














Автор: Наземцев А.С. Рыбальченко Д.Е.
Теги: характеристика машин по способу привода общее машиностроение машиноведение машиностроение гидропривод гидравлика пневмопривод
ISBN: 978-5-91134-128-2
Год: 2007




А.С. Наземцев
Д.Е. Рыбальченко
Пневматические и гидравлические приводы и системы
Часть 2
Гидравлические приводы и системы
Основы
Допущено Министерством образования Российской Федерации в качестве учебного пособия
для студентов, обучающихся по специальностям технического профиля
Москва
ФОРУМ
2007
УДК 62-85(075.32)
ББК 34.4472я723
Н19
Рецензент:
кандидат технических наук, заведующий лабораторией гидросистем станков «ЭНИМС»
Свешников Владимир Константинович.
Авторы:
А.С. Наземцев (гл. 1-11)
Д.Е. Рыбальченко (гл. 12)
Рисунки выполнены А.С. Наземцевым (гл. 1-11) и А.Л. Белковским (гл. 12)
Наземцев А.С. -
Н19 Пневматические и гидравлические приводы и системы. Часть 2. Гидравлические приводы и системы.
Основы. Учебное пособие / А,С. Наземцев, Д.Е. Рыбальченко. - М.: ФОРУМ, 2007 - 304 с. ил.
ISBN 978-5-91134-128-2
Учебное пособие посвящено современным машиностроительным гидроприводам межотраслевого
применения. Описаны структура и принципы построения гидравлических приводов, функциональное назначение,
конструктивные особенности, принципы действия и условные графические обозначения основной элементной
базы: насосов, исполнительных механизмов, направляющих и регулирующих гидроаппаратов, устройств
контроля и измерения основных параметров потока рабочей жидкости. Изложена методика проектирования и
расчета гидроприводов поступательного и вращательного действия, приведены сведения по монтажу, наладке и
Эксплуатации гидравлических приводов.
Рассмотрены вопросы построения и функционирования различных типов централизованных систем
смазки, приведены сведения по системам охлаждения.
Для студентов машиностроительных специальностей, слушателей отделений переподготовки и
повышения квалификации в области автоматизации технологических процессов и производств.
УДК 62-85(075.32)
ББК 34.4472я723
ISBN 978-5-91134-128-2
© ЗАО «ЭКОИНВЕНТ», 2007
*
Оглавление
Предисловие 7
Введение 8
1. Структура гидроприводов 11
2. Физические основы функционирования гидросистем 16
2.1. Силы, действующие в жидкости. Давление 16
2.2. Основные свойства жидкостей 18
2.3. Основы гидростатики 23
2.4. Основы гидродинамики 26
2.4.1. Расход ,.,.., 27
2.4.2. Уравнение Бернулли для потока идеальной жидкости 28
2.4.3. Уравнение Бернулли для потока реальной жидкости 31
2.4.4. Режимы течения жидкости 32
2.4.5. Потери энергии в гидросистемах . 33
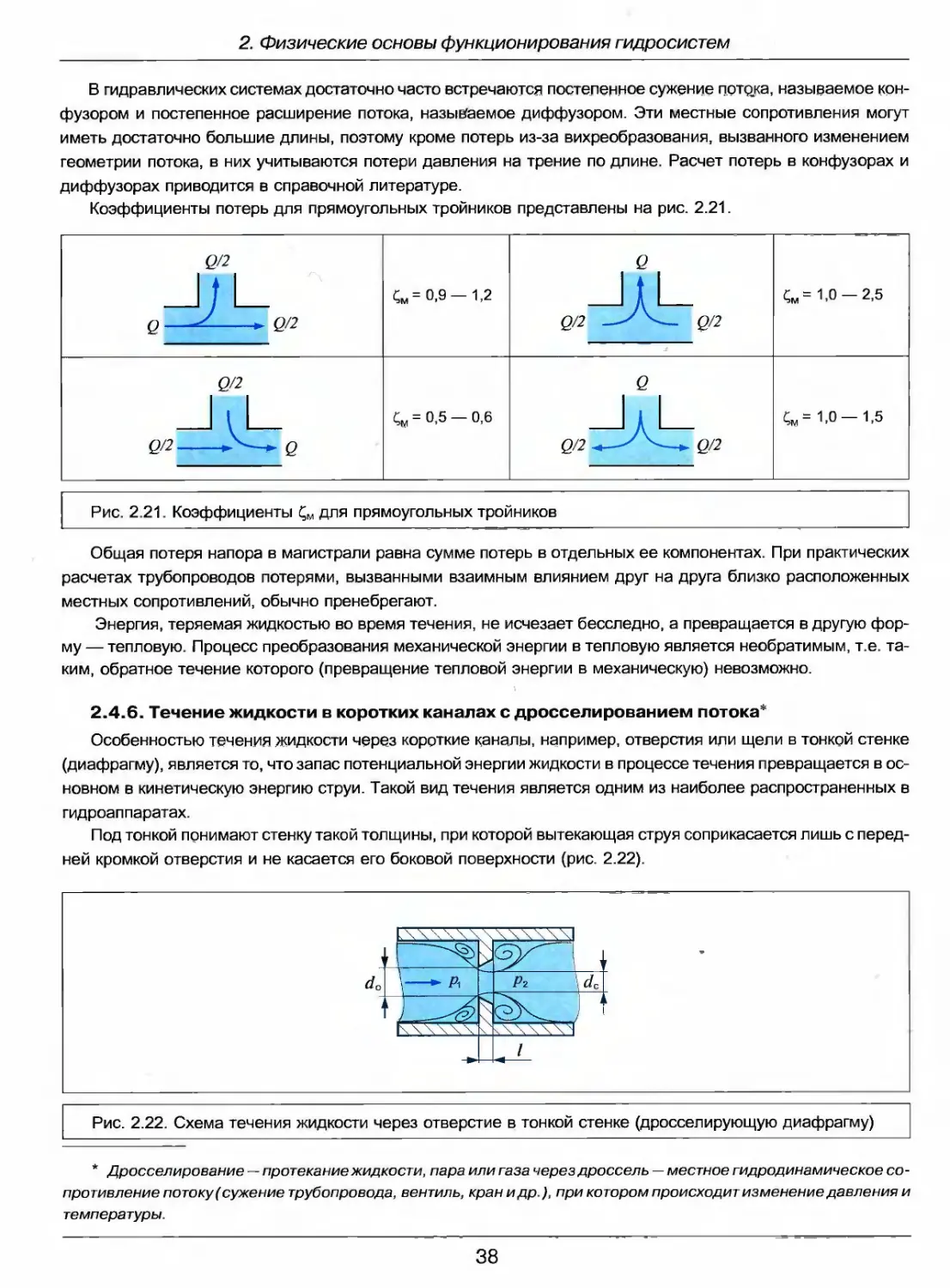
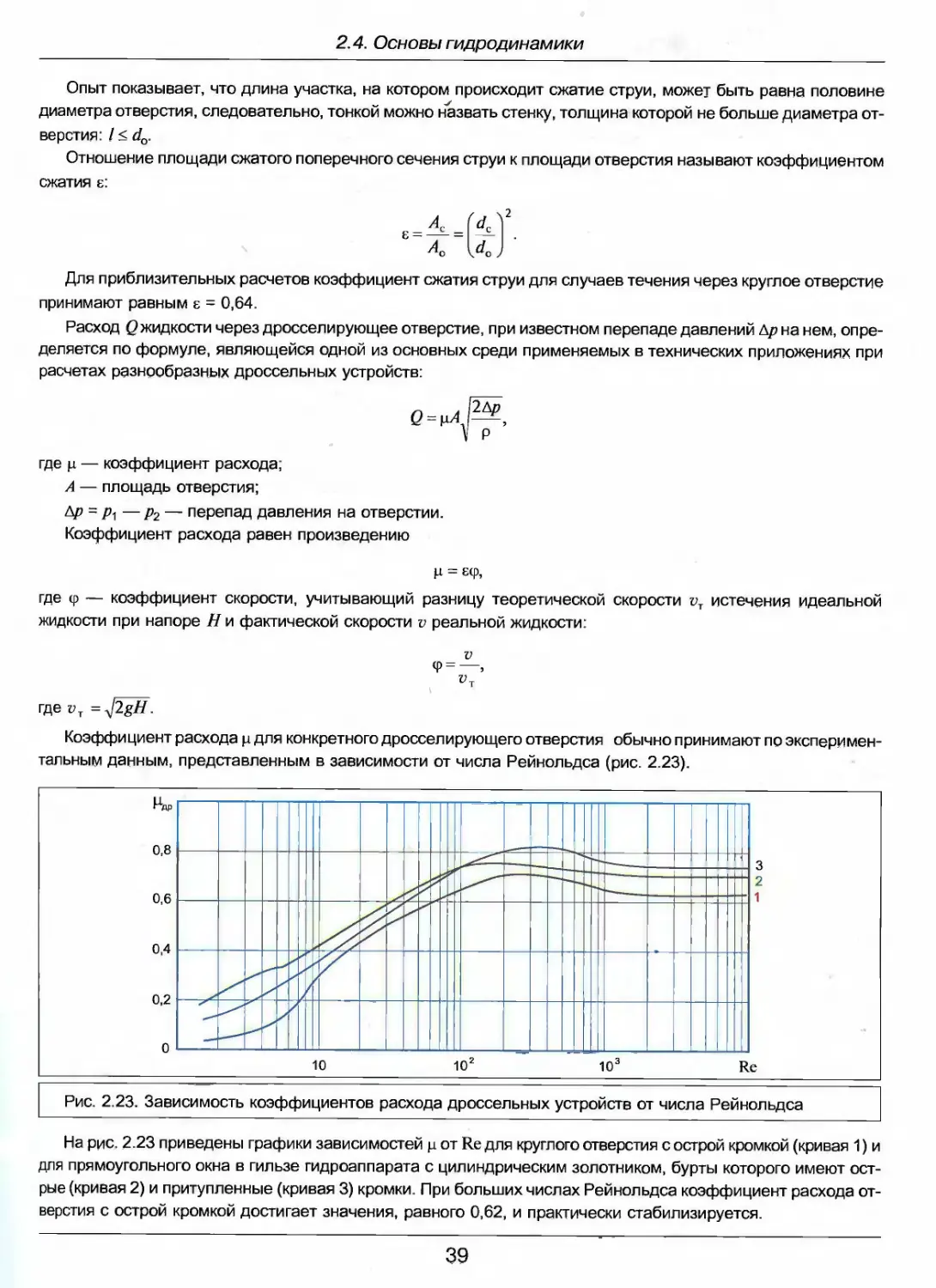
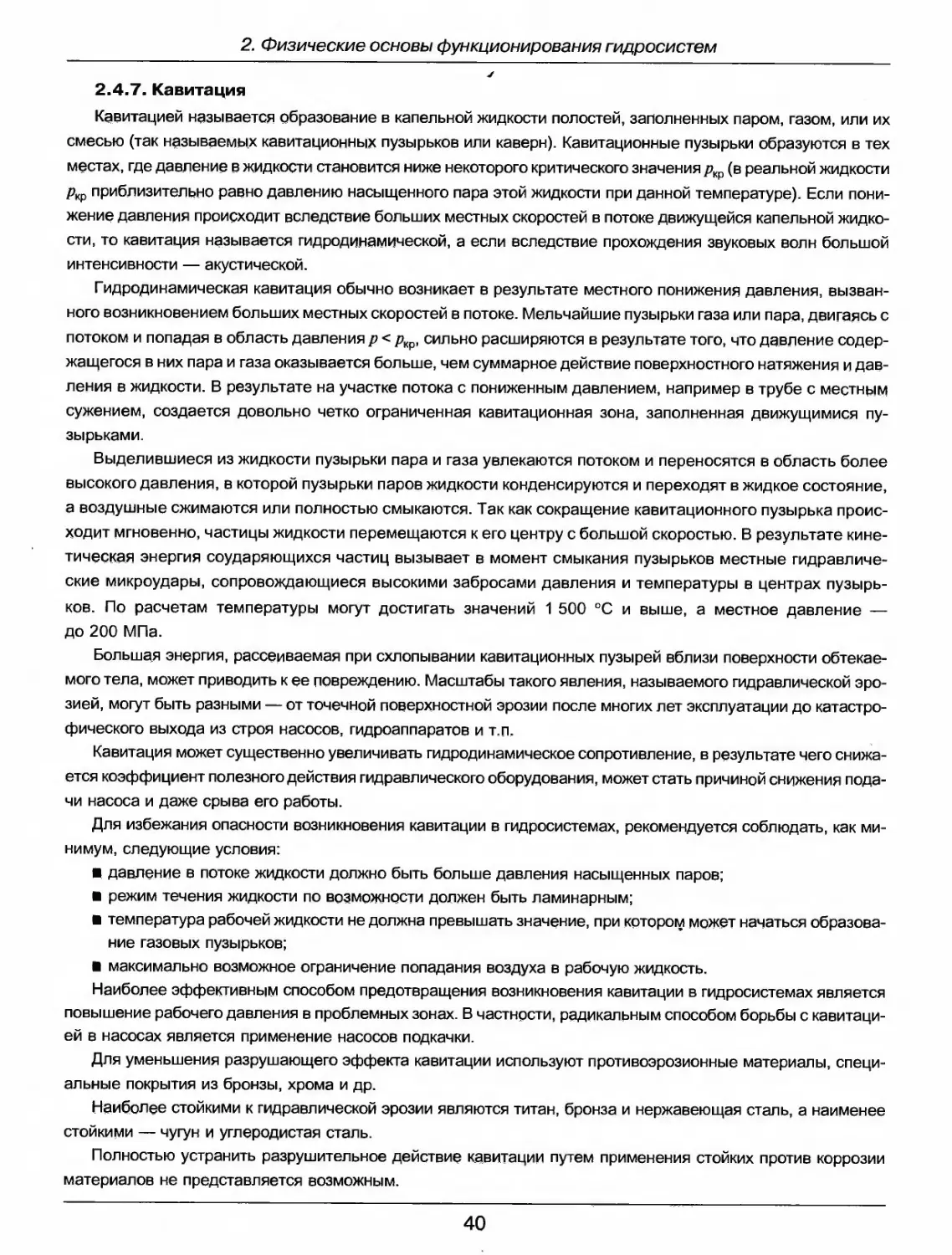
2.4.6. Течение жидкости в коротких каналах с дросселированием потока 38
2.4.7. Кавитация 40
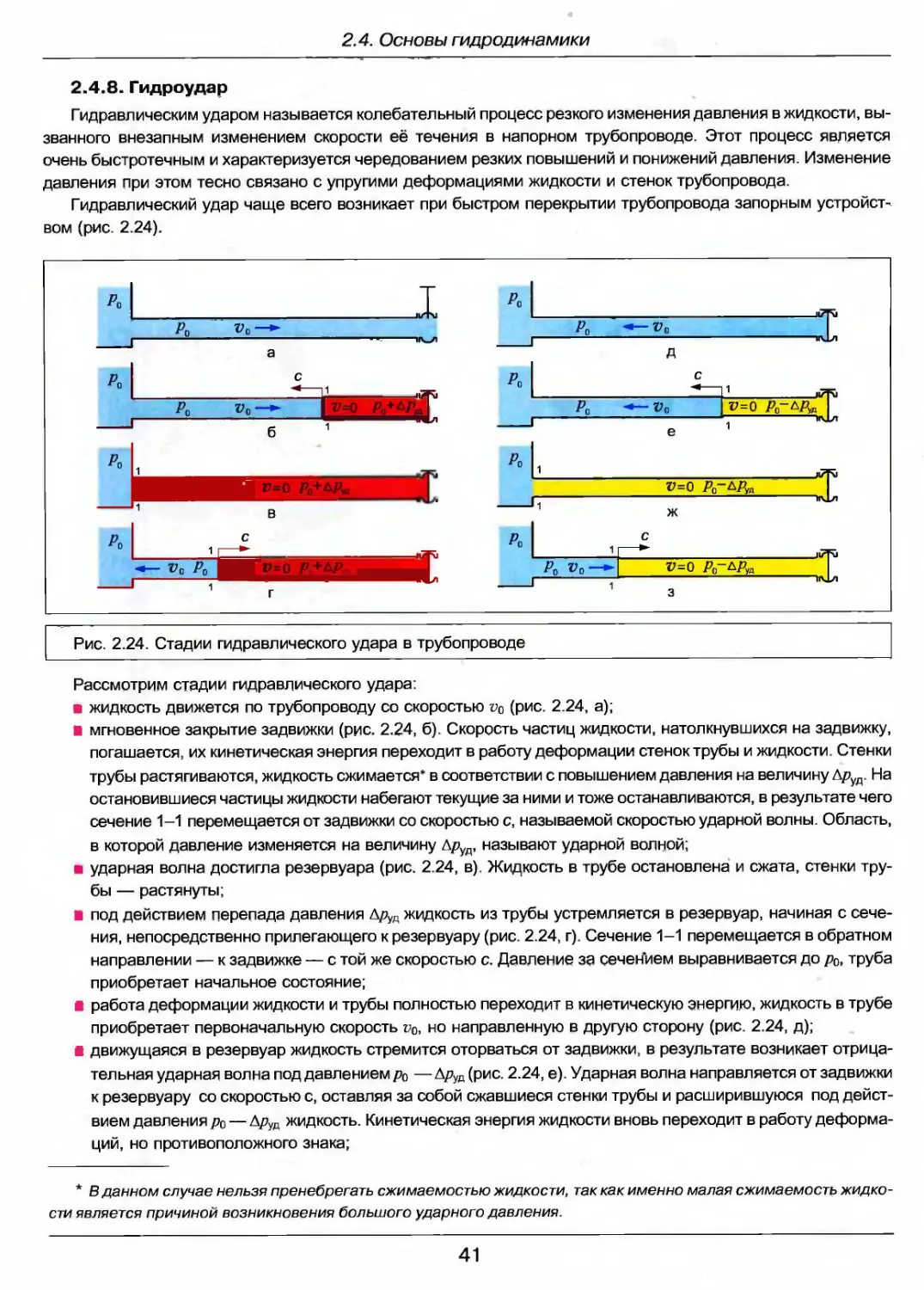
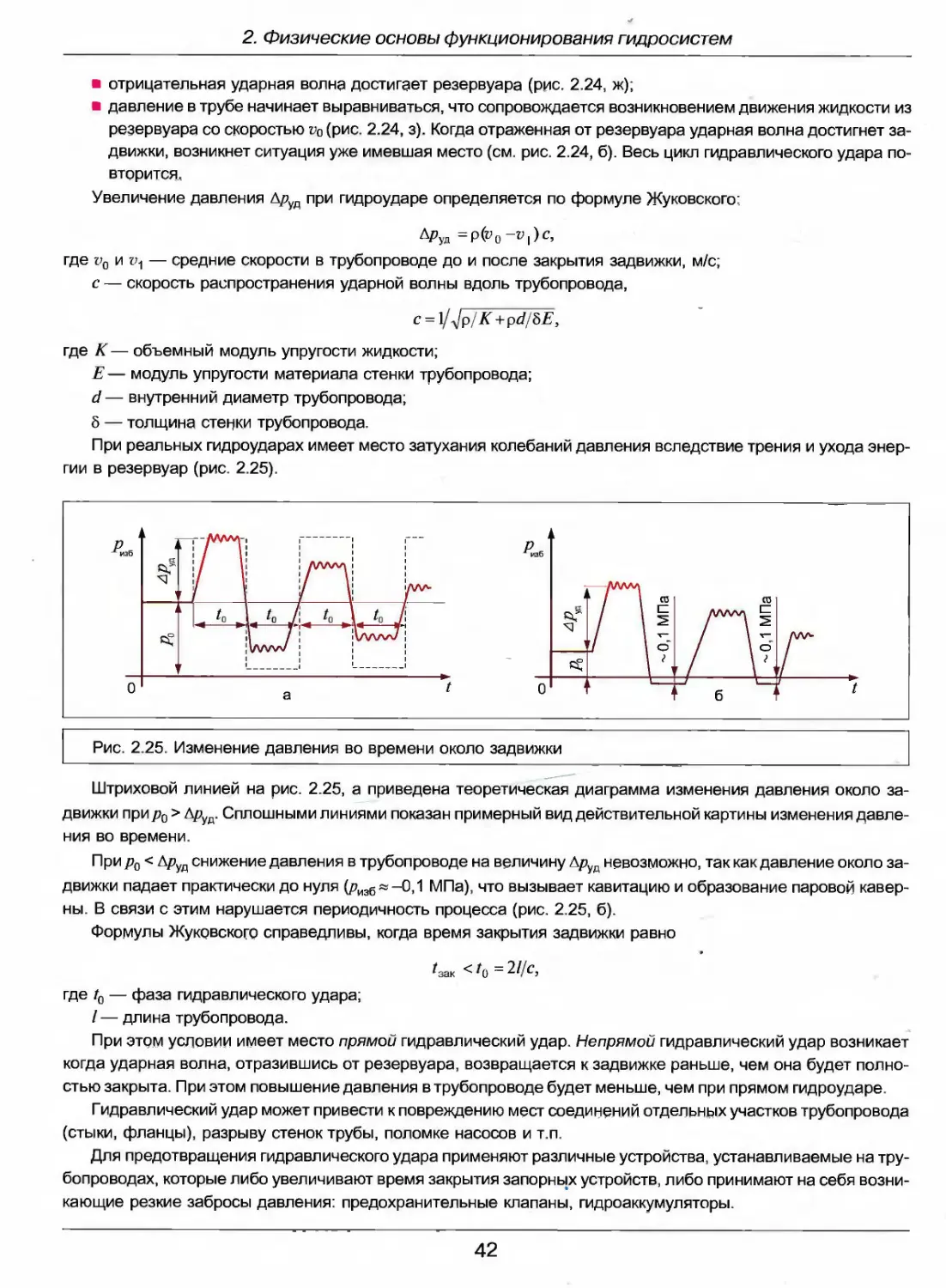
2.4.8. Гидроудар , . . , 41
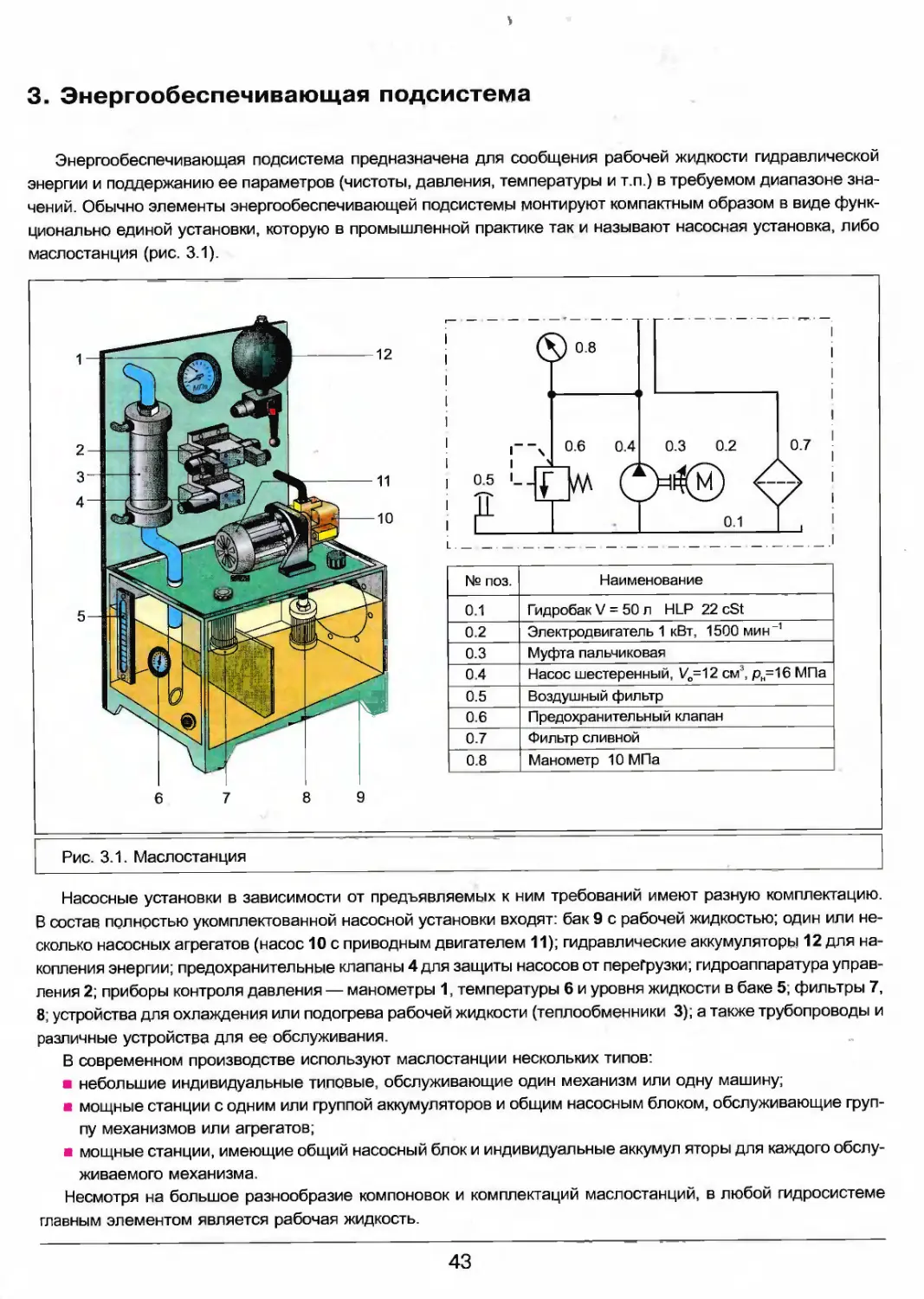
3. Энергообеспечивающая подсистема 43
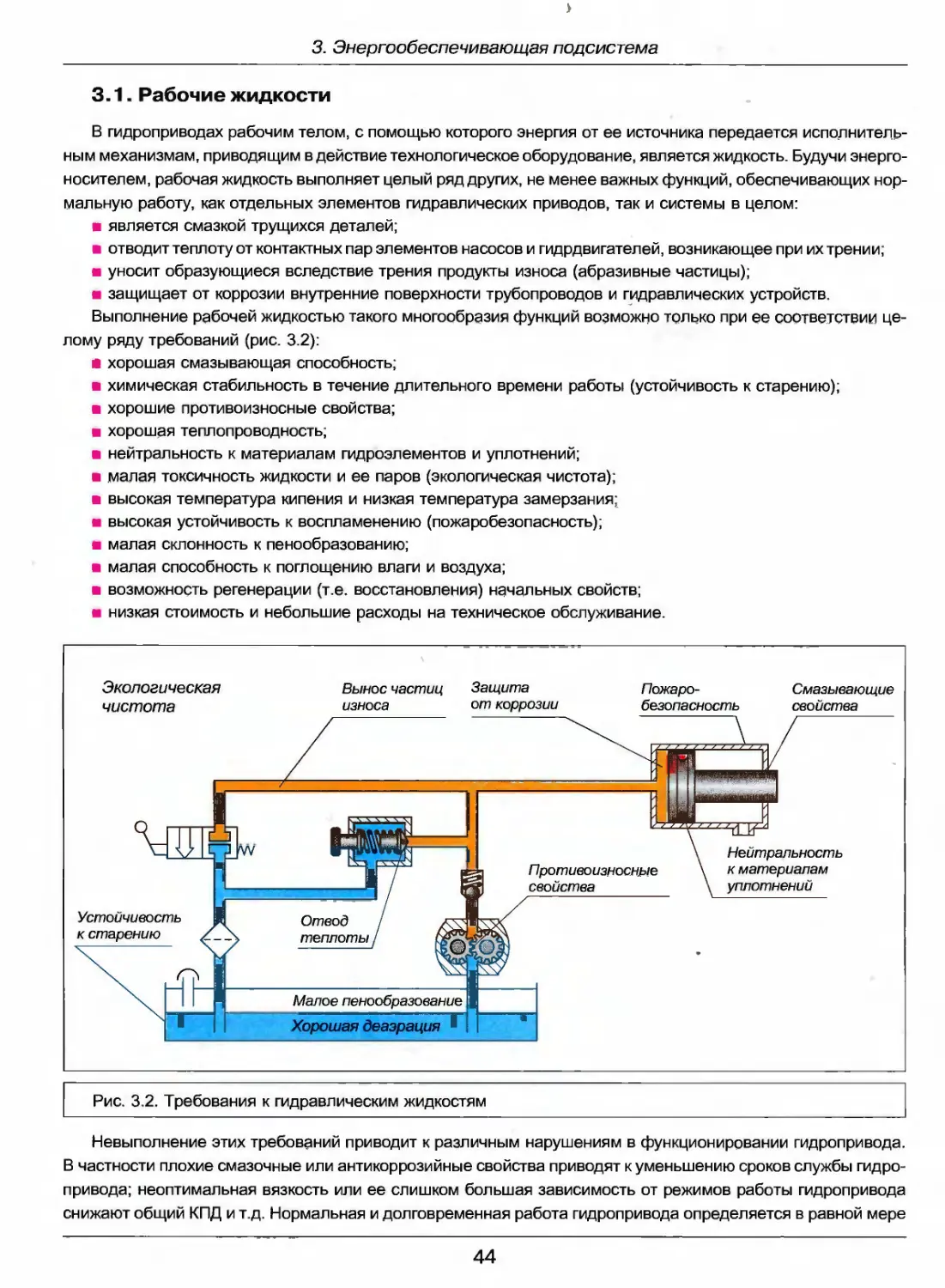
3.1. Рабочие жидкости 44
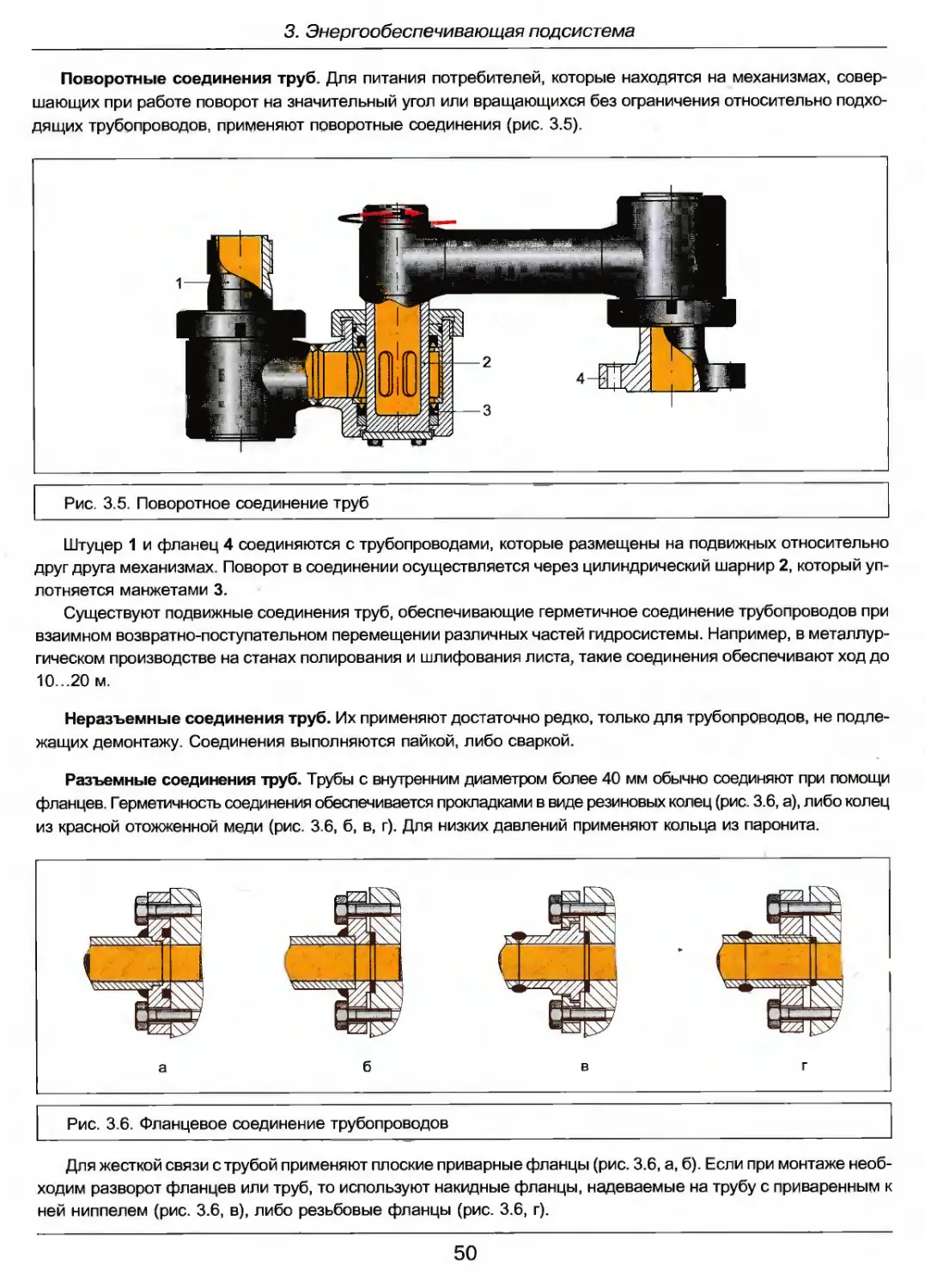
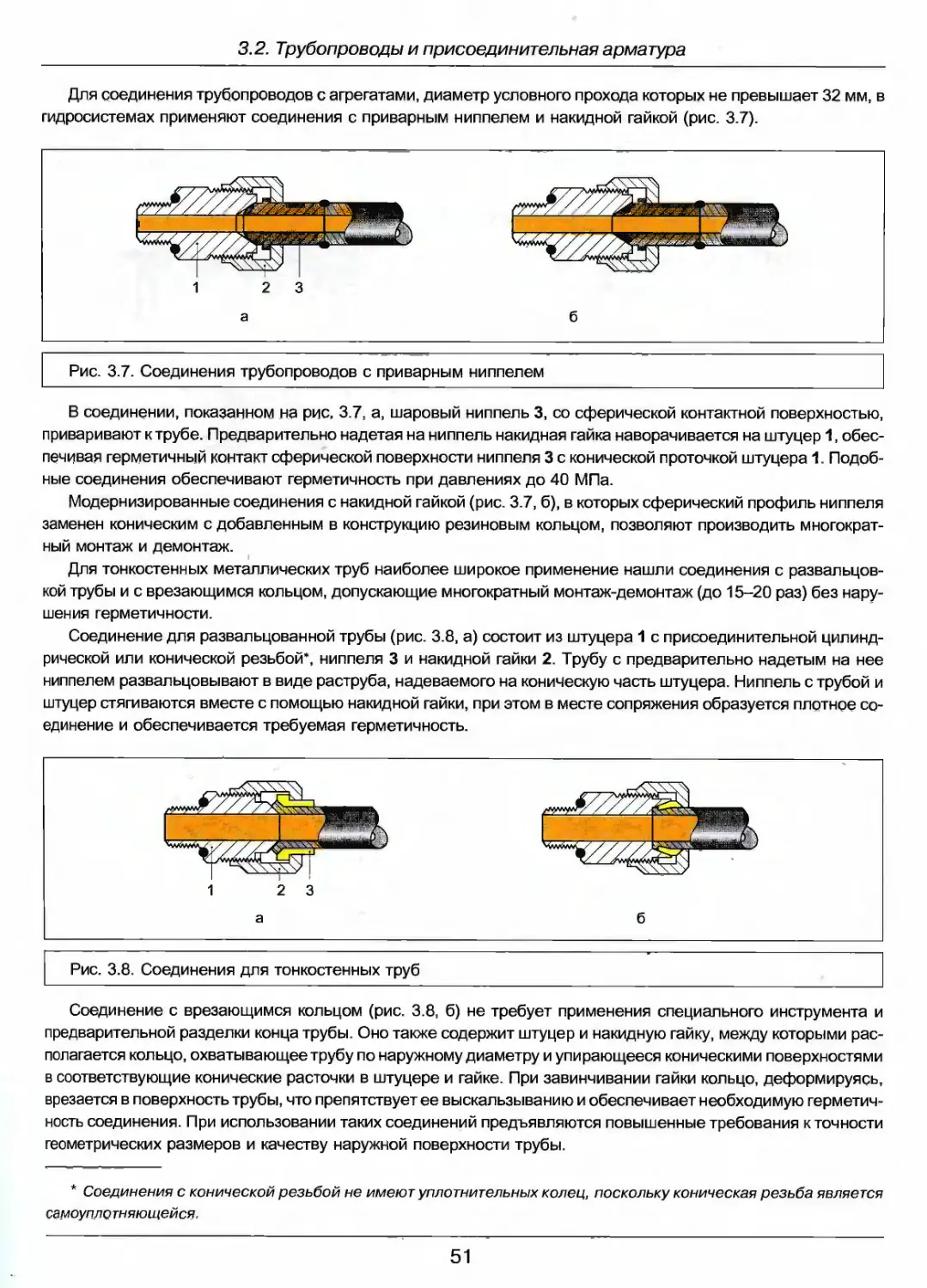
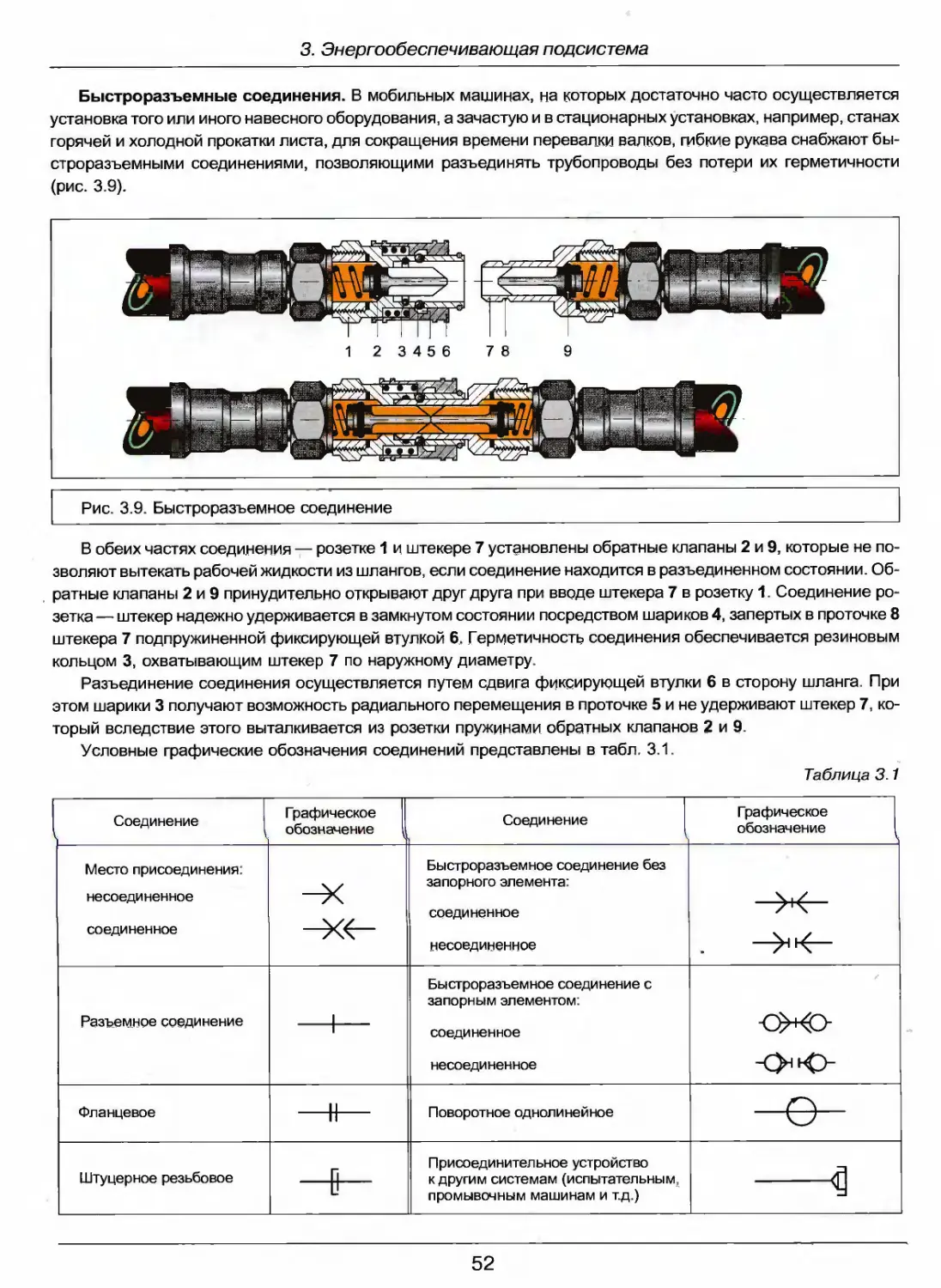
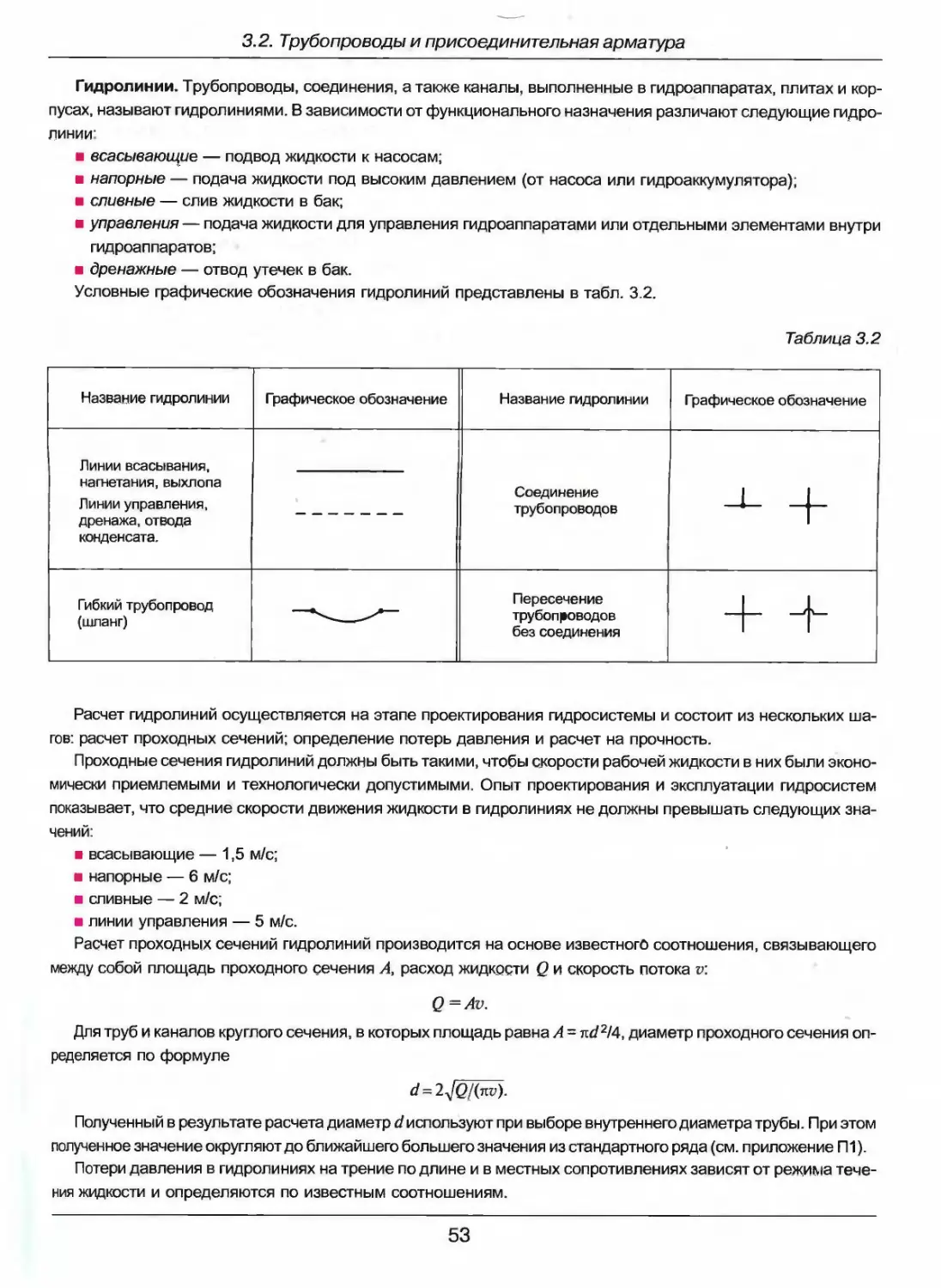
3.2. Трубопроводы и присоединительная арматура ,,,,,,..,., 48
3.3. Насосы . . 54
3.3.1. Шестеренные насосы 55
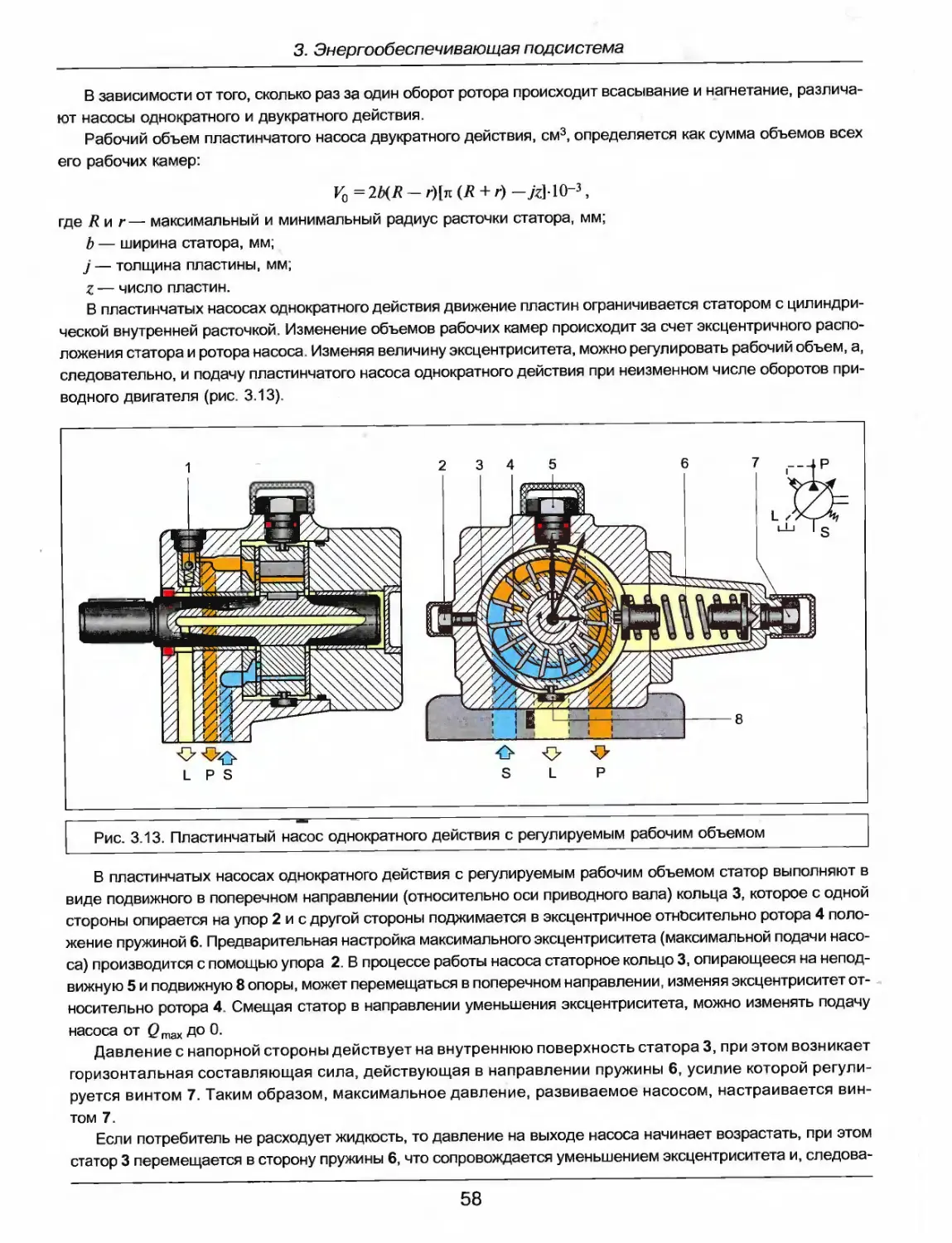
3.3.2. Пластинчатые насосы 57
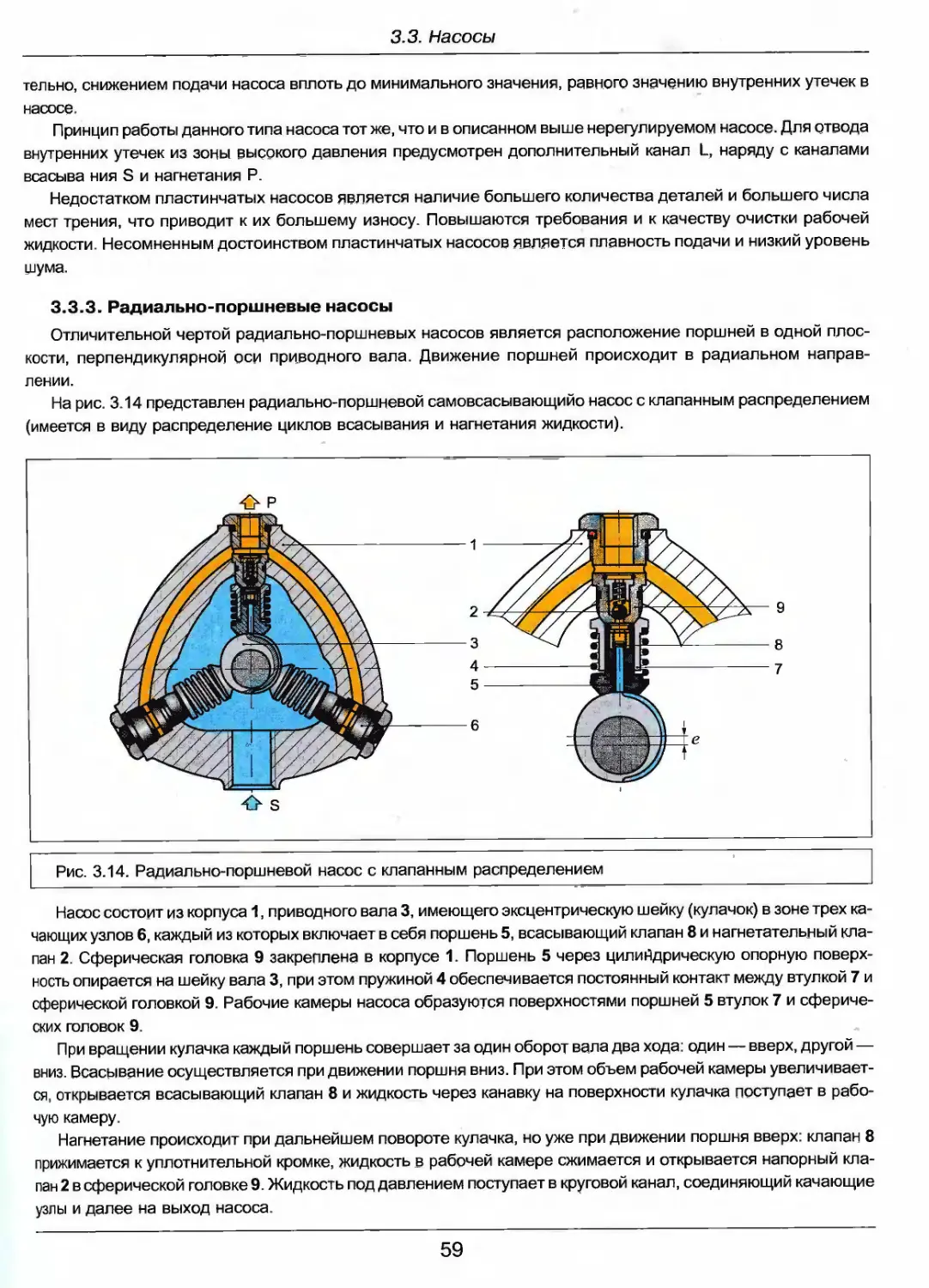
3.3.3. Радиально-поршневые насосы 59
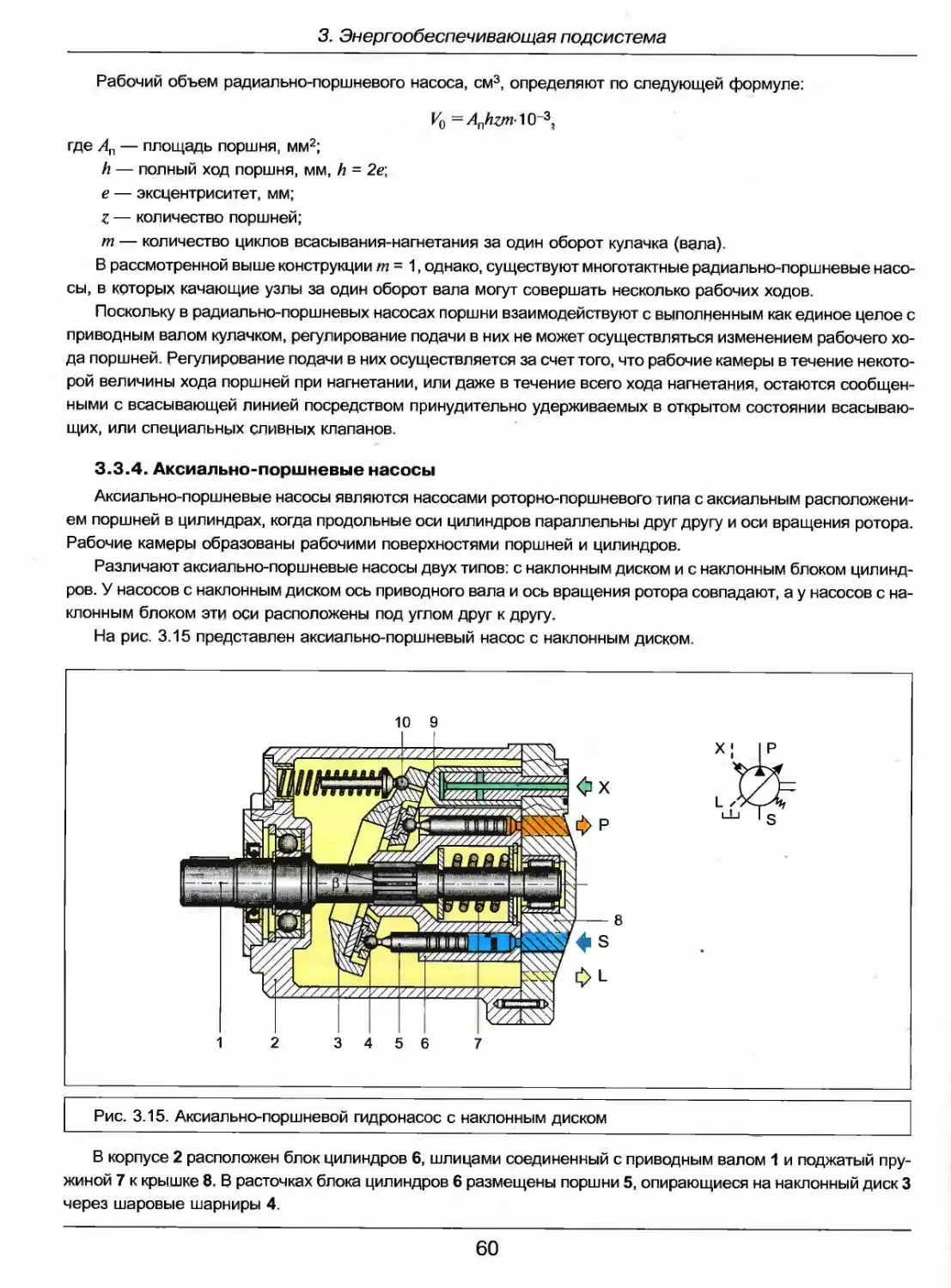
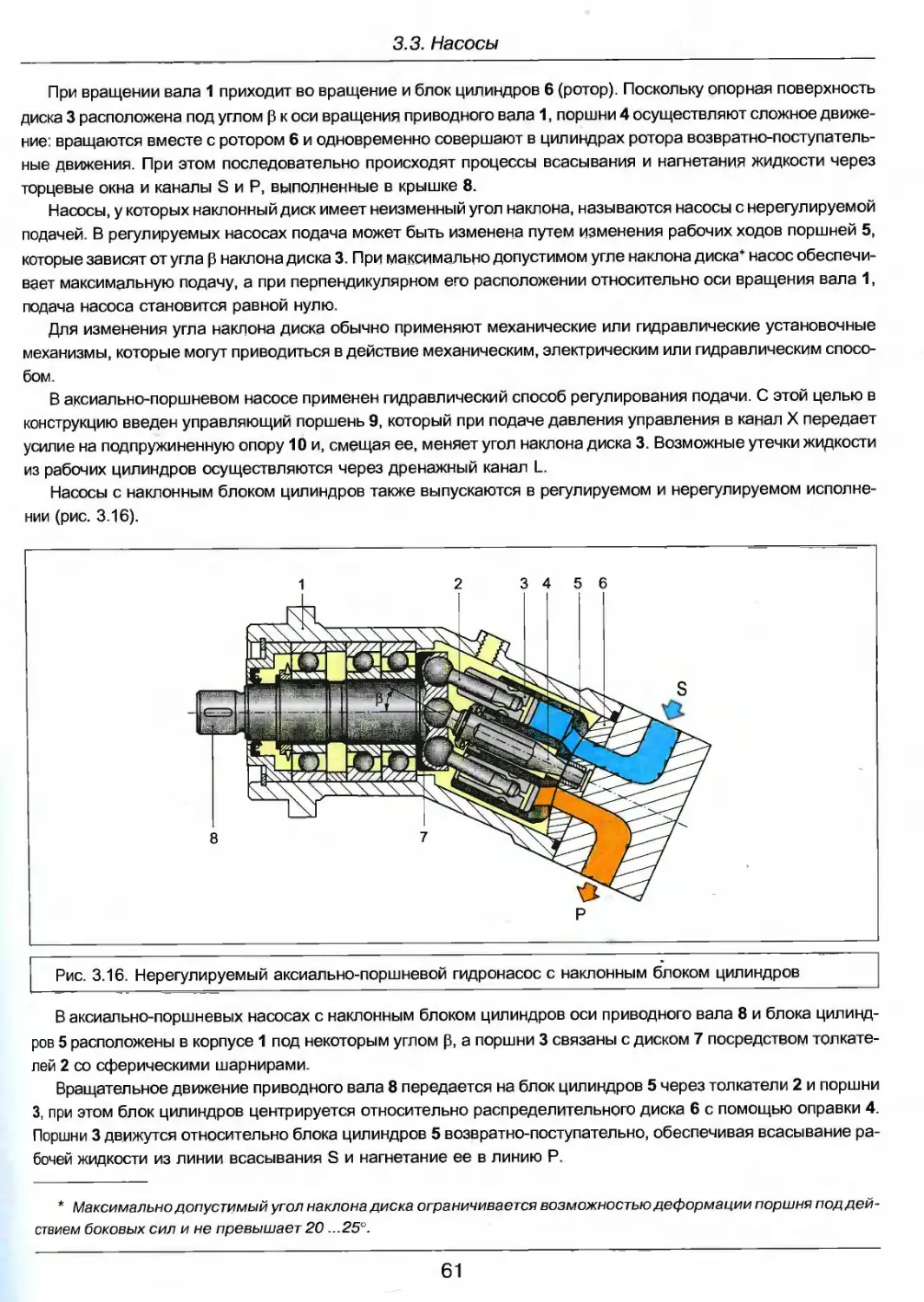
3.3.4. Аксиально-поршневые насосы 60
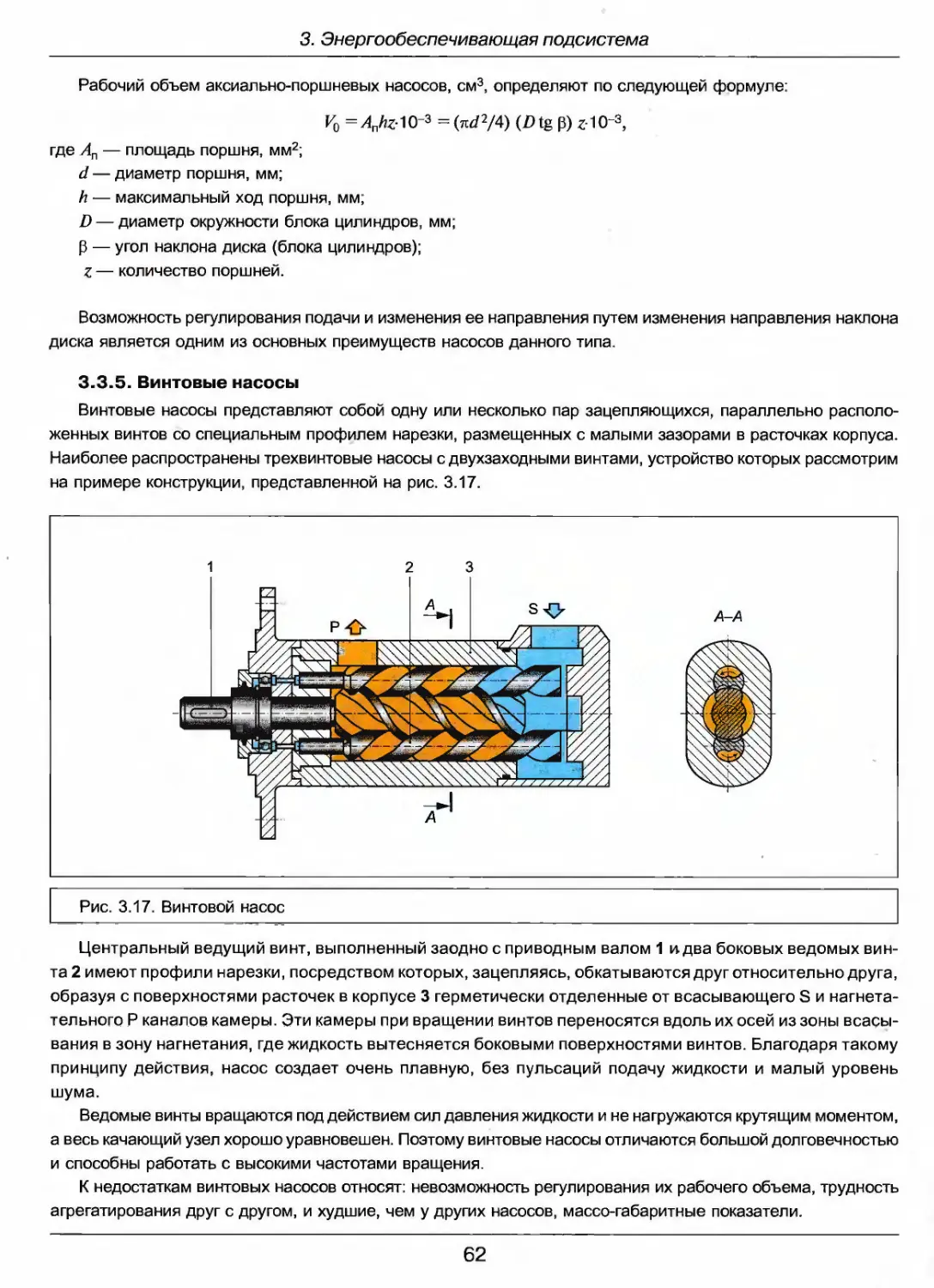
3.3.5. Винтовые насосы 62
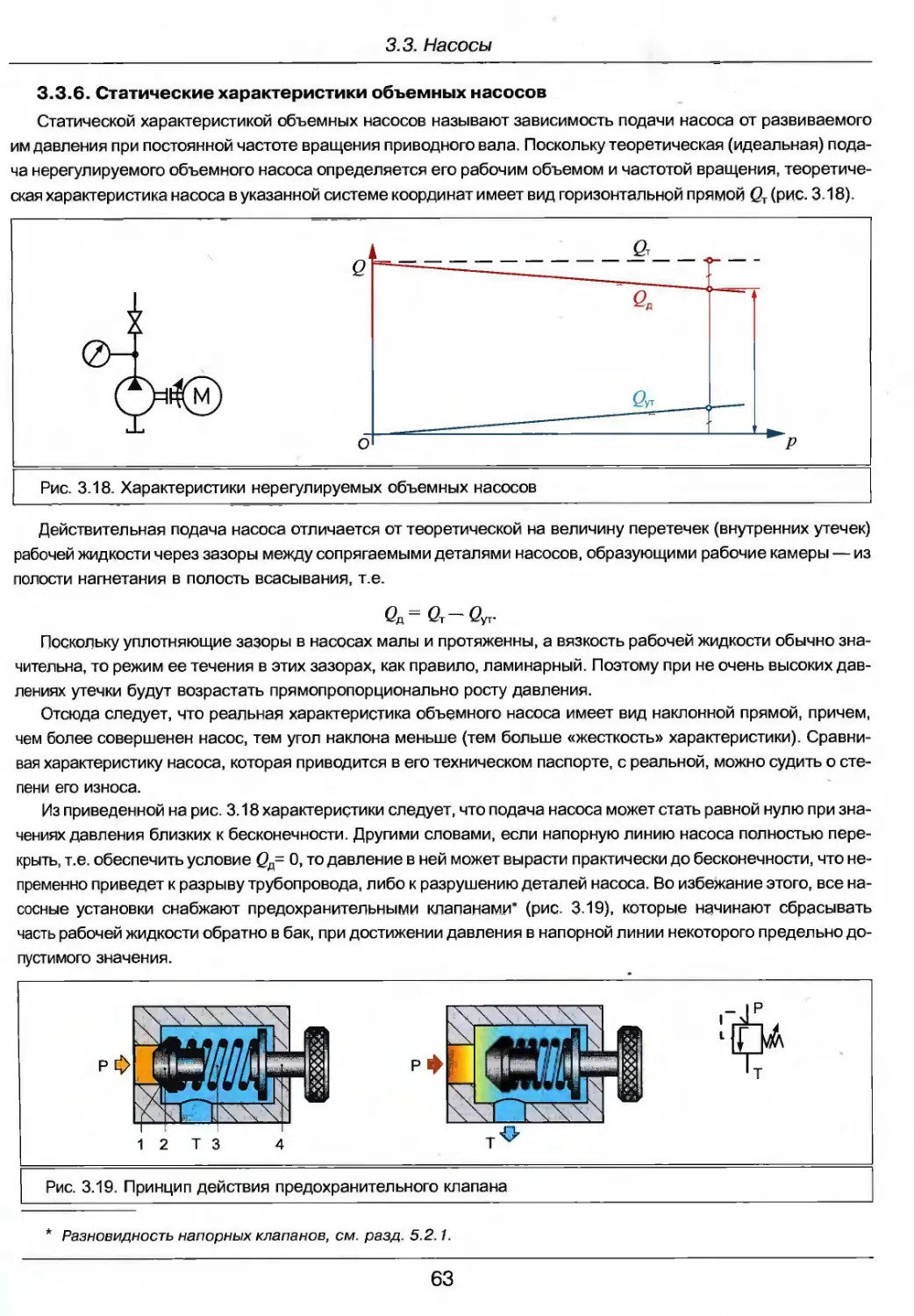
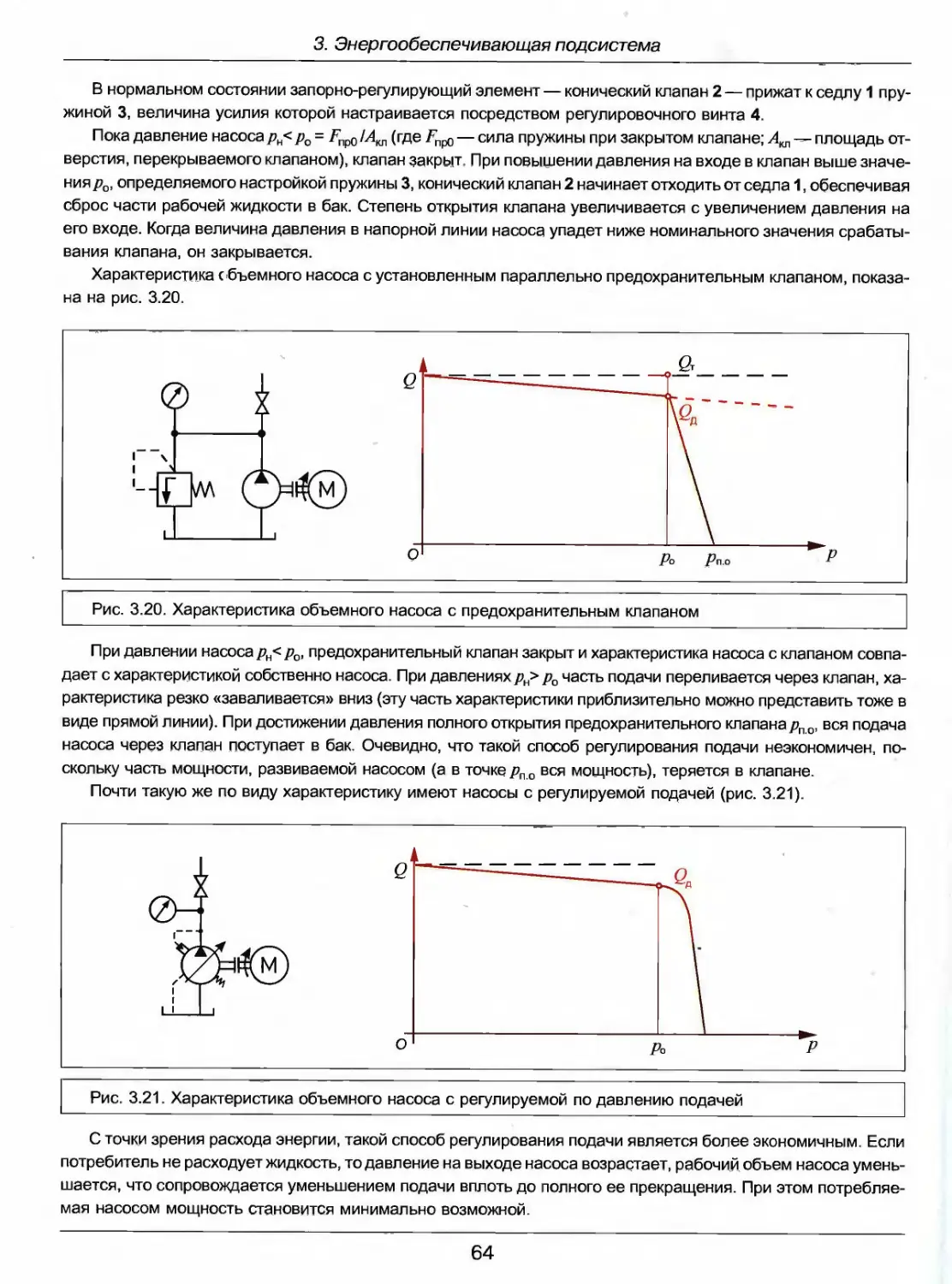
3.3.6. Статические характеристики объемных насосов ,, . , . 63
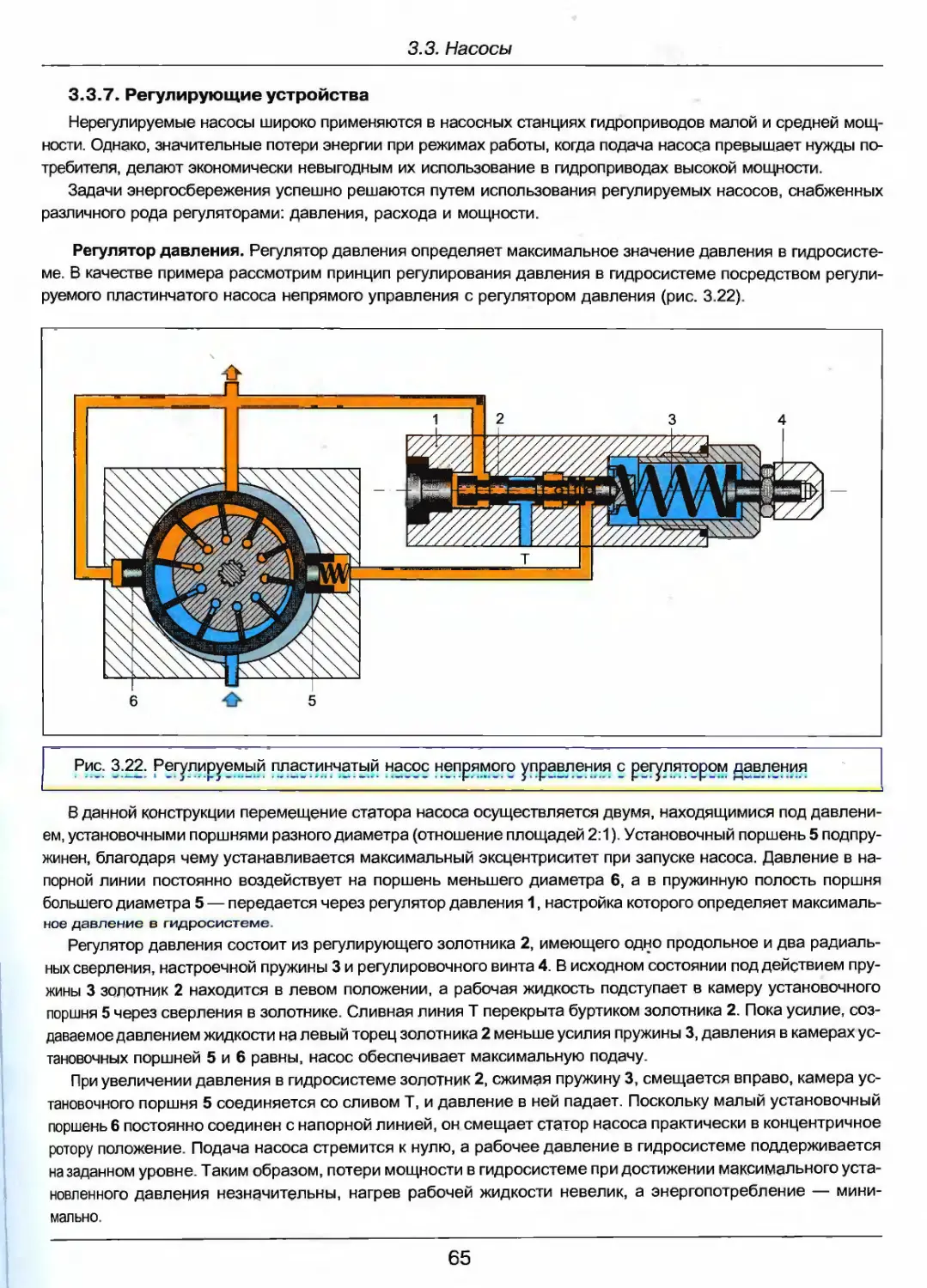
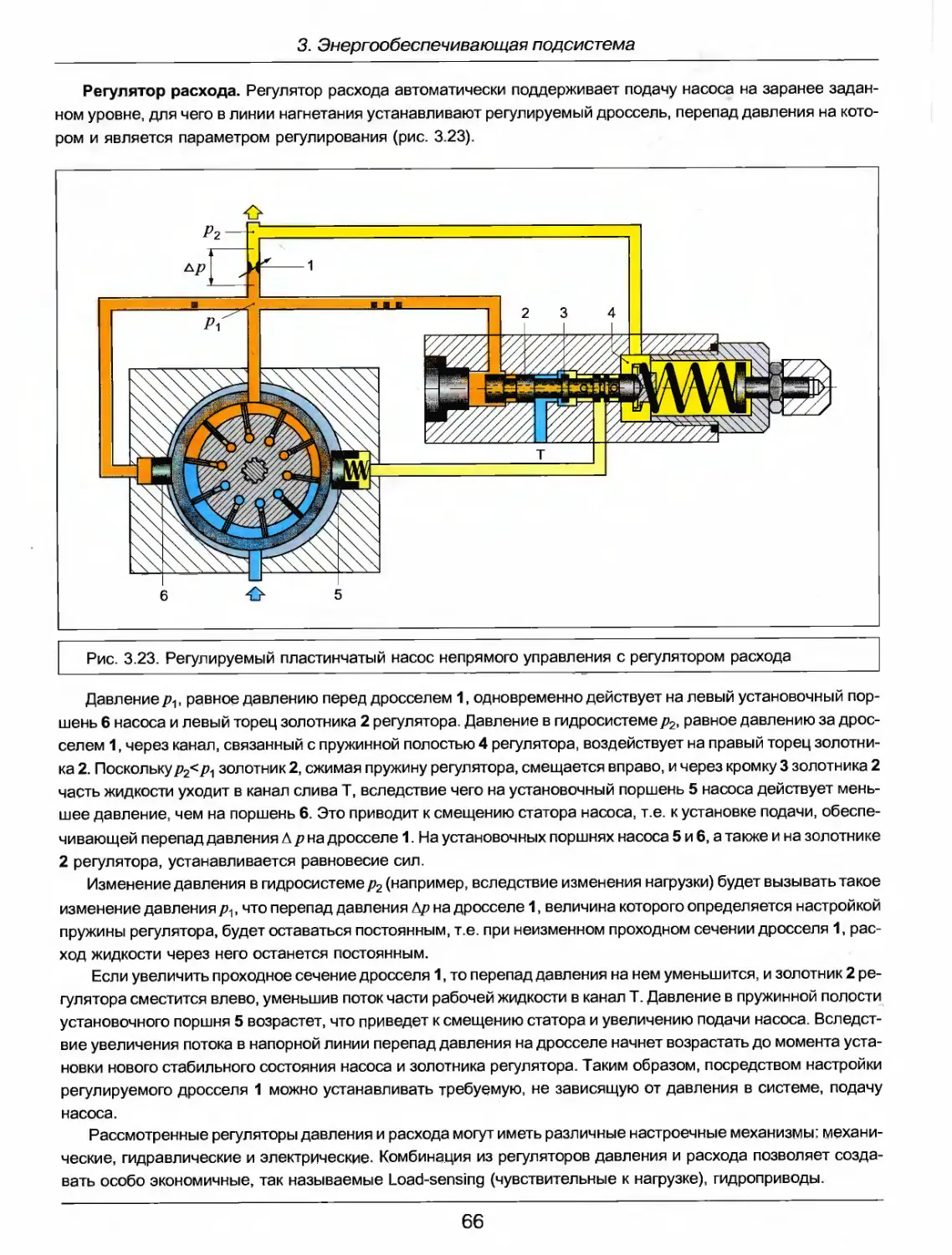
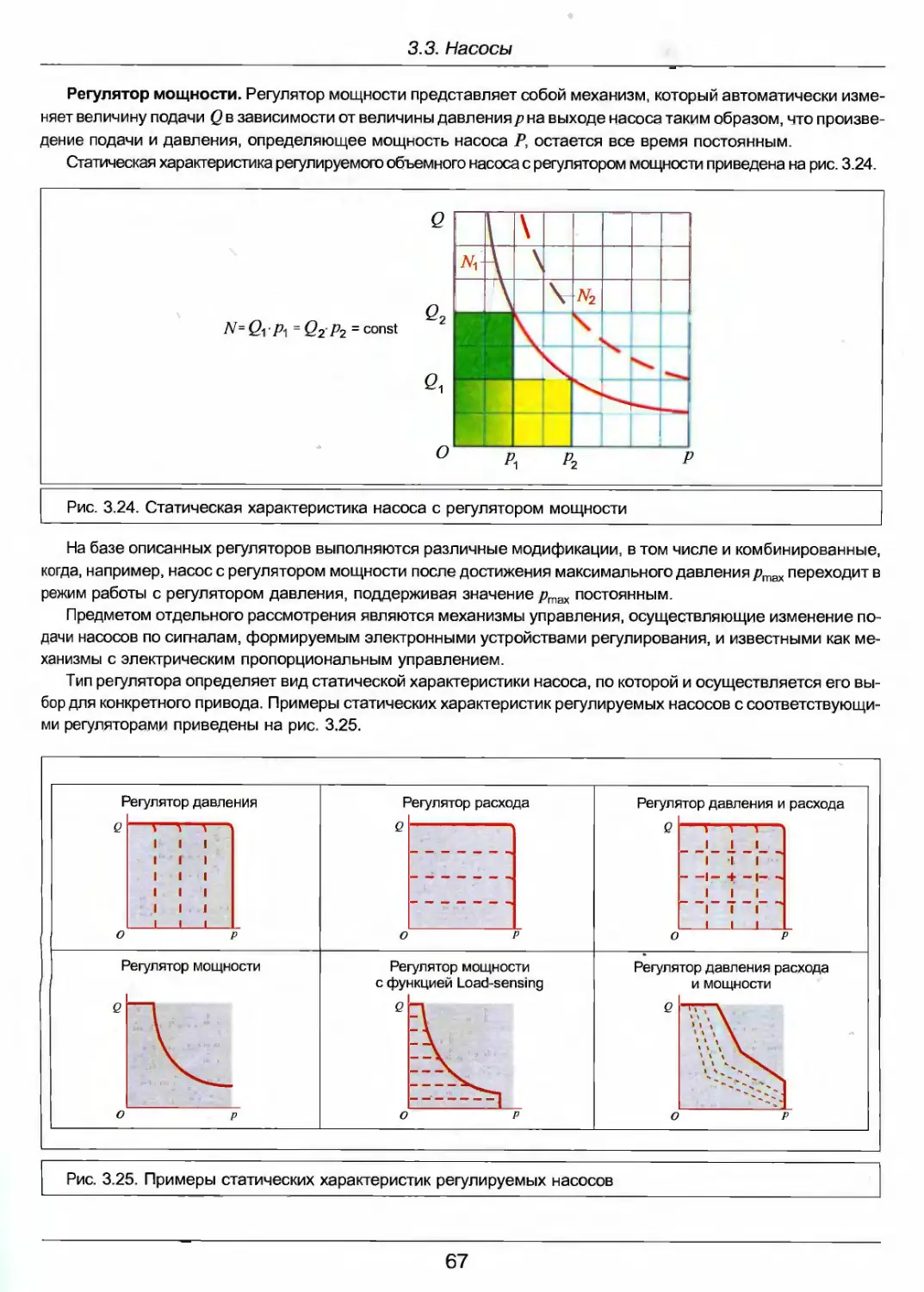
3.3.7. Регулирующие устройства 65
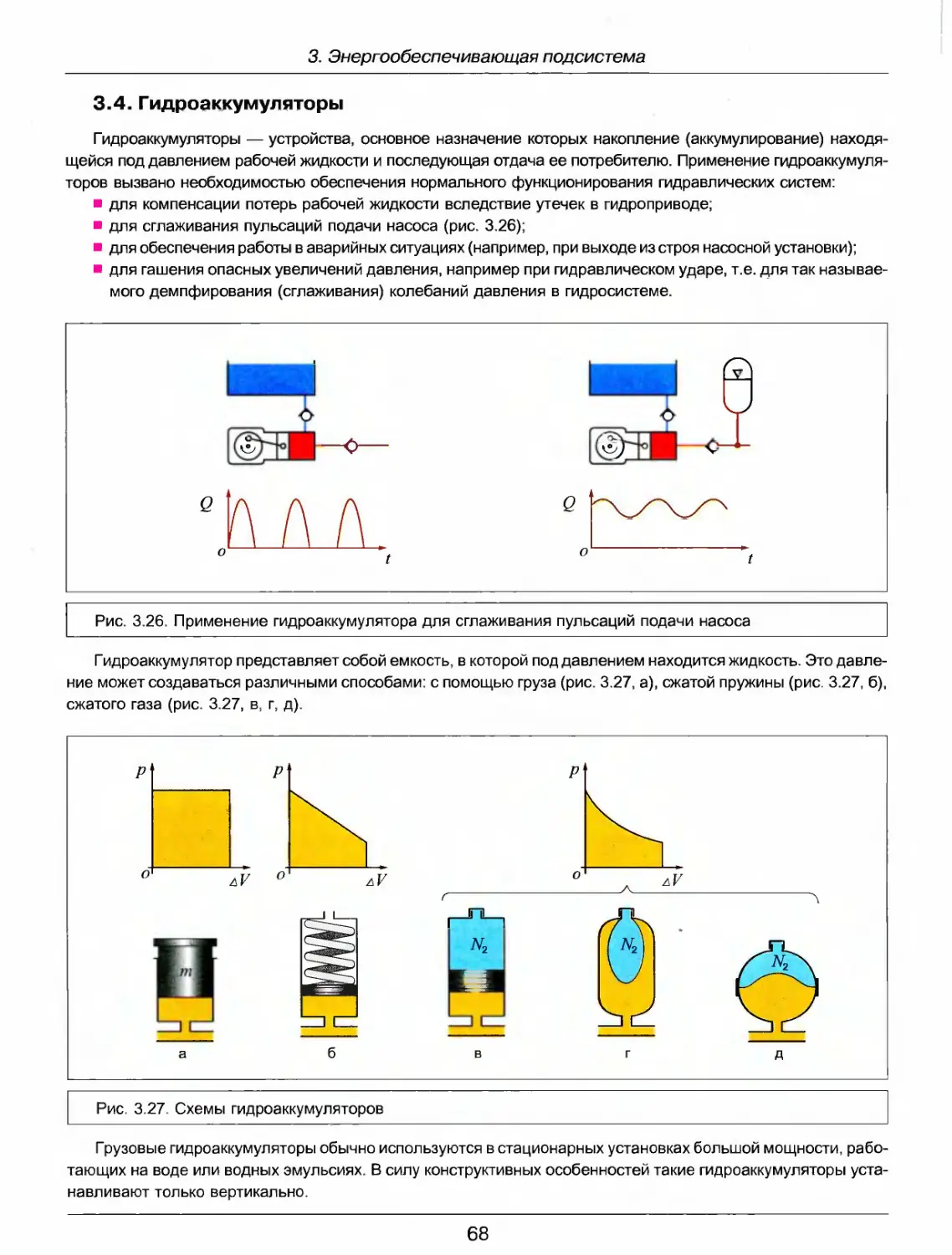
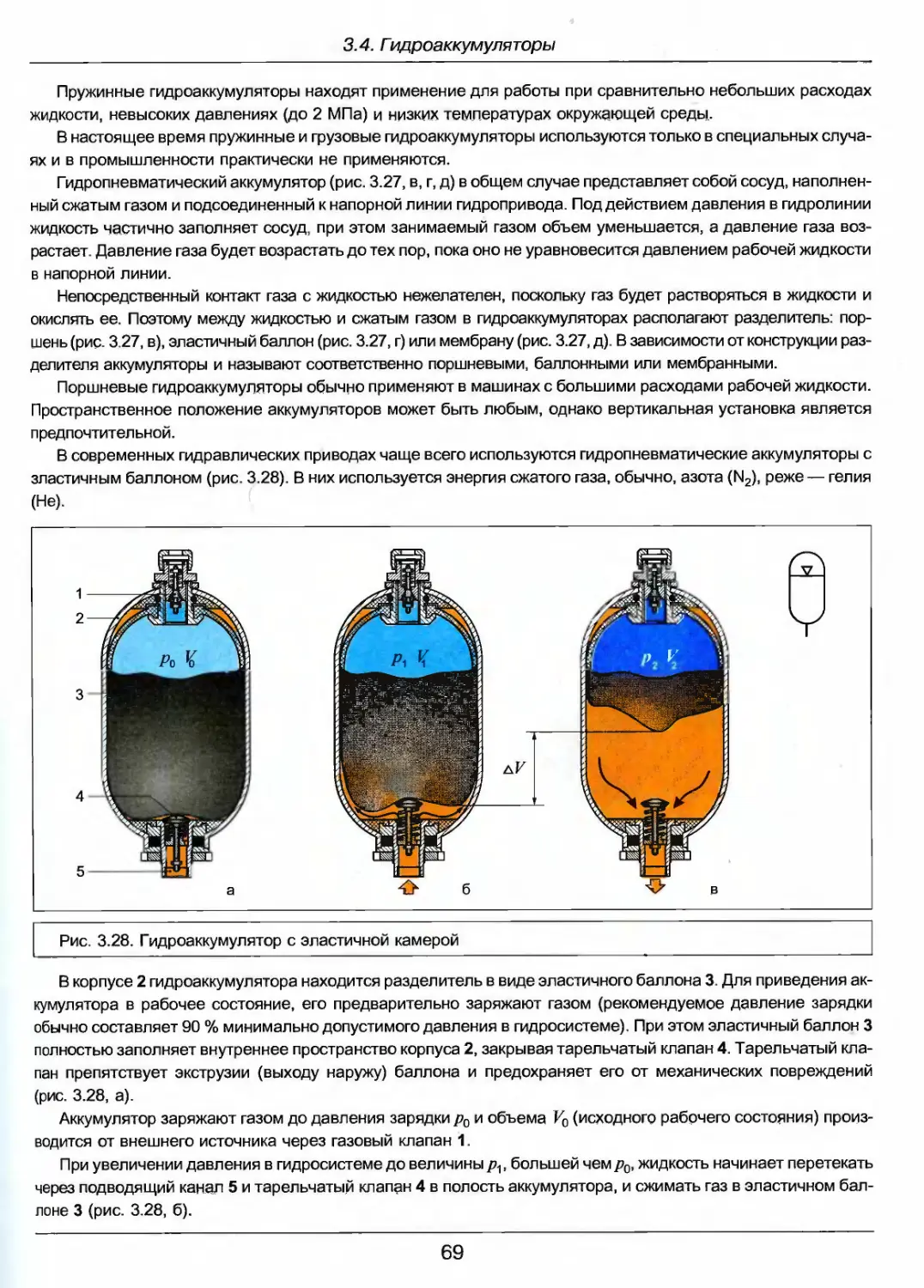
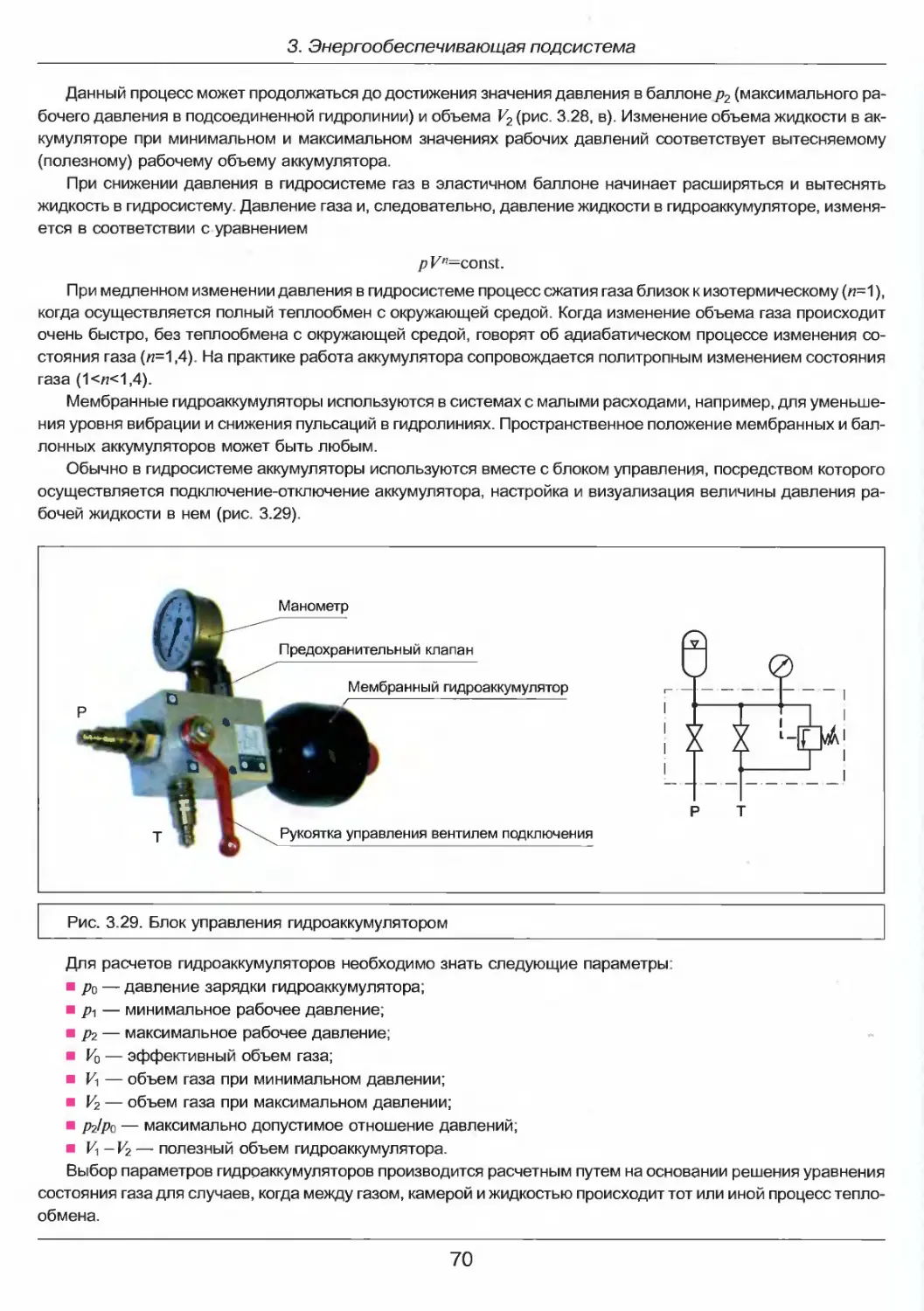
3.4. Гидроаккумуляторы 68
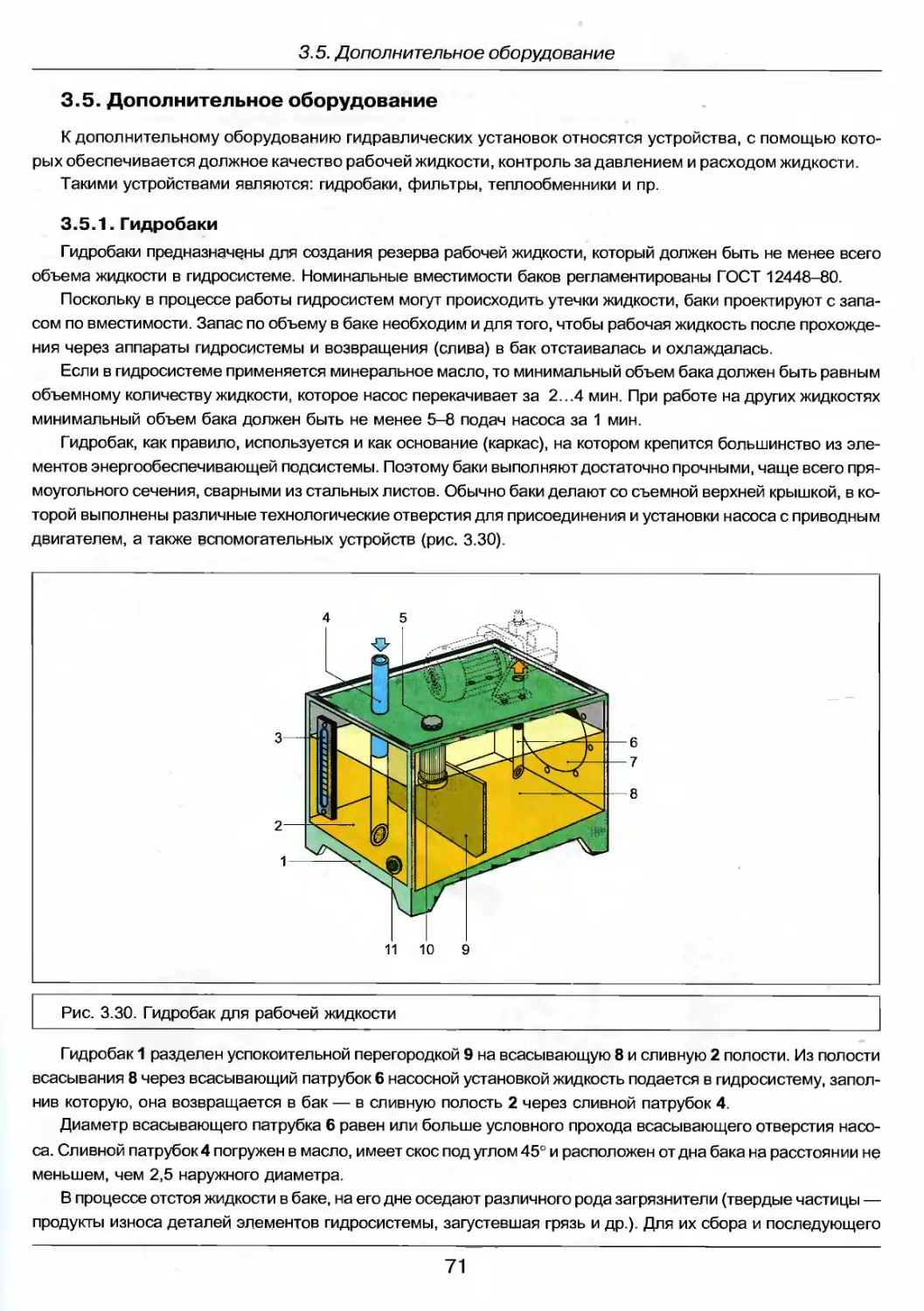
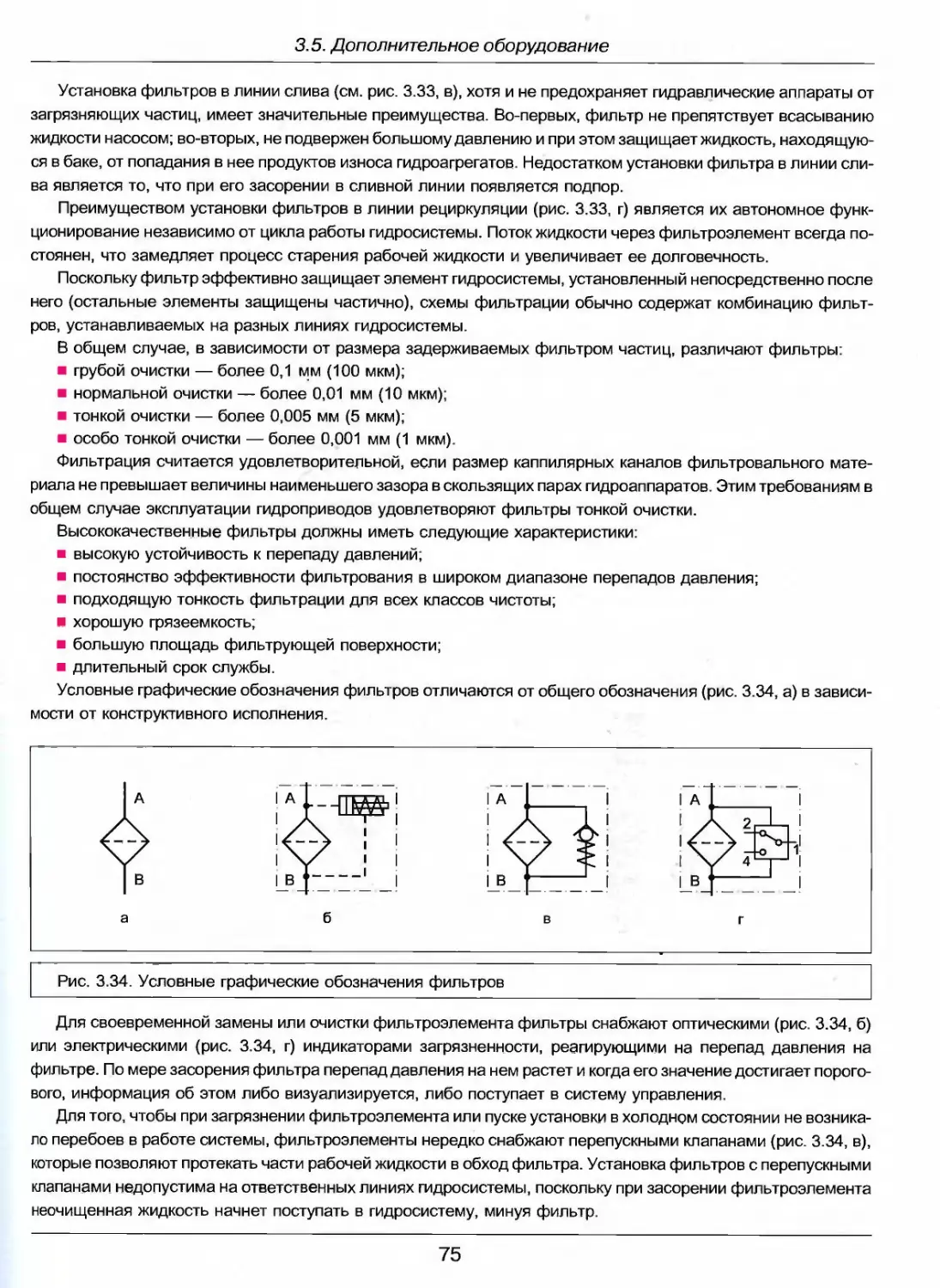
3.5. Дополнительное оборудование 71
3.5.1. Гидробаки .,,,,..., 71
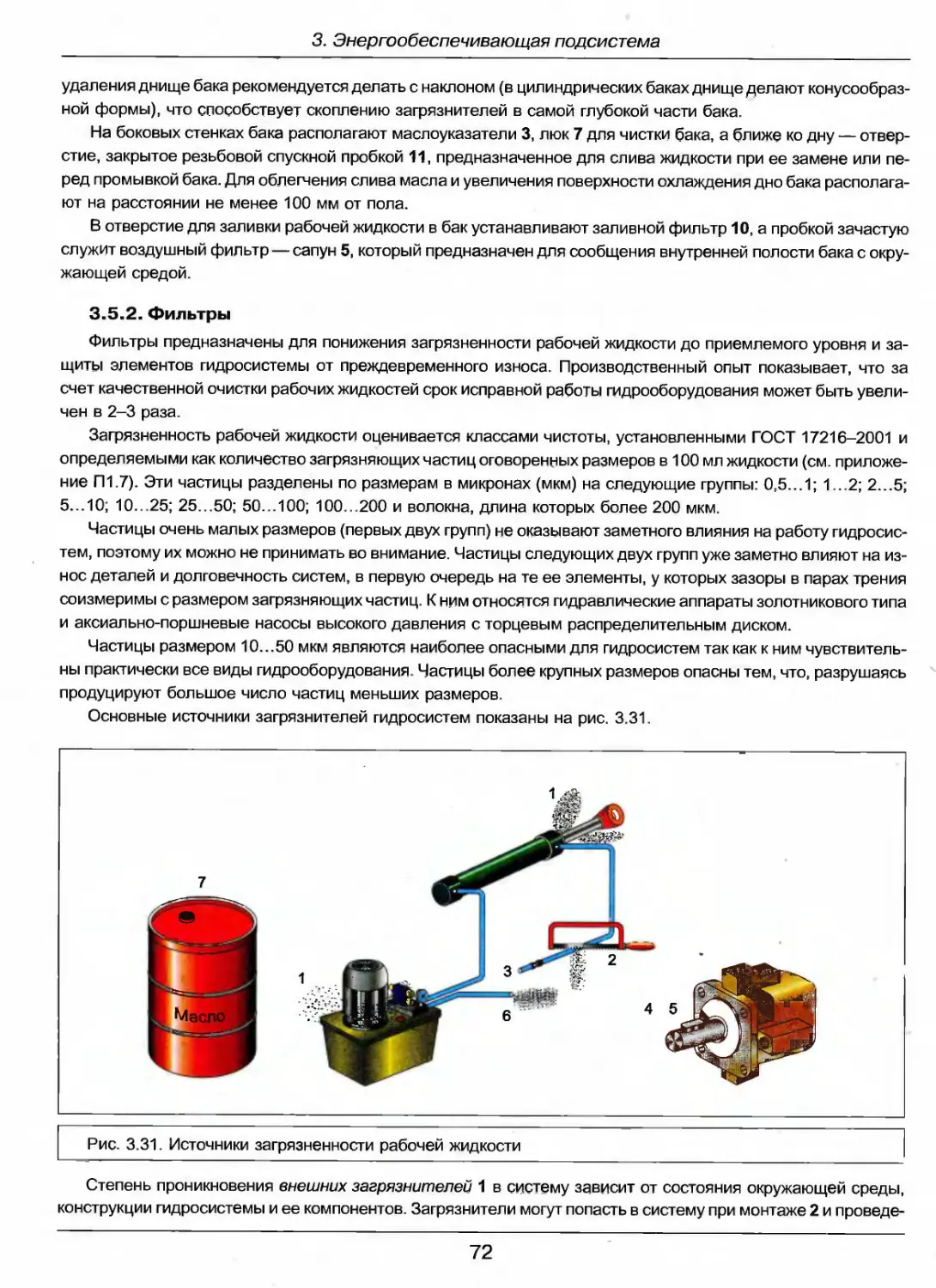
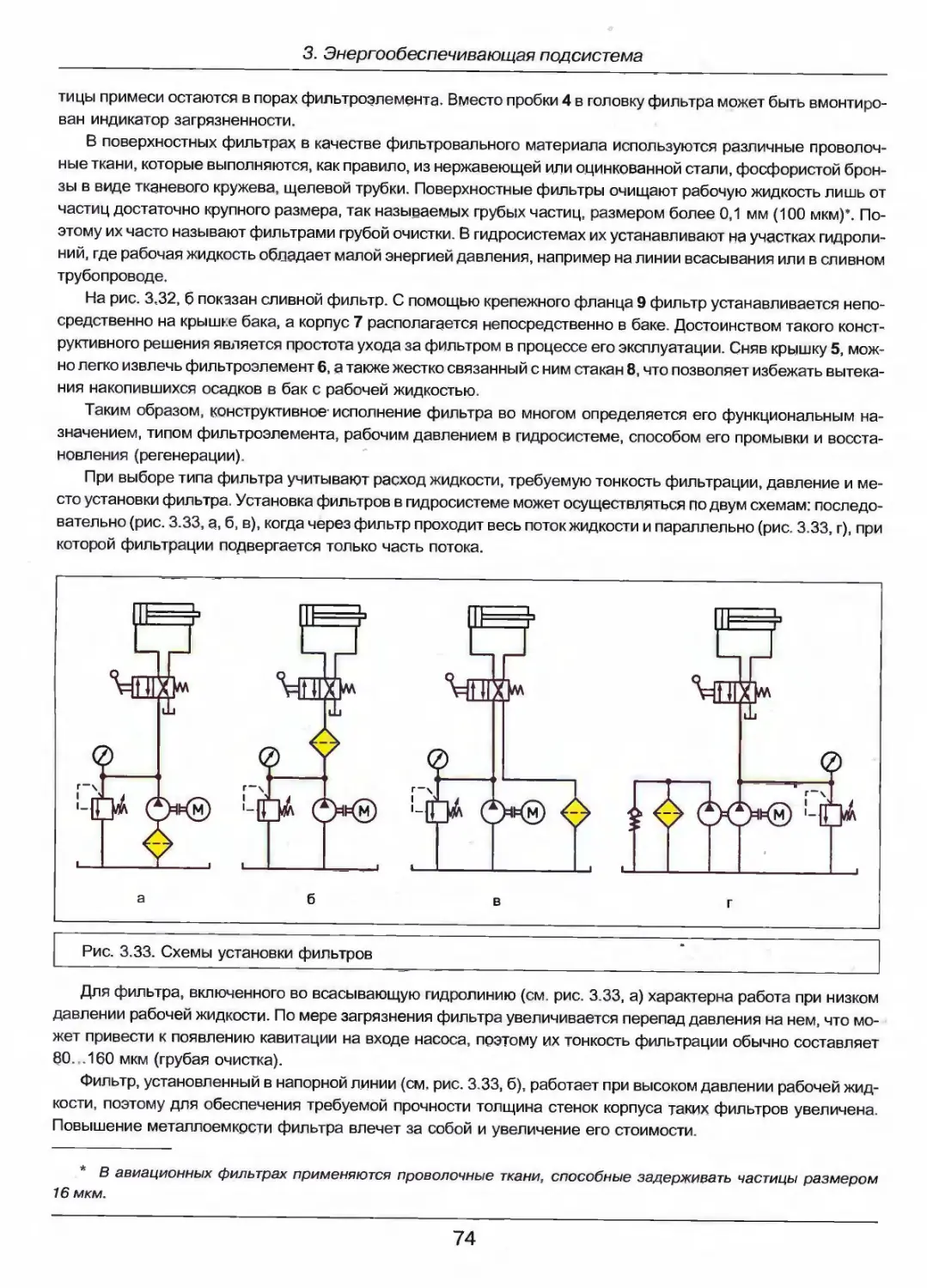
3.5.Z Фильтры 72
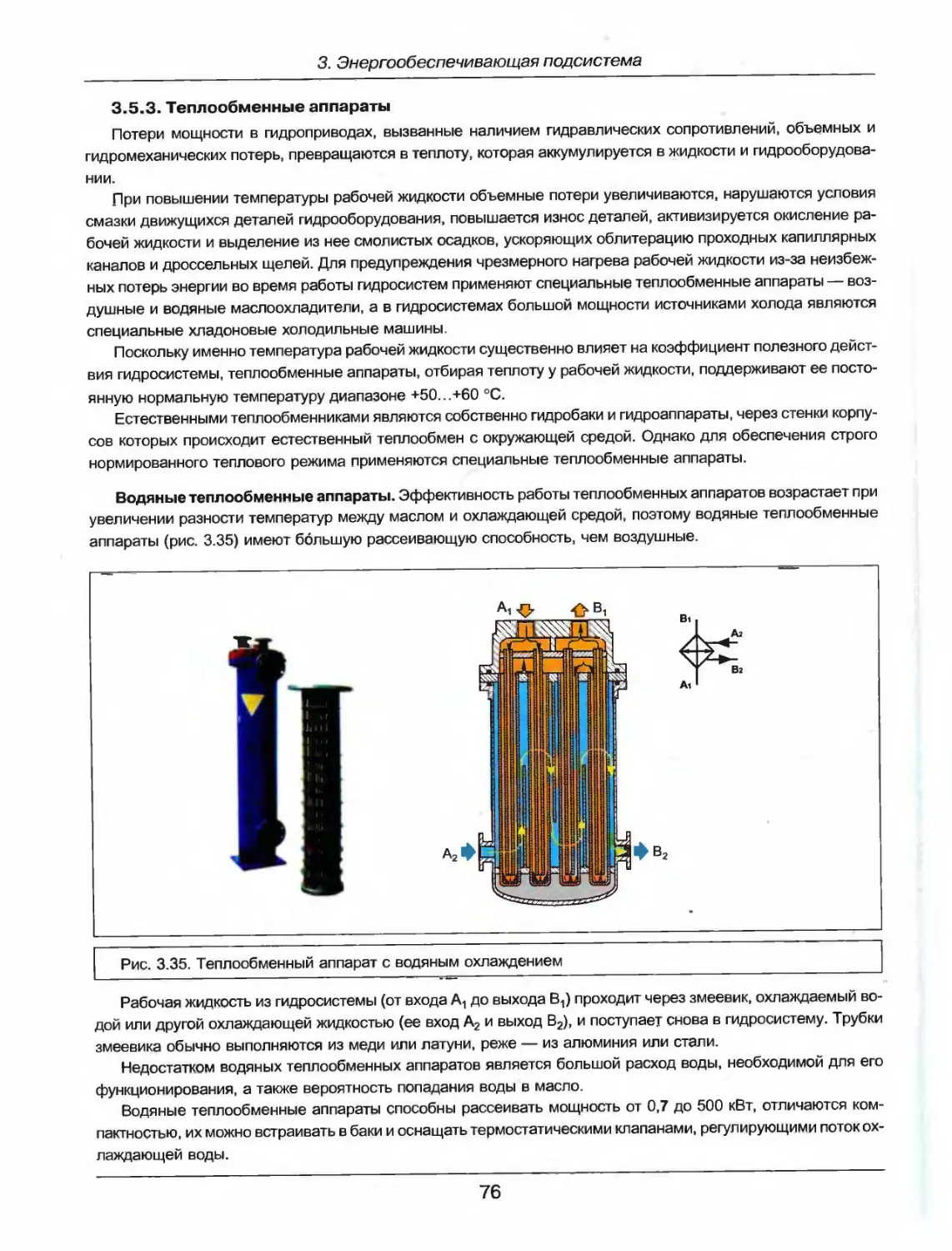
