














Автор: Наземцев А.С.
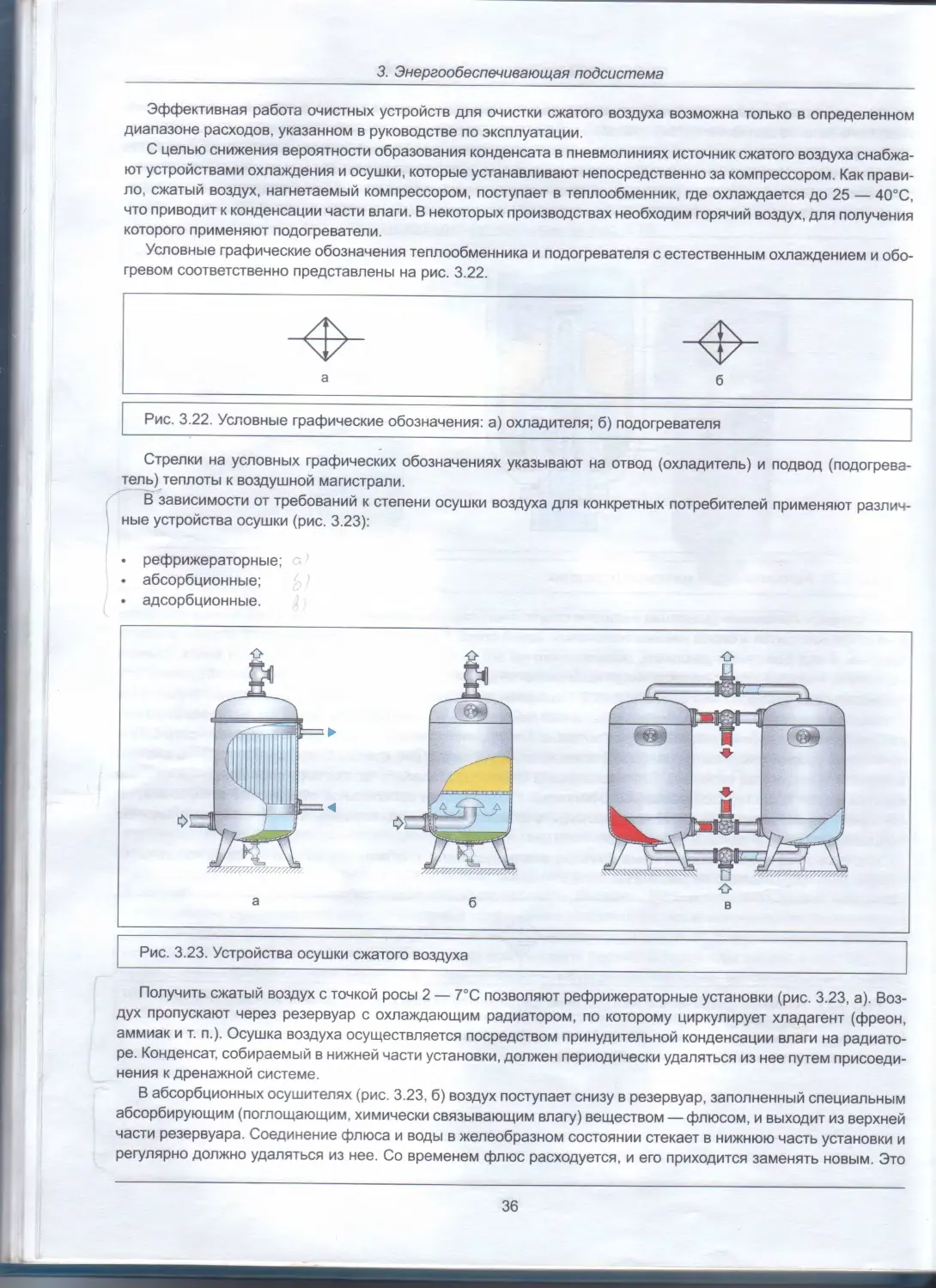
Теги: характеристика машин по способу привода общее машиностроение машиноведение автоматика гидравлика пневмопривод
ISBN: 5-8199-0143-6
Год: 2004
Похожие




Текст
А.С. Наземцев
Гидравлические и пневматические системы
Часть 1.
Пневматические приводы и средства автоматизации
Допущено Министерством образования Российской Федерации в качестве учебного пособия
для студентов, обучающихся по специальностям технического профиля
Москва
ФОРУМ
2004
УДК 52-85(075.32)
5БК 34 4472я723
Н19
Рецензент- Кафедра Гидромеханика. гидромашины и гидропневмоавтоматика»
МГТУ им. Н.Э. Баумана
кандидат технических наук, доцент К Д. Ефремова
Наземцев А.С.
Н19 Гидравлические и пневматические системы. Часть 1. Пневматические приводы и средства автоматизации: Учебное пособие -
М.. ФОРУМ, 2004. - 240 с, ил.
ISBN 5-8199-0143-6
В учебном пособии изложены основы релейной пневмоавтоматики высокого давления. Подробно описаны принципы построе-^»
пневматических систем, функциональное назначение, конструктивные особенности, принципы действия и условные графические обо
значения основной элементной базы: устройств подготовки сжатого воздуха, исполнительных механизмов, направляющей и регул
ющей аппаратуры. Изложены основы проектирования пневматических и релейно-контактных систем управления.
Пособие имеет прикладную направленность и содержит большое количество иллюстраций, типовых схемных решений, диагсэшш
и примеров расчетов.
В представленных материалах содержатся сведения, которые могут быть полезны не только тем, кто впервые приступает к изуче-
нию пневматических приводов и средств автоматизации, но и для техников и инженеров-практиков различных областей промышле—с-
сти, которые не в полной мере знакомы с современным пневматическим оборудованием.
УДК 62-85(075.32)
ББК 34.4472я723
ISBN 5-8199-0143-6
© Наземцев А.С.
© Художник Наземцев А.С
© УИЦ ЗАО «Экоинвент»
Содержание
Содержание
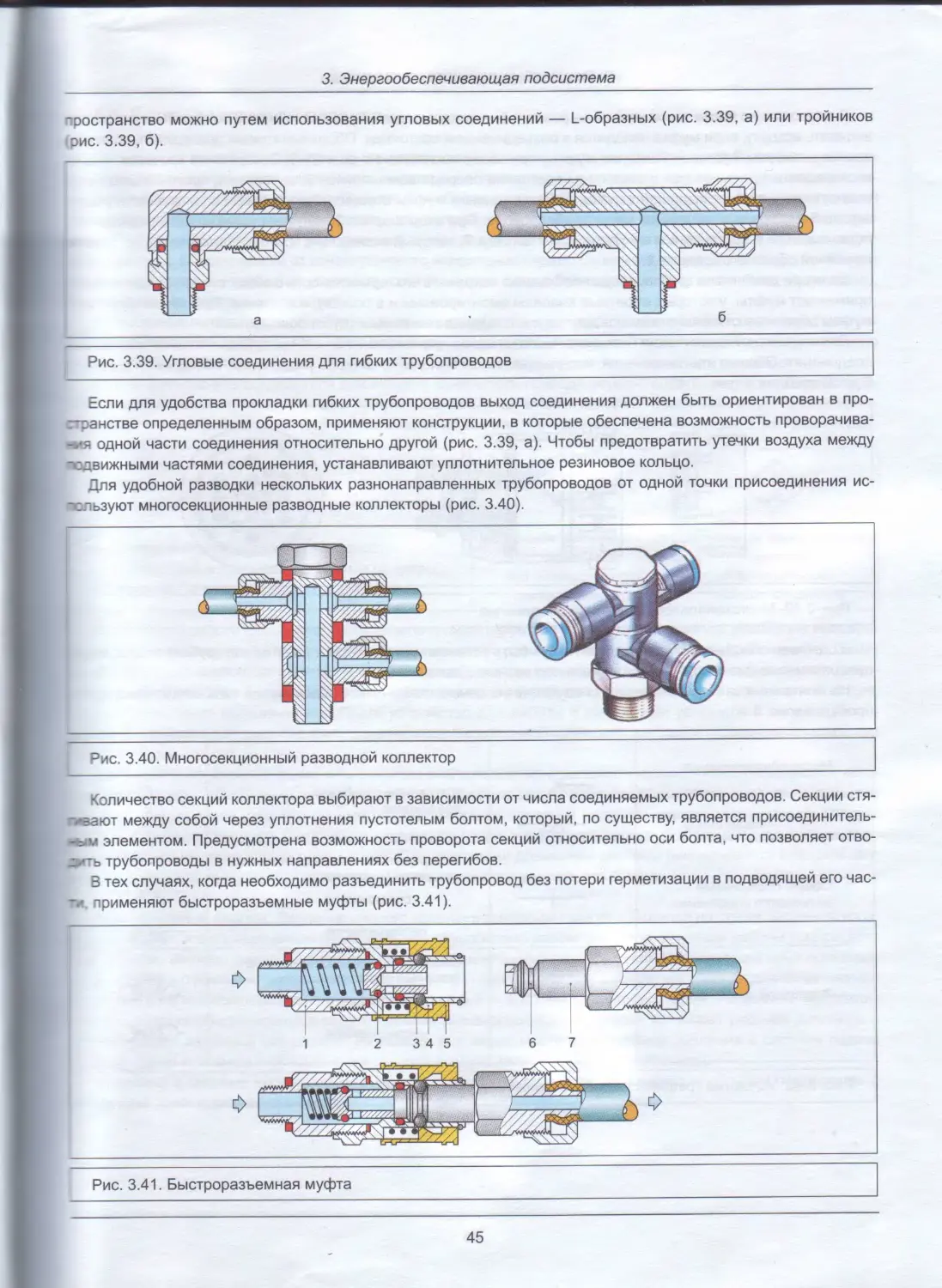
Бведение ..................................................................................7
1 Структура пневматических приводов.......................................................9
2. Физические основы функционирования пневмосистем........................................13
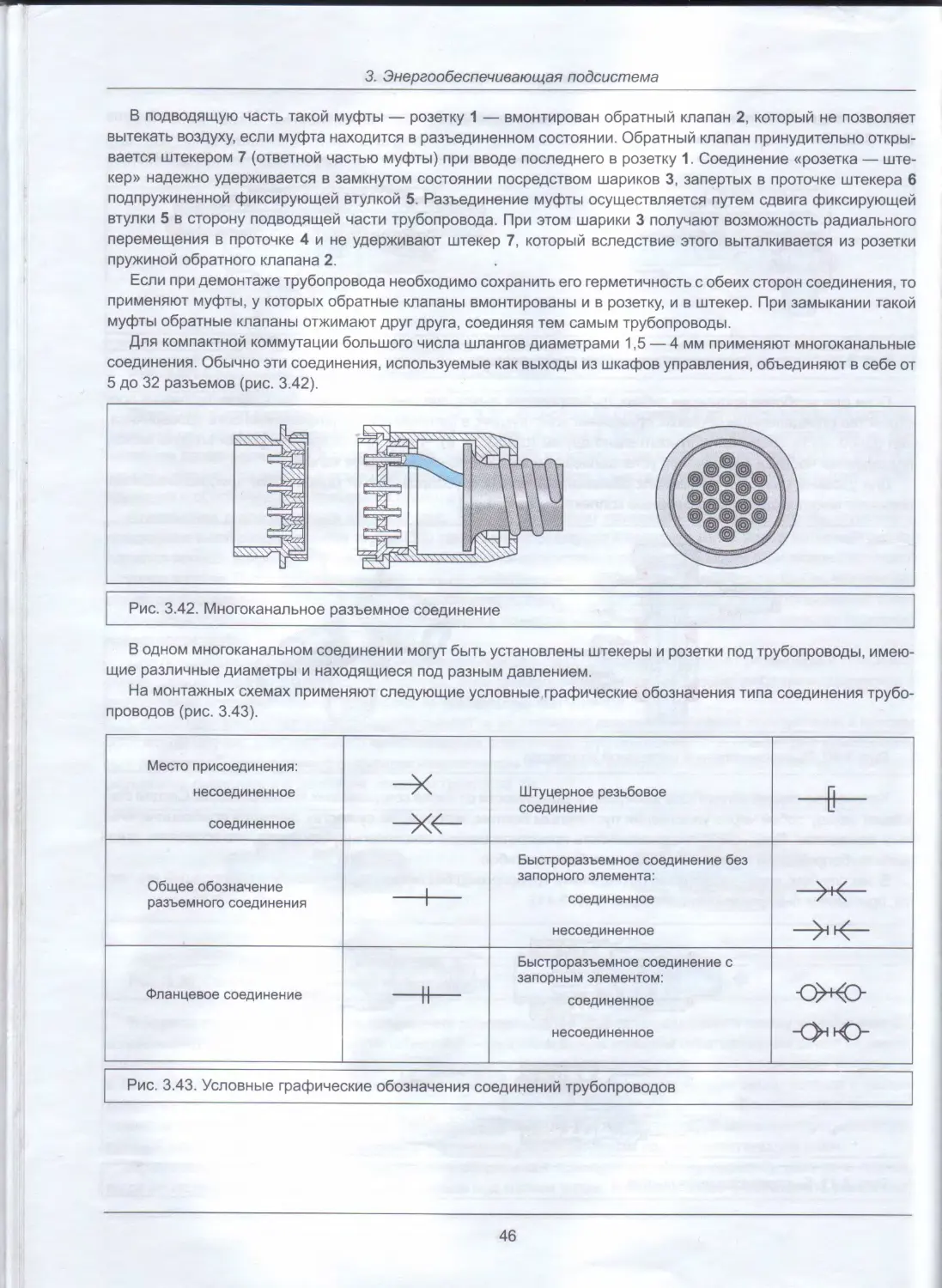
2.1. Основные параметры газа........................................................13
2.2. Основные физические свойства газов.............................................15
2.3. Основные газовые законы........................................................16
2.4. Течение газа...................................................................18
2.4.1. Расход..................................................................18
2.4.2. Уравнение Бернулли......................................................19
2.4.3. Режимы течения..........................................................20
2.4.4. Истечение газа через отверстие..........................................21
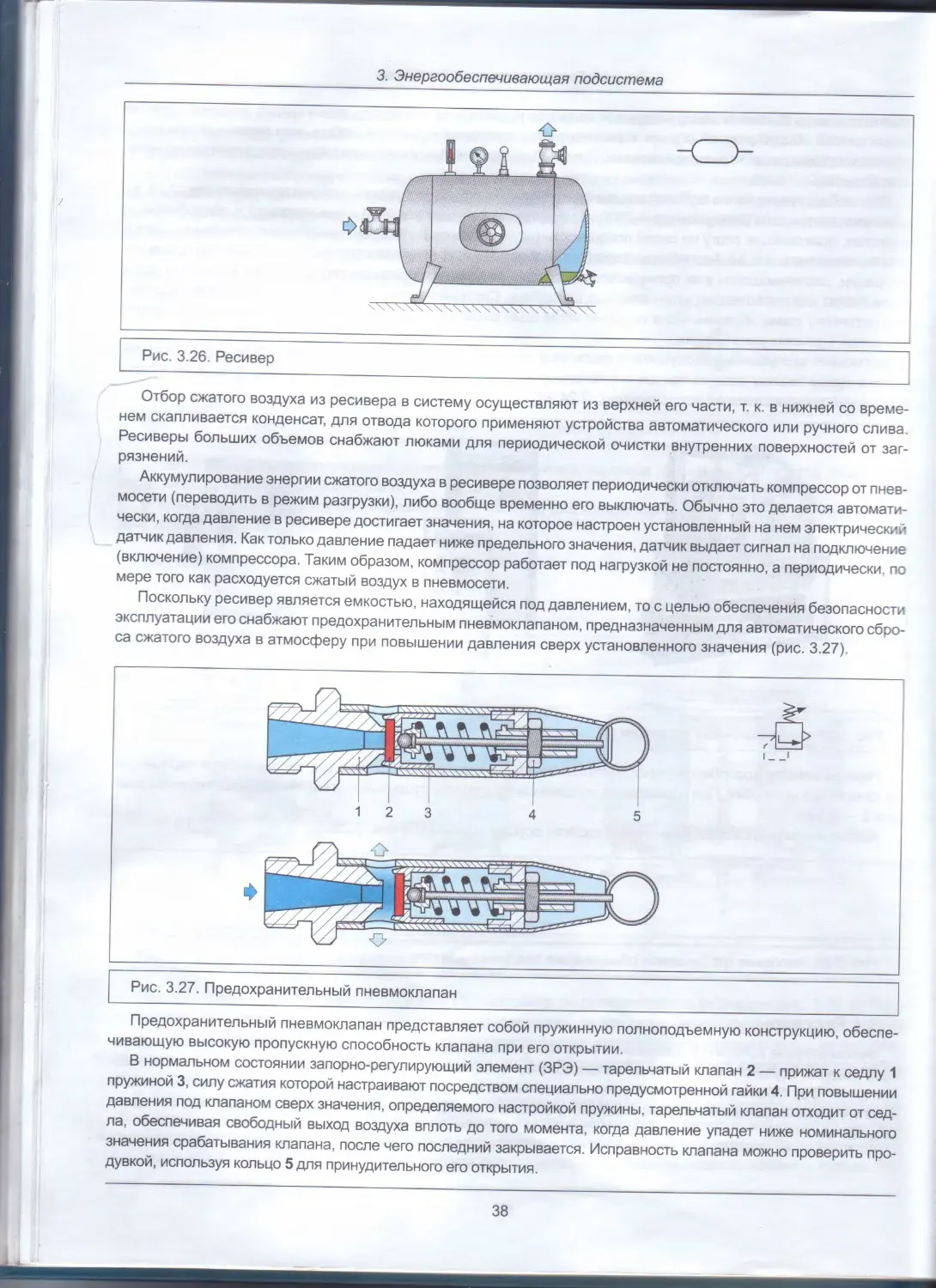
3. Энергообеспечивающая подсистема........................................................23
3.1. Производство и подготовка сжатого воздуха......................................24
3.2. Компрессоры....................................................................24
3.2.1. Объемные компрессоры....................................................25
3.2.2. Динамические компрессоры................................................29
3.3. Устройства очистки и осушки сжатого воздуха....................................32
3.4. Ресиверы.......................................................................37
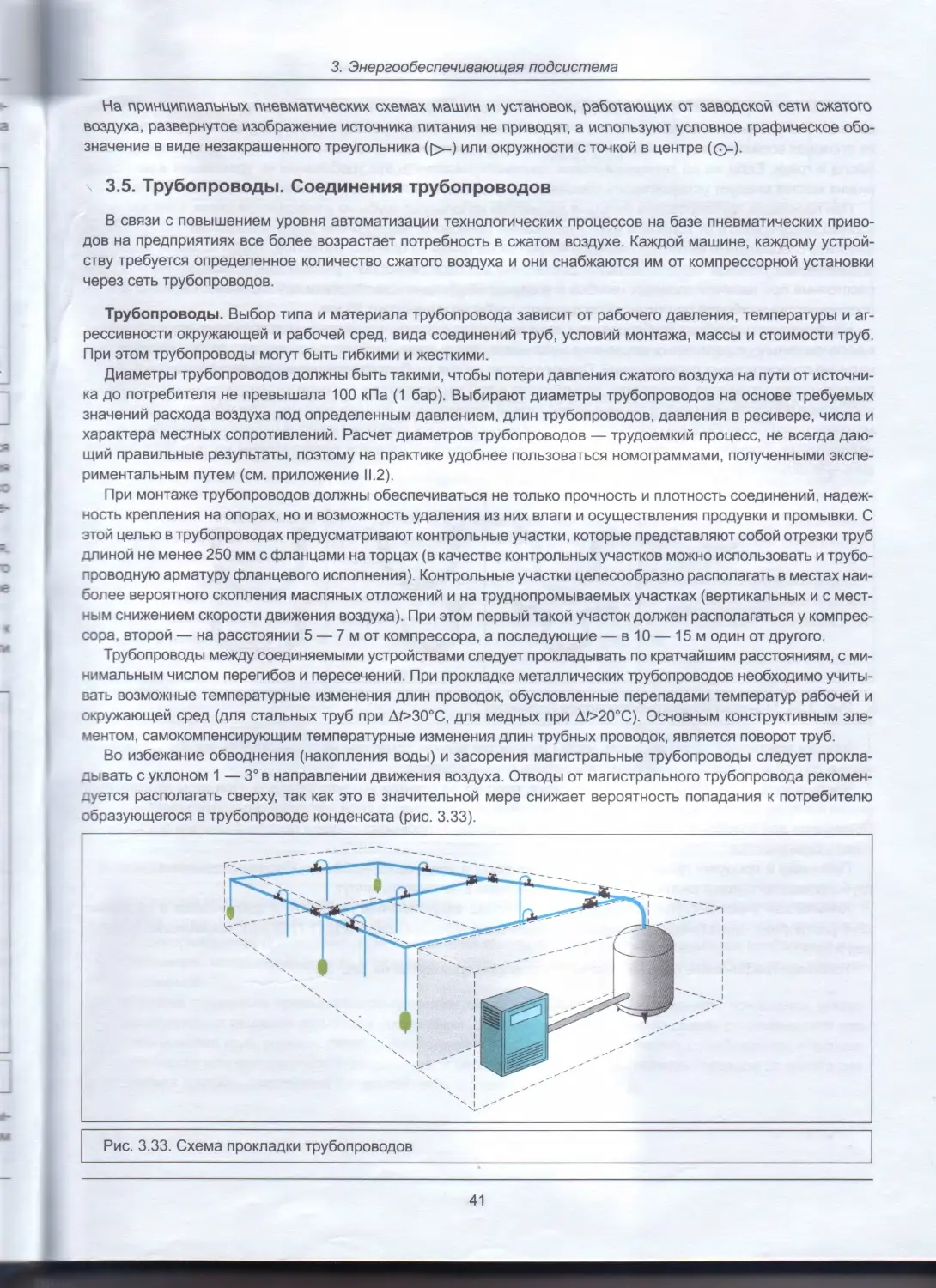
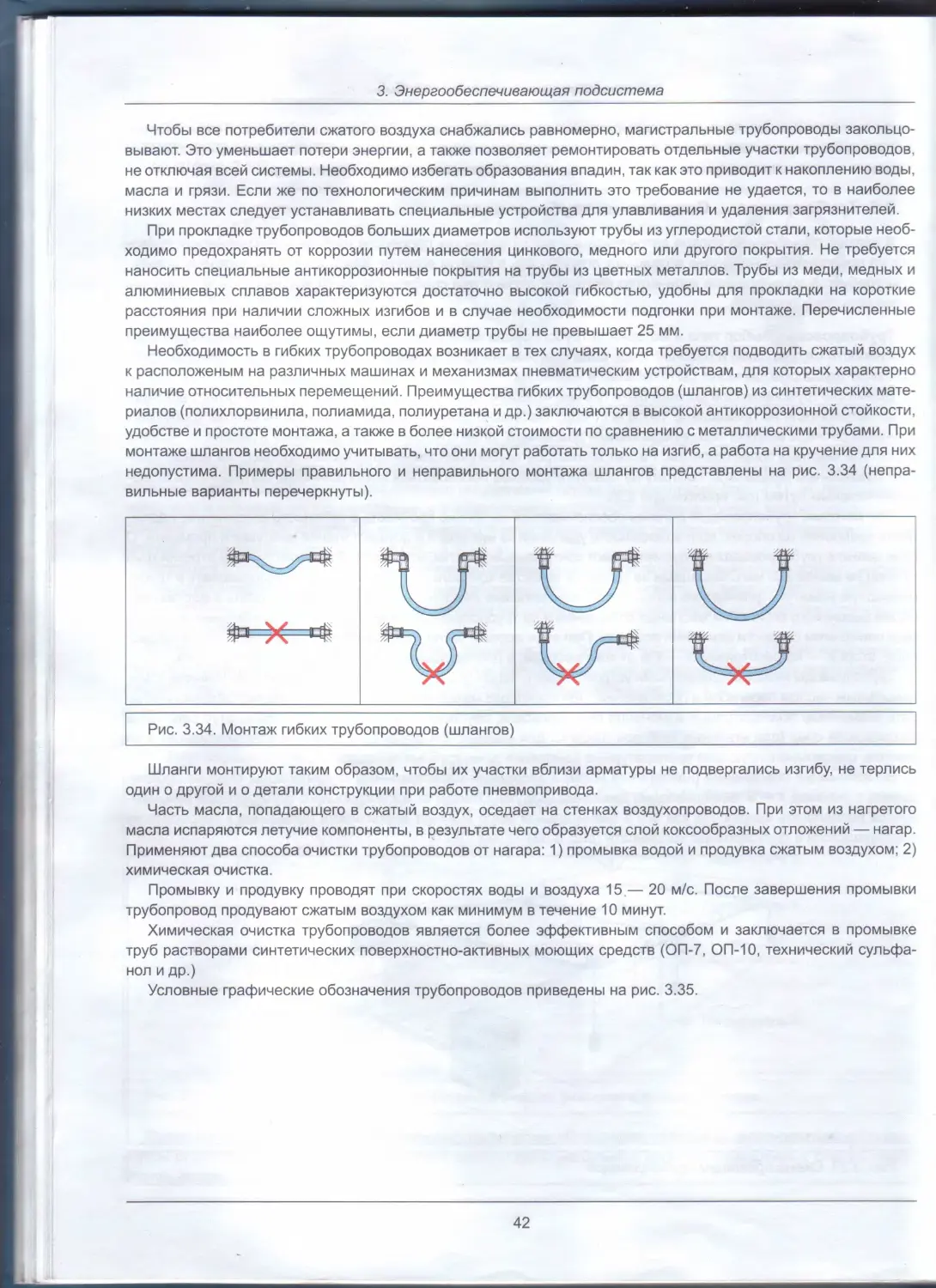
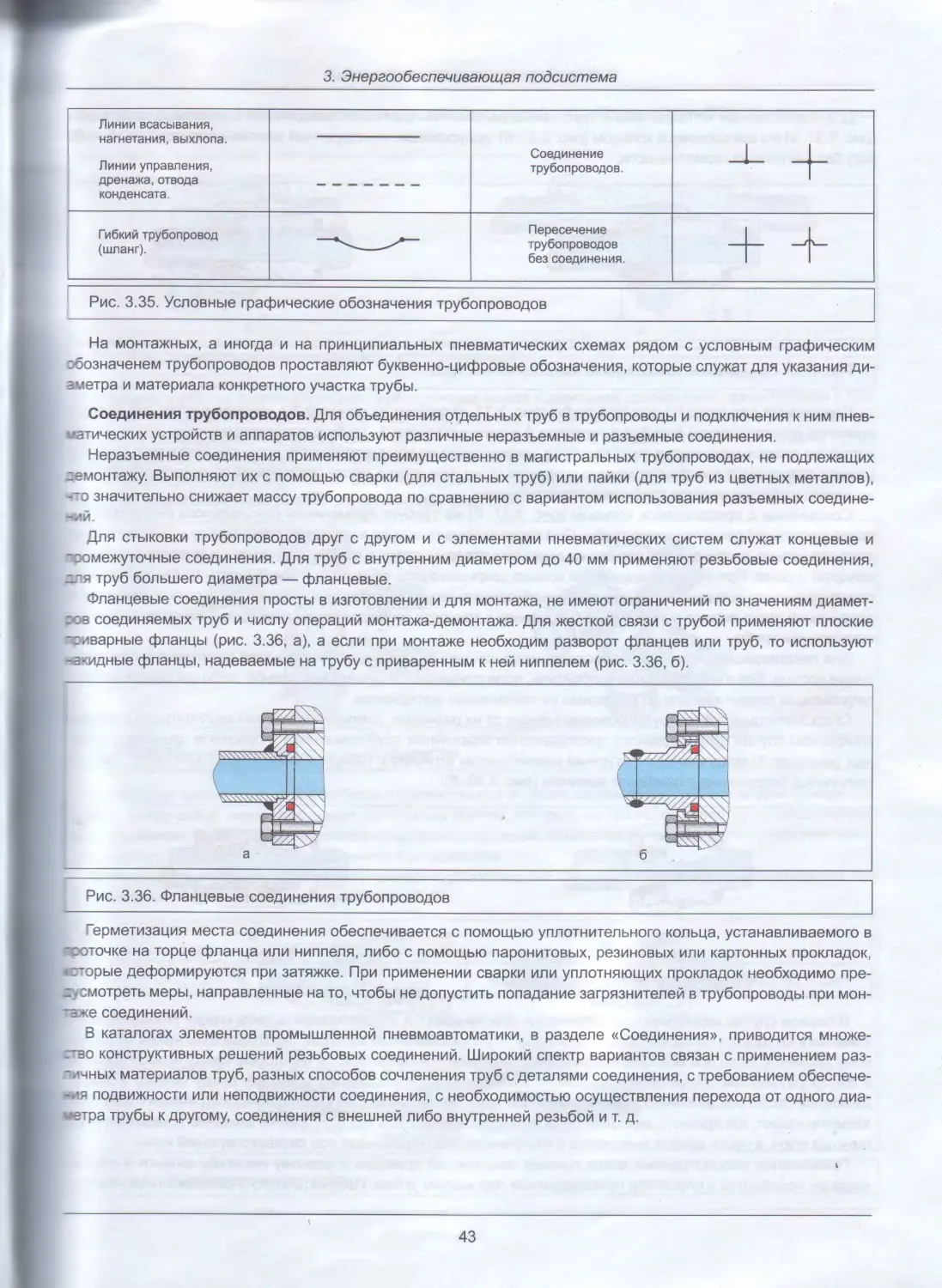
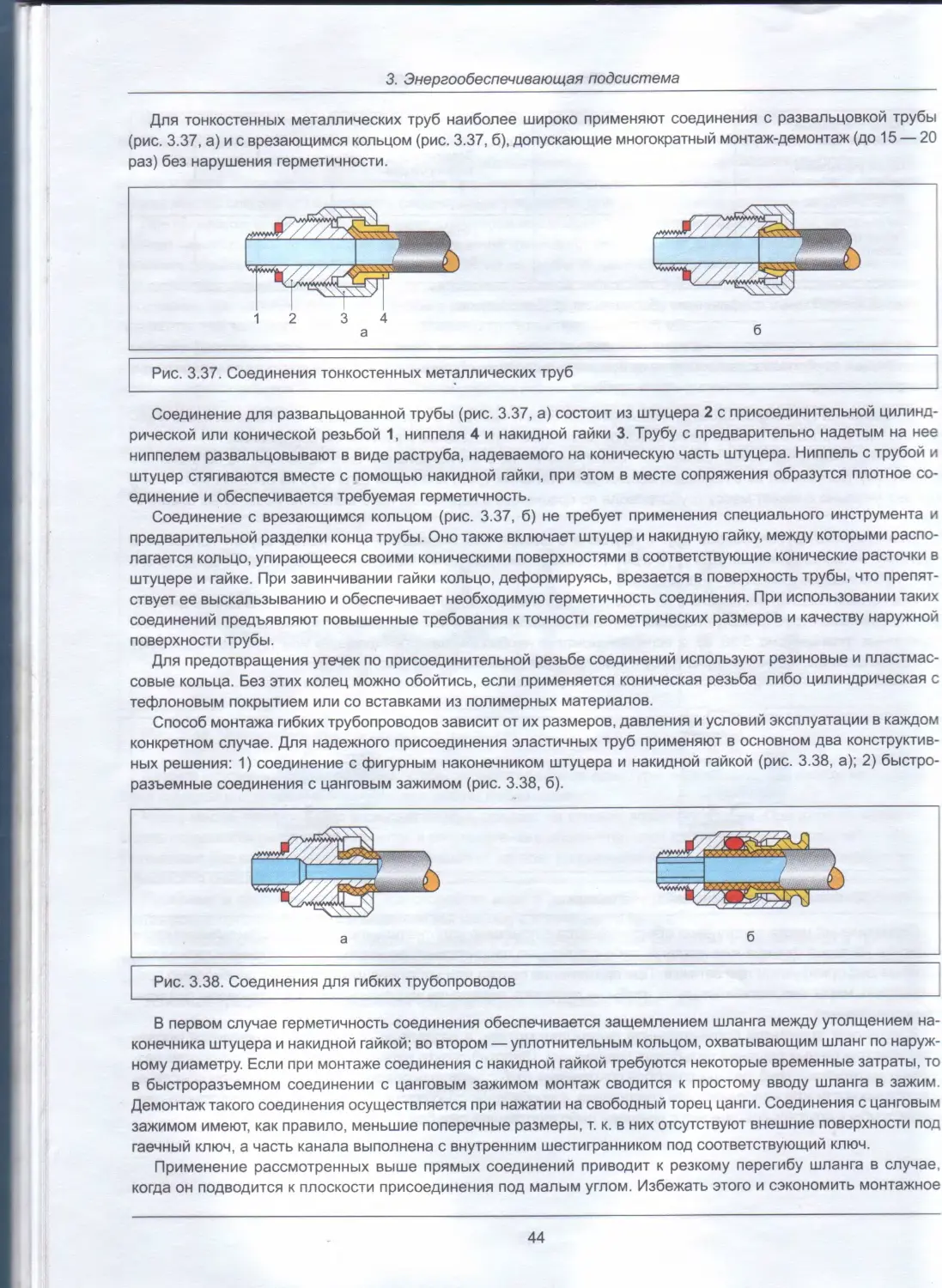
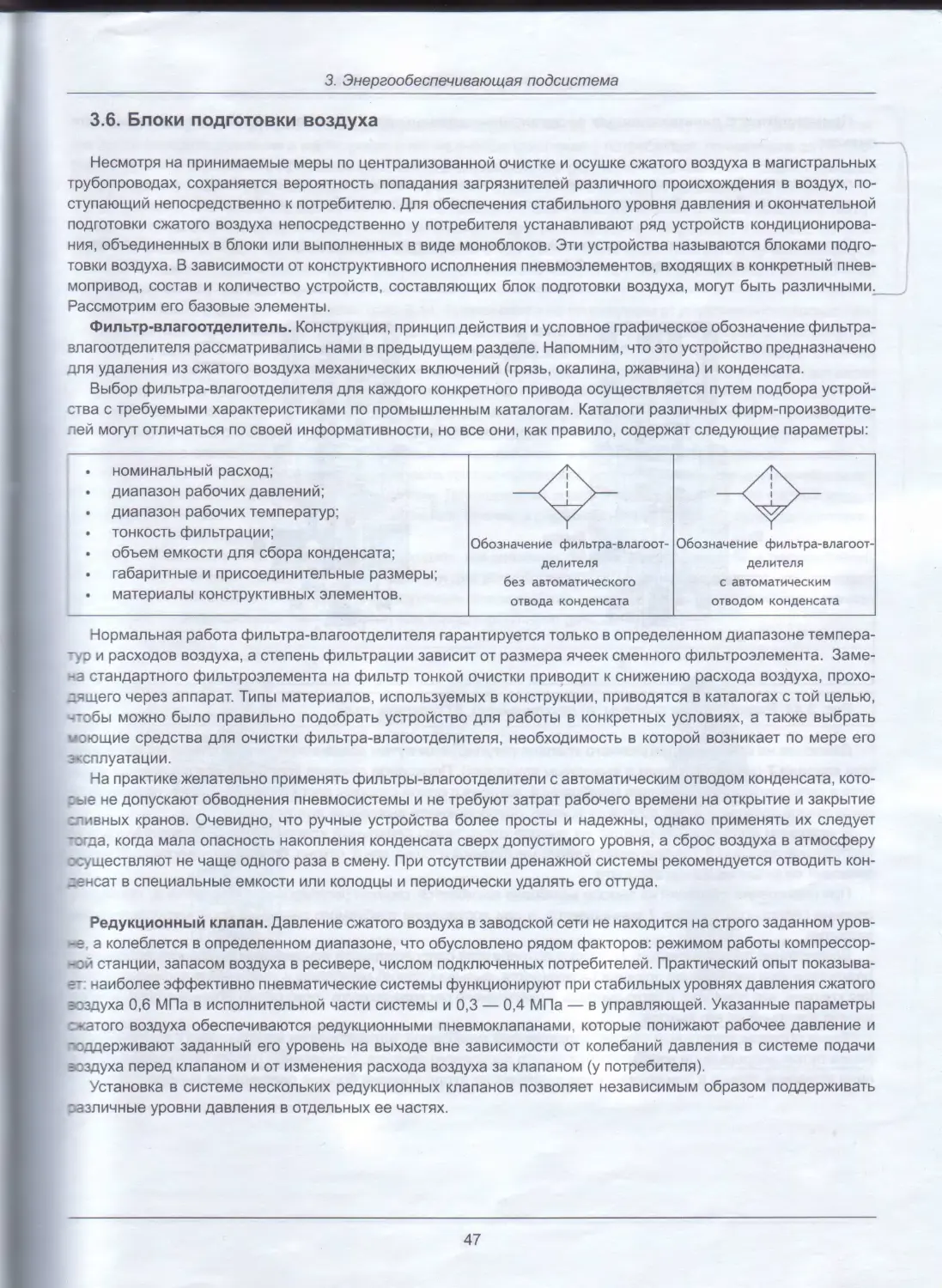
3.5. Трубопроводы. Соединения трубопроводов.........................................41
3.6. Блоки подготовки воздуха.......................................................47
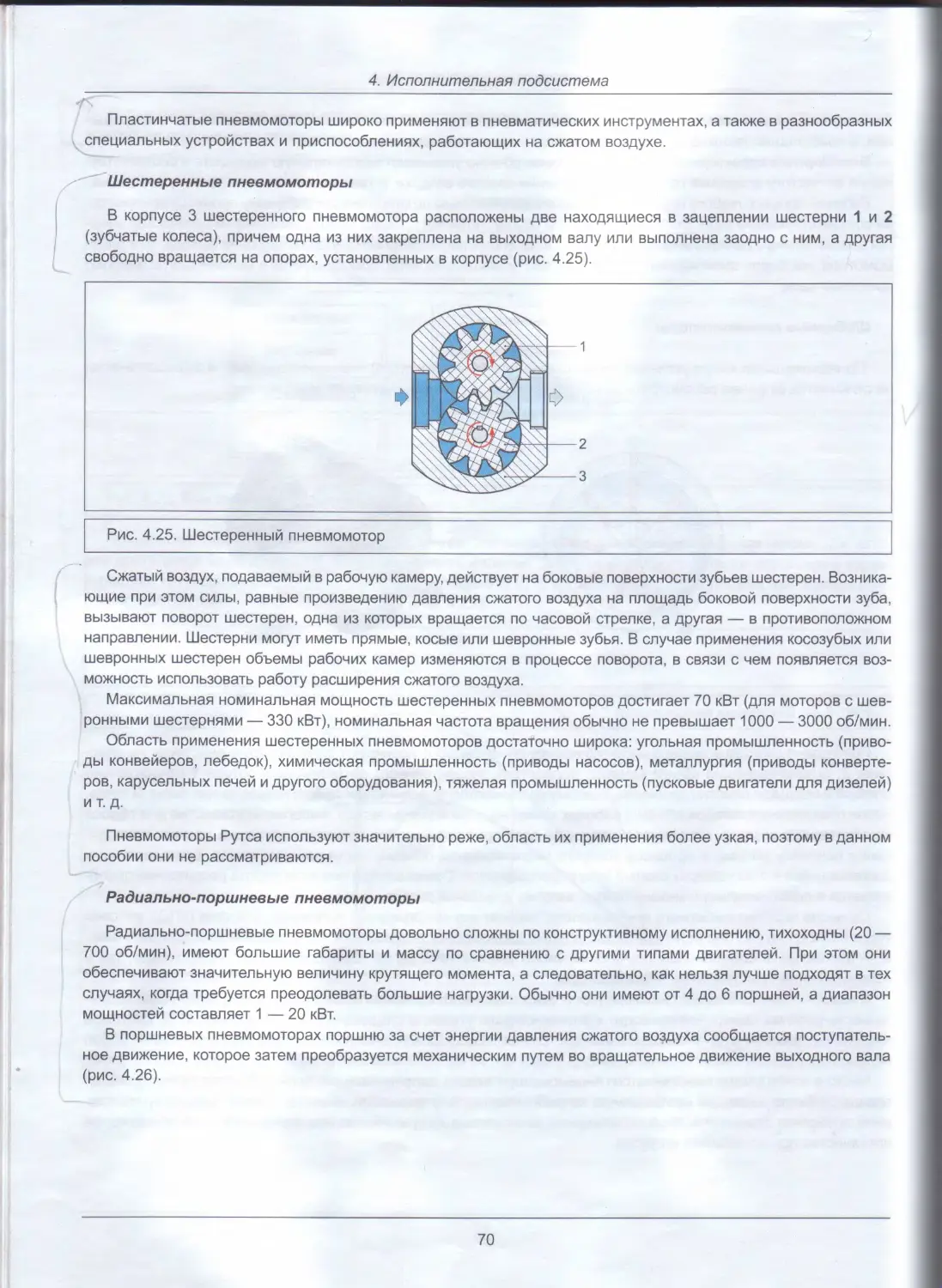
4. Исполнительная подсистема..............................................................53
4.1. Пневматические цилиндры........................................................53
4.1.1. Пневмоцилиндры одностороннего действия..................................54
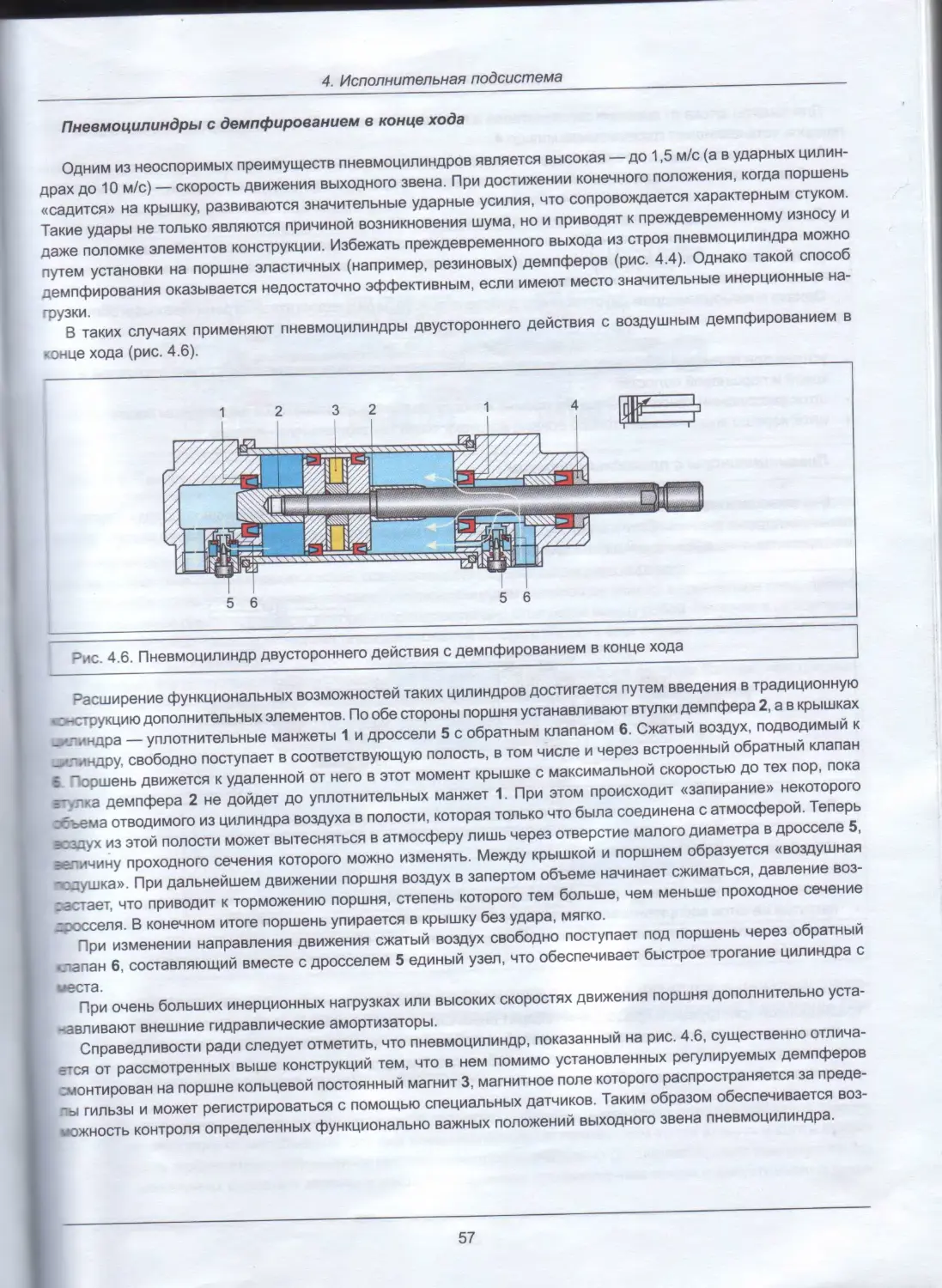
4.1.2. Пневмоцилиндры двустороннего действия...................................56
4.1.3. Позиционирование пневмоцилиндров........................................59
