D2 — 5D
Х\
XI
Хз
=
'о'
0
0
Отсюда
или
x2 + (D - 2)x3 = 0, I
4D2 — 5D + 2)хз = 0 J
dt3
dx3
dt
2x3,
X\ =
~dT
■ Xi + Хз.
Решив первое уравнение этой системы, получим дгз = (С\ -\- C2t)e' -\- Сзе2'.
Подставив найденное хз во второе уравнение системы, будем иметь дгг =
= (ci — Ci + Cit)e'. Подставив в последнее уравнение системы найденные
выражения для хг и дг3, получим дг| ^ (С\ + Сг + СгОе' + с3е2'.
7.120. Найти общее решение системы
Решение. С использованием дифференциального оператора запишем
даниую систему в виде
rD_4 -1 1
L 2 d-iJ
о
»1
J-
Преобразуем расширениую матрицу этой системы:
ГО —4 —1 ;— е2'1 Г D — 4 — 1 ; —
2
D-l
О
1 : -e2i
о: -е2т
Таким образом, данная система эквивалентна системе
D — 4 —I
=[-:-]
177
или
dx\
dx.
Решив первое уравнение системы, получим х\ = С\в*' + с^е3' + te21.
Подставив найденное х\ во второе уравнение системы и решив его, будем
иметь х^ = -2с,е21 - с2е3' — 2te2' + 2e".
В задачах 7.121—7.130 решить данную систему.
7.121. -^-=xi—2x2, ^ 7.122.-^- =
^=2x,-3x,J <£.=
7.123. J*£j- =x2-xu
at
7.125. ifL =
7.127. -^-=
at
7.129. *ZL
= 2x2 —3x,.
= X, - 2X2 4
7.124. i£L = 5^,-6x2+6x3/
a/
7.126.
^£L=Xl+8x2.
.^L =4x,-3x2
at
\ ?'128' У
= 2x] —X2 — 2cos,
7.130. -^L =x2-x,+x3-/+l, 1
^L = 2x2 - 2x, + x3 - / + 2,
178
7.8. ПРИЗНАКИ УСТОЙЧИВОСТИ И НЕУСТОЙЧИВОСТИ РЕШЕНИЙ
СИСТЕМ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
Краткие теоретические сведения
Рассмотрим систему дифференциальных уравнений
где А — числовая вещественная матрица второго порядка; X = ' I.
Очевидно, что точкой покоя такой системы является начало координат.
Если матрица А невырожденная, то начало координат является единствен-
единственной точкой покоя; если вырожденная, то имеется бесконечно много точек
покоя и они составляют прямую.
Классификация точек покоя основана на расположении траекторий
вблизи этих точек, которое зависит от корней Xt, X2 характеристического
уравнения матрицы А.
1. Если матрица системы невырожденная, то возможны следующие
случаи.
1. Xi, X2 -- действительные числа, причем Х\Х% > 0. Тогда точка покоя
называется узлом (рис. 7.1—7.4). Если Xt и X? — отрицательные, то реше-
решение устойчиво (притом асимптотически) и узел называется устойчивым
(рис. 7.1, 7.3). Если Х\ и X?.— положительные, то решение неустойчиво
и узел называется неустойчивым (рис. 7.2, 7.4).
2. Х.|, А.2 — действительные числа, причем XtX?<0. Точка покоя такого
типа называется седлом (рис. 7.5). В этом случае решение неустойчиво.
3. Xi.2 = o±p« (аФО; р=^=0). Точка покоя называется фокусом (рис.
7.6, 7.7). Если а < 0, то решение устойчиво и фокус называется устойчивым
(асимптотически, рис. 7.6). Если а > 0, то решение неустойчиво и фокус
называется неустойчивым (рис. 7.7).
4. Xi.2= ±Pi (Р Ф 0). В этом случае точка покоя называется центром
(рис. 7.8). Решение является устойчивым (не асимптотически).
II. Если матрица системы вырожденная, то возможны следующие
случаи.
1. X] =0, X? ф 0. Если Х2 < 0, то все решения устойчивы (не асимпто-
асимптотически, рис, 7.9, а). Если Кг > 0, то все решения неустойчивы (рис. 7.9, б).
2. X, = Х.2 = 0. Характер расположения траекторий вблизи точек покоя
показан на рис. 7.10. Все решения неустойчивы.
Пусть дана система линейных дифференциальных уравнений
~dT ~AXt
где Х =
; А — числовая матрица n-го порядка. При исследовании
Хп
на устойчивость решений рассматриваемой системы можно пользоваться
следующими признаками.
1. Если все характеристические числа матрицы А имеют отрица-
отрицательные действительные части, то все решения системы асимптотически
устойчивы. (Заметим, что необходимым условием отрицательности всех
действительных частей характеристических чисел матрицы А с действи-
действительными элементами является положительность всех коэффициентов ее
характеристического уравнения.)
179
Рис. 7.1
Рис. 7.2
Рис. 7.3
Р н с. 7.4
Рис. 7.5
Рис. 7.6
Рис. 7.7
Рис. 7.8
а 5
Л\ н- _
Рис. 7.9
■ 1 1 1
•*—
х,*0
Рис. 7.10
180
2. Если хотя бы одно характеристическое число матрицы А имеет по-
положительную действительную часть, то все решения системы неустойчивы.
3. Если все характеристические числа матрицы А имеют неположи-
неположительные действительные части, причем характеристическим числам, имею-
имеющим нулевые действительные части, в жордановой форме матрицы А со-
соответствуют жордановы блоки размеров 1X1, то все решения являются
устойчивыми.
Существуют критерии, позволяющие установить знаки действитель-
действительных частей характеристических чисел, не решая характеристического
уравнения. Пусть характеристическое уравнение матрицы А имеет вид
Критерий Рауса — Гурвица. Для того чтобы действительные
части всех корней уравнения G.26) были отрицательны, необходимо и
достаточно, чтобы все главные угловые миноры матрицы
6, 60 0 0 0 0 ... 0
63 62 6, 60 0 0 ... 0
65 64 6з 62 6i 6о ... 0
0 0 0 0 0 0
Ьп
были положительны. Числа 6* с индексами k > n заменяются нулями.
По главной диагонали стоят числа 6,, 62, ..., Ь„.
Критерий Михайлова. Обозначим левую часть уравнения
G.26) через F(V), т. е.
F(X) = 6„Г + 6,Г "' + 62Г + ... + 6„_ ,*. + Ьп.
Положим в этом равенстве X = to. Отделив действительную и мнимую
части, представим F(to) в виде
F[to) = ф((о2) + i<m)j(<o2).
Для того чтобы действительные части всех корней уравнения G.26)
были отрицательными, необходимо и достаточно, чтобы выполнялись сле-
следующие условия:
1) 6„6„-1>0;
2) все корни уравнений ф(|) = 0 и i)j(t)) = O простые, положительные,
и их можно занумеровать так, чтобы выполнялось условие h <Ц< <Ъ <
< ТJ < -
Заметим, что нулевое решение линейного дифференциального урав-
уравнения и-го порядка .
с постоянными коэффициентами устойчиво тогда и только тогда, когда
все корни его характеристического уравнения имеют отрицательные дей-
действительные части.
Можно исследовать на устойчивость по первому приближению нуле-
нулевое решение системы. Пусть дана система дифференциальных уравнений
**
*■) (<=
G.27)
для которой точка х, = 0 является точкой покоя. Предположим, что функ-
функции ft(xi, X2, ■., Хп) дифференцируемы любое число раз в точке покоя. Тогда,
разложив fi(X], X2, ..., х„) в ряд по формуле Тейлора в окрестности начала
181
координат, Литием систему в виде
—■ = у ацх-, + R, (*i, х2 xn) G=1, п),
G.28)
где /?,- — члены ие ниже второго порядка малости относительно х,.
Система
G.29)
называется системой уравнений первого приближения для системы G.27).
При исследовании на устойчивость решений системы G.27) по первому
приближению можно пользоваться следующими признаками.
1. Если все характеристические числа матрицы А = (a,,) (i=l, n;
j=\, n) имеют отрицательные действительные части, то решения Xi = 0
(i= I, n) систем G.29) и G.28) асимптотически устойчивы.
2. Если хотя бы одно характеристическое число матрицы А имеет
положительную действительную часть, то нулевое решение системы G.28)
неустойчиво.
3. Если действительные части всех характеристических чисел матрицы
А неположительны, причем действительная часть хотя бы одного характе-
характеристического числа равна нулю, то, вообще говоря, исследование на устой-
устойчивость по первому приближению неприменимо.
Задачи и упражнения
7.131. Определить тип точки покоя системы
где А =
1Г
4 —1
Х =
Решение. Характеристическое уравнение
-I 5
4 — 1 — I
= 0
матрицы системы имеет корни Xt = —5, /,2 = 4. Так как
покоя @, 0) является седлом. Решение неустойчиво.
^-2 <C 0, точка
7.132. Исследовать на устойчивость решение системы
где А =
2
0
0
0
1
5
1
1
3
2-
3
1
7
4
0
2
у
, Л —
Xi
х2
Хз
х
182
Решение. Характеристическое уравнение матрицы системы имеет вид
-2-Х
О
О
О
5 —Я.
3
2
3 — к
1
7
4
О
2-Х
= 0.
Корни характеристического уравнения: Л.| == — 2, /,2 = 2, Я,з,4 = 4 ± ~\/7.
Так как имеются корни с положительной действительной частью, то все
решения системы неустойчивы.
7.133. Исследовать на устойчивость нулевое решение диф-
дифференциального уравнения t/v + 2у'" + 6у" + Ъу' + 6г/ = 0.
Решение. Характеристическое уравнение для данного дифферен-
дифференциального уравнения имеет вид к4 + 21*+ 6к'2 + 5к + 6 = 0.
Способ 1. Для исследования на устойчивость воспользуемся кри-
критерием Рауса — Гурвица. Составим матрицу:
Главные
2,
миноры
9 1
£, 1
5 6
= 7,
2
5
0
2 1
5 6
0 6
0 0
1 0
6 2
6 5
0 0
2 1
5 6
0 6
= 11
2 10 0
5 6 2 1
0 6 5 6
0 0 0 'б
= 66
этой матрицы положительны. Следовательно, все корни характеристиче-
характеристического уравнения имеют отрицательную действительную часть и все решения
системы асимптотически устойчивы.
Способ 2. Используем критерий Михайлова. Условие
ется, так как Ь„Ьп-\ = 6 • 5 > 0. Проверим, выполняется ли
Так как F{k) = к* + 2к* + 6к2 + эк + 6, то
F(iu>) = аL — 2аЛ — бы2 + Ъш + 6
выполня-
выполняусловие 2.
F(to) = аL — бы2 + 6 + 1<о( — 2<о2 + 5) =
B) B)
где ф((о2) = ((о2J — бы2 -(- 6, 1|з(<о2) = —2<о2 + 5. Следовательно, ф(|) = £2 —
— 6ij + 6, i|)(t)) = — 2т) + 5. Решив уравнения |2 — 6£-|-6 = 0 и —2т) -(-
+ 5 = 0, получим |i=3 —"\/з"« 1,27, |2 = 3 + д/3"- 4,73, тц = 5/2 = 2,5.
Так как gi < т), < |г, то условие 2 выполнено.
Таким образом, все корни характеристического уравнения имеют от-
отрицательную действительную часть и все решения системы асимптоти-
асимптотически устойчивы.
7.134. Исследовать на устойчивость по первому прибли-
приближению точку покоя х\ = 0, Х2 = 0 системы
183
.££- =eXl+2x! — cos3*i,
dt
Решение. Разложив правые части данных уравнений по формуле
Тейлора в окрестности точки х\ = 0, хч = 0, запишем систему в виде
dx,
dt
~df ''
где R\(x\, X2), Ri{xi, Xi) — члены не ниже второго порядка малости отно-
относительно Х[ И *2-
Система первого приближения имеет вид
dx,
dt
dt
= Хх + 2X2,
Характеристическое уравнение
1 —Л, 2
2 — 2 — Я.
-2х2.
= 0 или Л2 + I — 6 = О
имеет один положительный корень, следовательно, нулевое решение дан-
данной системы неустойчиво.
А V
В задачах 7.135—7.145 для системы —~ = АХ, где А —
ш
V \ Х\ \
данная матрица, л= , определить тип точек покоя.
7.135. А =
7.137. А =
7.139. А =
7.141. А =
1.143. А =
7.145. А =
2 2
1 3J-
4 5
-1 21"
-1 13
-2 -3
О 2
-2 О
2 4
1 4
О 3
-1 4
7.136. Л =
7.138. Л =
7.140. А =
7.142. Л =
7.144. А =
2 -2
-1 1
-5 1
1 -1
-4 ' 1
3 2
1 4
-3
2 -2 Г
184
В задачах 7.146—7.162 исследовать на устойчивость ре-
решения системы линейных уравнений
Где Х =
Х\
х2
Хп
; А — данная матрица.
7.146. А =
7.148. А =
7.150. А =
7.152. А =
7.154. А =
7.156. А =
7.158. А =
7.160. А =
0 0
0 1
О 5
О О
— 1
1
2
-2
0
0
0
0
2
5
0
8
0
8
о"
-2
-2
-7
О
О
-1
-4
-8
— 6 3
-4
-8"
-8 -4 1
— 4
7.162. А =
— 1
2
-5
О О
О О
О О
О О
-2 -2
7.147. Л =
7.149. А =
7.151. А =
7.153. Л =
7.155. Л =
.7.157. А =
.7.159. Л =
.7.161. Л =
-3
0
0
— 1
0
0
0
0
4 8
3 5
-3 2
О -4
2 1
6 3
О 1 2
0-1 О
О -3 -2
1 2
О 2
4 О
1 2
1 О
1 3
— 3
-2
4
-2
3
О
1 -2 О
3 1 1
О 6 1
О 7
О О
О О
О О
3 2
4 -1
-3 2
О -5
185
В задачах 7.163—7.165 исследовать на устойчивое™
используя метод Рауса — Гурвица или Михайлова, решени
системы
где Х =
Х\
х„
А — данная матрица.
0
0
0
-2
-3
2
5
1
— 1
0
2
-2
1
0
0
-3
1
-2
2
0
3
4
7
2
3
1
5
7
0
1
0
t
0
0
-4
0
2"
0
1
1
0
0
1
-2
-5
-3
9
— 5
7.163. А =
7.164. А =
7.165. A =
В задачах 7.166—7.169 исследовать на устойчивость пс
первому приближению точку покоя Xi=jc2 = 0 данной си-
системы.
7.166. -^L =sin2jci+jc2,
7.167.
dt
7.168. 4£- = е*!-е2*!
dt
dX2 •
-jt sinxi —
7.169. 4^ =е-*х' -<
dt
— e*'.
2
at
dt
= х\ — хх
!+!.'
dt
= sin 2x2,
3 sin x3.
186
В задачах 7.170—7.173 исследовать устойчивость нуле-
нулевого решения, пользуясь критерием Рауса — Гурвица или
Михайлова.
7.170. yv + 2ylv - Ay'" + Ъу" + 5у' + у = 0.
7.171. yvl+ 5t/v + 3y"-5y'+y = 0.
7.172. t/v + \5у'" + №у" + \44у' + 2\0у = {).
7.173. у'" + 6у" +\\у' + Зу = 0.
7.9. КОЛЕБАТЕЛЬНЫЕ ДВИЖЕНИЯ
Краткие теоретические сведения
К колебательным движениям относятся вибрации машин и их дета-
деталей, инженерных сооружений и их отдельных элементов, а также автомо-
автомобилей, судов и т. д. Колебательные ггроцессы разнообразны по своей при-
природе (механические, звуковые, электромагнитные и т. п.). Мы будем рас-
рассматривать только механические колебания. При изучении других коле-
колебаний можно пользоваться аналогичными методами.
Обобщенными координатами системы назовем не зависящие друг от
друга величины, определяющие полностью и однозначно положение си-
системы в любой выбранный момент времени.
Колебательные движения механических систем описываются, вообще
говоря, системой обыкновенных дифференциальных уравнений относи-
относительно обобщенных координат системы (в технической литературе такие
механические системы называют системами с сосредоточенными парамет-
параметрами). Если предположить, что колебания малы (т. е. в течение всего вре-
времени движения координаты и их производные малы), то, отбросив
квадраты и более высокие степени координат и их производных, заменим
нелинейную систему линейной. Решение многих технических задач сводится
к решению линейных систем.
Закон, по которому совершаются малые свободные колебания си-
системы с сосредоточенными параметрами, может быть найден следующим
образом.
1. В качеств обобщенных координат х\, х%, ..., х„ выбирают отклонения
существенных объектов рассматриваемой системы от некоторого устойчи-
устойчивого положения равновесия.
2. Находят кинетическую Т и потенциальную П энергии системы в
выбранных координатах. Каждая из них, как известно, является квадра-
квадратичной формой.
3. Составляют матрицы М (матрицу масс) и К (матрицу жесткости)
соответственно квадратичных форм Г и //.
4. Находят собственные числа к\, к?, ..., к„ матрицы М~'К или
собственные числа Ц|, ц2, ..., (i« матрицы К' 1М.
5. Определяют собственные частоты со, малых колебаний по формуле
(О, = -\Д,- ИЛИ (О, = 1/ "у ц,-.
6. Находят собственные векторы да, матрицы М 'К или К~'М с собст-
собственными числами X: или ц,-, имеющие первую координату, равную единице.
7. Закон, по которому совершаются малые свободные колебания
системы в случае, если ни одна из частот <о, не равна нулю, задается
формулой
п
x(t) = 2 а,с cos(<o,f + a,),
187
где с,, а, — произвольные постоянные, которые находятся нз начальных
условий.
8. Если заданы начальные условия
Хо:
*,@)
МО)
л.@)
'■*! @)
х»@)
Хп@)
то Ct, о, могут быть найдены по формулам:
-\jyf + г'?/ш?, tg a, = — 2,/((/,чо,).
G.30)
где
_ ^лр, я,-) , _ l*o. a.J ,. _ y-^y G 31)
Уи z< — координаты векторов соответственно x<>, x0 в базисе ai, аг, ..., ал.
Заметим, что координаты векторов а, называют коэффициентами
распределения амплитуд. Совокупность коэффициентов распределения
для частоты <о, иногда называют формой собственного колебания.
Задачи и упражнения
7.174. Два жестких стержня, каждый массой m и длиной /,
соединены идеальным шарниром и подвешены на трех пру-
пружинах, жесткость каждой из которых равна k (рис. 7.11).
Рис. 7.11
Определить закон, по которому совершаются малые свобод-
свободные колебания данной системы при заданных начальных
условиях
0
0
0
, хо =
— 1/ffl
2/пг
— \/т
и форму собственных вертикальных колебаний в этой системе.
Решение. 1. В качестве обобщенных координат х\, хг, хз выберем
отклонения концов стержней от положения статического равновесия
(вертикальные смещения концов стержней).
2. Кинетическая энергия Т стержней состоит из энергии поступа-
поступательного движения центров масс и энергии вращательного движения
вокруг осей, проходящих через центры масс. Обозначим z\ и гч координаты
188
центров масс соответственно первого и второго стержней; 9Ь 9г — углы
поворота стержней; Уо — момент инерции стержней относительно оси,
проходящей через центр масс. Тогда
Т = у mil + у /о9? + -1 mil + -i- /09i.
Выразим 2i, 22, Oi, 92 через обобщенные координаты xi, x2, x3:
Zl = у (*1 + S2), Z2 = у (S2 + S3),
|Гогда
T = -^- (S?
2/2
2S2S3
— *))*
2/2
S§ -
Учитывая, что Jo= ml2/\2, последнее равенство можно записать так:
\\ T= -£-X\ + -5- S2+ -X-X3+ -C-S1S2+ -2-S2S3.
j DODO 6
; Потенциальной энергией является энергия деформированных пружин.
(Следовательно,
3. Квадратичная форма Т имеет матрицу
m
"IF
2
1
0
1
4
1
о'
1
2
а квадратичная форма Я— матрицу
kV
/С =-1 0 1 О
z 0 0 1
4. Матрица
имеет собственные числа
m
1
0
0
0
1
0
0"
0
1
m
10
1 z
2
1
0
1
4
1
0'
1
2
m
2
1
0
1
4
1
0
1
2
5. Собственными частотами являются:
/3/Г _ /_
I =~\/ • <°2= V
V ГП V :
6/г
, <оз
/ 6ft
Л^")
189
6. Собственные векторы с собственным числом ц, = m/Ck) имеют вид
О
— t
Положив /=1, получим собственный вектор с первой координатой,
равной единице, т. е. вектор
а, =
Для собственных чисел ц2 и цз искомые собственные векторы имеют вид:
д/з"
7. Закон, но которому совершаются малые свободные колебания
данной системы, определяется равенством
г
о
I
С'2 COS
с3 cos
1 - V3
с, cos(-\/ t + аЛ
\ V т /
(~\ 6k . t + аг)
V V т(ъ, ,/з\ /
8. По формулам G.31) находим:
I/, = 0 (!=Т73),
(хо, а,) -1/т + 0+ 1/т
21 - 1а,|2
(хо, а2) — \/т
|а,12
= 0,
(io, а3) -1
Используя формулы G.30), находим: С|=0, с2 = 0,3/~\jmk, Сз =
= 0,58/д/тА, <х2 = —л/2, аз = л/2. Следовательно,
0,3
Imk
2.73
».
190
0,3
sin
mk
0,58
2,73
1
1
— 0,73
1
Формой собственного колебания являются векторы (рис. 7.12):
I
о
2,73
1
— 0,73
1
Рис. 7.12
Задачи и упражнения
7.175. На невесомой струне длиной 2/ в середине нахо-
находится груз массой т. К грузу на пружине с жестжостью
k подвешен груз такой же массой. Сила натяжения струны
N. Определить собственные частоты и собственные векторы
при условии, что параметры системы связаны равенством
2N = Ik. Колебания происходят в плоскости рисунка; нижний
груз движется только вертикально (рис. 7.13).
I /77 I
> /77
Рис. 7.13
I m I m\ff I /77 I
Рис. 7.14
7.176. На невесомой нити длиной 4/ на равных расстоя-
расстояниях / друг от друга расположены три точечных груза.
Массы крайних грузов равны m каждый, масса среднего
m-уЗ, натяжение нити N. Определить собственные частоты
и собственные формы (рис. 7.14).
191
7.177. На невесомой нити длиной 3/ на расстояниях
отточек закрепления помещены два одинаковых груза массо
т каждый. К каждому из грузов на пружинах с жест
костью к подвешены такие же грузы. Найти собственны
частоты и собственные векторы. Движение происходи
в плоскости рисунка (рис. 7.15).