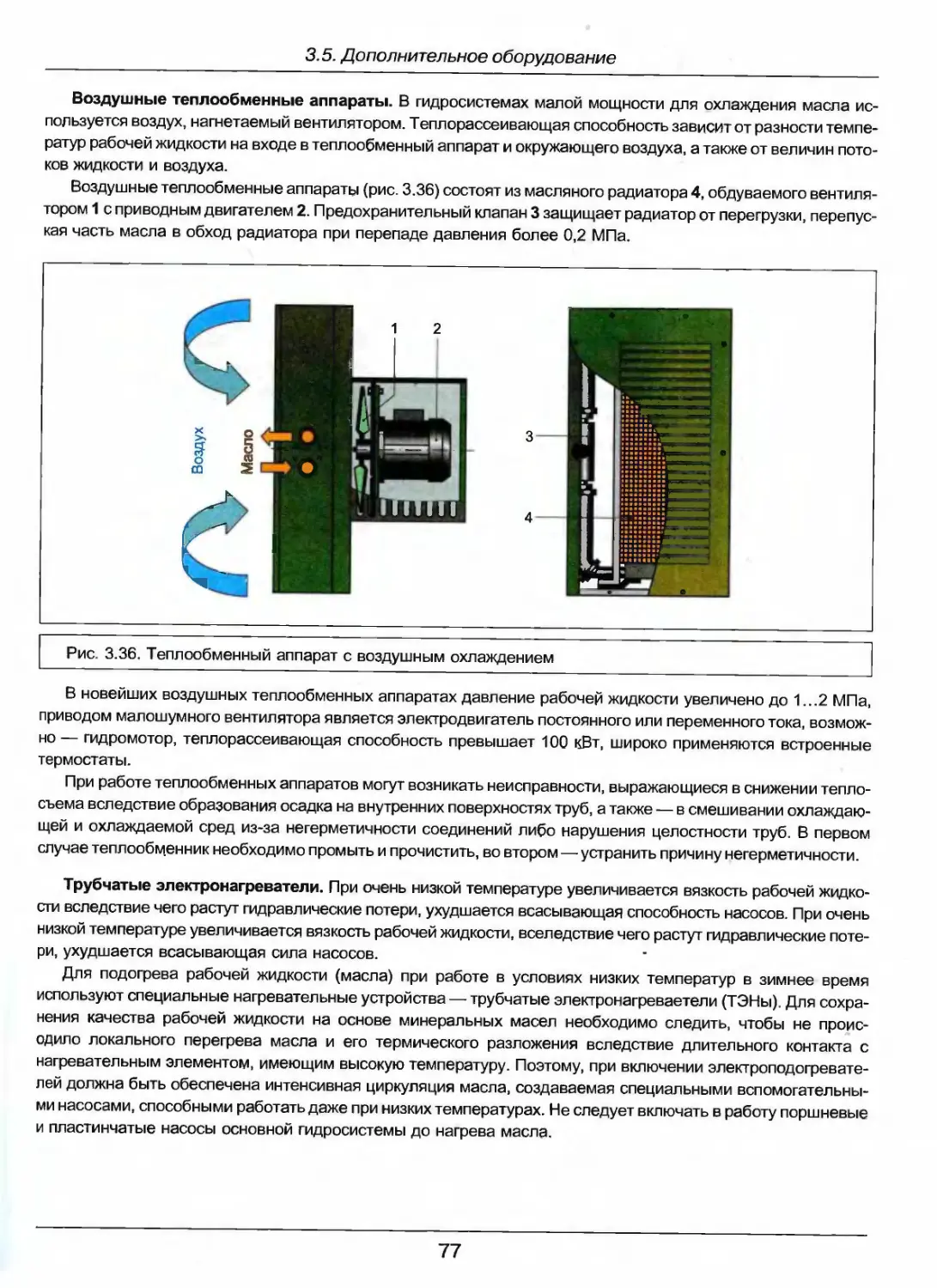
3.5.3. Теплообменные аппараты 76
3
Оглавление
4. Исполнительная подсистема 78
4.1. Гидроцилиндры .,. . 78
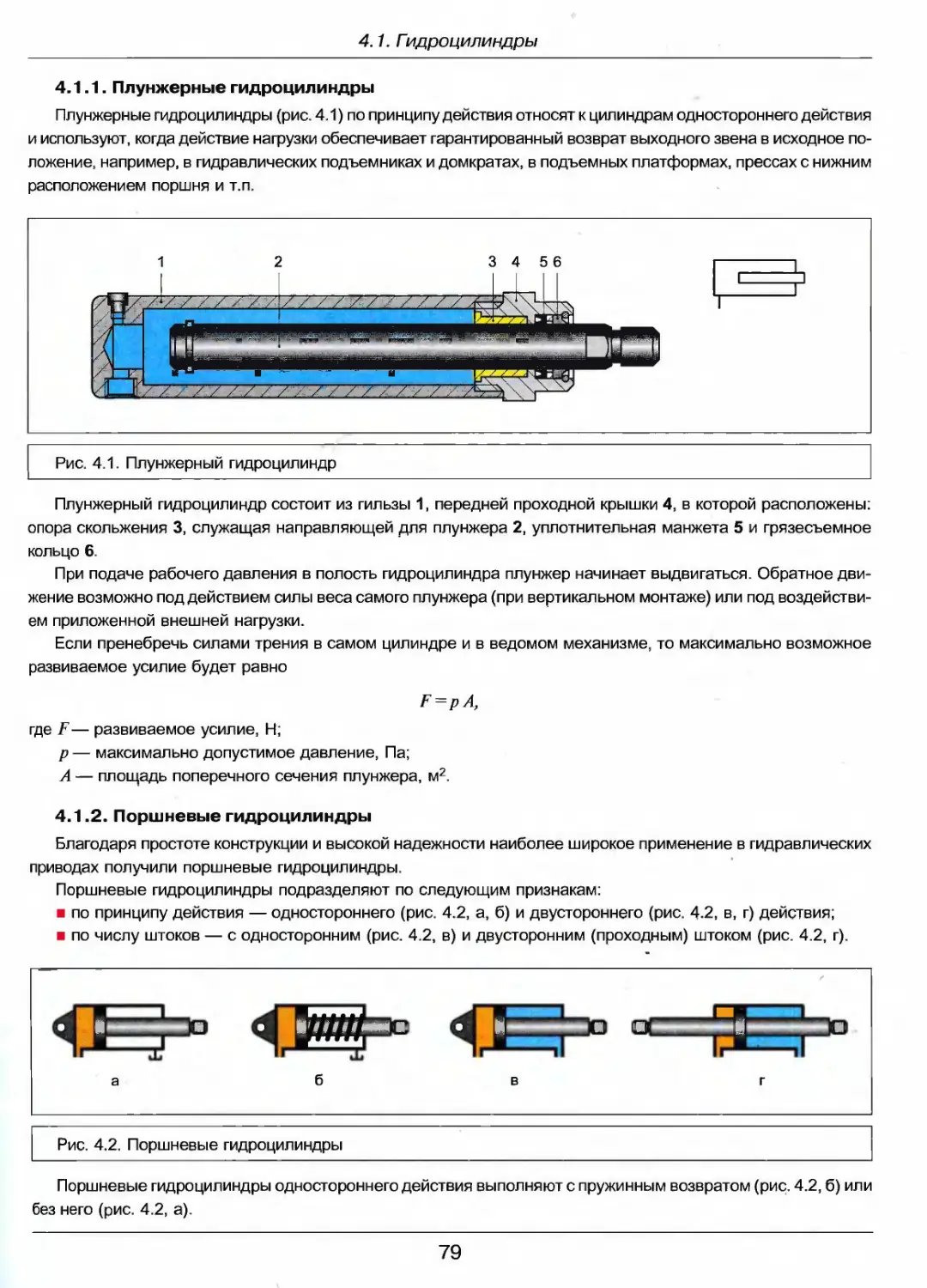
4.1.1. Плунжерные гидроцилиндры 79
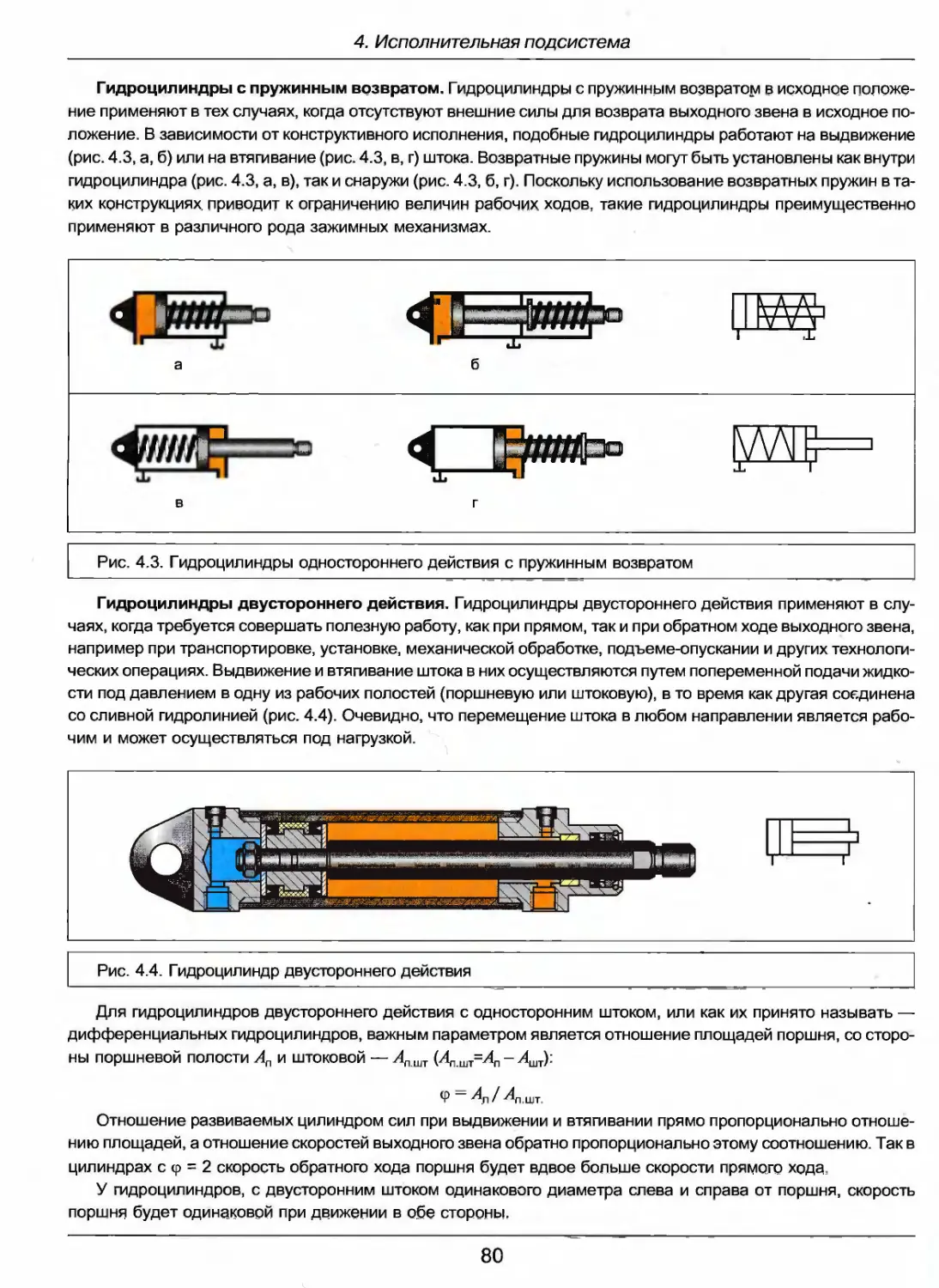
4.1.2. Поршневые гидроцилиндры , 79
4.1.3. Телескопические гидроцилиндры ,82
4.1.4. Крепление гидроцилиндров 83
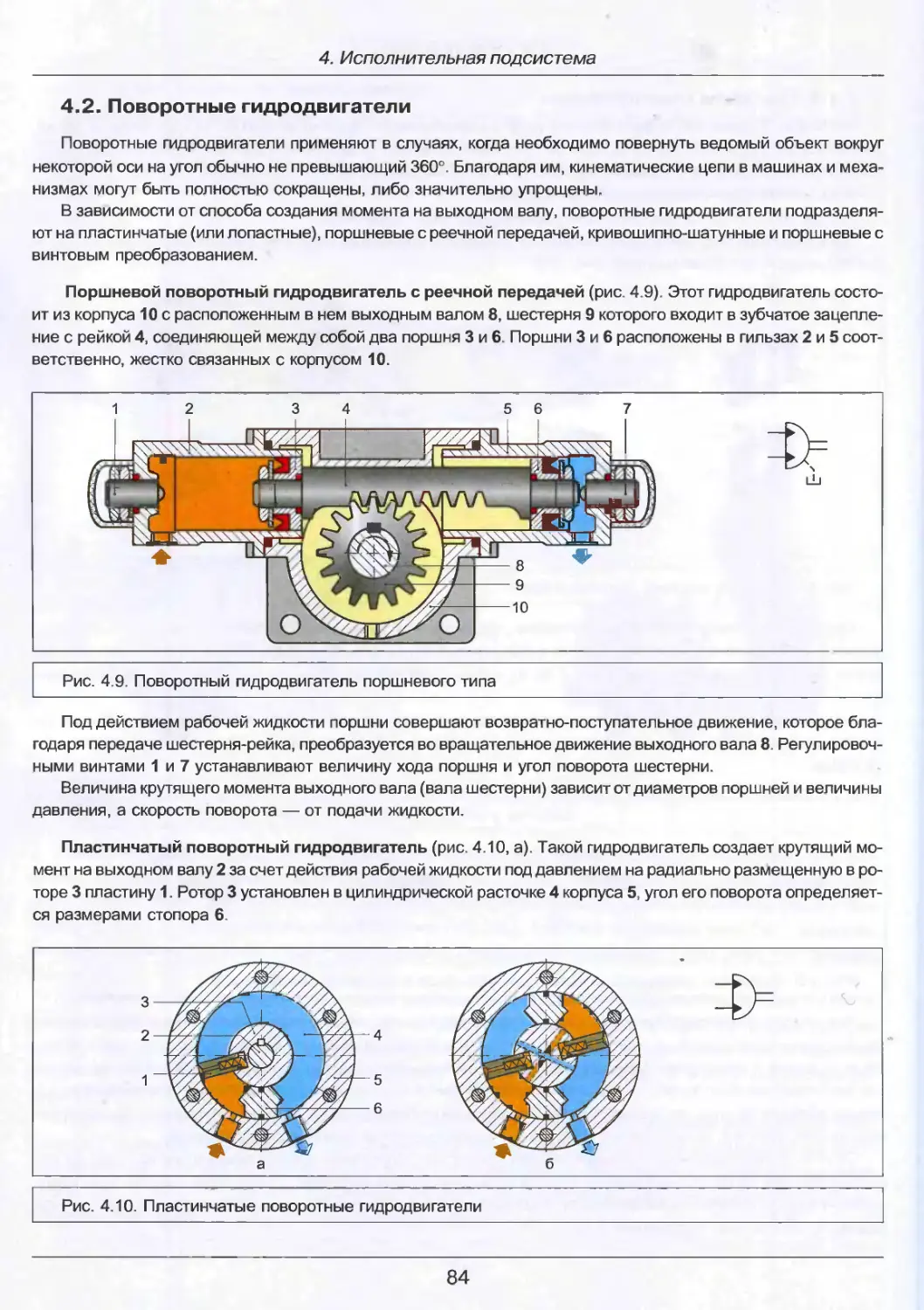
4.2. Поворотные гидродвигатели , 84
4.3. Гидромоторы 86
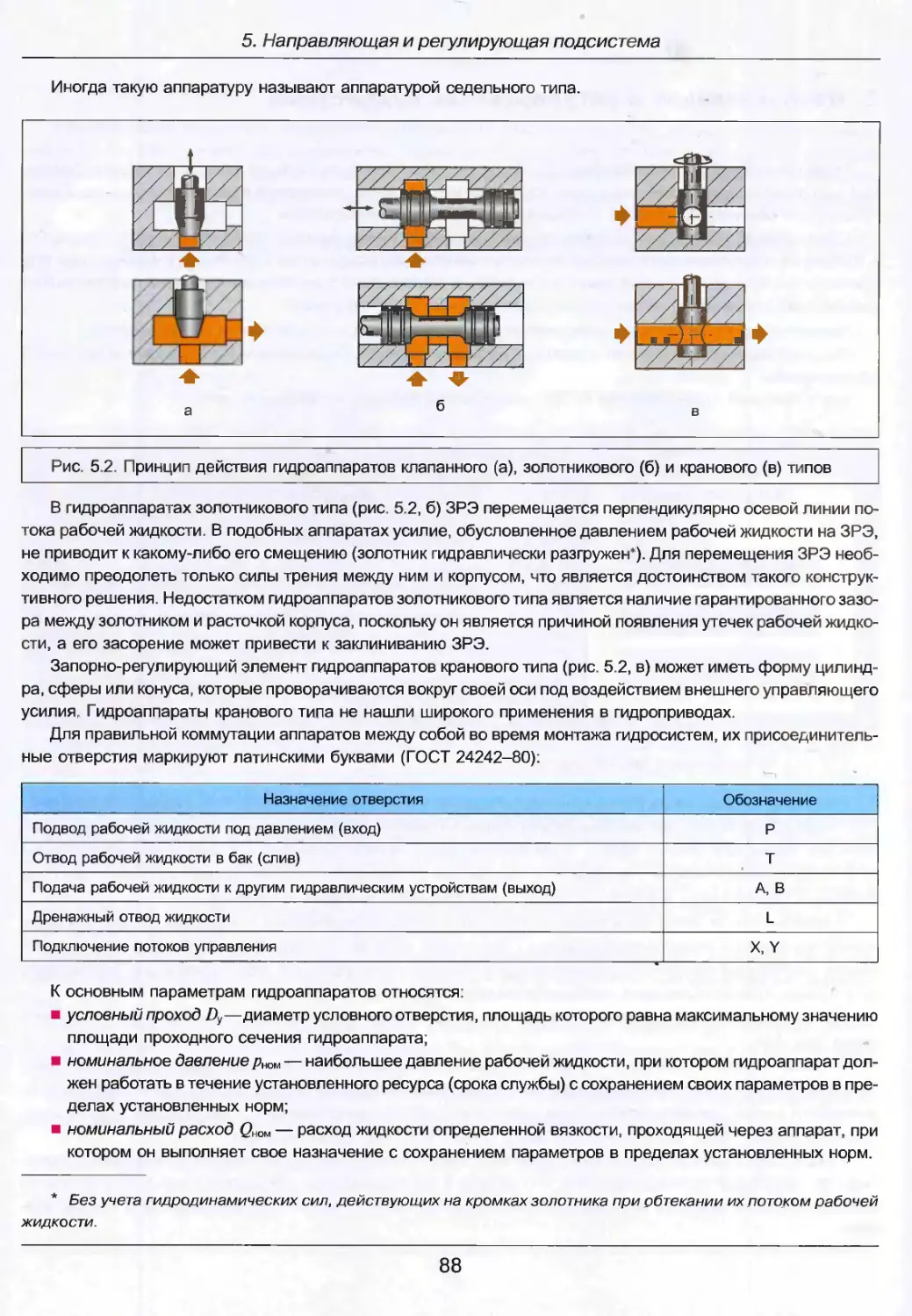
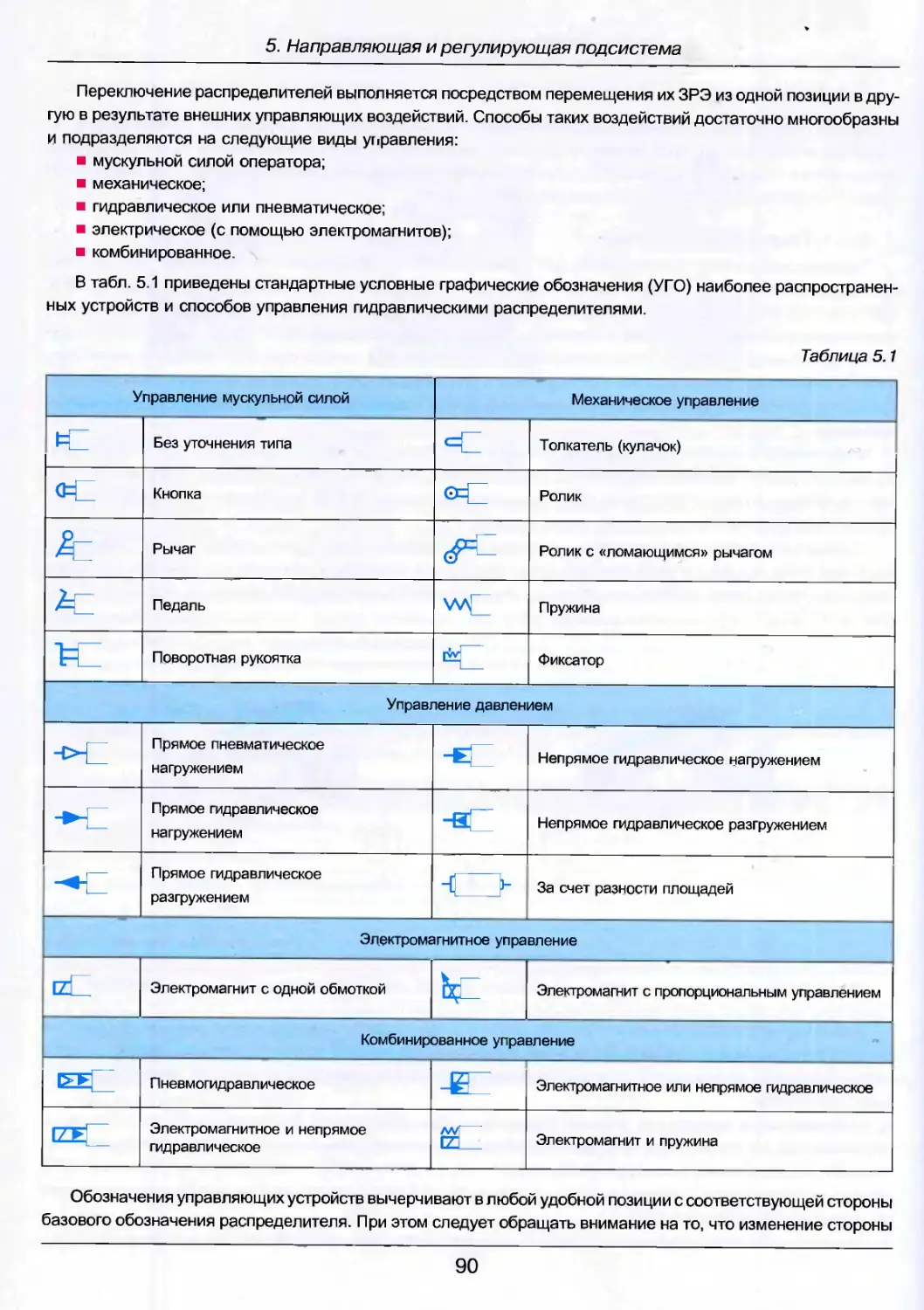
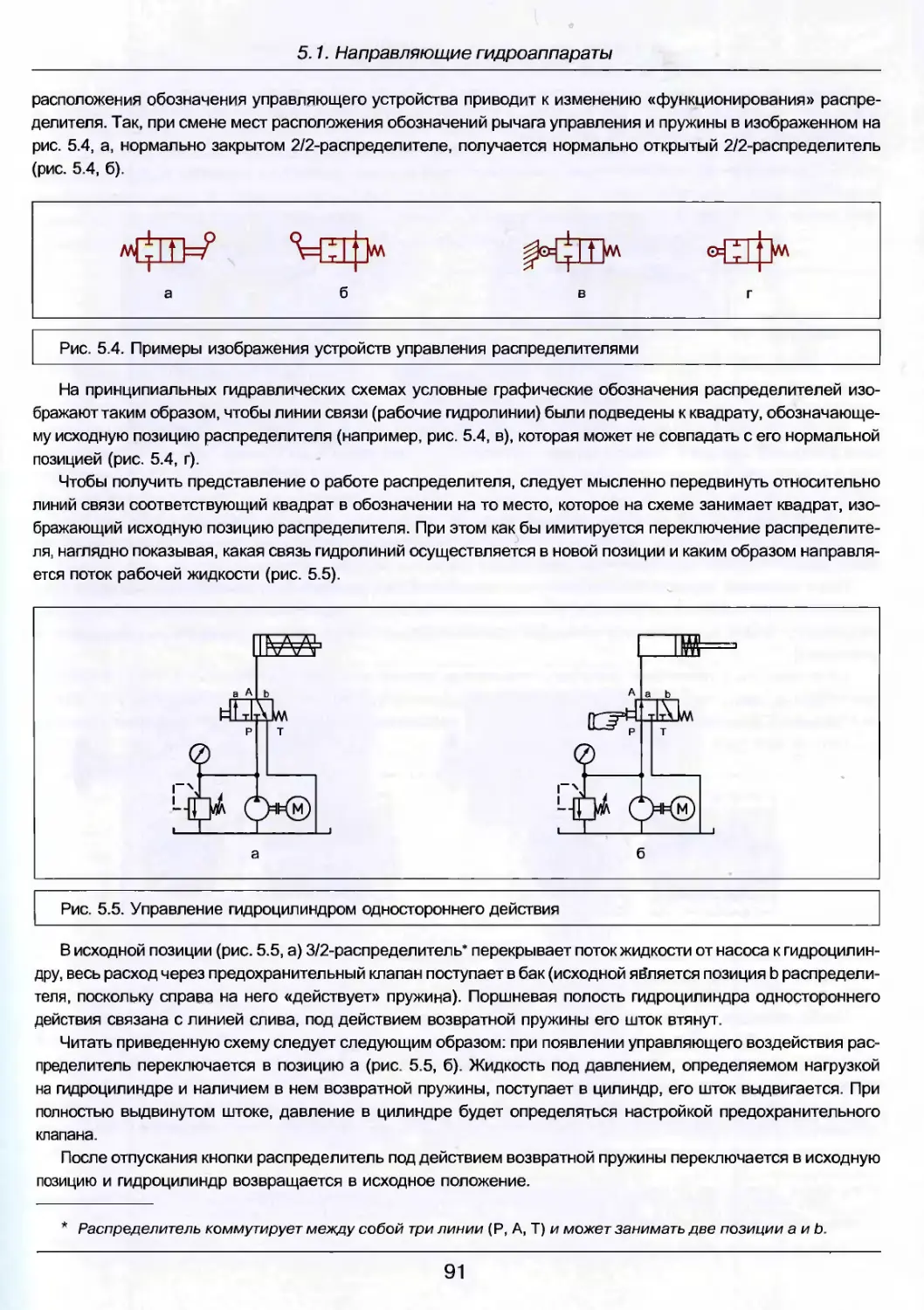
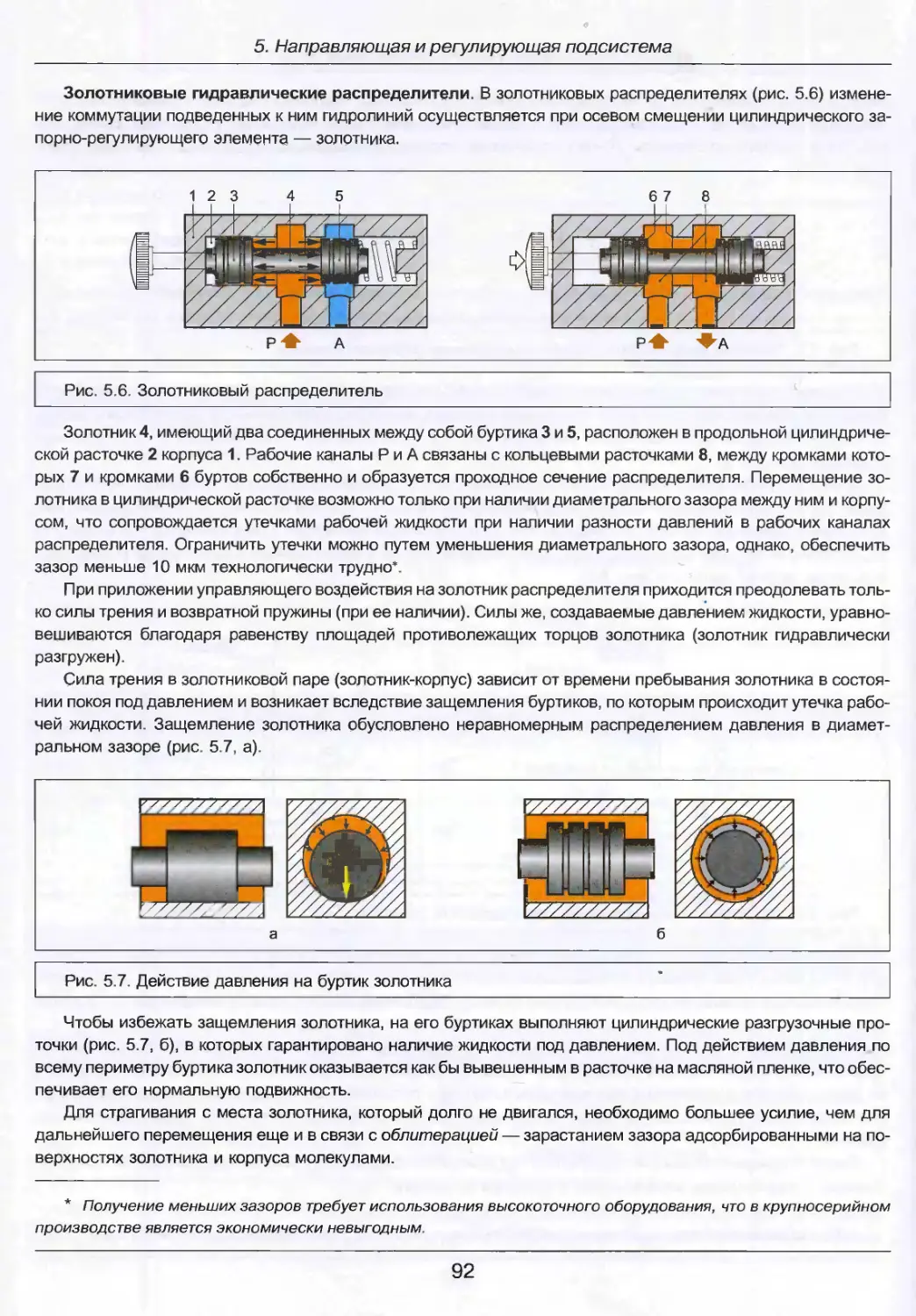
5. Направляющая и регулирующая подсистема 87
5.1. Направляющие гидроаппараты 89
5.1.1. Гидрораспределители 89
5.1.2. Обратные клапаны 104
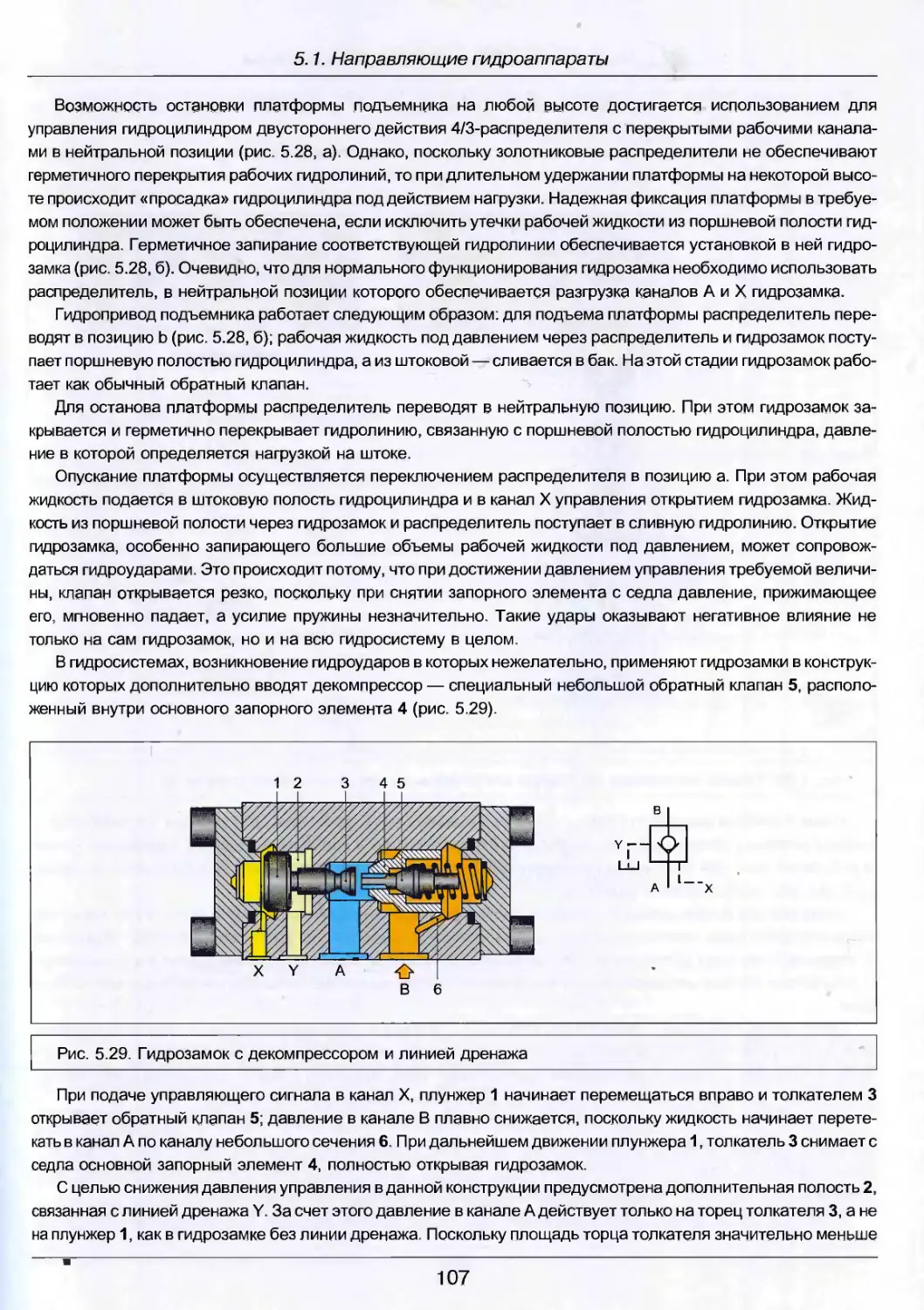
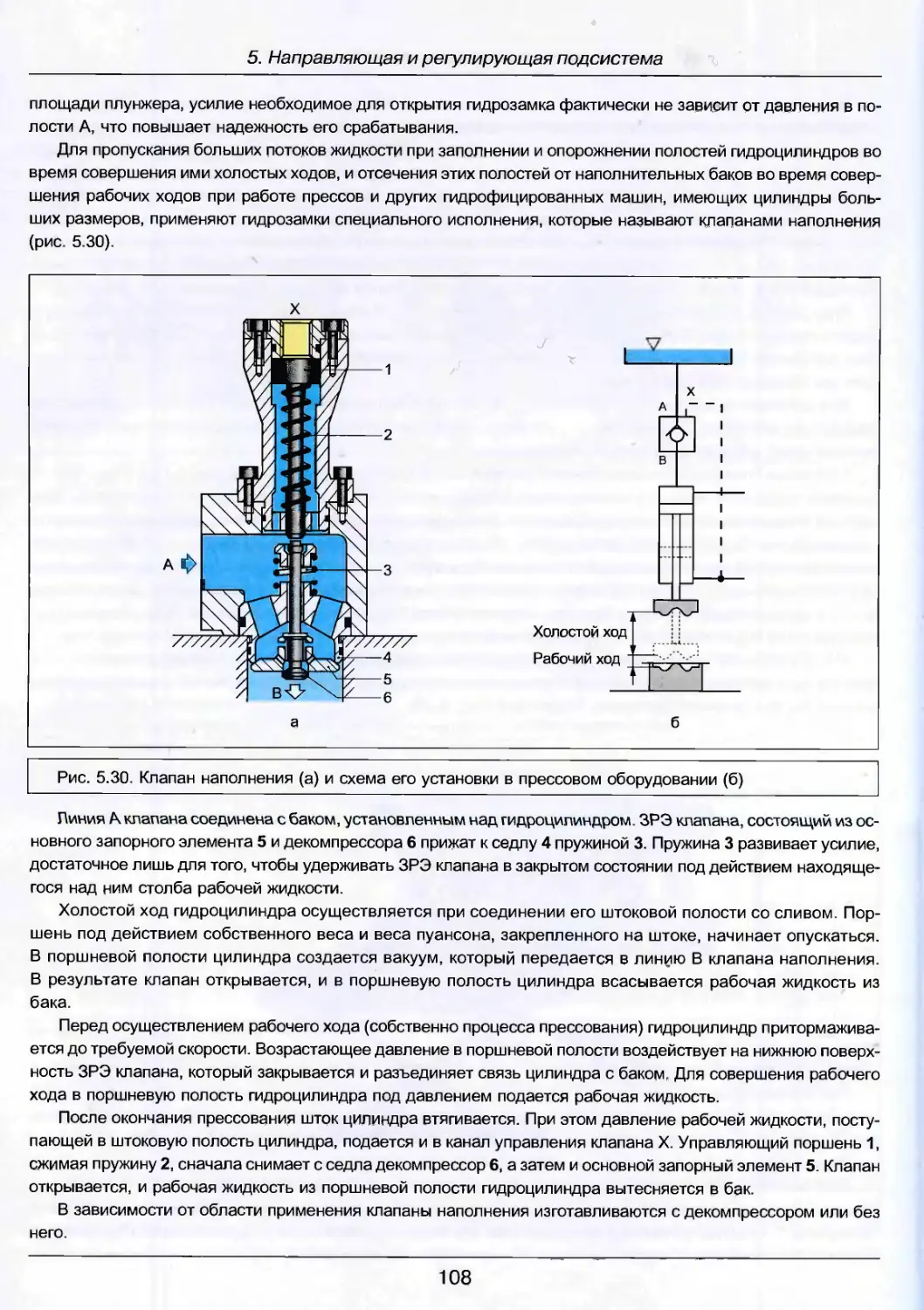
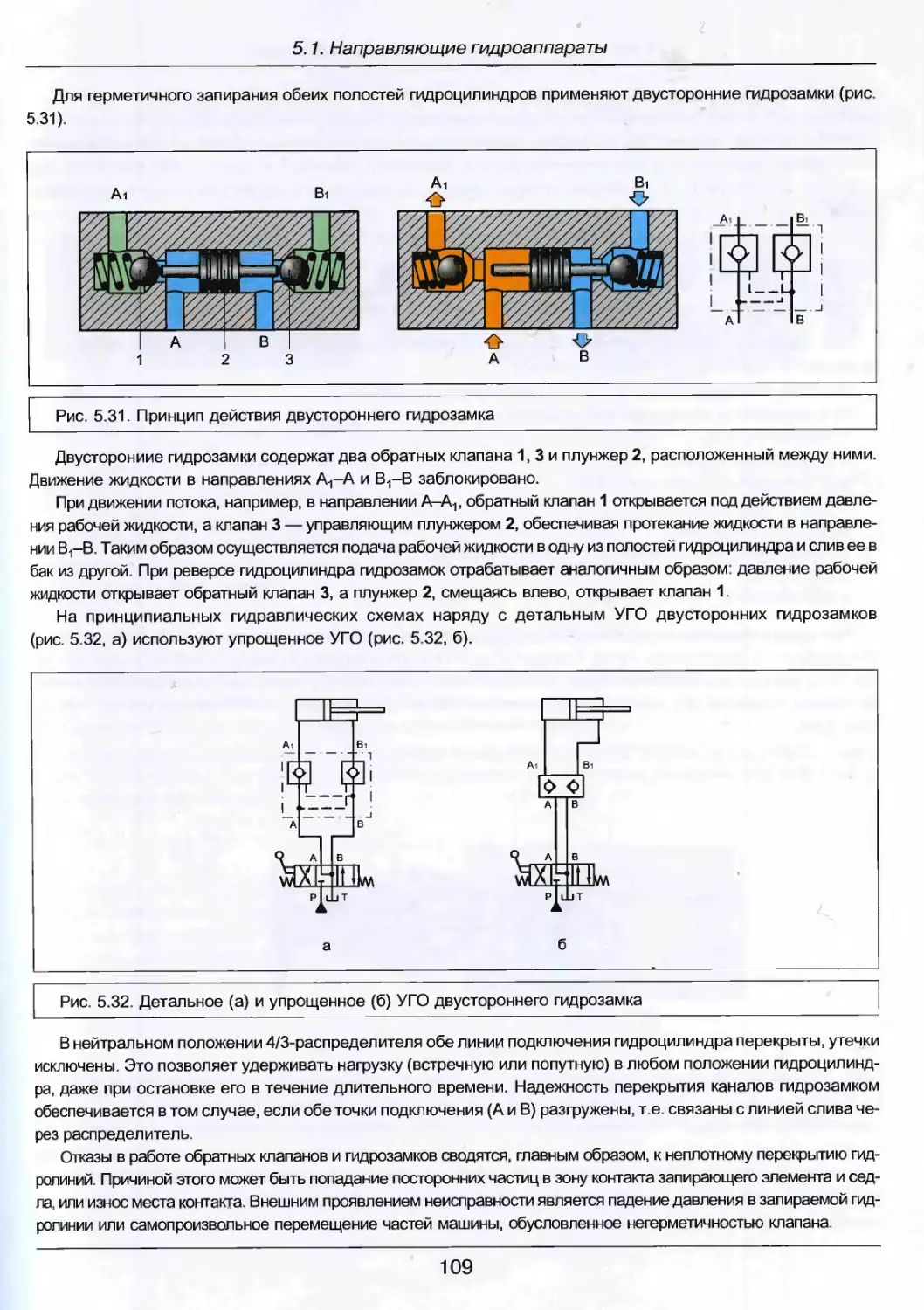
5.1.3. Гидрозамки 106
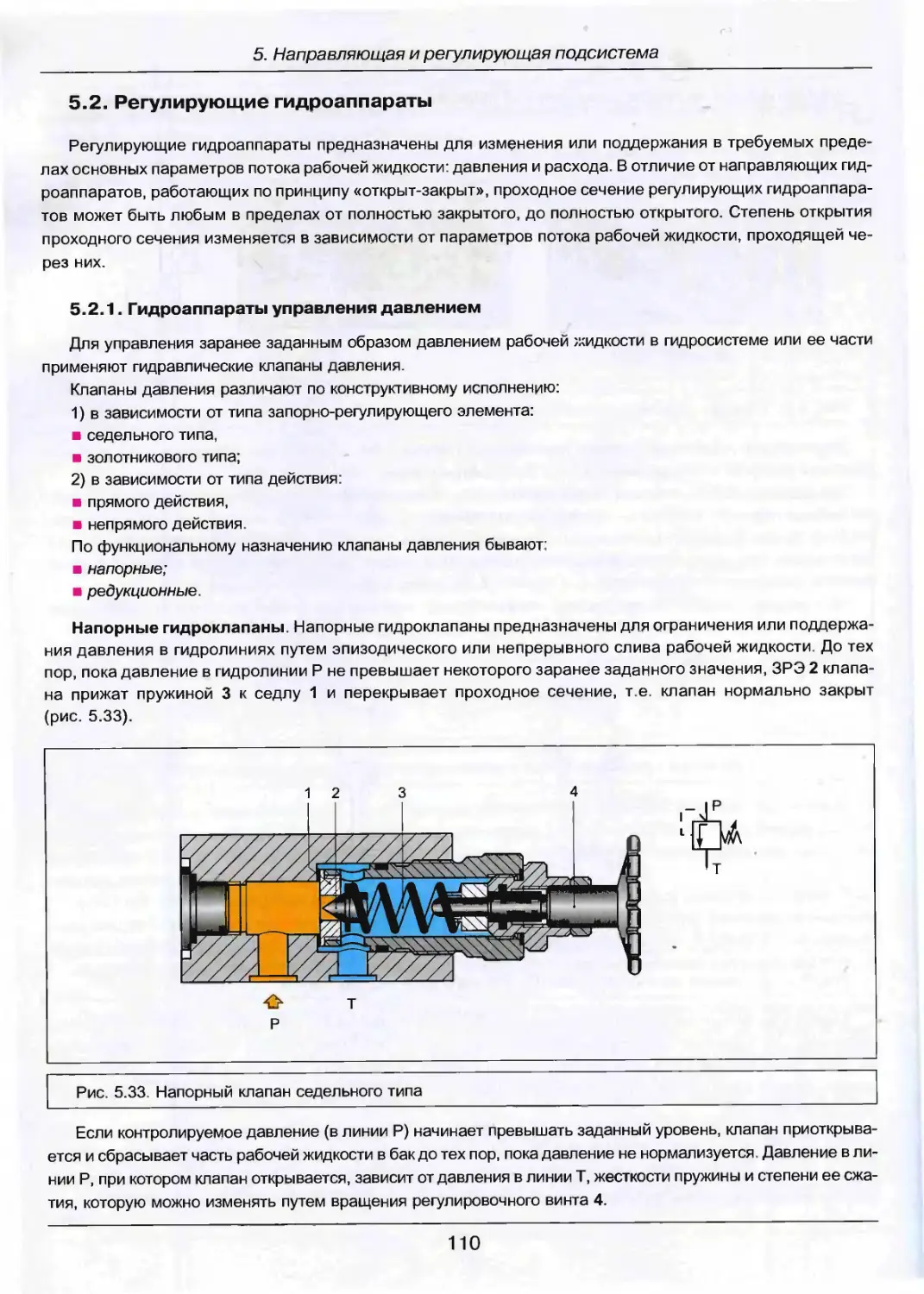
5.2. Регулирующие гидроаппараты , , . 110
5.2.1. Гидроаппараты управления давлением 110
5.2.2. Гидроаппараты управления расходом 121
6. Информационная подсистема 131
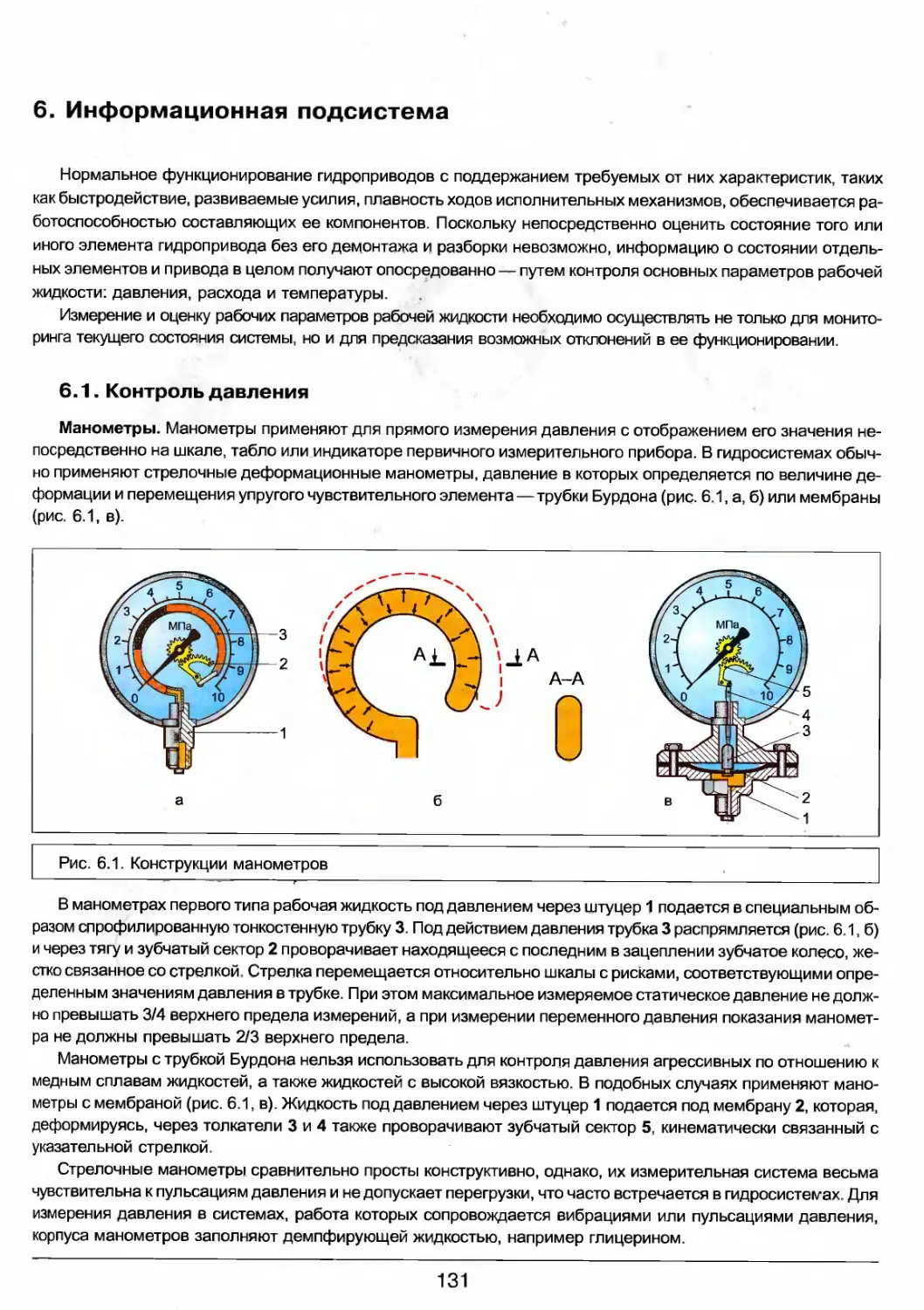
6.1. Контроль давления 131
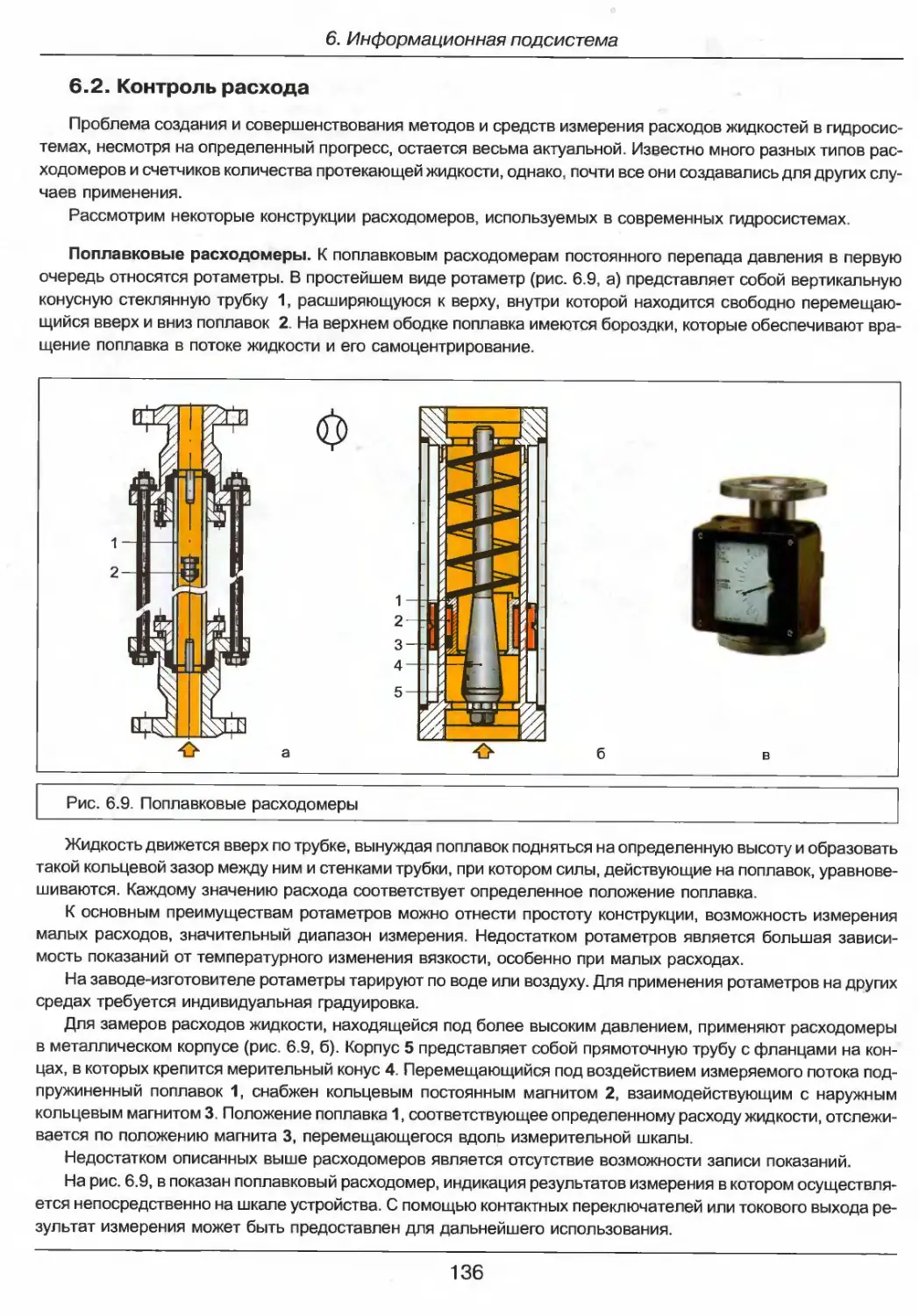
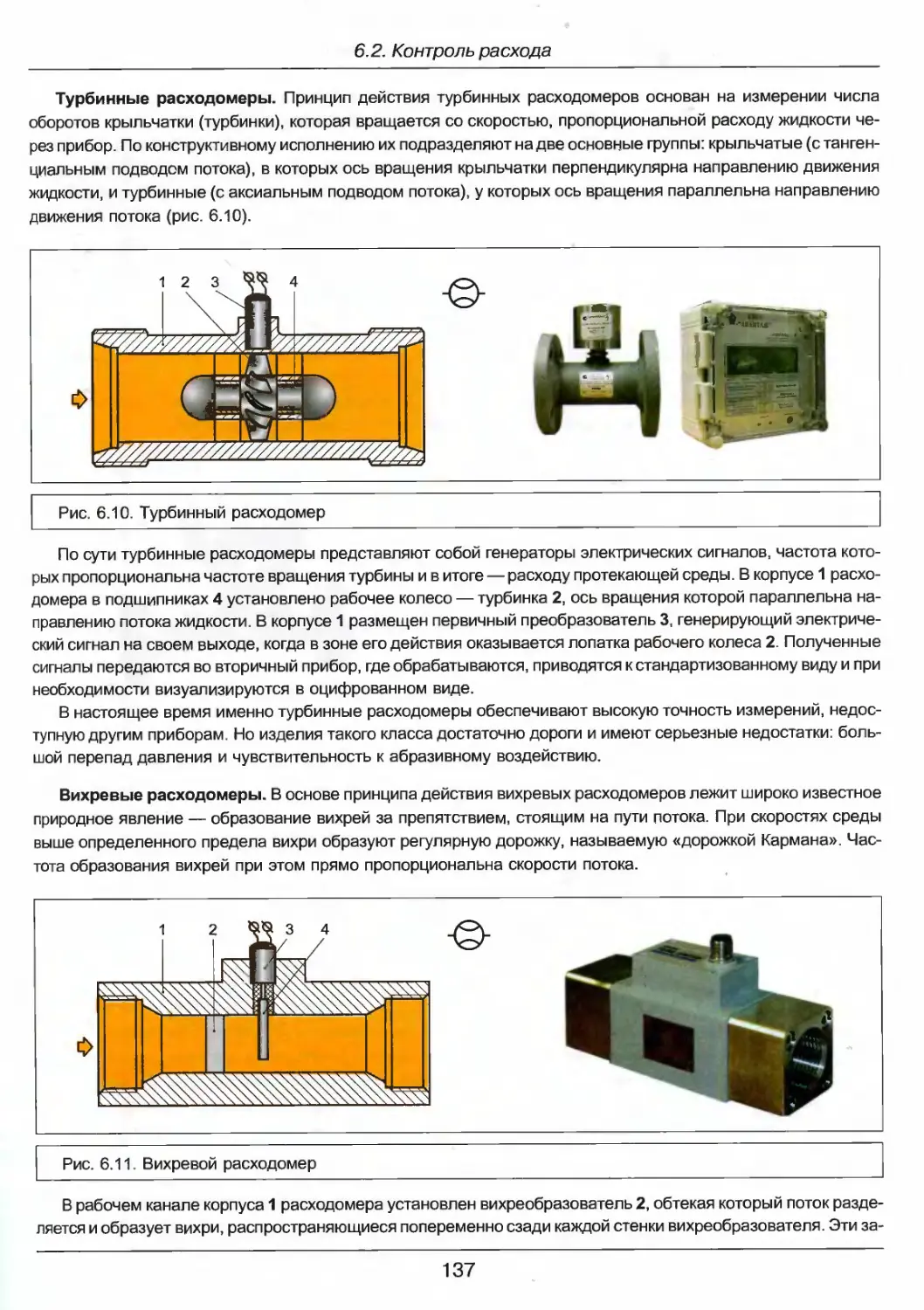
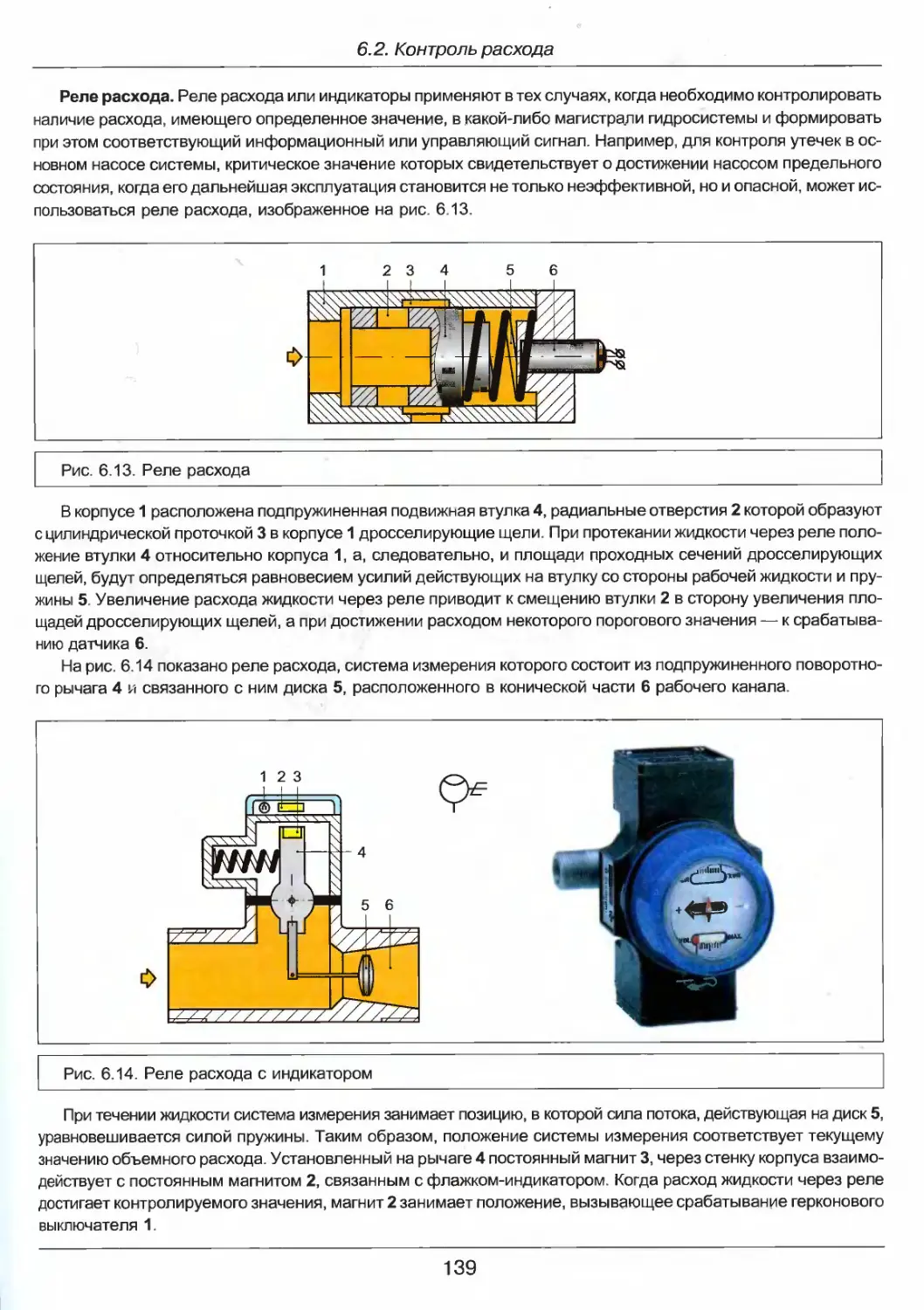
6.2. Контроль расхода 136
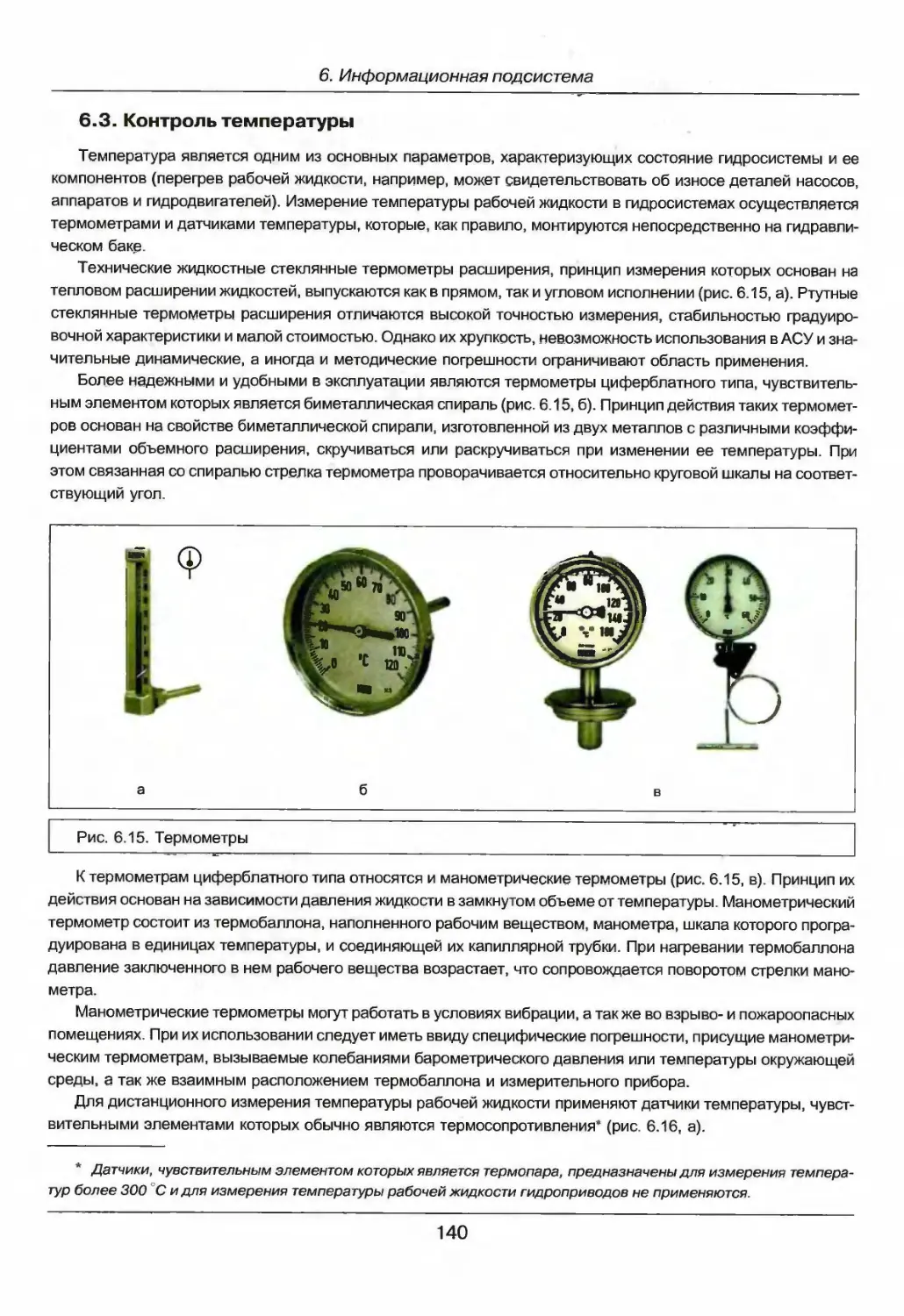
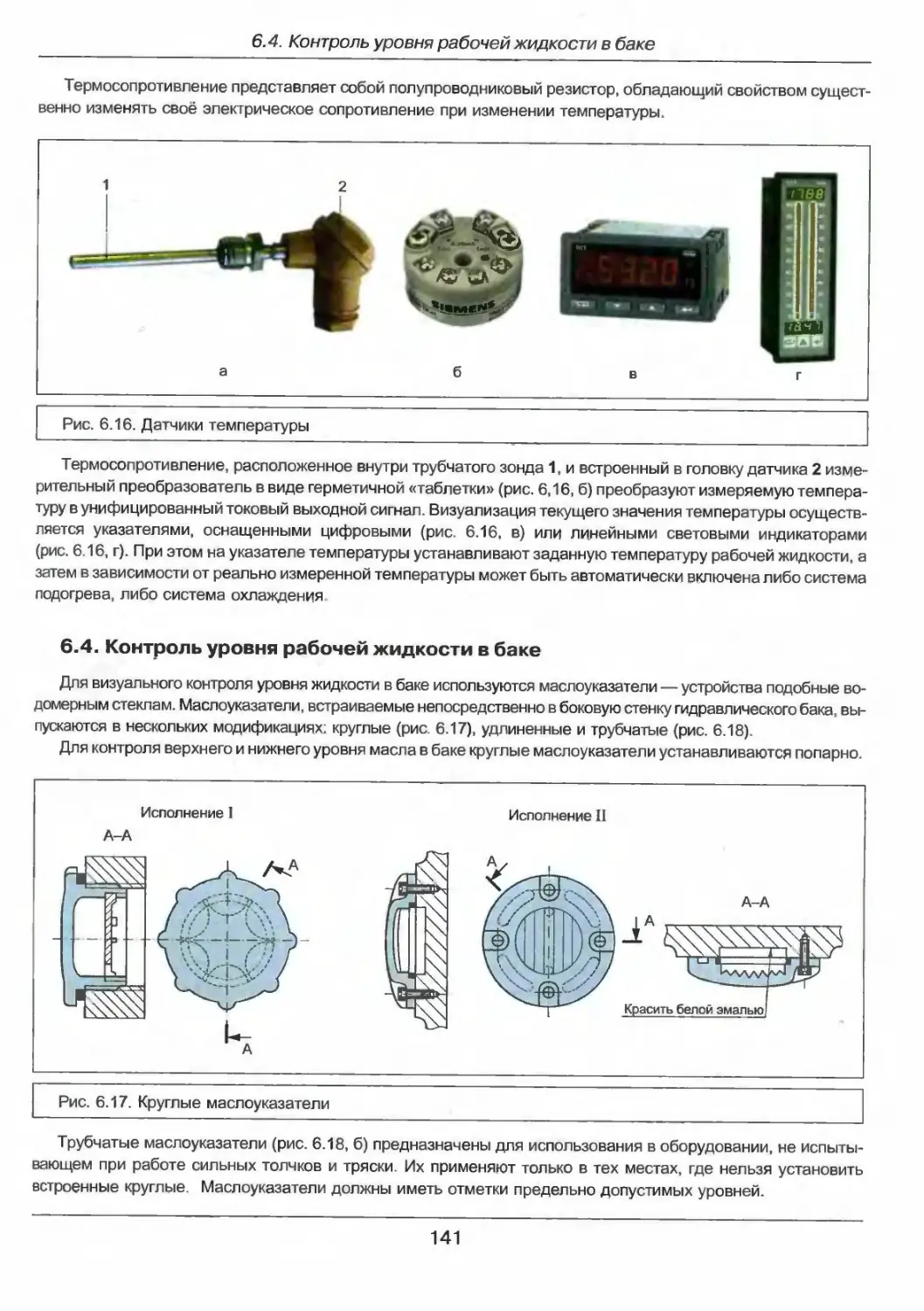
6.3. Контроль температуры 140
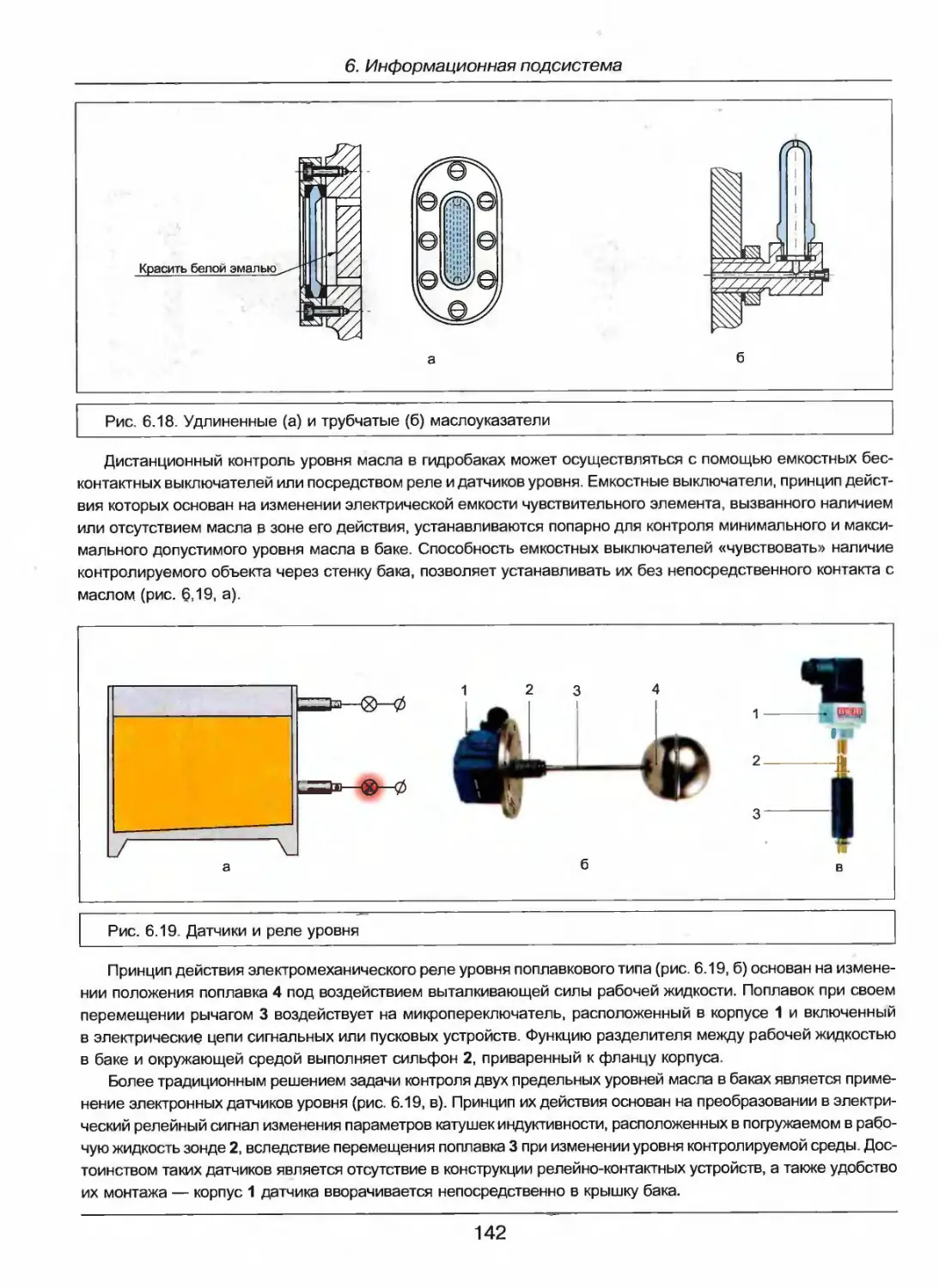
6.3. Контроль уровня рабочей жидкости в баке 141
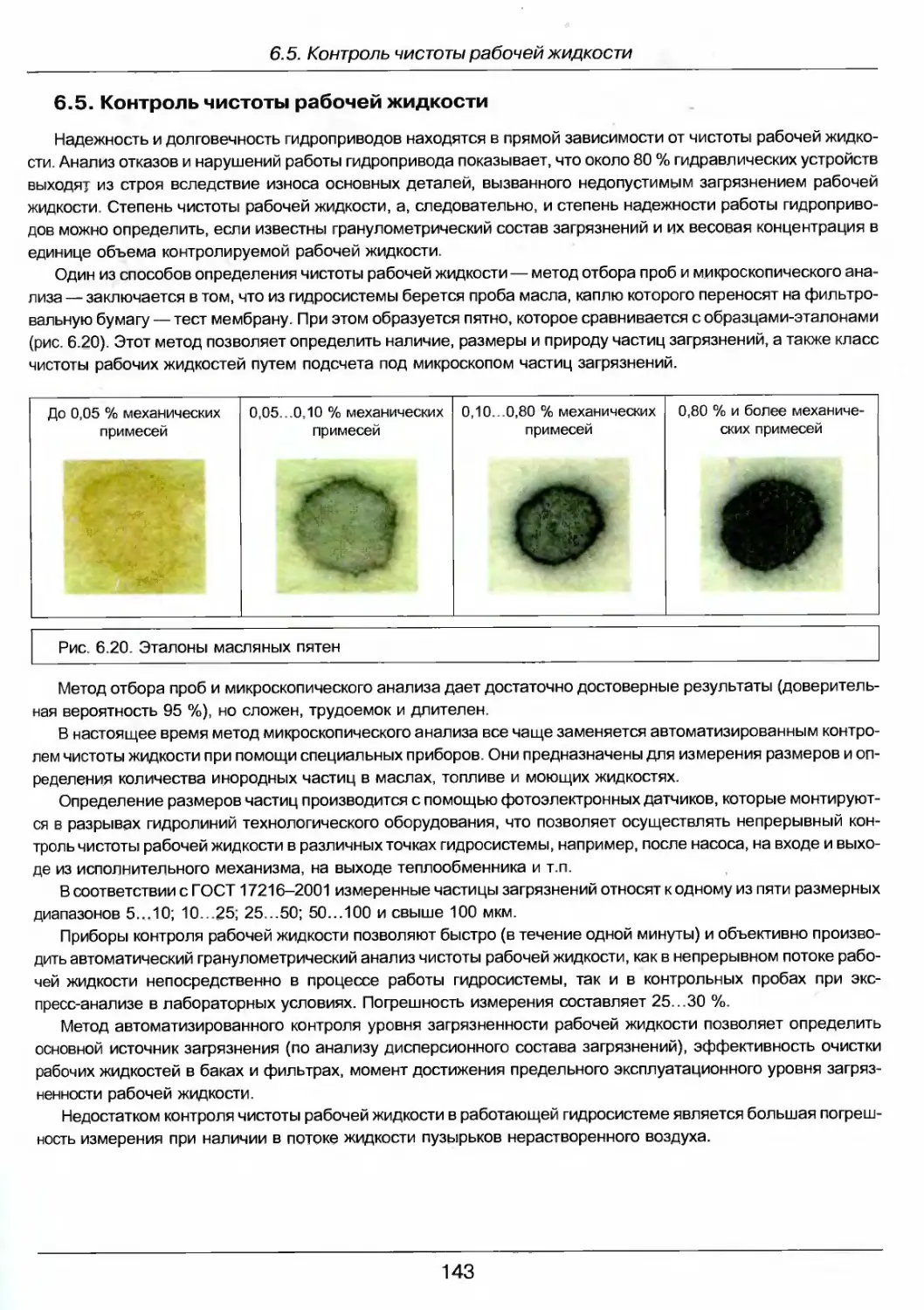
6.4. Контроль чистоты рабочей жидкости 143
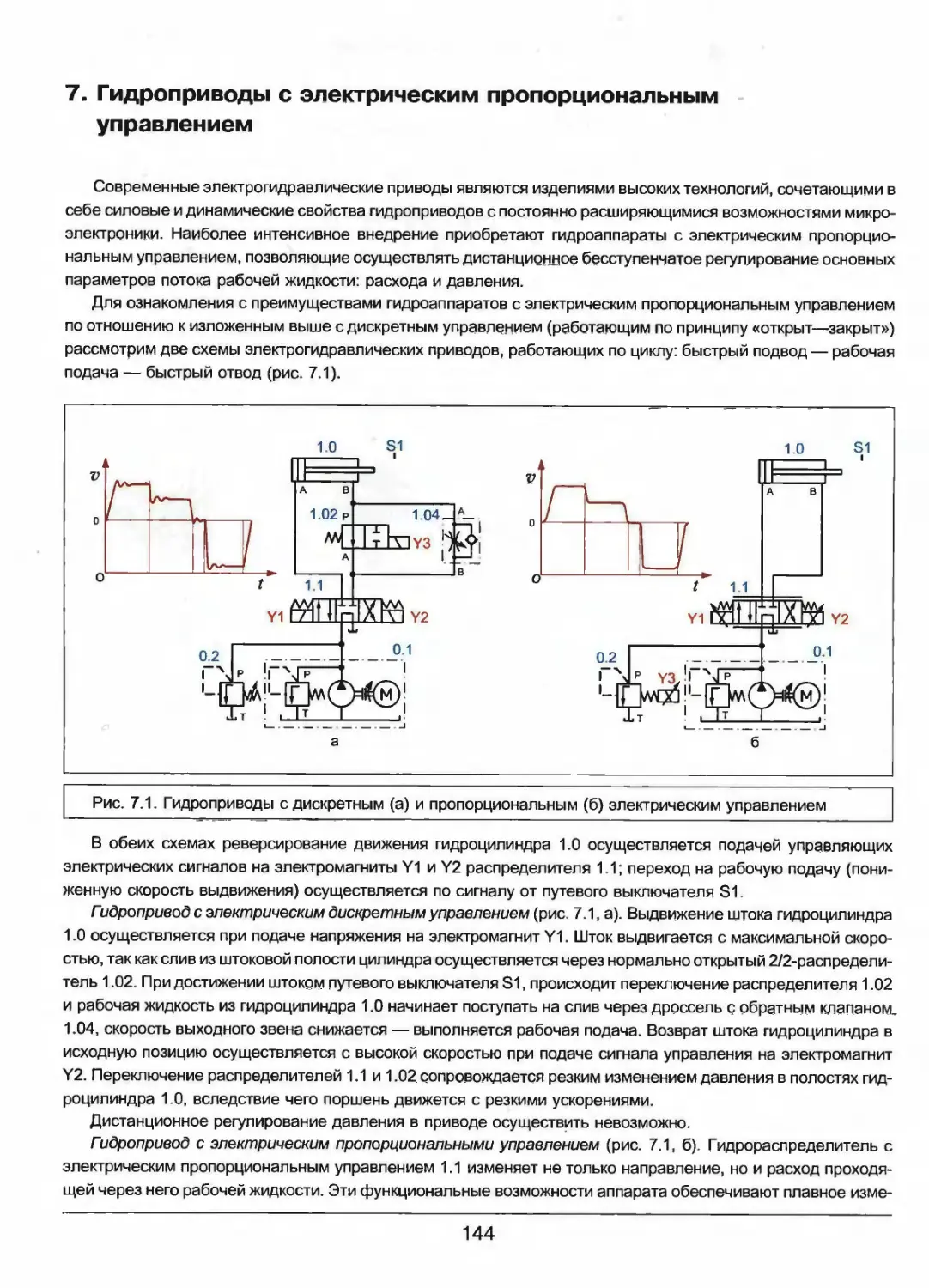
7. Гидроприводы с электрическим пропорциональным управлением . . . 144
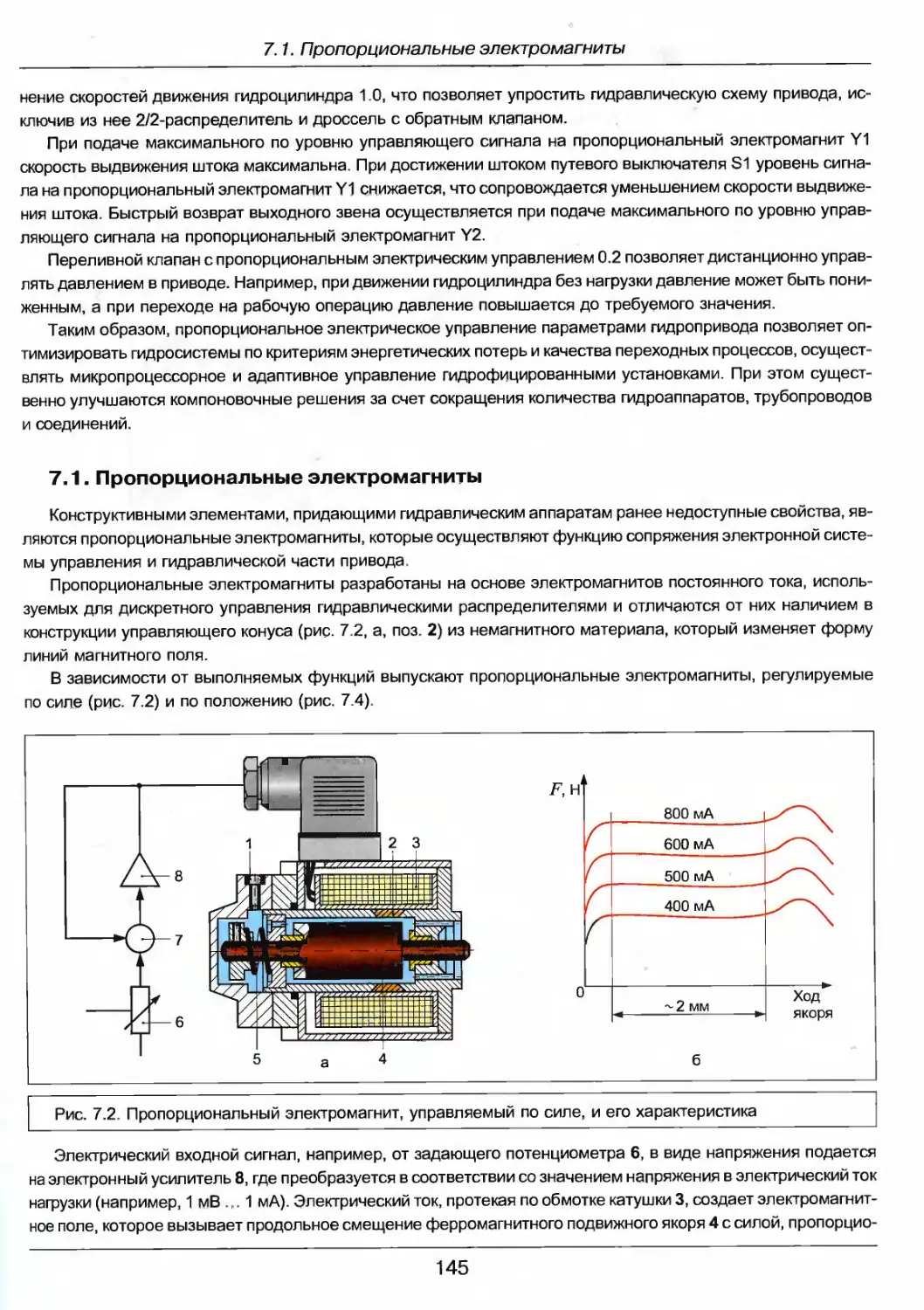
7.1. Пропорциональные электромагниты 145
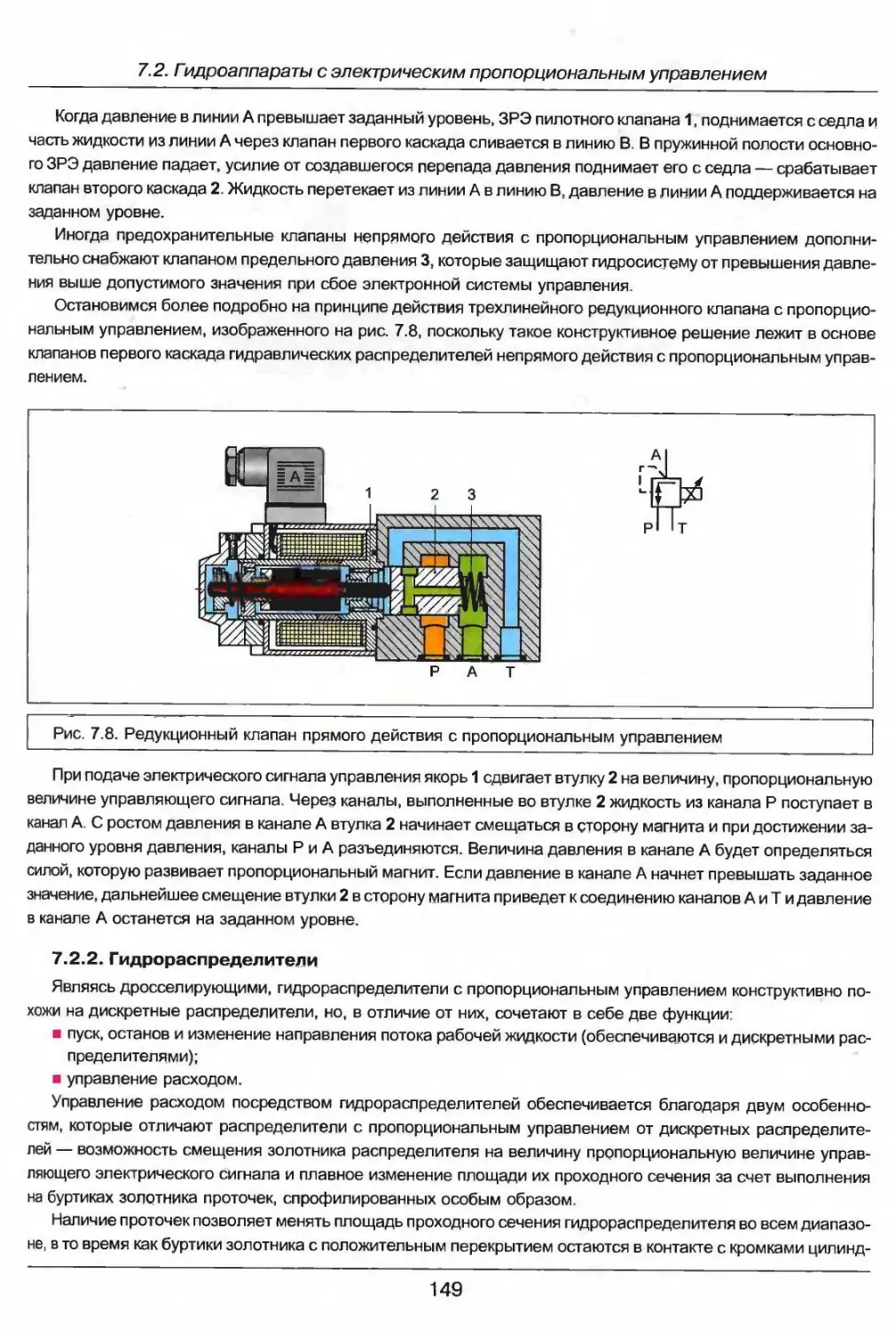
7.2. Гидроаппараты с электрическим пропорциональным управлением 148
7.2.1. Клапаны давления 148
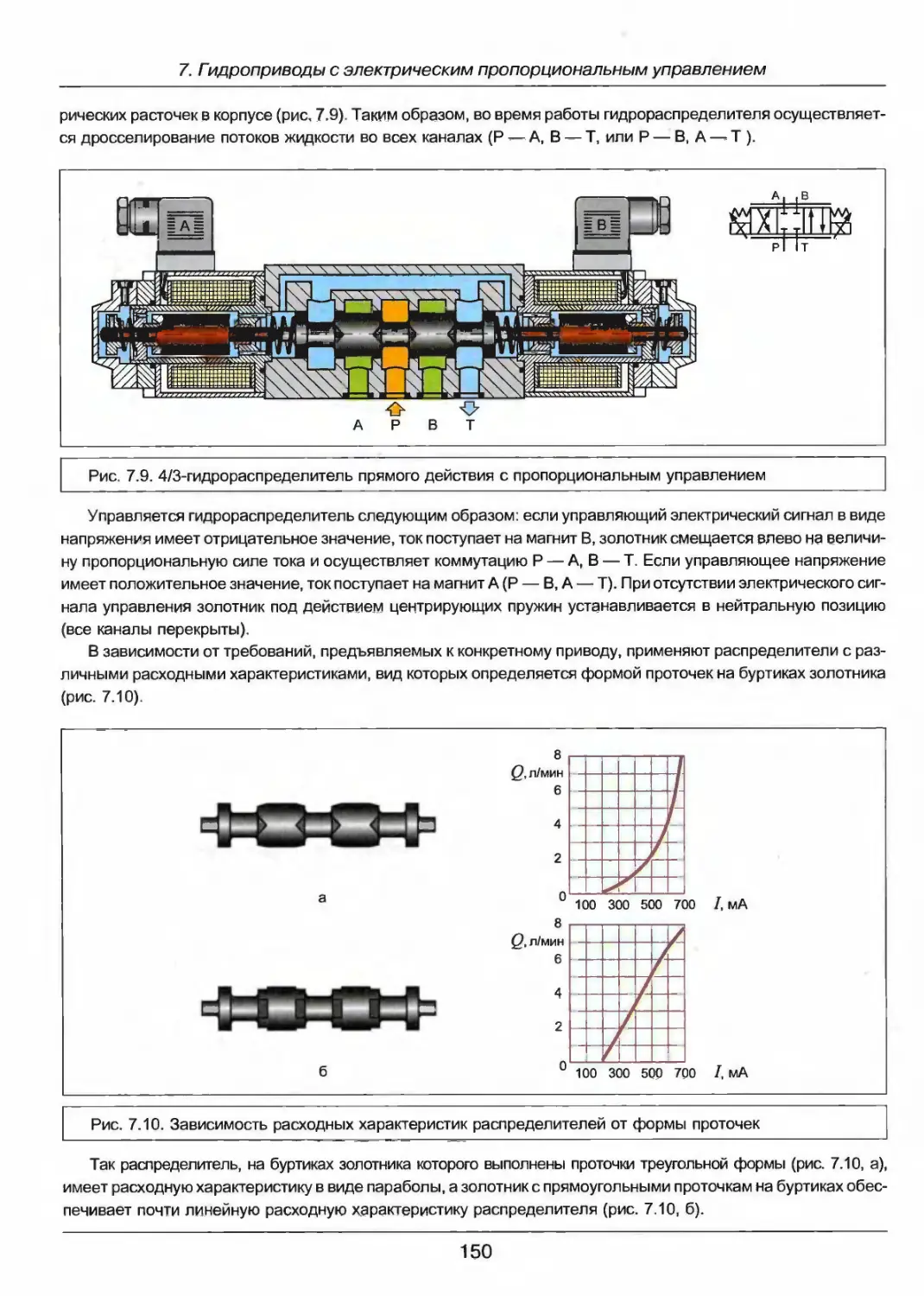
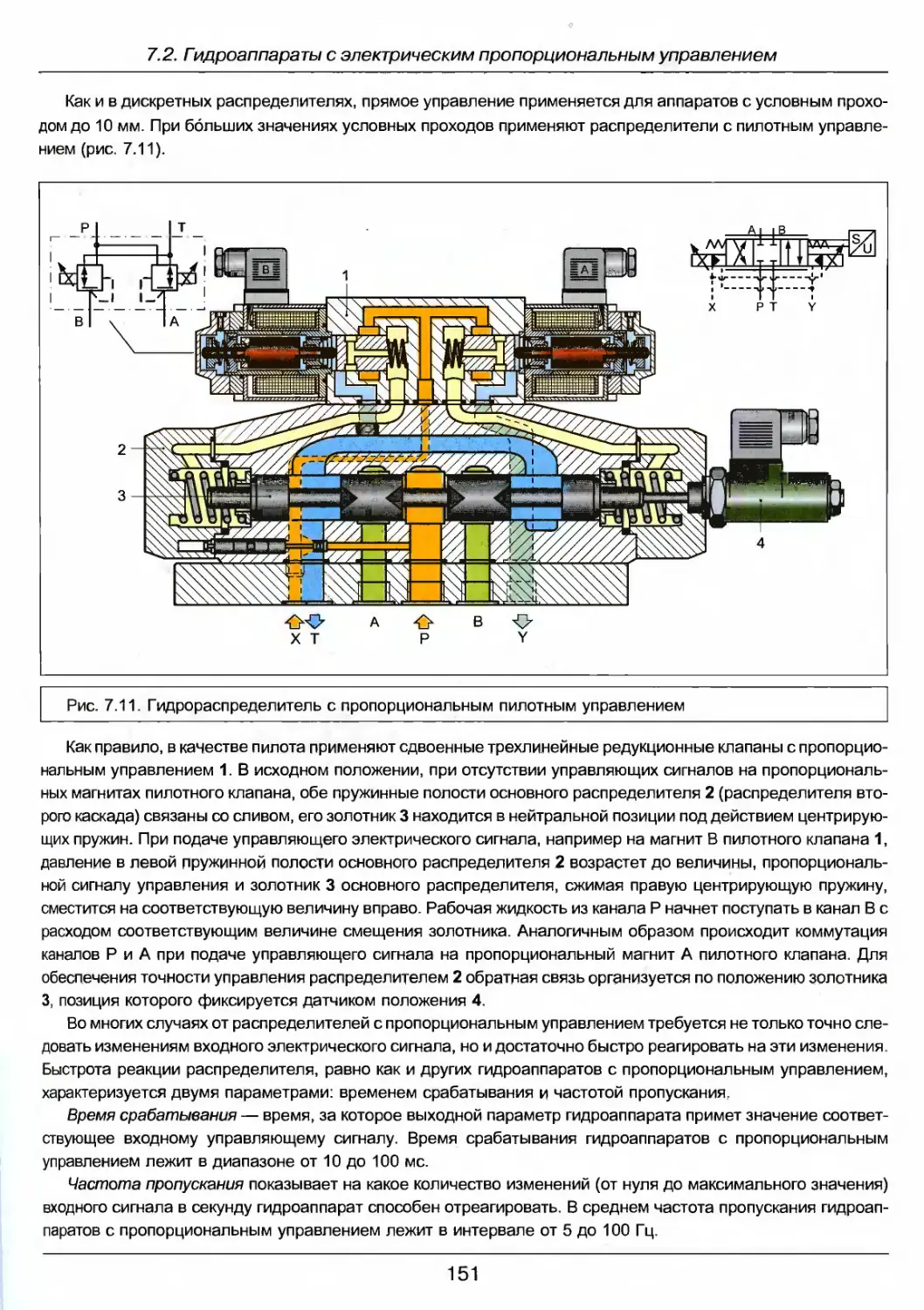
7.2.2. Гидрораспределители __ 149
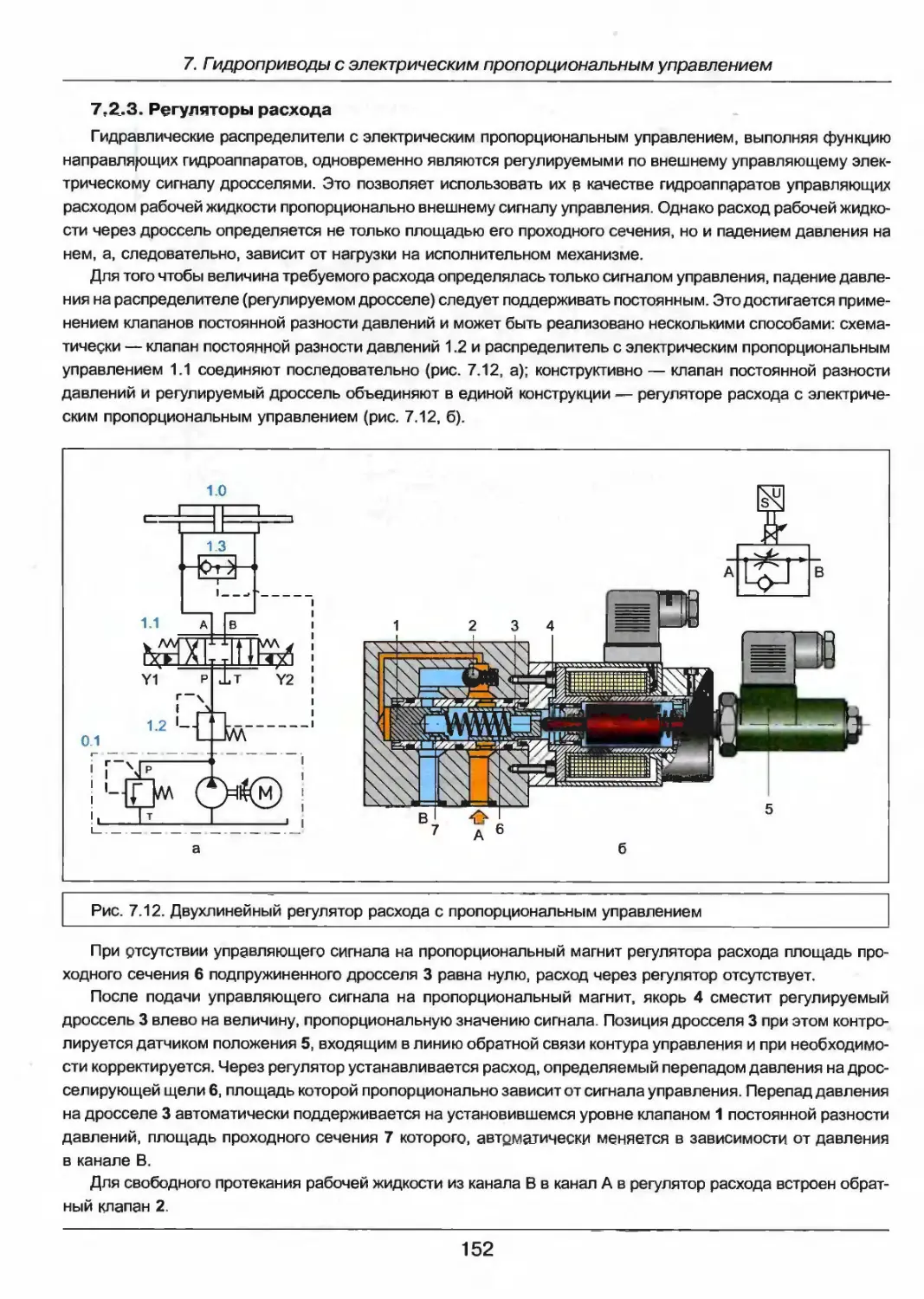
7.2.3. Регуляторы расхода , 152
7.3. Электронные усилители . . , 153
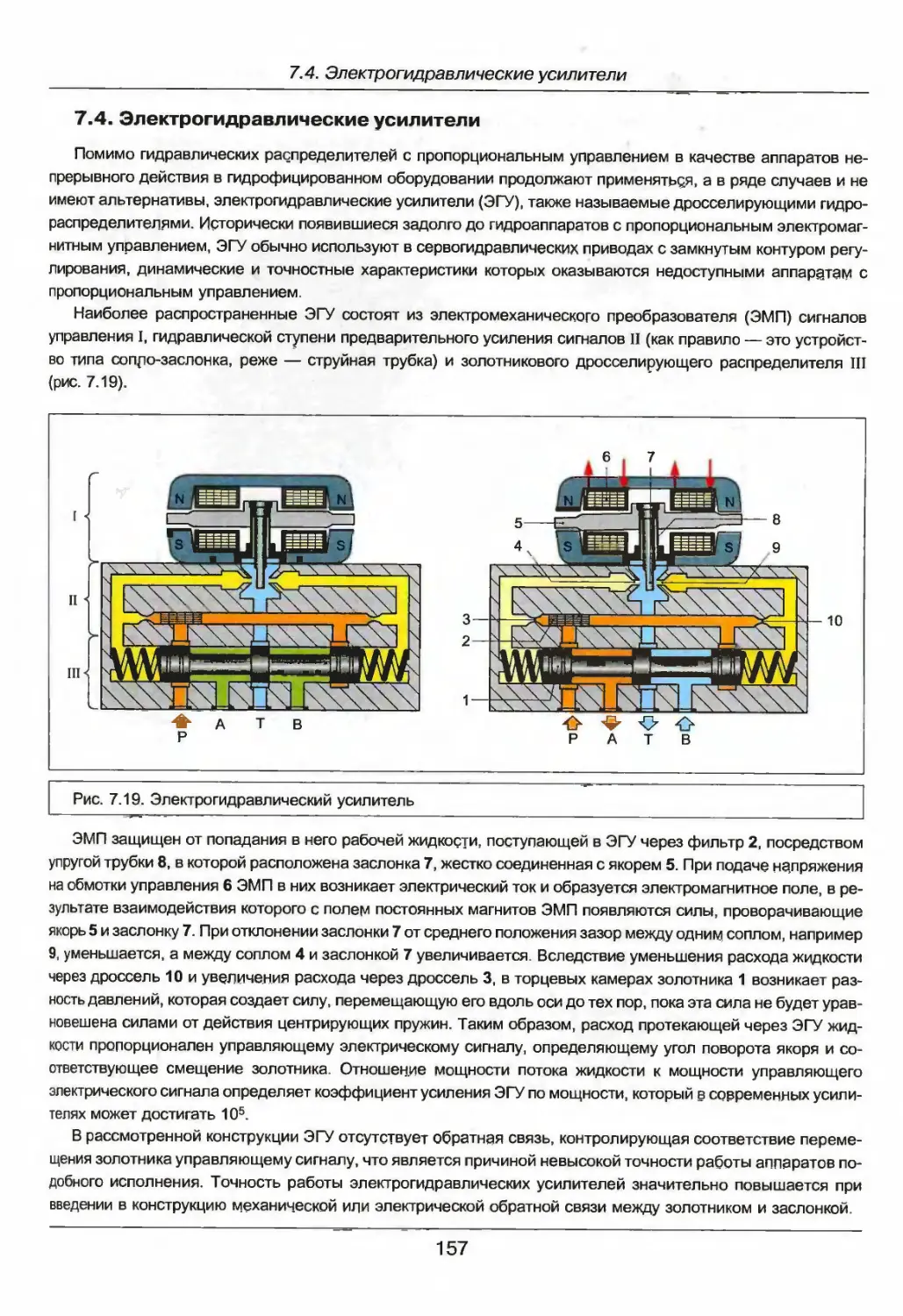
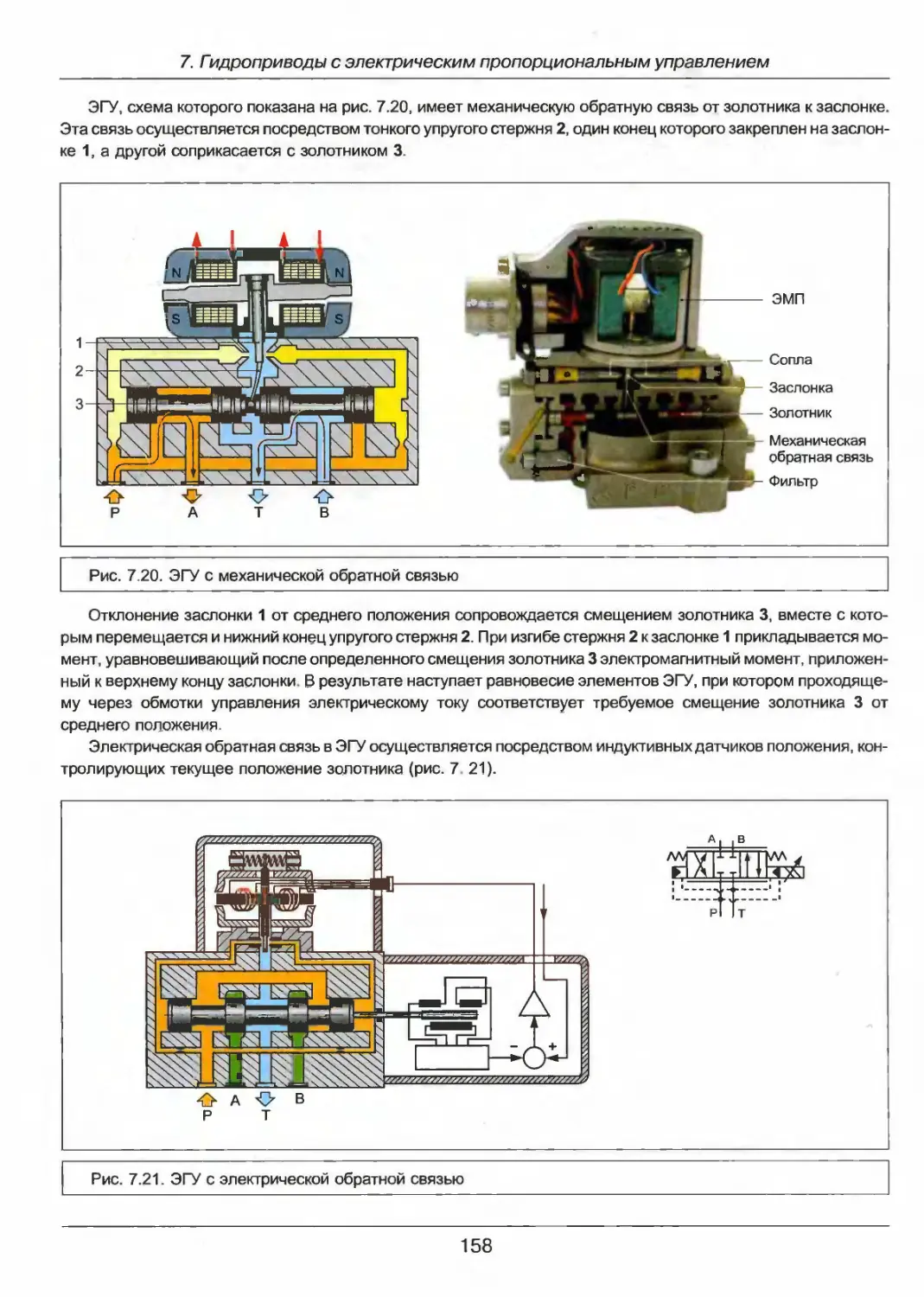
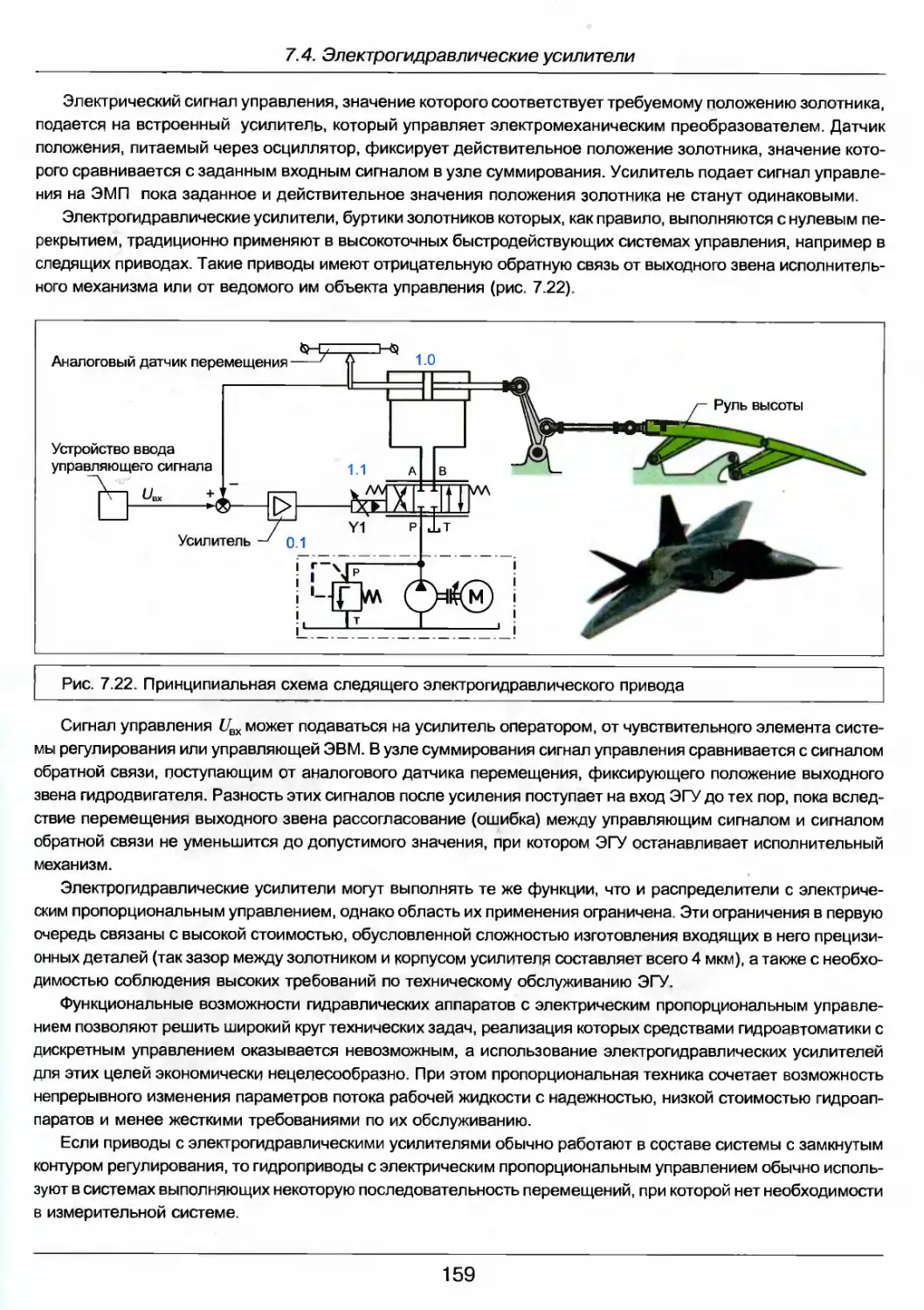
7.4. Электрогидравлические усилители 157
8. Монтаж гидроаппаратов 160
8.1. Гидрраппараты резьбового исполнения 160
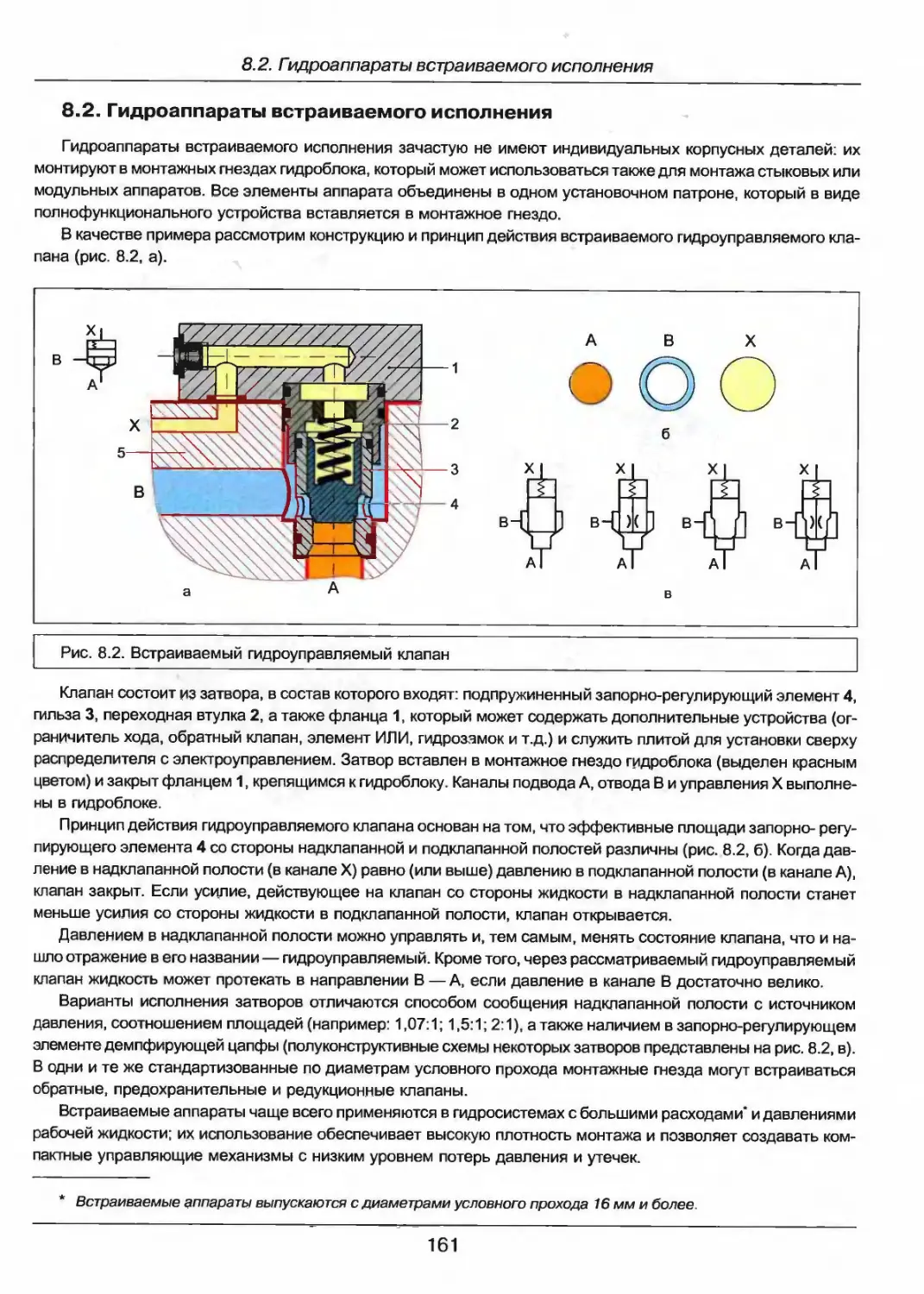
8.2. Гидроаппараты встраиваемого исполнения 161
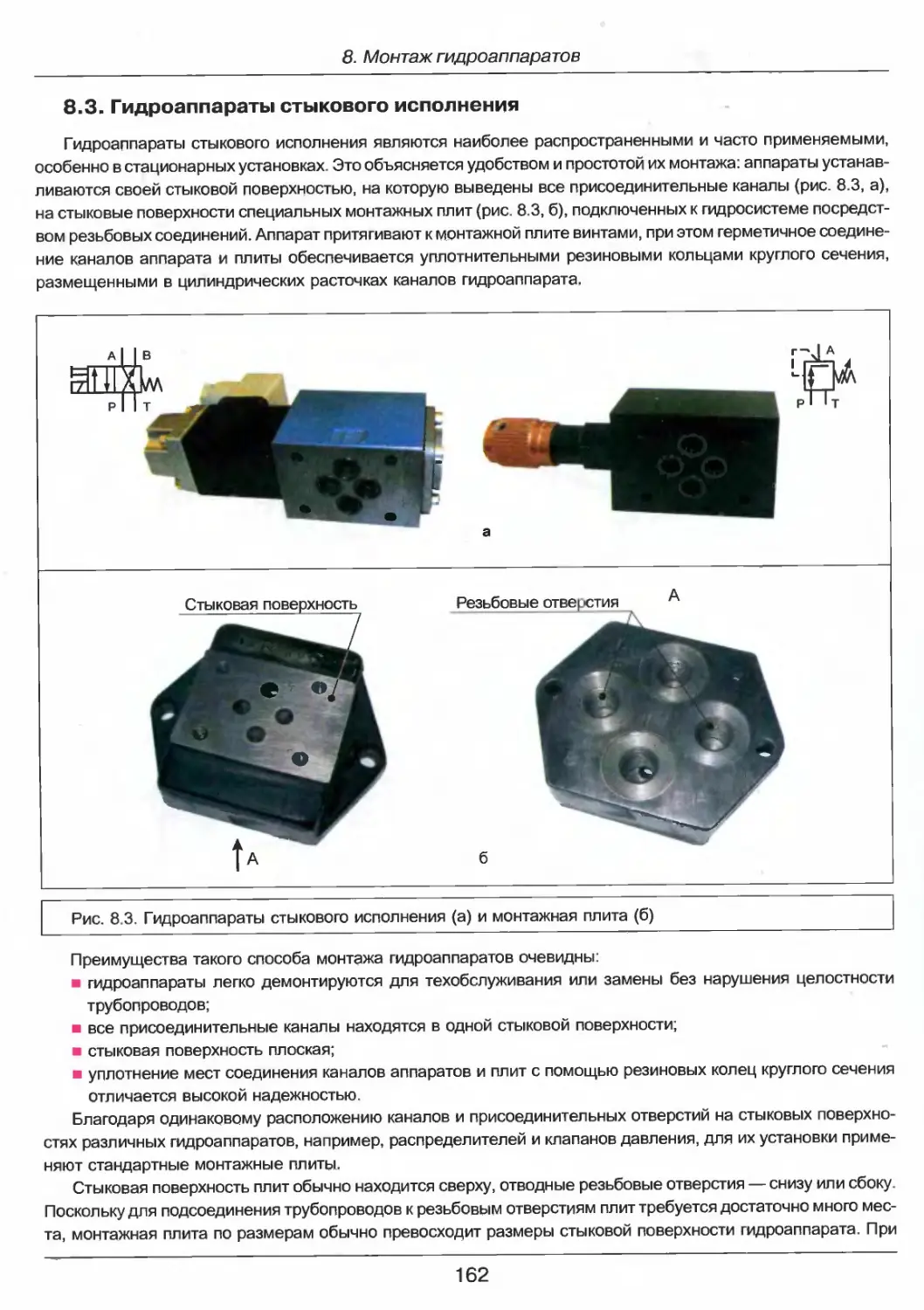
8.3. Гидроаппараты стыкового исполнения 162
8.4. Гидроаппараты модульного исполнения 164
4
Оглавление
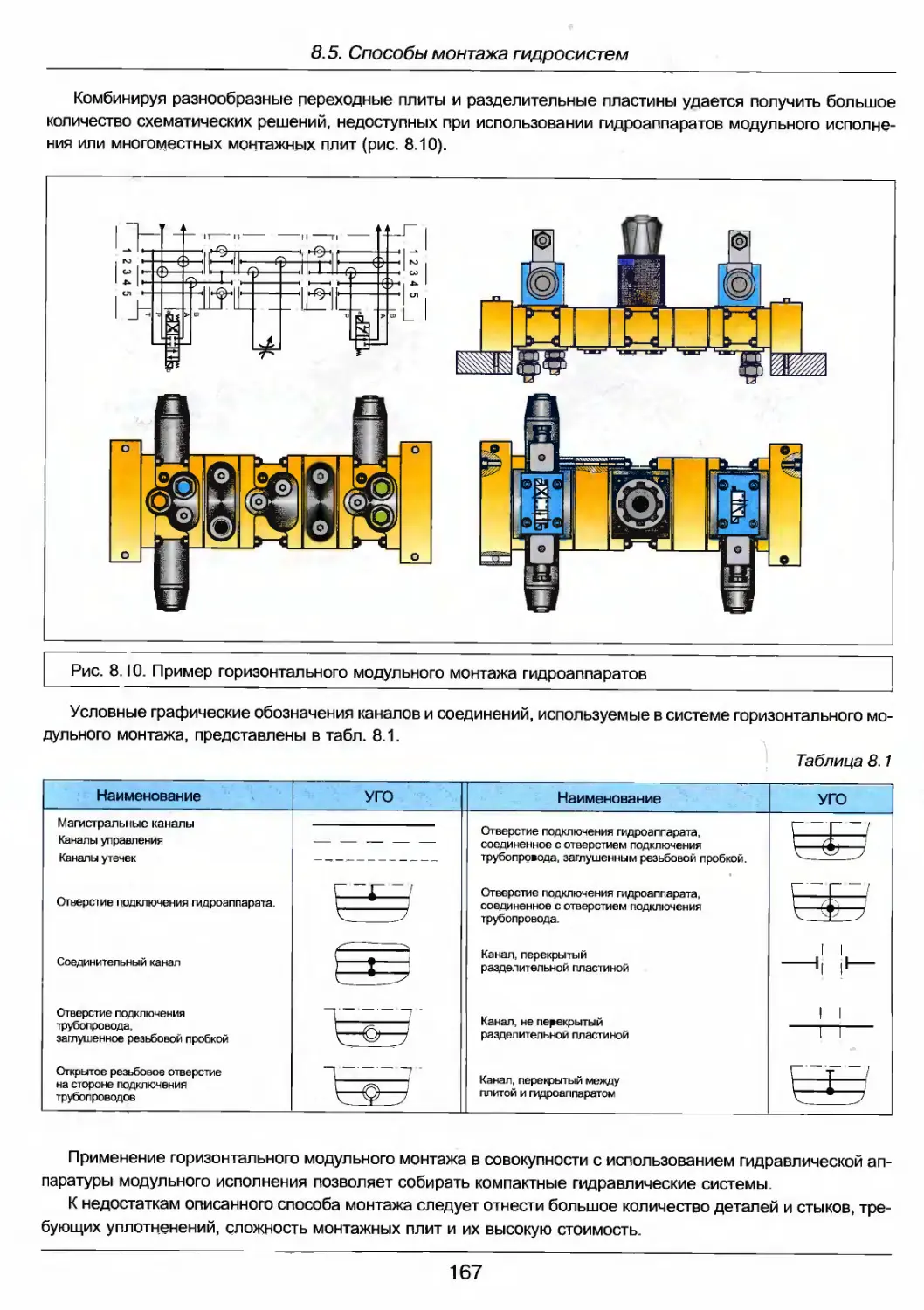
8.5. Способы монтажа гидросистем 165
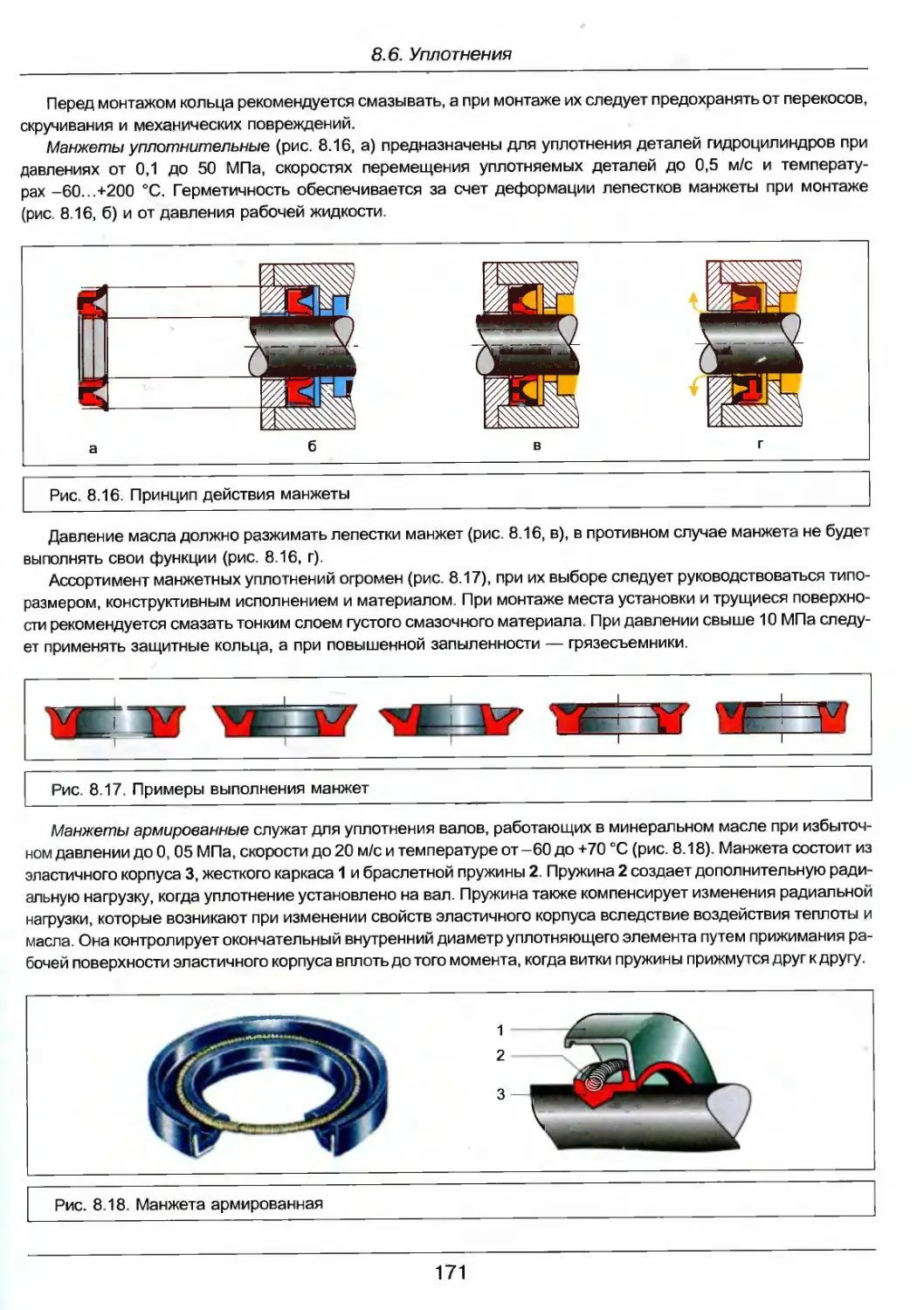
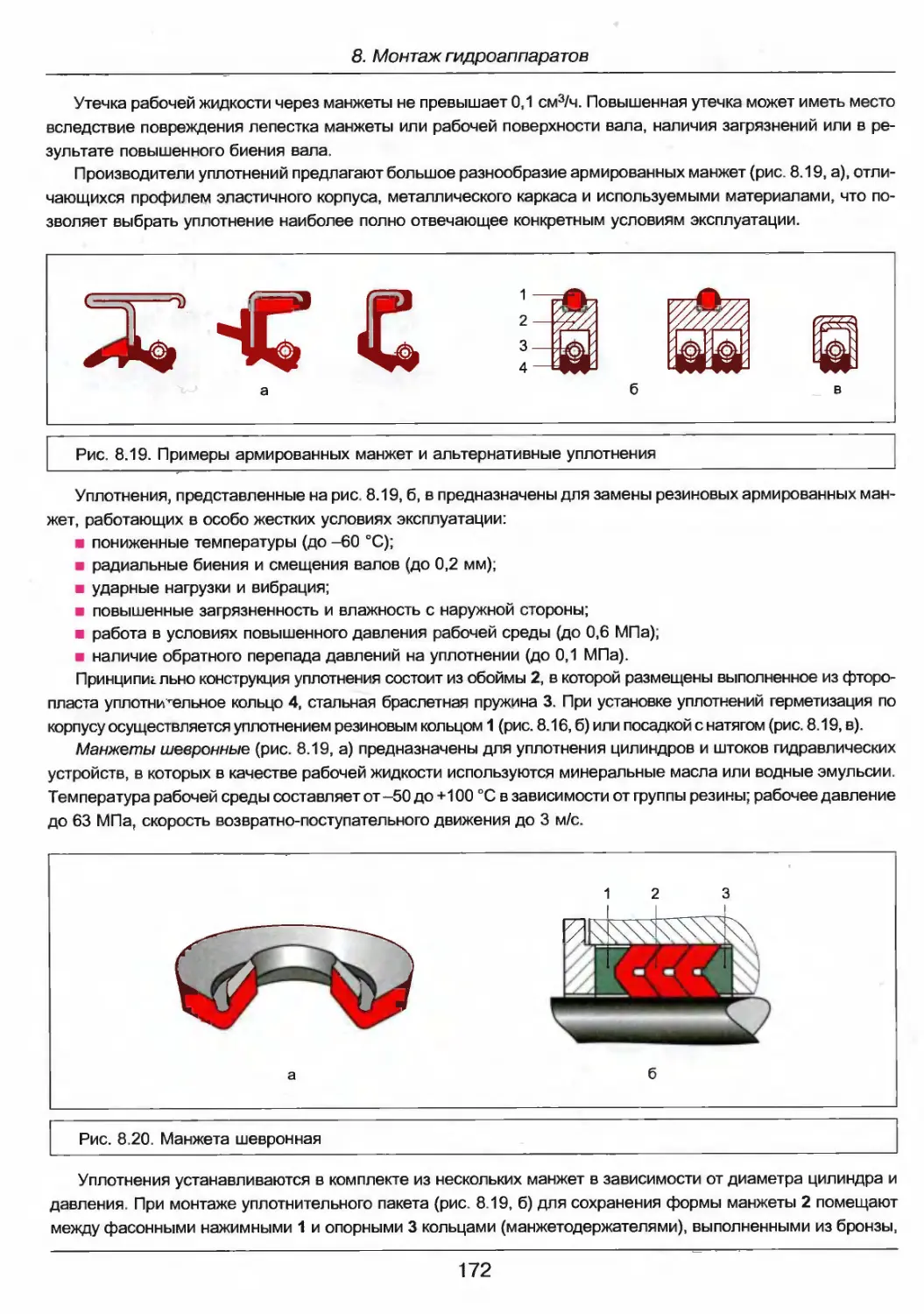
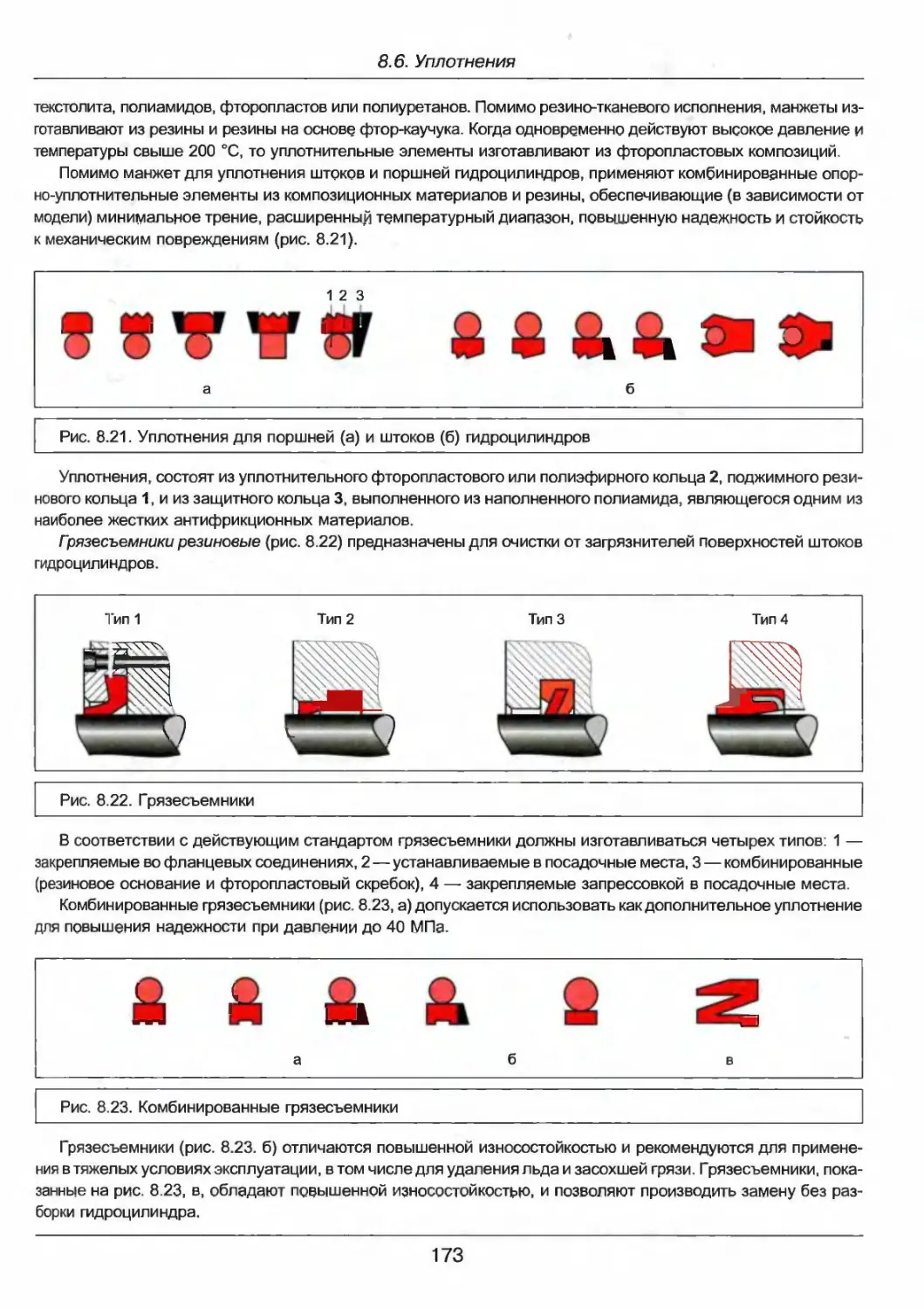
8.6. Уплотнения .,,.,.,,. 169
9. Функционирование гидроприводов 174
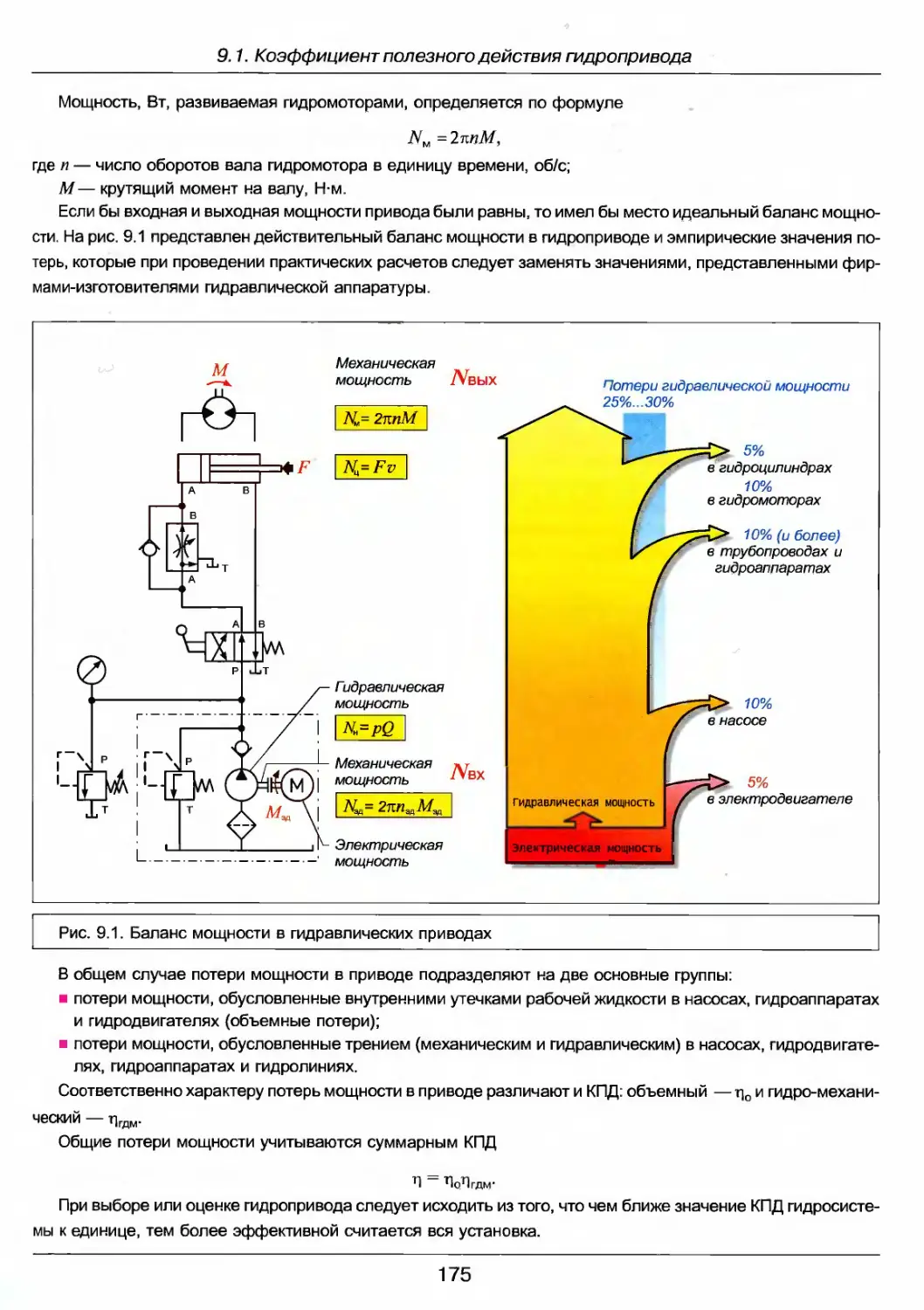
9.1. Коэффициент полезного действия гидропривода 174
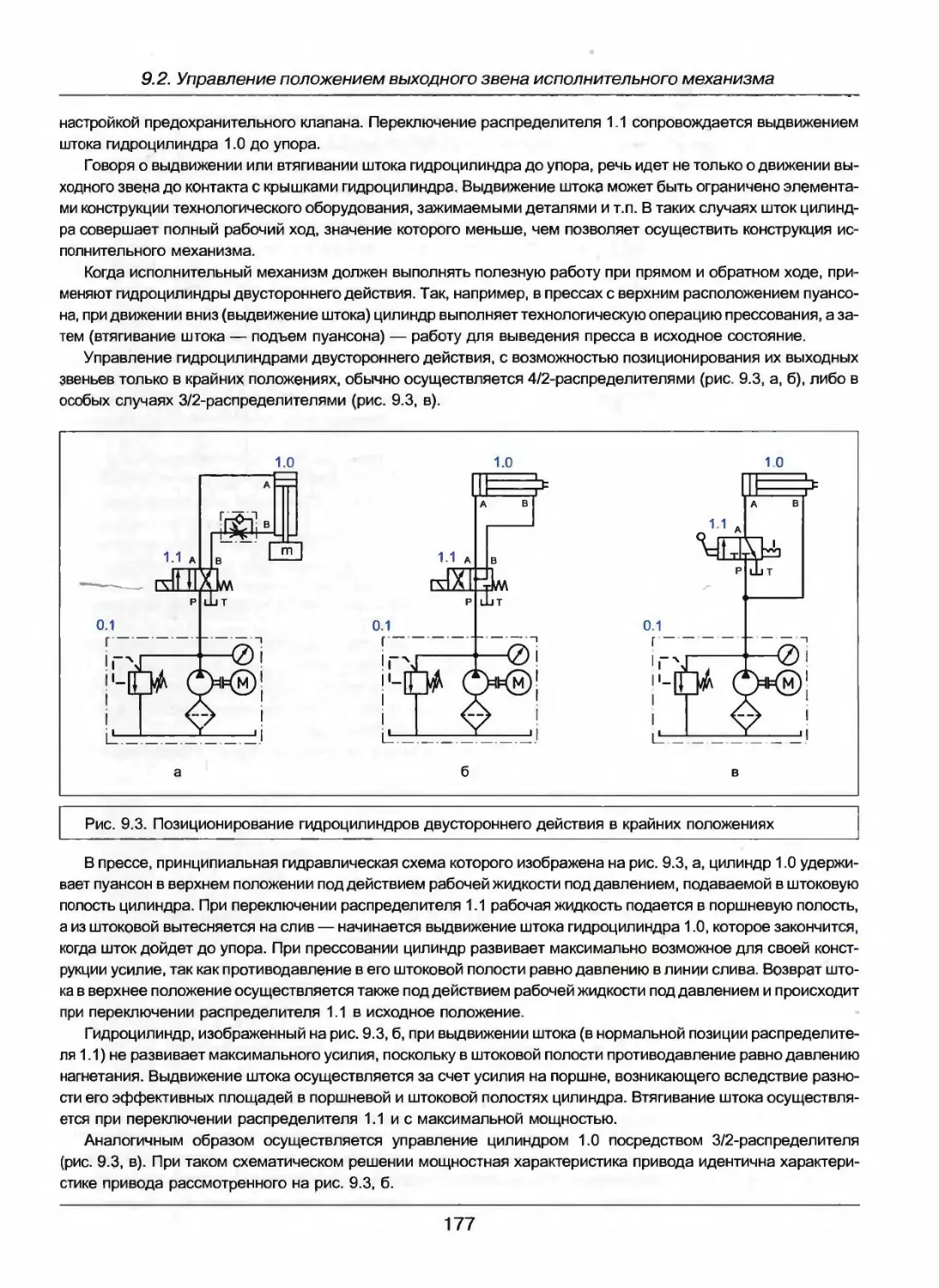
9.2. Управление положением выходного звена исполнительного механизма 176
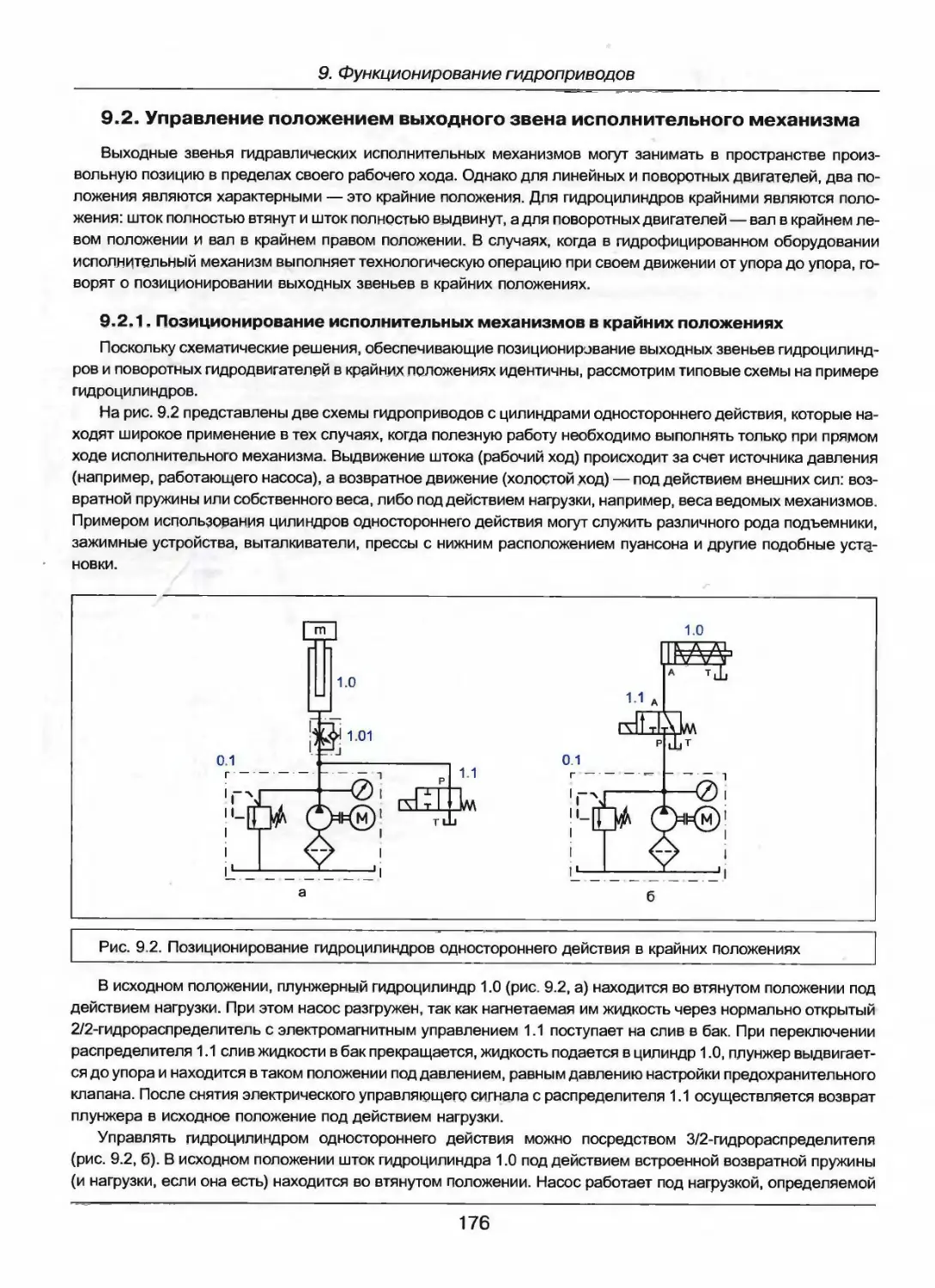
9.2.1. Позиционирование исполнительных механизмов в крайних положениях 176
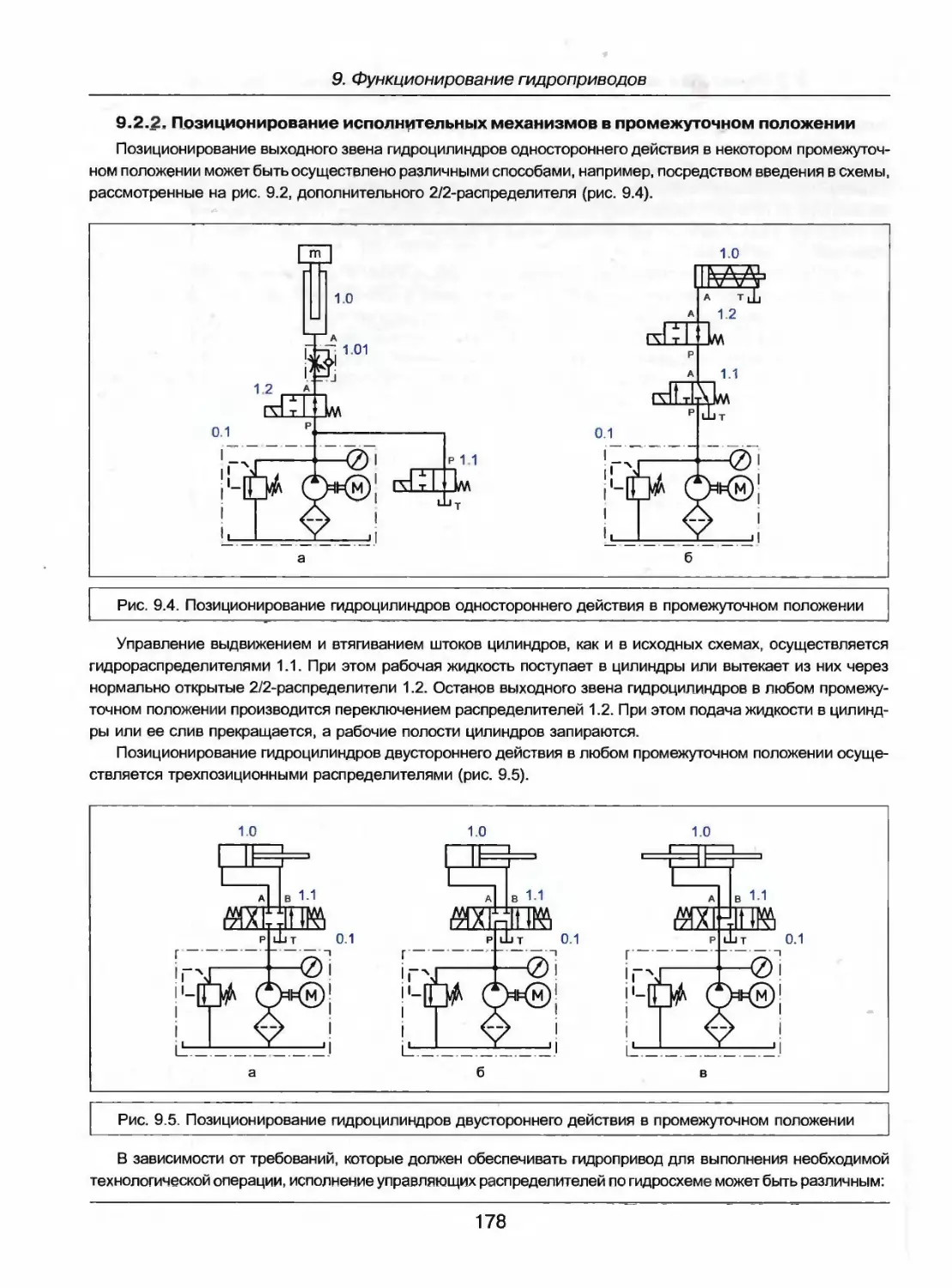
9.2.2. Позиционирование исполнительных механизмов в промежуточном положении 178
9.2.3. Позиционирование исполнительных механизмов в промежуточном положении
с длительной выдержкой под нагрузкой 179
9.3. Управление скоростью выходного звена исполнительного механизма 181
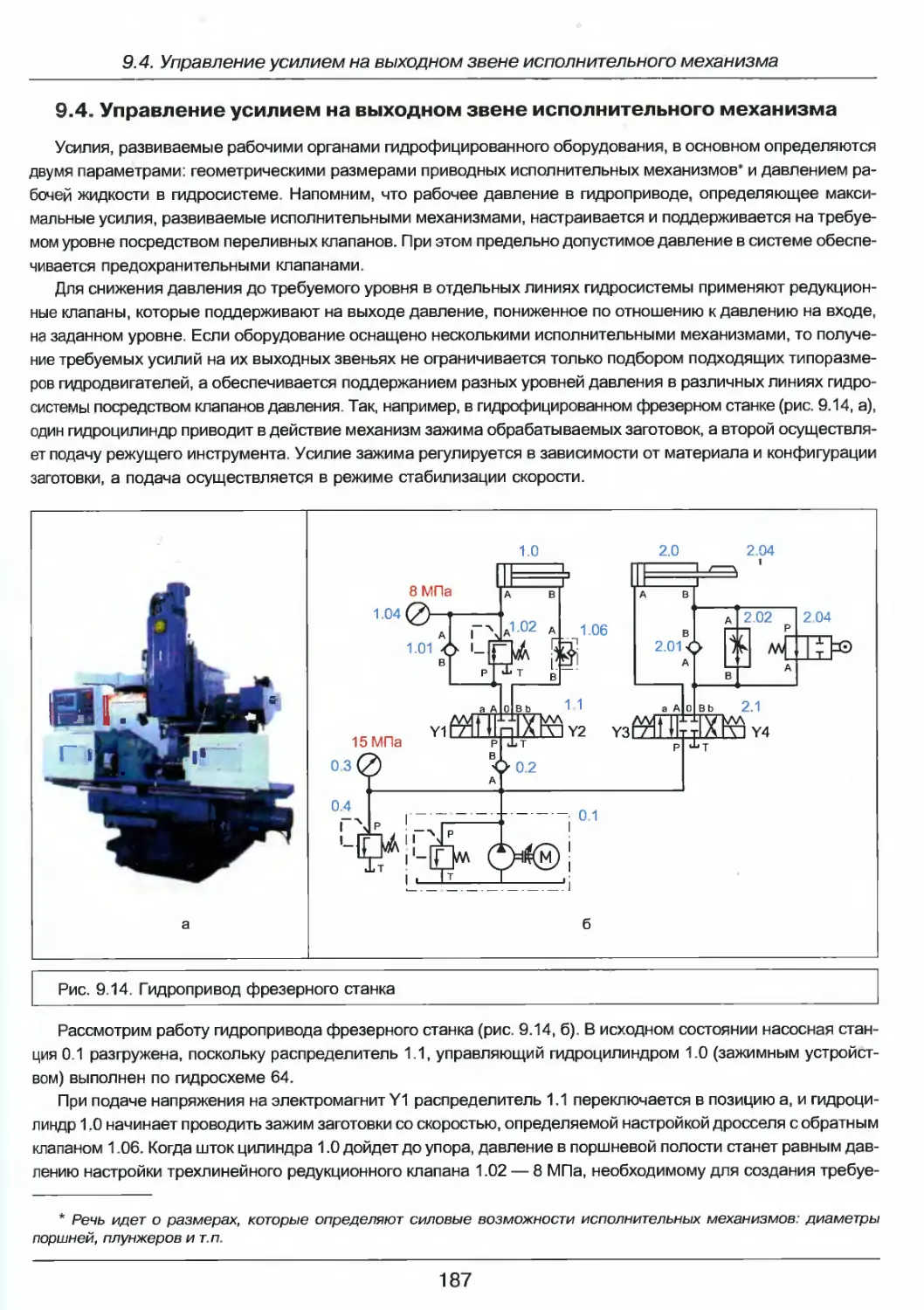
9.4. Управление усилием на выходном звене исполнительного механизма 187
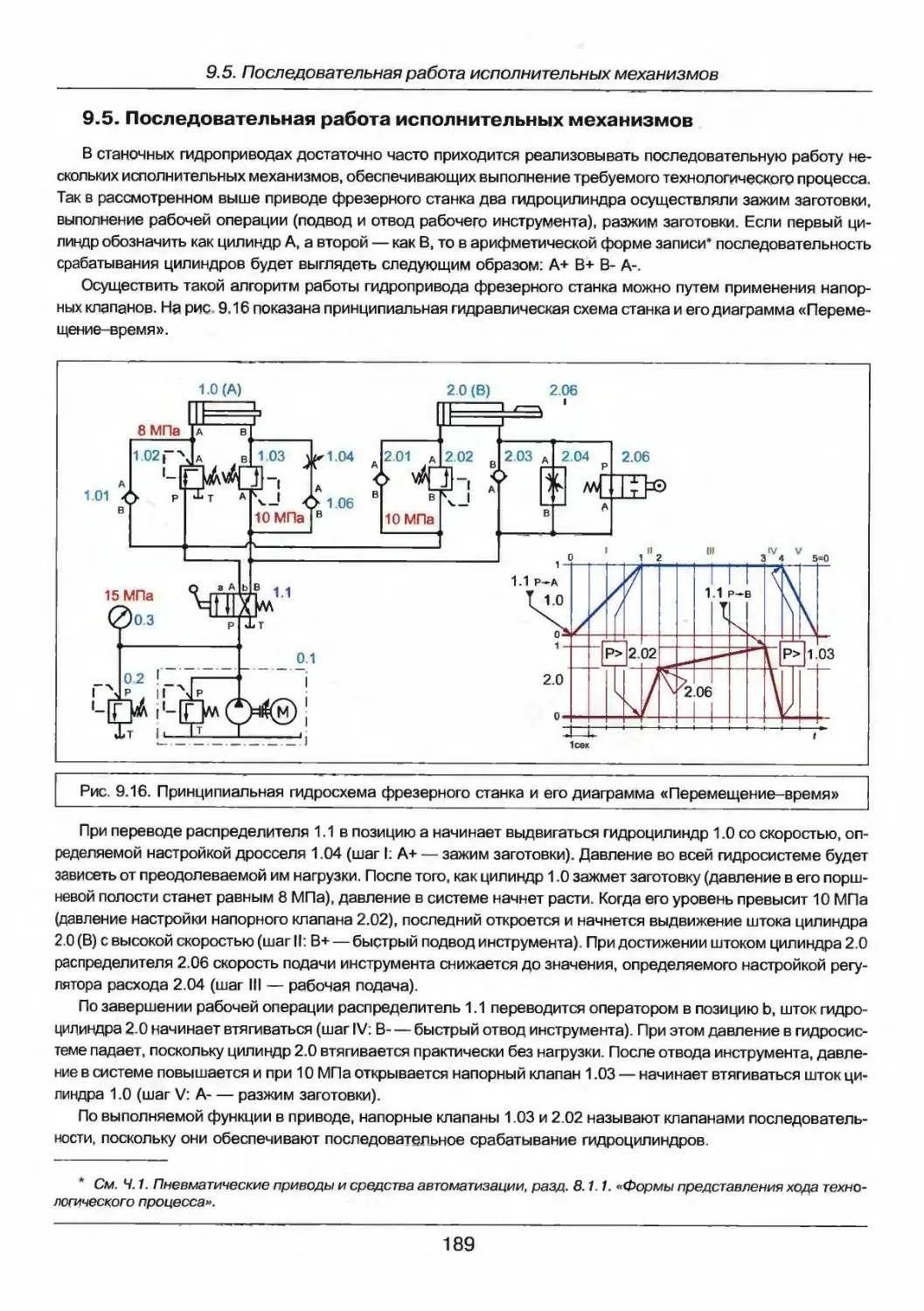
9.5. Последовательная работа исполнительных механизмов 189
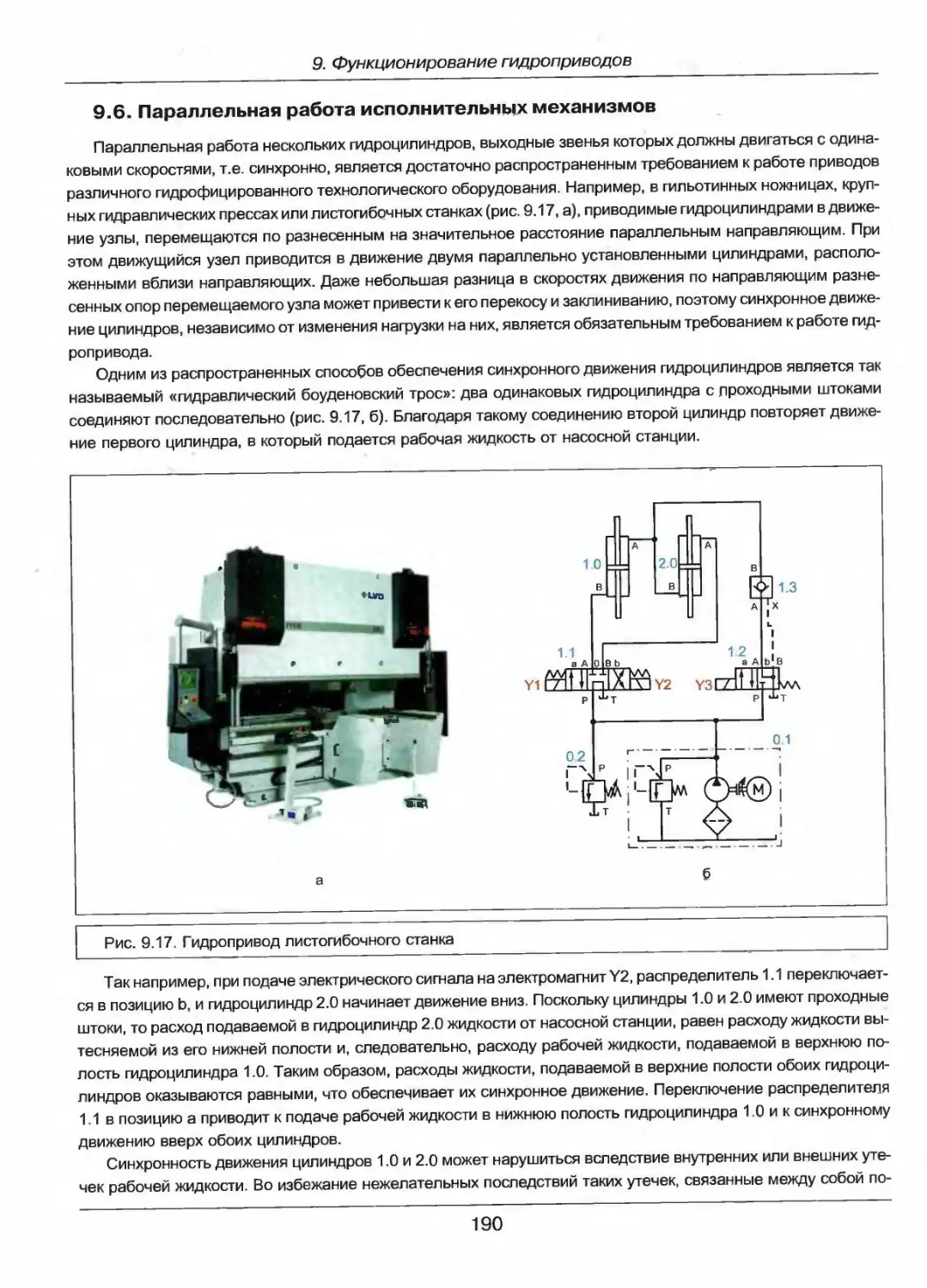
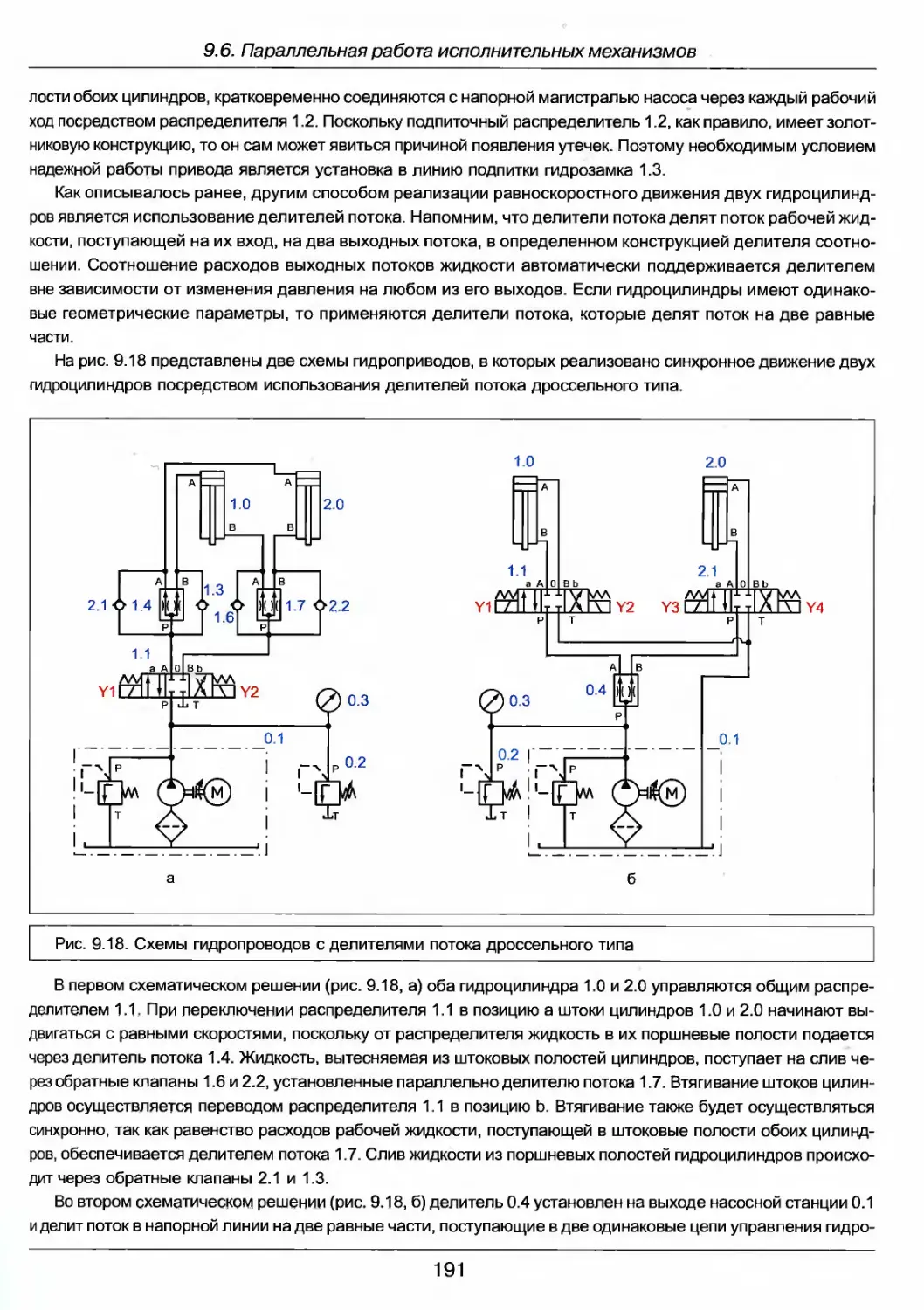
9.6. Параллельная работа исполнительных механизмов 190
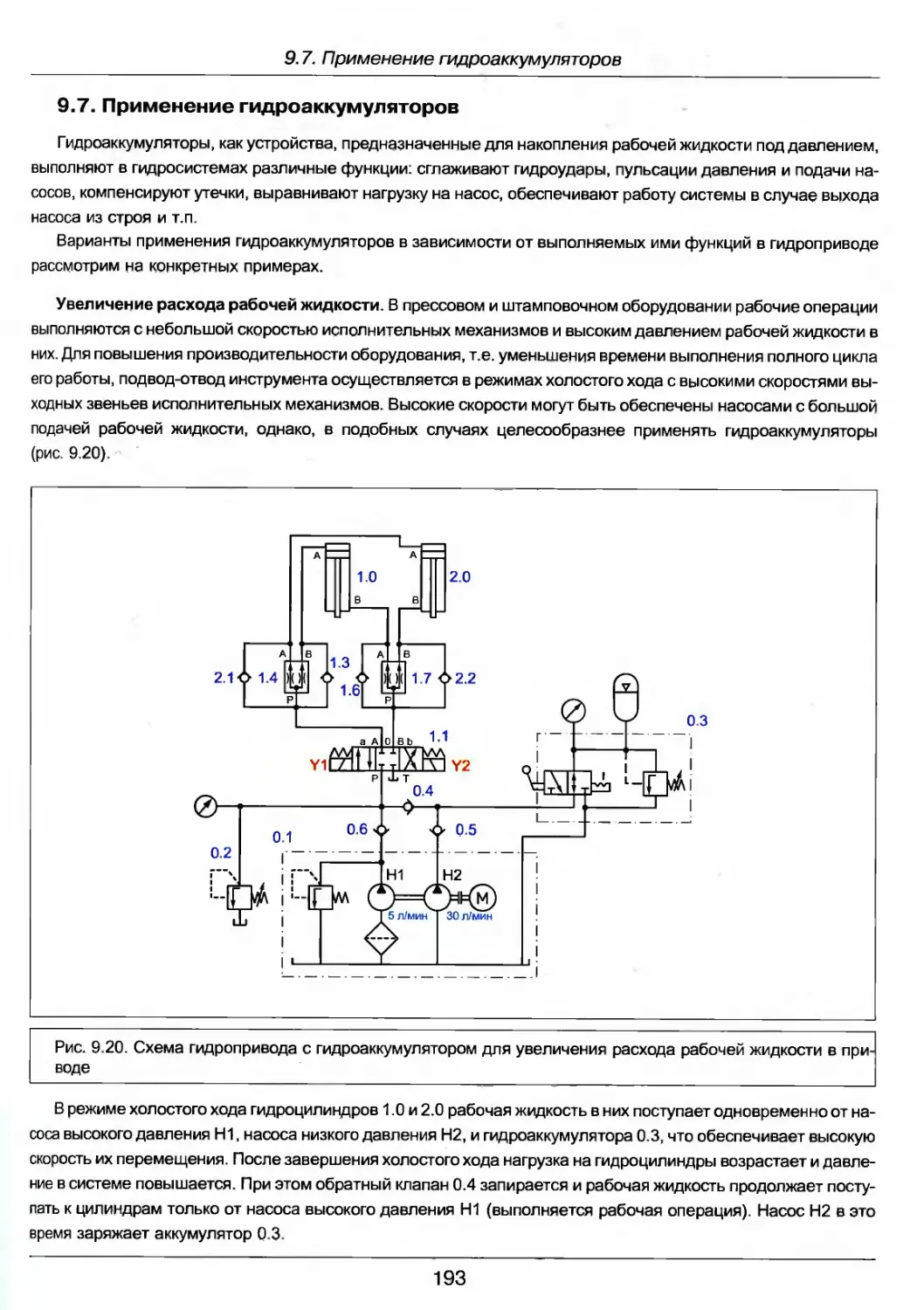
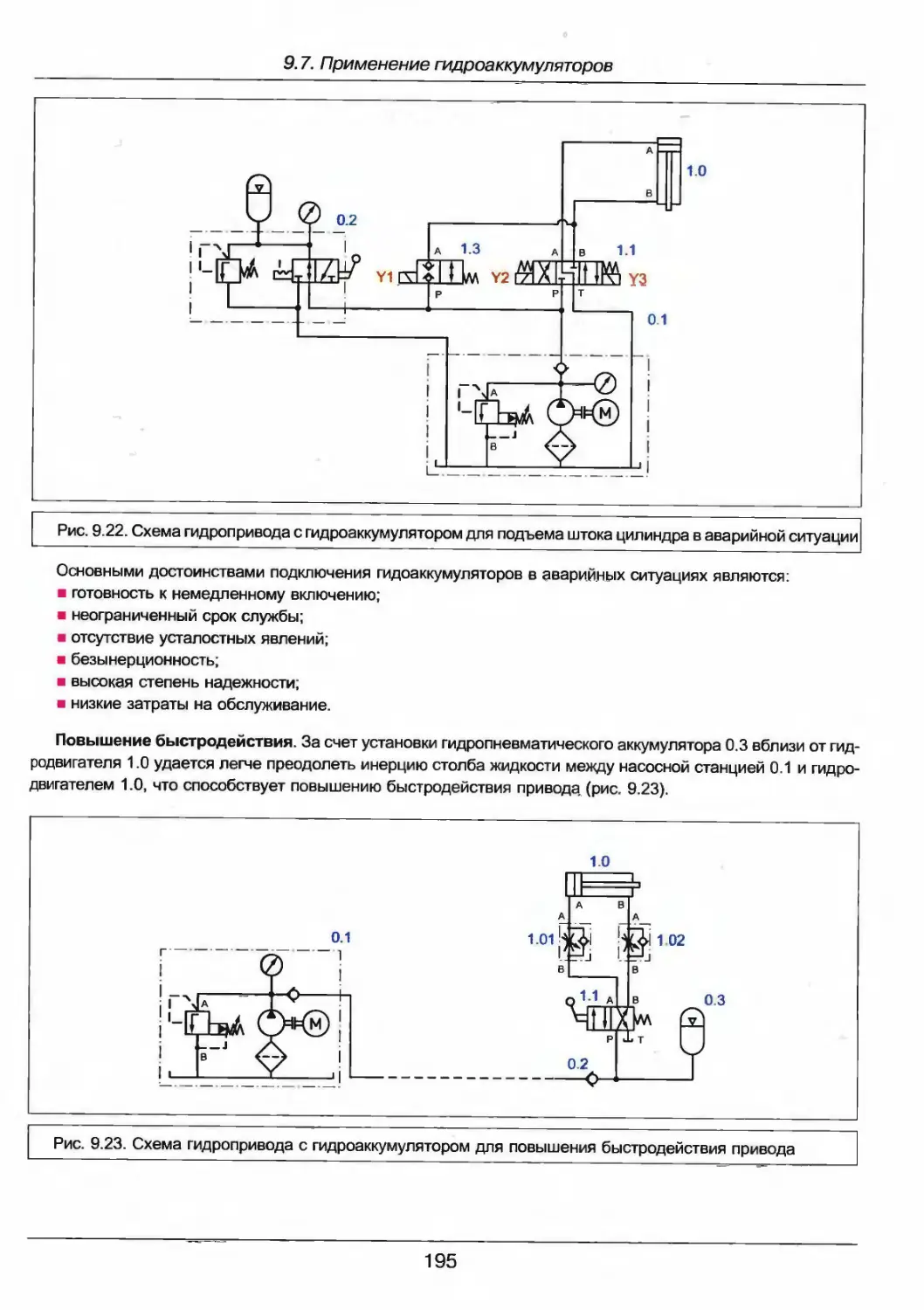
9.7. Применение гидроаккумуляторов . . , ,, 193
10. Основы эксплуатации гидроприводов 196
10.1. Ввод гидроприводов в эксплуатацию 196
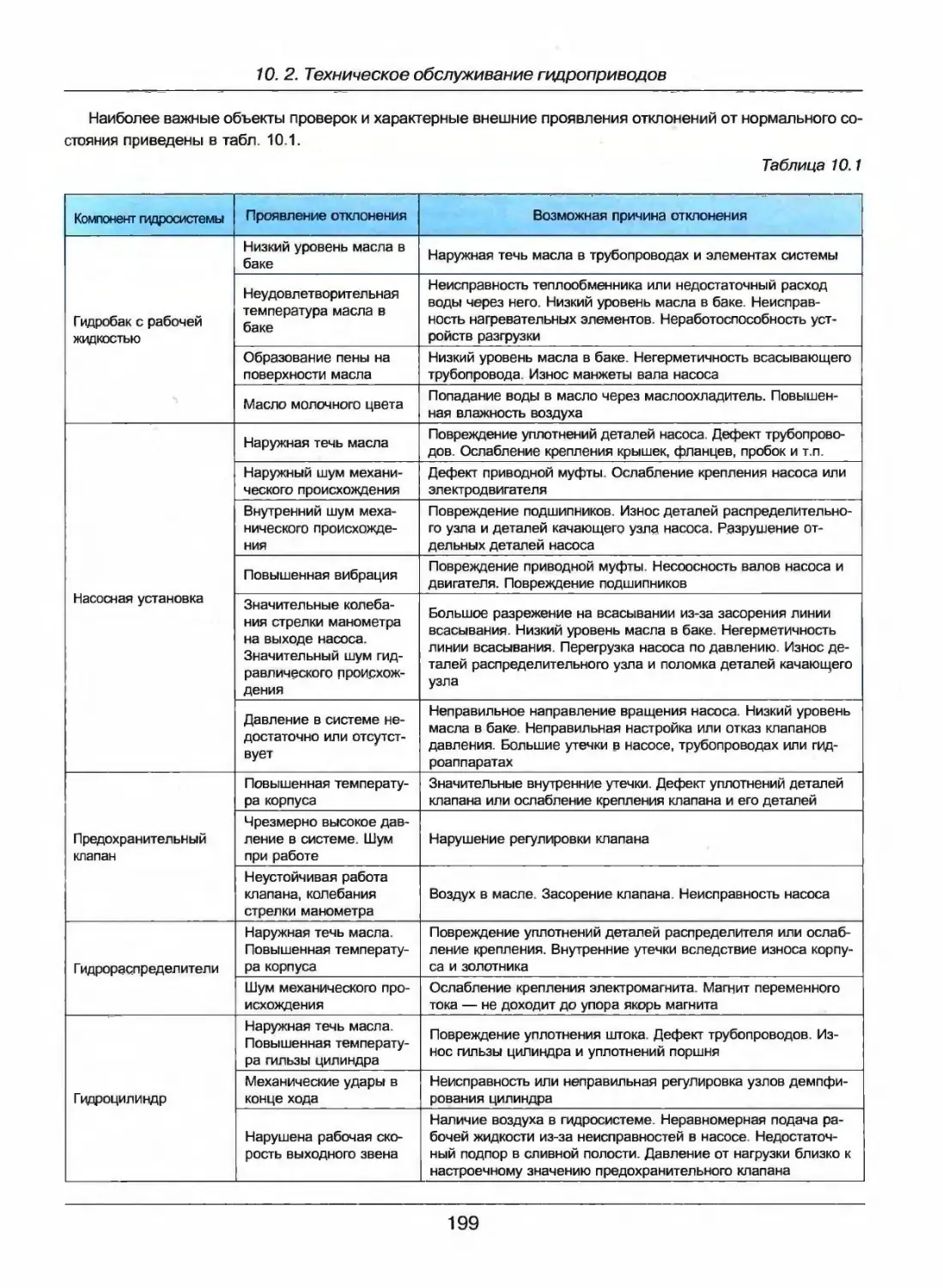
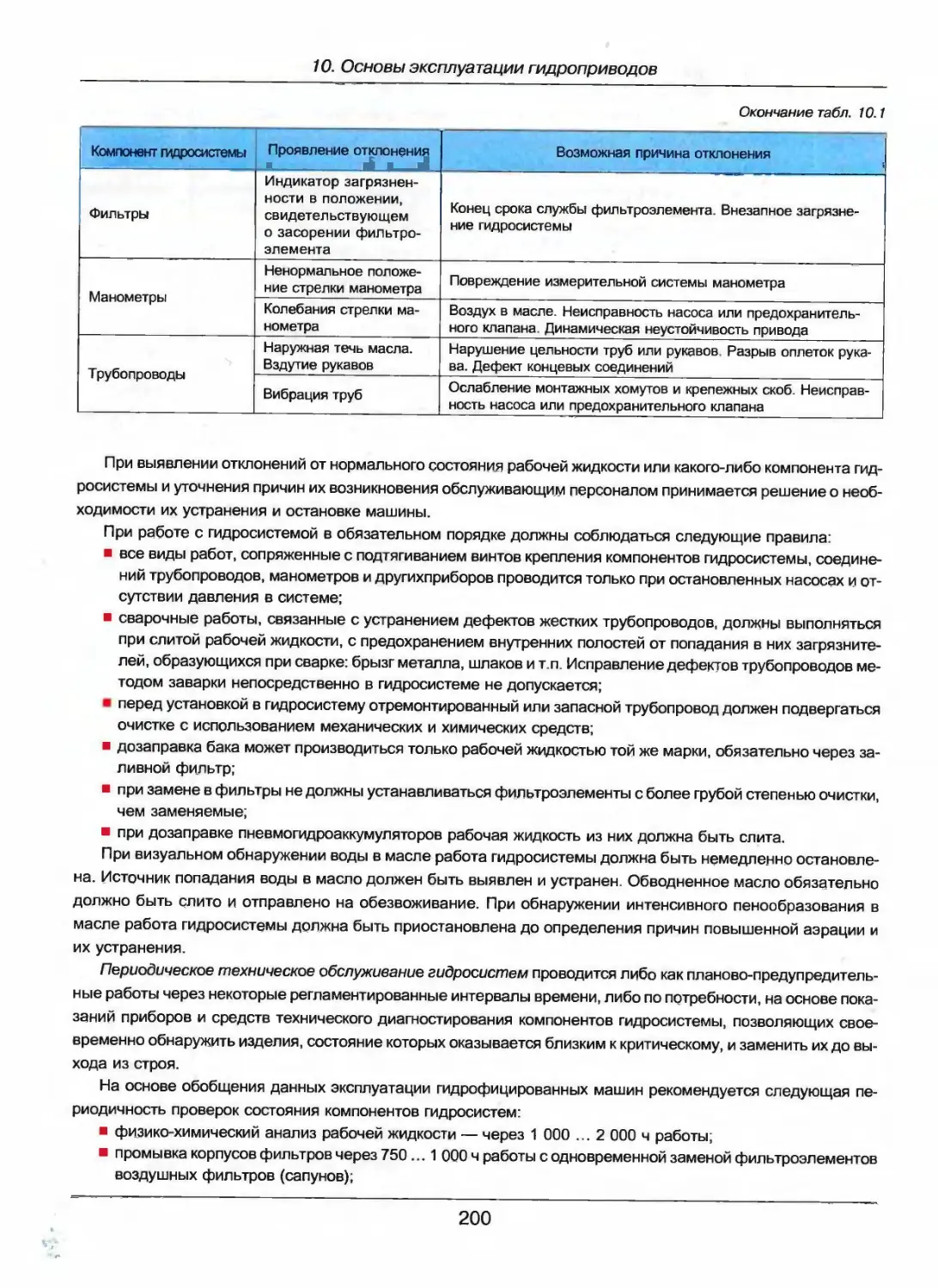
10.2. Техническое обслуживание гидроприводов 198
10.3. Поиск и устранение неисправностей 201
10.3.1. Виды неисправностей ....,,,,, 201