4.1.4. Бесштоковые пневмоцилиндры..............................................61
4.1.5. Защита штока пневмоцилиндра от проворота................................64
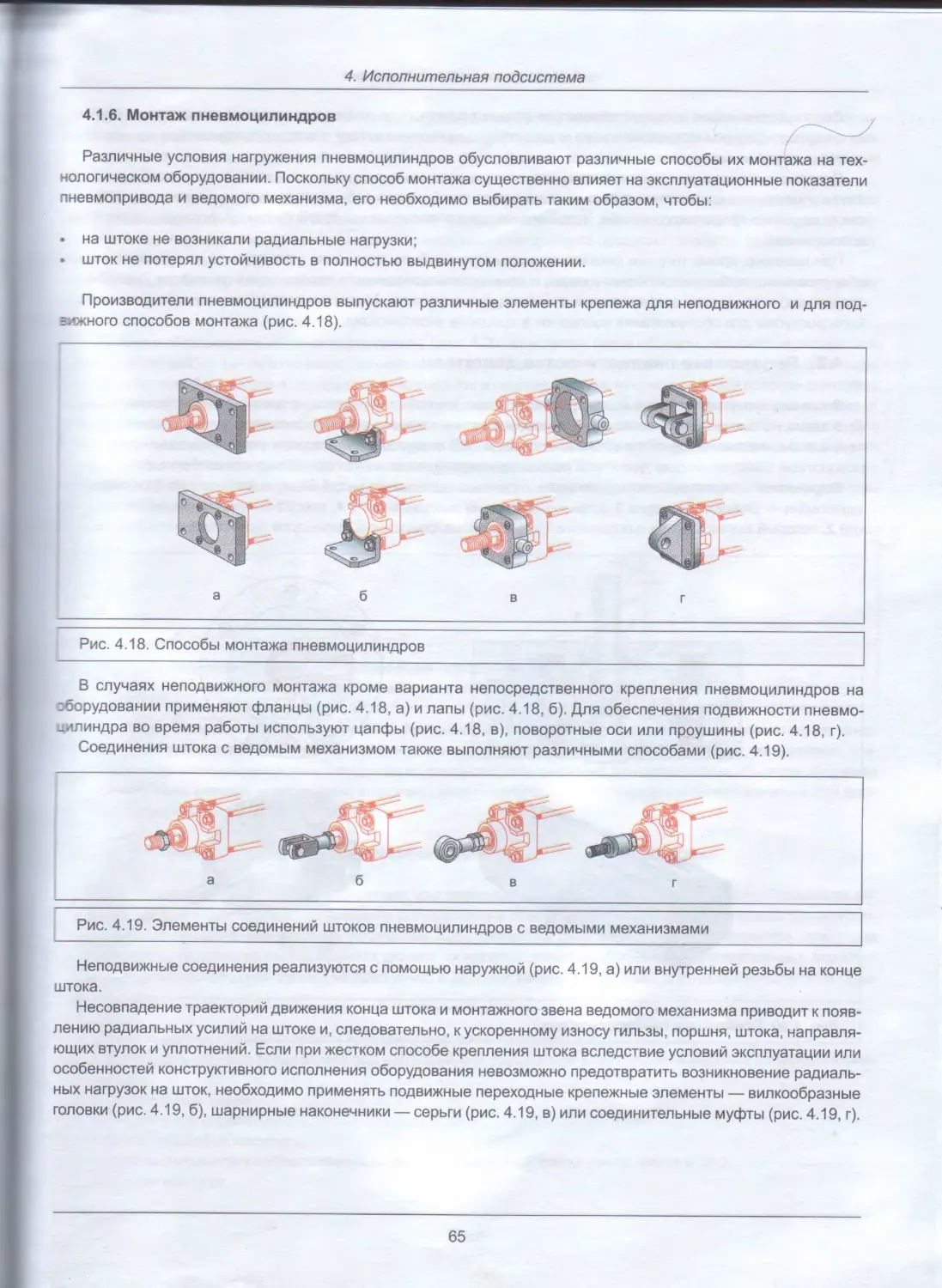
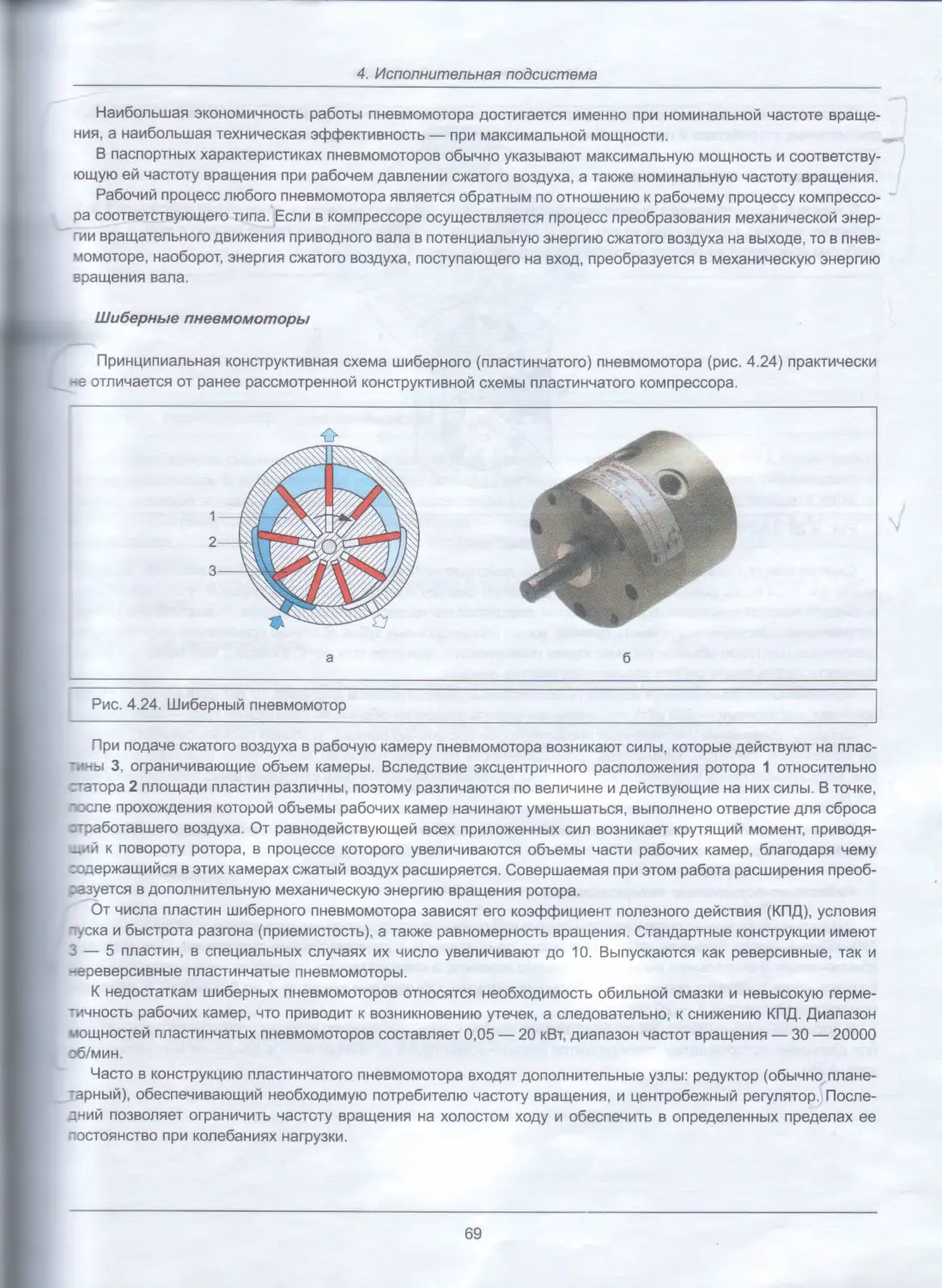
4.1.6. Монтаж пневмоцилиндров..................................................65
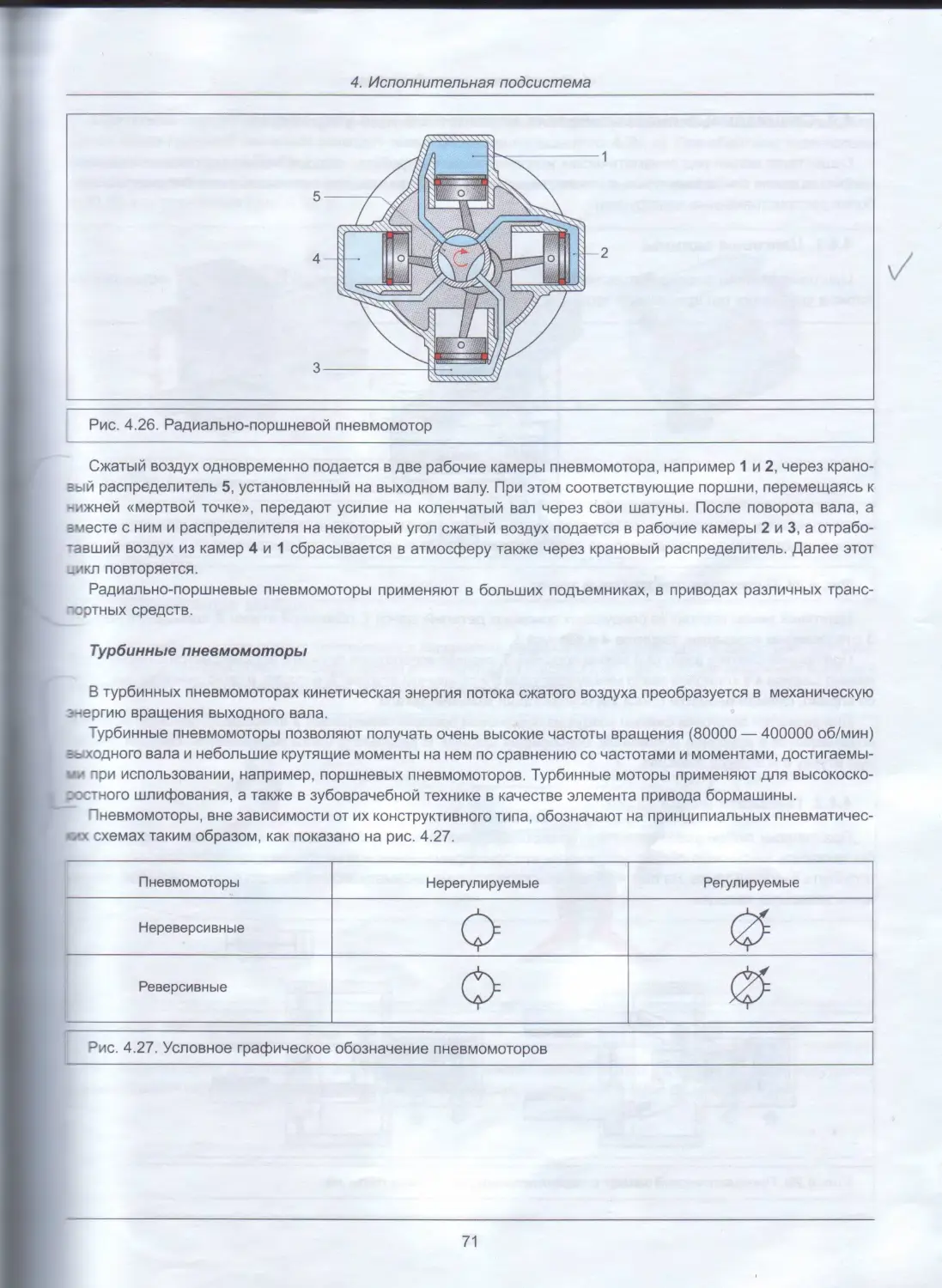
4.2. Поворотные пневматические двигатели............................................66
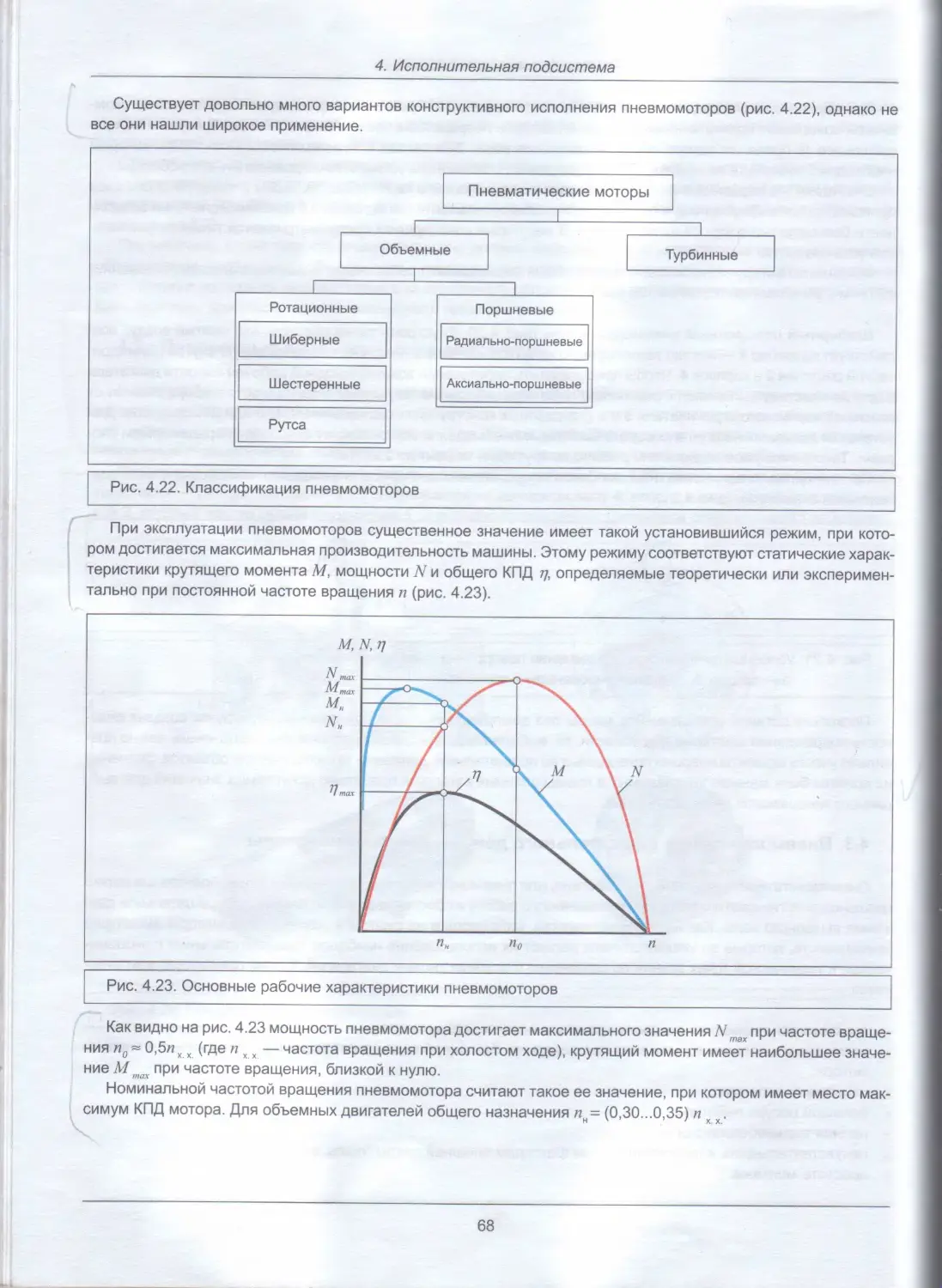
4.3. Пневмодвигатели вращательного действия — пневмомоторы..........................67
4.4. Специальные пневматические исполнительные устройства...........................72
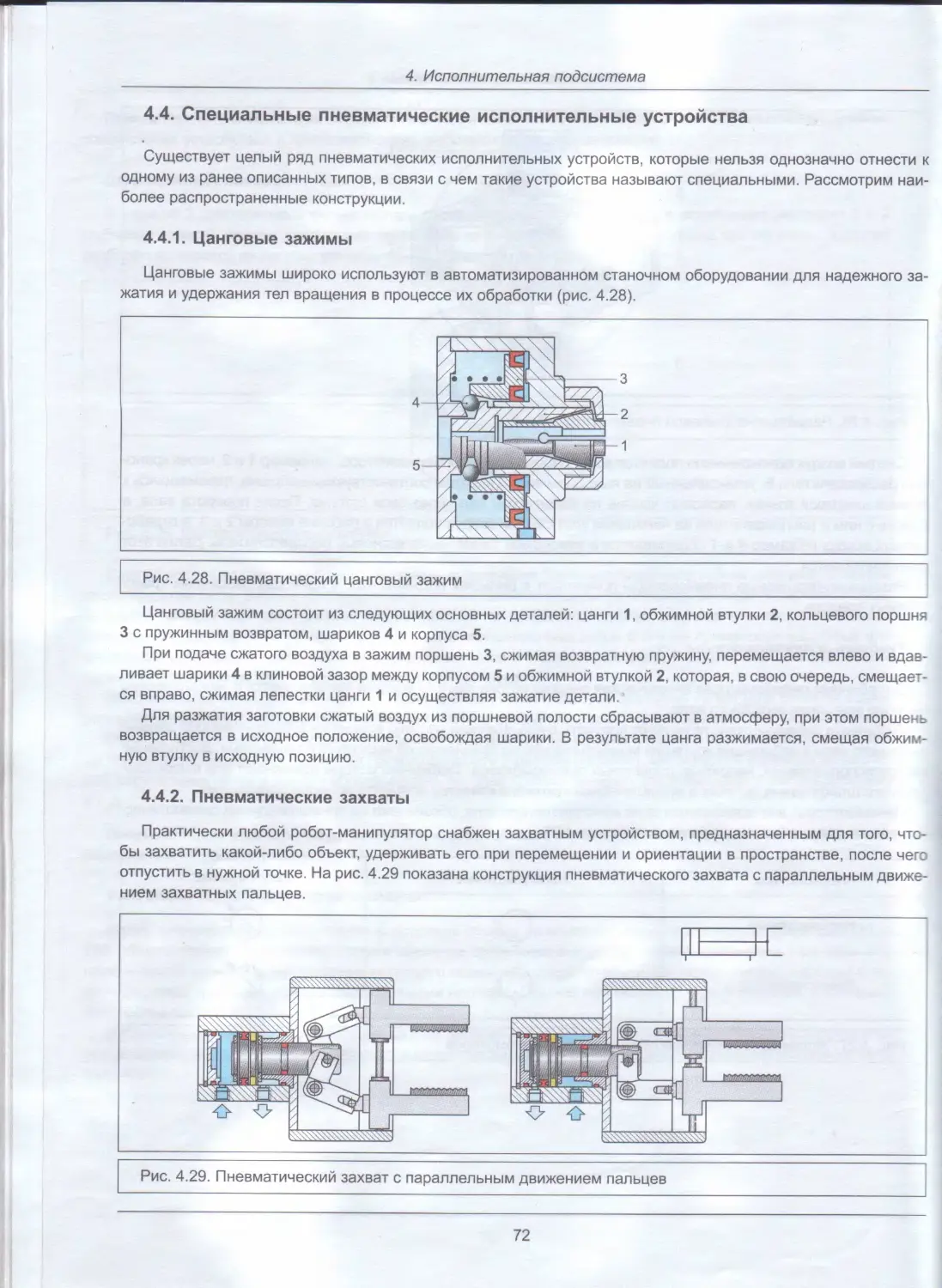
4.4.1. Цанговые зажимы.........................................................72
4.4.2. Пневматические захваты..................................................72
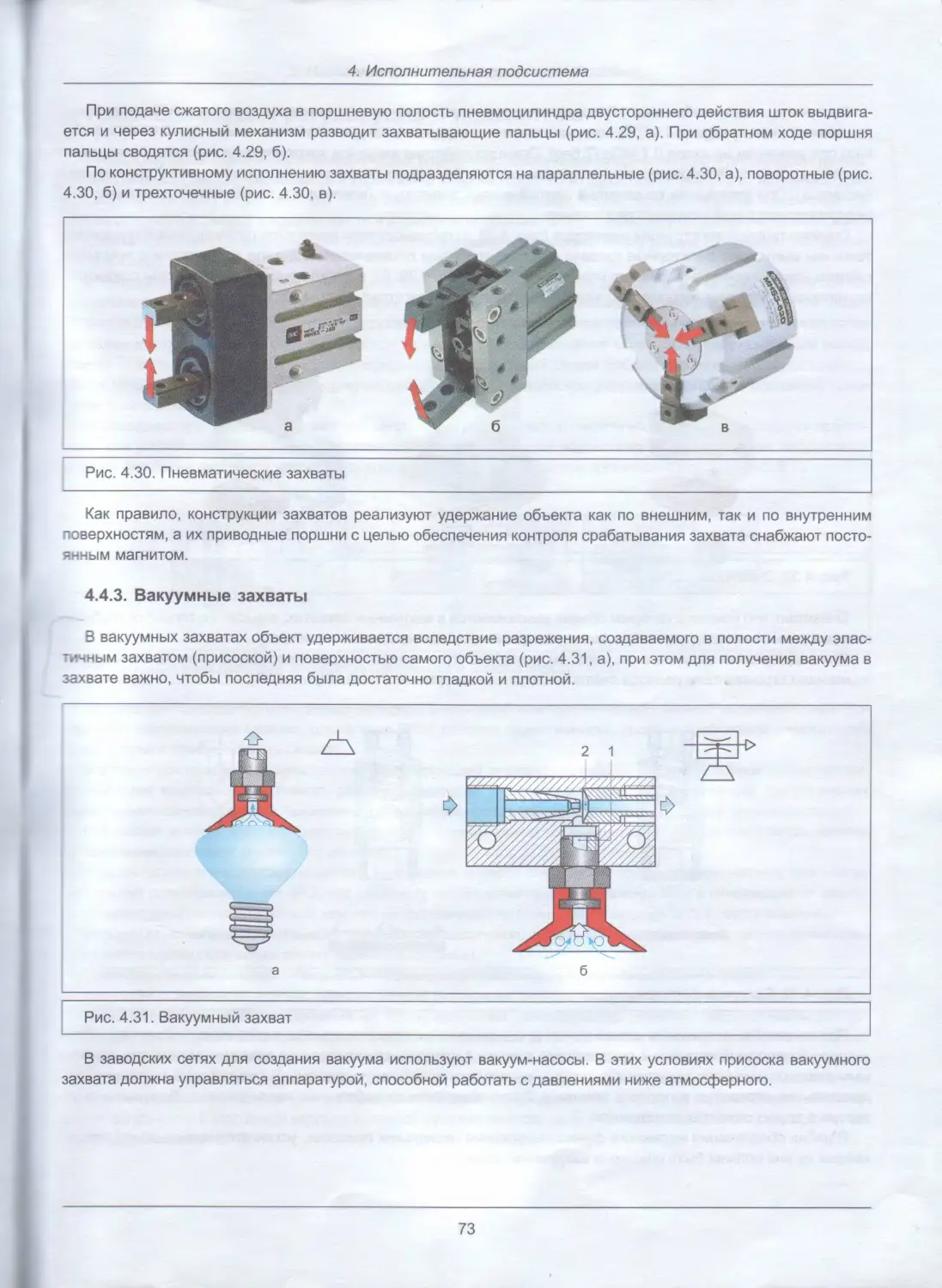
4.4.3. Вакуумные захваты.......................................................73
3
Содержание
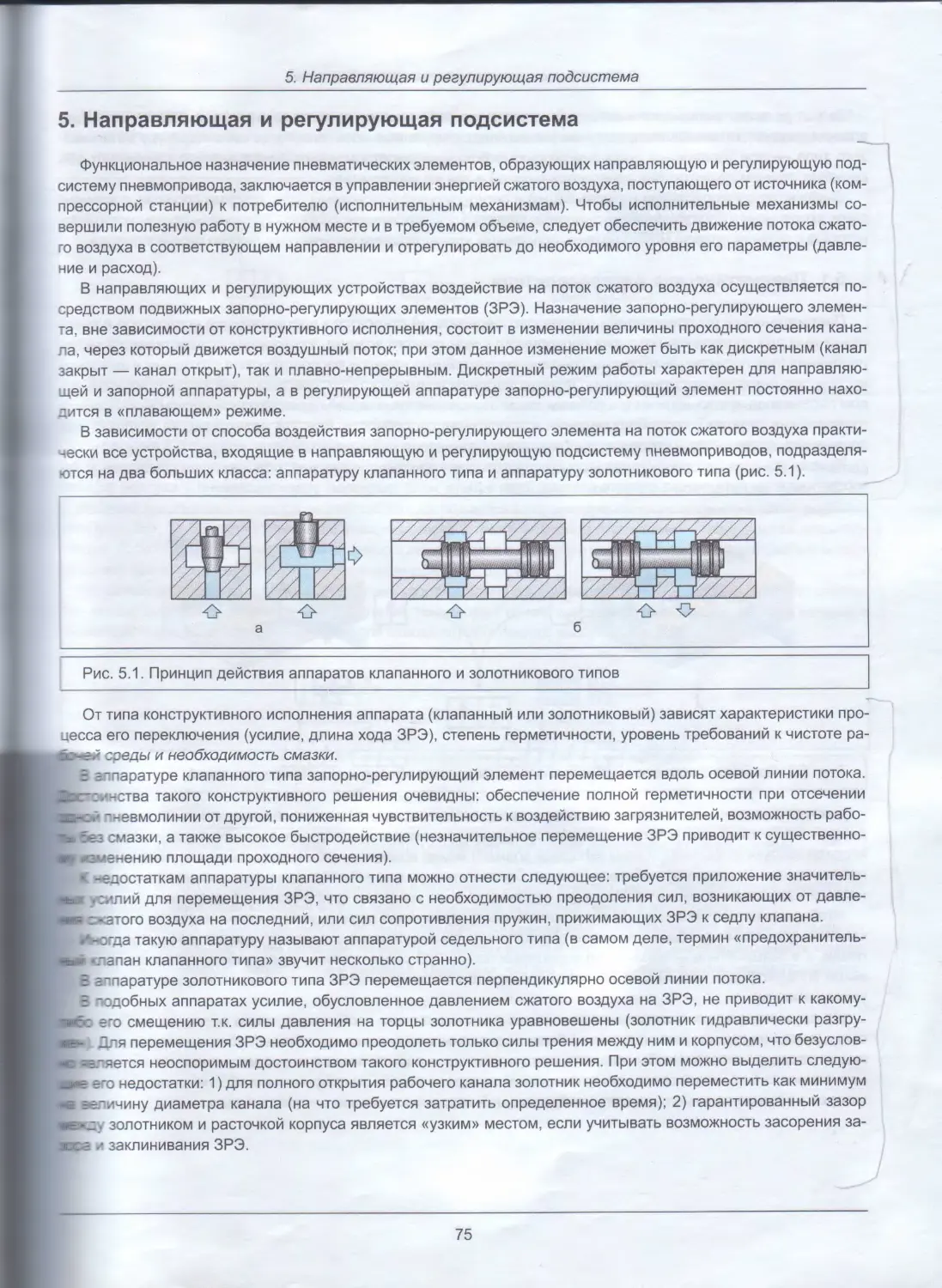
5. Направляющая и регулирующая подсистема....................................................75
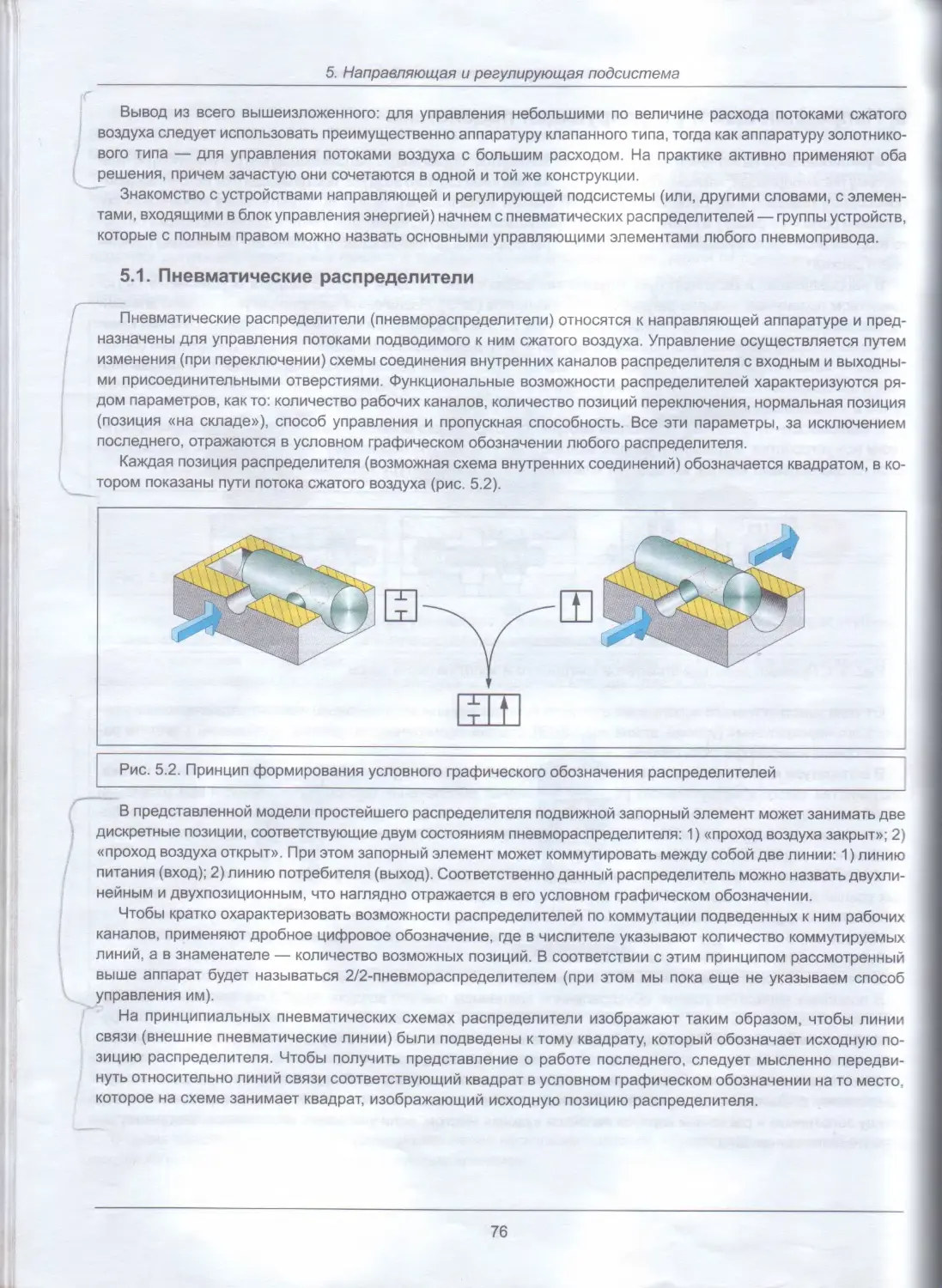
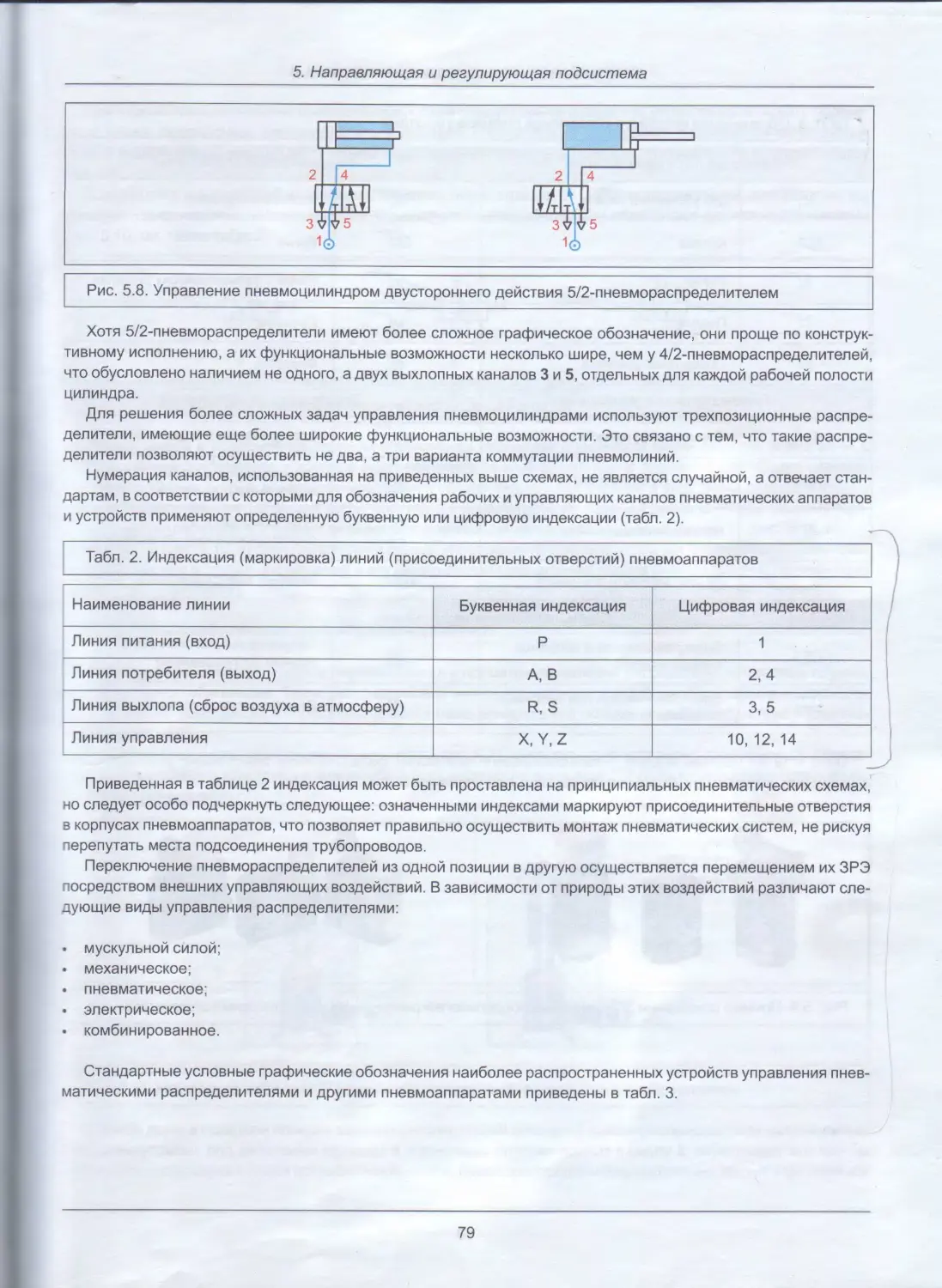
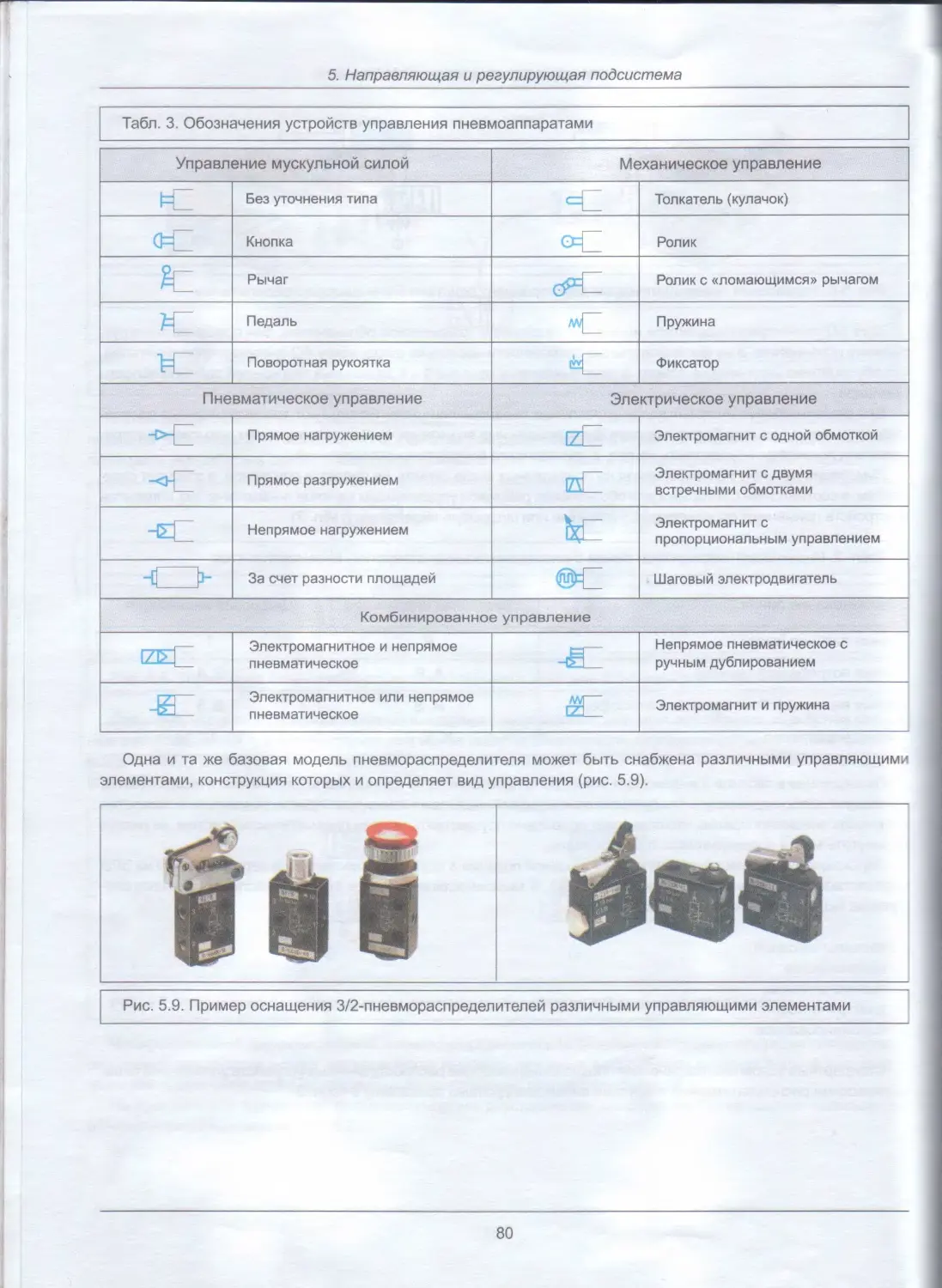
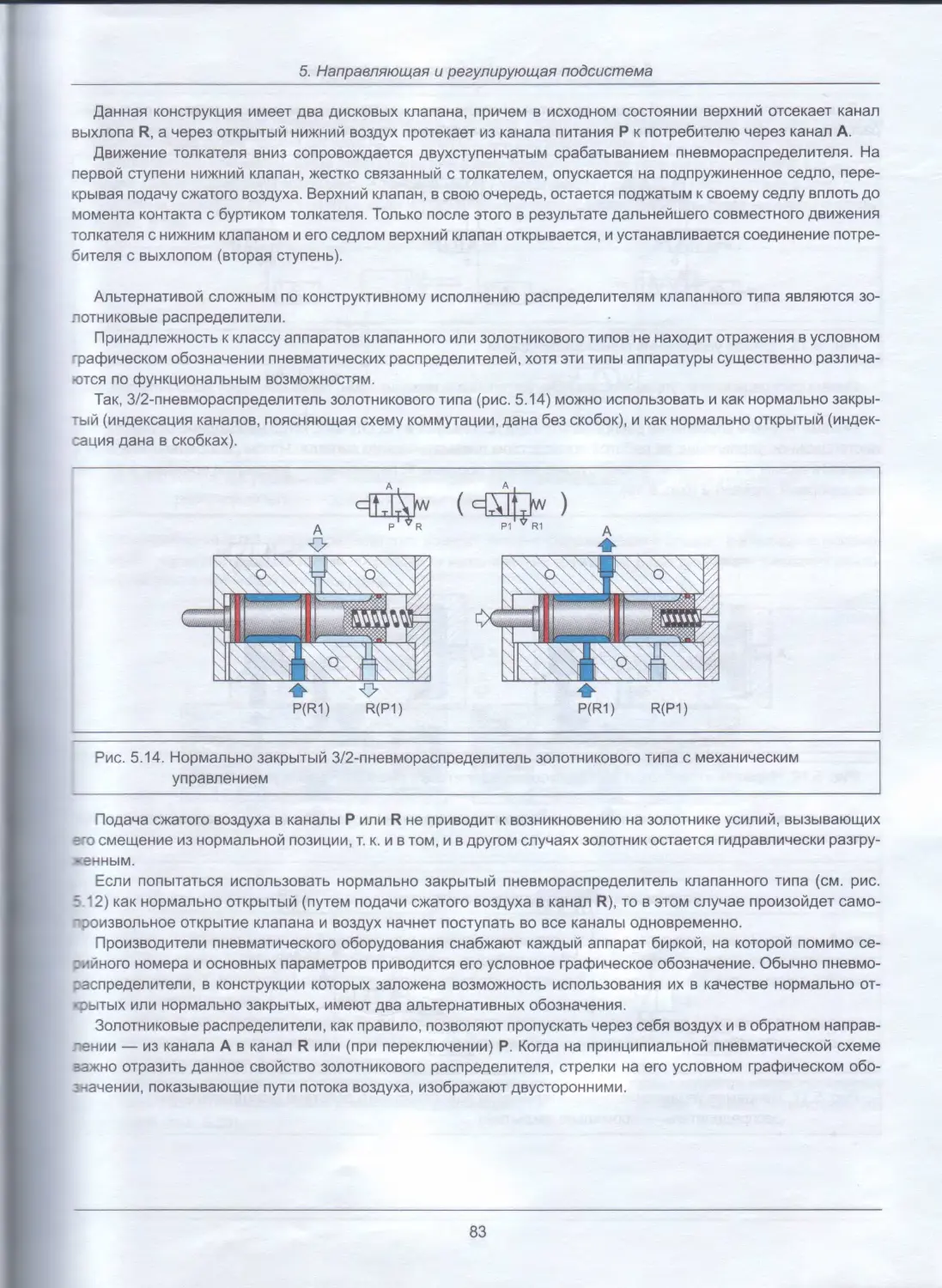
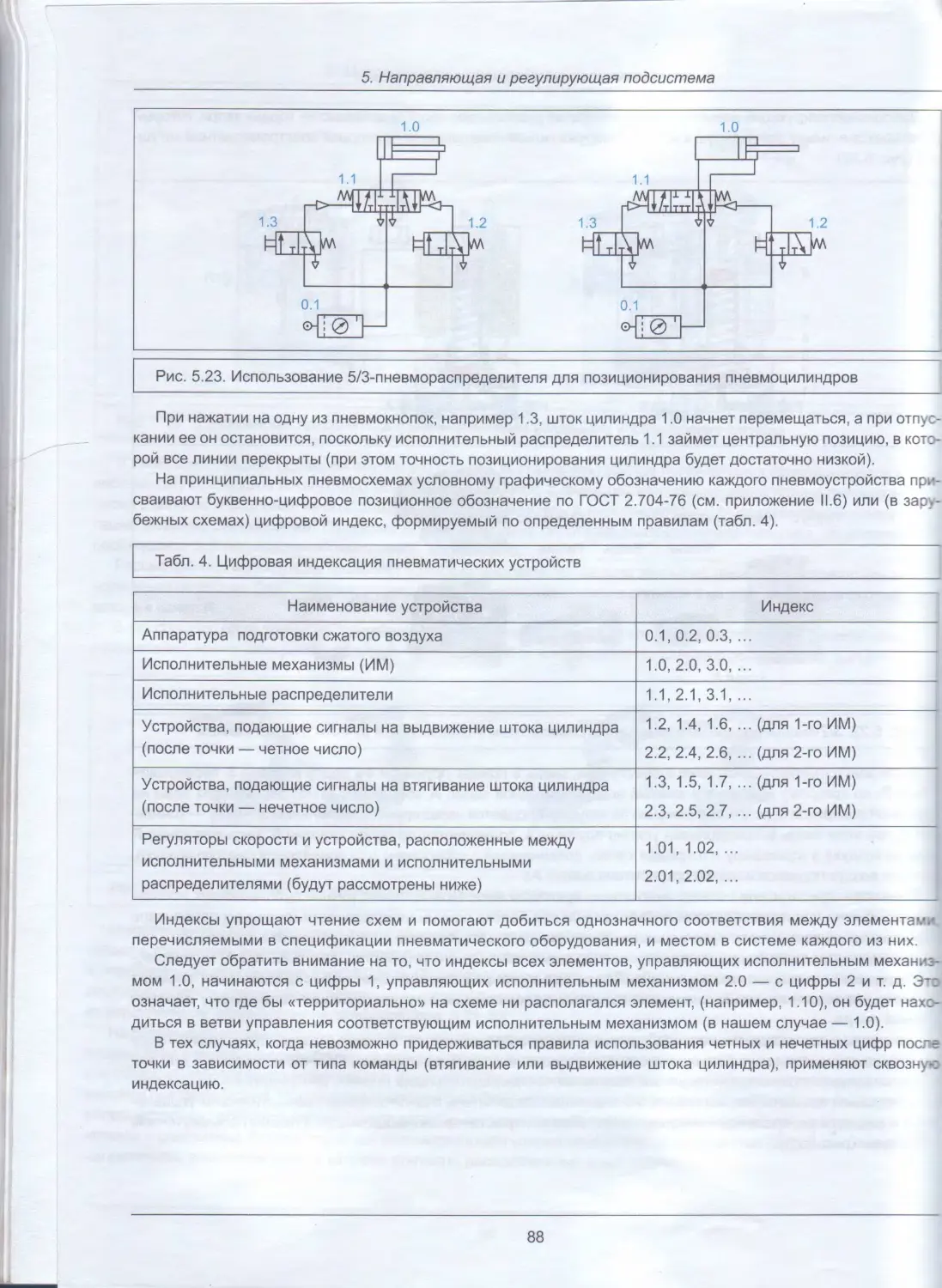
5.1. Пневматические распределители.....................................................76
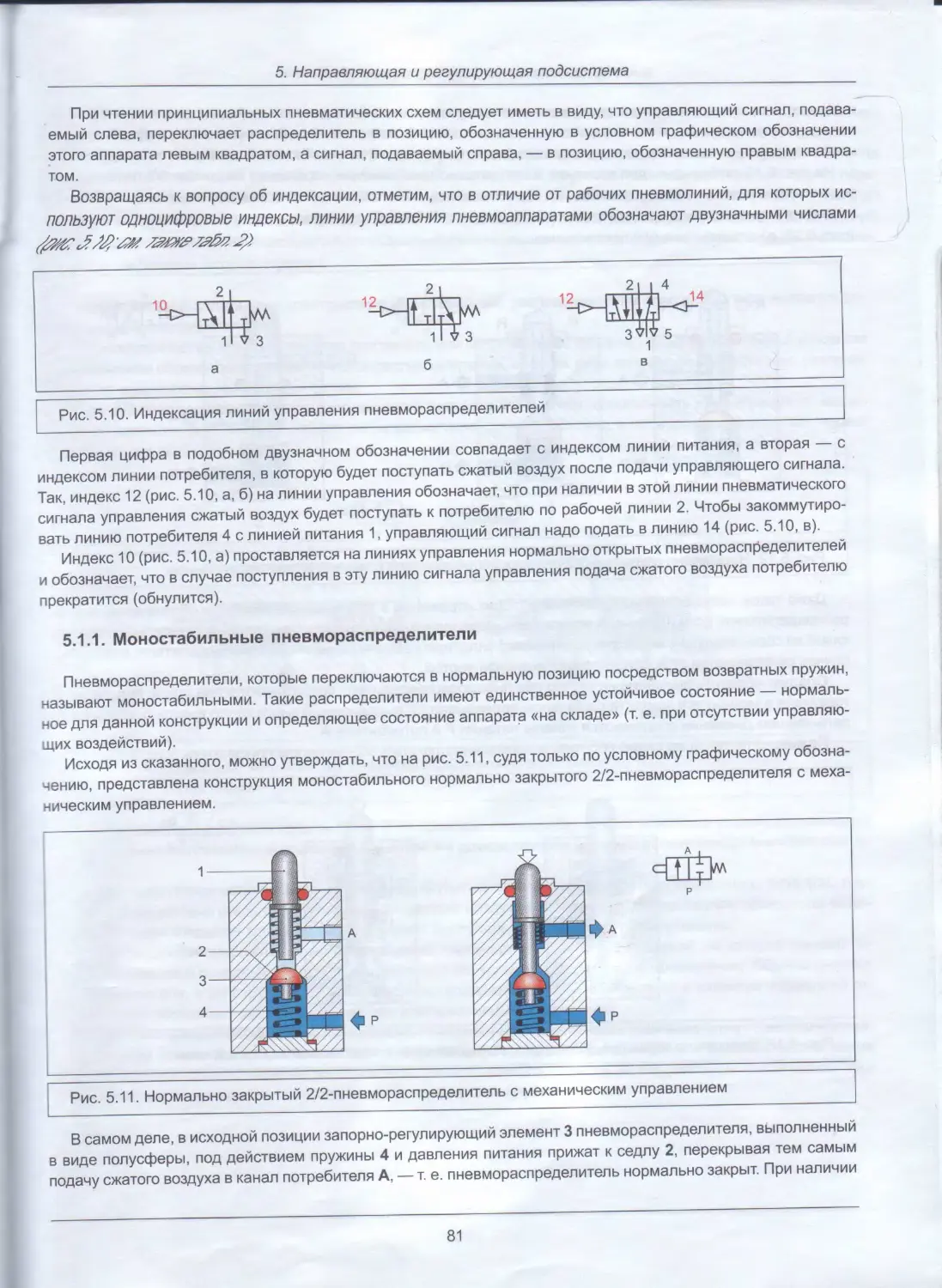
5.1.1. Моностабильные пневмораспределители........................................81
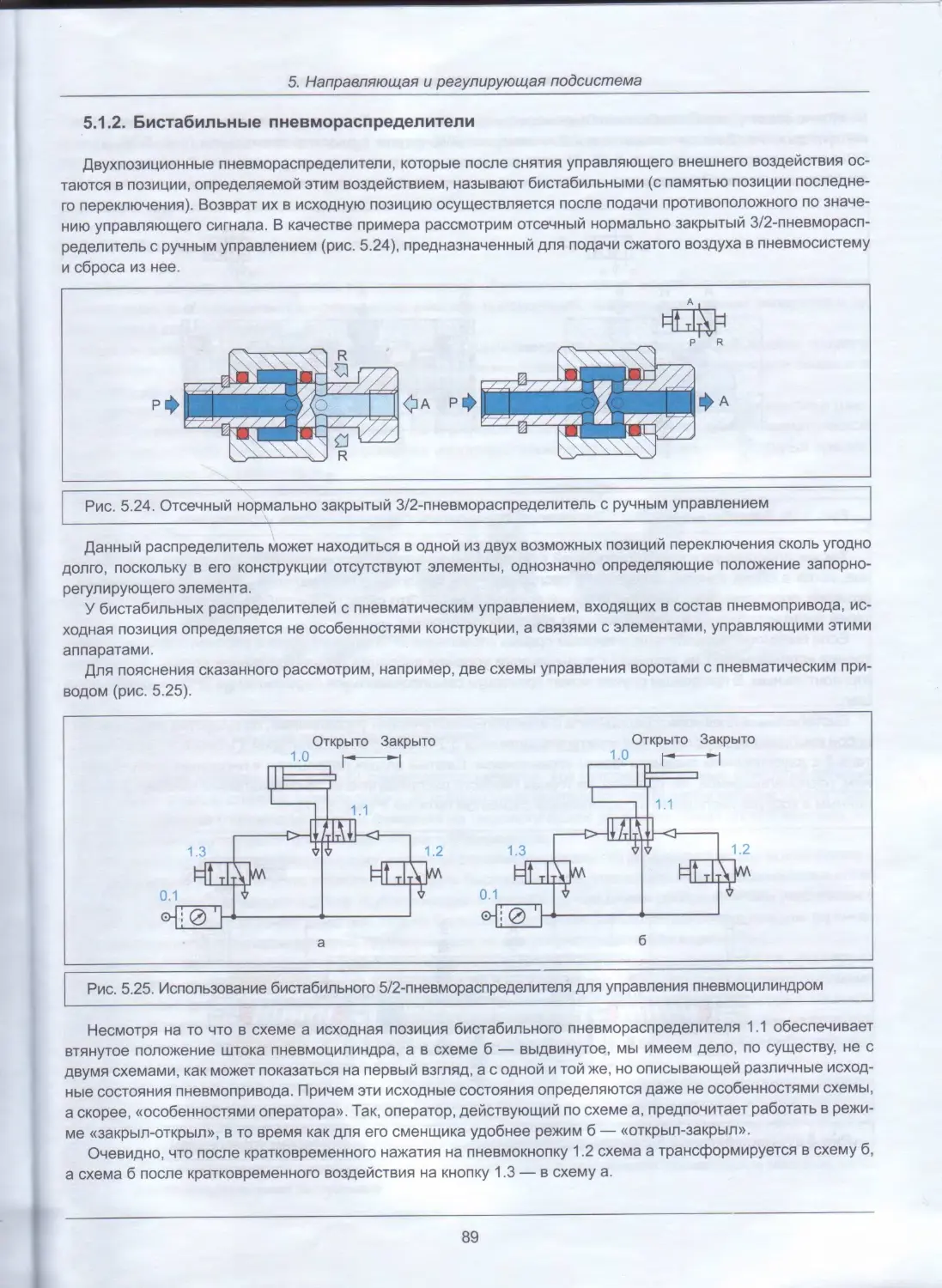
5.1.2. Бистабильные пневмораспределители.......'..................................89
5.1.3. Монтаж пневмораспределителей...............................................91
5.1.4. Определение параметров пневмораспределителей...............................92
5.2. Запорные элементы.................................................................94
5.3. Устройства регулирования расхода..................................................95
5.4. Устройства регулирования давления.................................................10С
6. Информационная подсистема................................................................104
6.1. Пневматические путевые выключатели...............................................104
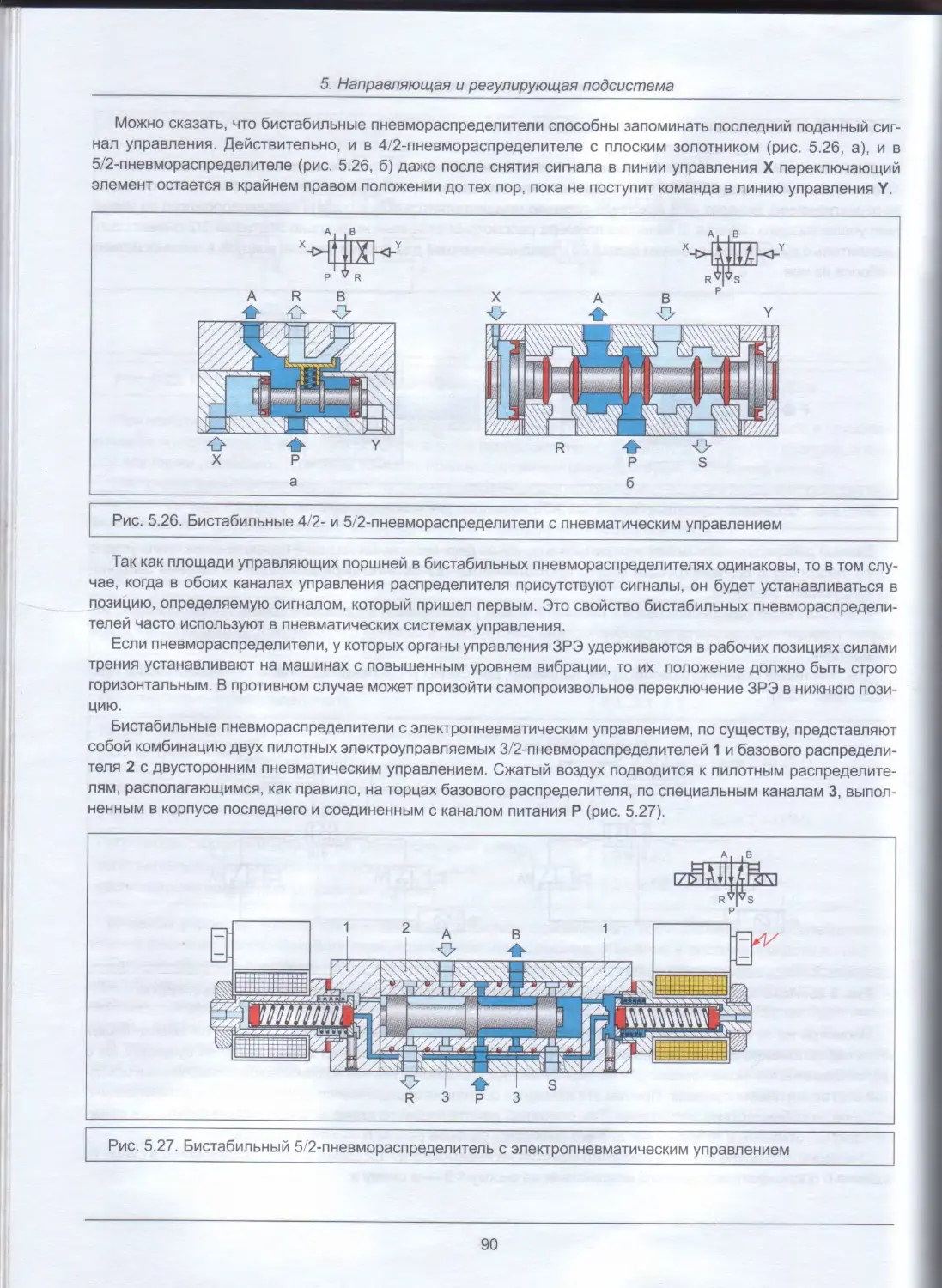
6.2. Струйные датчики положения.......................................................136
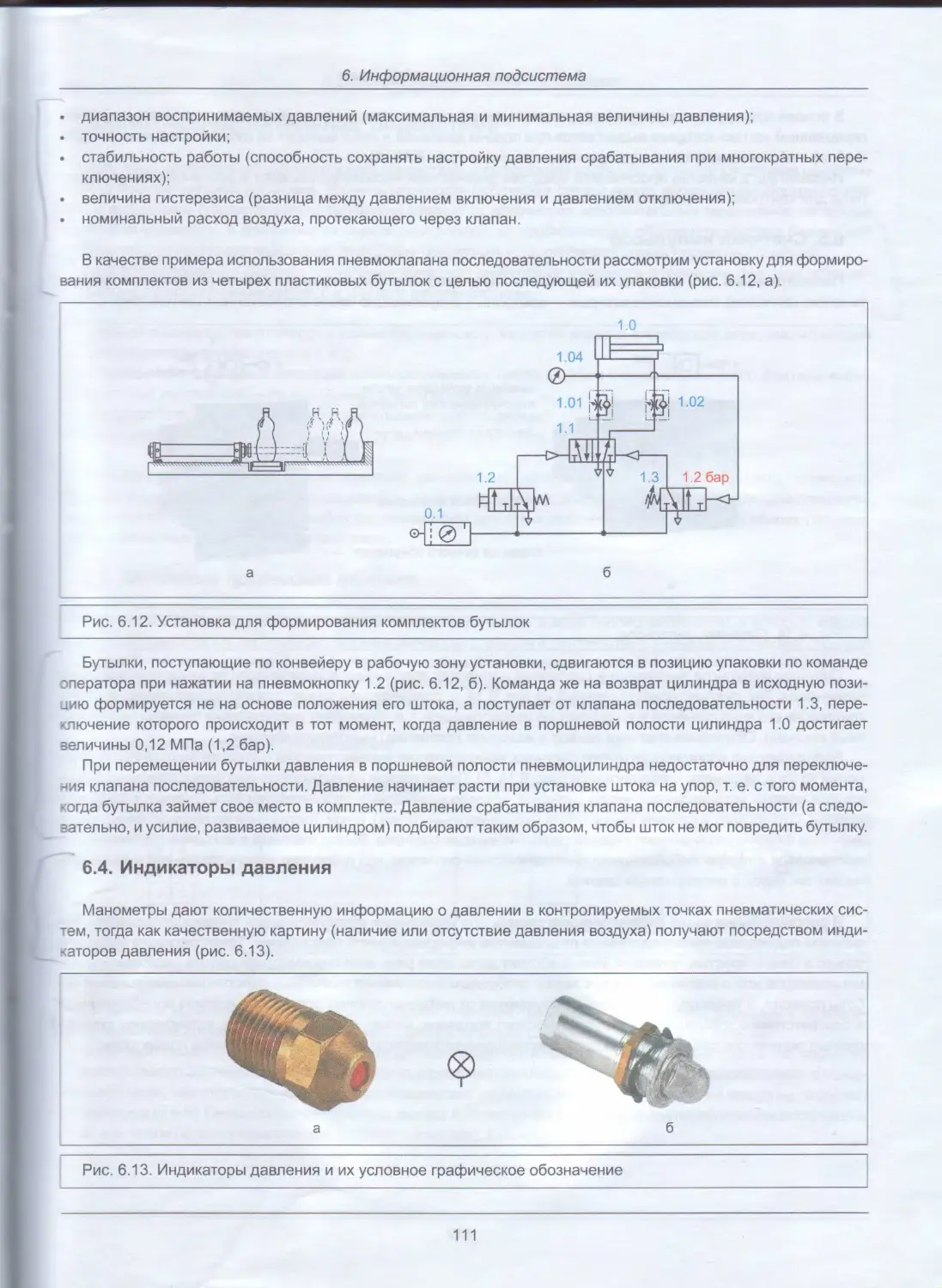
6.3. Пневмоклапаны последовательности.................................................110
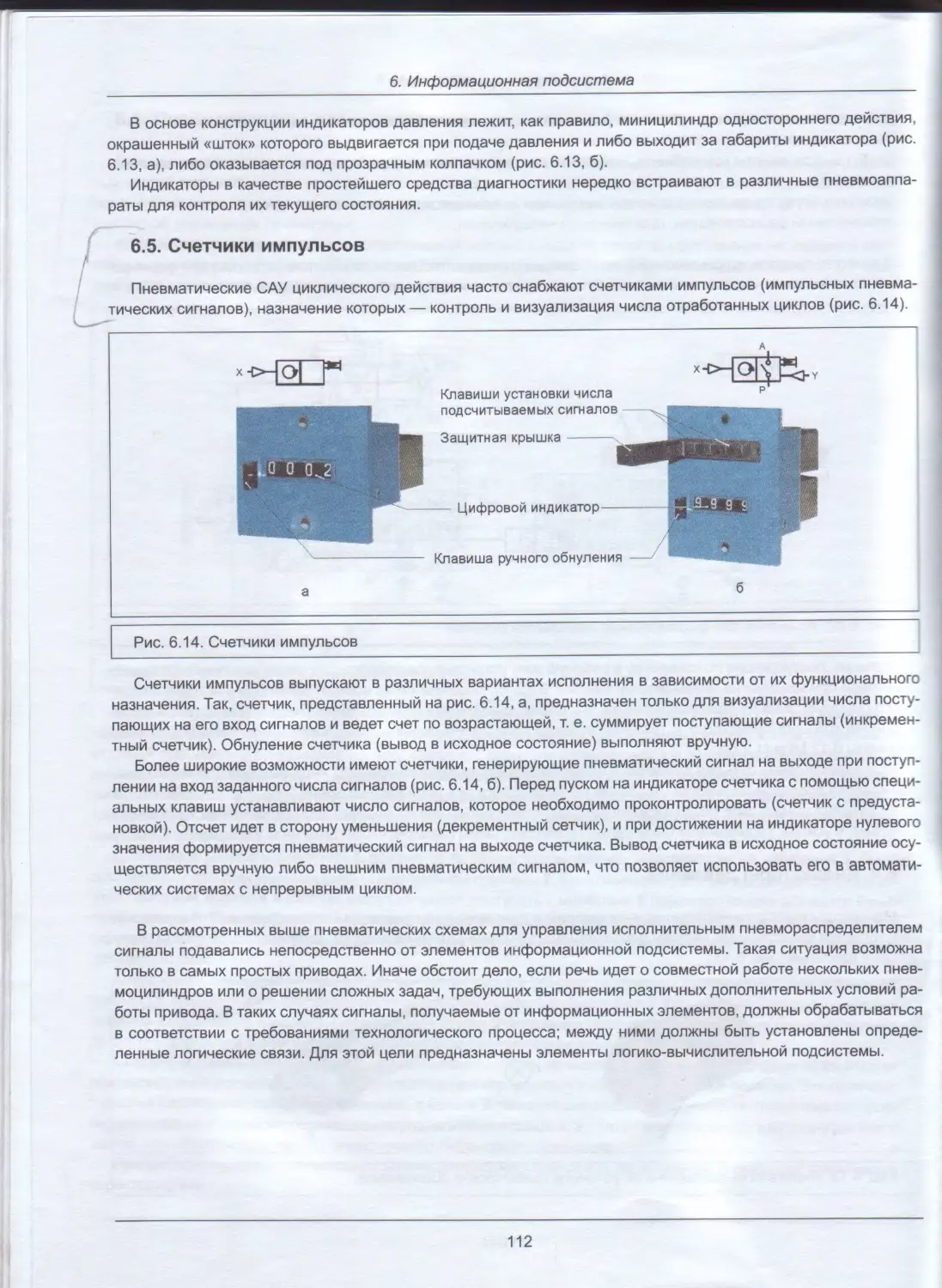
6.4. Индикаторы давления..............................................................111
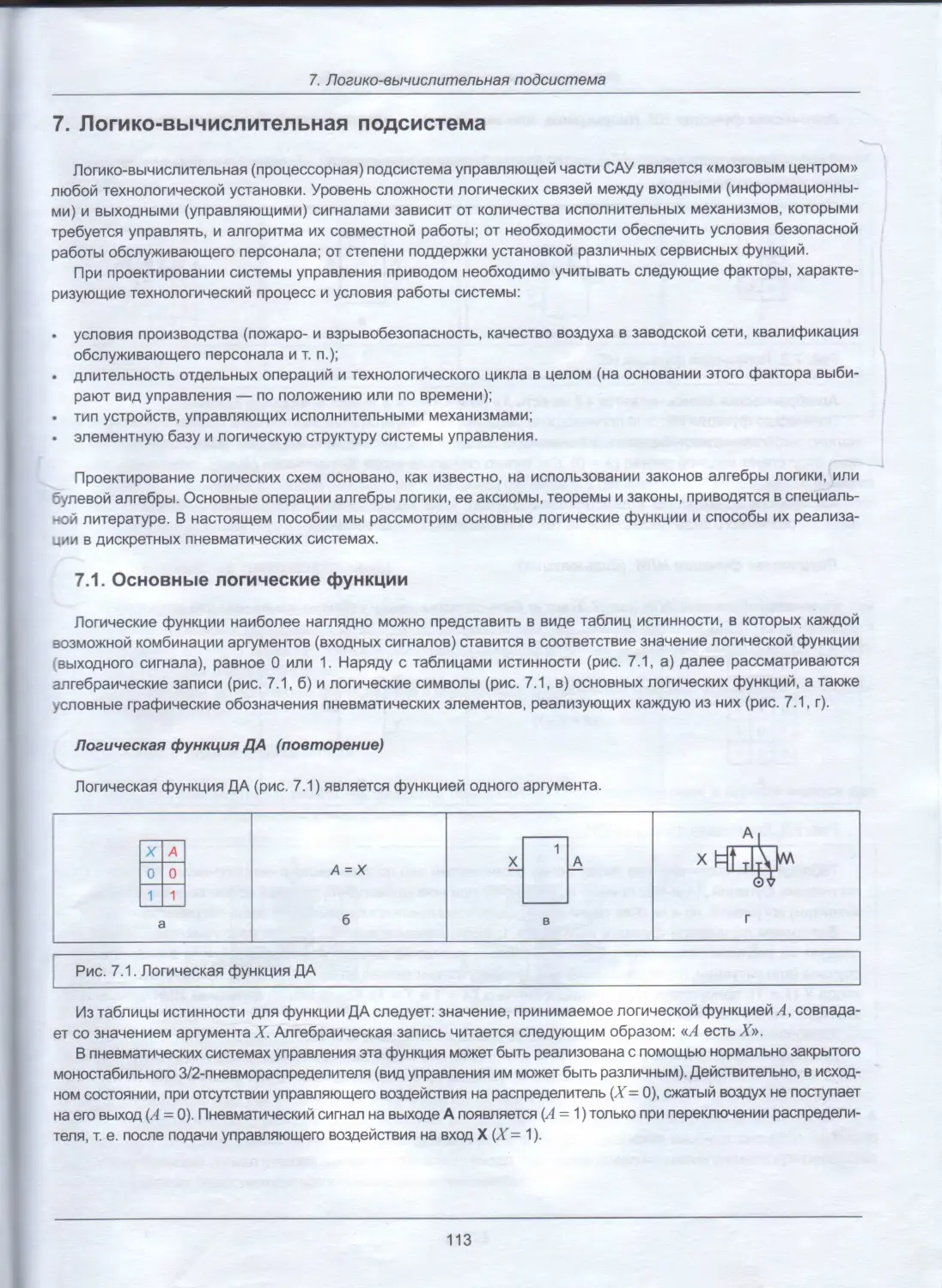
6.5. Счетчики импульсов.......................:.......................................112
7. Логико-вычислительная подсистема.........................................................113
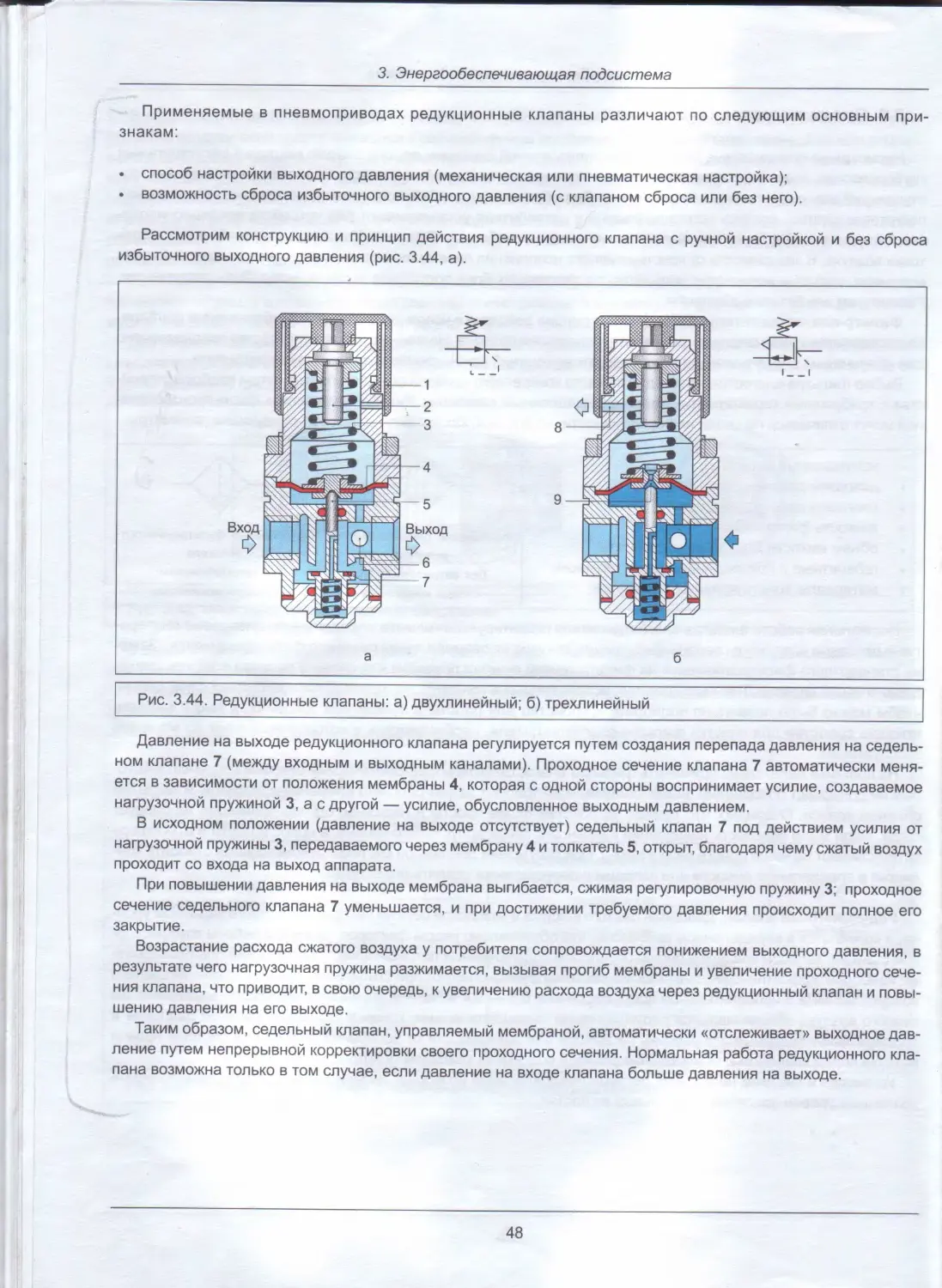
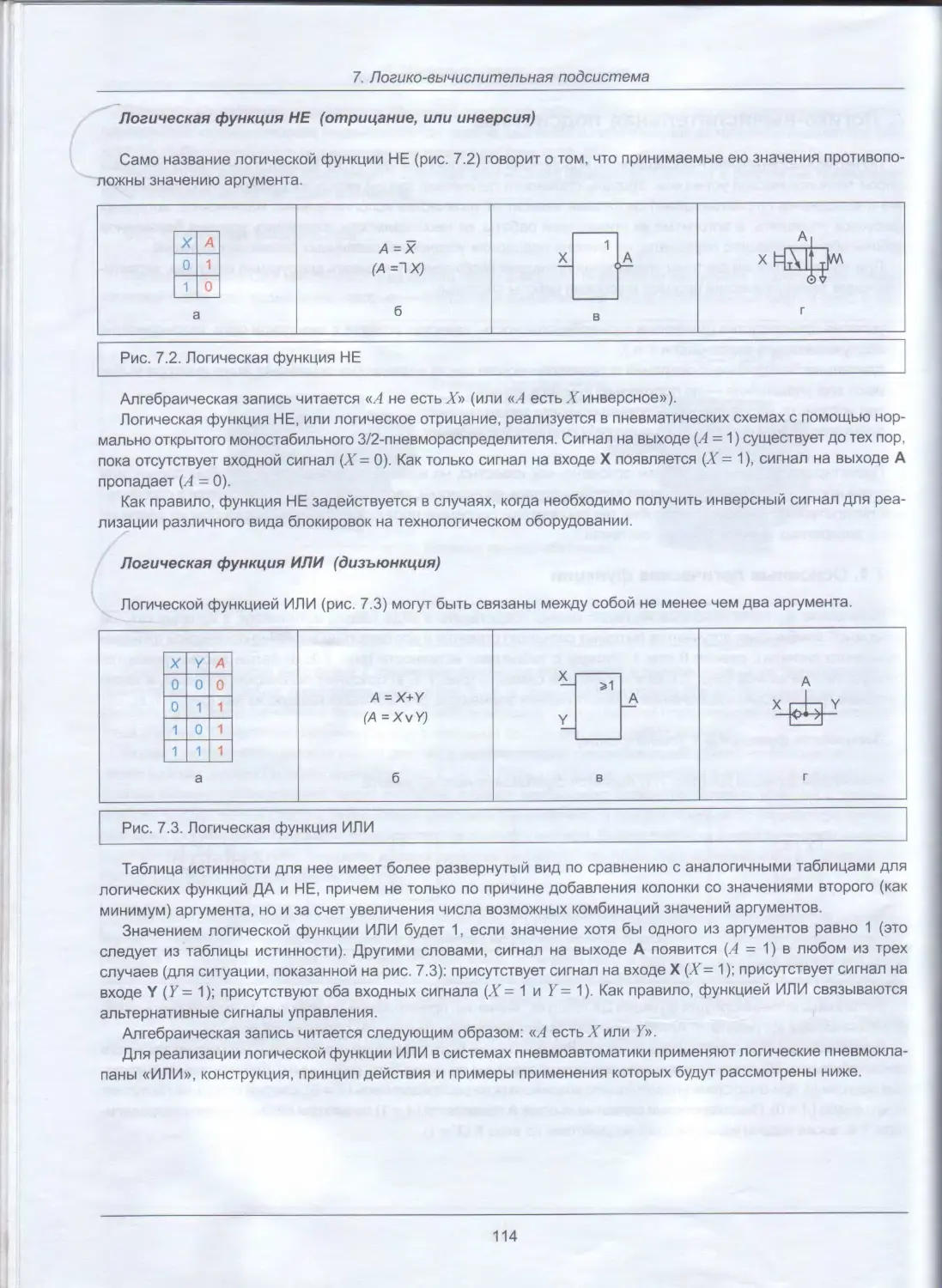
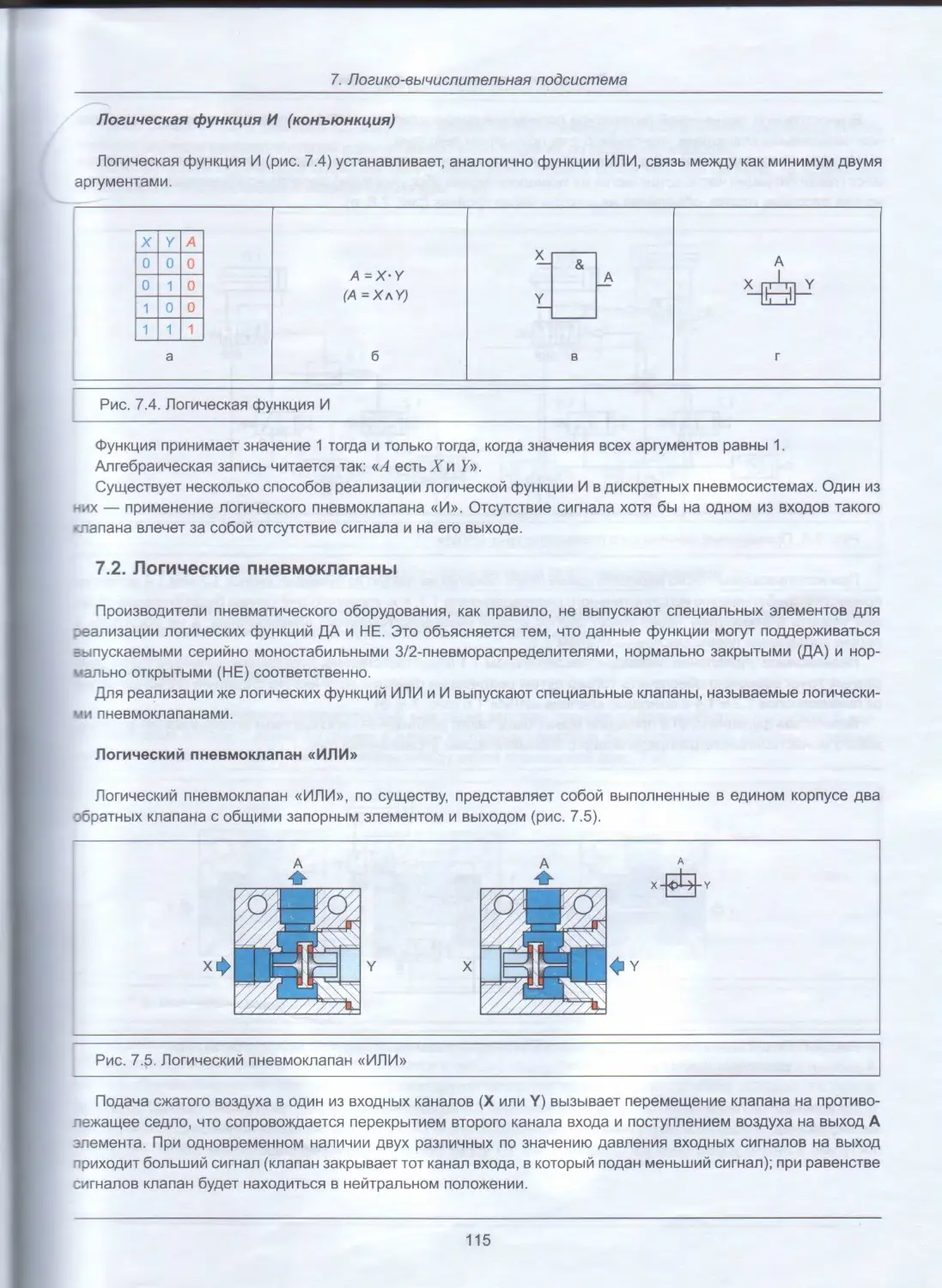
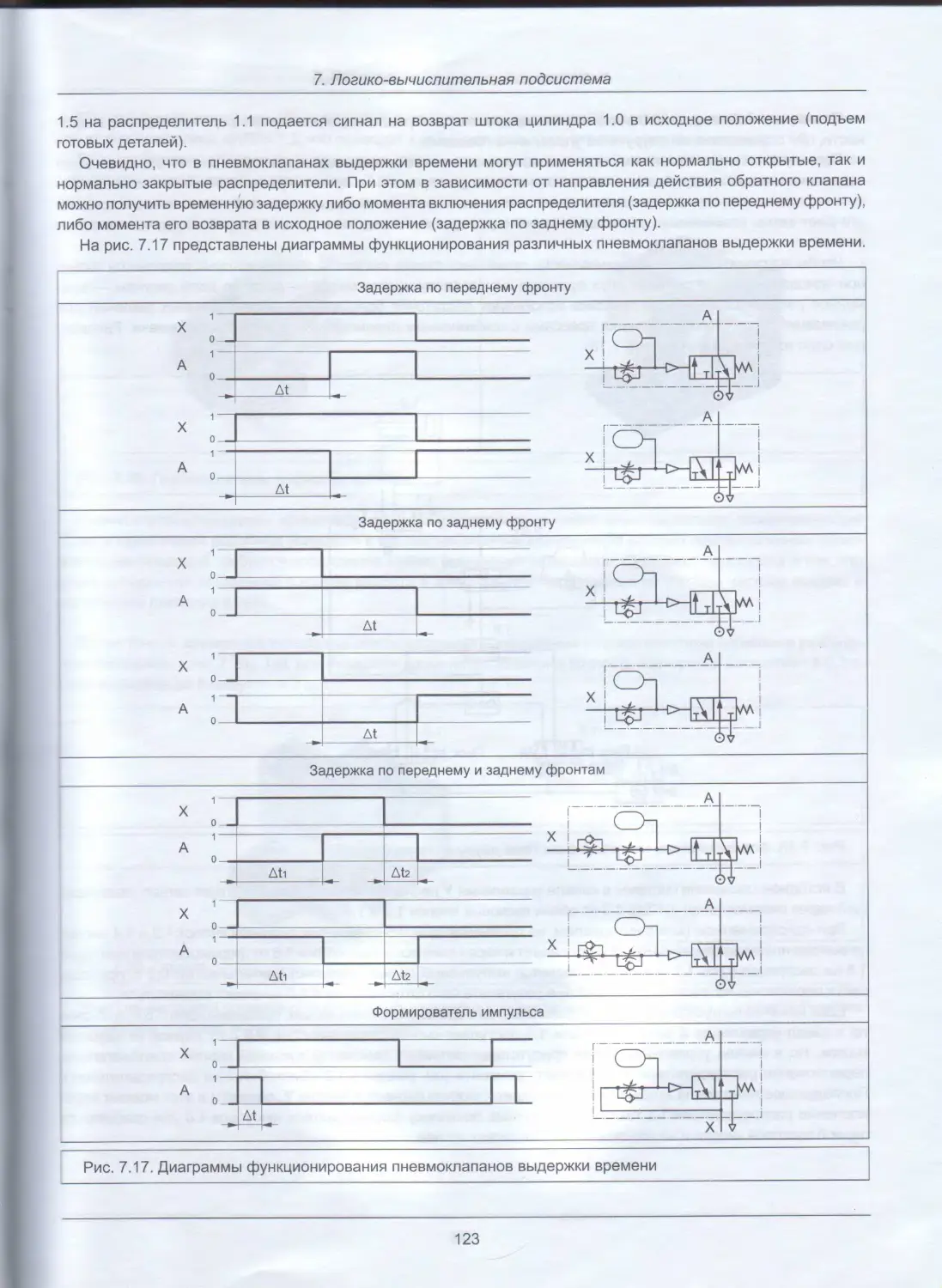
7.1. Основные логические функции......................................................113
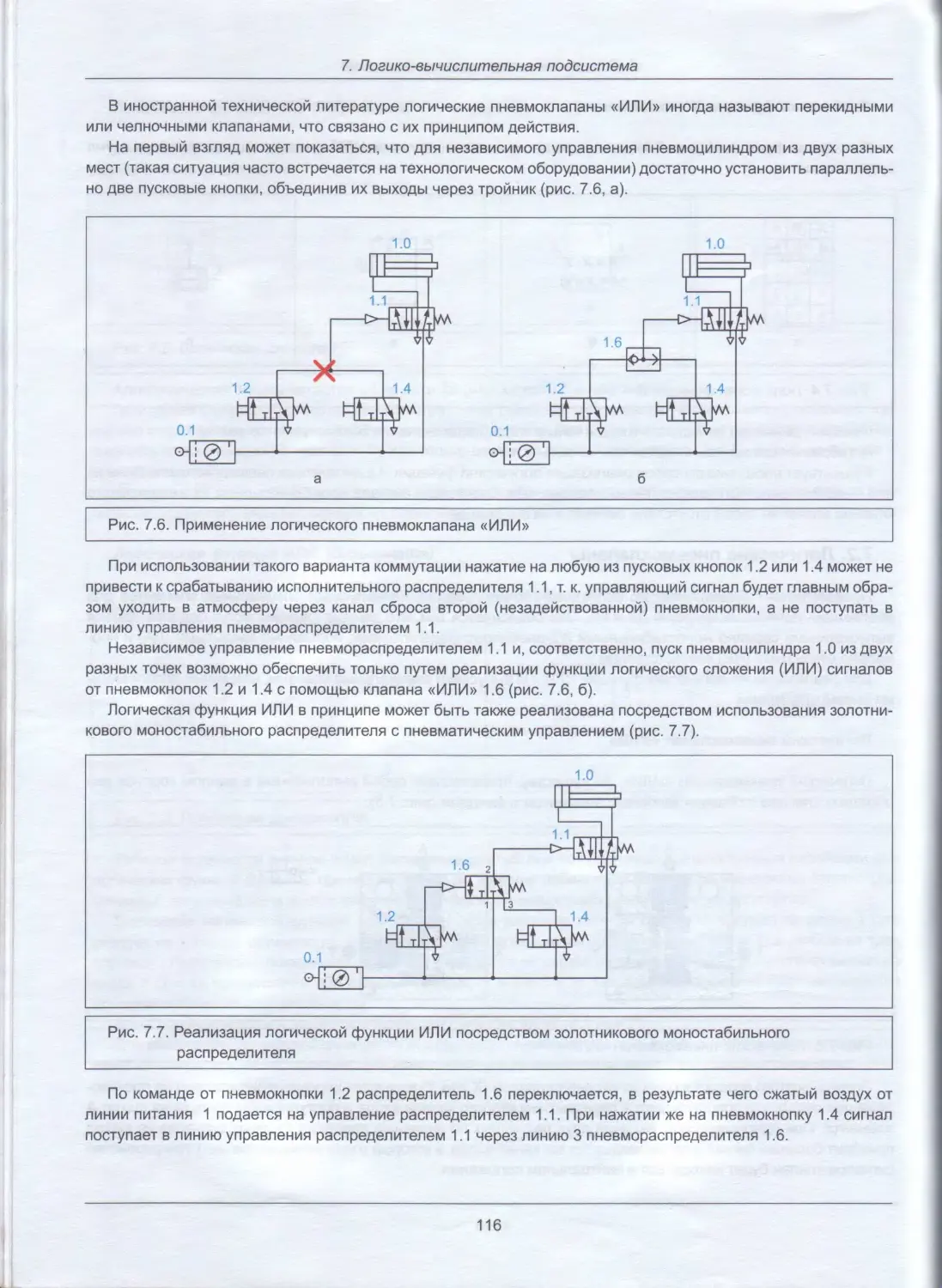
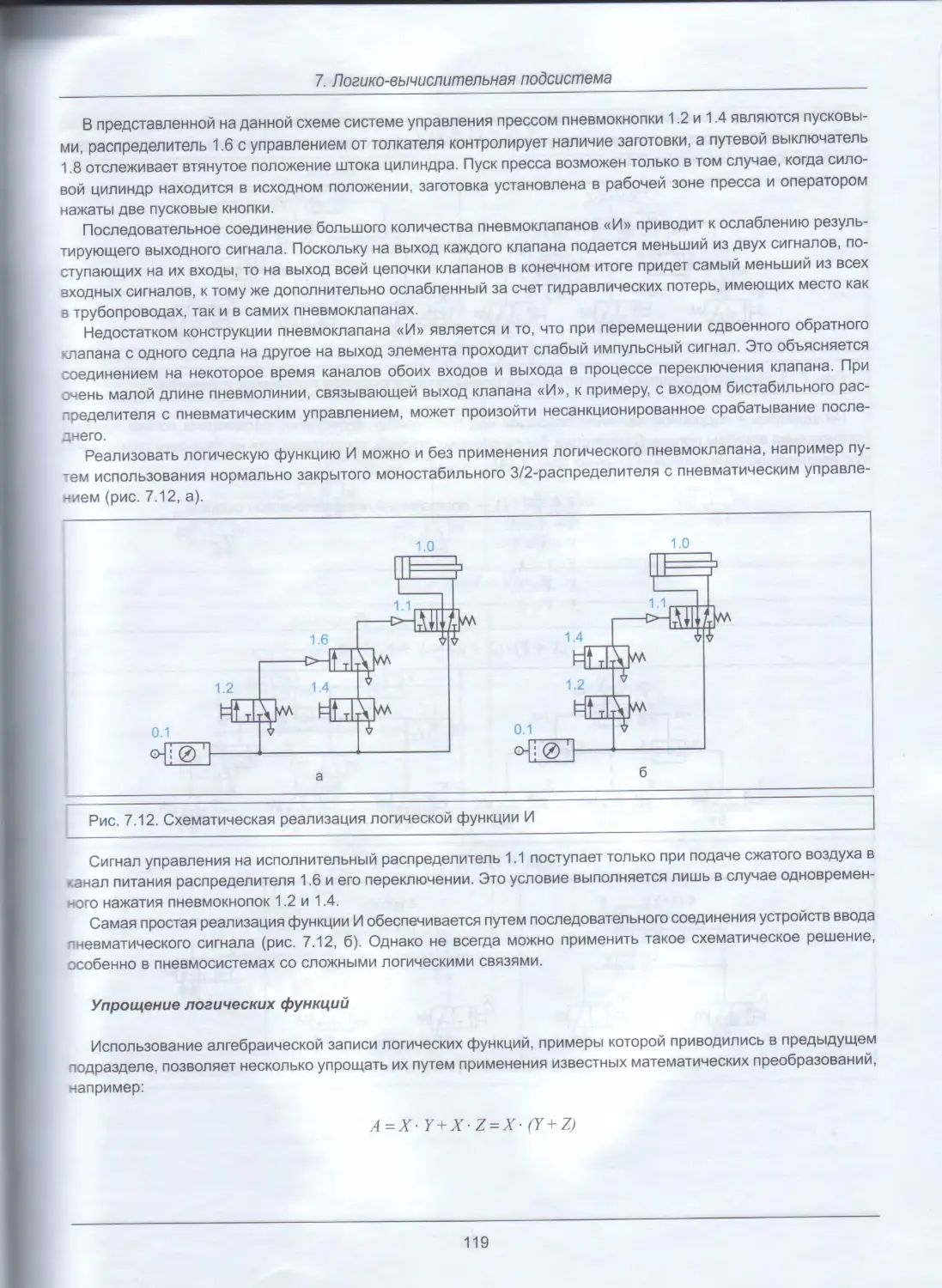
7.2. Логические пневмоклапаны.........................................................115
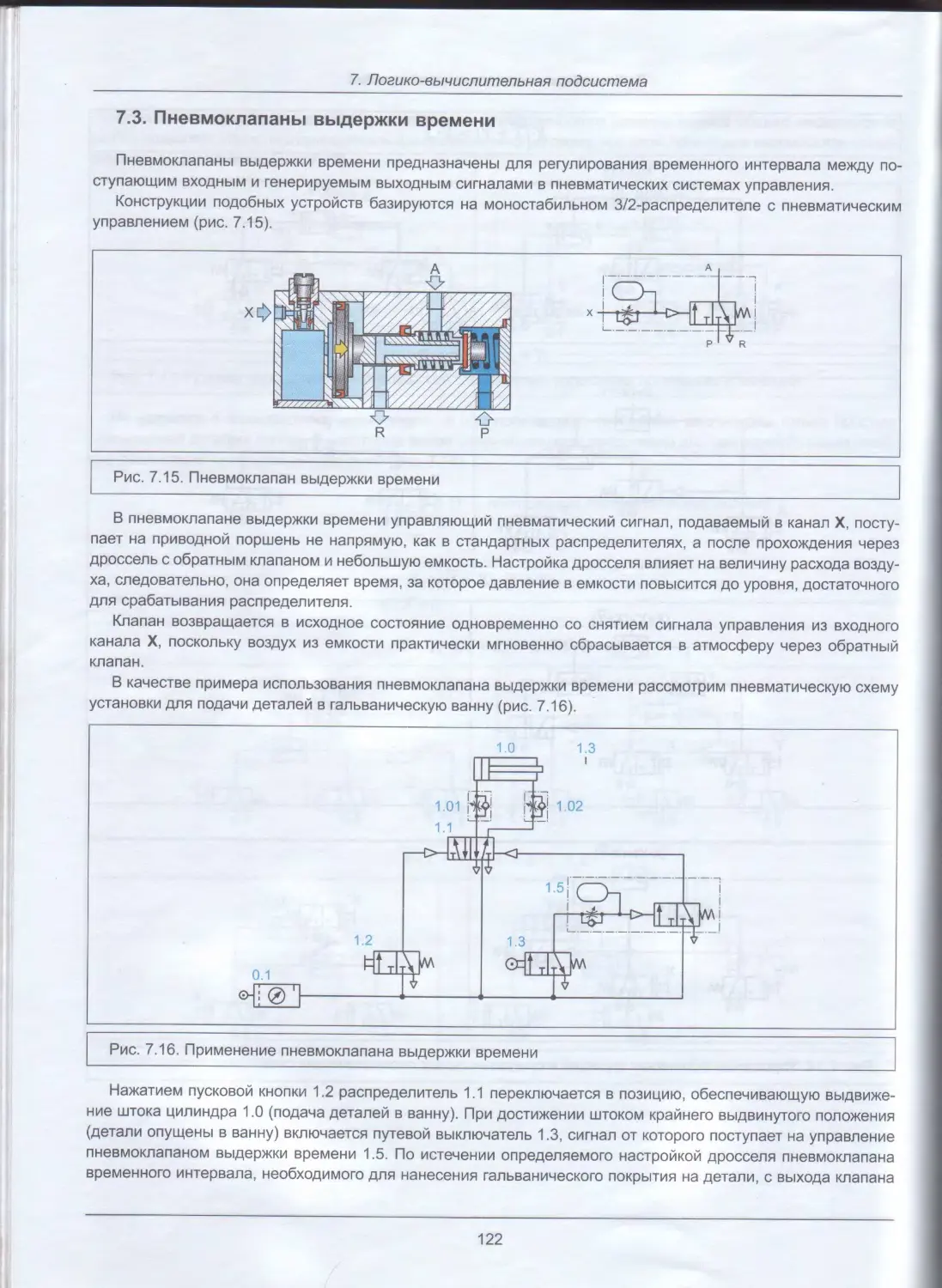
7.3. Пневмоклапаны выдержки времени...................................................122
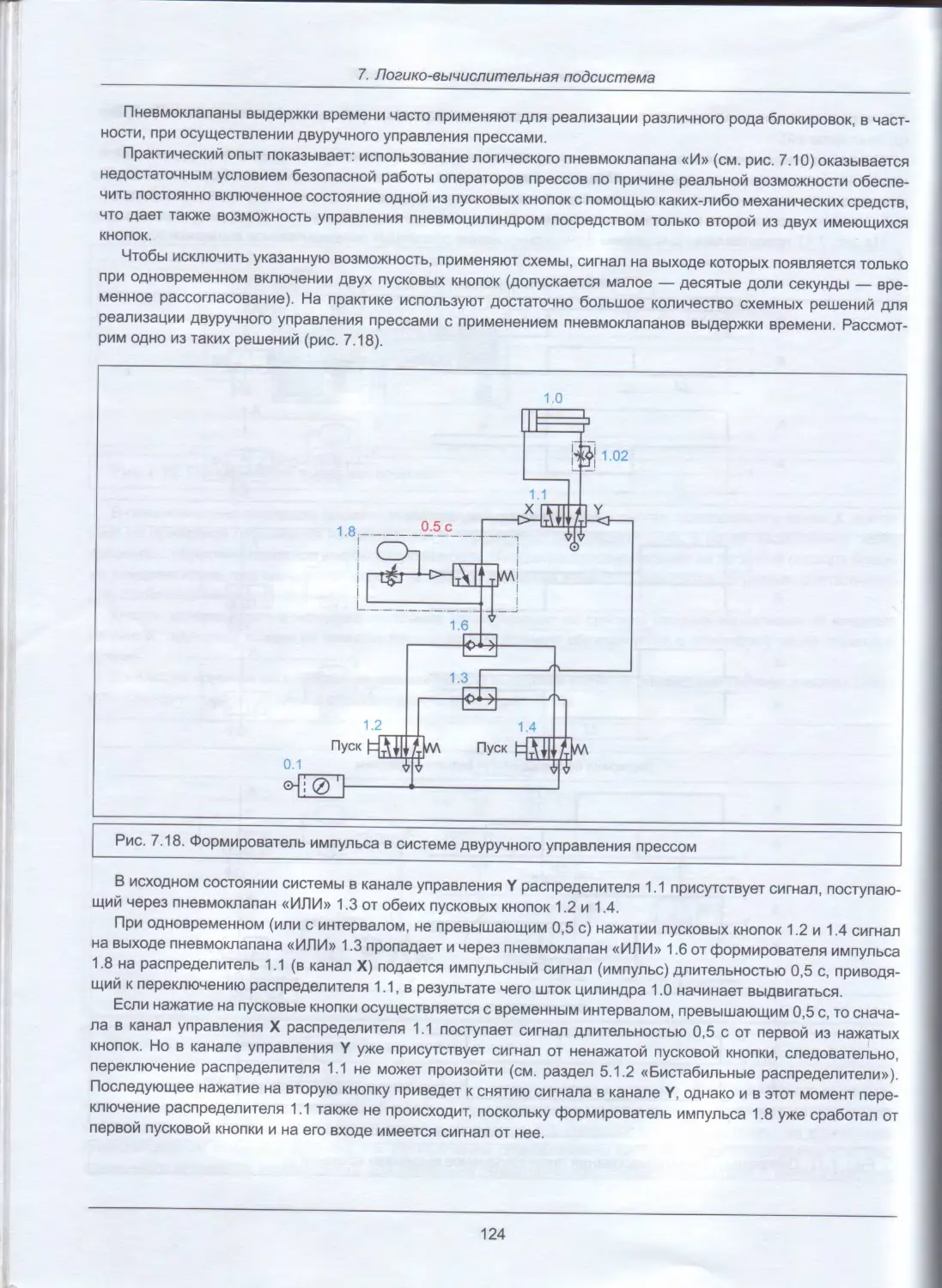
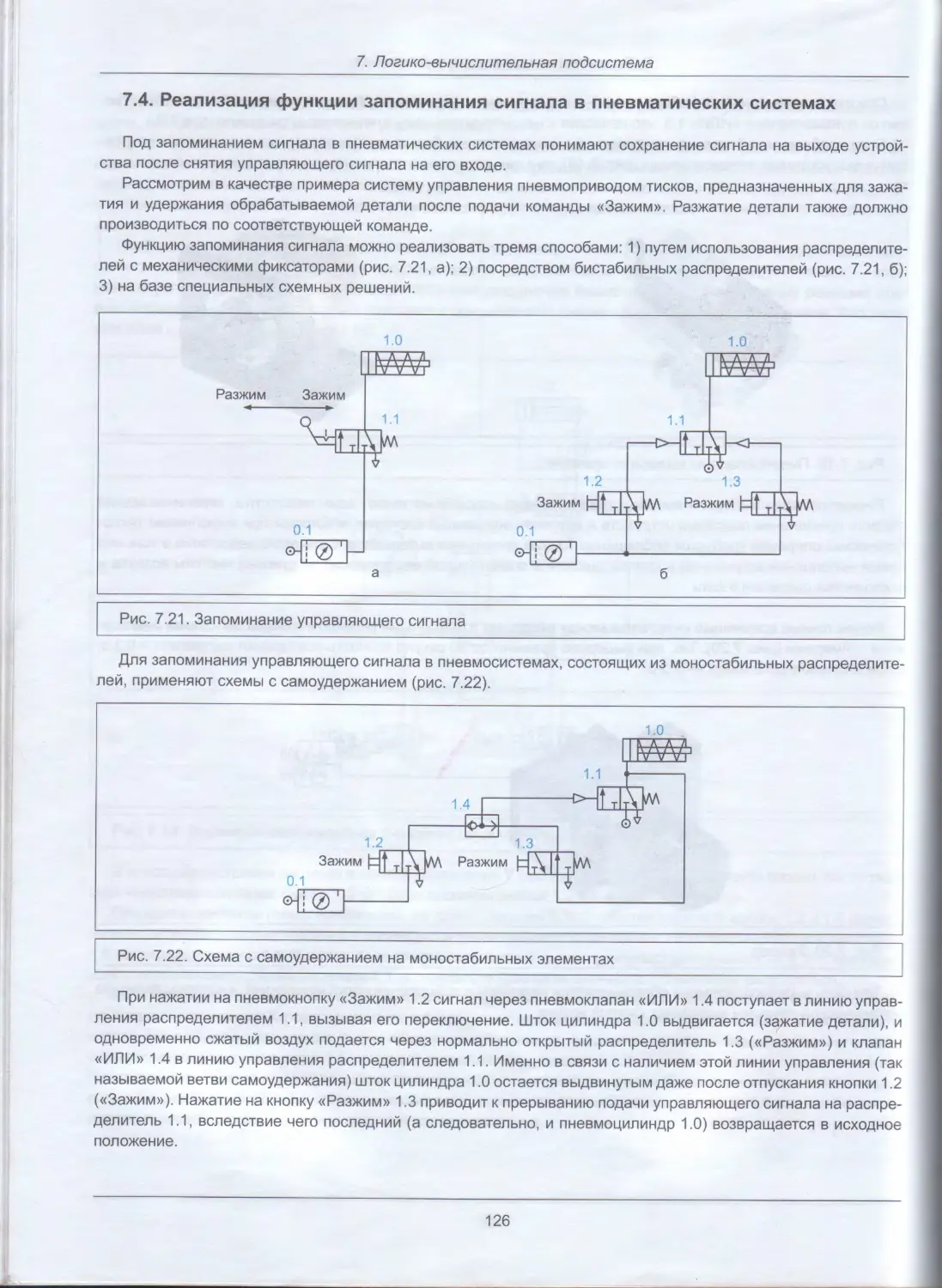
7.4. Реализация функции запоминания сигнала в пневматических системах.................126
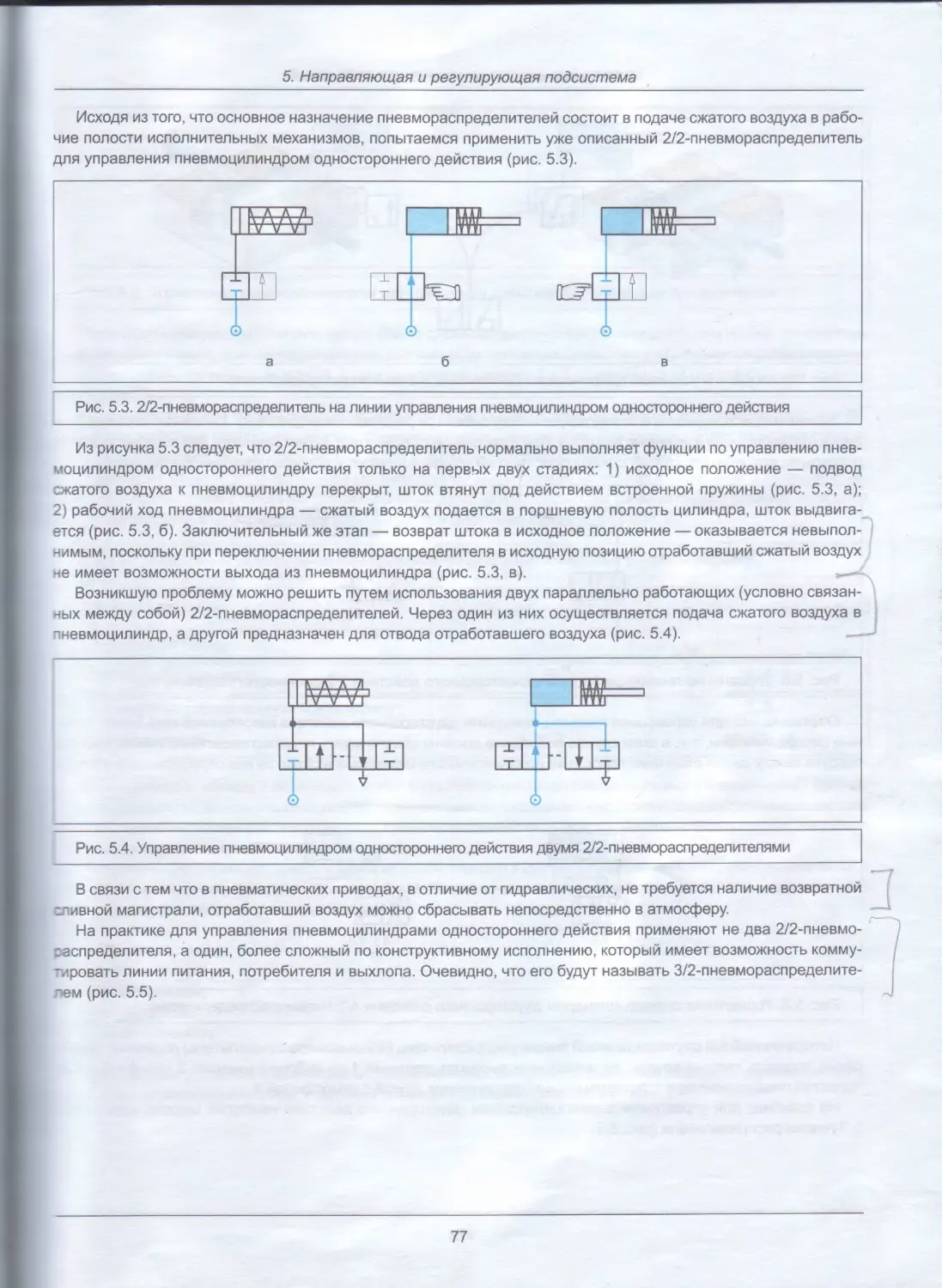
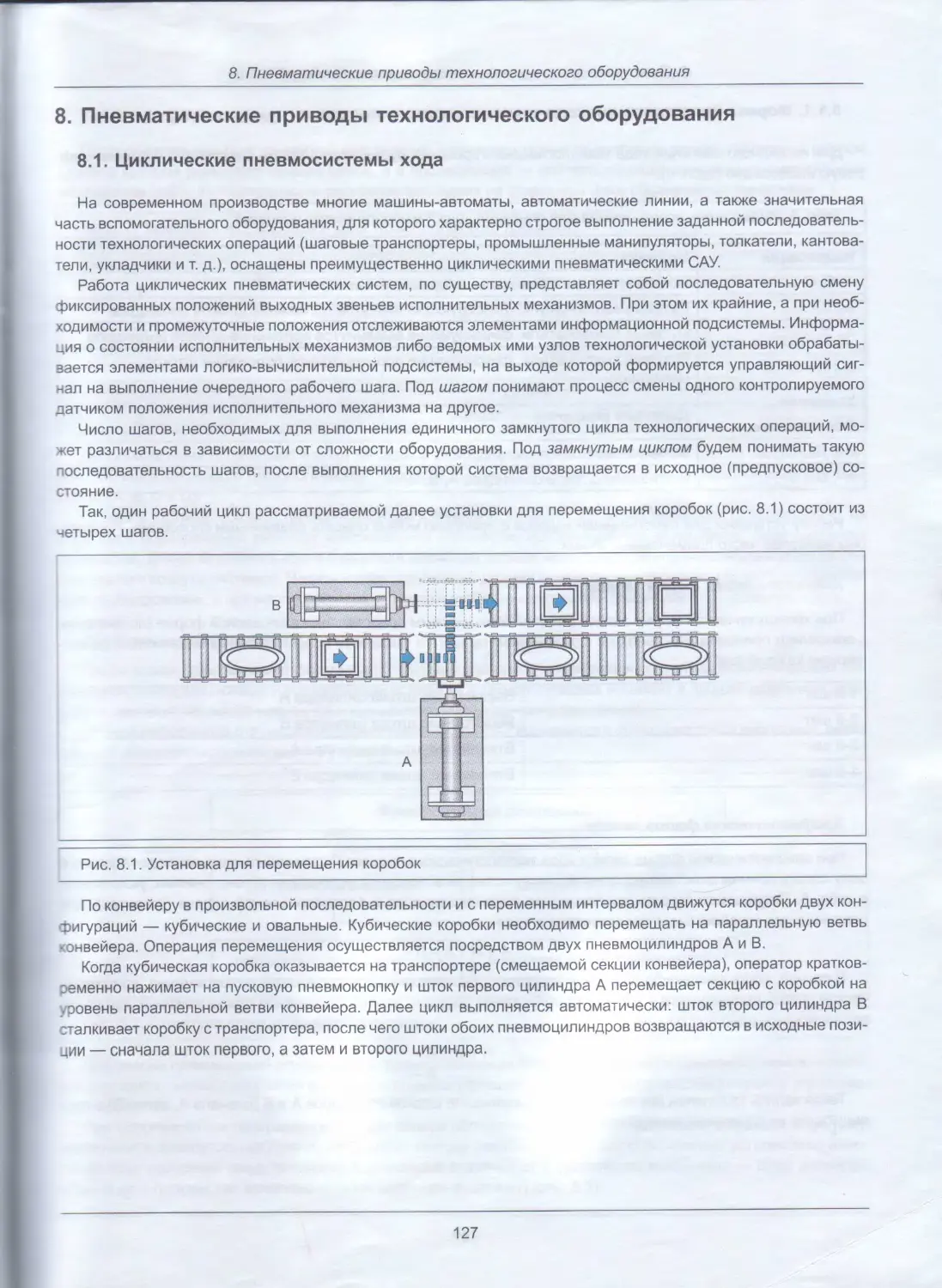
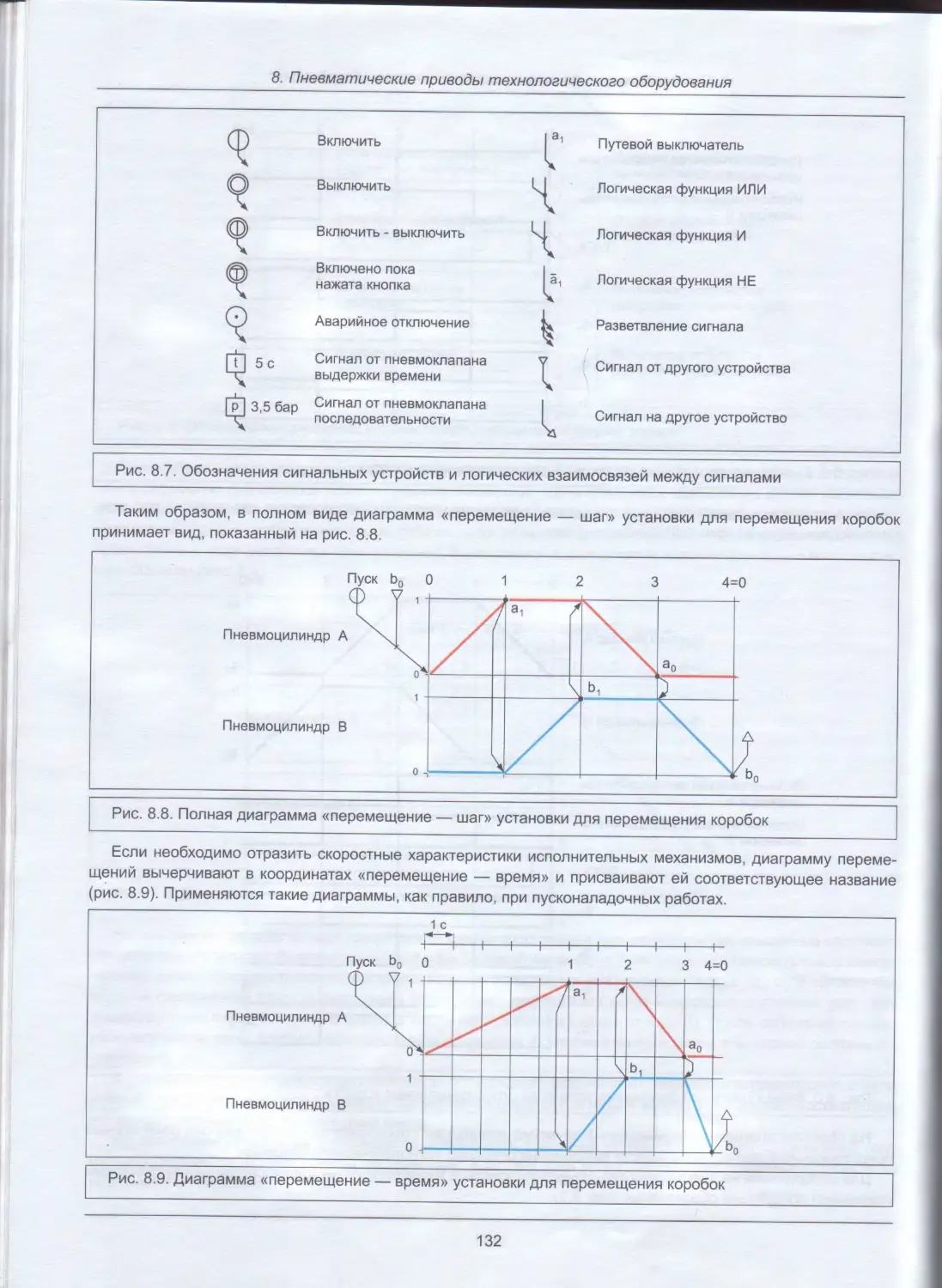
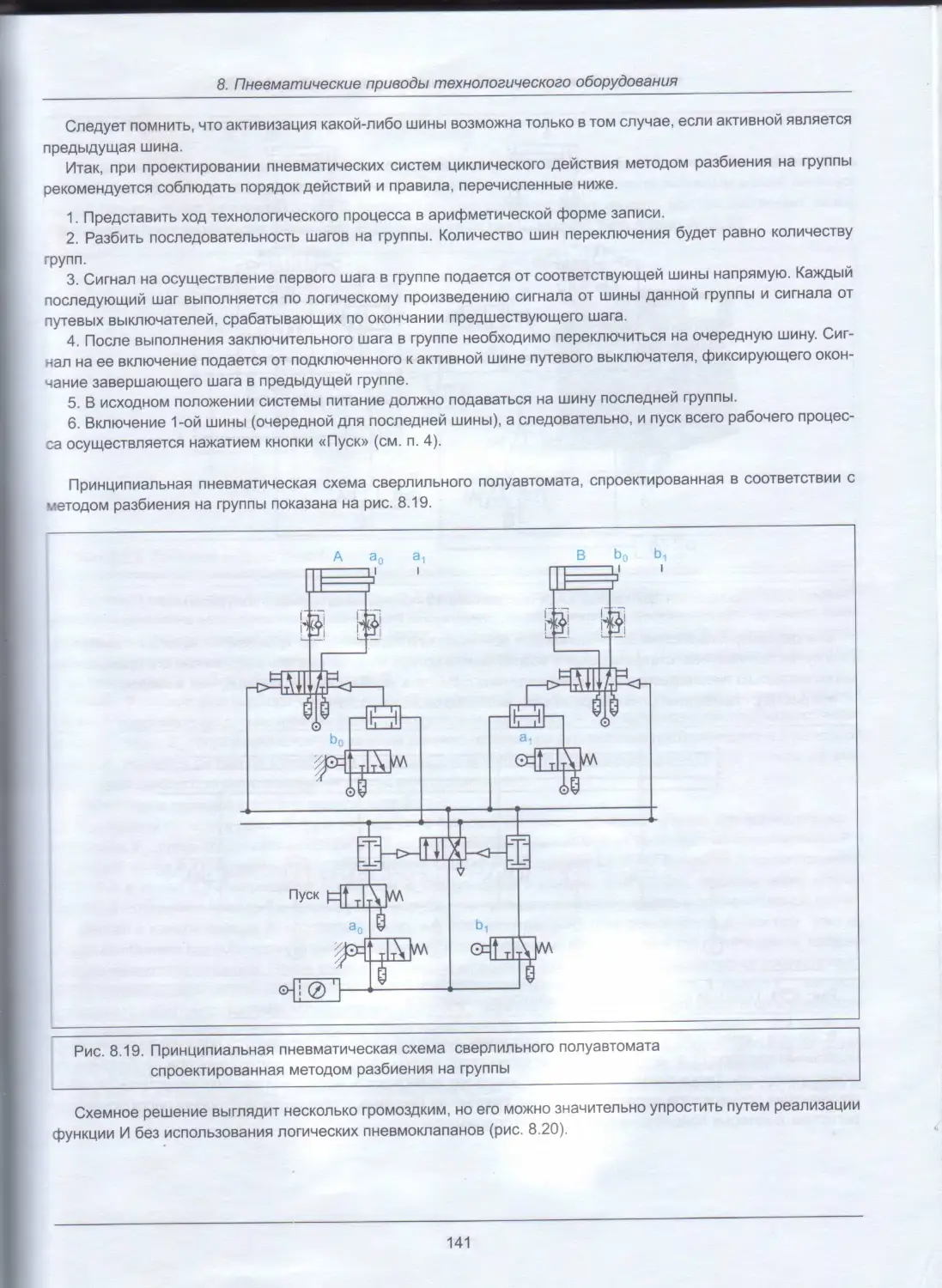
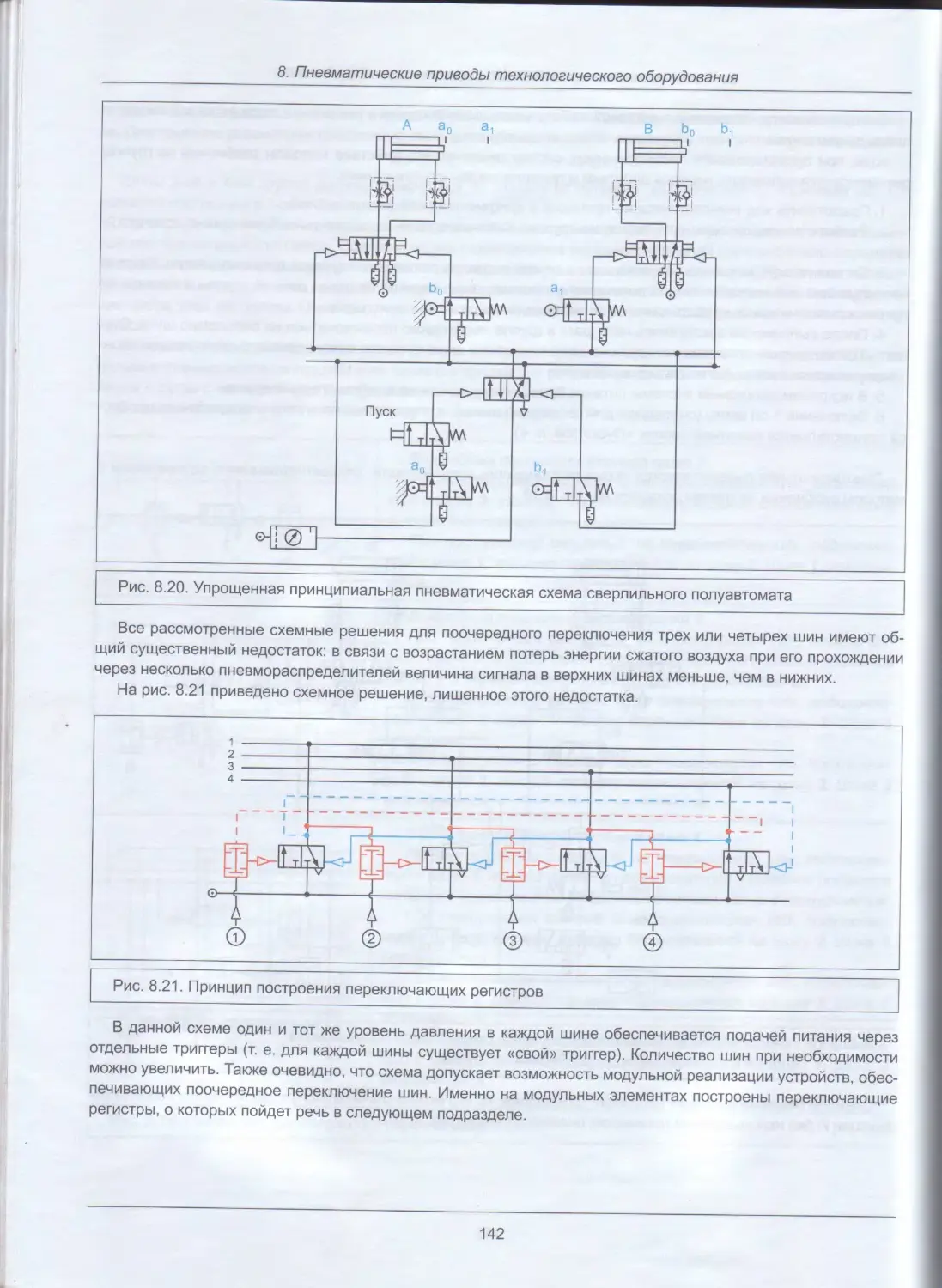
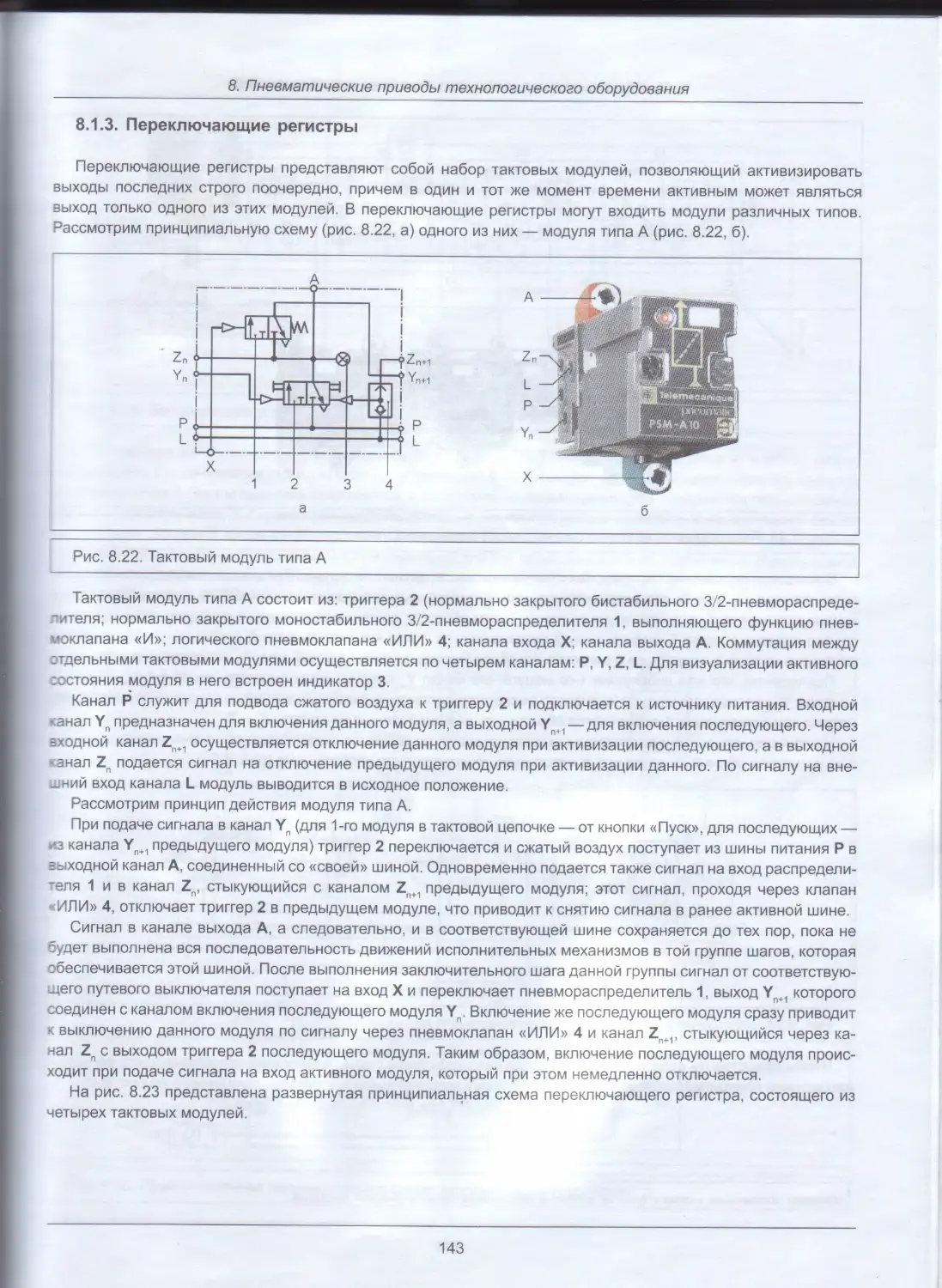
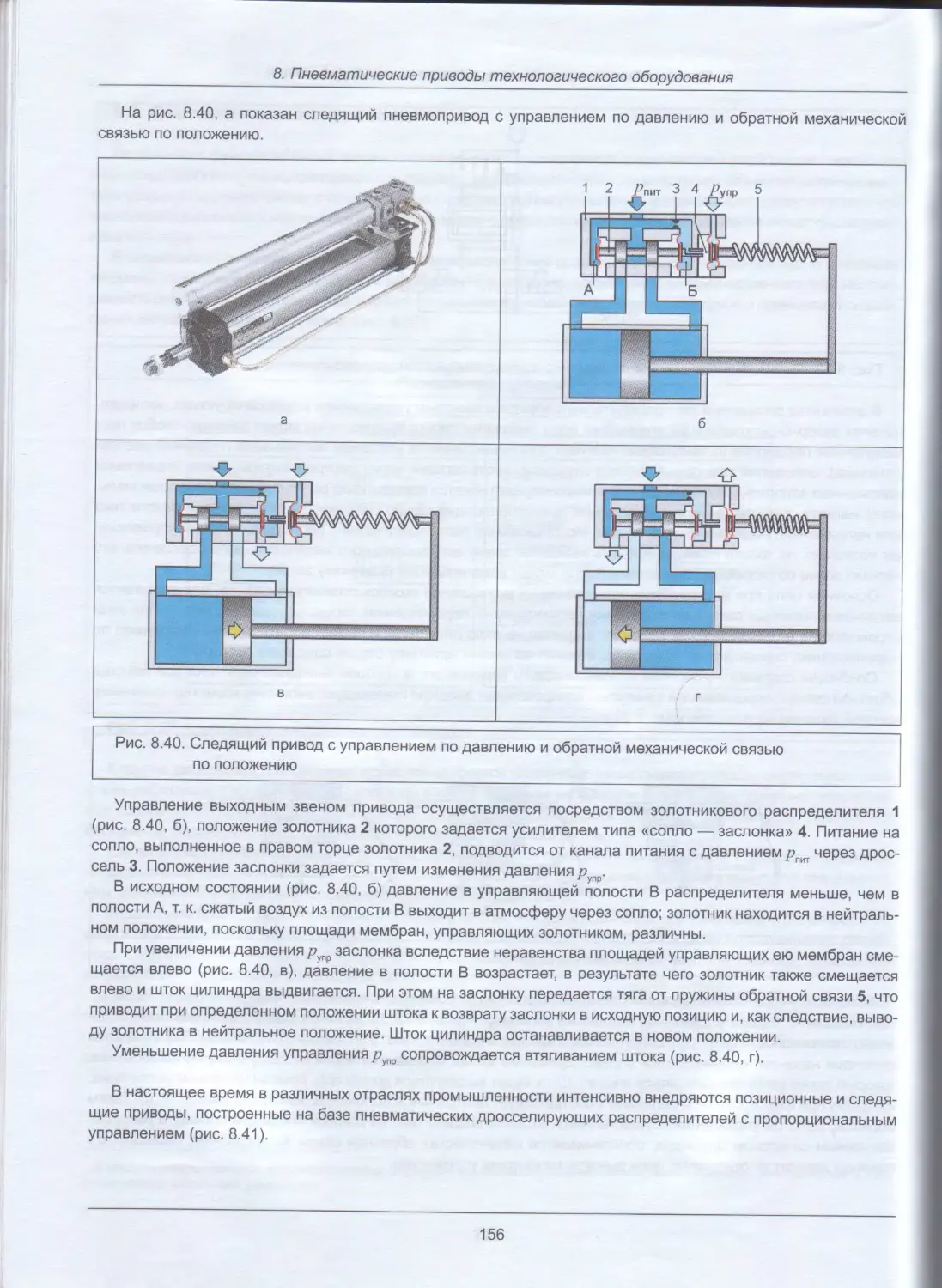
8. Пневматические приводы технологического оборудования.......................127
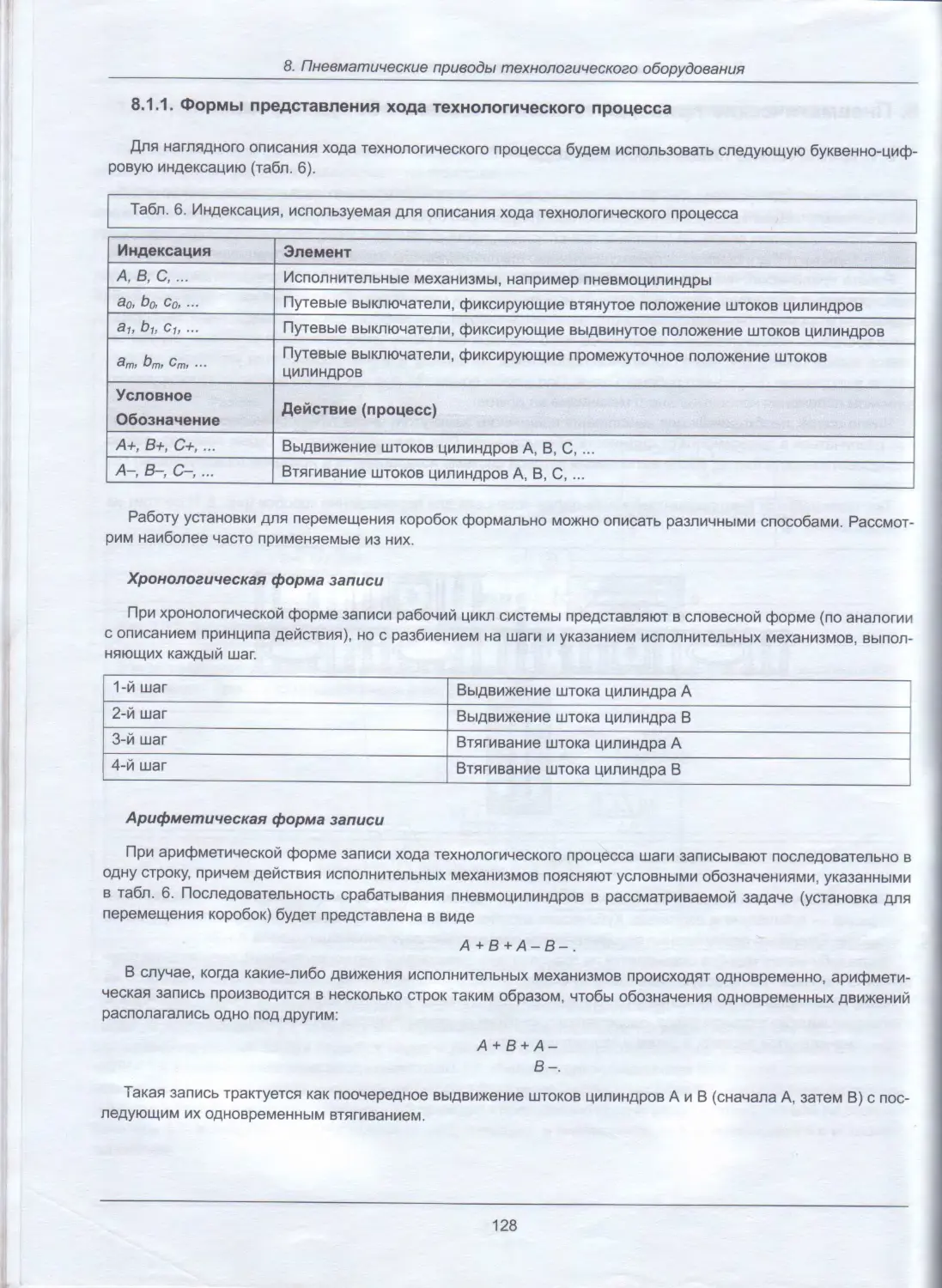
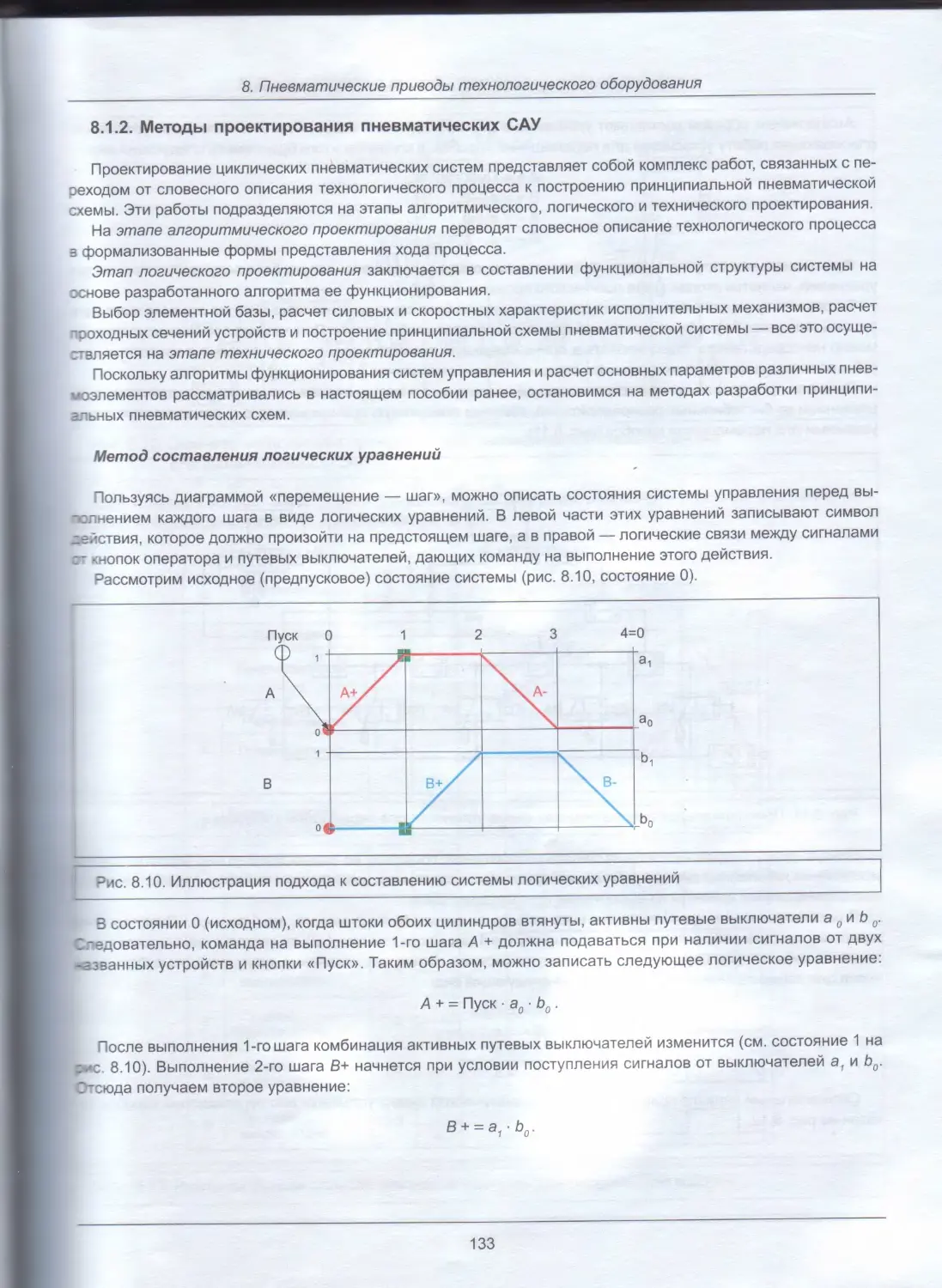
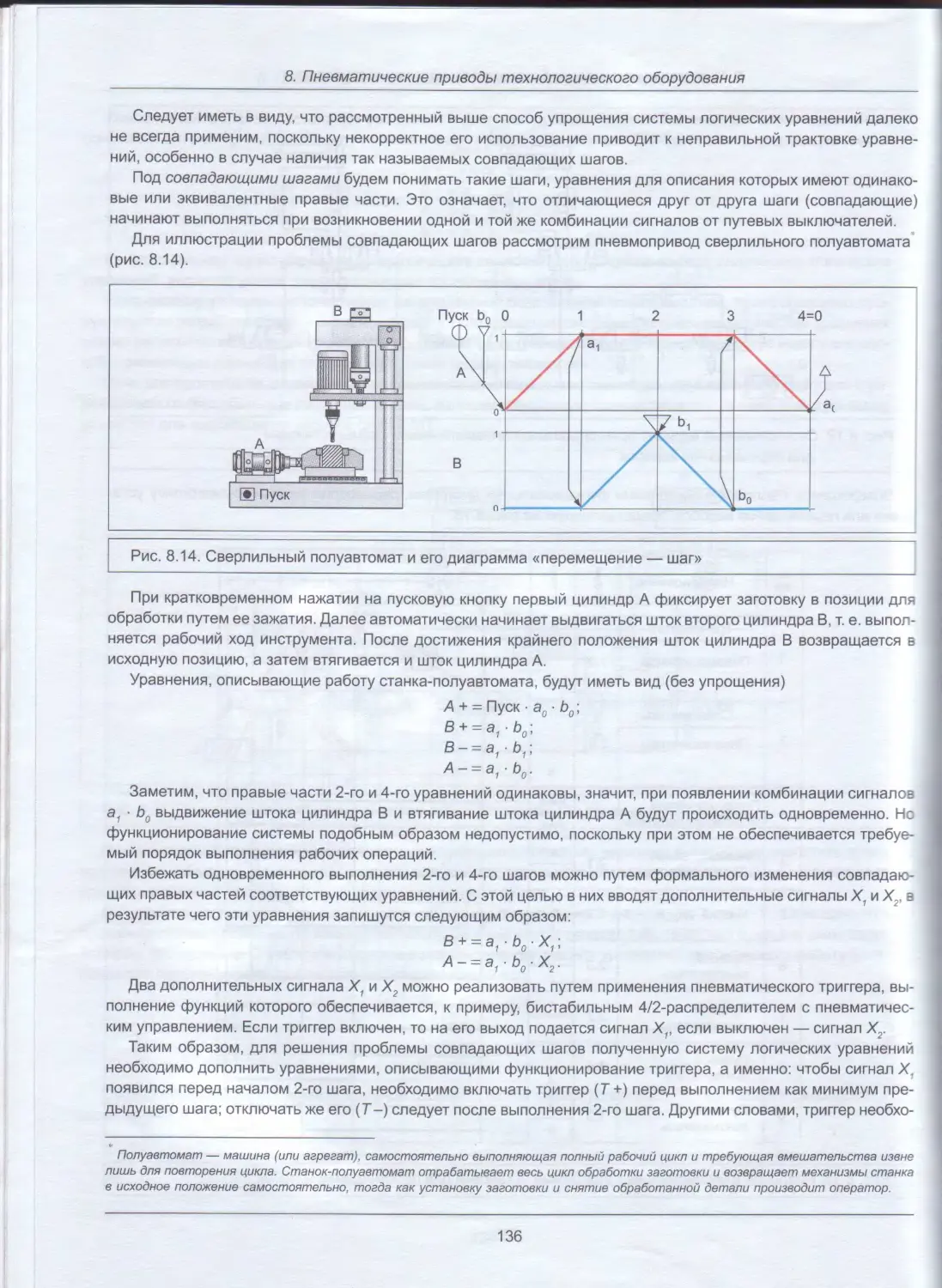
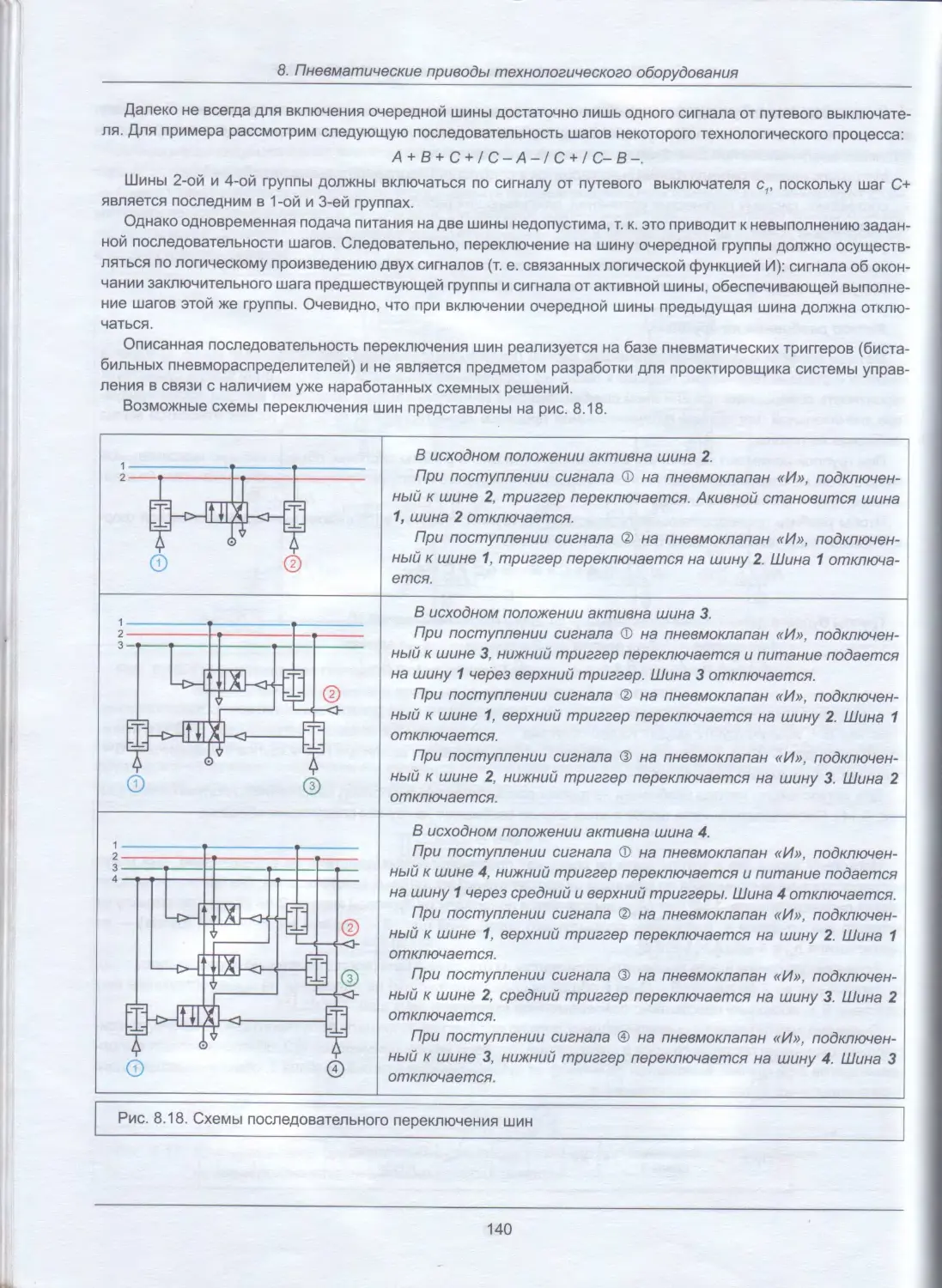
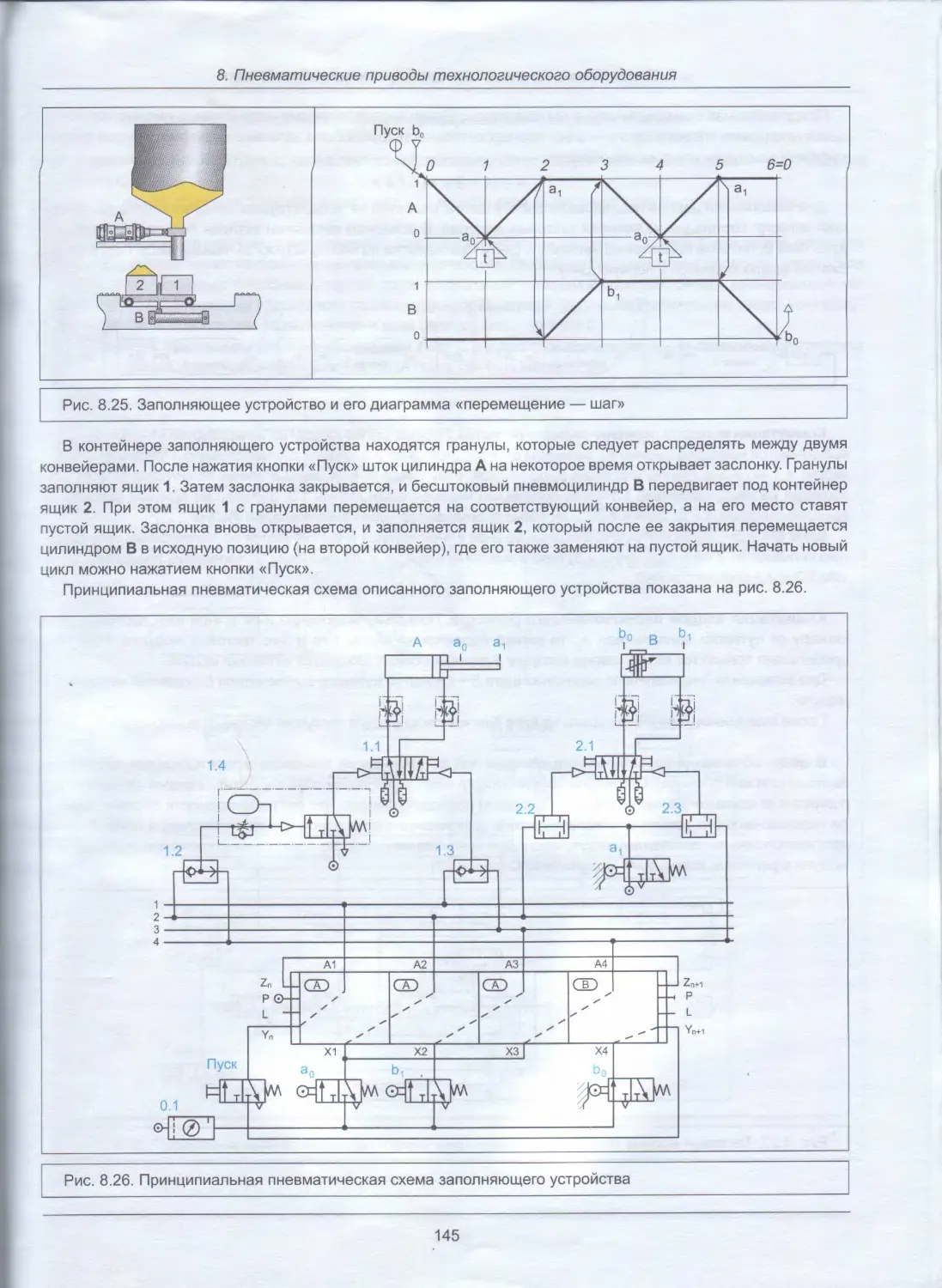
8.1. Циклические пневмосистемы хода...................................................127
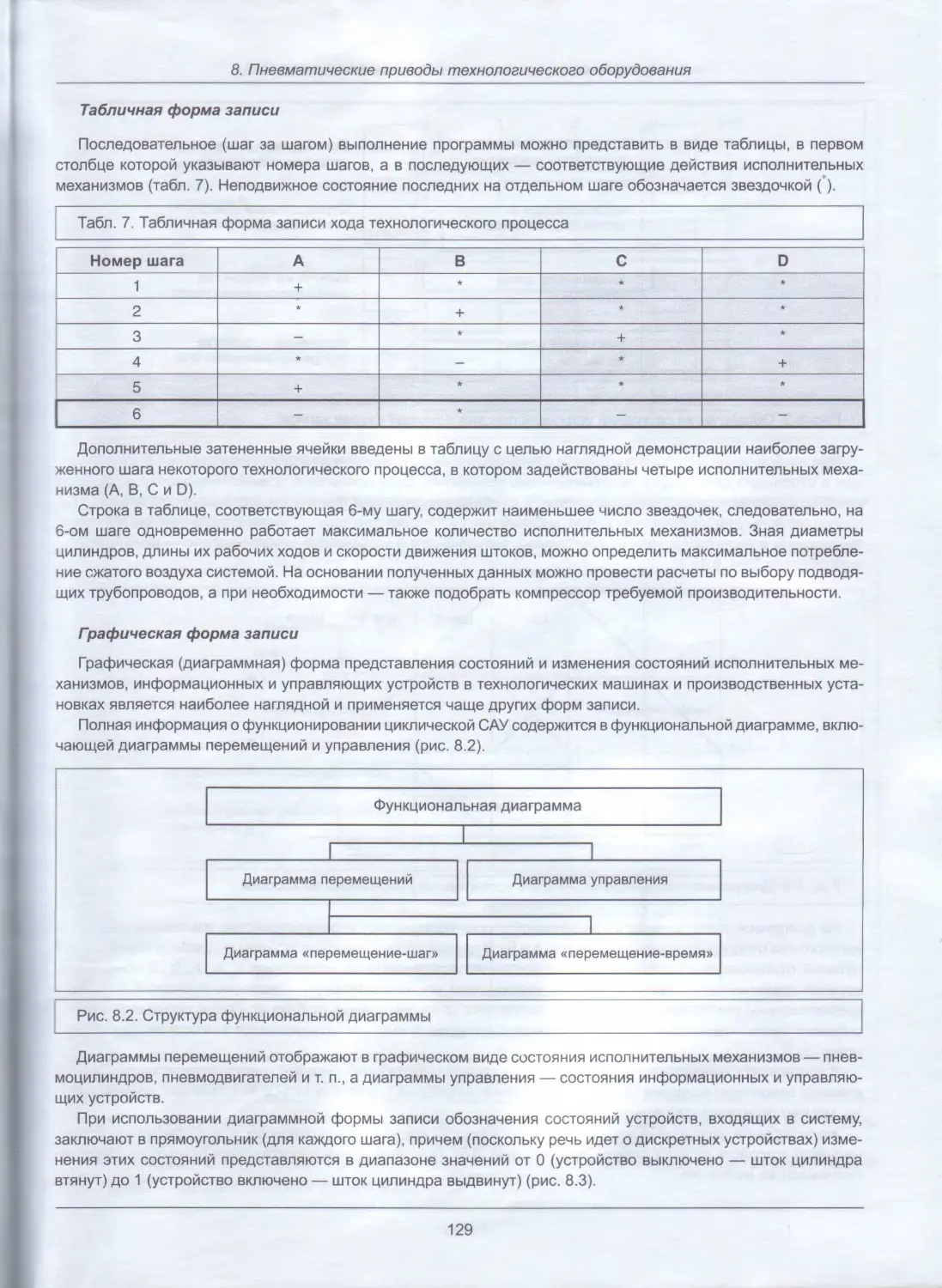
8.1.1. Формы представления хода технологического процесса....................... 128
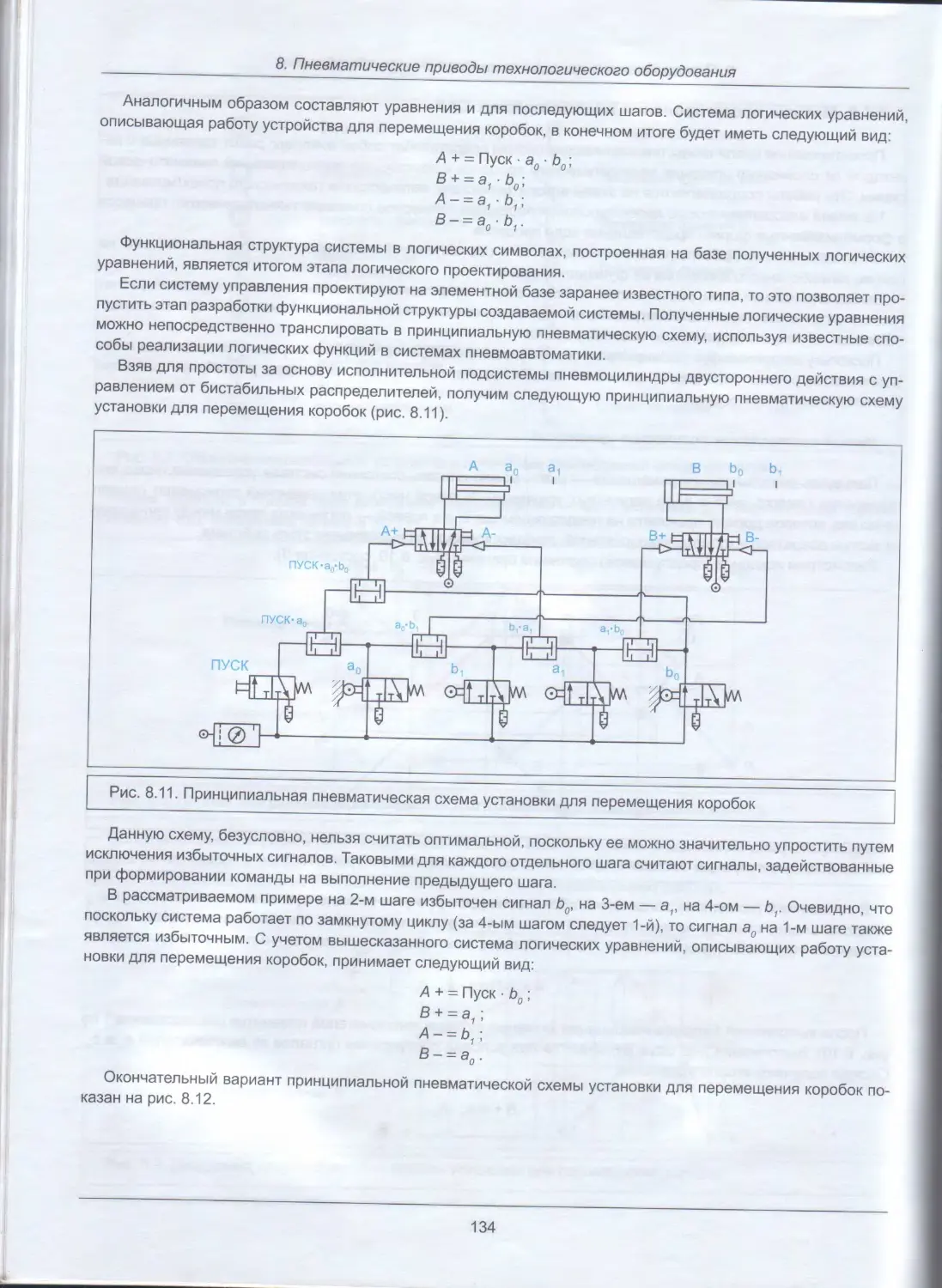