т т т
■—| ,—, |—, Fft)
//////////////////////////////
Рис. 7.15 Рис. 7.16
7.178. Три груза массой т каждый связаны одинаковым]
пружинами, жесткость которых к. Грузы лежат на глaдкo^
столе. На крайний груз действует горизонтальная ударна:
сила импульса р. Найти закон колебания масс цепочки поел'
действия силы (рис. 7.16).
7.179. Три груза массой т каждый соединены пружи
нами, жесткость которых к, и подвешены вертикально в пол
силы тяжести. Найти закон движения грузов после обрыв;
удерживающей нити (рис. 7.17).
/77
■м
Рис. 7.17 Рис. 7.18
7.180. Найти колебания, которые будут совершать в верти
кальной плоскости три одинаковые бусинки, растянутые н;
невесомой нити, если в начальный момент отклонена о
положения равновесия только средняя бусинка. Масс,
каждой бусинки т, расстояния между ними /, сила натяже
ния нити N. Начальная форма нити с бусинками показан,
на рис. 7.18.
8. ТИПОВЫЕ РАСЧЕТЫ*
8.1. ЭЛЕМЕНТЫ ВЕКТОРНОЙ АЛГЕБРЫ
И АНАЛИТИЧЕСКОЙ ГЕОМЕТРИИ
Теоретические вопросы
1. Определение векторного произведения; его геометри-
геометрический и механический смысл.
2. Свойства векторного произведения.
3. Определение смешанного произведения и его геометри-
геометрический смысл.
4. Свойства смешанного произведения.
5. Векторное уравнение плоскости в пространстве и
прямой на плоскости. Общее уравнение плоскости в прост-
пространстве и прямой на плоскости.
6. Канонические уравнения прямой.
7. Угол между двумя плоскостями.
8. Угол между двумя прямыми.
9. Угол между прямой и плоскостью.
10. Канонические уравнения кривых второго порядка.
Теоретические упражнения
1. Доказать, что |(а, Ь, с)| < |а| |Ь| |с|. В каком случае
здесь может быть равенство?
2. Доказать, что векторное произведение не изменится,
если к одному из сомножителей прибавить вектор, колли-
неарный другому сомножителю.
3. Доказать, что смешанное произведение трех векторов,
из которых два коллинеарны, равно нулю.
4. Зная, что с — аа + |ЗЬ, найти соотношение между век-
Торами а, Ь, с, не содержащее коэффициентов аир.
5. Доказать, что любая касательная параболы у2 =
— 2рх (р > 0) отсекает на отрицательной части оси Ох отре-
отрезок, длина которого равна абсциссе точки касания, а на
Оси Оу — отрезок, равный половине ординаты точки касания.
6. Даны две прямые:
х — х, _ у — у\ __ z — Z\ х — х2 __ у — уг __ г — г2
* Помещенные в начале каждого параграфа теоретические вопросы
И упражнения необходимо выполнить независимо от полученного
-Варианта типового расчета.
jjl-З. Зак. 5115. 193
Найти условие, при котором они расположены в одж
плоскости.
В а р и а нт 1
1. Выяснить, для каких векторов а и b выполняете
условие |а. —f— bI = |а| + |b|.
2. Вычислить (а, Ь), где a = 3mi—2тг; b = tni+4tn
mi, m2 — единичные векторы, угол между которыми р;
вен л/4.
3. Найти [2а+ b, b], где a = 3i-j-2k; b = i + 2j-,
4. Даны вершины треугольника Л A, —1,2), 6E, —6,2)
СB, 3, —1). Вычислить. длину его высоты, проведение
из вершины В на сторону АС.
5. Вычислить расстояние между прямыми 5л:—12у-
+ 52 = 0 и 10* —24у —33 = 0.
6. Выяснить, принадлежат ли точки /WiC, 0, 1
M2(—l, 2, 0), /И3@, 0, —1), М4B, 3, 1) одной плоскосп
7. Составить каноническое уравнение эллипса, больша
полуось которого равна 10, а эксцентриситет 0,6.
8. Определить вид фигуры и изобразить ее:
a) z = x2 + y'2; б) ху = 1;
в)
Вариант 2
1. Убедиться, что векторы, порождаемые медианами любо
го треугольника, в свою очередь могут служить сторонам]
другого треугольника.
2. Найти (а, Ь), |а|, |Ь|, если а = 2m + 3n —p, b = m —
— 4р, т, п, р — ортогональный базис и |т|=2, |п|=3
|р|=4.
3. Найти [2а —Ь, 2а + Ь], где a = 2i —j + k; b = 3k-
-i-2j.
4. Вычислить объем пирамиды с вершинами в точка:
А(\, 2, 0), ВC, 0, -3), СE, 2, 6) и О@, 0, 0).
5. Найти уравнение прямой, проходящей через точк;
МE, 0) и точку пересечения прямой 3*— 2у-\-4 = 1
с осью Оу.
д-_|_у 2 \ 0 '
6. Найти угол между прямой 2х — w + 4г + 5 = 0i
и плоскостью Ъх — у — г-(-2 = 0.
7. Составить каноническое уравнение гиперболы, действи
тельная полуось которой равна 3, а эксцентриситет 5/3
8. Определить вид фигуры и изобразить ее:
аL~4+4=1; б) (х-1J + (у~2J = 4;
194
в) бху + 8у2 + 6л[\0х + \л[\Ъу -7 = 0.
Вариант 3
1. Выяснить, для каких векторов а и b выполняется
условие |а + Ь| = |а| — |Ь|.
2. Найти проекцию вектора а = 4i — 3j -f- 4k на направле-
направление вектора b = 2i + 2j -+- k.
3. Вектор с перпендикулярен к векторам а и Ь, угол
между а и b равен л/6. Зная, что |а| =6, |Ь| =3, |с| =3,
вычислить (а, Ь, с).
4. Вычислить площадь треугольника с вершинами в точ-
точках ЛA, 3, -1), ВA, — 1. 3) и СE, -6, 2).
5. Написать уравнение прямой, проходящей через точку
(— 1, 2) перпендикулярно к прямой 2х -\- Зу -\- 1 = 0.
6. Найти проекцию точки C, 1, —1) на плоскость
х -f 1у + Зг — 30 = 0.
7. Составить каноническое уравнение эллипса, сумма
полуосей которого равна 8 и расстояние между фокусами 8.
8. Определить вид фигуры и изобразить ее:
а) (* — 2J + (у— 1)i = z\ б) x'2 = 2z;
в) 2bxz — 20ху -f 4у2 + 5д/29л: — 2л[29у = 0.
Вариант 4
1. Средствами векторной алгебры доказать, что сумма
квадратов диагоналей параллелограмма равна сумме
квадратов его сторон.
2. Найти (а, Ь), |а|, |Ь|, если а = 2i + j — k, b = j + 2k.
3. Вычислить площадь параллелограмма, построенного
на векторах а = 2\ -\- 3) и b = i — 4j.
4. Дана пирамида с вершинами в точках Л:C, 1, 4),
Л2(— 1, 6, 1), А3(— 1, 1, 6), А4@, 4, — 1). Найти длину высоты,
проведенной из вершины А4 на грань А\А2Аз.
5. Написать уравнение прямой, проходящей через точку
( —3, 2) перпендикулярно к прямой Зх + 2у — 4 = 0.
6. Составить канонические уравнения прямой
х — 2у 4- Зг — 4 = 0,1
Зх + 2у — 5г — 4 = 0.)
7. Написать каноническое уравнение эллипса, зная, что
большая полуось равна 6, а эксцентриситет 0,5.
8. Определить вид фигуры и изобразить ее:
а) х2-\-у2 — 4х + 6у — 3 = 0; б) х2-\-Зу2 — 9г2 = 27;
в) 4ху 4- Зу2 + 4д/5л: + 2л[Ьу — 21=0.
195
каждой внутренней вершине является средней арифметиче
ской температур ближайших четырех вершин, граничных ши
внутренних. Ожидается, что детали устройства, соприкасаяа
с различными участками контуров, сообщат соответствую-
соответствующим граничным точкам указанную на рис. 11 температуру
Возможно ли это? Если возможно, то однозначно ли при эток
распределение температуры во всех внутренних точках?
47. Стержень длиной 2000 мм был сварен по длине из
стали двух различных марок с коэффициентами линей-
линейного расширения соответственно а| = 17-10~8 и <Х2 =
= 12,1 • 10 . После сварки стержень проточили по наруж-
наружной поверхности. В дальнейшем потребовалось определить
положение сварного шва, а так как он стал незаметен
после проточки, поступили следующим образом. Стержень
нагрели до температуры / = 200°С и измерили его темпера-
температурное удлинение, которое оказалось равным 0,58 мм. По
имеющимся данным определить длину каждого из участков
стержня.
48. Коэффициент трения ременных передач в зависимости
от скорости v скольжения ремня выражается формулой f =
= a-\-bv. Определить постоянные величины а и 6 для кожа-
кожаного ремня, если опытным путем были найдены значения
коэффициентов: /i=0,4 при скорости скольжения V\ =
= 0,1 м/с и /"г = 0,5 при скорости скольжения У2 = 0,5 м/с.
49. Протяженная изотропная среда подвержена деформа-
деформации, при которой единичный куб с ребрами е(A, 0, 0),
е2@, 1, 0), ез@, 0, 1) переходит в параллелепипед с ребрами:
/(е,) = е(C/2, 1/2, 1/2), /(е2) = е5A/2, 1, 0), /(е3) = е$A/2, 0, 1).
Каковы главные оси деформации, т. е. направления, которые
сохраняются при деформации?
50. Пусть в плоскости л заданы базисные векторы i, j
прямоугольной декартовой системы координат Оху. Плос-
Плоскость л одинаково растянута в обе стороны от оси Оу (на-
(например, плоскость резиновая). Найти в базисе i, j матрицу
оператора, описывающего этот процесс.
51. Пусть две равные по модулю и противоположные
по направлению силы (например, силы, приложенные к лез-
лезвиям ножниц) стремятся сдвинуть один слой плоскости
относительно другого. Тогда один слой остается на месте,
а соседний смещается относительно него, т. е. происходит
поперечный сдвиг. Найти матрицу поперечного сдвига в орто-
нормированном базисе i, j прямоугольной декартовой систе-
системы координат Оху в предположении, что сдвиг происходит
в направлении оси Ох и смещение пропорционально рас-
расстоянию от слоя до оси Ох. Коэффициент пропорциональ-
пропорциональности равен \i.
ОТВЕТЫ
Глава 1
1.1. Матрицей размеров пг X п называется прямоугольная таблица
Он 012 ... п\п
О?1 Я22 ■•• п2п
ат\ атг ... ат„
составленная из тп элементов некоторого множества. 1.2. Элементами
матрицы называются элементы множества, из которых она составлена.
1.3. ац. 1.4. Матрица, у которой число строк равно числу столбцов
(пг = п), называется квадратной. 1.5. Порядком квадратной матрицы
называется число ее строк (столбцов). 1.6. Нулевой называется матрица,
все элементы которой равны нулю. 1.7. Диагональной называется
квадратная матрица, у которой все элементы, стоящие не на главной
диагонали, равны нулю. 1.8. Диагональная матрица, у которой каждый
элемент главной диагонали равен единице, называется единичной.
1.9. Две матрицы называются равными, если они одинаковых размеров
и элементы одной матрицы равны соответствующим элементам другой.
1.10. Суммой двух матриц Л„,х„ = (а,;) и В„Xa = (b,j) называется матрица
Стхп = {сц), такая, что Сц = а-ц + Ьц (i = I, m;j=l, л). 1.11. Нет. 1.12. Сум-
Суммой k матриц называется матрица, которая получается последовательным
сложением данных матриц. 1.13. Произведением числа а на матрицу
ЛтХ„ = (а,-;) называется матрица В тх„ = (Ьц), такая, что Ьц = аа„
(/=1, пг; /=1, п). 1.14. Матрицей, противоположной матрице А, назы-
называется матрица —А=(—\)А. 1.15. Разностью матриц А—В называется
матрица А + (— В). 1.16. Линейными операциями над матрицами назы-
называются сложение матриц и умножение матрицы на число. 1.17. 1) А +
+ В = В + А (коммутативность); 2) (А + В) + С = А +(В + С) (ассоциа-
(ассоциативность); 3) А+0 = А; 4) А + ( — Л) = 0; 5) 1Л=Л; 6) а(рЛ) =
= (аР)Л (ассоциативность относительно умножения чисел); 7) а(А + В) =
= аА + аВ (дистрибутивность умножения на число относительно сложения
матриц); 8) {а + Р)Л = аА + рЛ (дистрибутивность умножения на матрицу
относительно сложения чисел). 1.19. а) 2 X 3; б) 3 X 2; в) 3 X 3. 1.20. а23 =
= — 1, 034 = Ю. 1.21. А, С— квадратные матрицы соответственно порядка
2 и 3. 1.22. 7, —I, 8 — главная диагональ, 5, —1, 0 — побочная.
.23. А, С. 1.24.
10 0 0
0 10 0
0 0 10
0 0 0 1
1.25. а) В; б) D; в) S, С;
) А. 1.26.
.28. а)
7 6 7
— 3 11 21
12 -11 -1
1
б)
;
.27.
1
11
1
а)
(
(
3
9
24
г -
22
-6
-4
3
2
2
0
б)
1.30. а)
— 2 4
— 6 -8
— 16 0
3 —13
— 2 0
-3 -1
241
б)
Г —2 1/2
[1/3 -4
1. Нет. 1.32. Да. 1.33. Матрицу А можно умножить
на матрицу В (обозначается АВ), если число столбцов матрицы А
равно числу строк матрицы В. 1.34. Произведением матрицы А тХп на матри-
цу В„Хк называется матрица СтХ«, такая, что с,,=
, т. е. элемент
матрицы АВ, стоящий в «-Й строке и у-м столбце, равен сумме произведе-
произведений элементов «-й строки матрицы А на соответствующие элементы у-го
столбца матрицы В. 1.35. Произведение (АВ)С существует, если число
столбцов матрицы А равно числу строк матрицы В, а число столбцов
матрицы В равно числу строк матрицы С, т. е. А тХп, В„хк, CkXiVm,
п, k, I £ N. 1.36. Произведением п матриц называется матрица, полученная
последовательным умножением данных матриц, т. е. A\AiA3---An =
= (((AiA2)A3)---)An. 1.37. Произведения АВ и ВА существуют тогда и только
тогда, когда А = А тх„, В = В„хт. 1.38. Равенство АВ = ВА, вообще
2
говоря, не справедливо. 1.39. Возможно. Например: А =\
В= . 1.40. 1) (АВ)С = А(ВС) (ассоциативность); 2) а(АВ) =
= (аЛ)В = Л(аВ); 3) (А + В)С = АС + ВС (дистрибутивность умножения
справа относительно сложения матриц), С(А -\- В) = СА + СВ (дистрибу-
(дистрибутивность умножения слева относительно сложения матриц). 1.43. С23 = 18.
1.44. т =9, п = 1. 1.45. т = 7, л = 6. 1.46. а) Нет; б) да; в) да; г) нет; д) нет.
1.47. |—4]. 1.48.
1.51.
— 8
1.52.
0
39
39
48
37
112
-1
Ч
— 14
— 8
22
-32
1.49
— Г
38
149
32
11
8
30
1.5
1.50.
1.54. Произведение АА существует
8
9
-6
11
6
g
1
— 8
-8
тогда и только тогда, когда матрица А квадратная. 1.55. Целой положи-
положительной степенью Ак (k > 1) квадратной матрицы называется произведение
k матриц, каждая из которых равна А. 1.56. Нулевой степенью квадратной
матрицы А называется единичная матрица Е того же порядка, что и А,
т. е. А = Е. 1.57. Первой степенью квадратной матрицы А называется
сама матрица А. 1.58. Выражение Р(А) = ао-4* + а\А"~'+... + akE
называется многочленом от квадратной матрицы А. 1.59. Если Р(А) — нуле-
нулевая матрица, то Л называется корнем многочлена Р(х) = ао** + а\хк~[ + ...+
+ а*. 1.63. Г—5 —з 1.64. ["О 2 з"| 1.65. ["cos па — sin ла"|
[ 2 — 6J 4 0 9. [sin па cos па j
1.66.
2" 0 0 0
0 (—1)" 0 0
0 0 10
0 0 0 3"
1.67. Га" па"-'1 1.68. П па] 1.69. П6 —ю1
[О а" ]■ [О l| [О 6J
949
0
0
0
6
-2
— 4
2
4
— 2
1.71.
— 9
0
0
0
0
9
0
0
0
0
2
0
0
0
0
-5
1.72.
— 29
-10
20
-39
1.70.
1.74. Матрица, полученная из данной заменой каждой ее строки столбцом
1С тем же номером, называется матрицей, транспонированной к данной.
1.75. Операция нахождения матрицы, транспонированной к данной, назы-
называется транспонированием матрицы. 1.76. А т„хт. 1.77. В матрице А т элемент
fa,; стоит в у-й строке и i-м столбце. 1.78. 1) (Ат)т= А; 2) (аА)т =
аАг; 3) (А + В)г = А т -\- В г, где А и В— матрицы одинаковых
|размеров; 4) (АВI = ВТА т, если АВ существует. 1.81. а)
«б)
2 4
4 -1
6 0
1.82. а)
Г_4 -4 7]. б) Г
[ 10 2 —3J' [ —
2
— 1
0
7
5
1
-3
3 —
1.83. т = п.
1.84. а) Для нулевой квадратной матрицы; б) для любой единичной матрицы.
1.85. Г
— 8
13
1.86.
4
-1/2
1.87.
4-2 2
5 3-2
— 5 8 0
1.88. 3
-5
4
[ 1.89. Определителем матрицы п-го порядка называется сумма п\ слагаемых
вида (—|)*;»■•<" *-ia 1„(а2а/--а„о„, где ft(ai, аг, ..., а„) — число инверсий
в перестановке (аь аг, ..., а„), (ai, аг, ..., а„)—перестановка из п чисел
I, 2, .... п, т. е.
аи
а„, а„г ... апп
2 (-!)
k (a., ai а„;
"а |а,а2а,---1п
где сумма содержит все слагаемые, для которых перестановки (ai, аг, ..., а„)
различны. Приведем еще одно определение. Определителем матрицы А
порядка п называется сумма п слагаемых вида (—I)' + 'ai/-Ali/-, где Afi,—
определитель порядка п — 1, полученный из матрицы А вычеркиванием
первой строки и /-го столбца, т. е.
а,„
а„„
= X (-\y+iaiiM4.
1.90. а) |ац| = an; б)
an
a2i
— ai2a2i; в)
ап а|2 ai3
031 азг азз
— 012121 а3з — ОцОгзазг.
1.91. 1) Определитель матрицы, полученной из данной транспонирова-
транспонированием, равен определителю данной матрицы; 2) если все элементы
некоторой строки (столбца) определителя равны нулю, то определитель
равен нулю; 3) если все элементы некоторой строки (столбца) опреде-
243
лителя имеют общий множитель, то его можно вынести за знак определителя;
4) определитель, у которого каждый элемент некоторой строки (столбца)
является суммой двух слагаемых, равен сумме двух определителей,
у первого из которых в указанной строке (столбце) стоят первые слагаемые,
а у второго — вторые слагаемые, остальные строки (столбцы) у всех опре-
определителей одинаковы; 5) если матрица В получена из матрицы А
перестановкой двух строк (столбцов), то det В = —det A; 6) если матрица
А имеет две одинаковые строки (столбца), то det А = 0; 7) если матрица А
имеет две пропорциональные строки (столбца), то det Л = 0; 8) если
матрица В получена из матрицы А прибавлением к некоторой строке
(столбцу) другой строки (столбца), умноженной на к, то det В = det A.
1.95. 34. 1.96. —15. 1.97. 55. 1.98. —31. 1.99. 0. 1.100. 0. 1.101. 0.
1.103. а) а = 5/3; б) а, = — 1, а2 = 4; в) а=—3; г) а,=0, а2 = 3;
д) ни при каком а. 1.105. 0. 1.106. 0. 1.107. 0. 1.108. 0. 1.109. —40 400.
1.110.0. 1.111. 162. 1.112. det A = det В = -2. 1.113. det A = det В = -16.
1.114. 0. 1.115. Выберем в матрице A s строк и s столбцов. Минором порядка
s матрицы А называется определитель матрицы, составленный из ее эле-
элементов, стоящих на пересечении выбранных s строк и s столбцов.
1.116. I, 2, ..., min (m, п), т. е. 1 ^ s ^ min (m, п). 1.117. Минором, допол-
дополнительным к минору М порядка s, называется определитель матрицы,
оставшейся после вычеркивания тех s строк и s столбцов данной матрицы,
которые входят в минор М. Минор, дополнительный к минору М порядка s,
существует только у квадратной матрицы, если ее порядок п > s.
1.118. Алгебраическим дополнением минора М называется дополнительный
к нему минор, умноженный иа (—1)", где а — сумма номеров строк и
столбцов данной матрицы, которые входят в минор М. 1.119. Алгебраи-
Алгебраическим дополнением элемента а,, матрицы А порядка п называется опреде-
определитель матрицы порядка п — 1, которая получена из матрицы А вычеркива-
вычеркиванием 1-й строки и /-го столбца, умноженный на (—1)' + /. Обозначается
Ац. 1.120. Определитель матрицы равеи сумме произведений элементов не-
некоторой его строки на алгебраические дополнения этих элементов.
1.121. Определитель порядка п равен сумме произведений всевозможных
миноров k-то порядка (k <. п), которые можно составить из произвольно
выбранных k строк (столбцов), на алгебраические дополнения этих миноров.
1.124. а)
0
— 1
б)
4
-3
= —6.
1.126.
= -4. 1.127. (—
1.128. a) (—I)
|\2 + 3+l-
==-4; 6) (-1
1
Я24
a t4
3
2
— 7
125.
4 -
1
0
O2I
23
0Ц| ОЦЗ |
Й23 &24
a43 a44
-7
5
5
= 214;
(-1Г
— 7
5
4
= 101.
1.129. 42. 1.130. 140. 1.131. —30.
1.132. —16. 1.133. НО. 1.134. 300. 1.137. —65. 1.138. 0. 1.139. Если для
матрицы А существует матрица В, такая, что АВ = ВА = Е, где Е — еди-
единичная матрица, то В называется обратной матрице А. 1.140. Невырожден-
Невырожденной (неособенной) матрицей называется квадратная матрица, определи-
определитель которой отличен от нуля. 1.141. Вырожденной (особенной) матрицей
называется квадратная матрица, определитель которой равен нулю.