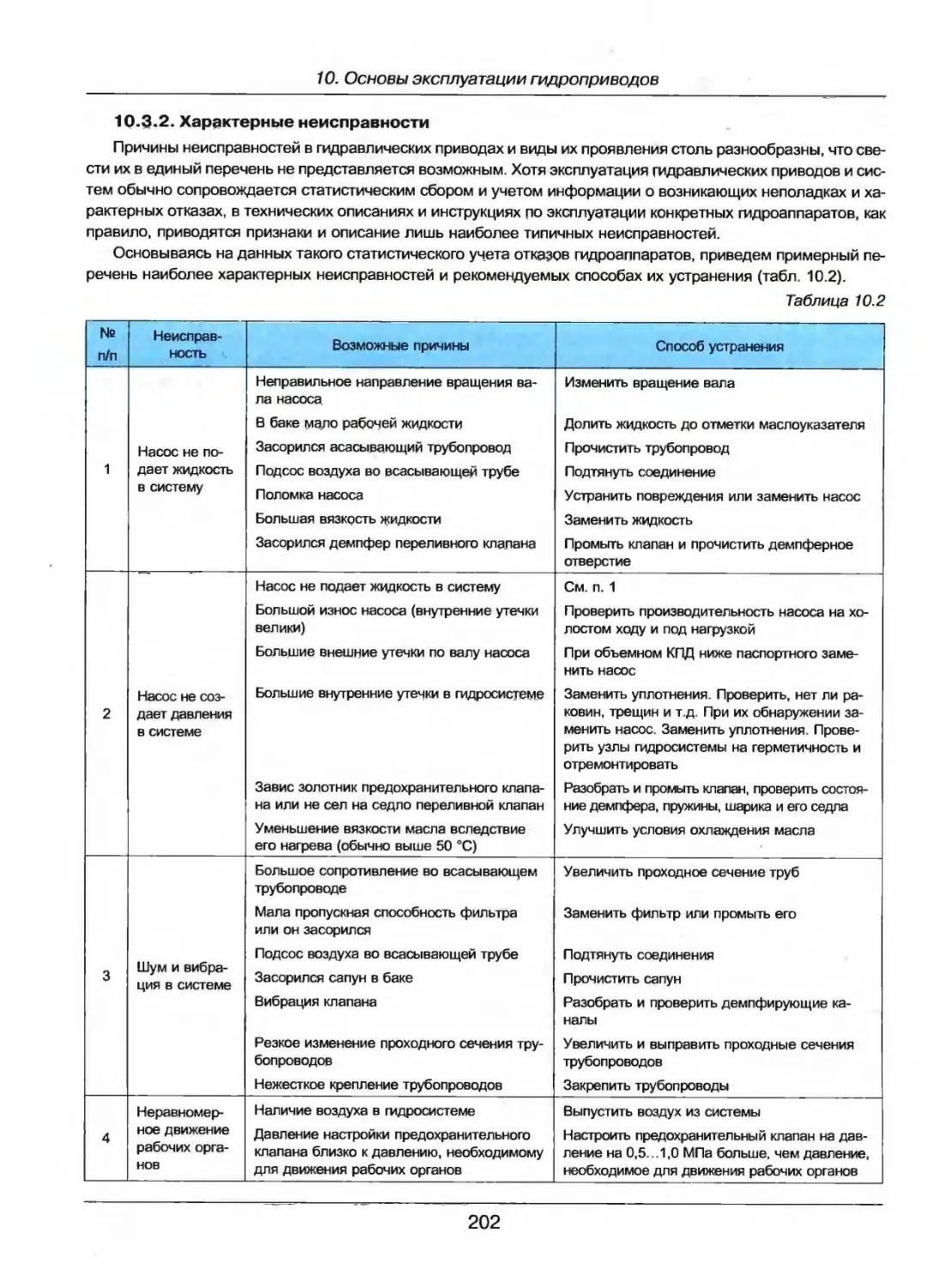
10.3.2. Характерные неисправности 202
1Q.3.3. Техническая диагностика гидросистем 206
10.4. Общие требования по технике безопасности , . . 207
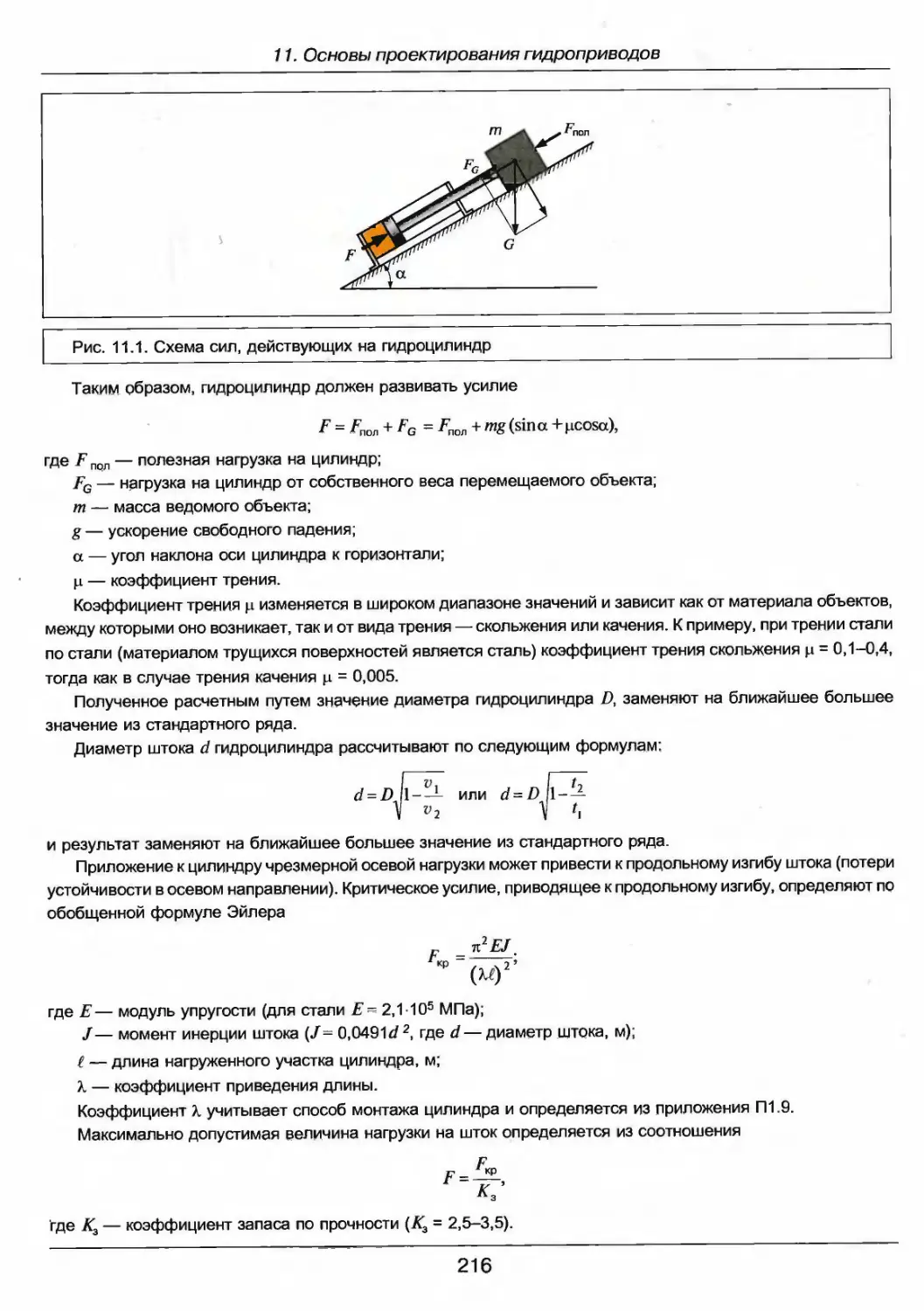
11. Основы проектирования гидроприводов 210
11.1. Разработка принципиальной схемы привода 210
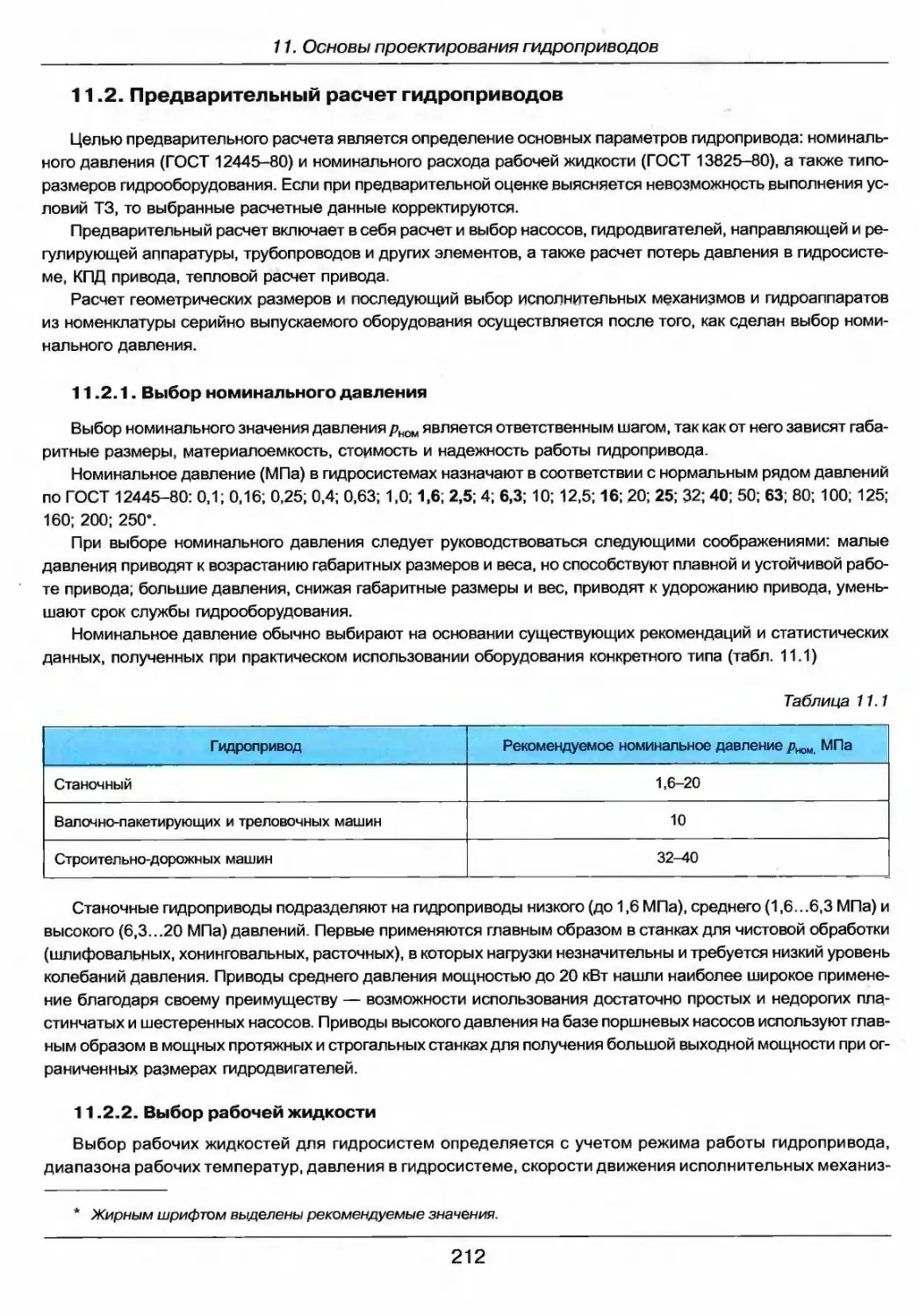
11.2. Предварительный расчет гидроприводов 212
11.2.1. Выбор номинального давления ..,,.. 212
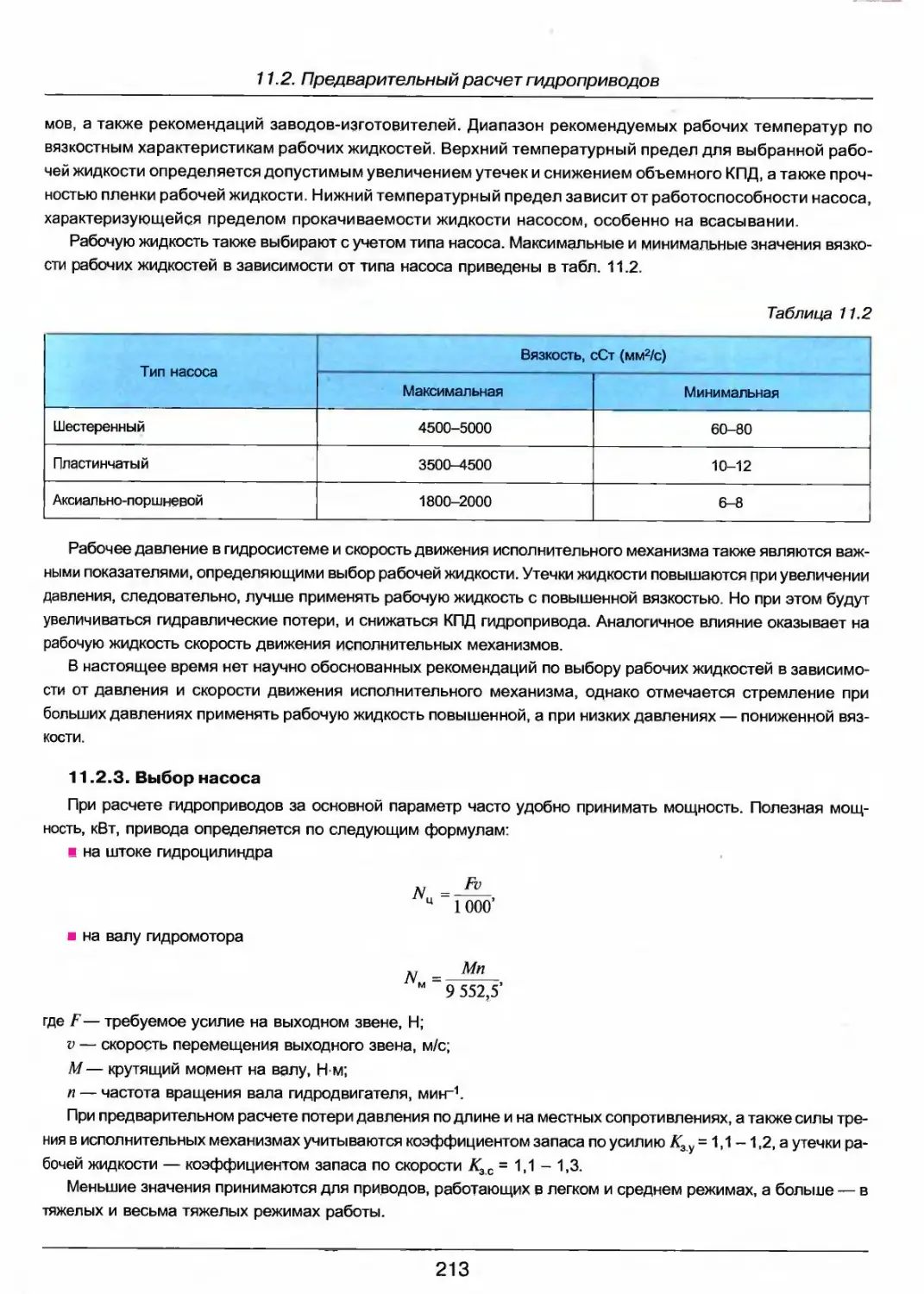
11.2.2. Выбор рабочей жидкости .* 212
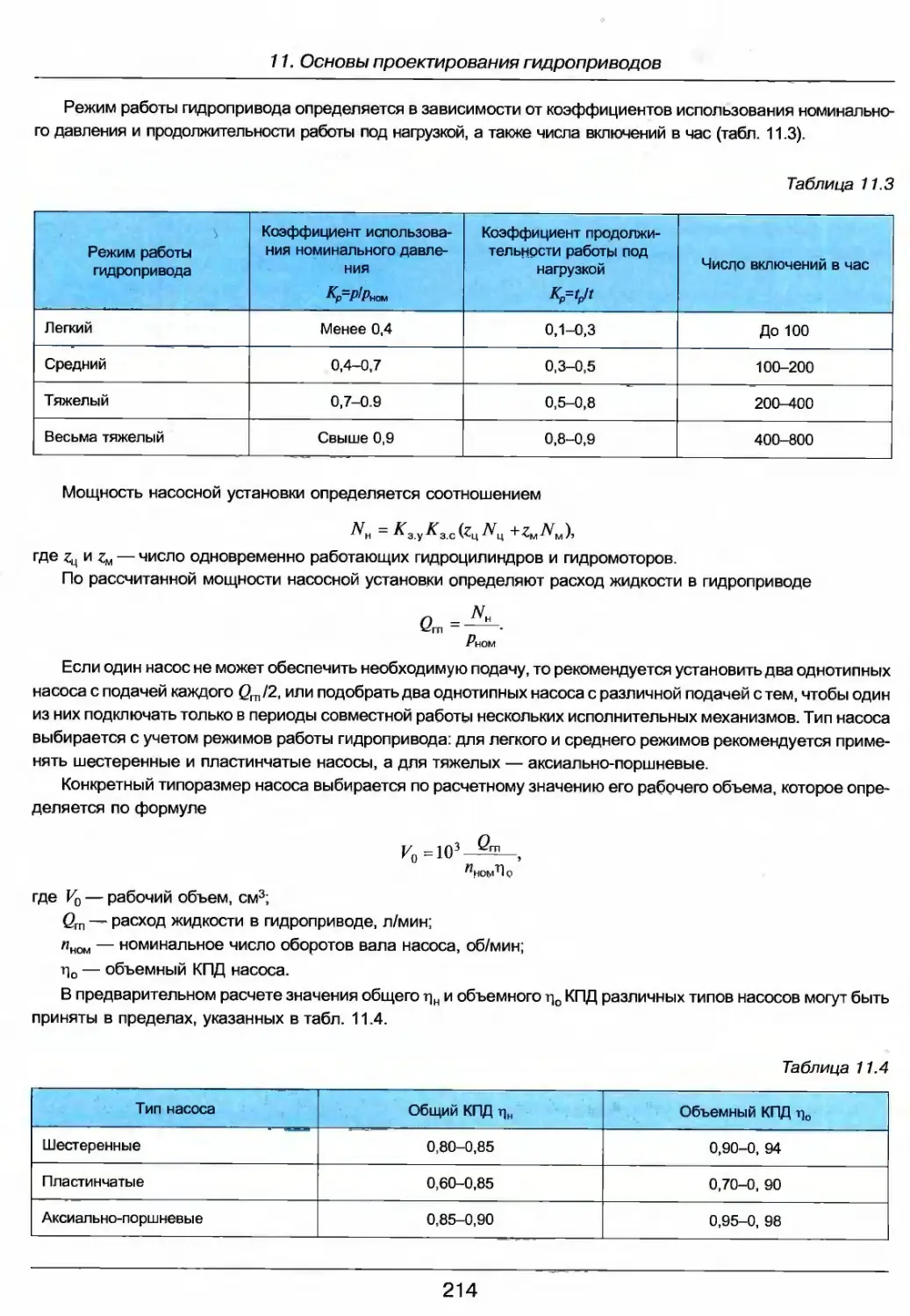
11.2.3. Выбор насоса 213
11.2.4. Определение основных геометрических параметров исполнительных механизмов ... 215
11.2.5. Выбор гидроаппаратуры 217
11.2.6. Выбор фильтров 217
11.2.7. Расчет трубопроводов 218
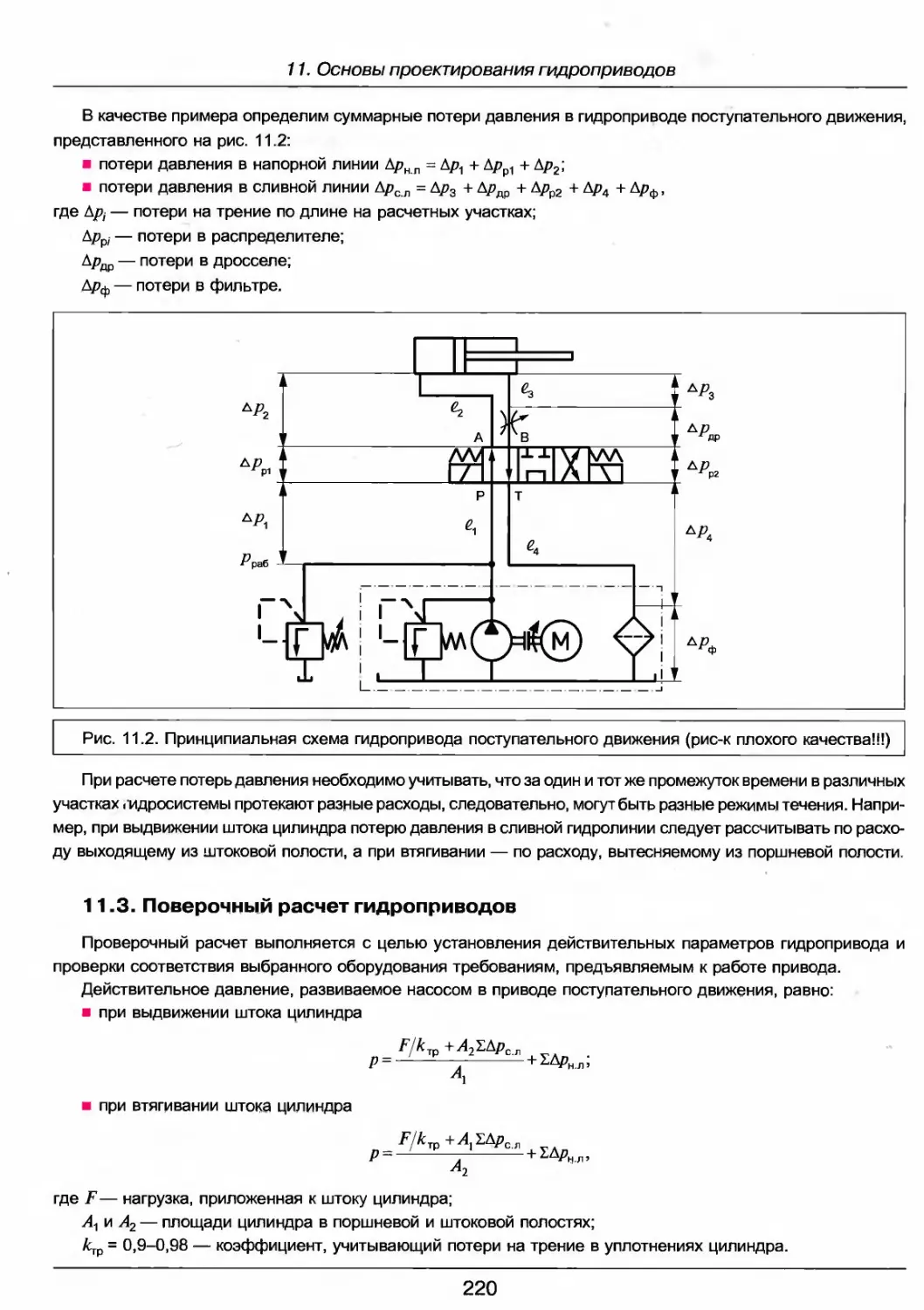
11.2.8. Расчет потерь давления в гидросистемах 218
11.3. Поверочный расчет гидроприводов 220
11.4. Определение мощности и КПД гидроприводов ..... 221
11.5. Тепловой расчет гидроприводов 222
5
Оглавление
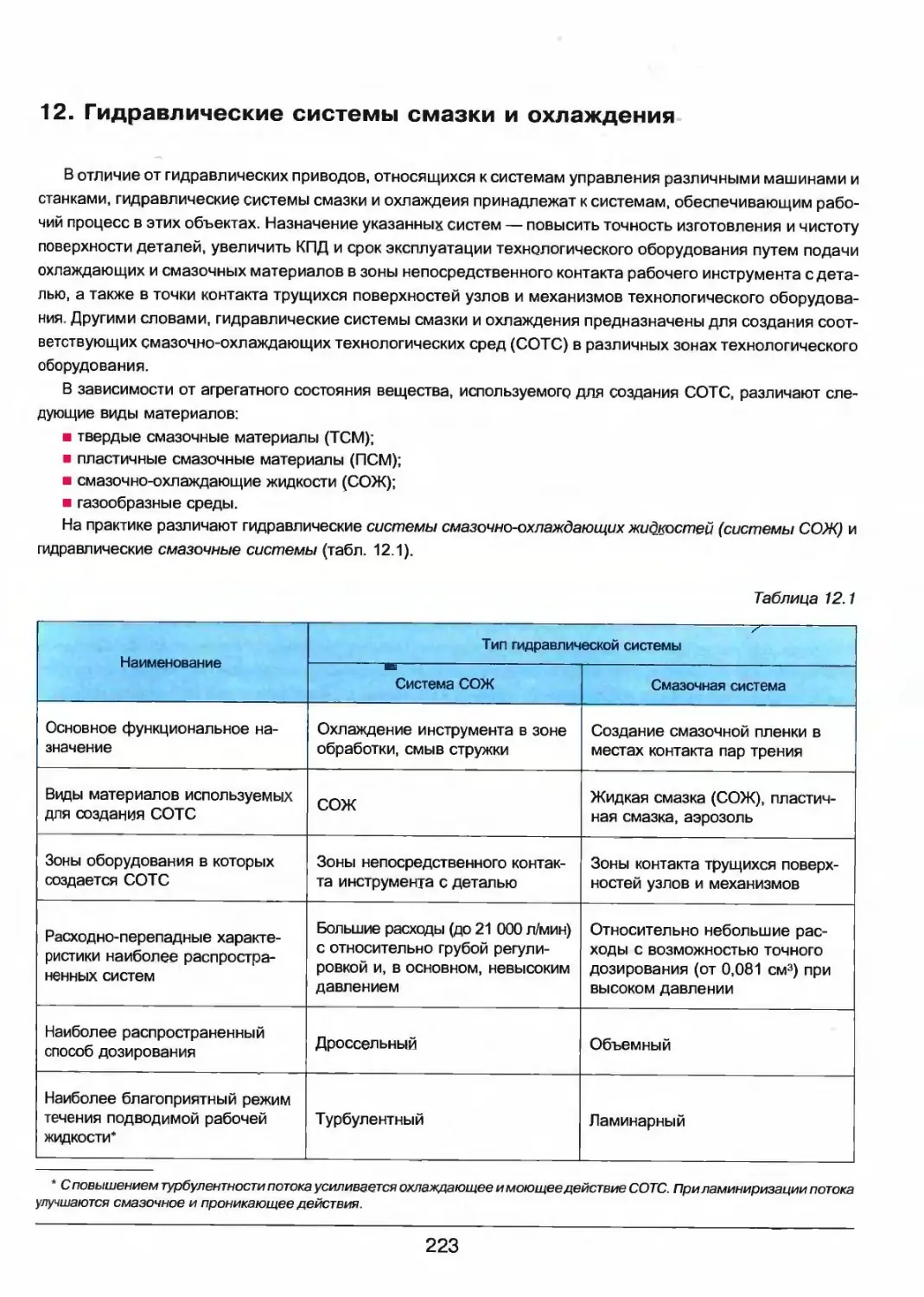
12. Гидравлические системы смазки и охлаждения 223
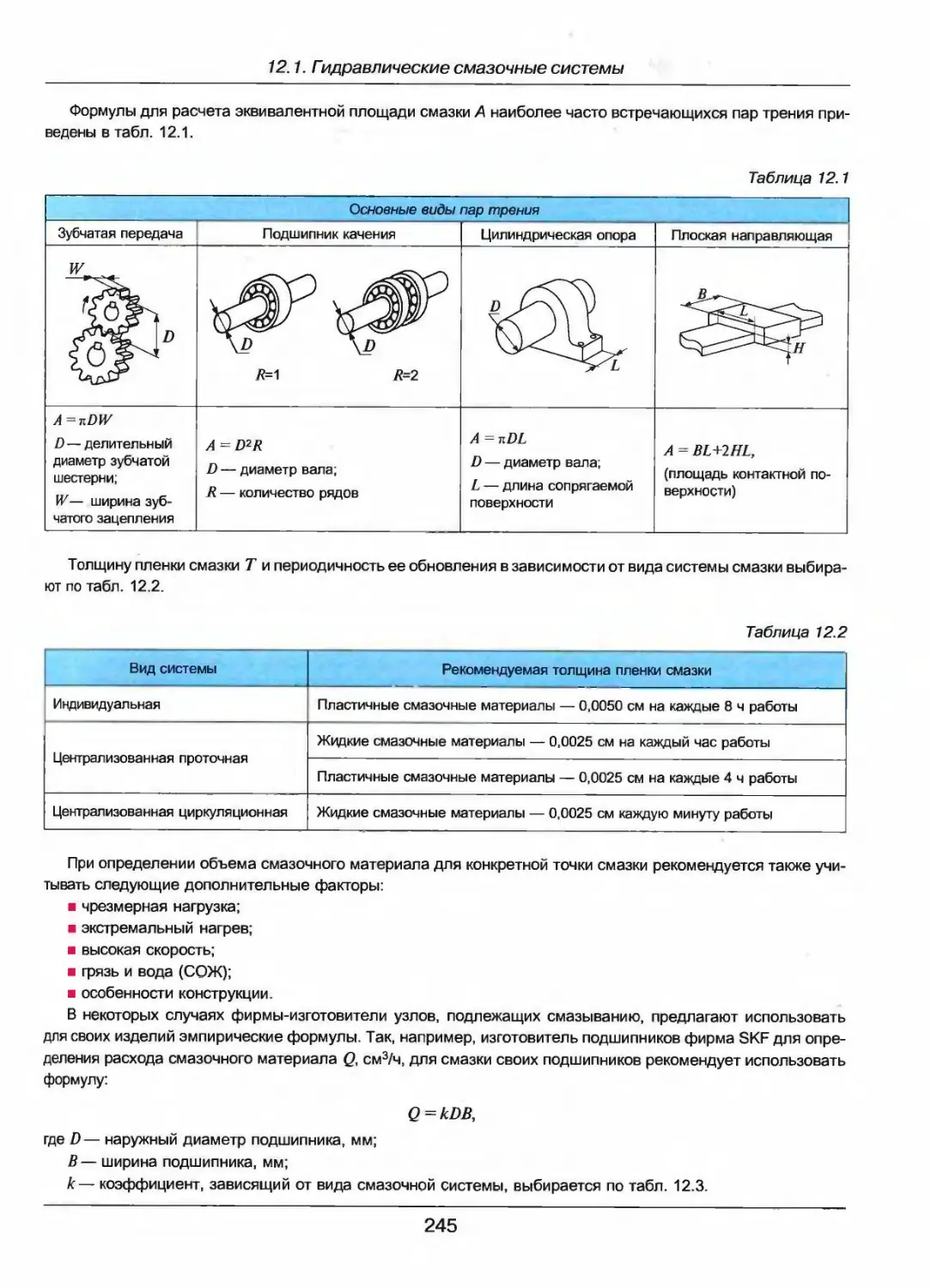
12.1. Гидравлические смазочные системы 224
12.1.1. Смазочные материалы 224
12.1.2. Классификация смазочных систем 226
12.1.3. Централизованные смазочные системы . 228
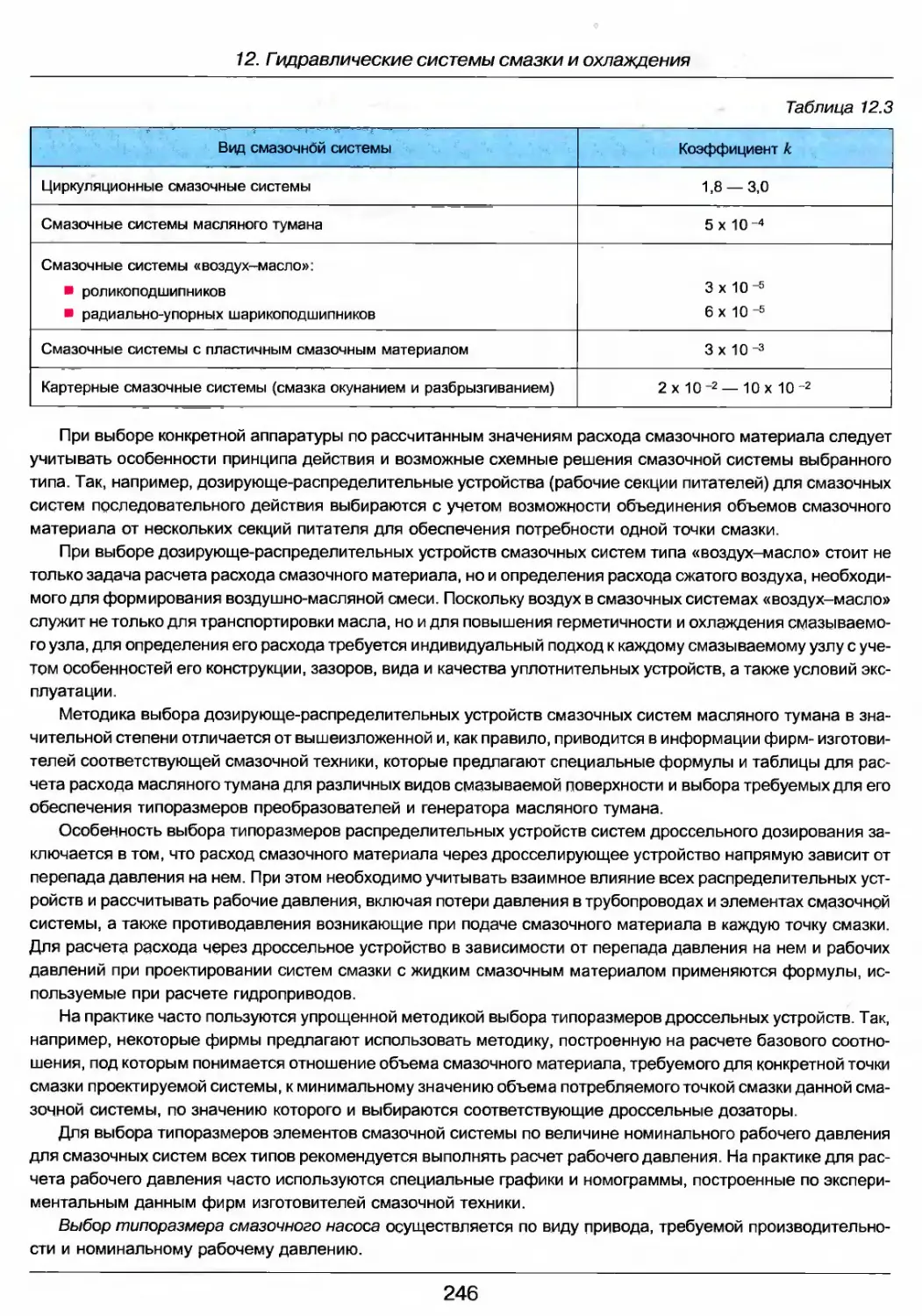
12.1.4. Информационные элементы смазочных систем 242
12.1.5. Проектирование централизованных смазочных систем 243
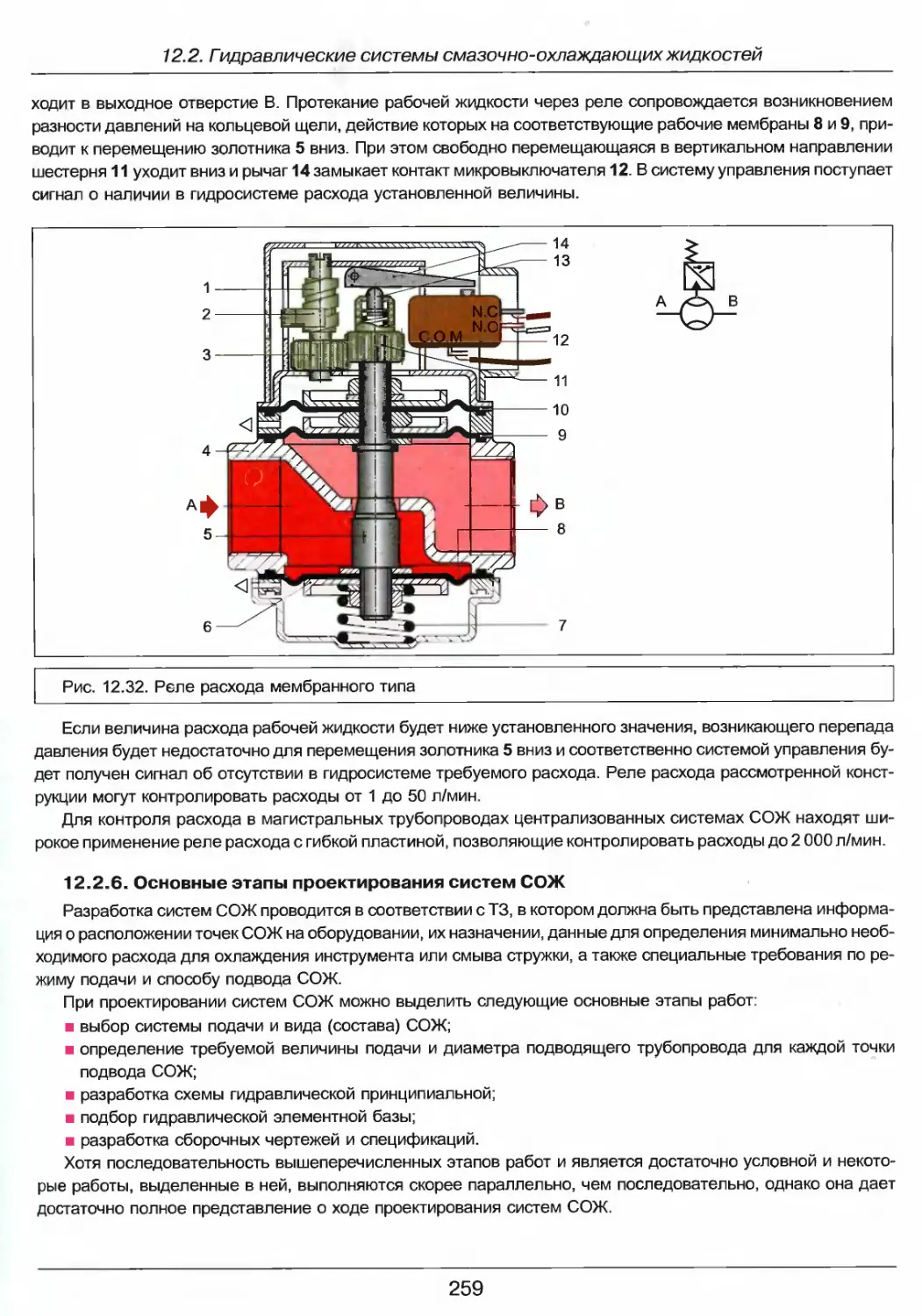
12.2. Гидравлические системы смазочно-охлаждающих жидкостей .,..,.,,.,,,,. 247
12.2.1. Смазочно-охлаждающие жидкости 247
12.2.2. Структура систем СОЖ 249
12.2.3. Элементы энергообеспечивающей подсистемы 250
12.2.4. Элементы направляющей и регулирующей подсистемы 254
12.2.5. Элементы информационной подсистемы 258
12.2.6. Основные этапы проектирования систем СОЖ 259
Приложение 260
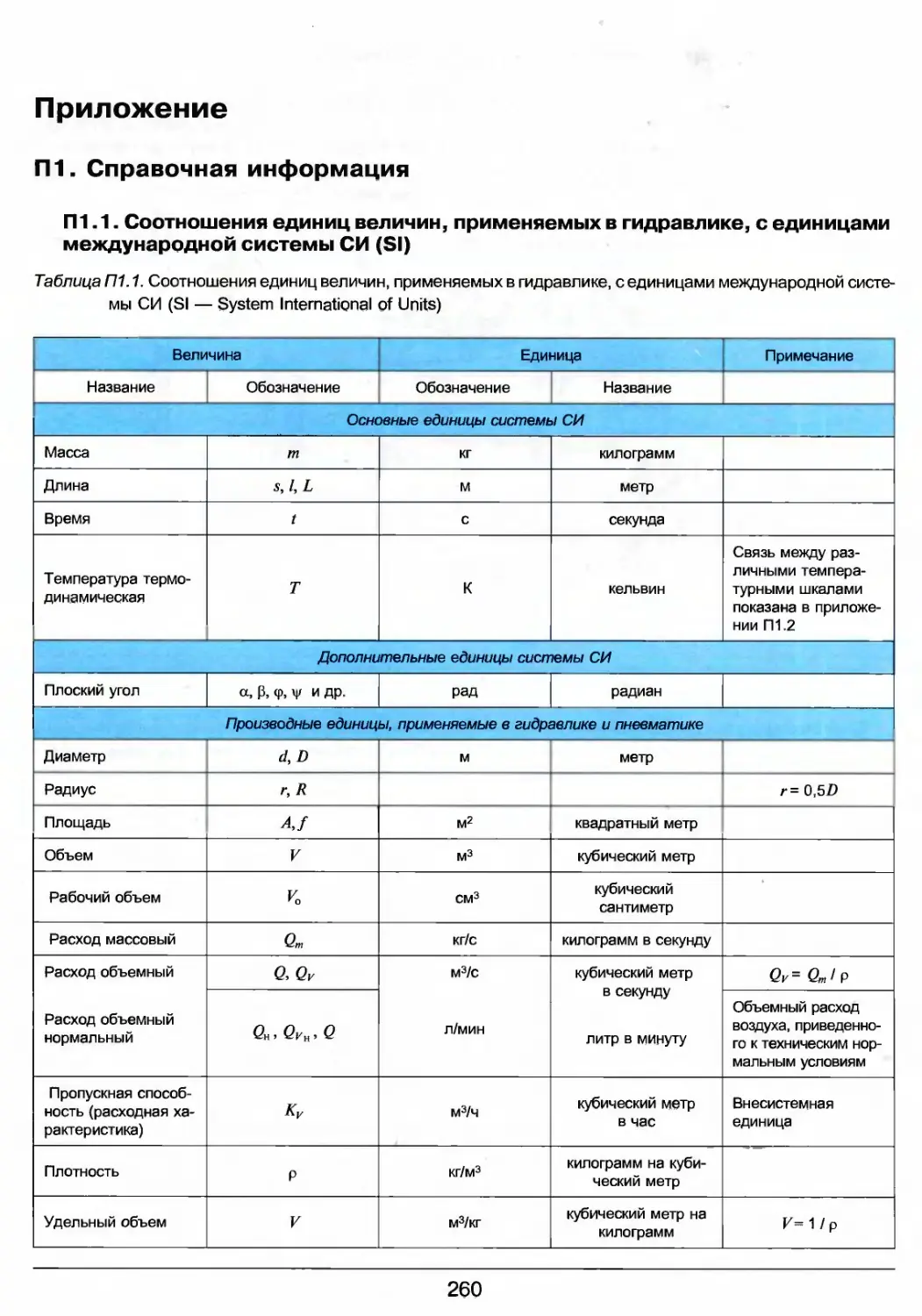
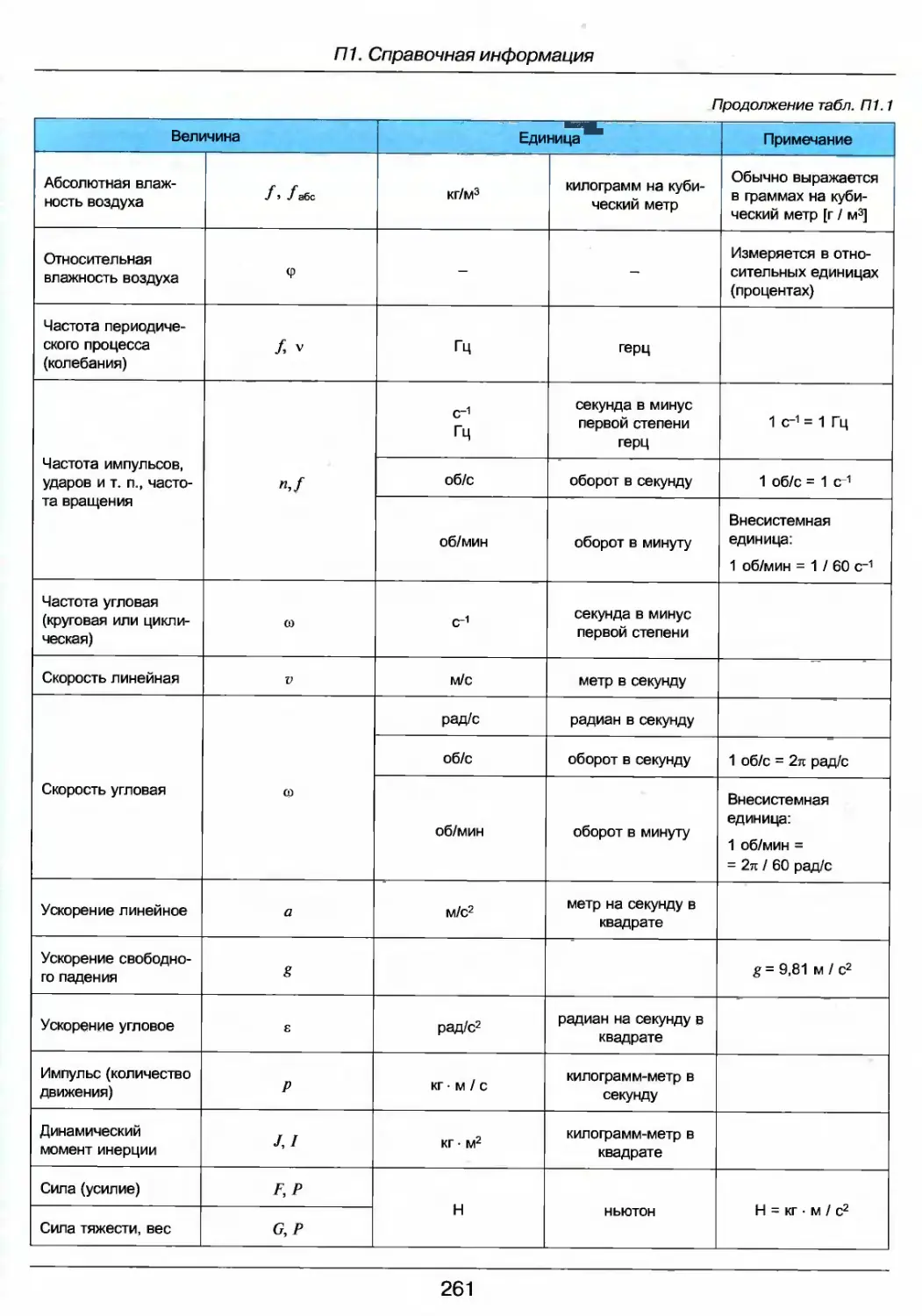
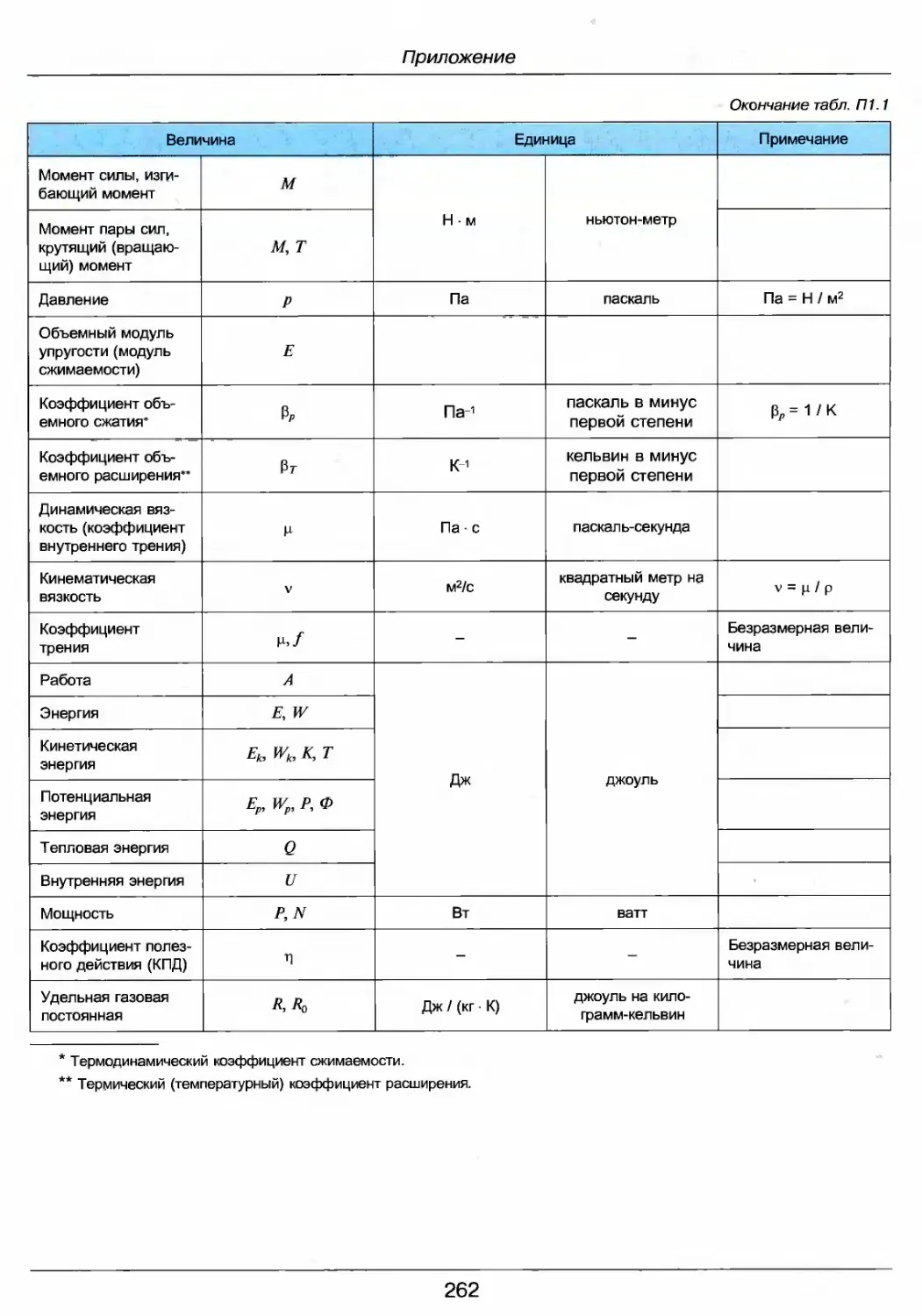
П1. Справочная информация 260
П1.1. Соотношения единиц величин, применяемых в гидравлике и пневматике,
с единицами международной системы СИ (SI) ,,.,,...., 260
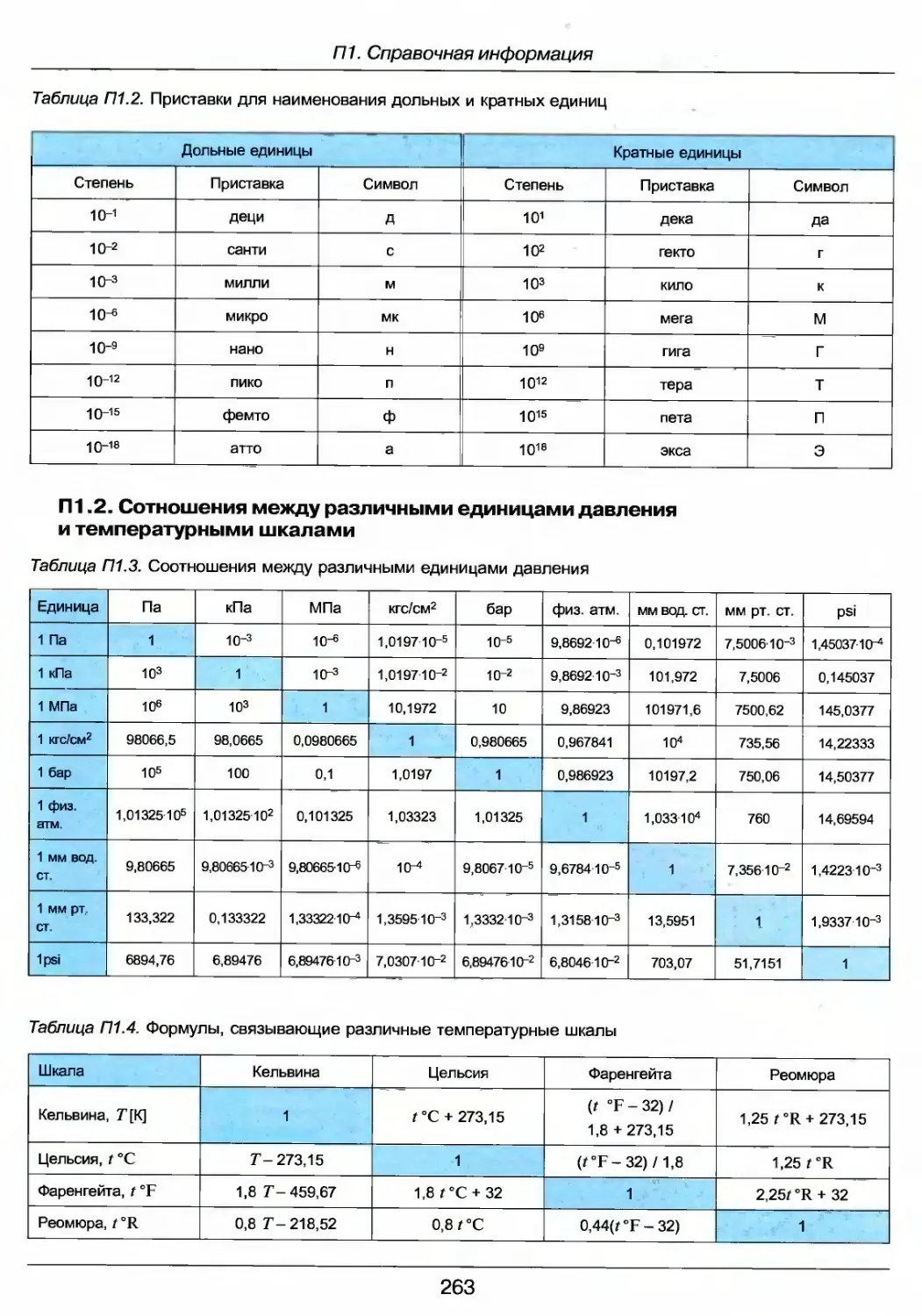
П1.2. Соотношения между различными единицами давления и температурными шкалами 263
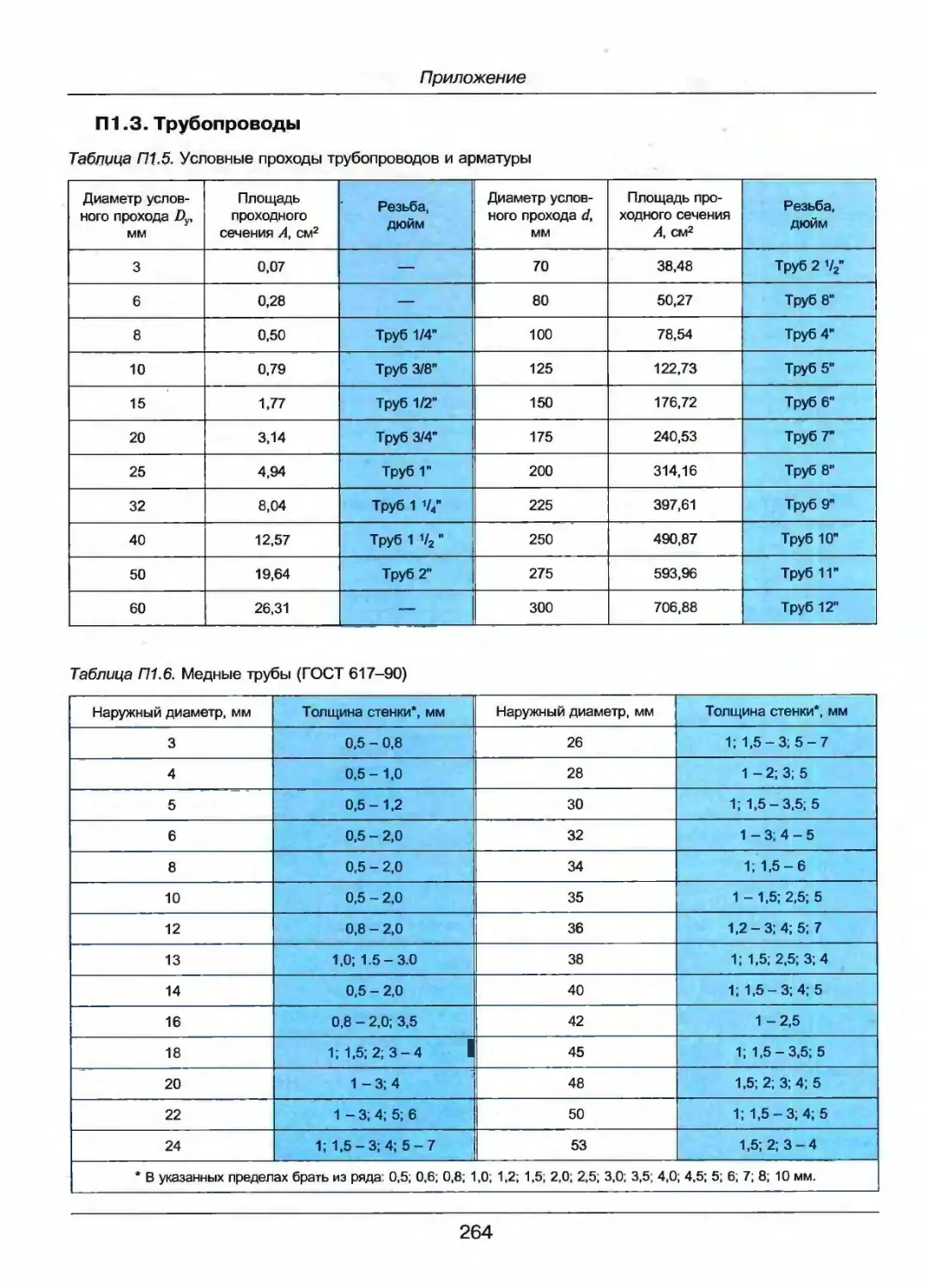
П1.3. Трубопроводы 264
П1.4. Структура обозначения индустриальных масел, в соответствии с ГОСТ 17479-87
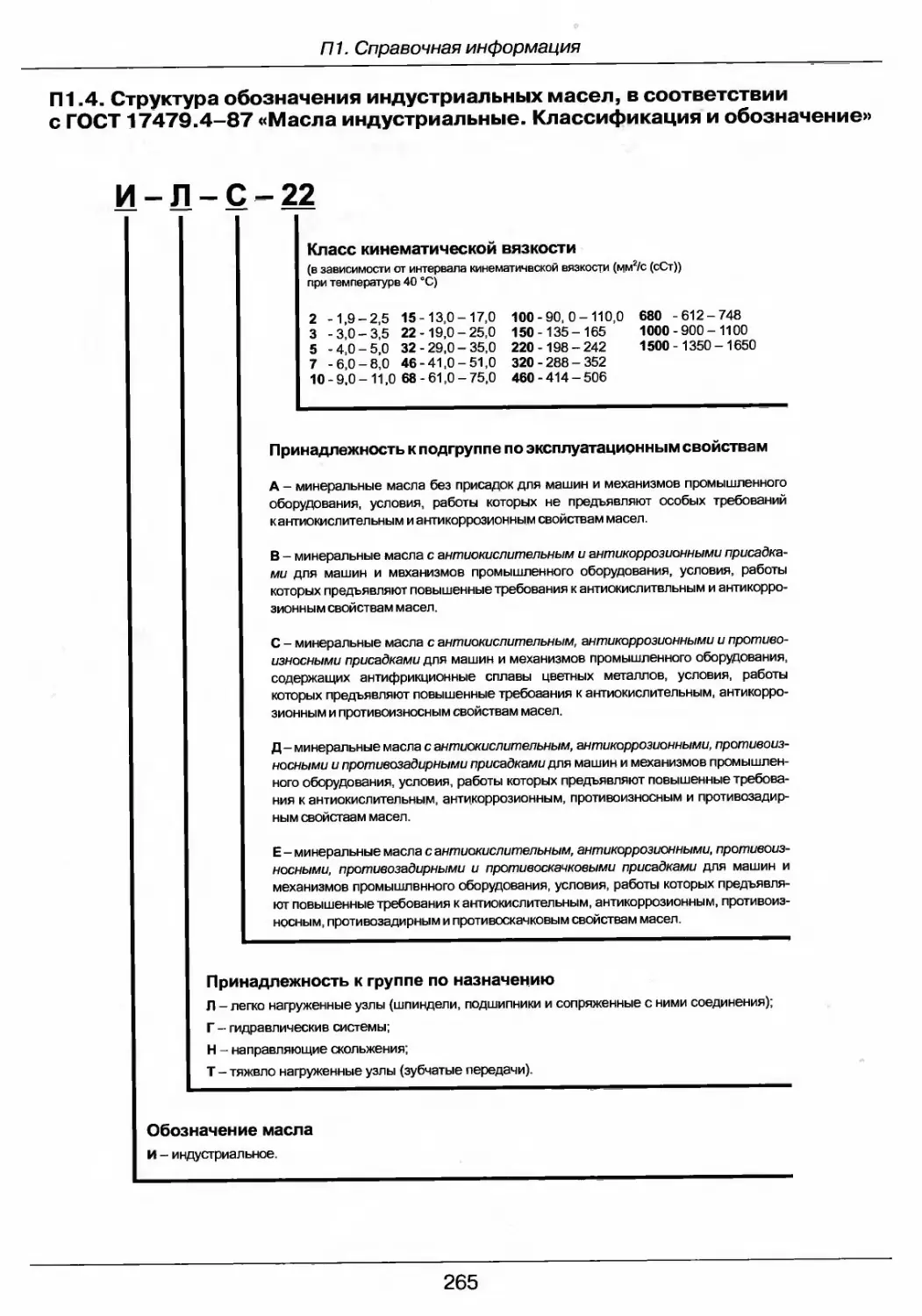
«Масла индустриальные. Классификация и обозначение» 265
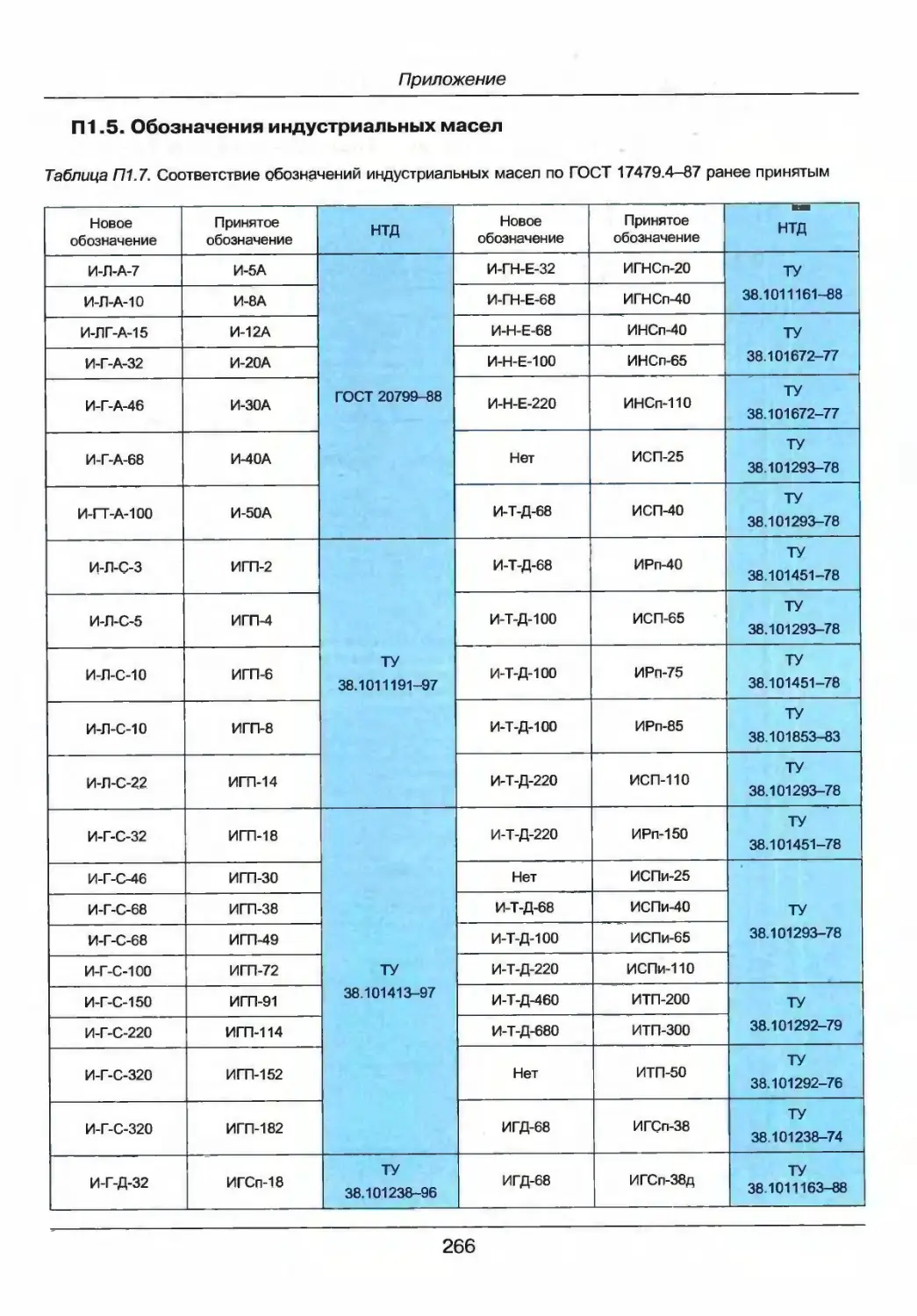
П1.5. Обозначения индустриальных масел 266
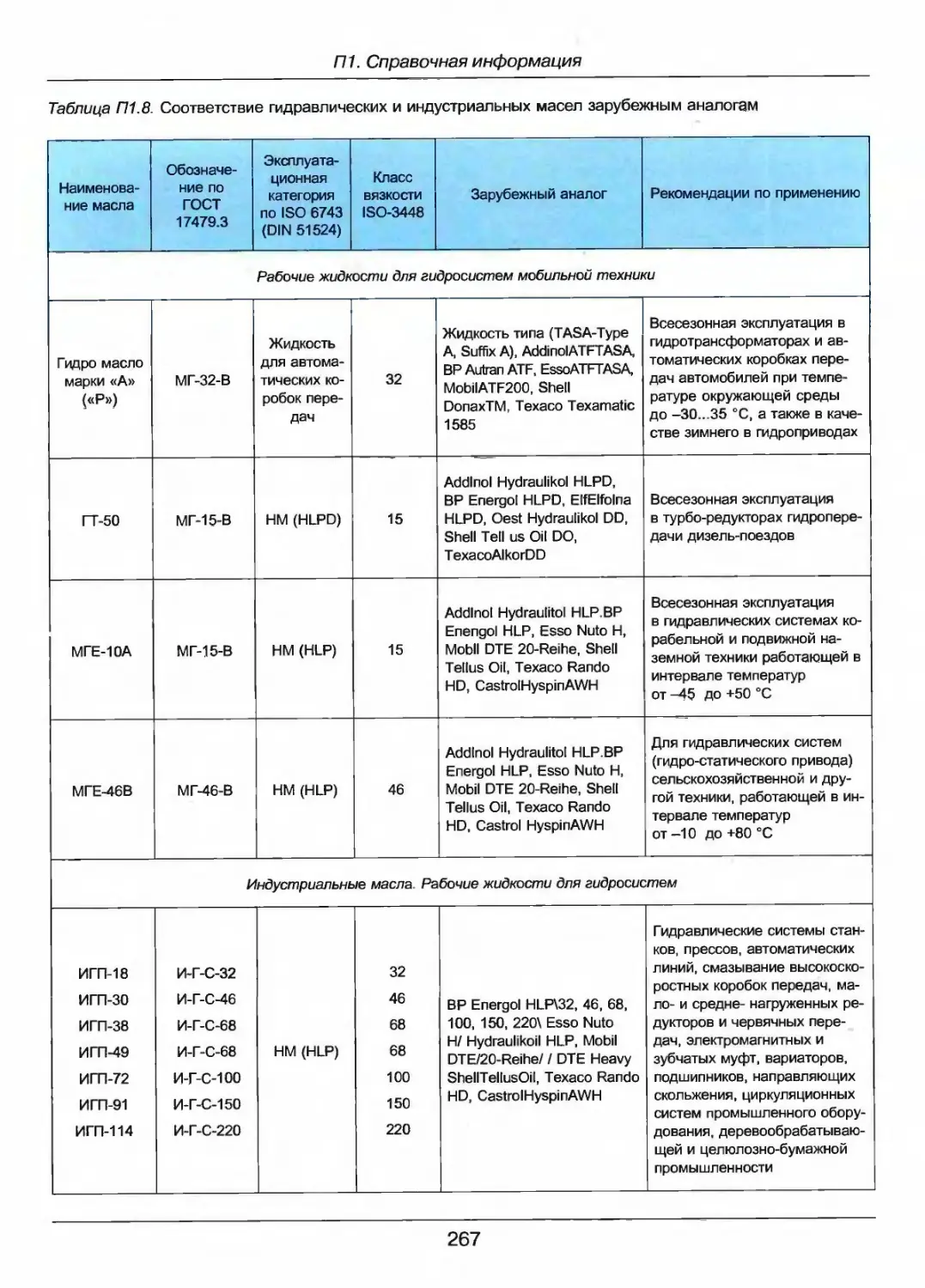
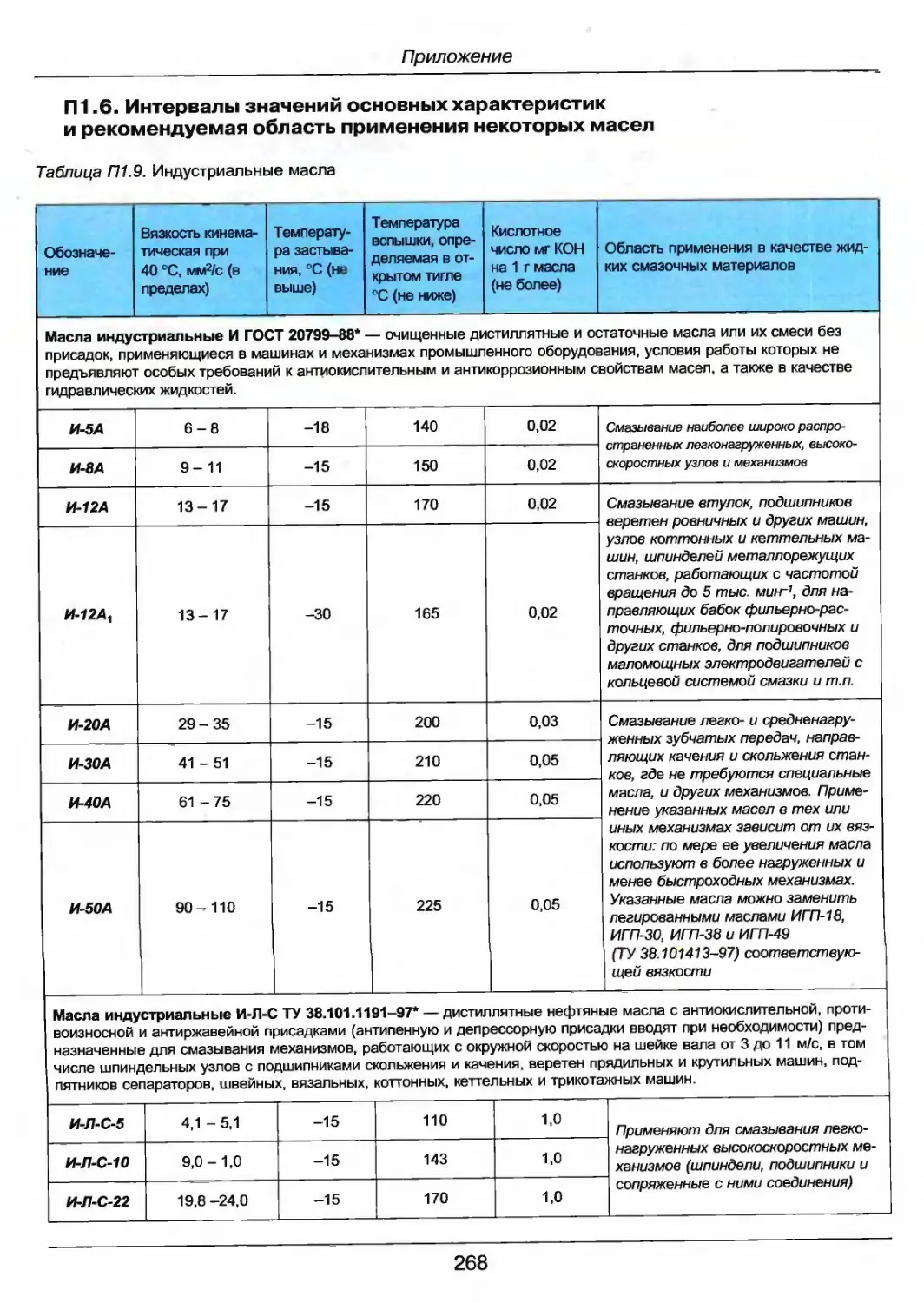
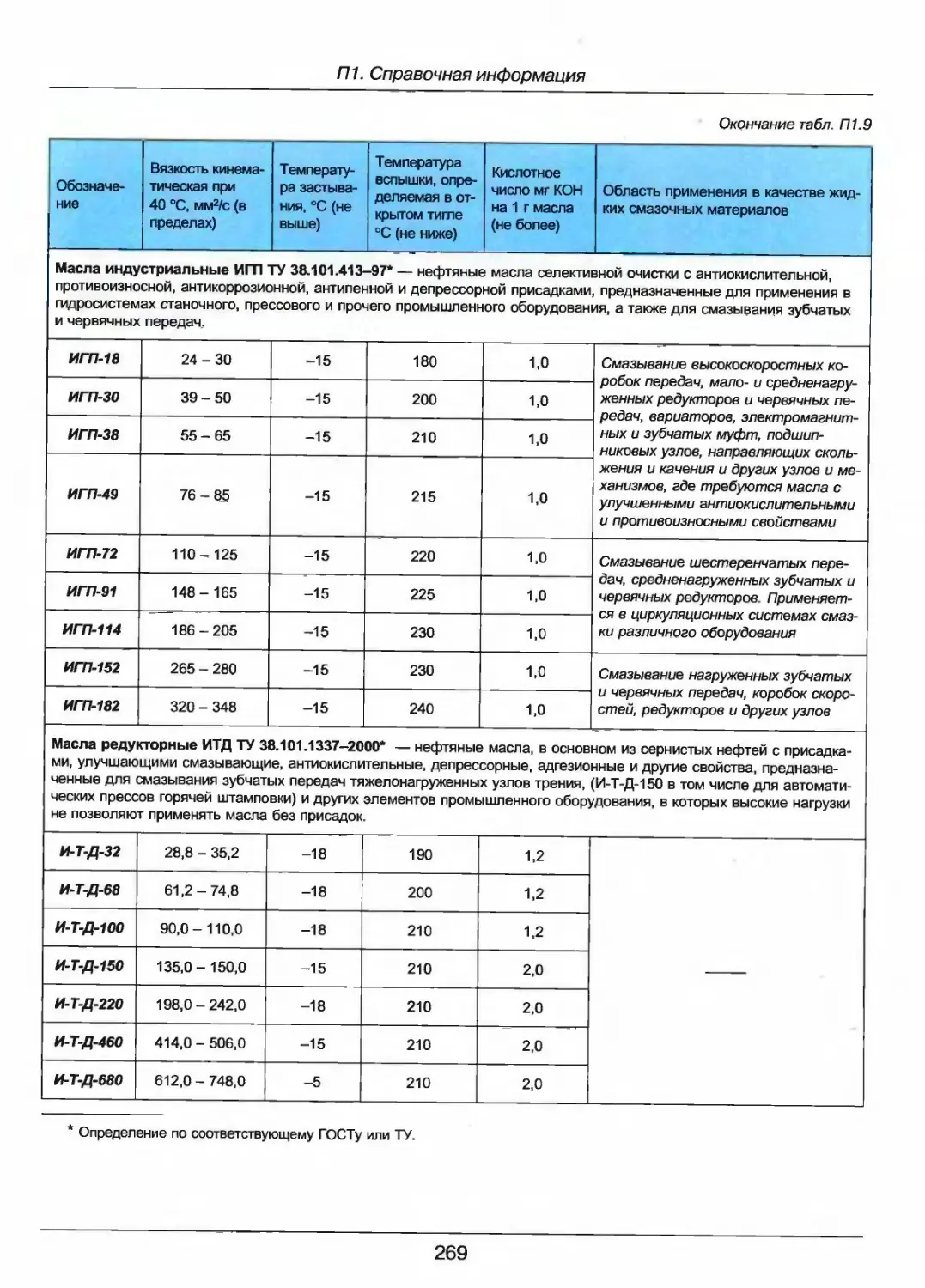
П1.6. Интервалы значений основных характеристик и рекомендуемая область
применения некоторых масел 268
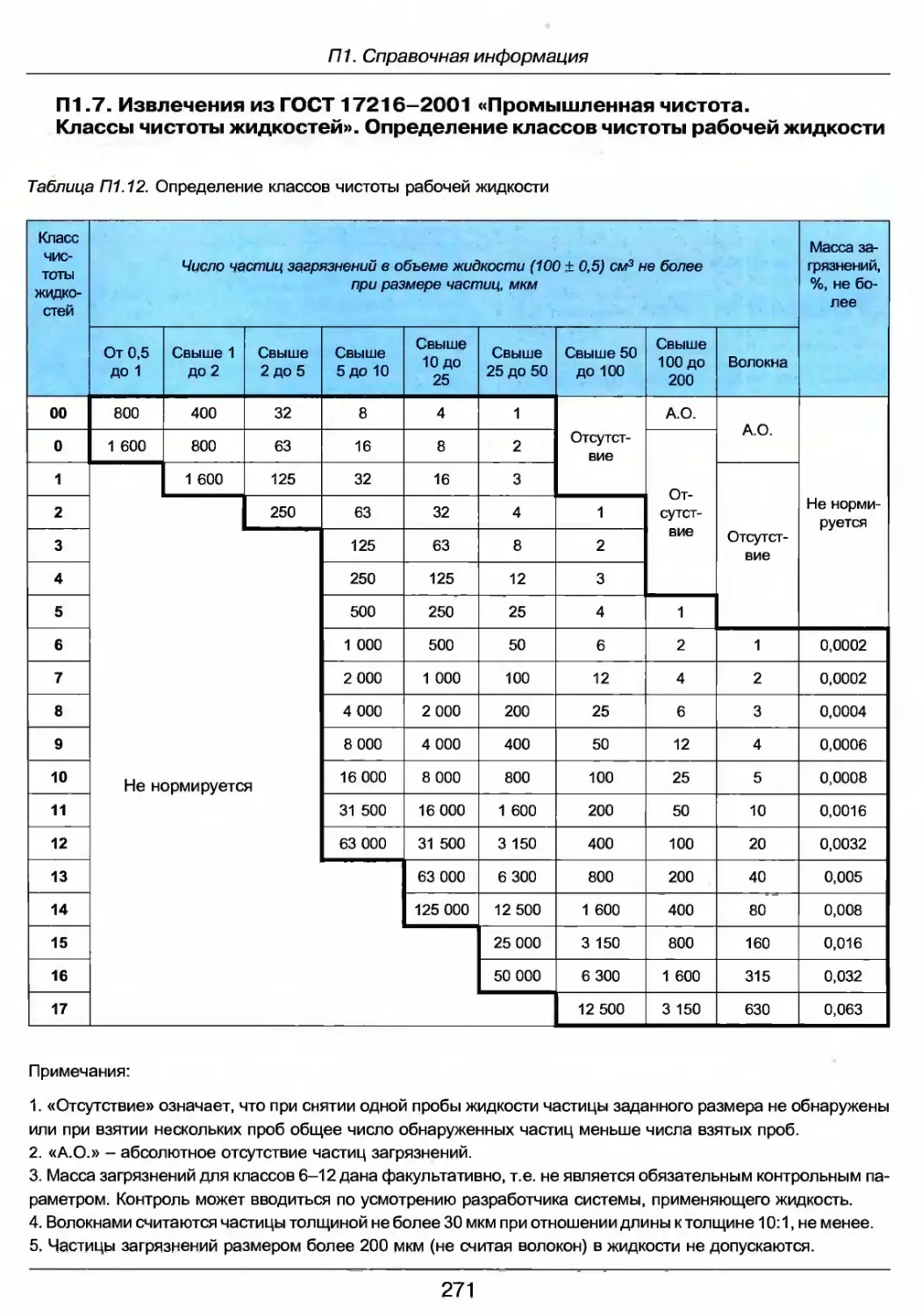
П1.7. Извлечения из ГОСТ 17216-2001 «Промышленная чистота. Классы чистоты жидкостей».
Определение классов чистоты рабочей жидкости 271
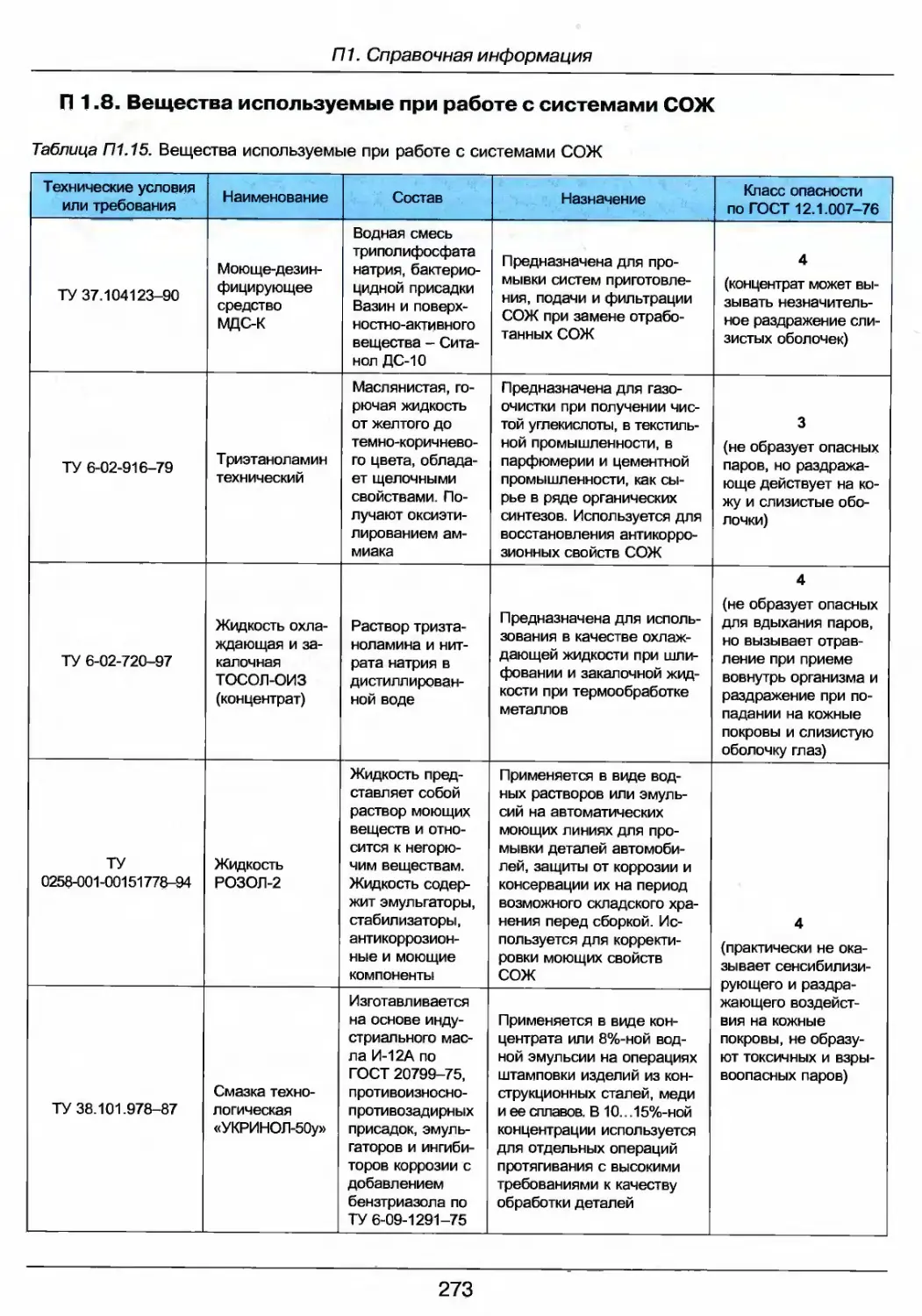
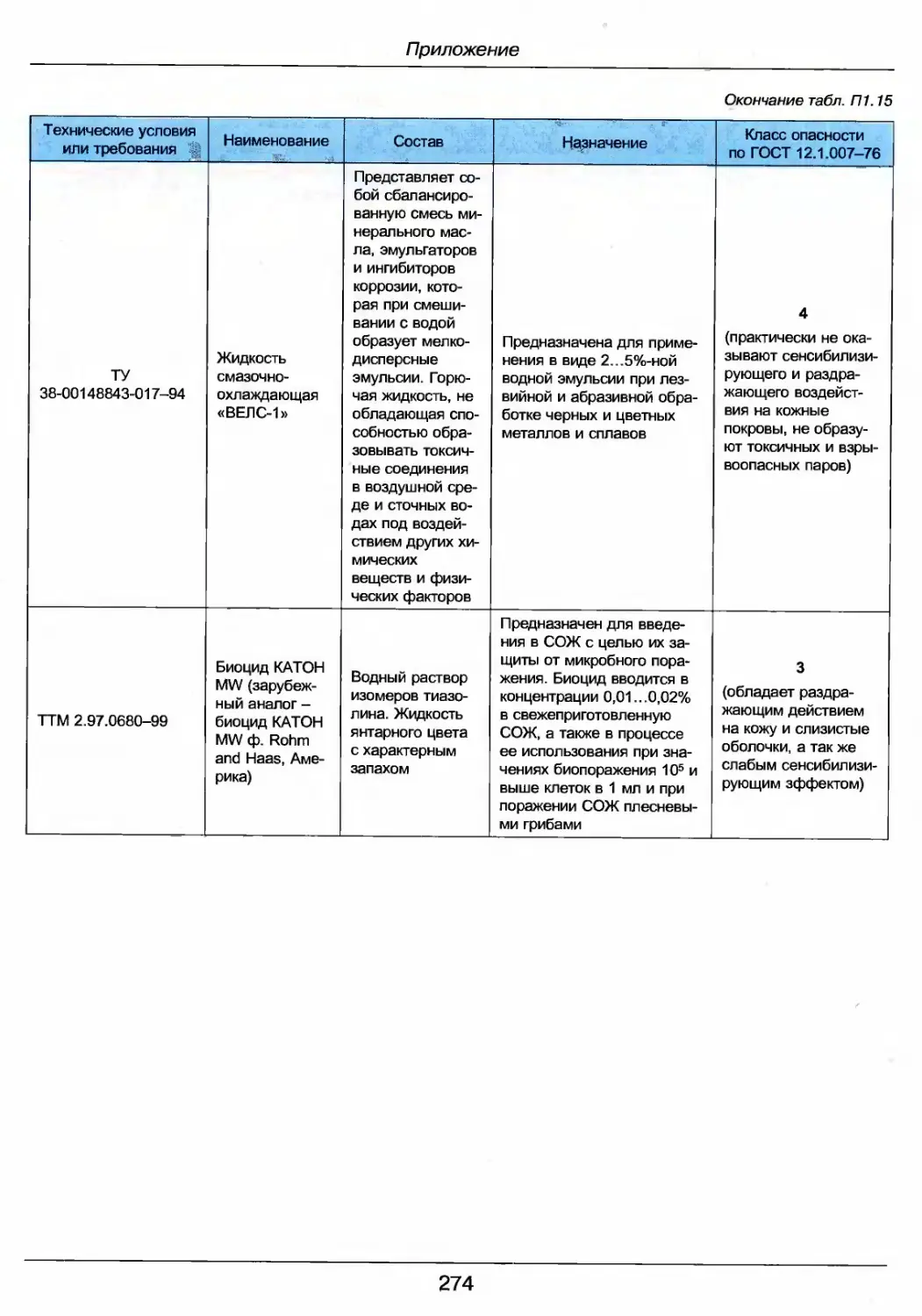
П1.8. Вещества, используемые при работе с системами СОЖ 273
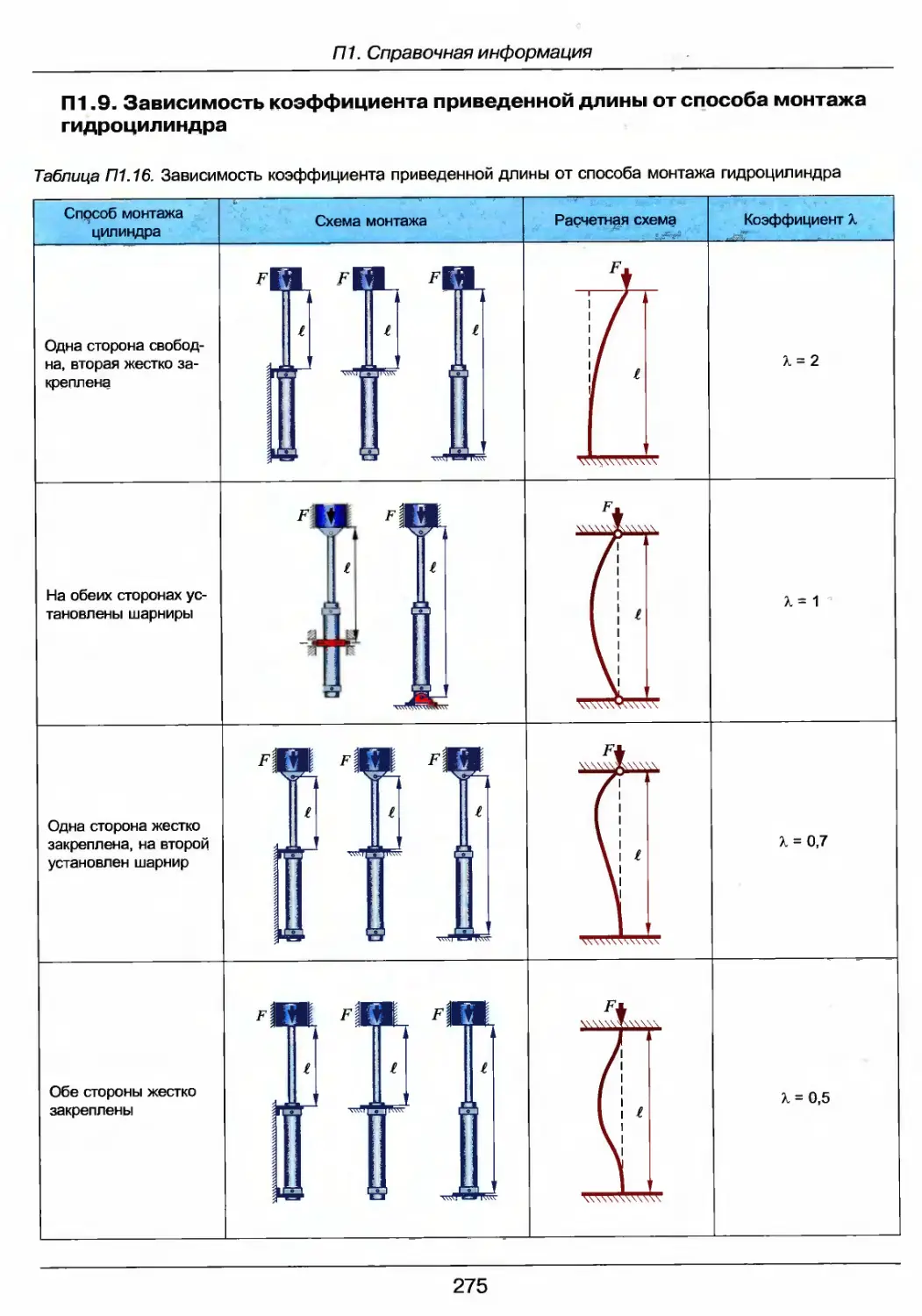
П1.9. Зависимость коэффициентов приведенной длины от способа монтажа н/щроцилиндра .... 275
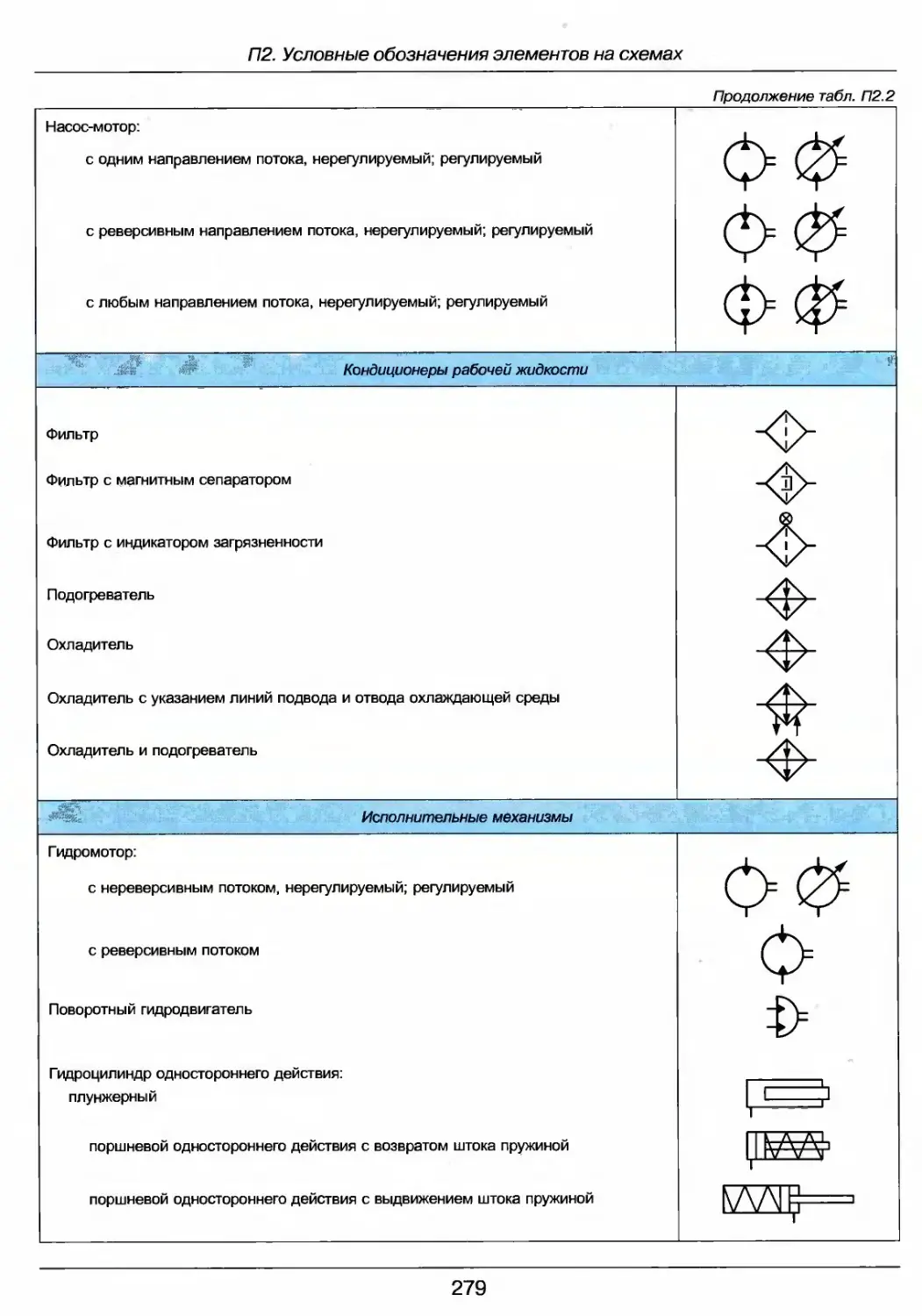
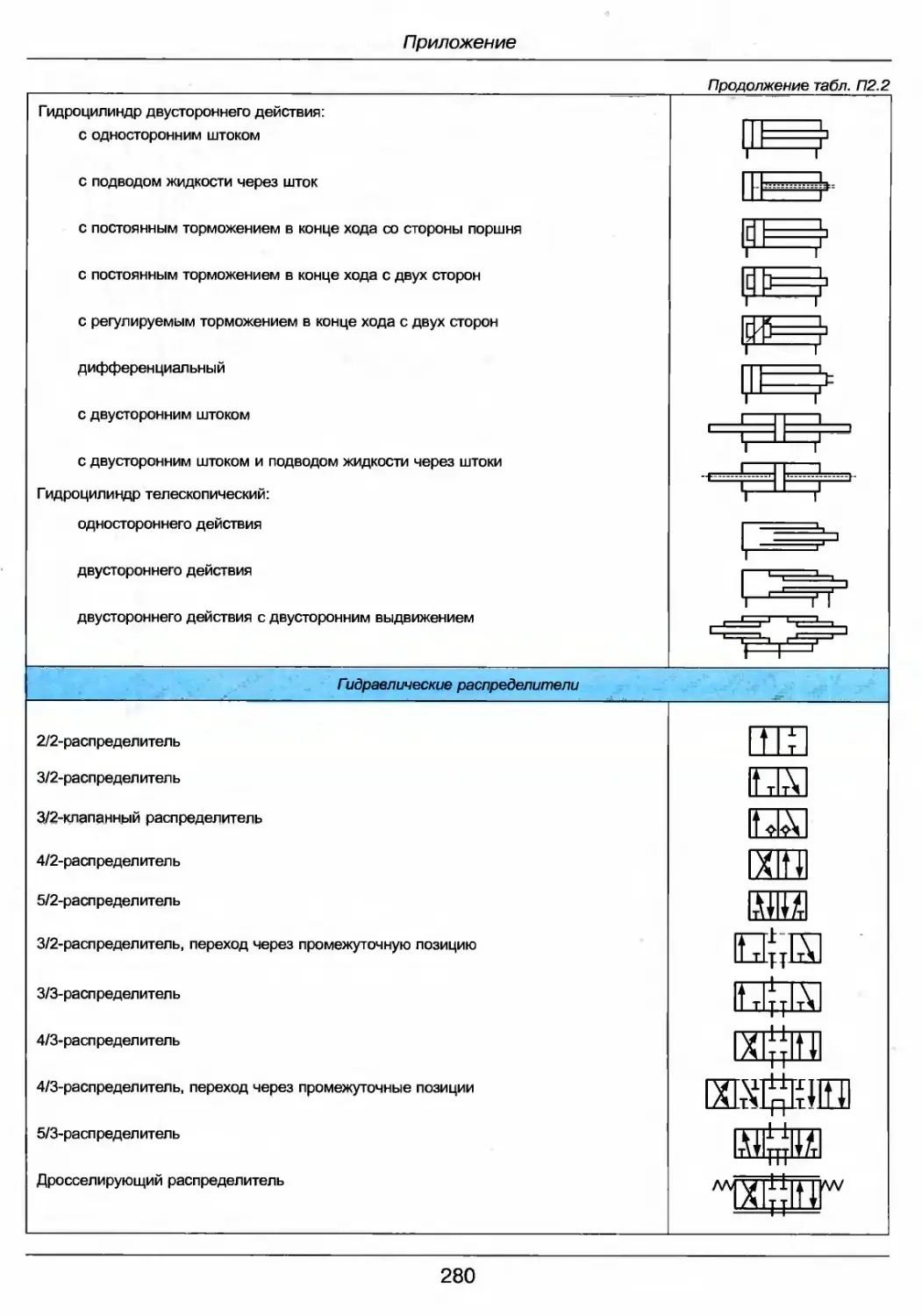
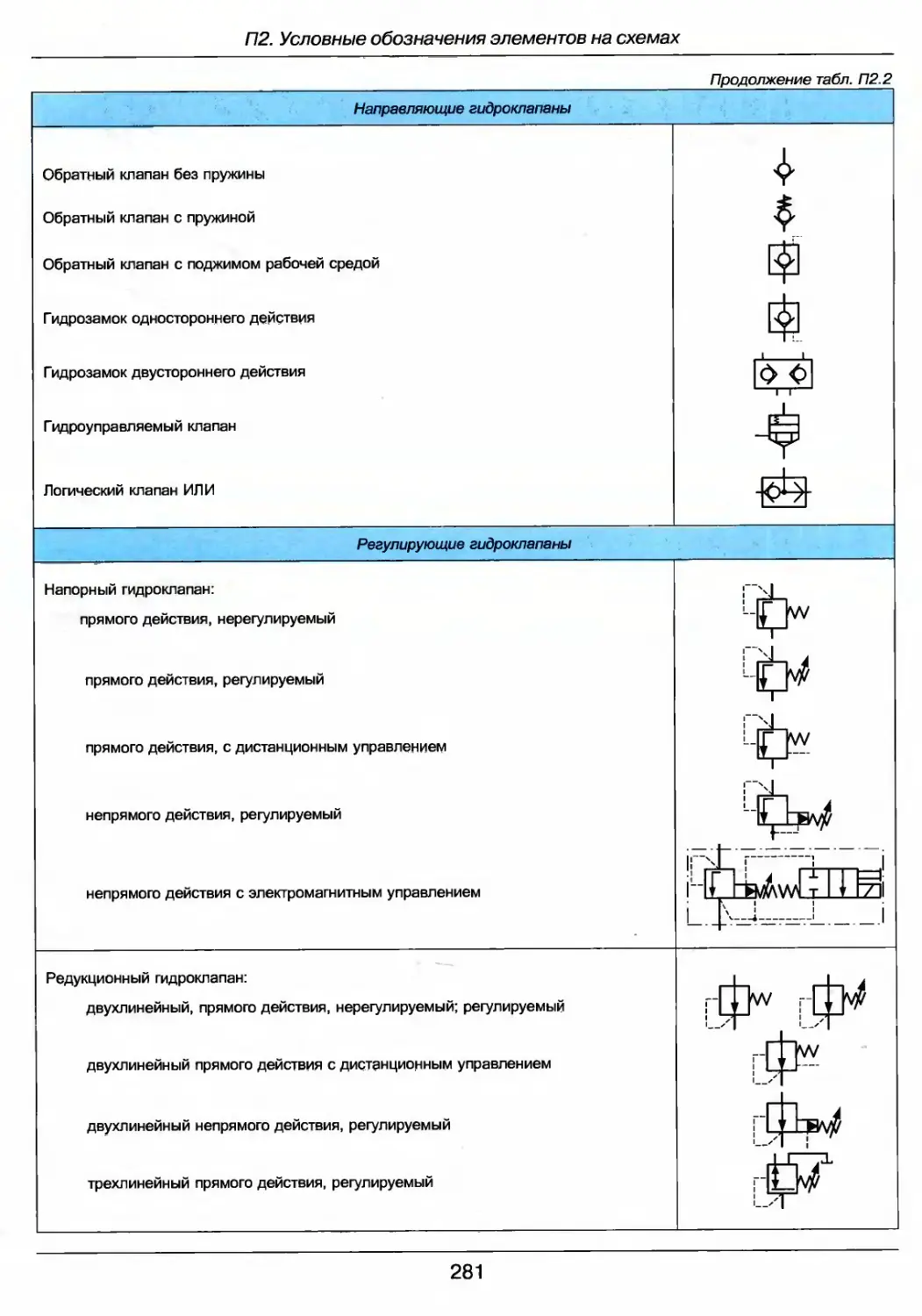
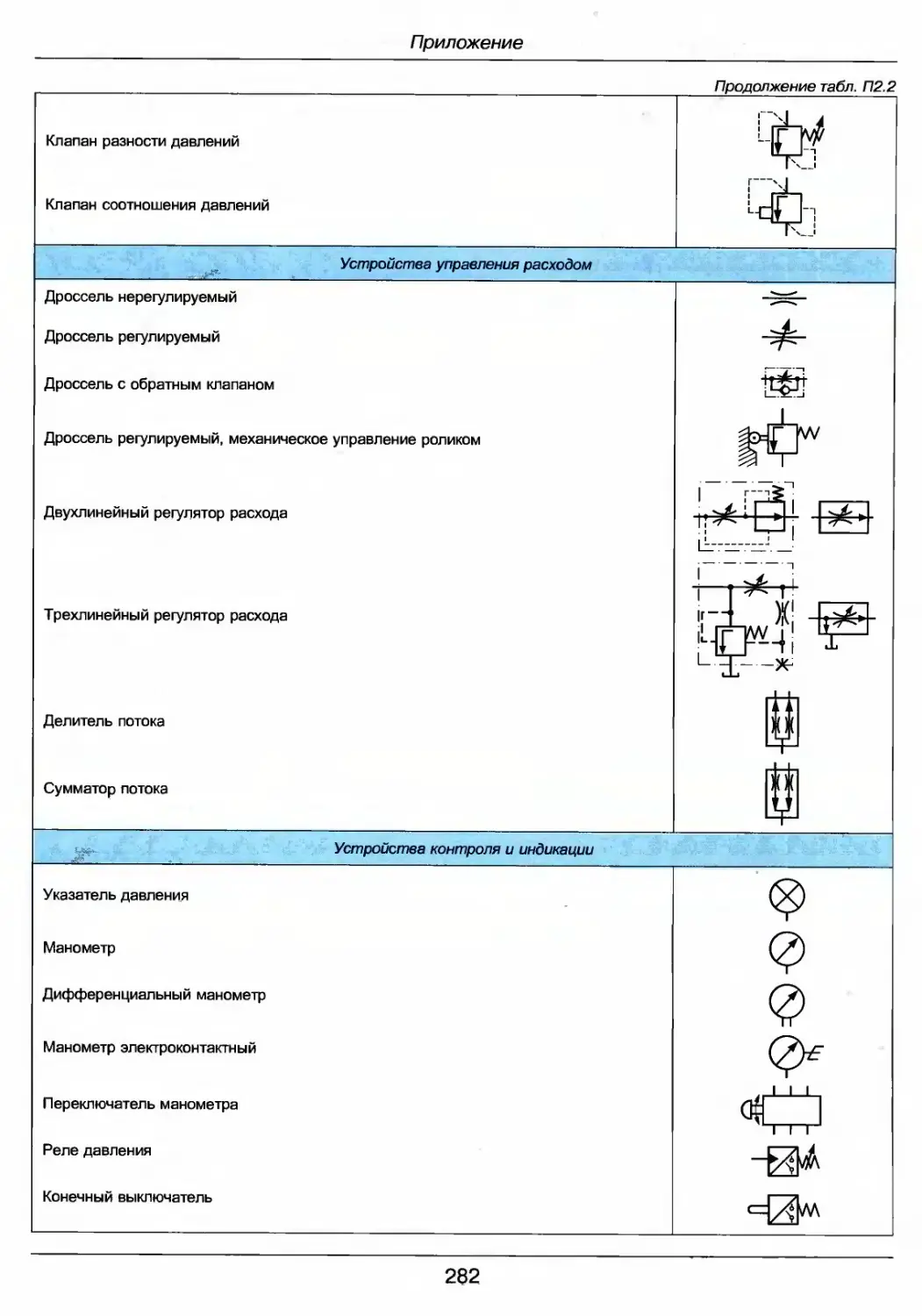
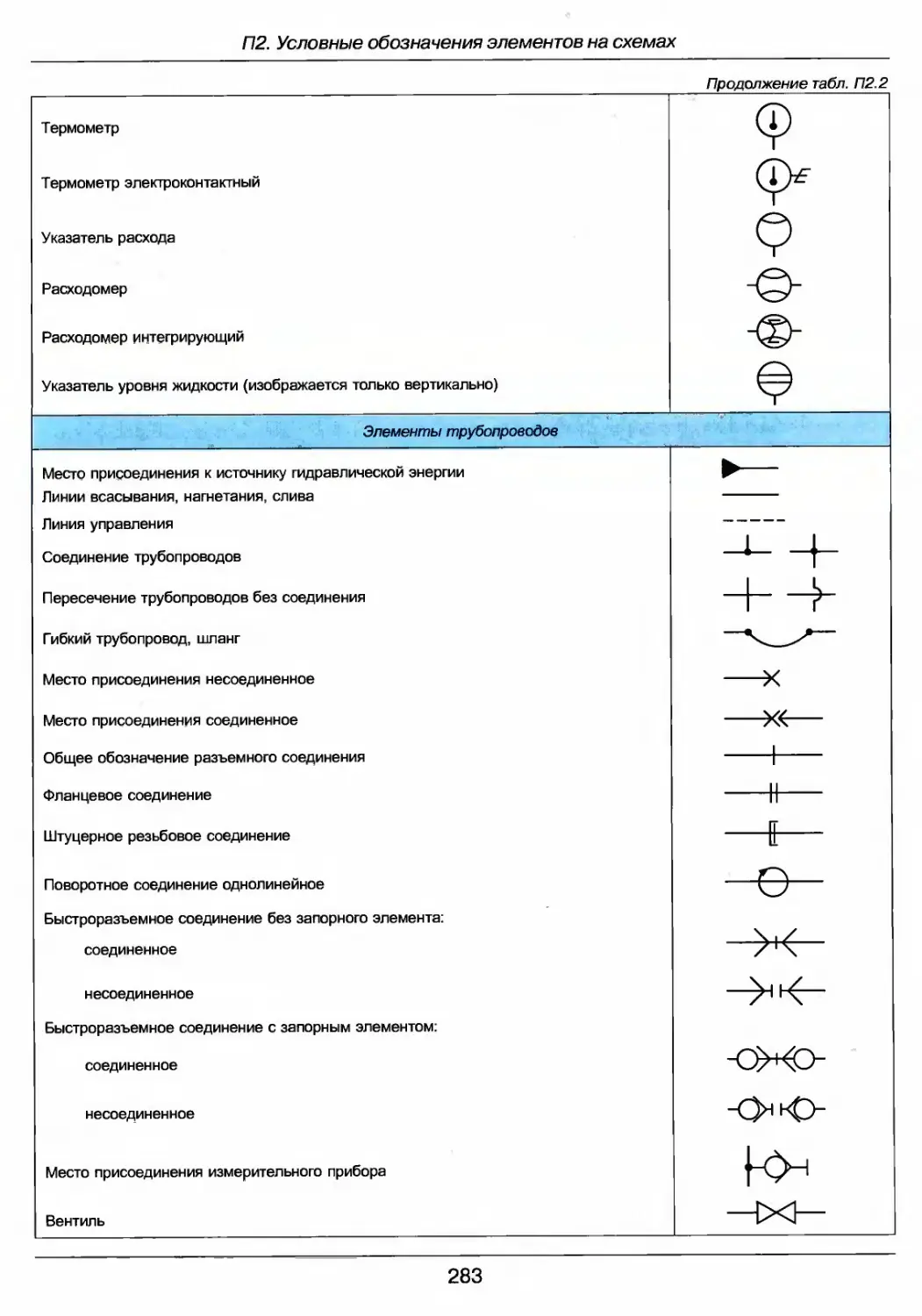
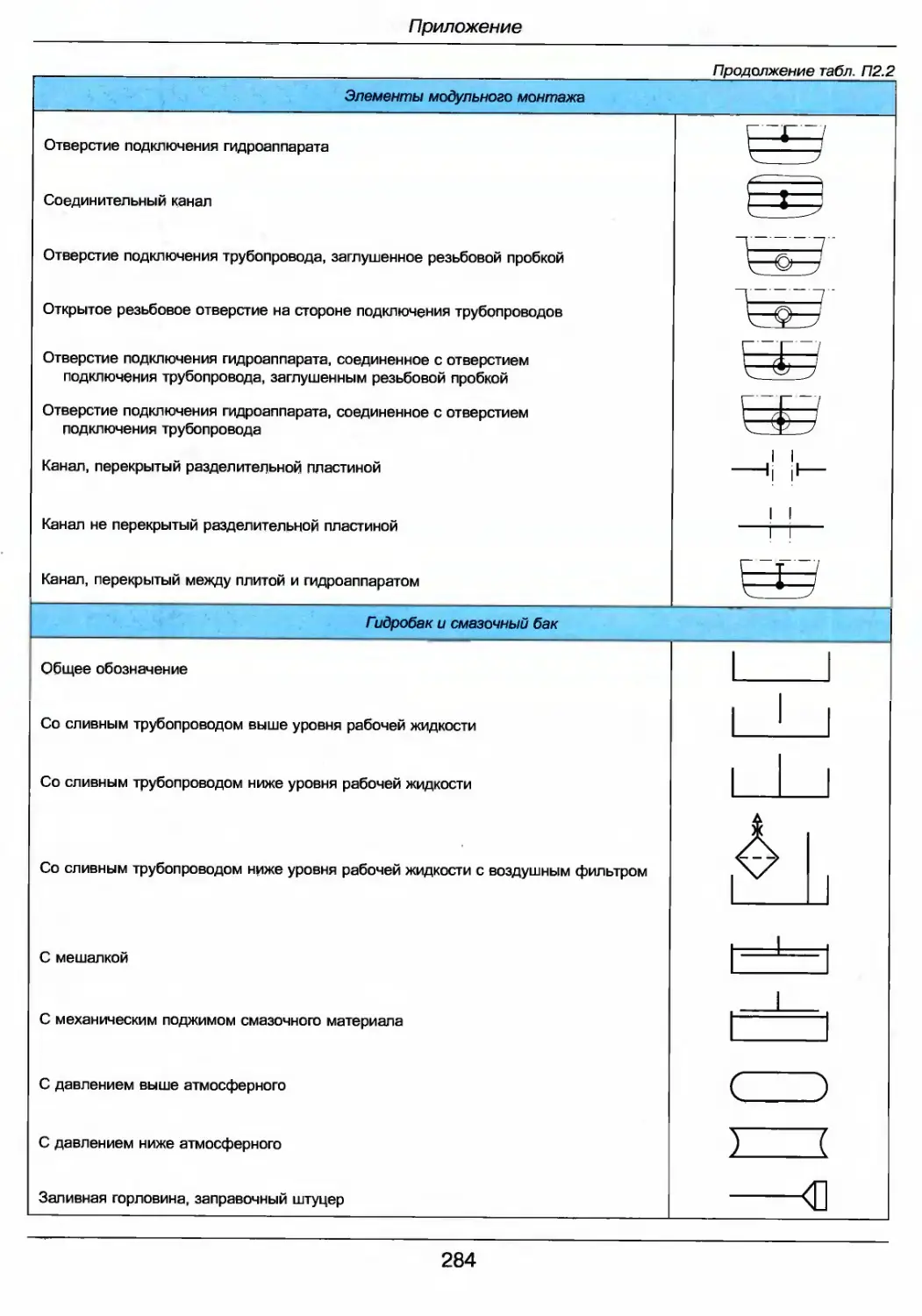
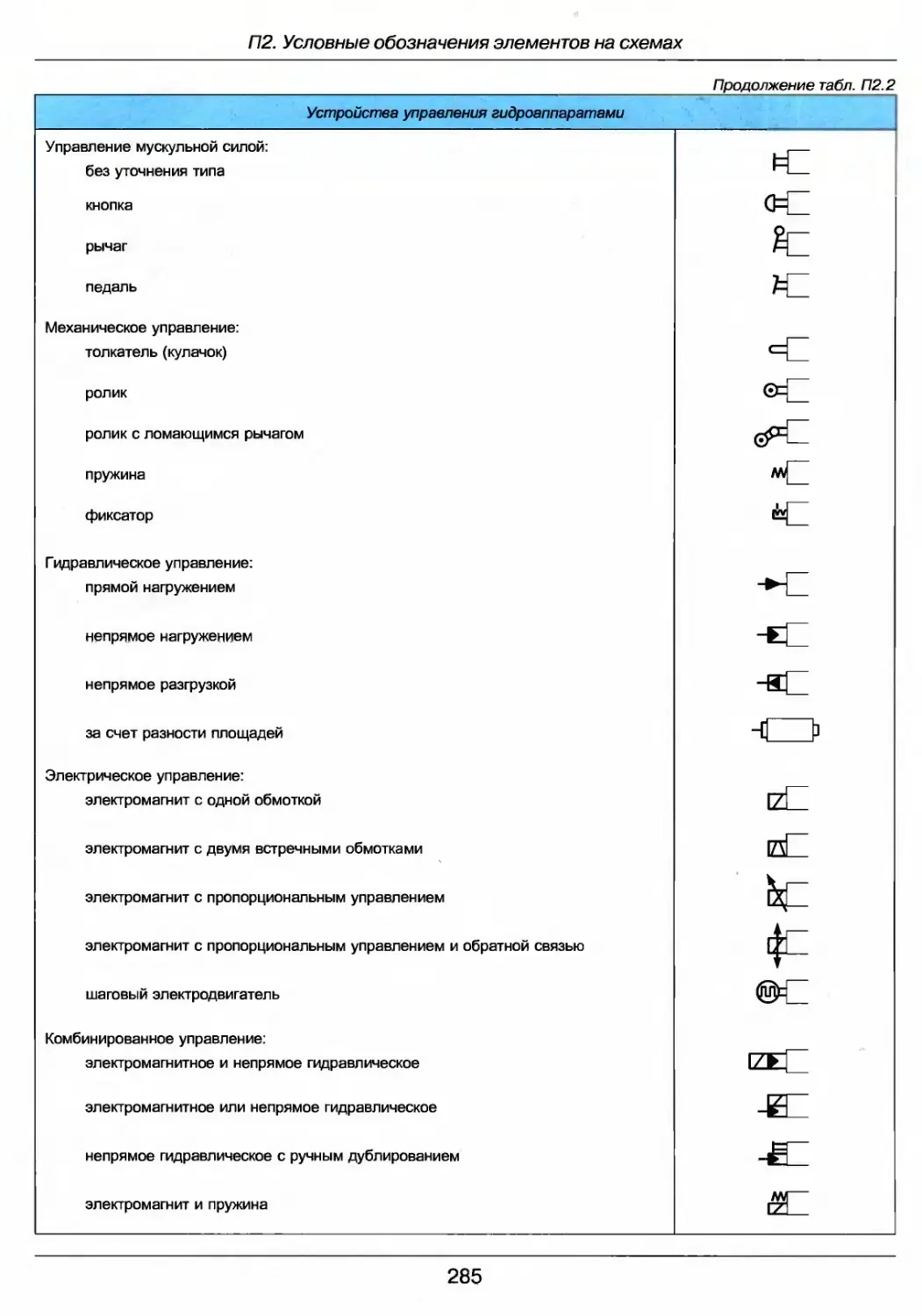
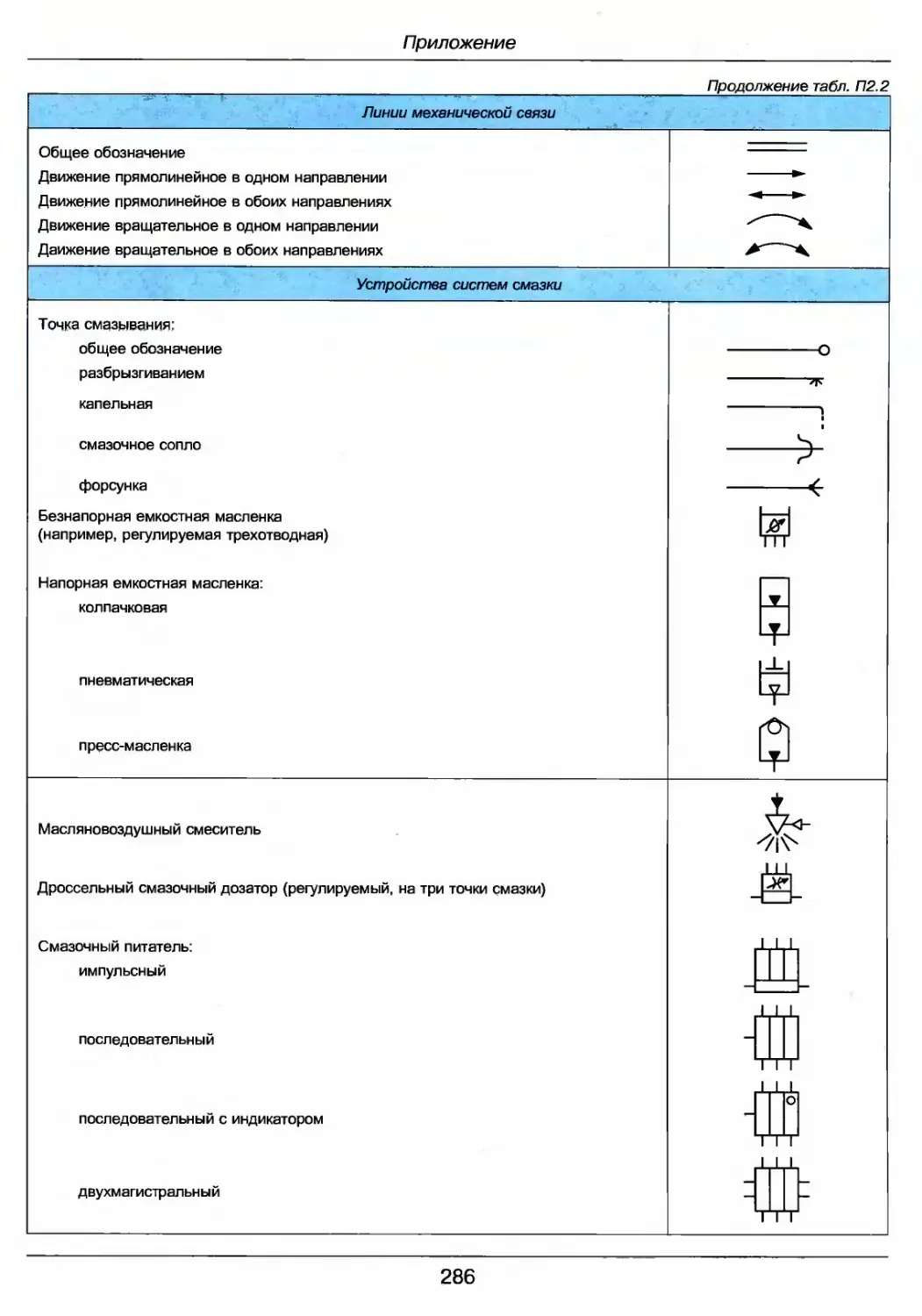
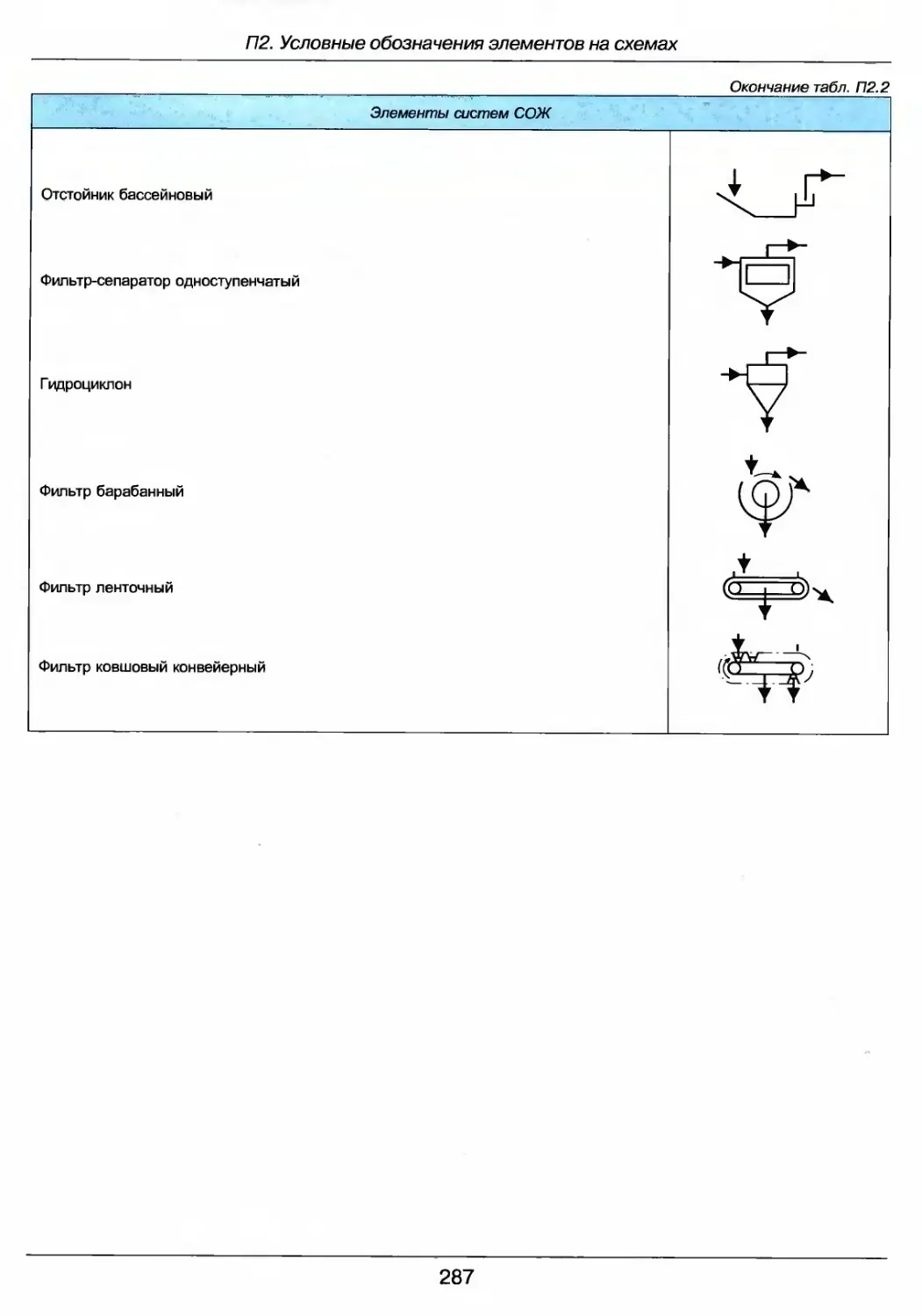
П2. Условные обозначения элементов на схемах 276
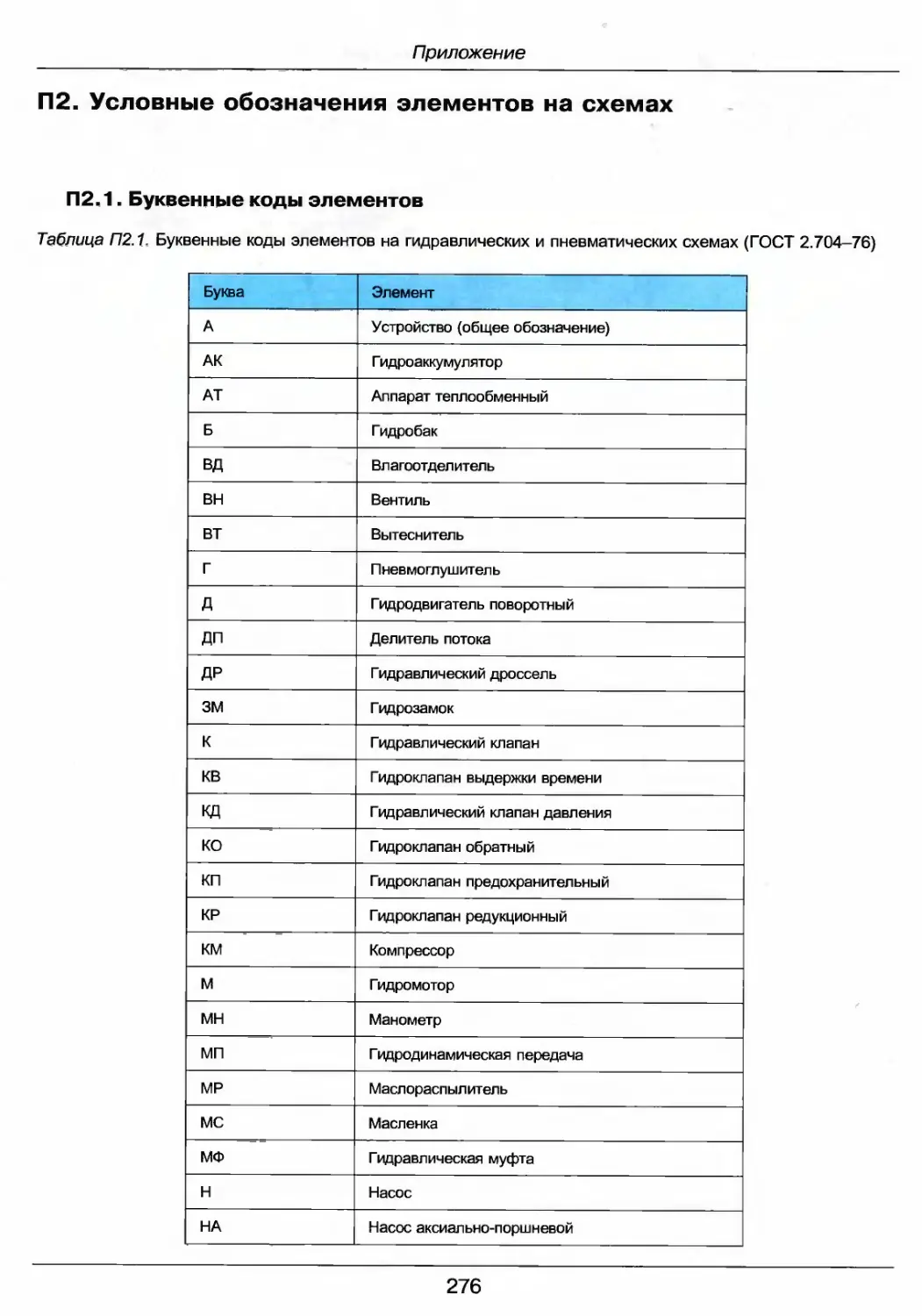
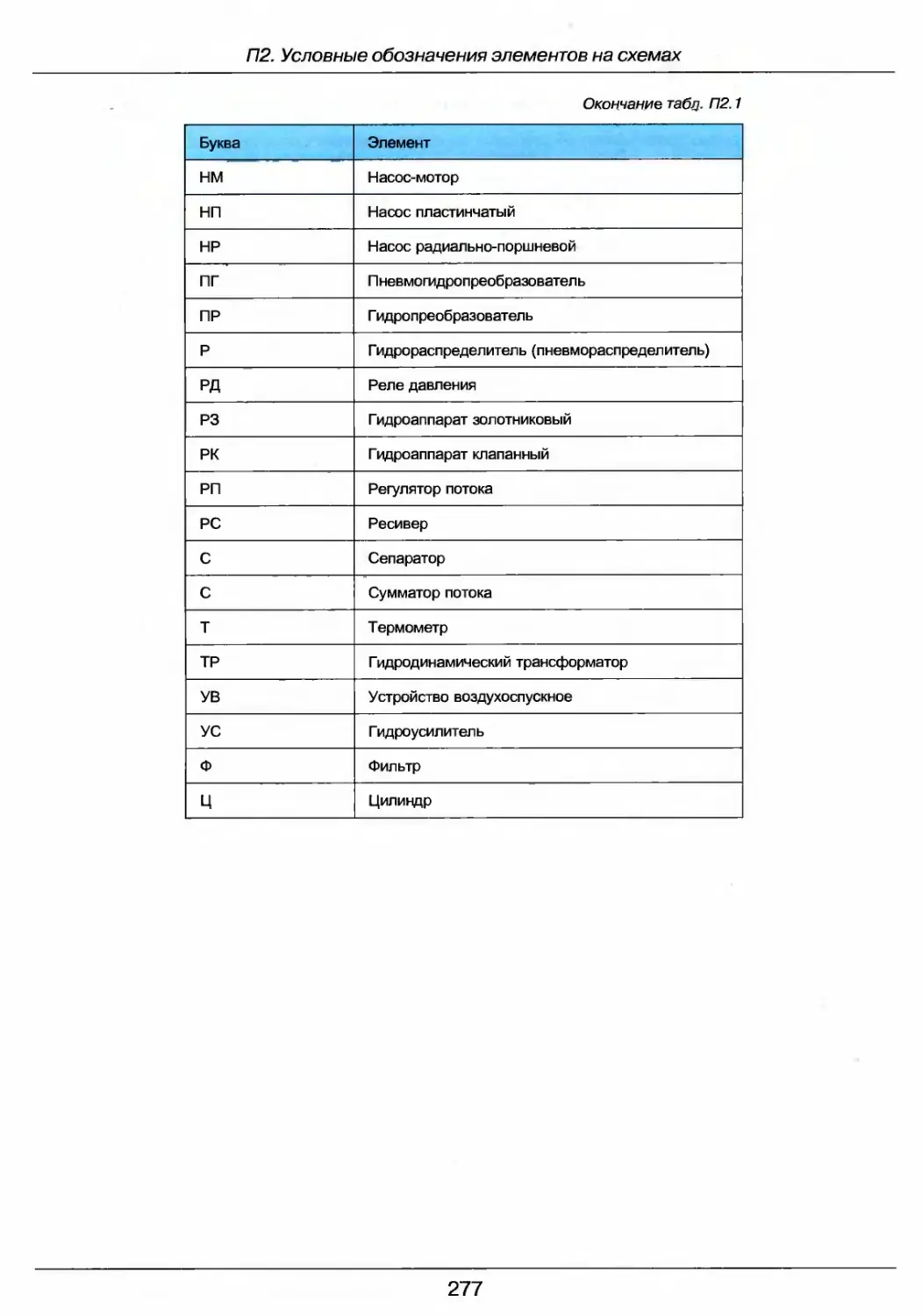
П2.1. Буквенные коды элементов 276
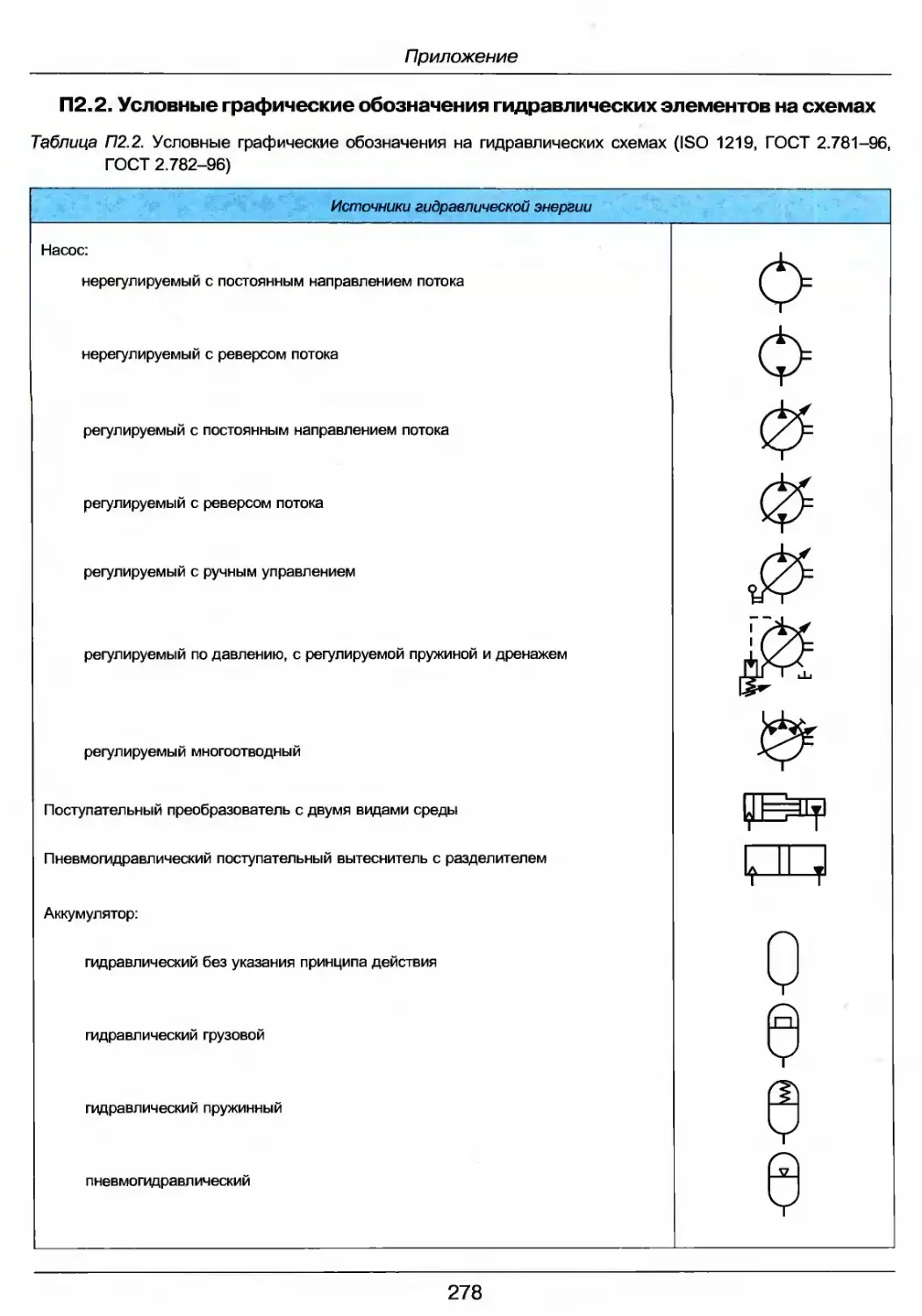
П2.2. Условные графические обозначения гидравлических элементов на схемах 278
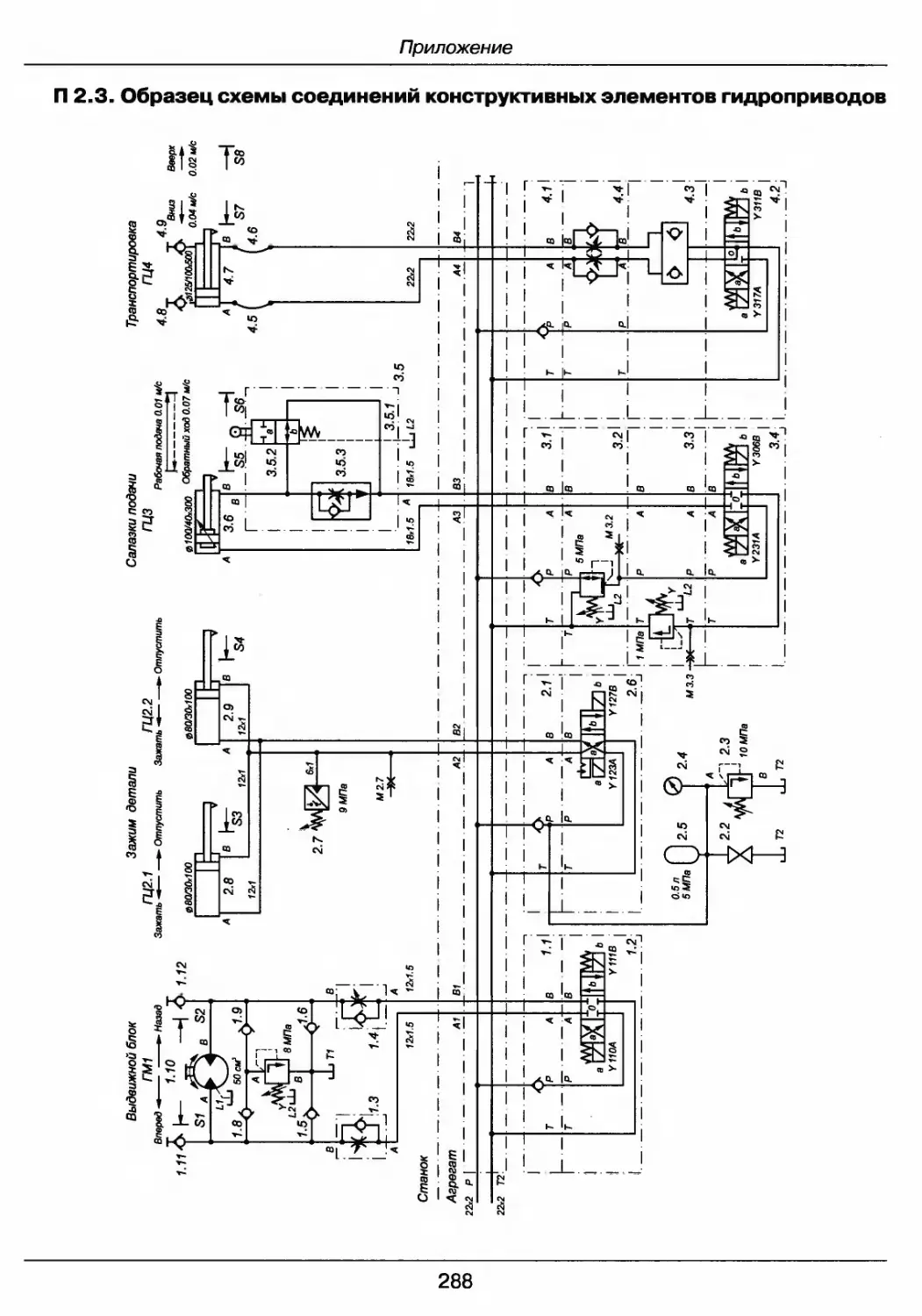
П2.3. Образец схемы соединений конструктивных элементов гидроприводов 288
Список использованной литературы..... .,,.,..., 289
Предметный указатель 290
6
Предисловие
Развитие отечественной промышленности многие годы сопровождалось совершенствованием
гидрооборудования отраслевого применения, что нашло свое отражение и в существующей технической литературе.