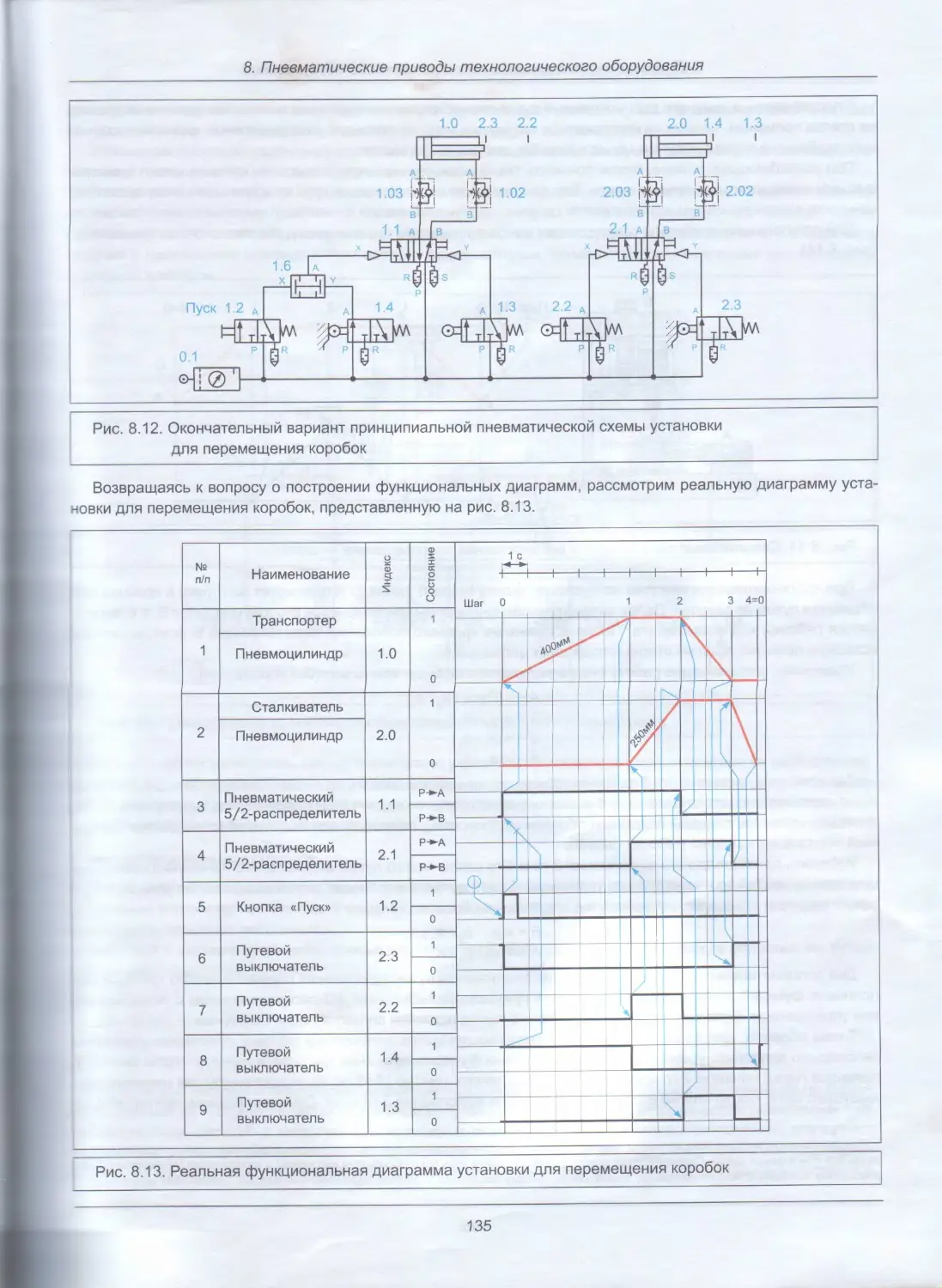
8.1.2. Методы проектирования пневматических САУ................................. 133
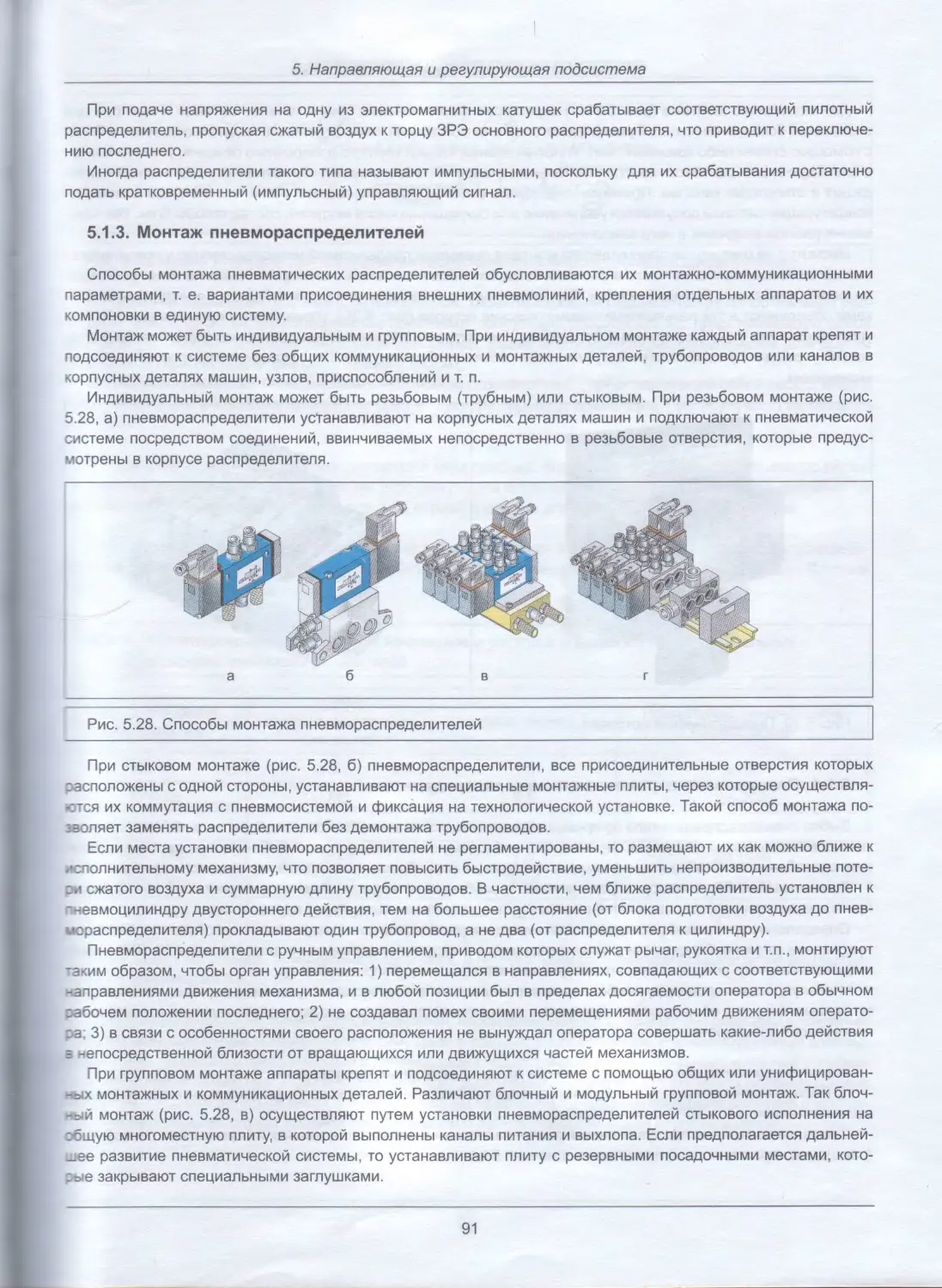
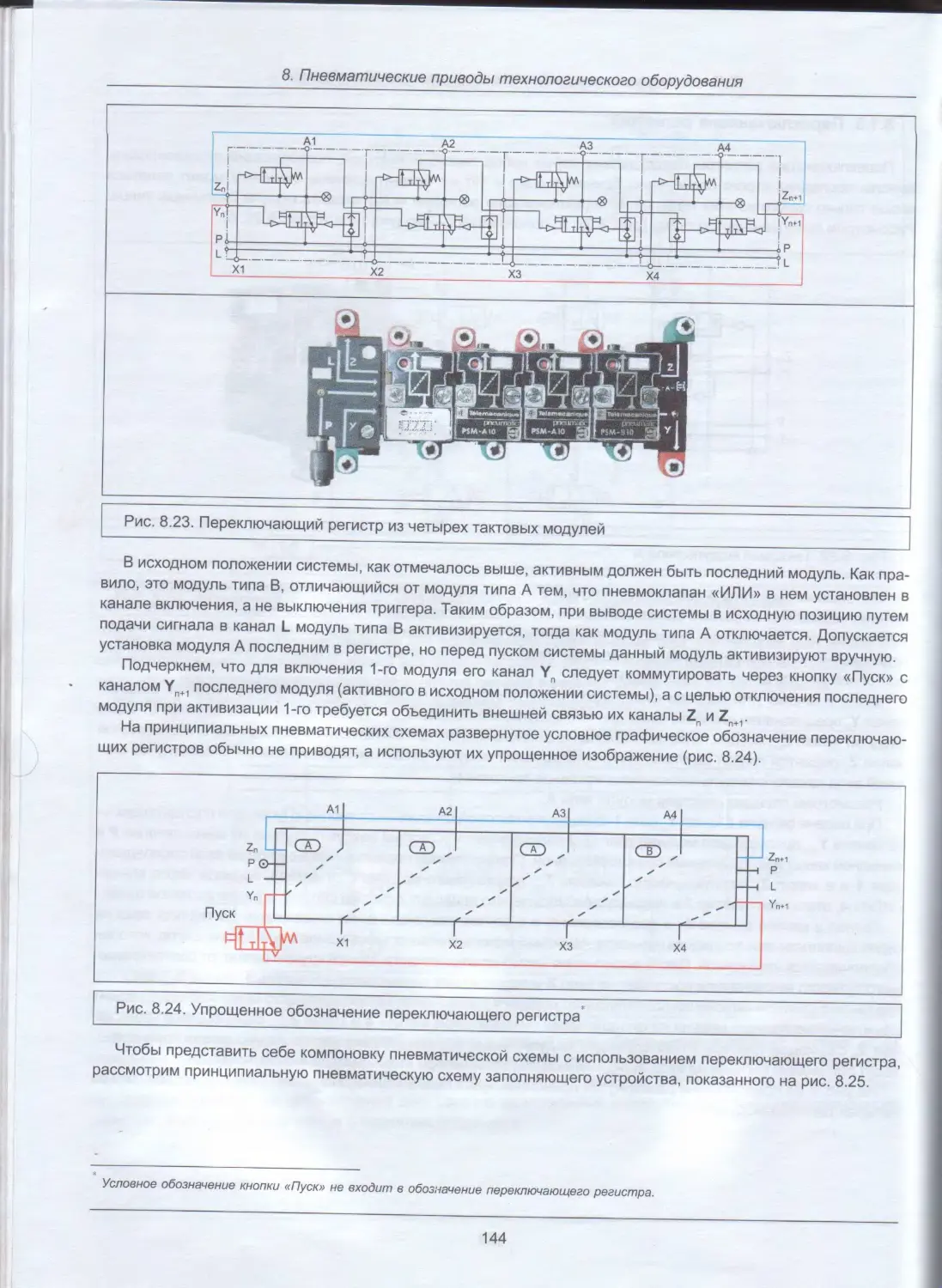
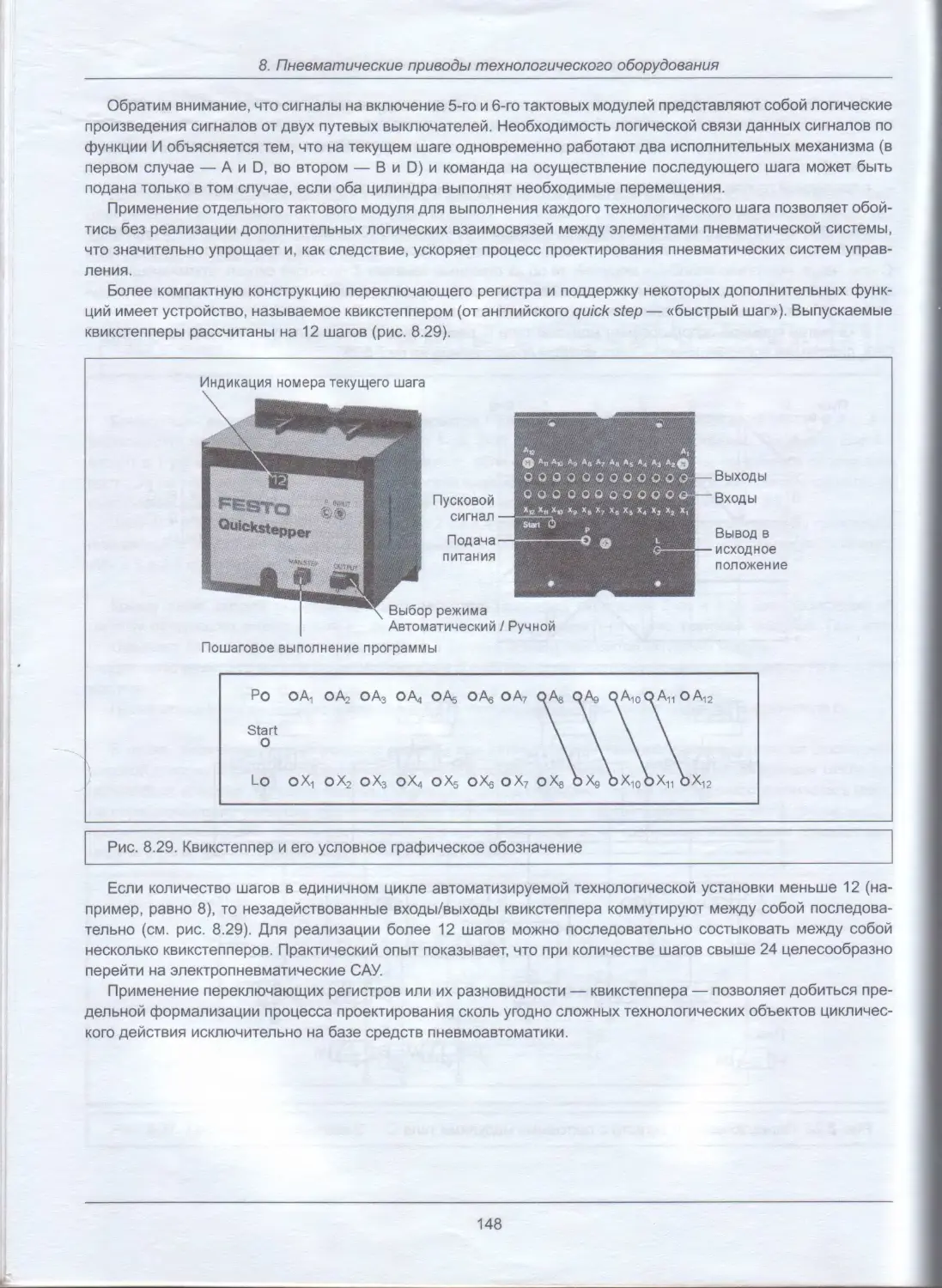
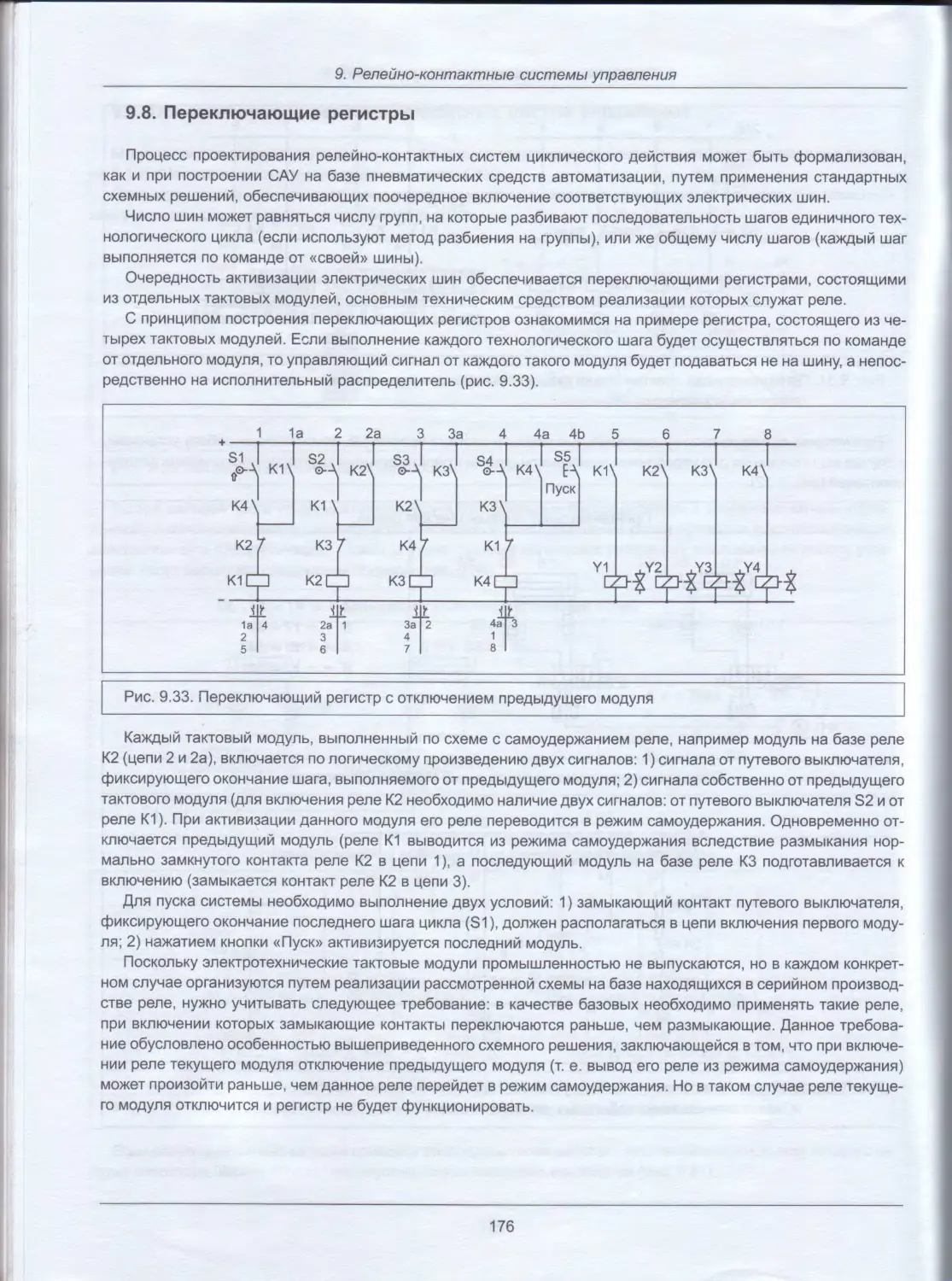
8.1.3. Переключающие регистры................................................... 143
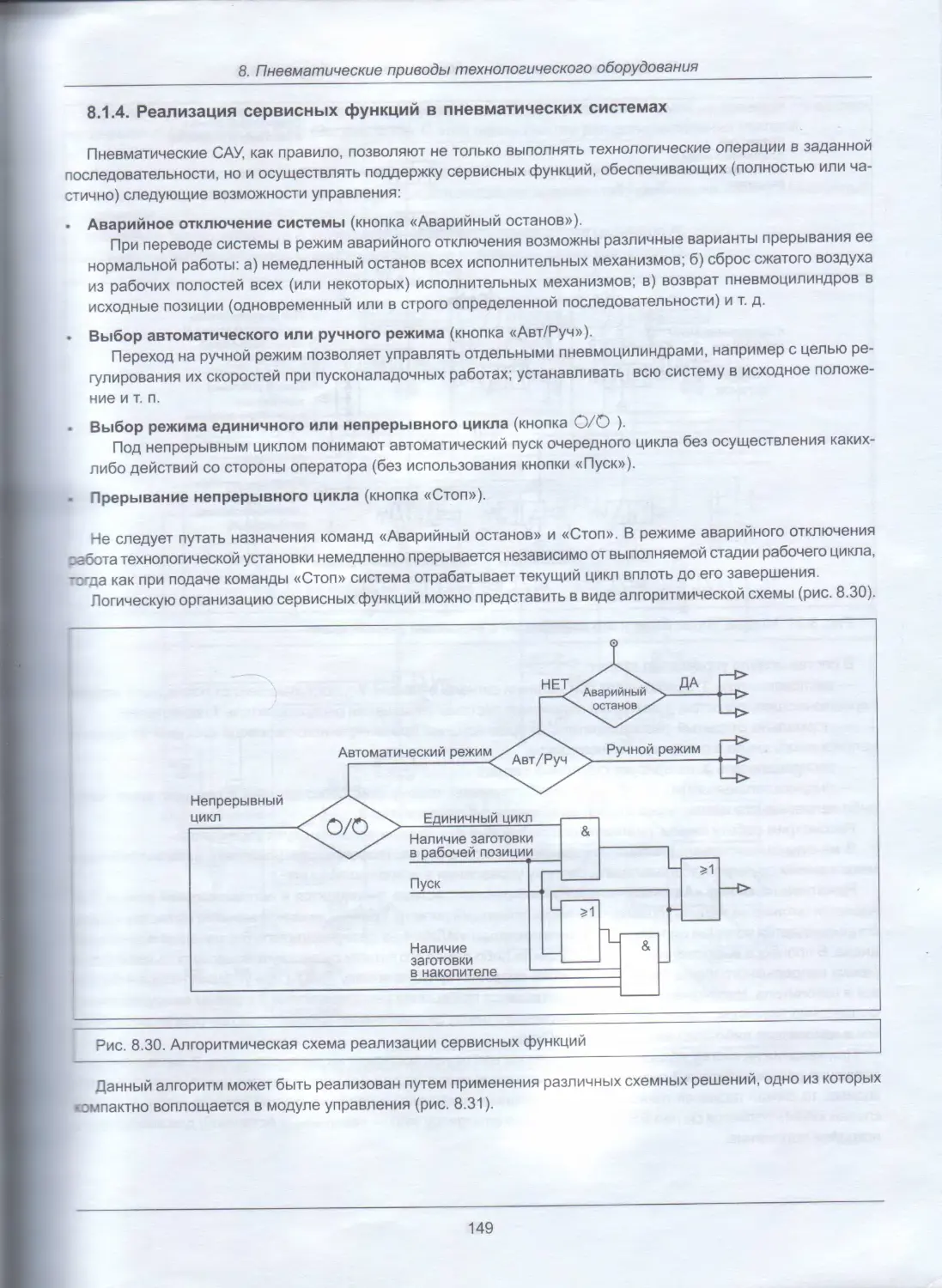
8.1.4. Реализация сервисных функций в пневматических системах................... 149
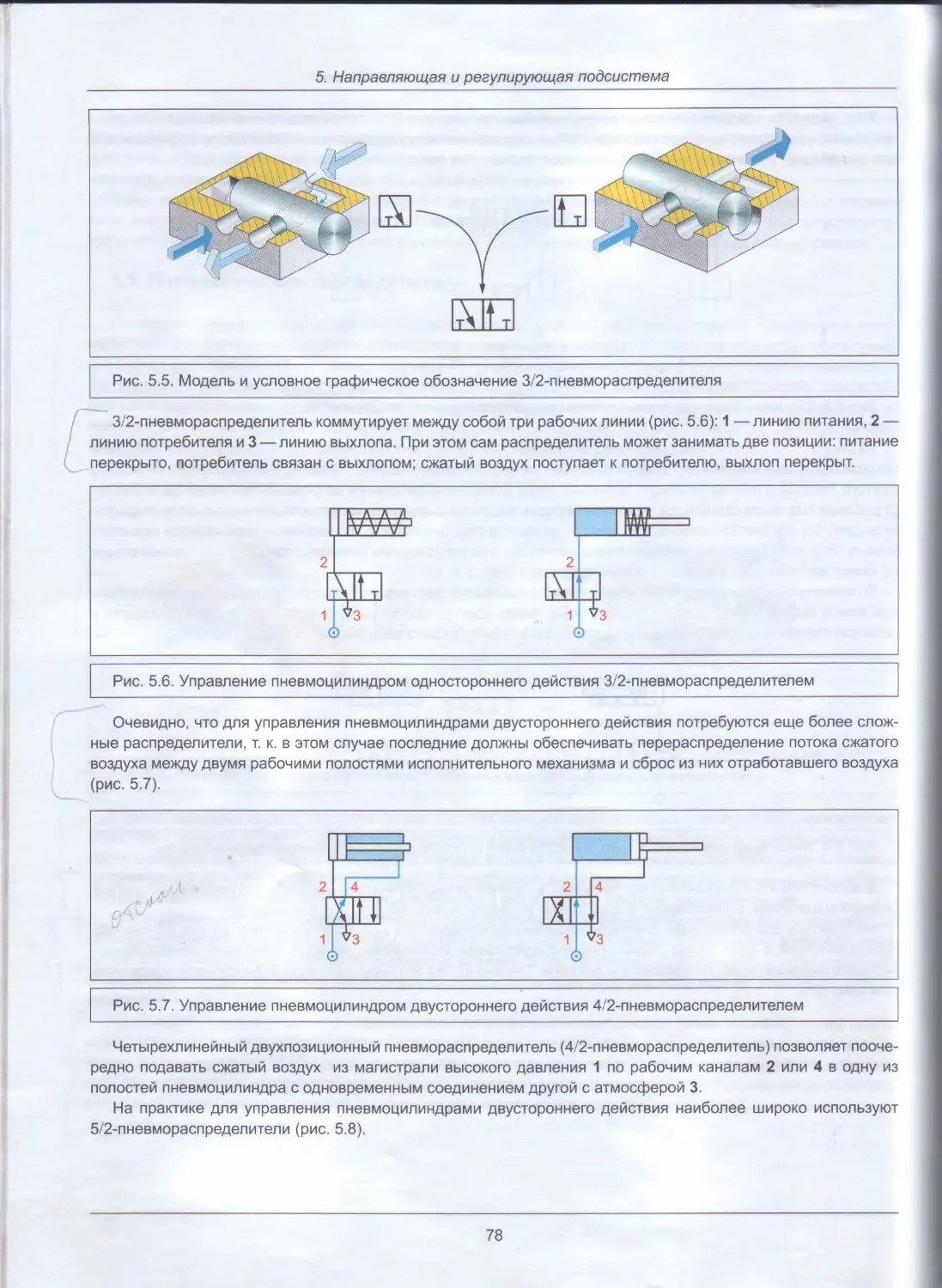
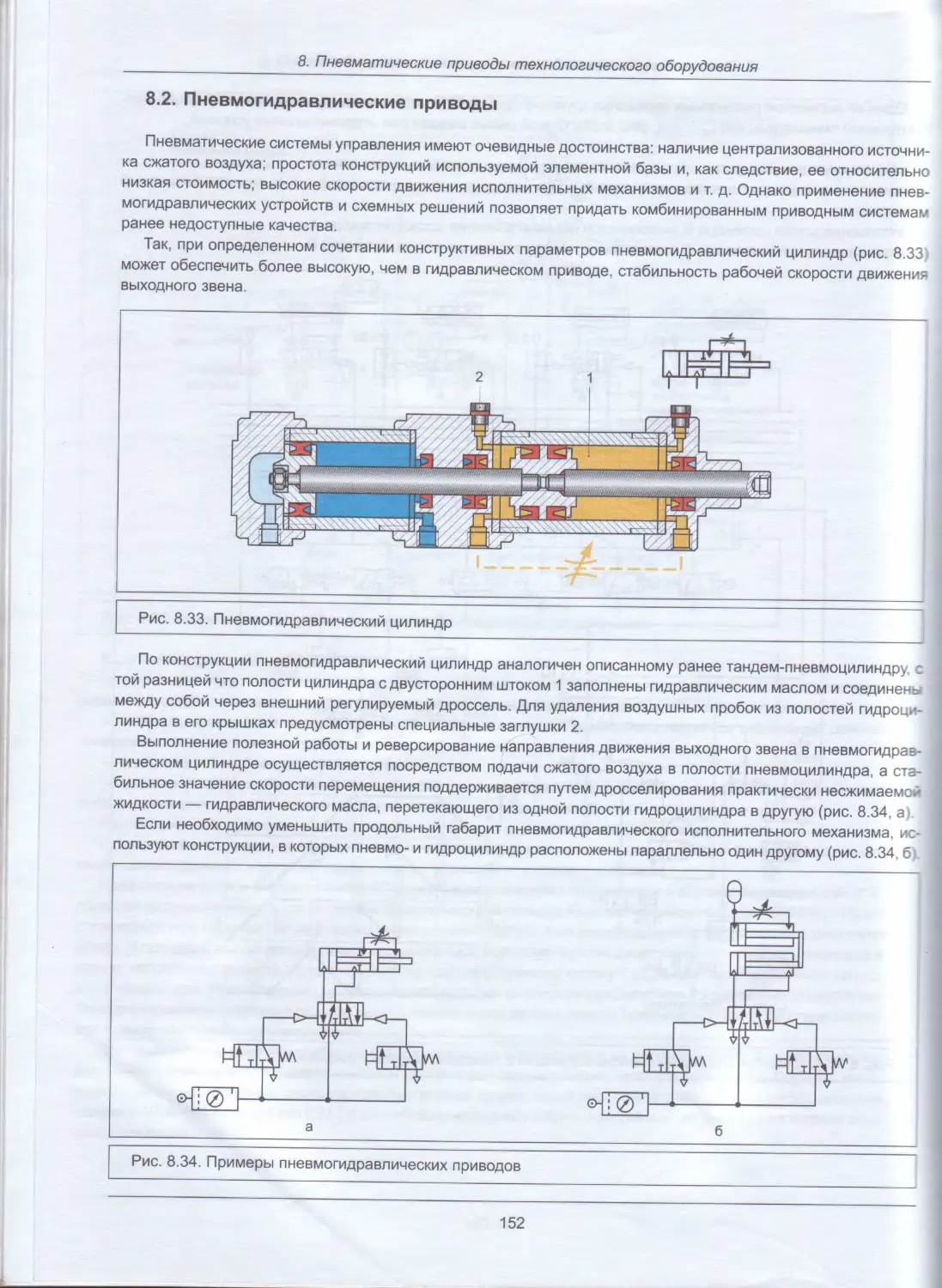
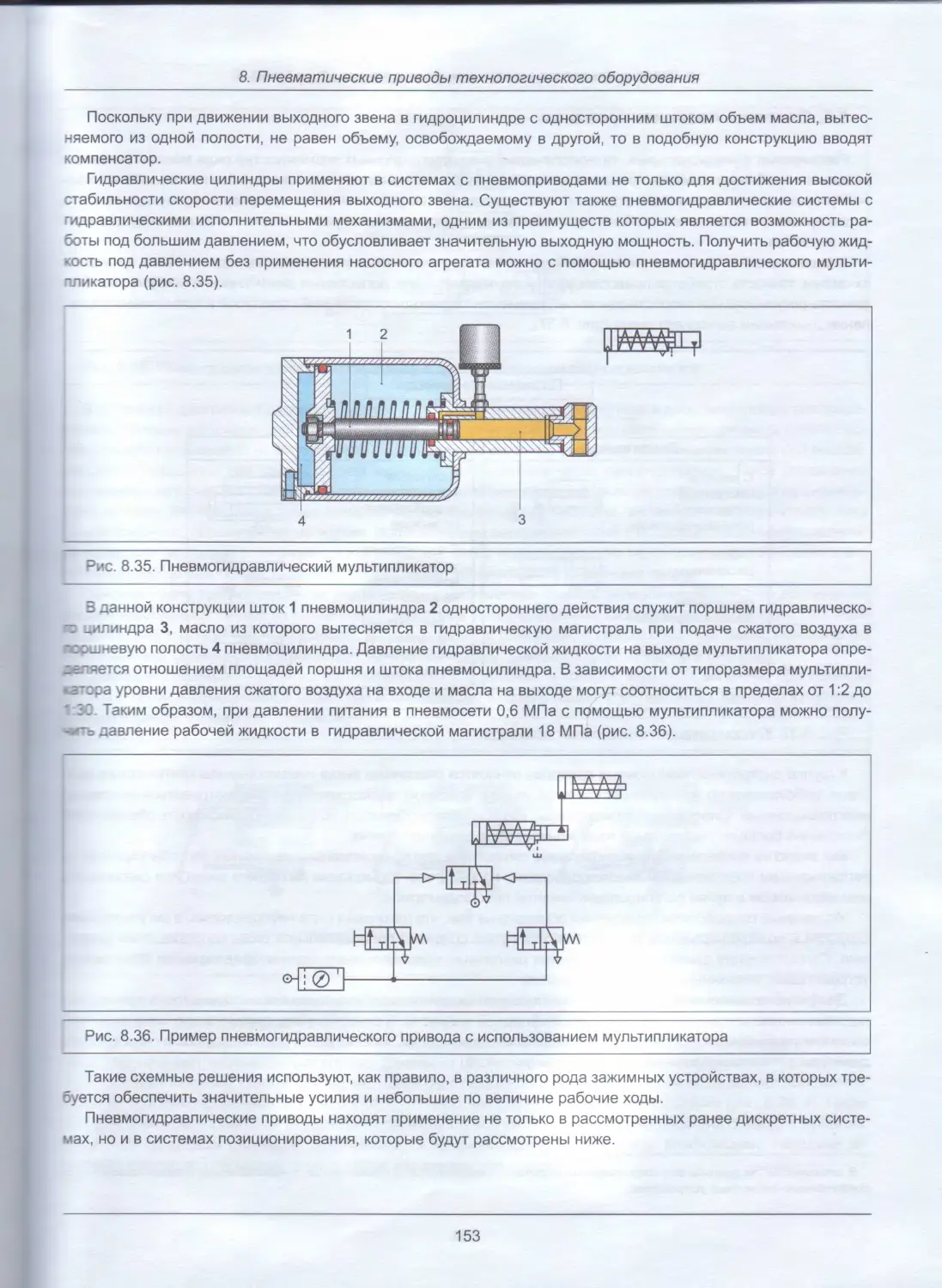
8.2. Пневмогидравлические приводы.....................................................152
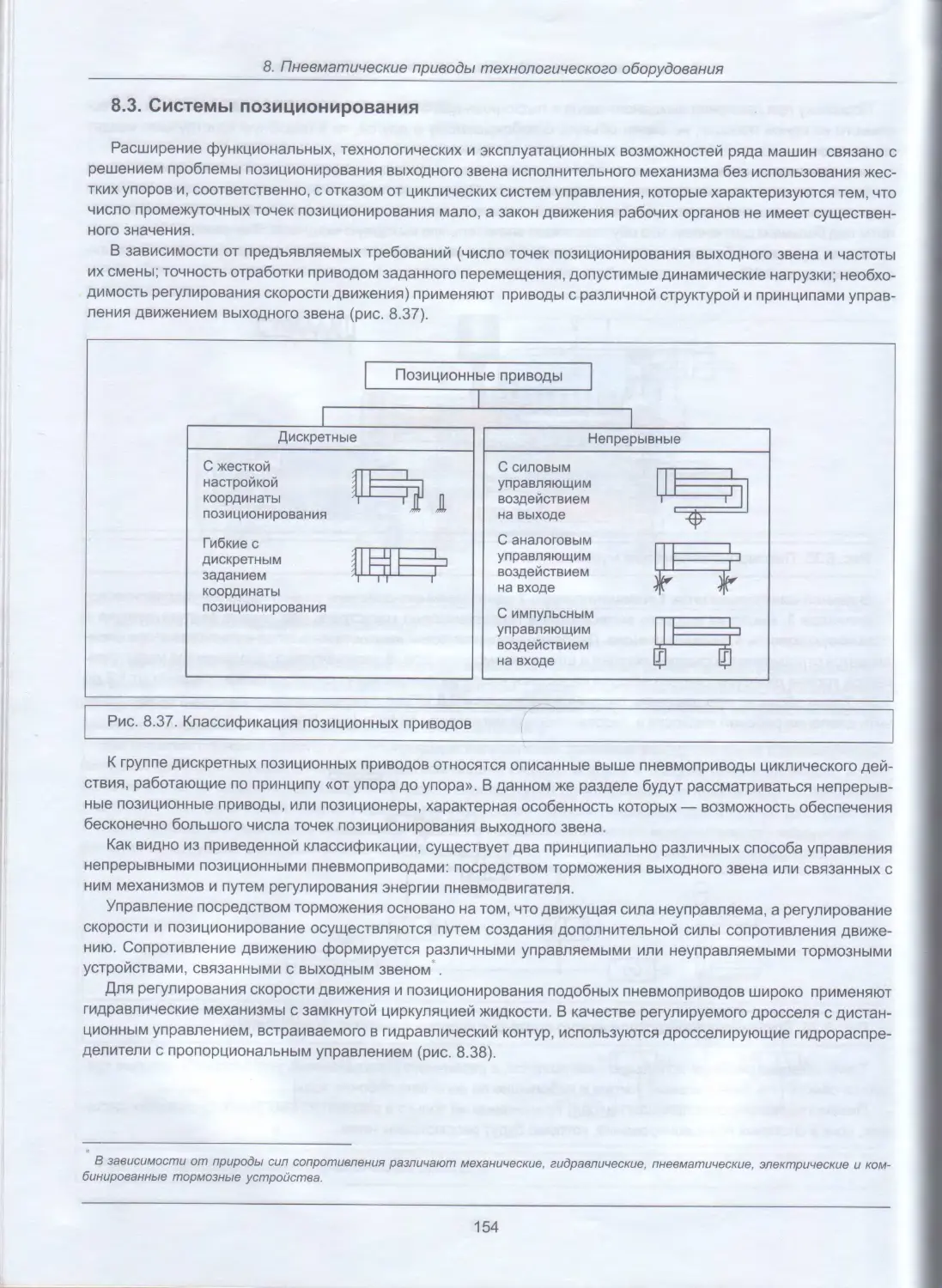
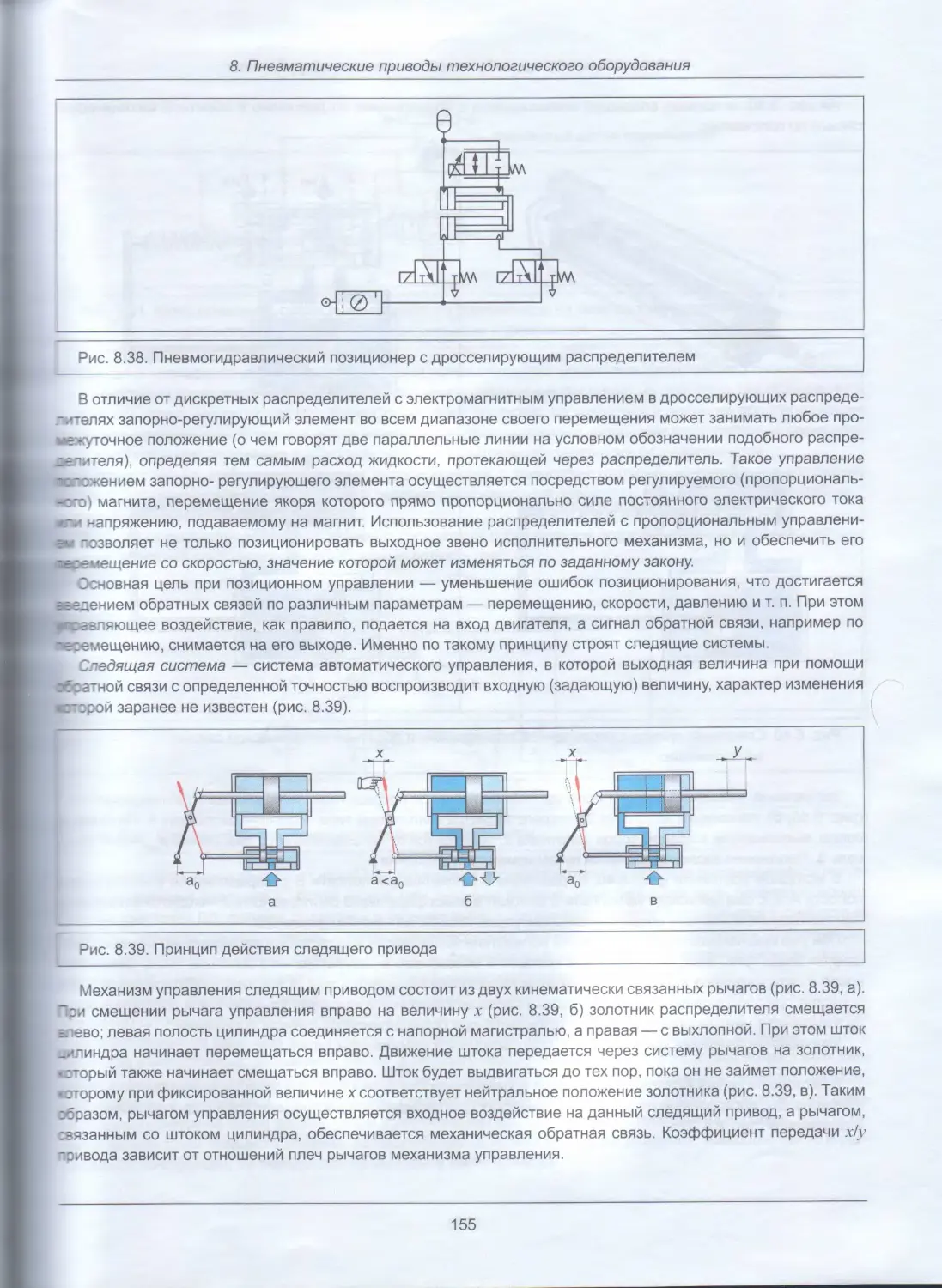
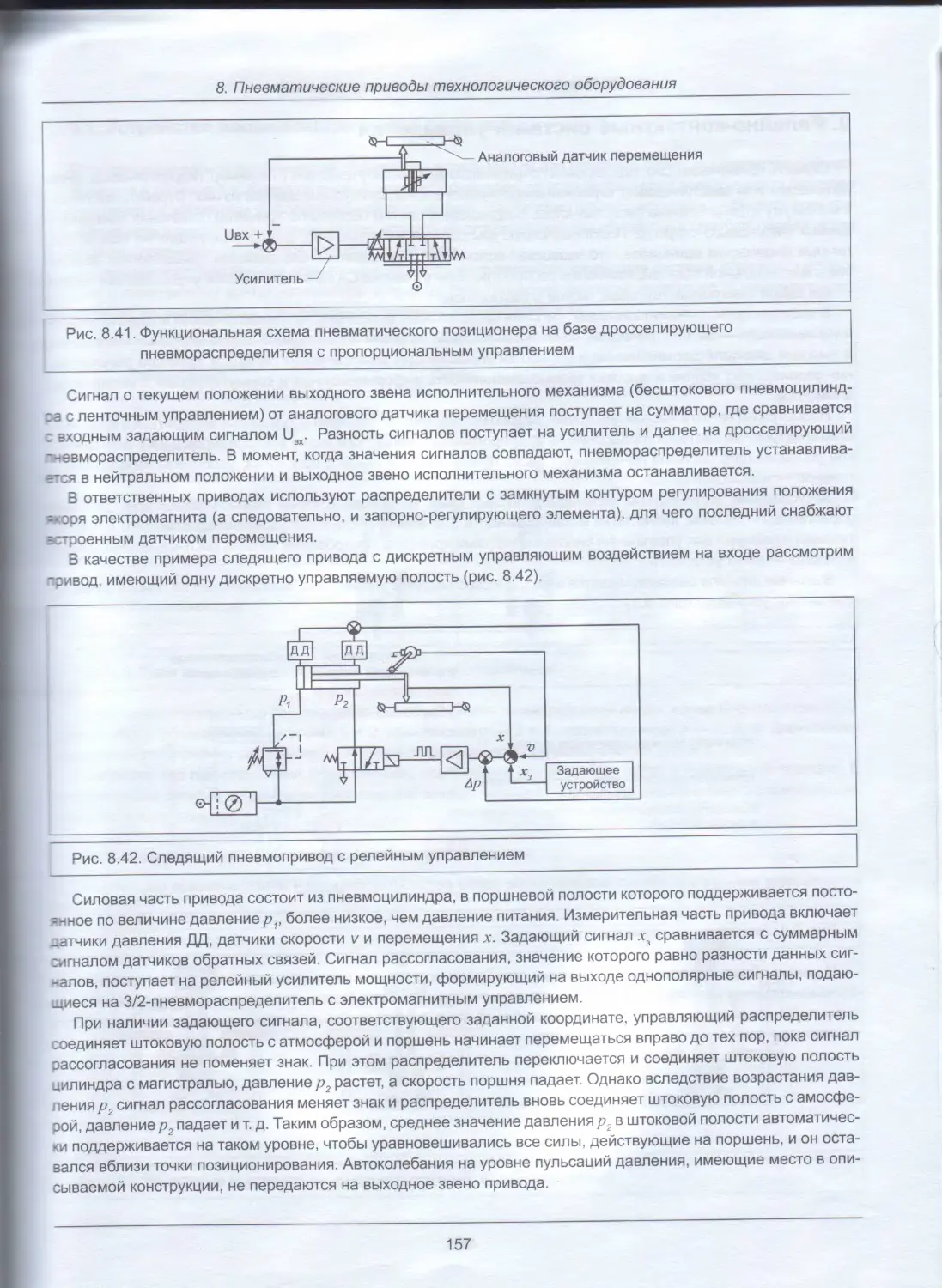
8.3. Системы позиционирования.........................................................154
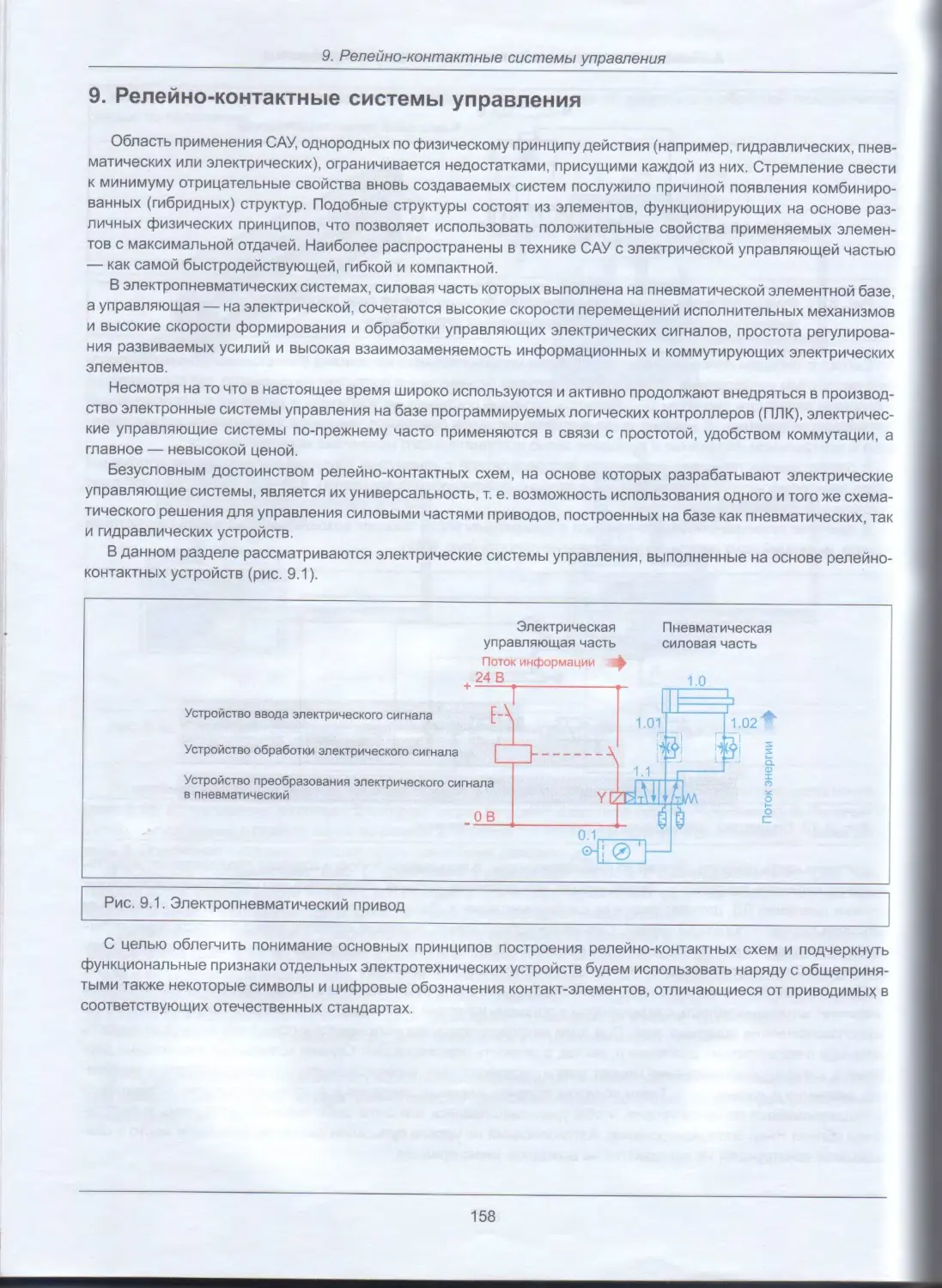
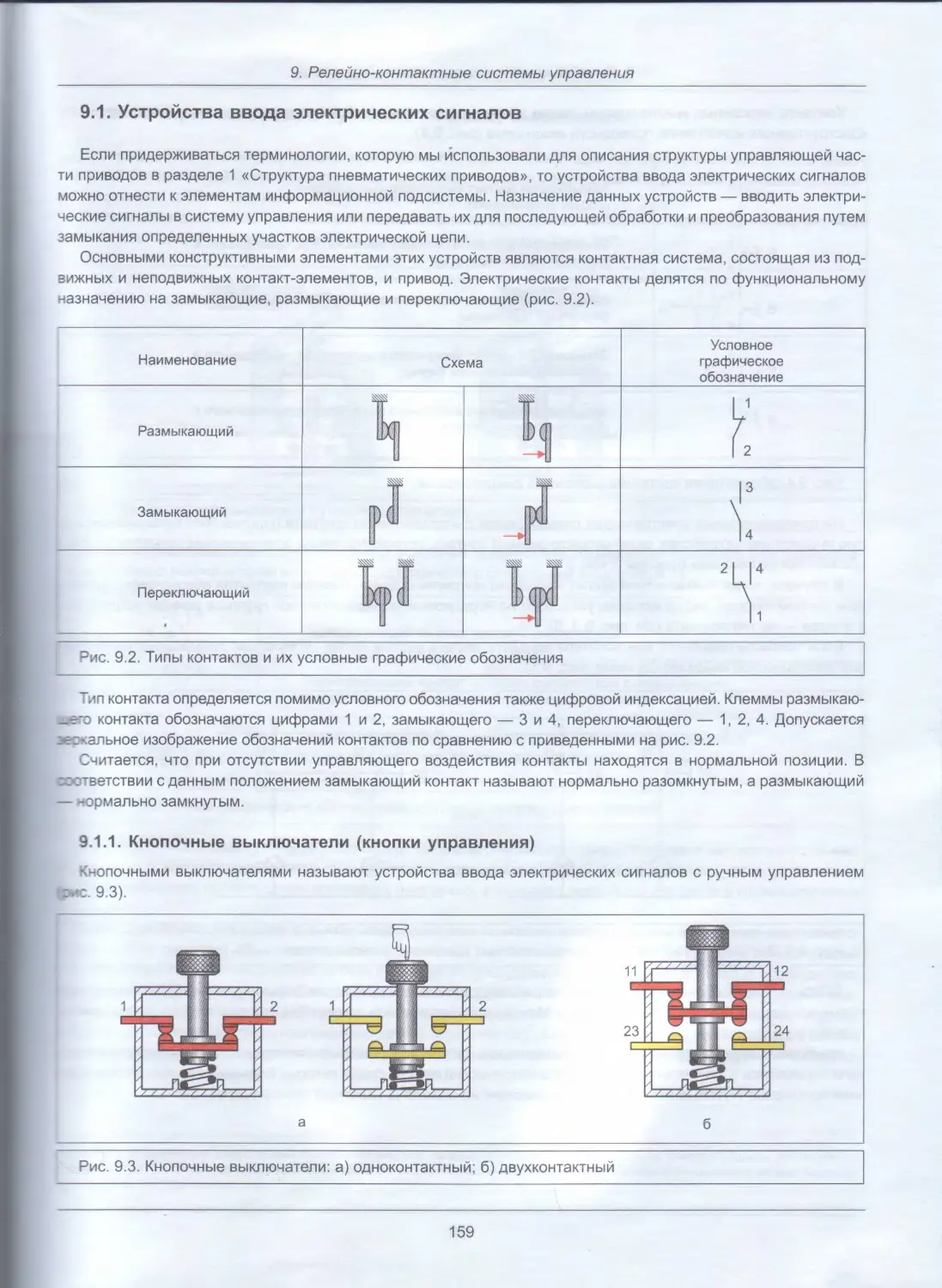
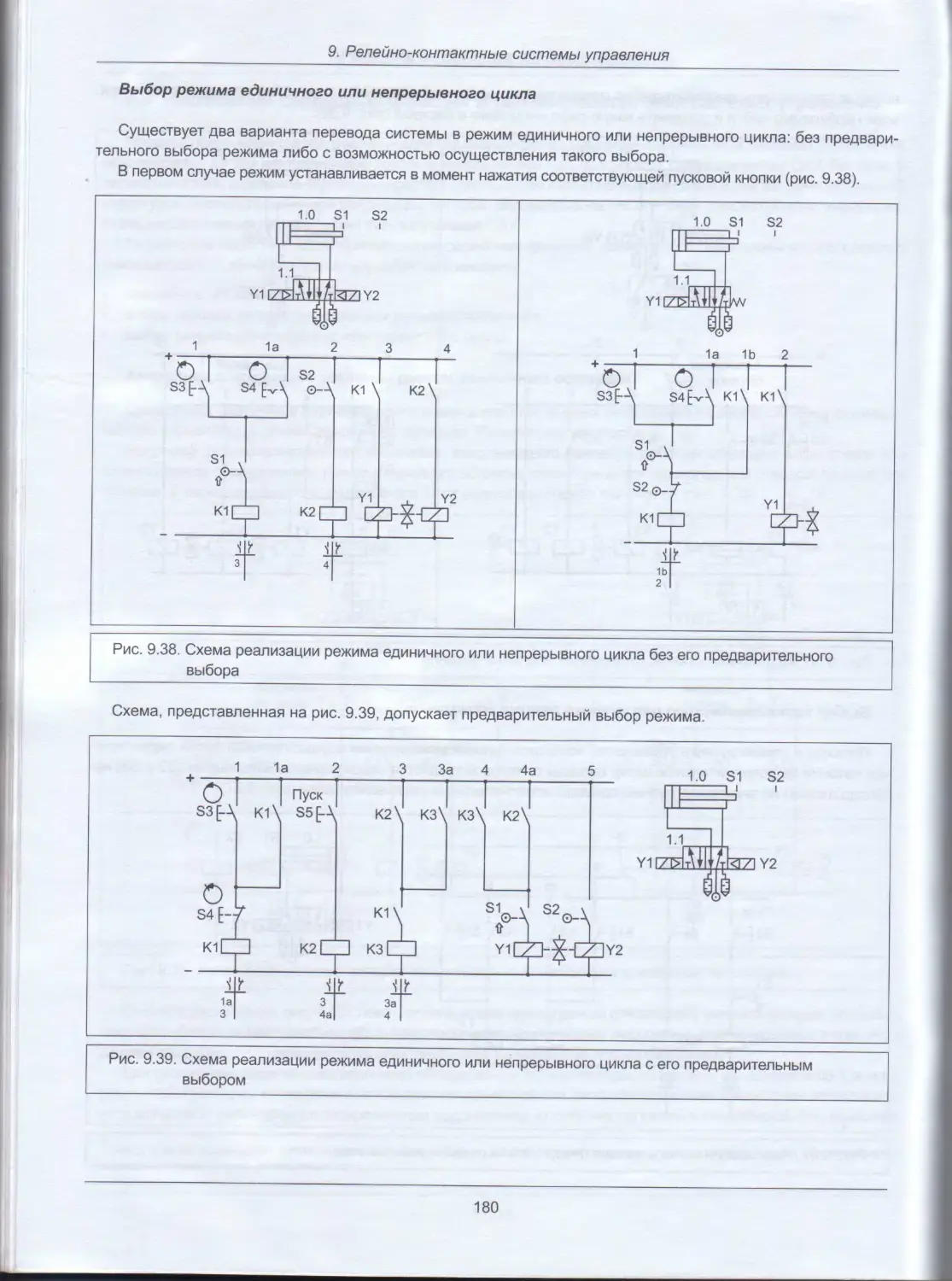
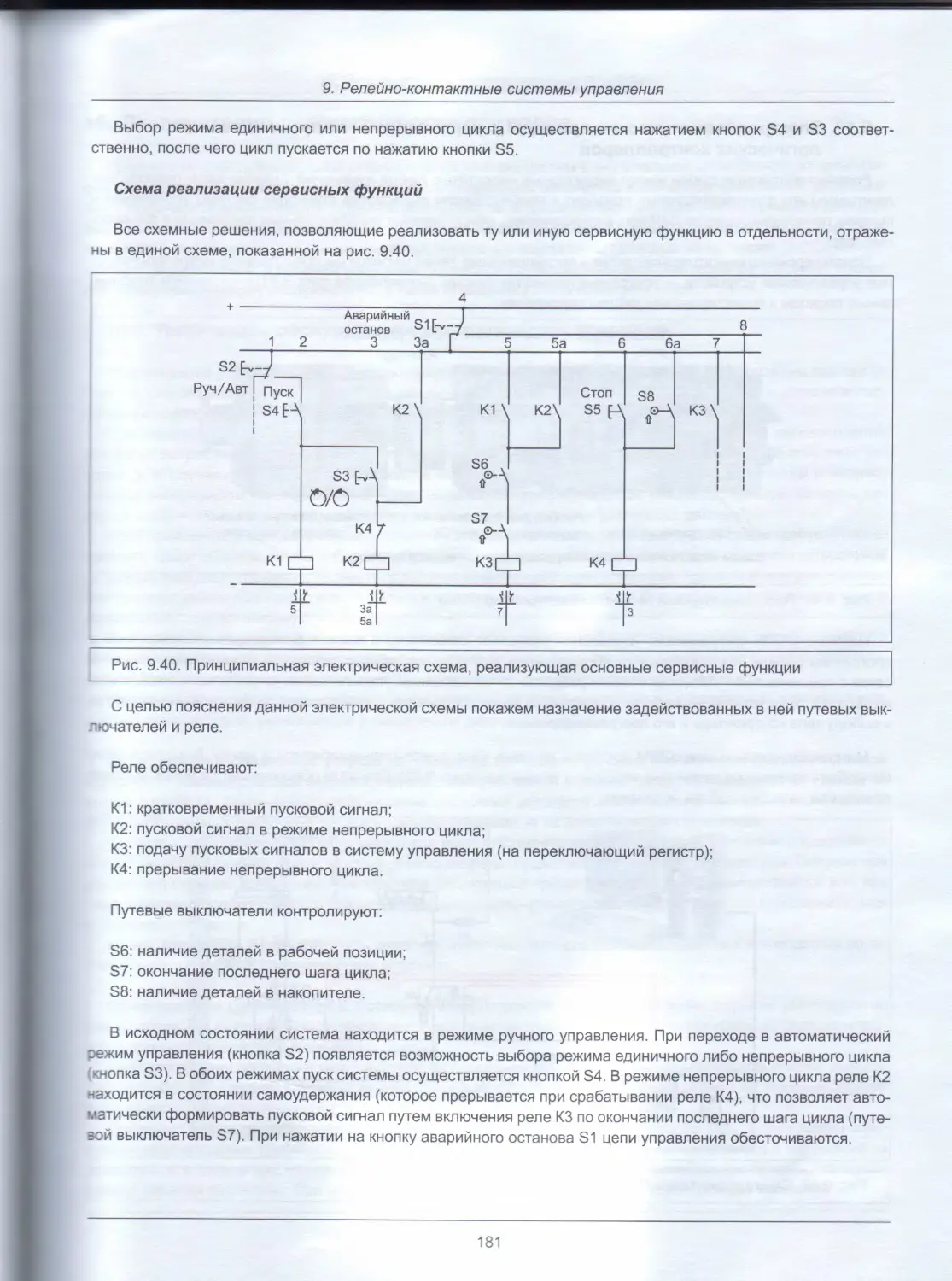
9. Релейно-контактные системы управления....................................................15»
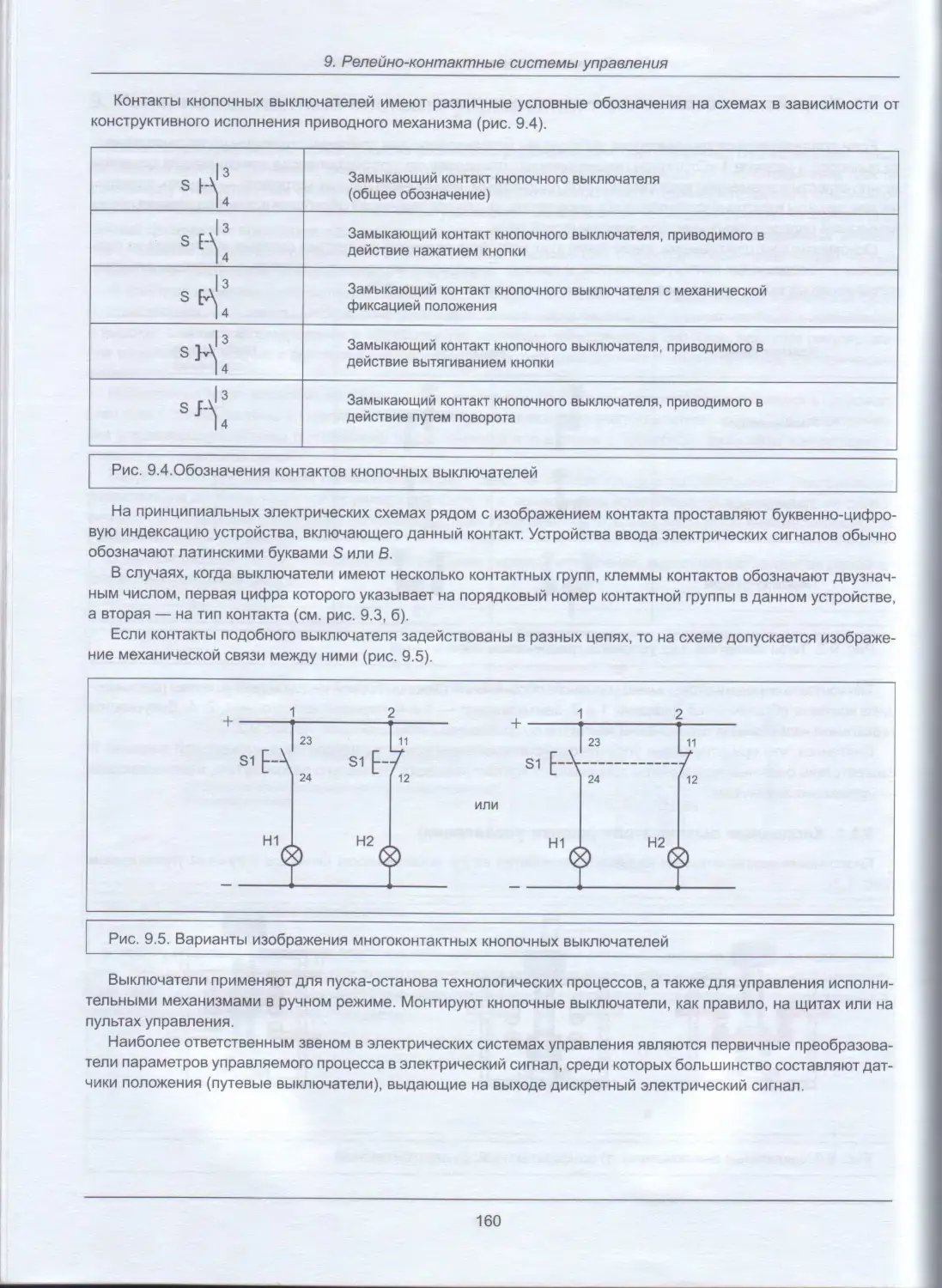
9.1. Устройства ввода электрических сигналов..........................................159
9.1.1. Кнопочные выключатели (кнопки управления)................................ 159
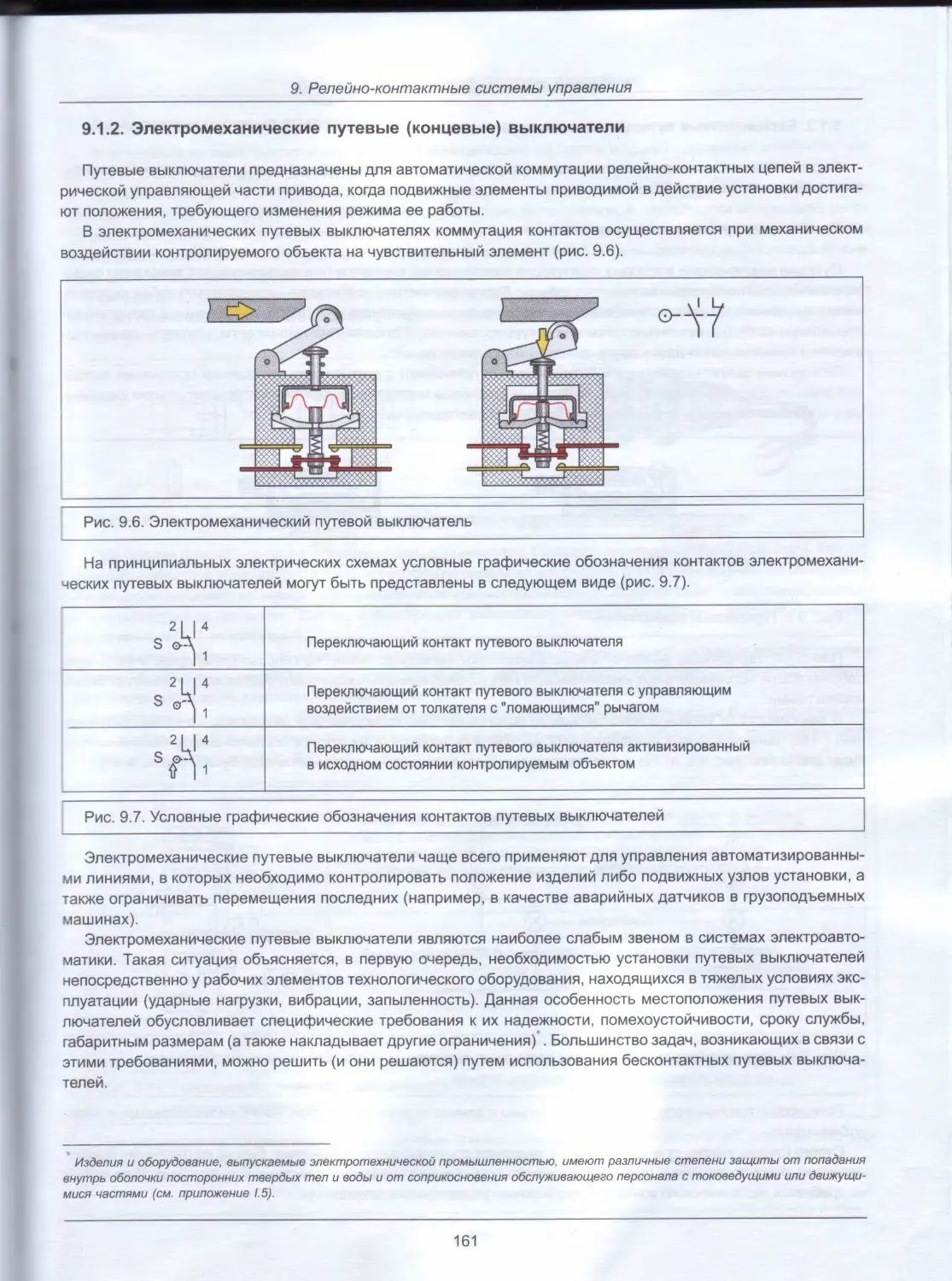
9.1.2. Электромеханические путевые (концевые) выключатели....................... 16'
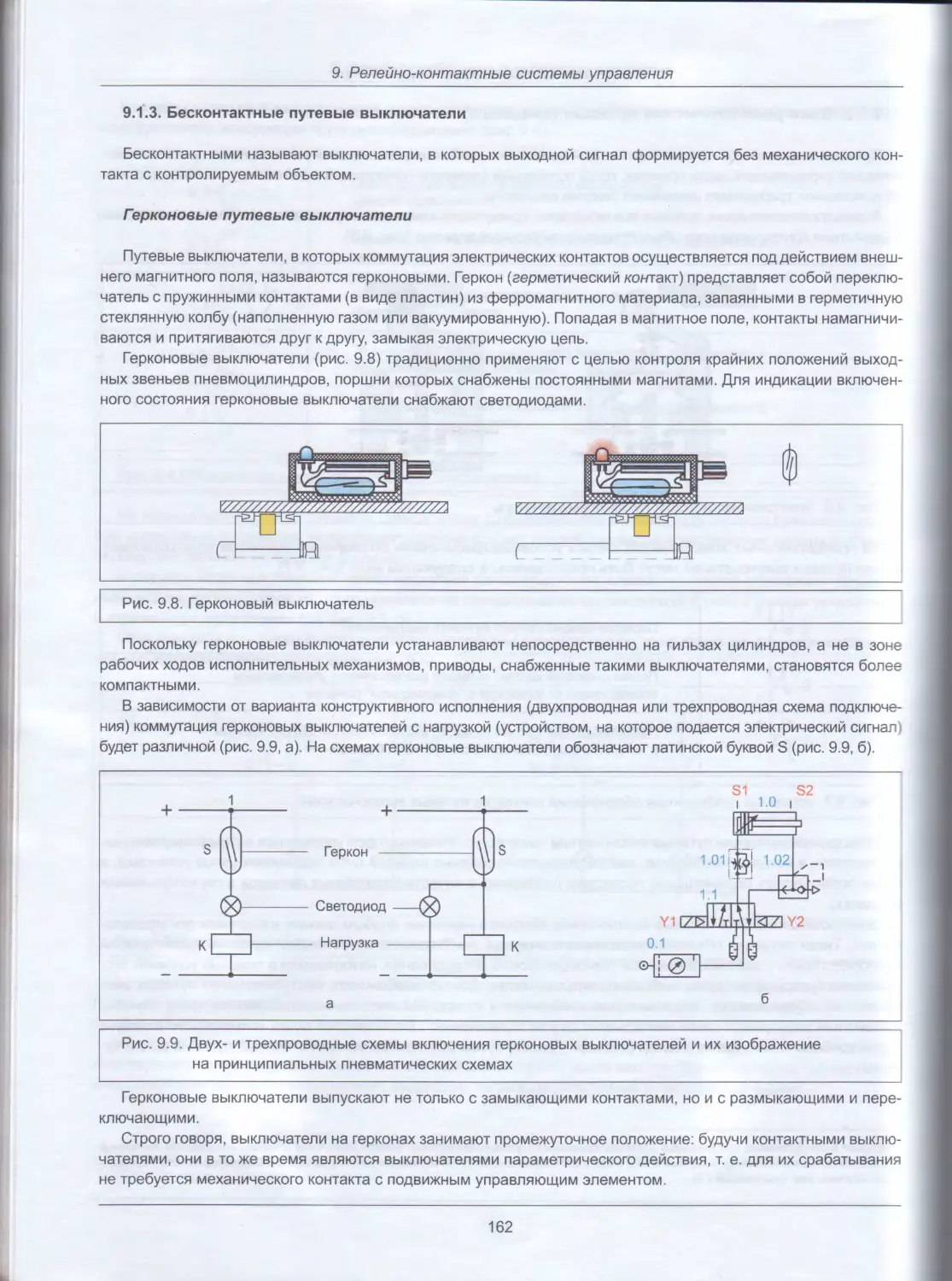
9.1.3. Бесконтактные путевые выключатели........................................ 162
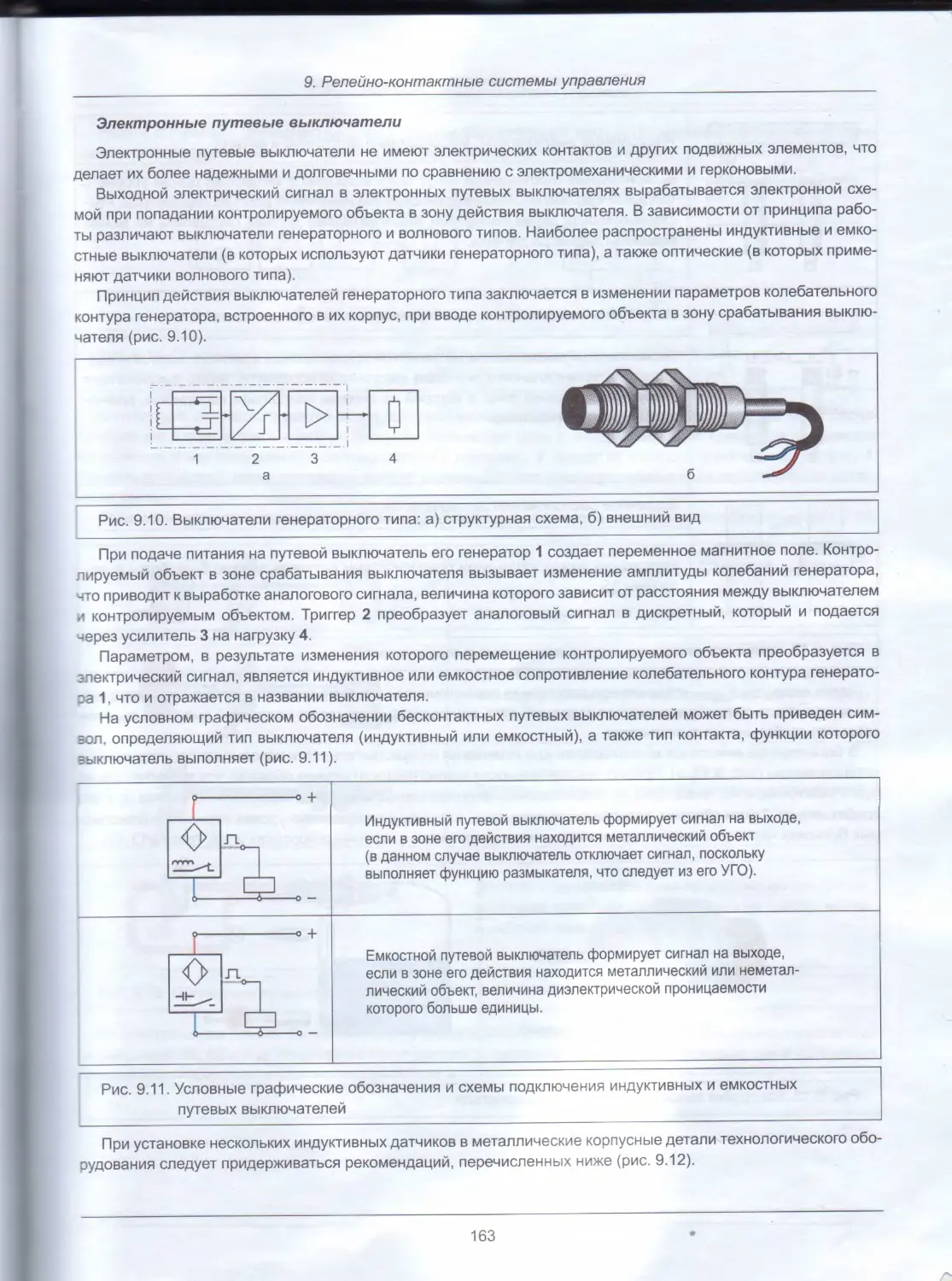
9.1.4. Электронные бесконтактные путевые выключатели............................ 163
9.2. Устройства обработки электрических сигналов......................................166
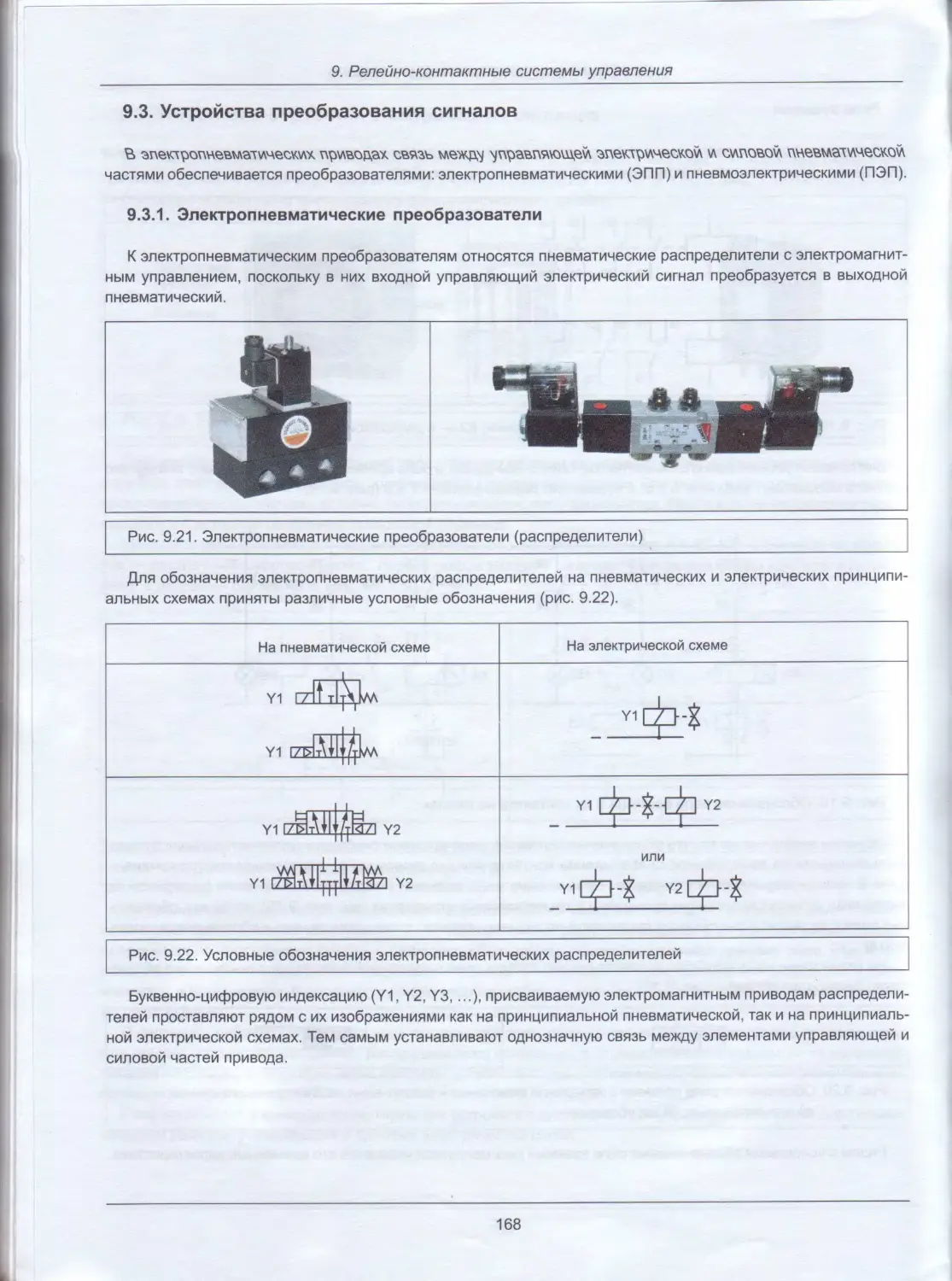
9.3. Устройства преобразования сигналов...............................................168
9.3.1. Электропневматические преобразователи.................................... 168
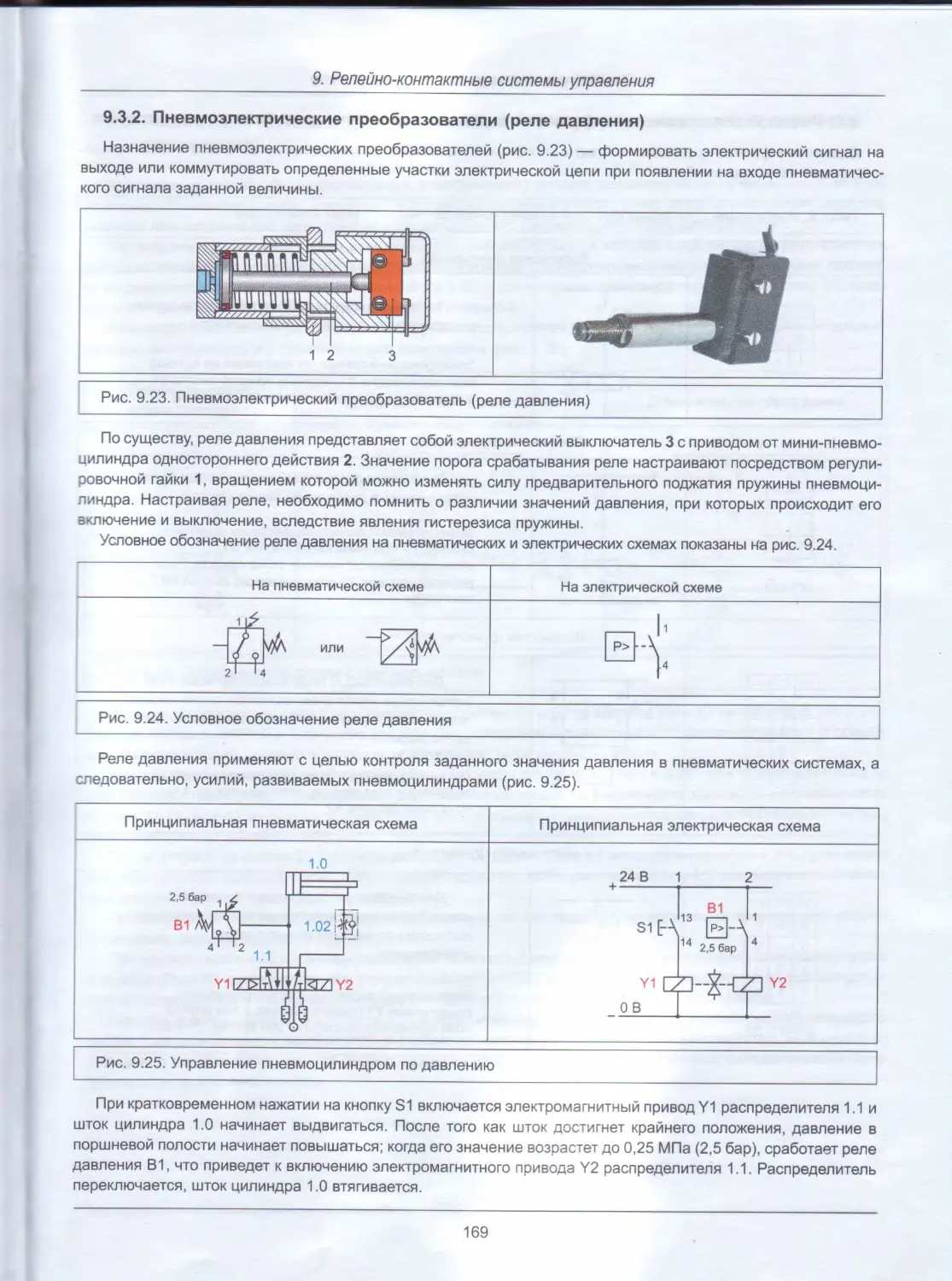
9.3.2. Пневмоэлектрические преобразователи (реле давления)...................... 169
4
Содержание
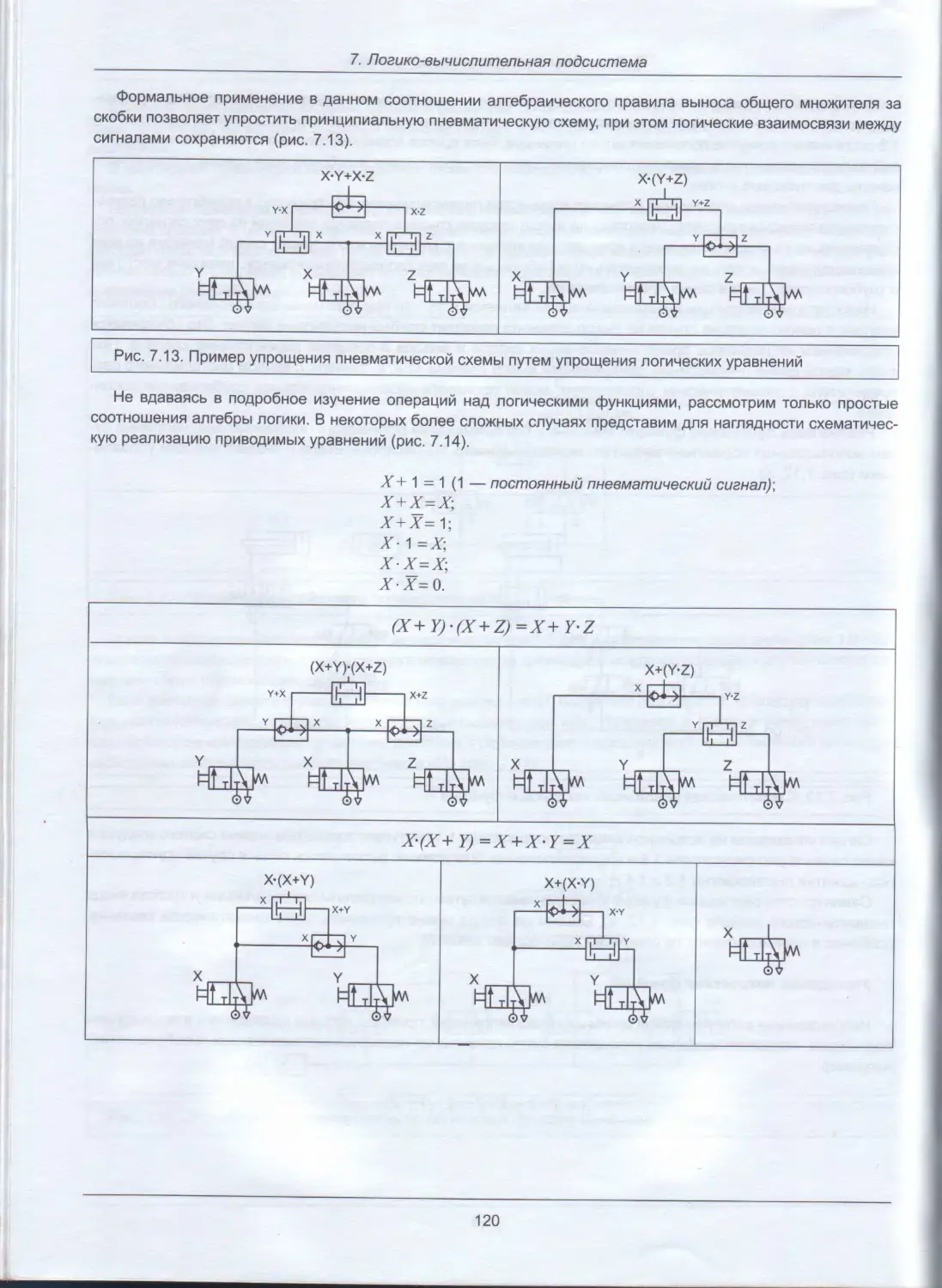
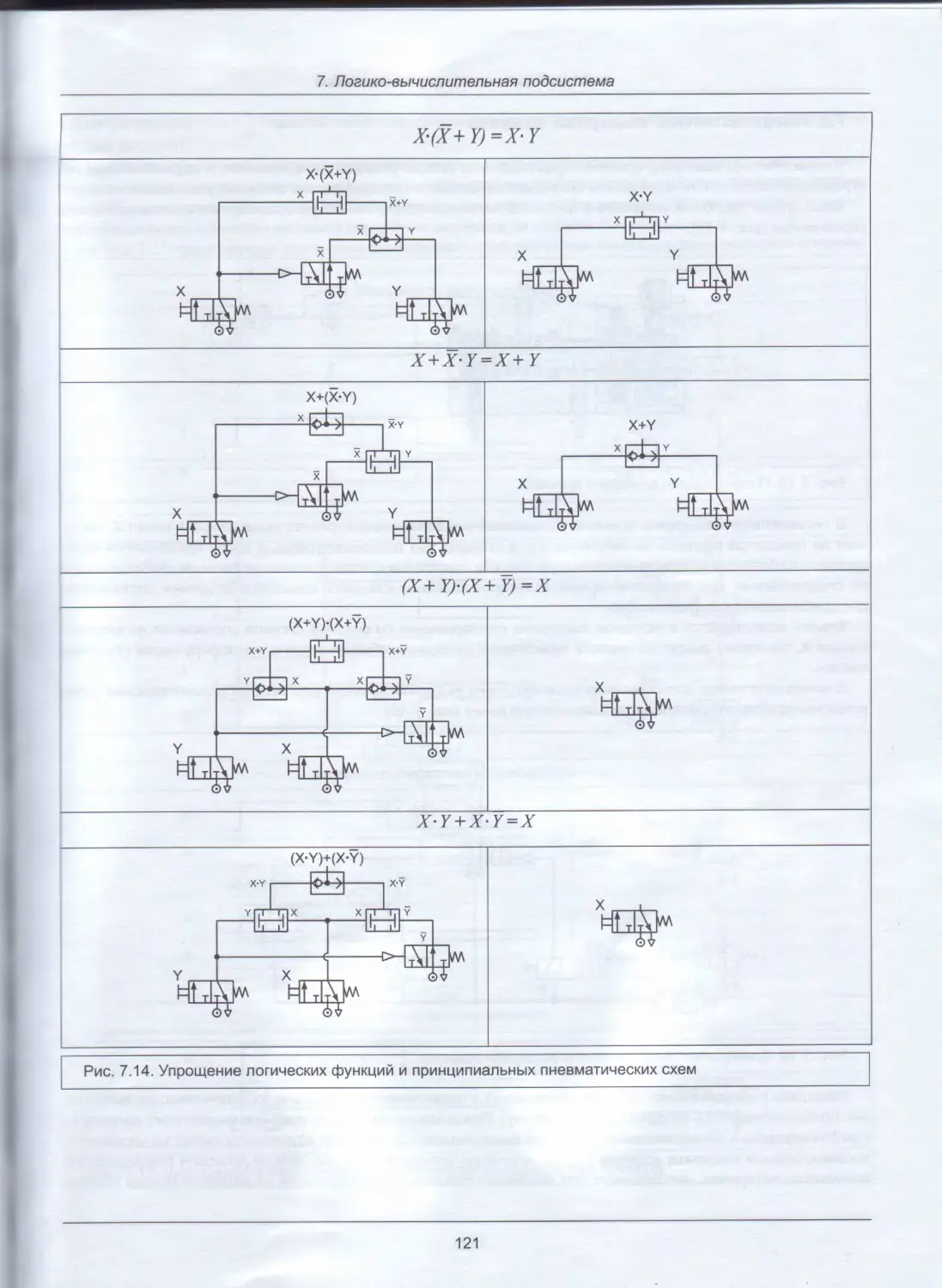
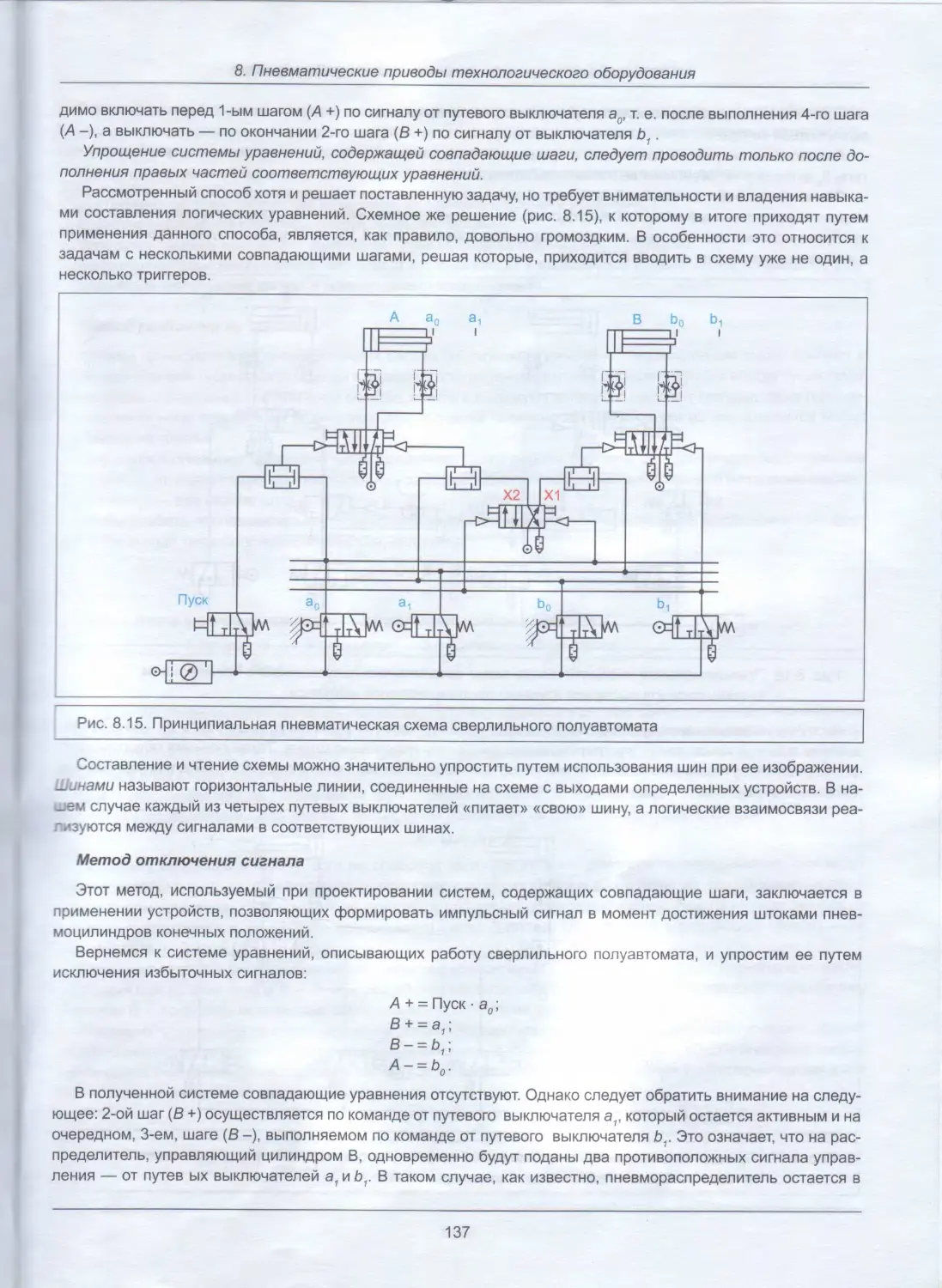
г ~ Реализация логических функций в релейно-контактных системах управления..............170
9 5. Реализация функции запоминания сигнала в релейно-контактных системах
управления........................................................................ 171
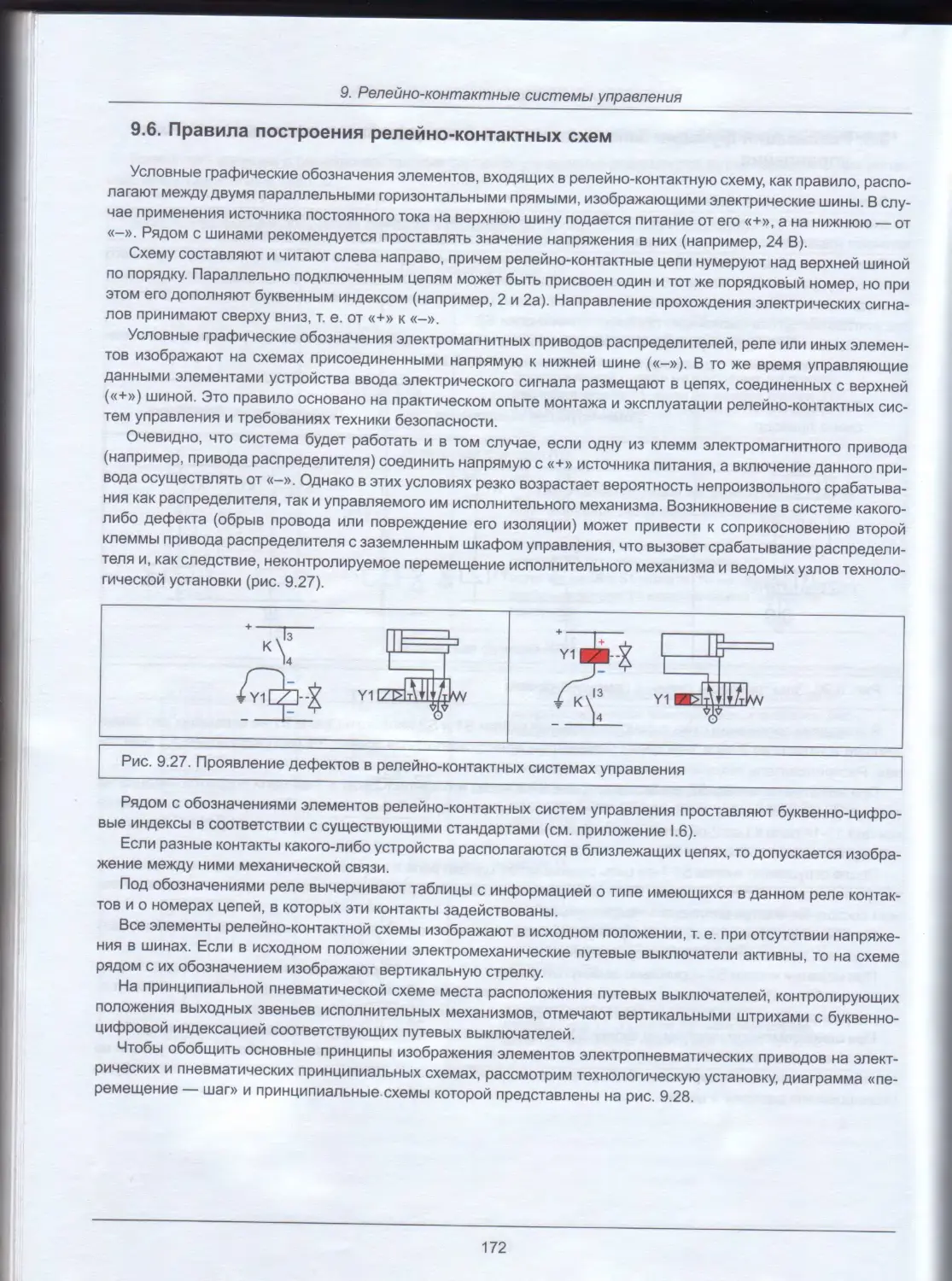
9.6. Правила построения релейно-контактных схем.........................................172
9.7. Проектирование релейно-контактных систем управления................................174
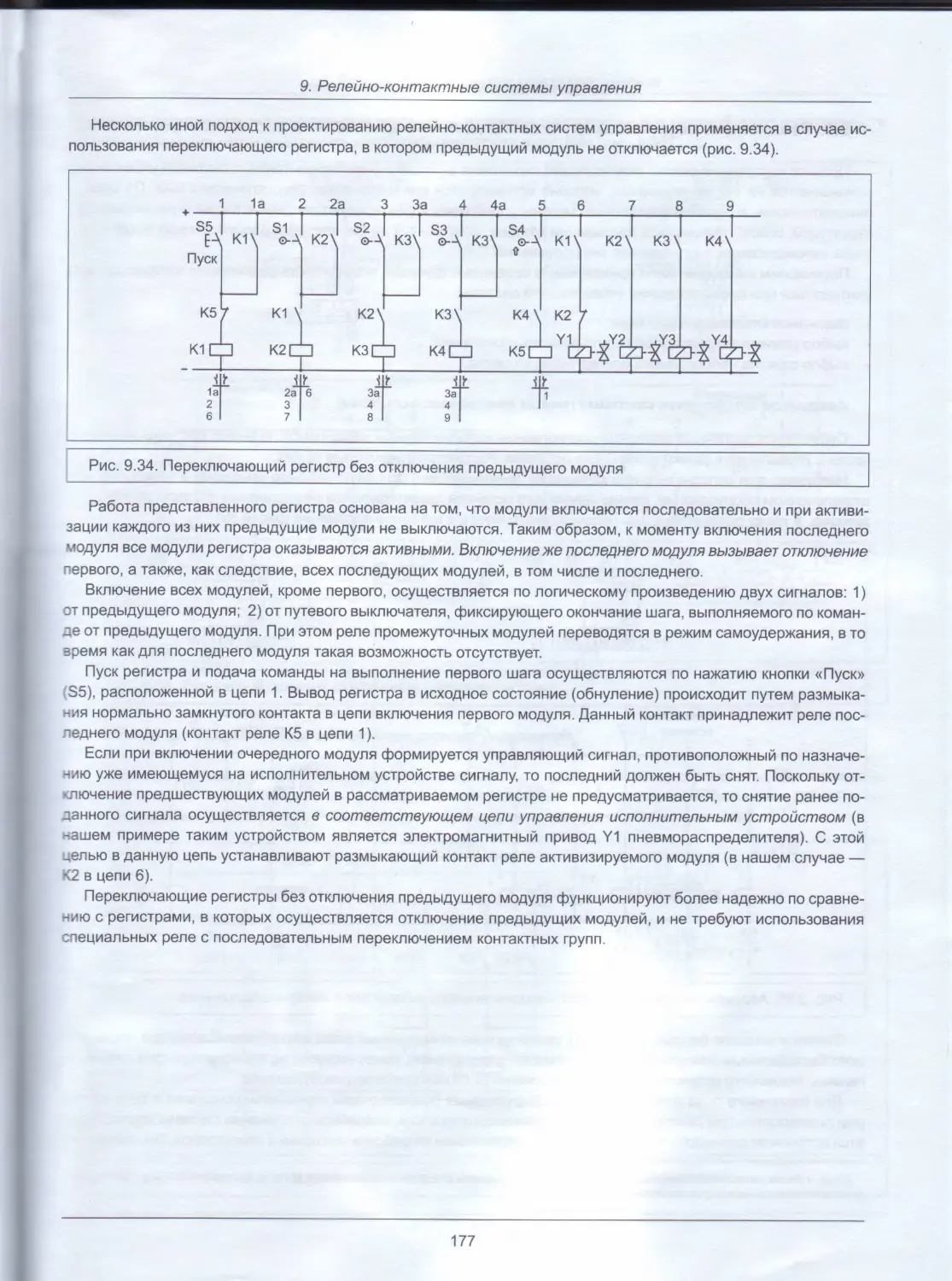
9.8. Переключающие регистры.............................................................176
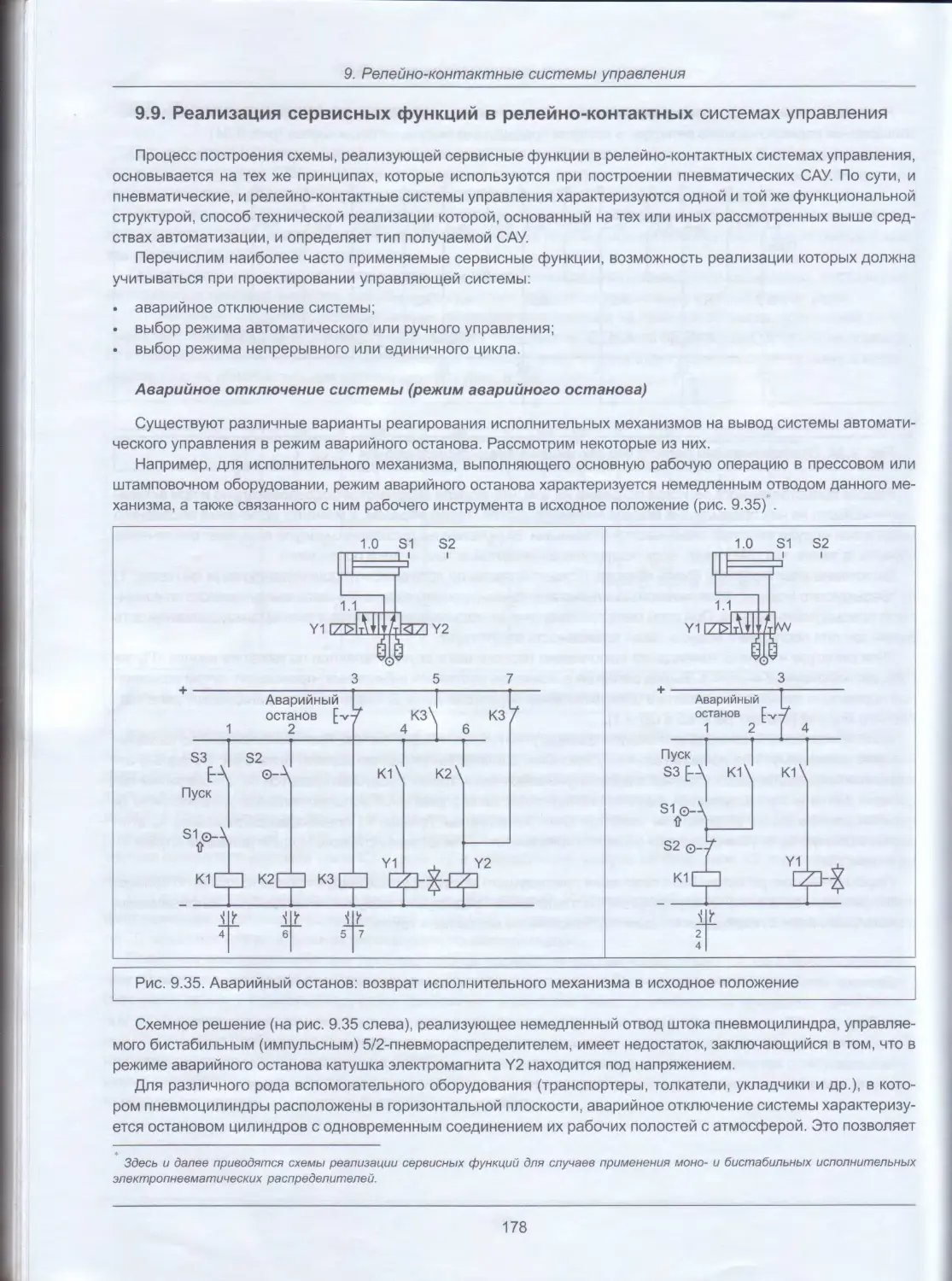
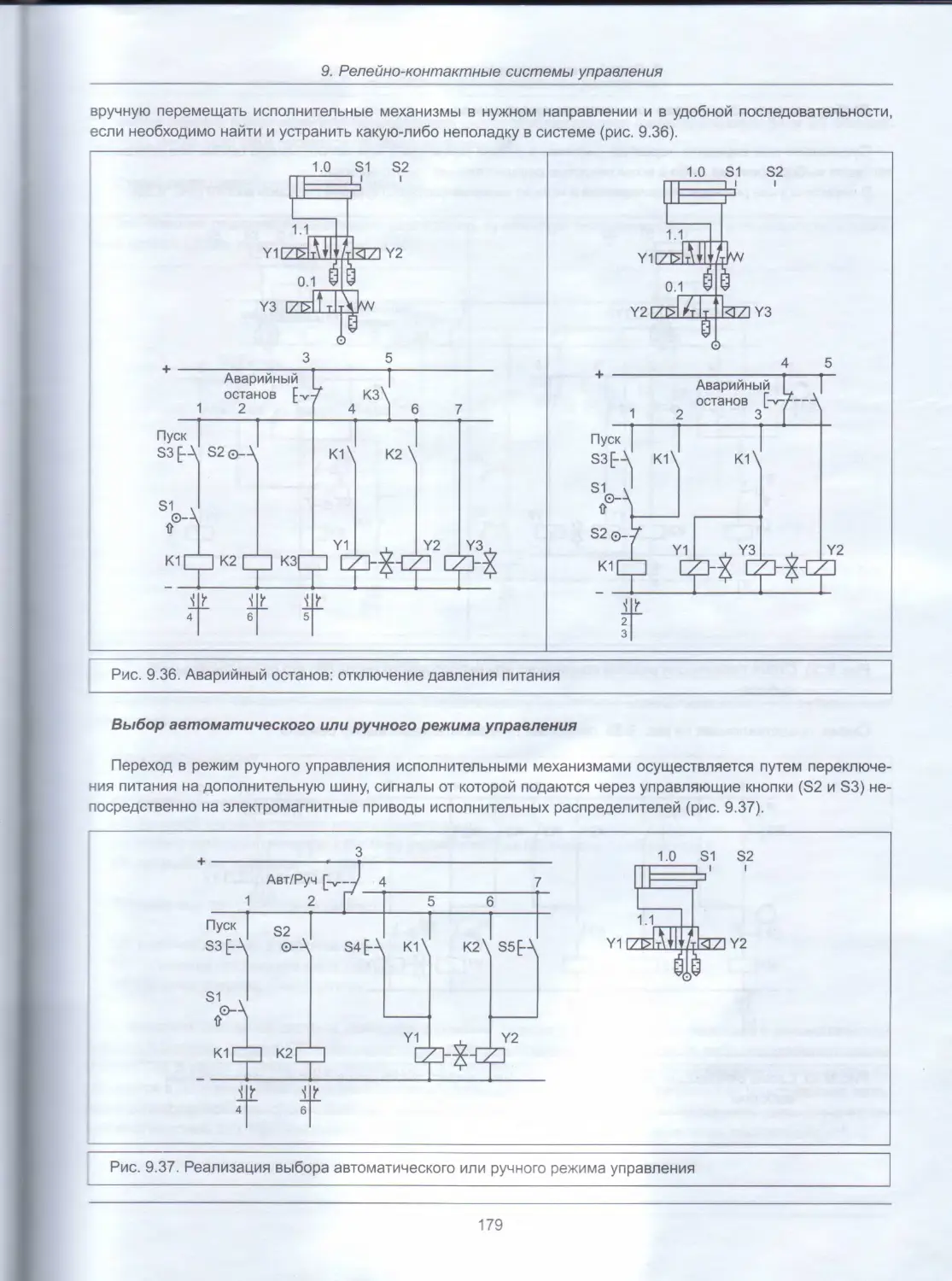
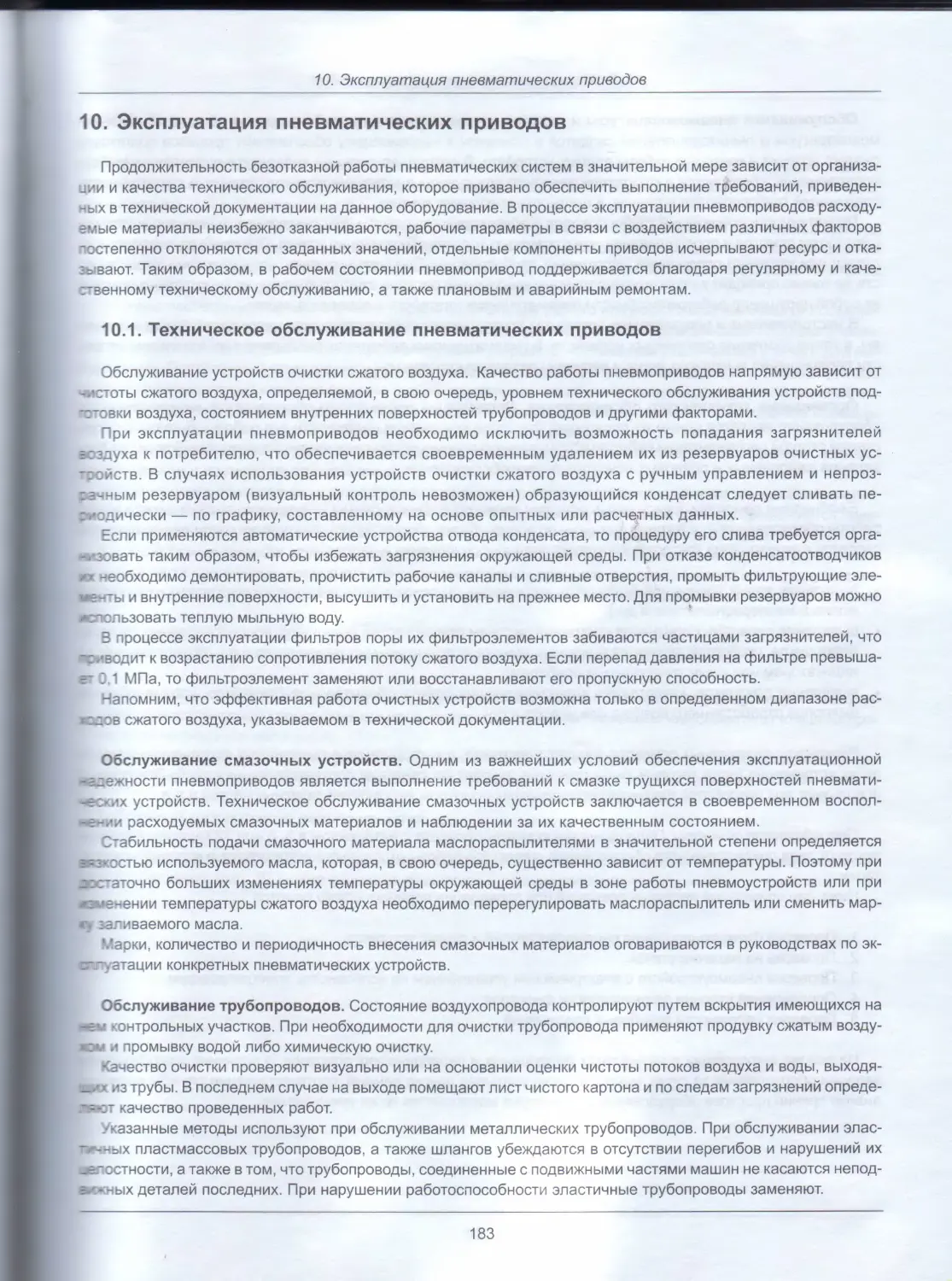
9 9. Реализация сервисных функций в релейно-контактных системах управления..............178
9 10. Электропневматические приводы с управлением от промышленных логических
контроллеров........................................................................182
*0 Эксплуатация пневматических приводов.......................................................183
10.1. Техническое обслуживание пневматических приводов..................................183
10.2. Поиск и устранение неисправностей.................................................185
10.3. Требования безопасности...........................................................189
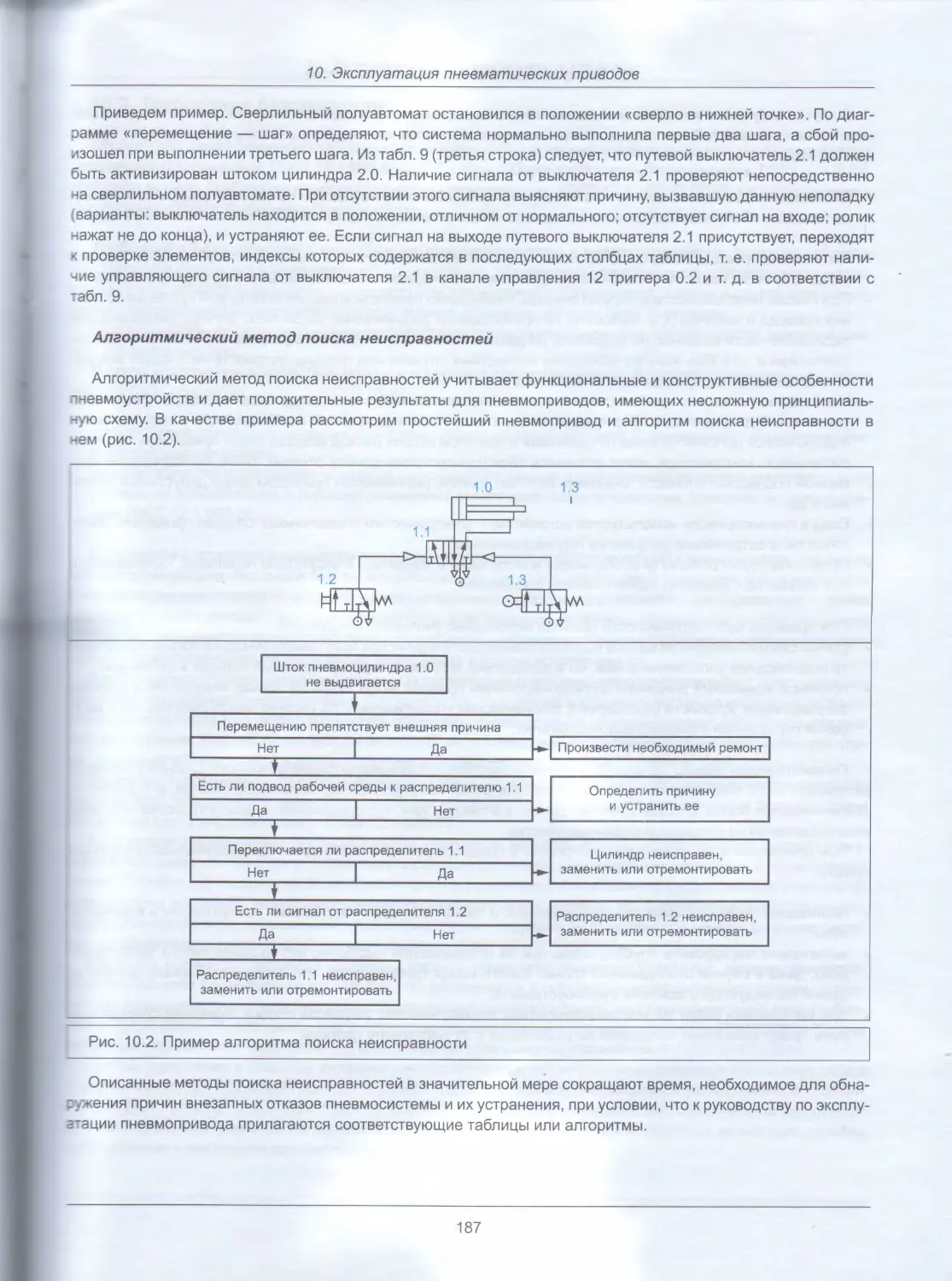
“эиложения......................................................................................93
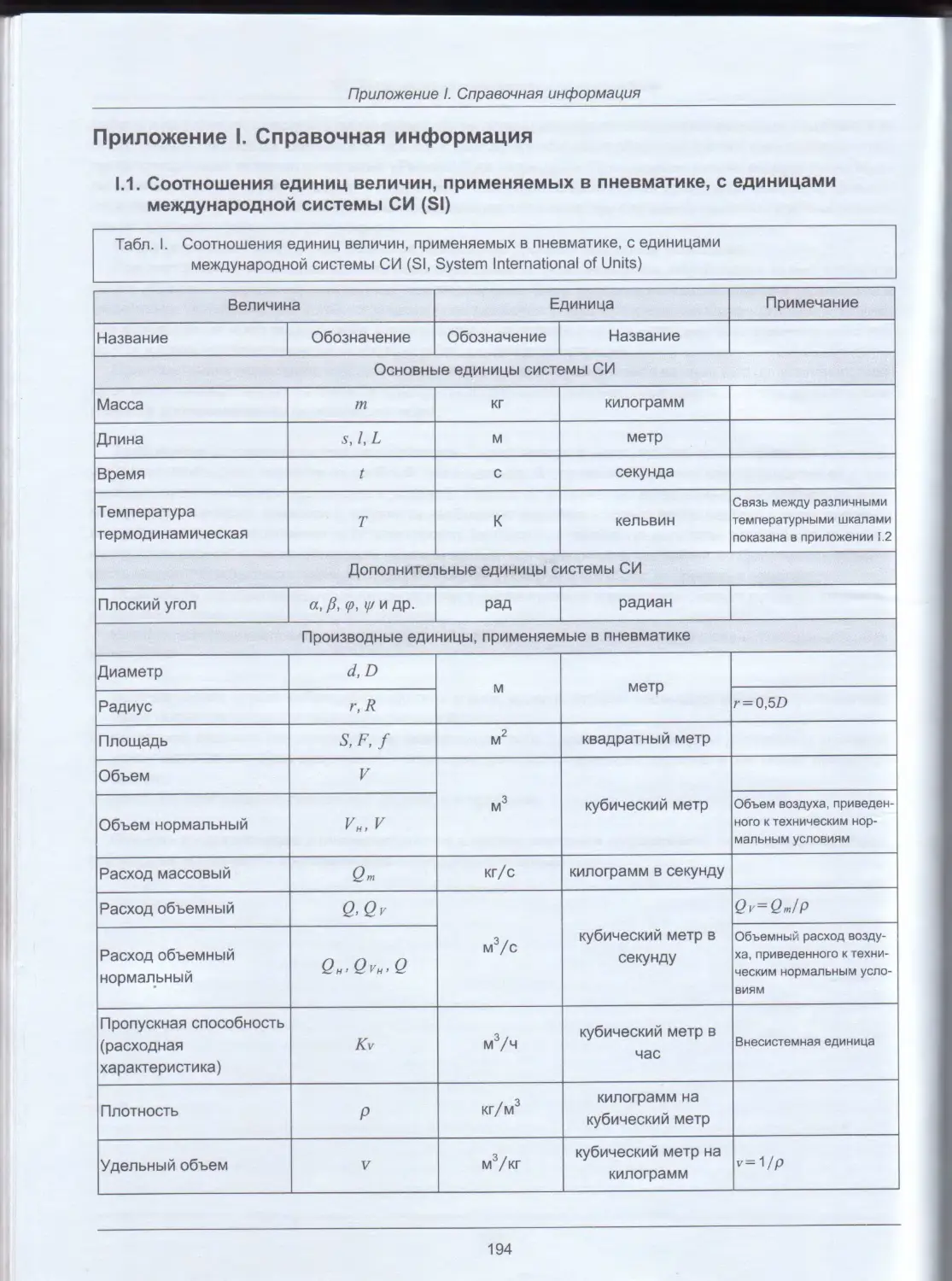
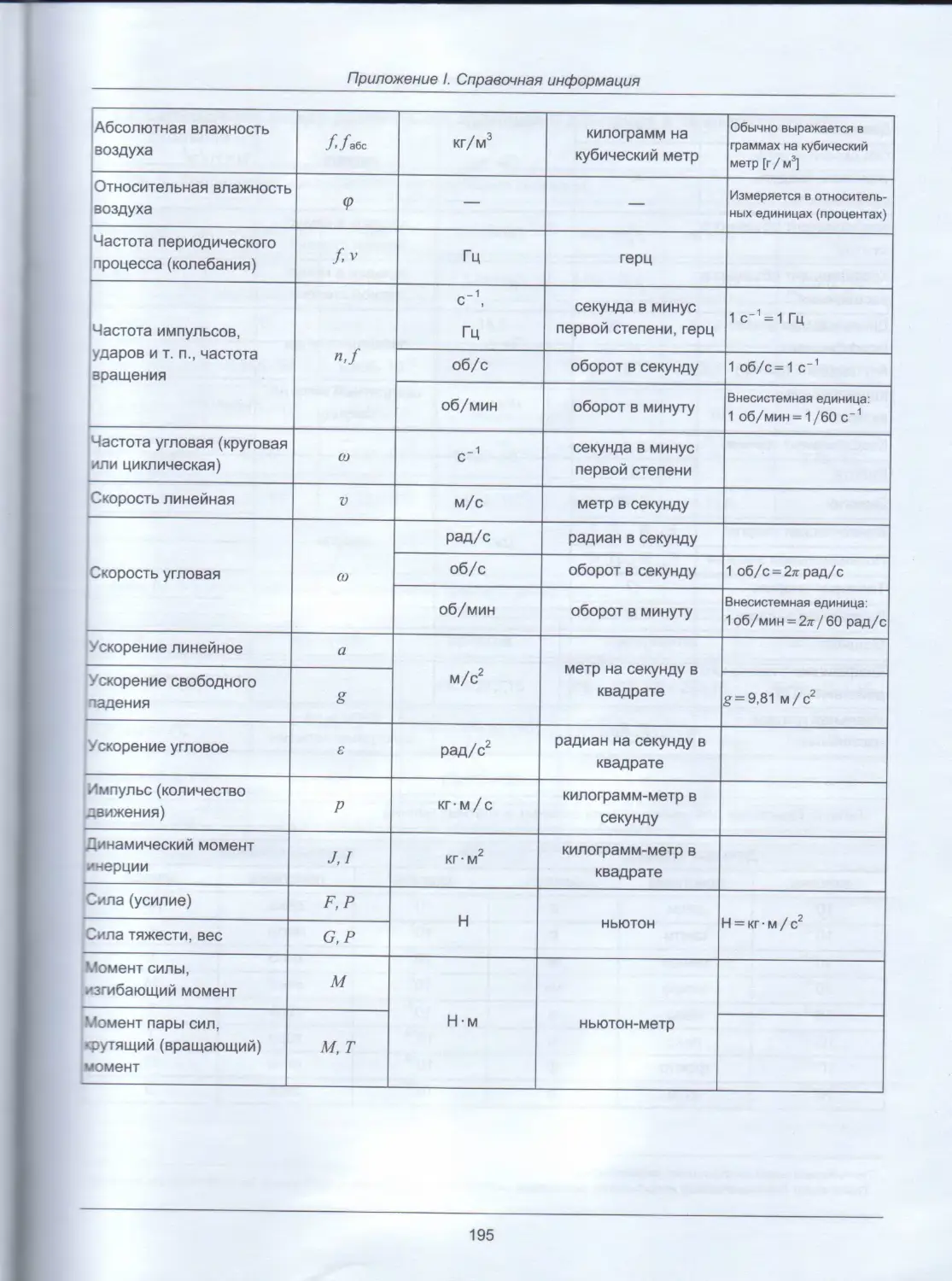
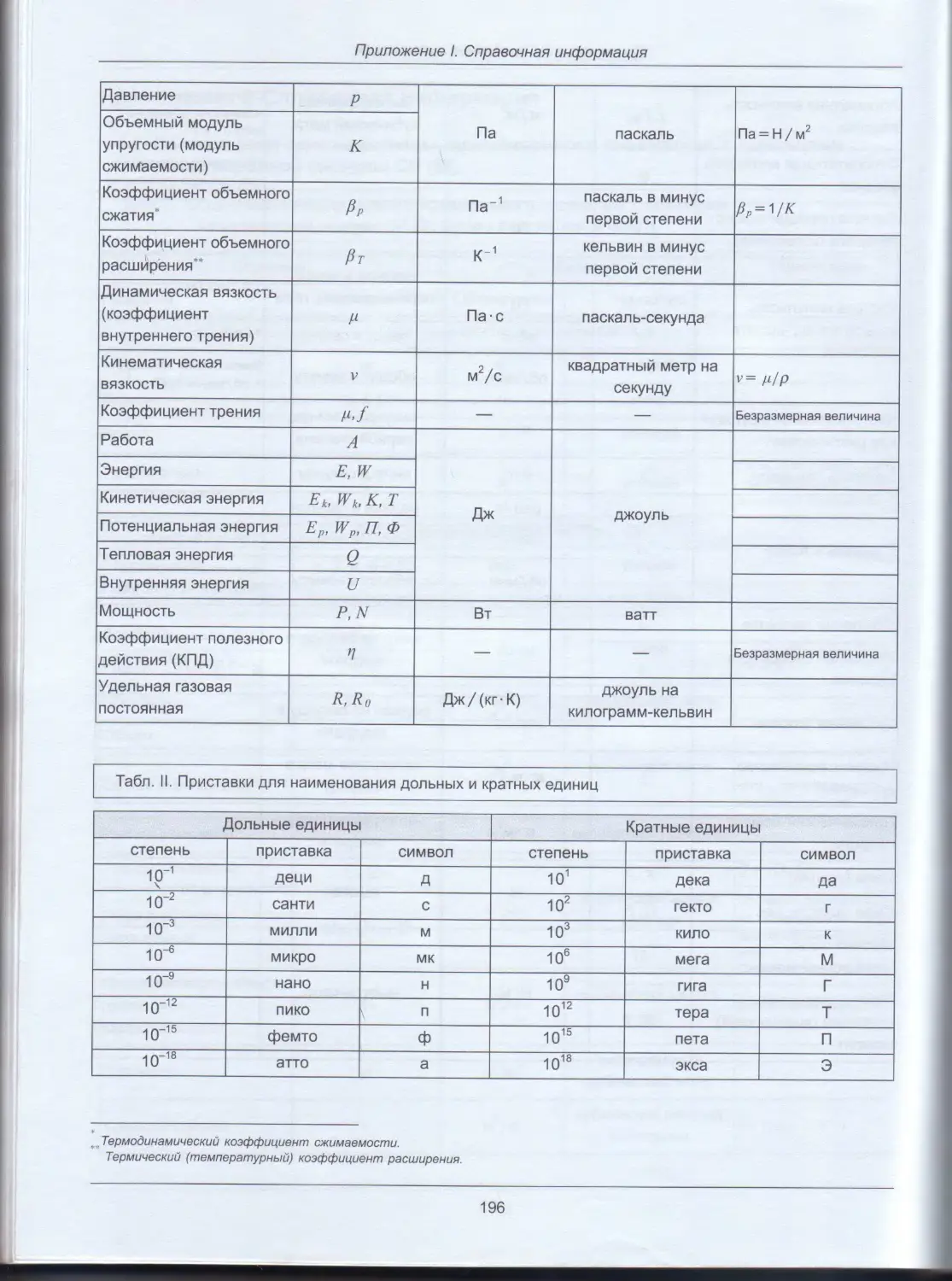
Приложение I. Справочная информация.....................................................194
1.1. Соотношения единиц величин, применяемых в пневматике, с единицами
международной системы СИ (SI)..................................................... 194
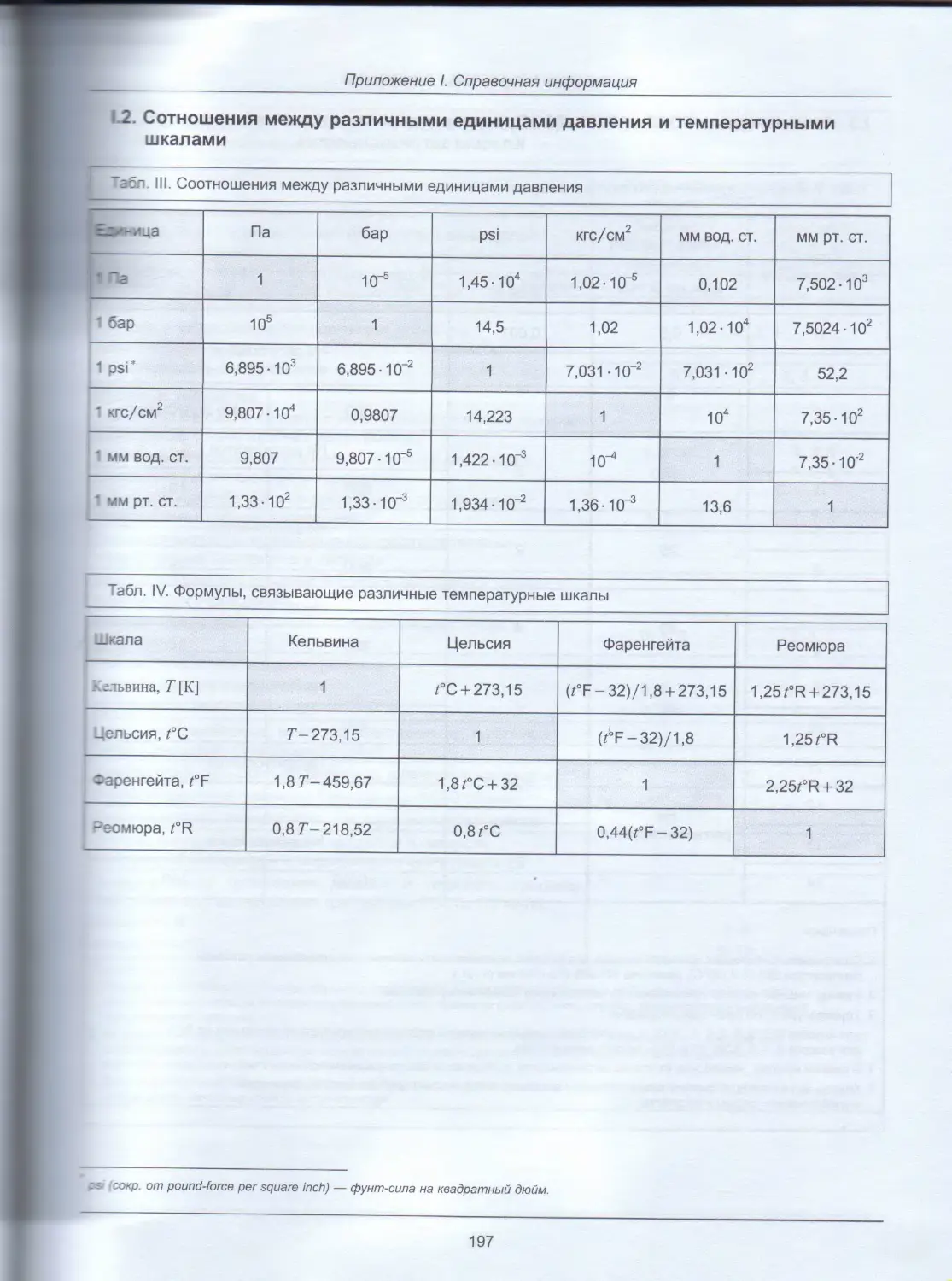
I.2. Сотношения между различными единицами давления и температурными
шкалами........................................................................... 197
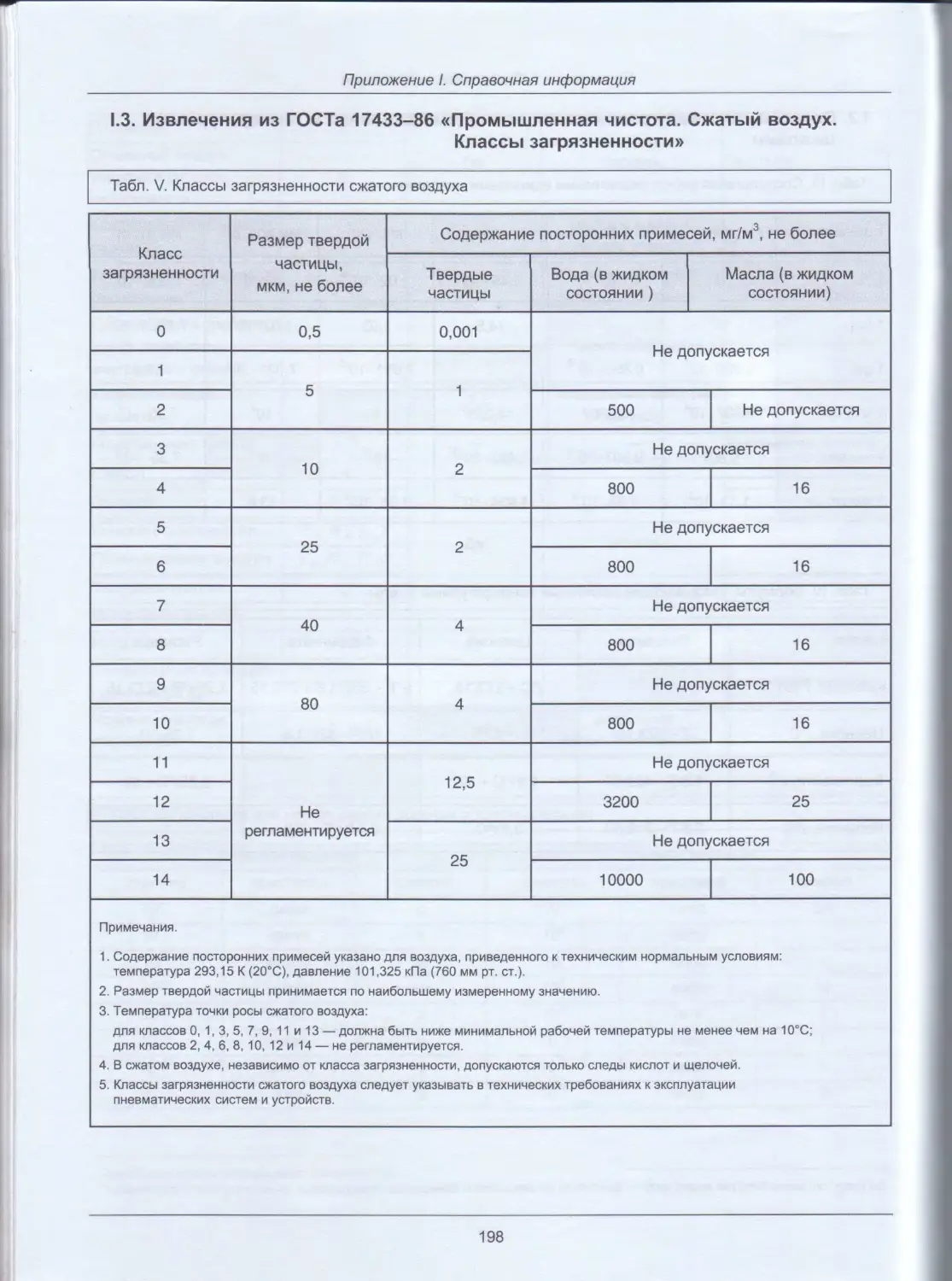
I.3. Извлечения из ГОСТа 17433—86 «Промышленная чистота. Сжатый воздух.