1.144. Вообще говоря, не всегда. Например:
АВ =
1 0 4
0 4 6
5 3
10 6
244
Так как detAB=O, то АВ — вырожденная матрица, однако матрицы
Л и В не являются даже квадратными. 1.145. Матрица, обратная
матрице А, существует только в том случае, когда det А Ф О, т. е. А —
невырожденная матрица. 1.146. Пусть Лг1 и Af1 — матрицы, обратные
невырожденной матрице А. Тогда ААГ1 = Е. Умножив обе части этого
равенства на Лг слева, получим Af'AAf1 = Лг~ '£• Так как Aj~'AAr[ =
ll1 \
det Л
л,, л21
Л,2 Л22
л„,
Л„2
где Aij — алгебраическое дополнение эле-
элемента а„ матрицы Л. 1.148. а) Так как Л 'А = £, то det (Л Л) = det E
или det Л ■' det Л = 1, откуда det Л~'= 1/det Л; б) так как А~'А = Е
и АА~' = Е, то матрица Л является обратной матрице А~'\ в) так как
аА(— А"'\ — (— А~1 а^ — Е, то — Л — матрица, обратная мат-
матрице аА; г) надо доказать, что матрицы Л* и (Л~')* взаимно обратные, т. е.
А"(А -')* = £ и (Л-')*Л* = £. Имеем
раз к раз к — 1 раз I
= (АА-А)Е(А-'А-'-А-1) = (АА-А)(А~1А-1 -А'1) = ■
— 1 раз
= £.
А— 1 раз к — 1 раз
{Аналогично можно доказать, что (Л~')*Л* = £; д) надо доказать, что
'матрицы АВ и 8~'Л~' взаимно обратные, т. е. (АВ) (Б~'Л~') =
= (В-'Л-')(ЛВ) = £. Действительно, (АВ)(В~1 Л) = Л/ВВ) Л~' =
Л£Л' ЛЛ"' £ (В|Л')(Лй) В|(Л'Л)В й'£В В1
, ()() ()
= £. 1.151. а) Нет; б) нет; в) да; г) нет. 1.152. При ХфЗ. 1.153. При
ХФ4 и X=?fc 1. 1.154. Ни прн каком X. 1.155. При любом X. 1.156. а) Л~' =
Лц Л2| Л31
Л|2 Л22 Лз2
Л13 Лгз Лзз
19 ^ и
—; б) Ь» =
1 ,
1.157. а) 632 =
1
det Л
-3 6
— 1 1
Л|2 =
1.160. Не существует.
-8 -12
вует. 1.164.
/2
0
0
0
2
0
о'
0
3
1.165.
О О
\/d2 О
О \/d3
О О
о
— 4
6
О
О
О
1.163. Не сущест-
245
0; не существует, если й\йчйъй\ = 0. 1.166. —-7-
48
Л67. т
2 -5
-3 3
1 —2
.1.168.-
-3 2 -3
1
1.170.
0 0 0 12
0 0 6 0
0 4 0 0
3 0 0 0
1.171.
1 3
О 1
О О
о о
1.169. ——
1.172.
1.173. Не существует. 1.174. Г°'' J'jl. 1.175. Г^ jjl. 1.176.
-2
4
(СУ
2
0
1
1 0
i i
0 1
0 0
— 1
1
2
0
2
—
0
0
1
1
0
3
4
0
7
1
3
5
3
5
3
0
0
0
0
1
2
0
-1
1.177.
1.178.
— 1
3
— 1
4
1.181. Рангом матрицы называется
наибольший из порядков ее миноров, отличных от нуля. Если все миноры
матрицы равны нулю, то ранг матрицы считается равным нулю. 1.182. Если
матрица невырожденная. 1.183. г. 1.184. Элементарными называются сле-
следующие преобразования матрицы: умножение некоторого столбца (строки)
матрицы на число, отличное от нуля; прибавление к одному столбцу
(строке) матрицы другого столбца (строки), умноженного на произвольное
число; перестановка местами двух столбцов (строк) матрицы. 1.185. а) г;
б) г. 1.186. Базисным минором матрицы называется отличный от нуля ее
минор, порядок которого равен рангу матрицы. 1.187. Некоторая строка
матрицы является линейной комбинацией других k строк этой матрицы, если
она может быть представлена в виде суммы этих k строк, умноженных
соответственно на числа ai, аг, ..., а*. 1.188. Линейно зависимыми назы-
называются такие k (k > 1) строк матрицы, из которых хотя бы одна является
линейной комбинацией остальных. 1.189. Линейно независимыми называются
такие k (k > 1) строк матрицы, что ни одна из них не является линейной
комбинацией остальных. 1.190. Пусть для данной матрицы выбран базисный
минор. Строки и столбцы матрицы, на пересечении которых стоят элементы
базисного мннора, называются базисными. 1.191. Любая строка (столбец)
матрицы является линейной комбинацией базисных строк (столбцов).
Базисные строки (столбцы) матрицы линейно независимы. 1.192. Если
г = 0, у матрицы нет базисных миноров; если гф0,у матрицы существует
один или несколько базисных миноров. 1.193. Минором, окаймляющим
минор М порядка k матрицы А, называется минор порядка k + 1 этой
матрицы, содержащий минор М. 1.194. а) Да; б) нет. 1.195. Рангу
матрицы. 1.196. а) Да; б) да. 1.203. 10. 1.204. Нет. 1.205. 3. 1.206. г = 2,
1
0
1
0
0
3
0
5
. 1.207. г = 2, М =
1 2
-1 3
. 1.208. г= 1, М = 2. 1.209. г = 2,
1 3 0
. 1.210. г= 1, М= —2. 1.211. г = 3, М =
2 4 0
0 0 2
. 1.212. г =
= 3, 7И =
1 —4
2 0
1 -3
. 1.213. г = 2, М =
3 5
— 6 0
. 1.214. г = l,Af =1.
246
1.215. г = 2, М =
0 1
1 О
. 1.216. k = mm(m, n). 1.219. О, 1, 2. 1.220. Нет.
1.221. г = 2. 1.222. г = 3. 1.223. г = 2. 1.224. X. = 3. 1.225. Я =^—17.
1.226. Х = 0, А. = 2. 1.227. а) Ни при каком к; б) к= — 3; в) X. ^ — 3.
1.228. При любом X. 1.232. 2. 1.233. 3. 1.234. 2. 1.235. 2. 1.236. 3.
Глава 2
2.1. Линейной системой m уравнений с п неизвестными называется
система вида
Эц*1 +0,2*2
+ 022*2 + •••
О* 1*1 + Ош2*2 +...
.. + 0|„*„ = А|, Л
•• + 02п*п = А2, I
• + от„*„ = Лт, ^
где djj, А<(('=1, т; /=1, п) — числа. 2.2. Матрицей системы
01 |*1 + 0,2*2 + ... +0,„*„ = Аь
021 *1 + 022*2 + ■•■+ пч„Х„ = А2,
omi*i
а„„х„ =
называется матрица
А =
Он 0|2
021 022
Oml
составленная из коэффициентов при неизвестных системы. Расширенной
матрицей системы называется матрица
А =
Oil Oi2
021 022
am2
а\„ п\
02л Аг
птп hm
которая получается из матрицы системы приписыванием столбца сво-
свободных членов. 2.3. АХ = Н, где:
А =
Ом
021
012
022
01„
, х =
*1
*2
Хп
, н =
'А,
А2
km
2.4. Упорядоченная система чисел (ci, Сг, ..., с„) называется решением
системы m линейных уравнений с п неизвестными *i, *2, .... хп, если каждое
из уравнений этой системы обращается в верное равенство после под-
подстановки вместо *i, *2, ..., */■ соответственно чисел С\, Сч, ..., сп- 2.5. Вектор-
решением системы АХ — Н с п неизвестными *i, *2, •••, *п называется матрица
c =
Cn
, для которой справедливо равенство АС — Н. 2.6. Система назы-
247
вается совместной, если она имеет хотя бы одно решение. 2.7. Система на-
называется несовместной, если она не имеет решений. 2.8. Определенной
называется совместная система, имеющая единственное решение. 2.9. Не-
Неопределенной называется совместная система, имеющая более одного ре-
решения. 2.10. Нет. 2.11. Система линейных уравнений называется невырожден-
невырожденной, если число ее уравнений равно числу неизвестных и матрица системы
невырожденная. 2.12. Невырожденная система имеет единственное решение.
2.13. X = А~1Н. 2.14. *; = Д;/Л (/=1, п), где Л—определитель матрицы
системы, а Д, — определитель матрицы, которая получается из матрицы си-
системы заменой ее /-го столбца столбцом свободных членов. 2.17. Является.
2.18. Не является. 2.19. Является. 2.20. Не является. 2.21. Не является.
2.22. *,=2, *2 = 3. 2.23. *, = I, х2=—1, х3 = 0. 2.24. х, = 2, *2=1,
дгз = — 1. 2.25. х, =0, *2 = 3, хъ= — 1. 2.26. х, = 1, *2=1, х3=\.
2.27. xi = 1, х2 = 0, *3 = — 1. 2.28. *i = 2, *2 = — 1, *3 = 1. 2.29. л = 3,
х2 = 8, *3 = 7. 2.30. xi = 2, *2 = 3, х3 = — 1, *4 = 5. 2.31. *, = — 1, *2 = 2,
*з = 3. 2.32. Для совместности системы АХ = Н необходимо и достаточно,
чтобы ранг матрицы системы был равен рангу ее расширенной матрицы
(г А = г jj). 2.33. Система АХ = Н имеет единственное решение тогда и только
тогда, когда ранг матрицы системы равен рангу ее расширенной матрицы
и равен числу неизвестных системы (гА==гл = п). 2.34. Система АХ = Н
имеет бесконечное множество решений тогда и только тогда, когда ранг
матрицы системы равен рангу ее расширенной матрицы и меньше числа
неизвестных системы (г А = гА < л). 2.35. Система либо несовместна, либо
имеет бесконечное множество решений. 2.36. Базисными неизвестными сов-
совместной системы называются те, коэффициенты при которых образуют
базисный минор матрицы системы; остальные неизвестные (если они есть)
называются свободными. 2.37. Число базисных переменных совместной
системы равно рангу матрицы этой системы. У несовместных систем
базисных неизвестных нет. 2.38. п — г, где п — число неизвестных
системы, а г—ранг матрицы системы. 2.42. Неизвестные х\, х2, х3 явля-
являются базисными, если среди миноров третьего порядка матрицы А хотя бы
один, составленный из коэффициентов при х\, *2, х3, отличен от нуля.
2.43. Базисными неизвестными являются х\ и хз, а свободными — *2, х4,
хь. Система эквивалентна, например, системе
-f- 0,14X2 -f- 023-^3 ~\- fl24*4 = ^2,
041*1 + a42*2 + ^43*3 + <*44*4 = ^4-
2-44. ,/*4- Z *' ,f\ I 2.45. x,= llc —4, *2 = 3 - 7c, x3 = c
. 2.46. *i =x2 = *3= 1. 2.47. Несовместна. 2.48. *i=Ci, *2 = Eci —
— 4c2—l!)/!0, *з = ( —7 —3c2)/5, x4 = c2 Vd, c2 6 R. 2.49. Несовместна.
2.50. *, = — 1, *2=1. 2.51. *i=Ci, *2 = c2, *з = C — 5ci +25c2)/9,
*4 = A0c2 —2c,)/3 Ус,, C26R. 2.52. *, = (9 — c, — 14c2 — c3)/7, *2 =
= ( —1-f 4ci — 7c2 —Зсз)/7, *з = С|, *4 = C2, *5 = c3 Vci, C2, c3 6 R-
2.53. Несовместна. 2.54. *, = с, *2 = 2 V с g R. 2.55. Несовместна. 2.56. *i =
= ci, *2 = 1 + 2ci + 3c2, *з = c2 V Ci, c2 6 R. 2.57. X. ^= 6. 2.58. При любом Х.
2.59. k= —2. 2.60. Если Н — О, то достаточно, и система имеет бесконечное
множество решений. Если Н ф О, то недостаточно. Если гл Ф гд, тс
система несовместна. Если гА = гд, то система имеет бесконечное мно-
множество решений. 2.61. det (A — кЕ)ФО. 2.62. Вообще говоря, нет. Если
гА = гл, то следует. Если же гАфгА-, то не следует. 2.63. Система либо
несовместна (если гА ф гл), либо имеет бесконечное множество решений.
2.64. Система линейных уравнений называется однородной, если свободный
член в каждом ее уравнении равен нулю. 2.65. Нулевым илн тривиальным ре-
решением однородной системы с п неизвестными *i, *2, ..., *„ называется
248
решение х\ = х2 = ... = х„ — 0. 2.66. Нет. 2.67. Для того чтобы однородная
система имела только тривиальное решение, необходимо и достаточно, чтобы
ранг матрицы этой системы равнялся числу ее неизвестных (г л = п).
2.68. Для того чтобы однородная система имела нетривиальные решения,
необходимо и достаточно, чтобы ранг матрицы этой системы был меньше
числа ее неизвестных (гА<Сп). 2.69. Фундаментальной системой решений
однородной системы линейных уравнений называется совокупность макси-
м'ального числа линейно независимых вектор-решений этой системы урав-
уравнений. 2.70. Ранг матрицы системы меньше числа неизвестных (г А <п).
2.71. п — г А, где п — число неизвестных, a r Д — ранг матрицы однородной
системы. 2.72. Либо ни одной (г . = п), либо бесконечное множество
(гд<п). 2.73. Пусть дана система АХ = 0 и известно, что п<г. Найдем
множество решений системы. Оно содержит п — г произвольных постоянных
С\, с2 Сп-г- Положив С\ = 1, Ci = ... = с„-, = 0, получим одно решение.
Затем, положив с2=1, С\ = съ = ... = с„~, = 0, получим второе решение,
N т. д. Таким образом получим множество решений, которое называется
армированной фундаментальной системой решений. 2.75. 10.
h
2.76.
2
1
0
2
0
з"
0
1
— 1
0
— 1"
0
0
1
!
или (B, 1, 0, 2,0), C,0, 1, -1,0), (-1, 0, 0, 1, 1)(.
2.77. 2. 2.78. х, =0, х2 = х* = с. 2.79. х, = х2 = х3 = 0. 2.80. х\ =0, х2 =
= 2ci+C2, хъ = с\, х, = С2 Vci, C2 6R- 2.81. х, = с,, х2 = С2, х3 = Cс1 +
+ 6с2)/4, х, = Eci + 10с2)/4 Vc,, c2€R. 2.82. jc, =(8c, + 9с2)/26, х2 =
= — Fс,+23с2)/26, jr3 = B2ci —11сг)/26, jt, = Ci, x5 = c2Vc, c2 g R.
2.83. х, = —с/7, *2=10с/7, A:3 = cVcgR. 2.85. a) jc = 10с, у=—7с,
г=— cVcgR; б) л:, = 14с, х2 = 5с, х3= — 13с с 6 R- 2.86. (B, 3, 1, 0),
C, -1, 0, 1)). 2.87. (A,3, 0, 0, 2), @, 0, 1, 0, 2), @, —1,0, 1, -1)). 2.88. B/3,
5/3, 1, 0); A/3, -5/3, 0, 1). 2.89. (C, —6, 1,0, 0), (-3, 5, 0, 1, 0), @, — 1,
0, 0, 1)). 2.90. |C, —2, 1)). 2.91. (A, 0, 0, 0, 0), @, —4, —3, —5, 1)(. 2.92. а) Си-
Система имеет только тривиальное решение; б) система имеет бесконечное
множество решений. 2.93. Система несовместна, если гАфг^\ система
имеет единственное решение, если г А = г j. 2.94. Система имеет бесконечное
множество решений. 2.95. Система имеет только тривиальное решение.
2.96. Прямым ходом метода Гаусса называется переход от данной
системы к равносильной ей системе, матрица которой треугольная нли
трапециевидная. 2.97. Обратным ходом метода Гаусса называется нахожде-
нахождение неизвестных из системы, полученной в результате прямого хода.
2.98. Система имеет единственное решение. 2.99. Несовместна. 2.101. х, =
= — 1, х2 = 1, х3 = 3. 2.102. х\ = 0, х2 = 2, х3 = — 1. 2.103. Несовместна.
2.104. х, = 1 + 5ci — 5с2, JC2 = — Зс, + Зс2, хъ = сх, х, = а V С\, с2 g R.
2.105. *|=1, х2=0, х3= — 2, х,= \. 2.106. Несовместна. 2.108. х,= 1,
х2 = 2, *з = 3. 2.109. х, = 14с, *2 = 21с, х3 = с, х< = с Vc6 R- 2.110. х, =
= C — 2с2)/10 — с,, лг2 = С|, х3= — 1/2 — 4с2, х4 = A — 14с2)/10, хь = с2
Vc, c2gR.
Глава 3
3.1. Направленным отрезком называется отрезок прямой, одна из гра-
граничных точек которого принята за начало, а другая — за конец. 3.2. Два
ненулевых направленных отрезка называются эквивалентными, если нх
длины равны н они сонаправлены. Нулевые направленные отрезки счи-
249
таются эквивалентными. 3.3. Вектором называется множество всех направ-
направленных отрезков, эквивалентных между собой. Каждый направленный от-
отрезок этого множества называется представителем вектора. 3.4. Длиной
направленного отрезка АВ называется расстояние между точками А и В.
Длиной вектора называется длина любого его представителя. 3.5. Два
вектора называются ортогональными, если угол между ними равен л/2.
3.6. Два вектора называются коллинеарными, если они сонаправлены или
противоположно направлены. 3.7. Векторы называются компланарными,
если их представители лежат в одной плоскости нли в параллельных плоско-
плоскостях. 3.8. Линейными операциями над векторами называются сложение
векторов и умножение векторов на число. 3.9. Пусть даны векторы а и Ь.
Приняв некоторую точку А за начало, стронм вектор АВ = а. Взяв точку
В за начало, строим вектор ВС = Ь. Вектор АС = с, соединяющий начало
первого слагаемого с концом второго, называется суммой векторов а и Ь,
что записывают так: а + Ь = с. 3.10. Суммой п векторов называется вектор,
который получается последовательным сложением данных векторов.
3.11. Произведением вектора а на число а называется вектор Ь, такой, что
|Ь| = |а| |а|, а и b сонаправлены, если а > 0, и противоположно направ-
направлены, если а<0. 3.12. 1) a + b=b + a; 2) (a + b) + с =a + (b + с);
3) афа) = Р(аа) = (ар)а (а, Р б R); 4) а(а + Ь) = аа + аЬ (а б R);
5) (а + р)а = аа + Ра (а, р £ R). 3.13. Противоположным вектору а назы-
называется вектор — а = (— 1)а. 3.14. Разностью а — b векторов а и b называется
вектор, равный сумме векторов а и — Ь, т. е. а — b = a-f-(— b). 3.16. Нет.
3.17. На сфере радиуса г с центром в точке А. 3.18. Три. 3.19. л/2, 5л/6,
5л/6, л/2, л/6, л/6. 3.20. Ь. 3.21. Нет. 3.22. Да. 3.23. а) к = 1/|а|; б) Я =
= —1/|а|; в) к = 0. 3.24. ВА = -АВ. 3.25. aftb-3.26. a||b. 3.27. af|b,
|а13НЬ|. 3.28. aJ-b. 3.29. a f|b. 3.30. afjb, |a| = |b|. 3.31. affb.
3.32. affb, 1Ы = 1. 3.33. afjb, |a| = |b|2. 3.34. |a| = |b|. 3.35. lal = |b|.
3.36. Векторы a, b, с являются сторонами треугольника ABC: a) a =
= А~В^Ъ = В~С, с = СЛ; б) а = Лй, Ь = ЙС, с = ЛС; в) а = Лй, b = CS,
с = АС. 3.38. ф при к>0, л — ф прн к < 0. 3.39. а= 1а|е, если a ffe; a =
= —|а|е, если afje. 3.42. Линейной комбинацией векторов Э|, аг, •■•, а„
называется вектор a,ai + оздг + •■• + алап, где аь аг, ..., а„— числа.
3.43. Базисом на плоскости называется упорядоченная пара неколлннеар-
ных векторов этой плоскости. 3.44. Базисом в пространстве называется
упорядоченная тройка неко.чпланарных векторов. 3.45. Пусть ei, ег, ез —
базис пространства. Разложением вектора а по данному базису называется
представление а в виде а = a,ei -f- агег + азез- 3.46. Координатами вектора
а в базисееи ег, е3 называется упорядоченная тройка чисел — коэффициенты
разложения вектора а по данному базису, т. е. если а = а|е1+агег +
+ азез, то ai, аг, аз — координаты вектора а в базисе ei, ег, ез- 3.47. Каж-
Каждая координата суммы векторов в некотором базисе равна сумме соответ-
соответствующих координат слагаемых векторов в том же базисе, т. е. если
а(оц, а2, а3), b(Pi, р2, Рз), то а + b(a, + рь а2 + Рг, а3 + рз). 3.48. Каждая
координата вектора ka в некотором базисе равна произведению числа к
на соответствующую координату вектора а в том же базисе, т. е. если
ajai, аг, а3), то ka(ka.i. Лаг, каз). 3.49. а = kb; если a(ai, аг, аз), Ь(Рь Рг,
Рз), то а,/р, = а2/р2 = а3/р3. 3.52. а) E, 0); б) G, 6). 3.54. а) G, -2, -4);
б) ( — 7, 13, —9); в) ( — 3/2, 2, —1). 3.55. а) Да; б) нет; в) да; г) нет.
3.56. Э = —1/3, a =12. 3.57. Да. 3.58. Нет. 3.59. Да. 3.60. Нет. 3.61.
A1/7, —1/7). 3.62. C, —1, 4). 3.63. Базис называется ортонормированным,
если базисные векторы попарно ортогональны и каждый базисный вектор
является единичным. 3.64. Совокупность точки О н ортонормированного
базиса i, j, k называется декартовой прямоугольной системой координат
в пространстве. 3.65. Радиусом-вектором точки М относительно декартовой
250
прямоугольной системы координат @; i, j, k) называется вектор ОМ.
3.66. Координатами точки М в декартовой прямоугольной системе коорди-
координат @; i, j, k) называются координаты радиуса-вектора ОМ в этой системе.
3.67. (xi — х\, yi — у\, 2г — Zi). 3.68. Разделить отрезок АВ в отношении
X (X Ф — 1) — значит на прямой, проходящей через точки Л и В, найти та-
такую точку С, чтобы А~С = ХСВ. 3.69. х = Х\+.*?* , У = У' + %У'* —
1 + X ' я 1 + X
г, +
- '-. 3.73. B{—\, 2, 4), C(l, 3, 0). 3.74. 0F, — 1, 1). 3.75. AD(-\,
1 -f- X
л п\ о ia in /о с /о I /о\ о -i-i ( mlxt 4~ m2X2 Ш\У\ + 21/2 \
4, —2). 6.10. (А/2., о/г, \/2). 6.П. I , - I. d.79.