Специалистам предлагаются книги по гидрооборудованию строительных и дорожных машин, по применению
гидроприводов в металлургическом производстве, в летательных аппаратах, станкостроении и пр. Однако,
несмотря на большое количество книг, посвященных вопросам применения гидроприводов в различных
областях промышленности, учебной литературы для изучения общих вопросов построения, функционирования
и обслуживания гидроприводов в различных областях явно недостаточно.
В предлагаемых учебниках и пособиях, по мнению авторов, не уделено достаточного внимания
структурированному подходу к изучению принципов построения гидроприводов, практически не освещены вопросы,
связанные с составлением и чтением принципиальных гидравлических схем; не рассмотрены
централизованные системы смазки и системы смазывающе-охлаждающих жидкостей.
Основной задачей авторов являлось структурирование и наглядное представление материалов для
ясного представления читателями конструктивных особенностей и принципов действия гидравлических
элементов, их функционального назначения, вне зависимости от отраслевого применения.
Цель пособия:
- обобщить информацию в области применения гидрооборудования;
- описать наиболее характерные конструкции гидроэлементов;
- изложить основы эксплуатации и проектирования гидравлических приводов и систем.
Учебное пособие состоит из двенадцати глав и приложения.
В главах 1, 2 рассмотрены вопросы построения и физические основы функционирования гидросистем.
Главы 3-7 посвящены изучению элементов объемного гидропривода, их конструктивному исполнению и
функциональному назначению. Основные принципы монтажа, эксплуатации и проектирования гидроприводов
приведены в главах 8-11.
В главе 12 собраны и обобщены материалы по классификации, структуре и элементной базе современных
централизованных систем смазки и смазочно-охлаждающих жидкостей.
В приложении приведена справочная информация, а также условные графические обозначения
элементов гидроприводов, систем смазки и смазывающе-охлаждающих жидкостей (СОЖ).
В список использованной литературы включены только источники, составляющие основу изложенных в
пособии материалов.
Авторы глубоко признательны руководству и сотрудникам ЗАО «ЭКОИНВЕНТ» за предоставленную
возможность написания данного пособия и за помощь, оказанную при поиске и подготовке материалов.
Особую благодарность авторы выражают заведующему лабораторией гидросистем станков «ЭНИМС»,
кандидату технических наук В.К. Свешникову за обстоятельное рецензирование рукописи и за полезные
предложения по улучшению его содержательной части.
7
Введение
Автоматизация технологических процессов в современном промышленном производстве является
непростой технической задачей и часто требует интегрирования в единой установке нескольких систем различной
архитектуры с различными энергоносителями.
В соответствии с функциональным назначением технические системы делят на системы управления —
системы, которые применяются для управления различными машинами, станками, устройствами, и системы,
обеспечивающие рабочий процесс этих объектов (системы смазки, охлаждения, противоаварийнои защиты,
топливные, системы пожаро/газобезопасности и др.).
Системы управления, в состав которых входит комплекс устройств, предназначенных для получения
усилий и перемещений в машинах и механизмах, называют приводами*. В зависимости от используемого
энергоносителя различают электро-, пневмо- и гидроприводы.
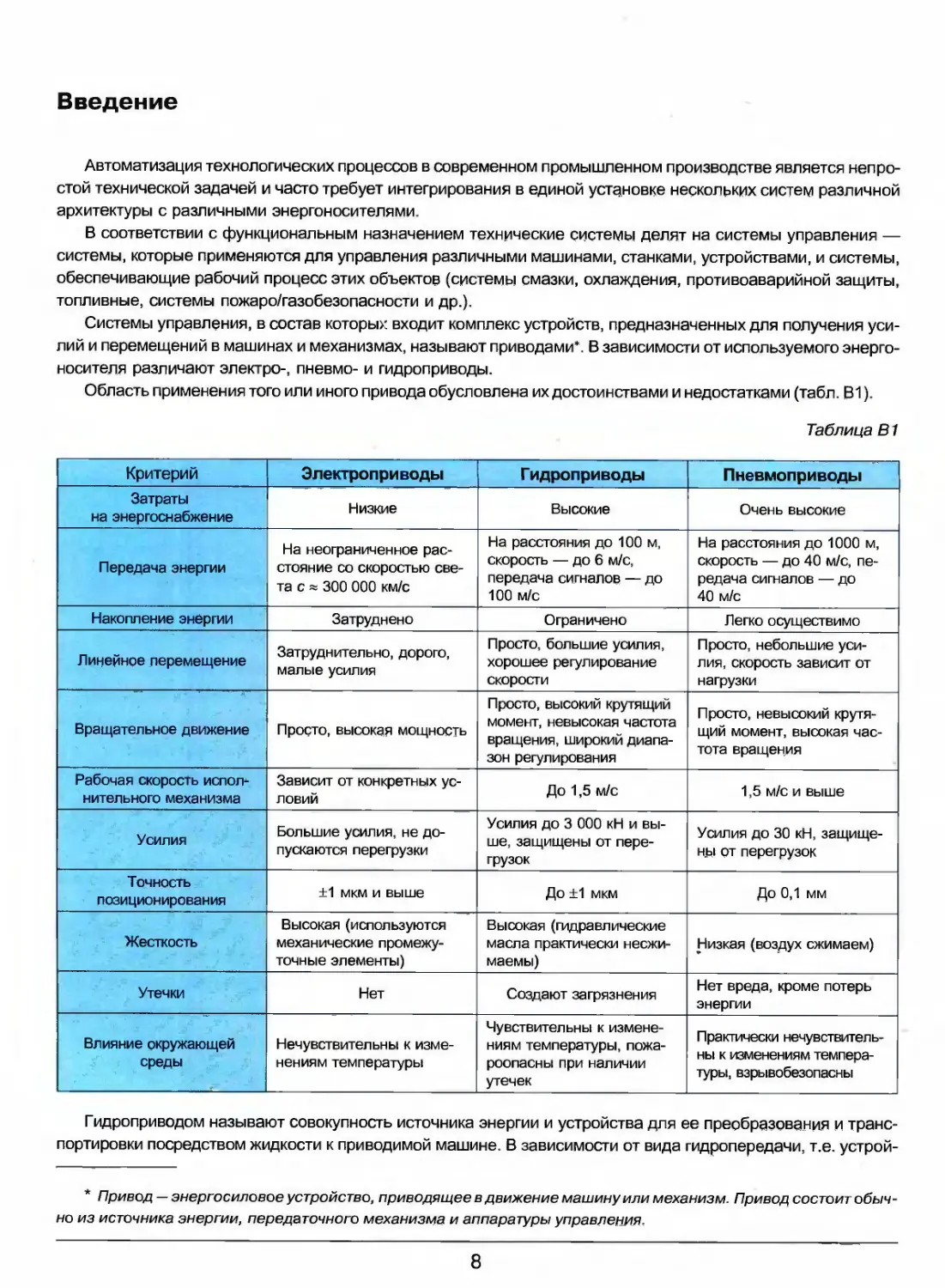
Область применения того или иного привода обусловлена их достоинствами и недостатками (табл. В1).
Таблица В1
Критерий
Затраты
на энергоснабжение
Передача энергии
Накопление энергии
Линейное перемещение
Вращательное движение „
Рабочая скорость исполу
нительного механизма
Усилия
Точность
позиционирования
Жесткость
Утечки
Влияние окружающей
среды
Э лектропри воды
Низкие
На неограниченное
расстояние со скоростью
света с « 300 000 км/с
Затруднено
Затруднительно, дорого,
малые усилия
Просто, высокая мощность
Зависит от конфетных
условий
Большие усилия, не
допускаются перегрузки
+1 мкм и выше
Высокая (используются
механические
промежуточные элементы)
Нет
Нечувствительны к
изменениям температуры
Гидроприводы
Высокие
На расстояния до 100 м,
скорость — до 6 м/с,
передача сигналов — до
100 м/с
Ограничено
Просто, большие усилия,
хорошее регулирование
скорости
Просто, высокий крутящий
момент, невысокая частота
вращения, широкий
диапазон регулирования
До 1,5 м/с
Усилия до 3 000 кН и
выше, защищены от
перегрузок
До ±1 мкм
Высокая (гидравлические
масла практически
несжимаемы)
Создают загрязнения
Чувствительны к
изменениям температуры,
пожароопасны при наличии
утечек
, Пневмоприводы
Очень высокие
На расстояния до 1000 м,
скорость — до 40 м/с,
передача сигналов — до
40 м/с
Легко осуществимо
Просто, небольшие
усилия, скорость зависит от
нагрузки
Просто, невысокий
крутящий момент, высокая
частота вращения
1,5 м/с и выше
Усилия до 30 кН,
защищены от перегрузок
До 0,1 мм
Низкая (воздух сжимаем)
Нет вреда, кроме потерь
энергии
Практически
нечувствительны к изменениям
температуры, взрывобезопасны
Гидроприводом называют совокупность источника энергии и устройства для ее преобразования и
транспортировки посредством жидкости к приводимой машине. В зависимости от вида гидропередачи, т.е. устрой-
* Привод — энергосиловое устройство, приводящее в движение машину или механизм. Привод состоит
обычно из источника энергии, передаточного механизма и аппаратуры управления.
8
Введение
ства, транспортирующего и преобразующего энергию, различают объемный (ранее называемый
гидростатическим), гидродинамический и смешанные приводы.
Объемный гидропривод—это совокупность устройств, предназначенных для преобразования и передачи
энергии посредством рабочей жидкости под давлением, с одним или более объемными гидродвигателями*.
Объемный гидропривод позволяет с высокой точностью поддерживать или изменять скорость машины при
произвольном нагружении, осуществлять слежение — точно воспроизводить заданные режимы
вращательного или возвратно-поступательного движения, усиливая одновременно управляющее воздействие. В
объемном гидравлическом приводе используется энергия практически несжимаемой рабочей жидкости.
Динамический гидропривод (гидродинамическая передача) позволяет осуществлять только
вращательное движение. В качестве источника энергии в них используются лопастные насосы, а в качестве двигателя —
лопастные турбины. Принцип действия динамических гидроприводов основан на гидродинамическом
воздействии потока жидкости на рабочий орган двигателя. Такие приводы применяют в системах управления не
столь широко, как объемные приводы. Это вызвано сложностью реверсирования движения выходных звеньев
гидродинамических двигателей, необходимостью установки дополнительных редукторов для согласования
обычно высоких частот вращения валов двигателей с более низкими скоростями движения управляемых
устройств и другими их конструктивными особенностями.
В данном пособии речь будет идти об объемных гидроприводах, которые в инженерной практике обычно
называют просто гидроприводами.
Ряд существенных преимуществ гидроприводов перед другими типами приводов послужил основанием
для широкого их применения в различных отраслях промышленности. В процессе развития
гидрооборудования сформировались такие крупные традиционные его потребители, как сельскохозяйственное и
строительно-дорожное машиностроение, металлургиеское производство и станкостроение, транспорт и авиастроение
со своими сложившимися конструктивными формами гидрооборудования. В несколько меньших масштабах,
но с большими потенциальными возможностями развивается гидрооборудование горного машиностроения,
особенно угольной промышленности.
Основным достоинством гидроприводов является возможность получения больших усилий и мощностей
при ограниченных размерах силовых исполнительных двигателей, что облегчает компоновку гидроприводов в
механизмах. Благодаря малой инерционности подвижных частей гидроприводы имеют высокое
быстродействие — время их разгона и торможения не превышает обычно нескольких сотых долей секунды. Важным
достоинством гидроприводов является возможность работы в динамических режимах при частых включениях,
остановках, реверсах движения или изменениях скорости.
Гидроприводы при условии хорошей плавности движения обеспечивают широкий диапазон
бесступенчатого регулирования скорости исполнительных двигателей, надежно защищают систему от перегрузки, что
дает возможность механизмам работать по жестким упорам.
Использование гидроприводов в станкостроении способствует существенному упрощению кинематики
станков, снижению их металлоемкости, повышению точности, надежности работы, а также уровня
автоматизации.
В многооперационных станках средства гидроавтоматики используются для обеспечения смены
инструмента, фиксации направляющих, автоматизированной смены заготовок, шпиндельных узлов, для
переключения скоростей и осуществления вспомогательных операций, в системе подач широко применяется следящий
гидропривод.
Гидропривод в наибольшей мере удовлетворяет реализации общих тенденций развития
сельскохозяйственных машин: увеличению числа рабочих органов, взаимодействующих с разными потребителями мощности
при значительном удалении их от двигателя.
В угольной промышленности гидропривод используется в механизмах подачи угольных комбайнов,
механизмах хода проходческих машин, для управления исполнительными органами добычных машин и приводе
другого горношахтного оборудования, а также в гидравлических крепях.
* Гидроустройство, предназначенное для преобразования энергии рабочей среды в механическую энергию в
процессе попеременного заполнения рабочей камеры рабочей средой и вытеснения ее из рабочей камеры.
9
Введение
В металлургическом производстве гидропривод, ране применяемый только во вспомогательных
механизмах (выталкивателях, кантователях, опрокидывателях и т.д.), является главным и единственным типом
приводов механизмов многих металлургических агрегатов, на которых осуществляется технология плавки чугуна,
стали, производство проката.
Наряду с указанными выше преимуществами, гидроприводы имеют и недостатки, которые ограничивают
область их использования. Так при течении минерального масла по трубопроводам и каналам гидросистемы
возникают потери на трение и утечки, снижающие КПД гидропривода и вызывающие нагрев рабочей
жидкости, насосной установки и гидроагрегатов. Надежная работа гидроприводов может быть гарантирована
только при надлежащей фильтрации рабочей жидкости. Необходимость применения фильтров тонкой очистки
повышает стоимость гидроприводов и усложняет их техническое обслуживание.
В некоторых отраслях промышленности по соображениям пожарной безопасности использовать
минеральное масло в гидроприводах невозможно. Применение негорючих рабочих жидкостей удорожает
гидроприводы. Тем не менее при правильных конструировании и грамотной эксплуатации гидроприводов их
недостатки могут быть сведены к минимуму.
Гидравлические системы в современном оборудовании применяются не только для управления
механизмами, но и для обеспечения нормального выполнения основного технологического процесса.
При работе любого оборудования в соприкасающихся и движущихся деталях возникает трение, которое
является причиной износа, т.е. постепенного разрушения поверхности твердого тела под действием сил
трения. Продление срока эксплуатации и повышение КПД работы оборудования достигаются созданием смазоч-
но-охлаждающих технологических сред в зонах контакта трущихся поверхностей узлов и механизмов, а также
в зонах обработки материалов. Эти задачи решаются с помощью гидравлических систем смазки и
охлаждения.
Централизованные системы смазки, задачей которых является своевременная доставка требуемого
количества смазочного материала в зону контакта трущихся поверхностей, не только обеспечивают нормальное
функционирование тяжелонагруженного оборудования, но и существенно повышают эффективность его
работы и снижают эксплуатационные расходы.
Применение систем подачи СОЖ значительно повышает производительность механообработки и
улучшает качество обработанных поверхностей. При использовании СОЖ улучшается износостойкость инструмента,
шероховатость обрабатываемой поверхности, точность обработки и т.д.
Гидроприводы, системы смазки и подачи СОЖ, которыми оснащено современное технологическое
оборудование, являются сложными техническими системами для отладки, технического обслуживания и ремонта
которых, наряду со специалистами по механике и электротехнике (электронике), нужны
специалисты-гидравлики.
10
1. Структура гидроприводов
Простейший гидропривод, как совокупность устройств, предназначенная для передачи механической
энергии и преобразования движения за счет гидростатического напора жидкости, состоит из объемного
насоса (ведущее звено), объемного гидродвигателя (ведомое звено), резервуара для рабочей жидкости и
трубопроводов. Рабочая жидкость (минеральное масло или синтетическая жидкость) засасывается из
резервуара насосом в его рабочие камеры и затем вытеснителями через трубопроводы нагнетается в
рабочие камеры гидродвигателя, вызывая изменение их объема (иногда вместо насоса может использоваться
другой источник гидростатического напора). Выходное звено гидродвигателя, кинематически связанное с
рабочим органом технологической установки (объектом управления), приходит в движение и совершает
полезную работу.
Для того, чтобы стабилизировать или изменять параметры движения гидродвигателя — перемещение,
скорость, ускорение — в приводе применяют устройства, управляющие направлением движения рабочей
жидкости, а также ее энергией.
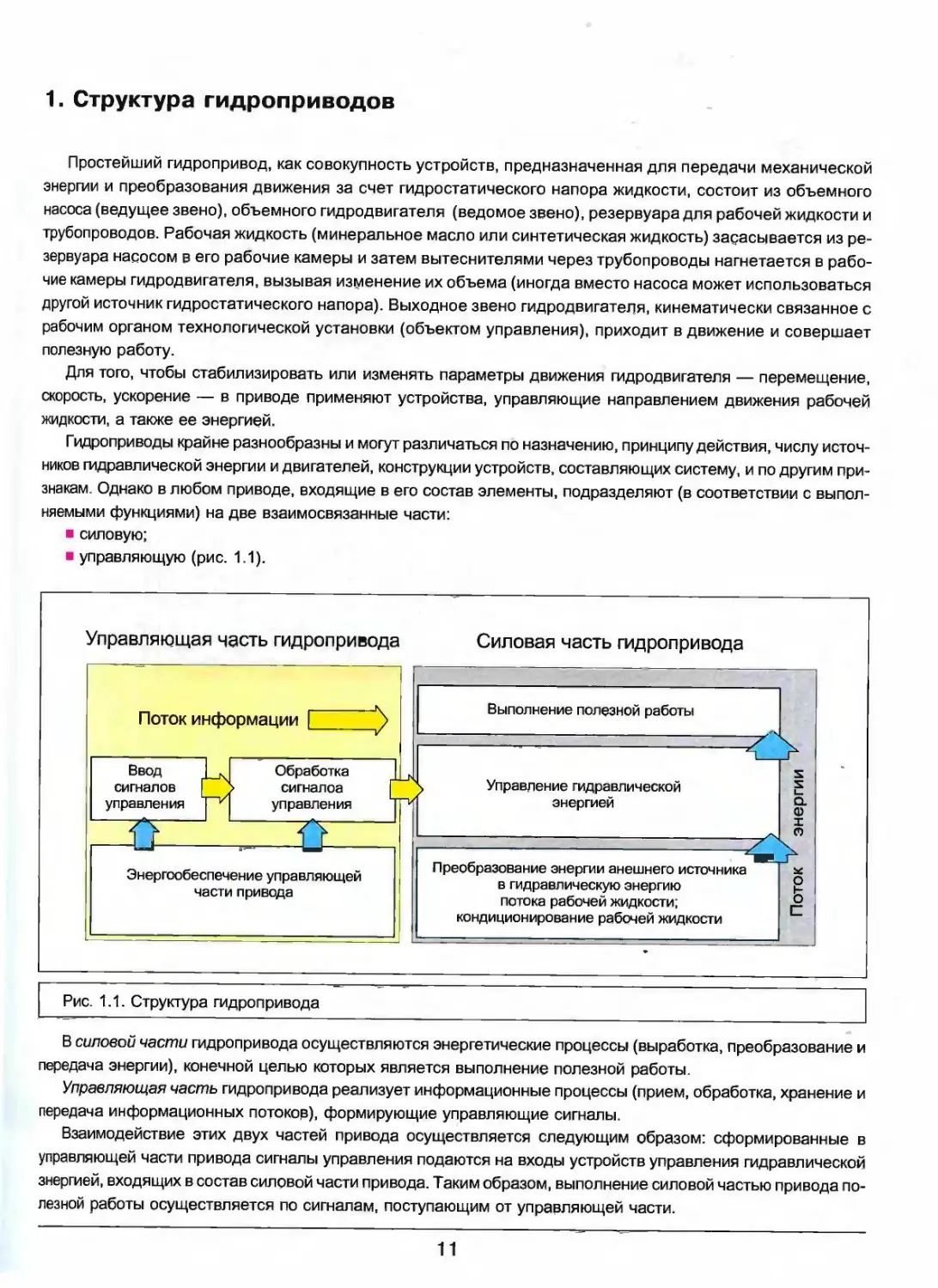
Гидроприводы крайне разнообразны и могут различаться по назначению, принципу действия, числу
источников гидравлической энергии и двигателей, конструкции устройств, составляющих систему, и по другим
признакам. Однако в любом приводе, входящие в его состав элементы, подразделяют (в соответствии с
выполняемыми функциями) на две взаимосвязанные части:
■ силовую;
■ управляющую (рис. 1.1).
Управляющая часть гидропривода
Силовая часть гидропривода
Поток информации
Ввод
сигналов
управления
Обработка
сигналоа
управления
ЗХ
U
Выполнение полезной работы
<.
Энергообеспечение управляющей
части привода
Управление гидравлической
энергией
S
I—
о.
а>
х
Преобразование энергии анешнего источника
в гидравлическую энергию
потока рабочей жидкости;
кондиционирование рабочей жидкости
^>
О
Рис. 1.1. Структура гидропривода
В силовой части гидропривода осуществляются энергетические процессы (выработка, преобразование и
передача энергии), конечной целью которых является выполнение полезной работы.
Управляющая часть гидропривода реализует информационные процессы (прием, обработка, хранение и
передача информационных потоков), формирующие управляющие сигналы.
Взаимодействие этих двух частей привода осуществляется следующим образом: сформированные в
управляющей части привода сигналы управления подаются на входы устройств управления гидравлической
энергией, входящих в состав силовой части привода. Таким образом, выполнение силовой частью привода
полезной работы осуществляется по сигналам, поступающим от управляющей части.
11
1. Структура гидроприводов
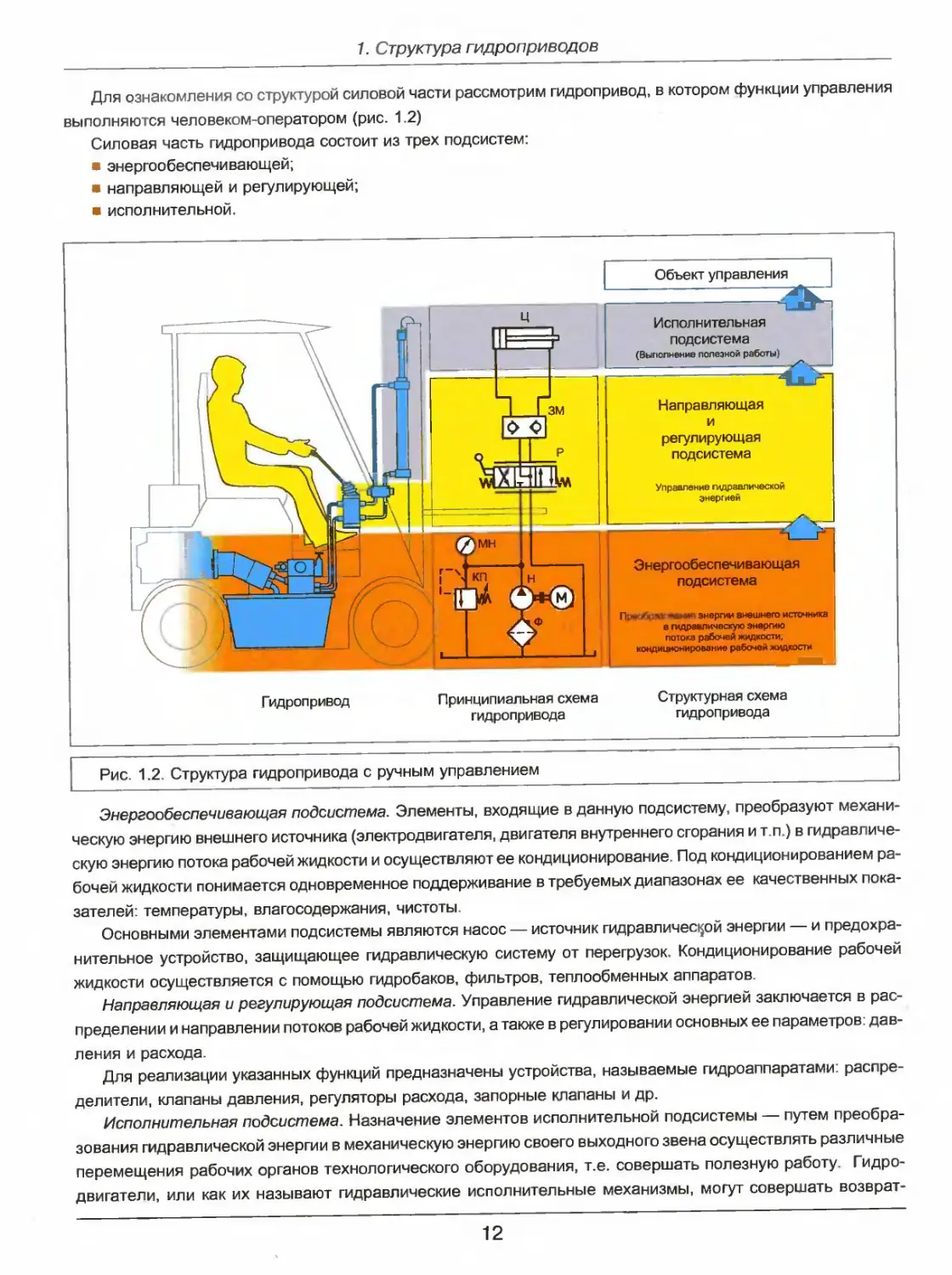
Для ознакомления со структурой силовой части рассмотрим гидропривод, в котором функции управления
выполняются человеком-оператором (рис. 1.2)
Силовая часть гидропривода состоит из трех подсистем:
■ энергообеспечивающей;
■ направляющей и регулирующей;
■ исполнительной.
Объект управления
Исполнительная
подсистема
(Выполнение полезной работы)
•Ч
Направляющая
и
регулирующая
подсистема
Управление гидравлической
энергией
—7
~1_
■X —'
Гидропривод
Принципиальная схема
гидропривода
Энергообеспечивающая
подсистема
■.... .. : энергии внешнего источника
в гидравлическую энергию
потока рабочей жидкости,
кондиционирование рабочей жидкости
Структурная схема
гидропривода
Рис. 1.2. Структура гидропривода с ручным управлением
Энергообеспечивающая подсистема. Элементы, входящие в данную подсистему, преобразуют
механическую энергию внешнего источника (электродвигателя, двигателя внутреннего сгорания и т.п.) в
гидравлическую энергию потока рабочей жидкости и осуществляют ее кондиционирование. Под кондиционированием
рабочей жидкости понимается одновременное поддерживание в требуемых диапазонах ее качественных
показателей: температуры, влагосодержания, чистоты.
Основными элементами подсистемы являются насос — источник гидравлической энергии — и
предохранительное устройство, защищающее гидравлическую систему от перегрузок. Кондиционирование рабочей
жидкости осуществляется с помощью гидробаков, фильтров, теплообменных аппаратов.
Направляющая и регулирующая подсистема. Управление гидравлической энергией заключается в
распределении и направлении потоков рабочей жидкости, а также в регулировании основных ее параметров:
давления и расхода.
Для реализации указанных функций предназначены устройства, называемые гидроаппаратами:
распределители, клапаны давления, регуляторы расхода, запорные клапаны и др.
Исполнительная подсистема. Назначение элементов исполнительной подсистемы — путем
преобразования гидравлической энергии в механическую энергию своего выходного звена осуществлять различные
перемещения рабочих органов технологического оборудования, т.е. совершать полезную работу.
Гидродвигатели, или как их называют гидравлические исполнительные механизмы, могут совершать возврат-
12
1. Структура гидроприводов
но-поступательное движение (гидроцилиндры), вращательное (гидромоторы) и поворотное (поворотные
гид род вигател и).
Следует обратить внимание на то, что принципиальная схема гидропривода (схема соединения
элементов гидропривода) воспроизводит его структурную схему. Она показывает с помощью стандартизованных
символов, называемых условными графическими обозначениями, как соединены между собой отдельные
конструктивные элементы системы. Обычно для большей наглядности ее вычерчивают без учета
действительного пространственного расположения составляющих ее элементов и строят по вертикали, как и
структурные схемы. Направление движения потока гидравлической энергии на схемах силовой части привода
принято снизу вверх.
Условные графические обозначения конструктивных элементов гидропривода следует располагать на
принципиальной схеме в направлении потока энергии:
■ внизу — элементы энергообеспечивающей части или условное обозначение источника энергии;
■ в середине — устройства направляющей и регулирующей подсистемы;
■ вверху — исполнительные механизмы.
Все устройства изображают на принципиальных схемах в исходном положении, т.е. в состоянии, которое
необходимо для запуска системы в работу.
Согласно ГОСТ 2.704-76 (см. приложение П.2.1) на принципиальных гидравлических схемах рядом с
условным графическим обозначением каждого устройства проставляют буквенно-цифровое позиционное
обозначение. По возможности обозначения располагают справа и сверху относительно условного графического
обозначения элемента. Введение в принципиальные гидравлические схемы индексов упрощает работу со
схемами и устанавливает однозначное соответствие между конкретными моделями гидравлических
аппаратов и устройств, перечисленных в спецификации гидравлического оборудования, и местом каждого из них в
данном приводе.
Элементы управления энергией (гидроаппараты), предназначенные для преобразования и передачи
сигналов от операторов или контролирующих какой-либо процесс автоматических устройств к исполнительным
механизмам образуют цепь управления.
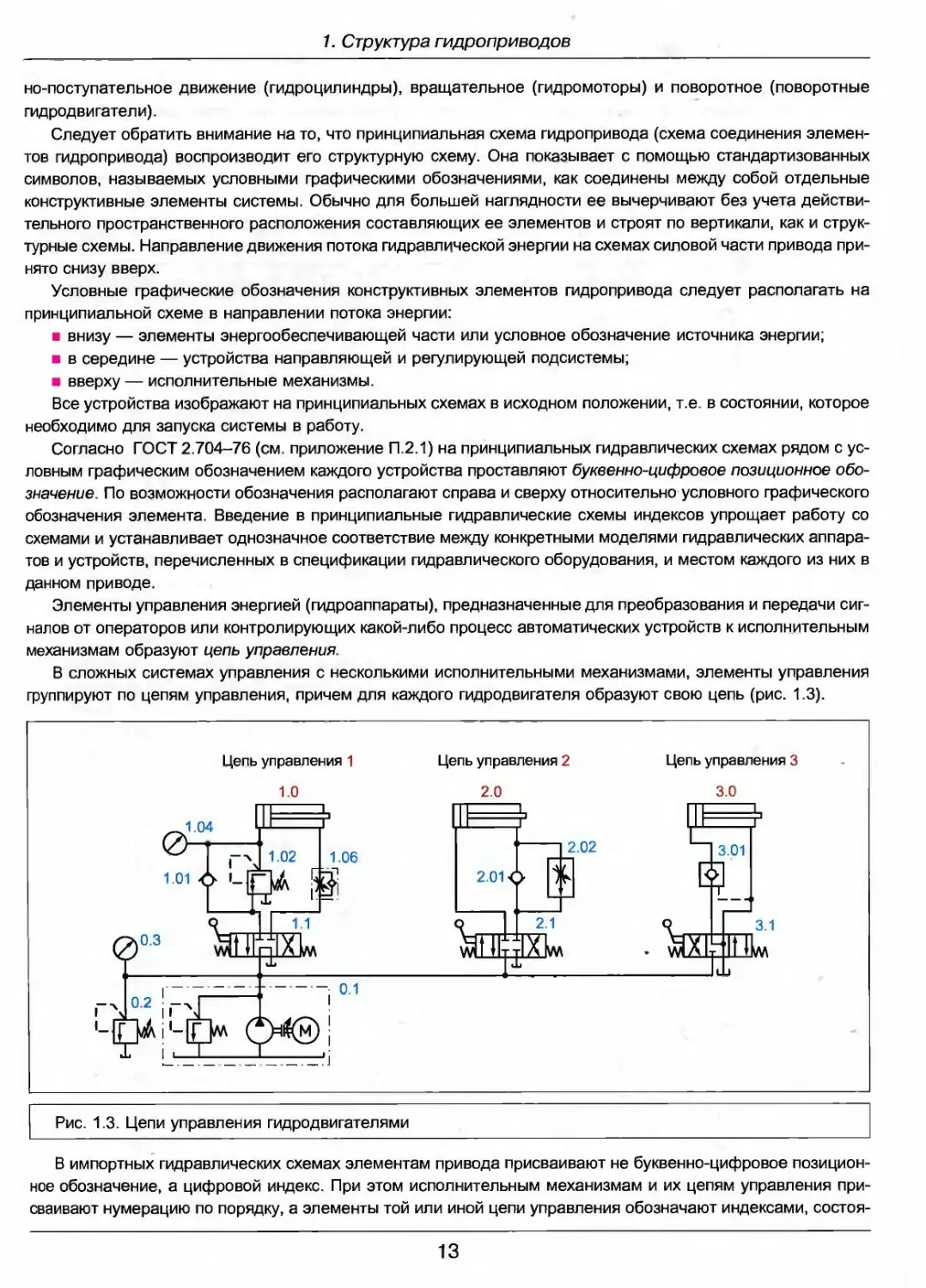
В сложных системах управления с несколькими исполнительными механизмами, элементы управления
группируют по цепям управления, причем для каждого гидродвигателя образуют свою цепь (рис. 1.3).
Цепь управления 1
1.0
0
1.01
1.04
■"Ы
i
1.02
ПЖ Щ
0
0.3
wU_.
1.06
1.1
й
0-2 -х
ш
|!-[Г>л ф<м)
X
Мл
0.1
Цепь управления 2
2.0
2.02
2.01 О
ЯП
2.1
Ё
X
\ЛЛ
Цепь управления 3
3.0
IF
3.1
п
МЛ
Рис. 1.3. Цепи управления гидродвигателями
В импортных гидравлических схемах элементам привода присваивают не буквенно-цифровое
позиционное обозначение, а цифровой индекс. При этом исполнительным механизмам и их цепям управления
присваивают нумерацию по порядку, а элементы той или иной цепи управления обозначают индексами, состоя-
13
1. Структура гидроприводов
щими из порядкового номера цепи и кодового числа. Энергообеспечивающая часть привода не может быть
отнесена к какой-либо цепи управления, так как она питает одновременно несколько цепей управления. Поэтому
ей всегда присваивают на схемах порядковый номер «О».
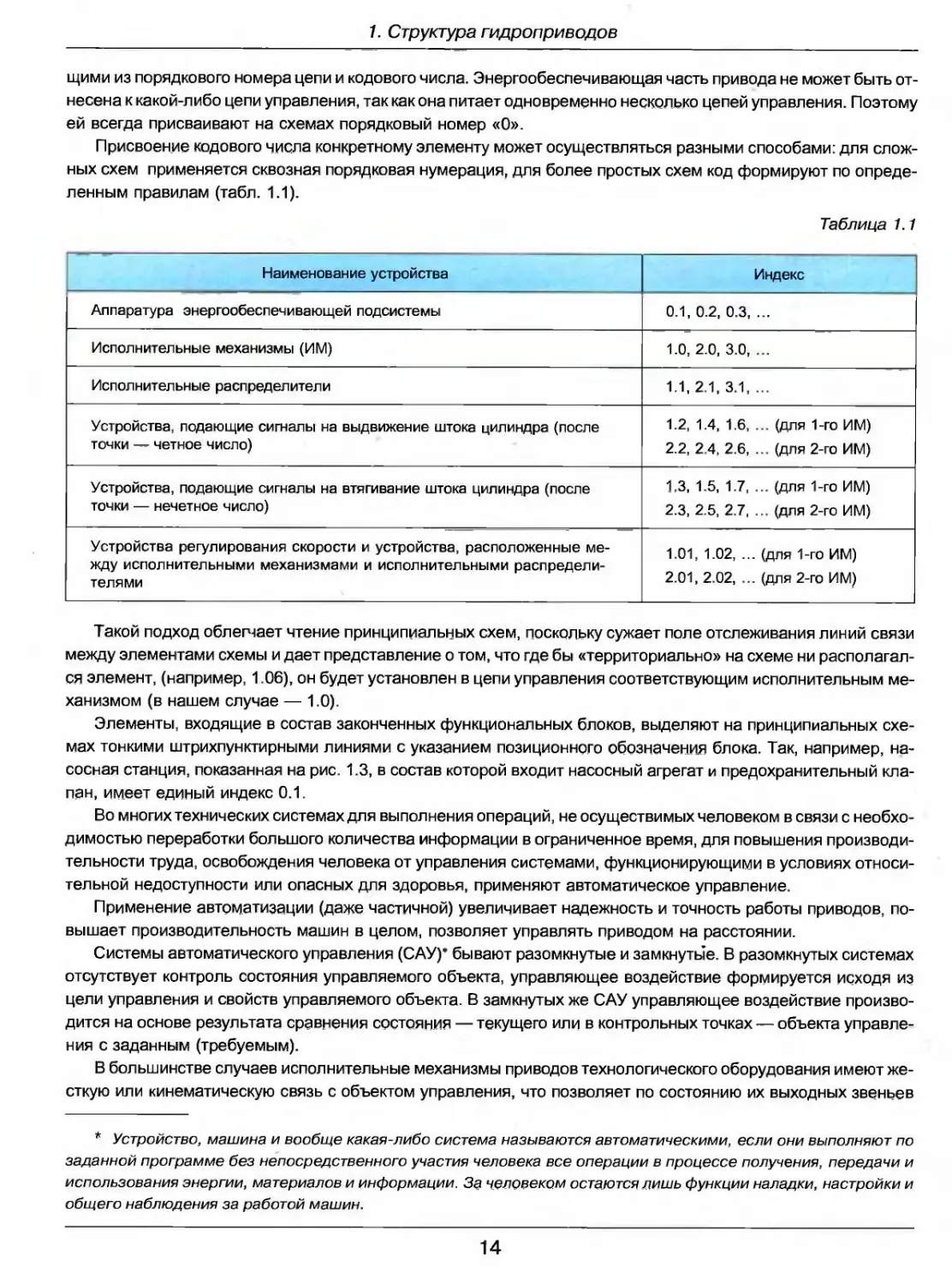
Присвоение кодового числа конкретному элементу может осуществляться разными способами: для
сложных схем применяется сквозная порядковая нумерация, для более простых схем код формируют по
определенным правилам (табл. 1.1).
Таблица 1.1
Наименование устройства
Аппаратура энергообеспечивающей подсистемы
Исполнительные механизмы (ИМ)
Исполнительные распределители
Устройства, подающие сигналы на выдвижение штока цилиндра (после
точки — четное число)
Устройства, подающие сигналы на втягивание штока цилиндра (после
точки — нечетное число)
Устройства регулирования скорости и устройства, расположенные
между исполнительными механизмами и исполнительными
распределителями
Индекс
0.1, 0.2, 0.3, ...
1.0,2.0,3.0, ...
1.1,2.1, 3.1, ...
1.2, 1.4, 1.6, ... (для 1-го ИМ)
2.2, 2.4, 2.6, ... (для 2-го ИМ)
1,3, 1.5, 1.7, ... (для 1-го ИМ)
2.3,2.5,2.7, ... (для 2-го ИМ)
1.01, 1.02, ... (для 1-го ИМ)
2.01,2.02, ... (для 2-го ИМ)
Такой подход облегчает чтение принципиальных схем, поскольку сужает поле отслеживания линий связи
между элементами схемы и дает представление о том, что где бы «территориально» на схеме ни
располагался элемент, (например, 1.06), он будет установлен в цепи управления соответствующим исполнительным
механизмом (в нашем случае — 1.0).
Элементы, входящие в состав законченных функциональных блоков, выделяют на принципиальных
схемах тонкими штрихпунктирными линиями с указанием позиционного обозначения блока. Так, например,
насосная станция, показанная на рис. 1.3, в состав которой входит насосный агрегат и предохранительный
клапан, имеет единый индекс 0.1.
Во многих технических системах для выполнения операций, не осуществимых человеком в связи с
необходимостью переработки большого количества информации в ограниченное время, для повышения
производительности труда, освобождения человека от управления системами, функционирующими в условиях
относительной недоступности или опасных для здоровья, применяют автоматическое управление.
Применение автоматизации (даже частичной) увеличивает надежность и точность работы приводов,
повышает производительность машин в целом, позволяет управлять приводом на расстоянии.
Системы автоматического управления (САУ)* бывают разомкнутые и замкнутые. В разомкнутых системах
отсутствует контроль состояния управляемого объекта, управляющее воздействие формируется исходя из
цели управления и свойств управляемого объекта. В замкнутых же САУ управляющее воздействие
производится на основе результата сравнения состояния — текущего или в контрольных точках — объекта
управления с заданным (требуемым).
В большинстве случаев исполнительные механизмы приводов технологического оборудования имеют
жесткую или кинематическую связь с объектом управления, что позволяет по состоянию их выходных звеньев
* Устройство, машина и вообще какая-либо система называются автоматическими, если они выполняют по
заданной программе без непосредственного участия человека все операции в процессе получения, передачи и
использования энергии, материалов и информации. За человеком остаются лишь функции наладки, настройки и
общего наблюдения за работой машин.
14
1. Структура гидроприводов
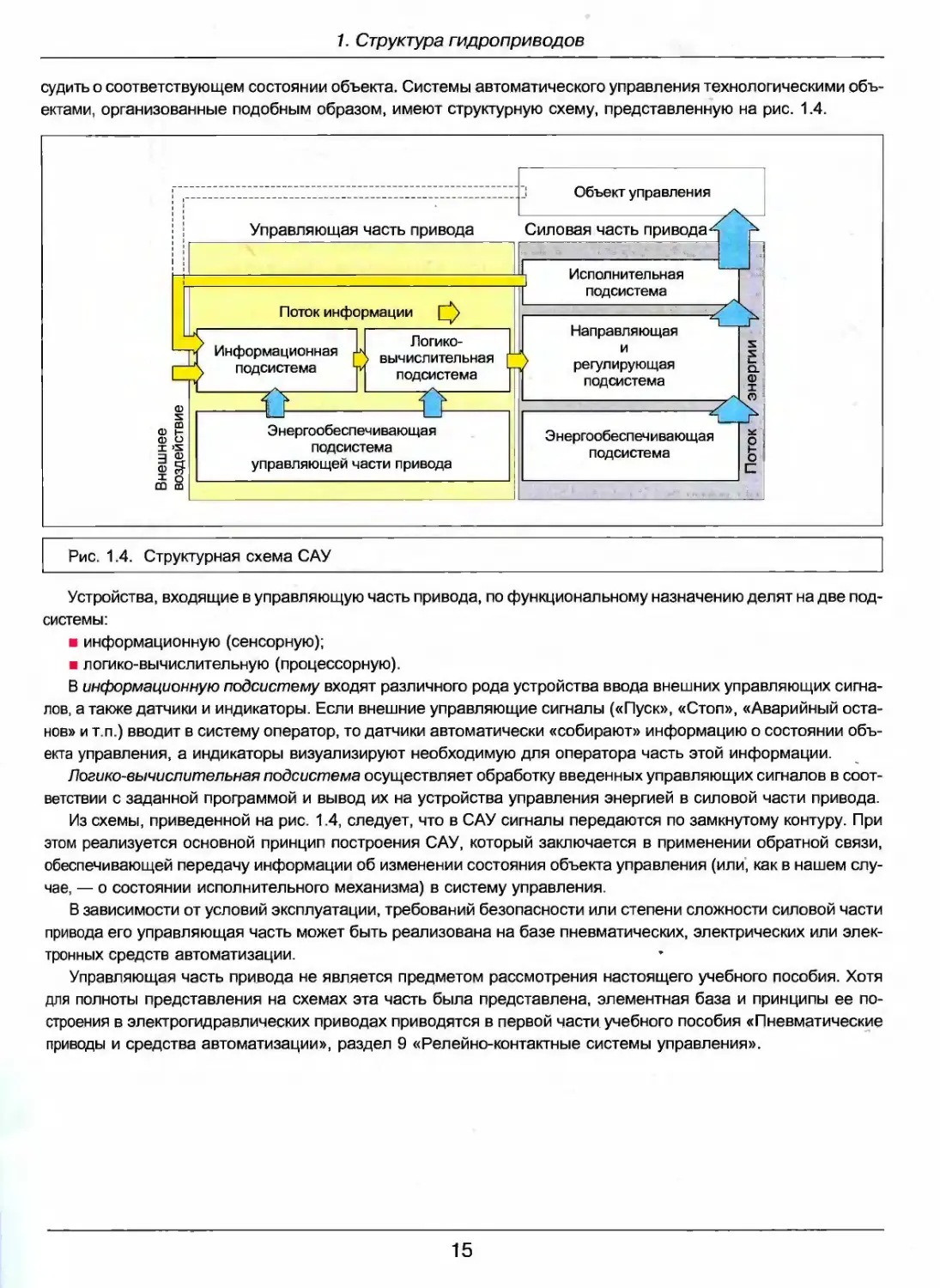
судить о соответствующем состоянии объекта. Системы автоматического управления технологическими
объектами, организованные подобным образом, имеют структурную схему, представленную на рис. 1.4.
Объект управления
Управляющая часть привода
Силовая часть привода
ч
Поток информации [~>
Информационная
подсистема
(D .
ф О
I >S
q Ф
19
1 о
со ш
Логико-
вычислительная
подсистема
Исполнительная
подсистема
и
Энергообеспечивающая
подсистема
управляющей части привода
Направляющая
и
регулирующая
подсистема
ч:
<_
03 I
>
Энергообеспечивающая
подсистема
Рис. 1.4. Структурная схема САУ
Устройства, входящие в управляющую часть привода, по функциональному назначению делят на две
подсистемы:
■ информационную (сенсорную);
■ логико-вычислительную (процессорную).
В информационную подсистему входят различного рода устройства ввода внешних управляющих
сигналов, а также датчики и индикаторы. Если внешние управляющие сигналы («Пуск», «Стоп», «Аварийный
останов» и т.п.) вводит в систему оператор, то датчики автоматически «собирают» информацию о состоянии
объекта управления, а индикаторы визуализируют необходимую для оператора часть этой информации.
Логико-вычислительная подсистема осуществляет обработку введенных управляющих сигналов в
соответствии с заданной программой и вывод их на устройства управления энергией в силовой части привода.
Из схемы, приведенной на рис. 1.4, следует, что в САУ сигналы передаются по замкнутому контуру. При
этом реализуется основной принцип построения САУ, который заключается в применении обратной связи,
обеспечивающей передачу информации об изменении состояния объекта управления (или, как в нашем
случае, — о состоянии исполнительного механизма) в систему управления.
В зависимости от условий эксплуатации, требований безопасности или степени сложности силовой части
привода его управляющая часть может быть реализована на базе пневматических, электрических или
электронных средств автоматизации.
Управляющая часть привода не является предметом рассмотрения настоящего учебного пособия. Хотя
для полноты представления на схемах эта часть была представлена, элементная база и принципы ее
построения в электрогидравлических приводах приводятся в первой части учебного пособия «Пневматические
приводы и средства автоматизации», раздел 9 «Релейно-контактные системы управления».
15
2. Физические основы функционирования гидросистем
В гидроприводах и системах применяются различные рабочие жидкости, физические свойства которых
удовлетворяют условиям эксплуатации. Несмотря на существенные отличия свойств, процессы и явления,
происходящие в различных жидкостях в состоянии равновесия или движения, подчиняются единым
физическим законам.
Раздел механики, в котором изучают равновесие и движение жидкости, а также силовое взаимодействие
между жидкостью и обтекаемыми ею телами или ограничивающими ее поверхностями, называют
гидромеханикой.
Науку о законах равновесия и движения жидкостей и о способах приложения этих законов к решению
конкретных технических задач называют гидравликой. В гидравлике рассматривают, главным образом,
потоки жидкости, ограниченные и направленные твердыми стенками, т.е, течения в открытых и закрытых
каналах — в руслах рек, в трубопроводах, в элементах гидромашин и других устройствах, внутри которых
протекает жидкость*.
При этом к понятию «жидкость» относят все тела, для которых свойственна текучесть, т.е. способность
сильно изменять свою форму под действием сколь угодно малых сил. Таким образом, под термином
«жидкость» понимают как обычные жидкости, называемые капельными, так и газы.
Для капельных жидкостей характерным является то, что они, будучи в малом количестве, под действием
сил поверхностного натяжения принимают сферическую форму, а в большом количестве — обычно образуют
свободную поверхность раздела с газом. Важной особенностью капельных жидкостей является и то, что они
ничтожно мало изменяют свой объем при изменении давления, поэтому их обычно считают несжимаемыми.
Газы, наоборот, могут значительно уменьшаться в объеме под действием давления и неограниченно
расширяться при его отсутствии, т.е. они обладают большой сжимаемостью. В дальнейшем под термином
«жидкость» будем понимать именно капельную жидкость.
В начале своего развития гидравлика представляла собой теоретическую науку — математическую
механику жидкости или гидромеханику. Используя сложный математический аппарат и принимая некоторые
допущения в отношении физических свойств жидкости, эта наука рассматривала движение жидкости по
упрощенным схемам. Но методы математической гидромеханики не позволили решить целый ряд практических задач.
В связи с этим стала развиваться практическая наука — техническая механика жидкости, решающая
инженерные задачи методом упрощения гидравлических явлений, но с введением в теоретические уравнения
поправочных коэффициентов, полученных в результате эксперимента.
В современной гидравлике для достоверного математического описания исследуемых явлений
используют как чисто теоретические методы, основанные на применении законов механики, так и зависимости,
полученные экспериментальным путем. Поэтому различие в методах этих двух ветвей одной и той же науки
постепенно исчезает. Современная гидравлика представляет собой самостоятельную, сформировавшуюся
отрасль знаний, находящую применение в различных областях техники.
2.1. Силы, действующие в жидкости. Давление
Вследствие текучести (подвижности частиц) в жидкости не действуют сосредоточенные силы, а
только непрерывно распределенные по ее объему или поверхности. В связи с этим силы, действующие на
объем жидкости и являющиеся по отношению к ней внешними, разделяют на объемные (массовые) и
поверхностные.
К объемным силам относятся силы тяжести и силы инерции, а к поверхностным — силы, обусловленные
воздействием соприкасающихся с жидкостью тел (твердых или газообразных) или же соседних объемов
жидкости,
* Задачи, связанные с внешним обтеканием тел сплошной средой, которое имеет место при движении
твердого тела в жидкости или газе (воздухе), рассматривают в аэрогидромеханике.
16
2.1. Силы, действующие в жидкости. Давление
Далее более подробно остановимся на рассмотрении поверхностных сил, поскольку, согласно третьему
закону Ньютона, жидкость действует на соприкасающиеся с нею тела с такими же силам.и, но в
противоположном направлении.
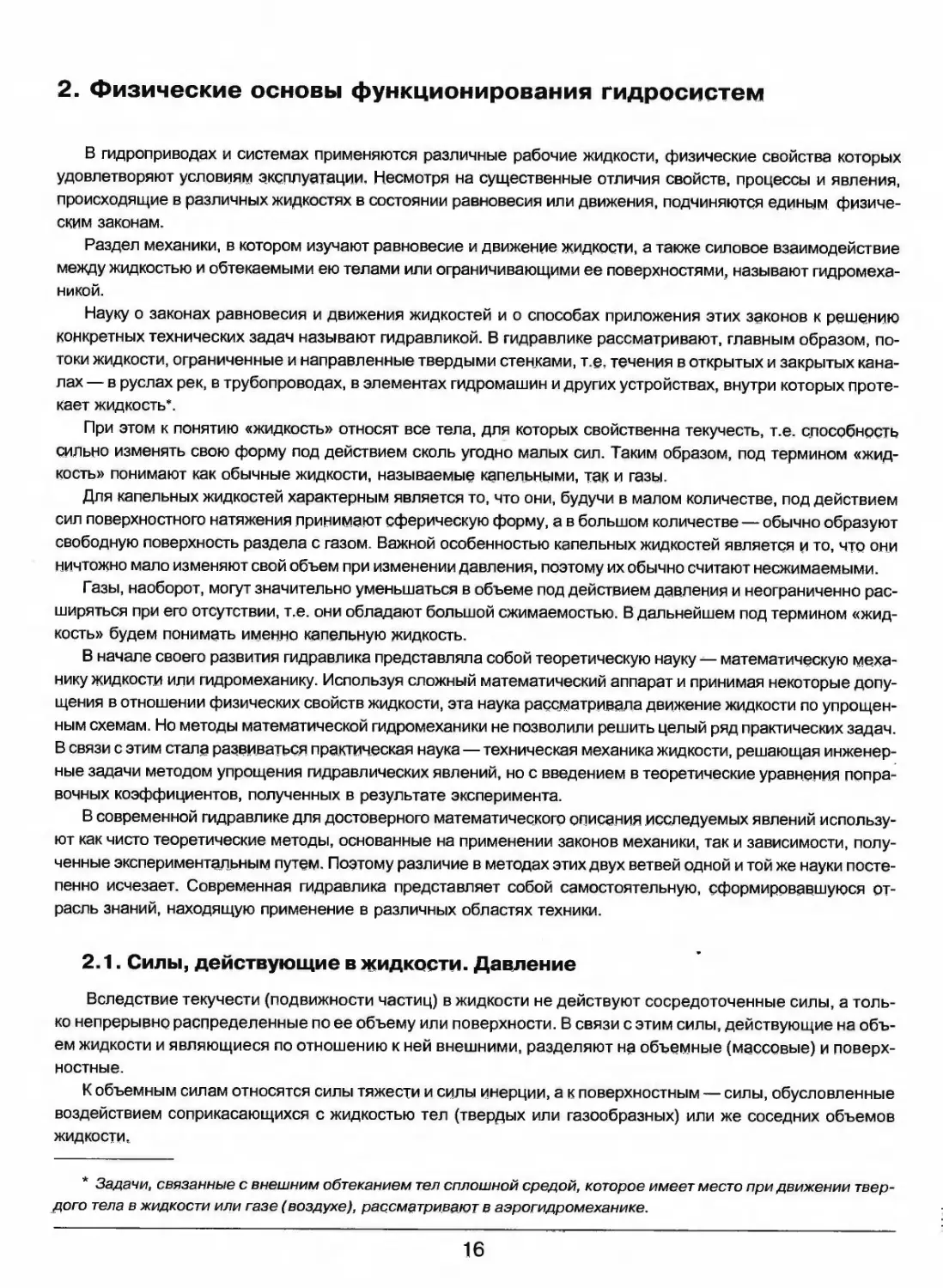
В общем случае поверхностная сила R, действующая на площадке А, направлена под некоторым углом к
ней, и ее можно разложить на нормальную Fи тангенциальную /доставляющие (рис. 2.1). Первая называется
силой давления, а вторая — силой трения.
Т
1=т
F
А=Р
Рис. 2.1. Разложение поверхностной силы на две составляющие
Массовые и поверхностные силы в гидромеханике рассматривают в виде единичных сил, отнесенных к
единице массы и единице площади соответственно.
Таким образом, единичная поверхностная сила, называемая напряжением поверхностной силы,
раскладывается на нормальное р и касательное напряжения /.
Нормальное напряжение, т.е. напряжение силы давления, называется гидромеханическим давлением,
или просто давлением.
Давление. Давление является одним из важнейших физических параметров, используемым, как в
расчетных целях, например для определения расхода, количества энергии жидкости, так и для контроля и
прогнозирования безопасных и эффективных гидравлических режимов работы элементов гидросистем.
Итак, давлением р называют отношение абсолютной величины нормального, т.е. действующего
перпендикулярно к поверхности тела, вектора силы F к площади этой поверхности А:
<
F
Р=А-
Поскольку в международной системе единиц СИ (см. приложение П1.1) единицей площади является м2, а
единицей силы — Н (ньютон), то единицей измерения давления будет Н/м2. Эта единица носит название
Паскаль и обозначается Па:
1 Па = 1 Н/м2.
Давление измеряют в различных единицах (см. приложение П1.2), однако следует применять единицу
измерения паскаль [Па], а также производные от нее, такие как килопаскаль [кПа = 103 Па], мегапаскаль [МПа =
106 Па] и т.п.; в виде исключения используют бар [бар]:
1 бар = 10е Па =-102 кПа = 0,1 МПа.
На практике давление могут измерять относительно двух различных уровней (рис. 2,2):
■ уровня абсолютного вакуума, или абсолютного нуля давления ^= идеализированного состояния среды в
замкнутом пространстве, из которого удалены все молекулы и атомы вещества среды;
■ уровня атмосферного, или барометрического, давления (ГОСТ 8.271-77).
Атмосферным давлением называют давление атмосферного воздуха на находящиеся в нем предметы и
на земную поверхность и обозначают ратм. В каждой точке атмосферы атмосферное давление определяется
весом вышележащего столба воздуха; с высотой его значение уменьшается. Атмосферное давление
меняется в зависимости от погодных условий и географического положения местности; на уровне моря его значение
17
2. Физические основы функционирования гидросистем
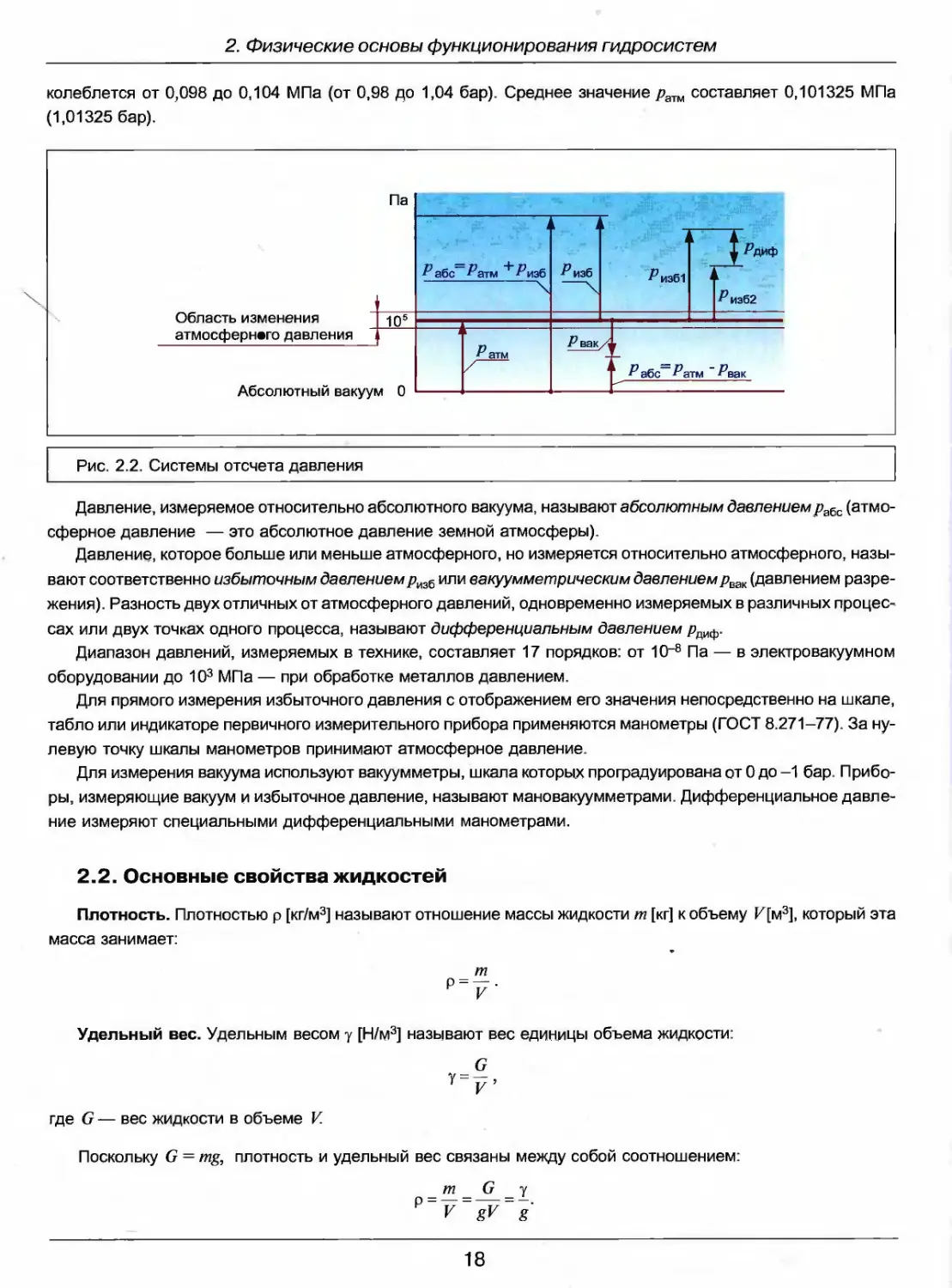
колеблется от 0,098 до 0,104 МПа (от 0,98 до 1,04 бар). Среднее значение ра1М составляет 0,101325 МПа
(1,01325 бар).
\
%
Па
ь_
Область изменения
атмосферного давления
106
Абсолютный вакуум 0
—
м 1
"абс-"атм изб
\ —\
1 1
" атм
/
i
i
• ^изб1
1
,, Рруф
\Риз52
Рвак/у,
п Рабс=Ратм
~ Рвак
Рис. 2.2. Системы отсчета давления
Давление, измеряемое относительно абсолютного вакуума, называют абсолютным давлениемра6с
(атмосферное давление — это абсолютное давление земной атмосферы).
Давление, которое больше или меньше атмосферного, но измеряется относительно атмосферного,
называют соответственно избыточным давлением рт6 или вакуумметрическим давлениемрвак (давлением
разрежения). Разность двух отличных от атмосферного давлений, одновременно измеряемых в различных
процессах или двух точках одного процесса, называют дифференциальным давлением ртф.
Диапазон давлений, измеряемых в технике, составляет 17 порядков: от 10-8 Па — в электровакуумном
оборудовании до 103 МПа — при обработке металлов давлением.
Для прямого измерения избыточного давления с отображением его значения непосредственно на шкале,
табло или индикаторе первичного измерительного прибора применяются манометры (ГОСТ 8.271-77). За
нулевую точку шкалы манометров принимают атмосферное давление.
Для измерения вакуума используют вакуумметры, шкала которых проградуирована от 0 до -1 бар.
Приборы, измеряющие вакуум и избыточное давление, называют мановакуумметрами. Дифференциальное
давление измеряют специальными дифференциальными манометрами.
2.2. Основные свойства жидкостей
Плотность. Плотностью р [кг/м3] называют отношение массы жидкости т [кг] к объему V[m3], который эта
масса занимает:
т
Р = У
Удельный вес. Удельным весом у [Н/м3] называют вес единицы объема жидкости:
G
где G — вес жидкости в объеме V.
Поскольку G = mg, плотность и удельный вес связаны между собой соотношением:
_ т _ G у
18
2.2. Основные свойства жидкостей
Сжимаемость. Свойство жидкости изменять объем под действием давления называют сжимаемостью.
Сжимаемость характеризуется коэффициентом объемного сжатия рр [Па -1], который представляет собой
относительное изменение объема, приходящееся на единицу давления:
Р,
1 AV
ЛрК,'
где И, — начальный объем, м3;
Д V— изменение объема, м3;
Ар — изменение давления, Па.
Величина, обратная коэффициенту рр, носит название объемного модуля упругости (модуля
сжимаемости) Е[Г\а].
Для капельных жидкостей модуль £ незначительно уменьшается с увеличением температуры и
возрастает с повышением давления. Для воды он составляет при атмосферном давлении приблизительно 2 000 МПа, для
минеральных масел — 1 400... 1 700 МПа. Следовательно, при повышении давления на 0,1 МПа, объемы этих
жидкостей уменьшатся всего на 1/20 000 и на 1/12 000 части соответственно, что дает основание считать
капельные жидкости несжимаемыми, т.е. считать плотность жидкостей независимой от давления.
Температурное расширение. Температурное расширение характеризуется коэффициентом объемного
расширения рг [К ~1], который представляет собой относительное изменение объема при изменении
температуры Г на 1 К при постоянном давлении:
1 AV
Коэффициент р7 воды, находящейся под давлением 0,1 МПа, возрастает от 14-10-6 до 700-10~6 с
увеличением температуры от 0 до 100 °С. Для минеральных масел в диапазоне давлений от 0 до 15 МПа рг можно в
среднем принимать равным 8-10-4.
При обычных гидравлических расчетах температурное расширение жидкостей, как правило, не
учитывают.
Вязкость. Свойство жидкостей оказывать сопротивление сдвигу (скольжению) слоев жидкости называют
вязкостью. Вязкость — свойство противоположное текучести (степени подвижности частиц жидкости); более
вязкие жидкости менее текучие и наоборот.
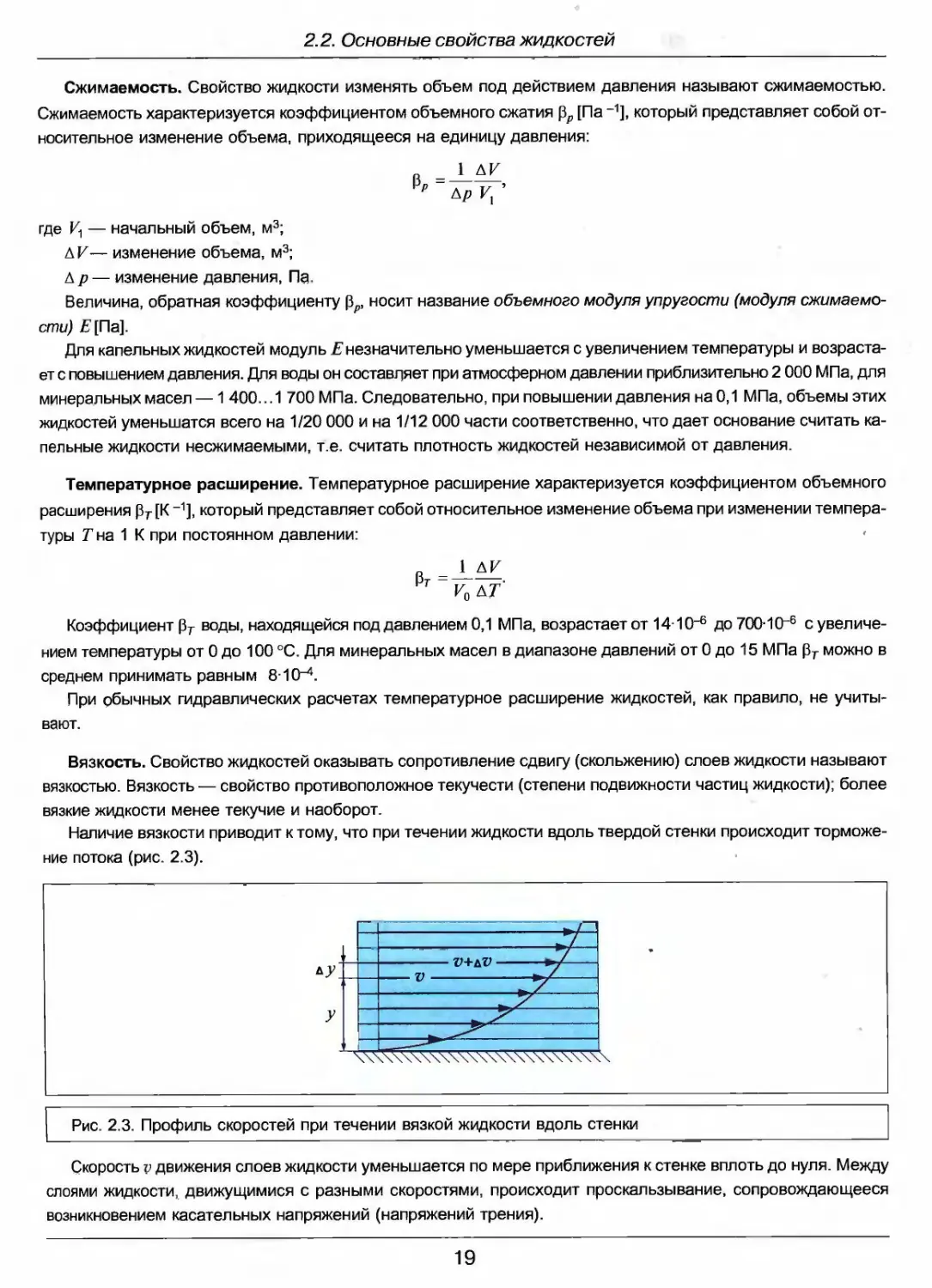
Наличие вязкости приводит к тому, что при течении жидкости вдоль твердой стенки происходит
торможение потока (рис. 2.3).
Рг
У
'
1
„ >
„ >
-■*"
4444\\\\44444444\4\44\444V
X
Рис. 2.3. Профиль скоростей при течении вязкой жидкости вдоль стенки
Скорость v движения слоев жидкости уменьшается по мере приближения к стенке вплоть до нуля. Между
слоями жидкости, движущимися с разными скоростями, происходит проскальзывание, сопровождающееся
возникновением касательных напряжений (напряжений трения).
19
2. Физические основы функционирования гидросистем
Величина касательных напряжений т [Па] зависит от рода жидкости и характера ее течения, и при
слоистом течении (рис. 2.3) определяется следующим соотношением:
Av
Ау
где ц — коэффициент пропорциональности, называемый коэффициентом динамической вязкости;
Av — приращение скорости, м/с;
А у — приращение координаты, м.
Помимо коэффициента динамической вязкости ц вязкость может быть охарактеризована и
коэффициентом кинематической вязкости v:
v = —.
Р
Единицей измерения коэффициента динамической вязкости ц, является паскаль-секунда [Пас].
Используется также единица измерения пуаз [П] системы единиц СГС*: 1 П = 0,1 Пас.
Единицей коэффициента кинематической вязкости v служит м2/с; применяют также единицу СГС стоке
[Ст]: 1 Ст = 1 см2/с = 1(Н м2/с.
Сотая доля стокса называется сантистоксом (сСт).
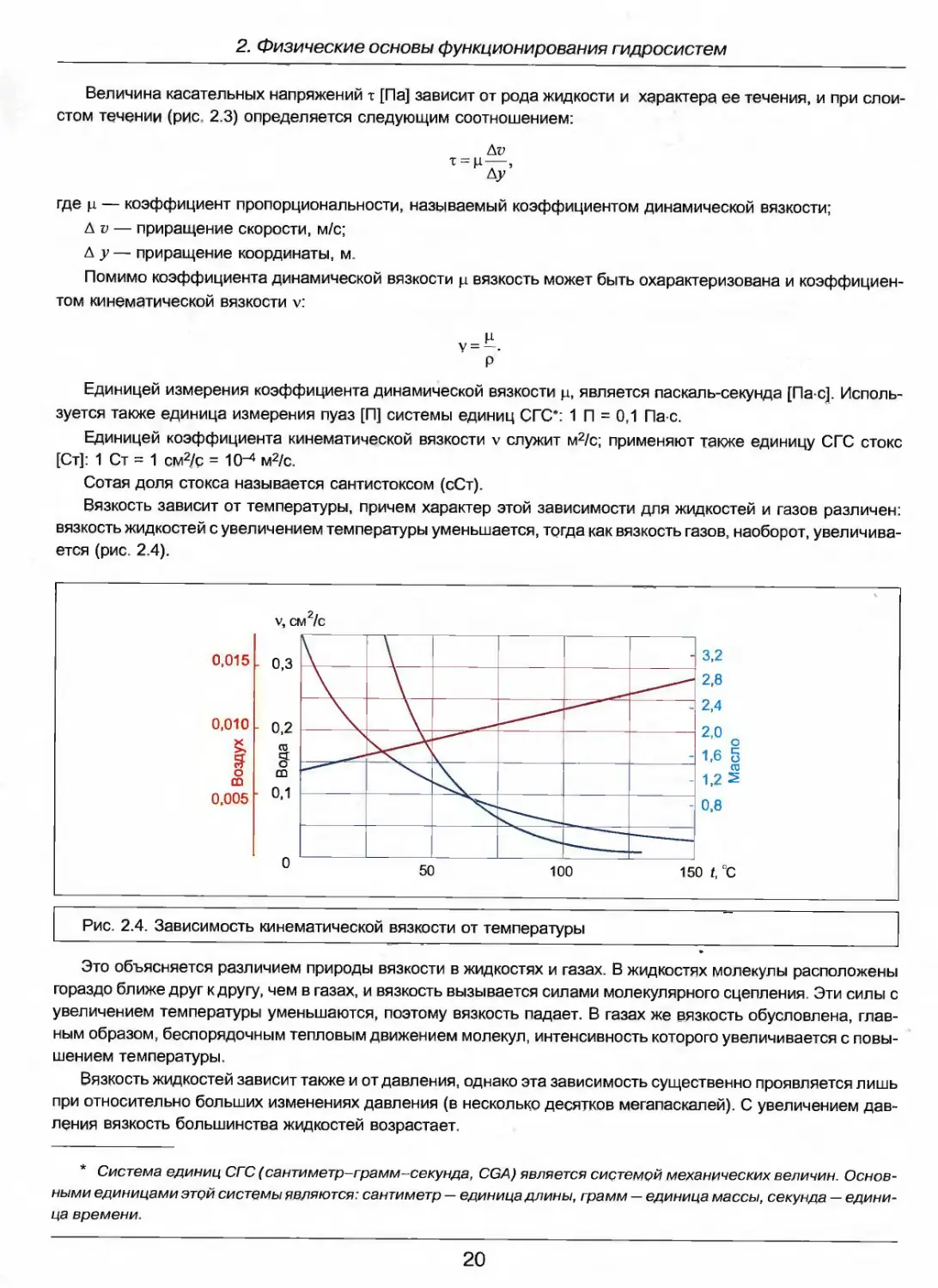
Вязкость зависит от температуры, причем характер этой зависимости для жидкостей и газов различен:
вязкость жидкостей с увеличением температуры уменьшается, тогда как вязкость газов, наоборот,
увеличивается (рис. 2.4).
3,2
2,8
2,4
2,0
о
1,6 5
го
1,2 2
0,8
ГС
Рис. 2.4. Зависимость кинематической вязкости от температуры
Это объясняется различием природы вязкости в жидкостях и газах. В жидкостях молекулы расположены
гораздо ближе друг к другу, чем в газах, и вязкость вызывается силами молекулярного сцепления. Эти силы с
увеличением температуры уменьшаются, поэтому вязкость падает. В газах же вязкость обусловлена,
главным образом, беспорядочным тепловым движением молекул, интенсивность которого увеличивается с повы- *
шением температуры.
Вязкость жидкостей зависит также и от давления, однако эта зависимость существенно проявляется лишь
при относительно больших изменениях давления (в несколько десятков мегапаскалей). С увеличением
давления вязкость большинства жидкостей возрастает.
* Система единиц СГС (сантиметр-грамм-секунда, CGA) является системой механических величин.
Основными единицами этой системы являются: сантиметр — единица длины, грамм — единица массы, секунда —
единица времени.
v, см /с
0,015
0,010
Я
о
со
0.005
0,3
0,2
го
о
со
0,1
-
~
_
-
-
50
100
15
20
2.2. Основные свойства жидкостей
Вязкость жидкостей измеряют при помощи вискозиметров. Наиболее распространенным является
вискозиметр Энглера, который представляет собой сосуд диаметром 106 мм, с короткой трубкой диаметром 2,8 мм,
встроенной в дно. Время t истечения 200 см3 испытуемой жидкости из вискозиметра через эту трубку под
действием силы тяжести, деленное на время /вод истечения того же объема дистиллированной воды при 20 °С,
выражает вязкость в условных единицах — в градусах Энглера:
\°Е = —,
'вод
где/вод = 51,6с.
Методов точного перевода условных единиц вязкости в абсолютные не существует, пересчет
производится по эмпирическим формулам и таблицам.
Так пересчет градусов Энглера в стоксы для применяемых в гидросистемах минеральных масел
осуществляют по формуле
v = 0,073°*-».
°Е
Пересчет градусов Энглера в абсолютные единицы вязкости для распространенных в гидросистемах
жидкостей может быть проведен и по упрощенной формуле:
ц = 0,00065°£".
Испаряемость. Испаряемость свойственна всем капельным жидкостям, однако ее интенсивность зависит
от свойств конкретной жидкости, а также условий, в которых она находится. Одним из показателей,
характеризующих испаряемость жидкости, является температура ее кипения при нормальном атмосферном
давлении — чем выше температура кипения, тем меньше испаряемость жидкости.
В гидросистемах; жидкости обычно находятся под избыточным давлением, поэтому испаряемость
характеризуют давлением насыщенных паров, т,е. давлением, при котором данная жидкость, имеющая некую
температуру, закипает.
Поверхностное натяжение. На поверхности раздела жидкости и газа действуют силы поверхностного
натяжения, стремящиеся придать жидкости сферическую форму и вызывающие некоторое дополнительное
давление. Однако это давление сказывается лишь при малых объемах жидкости.
Растворимость газов в жидкостях. Все жидкости обладают способностью растворять газы. Количество
растворенного газа, например воздуха, в единице объема жидкости увеличивается с увеличением давления и
температуры.
При понижении давления или температуры жидкости, газ, находившийся в ней в дисперсном состоянии,
начинает бурно выделяться в виде пузырьков, Выделившиеся пузырьки образуют механическую смесь газа с
жидкостью, которая отрицательно сказывается на работе гидросистем вследствие увеличения сжимаемости
рабочего тела.
На время растворения газов в жидкости влияет величина поверхности соприкосновения этих двух сред.
Так при вспенивании жидкости величина этой поверхности сильно увеличивается и время насыщения
жидкости газом может уменьшиться до нескольких минут вместо нескольких часов, как это наблюдается в жидкостях
со спокойной поверхностью.
Наличие растворенного в жидкости газа влияет нэ ее вязкость — чем больше в жидкости растворенного
газа, тем меньше ее вязкость.
Образование пены. При эксплуатации гидросистем может образоваться пена, которая состоит из
пузырьков воздуха различного размера. Пена понижает смазывающую способность масла, а также вызывает
коррозию деталей гидравлических агрегатов и окисление масла. Устойчивая пена превращается со временем
в вязкие включения, которые откладываются на внутренних поверхностях гидроагрегатов и могут нарушить их
нормальную работу.
21
2. Физические основы функционирования гидросистем
Пена образуется, как правило, тем интенсивнее, чем ниже поверхностное натяжещге и давление
насыщенного пара жидкости. Такие условия возникают при добавлении в жидкость даже небольшого (менее 0,1 %
по весу) количества свободной или растворенной воды.
Сопротивление растяжению. Согласно молекулярной теории сопротивление растяжению внутри
жидкости может быть весьма значительным — теоретическая прочность воды на разрыв равна 1,5 108 Па. Реальные
жидкости менее прочны. Максимальная прочность на разрыв тщательно очищенной воды, достигнутая при
растяжении воды при 10 °С, составляет 2,8107 Па, а технически чистые жидкости не выдерживают даже
незначительных напряжений растяжения.
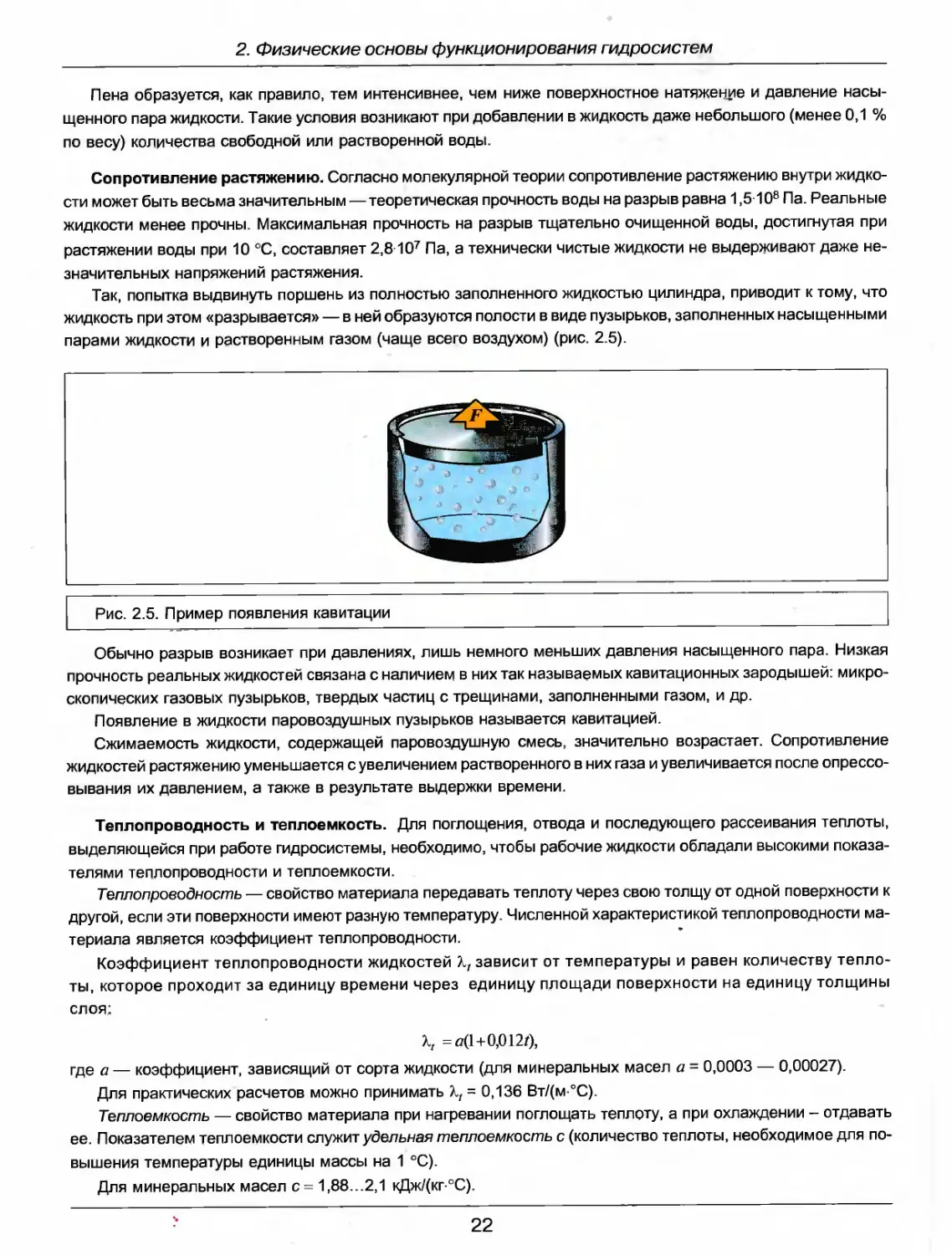
Так, попытка выдвинуть поршень из полностью заполненного жидкостью цилиндра, приводит к тому, что
жидкость при этом «разрывается» — в ней образуются полости в виде пузырьков, заполненных насыщенными
парами жидкости и растворенным газом (чаще всего воздухом) (рис. 2.5).
Рис. 2.5. Пример появления кавитации
Обычно разрыв возникает при давлениях, лишь немного меньших давления насыщенного пара. Низкая
прочность реальных жидкостей связана с наличием в них так называемых кавитационных зародышей:
микроскопических газовых пузырьков, твердых частиц с трещинами, заполненными газом, и др.
Появление в жидкости паровоздушных пузырьков называется кавитацией.
Сжимаемость жидкости, содержащей паровоздушную смесь, значительно возрастает. Сопротивление
жидкостей растяжению уменьшается с увеличением растворенного в них газа и увеличивается после
спрессовывания их давлением, а также в результате выдержки времени.
Теплопроводность и теплоемкость. Для поглощения, отвода и последующего рассеивания теплоты,
выделяющейся при работе гидросистемы, необходимо, чтобы рабочие жидкости обладали высокими
показателями теплопроводности и теплоемкости.
Теплопроводность — свойство материала передавать теплоту через свою толщу от одной поверхности к
другой, если эти поверхности имеют разную температуру. Численной характеристикой теплопроводности
материала является коэффициент теплопроводности.
Коэффициент теплопроводности жидкостей ^зависит от температуры и равен количеству
теплоты, которое проходит за единицу времени через единицу площади поверхности на единицу толщины
слоя:
X, =о(1+0,012/),
где a — коэффициент, зависящий от сорта жидкости (для минеральных масел a = 0,0003 — 0,00027).
Для практических расчетов можно принимать \ =0,136 Вт/(м°С).
Теплоемкость — свойство материала при нагревании поглощать теплоту, а при охлаждении - отдавать
ее. Показателем теплоемкости служит удельная теплоемкость с (количество теплоты, необходимое для
повышения температуры единицы массы на 1 °С).
Для минеральных масел с = 1,88...2,1 кДж/(кг°С).
22
2.3. Основы гидростатики
2.3. Основы гидростатики
Гидростатикой называют раздел гидромеханики, в котором рассматривают законы, действующие в
жидкостях, находящихся в состоянии относительного покоя, т.е. когда отсутствуют перемещения частиц жидкости
относительно друг друга. ч
Поскольку жидкости практически не способны сопротивляться растяжению, на неподвижную жидкость из
поверхностных сил могут действовать только силы давления, причем на внешней поверхности
рассматриваемого объема* силы давления всегда направлены по нормали внутрь объема жидкости и, следовательно,
являются сжимающими.
Таким образом, в неподвижной жидкости возможен только один вид напряжения — напряжение сжатия,
т.е. гидростатическое давление, основным свойством которого является то, что в любой точке жидкости
давление по всем направлениям одинаково.
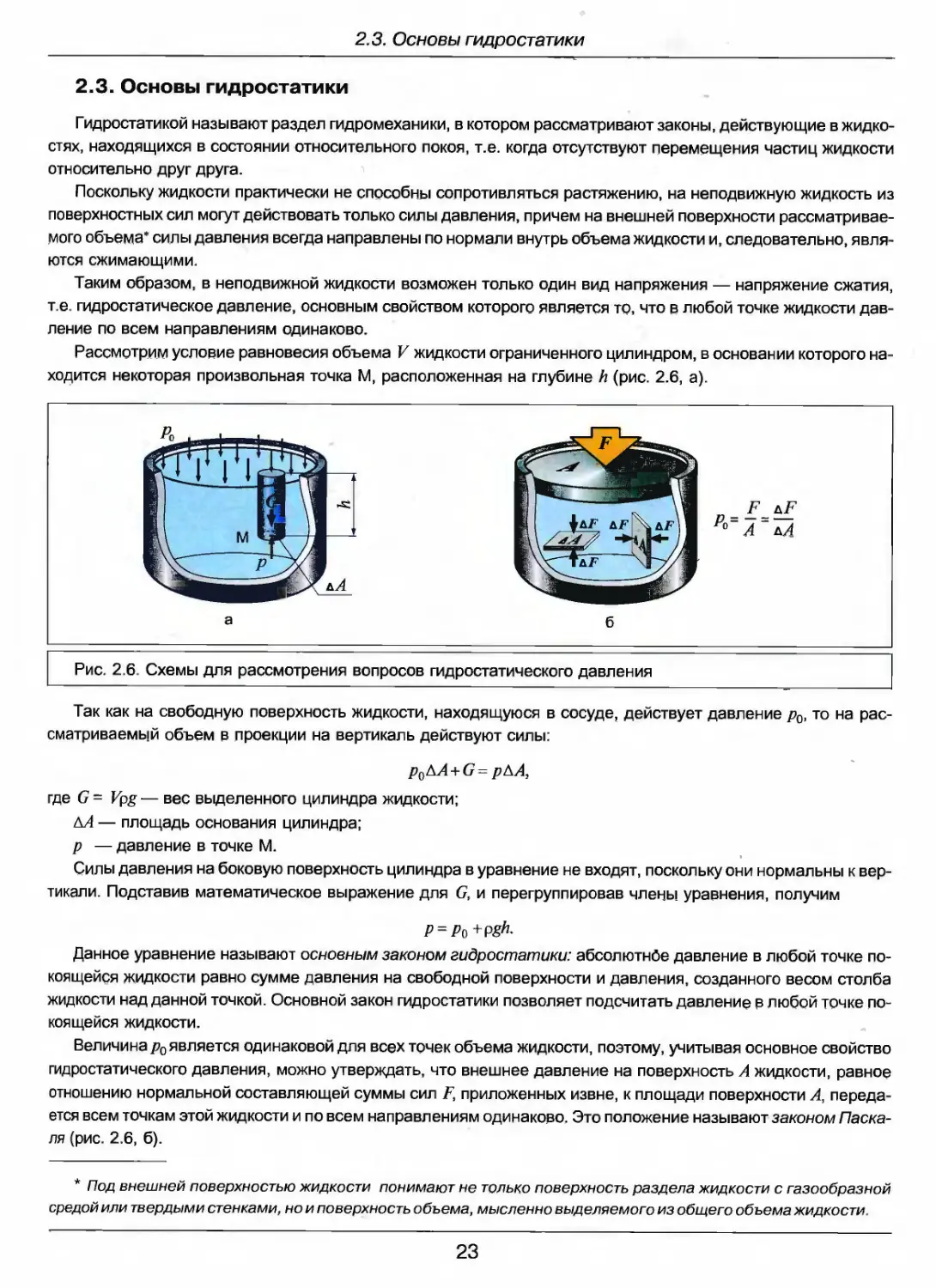
Рассмотрим условие равновесия объема V жидкости ограниченного цилиндром, в основании которого
находится некоторая произвольная точка М, расположенная на глубине h (рис. 2.6, а).
Так как на свободную поверхность жидкости, находящуюся в сосуде, действует давление р0, то на
рассматриваемый объем в проекции на вертикаль действуют силы:
p0AA + G = рАА,
где G = Vpg — вес выделенного цилиндра жидкости;
АА — площадь основания цилиндра;
р — давление в точке М.
Силы давления на боковую поверхность цилиндра в уравнение не входят, поскольку они нормальны к
вертикали. Подставив математическое выражение для G, и перегруппировав члены уравнения, получим
P = Po+P8h-
Данное уравнение называют основным законом гидростатики: абсолютное давление в любой точке
покоящейся жидкости равно сумме давления на свободной поверхности и давления, созданного весом столба
жидкости над данной точкой. Основной закон гидростатики позволяет подсчитать давление в любой точке
покоящейся жидкости.
Величина р0является одинаковой для всех точек объема жидкости, поэтому, учитывая основное свойство
гидростатического давления, можно утверждать, что внешнее давление на поверхность А жидкости, равное
отношению нормальной составляющей суммы сил F, приложенных извне, к площади поверхности А,
передается всем точкам этой жидкости и по всем направлениям одинаково. Это положение называют законом
Паскаля (рис. 2.6, б).
* Под внешней поверхностью жидкости понимают не только поверхность раздела жидкости с газообразной
средой или твердыми стенками, но и поверхность объема, мысленно выделяемого из общего объема жидкости.
23
2. Физические основы функционирования гидросистем
Закон Паскаля лежит в основе принципа действия множества гидравлических устройств и машин в
которых реализуются преобразование силы, перемещения и давления.
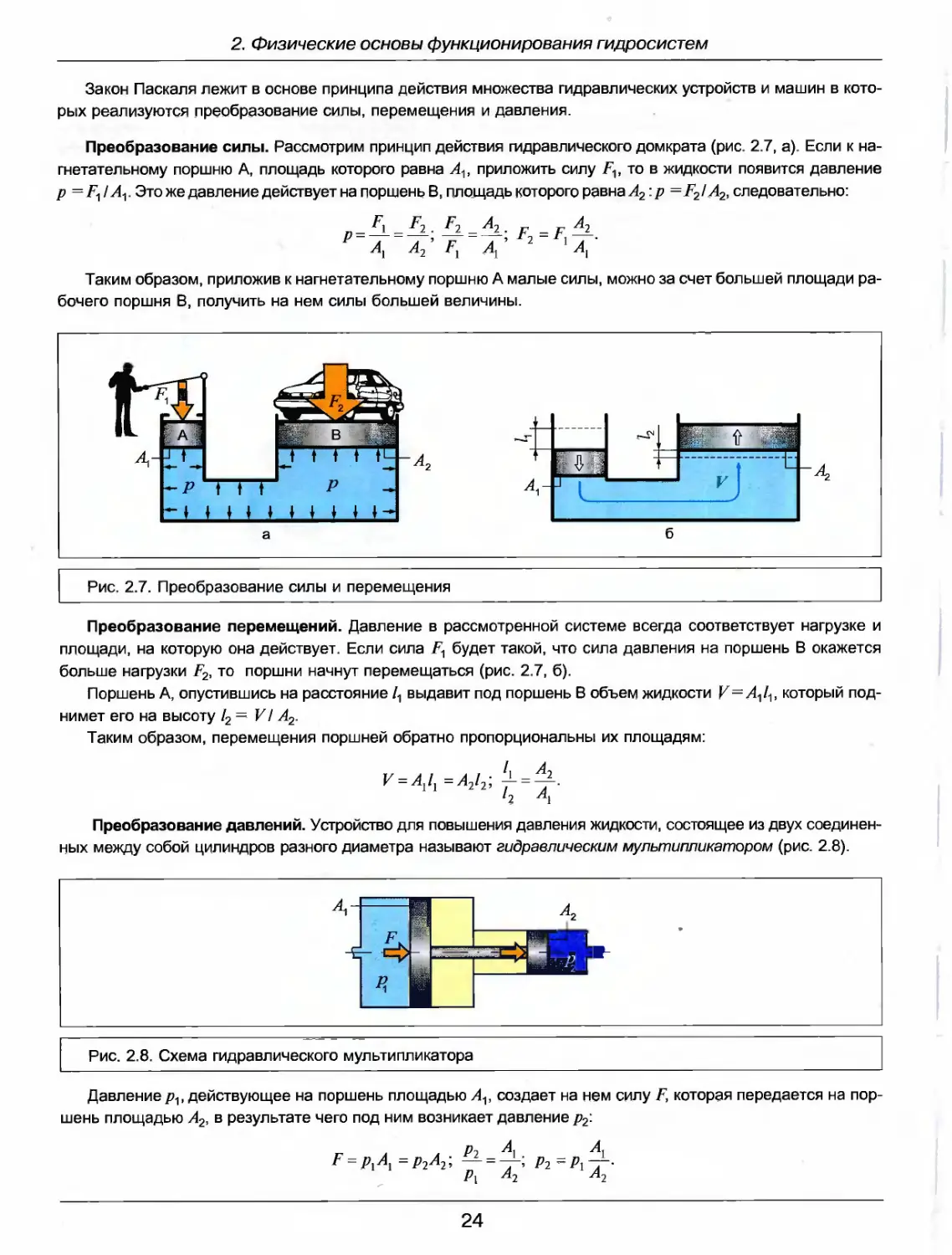
Преобразование силы. Рассмотрим принцип действия гидравлического домкрата (рис. 2.7, а). Если к
нагнетательному поршню А, площадь которого равна Ал, приложить силу Fb то в жидкости появится давление
р =F^IAV Это же давление действует на поршень В, площадь которого равна А2: р =F2IA2, следовательно:
F2. F2
п .
гЛ
л\ л2 г\ Л1 Л1
Таким образом, приложив к нагнетательному поршню А малые силы, можно за счет большей площади
рабочего поршня В, получить на нем силы большей величины.
f
А-
гЧ
: A j
~-р
^fc^^LJjJ
-гЛ
В». D Ш
J t
i т *
p
а
-A2
~-Г
i
; * i
^_CvJ
1
HP
t-r-
VJ l
б
•' ъ ' Щ
>J-L
-4
Рис. 2.7. Преобразование силы и перемещения
Преобразование перемещений. Давление в рассмотренной системе всегда соответствует нагрузке и
площади, на которую она действует. Если сила Гл будет такой, что сила давления на поршень В окажется
больше нагрузки F2, то поршни начнут перемещаться (рис. 2.7, б).
Поршень А, опустившись на расстояние 1Л выдавит под поршень В объем жидкости У=АЛЦ, который
поднимет его на высоту /2 = VIА2.
Таким образом, перемещения поршней обратно пропорциональны их площадям:
/, _А2
V = AJl=A2l2;f = -
Преобразование давлений. Устройство для повышения давления жидкости, состоящее из двух
соединенных между собой цилиндров разного диаметра называют гидравлическим мультипликатором (рис. 2.8).
Давление^, действующее на поршень площадью АЛ, создает на нем силу F, которая передается на
поршень площадью А2, в результате чего под ним возникает давление р2.
Р = рА=рЛ^ = Ъ~ *>А
'\
24
2.3. Основы гидростатики
Отношение величин входного и выходного давлений в мультипликаторе обратно пропорционально
отношению площадей его поршней.
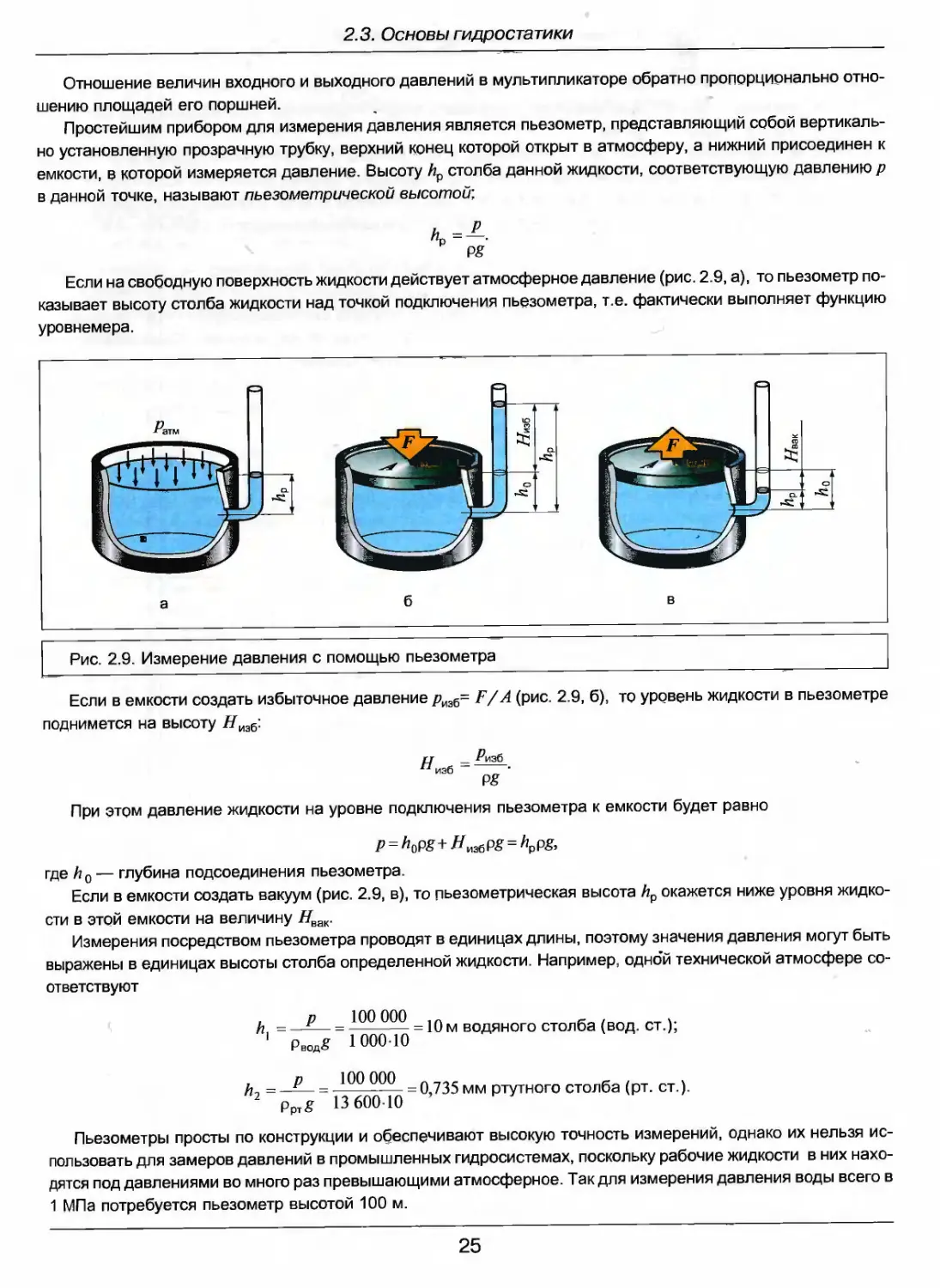
Простейшим прибором для измерения давления является пьезометр, представляющий собой
вертикально установленную прозрачную трубку, верхний конец которой открыт в атмосферу, а нижний присоединен к
емкости, в которой измеряется давление. Высоту Ир столба данной жидкости, соответствующую давлению р
в данной точке, называют пьезометрической высотой;
к =
pg
Если на свободную поверхность жидкости действует атмосферное давление (рис. 2.9, а), то пьезометр
показывает высоту столба жидкости над точкой подключения пьезометра, т.е. фактически выполняет функцию
уровнемера.
=
CD
1
О
а о.. -«
) -с,
Рис. 2.9. Измерение давления с помощью пьезометра
Если в емкости создать избыточное давление ртб= F/A (рис. 2.9, б), то уровень жидкости в пьезометре
поднимется на высоту HW3§:
Н
изб
Pg '
При этом давление жидкости на уровне подключения пьезометра к емкости будет равно
P = h0pg+HV[36pg = hpPg,
где Л 0 — глубина подсоединения пьезометра.
Если в емкости создать вакуум (рис. 2.9, в), то пьезометрическая высота hp окажется ниже уровня
жидкости в этой емкости на величину Нвак.
Измерения посредством пьезометра проводят в единицах длины, поэтому значения давления могут быть
выражены в единицах высоты столба определенной жидкости. Например, одно'й технической атмосфере
соответствуют
(,
, р 100 000 ,. _ , .
п. = —-— = = 10 м водяного столба (вод. ст.);
Рвод# 100°-10
Л,
'воде
р _ 100 000
Ррт<? 13 60010
0,735 мм ртутного столба (рт. ст.).
Пьезометры просты по конструкции и обеспечивают высокую точность измерений, однако их нельзя
использовать для замеров давлений в промышленных гидросистемах, поскольку рабочие жидкости в них
находятся под давлениями во много раз превышающими атмосферное. Так для измерения давления воды всего в
1 МПа потребуется пьезометр высотой 100 м.
25
2. Физические основы функционирования гидросистем
2.4. Основы гидродинамики
Гидродинамика — раздел гидромеханики, в котором изучаются движение несжимаемых жидкостей и их
взаимодействие с твердыми телами.
Для описания течения жидкостей с применением современного математического аппарата, в качестве
объекта исследования используют абстрактную, не существующую в природе абсолютно несжимаемую и
невязкую жидкость, которую называют идеальной жидкостью. Описание течения реальных жидкостей
производится на основании математических моделей, составленных для идеальной жидкости, с введением в них
корректирующих поправок.
Течение жидкости может быть установившимся (стационарным) и неустановившимся (нестационарным).
Установившимся называют течение жидкости, при котором давление и скорость зависят от координат
рассматриваемой точки и не зависят от времени. Давление и скорость могут изменяться по пути следования
частицы жидкости, но в конкретно взятой точке эти параметры остаются неизменными. Траектории частиц
жидкости при установившемся течении остаются неизменными во времени.
Неустановившимся называют течение жидкости, параметры которого (все или некоторые) в
рассматриваемых точках изменяются во времени. При неустановившемся течении траектории различных частиц,
проходящих через данную точку пространства, могут иметь разную форму.
Поскольку исследование установившихся течений гораздо проще, чем неустановившихся, в дальнейшем
будем рассматривать установившиеся течения.
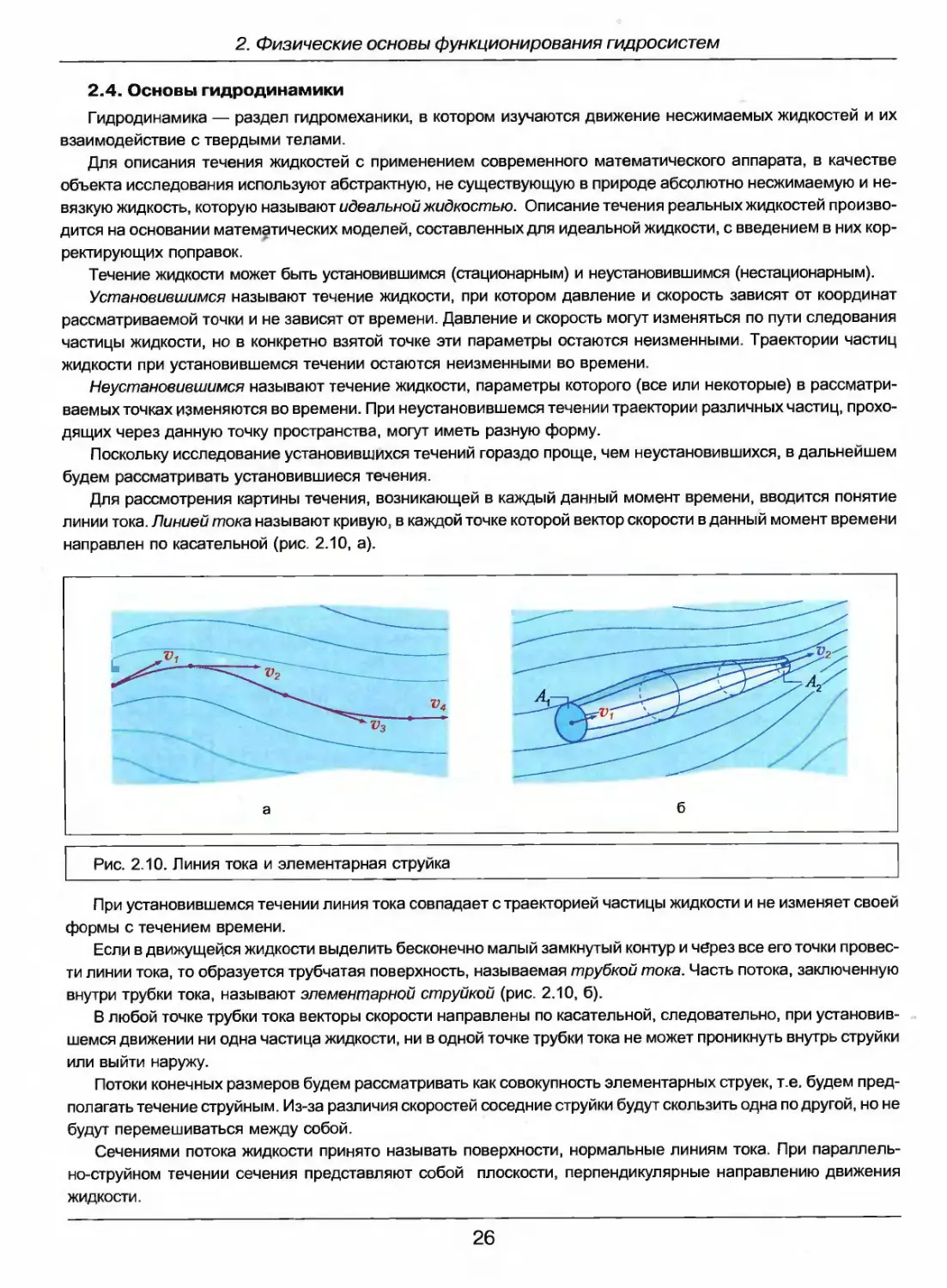
Для рассмотрения картины течения, возникающей в каждый данный момент времени, вводится понятие
линии тока. Линией тока называют кривую, в каждой точке которой вектор скорости в данный момент времени
направлен по касательной (рис. 2.10, а).
При установившемся течении линия тока совпадает с траекторией частицы жидкости и не изменяет своей
формы с течением времени.
Если в движущейся жидкости выделить бесконечно малый замкнутый контур и через все его точки
провести линии тока, то образуется трубчатая поверхность, называемая трубкой тока. Часть потока, заключенную
внутри трубки тока, называют элементарной струйкой (рис. 2.10, б).
В любой точке трубки тока векторы скорости направлены по касательной, следовательно, при
установившемся движении ни одна частица жидкости, ни в одной точке трубки тока не может проникнуть внутрь струйки
или выйти наружу.
Потоки конечных размеров будем рассматривать как совокупность элементарных струек, т.е. будем
предполагать течение струйным. Из-за различия скоростей соседние струйки будут скользить одна по другой, но не
будут перемешиваться между собой.
Сечениями потока жидкости принято называть поверхности, нормальные линиям тока. При
параллельно-струйном течении сечения представляют собой плоскости, перпендикулярные направлению движения
жидкости.
26
2.4. Основы гидродинамики
Различают напорные и безнапорные течения жидкости. Напорными называют течения в закрытых руслах
без свободной поверхности, а безнапорными — течения со свободной поверхностью.
Примерами напорного течения могут служить течения в трубопроводах, гидромашинах, гидроаппаратах.
Безнапорными являются течения в реках, открытых каналах.
В данном пособии рассматриваются напорные течения жидкости.
2.4.1. Расход
Расходом называют количество жидкости, протекающее через сечение потока в единицу времени. В
зависимости от единиц измерения этого количества различают объемный, весовой и массовый расходы. При
расчетах гидравлических систем обычно пользуются объемным расходом жидкости.
В технической литературе объемный расход обозначают латинской буквой Q (или Qyf и определяют из
соотношения
где Q — объемный расход, м3/с;
V— объем, м3;
t — время, с.
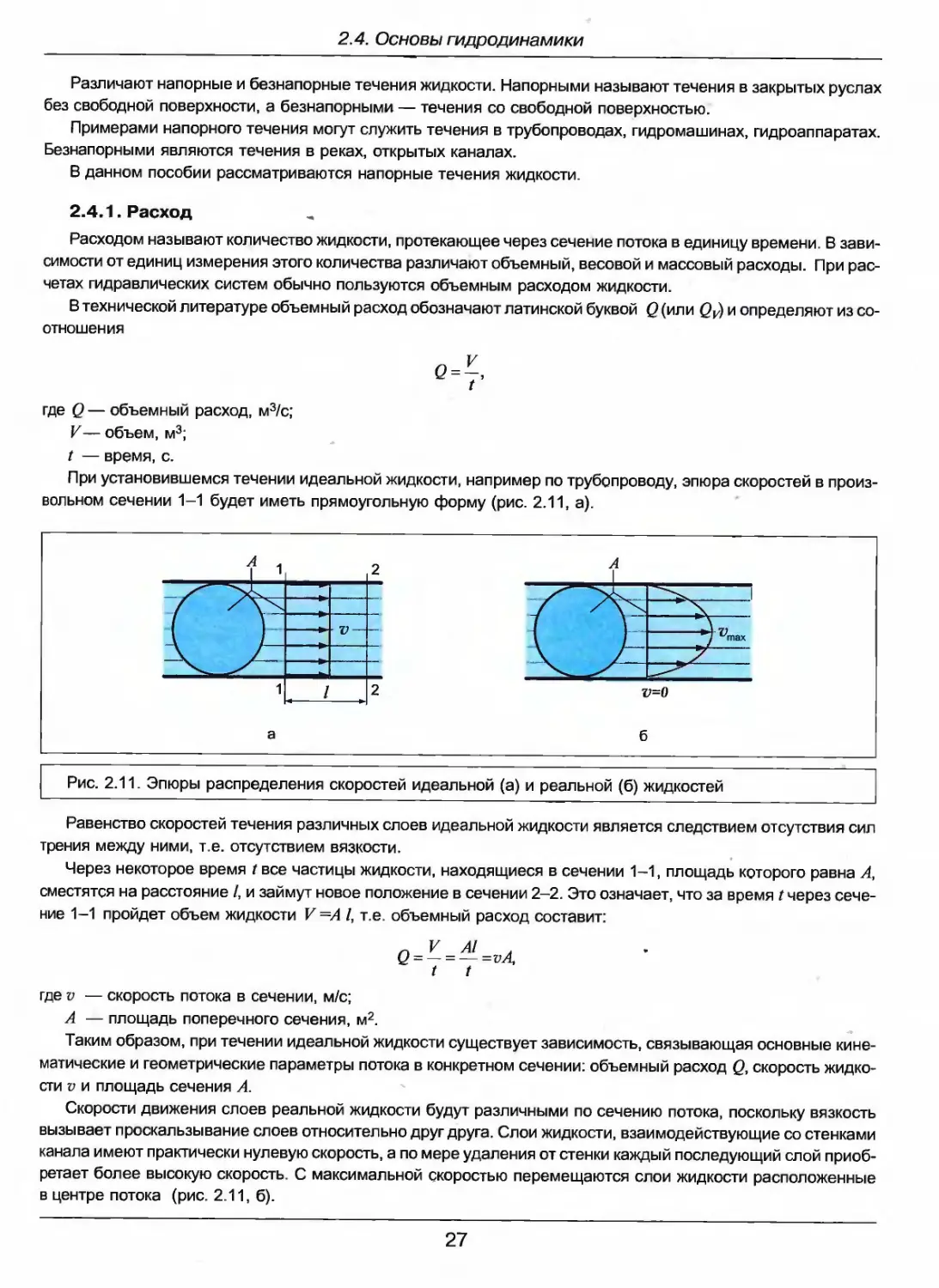
При установившемся течении идеальной жидкости, например по трубопроводу, эпюра скоростей в
произвольном сечении 1-1 будет иметь прямоугольную форму (рис. 2.11, а).
f 1
(
>К
■)-
J-
1
а
1
£.
А
_/~^_
( ')
2
"> '
*У "max
У^
_J--"**
V=0
6
Рис. 2.11. Эпюры распределения скоростей идеальной (а) и реальной (б) жидкостей
Равенство скоростей течения различных слоев идеальной жидкости является следствием отсутствия сил
трения между ними, т.е. отсутствием вязкости.
Через некоторое время t все частицы жидкости, находящиеся в сечении 1-1, площадь которого равна А,
сместятся на расстояние /, и займут новое положение в сечении 2-2. Это означает, что за время /через
сечение 1-1 пройдет объем жидкости V=A I, т.е. объемный расход составит:
П V M A
£? = — = — =vA,
t t
где v — скорость потока в сечении, м/с;
А — площадь поперечного сечения, м2.
Таким образом, при течении идеальной жидкости существует зависимость, связывающая основные
кинематические и геометрические параметры потока в конкретном сечении: объемный расход Q, скорость
жидкости v и площадь сечения А.
Скорости движения слоев реальной жидкости будут различными по сечению потока, поскольку вязкость
вызывает проскальзывание слоев относительно друг друга. Слои жидкости, взаимодействующие со стенками
канала имеют практически нулевую скорость, а по мере удаления от стенки каждый последующий слой
приобретает более высокую скорость. С максимальной скоростью перемещаются слои жидкости расположенные
в центре потока (рис. 2.11, б).
27
2. Физические основы функционирования гидросистем
Для определения объемного расхода реальной жидкости по полученной выше формуле, вводят
понятие средней скорости в сечении vcp, под которой понимают скорость, удовлетворяющую
равенству:
ср А
В прикладных расчетах гидросистем индекс «ср» и термин «средняя» обычно опускают и говорят о
скорости в конкретном сечении потока, понимая при этом ее среднюю величину.
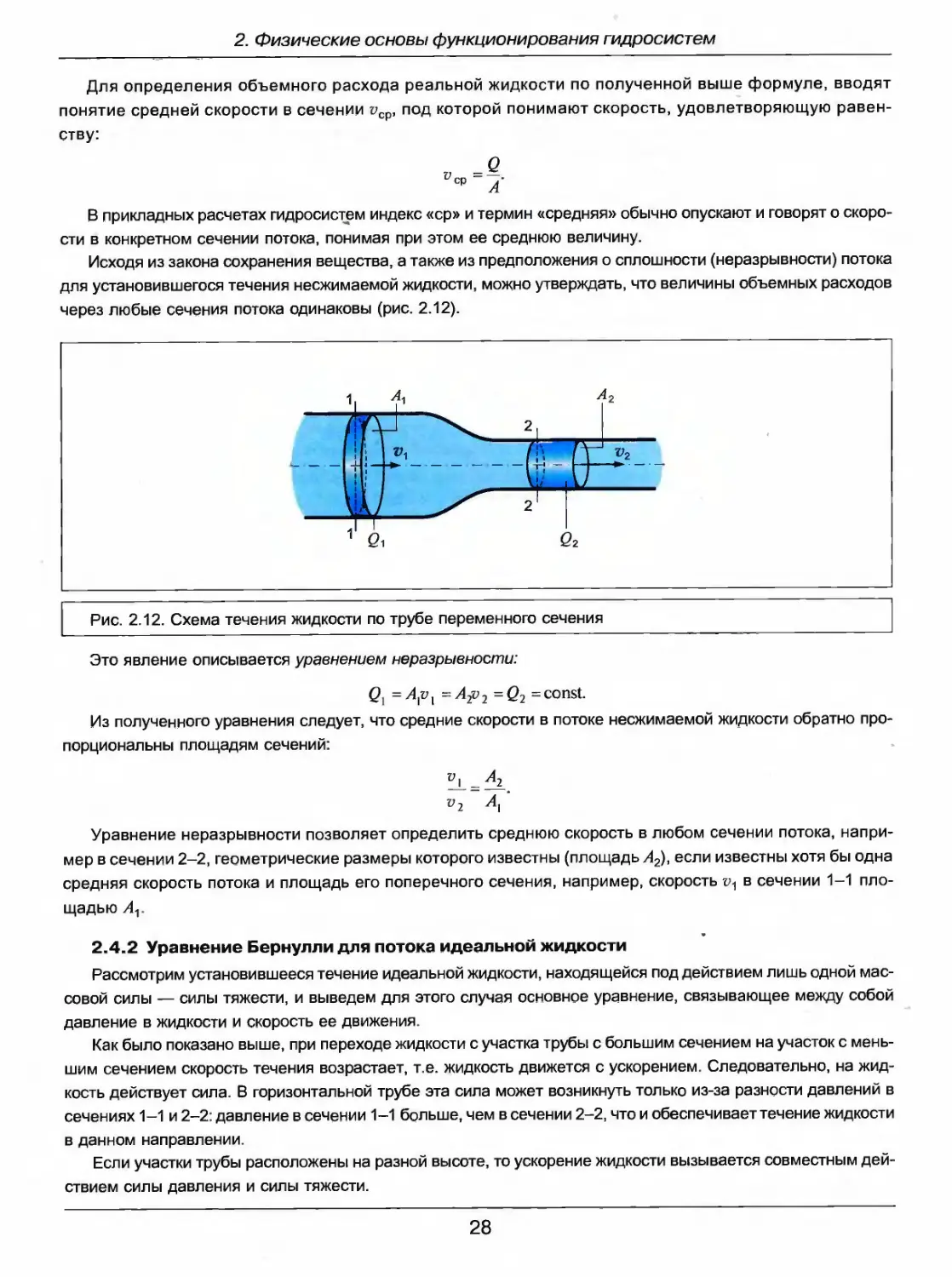
Исходя из закона сохранения вещества, а также из предположения о сплошности (неразрывности) потока
для установившегося течения несжимаемой жидкости, можно утверждать, что величины объемных расходов
через любые сечения потока одинаковы (рис. 2.12).
Это явление описывается уравнением неразрывности:
Qj =A]vl = A2v2 = Q2 = const.
Из полученного уравнения следует, что средние скорости в потоке несжимаемой жидкости обратно
пропорциональны площадям сечений:
v2 Л,"
Уравнение неразрывности позволяет определить среднюю скорость в любом сечении потока,
например в сечении 2-2, геометрические размеры которого известны (площадь А2), если известны хотя бы одна
средняя скорость потока и площадь его поперечного сечения, например, скорость и1 в сечении 1-1
площадью Av
2.4.2 Уравнение Бернулли для потока идеальной жидкости
Рассмотрим установившееся течение идеальной жидкости, находящейся под действием лишь одной
массовой силы — силы тяжести, и выведем для этого случая основное уравнение, связывающее между собой
давление в жидкости и скорость ее движения.
Как было показано выше, при переходе жидкости с участка трубы с большим сечением на участок с
меньшим сечением скорость течения возрастает, т.е. жидкость движется с ускорением. Следовательно, на
жидкость действует сила. В горизонтальной трубе эта сила может возникнуть только из-за разности давлений в
сечениях 1-1 и 2-2: давление в сечении 1-1 больше, чем в сечении 2-2, что и обеспечивает течение жидкости
в данном направлении.
Если участки трубы расположены на разной высоте, то ускорение жидкости вызывается совместным
действием силы давления и силы тяжести.
28
2.4. Основы гидродинамики
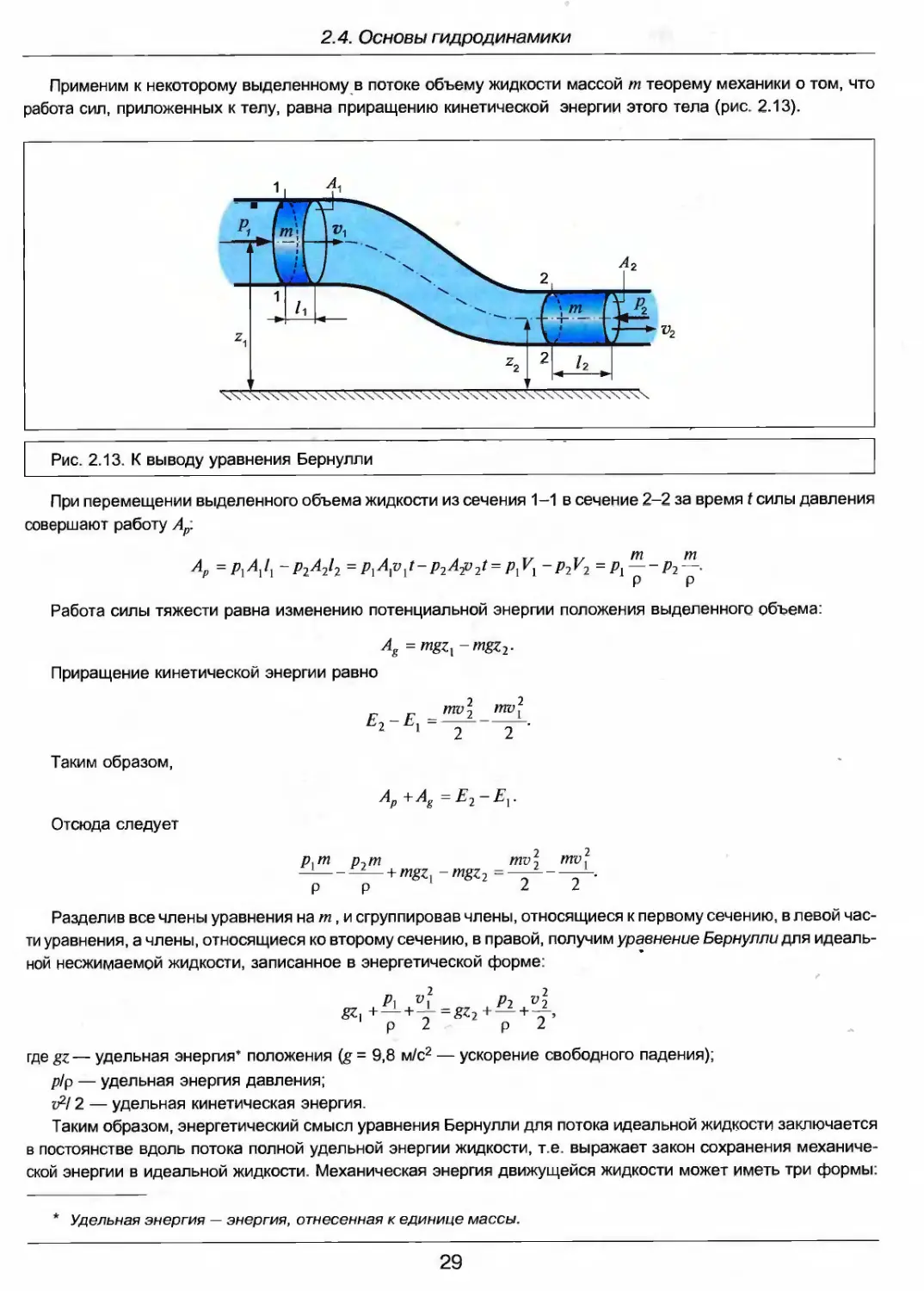
Применим к некоторому выделенному в потоке объему жидкости массой т теорему механики о том, что
работа сил, приложенных к телу, равна приращению кинетической энергии этого тела (рис. 2.13).
При перемещении выделенного объема жидкости из сечения 1-1 в сечение 2-2 за время t силы давления
совершают работу Ар:
Ар =Р\Л\1\ ~РгА212 =Р\А?\г-РгА-Ргг = Р\Ух ~Ргуг=Р]к Рг~-
Работа силы тяжести равна изменению потенциальной энергии положения выделенного объема:
Ag =mgzx-mgz2.
Приращение кинетической энергии равно
Таким образом,
Отсюда следует
Е -Е =г^1_п^1_
2 1т 1 '
Ар +Ag ~E-i Ev
р,т п-.т то\ то}
- + mgzl-mgz2=—±-—^.
Р Р
Разделив все члены уравнения на т, и сгруппировав члены, относящиеся к первому сечению, в левой
части уравнения, а члены, относящиеся ко второму сечению, в правой, получим уравнение Бернулли для
идеальной несжимаемой жидкости, записанное в энергетической форме:
Р\ v\ Pi »2
р 2 ~ р 2
где gz— удельная энергия* положения (g = 9,8 м/с2 — ускорение свободного падения);
pip — удельная энергия давления;
гР-12 — удельная кинетическая энергия.
Таким образом, энергетический смысл уравнения Бернулли для потока идеальной жидкости заключается
в постоянстве вдоль потока полной удельной энергии жидкости, т.е. выражает закон сохранения
механической энергии в идеальной жидкости. Механическая энергия движущейся жидкости может иметь три формы:
Удельная энергия — энергия, отнесенная к единице массы.
29
2. Физические основы функционирования гидросистем
V
энергия положения, давления и кинетическая энергия. Первая и третья формы механической энергии
известны из механики и в равной степени свойственны твердым и жидким телам. Энергия давления является
специфической для движущихся жидкостей. В процессе движения идеальной жидкости одна форма энергии может
превращаться в другую, однако величина полной удельной энергии жидкости остается неизменной.
Разделив все члены уравнения Бернудли на g, получим другую форму его записи:
*■ +
pg 2g pg 2g
где z — геометрическая высота, или геометрический напор;
Р /(р<§) — пьезометрическая высота, или пьезометрический напор;
v2l(2g) — скоростная высота, или скоростной напор.
Трехчлен вида
Р v2 и
Pg 2g
называют полным напором.
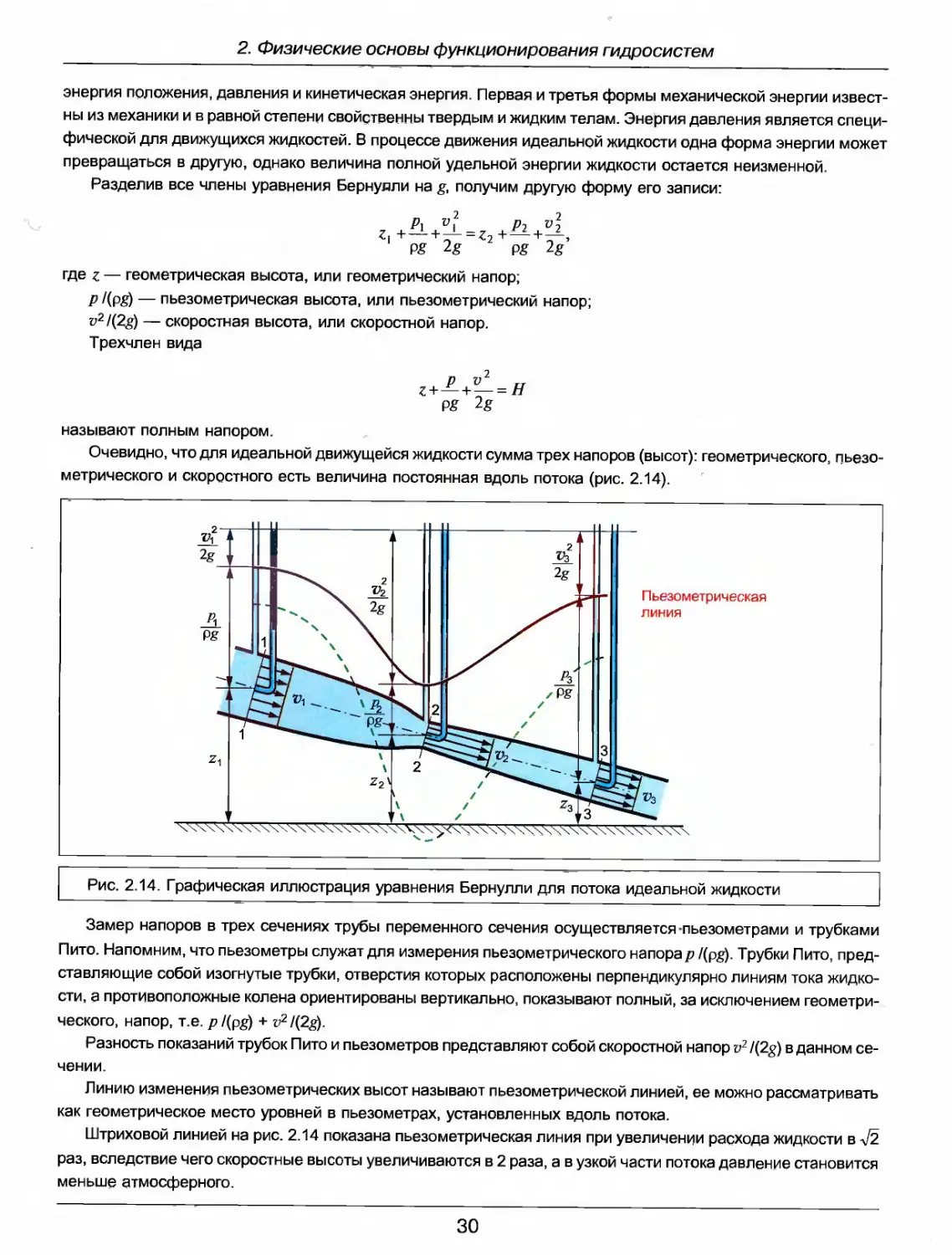
Очевидно, что для идеальной движущейся жидкости сумма трех напоров (высот): геометрического,
пьезометрического и скоростного есть величина постоянная вдоль потока (рис. 2.14).
Пьезометрическая
линия
Рис. 2.14. Графическая иллюстрация уравнения Бернулли для потока идеальной жидкости
Замер напоров в трех сечениях трубы переменного сечения осуществляется-пьезометрами и трубками
Пито. Напомним, что пьезометры служат для измерения пьезометрического напора/? /(pg). Трубки Пито,
представляющие собой изогнутые трубки, отверстия которых расположены перпендикулярно линиям тока
жидкости, а противоположные колена ориентированы вертикально, показывают полный, за исключением
геометрического, напор, т.е. pl(pg) + v2l(2g).
Разность показаний трубок Пито и пьезометров представляют собой скоростной напор v2l(2g) в данном
сечении.
Линию изменения пьезометрических высот называют пьезометрической линией, ее можно рассматривать
как геометрическое место уровней в пьезометрах, установленных вдоль потока.
Штриховой линией на рис. 2.14 показана пьезометрическая линия при увеличении расхода жидкости в J2
раз, вследствие чего скоростные высоты увеличиваются в 2 раза, а в узкой части потока давление становится
меньше атмосферного.
30
2.4. Основы гидродинамики
В ряде случаев удобно применять форму записи уравнения Бернулли, в которой члены уравнения имеют
размерность давления:
pv2 9v\
PgZx +/>! +-^- = PgZ2 +Pl + ~^,
где pgz — весовое давление;
p — гидромеханическое давление (или просто давление);
pv2/ 2 — динамическое давление*.
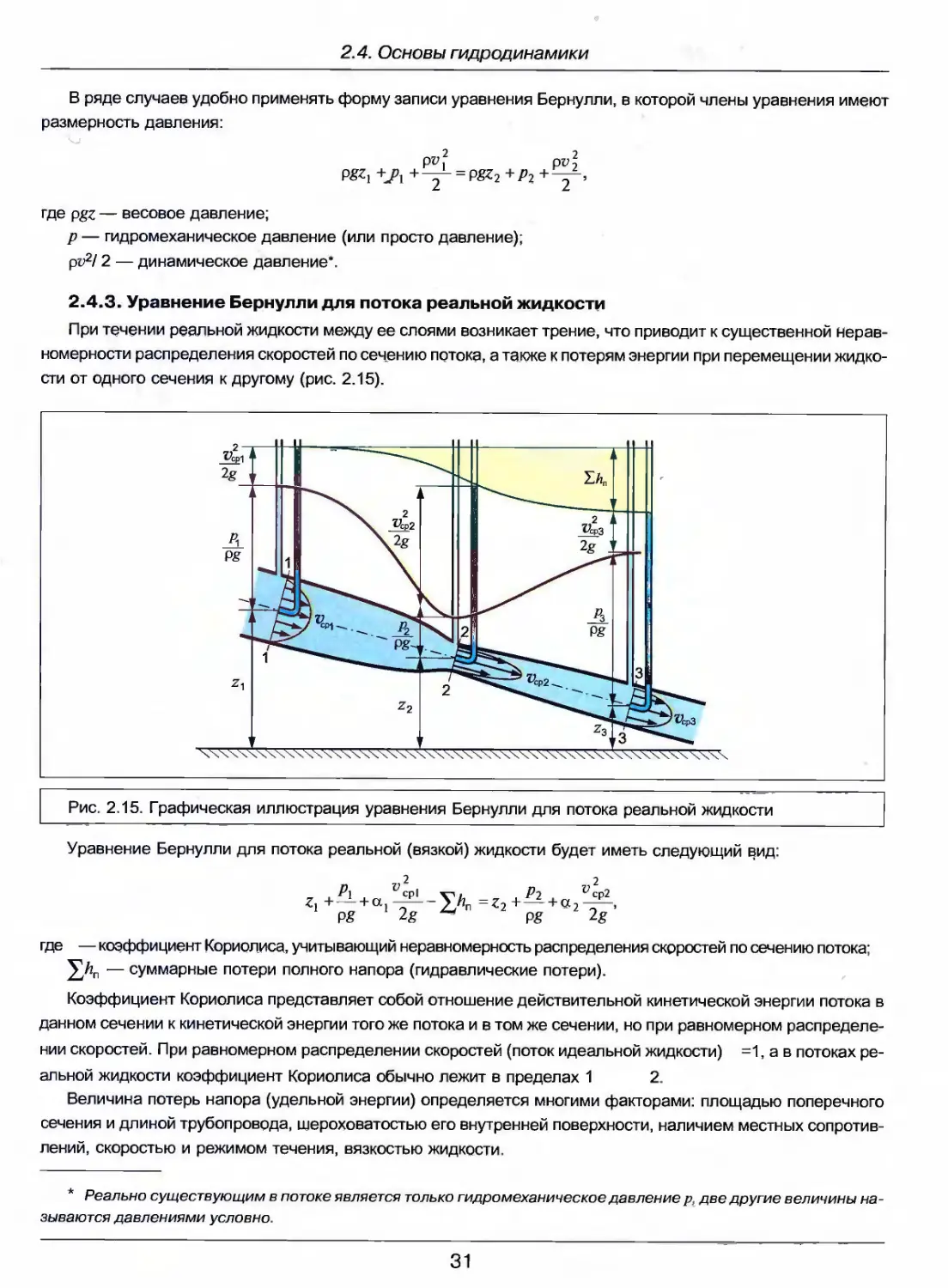
2.4.3. Уравнение Бернулли для потока реальной жидкости
При течении реальной жидкости между ее слоями возникает трение, что приводит к существенной
неравномерности распределения скоростей по сечению потока, а также к потерям энергии при перемещении
жидкости от одного сечения к другому (рис. 2.15).
Уравнение Бернулли для потока реальной (вязкой) жидкости будет иметь следующий вид:
Pi
Pi
сР2
f\ cpi х"| i fl
Pg 2g ~ Pg 2g
где — коэффициент Кориолиса, учитывающий неравномерность распределения скоростей по сечению потока;
^/гг — суммарные потери полного напора (гидравлические потери). ,
Коэффициент Кориолиса представляет собой отношение действительной кинетической энергии потока в
данном сечении к кинетической энергии того же потока и в том же сечении, но при равномерном
распределении скоростей. При равномерном распределении скоростей (поток идеальной жидкости) =1, а в потоках
реальной жидкости коэффициент Кориолиса обычно лежит в пределах 1 2.
Величина потерь напора (удельной энергии) определяется многими факторами: площадью поперечного
сечения и длиной трубопровода, шероховатостью его внутренней поверхности, наличием местных
сопротивлений, скоростью и режимом течения, вязкостью жидкости.
* Реально существующим в потоке является только гидромеханическое давление р, две другие величины
называются давлениями условно.
31
2. Физические основы функционирования гидросистем
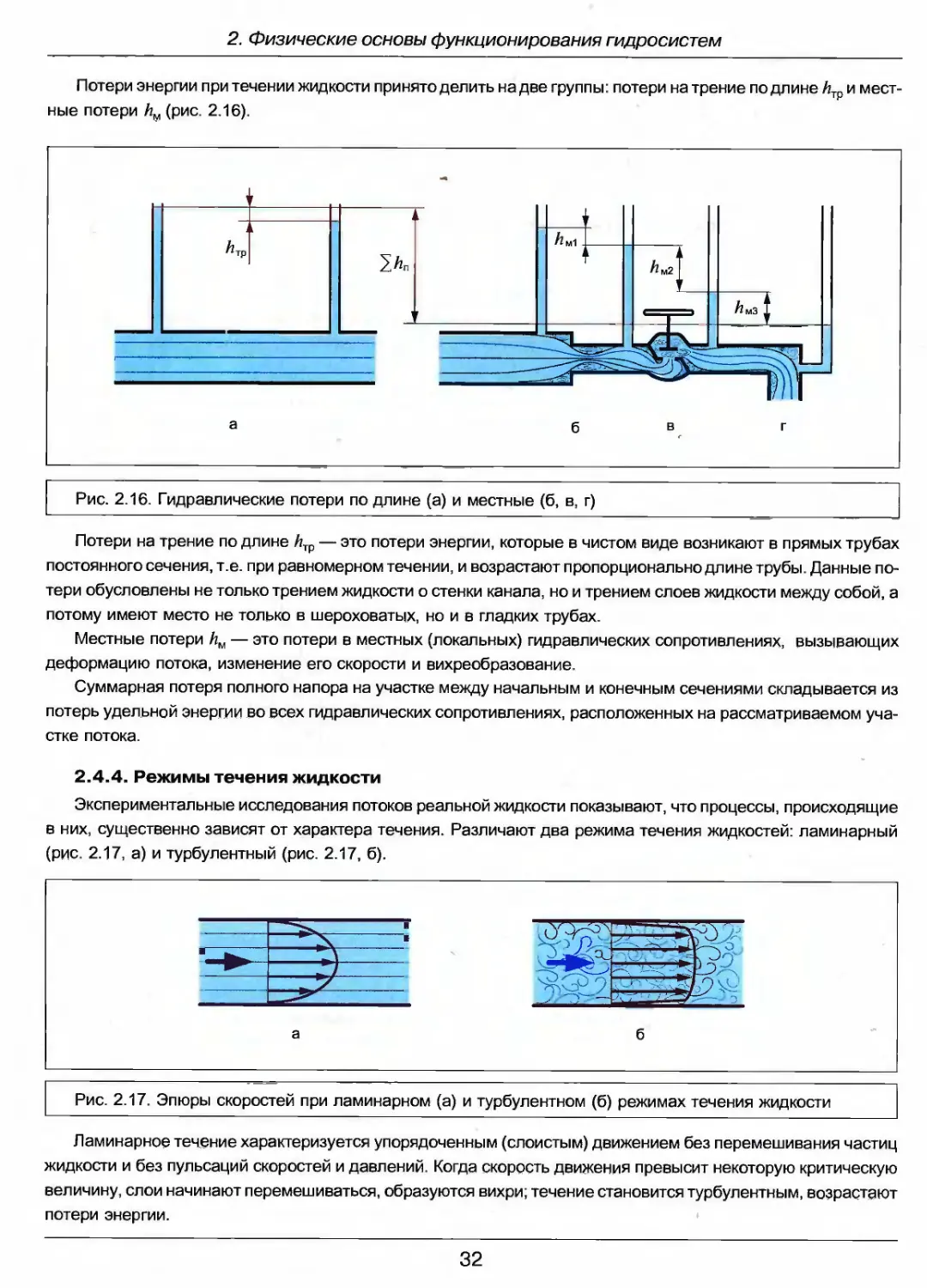
Потери энергии при течении жидкости принято делить на две группы: потери на трение подлине Лтр и
местные потери /гм (рис. 2.16).
Потери на трение по длине Лтр — это потери энергии, которые в чистом виде возникают в прямых трубах
постоянного сечения, т.е. при равномерном течении, и возрастают пропорционально длине трубы. Данные
потери обусловлены не только трением жидкости о стенки канала, но и трением слоев жидкости между собой, а
потому имеют место не только в шероховатых, но и в гладких трубах.
Местные потери Лм — это потери в местных (локальных) гидравлических сопротивлениях, вызывающих
деформацию потока, изменение его скорости и вихреобразование.
Суммарная потеря полного напора на участке между начальным и конечным сечениями складывается из
потерь удельной энергии во всех гидравлических сопротивлениях, расположенных на рассматриваемом
участке потока.
2.4.4. Режимы течения жидкости
Экспериментальные исследования потоков реальной жидкости показывают, что процессы, происходящие
в них, существенно зависят от характера течения. Различают два режима течения жидкостей: ламинарный
(рис. 2.17, а) и турбулентный (рис. 2.17, б).
Ламинарное течение характеризуется упорядоченным (слоистым) движением без перемешивания частиц
жидкости и без пульсаций скоростей и давлений. Когда скорость движения превысит некоторую критическую
величину, слои начинают перемешиваться, образуются вихри; течение становится турбулентным, возрастают
потери энергии. »
32
2.4. Основы гидродинамики
При течении жидкости по трубопроводу переход от ламинарного режима к турбулентному наблюдается в
тот момент, когда осредненная по сечению трубы скорость движения потока становится равной критической
икр. Как показывает эксперимент, критическая скорость прямо пропорциональна кинематической вязкости v
жидкости и обратно пропорциональна внутреннему диаметру d трубы:
где к — коэффициент пропорциональности;
v — кинематическая вязкость жидкости, м2/с;
d— внутренний диаметр трубы, м.
Экспериментально был установлен и тот факт, что смена режима течения любой жидкости по трубе
любого диаметра имеет место лишь при определенном значении безразмерного коэффициента к. Данный
коэффициент называют критическим числом Рейнольдса:
q d
ReKP =^кр -■
V
Для труб круглого сечения ReKp я 2 300.
Число Рейнольдса используют для описания режима течения:
V \l
Значение числа Рейнольдса позволяет судить о характере течения жидкости по трубе:
■ ламинарное течение Re < 2 300;
■ турбулентное течение Re > 2 300.
Таким образом, зная скорость движения потока, вязкость жидкости и внутренний диаметр трубы, можно
найти число Рейнольдса и, сравнив его с величиной ReKp, определить режим течения жидкости.
Результаты экспериментов показывают, что сразу после разрушения ламинарного течения устойчивого
турбулентного течения еще не появляется. Развитое турбулентное течение устанавливается при Re > 4 000.
Если значение Re уменьшается и оказывается ниже ReKp, турбулентное течение не сразу становится
ламинарным. Устойчивое ламинарное течение жидкости снова достигается лишь при значении Re = 0,5 ReKp
Исходя из того, что законы распределения скоростей по сечению трубы при ламинарном и турбулентном
режимах течения жидкости различны, коэффициент Кориолиса, учитывающий неравномерность
распределения скоростей в уравнении Бернулли, принимает разные значения:
■ для ламинарного течения а = 2;
■ для турбулентного течения а = 1.
2.4.5. Потери энергии в гидросистемах
Все элементы гидравлических систем оказывают то или иное сопротивление движению жидкости, что
приводит к потерям энергии, которые принято называть гидравлическими потерями.