Классы загрязненнсти»..................>...............................:......... 198
I.4. Характеристики минеральных масел.............................................200
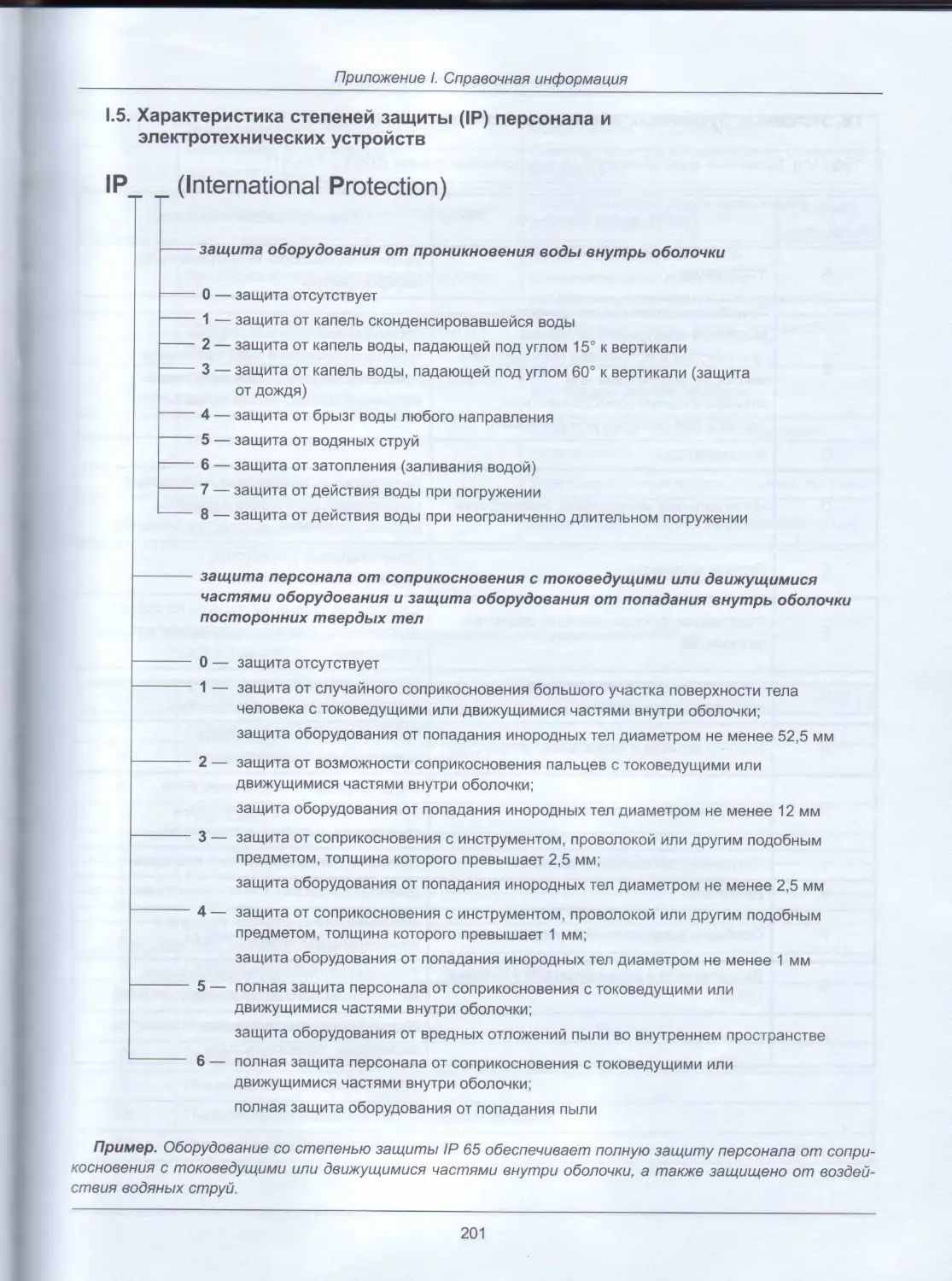
I.5. Характеристика степеней защиты (IP) персонала и электротехнических устройств.201
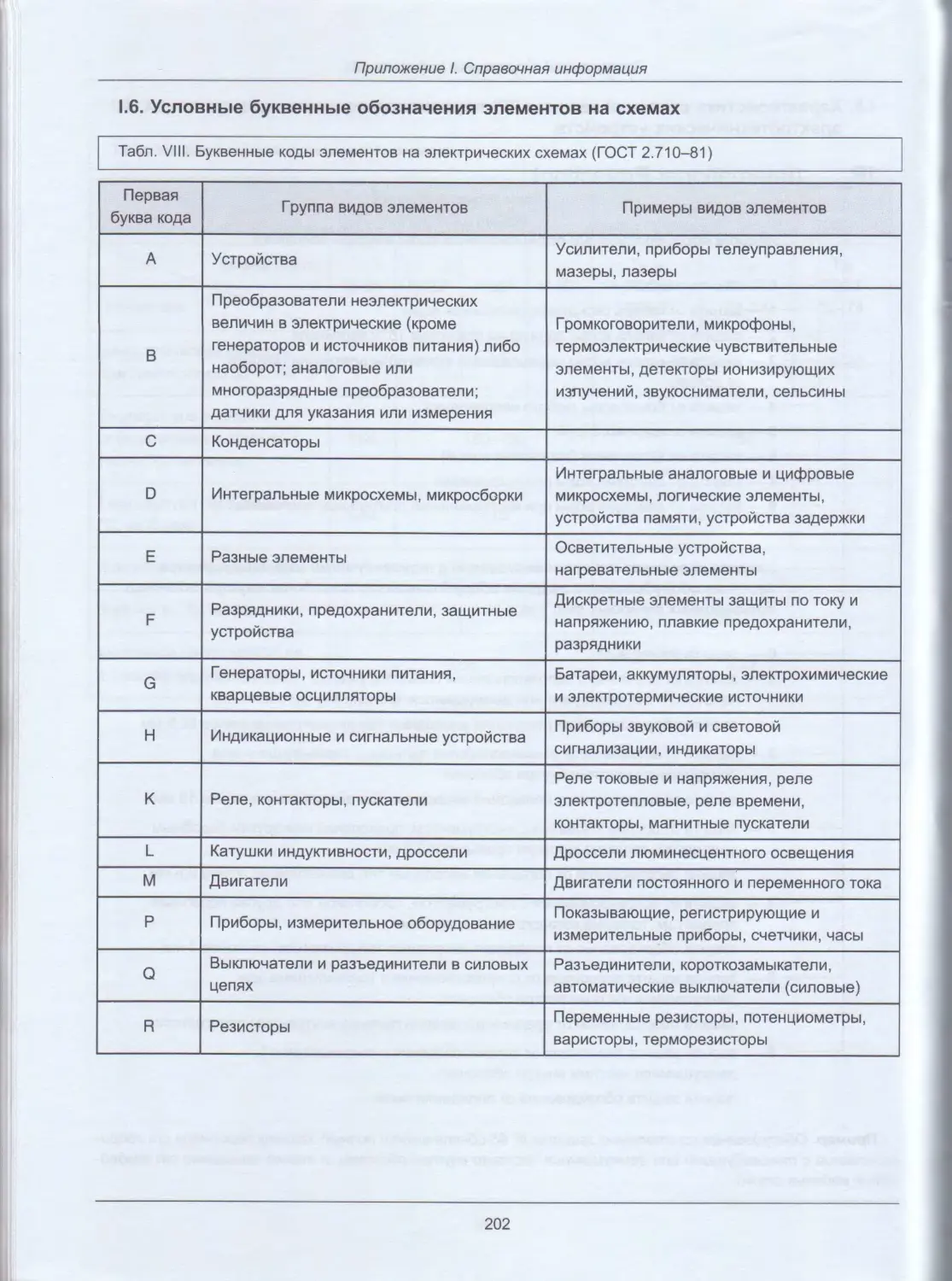
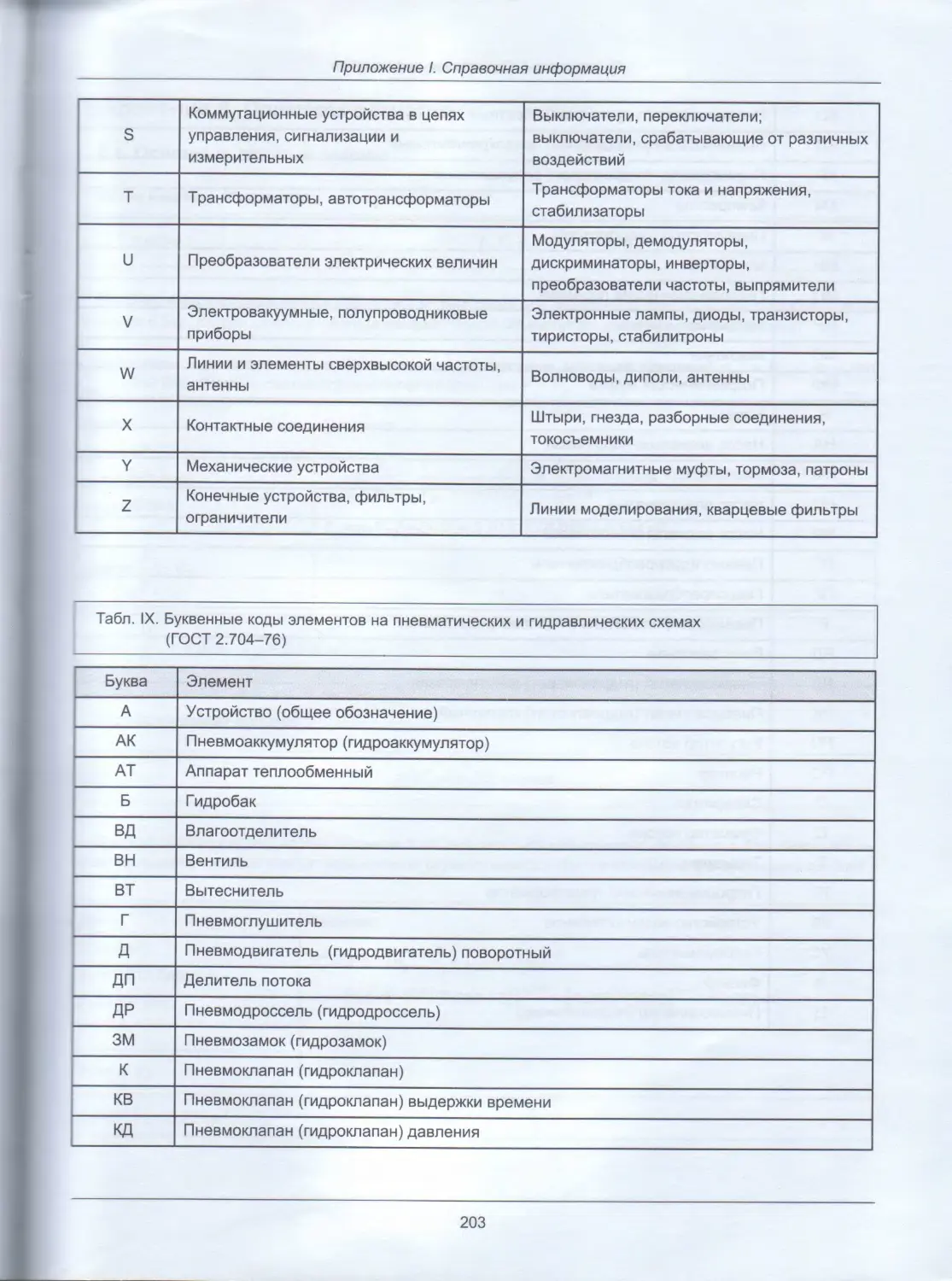
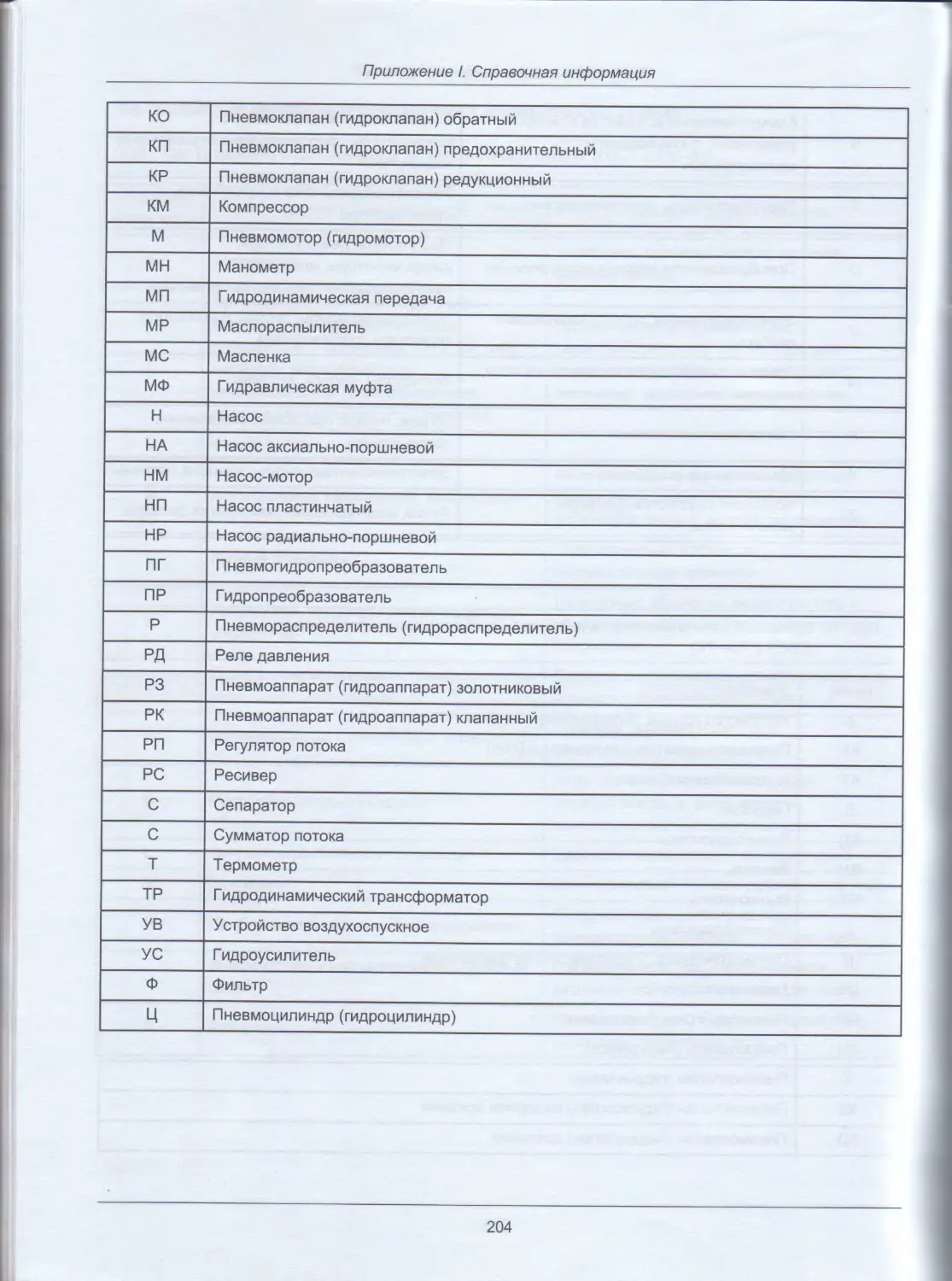
I.6. Условные буквенные обозначения элементов на схемах...........................202
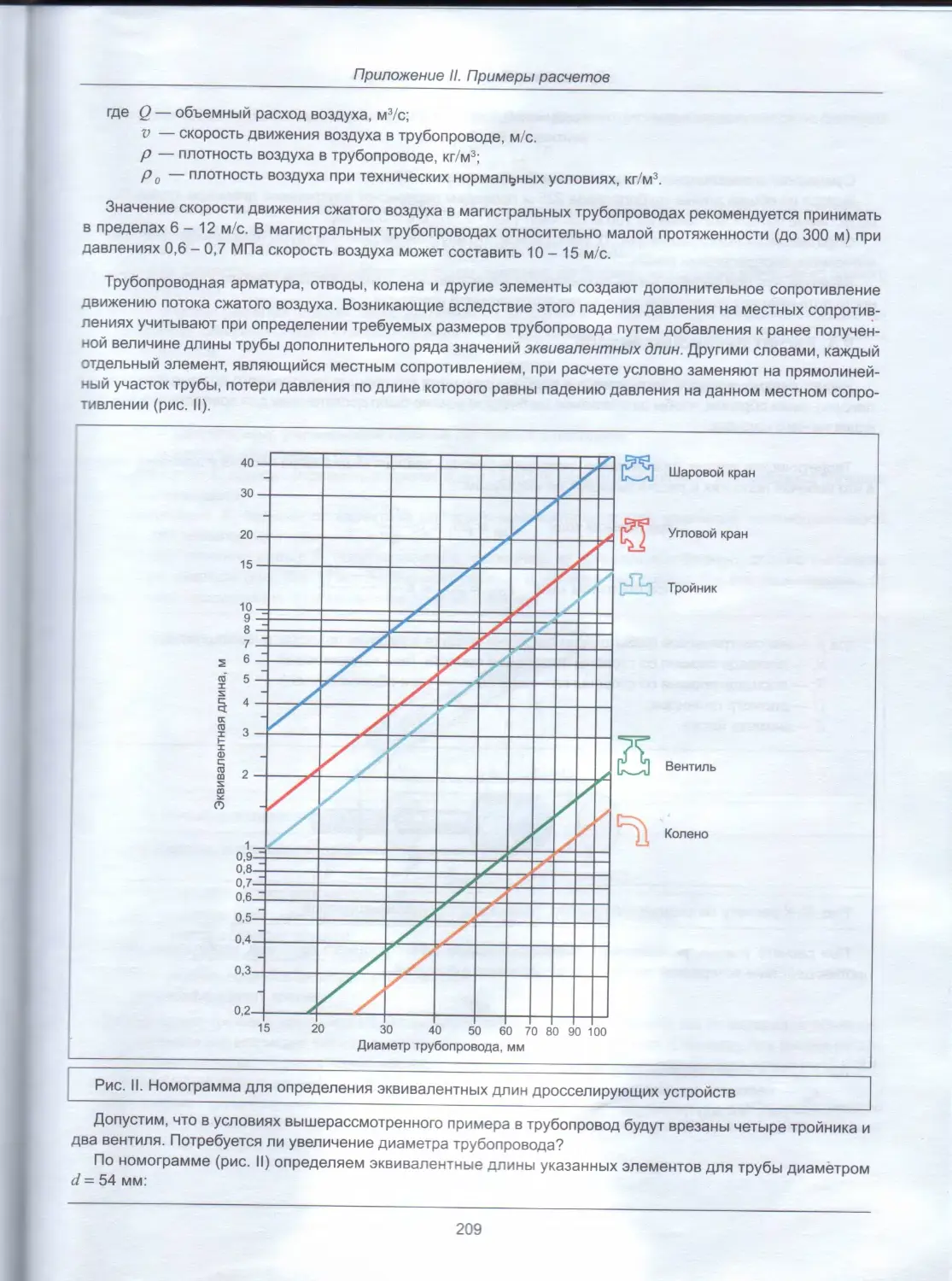
Приложение II. Примеры расчетов.........................................................205
11.1. Основные газовые законы.....................................................205
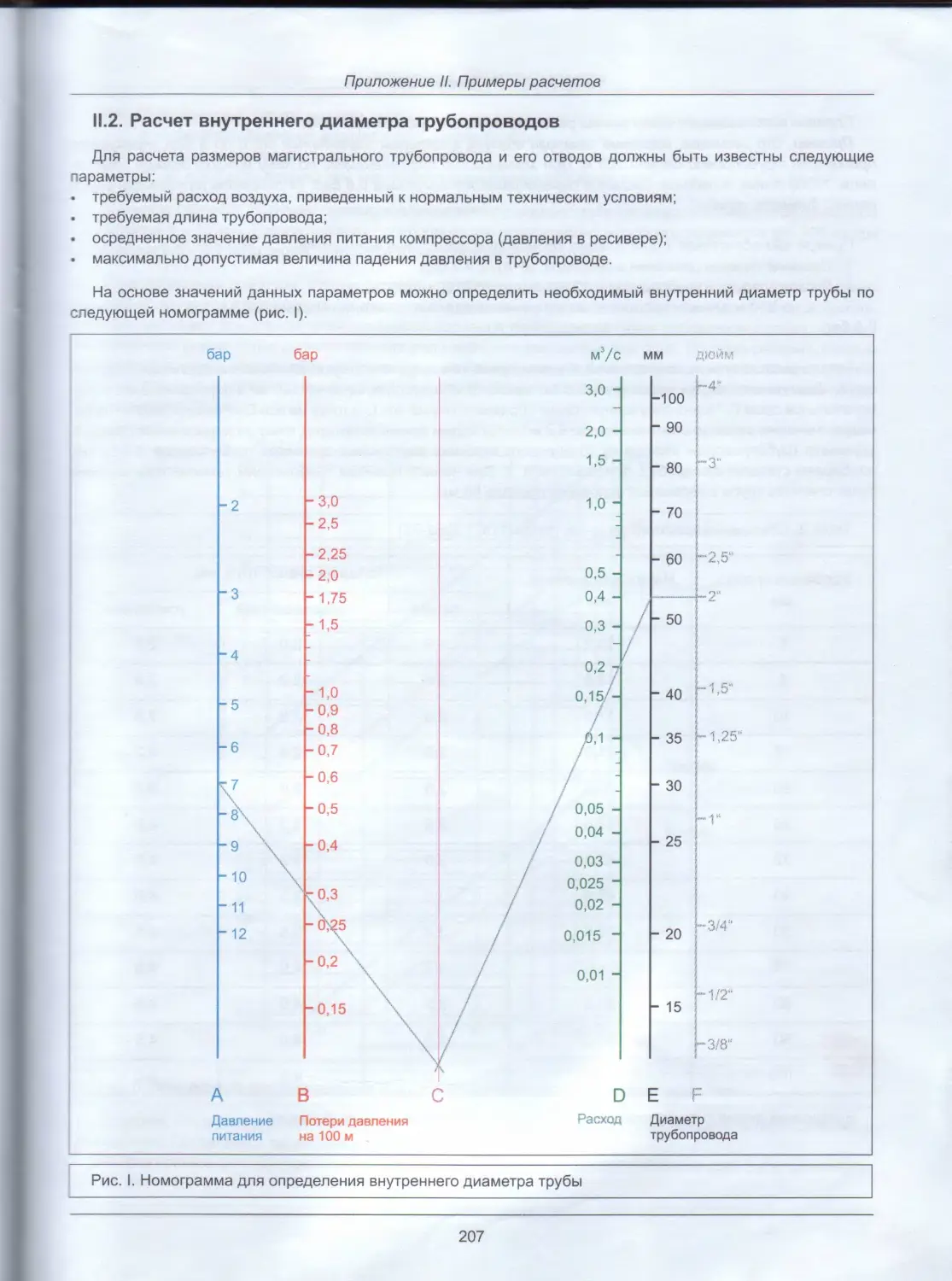
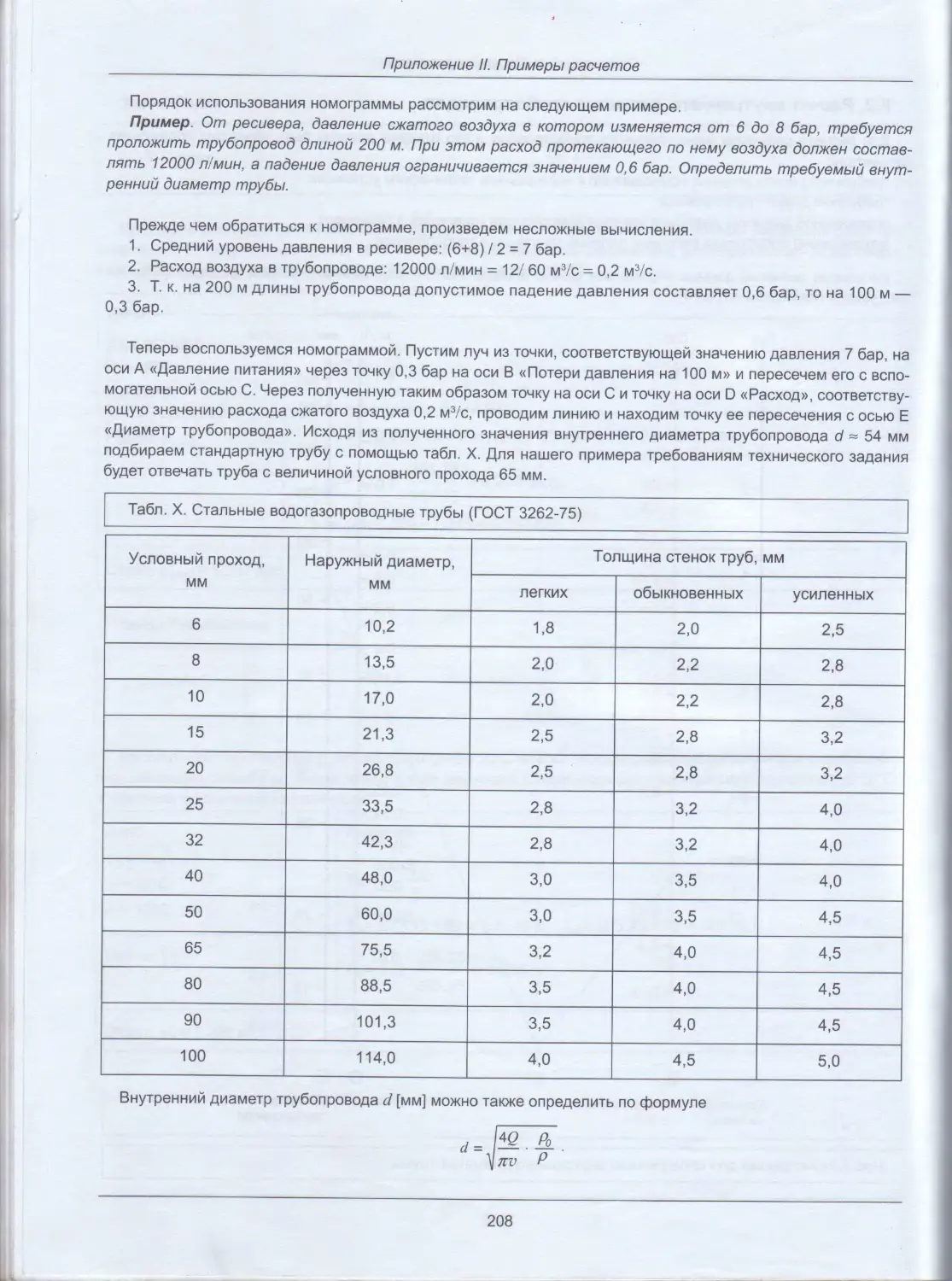
II.2. Расчет внутреннего диаметра трубопроводов...................................207
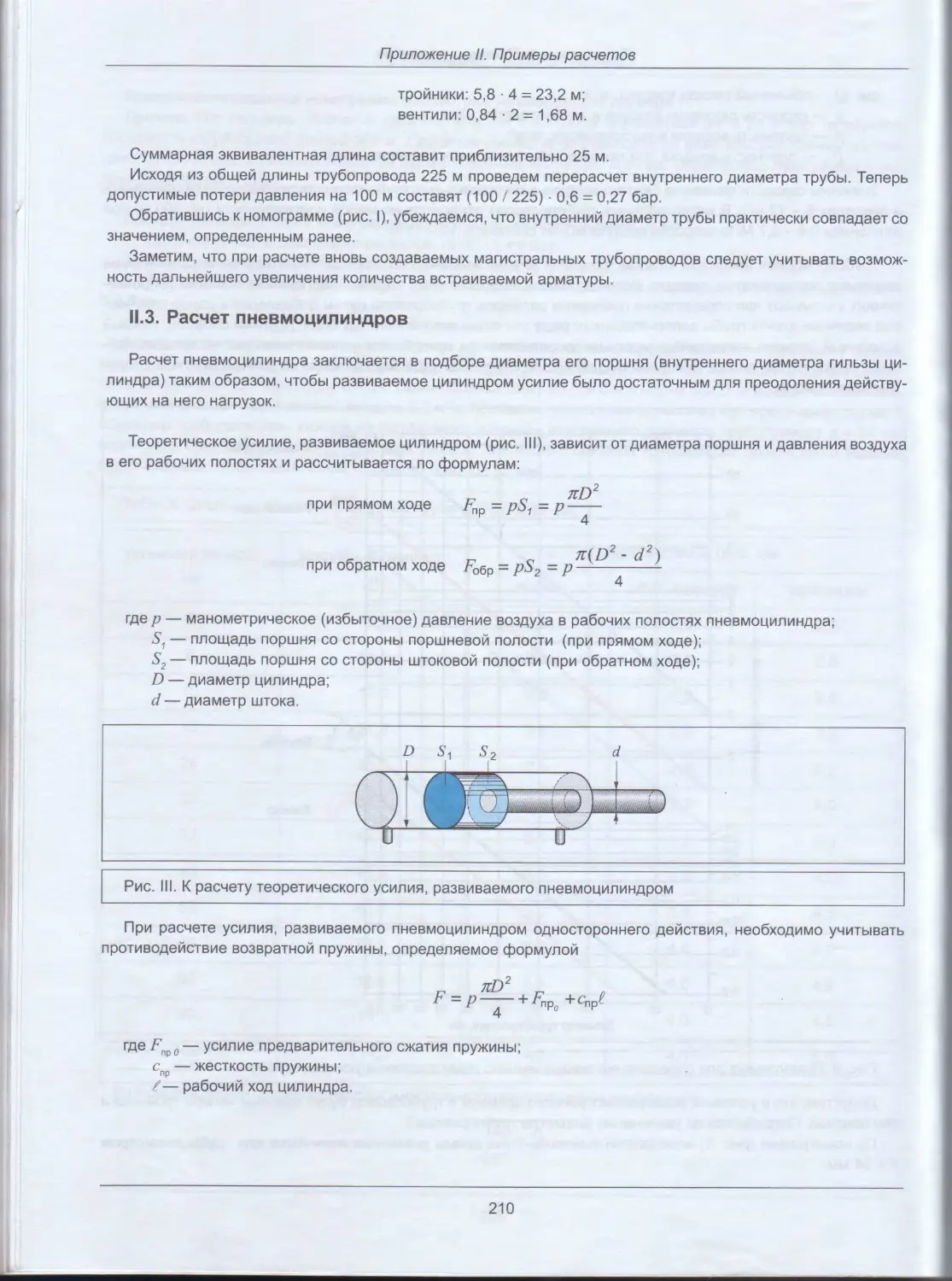
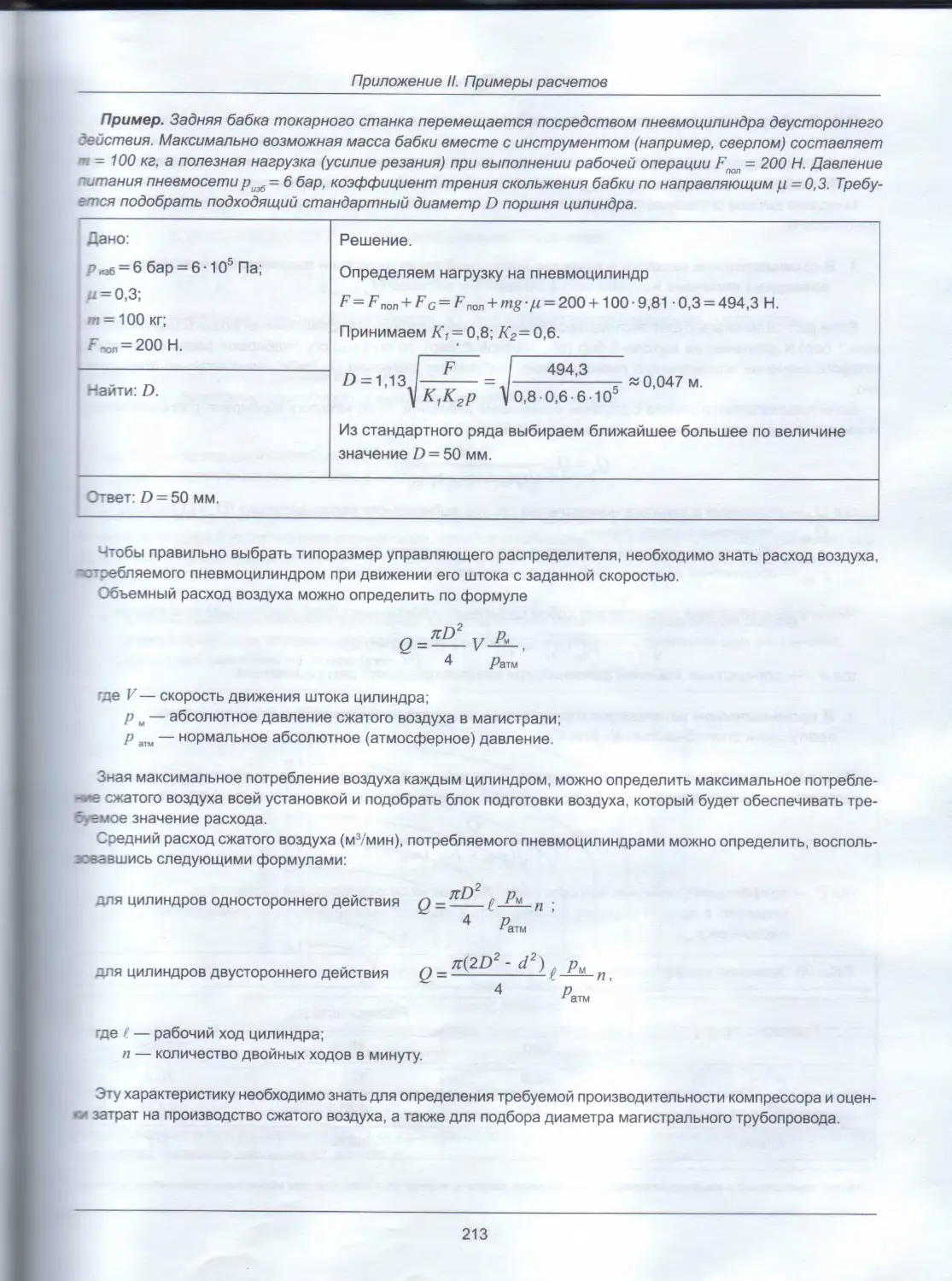
II.3. Расчет пневмоцилиндров......................................................210
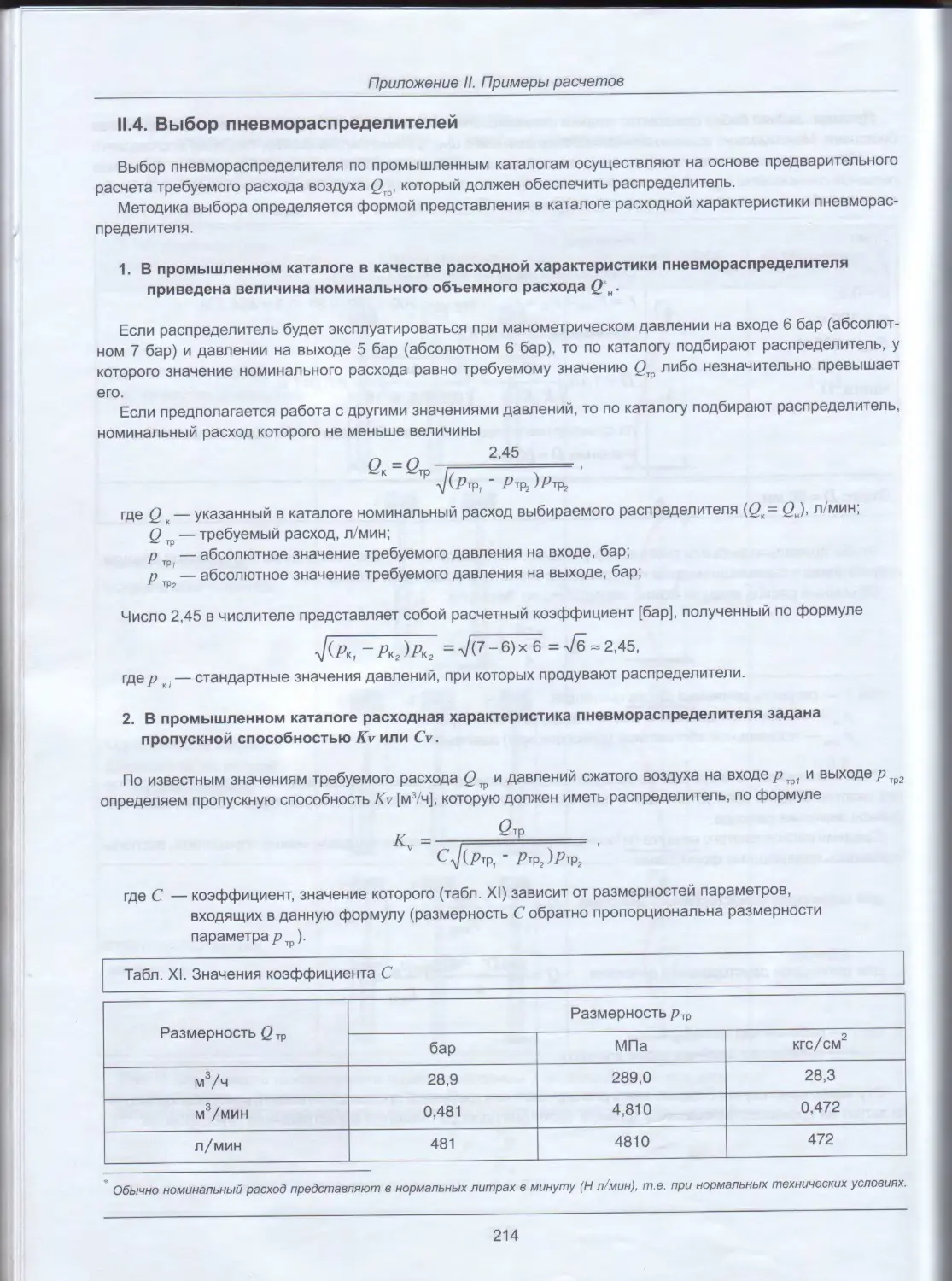
II.4. Выбор пневмораспределителей ................................................214
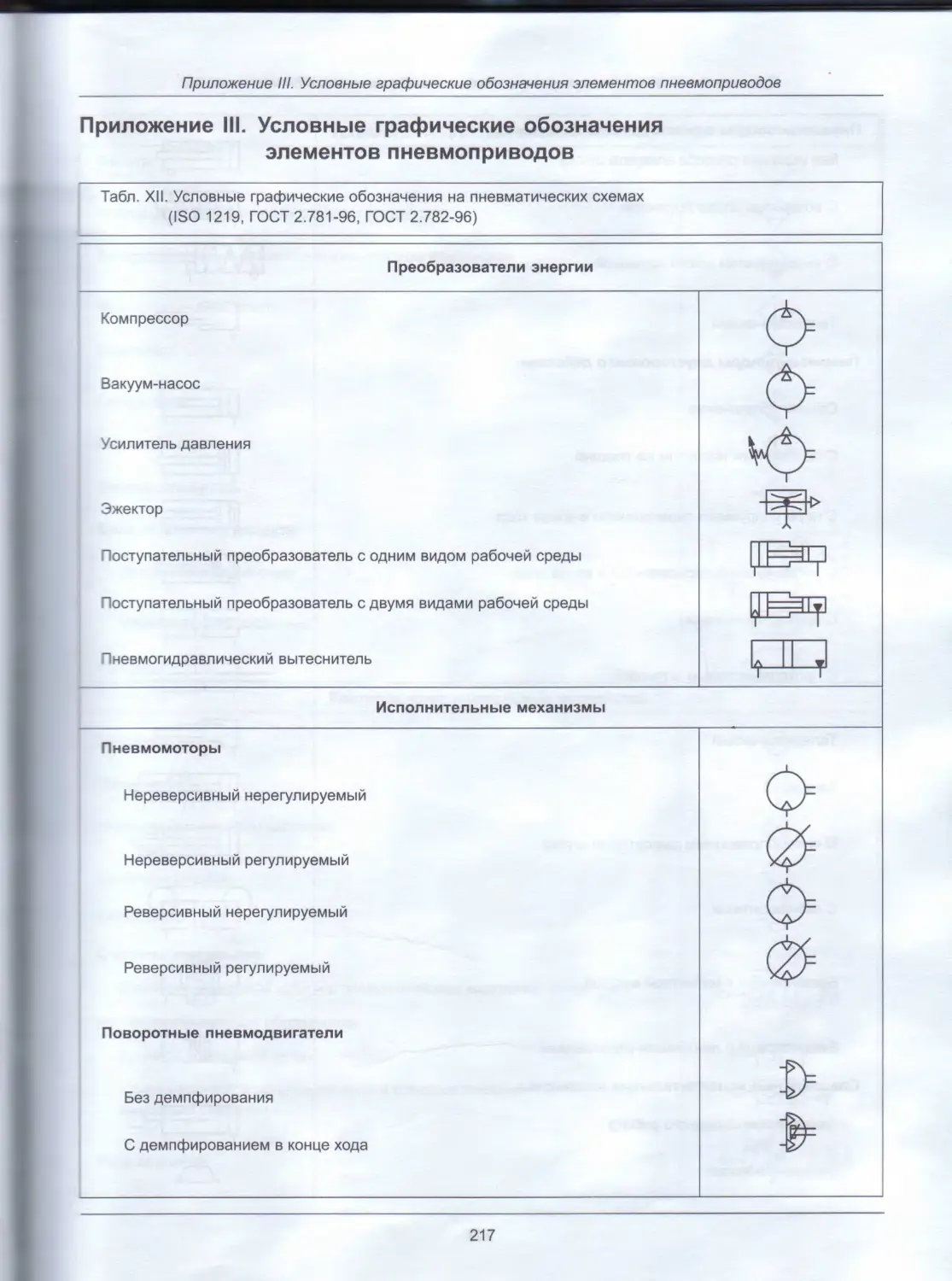
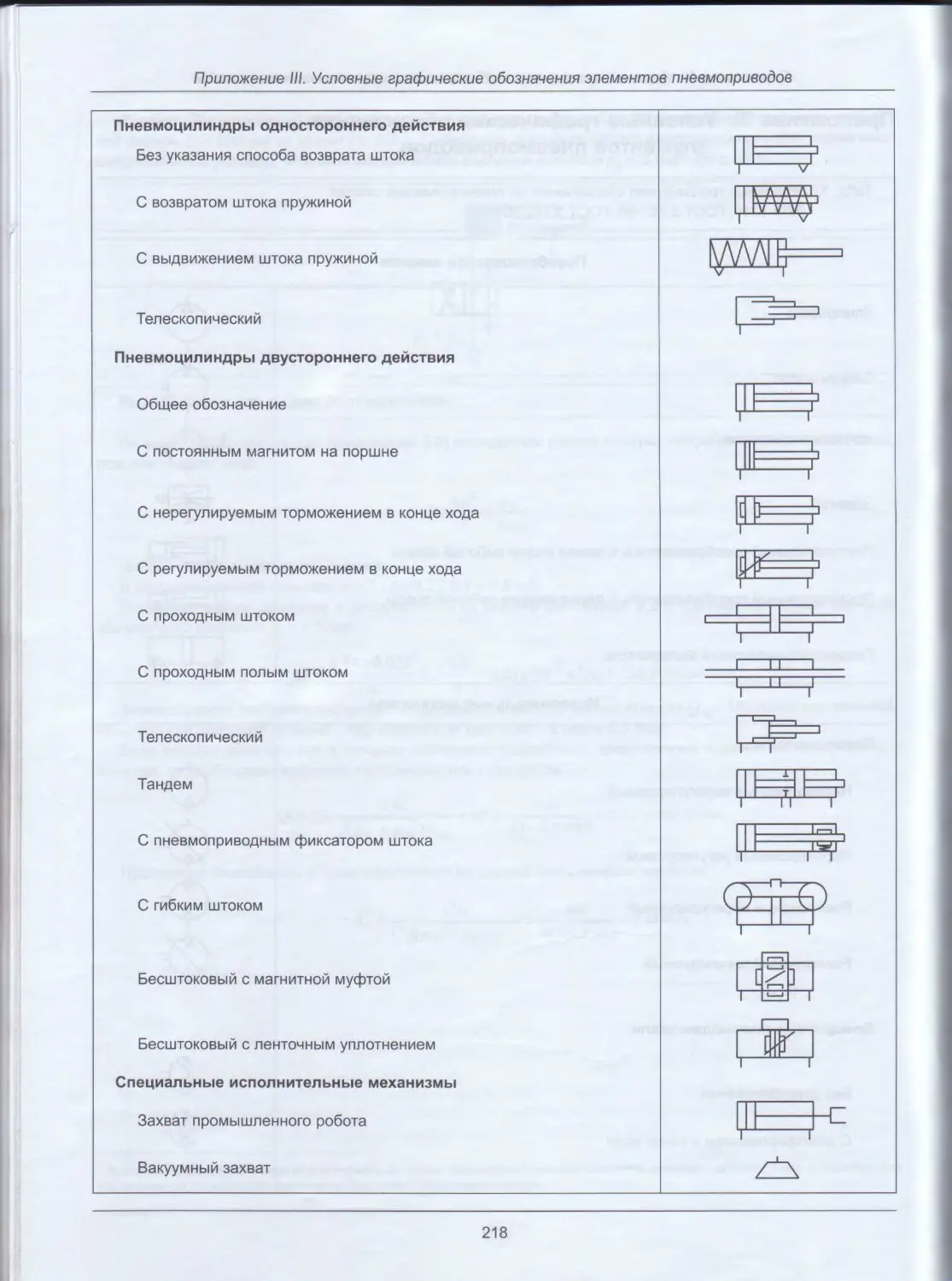
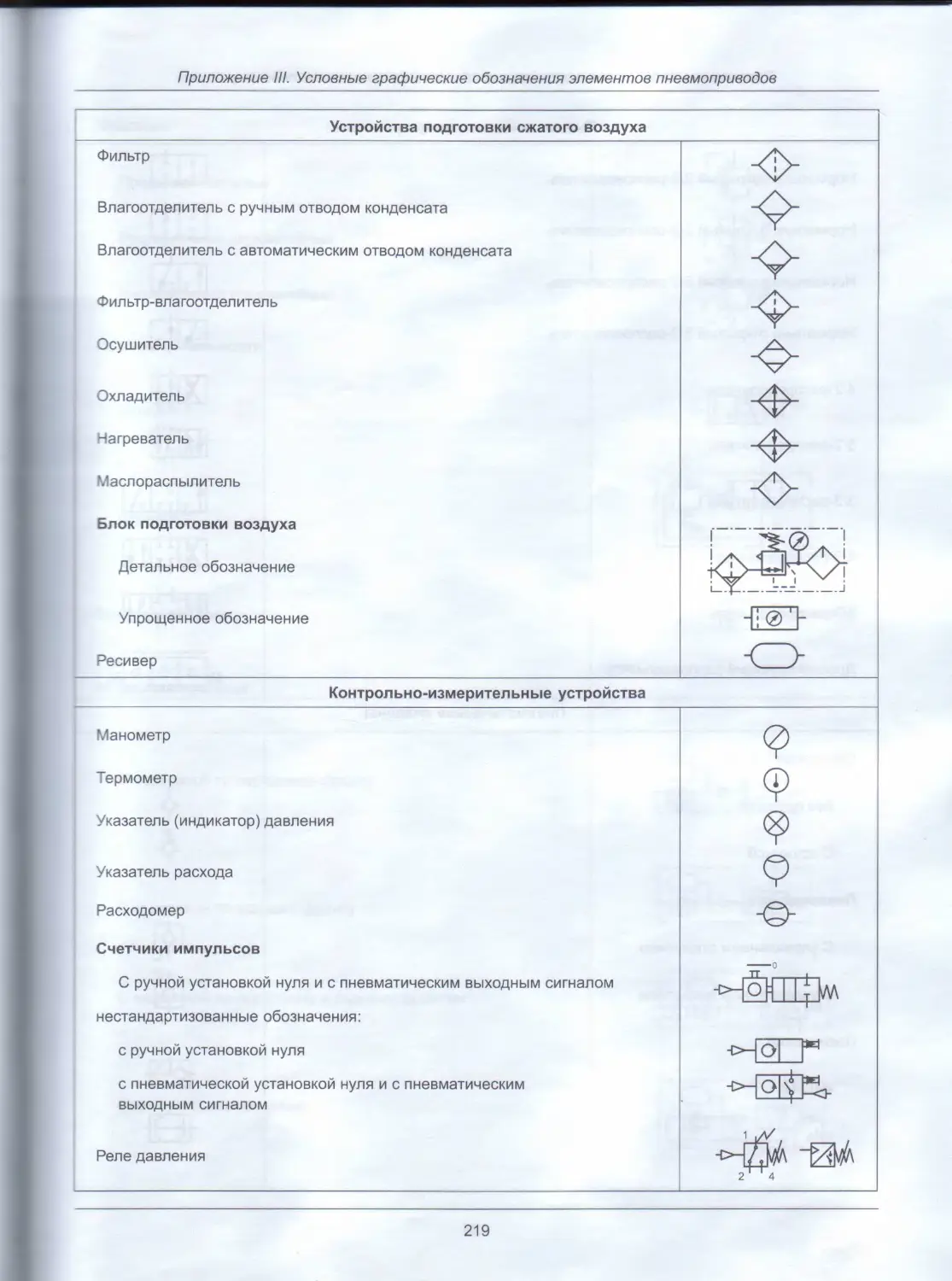
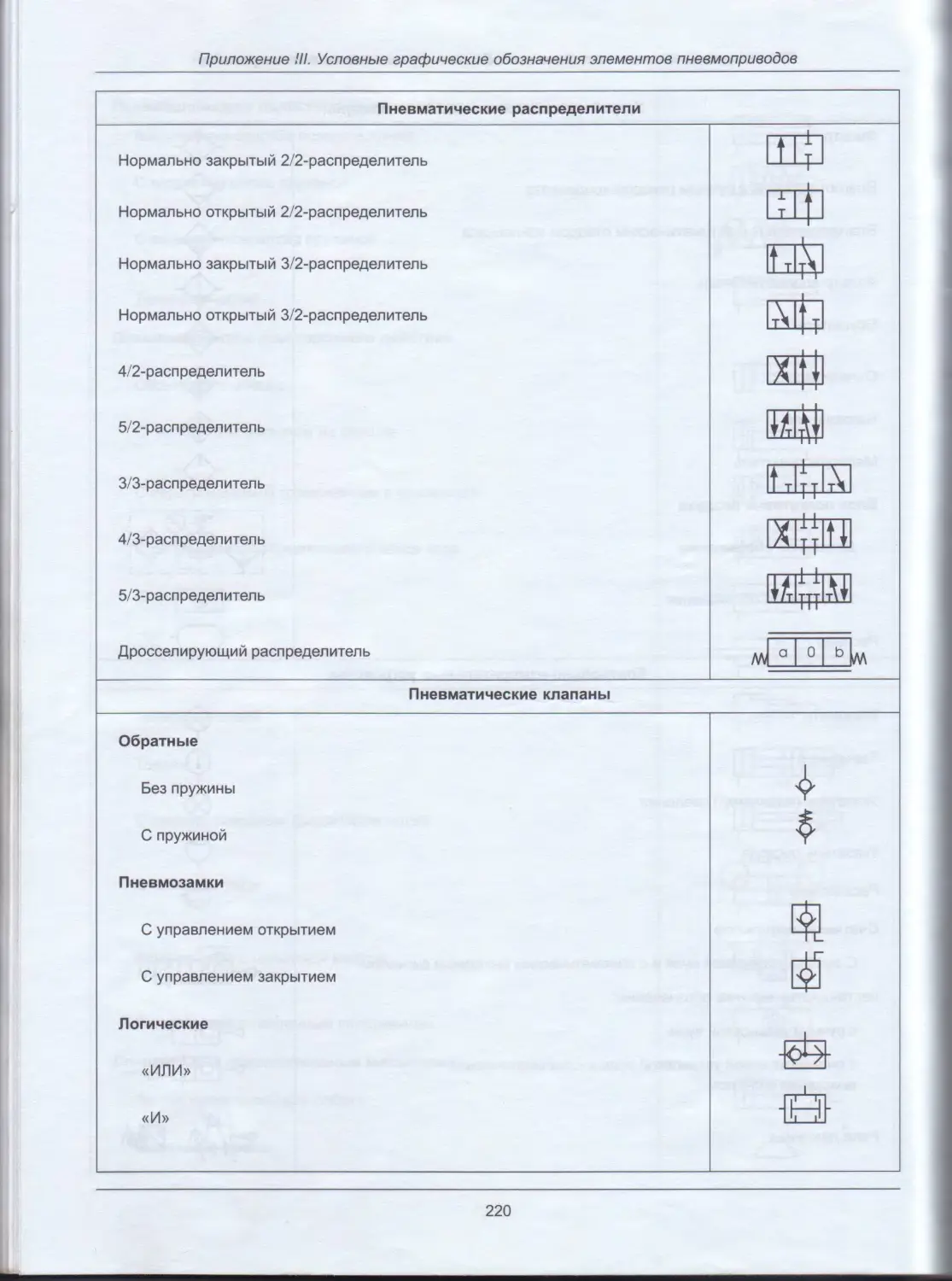
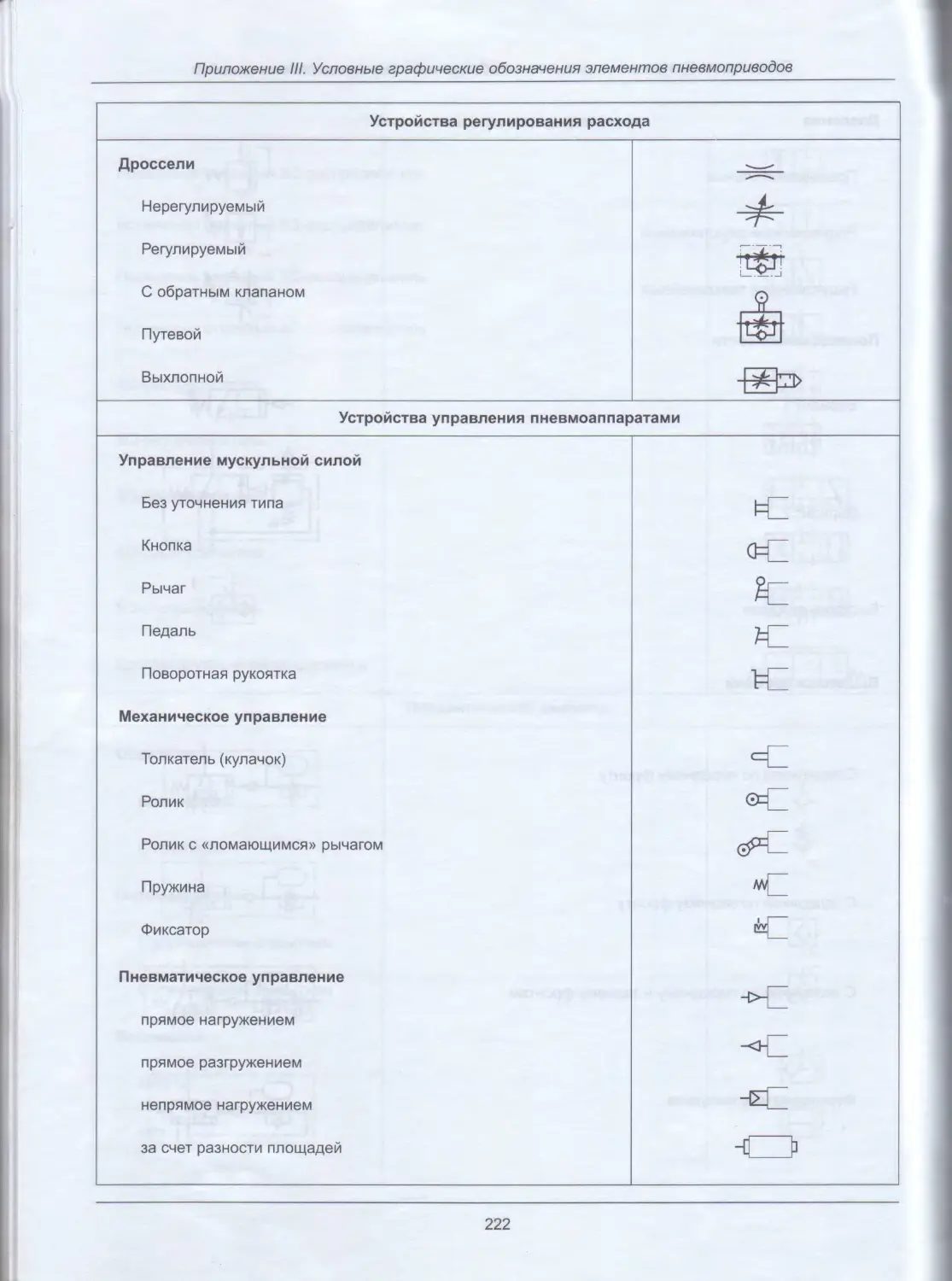
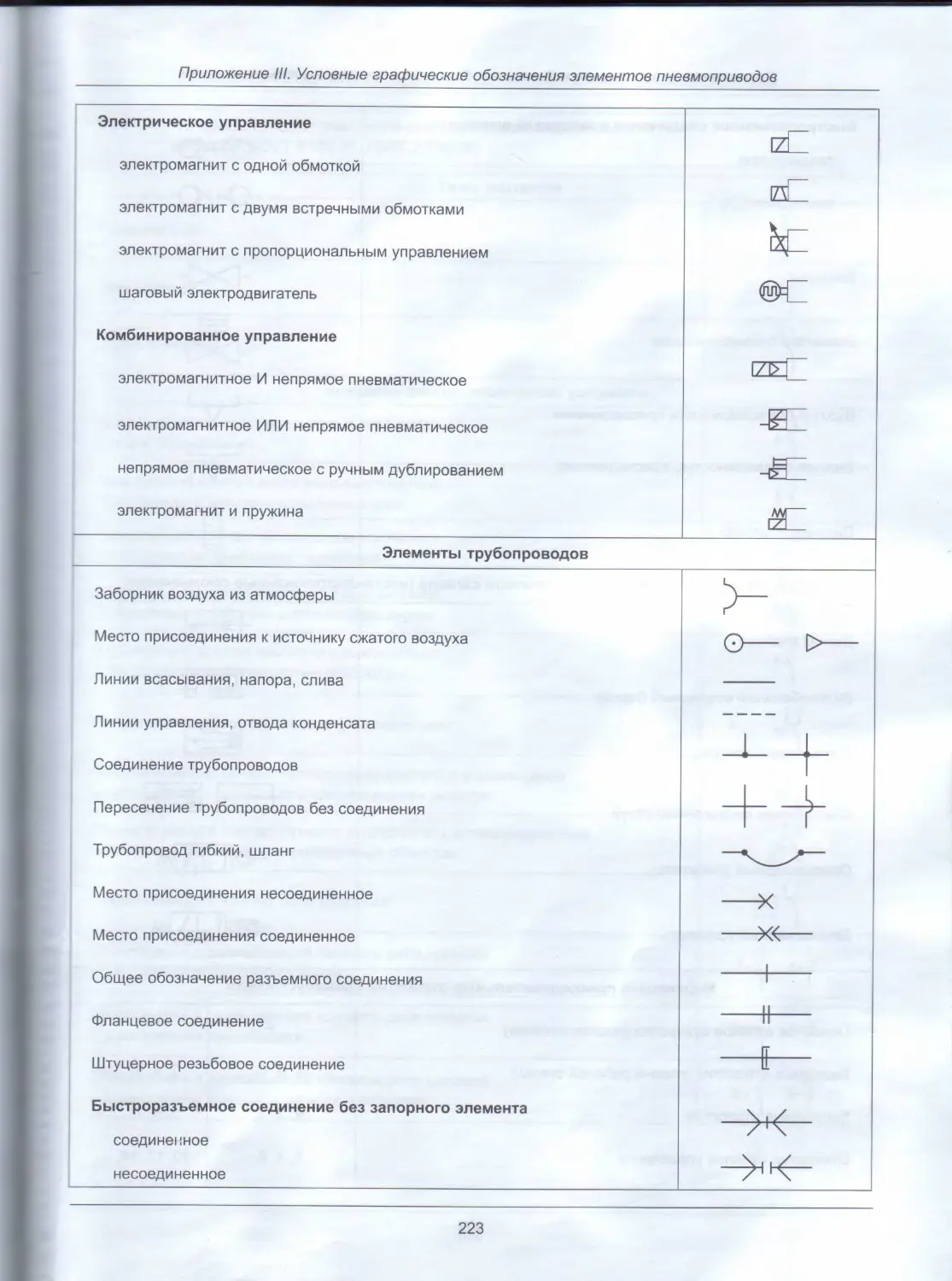
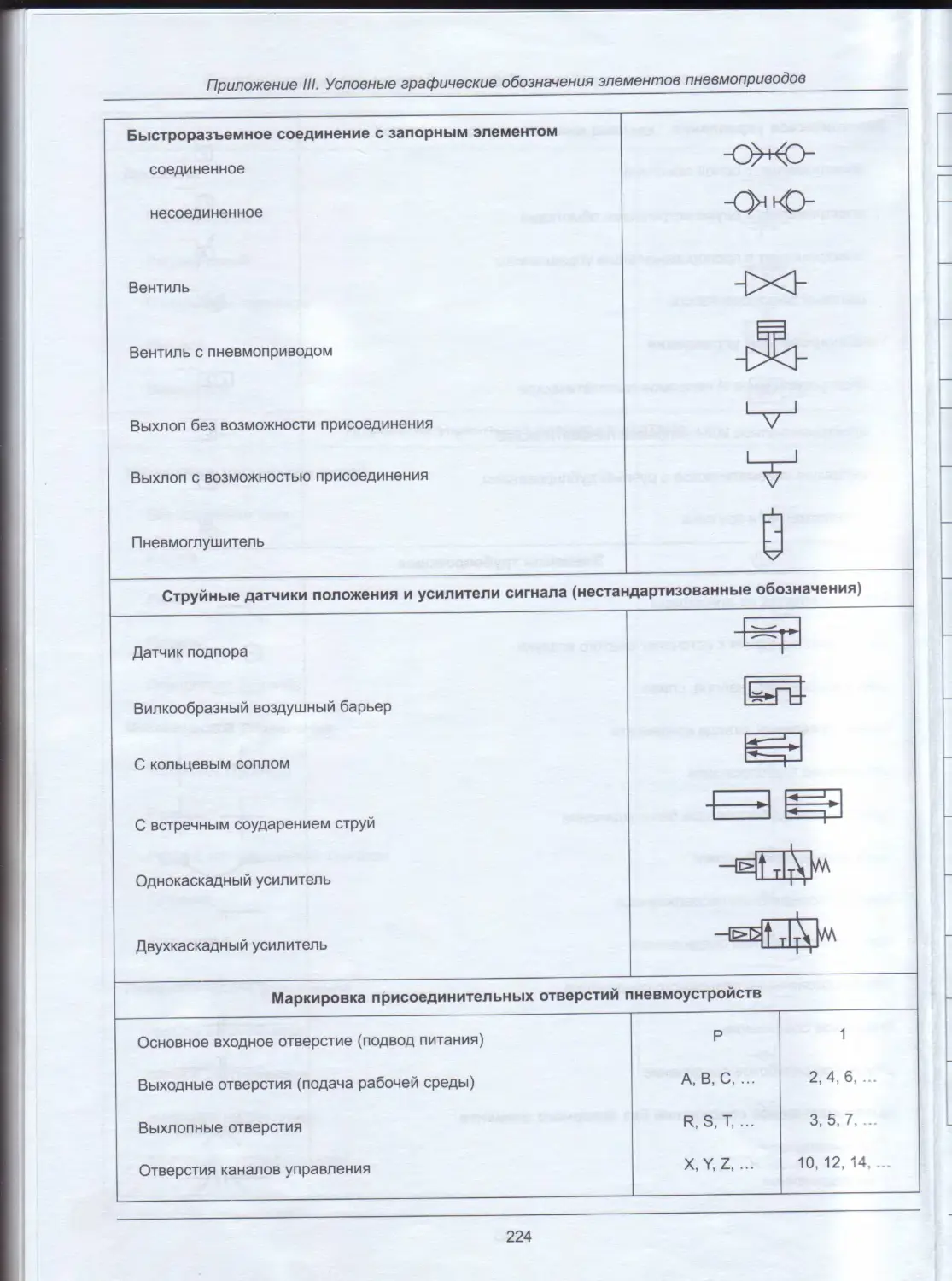
Приложение III. Условные графические обозначения элементов пневматических приводов......217
Предметный указатель..........................................................................227
~^*ература ...................................................................................235
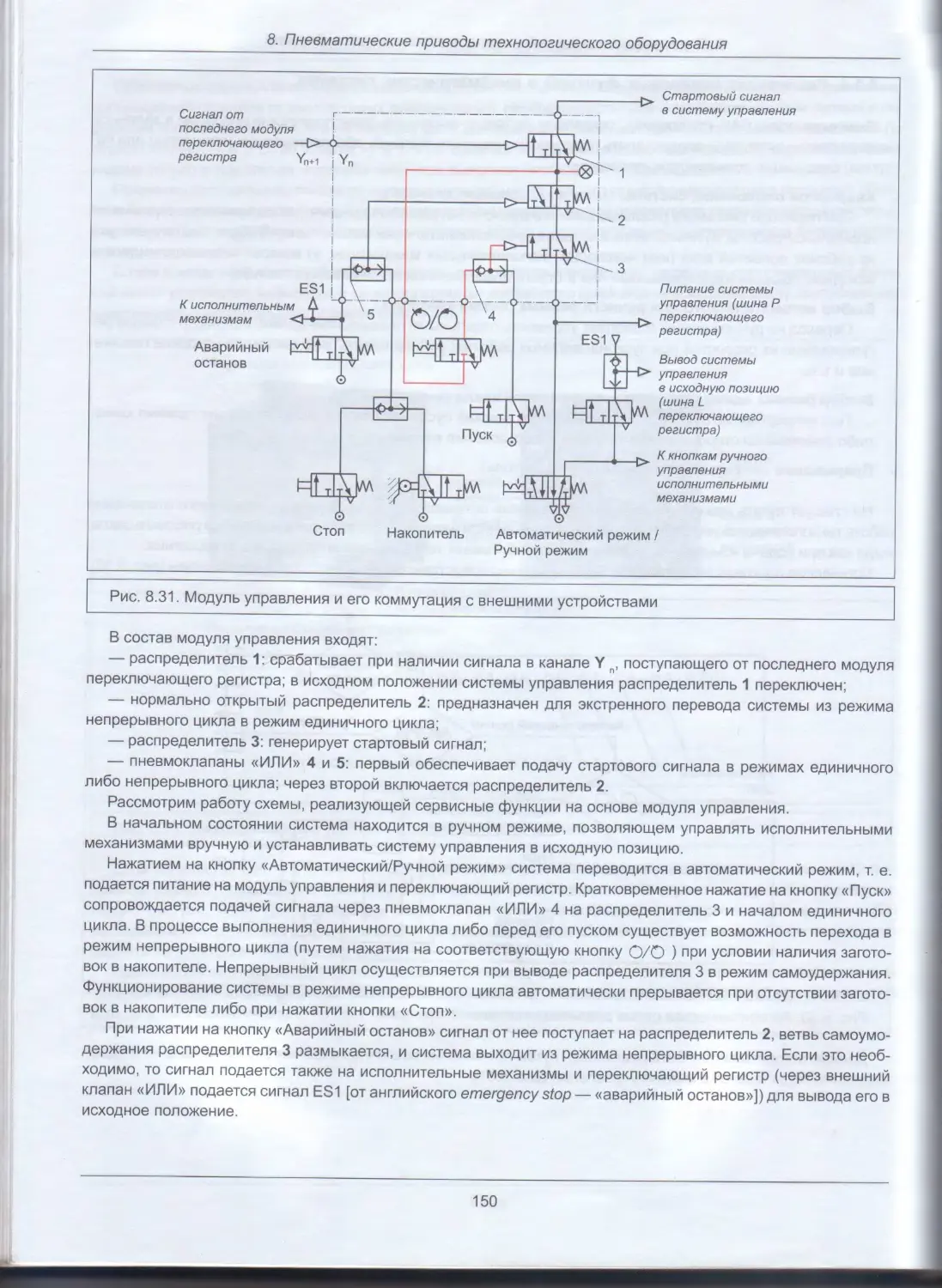
5
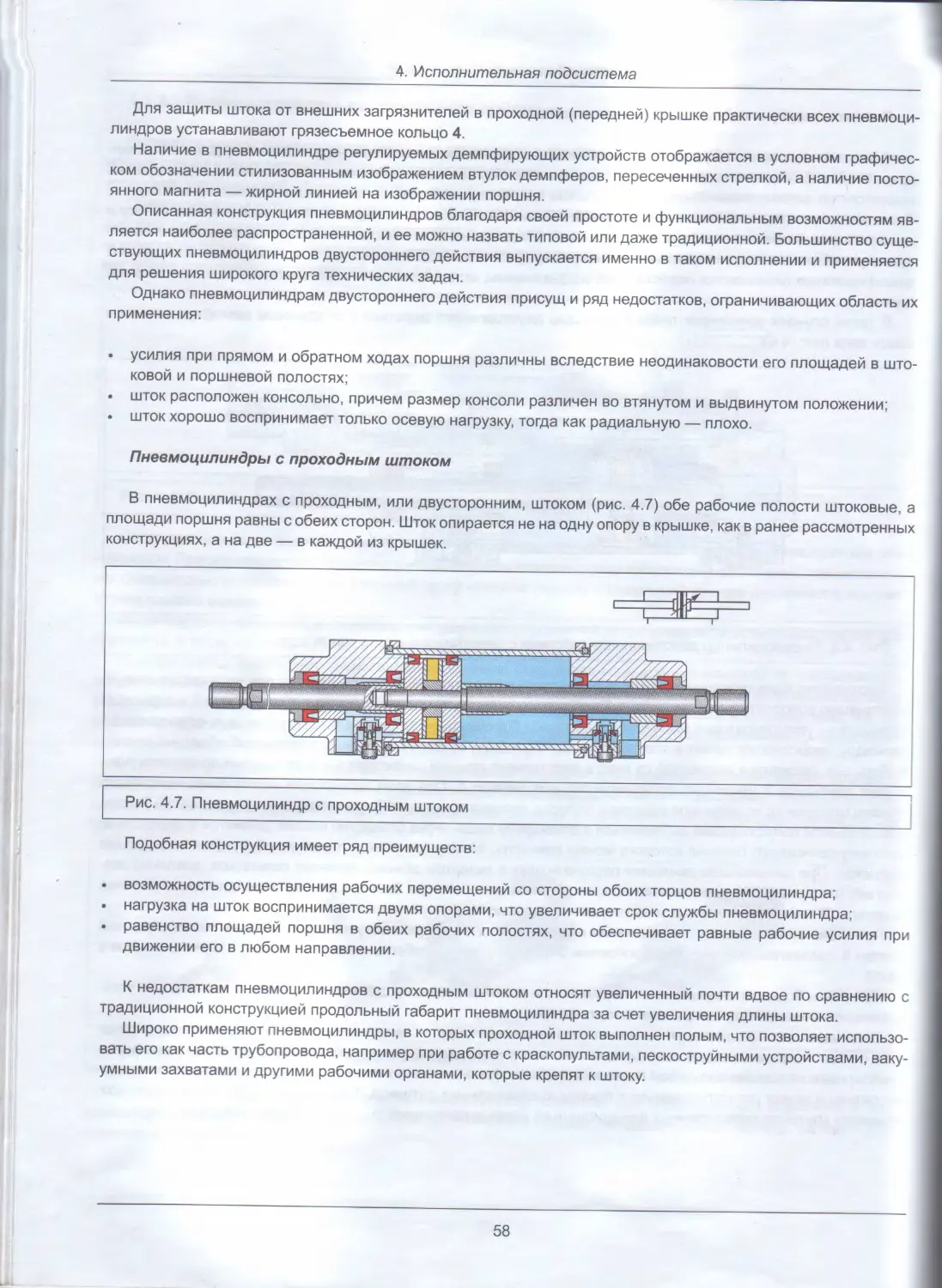
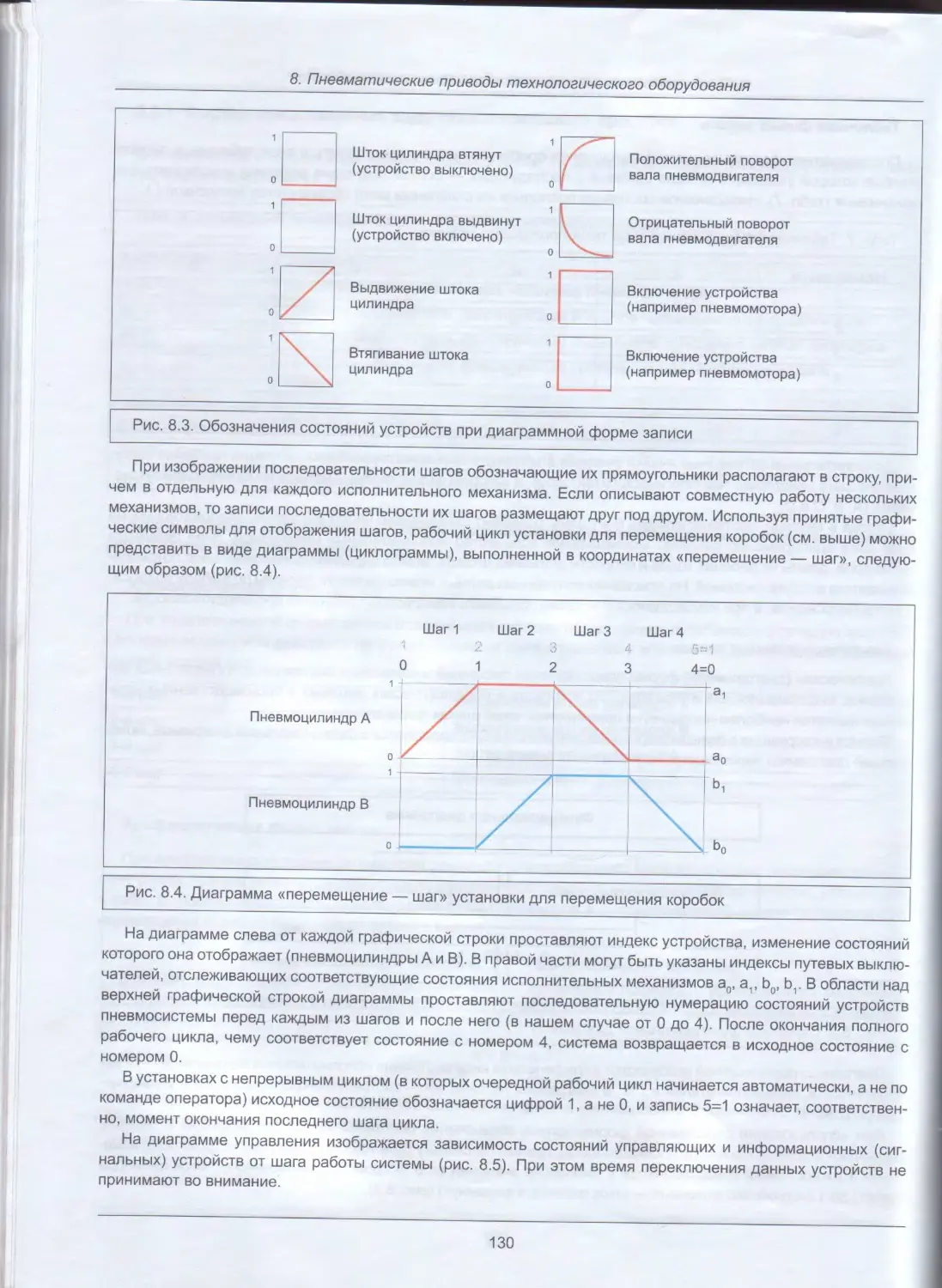
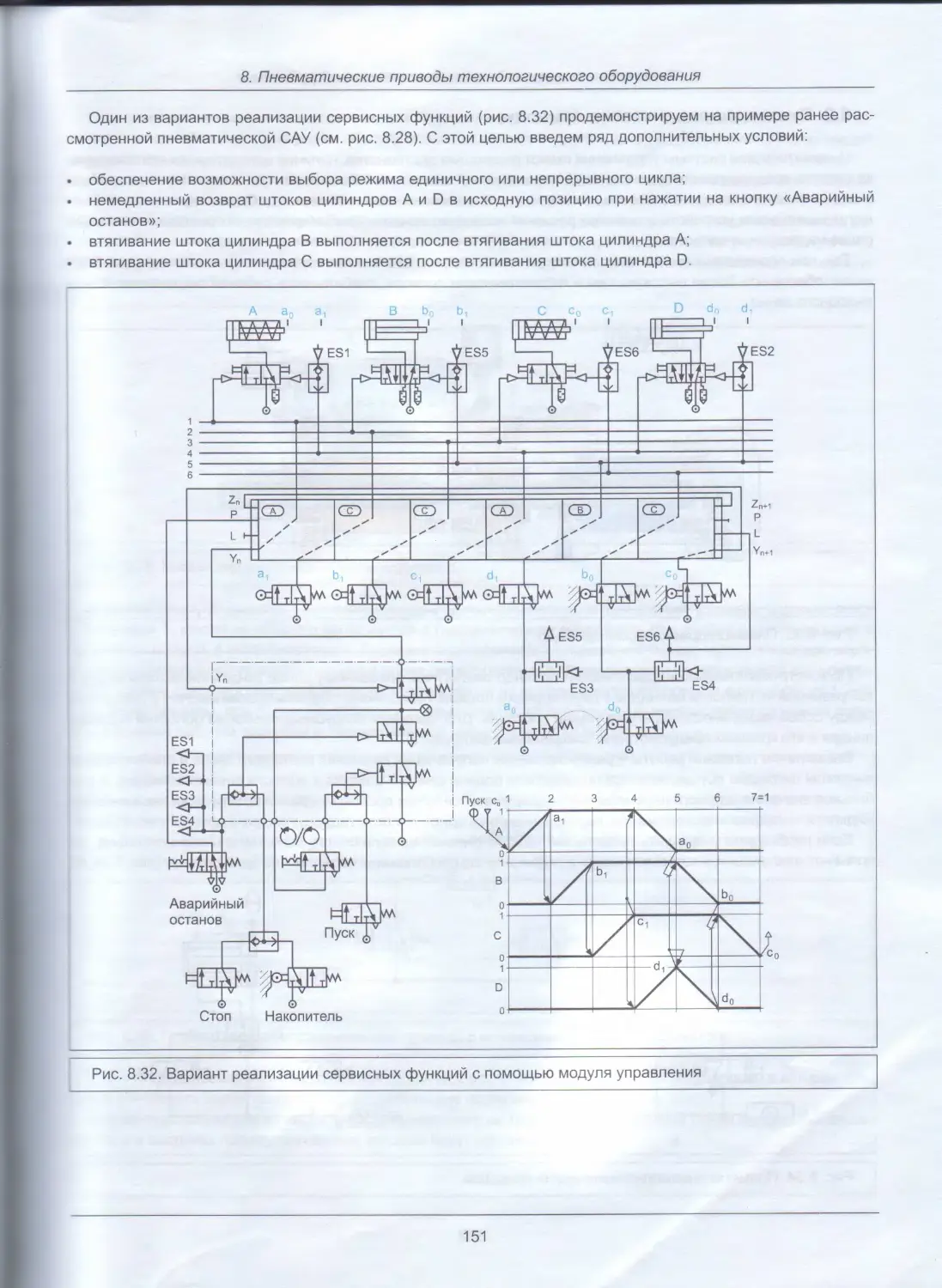
Введение
Введение
Отличительной чертой современного производства является широкое использование в оборудовании высо-
*:<нологичных, однотипных по функциональному назначению и конструкции компонентов общепромышлен-
гао применения*. В первую очередь, к таким компонентам относятся различного рода приводы и системы.
Системой называют совокупность взаимосвязанных объектов, объединенных единой целью и общим ал-
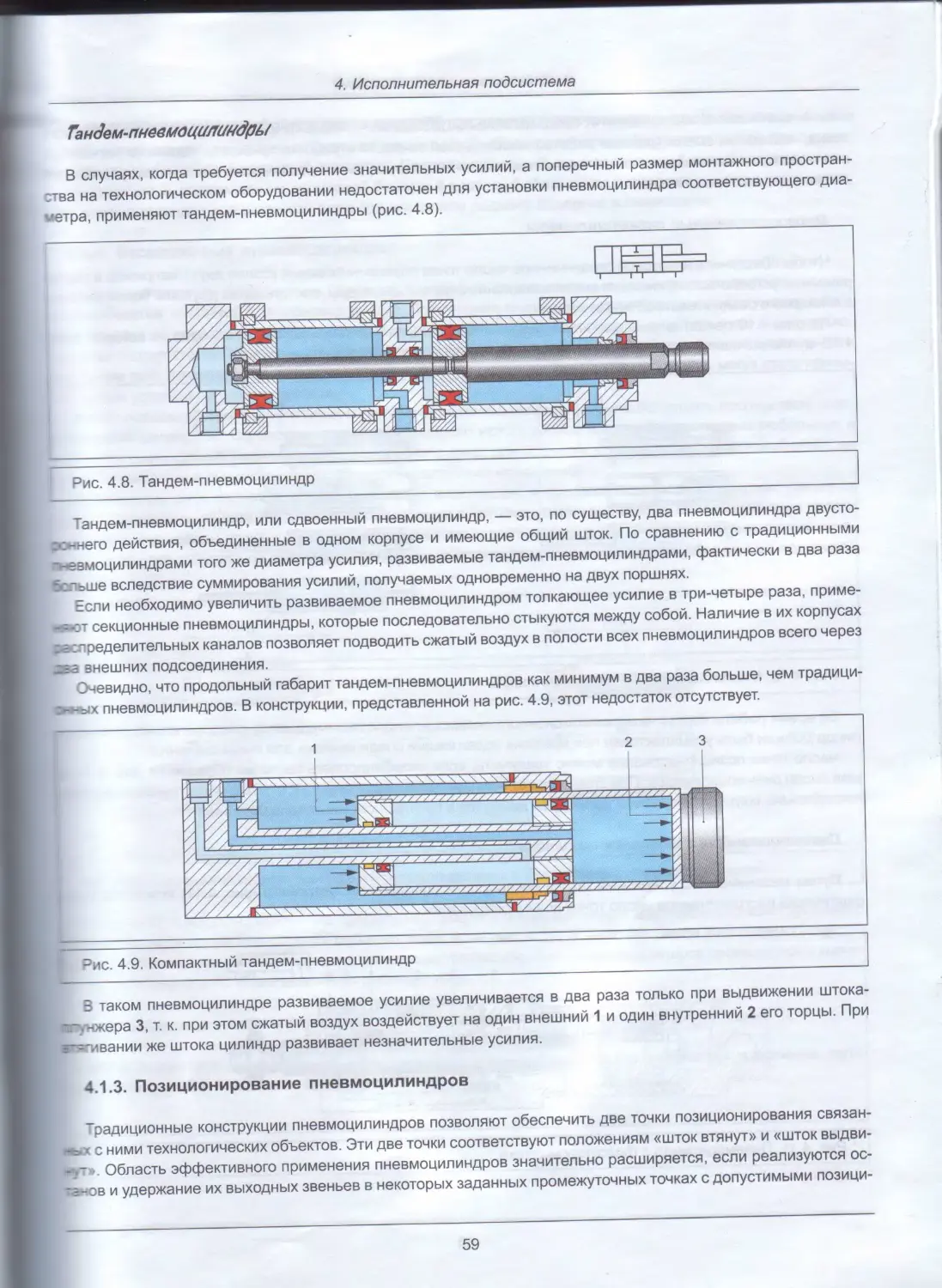
гоогтмом функционирования. Если объектами являются технические устройства, взаимодействие которых
ос•» .аествляется посредством жидкости или воздуха, то такие системы называют соответственно гидравли-
-=:«ими и пневматическими, или сокращенно гидро- и пневмосистемами. Используемые в них жидкость и
сжатый воздух называют рабочей средой (энергоносителем).
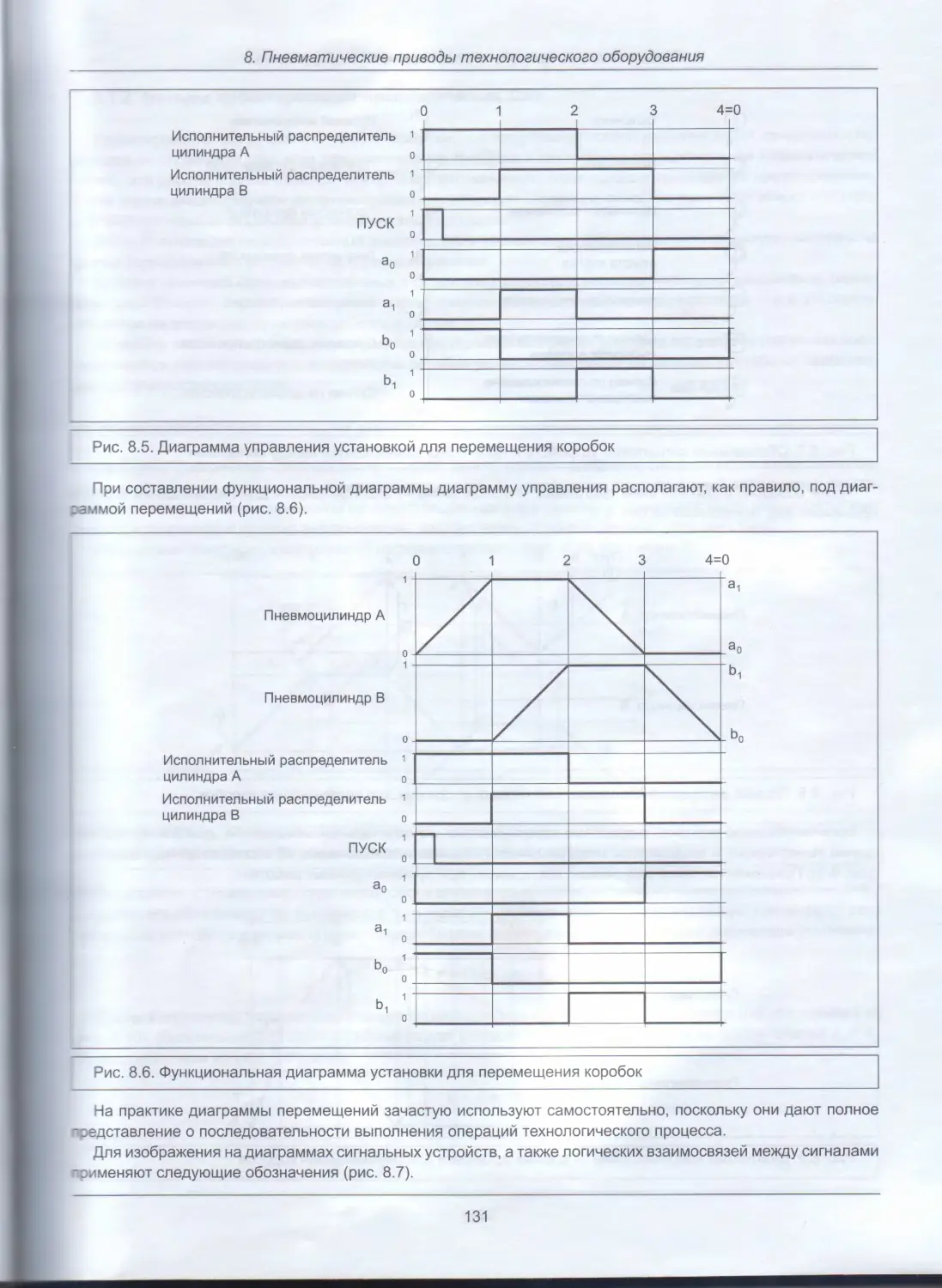
5 зависимости от функционального назначения гидро- и пневмосистемы делят на системы управления —
системы, которые используются для управления различными машинами, станками, аппаратами, и системы,
обеспечивающие рабочий процесс в этих объектах (системы смазки, топливные системы, системы охлажде-
тепло- и газоснабжения и т. п.).
Системы управления, в состав которых входит комплекс устройств, предназначенных для получения уси-
лий и перемещений в машинах и механизмах, называют также приводами. В зависимости от используемого
э-ергоносителя различают электрические, гидравлические и пневматические приводы, или сокращенно элек-
пх>. "идро- и пневмоприводы.
Область применения того или иного привода определяется путем анализа достоинств и недостатков, при-
ггшлх каждому из них (табл. 1).
абл. 1. Сравнение приводов по виду используемой энергии
I________________________________________________________
Критерий Электроприводы Гидроприводы Пневмоприводы
Затраты на э-ергоснабжение Низкие 1 Высокие 3...5 Очень высокие 7...10
Передача энергии На неограниченное расстояние со скоростью света с=300 км/с На расстояния до 100 м, скорость — до 6 м/с, передача сигналов — до 100 м/с На расстояния до 1000 м, скорость — до 40 м/с, передача сигналов — до 40 м/б
- s-опление энергии Затруднено Ограничено Легко осуществимо
“инейное еремещение Затруднительно, дорого, малые усилия Просто, большие усилия, хорошее регулирование скорости Просто, небольшие усилия, скорость зависит от нагрузки
Вращательное движение Просто, высокая мощность Просто, высокий крутящий момент, невысокая частота вращения Просто, невысокий крутящий момент, высокая частота вращения
Рабочая скорость исполнительного •-♦еханизма Зависит от конкретных условий До 0,5 м/с 1,5 м/с и выше
Усилия Большие усилия, не допускаются перегрузки Усилия до 3000 кН, защищены от перегрузок Усилия до 30 кН, защищены от перегрузок
Точность сзиционирования ±1 мкм и выше До ±1 мкм До 0,1 мм
-Кесткость Высокая (используются механические промежуточные элементы) Высокая (гидравлические масла практически несжимаемы) Низкая (воздух сжимаем)
, Утечки Нет Создают загрязнения Нет вреда, кроме потерь энергии
Влияние окружающей среды Нечувствительны к изменениям температуры Чувствительны к изменениям температуры, пожароопасны при наличии утечек Практически нечувствительны к колебаниям температуры, взрывобезопасны
Подшипники, муфты, цепи; датчики; микропроцессорные системы управления, контроля и диагностики; смазочные системы и
гтэойства; силовые полупроводниковые приборы и др.
7
Введение
Оборудование с пневмоприводами, рабочей средой в которых служит сжатый воздух, характеризуется про-
стотой конструкции, легкостью обслуживания и эксплуатации, высоким быстродействием, надежностью и дол-
говечностью работы, функциональной гибкостью, невысокой стоимостью, а также возможностью работы в аг-
рессивных средах, взрыво-, пожаро- и влагоопасных условиях. Сжатый воздух легко аккумулируется и транс-
портируется, а его утечки через уплотнения хотя и нежелательны, но не создают опасности для окружающей
среды и производимой продукции, что особенно важно для пищевой, парфюмерной, медицинской и электро-
ной промышленности.
От электроприводов пневмоприводы отличаются возможностью воспроизведения линейных и поворотнь х
движений без помощи преобразующих механизмов, большей удельной мощностью, а также сохранением ра-
ботоспособности при перегрузках. При этом скорость срабатывания и максимальная выходная мощность пнев-
матических исполнительных механизмов, питаемых от промышленных пневмомагистралей, меньше.
По сравнению с гидроприводами преимущества пневмоприводов заключаются в возможности использо-
вания централизованного источника сжатого воздуха, отсутствии возвратных линий и коммуникаций, более
низких требованиях к герметичности, отсутствии загрязнения окружающей среды, больших скоростях дви> е-
ния выходного звена. Для пневматических приводов характерны простота управления, свобода выбора мес-
та установки, малая чувствительность к изменениям температуры окружающей среды.
Вместе с тем пневмоприводам присущи некоторые недостатки, ограничивающие область их применена
Например, в связи с тем, что давление воздуха в централизованных пневмомагистралях, которое составляет
0,4-1,0 МПа (4-10 бар), значительно ниже уровня давлений в гидросистемах - до 60 МПа (600 бар), пневмо-
приводы имеют значительно меньшую энергоемкость и худшие массогабаритные показатели. Вследствие сжи-
маемости воздуха становится технически сложно обеспечить плавность перемещения выходных звеньев гг-
полнительных механизмов при колебаниях нагрузки, а также их точный останов в любом промежуточном поло-
жении (позиционирование) и реализацию заданного закона движения.
Разработка новых материалов, технологий конструирования и производства обусловливает повышение ка-
чества и постоянное расширение номенклатуры и области применения пневматических устройств как cpezr~
автоматизации'. Развитие и интенсивное внедрение электроники и микропроцессорной техники в управление
автоматизированным оборудованием и технологическими процессами способствует совершенствованию пнев-
матических приводов, приводит к созданию «интеллектуальных» электропневматических систем.
Специалист, занятый в области автоматизации производственных процессов, должен иметь четкое
представление о возможностях пневмоавтоматики , «философии» структурного построения автоматичеохж
систем управления, особенностях их функционирования и эксплуатации, знать основную элементную баз,, м
владеть методами расчета пневмоаппаратов ’.
Автоматизация — способ организации производства, при котором функции управления и контроля, ранее выполнявшиеся чегк<ве~
ком, передаются автоматическим устройствам.
Пневмоавтоматика — комплекс технических средств для построения систем автоматического управления, в которых информа-
ция представляется и передается в виде пневмосигналов (перепадов давления или расхода воздуха); техническая дисциплина, объе-
рассмотрения которой является данный вид технических средств автоматизации.
Пневмоаппарат — устройство для управления потоком сжатого воздуха.
8
1. Структура пневматических приводов
1. Структура пневматических приводов
Чтобы понять назначение тех или иных элементов пневмосистем, разобраться в принципах их объедине-
—<*я в различные части общей структуры привода и «прочувствовать» взаимосвязь этих частей, полезно вве-
сти некоторые обобщающие понятия.
Известно, что все технические процессы подразделяются на:
. технологические — производство и обработка материалов;
• энергетические — выработка, преобразование и передача различных видов энергии;
• информационные — формирование, прием, обработка, хранение и передача информационных потоков.
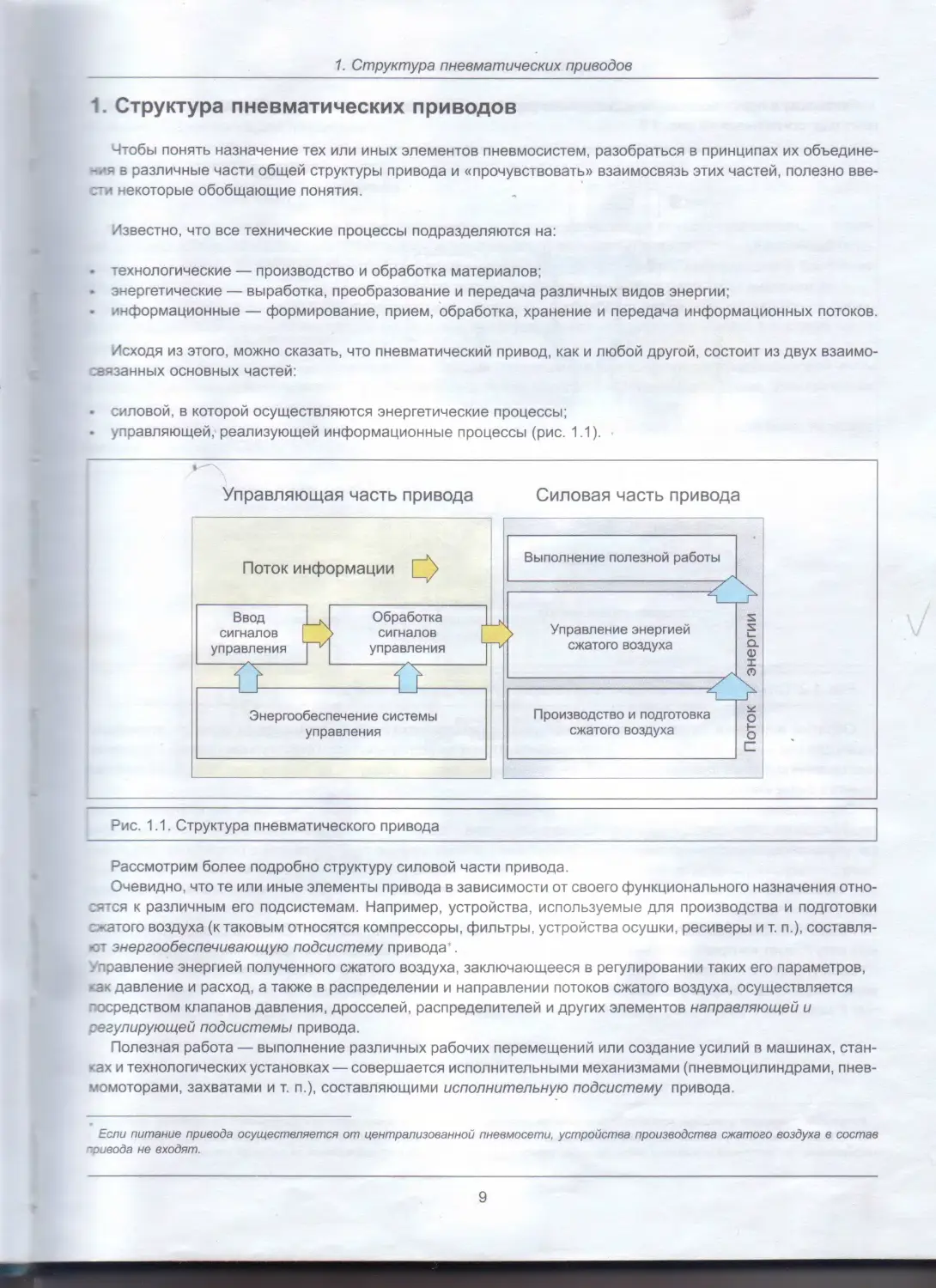
Исходя из этого, можно сказать, что пневматический привод, как и любой другой, состоит из двух взаимо-
связанных основных частей:
• силовой, в которой осуществляются энергетические процессы;
• управляющей, реализующей информационные процессы (рис. 1.1).
Управляющая часть привода
Силовая часть привода
Рис. 1.1. Структура пневматического привода
Рассмотрим более подробно структуру силовой части привода.
Очевидно, что те или иные элементы привода в зависимости от своего функционального назначения отно-
сятся к различным его подсистемам. Например, устройства, используемые для производства и подготовки
сжатого воздуха (к таковым относятся компрессоры, фильтры, устройства осушки, ресиверы и т. п.), составля-
ют энергообеспечивающую подсистему привода'.
.• правление энергией полученного сжатого воздуха, заключающееся в регулировании таких его параметров,
•ак давление и расход, а также в распределении и направлении потоков сжатого воздуха, осуществляется
посредством клапанов давления, дросселей, распределителей и других элементов направляющей и
регулирующей подсистемы привода.
Полезная работа — выполнение различных рабочих перемещений или создание усилий в машинах, стан-
•ах и технологических установках — совершается исполнительными механизмами (пневмоцилиндрами, пнев-
момоторами, захватами и т. п.), составляющими исполнительную подсистему привода.
Если питание привода осуществляется от централизованной пневмосети, устройства производства сжатого воздуха в состав
-ривода не входят.
9
1. Структура пневматических приводов
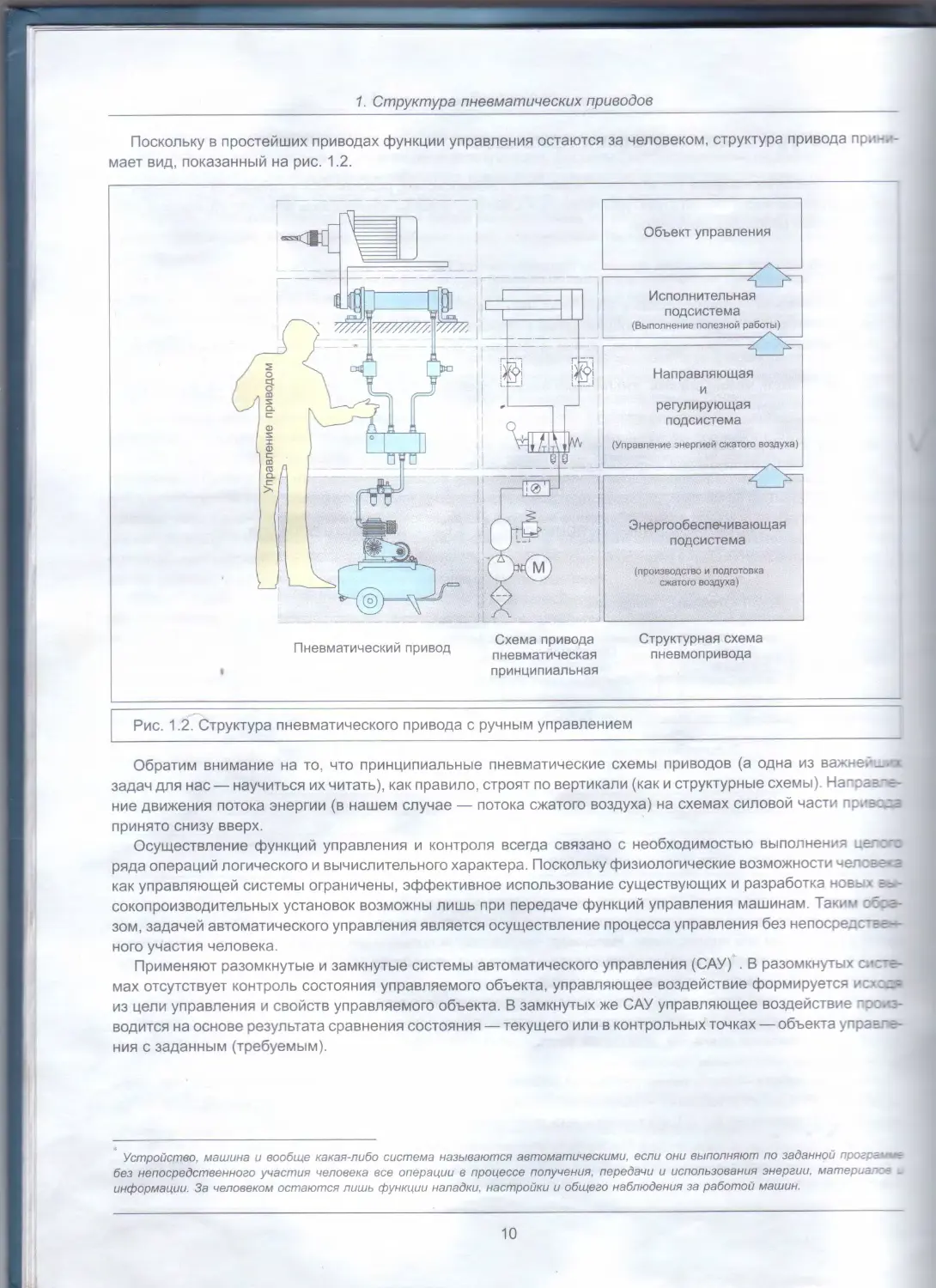
Поскольку в простейших приводах функции управления остаются за человеком, структура привода прини-
мает вид, показанный на рис. 1.2.
Пневматический привод
Схема привода
пневматическая
принципиальная
Объект управления
Исполнительная
подсистема
(Выполнение полезной работы)
Направляющая
и
регулирующая
подсистема
(Управление энергией сжатого воздуха)
Энергообеспечивающая
подсистема
(производство и подготовка
сжатого воздуха)
Структурная схема
пневмопривода
Рис. 1.2. Структура пневматического привода с ручным управлением
Обратим внимание на то, что принципиальные пневматические схемы приводов (а одна из важней--'^
задач для нас — научиться их читать), как правило, строят по вертикали (как и структурные схемы). Направ-^-
ние движения потока энергии (в нашем случае — потока сжатого воздуха) на схемах силовой части привела
принято снизу вверх.
Осуществление функций управления и контроля всегда связано с необходимостью выполнения tiers"
ряда операций логического и вычислительного характера. Поскольку физиологические возможности человека
как управляющей системы ограничены, эффективное использование существующих и разработка новь х
сокопроизводительных установок возможны лишь при передаче функций управления машинам. Таким ersa-
зом, задачей автоматического управления является осуществление процесса управления без непосредст=е—
ного участия человека.
Применяют разомкнутые и замкнутые системы автоматического управления (САУ) . В разомкнутых систе-
мах отсутствует контроль состояния управляемого объекта, управляющее воздействие формируется ис*сся
из цели управления и свойств управляемого объекта. В замкнутых же САУ управляющее воздействие произ-
водится на основе результата сравнения состояния — текущего или в контрольных точках — объекта упраЕ
ния с заданным (требуемым).
Устройство, машина и вообще какая-либо система называются автоматическими, если они выполняют по заданной программе
без непосредственного участия человека все операции в процессе получения, передачи и использования энергии, материалов _
информации. За человеком остаются лишь функции наладки, настройки и общего наблюдения за работой машин.
10
1. Структура пневматических приводов
Устройства, входящие в управляющую часть замкнутой системы управления, по своему функциональному
-^значению делятся на две подсистемы:
• информационную (сенсорную);
• логико-вычислительную (процессорную).
В информационную подсистему входят различного рода устройства ввода внешних управляющих сигна-
лое а также датчики и индикаторы. Если внешние управляющие сигналы («Пуск», «Стоп», «Аварийный оста-
нов» и т. п.) вводит в систему оператор, то датчики автоматически «собирают» информацию о состоянии
субъекта управления, а индикаторы визуализируют необходимую для оператора часть этой информации.
Назначение логико-вычислительной подсистемы очевидно — обработка введенных управляющих сигна-
лов в соответствии с заданной программой и вывод их на устройства управления энергией в силовой части
привода.
В зависимости от условий эксплуатации, требований безопасности или степени сложности силовой части
"лвода управляющая часть может быть реализована путем использования пневматических, электрических
/ли электронных средств автоматизации.
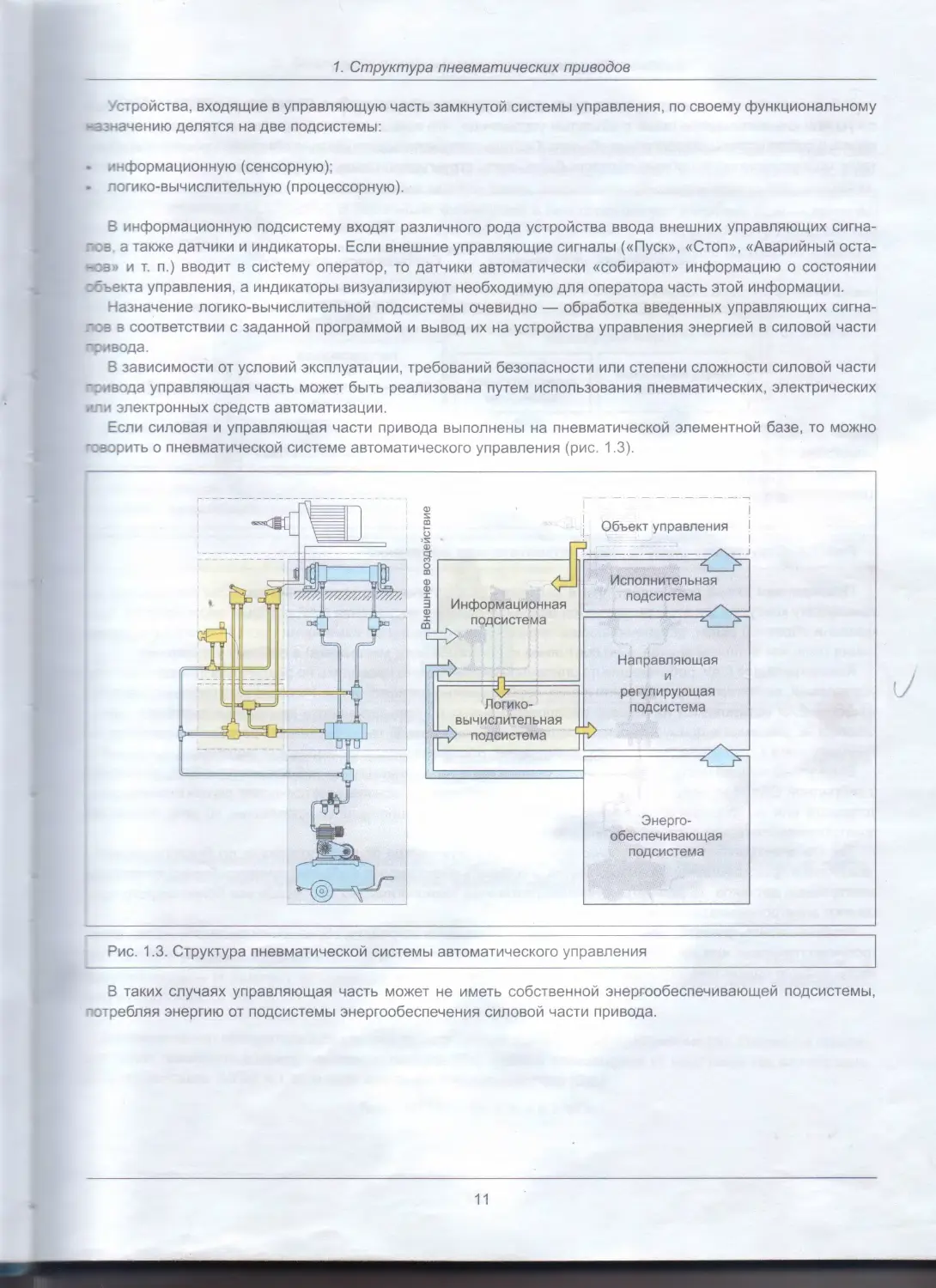
Если силовая и управляющая части привода выполнены на пневматической элементной базе, то можно
"ворить о пневматической системе автоматического управления (рис. 1.3).
Ф
ф
S
ф
ф
X
в
ф
Объект управления
Исполнительная
подсистема
Информационная
подсистема
Логико-
вычислительная
подсистема
Направляющая
и
регулирующая
подсистема
Энерго-
обеспечивающая
подсистема
Рис. 1.3. Структура пневматической системы автоматического управления
В таких случаях управляющая часть может не иметь собственной энергообеспечивающей подсистемы,
~отребляя энергию от подсистемы энергообеспечения силовой части привода.
11
1. Структура пневматических приводов
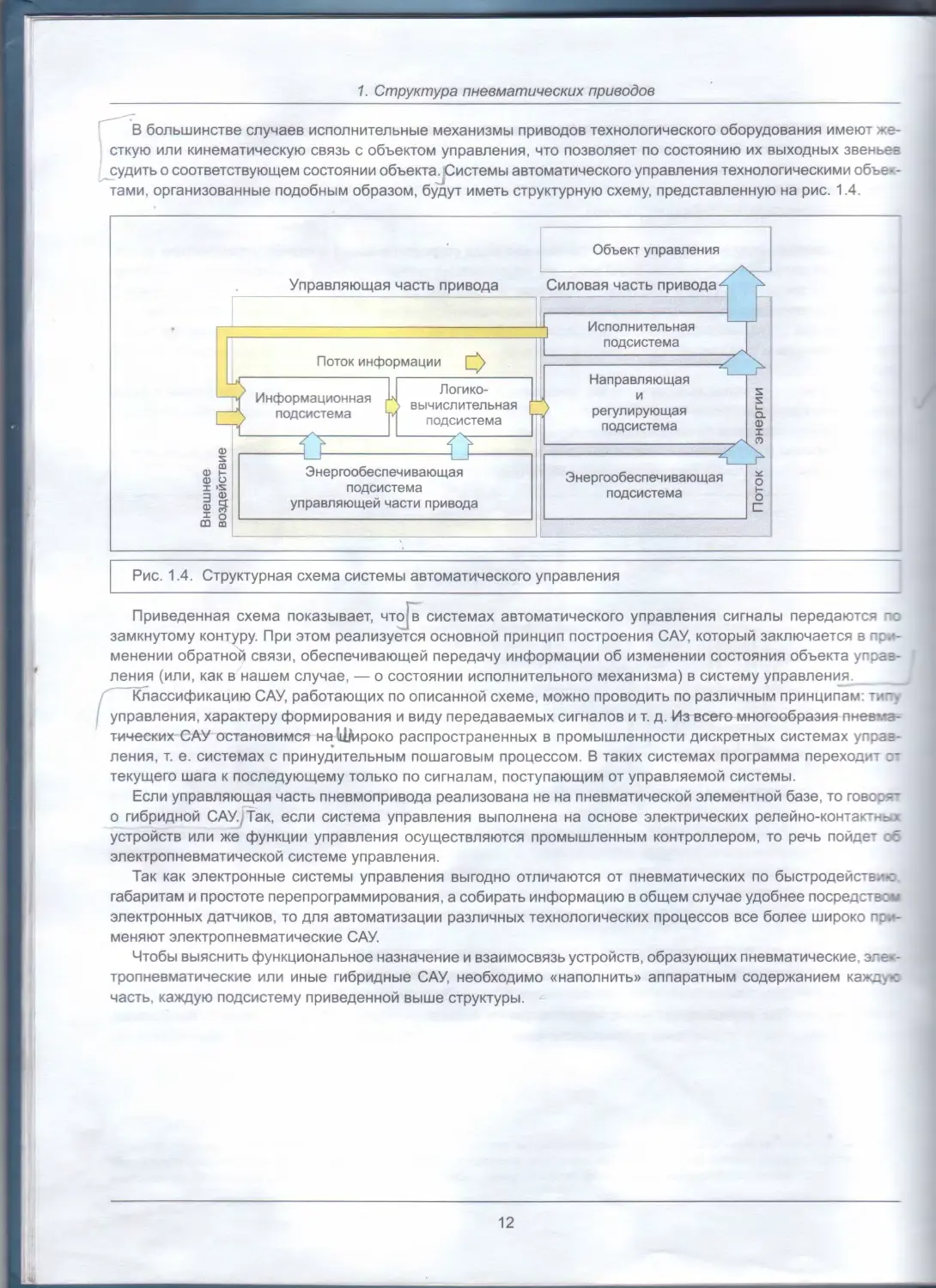
В большинстве случаев исполнительные механизмы приводов технологического оборудования имеют же-
сткую или кинематическую связь с объектом управления, что позволяет по состоянию их выходных звеньев
судить о соответствующем состоянии объекта. Системы автоматического управления технологическими объек-
тами, организованные подобным образом, будут иметь структурную схему, представленную на рис. 1.4.
Приведенная схема показывает, что! в системах автоматического управления сигналы передаются по
замкнутому контуру. При этом реализуется основной принцип построения САУ, который заключается в при-
менении обратной связи, обеспечивающей передачу информации об изменении состояния объекта управ-
ления (или, как в нашем случае, — о состоянии исполнительного механизма) в систему управления;__
Классификацию САУ, работающих по описанной схеме, можно проводить по различным принципам: тигг
управления, характеру формирования и виду передаваемых сигналов и т. д. Из всего многообразия пнев*ла-
тических САУ остановимся на liBnpoKo распространенных в промышленности дискретных системах управ-
ления, т. е. системах с принудительным пошаговым процессом. В таких системах программа переходит от
текущего шага к последующему только по сигналам, поступающим от управляемой системы.
Если управляющая часть пневмопривода реализована не на пневматической элементной базе, то говор=~
о гибридной САУ.Так, если система управления выполнена на основе электрических релейно-контактньс»
устройств или же функции управления осуществляются промышленным контроллером, то речь пойдет об
электропневматической системе управления.
Так как электронные системы управления выгодно отличаются от пневматических по быстродействию,
габаритам и простоте перепрограммирования, а собирать информацию в общем случае удобнее посредством
электронных датчиков, то для автоматизации различных технологических процессов все более широко при-
меняют электропневматические САУ.
Чтобы выяснить функциональное назначение и взаимосвязь устройств, образующих пневматические, элек-
тропневматические или иные гибридные САУ, необходимо «наполнить» аппаратным содержанием каждую
часть, каждую подсистему приведенной выше структуры.
12
Н^Физические основы функционирования пневмосистем
2. Физические основы функционирования пневмосистем
Во всех элементах, приборах и системах пневмоавтоматики рабочей средой является предварительно сжа-
рь**' в компрессоре воздух (в некоторых особых случаях применяют другие газы), который окружает нас в по-
I вседневной жизни. Воздух представляет собой газовую смесь, в основном состоящую из двух газов: азота N2
8 08%) и кислорода О2 (20,95%). В небольших количествах в нем присутствуют инертные газы — аргон Аг,
I Ne. гелий Не, криптон Кг и ксенон Хе — и водород Н2 (0,94%), а также диоксид углерода (углекислый газ)
НХ/ (0.03%). Помимо этих газов воздух содержит некоторое непостоянное по величине количество водяного
(влаги).
°абота пневматических элементов основывается на использовании энергии сжатого воздуха, а также физи-
[ чкхих эффектов, возникающих при его движении. Законы, описывающие эти процессы, подробно изучаются в
механики жидкости и газа. Далее в этом разделе мы уделим внимание только основным газовым зако-
«ВМ
2.1. Основные параметры газа
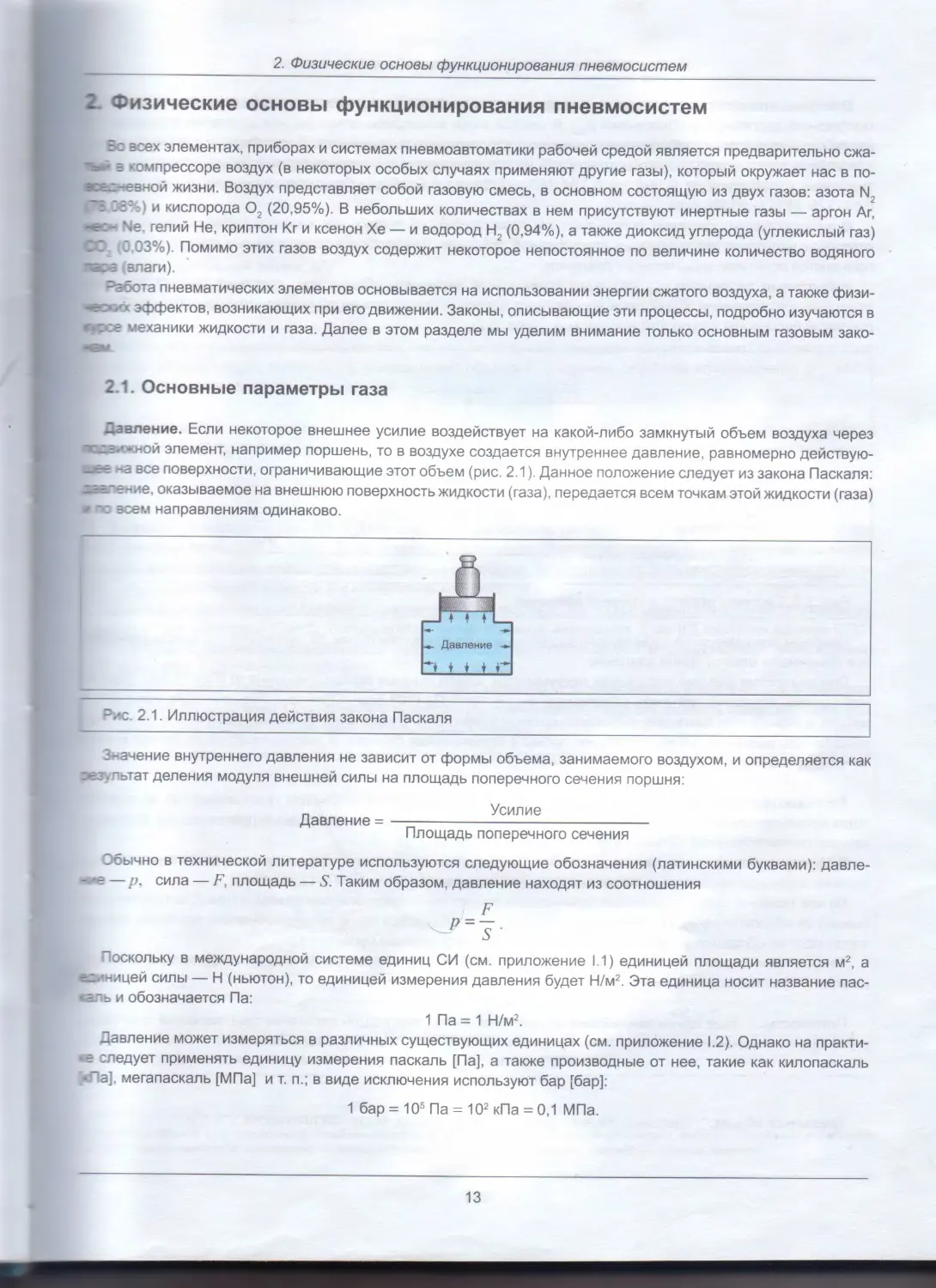
Давление. Если некоторое внешнее усилие воздействует на какой-либо замкнутый объем воздуха через
вссвичной элемент, например поршень, то в воздухе создается внутреннее давление, равномерно действую-
_^а все поверхности, ограничивающие этот объем (рис. 2.1). Данное положение следует из закона Паскаля:
дае-эение, оказываемое на внешнюю поверхность жидкости (газа), передается всем точкам этой жидкости (газа)
м пс всем направлениям одинаково.
Значение внутреннего давления не зависит от формы объема, занимаемого воздухом, и определяется как
результат деления модуля внешней силы на площадь поперечного сечения поршня:
Усилие
Давление =
Площадь поперечного сечения
Обычно в технической литературе используются следующие обозначения (латинскими буквами): давле-
- т —р, сила — F, площадь — 5. Таким образом, давление находят из соотношения
р = —.
S
Поскольку в международной системе единиц СИ (см. приложение 1.1) единицей площади является м2, а
единицей силы — Н (ньютон), то единицей измерения давления будет Н/м2. Эта единица носит название пас-
аль и обозначается Па:
1 Па = 1 Н/м2.
Давление может измеряться в различных существующих единицах (см. приложение I.2). Однако на практи-
ке следует применять единицу измерения паскаль [Па], а также производные от нее, такие как килопаскаль
[кЛа], мегапаскаль [МПа] и т. п.; в виде исключения используют бар [бар]:
1 бар = 105 Па = 102 кПа = 0,1 МПа.
13
2. Физические основы функционирования пневмосистем
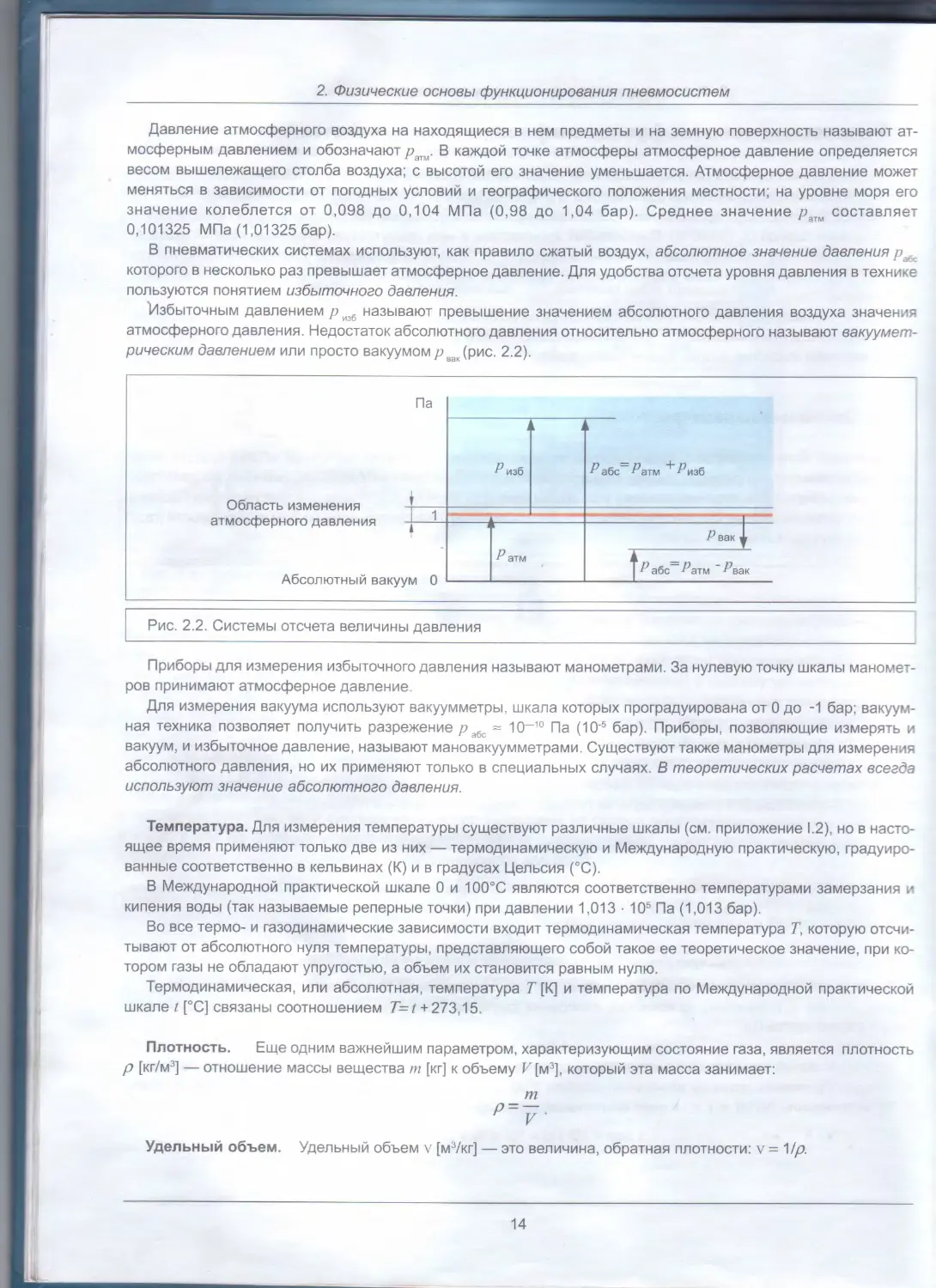
Давление атмосферного воздуха на находящиеся в нем предметы и на земную поверхность называют ат-
мосферным давлением и обозначают /?атм. В каждой точке атмосферы атмосферное давление определяется
весом вышележащего столба воздуха; с высотой его значение уменьшается. Атмосферное давление может
меняться в зависимости от погодных условий и географического положения местности; на уровне моря его
значение колеблется от 0,098 до 0,104 МПа (0,98 до 1,04 бар). Среднее значение /татм составляет
0,101325 МПа (1,01325 бар).
В пневматических системах используют, как правило сжатый воздух, абсолютное значение давления р^_
которого в несколько раз превышает атмосферное давление. Для удобства отсчета уровня давления в технике
пользуются понятием избыточного давления.
Избыточным давлением р изб называют превышение значением абсолютного давления воздуха значения
атмосферного давления. Недостаток абсолютного давления относительно атмосферного называют вакуумет-
рическим давлением или просто вакуумом рвак(рис. 2.2).
Па
Р изб
Р абс ^атм + Р изб
Область изменения
атмосферного давления
Абсолютный вакуум 0
Р абс Ратм ” Рвак
Р вак
Рис. 2.2. Системы отсчета величины давления
Приборы для измерения избыточного давления называют манометрами. За нулевую точку шкалы маномет-
ров принимают атмосферное давление.
Для измерения вакуума используют вакуумметры, шкала которых проградуирована от 0 до -1 бар; вакуум-
ная техника позволяет получить разрежение дабс = 10~10 Па (10 5 бар). Приборы, позволяющие измерять и
вакуум, и избыточное давление, называют мановакуумметрами. Существуют также манометры для измерения
абсолютного давления, но их применяют только в специальных случаях. В теоретических расчетах всегда
используют значение абсолютного давления.
Температура. Для измерения температуры существуют различные шкалы (см. приложение I.2), но в насто-
ящее время применяют только две из них — термодинамическую и Международную практическую, градуиро-
ванные соответственно в кельвинах (К) и в градусах Цельсия (°C).
В Международной практической шкале 0 и 100°С являются соответственно температурами замерзания и
кипения воды (так называемые реперные точки) при давлении 1,013 • 105 Па (1,013 бар).
Во все термо- и газодинамические зависимости входит термодинамическая температура Т, которую отсчи-
тывают от абсолютного нуля температуры, представляющего собой такое ее теоретическое значение, при ко-
тором газы не обладают упругостью, а объем их становится равным нулю.
Термодинамическая, или абсолютная, температура Т [К] и температура по Международной практической
шкале t [°C] связаны соотношением Г-/ + 273,15.
Плотность. Еще одним важнейшим параметром, характеризующим состояние газа, является плотность
р [кг/м3] — отношение массы вещества тп [кг] к объему И[м3], который эта масса занимает:
m
Удельный объем. Удельный объем v [м3/кг] — это величина, обратная плотности: v = 1 //?.
14
2. Физические основы функционирования пневмосистем
2 2 Основные физические свойства газов
Сжимаемость. Свойство газа изменять объем под действием давления называют сжимаемостью. Сжима-
остэ характеризуется коэффициентом объемного сжатия /3 [Па1], который представляет собой относитель-
в изл'енение объема, приходящееся на единицу давления:
1 ДГ
/3 =-------
р Vo \р'
□е — начальный объем, м3;
А Г'— изменение объема, м3;
т
Лр — изменение давления, Па.
минус» в формуле обусловлен тем, что положительному приращению (увеличению) давления р соот-
отрицательное приращение (уменьшение) объема К Величина, обратная коэффициенту /3 f >, носит
*ез=.=-ие объемного модуля упругости (модуля сжимаемости) К [Па].
Температурное расширение. Температурное расширение характеризуется коэффициентом объемного
смирения /3 г [К1], который представляет собой относительное изменение объема при изменении температу-
। Г на 1 К: 1 ДИ
?Т~ Vo ЬТ ‘
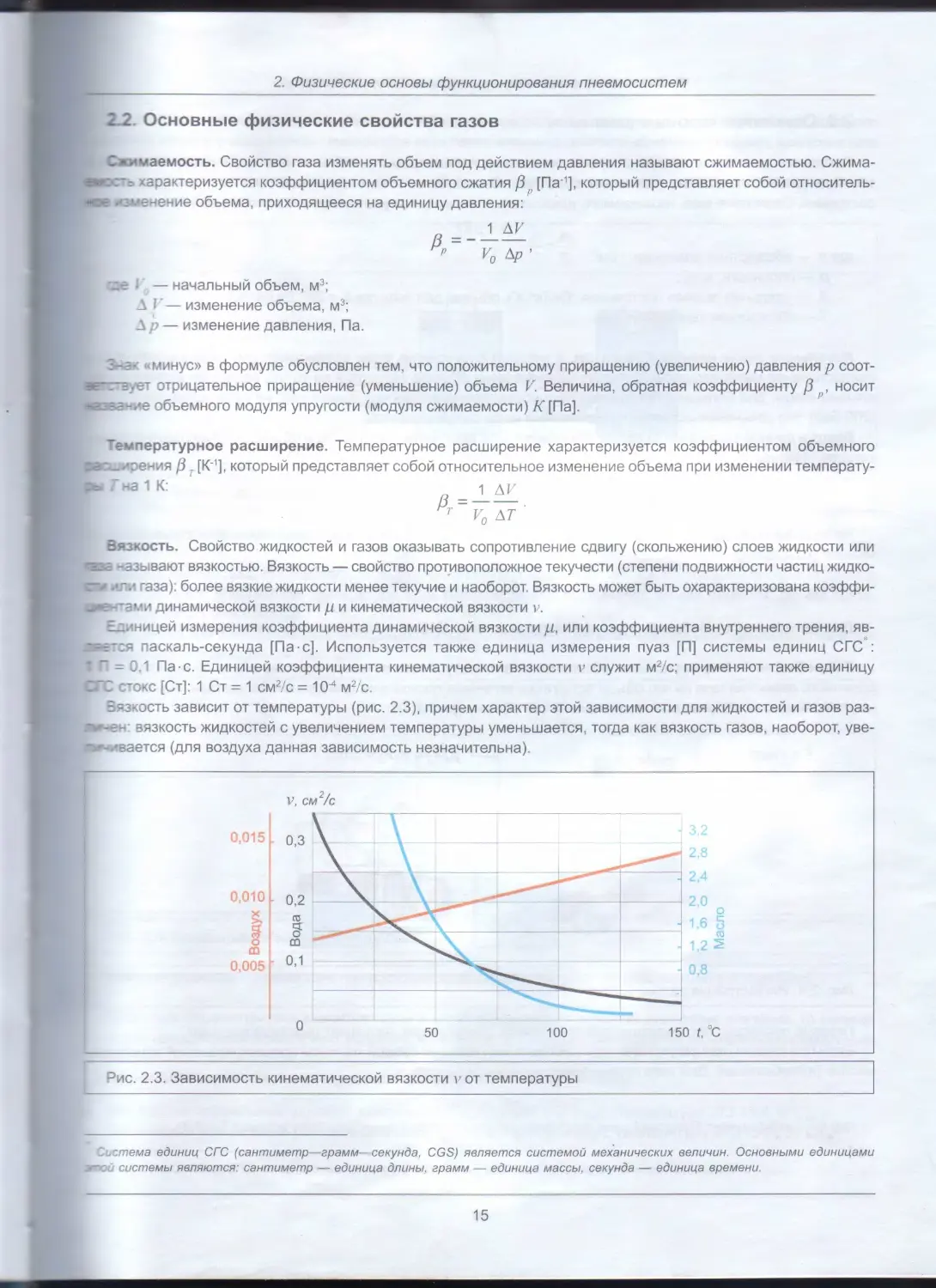
Вязкость. Свойство жидкостей и газов оказывать сопротивление сдвигу (скольжению) слоев жидкости или
-азывают вязкостью. Вязкость — свойство противоположное текучести (степени подвижности частиц жидко-
Т» или газа): более вязкие жидкости менее текучие и наоборот. Вязкость может быть охарактеризована коэффи-
вкнтами динамической вязкости ц и кинематической вязкости у.
Единицей измерения коэффициента динамической вязкости д, или коэффициента внутреннего трения, яв-
паскаль-секунда [Па-с]. Используется также единица измерения пуаз [П] системы единиц СГС :
1 П = 0.1 Па с. Единицей коэффициента кинематической вязкости у служит м2/с; применяют также единицу
СГС стокс [Ст]: 1 Ст = 1 см2/с = 10’4 м2/с.
Вязкость зависит от температуры (рис. 2.3), причем характер этой зависимости для жидкостей и газов раз-
лг-ен вязкость жидкостей с увеличением температуры уменьшается, тогда как вязкость газов, наоборот, уве-
лг-.'вается (для воздуха данная зависимость незначительна).
Рис. 2.3. Зависимость кинематической вязкости у от температуры
Ретема единиц СГС (сантиметр—грамм—секунда, CGS) является системой механических величин. Основными единицами
r-ой системы являются: сантиметр — единица длины, грамм — единица массы, секунда — единица времени.
15
2. Физические основы функционирования пневмосистем
2.3. Основные газовые законы
Состояние газа характеризуется тремя основными параметрами — абсолютным давлением, абсолют
температурой и плотностью (удельным объемом). Взаимосвязь этих параметров газа именуют уравнен
состояния. Состояние газа, называемого идеальным, описывается уравнением Клапейрона — Менделе*
р =pRT,
где р — абсолютное давление, Н/м2;
р — плотность, кг/м3;
R — удельная газовая постоянная, Дж/(кг- К); обычно для воздуха R = 287 Дж/(кг- К);
Т — абсолютная температура, К.
Идеальным газом называют такой газ, в котором отсутствуют силы взаимодействия между моле»>га
считающимися материальными точками, не имеющими объема. Несмотря на то что воздух не является
альным газом, для большинства газовых процессов, протекающих при давлениях, не превышающе 29
(200 бар), это уравнение остается в достаточной мере справедливым.
Введя в данное уравнение формулу, определяющую плотность через массу и объем, получим сос~-:-_еи
которое описывает состояние т килограммов идеального газа объемом V:
Нетрудно заметить, что для какой-либо постоянной массы газа левая часть уравнения есть эетгчжвщ
менная (константа):
Данное уравнение обобщает основные газовые законы: Бойля — Мариотта, Шарля и Гей-Лкэссаиа
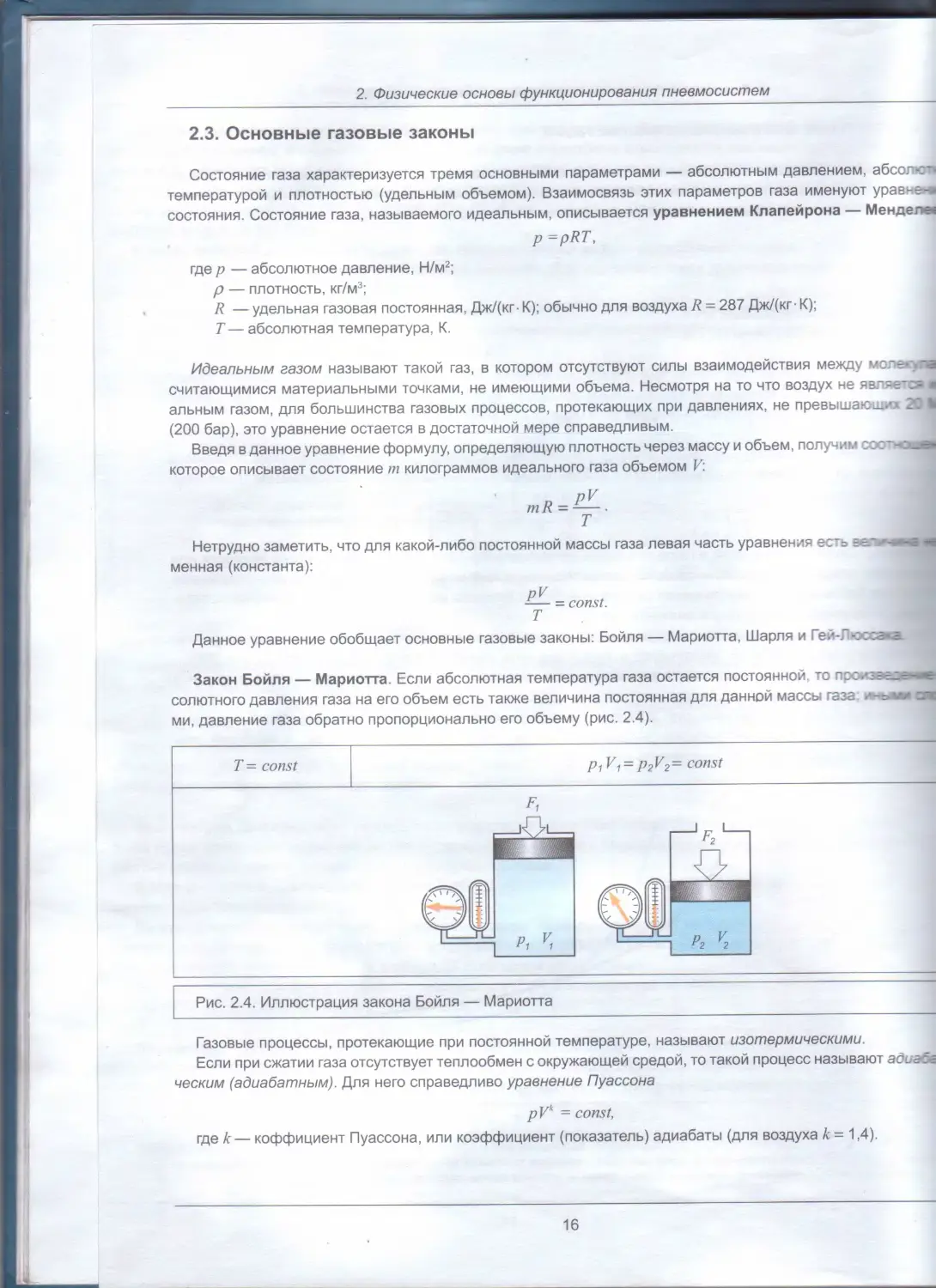
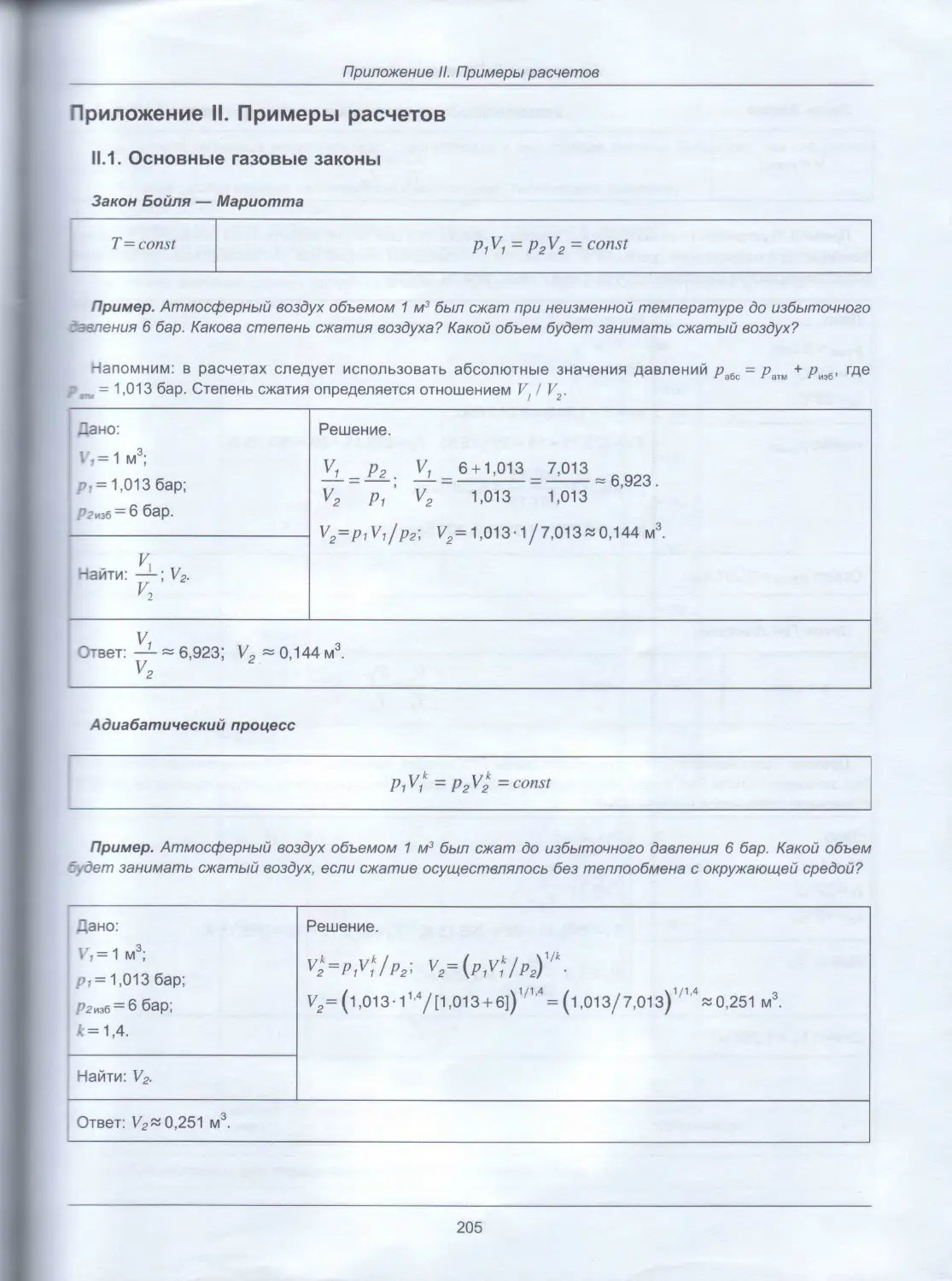
Закон Бойля — Мариотта. Если абсолютная температура газа остается постоянной, то произнеси ng
солютного давления газа на его объем есть также величина постоянная для данной массы газа иныим он
ми, давление газа обратно пропорционально его объему (рис. 2.4).
Рис. 2.4. Иллюстрация закона Бойля — Мариотта
Газовые процессы, протекающие при постоянной температуре, называют изотермическими.
Если при сжатии газа отсутствует теплообмен с окружающей средой, то такой процесс называют адиаба
ческим (адиабатным). Для него справедливо уравнение Пуассона
р Vk = const,
где к— коффициент Пуассона, или коэффициент (показатель) адиабаты (для воздуха к= 1,4).
16
2. Физические основы функционирования пневмосистем
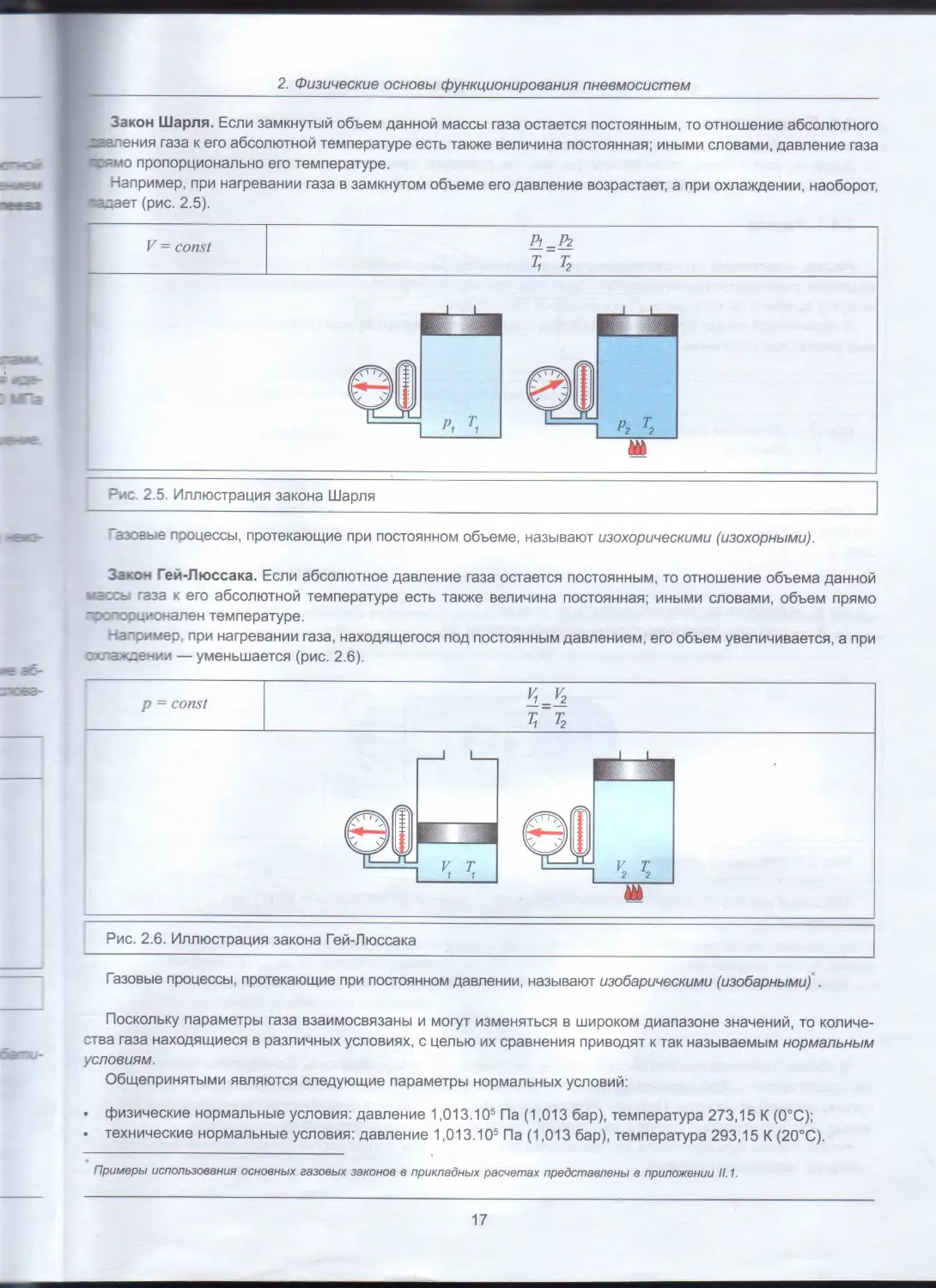
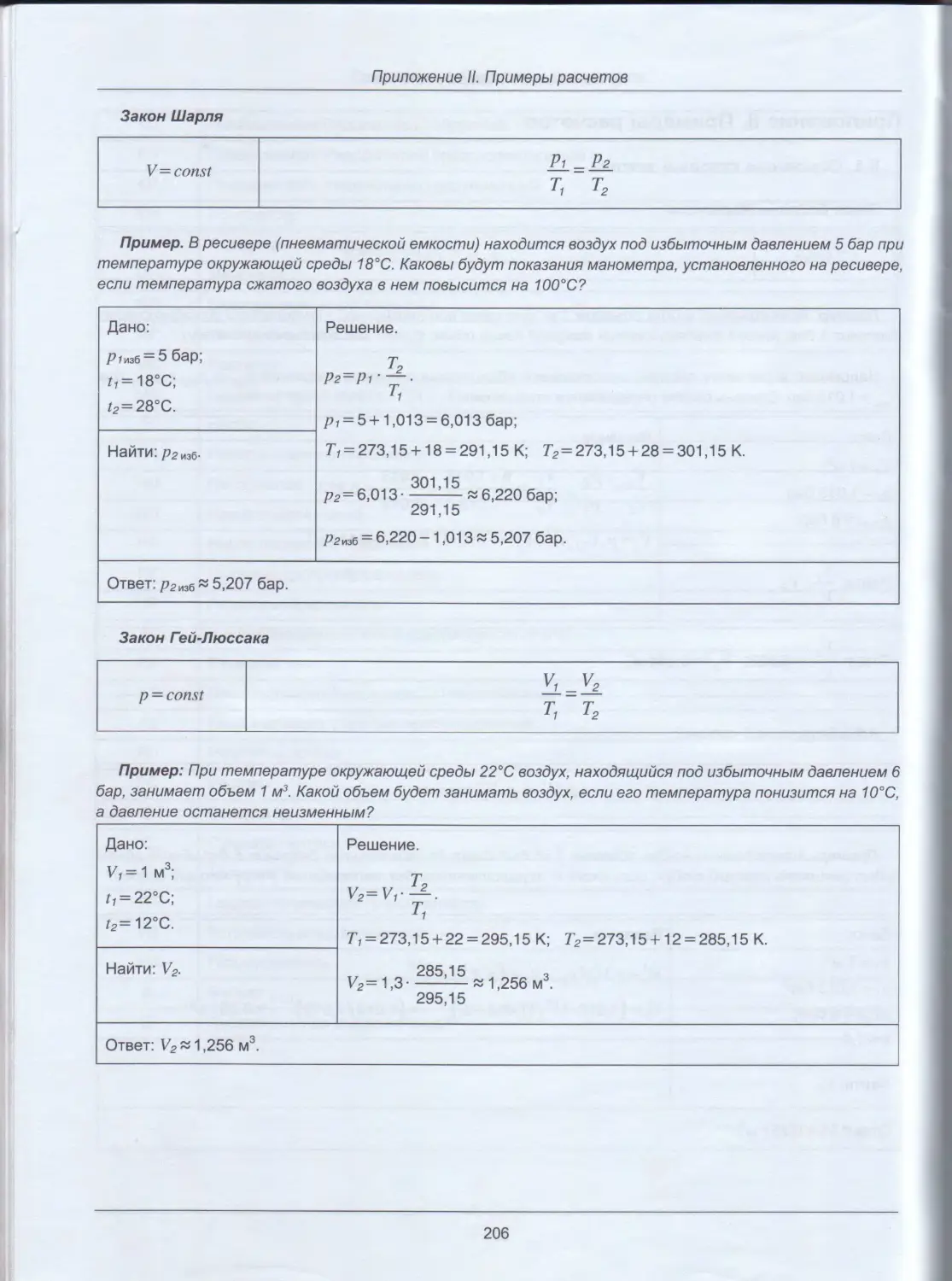
Закон Шарля. Если замкнутый объем данной массы газа остается постоянным, то отношение абсолютного
давления газа к его абсолютной температуре есть также величина постоянная; иными словами, давление газа
тсямо пропорционально его температуре.
Например, при нагревании газа в замкнутом объеме его давление возрастает, а при охлаждении, наоборот,
"адает (рис. 2.5).
V = const
гам*
)
Рис. 2.5. Иллюстрация закона Шарля
Газовые процессы, протекающие при постоянном объеме, называют изохорическими (изохорными).
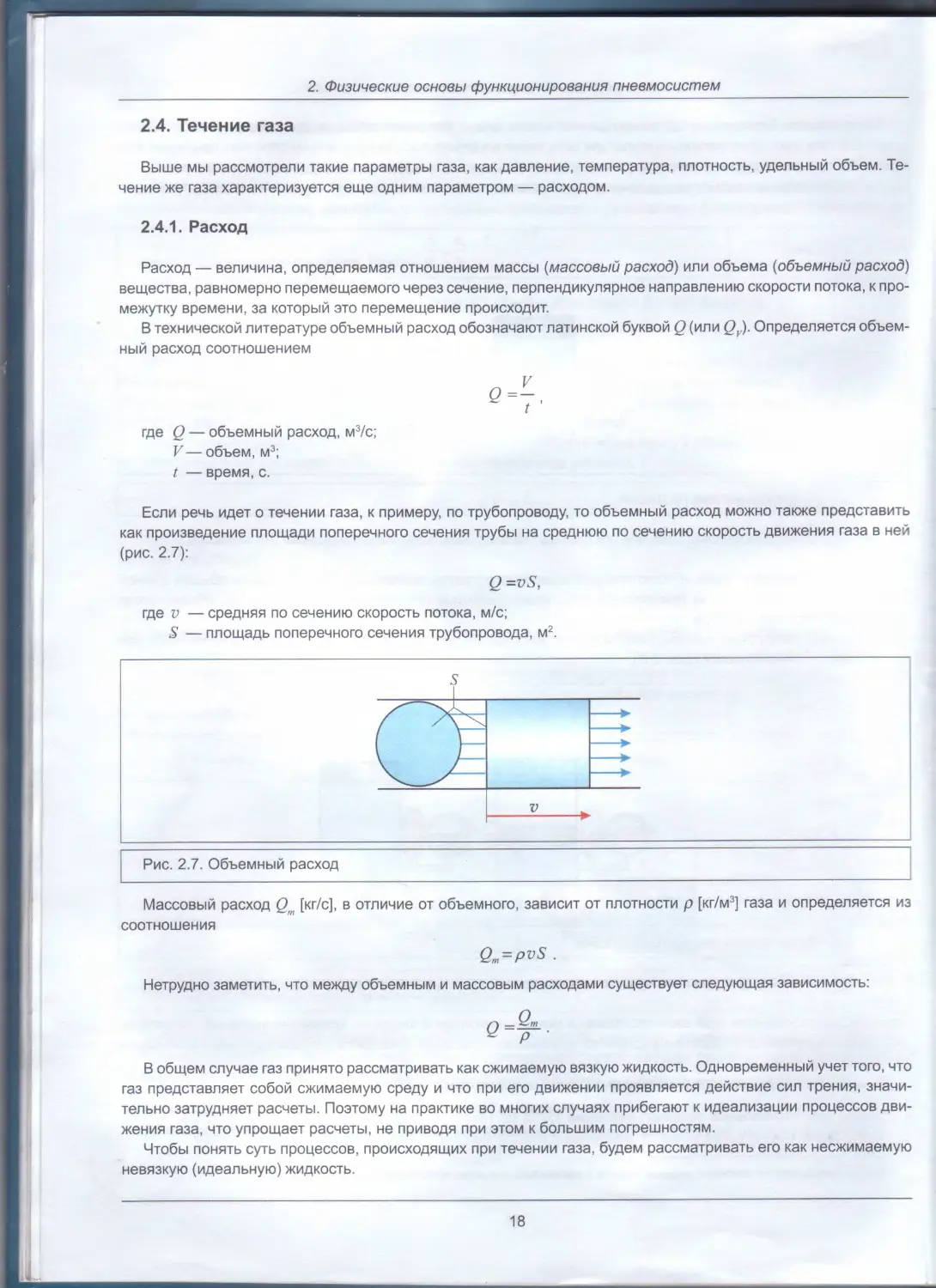
Закон Гей-Люссака. Если абсолютное давление газа остается постоянным, то отношение объема данной
массь газа к его абсолютной температуре есть также величина постоянная; иными словами, объем прямо
“2€_ооиионален температуре.