\ mt-\- mi гпх + тг )
Л0C, 3, 0). 3.80. Скалярным произведением двух ненулевых векторов на-
называется число, равное произведению их длин на косинус угла между
ними. Если хотя бы один из двух данных векторов нулевой, то их скалярное
произведение считается равным нулю. 3.81. (а, Ь)= |а| пр.Ь = |Ь! нрьа.
3.82. 1) (а, Ь) = (Ь, а); 2) (аа, Ь) = а(а, b) (d £ R); 3) (а + b, с) = (а, с)+
+ (Ь, с); 4) (а, а)=|а|2. 3.83. Если а = a,i + a2j + a3k, b = p,i + p2j +
+ рзк, то (a, b) = a,p, + a2p2 + азРз- 3.84. Если а = aii + a2j + a3k, то
|a| = ya? + a2 + a2. 3.85. Если Mi(xi, y\, z\), M2(*2, yi, z2), то |MiM2| =
= \[(x2-x,f+(y2-yif+(z2-zlf. 3.86. cos Ф = /'; ^ ; если а =,
k, то cos ф = —;
3.87. (a, b) = 0 нлн a,Pi + a2p2 + a3p3 = 0, где (a,, a2, a3) и р,, p2, p3) -
координаты векторов а и Ь соответственно. 3.88. Направляющими коси-
косинусами вектора называются косинусы углов, которые этот вектор обра-
образуют с осями координат. 3.91. Если |е| = 1, то (а, е) = преа. 3.92. Ра-
Равенство (а, Ь) = 0 справедливо не только в том случае, если один из
векторов — нулевой. 3.93. ± 1а| |Ь|. 3.94. —3/2. 3.95. Сумма квадратов
длин диагоналей параллелограмма равна сумме квадратов длин его сторон.
3.96. —21. 3.97. 4B — Уг). 3.98. л/3. 3.99. —10,5. 3.100. 4. 3.102. cos a =
a«54o4'. 3.103. e(l/3, 2/3, —2/3). 3.104. e=—^-i +
+ yj-yk. 3.105. a =3, |b| = 13, cos(aTfe)= 19/39 «0,48. 3.106. л/3.
3.107. 0A, 0, 2), л/2. 3.109. cos а = а* , cos p =
Л1а1 + al + al
= y , cos v= a\ 3.111. cos a= 12/13, cos p =
\ai + al + ai \ai + al -\- a?
= —3/13, cosv = 4/13. 3.112. а =л/з& 1,73, |bl=Vl4«3,74,
cos(a, b) = 6/V 42 « 0,926, cos on = 1/V3 « 0,58, cos Pi = l/-\/3« 0,58,
cos v, = —\/^/ifa —0,58, cos a2 = 2/Vn« 0,53, cos p2 = 3/ \f\Ax 0,80,
cos v2= — 1/лД4~« — 0,27. 3.113. cos a =—2/3, cos p = 2/3, cos v =
= —1/3. 3.114. vi=V3, V2 = 2n/3. 3.115. arccos(± 1/V^02). 3.116. 8.
3.117. 17/Уб~«6,94. З.Ц8. <z=l. 3.119. b = 4i — 2j + 10k. 3.120. b =
= 3i+j + 5k. 3.121. b = 2i — 2j — k. 3.122. Три некомпланарных вектора
й=АВ, Ь = AC, c = AD, взятых в указанном порядке, образуют правую
25!
\
тройку, если из конца AD поворот от АВ к АС по кратчайшему пути
виден в направлении, противоположном направлению движения часовой
стрелки. 3.123. Векторным произведением двух неколлинеарных векторов
а и Ь называется вектор с, для которого |с| = |а| |b| sin <р (ср = (а, Ь)),
ортогональный векторам а и b и направленный так, что a, b и с об-
образуют правую тройку. Если перемножаемые векторы коллинеарны, то
их векторное произведение по определению считается равным нулевому
вектору. 3.124. Если а и b неколлинеарны, то |[а, Ь]| численно равен
площади параллелограмма, сторонами которого являются АВ и АС, где
а = ЛД, Ь = ЛС. 3.125. 1) [а, Ь) = —[Ь, а]; 2) [аа, Ь] = а[а, Ь] (ag R); З)[а + Ь,
I j k
c| = [a, c| + [b, с]. 3.126. ]a, b] =
dz
3.129. а) Левую; б) пра-
Ьх Ьу Ьг
вую; в) левую. 3.130. Вектор е ортогонален векторам а и b н направлен
так, что векторы а, Ь, е образуют правую тройку, |е| = 1. 3.131. 3.
3.132. 4[Ь, с]. 3.133. 7д/2/2«4,9 кв. ед. 3.134. 72 кв. ед. 3.135. 30 кв. ед.
3.136. Площадь параллелограмма, сторонами которого являются диаго-
диагонали данного параллелограмма, равна удвоенной площади данного парал-
параллелограмма. 3.137. 24 кв. ед. 3.138. V38~«6,16 кв. ед. 3.139. л[Ш/Ь я
«4,67. 3.140. 3-yJb»6Jl. 3.141. а) 4i — 2j + 2k; б) 2j + 2k. 3.143. Сме-
Смешанным произведением трех векторов а, Ь, с называется число, получаемое
следующим образом: векторное произведение [а, Ь] умножаем скалярно
на с. 3.144. Модуль смешанного произведения трех некомпланарных векто-
векторов а, Ь, с численно равен объему параллелепипеда с ребрами АВ, АС,
AD, где АВ = а, АС = Ъ, ЛО = с. 3.145. Необходимым и достаточным
условием компланарности трех векторов является равенство нулю нх
смешанного произведения. 3.146. (а, Ь, с) =
ах
сх су сг
3.150. Равен-
Равенство имеет место тогда и только тогда, когда а, Ь и с попарно ортого-
ортогональны. 3.154. а) (а, Ь, с); б) 4(а, Ь, с). 3.155. а) 42 куб. ед. б) 24 куб. ед.
3.156. 100 куб. ед. 3.157. Нет. 3.158. а) Да; б) нет; в) да. 3.159. а) а, = 1,
а2=13/7; б) ни прн каком а; в) а =14. 3.160. а) Правая; б) левая.
3.161. 43/3» 14,33 куб. ед. 3.162. 32/У504 да 1,43. 3.163. а) 14 куб. ед.;
б) 4. 3.165. хх = -5, лг2 = 4б4-- 3.167. 529 куб. ед. 3.168. Да. 3.169. с =
о
= 12i — 3j — 4k. 3.170. —1/2. 3.172. Задача преобразования координат
точки заключается в том, чтобы, зная координаты точки в одной системе
координат, найтн ее координаты в другой системе. 3.173. а) х = х' + хо,
у = у' + 1/о, где х, у и х', у' — координаты точки плоскости в системах
координат (О, i, j) и (С; i, j) соответственно; х0, уо — координаты точки
О' в системе координат (О, i, j); б) х = х'+х0, у = у'+ уо, z = z' + z0,
где х, у, г и х', у', г' — координаты точки пространства в системах ко-
координат (О; i, j, к) и (О'; i, j, к) соответственно; x0, уо, z0 — координаты
точки О' в системе координат (О; i, j, k). 3.174. х = х' cos ф— у' sin ф,
у = х' sin ф + у' cos ф, где х, у и х', у' — координаты точки плоскости
в системах координат (О; i, j) и (О; i', j') соответственно; ф = (i, i')-
3.175. На плоскости задаются точка О, которая называется полюсом, и
выходящий нз полюса луч, называемый полярной осью; кроме того, за-
задается масштабная единица. 3.176. Координатами точки М в полярной
252
системе координат являются: полярный радиус р — расстояние от точки
М до полюса (р = \0М\), полярный угол 6 — угол между полярной осью
и радиусом-вектором ОМ точки М. При этом пишут М(р, 9). 3.177.
Согласно определению, р^О, — <х><6<+оо. Однако в этом случае
соответствие между точками плоскости н упорядоченными парами чисел
(р, 0) не является взаимно однозначным. Например, A, л/2) и A, 5л/2)
определяют одну и ту же точку. Чтобы соответствие между точками,
отличными от полюса, и упорядоченными парами чисел было взаимно
однозначным, достаточно рассматривать угол 6, удовлетворяющий нера-
неравенствам — л < 6 <: л илн 0 <: 0 < 2л. Иногда удобно рассматривать
полярные координаты р и 6, которые могут принимать любые значения
от -оо до +00. 3..78. * = PC0SM ^^^У'). 3..8L Л (-2, 3),
у = р sinBj tg 6 = y/x. ) "
fiC, 0), C( — 4, —1). 3.182. O'E, 4). 3.183. \AB\=5. 3.184. A(—\, \/з),
(д). 3.185. x = -x',y= -y'. 3.186. л:'2 + у'2 = 25. 3.187. у = 2х — 2.
3.188. O'( —2. 3). 3.189. y' =-Ax1' -3x' - \. 3.190. x'y' = — a2/2.
3.191. ф = л/4 + /ел/2 (ft = 0, ±1, ±2, ...). 3.193. a) A'(\, —л/б),
fi'B, л/3), C'C, 0); б) Л'A, 7л/6), й'B, 2л/3), С'C, л). 3.194. Л@, 5),
В( —4тД2), С(—3^/5/2, -3/2). 3.195. Л (д/^ -л/4), ВB, 5л/б), СB, л).
3.196. а) 15л:2 + 16/ - 6л: - 9 = 0; б) л:2 + 4у - 4 = 0. 3.197. а) р = 3 cos 0;
б) р = 3; в) 9 = л/3. 3.198. Ах + Ву + С = 0, где Л, В, С £ R, И| +
+ |В| ^=0. 3.199. Коэффициенты при х и у в общем уравнении являются
соответственно абсциссой и ординатой нормального вектора прямой.
3.200. А(х — Хо) + В(у—уо) = О. 3.201. * ~ *° = У ~ У° , где х0, Уо —
координаты точки, лежащей на прямой; m, n — координаты направляю-
направляющего вектора прямой (вектора, параллельного прямой). 3.202. °'\
y = nt-j-yo.)
3.203. y — kx-\-b, k — угловой коэффициент прямой: /j = tga; a — угол,
который прямая образует с осью Ох; Ь — ордината точки пересечения
прямой с осью Оу. 3.204. Прямых, параллельных оси Оу. 3.205. у — у0 =
lA % Cl
у у
= к(х - хо). 3.206. JLZIL = l^lL. 3.207. d = lAx> + %l + Cl ■ 3.208.
x x у у ^ ~
А\Аг + Bifi2 .
cos ф = ± — —, если уравнения прямых Л^ + В\у + С\ =
т/4? + В? V^i + Si
= 0 и Л2л: + В2у + С2 = 0; cos <j> = ± — Ш|Ш "' если уравне-
л: — Х\
ния прямых
Ш\ П]
= nit+y, и x = m2t+X2, y = nii+yi, tg ф = ± -^ т—г-, если урав-
1 -f- «1«2
нения прямых у = k\x-\- b\ и y = kix-\-bi. 3.209. Л1/Л2 = Bi/fi2— усло-
условие параллельности, Л]Лг+ В]Й2 = 0— условие перпендикулярности.
3.210, 3.211. m\/ni2 = п^/щ — условие параллельности, m\tni + П\Пъ = 0 —
условие перпендикулярности. 3.212. ft! =ft2 — условие параллельности,
ftift2= —1 —условие перпендикулярности. 3.215. пE, —3). 3.216. пC, 4),
МB, —5). 3.217. а) х — 4г/ + 9 = 0; б) х + Ьу— 15 = 0. 3.218. С = 4.
3.219. л:= —4. 3.220. а) л: = 2; б) у=\. 3.221. а) Проходит через начало
координат; б) параллельна оси Оу; в) параллельна оси Ол:; г) совпадает
с осью Oi/. 3.222. а) а = ±3; б) а = 2; в) а = —3; г) а = —3; д) нн при
253
д- т у i о х ^ t -4- 3 ^ х 3
каком значении а. 3.223. а) — = Т"—, ' \ б)
1 5 у = 5; — 2;J 4
х-3
В) ~0
л=3, 1
' y = t-2.f
Г
+ 12у + 9 = 0. 3.225. х + у — 7 = 0. 3.226. a) ft = 3; б) ft = —2/3; в) ft =
= 4/5; г) ft=— 1/5;_д) ft = 0; е) ft=—5/2. 3.227. ft=—1, 6=1.
3.228. a) cos<p=_7/Vl30; б) <р = п/4; в) ф = л/6; г) ф = л/2; д) ф = 0;
е) cos ф = З/VlO яв 0,9489, <р=18°24'. 3.229. 4х + -фу + 2 = 0, 7х —
-\/Зу-13 = 0. 3.230. i/=yx-l, у=-2х + 7. 3.231. л: = 0. 3.232.
2х + у = 0. 3.233. а) а = 2; б) ни при каком а; в) а= 1/9. 3.234. а) 4х —
— 5у+19 = 0; б) Зх — у+ 6 = 0; в) х + у —2 = 0; г) 2х + Зу — 7 = 0.
3.235. (—1, 2). 3.236. а) 5; б) 13/х/Г7« 3,152. 3.237. 12 кв. ед. 3.238. 3.
3.239. 2х + у — 4 = 0. 3.240. ВA2, 4). 3.241. ( — 4, —1), (8, —1), F, 4),
( — 2, —6). 3.242. х — Зу — 8 = 0, Зх + у — 34 = 0. 3.243. 4х + у — 3 = 0.
3.244. \х + Зу + 16 = 0, 4х + Зу — 14 = 0. 3.245. 12х + 8у — 7 = 0. 3.246.
2х + Зу±6 = 0. 3.247. Ах + Ву + Сг + D = 0, где Л, S, С, D £ R,
М| + |В| + \С\ ФО. 3.248. Коэффициенты при х, у, z в общем урав-
уравнении являются координатами нормального вектора плоскости, т. е. п(Л,
В, С) -нормальный вектор плоскости. 3.249. А (х — х0) + В (у — уо) +
C(z — 2o) = O. 3.250.
х, у — yi г — 2i
ХХ У2 — У\ 22 —2|
= 0. 3.251. cos ф =
С,С, = 0. 3.254. d=
( — У] 2з — 21
-. 3.252. i4i/i42 = Bi/B2 = Ci/C2. 3.253.
|Лх, + By, +Cz, +D\
\JA2 + B2 + C2
+ 2у+ 2-48 = 0; б) 3x-2y + 4z-28 = 0; в) 2х — Зу + 2 = 0; г) Зх -
— 2у — 2 = 0; д) у = 0; е) х + Зу + г — 3 = 0; ж) 2х + у + 2z — 1 = 0.
3.258. а) Параллельна оси Ох; б) проходит через начало координат;
в) параллельна оси Ог; г) проходит через ось Oz; д) проходит че-
через ось Оу; е) проходит через ось Ох; ж) параллельна плоскости
Oyz; з) параллельна плоскости Оху; и) совпадает с плоскостью Oxz.
3.259. а) х - 7у - Зг = 0; б) 31х + 26у - 17г - 65 = 0. 3.260. а) 5х +
+ 8у —7г—1=0; б) Зх + 10у + 2z — 27 = 0. 3.261. 2, 3, 6. 3.262. 5х—
— 2у + г±3 = 0. 3.263. х — у + г + 7 = 0. 3.264. а) Нет; б) да. 3.265.
а) cos ф = 1/6 « 0,667; б) л/4; в) л/3. 3.266. а) а = 2; б) а = 0; в) ни
при каком а; г) а = 0,4; д) а = 0,5. 3.267. а) Зх + 2у — г + 2 = 0;
б) х + 1 = 0; в) х + Зу — 2z + 1 = 0. 3.268. 5х + у — Зг — 11 = 0.
3.269. 13х + 24у + 10z = 0. 3.270. х — у + г — 2 = 0. 3.271. х — у = 0.
3.272. У3«1.72. 3.273. а) 5, 5; б) 1/B V6)«0,41. 3.274. A, 2, 3).
3.275. x + y + 2z-4=0. 3.276. * ~ *° = У ~ У" = г ~ Z" , где х„, у0,
Zo координаты точки, лежащей на прямой; m, n, p — координаты
направляющего вектора прямой (вектора, параллельного прямой).
х = mt + хоЛ х — х о u z z
3.277. y = nt + y0, \ 3.278. L = — — = -. 3.279.
Л ,х + В,у + C,z + D, =0,| w С,)^п2(Л2, В2, С,). 3.280. cos Ф =
= 0,J
+ C2z + D2
254
jru_ = щ = p, .
m2 P2
! z —4 x—1 _ y—5 _ z x — 4 _ y — 8 _ z + 3
Г -5 ; B) "~0~~^ ~2' Г) ~2~~~ i = -2 ■
_3 - 2 ' ' 0 ~ 1 0~"
+ 3 _z-9 . jc _ y-2 ._ z+1 дс - 3
_ У-4 г + 2 . o9S7 я, х - 1 _ у + 3 _ z + 5 , х
-^ГЗ~ = —о— • 3.287. а) — — — , б) -g-=
_^-J _ z-3_. в) х + 5 _ у-3 _ z . г) х-2 _ {/ + 5 _
-2 0 ' ' 7 -1 I ' ' 0 0
z-1 *+l _ y-2 _ z-1 x-\ _ y+l _ z-
■ • A) e)
1 ' м' -1 1 1 ' ' 3 ~~ —13 -7 '
х-2 у+1 _ z-З „, х-4 _ у + 5 _ z , х+1/2
3 ~ -2 0 ' ' 0 0 ~ 1 ' ' 3 ~
{/-2/3 _ z „ооо л> * =
2
t/ —2 _ z—1 x + 3 _ t/ — 2 _ z—1 л— 1
Z^ j • 5 j —6 ' i
= _£^. 3.290. -1 = -^±1 = -i=±. 3.291. а) л/2; б) cos a =
4 - -5 ■ 2 4-7
х-2 о+5
= 3/5; в) cos р = 6/д/Г61; г) я/3; д) я/2. 3.292.
2 -3
3OQQ ~*~ " О ОЛЛ _^_ О OQC я\ , *•
{/+1 _ z-2 х-Ъ у+\ _ z-2 х-3 _
°' ' в' о
2 ~ -3 ' ' 1 8 13 ' ' 3 ~ -1
Z~2
. 3.297. а) (-¥-, _-^-,-3i-V б) (—1, 2, 3); в) не пересе-
пересе. 3.297. а) (
каются. 3.298. sin ф = \Ат + Вп + Ср\ g 299 ^ Ат + Вп +
д/42 + S2 + С2 л/т2 + п1 + р2
+ Ср = 0; б) Л/т = В/п = С/р. 3.304. а) я/6; б) л/3; в) л/2. 3.305. а) о =
= —7; б) a = -4; в) a = 1/2; г) о = 1. 3.306. а) * ~ 3
z~ ' fii J:~3 У + 5 z— 1 х —3 {/ + 5
~ 5 ; ' 3 ~~0 ^Г2~;в'~(Г~~ i ~ 0~~"
3.307. 8л; — z + 41=0. 3.308. 2х — у + 4z — 26 = 0. 3.309. x + 2y — 5z —
— 17 = 0. 3.310. а) ( — 7, —5, —11); б) A, 1, 1). 3.311. A, —2, 5).
3.312. A, 0, —2). 3.313. ( — 5, 2, 4). 3.314. a = 2, р = 7. 3.315. 9х + 6у —
— 8z + 13 = 0. 3.316. х — 2i/ + z + 4 = 0. 3.317. 3* — у — 3z — 5 =0.
255
3.318. x + 2i/ — 5z = 0. 3.319. 7x — 3y — 5z — 20 = 0. 3.320. Эллипсом
называется множество точек плоскости, обладающих следующим свой-
свойством: сумма расстояний от любой точки этого множества до двух данных
точек плоскости есть величина постоянная, большая расстояния между
х2 у2
данными точками, называемыми фокусами эллипса. 3.321. —- 4- 2_ __ [
а Ь
3.322. Вершинами эллипса называются точки пересечения эллипса с его
осями симметрии. 3.323. а) х = 0, у = 0; б) А,( — а, 0), А2(а, 0), В,@, —Ь),
В2@; Ь). 3.324. Осями эллипса называются отрезки, соединяющие его
вершины, лежащие на одной и той же оси симметрии, а также длины
этих отрезков. 3.325. Та ось эллипса, на которой лежат его фокусы,
называется большой осью. Другая ось называется малой. 3.326. Ь2 = а2 —
— с2. 3.327. Гиперболой называется множество точек плоскости, обладаю-
обладающих следующим свойством: модуль разности расстояний от любой точки
этого множества до двух данных точек плоскости есть величина постоян-
постоянная, меньшая расстояния между данными точками и отличная от нуля.
2 2
X Ц
Данные точки называются фокусами гиперболы. 3.328. —г-—-2_=1,
а й
х2 у2
если ось Ох проходит через фокусы; -| = 1, если ось Оу проходит
через фокусы. 3.329. Вершинами гиперболы называются точки пересече-
пересечения гиперболы с ее осями симметрии. 3.330. а) х — 0, {/ = 0; б) А\( — а, 0),
Л 2 (а, 0). 3.331. В]@, —Ь), В2@, Ь). 3.332. Действительной осью гиперболы
называется отрезок, соединяющий ее вершины, а также его длина. От-
Отрезок А\А2, где А\{ — а, 0), А2(а, 0), а также его длина 2а. 3.333. Отрезок
BiB2, где В,@, — Ь), В2@, Ь), а также его длина 26. 3.334. С2 = аг + Ь2.
3.335. Асимптотой кривой называется прямая, обладающая следующим
свойством: расстояние от точки кривой до этой прямой стремится к нулю,
когда точка движется по кривой так, что расстояние от нее до начала
координат стремится к бесконечности. 3.336. у = ± —х. 3.337. Параболой
называется множество точек плоскости, каждая из которых равноудалена
от принадлежащих этой плоскости данных прямой и точки, не лежащей
на этой прямой. Данная точка называется фокусом параболы, а данная
прямая — директрисой. 3.338. у2 = 2рх, если ось Ох проходит через фокус
перпендикулярно к директрисе, х2 = 2ру, если ось Оу проходит через
фокус перпендикулярно к директрисе. 3.339. Точка пересечения параболы
с ее осью симметрии называется вершиной параболы. 3.340. Эксцентри-
Эксцентриситетом эллипса называется отношение расстояния между фокусами к
длине большой оси. 3.341. г = с/а, где с = ~\]а2 — Ъ2. 3.342. Эксцентри-
Эксцентриситетом гиперболы называется отношение расстояния между фокусами
к длине действительной оси. 3.343. е = с/а, где с
2 2
= Ь. 3.348. е = 0. 3.350. а) -|^- + ^-= 1; б)
и2 г'2 и2
+ -2Т = 1; г) "Ж + 1о- = 1
= 1. 3.352. а) /=•, @, —-\/з). F2{0, д/з). £ = л1з/2; б) F,(-3, 0), F2C, 0),
е = 0,6. 3.353. ^ + i£ = 1, е = л/ь/З. 3.354. B, 3), (-2, 3). 3.355. (-3, 3),
- а) -27 + -!г = 1: б> -Ш + Ш =
256
иг и2 х2 и2 х2 , 1~
- JL. = 1. 3.357. a) Xj- - — = 1; б) -JL - _ = 1. 3.358. (-2д/5,
0), Bд/5, О), е = V^ У= ±2х. 3.359. (О, -5), (О, 5), е = А , х = ± А у.