В общем случае формулу для подсчета гидравлических потерь между двумя произвольно выбранными
сечениями можно получить из уравнения Бернулли для потока реальной жидкости:
5ft=feI+^ + aii)-fe2+^+a2^)L
98 2g pg 2g
Для анализа влияния, которое оказывают потери на параметры потока, сгруппируем однотипные члены
уравнения:
98 98 2g 2g
33
2. Физические основы функционирования гидросистем
Нетрудно заметить, что для горизонтальных труб fa - гг) постоянного диаметра (и1 = v2) уравнение примет
вид
РГ Р£ Р£
где Ар = РтРг — перепад давления между двумя сечениями.
Из полученного уравнения следует, что гидравлические потери приводят к уменьшению давления в потоке
жидкости. Они не могут вызывать изменения скоростей, которые определяются кинематическим
соотношением — уравнением неразрывности, и, тем более, влиять на геометрические высоты.
Как показывают опыты, во многих случаях гидравлические потери пропорциональны скорости течения
жидкости во второй степени, поэтому в гидравлике принят общий способ выражения гидравлических потерь
полного напора в линейных единицах:
или в единицах давления
где С, — коэффициент потерь.
Потери давления на трение по длине. Потери на трение по длине имеют достаточно сложную
зависимость от средней скорости жидкости и подсчитываются по формуле Вейсбаха—Дарси:
Лтр=ЬН^ = Сгр
d2g{ d
или
Лр=р Jl'
где X — коэффициент Дарси (коэффициент потерь на трение по длине);
/ — длина трубы;
d — диаметр трубы.
Значение коэффициента потерь на трение по длине /зависит от многих факторов, и в первую очередь от
режима течения жидкости.
Для ламинарных потоков
Учитывая, что
л Re
v d Q 4Q
Re=y-; v = — = -
находим
v S iid1'
a A iid Tia
* С учетом дополнительных сопротивлений, вызываемых в основном сужением и прочими искажениями
сечения труб, а также охлаждением наружных слоев жидкости, соприкасающихся со стенками-трубы, значение I при
практических расчетах труб следует принимать для ламинарного режима Хп-75/ Re.
34
2.4. Основы гидродинамики
Полученное выражение, отражает закон Пуазейля — при ламинарном режиме течения потеря давления
на трение в трубах круглого сечения пропорциональна вязкости и расходу (а, следовательно, и скорости
течения) жидкости, в первой степени и обратно пропорциональна диаметру в четвертой степени.
Ввиду сложности турбулентного течения и трудности его аналитического исследования, в большинстве
случаев для практических расчетов пользуются экспериментальными данными.
Для гидравлически гладких труб* 7^ при 2300<Re<105 можно определять по полуэмпирической формуле
Блазиуса:
v
0,316
/Re
Для шероховатых труб Хт зависит не только от числа Рейнольдса, но и от шероховатости внутренней
поверхности труб А (рис. 2.18).
0,040
0,035
0,030
0,025
0,020
0,015
0,010
<
V\ \Ч
\^С
\
\
Re,<p
4j\
\
—-.
v|
N
\
~-
1<Ш^^Г
"5
-л 0,316 -
- \ГвЕ -
%w$
'^ksssv's:
-%
vr~
I
\
J-
-H-
I
^'^^
Nv
o»X\J
I
.-
иероховатые трубы
—I—i—'
I J_
I I
ff\
T \
!
I I
-zns:
N
^*—
L
\
^
i i ■ -J-
i
1
i—
—i—'
-v
^^
v
^
4
i
\
- \ '<
^
|
1
1 1 1
! !
. ..
1 I 1 | 1
I
1
1 1
i 1
~i— ' '-1—•—r
i
i
1
i
1 III
1 ' 1
ч! i !
i
i i
II4 ^J L_
.Q> i
•г-;— ' -
§5§^-^
Jk,
ч—
1
1
1
—(_
1
1
■ s.
:*--
s
5 6 810 1,5 2 3 4 5 6 810 1,5 2 3 4 5 6 8 10 1,5 2 3 4 5 6 8
*ю3 J, хю4 J, *ю5 J. х1°6
d/A
T 100
- 120
Ф= 140
■J-j 160
f 250
- 350
- 600
Г 800
f 1000
- 1250
- 1500
- 2000
— 2500
- 4000
■"- 8000
f 10000
w 12000
15000
10 Re
Рис. 2.18. Зависимость Хт от Re и шероховатости труб
* Гидравлически гладкой трубой принято считать такую трубу, в которой шероховатости скрыты в толще
ламинарного граничного слоя жидкости у стенок( цельнотянутые трубы из цветных металлов, высококачественные
бесшовные стальные трубы).
35
2. Физические основы функционирования гидросистем
Анализируя приведенные зависимости можно отметить следующие три области значений Re и d/A,
отличающиеся друг от друга характером изменения коэффициента 7^
Первая область — область малых значения Re и больших значений d/A, где коэффициент^ от
шероховатости не зависит, а определяется лишь числом Re; это область гидравлически гладких труб.
Во второй области коэффициент ^зависит одновременно от двух параметров—числа Re и отношения d/A.
Третья область — область больших Re и малых d/A, где (при достижении некоторого предельного
значения ReKp) коэффициент ^т не зависит от Re, а определяется лишь отношением d/A. Эту область называют
областью автомодельности, или режимом квадратичного сопротивления, так как независимость коэффициента
7^ от Re означает, что потеря давления пропорциональна скорости во второй степени (см. формулу Вейсба-
ха—Дарси). ^
Для практических расчетов по определению потерь в трубах можно воспользоваться формулой А.Д. Альт-
шуля
К =0,11
А 6*0
d + Re
Характерные значения А, мм, для труб из различных материалов приведены ниже:
Стекло 0
Трубы, тянутые из латуни, свинца, меди 0...0,002
Высококачественные бесшовные стальные трубы 0,06...0,2
Стальные трубы ,.,.,....,. 0,1...0,5
Чугунные асфальтированные трубы 0,1...0,2
Чугунные трубы 0,2...1,0
Подведем некоторые итоги: при ламинарном течении потеря давления на трение возрастает
пропорционально скорости (расходу) в первой степени, т.е. линейно. При переходе к турбулентному течению заметны
некоторый скачок сопротивления и затем более крутое нарастание величины Ар по кривой, близкой к
параболе второй степени (рис. 2.19).
Ар
О
Ламинарный режим
Re < 2000
^T~Re
/ Турбулентный режим
/ Re > 2500
/ h= 0.11)| 7+^e"
v;Q
Рис. 2.19. Зависимость потери давления по длине трубы от скорости и расхода
Для гидросистем, в которых расход жидкости зависит от потерь давления, следует избегать режимов
течения, при которых числа Реинольдса Re = 2 200 •— 2 500 ввиду неустойчивости такого течения и возможности
появления в системе колебательных процессов.
36
2.4. Основы гидродинамики
Местные гидравлические потери. К местным сопротивлениям относят короткие участки трубопроводов,
в которых происходит деформация потока, т.е' изменение скоростей движения жидкости по величине и/или
направлению. Простейшими местными гидравлическими сопротивлениями являются:
■ расширение потока;
■ сужение потока;
■ поворот потока.
Большинство местных сопротивлений, включая гидравлическую арматуру (вентили, краны, клапаны),
представляет собой комбинации простейших местных сопротивлений.
Как правило потери в местных сопротивлениях вызваны вихреобразованием и подсчитываются по
формуле Вейсбаха
К = С»
2g
или
ЬРм =рв^,=См
pv
~2~'
где v — средняя скорость жидкости в трубе, в которой установлено данное местное сопротивление.
Из-за сложности процессов, происходящих в местных гидравлических сопротивлениях, теоретически
найти С,ы удается только в отдельных случаях, большинство же значений этого коэффициента получено в
результате экспериментальных исследований (рис. 2. 20).
Внезапное сужение
^=0,5
Внезапное расширение
Ш:
Sm
1 —
А)
Выход из резервуара См=0,5
Вход в резервуар С„=1
Колено
Закругленное колено (отвод)*
1,5
^3 М
1,0
0,5
ЖЕ
4/>м = С
0 20 40 60 80 100 р
90° 2
и,з
Цм
0,2
0 1 2 3 4 5 Ш
Рис. 2.20. Потери в простейших местных сопротивлениях
* Приведенная потеря давления учитывает лишь дополнительное сопротивление, обусловленное кривизной
русла, поэтому при расчете трубопроводов, содержащих отводы, следует длины этих отводов включать в общую
длину трубопровода, по которой рассчитывается потеря на трение, а затем к этой потере на трение нужно
добавить дополнительную потерю от кривизны, определяемую £м.
37
2. Физические основы функционирования гидросистем
В гидравлических системах достаточно часто встречаются постеленное сужение потО-Ка, называемое кон-
фузором и постепенное расширение потока, называемое диффузором. Эти местные сопротивления могут
иметь достаточно большие длины, поэтому кроме потерь из-за вихреобразования, вызванного изменением
геометрии потока, в них учитываются потери давления на трение по длине. Расчет потерь в конфузорах и
диффузорах приводится в справочной литературе.
Коэффициенты потерь для прямоугольных тройников представлены на рис. 2.21.
Q/2
Q ^ ► Q/2
Q/2
Q/2 ,►>—*. Q
См=0,9 —1,2
См = 0,5 - 0,6
Q
Q/2 —</ Ч Q/2
j
Q
Q/2 *-У^-+ Q/2
См= 1,0-2,5
^= 1.0 — 1.5
Рис. 2.21. Коэффициенты С,ы для прямоугольных тройников
Общая потеря напора в магистрали равна сумме потерь в отдельных ее компонентах. При практических
расчетах трубопроводов потерями, вызванными взаимным влиянием друг на друга близко расположенных
местных сопротивлений, обычно пренебрегают.
Энергия, теряемая жидкостью во время течения, не исчезает бесследно, а превращается в другую
форму— тепловую. Процесс преобразования механической энергии в тепловую является необратимым, т.е.
таким, обратное течение которого (превращение тепловой энергии в механическую) невозможно.
2.4.6. Течение жидкости в коротких каналах с дросселированием потока*
Особенностью течения жидкости через короткие каналы, например, отверстия или щели в тонкой стенке
(диафрагму), является то, что запас потенциальной энергии жидкости в процессе течения превращается в
основном в кинетическую энергию струи. Такой вид течения является одним из наиболее распространенных в
гидроаппаратах.
Под тонкой понимают стенку такой толщины, при которой вытекающая струя соприкасается лишь с
передней кромкой отверстия и не касается его боковой поверхности (рис. 2.22).
d0
1\У\\\\Ч\\\\ЧЧ1
[1 "^;
\—»■ д
М ^4>\
1\\\\\\\
-<ёУ~\ \
Рг \dc
~<эК_ J '
\\\\<ХЧ
/
1
Рис. 2.22. Схема течения жидкости через отверстие в тонкой стенке (дросселирующую диафрагму)
* Дросселирование — протекание жидкости, пара или газа через дроссель — местное гидродинамическое
сопротивление потоку (сужение трубопровода, вентиль, кран и др.), при котором происходит изменение давления и
температуры.
38
2.4. Основы гидродинамики
Опыт показывает, что длина участка, на котором происходит сжатие струи, может быть равна половине
диаметра отверстия, следовательно, тонкой можно назвать стенку, толщина которой не больше диаметра
отверстия: /<
соотношение площади сжатого поперечного сечения струи к площади отверстия называют коэффициентом
сжатия е:
(а \
Б =
Лу
Для приблизительных расчетов коэффициент сжатия струи для случаев течения через круглое отверстие
принимают равным е = 0,64.
Расход Qжидкости через дросселирующее отверстие, при известном перепаде давлений Ар на нем,
определяется по формуле, являющейся одной из основных среди применяемых в технических приложениях при
расчетах разнообразных дроссельных устройств:
где ц — коэффициент расхода;
А — площадь отверстия;
Ар = р^ —р2 — перепад давления на отверстии.
Коэффициент расхода равен произведению
Ц = Еф,
где ф — коэффициент скорости, учитывающий разницу теоретической скорости vT истечения идеальной
жидкости при напоре Н и фактической скорости v реальной жидкости:
V
<р = —>
гдеит =^2gH.
Коэффициент расхода ц для конкретного дросселирующего отверстия обычно принимают по
экспериментальным данным, представленным в зависимости от числа Рейнольдса (рис. 2.23).
0,8
0,6
0,4
0,2
0
I
_j i
t 2
■■ 1
••
10 102 103 Re
Рис. 2.23. Зависимость коэффициентов расхода дроссельных устройств от числа Рейнольдса
На рис. 2.23 приведены графики зависимостей ц от Re для круглого отверстия с острой кромкой (кривая 1) и
для прямоугольного окна в гильзе гидроаппарата с цилиндрическим золотником, бурты которого имеют
острые (кривая 2) и притуплённые (кривая 3) кромки. При больших числах Рейнольдса коэффициент расхода
отверстия с острой кромкой достигает значения, равного 0,62, и практически стабилизируется.
39
2. Физические основы функционирования гидросистем
2.4.7. Кавитация
Кавитацией называется образование в капельной жидкости полостей, заполненных паром, газом, или их
смесью (так называемых кавитационных пузырьков или каверн). Кавитационные пузырьки образуются в тех
местах, где давление в жидкости становится ниже некоторого критического значения ркр (в реальной жидкости
Ркр приблизительно равно давлению насыщенного пара этой жидкости при данной температуре). Если
понижение давления происходит вследствие больших местных скоростей в потоке движущейся капельной
жидкости, то кавитация называется гидродинамической, а если вследствие прохождения звуковых волн большой
интенсивности — акустической.
Гидродинамическая кавитация обычно возникает в результате местного понижения давления,
вызванного возникновением больших местных скоростей в потоке. Мельчайшие пузырьки газа или пара, двигаясь с
потоком и попадая в область давления/? < ркр, сильно расширяются в результате того, что давление
содержащегося в них пара и газа оказывается больше, чем суммарное действие поверхностного натяжения и
давления в жидкости. В результате на участке потока с пониженным давлением, например в трубе с местным
сужением, создается довольно четко ограниченная кавитационная зона, заполненная движущимися
пузырьками.
Выделившиеся из жидкости пузырьки пара и газа увлекаются потоком и переносятся в область более
высокого давления, в которой пузырьки паров жидкости конденсируются и переходят в жидкое состояние,
а воздушные сжимаются или полностью смыкаются. Так как сокращение кавитационного пузырька
происходит мгновенно, частицы жидкости перемещаются к его центру с большой скоростью. В результате
кинетическая энергия соударяющихся частиц вызывает в момент смыкания пузырьков местные
гидравлические микроудары, сопровождающиеся высокими забросами давления и температуры в центрах
пузырьков. По расчетам температуры могут достигать значений 1 500 °С и выше, а местное давление —
до 200 МПа.
Большая энергия, рассеиваемая при схлопывании кавитационных пузырей вблизи поверхности
обтекаемого тела, может приводить к ее повреждению. Масштабы такого явления, называемого гидравлической
эрозией, могут быть разными — от точечной поверхностной эрозии после многих лет эксплуатации до
катастрофического выхода из строя насосов, гидроаппаратов и т.п.
Кавитация может существенно увеличивать гидродинамическое сопротивление, в результате чего
снижается коэффициент полезного действия гидравлического оборудования, может стать причиной снижения
подачи насоса и даже срыва его работы.
Для избежания опасности возникновения кавитации в гидросистемах, рекомендуется соблюдать, как
минимум, следующие условия:
■ давление в потоке жидкости должно быть больше давления насыщенных паров;
■ режим течения жидкости по возможности должен быть ламинарным;
■ температура рабочей жидкости не должна превышать значение, при котором может начаться
образование газовых пузырьков;
■ максимально возможное ограничение попадания воздуха в рабочую жидкость.
Наиболее эффективным способом предотвращения возникновения кавитации в гидросистемах является
повышение рабочего давления в проблемных зонах. В частности, радикальным способом борьбы с
кавитацией в насосах является применение насосов подкачки.
Для уменьшения разрушающего эффекта кавитации используют противоэрозионные материалы,
специальные покрытия из бронзы, хрома и др.
Наиболее стойкими к гидравлической эрозии являются титан, бронза и нержавеющая сталь, а наименее
стойкими — чугун и углеродистая сталь.
Полностью устранить разрушительное действие кавитации путем применения стойких против коррозии
материалов не представляется возможным.
40
2.4. Основы гидродинамики
2.4.8. Гидроудар
Гидравлическим ударом называется колебательный процесс резкого изменения давления в жидкости,
вызванного внезапным изменением скорости её течения в напорном трубопроводе. Этот процесс является
очень быстротечным и характеризуется чередованием резких повышений и понижений давления. Изменение
давления при этом тесно связано с упругими деформациями жидкости и стенок трубопровода.
Гидравлический удар чаще всего возникает при быстром перекрытии трубопровода запорным
устройством (рис. 2.24).
рв
рв
р0
Pa
Ро
1
р0
П
1 г
■*—vbpA
1
VB —*■
а
с
VB—~ \V=Q
б 1
В
С
—►-
iM~l>=0 А+ААП .
г
Ръ*ЬРт 1
^0
Р.
РВ
РВ
^~
1
Ро
р0
рв
1
vB—*-
1
*—vB |
nvLn
д
с
• 11 »f■
•*- VB | V = Q Р0-ЬРт ^
e 1
ii^i
v=o Рв-ьрт |
ж
с
V=0 Р„-&Рт 1
3
Рис. 2.24. Стадии гидравлического удара в трубопроводе
Рассмотрим стадии гидравлического удара:
■ жидкость движется по трубопроводу со скоростью z?0 (рис. 2.24, а);
■ мгновенное закрытие задвижки (рис. 2,24, б). Скорость частиц жидкости, натолкнувшихся на задвижку,
погашается, их кинетическая энергия переходит в работу деформации стенок трубы и жидкости. Стенки
трубы растягиваются, жидкость сжимается* в соответствии с повышением давления на величину Аруц. На
остановившиеся частицы жидкости набегают текущие за ними и тоже останавливаются, в результате чего
сечение 1-1 перемещается от задвижки со скоростью с, называемой скоростью ударной волны. Область,
в которой давление изменяется на величину Арт, называют ударной волной;
■ ударная волна достигла резервуара (рис. 2.24, в). Жидкость в трубе остановлена и сжата, стенки
трубы — растянуты;
■ под действием перепада давления ApyR жидкость из трубы устремляется в резервуар, начиная с
сечения, непосредственно прилегающего к резервуару (рис. 2.24, г). Сечение 1-1 перемещается в обратном
направлении — к задвижке — с той же скоростью с. Давление за сечекТием выравнивается до р0, труба
приобретает начальное состояние;
■ работа деформации жидкости и трубы полностью переходит в кинетическую энергию, жидкость в трубе
приобретает первоначальную скорость v0, но направленную в другую сторону (рис. 2.24, д);
■ движущаяся в резервуар жидкость стремится оторваться от задвижки, в результате возникает
отрицательная ударная волна под давлением р0 — Аруд (рис. 2.24, е). Ударная волна направляется от задвижки
к резервуару со скоростью с, оставляя за собой сжавшиеся стенки трубы и расширившуюся под
действием давления р0 — Аруд жидкость. Кинетическая энергия жидкости вновь переходит в работу
деформаций, но противоположного знака;
* В данном случае нельзя пренебрегать сжимаемостью жидкости, так как именно малая сжимаемость
жидкости является причиной возникновения большого ударного давления.
41
2. Физические основы функционирования гидросистем
■ отрицательная ударная волна достигает резервуара (рис. 2.24, ж);
■ давление в трубе начинает выравниваться, что сопровождается возникновением движения жидкости из
резервуара со скоростью vq (рис. 2.24, з). Когда отраженная от резервуара ударная волна достигнет
задвижки, возникнет ситуация уже имевшая место (см. рис. 2.24, б). Весь цикл гидравлического удара
повторится.
Увеличение давления Аруц при гидроударе определяется по формуле Жуковского;
АРуд =P<Pq-vx)c,
где v0 и и1 — средние скорости в трубопроводе до и после закрытия задвижки, м/с;
с — скорость распространения ударной волны вдоль трубопровода,
c = l/Jp/K+pd/5E,
где К— объемный модуль упругости жидкости;
Е— модуль упругости материала стенки трубопровода;
d — внутренний диаметр трубопровода;
б — толщина стенки трубопровода.
При реальных гидроударах имеет место затухания колебаний давления вследствие трения и ухода
энергии в резервуар (рис. 2.25).
Штриховой линией на рис. 2.25, а приведена теоретическая диаграмма изменения давления около
задвижки при/?0 > Лруд. Сплошными линиями показан примерный вид действительной картины изменения
давления во времени.
При р0 < Аруц снижение давления в трубопроводе на величину Аруд невозможно, так как давление около
задвижки падает практически до нуля (/?ИЗб~-0,1 МПа), что вызывает кавитацию и образование паровой
каверны. В связи с этим нарушается периодичность процесса (рис. 2.25, б).
Формулы Жуковского справедливы, когда время закрытия задвижки равно
'зак <tu=2l/c,
где t0 — фаза гидравлического удара;
/— длина трубопровода.
При этом условии имеет место прямой гидравлический удар. Непрямой гидравлический удар возникает
когда ударная волна, отразившись от резервуара, возвращается к задвижке раньше, чем она будет
полностью закрыта. При этом повышение давления в трубопроводе будет меньше, чем при прямом гидроударе.
Гидравлический удар может привести к повреждению мест соединений отдельных участков трубопровода
(стыки, фланцы), разрыву стенок трубы, поломке насосов и т.п.
Для предотвращения гидравлического удара применяют различные устройства, устанавливаемые на
трубопроводах, которые либо увеличивают время закрытия запорных устройств, либо принимают на себя
возникающие резкие забросы давления: предохранительные клапаны, гидроаккумуляторы.
42
3. Энергообеспечивающая подсистема
Энергообеспечивающая подсистема предназначена для сообщения рабочей жидкости гидравлической
энергии и поддержанию ее параметров (чистоты, давления, температуры и т.п.) в требуемом диапазоне
значений. Обычно элементы энергообеспечивающей подсистемы монтируют компактным образом в виде
функционально единой установки, которую в промышленной практике так и называют насосная установка, либо
маслостанция (рис. 3.1).
<S>
0.8
0.6 0.4
0.5 1_.Г ^
0.3
0.2
СКн)
0.1
L._
№ поз.
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Наименование
Гидробак V = 50 л HLP 22 cSt
Электродвигатель 1 кВт, 1500 мин-1
Муфта пальчиковая
Насос шестеренный, V0=12 см3, р„=16 МПа
Воздушный фильтр
Предохранительный клапан
Фильтр сливной
Манометр 10 МПа
Рис. 3.1. Маслостанция
Насосные установки в зависимости от предъявляемых к ним требований имеют разную комплектацию.
В состав полностью укомплектованной насосной установки входят: бак 9 с рабочей жидкостью; один или
несколько насосных агрегатов (насос 10 с приводным двигателем 11); гидравлические аккумуляторы 12 для
накопления энергии; предохранительные клапаны 4 для защиты насосов от перегрузки; гидроаппаратура
управления 2; приборы контроля давления — манометры 1, температуры 6 и уровня жидкости в баке 5; фильтры 7,
8; устройства для охлаждения или подогрева рабочей жидкости (теплообменники 3); а также трубопроводы и
различные устройства для ее обслуживания.
В современном производстве используют маслостанции нескольких типов:
■ небольшие индивидуальные типовые, обслуживающие один механизм или одну машину;
■ мощные станции с одним или группой аккумуляторов и общим насосным блоком, обслуживающие
группу механизмов или агрегатов;
■ мощные станции, имеющие общий насосный блок и индивидуальные аккумул яторы для каждого
обслуживаемого механизма.
Несмотря на большое разнообразие компоновок и комплектаций маслостанции, в любой гидросистеме
главным элементом является рабочая жидкость.
43
3. Энергообеспечивающая подсистема
3.1. Рабочие жидкости
В гидроприводах рабочим телом, с помощью которого энергия от ее источника передается
исполнительным механизмам, приводящим в действие технологическое оборудование, является жидкость. Будучи
энергоносителем, рабочая жидкость выполняет целый ряд других, не менее важных функций, обеспечивающих
нормальную работу, как отдельных элементов гидравлических приводов, так и системы в целом:
■ является смазкой трущихся деталей;
■ отводит теплоту от контактных пар элементов насосов и гидрдвигателей, возникающее при их трении;
■ уносит образующиеся вследствие трения продукты износа (абразивные частицы);
■ защищает от коррозии внутренние поверхности трубопроводов и гидравлических устройств.
Выполнение рабочей жидкостью такого многообразия функций возможно только при ее соответствии
целому ряду требований (рис. 3.2):
■ хорошая смазывающая способность;
■ химическая стабильность в течение длительного времени работы (устойчивость к старению);
■ хорошие противоизносные свойства;
■ хорошая теплопроводность;
■ нейтральность к материалам гидроэлементов и уплотнений;
■ малая токсичность жидкости и ее паров (экологическая чистота);
■ высокая температура кипения и низкая температура замерзания;
■ высокая устойчивость к воспламенению (пожаробезопасность);
■ малая склонность к пенообразованию;
■ малая способность к поглощению влаги и воздуха;
■ возможность регенерации (т.е. восстановления) начальных свойств;
■ низкая стоимость и небольшие расходы на техническое обслуживание.
Экологическая
чистота
Вынос частиц Защита
износа от коррозии
Пожаробезопасность
Смазывающие
свойства
\ш
JTfLrw
■
Устойчивость
к старению
tftfl"
Противоизносные
свойства
Нейтральность
к материалам
уплотнений
Отвод
теплоты
Малое пенообразование
Хорошая деаэрация *
Рис. 3.2. Требования к гидравлическим жидкостям
Невыполнение этих требований приводит к различным нарушениям в функционировании гидропривода.
В частности плохие смазочные или антикоррозийные свойства приводят к уменьшению сроков службы
гидропривода; неоптимальная вязкость или ее слишком большая зависимость от режимов работы гидропривода
снижают общий КПД и т.д. Нормальная и долговременная работа гидропривода определяется в равной мере
44
3.1. Рабочие жидкости
как правильностью выбора марки рабочей жидкости при конструировании, так и грамотной эксплуатацией
гидропривода.
Всем перечисленным выше требованиям не удовлетворяет в полной мере ни одна жидкость. И менее
всего — самая распространенная — вода, так как она является плохой смазкой и активно способствует коррозии
контактирующих с ней металлов.
В качестве рабочих жидкостей в гидроприводах применяют минеральные масла, эмульсии и
синтетические жидкости.
Минеральные масла. Наиболее часто в приводах используются минеральные масла, которые получают
путем перегонки нефти-сырца и на 85...98 % состоящие из базового масла. Однако базовые масла в чистом
виде, за редким исключением (веретенное АУ, турбинное и некоторые другие) не применяются, так как они не
обладают требуемыми для гидропривода свойствами. Для получения рабочих жидкостей с нужными
эксплуатационными свойствами в базовые масла вводятся различные присадки:
■ вязкостные — замедляют повышение вязкости при понижении температуры;
■ антиокислительные — приостанавливают реакцию окисления (хим ическую реакцию металлических
поверхностей с кислородом);
■ антикоррозионные — обеспечивают образование на металлических поверхностях пленки,
предотвращающей коррозию;
■ противоизносные — улучшают смазывающую способность жидкости в местах контактного трения
подвижных элементов насосов и гидродвигателей;
■ противопенные — уменьшают коэффициент поверхностного натяжения на поверхности контакта масла
с воздухом;
■ противозадирные ■= образуют в прецизионных парах гидроаппаратов химическую пленку, которая
эффективно предотвращает задиры и наволакивания металла;
■ деэмульгаторы — предотвращают смешивание рабочей жидкости с водой.
Обычно в рабочую жидкость вводят несколько присадок или комплексные присадки, улучшающие сразу
несколько показателей рабочей жидкости.
К отечественным маслам, содержащим весь комплекс присадок, и пригодным для использования в
гидросистемах различных машин промышленного назначения относятся масла индустриальные гидравлические
типа ИГП, которые изготовлены из нефтей, подвергнутых глубокой селективной очистке.
Непосредственное влияние на рабочие процессы и явления, происходящие в элементах гидропривода
оказывает вязкость масла. При чрезмерно высокой вязкости силы трения в жидкости настолько
значительны, что могут привести к нарушению сплошности потока. При этом происходит незаполнение рабочих камер
насоса, возникает кавитация, снижается подача, ухудшаются показатели надежности. Наряду с этим
высокая вязкость рабочей жидкости позволяет снизить утечки через зазоры и щелевые уплотнения, т.е.
увеличить объемный КПД. Изменение вязкости является критерием достижения предельного состояния рабочей
жидкости.
Вязкость минеральных масел повышается с ростом давления и снижается при увеличении температуры
масла, что отрицательно сказывается на его смазывающей способности, поэтому предпочтительно
применять масла, у которых зависимость вязкости от температуры слабее. Вязкостно-температурные свойства
масел оценивают с помощью индекса вязкости (ИВ), являющегося паспортной характеристикой современных
масел. ИВ определяется сравнением данного масла с двумя эталонами. Один из этих эталонов
характеризуется крутой вязкостно-температурной характеристикой, т.е. сильной зависимостью вязкости от температуры,
а другой — пологой характеристикой. Эталону с крутой характеристикой присвоен ИВ=0, а эталону с пологой
характеристикой = ИВ=100.
Сжимаемость минерального масла более чем в 100 раз превышает сжимаемость стали и часто
существенно влияет на качество работы гидропривода. На сжимаемость масла существенное влияние оказывает
наличие в ней нерастворенного воздуха (обычно до 6 % объема масла).
Рекомендуемый температурный диапазон для длительной и непрерывной работы масла составляет
+20...+50 °С. При периодической работе и достаточно длительных перерывах температура масла может
достигать +60 °С. Эксплуатация гидросистем при более высоких температурах масла не рекомендуется
45
3. Энергообеспечивающая подсистема
вследствие резкого сокращения срока службы масла вследствие возрастания скорости окислительных
процессов, которая увеличивается вдвое на каждые 10 °С приращения температуры сверх приведенных выше
значений.
Антиокислительная стабильность масла определяет долговечность его работы в гидроприводах. При
длительной эксплуатации в результате реакции углеводородов масла с кислородом воздуха в нем
появляются осадки смолистых веществ, вызывающие заклинивание трущихся деталей, засорение малых
отверстий, понижение способности масла отделять воду и воздух. На скорость окисления существенно влияют
температура масла, интенсивность его перемешивания, содержание в нем воздуха и воды, а также
металлических загрязнений. Значительное каталитическое воздействие на процесс окисления масла оказывает
контакт с медными деталями, например с трубопроводами. При возрастании температуры от 50 до 70 °С в
связи с резким увеличением скорости окислительных реакций срок эксплуатации масел уменьшается в
2 раза.
Степень окисленности масла характеризуется так называемым кислотным числом, которое представляет
собой количество миллиграммов щелочи КОН расходуемых на один миллилитр масла для его нейтрализации.
Это показатель определяется в лабораторных условиях и должен сравниваться с первоначальной величиной,
характерной для данного масла в состоянии поставки и указываемой в сопроводительной документации.
Изменение кислотного числа масел типа ИГП на 0,8... 1,0 мгКОН/мл, по сравнению с исходным значением,
является браковочным показателем, свидетельствующим о необходимости замены масла.
Еще одним браковочным показателем является наличие в масле воды в количестве большем, чем 0,2 %
объема масла (200 мл воды на 100 л масла).
В процессе работы гидросистемы вследствие дросселирования масла и его окисления происходит
постепенное разрушение присадок, что снижает эксплуатационные свойства масла. Косвенным показателем
выработки присадок является изменение первоначальной вязкости масла более чем на 20 %.
Определить степень разрушения присадок и изменения вязкости без использования приборов и
специальных реактивов нельзя, поэтому важно проводить периодические проверки качества масел в лабораторных
условиях.
При технически грамотной эксплуатации гидросистем масла можно нормально эксплуатировать в течение
6...8 тыс. ч.
В соответствии с областью применения гидравлические масла выпускают:
■ для гидроприводов, гидропередач и циркуляционных масляных систем различных агрегатов, машин и
механизмов, составляющих оборудование промышленных предприятий;
■ для летательных аппаратов, мобильной наземной, речной и морской техники;
■ для гидротормозных и амортизаторных устройств различных машин.
Эмульсии. Помимо минеральных масел в качестве рабочих жидкостей в гидроприводах иногда
используют эмульсии, которые приготавливают на основе базовых масел. Эмульсии представляют собой смеси масла
на нефтяной основе и смягченной воды.
Различают два типа эмульсий «масло в воде» и «вода в масле». Первые представляют собой
мелкодисперсионные смеси воды и 2...3 % эмульсола, в состав которого входят минеральное масло с добавкой 12... 14 %
олеиновой кислоты и 2,5 % едкого натра. Они обладают малой вязкостью, низкой смазывающей
способностью, высокой коррозионной активностью и ограниченным температурным диапазоном. Положительными
свойствами эмульсий типа «масло в воде» являются негорючесть и низкая стоимость.
Эмульсии типа «вода в масле» представляют собой смесь масла с водой (около 40 %) и присадками
(эмульгаторами), обеспечивающими стойкость эмульсии. При невысоких давлениях такие рабочие жидкости
немного уступают минеральным маслам по коррозионной стойкости и смазывающим свойствам.
Эмульсии нельзя смешивать между собой, поскольку, имея почти одинаковый состав, их
физико-химические свойства сильно различаются.
Эмульсии используют в качестве рабочих жидкостей в гидроприводах кузнечно-прессовых и горных
машин, где повышенные требования противопожарной безопасности.
46
3.1. Рабочие жидкости
Синтетические рабочие жидкости. Для гидроприводов, работающих в условиях, отличающихся от
нормальных (/ра6 > 100 °С, повышенные требования к пожаробезопасное™, чрезмерно низкие температуры
окружающей среды и т.п.), или от которых требуется повышенная стабильность характеристик, применяются
синтетические рабочие жидкости, основу которых составляют продукты, полученные в результате химических
реакций.
Обладая повышенными отдельными свойствами, синтетические рабочие жидкости имеют некоторые
недостатки, препятствующие их широкому применению. Это, в первую очередь, высокая стоимость и
ограниченность сырьевых ресурсов, используемых для изготовления синтетических жидкостей. Кроме того, ряд таких
жидкостей плохо совместим с основными материалами гидроприводов. Они токсичны и имеют худшие, по
сравнению с минеральными маслами, показатели по отдельным свойствам.
Из множества типов синтетических жидкостей в гидроприводах нашли применение следующие: ди-
эфиры, силоксаны, фосфаты, водосодержащие жидкости, фтор- и хлорорганические рабочие жидкости.
Органические жидкости обладают по сравнению с минеральными маслами повышенными
противопожарными свойствами. Наилучшими в этом отношении являются фторорганические жидкости, которые
отличаются полной негорючестью. Кроме того, они химически инертны и термически стабильны.
Водосодержащие жидкости не воспламеняются при распылении на пламя или на поверхность, нагретую до
температуры 700 °С. Остальные жидкости имеют повышенную огнестойкость по сравнению с нефтяными
маслами, но являются горючими и могут воспламеняться при попадании на огонь или раскаленные
предметы.
Водосодержащие жидкости (водно-гликолевые и водно-глицериновые) относятся к огнестойким
рабочим жидкостям, пожаробезопасность которых обеспечивает присутствующая в них вода. Основными
компонентами водногликолевых жидкостей являются гликоль (обычно, этиленгликоль) — 50...60 % и
вода -35...45 %. В состав рабочих жидкостей также входят водорастворимый загуститель и другие
присадки.
Обозначение рабочих жидкостей. В настоящее время действуют различные системы обозначения
марок рабочих жидкостей. Рабочие жидкости общего назначения принято называть «индустриальные» с
указанием вязкости в сСт при t = 50 °С. Кроме того, существуют еще отраслевые системы обозначений. Например,
рабочие жидкости для станочных гидроприводов — ИГП, для гидроприводов транспортных установок — МГ,
МГЕ, для авиационных гидроприводов — АМГ.
В будущем предполагается переход на новую систему маркировки, основой которой будет являться
международный стандарт MS ISO 6443/4, устанавливающий классификацию группы Н (гидравлические системы),
которая относится к классу L (смазочные материалы, индустриальные масла и родственные продукты).
Добавочные к наименованию группы Н индексы L, V, М, R и другие являются закодированными обозначениями
различных улучшающих присадок.
Например:
L — НН — очищенные минеральные масла без присадок;
L — HL — масла с антиокислительными и антифрикционными свойствами;
L — HF — жидкость с улучшенными огнестойкими свойствами;
L — HR — масла типа HL с вязкостными присадками;
L — НМ — масла типа HL с улучшенными противоизносными свойствами;
L — HV — масла типа НМ с присадками, увеличивающими вязкость.
На основе международного стандарта разрабатываются национальные стандарты. В России действует
группа стандартов ГОСТ 17479.0-85 — ГОСТ17479.4-87, по которым будет проводиться маркировка для
вновь создаваемых рабочих жидкостей на нефтяной основе.
Рекомендуемые для применения в станочных гидроприводах марки минеральных масел отечественнрго
производства и эквивалентные масла производства ведущих иностранных фирм приведены в приложении П1,
табл. П1.8.
47
3. Энергообеспечивающая подсистема
3.2. Трубопроводы и присоединительная арматура
Трубопроводы и присоединительная арматура являются важными элементами гидропроводов, поскольку
ими соединяются между собой отдельные гидроаппараты, образуя единую гидросистему. К трубопроводам
относятся жесткие трубы, гибкие рукава (шланги) и поворотные соединения труб, а к присоединительной
арматуре — различного рода разъемные и неразъемные соединения.
Жесткие трубы. Жесткие трубы применяют в случаях, когда различные части гидросистемы неподвижны
относительно друг друга.
Для трубопроводов высокого давления используют стальные бесшовные холоднодеформированные
трубы, которые способны выдерживать высокое давление и имеют хорошее качество внутренних поверхностей.
В трубопроводах низкого давления применяют водогазопроводные стальные и электросварные трубы, а
также медные, латунные и алюминиевые трубы.
В процессе работы гидросистем трубопроводы подвергаются действию статических и динамических
нагрузок. Статические нагрузки возникают от давления рабочей жидкости на внутренние стенки трубопроводов,
а также вследствие погрешностей монтажа и от температурных деформаций. Динамические нагрузки
обусловлены пульсацией давления рабочей жидкости, гидравлических ударов при срабатывании
гидроаппаратов, кавитационных явлений и др.
Подавляющее большинство разрушений трубопроводов носит усталостный характер под воздействием
часто повторяющихся динамических нагрузок. Интенсивность разрушения трубопроводов под действием
динамических нагрузок зависит от искажения профиля сечения труб при изгибе, кривизны изгиба, возможности
резонансных колебаний и др.
Под действием давления изогнутый трубопровод стремится распрямиться, в результате в месте
максимальной его кривизны возникают наибольшие напряжения при колебаниях давления и усталостные
разрушения. Поэтому необходимо монтировать трубопровод с максимально возможным радиусом кривизны, что
уменьшает сплющивание и повышает долговечность трубопровода. На участках гидролиний, работающих в
условиях пульсирующих давлений, рекомендуется применять радиус изгиба R >3d (d— наружный диаметр
трубы).
Для предупреждения разрушения трубопроводов под действием статических нагрузок нужно правильно
выбирать размеры и материал труб, производить тщательно монтаж, не допуская натяжений, сжатий или
перекосов труб и соединений, принимать меры по защите трубопроводов от теплового воздействия окружающей
среды и обеспечивать нормальную работу охлаждающих устройств рабочей жидкости.
При монтаже следует принимать меры для исключения резонансных колебаний трубопроводов: частое
крепление трубопроводов к рамам и фундаментам, установка демпфирующих прокладок, применение
специальных соединений и т.д.
При изготовлении трубопроводов внутренняя поверхность труб должна быть чистой. Если при монтаже
трубопровода осуществляется гибка труб с предварительным нагревом, приварка отводов, фланцев и
подобные операции, то после этого необходимо очистить внутреннюю поверхность труб.
Неочищенные трубопроводы могут служить источником сильного загрязнения.гидросистемы и рабочей
жидкости. В процессе работы окалина, остатки сварочного шлака, брызги металла и другие загрязнители
неизбежно проявят себя и могут привести к возникновению серьезных неполадок в работе гидросистемы и
преждевременному выходу из строя ее элементов.
Существуют два способа очистки внутренних поверхностей труб: механический и химический. При
монтаже оборудования должны проводиться оба вида очистки. Сначала выполняют механическую очистку
щетками, ершами, шарошками для того, чтобы удалить грат и шлак, которые не растворяются при химической
очистке. Химическую очистку проводят обработкой труб в водных растворах серной и соляной или 20%-ной орто-
фосфорной кислоты. После этого трубопровод промывают, нейтрализуют и сушат.
Гибкие трубопроводы (шланги). Их используют для соединения подвижных элементов
гидроприводов, для компенсации неточностей при сборке агрегатов, облегчения сборки и получения быстроразъемных
соединений, а также для демпфирования кратковременных динамических забросов (пиков) давления. Кро-
48
3.2. Трубопроводы и присоединительная арматура
ме того, иногда шланги применяют вместо жестких труб для снижения вибраций и шума при работе
гидропривода.
В качестве шлангов обычно используют резиновые рукава, упроченные снаружи хлопчатобумажной или
металлической оплеткой. Иногда шланги имеют внутренний каркас из тех же материалов. Шланги с одинарной
и двойной оплеткой применяют в системах с давлением до 4 МПа. Для систем с давлением до 20 МПа
используют одинарную оплетку из стальной проволоки, для больших давлений — двойную и даже тройную. Запас
прочности шлангов принимают равным 3-4. Наименьший радиус изгиба шлангов с двойной оплеткой должен
быть не менее 12 внутренних радиусов.
Для систем с давлением до 40 МПа применяют шланги с внутренней трубкой из фторопласта.
Большое значение для обеспечения работоспособности гибких шлангов имеет качество их соединения с
присоединительным штуцером. Основные способы заделки резино-тканевых шлангов в арматуре
представлены на рис. 3.3.
Неразборные соединения шлангов со штуцерами (рис. 3.3, а) изготавливают на специальных обжимных
прессах, а разборные соединения (рис. 3.3, б) могут быть собраны без специальных приспособлений. Осевые
нагрузки в соединении воспринимаются силами трения на конусном хвостовике ниппеля и в винтовой нарезке
муфты.
Важно правильно проводить монтаж шлангов, поскольку от этого в значительной степени зависит их
долговечность. Шланги следует монтировать так, чтобы они не терлись один о другой и о детали конструкции при
работе гидропривода, чтобы их участки вблизи арматуры не подвергались изгибу и механическому
растяжению (рис. 3.4).
Ч f f f f f
ihj* \r* %^J
Рис. З.4. Монтаж гибких трубопроводов (шлангов)
Дефекты трубопроводов сводятся в основном к нарушению герметичности и разрушению труб или
рукавов, нарушению герметичности их концевых соединений, а также загрязненности внутренних поверхностей и
уменьшению площади поперечного сечения трубопровода, обусловленных неправильной гибкой труб, смина-
нием рукава и нарушениями технологии сварки.
49
3. Энергообеспечивающая подсистема
Поворотные соединения труб. Для питания потребителей, которые находятся на механизмах,
совершающих при работе поворот на значительный угол или вращающихся без ограничения относительно
подходящих трубопроводов, применяют поворотные соединения (рис. 3.5).
Рис. 3.5. Поворотное соединение труб
Штуцер 1 и фланец 4 соединяются с трубопроводами, которые размещены на подвижных относительно
друг друга механизмах. Поворот в соединении осуществляется через цилиндрический шарнир 2, который
уплотняется манжетами 3.
Существуют подвижные соединения труб, обеспечивающие герметичное соединение трубопроводов при
взаимном возвратно-поступательном перемещении различных частей гидросистемы. Например, в
металлургическом производстве на станах полирования и шлифования листа, такие соединения обеспечивают ход до
10...20 м.
Неразъемные соединения труб. Их применяют достаточно редко, только для трубопроводов, не
подлежащих демонтажу. Соединения выполняются пайкой, либо сваркой.
Разъемные соединения труб. Трубы с внутренним диаметром более 40 мм обычно соединяют при помощи
фланцев. Герметичность соединения обеспечивается прокладками в виде резиновых колец (рис. 3.6, а), либо колец
из красной отожженной меди (рис. 3.6, б, в, г). Для низких давлений применяют кольца из паронита.
Для жесткой связи с трубой применяют плоские приварные фланцы (рис. 3.6, а, б). Если при монтаже
необходим разворот фланцев или труб, то используют накидные фланцы, надеваемые на трубу с приваренным к
ней ниппелем (рис. 3.6, в), либо резьбовые фланцы (рис. 3.6, г).
50
3.2. Трубопроводы и присоединительная арматура
Для соединения трубопроводов с агрегатами, диаметр условного прохода которых не превышает 32 мм, в
гидросистемах применяют соединения с приварным ниппелем и накидной гайкой (рис. 3.7).
(*yyty^///'j£r^i&iFPJ$
i |
1 2 3
а
КчТИ^ИЛ ('ТТу '/л
б
О^Л
1В^уУ^уМх\\Ц|1»т11»ИгшР- ']
Рис. 3.7. Соединения трубопроводов с приварным ниппелем
В соединении, показанном на рис, 3.7, а, шаровый ниппель 3, со сферической контактной поверхностью,
приваривают к трубе. Предварительно надетая на ниппель накидная гайка наворачивается на штуцер 1,
обеспечивая герметичный контакт сферической поверхности ниппеля 3 с конической проточкой штуцера 1.
Подобные соединения обеспечивают герметичность при давлениях до 40 МПа.
Модернизированные соединения с накидной гайкой (рис. 3.7, б), в которых сферический профиль ниппеля
заменен коническим с добавленным в конструкцию резиновым кольцом, позволяют производить
многократный монтаж и демонтаж.
Для тонкостенных металлических труб наиболее широкое применение нашли соединения с
развальцовкой трубы и с врезающимся кольцом, допускающие многократный монтаж-демонтаж (до 15-20 раз) без
нарушения герметичности.
Соединение для развальцованной трубы (рис. 3.8, а) состоит из штуцера 1 с присоединительной
цилиндрической или конической резьбой*, ниппеля 3 и накидной гайки 2. Трубу с предварительно надетым на нее
ниппелем развальцовывают в виде раструба, надеваемого на коническую часть штуцера. Ниппель с трубой и
штуцер стягиваются вместе с помощью накидной гайки, при этом в месте сопряжения образуется плотное
соединение и обеспечивается требуемая герметичность.
1 2 3
а
~J?77?m—
': '" " ^v8^
б
Рис. 3.8. Соединения для тонкостенных труб
Соединение с врезающимся кольцом (рис. 3.8, б) не требует применения специального инструмента и
предварительной разделки конца трубы. Оно также содержит штуцер и накидную гайку, между которыми
располагается кольцо, охватывающее трубу по наружному диаметру и упирающееся коническими поверхностями
в соответствующие конические расточки в штуцере и гайке. При завинчивании гайки кольцо, деформируясь,
врезается в поверхность трубы, что препятствует ее выскальзыванию и обеспечивает необходимую
герметичность соединения. При использовании таких соединений предъявляются повышенные требования к точности
геометрических размеров и качеству наружной поверхности трубы.
* Соединения с конической резьбой не имеют уплотнительных колец, поскольку коническая резьба является
самоуплотняющейся.
51
3. Энергообеспечивающая подсистема
Быстроразъемные соединения. В мобильных машинах, на которых достаточно часто осуществляется
установка того или иного навесного оборудования, а зачастую и в стационарных установках, например, станах
горячей и холодной прокатки листа, для сокращения времени перевалки валков, гибкие рукава снабжают бы-
строразъемными соединениями, позволяющими разъединять трубопроводы без потери их герметичности
(рис. 3.9).
1 2 3 456
7 8
Рис. 3.9. Быстроразъемное соединение
В обеих частях соединения — розетке 1 и штекере 7 установлены обратные клапаны 2 и 9, которые не
позволяют вытекать рабочей жидкости из шлангов, если соединение находится в разъединенном состоянии.
Обратные клапаны 2 и 9 принудительно открывают друг друга при вводе штекера 7 в розетку 1. Соединение
розетка— штекер надежно удерживается в замкнутом состоянии посредством шариков 4, запертых в проточке 8
штекера 7 подпружиненной фиксирующей втулкой 6. Герметичность соединения обеспечивается резиновым
кольцом 3, охватывающим штекер 7 по наружному диаметру.
Разъединение соединения осуществляется путем сдвига фиксирующей втулки 6 в сторону шланга. При
этом шарики 3 получают возможность радиального перемещения в проточке 5 и не удерживают штекер 7,
который вследствие этого выталкивается из розетки пружинами обратных клапанов 2 и 9.
Условные графические обозначения соединений представлены в табл. 3.1.
Таблица 3.1
Соединение
Графическое
обозначение
Соединение
Графическое
обозначение
Место присоединения:
несоединенное
соединенное
Быстроразъемное соединение без
запорного элемента:
соединенное
несоединенное
■X-
Разъемное соединение
Быстроразъемное соединение с
запорным элементом:
соединенное
несоединенное
-ою-
Фланцевое
Поворотное однолинейное
О
Штуцерное резьбовое
Присоединительное устройство
к другим системам (испытательным,
промывочным машинам и т.д.)
<
52
3.2. Трубопроводы и присоединительная арматура
Гидролинии. Трубопроводы, соединения, а также каналы, выполненные в гидроаппаратах, плитах и
корпусах, называют гидролиниями. В зависимости от функционального назначения различают следующие
гидролинии'
■ всасывающие — подвод жидкости к насосам;
■ напорные — подача жидкости под высоким давлением (от насоса или гидроаккумулятора);
■ сливные — слив жидкости в бак;
■ управления — подача жидкости для управления гидроаппаратами или отдельными элементами внутри
гидроаппаратов;
■ дренажные — отвод утечек в бак.
Условные графические обозначения гидролиний представлены в табл. 3.2.
Таблица 3.2
Название гидролинии
Линии всасывания,
натетания, выхлопа
Линии управления,
дренажа, отвода
конденсата.
Гибкий трубопровод
(шланг)
Графическое обозначение
i
—
Название гидролинии
Соединение
трубопроводов
Пересечение
трубопроводов
без соединения
Графическое обозначение
-«- +
+ +
Расчет гидролиний осуществляется на этапе проектирования гидросистемы и состоит из нескольких
шагов: расчет проходных сечений; определение потерь давления и расчет на прочность.
Проходные сечения гидролиний должны быть такими, чтобы скорости рабочей жидкости в них были
экономически приемлемыми и технологически допустимыми. Опыт проектирования и эксплуатации гидросистем
показывает, что средние скорости движения жидкости в гидролиниях не должны превышать следующих
значений:
■ всасывающие — 1,5 м/с;
■ напорные — 6 м/с;
■ сливные — 2 м/с;
■ линии управления — 5 м/с.
Расчет проходных сечений гидролиний производится на основе известного соотношения, связывающего
между собой площадь проходного сечения А, расход жидкости Q и скорость потока v.
Q=Av.
Для труб и каналов круглого сечения, в которых площадь равна А = nd2/4, диаметр проходного сечения
определяется по формуле
Полученный в результате расчета диаметр d используют при выборе внутреннего диаметра трубы. При этом
полученное значение округляют до ближайшего большего значения из стандартного ряда (см. приложение П1).
Потери давления в гидролиниях на трение по длине и в местных сопротивлениях зависят от режима
течения жидкости и определяются по известным соотношениям.
53
3. Энергообеспечивающая подсистема
3.3. Насосы
Насосы—гидравлические машины, назначение которых состоит в преобразовании механической энергии
приводного двигателя в гидравлическую энергию рабочей жидкости.
В гидравлических приводах применяют насосы, которые по своему принципу действия называют
объемными. В таких насосах, независимо от конструктивных особенностей, всасывание рабочей жидкости и
ее вытеснение в систему происходит в результате последовательного увеличения и уменьшения
геометрического объема их рабочих камер. Рабочая камера насоса — это изолированное пространство внутри
насоса ограниченное деталями данной конструкции, изменение взаимного положения которых и приводит
к увеличению или уменьшению ее объема. В процессе работы объемного насоса каждая рабочая камера
при увеличении ее объема соединяется с линией всасывания, а при ее уменьшении —. с линией
нагнетания. При этом давление в вытесняемой жидкости повышается до значения, достаточного для
преодоления суммарного сопротивления гидросистемы, которое складывается из внешнего и внутреннего
сопротивлений. Внешнее сопротивление обусловлено противодействием полезной нагрузки, механическим
трением, а также статической нагрузкой и динамическими силами, действующими на исполнительные
механизмы. Внутреннее (гидравлическое) сопротивление является следствием трения, возникающего
между слоями рабочей жидкости, а также между рабочей жидкостью и стенками каналов, и возникает при
движении жидкости по трубопроводам и через гидроаппараты системы.
Характерным параметром для насоса любой конструкции является его рабочий объем — объем жидкости,
который вытесняется насосом за один оборот приводного вала (обычно рабочий объем выражается в
кубических сантиментрах).
Подача насоса определяется как произведение его рабочего объема на частоту вращения приводного
вала в единицу времени, т.е. подача насоса — это расход жидкости подаваемой насосом в систему:
0Н = К0 л/1000,
где 0Н — объемный расход, л/мин;
V0 — рабочий объем, см3;
п — частота вращения вала, мин-1.
Действительная подача насоса несколько меньше расчетной вследствие перетекания жидкости
внутри насоса из полостей с большим давлением в полости с меньшим. Это так называемые объемные потери,
которые в разных насосах составляют от 3 до 15 % теоретической подачи и характеризуются объемным
КПД.
Наряду с параметрами, отмеченными выше, объемные насосы характеризуются номинальным
давлением, мощностью и полным КПД.
Номинальное давление — наибольшее давление, при котором насос должен работать в течение
установленного срока службы при сохранении параметров в пределах установленных норм,
Мощность насоса — мощность, потребляемая насосом от приводного двигателя:
где Nmn = p QH / 60 — полезная мощность насоса, кВт;
р — давление развиваемое насосом, МПа;
Он — объемный расход, л/мин;
г| — полный КПД насоса.
Полный КПД показывает какую долю полезная мощность составляет от мощности насоса, т.е.
характеризует потери энергии, обусловленные внутренними утечкамив насосе, потерями давления на трение жидкости
о стенки внутренних каналов аппаратов и машин, а также вследствие потерь на механическое трение в
движущихся элементах конструкции.
Классификация насосов основывается на их конструктивных особенностях, отражающих вид
вытеснителей, т.е. рабочих органов насоса, совершающих работу всасывания и вытеснения рабочей жидкости,
кинематическую схему качающего узла насоса, способ распределения жидкости при всасывании и нагнетании,
возможность регулирования рабочего объема и т.д.
54
3.3. Насосы
В зависимости от конструкции вытеснителей объемные насосы бывают следующих типов:
■ шестеренные;
■ роторно-пластинчатые;
■ аксиально-поршневые;
■ радиально-поршневые;
■ винтовые.
Насосы, рабочий объем которых может изменяться путем внешних настроек, либо автоматически в
зависимости от параметров потока, называют регулируемыми. Нерегулируемые насосы — насосы, в которых
рабочий объем регулировать нельзя.
К общим свойствам объемных насосов, которые обусловлены принципом действия и отличают их от
лопастных насосов (центробежных и осевых), относятся следующие:
■ цикличность рабочего процесса и связанная с ней порционность и неравномерность подачи;
■ герметичность насоса, т.е. постоянное отделение напорного трубопровода от всасывающего;
■ самовсасывание, т.е. способность объемного насоса создавать вакуум во всасывающем трубопроводе,
заполненном воздухом, достаточный для подъема жидкости до уровня расположения насоса;
■ жесткость характеристики, т.е. крутизна ее в системе координат/?— Q, что означает малую зависимость
подачи насоса от развиваемого им давления;
■ независимость давления, создаваемого объемным насосом, от частоты вращения приводного
вала.
3.3.1. Шестеренные насосы
Шестеренные насосы, являясь нерегулируемыми, отличаются простотой конструкции, малыми
габаритами и весом. В качестве вытеснителей в них используются две цилиндрические шестерни, находящиеся в
зубчатом зацеплении. В зависимости от вида зацепления шестерен, различают насосы с внешним (рис. 3.10) и
внутренним зацеплением (рис. 3.11).
Насос с внешним зацеплением состоит из корпуса 1, в котором находятся в зацеплении две одинаковые
шестерни 2 и 3. Одна из них (2) является ведущей и приводится во вращение валом 6, связанным муфтой с
валом приводного электродвигателя. Вторая шестерня (3) является ведомой, так как ее вращает за счет
зубчатого зацепления ведущая шестерня 2.
55
3. Энергообеспечивающая подсистема
При вращении шестерен 2 и 3, когда зубья выходят из зацепления объем камеры 5 увеличивается,
давление в полости S уменьшается и происходит всасывание жидкости. Жидкость, попавшая во впадины между
зубьями 4, перемещается по радиусу внутренней поверхности корпуса 1 и, наконец, вытесняется входящими в
зацепление зубьями в нагнетательную полость Р.
При малых зазорах в зубчатом зацеплении возможно образование полости с защемленным объемом
рабочей жидкости, что может привести к резкому увеличению давления и радиальной силы, действующей
на оси и валы насоса. Для устранения резкого роста давления (компрессии жидкости) предусматривают
каналы во впадинах шестерен, на боковых крышках и на нерабочих поверхностях зубьев (для
нереверсивных насосов). При изменении направления вращения ведущей шестерни направление нагнетания
жидкости также меняется на противоположное. Недостатком шестеренных насосов с внешним зацеплением
является большая пульсация (неравномерность) подачи и обусловленный ею довольно высокий уровень
шума.
Насосы с внутренним зацеплением шестерен имеют достаточно низкий уровень шума и практически
избавлены от пульсаций давления. Это обусловлено большим углом зоны зацепления зубьев и меньшей
скоростью изменения объема рабочих камер. Они имеют меньшие габариты, чем насосы с внешним зацеплением,
но являются конструктивно более сложными (см. рис. 3.11).
В насосе с внутренним зацеплением внутренняя шестерня 2 является ведущей и вращает в том же
направлении внешнюю шестерню 3. Свободные от зацепления межзубные впадины заполняются жидкостью из
полости всасывания S. Далее в образованных шестернями и корпусом 1 замкнутых камерах жидкость
переносится в полость нагнетания Р.
В полости нагнетания зубья шестерен вновь входят в зацепление, тем самым не позволяя жидкости
перетекать из полости нагнетания в полость всасывания. Серповидный сегмент 4, с которым почти плотно
контактируют одновременно обе шестерни, является конструктивным элементом насоса, разделяющим
всасывающую и нагнетательную полости.
Рабочий объем шестеренного насоса, см3, определяют по следующей формуле:
где m — модуль зубчатого зацепления, мм;
z — число зубьев шестерни;
Ъ — ширина венца шестерни, мм.
56
3.3. Насосы
Шестеренные насосы относятся к группе нерегулируемых насосов (параметры, определяющие рабочий
объем шестеренного насоса являются величинами постоянными). Невозможность регулирования подачи у
шестеренных насосов компенсируется их приспособленностью для соединения друг с другом при создании
насосных агрегатов.
3.3.2. Пластинчатые насосы
Пластинчатые насосы, как и шестеренные, относятся к числу так называемых роторных насосов —
объемных насосов, в которых вытеснение жидкости производится из перемещаемых рабочих камер в результате
вращательного или вращательно-поступательного движения вытеснителей относительно статора.
Часть роторного насоса, вращаемая непосредственно приводным валом, называется ротором. Статором
называют неподвижную часть насоса — корпус, имеющий приемную (всасывающую) и выходную (напорную)
полости.
На рис. 3.12 представлена полуконструктивная схема пластинчатого насоса с нерегулируемым рабочим
объемом.
Насос состоит из статора 1, во внутренней расточке которого (в плоскости рисунка она имеет форму
овала) расположен ротор 2, в радиальных пазах которого установлены пластины (вытеснители) 3. На боковых
стенках корпуса насоса имеются окна 5 и 4, сообщающиеся соответственно с всасывающими (S) и напорными
(Р) линиями, условно показанные на схеме в виде наружных подводов.
При вращении ротора 2 подвижные пластины 3 постоянно прижимаются к внутренней поверхности
статора 1 под действием центробежных сил, а в зоне нагнетания также давлением масла и, следовательно,
совершают возвратно-поступательное движение в направляющих пазах.
Пространство между рабочими поверхностями статора, ротора, двух соседних пластин и боковых
стенок корпуса образует рабочие камеры насоса, объем которых при вращении ротора изменяется. При
прохождении окон всасывания 5 рабочие камеры увеличиваются и наполняются жидкостью, т.е.
осуществляется процесс всасывания. Проходя окна нагнетания 4, рабочие камеры уменьшаются, и
находящаяся в них жидкость вытесняется на выход из насоса в напорную линию, осуществляется процесс
нагнетания.
Поскольку зоны нагнетания и всасывания расположены диаметрально относительно ротора, на него не
действуют радиальные силы, что положительно сказывается на долговечности подшипников приводного вала.
57
3. Энергообеспечивающая подсистема
В зависимости от того, сколько раз за один оборот ротора происходит всасывание и нагнетание,
различают насосы однократного и двукратного действия.
Рабочий объем пластинчатого насоса двукратного действия, см3, определяется как сумма объемов всех
его рабочих камер:
V0 = ЩЛ - r)[n (R + г) -М-10-з t
где /? и г— максимальный и минимальный радиус расточки статора, мм;
b — ширина статора, мм;
j — толщина пластины, мм;
z — число пластин.
В пластинчатых насосах однократного действия движение пластин ограничивается статором с
цилиндрической внутренней расточкой. Изменение объемов рабочих камер происходит за счет эксцентричного
расположения статора и ротора насоса. Изменяя величину эксцентриситета, можно регулировать рабочий объем, а,
следовательно, и подачу пластинчатого насоса однократного действия при неизменном числе оборотов
приводного двигателя (рис. 3.13).
В пластинчатых насосах однократного действия с регулируемым рабочим объемом статор выполняют в
виде подвижного в поперечном направлении (относительно оси приводного вала) кольца 3, которое с одной
стороны опирается на упор 2 и с другой стороны поджимается в эксцентричное относительно ротора 4
положение пружиной 6. Предварительная настройка максимального эксцентриситета (максимальной подачи
насоса) производится с помощью упора 2. В процессе работы насоса статорное кольцо 3, опирающееся на
неподвижную 5 и подвижную 8 опоры, может перемещаться в поперечном направлении, изменяя эксцентриситет
относительно ротора 4. Смещая статор в направлении уменьшения эксцентриситета, можно изменять подачу
насоса от Qmax до 0.
Давление с напорной стороны действует на внутреннюю поверхность статора 3, при этом возникает
горизонтальная составляющая сила, действующая в направлении пружины 6, усилие которой
регулируется винтом 7. Таким образом, максимальное давление, развиваемое насосом, настраивается
винтом 7.
Если потребитель не расходует жидкость, то давление на выходе насоса начинает возрастать, при этом
статор 3 перемещается в сторону пружины 6, что сопровождается уменьшением эксцентриситета и, следова-
58
3.3. Насосы
тельно, снижением подачи насоса вплоть до минимального значения, равного значению внутренних утечек в
насосе.
Принцип работы данного типа насоса тот же, что и в описанном выше нерегулируемом насосе. Для отвода
внутренних утечек из зоны высокого давления предусмотрен дополнительный канал L, наряду с каналами
всасыва ния S и нагнетания Р.
Недостатком пластинчатых насосов является наличие большего количества деталей и большего числа
мест трения, что приводит к их большему износу. Повышаются требования и к качеству очистки рабочей
жидкости. Несомненным достоинством пластинчатых насосов является плавность подачи и низкий уровень
шума.
3.3.3. Радиально-поршневые насосы
Отличительной чертой радиально-поршневых насосов является расположение поршней в одной
плоскости, перпендикулярной оси приводного вала. Движение поршней происходит в радиальном
направлении.
На рис. 3.14 представлен радиапьно-поршневой самовсасывающийо насос с клапанным распределением
(имеется в виду распределение циклов всасывания и нагнетания жидкости).
Рис. 3.14. Радиально-поршневой насос с клапанным распределением
Насос состоит из корпуса 1, приводного вала 3, имеющего эксцентрическую шейку (кулачок) в зоне трех
качающих узлов 6, каждый из которых включает в себя поршень 5, всасывающий клапан 8 и нагнетательный
клапан 2. Сферическая головка 9 закреплена в корпусе 1. Поршень 5 через цилиндрическую опорную
поверхность опирается на шейку вала 3, при этом пружиной 4 обеспечивается постоянный контакт между втулкой 7 и
сферической головкой 9. Рабочие камеры насоса образуются поверхностями поршней 5 втулок 7 и
сферических головок 9.
При вращении кулачка каждый поршень совершает за один оборот вала два хода: один — вверх, другой —
вниз. Всасывание осуществляется при движении поршня вниз. При этом объем рабочей камеры
увеличивается, открывается всасывающий клапан 8 и жидкость через канавку на поверхности кулачка поступает в
рабочую камеру.
Нагнетание происходит при дальнейшем повороте кулачка, но уже при движении поршня вверх: клапан 8
прижимается к уплотнительной кромке, жидкость в рабочей камере сжимается и открывается напорный
клапан 2 в сферической головке 9. Жидкость под давлением поступает в круговой канал, соединяющий качающие
узлы и далее на выход насоса.
ОР
US
59
3. Энергообеспечивающая подсистема
Рабочий объем радиально-поршневого насоса, см3, определяют по следующей формуле:
V0=Af]hzm-A0-3,
где Лп — площадь поршня, мм2;
h — полный ход поршня, мм, h = 2е;
е — эксцентриситет, мм;
Z — количество поршней;
m — количество циклов всасывания-нагнетания за один оборот кулачка (вала).
В рассмотренной выше конструкции m =-1, однако, существуют многотактные радиально-поршневые
насосы, в которых качающие узлы за один оборот вала могут совершать несколько рабочих ходов.
Поскольку в радиально-поршневых насосах поршни взаимодействуют с выполненным как единое целое с
приводным валом кулачком, регулирование подачи в них не может осуществляться изменением рабочего
хода поршней. Регулирование подачи в них осуществляется за счет того, что рабочие камеры в течение
некоторой величины хода поршней при нагнетании, или даже в течение всего хода нагнетания, остаются
сообщенными с всасывающей линией посредством принудительно удерживаемых в открытом состоянии
всасывающих, или специальных сливных клапанов.
3.3.4. Аксиально-поршневые насосы
Аксиально-поршневые насосы являются насосами роторно-поршневого типа с аксиальным
расположением поршней в цилиндрах, когда продольные оси цилиндров параллельны друг другу и оси вращения ротора.
Рабочие камеры образованы рабочими поверхностями поршней и цилиндров.
Различают аксиально-поршневые насосы двух типов: с наклонным диском и с наклонным блоком
цилиндров. У насосов с наклонным диском ось приводного вала и ось вращения ротора совпадают, а у насосов с
наклонным блоком эти оси расположены под углом друг к другу.
На рис. 3.15 представлен аксиально-поршневый насос с наклонным диском.
10 9
3 4 5 6
Рис. 3.15. Аксиально-поршневой гидронасос с наклонным диском
В корпусе 2 расположен блок цилиндров 6, шлицами соединенный с приводным валом 1 и поджатый
пружиной 7 к крышке 8, В расточках блока цилиндров 6 размещены поршни 5, опирающиеся на наклонный диск 3
через шаровые шарниры 4.
60
3.3. Насосы
При вращении вала 1 приходит во вращение и блок цилиндров 6 (ротор). Поскольку опорная поверхность
диска 3 расположена под углом р к оси вращения приводного вала 1, поршни 4 осуществляют сложное
движение: вращаются вместе с ротором 6 и одновременно совершают в цилиндрах ротора
возвратно-поступательные движения. При этом последовательно происходят процессы всасывания и нагнетания жидкости через
торцевые окна и каналы S и Р, выполненные в крышке 8.
Насосы, у которых наклонный диск имеет неизменный угол наклона, называются насосы с нерегулируемой
подачей. В регулируемых насосах подача может быть изменена путем изменения рабочих ходов поршней 5,
которые зависят от угла р наклона диска 3. При максимально допустимом угле наклона диска* насос
обеспечивает максимальную подачу, а при перпендикулярном его расположении относительно оси вращения вала 1,
подача насоса становится равной нулю.
Для изменения угла наклона диска обычно применяют механические или гидравлические установочные
механизмы, которые могут приводиться в действие механическим, электрическим или гидравлическим
способом.
В аксиально-поршневом насосе применен гидравлический способ регулирования подачи. С этой целью в
конструкцию введен управляющий поршень 9, который при подаче давления управления в канал X передает
усилие на подпружиненную опору 10 и, смещая ее, меняет угол наклона диска 3. Возможные утечки жидкости
из рабочих цилиндров осуществляются через дренажный канал L.
Насосы с наклонным блоком цилиндров также выпускаются в регулируемом и нерегулируемом
исполнении (рис. 3.16).
В аксиально-поршневых насосах с наклонным блоком цилиндров оси приводного вала 8 и блока
цилиндров 5 расположены в корпусе 1 под некоторым углом р, а поршни 3 связаны с диском 7 посредством
толкателей 2 со сферическими шарнирами.
Вращательное движение приводного вала 8 передается на блок цилиндров 5 через толкатели 2 и поршни
3, при этом блок цилиндров центрируется относительно распределительного диска 6 с помощью оправки 4.
Поршни 3 движутся относительно блока цилиндров 5 возвратно-поступательно, обеспечивая всасывание
рабочей жидкости из линии всасывания S и нагнетание ее в линию Р.
* Максимально допустимый угол наклона диска ограничивается возможностью деформации поршня под
действием боковых сил и не превышает 20 ...25°.
61
3. Энергообеспечивающая подсистема
Рабочий объем аксиально-поршневых насосов, см3, определяют по следующей формуле:
VQ = Д^-10-3 = (nd2/4) (Dig р) г-10-3,
где Ап — площадь поршня, мм2;
d — диаметр поршня, мм;
И — максимальный ход поршня, мм;
D — диаметр окружности блока цилиндров, мм;
Р — угол наклона диска (блока цилиндров);
Z — количество поршней.
Возможность регулирования подачи и изменения ее направления путем изменения направления наклона
диска является одним из основных преимуществ насосов данного типа.
3.3.5. Винтовые насосы
Винтовые насосы представляют собой одну или несколько пар зацепляющихся, параллельно
расположенных винтов со специальным профилем нарезки, размещенных с малыми зазорами в расточках корпуса.
Наиболее распространены трехвинтовые насосы с двухзаходными винтами, устройство которых рассмотрим
на примере конструкции, представленной на рис. 3.17.
Центральный ведущий винт, выполненный заодно с приводным валом 1 и. два боковых ведомых
винта 2 имеют профили нарезки, посредством которых, зацепляясь, обкатываются друг относительно друга,
образуя с поверхностями расточек в корпусе 3 герметически отделенные от всасывающего S и
нагнетательного Р каналов камеры. Эти камеры при вращении винтов переносятся вдоль их осей из зоны
всасывания в зону нагнетания, где жидкость вытесняется боковыми поверхностями винтов. Благодаря такому
принципу действия, насос создает очень плавную, без пульсаций подачу жидкости и малый уровень
шума.
Ведомые винты вращаются под действием сил давления жидкости и не нагружаются крутящим моментом,
а весь качающий узел хорошо уравновешен. Поэтому винтовые насосы отличаются большой долговечностью
и способны работать с высокими частотами вращения.
К недостаткам винтовых насосов относят: невозможность регулирования их рабочего объема, трудность
агрегатирования друг с другом, и худшие, чем у других насосов, массо-габаритные показатели.
62
3.3. Насосы
3.3.6. Статические характеристики объемных насосов
Статической характеристикой объемных насосов называют зависимость подачи насоса от развиваемого
им давления при постоянной частоте вращения приводного вала. Поскольку теоретическая (идеальная)
подача нерегулируемого объемного насоса определяется его рабочим объемом и частотой вращения,
теоретическая характеристика насоса в указанной системе координат имеет вид горизонтальной прямой Qr (рис. 3.18).
Действительная подача насоса отличается от теоретической на величину перетечек (внутренних утечек)
рабочей жидкости через зазоры между сопрягаемыми деталями насосов, образующими рабочие камеры — из
полости нагнетания в полость всасывания, т.е.
ед=0г-<2уг
Поскольку уплотняющие зазоры в насосах малы и протяженны, а вязкость рабочей жидкости обычно
значительна, то режим ее течения в этих зазорах, как правило, ламинарный. Поэтому при не очень высоких
давлениях утечки будут возрастать прямопропорционально росту давления.
Отсюда следует, что реальная характеристика объемного насоса имеет вид наклонной прямой, причем,
чем более совершенен насос, тем угол наклона меньше (тем больше «жесткость» характеристики).
Сравнивая характеристику насоса, которая приводится в его техническом паспорте, с реальной, можно судить о
степени его износа.
Из приведенной на рис. 3.18 характеристики следует, что подача насоса может стать равной нулю при
значениях давления близких к бесконечности. Другими словами, если напорную линию насоса полностью
перекрыть, т.е. обеспечить условие QR= О, то давление в ней может вырасти практически до бесконечности, что
непременно приведет к разрыву трубопровода, либо к разрушению деталей насоса. Во избежание этого, все
насосные установки снабжают предохранительными клапанами* (рис 3-19), которые начинают сбрасывать
часть рабочей жидкости обратно в бак, при достижении давления в напорной линии некоторого предельно
допустимого значения.
Разновидность напорных клапанов, см. разд. 5.2.1.
63
3. Энергообеспечивающая подсистема
В нормальном состоянии запорно-регулирующий элемент — конический клапан 2 — прижат к седлу 1
пружиной 3, величина усилия которой настраивается посредством регулировочного винта 4.
Пока давление насоса ри< р0 = Fnp0 /А^ (где Fnp0 — сила пружины при закрытом клапане; Д^ — площадь
отверстия, перекрываемого клапаном), клапан закрыт. При повышении давления на входе в клапан выше
значения/^, определяемого настройкой пружины 3, конический клапан 2 начинает отходить от седла 1, обеспечивая
сброс части рабочей жидкости в бак. Степень открытия клапана увеличивается с увеличением давления на
его входе. Когда величина давления в напорной линии насоса упадет ниже номинального значения
срабатывания клапана, он закрывается.
Характеристика с бъемного насоса с установленным параллельно предохранительным клапаном,
показана на рис. 3.20.
Я> {
-|f> СХм)
о
Ро рп.о
Рис. 3.20. Характеристика объемного насоса с предохранительным клапаном
При давлении насоса рн<р0, предохранительный клапан закрыт и характеристика насоса с клапаном
совпадает с характеристикой собственно насоса. При давленияхрн>р0 часть подачи переливается через клапан,
характеристика резко «заваливается» вниз (эту часть характеристики приблизительно можно представить тоже в
виде прямой линии). При достижении давления полного открытия предохранительного клапанарпо, вся подача
насоса через клапан поступает в бак. Очевидно, что такой способ регулирования подачи неэкономичен,
поскольку часть мощности, развиваемой насосом (а в точкерпо вся мощность), теряется в клапане.
Почти такую же по виду характеристику имеют насосы с регулируемой подачей (рис. 3.21).
оА
I
1 1
1
i
Q
сЛ
L
-
Г\д
Ро
'
р
Рис. 3.21. Характеристика объемного насоса с регулируемой по давлению подачей
С точки зрения расхода энергии, такой способ регулирования подачи является более экономичным. Если
потребитель не расходует жидкость, то давление на выходе насоса возрастает, рабочий объем насоса
уменьшается, что сопровождается уменьшением подачи вплоть до полного ее прекращения. При этом
потребляемая насосом мощность становится минимально возможной.
64
3.3. Насосы
3.3.7. Регулирующие устройства
Нерегулируемые насосы широко применяются в насосных станциях гидроприводов малой и средней
мощности. Однако, значительные потери энергии при режимах работы, когда подача насоса превышает нужды
потребителя, делают экономически невыгодным их использование в гидроприводах высокой мощности.
Задачи энергосбережения успешно решаются путем использования регулируемых насосов, снабженных
различного рода регуляторами: давления, расхода и мощности.
Регулятор давления. Регулятор давления определяет максимальное значение давления в
гидросистеме. В качестве примера рассмотрим принцип регулирования давления в гидросистеме посредством
регулируемого пластинчатого насоса непрямого управления с регулятором давления (рис. 3.22).
В данной конструкции перемещение статора насоса осуществляется двумя, находящимися под
давлением, установочными поршнями разного диаметра (отношение площадей 2:1). Установочный поршень 5
подпружинен, благодаря чему устанавливается максимальный эксцентриситет при запуске насоса. Давление в
напорной линии постоянно воздействует на поршень меньшего диаметра 6, а в пружинную полость поршня
большего диаметра 5 — передается через регулятор давления 1, настройка которого определяет
максимальное давление в гидросистеме.
Регулятор давления состоит из регулирующего золотника 2, имеющего одно продольное и два
радиальных сверления, настроечной пружины 3 и регулировочного винта 4. В исходном состоянии под действием
пружины 3 золотник 2 находится в левом положении, а рабочая жидкость подступает в камеру установочного
поршня 5 через сверления в золотнике. Сливная линия Т перекрыта буртиком золотника 2. Пока усилие,
создаваемое давлением жидкости на левый торец золотника 2 меньше усилия пружины 3, давления в камерах
установочных поршней 5 и 6 равны, насос обеспечивает максимальную подачу.
При увеличении давления в гидросистеме золотник 2, сжимая пружину 3, смещается вправо, камера
установочного поршня 5 соединяется со сливом Т, и давление в ней падает. Поскольку малый установочный
поршень 6 постоянно соединен с напорной линией, он смещает статор насоса практически в концентричное
ротору положение. Подача насоса стремится к нулю, а рабочее давление в гидросистеме поддерживается
на заданном уровне. Таким образом, потери мощности в гидросистеме при достижении максимального
установленного давления незначительны, нагрев рабочей жидкости невелик, а энергопотребление —
минимально.
65
3. Энергообеспечивающая подсистема
Регулятор расхода. Регулятор расхода автоматически поддерживает подачу насоса на заранее
заданном уровне, для чего в линии нагнетания устанавливают регулируемый дроссель, перепад давления на
котором и является параметром регулирования (рис. 3.23).
Давлениерл, равное давлению перед дросселем 1, одновременно действует на левый установочный
поршень 6 насоса и левый торец золотника 2 регулятора. Давление в гидросистеме р2, равное давлению за
дросселем 1, через канал, связанный с пружинной полостью 4 регулятора, воздействует на правый торец
золотника 2. Посколькур2<рл золотник 2, сжимая пружину регулятора, смещается вправо, и через кромку 3 золотника 2
часть жидкости уходит в канал слива Т, вследствие чего на установочный поршень 5 насоса действует
меньшее давление, чем на поршень 6. Это приводит к смещению статора насоса, т.е. к установке подачи,
обеспечивающей перепад давления А р на дросселе 1. На установочных поршнях насоса 5 и 6, а также и на золотнике
2 регулятора, устанавливается равновесие сил.
Изменение давления в гидросистеме р2 (например, вследствие изменения нагрузки) будет вызывать такое
изменение давления рл, что перепад давления Ар на дросселе 1, величина которого определяется настройкой
пружины регулятора, будет оставаться постоянным, т.е. при неизменном проходном сечении дросселя 1,
расход жидкости через него останется постоянным.
Если увеличить проходное сечение дросселя 1, то перепад давления на нем уменьшится, и золотник 2
регулятора сместится влево, уменьшив поток части рабочей жидкости в канал Т. Давление в пружинной полости^
установочного поршня 5 возрастет, что приведет к смещению статора и увеличению подачи насоса.
Вследствие увеличения потока в напорной линии перепад давления на дросселе начнет возрастать до момента
установки нового стабильного состояния насоса и золотника регулятора. Таким образом, посредством настройки
регулируемого дросселя 1 можно устанавливать требуемую, не зависящую от давления в системе, подачу
насоса.
Рассмотренные регуляторы давления и расхода могут иметь различные настроечные механизмы;
механические, гидравлические и электрические. Комбинация из регуляторов давления и расхода позволяет
создавать особо экономичные, так называемые Load-sensing (чувствительные к нагрузке), гидроприводы.
66
3.3. Насосы
Регулятор мощности. Регулятор мощности представляет собой механизм, который автоматически
изменяет величину подачи Q в зависимости от величины давленияр на выходе насоса таким образом, что
произведение подачи и давления, определяющее мощность насоса Р, остается все время постоянным.
Статическая характеристика регулируемого объемного насоса с регулятором мощности приведена на рис. 3.24.
Рис. 3.24. Статическая характеристика насоса с регулятором мощности
На базе описанных регуляторов выполняются различные модификации, в том числе и комбинированные,
когда, например, насос с регулятором мощности после достижения максимального давления ртах переходит в
режим работы с регулятором давления, поддерживая значение ртах постоянным.
Предметом отдельного рассмотрения являются механизмы управления, осуществляющие изменение
подачи насосов по сигналам, формируемым электронными устройствами регулирования, и известными как
механизмы с электрическим пропорциональным управлением.
Тип регулятора определяет вид статической характеристики насоса, по которой и осуществляется его
выбор для конкретного привода. Примеры статических характеристик регулируемых насосов с
соответствующими регуляторами приведены на рис. 3.25.
F
в
О
'егулятор давления
hi i "
■■ i'" r*"i ;
» i i i '"
L1 i >»' "
i i i
i
p
Регулятор мощности
Q
о
i-iVr'-»-'*
; "_-_ ,
p
F
Q
о
'егулятор расхода
г
_ -. -^_ ,
_l
р
Регулятор мощности
с функцией Load-sensing
Q
о
\ s (|
---.г***»-.,
р
Регуля
Q
о
ггор давления и
\ \ \ - '
III,
I <i I
1 1 1
1 1 1"
1
расхода
0
Регулятор давления расхода
и мощности
Q
о
р
Рис. 3.25. Примеры статических характеристик регулируемых насосов
67
3. Энергообеспечивающая подсистема
3.4. Гидроаккумуляторы
Гидроаккумуляторы — устройства, основное назначение которых накопление (аккумулирование)
находящейся под давлением рабочей жидкости и последующая отдача ее потребителю. Применение
гидроаккумуляторов вызвано необходимостью обеспечения нормального функционирования гидравлических систем:
■ для компенсации потерь рабочей жидкости вследствие утечек в гидроприводе;
■ для сглаживания пульсаций подачи насоса (рис. 3.26);
■ для обеспечения работы в аварийных ситуациях (например, при выходе из строя насосной установки);
■ для гашения опасных увеличений давления, например при гидравлическом ударе, т.е. для так
называемого демпфирования (сглаживания) колебаний давления в гидросистеме.
■
•
^ —с—
Q
о
ЛЛЛ
t
Q
О
.
• л
^*/
t
Рис. 3.26. Применение гидроаккумулятора для сглаживания пульсаций подачи насоса
Гидроаккумулятор представляет собой емкость, в которой под давлением находится жидкость. Это
давление может создаваться различными способами: с помощью груза (рис. 3.27, а), сжатой пружины (рис. 3.27, б),
сжатого газа (рис. 3.27, в, г, д).
Грузовые гидроаккумуляторы обычно используются в стационарных установках большой мощности,
работающих на воде или водных эмульсиях. В силу конструктивных особенностей такие гидроаккумуляторы
устанавливают только вертикально.
68
3.4. Гидроаккумуляторы
Пружинные гидроаккумуляторы находят применение для работы при сравнительно небольших расходах
жидкости, невысоких давлениях (до 2 МПа) и низких температурах окружающей среды.
В настоящее время пружинные и грузовые гидроаккумуляторы используются только в специальных
случаях и в промышленности практически не применяются.
Гидропневматический аккумулятор (рис. 3.27, в, г, д) в общем случае представляет собой сосуд,
наполненный сжатым газом и подсоединенный к напорной линии гидропривода. Под действием давления в гидролинии
жидкость частично заполняет сосуд, при этом занимаемый газом объем уменьшается, а давление газа
возрастает. Давление газа будет возрастать до тех пор, пока оно не уравновесится давлением рабочей жидкости
в напорной линии.
Непосредственный контакт газа с жидкостью нежелателен, поскольку газ будет растворяться в жидкости и
окислять ее. Поэтому между жидкостью и сжатым газом в гидроаккумуляторах располагают разделитель:
поршень (рис. 3.27, в), эластичный баллон (рис. 3.27, г) или мембрану (рис. 3.27, д). В зависимости от конструкции
разделителя аккумуляторы и называют соответственно поршневыми, баллонными или мембранными.
Поршневые гидроаккумуляторы обычно применяют в машинах с большими расходами рабочей жидкости.
Пространственное положение аккумуляторов может быть любым, однако вертикальная установка является
предпочтительной.
В современных гидравлических приводах чаще всего используются гидропневматические аккумуляторы с
эластичным баллоном (рис. 3.28). В них используется энергия сжатого газа, обычно, азота (N2), реже — гелия
(Не). С
В корпусе 2 гидроаккумулятора находится разделитель в виде эластичного баллона 3. Для приведения
аккумулятора в рабочее состояние, его предварительно заряжают газом (рекомендуемое давление зарядки
обычно составляет 90 % минимально допустимого давления в гидросистеме). При этом эластичный баллон 3
полностью заполняет внутреннее пространство корпуса 2, закрывая тарельчатый клапан 4. Тарельчатый
клапан препятствует экструзии (выходу наружу) баллона и предохраняет его от механических повреждений
(рис. 3.28, а).
Аккумулятор заряжают газом до давления зарядки р0 и объема V0 (исходного рабочего состояния)
производится от внешнего источника через газовый клапан 1.
При увеличении давления в гидросистеме до величины рЛ, большей чем р0, жидкость начинает перетекать
через подводящий канал 5 и тарельчатый клапан 4 в полость аккумулятора, и сжимать газ в эластичном
баллоне 3 (рис. 3.28, б).
69
3. Энергообеспечивающая подсистема
Данный процесс может продолжаться до достижения значения давления в баллоне р2 (максимального
рабочего давления в подсоединенной гидролинии) и объема V2 (рис. 3.28, в). Изменение объема жидкости в
аккумуляторе при минимальном и максимальном значениях рабочих давлений соответствует вытесняемому
(полезному) рабочему объему аккумулятора.
При снижении давления в гидросистеме газ в эластичном баллоне начинает расширяться и вытеснять
жидкость в гидросистему. Давление газа и, следовательно, давление жидкости в гидроаккумуляторе,
изменяется в соответствии с уравнением
р F^const.
При медленном изменении давления в гидросистеме процесс сжатия газа близок к изотермическому (и=1),
когда осуществляется полный теплообмен с окружающей средой. Когда изменение объема газа происходит
очень быстро, без теплообмена с окружающей средой, говорят об адиабатическом процессе изменения
состояния газа («=1,4). На практике работа аккумулятора сопровождается политропным изменением состояния
газа (1<и<1,4).
Мембранные гидроаккумуляторы используются в системах с малыми расходами, например, для
уменьшения уровня вибрации и снижения пульсаций в гидролиниях. Пространственное положение мембранных и
баллонных аккумуляторов может быть любым.
Обычно в гидросистеме аккумуляторы используются вместе с блоком управления, посредством которого
осуществляется подключение-отключение аккумулятора, настройка и визуализация величины давления
рабочей жидкости в нем (рис. 3.29).
Манометр
Предохранительный клапан
Мембранный гидроаккумулятор
,• •
if
Рукоятка управления вентилем подключения
ГТ^Ьа;
Рис. 3.29. Блок управления гидроаккумулятором
Для расчетов гидроаккумуляторов необходимо знать следующие параметры:
■ ро — давление зарядки гидроаккумулятора;
■ /7-| — минимальное рабочее давление;
■ р2 — максимальное рабочее давление;
■ У0 — эффективный объем газа;
* V^ — объем газа при минимальном давлении;
■ Vi — объем газа при максимальном давлении;
■ Рг/ро — максимально допустимое отношение давлений;
■ V\—V2 — полезный объем гидроаккумулятора.
Выбор параметров гидроаккумуляторов производится расчетным путем на основании решения уравнения
состояния газа для случаев, когда между газом, камерой и жидкостью происходит тот или иной процесс
теплообмена.
70
3.5. Дополнительное оборудование
3.5. Дополнительное оборудование
К дополнительному оборудованию гидравлических установок относятся устройства, с помощью
которых обеспечивается должное качество рабочей жидкости, контроль за давлением и расходом жидкости.
Такими устройствами являются: гидробаки, фильтры, теплообменники и пр.
3.5.1. Гидробаки
Гидробаки предназначены для создания резерва рабочей жидкости, который должен быть не менее всего
объема жидкости в гидросистеме. Номинальные вместимости баков регламентированы ГОСТ 12448-80.
Поскольку в процессе работы гидросистем могут происходить утечки жидкости, баки проектируют с
запасом по вместимости. Запас по объему в баке необходим и для того, чтобы рабочая жидкость после
прохождения через аппараты гидросистемы и возвращения (слива) в бак отстаивалась и охлаждалась.
Если в гидросистеме применяется минеральное масло, то минимальный объем бака должен быть равным
объемному количеству жидкости, которое насос перекачивает за 2...4 мин. При работе на других жидкостях
минимальный объем бака должен быть не менее 5-8 подач насоса за 1 мин.
Гидробак, как правило, используется и как основание (каркас), на котором крепится большинство из
элементов энергообеспечивающей подсистемы. Поэтому баки выполняют достаточно прочными, чаще всего
прямоугольного сечения, сварными из стальных листов. Обычно баки делают со съемной верхней крышкой, в
которой выполнены различные технологические отверстия для присоединения и установки насоса с приводным
двигателем, а также вспомогательных устройств (рис, 3.30).
11 10
Рис. 3.30. Гидробак для рабочей жидкости
Гидробак 1 разделен успокоительной перегородкой 9 на всасывающую 8 и сливную 2 полости. Из полости
всасывания 8 через всасывающий патрубок 6 насосной установкой жидкость подается в гидросистему,
заполнив которую, она возвращается в бак — в сливную полость 2 через сливной патрубок 4.
Диаметр всасывающего патрубка 6 равен или больше условного прохода всасывающего отверстия
насоса. Сливной патрубок 4 погружен в масло, имеет скос под углом 45° и расположен от дна бака на расстоянии не
меньшем, чем 2,5 наружного диаметра.
В процессе отстоя жидкости в баке, на его дне оседают различного рода загрязнители (твердые частицы —
продукты износа деталей элементов гидросистемы, загустевшая грязь и др.). Для их сбора и последующего
71
3. Энергообеспечивающая подсистема
удаления днище бака рекомендуется делать с наклоном (в цилиндрических баках днище делают
конусообразной формы), что способствует скоплению загрязнителей в самой глубокой части бака.
На боковых стенках бака располагают маслоуказатели 3, люк 7 для чистки бака, а ближе ко дну —
отверстие, закрытое резьбовой спускной пробкой 11, предназначенное для слива жидкости при ее замене или
перед промывкой бака. Для облегчения слива масла и увеличения поверхности охлаждения дно бака
располагают на расстоянии не менее 100 мм от пола.
В отверстие для заливки рабочей жидкости в бак устанавливают заливной фильтр 10, а пробкой зачастую
служит воздушный фильтр — сапун 5, который предназначен для сообщения внутренней полости бака с
окружающей средой.
3.5.2. Фильтры
Фильтры предназначены для понижения загрязненности рабочей жидкости до приемлемого уровня и
защиты элементов гидросистемы от преждевременного износа. Производственный опыт показывает, что за
счет качественной очистки рабочих жидкостей срок исправной работы гидрооборудования может быть
увеличен в 2-3 раза.
Загрязненность рабочей жидкости оценивается классами чистоты, установленными ГОСТ 17216-2001 и
определяемыми как количество загрязняющих частиц оговоренных размеров в 100 мл жидкости (см.
приложение П1.7). Эти частицы разделены по размерам в микронах (мкм) на следующие группы: 0,5...1; 1...2; 2...5;
5... 10; 10...25; 25...50; 50... 100; 100...200 и волокна, длина которых более 200 мкм.
Частицы очень малых размеров (первых двух групп) не оказывают заметного влияния на работу
гидросистем, поэтому их можно не принимать во внимание. Частицы следующих двух групп уже заметно влияют на
износ деталей и долговечность систем, в первую очередь на те ее элементы, у которых зазоры в парах трения
соизмеримы с размером загрязняющих частиц. К ним относятся гидравлические аппараты золотникового типа
и аксиально-поршневые насосы высокого давления с торцевым распределительным диском.
Частицы размером 10...50 мкм являются наиболее опасными для гидросистем так как к ним
чувствительны практически все виды гидрооборудования. Частицы более крупных размеров опасны тем, что, разрушаясь ч
продуцируют большое число частиц меньших размеров.
Основные источники загрязнителей гидросистем показаны на рис. 3.31.
Степень проникновения внешних загрязнителей 1 в систему зависит от состояния окружающей среды,
конструкции гидросистемы и ее компонентов. Загрязнители могут попасть в систему при монтаже 2 и проведе-
72
3.5. Дополнительное оборудование
нии ремонтных работ 6 (уплотнительные материалы, сварочные брызги, окалина, шлифовальная пыль), а также
при пуске 3 системы. Причиной попадания загрязнителей может оказаться заливка нового масла 7, а также
загрязнения, попавшие в аппараты при их изготовлении 4 (стружка, пыль, частицы краски, вода или
консерванты). К внутренним загрязнителям относят продукты износа гидроаппаратов 5.
Полностью исключить присутствие загрязняющих частиц в рабочей жидкости практически невозможно,
однако, необходимо ограничить их число и размеры с помощью различных методов очистки и фильтрации.
Практика показывает, что до 80 % отказов в работе гидросистем возникает вследствие несоответствия
рабочей жидкости условиям нормальной эксплуатации.
Высокое качество рабочей жидкости является необходимым условием надежного функционирования
гидросистемы любой машины.
В общем случае очистка рабочих жидкостей от твердых загрязняющих веществ осуществляется двумя
методами: силовым и механическим. При силовом методе очистки жидкость подвергается воздействию силового
поля — магнитного, электрического, гравитационного, центробежного. Такой метод очистки является весьма
дорогим и сложным.
В гидроприводах используется, главным образом, механический метод очистки, при котором жидкость
пропускается через сетчатые или пористые материалы фильтрующих элементов. В зависимости от
конструкции фильтроэлемента фильтры бывают глубинные и поверхностные.
Глубинные фильтры представляют собой устройства, в которых очистка рабочей жидкости происходит
при ее прохождении через толщу пористого материала из спрессованного или многослойного текстиля,
целлюлозы, металла, синтетики, стекловолокна и др.
Глубинные фильтры очищают рабочую жидкость от частиц достаточно малого размера, менее 0,01 мм
(10 мкм). Их называют фильтрами тонкой очистки и устанавливают в гидросистемах на участках
гидролиний, где жидкость обладает достаточно высокой энергией давления, например на напорном участке
(рис. 3.32, а).
Рабочая жидкость через входной канал в головке фильтра 1 поступает в стакан корпуса 2, где
размещается цилиндрический фильтроэлемент 3 из по ристого материала. Под действием давления (на входе в фильтр)
жидкость через поры фильтроэлемента попадает во внутренний канал фильтра и далее в линию выхода. Час-
73
3. Энергообеспечивающая подсистема
тицы примеси остаются в порах фильтроэлемента. Вместо пробки 4 в головку фильтра может быть
вмонтирован индикатор загрязненности.
В поверхностных фильтрах в качестве фильтровального материала используются различные
проволочные ткани, которые выполняются, как правило, из нержавеющей или оцинкованной стали, фосфористой
бронзы в виде тканевого кружева, щелевой трубки. Поверхностные фильтры очищают рабочую жидкость лишь от
частиц достаточно крупного размера, так называемых грубых частиц, размером более 0,1 мм (100 мкм)\
Поэтому их часто называют фильтрами грубой очистки. В гидросистемах их устанавливают на участках
гидролиний, где рабочая жидкость обладает малой энергией давления, например на линии всасывания или в сливном
трубопроводе.
На рис. 3,32, б показан сливной фильтр. С помощью крепежного фланца 9 фильтр устанавливается
непосредственно на крышке бака, а корпус 7 располагается непосредственно в баке. Достоинством такого
конструктивного решения является простота ухода за фильтром в процессе его эксплуатации. Сняв крышку 5,
можно легко извлечь фильтроэлемент 6, а также жестко связанный с ним стакан 8, что позволяет избежать
вытекания накопившихся осадков в бак с рабочей жидкостью.
Таким образом, конструктивное- исполнение фильтра во многом определяется его функциональным
назначением, типом фильтроэлемента, рабочим давлением в гидросистеме, способом его промывки и
восстановления (регенерации).
При выборе типа фильтра учитывают расход жидкости, требуемую тонкость фильтрации, давление и
место установки фильтра. Установка фильтров в гидросистеме может осуществляться по двум схемам:
последовательно (рис. 3.33, а, б, в), когда через фильтр проходит весь поток жидкости и параллельно (рис. 3.33, г), при
которой фильтрации подвергается только часть потока.
%€№
VtlTYW
%€№
|Г-0^е>Км) '-йГ^иКм) !-ОИ*Жм) <£> 4 <4 (Мж© '-&*
^€№
Рис. 3.33. Схемы установки фильтров
Для фильтра, включенного во всасывающую гидролинию (см. рис. 3.33, а) характерна работа при низком
давлении рабочей жидкости. По мере загрязнения фильтра увеличивается перепад давления на нем, что
может привести к появлению кавитации на входе насоса, поэтому их тонкость фильтрации обычно составляет
80. .160 мкм (грубая очистка).
Фильтр, установленный в напорной линии (см. рис. 3.33, б), работает при высоком давлении рабочей
жидкости, поэтому для обеспечения требуемой прочности толщина стенок корпуса таких фильтров увеличена.
Повышение металлоемкости фильтра влечет за собой и увеличение его стоимости.
В авиационных фильтрах применяются проволочные ткани, способные задерживать частицы размером
16 мкм.
74
3.5. Дополнительное оборудование
Установка фильтров в линии слива (см. рис. 3.33, в), хотя и не предохраняет гидравлические аппараты от
загрязняющих частиц, имеет значительные преимущества. Во-первых, фильтр не препятствует всасыванию
жидкости насосом; во-вторых, не подвержен большому давлению и при этом защищает жидкость,
находящуюся в баке, от попадания в нее продуктов износа гидроагрегатов. Недостатком установки фильтра в линии
слива является то, что при его засорении в сливной линии появляется подпор.
Преимуществом установки фильтров в линии рециркуляции (рис. 3.33, г) является их автономное
функционирование независимо от цикла работы гидросистемы. Поток жидкости через фильтроэлемент всегда
постоянен, что замедляет процесс старения рабочей жидкости и увеличивает ее долговечность.
Поскольку фильтр эффективно защищает элемент гидросистемы, установленный непосредственно после
него (остальные элементы защищены частично), схемы фильтрации обычно содержат комбинацию
фильтров, устанавливаемых на разных линиях гидросистемы.
В общем случае, в зависимости от размера задерживаемых фильтром частиц, различают фильтры:
■ грубой очистки — более 0,1 мм (100 мкм);
■ нормальной очистки — более 0,01 мм (10 мкм);
■ тонкой очистки — более 0,005 мм (5 мкм);
■ особо тонкой очистки — более 0,001 мм (1 мкм).
Фильтрация считается удовлетворительной, если размер каппилярных каналов фильтровального
материала не превышает величины наименьшего зазора в скользящих парах гидроаппаратов. Этим требованиям в
общем случае эксплуатации гидроприводов удовлетворяют фильтры тонкой очистки.
Высококачественные фильтры должны иметь следующие характеристики:
■ высокую устойчивость к перепаду давлений;
■ постоянство эффективности фильтрования в широком диапазоне перепадов давления;
■ подходящую тонкость фильтрации для всех классов чистоты;
■ хорошую грязеемкость;
■ большую площадь фильтрующей поверхности;
■ длительный срок службы.
Условные графические обозначения фильтров отличаются от общего обозначения (рис. 3.34, а) в
зависимости от конструктивного исполнения.
Для своевременной замены или очистки фильтроэлемента фильтры снабжают оптическими (рис. 3.34, б)
или электрическими (рис. 3.34, г) индикаторами загрязненности, реагирующими на перепад давления на
фильтре. По мере засорения фильтра перепад давления на нем растет и когда его значение достигает
порогового, информация об этом либо визуализируется, либо поступает в систему управления.
Для того, чтобы при загрязнении фильтроэлемента или пуске установки в холодном состоянии не
возникало перебоев в работе системы, фильтроэлементы нередко снабжают перепускными клапанами (рис. 3.34, в),
которые позволяют протекать части рабочей жидкости в обход фильтра. Установка фильтров с перепускными
клапанами недопустима на ответственных линиях гидросистемы, поскольку при засорении фильтроэлемента
неочищенная жидкость начнет поступать в гидросистему, минуя фильтр.
75
3. Энергообеспечивающая подсистема
3.5.3. Теплообменные аппараты
Потери мощности в гидроприводах, вызванные наличием гидравлических сопротивлений, объемных и
гидромеханических потерь, превращаются в теплоту, которая аккумулируется в жидкости и
гидрооборудовании.
При повышении температуры рабочей жидкости объемные потери увеличиваются, нарушаются условия
смазки движущихся деталей гидрооборудования, повышается износ деталей, активизируется окисление
рабочей жидкости и выделение из нее смолистых осадков, ускоряющих облитерацию проходных капиллярных
каналов и дроссельных щелей. Для предупреждения чрезмерного нагрева рабочей жидкости из-за
неизбежных потерь энергии во время работы гидросистем применяют специальные теплообменные аппараты —
воздушные и водяные маслоохладители, а в гидросистемах большой мощности источниками холода являются
специальные хладоновые холодильные машины.
Поскольку именно температура рабочей жидкости существенно влияет на коэффициент полезного
действия гидросистемы, теплообменные аппараты, отбирая теплоту у рабочей жидкости, поддерживают ее
постоянную нормальную температуру диапазоне +50...+60 °С.
Естественными теплообменниками являются собственно гидробаки и гидроаппараты, через стенки
корпусов которых происходит естественный теплообмен с окружающей средой. Однако для обеспечения строго
нормированного теплового режима применяются специальные теплообменные аппараты.
Водяные теплообменные аппараты. Эффективность работы теплообменных аппаратов возрастает при
увеличении разности температур между маслом и охлаждающей средой, поэтому водяные теплообменные
аппараты (рис. 3.35) имеют большую рассеивающую способность, чем воздушные.
ж
1 _!
liul
ll III
1 In,
' t«
It In I
it.
Ml
i|i
I,
(
Ai О OB,
pTispii^
III ljJII III
HIBBuIlli IBlyilllH
A2^H!iiluiliIlr
■'■«■LJVT'J. H.V>—■
|*B2
Bi
Л B2
Ai
•
Рис. 3.35. Теплообменный аппарат с водяным охлаждением
Рабочая жидкость из гидросистемы (от входа Ап до выхода ЕЦ) проходит через змеевик, охлаждаемый
водой или другой охлаждающей жидкостью (ее вход А2 и выход В2), и поступает снова в гидросистему. Трубки
змеевика обычно выполняются из меди или латуни, реже — из алюминия или стали.
Недостатком водяных теплообменных аппаратов является большой расход воды, необходимой для его
функционирования, а также вероятность попадания воды в масло.
Водяные теплообменные аппараты способны рассеивать мощность от 0,7 до 500 кВт, отличаются
компактностью, их можно встраивать в баки и оснащать термостатическими клапанами, регулирующими поток
охлаждающей воды.
76
3.5. Дополнительное оборудование
Воздушные теплообменные аппараты. В гидросистемах малой мощности для охлаждения масла
используется воздух, нагнетаемый вентилятором. Теплорассеивающая способность зависит от разности
температур рабочей жидкости на входе в теплообменный аппарат и окружающего воздуха, а также от величин
потоков жидкости и воздуха.
Воздушные теплообменные аппараты (рис. 3.36) состоят из масляного радиатора 4, обдуваемого
вентилятором 1 с приводным двигателем 2. Предохранительный клапан 3 защищает радиатор от перегрузки,
перепуская часть масла в обход радиатора при перепаде давления более 0,2 МПа.
В новейших воздушных теплообменных аппаратах давление рабочей жидкости увеличено до 1 ...2 МПа,
приводом малошумного вентилятора является электродвигатель постоянного или переменного тока,
возможно— гидромотор, теплорассеивающая способность превышает 100 кВт, широко применяются встроенные
термостаты.
При работе теплообменных аппаратов могут возникать неисправности, выражающиеся в снижении тепло-
съема вследствие образования осадка на внутренних поверхностях труб, а также — в смешивании
охлаждающей и охлаждаемой сред из-за негерметичности соединений либо нарушения целостности труб. В первом
случае теплообменник необходимо промыть и прочистить, во втором — устранить причину негерметичности.
Трубчатые электронагреватели. При очень низкой температуре увеличивается вязкость рабочей
жидкости вследствие чего растут гидравлические потери, ухудшается всасывающая способность насосов. При очень
низкой температуре увеличивается вязкость рабочей жидкости, вселедствие чего растут гидравлические
потери, ухудшается всасывающая сила насосов.
Для подогрева рабочей жидкости (масла) при работе в условиях низких температур в зимнее время
используют специальные нагревательные устройства — трубчатые электронагреваетели (ТЭНы). Для
сохранения качества рабочей жидкости на основе минеральных масел необходимо следить, чтобы не проис-
одило локального перегрева масла и его термического разложения вследствие длительного контакта с
нагревательным элементом, имеющим высокую температуру. Поэтому, при включении
электроподогревателей должна быть обеспечена интенсивная циркуляция масла, создаваемая специальными
вспомогательными насосами, способными работать даже при низких температурах. Не следует включать в работу поршневые
и пластинчатые насосы основной гидросистемы до нагрева масла.
77
4. Исполнительная подсистема
Широкое применение гидроприводов в различных областях промышленного производства в первую
очередь связано с поистине уникальными возможностями гидравлических исполнительных
механизмов — устройств, в которых происходит преобразование гидравлической энергии в механическую
работу. Являясь связующим звеном между гидросистемой и рабочей машиной, обладая высокой
энергонасыщенностью, гидравлические исполнительные механизмы позволяют осуществлять линейное,
поворотное или вращательное движение ведомых рабочих органов технологического оборудования без
использования каких-либо передаточных устройств. При этом задачи бесступенчатого
регулирования скорости в широких пределах, торможения и защиты машины от перегрузки решаются относительно
просто.
Многообразие производственных задач, решаемых посредством гидравлических исполнительных
механизмов, реализуется благодаря достаточно обширной гамме конструктивных решений этих машин. При
выборе конкретного исполнения принимают по внимание целый ряд критериев:
■ вид движения — вращательное, поворотное или линейное;
■ направление движения — реверсивное или нереверсивное;
■ развиваемая скорость вращения (угловая) или перемещения (линейная);
■ создаваемый момент или усилие;
■ эргономические показатели.
По реализуемому виду движения различают три основных типа исполнительных механизмов:
■ линейные гидродвигатели — гидравлические цилиндры;
■ поворотные гидродвигатели;
■ гидродвигатели вращательного действия — гидромоторы.
4.1. Гидроцилиндры
Гидроцилиндры используют для создания определенного усилия при осуществлении прямолинейных
возвратно-поступательных движений.
Основными параметрами, характеризующими силовые возможности гидроцилиндров, являются:
■ диаметр поршня Д,;
■ диаметр штока d^;
ш номинальное давление рНом-
Основные параметры гидроцилиндров регламентирует ГОСТ 6540-68 «Гидроцилиндры и пневмоцилинд-
ры. Ряды основных параметров»:
■ диаметры поршня А, (мм): 10; 12; 16; 20; 25; 32; 40; 50; 63; 80; 100; 125; 160; 200; 250;320; 400; 500; 630;
800; (в исключительных случаях разрешаются дополнительные значения — 36; 45; 56; 70; 90; 110; 140;
180; 220; 280; 360; 450; 560; 710; 900);
■ диаметры штока </шт (мм): 4; 5; 6; 8; 10; 12; 16; 20; 25; 32; 40; 50; 63; 80; 100; 125; 160; 200; 250; 320; 400;
500; 630; 800; (в исключительных случаях разрешаются дополнительные значения — 14; 18; 22; 36; 45;
56; 70; 90; 110; 140; 180; 220; 280; 360; 450; 560; 710; 900);
■ номинальные давления рИШ (МПа): 2,5; 6,3; 10; 16; 20; 25; 32; 40; 50; 63.
По принципу действия все гидроцилиндры разделяют на две группы:
■ цилиндры одностороннего действия;
■ цилиндры двустороннего действия.
В зависимости от конструктивного исполнения рабочего органа различают плунжерные, поршневые и
телескопические гидравлические цилиндры.
78
4.1. Гидроцилиндры
4.1.1. Плунжерные гидроцилиндры
Плунжерные гидроцилиндры (рис. 4.1) по принципу действия относят к цилиндрам одностороннего действия
и используют, когда действие нагрузки обеспечивает гарантированный возврат выходного звена в исходное
положение, например, в гидравлических подъемниках и домкратах, в подъемных платформах, прессах с нижним
расположением поршня и т.п.
3 4 56
/I/ / / / . ■ / / ////77"
zzzms.
й~
■ /:,-' ////,/. // / /,v.' / .■ /±\_
Рис. 4.1. Плунжерный гидроцилиндр
Плунжерный гидроцилиндр состоит из гильзы 1, передней проходной крышки 4, в которой расположены:
опора скольжения 3, служащая направляющей для плунжера 2, уплотнительная манжета 5 и грязесъемное
кольцо 6.
При подаче рабочего давления в полость гидроцилиндра плунжер начинает выдвигаться. Обратное
движение возможно под действием силы веса самого плунжера (при вертикальном монтаже) или под
воздействием приложенной внешней нагрузки.
Если пренебречь силами трения в самом цилиндре и в ведомом механизме, то максимально возможное
развиваемое усилие будет равно
F=pA,
где F— развиваемое усилие, Н;
р — максимально допустимое давление, Па;
А — площадь поперечного сечения плунжера, м2.
4.1.2. Поршневые гидроцилиндры
Благодаря простоте конструкции и высокой надежности наиболее широкое применение в гидравлических
приводах получили поршневые гидроцилиндры.
Поршневые гидроцилиндры подразделяют по следующим признакам:
■ по принципу действия — одностороннего (рис. 4.2, а, б) и двустороннего (рис. 4-2, в, г) действия;
■ по числу штоков — с односторонним (рис. 4.2, в) и двусторонним (проходным) штоком (рис. 4.2, г).
ЩЩ Щ Щ Ш W Ш ^^^ЯЧ^Ч 1И
Рис. 4.2. Поршневые гидроцилиндры
Поршневые гидроцилиндры одностороннего действия выполняют с пружинным возвратом (рис. 4.2, б) или
без него (рис. 4.2, а).
79
4. Исполнительная подсистема
Гидроцилиндры с пружинным возвратом. Гидроцилиндры с пружинным возвратом в исходное
положение применяют в тех случаях, когда отсутствуют внешние силы для возврата выходного звена в исходное
положение. В зависимости от конструктивного исполнения, подобные гидроцилиндры работают на выдвижение
(рис. 4.3, а, б) или на втягивание (рис. 4.3, в, г) штока. Возвратные пружины могут быть установлены как внутри
гидроцилиндра (рис. 4.3, а, в), так и снаружи (рис. 4.3, б, г). Поскольку использование возвратных пружин в
таких конструкциях, приводит к ограничению величин рабочих ходов, такие гидроцилиндры преимущественно
применяют в различного рода зажимных механизмах.
• 'Ш »11110Шт\»
а
• ими!™
в
Л "ся^щЬо
^i-" л^ 1
б
г
ш?
i ,±!
W\fc=
± i
Рис. 4.3. Гидроцилиндры одностороннего действия с пружинным возвратом
Гидроцилиндры двустороннего действия. Гидроцилиндры двустороннего действия применяют в
случаях, когда требуется совершать полезную работу, как при прямом, так и при обратном ходе выходного звена,
например при транспортировке, установке, механической обработке, подъеме-опускании и других
технологических операциях. Выдвижение и втягивание штока в них осуществляются путем попеременной подачи
жидкости под давлением в одну из рабочих полостей (поршневую или штоковую), в то время как другая соединена
со сливной гидролинией (рис. 4.4). Очевидно, что перемещение штока в любом направлении является
рабочим и может осуществляться под нагрузкой. '^
Для гидроцилиндров двустороннего действия с односторонним штоком, или как их принято называть —
дифференциальных гидроцилиндров, важным параметром является отношение площадей поршня, со
стороны поршневой полости Ап и штоковой — Апшт (АПШТ=АП - Ашт):
Ф=Л/^п.шт.
Отношение развиваемых цилиндром сил при выдвижении и втягивании прямо пропорционально
отношению площадей, а отношение скоростей выходного звена обратно пропорционально этому соотношению. Так в
цилиндрах с ф = 2 скорость обратного хода поршня будет вдвое больше скорости прямого хода,
У гидроцилиндров, с двусторонним штоком одинакового диаметра слева и справа от поршня, скорость
поршня будет одинаковой при движении в обе стороны,
80
4.1. Гидроцилиндры
Гидроцилиндры с демпфированием в конце хода. В ряде механических систем, например,
металлообрабатывающих станках, гидроцилиндры используются для приведения в движение тяжелых узлов и
механизмов, причем зачастую эти перемещения совершаются с большими ускорениями. При этом в конце рабочего
хода, когда поршень упирается в крышки цилиндра, появляется опасность возникновения критических
напряжений, приводящих к деформации крышек и корпуса цилиндра. Для гашения скорости и амортизации удара
движущихся масс в конце хода в гидроцилиндрах используют специальные устройства — демпферы.
В демпферах кинетическая энергия движущихся масс поглощается, т.е. необратимо преобразуется в
другие виды энергии и, прежде всего, в тепловую с последующим ее рассеиванием в окружающую среду. Потеря
кинетической энергии в демферах обусловлена потерями давления на преодоление гидравлических
сопротивлений.
Конструкция гидроцилиндра двустороннего действия с регулируемым торможением в конце хода
представлена на рис. 4.5.
ЧШ
л-£
Рис. 4.5. Гидроцилиндр двустороннего действия с регулируемым торможением в конце хода
При втягивании штока цилиндра (обратный ход) рабочая жидкость под давлением подается в штоковую
полость, а из поршневой полости свободно поступает в сливную линию через цилиндрическую расточку 5 в
задней крышке 2. Перед тем как поршень 4 упрется в крышку 2, демфирующая втулка 3, входит в расточку 5 и
запирает некоторый объем вытекающей из поршневой полости жидкости между поршнем 4 и крышкой 2.
Выдавливание жидкости из данного объема на слив теперь может осуществляться только через дроссель 6.
Давление в поршневой полости при дальнейшем движении поршня 4 будет возрастать, что приведет к снижению
скорости его движения и обеспечит безударный приход на крышку 2. Чем меньше проходное сечение
дросселирующей щели, тем труднее жидкости вытекать из поршневой полости и, следовательно, тем больше будет
сила торможения. Таким образом, с помощью дросселя 6 можно регулировать степень демпфирования. При
прямом ходе поршня (выдвижение штока цилиндра) жидкость подается в поршневую полость через обратный
клапан 1, минуя дроссель 6.
Существуют конструкции гидроцилиндров с нерегулируемым демпфированием, в которых отсутствует
дроссель 6. В них дросселирование жидкости осуществляется в цилиндрической щели, которая образуется
между демпфирующей втулкой и расточкой в крышке. По мере движения поршня протяженность щели
меняется, меняется и сила торможения. Спрофилированные специальным образом демпфирующие втулки
позволяют осуществлять торможение цилиндров по заданным законам.
В зависимости от назначения гидропривода демпфирование в гидроцилиндре может осуществляться в
обоих конечных положениях поршня.
Гидроцилиндры с демпфированием в конце хода рекомендуется применять в тех случаях, когда скорость
движения выходного звена превышает 0,1 м/с.
81
4. Исполнительная подсистема
4.1.3. Телескопические гидроцилиндры _
Для обеспечения больших рабочих ходов при сохранении небольших продольных габаритов во
втянутом положении применяют телескопические гидроцилиндры. Отличительной особенностью таких
конструкций является то, что в корпусе 1 цилиндра расположен не один поршень, а несколько (2-5), вставленных
друг в друга (рис. 4.6). Таким образом, длина цилиндра в сжатом состоянии лишь немного больше длины
одной из секций.
Рис. 4.6. Телескопический гидроцилиндр одностороннего действия
При подаче рабочей жидкости на вход цилиндра поршни выдвигаются последовательно. Поскольку
давление в цилиндре определяется величиной нагрузки и эффективной площадью поршней, первым начнет
выдвигаться поршень 2, так как его площадь максимальна. Вместе с ним переместятся и вставленные в него
поршни 3, 4, 5. При достижении поршнем 2 ограничителя хода, давление в цилиндре возрастет и
выдвижение начнет поршень 3. Процесс будет продолжаться до выдвижения последнего, сэмого малого по площади
поршня 5. ^
Нарастание давления в цилиндре по мере выдвижения поршней происходит вследствие того, что при
неизменной нагрузке эффективная площадь поршней уменьшается. При постоянной подаче рабочей
жидкости процесс выдвижения поршней сопровождается увеличением скорости движения каждого
последующего поршня. Возврат поршней в исходное положение осуществляется в обратной
последовательности.
В телескопических цилиндрах двустороннего действия втягивание отдельных секций определяется
соотношением эффективных площадей поршней и внешней нагрузки. При этом первым возвращаться в исходное
положение будет поршень с максимальной площадью. Развиваемое цилиндром усилие должно определяться
по площади наименьшего поршня. Телескопические цилиндры применяют в гидравлических подъемниках,
качающихся площадках, грузовых автомобилях (самосвалах) и т.д.
82
4.1. Гидроцилиндры
4.1.4. Крепление гидроцилиндров
Различные условия нагружения гидроцилиндров обусловливают различные способы их крепления на
технологическом оборудовании. Поскольку способ крепления оказывает существенное влияние на эксплуатационные
показатели гидропривода и ведомого механизма, его необходимо выбирать таким образом, чтобы:
■ на штоке не возникали радиальные нагрузки;
■ шток не терял устойчивость в полностью выдвинутом положении.
Производители гидроцилиндров выпускают различные элементы крепления, как для неподвижного, так и
для подвижного способов монтажа (рис. 4.7).
' 'Л . '
♦1*^ ■>
;-1 в
а
*ч
"'W,v
J
4ц*
б
тШ J3t
щШ&=- <^Ц
3
1^
«=^
-^щ^р-
>© Щ
ш
«=^
в г
Рис. 4.7. Способы монтажа гидроцилиндров
При неподвижном монтаже гидроцилиндров, кроме варианта непосредственного их крепления на
оборудовании, применяют фланцы (рис. 4.18, а) и лапы (рис. 4.18, б). Для обеспечения подвижности цилиндра во
время работы используют цапфы (рис. 4.18, в), поворотные оси или проушины со сферическим шарниром
(рис. 4.18, г).
Соединения штока с ведомым механизмом также выполняются различными способами (рис. 4.8).
Неподвижные соединения реализуются с помощью внутренней (рис. 4.8, а) или внешней (рис. 4.8, б) резьбы на
конце штока.
Несовпадение траекторий движения конца штока и монтажного звена ведомого механизма приводит к
появлению радиальных усилий на штоке и, следовательно, к ускоренному износу гильзы, поршня, штока,
направляющих втулок и уплотнений. Если при жестком способе крепления штока вследствие условий эксплуатации
или особенностей конструктивного исполнения оборудования невозможно предотвратить возникновение
радиальных нагрузок на шток, необходимо применять подвижные переходные крепежные элементы —
вилкообразные головки (рис. 4.8, в) либо серьги (рис. 4.8, г) — наконечники со сферическим шарниром.
От способа монтажа гидроцилиндра зависят предельно допустимые осевые сжимающие нагрузки на его
шток. Несмотря на то, что напряжения в штоке от чистого сжатия невелики, при больших рабочих ходах
возможна потеря устойчивости вследствие продольного изгиба. Устойчивость штока проверяется по обобщенной
формуле Эйлера (см. приложение П1.9).
83
4. Исполнительная подсистема
4.2. Поворотные гидродвигатели
Поворотные гидродвигатели применяют в случаях, когда необходимо повернуть ведомый объект вокруг
некоторой оси на угол обычно не превышающий 360°. Благодаря им, кинематические цепи в машинах и
механизмах могут быть полностью сокращены, либо значительно упрощены,
В зависимости от способа создания момента на выходном валу, поворотные гидродвигатели
подразделяют на пластинчатые (или лопастные), поршневые с реечной передачей, кривошипно-шатунные и поршневые с
винтовым преобразованием.
Поршневой поворотный гидродвигатель с реечной передачей (рис. 4.9). Этот гидродвигатель
состоит из корпуса 10 с расположенным в нем выходным валом 8, шестерня 9 которого входит в зубчатое
зацепление с рейкой 4, соединяющей между собой два поршня 3 и 6. Поршни 3 и 6 расположены в гильзах 2 и 5
соответственно, жестко связанных с корпусом 10.
5 6
1Щ$
^
^^^:
lLi
Рис. 4.9. Поворотный гидродвигатель поршневого типа
Под действием рабочей жидкости поршни совершают возвратно-поступательное движение, которое
благодаря передаче шестерня-рейка, преобразуется во вращательное движение выходного вала 8.
Регулировочными винтами 1 и 7 устанавливают величину хода поршня и угол поворота шестерни.
Величина крутящего момента выходного вала (вала шестерни) зависит от диаметров поршней и величины
давления, а скорость поворота — от подачи жидкости.
Пластинчатый поворотный гидродвигатель (рис. 4.10, а). Такой гидродвигатель создает крутящий
момент на выходном валу 2 за счет действия рабочей жидкости под давлением на радиально размещенную в
роторе 3 пластину 1. Ротор 3 установлен в цилиндрической расточке 4 корпуса 5, угол его поворота
определяется размерами стопора 6.
:1И'
^Ыш?Ф^6
а
ill
^ЫШ$^
б
' ф=
V,
Рис. 4.10. Пластинчатые поворотные гидродвигатели
84
4.2. Поворотные гидродвигатели
Для получения вдвое большего крутящего момента применяют так называемые четырехкамерные
пластинчатые гидродвигатели (рис. 4.10, б). Ротор таких машин содержит две рабочие пластины и имеет два
диаметральных канала для подачи рабочей жидкости в камеры, не соединенные напрямую с входными
отверстиями в корпусе. В таких конструкциях скорость вращения и угол поворота статора вдвое меньше, чем у
двигателей с одной пластиной.
Для уменьшения сил трения пластины, как правило, выполняют гидравлически разгруженными.
Кривошипно-шатунный поворотный гидродвигатель (рис. 4.11). По своему конструктивному
исполнению кривошипно-шатунный поворотный гидродвигатель похож на двигатель с реечной передачей. Шток,
соединяющий между собой поршни двигателя, через кривошипно-шатунный механизм передает крутящий
момент на выходной вал. Угол поворота таких двигателей не превышает 180°. Недостатком данной конструкции
является то, что момент на выходном валу меняется в зависимости от угла поворота.
^\Ч^З?^
хчччччч
5&§г
Л
кЧЧЧЧЧЧ^
lLi
Рис. 4.11. Кривошипно-шатунный поворотный гидродвигатель
В мобильной технике часто применяются гидродвигатели с винтовым преобразованием осевого усилия на
поршне в крутящий момент на выходном валу (рис. 4.12).
Поршень 4 через группу роликов 3 взаимодействует с разнонаправленными крупными резьбами большого
шага выполненными на внутренней поверхности корпуса 2 и наружной поверхности вала 1, который
установлен в корпусе на мощных радиально-упорных подшипниках 5.
85
4. Исполнительная подсистема
4.3. Гидромоторы
В гидромоторах энергия потока жидкости преобразуется в механическую энергию вращательного
движения вала. По принципу действия большинство объемных роторных гидромоторов и гидронасосов являются
обратимыми машинами, т.е. в качестве моторов и насосов могут применяться одни и те же агрегаты. Поэтому
общие вопросы конструкций и работы гидронасосов, рассмотренные ранее, справедливы и для
гидромоторов.
В качестве примера на рис. 4.13 приведен нерегулируемый аксиально-поршневый гидромотор с
наклонным диском.
Как и насос гидромотор состоит из корпуса 1, внутри которого установлен ротор 4 с поршнями 7,
наклонного диска 9 и выходного вала 2. Работа гидромотора осуществляется следующим образом. Рабочая жидкость
из напорной линии Р, выполненной в задней крышке 5, поступает в рабочие камеры 6 ротора 4,
расположенные по одну сторону от оси В-В.
Усилие, создаваемое давлением жидкости на поршни 7, передается через толкатели 8 на наклонный диск
9. При этом на толкателях 8 возникают окружные усилия, заставляющие вращаться барабан 3, а вместе с ним
ротор 4 и вал 2, так как они связаны с барабаном шпонками. Одновременно поршни, расположенные по
другую сторону от оси В-В, вдвигаются в цилиндры ротора. При этом жидкость вытесняется из рабочих камер в
сливную линию S. Прижим ротора к наклонному диску осуществляется специальной пружиной, а также
давлением жидкости, действующим на дно цилиндра рабочей камеры.
Скорость вращения выходного вала определяется величиной подачи жидкости в напорной линии.
Направление вращения зависит от того, какое из отверстий Р или S соединено с напорной линией
гидросистемы.
Подобно насосам гидромоторы подразделяют на группы: поршневые, шестеренные, винтовые, ротор-
но-пластинчатые. Они также бывают нерегулируемые (т.е. с постоянным рабочим объемом) и регулируемые
(с изменяемым рабочим объемом).
Гидромоторы по развиваемому крутящему моменту бывают низкомоментные и высокомоментные
(значение крутящего момента более 2 000 Нм при угловой частоте вращения не более 100 мин-1).
86
5. Направляющая и регулирующая подсистема
Управление энергией рабочей жидкости, поступающей от источника (от энергообеспечивающей
подсистемы) к исполнительным механизмам, осуществляется устройствами, входящими в состав направляющей и
регулирующей подсистемы, которые обобщенно называют гидроаппаратами.
Само название подсистемы отражает функциональное назначение аппаратов ее образующих: направлять
в требуемые гидролинии поток рабочей жидкости и регулировать параметры этого потока в необходимых для
нормального функционирования привода пределах. В соответствии с решаемыми задачами гидроаппараты
данной подсистемы делят на две группы: направляющие и регулирующие.
Направляющие гидроаппараты управляют пуском, остановом и направлением потока жидкости.
Регулирующие гидроаппараты управляют расходом жидкости, ее давлением, или расходом и давлением
одновременно.
Классификация гидроаппаратов по функциональному признаку приведена на рис. 5.1.
Гидроаппараты
Направляющие
■ Распределители -Ц
, Обратные клапаны
i.Гидрозамки in !«>■
Рис. 5.1. Классификация гидроаппаратов
И в направляющих, и в регулирующих гидроаппаратах воздействие на поток рабочей жидкости
осуществляется посредством подвижных запорно-регулирующих элементов (ЗРЭ). Назначение ЗРЭ состоит в изменении
величины проходного сечения канала, через который движется рабочая жидкость. Управление перемещением
ЗРЭ осуществляется либо за счет внешнего воздействия (оператором или управляющим сигналом), либо под
действием самого потока жидкости, например, из-за изменения давления или расхода.
В зависимости от назначения гидроаппарата, его проходное сечение может меняться дискретно (канал
полностью закрыт — канал полностью открыт), или плавно, когда канал может приоткрываться на какую-то
величину. Дискретный режим работы характерен для направляющих аппаратов, а'в регулирующих ЗРЭ
находится в промежуточном положении, определяемом параметрами потока рабочей жидкости.
По конструктивному исполнению ЗРЭ различают гидроаппараты клапанного, золотникового и кранового
типов (рис. 5.2).
В гидроаппаратах клапанного типа (рис. 5.2, а) ЗРЭ перемещается вдоль осевой линии потока.
Достоинства такого конструктивного решения очевидны: обеспечение полной герметичности при отсечении одной
гидролинии от другой, пониженная чувствительность к воздействию загрязнителей, а также высокое
быстродействие. ЗРЭ может быть выполнен в виде шара, конуса, иглы или диска (тарелки).
К недостаткам гидроаппаратов клапанного типа можно отнести следующее: требуется приложение
значительных усилий для перемещения ЗРЭ, что связано с необходимостью преодоления сил, возникающих от
давления рабочей жидкости на последний, или сил сопротивления пружин, прижимающих ЗРЭ к седлу
клапана.
Расход
Дроссели
Регуляторы расхода
Делители потока
Давление
Напорные клапаны
Редукционные клапаны
87
5. Направляющая и регулирующая подсистема
Иногда такую аппаратуру называют аппаратурой седельного типа.
В гидроаппаратах золотникового типа (рис. 5.2, б) ЗРЭ перемещается перпендикулярно осевой линии
потока рабочей жидкости. В подобных аппаратах усилие, обусловленное давлением рабочей жидкости на ЗРЭ,
не приводит к какому-либо его смещению (золотник гидравлически разгружен*). Для перемещения ЗРЭ
необходимо преодолеть только силы трения между ним и корпусом, что является достоинством такого
конструктивного решения. Недостатком гидроаппаратов золотникового типа является наличие гарантированного
зазора между золотником и расточкой корпуса, поскольку он является причиной появления утечек рабочей
жидкости, а его засорение может привести к заклиниванию ЗРЭ.
Запорно-регулирующий элемент гидроаппаратов кранового типа (рис. 5.2, в) может иметь форму
цилиндра, сферы или конуса, которые проворачиваются вокруг своей оси под воздействием внешнего управляющего
усилия. Гидроаппараты кранового типа не нашли широкого применения в гидроприводах.
Для правильной коммутации аппаратов между собой во время монтажа гидросистем, их
присоединительные отверстия маркируют латинскими буквами (ГОСТ 24242-80):
Назначение отверстия
Подвод рабочей жидкости под давлением (вход)
Отвод рабочей жидкости в бак (слив)
Подача рабочей жидкости к другим гидравлическим устройствам (выход)
Дренажный отвод жидкости
Подключение потоков управления
Обозначение
Р
Т
А, В
L
X, Y
К основным параметрам гидроаппаратов относятся:
■ условный проход Dy—диаметр условного отверстия, площадь которого равна максимальному значению
площади проходного сечения гидроаппарата;
■ номинальное давлениер^^ — наибольшее давление рабочей жидкости, при котором гидроаппарат
должен работать в течение установленного ресурса (срока службы) с сохранением своих параметров в
пределах установленных норм;
■ номинальный расход ()ИОМ — расход жидкости определенной вязкости, проходящей через аппарат, при
котором он выполняет свое назначение с сохранением параметров в пределах установленных норм.
* Без учета гидродинамических сил, действующих на кромках золотника при обтекании их потоком рабочей
жидкости.
88
5.1. Направляющие гидроаппараты
5.1. Направляющие гидроаппараты
Направляющие гидроаппараты — распределители, обратные клапаны, гидрозамки — обеспечивают
течение жидкости в каналах гидросистемы в различных направлениях, практически не влияя на основные
параметры потока — давление и расход. Для этих гидроаппаратов характерно выполнение своих функций путем
полного открытия или закрытия рабочих проходных сечений.
5.1.1. Гидрораспределители
Гидрораспределители предназначены для управления пуском, остановкой и направлением потока
жидкости в двух или более гидролиниях в зависимости от наличия внешнего управляющего воздействия на их ЗРЭ.
При этом ЗРЭ из одной позиции, которая обеспечивает некую коммутацию внутренних каналов, связанных с
присоединительными отверстиями в корпусе распределителя, перемещается в другую позицию, в которой
коммутация каналов меняется. Изменение направлений протекания потоков рабочей жидкости через
распределители позволяет реверсировать и останавливать движение исполнительных механизмов, разгружать
насосы и гидросистемы от давления, а также выполнять другие операции, в соответствии с гидросхемой
распределителя.
Функциональные возможности распределителей характеризуются рядом параметров таких как:
количество коммутируемых гидролиний, количество позиций переключения, нормальная позиция (позиция,
занимаемая распределителем при отсутствии управляющего воздействия), способ управления и отображаются в
условном графическом обозначении распределителя.
В условном графическом обозначении распределителей каждая из возможных позиций его ЗРЭ
обозначается квадратом, внутри которого показана схема внутренних соединений: линиями со стрелками
изображают направления потока рабочей жидкости, а тупиковой линией с поперечной чертой — закрытые каналы
(рис. 5.3).
Поскольку рассмотренная модель распределителя осуществляет коммутацию двух гидролиний (А и Р), а
его ЗРЭ при этом может занимать две позиции (левая — поток рабочей жидкости перекрыт, правая — поток
рабочей жидкости пропускается), то такой распределитель можно назвать двухлинейным, двухпозиционным
распределителем.
Для того чтобы компактным образом охарактеризовать возможности распределителей по коммутации
подведенных к ним гидролиний, используют дробное цифровое обозначение, где в числителе указывают
количество коммутируемых распределителем гидролиний, а в знаменателе — количество занимаемых его ЗРЭ
позиций. В соответствии с этим можно сказать, что на рис. 5.3 представлена модель и условное графическое
обозначение 2/2-распределителя.
89
5. Направляющая и регулирующая подсистема
Переключение распределителей выполняется посредством перемещения их ЗРЭ из одной позиции в
другую в результате внешних управляющих воздействий. Способы таких воздействий достаточно многообразны
и подразделяются на следующие виды управления:
■ мускульной силой оператора;
■ механическое;
■ гидравлическое или пневматическое;
■ электрическое (с помощью электромагнитов);
■ комбинированное, ч
В табл. 5.1 приведены стандартные условные графические обозначения (УГО) наиболее
распространенных устройств и способов управления гидравлическими распределителями.
Таблица 5.1
У
►с
ос:
к:
Hi
TfC
правление мускульной силой
Без уточнения типа
Кнопка
Рычаг
Педаль
Поворотная рукоятка
<1
©с
^=
w\Q
d»Q
Механическое управление
Толкатель (кулачок) ^
Ролик
Ролик с «ломающимся» рычагом
Пружина
Фиксатор
Управление давлением
н^
-^
-«С
Прямое пневматическое
нагружением
Прямое гидравлическое
нагружением
Прямое гидравлическое
разгружением
-ЕС
-яС
-[ ь
Непрямое гидравлическое нагружением
Непрямое гидравлическое разгружением
За счет разности площадей
сС
Электромагнитное управление
Электромагнит с одной обмоткой
Ьр
Электромагнит с пропорциональным управлением
Комбинированное управление
gF|
EEC
Пневмогидравлическое
Электромагнитное и непрямое
гидравлическое
-EZ
ег~
Электромагнитное или непрямое гидравлическое
Электромагнит и пружина
Обозначения управляющих устройств вычерчивают в любой удобной позиции с соответствующей стороны
базового обозначения распределителя. При этом следует обращать внимание на то, что изменение стороны
90
I
5.1. Направляющие гидроаппараты
расположения обозначения управляющего устройства приводит к изменению «функционирования»
распределителя. Так, при смене мест расположения обозначений рычага управления и пружины в изображенном на
рис. 5.4, а, нормально закрытом 2/2-распределителе, получается нормально открытый 2/2-распределитель
(рис. 5.4, б).
а
б
' №
в
г
' 1ЛЛ
Рис. 5.4. Примеры изображения устройств управления распределителями
На принципиальных гидравлических схемах условные графические обозначения распределителей
изображают таким образом, чтобы линии связи (рабочие гидролинии) были подведены к квадрату,
обозначающему исходную позицию распределителя (например, рис. 5.4, в), которая может не совпадать с его нормальной
позицией (рис. 5.4, г).
Чтобы получить представление о работе распределителя, следует мысленно передвинуть относительно
линий связи соответствующий квадрат в обозначении на то место, которое на схеме занимает квадрат,
изображающий исходную позицию распределителя. При этом как бы имитируется переключение
распределителя, наглядно показывая, какая связь гидролиний осуществляется в новой позиции и каким образом
направляется поток рабочей жидкости (рис. 5.5).
Рис. 5.5. Управление гидроцилиндром одностороннего действия
В исходной позиции (рис. 5.5, а) 3/2-распределитель* перекрывает поток жидкости от насоса к
гидроцилиндру, весь расход через предохранительный клапан поступает в бак (исходной ябляется позиция b
распределителя, поскольку справа на него «действует» пружина). Поршневая полость гидроцилиндра одностороннего
действия связана с линией слива, под действием возвратной пружины его шток втянут.
Читать приведенную схему следует следующим образом: при появлении управляющего воздействия
распределитель переключается в позицию а (рис. 5.5, б). Жидкость под давлением, определяемом нагрузкой
на гидроцилиндре и наличием в нем возвратной пружины, поступает в цилиндр, его шток выдвигается. При
полностью выдвинутом штоке, давление в цилиндре будет определяться настройкой предохранительного
клапана.
После отпускания кнопки распределитель под действием возвратной пружины переключается в исходную
позицию и гидроцилиндр возвращается в исходное положение.
Распределитель коммутирует между собой три линии (Р, А, Т) и может занимать две позиции а и Ь.
91
5. Направляющая и регулирующая подсистема
Золотниковые гидравлические распределители. В золотниковых распределителях (рис. 5.6)
изменение коммутации подведенных к ним гидролиний осуществляется при осевом смещении цилиндрического за-
порно-регулирующего элемента — золотника.
Рис. 5.6. Золотниковый распределитель
Золотник 4, имеющий два соединенных между собой буртика 3 и 5, расположен в продольной
цилиндрической расточке 2 корпуса 1. Рабочие каналы Р и А связаны с кольцевыми расточками 8, между кромками
которых 7 и кромками 6 буртов собственно и образуется проходное сечение распределителя. Перемещение
золотника в цилиндрической расточке возможно только при наличии диаметрального зазора между ним и
корпусом, что сопровождается утечками рабочей жидкости при наличии разности давлений в рабочих каналах
распределителя. Ограничить утечки можно путем уменьшения диаметрального зазора, однако, обеспечить
зазор меньше 10 мкм технологически трудно*.
При приложении управляющего воздействия на золотник распределителя приходится преодолевать
только силы трения и возвратной пружины (при ее наличии). Силы же, создаваемые давлением жидкости,
уравновешиваются благодаря равенству площадей противолежащих торцов золотника (золотник гидравлически
разгружен).
Сила трения в золотниковой паре (золотник-корпус) зависит от времени пребывания золотника в
состоянии покоя под давлением и возникает вследствие защемления буртиков, по которым происходит утечка
рабочей жидкости. Защемление золотника обусловлено неравномерным распределением давления в
диаметральном зазоре (рис. 5.7, а).
Чтобы избежать защемления золотника, на его буртиках выполняют цилиндрические разгрузочные
проточки (рис. 5.7, б), в которых гарантировано наличие жидкости под давлением. Под действием давления по
всему периметру буртика золотник оказывается как бы вывешенным в расточке на масляной пленке, что
обеспечивает его нормальную подвижность. ~~
Для страгивания с места золотника, который долго не двигался, необходимо большее усилие, чем для
дальнейшего перемещения еще и в связи с облитерацией — зарастанием зазора адсорбированными на
поверхностях золотника и корпуса молекулами.
* Получение меньших зазоров требует использования высокоточного оборудования, что в крупносерийном
производстве является экономически невыгодным.
92
5.1. Направляющие гидроаппараты
Рассмотрим некоторые конструкции золотниковых распределителей. На рис. 5.8 представлен гидравлический
3/2-распределитель с управлением от нажимной кнопки и пружинным возвратом. Когда управляющее воздействие
на толкатель 1 отсутствует, пружина 3 устанавливает золотник 2 в крайнее левое положение, которое является для
данной конструкции нормальной позицией. При этом канал Р перекрыт, а канал А связан с каналом слива Т. При
наличии управляющего воздействия на толкатель 1 (в данном случае при нажатии на кнопку оператором) золотник 2,
сжимая пружину 3 смещается в правую позицию, при которой каналы питания Р и потребителя А соединяются, а
канал слива Т перекрывается. Линия дренажа L предусмотрена для отвода утечек.
N
£
Vv\
Pi L
Рис. 5.8. 3/2-гидрораспределитель
Традиционно 3/2-распределители используются для управления нереверсивными гидромоторами и
гидроцилиндрами одностороннего действия.
Для управления реверсивными гидромоторами и цилиндрами двустороннего действия обычно применяют
4/2-гидрораспределители (рис. 5.9)*.
А
рХ
•Ь1
-J .
—ч
в
_.м
lLt
1-Г& О*®
р lLiT
Г\
п
мл
ф*@
tS.
№
р т
Рис. 5.9. 4/2-гидрораспределитель
4/2-распределители обеспечивают позиционирование гидроцилиндров двухстороннего действия только в
двух положениях: шток полностью втянут; шток полностью выдвинут.
* Для того, чтобы не затемнять принципиальные гидравлические схемы сливные гидролинии, если в них не
располагаются какие-либо гидроаппараты, не вычерчивают до УГО бака (см. рис. 5.5), а ограничиваются их
упрощенным изображением.
93
5. Направляющая и регулирующая подсистема
Если необходимо производить остановку штока гидроцилиндра в любом промежуточном положении
(например, при управлении ковшом экскаватора), то применяют 4/3-распределители (рис. 5.10).
Рис. 5.10. 4/3-гидрораспределитель с ручным управлением
При отсутствии управляющего воздействия, золотник 5 под действием пружин 4 и 6 устанавливается в
нейтральную (среднюю) позицию, все каналы распределителя оказываются перекрытыми. При повороте
рычага 1, он, вращаясь вокруг шарового шарнира 2, через толкатель 3 смещает золотник 5 в ту или иную сторону,
что приводит к смене схемы коммутации каналов, согласно приведенному условному графическому
обозначению.
В гидроприводе, схема которого изображена на рис. 5.11, в исходном положении (рис. 5.11, а) полости
цилиндра заперты, его выходное звено находится в позиции, определяемой предыдущей управляющей
командой. При переводе золотника распределителя посредством рычага в рабочую позицию а, шток цилиндра
начнет втягиваться (рис. 5.11, б).
В момент (определяемый оператором), когда шток займет требуемое положение, управляющее воздействие
на золотник прекращают. Это сопровождается автоматической (под действием центрирующих пружин)
установкой золотника распределителя в нейтральную позицию 0 и остановку цилиндра в новом положении (рис. 5.11, в).
94
5.1. Направляющие гидроаппараты
Позиции, которые могут занимать ЗРЭ распределителей обозначают буквами «а», «в» и «О», где «а» —
соответствует крайнему левому положению ЗРЭ, «в» — крайнему правому, а «О» — нейтральному или среднему
положению. Двухпозиционные распределители могут занимать только положения «а» и «в», а трехпозицион-
ные — и положение «О».
Для систематизации разнообразных схемных решений распределителей каждому из них присвоен номер
исполнения по гидросхеме. В качестве пояснения рассмотрим основные схемы коммутаций гидролиний,
реализуемые распределителями золотникового типа (табл. 5.2).
Таблица 5.2
Номер
схемы
14
24
34
44
54
64
64А
74
84
Схема
распределителя
ГОСТ 2.781-96
а А 0 В Ь
Х-'"-
Р Т
а А О.В b
13:~;
р 'т
а А.О в b
z£::;
Р1 Т
а А.О.В b
V
Л тт
Р1 'т
а А О.В b
::3х
р 'т —
а А. О.В b
11 у
п Л
р| iT'
a A, 0.B b
п л
pi lT
а А.О.В b
ХН-.:
р| iT
а А.О В b
Т^"1,'
РТ Т
Соединение каналов
в переходных
положениях
а А.О,В b
КЕЩШИ
Р" "Т
а А.О,В b
а А.О.В Ь
квдш
Р1 'Т
а А.О.В b
КВДЗО
р1 'т
а А.О,В b
(ПЩЕШ
Р" 'Т
а А.О,В b
а А.О,В b
Р' 'Т
а А. О.В b
кшшо
Р1 "Т
а А. О.В b
ГШ1*РП1
Р' 'Т
Номер
схемы
94
124
134
154
573
573Е
574
574А
574Е
Схема
распределителя
ГОСТ 2.781-96
а А О.В b
Л тт т
pi lT
а А 0 В b
Р Т
а А.О В b
Л т
Р1 Т
а А.О В b
'Zl'X
Р1 Т
а А ь.В
У
-"■ I
Р "Ч
А.а.В b
У"1
a A b В
1:..