~а_ример, при нагревании газа, находящегося под постоянным давлением, его объем увеличивается, а при
: клаждении — уменьшается (рис. 2.6).
Рис. 2.6. Иллюстрация закона Гей-Люссака
Газовые процессы, протекающие при постоянном давлении, называют изобарическими (изобарными) .
Поскольку параметры газа взаимосвязаны и могут изменяться в широком диапазоне значений, то количе-
ства газа находящиеся в различных условиях, с целью их сравнения приводят к так называемым нормальным
условиям.
Общепринятыми являются следующие параметры нормальных условий:
• физические нормальные условия: давление 1,013.105 Па (1,013 бар), температура 273,15 К (0°С);
• технические нормальные условия: давление 1,013.105 Па (1,013 бар), температура 293,15 К (20°С).
Примеры использования основных газовых законов в прикладных расчетах представлены в приложении II. 1.
17
2. Физические основы функционирования пневмосистем
2.4. Течение газа
Выше мы рассмотрели такие параметры газа, как давление, температура, плотность, удельный объем. Те-
чение же газа характеризуется еще одним параметром — расходом.
2.4.1. Расход
Расход — величина, определяемая отношением массы {массовый расход) или объема {объемный расход)
вещества, равномерно перемещаемого через сечение, перпендикулярное направлению скорости потока, к про-
межутку времени, за который это перемещение происходит.
В технической литературе объемный расход обозначают латинской буквой Q (или Qy). Определяется объем-
ный расход соотношением
где Q — объемный расход, м3/с;
V — объем, м3;
t — время, с.
Если речь идет о течении газа, к примеру, по трубопроводу, то объемный расход можно также представить
как произведение площади поперечного сечения трубы на среднюю по сечению скорость движения газа в ней
(рис. 2.7):
Q=vS,
где v — средняя по сечению скорость потока, м/с;
S — площадь поперечного сечения трубопровода, м2.
Рис. 2.7. Объемный расход
Массовый расход Q [кг/с], в отличие от объемного, зависит от плотности р [кг/м3] газа и определяется из
соотношения
Qm=pvs.
Нетрудно заметить, что между объемным и массовым расходами существует следующая зависимость:
О =— .
Р
В общем случае газ принято рассматривать как сжимаемую вязкую жидкость. Одновременный учет того, что
газ представляет собой сжимаемую среду и что при его движении проявляется действие сил трения, значи-
тельно затрудняет расчеты. Поэтому на практике во многих случаях прибегают к идеализации процессов дви-
жения газа, что упрощает расчеты, не приводя при этом к большим погрешностям.
Чтобы понять суть процессов, происходящих при течении газа, будем рассматривать его как несжимаемую
невязкую (идеальную) жидкость.
18
2. Физические основы функционирования пневмосистем
Исходя из закона сохранения вещества, а также из предположения о сплошности (неразрывности) потока
для установившегося течения несжимаемой жидкости, можно утверждать, что объемный расход через любое
сечение одинаков (рис. 2.8).
Это явление описывается уравнением неразрывности
Qi — S1 V-j — S2 'С2 = Q.2 ~ COHSt.
Из данного уравнения следует, что в узком сечении трубы поток ускоряется:
^2
= V1 —.
S2
2.4.2. Уравнение Бернулли
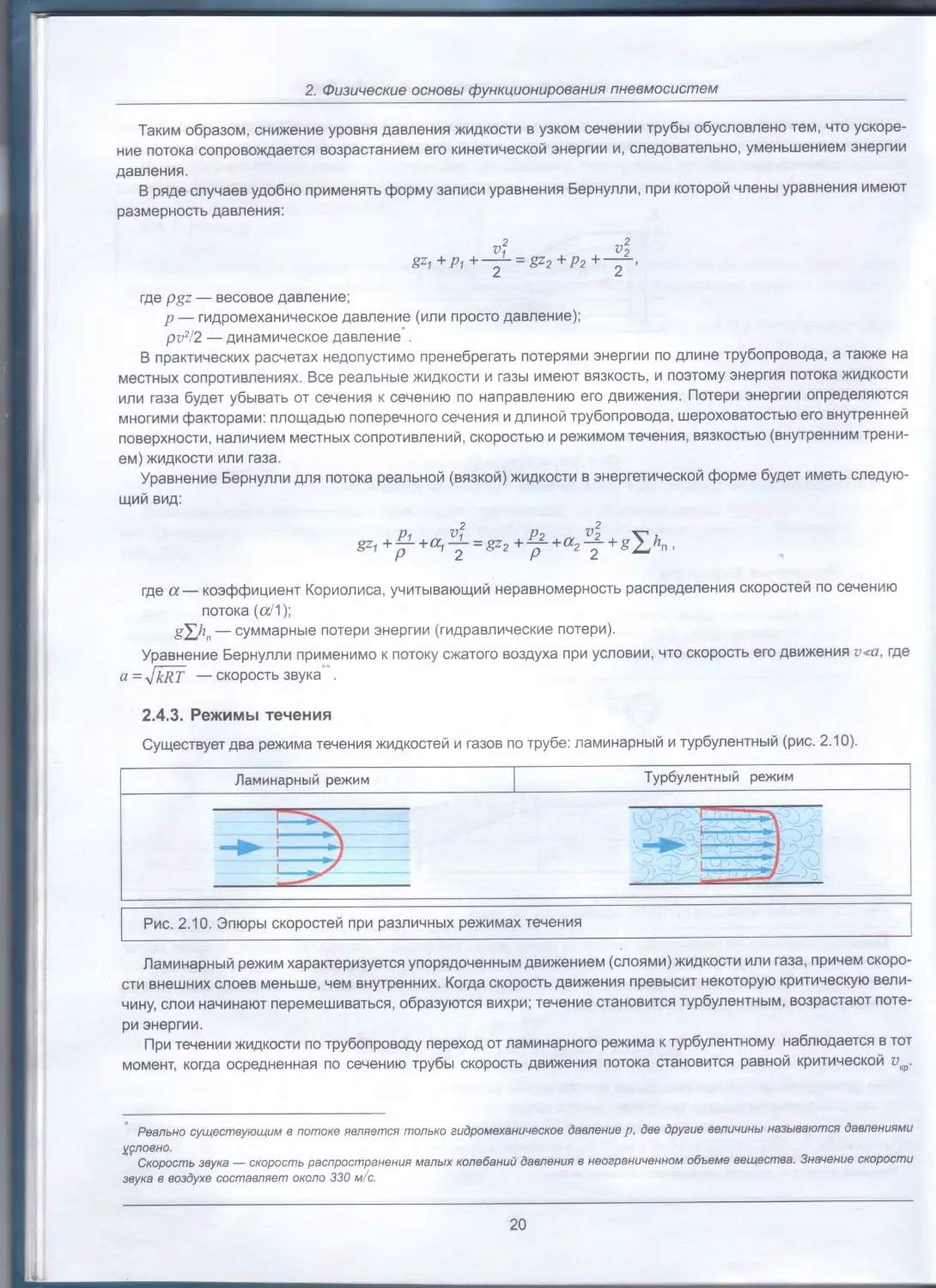
Результаты измерений давления в различных точках потока, движущегося по трубе с переменной площа-
дью поперечного сечения (рис. 2.9), могут показаться, на первый взгляд, парадоксальными: в узком сечении
давление меньше, чем в широком. По каким же причинам имеет место данное явление?
Рис. 2.9. Течение жидкости по трубе переменного сечения
Механическая энергия движущейся жидкости может иметь три формы: энергия положения, энергия давле-
ния и кинетическая энергия. В процессе движения идеальной жидкости одна форма энергии может превра-
щаться в другую, однако полная удельная энергия жидкости остается неизменной. Математически данное
положение описывается уравнением Бернулли
2 2 2
Pl V1 Р2 V2 Рз V3
gz1 + ~ + — = gZ2 + — + — = gZ? + + — >
7 p 2 2 P 2 6 3 P 2
где gz — удельная энергия положения (g = 9,8 м/с2 — ускорение свободного падения);
р/р — удельная энергия давления;
о2! 2 — удельная кинетическая энергия.
Течение, при котором параметры газа не меняются во времени.
Удельная энергия — энергия, отнесенная к единице массы.
19
2. Физические основы функционирования пневмосистем
Таким образом, снижение уровня давления жидкости в узком сечении трубы обусловлено тем, что ускоре-
ние потока сопровождается возрастанием его кинетической энергии и, следовательно, уменьшением энергии
давления.
В ряде случаев удобно применять форму записи уравнения Бернулли, при которой члены уравнения имеют
размерность давления:
2 2
V, V2
&l+Pl +— = ^2+Р2+—’
где pgz — весовое давление;
р — гидромеханическое давление (или просто давление);
ри2/2 — динамическое давление .
В практических расчетах недопустимо пренебрегать потерями энергии по длине трубопровода, а также на
местных сопротивлениях. Все реальные жидкости и газы имеют вязкость, и поэтому энергия потока жидкости
или газа будет убывать от сечения к сечению по направлению его движения. Потери энергии определяются
многими факторами: площадью поперечного сечения и длиной трубопровода, шероховатостью его внутренней
поверхности, наличием местных сопротивлений, скоростью и режимом течения, вязкостью (внутренним трени-
ем) жидкости или газа.
Уравнение Бернулли для потока реальной (вязкой) жидкости в энергетической форме будет иметь следую-
щий вид:
2 2
Zb V* р7 Uy v1 г
+ — + ц — = gz2 + — + a2 — 4- g 2 , hп,
г Z г Z
где a— коэффициент Кориолиса, учитывающий неравномерность распределения скоростей по сечению
потока (о/1);
g^hn — суммарные потери энергии (гидравлические потери).
Уравнение Бернулли применимо к потоку сжатого воздуха при условии, что скорость его движения и<ш, где
a = -yjkRT — скорость звука *.
2.4.3. Режимы течения
Существует два режима течения жидкостей и газов по трубе: ламинарный и турбулентный (рис. 2.10).
Ламинарный режим характеризуется упорядоченным движением (слоями) жидкости или газа, причем скоро-
сти внешних слоев меньше, чем внутренних. Когда скорость движения превысит некоторую критическую вели-
чину, слои начинают перемешиваться, образуются вихри; течение становится турбулентным, возрастают поте-
ри энергии.
При течении жидкости по трубопроводу переход от ламинарного режима к турбулентному наблюдается в тот
момент, когда осредненная по сечению трубы скорость движения потока становится равной критической икр.
Реально существующим в потоке является только гидромеханическое давление р, две другие величины называются давлениями
условно.
Скорость звука — скорость распространения малых колебаний давления в неограниченном объеме вещества. Значение скорости
звука в воздухе составляет около 330 м/с.
20
2. Физические основы функционирования пневмосистем
<ак показывает эксперимент, критическая скорость прямо пропорциональна кинематической вязкости v жидко-
сти и обратно пропорциональна внутреннему диаметру d трубы:
, v
^КО = К —
р d
где к — коэффициент пропорциональности;
v — кинематическая вязкость жидкости, м2/с;
d — внутренний диаметр трубы, м.
Экспериментально был также подтвержден тот факт, что смена режима течения любой жидкости или газа
трубе любого диаметра имеет место лишь при определенном значении безразмерного коэффициента к.
Еанный коэффициент называют критическим числом Рейнольдса:
d
ReKp - ^Кр ~
Для труб круглого сечения ReKp= 2300.
Число Рейнольдса используют для описания режима течения:
d vpd
Re = v — =----
v д
Значение числа Рейнольдса позволяет судить о характере течения жидкости по трубе: при Re<ReKp наблю-
дается ламинарный режим, при Re>Retp — турбулентный.
Таким образом, зная скорость движения потока, вязкость жидкости и внутренний диаметр трубы, можно рас-
четным путем найти число Рейнольдса и, сравнив его с величиной Re , определить режим течения жидкости.
кр
2.4.4. Истечение газа через отверстие
При расчетах пневматических систем необходимо знать зависимости объемного и массового расходов воз-
духа через отверстие от отношения давлений на входе в отверстие и на выходе из него. Если пренебречь
-еплообменом газа с окружающей средой и внутренним трением газа, то его течение можно считать изоэнтро-
"ическим (адиабатическим).
Массовый расход при изоэнтропическом течении рассчитывается по формуле Сен-Венана — Ванцеля
, | 77 I Е±Г
Qm = £fPo\--—-----(лк - 7tk) ,
J y\(k-A)RT0
где Е— коэффициент расхода отверстия (учитывает сжатие струи при истечении газа;
обычно определяется экспериментально);
f — площадь отверстия;
л = р1/р0, гдер0 — давление на входе (обычно принимаютр0= const)',
р1 — давление на выходе;
к— коэффициент Пуассона (адиабаты), для воздуха к= 1,4;
R — удельная газовая постоянная, обычно для воздуха R = 287 Дж/(кг • К);
Т() — температура воздуха перед отверстием.
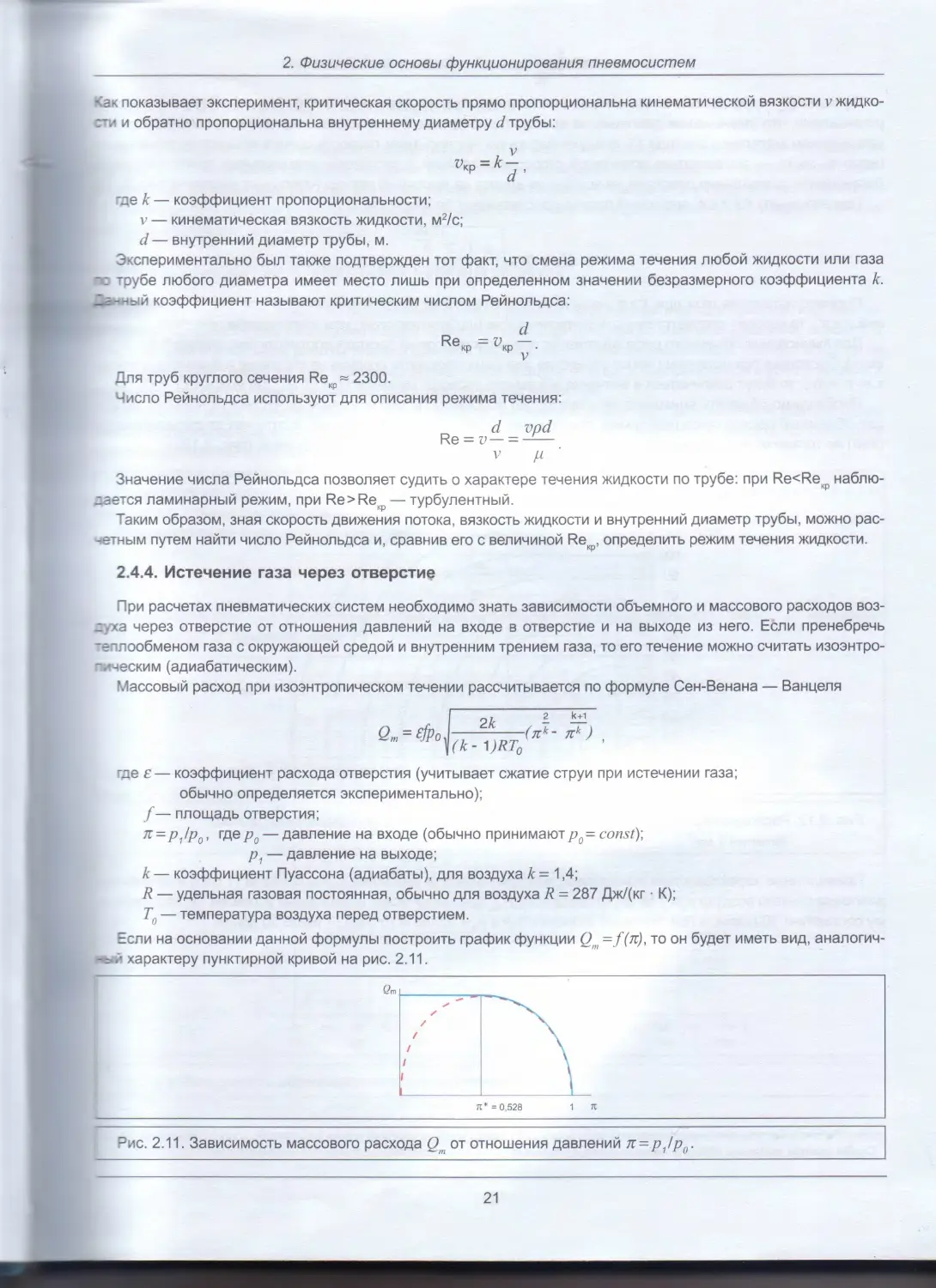
Если на основании данной формулы построить график функции Q то он будет иметь вид, аналогич-
-=йй характеру пунктирной кривой на рис. 2.11.
Рис. 2.11. Зависимость массового расхода Q от отношения давлений л=р11р1).
21
2. Физические основы функционирования пневмосистем
Функция Q „ = /(л) достигает максимума при критическом значении п = 0,528. Однако экспериментально
установлено, что уменьшение давления на выходе (приводящее к уменьшению значения л) сопровождается
увеличением массового расхода Qn воздуха только до тех пор, пока скорость потока воздуха не превышает
скорость звука — максимально возможной скорости истечения в отсутствие специальных приспособлений.
Дальнейшее уменьшение давления на выходе не влияет на массовый расход (сплошная кривая на рис. 2.11).
При значениях 0<7т<7г массовый расход подсчитывают по формуле
к+1
к Г 2 V-1
к +1
Процесс истечения газа при л>л называют докритическим (подкритическим), а если отношение давле-
ний лг <тг, то говорят соответственно о закритическом (надкритическом) или критическом процессе.
Для вычисления объемного расхода следует привести массовый расход к плотности (см. раздел 2.3.1 «Рас-
ход»). Поскольку при истечении через отверстие значения плотности воздуха на его входе и выходе различны,
т. е. р = f(p), то будут различаться и значения объемного расхода: на входе Qo= QJp0, на выходе Q7= Qm /р1.
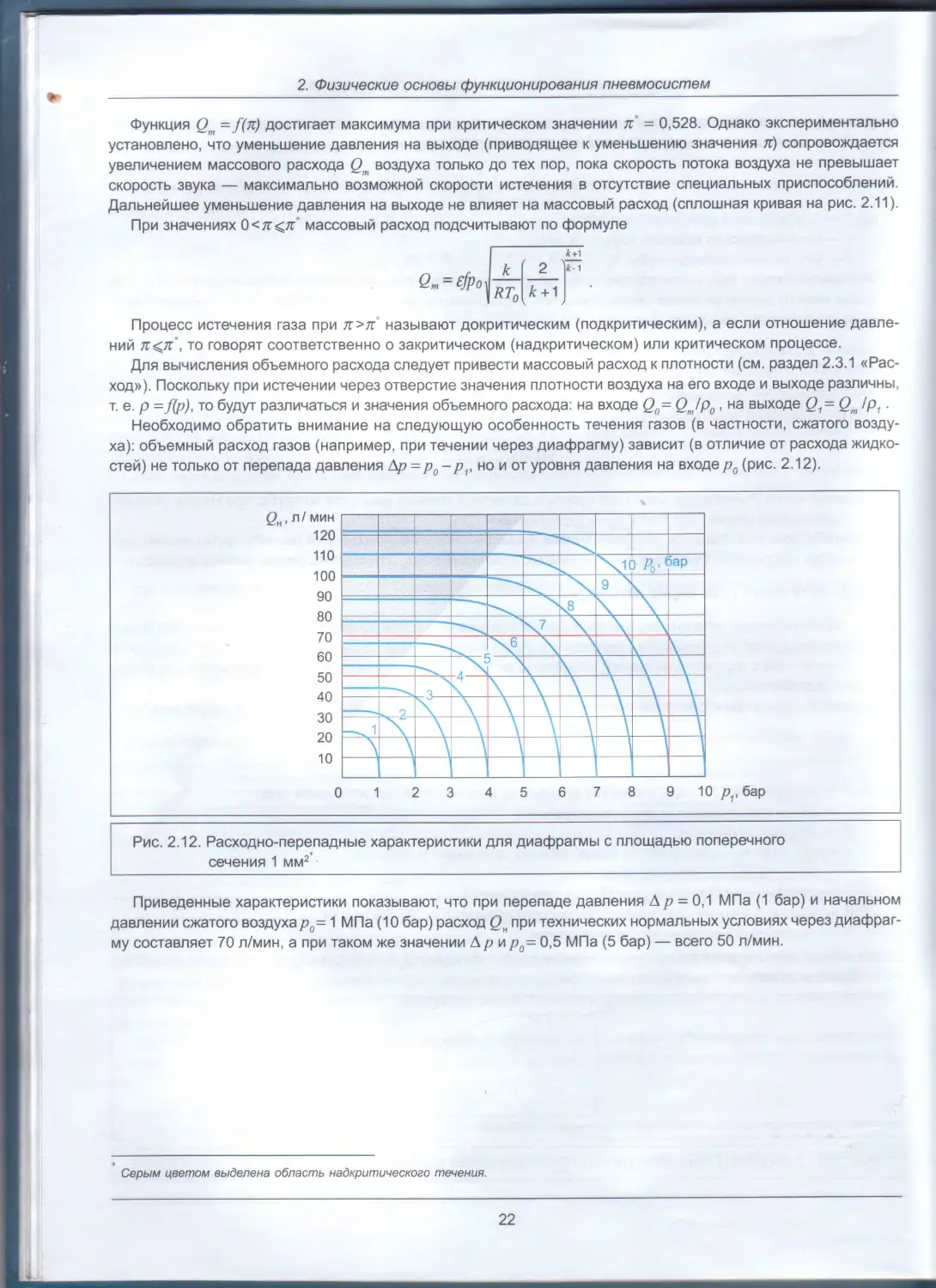
Необходимо обратить внимание на следующую особенность течения газов (в частности, сжатого возду-
ха): объемный расход газов (например, при течении через диафрагму) зависит (в отличие от расхода жидко-
стей) не только от перепада давления Ад = р0 -pv но и от уровня давления на входе р0 (рис. 2.12).
QH, л / мин
120
110
100
90
80
70
60
50
40
30
20
10
0 1 2 3 4 5 6 7 8 9 10 рг бар
Рис. 2.12. Расходно-перепадные характеристики для диафрагмы с площадью поперечного
сечения 1 мм2
Приведенные характеристики показывают, что при перепаде давления А р = 0,1 МПа (1 бар) и начальном
давлении сжатого воздуха р0= 1 МПа (10 бар) расход Q при технических нормальных условиях через диафраг-
му составляет 70 л/мин, а при таком же значении Ар и р0= 0,5 МПа (5 бар) — всего 50 л/мин.
Серым цветом выделена область надкритического течения.
22
3. Энергообеспечивающая подсистема
3. Энергообеспечивающая подсистема
На производство сжатого воздуха расходуется около 20% всей электроэнергии, потребляемой промышлен-
ностью. Поэтому он является одним из самых дорогих энергоносителей, используемых в современном произ-
водстве. На предприятиях, где широко применяются пневматические приводы и системы, обычно существует
центральная сеть питания сжатым воздухом. Диапазон давлений в ней, принятый как у нас в стране, так и за
рубежом, составляет 0,4 — 1,0 МПа (4 — 10 бар).
3.1. Производство и подготовка сжатого воздуха
-тобы преобразовать воздух из окружающей среды в рабочее тело пневматического привода, над ним не-
збходимо произвести ряд последовательных действий: сжать до требуемого значения давления, осушить и
очистить. Для нормальной работы пневмоприводов необходимо, чтобы загрязненность сжатого воздуха не
"□евышала допустимого уровня. Основные загрязнители воздуха — вода и компрессорное масло в жидком и
-эрообразном состояниях, а также твердые и газообразные вещества.
Источником воды, содержащейся в сжатом воздухе, является водяной пар, засасываемый компрессором
клесте с атмосферным воздухом. Для характеристики влагосодержания (влажности) воздуха используются
снятия абсолютной и относительной влажности.
Абсолютная влажность/абс (г/м3) — это масса паров воды, содержащихся в 1 м3 воздуха.
Влажность насыщенного napafHn — это наибольшая масса паров воды, которые могут содержаться в 1 м3
аоздуха при данной температуре.
Относительная влажность (р, измеряемая в процентах, определяется по формуле:
</> = -^х100%.
J нп
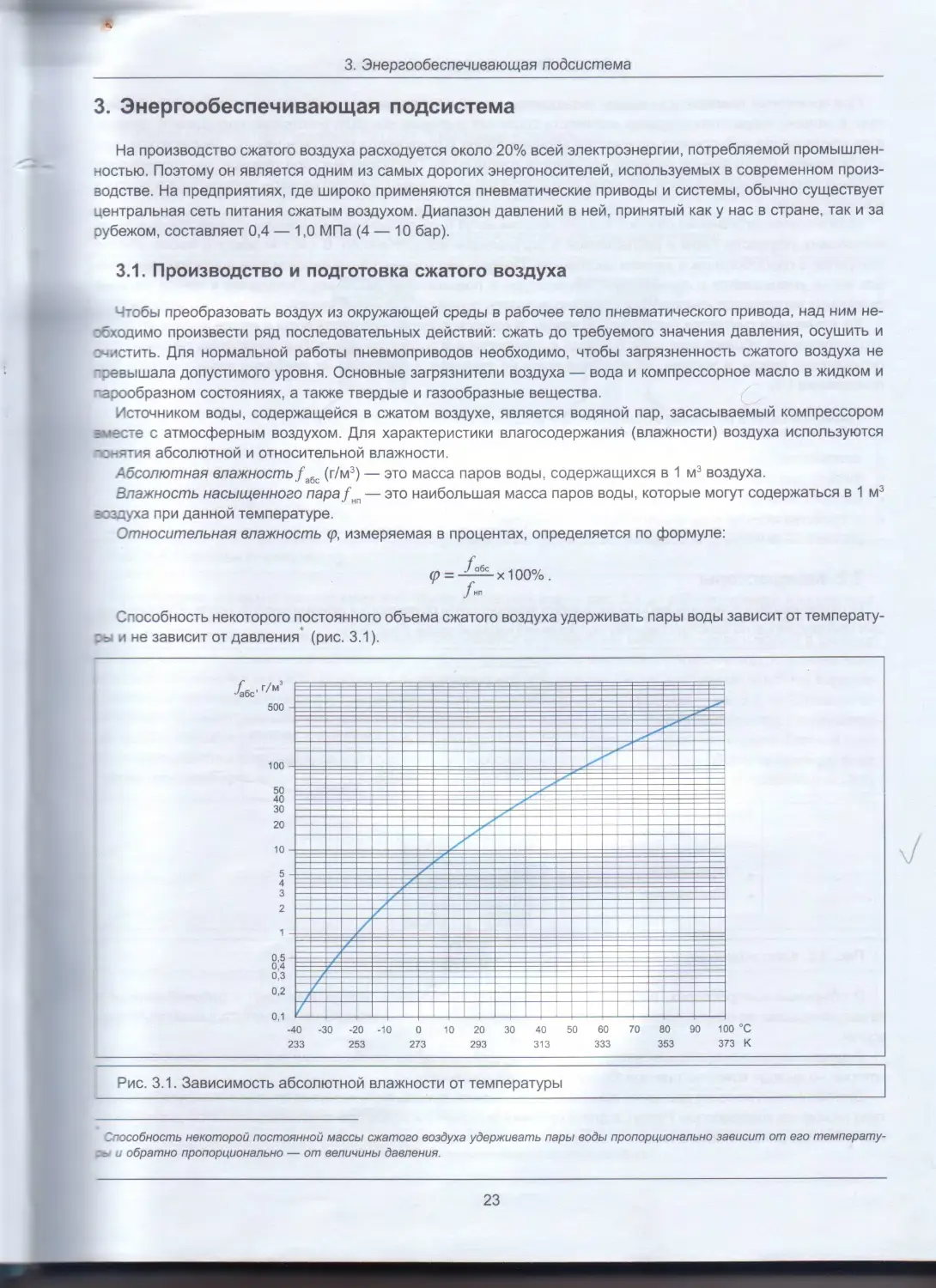
Способность некоторого постоянного объема сжатого воздуха удерживать пары воды зависит от температу-
оь и не зависит от давления (рис. 3.1).
Способность некоторой постоянной массы сжатого воздуха удерживать пары воды пропорционально зависит от его температу-
и обратно пропорционально — от величины давления.
23
3. Энергообеспечивающая подсистема
При понижении температуры воздух насыщается водяными парами, его относительная влажность возрас-
тает. В момент, когда относительная влажность достигает значения ср=100% (состояние насыщения), начина-
ется конденсация избыточного количества водяных паров и появляется вода (конденсат). Температура, при
которой имеет место данное явление, называется точкой росы. При более высокой температуре конденсация
водяных паров не наблюдается. Поэтому точку росы часто указывют в качестве меры содержания в воздухе
водяных паров.
Источниками загрязнения сжатого воздуха маслом могут быть смазочные материалы компрессоров и пнев-
матических устройств, пары и распыленное в окружающем воздухе масло. В сжатом воздухе масло обычно
находится в парообразном и жидком состояниях. Предельная концентрация паров масла в воздухе, как и па-
ров воды, уменьшается с понижением температуры и повышением давления. Попадание в линию питания
смазочных материалов компрессоров обычно является основной причиной загрязнения сжатого воздуха.
Качественным считается такой сжатый воздух, в котором содержание паров воды и масла настолько мало,
что исключается образование капель и льда в элементах и устройствах при любых возможных температурах
окружающей среды, а уровень содержания пыли не приводит к закупорке их наиболее узких участков (см.
приложение I.3).
Таким образом, в источник питания сжатым воздухом должны входить:
• компрессор;
• фильтр для очистки воздуха от пыли;
• маслоотделитель;
• устройства осушки и охлаждения сжатого воздуха;
• ресивер — емкость для создания резервного запаса воздуха.
3.2. Компрессоры
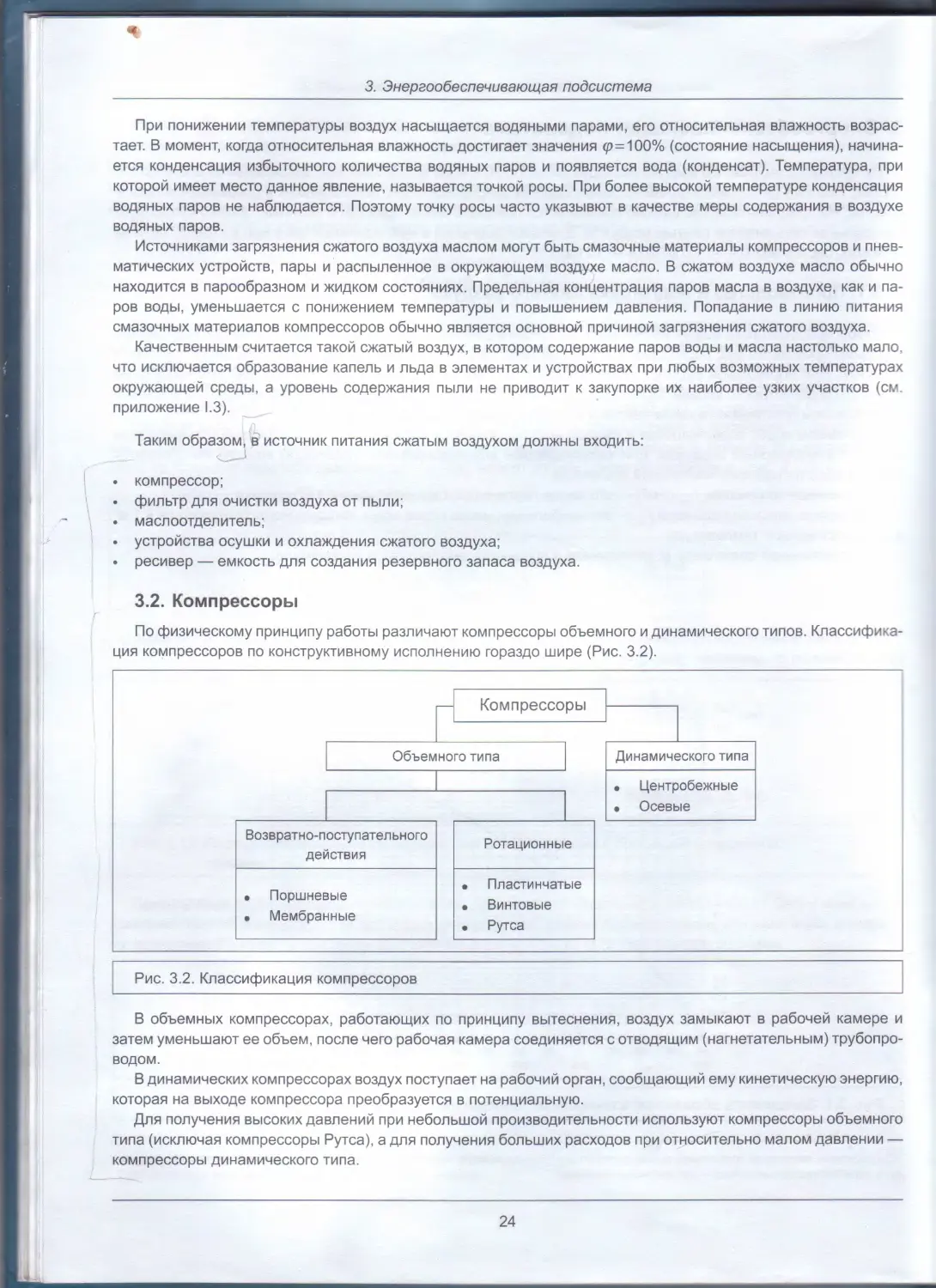
По физическому принципу работы различают компрессоры объемного и динамического типов. Классифика-
ция компрессоров по конструктивному исполнению гораздо шире (Рис. 3.2).
Рис. 3.2. Классификация компрессоров
В объемных компрессорах, работающих по принципу вытеснения, воздух замыкают в рабочей камере и
затем уменьшают ее объем, после чего рабочая камера соединяется с отводящим (нагнетательным) трубопро-
водом.
В динамических компрессорах воздух поступает на рабочий орган, сообщающий ему кинетическую энергию,
которая на выходе компрессора преобразуется в потенциальную.
Для получения высоких давлений при небольшой производительности используют компрессоры объемного
типа (исключая компрессоры Рутса), а для получения больших расходов при относительно малом давлении —
компрессоры динамического типа.
24
3. Энергообеспечивающая подсистема
3 2.1. Объемные компрессоры
Наиболее широкое примененение находят поршневые компрессоры.
Существует множество типов поршневых компрессоров. Они бывают простого и двойного действия, односту-
--атые и многоступенчатые, одноцилиндровые и многоцилиндровые, с воздушным и водяным охлаждением.
Основными деталями поршневого компрессора простого действия (рис. 3.3) являются: цилиндр 2 с нагнетатель-
7 и всасывающим 1 клапанами в крышке 6; поршень 3; кривошипно-шатунный механизм 5, преобразующий
:_^_ательное движение приводного вала 4 в возвратно-поступательное движение поршня.
p»ic. 3.3. Поршневой компрессор
~ри движении поршня к нижней «мертвой точке» (обратный ход — рис. 3.3, а) рабочая камера компрессора,
|Оссазованная замкнутым объемом между поршнем 3 и крышкой 6 цилиндра, увеличивается и в ней создается
эгуум. Под действием атмосферного давления открывается всасывающий клапан 1, через который в цилиндр
жкгупает воздух. В это время нагнетательный клапан 7 удерживается в закрытом положении под действием ваку-
ума в рабочей камере и высокого давления в нагнетательном трубопроводе. После достижения поршнем 3 крайне-
— "сложения начинается процесс его движения к верхней «мертвой точке» (прямой ход— рис. 3.3, б). Объем рабо-
те.' -амеры начинает уменьшаться, давление в ней возрастает, и всасывающий клапан закрывается. Нагнетатель-
-ь/ хлапан открывается тогда, когда давление в цилиндре превысит давление в линии нагнетания. Полный цикл
такого компрессора совершается за два хода поршня — обратный и прямой, т. е. за один оборот приводного вала.
Для увеличения производительности иногда применяют поршневые компрессоры двойного действия (рис. 3.4).
Рис. 3.4. Поршневой компрессор двойного действия
Производительность компрессора — расход производимого компрессором сжатого воздуха.
25
3. Энергообеспечивающая подсистема
Компрессор, выполненный по такой конструктивной схеме, имеет две рабочие камеры при одном поршне, а
всасывающие и нагнетательные клапаны установлены в обеих крышках. При ходе поршня вниз в верхней
рабочей камере происходит процесс всасывания, а в нижней — процесс нагнетания. При движении поршня
вверх сжатый воздух подается в напорную линию из верхней рабочей камеры, в то время как процесс всасыва-
ния осуществляется в нижней. Производительность компрессора двойного действия практически в два раза
выше производительности компрессора традиционной конструкции при одинаковых объемах рабочих камер.
Одноступенчатые компрессоры позволяют получить сжатый воздух с избыточным давлением до 1,3 МПа
(13 бар), а развиваемая ими производительность достигает 20 тыс. м3/час.
Для достижения более высоких значений давления сжатого воздуха (до 100 МПа) используют поршневые
компрессоры многоступенчатого исполнения (рис. 3.5).
Рис. 3.5. Двухступенчатый поршневой компрессор
Всасываемый воздух предварительно сжимается в первой ступени 1, проходит промежуточное охлажде-
ние, а затем подвергается сжатию во второй ступени 3. Увеличение степени сжатия воздуха обеспечивается
тем, что объем рабочей камеры второй ступени меньше, чем первой. Необходимость охлаждения сжатого
воздуха возникает в связи с интенсивным нагревом воздуха в процессе сжатия (в соответствии с законом Гей-
Люссака), особенно если степень сжатия значительна. Чтобы избежать этого, в конструкцию компрессора вво-
дят охладитель 2.
Поршневые компрессоры подают воздух в нагнетательный трубопровод неравномерно, отдельными порци-
ями. Степень неравномерности увеличивается еще и вследствие того, что скорость движения поршня не по-
стоянна, а изменяется по синусоидальному закону. Для сглаживания неравномерности подачи воздуха, а сле-
довательно, и пульсаций давления в линии нагнетания применяют многопоршневые компрессоры, ходы порш-
ней которых сдвинуты по фазе.
Все рассмотренные конструкции имеют один существенный недостаток: в картер поршневых компрессоров
заливают масло, предназначенное для смазки трущихся поверхностей. Высокие температуры в поршневом
пространстве компрессоров и на начальном участке линии питания приводят к парообразованию и к частично-
му термическому разложению масла. В результате часть масла окисляется и в виде нагара и лакообразной
пленки осаждается на внутренних полостях компрессоров и трубопроводов, а легкие фракции, в виде паров и
мелкодисперсной фазы, уносятся воздухом в систему.
Сжатый воздух, не содержащий паров масла, можно получить без применения маслоудерживающих филь-
тров при помощи мембранного компрессора (рис. 3.6).
Степень сжатия — отношение объемов, занимаемых определенной массой воздуха до и после его сжатия.
26
3. Энергообеспечивающая подсистема
Рис. 3.6. Мембранный компрессор
В мембранном компрессоре процесс получения сжатого воздуха происходит в принципе так же, как и в
"зршневом, с той лишь разницей, что в нем подвижной поршень заменен жестко закрепленной гибкой мембра-
-ой 1. Замкнутый объем изменяется за счет деформации мембраны при возвратно-поступательном движении
_л~ока 2.
Давление воздуха в мембранных компрессорах ограничено прочностными характеристиками мембраны и
-е превышает 0,3 МПа.
Основной недостаток мембранных компрессоров — необходимость периодической смены мембраны по
тс г-ине выхода ее из строя.
дотационные компрессоры, как и поршневые, работают с принудительным выталкиванием сжатого воздуха,
с^нако в их конструкции отсутствуют клапаны и кривошипно-шатунный механизм. На рис. 3.7 изображен рота-
ционный пластинчатый компрессор.
Рис. 3.7. Пластинчатый (шиберный) компрессор
В машинах такого типа вследствие эксцентричного расположения ротора 3 в цилиндрическом статоре 1
е еду ними образуется серповидная полость. В радиальных пазах ротора 3 размещены подвижные пластины
2 «оторые под действием центробежной силы при вращении ротора выдвигаются из пазов и плотно прижима-
<"я к внутренней цилиндрической поверхности статора 1 (часто применяют еще и дополнительный принуди-
жгьный поджим пластин при помощи пружин либо путем подведения к торцам пластин сжатого воздуха от
тг-ии нагнетания). Вращающиеся пластины делят пространство между ротором и статором на рабочие каме-
зэы. объем которых меняется по мере вращения ротора. За один оборот ротора объем рабочих камер вначале
г-егичивается (при этом пластины выдвигаются из пазов), а затем уменьшается (при этом пластины задвига-
с~:я в пазы). В том месте, где при вращении ротора объем рабочих камер увеличивыется, расположен входной
тг-рубок, а на участке, где их объем уменьшается, — выходной. Степень сжатия, а следовательно, и значение
юния на выходе пластинчатого компрессора (до 0,8 МПа) значительно меньше, чем у поршневого, но его
труктивное исполнение гораздо проще.
27
3. Энергообеспечивающая подсистема
Основные элементы конструкции винтового компрессора — два находящихся в зацеплении винта (рис. 3.8)
ведущий 1 и ведомый 2. При вращении винтов их винтовые линии, взаимно замыкаясь, отсекают некоторый
объем воздуха в камере всасывания, перемещают его вдоль оси винтов и в конечном итоге вытесняют в камеру
нагнетания. Воздух через компрессор двигается поступательно и плавно, без завихрения, как гайка по резьбе
при вращении винта.
Рис. 3.8. Винтовой компрессор
Процесс перемещения воздуха происходит по всей длине винтов непрерывно, и при постоянной частоте
вращения вала компрессора обеспечивается равномерная, без пульсаций, подача. Недостаток винтовых ком-
прессоров — довольно сложная технология изготовления винтов; преимущество — равномерность подачи
воздуха, а следовательно, отсутствие колебаний уровня давления в линии нагнетания. Винтовые компрессоры
обеспечивают давление сжатого воздуха до 2,5 МПа, а расход воздуха в них достигает 30 тыс. м3/час.
На рис. 3.9 изображен компрессор Рутса, также относящийся к ротационным компрессорам.
Рабочими органами такого компрессора служат два синхронно вращающихся специально спрофилирован-
ных вытеснителя 1. Воздух, попадая в рабочие камеры, образованные между вытеснителями и корпусом 3.
переносится из зоны всасывания в зону нагнетания. Рабочие органы не находятся в зацеплении друг с другом,
а синхронизация их вращения осуществляется шестернями 2, расположенными в специальном отделении кор-
пуса и находящимися в зацеплении между собой. Между самими вытеснителями, а также между вытеснителя-
ми и корпусом имеются гарантированные зазоры, и эта особенность конструкции обусловливает относительно
небольшие значения выходного давления. Практическое отсутствие трущихся поверхностей в рабочей камере
обеспечивает возможность достижения большой производительности благодаря высокой частоте вращения
роторов.
3. Энергообеспечивающая подсистема
3.2.2. Динамические компрессоры
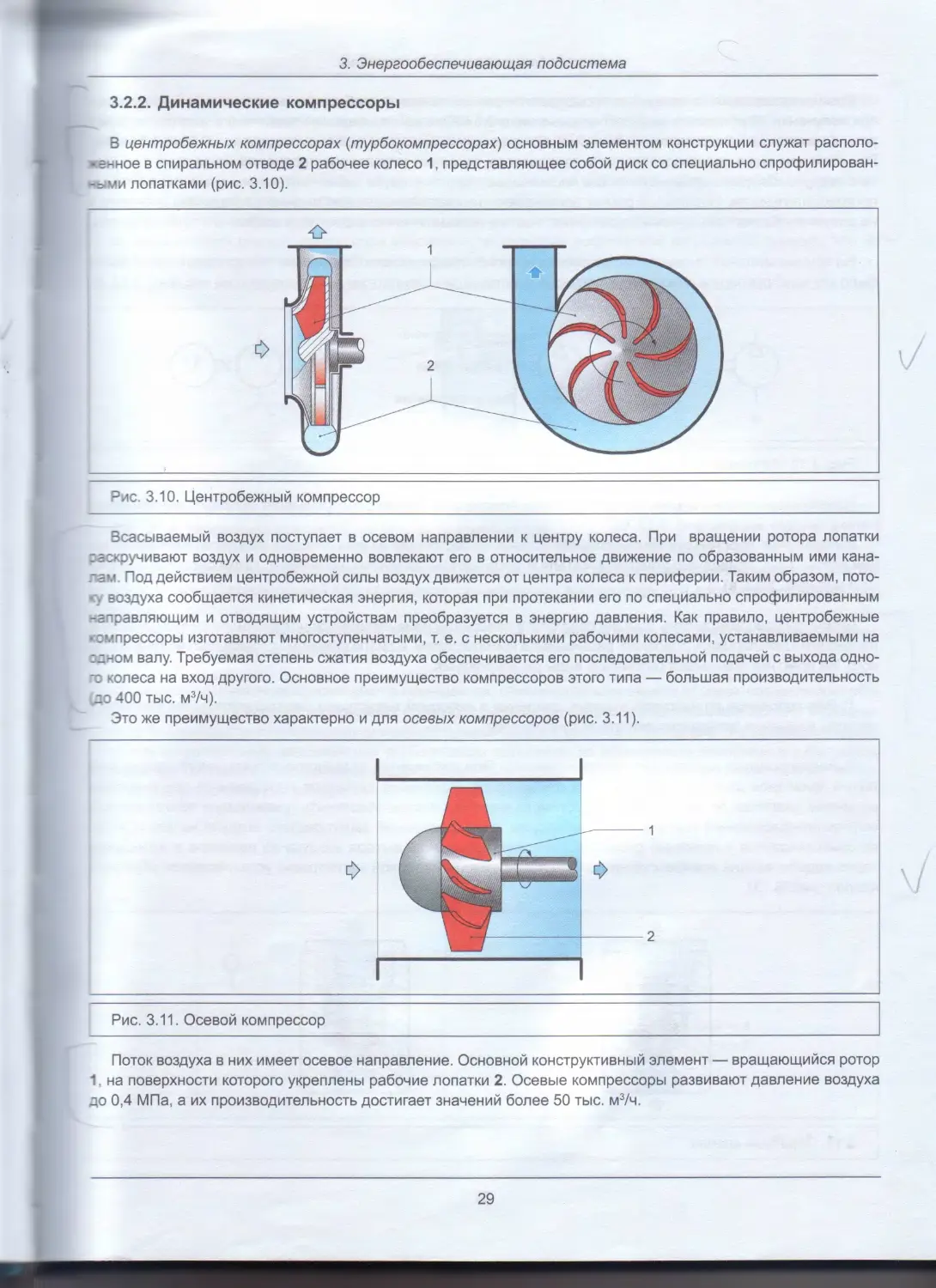
В центробежных компрессорах (турбокомпрессорах) основным элементом конструкции служат располо-
женное в спиральном отводе 2 рабочее колесо 1, представляющее собой диск со специально спрофилирован-
-ыми лопатками (рис. 3.10).
=>ис. 3.10. Центробежный компрессор
Всасываемый воздух поступает в осевом направлении к центру колеса. При вращении ротора лопатки
раскручивают воздух и одновременно вовлекают его в относительное движение по образованным ими кана-
там. Под действием центробежной силы воздух движется от центра колеса к периферии. Таким образом, пото-
. воздуха сообщается кинетическая энергия, которая при протекании его по специально спрофилированным
-алравляющим и отводящим устройствам преобразуется в энергию давления. Как правило, центробежные
•омпрессоры изготавляют многоступенчатыми, т. е. с несколькими рабочими колесами, устанавливаемыми на
Z2H0M валу. Требуемая степень сжатия воздуха обеспечивается его последовательной подачей с выхода одно-
колеса на вход другого. Основное преимущество компрессоров этого типа — большая производительность
до 400 тыс. м3/ч).
Это же преимущество характерно и для осевых компрессоров (рис. 3.11).
Рис. 3.11. Осевой компрессор
Поток воздуха в них имеет осевое направление. Основной конструктивный элемент — вращающийся ротор
1. на поверхности которого укреплены рабочие лопатки 2. Осевые компрессоры развивают давление воздуха
до 0,4 МПа, а их производительность достигает значений более 50 тыс. м3/ч.
29
3. Энергообеспечивающая подсистема
Производство сжатого воздуха сопровождается значительным потреблением электроэнергии. Например,
при получении 10 м2 3 сжатого воздуха под давлением 0,6 МПа с использованием поршневого компрессора зат-
раты электроэнергии составляют 0,76 — 0,98 кВт ч, а с использованием турбокомпрессора — 0,82 — 1,77 кВт ч.
При этом чем выше производительность компрессора, тем ниже затраты электроэнергии на каждый 1 м3 сжа-
того воздуха. Следовательно, стоимость производтва сжатого воздуха зависит от типа компрессора и от его
производительности. Несложный расчет показывает, что сжатый воздух необходимо расходовать экономно и
не допускать бесполезных утечек через неплотности в пневматических агрегатах и особенно в трубопроводах.
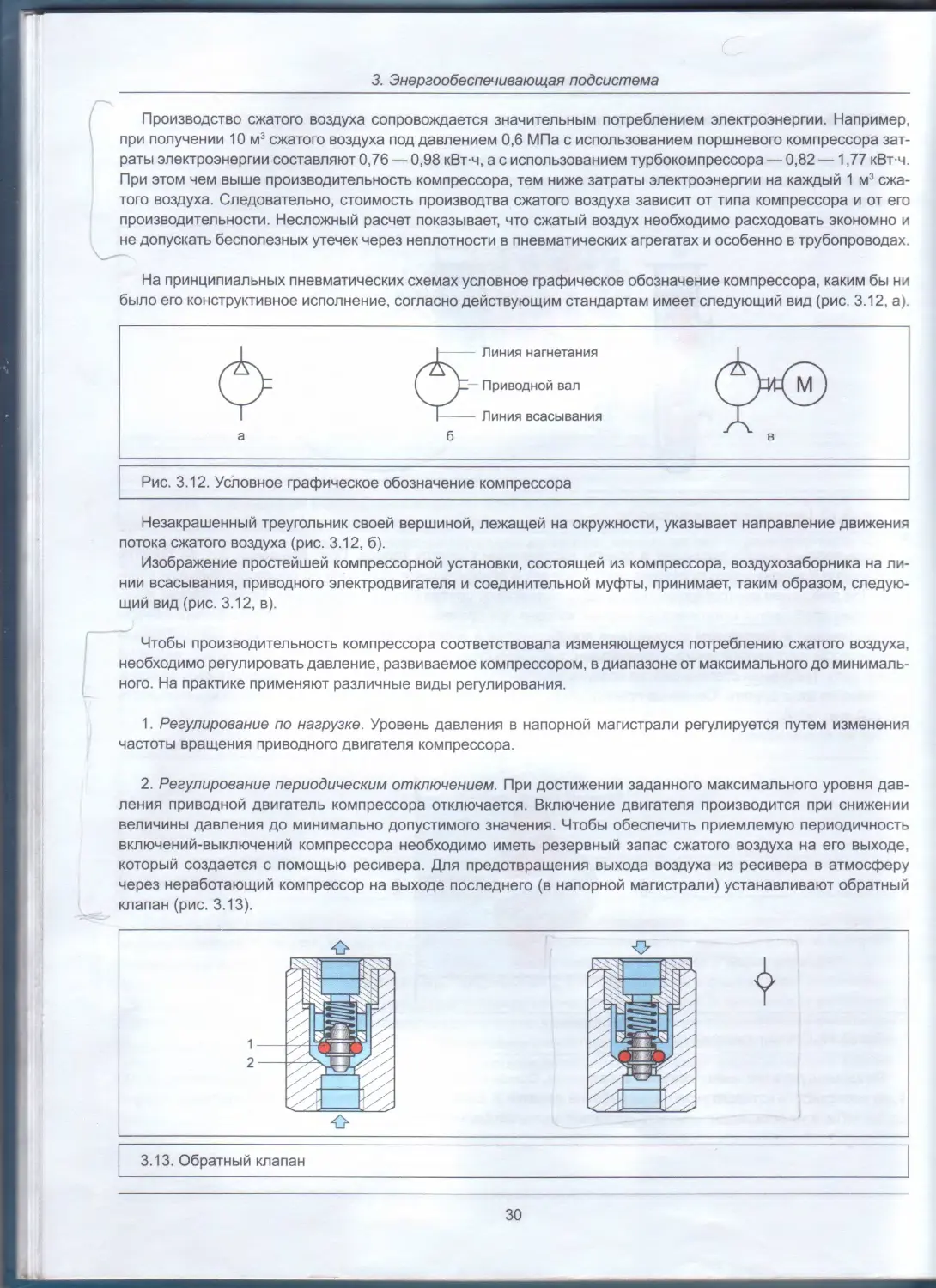
На принципиальных пневматических схемах условное графическое обозначение компрессора, каким бы ни
было его конструктивное исполнение, согласно действующим стандартам имеет следующий вид (рис. 3.12, а).
Незакрашенный треугольник своей вершиной, лежащей на окружности, указывает направление движения
потока сжатого воздуха (рис. 3.12, б).
Изображение простейшей компрессорной установки, состоящей из компрессора, воздухозаборника на ли-
нии всасывания, приводного электродвигателя и соединительной муфты, принимает, таким образом, следую-
щий вид (рис. 3.12, в).
Чтобы производительность компрессора соответствовала изменяющемуся потреблению сжатого воздуха,
необходимо регулировать давление, развиваемое компрессором, в диапазоне от максимального до минималь-
ного. На практике применяют различные виды регулирования.
1. Регулирование по нагрузке. Уровень давления в напорной магистрали регулируется путем изменения
частоты вращения приводного двигателя компрессора.
2. Регулирование периодическим отключением. При достижении заданного максимального уровня дав-
ления приводной двигатель компрессора отключается. Включение двигателя производится при снижении
величины давления до минимально допустимого значения. Чтобы обеспечить приемлемую периодичность
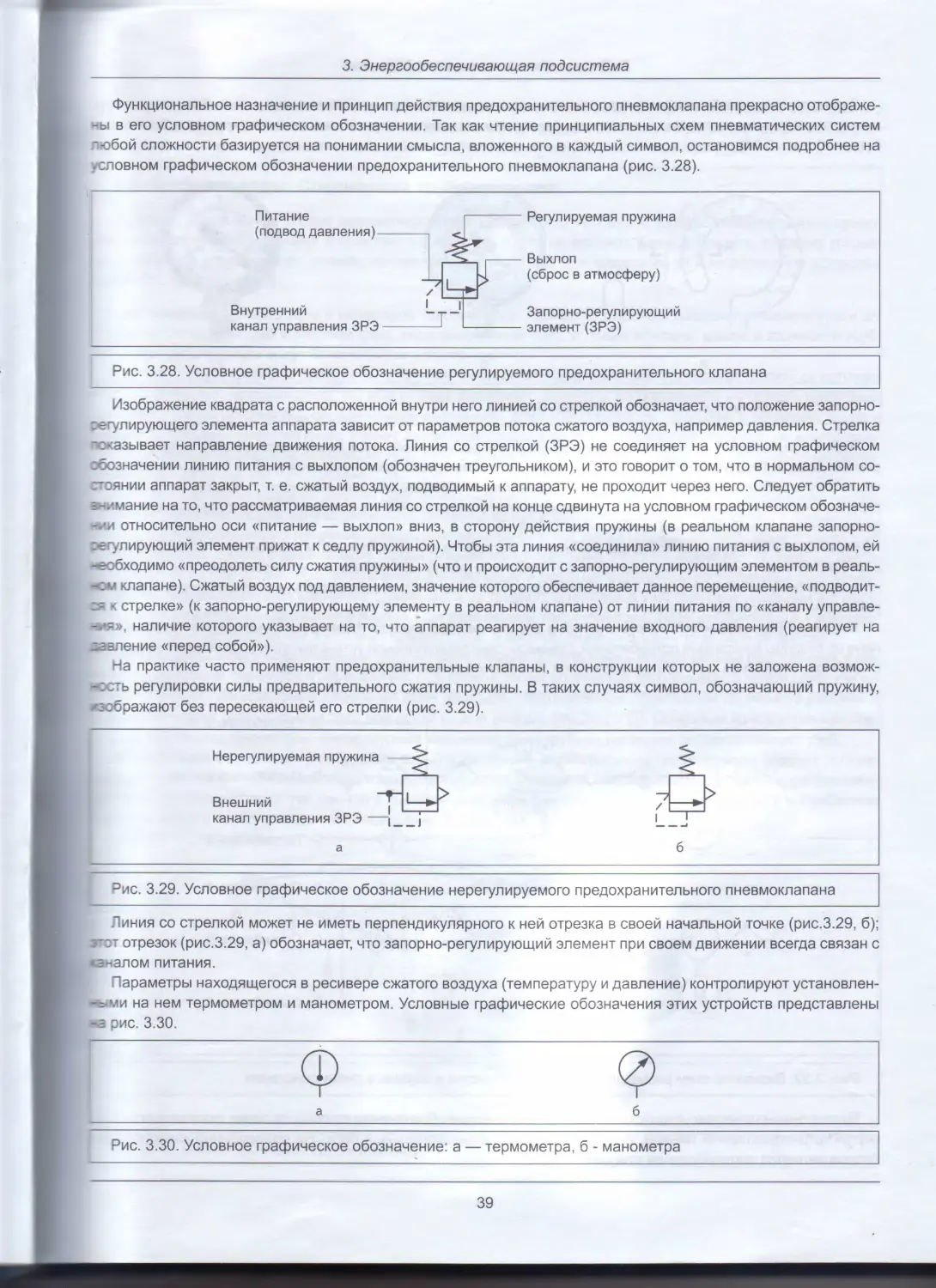
включений-выключений компрессора необходимо иметь резервный запас сжатого воздуха на его выходе,
который создается с помощью ресивера. Для предотвращения выхода воздуха из ресивера в атмосферу
через неработающий компрессор на выходе последнего (в напорной магистрали) устанавливают обратный
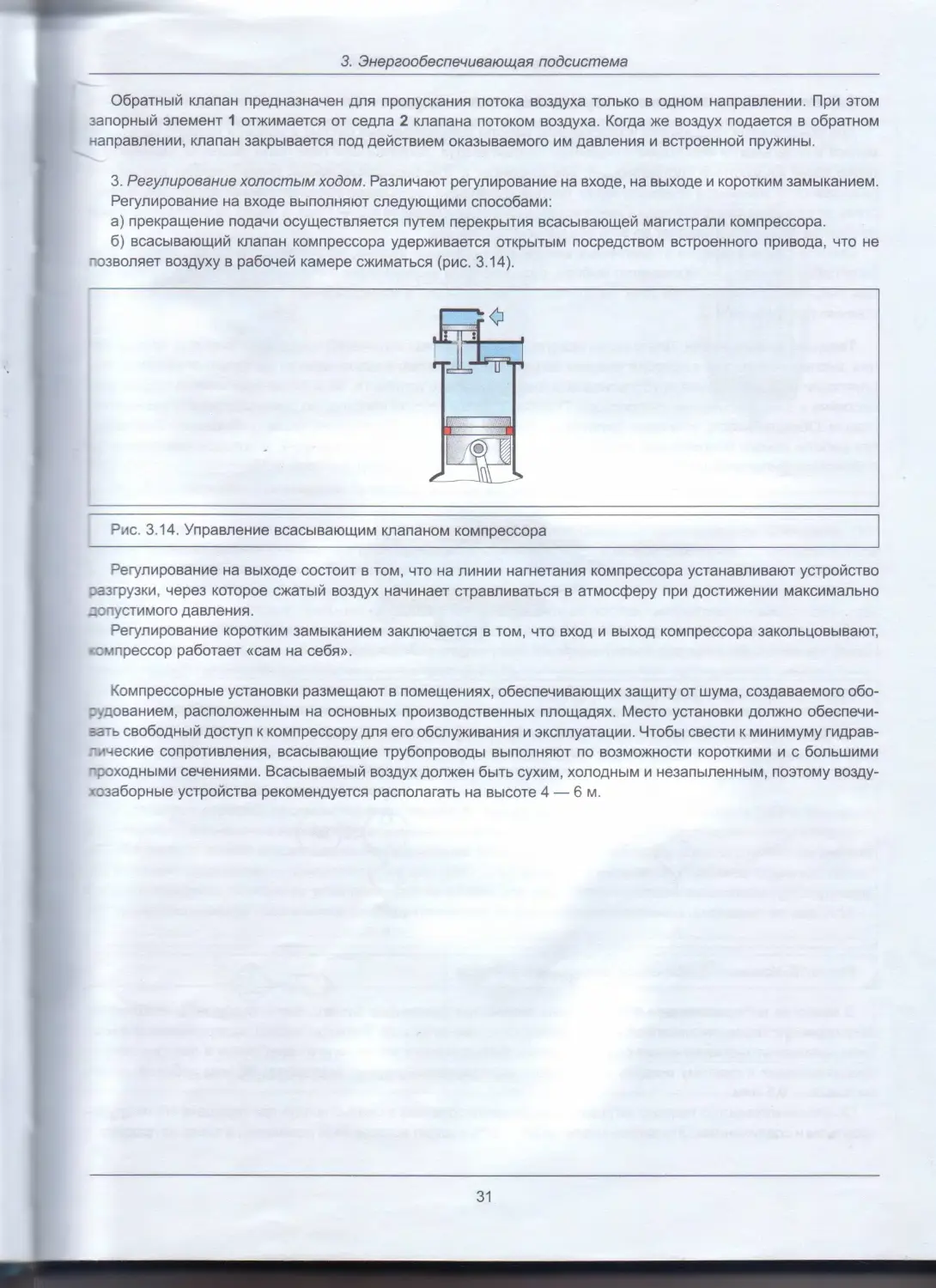
клапан (рис. 3.13).
3.13. Обратный клапан
30
3. Энергообеспечивающая подсистема
Обратный клапан предназначен для пропускания потока воздуха только в одном направлении. При этом
запорный элемент 1 отжимается от седла 2 клапана потоком воздуха. Когда же воздух подается в обратном
направлении, клапан закрывается под действием оказываемого им давления и встроенной пружины.
3. Регулирование холостым ходом. Различают регулирование на входе, на выходе и коротким замыканием.
Регулирование на входе выполняют следующими способами:
а) прекращение подачи осуществляется путем перекрытия всасывающей магистрали компрессора.
б) всасывающий клапан компрессора удерживается открытым посредством встроенного привода, что не
позволяет воздуху в рабочей камере сжиматься (рис. 3.14).
Регулирование на выходе состоит в том, что на линии нагнетания компрессора устанавливают устройство
зазгрузки, через которое сжатый воздух начинает стравливаться в атмосферу при достижении максимально
допустимого давления.
Регулирование коротким замыканием заключается в том, что вход и выход компрессора закольцовывают,
•омпрессор работает «сам на себя».
Компрессорные установки размещают в помещениях, обеспечивающих защиту от шума, создаваемого обо-
: .дованием, расположенным на основных производственных площадях. Место установки должно обеспечи-
вать свободный доступ к компрессору для его обслуживания и эксплуатации. Чтобы свести к минимуму гидрав-
лические сопротивления, всасывающие трубопроводы выполняют по возможности короткими и с большими
проходными сечениями. Всасываемый воздух должен быть сухим, холодным и незапыленным, поэтому возду-
хозаборные устройства рекомендуется располагать на высоте 4 — 6 м.
31
3. Энергообеспечивающая подсистема
3. 3. Устройства очистки и осушки сжатого воздуха
Для обеспечения надежности и безотказной работы пневматических систем в целом и каждого из их эле-
ментов в отдельности необходим очищенный сжатый воздух. Загрязнители типа пыли, окалины, ржавчины, а
также такие жидкостные составляющие, как конденсат и компрессорные масла, резко снижают показатели
безотказности элементов пневматических систем, приводят к нарушению технологических процессов. Вслед-
ствие загрязнения сжатого воздуха износ конструкций увеличивается в 2 — 7 раз, а число их выходов из строя
по этой же причине составляет до 80% общего числа отказов.
Очистка сжатого воздуха от различных включений — сложная задача, эффективное решение которой дос-
тигается путем квалифицированного выбора, размещения и эксплуатации очистных устройств на всех основ-
ных участках пневматической сети: на компрессорной станции, в магистральных трубопроводах и непосред-
ственно у потребителя.
Твердые загрязнители. Для очистки воздуха от механических включений применяют фильтры. Концентра-
ция, дисперсный состав и природа твердых загрязнителей сжатого воздуха зависят не только от режимов экс-
плуатации и обслуживания трубопроводов и пневматических устройств, но и от загрязненности воздушного
бассейна в зоне всасывания компрессора. Поэтому очистку воздуха необходимо предусматривать уже на этой
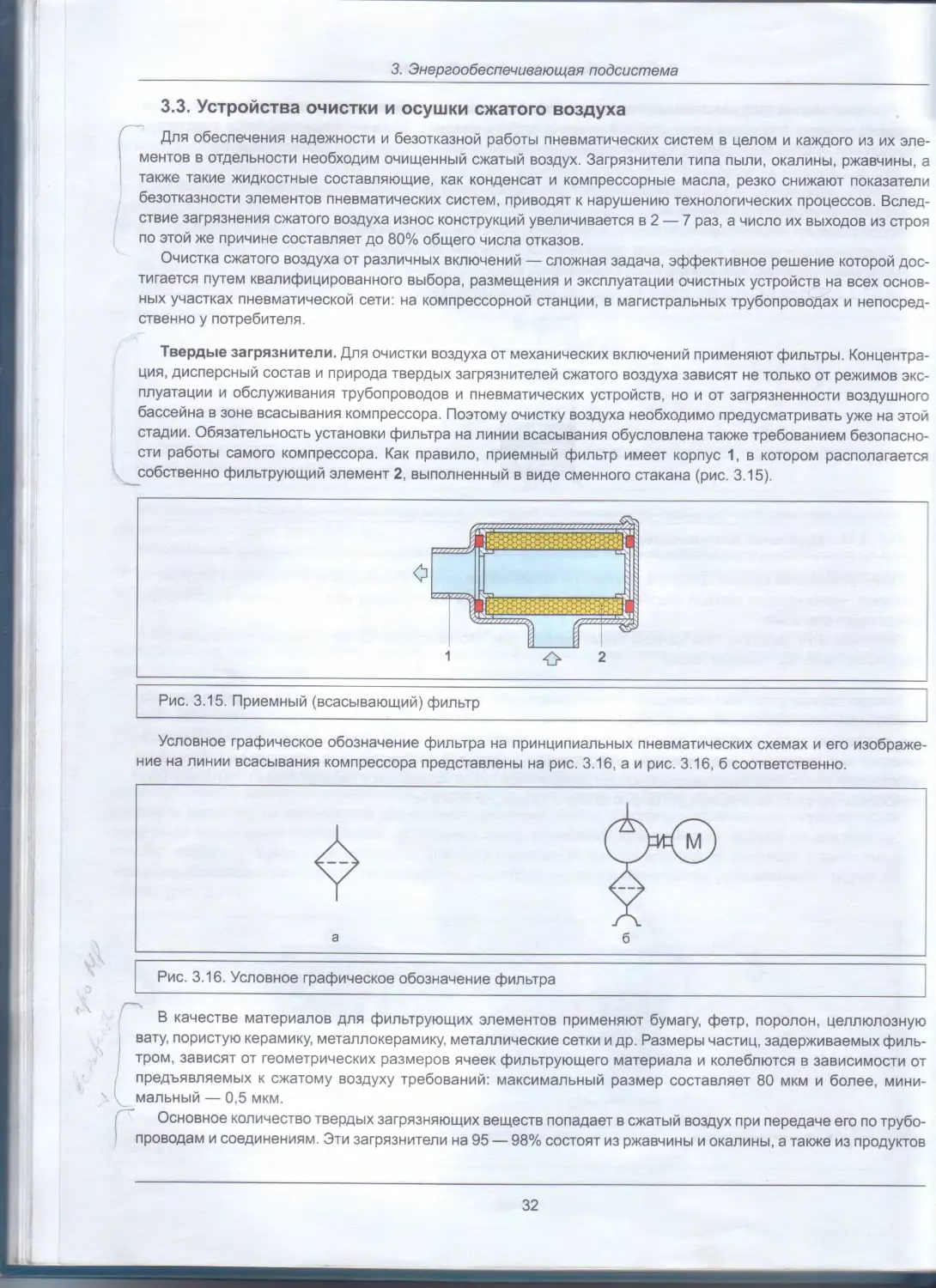
стадии. Обязательность установки фильтра на линии всасывания обусловлена также требованием безопасно-
сти работы самого компрессора. Как правило, приемный фильтр имеет корпус 1, в котором располагается
собственно фильтрующий элемент 2, выполненный в виде сменного стакана (рис. 3.15).
Рис. 3.15. Приемный (всасывающий) фильтр
Условное графическое обозначение фильтра на принципиальных пневматических схемах и его изображе-
ние на линии всасывания компрессора представлены на рис. 3.16, а и рис. 3.16, б соответственно.
В качестве материалов для фильтрующих элементов применяют бумагу, фетр, поролон, целлюлозную
вату, пористую керамику, металлокерамику, металлические сетки и др. Размеры частиц, задерживаемых филь-
тром, зависят от геометрических размеров ячеек фильтрующего материала и колеблются в зависимости от
предъявляемых к сжатому воздуху требований: максимальный размер составляет 80 мкм и более, мини-
мальный — 0,5 мкм.
Основное количество твердых загрязняющих веществ попадает в сжатый воздух при передаче его по трубо-
проводам и соединениям. Эти загрязнители на 95 — 98% состоят из ржавчины и окалины, а также из продуктов
32
3. Энергообеспечивающая подсистема
износа поршневых колец компрессоров и подвижных деталей пневмоаппаратов. При нарушении технологии
изготовления и монтажа трубопроводов в них попадают частицы уплотняющих материалов и промышленная
пыль. На трубопроводах, находящихся под давлением, устанавливают напорные фильтры (рис. 3.17, а).
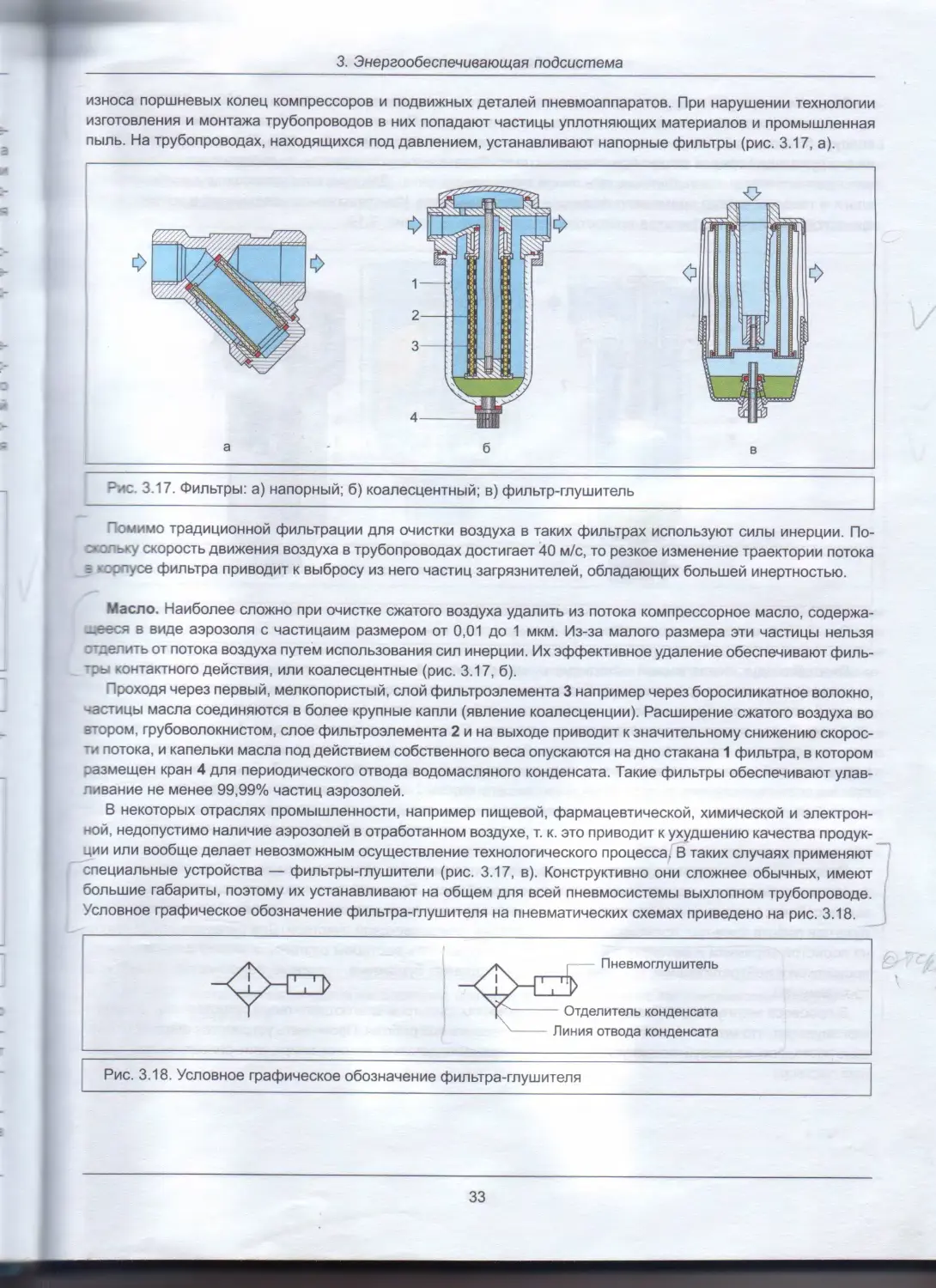
эис. 3.17. Фильтры: а) напорный; б) коалесцентный; в) фильтр-глушитель
Помимо традиционной фильтрации для очистки воздуха в таких фильтрах используют силы инерции. По-
ольку скорость движения воздуха в трубопроводах достигает 40 м/с, то резкое изменение траектории потока
з корпусе фильтра приводит к выбросу из него частиц загрязнителей, обладающих большей инертностью.
Масло. Наиболее сложно при очистке сжатого воздуха удалить из потока компрессорное масло, содержа-
щееся в виде аэрозоля с частицаим размером от 0,01 до 1 мкм. Из-за малого размера эти частицы нельзя
c-делить от потока воздуха путем использования сил инерции. Их эффективное удаление обеспечивают филь-
*рь контактного действия, или коалесцентные (рис. 3.17, б).
Проходя через первый, мелкопористый, слой фильтроэлемента 3 например через боросиликатное волокно,
-астицы масла соединяются в более крупные капли (явление коалесценции). Расширение сжатого воздуха во
втором, грубоволокнистом, слое фильтроэлемента 2 и на выходе приводит к значительному снижению скорос-
ти потока, и капельки масла под действием собственного веса опускаются на дно стакана 1 фильтра, в котором
размещен кран 4 для периодического отвода водомасляного конденсата. Такие фильтры обеспечивают улав-
ливание не менее 99,99% частиц аэрозолей.
В некоторых отраслях промышленности, например пищевой, фармацевтической, химической и электрон-
ной, недопустимо наличие аэрозолей в отработанном воздухе, т. к. это приводит к ухудшению качества продук-
ции или вообще делает невозможным осуществление технологического процесса. В таких случаях применяют
специальные устройства — фильтры-глушители (рис. 3.17, в). Конструктивно они сложнее обычных, имеют
большие габариты, поэтому их устанавливают на общем для всей пневмосистемы выхлопном трубопроводе.
Условное графическое обозначение фильтра-глушителя на пневматических схемах приведено на рис. 3.18.
Пневмоглушитель
3
- Отделитель конденсата
Линия отвода конденсата
Рис. 3.18. Условное графическое обозначение фильтра-глушителя
33
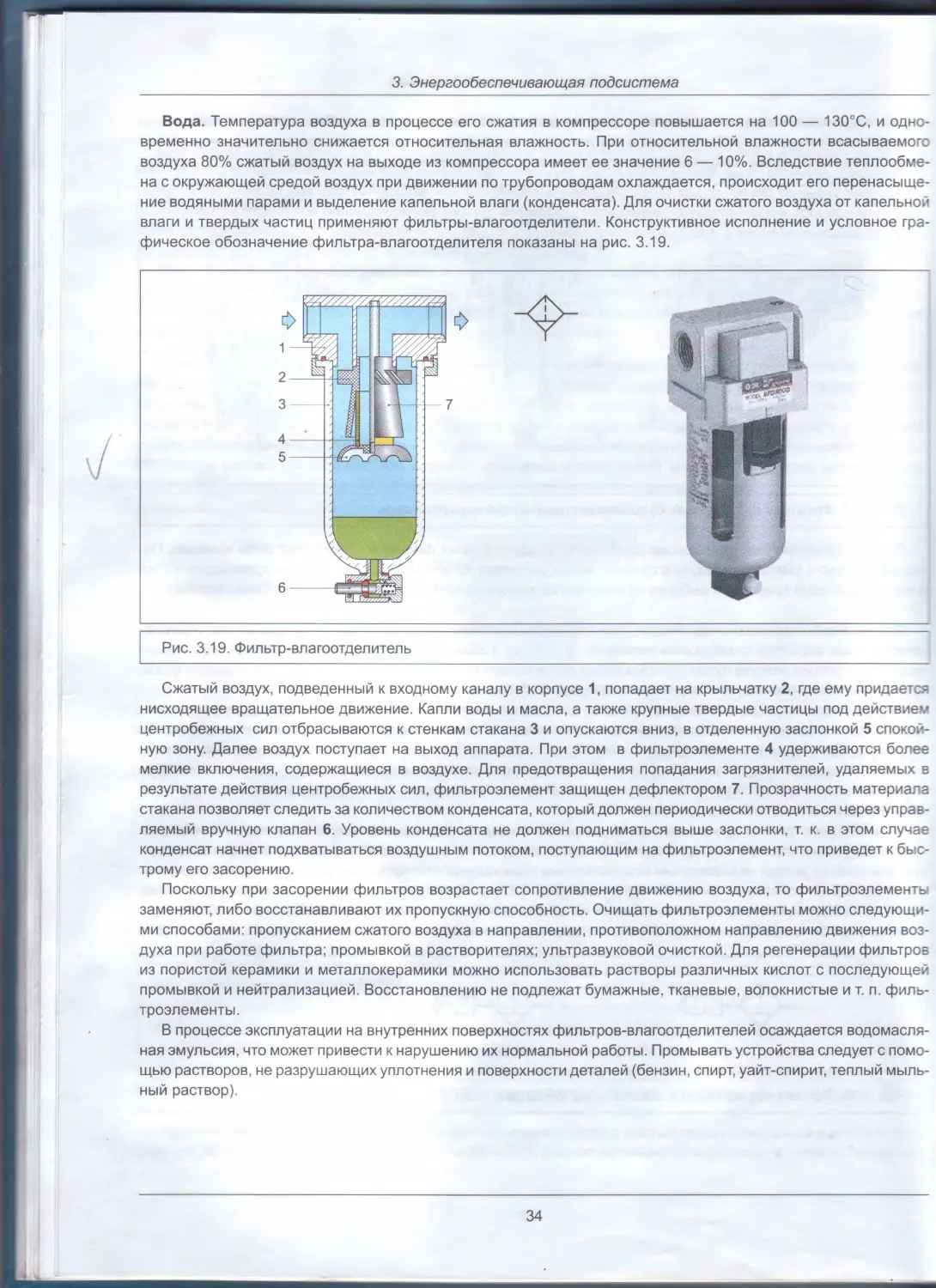
3. Энергообеспечивающая подсистема
Вода. Температура воздуха в процессе его сжатия в компрессоре повышается на 100 — 130°С, и одно-
временно значительно снижается относительная влажность. При относительной влажности всасываемого
воздуха 80% сжатый воздух на выходе из компрессора имеет ее значение 6 — 10%. Вследствие теплообме-
на с окружающей средой воздух при движении по трубопроводам охлаждается, происходит его перенасыще-
ние водяными парами и выделение капельной влаги (конденсата). Для очистки сжатого воздуха от капельной
влаги и твердых частиц применяют фильтры-влагоотделители. Конструктивное исполнение и условное гра-
фическое обозначение фильтра-влагоотделителя показаны на рис. 3.19.
Сжатый воздух, подведенный к входному каналу в корпусе 1, попадает на крыльчатку 2, где ему придается
нисходящее вращательное движение. Капли воды и масла, а также крупные твердые частицы под действием
центробежных сил отбрасываются к стенкам стакана 3 и опускаются вниз, в отделенную заслонкой 5 спокой-
ную зону. Далее воздух поступает на выход аппарата. При этом в фильтроэлементе 4 удерживаются более
мелкие включения, содержащиеся в воздухе. Для предотвращения попадания загрязнителей, удаляемых в
результате действия центробежных сил, фильтроэлемент защищен дефлектором 7. Прозрачность материала
стакана позволяет следить за количеством конденсата, который должен периодически отводиться через управ-
ляемый вручную клапан 6. Уровень конденсата не должен подниматься выше заслонки, т. к. в этом случае
конденсат начнет подхватываться воздушным потоком, поступающим на фильтроэлемент, что приведет к быс-
трому его засорению.
Поскольку при засорении фильтров возрастает сопротивление движению воздуха, то фильтроэлементь
заменяют, либо восстанавливают их пропускную способность. Очищать фильтроэлементы можно следующи-
ми способами: пропусканием сжатого воздуха в направлении, противоположном направлению движения воз-
духа при работе фильтра; промывкой в растворителях; ультразвуковой очисткой. Для регенерации фильтров
из пористой керамики и металлокерамики можно использовать растворы различных кислот с последующей
промывкой и нейтрализацией. Восстановлению не подлежат бумажные, тканевые, волокнистые и т. п. филь-
троэлементы.
В процессе эксплуатации на внутренних поверхностях фильтров-влагоотделителей осаждается водомасля-
ная эмульсия, что может привести к нарушению их нормальной работы. Промывать устройства следует с помо-
щью растворов, не разрушающих уплотнения и поверхности деталей (бензин, спирт, уайт-спирит, теплый мыль-
ный раствор).
34
3. Энергообеспечивающая подсистема
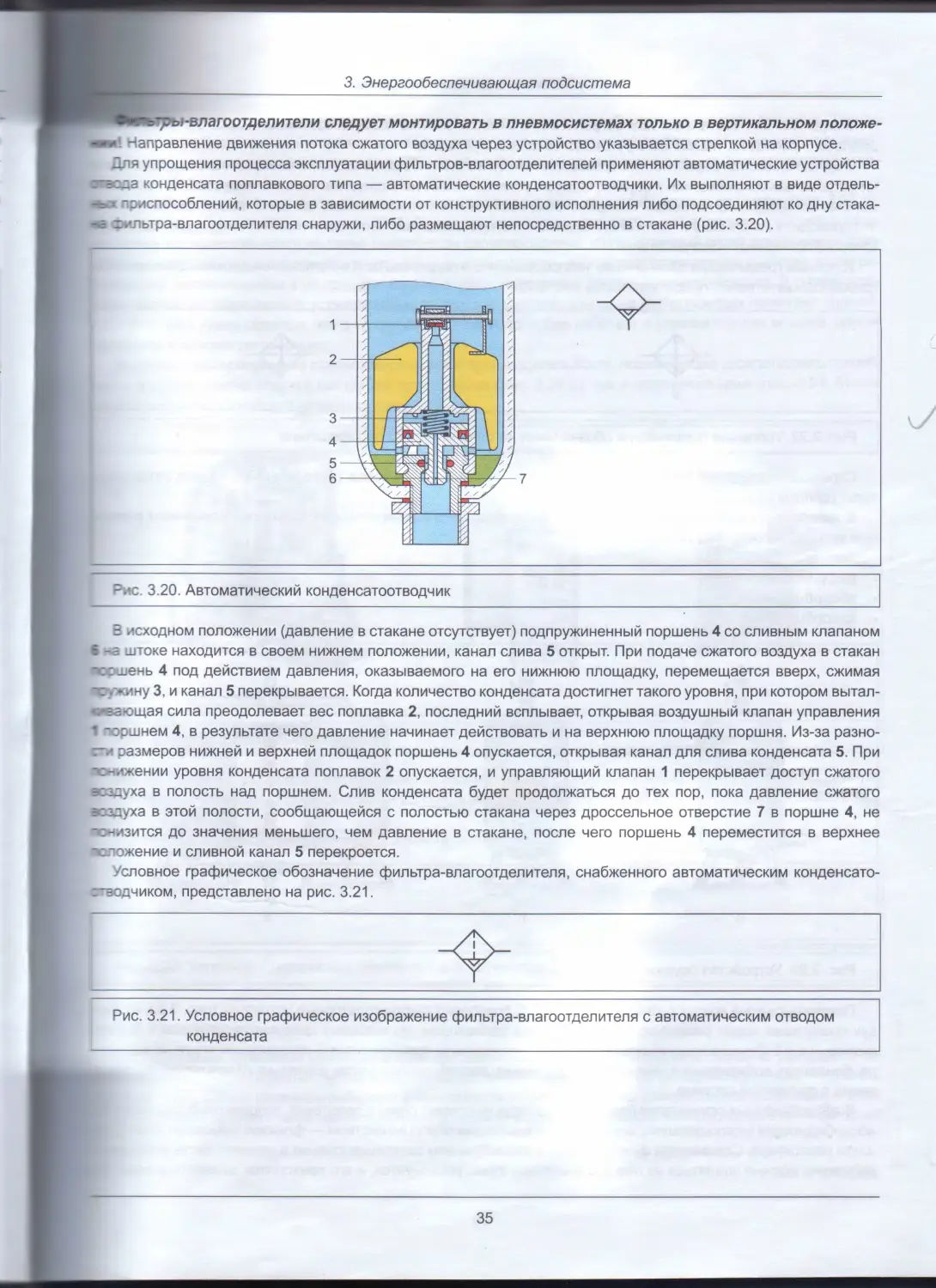
яры-влагоотделители следует монтировать в пневмосистемах только в вертикальном положе-
Направление движения потока сжатого воздуха через устройство указывается стрелкой на корпусе.
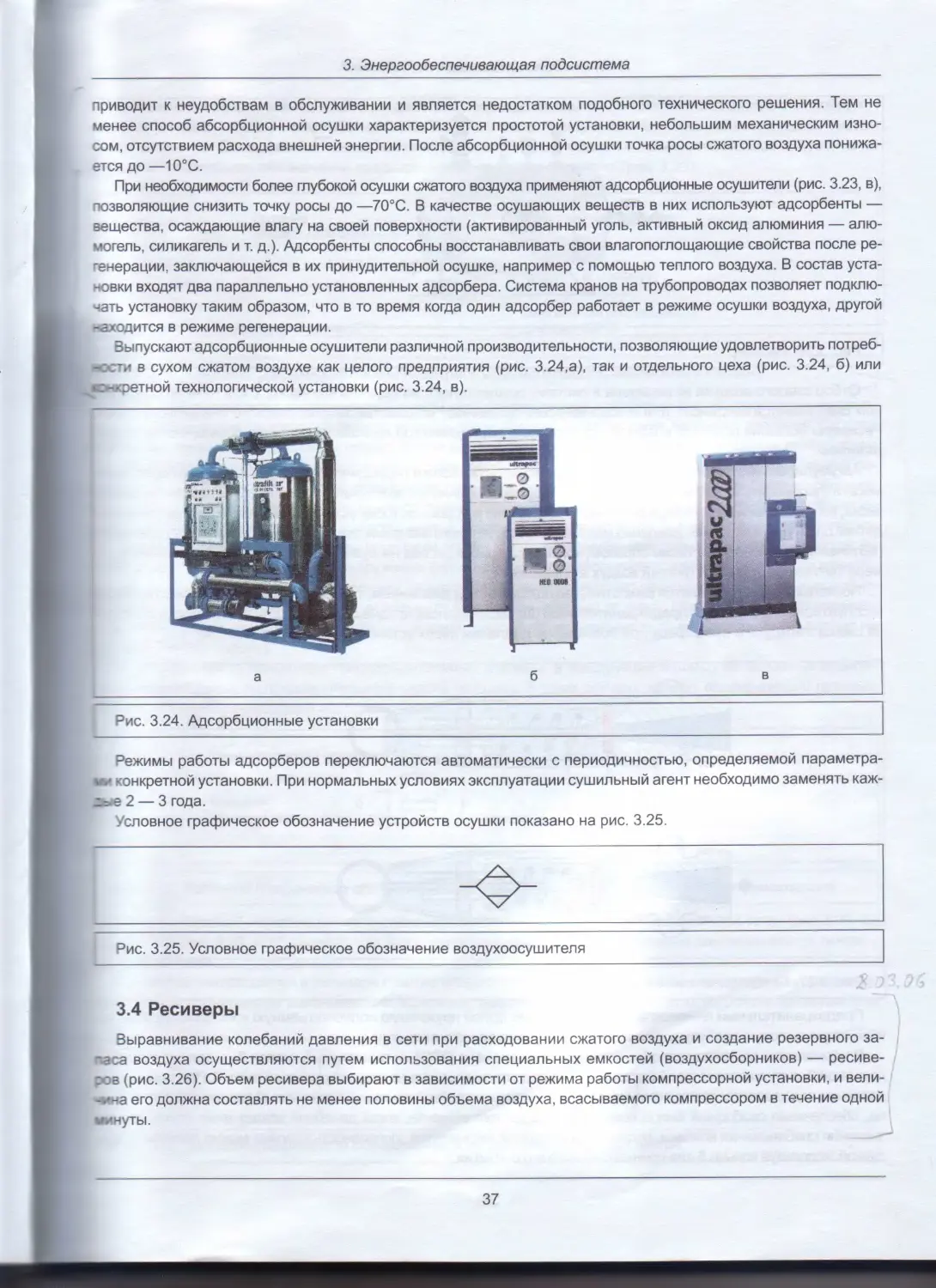
Для упрощения процесса эксплуатации фильтров-влагоотделителей применяют автоматические устройства
:-=1да конденсата поплавкового типа — автоматические конденсатоотводчики. Их выполняют в виде отдель-
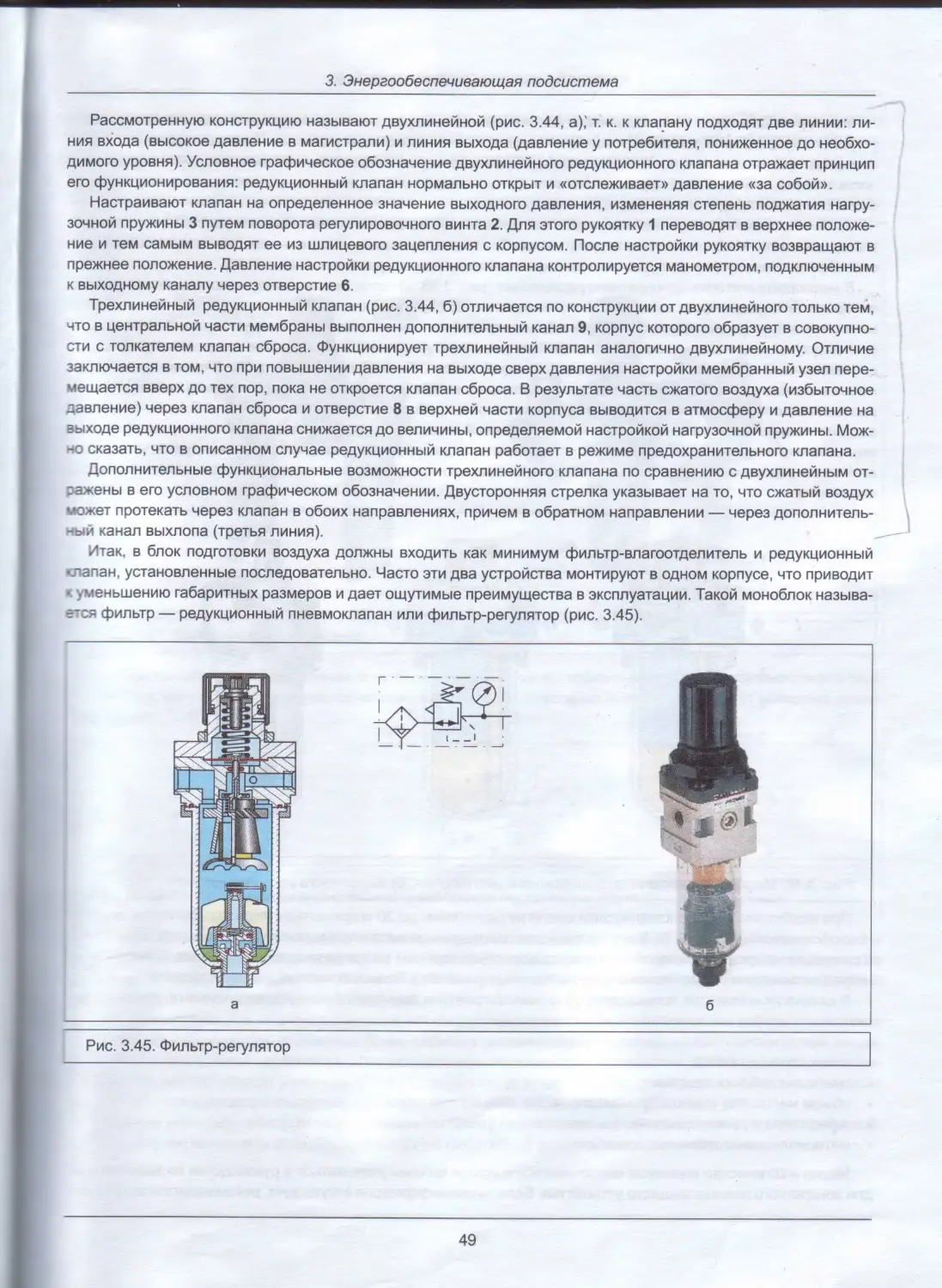
приспособлений, которые в зависимости от конструктивного исполнения либо подсоединяют ко дну стака-
ие гильтра-влагоотделителя снаружи, либо размещают непосредственно в стакане (рис. 3.20).
Рис. 3.20. Автоматический конденсатоотводчик
В исходном положении (давление в стакане отсутствует) подпружиненный поршень 4 со сливным клапаном
Б на штоке находится в своем нижнем положении, канал слива 5 открыт. При подаче сжатого воздуха в стакан
~с:шень 4 под действием давления, оказываемого на его нижнюю площадку, перемещается вверх, сжимая
- ину 3, и канал 5 перекрывается. Когда количество конденсата достигнет такого уровня, при котором вытал-
«меающая сила преодолевает вес поплавка 2, последний всплывает, открывая воздушный клапан управления
1 поршнем 4, в результате чего давление начинает действовать и на верхнюю площадку поршня. Из-за разно-
"> размеров нижней и верхней площадок поршень 4 опускается, открывая канал для слива конденсата 5. При
-снижении уровня конденсата поплавок 2 опускается, и управляющий клапан 1 перекрывает доступ сжатого
воздуха в полость над поршнем. Слив конденсата будет продолжаться до тех пор, пока давление сжатого
взздуха в этой полости, сообщающейся с полостью стакана через дроссельное отверстие 7 в поршне 4, не
-снизится до значения меньшего, чем давление в стакане, после чего поршень 4 переместится в верхнее
^сложение и сливной канал 5 перекроется.
Условное графическое обозначение фильтра-влагоотделителя, снабженного автоматическим конденсато-
з-водчиком, представлено на рис. 3.21.
Рис. 3.21. Условное графическое изображение фильтра-влагоотделителя с автоматическим отводом
конденсата
35
3. Энергообеспечивающая подсистема
Эффективная работа очистных устройств для очистки сжатого воздуха возможна только в определенном
диапазоне расходов, указанном в руководстве по эксплуатации.
С целью снижения вероятности образования конденсата в пневмолиниях источник сжатого воздуха снабжа-
ют устройствами охлаждения и осушки, которые устанавливают непосредственно за компрессором. Как прави-
ло, сжатый воздух, нагнетаемый компрессором, поступает в теплообменник, где охлаждается до 25 — 40°С,
что приводит к конденсации части влаги. В некоторых производствах необходим горячий воздух, для получения
которого применяют подогреватели.
Условные графические обозначения теплообменника и подогревателя с естественным охлаждением и обо-
гревом соответственно представлены на рис. 3.22.
Рис. 3.22. Условные графические обозначения: а) охладителя; б) подогревателя
Стрелки на условных графических обозначениях указывают на отвод (охладитель) и подвод (подогрева-
тель) теплоты к воздушной магистрали.
В зависимости от требований к степени осушки воздуха для конкретных потребителей применяют различ-
ные устройства осушки (рис. 3.23):
• рефрижераторные;
• абсорбционные;
• адсорбционные.
Рис. 3.23. Устройства осушки сжатого воздуха
Получить сжатый воздух с точкой росы 2 — 7°С позволяют рефрижераторные установки (рис. 3.23, а). Воз-
дух пропускают через резервуар с охлаждающим радиатором, по которому циркулирует хладагент (фреон,
аммиак и т. п.). Осушка воздуха осуществляется посредством принудительной конденсации влаги на радиато-
ре. Конденсат, собираемый в нижней части установки, должен периодически удаляться из нее путем присоеди-
нения к дренажной системе.
В абсорбционных осушителях (рис. 3.23, б) воздух поступает снизу в резервуар, заполненный специальным
абсорбирующим (поглощающим, химически связывающим влагу) веществом — флюсом, и выходит из верхней
части резервуара. Соединение флюса и воды в желеобразном состоянии стекает в нижнюю часть установки и
регулярно должно удаляться из нее. Со временем флюс расходуется, и его приходится заменять новым. Это
36
3. Энергообеспечивающая подсистема
приводит к неудобствам в обслуживании и является недостатком подобного технического решения. Тем не
менее способ абсорбционной осушки характеризуется простотой установки, небольшим механическим изно-
сом, отсутствием расхода внешней энергии. После абсорбционной осушки точка росы сжатого воздуха понижа-
ется до —10°С.
При необходимости более глубокой осушки сжатого воздуха применяют адсорбционные осушители (рис. 3.23, в),
позволяющие снизить точку росы до —70°С. В качестве осушающих веществ в них используют адсорбенты —
вещества, осаждающие влагу на своей поверхности (активированный уголь, активный оксид алюминия — алю-
•логель, силикагель и т. д.). Адсорбенты способны восстанавливать свои влагопоглощающие свойства после ре-
генерации, заключающейся в их принудительной осушке, например с помощью теплого воздуха. В состав уста-
новки входят два параллельно установленных адсорбера. Система кранов на трубопроводах позволяет подклю-
чать установку таким образом, что в то время когда один адсорбер работает в режиме осушки воздуха, другой
-аходится в режиме регенерации.
Выпускают адсорбционные осушители различной производительности, позволяющие удовлетворить потреб-
-:сти в сухом сжатом воздухе как целого предприятия (рис. 3.24,а), так и отдельного цеха (рис. 3.24, б) или
:-- эетной технологической установки (рис. 3.24, в).
эежимы работы адсорберов переключаются автоматически с периодичностью, определяемой параметра-
if/’ конкретной установки. При нормальных условиях эксплуатации сушильный агент необходимо заменять каж-
дые 2 — 3 года.
Условное графическое обозначение устройств осушки показано на рис. 3.25.
Рис. 3.25. Условное графическое обозначение воздухоосушителя
3.4 Ресиверы
Выравнивание колебаний давления в сети при расходовании сжатого воздуха и создание резервного за-
паса воздуха осуществляются путем использования специальных емкостей (воздухосборников) — ресиве-
ров (рис. 3.26). Объем ресивера выбирают в зависимости от режима работы компрессорной установки, и вели-
-гна его должна составлять не менее половины объема воздуха, всасываемого компрессором в течение одной
минуты.
3. Энергообеспечивающая подсистема
О
Рис. 3.26. Ресивер
Отбор сжатого воздуха из ресивера в систему осуществляют из верхней его части, т. к. в нижней со време-
нем скапливается конденсат, для отвода которого применяют устройства автоматического или ручного слива.
Ресиверы больших объемов снабжают люками для периодической очистки внутренних поверхностей от заг-
рязнений.
Аккумулирование энергии сжатого воздуха в ресивере позволяет периодически отключать компрессор от пнев-
мосети (переводить в режим разгрузки), либо вообще временно его выключать. Обычно это делается автомати-
чески, когда давление в ресивере достигает значения, на которое настроен установленный на нем электрический
датчик давления. Как только давление падает ниже предельного значения, датчик выдает сигнал на подключение
(включение) компрессора. Таким образом, компрессор работает под нагрузкой не постоянно, а периодически, по
мере того как расходуется сжатый воздух в пневмосети.
Поскольку ресивер является емкостью, находящейся под давлением, то с целью обеспечения безопасности
эксплуатации его снабжают предохранительным пневмоклапаном, предназначенным для автоматического сбро-
са сжатого воздуха в атмосферу при повышении давления сверх установленного значения (рис. 3.27).
Предохранительный пневмоклапан представляет собой пружинную полноподъемную конструкцию, обеспе-
чивающую высокую пропускную способность клапана при его открытии.
В нормальном состоянии запорно-регулирующий элемент (ЗРЭ) — тарельчатый клапан 2 — прижат к седлу 1
пружиной 3, силу сжатия которой настраивают посредством специально предусмотренной гайки 4. При повышении
давления под клапаном сверх значения, определяемого настройкой пружины, тарельчатый клапан отходит от сед-
ла, обеспечивая свободный выход воздуха вплоть до того момента, когда давление упадет ниже номинального
значения срабатывания клапана, после чего последний закрывается. Исправность клапана можно проверить про-
дувкой, используя кольцо 5 для принудительного его открытия.
38
3. Энергообеспечивающая подсистема
Функциональное назначение и принцип действия предохранительного пневмоклапана прекрасно отображе-
ны в его условном графическом обозначении. Так как чтение принципиальных схем пневматических систем
тюбой сложности базируется на понимании смысла, вложенного в каждый символ, остановимся подробнее на
.словном графическом обозначении предохранительного пневмоклапана (рис. 3.28).
Питание
(подвод давления)
Внутренний
канал управления ЗРЭ
Регулируемая пружина
Выхлоп
(сброс в атмосферу)
Запорно-регулирующий
элемент (ЗРЭ)
Рис. 3.28. Условное графическое обозначение регулируемого предохранительного клапана
Изображение квадрата с расположенной внутри него линией со стрелкой обозначает, что положение запорно-
зегулирующего элемента аппарата зависит от параметров потока сжатого воздуха, например давления. Стрелка
"называет направление движения потока. Линия со стрелкой (ЗРЭ) не соединяет на условном графическом
обозначении линию питания с выхлопом (обозначен треугольником), и это говорит о том, что в нормальном со-
~оянии аппарат закрыт, т. е. сжатый воздух, подводимый к аппарату, не проходит через него. Следует обратить
внимание на то, что рассматриваемая линия со стрелкой на конце сдвинута на условном графическом обозначе-
-.1И относительно оси «питание — выхлоп» вниз, в сторону действия пружины (в реальном клапане запорно-
регулирующий элемент прижат к седлу пружиной). Чтобы эта линия «соединила» линию питания с выхлопом, ей
необходимо «преодолеть силу сжатия пружины» (что и происходит с запорно-регулирующим элементом в реаль-
-:м клапане). Сжатый воздух под давлением, значение которого обеспечивает данное перемещение, «подводит-
ся I стрелке» (к запорно-регулирующему элементу в реальном клапане) от линии питания по «каналу управле-
-•'=», наличие которого указывает на то, что аппарат реагирует на значение входного давления (реагирует на
давление «перед собой»).
На практике часто применяют предохранительные клапаны, в конструкции которых не заложена возмож-
-эсть регулировки силы предварительного сжатия пружины. В таких случаях символ, обозначающий пружину,
*:ображают без пересекающей его стрелки (рис. 3.29).
Линия со стрелкой может не иметь перпендикулярного к ней отрезка в своей начальной точке (рис.3.29, б);
отрезок (рис.3.29, а) обозначает, что запорно-регулирующий элемент при своем движении всегда связан с
-налом питания.
Параметры находящегося в ресивере сжатого воздуха (температуру и давление) контролируют установлен-
-ыми на нем термометром и манометром. Условные графические обозначения этих устройств представлены
-а рис. 3.30.
Рис. 3.30. Условное графическое обозначение: а — термометра, б - манометра
39
3. ЭнергооЬеспечивающая подсистема
Существуют разнообразные конструктивные решения устройств контроля давления, но наиболее часто при-
меняют стрелочные манометры, чувствительным элементом которых служит тонкостенная упругая трубка (трубка
Бурдона) (рис. 3.31).
Через специальный штуцер, подсоединенный к контролируемой точке пневмосистемы, в трубку подаете?
сжатый воздух. Под действием оказываемого им давления трубка распрямляется (рис. 3.31, а), поворачивая
через тягу и зубчатый сектор находящееся в зацеплении с последним зубчатое колесо, жестко связанное сс
стрелкой, которая, в свою очередь, перемещается относительно шкалы с рисками, соответствующими опреде-
ленным значениям давления в трубке (рис. 3.31, б, в).
Входящие в состав пневмопривода манометры должны иметь красную черту, нанесенную поверх деления
соответствующего максимально допустимому рабочему давлению. Манометр устанавливают так, чтобы егс
показания были отчетливо видны обслуживающему персоналу, при этом желательным является вертикальное
расположение плоскости шкалы.
Варианты размещения устройств очистки и осушки сжатого воздуха формируются на основе требований
нему со стороны конкретных потребителей. Примеры схем рациональной установки этих устройств в пневмосе’и
Рис. 3.32. Варианты схем размещения устройств очистки и осушки в пневмосистемах
Группа пневматических устройств, условные графические обозначения которых на схеме охватываются зам-
кнутой штрихпунктирной линией, составляет единый функциональный блок. На приведенных схемах такиг
блоком является компрессорная станция.
40
3. Энергообеспечивающая подсистема
На принципиальных пневматических схемах машин и установок, работающих от заводской сети сжатого
воздуха, развернутое изображение источника питания не приводят, а используют условное графическое обо-
значение в виде незакрашенного треугольника ([>-) или окружности с точкой в центре (0-).
3.5. Трубопроводы. Соединения трубопроводов
В связи с повышением уровня автоматизации технологических процессов на базе пневматических приво-
дов на предприятиях все более возрастает потребность в сжатом воздухе. Каждой машине, каждому устрой-
ству требуется определенное количество сжатого воздуха и они снабжаются им от компрессорной установки
через сеть трубопроводов.
Трубопроводы. Выбор типа и материала трубопровода зависит от рабочего давления, температуры и аг-
рессивности окружающей и рабочей сред, вида соединений труб, условий монтажа, массы и стоимости труб.
При этом трубопроводы могут быть гибкими и жесткими.
Диаметры трубопроводов должны быть такими, чтобы потери давления сжатого воздуха на пути от источни-
ка до потребителя не превышала 100 кПа (1 бар). Выбирают диаметры трубопроводов на основе требуемых
значений расхода воздуха под определенным давлением, длин трубопроводов, давления в ресивере, числа и
характера местных сопротивлений. Расчет диаметров трубопроводов — трудоемкий процесс, не всегда даю-
щий правильные результаты, поэтому на практике удобнее пользоваться номограммами, полученными экспе-
риментальным путем (см. приложение II.2).
При монтаже трубопроводов должны обеспечиваться не только прочность и плотность соединений, надеж-
ность крепления на опорах, но и возможность удаления из них влаги и осуществления продувки и промывки. С
этой целью в трубопроводах предусматривают контрольные участки, которые представляют собой отрезки труб
длиной не менее 250 мм с фланцами на торцах (в качестве контрольных участков можно использовать и трубо-
проводную арматуру фланцевого исполнения). Контрольные участки целесообразно располагать в местах наи-
более вероятного скопления масляных отложений и на труднопромываемых участках (вертикальных и с мест-
ным снижением скорости движения воздуха). При этом первый такой участок должен располагаться у компрес-
сора, второй — на расстоянии 5 — 7 м от компрессора, а последующие — в 10 — 15 м один от другого.
Трубопроводы между соединяемыми устройствами следует прокладывать по кратчайшим расстояниям, с ми-
нимальным числом перегибов и пересечений. При прокладке металлических трубопроводов необходимо учиты-
вать возможные температурные изменения длин проводок, обусловленные перепадами температур рабочей и
окружающей сред (для стальных труб при Af>30°C, для медных при At>20°C). Основным конструктивным эле-
ментом, самокомпенсирующим температурные изменения длин трубных проводок, является поворот труб.
Во избежание обводнения (накопления воды) и засорения магистральные трубопроводы следует прокла-
дывать с уклоном 1 — 3° в направлении движения воздуха. Отводы от магистрального трубопровода рекомен-
дуется располагать сверху, так как это в значительной мере снижает вероятность попадания к потребителю
образующегося в трубопроводе конденсата (рис. 3.33).
41
3. Энергообеспечивающая подсистема
Чтобы все потребители сжатого воздуха снабжались равномерно, магистральные трубопроводы закольцо-
вывают. Это уменьшает потери энергии, а также позволяет ремонтировать отдельные участки трубопроводов,
не отключая всей системы. Необходимо избегать образования впадин, так как это приводит к накоплению воды,
масла и грязи. Если же по технологическим причинам выполнить это требование не удается, то в наиболее
низких местах следует устанавливать специальные устройства для улавливания и удаления загрязнителей.
При прокладке трубопроводов больших диаметров используют трубы из углеродистой стали, которые необ-
ходимо предохранять от коррозии путем нанесения цинкового, медного или другого покрытия. Не требуется
наносить специальные антикоррозионные покрытия на трубы из цветных металлов. Трубы из меди, медных и
алюминиевых сплавов характеризуются достаточно высокой гибкостью, удобны для прокладки на короткие
расстояния при наличии сложных изгибов и в случае необходимости подгонки при монтаже. Перечисленные
преимущества наиболее ощутимы, если диаметр трубы не превышает 25 мм.
Необходимость в гибких трубопроводах возникает в тех случаях, когда требуется подводить сжатый воздух
к расположенье на различных машинах и механизмах пневматическим устройствам, для которых характерно
наличие относительных перемещений. Преимущества гибких трубопроводов (шлангов) из синтетических мате-
риалов (полихлорвинила, полиамида, полиуретана и др.) заключаются в высокой антикоррозионной стойкости,
удобстве и простоте монтажа, а также в более низкой стоимости по сравнению с металлическими трубами. При
монтаже шлангов необходимо учитывать, что они могут работать только на изгиб, а работа на кручение для них
недопустима. Примеры правильного и неправильного монтажа шлангов представлены на рис. 3.34 (непра-
вильные варианты перечеркнуты).
Рис. 3.34. Монтаж гибких трубопроводов (шлангов)
Шланги монтируют таким образом, чтобы их участки вблизи арматуры не подвергались изгибу, не терлись
один о другой и о детали конструкции при работе пневмопривода.
Часть масла, попадающего в сжатый воздух, оседает на стенках воздухопроводов. При этом из нагретого
масла испаряются летучие компоненты, в результате чего образуется слой коксообразных отложений — нагар.
Применяют два способа очистки трубопроводов от нагара: 1) промывка водой и продувка сжатым воздухом; 2)
химическая очистка.
Промывку и продувку проводят при скоростях воды и воздуха 15 — 20 м/с. После завершения промывки
трубопровод продувают сжатым воздухом как минимум в течение 10 минут.
Химическая очистка трубопроводов является более эффективным способом и заключается в промывке
труб растворами синтетических поверхностно-активных моющих средств (ОП-7, ОП-Ю, технический сульфа-
нол и др.)
Условные графические обозначения трубопроводов приведены на рис. 3.35.
42
3. Энергообеспечивающая подсистема
Линии всасывания, нагнетания, выхлопа. Линии управления, дренажа, отвода конденсата. — Соединение трубопроводов.
Гибкий трубопровод (шланг). Пересечение трубопроводов без соединения. —г
Рис. 3.35. Условные графические обозначения трубопроводов
На монтажных, а иногда и на принципиальных пневматических схемах рядом с условным графическим
обозначенем трубопроводов проставляют буквенно-цифровые обозначения, которые служат для указания ди-
аметра и материала конкретного участка трубы.
Соединения трубопроводов. Для объединения отдельных труб в трубопроводы и подключения к ним пнев-
матических устройств и аппаратов используют различные неразъемные и разъемные соединения.
Неразъемные соединения применяют преимущественно в магистральных трубопроводах, не подлежащих
демонтажу. Выполняют их с помощью сварки (для стальных труб) или пайки (для труб из цветных металлов),
-~о значительно снижает массу трубопровода по сравнению с вариантом использования разъемных соедине-
ний.
Для стыковки трубопроводов друг с другом и с элементами пневматических систем служат концевые и
поомежуточные соединения. Для труб с внутренним диаметром до 40 мм применяют резьбовые соединения,
для труб большего диаметра — фланцевые.
Фланцевые соединения просты в изготовлении и для монтажа, не имеют ограничений по значениям диамет-
ров соединяемых труб и числу операций монтажа-демонтажа. Для жесткой связи с трубой применяют плоские
—иварные фланцы (рис. 3.36, а), а если при монтаже необходим разворот фланцев или труб, то используют
накидные фланцы, надеваемые на трубу с приваренным к ней ниппелем (рис. 3.36, б).
Герметизация места соединения обеспечивается с помощью уплотнительного кольца, устанавливаемого в
доточке на торце фланца или ниппеля, либо с помощью паронитовых, резиновых или картонных прокладок,
сторые деформируются при затяжке. При применении сварки или уплотняющих прокладок необходимо пре-
z .смотреть меры, направленные на то, чтобы не допустить попадание загрязнителей в трубопроводы при мон-
таже соединений.
В каталогах элементов промышленной пневмоавтоматики, в разделе «Соединения», приводится множе-
ггво конструктивных решений резьбовых соединений. Широкий спектр вариантов связан с применением раз-
/чных материалов труб, разных способов сочленения труб с деталями соединения, с требованием обеспече-
-ия подвижности или неподвижности соединения, с необходимостью осуществления перехода от одного диа-
гетра трубы к другому, соединения с внешней либо внутренней резьбой и т. д.
43
3. Энергообеспечивающая подсистема
Для тонкостенных металлических труб наиболее широко применяют соединения с развальцовкой трубы
(рис. 3.37, а) и с врезающимся кольцом (рис. 3.37, б), допускающие многократный монтаж-демонтаж (до 15 — 20
раз) без нарушения герметичности.
Соединение для развальцованной трубы (рис. 3.37, а) состоит из штуцера 2 с присоединительной цилинд-
рической или конической резьбой 1, ниппеля 4 и накидной гайки 3. Трубу с предварительно надетым на нее
ниппелем развальцовывают в виде раструба, надеваемого на коническую часть штуцера. Ниппель с трубой и
штуцер стягиваются вместе с помощью накидной гайки, при этом в месте сопряжения образутся плотное со-
единение и обеспечивается требуемая герметичность.
Соединение с врезающимся кольцом (рис. 3.37, б) не требует применения специального инструмента и
предварительной разделки конца трубы. Оно также включает штуцер и накидную гайку, между которыми распо-
лагается кольцо, упирающееся своими коническими поверхностями в соответствующие конические расточки в
штуцере и гайке. При завинчивании гайки кольцо, деформируясь, врезается в поверхность трубы, что препят-
ствует ее выскальзыванию и обеспечивает необходимую герметичность соединения. При использовании таких
соединений предъявляют повышенные требования к точности геометрических размеров и качеству наружной
поверхности трубы.
Для предотвращения утечек по присоединительной резьбе соединений используют резиновые и пластмас-
совые кольца. Без этих колец можно обойтись, если применяется коническая резьба либо цилиндрическая с
тефлоновым покрытием или со вставками из полимерных материалов.
Способ монтажа гибких трубопроводов зависит от их размеров, давления и условий эксплуатации в каждом
конкретном случае. Для надежного присоединения эластичных труб применяют в основном два конструктив-
ных решения: 1) соединение с фигурным наконечником штуцера и накидной гайкой (рис. 3.38, а); 2) быстро-
разъемные соединения с цанговым зажимом (рис. 3.38, б).
Рис. 3.38. Соединения для гибких трубопроводов
В первом случае герметичность соединения обеспечивается защемлением шланга между утолщением на-
конечника штуцера и накидной гайкой; во втором — уплотнительным кольцом, охватывающим шланг по наруж-
ному диаметру. Если при монтаже соединения с накидной гайкой требуются некоторые временные затраты, то
в быстроразъемном соединении с цанговым зажимом монтаж сводится к простому вводу шланга в зажим.
Демонтаж такого соединения осуществляется при нажатии на свободный торец цанги. Соединения с цанговым
зажимом имеют, как правило, меньшие поперечные размеры, т. к. в них отсутствуют внешние поверхности под
гаечный ключ, а часть канала выполнена с внутренним шестигранником под соответствующий ключ.
Применение рассмотренных выше прямых соединений приводит к резкому перегибу шланга в случае,
когда он подводится к плоскости присоединения под малым углом. Избежать этого и сэкономить монтажное
44
3. Энергообеспечивающая подсистема
пространство можно путем использования угловых соединений — L-образных (рис. 3.39, а) или тройников
рис. 3.39, б).
Рис. 3.39. Угловые соединения для гибких трубопроводов
Если для удобства прокладки гибких трубопроводов выход соединения должен быть ориентирован в про-
:~ранстве определенным образом, применяют конструкции, в которые обеспечена возможность проворачива-
-ия одной части соединения относительно другой (рис. 3.39, а). Чтобы предотвратить утечки воздуха между
«сдвижными частями соединения, устанавливают уплотнительное резиновое кольцо.
Для удобной разводки нескольких разнонаправленных трубопроводов от одной точки присоединения ис-
з.пьзуют многосекционные разводные коллекторы (рис. 3.40).
Рис. 3.40. Многосекционный разводной коллектор
Количество секций коллектора выбирают в зависимости от числа соединяемых трубопроводов. Секции стя-
’..•вают между собой через уплотнения пустотелым болтом, который, по существу, является присоединитель-
-ым элементом. Предусмотрена возможность проворота секций относительно оси болта, что позволяет отво-
л.ггь трубопроводы в нужных направлениях без перегибов.
В тех случаях, когда необходимо разъединить трубопровод без потери герметизации в подводящей его час-
Т* применяют быстроразъемные муфты (рис. 3.41).
45
3. Энергообеспечивающая подсистема
В подводящую часть такой муфты — розетку 1 — вмонтирован обратный клапан 2, который не позволяет
вытекать воздуху, если муфта находится в разъединенном состоянии. Обратный клапан принудительно откры-
вается штекером 7 (ответной частью муфты) при вводе последнего в розетку 1. Соединение «розетка — ште-
кер» надежно удерживается в замкнутом состоянии посредством шариков 3, запертых в проточке штекера 6
подпружиненной фиксирующей втулкой 5. Разъединение муфты осуществляется путем сдвига фиксирующей
втулки 5 в сторону подводящей части трубопровода. При этом шарики 3 получают возможность радиального
перемещения в проточке 4 и не удерживают штекер 7, который вследствие этого выталкивается из розетки
пружиной обратного клапана 2.
Если при демонтаже трубопровода необходимо сохранить его герметичность с обеих сторон соединения, то
применяют муфты, у которых обратные клапаны вмонтированы и в розетку, и в штекер. При замыкании такой
муфты обратные клапаны отжимают друг друга, соединяя тем самым трубопроводы.
Для компактной коммутации большого числа шлангов диаметрами 1,5 — 4 мм применяют многоканальные
соединения. Обычно эти соединения, используемые как выходы из шкафов управления, объединяют в себе от
5 до 32 разъемов (рис. 3.42).
В одном многоканальном соединении могут быть установлены штекеры и розетки под трубопроводы, имею-
щие различные диаметры и находящиеся под разным давлением.
На монтажных схемах применяют следующие условные графические обозначения типа соединения трубо-
проводов (рис. 3.43).
Место присоединения: несоединенное соединенное Штуцерное резьбовое соединение
Общее обозначение разъемного соединения — Быстроразъемное соединение без запорного элемента: соединенное несоединенное
Фланцевое соединение — 1— Быстроразъемное соединение с запорным элементом: соединенное несоединенное
Рис. 3.43. Условные графические обозначения соединений трубопроводов
46
3. Энергообеспечивающая подсистема
3.6. Блоки подготовки воздуха
Несмотря на принимаемые меры по централизованной очистке и осушке сжатого воздуха в магистральных
трубопроводах, сохраняется вероятность попадания загрязнителей различного происхождения в воздух, по-
ступающий непосредственно к потребителю. Для обеспечения стабильного уровня давления и окончательной
подготовки сжатого воздуха непосредственно у потребителя устанавливают ряд устройств кондиционирова-
ния, объединенных в блоки или выполненных в виде моноблоков. Эти устройства называются блоками подго-
товки воздуха. В зависимости от конструктивного исполнения пневмоэлементов, входящих в конкретный пнев-
мопривод, состав и количество устройств, составляющих блок подготовки воздуха, могут быть различными.
Рассмотрим его базовые элементы.
Фильтр-влагоотделитель. Конструкция, принцип действия и условное графическое обозначение фильтра-
влагоотделителя рассматривались нами в предыдущем разделе. Напомним, что это устройство предназначено
для удаления из сжатого воздуха механических включений (грязь, окалина, ржавчина) и конденсата.
Выбор фильтра-влагоотделителя для каждого конкретного привода осуществляется путем подбора устрой-
ства с требуемыми характеристиками по промышленным каталогам. Каталоги различных фирм-производите-
лей могут отличаться по своей информативности, но все они, как правило, содержат следующие параметры:
• номинальный расход; • диапазон рабочих давлений; • диапазон рабочих температур; • тонкость фильтрации; • объем емкости для сбора конденсата; • габаритные и присоединительные размеры; • материалы конструктивных элементов. /Г\ / 1 X ——< 1 ) х । / Обозначение фильтра-влагоот- делителя без автоматического отвода конденсата /Г\ / 1 \ X 1 / Обозначение фильтра-влагоот- делителя с автоматическим отводом конденсата
Нормальная работа фильтра-влагоотделителя гарантируется только в определенном диапазоне темпера-
тур и расходов воздуха, а степень фильтрации зависит от размера ячеек сменного фильтроэлемента. Заме-
-а стандартного фильтроэлемента на фильтр тонкой очистки приводит к снижению расхода воздуха, прохо-
дящего через аппарат. Типы материалов, используемых в конструкции, приводятся в каталогах с той целью,
-’обы можно было правильно подобрать устройство для работы в конкретных условиях, а также выбрать
моющие средства для очистки фильтра-влагоотделителя, необходимость в которой возникает по мере его
эксплуатации.
На практике желательно применять фильтры-влагоотделители с автоматическим отводом конденсата, кото-
рые не допускают обводнения пневмосистемы и не требуют затрат рабочего времени на открытие и закрытие
:ливных кранов. Очевидно, что ручные устройства более просты и надежны, однако применять их следует
"сгда, когда мала опасность накопления конденсата сверх допустимого уровня, а сброс воздуха в атмосферу
z-существляют не чаще одного раза в смену. При отсутствии дренажной системы рекомендуется отводить кон-
денсат в специальные емкости или колодцы и периодически удалять его оттуда.
Редукционный клапан. Давление сжатого воздуха в заводской сети не находится на строго заданном уров-
-е а колеблется в определенном диапазоне, что обусловлено рядом факторов: режимом работы компрессор-
-юй станции, запасом воздуха в ресивере, числом подключенных потребителей. Практический опыт показыва-
ег: наиболее эффективно пневматические системы функционируют при стабильных уровнях давления сжатого
эоздуха 0,6 МПа в исполнительной части системы и 0,3 — 0,4 МПа — в управляющей. Указанные параметры
: -:атого воздуха обеспечиваются редукционными пневмоклапанами, которые понижают рабочее давление и
“юддерживают заданный его уровень на выходе вне зависимости от колебаний давления в системе подачи
эоздуха перед клапаном и от изменения расхода воздуха за клапаном (у потребителя).