г2 и2 и2 х2 х2 и2
3.360. 4 А- = 1- 3.361. -2 — = 1. 3.362. — + |- = 1. 3.363.
4 1 1 о 48 64
х2 i/2 _ у2 х2 _ 2_ а_ I
в) {/2=-12х; г) х2 = 20{/; д) {/2 = - у х. 3.365. a) fG, 0), х = - 7;
б) F( — 4, 0), х = 4; в) F@, —3/8), {/ = 3/8. 3.366. а) {/2 = — 8х; б) у =
= х2. 3.367. л/37/2- 3.368. 16/3. 3.369. а) {/2 = —4х; б) х2 = —4{/. 3.370. {/" =
= ± 16х. 3.371. 2. 3.378. Лх2 + Вху + Су2 + Ох + Еу + F = 0, где IЛ | +
+ \В\ + \С\ фО. 3.379. ЛС > 0. 3.380. Или эллипс, или пустое множество
(мнимый эллипс), или точку. 3.381. ЛС<0. 3.382. Или гиперболу, или
пару пересекающихся прямых. 3.383. ЛС = 0. 3.384. Или параболу, или
пару параллельных прямых, или пару совпадающих прямых, или пустое
множество. 3.386. Окружность (х — 2J + (у + ЗJ = 12. 3.387. Эллипс
(х + 0,5) + ({/-О-2) =1. з.388. Точка E, -1). 3.389. Пустое множе-
2,5 U,4
ство (мнимый эллипс 2(х + 1,5J+ 3({/+IJ = — 17,5). 3.390. Гипербола
~L—- —j—— = 1. 3.391. Пара пересекающихся прямых х + у +
+ 2 = 0, х —{/ = 0. 3.392. Гипербола 71.^1 28195 = '■ 3-393.
Окружность(х —0,5J + {/2 = 0,25. 3.394. Парабола (у — 2J=3(х — 2).3.395. Па-
Парабола (х-3J=-2({/+1). 3.396. Эллипс (* + 2) + ({/ ~'°'5) =1.
4 о
3.397. Пара параллельных прямых х — 3 = 0, х + 1 = 0. 3.398. Пара совпа-
совпадающих прямых {/ + 2 = 0. 3.399. Пустое множество (у — 1) = —1,5.
£ iu п2
3.400. Парабола (х — ЗJ = 1,5{/. 3.401. Эллипс ~J + ^ = '■
3.402. Парабола х2 = 4({/+1). 3.403. Эллипс ^ (- -р— = 1.
3.404. Гипербола ^ ТУ3^ ^г = '• 3.405. Парабола у2 = 6(х + 1,5).
4/9 4/J
3.406. Уравнением линии на плоскости в заданной системе координат Оху
называется уравнение с двумя переменными F(x, у) = 0, которому удовлет-
удовлетворяют координаты любой точки, лежащей на этой линии, и не удовлетво-
удовлетворяют координаты точек, не лежащих на ней. 3.407. F (р, 9) = 0, где р, 0 —
полярные координаты произвольной точки линии. 3.408. Для составления
уравнения линии на плоскости следует в выбранной системе координат взять
на кривой произвольную точку и, исходя из свойств линии, установить
зависимость между координатами этой точки. 3.410. Если (±а, 0) — дан-
данные точки, то искомым уравнением является (х1 + у2J = 2а2(х2 — у2).
3.412. у = —^ . 3.413. t/2 = x2-Q + X . 3.414.р =
а — х а — х
= ± — ф. 3.415. р = -2- ± /, (х + аJ(/2 - х2) = х2{/2. 3.416. р = a cos0 ± /,
(о cos и
(х2 + у2 — ахJ + /2(х2 + у2) = 0. 3.417.
17. Зак. 5115. 257
+ ~\JyBa — у) — a arccos(l — y/a) — O. В начальный момент (/ = 0) точка
.. „. „ x = aBcos/ — cos 2/)Л
M находится в начале координат. 3.418. ^ = а{2 sin t — sin 2/) ( р — 2а(\ —
х = (a + b) cos / —
— cos 6)- 3.419.
у = (a + b) sin
t-acos a + b i)
. a + b \ 3-420-
t — asm ! /. I
а у
a 'I x — b cos3 /,1
> , ,, 3.421. p = asin
— a I y = b =inJ/.J v
a 'J
b —a
x = (b — a)cos t + a cos
i sin 28,
/I -^— /I ■ It ш П _ 1П ~ I I
i/ = F — a) sin / — a sin -
(*2 + i/2K = 4a2x2y2. 3.422. Поверхность, уравнение которой в некоторой
х2 у2 z2
декартовой прямоугольной системе координат имеет вид —г + -Z- -j = 1,
а Ь2 с'
называется эллипсоидом. 3.423. Поверхность, уравнение которой в некото-
х2 и2
рой декартовой прямоугольной системе координат имеег вид (- -2-
а2 й
— = 1, называется однополостным гиперболоидом. 3.424. Поверхность,
уравнение которой в некоторой декартовой прямоугольной системе коорди-
х2 у2 z2
нат имеет вид —5 -т j- =: 1, называется двуполостным гипербо-
гиперболоидом. 3.425. Поверхность, уравнение которой в некоторой декартовой
х2 у2
прямоугольной системе координат имеет вид z= 1 , где pq > 0,
называется эллиптическим параболоидом. 3.426. Поверхность, уравнение
которой в некоторой декартовой системе координат имеет вид z =
х2 у2
= 1 (pq > 0), называется гиперболическим параболоидом.
3.427. Цилиндрической поверхностью называется поверхность, образован-
образованная прямой, перемещающейся параллельно себе вдоль некоторой кривой.
При этом перемещающаяся прямая называется образующей, а кривая —
направляющей. 3.428. Цилиндрическую поверхность, образующая которой
параллельна оси Oz, а направляющей является линия, заданная урав-
уравнением F(x, у) = 0 в плоскости Оху. 3.429. Конической поверхностью или
конусом называется поверхность, образованная прямой линией, имеющей
одну неподвижную точку и перемещающейся вдоль некоторой кривой.
Прн этом перемещающаяся прямая называется образующей, кривая —
направляющей, а неподвижная точка — вершиной. 3.430. Поверхность,
образованная вращением плоской линии вокруг прямой, расположенной
в одной плоскости с этой линией, называется поверхностью вращения.
3.431. а) F(x, ±д/{/2 +22) = 0; б) F{± ~\jx2 + z2, y) = 0. 3.433. a — b = c.
3.435. Эллиптический параболоид. 3.436. Трехосный эллипсоид. 3.437. Од-
нополостный гиперболоид. 3.438. Параболоид вращения. 3.439. Гипербо-
Гиперболический параболоид. 3.440. Эллиптический параболоид. 3.441. Коническая
поверхность. 3.442. Параболический цилиндр. 3.443. Коническая поверх-
поверхность. 3.444. Эллиптический параболоид. 3.445. Гиперболический цилиндр.
3.446. Эллиптический цилиндр. 3.447. Шаровая поверхность. 3.448. Круго-
Круговой цилиндр. 3.449. Двуполостный гиперболоид. 3.450. 2 2 ' \
258
, . ,2 , , _ n2 _ g'f 3.453. z2 + y2 = 4. 4.454.
а) "У Z X = 1; 6* x* + y2 = 4z-
Глава 4
4.1. Операция сложения (внутренняя операция) на множестве V
определяется следующим образом: задается закон, согласно которому,
каждой паре х, у элементов множества V ставится в соответствие опре-
определенный элемент z этого множества. Элемент z называют суммой элемен-
элементов х и у и пишут х + у = z. 4.2. Операция умножения элемента множе-
множества V на число а 6 R (внешняя операция) определяется следующим
образом: задается закон, согласно которому, каждому элементу х 6 V и
произвольному числу а £ R ставится в соответствие определенный элемент
z £ V. Элемент z называют произведением числа а на элемент х и пишут
ax = z или ха = г. 4.3. Вещественным линейным пространством назы-
называется множество V, на котором введены операции сложения его элемен-
элементов и умножения элементов множества на числа из R и эти операции удов-
удовлетворяют следующим аксиомам. I. х + у = у -\- х V х, у £ V. II. (х + у) -f-
-j-z = x-\-(y-\-z) = x^-y-\-z\x, у, z £ 1Л III. В множестве I/ существует
элемент (который будем называть нулевым элементом и обозначать о),
такой, что х + о = х V х (Е I/. IV. Для каждого элемента х £ |/ существует
элемент (который будем называть противоположным элементу х и обозна-
обозначать -'Х), такой, что х + ( —х) = о. V. Для любого х (Е V 1х = х. Для
любых а, Ь £ R и любых х, {/ £ V. VI. а(Рх) = (сф)х. VII. а(х + {/) = ах + ау.
VIII. (а + Р)х = ах -\- рх. 4.4. Комплексное линейное пространство опре-
определяется аналогично вещественному линейному пространству, но в этом
случае вместо множества R берется множество С комплексных чисел.
4.5. Множество [х = (а\\ а2; ...; а„) I а, £ RJ, в котором операции сложения
и умножения на число а £ R определены следующим образом: если х =
= (а\\ а2; ...; ап), у = (Ь\\ й2; ...; Ь„), то х + у = (ai + йк а2 + й2; ...; а„ + Ь„)
и ax = (aai; ааг; ...; аап) образует линейное пространство, которое на-
называется арифметическим и обозначается R". 4.6. Разностью х — у элемен-
элементов х, у £ V называется сумма х + ( — у), т. е. х — j/ = x + ( — {/). 4.7. Мно-
Множество Ki элементов линейного пространства V называется подпростран-
подпространством пространства V, если выполняются следующие условия: 1) в мно-
множестве V\ операции сложения элементов и умножения элемента на число
определяются так же, как в множестве V; 2) если х, у (: V\, то х + уб 1Л;
3) если х£1Л, то ax£V\, где a£R(C). 4.9. а) Да; б) :.ет. 4.10. а) Да;
б) да. 4.11. а) Нет; б) нет. 4.12. а) Нет; б) нет. 4.13. а = 0. 4.14. а) Да;
б) нет; в) нет. 4.15. а) Да; б) нет. 4.16. Нет. 4.17. Да. 4.18. а) Да;
б) да. 4.19. а) Нет; б) да; в) да. 4.20. а) Да; б) да. 4.21. Нет. 4.22. а) Да;
б) нет; в) да; г) да. 4.23. а) Да; б) иет; в) да. 4.24. Линейной комбина-
комбинацией векторов Xi, X2, ..., х, называется вектор у = ot|Xi -f- a2x2 + ... +
+ а,хг, где oi, аг, ..-, а, — числа (вещественные, если линейное простран-
пространство вещественное, и комплексные, если пространство комплексное).
Числа (xi, а2, ..., а, называются коэффициентами линейной комбинации
векторов. 4.25. Если все коэффициенты линейной комбинации векторов
равны нулю, то такая комбинация называется тривиальной. Если хотя бы
один из коэффициентов линейной комбинации отличен от нуля, то комби-
комбинация векторов называется нетривиальной. 4.26. Система векторов Xi, x2, ...,
х, называется линейно независимой, если только тривиальная линейная
комбинация этих векторов является нулевым вектором, т. е. aix, +
+ а2х2 + ... + агхг = о<г-а, = а2 = ... = а, = 0. 4.27. Система векторов
xi, х2, ..., х, называется линейно зависимой, если существует нетривиаль-
259
ная линейная комбинация этих векторов, которая является нулевым векто
ром, т. е. если существуют числа ai, аг, ..., а,, из которых хотя бы одн!
отлично от нуля, и для этих чисел имеет место равенство at|Xi + а2хг -+■
■4- ... + а,х, = о. 4.28. Два вектора линейного пространства называюте!
коллинеарными, если они линейно зависимы. 4.29. Три вектора линейной
пространства называются компланарными, если они линейно зависимы
4.31. а) Да; б) да; в) нет; г) нет. 4.32. а) Да; б) нет; в) да. 4.33. а) Да
б) нет; в) да; г) нет; д) да. 4.34. а) Да; б) да; в) нет. 4.39. Число /
называется размерностью линейного пространства V, если в этом проетран
стве существует п линейно независимых векторов и любая система п -f-
векторов линейно зависима. Размерность линейного пространства I
обозначается dim V. 4.40. Базисом п-мерного линейного пространств
называется любая упорядоченная система п линейно независимых век
торов этого пространства. 4.41. dim V = п, ei, е2, ..., е„ — базис. 4.42. Есл1
d, ег, •••. е„— базис линейного пространства, то для любого вектора >
этого пространства существует единственная система чисел ati, аг, ■.., а„
такая, что х = aiei + агвг + ... + а„е„. Такое представление вектора х назы
вается разложением вектора х по базису ei, ег, •■■, е„, а числа ati, at2, •■■
а.п — координатами вектора х в данном базисе. 4.43. Координаты нуле
вого вектора в любом базисе равны нулю. 4.44. Если два вектора равнь
между собой, то их соответствующие координаты в одном и том же базис(
также равны между собой. 4.45. Координаты суммы двух векторов в не
котором базисе равны сумме соответствующих координат этих векторо1
в том же базисе, т. е. если х = a^i + ot2e2 + ... + а„е„, у = Pid + р2е2 +
+ ... + Р„е„, то x + y = (al + p,)ei+(<X2 + P2)e2 + ... + (<х„ + р„)е„. 4.46
Координаты произведения вектора на число в некотором базисе равны произ
ведению соответствующих координат данного вектора в том же базнсе н;
это число, т. е. если х = aid + «2е2 + ... + а„еп, то Хх = Xa\t\ ■+■ Ха.2*г ~т
+... + Хапе„. 4.47. Пусть дана система векторов Х|(вц, a2i, ..., а„\)
x2(oi2, 022, ..-, аЛ2), ..-, xm(oim, Огт, ■■•, ппш) и-мерного лилейного проетран
ства, координаты которых даны в одном и том же базисе. Матрицеь
системы векторов Х|, хг, ..., хт в данном базисе называется матриц;
д _
0|| 0|2 ... п\„
021 022 ••• п2т
в /-м столбце которой стоят координаты вектора ху. 4.48. Система п
векторов n-мерного линейного проетран^.па иицейно независима тогда 1
только тогда, когда ранг матрицы системы этих векторов равен т (числ;
векторов). 4.49. Система п векторов п-мерного линейного пространств:
образует базис тогда и только тогда, когда матрица системы этих векторо:
является невырожденной. 4.51. Если векторы ei, ег, ..., е„ линейно незави
симы, то они образуют базис. Если эти векторы линейно зависимы, то ош
не образуют базис. 4.52. а) Да; б) да; в) нет; г) нет; д) нет. 4.53. а) Да
б) нет; в) нет; г) да; д) нет. 4.54. а) Да; б) нет; в) да; г) нет. 4.55. Нет
4.57. а) 1, A, 7, 5); б) 3, (—0,1; 0,7; 1; 0; 0), (-0,4; -0,2; 0; 1; о;
@,4; 0,2; 0; 0; 1). 4.58. аB, -1,3,5), Ь(— 1, 4, 0, 0), с@, 0, 1, 0). 4.59. а) C, 1
-2,5, 6); б) A, 5, 3, 6, -2). 4.60. а) C, -2, 5); б) @, 4, -1); в) D, 12, 9;
4.61. а) (—1, 5, 2, 1); б) C, 7, -4, 12). 4.62. а) с( —5, 9, 11,4); б) с( —3, 28
23, 5). 4.63. ( — 2, 2). 4.64. A, 0, 2). 4.65. Да, d= — 2ai + За2. 4.66. Нет
4.67. Нет. 4.68. Да, d = 2а, + 5а2. 4.69. Нет. 4.70. Да, d = 3ai — а2. 4.71. а) 4
б) 3. 4.72. а) Х= —2; б) к= 1; в) при любом X. 4.73. Матрицей перехода
от базиса t\, ег, ..., е„ линейного пространства V к базису ei, ег е£ тог
же пространства называется матрица системы векторов el, ei, ..., е'п в базис
ei, ег, •■•> е„. 4.74. Если Т- невырожденная матрица, то она является матрице)
260
1ерехода от базиса к базису. Вырожденная матрица не может быть матрицей
1ерехода от базиса к базису. 4.75. Т~\ 4.76. Задача преобразования коор-
1инат заключается в нахождении зависимости между координатами
зектора в разных базисах. 4.77. Формулами преобразования координат
чазываются формулы, связывающие коордннаты вектора в разных базисах.
ж.78. Х=ТХ', X' = Т 'X, где X, X' — матрицы-столбцы нз координат век-'
opa
.81.
X
a)
соответственно
0
0
0
1
0
0] б)
0 ;
-lj
в
0
1
.0
базисах ei,
1
0
0
0"
0
1 .
4.82.
0 0
1
1
е„ и
0 0
0 0 0 0
10 0 0
е'ь е'2,
0
0 0 0 0
1
Г84.
1 —1
0 0 0 10
. 4.85. а) — 1, —2, 1; б) 1, 2, 3. 4.86. а)
4.83.
2
.1
0
1
1
0
0
1
1
0
2
9
— 4
-6
3
0
— 2
; б)
-3 0 6
6 0—3
-11 3 10
1 0 1
1 0 2
1 1 3
0 2 —1
5 3 2
О 1 —2
2—10
1 -2 1
-1 1 О
о з
-1 0
з 1
15
— 8 3
10 0
5 0
1 2 0
-3 4 3
2 1 0
4.87. а) х =
= 5е,; б) х=—2е,+ 14е2. 4.88. а) х= — — ei
7
—5
-10
11 / ^ 13 /
_е2;б) х=-е,-
JU е'2. 4.89. а) х = - 2ei + -5- е2 -
О О
11
3
-.90. а) —
32 -3
7 -27
16 -25
|
■ 4.91. а) --
0 -21 -12
1 14 6
б)
— 3
х = ei.
14 3
2-1
— 2 —12
. 4.92. Пусть каждой паре векторов х, у линейного ве-
дественного пространства V поставлено в соответствие вещественное число,
>бозначаемое (х, у), так, что Vx, у, zgl/nXgR выполняются следующие
геномы. I. (х, у) = (у, х). П. (х + у, z) = (x, z) + (y, z). III. (Xx, y) =
= X(x, y). IV. (x, x) ^ 0, причем равенство имеет место только в том случае,
:огда х = о. Введенная операция называется скалярным умножением векто-
юв, а число (х, у) — скалярным произведением. 4.93. Скалярное произве-
произведение (х, х) называется скалярным квадратом вектора х и обозначается
~2, т. е. (х, х) = х2. 4.94. Евклидовым пространством называется линейное
вещественное пространство, в котором задана операция скалярного умно-
умножения векторов. 4.95. Если и-мерное линейное пространство — евклидово, то
>удем называть его евклидовым п-мерным пространством, а базис линей-
loro пространства — базисом евклидова пространства. 4.96. (х, уJ ^
С х2у2. Равенство имеет место только в том случае, когда векторы х и у
:оллннеарны. 4.97. Пусть каждому вектору х линейного пространства
' поставлено в соответствие вещественное число, обозначаемое ||х||,
-эк, чтоУ х, у£ I/ hVA.£R выполняются следующие аксиомы. I. ||x|| ^ 0,
лричем ||х||=0ох = о. II. ||Хх|| = \Ц ||х||. III. ||х + у|| < ||х|| +
-1- ||у|| {неравенство треугольника). Число ||х|| называется нормой
261
(длиной) вектора х, а пространство V — нормированным линейны
пространством. 4.98. ||х||=-\Дх, х). 4.99. Угол ф, для которого cos ф =
(х v)
= — ' —@<ф<л), называется углом между векторами х и ;
II х || IIУII
4.100. Угол ф между векторами х и у произвольного евклидова пространств
(х< У)
определяется равенством cos ш= '—^ потому, что эта формула о(
1|Х|| ||у||
общает известную из геометрии формулу определения косинуса угла мена
векторами пространства Е2(Ез). 4.105. а) Да; б) нет; в) нет; г) д,
4.106. а) Нет; б) да. 4.107. Да. 4.108. а) Да; б) да. 4.109. а) |х| =
= л/ь; lyl =3; (х, у) = 3, С05ф= \/л]ъ\ б) |х| = л[м, |у| = ^Ъ, (х, у) = :
совф = -\/5/5; в) |х| = 13, |у| = \flZ,(x, у) = —15, cos ф = — 15/A3 V^
4.110. а) -фл; б) Л^— а3)/3; в) 0; г) е"(Ь — 1) — е"(л — 1); д) л/:
ь
е) arccos ((а + Ь)л/з/B ■ у'а2 + ab + й2)). 4.111. а)
\f(x)g(x)dx
Vb ь Гь Гь
\(i(x)Jdx \(g(x)fdx; б) у \(!(x) + g(x)fdx^-y
\(f(x)fdx -
у
ь
\ (g(x)fdx. 4.112. Два вектора называются ортогональными, если v
скалярное произведение равно нулю. 4.113. Система векторов xi, x2, ..., )
(п ^ 2) называется ортогональной, если эти векторы попарно ортогональш
т. е. (х,, х,) — 0 при 1ф\. 4.114. Ортогональная система векторов линей
независима, если среди векторов системы нет нулевых. 4.115. Базис евкл!
дова и-мерного пространства (n ^ 2) называется ортогональным, ест
базисные векторы составляют ортогональную систему. 4.116. Вектор
евклидова пространства называется нормированным или единичным, ест
||хЦ = 1. 4.117. Нахождение для данного ненулевого вектора х нормир!
ванных векторов х° и х" по формулам х° = х/||х|| и х? = — х/ЦхЦ наз1
вается нормированием вектора х. 4.118. Система векторов xi, x2, ..., ;
(n ^ 2) называется ортонормированной, если она ортогональна и каждь
вектор является нормированным, т. е. если
4.119. Базнс евклидова n-мерного (п ^ 2) пространства называет'
ортонормированным, если базисные векторы составляют ортонормирование
систему. 4.120. Процесс построения по данному базису ортонормированно
базиса называется ортогонализацией базиса. 4.121. Пусть x = otiei
+ а2е2 + ..-+ '-^.i. У = Piei + Р2е2+--+ Р/.ел, гдее|, е2, ..., е„ — ортонорм
рованный базис пространства. Тогда (х, у) = otiPi + а2р2 + ...+ а„р„, т.