Р "Т
a A b В
Р Т
А. а.В b
tXJtU
Соединение каналов
в переходных
положениях
а А.О.В b
Р" "Т
а А. О.В b
найпи
Р" 'Т
а А. О.В b
НЕШШ
Р" Т
а А.О.В b
ИВЦБШ
Р" "Т
а А. Ь.В
А, а,В b
Ух ЭЗЗЕЗ
р| Ат
а А,Ь.В
киши
гч
а А.Ь.В
А.а.В b
Р^Т
В процессе переключения распределителей, по ходу перемещения золотников, также возможны
различные варианты коммутации каналов. На графических условных обозначениях распределителей переходные
позиции, если это необходимо, обозначают прерывистыми линиями между рабочими позициями,
изображенными сплошными линиями.
Так, например, распределители, выполненные по схемам 64 и 64А, отличаются друг от друга не рабочими
позициями, а переходными. Это означает, что при переключении распределителя, выполненного по схеме 64,
давление в выходных линиях А и В, будет возрастать плавно, так как в переходных позициях оно начинает
подаваться одновременно во все каналы. Переключение же распределителя, выполненного по схеме 64А,
может сопровождаться гидравлическим ударом в выходных гидролиниях из-за резкого увеличения давления в
них. Применение того или иного схемного решения решается в каждом конкретном случае в зависимости от
требований конкретного гидропривода.
95
5. Направляющая и регулирующая подсистема
Такое разнообразие схем коммутации каналов в рабочих и переходных позициях обеспечивается
различным конструктивным исполнением золотников (рис. 5.12).
а А О В b
X
W;
а АДВ b
X
а А О В b
X
ft
p. .T
"А- '/' /у>^ /&
и -I
i
Т А Р В
lllllll
Т А Р В
Ш2Л
Рис. 5.12. Примеры реализации разных схем соединения в нейтральной позиции
В зависимости от геометрии и взаимного расположения буртикоЕ золотника и цилиндрических расточек
корпуса распределителя различают положительное, отрицательное и нулевое перекрытие (рис. 5.13).
д>0
^??ш^
Положительное перекрытие
При переключении такого распределителя все гидролинии,
подсоединенные к нему на короткое время отсекаются одна от другой. Такое
перекрытие характеризуется надежным отсечением коммутируемых
каналов и «жестким пуском» — резким повышением давления в каналах
при их соединении U
,Л>0
г Отрицательное перекрытие
При таком типе перекрытия каналы А, Р и В сообщаются между собой
в момент переключения распределителя, что сопровождается «мягким
пуском» — плавным изменением давления в выходных каналах
н-А"°
A JjJi В
Нулевое перекрытие
Такой тип перекрытия требует высокой точности изготовления
сопрягаемых деталей и применяется в основном в дросселирующих
распределителях, которые позволяют не только менять направление потока
рабочей жидкости, но и его расход. Малейшее смещение золотника
приводит к смене коммутации каналов
Рис. 5.13. Виды перекрытий золотников
Главным недостатком золотниковых распределителей является их негерметичность. Величина перетечек
зависит от величины диаметрального зазора между золотником и корпусом, вязкости рабочей жидкости и
особенно от величины давления. Обычно эти перетечки незначительны, однако в ряде случаев, когда они
недопустимы, распределители такого типа не используют.
96
5.1. Направляющие гидроаппараты
Клапанные гидрораспределители. Существует широкий класс задач, решение которых требует
отсутствия утечек внутри распределителя. Гидросистемы работающие при очень высоких давлениях — до 63 МПа;
запирание полостей гидроцилиндров, удерживающих подвижные части машин в верхнем положении;
гидросистемы, работающие на жидкостях с низкой вязкостью, например на водной эмульсии. В таких
гидросистемах используют распределители клапанного типа.
На рис. 5.14 представлен 3/2-гидрораспределитель клапанного типа, нормально открытый, с
управлением от рычага и пружинным возвратом. В исходном положении, определяемом наличием пружины 8, шаровой
клапан 6 поджат к седлу 5. Канал Р соединен с каналом А, канал Т перекрыт. Поворотом рычага 1 шаровой
клапан 6 через толкатель 2 снимается с седла 5 и устанавливается на седло 7. При этом канал Р запирается, а
канал А соединяется с каналом Т. Толкатель 2 уплотнен манжетами 3 и 4, а полость между ними соединена с
каналом Р, что уравновешивает силы, действующие со стороны рабочей жидкости, на клапан. Это позволяет
снизить величину управляющего воздействия, требуемого для переключения клапана.
Рис. 5.14. Нормально открытый клапанный (седельный) 3/2-гидрораспределитель
Для того, чтобы реализовать функцию нормально закрытого 3/2-распределителя необходимо
использовать двухклапанную конструкцию (рис. 5.15).
Клапанные распределители, вследствие своей специфической конструкции, не могут реализовать
множество вариантов коммутации гидролиний, характерных для золотниковых распределителей.
97
5. Направляющая и регулирующая подсистема
Крановые гидрораспределители. В крановых гидрораспределителях изменение направления потока
рабочей жидкости достигается поворотом пробки, имеющей плоскую, сферическую, коническую, или
цилиндрическую форму (рис. 5.16). Цилиндрическая пробка 5 установлена в гильзе 4, которая вместе с крышками 3 и
6, уплотняющими пробку с торцов, образует корпус распределителя. Переключение распределителя
осуществляется поворотом рукоятки 1, а фиксация занимаемых пробкой позиций осуществляется подпружиненным
стопором 2.
Для того чтобы уменьшить усилие переключения распределителя, зависящее от сил трения пробки о
гильзу, пробку уравновешивают от статических сил давления жидкости, так как в противном случае она будет
прижата к одной стороне гильзы. Уравновешивание достигается благодаря наличию в пробке двух сквозных
радиальных отверстий, что обеспечивает диаметрально противоположное действие давления жидкости на
пробку. Кроме этого, уменьшение сил трения в поворотных кранах часто достигается тем, что кран
центрируют на подшипниках качения.
Герметичность крановых гидрораспределителя обеспечивается за счет притирки пробки к корпусу крана.
Вследствие износа пробки и корпуса зазор между ними, а, следовательно, и утечка рабочей жидкости с
течением времени увеличиваются, что является недостатком такой конструкции распределителя.
Этого недостатка лишены крановые гидрораспределители с подпружиненной конической пробкой.
98
5.1. Направляющие гидроаппараты
Гидрораспределители с дискретным электромагнитным управлением . Все рассмотренные выше
конструкции распределителей относятся к распределителям прямого действия, характерным признаком которого
является приложение усилия переключения непосредственно к запорно-регулирующему элементу.
Распределитель с дискретным электромагнитным управлением, показанный на рис. 5.17, также является
распределителем прямого действия, или, другими словами, одноступенчатым распределителем.
Рис. 5.17. Нормально закрытый 3/2-гидрораспределитель с электромагнитным управлением
Работа распределителей с электромагнитным управлением основана на свойстве электромагнитных
катушек, находящихся под напряжением, втягивать находящийся в них якорь. При отсутствии управляющего
воздействия (рис. 5.17, а) золотник 6 под действием возвратной пружины 5 находится в крайнем левом положении.
При подаче напряжения на катушку 3 (рис. 5.17, б) через штепсельный разъем 7, якорь 2 (сердечник)
втягивается в катушку и через запрессованный в него толкатель 4 смещает золотник 6 в крайнюю правую позицию.
Смещение золотника 6 можно осуществить вручную, нажав на кнопку ручного управления 1.
Сила, развиваемая толкателем 3, существенно зависит от положения якоря 1 относительно
электромагнитной катушки 2 (рис. 5.18). Поскольку в начале движения толкатель 3 развивает незначительное усилие,
между ним и золотником 4 оставляют гарантированный зазор, обеспечивающий толкателю холостой ход, при
совершении которого золотник остается неподвижным. Когда сила, развиваемая электромагнитом, достигает
величины достаточной для сжатия пружины, действующей на противоположный торец золотника, толкатель
начинает перемещать золотник.
99
5. Направляющая и регулирующая подсистема
В распределителях прямого действия с электромагнитным управлением (рис. 5.19) используют
электромагниты постоянного или переменного тока, работающие в воздушной (с «сухим якорем» 2) или масляной
среде (с «мокрым якорем», 1).
В настоящее время наиболее распространены маслонаполненные электромагниты. Их применяют в
гидроприводах, работающих на открытом воздухе и в условиях повышенной влажности, поскольку исключается
коррозия внутренних поверхностей электромагнита. Наличие масла в электромагните позволяет снизить
износ, улучшить теплоотдачу и обеспечить демпфирование ударов. Существенным их преимуществом также
является то, что выдвигающийся толкатель якоря не нужно специально уплотнять, благодаря чему в
значительной мере уменьшаются силы трения и, как следствие, усилия переключения распределителя.
Электромагниты постоянного тока обладают высокой надежностью и обеспечивают плавное
включение распределителя. Они не перегорают, если перестановка якоря не завершена до конца, например, при
заклинивании золотника, поскольку потребление тока в них постоянно и не зависит от положения якоря.
К недостаткам электромагнитов постоянного тока следует отнести их физически обусловленное свойство
отдавать некоторый импульс тока самоиндукции при отключении. Это приводит к искрению на управляющих
магнитом коммуникационных контактах, что сокращает срок их службы. Для избежания этого применяются
специальные меры по искрогашению.
Электромагниты переменного тока обеспечивают высокую скорость переключения золотников (от
10 до 20 мс), однако они перегорают, если процесс переключения не завершен. Это происходит из-за того, что
потребляемый электромагнитом ток зависит от положения якоря — в начале хода якоря он в несколько раз
выше, чем в конце хода.
Как правило, диаметр условного прохода Dy одноступенчатых распределителей с прямым
электромагнитным управлением не превышает 10 мм. Это обусловлено тем, что для переключения распределителя
необходимо преодолевать не только силы трения и усилия от пружин, но и гидродинамические силы, действующие
на ЗРЭ при обтекании его потоком жидкости. Поскольку величина гидродинамических сил зависит от
давления и расхода жидкости через распределитель, а последний напрямую зависит от Dy, то для переключения
распределителей с большим условным проходом требуются большие усилия. Как показала практика,
использование более мощных электромагнитов оказывается нецелесообразным ввиду увеличения их габаритов,
времени переключения и появления ударов.
Гидрораспределители с электрогидравлическим управлением. Для переключения распределителей
с /)у>10 мм применяют непрямое (пилотное) управление, суть которого заключается в том, что ЗРЭ основного
распределителя управляется гидравлически —давлением рабочей жидкости, поступающей от управляющего
(пилотного) распределителя прямого действия. Если пилотный распределитель управляется электромагнита-
100
5.1. Направляющие гидроаппараты
ми, то блок «основной распределитель — пилот» называют распределителем с электрогидравлическим
управлением (рис. 5.20).
АЛЛ
ЩЕ
X
и
*ч!г---п г
да
■"V
-+ 1
ж
Р Т
й
tt
т*лл '
ib«-il
4ж^
XY
Рис. 5.20. 4/3-гидрораспределитель с электрогидравлическим управлением
В таких двухступенчатых конструкциях пилотный распределитель 1 устанавливается на верхней
плоскости корпуса основного распределителя 4. Рабочая жидкость под давлением подается к нему из линии
управления через канал X, выполненный в корпусе основного распределителя.
При отсутствии управляющего электрического сигнала, золотник пилотного распределителя находится
в нейтральной позиции, благодаря чему управляющие полости, расположенные с торцов золотника 7
основного распределителя, соединены со сливным каналом Y. Золотник 6 удерживается в средней позиции
пружинами 5 и 8.
При подаче управляющего электрического сигнала, например, на электромагнит b пилотного
распределителя, рабочая жидкость под давлением по каналу 3 поступит под левый торец золотника 6 основного
распределителя, что приведет к его перестановке в крайнее правое положение. При этом канал Р соединится с
каналом В, а канал А со сливом Т.
После отключения электромагнита b золотник пилотного распределителя возвратится в свою среднюю
позицию и давление в левой управляющей полости основного распределителя снизится. Под действием пружин
5 и 8 золотник 7 займет свою нейтральную позицию.
Переключение золотника пилотного распределителя происходит за очень короткое время. Если
золотник основного распределителя переключится так же быстро, то в линиях гидросистемы с высоким
давлением и большими расходами могут возникнуть гидравлические удары. Для предохранения системы от
гидроударов перемещение основного золотника может быть замедлено за счет дросселирования потока
жидкости, поступающей от пилота в управляющие полости. Это достигается с помощью специальных
сдвоенных дросселей с обратным клапаном*, устанавливаемых между пилотным и основным
распределителями.
См. разд. «Дроссели».
101
5. Направляющая и регулирующая подсистема
Напорная X и сливная Y линии управления могут подключаться независимо или объединяться с
соответствующими основными линиями Р и Т. В последнем случае палец 6 разворачивают на 180°, а канал X
закрывают пробкой; для объединения сливных линий следует снять пробку 2.
Объединение линий слива не допускается, если давление в линии Т превышает 6 МПа, а также в трехпози-
ционных распределителях с гидравлическим центрированием (рис. 5.21).
Нейтральное положение основного золотника 4 в распределителях с гидравлическим центрированием
обеспечивается тем, что в обе управляющие полости 1 и 5 от пилотного распределителя под давлением
подается рабочая жидкость.
При подаче управляющего сигнала на электромагнит а пилотного распределителя, управляющая полость
1 основного распределителя соединится с линией слива Y, в то время как управляющая полость 5 останется
под давлением. Золотник 4 вместе с центрирующим поршнем 3 и толкателем 2 переместится влево до упора;
при этом канал Р соединится с каналом А, а канал В — со сливом Т.
После отключения электромагнита а золотник пилотного распределителя возвратится в свою среднюю
позицию и давление в левой управляющей полости 1 станет равным давлению в полости 5. Вследствие того, что
суммарная площадь центрирующего поршня 3 и торца толкателя 2 больше площади правого торца золотника
4, золотник переместится вправо до упора центрирующего поршня 3 в корпус основного распределителя, т.е.
вернется в нейтральную позицию.
Подача сигнала управления на электромагнит b будет сопровождаться падением давления в
управляющей полости 5 и смещением золотника 4 вправо под действием давления рабочей жидкости на толкатель 2;
при этом канал Р соединится с каналом В, а канал А — со сливом Т.
После отключения электромагнита, b золотник пилотного распределителя возвратится в свою среднюю
позицию, давление в правой управляющей полости 5 поднимется и станет равным давлению в полости 1.
102
5.1. Направляющие гидроаппараты
Поскольку площадь торца золотника 4 больше площади торца толкателя 2, золотник переместится влево
до упора в находящийся под давлением центрирующий поршень 3, т.е. установится в нейтральную
позицию. J
Пружины в полостях 1 и 5 служат для удержания золотника 4 в нейтральном положении при отсутствии
давления управления, если, например, распределитель установлен в вертикальном положении. Для
разгрузки полости, образованной центрирующим поршнем 3 и основным золотником 4, ее сообщают с линией
утечки L.
При подаче рабочей жидкости к пилотному распределителю через канал Р отпадает необходимость в
отдельной линии управления, однако, при этом необходимо учесть некоторые моменты. Если золотник
основного распределителя имеет отрицательные перекрытия, то давление рабочей жидкости, поступающей на
пилотный распределитель, может оказаться недостаточным для переключения золотника основного
распределителя. В таких случаях в канале Р основного распределителя устанавливают подпорный клапан, создающий в
напорной линии управления давление порядка 0,5 МПа (рис. 5.22, а).
Подпорный клапан состоит из тарельчатого клапана 2, прижатого пружиной 4 к седлу корпуса 3,
вставленного в канал Р распределителя 1, установленного на присоединительную плиту 5. Клапан остается закрытым
до тех пор, пока давление рабочей жидкости, поступающей через радиальные сверления в корпусе 3 клапана
в канал управления пилотным распределителем 6 (канал X), не достигнет требуемого значения. После этого
под действием давления рабочей жидкости тарельчатый клапан 2, сжимая пружину 4, поднимется и пропустит
рабочую жидкость к золотнику 7 основного распределителя.
В случаях, когда напорные линии Р и X объединены и давление в линии Р превышает 25 МПа, между
основным и пилотным распределителями необходимо установить клапан соотношения давлений, понижающий
давление предварительного управления.
В качестве дополнительной оснастки могут применяться устройства для ограничения хода основного
золотника (рис. 5.22, б). С помощью ограничителя 3, вворачиваемого в торцовую крышку 2 распределителя,
уменьшают рабочий ход золотника 1 основного распределителя, что позволяет дросселировать поток
проходящей через распределитель рабочей жидкости.
Для того, чтобы настройка ограничителя не сбивалась в процессе работы ограничитель 3 фиксируют
контргайкой 4.
103
5. Направляющая и регулирующая подсистема
5.1.2. Обратные клапаны _
Обратные клапаны используют в гидросистемах в тех случаях, когда необходимо обеспечить пропускание
потока рабочей жидкости, движущейся по гидролинии, в одном направлении и запирать гидролинию при
обратном потоке. Обратные клапаны должны быть герметичными в закрытом положении и обладать
минимальным гидравлическим сопротивлением в открытом. Для обеспечения герметичного перекрытия потока
обратные клапаны выполняют только в седельном варианте (рис. 5.23).
Л
п
О
У/
/ /
%
'Л
f
ц
Уу
У/у
W
Я
У,
/у
4
'/
5
у
ш
У/
Ш
4
Рис. 5.23. Принцип действия обратного клапана
При движении потока в направлении из канала А в канал В (рис. 5.23, а), запорный элемент 2, сжимая
пружину 1, поднимается с седла 3 и пропускает поток рабочей жидкости. Если жидкость начинает двигаться в
обратном направлении (из канала В в канал А), то запорный элемент 2 устанавливается на седло 3, герметично
перекрывая поток. Прижим запорного элемента к седлу осуществляется пружиной и давлением рабочей жидкости.
Если пружина имеет незначительное предварительное сжатие, т.е. не нафужает запорный элемент в закрытом
положении клапана, то в УГО обратного клапана символ пружины может отсутствовать.
При использовании обратных клапанов без пружины (рис. 5.23, б), их следует устанавливать строго
вертикально, так как только в таком положении обеспечивается посадка запорного элемента на седло за счет
собственного веса. В качестве запорного элемента обратных клапанов обычно применяют шариковые (рис. 5.23),
конусные (рис. 5.24) (в том числе и с эластичными уплотнениями) и тарельчатые затворы*. На корпусах обратных
клапанов наносят стрелку, указывающую направление движения рабочей жидкости через клапан.
gg=g
4
Рис. 5.24. Обратные клапаны
Давление открытия клапана зависит от жесткости пружины, ее предварительного сжатия и уплотняемой
площади запорного элемента на которую действует давление. В зависимости от цели применения клапана
давление открытия может составлять от 0,05 до 0,3 МПа.
* Обратные клапаны с тарельчатым эластичным затвором применяют в системах с небольшим рабочим
давлением и расходом.
104
5.1. Направляющие гидроаппараты
Обратные клапаны используют: *^ j
■ для запирания одного из направлений потока;
■ для обхода дросселирующих устройств;
■ в качестве перепускных клапанов для защиты фильтров при их чрезмерном загрязнении;
■ в качестве подпорных клапанов для создания определенного давления подпора в гидросистеме.
Соединяя соответственным образом четыре обратных клапана, получают мостовую схему, которая
обычно применяется в сочетании с гидроаппаратами регулирования расхода и давления (рис. 5.25).
При движении рабочей жидкости в одном или другом направлении поток через аппарат остается
неизменным.
Мостовые схемы в сочетании с предохранительным клапаном часто используются в гидроприводах,
исполнительные механизмы которых подвергаются большим инерционным нагрузкам (рис. 5.26).
\
№
1М
f
"-О
■о
-О-'
—о—£г-о—
ШШ
F
МЛ
Рис. 5.26. Мостовая схема в приводе поворота башни экскаватора
При остановке гидромотора, вращающего большие массы (рис. 5.26, а), в линии слива резко возрастает
давление. Это объясняется тем, что выходной вал под действием сил инерции будет продолжать вращение, при
этом гидродвигатель начинает работать как насос и нагнетать рабочую жидкость в уже закрытую линию слива
(рис. 5.26, б). Для предотвращения разрыва трубопроводов избыточное давление сбрасывается через
предохранительный клапан. Одновременно с этим в гидролинии, по которой подводилась рабочая жидкость к
двигателю, по этой же причине возникает разряжение. Для избежания возникновения кавитации в линии слива
устанавливается подпиточный клапан, связанный со сливной линией предохранительного клапана.
105
5. Направляющая и регулирующая подсистема
5.1.3. Гидрозамки
Гидрозамками называют обратные клапаны с гидравлическим управлением. При отсутствии
управляющего сигнала гидрозамок работает как обычный обратный клапан: поток рабочей жидкости свободно протекает в
направлении А — В и запирается в направлении В — А (рис. 5.27).
В отличие от обратного клапана, в гидрозамке движение рабочей жидкости в направлении В — А может
быть разблокировано (иногда в литературе гидрозамки называют запорными клапанами с гидравлической де-
блокировкой или управляемыми обратными клапанами). Для этого в канал управления X подается рабочая
жидкость под давлением, плунжер 1 перемещается вправо и толкателем 2 принудительно, сжимая пружину 4,
снимает запорный элемент 3 с седла. Рабочая жидкость может двигаться из канала В в канал А.
Необходимое управляющее давление зависит от соотношения площадей управляющего плунжера и
площади уплотняющей поверхности клапана на которую действует давление в канале В, а также от давления в
канале А, поскольку оно действует на правый торец плунжера и препятствует его перемещению.
Гидрозамки применяют:
■ для запирания находящихся под давлением нагрузки участков гидросистемы;
■ для предотвращения самопроизвольного опускания грузов;
■ для предотвращения отпускания гидравлических зажимных устройств.
В качестве примера использования гидрозамка рассмотрим принципиальную схему гидропривода
автомобильного подъемника (рис. 5.28).
106
5.1. Направляющие гидроаппараты
Возможность остановки платформы подъемника на любой высоте достигается использованием для
управления гидроцилиндром двустороннего действия 4/3-распределителя с перекрытыми рабочими
каналами в нейтральной позиции (рис. 5.28, а). Однако, поскольку золотниковые распределители не обеспечивают
герметичного перекрытия рабочих гидролиний, то при длительном удержании платформы на некоторой
высоте происходит «просадка» гидроцилиндра под действием нагрузки. Надежная фиксация платформы в
требуемом положении может быть обеспечена, если исключить утечки рабочей жидкости из поршневой полости
гидроцилиндра. Герметичное запирание соответствующей гидролинии обеспечивается установкой в ней
гидрозамка (рис. 5.28, б). Очевидно, что для нормального функционирования гидрозамка необходимо использовать
распределитель, в нейтральной позиции которого обеспечивается разгрузка каналов А и X гидрозамка.
Гидропривод подъемника работает следующим образом: для подъема платформы распределитель
переводят в позицию b (рис. 5.28, б); рабочая жидкость под давлением через распределитель и гидрозамок
поступает поршневую полостью гидроцилиндра, а из штоковой — сливается в бак. На этой стадии гидрозамок
работает как обычный обратный клапан. ~?
Для останова платформы распределитель переводят в нейтральную позицию. При этом гидрозамок
закрывается и герметично перекрывает гидролинию, связанную с поршневой полостью гидроцилиндра,
давление в которой определяется нагрузкой на штоке.
Опускание платформы осуществляется переключением распределителя в позицию а. При этом рабочая
жидкость подается в штоковую полость гидроцилиндра и в канал X управления открытием гидрозамка.
Жидкость из поршневой полости через гидрозамок и распределитель поступает в сливную гидролинию. Открытие
гидрозамка, особенно запирающего большие объемы рабочей жидкости под давлением, может
сопровождаться гидроударами. Это происходит потому, что при достижении давлением управления требуемой
величины, клапан открывается резко, поскольку при снятии запорного элемента с седла давление, прижимающее
его, мгновенно падает, а усилие пружины незначительно. Такие удары оказывают негативное влияние не
только на сам гидрозамок, но и на всю гидросистему в целом.
В гидросистемах, возникновение гидроударов в которых нежелательно, применяют гидрозамки в
конструкцию которых дополнительно вводят декомпрессор — специальный небольшой обратный клапан 5,
расположенный внутри основного запорного элемента 4 (рис. 5.29).
1 2
4 5
Рис. 5.29. Гидрозамок с декомпрессором и линией дренажа
При подаче управляющего сигнала в канал X, плунжер 1 начинает перемещаться вправо и толкателем 3
открывает обратный клапан 5; давление в канале В плавно снижается, поскольку жидкость начинает
перетекать в канал А по каналу небольшого сечения 6. При дальнейшем движении плунжера 1, толкатель 3 снимает с
седла основной запорный элемент 4, полностью открывая гидрозамок.
С целью снижения давления управления в данной конструкции предусмотрена дополнительная полость 2,
связанная с линией дренажа Y. За счет этого давление в канале А действует только на торец толкателя 3, а не
на плунжер 1, как в гидрозамке без линии дренажа. Поскольку площадь торца толкателя значительно меньше
107
5. Направляющая и регулирующая подсистема
%
площади плунжера, усилие необходимое для открытия гидрозамка фактически не зависит от давления в
полости А, что повышает надежность его срабатывания.
Для пропускания больших потоков жидкости при заполнении и опорожнении полостей гидроцилиндров во
время совершения ими холостых ходов, и отсечения этих полостей от наполнительных баков во время
совершения рабочих ходов при работе прессов и других гидрофицированных машин, имеющих цилиндры
больших размеров, применяют гидрозамки специального исполнения, которые называют клапанами наполнения
(рис. 5.30).
-1 /
<>
Холостой ход
Рабочий ход '
СО
KW^-1
Рис. 5.30. Клапан наполнения (а) и схема его установки в прессовом оборудовании (б)
Пиния f\ клапана соединена с баком, установленным над гидроципиндром. ЗРЭ клапана, состоящий из
основного запорного элемента 5 и декомпрессора 6 прижат к седлу 4 пружиной 3. Пружина 3 развивает усилие,
достаточное лишь для того, чтобы удерживать ЗРЭ клапана в закрытом состоянии под действием
находящегося над ним столба рабочей жидкости.
Холостой ход гидроцилиндра осуществляется при соединении его штоковой полости со сливом.
Поршень под действием собственного веса и веса пуансона, закрепленного на штоке, начинает опускаться.
В поршневой полости цилиндра создается вакуум, который передается в линию В клапана наполнения.
В результате клапан открывается, и в поршневую полость цилиндра всасывается рабочая жидкость из
бака.
Перед осуществлением рабочего хода (собственно процесса прессования) гидроцилиндр
притормаживается до требуемой скорости. Возрастающее давление в поршневой полости воздействует на нижнюю
поверхность ЗРЭ клапана, который закрывается и разъединяет связь цилиндра с баком, Для совершения рабочего
хода в поршневую полость гидроцилиндра под давлением подается рабочая жидкость.
После окончания прессования шток цилиндра втягивается. При этом давление рабочей жидкости,
поступающей в штоковую полость цилиндра, подается и в канал управления клапана X. Управляющий поршень 1,
сжимая пружину 2, сначала снимает с седла декомпрессор 6, а затем и основной запорный элемент 5. Клапан
открывается, и рабочая жидкость из поршневой полости гидроцилиндра вытесняется в бак.
В зависимости от области применения клапаны наполнения изготавливаются с декомпрессором или без
него.
108
5.1. Направляющие гидроаппараты
Для герметичного запирания обеих полостей гидроцилиндров применяют двусторонние гидрозамки (рис.
5.31).
1
§
1
#
1
шж
А
m
k
в
р
//J
1
ш
1
W
2 3
Ail Ibi
"vl кП'
i—Ц
I f-—
Рис. 5.31. Принцип действия двустороннего гидрозамка
Двусторонние гидрозамки содержат два обратных клапана 1, 3 и плунжер 2, расположенный между ними.
Движение жидкости в направлениях А.,-А и В.,-В заблокировано.
При движении потока, например, в направлении А-А.,, обратный клапан 1 открывается под действием
давления рабочей жидкости, а клапан 3 — управляющим плунжером 2, обеспечивая протекание жидкости в
направлении В.,-В. Таким образом осуществляется подача рабочей жидкости в одну из полостей гидроцилиндра и слив ее в
бак из другой. При реверсе гидроцилиндра гидрозамок отрабатывает аналогичным образом: давление рабочей
жидкости открывает обратный клапан 3, а плунжер 2, смещаясь влево, открывает клапан 1.
На принципиальных гидравлических схемах наряду с детальным УГО двусторонних гидрозамков
(рис. 5.32, а) используют упрощенное УГО (рис. 5.32, б).
Ai
I
А
Т Т
Г
\л А
Vfl
X}
р
А
в
"t
lLt
т—'
Bi
1
> 1
1
в
1ЛЛ
Ж1
Ai
в.
0 О
А
А
ахт
р
в
в
-1 -
JjT
J—.
т—'
V\
<
Рис. 5.32. Детальное (а) и упрощенное (б) УГО двустороннего гидрозамка
В нейтральном положении 4/3-распределителя обе линии подключения гидроцилиндра перекрыты, утечки
исключены. Это позволяет удерживать нагрузку (встречную или попутную) в любом положении
гидроцилиндра, даже при остановке его в течение длительного времени. Надежность перекрытия каналов гидрозамком
обеспечивается в том случае, если обе точки подключения (А и В) разгружены, т.е. связаны с линией слива
через распределитель.
Отказы в работе обратных клапанов и гидрозамков сводятся, главным образом, к неплотному перекрытию
гидролиний. Причиной этого может быть попадание посторонних частиц в зону контакта запирающего элемента и
седла, или износ места контакта. Внешним проявлением неисправности является падение давления в запираемой
гидролинии или самопроизвольное перемещение частей машины, обусловленное негерметичностью клапана.
109
5. Направляющая и регулирующая подсистема
5.2. Регулирующие гидроаппараты
Регулирующие гидроаппараты предназначены для изменения или поддержания в требуемых
пределах основных параметров потока рабочей жидкости: давления и расхода. В отличие от направляющих
гидроаппаратов, работающих по принципу «открыт-закрыт», проходное сечение регулирующих
гидроаппаратов может быть любым в пределах от полностью закрытого, до полностью открытого. Степень открытия
проходного сечения изменяется в зависимости от параметров потока рабочей жидкости, проходящей
через них. | \
5.2.1. Гидроаппараты управления давлением
Для управления заранее заданным образом давлением рабочей жидкости в гидросистеме или ее части
применяют гидравлические клапаны давления.
Клапаны давления различают по конструктивному исполнению:
1) в зависимости от типа запорно-регулирующего элемента:
■ седельного типа,
■ золотникового типа;
2) в зависимости от типа действия:
■ прямого действия,
■ непрямого действия.
По функциональному назначению клапаны давления бывают;
■ напорные;
ш редукционные.
Напорные гидроклапаны. Напорные гидроклапаны предназначены для ограничения или
поддержания давления в гидролиниях путем эпизодического или непрерывного слива рабочей жидкости. До тех
пор, пока давление в гидролинии Р не превышает некоторого заранее заданного значения, ЗРЭ 2
клапана прижат пружиной 3 к седлу 1 и перекрывает проходное сечение, т.е. клапан нормально закрыт
(рис. 5.33).
Если контролируемое давление (в линии Р) начинает превышать заданный уровень, клапан
приоткрывается и сбрасывает часть рабочей жидкости в бак до тех пор, пока давление не нормализуется. Давление в
линии Р, при котором клапан открывается, зависит от давления в линии Т, жесткости пружины и степени ее
сжатия, которую можно изменять путем вращения регулировочного винта 4.
110
5.2. Регулирующие гидроаппараты
Следует обратить внимание на то, что напорные клапаны, имеющие подобную конструкцию, не могут
обеспечить стабильность давление в контролируемой гидролинии на строго заданном уровне. Для пояснения
данного утверждения рассмотрим условие равновесия сил, действующих на ЗРЭ клапана при его
срабатывании (рис. 5.34).
Уравнение равновесия ЗРЭ клапана в момент, когда клапан только начинает открываться (рис. 5.34, а),
выглядит следующим образом:
~~ *прО>
P0^- = F„
где р0 — давление в контролируемой гидролинии в момент начала открытия клапана;
^кп — диаметр уплотняющей поверхности ЗРЭ клапана;
Fnp0 — усилие предварительного поджатия регулировочной пружины.
При дальнейшем повышении давления в гидролинии до значения р ЗРЭ клапана начнет подниматься с
седла, сжимая пружину (рис. 5.34, б), и условие его равновесия изменится (для упрощения давление в линии
слива примем равным нулю):
, - *Vip - ЛфО +с">
где р — давление в контролируемой гидролинии;
Fnp — усилие сжатой пружины;
с — жесткость пружины;
h — величина подъема клапана над седлом.
Отсюда следует
^прО+сЛ)
р = —72—'
Таким образом, давлениер в гидролинии, в которой установлен напорный клапан, будет зависеть от
подъема ЗРЭ клапана h и жесткости пружины с. В свою очередь значение подъема ЗРЭ А, которое определяет
изменение площади проходного сечения клапана, зависит от расхода протекающей через клапан рабочей
жидкости.
Схема гидравлической установки для снятия характеристики клапана и расходно-перепадная
характеристика напорного клапана р =f(Q), настроенного таким образом, что при давлении 5 МПа он полностью открыт,
представлены на рис. 5.35.
111
5. Направляющая и регулирующая подсистема
15 МПа
QH = 4 л/мин
Ртах = 5 МПа
ЛР = 0,65 МПа
-Рср = 4,35 МПа
&р= 0,65 МПа
Л™ = 3.7 МПа
4 g, л/мин
Рис. 5.35. Расходно-перепадная характеристика напорного клапана
При постепенном увеличении давления в гидролинии, которое достигается частичным перекрытием вентиля,
клапан остается закрытым до тех пор, пока давление не достигнет значения р0Щ) = 4 МПа. С этого момента клапан
начинает пропускать через себя часть рабочей жидкости на слив и полностью открывается, т.е. пропускает на
слив всю подачу насоса (Qm = QH), при/>тах= 5 МПа. Зависимость давления в гидролинии от расхода жидкости
через клапан при этом соответствует верхней кривой. При уменьшении значения давления от ртах до р^^, при
котором клапан полностью закроется (3,7 МПа), зависимость давления от расхода будет характеризоваться нижней
кривой. Отсюда следует, что напорный клапан поддерживает давление в гидролинии рср не на строго заданном
уровне, а с некоторой погрешностью А, которая определяется из следующего отношения:
Д =
^ 100% = ^100% = 14,9% = 15%.
'ср
4,35
Если ориентироваться на изначально настроенные 5 МПа, то очевидно, что клапан начинает срабатывать
значительно раньше, чем давление достигнет заданного уровня.
Подпружиненный запорно-регулирующий элемент клапана представляет собой систему «масса на
пружине», которая склонна к автоколебаниям*. Колебания, возникающие в клапане при его открытии, оказывают
негативное влияние, как на элементы конструкции, так и на давление в системе, и должны быть задемпфирова-
ны. С этой целью ЗРЭ 4 клапана снабжают демпфирующим поршнем 3, который размещают в
цилиндрической проточке корпуса 2 седла клапана (рис. 5.36).
* Автоколебаниями называют незатухающие колебания, происходящие за счет энергии, периодическое
поступление которой регулируется самим колеблющимся телом.
112
5.2. Регулирующие гидроаппараты
Поскольку демпфирующий поршень 3 выполнен единым целым с ЗРЭ 4, то при движении последнего,
жидкость поступает (или вытесняется) в торцевую полость поршня через дросселирующее отверстие 1. При этом
возникает демпфирующее усилие, действующее против направления движения.
Достоинством напорных клапанов седельного типа является полная герметичность и высокое
быстродействие, поскольку уже при минимальном ходе ЗРЭ обеспечивается пропускание относительно больших
потоков.
Напорные клапаны золотникового типа более точно поддерживают давление на заданном уровне, так как
площадь проходного сечения в них меняется не столь резко и клапан может пропускать через себя достаточно
малые потоки рабочей жидкости. Плавное увеличение проходного сечения клапана становится возможным
благодаря выполнению на буртике золотника 3 специальным образом спрофилированных проточек
переменного сечения 4 (рис. 5.37).
Пока давление в линии Р не превышает заданный уровень, золотник 3 клапана под действием
настроечной пружины находится в крайнем левом положении — клапан закрыт. Когда по каналу управления 2 под
левый торец золотника 3 передается давление большее, чем давление настройки клапана, золотник 3 начинает
смещаться вправо, и через клапан начинает перетекать жидкость, расход которой увеличивается
пропорционально увеличению суммарной площади проточек 4. Дальнейший рост давления в линии Р приводит к
полному открытию клапана. Дроссель 1, расположенный в канале управления 2, выполняет демпфирующую
функцию, что делает клапан нечувствительным к случайным забросам давления и исключает появление
автоколебаний.
Рассмотренные конструкции по своему принципу действия относятся к клапанам прямого действия,
поскольку их срабатывание (изменение проходного сечения) происходит под воздействием потока рабочей
жидкости непосредственно на их ЗРЭ.
Недостатком напорных клапанов прямого действия является невозможность поддержания ими
стабильного давления при возрастании расхода рабочей жидкости через клапан. Кроме того, применение клапанов
прямого действия в гидросистемах с высокими номинальными давлениями и расходами становится
невозможным, поскольку в таких случаях в клапанах необходимо применять пружины большого усилия. Это
вызвано не только требованием поддержания высоких давлений в системе, но и необходимостью удержания ЗРЭ
большой площади в закрытом состоянии. Неизбежное увеличение размеров настроечных пружин, влечет за
собой резкое возрастание габаритов самого клапана.
В гидроприводах с высоким давлением (более 25 МПа) и большими расходами для обеспечения
приемлемых габаритных размеров применяют клапаны непрямого действия (двухкаскадные клапаны),
представляющие собой совокупность двух клапанов: основного (второй каскад) и вспомогательного (первый каскад). В этих
клапанах рабочее проходное сечение основного клапана изменяется в результате воздействия потока
рабочей жидкости на ЗРЭ вспомогательного клапана (рис. 5.38).
113
5. Направляющая и регулирующая подсистема
!1
-JZ х
Рис. 5.38. Напорный клапан седельного типа непрямого действия
Если давление в контролируемой гидролинии (линии А) не превышает давления настройки клапана
первого каскада 6, рабочая жидкость к которому подводится по каналу 4, то его ЗРЭ 7 поджат к седлу пружиной 8.
Предварительное сжатие пружины 8, а, следовательно, и давление срабатывания клапана первого каскада,
настраивается регулировочным винтом 9.
Отсутствие течения жидкости через клапан первого каскада приводит к тому, что на основной запорно-ре-
гулирующий элемент 3 (ЗРЭ второго каскада) сверху и снизу действует одинаковое давление, равное
давлению в линии А. Поскольку площадь основного ЗРЭ 3 со стороны пружины, имеющей небольшую жесткость,
больше, чем площадь уплотняемой поверхности, он прижат к седлу — клапан закрыт.
Когда давление в линии А превышает заданный уровень, ЗРЭ пилотного клапана 7, поднимается с
седла — (срабатывает первый каскад). Некоторая часть жидкости из линии А через канал 4, клапан первого
каскада и канал 10 сливается в линию В. Вследствие потерь давления в демпфирующем дросселе 2 в пружинной
полости основного ЗРЭ давление падает, усилие от создавшегося перепада давления на ЗРЭ 3 поднимает его
с седла (срабатывает второй каскад). Жидкость перетекает из линии А в линию В, давление в линии А
поддерживается на заданном уровне.
Поскольку жесткость пружины в клапане второго каскада небольшая, то увеличение проходного сечения
(подъема ЗРЭ 3) практически не вызывает увеличения давления в линии А (рис. 5.39).
р, МПа
Рис. 5.39. Расходно-перепадные характеристики напорных клапанов прямого и непрямого действия
Расходно-перепадная характеристика напорного клапана непрямого действия имеет две ярко
выраженные зоны: от Q а 0 до Qmiw и от Qmin до Qmax.
114
5.2. Регулирующие гидроаппараты
В первой зоне характеристики отражена работа клапана первого каскада — повышение давления в
системе сопровождается появлением небольшого расхода через клапан. С увеличением расхода через клапан
первого каскада, начинает возрастать перепад давления на основном ЗРЭ 3, и в момент, когда расход станет
больше, чем C?min, срабатывает второй каскад. Дальнейший рост расхода через клапан фактически не
сопровождается повышением давления в контролируемой гидролинии.
Сравнение характеристик наглядно показывает, что точность поддержания заданного давления
клапанами непрямого действия значительно выше, чем клапанами прямого действия (Ар^Ар2).
Двухкаскадная конструкция клапана позволяет осуществлять дистанционное управление давлением его
срабатывания. Для этого пробку 1, закрывающую канал внешнего управления X, выворачивают и клапан
через управляющий распределитель подключают к дополнительному внешнему напорному клапану (одному
или нескольким), который берет на себя функцию клапана первого каскада.
Давление настройки внешнего клапана должно быть меньшее, чем давление срабатывания клапана
первого каскада. При включении распределителя (подключении внешнего напорного клапана) второй каскад
напорного клапана непрямого действия будет срабатывать, когда давление в контролируемой гидролинии
превысит давление настройки внешнего клапана (рис. 5.40).
1.0
0.5 i 1 г 1 0.6
^
Рис. 5.40. Пример схемы дистанционного управления напорным клапаном непрямого действия
В исходном состоянии, когда управляющий распределитель с электромагнитным управлением 0.4
находится в нейтральной позиции, давление в системе равно 10 МПа (настройка клапана 0.3). При подаче
внешнего электрического сигнала, например, на электромагнит Y1, распределитель 0.4 переключится в позицию
а, подключив к линии управления X клапана 0.3 клапан 0.5, настроенный на давление 8 МПа. Давление
в системе, значение которого визуализируется манометром 0.2, станет равным 8 МПа. Переключением рас-
пределителя 0.4 в позицию b в системе можно установить давление 6 МПа (давление настройки
клапана 0.6).
Путем комбинирования напорного клапана непрямого действия и распределителя с электромагнитным
управлением получают клапан с разгрузкой по электрическому сигналу (рис. 5.41), который применяется для
обеспечения безнапорной циркуляции жидкости, например во время пуска насосов.
Под разгрузкой понимается такой режим работы клапана, когда жидкость протекает через него практически
свободно. Свободный проход жидкости через клапан может быть обеспечен, если пружинную полость ЗРЭ
второго каскада соединить со сливом, при этом он начинает работать как простой обратный клапан.
115
5. Направляющая и регулирующая подсистема
При отсутствии электрического сигнала на нормально закрытый 2/2-распределитель 1, напорный клапан
непрямого действия 2 работает в штатном режиме. Включение распределителя 1 приводит к снижению
давления в пружинной полости ЗРЭ второго каскада клапана и, как следствие, к его полному открытию.
В клапанах непрямого действия золотникового типа ЗРЭ 6 клапана первого каскада (пилотного клапана) —
седельного типа, а ЗРЭ второго каскада 2 — золотникового типа (рис. 5.42).
Если давление в линии Р не превышает давления срабатывания клапана первого каскада, золотник 2
находится в крайнем левом положении только под воздействием пружины 4, так как к его торцам по каналам 1
и 3 подводится одинаковое давление, равное давлению в канале Р (рис. 5.42, а). Когда уровень давления в
канале Р превысит давление срабатывания пилотного клапана 6, последний откроется и перепустит часть
жидкости в канал Т (рис. 5.42, б). Возникающий при этом перепад давления на дросселе 5 приведет к паде-
116
5.2. Регулирующие гидроаппараты
нию давления в пружинной полости золотника 2. Перепад давления на торцах золотника 2 вызовет его
смещение вправо, жидкость из канала Р начнет перетекать в канал Т; давление в канале Р останется на
заданном уровне.
Чтобы подчеркнуть функциональное назначение конкретного напорного клапана в гидросистеме, его
могут называть:
■ предохранительный клапан;
■ переливной клапан;
■ клапан отключения;
■ подпорный клапан; -
■ клапан последовательности.
Рассмотрим назначение и названия напорных клапанов, примененных в гидроприводе, представленном
на рис. 5.43.
0
2.0
3.0
1.0
У
1.1
Г
Уул^у
ь з.1 г5-
1
<д
У* 9
\4^
!1Ч
м
п^
Н2
5 л/мин Т 30 л/мин
Рис. 5.43. Напорные клапаны в гидроприводе
Клапан 1 — предохранительный. Устанавливается на насосной станции и используется для сброса
давления в аварийных (или других) ситуациях, когда давление рабочей жидкости превышает предельно допустимое
для данной системы значение. Это клапан эпизодического действия, так как при нормальной работе системы
он закрыт.
Клапан 2 — переливной. Предназначен для поддержания требуемого рабочего давления в приводе, путем
непрерывного слива части рабочей жидкости в бак. Давление срабатывания переливного клапана ниже
давления срабатывания предохранительного клапана.
Клапан 3 — клапан отключения. Когда гидроцилиндры 1.0 или 3.0 совершают холостой ход, давление в
системе низкое и подачи насосов Н1 (высокого давления) и Н2 (низкого давления) складываются для
увеличения скорости выходных звеньев. В момент, когда цилиндры начинают работать под нагрузкой, давле-
117
5. Направляющая и регулирующая подсистема
ние в системе возрастает клапан 3 срабатывает, переключая насос большей производительности Н2 в
режим разгрузки (вся подача насоса поступает в бак). На систему работает только насос высокого
давления Н1.
Клапан 4 — подпорный. Предназначен для создания подпора в линии слива распределителя 3.1.
Клапан 5 — тормозной. Используется как предохранительный клапан при остановке гидроцилиндра 3.0 в
промежуточном положении после выдвижении его штока, связанного с большими массами.
Клапан 6 — клапан последовательности. Предназначен для последовательного срабатывания
исполнительных механизмов. При переключении распределителя 1,1 в позицию а начинает выдвигаться шток
цилиндра 1.0. Когда давление в его поршневой полости достигнет давления настройки клапана последовательности 6
(например, после полного выдвижения штока), начнет выдвигаться шток цилиндра 2.0.
Редукционные гидроклапаны. Редукционные клапаны предназначены для поддержания в некоторой
части гидросистемы, пониженного (редуцированного) давления относительно давления в основной
гидролинии. При этом давление на выходе редукционного клапана автоматически поддерживается на заданном
уровне вне зависимости от изменения давления на входе (в основной гидролинии)* и от увеличения потребления
жидкости на выходе.
Как и напорные клапаны, редукционные клапаны разделяют на клапаны прямого и непрямого действия, а
по количеству присоединенных гидролиний — на двухлинейные (рис. 5.44) и трехлинейные.
Рис. 5.44. Двухлинейный редукционный клапан прямого действия
Редукционный клапан является нормально-открытым клапаном, поэтому в начальный момент
времени рост давления на входе в клапан (канал Р) сопровождается ростом давления на его выходе (канал А).
При этом по каналу управления 1, соединяющему канал выхода А и левый торец золотника 2, на
последний действует давление, равное давлению на выходе клапана. Золотник 2 перемещает в сторону
настроечной пружины 3, предварительное сжатие которой регулируется винтом 4. Перемещение золотника 2
сопровождается уменьшением проходного сечения клапана, и когда давление на выходе достигнет
заданного уровня, клапан закроется. Золотник 2 будет находиться в состоянии равновесия — на левый торец
действует заданное давление на выходе, на правый — настроечная пружина 3. Если давление на входе в
клапан больше давления настройки, то его изменение не оказывает никакого влияния на равновесное
состояние золотника 2.
Падение давления на выходе клапана (например, при появлении расхода жидкости к потребителю)
вызывает смещение золотника влево, что сопровождается увеличением проходного сечения клапана и
уменьшением перепада давления на нем — давление на выходе начинает расти. Таким образом, редукционный клапан
автоматически поддерживает на заданном уровне давление на выходе.
* Если давление в основной гидролинии не станет ниже заданного выходного давления.
Л
A L
118
5.2. Регулирующие гидроаппараты
Существенным недостатком двухлинейного редукционного клапана является невозможность
поддержания им заданного давления на выходе, если оно по каким-либо причинам (например, непредвиденное
увеличение нагрузки на исполнительном механизме) превысит заданный уровень.
Данного недостатка лишены трехлинейные редукционные клапаны, которые в штатном режиме работают
аналогично двухлинейным клапанам (рис. 5.45, а).
Конструктивное и функциональное отличие трехлинейного редукционного клапана от двухлинейного
заключается в наличии третьего канала — слива Т. Такая конструкция позволяет сохранять давление на выходе
клапана (в канале А) даже если оно начнет превышать настроенное значение. При этом золотник клапана,
перекрыв к этому моменту канал Р, смещается еще правее, соединяя каналы А и Т между собой; часть жидкости
из линии А уходит на слив (рис. 5.45, б). Можно сказать, что в подобных случаях редукционный клапан
работает в режиме предохранительного клапана.
Типичным примером применения редукционных клапанов являются приводы, исполнительные
механизмы которых должны развивать постоянное по величине усилие. Например, в полиграфическом оборудовании
при тиснении обложек книг, используют гидравлические прессы, развиваемое усилие которых
поддерживается постоянным на протяжении всей рабочей операции. Для того, чтобы избежать повреждение материала
обложки и учесть его свойства (толщина, плотность и т.п.) величина усилия тиснения может быть
отрегулирована (рис. 5.46).
-г
! I 1.02
Рис. 5.46. Пример использования редукционного клапана в прессе для тиснения
119
5. Направляющая и регулирующая подсистема
Усилие, развиваемое гидроцилиндром 1.0 при прямом ходе (операция тиснения), определяется
давлением в его поршневой полости, величина которого задается редукционным клапаном 1.02.
Поскольку через двухлинейный редукционный клапан жидкость не может протекать в направлении А-Р, то
при обратном ходе цилиндра жидкость подается на слив в обход редукционного клапана 1.02 через обратный
клапан 1.01.
Для поддержания пониженного давления в потоках с большими расходами применяют редукционные
клапаны непрямого действия (рис. 5.47).
В исходном положении клапан открыт, поскольку подпружиненный ЗРЭ основного каскада 2 находится
в нижнем положении и через его цилиндрические окна жидкость поступает из канала Р в канал А. Рабочая
жидкость под давлением, равным давлению в канале А, через дроссель 1 и канал 3 подается к пилотному
клапану 5 (ЗРЭ 6 которого в исходном положении закрыт) и через дроссель 4 в пружинную полость
основного ЗРЭ 2.
Когда давление в канале А достигает заданного уровня ЗРЭ 6 пилотного клапана 5 поднимается с седла и
часть жидкости уходит в канал Y, при этом давление в пружинной полости основного ЗРЭ 2 падает.
Вследствие возникшего перепада давления ЗРЭ 2 поднимается, сжимая пружину и перекрывая проход рабочей
жидкости из канала Р в канал А. Расход рабочей жидкости через клапан регулируется таким образом, чтобы
давление в канале А оставалось постоянным.
Для обеспечения свободного протекания рабочей жидкости через редукционный клапан в направлении
А-Р, в корпусе клапана смонтирован обратный клапан 8 (показан условно).
Завершая рассмотрение аппаратуры регулирования давления в гидросистемах, подведем некоторые
итоги.
Клапаны давления подразделяются на два типа: напорные и редукционные.
Назначение напорных клапанов — предотвращение повышения давления в контролируемых точках сверх
заданного уровня путем автоматического отвода части рабочей жидкости в гидробак.
Назначение редукционных гидроклапанов — поддерживать относительно стабильный уровень давления
на выходе (ниже величины давления питания) независимо от колебаний давления в подводящей гидролинии,
а также при изменении расхода рабочей жидкости за клапаном.
Принципиальные отличия между двумя рассмотренными типами клапанов состоят в следующем:
напорные клапаны контролируют давление на входе, а редукционные — на выходе; напорные клапаны
являются нормально закрытыми, тогда как редукционные — нормально открытыми.
120
]
5.2. Регулирующие гидроаппараты
5.2.2. Гидроаппараты управления расходом
Основным назначением гидроаппаратов, управляющих расходом жидкости в гидроприводах, является
изменение скорости движения выходных звеньев исполнительных механизмов — линейных скоростей
движения штоков гидроцилиндров или частот вращения выходных валов гидромоторов. Исходя из того, что
максимально возможная скорость выходных звеньев, развивается тогда, когда вся рабочая жидкость, подаваемая
насосом, поступает в исполнительный механизм, следует, что аппараты управления расходом могут изменять
скорость от максимального до требуемого значения, путем уменьшения количества подаваемой в
исполнительные механизмы рабочей жидкости*. ■"
Расход рабочей жидкости, поступающей к исполнительному механизму, может быть изменен путем
объемного или дроссельного регулирования.
Объемное регулирование расхода осуществляется за счет изменения объемной подачи насоса. Такой
способ управления расходом характерен для гидросистем, источником энергии в которых является
регулируемый насос (рис. 5.48, а).
ы
0>
i
i
i<?F
v,
'ц1
V,
'Ц2
,,М
JjT
О
F
Ы
ta=
var
0-
ecn=var-
Пм(л^*®
!"~\
Т~\
><:F
v.
'Ш
V.
„М
Ж
Ц2
О
t
It
£|ц = var
QH = const
ЧО^Чр^СЖм)
Рис. 5.48. Способы регулирования расхода: а — объемный; б — дроссельный
При объемном регулировании скорость исполнительного механизма не зависит от изменения значения
полезной нагрузки i^Ha нем, а определяется только объемной подачей насоса. Гидропривод имеет «жесткую»
нагрузочную характеристику v =f(F).
Дроссельное регулирование находит широкое применение в системах с насосами постоянной подачи и
осуществляется путем отвода части жидкости, подаваемой насосом, обратно в бак (рис. 5.48, б). Изменение
расхода поступающей к потребителю жидкости осуществляется путем уменьшения площади поперечного
сечения потока в аппарате управления расходом, что вызывает повышение давления перед ним и, как
следствие, срабатывание переливного клапана. Обязательным условием использования дроссельного
регулирования является избыточность подачи насоса по отношению к расходу, требуемому для получения заданной
скорости исполнительного механизма. Вид нагрузочной характеристики привода зависит от типа гидроаппарата
управления расходом.
В зависимости от функциональных возможностей гидроаппараты управления расходом делят на
дроссели и регуляторы расхода. Принципиальное отличие между этими типами гидроаппаратов состоит в том, что
расход, проходящий через дроссели, зависит от нагрузки на исполнительном механизме, а регуляторы расхо-
* В процессе настройки параметров гидропривода может производиться относительное увеличение
скорости исполнительного механизма, абсолютное значение которой будет оставаться меньше максимально
возможной.
121
5. Направляющая и регулирующая подсистема
да обеспечивают автоматическое поддержание расхода на заданном уровне вне зависимости от изменения
нагрузки.
Дроссели. Дроссели, как аппараты управления скоростью выходного звена исполнительного механизма,
применяют в тех случаях, когда на последний действует постоянная по величине нагрузка, либо когда
изменение скорости допустимо или дажэ желательно при изменении нагрузки.
Дроссели представляют собой местные гидравлические сопротивления расход рабочей жидкости через
которые определяется из известного соотношения
где Q — расход, м3/с;
m — коэффициент расхода (0,6-0,9);
у4др — площадь проходного сечения, м2;
Ар№ — перепад давления на дросселе, Па;
р — плотность жидкости, кг/м3.
Для прикладных расчетов удобнее использовать формулу
где Q — расход, л/мин;
у4др — площадь проходного сечения, мм2;
Apflp — перепад давления, бар.
Дроссели, через которые жидкости протекают в ламинарном режиме, называют линейными (рис. 5.49, а), а
дроссели с турбулентным течением — квадратичными (рис. 5.49, б).
ф
х
»Ш*
м
а
0
ф
V
Л
б
0
Рис. 5.49. Схемы линейного (а) и квадратичного (б) дросселей
В линейных дросселях потеря давления происходит по длине канала, определяется вязким
сопротивлением потоку и является практически линейной функцией скорости течения жидкости. Поскольку расход в таких
дросселях зависит от вязкости рабочей жидкости, то линейные дроссели используют в приводах, работающих
в условиях достаточно стабильных температур.
В квадратичных дросселях потеря давления обусловлена в основном потерями энергии при внезапном
сужении и расширении потока жидкости и практически пропорционально квадрату скорости потока, ввиду чего
такие дроссели и называют квадратичными. Расход через такие дроссели фактически не зависит от вязкости
рабочей жидкости. Из приведенного выше уравнения для определения расхода через дроссель можно
сделать вывод, что с технической точки зрения, наиболее простым способом изменения величины расхода,
является изменение площади проходного сечения дросселя.
Если в конструкции дросселя заложена возможность изменения площади проходного сечения
дросселирующей щели, то такие дроссели называют регулируемыми, в противном случае — нерегулируемыми
(рис. 5.49).
122
5.2. Регулирующие гидроаппараты
Конструкции регулируемых дросселей линейного и квадратичного типов приведены на рис. 5.50.
В линейном дросселе резьбового монтажа (рис. 5.50, а) рабочая жидкость через радиальные отверстия 4 в
корпусе 1 поступает к дросселирующей щели 3, образованной корпусом 1 и регулирующей муфтой 2.
Поскольку муфта 2 соединена с корпусом 1 посредством резьбы, вращением муфты можно изменять взаимное
положение корпуса и муфты, а, следовательно, и проходное сечение дросселирующей щели 3.
Ф
Р^Ч .
АГ>
Е^5
аО
Ов
Рис. 5.50. Регулируемые дроссели: а — линейный; б — квадратичный
Управление расходом в квадратичном дросселе (рис. 5.50, б) осуществляется поворотом рукоятки 1,
связанной с кулачком 2. При этом торцовая поверхность кулачка 2 меняет проходное сечение окна 4
выполненного во втулке 3.
В качестве устройств управления скоростью движения выходного звена исполнительного механизма,
дроссели могут устанавливаться в линии нагнетания (рис. 5.51, а), слива (рис. 5.51, б) или в ответвлении
(рис. 5.51, в).
Поскольку при прохождении жидкости через дроссель часть энергии давления преобразуется в тепловую
энергию, установка дросселей в линии нагнетания (рис. 5.51, а) нежелательна, так как это приводит к
нагреванию устройств, расположенных за дросселем, в частности — исполнительного механизма.
При размещении дросселей в линии слива или в ответвлении (рис. 5.51, б, в) нагретая при прохождении
через них рабочая жидкость поступает в гидробак.
123
5. Направляющая и регулирующая подсистема
Во многих технологических установках применяют путевые дроссели (рис. 5.52, а), которые позволяют
плавно изменять скорость исполнительного механизма в процессе движения рабочих органов машины.
В путевом дросселе проходное сечение рабочей щели 4 может меняться плавно под внешним
воздействием на рычаг 1 с роликом, находящимся в контакте с копиром, установленным на подвижной части машины.
Поворот рычага 1 вокруг своей оси преобразуется через толкатель 2 в поступательное перемещение
дросселирующего элемента 3.
По существу путевой дроссель представляет собой дросселирующий нормально открытый 2/2-распреде-
литель. В условном графическом обозначении возможность плавного перехода из одной позиции
распределителя в другую (возможность плавного изменения проходного сечения от полностью открытого до полностью
закрытого) обозначена параллельными линиями сверху и снизу символа распределителя.
На рис. 5.52, б представлен фрагмент гидросхемы, в которой реализована функция плавного уменьшение
скорости выдвижения штока цилиндра (плавное торможение). При реверсе гидроцилиндра скорость штока
будет плавно увеличиваться по мере его втягивания (плавный разгон).
Путевые дроссели применяют, главным образом, для управления рабочими органами машин,
работающих по циклу: быстрый подвод — рабочая подача — быстрый отвод, причем команда на переход в тот или
иной режим реализуется от кулачка, установленного на рабочем органе.
Во всех рассмотренных выше примерах изменение проходного сечения дросселей вызывает изменение
скорости как прямого, так и обратного хода гидроцилиндра.
Если необходимо дросселировать поток рабочей жидкости при ее движении в одном направлении, и
обеспечивать свободное ее протекание в обратном, применяют дроссели с обратным клапаном (рис. 5.53).
[ .
t>B А<>
Рис. 5.53. Дроссель с обратным клапаном
При движении жидкости в направлении А-В поток дросселируется, поскольку встроенный в корпус 1
обратный клапан 2 поджат к седлу пружиной и давлением рабочей жидкости. Движение потока в направлении
В-А открывает обратный клапан 2, что позволяет рабочей жидкости свободно протекать через аппарат.
124
5.2. Регулирующие гидроаппараты
Как правило, дроссели с обратными клапанами используют для независимого управления скоростями
прямого и обратного хода исполнительных механизмов (рис. 5.54).
Для управления скоростью выдвижения штока гидроцилиндра дроссель с обратным клапаном обычно
устанавливают на линии, связанной со штоковой полостью гидроцилиндра (рис. 5.54, а). При этом обратный
клапан должен быть расположен таким образом, чтобы обеспечивать свободное протекание рабочей жидкости к
цилиндру. В противном случае изменение проходного сечение дросселя будет приводить к изменению
скорости втягивания штока, а скорость выдвижения штока будет оставаться неуправляемой.
Независимое управление скоростью втягивания штока осуществляется установкой дросселя с обратным
клапаном в линии, связанной с поршневой полостью гидроцилиндра (рис. 5.54, б). Независимое друг от друга
управление скоростями прямого и обратного ходов исполнительных механизмов осуществляется установкой
двух дросселей с обратными клапанами в соответствующих гидролиниях (рис. 5.54, в), либо посредством
установки сдвоенного дросселя с обратным клапаном (рис. 5.55).
Ai Bi
£МФ
А2 Вг
О 9 О
Рис. 5.55. Сдвоенный дроссель с обратным клапаном
Сдвоенный дроссель с обратным клапаном состоит из корпуса 1, втулок 2 и 8, и подпружиненных дросселей
4 и 7. Крайнее выдвинутое положение каждого дросселя, например 4, относительно втулки 2, ограничивается
стопорным кольцом 3. Положение сборочного узла втулка — подпружиненный дроссель относительно корпуса 1
задает величину дросселирующей щели 6, и может изменяться путем внешней настройки.
При движении рабочей жидкости сверху вниз, например из канала А1 в канал А2, дроссель 4 остается в
выдвинутом положении, так как жидкость под давление через канал 5 поступает под его левый торец. Таким
образом, протекание жидкости в данном направлении может осуществляться только через дросселирующую
щель 6.
Поток жидкости, движущийся снизу вверх, например из канала В2 в канал В., проходит свободно, поскольку
дроссель 7 смещается вправо и полностью открывает проходное сечение. Это смещение дросселя
осуществляется под действием давления на его левый торец, которое передается по каналу 9.
Рассмотренный сдвоенный дроссель с обратным клапаном является аппаратом модульного исполнения
(см. разд. 8.4) и помимо регулирования скоростей движения выходных звеньев исполнительных механизмов
может использоваться для регулирования времени срабатывания распределителей с
электрогидравлическим управлением.
125
5. Направляющая и регулирующая подсистема
Регуляторы расхода. Регуляторы расхода — гидроаппараты, обеспечивающие пропускание постоянного
объемного расхода рабочей жидкости в условиях изменения давления, как на их входе, так и выходе. Как
правило, регуляторы расхода применяют для поддержания заданной скорости исполнительных механизмов,
работающих с переменной нагрузкой на выходном звене.
При описании работы дросселей было показано, что расход через дроссель зависит от перепада давления
на нем. Следовательно, если на дросселе поддерживать постоянный перепад давления, то объемный расход
через него, также будет оставаться постоянным. Регуляторы расхода и представляют собой комбинацию
регулируемого дросселя и регулятора, поддерживающего постоянный перепад давления на нем (рис. 5.56).
Рис. 5.56. Двухлинейный регулятор расхода
Двухлинейный регулятор расхода состоит из корпуса 7, установочного дросселя 6 и подпружиненного
регулировочного дросселя 3. Установочный дроссель 6 служит для настройки значения расхода, протекающего
через регулятор путем предварительной установки проходного сечения дросселирующей щели. Для
поддержания постоянного значения перепада давления на ней служит регулирующий дроссель 3, проходное сечение
4 которого автоматически меняется в процессе работы. На левый торец регулирующего дросселя 3 действует
пружина 2 и давление р3, равное давлению за установочным дросселем, а на правый торец действует
давление/^, равное давлению перед установочным дросселем. Давление на левый и правый торцы дросселя 3
передается соответственно по каналам 1 и 5.
По существу регулирующий дроссель 3 в совокупности с пружиной 2 и каналами 1 и 5 представляет собой
клапан постоянной разности давления, выполненный на базе редукционного клапана (что наглядно
отображается в развернутом условном графическом обозначении двухлинейного регулятора расхода).
Рассмотрим условие равновесия регулирующего дросселя 3:
Fnp+P3A=P2 4
FnP =Р2А-р3А;
FnP =А(р2-р3);
F
-у- = (/>2-/>3)-
А
Поскольку сила пружины Fnp и площадь А торца регулирующего дросселя 3 величины постоянные, то и
перепад давления Ар на установочном дросселе 6, равный их отношению, также есть величина
постоянная:
&Р = (Р2~Рз) = const.
Ф
—i
^к-
•--в
126
^ 5.2. Регулирующие гидроаппараты
Принцип действия двухлинейного регулятора расхода рассмотрим на примере гидропривода,
представленного на рис. 5.57.* В этом приводе давление в напорной линии, а следовательно и на входе в регулятор
расхода остается постоянным и определяется настройкой переливного клапана (/»1 = 16 МПа). Давление на
выходе регулятора расхода р3 зависит от нагрузки F на гидроцилиндр и равно давлению в поршневой полости
гидроцилиндра.
Допустим, что в ситуации, когда на цилиндр действует нагрузка ЕЛ (рис. 5.57, а), в его поршневой полости и
на выходе регулятора расхода устанавливается давление ръ = 9 МПа. Под действием этого давления
регулирующий дроссель занимает такое положение, что на его дросселирующей щели создается перепад давлений
р^-р2 = 6 МПа, т.е. давление р2 становится равным 10 МПа. Расход жидкости, протекающий через регулятор
расхода и поступающий в гидроцилиндр Qn = 6 л/мин, определяется площадью проходного сечения
установочного дросселя и перепадом давления на нем, Ар - р2-р3 =1 МПа. При возрастании нагрузки на
гидроцилиндр до значения F2, давление р3 становится равным 13 МПа, что приводит к смещению регулирующего
дросселя вправо и увеличению его проходного сечения (рис. 5.57, б).
Сопротивление потоку жидкости через регулирующий дроссель уменьшается и на нем устанавливается
меньший перепад давлений рЛ-р2 = 2 МПа. Поскольку давление/>2 становится равным 14 МПа, то перепад
давления на установочном дросселе р2~Рз остается равным 1 МПа, что обеспечивает протекание через него
прежнего расхода Q4 = 6 л/мин.
* Для упрощения пояснения потерями в трубопроводах и гидрораспределителе пренебрежем.
127
5. Направляющая и регулирующая подсистема
Аналогичные рассуждения справедливы и для случаев изменения давления /?1 на входе регулятора,
которое может происходить в случае совместной работы нескольких исполнительных механизмов от одной
насосной станции.
В трехлинейных регуляторах расхода установочный и регулирующий дроссели располагаются не
последовательно, как в двухлинейных регуляторах, а параллельно (рис. 5.58, а). Базовым элементом конструкции
является предохранительный клапан.
Постоянство перепада давлений Ар=р^-р2 на установочном дросселе 1 обеспечивается за счет слива
части потока Qcn рабочей жидкости (разницы между подачей насоса QH и установленным расходом QycT; Q^ =
- (?н_С?уст) через предохранительный клапан, ЗРЭ 2 которого выполняет функцию регулирующего дросселя,
в бак по каналу Т. Такая конструкция и принцип действия регулятора предопределяют место его установки
в приводе — только в линии подвода жидкости к потребителю.
Увеличение давления/^ на выходе В регулятора (за установочным дросселем) передается через канал 5
на правых торец ЗРЭ 2 предохранительного клапана, что приводит к его смещению влево, т.е. к уменьшению
проходного сечения дросселирующей щели 3. Перепад давления Ар=р^-рсп на ЗРЭ 2 возрастает, давление/*,
перед установочным дросселем увеличивается, перепад давления на установочном дросселе 1, а
следовательно и расход (2уст через него остается прежним. Уменьшение давления р2 будет сопровождаться
увеличением проходного сечения дросселирующей щели 3, а, следовательно, уменьшением давления рЛ и
сохранением величины перепада давления Ар - р-\-р2 на установочном дросселе 1.
Если сообщить со сливом пружинную полость ЗРЭ 2, то под действием давления рл на его левый торец он
сместится в крайнее правое положение, т.е. площадь его проходного сечения 3 увеличится до максимального
значения. При этом весь расход жидкости, подаваемый насосом, по каналу Т будет возвращаться в бак
(С?сл = СУ- Таким образом, выкрутив пробку 4 и соединив канал X трехлинейного регулятора расхода через
управляющий распределитель со сливной линией, можно разгружать гидросистему от давления по внешнему
управляющему сигналу.
Обычно в конструкцию трехлинейного регулятора расхода вводят еще один предохранительный клапан
(рис. 5.58, б), что расширяет его функциональные возможности: если давление р2 превысит давление
настройки дополнительного клапана, то аппарат работает в режиме предохранительного клапана непрямого
действия, защищая гидросистему от перегрузки.
Несмотря на одинаковое функциональное назначение — поддержание постоянного по величине расхода
рабочей жидкости в условиях изменяющейся нагрузки — двухлинейные и трехлинейные регуляторы расхода
отличаются друг от друга не только конструктивными особенностями и принципом действия, но и влиянием на
работу привода в целом.
128
5.2. Регулирующие гидроаппараты
В качестве примера рассмотрим две схемы гидропривода вальцов трубогибочного станка (рис. 5.59), в
котором для обеспечения требований техпроцесса гибки труб, скорость движения вальцов должна оставаться
постоянной на протяжении всей рабочей операции.
При использовании двухлинейного регулятора расхода (рис. 5.59, а) рабочий ход гидроцилиндра
осуществляется при работе насоса под максимальным давлением — давлением настройки предохранительного
клапана. Такой режим сопровождается большими потерями мощности и сильным тепловыделением, даже когда
гидроцилиндр преодолевает небольшую нагрузку*. Кроме того, установка регулятора расхода на выходе
гидроцилиндра приводит к тому, что все элементы последнего находятся под действием максимального
рабочего давления даже при холостом ходе (без нагрузки).
В гидросхеме с трехлинейным регулятором расхода (рис. 5.59, б) давление на выходе насоса превышает
давление в гидродвигателе только на величину потерь давления в регулирующем дросселе самого
регулятора. Таким образом, применение трехлинейного регулятора расхода уменьшает потери мощности, повышает
КПД системы и снижает тепловыделение.
Применение регуляторов расхода в гидроприводах дроссельного регулирования позволяет получить
нагрузочную характеристику по жесткости, не уступающую аналогичной характеристике гидропривода с
объемным регулированием. При этом стоимость гидропривода, в котором используются дешевые нерегулируемые
насосы, будет существенно ниже стоимости гидропривода с объемным регулированием. Однако следует
учитывать, что гидроприводы с дроссельным регулированием существенно проигрывают гидроприводам с
объемным регулированием по КПД, поэтому объемный способ регулирования может быть рекомендован для
использования в гидроприводах большой мощности.
Делители потока. В процессе работы некоторых гидрофицированных машин требуется синхронное
движение выходных звеньев гидродвигателей (движение с одинаковой скоростью), питающихся от одного насоса.
Параллельное подключение, например, двух одинаковых гидроцилиндров не обеспечивает их синхронное
перемещение, поскольку шток более нагруженного цилиндра будет двигаться медленнее. Для поддержания
равных скоростей движения одинаковых исполнительных механизмов необходимо обеспечить равенство
расходов поступающей в них рабочей жидкости.
* Уменьшить потери мощности можно путем установки в системе переливного клапана, настройка которого
должна незначительно превышать максимально возможное давление в гидродвигателе.
129
5. Направляющая и регулирующая подсистема
Гидроаппараты, предназначенные для разделения потока рабочей жидкости на два параллельных потока
и поддержания необходимого соотношения расходов жидкости в них, называют делителями потока.
Наиболее распространенной является конструкция делителя потока дроссельного типа (рис. 5.60).
Рабочая жидкость, поступающая в делитель по каналу Р, через балансные гидродроссели 3 и 4, имеющие
одинаковые гидравлические сопротивления, подается в торцевые полости золотника 1. Из них через
регулируемые дроссели 2 и 5, жидкость поступает в каналы выхода А и В. При равенстве давлений в каналах А и В
(рис, 5.60, а) золотник 1 находится в нейтральном положении, при котором регулируемые дроссели 2 и 5
имеют равные проходные сечения (одинаковое гидравлическое сопротивление). На обоих дросселях 3 и 4
происходят равные потери давления и, в результате, в выходные каналы поступают одинаковые расходы жидкости,
равные половине подачи в канал Р.
Если нагрузка на одном из исполнительных механизмов увеличивается (рис. 5.57, б), давление в
соответствующем канале делителя потока, например, давление р5 в канале В, возрастает, что сопровождается
ростом давления р3- При этом перепад давления Ар=р^-р3 на балансном дросселе 4 уменьшается, что приводит к
снижению расхода через него и в канале В соответственно.
Под действием возросшего давления р3 золотник 1 смещается влево, проходное сечение регулирующего
дросселя 2 уменьшается и перепад давлений Ар = р2~Ра на нем возрастает. Золотник 1 установится в новом
равновесном положении, при котором давлениер2 станет равным давлениюр3. На дросселе 3 установится
новый перепад давлений Ар =р-\-р2, равный перепаду Ар = р^-р3 на дросселе 4. Таким образом, расходы в
каналах А и В уменьшатся, но останутся равными.
На точность деления расходов влияют: точность и симметричность изготовления золотника и дросселей,
стабильность и одинаковость гидравлических характеристик дросселей. При необходимости деления потока
на две неравные части, требуемое соотношение расходов в параллельных потоках обеспечивается
установкой соответствующих балансных дросселей 3 и 4 с разным гидравлическим сопротивлением в нужной
пропорции.
В случаях, когда в гидроприводе необходимо поддерживать определенное соотношение расходов в
параллельных линиях при их слиянии, используются сумматоры потока с принципом действия, аналогичным
рассмотренному.
130
6. Информационная подсистема
Нормальное функционирование гидроприводов с поддержанием требуемых от них характеристик, таких
как быстродействие, развиваемые усилия, плавность ходов исполнительных механизмов, обеспечивается
работоспособностью составляющих ее компонентов. Поскольку непосредственно оценить состояние того или
иного элемента гидропривода без его демонтажа и разборки невозможно, информацию о состоянии
отдельных элементов и привода в целом получают опосредованно — путем контроля основных параметров рабочей
жидкости: давления, расхода и температуры.
Измерение и оценку рабочих параметров рабочей жидкости необходимо осуществлять не только для
мониторинга текущего состояния системы, но и для предсказания возможных отклонений в ее функционировании.
6.1. Контроль давления
Манометры. Манометры применяют для прямого измерения давления с отображением его значения
непосредственно на шкале, табло или индикаторе первичного измерительного прибора. В гидросистемах
обычно применяют стрелочные деформационные манометры, давление в которых определяется по величине
деформации и перемещения упругого чувствительного элемента—трубки Бурдона (рис. 6.1, а, б) или мембраны
(рис. 6.1, в).
В манометрах первого типа рабочая жидкость под давлением через штуцер 1 подается в специальным
образом спрофилированную тонкостенную трубку 3. Под действием давления трубка 3 распрямляется (рис. 6.1,6)
и через тягу и зубчатый сектор 2 проворачивает находящееся с последним в зацеплении зубчатое колесо,
жестко связанное со стрелкой, Стрелка перемещается относительно шкалы с рисками, соответствующими
определенным значениям давления в трубке. При этом максимальное измеряемое статическое давление не
должно превышать 3/4 верхнего предела измерений, а при измерении переменного давления показания
манометра не должны превышать 2/3 верхнего предела.
Манометры с трубкой Бурдона нельзя использовать для контроля давления агрессивных по отношению к
медным сплавам жидкостей, а также жидкостей с высокой вязкостью. В подобных случаях применяют
манометры с мембраной (рис. 6.1, в). Жидкость под давлением через штуцер 1 подается под мембрану 2, которая,
деформируясь, через толкатели 3 и 4 также проворачивают зубчатый сектор 5, кинематически связанный с
указательной стрелкой.
Стрелочные манометры сравнительно просты конструктивно, однако, их измерительная система весьма
чувствительна к пульсациям давления и не допускает перегрузки, что часто встречается в гидросистемах. Для
измерения давления в системах, работа которых сопровождается вибрациями или пульсациями давления,
корпуса манометров заполняют демпфирующей жидкостью, например глицерином.
131
6. Информационная подсистема
Если манометры выполняют также некоторые функции управления, они могут комплектоваться
электромеханическими микровыключателями, которые замыкают (или размыкают) определенные электрические
цепи при достижении давлением заданных предельных значений (рис. 6.2, а). При необходимости измерять
разность давления между двумя точками гидросистемы, например, перепад давления на фильтре, применяют
дифференциальные манометры (рис. 6.2, б, в).
Рис. 6.2. Манометры: а—■ электроконтактный; б—дифференциальный струбкой Бурдона; в—диафрагменный
В дифференциальных манометрах с трубкой Бурдона (рис. 6.2, б) используются две независимые трубки.
Перемещения измерительных элементов, пропорциональные давлению, преобразуются механизмом
индикации в соответствующий поворот стрелки относительно шкалы.
В дифференциальных манометрах с диафрагмой давления в контролируемых точках подаются в разные
полости манометра: от одной точки в поддиафрагменную полость, от второй — в наддиафрагменную. Под
действием перепада давлений диафрагма прогибается и перемещает стрелку.
Контрольные точки. Измерять давление в любой точке гидросистемы можно с помощью переносного
манометра, соединяемого с системой только на время измерения. Для этого используют специальные средства
сопряжения, в состав которых входят контрольные точки давления (рис. 6.3, а), встроенные в нужных местах
гидросистемы, а также соединительный шланг (рис. 6.3, б), с помощью которого манометр подключают к
работающей системе без ее остановки.
Конрольная точка давления представляет собой, по сути, миниатюрный обратный клапан, вворачиваемый
в требуемое место гидросистемы. В нерабочем состоянии шаровой клапан 1 поджат к седлу пружиной, а канал
сопряжения 2 закрыт колпачком 3. Для проведения замера колпачок 3 снимают, а на его место навинчивают
накидную гайку 6 соединительного шланга. При этом полый палец 4 шланга поднимает шаровой клапан 1
с седла, а уплотнение 5 герметизирует канал сопряжения 2, гарантируя изоляцию гидросистемы от внешней
среды. После окончания измерения шланг отсоединяют, колпачок 3 вновь навинчивают на корпус
контрольной точки.
132
6.1. Контроль давления
Переключатель манометра. Для централизованного контроля давления в нескольких точках
гидросистемы используют переключатели манометра, которые позволяют подключать к одному манометру ту или иную
точку гидросистемы (рис. 6.4).
«I
i i i
I I I
2 4 6
-М
-т
Рис. 6.4. Переключатель манометра
При нажатии на рукоятку 1 переключателя, золотник 4 смещается вправо и через канал 5 давление из
контролируемой точки подается в канал М и далее на манометр, подсоединенный к переключателю с помощью
трубопровода или шланга. После снятия усилия под действием пружины 2 рукоятка 1 возвращается в
исходную позицию, связывая манометр со сливом — показание манометра обнуляется. Для выбора следующей
точки рукоятку 1 проворачивают, и канал 5, выполненый в золотнике 4 фиксируется подпружиненным
шариком 3 напротив одного из шести, расположенных по периметру цилиндрического корпуса, присоединительных
отверстий Р.
Более компактным является переключатель манометра, непосредственно в рукоятку 1 которого, встроен
манометр 2 (рис. 6.5). Вращение рукоятки 1 сопровождается поворотом гильзы 6, в которой выполнены
коммуникационные каналы 5, соединяющие манометр 2 с одной из шести точек замера давления Р, расположенных
по периметру корпуса 4. Для разгрузки манометра 2 в гильзе 6 между точками измерения предусмотрены
каналы 3, связывающие манометр с линией слива Т.
,*-\JTTri
S3 6 5
7777/,
1 3 5
I I I
СОТ
I I I
2 4 6
Рис. 6.5. Переключатель манометра со встроенным манометром
133
6. Информационная подсистема
Реле давления. Манометры выполняют функцию локального контроля и в большинстве случаев (за
исключением манометров с выходным электрическим сигналом) не могут использоваться для целей
автоматизации. Для выполнения функций управления, а также дистанционного контроля заданных пороговых значений
давления, в электрогидравлических системах применяют реле давления (рис. 6.6).
или
й№
12 3 4 5
Рис. 6.6. Реле давления
Давление, подаваемое на вход Р реле воздействует на плунжер 6, который начинает перемещаться
влево, сжимая настроечную пружину 4. Если уровень давления оказывается достаточным, чтобы преодолеть
усилие создаваемое пружиной 4, то перемещение плунжера 6 и толкателя 2 приводит к срабатыванию
встроенного электромеханического микровыключателя 1, Настройка реле на требуемое давление осуществляется
путем вращения регулировочного винта 3, перемещение которого изменяет усилие предварительного поджатия
пружины 4. Механический ограничитель хода 5 предохраняет микровыключатель 1 от поломки при перегрузке
по давлению.
Другой вариант исполнения реле давления плунжерного типа представлен на рис. 6.7.
В данной конструкции плунжер 1 воздействует на опорную тарелку 3 пружины 4. Тарелка снабжена
выступом, взаимодействующим с микровыключателем 2. Настройка предварительного сжатия пружины 4, а,
следовательно и давления срабатывания реле, осуществляется вращением резьбовой втулки 5. Достоинством
такого конструктивного исполнения является стыковой способ монтажа реле, т.е. возможность установки реле
на присоединительную гидравлическую плиту.
134
6.1. Контроль давления
Датчики давления. Помимо реле давления, выдающих при срабатывании дискретный электрический
сигнал, для контроля текущего значения давления применяют измерительные преобразователи давления (ИПД)
или датчики давления, которые преобразуют давление в стандартизованный электрический сигнал (0...5 и
0...10 В или 4...20 мА).
По способу обработки и отображения измеряемого давления ИПД подразделяют на:
■ первичные преобразователи (рис. 6.8, а) — формируют для дистанционной передачи выходной сигнал,
соответствующий измеряемому давлению;
■ вторичные преобразователи (рис. 6.8, б) — получают сигнал от первичных преобразователей,
обрабатывают его, накапливают, отображают и передают в систему управления.
Существуют датчики, содержащие в единой конструкции и первичный, и вторичный преобразователи (рис.
6.8, в), а также датчики-дифманометры (рис. 6.8, г), позволяющие использовать для измерения разности
давлений один прибор вместо двух обычных.
г=
U
а
i
I
1
биНСТ5Х
L
0.385 МПа
* ' «8Ш73
б
N
)
в
1
/ !
\
• Р
ч '
я
к
г
Рис. 6.8. Датчики давления и цифровые индикаторы
Известны десятки способов преобразования давления в электрический сигнал, но только некоторые из
них получили широкое применение в общепромышленных ИПД. В наиболее распространенных тензорези-
сторных датчиках давления чувствительным элементом является диафрагма, изготовленная, как правило, из
нержавеющей стали, с закрепленными на ней тензорезисторами. Давление рабочей жидкости воздействует
на диафрагму, упругая деформация которой вызывает изменение сопротивления расположенных на ней
тензорезисторов, а встроенный или отдельно расположенный усилитель вырабатывает требуемые
стандартные электрические сигналы, которые передаются в систему управления или визуализируются цифровыми
индикаторами.
С учетом конкретных условий преобразователи устанавливаются и закрепляются либо
непосредственно на трубе в месте измерения давления, либо дистанционно на настенной панели с подводкой к
измеряемой среде посредством соединительных трубок. Кроме того, подключение датчиков
осуществляется, как правило, через вентильный (клапанный) блок, позволяющий, во-первых, отключить через
запорный вентиль прибор отточки измерения, во-вторых, с целью контроля и поверки прибора в рабочих
условиях подключить параллельно прибору через уравнительный вентиль другой контрольный
(образцовый) прибор.
Современные общепромышленные датчики давления — интегральные преобразователи с цифровым
интерфейсом со встроенным микропроцессором. Они обладают свойствами диагностики и конфигурирования
на расстоянии (установка нуля и диапазона шкалы, выбор технических единиц, ввод данных для
идентификации и физического описания датчика и т.п.), обеспечивают более высокое соотношение измеряемых
диапазонов, улучшенную температурную компенсацию, повышенную точность.
135
6. Информационная подсистема
6.2. Контроль расхода
Проблема создания и совершенствования методов и средств измерения расходов жидкостей в
гидросистемах, несмотря на определенный прогресс, остается весьма актуальной. Известно много разных типов
расходомеров и счетчиков количества протекающей жидкости, однако, почти все они создавались для других
случаев применения.
Рассмотрим некоторые конструкции расходомеров, используемых в современных гидросистемах.
Поплавковые расходомеры. К поплавковым расходомерам постоянного перепада давления в первую
очередь относятся ротаметры. В простейшем виде ротаметр (рис. 6.9, а) представляет собой вертикальную
конусную стеклянную трубку 1, расширяющуюся к верху, внутри которой находится свободно
перемещающийся вверх и вниз поплавок 2. На верхнем ободке поплавка имеются бороздки, которые обеспечивают
вращение поплавка в потоке жидкости и его самоцентрирование.
Жидкость движется вверх по трубке, вынуждая поплавок подняться на определенную высоту и образовать
такой кольцевой зазор между ним и стенками трубки, при котором силы, действующие на поплавок,
уравновешиваются. Каждому значению расхода соответствует определенное положение поплавка.
К основным преимуществам ротаметров можно отнести простоту конструкции, возможность измерения
малых расходов, значительный диапазон измерения. Недостатком ротаметров является большая
зависимость показаний от температурного изменения вязкости, особенно при малых расходах.
На заводе-изготовителе ротаметры тарируют по воде или воздуху. Для применения ротаметров на других
средах требуется индивидуальная градуировка.
Для замеров расходов жидкости, находящейся под более высоким давлением, применяют расходомеры
в металлическом корпусе (рис. 6.9, б). Корпус 5 представляет собой прямоточную трубу с фланцами на
концах, в которых крепится мерительный конус 4. Перемещающийся под воздействием измеряемого потока
подпружиненный поплавок 1, снабжен кольцевым постоянным магнитом 2, взаимодействующим с наружным
кольцевым магнитом 3. Положение поплавка 1, соответствующее определенному расходу жидкости,
отслеживается по положению магнита 3, перемещающегося вдоль измерительной шкалы.
Недостатком описанных выше расходомеров является отсутствие возможности записи показаний.
На рис. 6.9, в показан поплавковый расходомер, индикация результатов измерения в котором
осуществляется непосредственно на шкале устройства. С помощью контактных переключателей или токового выхода
результат измерения может быть предоставлен для дальнейшего использования.
136
6.2. Контроль расхода
Турбинные расходомеры. Принцип действия турбинных расходомеров основан на измерении числа
оборотов крыльчатки (турбинки), которая вращается со скоростью, пропорциональной расходу жидкости
через прибор. По конструктивному исполнению их подразделяют на две основные группы: крыльчатые (с
тангенциальным подводом потока), в которых ось вращения крыльчатки перпендикулярна направлению движения
жидкости, и турбинные (с аксиальным подводом потока), у которых ось вращения параллельна направлению
движения потока (рис. 6.10).
■©■
У//////Щ-
)
^^/////////>?//}//>///////^А
1 *
' * "-««ми»
L
Рис. 6.10. Турбинный расходомер
По сути турбинные расходомеры представляют собой генераторы электрических сигналов, частота
которых пропорциональна частоте вращения турбины и в итоге — расходу протекающей среды. В корпусе 1
расходомера в подшипниках 4 установлено рабочее колесо — турбинка 2, ось вращения которой параллельна
направлению потока жидкости. В корпусе 1 размещен первичный преобразователь 3, генерирующий
электрический сигнал на своем выходе, когда в зоне его действия оказывается лопатка рабочего колеса 2. Полученные
сигналы передаются во вторичный прибор, где обрабатываются, приводятся к стандартизованному виду и при
необходимости визуализируются в оцифрованном виде.
В настоящее время именно турбинные расходомеры обеспечивают высокую точность измерений,
недоступную другим приборам. Но изделия такого класса достаточно дороги и имеют серьезные недостатки:
большой перепад давления и чувствительность к абразивному воздействию.
Вихревые расходомеры. В основе принципа действия вихревых расходомеров лежит широко известное
природное явление — образование вихрей за препятствием, стоящим на пути потока. При скоростях среды
выше определенного предела вихри образуют регулярную дорожку, называемую «дорожкой Кармана».
Частота образования вихрей при этом прямо пропорциональна скорости потока.
■О"
~3
Г^Ч
1 ■•.,
Рис. 6.11. Вихревой расходомер
В рабочем канале корпуса 1 расходомера установлен вихреобразователь 2, обтекая который поток
разделяется и образует вихри, распространяющиеся попеременно сзади каждой стенки вихреобразователя. Эти за-
137
6. Информационная подсистема
вихрения являются причиной появления областей с колебаниями давления, которые фиксируются
чувствительным элементом 4 датчика 3 и преобразуются в электрический частотный сигнал.
Основные достоинства вихревых расходомеров: отсутствие подвижных деталей, что обусловливает
высокую надежность и стабильность метрологических характеристик; линейный выходной сигнал; широкий
динамический диапазон измерений; малую потерю давления. Вихревые расходомеры с хорошей точностью
измеряют скорость потока независимо от типа среды.
К недостаткам следует отнести необходимость установки прибора на длинных (не менее восьми
диаметров) прямолинейных участках трубопроводов. Наличие таких участков трубопровода до и после расходомера
гарантирует исключение посторонних возмущений потока.
Ультразвуковые расходомеры. Расход жидкости, протекающей через расходомер вычисляется путем
измерения либо времени распространения ультразвука в потоке, либо изменения частоты ультразвуковых
колебаний (эффект Доплера).
Прибор состоит из двух датчиков и блока электроники. Датчики 1 врезают в трубопровод, либо крепят на
внешней поверхности трубы 2, и подключают к блоку электроники с дисплеем (рис. 6.12).
ру>
■■■ /
*;»
Рис. 6.12. Ультразвуковой расходомер
Датчики (ультразвуковые преобразователи), одновременно являясь и излучателями и приемниками,
последовательно отправляют и принимают ультразвуковые сигналы. Сравнивая время прохождения
сигналов по и против направления течения потока, прибор автоматически вычисляет скорость течения
жидкости.
На основании произведенного замера и ранее занесенных данных о диаметре трубопровода,
вторичный преобразователь производит вычисление объемного расхода, которые в виде
стандартизованного электрического сигнала подаются в систему управления, либо оцифровываются и выводятся
на индикатор. Измерение расхода может производиться как при прямом, так и при обратном
направлении потока.
Для измерения расхода жидкостей в напорных трубопроводах наиболее часто применяют врезные
ультразвуковые расходомеры, поскольку их принято считать более точными по сравнению с расходомерами,
которые устанавливаются на внешней поверхности трубопровода (с накладными датчиками). Однако в
настоящее время расходомеры с накладными ультразвуковыми преобразователями находят все более
широкое применение. Это обусловлено тем, что расходомеры с накладными датчиками не требуют остановки
технологических процессов для врезки в трубопровод и перекрытия вентилей, что особо ценно при
экспресс-измерениях.
Преимуществами расходомеров с накладными датчиками является и то, что при их установке не
возникает падение давления в трубопроводе, нет влияния прибора на поток. Эти приборы отличает простота
установки, переноса и замены датчиков.
138
6.2. Контроль расхода
Реле расхода. Реле расхода или индикаторы применяют в тех случаях, когда необходимо контролировать
наличие расхода, имеющего определенное значение, в какой-либо магистрали гидросистемы и формировать
при этом соответствующий информационный или управляющий сигнал. Например, для контроля утечек в
основном насосе системы, критическое значение которых свидетельствует о достижении насосом предельного
состояния, когда его дальнейшая эксплуатация становится не только неэффективной, но и опасной, может
использоваться реле расхода, изображенное на рис. 6.13.
Рис. 6.13. Реле расхода
В корпусе 1 расположена подпружиненная подвижная втулка 4, радиальные отверстия 2 которой образуют
с цилиндрической проточкой 3 в корпусе 1 дросселирующие щели. При протекании жидкости через реле
положение втулки 4 относительно корпуса 1, а, следовательно, и площади проходных сечений дросселирующих
щелей, будут определяться равновесием усилий действующих на втулку со стороны рабочей жидкости и
пружины 5. Увеличение расхода жидкости через реле приводит к смещению втулки 2 в сторону увеличения
площадей дросселирующих щелей, а при достижении расходом некоторого порогового значения — к
срабатыванию датчика 6.
На рис. 6.14 показано реле расхода, система измерения которого состоит из подпружиненного
поворотного рычага 4 и связанного с ним диска 5, расположенного в конической части 6 рабочего канала.
При течении жидкости система измерения занимает позицию, в которой сила потока, действующая на диск 5,
уравновешивается силой пружины. Таким образом, положение системы измерения соответствует текущему
значению объемного расхода. Установленный на рычаге 4 постоянный магнит 3, через стенку корпуса
взаимодействует с постоянным магнитом 2, связанным с флажком-индикатором. Когда расход жидкости через реле
достигает контролируемого значения, магнит 2 занимает положение, вызывающее срабатывание герконового
выключателя 1.
139
6. Информационная подсистема
6.3. Контроль температуры
Температура является одним из основных параметров, характеризующих состояние гидросистемы и ее
компонентов (перегрев рабочей жидкости, например, может свидетельствовать об износе деталей насосов,
аппаратов и гидродвигателей). Измерение температуры рабочей жидкости в гидросистемах осуществляется
термометрами и датчиками температуры, которые, как правило, монтируются непосредственно на
гидравлическом баке.
Технические жидкостные стеклянные термометры расширения, принцип измерения которых основан на
тепловом расширении жидкостей, выпускаются как в прямом, так и угловом исполнении (рис. 6.15, а). Ртутные
стеклянные термометры расширения отличаются высокой точностью измерения, стабильностью градуиро-
вочной характеристики и малой стоимостью. Однако их хрупкость, невозможность использования в АСУ и
значительные динамические, а иногда и методические погрешности ограничивают область применения.
Более надежными и удобными в эксплуатации являются термометры циферблатного типа,
чувствительным элементом которых является биметаллическая спираль (рис. 6.15, б). Принцип действия таких
термометров основан на свойстве биметаллической спирали, изготовленной из двух металлов с различными
коэффициентами объемного расширения, скручиваться или раскручиваться при изменении ее температуры. При
этом связанная со спиралью стрелка термометра проворачивается относительно круговой шкалы на
соответствующий угол.
К термометрам циферблатного типа относятся и манометрические термометры (рис. 6.15, в). Принцип их
действия основан на зависимости давления жидкости в замкнутом объеме от температуры. Манометрический
термометр состоит из термобаллона, наполненного рабочим веществом, манометра, шкала которого програ-
дуирована в единицах температуры, и соединяющей их капиллярной трубки. При нагревании термобаллона
давление заключенного в нем рабочего вещества возрастает, что сопровождается поворотом стрелки
манометра.
Манометрические термометры могут работать в условиях вибрации, а так же во взрыво- и пожароопасных
помещениях. При их использовании следует иметь ввиду специфические погрешности, присущие
манометрическим термометрам, вызываемые колебаниями барометрического давления или температуры окружающей
среды, а так же взаимным расположением термобаллона и измерительного прибора.
Для дистанционного измерения температуры рабочей жидкости применяют датчики температуры,
чувствительными элементами которых обычно являются термосопротивления* (рис. 6.16, а).
* Датчики, чувствительным элементом которых является термопара, предназначены для измерения
температур более 300 "С и для измерения температуры рабочей жидкости гидроприводов не применяются.
140
6.4. Контроль уровня рабочей жидкости в баке
Термосопротивление представляет собой полупроводниковый резистор, обладающий свойством
существенно изменять своё электрическое сопротивление при изменении температуры.
•
А
t
1
а
2
1
■к.
*«SMjg5»*
б
nl
в
пва
I
ВШИ
г
Рис. 6.16. Датчики температуры
Термосопротивление, расположенное внутри трубчатого зонда 1, и встроенный в головку датчика 2
измерительный преобразователь в виде герметичной «таблетки» (рис. 6,16, б) преобразуют измеряемую
температуру в унифицированный токовый выходной сигнал. Визуализация текущего значения температуры
осуществляется указателями, оснащенными цифровыми (рис. 6.16, в) или линейными световыми индикаторами
(рис. 6.16, г). При этом на указателе температуры устанавливают заданную температуру рабочей жидкости, а
затем в зависимости от реально измеренной температуры может быть автоматически включена либо система
подогрева, либо система охлаждения
6.4. Контроль уровня рабочей жидкости в баке
Для визуального контроля уровня жидкости в баке используются маслоуказатели — устройства подобные
водомерным стеклам. Маслоуказатели, встраиваемые непосредственно в боковую стенку гидравлического бака,
выпускаются в нескольких модификациях круглые (рис. 6.17), удлиненные и трубчатые (рис. 6.18).
Для контроля верхнего и нижнего уровня масла в баке круглые маслоуказатели устанавливаются попарно.
Исполнение I
Исполнение II
А-А
пв
/VA
Рис. 6.17. Круглые маслоуказатели
Трубчатые маслоуказатели (рис. 6.18, б) предназначены для использования в оборудовании, не
испытывающем при работе сильных толчков и тряски. Их применяют только в тех местах, где нельзя установить
встроенные круглые. Маслоуказатели должны иметь отметки предельно допустимых уровней.
141
6. Информационная подсистема
Красить белой эмалью^
/Я*\\
Рис. 6.18. Удлиненные (а) и трубчатые (б) маслоуказатели
Дистанционный контроль уровня масла в гидробаках может осуществляться с помощью емкостных
бесконтактных выключателей или посредством реле и датчиков уровня. Емкостные выключатели, принцип
действия которых основан на изменении электрической емкости чувствительного элемента, вызванного наличием
или отсутствием масла в зоне его действия, устанавливаются попарно для контроля минимального и
максимального допустимого уровня масла в баке. Способность емкостных выключателей «чувствовать» наличие
контролируемого объекта через стенку бака, позволяет устанавливать их без непосредственного контакта с
маслом (рис. 6,19, а).
J
а
V
1
~ ь—0—0
.3=—Ф-0
- ъ i
\ 1
г з 4
i
л.
б
> 2
3
1
JL
i
1
и
в
Рис. 6.19. Датчики и реле уровня
Принцип действия электромеханического реле уровня поплавкового типа (рис. 6.19, б) основан на
изменении положения поплавка 4 под воздействием выталкивающей силы рабочей жидкости. Поплавок при своем
перемещении рычагом 3 воздействует на микропереключатель, расположенный в корпусе 1 и включенный
в электрические цепи сигнальных или пусковых устройств. Функцию разделителя между рабочей жидкостью
в баке и окружающей средой выполняет сильфон 2, приваренный к фланцу корпуса.
Более традиционным решением задачи контроля двух предельных уровней масла в баках является
применение электронных датчиков уровня (рис. 6.19, в). Принцип их действия основан на преобразовании в
электрический релейный сигнал изменения параметров катушек индуктивности, расположенных в погружаемом в
рабочую жидкость зонде 2, вследствие перемещения поплавка 3 при изменении уровня контролируемой среды.
Достоинством таких датчиков является отсутствие в конструкции релейно-контактных устройств, а также удобство
их монтажа — корпус 1 датчика вворачивается непосредственно в крышку бака.
142
6.5. Контроль чистоты рабочей жидкости
6.5. Контроль чистоты рабочей жидкости
Надежность и долговечность гидроприводов находятся в прямой зависимости от чистоты рабочей
жидкости. Анализ отказов и нарушений работы гидропривода показывает, что около 80 % гидравлических устройств
выходят из строя вследствие износа основных деталей, вызванного недопустимым загрязнением рабочей
жидкости. Степень чистоты рабочей жидкости, а, следовательно, и степень надежности работы
гидроприводов можно определить, если известны гранулометрический состав загрязнений и их весовая концентрация в
единице объема контролируемой рабочей жидкости.
Один из способов определения чистоты рабочей жидкости — метод отбора проб и микроскопического
анализа — заключается в том, что из гидросистемы берется проба масла, каплю которого переносят на
фильтровальную бумагу — тест мембрану. При этом образуется пятно, которое сравнивается с образцами-эталонами
(рис. 6.20). Этот метод позволяет определить наличие, размеры и природу частиц загрязнений, а также класс
чистоты рабочих жидкостей путем подсчета под микроскопом частиц загрязнений.
До 0,05 % механических
примесей
tfu'81" щ- .
1
***,
3^yjr
0,05. ..0,10 % механических
примесей
•л
*ч*' "' ;'* '
J, ■
Jt\ >: "
0,10...0,80 % механических
примесей
■•*■ ; /,
-$ < ;
Г'
0,80 % и более
механических примесей
Щ[
1 i « • 1::.
Рис. 6.20. Эталоны масляных пятен
Метод отбора проб и микроскопического анализа дает достаточно достоверные результаты
(доверительная вероятность 95 %), но сложен, трудоемок и длителен.
В настоящее время метод микроскопического анализа все чаще заменяется автоматизированным
контролем чистоты жидкости при помощи специальных приборов. Они предназначены для измерения размеров и
определения количества инородных частиц в маслах, топливе и моющих жидкостях.
Определение размеров частиц производится с помощью фотоэлектронных датчиков, которые
монтируются в разрывах гидролиний технологического оборудования, что позволяет осуществлять непрерывный
контроль чистоты рабочей жидкости в различных точках гидросистемы, например, после насоса, на входе и
выходе из исполнительного механизма, на выходе теплообменника и т.п.
В соответствии с ГОСТ 17216-2001 измеренные частицы загрязнений относят к одному из пяти размерных
диапазонов 5..,10; 10...25; 25...50; 50...100 и свыше 100 мкм.
Приборы контроля рабочей жидкости позволяют быстро (в течение одной минуты) и объективно
производить автоматический гранулометрический анализ чистоты рабочей жидкости, как в непрерывном потоке
рабочей жидкости непосредственно в процессе работы гидросистемы, так и в контрольных пробах при
экспресс-анализе в лабораторных условиях. Погрешность измерения составляет 25...30 %.
Метод автоматизированного контроля уровня загрязненности рабочей жидкости позволяет определить
основной источник загрязнения (по анализу дисперсионного состава загрязнений), эффективность очистки
рабочих жидкостей в баках и фильтрах, момент достижения предельного эксплуатационного уровня
загрязненности рабочей жидкости.
Недостатком контроля чистоты рабочей жидкости в работающей гидросистеме является большая
погрешность измерения при наличии в потоке жидкости пузырьков нерастворенного воздуха.
143
7. Гидроприводы с электрическим пропорциональным
управлением
Современные электрогидравлические приводы являются изделиями высоких технологий, сочетающими в
себе силовые и динамические свойства гидроприводов с постоянно расширяющимися возможностями
микроэлектроники. Наиболее интенсивное внедрение приобретают гидроаппараты с электрическим
пропорциональным управлением, позволяющие осуществлять дистанционное бесступенчатое регулирование основных
параметров потока рабочей жидкости: расхода и давления.
Для ознакомления с преимуществами гидроаппаратов с электрическим пропорциональным управлением
по отношению к изложенным выше с дискретным управлением (работающим по принципу «открыт—закрыт»)
рассмотрим две схемы электрогидравлических приводов, работающих по циклу: быстрый подвод — рабочая
подача — быстрый отвод (рис. 7.1).
1.0 S1
1.0
v
Л/w^
А В
1.02 р
М
t 1
Y1 [Z
ш
V
1.04_
ШУЗ j^yi
т
и
0.2
I
I
яа
Y2
t 1J_
YlhffiT
S1
i
P"
tf
0.1
0.2
! Ж Y3,
Гт
Ш
Y2
0.1
!-^(^®i
Рис. 7.1. Гидроприводы с дискретным (а) и пропорциональным (б) электрическим управлением
В обеих схемах реверсирование движения гидроцилиндра 1.0 осуществляется подачей управляющих
электрических сигналов на электромагниты Y1 и Y2 распределителя 1.1; переход на рабочую подачу
(пониженную скорость выдвижения) осуществляется по сигналу от путевого выключателя S1.
Гидропривод с электрическим дискретным управлением (рис. 7.1, а). Выдвижение штока гидроцилиндра
1.0 осуществляется при подаче напряжения на электромагнит Y1. Шток выдвигается с максимальной
скоростью, так как слив из штоковой полости цилиндра осуществляется через нормально открытый 2/2-распредели-
тель 1.02. При достижении штоком путевого выключателя S1, происходит переключение распределителя 1.02
и рабочая жидкость из гидроцилиндра 1.0 начинает поступать на слив через дроссель с обратным клапаном,
1.04, скорость выходного звена снижается — выполняется рабочая подача. Возврат штока гидроцилиндра в
исходную позицию осуществляется с высокой скоростью при подаче сигнала управления на электромагнит
Y2. Переключение распределителей 1.1 и 1.02 сопровождается резким изменением давления в полостях
гидроцилиндра 1.0, вследствие чего поршень движется с резкими ускорениями.
Дистанционное регулирование давления в приводе осуществить невозможно.
Гидропривод с электрическим пропорциональными управлением (рис. 7.1, б). Гидрораспределитель с
электрическим пропорциональным управлением 1.1 изменяет не только направление, но и расход
проходящей через него рабочей жидкости. Эти функциональные возможности аппарата обеспечивают плавное изме-
144
7.1. Пропорциональные электромагниты
нение скоростей движения гидроцилиндра 1.0, что позволяет упростить гидравлическую схему привода,
исключив из нее 2/2-распределитель и дроссель с обратным клапаном.
При подаче максимального по уровню управляющего сигнала на пропорциональный электромагнит Y1
скорость выдвижения штока максимальна. При достижении штоком путевого выключателя S1 уровень
сигнала на пропорциональный электромагнит Y1 снижается, что сопровождается уменьшением скорости
выдвижения штока. Быстрый возврат выходного звена осуществляется при подаче максимального по уровню
управляющего сигнала на пропорциональный электромагнит Y2.
Переливной клапан с пропорциональным электрическим управлением 0.2 позволяет дистанционно
управлять давлением в приводе. Например, при движении гидроцилиндра без нагрузки давление может быть
пониженным, а при переходе на рабочую операцию давление повышается до требуемого значения.
Таким образом, пропорциональное электрическое управление параметрами гидропривода позволяет
оптимизировать гидросистемы по критериям энергетических потерь и качества переходных процессов,
осуществлять микропроцессорное и адаптивное управление гидрофицированными установками. При этом
существенно улучшаются компоновочные решения за счет сокращения количества гидроаппаратов, трубопроводов
и соединений.
7.1. Пропорциональные электромагниты
Конструктивными элементами, придающими гидравлическим аппаратам ранее недоступные свойства,
являются пропорциональные электромагниты, которые осуществляют функцию сопряжения электронной
системы управления и гидравлической части привода.
Пропорциональные электромагниты разработаны на основе электромагнитов постоянного тока,
используемых для дискретного управления гидравлическими распределителями и отличаются от них наличием в
конструкции управляющего конуса (рис. 7.2, а, поз. 2) из немагнитного материала, который изменяет форму
линий магнитного поля.
В зависимости от выполняемых функций выпускают пропорциональные электромагниты, регулируемые
по силе (рис. 7.2) и по положению (рис. 7.4).
Электрический входной сигнал, например, от задающего потенциометра 6, в виде напряжения подается
на электронный усилитель 8, где преобразуется в соответствии со значением напряжения в электрический ток
нагрузки (например, 1мВ . „. 1 мА). Электрический ток, протекая по обмотке катушки 3, создает
электромагнитное поле, которое вызывает продольное смещение ферромагнитного подвижного якоря 4 с силой, пропорцио-
145
7. Гидроприводы с электрическим пропорциональным управлением
нальной силе тока. Наличие обратной связи по току, значение которого сравнивается с заданным входным
сигналом в узле суммирования 7, обеспечивает поддержание силы тока, а таким образом, и силы,
развиваемой якорем 4, на заданном уровне даже при изменении внешнего сопротивления якорю. Особенностью
электромагнитов, регулируемых по силе, является то, что они развивают постоянное по величине усилие,
пропорциональное поданному управляющему сигналу, во всем диапазоне хода якоря (рис. 7.2, б). Возврат
якоря 4 в исходное состояние при снятии управляющего сигнала осуществляется пружиной 5. Поскольку
пропорциональные электромагниты работают в масле, в конструкции предусмотрена пробка 1 для удаления
воздуха.
В гидроаппаратах с пропорциональным электрическим управлением сила, развиваемая электромагнитом,
уравновешивается силой пружины, нагружающей ЗРЭ. Рабочей точкой гидроаппарата является точка
пересечения характеристик пропорционального магнита и нагружающей пружины (рис. 7.3).
F.H
О х0
k 0.754
> 0,5 /„.
425 /т
F, Н
Ход якоря
'0,75/„
к0,5 /„
'0,25/^
Ход якоря
Ход якоря
0
0,25/тах /тах Ток нагрузки
Рис. 7.3. Принцип действия пропорционального магнита, управляемого по силе
Наложение линейной характеристики пружины гидроаппарата на характеристику магнита показывает, что
величина смещения подпружиненного якоря (величина сжатия нагружающей пружины) пропорциональна
току, протекающему через катушку электромагнита.
На стабильность характеристик гидроаппарата с пропорциональным управлением оказывают
отрицательное влияние гидродинамические силы, возникающие при обтекании запорно-регулирующего элемента, а
также силы трения между подвижными элементами конструкции. Проявление этих факторов может стать
причиной плохой повторяемости в работе гидроаппарата, т.е. приводить к тому, что при неоднократной подаче
одинаковых по уровню сигналов управления, положение якоря магнита, а, следовательно, и регулируемый
гидроаппаратом параметр, может оказываться различным. Таким образом, поддержание требуемых
параметров на заданном уровне определяется точностью позиционирования якоря электромагнита. Значительс
ное улучшение точности позиционирования якоря можно получить, если управление магнитом
осуществлять не с обратной связью по току, как это реализовано в магнитах с регулированием по силе, а с обратной
связью по положению якоря, как это выполняется в пропорциональных магнитах с управлением по
положению (рис. 7.4, а).
Якорь магнита 3 удерживается в позиции определяемой величиной тока протекающего по катушке,
независимо от противодействующей силы (в рабочем диапазоне значений) посредством замкнутого контура
регулирования. Сигнал обратной связи генерируется аналоговым индуктивным датчиком положения 1. Величина
выходного сигнала датчика зависит от положения жестко связанного с якорем 3 сердечника 2.
146
7.1. Пропорциональные электромагниты
На характеристике магнита, приведенной на рис. 7.4, б, ось «Ход якоря» выполнена в отрицательном
диапазоне значений по причине того, что в свободном состоянии якорь под действием пружины 4 находится в
выдвинутой позиции (ход якоря равен 0). При установке магнита на гидроаппарат под действием сопрягаемой
детали — пружины или золотника — якорь принудительно сдвигается внутрь катушки, т.е. в область
отрицательных значений хода. При подаче управляющего электрического сигнала на катушку якорь начинает
выдвигаться, т.е. приближаться к позиции 0.
1 2 3 4 Ход якоря
а б
Рис. 7.4. Пропорциональный магнит с управлением по положению
Характеристика регулируемого по положению магнита не имеет линейных участков, характерных для
магнитов, регулируемых по силе, что свидетельствует о зависимости развиваемого магнитом усилия от
положения якоря.
Гидроаппараты с пропорциональным управлением выполняют по следующим двум схемам:
■ в клапанах давления — нагружающую пружину располагают между пропорциональным магнитом и ЗРЭ
(рис. 7.5, а);
■ в гидрораспределителях — золотник располагают между нагружающей пружиной и пропорциональным
магнитом (рис. 7.5, б).
Такое конструктивное исполнение позволяет осуществлять пропорциональное входному электрическому
сигналу смещение золотника в распределителях и сжатие нагружающей пружины в клапанах давления. При
этом распределители приобретают возможность не только направлять потоки рабочей жидкости, но и
изменять ее расход.
147
7. Гидроприводы с электрическим пропорциональным управлением
7.2. Гидроаппараты с электрическим пропорциональным управлением
7.2.1. Клапаны давления
Использование клапанов давления с пропорциональным управлением позволяет при необходимости
непрерывно регулировать давление в различных линиях гидросистемы посредством электрического сигнала.
Принципы действия клапанов давления с пропорциональным управлением аналогичны принципам,
заложенным в основу работы рассмотренных выше клапанов с ручной настройкой, с той разницей, что сжатие
настроечных пружин в них осуществляется посредством пропорциональных магнитов, а не посредством
вращения регулировочных винтов.
В некоторых конструкциях настроечные пружины отсутствуют, а требуемое усилие на ЗРЭ клапана
передается непосредственно от пропорционального магнита (рис. 7.6).
-|р
Рис. 7.6. Предохранительный клапан прямого действия с пропорциональным управлением
Очевидно, что в клапанах давления непрямого действия пропорциональные магниты управляют ЗРЭ
клапанов первого каскада (рис. 7.7).
Давление в контролируемой гидролинии А определяется давлением настройки клапана первого каскада 1,
давление срабатывания которого задается входным электрическим сигналом на пропорциональный магнит.
148
7.2. Гидроаппараты с электрическим пропорциональным управлением
Когда давление в линии А превышает заданный уровень, ЗРЭ пилотного клапана 1, поднимается с седла и
часть жидкости из линии А через клапан первого каскада сливается в линию В. В пружинной полости
основного ЗРЭ давление падает, усилие от создавшегося перепада давления поднимает его с седла — срабатывает
клапан второго каскада 2. Жидкость перетекает из линии А в линию В, давление в линии А поддерживается на
заданном уровне.
Иногда предохранительные клапаны непрямого действия с пропорциональным управлением
дополнительно снабжают клапаном предельного давления 3, которые защищают гидросистему от превышения
давления выше допустимого значения при сбое электронной системы управления.
Остановимся более подробно на принципе действия трехлинейного редукционного клапана с
пропорциональным управлением, изображенного на рис. 7.8, поскольку такое конструктивное решение лежит в основе
клапанов первого каскада гидравлических распределителей непрямого действия с пропорциональным
управлением.
При подаче электрического сигнала управления якорь 1 сдвигает втулку 2 на величину, пропорциональную
величине управляющего сигнала. Через каналы, выполненные во втулке 2 жидкость из канала Р поступает в
канал А. С ростом давления в канале А втулка 2 начинает смещаться в сторону магнита и при достижении
заданного уровня давления, каналы Р и А разъединяются. Величина давления в канале А будет определяться
силой, которую развивает пропорциональный магнит. Если давление в канале А начнет превышать заданное
значение, дальнейшее смещение втулки 2 в сторону магнита приведет к соединению каналов АйТи давление
в канале А останется на заданном уровне.
7.2.2. Гидрораспределители
Являясь дросселирующими, гидрораспределители с пропорциональным управлением конструктивно
похожи на дискретные распределители, но, в отличие от них, сочетают в себе две функции:
■ пуск, останов и изменение направления потока рабочей жидкости (обеспечиваются и дискретными
распределителями);
■ управление расходом.
Управление расходом посредством гидрораспределителей обеспечивается благодаря двум
особенностям, которые отличают распределители с пропорциональным управлением от дискретных
распределителей — возможность смещения золотника распределителя на величину пропорциональную величине
управляющего электрического сигнала и плавное изменение площади их проходного сечения за счет выполнения
на буртиках золотника проточек, спрофилированных особым образом.
Наличие проточек позволяет менять площадь проходного сечения гидрораспределителя во всем
диапазоне, в то время как буртики золотника с положительным перекрытием остаются в контакте с кромками цилинд-
149
7. Гидроприводы с электрическим пропорциональным управлением
рических расточек в корпусе (рис, 7.9). Таким образом, во время работы гидрораспределителя
осуществляется дросселирование потоков жидкости во всех каналах (Р — А, В — Т, или Р — В, А —- Т ).
Управляется гидрораспределитель следующим образом: если управляющий электрический сигнал в виде
напряжения имеет отрицательное значение, ток поступает на магнит В, золотник смещается влево на
величину пропорциональную силе тока и осуществляет коммутацию Р — А, В — Т. Если управляющее напряжение
имеет положительное значение, ток поступает на магнит А (Р — В, А — Т). При отсутствии электрического
сигнала управления золотник под действием центрирующих пружин устанавливается в нейтральную позицию
(все каналы перекрыты).
В зависимости от требований, предъявляемых к конкретному приводу, применяют распределители с
различными расходными характеристиками, вид которых определяется формой проточек на буртиках золотника
(рис. 7.10).
8
Q, л/мин
6
2
а 0
з
Q. л/мин
6
4
2
б °
>
У
j
/
)
f
/
/
/
I
100 300 500 7(
100 300 500 7(
DO /, мА
Ю /, мА
Рис. 7.10. Зависимость расходных характеристик распределителей от формы проточек
Так распределитель, на буртиках золотника которого выполнены проточки треугольной формы (рис. 7.10, а),
имеет расходную характеристику в виде параболы, а золотник с прямоугольными проточкам на буртиках
обеспечивает почти линейную расходную характеристику распределителя (рис. 7.10, б).
150
7.2. Гидроаппараты с электрическим пропорциональным управлением
Как и в дискретных распределителях, прямое управление применяется для аппаратов с условным
проходом до 10 мм. При больших значениях условных проходов применяют распределители с пилотным
управлением (рис. 7.11).
Как правило, в качестве пилота применяют сдвоенные трехлинейные редукционные клапаны с
пропорциональным управлением 1. В исходном положении, при отсутствии управляющих сигналов на
пропорциональных магнитах пилотного клапана, обе пружинные полости основного распределителя 2 (распределителя
второго каскада) связаны со сливом, его золотник 3 находится в нейтральной позиции под действием
центрирующих пружин. При подаче управляющего электрического сигнала, например на магнит В пилотного клапана 1,
давление в левой пружинной полости основного распределителя 2 возрастет до величины,
пропорциональной сигналу управления и золотник 3 основного распределителя, сжимая правую центрирующую пружину,
сместится на соответствующую величину вправо. Рабочая жидкость из канала Р начнет поступать в канал В с
расходом соответствующим величине смещения золотника. Аналогичным образом происходит коммутация
каналов Р и А при подаче управляющего сигнала на пропорциональный магнит А пилотного клапана. Для
обеспечения точности управления распределителем 2 обратная связь организуется по положению золотника
3, позиция которого фиксируется датчиком положения 4.
Во многих случаях от распределителей с пропорциональным управлением требуется не только точно
следовать изменениям входного электрического сигнала, но и достаточно быстро реагировать на эти изменения.
Быстрота реакции распределителя, равно как и других гидроаппаратов с пропорциональным управлением,
характеризуется двумя параметрами: временем срабатывания и частотой пропускания,
Время срабатывания — время, за которое выходной параметр гидроаппарата примет значение
соответствующее входному управляющему сигналу. Время срабатывания гидроаппаратов с пропорциональным
управлением лежит в диапазоне от 10 до 100 мс.
Частота пропускания показывает на какое количество изменений (от нуля до максимального значения)
входного сигнала в секунду гидроаппарат способен отреагировать. В среднем частота пропускания
гидроаппаратов с пропорциональным управлением лежит в интервале от 5 до 100 Гц.
151
7. Гидроприводы с электрическим пропорциональным управлением
7.2.3. Регуляторы расхода
Гидравлические распределители с электрическим пропорциональным управлением, выполняя функцию
направляющих гидроаппаратов, одновременно являются регулируемыми по внешнему управляющему
электрическому сигналу дросселями. Это позволяет использовать их в качестве гидроаппаратов управляющих
расходом рабочей жидкости пропорционально внешнему сигналу управления. Однако расход рабочей
жидкости через дроссель определяется не только площадью его проходного сечения, но и падением давления на
нем, а, следовательно, зависит от нагрузки на исполнительном механизме.
Для того чтобы величина требуемого расхода определялась только сигналом управления, падение
давления на распределителе (регулируемом дросселе) следует поддерживать постоянным. Это достигается
применением клапанов постоянной разности давлений и может быть реализовано несколькими способами:
схематически — клапан постоянной разности давлений 1.2 и распределитель с электрическим пропорциональным
управлением 1.1 соединяют последовательно (рис. 7.12, а); конструктивно — клапан постоянной разности
давлений и регулируемый дроссель объединяют в единой конструкции — регуляторе расхода с
электрическим пропорциональным управлением (рис. 7.12, б).
При ртсутствии управляющего сигнала на пропорциональный магнит регулятора расхода площадь
проходного сечения 6 подпружиненного дросселя 3 равна нулю, расход через регулятор отсутствует.
После подачи управляющего сигнала на пропорциональный магнит, якорь 4 сместит регулируемый
дроссель 3 влево на величину, пропорциональную значению сигнала. Позиция дросселя 3 при этом
контролируется датчиком положения 5, входящим в линию обратной связи контура управления и при
необходимости корректируется. Через регулятор устанавливается расход, определяемый перепадом давления на
дросселирующей щели 6, площадь которой пропорционально зависит от сигнала управления. Перепад давления
на дросселе 3 автоматически поддерживается на установившемся уровне клапаном 1 постоянной разности
давлений, площадь проходного сечения 7 которого, автоматически меняется в зависимости от давления
в канале В.
Для свободного протекания рабочей жидкости из канала В в канал А в регулятор расхода встроен
обратный клапан 2.
152
7.3. Электронные усилители
7.3. Электронные усилители
*.
Для управления пропорциональным электромагнитом требуется достаточно мощный электрический
сигнал (20...40 Вт), который не может быть подан непосредственно от электронной системы управления
(выходная мощность менее 0,5 Вт). Сопряжение этих устройств осуществляется электронными усилителями,
которые усиливают входной сигнал по мощности до величины, достаточной для того, чтобы привести в
действие пропорциональный электромагнит и управляемые им запорно-регулирующие элементы
гидроаппаратов, х
Применяют два типа усилителей: аналоговые и ключевые. Аналоговые усилители, которые строятся на
базе линейных операционных усилителей с мощным выходом не нашли широкого применения для
управления пропорциональными электромагнитами ввиду низкого КПД (порядка 50 %) и невысокой надежности.
В ключевых усилителях, являющихся широтно-импульсными преобразователями, реализуется принцип
широтно-импульсной модуляции (ШИМ) выходного сигнала. Основное достоинство ШИМ — высокий КПД
(более 90 %) построенных на ее основе усилителей мощности, который достигается за счет использования их в
ключевом режиме (включение и отключение тока в цепи управления) (рис. 7.13).
При ШИМ непрерывный сигнал, подаваемый на вход усилителя, преобразуется в импульсный сигнал на
его выходе. При этом амплитуда, например 24 В, и период Г генерируемых усилителем импульсов остаются
постоянными, а ширина импульса Д Т зависит от величины входного сигнала.
Мощность выходного сигнала Р и ток определяются следующими соотношениями:
/ -UAT
ср R Т '
где U— амплитуда импульсов;
/ср — среднее арифметическое значение тока нагрузки;
R — сопротивление катушки электромагнита.
Поскольку катушки пропорциональных электромагнитов обладают индуктивностью, а якорь —
инерцией, импульсы с выхода усилителя сглаживаются и при достаточно высокой частоте ШИМ-сигна-
па якорь может вести себя как при управлении обычным аналоговым сигналом. Однако для управле-
153
7. Гидроприводы с электрическим пропорциональным управлением
ния гидравлическими распределителями выходной сигнал усилителя подается с частотой, на которую
якорь пропорционального магнита успевает откликаться. Это делается для того, чтобы золотник
распределителя, находящийся в контакте с якорем, осциллировал, т.е. колебался в заданной позиции с
малой амплитудой и большой частотой. В таком состоянии между золотником и корпусом
распределителя начинают действовать силы трения скольжения, значительно меньшие, чем силы трения покоя,
что повышает чувствительность распределителя к управляющим сигналам и улучшает стабильность
его работы.
В некоторых моделях ключевых усилителей предусмотрена возможность ввода дополнительной частоты
и амплитуды осцилляции, независимо от ШИМ.
Для управления гидроаппаратами с одним пропорциональным электромагнитом применяют одноканаль-
ные усилители, на вход которых сигнал управления подается в виде напряжения постоянного тока, обычно в
диапазоне от 0 до 10 В. Управление гидроаппаратами с двумя магнитами осуществляется двухканальными
усилителями, на один вход которого подается сигнал управления в диапазоне от 0 до -10 В, а на второй от 0 до
+10 В.
Для оптимизации совместной работы гидроаппаратов и электронных усилителей в последних
предусмотрена возможность настройки некоторых параметров. Для удобства обслуживания органы настройки обычно
выносят на лицевую панель усилителей.
В качестве примера на рис. 7.14 показаны двухканальный усилитель и его настраиваемые параметры.
3?
-::ц *
''±.Jm
Максимальный ток
.Sfc*
хср1тах
5
4 -
♦ -
Магнит В
Магнит А
Балансировочный ток
+10 В [/„
Jcp2max
Рис. 7.14. Двухканальный усилитель и его настраиваемые параметры
Балансировочный ток. Вследствие неизбежных технологических погрешностей, возникающих в процессе
изготовления распределителей, золотники в них могут занимать не строго центральное положение при
отсутствии управляющих сигналов на пропорциональных электромагнитах. Это отклонение можно
компенсировать, подав на один из магнитов балансировочный ток. Эту меру компенсации положения золотника обычно
называют настройкой сдвига.
Предварительный ток. Поскольку в распределителях с пропорциональным управлением обычно
применяются золотники с положительным перекрытием, то для устранения зоны нечувствительности на магниты
подают предварительный ток, под действием которого золотник смещается на величину, близкую к значению
положительного перекрытия и устанавливается в положении, характерном для золотников с нулевым
перекрытием.
Максимальный ток. Настройкой данного параметра согласуют работу усилителя с различными по
потребляемому току пропорциональными электромагнитами. Этот же электрический параметр служит мерой
ограничения гидравлических параметров гидроаппаратов при сохранении всего диапазона управляющих сигналов.
Например, ограничив максимальный ток значением вдвое меньшим допустимого, при подаче максимального
управляющего сигнала на пропорциональный электромагнит, золотник распределителя сместится на
величину вдвое меньшую его полного рабочего хода.
154
7.3. Электронные усилители
Результатом правильных настроек усилителя является получение практически идеальной расходной
характеристики гидравлического распределителя с пропорциональным управлением (рис. 7.15).
Характеристика
усилителя
Характеристика
распределителя
Характеристика
распределителя, управляемого усилителем
£4.
Э
/
\
1
и*
^>
* Q'
7
/
г
е
и„
=>
/
У-
/
tf.
т
е
:>
Рис. 7.15. Компенсация зоны нечувствительности распределителей с пропорциональным управлением
Помимо указанных выше настроек в усилителях предусматривается возможность независимого
изменения времени нарастания и времени уменьшения выходного сигнала после подачи и снятия скачкообразного
входного (так называемая настройка рамп). Так, например, минимальное время срабатывания однокаскадных
гидравлических распределителей в среднем составляет 50 мс, при этом управляемые ими исполнительные
механизмы двигаются с высокими ускорениями, что может сопровождаться скачками давления и
неравномерным движением выходных звеньев (рис. 7.16, а).
„ 100
Я 80
к:
1 60
о
8 40
Г)
Э 20
X
0
^р 100
в*
g 80
К 60
о
S 40
to
s
О 20
J
;
/
/
/
/
\
20 40 60 80 1С
t, мс
,J
0 0
т
1
Л
\
\
\
\
\
\
20 40 60 80 1С
t, MP
20 40 60 60 100120140160180 2
t, мс
00
0
V t
га
а
20 40 60 80 100 120 1
t, мс
б
О
V '
»о 0
t
,
Л Л
t
Рис. 7.16. Регулирование времени срабатывания гидравлического распределителя
Увеличение времени нарастания и снижения выходного сигнала усилителя обеспечивает плавное
перемещение з.олотника распределителя и приводит к работе исполнительных механизмов с требуемым
нарастанием скорости при разгоне и торможением в конце хода (рис. 7.16, б). Таким образом гидравлические
распределители с пропорциональным управлением обеспечивают не только требуемые скорости движения испол-
155
7. Гидроприводы с электрическим пропорциональным управлением
нительных механизмов, но и их ускорения, как при разгоне, так и при торможении. Это позволяет решать
широкий круг технических задач, реализация которых на базе дискретных гидрораспределителей невозможна.
Так при массовой подготовке специалистов для работы со сложнейшей техникой, эксплуатация которой
связана с риском для жизни, активно используются различного рода тренажеры-имитаторы, оснащенные
гидроприводами на базе распределителей с пропорциональным управлением.
Например, пилоты воздушных кораблей тренируются в режиме реальных ощущений: компьютерные
тренажеры предлагают им во время тренировки переживать и вертикальные взлеты, и воздушные ямы. Плавные
или резкие подъемы вверх, наклоны, повороты и их сочетание достигаются изменением положения одного
или нескольких тяговых гидроцилиндров, управляемых гидравлическими распределителями с
пропорциональным управлением (рис. 7.17).
ооои
«вп«
•' М
s 4
гУ \i
#*
ft
lTTIHhflryiAlTTITIr^
ft
Г
Рис. 7.17. Тренажер-имитатор самолета
Конструктивно усилители для пропорциональных магнитов выпускают в двух исполнениях: в виде
отдельного модуля (рис. 7.18, а) и встроенными непосредственно в коннектор пропорционального магнита
(рис. 7.18, б).
^аз*''"
'«v
38'
^ Л.
„ •
ЛГ
Л»
44
иш
=VrV
J
> %
Рис. 7.18. Усилители для пропорциональных магнитов: а — отдельный модуль, б — встроенный
156
7.4. Электрогидравлические усилители
7.4. Электрогидравлические усилители
Помимо гидравлических распределителей с пропорциональным управлением в качестве аппаратов
непрерывного действия в гидрофицированном оборудовании продолжают применяться, а в ряде случаев и не
имеют альтернативы, электрогидравлические усилители (ЭГУ), также называемые дросселирующими
гидрораспределителями. Исторически появившиеся задолго до гидроаппаратов с пропорциональным
электромагнитным управлением, ЭГУ обычно используют в сервогидравлических приводах с замкнутым контуром
регулирования, динамические и точностные характеристики которых оказываются недоступными аппаратам с
пропорциональным управлением.
Наиболее распространенные ЭГУ состоят из электромеханического преобразователя (ЭМП) сигналов
управления I, гидравлической ступени предварительного усиления сигналов II (как правило — это
устройство типа сопло-заслонка, реже — струйная трубка) и золотникового дросселирующего распределителя III
(рис. 7.19).
ЭМП защищен от попадания в него рабочей жидкости, поступающей в ЭГУ через фильтр 2, посредством
упругой трубки 8, в которой расположена заслонка 7, жестко соединенная с якорем 5. При подаче напряжения
на обмотки управления 6 ЭМП в них возникает электрический ток и образуется электромагнитное поле, в
результате взаимодействия которого с полем постоянных магнитов ЭМП появляются силы, проворачивающие
якорь 5 и заслонку 7. При отклонении заслонки 7 от среднего положения зазор между одним соплом, например
9, уменьшается, а между соплом 4 и заслонкой 7 увеличивается. Вследствие уменьшения расхода жидкости
через дроссель 10 и увеличения расхода через дроссель 3, в торцевых камерах золотника 1 возникает
разность давлений, которая создает силу, перемещающую его вдоль оси до тех пор, пока эта сила не будет
уравновешена силами от действия центрирующих пружин. Таким образом, расход протекающей через ЭГУ
жидкости пропорционален управляющему электрическому сигналу, определяющему угол поворота якоря и
соответствующее смещение золотника. Отношение мощности потока жидкости к мощности управляющего
электрического сигнала определяет коэффициент усиления ЭГУ по мощности, который в современных
усилителях может достигать 105.
В рассмотренной конструкции ЭГУ отсутствует обратная связь, контролирующая соответствие
перемещения золотника управляющему сигналу, что является причиной невысокой точности работы аппаратов
подобного исполнения. Точность работы электрогидравлических усилителей значительно повышается при
введении в конструкцию механической или электрической обратной связи между золотником и заслонкой.
157
7. Гидроприводы с электрическим пропорциональным управлением
ЭГУ, схема которого показана на рис. 7.20, имеет механическую обратную связь от золотника к заслонке.
Эта связь осуществляется посредством тонкого упругого стержня 2, один конец которого закреплен на
заслонке 1, а другой соприкасается с золотником 3.
. Г I
эмп
Сопла
Заслонка
Золотник
Механическая
обратная связь
Фильтр
Рис. 7.20. ЭГУ с механической обратной связью
Отклонение заслонки 1 от среднего положения сопровождается смещением золотника 3, вместе с
которым перемещается и нижний конец упругого стержня 2. При изгибе стержня 2 к заслонке 1 прикладывается
момент, уравновешивающий после определенного смещения золотника 3 электромагнитный момент,
приложенный к верхнему концу заслонки В результате наступает равновесие элементов ЭГУ, при котором
проходящему через обмотки управления электрическому току соответствует требуемое смещение золотника 3 от
среднего положения.
Электрическая обратная связь в ЭГУ осуществляется посредством индуктивных датчиков положения,
контролирующих текущее положение золотника (рис. 7 21).
Ъ
w/?/;////;w//w;//ww/w/;//M
О А О В
Р Т
*| |В
Wj WI-L-LU 1КЛЛ 4
г1А1тт11 JrggS
I ' ^^ — ■' I *
I ,„уг ■
Рис. 7.21. ЭГУ с электрической обратной связью
158
7.4. Электрогидравлические усилители
Электрический сигнал управления, значение которого соответствует требуемому положению золотника,
подается на встроенный усилитель, который управляет электромеханическим преобразователем. Датчик
положения, питаемый через осциллятор, фиксирует действительное положение золотника, значение
которого сравнивается с заданным входным сигналом в узле суммирования. Усилитель подает сигнал
управления на ЭМП пока заданное и действительное значения положения золотника не станут одинаковыми.
Электрогидравлические усилители, буртики золотников которых, как правило, выполняются с нулевым
перекрытием, традиционно применяют в высокоточных быстродействующих системах управления, например в
следящих приводах. Такие приводы имеют отрицательную обратную связь от выходного звена
исполнительного механизма или от ведомого им объекта управления (рис. 7.22).
Аналоговый датчик перемещения 7<> 1 -О
Устройство ввода
управляющего сигнала
■чУ
ив,
+ f
1.1
Ф-
щ—Ш
С
Руль высоты
Усилитель -^ 0.1
Y1
Г-\|
iw\
ЗГ
f> С)4@
•iHr
Рис. 7.22. Принципиальная схема следящего электрогидравлического привода
Сигнал управления UBX может подаваться на усилитель оператором, от чувствительного элемента
системы регулирования или управляющей ЭВМ. В узле суммирования сигнал управления сравнивается с сигналом
обратной связи, поступающим от аналогового датчика перемещения, фиксирующего положение выходного
звена гидродвигателя. Разность этих сигналов после усиления поступает на вход ЭГУ до тех пор, пока
вследствие перемещения выходного звена рассогласование (ошибка) между управляющим сигналом и сигналом
обратной связи не уменьшится до допустимого значения, при котором ЭГУ останавливает исполнительный
механизм.
Электрогидравлические усилители могут выполнять те же функции, что и распределители с
электрическим пропорциональным управлением, однако область их применения ограничена. Эти ограничения в первую
очередь связаны с высокой стоимостью, обусловленной сложностью изготовления входящих в него
прецизионных деталей (так зазор между золотником и корпусом усилителя составляет всего 4 мкм), а также с
необходимостью соблюдения высоких требований по техническому обслуживанию ЭГУ.
Функциональные возможности гидравлических аппаратов с электрическим пропорциональным
управлением позволяют решить широкий круг технических задач, реализация которых средствами гидроавтоматики с
дискретным управлением оказывается невозможным, а использование электрогидравлических усилителей
для этих целей экономически нецелесообразно. При этом пропорциональная техника сочетает возможность
непрерывного изменения параметров потока рабочей жидкости с надежностью, низкой стоимостью
гидроаппаратов и менее жесткими требованиями по их обслуживанию.
Если приводы с электрогидравлическими усилителями обычно работают в составе системы с замкнутым
контуром регулирования, то гидроприводы с электрическим пропорциональным управлением обычно
используют в системах выполняющих некоторую последовательность перемещений, при которой нет необходимости
в измерительной системе.
159
>
8. Монтаж гидроаппаратов
Производителями гидравлического оборудования выпускается широкая гамма идентичных по
функциональному назначению, но отличающихся конструктивным исполнением гидроалпаратов. Это вызвано
многообразием требований, предъявляемых к компоновке отдельных узлов и функциональных блоков различных
по назначению гидросистем, к обеспечению удобства обслуживания составляющих компонентов, к легкости
монтажа-демонтажа гидрооборудования.
По типу исполнения гидроаппараты делят на аппаратуру резьбового, встраиваемого, стыкового и
модульного исполнения. Тип исполнения определяет способ крепления аппарата и способ соединения его с
гидролиниями системы — т.е. с трубопроводами или каналами, выполненными в блоках и монтажных плитах.
Вне зависимости ст типа исполнения гидроаппарата места его соединений с системой должны оказывать
минимальное сопротивление потоку рабочей жидкости, в течение длительного времени сохранять
герметичность, выдерживать различные динамические нагрузки.
8.1. Гидроаппараты резьбового исполнения
Гидравлические аппараты резьбового исполнения подсоединяются к гидравлической системе
посредством вворачиваемых в корпуса аппаратов резьбовых соединений (рис. 8.1).
Обратные клапаны, гидрозамки, дроссели с небольшими диаметрами условного прохода благодаря их
небольшим весам могут монтироваться «вывешенными» непосредственно на трубопроводах или шлангах.
Клапаны резьбового исполнения, ввиду более сложной конструкции, массивнее, и в своих корпусах имеют
отверстия, через которые могут крепиться к станинам оборудования.
—
" h
ш-
1
4
1 •**,
J
»т
4
^.
<Т^
•
IT'S
/tar 1-
Ч
I
1
1
1
Рис. 8.1. Гидроаппараты резьбового исполнения
Аппараты данного типа практически не нуждаются в техническом обслуживании, обычно имеют только два
подвода и за счет своей конструктивной простоты не требуют больших затрат при монтаже и ремонте.
Недостатком такого конструктивного исполнения гидроаппаратов является то, что при демонтаже
аппаратов нарушается целостность трубопроводов гидросистемы.
160
8.2. Гидроаппараты встраиваемого исполнения
8.2. Гидроаппараты встраиваемого исполнения
Гидроаппараты встраиваемого исполнения зачастую не имеют индивидуальных корпусных деталей: их
монтируют в монтажных гнездах гидроблока, который может использоваться также для монтажа стыковых или
модульных аппаратов. Все элементы аппарата объединены в одном установочном патроне, который в виде
полнофункционального устройства вставляется в монтажное гнездо.
В качестве примера рассмотрим конструкцию и принцип действия встраиваемого гидроуправляемого
клапана (рис. 8.2, а).
Клапан состоит из затвора, в состав которого входят: подпружиненный запорно-регулирующий элемент 4,
гильза 3, переходная втулка 2, а также фланца 1, который может содержать дополнительные устройства
(ограничитель хода, обратный клапан, элемент ИЛИ, гидроззмок и т.д.) и служить плитой для установки сверху
распределителя с электроуправлением. Затвор вставлен в монтажное гнездо гидроблока (выделен красным
цветом) и закрыт фланцем 1, крепящимся к гидроблоку. Каналы подвода А, отвода В и управления X
выполнены в гидроблоке.
Принцип действия гидроуправляемого клапана основан на том, что эффективные площади запорно-
регулирующего элемента 4 со стороны надклапанной и подклапанной полостей различны (рис. 8.2, б). Когда
давление в надклапанной полости (в канале X) равно (или выше) давлению в подклапанной полости (в канале А),
клапан закрыт. Если усилие, действующее на клапан со стороны жидкости в надклапанной полости станет
меньше усилия со стороны жидкости в подклапанной полости, клапан открывается.
Давлением в надклапанной полости можно управлять и, тем самым, менять состояние клапана, что и
нашло отражение в его названии — гидроуправляемый. Кроме того, через рассматриваемый гидроуправляемый
клапан жидкость может протекать в направлении В — А, если давление в канале В достаточно велико.
Варианты исполнения затворов отличаются способом сообщения надклапанной полости с источником
давления, соотношением площадей (например: 1,07:1; 1,5:1; 2:1), а также наличием в запорно-регулирующем
элементе демпфирующей цапфы (полуконструктивные схемы некоторых затворов представлены на рис. 8.2, в).
В одни и те же стандартизованные по диаметрам условного прохода монтажные гнезда могут встраиваться
обратные, предохранительные и редукционные клапаны.
Встраиваемые аппараты чаще всего применяются в гидросистемах с большими расходами* и давлениями
рабочей жидкости; их использование обеспечивает высокую плотность монтажа и позволяет создавать
компактные управляющие механизмы с низким уровнем потерь давления и утечек.
* Встраиваемые аппараты выпускаются с диаметрами условного прохода 16 мм и более.
161
8. Монтаж гидроаппаратов
8.3. Гидроаппараты стыкового исполнения
Гидроаппараты стыкового исполнения являются наиболее распространенными и часто применяемыми,
особенно в стационарных установках. Это объясняется удобством и простотой их монтажа: аппараты
устанавливаются своей стыковой поверхностью, на которую выведены все присоединительные каналы (рис. 8.3, а),
на стыковые поверхности специальных монтажных плит (рис. 8.3, б), подключенных к гидросистеме
посредством резьбовых соединений. Аппарат притягивают к монтажной плите винтами, при этом герметичное
соединение каналов аппарата и плиты обеспечивается уплотнительными резиновыми кольцами круглого сечения,
размещенными в цилиндрических расточках каналов гидроаппарата,
рТТт
О О
Стыковая поверхность
• т «V
и
Резьбовые отверстия
t*
Рис. 8.3. Гидроаппараты стыкового исполнения (а) и монтажная плита (б)
Преимущества такого способа монтажа гидроаппаратов очевидны:
■ гидроаппараты легко демонтируются для техобслуживания или замены без нарушения целостности
трубопроводов;
■ все присоединительные каналы находятся в одной стыковой поверхности;
■ стыковая поверхность плоская;
■ уплотнение мест соединения каналов аппаратов и плит с помощью резиновых колец круглого сечения
отличается высокой надежностью.
Благодаря одинаковому расположению каналов и присоединительных отверстий на стыковых
поверхностях различных гидроаппаратов, например, распределителей и клапанов давления, для их установки
применяют стандартные монтажные плиты,
Стыковая поверхность плит обычно находится сверху, отводные резьбовые отверстия — снизу или сбоку.
Поскольку для подсоединения трубопроводов к резьбовым отверстиям плит требуется достаточно много
места, монтажная плита по размерам обычно превосходит размеры стыковой поверхности гидроаппарата. При
162
8.3. Гидроаппараты стыкового исполнения
этом каналы от' стыковой поверхности к резьбовым отверстиям отводов могут выполняться наклонными
(рис. 8.4, а) либо поперечными (рис. 8.4, б).
Стыковые поверхности гидроаппаратов и плит унифицированы для различных диаметров условных
проходов (рис. 8.5).