Установка в системе нескольких редукционных клапанов позволяет независимым образом поддерживать
различные уровни давления в отдельных ее частях.
47
3. Энергообеспечивающая подсистема
Применяемые в пневмоприводах редукционные клапаны различают по следующим основным при-
знакам:
• способ настройки выходного давления (механическая или пневматическая настройка);
• возможность сброса избыточного выходного давления (с клапаном сброса или без него).
Рассмотрим конструкцию и принцип действия редукционного клапана с ручной настройкой и без сброса
избыточного выходного давления (рис. 3.44, а).
Давление на выходе редукционного клапана регулируется путем создания перепада давления на седель-
ном клапане 7 (между входным и выходным каналами). Проходное сечение клапана 7 автоматически меня-
ется в зависимости от положения мембраны 4, которая с одной стороны воспринимает усилие, создаваемое
нагрузочной пружиной 3, а с другой — усилие, обусловленное выходным давлением.
В исходном положении (давление на выходе отсутствует) седельный клапан 7 под действием усилия от
нагрузочной пружины 3, передаваемого через мембрану 4 и толкатель 5, открыт, благодаря чему сжатый воздух
проходит со входа на выход аппарата.
При повышении давления на выходе мембрана выгибается, сжимая регулировочную пружину 3; проходное
сечение седельного клапана 7 уменьшается, и при достижении требуемого давления происходит полное его
закрытие.
Возрастание расхода сжатого воздуха у потребителя сопровождается понижением выходного давления, в
результате чего нагрузочная пружина разжимается, вызывая прогиб мембраны и увеличение проходного сече-
ния клапана, что приводит, в свою очередь, к увеличению расхода воздуха через редукционный клапан и повы-
шению давления на его выходе.
Таким образом, седельный клапан, управляемый мембраной, автоматически «отслеживает» выходное дав-
ление путем непрерывной корректировки своего проходного сечения. Нормальная работа редукционного кла-
пана возможна только в том случае, если давление на входе клапана больше давления на выходе.
48
3. Энергообеспечивающая подсистема
Рассмотренную конструкцию называют двухлинейной (рис. 3.44, а),' т. к. к клапану подходят две линии: ли-
ния входа (высокое давление в магистрали) и линия выхода (давление у потребителя, пониженное до необхо-
димого уровня). Условное графическое обозначение двухлинейного редукционного клапана отражает принцип
его функционирования: редукционный клапан нормально открыт и «отслеживает» давление «за собой».
Настраивают клапан на определенное значение выходного давления, измененяя степень поджатия нагру-
зочной пружины 3 путем поворота регулировочного винта 2. Для этого рукоятку 1 переводят в верхнее положе-
ние и тем самым выводят ее из шлицевого зацепления с корпусом. После настройки рукоятку возвращают в
прежнее положение. Давление настройки редукционного клапана контролируется манометром, подключенным
к выходному каналу через отверстие 6.
Трехлинейный редукционный клапан (рис. 3.44, б) отличается по конструкции от двухлинейного только тем,
что в центральной части мембраны выполнен дополнительный канал 9, корпус которого образует в совокупно-
сти с толкателем клапан сброса. Функционирует трехлинейный клапан аналогично двухлинейному. Отличие
заключается в том, что при повышении давления на выходе сверх давления настройки мембранный узел пере-
мещается вверх до тех пор, пока не откроется клапан сброса. В результате часть сжатого воздуха (избыточное
давление) через клапан сброса и отверстие 8 в верхней части корпуса выводится в атмосферу и давление на
выходе редукционного клапана снижается до величины, определяемой настройкой нагрузочной пружины. Мож-
но сказать, что в описанном случае редукционный клапан работает в режиме предохранительного клапана.
Дополнительные функциональные возможности трехлинейного клапана по сравнению с двухлинейным от-
лажены в его условном графическом обозначении. Двусторонняя стрелка указывает на то, что сжатый воздух
может протекать через клапан в обоих направлениях, причем в обратном направлении — через дополнитель-
ный канал выхлопа (третья линия).
Итак, в блок подготовки воздуха должны входить как минимум фильтр-влагоотделитель и редукционный
•лапан, установленные последовательно. Часто эти два устройства монтируют в одном корпусе, что приводит
к уменьшению габаритных размеров и дает ощутимые преимущества в эксплуатации. Такой моноблок называ-
ется фильтр — редукционный пневмоклапан или фильтр-регулятор (рис. 3.45).
Рис. 3.45. Фильтр-регулятор
49
3. Энергообеспечивающая подсистема
Маслораспылитель. Если подвижные части пневмоцилиндров, пневмомоторов или иных пневматических
устройств нуждаются в постоянной внешней смазке, то к трущимся поверхностям наиболее просто подавать
смазывающий материал с потоком поступающего в них воздуха. Устройства, обеспечивающие ввод масла в
поток воздуха, называют маслораспылителями. Устанавливают их, как правило, в блоке подготовки воздуха за
фильтром-влагоотделителем и редукционным клапаном.
Чтобы масло переносилось потоком сжатого воздуха по трубопроводам на значительные расстояния, его вводят
в виде аэрозоля. Маслораспылители делят по особенностям функционирования и качеству получаемого таким
способом масляного тумана на два типа: однократного и двукратного распыления (рис. 3.46).
В маслораспылителях однократного распыления (рис. 3.46, а) поток сжатого воздуха направляется с входа
аппарата непосредственно на выход. Часть воздуха через обратный клапан 3 попадает в стакан 4 и начинает
вытеснять масло по маслозаборной трубке 5 в смотровой колпачок-капельницу 1, через который осуществля-
ется визуальный контроль за подачей масла. Расход регулируется винтом 2, вращение которого сопровождает-
ся изменением проходного сечения маслоподающего канала. По эжектирующей трубке 6 происходит подсос
масла из колпачка 1 в основной поток, при попадании в который оно распыляется. Поскольку основная часть
распыленного масла смачивает внутреннюю поверхность трубопровода, то на расстоянии 1,5 — 2 м от масло-
распылителя начинается образование тонкой масляной пленки, которая перемещается по направлению дви-
жения потока воздуха. В связи с этим маслораспылители однократного распыления рекомендуется устанавли-
вать непосредственно перед смазываемым пневмоаппаратом или выше него, чтобы масло могло поступать
самотеком.
Рис. 3.46. Маслораспылители: а) однократного распыления; б) двукратного распыления
При необходимости транспортировки масла на расстояния до 30 м применяют маслораспылители двукрат-
ного распыления (рис. 3.46, б). В этих устройствах распыленное масло не подается сразу на выход, а поступает
в стакан, из которого в выходной канал попадают только частицы масла размером менее 3 мкм. Обычно такие
маслораспылители применяются в сложных пневмоприводах с большим числом пневмоустройств.
В каталогах элементов промышленной пневмоавтоматики приводятся следующие данные по маслораспы-
лителям:
• номинальный расход;
• диапазон рабочих давлений;
• объем масла или емкости для масла;
• габаритные и присоединительные размеры;
• материалы конструктивных элементов.
Марки и количество вносимых смазочных материалов должны указываться в руководстве по эксплуатации
для конкретного пневматического устройства. Если такая информация отсутствует, рекомендуется заправлять
50
3. Энергообеспечивающая подсистема
..'аслораспылители минеральными маслами, вязкость которых не превышает 35 мм2/с (сСт) при температуре
50°С (см. приложение 1.4); при этом расход масла должен составлять 1 — 10 капель на 1 м3 сжатого воздуха.
Запрещается заправлять в маслораспылители компрессорные масла!
Для удобства обслуживания маслораспылители устанавливают последовательно с фильтрами-влагоотде-
-.ггелями и редукционными пневмоклапанами и объединяют в единые функциональные блоки — блоки подго-
~свки воздуха (рис. 3.47).
элс. 3.47. Блоки подготовки воздуха
В зависимости от того, состоит ли блок подготовки воздуха из отдельных устройств, или выполнен в виде
•с-юблока, его условные графические обозначения на принципиальных пневмосхемах будут несколько разли-
-е'эся (рис. 3.48).
а б в
Рис. 3.48. Условные графические обозначения блоков подготовки воздуха
Ча рис. 3.48, а показано обозначение блока подготовки воздуха, состоящего из отдельных устройств. На
~с --ципиальной пневмосхеме каждому их них присваивают свой номер для внесения в спецификацию. На
ежс. 3.48, б показано развернутое обозначение блока подготовки воздуха, выполненного в виде моноблока, а
-а рис. 3.48, в — его упрощенное обозначение.
Для пневмоприводов, эксплуатируемых в тяжелых условиях и с высокой цикличностью работы при жестких
тебованиях к надежности, применяют более сложные системы смазки с регенерацией и циркуляцией масла.
3 таких случаях используют фильтры-маслоотделители, которые устанавливают на общей линии сброса отра-
ботавшего сжатого воздуха (линии выхлопа). Отделенное от воздуха масло с помощью специальных насосов
=»-овь подается в маслораспылители, что позволяет снизить его расход в 8 — 10 раз.
Хотя тем или иным способом можно решить проблему подачи внешней смазки к пневмоустройствам, удоб-
нее и выгоднее применять аппаратуру, способную работать на воздухе, не содержащем масла.
51
3. Энергообеспечивающая подсистема
Для нормального функционирования подобных устройств в течение всего их жизненного цикла достаточно
внести в них консистентную смазку при сборке. Такое техническое решение стало возможным благодаря при-
менению новых материалов с низким коэффициентом трения для изготовления корпусных и подвижных дета-
лей, а также специальных полимеров (витон, пербунан) для уплотнений. Пневмоприводы, в которых использу-
ют упомянутые аппараты, имеют ряд существенных преимуществ: не требуются специальные смазывающие
устройства; окружающая среда не загрязняется парами минеральных масел, попадающими в нее при сбросе
отработавшего сжатого воздуха; эксплуатация и обслуживание не вызывают затруднений. Использовать сжа-
тый воздух с распыленным маслом в этих пневмоприводах не рекомендуется, поскольку в таком случае будет
происходить вымывание консистентной смазки. После работы на воздухе, содержащем масло, эксплуатация
таких устройств на сухом воздухе не допускается!
Если некоторые элементы пневмопривода нуждаются во внешней смазке (чаще всего это исполнительные
механизмы), а некоторые — не нуждаются (например, аппараты системы управления), то в блок подготовки
воздуха встраивают модуль отвода, который располагают перед маслораспылителем (рис. 3.49).
Рис. 3.49. Блок подготовки воздуха с модулем отвода
Подведем некоторые итоги.
Блок подготовки сжатого воздуха — это совокупность устройств кондиционирования воздуха, которые долж-
ны располагаться на каждой автономной машине или на каждом механизме в составе сложного технологичес-
кого оборудования, потребляющего сжатый воздух. Пневмопривод конкретной машины начинается собственно
с блока подготовки сжатого воздуха. Поскольку правильная подготовка сжатого воздуха представляет собой
необходимое условие надежного функционирования и долговечности пневматических систем, важным требо-
ванием является технически грамотная эксплуатация и обслуживание блоков подготовки воздуха.
Напомним основные правила:
• блоки подготовки сжатого воздуха должны располагаться вертикально (±5°);
• при отсутствии автоматического конденсатоотводчика недопустимо, чтобы уровень конденсата в фильтре-
влагоотделителе превышал допустимую норму;
• давление настройки редукционного клапана не должно превышать требуемый уровень рабочего давления
пневмопривода;
. в маслораспылители следует заправлять те масла, которые подходят для смазки пневмоустройств;
• необходимо периодически промывать внутренние поверхности устройств от накапливающихся отложений.
52
4. Исполнительная подсистема
4. Исполнительная подсистема
Воздействие системы автоматического управления (САУ) непосредственно на какой-либо технологический
объект осуществляется исполнительными механизмами, которые и составляют исполнительную подсистему
ЗАУ (см. рис. 1.4). Энергия давления сжатого воздуха преобразуется в механическую энергию исполнительных
\.«еханизмов при воздействии воздуха на их рабочие органы, которыми могут служить поршень, лопатка или
*..»ембрана. Очевидно, что при этом усилие, развиваемое исполнительным механизмом, пропорционально дав-
лению в нем, а скорость движения выходного звена определяется расходом сжатого воздуха. Таким образом,
••сполнительные механизмы осуществляют необходимые технологические операции, обеспечивая требуемые
усилия и скорости.
Широкая гамма конструктивных решений исполнительных механизмов дает возможность осуществлять
множество разнообразных операций в различных технологических процессах. Фиксация и зажим, тиснение и
ц-ессование деталей, их перемещение и ориентировка в пространстве обеспечиваются соответствующими
•сполнительными механизмами, которые могут выполнять следующие виды движения:
• линейное (возвратно-поступательное);
- поворотное (в ограниченном угловом диапазоне);
• вращательное.
По реализуемому виду движения исполнительные механизмы подразделяются на три основных типа:
• линейные пневмодвигатели — пневматические цилиндры;
• поворотные пневмодвигатели;
• пневмодвигатели вращательного действия — пневматические моторы.
В отдельную группу можно выделить специальные пневматические исполнительные механизмы, такие как
вакуумные захваты, цанговые зажимы и т. п.
Все перечисленные типы исполнительных механизмов и каждая из существующих конструкций определен-
-сго типа имеют свои преимущества и недостатки, а следовательно, все они характеризуются некоторой пред-
"С'чтительной областью применения.
Исполнительный механизм выбирают исходя из его соответствия определенному набору критериев, как то:
• вид движения — вращательное, поворотное или линейное;
• направление движения — реверсивное или нереверсивное;
• развиваемая скорость вращения (угловая) или перемещения (линейная);
* создаваемый момент или усилие;
- эргономические показатели.
4.1. Пневматические цилиндры
Среди множества исполнительных механизмов пневматические цилиндры (пневмоцилиндры) выделяются
:е:чообразием
конструкций
и широким диапазоном основных параметров:
• диаметр поршня:
рабочий ход:
развиваемое усилие:
скорость движения выходного звена:
2,5 — 320,0 мм;
1 — 2000 мм (в бесштоковых конструкциях до 10 м);
2 — 50000 Н;
0,02 — 1,50 м/с.
Пневмоцилиндры различаются также по таким показателям, как значения допустимых давления и на-
"эузки, наличие или отсутствие специальных элементов конструкции. Разработаны и выпускаются пневмо-
-илиндры для
особых случаев эксплуатации
с увеличенной коррозионной стойкостью; жаропрочные —
^ля
работы
в условиях высокой температуры (200°С и выше)
для работы в системах с давлением рабочей
2
гоеды до
МПа
с усиленным штоком — для большей устойчивости; с повышенной защитой от агрессив-
-ых
сред
(с применением
пластиковых покрытий и специальных сталей) и др.
53
4. Исполнительная подсистема
По функциональным возможностям пневмоцилиндры подразделяют на два базовых типа:
• пневмоцилиндры одностороннего действия: подача сжатого воздуха в них осуществляется для выполне-
ния рабочего хода в одном направлении;
• пневмоцилиндры двустороннего действия: полезная работа совершается ими как при прямом, так и при
обратном ходе поршня.
4.1.1. Пневмоцилиндры одностороннего действия
Пневмоцилиндры одностороннего действия применяют в различного рода выталкивателях и отсекателях, в
зажимных, маркировочных и других подобных устройствах. Рабочий ход в таких пневмоцилиндрах осуществ-
ляется под действием сжатого воздуха, а в исходную позицию выходное звено возвращается встроенной пру-
жиной либо от внешней нагрузки (рис. 4.1).
В рассматриваемой конструкции гильза пневмоцилиндра 5 (цилиндрический корпус) с обеих сторон закрыта
крышками 1 и 8, причем в задней крышке 1 выполнено отверстие для подвода сжатого воздуха, а передняя
крышка 8 имеет декомпрессионное отверстие с вмонтированным фильтроэлементом 7. Поршень 2 делит внут-
реннее пространство гильзы на две полости: штоковую, в которой находится жестко связанный с ним шток 4, и
поршневую. Полости разграничены герметичным уплотнением 3 (например, манжетой), расположенным в кольце-
вой проточке на наружной цилиндрической поверхности поршня. Передняя (проходная) крышка 8 снабжена
направляющей втулкой 9, которая является опорой скольжения штока, передающего усилие от поршня на вне-
шний объект. Возвратная пружина 6 смонтирована внутри цилиндра и охватывает шток.
Рабочий ход пневмоцилиндра (полезная работа) выполняется при подаче сжатого воздуха в поршневую
полость; обратный ход происходит под действием встроенной пружины, что обусловливает меньшее потреб-
ление воздуха по сравнению с пневмоцилиндрами двустороннего действия аналогичных размеров. Кроме того,
пневмоцилиндры одностороннего действия несколько проще по конструктивному исполнению, т. к. в них не
требуется полная герметизация штоковой полости, постоянно связанной с атмосферой, а отсутствие дополни-
тельных уплотнений снижает потери на трение.
Область применения пневмоцилиндров одностороннего действия ограничена недостатками, присущими
данной конструкции:
. рабочее усилие снижено вследствие противодействия пружины (примерно на 10%);
• малое усилие при обратном ходе (примерно 10% рабочего);
• ограниченное перемещено штока (максимум 100 мм);
• увеличенные продольные габариты (прибавляется длина сжатой пружины).
54
4. Исполнительная подсистема
Таким образом, пневмоцилиндры одностороннего действия широко применяют в тех случаях, когда требу-
ется передача усилия только в одном направлении, а возврат происходит беспрепятственно (т. е. при отсут-
ствии противодействующей нагрузки), а также тогда, когда из соображений безопасности должно обеспечи-
ваться втянутое положение штока при отключении питания (падении давления сжатого воздуха в пневмосети).
Несмотря на простое устройство пневмоцилиндров одностороннего действия, существует большое количе-
ство их конструктивных исполнений, например мембранные пневмоцилиндры (рис. 4.2).
а
Рис. 4.2. Мембранные пневмоцилиндры одностороннего действия
Принцип функционирования мембранного пневмоцилиндра (рис. 4.2, а) аналогичен вышеописанному прин-
ципу работы поршневого пневмоцилиндра одностороннего действия. Конструктивные отличия заключаются в
том что подвижной поршень заменен жестко защемленной упругой мембраной 1, изготовленной из резины,
зорезиненной ткани или пластика. Благодаря большой площади мембраны такие пневмоцилиндры развива-
<* усилия до 25000 Н, но при этом ход штока 2 ограничен. В связи с особенностями конструкции мембранные
--евмоцилиндры характеризуются существенно меньшими продольными габаритами и простотой монтажа;
□нм недороги, и в них отсутствуют подвижные уплотнения.
Мембранный пневмоцилиндр одностороннего действия, показанный на рис. 4.2, б, предназначен для зажима
деталей с целью их последующей механической обработки. В таком пневмоцилиндре отсутствует шток, а усилие
-предается непосредственно через мембрану 1, рабочий ход которой составляет 1 — 5 мм.
На принципиальных пневматических схемах пневмоцилиндры одностороннего действия, вне зависимости от
z-кретного конструктивного исполнения, обозначаются символами, приведенными на рис. 4.^.
ЕЯ
1
I
а б
Рис. 4.3. Условные графические обозначения пневмоцилиндров одностороннего действия
На рис. 4.3, а показано условное графическое обозначение пневмоцилиндра одностороннего действия, в ко-
*:оом рабочий ход осуществляется при выдвигании штока, а на рис. 4.3, б — при его втягивании.
'анал выхлопа на графическом обозначении цилиндра может быть не показан.
55
4. Исполнительная подсистема
4.1.2. Пневмоцилиндры двустороннего действия
Пневмоцилиндры двустороннего действия применяют в тех случаях, когда требуется передавать рабочее
усилие при линейных перемещениях в обоих направлениях, например при транспортировании, сортировании,
установке, механической обработке, подъеме и опускании и других технологических операциях.
Принципиальное отличие пневмоцилиндров двустороннего действия от рассмотренных выше пневмоци-
линдров одностороннего действия заключается в том, что в них как прямой, так и обратный ходы поршня
осуществляются под действием сжатого воздуха при попеременной его подаче в одну из полостей, в то время
как другая соединена с атмосферой (рис. 4.4).
Рис. 4.4. Пневмоцилиндр двустороннего действия
Очевидно, что перемещение штока в любом направлении является рабочим и может осуществляться под
нагрузкой. При обратном ходе поршня штоковая полость находится под избыточным давлением, что связано с
необходимостью установки дополнительных уплотнений на поршне и в передней крышке для предотвращения
утечек сжатого воздуха по штоку.
Таким образом, в поршневых пневмоцилиндрах одностороннего и двустороннего действия практически все
элементы, а также способы их крепления одинаковы.
Конструктивное исполнение пневмоцилиндров может быть различным в зависимости от их типоразмера и
области применения. Так, наиболее распространенным способом крепления корпусных деталей пневмоцилинд-
ров с диаметром поршня до 25 мм (редко — до 63 мм) является завальцовка гильзы в крышках (рис. 4.5, а
Очевидная простота конструкции, обусловленная отсутствием крепежных элементов, оборачивается существен-
ным недостатком — пневмоцилиндры не подлежат ремонту.
Если диаметр поршня свыше 32 мм, то традиционным способом крепления остается стягивание крышек ,•
гильзы шпильками (рис. 4.5, б). Удобны в эксплуатации и фактически не имеют ограничений по диаметру пор-
шня пневмоцилиндры, крышки которых присоединены болтами к цельнотянутой спрофилированной гильзе
(рис. 4.5, в).
Технология производства цельнотянутых гильз-корпусов позволяет при необходимости выполнять в них
каналы для подвода воздуха, пазы для датчиков положения поршня; придавать конфигурацию, удобную для
монтажа и обслуживания.
56
4. Исполнительная подсистема
Пневмоцилиндры с демпфированием в конце хода
Одним из неоспоримых преимуществ пневмоцилиндров является высокая — до 1,5 м/с (а в ударных цилин-
драх до 10 м/с) — скорость движения выходного звена. При достижении конечного положения, когда поршень
«садится» на крышку, развиваются значительные ударные усилия, что сопровождается характерным стуком.
Такие удары не только являются причиной возникновения шума, но и приводят к преждевременному износу и
даже поломке элементов конструкции. Избежать преждевременного выхода из строя пневмоцилиндра можно
путем установки на поршне эластичных (например, резиновых) демпферов (рис. 4.4). Однако такой способ
демпфирования оказывается недостаточно эффективным, если имеют место значительные инерционные на-
грузки.
В таких случаях применяют пневмоцилиндры двустороннего действия с воздушным демпфированием в
<онце хода (рис. 4.6).
Рис. 4.6. Пневмоцилиндр двустороннего действия с демпфированием в конце хода
Расширение функциональных возможностей таких цилиндров достигается путем введения в традиционную
«инструкцию дополнительных элементов. По обе стороны поршня устанавливают втулки демпфера 2, а в крышках
_ “индра — уплотнительные манжеты 1 и дроссели 5 с обратным клапаном 6. Сжатый воздух, подводимый к
_/ _индру, свободно поступает в соответствующую полость, в том числе и через встроенный обратный клапан
6 Поршень движется к удаленной от него в этот момент крышке с максимальной скоростью до тех пор, пока
г~.лка демпфера 2 не дойдет до уплотнительных манжет 1. При этом происходит «запирание» некоторого
гсъема отводимого из цилиндра воздуха в полости, которая только что была соединена с атмосферой. Теперь
=с :дух из этой полости может вытесняться в атмосферу лишь через отверстие малого диаметра в дросселе 5,
=е_ичину проходного сечения которого можно изменять. Между крышкой и поршнем образуется «воздушная
*: душка». При дальнейшем движении поршня воздух в запертом объеме начинает сжиматься, давление воз-
растает, что приводит к торможению поршня, степень которого тем больше, чем меньше проходное сечение
дросселя. В конечном итоге поршень упирается в крышку без удара, мягко.
При изменении направления движения сжатый воздух свободно поступает под поршень через обратный
•дапан 6, составляющий вместе с дросселем 5 единый узел, что обеспечивает быстрое трогание цилиндра с
места.
При очень больших инерционных нагрузках или высоких скоростях движения поршня дополнительно уста-
навливают внешние гидравлические амортизаторы.
Справедливости ради следует отметить, что пневмоцилиндр, показанный на рис. 4.6, существенно отлича-
ется от рассмотренных выше конструкций тем, что в нем помимо установленных регулируемых демпферов
/монтирован на поршне кольцевой постоянный магнит 3, магнитное поле которого распространяется за преде-
лы гильзы и может регистрироваться с помощью специальных датчиков. Таким образом обеспечивается воз-
можность контроля определенных функционально важных положений выходного звена пневмоцилиндра.
57
4. Исполнительная подсистема
Для защиты штока от внешних загрязнителей в проходной (передней) крышке практически всех пневмоци-
линдров устанавливают грязесъемное кольцо 4.
Наличие в пневмоцилиндре регулируемых демпфирующих устройств отображается в условном графичес-
ком обозначении стилизованным изображением втулок демпферов, пересеченных стрелкой, а наличие посто-
янного магнита — жирной линией на изображении поршня.
Описанная конструкция пневмоцилиндров благодаря своей простоте и функциональным возможностям яв-
ляется наиболее распространенной, и ее можно назвать типовой или даже традиционной. Большинство суще-
ствующих пневмоцилиндров двустороннего действия выпускается именно в таком исполнении и применяется
для решения широкого круга технических задач.
Однако пневмоцилиндрам двустороннего действия присущ и ряд недостатков, ограничивающих область их
применения:
• усилия при прямом и обратном ходах поршня различны вследствие неодинаковости его площадей в што-
ковой и поршневой полостях;
• шток расположен консольно, причем размер консоли различен во втянутом и выдвинутом положении;
• шток хорошо воспринимает только осевую нагрузку, тогда как радиальную — плохо.
Пневмоцилиндры с проходным штоком
В пневмоцилиндрах с проходным, или двусторонним, штоком (рис. 4.7) обе рабочие полости штоковые, а
площади поршня равны с обеих сторон. Шток опирается не на одну опору в крышке, как в ранее рассмотренных
конструкциях, а на две — в каждой из крышек.
Подобная конструкция имеет ряд преимуществ:
• возможность осуществления рабочих перемещений со стороны обоих торцов пневмоцилиндра;
• нагрузка на шток воспринимается двумя опорами, что увеличивает срок службы пневмоцилиндра;
• равенство площадей поршня в обеих рабочих полостях, что обеспечивает равные рабочие усилия при
движении его в любом направлении.
К недостаткам пневмоцилиндров с проходным штоком относят увеличенный почти вдвое по сравнению с
традиционной конструкцией продольный габарит пневмоцилиндра за счет увеличения длины штока.
Широко применяют пневмоцилиндры, в которых проходной шток выполнен полым, что позволяет использо-
вать его как часть трубопровода, например при работе с краскопультами, пескоструйными устройствами, ваку-
умными захватами и другими рабочими органами, которые крепят к штоку.
58
4. Исполнительная подсистема
Тандем-пневмоцилсшдрь/
В случаях, когда требуется получение значительных усилий, а поперечный размер монтажного простран-
ства на технологическом оборудовании недостаточен для установки пневмоцилиндра соответствующего диа-
метра, применяют тандем-пневмоцилиндры (рис. 4.8).
Тандем-пневмоцилиндр, или сдвоенный пневмоцилиндр, — это, по существу, два пневмоцилиндра двусто-
ссннего действия, объединенные в одном корпусе и имеющие общий шток. По сравнению с традиционными
’>-евмоцилиндрами того же диаметра усилия, развиваемые тандем-пневмоцилиндрами, фактически в два раза
больше вследствие суммирования усилий, получаемых одновременно на двух поршнях.
Если необходимо увеличить развиваемое пневмоцилиндром толкающее усилие в три-четыре раза, приме-
-*=-эт секционные пневмоцилиндры, которые последовательно стыкуются между собой. Наличие в их корпусах
распределительных каналов позволяет подводить сжатый воздух в полости всех пневмоцилиндров всего через
дза внешних подсоединения.
Очевидно, что продольный габарит тандем-пневмоцилиндров как минимум в два раза больше, чем традици-
э—ых пневмоцилиндров. В конструкции, представленной на рис. 4.9, этот недостаток отсутствует.
1 2 3
-----------------------------------------
эис. 4.9. Компактный тандем-пневмоцилиндр
В таком пневмоцилиндре развиваемое усилие увеличивается в два раза только при выдвижении штока-
гпп.нжера 3, т. к. при этом сжатый воздух воздействует на один внешний 1 и один внутренний 2 его торцы. При
з^ллвании же штока цилиндр развивает незначительные усилия.
4.1.3. Позиционирование пневмоцилиндров
Традиционные конструкции пневмоцилиндров позволяют обеспечить две точки позиционирования связан-
иьх с ними технологических объектов. Эти две точки соответствуют положениям «шток втянут» и «шток выдви-
нут». Область эффективного применения пневмоцилиндров значительно расширяется, если реализуются ос-
тпанов и удержание их выходных звеньев в некоторых заданных промежуточных точках с допустимыми позици-
59
4. Исполнительная подсистема
онными ошибками. В зависимости от предъявляемых требований — числа точек позиционирования выходного
звена, частоты их смены (режима работы), необходимой точности отработки приводом заданного перемеще-
ния — используют пневматические механизмы различной структуры и с различными принципами управления
движением выходного звена.
Многопозиционные пневмоцилиндры
Чтобы обеспечить некоторое ограниченное число точек позиционирования (более двух), например в сорти-
ровочных устройствах, применяют многопозиционные пневмоцилиндры, состоящие из двух или более пневмо-
цилиндров с различными рабочими ходами.
На рис. 4.10 представлены две конструкции многопозиционных пневмоцилиндров, одна из которых (рис.
4.10, а) обеспечивает три, а вторая (рис. 4.10, б) — четыре точки позиционирования.
Рис. 4.10. Многопозиционные пневмоцилиндры
Во время работы корпус четырехпозиционного пневмоцилиндра перемещается, следовательно, пневмоци-
линдр должен быть укомплектован при монтаже подвижными соединениями для пневмошлангов.
Число точек позиционирования можно увеличить, если скомбинировать таким же образом не два, а боль-
шее число пневмоцилиндров. При этом следует учитывать, что подобные конструкции могут функционировать
нестабильно, когда штоки разных цилиндров движутся в противоположных направлениях.
Пневмоцилиндры с фиксатором штока
Путем механического удержания штока посредством специальных устройств (рис. 4.11) можно получить
фактически неограниченное число точек позиционирования.
Рис. 4.11. Пневмоцилиндр с фиксатором штока
60
4. Исполнительная подсистема
В представленной на рис. 4.11 конструкции шток 6 удерживается разрезным тормозным башмаком 4, кото-
рый обжимает его под действием встроенной пружины 1. Разблокировка штока 6 осуществляется при подаче
: «этого воздуха в рабочую полость 5 фиксатора. При этом поршень 2, сжимая пружину 1, освобождает элемен-
ты конструкции 3, прижимающие тормозной башмак 4 к штоку 6. Фиксаторы позволяют надежно удерживать
_~ок пневмоцилиндра под нагрузкой даже при внезапном падении давления в пневмосети.
4.1.4. Бесштоковые пневмоцилиндры
Существует много технологических операций, где требуются значительные (до нескольких метров) переме-
щения объектов, например при транспортировке. Применение пневмоцилиндров традиционного исполнения в
s-их случаях не только затруднительно, но зачастую и невозможно. Для обеспечения большого хода необхо-
zzm шток соответствующей длины, что обусловливает резкое увеличение продольного габарита пневмоцилин-
~а. кроме того, значительные размеры консольной части штока в выдвинутом положении могут стать причи-
«м потери устойчивости под нагрузкой.
Задачу осуществления значительных по величине перемещений можно было бы решить посредством теле-
скопических цилиндров. Однако такие цилиндры, широко используемые в гидрофицированных мобильных и
подъемно-транспортных машинах и установках (например, для подъема кузовов грузовых автомобилей), не
-а_1ли применения в пневмоприводах общепромышленного назначения.
По существу, шток является «лишней» деталью в цилиндре, и предназначен он для передачи усилия от
-ссшня к внешнему объекту. Бесштоковые конструкции, в которых усилие передается непосредственно от пор-
хчя имеют очевидные преимущества, главное из которых заключается в как минимум двукратном уменьше-
-ии продольного габарита по сравнению с пневмоцилиндром традиционной конструкции с той же величиной
жзда (рис. 4.12).
На рис 4.12, а показано изменение продольного габарита пневмоцилиндра традиционного конструктивного
«исполнения до и после совершения рабочего хода, а на рис. 4.12, б — то же самое для пневмоцилиндра
сесштоковой конструкции. Очевидно, что преимущества бесштоковых пневмоцилиндров проявляются в значи-
-ельной степени при больших величинах рабочего хода.
Пневмоцилиндр с гибким штоком
Одним из конструктивных решений, позволяющих отказаться от штока в его традиционном значении, явля-
ется пневмоцилиндр с гибким штоком (рис. 4.13).
61
4. Исполнительная подсистема
Жесткий шток в данной конструкции заменен покрытым нейлоном металлическим тросом 3 (либо лентой из
синтетического материала), охватывающим ролики 1, размещенные в крышках пневмоцилиндра. Внутри гиль-
зы 4 цилиндра трос 3 жестко связан с поршнем 5, а снаружи — с кареткой 2, к которой и крепится перемещае-
мый объект. Однако такое техническое решение, несмотря на свою простоту, не получило широкого распрост-
ранения.
Пневмоцилиндр с магнитной муфтой
В пневмоцилиндрах с магнитной муфтой (рис. 4.14) усилия, развиваемые поршнем, передаются на вне-
шнюю каретку за счет сил магнитного взаимодействия.
Поршень 1 имеет набор кольцевых постоянных магнитов 2, которые взаимодействуют с кольцевыми магнита-
ми 3, расположенными в каретке 4, охватывающей гильзу 5. Если гильза выполнена из немагнитного материала
и является тонкостенной, то движение поршня (1-я полумуфта) сопровождается синхронным перемещением ка-
ретки (2-я полумуфта), к которой присоединен внешний объект (нагрузка).
По сравнению с конструкциями, в которых усилие с поршня на нагрузку передается механическим путем, в
пневмоцилиндрах с магнитной муфтой при равных значениях диаметра цилиндра и давления питания разви-
ваемое усилие приблизительно на 20% меньше. Кроме того, такие пневмоцилиндры чувствительны к случай-
ным перегрузкам, которые могут привести к «разрыву» муфты.
Конечно, установив дополнительные магнитные кольца, можно увеличить силу магнитного сцепления порш-
ня с кареткой, однако в этом случае возрастает продольный габарит поршня и всей конструкции в целом.
Особенности конструктивного исполнения пневмоцилиндров с магнитной муфтой (нежесткая связь между
поршнем и кареткой, эксцентричное положение нагрузки) накладывают ограничения на величины осевых и
радиальных нагрузок и местонахождение точек их приложения, а также на допустимое соотношение скорости
и массы перемещаемых объектов.
62
4. Исполнительная подсистема
Пневмоцилиндр с ленточным уплотнением
В настоящее время наиболее широко распространены бесштоковые пневмоцилиндры, в которых усилие
механически передается на нагрузку непосредственно поршнем (рис. 4.15).
Рис. 4.15. Пневмоцилиндр с ленточным уплотнением
"лльза 2 пневмоцилиндра имеет сквозной продольный паз (по всей длине гильзы). Через этот паз поршень
3 механически связан с внешней кареткой 1 (т. е. поршень выполнен заодно с ней). С целью герметизации
*.._=зы паз с ее внутренней стороны закрыт металлической либо синтетической лентой 4, закрепленной в крыш-
«а« Чтобы пропустить поршень сквозь паз, часть ленты, расположенную между уплотнениями поршня, прово-
Я?’ -»ерез тело последнего под узкой частью. При работе пневмоцилиндра лента, неподвижная относительно
erz «орпусных деталей, скользит в теле поршня, открывая паз в гильзе только в месте нахождения поршня.
предотвратить
попадание загрязнителей
из окружающей среды
внутрь гильзы 3, продольный паз закрыт
внешней стороны защитной лентой 5, пропущенной через каретку 1.
При работе в условиях значительных радиальных нагрузок бесштоковые пневмоцилиндры с целью их раз-
зкм снабжают специальными направляющими (рис. 4.16, а) или выполняют каретку таким образом, что она
:едает нагрузку на гильзу-корпус (рис. 4.16, б). Подобное конструктивное исполнение позволяет обеспечить
сокую точность направления движения каретки, защиту присоединенного объекта от проворота и некоторое
всэоастание значения полезной нагрузки на привод.
Рис. 4.16. Бесштоковые пневмоцилиндры с направляющими
63
4. Исполнительная подсистема
4.1.5. Защита штока пневмоцилиндра от проворота
При возвратно-поступательном движении штока в стандартных пневмоцилиндрах имеет место некоторый
его проворот относительно оси движения, что обусловлено наличием микронеровностей на поверхности само-
го штока, а также на направляющих и уплотнениях. В связи с этим непосредственно на штоке пневмоцилиндра
нельзя закреплять инструмент (например, краскопульт), требующий строгой ориентации в пространстве. С це-
лью устранения этого недостатка, особенно в тех случаях, когда к штоку прикладывается крутящий момент,
применяют различные конструкции, в которых шток защищен от проворота (рис. 4.17).
Крутящий момент в таких конструкциях может восприниматься: штоком (рис. 4.17 а, б); поршнем (рис. 4.17
в, г); направляющими (рис. 4.17 д, е).
При небольших значениях крутящих моментов могут использоваться конструкции с двумя штоками (рис. 4.17.
а) либо с квадратным штоком (рис. 4.17, б). Более высокие значения крутящих моментов воспринимают пневмо-
цилиндры с овальным (рис. 4.17, в) или прямоугольным (рис. 4.17, г) поршнем. Кроме того, благодаря прямоуголь-
ному профилю гильзы такие цилиндры позволяют обеспечить высокую плотность монтажа. Если пневмоцилинд-
ры работают в условиях значительных по величине крутящих моментов, их снабжают либо внешними направля-
ющими (рис. 4.17, д), либо направляющими, выполненными в одном корпусе с гильзой (рис. 4.17, е).
64
4. Исполнительная подсистема
4.1.6. Монтаж пневмоцилиндров
Различные условия нагружения пневмоцилиндров обусловливают различные способы их монтажа на тех-
нологическом оборудовании. Поскольку способ монтажа существенно влияет на эксплуатационные показатели
пневмопривода и ведомого механизма, его необходимо выбирать таким образом, чтобы:
• на штоке не возникали радиальные нагрузки;
• шток не потерял устойчивость в полностью выдвинутом положении.
Производители пневмоцилиндров выпускают различные элементы крепежа для неподвижного и для под-
вижного способов монтажа (рис. 4.18).
В случаях неподвижного монтажа кроме варианта непосредственного крепления пневмоцилиндров на
оборудовании применяют фланцы (рис. 4.18, а) и лапы (рис. 4.18, б). Для обеспечения подвижности пневмо-
цилиндра во время работы используют цапфы (рис. 4.18, в), поворотные оси или проушины (рис. 4.18, г).
Соединения штока с ведомым механизмом также выполняют различными способами (рис. 4.19).
Неподвижные соединения реализуются с помощью наружной (рис. 4.19, а) или внутренней резьбы на конце
штока.
Несовпадение траекторий движения конца штока и монтажного звена ведомого механизма приводит к появ-
лению радиальных усилий на штоке и, следовательно, к ускоренному износу гильзы, поршня, штока, направля-
ющих втулок и уплотнений. Если при жестком способе крепления штока вследствие условий эксплуатации или
особенностей конструктивного исполнения оборудования невозможно предотвратить возникновение радиаль-
ных нагрузок на шток, необходимо применять подвижные переходные крепежные элементы — вилкообразные
головки (рис. 4.19, б), шарнирные наконечники — серьги (рис. 4.19, в) или соединительные муфты (рис. 4.19, г).
65
4. Исполнительная подсистема
Серьги, содержащие шаровой элемент, разрешают поворот оси присоединительного отверстия на несколь-
ко градусов, а муфты допускают также и радиальное смещение штока и ведомого механизма на несколько
десятых долей миллиметра.
Следует иметь в виду, что предельно допустимые осевые нагрузки на шток зависят от способа монтажа.
Хотя напряжения в штоке от чистого сжатия невелики, при больших рабочих ходах возможна потеря устойчиво-
сти вследствие продольного изгиба. Устойчивость штока проверяется по обобщенной формуле Эйлера (см.
приложение 11.3).
При монтаже, кроме того что пневмоцилиндры должны быть правильно установлены на технологическом
оборудовании, необходимо соблюсти меры, исключающие возможность повреждения цилиндров (в особенно-
сти штоков) и попадания загрязнителей в их внутренние полости. Места установки пневмоцилиндров должны
быть доступны для обслуживания последних в процессе эксплуатации.
4.2. Поворотные пневматические двигатели
В технике существует довольно широкий круг задач, в которых требуется не линейное перемещение выход-
ного звена исполнительного механизма, а поворот его на заданный угол. Угол поворота, как правило, ограни-
чен, и значение его находится в диапазоне от 0 до 360 градусов. Для решения указанных задач применяют
поворотные пневматические двигатели (пневмодвигатели), чаще всего поршневые или шиберные.
Поршневой поворотный пневмодвигатель с реечной передачей (рис. 4.20, а) выполняют на базе передачи
«шестерня — рейка». Шестерня 3 устанавливается на выходном валу 4, входит в зацепление со штоком-рей-
кой 2, который жестко связан с поршнями 1 двух разнонаправленных цилиндров одностороннего действия.
Рис. 4.20. Поворотные пневмодвигатели
66
4. Исполнительная подсистема
При подаче сжатого воздуха в рабочую полость одного из пневмоцилиндров поршни вместе со штоком-
рейкой совершают прямолинейное движение, которое посредством реечной передачи преобразуется во вра-
щательное (в пределах одного оборота) движение вала. Вал связан с технологическим объектом, который
необходимо повернуть на некоторый угол (например, с захватным устройством промышленного робота).
Очевидно, что поршневые пневмодвигатели можно выполнить таким образом, чтобы в конце рабочего хода
происходило демпфирование, а поршни были снабжены магнитными вставками с целью обеспечения возмож-
ности бесконтактного опроса их положения. В некоторых конструкциях предусматривается также регулирова-
ние угла поворота.
Максимальный крутящий момент, развиваемый поршневыми поворотными пневмодвигателями, составляет
150 Н-м (при диаметре поршней 100 мм).
Шиберный поворотный пневмодвигатель (рис. 4.20, б) устроен таким образом, что сжатый воздух воз-
действует на шибер 1 —жестко закрепленную на выходном валу 2 пластину, расположенную внутри цилиндри-
ческой расточки 3 в корпусе 4. Чтобы предотвратить перетекание воздуха из одной рабочей полости двигателя
в другую пластину выполняют с резиновым либо пластмассовым покрытием. Угол поворота шибера зависит от
размеров корпусного ограничителя бив стандартных конструкциях составляет 90, 180 или 270 градусов. Для
установки произвольного угла поворота шиберные пневмодвигатели снабжают внешними передвижными упо-
□ами. Такого типа пневмодвигатели развивают крутящий момент до 250 Нм.
На принципиальных пневматических схемах поршневые и шиберные пневмодвигатели обозначаются оди-
наковыми символами (рис. 4.21).
->
->
Рис. 4.21. Условное графическое обозначение поворотных пневмодвигателей:
а — общее; б — с демпфированием в конце хода
Поскольку останов вращающейся массы без демпфирования или при наличии перегрузок создает опас-
юсть повреждения шестерни или лопасти, то, выбирая подходящий поворотный двигатель, очень важно пра-
е•' ~эно учесть моменты инерции приводимых во вращательное движение технологических объектов. Значения
должны быть меньше указываемых в промышленных каталогах предельно допустимых значений для выб-
р i-чого типоразмера пневмодвигателя.
4.3. Пневмодвигатели вращательного действия — пневмомоторы
Пневмодвигатели вращательного действия, или пневмомоторы, предназначены для преобразования потен-
циальной энергии сжатого воздуха в механическую работу и обеспечивают неограниченное вращательное дви-
жение выходного вала. Как и другие устройства, работающие на сжатом воздухе, пневмомоторы имеют ряд
гсеимуществ, которые во многих случаях делают их использование наиболее предпочтительным с экономи-
кеской и технической точек зрения по сравнению с другими типами двигателей. К этим преимуществам отно-
сятся:
- простота регулирования скорости вращения и крутящего момента;
• возможность полного торможения под нагрузкой без ущерба для конструкции и рабочих качеств пневмо-
мотора;
• отсутствие перегрева;
- большой ресурс работы;
• полная взрывобезопасность;
• нечувствительность к неблагоприятным факторам внешней среды (пыль, влага и др.);
• простота монтажа.
67
4. Исполнительная подсистема
Существует довольно много вариантов конструктивного исполнения пневмомоторов (рис. 4.22), однако не
все они нашли широкое применение.
Пневматические моторы
Объемные
Турбинные
Поршневые
Радиально-поршневые
Аксиально-поршневые
Рис. 4.22. Классификация пневмомоторов
При эксплуатации пневмомоторов существенное значение имеет такой установившийся режим, при кото-
ром достигается максимальная производительность машины. Этому режиму соответствуют статические харак-
теристики крутящего момента М, мощности N и общего КПД т/, определяемые теоретически или эксперимен-
тально при постоянной частоте вращения п (рис. 4.23).
Рис. 4.23. Основные рабочие характеристики пневмомоторов
Как видно на рис. 4.23 мощность пневмомотора достигает максимального значения Nтах при частоте враще-
ния п0 ~ 0,5/7 х х (где /7 х х — частота вращения при холостом ходе), крутящий момент имеет наибольшее значе-
ние Л/при частоте вращения, близкой к нулю.
Номинальной частотой вращения пневмомотора считают такое ее значение, при котором имеет место мак-
симум КПД мотора. Для объемных двигателей общего назначения пн= (0,30...0,35) п х х.
68
4. Исполнительная подсистема
Наибольшая экономичность работы пневмомотора достигается именно при номинальной частоте враще-
ния, а наибольшая техническая эффективность — при максимальной мощности.
В паспортных характеристиках пневмомоторов обычно указывают максимальную мощность и соответству-
ющую ей частоту вращения при рабочем давлении сжатого воздуха, а также номинальную частоту вращения.
Рабочий процесс любого пневмомотора является обратным по отношению к рабочему процессу компрессо-
ра соответствующего типа. Если в компрессоре осуществляется процесс преобразования механической энер-
гии вращательного движения приводного вала в потенциальную энергию сжатого воздуха на выходе, то в пнев-
момоторе, наоборот, энергия сжатого воздуха, поступающего на вход, преобразуется в механическую энергию
вращения вала.
Шиберные пневмомоторы
L Принципиальная конструктивная схема шиберного (пластинчатого) пневмомотора (рис. 4.24) практически
не отличается от ранее рассмотренной конструктивной схемы пластинчатого компрессора.
При подаче сжатого воздуха в рабочую камеру пневмомотора возникают силы, которые действуют на плас-
тины 3, ограничивающие объем камеры. Вследствие эксцентричного расположения ротора 1 относительно
згтатора 2 площади пластин различны, поэтому различаются по величине и действующие на них силы. В точке,
эосле прохождения которой объемы рабочих камер начинают уменьшаться, выполнено отверстие для сброса
^’работавшего воздуха. От равнодействующей всех приложенных сил возникает крутящий момент, приводя-
щий к повороту ротора, в процессе которого увеличиваются объемы части рабочих камер, благодаря чему
содержащийся в этих камерах сжатый воздух расширяется. Совершаемая при этом работа расширения преоб-
разуется в дополнительную механическую энергию вращения ротора.
От числа пластин шиберного пневмомотора зависят его коэффициент полезного действия (КПД), условия
пуска и быстрота разгона (приемистость), а также равномерность вращения. Стандартные конструкции имеют
3 — 5 пластин, в специальных случаях их число увеличивают до 10. Выпускаются как реверсивные, так и
нереверсивные пластинчатые пневмомоторы.
К недостаткам шиберных пневмомоторов относятся необходимость обильной смазки и невысокую герме-
тичность рабочих камер, что приводит к возникновению утечек, а следовательно, к снижению КПД. Диапазон
мощностей пластинчатых пневмомоторов составляет 0,05 — 20 кВт, диапазон частот вращения — 30 — 20000
об/мин.
Часто в конструкцию пластинчатого пневмомотора входят дополнительные узлы: редуктор (обычно плане-
арный), обеспечивающий необходимую потребителю частоту вращения, и центробежный регулятор. После-
дний позволяет ограничить частоту вращения на холостом ходу и обеспечить в определенных пределах ее
постоянство при колебаниях нагрузки.
69
4. Исполнительная подсистема
Пластинчатые пневмомоторы широко применяют в пневматических инструментах, а также в разнообразных
специальных устройствах и приспособлениях, работающих на сжатом воздухе.
Шестеренные пневмомоторы
В корпусе 3 шестеренного пневмомотора расположены две находящиеся в зацеплении шестерни 1 и 2
(зубчатые колеса), причем одна из них закреплена на выходном валу или выполнена заодно с ним, а другая
свободно вращается на опорах, установленных в корпусе (рис. 4.25).
Рис. 4.25. Шестеренный пневмомотор
Сжатый воздух, подаваемый в рабочую камеру, действует на боковые поверхности зубьев шестерен. Возника-
ющие при этом силы, равные произведению давления сжатого воздуха на площадь боковой поверхности зуба,
вызывают поворот шестерен, одна из которых вращается по часовой стрелке, а другая — в противоположном
направлении. Шестерни могут иметь прямые, косые или шевронные зубья. В случае применения косозубых или
шевронных шестерен объемы рабочих камер изменяются в процессе поворота, в связи с чем появляется воз-
можность использовать работу расширения сжатого воздуха.
Максимальная номинальная мощность шестеренных пневмомоторов достигает 70 кВт (для моторов с шев-
ронными шестернями — 330 кВт), номинальная частота вращения обычно не превышает 1000 — 3000 об/мин.
Область применения шестеренных пневмомоторов достаточно широка: угольная промышленность (приво-
ды конвейеров, лебедок), химическая промышленность (приводы насосов), металлургия (приводы конверте-
ров, карусельных печей и другого оборудования), тяжелая промышленность (пусковые двигатели для дизелей)
ит. д.
Пневмомоторы Рутса используют значительно реже, область их применения более узкая, поэтому в данном
пособии они не рассматриваются.
Радиально-поршневые пневмомоторы
Радиально-поршневые пневмомоторы довольно сложны по конструктивному исполнению, тихоходны (20 —
700 об/мин), имеют большие габариты и массу по сравнению с другими типами двигателей. При этом они
обеспечивают значительную величину крутящего момента, а следовательно, как нельзя лучше подходят в тех
случаях, когда требуется преодолевать большие нагрузки. Обычно они имеют от 4 до 6 поршней, а диапазон
мощностей составляет 1 — 20 кВт.
В поршневых пневмомоторах поршню за счет энергии давления сжатого воздуха сообщается поступатель-
ное движение, которое затем преобразуется механическим путем во вращательное движение выходного вала
(рис. 4.26).
70
4. Исполнительная подсистема
Рис. 4.26. Радиально-поршневой пневмомотор
Сжатый воздух одновременно подается в две рабочие камеры пневмомотора, например 1 и 2, через крано-
вый распределитель 5, установленный на выходном валу. При этом соответствующие поршни, перемещаясь к
мижней «мертвой точке», передают усилие на коленчатый вал через свои шатуны. После поворота вала, а
вместе с ним и распределителя на некоторый угол сжатый воздух подается в рабочие камеры 2 и 3, а отрабо-
-авший воздух из камер 4 и 1 сбрасывается в атмосферу также через крановый распределитель. Далее этот
цикл повторяется.
Радиально-поршневые пневмомоторы применяют в больших подъемниках, в приводах различных транс-
-сртных средств.
Турбинные пневмомоторы
В турбинных пневмомоторах кинетическая энергия потока сжатого воздуха преобразуется в механическую
энергию вращения выходного вала.
Турбинные пневмомоторы позволяют получать очень высокие частоты вращения (80000 — 400000 об/мин)
выходного вала и небольшие крутящие моменты на нем по сравнению со частотами и моментами, достигаемы-
ыи при использовании, например, поршневых пневмомоторов. Турбинные моторы применяют для высокоско-
2'эстного шлифования, а также в зубоврачебной технике в качестве элемента привода бормашины.
Пневмомоторы, вне зависимости от их конструктивного типа, обозначают на принципиальных пневматичес-
zx схемах таким образом, как показано на рис. 4.27.
Пневмомоторы Нерегулируемые Регулируемые
Нереверсивные
Реверсивные
Рис. 4.27. Условное графическое обозначение пневмомоторов
71
4. Исполнительная подсистема
4.4. Специальные пневматические исполнительные устройства
Существует целый ряд пневматических исполнительных устройств, которые нельзя однозначно отнести к
одному из ранее описанных типов, в связи с чем такие устройства называют специальными. Рассмотрим наи-
более распространенные конструкции.
4.4.1. Цанговые зажимы
Цанговые зажимы широко используют в автоматизированном станочном оборудовании для надежного за-
жатия и удержания тел вращения в процессе их обработки (рис. 4.28).
Цанговый зажим состоит из следующих основных деталей: цанги 1, обжимной втулки 2, кольцевого поршня
3 с пружинным возвратом, шариков 4 и корпуса 5.
При подаче сжатого воздуха в зажим поршень 3, сжимая возвратную пружину, перемещается влево и вдав-
ливает шарики 4 в клиновой зазор между корпусом 5 и обжимной втулкой 2, которая, в свою очередь, смещает-
ся вправо, сжимая лепестки цанги 1 и осуществляя зажатие детали.
Для разжатия заготовки сжатый воздух из поршневой полости сбрасывают в атмосферу, при этом поршень
возвращается в исходное положение, освобождая шарики. В результате цанга разжимается, смещая обжим-
ную втулку в исходную позицию.
4.4.2. Пневматические захваты
Практически любой робот-манипулятор снабжен захватным устройством, предназначенным для того, что-
бы захватить какой-либо объект, удерживать его при перемещении и ориентации в пространстве, после чего
отпустить в нужной точке. На рис. 4.29 показана конструкция пневматического захвата с параллельным движе-
нием захватных пальцев.
Рис. 4.29. Пневматический захват с параллельным движением пальцев
72
4. Исполнительная подсистема
При подаче сжатого воздуха в поршневую полость пневмоцилиндра двустороннего действия шток выдвига-
ется и через кулисный механизм разводит захватывающие пальцы (рис. 4.29, а). При обратном ходе поршня
пальцы сводятся (рис. 4.29, б).
По конструктивному исполнению захваты подразделяются на параллельные (рис. 4.30, а), поворотные (рис.
4.30, б) и трехточечные (рис. 4.30, в).
Как правило, конструкции захватов реализуют удержание объекта как по внешним, так и по внутренним
поверхностям, а их приводные поршни с целью обеспечения контроля срабатывания захвата снабжают посто-
янным магнитом.
4.4.3. Вакуумные захваты
В вакуумных захватах объект удерживается вследствие разрежения, создаваемого в полости между элас-
тичным захватом (присоской) и поверхностью самого объекта (рис. 4.31, а), при этом для получения вакуума в
захвате важно, чтобы последняя была достаточно гладкой и плотной.
Рис. 4.31. Вакуумный захват
В заводских сетях для создания вакуума используют вакуум-насосы. В этих условиях присоска вакуумного
захвата должна управляться аппаратурой, способной работать с давлениями ниже атмосферного.
73
4. Исполнительная подсистема
В случаях, когда необходимо обеспечить вакуум на конкретном участке технологического оборудования,
применяют эжекторы (рис. 4.31, б), которые позволяют создавать вакуум в рабочем канале до -0,09 МПа (-0,9
бар) при давлении на входе 0,7 МПа (7 бар). Принцип действия эжектора заключается в понижении давления
на тех участках трубопровода, где воздух движется с большими скоростями (в соответствии с уравнением
Бернулли). При протекании по каналу 2 сжатый воздух эжектирует (вовлекает в поток) воздух из камеры 1, в
результате чего в ней возникает разрежение.
Помимо типовых конструкций эжекторов (рис. 4.32, а) производители элементов промышленной пневмоав-
томатики выпускают эжекторные головки с принудительным отталкиванием детали от присоски с помощью
сжатого воздуха после завершения операции захвата (рис. 4.32, б), а также компактные эжекторы с электро-
магнитным управлением процессом захвата и отталкивания заготовки (рис. 4.32, в).
Очевидно, что усилие с которым объект удерживается в вакуумных захватах, зависит не только от глубины
вакуума, но и от площади присоски (или суммарной площади нескольких присосок).
Для поддержания вакуума в системе при выходе из строя одного или даже нескольких вакуумных захватов
применяют ограничители расхода сжатого воздуха — вакуумные клапаны (рис. 4.33).
Рис. 4.33. Вакуумный клапан
При повреждении присоски или ее контакте с неочищенной поверхностью захватываемого объекта подпру-
жиненный запорный элемент 2 прижимается к седлу 1 клапана, образующимся воздушным потоком, тем са-
мым резко ограничивая возможность попадания воздуха в вакуумную систему. В результате в систему через
дроссельное отверстие запорного элемента 2 проникает только небольшая часть воздуха, благодаря чему
вакуум в других захватах сохраняется.
В целях обеспечения надежного функционирования нескольких присосок, установленных на одной линии,
каждая из них должна быть снабжена вакуумным клапаном.
74
5. Направляющая и регулирующая подсистема
5. Направляющая и регулирующая подсистема
Функциональное назначение пневматических элементов, образующих направляющую и регулирующую под-
систему пневмопривода, заключается в управлении энергией сжатого воздуха, поступающего от источника (ком-
прессорной станции) к потребителю (исполнительным механизмам). Чтобы исполнительные механизмы со-
вершили полезную работу в нужном месте и в требуемом объеме, следует обеспечить движение потока сжато-
го воздуха в соответствующем направлении и отрегулировать до необходимого уровня его параметры (давле-
ние и расход).
В направляющих и регулирующих устройствах воздействие на поток сжатого воздуха осуществляется по-
средством подвижных запорно-регулирующих элементов (ЗРЭ). Назначение запорно-регулирующего элемен-
та, вне зависимости от конструктивного исполнения, состоит в изменении величины проходного сечения кана-
ла, через который движется воздушный поток; при этом данное изменение может быть как дискретным (канал
закрыт — канал открыт), так и плавно-непрерывным. Дискретный режим работы характерен для направляю-
щей и запорной аппаратуры, а в регулирующей аппаратуре запорно-регулирующий элемент постоянно нахо-
дится в «плавающем» режиме.
В зависимости от способа воздействия запорно-регулирующего элемента на поток сжатого воздуха практи-
чески все устройства, входящие в направляющую и регулирующую подсистему пневмоприводов, подразделя-
ются на два больших класса: аппаратуру клапанного типа и аппаратуру золотникового типа (рис. 5.1).
Рис. 5.1. Принцип действия аппаратов клапанного и золотникового типов
От типа конструктивного исполнения аппарата (клапанный или золотниковый) зависят характеристики про-
цесса его переключения (усилие, длина хода ЗРЭ), степень герметичности, уровень требований к чистоте ра-
среды и необходимость смазки.
5 аппаратуре клапанного типа запорно-регулирующий элемент перемещается вдоль осевой линии потока,
сгоинства такого конструктивного решения очевидны: обеспечение полной герметичности при отсечении
юй гчевмолинии от другой, пониженная чувствительность к воздействию загрязнителей, возможность рабо-
без смазки, а также высокое быстродействие (незначительное перемещение ЗРЭ приводит к существенно-
«с-менению площади проходного сечения).
• -едостаткам аппаратуры клапанного типа можно отнести следующее: требуется приложение значитель-
ж усилий для перемещения ЗРЭ, что связано с необходимостью преодоления сил, возникающих от давле-
а : катого воздуха на последний, или сил сопротивления пружин, прижимающих ЗРЭ к седлу клапана.
Я-огда такую аппаратуру называют аппаратурой седельного типа (в самом деле, термин «предохранитель-
ный • лапан клапанного типа» звучит несколько странно).
Е аппаратуре золотникового типа ЗРЭ перемещается перпендикулярно осевой линии потока.
Е подобных аппаратах усилие, обусловленное давлением сжатого воздуха на ЗРЭ, не приводит к какому-
ябо его смещению т.к. силы давления на торцы золотника уравновешены (золотник гидравлически разгру-
ЖЕ-- 2ля перемещения ЗРЭ необходимо преодолеть только силы трения между ним и корпусом, что безуслов-
«эрв~яется неоспоримым достоинством такого конструктивного решения. При этом можно выделить следую-
его недостатки: 1) для полного открытия рабочего канала золотник необходимо переместить как минимум
ееличину диаметра канала (на что требуется затратить определенное время); 2) гарантированный зазор
, золотником и расточкой корпуса является «узким» местом, если учитывать возможность засорения за-
ра .1 заклинивания ЗРЭ.
75
5. Направляющая и регулирующая подсистема
Вывод из всего вышеизложенного: для управления небольшими по величине расхода потоками сжатого
воздуха следует использовать преимущественно аппаратуру клапанного типа, тогда как аппаратуру золотнико-
вого типа — для управления потоками воздуха с большим расходом. На практике активно применяют оба
решения, причем зачастую они сочетаются в одной и той же конструкции.
Знакомство с устройствами направляющей и регулирующей подсистемы (или, другими словами, с элемен-
тами, входящими в блок управления энергией) начнем с пневматических распределителей — группы устройств,
которые с полным правом можно назвать основными управляющими элементами любого пневмопривода.
5.1. Пневматические распределители
Пневматические распределители (пневмораспределители) относятся к направляющей аппаратуре и пред-
назначены для управления потоками подводимого к ним сжатого воздуха. Управление осуществляется путем
изменения (при переключении) схемы соединения внутренних каналов распределителя с входным и выходны-
ми присоединительными отверстиями. Функциональные возможности распределителей характеризуются ря-
дом параметров, как то: количество рабочих каналов, количество позиций переключения, нормальная позиция
(позиция «на складе»), способ управления и пропускная способность. Все эти параметры, за исключением
последнего, отражаются в условном графическом обозначении любого распределителя.
Каждая позиция распределителя (возможная схема внутренних соединений) обозначается квадратом, в ко-
тором показаны пути потока сжатого воздуха (рис. 5.2).
Рис. 5.2. Принцип формирования условного графического обозначения распределителей
В представленной модели простейшего распределителя подвижной запорный элемент может занимать две
дискретные позиции, соответствующие двум состояниям пневмораспределителя: 1) «проход воздуха закрыт»; 2)
«проход воздуха открыт». При этом запорный элемент может коммутировать между собой две линии: 1) линию
питания (вход); 2) линию потребителя (выход). Соответственно данный распределитель можно назвать двухли-
нейным и двухпозиционным, что наглядно отражается в его условном графическом обозначении.
Чтобы кратко охарактеризовать возможности распределителей по коммутации подведенных к ним рабочих
каналов, применяют дробное цифровое обозначение, где в числителе указывают количество коммутируемых
линий, а в знаменателе — количество возможных позиций. В соответствии с этим принципом рассмотренный
выше аппарат будет называться 2/2-пневмораспределителем (при этом мы пока еще не указываем способ
управления им).
На принципиальных пневматических схемах распределители изображают таким образом, чтобы линии
связи (внешние пневматические линии) были подведены к тому квадрату, который обозначает исходную по-
зицию распределителя. Чтобы получить представление о работе последнего, следует мысленно передви-
нуть относительно линий связи соответствующий квадрат в условном графическом обозначении на то место,
которое на схеме занимает квадрат, изображающий исходную позицию распределителя.
76
5. Направляющая и регулирующая подсистема
Исходя из того, что основное назначение пневмораспределителей состоит в подаче сжатого воздуха в рабо-
чие полости исполнительных механизмов, попытаемся применить уже описанный 2/2-пневмораспределитель
для управления пневмоцилиндром одностороннего действия (рис. 5.3).
б
в
Рис. 5.3. 2/2-пневмораспределитель на линии управления пневмоцилиндром одностороннего действия
Из рисунка 5.3 следует, что 2/2-пневмораспределитель нормально выполняет функции по управлению пнев-
моцилиндром одностороннего действия только на первых двух стадиях: 1) исходное положение — подвод
сжатого воздуха к пневмоцилиндру перекрыт, шток втянут под действием встроенной пружины (рис. 5.3, а);
2) рабочий ход пневмоцилиндра — сжатый воздух подается в поршневую полость цилиндра, шток выдвига-
ется (рис. 5.3, б). Заключительный же этап — возврат штока в исходное положение — оказывается невыпол-
нимым, поскольку при переключении пневмораспределителя в исходную позицию отработавший сжатый воздух
не имеет возможности выхода из пневмоцилиндра (рис. 5.3, в). »—
Возникшую проблему можно решить путем использования двух параллельно работающих (условно связан-
ных между собой) 2/2-пневмораспределителей. Через один из них осуществляется подача сжатого воздуха в
пневмоцилиндр, а другой предназначен для отвода отработавшего воздуха (рис. 5.4). —
В связи с тем что в пневматических приводах, в отличие от гидравлических, не требуется наличие возвратной
:.~ивной магистрали, отработавший воздух можно сбрасывать непосредственно в атмосферу.
На практике для управления пневмоцилиндрами одностороннего действия применяют не два 2/2-пневмо-
заспределителя, а один, более сложный по конструктивному исполнению, который имеет возможность комму-
тировать линии питания, потребителя и выхлопа. Очевидно, что его будут называть 3/2-пневмораспределите-
лем (рис. 5.5).
77
5. Направляющая и регулирующая подсистема
Рис. 5.5. Модель и условное графическое обозначение 3/2-пневморасггределителя
3/2-пневмораспределитель коммутирует между собой три рабочих линии (рис. 5.6): 1 — линию питания, 2 —
линию потребителя и 3 — линию выхлопа. При этом сам распределитель может занимать две позиции: питание
перекрыто, потребитель связан с выхлопом; сжатый воздух поступает к потребителю, выхлоп перекрыт.
Рис. 5.6. Управление пневмоцилиндром одностороннего действия 3/2-пневмораспределителем
Очевидно, что для управления пневмоцилиндрами двустороннего действия потребуются еще более слож-
ные распределители, т. к. в этом случае последние должны обеспечивать перераспределение потока сжатого
воздуха между двумя рабочими полостями исполнительного механизма и сброс из них отработавшего воздуха
(рис. 5.7).
Рис. 5.7. Управление пневмоцилиндром двустороннего действия 4/2-пневмораспределителем
Четырехлинейный двухпозиционный пневмораспределитель (4/2-пневмораспределитель) позволяет пооче-
редно подавать сжатый воздух из магистрали высокого давления 1 по рабочим каналам 2 или 4 в одну из
полостей пневмоцилиндра с одновременным соединением другой с атмосферой 3.
На практике для управления пневмоцилиндрами двустороннего действия наиболее широко используют
5/2-пневмораспределители (рис. 5.8).
78
5. Направляющая и регулирующая подсистема
Рис. 5.8. Управление пневмоцилиндром двустороннего действия 5/2-пневмораспределителем
Хотя 5/2-пневмораспределители имеют более сложное графическое обозначение, они проще по конструк-
тивному исполнению, а их функциональные возможности несколько шире, чем у 4/2-пневмораспределителей,
что обусловлено наличием не одного, а двух выхлопных каналов 3 и 5, отдельных для каждой рабочей полости
цилиндра.
Для решения более сложных задач управления пневмоцилиндрами используют трехпозиционные распре-
делители, имеющие еще более широкие функциональные возможности. Это связано с тем, что такие распре-
делители позволяют осуществить не два, а три варианта коммутации пневмолиний.
Нумерация каналов, использованная на приведенных выше схемах, не является случайной, а отвечает стан-
дартам, в соответствии с которыми для обозначения рабочих и управляющих каналов пневматических аппаратов
и устройств применяют определенную буквенную или цифровую индексации (табл. 2).
Табл. 2. Индексация (маркировка) линий (присоединительных отверстий) пневмоаппаратов
Наименование линии Буквенная индексация Цифровая индексация
Линия питания (вход) Р 1
Линия потребителя (выход) А, В 2,4
Линия выхлопа (сброс воздуха в атмосферу) R, S 3, 5
Линия управления X, Y, Z 10, 12, 14
——-------------------------------------------------------------------
Приведенная в таблице 2 индексация может быть проставлена на принципиальных пневматических схемах,
но следует особо подчеркнуть следующее: означенными индексами маркируют присоединительные отверстия
в корпусах пневмоаппаратов, что позволяет правильно осуществить монтаж пневматических систем, не рискуя
перепутать места подсоединения трубопроводов.
Переключение пневмораспределителей из одной позиции в другую осуществляется перемещением их ЗРЭ
посредством внешних управляющих воздействий. В зависимости от природы этих воздействий различают сле-
дующие виды управления распределителями:
• мускульной силой;
• механическое;
• пневматическое;
• электрическое;
• комбинированное.
Стандартные условные графические обозначения наиболее распространенных устройств управления пнев-
матическими распределителями и другими пневмоаппаратами приведены в табл. 3.
79
5. Направляющая и регулирующая подсистема
Табл. 3. Обозначения устройств управления пневмоаппаратами
Управление мускульной силой Механическое управление
Без уточнения типа Толкатель (кулачок)
Qz[ Кнопка Ролик
Рычаг Ролик с «ломающимся» рычагом
Педаль Пружина
Поворотная рукоятка 1 Фиксатор
Пневматическое управление Электрическое управление
-о-| Прямое нагружением Электромагнит с одной обмоткой
Прямое разгружением Электромагнит с двумя встречными обмотками
Непрямое нагружением Электромагнит с пропорциональным управлением
За счет разности площадей Шаговый электродвигатель
Комбинированное управление
|/|> | Электромагнитное и непрямое пневматическое — Непрямое пневматическое с ручным дублированием
Электромагнитное или непрямое пневматическое Электромагнит и пружина
Одна и та же базовая модель пневмораспределителя может быть снабжена различными управляющими
элементами, конструкция которых и определяет вид управления (рис. 5.9).
80
5. Направляющая и регулирующая подсистема
При чтении принципиальных пневматических схем следует иметь в виду, что управляющий сигнал, подава-
емый слева, переключает распределитель в позицию, обозначенную в условном графическом обозначении
этого аппарата левым квадратом, а сигнал, подаваемый справа, — в позицию, обозначенную правым квадра-
том.
Возвращаясь к вопросу об индексации, отметим, что в отличие от рабочих пневмолиний, для которых ис-
пользуют одноцифровые индексы, линии управления пневмоаппаратами обозначают двузначными числами
({Ж <5W 77Ш?7?Зя
Рис. 5.10. Индексация линий управления пневмораспределителей
Первая цифра в подобном двузначном обозначении совпадает с индексом линии питания, а вторая — с
индексом линии потребителя, в которую будет поступать сжатый воздух после подачи управляющего сигнала.
Так, индекс 12 (рис. 5.10, а, б) на линии управления обозначает, что при наличии в этой линии пневматического
сигнала управления сжатый воздух будет поступать к потребителю по рабочей линии 2. Чтобы закоммутиро-
вать линию потребителя 4 с линией питания 1, управляющий сигнал надо подать в линию 14 (рис. 5.10, в).
Индекс 10 (рис. 5.10, а) проставляется на линиях управления нормально открытых пневмораспределителей
и обозначает, что в случае поступления в эту линию сигнала управления подача сжатого воздуха потребителю
прекратится (обнулится).
5.1.1. Моностабильные пневмораспределители
Пневмораспределители, которые переключаются в нормальную позицию посредством возвратных пружин,
называют моностабильными. Такие распределители имеют единственное устойчивое состояние — нормаль-
ное для данной конструкции и определяющее состояние аппарата «на складе» (т. е. при отсутствии управляю-
щих воздействий).
Исходя из сказанного, можно утверждать, что на рис. 5.11, судя только по условному графическому обозна-
чению, представлена конструкция моностабильного нормально закрытого 2/2-пневмораспределителя с меха-
ническим управлением.
Рис. 5.11. Нормально закрытый 2/2-пневмораспределитель с механическим управлением
В самом деле, в исходной позиции запорно-регулирующий элемент 3 пневмораспределителя, выполненный
в виде полусферы, под действием пружины 4 и давления питания прижат к седлу 2, перекрывая тем самым
подачу сжатого воздуха в канал потребителя А, — т. е. пневмораспределитель нормально закрыт. При наличии
81
5. Направляющая и регулирующая подсистема
внешнего управляющего воздействия, величина которого должна быть достаточной для преодоления усилия
от возвратных пружин и давления, действующего на клапан 3, толкатель 1 снимает клапан 3 с седла 2, и пнев-
мораспределитель занимает позицию, в которой каналы питания Р и потребителя А сообщаются между собой.
На рис. 5.12 изображены два варианта конструктивного исполнения нормально закрытого 3/2-пневморасп-
ределителя с механическим управлением. Отличие между ними заключается в том, что в одном (рис. 5.12, б)
заложена возможность подсоединения к линии выхлопа R (например, можно ввернуть глушитель), а в другом
(рис. 5.12, а) это действие осуществить нельзя.
Рис. 5.12. Нормально закрытые 3/2-пневмораспределители с механическим управлением
Даже такое несущественное различие находит отражение в условном графическом обозначении пневмо-
распределителей: если исключена возможность подсоединения к отверстию выхлопа, то треугольник, указыва-
ющий на сброс воздуха в атмосферу, примыкает вплотную к обозначению пневмораспределителя; в противном
случае он отделяется от последнего вертикальной чертой.
Следует обратить внимание на то, что оба пневмораспределителя срабатывают в два этапа: при движении
толкателя в момент его контакта с клапаном перекрывается выполненный в нем канал выхлопа, и только при
дальнейшем движении соединяются каналы питания Р и потребителя А.
Примерно по такой же схеме работает и нормально открытый 3/2-пневмораспределитель (рис. 5.13).
82
5. Направляющая и регулирующая подсистема
Данная конструкция имеет два дисковых клапана, причем в исходном состоянии верхний отсекает канал
выхлопа R, а через открытый нижний воздух протекает из канала питания Р к потребителю через канал А.
Движение толкателя вниз сопровождается двухступенчатым срабатыванием пневмораспределителя. На
первой ступени нижний клапан, жестко связанный с толкателем, опускается на подпружиненное седло, пере-
крывая подачу сжатого воздуха. Верхний клапан, в свою очередь, остается поджатым к своему седлу вплоть до
момента контакта с буртиком толкателя. Только после этого в результате дальнейшего совместного движения
толкателя с нижним клапаном и его седлом верхний клапан открывается, и устанавливается соединение потре-
бителя с выхлопом (вторая ступень).
Альтернативой сложным по конструктивному исполнению распределителям клапанного типа являются зо-
лотниковые распределители.
Принадлежность к классу аппаратов клапанного или золотникового типов не находит отражения в условном
графическом обозначении пневматических распределителей, хотя эти типы аппаратуры существенно различа-
ются по функциональным возможностям.
Так, 3/2-пневмораспределитель золотникового типа (рис. 5.14) можно использовать и как нормально закры-
тый (индексация каналов, поясняющая схему коммутации, дана без скобок), и как нормально открытый (индек-
сация дана в скобках).
Рис. 5.14. Нормально закрытый 3/2-пневмораспределитель золотникового типа с механическим
управлением
Подача сжатого воздуха в каналы Р или R не приводит к возникновению на золотнике усилий, вызывающих
его смещение из нормальной позиции, т. к. и в том, и в другом случаях золотник остается гидравлически разгру-
женным.
Если попытаться использовать нормально закрытый пневмораспределитель клапанного типа (см. рис.
12) как нормально открытый (путем подачи сжатого воздуха в канал R), то в этом случае произойдет само-
произвольное открытие клапана и воздух начнет поступать во все каналы одновременно.
Производители пневматического оборудования снабжают каждый аппарат биркой, на которой помимо се-
рийного номера и основных параметров приводится его условное графическое обозначение. Обычно пневмо-
эаспределители, в конструкции которых заложена возможность использования их в качестве нормально от-
крытых или нормально закрытых, имеют два альтернативных обозначения.
Золотниковые распределители, как правило, позволяют пропускать через себя воздух и в обратном направ-
тении — из канала А в канал R или (при переключении) Р. Когда на принципиальной пневматической схеме
важно отразить данное свойство золотникового распределителя, стрелки на его условном графическом обо-
значении, показывающие пути потока воздуха, изображают двусторонними.
83
5. Направляющая и регулирующая подсистема
В тех случаях, когда сжатый воздух подается к исполнительным механизмам непосредственно от пневмо-
распределителей с механическим или мускульным управлением, говорят о прямом управлении (рис. 5.15).
Рис. 5.15. Прямое управление пневмоцилиндрами
Пневмораспределители, управляющие исполнительными механизмами, также называют исполнительными.
Пневматическое управление распределителями используют в тех случаях, когда необходимо осуществлять
дистанционное управление их работой посредством пневматического сигнала. Чтобы распределитель был с
пневматическим управлением, в конструкцию вводят поршень 1, перемещение которого и приводит в движе-
ние запорный элемент 2 (рис. 5.16).
Рис. 5.16. Нормально закрытый 3/2-пневмораспределитель с пневматическим управлением
Рассмотрим схему управления пневмоцилиндром одностороннего действия с использованием распредели-
теля с пневматическим управлением (рис. 5.17).
Рис. 5.17. Непрямое управление пневмоцилиндром одностороннего действия (исполнительный
распределитель — нормально закрытый)
84
5. Направляющая и регулирующая подсистема
В предложенной схеме пневмораспределитель с ручным управлением (пневмокнопка) управляет работой
пневмоцилиндра путем подачи сигнала на исполнительный распределитель с пневматическим управлением.
Напомним, что принципиальные пневматические схемы технологических установок изображают в исходной
позиции: давление питания подведено, установка «ждет» управляющего сигнала. В соответствии с этим прин-
ципом схема несколько видоизменится, если исполнительный пневмораспределитель будет нормально откры-
тым (рис. 5.18).
Рис. 5.18. Непрямое управление пневмоцилиндром одностороннего действия (исполнительный
распределитель — нормально открытый)
В моностабильных пневмораспределителях возврат запорно-регулирующего элемента в исходное положе-
ние может осуществляться не только посредством механических пружин, но и под действием давления сжато-
го воздуха (пневматической пружины) (рис. 5.19).
Рис. 5.19. 5/2-пневмораспределитель с пневматическим управлением и возвратом
В исходной позиции золотник 2 находится в крайнем левом положении, т. к. на его правый поршень 4 через
специальный канал 3, связанный с линией питания, подается сжатый воздух. При поступлении управляющего
сигнала в канал Y золотник 2 сместится вправо, поскольку площадь левого поршня 1 значительно больше
площади правого поршня 4.
В некоторых конструкциях возврат ЗРЭ в исходную позицию осуществляется под действием одновременно
и механической, и пневматической пружин. Такое сочетание обеспечивает более высокую стабильность и на-
дежность переключения пневмораспределителя.
В тех случаях, когда имеются технологические ограничения на величину управляющих сигналов, применяют
распределители с пневматическим усилением управляющего сигнала (или, другими словами — пилотным уп-
равлением) (рис. 5.20).
85
5. Направляющая и регулирующая подсистема
Рис. 5.20. 3/2-пневмораспределитель с пневматическим усилением управляющего сигнала
В таких конструкциях (в данном случае это путевой выключатель) усилие переключения прикладывается к
небольшому вспомогательному (пилотному) распределителю 2, функцией которого является подача пневмати-
ческого сигнала управления на основной пневмораспределитель 3, непосредственно осуществляющий комму-
тацию внешних пневмолиний. Поскольку площадь клапана пилотного распределителя невелика, то усилие,
необходимое для переключения последнего, минимально.
Рассмотренная конструкция позволяет трансформировать нормально закрытый пневмораспределитель в
нормально открытый. Для этого надо развернуть управляющую головку с роликом 1 на 180° и подавать сжатый
воздух в канал R.
В тех случаях, когда требуется контролировать какой-либо объект при его движении только в определенном
направлении, применяют распределители с управлением от «ломающегося» рычага с роликом (рис. 5.21).
Рис. 5.21. Принцип действия «ломающегося» рычага с роликом
Конструкция рычага выполнена таким образом, что он воздействует на толкатель пневмораспределителя
только в том случае, если движение штока пневмоцилиндра или другого контролируемого объекта происходит
в определенном направлении (рис. 5.21, а). Пневмораспределитель не срабатывает при движении объекта в
противоположном направлении, поскольку рычаге роликом проворачивается на оси («ломается») и не переда-
ет управляющее воздействие на толкатель (рис. 5.21, б).
На современном производстве управление сложными технологическими объектами с пневматическими при-
водами базируется преимущественно на электрических и электронных системах, имеющих широкие возможно-
сти сбора, обработки информационных и формирования управляющих электрических сигналов, а главное —
высокое быстродействие. Независимо от элементной базы управляющих систем (релейно-контактная или мик-
ропроцессорная техника), в силовой части привода применяют пневматические распределители с электромаг-
нитным управлением. Работа подобных пневмораспределителей основывается на свойстве находящихся под
напряжением электромагнитных катушек втягивать расположенный в них якорь.
86
5. Направляющая и регулирующая подсистема
Запорно-регулирующий элемент в таких аппаратах располагают непосредственно на торцах якоря, который
помещается в гильзу, ввинченную в корпус. Снаружи гильза охватывается приводной электромагнитной катуш-
кой (рис. 5.22).
Рис. 5.22. 3/2-пневмораспределитель с электромагнитным управлением и ручным дублированием
Если электромагнитная катушка 7 обесточена, якорь 5 прижат пружиной 4 к седлу клапана 3, перекрывая
«знал Р, по которому подводится сжатый воздух; выходной канал А соединен с атмосферой через пазы на
-наружной поверхности якоря. Напряжение на катушку 7 подается через присоединительный элемент — коннек-
тор 8, при этом якорь 5, преодолевая усилие пружины 4, поднимается до седла клапана 6, закрывая канал R
выхода воздуха в атмосферу и открывая канал, соединенный с отверстием для подведения сжатого воздуха.
Z -атый воздух подается в линию потребителя (канал А).
Пневмораспределители с электромагнитным приводом имеют, как правило, ручное дублирование, исполь-
: .емое обычно при пусконаладочных работах или при поиске причин неисправности (если распределитель
::абатывает от элемента ручного управления, это свидетельствует о том, что не работает катушка). Включа-
<п пневмораспределитель нажатием или проворотом специального устройства (рис. 5.22, поз.1) механичес-
«у поднимающего якорь с седла клапана. После проверки работоспособности распределителя элемент
сучного управаления необходимо выставить в положение не препятствующее свободному переме-
щению якоря.
Заканчивая рассмотрение моностабильных пневмораспределителей, следует сказать, что к этому классу
аппаратов относится также большое число трехпозиционных распределителей. Обычно нормальной для них
==ляется средняя позиция, в которую они выставляются посредством двух пружин, центрирующих их запорно-
эегулирующий элемент. Так, используя 5/3-пневмораспределитель с двусторонним пневматическим управле-
-.лем и закрытой центральной позицией, можно обеспечить останов пневмоцилиндра в любом промежуточном
-сложении (рис. 5.23).
87
5. Направляющая и регулирующая подсистема
Рис. 5.23. Использование 5/3-пневмораспределителя для позиционирования пневмоцилиндров
При нажатии на одну из пневмокнопок, например 1.3, шток цилиндра 1.0 начнет перемещаться, а при отпус-
кании ее он остановится, поскольку исполнительный распределитель 1.1 займет центральную позицию, в кото-
рой все линии перекрыты (при этом точность позиционирования цилиндра будет достаточно низкой).
На принципиальных пневмосхемах условному графическому обозначению каждого пневмоустройства при-
сваивают буквенно-цифровое позиционное обозначение по ГОСТ 2.704-76 (см. приложение II.6) или (в зару-
бежных схемах) цифровой индекс, формируемый по определенным правилам (табл. 4).
Табл. 4. Цифровая индексация пневматических устройств
Наименование устройства Индекс
Аппаратура подготовки сжатого воздуха 0.1, 0.2, 0.3, ...
Исполнительные механизмы (ИМ) 1.0, 2.0, 3.0, ...
Исполнительные распределители 1.1,2.1,3.1,...
Устройства, подающие сигналы на выдвижение штока цилиндра (после точки — четное число) 1.2, 1.4, 1.6, ... (для 1-го ИМ) 2.2, 2.4, 2.6, ...(для 2-го ИМ)
Устройства, подающие сигналы на втягивание штока цилиндра (после точки — нечетное число) 1.3, 1.5, 1.7, ... (для 1-го ИМ) 2.3, 2.5, 2.7, ... (для 2-го ИМ)
Регуляторы скорости и устройства, расположенные между исполнительными механизмами и исполнительными распределителями (будут рассмотрены ниже) 1.01, 1.02, ... 2.01, 2.02, ...
Индексы упрощают чтение схем и помогают добиться однозначного соответствия между элементам,*i,
перечисляемыми в спецификации пневматического оборудования, и местом в системе каждого из них.
Следует обратить внимание на то, что индексы всех элементов, управляющих исполнительным механиз-
мом 1.0, начинаются с цифры 1, управляющих исполнительным механизмом 2.0 — с цифры 2 и т. д. Этс
означает, что где бы «территориально» на схеме ни располагался элемент, (например, 1.10), он будет нахо-
диться в ветви управления соответствующим исполнительным механизмом (в нашем случае — 1.0).
В тех случаях, когда невозможно придерживаться правила использования четных и нечетных цифр после
точки в зависимости от типа команды (втягивание или выдвижение штока цилиндра), применяют сквозну-з
индексацию.
88
5. Направляющая и регулирующая подсистема
5.1.2. Бистабильные пневмораспределители
Двухпозиционные пневмораспределители, которые после снятия управляющего внешнего воздействия ос-
таются в позиции, определяемой этим воздействием, называют бистабильными (с памятью позиции последне-
го переключения). Возврат их в исходную позицию осуществляется после подачи противоположного по значе-
нию управляющего сигнала. В качестве примера рассмотрим отсечный нормально закрытый 3/2-пневморасп-
ределитель с ручным управлением (рис. 5.24), предназначенный для подачи сжатого воздуха в пневмосистему
и сброса из нее.
Рис. 5.24. Отсечный нормально закрытый 3/2-пневмораспределитель с ручным управлением
Данный распределитель может находиться в одной из двух возможных позиций переключения сколь угодно
долго, поскольку в его конструкции отсутствуют элементы, однозначно определяющие положение запорно-
регулирующего элемента.
У бистабильных распределителей с пневматическим управлением, входящих в состав пневмопривода, ис-
ходная позиция определяется не особенностями конструкции, а связями с элементами, управляющими этими
аппаратами.
Для пояснения сказанного рассмотрим, например, две схемы управления воротами с пневматическим при-
водом (рис. 5.25).
Рис. 5.25. Использование бистабильного 5/2-пневмораспределителя для управления пневмоцилиндром
Несмотря на то что в схеме а исходная позиция бистабильного пневмораспределителя 1.1 обеспечивает
втянутое положение штока пневмоцилиндра, а в схеме б — выдвинутое, мы имеем дело, по существу, не с
двумя схемами, как может показаться на первый взгляд, а с одной и той же, но описывающей различные исход-
ные состояния пневмопривода. Причем эти исходные состояния определяются даже не особенностями схемы,
а скорее, «особенностями оператора». Так, оператор, действующий по схеме а, предпочитает работать в режи-
ме «закрыл-открыл», в то время как для его сменщика удобнее режим б — «открыл-закрыл».
Очевидно, что после кратковременного нажатия на пневмокнопку 1.2 схема а трансформируется в схему б,
а схема б после кратковременного воздействия на кнопку 1.3 — в схему а.
89
5. Направляющая и регулирующая подсистема
Можно сказать, что бистабильные пневмораспределители способны запоминать последний поданный сиг-
нал управления. Действительно, и в 4/2-пневмораспределителе с плоским золотником (рис. 5.26, а), и в
5/2-пневмораспределителе (рис. 5.26, б) даже после снятия сигнала в линии управления X переключающий
элемент остается в крайнем правом положении до тех пор, пока не поступит команда в линию управления Y.
Рис. 5.26. Бистабильные 4/2- и 5/2-пневмораспределители с пневматическим управлением
Так как площади управляющих поршней в бистабильных пневмораспределителях одинаковы, то в том слу-
чае, когда в обоих каналах управления распределителя присутствуют сигналы, он будет устанавливаться в
позицию, определяемую сигналом, который пришел первым. Это свойство бистабильных пневмораспредели-
телей часто используют в пневматических системах управления.
Если пневмораспределители, у которых органы управления ЗРЭ удерживаются в рабочих позициях силами
трения устанавливают на машинах с повышенным уровнем вибрации, то их положение должно быть строго
горизонтальным. В противном случае может произойти самопроизвольное переключение ЗРЭ в нижнюю пози-
цию.
Бистабильные пневмораспределители с электропневматическим управлением, по существу, представляют
собой комбинацию двух пилотных электроуправляемых 3/2-пневмораспределителей 1 и базового распредели-
теля 2 с двусторонним пневматическим управлением. Сжатый воздух подводится к пилотным распределите-
лям, располагающимся, как правило, на торцах базового распределителя, по специальным каналам 3, выпол-
ненным в корпусе последнего и соединенным с каналом питания Р (рис. 5.27).
90
5. Направляющая и регулирующая подсистема
При подаче напряжения на одну из электромагнитных катушек срабатывает соответствующий пилотный
распределитель, пропуская сжатый воздух к торцу ЗРЭ основного распределителя, что приводит к переключе-
нию последнего.
Иногда распределители такого типа называют импульсными, поскольку для их срабатывания достаточно
подать кратковременный (импульсный) управляющий сигнал.
5.1.3. Монтаж пневмораспределителей
Способы монтажа пневматических распределителей обусловливаются их монтажно-коммуникационными
параметрами, т. е. вариантами присоединения внешних пневмолиний, крепления отдельных аппаратов и их
компоновки в единую систему.
Монтаж может быть индивидуальным и групповым. При индивидуальном монтаже каждый аппарат крепят и
подсоединяют к системе без общих коммуникационных и монтажных деталей, трубопроводов или каналов в
корпусных деталях машин, узлов, приспособлений и т. п.
Индивидуальный монтаж может быть резьбовым (трубным) или стыковым. При резьбовом монтаже (рис.
5.28, а) пневмораспределители устанавливают на корпусных деталях машин и подключают к пневматической
системе посредством соединений, ввинчиваемых непосредственно в резьбовые отверстия, которые предус-
мотрены в корпусе распределителя.
Рис. 5.28. Способы монтажа пневмораспределителей
При стыковом монтаже (рис. 5.28, б) пневмораспределители, все присоединительные отверстия которых
расположены с одной стороны, устанавливают на специальные монтажные плиты, через которые осуществля-
йся их коммутация с пневмосистемой и фиксация на технологической установке. Такой способ монтажа по-
зволяет заменять распределители без демонтажа трубопроводов.
Если места установки пневмораспределителей не регламентированы, то размещают их как можно ближе к
.сполнительному механизму, что позволяет повысить быстродействие, уменьшить непроизводительные поте-
ри сжатого воздуха и суммарную длину трубопроводов. В частности, чем ближе распределитель установлен к
--евмоцилиндру двустороннего действия, тем на большее расстояние (от блока подготовки воздуха до пнев-
мораспределителя) прокладывают один трубопровод, а не два (от распределителя к цилиндру).
Пневмораспределители с ручным управлением, приводом которых служат рычаг, рукоятка и т.п., монтируют
-эким образом, чтобы орган управления: 1) перемещался в направлениях, совпадающих с соответствующими
-эправлениями движения механизма, и в любой позиции был в пределах досягаемости оператора в обычном
рабочем положении последнего; 2) не создавал помех своими перемещениями рабочим движениям операто-
ра: 3) в связи с особенностями своего расположения не вынуждал оператора совершать какие-либо действия
= непосредственной близости от вращающихся или движущихся частей механизмов.
При групповом монтаже аппараты крепят и подсоединяют к системе с помощью общих или унифицирован-
ных монтажных и коммуникационных деталей. Различают блочный и модульный групповой монтаж. Так блоч-
ный монтаж (рис. 5.28, в) осуществляют путем установки пневмораспределителей стыкового исполнения на
збщую многоместную плиту, в которой выполнены каналы питания и выхлопа. Если предполагается дальней-
шее развитие пневматической системы, то устанавливают плиту с резервными посадочными местами, кото-
рые закрывают специальными заглушками.
91
5. Направляющая и регулирующая подсистема
Для модульного монтажа (рис. 5.28, г) характерно формирование общих каналов питания и выхлопа при
состыковке боковых плоскостей распределителей или монтажных плит. Отдельные модули соединяют в блоки
с помощью стяжек либо концевых плит. Уплотнительные кольца круглого поперечного сечения, установленные
в цилиндрических расточках присоединительных отверстий, обеспечивают герметичность соединений подво-
дящих и отводящих каналов. Преимущество такого способа монтажа состоит в том, что в случае изменения
конфигурации системы допускается увеличение или сокращение числа модулей, составляющих блок, без нару-
шения работы входящих в него компонентов.
Несмотря на очев\л{\нъ\е преимущества монтажа пневмораспререпитепей непосредственно у испопнитепъ-
ных механизмов, наиболее часто в сложных технологических системах с электропневматическими распреде-
лителями применяют блочный монтаж. При этом пневмораспределители в совокупности с электронными бло-
ками объединяют в так называемые пневматические острова (рис. 5.29), управляемые промышленными кон-
троллерами или функционирующие автономно. Компактность расположения пневмораспределителей значи-
тельно упрощает пусконаладочные и ремонтные работы и облегчает их коммуникацию с электронной системой
управления.
Рис. 5.29. Пневматические острова
5.1.4. Определение параметров пневмораспределителей
Выбор пневмораспределителя по промышленным каталогам заключается в подборе модели, которая соче-
тает в себе множество требуемых параметров: необходимую схему коммутаций рабочих каналов, вид управле-
ния, способ монтажа, габаритные размеры, пропускную способность (расходные характеристики) и т.п.
Правильный выбор пневмораспределителей, в особенности по расходным характеристикам, имеет огром-
ное значение при проектировании пневмоприводов с заданными выходными параметрами.
Определение требуемой расходной характеристики распределителя представляет собой достаточно слож-
ную задачу из-за необходимости учитывать размеры и скорости перемещения исполнительного механизма,
внешнюю нагрузку, сопротивления подводящих и отводящих трубопроводов и др.
Чтобы упростить процедуру подбора пневмораспределителя из числа выпускаемых серийно, производите-
ли пневматического оборудования приводят в технической документации экспериментальные данные по их
пропускной способности.
В настоящее время применяют три способа задания расходных характеристик.
1. Расходная характеристика выражается величиной объемного расхода Q„ [л/мин], при технических нор-
мальных условиях (t = 20°С, рн = 101,3 кПа).
Схема установки для продувки пневмораспределителей с целью определения их пропускной способности
(расходной характеристики) представлена на рис. 5.30.
92
5. Направляющая и регулирующая подсистема
2. Расходная характеристика задается параметром, характеризующим гидравлическое сопротивление рас-
пределителя. В качестве такого параметра применяют пропускную способность Kv, представляющую собой
расход [м3/ч] жидкости с плотностью 1 кг/дм3 (например, воды), пропускаемой распределителем (или другим
устройством) при перепаде давления на нем 1 кгс/см2.
За рубежом применяют также параметр пропускной способности С , представляющий собой расход воды в
американских или английских галлонах за одну минуту при перепаде давления в 1 psi (фунт-сила на квадрат-
ный дюйм).
3. Расходная характеристика представляется в виде графика, отражающего зависимость объемного расхо-
да воздуха (при нормальных технических условиях) через пневмораспределитель от перепада давления на
-ем при определенном давлении на входе, или серией графиков для различных давлений на входе.
Хотя размеры присоединительных отверстий не характеризуют пропускную способность пневмораспреде-
'ителей, для ориентировочного подбора необходимого типоразмера распределителя можно воспользоваться
~абл. 5.
Табл. 5. Ориентировочное соотношение номинальных расходов и размеров присоединительных
отверстий пневмораспределителей
Диаметр поршня цилиндра, мм Размер присоединительных отверстий Условный проход, мм Нормальный номинальный расход, л/мин
ДО 12 М3 1,5 до 80
12-25 М5 2,5 до 200
25-50 G1/8 3,5 до 500
50-100 G1/4 7,0 до 1140
150-200 G1/2 12,0 до 3000
200 - 320 G3/4, G1 18,7 до 6000
Более подробно данные, приводимые в каталогах, и порядок выбора пневмораспределителей рассматри-
ваются в приложении II.4.
Завершая рассмотрение пневмораспределителей, необходимо пояснить, почему они отнесены к основным
..правляющим элементам пневматических САУ. Дело в том, что распределитель как конструктивный элемент
присутствует не только в направляющей и регулирующей подсистеме, но и в логико-вычислительной и инфор-
мационной подсистемах. При этом он может либо составлять конструктивную часть элемента любой из данных
подсистем, либо сам являться таким элементом. Как бы то ни было, понимание принципов действия и устрой-
ства распределителей служит основой представления о работе пневматической системы в целом.
93
5. Направляющая и регулирующая подсистема
5.2. Запорные элементы
К запорным элементам в пневмоавтоматике относятся устройства, обеспечивающие полное перекрытие
потока сжатого воздуха, — обратные клапаны, пневмозамки, вентили.
О конструкции и принципе действия обратного клапана шла речь в разделе 3.1.2 «Динамические компрессо-
ры». Напомним, что обратные клапаны устанавливают в тех линиях пневматической системы, где требуется
обеспечить свободное протекание потока сжатого воздуха в одном направлении и полное его перекрытие — в
обратном (рис. 5.31).
Рис. 5.31. Обратный клапан
Герметичное закрытие клапана при движении потока в обратном направлении обеспечивается не только
встроенной пружиной, но и воздействием давления сжатого воздуха на его запорно-регулирующий элемент.
Символ пружины включают в условное графическое обозначение обратных клапанов в том случае, когда
необходимо подчеркнуть следующее: клапан открывается при условии, что давление на входе превышает дав-
ление на выходе и давление пружины.
Обратные клапаны, которые при подаче управляющего сигнала на встроенный в их корпус приводной меха-
низм могут быть принудительно открыты, называются пневмозамками (рис. 5.32).
Рис. 5.32. Пневмозамок и примеры его применения
Через пневмозамок воздух свободно проходит из канала 1 в канал 2 (рис. 5.32, а), тогда как в обратном направ-
лении — только при наличии сигнала в канале управления 21. При этом во втором случае шток 2 миницилиндра
(площадь поршня 1 которого больше площади клапана 3) принудительно снимает клапан 3 с седла, тем самым
обеспечивая возможность протекания воздуха из канала 2 в канал 1.
Обычно пневмозамки применяют в системах позиционирования, т. е. для останова и удержания пневмоци-
линдров в любом промежуточном положении, а также для предотвращения самопроизвольного опускания што-
ков вертикально установленных пневмоцилиндров. В схеме с 5/3-пневмораспределителем (рис. 5.32, б) оба
пневмозамка в исходном состоянии закрыты, поскольку их каналы управления соединены с атмосферой через
распределитель. При переключении распределителя один из пневмозамков (расположенный в линии сброса
отработавшего воздуха) открывается автоматически, т. к. в его канал управления поступает сигнал из линии, по
которой сжатый воздух подается к цилиндру.
94
5. Направляющая и регулирующая подсистема
Во фрагменте схемы с 5/2-пнемораспределителем, показанном на рис. 5.32, в, пневмозамки открываются
при подаче внешнего управляющего сигнала.
Для запирания магистральных трубопроводов или отсечения отдельных ветвей пневмосистемы применяют
различные вентили. В шаровых вентилях (рис. 5.33) поток сжатого воздуха полностью перекрывается при пово-
роте запорно-регулирующего элемента (шара с выполненным в нем сквозным отверстием) на 90°.
Вентили с пневматическим управлением широко применяют в автоматизированных производствах, содер-
жащих разветвленную сеть трубопроводов, например в пищевой, химической и других отраслях промышлен-
-юсти.
5.3. Устройства регулирования расхода
Расход сжатого воздуха в пневмоприводах обычно регулируют с целью управления скоростями движения
выходных звеньев исполнительных механизмов. К примеру, чем больше расход воздуха, поступающего в пнев-
иоцилиндр, тем выше скорость перемещения штока.
Простейшим пневматическим элементом, позволяющим регулировать расход воздуха, является дроссель.
дроссель — это устройство, обеспечивающее существенное уменьшение площади проходного сечения кана-
ла по которому движется сжатый воздух. Установка дросселя в пневмолинии приводит к возникновению до-
слнительного местного сопротивления движению потока воздуха, что и обусловливает снижение расхода.
По существу, дроссель представляет собой щель некоторой длины, имеющую определенные размеры про-
жодного сечения. При этом площадь последнего в зависимости от конструктивного исполнения дросселя либо
остается постоянной, либо может изменяться путем вращения регулировочного винта. Соответственно дроссель
: .дет называться либо постоянным (рис. 5.34, а), либо регулируемым (рис. 5.34, б).
Рис. 5.34. Пневмодроссели: а — постоянный; б — регулируемый
95
5. Направляющая и регулирующая подсистема
Если длина щели превышает ее диаметр, дроссель принято называть ламинарным, в противном случае —
турбулентным.
При установке дросселя в трубопроводе расход воздуха будет снижаться при протекании потока в любом из
двух возможных направлений. Если возникает необходимость регулировать расход только в одном из них и
обеспечить свободное протекание потока сжатого воздуха в обратном, то в пневмолинию устанавливают дрос-
сель с обратным клапаном (рис. 5.35).
Рис. 5.35. Пневмодроссель с обратным клапаном
В нормальном состоянии тарельчатый обратный клапан 5, в центральной части которого выполнено дрос-
селирующее отверстие 3, прижат к седлу 4 пружиной 2. В случае, когда сжатый воздух поступает из канала А в
канал В, он протекает только через это отверстие, проходное сечение которого (а следовательно, и расход
можно изменять посредством регулировочного винта 1. Движение воздуха в обратном направлении сопровож-
дается подъемом обратного клапана с седла, что позволяет потоку беспрепятственно протекать из канала В в
канал А.
Таким образом, поток воздуха дросселируется при движении через дроссель с обратным клапаном в одном
направлении и свободно протекает через обратный клапан при движении в противоположном направлении.
Обычно на корпусах пневматических дросселей с обратным клапаном присутствует условное графическое
обозначение, на котором расположение обратного клапана относительно присоединительных отверстий стро-
го соответствует его позиции в реальной конструкции. Иногда обозначение заменяют стрелкой, указывающей
направление дросселирования потока. Это делается для предотвращения неправильной установки данного
элемента в системе.
Рассмотрим примеры использования дросселей и дросселей с обратным клапаном для регулирования ско-
рости движения штока пневмоцилиндра одностороннего действия (рис. 5.36).
При установке регулируемого дросселя без обратного клапана (рис. 5.36, а) скорости прямого и обратного
ходов взаимосвязаны, поскольку и входящий в цилиндр, и исходящий из него потоки воздуха проходят через
одно и то же сечение дросселирующей щели.
96
5. Направляющая и регулирующая подсистема
С целью регулирования скорости выдвижения штока (рис. 5.36, б) необходимо применять дроссель с обрат-
ным клапаном, причем последний должен быть закрыт при поступлении воздуха в цилиндр. Для регулирования
скорости втягивания штока (рис. 5.36, в) дроссель необходимо устанавливать таким образом, чтобы натекаю-
щий воздух свободно поступал в цилиндр через обратный клапан и вытекал из него через дроссель.
Управлять скоростью выходного звена пневмоцилиндров двустороннего действия можно дросселировани-
ем воздуха в линии нагнетания (регулирование на входе) или выхлопа (регулирование на выходе). Для приме-
ра рассмотрим регулирование скорости прямого хода.
При дросселировании натекающего воздуха (регулирование на входе — рис. 5.37, а) рабочая полость за-
полняется медленно, столь же медленно возрастает и давление в ней. В связи с этим давление в рабочей
полости сильно зависит от колебаний значений нагружающего усилия, а восприятие цилиндром попутной на-
грузки (направление действия которой совпадает с направлением движения штока) становится практически
невозможным.
По этой причине скорость движения штока пневмоцилиндра двустороннего действия регулируется преиму-
щественно дросселированием воздуха, вытекающего из исполнительного механизма (регулирование на выхо-
де — рис. 5.37, б). Сжатый воздух при такой схеме включения дросселя с обратным клапаном свободно посту-
пает в поршневую полость цилиндра, тогда как в штоковой создается «подпор», тормозящий поршень. При
этом в обеих рабочих полостях поддерживается высокий уровень давления, что обеспечивает плавный ход
поршня, практически не зависящий от колебаний значения нагружающего усилия.
Для независимого регулирования скоростей прямого и обратного ходов дроссели с обратными клапанами
устанавливают в обеих пневмолиниях, подсоединенных к цилиндру (рис. 5.37, в). При такой схеме установки
сжатый воздух свободно проходит в рабочие полости цилиндра через обратные клапаны и вытекает через
дроссели, создающие сопротивление отработавшему воздуху.
При установке дросселей с обратным клапаном (рис. 5.38, а) следует обращать особое внимание на на-
правление, в котором дросселируется поток воздуха, поскольку из-за симметричного исполнения корпуса дрос-
селя значительно увеличивается вероятность неверного монтажа (рис. 5.38, б).
Рис. 5.38. Дроссели с обратным клапаном и пример неправильной их установки
На представленной схеме оба дросселя с обратным клапаном регулируют скорость прямого хода цилиндра,
в то время как скорость обратного хода регулированию не поддается.
97
5. Направляющая и регулирующая подсистема
Часто дроссели, как устройства регулирования скорости движения выходного звена исполнительного меха-
низма, устанавливают непосредственно на этом механизме либо на исполнительном распределителе. В таких
случаях применяют ввертные конструкции (рис. 5.39).
Рис. 5.39. Ввертные дроссели: а - дроссель с обратным клапаном; б - выхлопной дроссель
Дроссели с обратным клапаном (рис. 5.39, а) ввинчивают в места установки пневматических соединений на
исполнительных механизмах, а выхлопные дроссели (рис. 5.39, б), представляющие собой пневмоглушители с
встроенной дроссельной иглой, — в выхлопные отверстия пневмораспределителей.
Применение выхлопных дросселей становится неэффективным, если линия подвода воздуха от пневмо-
распределителя к исполнительному механизму имеет значительную длину. Этот факт объясняется тем, что
объем, в котором сжимается воздух (выхлопная полость цилиндра и трубопровод), оказывается настолько
большим, что перемещение поршня уже не вызывает в нем повышения давления в той мере, в какой это
требуется для обеспечения эффективного регулирования скорости движения выходного звена.
Преимущество ввертных конструкций состоит в невозможности неправильной установки, поскольку един-
ственное имеющееся в них резьбовое соединение однозначно определяет коммутацию с сопрягаемым устрой-
ством.
На принципиальных пневмосхемах, при использовании позиционных обозначений в виде цифровых индек-
сов, устройствам, регулирующим скорость, присваиваются трехзначные индексы (см. табл. 4). Разделенные
точкой первые две цифры этих индексов указывают на исполнительный механизм, скорость движения которого
регулируется (рис. 5.40). (Напомним, что в индексе четная цифра после точки означает, что устройство задей-
ствуется в процессе выдвижения штока цилиндра, а нечетная — в процессе втягивания.)
На первый взгляд, можно сделать однозначный вывод о том, что исполнительный механизм будет двигаться
с максимально возможной скоростью, если в его выхлопной магистрали отсутствуют дросселирующие устрой-
ства. Однако нельзя забывать, что пневмолинии представляют собой гидравлические сопротивления на пути
98
5. Направляющая и регулирующая подсистема
сжатого воздуха. Чтобы отработавший воздух был сброшен в атмосферу, его необходимо «продавить» как
минимум через трубопроводы и исполнительный распределитель. Поэтому очевидно следующее: максималь-
но возможную скорость исполнительный механизм разовьет лишь в том случае, если сброс воздуха в атмосфе-
ру будет осуществляться непосредственно за его рабочей полостью. Реализовать этот вариант можно путем
применения клапана быстрого выхлопа (рис. 5.41), который, с одной стороны, свободно пропускает сжатый
воздух к исполнительному механизму, а с другой — сбрасывает отработавший воздух непосредственно в ат-
мосферу.
При подаче сжатого воздуха в канал А запорный элемент смещается в сторону отверстия выхлопа R и
перекрывает его, освобождая путь в канал В. Подача воздуха в канал В сопровождается перекрытием канала
А (т. е. отсечением присоединенных пневмолиний) и сбросом отработавшего воздуха в атмосферу через канал
R (Обратим внимание, что условное графическое обозначение клапана быстрого выхлопа четко отражает
пэинцип его функционирования.)
Клапаны быстрого выхлопа на принципиальных пневматических схемах также обозначают трехзначными
цифровыми индексами (рис. 5.42).
Рис. 5.42. Принципиальная пневматическая схема с клапанами быстрого выхлопа
Регулирование скорости движения исполнительных механизмов не ограничивается только использованием
дросселей и клапанов быстрого выхлопа. Существует множество схемных решений с применением клапанов
давления, дополнительных емкостей, внешних тормозных устройств и др. Все указанные способы регулирова-
ния, как правило, связаны с необходимостью размещения дополнительных устройств и вследствие этого обус-
ловливают увеличение размеров, массы и стоимости привода.
99
5. Направляющая и регулирующая подсистема
5.4. Устройства регулирования давления
Необходимость регулирования давления в пневматических системах обусловлена рядом причин. Так, при
работе оборудования на малых давлениях резко снижается КПД, и в то же время давление выше оптимального
приводит к интенсивному его износу при незначительном повышении производительности. Кроме того, поддер-
жание заданного давления в рабочих полостях исполнительных механизмов обеспечивает постоянство разви-
ваемого ими усилия либо скорости движения выходного звена, что является обязательным требованием при
создании многих технологических установок.
Задачи регулирования давления в пневматических системах решаются посредством клапанов давления:
предохранительных (см. раздел 3.3 «Устройства очистки и осушки сжатого воздуха») и редукционных (см. раз-
дел 3.6 «Блоки подготовки воздуха»).
Напомним, что назначение предохранительных клапанов (рис. 5.43, а) заключается в предотвращении по-
вышения давления в контролируемых точках сверх заданного уровня путем автоматического сброса части
сжатого воздуха в атмосферу. Предохранительные клапаны устанавливают на специальных патрубках, присо-
единительных трубопроводах или непосредственно на пневматических емкостях в местах, удобных для осмот-
ра, монтажа и эксплуатации. При установке в пневматических системах клапаны настраивают на заданное
давление и пломбируют.
Назначение редукционных пневмоклапанов (рис. 5.43, б, в) — поддерживать относительно стабильный уро-
вень давления на выходе (ниже величины давления питания) независимо от колебаний давления, имеющих
место в системе подачи воздуха перед клапаном, а также при изменении расхода воздуха за клапаном. Редук-
ционные клапаны монтируют, как правило, в конкретных точках производственных установок либо они входят в
составе блоков подготовки воздуха.
Принципиальные отличия между двумя рассмотренными типами клапанов состоят в следующем: предохра-
нительные клапаны контролируют давление «перед собой», а редукционные — «за собой»; предохранитель-
ные клапаны являются нормально закрытыми, тогда как редукционные — нормально открытыми (рис. 5.43).
Рис. 5.43. Пневмоклапаны давления : а) предохранительный; б) редукционный двухлинейный;
в) редукционный трехлинейный
При выборе клапанов давления следует принимать во внимание следующие технические характеристики:
диапазон рабочих давлений;
диапазон температур;
номинальный расход;
размеры присоединительных отверстий.
Традиционные варианты использования клапанов давления в пневматических системах представлены на
рис. 5.44.
Манометры в комплект поставки клапанов давления не входят.
100
5. Направляющая и регулирующая подсистема
Рис. 5.44. Пример использования пневмоклапанов давления
Предохранительный клапан 0.4 ограничивает уровень давления в ресивере 0.1, а клапаны 2.01 и 2.02 созда-
ют «подпор» в рабочих полостях пневмоцилиндра 2.0. Посредством этих клапанов фактически регулируется
скорость движения штока цилиндра 2.0. Подобная схема регулирования обеспечивает стабильность скорост-
ных характеристик при изменении величины нагрузки.
Редукционный клапан 1.02 поддерживает на постоянном уровне усилие, развиваемое пневмоцилиндром 1.0
при прямом ходе. Чтобы обеспечить свободный возврат пневмоцилиндра 1.0 в исходную позицию, параллель-
но редукционному клапану 1.02 устанавливают обратный клапан 1.01.
Обратим внимание, что предохранительные клапаны 2.01 и 2.02 отличаются по конструктивному исполне-
нию от клапана 0.4, поскольку к их выхлопному отверстию можно присоединенить резьбовые соединения либо
пневмоглушители (рис. 5.45).
Рис. 5.45. Предохранительный пневмоклапан
Предохранительный клапан ограничивает уровень давления сжатого воздуха, подводимого к каналу Р и
воздействующего на подпружиненную мембрану 1 (рис. 5.45, б), в жестком центре которой установлен тарель-
чатый клапан 2, перекрывающий проход к каналу А. Когда давление становится достаточным для преодоления
усилия пружины, клапан открывается, пропуская сжатый воздух в канал А.
Кроме описанных выше клапанов давления с ручной настройкой уровня контролируемого давления суще-
ствуют также клапаны давления с внешним дистанционным управлением (рис. 5.46).
101
5. Направляющая и регулирующая подсистема
а б в
Рис. 5.46. Пневмоклапаны давления с внешним управлением
Управление может быть: 1) механическим — уровень давления зависит от положения некоторого технологи-
ческого объекта, с которым орган управления клапаном связан кинематически (рис. 5.46, а); 2) пневматическим
— уровень контролируемого давления задается значением давления в некоторой точке пневматической систе-
мы (рис. 5.46, б); 3) пропорциональным — клапан регулирует давление пропорционально заданной силе тока
или напряжению (рис. 5.46, в).
Клапаны с пропорциональным управлением являются наиболее универсальными с точки зрения возможно-
стей автоматизации управления сложными технологическими объектами, поскольку в соответствующий анало-
говый электрический сигнал можно преобразовать и перемещение, и давление (а также другие физические
величины). Кроме того, применение клапанов давления с пропорциональным управлением позволяет осуще-
ствлять программное управление уровнем давления в пневматической системе с помощью промышленных
логических контроллеров.
В ряде случаев для уменьшения габаритов установок, оснащенных пневмоприводами, целесообразно пе-
рейти на работу с давлением, уровень которого выше, чем в заводской сети. С этой целью применяют усилите-
ли давления (рис. 5.47).
Рис. 5.47. Усилитель давления
Усилитель давления фактически представляет собой двухпоршневой компрессор с пневматическим приво-
дом. Поршни перемещаются под действием сжатого воздуха, поступающего поочередно в одну из приводных
(бесштоковых) камер. Реверсирование движения поршней осуществляется при достижении ими «мертвых то-
чек» посредством встроенного 4/2-пневмораспределителя с двусторонним механическим управлением. Уровень
давления на выходе задается с помощью регулятора давления и контролируется через канал обратной связи.
Давление, развиваемое усилителем, как правило, не превышает давления в пневмосети более чем в два раза, при
этом расход сжатого воздуха, затрачиваемого на работу усилителя, составляет около 120% от расхода на его выходе.
При необходимости для сглаживания пульсаций давления на выходе усилителя устанавливают ресивер
(рис. 5.48, а).
102
5. Нгиргеляющая 6/ регулирующая ладою/лема
Если усилитель работает на ресивер (замкнутый объем), то для ускорения наполнения последнего парал-
лельно усилителю встраивают обратный клапан (рис. 5.48, б). При этом усилитель начинает работать в тот
момент, когда давление в ресивере становится равным давлению в пневмосети.
Подача сжатого воздуха в пневматические системы технологического оборудования в момент их подключе-
ния к сети сопровождается внезапным повышением давления. Это может привести к резкому перемещению
исполнительных механизмов и ведомых частей установки при их выходе в исходную позицию. В результате
опорные конструкции установок воспринимают значительные ударные нагрузки, что обусловливает преждев-
ременный выход оборудования из строя. Для обеспечения плавного повышения давления в пневмосистемах
до заданного уровня применяют специальные блоки (рис. 5.49).
Рис. 5.49. Блок плавного повышения давления
Блоки плавного повышения давления (рис. 5.49, а) могут быть выполнены на основе различных схемных
решений в зависимости от условий функционирования конкретных установок. Так, блок, выполненный по схе-
ме, показанной на рисунке 5.49, б позволяет осуществлять плавное нарастание давления в системе через
регулируемый дроссель. При достижении заданного уровня давления срабатывает клапан последовательнос-
ти (см. п. 6.3), что обеспечивает дальнейшее свободное поступление воздуха в систему. Сброс воздуха из
системы осуществляется резко (через обратный клапан).
Схемное решение, изображенное на рисунке 5. 49, в, позволяет осуществлять плавное (нерегулируемое)
повышение давления в системе до требуемого уровня через нерегулируемый дроссель клапана последова-
’ельности и плавный сброс (через регулируемый дроссель) воздуха из системы.
Часто для удобства эксплуатации такие блоки монтируют в составе блоков подготовки воздуха.
Мы завершили рассмотрение элементов, входящих в силовую часть пневмоприводов. Знание элементов ис-
полнительной, а также направляющей и регулирующей подсистем позволяет проектировать вполне работоспо-
собные пневматические системы, подобные рассмотренным выше. Следует отметить, что все они не являются
пневматическими системами автоматического управления. В связи с отсутствием пневматической управляю-
щей части правильнее было бы отнести их к пневмоприводам с ручным управлением. Действительно, команды
на перемещение исполнительных механизмов в описанных системах подаются от пневмораспределителей с
ручным управлением, т. е. оператором, который и осуществляет визуальный контроль за ходом выполнения тех-
нологического процесса. Система управления может быть названа автоматической (САУ) лишь в том случае,
если существует возможность управления исполнительными механизмами без участия человека. (Напомним,
что управляющая часть замкнутой САУ состоит из двух подсистем: информационной и логико-вычислительной.)
103
6. Информационная подсистема
6. Информационная подсистема
Пневматические элементы, входящие в информационную (сенсорную) подсистему управляющей части пнев-
мопривода, предназначены для пуска и останова технологического процесса, а также для сбора информации о
ходе его выполнения. Полученная информация в виде пневматических сигналов при необходимости обраба-
тывается в логико-вычислительной (процессорной) подсистеме и передается в направляющую и регулирую-
щую подсистему силовой части привода для управления исполнительными механизмами.
Рассмотренные выше пневмораспределители с механическим управлением в большинстве своем входят в
состав именно информационной подсистемы. Действительно, пневмораспределители, управляемые мускуль-
ной силой, вводят в систему команды оператора, а пневмораспределители с управлением от толкателей и
роликов — команды от контролируемых объектов технологической установки.
Поскольку в ходе выполнения технологических операций происходит постоянное перемещение выходных
звеньев исполнительных механизмов, пневмораспределители, контролирующие положение последних, часто
называют пневматическими путевыми выключателями.
6.1. Пневматические путевые выключатели
Пневматические путевые выключатели устанавливают в тех местах, где положение исполнительного ме-
ханизма обязательно должно контролироваться. Так, команды на продолжение технологического процесса
поступают в систему от путевых выключателей только в том случае, если предыдущая технологическая опера-
ция была завершена, т. е. произошли все необходимые перемещения. Подобный способ управления называют
управлением по положению.
Обычно путевые выключатели устанавливают таким образом, чтобы они переключались в крайних положе-
ниях выходного звена исполнительного механизма (для пневмоцилиндра это полностью втянутое и полностью
выдвинутое положения штока), но при необходимости они также могут быть приведены в действие и в каком-
либо функционально важном промежуточном положении выходного звена.
Рассмотрим схему управления сверлильным станком с пневмоприводом (рис. 6.1). Установка заготовки в
тиски, ее зажатие и пуск станка осуществляются оператором, а рабочий ход и отвод инструмента в исходную
позицию происходит без его вмешательства.
Рис. 6.1. Сверлильный станок и его принципиальная пневматическая схема
В представленной схеме блок подготовки воздуха 0.1 относится к энергообеспечивающей подсистеме; пнев-
моцилиндр 1.0 — к исполнительной; бистабильный 5/2-пневмораспределитель 1.1 и дроссель с обратным кла-
паном 1.02 — к направляющей и регулирующей; пневмокнопка 1.2 и путевой выключатель 1.3 — к информаци-
онной.
Здесь и далее приводятся стилизованные примеры технологического оборудования.
104
6. Информационная подсистема
После кратковременного нажатия на кнопку 1.2 (команда «Пуск») распределитель 1.1 переключается в по-
зицию, обеспечивающую выдвижение штока цилиндра 1.0. Шток, перемещая рабочий инструмент, выдвигает-
ся со скоростью, соответствующей настройке дросселя с обратным клапаном 1.02. После выполнения рабоче-
го хода активизируется путевой выключатель 1.3, и на распределитель 1.1 подается команда на втягивание
штока пневмоцилиндра (на отвод инструмента в исходную позицию).
Расположение обозначений путевых выключателей на пневмосхемах в зоне рабочих ходов пневмоцилинд-
ров может значительно усложнить чтение схем. Для примера рассмотрим принципиальную пневматическую
схему хонинговального станка (рис. 6.2), выходное звено которого должно совершать возвратно-поступатель-
ное движение.
Рис. 6.2. Хонинговальный станок и его принципиальная пневматическая схема
В исходном состоянии станка шток пневмоцилиндра 1.0 втянут, вследствие чего путевой выключатель 1.2
чаходится в активном (переключенном) положении (на это следует обратить особое внимание). Когда распре-
делитель 0.2 переводится в положение «Пуск», через путевой выключатель 1.2 поступает сигнал на распреде-
литель 1.1, переключение которого сопровождается выдвижением штока цилиндра 1.0. После трогания штока
-невмоцилиндра с места выключатель 1.2 переводится в нормально закрытое состояние, а при достижении
«райнего выдвинутого положения штока активизируется теперь уже путевой выключатель 1.3, подающий ко-
манду на втягивание. Таким образом, шток цилиндра 1.0 начинает совершать возвратно-поступательное дви-
жение вплоть до перевода пневмораспределителя 0.2 в состояние «Останов».
Появление «петель» линий связи на схемах существенно затрудняет их чтение, поэтому условные графи-
ческие обозначения пневмоэлементов предпочтительнее располагать по ярусам. В нижней части схемы раз-
решают элементы, входящие в энергообеспечивающую подсистему, над ними — в информационную, еще
э& ше — в направляющую и регулирующую подсистему, а на самом верху — исполнительные механизмы.
Для однозначного указания места расположения путевых выключателей относительно пневмоцилиндра места
нх установки обозначают вертикальной чертой и индексом, присвоенным соответствующему выключателю (рис.
6.3).
105
6. Информационная подсистема
1.0 1.2 1.3
Останов
Рис. 6.3. Изображение путевых выключателей на принципиальных пневматических схемах
С целью подчеркнуть, что путевой выключатель 1.2 в исходном состоянии активен, его изображают в пере-
ключенном состоянии под действием механического кулачка.
6.2. Струйные датчики положения
Получить информацию о состоянии контролируемого объекта с помощью путевого выключателя можно только
посредством их механического взаимодействия. Но далеко не каждый объект может развить достаточное для
этого усилие. Например, при производстве магнитной ленты невозможно контролировать ее целостность с
помощью пневмораспределителя с управлением от толкателя или ролика. Для решения подобных задач при-
меняют струйные датчики положения, позволяющие получать нужную информацию бесконтактным методом —
с помощью струи воздуха. Данный метод заключается в том, что контролируемый объект, попадая в зону дей-
ствия датчика, вызывает изменение уровня давления на его выходе.