скалярное произведение векторов равно сумме произведений одноименн!
координат этих векторов в ортонормнрованном базисе. 4.122. Пусть
= aid + (Хге2 + ■■•+ antn, где ei, е2, ..., ел — ортонормированный б
Тогда ||х|| = уа?, -\-ai + ...+ al, т. е. норма вектора равна корию квадра
ному из суммы квадратов координат вектора в ортонормированном базж
4.124. а) Да; б) нет; в) да; г) да; д) нет. 4.125. а) Да; б) нет; в) да; г) л
д) нет; е) нет; ж) да. 4.126. а) Нет; б) да; в) да; г) нет; д) да; е) нет; ж) д
262
д/
б) да; в) да. 4.129. а) —=; б) ; в)
V
=; б)
V2 V2
; -I=V б) A; 0; 0), @; 1; 0), @; 0; 1); в) (~; -1;
Vio Vio л/107 v г
2 ' 2/' \2 ' 2 ' 2' 2/'\2; 2'2' 2/'\2' 2'
t ( n t ( _ 13
— ,—' Л HI Я1 I 1 I 11 _
,182
2
у 6)( 1 . 2 . з \ / _!_._!_. з_\
/ Vyi4 Vl4 Vl4y V V35 V35 V357
(- «;0; ' ); в, (,; 0; 0, @; ' ; - ' ), (o; ' ; ' ).
^ Vio V'o7 v V2 V2y v Ф V2/
4..32. a, ( ' ; > : 0; o), (o; 0; > ; ' ), (-L; _ ' ; 0; о), @;
W2 "V2 У V V2 ^ VV2 ЛИ ^ V
o- JL- __LV 6) Гi o
. n- ■ 1 / _ * n.
I— ' r—l'-'\ г- < "• /—• ;— l> l о ' U'
/ F; 0; —=.; oV @; 1; 0; 0). 4.133. 1/д/2, хд/Пб. 4.134. а) с = 4i —
\ д/2 д/2 /
— j + 5k; 6) c= — 5i + 4j + 13k. 4.135. a) (a, b) = — 46, |a| = 88,
|b|=89; 6) (a, b) = — 4, |a| = |Ь| = д/к" 4.136. a) cos <p = л/8/27,
Ф«57°18'; б) cos9 = 63/121. ф« 58°36'. 4.137. Пусть (/ — комплексное
линейное пространство. Каждой паре векторов х, у этого пространства
поставим в соответствие число, обозначаемое (х, у), такое, что V х, у £ V и
X £ С выполняются следующие аксиомы. I. (х, у) и (у, х) — сопряженные
комплексные числа, т. е. (х, у) = (у, х). II. (х + у, z) = (x, z) + (у, г).
III. (кх, у) = Х(х, у). IV. (х, х) ^ 0, причем равенство имеет место только
в том случае, когда х = о. Введенную операцию назовем скалярным умно-
умножением векторов в комплексном пространстве, а число (х, у) — скалярным
произведением. 4.138. Унитарным называется линейное комплексное про-
пространство, в котором задано скалярное произведение. 4.139. Пусть
х = aciei -j- (хгег + ■••+ <х„еп, У = Pi^i + Ргвэ + ...+ pnen, где ei, ег, ..., е„ —
ортонормированный базис унитарного пространства. Тогда (х, у) = atiPi +
+ 012Р2 + •••+ а„Р~ц, т. е. скалярное произведение векторов унитарного
пространства равно сумме произведений координат первого вектора на соот-
соответствующие сопряженные координаты второго вектора. 4.140. Пусть х =
= aiei + агвг +... + а„е,, где еь ег, ..., е„ — ортонормированный базис
263
унитарного пространства. Тогда |х|
-V*
|а,|2, т. е. длина вектора, за-
заданного в ортонормированном базисе унитарного пространства, равна корню
квадратному из суммы квадратов модулей его координат. 4.143. Нет.
4.144. Да. 4.145. Да. 4.146. Да. 4.147. а) |х| = 5; б) 10 + Юг.
1)Bп
-; б) 1+2+...+
. 4.149. а) Да; б) нет; в) да. 4.150. а) —1 + 6i; б) 2 — 4г.
4.151. а) 91+63i, |а| = Vl57, |Ь| = л//106; б) 4 — 4/, !а| = |Ь| = л/б.
4.152. а)
15
15
Глава 5
5.1. Пусть даны два линейных вещественных (комплексных) прост-
пространства V и W. Будем говорить, что задано отображение / пространства
V в W или оператор, действующий из V в W, если каждому х £ V поставлен
в соответствие единственный вектор у £ W, и писать /: I/-* № илн у = f(x).
5.2. Оператором пространства V называется оператор, действующий из
V в V. 5.3. Пусть у = /(х). Тогда вектор у называется образом вектора х, а
х — прообразом вектора у. 5.4. Два оператора /: V-+W и g: I/-* It? назы-
называются равными, если для V х £ I/ имеет место равенство /(x) = g(x).
5.5. Оператор /: К-*№ называется линейным, если Vx,, x2 6 I/ иУХ (ве-
(вещественного, если пространство V — вещественное, и комплексного,
если— комплексное) выполняются следующие условия: 1) /(xi + x2) =
= /(Х|) + /(х2); 2) /(ЪС|) = A./(xi). 5.6. Оператор пространства V называется
тождественным, если он каждому вектору пространства ставит в соответствие
этот же вектор, т. е. /(х) = х V х £ V. 5.7. Пусть в пространстве V с базисом
Ci, ег, ..., е„ задан оператор f так, что
/(ei) = aMei + a2ie2 +...+ а„,е„,
a,2ei + a22e2 +... +а„2е„,
Тогда матрица
f(tn) — a
А =
■■■ + anntn.
п\\ п\2 ...
am
264
называется матрицей линейного оператора f в базисе ei, в2, ..., е„. 5.8. У =
= ЛХ, где X, Y — столбцы из координат векторов соответственно х и у =
= Дх) в базисе ei, ег е„. 5.13. Условие Цх\ + х2) = Дх,-) + Дхг) означает,
что диагональ параллелограмма, построенного на векторах Xi и хг, должна
переходить в диагональ параллелограмма, построенного на векторах /(xi)
и Дх2). Условие ДЯх) = Я.х означает, что при изменении длины вектора х в \К\
раз во столько же раз изменится и длина вектора Дх). 5.14. Нет. 5.15. а) Да;
б) нет; в) нет; г) нет; д) да. 5.16. а) Да; б) нет; в) да; г) нет; д) нет.
5.17. а) Нет; б) нет; в) нет; г) да; д) да; е) да. 5.18. а)
[-1 ol 4 Г
I -
не является линейным; д)
■) да; д) да. 5.21. а)
; г) если а = о, то
, если а Фо, то
1/2 1/21
1/2 1/2 5.19. Да. 5.20. а) Нет; б) да; в) нет;
2 3 -1
0 1
1 О
О 1
1
1
0
0
1
0
0
0
б)
1
0.
1
2
0
1
— 2
1
о
1
1
-2
5.22. а)
1
0
2
— 1
2
0
б)
;
,23. а)
1
1
1
1
1
1
1
1
1 Г
1 1
1 1
1 1
б)
4
6
8
2
-6
9
-12
3
0 1—1 1
10 0 1
0 1 2-1
0 0 1 1
0 3-2
-3 0 —1
2 1 0
5.24. а)
3
2
1
0
0
0
0
0
0
б)
1
-3
— 2
0
0
0
о"
0
0
. 5.25.
— 12 0 0
3 4 0 0
0 0-12
0 0 3 4
8 —2
-12 3
16 -4
-4 1
. 5.26. а) уA, 3, 0); б) уD, 4, —4);
I Г 7 1 1 1 Г 9 ч!
в) у@, 2, 0). 5.28. а) —- ' Ч; б) -=- , , . 5.29. В =
II [-3 -2J 2 [-3 -1J
= Т 'AT. 5.30. Ранги матриц линейного оператора / в различных базисах
14 1
равны между собой. 5.31. Нет. 5.33. а)
1
1
о'
Z
е)
18.
-1
3
3
[-'.
Зак.
1
-1
3
_]
5115.
— 2
0
8
1
о
10
— 1
8
5
13
16
■:}
-9
-6
g
,s
1 Г — 1
Т -I
; д)
о
—6
15
0 1
1 0
б)
27
-41 -21
0
1
-16
40
б)
7
-14
0
-1
1
О
3
-6
— 1
о
265
!}"[;:} •>[;?]■ •*■>!
б)т
-3 —6 15
-5 -10 25
-4 -8 20
— 2 —9 18
-8 -1 16
-5 -5 17
5.36. Ядром оператора /: V-*-W называется мно-
множество тех векторов пространства V, каждый из которых данный оператор
переводит в нулевой вектор. 5.37. Кег /. 5.38. Областью значений или образом
оператора /: V-*- VC называется множество векторов пространства W, каж-
каждый из которых является образом хотя бы одного вектора из V. 5.39. lm /.
5.40. dim Im /. 5.41. dim Кег /. 5.42. a) г Л, n — r A; б) нужно найти множество
решений системы АХ = О; в) Im / = jaiai + агаг +•■■+ o.ra.,\ Va,■£ R, / =
= 1, г), где ai, аг, .-, а, — базисные столбцы матрицы А. 5.44. Кег / =
= )о), Im / = V. 5.45. Если из неравенства xi=^fcx2 следует /(xi) Ф /(хг).
5.46. Кег / = V, Im/ = joj. 5.47. Кег/ — все векторы, перпендикулярные
к оси Ox, lm / — все векторы, параллельные оси Ох. 5.48. Кег / — все век-
векторы, перпендикулярные к плоскости Оху, lm / — все векторы, параллельные
плоскости Оху, ранг / равен двум, дефект — единице. 5.49. а) Кег / — мно-
множество векторов, перпендикулярных к вектору a, Im / — множество векторов,
коллннеарных вектору а, ранг / равен единице, дефект — двум; б) Кег / —
множество векторов, коллинеарных вектору a, lm / — множество векторов,
ортогональных вектору а, ранг / равен двум, дефект — единице.
5.50. а) Кег / = jo), Im / = V, ранг / равен трем, дефект — нулю; б) Кег [ =
= (—1, 7, 4)/|V/6R|, lm/ = (a,(l, 3, 4) + a2(—1, 1, 0I V a,. a2 6 R),
ранг / равен двум, дефект — единице; в) Кег / = {(/, —At — 2s, s), VJ, s 6 Rl,
lm/ = D, 1, 2)/iV/6R(, ранг/ равен единице, дефект двум; г) Кег / =
= V, Im / = (о), ранг / равен нулю, дефект — трем. 5.51. Кег/ = о,
lm / = Ез. ранг / равен трем; дефект— нулю. 5.52. Суммой операторов
/ и g некоторого пространства называется оператор п, такой, что для
любого вектора х этого пространства Л(х) = /(х) -j- g(x). Сумму операторов
fug обозначают / + g. 5.53. Да. 5.54. A -j- В. 5.55. Произведением
операторов f и g, действующих в пространстве V, называется оператор,
обозначаемый g°f или gf и определяемый равенством £°/(х) = #(/(х))
Vx g V. 5.56. Да. 5.57. АВ. 5.58. Линейный оператор называется невырожден-
невырожденным, если его матрица невырожденная. 5.59. Линейный оператор назы-
называется вырожденным, если его матрица вырожденная. 5.60. Два линейных
оператора / и (р называются взаимно обратными, если для любого х имеют
место равенства /°(р(х) = (р°/(х) = х или /оф = фо/ = /, где / — тождест-
тождественный оператор. 5.61. Оператор ф называется обратным оператору /,
если /оф = фо^ = /1 где / — тождественный оператор. 5.62. Всякий невы-
невырожденный оператор. 5.63. А 'К 5.67. а)
1
5
2
2
3
7
1
0
6
; б)
в)
г)
1
8
7
14
-8
23
5
-2
11
5.68. а)
[J ',} •> h! "?]=
B)
—6
13
20
1
-9
— 1
0
6
6
6
3
2
4
5
-1
0
-1
266
в)
О 1
-1 оГ
— cos a sin a
sin a cos a
; д)
— cos a —sin a
— sin a cos a
5.71. а)
Д)
К
0
0
0
X
0
о'
0
— X
; б)
X О О
О X О
О О —X
в)
0 0 О
О 1 О
0 0 —1
-cos a sin a
-sin a —cos a
г)
0 0 О
О 1 О
0 0-1
0
0
0
0
X
0
0
0
-X
; е)
X
0
0
0
X
0
0
0
— X
; ж)
0 0 О
О X О
О О —X
. 5.72. а) Нет; б) да;
в) да. 5.73. а) Нет; б) нет. 5.74. a) f ' =/; б) / ' — поворот на угол ( — а).
-4 19 —{
5.75. Является, если g ° f = /
5.76. а) -^
б)
12
0 5 2
12 -19 2
О 1 —2
в) не существует; г)
30
12 -8 -4
0—7 О
-5 15 -25
-2 0 14
4 0 2
5.77. Вектор х линейного пространства называется собственным вектором
линейного оператора f этого пространства, если этот вектор ненулевой и су-
существует число k, такое, что f{x) = kx. При этом k вещественное, если
линейное пространство вещественное, и комплексное, если пространство
комплексное. Число k называется собственным значением оператора f.
5.78. Характеристическим уравнением линейного оператора называется
уравнение det (Л — ХЕ) = 0, где А — матрица этого оператора в некотором
базисе, £ — единичная матрица того же порядка, что и матрица А.
5.79. Характеристическим уравнением матрицы А порядка п называется
.уравнение det (Л—Я£) = 0, где £- единичная матрица порядка п.
5.80. Характеристическими числами линейного оператора (матрицы) на-
называются корни характеристического уравнения этого оператора (матрицы).
5.81. Система всех характеристических чисел линейного оператора на-
называется его спектром, причем каждое характеристическое число входит в
спектр столько раз, какова его кратность. 5.82. Спектр называется простым,
если его характеристическое уравнение имеет только простые корня.
5.83. Для того чтобы найти собственные значения линейного оператора
с матрицей А, нужно найти характеристические числа этого оператора,
т. е. найти корни уравнения det (Л—ХЕ) = 0. В случае комплексного
пространства все найденные корни являются собственными значениями;
в случае вещественного пространства собственными значениями явля-
являются только вещественные корни. 5.84. Чтобы найти собственные векторы
оператора f я-мерного вещественного линейного пространства, имеющето
в некотором базисе матрицу А, поступаем следующим образом. 1. Находим
собственные значения оператора /. Для этого составляем характеристическое
уравнение det (Л —кЕ) = 0, находим его корни и выбираем все веществен-
вещественные корни. 2. Для каждого собственного значения X, находим собственные
векторы. Для этого решаем систему. (Л — XiE)X = O, где X — столбец,
элементами которого являются искомые координаты собственных векторов.
Любое ненулевое решение (oi, eta, ..., а„) этой системы определяет
собственный вектор x(oi, ct2, ..., а„) с собственным значением Я.,. 5.85. m < k.
5.86. п — гА_)Е. 5.89. Собственным вектором линейного оператора /: E:t->-
->-Ез(/: E2-*E2) является ненулевой вектор, образ которого есть вектор, колли-
неарный данному. 5.90. a) Vx||i (х=^о) с собственным значением I, Vx||j
(х Ф о) с собственным значением — 1; б) V х || i (x Ф о) с собственным значе-
значением — l,Vx||j (x^to) e собственным значением 1; в) любой ненулевой
267
вектор с собственным числом k; г) V х ||i (x Фо) с собственным значением 1,
V х 4- fi (x Ф о) с собственным значением —l,Vx_Li (x=5fco) с собственным
значением 0. 5.92. Нет. 5.93. а) хг с собственным значением 3, хз с собствен-
собственным значением 2; б) xi с собственным значением —3; в) Х| с собственным
значением 1, хг с собственным значением 5. 5.94. а) Я2— 5Я + 6 = 0; 2, 3;
б) Я2 — 6*.+ 8 = 0; 2, 4; в) Я(Я — 2) (Я — 3) = 0; 0, 2, 3; г) (Я — 1JХ
Х(Я + 3) = 0; -3, 1, 1; д) (Я - 4J (Я - 5) = 0; 4, 4, 5; е) (Я—1J(Я-,
-2)(Я + 1) = 0; — 1, 1, 1, 2; ж) (Я — 4J (Я— IJ = 0; I, 1, 4, 4; з) (Я -
— 92 (Я— 1)(Я+ 1) = 0; —1, 1, 9, 9. 5.95. а) Собственных значений оператор
не имеет; б) —2, 3; в) 1; г) —2, 3, 4. 5.100. Нет. 5.104. а)
;
6 R, t ф 0, s ф 0; в)
0; г)
1
0
0
s
t.
V/
8
9
i
s6 R
s,
, t
9
-3
1
Ф0, s
v/, s, ken,
o"
1
0
/,
15
8
-9
'if
16
11
V/, s, fegR,
O, s¥=0,
. 5.106. a) 0
k V/,s,fe6R,
15 Ik Vt, s, ke R, /=^0,
в)
1'
0
0
б)
t,
0
0
1
5"
1
—
1
1
18
s,
s.
"l25"
49
21
7
-3
6
kyt, s, AgR,
V /, s, k 6 R, t Ф 0, s ^= 0, k Ф 0. 5.107. Для того
чтобы в пространстве V размерности п существовал базнс, состоящий из
собственных векторов оператора /, необходимо и достаточно, чтобы выпол-
выполнялись следующие условия: 1) каждое собственное число оператора было его
собственным значением; 2) для каждого собственного значения Я, кратности
ki выполнялось равенство ki — п — /•<, где г,— ранг матрицы А — Я,£, А —
матрица оператора / в некотором базисе, т. е. максимальное число линейно
независимых собственных векторов оператора совпадает с размерностью
пространства. 5.108. Линейный оператор называется оператором простой
структуры, если существует базис, состоящий из собственных векторов этого
оператора. 5.109. А =
Я, 0
0 Я2
о о ... я„
значения оператора. 5.110. Оператор называется дитонализируемым, еслй^
, где Я|, Я2, ..., Я„ — собственные
268
существует базис, в котором его матрица диагональная. 5.111. Квадратная
матрица А называется диагонализируемой в комплексном пространстве,
если существует невырожденная комплексная матрица Т, такая, что
матрица Т~'АТ диагональная. 5.112. Квадратная матрица А называется
диагонализируемой в вещественном пространстве, если существует невы-
невырожденная вещественная матрица Т, такая, что Т~1АТ — вещественная
диагональная матрица. 5.113. Матрица Т называется матрицей, диагона-
лизирующей матрицу А, если Т~'АТ — диагональная матрица. 5.114. Не-
Необходимое и достаточное условия диагонализируемости матрицы (опера-
(оператора) совпадают с условиями 1, 2, указанными в ответе к задаче 5.107. В ча-
частном случае, если все характеристические числа вещественной матрицы
вещественны и попарно различны, матрица диагонализируема в вещест-
вещественном пространстве. 5.115. Для того чтобы найти матрицу 7", диагона-
лнзнрующую матрицу А порядка п, нужно найти п линейно независимых
собственных векторов матрицы А. Координаты найденных векторов обра-
образуют столбцы матрицы Т. 5.118. а) 1; б) 2; в) 2; г) 1; д) 4; е) 2.
5.119. a) L _„ ; б) ; в) не приводится; г)
0
0
0
0
0
0
0
0
2
; д) не
приводится;
е)
— 2
0
0
0
0
0
0
0
1
; ж) не приводится; з)
-2000
0 2 0 0
0 0 2 0
0 0 0 2
и) не приводится. 5.120. a) el =Bei + e2)fe, e2 = ( — 2ei + е2) / Vfe, / 6 R,
k ф 0, / Ф 0; 6) e\ = (e, — e2) k, e'2 = Be, + 3e2) m Vfe, m g R, k ф 0, m =#= 0;
в) ei=(ei—e3)fe, e2 = (ei+e3)m, e3 = pe2VA, m, p g R, fe Ф 0, тФО,
рфО; г) ei=(ei— e2) A, e2 = ( —3e, + 2e3) m, e3 = (ei + e2 — e3)p V k,
m, pgR, fe=^0, m^fcO, p =?fc 0; д) ei = (e2 + 2e3)/, e2=Ge,+5e2 +
+ 6e3)m, e3 = Ee2 + 6e3) / V/, m, / g R, /^=0, m^fcO, /^=0; e) e', =
= (9e,-2e2 + e3)/, e2 = (-2e,+e2) s, e3 = (e2 — 2e3) A V<, s, fe g R,
t Ф0, s =?fc 0, fe =jfc 0; ж) е{ = (е1+ег)/, е2=(е1+ез)т. ез=(е|+е4)п,
е4= (ei — е2 — е3 — е4)р V/, т, п, р 6 R, / ФО, т ф 0, п ф 0, р =^fc 0; з) ef =
+ feie2 + Pie3 + Pie4, e4 ^ ^2в1 + ^ге2 + Р2вз + Рге4 Vi, tz, S\, s2, k\, fe2,
Pi, Pi € R. причем
5.121. a)
2/ s
2/ -2s
— t\
—/2
fel
fe2
1 VA,
/2
k
m
i
e
Sl
s2
Pi
P2
R, /S
— si
— s2
Pi
p2
s, k 6R,
, m ^ 0
Г5 (
' Lo -;
.0
fcO,
0
0
0
3
0
0"
0
6
; б) Т =
; г)Г=
269
6s,+4/, s, U
6s2 + 4B s2 /2
3ft 0 ft
i, s2, /,, /2, ft 6 R, причем det 7" ^ 0,
Д) T =
0
0
0
0
1
0
0
0
1
det T Ф0,
; e) T =
1 0 0
0-1 0
0 0—1
0
0
0
0
0
0
0
0
3
ft ft -ft
2/, +3si —2/, —2s,
V .*,,/,, s2, /2,
, причем det 7" Ф0.
; ж) Т =
S-2
ft s,
k t\ /2
k 3Ui — Si) 3(b — s2)
Vsi,i2, /1, /2, ft g R, причем
k 0 0-3/
0 s 0 it
0 0 р -3(
О 0 -р it
Vfe, s, p, /6R,
причем det Т Ф О,
2 0 0 0
0 2 0 0
0 0 2 0
0 0 0 1
Л =
. 5.122. Вещественная квадратная матрица
аи ai2 ... аи
О2| а-22 ... 0.2а
а„\
называется ортогональной, если соответствующая ей система вектороЕ
х 1 (a11, Q21, ■■■, а„|), x2(qi2, а22, ..., а„2), ■■., х„(а,„, a2/i, ..., а„„) ортонормированная
При этом предполагается, что векторы х,, х2, ..., х„ являются элeмeнтaм^
евклидова пространства, в котором скалярное произведение определен<
п
следующим образом: (х„ ху) = 2 а^ащ. 5.123. Для того чтобы квадратна*
*=|
матрица А была ортогональной, необходимо н достаточно, чтобы выполня
лось одно нз следующих условий: 1) А А = £; 2) ЛЛГ = £; 3) ЛГ = Л '
5.124. Если А — ортогональная матрица, то det У1 = ± 1. 5.125. Нет
5.126. Да. 5.127. а) Да; б) да. 5.128. Да. 5.129. Линейный оператор
евклидова пространства Е называется ортогональным, если V х, у 6 Е
выполняется условие (х, у) = (/(х), /(у)). 5.130. Для того чтобы операто)
/: Е—>-Е был ортогональным, необходимо и достаточно, чтобы выполнялоа
одно из следующих условий: 1) его матрица в ортонормнрованном базиа
была ортогональна; 2) этот оператор переводил ортонормированный бази!