Dy=6
А"
СО
t
а ■ Ф-
-ф Т .ф-
1 1
32,5
Dy=16
/4V4 ^
i T * Р
О
\
/
Dy=10
-ф- ^к А
"^ -А
ф- ^
Dy=25
/
\
о
Рис. 8.5. Расположение каналов и крепежных отверстий на монтажных плитах
Для того чтобы исключить возможность неправильной установки гидроаппаратов на монтажную плиту
крепежные отверстия на стыковых поверхностях раслолагают несимметрично, либо используют установочные
штифты. Аппараты стыкового исполнения устанавливают не только на индивидуальные, но и на многоместные
монтажные плиты, а также на гидроблоки, имеющие соответствующие места подсоединений гидроаппаратов.
163
8. Монтаж гидроаппаратов
8.4. Гидроаппараты модульного исполнения
Гидроаппараты модульного исполнения, как и гидроаппараты стыкового исполнения, соединяются с
гидросистемой через стыковые поверхности, но имеют не по одной, а по две стыковые поверхности,
выполненные сверху и снизу корпуса. Такая компоновка позволяет сопрягать аппараты не только с монтажными
плитами, но и между собой. Установленные один на другой гидроаппараты образуют пакет (обычно замыкаемый
сверху гидрораспределителем), представляющий собой компактный функциональный блок, который
располагают на монтажной плите, имеющей отверстия для подключения к гидросистеме.
Одним из функциональных блоков, традиционно выполняемых на базе гидроаппаратов модульного
исполнения, является система управления исполнительным механизмом, реализующая набор следующих
функций:
■ управление пуском, остановом и реверсом гидродвигателя (гидрораспределитель);
■ управление скоростью гидродвигателя (дроссели);
■ регулирование развиваемого гидродвигателем усилия (клапан давления);
■ блокировка гидродвигателя (гидрозамки).
На рис. 8.6, в изображен внешний вид функционального блока, установленного на монтажную плиту,
подключаемую к гидросистеме через быстроразъемные соединения; на рис. 8.6, а представлена принципиальная
гидравлическая схема описанного функционального блока; на рис. 8.6, б — реализация этого схематического
решения на базе гидроаппаратов модульного исполнения.
1 <
1
i
1
#
1
—1—■
> <
т т
1 К
1
>
1
А
Хт
pTi
в
t
.JT
i
й
■VI
ш
щ
л*лл
ш
L. _
№"
i 11
& Ш
о о
О
в" т?
О 0 О
Рис. 8.6. Пример использования гидроаппаратов модульного исполнения
Применение аппаратов модульного исполнения упрощает сборку гидроприводов, позволяет предельно
сократить число трубопроводов, открывает широкие возможности для модернизации оборудования или
совершенствования гидросистемы в процессе ее наладки.
Вместе с тем номенклатура аппаратов модульного исполнения ограничена; в ряде случаев их
технические характеристики ниже, чем у аппаратов стыкового исполнения; собранные пакеты аппаратов
имеют большое число уплотняемых стыков, что требует применения специальных сквозных стальных
стяжек.
164
8.5. Способы монтажа гидросистем
8.5. Способы монтажа гидросистем
При монтаже гидросистем аппараты компонуют таким образом, чтобы свести к минимуму число
соединений и трубопроводов, объединяющих группы аппаратов в законченные функциональные блоки, а также
обеспечить удобство их эксплуатации и технического обслуживания. Для реализации этих целей при монтаже
одной системы может быть использована аппаратура различного типа исполнения, а также применены
различные способы ее монтажа:
■ трубный; N
■ стыковой;
■ модульный;
■ блочный;
■ секционный.
Трубный монтаж. Трубный монтаж заключается в соединении отдельных гидроаппаратов между собой
посредством жестких, либо гибких трубопроводов (рис. 8.7).
В чистом виде трубный монтаж фактически не применяется поскольку соединение гидроаппаратов
трубопроводами и шлангами не всегда удовлетворяет требованиям компактности гидравлических установок и
надежной эксплуатации, однако, в той или иной мере используется при монтаже любой гидросистемы.
Стыковой монтаж. Объединение гидроаппаратов стыкового исполнения, установленных на
индивидуальные монтажные плиты, в единую систему обычно осуществляется посредством трубопроводов. Сократить
количество труб и резьбовых соединений удается путем использования многоместных монтажных плит,
имеющих общие каналы питания и слива. Многоместные плиты обычно используются при монтаже
гидросистем, в которых питание нескольких потребителей осуществляется от общего трубопровода. На многоместную
плиту устанавливают гидроаппараты с одинаковыми диаметрами условного прохода, или с условными
проходами, отличающимися на одну ступень (например, Dy = 6 мм и Dy = 10 мм).
Модульный монтаж. Под модульным монтажом понимается сборка некоторого функционального
блока либо всей гидросистемы из отдельных модулей, имеющих одинаковые стыковочные поверхности и об-
165
8. Монтаж гидроаппаратов
разующих при сопряжении между собой общие каналы. В качестве модулей могут использоваться
гидроаппараты модульного исполнения или модульные монтажные плиты для гидроаппаратов стыкового
исполнения.
Модульный монтаж с сопряжением аппаратов по высоте (вертикальный модульный монтаж), вследствие
существующего ограничения в номенклатуре аппаратов модульного исполнения, не всегда удобен для
потребителя. Более гибкой является система горизонтального модульного монтажа, состоящая из большого
разнообразия монтажных, переходных и крепежных плит, а также разделительных пластин.
Модульные монтажные плиты имеют три стыковочные поверхности: одна предназначена для установки
гидроаппарата, а две — для сопряжения с соседними плитами (рис. 8.8). Со стороны, противоположной
поверхности для установки гидроаппарата, модульные монтажные плиты имеют плоскость на которую
выведены резьбовые отверстия для подвода рабочей жидкости, а также для подключения потребителей и
организации слива.
С
I1 I
ж
> 5 4 3 2
>5
'i
w
w
*A
:E
n
6 i -
* t -
Рис. 8.8. Модульная монтажная плита
Состыкованные между собой модульные плиты образуют многоместную плиту для установки
гидроаппаратов стыкового и модульного исполнения. При необходимости между монтажными плитами устанавливают
переходные плиты, коммутирующие между собой отдельные сквозные каналы (рис. 8.9, а), и разделительные
пластины, перекрывающие отдельные каналы (рис. 8.9, б).
о©о©о
<!> 5 4 3 2 1 £>
®т®
Г""!
СП
7—
*.
ut
(
к
' i
..J
Г "
i <
а
(Л
•J
toсо
С
v i
j
О *jp О
i
111
f T
i
о о
О <£> L
б
1 1
т т
1
—1
i
т
Рис. 8.9. Примеры исполнения переходных плит и разделительных пластин
166
8.5. Способы монтажа гидросистем
Комбинируя разнообразные переходные плиты и разделительные пластины удается получить большое
количество схематических решений, недоступных при использовании гидроаппаратов модульного
исполнения или многоместных монтажных плит (рис. 8.10).
Рис. 8.10. Пример горизонтального модульного монтажа гидроаппаратов
Условные графические обозначения каналов и соединений, используемые в системе горизонтального
модульного монтажа, представлены в табл. 8.1.
)
Таблица 8.1
:*; Наименование
УГО ,
Наименование
УГО
Магистральные каналы
Каналы управления
Каналы утечек
Отверстие подключения гидроаппарата.
Соединительный канал
Отверстие подключения
трубопровода,
заглушённое резьбовой пробкой
Открытое резьбовое отверстие
на стороне подключения
трубопроводов
^
Отверстие подключения гидроаппарата,
соединенное с отверстием подключения
трубопровода, заглушённым резьбовой пробкой.
Отверстие подключения гидроаппарата,
соединенное с отверстием подключения
трубопровода.
Канал, перекрытый
разделительной пластиной
Канал, не перекрытый
разделительной пластиной
*
I I
I I
тт
Канал, перекрытый между
плитой и гидроаппаратом
Применение горизонтального модульного монтажа в совокупности с использованием гидравлической
аппаратуры модульного исполнения позволяет собирать компактные гидравлические системы.
К недостаткам описанного способа монтажа следует отнести большое количество деталей и стыков,
требующих уплотненений, сложность монтажных плит и их высокую стоимость.
167
8. Монтаж гидроаппаратов
Блочный монтаж. Блочный монтаж гидроаппаратуры широко применяется при сборке сложных
гидросистем, требующих применения индивидуально сконструированных и изготовленных монтажных плит и блоков.
Он подобен монтажу элементов радиоэлектроники на печатных платах, но при этом монтаж выполняется не
на одной или двух плоскостях платы, а на всех шести (или менее) гранях монтажной плиты, выполняемой
обычно в виде прямоугольного параллелепипеда (рис. 8.11, а).
В монтажной плите могут быть выполнены гнезда для установки аппаратуры встраиваемого исполнения,
отдельные аппараты стыкового исполнения и/или пакеты аппаратов модульного исполнения крепятся к плите
винтами, а каналы уплог.^^тся резиновыми кольцами круглого сечения. Соединения между каналами
гидроаппаратов выполняются посредством многочисленных сверлений в монтажной плите, являющейся базовым
элементом гидроблока.
В ряде случаев по техническим причинам желательно расположить гидроаппараты управления как можно
ближе к гидродвигателю или непосредственно на нем (рис. 8.11, б). При этом применяют переходные блоки,
которые имеют отверстия для подключения гидроцилиндра или гидромотора, а также для аппаратуры
управления.
Преимущества блочного монтажа особенно очевидны для гидроаппаратуры больших условных проходов.
Никакой другой способ монтажа не позволяет создавать столь компактные узлы управления при
минимальном количестве уплотняющих элементов. Основная область применения блочного монтажа — большие
гидравлические прессы.
Блочный монтаж гидроаппаратуры для мобильных машин значительно отличается от аналогичных
устройств стационарного применения. Монтажную плиту обычно получают методом литья, что имеет ряд
достоинств: литые каналы имеют хорошую пропускную способность; полученная литьем внешняя форма блока
оптимизирована сточки зрения габаритных размеров и экономии металла. Блок является корпусной деталью не
только для аппаратуры встраиваемого исполнения, но и для распределителей, золотники которых размещают
непосредственно в блоке. Такой подход к исполнению гидроблоков возможен благодаря массовому
применению однотипных блоков в мобильной технике. Для стационарных машин блоки управления более специфичны
и имеют меньшую серийность изготовления.
Секционный монтаж. Секционный монтаж гидроаппаратуры применяют для обеспечения гибкости при
мелкосерийном производстве блоков управления мобильных машин. Блок управления получают путем
монтажа в индивидуальном порядке нескольких секций друг на друга.
168
8.6. Уплотнения
8.6. Уплотнения
Назначение уплотнений заключается в предотвращении внутренних и внешних утечек рабочей жидкости
через зазоры между сопрягаемыми деталями элементов гидропривода, вызванных перепадом давления.
Принимая во внимание, что утечки приводят к потере гидравлической энергии, становится очевидным, что от
качества уплотнений существенно зависит КПД гидропривода.
В связи с этим уплотнения должны быть достаточно герметичными, надежными, износостойкими;
совместимыми с конструкционными материалами и рабочей жидкостью; обладать устойчивостью к температурным
колебаниям; обеспечивать удобство монтажа-демонтажа; создавать минимальное трение; иметь небольшие
размеры и невысокую стоимость.
Уплотнения делят на две группы:
■ уплотнения неподвижных соединений, которые должны обеспечивать абсолютную герметичность при
всех режимах работы гидропривода;
■ уплотнения подвижных соединений, допускающие появление регламентированных утечек рабочей жидкости.
Уплотнение неподвижных соединений. В неразъемных соединениях герметичность достигается пайкой
и сваркой деталей. В разъемных неподвижных соединениях утечки предотвращаются несколькими
способами: путем деформации уплотняемых поверхностей внешней силой; взаимной приработкой уплотняемых
поверхностей; заполнением микронеровностей на уплотняемых поверхностях различными прокладками,
выполненными из неметаллических или металлических эластичных материалов, способных компенсировать при
затяжке соединения неровности и другие дефекты поверхностей уплотняемой пары.
Некоторые варианты уплотнения неподвижных соединений прокладками и кольцами представлены на рис. 8.12.
Рис. 8.12. Варианты уплотнения неподвижных соединений
При всех вариантах уплотнения между соединяемыми деталями должно быть создано контактное
давление, превышающее максимальное рабочее давление.
Уплотнение подвижных соединений. Уплотнение подвижных соединений может быть бесконтактным
(щелевыми, лабиринтными) или контактным, выполненным при помощи различных уплотнителей.
Бесконтактные уплотнения. Эти уплотнения, в частности, щелевые (рис. 8.13, а), используются во
многих гидроагрегатах (в насосах, распределителях и т.п.). Утечки через бесконтактные уплотнения неизбежны,
однако их можно снизить за счет уменьшения зазора S между подвижными деталями.
169
8. Монтаж гидроаппаратов
Для повышения сопротивления щели при высоких числах Рейнольдса, соответствующих турбулентному
режиму течения, на одной (рис. 7.13, б) или обеих (рис. 7.13, в) поверхностях, образующих щель, выполняют
лабиринтное канавки, которые вследствие чередующегося изменения сечения щели повышают ее
сопротивление.
Недостаток щелевых уплотнений — высокая стоимость изготовления сопрягаемых деталей и
возможность облитерации щели.
Контактные уплотнения. Эти уплотнения выполняются посредством колец (металлических и
резиновых) и манжет.
Металлические кольца — одно из самых простых и долговечных уплотнений. В качестве материала колец
используют серый чугун, бронзу или металлографитовую массу.
11..'
а 6 в
1
г
Рис. 8.14. Стыковые замки металлических уплотнительных колец
При давлениях р< 5 МПа используют кольца, стыки которых выполнены прямыми (рис. 8.14, а); при
давлениях^ 20 МПа стыковые замки могут быть косыми (рис. 8.14, б) и ступенчатыми (рис. 8.14, в, г). В ступенчатом
стыковом замке часто одну из сопряженных поверхностей выполняют плоской, а вторую — несколько
выпуклой (рис. 8.14, г), благодаря чему повышается удельное давление в стыке колец, способствующее повышению
герметичности. Форма поперечного сечения колец — прямоугольная. Число колец в уплотнении колеблется
от 2 до 9, в зависимости от перепада давлений.
К недостаткам уплотнения металлическими кольцами относится необходимость точного изготовления
деталей соединения, так как кольца не компенсируют микронеровности, овальность, конусность и т.п. Кольца
создают дополнительную силу трения и не обеспечивают полную герметичность.
Резиновые кольца отличаются простотой конструкции, минимальными размерами, возможностью
герметизации радиольного соединения независимо от направления действия давления, широкой
универсальностью, низкой стоимостью, хорошей герметичностью. Рабочие температуры -60...+300 °С (в зависимости от
группы резины), уплотняемые давления до 50 МПа в неподвижных соединениях и до 32 МПа — в подвижных;
скорость перемещения до 0,5 м/с.
Характерные размеры колец (рис. 8.15, а): внутренний диаметр d, и диаметр сечения d2.
7777 У///'Л
3 ^^ чГ -
rl rt г
А / А
Рис. 8.15. Резиновые уплотнительные кольца
При монтаже колец для уплотнения торцовых (рис. 8.15, б) и радиальных соединений (рис. 8.15, в, г)
размеры сопрягаемых деталей (диаметр штока сСшт, цилиндра dv глубина цековки И) выбираются такими, чтобы
кольцо деформировалось и прижималось к уплотняемым поверхностям. Под действием давления кольцо может
вытесняться в радиальный зазор б (рис. 8.15, д), поэтому при значениях ;> > 10 МПа и б > 0,02 мм рекомендуется
устанавливать защитные кольца из фторопласта, полиамидной смолы или других материалов (рис. 8.15, е).
170
8.6. Уплотнения
Перед монтажом кольца рекомендуется смазывать, а при монтаже их следует предохранять от перекосов,
скручивания и механических повреждений.
Манжеты уплотнительные (рис. 8.16, а) предназначены для уплотнения деталей гидроцилиндров при
давлениях от 0,1 до 50 МПа, скоростях перемещения уплотняемых деталей до 0,5 м/с и
температурах -60...+200 °С. Герметичность обеспечивается за счет деформации лепестков манжеты при монтаже
(рис. 8.16, б) и от давления рабочей жидкости.
Давление масла должно разжимать лепестки манжет (рис. 8.16, в), в противном случае манжета не будет
выполнять свои функции (рис. 8.16, г).
Ассортимент манжетных уплотнений огромен (рис. 8.17), при их выборе следует руководствоваться
типоразмером, конструктивным исполнением и материалом. При монтаже места установки и трущиеся
поверхности рекомендуется смазать тонким слоем густого смазочного материала. При давлении свыше 10 МПа
следует применять защитные кольца, а при повышенной запыленности — грязесъемники.
Манжеты армированные служат для уплотнения валов, работающих в минеральном масле при
избыточном давлении до 0, 05 МПа, скорости до 20 м/с и температуре от-60 до +70 °С (рис. 8.18). Манжета состоит из
эластичного корпуса 3, жесткого каркаса 1 и браслетной пружины 2. Пружина 2 создает дополнительную
радиальную нагрузку, когда уплотнение установлено на вал. Пружина также компенсирует изменения радиальной
нагрузки, которые возникают при изменении свойств эластичного корпуса вследствие воздействия теплоты и
масла. Она контролирует окончательный внутренний диаметр уплотняющего элемента путем прижимания
рабочей поверхности эластичного корпуса вплоть до того момента, когда витки пружины прижмутся друг к другу.
171
8. Монтаж гидроаппаратов
Утечка рабочей жидкости через манжеты не превышает 0,1 см3/ч. Повышенная утечка может иметь место
вследствие повреждения лепестка манжеты или рабочей поверхности вала, наличия загрязнений или в
результате повышенного биения вала.
Производители уплотнений предлагают большое разнообразие армированных манжет (рис. 8.19, а),
отличающихся профилем эластичного корпуса, металлического каркаса и используемыми материалами, что
позволяет выбрать уплотнение наиболее полно отвечающее конкретным условиям эксплуатации.
Уплотнения, представленные на рис. 8.19, б, в предназначены для замены резиновых армированных
манжет, работающих в особо жестких условиях эксплуатации:
■ пониженные температуры (до -60 °С);
■ радиальные биения и смещения валов (до 0,2 мм);
■ ударные нагрузки и вибрация;
■ повышенные загрязненность и влажность с наружной стороны;
■ работа в условиях повышенного давления рабочей среды (до 0,6 МПа);
■ наличие обратного перепада давлений на уплотнении (до 0,1 МПа).
Принципиально конструкция уплотнения состоит из обоймы 2, в которой размещены выполненное из
фторопласта уплотни^ельное кольцо 4, стальная браслетная пружина 3. При установке уплотнений герметизация по
корпусу осуществляется уплотнением резиновым кольцом 1 (рис. 8.16, б) или посадкой с натягом (рис. 8.19, в).
Манжеты шевронные (рис. 8.19, а) предназначены для уплотнения цилиндров и штоков гидравлических
устройств, в которых в качестве рабочей жидкости используются минеральные масла или водные эмульсии.
Температура рабочей среды составляет от-50 до +100 °С в зависимости от группы резины; рабочее давление
до 63 МПа, скорость возвратно-поступательного движения до 3 м/с.
Г/
а
^
1 2 3
i 1 1
б
Рис. 8.20. Манжета шевронная
Уплотнения устанавливаются в комплекте из нескольких манжет в зависимости от диаметра цилиндра и
давления. При монтаже уплотнительного пакета (рис. 8.19, б) для сохранения формы манжеты 2 помещают
между фасонными нажимными 1 и опорными 3 кольцами (манжетодержателями), выполненными из бронзы,
172
8.6. Уплотнения
текстолита, полиамидов, фторопластов или полиуретанов. Помимо резино-тканевого исполнения, манжеты
изготавливают из резины и резины на основе фтор-каучука. Когда одновременно действуют высокое давление и
температуры свыше 200 СС, то уплотнительные элементы изготавливают из фторопластовых композиций.
Помимо манжет для уплотнения штоков и поршней гидроцилиндров, применяют комбинированные опор-
но-уплотнительные элементы из композиционных материалов и резины, обеспечивающие (в зависимости от
модели) минимальное трение, расширенный, температурный диапазон, повышенную надежность и стойкость
к механическим повреждениям (рис. 8.21).
I l I
1
а
Рис. 8.21. Уплотнения для поршней (а) и штоков (б) гидроцилиндров
Уплотнения, состоят из уплотнительного фторопластового или полиэфирного кольца 2, поджимного
резинового кольца 1, и из защитного кольца 3, выполненного из наполненного полиамида, являющегося одним из
наиболее жестких антифрикционных материалов.
Грязесъемники резиновые (рис. 8.22) предназначены для очистки от загрязнителей поверхностей штоков
гидроцилиндров.
Тип 1
'И
0
Тип 2
11
v )
ТипЗ
/////
i
Тип 4
в
Рис. 8.22. Грязесъемники
В соответствии с действующим стандартом грязесъемники должны изготавливаться четырех типов: 1 —
закрепляемые во фланцевых соединениях, 2 — устанавливаемые в посадочные места, 3 — комбинированные
(резиновое основание и фторопластовый скребок), 4 — закрепляемые запрессовкой в посадочные места.
Комбинированные грязесъемники (рис. 8.23, а) допускается использовать как дополнительное уплотнение
для повышения надежности при давлении до 40 МПа.
.<-
|~4
а
б
Z3
в
Рис. 8.23. Комбинированные грязесъемники
Грязесъемники (рис. 8.23. б) отличаются повышенной износостойкостью и рекомендуются для
применения в тяжелых условиях эксплуатации, в том числе для удаления льда и засохшей грязи. Грязесъемники,
показанные на рис. 8.23, в, обладают повышенной износостойкостью, и позволяют производить замену без
разборки гидроцилиндра.
4 4
173
9. Функционирование гидроприводов
Приступая к изучению работы гидроприводов и рассмотрению различных схематических решений,
позволяющих реализовать то или иное функциональное назначение привода в технологической установке, следует
вспомнить, что в основе работы любого гидропривода лежит преобразование и передача энергии объекту воздействия.
В гидроприводах механическая энергия преобразуется в гидравлическую, которая передается на
расстояние, подвергается управляющим воздействиям и снова преобразуется в механическую энергию. Изменение
энергии в единицу времени называют мощностью. При этом количественным параметром, отражающим
эффективность работы привода, является коэффициент полезного действия (КПД).
9.1. Коэффициент полезного действия гидропривода
Коэффициентом полезного действия гидропривода считают отношение выходной мощности NBblx привода
к мощности, подводимой на вход привода Nm:
_ '' вых
#вх
Мощность, подводимая на вход гидропривода, не равна выходной мощности, поскольку во всех
подсистемах привода имеют место потери. Напомним, что в силовую часть гидропривода, в которой собственно и
происходит формирование, преобразование и передача энергии, входят три подсистемы: энергообеспечиваю-
щая, направляющая и регулирующая, исполнительная.
Входная мощность Л^, подводится к приводу в энергообеспечивающей подсистеме, где механическая
энергия пр 1водного двигателя (обычно электродвигателя) передается насосу, в котором она преобразуется в
гидравлическую энергию,
Выходкая мощность электродвигателя, Вт, являющаяся входной мощностью насоса и привода в целом,
подсчитывается по формуле
Мэд=2ппМ,
где п — число оборотов вала электродвигателя в единицу времени, об/с;
М— крутящий момент на валу, Н-м.
В насосе механическая мощность, Вт, преобразуется в гидравлическую:
K=pQ,
где р — давление на выходе насоса, Па;
Q — объемный расход, создаваемый насосом, м3/с.
Гидравлическую мощность, кВт, отдаваемую насосом можно вычислить по формуле
" 60
где р — давление на выходе насоса, МПа;
Q — объемный расход, создаваемый насосом, л/мин,
В элементах направляющей и регулирующей подсистемы преобразования мощности не происходи^ а ее
потери могут доходить до 30 % входной мощности привода.
В элементах исполнительной подсистемы гидравлическая мощность преобразуется в механическую,
которая и является выходной мощностью привода NBblx.
Мощность, Вт, развиваемая гидроцилиндрами, вычисляется по формуле
Nn=Fv,
где F— усилие на выходном звене, Н;
v — скорость перемещения выходного звена, м/с.
174
9.1. Коэффициент полезного действия гидропривода
Мощность, Вт, развиваемая гидромоторами, определяется по формуле
NM=2nnM,
где и — число оборотов вала гидромотора в единицу времени, об/с;
М— крутящий момент на валу, Н-м.
Если бы входная и выходная мощности привода были равны, то имел бы место идеальный баланс
мощности. На рис. 9.1 представлен действительный баланс мощности в гидроприводе и эмпирические значения
потерь, которые при проведении практических расчетов следует заменять значениями, представленными
фирмами-изготовителями гидравлической аппаратуры.
^j
М
Г&!
Механическая
мощность ./Увых
N„= 2nnM
ш
=*F
K=Fv
•*• 1±|П
г~\
Гидравлическая
мощность
K=PQ
Механическая
мощность
Nbx
Потери гидравлической мощности
25%...30%
5%
в гидроцилиндрах
10%
в гидромоторах
10% (и более)
в трубопроводах и
гидроаппаратах
Nm= 2nnmMm
Электрическая
мощность
гидравлическая мощность
Электрическая мощность
10%
в насосе
5%
в электродвигателе
Рис. 9.1. Баланс мощности в гидравлических приводах
В общем случае потери мощности в приводе подразделяют на две основные группы:
■ потери мощности, обусловленные внутренними утечками рабочей жидкости в насосах, гидроаппаратах
и гидродвигателях (объемные потери);
■ потери мощности, обусловленные трением (механическим и гидравлическим) в насосах,
гидродвигателях, гидроаппаратах и гидролиниях.
Соответственно характеру потерь мощности в приводе различают и КПД: объемный — г]0 и гидро-механи-
ческий — т]ГдМ.
Общие потери мощности учитываются суммарным КПД
Л = •ПоЛгдм-
При выборе или оценке гидропривода следует исходить из того, что чем ближе значение КПД
гидросистемы к единице, тем более эффективной считается вся установка.
175
9. Функционирование гидроприводов
9.2. Управление положением выходного звена исполнительного механизма
Выходные звенья гидравлических исполнительных механизмов могут занимать в пространстве
произвольную позицию в пределах своего рабочего хода. Однако для линейных и поворотных двигателей, два
положения являются характерными — это крайние положения. Для гидроцилиндров крайними являются
положения: шток полностью втянут и шток полностью выдвинут, а для поворотных двигателей — вал в крайнем
левом положении и вал в крайнем правом положении. В случаях, когда в гидрофицированном оборудовании
исполнительный механизм выполняет технологическую операцию при своем движении от упора до упора,
говорят о позиционировании выходных звеньев в крайних положениях.
9.2.1. Позиционирование исполнительных механизмов в крайних положениях
Поскольку схематические решения, обеспечивающие позиционирование выходных звеньев
гидроцилиндров и поворотных гидродвигателей в крайних положениях идентичны, рассмотрим типовые схемы на примере
гидроцилиндров.
На рис. 9.2 представлены две схемы гидроприводов с цилиндрами одностороннего действия, которые
находят широкое применение в тех случаях, когда полезную работу необходимо выполнять только при прямом
ходе исполнительного механизма. Выдвижение штока (рабочий ход) происходит за счет источника давления
(например, работающего насоса), а возвратное движение (холостой ход) — под действием внешних сил:
возвратной пружины или собственного веса, либо под действием нагрузки, например, веса ведомых механизмов.
Примером использования цилиндров одностороннего действия могут служить различного рода подъемники,
зажимные устройства, выталкиватели, прессы с нижним расположением пуансона и другие подобные
установки.
В исходном положении, плунжерный гидроцилиндр 1.0 (рис. 9.2, а) находится во втянутом положении под
действием нагрузки. При этом насос разгружен, так как нагнетаемая им жидкость через нормально открытый
2/2-гидрораспределитель с электромагнитным управлением 1.1 поступает на слив в бак. При переключении
распределителя 1.1 слив жидкости в бак прекращается, жидкость подается в цилиндр 1.0, плунжер
выдвигается до упора и находится в таком положении под давлением, равным давлению настройки предохранительного
клапана. После снятия электрического управляющего сигнала с распределителя 1.1 осуществляется возврат
плунжера в исходное положение под действием нагрузки.
Управлять гидроцилиндром одностороннего действия можно посредством 3/2-гидрораспределителя
(рис. 9.2, б). В исходном положении шток гидроцилиндра 1.0 под действием встроенной возвратной пружины
(и нагрузки, если она есть) находится во втянутом положении. Насос работает под нагрузкой, определяемой
176
9.2. Управление положением выходного звена исполнительного механизма
настройкой предохранительного клапана. Переключение распределителя 1.1 сопровождается выдвижением
штока гидроцилиндра 1.0 до упора.
Говоря о выдвижении или втягивании штока гидроцилиндра до упора, речь идет не только о движении
выходного звена до контакта с крышками гидроцилиндра. Выдвижение штока может быть ограничено
элементами конструкции технологического оборудования, зажимаемыми деталями и т.п. В таких случаях шток
цилиндра совершает полный рабочий ход, значение которого меньше, чем позволяет осуществить конструкция
исполнительного механизма.
Когда исполнительный механизм должен выполнять полезную работу при прямом и обратном ходе,
применяют гидроцилиндры двустороннего действия. Так, например, в прессах с верхним расположением
пуансона, при движении вниз (выдвижение штока) цилиндр выполняет технологическую операцию прессования, а
затем (втягивание штока — подъем пуансона) — работу для выведения пресса в исходное состояние.
Управление гидроцилиндрами двустороннего действия, с возможностью позиционирования их выходных
звеньев только в крайних положениях, обычно осуществляется 4/2-распределителями (рис. 9.3, а, б), либо в
особых случаях 3/2-распределителями (рис. 9.3, в).
1.0
1.0
1.0
1.1 а
X
ш
А В
1.1
В
А В
Р JjT
Рис. 9.3. Позиционирование гидроцилиндров двустороннего действия в крайних положениях
В прессе, принципиальная гидравлическая схема которого изображена на рис. 9.3, а, цилиндр 1.0
удерживает пуансон в верхнем положении под действием рабочей жидкости под давлением, подаваемой в штоковую
полость цилиндра. При переключении распределителя 1.1 рабочая жидкость подается в поршневую полость,
а из штоковои вытесняется на слив — начинается выдвижение штока гидроцилиндра 1.0, которое закончится,
когда шток дойдет до упора. При прессовании цилиндр развивает максимально возможное для своей
конструкции усилие, так как противодавление в его штоковои полости равно давлению в линии слива. Возврат
штока в верхнее положение осуществляется также под действием рабочей жидкости под давлением и происходит
при переключении распределителя 1.1 в исходное положение.
Гидроцилиндр, изображенный на рис. 9.3, б, при выдвижении штока (в нормальной позиции
распределителя 1.1) не развивает максимального усилия, поскольку в штоковои полости противодавление равно давлению
нагнетания. Выдвижение штока осуществляется за счет усилия на поршне, возникающего вследствие
разности его эффективных площадей в поршневой и штоковои полостях цилиндра. Втягивание штока
осуществляется при переключении распределителя 1.1 и с максимальной мощностью.
Аналогичным образом осуществляется управление цилиндром 1.0 посредством 3/2-распределителя
(рис. 9.3, в). При таком схематическом решении мощностная характеристика привода идентична
характеристике привода рассмотренного на рис. 9.3, б.
177
9. Функционирование гидроприводов
9.2.2. Позиционирование исполнительных механизмов в промежуточном положении
Позиционирование выходного звена гидроцилиндров одностороннего действия в некотором
промежуточном положении может быть осуществлено различными способами, например, посредством введения в схемы,
рассмотренные на рис. 9.2, дополнительного 2/2-распределителя (рис. 9.4).
Управление выдвижением и втягиванием штоков цилиндров, как и в исходных схемах, осуществляется
гидрораспределителями 1.1. При этом рабочая жидкость поступает в цилиндры или вытекает из них через
нормально открытые 2/2-распределители 1.2. Останов выходного звена гидроцилиндров в любом
промежуточном положении производится переключением распределителей 1.2. При этом подача жидкости в
цилиндры или ее слив прекращается, а рабочие полости цилиндров запираются.
Позиционирование гидроцилиндров двустороннего действия в любом промежуточном положении
осуществляется трехпозиционными распределителями (рис. 9.5).
В зависимости от требований, которые должен обеспечивать гидропривод для выполнения необходимой
технологической операции, исполнение управляющих распределителей по гидросхеме может быть различным:
178
9.2. Управление положением выходного звена исполнительного механизма
■ позиционирование (останов) гидроцилиндра 1.0 в любом промежуточном положении осуществляется
при переводе распределителя 1.1, выполненного по гидросхеме 44, в нейтральную позицию (рис. 9.5, а).
При этом рабочие полости гидроцилиндра оказываются запертыми, давление в линии нагнетания
достигает максимального значения (давления настройки предохранительного клапана), насос работает под
нагрузкой;
■ позиционирование гидроцилиндра осуществляется аналогичным образом, однако, распределитель 1.1,
выполненный по гидросхеме 64, в своей нейтральной позиции переводит насосную станцию в режим
разгрузки (рис. 9.5, б);
■ распределитель 1.1 выполнен по гидросхеме 24. Останов гидроцилиндра с проходным штоком 1.0 в
промежуточном положении обеспечивается одновременной подачей рабочей жидкости под давлением в
обе полости цилиндра (рис. 9.5, в). Равенство площадей поршня в обеих полостях гарантирует останов
выходного звена в любом промежуточном положении. При этом насос работает под нагрузкой.
Золотниковые распределители не обеспечивают полной герметичности разделяемых ими каналов, что
может привести к смещению из точки позиционирования выходных звеньев исполнительных механизмов,
находящихся длительное время под нагрузкой.
9.2.3. Позиционирование исполнительных механизмов в промежуточном положении
с длительной выдержкой под нагрузкой
Задачи сохранения заданного положения исполнительного механизма под нагрузкой в течение
длительного промежутка времени решаются не только для обеспечения требований техпроцесса, но и для
выполнения приводом условий безопасной работы обслуживающего персонала. Так, например, резкое падение
давления в напорной линии, обесточивание электропривода насоса или иные внезапные отказы оборудования не
должны приводить к различного рода аварийным ситуациям: падению поднятого груза, ослаблению зажима
обрабатываемых деталей и пр.
Для длительного удержания нагрузки в заданной точке позиционирования полости гидродвигателей
должны запираться абсолютно герметично, без перетечек или утечек рабочей жидкости. С этой целью в
гидроприводах применяют гидроаппаратуру клапанного типа — либо распределители (рис, 9.6, а), либо гидрозамки
(рис. 9.6, б).
Гт
0.1
Г"
г\г—^
1.0
1.01
1.2
У\Л
<z>
ELl.
1.1
Мл
1.0
№
A fjj
! 1.2
Рис. 9.6. Позиционирование гидроцилиндров одностороннего действия в промежуточном положении
Управление выдвижением и втягиванием выходного звена плунжерного гидроцилиндра 1.0 (рис. 9.6, а)
осуществляется распределителем 1.1, а останов выходного звена в любом промежуточном положении произ-
179
9. Функционирование гидроприводов
водится переключением распределителей 1.2. Поскольку распределитель 1.2 имеет клапанную конструкцию,
то гидроцилиндр может находиться в заданном положении под нагрузкой сколь угодно долго.
Позиционирование (выдвижение и останов в требуемой позиции) штока гидроцилиндра одностороннего
действия 1.0 (см. рис. 9.6, б) осуществляется 3/2-распределителем 1.1. Фиксация штока в заданном
положении обеспечивается гидрозамком 1.3. Втягивание штока осуществляется в том случае, если распределитель
1.1 находится в своем нормальном положении, а распределитель 1.2 переключен, т.е. подает управляющий
сигнал на открытие гидрозамка 1.3. Длительное удержание гидроцилиндров двустороннего действия в
требуемой позиции также осуществляется при помощи гидрозамков (рис. 9.7).
m
1.0
га
1.0
т
1.01
A AI /V. В
1.3
.!
А
1.0
в
1.01
A AM 'Vi'b
ш
J'2 «I 0 * в1-
р Шт р lCt
1.2
А,
г
1.2
Г
1.1
МЛ
\МД
Шт
0.1
в 1.1
№
шт
Рис. 9.7. Позиционирование гидроцилиндров двустороннего действия в промежуточном положении
Если нагрузка воздействует на гидроцилиндр постоянно в одном направлении, то в приводе можно
использовать односторонний гидрозамок (рис. 9.7 а, б), если же нагрузка имеет знакопеременный характер, то в
приводе применяют гидрозамок двустороннего действия (рис. 9.6, в):
■ выдвижение штока цилиндра 1.0 осуществляется при переключении 4/2-распределителя 1.1 в левую
позицию (рис. 9.7, а). При этом жидкость через гидрозамок 1.3 подается в поршневую полость цилиндра, в
то время как из штоковой вытесняется на слив. Останов штока цилиндра в требуемой точке происходит
при возврате распределителя 1.1 в исходное положение: жидкость под давлением подается в штоковую
полость цилиндра 1.0, в то время как поршневая оказывается запертой гидрозамком 1.3. В таком
положении гидроцилиндр 1.0, находящийся под действием внешней нагрузки и давления штоковой полости,
будет удерживаться до тех пор, пока не будет подана команда на разблокирование гидрозамка 1.3
посредством 3/2-распределителя 1.2;
■ позиционирование гидроцилиндра 1.0 осуществляется 4/3-распределителем 1.1, выполненным по
гидросхеме 34, переключение которого в нейтральную позицию обеспечивает надежное запирание
гидрозамка 1.2, так как каналы А и X последнего сообщаются со сливом (рис. 9.5, б);
■ для фиксации штока гидроцилиндра 1.0, испытывающего знакопеременные нагрузки, в любом
положении применен двусторонний гидрозамок 1.2 (рис. 9.5, в). Позиционирование гидроцилиндра 1.0 и
управление гидрозамком 1.2 осуществляется 4/3-распределителем 1.1, выполненным по гидросхеме 34.
180
9.3. Управление скоростью выходного звена исполнительного механизма
9.3. Управление скоростью выходного звена исполнительного механизма
Одним из достоинств гидравлических приводов является возможность плавного регулирования скорости
движения выходных звеньев их исполнительных механизмов в широком диапазоне значений. При этом, кроме
непосредственного управления скоростью, достаточно простыми способами решаются вопросы
стабилизации скорости при работе привода с переменными нагрузками, синхронизации движения выходных звеньев
нескольких исполнительных механизмов.
Напомним, что скорость выходного звена зависит от объемного расхода рабочей жидкости, поступающей
в исполнительный механизм, а также от геометрических параметров самого механизма.
Линейные скорости движения штоков гидроцилиндров (рис. 9.8) определяются из следующих
соотношений:
■ прямой ход
Q 4(2
А{ V.D1
где v — скорость выходного звена, м/с;
Q — объемный расход рабочей жидкости, м3/с;
АЛ — площадь поршня со стороны поршневой полости, м2;
D — диаметр поршня, м;
■ обратный ход
где А2 — площадь поршня со стороны штоковой полости, м2;
А3 — площадь поперечного сечения штока, м2;
d—диаметр штока цилиндра, м. *•
D
1
Ал Аг Аъ
ГО:
V
1
d
Прямой ход
Обратный ход
Рис. 9.8. К расчету скорости движения штока гидроцилиндра
Частота вращения вала гидромотора определяется по формуле
"ГМ - ж, '
гм
где пш — частота вращения вала гидромотора, об/с;
Vm — рабочий объем гидромотора, м3.
Как говорилось выше, изменение объемного расхода рабочей жидкости, поступающей в гидродвигатель,
а, следовательно, и изменение скорости движения или частоты вращения его выходного звена, может
осуществляться путем объемного или дроссельного регулирования. При объемном регулировании изменение
расхода до требуемой величины обеспечивается изменением подачи регулируемого насоса, а при
дроссельном — за счет отвода обратно в бак определенной части рабочей жидкости, подаваемой в систему
нерегулируемым насосом.
При дроссельном регулировании отвод части рабочей жидкости в бак осуществляется через переливной
клапан, открытие которого происходит вследствие повышения давления в системе перед гидроаппаратами
управления расходом — дросселями, либо регуляторами расхода.
181
9. Функционирование гидроприводов
На практике применяют различные варианты установки дросселей в систему, однако, во всех случаях
изменение площади проходного сечения дросселя вызывает изменение скоростей прямого и обратного хода
исполнительного механизма.
Раздельное управление скоростями прямого и обратного хода может быть осуществлено посредством
гидродросселей с обратным клапаном. Управлять скоростью, например, выдвижения штока гидроцилиндра,
можно путем установки гидродросселя с обратным клапаном 1.04 в линию нагнетания (рис. 9.9, а) или в линию
слива (рис. 9.9, б).
1.0 Ф = 2
1.0 Ф = 2
Qii = 8 л/мин
0,15 МПа
1.06 0-
1.04
6,0 МПа
1.02 0-
6,3 МПа
0.3 0
- 0,3 МПа
—01.01
О А в 1-1
ч:га*
0.2
Ш!'-
Гт
Qli = 8 л/мин
■ь т
6,0 МПа
1.02 0-
6,3 МПа
0.3 0
12,0 МПа
'—01.03
О а в ■
МЕЖ
0.1
0.2
|_
1.04
- 0,3 МПа
—01.01
1.1
М
>ЬТ
0.1
Qcn = 2 л/мин QH = 10 л/мин
Qcn = 2 л/мин QH = 10 г\1мш
б
Рис. 9.9. Установка дросселей с обратным клапаном в линии нагнетания (а) и слива (б)
Допустим, что требуемая скорость выдвижения штока дифференциального гидроцилиндра 1.0
обеспечивается, когда расход подаваемой в него рабочей жидкости равен 8 л/мин; распределитель 1.1 пропускает
такой расход при перепаде давления на нем 0,3 МПа. Для простоты рассуждений условимся, что цилиндр
работает без нагрузки.
Дроссель с обратным клапаном в линии нагнетания (рис. 9.9, а). Если переливной клапан 0.2 настроен
на давление открытия 6,3 МПа, то дроссель с обратным клапаном 1.04 должен быть настроен таким образом,
чтобы давление перед ним равнялось 6 МПа, так как при этом обеспечивается требуемый перепад давления
на распределителе 1.1 (0,3 МПа). Перепад давления на дросселе с обратным клапаном 1.04 составит
5,85 МПа (отношение эффективных площадей поршня дифференциального гидроцилиндра 1.0 равно 2:1,
следовательно, при давлении в штоковой полости 0,3 МПа, давление в поршневой полости составит 0,3 МПа:2 =
= 0,15 МПа). При подаче насоса QH = 10 л/мин, расход жидкости, отводимой через переливной клапан 0.2 на
слив, будет равен 2 л/мин.
Недостатком такого схематического решения является то, что жидкость, проходящая через дроссель с
обратным клапаном 1.04, нагревается, и, следовательно, вызывает нагрев аппаратов (в частности —
гидроцилиндра*) установленных за ним.
* В высокоточных гидроприводах металлообрабатывающих станков необходимо учитывать температурное
расширение материала исполнительного механизма.
182
9.3. Управление скоростью выходного звена исполнительного механизма
Кроме того, поскольку в обеих полостях цилиндра низкое давление, это может привести к выделению из
рабочей жидкости растворенного в ней воздуха и появлению воздушных пузырей. Наличие пузырей воздуха в
рабочей жидкости снижает жесткость привода и может вызвать неустойчивую работу цилиндра.
Дроссель с обратным клапаном в линии слива (рис. 9.9, б). Учитывая соотношение площадей поршня
гидроцилиндра 1.0 (2:1), определяем, что требуемая скорость (расход подаваемой в гидроцилиндр рабочей
жидкости Q4 = 8 л/мин, или перепад давления на распределителе 1.1, равный 0,3 МПа) будет обеспечена
такой настройкой дросселя с обратным клапаном 1.04, при которой показание манометра 1.03 будет равным
12 МПа (при отсутствии внешней нагрузки и <р = 2 давление в штоковой полости гидроцилиндра вдвое выше
давления в поршневой).
Достоинства рассмотренного схематического решения: высокое давление в обоих полостях
гидроцилиндра 1.0 исключает возможность появления воздушных пузырей в рабочей жидкости; рабочая жидкость,
нагреваемая при прохождении через дроссель с обратным клапаном 1.04, сливается в бак, где происходит ее
остывание.
Для раздельного управления скоростями прямого и обратного хода гидроцилиндров дроссели с обратным
клапаном предпочтительно устанавливать в линиях слива (рис. 9.10, а). Скорость выдвижения штока
гидроцилиндра 1.0 управляется дросселем с обратным клапаном 1.02, а скорость втягивания штока — дросселем с
обратным клапаном 1.01.
1.0
1
А
А В
Q1-1 А
ii мр ::
Ч
J .4
А !
) П>\ 1.02 ,---,
в
0.1
" м(*)#(м)
а
1"° , 1.021
А
101Щ
В
А В
А
t 1-02J'
в
р
'• "М. Л
Т L
- .-л 1-04
Щ '-г A i
т
!г
0.1
|'- г м(*>(®;
б
п
Рис. 9.10. Схемы раздельного управления скоростями прямого и обратного хода
Выбирая такое схематическое решение, следует иметь в виду, что при работе с попутными нагрузками
уровень давления в штоковой полости гидроцилиндра 1.0 может превысить максимально допустимый
уровень и привести к разрыву трубопроводов. В подобных случаях для защиты гидросистемы применяют
тормозной клапан 1.04, ограничивающий давление в штоковой полости (рис. 9.10, б).
Напомним, что гидродроссели, как устройства управления скоростью исполнительных механизмов, не
обеспечивают стабильное значение скорости при работе гидроприводов с переменными нагрузками.
Например, в металлургических машинах, в строительно-дорожной и сельскохозяйственной технике
гидроцилиндры чаще всего соединены с объектом управления при помощи рычагов, что делает приведенную к
гидроцилиндру инерционную нагрузку переменной, зависящей от положения поршня и меняющейся иногда более
чем на порядок. Если гидравлические приводы таких машин должны поддерживать стабильной скорость
ведомого объекта, то регулирование скорости исполнительных механизмов в них осуществляется
регуляторами расхода.
183
9. Функционирование гидроприводов \
Как устройства стабилизации скорости регуляторы расхода применяются, например, в металлорежущих
станках, подача рабочих органов в которых осуществляется по циклу: быстрый подвод — рабочая подача —
быстрый отвод (рис. 9.11).
1.0
Y1
mi
ТЗ-
А В
1.01
1.04
1.0
ш
1.02
Л/V
1.04
Э*>
м
3©
•ПЫ в] 102 "
£ #1-01
Tj В
-I .
1.1
I1-
в ь
ш
Y1
еяп
1.04
в ь
1.1
ш
0.1
;Ej>ffi©j
тлл
Ш Y2
0.1
Г\[р~
: J
Рис. 9.11. Гидроприводы, реализующие цикл: А—быстрый подвод; В — рабочая подача; С — быстрый отвод
На рис. 9.11, а показан привод, стабильная рабочая подача в котором поддерживается двухлинейным
регулятором расхода 1.02. Работает привод следующим образом:
■ быстрый подвод. При подаче электрического управляющего сигнала на электромагнит Y1 4/3-распре-
делитель 1.1 переключается в позицию а, рабочая жидкость от насосной станции подается в поршневую
полость гидроцилиндра 1.0. Из штоковой полости жидкость свободно поступает на слив через
нормально открытый 2/2-распределитель с управлением от ролика 1.04. Поскольку на участке хода А цилиндр не
нагружен, скорость гидроцилиндра 1.0 максимальна и определяется подачей насоса;
■ рабочая подача. Кулачок, связанный со штоком гидроцилиндра 1.0, входит в контакт с роликом
распределителя 1.04 и переключает последний. Жидкость из штоковой полости гидроцилиндра начинает
поступать на слив через двухлинейный регулятор расхода 1.02, обеспечивающий требуемую скорость
движения рабочего органа при выполнении технологической операции. Изменение нагрузки на
гидроцилиндр на участке хода В не оказывает влияния на скорость выдвижения штока;
■ быстрый отвод. При подаче электрического управляющего сигнала на электромагнит Y2 4/3-распреде-
литель 1.1 переключается в позицию Ь, рабочая жидкость от насосной станции, минуя регулятор
расхода 1.02 и распределитель 1.04, подается в штоковую полость гидроцилиндра 1.0 через обратный клапан
1.01. Из поршневой полости жидкость свободно поступает на слив. Поскольку при обратном ходе
цилиндр не нагружен, его скорость на участке С максимальна и определяется подачей насоса. Скорость
быстрого отвода выше скорости быстрого подвода, так как площадь поршня в штоковой полости меньше
площади в поршневой.
Аналогичным образом работает гидропривод, показанный на рис. 9.11,6. Использование в схематическом
решении трехлинейного регулятора расхода 1.02 предопределяет его установку в линии нагнетания
гидроцилиндра при выдвижении штока. Для обеспечения режимов быстрый подвод — рабочая подача параллельно
регулятору расхода 1.02 установлен нормально открытый 2/2-распределитель 1.04. Режим быстрый отвод
обеспечивается наличием обратного клапана 1.01.
Реализовать подачу рабочих органов металлорежущего оборудования по циклу быстрый подвод —
рабочая подача — быстрый отвод можно другим схематическим решением с использованием дифференциального
184
9.3. Управление скоростью выходного звена исполнительного механизма
гидроцилиндра, подключаемого по так называемой дифференциальной схеме. Конструктивная особенность
дифференциального гидроцилиндра — соотношение 2:1 эффективных площадей поршня со стороны
поршневой и штоковой полости (рис. 9.12).
Прямой ход
„2=% = %.2=2*1;
v2 = 2 v{
t,
QJ
П
i
— *»s
i
t J
k
Q
одключение по дифференциальной схеме
„ Qu+Qun Qh+V3-A2.
Vi~ A - A
ШТ
"1 V1l
v3(Al-A2) = QH;
v3 =2.^ = 21;,;
v3 = 2vt
Рис. 9.12. Скорости выходного звена дифференциального гидроцилиндра
На рис. 9.12 видно, что при одинаковом расходе QH поступающей к цилиндру рабочей жидкости, скорость
прямого хода (выдвижения штока) дифференциального цилиндра будет вдвое меньше скорости обратного
хода (втягивания штока).
Путем дифференциального подключения, т.е. соединением обеих полостей гидроцилиндра с напорной
линией, обеспечивается удвоенная скорость прямого хода, равная скорости втягивания. Таким образом,
используя дифференциальный гидроцилиндр, появляется возможность получить быструю и медленную
скорости выдвиженя штока цилиндра и быструю скорость втягивания. При этом усилия, развиваемые цилиндром,
следующие:
■ быстрый подвод (подключение по дифференциальной схеме)
А,
Fi=P„A1-pHA2=pH^-;
рабочая подача
F\ =рЛ',
185
9. Функционирование гидроприводов
■ быстрый omdeod
Л
Из приведенных соотношений следует, что в режиме рабочего хода гидроцилиндр развивает
максимальное усилие, что и требуется при совершении технологической операции. В то же время, холостые хода —
быстрый подвод и быстрый отвод — осуществляются с меньшим усилием
Принципиальная схема гидропривода, реализующего вышеописанный цикл, показана на рис. 9.13, а.
1.0
1.0
1.1
1 1
О А а ВО Ь ■•'
р 1т
А В
Р iLt
tf
1.02
0.1
'L^(ft®j
!г\Г£
X
1.02
0.1
-ПЧ!>*®
Рис. 9.13. Гидроприводы с дифференциальным гидроцилиндром
Работает привод следующим образом:
■ быстрый подвод. При переключении распределителя 1.1, выполненного по 24 гидросхеме, в позицию 0
реализуется дифференциальная схема подключения гидроцилиндра, обеспечивающая высокую
скорость выдвижения штока дифференциального гидроцилиндра 1.0;
■ рабочая подача. Распределитель 1.1 переводится в позицию Ь. Расход рабочей жидкости поступающей
в поршневую полость гидроцилиндра и скорость выдвижения штока снижается вдвое;
■ быстрый отвод. Распределитель 1.1 переводится в позицию а. Шток цилиндра с удвоенной, по
отношению к рабочей подаче, скоростью возвращается в исходную позицию.
При необходимости обеспечить равные скорости выдвижения и втягивания штока гидроцилиндра можно
воспользоваться схемой, приведенной на рис. 9.13, б. Переключение нормально закрытого 3/2-гидрораспре-
делителя приводит к подключению гидроцилиндра 1.0 по дифференциальной схеме. Шток цилиндра
выдвигается со скоростью, равной скорости втягивания. Втягивание осуществляется при переводе распределителя
1.1 в исходное состояние. Скорости движения прямого и обратного хода настраиваются регулятором
расхода 1.02.
Для изменения скорости выходного звена исполнительного механизма по ходу его движения по заранее
заданному закону в гидроприводах применяют путевые дроссели.
Изменение проходного сечения путевого дросселя, а, следовательно, и скорости выходного звена
гидроцилиндра, осуществляется посредством управляющих кулачков, устанавливаемых на рабочих органах
машин. Профиль кулачка определяет закон по которому будет меняться скорость.
186
9.4. Управление усилием на выходном звене исполнительного механизма
9.4. Управление усилием на выходном звене исполнительного механизма
Усилия, развиваемые рабочими органами гидрофицированного оборудования, в основном определяются
двумя параметрами: геометрическими размерами приводных исполнительных механизмов* и давлением
рабочей жидкости в гидросистеме. Напомним, что рабочее давление в гидроприводе, определяющее
максимальные усилия, развиваемые исполнительными механизмами, настраивается и поддерживается на
требуемом уровне посредством переливных клапанов. При этом предельно допустимое давление в системе
обеспечивается предохранительными клапанами.
Для снижения давления до требуемого уровня в отдельных линиях гидросистемы применяют
редукционные клапаны, которые поддерживают на выходе давление, пониженное по отношению к давлению на входе,
на заданном уровне. Если оборудование оснащено несколькими исполнительными механизмами, то
получение требуемых усилий на их выходных звеньях не ограничивается только подбором подходящих
типоразмеров гидродвигателей, а обеспечивается поддержанием разных уровней давления в различных линиях
гидросистемы посредством клапанов давления. Так, например, в гидрофицированном фрезерном станке (рис. 9.14, а),
один гидроцилиндр приводит в действие механизм зажима обрабатываемых заготовок, а второй
осуществляет подачу режущего инструмента. Усилие зажима регулируется в зависимости от материала и конфигурации
заготовки, а подача осуществляется в режиме стабилизации скорости.
Г-
i л
Г i
IS
f »
8МПа
1.04 0
15МПа
030
У|!-^Ф^^м)
Рис. 9.14. Гидропривод фрезерного станка
Рассмотрим работу гидропривода фрезерного станка (рис. 9.14, б). В исходном состоянии насосная
станция 0.1 разгружена, поскольку распределитель 1.1, управляющий гидроцилиндром 1.0 (зажимным
устройством) выполнен по гидросхеме 64.
При подаче напряжения на электромагнит Y1 распределитель 1.1 переключается в позицию а, и
гидроцилиндр 1,0 начинает проводить зажим заготовки со скоростью, определяемой настройкой дросселя с обратным
клапаном 1.06. Когда шток цилиндра 1.0 дойдет до упора, давление в поршневой полости станет равным
давлению настройки трехлинейного редукционного клапана 1.02 — 8 МПа, необходимому для создания требуе-
* Речь идет о размерах, которые определяют силовые возможности исполнительных механизмов: диаметры
поршней, плунжеров и т.п.
187
9. Функционирование гидроприводов
мого усилия зажима заготовки. Давление, развиваемое насосом, достигнет значения настройки переливного
клапана 0.4 — 15 ГИПа
Далее распределитель 2.1 переключается в позицию а, и гидроцилиндр 2.0 начинает осуществлять
подачу рабочего инструмента в режиме быстрый подвод, поскольку нормально открытый распределитель 2-04
обеспечивает свободный слив рабочей жидкости из штоковой полости гидроцилиндра 2.0 в бак. При этом
обратный клапан 0.2 не дает понизиться давлению на входе в редукционный клапан 1.02, что обеспечивает
сохранение усилия зажима заготовки на данном этапе. Переход на режим рабочая подача осуществляется при
переключении распределителя 2.04 от кулачка, связанного со штоком гидроцилиндра 2.0. Рабочая подача
инструмента осуществляется с постоянной скоростью, величина которой настраивается двухлинейным
регулятором расхода 2.02.
Быстрый возврат цилиндра 2.0 в исходное состояние осуществляется при переключении распределителя
2.1 в позицию b со скоростью определяемой подачей насосной станции 0.1. Несмотря на то, что при движении
гидроцилиндра 2.0 в различных режимах давление в напорной линии изменяется, давление в поршневой
полости гидроцилиндра 1.0 и усилие зажима заготовки остается неизменным, благодаря установке
редукционного клапана 1.02. Разжим заготовки также осуществляется с максимальной скоростью.
При использовании для понижения давления в полости гидроцилиндра редукционного клапана, на входе
последнего поддерживается давление, определяемое настройкой переливного клапана. Если от этой же
насосной станции приводятся в действие другие гидродвигатели, то только на входе в гидродвигатель, перед
которым установлен редукционный клапан будет поддерживаться низкий уровень давления. Рабочее давление
в остальных гидродвигателях определяется настройкой переливного клапана.
Понизить давление рабочей жидкости в полости гидродвигателя можно путем подсоединения к ней
напорного клапана (рис. 9.15).
1.0
8МПа
104 0——
1.02 '-{ПЖ
15МПа
0.3 0 Y1
Ш
А
А
^1.06
11
,-гт—
т
1
vr
•—
■*
-, f-
ф
02
f*f
р il "\
lXmY2
w\
йейхвэ
i
. 0.1
1т I ■ 1т JL ,-
Рис. 9.15. Понижение давления в полости гидроцилиндра посредством напорного клапана
Если в приводе один цилиндр, то такая схема поддержания пониженного давления имеет даже
некоторое преимущество по отношению к схемам с применением редукционного клапана — при длительном
удержании гидроцилиндра 1.0 в выдвинутом положении, насос работает под давлением 8 МПа, а не под
давлением 15 МПа, на которое настроен переливной клапан 0.2. Такое схематическое решение может оказаться
неприменимым в случаях, когда в приводе несколько исполнительных механизмов. Это объясняется тем,
что при положении распределителя 1.1 в позиции а давление снижается до давления настройки напорного
клапана 1.02 не только в поршневой полости гидроцилиндра 1.0, но и во всей гидросистеме, что может
оказаться недопустимым для выполнения другими исполнительными механизмами требуемых
технологических операций.
188
9.5. Последовательная работа исполнительных механизмов
9.5. Последовательная работа исполнительных механизмов
В станочных гидроприводах достаточно часто приходится реализовывать последовательную работу
нескольких исполнительных механизмов, обеспечивающих выполнение требуемого технологического процесса.
Так в рассмотренном выше приводе фрезерного станка два гидроцилиндра осуществляли зажим заготовки,
выполнение рабочей операции (подвод и отвод рабочего инструмента), разжим заготовки. Если первый
цилиндр обозначить как цилиндр А, а второй — как В, то в арифметической форме записи* последовательность
срабатывания цилиндров будет выглядеть следующим образом: А+ В+ В- А-.
Осуществить такой алгоритм работы гидропривода фрезерного станка можно путем применения
напорных клапанов. На рис 9,16 показана принципиальная гидравлическая схема станка и его диаграмма
«Перемещение-время».
1.0(A)
2.0 (В)
8 МПа
1.02Г^|а t dSm
1.01 Л р
в
IT A
15 МПа
00.3
Щ
103 j|f1.04 J2.01 а
в
10 МПа в
1.06
2.06
i
2.02
в
10 МПа
2 03 А
JI-, 9
К] А
2.04
%
ЛЛ/
2.06
3*>
m 1-1
02
р . II Мр
0.1
[f> .M^ffi©
11
1.1 Р-А
Т 1.о
2.0
f
I
1
";
Р> 2.02
I]
\
/
>
ii
1.1 р-
m
'2.06
| '
3
3
IV
4
<N
\Р
V
Т^
V
5
\
=0
> 1.03
/
1
1сек
Рис. 9.16. Принципиальная гидросхема фрезерного станка и его диаграмма «Перемещение-время»
При переводе распределителя 1.1 в позицию а начинает выдвигаться гидроцилиндр 1.0 со скоростью,
определяемой настройкой дросселя 1.04 (шаг I: A+ — зажим заготовки). Давление во всей гидросистеме будет
зависеть от преодолеваемой им нагрузки. После того, как цилиндр 1.0 зажмет заготовку (давление в его
поршневой полости станет равным 8 МПа), давление в системе начнет расти. Когда его уровень превысит 10 МПа
(давление настройки напорного клапана 2.02), последний откроется и начнется выдвижение штока цилиндра
2.0 (В) с высокой скоростью (шаг II: В+ — быстрый подвод инструмента). При достижении штоком цилиндра 2.0
распределителя 2.06 скорость подачи инструмента снижается до значения, определяемого настройкой
регулятора расхода 2.04 (шаг III — рабочая подача).
По завершении рабочей операции распределитель 1.1 переводится оператором в позицию Ь, шток
гидроцилиндра 2.0 начинает втягиваться (шаг IV: В— быстрый отвод инструмента). При этом давление в
гидросистеме падает, поскольку цилиндр 2.0 втягивается практически без нагрузки. После отвода инструмента,
давление в системе повышается и при 10 МПа открывается напорный клапан 1.03 — начинает втягиваться шток
цилиндра 1.0 (шаг V: А разжим заготовки).
По выполняемой функции в приводе, напорные клапаны 1.03 и 2.02 называют клапанами
последовательности, поскольку они обеспечивают последовательное срабатывание гидроцилиндров.
* См. Ч. 1. Пневматические приводы и средства автоматизации, разд. 8.1.1. «Формы представления хода
технологического процесса».
189
9. Функционирование гидроприводов
9.6. Параллельная работа исполнительных механизмов
Параллельная работа нескольких гидроцилиндров, выходные звенья которых должны двигаться с
одинаковыми скоростями, т.е. синхронно, является достаточно распространенным требованием к работе приводов
различного гидрофицированного технологического оборудования. Например, в гильотинных ножницах,
крупных гидравлических прессах или листогибочных станках (рис. 9.17, а), приводимые гидроцилиндрами в
движение узлы, перемещаются по разнесенным на значительное расстояние параллельным направляющим. При
этом движущийся узел приводится в движение двумя параллельно установленными цилиндрами,
расположенными вблизи направляющих. Даже небольшая разница в скоростях движения по направляющим
разнесенных опор перемещаемого узла может привести к его перекосу и заклиниванию, поэтому синхронное
движение цилиндров, независимо от изменения нагрузки на них, является обязательным требованием к работе
гидропривода.
Одним из распространенных способов обеспечения синхронного движения гидроцилиндров является так
называемый «гидравлический боуденовский трос»: два одинаковых гидроцилиндра с проходными штоками
соединяют последовательно (рис. 9.17, б). Благодаря такому соединению второй цилиндр повторяет
движение первого цилиндра, в который подается рабочая жидкость от насосной станции.
♦1*0
10
в
0 Г
!*■
1.1
а А
YlfiffiT
2.0
в
й
о
I
вь
ш
1 2
а А
Y2 Y3CZ
П
02 : , ;
1.3
зь
01
Рис. 9.17. Гидропривод листогибочного станка
Так например, при подаче электрического сигнала на электромагнит Y2, распределитель 1.1
переключается в позицию Ь, и гидроцилиндр 2.0 начинает движение вниз. Поскольку цилиндры 1.0 и 2.0 имеют проходные
штоки, то расход подаваемой в гидроцилиндр 2.0 жидкости от насосной станции, равен расходу жидкости
вытесняемой из его нижней полости и, следовательно, расходу рабочей жидкости, подаваемой в верхнюю
полость гидроцилиндра 1.0. Таким образом, расходы жидкости, подаваемой в верхние полости обоих
гидроцилиндров оказываются равными, что обеспечивает их синхронное движение. Переключение распределителя
1.1 в позицию а приводит к подаче рабочей жидкости в нижнюю полость гидроцилиндра 1.0 и к синхронному
движению вверх обоих цилиндров.
Синхронность движения цилиндров 1.0 и 2.0 может нарушиться вследствие внутренних или внешних
утечек рабочей жидкости. Во избежание нежелательных последствий таких утечек, связанные между собой по-
190
9.6. Параллельная работа исполнительных механизмов
лости обоих цилиндров, кратковременно соединяются с напорной магистралью насоса через каждый рабочий
ход посредством распределителя 1.2. Поскольку подпиточный распределитель 1.2, как правило, имеет
золотниковую конструкцию, то он сам может явиться причиной появления утечек. Поэтому необходимым условием
надежной работы привода является установка в линию подпитки гидрозамка 1.3.
Как описывалось ранее, другим способом реализации равноскоростного движения двух
гидроцилиндров является использование делителей потока. Напомним, что делители потока делят поток рабочей
жидкости, поступающей на их вход, на два выходных потока, в определенном конструкцией делителя
соотношении. Соотношение расходов выходных потоков жидкости автоматически поддерживается делителем
вне зависимости от изменения давления на любом из его выходов. Если гидроцилиндры имеют
одинаковые геометрические параметры, то применяются делители потока, которые делят поток на две равные
части.
На рис. 9.18 представлены две схемы гидроприводов, в которых реализовано синхронное движение двух
гидроцилиндров посредством использования делителей потока дроссельного типа.
2.1 <> 1.4
1.0
2.0
1.0
в
2.0
1.7 <>2.2
Y1
1.1
а А
Ж"
2.1
УКЛЛ
ДШУ2 Y3
mi
вь
\7"КЛЛ
#^¥2 0о.з
'"^
00.3
0.4
)()!
0.2
£>
'""^
Г
0.2
р
ОА!'-[Плл (~)=i£®
туклл
1АШу4
0.1
Рис. 9.18. Схемы гидропроводов с делителями потока дроссельного типа
В первом схематическом решении (рис. 9.18, а) оба гидроцилиндра 1.0 и 2.0 управляются общим
распределителем 1.1. При переключении распределителя 1.1 в позицию а штоки цилиндров 1.0 и 2.0 начинают
выдвигаться с равными скоростями, поскольку от распределителя жидкость в их поршневые полости подается
через делитель потока 1.4. Жидкость, вытесняемая из штоковых полостей цилиндров, поступает на слив
через обратные клапаны 1.6 и 2.2, установленные параллельно делителю потока 1.7. Втягивание штоков
цилиндров осуществляется переводом распределителя 1.1 в позицию Ь. Втягивание также будет осуществляться
синхронно, так как равенство расходов рабочей жидкости, поступающей в штоковые полости обоих
цилиндров, обеспечивается делителем потока 1.7. Слив жидкости из поршневых полостей гидроцилиндров
происходит через обратные клапаны 2.1 и 1.3.
Во втором схематическом решении (рис. 9.18, б) делитель 0.4 установлен на выходе насосной станции 0.1
и делит поток в напорной линии на две равные части, поступающие в две одинаковые цепи управления гидро-
191
9. Функционирование гидроприводов
цилиндрами 1.0 и 2.0. Синхронное движение цилиндров может быть осуществлено только при условии, что
управляющие команды на распределители 1.1 и 2.1 подаются одновременно: для выдвижения штоков — на
электромагниты Y1 и Y3, а для втягивания — на Y2 и Y4.
Помимо делителей потока дроссельного типа в гидроприводах применяются делители потока объемного
типа. Простыми делителями потока объемного типа являются спаренные (связанные валами) гидромоторы,
преимущественно аксиально-поршневых типов. Гидромоторы в такой схеме являются расходомерными
устройствами (дозаторами), пропускающими через себя за один оборот объем жидкости, равный рабочему объему
гидромотора (без учета утечек жидкости в гидромоторе). При равных рабочих объемах гидромоторов расход
жидкости, поступающий от насоса, будет разделен между гидродвигателями на две равные части (рис. 9.19, а).
1.0
2.0
1.0
2.0
Y1
1.1s
а А
2.1
Яй
Y2 Y3
ш
р т
00.3
о*оо!
р
вь
"I^Y4
1.1
Y1E
X
0.1
0.3 0
МЛ Y2E1
т
2.1 а
X
0.4 0.5
m
в
Рис. 9.19. Схемы гидроприводов с синхронным движением гидроцилиндров
Еще одним способом подачи равных расходов в два гидроцилиндра является применение спаренных
насосов с равными рабочими объемами (рис. 9.18, б). Насосы Н1 и Н2 приводятся в действие от одного
электродвигателя, что гарантирует одинаковую частоту их вращения. Для поддержания на выходе насосов равного
давления в схеме использован общий переливной клапан 0.2, а для исключения взаимного влияния друг на друга —
разнонаправленные обратные клапаны 0.4 и 0.5. Направление движения гидроцилиндров задается
распределителями 1.1 и 2.1, причем одновременной подачей управляющих сигналов на электромагниты Y1 и Y2.
На всех вышеприведенных схемах, реализующих синхронное движение двух гидроцилиндров, показаны
только принципы построения систем синхронизации.. Реальные схематические решения оказываются
значительно сложнее, поскольку в них предусматриваются элементы, компенсирующие разность расходов рабочей
жидкости, подаваемой в гидроцилиндры. Неравенство подач может возникнуть по различным причинам:
вследствие неодинаковой утечки в элементах гидропривода, из-за неодинаковой подачи насосов, в
результате сжатия рабочей жидкости, из-за люфтов в подшипниках машины и пр.
Качество работы приводов с синхронным движением гидроцилиндров в основном определяется
эффективностью работы систем обнаружения и компенсации ошибок, возникающих в процессе функционирования
приводов.
192
9.7. Применение гидроаккумуляторов
9.7. Применение гидроаккумуляторов
Гидроаккумуляторы, как устройства, предназначенные для накопления рабочей жидкости под давлением,
выполняют в гидросистемах различные функции: сглаживают гидроудары, пульсации давления и подачи
насосов, компенсируют утечки, выравнивают нагрузку на насос, обеспечивают работу системы в случае выхода
насоса из строя и т.п.
Варианты применения гидроаккумуляторов в зависимости от выполняемых ими функций в гидроприводе
рассмотрим на конкретных примерах.
Увеличение расхода рабочей жидкости. В прессовом и штамповочном оборудовании рабочие операции
выполняются с небольшой скоростью исполнительных механизмов и высоким давлением рабочей жидкости в
них. Для повышения производительности оборудования, т.е. уменьшения времени выполнения полного цикла
его работы, подвод-отвод инструмента осуществляется в режимах холостого хода с высокими скоростями
выходных звеньев исполнительных механизмов. Высокие скорости могут быть обеспечены насосами с большой
подачей рабочей жидкости, однако, в подобных случаях целесообразнее применять гидроаккумуляторы
(рис. 9.20). - "
2.1 <> 1.4
1.0
в
Y1
а А|0
ея£г
2.0
1.7 <>2.2
1.1
&
—9—Т
01 0.6 -6, А 0.
0.2
ft
тлл
Ш Y2
0.4
Г}Ж i !--[Плл
Н2
5 л/мин
О*®
30 л/мин
е>
Чк
0.3
га
1-\ПА
Рис. 9.20. Схема гидропривода с гидроаккумулятором для увеличения расхода рабочей жидкости в
приводе
В режиме холостого хода гидроцилиндров 1.0 и 2.0 рабочая жидкость в них поступает одновременно от
насоса высокого давления Н1, насоса низкого давления Н2, и гидроаккумулятора 0.3, что обеспечивает высокую
скорость их перемещения. После завершения холостого хода нагрузка на гидроцилиндры возрастает и
давление в системе повышается. При этом обратный клапан 0.4 запирается и рабочая жидкость продолжает
поступать к цилиндрам только от насоса высокого давления Н1 (выполняется рабочая операция). Насос Н2 в это
время заряжает аккумулятор Q.3-
193
9. Функционирование гидроприводов
Компенсация утечек. В гидравлических зажимных устройствах усилие, с которым цилиндр зажимает
деталь, остается постоянным только в том случае, если возникающие утечки рабочей жидкости непрерывно
компенсируются. Восполнять утечки можно путем постоянного соединения гидроцилиндра с напорной
линией насосной установки, однако, более экономичным способом является применение гидроаккумулятора
(рис. 9.21).
После зажима детали распределитель 1.1 выводится в нейтральную позицию, запирая полости
гидроцилиндра 1.0 и переводя насосную станцию 0.1 в режим разгрузки. Возникающие внутренние или внешние
утечки рабочей жидкости компенсируются гидроаккумулятором 0.2, подсоединенным к поршневой полости
гидроцилиндра 1.0. Такое схемное решение имеет ряд достоинств: при длительном удержании детали в зажимном
устройстве насосную станцию можно выключить, что позволит значительно снизить эксплуатационные
расходы и увеличить срок службы гидропривода.
Работа в аварийных ситуациях. Если гидроаккумулятор используется в качестве элемента,
обеспечивающего безопасность, он не выполняет функции источника энергии при нормальной работе гидропривода,
однако напрямую подключен к насосу.
В нештатных ситуациях, например, при отказе насосного агрегата, сбое в электроснабжении и т.п., энергия
рабочей жидкости в аккумуляторе позволяет исполнительным механизмам гидропривода совершить
действия, направленные на обеспечение безопасности обслуживающего персонала и безаварийную остановку
оборудования. Так при возникновении аварийной ситуации в металлообрабатывающем оборудовании
гидроцилиндры смогут завершить рабочую операцию или, наоборот—немедленно вывести инструмент из рабочей
зоны; на канатных дорогах или в гидравлических лифтах привести в действие устройства аварийного
торможения; в авиалайнерах выдвинуть шасси и т.п.
В качестве примера рассмотрим схему гидропривода пресса, в котором при сбое электроснабжения
пуансон немедленно выводится гидроцилиндром в верхнее положение (рис. 9.22). При отключении
электроэнергии 4/3-распределитель 1.1 установится в нейтральное положение под действием центрирующих пружин, а
2/2-распределитель 1.3 — в свое нормально открытое состояние. При этом аккумулятор 0.2 соединится через
распределитель 1.3 со штоковой полостью гидроцилиндра 1.0, и его шток втянется.
194
9.7. Применение гидроаккумуляторов
Э^У,
к
/\.
А 1.3
1_||ЛЛ Y2
Ж
1.0
в 1.1
Y3
!-[£Г6*®
в
0.1
Рис. 9.22. Схема гидропривода с гидроаккумулятором для подъема штока цилиндра в аварийной ситуации
Основными достоинствами подключения гидоаккумуляторов в аварийных ситуациях являются:
■ готовность к немедленному включению;
■ неограниченный срок службы;
■ отсутствие усталостных явлений;
■ безы инерционность;
■ высокая степень надежности;
■ низкие затраты на обслуживание.
Повышение быстродействия. За счет установки гидропневматического аккумулятора 0.3 вблизи от
гидродвигателя 1.0 удается легче преодолеть инерцию столба жидкости между насосной станцией 0.1 и
гидродвигателем 1.0, что способствует повышению быстродействия привода, (рис. 9.23).
1.0
1.01!
А В
й Ш
Яе
102
Sr
0.2
0.3
Рис. 9.23. Схема гидропривода с гидроаккумулятором для повышения быстродействия привода
195
10. Основы эксплуатации гидроприводов
Гидроприводы большинства машин представляют собой достаточно сложную техническую систему с
большим числом компонентов, многие из которых представляют собой высокоточные изделия, работающие в
довольно тяжелых режимах, и выход из строя одного из них может привести к длительной остановке всей
системы. Важнейшими состояниями, в которых может находиться любая техническая система, являются:
исправность, неисправность, работоспособность и отказ.
Исправность — состояние изделия, при котором оно в данный момент времени удовлетворяет всем
требованиям, установленным в отношении всех параметров (основных и второстепенных)*.
Неисправность — состояние изделия, при котором оно в данный момент времени не удовлетворяет хотя
бы одному из параметров.
Работоспособность — состояние изделия, при котором оно в данный момент времени удовлетворяет
всем требованиям, установленным по основным параметрам (исправное изделие обязательно
работоспособно, но работоспособное изделие может быть и неисправно).
Отказ — событие, состоящее в полной или частичной утрате работоспособности.
Работоспособность изделия может сохраняться до определенного предельного состояния. Для насосов
предельное состояние определяется допустимым снижением коэффициента полезного действия, для
распределителей и гидромоторов — величиной утечек, для предохранительных клапанов — изменением
давления настройки во всем диапазоне расходов и т.д.
Работоспособность изделия выявляется, как правило, во время его эксплу атации. Если изделие
сохраняет работоспособность непрерывно в течение некоторого времени, то оно обладает свойством
безотказности. Если же изделие сохраняет работоспособность до наступления предельного состояния, конечно, с
возможными перерывами на ремонт, то в этом случае, говорят о долговечности.
В технике чаще используют более общее понятие надежность — свойство изделия сохранять во времени
в установленных пределах значения всех параметров, характеризующих способность выполнять требуемые
функции в заданных режимах и условиях применения, технического обслуживания, ремонтов, хранения и
транспортирования. Надежность, как свойство, включает в себя и безотказность, и долговечность, и
ремонтопригодность — приспособленность изделия (технического устройства) к проведению различных работ по его
техническому обслуживанию и ремонту.
10.1. Ввод гидроприводов в эксплуатацию
Применение в гидроприводах машин конструктивно сложного гидравлического оборудования с
прецизионными парами трения предъявляет повышенные требования к его эксплуатации и техническому
обслуживанию. Несоответствие условий эксплуатации и предъявляемых требований приводит к нарушению
работоспособности гидрооборудования, снижению надежности и производительности машин, а иногда и отказу. Часто
поломки гидропривода происходят при его первом же пуске, поэтому необходимо соблюдать следующий
строго определенный порядок ввода гидропривода в эксплуатацию:
1) заполнить бак маслом. Заливаемое масло должно соответствовать указанному в руководстве, а его
качество должно предварительно контролироваться;
2) проверить соблюдение требований безопасности;
3) ослабить регулировочный винт предохранительного клапана;
4) проверить положение рабочих органов и распределителей, обеспечивающее поджим рабочих органов к
упорам. Поскольку при первом пуске возможны любые случайные движения, рекомендуется установить до-
* К числу основных параметров изделия относятся: быстродействие, нагрузочная характеристика,
устойчивость, точность выполнения производственных операций и т.д. Вместе с другими показателями (масса,
габаритные размеры, удобство в обслуживании и др.) они составляют комплекс показателей качества изделия.
196
10.1. Ввод гидроприводов в эксплуатацию
полнительные упоры, тщательно наблюдать за движением каждого рабочего органа. До включения
гидропривода проверить правильность срабатывания электромагнитов распределителей. Если в гидросистеме
имеются чувствительные к засорению аппараты, например, дросселирующие гидрораспределители, то вместо них
установить технологические плитки, допускающие циркуляцию масла. Установка снятых аппаратов
осуществляется только после очистки гидросистемы от начальных загрязнений;
5) кратковременным пуском электродвигателя (1...2 с) проверить правильность направления вращения
насоса (указано в руководстве к насосу);
6) проверить наличие давления при включении насосной установки (уровень давления определяется
регулировкой предохранительного клапана по п. 3);
7) устранить наружные утечки. При наличии течей по стыковым поверхностям аппаратов не
рекомендуется чрезмерная затяжка крепежных винтов, результатом которой может быть деформация корпуса и
заклинивание золотников; следует проверить отклонение от плоскостности соединительных поверхностей и качество
уплотнительных колец;
8) в процессе работы на низком давлении проверить ход всех рабочих органов и выпустить воздух из
гидродвигателей и трубопроводов через специально предусмотренные устройства или ослабляя затяжку
соединений трубопроводов в верхних точках гидросистемы (при давлении не более 0,3 МПа). При необходимости
долить масло в бак;
9) с помощью предохранительного клапана или регулятора насоса установить в гидросистеме
нормальное рабочее давление. После проверки рабочего давления манометр необходимо отключить от
гидросистемы (с помощью специальных переключателей) и проследить, чтобы его стрелка вернулась к
нулевой отметке;
10) при наличии повышенного уровня шума или пены на поверхности масла в баке проверить уплотнение
вала насоса, герметичность всасывающего и сливного трубопроводов, а также уровень масла в баке;
11) произвести наладку узлов гидропривода; обеспечить плавность движения гидроцилиндров,
нарушение которой может быть вызвано следующими причинами: повышенное трение в уплотнениях цилиндра или
направляющих рабочего органа, перекос оси цилиндра относительно направляющих, наличие воздуха в
полостях, недостаточное давление настройки предохранительного клапана, недостаточное противодавление в
сливной полости.
Осуществить настройку тормозных устройств и выставить упоры, установленные на машине (во
избежание разрушения гидроцилиндра, особенно при больших перемещаемых массах, при полном ходе рабочих
органов поршень не должен доходить до упора в крышку).
Сжимаемость масла в рабочей полости цилиндра приводит к запаздыванию начала движения его штока,
поэтому соответствующие паузы при наладке цикла не следует считать дефектом. Аналогичные явления
приводят к замедленному росту давления в полостях цилиндра и появлению пауз (до нескольких секунд при
малых подачах) при управлении по давлению.
Для нормальной работы путевых дросселей и распределителей произвести наладку кулачков. При этом
необходимо следить, чтобы ход толкателя или ролика не превышал значения, требуемого по техническому
условию, а угол наклона кулачка не превышал 30". По окончании наладки регулировочные элементы
наиболее ответственных гидроаппаратов опломбировать или запереть на замок.
В процессе регулирования и наладки гидропривода проверить правильность функционирования
гидравлических блокировок, обеспечивающих необходимую последовательность работы механизмов (например,
сначала зажим заготовки, а затем включение подачи), а также защиту от аварии при нарушениях в работе
гидросистемы (случайные падения давления, отключение одного из насосов и др.).
При отладке электрогидравлических приводов особое внимание следует уделить качеству выполнения
механической части (т.е. проверить уровень трения (сухого); наличие зазоров а механических передачах;
правильность закрепления датчиков; отсутствие воздуха в гидродвигателях; жесткость и длину трубопроводов,
связывающих распределитель с гидроприводом);
12) подключить систему электроавтоматики и произвести наладку автоматического цикла.
Функционирование гидродвигателей в автоматическом цикле должно строго соответствовать циклограмме работы
197
10. Основы эксплуатации гидроприводов
оборудования. При наладке автоматического цикла отрабатывается четкость работы электрической
системы управления последовательностью включения распределителей, надежность блокировок,
окончательно регулируются и уточняются время каждого перехода, величины ходов, характер динамических
процессов;
13) если при наладке установлено, что средний уровень звука 85 дБА, допустимый в соответствии с
ГОСТ 12.1.003-83 для постоянных рабочих мест в производственных помещениях, превышен, необходимо
принять меры к его снижению. Прежде всего следует обратить внимание на качество насоса и наличие
воздуха в гидросистеме;
14) после работы гидропривода в автоматическом цикле в течение 4...5 ч определить установившуюся
температуру масла в баке, которая не должна превышать 55 °С. При наличии перегрева следует прежде
всего уменьшить потери мощности в гидроприводе (проверить действие устройств разгрузки, устранить
чрезмерные запасы по давлению и расходу), а затем обратить внимание на функционирование
маслоохладителей (наличие потока охлаждающего воздуха в воздушных или воды в водяных теплообменниках;
количество масла, проходящее через теплообменник; исправность терморегуляторов и правильность их
регулировки).
Следует помнить, что нормальный тепловой режим гарантируется лишь при строгом соблюдении
рекомендаций завода-изготовителя по типу применяемых масел. Для определения возможных перетечек в
гидросистеме целесообразно проверить расход масла через дренажную и сливную линии при неподвижных
гидродвигателях;
15) наладить систему фильтрации. После нескольких часов эксплуатации привода проверить степень
загрязнения фильтров и при необходимости очистить или заменить фильтроэлементы.
10.2. Техническое обслуживание гидроприводов
Техническое обслуживание представляет собой регламентированный, регулярно проводимый комплекс
профилактических мероприятий, обеспечивающих исправность гидроприводов при их эксплуатации.
Одним из основных условий увеличения срока службы гидроприводов является своевременное и
качественное проведение всех видов технического обслуживания и ремонта на базе системы
планово-предупредительного ремонта. По этой системе гидрофицированные машины останавливаются для ремонта по заранее
разработанному плану, когда они находятся еще в работоспособном состоянии. Система
планово-предупредительного ремонта позволяет устранить элементы случайности в работе приводов и внезапные отказы его
элементов,
Техническое обслуживание является неотъемлемой частью системы планово-предупредительного ремонта
машин, которая должна связывать в один комплекс выполнение технических обслуживании и ремонтов.
Составными частями технического обслуживания гидроприводов являются:
■ постоянное наблюдение за состоянием рабочей жидкости и всех других частей системы,
осуществляемое с помощью органов чувств — визуально, на слух и на ощупь, и проверка показаний приборов с
целью выявления отклонений от нормы, причин их появления и принятия оперативных мер по их
устранению;
■ периодическая комплексная проверка свойств и состояния рабочей жидкости, а также проверка
состояния наиболее отказоопасных компонентов гидропривода с целью их своевременной замены или
ремонта (незамедлительно, если этого требует их реальное состояние, либо в планово-предупредительном
порядке);
■ единовременная полная ревизия гидропривода, выполняемая обычно не чаще раза в год,
сопровождаемая очисткой гидробака и моаслоохладителя, заменой рабочей жидкости, заменой, при необходимости,
основных гидроагрегатов и поднастройкой контрольно-регулирующей аппаратуры.
Постоянное наблюдение за состоянием машины осуществляется оператором машины, а перед началом
смены и работниками службы механика цеха или участка.
198
10. 2. Техническое обслуживание гидроприводов
Наиболее важные объекты проверок и характерные внешние проявления отклонений от нормального
состояния приведены в табл. 10.1.
Таблица 10.1
Компонент гидросистемы
Гидробак с рабочей
жидкостью
<1
Насосная установка
Предохранительный
клапан
Гидрораспределители
Гидроцилиндр
Проявление отклонения
Низкий уровень масла в
баке
Неудовлетворительная
температура масла в
баке
Образование пены на
поверхности масла
Масло молочного цвета
Наружная течь масла
Наружный шум
механического происхождения
Внутренний шум
механического
происхождения
Повышенная вибрация
Значительные
колебания стрелки манометра
на выходе насоса.
Значительный шум
гидравлического
происхождения
Давление в системе
недостаточно или
отсутствует
Повышенная
температура корпуса
Чрезмерно высокое
давление в системе. Шум
при работе
Неустойчивая работа
клапана, колебания
стрелки манометра
Наружная течь масла.
Повышенная
температура корпуса
Шум механического
происхождения
Наружная течь масла.
Повышенная
температура гильзы цилиндра
Механические удары в
конце хода
Нарушена рабочая
скорость выходного звена
Возможная причина отклонения
Наружная течь масла в трубопроводах и элементах системы
Неисправность теплообменника или недостаточный расход
воды через него. Низкий уровень масла в баке.
Неисправность нагревательных элементов. Неработоспособность
устройств разгрузки
Низкий уровень масла в баке. Негерметичность всасывающего
трубопровода. Износ манжеты вала насоса
Попадание воды в масло через маслоохладитель.
Повышенная влажность воздуха
Повреждение уплотнений деталей насоса. Дефект
трубопроводов. Ослабление крепления крышек, фланцев, пробок и т.п.
Дефект приводной муфты. Ослабление крепления насоса или
электродвигателя
Повреждение подшипников. Износ деталей
распределительного узла и деталей качающего узла насоса. Разрушение
отдельных деталей насоса
Повреждение приводной муфты. Несоосность валов насоса и
двигателя. Повреждение подшипников
Большое разрежение на всасывании из-за засорения линии
всасывания. Низкий уровень масла в баке. Негерметичность
линии всасывания. Перегрузка насоса по давлению. Износ
деталей распределительного узла и поломка деталей качающего
узла
Неправильное направление вращения насоса. Низкий уровень
масла в баке. Неправильная настройка или отказ клапанов
давления. Большие утечки в насосе, трубопроводах или
гидроаппаратах
Значительные внутренние утечки. Дефект уплотнений деталей
клапана или ослабление крепления клапана и его деталей
Нарушение регулировки клапана
Воздух в масле. Засорение клапана. Неисправность насоса
Повреждение уплотнений деталей распределителя или
ослабление крепления. Внутренние утечки вследствие износа
корпуса и золотника
Ослабление крепления электромагнита. Магнит переменного
тока — не доходит до упора якорь магнита
Повреждение уплотнения штока. Дефект трубопроводов.
Износ гильзы цилиндра и уплотнений поршня
Неисправность или неправильная регулировка узлов
демпфирования цилиндра
Наличие воздуха в гидросистеме. Неравномерная подача
рабочей жидкости из-за неисправностей в насосе.
Недостаточный подпор в сливной полости. Давление от нагрузки близко к
настроечному значению предохранительного клапана
199
10. Основы эксплуатации гидроприводов
Окончание табл. 10.1
Компонент гидросистемы
Фильтры
Манометры
Трубопроводы
Проявление отклонения
■ Л ш Л
Индикатор
загрязненности в положении,
свидетельствующем
о засорении фильтро-
элемента
Ненормальное
положение стрелки манометра
Колебания стрелки
манометра
Наружная течь масла.
Вздутие рукавов
Вибрация труб
Возможная причина отклонения
Конец срока службы фильтроэлемента. Внезапное
загрязнение гидросистемы
Повреждение измерительной системы манометра
Воздух в масле. Неисправность насоса или
предохранительного клапана. Динамическая неустойчивость привода
Нарушение цельности труб или рукавов. Разрыв оплеток
рукава. Дефект концевых соединений
Ослабление монтажных хомутов и крепежных скоб.
Неисправность насоса или предохранительного клапана
При выявлении отклонений от нормального состояния рабочей жидкости или какого-либо компонента
гидросистемы и уточнения причин их возникновения обслуживающим персоналом принимается решение о
необходимости их устранения и остановке машины.
При работе с гидросистемой в обязательном порядке должны соблюдаться следующие правила:
■ все виды работ, сопряженные с подтягиванием винтов крепления компонентов гидросистемы,
соединений трубопроводов, манометров и другихприборов проводится только при остановленных насосах и
отсутствии давления в системе;
■ сварочные работы, связанные с устранением дефектов жестких трубопроводов, должны выполняться
при слитой рабочей жидкости, с предохранением внутренних полостей от попадания в них
загрязнителей, образующихся при сварке: брызг металла, шлаков и т.п. Исправление дефектов трубопроводов
методом заварки непосредственно в гидросистеме не допускается;
перед установкой в гидросистему отремонтированный или запасной трубопровод должен подвергаться
очистке с использованием механических и химических средств;
■ дозаправка бака может производиться только рабочей жидкостью той же марки, обязательно через
заливной фильтр;
■ при замене в фильтры не должны устанавливаться фильтроэлементы с более грубой степенью очистки,
чем заменяемые;
■ при дозаправке пневмогидроаккумуляторов рабочая жидкость из них должна быть слита.
При визуальном обнаружении воды в масле работа гидросистемы должна быть немедленно
остановлена. Источник попадания воды в масло должен быть выявлен и устранен. Обводненное масло обязательно
должно быть слито и отправлено на обезвоживание. При обнаружении интенсивного пенообразования в
масле работа гидросистемы должна быть приостановлена до определения причин повышенной аэрации и
их устранения.
Периодическое техническое обслуживание гидросистем проводится либо как
планово-предупредительные работы через некоторые регламентированные интервалы времени, либо по потребности, на основе
показаний приборов и средств технического диагностирования компонентов гидросистемы, позволяющих
своевременно обнаружить изделия, состояние которых оказывается близким к критическому, и заменить их до
выхода из строя.
На основе обобщения данных эксплуатации гидрофицированных машин рекомендуется следующая
периодичность проверок состояния компонентов гидросистем:
■ физико-химический анализ рабочей жидкости — через 1 000 ... 2 000 ч работы;
■ промывка корпусов фильтров через 750 ... 1 000 ч работы с одновременной заменой фильтроэлементов
воздушных фильтров (сапунов);
200
10.3. Поиск и устранение неисправностей
■ оценка состояния насосов с измерением величины утечек из корпуса насоса через 2 000 ... 3 000 ч
работы;
■ оценка состояния гидроцилиндров через 3 000 ... 5 000 ч работы;
■ оценка состояния предохранительных клапанов, работающих в режиме перелива, через 750... 1 000 ч
работы.
Проводя техническое обслуживание гидросистем, необходимо помнить, что лучше заменить компонент
системы при видимых отклонениях его состояния от нормального, чем продолжать его эксплуатировать, что
может повлечь за собой не только отказ данного компонента, но и привести к значительной потере времени на
устранение последствий этого отказа во всей гидросистеме. Например, отказ насоса, связанный с
разрушением деталей качающего узла, может привести к выносу осколков в гидролинии, что может стать причиной
заклинивания гидроаппаратов, быстрого износа гидродвигателей, повреждению фильтроэлементов и т.д.
Единовременная полная ревизия гидросистемы, как правило, должна производиться в период
капитального ремонта, или среднего ремонта самой машины. В это же время может проводиться плановый ремонт
гидрооборудования с последующим контролем отремонтированных изделий на специальном испытательном
стенде.
Надежное функционирование гидроприводов подразумевает не только строгое выполнение заданных
функций исполнительных механизмов, но и возможность эффективного обнаружения и максимально
быстрого устранения причин отказов, вызванных теми или иными неисправностями.
10.3. Поиск и устранение неисправностей
Важной составляющей технического обслуживания является своевременное обнаружение
неисправностей, приведших к потере работоспособности оборудования и поиск отказавшего элемента. Для сложных
гидроприводов это оказывается достаточно трудоемкой процедурой и может вызвать длительный простой
оборудования.
10.3.1. Виды неисправностей
В гидравлических системах, как и в любых других устройствах, встречаются два вида неисправностей,
или, как их принято называть в теории надежности, два типа отказов: внезапные и постепенные.
Внезапные отказы характеризуются скачкообразным изменением значений одного или нескольких
основных параметров устройства (например, заклинивание подвижных частей, разрушение или деформация
деталей гидрооборудования). При внезапных отказах гидросистема теряет работоспособность.
Постепенные отказы — медленное (постепенное) изменение значений одного или нескольких основных
параметров устройства (например, снижение мощности двигателя ниже установленной), являющееся
следствием естественного износа деталей, нарушения герметичности или неправильной установки гидроаппаратов.
Постепенные отказы ведут к постепенной потере работоспособности, когда гидросистема может еще
работать, но все менее эффективно, с меньшей производительностью, с нерациональными затратами энергии, с
загрязнением окружающей среды и ухудшением условий труда обслуживающего персонала.
Поскольку причины возникновения внезапных и постепенных отказов различны, то и способы их
предотвращения отличаются друг от друга.
Для уменьшения количества внезапных отказов может быть рекомендована предварительная обкатка
системы и приработка гидроаппаратов с целью выявления скрытых дефектов производства.
Уменьшению числа постепенных отказов может способствовать своевременная замена изношенных
элементов, выработавших свой ресурс.
Критерии отказов устанавливаются в нормативно-технической документации на конкретное оборудование.
Отказ отдельного элемента гидропривода, не обусловленный повреждениями других элементов,
называется независимым отказом (например, поломка пружины гидрораспределителя), а возникший в результате
повреждения или выхода из строя других элементов — зависимым (например, заклинивание золотника
распределителя вследствие выхода из строя напорного фильтра).
201
10. Основы эксплуатации гидроприводов
10.3.2. Характерные неисправности
Причины неисправностей в гидравлических приводах и виды их проявления столь разнообразны, что
свести их в единый перечень не представляется возможным. Хотя эксплуатация гидравлических приводов и
систем обычно сопровождается статистическим сбором и учетом информации о возникающих неполадках и
характерных отказах, в технических описаниях и инструкциях по эксплуатации конкретных гидроаппаратов, как
правило, приводятся признаки и описание лишь наиболее типичных неисправностей.
Основываясь на данных такого статистического учета отказов гидроаппаратов, приведем примерный
перечень наиболее характерных неисправностей и рекомендуемых способах их устранения (табл. 10.2).
Таблица 10.2
№
п/п
1
2
3
4
Неисправность Ц
Насос не
подает жидкость
в систему
Насос не
создает давления
в системе
Шум и
вибрация в системе
Неравномерное движение
рабочих
органов
Возможные причины
Неправильное направление вращения
вала насоса
В баке мало рабочей жидкости
Засорился асасывающий трубопровод
Подсос воздуха во всасывающей трубе
Поломка насоса
Большая вязкость жидкости
Засорился демпфер переливного клапана
Насос не подает жидкость в систему
Большой износ насоса (внутренние утечки
велики)
Большие внешние утечки по валу насоса
Большие внутренние утечки в гидросистеме
Завис золотник предохранительного
клапана или не сел на седло переливной клапан
Уменьшение вязкости масла вследствие
его нагрева (обычно выше 50 °С)
Большое сопротивление во всасывающем
трубопроводе
Мала пропускная способность фильтра
или он засорился
Подсос воздуха во всасывающей трубе
Засорился сапун в баке
Вибрация клапана
Резкое изменение проходного сечения
трубопроводов
Нежесткое крепление трубопроводов
Наличие воздуха в гидросистеме
Давление настройки предохранительного
клапана близко к давлению, необходимому
для движения рабочих органов
Способ устранения
Изменить вращение вала
Долить жидкость до отметки маслоуказателя
Прочистить трубопровод
Подтянуть соединение
Устранить повреждения или заменить насос
Заменить жидкость
Промыть клапан и прочистить демпферное
отверстие
См. п. 1
Проверить производительность насоса на
холостом ходу и под нагрузкой
При объемном КПД ниже паспортного
заменить насос
Заменить уплотнения. Проверить, нет ли
раковин, трещин и т.д. При их обнаружении
заменить насос. Заменить уплотнения.
Проверить узлы гидросистемы на герметичность и
отремонтировать
Разобрать и промыть клапан, проверить
состояние демпфера, пружины, шарика и его седла
Улучшить условия охлаждения масла
Увеличить проходное сечение труб
Заменить фильтр или промыть его
Подтянуть соединения
Прочистить сапун
Разобрать и проверить демпфирующие
каналы
Увеличить и выправить проходные сечения
трубопроводов
Закрепить трубопроводы
Выпустить воздух из системы
Настроить предохранительный клапан на
давление на 0,5... 1,0 МПа больше, чем давление,
необходимое для движения рабочих органов
202
70.3. Поиск и устранение неисправностей
Продолжение табл. 10.2
№
п/п
4
5
6
7
8
9
10
Неисправность
Резкое
уменьшение
скорости движения
при росте
нагрузки
Постепенное
уменьшение
скорости
движения
рабочего органа
Повышенное
давление в
нагнетательной линии при
холодтом ходе
Повышенный
нагрев масла
в системе
Обратный
клапан
пропускает жидкость
при
изменении
направления потока
Предохранительный
клапан не
удерживает
давления
Возможные причины
Мало противодавление на сливе из
цилиндра
Механическое заедание подвижных частей
гидроцилиндра
Неравномерная подача масла насосом.
Шум и стук в насосе вследствие поломки
одной из лопаток или плунжера
Большие внутренние или внешние утечки
в элементах гидросистемы
Регулятор расхода заедает в открытом
положении
Предохранительные и переливные
клапаны отрегулированы на низкое давление
Загрязнение рабочей жидкости
Засорение фильтров, дросселей и других
аппаратов системы
Облитерация (заращивание) щелей
дросселя
Износились уплотняющие поверхности
гидроагрегатов или снизилась вязкость
рабочей жидкости
Повысились потери давления в системе
из-за неправильного выбора аппаратуры,
уменьшенного проходного сечения
трубопроводов, а также в результате
некачественного монтажа
8 переливном клапане засорился канал
управления
Повышенные механические сопротивления
движению рабочих органов
Повышенные потери давления в
трубопроводах и гидроаппаратуре
Плохой отвод теплоты от бака и
трубопроводов
Насос не разгружается во время пауз
Чрезмерно большие запасы по давлению и
подаче насоса
Клапан не прилегает седлу
Дефект рабочих кромок клапана или седла
Сломалась пружина клапана
Засорился демпфер или седло клапана.
Потеря герметичности в системе
дистанционной разгрузки
Износился шарик или седло
Сломалась пружина
Способ устранения
Повысить сопротивление на сливе
(регулировкой дросселя или подпорного клапана)
Отремонтировать гидроцилиндр
Заменить насос
См. п. 2
Разобрать регулятор расхода, проверить
исправность пружины и плавность перемещения
золотника. Устранить дефекты, промыть и
собрать регулятор
Настроить предохранительные и переливные
клапаны
Заменить жидкость и промыть гидросистему
Промыть аппаратуру
Увеличить открытие дросселя или установить
дроссель с меньшим минимальным расходом
Заменить износившиеся гидроагрегаты или
заменить рабочую жидкость
Заменить аппаратуру, установить
трубопроводы с большим проходным сечением,
исключить излишние изгибы, соединения и т.п
Прочистить канал управления
Устранить недостатки конструкции,
отремонтировать штоки цилиндров и т.п.
См. п. 7, а также улучшить теплоотвод от
бака и труб
Проверить работу разгрузочного устройства,
устранить дефекты
Установить насос с требуемыми параметрами
Разобрать клапан, проверить состояние
седла, конуса клапана и пружины. Устранить
дефекты, промыть и собрать клапан
Прочистить демпфер, промыть потоком
жидкости
Заменить шарик или седло
Заменить пружину
203
10. Основы эксплуатации гидроприводов
Продолжение табл. 10.2
№
п/п
11
12
13
14
15
16
17
18
Неисправность
Давление за
редукционным
клапаном
отсутствует
Через
дренажные отаерстия
идут большие
утечки
Золотники с
электрогидравлическим
управлением
не
переключаются при
включении
электромагнита
Электромагниты гудят и
перегреваются
Обрыв и
трещины
маслопроводов с
нарушением
герметизации
Редукционный
клапан не
понижает
давления или
понижает
недостаточно
Скорость
подачи силового
узла мала и
падает при
нагрузке
(регулирование с
помощью
регулятора расхода)
Поток масла
не
реверсируется
распределителем
золотникового
исполнения
Возможные причины
Засорился демпфер или седло клапана
Износился шарик или седло
Сломалась пружина
Износились уплотнения
Износились рабочие поверхности
подвижных распределительных устройств
Заедание золотника в корпусе (задир
золотника)
Заклинивание золотника при грязном
масле или осевшей возвратной пружине
Густое масло затрудняет перемещение
золотника
Якоря электромагнитов не перемещаются
на полную величину хода
Расклепался конец толкателя
Засорилось дренажное отверстие в
золотнике
Слишком сильны возвратные пружины
Напряжение питающего тока не
соответствует номиналу
Расклепался якорь электромагнита
Недопустимые деформации гибких рукавов
Старение и износ гибких рукавов
Резонансные колебания трубопроводов
Значительные пики давления в
гидросистеме
Регулирующая пружина сжата почти
до полного прилегания витков
Золотник клапана заедает
Засорилась линия отвода масла после
шарика в бак
Осела регулирующая пружина
Засорилось демпферное отверстие
золотника
Между шариком и седлом попала грязь
или поврежден шарик
Засорилась щель дросселя
Ослабла пружина встроенного
редукционного клапана или застрял золотник
Повышение утечки в насосе и
гидроагрегатах
Большая вязкость масла
Заедание золотника в корпусе вследствие
грязного масла, пережима крепежных
болтов, неплоскостности монтажной
поверхности, полома возвратных пружин,
отсутствия давления управления
Сгорела катушка или расклепался якорь
Способ устранения
См. п. 10
См. п. 10
См. п. 10
Заменить уплотнения
Произвести ремонт или замену
Снять элетромагниты, проверить вручную
перемещение золотника, проверить затяжку
крепления корпуса золотника, промыть
аппарат, сменить масло
Проверить напряжение в зажимах
электромагнита, устранить заедание якоря при
перемещениях
Заменить толкатель
Разобрать, промыть
См. п. 13
Заменить на более слабые Отрегулировать
напряжение электротока
Переклепать якорь
Довести конструкцию маслопровода
Заменить рукав
Закрепить трубы скобами
Поставить перепускные клапаны и демпферы.
Снизить скорость рабочего органа
Разобрать клапан промыть и заменить
дефектные детали
Разобрать и промыть с заменой дефектных
деталей
Заменить износившиеся гидроагрегаты
Заменить масло
Разобрать и промыть распределитель
Ослабить крепежные болты
Поверить давление управления
Заменить дефектные детали
204
70.3. Поиск и устранение неисправностей
Окончание табл. 10.2
№
п/п
19
Неисправ- ¥
ность '
Масло и пена
выбрасываются через
заливную
горловину
маслобака или крышку
встроенного
сливного _
фильтра
Возможные причины
Избыток масла в баке
Подсос воздуха в гидросистему
Засорился фильтр или повреждены
уплотнения крышки фильтра
Способ устранения
Слить часть масла
Подтянуть соединения всасывающей линии
Промыть фильтр и заменить уплотнения
Поскольку стоимость узлов гидропривода сравнительно невелика, производить их трудоемкий ремонт
обычно нецелесообразно, проще заменить узел новым. Замена быстроизнашиваемых элементов (шариков,
пружин, уплотнений, электромагнитов и др.) широко применяется при эксплуатации. В любом случае основной
задачей при появлении признаков нарушения работоспособности привода является локализация
неисправности, т.е. обнаружение конкретного неисправного элемента системы. Эта задача может быть решена только
применением эффективного метода поиска, так как описание всех возможных причин даже для относительно
простой гидросистемы очень сложно.
Метод простого перебора или метод проб и ошибок, практически, неприемлем хотя бы из-за длительности
по времени и значительной дороговизны.
Наиболее правильным для выявления неисправного элемента гидросистемы является использование
логического метода поиска, что требует хороших знаний принципов действия, конструкции и особенностей
функционирования всех гидроаппаратов по отдельности и системы в целом.
Вполне понятно, что если все элементы системы оснащены устройствами, которые дают информацию об
их техническом состоянии (датчики усилий, скорости, перемещений, давления, уровня, температуры и др.), то
проблемы поиска неисправностей не возникает. Каждый отказ обнаруживается автоматически. Однако
подобная ситуация может быть реализована только для очень ответственных и дорогих гидросистем
автоматизированных машин. Поэтому логический метод диагностики может быть применен для большинства
существующих гидросистем различной степени сложности.
Логический метод диагностики. Весь процесс поиска неисправностей разбивается на
последовательные шаги: вначале устанавливается вид функциональной неисправности всей гидросистемы (или всего
гидропривода), затем конкретизируется группа гидроаппаратов, неисправности которых могут быть причиной
функциональных отказов. При этом используется опыт, накопленный при эксплуатации данной системы, либо
систем, косвенно похожих на диагностируемую. После этого выявляется неисправный аппарат, определяется
вид неисправности и принимается решение о способе ее устранения. Таким образом, процедуру поиска
«виновника» отказа в гидравлической системе любого технологического оборудования можно представить в виде
определенной последовательности действий.
Общий смысл этих действий представляет собой совокупность следующих шагов.
Шаг 1. Уточнение возникшей неисправности в машине (конкретизируется вид функциональной
неполадки). При этом используется перечень проявлений неисправностей:
■ прекращение движения рабочего органа машины;
■ неконтролируемое движение рабочего органа;
■ недостаточная скорость перемещения;
■ недостаточное усилие, развиваемое рабочим органом;
■ неправильное направление движения.
После установления и четкого формулирования вида неисправости определяется какой из основных
параметров гидросистемы является причиной этой неисправности: давление; расход или направление потока
рабочей жидкости.
205
10. Основы эксплуатации гидроприводов
Шаг 2. Составление предварительного перечня гидроаппаратов и элементов системы,
подозреваемых в создании неисправности. Составляется перечень гидроаппаратов, которые непосредственно
участвуют в передаче мощности к исполнительному механизму нарушение работоспособности которого было
выявлено на первом шаге, а также в управлении этой мощностью.
Шаг 3. Анализ статистической информации причин неисправности. Изучается статистическая
информация по неполадкам и техническому обслуживанию конкретной гидросистемы или ее аналогов. Обычно
такая информация содержится в техническом описании машины и, главным образом, в журнале учета
неисправностей гидрооборудования.
Шаг 4. Интуитивный поиск неисправности. Интуитивная оценка ситуации проводится с целью
сокращения числа подозреваемых элементов. Для этого — на слух, на ощупь, визуально — ищутся дополнительные
признаки неисправности какого-либо гидроаппарата или потери рабочей жидкостью своих эксплуатационных
качеств, например повышенные шум, вибрация, нагрев корпуса, пенообразование, ненормальный уровень
жидкости в баке и т.д.
Шаг 5. Поиск неисправности с помощью технических средств. Производится в тех случаях, когда
причина неисправности не была выявлена на шагах 3 и 4. Используются специальные контрольно-измерительные
средства для определения давления и расхода жидкости, величины хода штока гидроцилиндра, положения
золотника распределителя и других параметров гидросистемы и ее элементов.
При этом бывает весьма желательно осуществлять такой контроль без демонтажа компонентов
гидросистемы. Для этого сама система должна быть оборудована устройствами для легкого присоединения
контрольных средств и приборов.
Шаг 6. Выявление неисправного аппарата, определение неисправности и принятие решения о способе
ее устранения. На основании выявленных признаков неисправности формулируется окончательный вывод о
«виновности» конкретного гидроаппарата и принимается решение о возможности устранения неисправности
на месте, либо о замене его новым.
Например, не выдвигается шток гидроцилиндра из-за несрабатывания клапана последовательности.
Если, запорный элемент клапана заклинен в закрытом положении вследствие поломки пружины, то необходима
замена неисправного клапана новым. В случае, если неисправность клапана обусловлена его загрязнением,
то его прочистку можно провести на месте.
При неисправностях насоса, износе гидроцилиндра или гидрораспределителя, как правило, их заменяют
на новые, а неисправные отправляют в ремонт.
Шаг 7. Анализ причин появления отказа и возможных последствий неисправности. Проводится
анализ общих причин, которые могли предшествовать появлению отказа, чтобы предотвратить появление
подобных отказов в дальнейшем. Например, если отказ был связан с засоренностью аппарата, а уровень
загрязненности рабочей жидкости близок к критическому, то следует ожидать возникновение последующих
отказов.
После выхода из строя насоса вся система до установки нового насоса должна быть тщательно промыта
для удаления возможных обломков и мелких частиц.
Обязательным при этом является внесение информации о неисправности в журнал учета.
Для сложных гидросистем целесообразно разрабатывать специальные алгоритмы поиска
неисправностей и рекомендации по устранению причин их возникновения, а также оптимальные графики проведения
планово-предупредительных проверок и ремонтов.
Своевременное устранение постепенных отказов и причин их возникновения позволяет предотвратить
появление внезапных отказов с прекращением функционирования всего гидропривода. Устранение причин
появления постепенных отказов — основная задача технического обслуживания гидросистем.
10.3.3. Техническая диагностика гидросистем
В решении проблемы обеспечения надежной работы гидроприводов постоянно возрастает роль
технической диагностики, контролирующей техническое состояние гидропривода в процессе эксплуатации, что
позволяет использовать привод оптимальным образом, осуществлять ремонт в кратчайшие и
действительно необходимые сроки. В качестве переносных средств технической диагностики все более широко
применяются гидротестеры, с помощью которых можно контролировать давление, температуру и расход. В состав
206
70.4. Общие требования по технике безопасности
таких тестеров входят: один-два датчика давления, или малогабаритный манометр, средства сопряжения,
датчик температуры, вторичный прибор для цифровой индикации контролируемых параметров,
расходомер. К встраиваемым средствам диагностики относятся различные датчики и индикаторы, позволяющие
оперативно следить за техническим состояние привода. Особенно перспективно использование
встроенных в различные участки гидросистемы тепловых датчиков, с помощью которых реализуется
термодинамический метод диагностирования — по температуре масла в различных точках гидросистемы можно судить о
величине и направлении потоков, наличии гидравлических потерь, эффективности системы
терморегулирования.
Перспективно применение средств вибрационной диагностики, позволяющих по вибрациям корпусов
насосов производить оперативный анализ нормированных диагностических признаков, свидетельствующих о
наличии погрешностей деталей или их взаимного расположения после сборки, и отбраковывать насосы по
комплексному показателю качества.
10.4. Общие требования по технике безопасности
Объемный гидропривод является сложной технической системой, к конструкции которой предъявляются
требования безопасности, регламентируемые ГОСТ 12.2.040-79. Требования безопасности к монтажу,
испытаниям и эксплуатации объемных гидроприводов оговариваются в ГОСТ 12.2.086-83 ССБТ.
Гидропривод должен быть защищен от перегрузок. Для защиты гидроприводов от перегрузок и контроля
давления в напорных линиях должны быть установлены предохранительные клапаны и манометры. На
шкалах манометров наносят специальные (чаще — красного цвета) метки, которые соответствуют максимально
допустимому давлению. В линиях, ведущих к манометрам, запрещается отбор рабочей жидкости.
Конструкция гидроприводов должна исключать опасность для обслуживающего персонала:
а) в гидросистемах с высоким давлением (более 10 МПа) для избежания поражения струей жидкости
необходимо ограждать кожухом все участки гидролиний, незаключенные в общий корпус машины;
б) в гидросистемах должны быть предусмотрены блокировки (в виде — датчиков положения, датчиков
давления и др.), исключающие возможность ошибочного включения несовместимых движений рабочих
органов; например в гидроприводах металлорежущих станков цикл обработки детали начинается только после
окончания цикла зажима детали;
в) в гидросистеме должна быть предусмотрена возможность блокировки, останавливающей машину при
снижении давления ниже разрешенного (величина разрешенного давления указывается в технических
условиях); при этом не должны отключаться устройства, перерыв в работе которых может привести к
травмированию персонала (тормозные устройства, зажимные и подъемные механизмы и др.);
г) в гидросистемах с двумя и более насосами должны быть предусмотрены блокировки, исключающие
опасность при внезапной остановке одного из насосов или при изменении последовательности их работы; так,
например, при остановке одного насоса и, связанного с этим, падении давления в его напорной линии
возможна переблокировка на другой источник давления: от гидроаккумулятора, от другого насоса.
Гидрофицированные устройства для закрепления заготовок и инструмента должны надежно удерживать
заготовку или инструмент даже в случае неожиданного падения давления масла в системе.
Гидроаппараты, регулирование которых некомпетентным персоналом может привести к аварийный
ситуациям или травмированию, должны быть снабжены специальными замками или пломбами.
На устройствах, допускающих только одностороннее движение, должно быть указано, например,
стрелками, направление этого движения.
Конструкция гидропривода должна исключать возможность разбрызгивания (утечки) рабочей
жидкости во внешнюю среду. Предельно допустимая концентрация масляного тумана в воздушной среде не
должна превышать 5 мг/м3, а паров углеводородов масла — не более 300 мг/м3. Правила безопасной работы с
маслами изложены в соответствующих ГОСТах.
Гидроприводы, в которых используются гидроаккумуляторы, должны быть самозащищены от
перегрузок. С этой целью применяются либо предохранительные устройства, либо устройства для отключения
гидроаккумулятора от гидросистемы и соединение его жидкостной полости со сливной линией.
207
10. Основы эксплуатации гидроприводов
Гидроаккумуляторы, у которых произведение вместимости (л) на рабочее давление (МПа) превышает
значение 20, подлежат эксплуатации и контролю согласно «Правил устройства и безопасной эксплуатации
сосудов, работающих под давлением».
Конструкция и параметры гидропривода должны исключать возможность опасных уровней вибрации и
шума. Источниками вибрации и шума, воздействующими как на оператора и его рабочее место, так и на саму
машину, могут быть различные причины, связанные с несовершенством конструкции и самого
технологического процесса. Некоторые из таких причин: несимметричное распределение жидкости в гидродвигателях;
погрешности при изготовлении гидроаппаратов (зазоры, пружины и т.п.); наличие воздуха в рабочей жидкости
(может привести к кавитационным явлениям); вибрации золотников в регулирующих и направляющих
аппаратах; вибрации в местах закрепления трубопроводов; недостаточная виброизоляция (чаще всего — насосных
агрегатов) и др.
Значение величин опасных уровней вибрации и шума изложены в соотвествующих специальных ГОСТах:
ГОСТ 12.2.040-79 «Допустимые средние уровни звука для насосов и насосных агрегатов»; ГОСТ 12.1.003-83
«Допустимый средний уровень звука в производственных помещениях» и др.
Гидропривод должен обладать свойством электрической безопасности.
Прежде всего речь идет о наличии заземления и других средствах защиты электрооборудования (ГОСТ
12.2.007.0-75; 21130-75; 14254-80).
Испытания гидрофицированных систем и устройств следует проводить при строгом соблюдении
следующих основных правил:
■ перед началом испытаний следует установить органы управления в исходные позиции;
■ максимально ослабить регулирующие пружины предохранительных клапанов;
■ проверить наличие и надежность закрепления предусмотренных ограждений;
■ проверить наличие заземления электрооборудования;
■ проверить состояние манометров (визуально);
■ проверить наличие пломб или состояние замков;
■ проверить кратковременным включением наличие и направление вращения насосов;
■ проверить уровень жидкости в баке и убедиться в отсутствии протечек в гидросистеме.
Работа гидроприводов должна производиться при тщательном соблюдении правил пожарной
безопасности. Основные требования пожарной безопасности при обслуживании и эксплуатации
гидропривода регламентируются специальными ГОСТами, установленными в каждой отрасли (например, Правила
ППБО-136-86 — в металлургии).
Смысл этих правил сводится к следующему:
■ при загорании масла допускаются все средства тушения, кроме воды;
■ обязательность наличия огнетушителей, ящиков с песком и вспомогательного инструмента в местах
хранения масел и расположения насосных станций;
■ гидроаппаратура управления насосными станциями и гидроприводами должна быть во взрывобезопас-
ном исполнении;
■ оборудование маслоподвалов, насосно-аккумуляторных станций, агрегатов, технологических линий
должно подвергаться регулярному осмотру и предупредительному ремонту; при обнаружении утечки
масла необходимо принять немедленные меры по ее устранению;
■ при очистке гидропривода и его аппаратов от загрязнителей запрещается использовать бензин, керосин
и другие легковоспламеняющиеся и горючие жидкости.
Более частные, но зачастую не менее важные, правила соблюдения противопожарной безопасности
определяются специальными рабочими инструкциями.
В заключение отметим, что дополнительные требования, учитывающие особенности конструкции и
эксплуатации конкретных узлов гидропривода, при необходимости устанавливаются в ГОСТах, Технических
условиях (ТУ) или Руководствах по эксплуатации.
При эксплуатации гидроприводов с высоким давлением (более 10 МПа) следует создать безопасные
условия для обслуживающего персонала от поражения струей рабочей жидкости. Для этого необходимо
ограждать кожухом все участки гидролиний, которые не заключены в общий корпус машины. При обнаружении
внешних утечек жидкости необходимо немедленно остановить насос и устранить утечки. Категорически за-
208
70.4. Общие требования по технике безопасности
прещается для устранения утечек подтягивать соединения трубопроводов, штуцеры и т.п. при наличии
высокого давления в гидросистеме.
Гибкие рукава и шланги не должны перекручиваться в процессе эксплуатации, что определяется по
продольным надписям основных параметров (диаметра, давления и т.п.), наносимым на рукава
заводами-изготовителями. При обнаружении местных вздутий наружного покрова на рукавах и шлангах или появлении утечек
поврежденные участки должны быть немедленно заменены новыми.
Контроль за давлением в напорной гидролинии осуществляется по манометру, установленному на
насосной станции. На шкале или корпусе манометра, постоянно показывающего давление в конкретной системе,
должны быть выделены зоны, соответствующие наибольшему и наименьшему давлению в этой системе.
Запрещается эксплуатировать гидропривод высокого давления без манометра или при его неисправности.
Следует систематически проверять работу предохранительных клапанов. В случае отклонения давления
срабатывания клапана от настроечного более чем на 10 %, клапан должен быть заменен новым.
Запрещается настраивать предохранительные клапаны на работающей установке. Их настройка должна
производиться только на специальных стендах. После настройки предохранительные клапаны и другая
регулирующая гидроаппаратура должны быть опломбированы.
При работе с нефтяными маслами и другими жидкостями для гидроприводов необходимо соблюдение
следующих правил безопасной работы:
■ при длительной работе с маслами необходимо пользоваться рукавицами или применять защитные
мази, пасты для рук;
■ при вскрытии тары с маслом не применять инструменты, вызывающие при ударе искру;
■ после окончания работы с маслами и перед принятием пищи необходимо вымыть руки теплой водой с
мылом.
Не допускается эксплуатировать системы при возникновении хотя бы одной из следующих
неисправностей, выход значения какого-либо параметра системы или устройства за пределы допустимого: появление
повышенного шума, стука и вибраций в гидромоторах и насосах; появление наружных утечек жидкости;
повреждение измерительных приборов и сигнальных устройств.
Не допускается эксплуатация манометров, если при его выключении стрелка не возвращается к упорному
штифту или, в случае отсутствия штифта, отклоняется от нулевого деления шкалы на значение,
превышающее половину допускаемой погрешности, а также при любом повреждении манометра.
Не допускается производить подтягивание болтов, гаек и других соединений в системе, находящейся под
давлением и во время ее работы.
Элементы систем и устройств, разрегулировка которых может привести к аварийному состоянию, должны
быть после регулировки зопломбированы или заперты встроенным замком в соответствии с требованиями
эксплуатационной документации.
Все вращающиеся и быстродвижущиеся элементы гидропневмоприводов, не помещенные в корпус
машины, должны быть закрыты кожухами или иметь ограждения.
Не допускается эксплуатация гидромашин с заглушённым дренажным отверстием.
Обслуживающий персонал машины при использовании электроподогрева рабочей жидкости должен
строго соблюдать меры пожарной и электробезопасности и следить за тем, чтобы поверхности
электронагревателей находились ниже уровня рабочей жидкости не менее чем на 40 мм.
209
11. Основы проектирования гидроприводов
Проектирование гидроприводов осуществляется на основании технического задания (ТЗ), которое
составляется ведущим разработчиком технологического оборудования. В этом документе, помимо общего описания
оборудования, включающего механическую и электрическую часть, должны содержаться следующие
сведения:
■ назначение привода и предъявляемые к нему требования;
■ предварительная компоновка основных функциональных узлов гидропривода: исполнительных
механизмов, насосной станции и гидроаппаратуры;
■ условия эксплуатации;
■ усилия на штоках гидроцилиндров и нагружающие моменты на валах гидромоторов;
■ требуемые скорости перемещения штоков гидроцилиндров и частоты вращения валов гидромоторов
с указанием требований к их стабильности;
■ циклограмма технологического процесса, обеспечиваемая работой гидропривода.
От типа и назначения технологического оборудования, кинематики его рабочих органов, циклограммы
работы зависят гидравлическая схема и компоновка элементов гидросистемы. Значения усилий на штоках
гидроцилиндров и нагружающих моментов на валах гидромоторов приводятся для проведения расчета
исполнительных механизмов и выбора конкретных типоразмеров. По скоростям движения выходных звеньев
выбранных гидродвигателей определяют подачу насосной станции.
При необходимости в ТЗ могут указываться требования по точности, жесткости, вибрации, по допустимому
уровню шума гидропривода и т.п.
Специалист-гидравлик вместе с ведущим разработчиком конкретизирует и уточняет ТЗ с учетом
специфики гидропривода.
Проектирование гидравлических приводов обычно проводитсятся в три этапа:
■ разработка принципиальной гидравлической схемы привода;
■ предварительный расчет;
■ проверочный расчет.
11.1. Разработка принципиальной схемы гидропривода
Принципиальная схема гидропривода разрабатывается на основе циклограммы технологического
процесса и технических требований, указанных в ТЗ. Поскольку конструкция и характеристики гидропривода
обусловлены назначением и характеристиками ведомых механизмов (рабочих органов) гидрофицируемой
машины, необходимо ознакомиться с назначением машины, принципом ее действия, условиями эксплуатации,
возможными вариантами компоновки гидрооборудования.
При составлении гидравлической схемы необходимо проанализировать различные возможные
варианты, используя опыт разработки и эксплуатации гидроприводов, выполняющих подобные функции. При
этом следует ориентироваться на типовые схематические решения, характерные для данной отрасли
промышленности, и на соответствующую номенклатуру серийно выпускаемой гидроаппаратуры и
гидрооборудования.
В ходе разработки гидравлической схемы решают следующие вопросы:
■ число потоков гидросистемы (одно- двух- или многопоточная);
■ характер циркуляции рабочей жидкости (замкнутая или разомкнутая);
■ регулирование скорости движения выходных звеньев исполнительных механизмов (нерегулируемая
скорость, дроссельный или объемный способ регулирования);
■ вид управления (цикловое, следящее, адаптивное или программное);
■ размещение и компоновка элементов гидропривода.
210
11.1. Разработка принципиальной схемы гидропривода
Число потоков гидросистемы. При разработке гидравлической схемы с несколькими исполнительными
механизмами, следует иметь в виду, что давления перед ними не должны значительно отличаться друг от
друга. Если применение различных уровней давления по каким-либо причинам неизбежно, то следует перейти к
двухпоточной (многопоточной) схеме и для питания каждого исполнительного механизма (или группы
механизмов) необходимо предусмотреть свой насос. В противном случае для снижения давления в отдельных
гидролиниях придется использовать редукционный клапан, что увеличит гидравлические потери и снизит КПД
гидропривода.
Характер циркуляции рабочей жидкости. Гидроприводы с разомкнутой циркуляцией, в которых рабочая
жидкость всасывается насосом из бака и из гидросистемы вновь сливается в бак, находят применение в
оборудовании различного назначения и при использовании гидродвигателей поступательного или
вращательного действия. В гидроприводах с замкнутой циркуляцией рабочая жидкость, сливающаяся из гидросистемы,
поступает непосредственно во всасывающую линию насоса. Замкнутая циркуляция применяется только в
приводах исполнительными механизмами в которых являются гидромоторы, либо гидроцилиндры с равными
рабочими площадями.
Регулирование скорости движения выходных звеньев исполнительных механизмов. Скорость
выходного звена может изменяться регулируемыми гидромашинами (насосами или моторами) в гидроприводах
с объемным регулированием или посредством аппаратов, регулирующих расход рабочей жидкости, в
гидроприводах с дроссельным регулированием.
Первый способ более экономичен и применяется в приводах большой мощности (свыше 10 кВт), с
длительными режимами непрерывной работы, а также в приводах с замкнутой циркуляцией рабочей жидкости.
Однако в этом случае требуются регулируемые гидромашины, которые дороги и, как правило, менее
долговечны по сравнению с нерегулируемыми.
Дроссельное регулирование менее экономично, чем объемное и применяется в гидроприводах малой
мощности, т.е. в гидроприводах, для которых вопросы экономичности не имеют решающего значения, а также,
когда режимы непрерывной работы привода кратковременные.
Вид управления. Вид управления выбирается исходя из принципа действия привода, оговоренного в ТЗ
на разработку, и определяет вид управления направляющей гидроаппаратуры (с ручным, механическим,
электромагнитным дискретным или пропорциональным электромагнитным управлением).
Размещение и компоновка элементов гидропривода. Требования (если они прописаны в ТЗ) к
компоновке элементов привода позволяют произвести выбор гидроаппаратуры того или иного исполнения, способ
его монтажа, а также проанализировать варианты размещения гидрооборудования.
Составление принципиальной гидравлической схемы целесообразно начинать от исполнительных
механизмов, т.е. нанести условные графические обозначения выбранных гидродвигателей, затем на их рабочих
гидролиниях — направляющие и регулирующие гидроаппараты в соответствии с режимом работы и другими
конкретными требованиями к работе каждого двигателя. После этого объединить линии нагнетания, слива и
дренажа отдельных участков схемы; при необходимости определить места установки клапанов давления,
обратных клапанов и других гидроаппаратов.
Последним этапом является разработка гидросхемы насосной установки, размещение фильтров и других
вспомогательных элементов. Составленную гидравлическую схему необходимо проанализировать на
безаварийность работы, т.е. оценить поведение рабочих органов при возможных нарушениях в работе
гидроаппаратов. При необходимости в схему следует ввести дополнительные блокирующие устройства, например
гидрозамки, исключающие возможность возникновения аварийных ситуаций.
Таким образом, на стадии составления принципиальной гидравлической схемы гидропривода
определяется состав его элементов, конкретные типоразмеры которых далее уточняются в процессе расчета
гидропривода.
211
11. Основы проектирования гидроприводов
11.2. Предварительный расчет гидроприводов
Целью предварительного расчета является определение основных параметров гидропривода:
номинального давления (ГОСТ 12445-80) и номинального расхода рабочей жидкости (ГОСТ 13825-80), а также
типоразмеров гидрооборудования. Если при предварительной оценке выясняется невозможность выполнения
условий ТЗ, то выбранные расчетные данные корректируются.
Предварительный расчет включает в себя расчет и выбор насосов, гидродвигателей, направляющей и
регулирующей аппаратуры, трубопроводов и других элементов, а также расчет потерь давления в
гидросистеме, КПД привода, тепловой расчет привода.
Расчет геометрических размеров и последующий выбор исполнительных механизмов и гидроаппаратов
из номенклатуры серийно выпускаемого оборудования осуществляется после того, как сделан выбор
номинального давления.
11.2.1. Выбор номинального давления
Выбор номинального значения давления риоы является ответственным шагом, так как от него зависят
габаритные размеры, материалоемкость, стоимость и надежность работы гидропривода.
Номинальное давление (МПа) в гидросистемах назначают в соответствии с нормальным рядом давлений
по ГОСТ 12445-80: 0,1; 0,16; 0,25; 0,4; 0,63; 1,0; 1,6; 2,5; 4; 6,3; 10; 12,5; 16; 20; 25; 32; 40; 50; 63; 80; 100; 125;
160; 200; 250*.
При выборе номинального давления следует руководствоваться следующими соображениями: малые
давления приводят к возрастанию габаритных размеров и веса, но способствуют плавной и устойчивой
работе привода; большие давления, снижая габаритные размеры и вес, приводят к удорожанию привода,
уменьшают срок службы гидрооборудования.
Номинальное давление обычно выбирают на основании существующих рекомендаций и статистических
данных, полученных при практическом использовании оборудования конкретного типа (табл. 11.1)
Таблица 11.1
Гидропривод
Станочный
Валочно-пакетирующих и треловочных машин
Строительно-дорожных машин
Рекомендуемое номинальное давление />ном МПа
1,6-20
10
32-40
Станочные гидроприводы подразделяют на гидроприводы низкого (до 1,6 МПа), среднего (1,6...6,3 МПа) и
высокого (6,3...20 МПа) давлений. Первые применяются главным образом в станках для чистовой обработки
(шлифовальных, хонинговальных, расточных), в которых нагрузки незначительны и требуется низкий уровень
колебаний давления. Приводы среднего давления мощностью до 20 кВт нашли наиболее широкое
применение благодаря своему преимуществу — возможности использования достаточно простых и недорогих
пластинчатых и шестеренных насосов. Приводы высокого давления на базе поршневых насосов используют
главным образом в мощных протяжных и строгальных станках для получения большой выходной мощности при
ограниченных размерах гидродвигателей.
11.2.2. Выбор рабочей жидкости
Выбор рабочих жидкостей для гидросистем определяется с учетом режима работы гидропривода,
диапазона рабочих температур, давления в гидросистеме, скорости движения исполнительных механиз-
* Жирным шрифтом выделены рекомендуемые значения.
212
11.2. Предварительный расчет гидроприводов
мов, а также рекомендаций заводов-изготовителей. Диапазон рекомендуемых рабочих температур по
вязкостным характеристикам рабочих жидкостей. Верхний температурный предел для выбранной
рабочей жидкости определяется допустимым увеличением утечек и снижением объемного КПД, а также
прочностью пленки рабочей жидкости. Нижний температурный предел зависит от работоспособности насоса,
характеризующейся пределом прокачиваемости жидкости насосом, особенно на всасывании.
Рабочую жидкость также выбирают с учетом типа насоса. Максимальные и минимальные значения
вязкости рабочих жидкостей в зависимости от типа насоса приведены в табл. 11.2.
Таблица 11.2
Тип насоса
Шестеренный
Пластинчатый
Аксиально-поршневой
Максимальная
Вязкость, (
4500-5000
3500-4500
1800-2000
:Ст (мм2/с)
Минимальная
60-80
10-12
6-8
Рабочее давление в гидросистеме и скорость движения исполнительного механизма также являются
важными показателями, определяющими выбор рабочей жидкости. Утечки жидкости повышаются при увеличении
давления, следовательно, лучше применять рабочую жидкость с повышенной вязкостью. Но при этом будут
уреличиваться гидравлические потери, и снижаться КПД гидропривода. Аналогичное влияние оказывает на
рабочую жидкость скорость движения исполнительных механизмов.
В настоящее время нет научно обоснованных рекомендаций по выбору рабочих жидкостей в
зависимости от давления и скорости движения исполнительного механизма, однако отмечается стремление при
больших давлениях применять рабочую жидкость повышенной, а при низких давлениях — пониженной
вязкости.
11.2.3. Выбор насоса
При расчете гидроприводов за основной параметр часто удобно принимать мощность. Полезная
мощность, кВт, привода определяется по следующим формулам:
■ на штоке гидроцилиндра
ц 1000
■ на валу гидромотора
м 9 552,5
где F— требуемое усилие на выходном звене, Н;
v — скорость перемещения выходного звена, м/с;
М— крутящий момент на валу, Н-м;
и — частота вращения вала гидродвигателя, мин-1.
При предварительном расчете потери давления по длине и на местных сопротивлениях, а также силы
трения в исполнительных механизмах учитываются коэффициентом запаса по усилию Кзу = 1,1 -1,2, а утечки
рабочей жидкости — коэффициентом запаса по скорости Кзс =1,1-1,3.
Меньшие значения принимаются для приводов, работающих в легком и среднем режимах, а больше — в
тяжелых и весьма тяжелых режимах работы.
213
11. Основы проектирования гидроприводов
Режим работы гидропривода определяется в зависимости от коэффициентов использования
номинального давления и продолжительности работы под нагрузкой, а также числа включений в час (табл. 11.3).
Таблица 11.3
\
Режим работы
гидропривода
Легкий
Средний
Тяжелый
Весьма тяжелый
Коэффициент
использования номинального
давления
Менее 0,4
0,4-0,7
0,7-0.9
Свыше 0,9
Коэффициент
продолжительности работы под
нагрузкой
0,1-0,3
0,3-0,5
0,5-0,8
0,8-0,9
Число включений в час
До 100
100-200
200-400
400-800
Мощность насосной установки определяется соотношением
^н = K3.vK3.AzHNH +ZMNJ,
где 1ц и zM — число одновременно работающих гидроцилиндров и гидромоторов.
По рассчитанной мощности насосной установки определяют расход жидкости в гидроприводе
бп
N»
Если один насос не может обеспечить необходимую подачу, то рекомендуется установить два однотипных
насоса с подачей каждого (?т/2, или подобрать два однотипных насоса с различной подачей с тем, чтобы один
из них подключать только в периоды совместной работы нескольких исполнительных механизмов. Тип насоса
выбирается с учетом режимов работы гидропривода: для легкого и среднего режимов рекомендуется
применять шестеренные и пластинчатые насосы, а для тяжелых — аксиально-поршневые.
Конкретный типоразмер насоса выбирается по расчетному значению его рабочего объема, которое
определяется по формуле
F0=103 Qvn ,
"ном Л о
где V0 — рабочий объем, см3;
(2ГП — расход жидкости в гидроприводе, л/мин;
"ном — номинальное число оборотов вала насоса, об/мин;
ri0 — объемный КПД насоса.
В предварительном расчете значения общего т,н и объемного ri0 КПД различных типов насосов могут быть
приняты в пределах, указанных в табл. 11.4.
Таблица 11.4
■', ' Тип насоса ; " .,.
Шестеренные
Пластинчатые
Аксиально-поршневые
\ Общий КПД т,н •
0,80-0,85
0,60-0,85
0,85-0,90
'щ ,. н Объемный КПД т)0 •
0,90-0, 94
0,70-0, 90
0,95-0, 98
214
11.2. Предварительный расчет гидроприводов
После определения V0 из каталогов выбирается насос, имеющий ближайший больший рабочий объем и
рассчитывается его действительная подача:
В промышленных каталогах технические характеристики насосов, в том числе и значение г|0, указывают
при номинальном давлении рном. Если насос работает в режимах, отличающихся от номинального, подачу
насоса определяют по формуле
a- a
и _/._ Р
V ЛоСном)
^о(ном)
Мощность, кВт, необходимую для привода насоса, рассчитывают по формуле
0*р
N.
н 60nH'
где QH — подача насоса, л/мин;
р — давление, развиваемое насосом, МПа;
т]н — общий КПД насоса.
11.2.4. Определение основных геометрических параметров исполнительных
механизмов
Основными геометрическими параметрами исполнительных механизмов являются:
■ для гидроцилиндров — диаметр поршня Д диаметр штока d и ход s выходного звена;
■ для гидромоторов — рабочий объем V0.
Расчет гидроцилиндров. Расчет производится на основе заданных величин:
■ рабочее давление /?раб;
■ полезная нагрузка на гидроцилиндр Fmn;
■ рабочий ход s выходного звена;
■ скорость выходного звена при прямом у1 и обратном v2 ходе, или время прямого ц и обратного t2
хода.
Под рабочим давлением рраб понимают действительное давление в приводе, достаточное для
преодоления исполнительными механизмами действующих на них нагрузок. Значение рабочего давления в
гидроприводе устанавливают с некоторым запасом, который при необходимости может быть использован в процессе
отладки оборудования. Как правило, рабочее давление несколько ниже выбранного номинального (/>раб =
= (0,8~0,9)рном).
Для предварительного расчета диаметра гидроцилиндра можно воспользоваться формулой:
D = in \-2L-;
\*] Рраб
где F— нагрузка, преодолеваемая гидроцилиндром;
г| — общий КПД гидроцилиндра {ц = 0,85-0,95).
Очевидно, что значение усилия /"должно учитывать следующие факторы (рис. 11.1): массу ведомого
объекта и наличие сил трения при его перемещении; направление перемещения; полезную нагрузку на
цилиндр Fnori.
215
11. Основы проектирования гидроприводов
\
Fl
Р\ а
m
С
•
Рис. 11.1. Схема сил, действующих на гидроцилиндр
Таким образом, гидроцилиндр должен развивать усилие
F = ^пол + Fc = ^пол + mg (sin« + цсоах),
где FnQn — полезная нагрузка на цилиндр;
FG — нагрузка на цилиндр от собственного веса перемещаемого объекта;
m — масса ведомого объекта;
g— ускорение свободного падения;
a — угол наклона оси цилиндра к горизонтали;
|л — коэффициент трения.
Коэффициент трения ц изменяется в широком диапазоне значений и зависит как от материала объектов,
между которыми оно возникает, так и от вида трения — скольжения или качения. К примеру, при трении стали
по стали (материалом трущихся поверхностей является сталь) коэффициент трения скольжения ц = 0,1-0,4,
тогда как в случае трения качения ц = 0,005.
Полученное расчетным путем значение диаметра гидроцилиндра D, заменяют на ближайшее большее
значение из стандартного ряда.
Диаметр штока d гидроцилиндра рассчитывают по следующим формулам:
d = D\l-^- или d = D\\-t^
и результат заменяют на ближайшее большее значение из стандартного ряда.
Приложение к цилиндру чрезмерной осевой нагрузки может привести к продольному изгибу штока (потери
устойчивости в осевом направлении). Критическое усилие, приводящее к продольному изгибу, определяют по
обобщенной формуле Эйлера
F -nl£J
где Е— модуль упругости (для стали Е~ 2,1-105 МПа);
/— момент инерции штока (/= 0,0491 d2, где d — диаметр штока, м);
(. — длина нагруженного участка цилиндра, м;
X — коэффициент приведения длины.
Коэффициент X учитывает способ монтажа цилиндра и определяется из приложения П1.9.
Максимально допустимая величина нагрузки на шток определяется из соотношения
где К3 — коэффициент запаса по прочности (К3 = 2,5-3,5).
216
11.2. Предварительный расчет гидроприводов
Расчет гидромоторов При расчете гидромоторов заданными величинами являются:
■ рабочее давление /?раб;
■ нагружающий момент на валу гидромотора М\
■ частота вращения выходного вала и.
Развиваемый гидромотором крутящий момент, Н-м, рассчитывают по формуле
^о/'рабЛ
М = -
2nK3V
где V0 — рабочий объем, см3;
/'раб — рабочее давление, МПа;
т] — общий КПД гидромотора (т) = 0,8-0,93).
Отсюда
2nK3VM
V - зу
0 ^
— .РрабП
Из каталога выбирается гидромотор с ближайшим булыиим рабочим объемом.
Если значение номинального давления выбранного гидромотора Афом)> приведенное в его технических
характеристиках, больше значения номинального давления /?ном, принятого для расчета гидропривода, то
крутящий момент определяют из соотношения
М _ риом
"*ном /'м(ном)
11.2.5. Выбор гидроаппаратуры
Основными параметрами гидроалпаратуры являются номинальное давление/7га(ном), номинальный расход
Сга(ном)и условный проход Dy. Выбор гидроаппаратов осуществляют в соответствии с принципиальной схемой
по функциональному назначению и значению условного прохода Dy, проверяя при этом соответствие
расчетных значений максимального расхода жидкости через гидроаппарат и максимального рабочего давления
паспортным данным гидроаппарата.
При проектировании гидропривода гидроаппаратуру обычно не рассчитывают, а выбирают из
промышленных каталогов производителей в соответствии с принципиальной схемой по функциональному
назначению, значению условного прохода Z>y и давлению.
При выборе гидроаппаратов следует соблюдать следующие условия:
/та(ном) — Аном> tira(HOM) — V^hqwi-
Предпочтение следует отдавать аппаратам, имеющим наиболее близкие к расчетным номинальные
значения давления и расхода.
11.2.6. Выбор фильтров
При определении типоразмера, тонкости фильтрации и конструкции фильтра следует руководствоваться
следующими критериями:
■ чувствительность к загрязнению элементов гидросистемы с учетом тонкости фильтрации и требуемого
класса чистоты. Класс чистоты гидросистемы зависит от класса чистоты, который требуется наиболее
чувствительному к загрязнению элементу системы;
■ область применения гидросистемы;
■ определение расхода жидкости, проходящей через фильтр;
217
11. Основы проектирования гидроприводов
ш допустимый перепад давлении;
■ гарантия совместимости фильтровального материала с рабочей жидкостью;
■ желаемая надежность гидропривода.
11.2.7, Расчет трубопроводов
На стадии предварительного расчета внутренние диаметры трубопроводов определяют на основе
рекомендуемых значений средних скоростей движения жидкости в гидролиниях:
■ во всасывающих — 1,5 м/с;
■ в напорных — 6 м/с;
■ в сливных — 2 м/с;
■ в линиях, управления — 5 м/с.
Внутренние диаметры трубопроводов определяют на основе известного соотношения, связывающего
между собой площадь проходного сечения трубы Атр, расход жидкости Q и скорость потока v в ней:
Q=ATpv.
Для труб и каналов круглого сечения, в которых площадь Arp = nd*pl4, диаметр проходного сечения d,p
рассчитывают по следующей формуле:
rfTP=2.
—■
Inv
Для инженерных расчетов dip, мм, удобно определять по формуле
где Q — расход, л/мин;
v — скорость жидкости в трубе, м/с.
Полученный в результате расчета значения диаметра djp округляют до ближайшего большего значения из
стандартного ряда (см. приложение П1.3).
Расчет трубопроводов на прочность сводится к определению толщины 5 их стенок, значение которой
зависит от внутреннего диаметра трубопровода, максимального давления р, действующего в гидросистеме,
допустимого напряжения материала стд а также необходимого запаса прочности к на случай
гидравлического удара:
2стд
Для стальных труб (сталь 20, 35,40) допустимое напряжение ад = 400.. .500 МПа, для труб из цветных
металлов и сплавов ад = 200...250 МПа. При искажении цилиндрической формы трубы стд должно быть снижено
на 25 %. Запас прочности к при расчете обычно выбирают равным трем.