Так, принцип действия датчика «вилкообразный воздушный барьер» основан на гидромеханическом эф-
фекте прерывания струи (рис. 6.4).
Рис. 6.4. Струйный датчик «вилкообразный воздушный барьер»
В неактивном состоянии датчика струя воздуха, подаваемого в канал питания Р, через питающее сопло и
рабочую зону проникает в приемное сопло, связанное с каналом выхода А. Контролируемый объект, попадая в
рабочую зону датчика, прерывает струю воздуха, в результате чего пневматический сигнал на выходе А пропа-
дает. Информация об изменении состояния датчика поступает в систему управления для дальнейшей обра-
ботки.
Поскольку при работе датчика окружающий воздух, эжектируемый струей сжатого воздуха, попадает в его
приемное сопло, это делает невозможным использование такого датчика в условиях повышенной запыленно-
сти окружающей среды. Данный недостаток отсутствует у струйного датчика с кольцевым питающим соплом
(рис. 6.5).
106
6. Информационная подсистема
Рис. 6.5. Струйный датчик с кольцевым соплом
Во время нахождения датчика в неактивном состоянии сигнал в его выходном канале А отсутствует, т. к.
эоздух увлекается из последнего питающей струей. Контролируемый объект в зоне действия датчика вызы-
вает перераспределение воздушных потоков, в результате чего уровень давления в выходном канале А по-
вышается.
Диапазон чувствительности подобных датчиков достигает 15 мм. При необходимости увеличения зоны чув-
ствительности струйных датчиков применяют конструкции со встречным соударением струй, способные осу-
ществлять контроль на расстояниях до 100 мм (рис. 6.6). —
Рис. 6.6. Струйный датчик со встречным соударением струй
Датчик выполнен в двух корпусах, из сопел которых выходят две встречные струи воздуха. Струя из сопла-
-ередатчика (слева) препятствует свободному выходу струи из сопла-приемника (справа), что вызывает воз-
никновение «подпора» в последнем и появление пневматического сигнала в его выходном канале А. При попа-
sa-ии контролируемого объекта в рабочую зону датчика струя воздуха свободно выходит из сопла-приемника,
вследствие чего сигнал на выходе датчика пропадает.
К неоспоримым преимуществам струйных датчиков относятся:
• способность работать в условиях повышенной запыленности и взрывоопасности;
• нечувствительность к влиянию магнитных полей и звуковых волн;
• надежность работы в условиях повышенных температур.
К недостаткам рассматриваемых датчиков можно отнести необходимость использования дополнительной
аппаратуры. Поскольку струйные датчики любого типа являются пневматическими элементами, постоянно по-
оебляющими сжатый воздух, то для уменьшения его непроизводительного расхода давление питания струй-
ных датчиков уменьшают до 0,001 — 0,005 МПа. Низкий уровень выходного сигнала датчиков обусловливает
необходимость применения усилителей давления.
В системах пневматического управления, работающих с давлениями до 0,05 МПа, с этой целью применяют
"нокаскадные усилители (рис. 6.7).
107
6. Информационная подсистема
Рис. 6.7. Однокаскадный усилитель давления
Однокаскадный усилитель давления представляет собой нормально закрытый моностабильный 3/2-пнев-
мораспределитель с пневматическим управлением, в канал питания Р которого подается сжатый воздух под
высоким давлением. Поскольку приводная мембрана имеет большую площадь, то подача пневматического
сигнала низкого уровня от струйного датчика на вход X усилителя приводит к переключению распределителя,
что сопровождается появлением сигнала высокого уровня на выходе А усилителя. Отношение значений давле-
ния на входе в усилитель и на выходе из него называют коэффициентом усиления.
Для усиления выходных сигналов датчиков, работающих с давлениями до 0,02 МПа, применяют двухкас-
кадные усилители давления (рис. 6.8).
Рис. 6.8. Двухкаскадный усилитель давления
В основе конструкции двухкаскадного усилителя давления лежит однокаскадный усилитель, сигнал управ-
ления на который подается от каскада предварительного усиления типа «сопло — заслонка». В отличие от
однокаскадного усилителя двухкаскадный имеет два дополнительных канала, обеспечивающих работу каска-
да предварительного усиления: Рх — канал питания, Rx — канал выхлопа. Через этот каскад непрерывно про-
текает сжатый воздух под давлением 0,01 — 0,02 МПа. Поступающий на вход X усилителя сигнал от струйного
датчика вызывает прогиб чувствительной мембраны-заслонки, которая препятствует свободному выходу воз-
духа через сопло, что сопровождается повышением давления на входе последнего. В результате давление под
мембраной второго каскада также повышается, и в конечном итоге это вызывает срабатывание встроенного
3/2-пневмораспределителя.
Завершая раздел, посвященный струйным датчикам, рассмотрим пример использования датчика с кольце-
вым соплом в машине для намотки магнитной ленты на барабан (рис. 6.9).
108
6. Информационная подсистема
Рис. 6.9. Применение струйного датчика с кольцевым соплом
Барабан, на который наматывается магнитная лента, приводится пневмомотором 1.0 во вращение со ско-
ростью, регулируемой выхлопным дросселем 1.02. Сжатый воздух подается на пневмомотор через моноста-
бильный 3/2-распределитель с пневматическим управлением 1.1 при условии наличия ленты в зоне действия
струйного датчика 1.2. При этом на вход двухкаскадного усилителя 1.4 посылается управляющий сигнал низко-
го уровня давления, а на распределитель 1.1 — высокого. Для подачи питания к датчику 1.2 и усилителю 1.4
установлен редукционный клапан 0.3 с давлением настройки 0,02 МПа. Вращение барабана прекращается в
случае обрыва ленты.
Если в рассмотренной машине используется датчик со встречным соударением струй, то управление пнев-
момотором 1.0 должно осуществляться нормально открытым исполнительным пневмораспределителем 1.1
рис. 6.10). Это связано с тем, что на выходе струйного датчика 1.2 сигнал генерируется в случае отсутствия
ленты, а при ее наличии он снимается.
Рис. 6.10. Применение струйного датчика со встречным соударением струй
109
6. Информационная подсистема
6.3. Пневмоклапаны последовательности
Помимо контроля положения исполнительных механизмов либо кинематически связанных с ними подвиж-
ных частей технологических установок нередко требуется также формирование управляющих сигналов на ос-
нове информации о значении давления в определенных точках пневматической системы. В таких случаях
говорят об управлении по давлению.
Устройства, преобразующие аналогово-пневматический сигнал на входе при достижении им заданной вели-
чины в дискретный пневматический сигнал на выходе, называют клапанами последовательности или реле
давления с пневматическим выходом (рис. 6.11).
Условные графические обозначения пневмоклапанов последовательности могут различаться в зависимос-
ти от их конструктивного исполнения. Так, клапан последовательности, показанный на рис. 6.11, а, представля-
ет собой комбинацию предохранительного клапана с внешним управлением 1 и 3/2-пневмораспределителя с
пневматическим управлением 7, включенных последовательно, что находит отражение в его условном обозна-
чении. Напомним: штрихпунктирная линия, охватывающая обозначения нескольких пневматических элемен-
тов, указывает на то, что эти элементы не являются самостоятельными аппаратами, а входят в состав объеди-
няющего их устройства.
Давление в канале управления X должно быть таким, чтобы усилие, возникающее на мембране 3, было
достаточным для преодоления усилия настроечной пружины 2. Как только это условие выполняется, открыва-
ется пилотный клапан 4 и сжатый воздух начинает поступать к мембране 5 переключающего элемента 6 рас-
пределителя 7. При срабатывании данного элемента происходит переключение пневмораспределителя 7, в
результате чего в канале А появляется сигнал. Усилие настроечной пружины можно изменить путем вращения
регулировочного винта.
Клапан, изображенный на рис. 6.11, б, выполнен на базе 3/2-распределителя с пневматическим управлени-
ем. Порог срабатывания клапана настраивают смещением регулировочной втулки 3, на которую опирается
пружина 2 приводного поршня 1. Перемещение втулки 3 сопровождается изменением усилия предварительно-
го сжатия пружины 2 и обеспечивается вращением регулировочной гайки 4.
Следует обратить внимание на то, что активная площадь приводного поршня 1 (на которую воздействует
контролируемое давление) резко увеличивается при его трогании с места из исходной позиции. Это означает,
что даже постепенное повышение давления в канале X до некоторого порогового значения (величины настрой-
ки) приводит не к плавному перемещению управляющего поршня, а к его резкому переходу в выдвинутое поло-
жение, что обеспечивает четкое переключение пневмораспределителя.
При выборе клапанов последовательности необходимо принимать во внимание следующие технические
характеристики:
110
6. Информационная подсистема
• диапазон воспринимаемых давлений (максимальная и минимальная величины давления);
• точность настройки;
• стабильность работы (способность сохранять настройку давления срабатывания при многократных пере-
ключениях);
• величина гистерезиса (разница между давлением включения и давлением отключения);
• номинальный расход воздуха, протекающего через клапан.
В качестве примера использования пневмоклапана последовательности рассмотрим установку для формиро-
вания комплектов из четырех пластиковых бутылок с целью последующей их упаковки (рис. 6.12, а).
Рис. 6.12. Установка для формирования комплектов бутылок
Бутылки, поступающие по конвейеру в рабочую зону установки, сдвигаются в позицию упаковки по команде
оператора при нажатии на пневмокнопку 1.2 (рис. 6.12, б). Команда же на возврат цилиндра в исходную пози-
цию формируется не на основе положения его штока, а поступает от клапана последовательности 1.3, пере-
ключение которого происходит в тот момент, когда давление в поршневой полости цилиндра 1.0 достигает
величины 0,12 МПа (1,2 бар).
При перемещении бутылки давления в поршневой полости пневмоцилиндра недостаточно для переключе-
ния клапана последовательности. Давление начинает расти при установке штока на упор, т. е. с того момента,
-огда бутылка займет свое место в комплекте. Давление срабатывания клапана последовательности (а следо-
вательно, и усилие, развиваемое цилиндром) подбирают таким образом, чтобы шток не мог повредить бутылку.
6.4. Индикаторы давления
Манометры дают количественную информацию о давлении в контролируемых точках пневматических сис-
тем, тогда как качественную картину (наличие или отсутствие давления воздуха) получают посредством инди-
- аторов давления (рис. 6.13).
Рис. 6.13. Индикаторы давления и их условное графическое обозначение
111
6. Информационная подсистема
В основе конструкции индикаторов давления лежит, как правило, миницилиндр одностороннего действия,
окрашенный «шток» которого выдвигается при подаче давления и либо выходит за габариты индикатора (рис.
6.13, а), либо оказывается под прозрачным колпачком (рис. 6.13, б).
Индикаторы в качестве простейшего средства диагностики нередко встраивают в различные пневмоаппа-
раты для контроля их текущего состояния.
6.5. Счетчики импульсов
Пневматические САУ циклического действия часто снабжают счетчиками импульсов (импульсных пневма-
тических сигналов), назначение которых — контроль и визуализация числа отработанных циклов (рис. 6.14).
Счетчики импульсов выпускают в различных вариантах исполнения в зависимости от их функционального
назначения. Так, счетчик, представленный на рис. 6.14, а, предназначен только для визуализации числа посту-
пающих на его вход сигналов и ведет счет по возрастающей, т. е. суммирует поступающие сигналы (инкремен-
тный счетчик). Обнуление счетчика (вывод в исходное состояние) выполняют вручную.
Более широкие возможности имеют счетчики, генерирующие пневматический сигнал на выходе при поступ-
лении на вход заданного числа сигналов (рис. 6.14, б). Перед пуском на индикаторе счетчика с помощью специ-
альных клавиш устанавливают число сигналов, которое необходимо проконтролировать (счетчик с предуста-
новкой). Отсчет идет в сторону уменьшения (декрементный сетчик), и при достижении на индикаторе нулевого
значения формируется пневматический сигнал на выходе счетчика. Вывод счетчика в исходное состояние осу-
ществляется вручную либо внешним пневматическим сигналом, что позволяет использовать его в автомати-
ческих системах с непрерывным циклом.
В рассмотренных выше пневматических схемах для управления исполнительным пневмораспределителем
сигналы подавались непосредственно от элементов информационной подсистемы. Такая ситуация возможна
только в самых простых приводах. Иначе обстоит дело, если речь идет о совместной работе нескольких пнев-
моцилиндров или о решении сложных задач, требующих выполнения различных дополнительных условий ра-
боты привода. В таких случаях сигналы, получаемые от информационных элементов, должны обрабатываться
в соответствии с требованиями технологического процесса; между ними должны быть установлены опреде-
ленные логические связи. Для этой цели предназначены элементы логико-вычислительной подсистемы.
112
7. Логико-вычислительная подсистема
7. Логико-вычислительная подсистема
Логико-вычислительная (процессорная) подсистема управляющей части САУ является «мозговым центром»
любой технологической установки. Уровень сложности логических связей между входными (информационны-
ми) и выходными (управляющими) сигналами зависит от количества исполнительных механизмов, которыми
требуется управлять, и алгоритма их совместной работы; от необходимости обеспечить условия безопасной
работы обслуживающего персонала; от степени поддержки установкой различных сервисных функций.
При проектировании системы управления приводом необходимо учитывать следующие факторы, характе-
ризующие технологический процесс и условия работы системы:
• условия производства (пожаро- и взрывобезопасность, качество воздуха в заводской сети, квалификация
обслуживающего персонала и т. п.);
• длительность отдельных операций и технологического цикла в целом (на основании этого фактора выби-
рают вид управления — по положению или по времени);
• тип устройств, управляющих исполнительными механизмами;
• элементную базу и логическую структуру системы управления.
Проектирование логических схем основано, как известно, на использовании законов алгебры логики, или
булевой алгебры. Основные операции алгебры логики, ее аксиомы, теоремы и законы, приводятся в специаль-
ной литературе. В настоящем пособии мы рассмотрим основные логические функции и способы их реализа-
ции в дискретных пневматических системах.
7.1. Основные логические функции
Логические функции наиболее наглядно можно представить в виде таблиц истинности, в которых каждой
возможной комбинации аргументов (входных сигналов) ставится в соответствие значение логической функции
выходного сигнала), равное 0 или 1. Наряду с таблицами истинности (рис. 7.1, а) далее рассматриваются
алгебраические записи (рис. 7.1, б) и логические символы (рис. 7.1, в) основных логических функций, а также
условные графические обозначения пневматических элементов, реализующих каждую из них (рис. 7.1, г).
Логическая функция ДА (повторение)
Логическая функция ДА (рис. 7.1) является функцией одного аргумента.
--ох Ш -» о Ь А =Х б 1 Х_ А в г
Рис. 7.1. Логическая функция ДА
Из таблицы истинности для функции ДА следует: значение, принимаемое логической функцией А, совпада-
ет со значением аргумента X. Алгебраическая запись читается следующим образом: «А есть X».
В пневматических системах управления эта функция может быть реализована с помощью нормально закрытого
моностабильного 3/2-пневмораспределителя (вид управления им может быть различным). Действительно, в исход-
ном состоянии, при отсутствии управляющего воздействия на распределитель (Х= 0), сжатый воздух не поступает
на его выход (А = 0). Пневматический сигнал на выходе А появляется (А = 1) только при переключении распредели-
теля, т. е. после подачи управляющего воздействия на вход X (Х= 1).
113
7. Логико-вычислительная подсистема
Логическая функция НЕ (отрицание, или инверсия)
Само название логической функции НЕ (рис. 7.2) говорит о том, что принимаемые ею значения противопо-
ложны значению аргумента.
Алгебраическая запись читается «А не есть А» (или «А есть А" инверсное»).
Логическая функция НЕ, или логическое отрицание, реализуется в пневматических схемах с помощью нор-
мально открытого моностабильного 3/2-пневмораспределителя. Сигнал на выходе (А = 1) существует до тех пор,
пока отсутствует входной сигнал (%= 0). Как только сигнал на входе X появляется (%= 1), сигнал на выходе А
пропадает (А = 0).
Как правило, функция НЕ задействуется в случаях, когда необходимо получить инверсный сигнал для реа-
лизации различного вида блокировок на технологическом оборудовании.
Логическая функция ИЛИ (дизъюнкция)
Логической функцией ИЛИ (рис. 7.3) могут быть связаны между собой не менее чем два аргумента.
A = X+Y
(A=XvY)
б
Рис. 7.3. Логическая функция ИЛИ
Таблица истинности для нее имеет более развернутый вид по сравнению с аналогичными таблицами для
логических функций ДА и НЕ, причем не только по причине добавления колонки со значениями второго (как
минимум) аргумента, но и за счет увеличения числа возможных комбинаций значений аргументов.
Значением логической функции ИЛИ будет 1, если значение хотя бы одного из аргументов равно 1 (это
следует из таблицы истинности). Другими словами, сигнал на выходе А появится (А = 1) в любом из трех
случаев (для ситуации, показанной на рис. 7.3): присутствует сигнал на входе X (Х= 1); присутствует сигнал на
входе Y (У = 1); присутствуют оба входных сигнала (Х = 1 и У= 1). Как правило, функцией ИЛИ связываются
альтернативные сигналы управления.
Алгебраическая запись читается следующим образом: «А есть А"или У».
Для реализации логической функции ИЛИ в системах пневмоавтоматики применяют логические пневмокла-
паны «ИЛИ», конструкция, принцип действия и примеры применения которых будут рассмотрены ниже.
114
7. Логико-вычислительная подсистема
Логическая функция И (конъюнкция)
Логическая функция И (рис. 7.4) устанавливает, аналогично функции ИЛИ, связь между как минимум двумя
аргументами.
A =X-Y
(А =ХлУ)
Рис. 7.4. Логическая функция И
Функция принимает значение 1 тогда и только тогда, когда значения всех аргументов равны 1.
Алгебраическая запись читается так: «А есть Хи У».
Существует несколько способов реализации логической функции И в дискретных пневмосистемах. Один из
-•их — применение логического пневмоклапана «И». Отсутствие сигнала хотя бы на одном из входов такого
•лапана влечет за собой отсутствие сигнала и на его выходе.
7.2. Логические пневмоклапаны
Производители пневматического оборудования, как правило, не выпускают специальных элементов для
з-еализации логических функций ДА и НЕ. Это объясняется тем, что данные функции могут поддерживаться
выпускаемыми серийно моностабильными 3/2-пневмораспределителями, нормально закрытыми (ДА) и нор-
мально открытыми (НЕ) соответственно.
Для реализации же логических функций ИЛИ и И выпускают специальные клапаны, называемые логически-
ми пневмоклапанами.
Логический пневмоклапан «ИЛИ»
Логический пневмоклапан «ИЛИ», по существу, представляет собой выполненные в едином корпусе два
обратных клапана с общими запорным элементом и выходом (рис. 7.5).
Рис. 7.5. Логический пневмоклапан «ИЛИ»
Подача сжатого воздуха в один из входных каналов (X или Y) вызывает перемещение клапана на противо-
лежащее седло, что сопровождается перекрытием второго канала входа и поступлением воздуха на выход А
элемента. При одновременном наличии двух различных по значению давления входных сигналов на выход
приходит больший сигнал (клапан закрывает тот канал входа, в который подан меньший сигнал); при равенстве
сигналов клапан будет находиться в нейтральном положении.
115
7. Логико-вычислительная подсистема
В иностранной технической литературе логические пневмоклапаны «ИЛИ» иногда называют перекидными
или челночными клапанами, что связано с их принципом действия.
На первый взгляд может показаться, что для независимого управления пневмоцилиндром из двух разных
мест (такая ситуация часто встречается на технологическом оборудовании) достаточно установить параллель-
но две пусковые кнопки, объединив их выходы через тройник (рис. 7.6, а).
Рис. 7.6. Применение логического пневмоклапана «ИЛИ»
При использовании такого варианта коммутации нажатие на любую из пусковых кнопок 1.2 или 1.4 может не
привести к срабатыванию исполнительного распределителя 1.1, т. к. управляющий сигнал будет главным обра-
зом уходить в атмосферу через канал сброса второй (незадействованной) пневмокнопки, а не поступать в
линию управления пневмораспределителем 1.1.
Независимое управление пневмораспределителем 1.1 и, соответственно, пуск пневмоцилиндра 1.0 из двух
разных точек возможно обеспечить только путем реализации функции логического сложения (ИЛИ) сигналов
от пневмокнопок 1.2 и 1.4 с помощью клапана «ИЛИ» 1.6 (рис. 7.6, б).
Логическая функция ИЛИ в принципе может быть также реализована посредством использования золотни-
кового моностабильного распределителя с пневматическим управлением (рис. 7.7).
Рис. 7.7. Реализация логической функции ИЛИ посредством золотникового моностабильного
распределителя
По команде от пневмокнопки 1.2 распределитель 1.6 переключается, в результате чего сжатый воздух от
линии питания 1 подается на управление распределителем 1.1. При нажатии же на пневмокнопку 1.4 сигнал
поступает в линию управления распределителем 1.1 через линию 3 пневмораспределителя 1.6.
116
7. Логико-вычислительная подсистема
Такие схематические решения применяются крайне редко, поскольку логические пневмоклапаны «ИЛИ»
намного дешевле распределителей и значительно превосходят их по надежности работы.
Если функцией логического сложения (ИЛИ) необходимо связать более чем два сигнала, то применяют
несколько логических пневмоклапанов «ИЛИ» (рис. 7.8).
Рис. 7.8. Логическое сложение (связь по логической функции ИЛИ) четырех сигналов
В приведенной схеме последовательное подключение клапанов «ИЛИ» позволяет осуществлять альтерна-
тивное управление цилиндром посредством любой из четырех пневмокнопок.
Логический пневмоклапан «И»
В конструкции логического пневмоклапана «И» также заложен принцип действия обратного клапана. В еди-
ной корпусной детали с двумя входными и одним выходным каналами расположены два обратных клапана,
запорные элементы которых жестко связаны между собой перемычкой (рис. 7.9).
Рис. 7.9. Логический пневмоклапан «И»
Под действием давления сжатого воздуха при его подаче только на один из входов (X или Y) пневмоклапана
соответствующий запорный элемент прижимается к своему седлу, блокируя проход воздуха к каналу выхода А
клапана. Одновременно жестко связанный с ним другой запорный элемент принудительно снимается с седла.
При этом канал второго входа клапана коммутируется с его выходным каналом А. Подача сигнала на второй
вход приводит к появлению сигнала на выходе А. Таким образом, на выходе пневмоклапана сигнал появляется
только при наличии сигналов на обоих его входах.
117
7. Логико-вычислительная подсистема
Если значения давления входных сигналов различны, то запорный элемент прижимается к седлу со сто-
роны того входа, на который подается больший сигнал, а на выход клапана поступает сигнал с меньшим
давлением.
В зарубежной технической литературе логические пневмоклапаны «И» часто называют клапанами двух дав-
лений.
Наглядным примером использования логического пневмоклапана «И» является реализация двуручного уп-
равления прессом. В целях обеспечения безопасной работы обслуживающего персонала (для защиты рук опе-
раторов) пресс включается только тогда, когда оператор одновременно воздействует двумя руками на два раз-
личных органа управления, вследствие чего исключается возможность попадания руки в зону прессования при
выполнении рабочей операции (рис. 7.10).
Использование моностабильного пневмораспределителя 1.1 для управления силовым цилиндром 1.0 обо-
сновывается необходимостью немедленного отвода штока цилиндра в исходную позицию в случае снятия од-
ного или обоих управляющих сигналов.
Если требуется связать функцией логического умножения (И) более чем два сигнала, то следует задейство-
вать соответствующее количество логических пневмоклапанов «И». Например, в системе управления прес-
сом, на котором контролируются наличие заготовки в рабочей зоне и исходное положение силового цилиндра,
необходимо использовать три пневмоклапана «И» (рис. 7.11).
Рис. 7.11. Логическое умножение (связь по логической функции И) четырех сигналов
118
7. Логико-вычислительная подсистема
В представленной на данной схеме системе управления прессом пневмокнопки 1.2 и 1.4 являются пусковы-
ми, распределитель 1.6 с управлением от толкателя контролирует наличие заготовки, а путевой выключатель
1.8 отслеживает втянутое положение штока цилиндра. Пуск пресса возможен только в том случае, когда сило-
вой цилиндр находится в исходном положении, заготовка установлена в рабочей зоне пресса и оператором
нажаты две пусковые кнопки.
Последовательное соединение большого количества пневмоклапанов «И» приводит к ослаблению резуль-
тирующего выходного сигнала. Поскольку на выход каждого клапана подается меньший из двух сигналов, по-
ступающих на их входы, то на выход всей цепочки клапанов в конечном итоге придет самый меньший из всех
входных сигналов, к тому же дополнительно ослабленный за счет гидравлических потерь, имеющих место как
в трубопроводах, так и в самих пневмоклапанах.
Недостатком конструкции пневмоклапана «И» является и то, что при перемещении сдвоенного обратного
клапана с одного седла на другое на выход элемента проходит слабый импульсный сигнал. Это объясняется
соединением на некоторое время каналов обоих входов и выхода в процессе переключения клапана. При
очень малой длине пневмолинии, связывающей выход клапана «И», к примеру, с входом бистабильного рас-
пределителя с пневматическим управлением, может произойти несанкционированное срабатывание после-
днего.
Реализовать логическую функцию И можно и без применения логического пневмоклапана, например пу-
*ем использования нормально закрытого моностабильного 3/2-распределителя с пневматическим управле-
нием (рис. 7.12, а).
Рис. 7.12. Схематическая реализация логической функции И
Сигнал управления на исполнительный распределитель 1.1 поступает только при подаче сжатого воздуха в
анал питания распределителя 1.6 и его переключении. Это условие выполняется лишь в случае одновремен-
ного нажатия пневмокнопок 1.2 и 1.4.
Самая простая реализация функции И обеспечивается путем последовательного соединения устройств ввода
пневматического сигнала (рис. 7.12, б). Однако не всегда можно применить такое схематическое решение,
особенно в пневмосистемах со сложными логическими связями.
Упрощение логических функций
Использование алгебраической записи логических функций, примеры которой приводились в предыдущем
подразделе, позволяет несколько упрощать их путем применения известных математических преобразований,
например:
А=Х-Y + X-Z = X- (Y+Z)
119
7. Логико-вычислительная подсистема
Формальное применение в данном соотношении алгебраического правила выноса общего множителя за
скобки позволяет упростить принципиальную пневматическую схему, при этом логические взаимосвязи между
сигналами сохраняются (рис. 7.13).
Не вдаваясь в подробное изучение операций над логическими функциями, рассмотрим только простые
соотношения алгебры логики. В некоторых более сложных случаях представим для наглядности схематичес-
кую реализацию приводимых уравнений (рис. 7.14).
X + 1 = 1 (1 — постоянный пневматический сигнал);
120
7. Логико-вычислительная подсистема
121
7. Логико-вычислительная подсистема
7.3. Пневмоклапаны выдержки времени
Пневмоклапаны выдержки времени предназначены для регулирования временного интервала между по-
ступающим входным и генерируемым выходным сигналами в пневматических системах управления.
Конструкции подобных устройств базируются на моностабильном 3/2-распределителе с пневматическим
управлением (рис. 7.15).
Рис. 7.15. Пневмоклапан выдержки времени
В пневмоклапане выдержки времени управляющий пневматический сигнал, подаваемый в канал X, посту-
пает на приводной поршень не напрямую, как в стандартных распределителях, а после прохождения через
дроссель с обратным клапаном и небольшую емкость. Настройка дросселя влияет на величину расхода возду-
ха, следовательно, она определяет время, за которое давление в емкости повысится до уровня, достаточного
для срабатывания распределителя.
Клапан возвращается в исходное состояние одновременно со снятием сигнала управления из входного
канала X, поскольку воздух из емкости практически мгновенно сбрасывается в атмосферу через обратный
клапан.
В качестве примера использования пневмоклапана выдержки времени рассмотрим пневматическую схему
установки для подачи деталей в гальваническую ванну (рис. 7.16).
Нажатием пусковой кнопки 1.2 распределитель 1.1 переключается в позицию, обеспечивающую выдвиже-
ние штока цилиндра 1.0 (подача деталей в ванну). При достижении штоком крайнего выдвинутого положения
(детали опущены в ванну) включается путевой выключатель 1.3, сигнал от которого поступает на управление
пневмоклапаном выдержки времени 1.5. По истечении определяемого настройкой дросселя пневмоклапана
временного интервала, необходимого для нанесения гальванического покрытия на детали, с выхода клапана
122
7. Логико-вычислительная подсистема
1.5 на распределитель 1.1 подается сигнал на возврат штока цилиндра 1.0 в исходное положение (подъем
готовых деталей).
Очевидно, что в пневмоклапанах выдержки времени могут применяться как нормально открытые, так и
нормально закрытые распределители. При этом в зависимости от направления действия обратного клапана
можно получить временную задержку либо момента включения распределителя (задержка по переднему фронту),
либо момента его возврата в исходное положение (задержка по заднему фронту).
На рис. 7.17 представлены диаграммы функционирования различных пневмоклапанов выдержки времени.
123
7. Логико-вычислительная подсистема
Пневмоклапаны выдержки времени часто применяют для реализации различного рода блокировок, в част-
ности, при осуществлении двуручного управления прессами.
Практический опыт показывает: использование логического пневмоклапана «И» (см. рис. 7.10) оказывается
недостаточным условием безопасной работы операторов прессов по причине реальной возможности обеспе-
чить постоянно включенное состояние одной из пусковых кнопок с помощью каких-либо механических средств,
что дает также возможность управления пневмоцилиндром посредством только второй из двух имеющихся
кнопок.
Чтобы исключить указанную возможность, применяют схемы, сигнал на выходе которых появляется только
при одновременном включении двух пусковых кнопок (допускается малое — десятые доли секунды — вре-
менное рассогласование). На практике используют достаточно большое количество схемных решений для
реализации двуручного управления прессами с применением пневмоклапанов выдержки времени. Рассмот-
рим одно из таких решений (рис. 7.18).
В исходном состоянии системы в канале управления Y распределителя 1.1 присутствует сигнал, поступаю-
щий через пневмоклапан «ИЛИ» 1.3 от обеих пусковых кнопок 1.2 и 1.4.
При одновременном (или с интервалом, не превышающим 0,5 с) нажатии пусковых кнопок 1.2 и 1.4 сигнал
на выходе пневмоклапана «ИЛИ» 1.3 пропадает и через пневмоклапан «ИЛИ» 1.6 от формирователя импульса
1.8 на распределитель 1.1 (в канал X) подается импульсный сигнал (импульс) длительностью 0,5 с, приводя-
щий к переключению распределителя 1.1, в результате чего шток цилиндра 1.0 начинает выдвигаться.
Если нажатие на пусковые кнопки осуществляется с временным интервалом, превышающим 0,5 с, то снача-
ла в канал управления X распределителя 1.1 поступает сигнал длительностью 0,5 с от первой из нажатых
кнопок. Но в канале управления Y уже присутствует сигнал от ненажатой пусковой кнопки, следовательно,
переключение распределителя 1.1 не может произойти (см. раздел 5.1.2 «Бистабильные распределители»).
Последующее нажатие на вторую кнопку приведет к снятию сигнала в канале Y, однако и в этот момент пере-
ключение распределителя 1.1 также не происходит, поскольку формирователь импульса 1.8 уже сработал от
первой пусковой кнопки и на его входе имеется сигнал от нее.
124
7. Логико-вычислительная подсистема
При отпускании одной или обеих пусковых кнопок в канал управления Y распределителя 1.1 поступает сиг-
нал от пневмоклапана «ИЛИ» 1.3, что приводит к незамедлительному втягиванию штока цилиндра 1.0.
Если необходимо обеспечить интервалы выдержки времени большие, чем позволяют соответствующие се-
рийно выпускаемые пневмоклапаны (рис. 7.19), то к ним подключают дополнительные внешние пневмоемкос-
ти.
Рис. 7.19. Пневмоклапаны выдержки времени
Пневмоклапаны выдержки времени традиционного исполнения имеют один недостаток, ограничивающий
область применения подобных устройств в автоматизированных системах, в которых при выполнении техно-
логических операций требуется соблюдение точных временных интервалов. Суть этого недостатка в том, что
время наполнения встроенной в клапан емкости в значительной мере зависит от степени чистоты воздуха и
тостоянства давления в сети.
Более точные временные интервалы между входными и выходными пневматическими сигналами реализу-
стся таймерами (рис. 7.20). Так, при выдержке времени до 30 секунд точность повторения составляет ± 0,3 с,
э пои выдержке до 5 минут — ± 3 с.
Рис. 7.20. Таймер
Точность выдержки времени обеспечивается наличием в таймере часового механизма, в котором функцию
механической пружины выполняет сжатый воздух.
125
7. Логико-вычислительная подсистема
7.4. Реализация функции запоминания сигнала в пневматических системах
Под запоминанием сигнала в пневматических системах понимают сохранение сигнала на выходе устрой-
ства после снятия управляющего сигнала на его входе.
Рассмотрим в качестре примера систему управления пневмоприводом тисков, предназначенных для зажа-
тия и удержания обрабатываемой детали после подачи команды «Зажим». Разжатие детали также должно
производиться по соответствующей команде.
Функцию запоминания сигнала можно реализовать тремя способами: 1) путем использования распределите-
лей с механическими фиксаторами (рис. 7.21, а); 2) посредством бистабильных распределителей (рис. 7.21, б);
3) на базе специальных схемных решений.
Рис. 7.21. Запоминание управляющего сигнала
Для запоминания управляющего сигнала в пневмосистемах, состоящих из моностабильных распределите-
лей, применяют схемы с самоудержанием (рис. 7.22).
Рис. 7.22. Схема с самоудержанием на моностабильных элементах
При нажатии на пневмокнопку «Зажим» 1.2 сигнал через пневмоклапан «ИЛИ» 1.4 поступает в линию управ-
ления распределителем 1.1, вызывая его переключение. Шток цилиндра 1.0 выдвигается (зажатие детали), и
одновременно сжатый воздух подается через нормально открытый распределитель 1.3 («Разжим») и клапан
«ИЛИ» 1.4 в линию управления распределителем 1.1. Именно в связи с наличием этой линии управления (так
называемой ветви самоудержания) шток цилиндра 1.0 остается выдвинутым даже после отпускания кнопки 1.2
(«Зажим»), Нажатие на кнопку «Разжим» 1.3 приводит к прерыванию подачи управляющего сигнала на распре-
делитель 1.1, вследствие чего последний (а следовательно, и пневмоцилиндр 1.0) возвращается в исходное
положение.
126
8. Пневматические приводы технологического оборудования
8. Пневматические приводы технологического оборудования
8.1. Циклические пневмосистемы хода
На современном производстве многие машины-автоматы, автоматические линии, а также значительная
часть вспомогательного оборудования, для которого характерно строгое выполнение заданной последователь-
ности технологических операций (шаговые транспортеры, промышленные манипуляторы, толкатели, кантова-
тели, укладчики и т. д.), оснащены преимущественно циклическими пневматическими САУ.
Работа циклических пневматических систем, по существу, представляет собой последовательную смену
фиксированных положений выходных звеньев исполнительных механизмов. При этом их крайние, а при необ-
ходимости и промежуточные положения отслеживаются элементами информационной подсистемы. Информа-
ция о состоянии исполнительных механизмов либо ведомых ими узлов технологической установки обрабаты-
вается элементами логико-вычислительной подсистемы, на выходе которой формируется управляющий сиг-
нал на выполнение очередного рабочего шага. Под шагом понимают процесс смены одного контролируемого
датчиком положения исполнительного механизма на другое.
Число шагов, необходимых для выполнения единичного замкнутого цикла технологических операций, мо-
жет различаться в зависимости от сложности оборудования. Под замкнутым циклом будем понимать такую
последовательность шагов, после выполнения которой система возвращается в исходное (предпусковое) со-
стояние.
Так, один рабочий цикл рассматриваемой далее установки для перемещения коробок (рис. 8.1) состоит из
четырех шагов.
По конвейеру в произвольной последовательности и с переменным интервалом движутся коробки двух кон-
фигураций — кубические и овальные. Кубические коробки необходимо перемещать на параллельную ветвь
-онвейера. Операция перемещения осуществляется посредством двух пневмоцилиндров А и В.
Когда кубическая коробка оказывается на транспортере (смещаемой секции конвейера), оператор кратков-
эеменно нажимает на пусковую пневмокнопку и шток первого цилиндра А перемещает секцию с коробкой на
.ровень параллельной ветви конвейера. Далее цикл выполняется автоматически: шток второго цилиндра В
сталкивает коробку с транспортера, после чего штоки обоих пневмоцилиндров возвращаются в исходные пози-
ции — сначала шток первого, а затем и второго цилиндра.
127
8. Пневматические приводы технологического оборудования
8.1.1. Формы представления хода технологического процесса
Для наглядного описания хода технологического процесса будем использовать следующую буквенно-циф-
ровую индексацию (табл. 6).
Табл. 6. Индексация, используемая для описания хода технологического процесса
Индексация Элемент
А, В, С, ... Исполнительные механизмы, например пневмоцилиндры
Sq, bo, Со, ... Путевые выключатели, фиксирующие втянутое положение штоков цилиндров
Зъ bi, Ci,... Путевые выключатели, фиксирующие выдвинутое положение штоков цилиндров
&m> Ьт> Cm, ••• Путевые выключатели, фиксирующие промежуточное положение штоков цилиндров
Условное Обозначение Действие(процесс)
A+, B+, C~f~, ... Выдвижение штоков цилиндров А, В, С,...
А- В- C-, ... Втягивание штоков цилиндров А, В, С, ...
Работу установки для перемещения коробок формально можно описать различными способами. Рассмот-
рим наиболее часто применяемые из них.
Хронологическая форма записи
При хронологической форме записи рабочий цикл системы представляют в словесной форме (по аналогии
с описанием принципа действия), но с разбиением на шаги и указанием исполнительных механизмов, выпол-
няющих каждый шаг.
1-й шаг Выдвижение штока цилиндра А
2-й шаг Выдвижение штока цилиндра В
3-й шаг Втягивание штока цилиндра А
4-й шаг Втягивание штока цилиндра В
Арифметическая форма записи
При арифметической форме записи хода технологического процесса шаги записывают последовательно в
одну строку, причем действия исполнительных механизмов поясняют условными обозначениями, указанными
в табл. 6. Последовательность срабатывания пневмоцилиндров в рассматриваемой задаче (установка для
перемещения коробок) будет представлена в виде
А+ В + А - В - .
В случае, когда какие-либо движения исполнительных механизмов происходят одновременно, арифмети-
ческая запись производится в несколько строк таким образом, чтобы обозначения одновременных движений
располагались одно под другим:
А+ В + А-
В-.
Такая запись трактуется как поочередное выдвижение штоков цилиндров А и В (сначала А, затем В) с пос-
ледующим их одновременным втягиванием.
128
8. Пневматические приводы технологического оборудования
Табличная форма записи
Последовательное (шаг за шагом) выполнение программы можно представить в виде таблицы, в первом
столбце которой указывают номера шагов, а в последующих — соответствующие действия исполнительных
механизмов (табл. 7). Неподвижное состояние последних на отдельном шаге обозначается звездочкой (*).
Табл. 7. Табличная форма записи хода технологического процесса
Номер шага А в с D
1 + * * *
2 * + * ★
3 - ★ + *
4 * — * +
5 + ★ * *
6 - * - —
Дополнительные затененные ячейки введены в таблицу с целью наглядной демонстрации наиболее загру-
женного шага некоторого технологического процесса, в котором задействованы четыре исполнительных меха-
низма (А, В, С и D).
Строка в таблице, соответствующая 6-му шагу, содержит наименьшее число звездочек, следовательно, на
6-ом шаге одновременно работает максимальное количество исполнительных механизмов. Зная диаметры
цилиндров, длины их рабочих ходов и скорости движения штоков, можно определить максимальное потребле-
ние сжатого воздуха системой. На основании полученных данных можно провести расчеты по выбору подводя-
щих трубопроводов, а при необходимости — также подобрать компрессор требуемой производительности.
Графическая форма записи
Графическая (диаграммная) форма представления состояний и изменения состояний исполнительных ме-
ханизмов, информационных и управляющих устройств в технологических машинах и производственных уста-
новках является наиболее наглядной и применяется чаще других форм записи.
Полная информация о функционировании циклической САУ содержится в функциональной диаграмме, вклю-
чающей диаграммы перемещений и управления (рис. 8.2).
Рис. 8.2. Структура функциональной диаграммы
Диаграммы перемещений отображают в графическом виде состояния исполнительных механизмов — пнев-
моцилиндров, пневмодвигателей и т. п., а диаграммы управления — состояния информационных и управляю-
щих устройств.
При использовании диаграммной формы записи обозначения состояний устройств, входящих в систему,
заключают в прямоугольник (для каждого шага), причем (поскольку речь идет о дискретных устройствах) изме-
нения этих состояний представляются в диапазоне значений от 0 (устройство выключено — шток цилиндра
втянут) до 1 (устройство включено — шток цилиндра выдвинут) (рис. 8.3).
129
8. Пневматические приводы технологического оборудования
При изображении последовательности шагов обозначающие их прямоугольники располагают в строку, при-
чем в отдельную для каждого исполнительного механизма. Если описывают совместную работу нескольких
механизмов, то записи последовательности их шагов размещают друг под другом. Используя принятые графи-
ческие символы для отображения шагов, рабочий цикл установки для перемещения коробок (см. выше) можно
представить в виде диаграммы (циклограммы), выполненной в координатах «перемещение — шаг», следую-
щим образом (рис. 8.4).
Рис. 8.4. Диаграмма «перемещение — шаг» установки для перемещения коробок
На диаграмме слева от каждой графической строки проставляют индекс устройства, изменение состояний
которого она отображает (пневмоцилиндры А и В). В правой части могут быть указаны индексы путевых выклю-
чателей, отслеживающих соответствующие состояния исполнительных механизмов а0, av b0, Ьг В области над
верхней графической строкой диаграммы проставляют последовательную нумерацию состояний устройств
пневмосистемы перед каждым из шагов и после него (в нашем случае от 0 до 4). После окончания полного
рабочего цикла, чему соответствует состояние с номером 4, система возвращается в исходное состояние с
номером 0.
В установках с непрерывным циклом (в которых очередной рабочий цикл начинается автоматически, а не по
команде оператора) исходное состояние обозначается цифрой 1, а не 0, и запись 5=1 означает, соответствен-
но, момент окончания последнего шага цикла.
На диаграмме управления изображается зависимость состояний управляющих и информационных (сиг-
нальных) устройств от шага работы системы (рис. 8.5). При этом время переключения данных устройств не
принимают во внимание.
130
8. Пневматические приводы технологического оборудования
Исполнительный распределитель
цилиндра А
Исполнительный распределитель
цилиндра В
ПУСК
ао
а1
ьо
Ь1
Рис. 8.5. Диаграмма управления установкой для перемещения коробок
При составлении функциональной диаграммы диаграмму управления располагают, как правило, под диаг-
раммой перемещений (рис. 8.6).
На практике диаграммы перемещений зачастую используют самостоятельно, поскольку они дают полное
представление о последовательности выполнения операций технологического процесса.
Для изображения на диаграммах сигнальных устройств, а также логических взаимосвязей между сигналами
применяют следующие обозначения (рис. 8.7).
131
8. Пневматические приводы технологического оборудования
Включить
Выключить
Включить - выключить
Включено пока
нажата кнопка
Аварийное отключение
Сигнал от пневмоклапана
выдержки времени
Сигнал от пневмоклапана
последовательности
Путевой выключатель
Логическая функция ИЛИ
Логическая функция И
Логическая функция НЕ
Разветвление сигнала
Сигнал от другого устройства
Сигнал на другое устройство
Рис. 8.7. Обозначения сигнальных устройств и логических взаимосвязей между сигналами
Таким образом, в полном виде диаграмма «перемещение — шаг» установки для перемещения коробок
принимает вид, показанный на рис. 8.8.
Рис. 8.8. Полная диаграмма «перемещение — шаг» установки для перемещения коробок
Если необходимо отразить скоростные характеристики исполнительных механизмов, диаграмму переме-
щений вычерчивают в координатах «перемещение — время» и присваивают ей соответствующее название
(рис. 8.9). Применяются такие диаграммы, как правило, при пусконаладочных работах.
Рис. 8.9. Диаграмма «перемещение — время» установки для перемещения коробок
132
8. Пневматические приводы технологического оборудования
8.1.2. Методы проектирования пневматических САУ
Проектирование циклических пневматических систем представляет собой комплекс работ, связанных с пе-
реходом от словесного описания технологического процесса к построению принципиальной пневматической
схемы. Эти работы подразделяются на этапы алгоритмического, логического и технического проектирования.
На этапе алгоритмического проектирования переводят словесное описание технологического процесса
з формализованные формы представления хода процесса.
Этап логического проектирования заключается в составлении функциональной структуры системы на
основе разработанного алгоритма ее функционирования.
Выбор элементной базы, расчет силовых и скоростных характеристик исполнительных механизмов, расчет
проходных сечений устройств и построение принципиальной схемы пневматической системы — все это осуще-
ствляется на этапе технического проектирования.
Поскольку алгоритмы функционирования систем управления и расчет основных параметров различных пнев-
ыоэлементов рассматривались в настоящем пособии ранее, остановимся на методах разработки принципи-
альных пневматических схем.
Метод составления логических уравнений
Пользуясь диаграммой «перемещение — шаг», можно описать состояния системы управления перед вы-
-слнением каждого шага в виде логических уравнений. В левой части этих уравнений записывают символ
действия, которое должно произойти на предстоящем шаге, а в правой — логические связи между сигналами
от кнопок оператора и путевых выключателей, дающих команду на выполнение этого действия.
Рассмотрим исходное (предпусковое) состояние системы (рис. 8.10, состояние 0).
эис. 8.10. Иллюстрация подхода к составлению системы логических уравнений
В состоянии 0 (исходном), когда штоки обоих цилиндров втянуты, активны путевые выключатели а 0 и b 0.
~ "едовательно, команда на выполнение 1-го шага А + должна подаваться при наличии сигналов от двух
-езванных устройств и кнопки «Пуск». Таким образом, можно записать следующее логическое уравнение:
А + = Пуск • а0 Ьо.
После выполнения 1-го шага комбинация активных путевых выключателей изменится (см. состояние 1 на
рис. 8.10). Выполнение 2-го шага В+ начнется при условии поступления сигналов от выключателей а1 и Ьо.
Этсюда получаем второе уравнение:
В + = а,-Ь0.
133
8. Пневматические приводы технологического оборудования
Аналогичным образом составляют уравнения и для последующих шагов. Система логических уравнений,
описывающая работу устройства для перемещения коробок, в конечном итоге будет иметь следующий вид:
А + = Пуск • а0 • Ьо;
В + = а,Ь„;
Д- = а,-Ь,;
В- = а„Ь,.
Функциональная структура системы в логических символах, построенная на базе полученных логических
уравнений, является итогом этапа логического проектирования.
Если систему управления проектируют на элементной базе заранее известного типа, то это позволяет про-
пустить этап разработки функциональной структуры создаваемой системы. Полученные логические уравнения
можно непосредственно транслировать в принципиальную пневматическую схему, используя известные спо-
собы реализации логических функций в системах пневмоавтоматики.
Взяв для простоты за основу исполнительной подсистемы пневмоцилиндры двустороннего действия с уп-
равлением от бистабильных распределителей, получим следующую принципиальную пневматическую схему
установки для перемещения коробок (рис. 8.11).
Данную схему, безусловно, нельзя считать оптимальной, поскольку ее можно значительно упростить путем
исключения избыточных сигналов. Таковыми для каждого отдельного шага считают сигналы, задействованные
при формировании команды на выполнение предыдущего шага.
В рассматриваемом примере на 2-м шаге избыточен сигнал Ьо, на 3-ем — аг на 4-ом — Очевидно, что
поскольку система работает по замкнутому циклу (за 4-ым шагом следует 1-й), то сигнал а0 на 1-м шаге также
является избыточным. С учетом вышесказанного система логических уравнений, описывающих работу уста-
новки для перемещения коробок, принимает следующий вид:
А + = Пуск • Ьо;
В + = а1;
А- = Ь1;
В- = а0.
Окончательный вариант принципиальной пневматической схемы установки для перемещения коробок по-
казан на рис. 8.12.
134
8. Пневматические приводы технологического оборудования
Возвращаясь к вопросу о построении функциональных диаграмм, рассмотрим реальную диаграмму уста-
новки для перемещения коробок, представленную на рис. 8.13.
Рис. 8.13. Реальная функциональная диаграмма установки для перемещения коробок
135
8. Пневматические приводы технологического оборудования
Следует иметь в виду, что рассмотренный выше способ упрощения системы логических уравнений далеко
не всегда применим, поскольку некорректное его использование приводит к неправильной трактовке уравне-
ний, особенно в случае наличия так называемых совпадающих шагов.
Под совпадающими шагами будем понимать такие шаги, уравнения для описания которых имеют одинако-
вые или эквивалентные правые части. Это означает, что отличающиеся друг от друга шаги (совпадающие)
начинают выполняться при возникновении одной и той же комбинации сигналов от путевых выключателей.
Для иллюстрации проблемы совпадающих шагов рассмотрим пневмопривод сверлильного полуавтомата
(рис. 8.14).
Рис. 8.14. Сверлильный полуавтомат и его диаграмма «перемещение — шаг»
При кратковременном нажатии на пусковую кнопку первый цилиндр А фиксирует заготовку в позиции для
обработки путем ее зажатия. Далее автоматически начинает выдвигаться шток второго цилиндра В, т. е. выпол-
няется рабочий ход инструмента. После достижения крайнего положения шток цилиндра В возвращается в
исходную позицию, а затем втягивается и шток цилиндра А.
Уравнения, описывающие работу станка-полуавтомата, будут иметь вид (без упрощения)
А + = Пуск а0 • Ьо;
В + = а,-Ь0;
В- = а,-Ь,;
Д- = а,-Ъ0.
Заметим, что правые части 2-го и 4-го уравнений одинаковы, значит, при появлении комбинации сигналов
а1 Ьо выдвижение штока цилиндра В и втягивание штока цилиндра А будут происходить одновременно. Но
функционирование системы подобным образом недопустимо, поскольку при этом не обеспечивается требуе-
мый порядок выполнения рабочих операций.
Избежать одновременного выполнения 2-го и 4-го шагов можно путем формального изменения совпадаю-
щих правых частей соответствующих уравнений. С этой целью в них вводят дополнительные сигналы Х1 и Х2. в
результате чего эти уравнения запишутся следующим образом:
B + = af-b0-X,;
А - - а1 b0 Х2.
Два дополнительных сигнала Х1 и Х2 можно реализовать путем применения пневматического триггера, вы-
полнение функций которого обеспечивается, к примеру, бистабильным 4/2-распределителем с пневматичес-
ким управлением. Если триггер включен, то на его выход подается сигнал Xv если выключен — сигнал Х2.
Таким образом, для решения проблемы совпадающих шагов полученную систему логических уравнений
необходимо дополнить уравнениями, описывающими функционирование триггера, а именно: чтобы сигнал X.
появился перед началом 2-го шага, необходимо включать триггер (7 +) перед выполнением как минимум пре-
дыдущего шага; отключать же его (7-) следует после выполнения 2-го шага. Другими словами, триггер необхо-
Полуавтомат — машина (или агрегат), самостоятельно выполняющая полный рабочий цикл и требующая вмешательства извне
лишь для повторения цикла. Станок-полуавтомат отрабатывает весь цикл обработки заготовки и возвращает механизмы станка
в исходное положение самостоятельно, тогда как установку заготовки и снятие обработанной детали производит оператор.
136
8. Пневматические приводы технологического оборудования
димо включать перед 1-ым шагом (Д +) по сигналу от путевого выключателя а0, т. е. после выполнения 4-го шага
(Д -), а выключать — по окончании 2-го шага (В +) по сигналу от выключателя Ь1.
Упрощение системы уравнений, содержащей совпадающие шаги, следует проводить только после до-
полнения правых частей соответствующих уравнений.
Рассмотренный способ хотя и решает поставленную задачу, но требует внимательности и владения навыка-
ми составления логических уравнений. Схемное же решение (рис. 8.15), к которому в итоге приходят путем
применения данного способа, является, как правило, довольно громоздким. В особенности это относится к
задачам с несколькими совпадающими шагами, решая которые, приходится вводить в схему уже не один, а
несколько триггеров.
Составление и чтение схемы можно значительно упростить путем использования шин при ее изображении.
Шинами называют горизонтальные линии, соединенные на схеме с выходами определенных устройств. В на-
^•ем случае каждый из четырех путевых выключателей «питает» «свою» шину, а логические взаимосвязи реа-
лизуются между сигналами в соответствующих шинах.
Метод отключения сигнала
Этот метод, используемый при проектировании систем, содержащих совпадающие шаги, заключается в
применении устройств, позволяющих формировать импульсный сигнал в момент достижения штоками пнев-
моцилиндров конечных положений.
Вернемся к системе уравнений, описывающих работу сверлильного полуавтомата, и упростим ее путем
исключения избыточных сигналов:
А + = Пуск а0;
В + = а1;
В- = Ь,;
Д- = Ь„.
В полученной системе совпадающие уравнения отсутствуют. Однако следует обратить внимание на следу-
ющее: 2-ой шаг (В +) осуществляется по команде от путевого выключателя а7, который остается активным и на
очередном, 3-ем, шаге (В -), выполняемом по команде от путевого выключателя Это означает, что на рас-
пределитель, управляющий цилиндром В, одновременно будут поданы два противоположных сигнала управ-
ления — от путев ых выключателей а? и Ьг В таком случае, как известно, пневмораспределитель остается в
137
8. Пневматические приводы технологического оборудования
позиции, определяемой первым из поступивших управляющих сигналов, следовательно, 3-й шаг (действие В -)
выполняться не будет.
Аналогичная ситуация имеет место и при выполнении 1-го шага: в исходном состоянии путевой выключа-
тель Ьо активен и не позволяет выполнить действие А +.
Схема станет работоспособной, если «проблемные» путевые выключатели в момент включения будут фор-
мировать не постоянный сигнал, а импульсный. Существуют различные методы получения импульсного сигна-
ла: путем использования пневмоклапанов выдержки времени (рис. 8.16), посредством путевых выключателей
с «ломающимся» рычагом (рис. 8.17) и др.
Рис. 8.16. Принципиальная пневматическая схема сверлильного полуавтомата с применением
пневмоклапанов выдержки времени (формирователей импульса)
В случае использования путевых выключателей с «ломающимся» рычагом устанавливать их нужно со сме-
щением в 2 — 4 мм от точки, соответствующей конечному положению штока. Такая позиция обусловливает
формирование путевым выключателем импульса при подходе штока к конечному положению и игнорирование
прохождения штока через выключатель при обратном ходе.
Рис. 8.17. Принципиальная пневматическая схема сверлильного полуавтомата с применением
путевых выключателей с «ломающимся» рычагом
138
8. Пневматические приводы технологического оборудования
На пневматических схемах места установки путевых выключателей с «ломающимся» рычагом обозначают
вертикальным штрихом, перпендикулярно которому ставят стрелку, указывающую направление, в котором сра-
батывает выключатель при движении штока пневмоцилиндра.
Метод отключения сигнала формально сводится к следующей последовательности действий:
• составляют систему логических уравнений, описывающих работу установки;
• выделяют уравнения с совпадающими правыми частями;
• упрощают систему логических уравнений путем сокращения избыточных сигналов;
• заменяют путевые выключатели, сигналы от которых входят в выделенные уравнения, на устройства, фор-
мирующие импульсный сигнал в момент своего срабатывания.
Метод разбиения на группы
Методы проектирования пневматических систем циклического действия, рассмотренные выше, требуют в
-екоторой степени творческого подхода к решению поставленной задачи. В такой ситуации всегда существует
вероятность совершения той или иной ошибки, свести к минимуму которую позволяют методы, характеризуе-
мые значительной или полной формализацией процесса проектирования. К одним из них относится метод
разбиения на группы.
Под группой понимают некоторую часть единичного цикла работы системы, объединяющую максимальное
число шагов, не содержащих противоположных действий одного и того же исполнительного механизма (выдви-
жение штока — втягивание штока).
Чтобы разбить последовательность действий на группы, следует воспользоваться арифметической фор-
мой записи хода технологического процесса, например:
А + С + В-В + С + С-А-
С-.
Группы будем в дальнейшем отделять друг от друга наклонной чертой (/).
1-ая группа 2-ая группа 3-я группа 4-ая группа
А + С + В-/ В + / С + / С-А-/
С-
1-ая группа заканчивается шагом В поскольку на следующем шаге должно выполняться противоположное
действие В +; во 2-ую группу входит только один шаг — одновременное выдвижение цилиндра В (В +) и втяги-
вание цилиндра С (С -), т. к. последующий шаг С + — выдвижение цилиндра С; 3-я группа содержит шаг С +,
тогда как в 4-ую входят шаги С - и А -.
Для иллюстрации метода разбиения на группы рассмотрим пневмопривод сверлильного полуавтомата (см.
рис. 8.14). Последовательность шагов в этом случае разбивают на группы следующим образом:
А + В +/ В - А -.
Поскольку входящие в группу шаги не содержат противоположных действий по определению, они могут
последовательно выполняться по сигналам от соответствующих путевых выключателей, без применения логи-
ческих пневмоклапанов. 1-ый шаг (А +) выполняется по сигналу от пусковой кнопки, 2-ой (В +) — по сигналу от
путевого выключателя а1 (окончание предыдущего шага), 3-ий шаг (В -, первый в следующей группе) — от
выключателя Ь7, а 4-ый (Д -) — от Ьо.
Если каждую группу шагов выполнять по сигналам из отдельных шин (последовательно переключающихся),
то первый шаг во 2-ой группе В - (3-ий в общей последовательности) не наложится на предшествующее ему
действие В +, поскольку невозможно одновременное включение двух шин.
Очевидно, что питание на очередную шину должно подаваться по сигналу от путевого выключателя, фикси-
рующего окончание последнего шага в предыдущей группе. В нашем примере шина 2, обеспечивающая выпол-
нение шагов 2-ой группы, включается по сигналу от путевого выключателя bv а шина 1, обеспечивающая шаги
1-ой группы, — от путевого выключателя а0:
139
8. Пневматические приводы технологического оборудования
Далеко не всегда для включения очередной шины достаточно лишь одного сигнала от путевого выключате-
ля. Для примера рассмотрим следующую последовательность шагов некоторого технологического процесса:
А + В + С + / С - А - / С + / С-В
Шины 2-ой и 4-ой группы должны включаться по сигналу от путевого выключателя ср поскольку шаг С+
является последним в 1-ой и 3-ей группах.
Однако одновременная подача питания на две шины недопустима, т. к. это приводит к невыполнению задан-
ной последовательности шагов. Следовательно, переключение на шину очередной группы должно осуществ-
ляться по логическому произведению двух сигналов (т. е. связанных логической функцией И): сигнала об окон-
чании заключительного шага предшествующей группы и сигнала от активной шины, обеспечивающей выполне-
ние шагов этой же группы. Очевидно, что при включении очередной шины предыдущая шина должна отклю-
чаться.
Описанная последовательность переключения шин реализуется на базе пневматических триггеров (биста-
бильных пневмораспределителей) и не является предметом разработки для проектировщика системы управ-
ления в связи с наличием уже наработанных схемных решений.
Возможные схемы переключения шин представлены на рис. 8.18.
В исходном положении активна шина 2.
При поступлении сигнала Ф на пневмоклапан «И», подключен-
ный к шине 2, триггер переключается. Акивной становится шина
1, шина 2 отключается.
При поступлении сигнала @ на пневмоклапан «И», подключен-
ный к шине 1, триггер переключается на шину 2. Шина 1 отключа-
ется.
В исходном положении активна шина 3.
При поступлении сигнала Ф на пневмоклапан «И», подключен-
ный к шине 3, нижний триггер переключается и питание подается
на шину 1 через верхний триггер. Шина 3 отключается.
При поступлении сигнала @ на пневмоклапан «И», подключен-
ный к шине 1, верхний триггер переключается на шину 2. Шина 1
отключается.
При поступлении сигнала (D на пневмоклапан «И», подключен-
ный к шине 2, нижний триггер переключается на шину 3. Шина 2
отключается.
В исходном положении активна шина 4.
При поступлении сигнала Ф на пневмоклапан «И», подключен-
ный к шине 4, нижний триггер переключается и питание подается
на шину 1 через средний и верхний триггеры. Шина 4 отключается.
При поступлении сигнала @ на пневмоклапан «И», подключен-
ный к шине 1, верхний триггер переключается на шину 2. Шина 1
отключается.
При поступлении сигнала ® на пневмоклапан «И», подключен-
ный к шине 2, средний триггер переключается на шину 3. Шина 2
отключается.
При поступлении сигнала ® на пневмоклапан «И», подключен-
ный к шине 3, нижний триггер переключается на шину 4. Шина 3
отключается.
Рис. 8.18. Схемы последовательного переключения шин
140
8. Пневматические приводы технологического оборудования
Следует помнить, что активизация какой-либо шины возможна только в том случае, если активной является
предыдущая шина.
Итак, при проектировании пневматических систем циклического действия методом разбиения на группы
рекомендуется соблюдать порядок действий и правила, перечисленные ниже.
1. Представить ход технологического процесса в арифметической форме записи.
2. Разбить последовательность шагов на группы. Количество шин переключения будет равно количеству
групп.
3. Сигнал на осуществление первого шага в группе подается от соответствующей шины напрямую. Каждый
последующий шаг выполняется по логическому произведению сигнала от шины данной группы и сигнала от
путевых выключателей, срабатывающих по окончании предшествующего шага.
4. После выполнения заключительного шага в группе необходимо переключиться на очередную шину. Сиг-
нал на ее включение подается от подключенного к активной шине путевого выключателя, фиксирующего окон-
чание завершающего шага в предыдущей группе.
5. В исходном положении системы питание должно подаваться на шину последней группы.
6. Включение 1-ой шины (очередной для последней шины), а следовательно, и пуск всего рабочего процес-
са осуществляется нажатием кнопки «Пуск» (см. п. 4).
Принципиальная пневматическая схема сверлильного полуавтомата, спроектированная в соответствии с
методом разбиения на группы показана на рис. 8.19.
Схемное решение выглядит несколько громоздким, но его можно значительно упростить путем реализации
функции И без использования логических пневмоклапанов (рис. 8.20).
141
8. Пневматические приводы технологического оборудования
Все рассмотренные схемные решения для поочередного переключения трех или четырех шин имеют об-
щий существенный недостаток: в связи с возрастанием потерь энергии сжатого воздуха при его прохождении
через несколько пневмораспределителей величина сигнала в верхних шинах меньше, чем в нижних.
На рис. 8.21 приведено схемное решение, лишенное этого недостатка.
В данной схеме один и тот же уровень давления в каждой шине обеспечивается подачей питания через
отдельные триггеры (т. е. для каждой шины существует «свой» триггер). Количество шин при необходимости
можно увеличить. Также очевидно, что схема допускает возможность модульной реализации устройств, обес-
печивающих поочередное переключение шин. Именно на модульных элементах построены переключающие
регистры, о которых пойдет речь в следующем подразделе.
142
8. Пневматические приводы технологического оборудования
8.1.3. Переключающие регистры
Переключающие регистры представляют собой набор тактовых модулей, позволяющий активизировать
выходы последних строго поочередно, причем в один и тот же момент времени активным может являться
выход только одного из этих модулей. В переключающие регистры могут входить модули различных типов.
Рассмотрим принципиальную схему (рис. 8.22, а) одного из них — модуля типа А (рис. 8.22, б).
Тактовый модуль типа А состоит из: триггера 2 (нормально закрытого бистабильного 3/2-пневмораспреде-
.^ителя; нормально закрытого моностабильного 3/2-пневмораспределителя 1, выполняющего функцию пнев-
чоклапана «И»; логического пневмоклапана «ИЛИ» 4; канала входа X; канала выхода А. Коммутация между
отдельными тактовыми модулями осуществляется по четырем каналам: Р, Y, Z, L. Для визуализации активного
состояния модуля в него встроен индикатор 3.
Канал Р служит для подвода сжатого воздуха к триггеру 2 и подключается к источнику питания. Входной
•анал Yn предназначен для включения данного модуля, а выходной Yn+1 — для включения последующего. Через
входной канал Zn+1 осуществляется отключение данного модуля при активизации последующего, а в выходной
-анал Zn подается сигнал на отключение предыдущего модуля при активизации данного. По сигналу на вне-
шний вход канала L модуль выводится в исходное положение.
Рассмотрим принцип действия модуля типа А.
При подаче сигнала в канал Yn (для 1-го модуля в тактовой цепочке — от кнопки «Пуск», для последующих —
из канала Yn+1 предыдущего модуля) триггер 2 переключается и сжатый воздух поступает из шины питания Р в
выходной канал А, соединенный со «своей» шиной. Одновременно подается также сигнал на вход распредели-
теля 1 и в канал Zn, стыкующийся с каналом Zn+1 предыдущего модуля; этот сигнал, проходя через клапан
ИЛИ» 4, отключает триггер 2 в предыдущем модуле, что приводит к снятию сигнала в ранее активной шине.
Сигнал в канале выхода А, а следовательно, и в соответствующей шине сохраняется до тех пор, пока не
будет выполнена вся последовательность движений исполнительных механизмов в той группе шагов, которая
обеспечивается этой шиной. После выполнения заключительного шага данной группы сигнал от соответствую-
щего путевого выключателя поступает на вход X и переключает пневмораспределитель 1, выход Yn+1 которого
соединен с каналом включения последующего модуля Yn. Включение же последующего модуля сразу приводит
к выключению данного модуля по сигналу через пневмоклапан «ИЛИ» 4 и канал Zn+1, стыкующийся через ка-
нал Zn с выходом триггера 2 последующего модуля. Таким образом, включение последующего модуля проис-
ходит при подаче сигнала на вход активного модуля, который при этом немедленно отключается.
На рис. 8.23 представлена развернутая принципиальная схема переключающего регистра, состоящего из
четырех тактовых модулей.
143
8. Пневматические приводы технологического оборудования
Рис. 8.23. Переключающий регистр из четырех тактовых модулей
В исходном положении системы, как отмечалось выше, активным должен быть последний модуль. Как пра-
вило, это модуль типа В, отличающийся от модуля типа А тем, что пневмоклапан «ИЛИ» в нем установлен в
канале включения, а не выключения триггера. Таким образом, при выводе системы в исходную позицию путем
подачи сигнала в канал L модуль типа В активизируется, тогда как модуль типа А отключается. Допускается
установка модуля А последним в регистре, но перед пуском системы данный модуль активизируют вручную.
Подчеркнем, что для включения 1-го модуля его канал Yn следует коммутировать через кнопку «Пуск» с
каналом Уп+1 последнего модуля (активного в исходном положении системы), а с целью отключения последнего
модуля при активизации 1-го требуется объединить внешней связью их каналы Zn и Zn+1.
На принципиальных пневматических схемах развернутое условное графическое обозначение переключаю-
щих регистров обычно не приводят, а используют их упрощенное изображение (рис. 8.24).
Рис. 8.24. Упрощенное обозначение переключающего регистра
Чтобы представить себе компоновку пневматической схемы с использованием переключающего регистра,
рассмотрим принципиальную пневматическую схему заполняющего устройства, показанного на рис. 8.25.
*
Условное обозначение кнопки «Пуск» не входит в обозначение переключающего регистра.
144
8. Пневматические приводы технологического оборудования
Рис. 8.25. Заполняющее устройство и его диаграмма «перемещение — шаг»
В контейнере заполняющего устройства находятся гранулы, которые следует распределять между двумя
конвейерами. После нажатия кнопки «Пуск» шток цилиндра А на некоторое время открывает заслонку. Гранулы
заполняют ящик 1. Затем заслонка закрывается, и бесштоковый пневмоцилиндр В передвигает под контейнер
ящик 2. При этом ящик 1 с гранулами перемещается на соответствующий конвейер, а на его место ставят
пустой ящик. Заслонка вновь открывается, и заполняется ящик 2, который после ее закрытия перемещается
цилиндром В в исходную позицию (на второй конвейер), где его также заменяют на пустой ящик. Начать новый
цикл можно нажатием кнопки «Пуск».
Принципиальная пневматическая схема описанного заполняющего устройства показана на рис. 8.26.
145
8. Пневматические приводы технологического оборудования
Представленная схема получена в соответствии с ранее перечисленными правилами, а именно: по имею-
щейся диаграмме «перемещение — шаг» последовательность шагов была записана в арифметической форме
и разбита на группы следующим образом:
А-/А + В + /А-/А + В-.
Для выполнения данной последовательности шагов, разбитой на четыре группы, использован переключаю-
щий регистр, состоящий из четырех тактовых модулей. В исходном состоянии активен последний (4-ый) мо-
дуль типа В, питание подается на четвертую шину. При нажатии на кнопку «Пуск» активизируется 1-ый модуль,
сжатый воздух подается в первую шину.
Коммутация выходов переключающего регистра. Первые шаги в каждой из четырех групп (Д -, А +, А -, А +)
выполняются непосредственно по сигналам от 1-ой, 2-ой, 3-ей и 4-ой шин соответственно. Поскольку шаг А -
входит в 1-ую и 3-ю группы и должен выполняться, если активна 1-ая или 3-я шины, то сигналы от этих шин
проходят на распределитель 1.1 через логический пневмоклапан «ИЛИ» 1.3. (По этой же причине сигналы на
выполнение шага А + от 2-ой и 4-ой шин также пропускаются через пневмоклапан «ИЛИ» 1.2.)
Шаги В + и В - являются последующими во 2-ой и 4-ой группах и выполняются по логическому произведе-
нию сигналов от 2-ой и 4-ой шины и путевого выключателя а7, т. е. по сигналам от логических пневмоклапанов
«И» 2.2 и 2.3 соответственно.
Коммутация входов переключающего регистра. Поскольку включение 2-ой и 4-ой шин происходит по
сигналу от путевого выключателя а0, то сигнал подается на входы 1-го и 3-го тактовых модулей. При этом
срабатывает только тот из них, перед которым в данный момент находится активный модуль.
Для включения 3-го модуля по окончании шага В + сигнал от путевого выключателя Ь1 подается на вход 2-го
модуля.
После завершения единичного цикла на вход 4-го тактового модуля поступает сигнал от выключателя Ьо.
В целях облегчения проектирования системы при автоматизации технологических процессов достаточно
высокой степени сложности переключающий регистр компонуют таким образом, чтобы каждый шаг цикла вы-
полнялся от «своего» тактового модуля. При таком подходе очевидно, что нет необходимости отключать моду-
ли переключающего регистра, обеспечивающие выполнение шагов одной группы, поскольку в группе шаги с
противоположными действиями отсутствуют. Для выполнения шагов, не требующих отключения предыдущего
модуля в регистре, используют модули типа С (рис. 8.27).
Рис. 8.27. Тактовый модуль типа С
146
8. Пневматические приводы технологического оборудования
При использовании модулей типа С следует придерживаться следующих правил:
• первый шаг в любой группе, кроме последней, выполняется от модуля типа А, последующие — от модулей
типа С;
• в последней группе первый шаг выполняется от модуля типа В, последующие — от модулей типа С.
Напомним: когда для выполнения первого шага в группе активизируется модуль типа А или типа В, через его
• анал Z подается сигнал на отключение предыдущего модуля. Поскольку таковым может являться модуль типа
С или, чаще, несколько подобных модулей, то по их сквозным каналам Z проходит сигнал, отключающий мо-
дуль типа А или В, который «управляет» первым шагом предыдущей группы. За отключением же данного моду-
ля (типа А или В) последует и отключение и всей цепочки модулей типа С.
В качестве примера использования модулей типа С рассмотрим принципиальную схему пневматической
САУ. диаграмма «перемещение — шаг» которой представлена на рис. 8.28.
147
8. Пневматические приводы технологического оборудования
Обратим внимание, что сигналы на включение 5-го и 6-го тактовых модулей представляют собой логические
произведения сигналов от двух путевых выключателей. Необходимость логической связи данных сигналов по
функции И объясняется тем, что на текущем шаге одновременно работают два исполнительных механизма (в
первом случае — А и D, во втором — В и D) и команда на осуществление последующего шага может быть
подана только в том случае, если оба цилиндра выполнят необходимые перемещения.
Применение отдельного тактового модуля для выполнения каждого технологического шага позволяет обой-
тись без реализации дополнительных логических взаимосвязей между элементами пневматической системы,
что значительно упрощает и, как следствие, ускоряет процесс проектирования пневматических систем управ-
ления.
Более компактную конструкцию переключающего регистра и поддержку некоторых дополнительных функ-
ций имеет устройство, называемое квикстеппером (от английского quickstep — «быстрый шаг»). Выпускаемые
квикстепперы рассчитаны на 12 шагов (рис. 8.29).
Пошаговое выполнение программы
Рис. 8.29. Квикстеппер и его условное графическое обозначение
Если количество шагов в единичном цикле автоматизируемой технологической установки меньше 12 (на-
пример, равно 8), то незадействованные входы/выходы квикстеппера коммутируют между собой последова-
тельно (см. рис. 8.29). Для реализации более 12 шагов можно последовательно состыковать между собой
несколько квикстепперов. Практический опыт показывает, что при количестве шагов свыше 24 целесообразно
перейти на электропневматические САУ.
Применение переключающих регистров или их разновидности — квикстеппера — позволяет добиться пре-
дельной формализации процесса проектирования сколь угодно сложных технологических объектов цикличес-
кого действия исключительно на базе средств пневмоавтоматики.
148
8. Пневматические приводы технологического оборудования
8.1.4. Реализация сервисных функций в пневматических системах
Пневматические САУ, как правило, позволяют не только выполнять технологические операции в заданной
последовательности, но и осуществлять поддержку сервисных функций, обеспечивающих (полностью или ча-
стично) следующие возможности управления:
• Аварийное отключение системы (кнопка «Аварийный останов»).
При переводе системы в режим аварийного отключения возможны различные варианты прерывания ее
нормальной работы: а) немедленный останов всех исполнительных механизмов; б) сброс сжатого воздуха
из рабочих полостей всех (или некоторых) исполнительных механизмов; в) возврат пневмоцилиндров в
исходные позиции (одновременный или в строго определенной последовательности) и т. д.
• Выбор автоматического или ручного режима (кнопка «Авт/Руч»),
Переход на ручной режим позволяет управлять отдельными пневмоцилиндрами, например с целью ре-
гулирования их скоростей при пусконаладочных работах; устанавливать всю систему в исходное положе-
ние и т. п.
• Выбор режима единичного или непрерывного цикла (кнопка О/О ).
Под непрерывным циклом понимают автоматический пуск очередного цикла без осуществления каких-
либо действий со стороны оператора (без использования кнопки «Пуск»).
- Прерывание непрерывного цикла (кнопка «Стоп»),
Не следует путать назначения команд «Аварийный останов» и «Стоп». В режиме аварийного отключения
забота технологической установки немедленно прерывается независимо от выполняемой стадии рабочего цикла,
~огда как при подаче команды «Стоп» система отрабатывает текущий цикл вплоть до его завершения.
Логическую организацию сервисных функций можно представить в виде алгоритмической схемы (рис. 8.30).
Рис. 8.30. Алгоритмическая схема реализации сервисных функций
Данный алгоритм может быть реализован путем применения различных схемных решений, одно из которых
компактно воплощается в модуле управления (рис. 8.31).
149
8. Пневматические приводы технологического оборудования
Стоп
Накопитель
Питание системы
управления (шина Р
переключающего
регистра)
К кнопкам ручного
управления
исполнительными
механизмами
Вывод системы
управления
в исходную позицию
(шина L
переключающего
регистра)
Автоматический режим /
Ручной режим
Стартовый сигнал
в систему управления
Рис. 8.31. Модуль управления и его коммутация с внешними устройствами
В состав модуля управления входят:
— распределитель 1: срабатывает при наличии сигнала в канале Y п, поступающего от последнего модуля
переключающего регистра; в исходном положении системы управления распределитель 1 переключен;
— нормально открытый распределитель 2: предназначен для экстренного перевода системы из режима
непрерывного цикла в режим единичного цикла;
— распределитель 3: генерирует стартовый сигнал;
— пневмоклапаны «ИЛИ» 4 и 5: первый обеспечивает подачу стартового сигнала в режимах единичного
либо непрерывного цикла; через второй включается распределитель 2.
Рассмотрим работу схемы, реализующей сервисные функции на основе модуля управления.
В начальном состоянии система находится в ручном режиме, позволяющем управлять исполнительными
механизмами вручную и устанавливать систему управления в исходную позицию.
Нажатием на кнопку «Автоматический/Ручной режим» система переводится в автоматический режим, т. е.
подается питание на модуль управления и переключающий регистр. Кратковременное нажатие на кнопку «Пуск»
сопровождается подачей сигнала через пневмоклапан «ИЛИ» 4 на распределитель 3 и началом единичного
цикла. В процессе выполнения единичного цикла либо перед его пуском существует возможность перехода в
режим непрерывного цикла (путем нажатия на соответствующую кнопку О/О ) при условии наличия загото-
вок в накопителе. Непрерывный цикл осуществляется при выводе распределителя 3 в режим самоудержания.
Функционирование системы в режиме непрерывного цикла автоматически прерывается при отсутствии загото-
вок в накопителе либо при нажатии кнопки «Стоп».
При нажатии на кнопку «Аварийный останов» сигнал от нее поступает на распределитель 2, ветвь самоумо-
держания распределителя 3 размыкается, и система выходит из режима непрерывного цикла. Если это необ-
ходимо, то сигнал подается также на исполнительные механизмы и переключающий регистр (через внешний
клапан «ИЛИ» подается сигнал ES1 [от английского emergency stop — «аварийный останов»]) для вывода его в
исходное положение.
150
8. Пневматические приводы технологического оборудования
Один из вариантов реализации сервисных функций (рис. 8.32) продемонстрируем на примере ранее рас-
смотренной пневматической САУ (см. рис. 8.28). С этой целью введем ряд дополнительных условий:
• обеспечение возможности выбора режима единичного или непрерывного цикла;
• немедленный возврат штоков цилиндров А и D в исходную позицию при нажатии на кнопку «Аварийный
останов»;
• втягивание штока цилиндра В выполняется после втягивания штока цилиндра А;
• втягивание штока цилиндра С выполняется после втягивания штока цилиндра D.
Рис. 8.32. Вариант реализации сервисных функций с помощью модуля управления
151
8. Пневматические приводы технологического оборудования
8.2. Пневмогидравлические приводы
Пневматические системы управления имеют очевидные достоинства: наличие централизованного источни
ка сжатого воздуха
простота конструкций используемой элементной базы
и,
как следствие,
ее относительно
низкая стоимость; высокие скорости движения исполнительных механизмов и т. д. Однако применение пнев-
могидравлических устройств и схемных решений позволяет придать комбинированным приводным системам
ранее недоступные качества.
Так,
при определенном сочетании конструктивных параметров пневмогидравлический цилиндр (рис. 8.33
может обеспечить более высокую, чем в гидравлическом приводе, стабильность рабочей скорости движения
выходного звена.
По конструкции пневмогидравлический цилиндр аналогичен описанному ранее тандем-пневмоцилиндру. с
той разницей что полости цилиндра с двусторонним штоком 1 заполнены гидравлическим маслом и соединены
между собой через внешний регулируемый дроссель. Для удаления воздушных пробок из полостей гидроци-
линдра в его крышках предусмотрены специальные заглушки 2.
Выполнение полезной работы и реверсирование направления движения выходного звена в пневмогидрав-
лическом цилиндре осуществляется посредством подачи сжатого воздуха в полости пневмоцилиндра, а ста-
бильное значение скорости перемещения поддерживается путем дросселирования практически несжимаемо*'
жидкости — гидравлического масла, перетекающего из одной полости гидроцилиндра в другую (рис. 8.34, а
Если необходимо уменьшить продольный габарит пневмогидравлического исполнительного механизма, ис-
пользуют конструкции, в которых пневмо- и гидроцилиндр расположены параллельно один другому (рис. 8.34. б)_
Рис. 8.34. Примеры пневмогидравлических приводов
152
8. Пневматические приводы технологического оборудования
Поскольку при движении выходного звена в гидроцилиндре с односторонним штоком объем масла, вытес-
няемого из одной полости, не равен объему, освобождаемому в другой, то в подобную конструкцию вводят
компенсатор.
Гидравлические цилиндры применяют в системах с пневмоприводами не только для достижения высокой
стабильности скорости перемещения выходного звена. Существуют также пневмогидравлические системы с
гидравлическими исполнительными механизмами, одним из преимуществ которых является возможность ра-
боты под большим давлением, что обусловливает значительную выходную мощность. Получить рабочую жид-
-ость под давлением без применения насосного агрегата можно с помощью пневмогидравлического мульти-
пликатора (рис. 8.35).
4 3
Рис. 8.35. Пневмогидравлический мультипликатор
В данной конструкции шток 1 пневмоцилиндра 2 одностороннего действия служит поршнем гидравлическо-
“ цилиндра 3, масло из которого вытесняется в гидравлическую магистраль при подаче сжатого воздуха в
"оошневую полость 4 пневмоцилиндра. Давление гидравлической жидкости на выходе мультипликатора опре-
деляется отношением площадей поршня и штока пневмоцилиндра. В зависимости от типоразмера мультипли-
«а~ора уровни давления сжатого воздуха на входе и масла на выходе могут соотноситься в пределах от 1:2 до
“1230 Таким образом, при давлении питания в пневмосети 0,6 МПа с помощью мультипликатора можно полу-
-.''ь давление рабочей жидкости в гидравлической магистрали 18 МПа (рис. 8.36).
Рис. 8.36. Пример пневмогидравлического привода с использованием мультипликатора
Такие схемные решения используют, как правило, в различного рода зажимных устройствах, в которых тре-
буется обеспечить значительные усилия и небольшие по величине рабочие ходы.
Пневмогидравлические приводы находят применение не только в рассмотренных ранее дискретных систе-
мах, но и в системах позиционирования, которые будут рассмотрены ниже.
153
8. Пневматические приводы технологического оборудования
8.3. Системы позиционирования
Расширение функциональных, технологических и эксплуатационных возможностей ряда машин связано с
решением проблемы позиционирования выходного звена исполнительного механизма без использования жес-
тких упоров и, соответственно, с отказом от циклических систем управления, которые характеризуются тем, что
число промежуточных точек позиционирования мало, а закон движения рабочих органов не имеет существен-
ного значения.
В зависимости от предъявляемых требований (число точек позиционирования выходного звена и частоты
их смены; точность отработки приводом заданного перемещения, допустимые динамические нагрузки; необхо-
димость регулирования скорости движения) применяют приводы с различной структурой и принципами управ-
ления движением выходного звена (рис. 8.37).
Рис. 8.37. Классификация позиционных приводов
К группе дискретных позиционных приводов относятся описанные выше пневмоприводы циклического дей-
ствия, работающие по принципу «от упора до упора». В данном же разделе будут рассматриваться непрерыв-
ные позиционные приводы, или позиционеры, характерная особенность которых — возможность обеспечения
бесконечно большого числа точек позиционирования выходного звена.
Как видно из приведенной классификации, существует два принципиально различных способа управления
непрерывными позиционными пневмоприводами: посредством торможения выходного звена или связанных с
ним механизмов и путем регулирования энергии пневмодвигателя.
Управление посредством торможения основано на том, что движущая сила неуправляема, а регулирование
скорости и позиционирование осуществляются путем создания дополнительной силы сопротивления движе-
нию. Сопротивление движению формируется различными управляемыми или неуправляемыми тормозными
устройствами, связанными с выходным звеном .
Для регулирования скорости движения и позиционирования подобных пневмоприводов широко применяют
гидравлические механизмы с замкнутой циркуляцией жидкости. В качестве регулируемого дросселя с дистан-
ционным управлением, встраиваемого в гидравлический контур, используются дросселирующие гидрораспре-
делители с пропорциональным управлением (рис. 8.38).
В зависимости от природы сил сопротивления различают механические, гидравлические, пневматические, электрические и ком-
бинированные тормозные устройства.
154
8. Пневматические приводы технологического оборудования
Рис. 8.38. Пневмогидравлический позиционер с дросселирующим распределителем
В отличие от дискретных распределителей с электромагнитным управлением в дросселирующих распреде-
“.ггелях запорно-регулирующий элемент во всем диапазоне своего перемещения может занимать любое про-
межуточное положение (о чем говорят две параллельные линии на условном обозначении подобного распре-
делителя), определяя тем самым расход жидкости, протекающей через распределитель. Такое управление
пспо чением запорно- регулирующего элемента осуществляется посредством регулируемого (пропорциональ-
woro) магнита, перемещение якоря которого прямо пропорционально силе постоянного электрического тока
напряжению, подаваемому на магнит. Использование распределителей с пропорциональным управлени-
ем "озволяет не только позиционировать выходное звено исполнительного механизма, но и обеспечить его
перемещение со скоростью, значение которой может изменяться по заданному закону.
Основная цель при позиционном управлении — уменьшение ошибок позиционирования, что достигается
аеедением обратных связей по различным параметрам — перемещению, скорости, давлению и т. п. При этом
рсавляющее воздействие, как правило, подается на вход двигателя, а сигнал обратной связи, например по
"’еоемещению, снимается на его выходе. Именно по такому принципу строят следящие системы.
Следящая система — система автоматического управления, в которой выходная величина при помощи
обоатной связи с определенной точностью воспроизводит входную (задающую) величину, характер изменения
«сферой заранее не известен (рис. 8.39).
Механизм управления следящим приводом состоит из двух кинематически связанных рычагов (рис. 8.39, а).
Пои смещении рычага управления вправо на величину х (рис. 8.39, б) золотник распределителя смещается
=лево; левая полость цилиндра соединяется с напорной магистралью, а правая — с выхлопной. При этом шток
цилиндра начинает перемещаться вправо. Движение штока передается через систему рычагов на золотник,
♦ сторый также начинает смещаться вправо. Шток будет выдвигаться до тех пор, пока он не займет положение,
•оторому при фиксированной величине х соответствует нейтральное положение золотника (рис. 8.39, в). Таким
эбразом, рычагом управления осуществляется входное воздействие на данный следящий привод, а рычагом,
гзязанным со штоком цилиндра, обеспечивается механическая обратная связь. Коэффициент передачи х/у
привода зависит от отношений плеч рычагов механизма управления.
155
8. Пневматические приводы технологического оборудования
На рис. 8.40, а показан следящий пневмопривод с управлением по давлению и обратной механической
связью по положению.
Рис. 8.40. Следящий привод с управлением по давлению и обратной механической связью
по положению
Управление выходным звеном привода осуществляется посредством золотникового распределителя 1
(рис. 8.40, б), положение золотника 2 которого задается усилителем типа «сопло — заслонка» 4. Питание на
сопло, выполненное в правом торце золотника 2, подводится от канала питания с давлением рпит через дрос-
сель 3. Положение заслонки задается путем изменения давления /?упр.
В исходном состоянии (рис. 8.40, б) давление в управляющей полости В распределителя меньше, чем в
полости А, т. к. сжатый воздух из полости В выходит в атмосферу через сопло; золотник находится в нейтраль-
ном положении, поскольку площади мембран, управляющих золотником, различны.
При увеличении давления дупр заслонка вследствие неравенства площадей управляющих ею мембран сме-
щается влево (рис. 8.40, в), давление в полости В возрастает, в результате чего золотник также смещается
влево и шток цилиндра выдвигается. При этом на заслонку передается тяга от пружины обратной связи 5, что
приводит при определенном положении штока к возврату заслонки в исходную позицию и, как следствие, выво-
ду золотника в нейтральное положение. Шток цилиндра останавливается в новом положении.
Уменьшение давления управления дупр сопровождается втягиванием штока (рис. 8.40, г).
В настоящее время в различных отраслях промышленности интенсивно внедряются позиционные и следя-
щие приводы, построенные на базе пневматических дросселирующих распределителей с пропорциональным
управлением (рис. 8.41).
156
8. Пневматические приводы технологического оборудования
Аналоговый датчик перемещения
Рис. 8.41. Функциональная схема пневматического позиционера на базе дросселирующего
пневмораспределителя с пропорциональным управлением
Сигнал о текущем положении выходного звена исполнительного механизма (бесштокового пневмоцилинд-
за с ленточным управлением) от аналогового датчика перемещения поступает на сумматор, где сравнивается
: входным задающим сигналом Ubx. Разность сигналов поступает на усилитель и далее на дросселирующий
тневмораспределитель. В момент, когда значения сигналов совпадают, пневмораспределитель устанавлива-
ется в нейтральном положении и выходное звено исполнительного механизма останавливается.
В ответственных приводах используют распределители с замкнутым контуром регулирования положения
=«оря электромагнита (а следовательно, и запорно-регулирующего элемента), для чего последний снабжают
встроенным датчиком перемещения.
В качестве примера следящего привода с дискретным управляющим воздействием на входе рассмотрим
-ривод, имеющий одну дискретно управляемую полость (рис. 8.42).
Рис. 8.42. Следящий пневмопривод с релейным управлением
Силовая часть привода состоит из пневмоцилиндра, в поршневой полости которого поддерживается посто-
янное по величине давление более низкое, чем давление питания. Измерительная часть привода включает
датчики давления ДД, датчики скорости v и перемещения х. Задающий сигнал хз сравнивается с суммарным
сигналом датчиков обратных связей. Сигнал рассогласования, значение которого равно разности данных сиг-
налов, поступает на релейный усилитель мощности, формирующий на выходе однополярные сигналы, подаю-
щиеся на 3/2-пневмораспределитель с электромагнитным управлением.
При наличии задающего сигнала, соответствующего заданной координате, управляющий распределитель
соединяет штоковую полость с атмосферой и поршень начинает перемещаться вправо до тех пор, пока сигнал
рассогласования не поменяет знак. При этом распределитель переключается и соединяет штоковую полость
цилиндра с магистралью, давление р2 растет, а скорость поршня падает. Однако вследствие возрастания дав-
ления р2 сигнал рассогласования меняет знак и распределитель вновь соединяет штоковую полость с амосфе-
рой, давлениер2 падает и т. д. Таким образом, среднее значение давления р2 в штоковой полости автоматичес-
ки поддерживается на таком уровне, чтобы уравновешивались все силы, действующие на поршень, и он оста-
вался вблизи точки позиционирования. Автоколебания на уровне пульсаций давления, имеющие место в опи-
сываемой конструкции, не передаются на выходное звено привода.
157
9. Релейно-контактные системы управления
9. Релейно-контактные системы управления
Область применения САУ, однородных по физическому принципу действия (например, гидравлических, пнев-
матических или электрических), ограничивается недостатками, присущими каждой из них. Стремление свести
к минимуму отрицательные свойства вновь создаваемых систем послужило причиной появления комбиниро-
ванных (гибридных) структур. Подобные структуры состоят из элементов, функционирующих на основе раз-
личных физических принципов, что позволяет использовать положительные свойства применяемых элемен-
тов с максимальной отдачей. Наиболее распространены в технике САУ с электрической управляющей частью
— как самой быстродействующей, гибкой и компактной.
В электропневматических системах, силовая часть которых выполнена на пневматической элементной базе,
а управляющая — на электрической, сочетаются высокие скорости перемещений исполнительных механизмов
и высокие скорости формирования и обработки управляющих электрических сигналов, простота регулирова-
ния развиваемых усилий и высокая взаимозаменяемость информационных и коммутирующих электрических
элементов.
Несмотря на то что в настоящее время широко используются и активно продолжают внедряться в производ-
ство электронные системы управления на базе программируемых логических контроллеров (ПЛК), электричес-
кие управляющие системы по-прежнему часто применяются в связи с простотой, удобством коммутации, а
главное — невысокой ценой.
Безусловным достоинством релейно-контактных схем, на основе которых разрабатывают электрические
управляющие системы, является их универсальность, т. е. возможность использования одного и того же схема-
тического решения для управления силовыми частями приводов, построенных на базе как пневматических, так
и гидравлических устройств.
В данном разделе рассматриваются электрические системы управления, выполненные на основе релейно-
контактных устройств (рис. 9.1).
1.02
Устройство обработки электрического сигнала
1.0
Устройство ввода электрического сигнала
Электрическая
управляющая часть
Поток информации ф
24 В
Пневматическая
силовая часть
О В
Устройство преобразования электрического сигнала
в пневматический
Рис. 9.1. Электропневматический привод
С целью облегчить понимание основных принципов построения релейно-контактных схем и подчеркнуть
функциональные признаки отдельных электротехнических устройств будем использовать наряду с общеприня-
тыми также некоторые символы и цифровые обозначения контакт-элементов, отличающиеся от приводимых в
соответствующих отечественных стандартах.
158
9. Релейно-контактные системы управления
9.1. Устройства ввода электрических сигналов
Если придерживаться терминологии, которую мы использовали для описания структуры управляющей час-
ти приводов в разделе 1 «Структура пневматических приводов», то устройства ввода электрических сигналов
можно отнести к элементам информационной подсистемы. Назначение данных устройств — вводить электри-
ческие сигналы в систему управления или передавать их для последующей обработки и преобразования путем
замыкания определенных участков электрической цепи.
Основными конструктивными элементами этих устройств являются контактная система, состоящая из под-
вижных и неподвижных контакт-элементов, и привод. Электрические контакты делятся по функциональному
назначению на замыкающие, размыкающие и переключающие (рис. 9.2).
Тип контакта определяется помимо условного обозначения также цифровой индексацией. Клеммы размыкаю-
_ето контакта обозначаются цифрами 1 и 2, замыкающего — 3 и 4, переключающего — 1, 2, 4. Допускается
зеркальное изображение обозначений контактов по сравнению с приведенными на рис. 9.2.
Считается, что при отсутствии управляющего воздействия контакты находятся в нормальной позиции. В
:: :*ветствии сданным положением замыкающий контакт называют нормально разомкнутым, а размыкающий
— нормально замкнутым.
9.1.1. Кнопочные выключатели (кнопки управления)
Кнопочными выключателями называют устройства ввода электрических сигналов с ручным управлением
рис. 9.3).
Рис. 9.3. Кнопочные выключатели: а) одноконтактный; б) двухконтактный
159
9. Релейно-контактные системы управления
Контакты кнопочных выключателей имеют различные условные обозначения на схемах в зависимости от
конструктивного исполнения приводного механизма (рис. 9.4).
'Ч 3 4 Замыкающий контакт кнопочного выключателя (общее обозначение)
stA 3 Замыкающий контакт кнопочного выключателя, приводимого в
4 действие нажатием кнопки
3 Замыкающий контакт кнопочного выключателя с механической
4 фиксацией положения
SM 3 Замыкающий контакт кнопочного выключателя, приводимого в
4 действие вытягиванием кнопки
*4 з Замыкающий контакт кнопочного выключателя, приводимого в
4 действие путем поворота
Рис. 9.4.Обозначения контактов кнопочных выключателей
На принципиальных электрических схемах рядом с изображением контакта проставляют буквенно-цифро-
вую индексацию устройства, включающего данный контакт. Устройства ввода электрических сигналов обычно
обозначают латинскими буквами S или В.
В случаях, когда выключатели имеют несколько контактных групп, клеммы контактов обозначают двузнач-
ным числом, первая цифра которого указывает на порядковый номер контактной группы в данном устройстве,
а вторая — на тип контакта (см. рис. 9.3, б).
Если контакты подобного выключателя задействованы в разных цепях, то на схеме допускается изображе-
ние механической связи между ними (рис. 9.5).
Рис. 9.5. Варианты изображения многоконтактных кнопочных выключателей
Выключатели применяют для пуска-останова технологических процессов, а также для управления исполни-
тельными механизмами в ручном режиме. Монтируют кнопочные выключатели, как правило, на щитах или на
пультах управления.
Наиболее ответственным звеном в электрических системах управления являются первичные преобразова-
тели параметров управляемого процесса в электрический сигнал, среди которых большинство составляют дат-
чики положения (путевые выключатели), выдающие на выходе дискретный электрический сигнал.
160
9. Релейно-контактные системы управления
9.1.2. Электромеханические путевые (концевые) выключатели
Путевые выключатели предназначены для автоматической коммутации релейно-контактных цепей в элект-
рической управляющей части привода, когда подвижные элементы приводимой в действие установки достига-
ют положения, требующего изменения режима ее работы.
В электромеханических путевых выключателях коммутация контактов осуществляется при механическом
воздействии контролируемого объекта на чувствительный элемент (рис. 9.6).
На принципиальных электрических схемах условные графические обозначения контактов электромехани-
ческих путевых выключателей могут быть представлены в следующем виде (рис. 9.7).
s2^ 4 1 Переключающий контакт путевого выключателя
s2^ 4 Переключающий контакт путевого выключателя с управляющим воздействием от толкателя с "ломающимся" рычагом
4 1 Переключающий контакт путевого выключателя активизированный в исходном состоянии контролируемым объектом
Рис. 9.7. Условные графические обозначения контактов путевых выключателей
Электромеханические путевые выключатели чаще всего применяют для управления автоматизированны-
ми линиями, в которых необходимо контролировать положение изделий либо подвижных узлов установки, а
также ограничивать перемещения последних (например, в качестве аварийных датчиков в грузоподъемных
машинах).
Электромеханические путевые выключатели являются наиболее слабым звеном в системах электроавто-
матики. Такая ситуация объясняется, в первую очередь, необходимостью установки путевых выключателей
непосредственно у рабочих элементов технологического оборудования, находящихся в тяжелых условиях экс-
плуатации (ударные нагрузки, вибрации, запыленность). Данная особенность местоположения путевых вык-
лючателей обусловливает специфические требования к их надежности, помехоустойчивости, сроку службы,
габаритным размерам (а также накладывает другие ограничения)*. Большинство задач, возникающих в связи с
этими требованиями, можно решить (и они решаются) путем использования бесконтактных путевых выключа-
телей.
Изделия и оборудование, выпускаемые электротехнической промышленностью, имеют различные степени защиты от попадания
внутрь оболочки посторонних твердых тел и воды и от соприкосновения обслуживающего персонала с токоведущими или движущи-
мися частями (см. приложение 1.5).
161
9. Релейно-контактные системы управления
9.1.3. Бесконтактные путевые выключатели
Бесконтактными называют выключатели, в которых выходной сигнал формируется без механического кон-
такта с контролируемым объектом.
Герконовые путевые выключатели
Путевые выключатели, в которых коммутация электрических контактов осуществляется под действием внеш-
него магнитного поля, называются герконовыми. Геркон (герметический контакт) представляет собой переклю-
чатель с пружинными контактами (в виде пластин) из ферромагнитного материала, запаянными в герметичную
стеклянную колбу (наполненную газом или вакуумированную). Попадая в магнитное поле, контакты намагничи-
ваются и притягиваются друг к другу, замыкая электрическую цепь.
Герконовые выключатели (рис. 9.8) традиционно применяют с целью контроля крайних положений выход-
ных звеньев пневмоцилиндров, поршни которых снабжены постоянными магнитами. Для индикации включен-
ного состояния герконовые выключатели снабжают светодиодами.
Рис. 9.8. Герконовый выключатель
Поскольку герконовые выключатели устанавливают непосредственно на гильзах цилиндров, а не в зоне
рабочих ходов исполнительных механизмов, приводы, снабженные такими выключателями, становятся более
компактными.
В зависимости от варианта конструктивного исполнения (двухпроводная или трехпроводная схема подключе-
ния) коммутация герконовых выключателей с нагрузкой (устройством, на которое подается электрический сигнал)
будет различной (рис. 9.9, а). На схемах герконовые выключатели обозначают латинской буквой S (рис. 9.9, б).
Рис. 9.9. Двух- и трехпроводные схемы включения герконовых выключателей и их изображение
на принципиальных пневматических схемах
Герконовые выключатели выпускают не только с замыкающими контактами, но и с размыкающими и пере-
ключающими.
Строго говоря, выключатели на герконах занимают промежуточное положение: будучи контактными выклю-
чателями, они в то же время являются выключателями параметрического действия, т. е. для их срабатывания
не требуется механического контакта с подвижным управляющим элементом.
162
9. Релейно-контактные системы управления
Электронные путевые выключатели
Электронные путевые выключатели не имеют электрических контактов и других подвижных элементов, что
делает их более надежными и долговечными по сравнению с электромеханическими и герконовыми.
Выходной электрический сигнал в электронных путевых выключателях вырабатывается электронной схе-
мой при попадании контролируемого объекта в зону действия выключателя. В зависимости от принципа рабо-
ты различают выключатели генераторного и волнового типов. Наиболее распространены индуктивные и емко-
стные выключатели (в которых используют датчики генераторного типа), а также оптические (в которых приме-
няют датчики волнового типа).
Принцип действия выключателей генераторного типа заключается в изменении параметров колебательного
контура генератора, встроенного в их корпус, при вводе контролируемого объекта в зону срабатывания выклю-
чателя (рис. 9.10).
Рис. 9.10. Выключатели генераторного типа: а) структурная схема, б) внешний вид
При подаче питания на путевой выключатель его генератор 1 создает переменное магнитное поле. Контро-
лируемый объект в зоне срабатывания выключателя вызывает изменение амплитуды колебаний генератора,
что приводит к выработке аналогового сигнала, величина которого зависит от расстояния между выключателем
и контролируемым объектом. Триггер 2 преобразует аналоговый сигнал в дискретный, который и подается
через усилитель 3 на нагрузку 4.
Параметром, в результате изменения которого перемещение контролируемого объекта преобразуется в
электрический сигнал, является индуктивное или емкостное сопротивление колебательного контура генерато-
оа 1, что и отражается в названии выключателя.
На условном графическом обозначении бесконтактных путевых выключателей может быть приведен сим-
вол, определяющий тип выключателя (индуктивный или емкостный), а также тип контакта, функции которого
выключатель выполняет (рис. 9.11).
Индуктивный путевой выключатель формирует сигнал на выходе,
если в зоне его действия находится металлический объект
(в данном случае выключатель отключает сигнал, поскольку
выполняет функцию размыкателя, что следует из его УГО).
Емкостной путевой выключатель формирует сигнал на выходе,
если в зоне его действия находится металлический или неметал-
лический объект, величина диэлектрической проницаемости
которого больше единицы.
Рис. 9.11. Условные графические обозначения и схемы подключения индуктивных и емкостных
путевых выключателей
При установке нескольких индуктивных датчиков в металлические корпусные детали технологического обо-
рудования следует придерживаться рекомендаций, перечисленных ниже (рис. 9.12).
163
9. Релейно-контактные системы управления
Индуктивные выключатели, встраиваемые заподлицо в металл
Бесконтактные выключатели могут быть встроены в металл на одном уровне с
торцевой чувствительной поверхностью без изменения рабочих параметров. Рас-
стояние между двумя соседними выключателями должно составлять не менее
величины диаметра датчика.
Индуктивные выключатели, не встраиваемые заподлицо в металл
Бесконтактный выключатель не является встраиваемым в металл, если для под-
держания установленного значения какого-либо параметра такого выключателя
требуется свободная зона, в которой не должны находиться материалы, влияю-
щие на данный параметр.
Встречное расположение выключателей
Расстояние между активными поверхностями датчиков должно быть больше ве-
личины 3S
Рис. 9.12. Установка нескольких индуктивных путевых выключателей
Здесь величина 5ном — номинальное расстояние переключения — такое расстояние от активной поверхно-
сти выключателя до приближающегося к нему объекта, при достижении которого последний вызывает гаранти-
рованное срабатывание выключателя.
В большинстве емкостных выключателей для изменения их чувствительности используют регулировочные
потенциометры (рис. 9.13, а). Предел чувствительности можно настроить таким образом, что выключатель не
будет реагировать на те материалы, диэлектрическая проницаемость которых недостаточно велика для его
срабатывания. Таким образом, появляется возможность, к примеру, определения уровня жидкости в пластико-
вых бутылках через их стенки, индикации наличия содержимого в картонных коробках и т. п. (рис. 9.13, б).
164
9. Релейно-контактные системы управления
Работа оптических (фотоэлектрических) путевых выключателей (рис. 9.14) основана на изменении осве-
щенности фоточувствительного элемента (фотоприемника) при перемещениях контролируемого объекта.
Конструкция оптического выключателя (датчика) включает: излучатель и приемник 1, которые могут распо-
лагаться как в одном, так и в разных корпусах; логическую цепь 2, осуществляющую сравнение параметров
излучаемого и воспринимаемого светового потока; усилитель 3, сигнал от которого поступает на нагрузку 4.
Наличие логической цепи в датчике исключает возможность его ложного срабатывания от посторонних источ-
ников света.
Оптические датчики характеризуются большим разнообразием вариантов конструктивного исполнения (рис. 9.15).
Датчики типа «разнесенная оптика» состоят из двух
корпусов — приемника и излучателя, которые должны
располагаться строго друг напротив друга.
Датчики с отражением от катафота (световозвращате-
ля) содержат излучатель и приемник в едином корпу-
се. Катафот входит в состав датчика.
Датчики с отражением луча от контролируемого объекта.
Датчики с оптоволоконными проводами используются
в случаях, когда для самого датчика не хватает места
в рабочей зоне.
Рис. 9.15. Оптические путевые выключатели
На электрических схемах бесконтактным путевым выключателям присваивают буквенно-цифровые индек-
сы, например В1, В2 и т. д. Исключение могут составить герконовые выключатели, которые, как и контактные
=ыключатели, часто обозначают латинской буквой S.
165
9. Релейно-контактные системы управления
9.2. Устройства обработки электрических сигналов
Для обработки электрических сигналов применяют реле — устройства для автоматической коммутации элек-
трических цепей по внешнему управляющему сигналу. Коммутация контактов в реле (рис. 9.16) осуществляет-
ся благодаря встроенному маломощному электромагнитному приводу.
Рис. 9.16. Реле
При подаче напряжения проходящий через обмотку катушки электрический ток создает электромагнитное
поле, под действием которого якорь притягивается к сердечнику катушки. Сам якорь, в свою очередь, механи-
чески соединен с контактами, которые либо размыкаются, либо замыкаются. После снятия напряжения якорь
выводится в исходное положение возвратной пружиной.
На схемах реле присваивают буквенно-цифровые обозначения (например: К1, К2, КЗ), а клеммам их контак-
тов — двузначный цифровой индекс, первая цифра которого означает порядковый номер контакта в данном
реле, а вторая — тип контакта (рис. 9.17, а).
На принципиальных электрических схемах ограничиваются изображением электропривода реле без ме-
ханической связи с контактами (рис. 9.17, б). Контактам же, располагающимся в различных цепях схемы,
дополнительно присваивают буквенно-цифровое обозначение, ранее назначенное данному реле. Под изоб-
ражением электропривода реле вычерчивают таблицу, в заголовке которой приводят информацию о типе
контактов в данном реле. В соответствующие столбцы таблицы заносят номера цепей, в которых эти контак-
ты расположены.
В системах, работающих от источника постоянного тока, одну из клемм электромагнитного привода реле
или другого устройства (например, распределителя) соединяют с отрицательным полюсом («-») источника
питания напрямую, а вторую — через контакты устройств ввода электрического сигнала — с положительным
полюсом («+») источника.
Реле используют в качестве коммутирующих устройств с дистанционным управлением, а также для гальва-
нической развязки управляющих и силовых электрических цепей.
166
9. Релейно-контактные системы управления
Реле времени
Для замыкания или размыкания электрических цепей через заданный промежуток времени после подачи
или снятия управляющего сигнала применяют реле времени (рис. 9.18).
Рис. 9.18. Реле времени: К1 — с задержкой включения; К2 — с задержкой выключения
В отличие от индексации клемм контактов, описанной ранее, в реле времени клеммы нормально замкнутого
контакта обозначают цифрами 5 и 6, а нормально разомкнутого — 7 и 8 (рис. 9.19). ч
Рис. 9.19. Обозначение реле времени и их контактов на схемах
Обратим внимание на то, что обозначения контактов реле времени снабжены дополнительными дугами,
указывающими на замедленное срабатывание контакта при его движении в направлении центра кривизны
дуги. В западноевропейских стандартах обозначение реле времени с задержкой включения (задержкой по
переднему фронту) аналогично принятому в отечественных стандартах (см. рис. 9.18), тогда как обозначе-
ние реле с задержкой выключения (задержкой по заднему фронту) отличается от него и обозначается симво-
лом И~^~1.
На отечественных и зарубежных электрических схемах реле с задержкой включения и выключения обозна-
чают следующим образом (рис. 9.20).
Рис. 9.20. Обозначение реле времени с задержкой включения и выключения на электрических схемах:
а) отечественных; б) зарубежных
Рядом с условными обозначениями реле времени рекомендуется указывать его временные характеристики.
167
9. Релейно-контактные системы управления
9.3. Устройства преобразования сигналов
В эпектропчевматических приводах связь межэд \/правг\я\о\цей электрической и сиповой пневматической
частями обеспечивается преобразователями: электропневматическими (ЭПП) и пневмоэлектрическими (ПЭП).
9.3.1. Электропневматические преобразователи
К электропневматическим преобразователям относятся пневматические распределители с электромагнит-
ным управлением, поскольку в них входной управляющий электрический сигнал преобразуется в выходной
пневматический.
Рис. 9.21. Электропневматические преобразователи (распределители)
Для обозначения электропневматических распределителей на пневматических и электрических принципи-
альных схемах приняты различные условные обозначения (рис. 9.22).
На пневматической схеме На электрической схеме
Y1 Г7~1 1 Y1 [7т!т\' Yicp-%
Y1 Y1 [7Ei\.tLj.j =l УДК71 Y2 у1т/тРГ71 Y2 vi nh-$-cpY2 или YinH-^ У2[ф1-%
Рис. 9.22. Условные обозначения электропневматических распределителей
Буквенно-цифровую индексацию (Y1, Y2, Y3,...), присваиваемую электромагнитным приводам распредели-
телей проставляют рядом с их изображениями как на принципиальной пневматической, так и на принципиаль-
ной электрической схемах. Тем самым устанавливают однозначную связь между элементами управляющей и
силовой частей привода.
168
9. Релейно-контактные системы управления
9.3.2. Пневмоэлектрические преобразователи (реле давления)
Назначение пневмоэлектрических преобразователей (рис. 9.23) — формировать электрический сигнал на
выходе или коммутировать определенные участки электрической цепи при появлении на входе пневматичес-
кого сигнала заданной величины.
Рис. 9.23. Пневмоэлектрический преобразователь (реле давления)
По существу, реле давления представляет собой электрический выключатель 3 с приводом от мини-пневмо-
цилиндра одностороннего действия 2. Значение порога срабатывания реле настраивают посредством регули-
ровочной гайки 1, вращением которой можно изменять силу предварительного поджатия пружины пневмоци-
линдра. Настраивая реле, необходимо помнить о различии значений давления, при которых происходит его
включение и выключение, вследствие явления гистерезиса пружины.
Условное обозначение реле давления на пневматических и электрических схемах показаны на рис. 9.24.
Реле давления применяют с целью контроля заданного значения давления в пневматических системах, а
следовательно, усилий, развиваемых пневмоцилиндрами (рис. 9.25).
Принципиальная пневматическая схема
Принципиальная электрическая схема
। 24 В 1__________2
Рис. 9.25. Управление пневмоцилиндром по давлению
При кратковременном нажатии на кнопку S1 включается электромагнитный привод Y1 распределителя 1.1 и
шток цилиндра 1.0 начинает выдвигаться. После того как шток достигнет крайнего положения, давление в
поршневой полости начинает повышаться; когда его значение возрастет до 0,25 МПа (2,5 бар), сработает реле
давления В1, что приведет к включению электромагнитного привода Y2 распределителя 1.1. Распределитель
переключается, шток цилиндра 1.0 втягивается.
169
9. Релейно-контактные системы управления
9.4. Реализация логических функций в релейно-контактных системах управления
Логические функции в релейно-контактных системах управления реализуются путем схематических реше-
ний, представленных в табл. 8.
Табл. 8. Реализация логических функций в релейно-контактных системах управления
Логическая функция ДА
+ Логическая функция ДА реализуется путем использования замыкающего контакта.
S1 Y1 S1 [А 3
0 0 4
1 1 Электрический сигнал не поступает на привод
Y1 =S1 Y1 D распределителя Y1, если не нажата кнопка S1; в противном случае он подается на привод Y1.
Логическая функция НЕ
+ Логическая функция НЕ реализуется путем
S1 Y1 S1Е- 7 использования размыкающего контакта.
0 1 2 Электрический сигнал подается на электро- привод Y1 при ненажатой кнопке S1;
1 0 —L,
Y1 =S1 Y1 □ 2 если же кнопка S1 нажата, то на привод распределителя Y1 электрический сигнал не поступает.
Логическая функция ИЛИ
Для реализации логической функции ИЛИ устройства ввода электрических сигналов рас- полагают в параллельно работающих ветвях электроцепи. Сигнал на электропривод распределителя Y1 подается в том случае, если нажата хотя бы одна из кнопок S1 или S2.
S1 S2 Y1 siE-X 3 J S2 F-X 4 3 4
0 0 0
0 1
1 0 1
1 1 1
Y1=S1+S2
Логическая функция И
S1 S2 Y1
0 0 0
0 1 0
1 0 0
1 1 1
Y1=S1-S2
Для реализации логической функции И
устройства ввода электрических сигналов рас-
полагают последовательно в одной
электроцепи.
Управляющий сигнал на электропривод рас-
пределителя Y1 подается только в том случае,
если одновременно нажаты обе кнопки S1 и S2.
170
9. Релейно-контактные системы управления
9.5. Реализация функции запоминания сигнала в релейно-контактных системах
управления
Запоминание кратковременного входного электрического сигнала осуществляется путем включения реле
по схемам с самоудержанием. Суть подобных схемных решений состоит в том, что для управления реле под-
ключают параллельно две цепи, одна из которых содержит замыкающий контакт данного реле.
Рассмотрим в качестве примера электропневматический привод, в котором шток цилиндра двустороннего
действия, управляемого моностабильным распределителем с электропневматическим управлением, достига-
ет выдвинутого конечного положения (и остается в нем) после кратковременного нажатия на кнопку S1, тогда
как втягивание штока происходит после нажатия кнопки S2.
Реализовать поставленную задачу можно путем использования одного из двух схемных решений: с домини-
рующим выключением и с доминирующим включением (рис. 9.26).
Рис. 9.26. Электрические схемы с самоудержанием
В исходном положении схем с самоудержанием кнопки S1 и S2 не нажаты, реле К1 не включено, его замы-
кающие контакты во 2-ой и 3-ей цепях разомкнуты, электромагнитный привод Y1 распределителя 1.1 обесто-
чен. Распределитель находится в исходном положении, шток цилиндра втянут.
При нажатии на кнопку S1 срабатывает реле К1 и через его контакт 23-24 в 3-ей цепи подается питание на
электромагнитный привод Y1 распределителя 1.1, шток цилиндра 1.0 выдвигается. Одновременно замыкается
контакт 13-14 реле К1 во 2-ой цепи, по которой также поступает сигнал на включение реле К1 (через нормально
замкнутый контакт 1-2 кнопки S2).
После отпускания кнопки S1 1-ая цепь размыкается, однако реле К1 остается включенным, т. к. продолжает
получать питание через 2-ую цепь. Реле работает «само на себя», распределитель 1.1 остается в переключен-
ном состоянии, а шток цилиндра — выдвинутым.
Релейно-контактная цепь, по которой управляющий сигнал подается на реле через замыкающий контакт
последнего, называют цепьюю самоудержания.
При нажатии кнопки S2 нормально замкнутый контакт 1-2 кнопки S2 размыкается и цепь самоподхвата раз-
рывается. Реле К1 выключается, его замыкающий контакт 23-24 в 3-ей цепи возвращается в исходное состоя-
ние, и распределитель 1.1 переключается в исходное положение. Шток цилиндра втягивается.
При одновременном нажатии на кнопки S1 и S2 в схеме с доминирующим выключением реле К1 не сработа-
ет, т. к. 1-ая цепь окажется разомкнутой, а в схеме с доминирующим включением — сработает, хотя реле и не
перейдет в режим самоудержания. Выбор одного из данных схемных решений зависит от требований к функ-
ционированию системы в целом.
171
9. Релейно-контактные системы управления
9.6. Правила построения релейно-контактных схем
Условные графические обозначения элементов, входящих в релейно-контактную схему, как правило, распо-
лагают между двумя параллельными горизонтальными прямыми, изображающими электрические шины. В слу-
чае применения источника постоянного тока на верхнюю шину подается питание от его «+», а на нижнюю — от
«-». Рядом с шинами рекомендуется проставлять значение напряжения в них (например, 24 В).
Схему составляют и читают слева направо, причем релейно-контактные цепи нумеруют над верхней шиной
по порядку. Параллельно подключенным цепям может быть присвоен один и тот же порядковый номер, но при
этом его дополняют буквенным индексом (например, 2 и 2а). Направление прохождения электрических сигна-
лов принимают сверху вниз, т. е. от «+» к «-».
Условные графические обозначения электромагнитных приводов распределителей, реле или иных элемен-
тов изображают на схемах присоединенными напрямую к нижней шине («-»). В то же время управляющие
данными элементами устройства ввода электрического сигнала размещают в цепях, соединенных с верхней
(«+») шиной. Это правило основано на практическом опыте монтажа и эксплуатации релейно-контактных сис-
тем управления и требованиях техники безопасности.
Очевидно, что система будет работать и в том случае, если одну из клемм электромагнитного привода
(например, привода распределителя) соединить напрямую с «+» источника питания, а включение данного при-
вода осуществлять от «-». Однако в этих условиях резко возрастает вероятность непроизвольного срабатыва-
ния как распределителя, так и управляемого им исполнительного механизма. Возникновение в системе какого-
либо дефекта (обрыв провода или повреждение его изоляции) может привести к соприкосновению второй
клеммы привода распределителя с заземленным шкафом управления, что вызовет срабатывание распредели-
теля и, как следствие, неконтролируемое перемещение исполнительного механизма и ведомых узлов техноло-
гической установки (рис. 9.27).
Рядом с обозначениями элементов релейно-контактных систем управления проставляют буквенно-цифро-
вые индексы в соответствии с существующими стандартами (см. приложение 1.6).
Если разные контакты какого-либо устройства располагаются в близлежащих цепях, то допускается изобра-
жение между ними механической связи.
Под обозначениями реле вычерчивают таблицы с информацией о типе имеющихся в данном реле контак-
тов и о номерах цепей, в которых эти контакты задействованы.
Все элементы релейно-контактной схемы изображают в исходном положении, т. е. при отсутствии напряже-
ния в шинах. Если в исходном положении электромеханические путевые выключатели активны, то на схеме
рядом с их обозначением изображают вертикальную стрелку.
На принципиальной пневматической схеме места расположения путевых выключателей, контролирующих
положения выходных звеньев исполнительных механизмов, отмечают вертикальными штрихами с буквенно-
цифровой индексацией соответствующих путевых выключателей.
Чтобы обобщить основные принципы изображения элементов электропневматических приводов на элект-
рических и пневматических принципиальных схемах, рассмотрим технологическую установку, диаграмма «пе-
ремещение — шаг» и принципиальные схемы которой представлены на рис. 9.28.
172
9. Релейно-контактные системы управления
Диаграмма «перемещение — шаг»
Принципиальная пневматическая схема
S3 S4
1.0 S1 В2 । 2.0 ।
Принципиальная электрическая схема
1 23 За 4 4а 56 78
it ц ц Ц Ц
8 3 За 7 3
R
Рис. 9.28. Диаграмма «перемещение — шаг» и принципиальные схемы электропневматического
привода
173
9. Релейно-контактные системы управления
9.7. Проектирование релейно-контактных систем управления
Методы проектирования релейно-контактных систем управления аналогичны методам, описанным в разде-
ле 8.1.2 «Методы проектирования пневматических САУ».
Процедуру построения электропневматической системы управления рассмотрим на примере уже известной
нам установки для перемещения коробок (рис. 9.29).
Рис. 9.29. Установка для перемещения коробок
Если в силовой части установки используются бистабильные распределители с электромагнитным управ-
лением, а положения пневмоцилиндров отслеживаются электромеханическими путевыми выключателями, то
электрическая и пневматическая схемы, а также система логических уравнений, описывающих работу уста-
новки, будут выглядеть следующим образом (рис. 9.30).
Принципиальная пневматическая схема
1.0(A) S100)82(3,)
2.0(B) S3(bn) S4(b,)
2.1
Y3[ZE
Гй!!Н
А + = Пуск • b0= S5 S3
В + = a ,= S2
А - =Ь,= S4
В -=a= S1
0.1
Принципиальная электрическая схема (прямое управление)
1
2
3
4
1 2
3 4
Пуск
S5EX
13
14
(b0) 1
(а,)
1 (bp
S4 О-X
4
(а0)
S1^X
1 или
Пуск
S5 ЕХ
14
(Ьо) 1 (Ь,)
S3^0-\ S4&X,
13
(а,)
S20-X
1 (ао\
S1©--
4 *
(А+)
Y1
4
4
4
(А+)
Y1 [
) (А-) (В+) (Е
(В-)
] Y4
4
4
1
4
Рис. 9.30. Электропневматический привод установки для перемещения коробок
Если электромагнитные катушки приводов распределителей работают под напряжением, вывод которого на
пульт оператора (кнопку «Пуск») недопустим, схема несколько изменяется (рис. 9.31).
174
9. Релейно-контактные системы управления
Рис. 9.31. Принципиальная электрическая схема установки для перемещения коробок
(непрямое управление)
Рассмотрим, как изменятся принципиальные схемы и система уравнений, описывающих работу установки,
в случае использования для управления пневмоцилиндрами моностабильных электропневматических распре-
делителей (рис. 9.32).
Принципиальная пневматическая схема
А + = Y1= S5- S3
В + = Y2= S2
А — = Y1= S4
В - = Y2= S1
Принципиальная электрическая схема (прямое управление)
Рис. 9.32. Электропневматический привод установки для перемещения коробок с
использованием моностабильных распределителей
175
9. Релейно-контактные системы управления
9.8. Переключающие регистры
Процесс проектирования релейно-контактных систем циклического действия может быть формализован,
как и при построении САУ на базе пневматических средств автоматизации, путем применения стандартных
схемных решений, обеспечивающих поочередное включение соответствующих электрических шин.
Число шин может равняться числу групп, на которые разбивают последовательность шагов единичного тех-
нологического цикла (если используют метод разбиения на группы), или же общему числу шагов (каждый шаг
выполняется по команде от «своей» шины).
Очередность активизации электрических шин обеспечивается переключающими регистрами, состоящими
из отдельных тактовых модулей, основным техническим средством реализации которых служат реле.
С принципом построения переключающих регистров ознакомимся на примере регистра, состоящего из че-
тырех тактовых модулей. Если выполнение каждого технологического шага будет осуществляться по команде
от отдельного модуля, то управляющий сигнал от каждого такого модуля будет подаваться не на шину, а непос-
редственно на исполнительный распределитель (рис. 9.33).
1 1а 2 2а 3 За 4 4а 4Ь 5 6 7 8
К1\ К2\ К3\ К4\
1а 4
2
5
lit
2а 1
3
6
За 2
4
7
lit
4а 3
1
8
Рис. 9.33. Переключающий регистр с отключением предыдущего модуля
Каждый тактовый модуль, выполненный по схеме с самоудержанием реле, например модуль на базе реле
К2 (цепи 2 и 2а), включается по логическому произведению двух сигналов: 1) сигнала от путевого выключателя,
фиксирующего окончание шага, выполняемого от предыдущего модуля; 2) сигнала собственно от предыдущего
тактового модуля (для включения реле К2 необходимо наличие двух сигналов: от путевого выключателя S2 и от
реле К1). При активизации данного модуля его реле переводится в режим самоудержания. Одновременно от-
ключается предыдущий модуль (реле К1 выводится из режима самоудержания вследствие размыкания нор-
мально замкнутого контакта реле К2 в цепи 1), а последующий модуль на базе реле КЗ подготавливается к
включению (замыкается контакт реле К2 в цепи 3).