в ортонормированный; 3) этот оператор не менял длину вектора. 5.131. Дл>
ортогональных операторов справедливы следующие свойства: 1) ортого
нальный оператор — невырожденный; 2) для ортогонального оператор;
существует обратный оператор, который также является ортогональным
3) если Л - матрица ортогонального оператора, то А1'-• матрица опера
тора, обратного данному; 4) произведение ортогональных опера
торов также является ортогональным оператором. 5.134. а) Нет; б) да
270
i/ут з/Vio
-з/V'io i/лДо
в) да,
0 2/д/3~
2/\/б" -1/\/б" -1/V^
2/узо~ 5/узо" -1/узо~
0
1
0
3/Vl3
0
2/-\/l3~
; e)
Да,
i/л/з
1/V2 -1/л/2 О
; г) нет; д) да,
5.135. а2 +
+ Р2 = 1. 5.136. а) Да; б) да при Я = ± Г, нет прн А,=?ь±1; в) да;
г) да. 5.138. 3. 5.139. deMS=±l. 5.140. а) Нет; б) да; в) да. 5.141.
Диагональная матрица является ортогональной тогда и только тогда,
когда каждый диагональный элемент равен ±1. 5.143. Нет. 5.144. Опе-
Оператор g: Е„->-Е„ называется сопряженным оператору f: Е„->-Е„, если
Vx, у 6 Е„ выполняется условие (/(х), у) = (х, g(y)). 5.145. Оператор, сопря-
сопряженный оператору /, обозначается f*. 5.146. Операторы / и /* называются
взаимно сопряженными. 5.147. Если А матрица оператора / в орто-
ортонормированном базисе, то А — матрица оператора /* в том же базисе.
5.148. Сопряженный оператор обладает следующими свойствами: 1) (/*)* =
= /;_2) (f°g)* = g*°i*\ 3) (f + g)* = I* + g*; 4) (af)* = a[*; 5) (/*)"' =
= (/ )*, если оператор / невырожденный. 5.149. Линейный оператор
/: Е„->-Е„ называется самосопряженным (или симметрическим), если V х,
у £ Е„ выполняется условие (Дх), у) = (х, /(у)). Таким образом, если f —
самосопряженный оператор, то f* = f. 5.150. Матрица А = (а,,) самосопря-
самосопряженного оператора в ортонормированном базисе является симметрической,
т. е. aji = aij. 5.151. Собственные векторы самосопряженного оператора,
соответствующие различным собственным значениям, ортогональны.
5.152. Нет: самосопряженный оператор имеет только вещественные характе-
характеристические числа. 5.153. Для всякого самосопряженного оператора суще-
существует ортогональный базис, состоящий из собственных векторов этого
оператора. 5.154. Из теоремы о полноте собственных векторов самосопря-
самосопряженного оператора вытекают следующие свойства: 1) всякий самосопря-
самосопряженный оператор является оператором простой структуры; 2) для всякого
самосопряженного оператора существует ортонормнрованный базис, со-
состоящий из собственных векторов этого оператора. 5.155. Симметрическая
матрица диагоналнзируема в вещественном пространстве. 5.156. Чтобы
найти ортогональную матрицу Т, диагонализирующую симметрическую
матрицу А порядка п, надо найтн п ортонормированных собственных векто-
векторов матрицы А; координаты <-го (/= 1, п) нормированного собственного
вектора матрицы А образуют г-й столбец матрицы Т. 5.160. / =/*. 5.161.
а)
Г 2 41
L-3 5J1
б)
— 1
3
2
0
1
4
3
-1
— 2
■ B)
0 3 1
— 1 4 0 . 5.162. I* — пово-
2-5-3
рот на угол ( — а). 5.163. а) Нет; б) да; в) нет; г) да. 5.164. а) а —
г Г-3 —11 _ 1 Г19 —171
= 1/V2; б) ни прн каком а. 5.168. а) _4 Л. б) — I I;
4/3 3/\/б" 5/3 -ф
в)
4/V6
0 1/д/з"
0 —1/3
5.169. Ответ определен неоднозначно:
271
1/V2" 1/V2]
в)
Д)
-1 0
0 5
7
0
0
0
4
0
0
0
4
1/V2~ -I/V2" 0
1/V2" 1/V2" 0
1
0
0
0
3
0
0
0
4
e)
2/V6" —
0 5/V30"
1
0
0
0
0
0
0
0
5
ж)
;
0
1
0
1
0
0
0
5
0
0
0
5
Глава б
6.1. Квадратичной формой n переменных xt, x2, ..., xn, прннимающю
n n
числовые значения, называется числовая функция вида 2 2 aijXiXj =
... +ainx,xn
+ an\xnx\ + an2*nx2 + ... + annxiJ, где а/, — числа, называемые коэффи
циентами квадратичной формы. 6.2. Квадратичная форма называется ве-
вещественной, если ее коэффициенты вещественны и переменные принимают
вещественные значения. 6.3. Матрицей квадратичной формы п переменны)
Х\, хч хп называется симметрическая матрица порядка п, элементь
главной диагонали которой совпадают с коэффициентами при квадрата>
переменных, а каждый недиагональный элемент, расположенный в 1-й стро
ке и ;-м столбце, равен половине коэффициента прн xtxj в квадратично?
форме. 6.4. Рангом квадратичной формы называется ранг ее матрицы
6.5. Квадратичная фосма называется невырожденной, если ее матрице
невырожденная. 6.6. X АХ, где А — матрица квадратичной формы, а
у
Хп
, X =[х\
6.7. L(xu *2, ..., х„) = (/(х), х), при этом матрица А называется матрицей
1
в)
ж)
шт
)
3
0
0
ичной
°1-
-2\-
0
— 1
0
формы
г)
0
0
5
Г °
3/2
;
в базисе.
3/21 Д)
о J;
з)
0
1/2
1
6.9.
1
0
-3
1/2
0
0
a) [I
0
-2
0
— 1
0
0
г 2"
> —1
з
0
1
;
;
и)
;
б)
е)
"о
2
О
О
'_
О
О
2
О
О
1
1/2
О
1
— 1
О
О
-2
м_ 1
-1/2
3
О
— 1
О
О
О
-1
3
272
а) Цх,, лг2) =
; в) Цхь х2) =
6.10. a) 1; б) 2; в) 3; г) 2; д) 4. 6.11.
; б) Цх,, х2) = [х.
3/2 1 J
; г)
) = [х, х2 х3]
Х2 Хз
0
1/2
3/2
1
5
0
1
1/2
0
-1
0
1
0 —1/2
-1/2 0
3/2 '
-1
0
X,
х2 .
Хз
6.12. а) Цх,, х2) = х? + Зх? - 4х,х2; б) Цх,, xi) = — Здг| + 2х,х2; в) Цх,,
х2, хз) = 2х? + х\ — 4х,х2 — 2х2х3; г) Цх,, х2, х3) = Зх? — 2х| + xl + 4х,х3 +
+ 2х2х3; д) Цх,, х2, х3)= — Зх2+10xix2; е) Цх,, х2, х3, х4)=—х? +
+ 2хз + 6х,х2 + 2х,х4 + 8х2х3 + 10х3Х4. 6.13. Квадратичная форма назы-
называется канонической (имеет канонический вид), если она имеет вид
п
а,,х? + а22х2+ ••• + а„пх — 2 а„х,?. 6.14. Матрица канонической квадра-
/= 1
тнчной формы является диагональной. 6.15. Говорят, что квадратичная
форма приводится к каноническому виду, если существует базис линей-
линейного пространства V, в котором матрица квадратичной формы является
диагональной. 6.16. Да. 6.17. Для того чтобы найти ортогональную матри-
матрицу Т, приводящую квадратичную форму к каноническому виду, нужно
найти координаты векторов ортонормированного базиса, состоящего J13
собственных векторов матрицы А данной квадратичной формы. Коорди-
Координаты t-го (/ = 1, п) вектора указанного ортонормнрованного базиса обра-
образуют 1-й столбец матрицы А. 6.18. 6, =ЯЬ 62 = Я2, ..., Ь„ = Я„, где \\, Я,2, ...,
^-—собственные значения матрицы А квадратичной формы
а,,х,х;.
6.19. Метод Лагранжа приведения квадратичной формы к каноническому
виду состоит в последовательном выделении в квадратичной форме пол-
полных квадратов [1]. 6.20. Главными угловыми минорами матрицы
а-п а,2 а,з
а,г а22 а2з
а„„
называются миноры
Д,=1
a,i . а,2
а, г а22
а, 2
й|2
а22
273
а, 2
022
O-ln
п п2„ ... а„„
6.21. Метод Якоби приведения квадратичной формы к каноническому виду
применим в случае, когда главные угловые миноры матрицы квадратичной
формы отличны от нуля. 6.22. Х\ = у\ -\- ot2it/2 + (X31I/3 + •■■ + а.„\у„,
Х2= 1/2 + <*32(/3 + ••• + <*п1Уп,
Хз= 1/3 + ••• + ЪпЪУп,
Х„ = Уп,
где (Xj,• = (—1)'+'—г——-; Д/-1 / — минор матрицы А, расположенный на
Д/-1
пересечении строк этой матрицы с номерами 1, 2, ..., / — 1 и столбцов с номе-
номерами 1, 2, ..., j—I, t+1 j. 6.23. Pi=Ai, ру = ' (; = 2, п), где
Л, — главные угловые миноры матрицы А. 6.24. Нет. 6.25. Закон инерции
квадратичных форм заключается в следующем. Все канонические формы,
к которым приводится данная квадратичная форма, имеют: одно и то же
число нулевых коэффициентов; одно н то же число положительных коэф-
коэффициентов; одно н то же число отрицательных коэффициентов. 6.27. Нет.
6.28. Да. 6.29. Ответ определяется неоднозначно, а) х\ = —— i/i +
Л/2
1
1
хг=
1
V2~ л/2
в) х\ =
Г) X, =
-i/i ■
i— У I /—
л/з V2
*2= —
1
' ,1+4
1/з, Хч =
= ф + 3yh б) х, =
1 . 1
1
—г—
Л/З
i/i
- 1/2
f
Н ?=-1/з, Цуи
1/3,
, У% Уз) =
1 . 1
-1/2 +
4(/2 —
-1/1 +
л/г
;д)„ = -|
1 1
л/б
Уз,
л/з" л/2" Ve"
Уз) = 9i/? + 6i/i + 6i/I; е) я, = -
Хз =
V3"
1/1 +
1
4
-Уз,
Х-2 = ■
Уз) =
+
274
т=
1,1
"^2 + ТУз' Хз= ~
11
—У*
V2
ж) jci =
1/1
1/2
1/11/2т^
д/З Л/2 V6
7^
Л/3
л/б
Уз, Xi=
12
—1/1 Н —1/3, ЦУ1, 1/2, 1/з)= — i/i
+ 2y'i. 6.30. Ответ определяется неоднозначно, а) Цу,, y2) = yl + yL
у,=х,+Х2, у2 = х2; б) Цу,, у2, Уз)=у2\+у'1 у,=х,+хг + х3, Уг =
= х3 —2х2, у3 = х3; в) L(y,, у2, Уз) = У? + у\ + 5у1, у\ = 2х,—х->, уг =
= х2 — Зх3, уз = х3; Г) ^ (#1. i/2, Уз) = У? — у! — 4{/з, У i = Х\ — Хч + х3,
У2=— Хг + хз, уз = х3; д) /.(Уь У2, Уз) = у? + yi — Уз, J/i = 0,5(х, + *з),
у2 = х3 — хг, уз = 0,5(х3 — X|); e) L (yi, уг, уз) = У? — yl, у i = 0,5xi +
+ 0,5х2 — 0,5х3, уг = —0,5xi + 0,5x2 — 0,5х3, у3 = х3. 6.31. a) L(yi, y2, уз) =
= у? — Ьу\ + 3,2у§, xi = yi — 2у2 — 0,4у3, х2 = у2 + 0,2у3, х3 = у3; б) L(yi,
У2, Уз) = 2у? + 0,5у1 + 5уз, xi=yi+0,5y2, х2 = у2, х3 = у3; в) L(y,, y2.
Уз) = — У?+Пуг+-ррУз, Jti =yi +3у2+ урУз, Х2 = у2+ урУз, Х3 =
= уз. 6.32. В случаях 1,2 ответ неоднозначен, а) 1. £(yi, y2) = 2у\,
Х\х2, #2=—— х, — х2; 2. L(yi,y2)=yl у, =
V
у\ = =гХ\-\ х2, #2=х,
V2 V2 V2 V2
= xi—х2, у2 = х2; 3. Неприменим; б) 1. L(yt, у2) = 4у? — 5у2, yi =
2л/2" 1 1 2л/2 ,
= —х, + — х2, у2= — х, Н ^—*г; 2. L{yi, y2) = 5yf — у2, yi =
CC о о
Г 2 20 S 2\^
= xi, у2= У2*' +2jc2; 3. Л-(г/i, у2) =3yf ^— уг, xi = у, И — у2,
о о
х2 = у2; в) 1. L(y\, у2, уз) = у? + yl + 3(/§, yi=xi, у2 =—р-х2 +
Н р-*з, Уз= ^-«2Н ^х3;
V2 V2 V2
у, = xi, у2 = х2 + ~2Хз' Уз = Хз' 3' ^ 'Уи У2' Уз^ = -^ + 2.+ ~2 $•
xi=yi, Х2 = у2 s"Уз, х3 = уз. 6.33. fe = г, где г -ранг матрицы А =
= (а,7). 6.35. ах2 + Ьху + су2 + dx + gy +1 = 0, где |а| + |Ь| + |с| #0.
6.36. [х у|
су2, А = . 6.38. а) 1. Пусть ортогональный оператор с мат-
матй
рицей
Т =
2I '22
р базисе i, j приводит квадратичную форму ах2 -j- bxy + су2 к каноническому
.' виду. Этот оператор переводит ортоиормированный базис i, j в ортонормиро-
ванной базис V, ]', где ¥ = tn\ + t2t), ]' = <i2i + М, который и является
искомым; 2. Х\х" -j-Xii/, где Х\, Я,2 — собственные значения матрицы
квадратичной формы ах2 + Ьху + су2; 3. Xix'" + ^2</'2 + [d g] ," ,'2 X
|_I2I «22J
275
X
= 0. 6.39. Уравнение ax2 + bxy + cy2 + dx
= 0 опреде-
ляет фигуру: а) эллиптического типа, если ас — (b/2f > 0; б) гиперболи-
гиперболического типа, если ас — {b/2f < 0; в) параболического типа, если ас —
у\ \\
-3/2
3/2 2
= 0. 6.41. а)
фигура гиперболического типа; б) \х у]
= 0, фигура параболического типа; в) [х у]
3 -1
-I 2
[-! 5]
X — 1 = 0, фигура эллиптического типа; г) [х
L У J
И
+ [2 -ИХ
+ [ — 3 4] -(-3 = 0, фигура гиперболического типа. 6.42. а) Гипербо-
Гиперболического; б) гиперболического, если Ь Ф 0, параболического, ecnjH b = 0.
6.44. Ответ определяется неоднозначно, а)
1
б)
(</' + 3/2J
= 0; д)
. = |. в)
У'_+ 1/2J
19/20
19/50
(у' - 7/25J
48/625
- , 2
'
0,5
- = !; г)
(У+1J
1
= 1;
48/625
3
i; и) (у' -
— 3 = 0, 2х' — 2 д/5~{/' — 3 = 0. 6.45. а, ,х2 + a22i/2 + а33г2 + 2at2xy +
+ 2ai3xz + 2u23yz + bx + су + dz + f — 0, где хотя бы один из коэф-
коэффициентов а,, (»'=1, 3; / := 1, 3) отличен от нуля. 6.46. [х у z] X
X
ам
Й22 Я23
#23 #33
+ \b с d\
+ f == 0. 6.47. а, ,х2 + а22;/2 + a33z2 +
2a23yz,
А =
6.48. а) 1. Пусть ортогональный оператор с матрицей
в базисе i, j, k приводит квадратичную форму ацх2 + а^у2 -\-аззг2 +
-j-2ai2xy-\-2al3xz-\-п2зуг к каноническому виду. Этот оператор переводит
276
ортонормированный базис i, j, к в ортоиормированный базис V, j', к', где
K = <ni + /2ij-H3ik, }' = tu\ + fej + <з2к, k' = /i3i + /23J + <ззк, который и
является искомым; 2. Xix1 + ЬгУ' + taz' , где A,i, Xi, А,3 — собственные зиа-
чеиия матрицы
А =
«12
023
a33
квадратичной формы а.цх2 + а22у2 + аззг2 + 2а12ху + 2а,3л:г + 2a23yz;
'til til t
3.
X
X
z' +\b с d\
t2l
/si
^33
Z'
f = 0.6.50. a) [x yz}X
3 0 2
О -1 -3
2 —3 2|
х
У +[2
-5 = 0;6) [x 1/ z]
0 1/2 -1
1/2 1 0
+ [1 2 -3]
= 0; в) \х у
0 1 2
1 0 -3/2
2 —3/2
-1 0 -1
х
/2
О'
X
[3 -1 2]
- 1 = 0; г) [х у г]
1 2 О
2 3 7/2
О 7/2 О
+ [0 0 —5]X
X
+ 10 = 0. 6.51. Ответ определяется неоднозначно, а)
1/4
1/2
= 0; в)
1/8
5/2
5/4
(г' + IJ
= 1; r)
43/4
= 1; е)
i; д) -
y'
x'~ 12J
43/2
= 1.
43/10 "' "' 1/6 1/2 1/3
6.56. Положительно определенная. 6.57. Не является знакоопределеиной.
6.58. Не является знакоопределенной. 6.59. Положительно определенная.
6.60. Отрицательно определенная. 6.61. Не является знакоопределенной.
6.62. Для любого X > 0. 6.63. Ни при каком значении X. 6.64. X > 4/3.
6.65. Х<— 4/3. 6.66. Ни при каком значении X. 6.67. Х> 57/29.
6.68. Х> 1, Х<— 2. 6.70. Я,@, 2, 0) —точка минимума, umin=—16;
стационарная точка Яг @, —2, 0) не является точкой экстремума.
6.71. Стационарная точка ЯA, 0, —2) не является точкой экстремума.
6.72. ЯA/86, 1/43, 11/86) —точка максимума, umax = 473/7396. 6.73. ЯC,
— 2, 1) — точка минимума, umin = — 14. 6.74. Я|A, 1, 1) — точка максимума,
umajl=l, стационарная точка Р2@, 0, 0) не является точкой экстремума.
6.75. Я( — 2/3, —1/3, 1) — точка минимума, umin = 24/9.
277
Глава 7
7.2. a) [10]; б) Г-
Г-7
[ 0
5
0
0
I
5
0
0
1
5
г)
д)
11
0
0
0
1
11
0
0
0
1
11
0
0
0
I
.11
е)
3
0
0
1
3
0
о"
0
1
ж)
;
и)
2
0
0
0
0
0
1
— 2
0
0
0
0
0
0
0
0
0
0
0
0
0
6
0
0
0
0
0
1
6
0
0
0
0
0
1
6
в) [5 1 0 г) [_2 1 0 0
0—2 1 0
0 0-2 1
0 0 0—2
-4000
0-310
0 0—3 1
0 0 0—3
. 7.3. [У,, A), У2(-2)]. 7.4. [У2C)]. 7.5. Не яв-
0
0
0
0
1
И
0
0
0
0
— 1
0
0
0
1
-1
з)
ляется. 7.6. Не является. 7.7. [У,E), 7,E), ЛF)]. 7.8. Не является. 7.9. [У2( — 2),
У,G)]. 7.10. [У2A2), У2(-7)|. 7.11. [ЛF), У3(-6)|. 7.12. [У,(-1), У2B), У,( —5)].
7.13. Не является. 7.14. |У3@),У2A)]. 7.15. а)
— 4
0
0
-2
6
0
0
5
б)
J
3
0
0
0
0
0
0
0
1
1
0
0
0
0
-1
0
в)
4
0
0
3
-4
0
1
4
7
; г)
6
0
0
5
6
0
1
5
6
. 7.22. Жорданова форма матрицы имеет
п клеток, где п -- порядок матрицы. 7.23. а) Х\ = 2, S|=2, Х2=—1,
s2 = 2, п = 4; б) Х.1 =0, s, = 2, Х2 = 5, s2 = 3, п = 5; в) X, = — 3, s, = 1,
12=\, s2 = 3, Х.з = 0, s3 = 3, n = 7; г) h = 4, s, = 3, л = 3. 7.24. Нет.
7.25. Да. 7.26. Нет. 7.27. Да 7.28. Да. 7.29. Нет. 7.30. [/,A), У,(— 1),
/,D)|. 7.31. [У,E), У2C)]. 7.32. [У,@), У,B), У,(-2)]. 7.33. J./j(l), У,A),
У,(-1)]. 7.34. [У,C),- У2@)]. 7.35. [У,B), У2A)]. 7.36. [У,A), У,B), 2)
37 ]УE)] 738 [УЗ) УB) УA) УA)| 739 (У() У2)
()] [(), ()] [() ()] [() ()
7.37. ]У3E)]. 7.38. [У.(-З), У,(-2), У,A), У,A)|. 7.39. (У2A), У,B),
7.40. [У,C), У2C), У2A)]. 7.41. [У2A), У2A)|. 7.44. [У,B), У,C)|,
). 7.46. 1У2(-
ф °; S
(
У,B)
У,C)
Г =
' 7'48' |У2@
I. 7.45. [У2B)|, Т =
AФ0). 7.47. [У,(-4), У,G)], Т=[~3[ J]
7=1 Aф0). 7.49. [/i@), У|@)|, Т — любая невырождениая матри-
матрица второго порядка. 7.50. |У|@), Уi @), Уi C)], Т =
t 0
0 s 2р
0 0 Зр
(t фО- s =И=
278
= 0; р'фО). 7.51. [У,@), У,F), У,(-1)], Т =
Го 0 (/4
/ s p
—4< 2s 2p
О 6s -р
■> Ф 0). 7.52.
т =
О t/2 s/2
/ s р
AфО). 7.53. [У2C), У,@)], Г =
О t/2 Зр
О </2 — 6р
AФ0; рФО). 7.54. [У,(-1), У2(-1I, Т =
0
/
0
0
0
s
s
0
0
). 7.55. |У3E)|, Г?=
О / s
О 0 t
t s р
, (/^0). 7.56. [У 4
/ s р k
О </3 S/3 + //9 р/3 + 2//27 + s/9
О О -//3 -2</9-s/3
0 0 0 -*/9
г' <е' О
О е' О
0 0 e2'
7.64.
gat О О
О е" О
0 0 e"
7.66.
10 0
' te~'
fe-
feО е' te
z
О 0 е~' te~'
0 0 0 е-1
7.62.
7.65.
7.67.
V о о
О е21 О
О 0 е3'
7.63.
1
0
0
,81
0
0
0
/
1
0
t
(
еы
„81
0
0
е/2
t
1
0
0
е71
0
€
0
0
te
е1
".68. e"
1 < t'2/2\
0 1 <
0 0 1
0 0 0
B/2\
7-69.
2e2t-e31 -
—t ' ■
7.73. Г ' °1 7 74
L5/ 1J- /4'
= \Р К Q]. где
7 72 '
-7-72-TT
775 1
3
3 0 — 1 + e3
0 3 -2 + 2e
0 0 3e
+
3e3'
15e?' ~
. 7.76. eM =
2,8e" 4'— l,8e'— l,2<e'
l,2e4' — l,2e' 0
l,2e" - l,2e'-l,2<e'
-I,4e41+ l,4e'+ 1,6/
-0,6e4( + l,6e'
-0,6e4' +0,6e'+ l,6
, Q=
— 2,8e"' + 2,8e'+ 1,2/e'l
-l,2e4' + l,2e'
— l,2e4' +2,2e'+ 1,2/ej
279
7-77. T2
4е6' + 24е"
24еЬ1_одр-1
1 О О
21 1 О
2/2 21 1
• 7'79- 78
■' 28 + 2е6'+12е~' 12е6'— 12е '
6еб'_6е~' 36е6' + 6е~'
18е3' 24< + 2 —2е3' 2е3' +- 12/ — 2
О 12е3' + 6 бе3'-6
О 12е3'-12 бе3'+12
7.78.
7.80. е-
1 О О
О 1 О
/ 0 1
. 7.81. е5
1 / О
О 1 О
/ /2/2 1
. 7.86. х, = с,е2', х2 = (
е7',
7.87. х, = е5'(с, + c2t), х2 = с2е5'. 7.88.
7.89. х, = се"', х2 = е'(с2 + Ы), х3 = с3е'. 7.90. х, = (с, + с2 + Ц-
х2 = (с, +c2t)e7', хз = с3е7'- 7.91. х, = е~3'(с + c2t), х2 = с2е~31, х3 —
= еы(Сз + Ы), х4 = с4е5'. 7.92. х, = e2'(ct + c2t + у /2\ x2 = е2'(с2 + c3t),
х3 = с3е2', х4 = с4е"'. 7.93. х, =2с,е2'+ с2е3', х2 = с,е2'+ с2е3'. 7.94. х, =
= (С + c2t + сг)^2', хг = (— с, — c2t)e21. 7.95. х, =Gс, + 7c2t)e~\ х2 = с2е~'.
7.96. х, = —Зс,е~4' + 5с2е7'1 х2 = с,е~4'+ 2с2е7'. 7.97. х, = с, + с2е6' -|_
+ с3е~', х2 = — 4с, + 2с2е6' + 2с3е "', х3 = 6с2е61 — с3е~'. 7.98. х, = с3е3',
х2 = Bс2 + 2<с3)е3', хз = Dс, + 4с2/ + 2с3/2)е3'. 7.99. х, = 2с,е3' + 2с2е31 + с3,
Х2 = С2(?> + Зс3, хз = с2е3'-6с3. 7.100. х,=с3е-', х2=с,е-', х3 = (с2 +
+ c3t)e-'. 7.101. х, = (С2 + c3t)eb\ х2 = с3еы, х3= (с, + c2t +\~) «"•
-Зс4е2'. 7.103.
х, = е2' (— с, + 2с2 — 2с3) + 2е3' (с — с2 + с3). х2 = е2' Eс — 4с2 + 5с3) —
- 5е3' (с, - сг + сз), хз = е2'Fс - 6с2 + 7сз) - бе3'(с, - с2 + с3). 7.104.
х, = -с,е2' + с2е3' + с3е6', х2 = с2е3' - 2с3е6', х3 = се2' + c2e3t + с3еы. 7.105.
х, = —е'(с + 2с2 + Зсз) + е3'Bс, + 2с2 + Зс3), х2 = —е'Bс, + с2 + Зс3) +
+ е3'Bс+2с2 + 3сз), х3 = 2е'(с+с2 + 2сз)-е3'Bс,+2с2 + 3с3). 7.106.
х, = с, cos / + сг sin t, х2= —с, sin / + с2 cos /. 7.107. х, = Eс, cos Ы +
+ 5с2 sin 3<)е4', хг = (( — с, — Зс2) cos 3/ + (Зс, — с2) sin 3/)e4'. 7.108. х, =
= Dс2 cos 2t + 4с3 sin 2<)е2', х2 = (Dс2 — 8c3)cos 2/ + (8с2 + 4c3)sm2<)e2',
х3 = се4'+ (( —7c2 + c3)cos2/— (с2 —7c3)sin 2<)е2'. 7.111. х, =е2'( — t3—
+ 0)- 7.112. xi =(с +/ In t + c2t)e', x2 = (ln t + c2)e'. 7.113. x, =— 2e3' —
_e-' + C|e2- + 3c2e4', x2= -e3'-2e-' + c,e2' + C2e4'. 7.114. х,=|г'-
— e' — te' — ^ eM + 3<«3' + ci«' — 3c2«' + e3e31, x2 = —2te> — e' — — e31 +
+ 3/e3' + c,e' + c3e31, x3 = e' + 2/e' - -i- e~' + 2e3' - 3/e3' •
.115. х, = е'(у е + с,), х2 = -1 <V + y
7.
280
+(С2
— c3)t + c, je2', x2 = ( —
7.116. Xl=^_cos/-y
cos < + C2)e2', x3 = ( — cos t — sin t — у /2 + (c, +
. 7.117. x, =-1Уз*е2'+(
e2' - 3e5' + W3'-2Сзе|!'- y), x3 =
+ + )(+
+ c2e4'. 7.123. л = с, + c2e2' -
7.124. x\ =2c2e2' — c3e"', x2 =
= c,e' — c2e"' + te' — e' — 21, xi
= e5'(c2 —3c, — 3c2/) — 4e4', x2 =
— cos/ + 2sin/, x2 = 3cie' + c
+ cos/ — 2sin<, x2 = cie' + 2с2
7.121. *,=(CI +
7.122. *, = c,e2' + 3c2e4', x2 = c,e2' +
', x2 = c, + 3c2e2', x3 = -2c2e2' + c3e " '.
ie'+ c2e2', x3 = c,e' + c3e~'. 7.125. xi =
= c,e' + c2e ' + /e' — t2 — 2. 7.126. x, =
e5'(c, + at) + e41. 7.127. x, =c^e^ + c2e ' —
e"' + 3 sin t. 7.128. x, = c,e' + 3c2e2' +
2 cos / — 2 sin t. 7.129. л =
— Ci)C0S / — [С]
X\ = 1 + сг sin
— c\e' -j- C2 cos
> = e2'(C\ cos /
c2s'm t) -e
. 7.130.
+ c3 cos <), Xi = C|g' + c2 sin / + c3 cos /, хз = t —
\ j 2 — Сз sin t. 7.135. Неустойчивый узел. 7.136. Седло. Не-
Неустойчиво. 7.137. Неустойчивый фокус. 7.138. Центр. Устойчиво. 7.139. Ус-
Устойчивый фокус. 7.140. Седло. Неустойчиво. 7.141. Центр. Устойчиво.
7.142. Неустойчивый узел. 7.143. Неустойчивый фокус. 7.144. Устойчивый
узел. 7.145. Устойчивый узел. 7.146. Решения неустойчивы. 7.147. Решения
устойчивы. 7.148. Решения неустойчивы. 7.149. Решения неустойчивы.
7.150. Решения устойчивы. 7.151. Решения неустойчивы. 7.152. Решения
неустойчивы. 7.153. Устойчиво. 7.154. Устойчиво. 7.155. Устойчиво. 7.156.
Асимптотически устойчиво. 7.157. Неустойчиво. 7.158. Неустойчиво. 7.159.
Неустойчиво. 7.160. Асимптотически устойчиво. 7.161. Неустойчиво.
7.162. Устойчиво. 7.163. Асимптотически устойчиво. 7.164. Асимптотически
устойчиво. 7.165. Неустойчиво. 7.166. Неустойчиво. 7.167. Асимптотически
устойчиво. 7.168. Неустойчиво. 7.169. Асимптотически устойчиво. 7.170. Не-
Неустойчиво. 7.171. Неустойчиво. 7.172. Устойчиво. 7.173. Устойчиво 1.175.
о, =0,616"\/fc/m, co2= \fi2o-\[k/m, ai = , а2 = _ofi, . 7.176. wi =
= O,65-0V/(/m), 102= \А\Ал1ы/Aт), co3 = 1,652 -\jN/{lm), a, =
1,257
1
4 Г 4
^2= 0 , a3= 0,422 . 7.177. со, = 0,469ш0, со2 = 0,843ш0, оK= 1,5О9о)О,
: ы L * J
f>4 = 1,732о)о, где оH = — =—j-; F— сила натяжения нити; собственные
m ml
акторы:
1
1,28
1
1,28
, а2 =
1
2
— 1
— 2
, а3 =
1
— 0,78
1
— 0,78
, а4 =
1
-0,5
— 1
0,5
281
(нечетные координаты собственных векторов относятся к грузам, под-
подвешенным на нити, четные — к грузам на пружинах). 7.178. coi = О,
(о2 = Л]к/т, из = 1,732 ~yk/m;
6т шз
1
— 2
1
Г
-2
1
n = -yk/m. 7.180.
sin 0K/. 7.179.
Зт
t —
— 1
О
1
О
— 1
2л2
-cosnt-
где / — длина недеформированных пружин,
'х, 1 Го,353
хг = 0,5
х3 0,353
J L.
I COS 0>i/ —
0,3531
— 0,5 1X2 cos 0J/, где *•>—
0,353 J
начальное отклонение средней бусинки; wi = 0,766 \N/(ml), oJ =
= l,847-yV/(«/).
Приложение
2. 4 Н. 3. 9i+ 13j — 7k. 4. Равнодействующая равна нулю. Указание.
Рассмотреть, как изменится сумма компланарных векторов, если все
слагаемые будут повернуты в одном и том же направлении на один и тот
же угол. 5. -Ji-i-Jl-j-i-k. 6. 1. а) Ь = р - (п, р)п; б) 1Ы =
= Vl - (п, рJ; в) к=
j
Р~("'
У'- (п, РJ
, г) (q'. к') = sin в, (q, к) = sin Ф;
д) (q\ k)=—-yl—(p, nJ, (q, k) = д/1 — (P. nJ; ж) a = ((q', n) —(p,
n))n + ((q', k) —(p, k))k = ( —cos6 + cos9)n-)-(sin 8 —sin ф)к. 3. q'=
= e(p —n(p, n))M -"
5 + Vl7~ 7 •
{~ „>») ■
7- B. 3)- 8- (-
4/9).
. 10. Fx/2; —6y/2). 11. /,/г/з. 12. Нет.
4 8 у
13. Да. 14. Нет. 15. В тросах возникают растягивающие силы: 10g уЗ Н,
20g"\/3 Н. 16. На стержень АВ действует растягивающая сила 120g H,
а на стержень СВ — сжимающая сила 60g-\/3 H. 17. 10g H, iOg H,
10gV2 H. 18. На стержни АО и ВО действуют силы, равные 5g"\/6~ H,
а на стержень СО — сжимающая сила, равная 20g"\/3 H. 19. х — у — 2 — 0,
x + y — 2 = Q.20.x + y+\=0,x — y+l=Q,x + y—l~0. 21. mE6, 33).
22. Границы расположены на прямых х — у + 5 = 0, х — у — 3 = 0, х +
+ {/-7 = 0, х + у -15 = 0. 23. 10 с. 24. 6,5 см/с. 25. A4, -4, 1)
27. Х= -mgb2x/(a2y). 28. 5,1 . 106 км. 29. |О| = Imgb2x/(.a2y)\-yjb*x2 + a4y2.
30. е «0,08. 31. 9/4. 32. х2 + у2 = /2/4, где / — длина стержня.
282
~u где '~
стержня; "=
Рас"
A2
,
24 \
—j—j-l. Указание. В точке М должно выполняться условие пр-Н-уО,
где х — вектор, направленный по касательной к кривой в этой точке.
36. 2х — 9у+32 = 0, 6х+7у — 40 = 0. 37. (А2а -+- В2Ь -+- С2) (А,х+ В,у -f-
+ Ci) — (Л|а + Sife + Cx)(Aix+ В2у + C2) =0, (Л2а + ^2* + C2)HiJc +
+ Biy+ C\) + {Ata + Btb + Ct)(A2x + B2y + C2) = 0. 38. Координаты иско-
искомой точки являются решением системы
Х(х, у)Ц(х, y)-Y(x, y)f',(x, y) = 0,|
fix. y) = 0-l
39. Координаты искомой точки являются решением системы ^ ' ' \
причем
Х(х, у, z) Y(x, у, г) Z(x, у, z)
f'x(x, у, z) /Их, у, z) ГЛх. У. г) =0.
gi(x, у, z) g'y{x, у, z) gi(x, у, г)
4,.
янир ,nl=lnp.Fl.
x. у)
где п — вектор, направленный по нормали к кривой. 42. Л =/0-5—;—б~-
Я| ■+- Д2
=/
Rl +/?2
12 = /о
U = /о
(Л.
R5) '
Rb)
+ «4
44. 1 500 м. 45. u = Uiai
, где
i +R2
a3=-g-((jciy2 —
{)i—J/2)*+(*2—xi)i/); S — площадь дЛВС. 46. Возможно и одно-
однозначно. 47. Длина каждого из участков стержня равна 100 мм. 48. а =
= 0,375, b = 0,25. 49. ( — <,<, /). @, s, — s), Bр, р, р), где t, s, p 6 R; <«Р =И= 0.
50. , где а — коэффициент растяжения. 51. .
РЕКОМЕНДУЕМАЯ ЛИТЕРАТУРА
1. Апатенок Р. Ф., Маркина А. М., Попова Н. В., Хейнман В. Б. Эле-
Элементы линейной алгебры и аналитической геометрии.— Мн.: Выш. шк.,
1977.— 256 с.
2. Беклемишев Д. В. Курс аналитической геометрии и линейной алгебры.—
М.: Наука, 1980.—360 с.
3. Бугров Я. С, Никольский С. М. Задачник.—М.: Наука, 1982.—192 с.
4. Бугров Я. С, Никольский С. М. Элементы линейной алгебры и анали-
аналитической геометрии.— М.: Наука, 1980.— 176 с.
5. Воеводин В. В. Линейная алгебра.— М.: Наука, 1975.— 176 с.
6. Головина Л. И. Линейная алгебра и некоторые ее приложения.—
М.: Наука, 1975.—480 с.
7. Ефимов Н. В. Квадратичные формы и матрицы.— М.: Наука, 1975.—
160 с.
8. Ефимов Н. В. Краткий курс аналитической геометрии.— М.: Наука,
1975.—272 с.
9. Ильин В. А., Позняк Э. Г. Аналитическая геометрия. - М.: Наука,
1971,—232 с.
10. Ильин В. А., Позняк Э. Г. Линейная алгебра.— М.: Наука, 1971.—
232 с.
11. Клетенник Д. В. Сборник задач по аналитической геометрии. — М.:
Наука, 1980,—240 с.
12. Мальцев А. И. Основы линейной алгебры.—М.: Наука, 1975,—400 с.
13. Матвеев Н. М. Методы интегрирования обыкновенных дифференциаль-
дифференциальных уравнений.— М.: Высш. шк., 1967.— 564 с.
14. Сборник задач по математике для втузов: Линейная алгебра и основы
математического анализа/В. А. Болгов, Б. П. Демидович, Д. А. Ефи-
менко и др.; Под ред. А. В. Ефимова и Б. П. Демидовича. — М.: Наука,
1975.—480 с.
15. Тышкевич Р. И., Феденко, А. С. Линейная алгебра и аналитическая гео-
геометрия.— Ми.: Выш. шк., 1976.— 544 с.
16. Филиппов А. Ф. Сборник задач по дифференциальным уравнениям.—
М.: Наука, 1973.- 128 с.
ОГЛАВЛЕНИЕ
Предисловие 3
Основные обозначения . . 5
, 1. Матрицы и определители
1.1. Матрица. Основные определения. Линейные операции над
матрицами 7
1.2. Умножение матриц 10
1.3. Многочлены от матриц 12
1.4. Транспонирование матрицы 14
1.5. Определитель матрицы 16
1.6. Миноры и алгебраические дополнения. Разложение определи-
определителя по элементам строки (столбца) 18
1.7. Обратная матрица 22,
1.8. Ранг матрицы. Теорема о базисном миноре 26
2. Системы линейных уравнений
2.1. Матричная запись системы линейных уравнений. Решение
невырожденных систем 33
2.2. Решение произвольных систем линейных уравнений ... 36
2.3. Однородные системы линейных уравнений 39
2.4. Метод Гаусса 42
3. Аналитическая геометрия
3.1. Определение вектора. Линейные операции над векторами . . 46
3.2. Разложение вектора по базису. Линейные операции над векто-
векторами, заданными координатами 48
3.3. Декартова прямоугольная система координат. Деление отрезка
в данном отношении 50
3.4. Скалярное произведение векторов 51
3.5. Векторное произведение векторов 54
3.6. Смешанное произведение векторов 55
3.7. Преобразование координат. Полярная система координат 58
3.8. Прямая в R2 60
3.9. Плоскость в R3 64
3.10. Прямая в R3 67
3.11. Прямая н плоскость в R3 71
3.12. Эллипс. Гипербола. Парабола 74
3.13. Упрощение общего уравнения кривой второго порядка в слу-
случае отсутствия члена с произведением ху 79
3.14. Некоторые кривые, встречающиеся в математике и приложе-
приложениях 80
3.15. Поверхности второго порядка в R3 86
4. Линейные пространства
4.1. Определение линейного пространства н подпространства 88
4.2. Линейная зависимость и линейная независимость векторов 90
4.3. Размерность н базис линейного пространства. Координаты
вектора 92
4.4. Матрица перехода от базиса к базису. Преобразование ко-
координат вектора 96
285
4.5. Скалярное произведение векторов. Определение евклидова про-
пространства. Норма вектора. Угол между векторами .... 9
4.6. Ортонормнрованный базис. Выражение скалярного произведе-
произведения векторов через координаты в ортонормированием базисе 10
4.7. Унитарные пространства 10
5. Линейные операторы
5.1. Определение линейного оператора. Матрица линейного опера-
оператора. Связь между координатами вектора и его образа . . . 10i
5.2. Преобразование матрицы линейного оператора при переходе
к новому базису II1
5.3. Ядро и область значений линейного оператора 11
5.4. Операции над линейными операторами. Взаимно обратные
операторы 11
5.5. Собственные векторы. Характеристическое уравнение . . .11
5.6. Диагоналнзируемость линейного оператора 12
5.7. Ортогональные матрицы. Ортогональный оператор . . . .12
5.8. Сопряженный и самосопряженный операторы 12.
6. Квадратичные формы и их применения
6.1. Определение и матричная запись квадратичной формы . . .13
6.2. Приведение квадратичной формы к каноническому виду . . 13
6.3. Упрощение уравнений фигур второго порядка на плоскости 13
6.4. Упрощение уравнений фнгур второго порядка в пространстве 14
6.5. Знакоопределенные квадратичные фбрмы 14
6.6. Применение квадратичных форм к исследованию функций не-
нескольких переменных на экстремум 14
7. Применение матриц к теории дифференциальных уравнений
7.1. Блочные матрицы. Матрицы Жордана 14
7.2. Приведение матрицы к жордановой форме 15
7.3. Нахождение матрицы, приводящей данную матрицу к жорда-
жордановой форме 15
7.4. Матричная экспонента 15
7.5. Матричный способ решения системы . чпнчшых однородных
дифференциальных уравнений первою морилка с постоянными
коэффициентами 16
7.6. Метод вариации решения системы линейных неоднородных
дифференциальных уравнений первого порядка с постоянными
коэффициентами 17
7.7. Использование идеи метода Гаусса для решения линейных
систем дифференциальных уравнений с постоянными коэф-
коэффициентами 17
7.8. Признаки устойчивости и неустойчивости решений систем
дифференциальных уравнений 18
7.9. Колебательные движения 18
8. Типовые расчеты
8.1. Элементы векторной алгебры и аналитической геометрии . . 19
8.2. Элементы линейной алгебры 21
Приложение. Некоторые применения методов аналитической
геометрии и линейной алгебры 23
Ответы 24
Рекомендуемая литература 2£
Учебное издание
Апатеиок Рогнеда Федоровна
Маркина Александра Матвеевна
Хейнман Валентина Борисовна
СБОРНИК ЗАДАЧ ПО ЛИНЕЙНОЙ АЛГЕБРЕ
И АНАЛИТИЧЕСКОЙ ГЕОМЕТРИИ
Заведующий редакцией Л. Д. Духвалов
Редактор Е. В. Сукач
Младшие редакторы В. М. К у шиле в ич, И.В.Моховикова
Художественный редактор Ю. С. Сергачев
Технический редактор М. Н. Кис л яков а
Корректор В. П. Шкредова
Художник переплета В. А. Ярошевич
И Б № 2894
Сдано в найор 23.05.89. Подписано в печать 07.02.90. Формат 84X108/32. Бумага
кн.-журнальная. Гарнитура литературная. Офсетная печать. Усл. печ. л. 15,12.
Усл. кр.-отт. 15,12. Уч.-изд. л. 17,08. Тираж 10 000 экз. Заказ 5115. Цена 1 р.
Издательство «Вышчйшая школа» Государственного комитета БССР по печати.
220048, Минск, проспект Машерова, 11.
Набрано в Минском ордена Трудового Красного Знамени полиграфкомбинате
МП1ТО им. Я. Коласа. 220005, Минск, ул. Красная, 23.
Отпечатано в типографии «Победа». 222310, Молодечно, ул. Таалая. 11.