Для пуска системы необходимо выполнение двух условий: 1) замыкающий контакт путевого выключателя,
фиксирующего окончание последнего шага цикла (S1), должен располагаться в цепи включения первого моду-
ля; 2) нажатием кнопки «Пуск» активизируется последний модуль.
Поскольку электротехнические тактовые модули промышленностью не выпускаются, но в каждом конкрет-
ном случае организуются путем реализации рассмотренной схемы на базе находящихся в серийном производ-
стве реле, нужно учитывать следующее требование: в качестве базовых необходимо применять такие реле,
при включении которых замыкающие контакты переключаются раньше, чем размыкающие. Данное требова-
ние обусловлено особенностью вышеприведенного схемного решения, заключающейся в том, что при включе-
нии реле текущего модуля отключение предыдущего модуля (т. е. вывод его реле из режима самоудержания)
может произойти раньше, чем данное реле перейдет в режим самоудержания. Но в таком случае реле текуще-
го модуля отключится и регистр не будет функционировать.
176
9. Релейно-контактные системы управления
Несколько иной подход к проектированию релейно-контактных систем управления применяется в случае ис-
пользования переключающего регистра, в котором предыдущий модуль не отключается (рис. 9.34).
3 За 4 4а
1 1а 2 2а
S5~| | S1 | Г
ЕД К1\ оД K2V
Пуск
ф0-Д К1\ К2\ К3\ К4\
5 6 7 8 9
1а
2
6
lit
2а 6
lit lit
За За
4 4
lit
1
Рис. 9.34. Переключающий регистр без отключения предыдущего модуля
Работа представленного регистра основана на том, что модули включаются последовательно и при активи-
зации каждого из них предыдущие модули не выключаются. Таким образом, к моменту включения последнего
модуля все модули регистра оказываются активными. Включение же последнего модуля вызывает отключение
первого, а также, как следствие, всех последующих модулей, в том числе и последнего.
Включение всех модулей, кроме первого, осуществляется по логическому произведению двух сигналов: 1)
от предыдущего модуля; 2) от путевого выключателя, фиксирующего окончание шага, выполняемого по коман-
де от предыдущего модуля. При этом реле промежуточных модулей переводятся в режим самоудержания, в то
время как для последнего модуля такая возможность отсутствует.
Пуск регистра и подача команды на выполнение первого шага осуществляются по нажатию кнопки «Пуск»
S5), расположенной в цепи 1. Вывод регистра в исходное состояние (обнуление) происходит путем размыка-
ния нормально замкнутого контакта в цепи включения первого модуля. Данный контакт принадлежит реле пос-
леднего модуля (контакт реле К5 в цепи 1).
Если при включении очередного модуля формируется управляющий сигнал, противоположный по назначе-
нию уже имеющемуся на исполнительном устройстве сигналу, то последний должен быть снят. Поскольку от-
ключение предшествующих модулей в рассматриваемом регистре не предусматривается, то снятие ранее по-
данного сигнала осуществляется в соответствующем цепи управления исполнительным устройством (в
-ашем примере таким устройством является электромагнитный привод Y1 пневмораспределителя). С этой
_елью в данную цепь устанавливают размыкающий контакт реле активизируемого модуля (в нашем случае —
К2 в цепи 6).
Переключающие регистры без отключения предыдущего модуля функционируют более надежно по сравне-
нию с регистрами, в которых осуществляется отключение предыдущих модулей, и не требуют использования
специальных реле с последовательным переключением контактных групп.
177
9. Релейно-контактные системы управления
9.9. Реализация сервисных функций в релейно-контактных системах управления
Процесс построения схемы, реализующей сервисные функции в релейно-контактных системах управления,
основывается на тех же принципах, которые используются при построении пневматических САУ. По сути, и
пневматические, и релейно-контактные системы управления характеризуются одной и той же функциональной
структурой, способ технической реализации которой, основанный на тех или иных рассмотренных выше сред-
ствах автоматизации, и определяет тип получаемой САУ.
Перечислим наиболее часто применяемые сервисные функции, возможность реализации которых должна
учитываться при проектировании управляющей системы:
• аварийное отключение системы;
• выбор режима автоматического или ручного управления;
• выбор режима непрерывного или единичного цикла.
Аварийное отключение системы (режим аварийного останова)
Существуют различные варианты реагирования исполнительных механизмов на вывод системы автомати-
ческого управления в режим аварийного останова. Рассмотрим некоторые из них.
Например, для исполнительного механизма, выполняющего основную рабочую операцию в прессовом или
штамповочном оборудовании, режим аварийного останова характеризуется немедленным отводом данного ме-
ханизма, а также связанного с ним рабочего инструмента в исходное положение (рис. 9.35) .
Рис. 9.35. Аварийный останов: возврат исполнительного механизма в исходное положение
Схемное решение (на рис. 9.35 слева), реализующее немедленный отвод штока пневмоцилиндра, управляе-
мого бистабильным (импульсным) 5/2-пневмораспределителем, имеет недостаток, заключающийся в том, что в
режиме аварийного останова катушка электромагнита Y2 находится под напряжением.
Для различного рода вспомогательного оборудования (транспортеры, толкатели, укладчики и др.), в кото-
ром пневмоцилиндры расположены в горизонтальной плоскости, аварийное отключение системы характеризу-
ется остановом цилиндров с одновременным соединением их рабочих полостей с атмосферой. Это позволяет
*
Здесь и далее приводятся схемы реализации сервисных функций для случаев применения моно- и бистабильных исполнительных
электропневматических распределителей.
178
9. Релейно-контактные системы управления
вручную перемещать исполнительные механизмы в нужном направлении и в удобной последовательности,
если необходимо найти и устранить какую-либо неполадку в системе (рис. 9.36).
Рис. 9.36. Аварийный останов: отключение давления питания
Выбор автоматического или ручного режима управления
Переход в режим ручного управления исполнительными механизмами осуществляется путем переключе-
ния питания на дополнительную шину, сигналы от которой подаются через управляющие кнопки (S2 и S3) не-
посредственно на электромагнитные приводы исполнительных распределителей (рис. 9.37).
Рис. 9.37. Реализация выбора автоматического или ручного режима управления
179
9. Релейно-контактные системы управления
Выбор режима единичного или непрерывного цикла
Существует два варианта перевода системы в режим единичного или непрерывного цикла: без предвари-
тельного выбора режима либо с возможностью осуществления такого выбора.
В первом случае режим устанавливается в момент нажатия соответствующей пусковой кнопки (рис. 9.38).
Рис. 9.38. Схема реализации режима единичного или непрерывного цикла без его предварительного
выбора
Схема, представленная на рис. 9.39, допускает предварительный выбор режима.
Рис. 9.39. Схема реализации режима единичного или непрерывного цикла с его предварительным
выбором
180
9. Релейно-контактные системы управления
Выбор режима единичного или непрерывного цикла осуществляется нажатием кнопок S4 и S3 соответ-
ственно, после чего цикл пускается по нажатию кнопки S5.
Схема реализации сервисных функций
Все схемные решения, позволяющие реализовать ту или иную сервисную функцию в отдельности, отраже-
ны в единой схеме, показанной на рис. 9.40.
Рис. 9.40. Принципиальная электрическая схема, реализующая основные сервисные функции
С целью пояснения данной электрической схемы покажем назначение задействованных в ней путевых вык-
лючателей и реле.
Реле обеспечивают:
К1: кратковременный пусковой сигнал;
К2: пусковой сигнал в режиме непрерывного цикла;
КЗ: подачу пусковых сигналов в систему управления (на переключающий регистр);
К4: прерывание непрерывного цикла.
Путевые выключатели контролируют:
S6: наличие деталей в рабочей позиции;
S7: окончание последнего шага цикла;
S8: наличие деталей в накопителе.
В исходном состоянии система находится в режиме ручного управления. При переходе в автоматический
режим управления (кнопка S2) появляется возможность выбора режима единичного либо непрерывного цикла
кнопка S3). В обоих режимах пуск системы осуществляется кнопкой S4. В режиме непрерывного цикла реле К2
находится в состоянии самоудержания (которое прерывается при срабатывании реле К4), что позволяет авто-
матически формировать пусковой сигнал путем включения реле КЗ по окончании последнего шага цикла (путе-
вой выключатель S7). При нажатии на кнопку аварийного останова S1 цепи управления обесточиваются.
181
9. Релейно-контактные системы управления
9.10. Электропневматические приводы с управлением от промышленных
логических контроллеров
Релейно-контактные схемы имеют характерный недостаток: любое изменение силовой части привода или
диаграммы его функционирования приводит к необходимости пересмотра структуры системы управления и
состава технических средств САУ, что, в свою очередь, обусловливает дополнительные временные и финансо-
вые затраты.
Начало промышленного производства и последовавшее затем широкое распространение микропроцессор-
ных управляющих устройств — программируемых логических контроллеров (рис. 9.41) — изменило традици-
онные подходы к проектированию систем управления.
Рис. 9.41. Программируемый логический контроллер (ПЛК)
Наличие в ПЛК программного управления позволяет относительно легко и быстро вносить изменения в
программы работы технологического оборудования, что придает гибкость производственным процессам. В
связи с применением ПЛК центр тяжести работ по проектированию управляющего устройства перемещается
из области схемотехники в сферу алгоритмизации задач управления, а сам процесс проектирования сводится
к выбору типа контроллера и его программированию.
Микропроцессоры и микроЭВМ доступны по цене. Они имеют малые габариты и массу, благодаря чему
могут быть встроены в различные машины и механизмы (рис. 9.42). При этом обеспечиваются более высокие
показатели качества работы последних.
182
10. Эксплуатация пневматических приводов
10. Эксплуатация пневматических приводов
Продолжительность безотказной работы пневматических систем в значительной мере зависит от организа-
ции и качества технического обслуживания, которое призвано обеспечить выполнение требований, приведен-
ных в технической документации на данное оборудование. В процессе эксплуатации пневмоприводов расходу-
емые материалы неизбежно заканчиваются, рабочие параметры в связи с воздействием различных факторов
постепенно отклоняются от заданных значений, отдельные компоненты приводов исчерпывают ресурс и отка-
зывают. Таким образом, в рабочем состоянии пневмопривод поддерживается благодаря регулярному и каче-
:твенному техническому обслуживанию, а также плановым и аварийным ремонтам.
10.1. Техническое обслуживание пневматических приводов
Обслуживание устройств очистки сжатого воздуха. Качество работы пневмоприводов напрямую зависит от
•-лстоты сжатого воздуха, определяемой, в свою очередь, уровнем технического обслуживания устройств под-
-2’овки воздуха, состоянием внутренних поверхностей трубопроводов и другими факторами.
При эксплуатации пневмоприводов необходимо исключить возможность попадания загрязнителей
воздуха к потребителю, что обеспечивается своевременным удалением их из резервуаров очистных ус-
'эойств. В случаях использования устройств очистки сжатого воздуха с ручным управлением и непроз-
рачным резервуаром (визуальный контроль невозможен) образующийся конденсат следует сливать пе-
риодически — по графику, составленному на основе опытных или расчетных данных.
Если применяются автоматические устройства отвода конденсата, то процедуру его слива требуется орга-
низовать таким образом, чтобы избежать загрязнения окружающей среды. При отказе конденсатоотводчиков
иг необходимо демонтировать, прочистить рабочие каналы и сливные отверстия, промыть фильтрующие эле-
ние-'ты и внутренние поверхности, высушить и установить на прежнее место. Для промывки резервуаров можно
использовать теплую мыльную воду.
В процессе эксплуатации фильтров поры их фильтроэлементов забиваются частицами загрязнителей, что
гс вводит к возрастанию сопротивления потоку сжатого воздуха. Если перепад давления на фильтре превыша-
I е~ 0,1 МПа, то фильтроэлемент заменяют или восстанавливают его пропускную способность.
Напомним, что эффективная работа очистных устройств возможна только в определенном диапазоне рас-
:дов сжатого воздуха, указываемом в технической документации.
Обслуживание смазочных устройств. Одним из важнейших условий обеспечения эксплуатационной
-сдежности пневмоприводов является выполнение требований к смазке трущихся поверхностей пневмати-
I месхих устройств. Техническое обслуживание смазочных устройств заключается в своевременном воспол-
ье~ии расходуемых смазочных материалов и наблюдении за их качественным состоянием.
Стабильность подачи смазочного материала маслораспылителями в значительной степени определяется
[ зкзкостью используемого масла, которая, в свою очередь, существенно зависит от температуры. Поэтому при
। ре паточно больших изменениях температуры окружающей среды в зоне работы пневмоустройств или при
> изменении температуры сжатого воздуха необходимо перерегулировать маслораспылитель или сменить мар-
I гу заливаемого масла.
Марки, количество и периодичность внесения смазочных материалов оговариваются в руководствах по эк-
I рплуатации конкретных пневматических устройств.
Обслуживание трубопроводов. Состояние воздухопровода контролируют путем вскрытия имеющихся на
Кюи контрольных участков. При необходимости для очистки трубопровода применяют продувку сжатым возду-
I вом и промывку водой либо химическую очистку.
Качество очистки проверяют визуально или на основании оценки чистоты потоков воздуха и воды, выходя-
, texx из трубы. В последнем случае на выходе помещают лист чистого картона и по следам загрязнений опреде-
г=<’ качество проведенных работ.
Указанные методы используют при обслуживании металлических трубопроводов. При обслуживании элас-
* --ых пластмассовых трубопроводов, а также шлангов убеждаются в отсутствии перегибов и нарушений их
.злостности, а также в том, что трубопроводы, соединенные с подвижными частями машин не касаются непод-
I важных деталей последних. При нарушении работоспособности эластичные трубопроводы заменяют.
183
10. Эксплуатация пневматических приводов
Обслуживание пневмоаппаратуры и исполнительных механизмов. Техническое обслуживание --е-э-
моаппаратуры и пневмодвигателей сводится в основном к надлежащему обеспечению процесса по^готовжи
сжатого воздуха и контролю работы данных устройств. В распределительной аппаратуре проверяют чет* зсть
переключения, убеждаются в отсутствии заеданий при ручном и механическом управлении, в герметимнос’и
соединений трубопроводов и стыков, в плотности крепления крышек.
Герметичность соединений трубопроводов и эффективность работы уплотнительных элементов контроли-
руют путем осмотра и прослушивания или с помощью средств обнаружения утечек. При необходимости под’я-
гивают или заменяют соединения, уплотнения, трубопроводы. Следует учитывать, что нарушение герметично-
сти не только приводит к непроизводительному увеличению расхода сжатого воздуха, но может также повлечь
за собой нарушение работоспособности пневматических устройств и привода в целом.
В настраиваемых и регулируемых элементах контролируют соответствие параметров требуемым значени-
ям, а также состояние стопорящих устройств. В пневматических двигателях проверяют также значение скоро-
сти перемещения выходного звена и величину развиваемого усилия.
Организация технического обслуживания. Организация технического обслуживания пневматического
оборудования является одним из решающих факторов повышения надежности его работы. В связи с отсут-
ствием строгой регламентации работ по обслуживанию пневмосистем рекомендуется следующий порядок про-
ведения ежедневных и плановых осмотров пневмооборудования.
Ежедневные осмотры. Ежедневные осмотры проводят в начале смены — в течение первых десяти минут
работы оборудования — ив конце смены — во время уборки оборудования. Фактически ежедневные осмотры
сводятся к визуальному контролю состояния пневмооборудования и направлены на:
• выявление явных изменений (например, количества конденсата в фильтре-влагоотделителе, количества
масла в маслораспылителе и др.);
• выявление очевидных признаков состояния системы или ее частей (например, последовательности отра-
ботки цикла, скоростей движения выходных звеньев исполнительных механизмов и др., определяемых по
индикаторам или иным контрольным приборам);
• выявление признаков, качественно характеризующих работу оборудования (например, уровня шума от
выхлопов отработавшего воздуха или ударов и др).
Результаты ежедневных осмотров заносят в протокол, а информацию о выявленных отклонениях и мерах
по их устранению (если таковые были приняты) доводят до сведения соответствующих служб. Эти данные
используют при разработке графиков периодических осмотров, ведомостей запасных частей и т. д.
Периодические осмотры. Периодические осмотры проводят с интервалом в 3, 6 или 12 месяцев в зависи-
мости от типа пневматического оборудования, характера работы отдельных его элементов и условий эксплуа-
тации.
Ниже дан примерный перечень операций при проведении периодического осмотра.
1. Проверка функционирования пневмодвигателей и других устройств.
2. Проверка на наличие утечек.
3. Проверка пневмоустройств с электрическим управлением на исправность электропроводки.
4. Определение степени загрязненности фильтров.
5. Проверка надежности резьбовых соединений.
На основе информации о результатах ежедневных и периодических осмотров, о величине коэффициента
загрузки оборудования за сутки, месяц, а также учитывая другие данные, соответствующие службы проводят
анализ причин простоев оборудования и планируют мероприятия по их уменьшению.
184
10. Эксплуатация пневматических приводов
10.2. Поиск и устранение неисправностей
При эксплуатации пневматического привода, как и любой другой технической системы, наступает момент,
когда процесс его нормального функционирования нарушается, что проявляется в различного рода отказах,
как внезапных, так и постепенных.
Внезапные отказы характеризуются скачкообразным изменением заданных значений параметров привода
(одного или нескольких), что обычно приводит к его останову или нарушению последовательности выполнения
технологических операций. Отказ подобного рода очевиден, функционирование объекта прекращается в целях
проведения ремонтных работ.
В случае постепенного отказа значения параметров привода (одного или нескольких) изменяются постепен-
но, что может быть обусловлено износом или прогрессирующим нарушением настроек каких-либо его элемен-
тов, уменьшением проходных сечений дросселирующих устройств, чрезмерным увеличением утечек и другими
факторами. Постепенный отказ может и не сопровождаться видимыми нарушениями работы пневмопривода,
но его наличие приводит к ухудшению качества и/или уменьшению объемов выпуска продукции. В связи с этим
важно своевременно выявить и устранить причины постепенных отказов, что позволяет обеспечить нормаль-
ное функционирование системы и сократить число аварийных ремонтов.
Время, затрачиваемое на ремонт пневмопривода, складывается из двух составляющих: времени на поиск
неисправности и времени на ее устранение.
Время на поиск неисправности существенно сокращается, если используются методы технической диагно-
стики, позволяющие локализовать место ее наличия, а также в том случае, если в приводе применяются пнев-
матические элементы, снабженные различными индикаторами и дублирующими устройствами.
К устройствам индикации относят штырьковые индикаторы давления и положения запорно-регулирующего
элемента распределителей, светодиоды на электромагнитных приводах распределителей и т. п.; к дублирую-
щим — устройства ручного включения пневмо- и электропневматических распределителей, тактовых модулей
и др.
Применительно к пневмоприводам можно выделить два метода поиска неисправностей:
• табличный — на основе анализа принципиальной пневматической схемы составляют таблицу, по которой
выявляют оптимальную последовательность проверки элементов системы в зависимости от внешних про-
явлений имеющихся неполадок;
• алгоритмический — поиск неисправностей осуществляют по заданному алгоритму с использованием списка
достаточно простых рекомендаций, выведенных исходя из опыта эксплуатации пневмоприводов.
Табличный метод поиска неисправностей
Для иллюстрации табличного метода поиска неисправностей вернемся к пневматической схеме сверлиль-
-ого полуавтомата (рис. 10.1), уже рассматривавшегося в данном пособии.
185
10. Эксплуатация пневматических приводов
Рис. 10.1. Сверлильный полуавтомат
На основе анализа диаграммы «перемещение — шаг» сверлильного полуавтомата и его принципиальной
пневматической схемы заполняют таблицу, в которой указывают задействованные на каждом шаге элементы
системы и их состояния (табл. 9).
Табл. 9. Таблица для поиска неисправностей в пневмоприводе сверлильного полуавтомата
№ шага Кнопки, выключатели Как активизируются Триггер (переключающий регистр) Номер активной шины Исполнительный распределитель Дроссель с обратным клапаном Исполнительный механизм
Вкл. (выдвиж.) Выкл. (втяг.)
1 Пуск 1.2 1.4 Оператор Ц 1.0 0.2(14)* 1 1.1 (14) 1.02 1.0 —
2 2.2 Ц 1.0 — 1 2.1 (14) 2.02 2.0 —
3 2.1 Ц 2.0 0.2 (12) 2 2.1 (12) 2.01- — 2.0
4 1.3 Ц2.0 — 2 1.1 (12) 1.01 — 1.0
В случае возникновения неисправности по диаграмме перемещений определяют шаг, на котором остано-
вился процесс. Строку, в которой отражено рабочее состояние задействованных на аварийном шаге элемен-
тов системы, читают последовательно слева направо (попутно также проверяют их реальное состояние на
технологическом оборудовании).
В скобках приведена индексация каналов управления, в которые подается сигнал.
186
10. Эксплуатация пневматических приводов
Приведем пример. Сверлильный полуавтомат остановился в положении «сверло в нижней точке». По диаг-
рамме «перемещение — шаг» определяют, что система нормально выполнила первые два шага, а сбой про-
изошел при выполнении третьего шага. Из табл. 9 (третья строка) следует, что путевой выключатель 2.1 должен
быть активизирован штоком цилиндра 2.0. Наличие сигнала от выключателя 2.1 проверяют непосредственно
на сверлильном полуавтомате. При отсутствии этого сигнала выясняют причину, вызвавшую данную неполадку
(варианты: выключатель находится в положении, отличном от нормального; отсутствует сигнал на входе; ролик
нажат не до конца), и устраняют ее. Если сигнал на выходе путевого выключателя 2.1 присутствует, переходят
к проверке элементов, индексы которых содержатся в последующих столбцах таблицы, т. е. проверяют нали-
чие управляющего сигнала от выключателя 2.1 в канале управления 12 триггера 0.2 и т. д. в соответствии с
табл. 9.
Алгоритмический метод поиска неисправностей
Алгоритмический метод поиска неисправностей учитывает функциональные и конструктивные особенности
лневмоустройств и дает положительные результаты для пневмоприводов, имеющих несложную принципиаль-
ную схему. В качестве примера рассмотрим простейший пневмопривод и алгоритм поиска неисправности в
нем (рис. 10.2).
Описанные методы поиска неисправностей в значительной мере сокращают время, необходимое для обна-
ружения причин внезапных отказов пневмосистемы и их устранения, при условии, что к руководству по эксплу-
атации пневмопривода прилагаются соответствующие таблицы или алгоритмы.
187
10. Эксплуатация пневматических приводов
В случае отсутствия в технической документации информации, касающейся обнаружения и устранения воз-
можных неисправностей, при поиске причин останова оборудования следует учитывать рекомендации, приве-
денные ниже.
• Необходимо тщательно изучить техническую документацию и руководство по эксплуатации пневмоприво-
да (правила обслуживания привода и входящих в него устройств, нормативные указания по эксплуатации и
ДР-).
• Если схема привода достаточно сложная, с целью облегчения поиска неисправностей следует условно
разделить ее на части по выполняемым функциям, по очередности срабатывания и другим критериям.
• При поиске неисправности в первую очередь необходимо провести внешний осмотр для проверки состоя-
ния привода и машины (т. е. выяснить, не произошло ли заклинивание какой-либо детали, материала или
подвижной части машины; не поломаны ли детали приводных механизмов устройств с механическим уп-
равлением и др.). При этом во избежание несчастных случаев или поломки устройств не следует воздей-
ствовать на кнопки, путевые выключатели и т. п.
• Необходимо проверить, соответствует ли давление сжатого воздуха на входе пневмопривода нормативам
технической документации. В ситуации, когда в силу производственной необходимости к системе могут
подключаться дополнительные потребители и при этом общий расход воздуха будет превышать произво-
дительность компрессора, могут возникать сбои (самоустраняющиеся отказы), такие как нарушение вре-
менной последовательности, снижение величин усилий, развиваемых приводом, ниже допустимых значе-
ний и др.
• Если в пневмоприводе используются устройства с электрическим управлением, следует проверить, нахо-
дятся ли электрические устройства под напряжением.
• Проверить трубопроводы (в особенности эластичные) и убедиться в отсутствии перегибов, скручиваний и
т. п. дефектов. Проверить герметичность соединений.
При проверке работоспособности привода необходимо учитывать следующее:
• утечки сжатого воздуха из канала выхлопа пневмораспределителя могут иметь место не только в результа-
те повреждения уплотнений в нем, но и вследствие выхода из строя уплотнений поршня в цилиндре;
• причиной изменения динамики функционирования привода могут стать не только нарушение настройки
регулирующих устройств (дросселей с механическим управлением и др.) или их неисправность, но и засо-
рение глушителей в пневмораспределителях.
Пневматический привод целесообразно ремонтировать путем замены пневмоустройств. С одной стороны, в
результате этого сокращается продолжительность ремонта производственного оборудования, а с другой —
обеспечивается более высокое качество ремонта в связи с тем, что отказавшие пневмоустройства подлежат
восстановлению на специализированном участке.
При демонтаже и монтаже пневмоустройств в процессе ремонта необходимо придерживаться следующих
правил:
• необходимо заменить уплотнительные кольца, а также прокладки на стыковых поверхностях и в соедине-
ниях;
• желательно маркировать трубопроводы при их отсоединении (особенно это касается гибких трубопрово-
дов), даже в случае отсоединения только одного конца трубопровода, что позволит избежать ошибок во
время последующего монтажа пневмоустройств;
• при выполнении работ по монтажу-демонтажу пневматических устройств особое внимание следует уде-
лять предотвращению попадания загрязнителей в их внутренние полости.
188
10. Эксплуатация пневматических приводов
10.3. Требования безопасности
Общие требования безопасности к пневмоприводам, которые вводятся в эксплуатацию, регламентируются
следующими стандартами: ГОСТ 12.1.003-83 ССБТ. «Шум. Общие требования безопасности»; ГОСТ 17770-86.
Машины ручные. Требования к вибрационным характеристикам»; ГОСТ 12.2.007-75 ССБТ. «Изделия электро-
•ехнические. Общие требования безопасности».
Требования безопасности к конструкции пневмоприводов и пневмоустройств. Конструкция пнев-
моприводов и пневмоустройств должна быть надежной, обеспечивать безопасную эксплуатацию и предус-
матривать возможность проведения осмотра, очистки и ремонта. Ограждения, кожухи и другие приспособ-
тения, препятствующие внешнему осмотру пневмоустройств, должны быть съемными.
Пневмоприводы должны снабжаться устройствами, предназначенными для полного снятия давления сжа-
’ого воздуха в системе.
В целях исключения воздействия опасных и вредных производственных факторов пневмоприводы также
должны быть оснащены:
• устройствами, предотвращающими повышение давления сверх значения, установленного нормативно-тех-
нической документацией;
• устройствами для улавливания масляных аэрозолей при выводе отработавшего воздуха в атмосферу, если
уровень их концентрации в рабочем помещении может превысить предельные значения, устанавливае-
мые ГОСТ 12.1.005-88.
Если падение давления в пневмоприводах или напряжения в электрической сети может создать опасность
для обслуживающего персонала или вызвать аварийную ситуацию, необходимо предусмотреть возможность
'локировки пневмопривода — автоматического прекращения работы оборудования с одновременной подачей
соответствующего светового или звукового сигнала. В то же время не должны отключаться устройства, вывод
«оторых из рабочего состояния может привести к авариям и производственному травматизму (зажимные, при-
-имные, уравновешивающие, тормозные, стопорящие и другие устройства).
Если конечные положения пневматических исполнительных механизмов ограничиваются с помощью элек-
-оических или пневматических путевых выключателей, то в случае нарушения процесса нормального функ-
-.«онирования последних может возникнуть опасность травмирования обслуживающего персонала или ава-
z/йная ситуация. В целях предотвращения подобных последствий необходимо устанавливать жесткие упо-
:ы. защитные кожухи и другие приспособления для ограничения опасных перемещениий.
Поверхности ограждений, защитных устройств и элементы конструкции пневмоприводов и пневмоустройств,
•оторые могут представлять опасность для обслуживающего персонала, должны иметь знаки безопасности и
сигнальные цвета в соответствии с ГОСТ 12.4.026-76*.
Конструкция регулируемых пневмоустройств, изменение настроек которых может привести систему в ава-
:лйное состояние, должна предусматривать надежную фиксацию регулирующих элементов с применением
- змков, пломб и других средств. Конструкция органов управления и их взаимное расположение, в свою оче-
редь, должны исключать возможность самопроизвольного пуска привода. На пульте управления технологи-
-еским оборудованием, оснащенным пневмоприводами с поддержкой возможности общего останова систе-
мы, устанавливают управляющий элемент красного цвета «СТОП ОБЩИЙ».
Величины усилий, развиваемых на ручных органах управления пневмоустройствами, должны удовлетво-
:ять требованиям соответствующих ГОСТов (это не относится к специальным управляющим органам и эле-
ментам, предназначенным для настройки редукционных пневмоклапанов): для переключателей типа тумбле-
ров — ГОСТ 22615-77; для кнопочных и клавишных выключателей и переключателей — ГОСТ 22614-77; для
маховиков управления и штурвалов — ГОСТ 21752-76*; для рычагов управления — ГОСТ 21753-76*.
Органы управления и средства отображения сопроводительной информации размещают в соответствии с
требованиями ГОСТ 12.2.032-78 и ГОСТ 12.2.033-78, а обозначения функций органов управления — в соответ-
ствии с ГОСТ 12.4.040-78 (СТ СЭВ 3082-81). Символы и надписи располагают в непосредственной близости от
оэганов управления, при этом не должно возникать никаких помех их чтению. Надписи, кроме того, должны
быть краткими и понятными при быстром считывании.
189
10. Эксплуатация пневматических приводов
Вблизи запорных устройств (вентилей, кранов и др.) должны быть хорошо видны стрелки, указывающие
направление вращения маховиков, кранов, а также надписи «ОТКРЫТО», «ЗАКРЫТО» или другие обозначе-
ния.
На пульте управления пневмоприводами необходимо применять следующую цветовую индикацию или све-
товые сигналы: красный цвет — для обозначения аварийных и отключающих органов управления, а также для
сигнальных элементов, извещающих о нарушении процесса нормального функционирования пневмопривода
или условий безопасности; зеленый цвет — для сигнальных элементов, подтверждающих нормальное функци-
онирование пневмопривода.
Для оповещения об аварийном состоянии пневмопривода можно использовать звуковую сигнализацию,
применение которой предпочтительно в ситуациях, требующих немедленного реагирования.
В тех случаях, когда пневмопривод находится в помещении, где распознать звуковой сигнал трудно вслед-
ствие высокого уровня производственных шумов, рекомендуется дополнительно использовать яркий мигаю-
щий сигнал, цвет которого выбирают по ГОСТ 12.4.026-76’.
Пневматические приводы и устройства, в которых по характеру работы или в связи с воздействием окружа-
ющей среды возможен рост давления выше допустимого, должны снабжаться предохранительными клапана-
ми, размещенными в доступных для их осмотра и обслуживания местах.
В любом случае началу эксплуатации пневмопривода должна предшествовать проверка настройки пре-
дохранительного клапана лицами, ответственными за соблюдение правил техники безопасности. Предохрани-
тельный клапан, в свою очередь, должен быть снабжен устройством, служащим для проверки исправности
клапана путем его принудительного открытия в процессе функционирования привода.
Требования безопасности при подготовительных работах, монтаже и испытаниях. Монтаж пневмати-
ческих приводов и устройств для проведения испытаний следует выполнять в соответствии с требованиями,
изложенными в рабочих чертежах, инструкциях, методиках и программах испытаний. Руководство испытания-
ми поручают ответственному лицу, распоряжения которого являются обязательными для всех участников ис-
пытаний.
Обслуживание пневмоприводов при испытаниях можно поручать лицам, достигшим 18-летнего возраста,
прошедшим производственное обучение и инструктаж по безопасному обслуживанию пневмосистем. Осве-
щенность рабочих мест при испытаниях должна составлять не менее 50 лк. Источник света должен распола-
гаться таким образом, чтобы не происходило ослепление рабочих. Шкалы приборов должны быть четко видны
с расстояния до 3 м. Во всех случаях необходимо добиваться того, чтобы освещение обеспечивало удобство
наблюдения за приборами.
Место испытаний должно быть ограждено, либо вблизи него должен находиться наблюдающий. В качестве
ограждений можно применять щиты, барьеры, канаты с подвешенными к ним плакатами с надписью «Внима-
ние! Идут испытания!» или световое табло с аналогичной надписью. На оборудовании, столах, механизмах, на
полу возле испытательного стенда не должно быть посторонних предметов (заготовок, готовых изделий, отхо-
дов производства).
Запрещается оставлять инструменты, материалы, спецодежду и другие предметы на элементах, входящих
в привод. Рабочие места должны быть оборудованы стеллажами для хранения приспособлений, инструмен-
тов, проверочных шаблонов, прокладок и т. п. Габариты подобных стеллажей должны соответствовать наи-
большим размерам укладываемых на них изделий.
Перед испытаниями следует проверить рабочие инструменты на соответствие основным требованиям тех-
ники безопасности.
Электрифицированный инструмент можно применять лишь с рабочим напряжением не более 36 В и при
условии полной исправности. В случае, если в производственном помещении отсутствуют факторы повышен-
ной опасности, допускается использовать значения напряжения 127 и 220 В, но при обязательном использова-
нии защитных средств. Корпуса электроинструментов, работающих под напряжением свыше 36 В, должны
быть заземлены вне зависимости от частоты тока.
Ручные инструменты, применяемые для электромонтажных работ (отвертки, плоскогубцы, кусачки и т. п.),
должны иметь изолированные рукоятки.
Шланги необходимо крепить к пневмоинструменту и трубопроводам таким образом, чтобы исключить воз-
можность их срыва.
190
10. Эксплуатация пневматических приводов
Перед проведением испытаний проверяют готовность пневмопривода или устройства. С этой целью их тща-
тельно осматривают и убеждаются в отсутствии трещин, надрывов, выпучин, раковин, следов коррозии и дру-
гих дефектов на внутренних и внешних поверхностях устройств, в сварных швах, уплотнительных узлах и
соединениях. Кроме того, перед началом испытаний пневмоприводов и устройств необходимо:
• проверить правильность и надежность присоединений пневмолиний и электрических проводов к соответ-
ствующим устройствам;
• проверить надежность функционирования блокировок, наличие стопорения и пломб на регулирующей ап-
паратуре и приборах;
• проверить наличие и исправность заземления;
• проверить наличие и надежность закрепления ограждений, предусматриваемых требованиями безопас-
ности;
• вывесить предупреждающий плакат с надписью «Внимание! Идут испытания!»;
• установить при необходимости аварийную сигнализацию (звуковую или световую).
Персонал, участвующий в испытаниях пневмоприводов и устройств, должен быть ознакомлен:
• со схемой пневмопривода и правилами его обслуживания;
• с конструкциями и принципами действия устройств, входящих в пневмопривод;
• с расположением кондиционеров сжатого воздуха, пневмоаппаратов и приборов;
• со способами регулирования параметров (давления, скорости и др.);
• с методами проверки пневмоустройств на прочность и герметичность и правилами их осмотра при испы-
таниях.
Пневмоустройства должны быть испытаны на прочность. Входящие в состав пневмопривода пневмоустрой-
ства общепромышленного применения, на которые распространяются положения ГОСТ 12.3.001-85 (СТ СЭВ
3274-81), испытывают на прочность путем плавного повышения давления до пробного значения, которое дол-
жно превосходить номинальное не менее чем в 1,5 раза; для пневмоглушителей, установленных в местах
выхлопа отработавшего воздуха, пробное значение давления должно быть не меньше номинального для пнев-
мопривода. Длительность испытаний на прочность должна составлять не менее 3 мин. После этого давление
постепенно снижают до номинального и затем производят осмотр пневмоустройства.
Проверяют пневмоустройство путем использования воздуха, минерального масла или воды. При испытани-
ях его закрывают защитным кожухом (экраном), либо проводящий их персонал должен находиться на безопас-
ном расстоянии от объекта испытаний, которое исключает возможность травмирования в случае разрушения
последнего.
При типовых и периодических испытаниях на ресурс пневмоустройств и их элементов, функционирующих в
.словиях циклического нагружения давлением, их необходимо подвергать циклическому нагружению рабочим
давлением в соответствии с требованиями и методикой разработчика.
Пневмоустройства или их элементы считаются выдержавшими испытания на прочность, если при последу-
ющем тщательном осмотре не были обнаружены: признаки разрыва; видимые остаточные деформации; утечки
воздуха сверх уровня, установленного в нормативных требованиях; подтекание и потение в сварных швах при
опрессовке жидкостью.
Испытания должны быть прерваны в следующих случаях: при повышении давления в системе сверх допу-
стимого уровня; при неисправности предохранительных клапанов; при обнаружении в элементах пневмоуст-
ройств выпучин, утонений стенок, подтеканий в соединениях, разрывов уплотнений; при неисправности мано-
метров, блокировочных устройств, а также при неисправности (отсутствии) предусмотренных схемой испыта-
ний контрольно-измерительных приборов и средств автоматизации; при появлении стуков, посторонних шу-
мов; при заметном возрастании вибраций приводного механизма; при обнаружении других неисправностей,
которые могут привести к аварийной ситуации.
После снижения уровня давления, достигнутого в ходе испытаний, до номинального (рабочего) значения,
пневмоустройства и привод в целом осматривают уполномоченные на то лица, прошедшие специальный инст-
руктаж. В ходе осмотра запрещается повышать давление. При обнаружении дефектов во время испытаний
работы по их устранению (монтаж и демонтаж пневмолиний, подтягивание соединений, рихтовка, сварочные
191
10. Эксплуатация пневматических приводов
работы и др.) следует выполнять после прекращения подачи воздуха, полного снятия давления в системе и ее
отключения от питающей электросети, причем в местах отключения в обязательном порядке вывешиваются
предупреждающие таблички с надписью «Ремонт! Пуск запрещен!». Прекращение подачи воздуха путем пере-
гибания эластичных трубопроводов не допускается! Все устройства в составе привода должны быть приведе-
ны в такое состояние, при котором их самопроизвольное включение при случайном нажатии пусковых элемен-
тов не приведет к опасным последствиям.
После устранения выявленных дефектов необходимо провести повторные испытания.
При повторном пуске следует принять меры безопасности, указанные выше, и проследить за тем, чтобы все
ранее убранные ограждения и защитные приспособления были снова надлежащим образом размещены и
закреплены. Испытания при снятых ограждениях допускаются только с разрешения администрации. Отключе-
ние оборудования и его подключение к электросети осуществляют после установки предохранительных уст-
ройств и также исключительно на основании разрешения администрации.
При испытаниях необходимо следить за тем, чтобы выхлоп отработавшего воздуха был направлен в сторо-
ну от места нахождения оператора и не приводил к загрязнению рабочего помещения. Уровень шума при вых-
лопах не должен нарушать гигиенических норм.
Требования безопасности при эксплуатации. Перед вводом в эксплуатацию пневмоприводов и пневмо-
устройств необходимо провести их пробный пуск и наладку. В случае обнаружения неисправностей во время
пробного пуска пневмопривод следует отключить. Работы по устранению выявленных неисправностей и ре-
монту пневматических приводов и устройств необходимо выполнять только после полного снятия давления
воздуха в системе и отключения их от электросети. Вентили и пневмораспределители, отвечающие за соеди-
нение пневмолинии с пневмоприводом, должны находиться в исправном состоянии и обеспечивать возмож-
ность надежного и быстрого перекрытия подачи сжатого воздуха и его сброс из привода в атмосферу.
Подключать отремонтированный пневмопривод к пневмолинии и электросети следует после установки ог-
раждений и снятия предупреждающих плакатов.
Эксплуатация пневмоприводов и пневмоустройств запрещается в случаях возникновения следующих неис-
правностей:
• наличие шумов, стуков, вибраций и наружных утечек, уровень которых превышает значения, устанавлива-
емые нормативно-технической документацией;
. появление видимых повреждений или выход какого-либо параметра за пределы допустимых значений,
если подобная ситуация представляет опасность для обслуживающего персонала или может привести к
аварии;
• отказ или повреждение сигнальных устройств и приборов.
Очищать воздухопроводы и пневмоустройства в местах скопления загрязнителей необходимо способами,
при которых исключается воспламенение имеющихся отложений.
192
Приложения
Приложение I. Справочная информация
Приложение I. Справочная информация
1.1. Соотношения единиц величин, применяемых в пневматике, с единицами
международной системы СИ (SI)
Табл. I. Соотношения единиц величин, применяемых в пневматике, с единицами
международной системы СИ (SI, System International of Units)
Величина Единица Примечание
Название Обозначение Обозначение Название
Основные единицы системы СИ
Масса т кг килограмм
Длина s, 1, L м метр
Время t с секунда
Температура термодинамическая Т К кельвин Связь между различными температурными шкалами показана в приложении 1.2
Дополнительные единицы системы СИ
Плоский угол a,p, <р, ^и др. рад радиан
Производные единицы, применяемые в пневматике
Диаметр d,D м метр
Радиус r.R r = 0,5D
Площадь S.F, f м2 квадратный метр
Объем V м3 кубический метр
Объем нормальный VH, V Объем воздуха, приведен- ного к техническим нор- мальным условиям
Расход массовый Qm кг/с килограмм в секунду
Расход объемный Q>Qv м3/с кубический метр в секунду Qy=Qm/p
Расход объемный нормальный X Объемный расход возду- ха, приведенного к техни- ческим нормальным усло- виям
Пропускная способность (расходная характеристика) Kv м3/ч кубический метр в час Внесистемная единица
Плотность p кг/м3 килограмм на кубический метр
Удельный объем V м3/кг кубический метр на килограмм v=1/p
194
Приложение I. Справочная информация
Абсолютная влажность воздуха Z/абс кг/м3 килограмм на кубический метр Обычно выражается в граммах на кубический метр [г / м3]
Относительная влажность воздуха — — Измеряется в относитель- ных единицах (процентах)
Частота периодического процесса (колебания) / V Гц герц
Частота импульсов, ударов ит. п., частота вращения и,/ с-1, Гц секунда в минус первой степени, герц 1 с-1 = 1 Гц
об/с оборот в секунду 1 об/с= 1 с-1
об/мин оборот в минуту Внесистемная единица: 1 об/мин = 1 /60 с-1
(Частота угловая (круговая 'или циклическая) со с-1 секунда в минус первой степени
Скорость линейная V м/с метр в секунду
Скорость угловая со рад/с радиан в секунду
об/с оборот в секунду 1 об/с = 2л рад/с
об/мин оборот в минуту Внесистемная единица: 1 об/мин = 2л 160 рад/с
Ускорение линейное a м/с2 метр на секунду в квадрате
Ускорение свободного падения g g = 9,81 м/с2
•Ускорение угловое £ рад/с2 радиан на секунду в квадрате
Импульс (количество движения) Р кг • м / с килограмм-метр в секунду
Динамический момент инерции J.I кг - м2 килограмм-метр в квадрате
ГТ ' " Сила (усилие) F.P Н ньютон Н = кг-м/с2
Сила тяжести, вес G, Р
Момент силы, изгибающий момент М Н • м ньютон-метр
Момент пары сил, крутящий (вращающий) момент М, Т
195
Приложение I. Справочная информация
Давление Р Па \ V паскаль Па = Н/м2
Объемный модуль упругости (модуль сжимаемости) К
Коэффициент объемного сжатия' р,. Па’1 паскаль в минус первой степени
Коэффициент объемного расширения*' Р Т К-1 кельвин в минус первой степени
Динамическая вязкость (коэффициент внутреннего трения) р Па с паскаль-секунда
Кинематическая вязкость V м2/с квадратный метр на секунду v= р/р
Коэффициент трения pj — — Безразмерная величина
Работа А Дж джоуль
Энергия Е, W
Кинетическая энергия Ek, Wk, К, Т
Потенциальная энергия Ер, Wp, П, Ф
Тепловая энергия Q
Внутренняя энергия и
Мощность Р, N Вт ватт
Коэффициент полезного действия (КПД) 7 — — Безразмерная величина
Удельная газовая постоянная R,Ro Дж/(кг К) джоуль на килограмм-кельвин
Табл. II. Приставки для наименования дольных и кратных единиц
Дольные единицы Кратные единицы
степень приставка символ степень приставка символ
10"1 \ деци Д 101 дека Да
1СГ2 санти с 102 гекто г
10'3 милли м 103 кило к
10"6 микро мк 106 мега М
10“9 нано н ю9 гига Г
10"12 пико \ п 1012 тера т
10-15 фемто ф ю15 пета п
ю-18 атто а 1018 экса э
Термодинамический коэффициент сжимаемости.
Термический (температурный) коэффициент расширения.
196
Приложение I. Справочная информация
1.2. Сотношения между различными единицами давления и температурными
шкалами
"абл III. Соотношения между различными единицами давления
£л---ица Па бар psi кгс/см2 мм вод. ст. мм рт. ст.
" ~ = 1 10-5 1,45-104 1,02-10’5 0,102 7,502-103
1 бар 105 1 14,5 1,02 1,02-104 7,5024-102
1 psi’ 6,895-103 6,895-10’2 1 7,031 -10’2 7,031-102 52,2
1 кгс/см2 9,807-104 0,9807 14,223 1 104 7,35-102
1 мм вод. ст. 9,807 9,807-10'5 1,422-10-3 10^ 1 7,35-10'2
1 мм рт. ст. 1,33-102 1,33-10’3 1,934-10-2 1,36-10-3 13,6 1
абл. IV. Формулы, связывающие различные температурные шкалы
Шкала Кельвина Цельсия Фаренгейта Реомюра
Кельвина, Г [К] 1 ГС+ 273,15 (Z°F-32)/1,8 + 273,15 1,25r°R + 273,15
_;ельсия, /°C Г-273,15 1 (r°F-32)/1,8 1,25/°R
Фаренгейта, r°F 1,8 Г-459,67 1,8/°C+ 32 1 2,25r°R + 32
эеомюра, r°R 0,8 Г-218,52 0,8 Г°С 0,44(r°F —32) 1
- s сокр. от pound-force per square inch) — фунт-сила на квадратный дюйм.
197
Приложение I. Справочная информация
1.3. Извлечения из ГОСТа 17433-86 «Промышленная чистота. Сжатый воздух.
Классы загрязненности»
Табл. V. Классы загрязненности сжатого воздуха
Класс загрязненности Размер твердой частицы, мкм, не более Содержание посторонних примесей, мг/м3, не более
Твердые частицы Вода (в жидком состоянии ) Масла (в жидком состоянии)
0 0,5 0,001 Не допускается
1 5 1
2 500 Не допускается
3 10 2 Не допускается
4 800 16
5 25 2 Не допускается
6 800 16
7 40 4 Не допускается
8 800 16
9 80 4 Не допускается
10 800 16
11 Не регламентируется 12,5 Не допускается
12 3200 25
13 25 Не допускается
14 10000 100
Примечания. 1. Содержание посторонних примесей указано для воздуха, приведенного к техническим нормальным условиям: температура 293,15 К (20°С), давление 101,325 кПа (760 мм рт. ст.). 2. Размер твердой частицы принимается по наибольшему измеренному значению. 3. Температура точки росы сжатого воздуха: для классов 0, 1, 3, 5, 7, 9, 11 и 13 — должна быть ниже минимальной рабочей температуры не менее чем на 10°С; для классов 2, 4, 6, 8, 10, 12 и 14 — не регламентируется. 4. В сжатом воздухе, независимо от класса загрязненности, допускаются только следы кислот и щелочей. 5. Классы загрязненности сжатого воздуха следует указывать в технических требованиях к эксплуатации пневматических систем и устройств.
198
Приложение I. Справочная информация
Табл. VI. Требования к чистоте сжатого воздуха для пневматических систем, устройств
и технологических процессов
Пневматические системы, устройства и технологические операции, выполняемые сжатым воздухом Класс загрязненности сжатого воздуха (ГОСТ 17433-86)
Высокие требования к надежности Обычные требования к надежности
Пневматические устройства для измерения линейных размеров 0
Пневматические приборы и средства автоматизации: приборы и устройства для получения, передачи, преобразования, хранения и обработки информации исполнительные устройства 0, 1, 2, 3, 4
5, 6 7, 8
Струйные устройства: элементы системы «Волга» с увеличенным сечением каналов и связанные с ними входные устройства элементы с нормальным и малым сечением каналов и связанные с ними входные устройства выходные устройства и не связанные со струйными элементами входные устройства 1,3 0, 1 5, 7 2, 3, 5 1,3, 5 7, 8,9
Пневмотранспорт и перемешивание продуктов питания, лекарственных препаратов и напитков 0
Подача воздуха для дыхания, в стерильные боксы и камеры в медицинских учреждениях 0
Газовая смазка подшипников и направляющих станков и приборов 0, 1,3 2, 3,5
Пневмоаппаратура высокого давления: с дроссельными отверстиями без дроссельных отверстий 3, 5, 7 5, 7, 9 5-8 6-10
Поршневые, шиберные, винтовые, шестеренные, турбинные пневмодвигатели и пневмоинструмент 5, 7,9 6-10
Мембранные, сильфонные, камерные, шланговые цилиндры 8-10
Высокоскоростные пневмомоторы (свыше 60000 об/мин) 1,2,3
Перемешивание электролитов, распыление лаков и красок 1,3,5
Очистка сосудов для пищевых продуктов и лекарств, электронной аппаратуры и медицинского инструмента 0
Продувка после промывания деталей и устройств моющими средствами, соответствующими требованиям ГОСТа 17216-86: классам 0-9 классам 10-17 1-8 8-10
Примечания.
1. Классы загрязненности из графы «Высокие требования к надежности» необходимо выбирать в тех случаях, когда
выход пневмоустройства из строя или его отказ может привести к несчастному случаю, аварии или неоправданным
экономическим затратам.
2. Нечетные классы загрязненности из графы «Обычные требования к надежности» рекомендуется выбирать для
пневмоустройств, работающих при отрицательной температуре окружающей среды или в других условиях и
режимах, приводящих к обледенению пневмоустройств.
3. Для продувки после промывания деталей, не допускающих наличия следов масла на поверхности, следует
использовать нечетные классы загрязненности.
199
Приложение I. Справочная информация
1.4. Характеристики минеральных масел
Табл. VII. Характеристики минеральных масел
Индустриальные масла (ГОСТ 20799-88) Турбинные масла
Марка масла Показатель И-2А И-20А И-25А И-30А Тп-22 ГОСТ 9972-74 Т22 ГОСТ 32-74 Т30 ГОСТ 32-74
Кинематическая вязкость при температуре 50°С, мм2/с 10-14 17-23 24-27 28-33 20-23 28-32
Температура вспышки, определяемая в открытом тигле, °C, не менее 165 180-190 180
Температура застывания, °C, не более -30 -15 -15 -10
Коксуемость, %, не более — 0,15 —
Зольность, %, не более — 0,005 —
Кислотное число мгКОН на 1 г масла, не более 0,05 0,02
200
Приложение I. Справочная информация
1.5. Характеристика степеней защиты (IP) персонала и
электротехнических устройств
IP (International Protection)
----защита оборудования от проникновения воды внутрь оболочки
----О — защита отсутствует
----1 — защита от капель сконденсировавшейся воды
----2 — защита от капель воды, падающей под углом 15° к вертикали
----3 — защита от капель воды, падающей под углом 60° к вертикали (защита
от дождя)
----4 — защита от брызг воды любого направления
----5 — защита от водяных струй
----6 — защита от затопления (заливания водой)
----7 — защита от действия воды при погружении
---- 8 — защита от действия воды при неограниченно длительном погружении
------- защита персонала от соприкосновения с токоведущими или движущимися
частями оборудования и защита оборудования от попадания внутрь оболочки
посторонних твердых тел
------- 0 — защита отсутствует
------- 1 — защита от случайного соприкосновения большого участка поверхности тела
человека с токоведущими или движущимися частями внутри оболочки;
защита оборудования от попадания инородных тел диаметром не менее 52,5 мм
------- 2 — защита от возможности соприкосновения пальцев с токоведущими или
движущимися частями внутри оболочки;
защита оборудования от попадания инородных тел диаметром не менее 12 мм
------- 3 — защита от соприкосновения с инструментом, проволокой или другим подобным
предметом, толщина которого превышает 2,5 мм;
защита оборудования от попадания инородных тел диаметром не менее 2,5 мм
-------4 — защита от соприкосновения с инструментом, проволокой или другим подобным
предметом, толщина которого превышает 1 мм;
защита оборудования от попадания инородных тел диаметром не менее 1 мм
------- 5 — полная защита персонала от соприкосновения с токоведущими или
движущимися частями внутри оболочки;
защита оборудования от вредных отложений пыли во внутреннем пространстве
------- 6 — полная защита персонала от соприкосновения с токоведущими или
движущимися частями внутри оболочки;
полная защита оборудования от попадания пыли
Пример. Оборудование со степенью защиты IP 65 обеспечивает полную защиту персонала от сопри-
косновения с токоведущими или движущимися частями внутри оболочки, а также защищено от воздей-
ствия водяных струй.
201
Приложение I. Справочная информация
1.6. Условные буквенные обозначения элементов на схемах
Табл. VIII. Буквенные коды элементов на электрических схемах (ГОСТ 2.710-81)
Первая буква кода Группа видов элементов Примеры видов элементов
А Устройства Усилители, приборы телеуправления, мазеры, лазеры
В Преобразователи неэлектрических величин в электрические (кроме генераторов и источников питания) либо наоборот; аналоговые или многоразрядные преобразователи; датчики для указания или измерения Громкоговорители, микрофоны, термоэлектрические чувствительные элементы, детекторы ионизирующих излучений, звукосниматели, сельсины
С Конденсаторы
D Интегральные микросхемы, микросборки Интегральные аналоговые и цифровые микросхемы, логические элементы, устройства памяти, устройства задержки
Е Разные элементы Осветительные устройства, нагревательные элементы
F Разрядники, предохранители, защитные устройства Дискретные элементы защиты по току и напряжению, плавкие предохранители, разрядники
G Генераторы, источники питания, кварцевые осцилляторы Батареи, аккумуляторы, электрохимические и электротермические источники
Н Индикационные и сигнальные устройства Приборы звуковой и световой сигнализации, индикаторы
К Реле, контакторы, пускатели Реле токовые и напряжения, реле электротепловые, реле времени, контакторы, магнитные пускатели
L Катушки индуктивности, дроссели Дроссели люминесцентного освещения
М Двигатели Двигатели постоянного и переменного тока
Р Приборы, измерительное оборудование Показывающие, регистрирующие и измерительные приборы, счетчики, часы
Q Выключатели и разъединители в силовых цепях Разъединители, короткозамыкатели, автоматические выключатели (силовые)
R Резисторы Переменные резисторы, потенциометры, варисторы, терморезисторы
202
Приложение I. Справочная информация
S Коммутационные устройства в цепях управления, сигнализации и измерительных Выключатели, переключатели; выключатели, срабатывающие от различных воздействий
т Трансформаторы, автотрансформаторы Трансформаторы тока и напряжения, стабилизаторы
и Преобразователи электрических величин Модуляторы, демодуляторы, дискриминаторы, инверторы, преобразователи частоты, выпрямители
V Электровакуумные, полупроводниковые приборы Электронные лампы, диоды, транзисторы, тиристоры,стабилитроны
W Линии и элементы сверхвысокой частоты, антенны Волноводы, диполи, антенны
X Контактные соединения Штыри, гнезда, разборные соединения, токосъемники
У Механические устройства Электромагнитные муфты, тормоза, патроны
Z Конечные устройства, фильтры, ограничители Линии моделирования, кварцевые фильтры
Табл. IX. Буквенные коды элементов на пневматических и гидравлических схемах
(ГОСТ 2.704-76)
Буква Элемент
А Устройство (общее обозначение)
АК Пневмоаккумулятор (гидроаккумулятор)
АТ Аппарат теплообменный
Б Г идробак
вд Влагоотделитель
ВН Вентиль
ВТ Вытеснитель
Г Пневмоглушитель
д Пневмодвигатель (гидродвигатель) поворотный
дп Делитель потока
др Пневмодроссель (гидродроссель)
зм Пневмозамок (гидрозамок)
к Пневмоклапан (гидроклапан)
кв Пневмоклапан (гидроклапан) выдержки времени
кд Пневмоклапан (гидроклапан) давления
203
Приложение I. Справочная информация
КО Пневмоклапан (гидроклапан) обратный
КП Пневмоклапан (гидроклапан) предохранительный
КР Пневмоклапан (гидроклапан) редукционный
км Компрессор
м Пневмомотор (гидромотор)
мн Манометр
МП Гидродинамическая передача
МР Маслораспылитель
мс Масленка
МФ Гидравлическая муфта
н Насос
НА Насос аксиально-поршневой
нм Насос-мотор
нп Насос пластинчатый
HP Насос радиально-поршневой
пг Пневмогидропреобразователь
ПР Г идропреобразователь
р Пневмораспределитель (гидрораспределитель)
рд Реле давления
РЗ Пневмоаппарат (гидроаппарат) золотниковый
РК Пневмоаппарат (гидроаппарат) клапанный
РП Регулятор потока
PC Ресивер
с Сепаратор
с Сумматор потока
т Термометр
ТР Гидродинамический трансформатор
УВ Устройство воздухоспускное
УС Г идроусилитель
ф Фильтр
ц Пневмоцилиндр (гидроцилиндр)
204
Приложение II. Примеры расчетов
Приложение II. Примеры расчетов
11.1. Основные газовые законы
Закон Бойля — Мариотта
Т = const p1V1 = р 2V2 = const
Пример. Атмосферный воздух объемом 1 м3 был сжат при неизменной температуре до избыточного
:явления 6 бар. Какова степень сжатия воздуха? Какой объем будет занимать сжатый воздух?
Напомним: в расчетах следует использовать абсолютные значения давлений ра5с = ратм + ризб, где
г = 1,013 бар. Степень сжатия определяется отношением V / К2.
Дано: v,= 1 м3; = 1,013 бар; Дгизб = 6 бар. Решение. К р2 V1 6 + 1,013 7,013 — = —; — = = — ~ 6,923. V2 р1 V2 1,013 1,013 V2=P^!p2\ Vp= 1,013-1/7,013«0,144 м3.
Г. Найти: —; 7
Ответ: ~ » 6,923; V, ~ 0,144 м3.
7
Адиабатический процесс
= р2\?2 — const
Пример. Атмосферный воздух объемом 1 м3 был сжат до избыточного давления 6 бар. Какой объем
будет занимать сжатый воздух, если сжатие осуществлялось без теплообмена с окружающей средой?
Дано: У, = 1 м3; \ Pi= 1,013 бар; Ргизб = 6 бар; *=1,4. Найти: V2. Решение. ^‘=p+,7p2; v2=(p,vk,/p?)lk- v2= (1,013-11,4/[1,013 + 6])1/1,4= (1,013/7,013)1/1’4~ 0,251 м3.
Ответ: V2~ 0,251 м3.
205
Приложение II. Примеры расчетов
Закон Шарля
V = const Pj-=P1 Т, тг
Пример. В ресивере (пневматической емкости) находится воздух под избыточным давлением 5 бар при
температуре окружающей среды 18°С. Каковы будут показания манометра, установленного на ресивере,
если температура сжатого воздуха в нем повысится на 100°С?
Cl ГО Ю . - ю О О О о || со со о V- СЧ го 1 II II Ч с Решение. т2 Р2 = Р1 • — • Pi = 5 +1,013 = 6,013 бар; 7’7 = 273,15 + 18 = 291,15 К; 7^ = 273,15 + 28 = 301,15 К. 301,15 р2= 6,013 ~ 6,220 бар; 291,15 Р2изб = 6,220 - 1,013 « 5,207 бар.
Найти: р2изб.
Ответ: р2т& ~ 5,207 бар.
Закон Гей-Люссака
р = const II
Пример: При температуре окружающей среды 22°C воздух, находящийся под избыточным давлением 6
бар, занимает объем 1 м3. Какой объем будет занимать воздух, если его температура понизится на 10°С,
а давление останется неизменным?
< О о О 0 СЧ СЧ о .. сч т- S 'L и и п > с Решение. уг=у,Ь., Т Л = 273,15+ 22 = 295,15 К; 7^ = 273,15 +12 = 285,15 К. 285,15 3 V2=1,3 —«1,256 м3. 295,15
Найти: V2.
Ответ: 1,256 м3.
206
Приложение II. Примеры расчетов
11.2. Расчет внутреннего диаметра трубопроводов
Для расчета размеров магистрального трубопровода и его отводов должны быть известны следующие
параметры:
• требуемый расход воздуха, приведенный к нормальным техническим условиям;
• требуемая длина трубопровода;
• осредненное значение давления питания компрессора (давления в ресивере);
• максимально допустимая величина падения давления в трубопроводе.
На основе значений данных параметров можно определить необходимый внутренний диаметр трубы по
следующей номограмме (рис. I).
бар бар
м3/с мм дюйм
Давление Потери давления
литания на 100 м
Расход Диаметр
трубопровода
Рис. I. Номограмма для определения внутреннего диаметра трубы
207
Приложение II. Примеры расчетов
Порядок использования номограммы рассмотрим на следующем примере.
Пример. От ресивера, давление сжатого воздуха в котором изменяется от 6 до 8 бар, требуется
проложить трубопровод длиной 200 м. При этом расход протекающего по нему воздуха должен состав-
лять 12000 л/мин, а падение давления ограничивается значением 0,6 бар. Определить требуемый внут-
ренний диаметр трубы.
Прежде чем обратиться к номограмме, произведем несложные вычисления.
1. Средний уровень давления в ресивере: (6+8) /2 = 7 бар.
2. Расход воздуха в трубопроводе: 12000 л/мин = 12/60 м3/с = 0,2 м3/с.
3. Т. к. на 200 м длины трубопровода допустимое падение давления составляет 0,6 бар, то на 100 м —
0,3 бар.
Теперь воспользуемся номограммой. Пустим луч из точки, соответствующей значению давления 7 бар, на
оси А «Давление питания» через точку 0,3 бар на оси В «Потери давления на 100 м» и пересечем его с вспо-
могательной осью С. Через полученную таким образом точку на оси С и точку на оси D «Расход», соответству-
ющую значению расхода сжатого воздуха 0,2 м3/с, проводим линию и находим точку ее пересечения с осью Е
«Диаметр трубопровода». Исходя из полученного значения внутреннего диаметра трубопровода d ~ 54 мм
подбираем стандартную трубу с помощью табл. X. Для нашего примера требованиям технического задания
будет отвечать труба с величиной условного прохода 65 мм.
Табл. X. Стальные водогазопроводные трубы (ГОСТ 3262-75)
Условный проход, мм Наружный диаметр, мм Толщина стенок труб, мм
легких обыкновенных усиленных
6 10,2 1,8 2,0 2,5
8 13,5 2,0 2,2 2,8
10 17,0 2,0 2,2 2,8
15 21,3 2,5 2,8 3,2
20 26,8 2,5 2,8 3,2
25 33,5 2,8 3,2 4,0
32 42,3 2,8 3,2 4,0
40 48,0 3,0 3,5 4,0
50 60,0 3,0 3,5 4,5
65 75,5 3,2 4,0 4,5
80 88,5 3,5 4,0 4,5
90 101,3 3,5 4,0 4,5
100 114,0 4,0 4,5 5,0
Внутренний диаметр трубопровода d [мм] можно также определить по формуле
'40 . Ро_
7CV Р
208
Приложение II. Примеры расчетов
где Q — объемный расход воздуха, м3/с;
v — скорость движения воздуха в трубопроводе, м/с.
р — плотность воздуха в трубопроводе, кг/м3;
р 0 — плотность воздуха при технических нормальных условиях, кг/м3.
Значение скорости движения сжатого воздуха в магистральных трубопроводах рекомендуется принимать
в пределах 6-12 м/с. В магистральных трубопроводах относительно малой протяженности (до 300 м) при
давлениях 0,6 - 0,7 МПа скорость воздуха может составить 10-15 м/с.
Трубопроводная арматура, отводы, колена и другие элементы создают дополнительное сопротивление
движению потока сжатого воздуха. Возникающие вследствие этого падения давления на местных сопротив-
лениях учитывают при определении требуемых размеров трубопровода путем добавления к ранее получен-
ной величине длины трубы дополнительного ряда значений эквивалентных длин. Другими словами, каждый
отдельный элемент, являющийся местным сопротивлением, при расчете условно заменяют на прямолиней-
ный участок трубы, потери давления по длине которого равны падению давления на данном местном сопро-
тивлении (рис. II).
Допустим, что в условиях вышерассмотренного примера в трубопровод будут врезаны четыре тройника и
два вентиля. Потребуется ли увеличение диаметра трубопровода?
По номограмме (рис. II) определяем эквивалентные длины указанных элементов для трубы диаметром
d = 54 мм:
209
Приложение II. Примеры расчетов
тройники: 5,8 • 4 = 23,2 м;
вентили: 0,84 2 = 1,68 м.
Суммарная эквивалентная длина составит приблизительно 25 м.
Исходя из общей длины трубопровода 225 м проведем перерасчет внутреннего диаметра трубы. Теперь
допустимые потери давления на 100 м составят (100 / 225) • 0,6 = 0,27 бар.
Обратившись к номограмме (рис. I), убеждаемся, что внутренний диаметр трубы практически совпадает со
значением, определенным ранее.
Заметим, что при расчете вновь создаваемых магистральных трубопроводов следует учитывать возмож-
ность дальнейшего увеличения количества встраиваемой арматуры.
II.3. Расчет пневмоцилиндров
Расчет пневмоцилиндра заключается в подборе диаметра его поршня (внутреннего диаметра гильзы ци-
линдра) таким образом, чтобы развиваемое цилиндром усилие было достаточным для преодоления действу-
ющих на него нагрузок.
Теоретическое усилие, развиваемое цилиндром (рис. Ill), зависит от диаметра поршня и давления воздуха
в его рабочих полостях и рассчитывается по формулам:
„ о nD2
при прямом ходе Fnp = pS1 = р——
, „ „ TT(D2 - d2)
при обратном ходе Fo6p = pS2 = р—---------
4
где р — манометрическое (избыточное) давление воздуха в рабочих полостях пневмоцилиндра;
S1 — площадь поршня со стороны поршневой полости (при прямом ходе);
S2 — площадь поршня со стороны штоковой полости (при обратном ходе);
D — диаметр цилиндра;
d — диаметр штока.
При расчете усилия, развиваемого пневмоцилиндром одностороннего действия, необходимо учитывать
противодействие возвратной пружины, определяемое формулой
Р — р + ^пр0 + Gip^
где F— усилие предварительного сжатия пружины;
с — жесткость пружины;
Z— рабочий ход цилиндра.
210
Приложение II. Примеры расчетов
При условии, что полость выхлопа соединена с атмосферой, диаметр цилиндра определяется по формуле
Для пневмоцилиндров, изготовляемых серийно, Международная организация по стандартизации (ISO) ре-
комендует принимать значения диаметров [мм] из стандартного ряда:
8. 10, 12, 16, 20, 25, 32, 40, 50, 63, 80, 100, 125, 140, 160, 200, 250, 320.
Значения диаметра, полученное расчетным путем, заменяют на ближайшее большее значение из данного
:~андартного ряда.
3 практических расчетах следует также учитывать силы трения в пневмоцилиндре и предусматривать за-
~ас по усилию, обеспечивающий стабильное значение скорости выходного звена при колебаниях величины
=-ешней нагрузки: ________
I F
/9 = 1,13 ------ ,
где К1 — коэффициент, учитывающий наличие сил трения в цилиндре;
К2 — коэффициент запаса по усилию.
Коэффициент К1 зависит от диаметра поршня: К1 = 0,754-0,9 (большим значениям К1 соответствуют большие
лгаметры цилиндров).
Коэффициент К2 зависит от характера работы пневмоцилиндра: для зажимных пневмоцилиндров
А' = 0,9; для транспортирующих — К2 = 0,54-0,6.
Ясно, что значение усилия F, подставляемое в последнюю из приведенных формул, должно учитывать
:~едующие факторы (рис. IV): 1) массу ведомого объекта и наличие сил трения при его перемещении; 2)
-управление перемещения; 3) полезную нагрузку на цилиндр:
Рис. IV. Внешние воздействия на цилиндр
Таким образом, пневмоцилиндр должен развивать усилие
F = ^пол + fg = Fnon + wg(sina + //cosa) •
где F пол — полезная нагрузка на цилиндр;
F G — нагрузка на цилиндр от собственного веса перемещаемого объекта;
т — масса ведомого объекта;
g — ускорение свободного падения;
a — угол наклона оси цилиндра к горизонтали;
р — коэффициент трения.
Коэффициент трения р изменяется в широком диапазоне значений и зависит как от материала объектов,
1 * *ежду которыми оно возникает, так и от вида трения — скольжения или качения. К примеру, при трении «сталь
-о стали» (материалом трущихся поверхностей является сталь) коэффициент трения скольжения р = 0,14-0,4,
*огда как в случае трения качения р = 0,005.
Приложение к цилиндру чрезмерной осевой нагрузки может привести к продольному изгибу штока (потерю
.стойчивости в осевом направлении). Критическое усилие, приводящее к продольному изгибу, рассчитывают
"о обобщенной формуле Эйлера 2 Т
_ я EJ
211
Приложение II. Примеры расчетов
где Е — модуль упругости (для стали £=2,1 • 105 МПа);
J— момент инерции штока (J= 0,0491 d2, где d — диаметр штока);
— длина нагруженного участка цилиндра;
Л— коэффициент приведения длины.
Коэффициент Л учитывает способ монтажа цилиндра и определяется из рис. V.
Способ монтажа Схема монтажа Расчетная схема Коэффициент Л
цилиндра
F]pTj| F | f j F,
£ £ л
На обеих сторонах установлены шарниры с 1 Л=1
Рис. V. Зависимость коэффициента приведения длины Л от способа монтажа цилиндра
Максимально допустимая величина нагрузки на шток определяется из соотношения
где К3 — коэффициент запаса по прочности (К3 = 2,5-ьЗ,5).
212
Приложение II. Примеры расчетов
Пример. Задняя бабка токарного станка перемещается посредством пневмоцилиндра двустороннего
действия. Максимально возможная масса бабки вместе с инструментом (например, сверлом) составляет
= 100 кг, а полезная нагрузка (усилие резания) при выполнении рабочей операции Fnon = 200 Н. Давление
питания пневмосети ризб = 6 бар, коэффициент трения скольжения бабки по направляющим р = 0,3. Требу-
ется подобрать подходящий стандартный диаметр D поршня цилиндра.
Дано: । Ризб = 6 бар = 6 -105 Па; ! Я=0,3; т = 100 кг; । ГПОЛ = 200Н. Решение. Определяем нагрузку на пневмоцилиндр F = Fnon + Fg = Fnon + mg>p = 200 + 100 • 9,81 • 0,3 = 494,3 H. Принимаем = 0,8; K2= 0,6. ГЧ If I 494,3 D = 1,13 = I 0,047 м. \ KjK2p \ 0,8 0,6-6-105 Из стандартного ряда выбираем ближайшее большее по величине значение D = 50 мм.
Найти: D.
Ответ: D = 50 мм.
Чтобы правильно выбрать типоразмер управляющего распределителя, необходимо знать расход воздуха,
~:~ребляемого пневмоцилиндром при движении его штока с заданной скоростью.
Объемный расход воздуха можно определить по формуле
б = — v-^-,
4 Ратм
где V—скорость движения штока цилиндра;
р м — абсолютное давление сжатого воздуха в магистрали;
Р атм — нормальное абсолютное (атмосферное) давление.
Зная максимальное потребление воздуха каждым цилиндром, можно определить максимальное потребле-
ние сжатого воздуха всей установкой и подобрать блок подготовки воздуха, который будет обеспечивать тре-
т.емое значение расхода.
Средний расход сжатого воздуха (м3/мин), потребляемого пневмоцилиндрами можно определить, восполь-
?:вавшись следующими формулами:
7гТ)^ Г)
для цилиндров одностороннего действия q - п ц Р* п
4 р
'атм
_ n(2D2 - d2) . рм
для цилиндров двустороннего действия Q = —-------------- ( п,
4 р
'атм
где f — рабочий ход цилиндра;
п — количество двойных ходов в минуту.
Эту характеристику необходимо знать для определения требуемой производительности компрессора и оцен-
• .• затрат на производство сжатого воздуха, а также для подбора диаметра магистрального трубопровода.
213
Приложение II. Примеры расчетов
11.4. Выбор пневмораспределителей
Выбор пневмораспределителя по промышленным каталогам осуществляют на основе предварительного
расчета требуемого расхода воздуха £>тр, который должен обеспечить распределитель.
Методика выбора определяется формой представления в каталоге расходной характеристики пневморас-
пределителя.
1. В промышленном каталоге в качестве расходной характеристики пневмораспределителя
приведена величина номинального объемного расхода Q
Если распределитель будет эксплуатироваться при манометрическом давлении на входе 6 бар (абсолют-
ном 7 бар) и давлении на выходе 5 бар (абсолютном 6 бар), то по каталогу подбирают распределитель, у
которого значение номинального расхода равно требуемому значению (?тр либо незначительно превышает
его.
Если предполагается работа с другими значениями давлений, то по каталогу подбирают распределитель,
номинальный расход которого не меньше величины
2,45
7^ Ар, “ Pvp2 )Ар2
где Q к — указанный в каталоге номинальный расход выбираемого распределителя (£>к = (?н), л/мин;
Q тр — требуемый расход, л/мин;
р тр — абсолютное значение требуемого давления на входе, бар;
р гр — абсолютное значение требуемого давления на выходе, бар;
Число 2,45 в числителе представляет собой расчетный коэффициент [бар], полученный по формуле
-А2)Рк2 = V(7-6)x6 = л/б == 2,45,
где р к. — стандартные значения давлений, при которых продувают распределители.
2. В промышленном каталоге расходная характеристика пневмораспределителя задана
пропускной способностью Kv ИЛИ Cv.
По известным значениям требуемого расхода (Этр и давлений сжатого воздуха на входе ртр1 и выходе рлр2
определяем пропускную способность Kv [м3/ч], которую должен иметь распределитель, по формуле
К ^ТР
С7^ Ар, ‘ Ар2)Ар2
где С — коэффициент, значение которого (табл. XI) зависит от размерностей параметров,
входящих в данную формулу (размерность С обратно пропорциональна размерности
параметра р1р).
Табл. XI. Значения коэффициента С
Размерность (Этр Размерность дтр
бар МПа кгс/см2
м3/ч 28,9 289,0 28,3
м3/мин 0,481 4,810 0,472
л/мин 481 4810 472
Обычно номинальный расход представляют в нормальных литрах в минуту (Н л/мин), т.е. при нормальных технических условиях.
214
Приложение II. Примеры расчетов
Исходя из вычисленного значения Kv по каталогу подбирают распределитель, значение пропускной спо-
собности которого не меньше расчетного.
Пропускную способность Kv цепи, состоящей из п распределителей (проточных устройств), каждый из
•оторых характеризуется пропускной способностью Kv, (1=1, 2,3, ..., п), определяют по следующим форму-
лам:
Kv = Kvi + Kvz + ...1 Kvn — при параллельном соединении;
111 1
—7 = —у + —2~ + -- + —г- — при последовательном соединении.
Между параметрами пропускной способности Kv и Cv имеют место следующие соотношения:
Cv = 1,17AV,
где Kv — пропускная способность в м3/ч;
Cv — пропускная способность в американских галлонах в минуту.
Су = 0,97 Kv,
где Kv — пропускная способность в м3/ч;
Cv — пропускная способность в английских галлонах в минуту.
Обычно пропускную способность пневмораспределителя выбирают с некоторым запасом, особенно для
-евмоцилиндров с торможением в конце хода, которое необходимо при высоких скоростях движения пор-
_чя. а также при больших значениях длин соединительных трубопроводов между распределителем и ци-
~гндром.
3. В промышленном каталоге расходная характеристика пневмораспределителя задана
серией графиков, отражающих зависимость расхода от перепада давления при различных
значениях давления на входе (рис. VI).
Объемный расход (Н л/мин)
Рис. VI. Пример расходно-перепадной характеристики распределителя
На горизонтальной оси графика отмечается точка, соответствующая значению расхода £>тр. Из этой точки
"эоводят вертикальную линию до пересечения с кривой, построенной для требуемого значения давления на
входе распределителярг Перпендикуляр, опущенный из полученной точки пересечения на вертикальную шкалу,
определяет значение давления на выходе р2.
215
Приложение II. Примеры расчетов
Пример. Транспортный пневмоцилиндр с диаметром поршня D = 32 мм должен совершать рабочий
ход длиной L = 200 мм за время t = 0,4 с. Подобрать пневматический распределитель для управления
цилиндром при условии, что манометрическое давление питания рм = 6 бар* (рис. VII).
Рис. VII. Схема для выбора распределителя
По известной формуле (см. приложение 11.3) определяем расход воздуха, потребляемого пневмоцилинд-
ром при прямом ходе:
4 Ратм
где v — скорость движения поршня.
В рассматриваемом примере v = L /1 = 0,2 / 0,4 = 0,5 м/с.
Поскольку потери давления в распределителях обычно составляют 0,2 - 0,8 бар, то примем значение
абсолютного давления р2 = 6,5 бар.
Л 3,14х0,0322 6,5 .3 3 / ,
Q =------------0,5---= 2,61x10 3 м/с =156,6 л/мин .
4 1
Таким образом, требуется распределитель, обеспечивающий расход воздуха (9тр=160 л/мин при значении
абсолютного давления питания 7 бар и перепаде давления на нем в 0,5 бар.
Если используется каталог, в котором пропускная способность представлена значениями номинального
расхода, то необходимо выбирать распределитель с расходом
2 45 2 45
Ок = Ртр = 160 х . - — =217,7 = 220 л/мин.
^(Ргр,- V(7-6,5)x6,5
Пропускная способность Kv распределителя не должна быть меньше значения
C^(p,p,-APj)p , 48l7o,5x6.5
Выбор распределителя можно осуществлять на основе завышенного значения скорости цилиндра, например 1 м/с, с последующим
его снижением до заданного при помощи дросселя с обратным клапаном.
216
Приложение III. Условные графические обозначения элементов пневмоприводов
Приложение III. Условные графические обозначения
элементов пневмоприводов
Табл. XII. Условные графические обозначения на пневматических схемах
(ISO 1219, ГОСТ 2.781-96, ГОСТ 2.782-96)
Преобразователи энергии
Компрессор
Вакуум-насос
Усилитель давления
Эжектор
Поступательный преобразователь с одним видом рабочей среды
Поступательный преобразователь с двумя видами рабочей среды
Пневмогидравлический вытеснитель
Исполнительные механизмы
Пневмомоторы Нереверсивный нерегулируемый Нереверсивный регулируемый Реверсивный нерегулируемый Реверсивный регулируемый Поворотные пневмодвигатели Без демпфирования С демпфированием в конце хода
217
Приложение III. Условные графические обозначения элементов пневмоприводов
Пневмоцилиндры одностороннего действия Без указания способа возврата штока С возвратом штока пружиной С выдвижением штока пружиной Телескопический Пневмоцилиндры двустороннего действия Общее обозначение С постоянным магнитом на поршне С нерегулируемым торможением в конце хода С регулируемым торможением в конце хода С проходным штоком С проходным полым штоком Телескопический Тандем С пневмоприводным фиксатором штока С гибким штоком Бесштоковый с магнитной муфтой Бесштоковый с ленточным уплотнением Специальные исполнительные механизмы Захват промышленного робота Вакуумный захват -I
1
। J
I v
Л Л А1
\ \ \ \ ।
1 п
I v
\М
V 1
I — -1
i □
I 1 -1
I I
[
J
I I
_J 1
I I
1 * —
у- 1
ЕТ 11
TZ 1 1 —1
1 1 1
“Г
—А- L,
х J
Т“ II г
1 1 1 / \ п / Л
<2 — —
। 1
С<]
। L=d I
। ।
Г-
1
1 I
218
Приложение III. Условные графические обозначения элементов пневмоприводов
Устройства подготовки сжатого воздуха
Фильтр
Влагоотделитель с ручным отводом конденсата
Влагоотделитель с автоматическим отводом конденсата
Ф и л ьтр-вл а гоотдел ител ь
Осушитель
Охладитель
Нагреватель
Маслораспылитель
Блок подготовки воздуха
Детальное обозначение
Упрощенное обозначение
Ресивер
Контрольно-измерительные устройства
Манометр
Термометр
Указатель (индикатор) давления
Указатель расхода
Расходомер
Счетчики импульсов
С ручной установкой нуля и с пневматическим выходным сигналом
нестандартизованные обозначения:
с ручной установкой нуля
с пневматической установкой нуля и с пневматическим
выходным сигналом
Реле давления
219
Приложение III. Условные графические обозначения элементов пневмоприводов
Пневматические распределители
Нормально закрытый 2/2-распределитель
Нормально открытый 2/2-распределитель
Нормально закрытый 3/2-распределитель
Нормально открытый 3/2-распределитель
4/2-распределитель
5/2-распределитель
3/3-распределитель
4/3- расп редел ител ь
5/3- расп редел ител ь
Дросселирующий распределитель
Пневматические клапаны
Обратные
Без пружины
С пружиной
Пневмозамки
С управлением открытием
С управлением закрытием
Логические
«ИЛИ»
«и»
$
is
220
Приложение III. Условные графические обозначения элементов пневмоприводов
Давления
Предохранительный
Редукционный двухлинейный
Редукционный трехлинейный
П осл ед о вате л ь н ости
Вариант 1
Вариант 2
Быстрого выхлопа
Выдержки времени
С задержкой по переднему фронту
С задержкой по заднему фронту
С задержкой по переднему и заднему фронтам
Формирователь импульса
221
Приложение III. Условные графические обозначения элементов пневмоприводов
Устройства регулирования расхода
Дроссели Нерегулируемый Регулируемый С обратным клапаном Путевой Выхлопной Т t
Устройства управления пневмоаппаратами
Управление мускульной силой Без уточнения типа Кнопка Рычаг Педаль Поворотная рукоятка Механическое управление Толкатель (кулачок) Ролик Ролик с «ломающимся» рычагом Пружина Фиксатор Пневматическое управление прямое нагружением прямое разгружением непрямое нагружением за счет разности площадей д ]
222
Приложение III. Условные графические обозначения элементов пневмоприводов
Электрическое управление электромагнит с одной обмоткой электромагнит с двумя встречными обмотками электромагнит с пропорциональным управлением шаговый электродвигатель Комбинированное управление электромагнитное И непрямое пневматическое электромагнитное ИЛИ непрямое пневматическое непрямое пневматическое с ручным дублированием электромагнит и пружина с
Элементы трубопроводов
Заборник воздуха из атмосферы Место присоединения к источнику сжатого воздуха Линии всасывания, напора, слива Линии управления, отвода конденсата Соединение трубопроводов Пересечение трубопроводов без соединения Трубопровод гибкий, шланг Место присоединения несоединенное Место присоединения соединенное Общее обозначение разъемного соединения Фланцевое соединение Штуцерное резьбовое соединение Быстроразъемное соединение без запорного элемента соединенное несоединенное L
—X -х<— -н— -н ч— —
223
Приложение III. Условные графические обозначения элементов пневмоприводов
Быстроразъемное соединение с запорным элементом
соединенное
несоединенное
Вентиль
Вентиль с пневмоприводом
Выхлоп без возможности присоединения
Выхлоп с возможностью присоединения
Пневмоглушитель
Струйные датчики положения и усилители сигнала (нестандартизованные обозначения)
Датчик подпора
Вилкообразный воздушный барьер
С кольцевым соплом
С встречным соударением струй
Однокаскадный усилитель
Двухкаскадный усилитель
Маркировка присоединительных отверстий пневмоустройств
Основное входное отверстие (подвод питания) Р 1
Выходные отверстия (подача рабочей среды) А, В, С, ... 2, 4, 6. ...
Выхлопные отверстия R, S, Т, ... 3, 5, 7, ...
Отверстия каналов управления X, Y, Z, ... 10, 12, 14. ...
224
заложение III. Условные графические обозначения элементов пневмоприводов
"=сг Х.И. Условные графические обозначения на электрических схемах
ISO 1219, ГОСТ 2.755-87, ГОСТ 2.756-76)
Типы контактов
Размыкающий
Замыкающий \
Переключающий ч
Контакты электротехнических устройств
Замыкающий контакт кнопочного выключателя (общее обозначение) в
Замыкающий контакт кнопочного выключателя, приводимого в действие нажатием кнопки в
Замыкающий контакт кнопочного выключателя с механической фиксацией положения р
Замыкающий контакт кнопочного выключателя, приводимого в действие вытягиванием кнопки в
Замыкающий контакт кнопочного выключателя, приводимого в действие путем поворота в
Переключающий контакт путевого выключателя о- 'j
Переключающий контакт путевого выключателя с управляющим воздействием от толкателя с «ломающимся» рычагом
Переключающий контакт путевого выключателя, активизированный в исходном состоянии контролируемым объектом
Переключающий контакт реле давления О в- 1
Замыкающий и размыкающий контакты реле времени с замедлением при срабатывании <-> I'!
Замыкающий и размыкающий контакты реле времени с замедлением при возврате >-х I >
Замыкающий и размыкающий контакты реле времени с замедлением при срабатывании и возврате I 4
225
Приложение III. Условные графические обозначения элементов пневмоприводов
Воспринимающая часть электромеханических устройств
Катушка
Катушка с одной обмоткой
Катушка с двумя встречными обмотками
Катушка устройства с замедлением при срабатывании
(например, реле времени)
Катушка устройства с замедлением при отпускании
Катушка устройства с замедлением при срабатывании
и отпускании
Бесконтактные путевые выключатели
Геркон
Индуктивный
Емкостный
Оптический
Реле
Электропневматический преобразователь (пневматический
распределитель с электромагнитным управлением)
Световой индикатор
226
Предметный указатель
Предметный указатель
-.с~т^5’,<зация производственных процессов: 7, 8, 12, 41,
95, 102, 146
г - зэедслтва автоматизации: 7, 8, 11, 178, 192
-ревматические 8, 11,43, 50, 74, 94, 134, 148, 176
зпектрические
эгектронные
Аягиха логики (булева алгебра)
11, 12, 161
11, 12
37
113, 120
57
33, 50, 189
повышения давления плавного 103
подготовки воздуха: 47, 49-52, 88, 91, 100, 103, 104, 183
- с модулем отвода 52
аиг/'.мыетры 14
п.~«а гальваническая 122, 123
5—94, 95, 192
_Яровы е 95
Ега.«-хть (влагосодержание) воздуха: 23
Е абсолютная (f,fa6c) 23
.ценного пара (fHn) 23
. - -юсительная (ср) 23, 24, 34
* сжатый:
- температура (Т) 14, 21, 23, 34, 39, 41,42, 47, 100, 183
- энергия и управление ею 9-11, 13, 53, 70, 75, 76
Ворота пневмоприводные 89
Выключатели кнопочные (кнопки управления) 159, 160,
169-171, 174, 176, 177, 179-181, 189
Выключатели путевые (концевые): 86, 104-106, 118, 119,
122, 128, 130, 132, 133, 135-141, 143, 146, 148, 160-162,
176, 177, 181, 187-189
161-165
162, 165
163
163, 164
163, 164
163, 165
161, 163, 165, 172, 174
138, 161
161
161
15, 183
15
15, 21
- де^зе-ие (р): 7-9, 13, 20, 23, 24, 39, 41, 42, 44, 46-48,
5С 52, 55, 57, 62, 69, 70, 74, 75, 85, 94, 97, 98, 100-103,
-07-112. 115-118, 122, 125, 142, 153, 156, 157, 169, 179,
188-192
абсолютное (р, ра6с) 14
вакууметрическое (вакуум, PBJ 14,74
хзбыточное (ртб) 14, 26-29, 48, 49
- движение и его направление 9, 10, 13, 33, 35, 39, 41,
75,
83
- запас аварийный 24
- запас резервный 30, 37, 47
- источники 7, 24, 36, 40, 75, 152
- осуижа 9, 31, 32, 36, 37, 40, 47
- сспаждение 24, 26, 31, 34, 36
- хисгпка (чистота) 23, 31-33, 36, 47, 125, 183
- оасход (Q): 8, 9, 18, 24, 36, 41, 47, 48, 51, 53, 74-
76, 95,
96, 100, 102, 107, 122, 129, 183, 184, 188
' массовый (Qm) 18,21,22
объемный (Q или QJ: 18,21,22,28
- нормальный (QJ 22, 92, 93
-юминальный 47, 50, 93, 100, 111
- подогрев 36
- -ооизводство и подготовка 9, 10, 23, 47, 52, 184
- бесконтактные:
герконовые
электронные:
- емкостные
- индуктивные
- оптические (фотоэлектрические)
- электромеханические:
с «ломающимся» рычагом
- требования и ограничения
- условия эксплуатации
Вязкость:
динамическая (м)
кинематическая (н)
Газы:
азот
водород
инертные (аргон, гелий, криптон, ксенон, неон)
кислород
углерода диоксид (углекислый газ)
- идеальный газ
- параметры основные:
давление (абсолютное) (р)
объем удельный (v)
плотность (р)
температура (Т)
- свойства физические:
вязкость (внутреннее трение)
сжимаемость:
- напряжения сжатия нормальные
текучесть
температурное расширение
- упругость
Глушители пневматические
Головки управляющие (в пневмораспределителях)
Группа (часть единичного рабочего цикла)
13
13
13
13
13
16
13, 16-18
13, 15-18
14, 16, 18
14-16, 18, 22
14-18
15
15, 18, 20, 21
6, 7, 15, 18
15
15
15
14
82, 98, 101, 188, 191
80, 86
139-141, 143,
146, 147, 176
Давление:
атмосферное (рахм) 14, 25, 73
весовое 20
гидромеханическое 20
C-J составлении предметного указателя материалы приложений не обрабатывались.
227
Предметный указатель
динамическое 20
на входе 22, 48, 49, 93, 94, 100, 108, 153
на выходе 22, 48, 49, 94, 100, 102, 103, 106-108, 153
- гистерезис 111
- отношение давлений на входе и выходе: 21, 22, 108,
153
- критическое значение 22
- перепад 8, 22, 48, 93, 183
-потери 41,91,183
- регулирование давления,
развиваемого компрессором: 30
- периодическим отключением 30
- по нагрузке 30
- холостым ходом: 31
- коротким замыканием 31
- на входе 31
- на выходе 31
Датчики: 6, 11, 12, 38, 56, 58, 157, 160-163, 176, 186
волнового типа: 163
- оптические 165
генераторного типа: 163
- емкостные 163, 164
- индуктивные: 163, 164
- расстояние переключения номинальное (Sh0M) 164
герконовые 162
струйные: 106, 108, 109
- «вилкообразный воздушный барьер» 106
- с кольцевым питающим соплом 106, 107, 109
- со встречным соударением струй 107, 109
Двигатели пневматические вращательного действия
(пневмомоторы): 7, 10, 49, 53, 67-69, 71, 109, 129, 130,
154,
155, 184
I) объемные: 68
- поршневые: 68, 70, 71
аксиально-поршневые 68
радиально-поршневые 68, 70, 71
- ротационные: 68
типа Рутса 68, 70
шестеренные 68,70
шиберные (пластинчатые) 68-70
II) турбинные 68, 71
1) нереверсивные 69, 71
2) реверсивные 69, 71
а) нерегулируемые . 71
б) регулируемые 71
- приемистость (быстрота разгона) 69
- скорость срабатывания 7
- характеристики рабочие 68, 69
Двигатели пневматические поворотные: 53, 66, 129, 130,
154, 155, 184
поршневые: 66,67
- с реечной передачей 66
шиберные 66,67
Движение:
- по виду: 53
- вращательное 6, 34, 53, 67, 69, 70
- линейное (возвратно-поступательное,
6, 7, 53, 56, 64, 66, 67, 70, 105
7, 53, 66, 67
53
53
53, 102, 152
129, 131, 132, 135, 182
129, 131, 132, 186
129, 132
поступательное)
- поворотное
- по направлению:
- нереверсивное
- реверсивное
Диаграмма функциональная:
перемещений:
- «перемещение-время»
- «перемещение-шаг» 129, 130, 132, 133, 136, 145-147,
172, 173, 186, 187
135
129, 131
9, 57, 95, 96, 98, 99, 185, 188
95
95, 96, 152, 154
95
95
98, 109
96, 97, 105, 122, 186
98
97
13
13
14
15
14, 15
13
13, 15
15
15
15
18
реальная
управления
Дроссели:
I) постоянный
II) регулируемый
а) ламинарный
б) турбулентный
выхлопной (ввертный)
с обратным клапаном:
ввертные
- монтаж
Единицы измерения:
бар [бар]
градус Цельсия [°C]
квадратный метр на секунду [мг/с]
кельвин [К]
ньютон [Н]
паскаль [Па]
паскаль-секунда [Па с]
пуаз [П]
стокс [Ст]
Жидкость идеальная
Загрязнители 23, 24, 26, 32-34, 42, 43, 47, 58, 63, 66, 75,
183, 184, 188
44, 53, 72
16, 17
16
16, 17, 26
16, 17
13
19
94
Зажимы цанговые
Закон:
- основные газовые законы:
Бойля — Мариотта
Гей-Люссака
Шарля
- Паскаля
- сохранения вещества
Замки пневматические
Захваты:
вакуумные
пневматические:
- параллельные
- поворотные
- трехточечные
Золотники
Индексация:
- для описания хода технологического процесса 128
- контактов 159, 160, 166, 167
- линий (присоединительных отверстий
пневмоаппаратов)
- токопроводов
- устройств пневматических
- элементов на схемах
53, 58, 73, 74
10, 72, 73
73
73
73
75, 76, 83, 85, 90, 155, 156
79, 81, 186
172
88, 160
172
228
Предметный указатель
Квикстепперы
Клапаны:
- вакуумный
- воздушный
- всасывающий
- выдержки времени:
диаграммы функционирования
- выхлопа быстрого
- давления:
предохранительный:
- нерегулируемый
- регулируемый
редукционный:
- двухлинейный
- трехлинейный
- с внешним управлением:
механическим
пневматическим
пропорциональным
- логические:
«И»
«ИЛИ»
- нагнетательный
- обратный
I) динамические:
а) осевые
б) центробежные (турбокомпрессоры)
II) объемные:
в) возвратно-поступательные:
1) поршневые:
- простого действия
- двойного действия
- одноступенчатые
- многоступенчатые
- одноцилиндровые
- многоцилиндровые
- с водяным охлаждением
- с воздушным охлаждением
2) мембранные
г) ротационные:
3) пластинчатые (шиберные)
Индикаторы 11, 111, 112, 143, 184, 185
Индикация цветовая (световые сигналы) 190
148
27, 82, 83, 86, 87, 101
74
35
25, 26, 31
122-125, 132, 138
123
99
9, 99-101
38, 39, 49, 75, 100, 101, 110,
190, 192
39
38, 39
47-52, 100, 101, 109, 189
48, 49, 100
48, 49, 100
101, 102
102
102, 110
102
114, 115, 139, 141
115, 117-119, 124, 140, 143, 146
114-117, 124-126, 143, 144, 146, 150
25, 26
30, 31,46, 50, 57, 94, 96, 97, 101, 103, 115,
117, 119, 122, 123
- пилотный 110
- последовательности давлений (реле давления с
пневматическим выходом) 110, 111, 132
- сброса (избыточного давления) 48, 49
- сливной 34, 35
Кнопки пневматические 85, 88, 89, 105, 111, 116, 117, 119,
122, 124-127, 133, 135, 136, 139, 141, 143-146, 149-151,
186, 188, 189
Коалесценция 33
Коллекторы разводные 45
Коммуникации возвратные 7
Компрессоры: 9, 13, 23, 24, 30-34, 36-38, 41, 69, 102, 129,
188
24, 29, 94
24, 29
24, 29, 30
24, 25
24
24-26, 28, 30
25, 26
25, 26
25, 26
25, 26
26
26
26
26
24, 26, 27
24, 27, 28
24, 27, 28, 69
4) винтовые
5) Рутса
- компрессорная станция
- компрессорная установка
Контакты (контакт-элементы):
а) электрические
б) герметические (герконы)
I) замыкающие (нормально разомкнутые)
24, 28
24, 28
32, 40, 47, 75
30, 31, 37, 41
159-163, 166, 167, 172, 176
162, 163
I 159, 160,
162,
167, 170, 171, 176
II) переключающие 159, 161, 162
III) размыкающие (нормально замкнутые) 159, 162,
167,
170, 171, 176, 177
Контроллеры программируемые логические (ПЛК,
промышленные контроллеры) 12, 92, 102, 158, 182
Коэффициент:
загрузки оборудования
Кориолиса (а)
объемного расширения (Р )
объемного сжатия (Р р)
передачи привода
полезного действия (КПД, г/)
Пуассона (адиабаты) (к)
расхода отверстия (е)
трения скольжения (р)
усиления
Краскопульты
Линии (каналы, магистрали) пневматические:
185
20
15
15
156
68, 69, 100
16, 21
21
52
108
58, 64
7, 22, 36,
43,
74-79, 81, 86, 91, 95-99, 101, 102, 106-108, 110, 115-117,
119, 122, 124, 143, 144, 146, 147, 150, 157, 191, 192
возвратные 7,77
всасывания 30-32,43
выхлопа 43, 49, 51, 77-79, 82, 83, 87, 91, 94, 97-99, 108,
155, 188
дренажа 43
нагнетания (напорные) 25-28, 30, 31,43, 97, 155
отвода конденсата 43
питания 24, 26, 39, 49, 76-79, 81-83, 85, 87, 90, 91, 106,
108, 156
потребителя 49, 76-79, 81-83, 87
самоудержания (самоподхвата) 126, 150, 171
управления 39, 43, 77, 79, 81, 90, 94, 110, 116, 124-126,
186, 187
14
14, 39, 40, 49, 100, 111, 192
Мановакуумметры
Манометры:
Масла:
гидравлические
для заправки маслораспылителей
компрессорные
Маслораспылители:
однократного распыления
двукратного распыления
Механизмы исполнительные:
6, 152, 153, 191
50-52, 183, 184
23, 26, 32-34, 51
49-52, 183, 184
50
50
7, 9, 10, 12, 52, 53, 75,
77, 78, 84, 88, 92, 97, 100, 103-105, 113, 127-130,
132, 133, 136, 139, 143, 148-150, 152, 153, 160,
162, 172, 177-179, 184, 186, 189
229
Предметный указатель
- выходное звено: 7, 12, 59, 60, 66, 104, 105, 127, 152-157,
162, 172
- закон движения 7, 154
- плавность /резкость перемещения 7, 97, 103
- скорость движения 6, 7, 53, 57, 92, 95-101, 105, 129,
149, 152-155, 158, 184
- показатели эргономические 53
- связь с объектом управления:
жесткая 12
кинематическая 12, 155
Мешалки 70
Модули:
- тактовые: 142-144, 146-148, 150, 176, 177, 185
типа А 143,144,147
144, 146, 147
146, 147
149-151
15
67
6, 53, 64, 67-71
6, 7, 68-70
153
30, 45, 46, 62, 65, 66
42
102
51, 70, 153
73
92
13, 23, 24, 34, 41
6, 7
58
50
91
70, 71
6, 7, 59, 60, 88, 94, 154, 155
42, 44, 52
136
136-139, 141, 142, 185-187
16, 21
164
типа В
типа С
- управления
Модуль упругости объемный (модуль сжимаемости) (К)
Момент инерции динамический (J)
Момент крутящий (вращающий) (М)
Мощность (Т5)
Мультипликаторы пневмогидравлические
Муфты
Нагар
Напряжение
Насосы
вакуумные (вакуум-насосы)
Острова пневматические
Пар водяной (влага)
Перегрузки
Пескоструйки
Пленка масляная
Плиты монтажные
Подъемники
Позиционирование
Полимеры
Полуавтомат:
сверлильный
Постоянная удельная газовая (R)
Потенциометры регулировочные
Преобразователи:
- пневмоэлектрические (ПЭП; реле давления) 168, 169
- электропневматические (ЭПП; пневмораспределители
с электромагнитным управлением) 168-170
Пресс 118, 119, 124
Приводы: 6
I) гидравлические 6, 7, 71, 77, 152, 158
II) пневматические: 6-12, 23, 41, 47, 50-52, 61, 65,
76, 77,
89, 92, 95, 100, 103, 112, 127, 136, 152-154, 158, 159, 162,
183-192
- а) силовая часть:
- исполнительная
подсистема
9-11, 86, 103, 104, 158, 182
10, 11,47, 53, 103, 104, 134
- направляющая и регулирующая
подсистема 9-11, 75, 93, 103-105
- энергообеспечивающая
подсистема 9-11, 23, 104, 105
- б) управляющая часть: 9-11,47, 52, 103, 113, 158,
159
- информационная (сенсорная)
подсистема 11, 103-105, 112, 127, 159
- логико-вычислительная (процессорная)
подсистема 11, 103, 112, 113, 127
- неисправности: 185-188, 192
- методы поиска: 185, 187, 188
табличный 185-187
алгоритмический 185, 187
- осмотры 184, 185, 188-192
- отказы 185, 187, 188
- применение 7
- ремонт 183, 185, 188, 189, 192
III) пневмогидравлические 152, 153
IV) электрические 6, 7
V) электропневматические: 7, 158, 168, 171-175, 182
- с управлением от ПЛК 182
позиционные: 154, 156
- дискретные 154
- непрерывные (позиционеры): 154, 155, 157
-управление (позиционное): 154, 155
- посредством торможения
(выходного звена) 154
- путем регулирования энергии
(пневмодвигателя) 154
следящие 155-157
- быстродействие 7
- взрывобезопасность 7, 113
- габариты (размеры) 7, 99
- герметичность 7
- гибкость функциональная 7
- долговечность 7, 52
- жесткость 6
- масса 7, 99
- место установки 7
- мощность: 6, 7, 153
удельная 7
- надежность 7, 51, 52
- обслуживания легкость 7
- пожаробезопасность 7, 113
- простота (степень сложности) конструкции 7, 152
- простота управления 7, 52
- работоспособность 7, 188
- стоимость 7, 99, 152
- цикличность работы 51
- эксплуатация: 7, 65, 183, 185, 188-190, 192
- безопасность 11, 189-192
- легкость 7, 52
- условия 7, 11, 51, 113, 184
- энергоемкость Проворот: 7
объекта присоединенного 63
штока пневмоцилиндра 64
Проектирование пневматических и электропневматических
(релейно-контактных) САУ: 133, 140, 146, 148, 174-178, 182
- методы: 133, 139, 172
отключения сигнала 137, 139
230
Предметный указатель
разбиения на группы 139, 141, 146, 176 - с ручным управлением:
составления логических уравнений: 133-137, 174, - нормально закрытые 89
175 - с пневматическим управлением:
- решение проблемы совпадающих шагов 136, 137, 139 - нормально закрытые 126, 143
- упрощение логических уравений 134, 136, 137, 139 - 4/2-распределители: 78, 79
- этапы: 133 - бистабильные:
алгоритмического проектирования 133 - с механическим управлением 102
логического проектирования 133, 134 - с пневматическим управлением 90, 136
технического проектирования 133 - 5/2-распределители: 78, 79
Промышленность (отрасли): - моностабильные:
легкая 7 - с пневматическим управлением 85, 116,
медицинская 7, 71 118,
металлургия 70 119
парфюмерная 7 - с электромагнитным управлением 168,
пищевая 7, 33, 95 170-172, 175
тяжелая 8, 70 - бистабильные:
угольная 70 - с пневматическим управлением 89, 90, 94,
фармацевтическая 33 104, 122-125, 134, 135, 146, 187
химическая 33, 70, 95 - с электромагнитным управлением
электронная 7, 33 (импульсные) 90, 169, 174, 178
электротехническая 161 II) трехпозиционные: 79, 87
Процессы газовые: - 5/3-распределители: 76. 77, 81
адиабатический (адиабатный) 16 - с пневматическим управлением 87, 88
изобарический (изобарный) 17 - с электромагнитным управлением 94
изотермический 16 дросселирующие с пропорциональным управлением 156.
изохорический (изохорный) 17 157
исполнительные
9
76, 77, 81
81
77, 78, 80, 82, 113-116
Процессы технические:
технологические 9, 41, 53, 56, 61, 103, 104, 112, 113, 125,
127-129, 131, 133, 139-141, 149, 160, 185
энергетические 9
информационные 9
Пружина пневматическая 85
Распределители гидравлические дросселирующие
с пропорциональным управлением 154, 155
Распределители пневматические: 9, 76, 77, 79-87, 91-93,
98, 103-106, 117, 119, 122, 125, 126, 137, 138, 140, 142, 155,
156, 166, 168, 177, 184, 185, 188, 192
I) двухпозиционные:
- 2/2-распределители:
- моностабильные:
- с механическим управлением:
- нормально закрытые
- 3/2-распределители:
- моностабильные:
- с механическим управлением:
- нормально закрытые:
золотниковые 83
клапанные 82, 83, 118, 119, 126, 187
- нормально открытые:
золотниковые
клапанные
- с пневматическим управлением:
- нормально закрытые: 84, 108-110, 119,
122, 123, 126, 143, 150
с пилотным управлением 85, 86
- нормально открытые 85, 109, 123, 150
- с электромагнитным управлением 87, 157
- бистабильные:
83
82, 83
пилотные
- монтаж
- обозначения цифровые
- параметры и их определение:
- пропускная способность
(расходные характеристики Kv, Cv)
Распределитель цапфенный
Регистры переключающие
Регулятор центробежный
Регуляторы:
давления
расхода
Редуктор
Режимы (работы пневмосистемы):
а) автоматического управления
б) ручного управления
I) единичного цикла
II) непрерывного цикла
аварийного останова (отключения)
Рейнольдса число (Re):
критическое (ReKp)
Реле:
времени
давления
- включение по схеме с самоудержанием
(самоподхватом) 171, 176, 177, 181
Ресиверы (воздухосборники) 9, 24, 37, 38, 41,47, 101, 103
Связь обратная 12, 102, 155-157
Серьги 65,66
Сеть (система) пневматическая: 23, 32, 37, 38, 40, 42, 47,
176, 179, 186
86, 90
91, 92
76
92, 93
100, 102
95
69
92, 93
71
142-148, 150, 176, 177, 181, 186
70
149, 150, 178, 179, 181
149, 150, 178, 179, 181
149-151, 178, 180, 181
130, 149-151, 178, 180, 181
149-151, 178, 179
21
21
166, 171, 172, 176, 177, 181
167
169
231
Предметный указатель
вакуумная
дренажная
заводская
питания центральная
Сигналы управляющие
55, 61, 89, 91, 93, 94, 95, 100, 102, 103, 111, 125, 126, 153,
169, 189, 192
74
36, 47
40, 47, 73, 102, 113
9, 23
11, 81, 82, 85, 86, 89, 90, 94, 102,
108-110, 112, 113, 116, 118, 122, 126, 127, 137-139, 155,
158, 166-168, 176, 177
Сила (усилие, F) 6, 9, 13, 53-56, 58, 59, 61, 69, 70, 75, 97,
100, 102, 106, 110, 153, 154, 158, 169,
184, 188, 189
Системы (объектов, устройств) 6, 129
Системы автоматические: 9, 10, 12, 125
- системы автоматического управления
(САУ): 8, 10, 53, 103, 113, 133, 155, 178, 182
I) замкнутые 10, 11, 103
II) разомкнутые 10
а) пневматические: 11, 90, 93, 103, 107, 112, 113, 122,
149-151, 158, 178
- дискретные системы последовательного
управления 12, 113, 115, 153
- циклические 127, 129, 133, 139, 141, 147, 148,
154, 176
б) гидравлические 158
в) электрические 158, 160
г) гибридные: 11, 158
- электропневматические: 12, 148, 158, 174
- релейно-контактные (с электрической
управляющей частью): 158, 172, 174, 176,
178, 181
- циклические 176
- электронные (с электронной управляющей
частью)
следящие
Системы единиц:
СГС (механическая система единиц)
СИ (международная система единиц)
Системы позиционирования
Скорость:
звука (а)
света (с)
угловая (вращения, щ)
Соединения трубопроводов:
I) неразъемные
II) разъемные:
- быстроразъемные:
без запорного элемента
с запорным элементом
а) резьбовые
б) фланцевые
гибких трубопроводов (шлангов):
- прямые:
- с фигурным наконечником штуцера и
накидной гайкой
- с цанговым зажимом быстроразъемные
- угловые:
158, 182
155
15
13
94, 153, 154
20, 22
6
53, 67, 69-71
41—46, 188
43
43, 46
44-46
46
43, 46
43, 46
44, 45, 46
44, 45
44
44
45
104
105, 106
161
- тройники
- L-образные
- многоканальные
тонкостенных металлических труб:
- с врезающимся кольцом
- с развальцовкой трубы
- разводка
Сопротивления:
гидравлические
местные
Среда окружающая (внешняя):
- агрессивность (неблагоприятность) 7, 42, 54, 67, 106,
107, 161, 190
- загрязнение 6, 7, 52, 183, 189, 192
- температура и ее изменения 6, 7, 41,42, 54, 107, 183
- теплообмен 34
Среда рабочая 6, 7, 13, 23, 41,42, 54, 75, 187
Станок:
сверлильный
хонинговальный
Степени защиты (оборудования и персонала)
Схемы:
монтажные 43,46
принципиальные пневматические 10, 39, 40, 43, 51, 79,
81, 83, 85, 88, 98, 99, 105, 120, 121, 133-135, 137, 138, 141,
142, 144-147, 160, 162, 168, 169, 172-175, 185-188, 191
принципиальные электрические 160, 161, 165-169,
172-175, 181
158, 170-172, 182
9-12
112
125
39
14
14
18
21
19
22
21, 22
22
22
21
18
18, 19, 93
18, 21, 22
18, 19, 21, 22
18-21,74, 191
20, 21
20, 21
20, 21
20, 21
126
160, 161, 166, 171, 172, 176, 177
24, 36, 37
25, 71, 102
163
136, 137, 140, 142-144, 146, 186, 187
45
45
46
44
44
44
45, 46
31, 92, 93, 95, 99
20, 21,41
релейно-контактные
структурные
Счетчики (сигналов)
Таймеры
Термометры
Температура абсолютная (термодинамическая, Т ):
- абсолютный нуль
Течение (жидкостей и газов):
изоэнтропическое (адиабатическое)
установившееся
через диафрагму
через отверстие истечение:
- докритическое (подкритическое)
- закритическое (надкритическое)
- сжатие струи на выходе из отверстия
- параметры:
- расход (Q):
массовый (Qm)
объемный (Q или Qv)
- скорость (v):
критическая (v )
- режимы:
ламинарный
турбулентный
Тиски пневмоприводные
Токопроводы
Точка росы
«Точки мертвые» (хода поршня)
Триггеры:
пневматические
232
Предметный указатель
Трубка Бурдона 40
Трубопроводы: 18, 26, 30, 32-34, 37, 41-47, 50, 58, 74, 79,
91, 92, 95, 96, 98-100, 119, 129, 183,
I) всасывающий
II) выхлопной
III) нагнетательный
гибкие (шланги)
- диаметр (внутренний, d):
- номограммы для расчета
- длина (L)
- материал
- монтаж и демонтаж
- очистка химическая
- площадь поперечного сечения (S):
переменная
- продувка
- промывка
184, 188, 191, 192
31
33
24-26
42-46, 60, 184, 188
21, 41-43, 46
41
20, 31, 41, 91
41-43
41-46
42, 183
18-20, 31
19
42, 183
42, 52, 183
- шероховатость внутренней поверхности 20
Управление пневмоаппаратами: 79,80
I) мускульной силой (ручное) 10, 79, 80, 84, 91, 95, 104,
160, 189
механическое: 79-82, 84, 104
- от ролика с «ломающимся» рычагом 80, 86
II) пневматическое: 79, 80, 84, 90, 95
- непрямое 80, 84, 85
- прямое 80, 84
/V) электрическое (электромагнитное) 79, 80, 86, 87, 90,
155, 188
V) комбинированное: 79, 80
- электропневматическое:
непрямое
прямое
а) по положению
б) по давлению
в) по времени
Уравнение:
Бернулли:
- для потока идеальной жидкости
- для потока реальной жидкости
Клапейрона
Клапейрона — Менделеева
неразрывности
Пуассона
состояния
Усилители:
давления:
- двухкаскадные
- однокаскадные
Ускорение свободного падения (g)
Условия нормальные:
технические
физические
Установка для перемещения коробок
Устойчивость (штока)
Устройства:
вакуумные
80, 90, 92, 174, 175
175
174
104, 110, 113, 156
110, 156, 169
113
19, 20, 74
19
20
16
16
19
16
16
157, 163, 165
102, 103, 107, 156
108, 109
107, 108
19
17
17, 22, 92
17
127, 128, 130-135,
174, 175
54, 61, 65, 66
14
ввода электрических сигналов: 158-160, 170, 172
- с автоматическим управлением — см. Выключатели
путевые (концевые)
- с ручным управлением — см. Выключатели
кнопочные (кнопки управления)
воздухозаборные 30,31
дублирующие 87, 185
заполняющее 145
золотникового типа 75, 76
клапанного (седельного) типа 75, 76
микропроцессорные 6, 7, 86, 182
обработки электрических сигналов 158, 166
осушки сжатого воздуха: 9, 24, 32, 36, 40, 100
- рефрижераторные 36
- абсорбционные 36, 37
- адсорбционные (адсорберы) 36, 37
отвода (слива) конденсата: 33-35, 36, 38, 183
- автоматические 35, 38, 52, 183
- ручные 33, 34, 38, 183
охлаждения сжатого воздуха (теплообменники) 24, 36
очистки сжатого воздуха 32, 36, 40, 100, 183
подогрева сжатого воздуха (подогреватели) 36
преобразования электрических сигналов 158, 168
релейно-контактные 12, 86, 158
сигнальные: 129, 132, 190-192
- обозначения 132
смазочные: 6, 183
- на основе консистентной смазки 51, 52
сортировочные 60
специальные пневматические исполнительные 53, 72
тормозные 99, 154
управления пневмоаппаратами (управляющие) 79, 80,
113, 118, 129, 131, 189, 190
электронные 7, 12, 86, 92, 158
Утечки 6, 7, 30, 44, 45, 56, 69, 184, 185, 188, 191, 192
Фильтры: 9, 32, 183, 185
коалесцентный (контактного действия) 33
масляных паров (маслоудерживающие) 24, 26
напорный 33
очистки сжатого воздуха от пыли 24
приемный (всасывающий) 32
фильтр-влагоотделитель 34, 35, 47, 49-52, 184
фильтр-глушитель 33
фильтр-маслоотделитель 51
фильтр-регулятор 49,51
- фильтроэлемент (фильтрующий элемент) 32, 34, 47,
54, 183
- фильтр тонкой очистки 47
Флюс 36
Форма записи (хода технологического процесса):
арифметическая 128
графическая (диаграммная) 129, 130
табличная 129
хронологическая 128
Формула:
Сен-Венана — Ванцеля 21
Эйлера обобщенная 66
Функции:
233
Предметный указатель
- запоминания сигнала 126, 171
-логические: 113-121,170
ДА (повторение) 113-115, 170
И (конъюнкция, логическое умножение) 115, 118, 119,
132, 140, 141, 146, 148, 170, 176, 177
ИЛИ (дизъюнкция, логическое сложение) 114-117,
132, 170
114, 115, 132, 170
119-121
149-151, 178, 181
- многопозиционные
- с демпфированием в конце хода:
- с проходным штоком
- с фиксатором штока
- секционные
- тандем-цилиндры:
- компактные
III) бесштоковые:
- с гибким штоком
- с ленточным уплотнением
- с магнитной муфтой
- с направляющими
телескопические
- крепление крышек
- монтаж
- параметров основных диапазон
- соединение штока с ведомым механизмом
Цилиндры пневмогидравлические
Частота вращения (и)
номинальная
Шаг (рабочий)
НЕ (отрицание, или инверсия)
- упрощение
- сервисные
Характеристики расходно-перепадные:
диафрагмы 22
Хладагенты 36
Ход холостой 68, 70
Цикл рабочий: 127, 128. 130, 136, 139, 145, 146, 148-151,
176, 178, 180, 181, 184
замкнутый 127, 134
Циклограмма 130
Цилиндры гидравлические 152, 153
Цилиндры пневматические (двигатели пневматические
линейные): 10, 25, 49, 53, 54, 56-59, 61, 64-66, 84, 86-89,
91, 94, 95, 98, 101, 104, 105, 111, 112, 116, 118, 119,
122-133, 136-139, 145, 148, 149, 151, 152, 155-157, 162,
169, 173-175, 178, 179, 187, 188
I) одностороннего действия: 54-56, 66, 67, 77, 78, 84,
85, 96, 97, 153, 169
- мембранные 55
II) двустороннего действия: 54, 56, 58, 59, 73, 78, 97, 134,
135, 171
60
57, 58
58
60
59
59, 152
59
61, 63
61, 62
63
62
63
61
56
65, 66
53
65
152
6, 30, 68, 69
68, 69
127-131, 133, 134, 136-141, 143, 146-148,
176, 181, 186, 187
137, 139-143, 146, 150, 172, 176, 179, 186
14
14
14
14
14
14
Шины
Шкалы температурные:
Международная практическая:
- точки реперные:
- точка замерзания воды
- точка кипения воды
термодинамическая
46, 172
74
Шкаф управления
Эжекторы:
- головка эжекторная с принудительным
отталкиванием детали от присоски
- компактный с электромагнитным управлением
Элементы запорно-регулирующие (ЗРЭ) и запорные
74
74
31,
38,
39, 74-76, 79, 81, 84, 85, 87, 89, 90, 94, 95, 99, 115, 117,
155-157, 185
Энергия:
давления
механическая:
- кинетическая
- полная
- положения
- потенциальная
удельная
электрическая
- виды
- выработка
- затраты (снабжение энергией)
- накопление (аккумулирование)
- носители (энергоносители)
- передача
- потери:
- на местных сопротивлениях
- на теплообмен с окружающей средой
- на трение:
- на внутреннее трение
- по длине трубопровода
- суммарные (гидравлические)
- преобразование
19, 20, 29
19, 20, 53, 69, 71
19, 20, 24, 29, 71
19
19
24, 67, 69
19
30
6
9
6, 30, 37
6, 38
6, 23
6, 9
6, 20, 21,41, 142
20, 21
21
21, 54
20, 21
20
20, 119
9
234
Литература
Литература
1 . Башта Т.М., Руднев С.С, Некрасов Б.Б., Байбаков О.В., Кирилевский Ю.Л. Гидравлика, гидромашины и
гидроприводы. М.: Машиностроение, 1982, 423 с.
2 Виленский П.И., Срибнер Л.А. Бесконтактные путевые выключатели. М.: Энергоатомиздат, 1985, 78 с.
3 . Гаврюшина О.С., Ефремова К.Д., Наземцев А.С. Основы проектирования циклических пневмосистем.
МГТУ им. Н.Э. Баумана, 1997.
4 Герц Е.В. Динамика пневматических систем машин. М.: Машиностроение, 1985, 256 с.
5 Деньгуб В.М., Смирнов ВТ. Единицы величин: Словарь-справочник. — М.: Изд-во стандартов, 1990. —
240 с.
6 Клюев А.С., Глазов Б.В., Дубровский А.Х., Клюев А.А. Проектирование систем автоматизации техноло-
гических процессов. Справочное пособие. М.: Энергоатомиздат, 1990. — 464 с.
7 . Кудрявцев А.И., Пятидверный А.П., Рагулин Е.А. Монтаж, наладка и эксплуатация пневматических при-
водов и устройств. М.: Машиностроение, 1990, 206 с.
5 Кросер П., Эбель Ф. Пневмоавтоматика. D-73734 Esslingen, 1997, 228 с.
9 Левин В.И. Пневматические элементы и устройства релейной автоматики. М.: Машиностроение, 1983,
168 с.
‘0 Нагорный В.С., Денисов А.А. Устройства автоматики гидро- и пневмосистем. ВНИИТЭМР, 1989, 64 с. М.:
Высшая школа, 1991, 367 с.
11 Никитин О.Ф., Холин К.М. Объемные гидравлические и пневматические приводы. М.: Машиностроение,
1981,269 с.
121 Петров И.В. Обслуживание гидравлических и пневматических приводов дорожно-строительных машин.
М.: Транспорт, 1985, 170 с.
“ 3 Пневматические средства автоматизации. Каталог 1998/99. Festo.
14 Пневмоавтоматика. Международные курсы. СПб.: ООО “ЭС ЭМ СИ Пневматик”, 192 с.
15 Прудников С.Н. Расчет управляющих устройств пневматических систем. М.: Машиностроение, 1987,
152 с.
16 Струйные логические элементы и устройства автоматического управления технологическим обору-
дованием. Отраслевой каталог. М.: ВНИИТЭМР, 1989, 64 с.
17 Трофимова Т.И. Курс физики: Учеб, пособие для вузов. — 7-е изд., стер. — М.: Высш, шк., 2001. — 542 с.
*8. Филипов И.Б. Тормозные устройства пневмоприводов. Л.: Машиностроение, 1987, 144 с.
‘9. Элементы и устройства пневмоавтоматики высокого давления. Отраслевой каталог. М.: ВНИИТЭМР,
1990, 184 с.
20. Basic Pneumatics. Ing.-Buro J.P. Hasebrink, D-78345 Moos, Schleunungdruck GmbH, Eltertstr. 27, 1997.
21. SMC Pneumatik. Каталог C3. 1998.
235
Участник Межгосударственной ассоциации
разработчиков и производителей учебной техники
Учебно-инженерный центр
предлагает Учебно- методические комплексы:
- итальянская фирма CAMOZZI -
предлагает комплексную поставку пневмоаппаратуры,
проводит технические консультации и дает рекомендации по применению.
В номенклатуру входят:
- пневматические цилиндры различных моделей; - устройства подготовки сжатого воздуха (фильтры,
- пневматические распределители с электромагнитным, регуляторы давления, маслораспылители);
электропневматическим, пневматическим, - латунные фитинги и пластиковые трубопроводы.
_____________механическим и ручным управлением;________________________________________
ООО “Камоцци Пневматика” Россия, г. Химки, ул. Ленинградская, 1А
Тел./Факс (095) 572-3651, 572-4613, 575-4561, 575-4564
E-mail: info@camozzi.ru 230-6961 Интернет: www.camozzi.ru,www.camozzi.com
11 11 LDHA1VV
125171, г. Москва, ул. Космонавта Волкова, 6-А, офис 1206
тел./факс (095) 150-2321, 150-8323, 150-8329, 742-4082
E-mail: pneumax@asvt.ru www.pneumax.ru
Бош Рексрот - ведущий производитель пневматических систем
предлагает широкую палитру стандартных и специальных изделий
для автоматизации технологического оборудования, мы поставляем
высокачественное оборудование напрямую с заводов-изготовителей.
Наш большой ассортимент компонентов специального назначения
существенно влияет на общий уровень достижений пневматической
техники в мире и направляет процесс развития пневматических
технологий, но мы не ограничиваемся только поставками
высококачественной продукции, наши эксперты всегда готовы
прийти на помощь и поделиться с Вами знаниями в области
пневмотехники.
127015, г.Москва, ул.Вятская, д.27, стр.15
тел. : (095) 785-74-78; 785-74-79 факс: (095) 785-74-77 (автомат)
Сайт: www.boschrexrot.ru E-mail: brp@boschrexroth.ru
Наземцев Аркадий Семенович
Гидравлические и пневматические системы
Часть 1. Пневматические приводы и средства автоматизации
Учебное пособие
Корректор В. Г. Овсянникова
Компьютерная верстка С. Зайнуллина
Художник А. С. Наземцев
Сдано в набор 10.05.2004. Подписано в печать 18.08.2004.
Формат 60x90 1/8. Бумага офсет. Гарнитура «Arial».
Печать офсетная.Усл. печ. л. 30. Уч.-изд. л. 27,8.
Тираж 3 000 экз.
Заказ № 10266.
Отпечатано в полном соответствии с качеством
предоставленных диапозитивов в ОАО "Тульская типография”.
300600, г. Тула, пр. Ленина, 109.