11.2.8. Расчет потерь давления в гидросистемах
Расчет потерь давления в гидросистеме производится для определения эффективности
спроектированного гидропривода и уточнения выходных параметров при поверочном расчете. Если система спроектирована
нормально, потери давления не превышают 6 % номинального давления насоса.
Суммарные потери давления в гидросистеме складываются из потерь давления в отдельных
элементах:
Z Ар = Z Артр + Z Арм + ZApra,
218
11.2. Предварительный расчет гидроприводов
где £Дртр — суммарные потери давления на трение по длине всех участков трубопровода;
£Дрм — суммарные потери давления в местных сопротивлениях трубопровода;
£Д/)га — суммарные потери давления в гидроаппаратах.
Потери давления на трение по длине трубопровода и на местных сопротивлениях определяются по
соответствующим формулам:
, ( Q Л'
, l V I l
dw 2 2d^
\.Avj
Р^__ р
2 -f Q *
\Лъ)
где р — плотность рабочей жидкости;
X — коэффициент потерь на трение по длине;
/ — длина трубы;
dw — диаметр трубы;
QM — коэффициент потерь на местном сопротивлении;
v — средняя скорость потока в расчетном участке трубопровода;
Q— расход жидкости;
Атр — площадь сечения потока на расчетном участке трубопровода.
Значение коэффициента потерь на трение по длине X зависит от режима течения жидкости, который
определяется по числу Рейнольдса;
Ке=Л - «
v ndjpv
где v — кинематическая вязкость жидкости.
Для ламинарных потоков (Re<2300)
Re
При турбулентном течении для гидравлически гладких труб
, 0,316
Re
Коэффициенты местных сопротивлений С,м выбирают По справочным данным в зависимости от их вида.
Потери давления в гидроаппаратах принимают по их техническим характеристикам при номинальном
расходе, а при других расходах определяют из соотношения
ААа = ААа(ноМ) ^~
При отсутствии данных о потерях давления в гидроаппаратах, их можно определять как потери в местных
сопротивлениях, принимая С,м из справочных таблиц.
Рекомендуется потери давления суммировать по отдельным участкам напорной и сливной гидролиниям
для каждого гидродвигателя. Если участки соединены последовательно, то общая потеря давления равна
сумме потерь на всех участках. Потери параллельно соединенных участков подсчитываются для каждой из
них, но при определении давления, создаваемого насосом, учитывается наибольшее из них-
219
11. Основы проектирования гидроприводов
В качестве примера определим суммарные потери давления в гидроприводе поступательного движения,
представленного на рис. 11.2:
■ потери давления в напорной линии Арнп = Арл + Д/?р1 + Ар2;
■ потери давления в сливной линии Арсп = Ар3 + Ардр + Арр2 + Ар4 + Арф,
где Ар, — потери на трение по длине на расчетных участках;
Арр! — потери в распределителе;
Ар№ — потери в дросселе;
Д/?ф — потери в фильтре.
]
ьр2
Ар '
|_
1
' А
: f?
р
)^ ::
пЛТ1
т "
е4
^М м-^ф^м) ^
АЛ
л/>
ЛД
Р2
АР.
АР*
Рис. 11.2. Принципиальная схема гидропривода поступательного движения (рис-к плохого качества!!!)
При расчете потерь давления необходимо учитывать, что за один и тот же промежуток времени в различных
участках гидросистемы протекают разные расходы, следовательно, могут быть разные режимы течения.
Например, при выдвижении штока цилиндра потерю давления в сливной гидролинии следует рассчитывать по
расходу выходящему из штоковой полости, а при втягивании — по расходу, вытесняемому из поршневой полости.
11.3. Поверочный расчет гидроприводов
Проверочный расчет выполняется с целью установления действительных параметров гидропривода и
проверки соответствия выбранного оборудования требованиям, предъявляемым к работе привода.
Действительное давление, развиваемое насосом в приводе поступательного движения, равно:
■ при выдвижении штока цилиндра
F/kip+A2XApc.
Р = -. + £ДРн.л.
при втягивании штока цилиндра
F/kTp+A^Apcn
Р = , + £АЛ.л.
где F— нагрузка, приложенная к штоку цилиндра;
Ал\л А2 — площади цилиндра в поршневой и штоковой полостях;
kjp = 0,9-0,98 — коэффициент, учитывающий потери на трение в уплотнениях цилиндра.
220
11.4. Определение мощности и КПД гидроприводов
В приводе с гидромотором действительное давление, развиваемое насосом, рассчитывают по формуле
2пМ
Для определения скоростей движения гидродвигателей необходимо вычислить действительный расход
рабочей жидкости Qn, поступающей в гидродвигатели:
Од=од.н-£Аеут,
гДе Сд.н — действительная подача выбранного насоса;
ZAQyr — суммарные утечки во всех гидроаппаратах, включенных между насосом и гидродвигателями.
Скорость штока гидроцилиндра
.б«.
"ц=ТЛо.
где А — эффективная площадь гидроцилиндра;
т]0 — объемный КПД гидроцилиндра.
Частота вращения вала гидромотора
0д
Лм=ТгЛо.
"о
где VQ — рабочий объем гидромотора;
т]0 — объемный КПД гидромотора.
Расхождение между заданными П3 и действительными Пд параметрами подсчитывается по формуле
п>Пз~Пд юо%.
П3
11.4. Определение мощности и КПД гидроприводов
Полная мощность гидропривода, кВт, равна мощности, потребляемой насосом, т.е.
N =N =^-
гп Н CCV- '
60пн
где С?н — подача насоса, л/мин;
р — давление, развиваемое насосом, МПа;
т]н — общий КПД насоса.
Полезная мощность гидропривода Nmn, кВт, представляет собой сумму выходных мощностей
гидродвигателей, которые определяются по их действительным выходным параметрам, полученным в ходе поверочного
расчета:
Fv
■ на штоке гидроцилиндра Nu = ц ;
на валу гидромотора NM = ■
1000
Л/и
9 552,5
где F— усилие на выходном звене, Н;
уц — скорость перемещения выходного звена, м/с;
Л/— крутящий момент на валу, Н-м;
пм — частота вращения вала гидромотора, мин-1.
КПД гидропривода рассчитывают по следующей формуле:
N
л =■ пол
Nn
221
11. Основы проектирования гидроприводов
11.5. Тепловой расчет гидроприводов
Тепловой расчет выполняют с целью определения условий работы гидропривода, уточнения объема
гидробака и поверхности теплоотдачи, а также выявления необходимости применения теплообменников.
Количество теплоты или тепловой энергии Ет, получаемое рабочей жидкостью в единицу времени, соответствует
потерянной в гидроприводе мощности и определяется по формуле
£m = AN = Nm — Nm.
Условие приемлемости теплового режима в гидроприводе имеет следующий вид:
А^уст— *доп — *тах *отах,
где Д Туст — перепад температур между рабочей жидкостью и окружающим воздухом в установившемся режиме;
ДГДОП — максимально допустимый перепад температур между рабочей жидкостью и окружающим
воздухом;
Гтах — максимально допустимая температура рабочей жидкости (должна соответствовать минимально
допустимой вязкости, указанной в технических условиях на выбранный тип насосов и гидромоторов);
Т0 тах — максимальная температура окружающего воздуха.
Площадь поверхности теплообмена, необходимая для поддержания перепада Д7^ст < 7^ определяется
выражением
А>- -Е™
^б^трД^доп
где Аби Ктр — коэффициенты теплопередачи гидробака и труб, Вт/(м2оС):
■ для гидробака Къ = 8-12;
■ для труб Ктр = 12-16;
■ при обдуве гидробака К^ = 20-25;
■ для гидробака с водяным охлаждением К^ = 110-175.
Площадь поверхности теплообмена складывается из суммарной площади поверхности труб Атр, через
которые происходит теплообмен с окружающей средой, и площади поверхности теплоотдачи бака А^.
Определив площадь поверхностей труб из соотношения
Afp = nd 1.1,
где d — внешний диаметр трубы;
1.1— суммарная длина труб,
находят площадь поверхности теплоотдачи гидравлического бака А^.
Определить объем бака V6 можно и по площади его поверхности:
A6=ab + 2йЛ[ + 2йЛ[,
где а и Ь — длина, ширина бака;
hA — уровень масла в баке.
Учитывая, что бак имеет форму параллелепипеда (V6 = abh), конструктивно подбирают габаритные
размеры гидробака: длину а, ширину Ь, высоту А (И > Ил), Найденный объем бака округляют до стандартного
значения в большую сторону. Номинальные емкости для приводов гидростатических, пневматических и смазочных
систем приводятся в ГОСТ 12448-80.
222
12. Гидравлические системы смазки и охлаждения-
В отличие от гидравлических приводов, относящихся к системам управления различными машинами и
станками, гидравлические системы смазки и охлаждеия принадлежат к системам, обеспечивающим
рабочий процесс в этих объектах. Назначение указанных систем — повысить точность изготовления и чистоту
поверхности деталей, увеличить КПД и срок эксплуатации технологического оборудования путем подачи
охлаждающих и смазочных материалов в зоны непосредственного контакта рабочего инструмента с
деталью, а также в точки контакта трущихся поверхностей узлов и механизмов технологического
оборудования. Другими словами, гидравлические системы смазки и охлаждения предназначены для создания
соответствующих смазочно-охлаждающих технологических сред (СОТС) в различных зонах технологического
оборудования.
В зависимости от агрегатного состояния вещества, используемого для создания СОТС, различают
следующие виды материалов:
■ твердые смазочные материалы (ТСМ);
■ пластичные смазочные материалы (ПСМ);
■ смазочно-охлаждающие жидкости (СОЖ);
■ газообразные среды.
На практике различают гидравлические системы смазочно-охлаждающих жидкостей (системы СОЖ) и
гидравлические смазочные системы (табл. 12.1).
Таблица 12.1
Наименование
Основное функциональное
назначение
Виды материалов используемых
для создания СОТС
Зоны оборудования в которых
создается СОТС
Расходно-перепадные
характеристики наиболее
распространенных систем
Наиболее распространенный
способ дозирования
Наиболее благоприятный режим
течения подводимой рабочей
жидкости*
Тип гидравлической системы
Система СОЖ
Охлаждение инструмента в зоне
обработки, смыв стружки
СОЖ
Зоны непосредственного
контакта инструмента с деталью
Большие расходы (до 21 000 л/мин)
с относительно грубой
регулировкой и, в основном, невысоким
давлением
Дроссельный
Турбулентный
Смазочная система
Создание смазочной пленки в
местах контакта пар трения
Жидкая смазка (СОЖ),
пластичная смазка, аэрозоль
Зоны контакта трущихся
поверхностей узлов и механизмов
Относительно небольшие
расходы с возможностью точного
дозирования (от 0,081 см3) при
высоком давлении
Объемный
Ламинарный
* С повышением турбулентности потока усиливается охлаждающее и моющее действие СОТС. Приламиниризации потока
улучшаются смазочное и проникающее действия.
223
12. Гидравлические системы смазки и охлаждения
12.1. Гидравлические смазочные системы
Развитие теории рабочих процессов машин, опыт создания и эксплуатации оборудования показали, что
основной причиной выхода из строя деталей и рабочих органов является не поломка, а износ и повреждение
их поверхностей трения. На любой обработанной поверхности всегда существуют шероховатости и
волнистости которые соприкасаются при движении одной поверхности подругой. В результате этих соприкосновений в
тонком поверхностном слое пар трения наблюдается срезание микронеровностей, их упругая или
пластическая деформация, что приводит к изнашиванию, т.е. постепенному разрушению поверхности твердого тела
под действием силы трения.
В зависимости от условий, в которых происходит взаимодействие контактирующих поверхностей твердых
тел, различают сухое, граничное и жидкостное трение.
Сухое трение возникает при взаимодействии твердых тел без наличия между ними прослойки смазочного
материала. Такое трение приводит к наибольшему износу пар трения и потерям энергии прилагаемой для
реализации взаимного перемещения поверхностей.
В случаях, когда на поверхностях контактирующих твердых тел имеется пленка смазочного материала
толщиной порядка 0,1 мкм, говорят о граничном трении. Граничное трение не исключает износа трущихся
поверхностей, но в этом случае происходит износ только наиболее выступающих микронеровностей.
При наличии между взаимно перемещающимися контактирующими поверхностями слоя смазочного
материала, полностью разделяющего трущиеся поверхности, толщиной свыше 0,5 мкм, т.е. когда слои смазочного
материала имеют возможность свободно перемещаться друг относительно друга, имеет место жидкостное
трение. При этом внешнее трение между контактирующими поверхностями твердых тел заменяется на
внутреннее трение взаимно перемещающихся слоев смазочного материала.
Для уменьшения силы трения и интенсивности изнашивания за счет замены внешнего трения между
контактирующими поверхностями твердых тел на внутреннее трение относительного скольжения слоев
смазочного материала промышленное оборудование оснащают смазочными системами, основная задача
которых — своевременная доставка требуемого количества смазочного материала в зону контакта трущихся
поверхностей.
При этом слой смазочного материала предохраняет пары трения от коррозии, работает в качестве
гидравлического буфера, воспринимающего ударные нагрузки, охлаждает и уносит продукты износа трущихся
поверхностей.
12.1.1. Смазочные материалы
Материалы, способствующие уменьшению силы трения и износу трущихся поверхностей, увеличению
нагрузочной способности механизмов, называют смазочными материалами. В качестве смазочных материалов
наибольшее применение нашли жидкие и пластичные смазочные материалы.
Жидкие смазочные материалы (смазочные масла). Смазочные масла в большинстве своем
представляют собой очищенные нефтяные масла со специальными присадками, позволяющими увеличить срок
службы масел в 2-4 раза. Масла без присадок применяют для смазывания легконагруженных, высокоскоростных
узлов в машинах и механизмах промышленного оборудования. Эксплуатационные свойства таких масел
обеспечиваются их естественной нефтяной основой.
Основными характеристиками общими для всех жидких смазочных материалов являются:
■ вязкость;
■ температура застывания;
ш температура вспышки;
■ кислотное число.
Вязкость — одна из наиболее важных характеристик смазочного материала, во многом
определяющая силу трения между перемещающимися поверхностями, на котдрые нанесэн смазочный материал.
224
12.1. Гидравлические смазочные системы
Поскольку вязкость обратно пропорциональна температуре (в диапазоне температур от -30 ... +150 °С
изменяется в тысячи раз) для стабилизации вязкостно-температурных свойств масел в их состав
добавляют специальные вязкостные присадки, относительно мало повышающие вязкость базового масла при
низкой температуре, но значительно увеличивающие вязкость при повышении температуры. Значение
вязкости смазочного материала всегда указывается при конкретном значении температуры, как
правило, при 40 °С.
Температура застывания (точка утечки) — самая низкая температура, при которой масло
растекается под действием силы тяжести. Понятие температуры застывания используется для определения
прокачиваемое™ масла по трубопроводам и возможности смазки узлов трения, работающих при пониженной
температуре. Под температурой застывания масла подразумевается температура, при которой масло,
помещенное в пробирку и наклоненное под углом 45°, не изменяет своего уровня в течение одной минуты.
Температура застывания должна быть на 5 ... 7 °С ниже той температуры, при которой масло должно
прокачиваться.
Температура вспышки — самая низкая температура, при которой масло воспламеняется при
воздействии на него пламени. Температуру вспышки паров масла необходимо знать при подаче масла к
узлам трения, работающим при повышенной температуре. Температуру вспышки определяют в открытом
или закрытом тигле. Обычно в справочниках указывается температура вспышки паров масла в открытом
тигле.
Кислотное число — мера содержания в масле свободных органических кислот. Кислотное число
определяется количеством миллиграмм гидроксида калия (КОН), необходимым для нейтрализации всех
кислых компонентов, содержащихся в 1 г масла. При старении масла кислотное число повышается. Во многих
случаях это число является основным показателем для смены масла в циркуляционных смазочных
системах.
При выборе жидких смазочных материалов для конкретных условий работы руководствуются следущими
характеристики:
■ индекс вязкости — оценка изменения вязкости смазочного материала в зависимости от изменения
температуры;
■ окисляемость — оценка способности масла вступать в реакцию с кислородом. Стойкость к
окислению — показатель стабильности того или иного масла;
■ экстремальное давление (ЕР) — мера качества прочности масляной пленки, используется для
характеристики смазочных материалов тяжело нагруженных поверхностей трения;
■ заедание (Stick-slip) — оценка способности смазочного материала предотвращать скачки или
неустойчивое движения силового стола или каретки станка даже при крайне низких скоростях.
Срок службы смазочного масла зависит от скорости накопления в нем вредных примесей и его старения.
Сущность старения заключается в том, что в процессе эксплуатации происходит окисление масла кислородом
воздуха с образованием растворимых кислот и шлама. Масло подлежит замене, если обнаружено повышение
его кинематической вязкости более чем на 30 %; возрастание значения кислотного числа до 3 мг КОН на 1 г
масла; содержание воды более 0,2 %; содержание механических примесей неабразивного характера (шлам,
примесь пластичных смазок) более 0,1 %.
Из всего многообразия моторных, трансмиссионных и других масел специального назначения масла,
предназначенные для смазывания промышленного оборудования, выделяют в самостоятельную группу
«Индустриальные масла» и обозначают буквой «И». ГОСТ 17479.4-87 «Масла индустриальные. Классификация и
обозначение» определяет единую систему обозначений индустриальных масел с учетом применения их в
различном промышленном оборудовании*.
* Структура обозначения индустриальных масел в соответствии с ГОСТ 17479.4-87, интервалы значений
основных характеристик и рекомендуемая область их применения, приведены в приложении П1.6, табл. П1.10.
225
12. Гидравлические системы смазки и охлаждения
Пластичные (консистентные) смазочные материалы. Представляют собой нефтяные или
синтетические масла с добавлением многофункциональных присадок и загустителя, в качестве которого используются
мыла высших сортов жирных кислот, твердые углеводороды (церазины, парафины), силикагель и сажа,
относящиеся к термостойким загустителям и др.
Пластичные смазочные материалы применяют в следующих случаях:
■ для тяжелонагруженных подшипников скольжения, работающих при небольших скоростях в условиях
граничного трения с частыми реверсами или в повторно-кратковременном режиме;
■ когда смазочный материал кроме основного назначения используется как уплотняющий для
предохранения поверхности от попадания загрязнителей из окружающей среды;
■ для создания защитной масляной пленки на поверхности трения при длительных остановках;
■ в узлах трения, доступ к которым затруднен или которые могут работать длительное время без
пополнения смазки;
■ при необходимости одновременного использования смазочного материала дл.я консервации и смазки
механизма.
Основные характеристики пластичных смазок:
■ вязкость;
■ предел прочности на сдвиг;
■ температура каплвпадения;
■ число пенетрации.
Вязкость пластичных смазочных материалов, в отличие от смазочных масел, зависит не только от
температуры, но и от скорости деформации. Значение вязкости пластичного смазочного материала, определенное
при заданной скорости деформации и температуре, является постоянным и называется эффективной
вязкостью.
Предел прочности на сдвиг — минимальное напряжение сдвига, которое вызывает переход смазки к ее
вязкому течению. Предел прочности на сдвиг характеризует способность смазки удерживаться на
движущихся деталях, вытекать и выдавливаться из негерметизированных узлов трения.
Температура каплепадения — температура, при которой смазка утрачивает свою густую консистенцию и
переходит в состояние жидкой смазки (температура, при которой падает первая капля). Обычно пластичную
смазку применяют при температурах на 15 ... 20 СС ниже температуры каплепадения.
Число пенетрации определяет степень загустения пластичного смазочного материала, которая по
ГОСТ5346-78 определяется глубиной погружения в смазочный материал стандартного конуса
пенетрометра за 5 с при температуре 25 °С и общей нагрузке 150 г и выражается в десятых долях
миллиметра.
Интервалы значений основных характеристик некоторых пластичных смазочных материалов приведены в
приложении П1.6, табл. П1.10.
Для импортных пластичных смазочных материалов в зависимости от диапазона пенетрации
устанавливается понятие степени загустения (консистенции) по классификации NLGI (National Lubrication Grease
Institute — США) (см. приложение П1.6, табл. П1.11) от 000 (жидкая консистентная смазка) и до степени 6
(чрезвычайно густая). В большинстве случаев для промышленного применения используется пластичная смазка
степени загустения от 000 до 2.
12.1.2. Классификация смазочных систем
Смазочные системы представляют собой совокупность устройств, обеспечивающих дозированную
доставку смазочного материала к поверхностям трения, и, при необходимости, ее возврат в смазочный бак. Так
же как гидроприводы и системы СОЖ, любая смазочная система состоит из двух взаимосвязанных основных
частей: силовой, в которой осуществляются энергетические процессы, связанные с доставкой мерных порций
смазочного материала к точкам смазки, и управляющей, которая по функциональному назначению делится на
226
12.1. Гидравлические смазочные системы
информационную и логико-вычислительную подсистемы, Однако, однозначно выделить в силовой
подсистеме энергетическую, направляюще-регулирующую и исполнительную часть, по аналогии с гидроприводом,
можно не во всех разновидностях смазочных систем. В связи с этим классификацию смазочных систем
обычно проводят по набору специальных характерных признаков. В соответствии с ГОСТ 20765-87 «Системы
смазочные. Термины и определения», все смазочные системы, применяемые в различных областях
промышленности, классифицируют:
■ по виду смазочного материала;
■ по числу смазываемых пар трения;
■ по способу подключения к точке смазки;
■ по способу использования смазочного материала;
■ по способу дозирования;
■ по режиму подачи;
■ по типу привода;
■ по способу управления.
По виду смазочного материала различают смазочные системы с жидким — жидкостные смазочные
системы и густым (пластичным) смазочным материалом — пластично-смазочные системы. В свою очередь в
составе жидкостных смазочных систем выделяют масляно-воздушные системы, в которых смазочный материал
транспортируется к парам трения сжатым воздухом.
По числу смазываемых пар трения, обеспечиваемых смазочным материалом от одного смазочного
нагнетателя, различают индивидуальные смазочные системы, предназначенные для смазывания одной пары
трения и централизованные, обслуживающие несколько пар трения.
По способу подключения к точке смазки различают раздельные смазочные системы, в которых
смазочный насос или заливная масленка присоединяются к одной или нескольким парам трения только на время
подачи смазочного материала, и нераздельные смазочные системы, в которых смазочный нагнетатель или
наливная масленка присоединены к точке смазки постоянно.
По способу использования смазочного материала смазочные системы подразделяют на циркуляционные
и проточные. В циркуляционных системах — смазочных системах с многократным использованием
смазочного материала — масло поступает к узлу трения, смазывает его, отводит от него теплоту и возвращается в
резервуар, где охлаждается, очищается, после чего вновь подается к узлу трения.
К проточным смазочным системам относятся системы с однократным использованием смазочного
материала. Так в пластично-смазочных системах консистентная смазка, пройдя через зазор между трущимися
поверхностями, в большинстве случаев утрачивает свои смазочные свойства, и постепенно выдавливаясь
наружу, теряется безвозвратно.
По способу дозирования различают смазочные системы объемного и дроссельного дозирования.
По режиму подачи различают смазочные системы непрерывного и периодического действия. Для первых
характерна непрерывная подача смазочного материала к парам трения в течение всего времени работы
смазываемого объекта, а в смазочных системах периодического действия — периодическая.
По типу привода смазочного нагнетателя выделяют смазочные системы с ручным, механическим,
электрическим, гидравлическим и пневматическим приводом.
По способу управления циклом смазки различают смазочные системы: с ручным управлением, когда
заданные параметры режима смазывания обеспечиваются оператором, полуавтоматическим управлением,
когда смазочная система приводиться в действие вручную, а затем работает без участия оператора до
завершения рабочего цикла; автоматическим управлением, обеспечивающим заданные режимы смазывания без
участия оператора.
Классификация простейшей смазочной системы, состоящей из смазочного шприца (рис. 12.1, а) и
пресс-масленки (рис. 12.1, б) в соответствии с ГОСТ 20765-87 «Смазочные системы. Термины и
определения» выглядит следующим образом: «Жидкостная, индивидуальная, раздельная, проточная, объемно-
227
12. Гидравлические системы смазки и охлаждения
го дозирования, периодического действия с ручным приводом и ручным способом управления смазочная
система».
Для смазки редко работающих зубчатых передач, редукторов и подшипников скольжения часто
применяется закладная смазка, когда смазочный материал закладывается в узел трения при его сборке и обновляется
при плановом или предупредительном ремонте.
В ряде случаев достаточно эффективной являете^ картерная смазка, которая осуществляется окунанием
узлов трения в процессе работы механизма в масляную ванну и разбрызгиванием смазочного материала в
замкнутом пространстве, в котором размещены смазываемые детали.
12.1.3. Централизованные смазочные системы
В настоящее время индивидуальные смазочные системы уже не обеспечивают требований,
предъявляемых к смазке современного оборудования. Только применение централизованных смазочных систем
позволяет снизить затраты на дорогостоящий смазочный материал и потребляемую мощность смазываемого
оборудования, улучшить качество смазки пар трения за счет смазывания оборудования во время его работы и
снизить затраты на ремонт; сократить количество обслуживающего персонала и повысить безопасность
производства.
Используя упрощенную классификацию смазочных систем по признаку «конструкция и принцип действия
дозирующе-распределительных устройств», можно выделить следующие наиболее распространенные
централизованные смазочные системы:
■ насосного распределения;
■ дроссельные;
■ импульсные;
■ двухмагистральные;
■ последовательные;
■ масляного тумана;
■ «воздух-масло».
Смазочные системы насосного распределения. Смазочная система насосного распределения —
система, в которой дозирование смазочного материала и его распределение к поверхностям трения
осуществляется непосредственно смазочным насосом. Одна из характерных конструкций смазочных насосов
228
12.1. Гидравлические смазочные системы
используемых в подобных системах — многоотводный насос поршневого типа с пневматическим
приводом (рис. 12,2).
Рис. 12.2. Многоотводный насос поршневого типа с пневматическим приводом
При подаче сжатого воздуха в отверстие Р плунжер 3 перемещается вперед и перекрывает входное
отверстие S, через которое смазочный материал из бака поступает в насос. При дальнейшем перемещении
плунжера 3 давлением смазочного материала, запертого в рабочей камере 8, шарик 7 обратного клапана,
отжимается от седла и смазочный материал через канал 2 поступает в кольцевую проточку 6, соединяющуюся при
перемещении плунжера 3 с одним из выходных отверстий Р.,, Р2, ... Р12, которые расположены друг за другом по
три в ряду на четырех гранях шестигранного корпуса насоса и соединены с соответствующими точками
смазки. При отключении подачи сжатого воздуха пружины 4 возвращают поршень 5 с плунжером 3 в исходное
положение. Шарик 7, поджатый пружиной 1 к седлу, препятствует возврату смазочного материала из точек
смазки в бак при обратном ходе плунжера 3. Количество используемых рабочих выходов от 1 до 12 определяется
длиной упора 9, ограничивающего ход плунжера 3. Максимальная частота срабатывания такого насоса может
составлять от 110 до 350 циклов в минуту в зависимости от количества выходов, с подачей на один выход за
одно срабатывание насоса 0,082 см3.
Смазочные системы насосного распределения бывают проточные и циркуляционные, при этом
многоотводный смазочный насос выполняет функцию как дозирующего, так и распределительного устройства.
Гидравлическая схема типовой централизованной циркуляционной смазочной системы насосного
распределения представлена на рис. 12.3. Системы насосного распределения не имеют местных сопротивлений до-
зирующе-распределительных устройств характерных для смазочных систем других типов и могут
применяться для подачи смазочного материала в точки с высоким противодавлением (100 МПа и выше). К недостаткам
таких смазочных систем следует отнести сложность конструкции многоотводного насоса и разводки
трубопроводов смазочной системы.
Рис. 12.3. Гидравлическая схема типовой централизованной циркуляционной смазочной системы
насосного распределения
229
12. Гидравлические системы смазки и охлаждения
Смазочные системы дроссельного дозирования. Смазочная система дроссельного
дозирования — система, в которой требуемое количество смазочного материала, подаваемого к поверхностям
трения, задается путем принудительного дросселирования потока смазочного материала смазочными
дозаторами.
Дроссельные смазочные дозаторы подразделяют на регулируемые и нерегулируемые смазочные
дроссели (рис. 12.4) и смазочные регуляторы расхода.
—7—7—J J /\.
-, М ъ*»
Рис. 12.4. Смазочный дроссель
Поступающий на вход А смазочный материал проходит через фильтроэлемент 1 (с тонкостью
фильтрации 40 мкм), обратный клапан 2, винтовую канавку 3, оказывающую гидравлическое сопротивление
потоку смазочного материала, которое определяет его расход проходящий через смазочный дроссель и
поступает к точке смазке. При отсутствии давления в напорной магистрали обратный клапан 2
предотвращает перетекание смазочного материала из точки смазки, подключенной к выходу В, обратно в смазочную
систему.
Гидравлическая схема типовой смазочной системы дроссельного дозирования представлена на рис. 12.5.
1 О 2 о з о
Др)
( *>)( Др)
(
I ' |Б
БД
-04
-Об
-Об
-07
Др)
ДР
(
о8
09
Рис. 12.5. Гидравлическая схема типовой смазочной системы дроссельного дозирования
Распределение смазочного материала от насоса к точкам смазки определяется гидравлическими
сопротивлениями дроссельных смазочных дозаторов Др, которые для обеспечения удобства монтажа и разводки
трубопроводов смазочной системы с помощью специального коллектора могут быть сгруппированы в
дроссельный смазочный блок БД, обеспечивающий подачу смазочного материала к нескольким точкам смазки. Как
правило, в дроссельный смазочный блок объединяется от 4 до 10 дросселей.
230
12.1. Гидравлические смазочные системы
Поскольку дроссели стабильно работают лишь при относительно больших расходах, их обычно
применяют в циркуляционных смазочных системах непрерывной подачи. Серийно выпускаемые дроссели позволяют
распределять подачу насоса к отдельным точкам смазки в соотношении 512 к 1. В качестве нагнетательных
устройств в таких системах используют смазочные станции, в основном с шестеренным или лопастным
насосом сравнительно большой производительности и низкого давления (до 1,6 МПа).
К преимуществам систем дроссельного дозирования следует отнести большую пропускную
способность и конструктивную простоту дозирующих устройств, в которых практически отсутствуют подвижные
детали. Недостатком таких систем является зависимость величины потока смазочного материала от
температуры и перепада давлений на дросселе. Кроме того, изменение расхода через один дроссель влияет
на расходы через остальные дроссели, что весьма затрудняет регулирование подачи смазочного
материала, а разрыв любого из трубопроводов выводит из строя всю систему. Как правило, такие смазочные
системы применяются для смазывания оборудования с небольшим количеством близко расположенных
точек смазки.
Импульсные смазочные системы. Импульсная смазочная система — система, принцип работы которой
основан на создании импульсов давления в смазочной магистрали, к которой подключены импульсные
питатели, рабочие камеры которых попеременно сообщаются с подводом смазочного материала от насоса и
отводом в точку смазки. Конструктивные схемы импульсного питателя представлены на рис. 12.6.
В момент подачи давления в магистраль (рис. 12.6, б), смазочный материал, отгибая эластичный
запорный элемент 2, поступает в камеру зарядки 3. Преодолевая усилие сжатия пружины 6, гильза 5 с герметично
поджатым к ее отверстию плунжером 4, перемещается до упора в торец резьбовой втулки 8, вытесняя
смазочный материал из камеры нагнетания 7 в точку смазки. При этом камера зарядки 3 увеличивается в размерах,
принимая очередную дозу смазочного материала. Таким образом, выдача порции смазочного материала и
заполнение зарядной камеры происходит одновременно.
При снятии давления в смазочной магистрали (рис. 12.6, в), давлением в камере зарядки 3, эластичный
запорный элемент 2 поджимается к внутренней поверхности проточки в корпусе 1, герметично отделяя камеру
зарядки от разгруженной смазочной магистрали. При этом сферическая головка плунжера 4 выходит из
отверстия в гильзе 5 и смазочный материал из камеры зарядки 3 поступает в напорную камеру 7. Таким образом, пи-
231
12. Гидравлические системы смазки и охлаждения
татель перезарядился и готов к выдаче очередной дозы смазочного материала при поступлении следующего
импульса давления (рис. 12.6, а). Питатели рассмотренной конструкции относят к питателям с пружинной
повторной установкой.
Питатели импульсного действия различных типоразмеров могут обеспечивать подачу дозы смазочного
материала в диапазоне от 0,025 до 1,5 см3 за одно срабатывание при рабочих давлениях от 1,6 до 17,2 МПа. Для
обеспечения удобства монтажа и разводки трубопроводов смазочной системы, импульсные питатели (до 8
штук) могут быть скомпонованы в блоки (рис. 12 7).
•
I
4
I \
i
• f
-
!■ 1 11
i
чЭ
»»-
1
■
in —-
'"%
'
"l
, V
\
t
" -*L
k
'
Рис. 12.7. Блоки импульсных питателей
Обязательными элементами импульсной смазочной системы являются смазочный насос, разгрузочный
аппарат, в качестве которого может быть использован, например, 3/2 распределитель с гидравлическим
управлением, и импульсные питатели (рис. 12.8).
Смазочная система работает следующим образом. При включении привода смазочного насоса,
смазочный материал от насоса Н поступает к гидрораспределителю Р, который под действием гидравлического
управления переключается в левую по схеме позицию, обеспечивая поступление масла к импульсному пи-
232
12.1. Гидравлические смазочные системы
тателю ИП и блоку импульсных питателей БИП. БИП одновременно срабатывают и подают заданные дозы
смазочного материала к точкам смазки. Для перезарядки питателей необходимо отключить насос и
разгрузить напорную магистраль через подпружиненный обратный клапан КО, обеспечивающий минимальный
уровень давления, препятствующий полному опорожнению смазочных трубопроводов и попаданию в них
воздуха. Для контроля поступления смазочного материала к смазываемым парам трения, между ними и
питателями могут быть установлены устройства, формирующие электрический или визуальный сигнал о
поступлении смазочного материала в контролируемую точку смазки.
В импульсных смазочных системах работа одного питателя не отражается на работе других при этом, они
могут использоваться как для подачи масла, так и для легких пластичных смазочных материалов.
Импульсные смазочные системы находят применение в оборудовании малого и среднего размеров не требующем
густой пластичной смазки или обширного контроля подачи смазочного материала.
Двухмагистральные смазочные системы. Двухмагистральная смазочная система — система, в состав
которой входят смазочные питатели с двумя подводами, каждый из которых подключен к одной из двух
магистралей, работающих в противофазе. Наличие в системе двух магистралей позволяет объединить в
конструкции одного двухмагистрального питателя (рис. 12.9) два дозирующих устройства, каждое из которых может
обслуживать отдельную точку смазки.
При подаче смазочного материала в подвод РЛ (рис. 12.9, а), соединенный с магистралью находящейся
под давлением, распределительный золотник 5 перемещается в крайнее нижнее положение, вытесняя
находящийся под его торцом смазочный материал в подвод Р2, связанный с разгруженной магистралью.
Одновременно смазочный материал из подвода Р^ поступает в верхнюю камеру дозирующего поршня 3. Под
действием давления смазочного материала дозирующий поршень 3 перемещается в крайнее нижнее положение,
вытесняя смазочный материал, находящийся под ним через распределительный золотник 5 в отвод В и к
подключенной к нему точке смазки.
При подаче смазочного материала в подвод Р2 (рис. 12.9, б) распределительный золотник 5
перемещается в крайнее верхнее положение. При этом смазочный материал из подвода Р2 поступает в нижнюю камеру
дозирующего поршня 3, который перемещаясь в крайнее верхнее положение, вытесняет смазочный материал
233
12. Гидравлические системы смазки и охлаждения
из верхней камеры в отвод А. Ход дозирующего поршня, а следовательно, и объем дозы смазочного
материала, настраивается регулировочным винтом 1, ограничивающим перемещение жестко связанного с поршнем 3
штока индикатора 2.
Дозу смазочного материала, подаваемую к паре трения, можно удвоить, удалив пробку 4 и заглушив один
из отводов (А или В).
Двухмагистральные питатели различных серий и типоразмеров обеспечивают подачу дозы смазочного
материала в диапазоне от 0,098 до 9,947 см3 за один ход дозирующего поршня и работают на давлениях от 4
до 40 МПа. Для автоматизированного контроля срабатывания питателя на нем может быть установлен
микровыключатель, посылающий в систему управления сигнал о перемещении его дозирующего поршня. При этом
регулировка дозы смазки с помощью регулировочного устройства входящего в состав питателя становится
невозможной. С целью удобства монтажа и разводки трубопроводов смазочной системы питатели (до пяти
штук) могут объединяться в блоки.
Различают двухмагистральные системы двух типов: петлевого (замкнутого) и концевого. В смазочных
системах петлевого типа для поочередного подключения смазочных магистралей к напору и сливу
используется специальный реверсивный распределитель с гидравлическим управлением, к которому подключены
четыре магистральных трубопровода образующие две замкнутые петли. В двухмагистральных системах
концевого типа (рис. 12.10) для реверсирования потока смазочного материала может использоваться стандартный
распределитель с электрическим управлением Р, который получает сигнал на реверсирование от смазочного
блока переключения БП, формирующего электрический сигнал на переключение распределителя Р, а
следовательно и поочередное подключение к насосу магистралей Р, и Р2 при достижении в магистрали
являющейся напорной, давления, при котором гарантированно срабатывают все питатели, подключенные к ней.
Смазочный блок переключения — конструктивно оформленная в одно целое совокупность смазочных
аппаратов для подачи команды на переключение потока в одну из смазочных магистралей двухмагистральной
смазочной системы при достижении заданного давления в другой смазочной магистрали. Смазочный блок
переключения обычно устанавливается в конце наиболее длинных ответвлений магистральных трубопроводов
и, как правило, снабжается манометрами для визуального контроля величины давления переключения.
1 3 4 5
ni да
i
ш
2 6 7 8
Pi
КГ1 _
Х№
17 18 БП иф' 21
£=3
9 10 1112
п????
U
19 20
Б|_
^(^z(m)
13141516
I
22
Рис. 12.10. Гидравлическая схема типовой двухмагистральной смазочной системы концевого типа
В двухмагистральных системах изменение подачи одного питателя не отражается на подаче других, при
этом, параллельное подключение, магистральных трубопроводов к насосной станции может быть выполнено
трубами относительно большого сечения, что снижает их гидравлическое сопротивление, кроме того, они мо-
234
12.1. Гидравлические смазочные системы
гут использоваться как для подачи масла, так и пластичных смазочных материалов. Однако блокирование
одной из смазочных магистралей может вызвать преждевременное срабатывание механизма реверса, при этом
будет показано, что система функционирует надежно. К недостаткам рассматриваемых систем относят также
необходимость монтажа второй магистрали и невозможность централизованного контроля поступления
смазочного материала в смазываемые точки. Визуальный контроль по движению штоков-индикаторов
практически невыполним при множестве достаточно удаленных друг от друга точек, а также при малых подачах.
Наиболее широкое применение двухмагистральные смазочные системы находят в оборудовании большой
протяженности, требующем смазки пластичным смазочным материалом (металлургическое, прокатное
оборудование и т.п.).
Последовательные смазочные системы. Последовательная смазочная система — смазочная система,
в которой дозирование смазочного материала и его распределение к поверхностям трения осуществляется
питателями, имеющими один подвод и несколько отводов, причем подача доз смазочного материала в отводы
осуществляется последовательно, и в очередной отвод смазочный материал подается питателем только в
том случае, если подача в предыдущий отвод завершена. При подаче смазочного материала в подвод
питателя золотники рабочих секций, управляя друг другом, начинают перемещаться в определенной
последовательности и вытеснять мерные дозы смазочного материала из отводов подключенных к смазываемым парам
трения (рис, 12.11).
5в=|= ■
!'ч='=
г* Г
2
3
~7
—I—и-
т 1
1=г>-
■Н=|—W
=И=1- -
5
■|:|—I—
■«Sl-=W-
Рис. 12.11. Принцип действия питателя последовательного действия
Питатель может начать работу независимо от положения золотников и отрабатывает один цикл, когда все
золотники совершат по одному возвратно-поступательному движению, т.е. по два рабочих хода.
Последовательная работа питателя, когда смазка очередной точки не начинается, если смазка предыдущей не заверше-
235
4
12. Гидравлические системы смазки и охлаждения
на, позволяет осуществлять централизованный контроль поставки смазочного материала ко всем точкам
смазки, что является отличительной особенностью смазочных систем данного типа.
Внешний вид и полуконструктивная схема смазочных питателей последовательного действия, а также
конструкция основного элемента питателя — рабочей секции, представлены на рис. 12.12.
а б в
Рис. 12.12. Питатель последовательного действия: а — внешний вид; б — полуконструктивная схема;
в — рабочая секция
На полуконструктивной схеме (рис. 12.12, б) изображен питатель, состоящий из входной секции 1 с
подводом Р, трех рабочих секций 2 с отводами В.,-В6 и конечной секции 3. Рабочие секции 2 с дозирующе-распреде-
лительными золотниками 5 стыкуются между собой, входной и конечной секциями через уплотнительные
кольца 4, обеспечивающие герметичное соединение внутренних каналов питателя.
Основным элементом рабочих секций питателя (рис. 12.12, в), является дозирующе-распределительный
золотник 2, совершающий возвратно-поступательное движение от упора до упора в продольной расточке
корпуса 3 рабочей секции, закрытой с двух сторон пробками 1.
При подаче смазочного материала под правый торец дозирующе-распределительного золотника 2 он
перемещается влево, и смазочный материал через систему каналов (на рисунке показаны пунктиром),
вытесняется из полости, образованной левым торцом золотника 2 и пробкой 1 в отвод 4. Для удобства разводки
трубопроводов к точкам смазки отводы имеют альтернативные выходы, которые при использовании основного
отвода закрыты пробками 5. Обратные клапаны 6 исключают подсос воздуха и смазочного материала из
трубопроводов ведущих к точкам смазки при обратном ходе золотника 2.
Если соединить выходы рабочей секции между собой, например, внутренним сквозным каналом и
заглушить один из основных отводов пробкой, можно получить рабочую секцию с одним отводом, выдающим
двойную дозу смазочного материала. При необходимости дозы смазочного материала от отдельных отводов
соседних рабочих секций можно объединить с помощью соединительных колодок, устанавливаемых на
альтернативные выходы рабочих секций или соединительных плит, устанавливаемых в питателях блочно-мо-
дульной конструкции, между рабочей секцией и установочной плитой. При этом не использованный основной
отвод должен быть заглушён. На принципиальных гидравлических схемах объединение доз отводов смежных
рабочих секций питателей изображаются отрезком прямой, либо стрелкой, указывающей направление
подачи дополнительно подаваемой на выход рабочей секции дозы смазочного материала.
Очевидно, что доза смазочного материала, которую выдает при перемещении соответствующий
дозирующе-распределительный золотник, определяется его диаметром и длиной хода, от величины, которых и
зависит типоразмер рабочей секции.
236
12.1. Гидравлические смазочные системы
Производители смазочного оборудования выпускают питатели, в каждый из которых может быть
сгруппировано до десяти рабочих секций с рабочим объемом от 0,081 до 19,668 см3 (в зависимости от типоразмера
питателя), работающих при давлениях до 52 МПа с максимальной частотой срабатывания до 300 циклов в
минуту. Для обеспечения последовательного срабатывания объединенных в один питатель рабочих секций, их
количество должно быть не менее трех.
Для удобства обслуживания и контроля работы питателя, рабочие секции конструктивно выполняют таким
образом, что доза смазочного материала выдается именно из той секции, золотник, которой перемещается в
данный момент.
В питателях блочно-модульной конструкции (рис. 12.12, а) используются рабочие секции стыкового
монтажа, которые крепятся на установочных плитах, что дает возможность осуществлять замену любой рабочей
секции без разборки питателя и демонтажа трубопроводов. Вместо стандартных входных секций в питатель
блочно-модульной конструкции могут быть установлены смазочные распределители, выполненные в виде
специальных входных секций с электромагнитным управлением.
Наиболее часто используется отсечная входная секция (рис. 12.13, а), предназначенная для отключения
потока смазочного материала от питателя, и обводная входная секция (рис. 12,13,6), которая при подаче
электрического сигнала отводит поток смазочного материала на другой питатель, другую точку смазки или в
смазочный бак.
р
= ; ■
А
а
, м
р
= т\-
А
, *Л
б
в
Рис. 12.13. Условные графические обозначения специальных входных секций с электромагнитным
управлением: а — отсечная входная секция; б — обводная входная секция
Существуют питатели модульной конструкции, не имеющие специальных входных и конечных секций,
функции которых интегрированы в соответственно первую и последнюю рабочие секции.
На рис. 12.14 представлена гидравлическая схема типовой последовательной смазочной системы.
°А
кп
"1лд
<2©И
—! 1 1 2
РЦ
A/vlEH
П1
Ин©
Ин©
©ИнИн©
П1.1
О 00
3 4 5 6 7 8
П1.2
ООО ОООО ОО
П1.3
9 10 1112 13 14
00 О
15 16 17
Рис. 12.14. Гидравлическая схема типовой последовательной смазочной системы
237
12. Гидравлические системы смазки и охлаждения
При включении привода смазочного насоса Н, смазочный материал, обычно через фильтр Ф, поступает
к центральному питателю П1 — питателю первого каскада, от которого его мерные дозы подаются к
питателям второго каскада П1.1, П1.2 и П1.3, подключенным к точкам смазки 1-16. От питателя первого каскада П1
смазка может поступать также напрямую к точкам, требующим большого объема смазочного материала
(см. рис. 12.14, точка смазки 17). В системах смазки последовательного действия рекомендуется применять
до трех каскадов питателей, хотя наиболее оптимальными считаются двухкаскадные системы. Окончание
цикла смазки фиксируется реле цикла РЦ, которое контролирует положение золотника верхней рабочей
секции центрального питателя. Если хотя бы одна линия или точка смазки в данной системе заблокирована и не
принимает смазочный материал, цикл смазки прерывается, о чем по истечении контрольного времени в
систему управления поступает сигнал. Определить заблокированную линию или точку смазки можно с помощью
индикаторов превышения давления (блокирования) Ин.
Широкая гамма устройств управления и контроля доставки смазочного материала позволяет реализовать
индивидуальный режим смазывания отдельных групп точек смазки при использовании одного смазочного
насоса. Точное дозирование смазочного материала с централизованным контролем его подачи в каждую точку
смазки обеспечили широкое применение систем последовательного действия во всех видах оборудования с
большим количеством точек смазки.
Смазочные системы масляного тумана. Смазочная система масляного тумана — масляновоздушная
смазочная система, в которой смазочный материал подается к поверхностям трения в виде масляного
тумана, централизованно создаваемого распылением жидкого смазочного материала струей воздуха. При этом
дозирование масляного тумана, формирование его струи требуемой формы и консистенции, осуществляется
преобразователями, которые устанавливаются в точках смазки.
Основными элементами смазочной системы масляного тумана (рис. 12.15) являются: фильтр-влагоот-
делитель ФВ, редукционный клапан КР, манометр МН, генератор масляного тумана ГМТ и преобразователи
масляного тумана ПМТ. Из цеховой магистрали сжатый воздух поступает к фильтру-влагоотделителю ФВ,
обеспечивающему его очистку от мельчайших частиц воды, масла и твердых загрязнителей, после чего
проходит через редукционный клапан КР, где уровень его давления, в зависимости от производительности
генератора масляного тумана, понижается до значения от 1,5 до 3 бар. Генератор масляного тумана ГМТ
формирует масляно-воздушную смесь в виде аэрозоля со средним размером частиц масла 1...2 мкм. Среднее
отношение масло/воздух в масляном тумане составляет приблизительно 4 мм3 распыленного масла на 1 л
воздуха. От генератора к преобразователям ПМТ масляный туман передается по трубопроводам со
скоростью до 7,5 м/с (оптимальной считается скорость до 5 м/с) оставаясь «сухим» к касанию стенок
трубопроводов. На выходе из преобразователей скорость потока масляного тумана достигает 30 м/с и выше. При этом
частицы масла, ударясь о смазываемую поверхность, оседают на ней и обеспечивают эффективное
смазывание.
МН
КР 0
ФВ ^4 ГМТ
12 3 4
О О О О
}(пмт Дпмт ](пмт у(пмт
Рис. 12.15. Гидравлическая схема типовой смазочной системы масляного тумана
Одна из конструкций генератора масляного тумана представлена на рис. 12.16.
238
12.1. Гидравлические смазочные системы
ю
^ГПГ** Щ ^
<
SSi^\\x- \wv
\ \ч\ \
ъ
Рис. 12.16. Генератор масляного тумана
При подаче сигнала управления на электромагнит 9 2/2-пневмораспределителя сжатый воздух, проходя через
фильтр-влагоотделитель (не показан), очищается и под давлением, определяемым настройкой редукционного
клапана (не показан), проходит через сопло Вентури 10. При этом в прозрачном колпаке 1 создается разряжение
под действием которого масло из резервуара 8 всасывается через фильтр 6 по трубкам 5 и 2 и, проходя через
диффузионную пробку 4, распыляется в верхнюю часть резервуара 8. При этом крупные частицы масла
осаждаются, а в верхней части резервуара образуется масляный туман, который поступает на выход генератора.
Подача распыляемого масла регулируется дросселирующим винтом (не показан), а расход воздуха —
винтом байпасного потока 3. Минимально допустимый уровень масла в резервуаре генератора
контролируется поплавком реле уровня 7, а максимально допустимая величина давления масляного тумана
ограничивается предохранительным клапаном (не показан).
Поскольку некоторая часть распыленного в воздухе масла осаждается на стенках трубопровода,
центральный коллектор монтируют на оборудовании с наклоном, обеспечивающим слив образующегося
конденсата обратно в резервуар генератора. Отводы трубопровода, во избежание образования .масляных пробок
рекомендуется подключать к верхней части трубы коллектора.
В смазочных системах масляного тумана применяют преобразователи трех типов: разбрызгивающие,
конденсационные и распыляющие (рис. 12.17).
Центральный коллектор масляного тумана
Вентиляционный
• патрубок
Закрытая
коробка
От генератора
масляного тумана
Разбрызгивающий
преобразователь
Конденсационный
преобразователь
Распыляющий
преобразователь
Рис. 12.17. Преобразователи масляного тумана
239
12. Гидравлические системы смазки и охлаждения
Разбрызгивающие преобразователи применяются для таких вращающихся элементов, как шариковые и
роликовые подшипники, шестерни и цепи и преобразуют высокий процент масляного тумана в масло. Поток
смазочного материала из разбрызгивающих преобразователей должен быть перпендикулярен направлению
движения элементов, подлежащих смазке.
Конденсационные преобразователи используются в элементах с продольным движением, таких как
плоские опоры, салазки и рельсы и конденсируют туман в масло, которое под действием силы тяжести попадает
на смазываемую поверхность.
Распылительные преобразователи применяются в качестве исключения для элементов с
вращательным движением, работающих в пределах нормальных скоростей и подают поток тумана в точку
смазки с минимальным конденсатом. Эти преобразователи рекомендуется устанавливать на расстоянии от
3 до 30 мм от смазываемой поверхности таким образом, чтобы поток смазочного материала был
направлен вниз.
На практике для смазки одной поверхности может быть использовано несколько преобразователей.
В случаях, когда масляный туман применяется для смазки элементов машин работающих в полностью
закрытых корпусах, последние снабжают вентиляционными патрубками, которые обеспечивают циркуляцию
потока масляного тумана внутри замкнутого корпуса и поддерживают в нем избыточное давление,
препятствующее попаданию в корпус всякого рода загрязнителей.
Смазочные системы масляного тумана используются в основном для смазки высокоскоростных
подшипников и зубчатых передач, работающих в закрытых корпусах*.
Смазочные системы «воздух-масло». Смазочная система «воздух-масло» — масляновоздушная
смазочная система, в которой смазочный материал подается к поверхностям трения в виде струи аэрозоля,
формируемой смесителями, установленными в точках смазки, к которым жидкий смазочный материал и воздух
подводятся через раздельные подводы. Смазочные системы «масло-воздух» созданы вместо систем
масляного тумана и, наряду с сохранением основных преимуществ, устраняют их основной недостаток — вредный
для здоровья масляный туман, ухудшающий экологическую обстановку на производстве.
Масляновоздушный смеситель, представленный на рис. 12.18, обеспечивает постоянную подачу сжатого
воздуха к паре трения и формирование воздушно-масляной смеси при подаче на его вход дозированной
порции смазочного материала, осуществляемой отдельным дозирующим устройством.
10 9 8 7 6
Рис. 12.18. Масляновоздушный смеситель
При подаче дозы масла на вход Р поршень 2, преодолевая усилие пружины 3, открывает проход мерной
порции масла в камеру смешивания колпачка-распылителя 5. В камере смешивания масло подхватывается
сжатым воздухом, поступающим из подвода А через зазор между внутренней поверхностью корпуса 9 и
наружной поверхностью центральной втулки 4, и через отверстия в колпачке-распылителе 5 струя
воздушно-масляной смеси (аэрозоля) конической формы направляется на поверхность смазывания. При отсутствии
* Смазочные системы масляного тумана практически запрещены к применению в новом оборудовании.
240
12.1. Гидравлические смазочные системы
подачи масла, поршень 2 поджимается пружиной 3 к уплотнительному кольцу 1, предотвращая попадание
воздуха в линию подвода масла и препятствуя ее опорожнению.
Для нормальной работы масловоздушных смесителей требуется очищенный воздух, как правило, с
тонкостью фильтрации 5 мкм, с точкой росы до 4 СС и давлением 0,1 МПа. Отверстия подвода сжатого воздуха А и В
имеют одинаковое функциональное назначение и если нет необходимости отвода сжатого воздуха отданного
масляновоздушного смесителя на смеситель, расположенный рядом, одно из них закрывают пробкой 10.
Смеситель устанавливают в резьбовое отверстие корпуса смазываемого узла и фиксируют контргайкой 8.
Герметичность соединения обеспечивается с помощью шайбы 7 и уплотнительного кольца 6.
Известны также масляновоздушные смесители, в которых устройства дозирования масляной и воздушной
составляющих аэрозольной смеси объединены в одной конструкции.
В качестве примера, иллюстрирующего принцип действия смазочных систем «воздух-масло»,
рассмотрим работу системы с использованием питателей последовательного действия для дозирования
масляной составляющей аэрозольной смеси и масляновоздушных смесителей рассмотренной нами
конструкции (ри - 12.19). Дан ая система относится к смазочным системам комбинированного типа, так как она
обеспечивает подачу смазочного материала в точки, смазываемые только маслом (точки 3 и 4), и точки,
смазываемые масляновоздушной смесью (точки 1 и 2). При этом ко всем точкам масло подается от
питателя последовательного действия П, который дозирует масло, направляя его мерные порции к масляновоз-
душным смесителям МВС, установленным в точках смазки 1 и 2, и через обратные клапаны КО —
напрямую к точкам смазки 3 и 4. Обратные клапаны предотвращают опорожнение линий подвода масла и
попадание в них воздуха, постоянно подаваемого к смесителям от цеховой магистрали. Для предотвращения
попадания СОЖ и других посторонних материалов на смазываемые поверхности внутри шпиндельной
головки поддерживается избыточное давление, величина которого ограничивается предохранительным
клапаном КП (порядка 0,014 МПа).
Рм^~
<h
РЦ
/YV&-20S
мн
0 КР
20S
5Т
МВС
МВС
& ФВ
Рв
l__l
^-j j^W I
Г7-1
1 2
Шпиндельная головка
КП
.^Т-
т
Рис. 12.19. Гидравлическая схема смазочной системы «воздух-масло»
Смазочные системы «воздух-масло» применяются практически для любых типов поверхностей трения, но
они особенно эффективны при смазке пар трения работающих:
в диапазоне высоких температур (прокатные станы, рольганги печей, линии непрерывной разливки
стали, бумагоделательные машины);
■ с высокими линейными или окружными скоростями (станы, высокооборотные станки);
■ при воздействии воды, пыли и вредных газов (например, шлифовальные станки, бумагоделательные
машины, установки химической и цементной промышленности и т.п.).
L
241
12. Гидравлические системы смазки и охлаждения
12.1.4. Информационные элементы смазочных систем
Информационные элементы смазочных систем предназначены для пуска и останова процесса смазки, а
также сбора информации о ходе его выполнения.
В общем случае в смазочной системе могут контролироваться следующие параметры:
■ уровень и температура смазочного материала в баке смазки*;
■ давление в смазочном трубопроводе;
■ срабатывание дозирующе-распределительных устройств;
■ наличие подачи смазочного материала;
■ целостность смазочной линии.
К наиболее распространенным устройствам контроля параметров цикла смазки, формирующим
визуальный (индикаторы) и/или электрический (реле) сигнал, относятся:
■ индикаторы и реле цикла;
■ индикаторы превышения давления;
■ индикаторы разрыва линии смазки;
■ реле контроля подачи дозы смазочного материала.
Как правило, устройства контроля конструктивно адаптированы к основному элементу системы,
осуществляющему дозирование смазочного материала. В качестве примера рассмотрим основные элементы
информационной подсистемы, используемые с питателями последовательного действия (рис. 12. 20)**.
Индикаторы и реле цикла — механогидравлические (индикаторы) и электрогидравлические (реле)
устройства, реагирующие на перемещение дозирующе-распределительного золотника рабочей секции
питателя, предназначенные для контроля и управления циклом смазки.
* Аппаратура для контроля уровня, температуры и давления в смазочных системах аналогична используемой в
гидропневмоприводах и в данном разделе не рассматривается.
** Элементы информационной подсистемы других смазочных систем могут иметь конструктивные отличия,
однако принципиально выполняют аналогичные функции.
242
12.1. Гидравлические смазочные системы
Индикаторы цикла устанавливаются непосредственно в рабочие секции питателя последовательного
действия и имеют жестко связанный с дозирующе-распределительным золотником шток-индикатор, по
состоянию которого (втянут/выдвинут) определяют положение золотника.
В реле цикла контактного типа шток-индикатор является приводом микровыключателя, формирующего
электрический сигнал о работе питателя.
При перемещениях золотника питателя с высокой частотой (до 200 циклов в минуту) используют реле
цикла бесконтактного типа со светодиодной индикацией. Привод микровыключателя в таких реле снабжен
постоянным магнитом, который и реагирует на положение дозирующего золотника.
Индикаторы превышения давления — устройства, реагирующие на превышение уровня давления при
блокировании поступления смазочного материала. Такие индикаторы устанавливаются на лицевой стороне
рабочей секции питателя в альтернативных выходах. Наиболее распространенными являются индикаторы
превышения давления штырькового типа с сохранением индикации (с памятью) которые используются в
последовательных смазочных системах оборудования, работа которого без подачи смазочного материала во
все точки смазки недопустима.
В случаях, когда по условиям работы смазываемого оборудования допускается, чтобы последовательная
смазочная система продолжала работать при блокировании одного или нескольких отводов смазочного
материала применяют индикаторы превышения давления мембранного типа. При их использовании в случае
превышения нормального рабочего давления при подаче смазочного материала в контролируемую линию или
точку смазки, происходит разрыв тарированной на определенное давление мембраны, при котором дозы
смазочного материала выбрасывается в атмосферу, что дает визуальный сигнал, о недопустимом превышении
давления.
Индикаторы разрыва трубопровода — устройства, реагирующие на падение давления смазочного
материала до контрольного значения при разрыве смазочной линии или наличии в ней чрезмерно больших,
недопустимых утечек. Индикатор разрыва состоит из двух частей: указателя разрыва с индикаторным штоком и
встроенным обратным клапаном и подпорного клапана (симулятора).
Указатель разрыва устанавливается в выходное отверстие питателя и связывается с подпорным
клапаном, размещенным непосредственно в точке смазки, трубопроводом, целостность которого и будет
контролироваться. Таким образом, контролируемая смазочная линия в нормальном состоянии всегда заполнена
смазочным материалом и находится под действием избыточного давления, создаваемого подпорным клапаном,
о чем сигнализирует выдвинутый шток указателя разрыва. При падении давления смазочного материала в
контролируемом трубопроводе, из-за его повреждения или вследствие чрезмерных утечек, шток втягивается,
сигнализируя о нарушении герметичности смазочной линии.
Реле контроля подачи дозы смазочного материала — электрогидравлические устройства,
формирующие электрический сигнал при прохождении через них дозы смазочного материала.
Коммутация электрических цепей реле осуществляется встроенным герконом, реагирующим на
магнитный плунжер, который перемещается в зону его действия каждый раз, когда через реле проходит доза
смазочного материала.
12.1.5. Проектирование централизованных смазочных систем
Проектирование смазочных систем достаточно сложный процесс, включающий в себя следующие
этапы:
■ выбор типа смазочной системы;
■ формирование групп точек смазки;
■ выбор типоразмеров дозирующе-распределительной смазочной аппаратуры;
■ определение типоразмера смазочного насоса;
■ выбор аппаратуры контроля и управления циклом смазки.
Последовательность выполнения перечисленных этапов работ является условной так как, например, при
выборе типа смазочной системы должны учитываться как требования по обеспечению контроля прохождения
243
12. Гидравлические системы смазки и охлаждения
смазочного материала, так и значения рабочих давлений и объемов, для всех пар трения, смазывание
которых предполагается осуществлять от одной смазочной системы. В то же время именно по значениям объемов
смазочного материала и рабочих давлений осуществляется выбор конкретных типоразмеров дозирующе-рас-
пределительной и контрольной смазочной аппаратуры. При этом для отдельных узлов и механизмов одной
машины могут использоваться смазочные системы различных типов. Так, например, в состав автоматической
линии часто одновременно входят индивидуальная, централизованная проточная и централизованная
циркуляционная системы смазки. И если проектирование индивидуальной смазочной системы ограничивается
выбором конкретных типоразмеров масленок или тавотниц, которые устанавливаются в точки смазки, то для
проектирования централизованных смазочных систем требуется выполнение всех вышеперечисленных
этапов.
Рабочие характеристики смазочных систем всех типов используемых в одной машине, полученные в ходе
проектирования, включая периодичность заправки смазочных резервуаров и обозначение смазочного
материала, записываются в карту смазки.
Выбор типа смазочной системы по классификационному признаку «конструкция и принцип действия до-
зирующе-распределительных устройств» выполняется по следующим критериям:
■ вид применяемого смазочного материала (жидкий или пластичный);
■ количество точек смазки;
■ конструктивное исполнение, условия и характеристики режимов работы пар трения;
■ противодавления в точках смазки;
■ требуемый объем смазочного материала и периодичность его обновления для каждой точки смазки;
■ минимально допустимый период времени между заправками смазочных емкостей;
■ требования к автоматизации управления циклом смазки и контролю поступления смазочного материала
в точки смазки;
■ стоимость элементов смазочной системы.
Формирование групп точек смазки производится с целью обеспечения оптимального режима
функционирования системы с минимальной себестоимостью и использованием серийно выпускаемых смазочных
устройств и аппаратов.
Выделение групп точек смазки выполняется по следующим критериям:
■ технических характеристик серийно выпускаемых элементов системы смазки выбранного типа и
соблюдения требований фирм-изготовителей по их эксплуатации;
■ минимального количества используемых дозирующе-распределительных устройств;
■ минимальной суммарной длины трубопроводов системы смазки;
■ минимального количества и длины гибких рукавов для подвода смазочного материала к подвижным
точкам смазки;
■ максимальной приближенности дозирующе-распределительных устройств к точкам смазки с малыми
расходами смазочного материала;
■ удобства монтажа и обслуживания элементов систем смазки.
Для выбора типоразмеров распределительной смазочной аппаратуры необходимо рассчитать
требуемые расходы смазочного материала и потери давления в трубопроводах при его доставке в каждую точку
смазки. Расход смазочного материала для каждой точки смазки определяется как объем смазочного
материала, который необходимо подать к точке смазки в единицу времени. В общем случае значения объема
смазочного материала для каждой точки смазки (кроме масляновоздушных смазочных систем) рассчитывают по
следующей формуле:
V = AT,
где V— объем смазочного материала, см3;
А — эквивалентная площадь смазки, см2;
Т— толщина пленки смазки, см.
244
12.1. Гидравлические смазочные системы
Формулы для расчета эквивалентной площади смазки А наиболее часто встречающихся пар трения
приведены в табл. 12.1.
Таблица 12.1
Зубчатая передача
Основные виды пар трения
Подшипник качения Цилиндрическая опора
Плоская направляющая
Л=1
R=2
A=t.DW
D — делительный
диаметр зубчатой
шестерни;
W— ширина
зубчатого зацепления
A=D2R
D — диаметр вала;
Я — количество рядов
A=nDL
D — диаметр вала;
L — длина сопрягаемой
поверхности
А = BL+2HL,
(площадь контактной
поверхности)
Толщину пленки смазки Т и периодичность ее обновления в зависимости от вида системы смазки
выбирают по табл. 12.2.
Таблица 12.2
Вид системы
Индивидуальная
Централизованная проточная
Централизованная циркуляционная
Рекомендуемая толщина пленки смазки
Пластичные смазочные материалы — 0,0050 см на каждые 8 ч работы
Жидкие смазочные материалы — 0,0025 см на каждый час работы
Пластичные смазочные материалы — 0,0025 см на каждые 4 ч работы
Жидкие смазочные материалы — 0,0025 см каждую минуту работы
При определении объема смазочного материала для конкретной точки смазки рекомендуется также
учитывать следующие дополнительные факторы:
■ чрезмерная нагрузка;
■ экстремальный нагрев;
■ высокая скорость;
■ грязь и вода (СОЖ);
■ особенности конструкции.
В некоторых случаях фирмы-изготовители узлов, подлежащих смазыванию, предлагают использовать
для своих изделий эмпирические формулы. Так, например, изготовитель подшипников фирма SKF для
определения расхода смазочного материала Q, см3/ч, для смазки своих подшипников рекомендует использовать
формулу:
Q=kDB,
где D— наружный диаметр подшипника, мм;
В— ширина подшипника, мм;
к— коэффициент, зависящий от вида смазочной системы, выбирается по табл. 12.3.
245
12. Гидравлические системы смазки и охлаждения
Таблица 12.3
Вид смазочной системы •* %, г", ™., * ■* •„, '■.
Циркуляционные смазочные системы
Смазочные системы масляного тумана
Смазочные системы «воздух-масло»:
■ роликоподшипников
■ радиально-упорных шарикоподшипников
Смазочные системы с пластичным смазочным материалом
Картерные смазочные системы (смазка окунанием и разбрызгиванием)
\ i *| Коэффициенте ,
1,8 — 3,0
5х Ю-4
Зх Ю-5
6х Ю-5
Зх Ю-3
2х Ю-2— 10 х Ю-2
При выборе конкретной аппаратуры по рассчитанным значениям расхода смазочного материала следует
учитывать особенности принципа действия и возможные схемные решения смазочной системы выбранного
типа. Так, например, дозирующе-распределительные устройства (рабочие секции питателей) для смазочных
систем последовательного действия выбираются с учетом возможности объединения объемов смазочного
материала от нескольких секций питателя для обеспечения потребности одной точки смазки.
При выборе дозирующе-распределительных устройств смазочных систем типа «воздух-масло» стоит не
только задача расчета расхода смазочного материала, но и определения расхода сжатого воздуха,
необходимого для формирования воздушно-масляной смеси. Поскольку воздух в смазочных системах «воздух-масло»
служит не только для транспортировки масла, но и для повышения герметичности и охлаждения
смазываемого узла, для определения его расхода требуется индивидуальный подход к каждому смазываемому узлу с
учетом особенностей его конструкции, зазоров, вида и качества уплотнительных устройств, а также условий
эксплуатации.
Методика выбора дозирующе-распределительных устройств смазочных систем масляного тумана в
значительной степени отличается от вышеизложенной и, как правило, приводится в информации фирм-
изготовителей соответствующей смазочной техники, которые предлагают специальные формулы и таблицы для
расчета расхода масляного тумана для различных видов смазываемой поверхности и выбора требуемых для его
обеспечения типоразмеров преобразователей и генератора масляного тумана.
Особенность выбора типоразмеров распределительных устройств систем дроссельного дозирования
заключается в том, что расход смазочного материала через дросселирующее устройство напрямую зависит от
перепада давления на нем. При этом необходимо учитывать взаимное влияние всех распределительных
устройств и рассчитывать рабочие давления, включая потери давления в трубопроводах и элементах смазочной
системы, а также противодавления возникающие при подаче смазочного материала в каждую точку смазки.
Для расчета расхода через дроссельное устройство в зависимости от перепада давления на нем и рабочих
давлений при проектировании систем смазки с жидким смазочным материалом применяются формулы,
используемые при расчете гидроприводов.
На практике часто пользуются упрощенной методикой выбора типоразмеров дроссельных устройств. Так,
например, некоторые фирмы предлагают использовать методику, построенную на расчете базового
соотношения, под которым понимается отношение объема смазочного материала, требуемого для конкретной точки
смазки проектируемой системы, к минимальному значению объема потребляемого точкой смазки данной
смазочной системы, по значению которого и выбираются соответствующие дроссельные дозаторы.
Для выбора типоразмеров элементов смазочной системы по величине номинального рабочего давления
для смазочных систем всех типов рекомендуется выполнять расчет рабочего давления. На практике для
расчета рабочего давления часто используются специальные графики и номограммы, построенные по
экспериментальным данным фирм изготовителей смазочной техники.
Выбор типоразмера смазочного насоса осуществляется по виду привода, требуемой
производительности и номинальному рабочему давлению.
246
72.2. Гидравлические системы смазочно-охлаждающих жидкостей
Выбор вида привода смазочного насоса выполняется с учетом особенностей конструктивного исполнения
узлов смазываемого оборудования, имеющихся в его составе приводов и условий эксплуатации.
Наиболее распространены смазочные насосы со следующими видами приводов:
■ электрическим;
■ пневматическим;
■ гидравлическим;
■ механическим;
■ ручным.
Ручной привод можно использовать в смазочных системах неответственных узлов и механизмов, с
периодичностью смазки не чаще одного раза за смену работы. Механический привод целесообразно применять,
когда в составе оборудования есть узлы, конструкция которых позволяет легко смонтировать на них смазочный
насос, подключив его с помощью дополнительных приспособлений (шестерен, эксцентриков и т.п.) к деталям
узла, совершающим механические перемещения. Гидравлический или пневматический привод
целесообразно применять в случаях, когда в состав смазываемого оборудования входят данные приводы. Электрический
привод является как наиболее универсальным, так и наиболее дорогим. Его использование может быть
ограничено условиями взрывобезопасности.
Производительность смазочного насоса должна быть на 10 ... 20 % выше расчетной суммы расходов
смазочного материала, потребляемого всеми точками смазки.
Номинальное рабочее давление, которое должен обеспечивать выбранный смазочный насос должно
быть выше максимального давления, требуемого для доставки смазочного материала в любую точку смазки
смазываемого оборудования.
Выбор аппаратуры контроля и управления циклом смазки осуществляется на основании требований,
предъявляемых разработчиками конструкции оборудования, пары трения которого должны быть смазаны, и во
многом зависит от выбора сделанного на предыдущих этапах проектирования. Основные разновидности
аппаратуры контроля и управления циклом смазки, которые относятся к информационным элементам смазочных
систем, описаны в соответствующем разделе. При этом, один из электрических сигналов о наличии: расхода,
давления или срабатывания дозирующе-распределительного устройства смазочной системы используется в
системе управления оборудованием в качестве сигнала для автоматизированного управления циклом смазки.
12.2. Гидравлические системы смазочно-охлаждающих жидкостей
В настоящее время во всех отраслях машиностроения идет борьба за сокращение веса и габаритных
размеров машин, при этом их узлы проектируются на большие удельные нагрузки и на меньшие запасы
прочности. Надежная работа таких машин может обеспечиваться только при наличии систем СОЖ и применении
высококачественных смазочно-охлаждающих материалов, которые, с одной стороны, снижают интенсивность
силовых и тепловых нагрузок на режущий инструмент и обрабатываемую деталь, а с другой — удаляют из
зоны резания образующуюся стружку и продукты износа инструмента. При этом не только достигается заданный
класс чистоты обработки и точность изготовления деталей, но и повышаются скорости резания, а также
существенно уменьшается износ режущего инструмента.
Правильный выбор СОЖ, своевременное и качественное обслуживание систем СОЖ технологического
оборудования являются одним из основных условий, позволяющих увеличить его долговечность, повысить
работоспособность и сохранить на длительный период технологическую точность машин.
12.2.1. Смазочно-охлаждающие жидкости
Эффективность систем СОЖ во многом зависит от правильного выбора типа СОЖ, который
осуществляется по функциональным, эксплуатационным и санитарным группам требований.
К функциональным требованиям относят смазывающую, охлаждающую и моющую способности, а также
способность проникновения СОЖ в зону контакта инструмента с деталью и стружкой.
Эксплуатационные (технологические) требования учитывают стабильность состояния СОЖ при
хранении, ее влияние на элементы технологического оборудования (коррозионную агрессивность, влияние на
краску узлов и изоляцию электрооборудования и т.п.), взаимодействие с используемыми в узлах оборудования
247
12. Гидравлические системы смазки и охлаждения
смазочными материалами, склонность к отложению осадков на поверхностях оборудования и в элементах
системы подачи СОЖ, испаряемость и вспениваемость, устойчивость к заражению грибками и бактериями, а
также пожаровзрывобезопасность.
К санитарным требованиям относят оценку влияния СОЖ на организм человека, сложность утилизации
отработанной СОЖ.
В зависимости от физико-химических особенностей основной фазы различают, водные (водосмешивае-
мые), масляные и специальные СОЖ.
Наиболее широко применяются СОЖ на водной и на масляной основе, или, другими словами, водные и
маслянью СОЖ. При этом водные СОЖ обладают ярко выраженными охлаждающими, а масляные —
смазывающими свойствами.
Водные СОЖ в зависимости от дисперсности компонентов, вводимых в основную фазу, подразделяют на
растворы электролитов, синтетические СОЖ, полусинтетические СОЖ и эмульсии.
Растворы электролитов относятся к средам с ионной степенью дисперсности и могут применяться в
качестве самостоятельной СОТС или являться основой для приготовления многокомпонентных синтетических и
полусинтетических СОЖ. Чаще всего в качестве электролитов используют соли неорганических кислот.
Синтетические СОЖ—среды с молекулярной степенью дисперсности, основными смешиваемыми
(диспергируемыми) компонентами которых являются разнообразные водорастворимые органические продукты,
среди которых преобладают так называемые поверхностно-активные вещества (ПАВ) — вещества способные
образовывать на поверхности металла тонкие сплошные пленки.
Полусинтетические СОЖ относятся к средам с коллоидной степенью дисперсности. Смешиваемыми
компонентами являются маловязкие минеральные или синтетические масла, водонерастворимые
органические жидкости, в связи с чем концентраты для приготовления полусинтетических СОЖ часто называют
растворимыми маслами. При этом очень высокая (коллоидная) степень дисперсности не позволяет выделить в
растворе какую-либо отдельную фазу. Для обеспечения требуемых эксплуатационных характеристик в
полусинтетические СОЖ также вводятся различные добавки (ингибиторы, бактериоциды, стабилизаторы,
антипенные присадки и др.).
Эмульсии — грубо-дисперсные смеси нерастворимых фаз. Основной (дисперсионной) фазой обычно
является вода, а дисперсной — мельчайшие капельки масла. Эмульсии получают путем самопроизвольного или
принудительного смешивания в воде концентрата, называемого эмульсолом. В общем случае эмульсол
состоит из базовой масляной основы; эмульгатора, противоизносных, противозадирных и антифрикционных
присадок; а также добавок, улучшающих эксплутационные свойства эмульсии (ингибиторы коррозии,
бактериоциды, стабилизаторы и др.).
В масляные СОЖ входят базовое минеральное масло (60... 100 % массы СОЖ) и различные присадки.
В зависимости от назначения различают следующие присадки:
■ антифрикционные, снижающие коэффициент трения между обрабатываемым изделием и инструментом;
■ противоизносные, снижающие износ инструмента;
■ противозадирные, предотвращающие заедание и схватывание материалов инструмента и изделия;
■ моющие, препятствующие оседанию и адгезии загрязнений;
■ антикоррозионные, снижающие коррозионное действие СОЖ;
■ антиокислительные, ингибирующие окисление;
■ вязкостные, повышающие вязкость и изменяющие индекс вязкости;
■ специальные, трибополимеризирующиеся, антискачковые, насыщающие взаимодействующие
материалы продуктами распада, облегчающие диспергирование и др. *
■ антипенные, ингибирующие пенообразование;
■ многофункциональные, одновременно повышающие свойства масел по нескольким показателям и др.
К наиболее распространенным специальным СОЖ можно отнести синтетические масла, которые
обладают рядом характерных свойств не присущих нефтяным маслам: не горючи, исключительно химически инертны
и термически стабильны, работоспособны при низких температурах, имеют хорошие антифрикционные и
противоизносные свойства. Вследствие высокой стоимости специальные СОЖ находят ограниченное
применение в промышленности, однако нередко их используют в качестве присадок (вязкостных, антипенных) к
водным и масляным СОЖ.
248
72.2. Гидравлические системы смазочно-охлаждающих жидкостей
Общие рекомендации по применению СОЖ и их основные характеристики содержаться в Технических
условиях, разрабатываемых заводами-изготовителями СОЖ (см. приложение П1.8). Более детальные
рекомендации по использованию конкретной СОЖ приводятся в специальной справочной литературе, где
содержаться так же сведения по нормам расхода СОЖ для определенного оборудования и вида обработки.
При выборе СОЖ обязательно должны учитываться санитарные требования, так как СОЖ могут явиться
причиной некоторых профессиональных заболеваний обслуживающего персонала. Отрицательное
воздействие СОЖ возможно как при непосредственном контакте жидкости с кожей, так и через цеховую атмосферу и
определяется классом опасности, который устанавливается по ГОСТ 12.1.007-76 в зависимости от степени
воздействия на организм человека.
12.2.2. Структура систем СОЖ
В структуре систем СОЖ, как и в гидравлических приводах, можно выделить энергообеспечивающую,
направляющую и регулирующую, а также информационную подсистемы. Однако даже в одинаковых по
функциональному назначению подсистемах гидропривода и систем СОЖ, отдельные устройства последних
отличаются особенностями конструктивного исполнения, обусловленными необходимостью пропускания
элементами систем СОЖ больших расходов и свойствами самих смазочно-охлаждающих жидкостей. Кроме того в
гидроприводах рабочая жидкость контактирует только с внутренними частями элементов гидропривода, тогда
как в системах СОЖ—и с элементами технологического оборудования к которым она доставляется и которые
являются источниками повышенного загрязнения рабочей среды.
В зависимости от количества и разновидностей оборудования, подключенного к одной энергообеспечи-
вающей подсистеме, различают следующие системы СОЖ:
■ индивидуальные (предназначенные для одного станка);
■ групповые (предназначенные для группы однотипных станков или автоматических линий);
■ централизованные (предназначенные для группы разнотипных станков, участков или цехов).
На рис. 12.21 представлен фрагмент гидросхемы индивидуальной системы СОЖ. Система обеспечивает
автоматическое включение/отключение подачи СОЖ для охлаждения инструмента (распределитель Р1),
«ручное» включение/отключение подачи СОЖ для смыва стружки (распределитель Р2), а так же очистку
загрязненной СОЖ при ее возврате в бак станции СОЖ (фильтр Ф1).
028
\ЛЛ *
РР1
Р1 (^
022
022 022
016
ВН2
ВН4
ВН1
W
г
&
см
51
см
51
о
«1
о
51
Смыв стружки
Охлаждение инструмента
УН1
С1
Рис. 12.21. Фрагмент гидросхемы индивидуальной системы СОЖ
249
12. Гидравлические системы смазки и охлаждения
Все основные элементы рассмотренной системы СОЖ можно сгруппировать по подсистемам следующим
образом:
■ энергообеспечивающая подсистема — станция СОЖ (С1) в составе: электродвигатель М1, насос Н1 и
сливной Ф1 фильтр; напорный фильтр Ф2.
■ направляющая и регулирующая подсистема — распределители Р1 и Р2, вентили ВН1, ВН2, ВНЗи ВН4,
а также система трубопроводов и шлангов разного диаметра обеспечивающая их подключение;
■ информационная подсистема — реле расхода РР1.
В отличие от индивидуальных систем СОЖ групповые и централизованные системы предполагают
наличие одной энергообеспечивающей подсистемы для однотипного или разнотипного оборудования. В схемах
гидравлических принципиальных отдельного оборудования, входящего в состав групповой или
централизованной системы СОЖ, энергообеспечивающую подсистему, как правило, не изображают, а точку подключения
к ней обозначают зачерненным треугольником и индексом, например, буквой «Р».
12.2.3. Элементы энергообеспечивающей подсистемы
К особенностям функционирования энергообеспечивающей подсистемы СОЖ относится необходимость
обеспечения больших расходов СОЖ, как правило с относительно невысоким давлением, что находит свое
отражение в конструктивном исполнении отдельных устройств и аппаратов. Кроме того, в энергетическую
подсистему СОЖ входит целый ряд разнообразных устройств очистки СОЖ, предназначенных для удаления
из СОЖ, поступающих на повторное использование, отходов обработки металлов (стружки при резании,
металлической пыли и частицами абразива при шлифовании и т.п.).
Насосы. В качестве устройств перекачки рабочих сред в централизованных системах водных СОЖ
наиболее часто применяются центробежные насосы, основным элементом конструкции которых является
расположенное в спиральном отводе 1 рабочее колесо 2, представляющее собой два диска, соединенных между
собой специально спрофилированными лопатками 3 (рис. 12.22).
При вращении приводного вала 4 перекачиваемая СОЖ поступает в осевом направлении к центру колеса
2, лопатки 3 которого раскручивают жидкость и одновременно вовлекают ее в относительное движение по
образованным ими каналам. Под действием центробежной силы жидкость движется от центра колеса к
периферии, таким образом, СОЖ сообщается кинетическая энергия. При протекании СОЖ по спиральному отводу 1
кинетическая энергия потока жидкости преобразуется в энергию давления.
В системах масляных СОЖ преимущественно используются шестеренные и винтовые насосы.
Оборудование очистки СОЖ. Выбор способа очистки и конструкции очистителя определяется
требованиями, предъявляемыми к качеству и производительности очистки, составом СОЖ подлежащей очистке, а
также характером загрязняющих примесей.
250
12.2. Гидравлические системы смазочно-охлаждающихжидкостей
В соответствии с ГОСТ 17216-2001 «Промышленная чистота. Классы чистоты жидкостей» (см.
приложение П1.7, табл. П1.12) существует 19 классов чистоты жидкости, которые должны указываться в технических
требованиях к рабочим жидкостям при их поставке, транспортировании и хранении, а также в технических
требованиях на изготовление и эксплуатацию гидросистем.
На практике наиболее распространенными показателями, определяющими качество очистки являются
тонкость и степень оч_истки. Под степенью очистки (коэффициент фильтрации) понимается число в
процентах частиц загрязнителя, задерживаемых очистителем, а тонкость очистки определяется наименьшим
размером задерживаемых частиц загрязнений.
По тонкости очистки все очистители можно условно разбить на две группы:
■ грубой очистки, задерживающие частицы примесей размером более 50 мкм;
■ тонкой очистки, удаляющие примеси с частицами размером менее 50 мкм.
Наиболее широко распространены два способа очистки СОЖ: фильтрация — очистка путем пропускания
жидкостей через пористые или щелевые перегородки и очистка в силовых полях.
Устройства фильтрации. Большие расходы СОЖ (десятки кубических метров в час) в технологическом
оборудовании, а также большое количество содержащихся в них загрязнителей делают невозможным
применение в системах СОЖ традиционных для гидравлических приводов конструктивных решений фильтрующих
элементов и устройств.
Как правило для очистки СОЖ используют специальные автоматизированные установки, такие как
фильтры-транспортеры, намывные трубчатые фильтры и ленточные фильтровальные автоматы.
В качестве примера рассмотрим конструкцию и принцип действия наиболее простой из них —
фильтра-транспортера, применяемого для очистки СОЖ на водной основе (рис. 12.23).
Установка представляет собой транспортер фильтровального бумажного полотна*, который приводится
во вращение электродвигателем с редуктором (на схеме не показан), установленным на боковой стенке
корпуса коробчатой формы 7. На цепях 6 шарнирно закреплены поперечно расположенные пластины,
образующие вместе с цепями сетку транспортера. Перед пуском фильтра-транспортера в работу свободный конец
рулона фильтровальной бумаги 5 расстилают на металлической сетке транспортера так, чтобы на ней могло
удержаться некоторое количество жидкости. Загрязненная СОЖ со станка поступает в приемный лоток 1, из
* Щелочностойкая длинноволокнистая пропитанная поливиниловым спиртом бумага марки А (размер
задерживаемых частиц 65... 70 мкм) и марки Б - для тонкой очистки (размер задерживаемых частиц 25... 30 мкм).
251
12. Гидравлические системы смазки и охлаждения
которого стекает на рабочий участок фильтровальной бумаги и, проходя через нее, очищается. По мере того,
как фильтровальная бумага покрывается шламом, ее пропускная способность ухудшается и уровень
жидкости, удерживающейся на ней, повышается, что сопровождается подъемом поплавка 2. При достижении
определенной высоты подъема поплавка, регулировка высоты расположения которого производится винтом 3,
срабатывает микровыключатель 4, включающий приводной электродвигатель, и сетка-транспортер вместе с
загрязненной бумагой начинает перемещаться. Движение транспортера продолжается до тех пор, пока в зону
поступления загрязненной СОЖ не подведется чистое бумажное полотно, уровень жидкости не понизится до
прежней отметки и поплавок 2 не опустится в исходное положение. Цикл работы фильтра-транспортера
повторяется автоматически по мере загрязнения фильтровальной бумаги. Загрязненный участок
фильтровальной бумаги с осевшим на ней шламом спускается в специальный бак 8, из которого его удаляют по окончанию
работы.
Намывные трубчатые фильтры-автоматы и ленточные фильтровальные автоматы используют для тонкой
очистки масляных СОЖ.
Устройства очистки в силовых полях. Практически любой резервуар, в котором собирается
циркулирующая в гидросистеме рабочая жидкость является простейшим силовым очистителям, в котором под
действием гравитационного поля происходит очистка рабочей жидкости. К основным недостатком
гравитационных очистителей можно отнести их невысокую эффективность и необходимость использования
резервуаров рабочей жидкости больших размеров, что целесообразно лишь в централизованных гидравлических
системах. Однако гравитационная очистка очень часто используется в сочетании с другими способами
очистки.
Очистка в магнитном силовом поле. К простейшим устройствам осуществляющим очистку рабочих
жидкостей от мелких ферромагнитных частиц загрязнений, а также некоторых органических засорений и
абразивных частиц, относятся магнитные фильтры, монтируемые непосредственно на трубопроводах гидросистем.
В конструкцию таких фильтров включены магниты, которые и создают магнитное поле, осаждающее частицы
загрязнений.
Перед магнитными фильтрами рекомендуется устанавливать фильтры грубой очистки или магнитные
сепараторы, которые широко используются в современных металлорежущих станках (особенно работающих
абразивными инструментами) для очистки водных эмульсий, а также масляных, синтетических и других СОЖ
(рис. 12.24).
Рис. 12.24. Магнитный сепаратор
Загрязненная СОЖ поступая на вход сепаратора, проходит между корпусом и вращающимся в
направлении, обратном движению потока жидкости ротором 2 с постоянными магнитами 3. Ферромагнитные частицы и
Ч^
252
~\2.2. Гидравлические системы смазочно-охлаждающихжидкостей
некоторая часть немагнитных примесей притягиваются магнитами к ротору, отжимаются резиновым роликом
1 и счищаются с поверхности ротора 2 скребком 4 в контейнер 5.
К преимуществам магнитных сепараторов относят небольшие габаритные размеры, сравнительно
невысокую стоимость и простоту обслуживания, а к недостаткам — невозможность их использования при
обработке деталей из немагнитных материалов и невысокая степень очистки СОЖ.
Очистка в центробежном силовом поле. Среди очистителей, работа которых основана на действии
центробежного силового поля, наибольшее распространение нашли центрифуги и гидроциклоны.
В центрифугах твердые частицы загрязнений в СОЖ под действием центробежной силы отбрасываются
к стенкам вращающегося ротора и удерживаются на них до отключения приводного электродвигателя, после
чего сбрасываются в специальный резервуар, входящий в состав центрифуги.
В гидроциклонах разделение жидких неоднородных смесей происходит под действием поля
центробежных сил инерции, возникающего вследствие создания определенного движения потоков очищаемой
жидкости.
Гидроциклон (рис. 12.25) состоит из крышки 2 с входным 5 и выходным 1 патрубками, к которой, с помощью
фланцевого соединения герметично пристыкован корпус 3 с наконечником 4 для отвода выделенных из
очищаемой СОЖ загрязнений (шлама).
А|
Очищенная
СОЖ
Загрязненная _.
С°Ж| "£
1 • т:—
г. -%л**'Л
Г*J 1
г •;?;,£
-fe. 3
•я »• 1
Jli
ml
i
Шлам
1
-2
5
-3
4
Вид А
О "-
м^- ^^\х '
^шг
S-^JC
Рис. 12.25. Гидроциклон напорный
Загрязненная СОЖ подается под давлением во входной патрубок 5 и через него поступает в
спиралевидный канал, приобретая вращательное движение, в результате которого возникают центробежные силы,
направляющие тяжелые частицы загрязнений к стенкам корпуса 3. Таким образом, возникает внешний круговой
поток, периферийная часть которого по спиральной траектории вдоль стенок корпуса 3 смещается в сторону
наконечника 4 и частицы загрязнителя через дросселирующие отверстия в наконечнике 4 выбрасываются из
гидроциклона. При этом 85...95 % жидкости сосредотачивается в центе вихря, поднимается и отводится через
выходной патрубок 1, расположенный по оси гидроциклона в крышке 2.
253
12. Гидравлические системы смазки и охлаждения
Тонкость очистки СОЖ в гидроциклонах в зависимости от их конструкции и условий эксплуатации
составляет 5... 15 мкм при степени очистки 60...90 %.
К основным преимуществам напорных гидроциклонов относят компактность и простоту конструкции, а к
недостаткам — зависимость качества очистки от колебаний напора СОЖ на входном патрубке 5, быструю
изнашиваемость их внутренних поверхностей, а также отсутствие точных методов расчета и выбора рабочих
характеристик гидроциклонов.
Отдельные устройства очистки СОЖ могут объединяться в комплексные установки многоступенчатой
очистки (рис. 12.26).
Очищенная
СОЖ
О 12 3 4
12 11 10 9 8 7 6 5
Рис. 12.26. Комплексная установка многоступенчатой очистки
Установка многоступенчатой очистки СОЖ работает следующим образом. На первом этапе очистки,
загрязненная СОЖ по желобу 4 поступает в гравитационный бак-отстойник 3, где происходит
предварительное отделение наиболее крупных и тяжелых частиц загрязнений. На втором этапе осуществляется
очистка СОЖ за счет ее пропускания через щелевой грохот 8, проходя через который СОЖ поступает в
отстойную камеру 9. Скребковый конвейер 7 очищает щелевой грохот и гравитационный бак-отстойник 3
от осевших загрязнителей и по наклонной рампе 6 перемещает их в контейнер 5. Заключительную
тонкую очистку (третий этап) выполняет ленточный фильтр-автомат 1, к которому СОЖ подается насосом
10 из отстойной камеры 9. Поступление очищенной СОЖ из бака 12 к потребителям обеспечивается
насосом 11. Избыток прошедшей очистку СОЖ из бака 12 переливается в отстойную камеру 9.
Непрерывное снабжение потребителей СОЖ обеспечивается значительным запасом СОЖ в баке 12 и более
высокой производительностью насоса 10 в сравнении с насосом 11, подающим очищенную СОЖ к потреби-"
телям.
12.2.4. Элементы направляющей и регулирующей подсистемы
Рассмотрим конструкцию распределителя, предназначенного для работы на больших расходах —
пистолета СОЖ — распределителя с ручным управлением обеспечивающего возможность подачи струи СОЖ в
произвольном направлении, а также группу устройств подачи СОЖ в зону резания, которые можно отнести к
специальным распределительным устройствам, используемым в составе систем СОЖ.
254
~\2.2. Гидравлические системы смазочно-охлаждающихжидкостей
Распределители. Для управления большими расходами в системах СОЖ широко применяются
распределители фланцевого исполнения мембранного типа с электрогидравлическим управлением (рис. 12.27).
В корпусе 1 распределителя с входным Р и выходным А отверстиями, смонтировано седло 6, на
которое опирается основной клапан 2, снабжонный мембраной 7. В клапане 2 выполнен специальный канал 5
через который рабочая жидкость поступает в надмембранную полость и через канал а к пилотному
клапану 8 с электромагнитным приводом. Для управления клапаном вручную в нижней части корпуса 1 встроен
винт 4.
Е*Т
4
W
Рис. 12.27. 2/2-распределитель фланцевого исполнения мембранного типа с электрогидравлическим
управлением
При обесточенной обмотке катушки 9 пилотный клапан 8 перекрывает разгрузочный канал Ь, поэтому
давления жидкости на входе Р и в надмембранной полости равны. Основной клапан 2 под действием
собственного веса и усилия пружины 3 герметично отсекает входное Р и выходное А отверстия. При подаче
напряжения на обмотку катушки 9 клапан 8 перемещается вверх, открывая проход рабочей жидкости из
надмембранной полости через разгрузочный канал b в канал А. Давление над мембраной 7 снижается и в
результате разности давлений действующих на эффективную площадь мембраны 7 возникает управляющее
усилие, отжимающее основной клапан 2 от седла 6. При этом вход Р соединяется с выходом А. После
снятия напряжения с обмотки катушки 9 пилотный клапан 8 перемещается вниз и перекрывает разгрузочное
отверстие Ь. При этом величина перепада давления, воздействующего на мембрану 7, становится равной
нулю, и основной клапан 2 по действие усилия пружины 3 перемещается вниз, отсекая входное Р и выходное А
отверстия.
255
12. Гидравлические системы смазки и охлаждения
Для обеспечения возможности смыва стружки, скапливающейся в труднодоступных местах
технологического оборудования, в состав практически каждой системы СОЖ включают 2/2-распределитель с мускульным
управлением, который зачастую называют пистолетом СОЖ (рис. 12.28).
Пистолет СОЖ работает следующим образом. При повороте рычага 7 вокруг оси, через толкатель 2
передается усилие, отжимающее клапан 4 от седла, выполненного в корпусе 3. Охлаждающая жидкость из
канала Р через осевую расточку в хвостовике 6 и два продольных канала 8 в корпусе 3 попадает в канал А
насадки 1, которая и формирует струю СОЖ. При снятии управляющего воздействия на рычаг 7 клапан 4 под
действием пружины 5 и давления потока охлаждающей жидкости прижимается к седлу, отсекая канал Р от
канала А.
Устройства подачи СОЖ в зону резания. Наибольшее распространение в промышленности нашли
следующие способы подачи СОЖ в зону резания:
■ поливом (свободно падающей струей);
■ напорной струей;
■ струей воздушно-жидкостной смеси.
При подаче поливом поток свободно падающей струи СОЖ обильно поливает зону резания. Подвод
СОЖ в зону обработки обеспечивается набором стандартных элементов и системой трубопроводов, на
последнем участке которой устанавливаются сопла, формирующие требуемую форму и направление струи
СОЖ. Простейшие сопла изготавливают расплющиванием конечного участка трубопровода подающего
СОЖ в конкретную точку полива. При необходимости подачи СОЖ в несколько точек одной зоны обработки
конечные трубопроводы могут собираться в коллекторы, монтируемые в непосредственной близости от
зоны обработки.
Точное направление подачи СОЖ — очень важная задача. Так, например, подача СОЖ при сверлении по
направлению стружечных канавок инструмента, обеспечивает не только поступление жидкости в зону
резания, но и эффективное удаление стружки.
Сущность подачи СОЖ напорной струей заключается в направлении тонкой струи СОЖ со скоростью
40...60 м/с в зону контакта режущей кромки инструмента с обрабатываемой заготовкой со стороны задней
грани лезвия. При этом струю СОЖ рекомендуется располагать в плоскости резания на расстоянии 1/3
глубины резания от вершины режущей кромки. Сложность обеспечения точного направления струи СОЖ на
режущую кромку инструмента послужило причиной создания специальных инструментов с каналами для
подвода СОЖ, выполненными в теле инструмента и дополнительных устройств для обеспечения такого
подвода. Так, при обработке отверстий сравнительно небольшой длины (например, когда глубина сверления
256
12.2. Гидравлические системы смазочно-охлаждающих жидкостей
равна диаметру сверления) с наружным отводом стружки на вертикально- и горизонтально-сверлильных
станках, сверло с каналами для подвода СОЖ закрепляют в специальном патроне, обеспечивающем
подвод СОЖ к зоне резания через каналы в теле сверла (рис. 12.29).
СОЖ нагнетается к сверлу 8 через штуцер 4, ввернутый в муфту 1, радиальные отверстия в распорном
кольце 5 и корпусе 7 и паз в переходной втулке 6. Муфта 1 устанавливается на корпусе 7 на подшипниках 2.
При этом две манжеты 3 предотвращают утечку подаваемой СОЖ.
Особенность конструкций для подвода СОЖ, используемых при сверлении глубоких отверстий с
относительной длиной более 3-5 диаметров сверления, заключается в необходимости обеспечения
принудительного (внутреннего или наружного) отвода стружки, для чего применяются специальные устройства и режущие
инструменты (рис. 12.30).
В представленном устройстве СОЖ под давлением подается по каналу 7 в кольцевое пространство между
стеблем 4 сверла 1 и поверхностью обрабатываемого отверстия заготовки 2. При этом в состав станка для
глубокого сверления обязательно должен входить маслоприемник 3, направляющий СОЖ к зоне резания,
герметизирующий стык между торцом заготовки 2 и каналом подвода СОЖ 7 и компенсирующий
температурные деформации (удлинение) заготовки 2 в процессе обработки. Пройдя зону резания, СОЖ захватывает
стружку и отводит ее в емкость 5. Стебель 4 сверла 1 на таких станках поддерживается люнетом 6,
закрепленным на суппорте, сообщающем сверлу 1 движение рабочей подачи.
Подача СОЖ в зону резания в виде струи воздушно-жидкостной смеси приводит к существенному
снижению расходов СОЖ и значительному увеличению эффективности СОТС, создаваемой в зоне обработки.
257
12. Гидравлические системы смазки и охлаждения
Это объясняется повышением физической и химической активности СОЖ в распыленном (аэрозольном)
состоянии.
Основными элементами систем подачи СОЖ в виде струи воздушно-жидкостной смеси являются:
пневматические устройства и аппараты, обеспечивающие подачу сжатого воздуха; гидравлические устройства и
аппараты, обеспечивающие доставку жидкой составляющей смеси; смесительные устройства, в которых
происходит формирование струи воздушно-жидкостной смеси. При этом гидравлические и пневматические
устройства и аппараты являются стандартными элементами, а оригинальным устройством является
сопло-смеситель (рис. 12.31).
Данное устройство состоит из двух сопло-смесителей смонтированных в корпусе 1, по обе стороны от
инструмента, в данном случае — сверла. Каждое из сопло-смесителей состоит из втулки 7, пористого элемента
9, гайки 8 и прокладок 5 и 6. Воздух по трубопроводу 3 подводится к центральному каналу втулки 7, а жидкость
по трубопроводу 2 — к наружной поверхности пористого элемента 9. Смесь образуется непосредственно
перед выбросом из смесителя.
12.2.5. Элементы информационной подсистемы
К элементам информационной подсистемы гидравлических систем охлаждения относятся аппараты,
предназначенные для пуска и управления процессом доставки СОЖ, а также сбора информации о ходе его
выполнения. Как и в любой гидравлической системе, основными контролируемыми параметрами являются
давление и расход. При этом для измерения давления применяются стандартные устройства (см. разд. 6.1), а
для контроля больших расходов, характерных для систем СОЖ, могут применяться специальные устройства,
такие как реле расхода мембранного типа, предназначенного для формирования электрического сигнала при
отклонении величины расхода рабочей жидкости от заданной. В корпусе 4 выполнена разделительная
перегородка со сквозным отверстием, через которое пропущен золотник 5, прикрепленный к корпусу рабочими
мембранами 8 и 9 и защитной мембраной 10. Нижний конец золотника 5 через установочную пластину 6 опирается
на пружину 7. Верхняя часть 13 золотника 5, через механизм установки контролируемой величины расхода,
включающий регулировочной винт 1, флажок-индикатор 2, ведущую 3 и ведомую 11 шестерни, упирается в
рычаг 14, который при определенных условиях вызывает срабатывание микровыключателя 12.
Установка контролируемой величины расхода осуществляется вращением регулировочного винта 1 в
результате чего конусная часть золотника 5 перемещается относительной отверстия в разделительной
перегородке, изменяя площадь кольцевой щели через которую поток рабочей жидкости из входного отверстия А про-
258
12.2. Гидравлические системы смазочно-охлаждающихжидкостей
ходит в выходное отверстие В. Протекание рабочей жидкости через реле сопровождается возникновением
разности давлений на кольцевой щели, действие которых на соответствующие рабочие мембраны 8 и 9,
приводит к перемещению золотника 5 вниз. При этом свободно перемещающаяся в вертикальном направлении
шестерня 11 уходит вниз и рычаг 14 замыкает контакт микровыключателя 12. В систему управления поступает
сигнал о наличии в гидросистеме расхода установленной величины.
Если величина расхода рабочей жидкости будет ниже установленного значения, возникающего перепада
давления будет недостаточно для перемещения золотника 5 вниз и соответственно системой управления
будет получен сигнал об отсутствии в гидросистеме требуемого расхода. Реле расхода рассмотренной
конструкции могут контролировать расходы от 1 до 50 л/мин.
Для контроля расхода в магистральных трубопроводах централизованных системах СОЖ находят
широкое применение реле расхода с гибкой пластиной, позволяющие контролировать расходы до 2 000 л/мин.
12.2.6. Основные этапы проектирования систем СОЖ
Разработка систем СОЖ проводится в соответствии с ТЗ, в котором должна быть представлена
информация о расположении точек СОЖ на оборудовании, их назначении, данные для определения минимально
необходимого расхода для охлаждения инструмента или смыва стружки, а также специальные требования по
режиму подачи и способу подвода СОЖ.
При проектировании систем СОЖ можно выделить следующие основные этапы работ:
■ выбор системы подачи и вида (состава) СОЖ;
■ определение требуемой величины подачи и диаметра подводящего трубопровода для каждой точки
подвода СОЖ;
■ разработка схемы гидравлической принципиальной;
■ подбор гидравлической элементной базы;
■ разработка сборочных чертежей и спецификаций.
Хотя последовательность вышеперечисленных этапов работ и является достаточно условной и
некоторые работы, выделенные в ней, выполняются скорее параллельно, чем последовательно, однако она дает
достаточно полное представление о ходе проектирования систем СОЖ.
259
Приложение
П1. Справочная информация
П1.1. Соотношения единиц величин, применяемых в гидравлике, с единицами
международной системы СИ (SI)
Таблица П1.1. Соотношения единиц величин, применяемых в гидравлике, с единицами международной
системы СИ (SI — System International of Units)
Величина Единица
Название Обозначение Обозначение Название
Примечание
Масса
Длина
Время
Температура
термодинамическая
Плоский угол
Оснс
т
s, I, L
t
Т
юные единицы системь
кг
м
с
К
,/СИ
килограмм
метр
секунда
кельвин
Дополнительные единицы системы СИ
а, р, (р, у и др.
Производные единиц
рад
ы, применяемые в гидр,.
радиан
эвлике и пневматике
Связь между
различными
температурными шкалами
показана в
приложении П1.2
Диаметр
Радиус
d,D м метр
г, R
0,5D
Площадь
Объем
Рабочий объем
Расход массовый
Расход объемный
Расход объемный
нормальный
Пропускная
способность (расходная
характеристика)
Плотность
Удельный объем
AJ
V
К
О,
Q,Qv
Qn,QvH,Q
Ку
р
V
м2
м3
см3
кг/с
м3/с
л/мин
м3/ч
кг/м3
м3/кг
квадратный метр
кубический метр
кубический
сантиметр
килограмм в секунду
кубический метр
в секунду
литр в минуту
кубический метр
в час
килограмм на
кубический метр
кубический метр на
килограмм
Qv=Qm'p
Объемный расход
воздуха,
приведенного к техническим
нормальным условиям
Внесистемная
единица
К=1/р
260
/77. Справочная информация
Продолжение табл. П1.1
Величина
Абсолютная
влажность воздуха
Относительная
влажность воздуха
Частота
периодического процесса
(колебания)
Частота импульсов,
ударов и т. п.,
частота вращения
Частота угловая
(круговая или
циклическая)
Скорость линейная
Скорость угловая
Ускорение линейное
Ускорение
свободного падения
Ускорение угловое
Импульс (количество
движения)
Динамический
момент инерции
Сила (усилие)
Сила тяжести, вес
J э J абс
Ф
f, v
n,f
со
V
со
a
8
8
Р
И
F,P
G,P
Единица
кг/м3
-
Гц
С"1
ГЦ
об/с
об/мин
С"1
м/с
рад/с
об/с
об/мин
м/с2
рад/с2
кг • м / с
кг- м2
Н
килограмм на
кубический метр
-
герц
секунда в минус
первой степени
герц
оборот в секунду
оборот в минуту
секунда в минус
первой степени
метр в секунду
радиан в секунду
оборот в секунду
оборот в минуту
метр на секунду в
квадрате
радиан на секунду в
квадрате
килограмм-метр в
секунду
килограмм-метр в
квадрате
ньютон
Примечание
Обычно выражается
в граммах на
кубический метр [г / м3]
Измеряется в
относительных единицах
(процентах)
1 с-1 = 1 Гц
1 об/с = 1 с 1
Внесистемная
единица:
1 об/мин = 1/60 с-1
1 об/с = 2л рад/с
Внесистемная
единица:
1 об/мин =
= 2л / 60 рад/с
g = 9,81 м / с2
Н = кг • м / с2
261
Приложение
Окончание табл. П1.1
\ Г *,_ _, Величина "•:, "Ь '-* " 4
Момент силы,
изгибающий момент
Момент пары сил,
крутящий
(вращающий) момент
Давление
Объемный модуль
упругости (модуль
сжимаемости)
Коэффициент
объемного сжатия*
Коэффициент
объемного расширения**
Динамическая
вязкость (коэффициент
внутреннего трения)
Кинематическая
вязкость
Коэффициент
трения
Работа
Энергия
Кинетическая
энергия
Потенциальная
энергия
Тепловая энергия
Внутренняя энергия
Мощность
Коэффициент
полезного действия (КПД)
Удельная газовая
постоянная
М
М, Т
Р
Е
РР
Рт-
И
V
И>/
А
Е, W
Еь Wh К, Т
Ер, Wp, Р, Ф
Q
и
P,N
Л
R, Rq
, . J;i:, " _ .; t,... ЕдИНИЦа , ; ; , ■ , ' J
Н-м
Па
Па-1
К-1
Па с
м2/с
-
Дж
Вт
-
Дж / (кг • К)
ньютон-метр
паскаль
паскаль в минус
первой степени
кельвин в минус
первой степени
ласкал ь-секунда
квадратный метр на
секунду
-
джоуль
ватт
-
джоуль на кило-
грамм-кельвин
i;4 Примечание
Па = Н / м2
Р, = 1 / К
v = ц/р
Безразмерная
величина
■
Безразмерная
величина
* Термодинамический коэффициент сжимаемости.
** Термический (температурный) коэффициент расширения.
262
/77. Справочная информация
Таблица П1.2. Приставки для наименования дольных и кратных единиц
" ... ■ ; ■=
Степень
ю-1
10-2
ю-3
ю-6
ю-9
ю-12
10-15
10-18
Дольные единицы
Приставка
деци
санти
МИЛЛИ
микро
нано
пико
фемто
атто
" » *
Символ
Д
с
м
мк
н
п
ф
а
Степень
101
102
103
106
109
1012
1015
1Q18
Кратные единицы
Приставка
дека
гекто
кило
мега
гига
тера
пета
экса
*
Символ
да
г
к
М
Г
т
п
э
П1.2. Сотношения между различными единицами давления
и температурными шкалами
Таблица П1.3. Соотношения между различными единицами давления
Единица
1 Па .
1 кПа
1 МПа , "
1 кгс/см2
1 бар
1 физ.
атм.
1 мм.вод.
С1Ч *
1 мм рт,
ст.
1psi
Па
" ":-■ 1„ ""'
103
106
98066,5
105
1,01325-105
9,80665
133,322
6894,76
кПа
ю-3
*" 1 * '■.,
103
98,0665
100
1,01325-Ю2
9,80665-1 fr3
0,133322
6,89476
МПа
ю-6
10-3
'к *1 "!'
0,0980665
0,1
0,101325
9,80665-10-6
1,33322-КИ
6.8947610-3
КГС/СМ2
1,019710-5
1,019710"2
10,1972
■ г ! '-■■
1,0197
1,03323
1(Н
1,3595Ю-3
7.030710-2
бар
Ю-5
ю-2
10
0,980665
'""" , 1 1 ?"
1,01325
9,806710-5
1,3332-Ю-з
6,8947610-2
физ. атм.
9,8692-1 ГГ6
9,869210-3
9,86923
0,967841
0,986923
1
9.678410-5
1,315810-3
6,804610"2
мм ВОД. СТ.
0,101972
101,972
101971,6
104
10197,2
1,033-104
":: ""1 %"
13,5951
703,07
мм рт. ст.
7,5006-Ю-з
7,5006
7500,62
735,56
750,06
760
7,35610-2
' 1 ,"
51,7151
psi
1,45037-КИ
0,145037
145,0377
14,22333
14,50377
14,69594
1,422310-3
1,933710-3
1
Таблица П1.4. Формулы, связывающие различные температурные шкалы
Шкала
Кельвина, Г [К]
Цельсия, t °C
Фаренгейта, t °F
Реомюра, t °R
Кельвина
'. .. 1 ' ' ■
Г-273,15
1,8 Г-459,67
0,8 Г-218,52
Цельсия
ГС+ 273,15
1 ,
1,8 ГС+ 32
0,8 ГС
Фаренгейта
(t °F - 32) /
1,8 + 273,15
(rF-32)/1,8
,' - * 1-
0,44(rF-32)
Реомюра
1,25 ГЯ+273,15
1,25 Г R
2,25f°R+32
• ,-'~Г"*' 1'"'я ' -
263
Приложение
П1.3. Трубопроводы
Табдуца П1.5. Условные проходы трубопроводов и арматуры
Диаметр
условного прохода 2)у,
мм
3
6
8
10
15
20
25
32
40
50
60
Площадь
проходного
сечения А, см2
0,07
0,28
0,50
0,79
1,77
3,14
4,94
8,04
12,57
19,64
26,31
Резьба,
дюйм
—
—
Труб 1/4"
Труб 3/8"
Труб 1/2"
Труб 3/4"
Труб 1"
Труб 1 1/4"
Труб 1 1/2"
Труб 2"
—
Диаметр
условного прохода d,
мм
70
80
100
125
150
175
200
225
250
275
300
Площадь
проходного сечения
А, см2
38,48
50,27
78,54
122,73
176,72
240,53
314,16
397,61
490,87
593,96
706,88
Резьба,
дюйм
Труб 2 V2"
Труб 8"
Труб 4"
Труб 5"
Труб 6"
Труб 7"
Труб 8"
Труб 9"
Труб 10"
Труб 11"
Труб 12"
Таблица П1.6. Медные трубы (ГОСТ 617-90)
Наружный диаметр, мм
3
4
5
6
8
10
12
13
14
16
18
20
22
24
Толщина стенки*, мм
0,5 - 0,8
0,5-1,0
0,5-1,2
0,5 - 2,0
0,5 - 2,0
0,5 - 2,0
0,8 - 2,0
1,0; 1.5-3.0
0.5 - 2,0
0,8 - 2,0; 3,5
1; 1,5; 2; 3-4 1
1 - 3; 4
1 - 3; 4; 5; 6
1; 1,5-3; 4; 5-7
Наружный диаметр, мм
26
28
30
32
34
35
36
38
40
42
45
48
50
53
Толщина стенки*, мм
1; 1,5-3:5-7
1-2;3;5
1; 1,5-3,5; 5
1 - 3; 4 - 5
1; 1,5-6
1-1,5; 2,5; 5
1,2-3; 4; 5; 7
1; 1,5; 2,5; 3; 4
1; 1,5-3; 4; 5
1-2,5
1; 1,5-3,5;5
1,5; 2; 3; 4; 5
1:1,5-3; 4; 5
1,5; 2; 3-4
* В указанных пределах брать из ряда: 0,5; 0,6; 0,8; 1,0; 1,2; 1,5; 2,0; 2,5; 3,0; 3,5; 4,0; 4,5; 5; 6; 7; 8; 10 мм.
264
П1. Справочная информация
П1.4. Структура обозначения индустриальных масел, в соответствии
с ГОСТ 17479.4-87 «Масла индустриальные. Классификация и обозначение»
И - Л - С - 22
Класс
кинематической вязкости
(в зависимости от интервала кинематической вязкости (мм2/с (сСт))
при температуре 40
2
3
5
7
10
-1,9-
-3,0-
-4,0-
-6,0-
-9.0-
-2,5
-3,5
-5,0
-8,0
15
22
32
46
-11,0 68
"С)
-13,0-
-19,0-
- 29,0 -
-41,0-
-61,0-
-17,0
-25,0
-35,0
-51,0
-75,0
100
150
220
320
460
-90,0
-135-
-198-
-288-
-414-
-110,0
165
242
352
506
680
1000
1500
-612-
900-
1350
748
1100
-1650
Принадлежность к подгруппе по эксплуатационным свойствам
А - минеральные масла без присадок для машин и механизмов промышленного
оборудования, условия, работы которых не предъявляют особых требований
к антиокислительным и антикоррозионным свойствам масел.
В - минеральные масла с антиокислительным и антикоррозионными
присадками для машин и механизмов промышленного оборудования, условия, работы
которых предъявляют повышенные требования к антиокислитвльным и
антикоррозионным свойствам масел.
С - минеральные масла с антиокислительным, антикоррозионными и противо-
износными присадками для машин и механизмов промышленного оборудования,
содержащих антифрикционные сплавы цветных металлов, условия, работы
которых предъявляют повышенные требования к антиокислительным,
антикоррозионным и противоизносным свойствам масел.
Д- минеральные масла с антиокислительным, антикоррозионными, противоиз-
носными и противозадирными присадками для машин и механизмов
промышленного оборудования, условия, работы которых предъявляют повышенные
требования к антиокислительным, антикоррозионным, противоизносным и противозадир-
ным свойствам масел.
Е - минеральные масла с антиокислительным, антикоррозионными, противоиз-
носными, противозадирными и противоскачковыми присадками для машин и
механизмов промышленного оборудования, условия, работы которых
предъявляют повышенные требования к антиокислительным, антикоррозионным,
противоизносным, противозадирным и противоскачковым свойствам масел.
Принадлежность к группе по назначению
Л - легко нагруженные узлы (шпиндели, подшипники и сопряженные с ними соединения);
Г - гидравлические системы;
Н - направляющие скольжения;
T - тяжело нагруженные узлы (зубчатые передачи).
Обозначение масла
И - индустриальное.
265
Приложение
П1.5. Обозначения индустриальных масел
Таблица П1.7. Соответствие обозначений индустриальных масел по ГОСТ 17479.4-87 ранее принятым
Новое
обозначение
И-Л-А-7
И-Л-А-10
И-ЛГ-А-15
И-Г-А-32
И-Г-А-46
И-Г-А-68
И-ГТ-А-100
и-л-с-з
И-Л-С-5
И-Л-С-10
И-Л-С-10
И-Л-С-22
И-Г-С-32
И-Г-С-46
И-Г-С-68
И-Г-С-68
И-Г-С-100
И-Г-С-150
И-Г-С-220
И-Г-С-320
И-Г-С-320
И-Г-Д-32
Принятое
обозначение
И-5А
И-8А
И-12А
И-20А
И-ЗОА
И-40А
И-50А
ИГП-2
ИГП-4
ИГП-6
ИГП-8
ИГП-14
ИГП-18
ИГП-30
ИГП-38
ИГП-49
ИГП-72
ИГП-91
ИГП-114
ИГП-152
ИГП-182
ИГСп-18
нтд
ГОСТ 20799-88
ТУ
38.1011191-97
ТУ
38.101413-97
ТУ
38.101238-96
Новое
обозначение
И-ГН-Е-32
И-ГН-Е-68
И-Н-Е-68
И-Н-Е-100
И-Н-Е-220
Нет
И-Т-Д-68
И-Т-Д-68
И-Т-Д-100
И-Т-Д-100
И-Т-Д-100
И-Т-Д-220
И-Т-Д-220
Нет
И-Т-Д-68
И-Т-Д-100
И-Т-Д-220
И-Т-Д-460
И-Т-Д-680
Нет
ИГД-68
ИГД-68
Принятое
обозначение
ИГНСп-20
ИГНСп-40
ИНСп-40
ИНСп-65
ИНСп-110
ИСП-25
ИСП-40
ИРп-40
ИСП-65
ИРп-75
ИРп-85
ИСП-110
ИРп-150
ИСПи-25
ИСПи-40
ИСПи-65
ИСПи-110
ИТП-200
ИТП-300
ИТП-50
ИГСп-38
ИГСп-38д
нтд
ТУ
38.1011161-88
ТУ
38.101672-77
ТУ
38.101672-77
ТУ
38.101293-78
ТУ
38.101293-78
ТУ
38.101451-78
ТУ
38.101293-78
ТУ
38.101451-78
ТУ
38.101853-63
ТУ
38.101293-78
ТУ
38.101451-78
ТУ
38.101293-78
ТУ
38.101292-79
ТУ
38.101292-76
ТУ
38.101238-74
ТУ
38.1011163-88
266
/77. Справочная информация
Таблица П1.8. Соответствие гидравлических и индустриальных масел зарубежным аналогам
Наименование масла
Обозначение по
ГОСТ
17479.3
Эксплуатационная
категория
по ISO 6743
(DIN 51524)
Класс
вязкости
ISO-3448
'Зарубежный аналог
Рекомендации по применению
Рабочие жидкости для гидросистем мобильной техники
Гидро масло
марки «А»
(«Р»)
ГТ-50
МГЕ-10А
МГЕ-46В
МГ-32-В
МГ-15-В
МГ-15-В
МГ-46-В
Жидкость
для
автоматических
коробок
передач
НМ (HLPD)
НМ (HLP)
НМ (HLP)
32
15
15
46
Жидкость типа (TASA-Type
A, Suffix A), AddinolATFTASA,
ВР Autran ATF. EssoATFTASA,
MobilATF200, Shell
DonaxTM, Texaco Texamatic
1585
Addlnol Hydraulikol HLPD,
BP Energol HLPD, ElfElfolna
HLPD, Oest Hydraulikol DD,
Shell Tell us Oil DO,
TexacoAlkorDD
Addlnol Hydraulitol HLP.BP
Enengol HLP, Esso Nuto H,
Mobil DTE 20-Reihe, Shell
Tellus Oil, Texaco Rando
HD, CastrolHyspinAWH
Addlnol Hydraulitol HLP.BP
Energol HLP, Esso Nuto H,
Mobil DTE 20-Reihe, Shell
Tellus Oil, Texaco Rando
HD, Castrol HyspinAWH
Всесезонная эксплуатация в
гидротрансформаторах и
автоматических коробках
передач автомобилей при
температуре окружающей среды
до -30...35 °С, а также в
качестве зимнего в гидроприводах
Всесезонная эксплуатация
в турбо-редукторах
гидропередачи дизель-поездов
Всесезонная эксплуатация
в гидравлических системах
корабельной и подвижной
наземной техники работающей в
интервале температур
от -45 до +50 °С
Для гидравлических систем
(гидро-статического привода)
сельскохозяйственной и
другой техники, работающей в
интервале температур
от-10 до+80°С
Индустриальные масла. Рабочие жидкости для гидросистем
ИГП-18
ИГП-30
ИГП-38
ИГП-49
ИГП-72
ИГП-91
ИГП-114
И-Г-С-32
И-Г-С-46
И-Г-С-68
И-Г-С-68
И-Г-С-100
И-Г-С-150
И-Г-С-220
НМ (HLP)
32
46
68
68
100
150
220
BP Energol HLP\32, 46, 68,
100, 150, 220\ Esso Nuto
H/ Hydraulikoil HLP, Mobil
DTE/20-Reihe/ / DTE Heavy
ShellTellusOil, Texaco Rando
HD, CastrolHyspinAWH
Гидравлические системы
станков, прессов, автоматических
линий, смазывание
высокоскоростных коробок передач,
мало- и средне- нагруженных
редукторов и червячных пере-^
дач, электромагнитных и
зубчатых муфт, вариаторов,
подшипников, направляющих
скольжения, циркуляционных
систем промышленного
оборудования,
деревообрабатывающей и целюлозно-бумажной
промышленности
267
Приложение
П1.6. Интервалы значений основных характеристик
и рекомендуемая область применения некоторых масел
Таблица /719. Индустриальные масла
Обозначение
Вязкость
кинематическая при
40 °С, мм2/с (в
пределах)
Температура
застывания, °С(н-
выше)
Температура
вспышки,
определяемая в
открытом тигле
°С (не ниже)
Кислотное
число мг КОН
на 1 г масла
(не более)
Область применения в качестве
жидких смазочных материалов
I
Масла индустриальные И ГОСТ 20799-88* — очищенные дистиллятные и остаточные масла или их смеси без
присадок, применяющиеся в машинах и механизмах промышленного оборудования, условия работы которых не
предъявляют особых требований к антиокислительным и антикоррозионным свойствам масел, а также в качестве
гидравлических жидкостей.
И-5А
И-8А
И-12А
И-12АЛ
И-20А
И-ЗОА
И-40А
И-50А
6-8
9-11
13-17
13-17
29-35
41-51
61 -75
90-110
-18
-15
-15
-30
-15
-15
-15
-15
140
150
170
165
200
210
220
225
0,02
0,02
0,02
0,02
0,03
0,05
0,05
0,05
Смазывание наиболее широко
распространенных легконагруженных,
высокоскоростных узлов и механизмов
Смазывание втулок, подшипников
веретен ровничных и других машин,
узлов коттонных и кеттельных
машин, шпинделей металлорежущих
станков, работающих с частотой
вращения до 5 тыс. мин-1, для
направляющих бабок фильерно-рас-
точных, фильерно-полировочных и
других станков, для подшипников
маломощных электродвигателей с
кольцевой системой смазки и т.п.
Смазывание легко- и средненагру-
женных зубчатых передач,
направляющих качения и скольжения
станков, где не требуются специальные
масла, и других механизмов.
Применение указанных масел в тех или
иных механизмах зависит от их
вязкости: по мере ее увеличения масла
используют в более нагруженных и
менее быстроходных механизмах.
Указанные масла можно заменить
легированными маслами ИГП-18,
ИГП-30, ИГП-38 и ИГП-49
(ТУ 38.101413-97)
соответствующей вязкости
Масла индустриальные И-Л-С ТУ 38.101.1191-97* — дистиллятные нефтяные масла с антиокислительной, проти-
воизносной и антиржавейной присадками (антипенную и депрессорную присадки вводят при необходимости)
предназначенные для смазывания механизмов, работающих с окружной скоростью на шейке вала от 3 до 11 м/с, в том
числе шпиндельных узлов с подшипниками скольжения и качения, веретен прядильных и крутильных машин,
подпятников сепараторов, швейных, вязальных, коттонных, кеттельных и трикотажных машин.
И-Л-С-5
И-Л-С-10
И-Л-С-22
4,1 - 5,1
9,0-1,0
19,8 -24,0
-15
-15
-15
110
143
170
1,0
1,0
1,0
Применяют для смазывания легко-
нагруженных высокоскоростных
механизмов (шпиндели, подшипники и
сопряженные с ними соединения)
268
/77. Справочная информация
Окончание табл. П1.9
Обозначение
Вязкость
кинематическая при
40 °С, мм2/с (в
пределах)
Температура
застывания, °С (не
выше)
Температура
вспышки,
определяемая в
открытом тигле
°С (не ниже)
Кислотное
число мг КОН
на 1 г масла
(не более)
Область применения в качестве
жидких смазочных материалов
Масла индустриальные ИГП ТУ 38.101.413-97* — нефтяные масла селективной очистки с антиокислительной,
противоизносной, антикоррозионной, антипенной и депрессорной присадками, предназначенные для применения в
гидросистемах станочного, прессового и прочего промышленного оборудования, а также для смазывания зубчатых
и червячных передач.
И/77-78
ИГП-30
ИГП-38
ИГП-49
ИГП-72
ИГП-91
ИГП-114
ИГП-152
ИГП-182
24-30
39-50
55-65
76 - 65
110-125
148-165
186-205
265 - 280
320 - 348
-15
-15
-15
-15
-15
-15
-15
-15
-15
180
200
210
215
220
225
230
230
240
1,0
1,0
1,0
1,0
1,0
1,0
1,0
1,0
1,0
Смазывание высокоскоростных
коробок передач, мало- и средненагру-
женных редукторов и червячных
передач, вариаторов,
электромагнитных и зубчатых муфт,
подшипниковых узлов, направляющих
скольжения и качения и других узлов и
механизмов, где требуются масла с
улучшенными антиокислительными
и противоизносными свойствами
Смазывание шестеренчатых
передач, средненагруженных зубчатых и
червячных редукторов.
Применяется в циркуляционных системах
смазки различного оборудования
Смазывание нагруженных зубчатых
и червячных передач, коробок
скоростей, редукторов и других узлов
Масла редукторные ИТД ТУ 38.101.1337-2000* — нефтяные масла, в основном из сернистых нефтей с
присадками, улучшающими смазывающие, антиокислительные, депрессорные, адгезионные и другие свойства,
предназначенные для смазывания зубчатых передач тяжелонагруженных узлов трения, (И-Т-Д-150 в том числе для
автоматических прессов горячей штамповки) и других элементов промышленного оборудования, в которых высокие нагрузки
не позволяют применять масла без присадок.
И-Т-Д-32
И-Т-Д-68
И-Т-Д-100
И-Т-Д-150
И-Т-Д-220
И-Т-Д-460
И-Т-Д-680
28,8 - 35,2
61,2-74,8
90,0-110,0
135,0-150,0
198,0-242,0
414,0 - 506,0
612,0 - 748,0
-18
-18
-18
-15
-18
-15
-5
190
200
210
210
210
210
210
1,2
1,2
1,2
2,0
2,0
2,0
2,0
* Определение по соответствующему ГОСТу или ТУ.
269
Приложение
Таблица П1,10. Пластичные смазочные материалы
Обозначение
, Вязкость эффективная при
среднем градиенте скорости
деформации 10 с-!
Температура
измерения, °С
Вязкость,
'.. : Па • с
5, (не более)
Предел прочности на сдвиг
Температура
измерения, °С
Предел проч-
5f ности, Па '
; (не менее)
Температура
каплепадения
°С (не ниже)
Пенетрация
при25°Сс
перемешиванием, мм-1
СМАЗКА «ЦИАТИМ-201» ГОСТ 6267-74* - морозостойкая смазка, предназначенная для смазывания малонагру-
женных узлов трения качения и скольжения при температурах от - 60 до +90 °С.
ЦИАТИМ-201
-50
1100
50
250 - 500
175
Не
нормируется
СМАЗКА «ЛИТОЛ 24» ГОСТ 21150-87* - минеральные масла загущенные литиевыми мылами технической
12-оксистеариновой кислоты с добавлением присадок, применяющиеся в узлах трения колесных и гусеничных
транспортных средств, промышленного оборудования и судовых механизмов различного назначения, работающих
при температурах от - 40 до +120 °С (кратковременно до +130 °С).
Литол 24
-20
650
20
500 - 1000
185
220 - 250
СМАЗКА «ЛКС-2» ТУ 38.1011015-85* - нефтяные или синтетические масла загущенные комплексными литиевыми
мылами с добавлением многофункциональных присадок, применяющиеся для смазывания тяжелонагруженных
подшипников качения шпиндельных узлов металлорежущих станков (в том числе типа обрабатывающий центр),
работающих при высоких скоростях и нагрузках и температуре от - 50 до +150 °С.
ЛКС-2
0
180
20
300
200
265 - 295
СМАЗКА «ЛС-1П» ТУ 38 УССР 201-145-77 - минеральные масла, загущенные литиевыми мылами с присадками,
улучшающими смазывающие и антиокислительные свойства, предназначена для смазывания узлов трения,
работающих при средних и высоких нагрузках и температуре не выше 130 °С.
ЛС-1П
20
100
20
98
185
310-340
* Определение по соответствующему ГОСТу или ТУ.
Таблица П1.11. Степень загустения (консистенции) пластичного смазочного материала по классификации NLGI
\ ' Класс по NLGI * Ц 4 \ \ , "\,А '*•-
000
00
0
1
2
3
4
5
6
Диапазон пенетрации, мм ~1 4, *,, '\ •
450 - 475
400 - 430
355 - 385
310-340
265 - 295
220 - 250
175-205
130-160
85-115
270
/77. Справочная информация
П1.7. Извлечения из ГОСТ 17216-2001 «Промышленная чистота.
Классы чистоты жидкостей». Определение классов чистоты рабочей жидкости
Таблица П1.12. Определение классов чистоты рабочей жидкости
Класс
чистоты
жидкостей
00
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
Число частиц загрязнений в объеме жидкости (100 ± 0,5) см3 не более
при размере частиц, мкм
От 0,5
до 1
800
1 600
Свыше 1
до 2
400
800
1 600
Свыше
2 до 5
32
63
125
250
Не нормируется
Свыше
5 до 10
8
16
32
63
125
250
500
1 000
2 000
4 000
8 000
16 000
31 500
63 000
Свыше
Ю до
. 25
4
8
16
32
63
125
250
500
1 000
2 000
4 000
8 000
16 000
31 500
63 000
125 000
Свыше
25 до 50
1
2
3
4
8
12
25
50
100
200
400
800
1 600
3 150
6 300
12 500
25 000
50 000
Свыше 50
до 100
Отсутствие
1
2
3
4
6
12
25
50
100
200
400
800
1 600
3 150
6 300
12 500
Свыше
100 до
200
А.О.
сутствие
1
2
4
6
12
25
50
100
200
400
800
1 600
3 150
Волокна
А.О.
Отсутствие
1
2
3
4
5
10
20
40
80
160
315
630
Масса
загрязнений,
%, не бо-
, лее
Не
нормируется
0,0002
0,0002
0,0004
0,0006
0,0008
0,0016
0,0032
0,005
0,008
0,016
0,032
0,063
Примечания:
1. «Отсутствие» означает, что при снятии одной пробы жидкости частицы заданного размера не обнаружены
или при взятии нескольких проб общее число обнаруженных частиц меньше числа взятых проб.
2. «А.О.» - абсолютное отсутствие частиц загрязнений.
3. Масса загрязнений для классов 6-12 дана факультативно, т.е. не является обязательным контрольным
параметром. Контроль может вводиться по усмотрению разработчика системы, применяющего жидкость.
4. Волокнами считаются частицы толщиной не более 30 мкм при отношении длины к толщине 10:1, не менее.
5. Частицы загрязнений размером более 200 мкм (не считая волокон) в жидкости не допускаются.
271
Приложение
Таблица П1.13. Рекомендуемые классы чистоты для гидравлических устройств и аапаратов
Гидравлическое оборудование
Насосы и гидромоторы шестеренные и пластинчатые
Насосы и гидромоторы аксиально-поршневые:
■ с торцевым распределением
■ с клапанным распределением
Насосы и гидромоторы радиально-поршневые:
■ с цапфенным распределением
■ с клапанным распределением
Гидроап парату ра
Дросселирующие гидрораспределители
Номинальное давление,
МПа
До 2,5
От 2,5 до 6,3
Свыше 6,3
До 200
Свыше 200
До 200
Свыше 200
До 200
Свыше 200
До 200
Свыше 200
Класс чистоты по ГОСТ
17216-2001, не грубее
14
13
12
12
11
14
13
12
11
14
13
12
11
Таблица П1.14. Значение зазоров в рабочих парах гидравлических устройств и аппаратов и рекомендуемая
тонкость фильтрации при их использовании
Гидравлическое оборудование и зазоры в рабочих парах
Пластинчатые насосы:
■ между торцами ротора и распределительными дисками;
■ между лопатками и пазами ротора
■ между торцами лопаток и распределительных дисков.
Шестеренные насосы:
■ между вершиной шестерни и расточкой в корпусе
■ между торцами шестерни и крышками
Поршневые насосы:
а) радиально-поршневые с клапанным распределением
■ между плунжером и корпусом (втулкой)
б) аксиально-поршневые с торцевым распределением
■ между распределительным диском и блоком цилиндров
Дросселирующие гидрораспределители:
■ отверстие в сопле
■ между соплом и заслонкой
■ между золотником и втулкой
Гидрораспредел ител и
■ между золотником и корпусом (втулкой)
Гидроклапаны давления
■ между золотником и корпусом (втулкой)
Зазоры* в рабочих
парах, мкм
10-60
10-30
20-70
80 - 120
20-40
8-70
5-20
15-100
30-150
0,8-8
3-30
5-30
Рекомендуемая
тонкость фильтрации, ■
1 мкм
10-25
10-40
10-25
5-10
10-25
10-25
* С уменьшением зазоров в рабочих парах гидравлического оборудования требования к чистоте жидкости
повышаются
272
/77. Справочная информация
П 1.8. Вещества используемые при работе с системами СОЖ
Таблица П1.15. Вещества используемые при работе с системами СОЖ
Технические условия
или требования *
ТУ 37.104123-90
ТУ 6-02-916-79
ТУ 6-02-720-97
ТУ
0258-001-00151778-94
ТУ 38.101.978-87
Наименование
Моюще-дезин-
фицирующее
средство
МДС-К
Триэтаноламин
технический
Жидкость
охлаждающая и
закалочная
ТОСОЛ-ОИЗ
(концентрат)
Жидкость
РОЗОЛ-2
Смазка
технологическая
«УКРИНОЛ-50у»
Состав
Водная смесь
триполифосфата
натрия, бактерио-
цидной присадки
Вазин и
поверхностно-активного
вещества - Сита-
нол ДС-10
Маслянистая,
горючая жидкость
от желтого до
темно-коричневого цвета,
обладает щелочными
свойствами.
Получают оксиэти-
лированием
аммиака
Раствор тризта-
ноламина и
нитрата натрия в
дистиллированной воде
Жидкость
представляет собой
раствор моющих
веществ и
относится к
негорючим веществам.
Жидкость
содержит эмульгаторы,
стабилизаторы,
антикоррозионные и моющие
компоненты
Изготавливается
на основе
индустриального
масла И-12А по
ГОСТ 20799-75,
противоизносно-
противозадирных
присадок,
эмульгаторов и
ингибиторов коррозии с
добавлением
бензтриазола по
ТУ 6-09-1291-75
1 Назначение .,_ ц
Предназначена для
промывки систем
приготовления, подачи и фильтрации
СОЖ при замене
отработанных СОЖ
Предназначена для
газоочистки при получении
чистой углекислоты, в
текстильной промышленности, в
парфюмерии и цементной
промышленности, как
сырье в ряде органических
синтезов. Используется для
восстановления
антикоррозионных свойств СОЖ
Предназначена для
использования в качестве
охлаждающей жидкости при
шлифовании и закалочной
жидкости при термообработке
металлов
Применяется в виде
водных растворов или
эмульсий на автоматических
моющих линиях для
промывки деталей
автомобилей, защиты от коррозии и
консервации их на период
возможного складского
хранения перед сборкой.
Используется для
корректировки моющих свойств
СОЖ
Применяется в виде
концентрата или 8%-ной
водной эмульсии на операциях
штамповки изделий из
конструкционных сталей, меди
и ее сплавов. В 10...15%-ной
концентрации используется
для отдельных операций
протягивания с высокими
требованиями к качеству
обработки деталей
Класс опасности
по ГОСТ 12.1.007-76
4
(концентрат может
вызывать
незначительное раздражение
слизистых оболочек)
3
(не образует опасных
паров, но
раздражающе действует на
кожу и слизистые
оболочки)
4
(не образует опасных
для вдыхания паров,
но вызывает
отравление при приеме
вовнутрь организма и
раздражение при
попадании на кожные
покровы и слизистую
оболочку глаз)
4
(практически не
оказывает
сенсибилизирующего и
раздражающего
воздействия на кожные
покровы, не
образуют токсичных и
взрывоопасных паров)
273
Приложение
Окончание табл. П1.15
Технические условия
или требования
ТУ
38-00148843-017-94
ТТМ 2.97.0680-99
Наименование
Жидкость
смазочно-
охлаждающая
«ВЕЛС-1»
Биоцид КАТОН
MW
(зарубежный аналог -
биоцид КАТОН
MW ф. Rohm
and Haas,
Америка)
Состав
Представляет
собой
сбалансированную смесь
минерального
масла, эмульгаторов
и ингибиторов
коррозии,
которая при
смешивании с водой
образует
мелкодисперсные
эмульсии.
Горючая жидкость, не
обладающая
способностью
образовывать
токсичные соединения
в воздушной
среде и сточных
водах под
воздействием других
химических
веществ и
физических факторов
Водный раствор
изомеров тиазо-
лина. Жидкость
янтарного цвета
с характерным
запахом
Назначение
Предназначена для
применения в виде 2...5%-ной
водной эмульсии при
лезвийной и абразивной
обработке черных и цветных
металлов и сплавов
Предназначен для
введения в СОЖ с целью их
защиты от микробного
поражения. Биоцид вводится в
концентрации 0,01...0,02%
в свежеприготовленную
СОЖ, а также в процессе
ее использования при
значениях биопоражения 105 и
выше клеток в 1 мл и при
поражении СОЖ
плесневыми грибами
Класс опасности ,-
по ГОСТ 12.1.007-76
4
(практически не
оказывают
сенсибилизирующего и
раздражающего
воздействия на кожные
покровы, не
образуют токсичных и
взрывоопасных паров)
3
(обладает
раздражающим действием
на кожу и слизистые
оболочки, а так же
слабым
сенсибилизирующим эффектом)
274
/77. Справочная информация
П1.9. Зависимость коэффициента приведенной длины от способа монтажа
гидроцилиндра
Таблица П1.16. Зависимость коэффициента приведенной длины от способа монтажа гидроцилиндра
Способ монтажа
цилиндра >
Схема монтажа
Расчетная схема
Коэффициент X
Одна сторона
свободна, вторая жестко
закреплена
*"HL -FBL FH.T
гПЗЭ ™J p
Рв
а
^i'iii'kto
Х = 2
На обеих сторонах
установлены шарниры
F £
1
1
я
ктолЛто-
х= 1
Одна сторона жестко
закреплена, на второй
установлен шарнир
1 н^*т ',точ^53т^^' С О
#в
ь л Тч^ЧЯ^Т^^"
), = 0,7
Ш FWL f№
Обе стороны жестко
закреплены
i
|@
"TO^fff^W^^^ Г д _1
t—я т^ттЕЯЧ^то"
>. = 0,5
275
Приложение
П2. Условные обозначения элементов на схемах
П2.1. Буквенные коды элементов
Таблица П2.1, Буквенные коды элементов на гидравлических и пневматических схемах (ГОСТ 2.704-76)
Буква
А
АК
AT
Б
вд
ВН
ВТ
Г
Д
ДП
др
зм
к
KB
КД
ко
кп
КР
км
м
мн
МП
MP
мс
МФ
н
НА
Элемент
Устройство (общее обозначение)
Гидроаккумулятор
Аппарат теплообменный
Гидробак
Влагоотделитель
Вентиль
Вытеснитель
Пневмоглушитель
Гидродвигатель поворотный
Делитель потока
Гидравлический дроссель
Гидрозамок
Гидравлический клапан
Гидроклапан выдержки времени
Гидравлический клапан давления
Гидроклапан обратный
Гидроклапан предохранительный
Гидроклапан редукционный
Компрессор
Гидромотор
Манометр
Гидродинамическая передача
Маслораспылитель
Масленка
Гидравлическая муфта
Насос
Насос аксиально-поршневой
276
/72. Условные обозначения элементов на схемах
Окончание табд. П2.1
Буква
НМ
НП
HP
ПГ
ПР
Р
РД
РЗ
РК
РП
PC
С
С
т
ТР
УВ
УС
ф
ц
Элемент
Насос-мотор
Насос пластинчатый
Насос радиально-поршневой
Пневмогидропреобразователь
Гидропреобразователь
Гидрораспределитель (пневмораспределитель)
Реле давления
Гидроаппарат золотниковый
Гидроаппарат клапанный
Регулятор потока
Ресивер
Сепаратор
Сумматор потока
Термометр
Гидродинамический трансформатор
Устройство воздухоспускное
Гидроусилител ь
Фильтр
Цилиндр
277
Приложение
П2.2. Условные графические обозначения гидравлических элементов на схемах
Таблица П2.2. Условные графические обозначения на гидравлических схемах (ISO 1219, ГОСТ 2.781-96,
ГОСТ 2.782-96)
, . ■ ■ • Источники гидравлической энергии ** ■..., * !и, ■*'"*■ * " - тс.* .ч * .
Насос:
нерегулируемый с постоянным направлением потока
нерегулируемый с реверсом потока
регулируемый с постоянным направлением потока
регулируемый с реверсом потока
регулируемый с ручным управлением
регулируемый по давлению, с регулируемой пружиной и дренажем
регулируемый многоотводный
Поступательный преобразователь с двумя видами среды
Пневмогидравлическии поступательный вытеснитель с разделителем
Аккумулятор:
гидравлический без указания принципа действия
гидравлический грузовой
гидравлический пружинный
пневмогидравлическии
Л^
<>
О
&
<$
&
j/%
gy-1-
I
5.
<t
—4lx
,-Ll*
Т^ 1
Л
Т" 1
и
а
а
а
278
/72. Условные обозначения элементов на схемах
Продолжение табл. П2.2
Насос-мотор:
с одним направлением потока, нерегулируемый; регулируемый
с реверсивным направлением потока, нерегулируемый; регулируемый
с любым направлением потока, нерегулируемый; регулируемый
Кондиционеры рабочей жидкости
Фильтр
Фильтр с магнитным сепаратором
Фильтр с индикатором загрязненности
Подогреватель
Охладитель
Охладитель с указанием линий подвода и отвода охлаждающей среды
Охладитель и подогреватель
4>
Ф
Ф
#
Ф
Исполнительные механизмы
Гидромотор:
с нереверсивным потоком, нерегулируемый; регулируемый
с реверсивным потоком
Поворотный гидродвигатель
Гидроцилиндр одностороннего действия:
плунжерный
поршневой одностороннего действия с возвратом штока пружиной
поршневой одностороннего действия с выдвижением штока пружиной
00
о
»
ЕЯ
279
Приложение
Продолжение табл. П2.2
Гидроцилиндр двустороннего действия:
с односторонним штоком
с подводом жидкости через шток
с постоянным торможением в конце хода со стороны поршня
с постоянным торможением в конце хода с двух сторон
с регулируемым торможением в конце хода с двух сторон
дифференциальный
с двусторонним штоком
с двусторонним штоком и подводом жидкости через штоки
Гидроцилиндр телескопический:
одностороннего действия
двустороннего действия
двустороннего действия с двусторонним выдвижением
[ 3
ш
-=Е
T==F
ш--
s=l
Гидравлические распределители
2/2-распределитель
3/2-распределитель
3/2-клапанный распределитель
4/2-расп редел итель
5/2-распределитель
3/2-распределитель, переход через промежуточную позицию
3/3-распределитель
4/3-распределитель
4/3-распределитель, переход через промежуточные позиции
5/3-расп редел итель
Дросселирующий распределитель
П1
I
их
ОЙЭ
ЕШ
М{
tt
1
и
VW
280
/72. Условные обозначения элементов на схемах
Продолжение табл. П2.2
Направляющие гидроклапаны
Обратный клапан без пружины
Обратный клапан с пружиной
Обратный клапан с поджимом рабочей средой
Гидрозамок одностороннего действия
Гидрозамок двустороннего действия
Гидроуправляемый клапан
Логический клапан ИЛИ
4
J L
оо
-Ер
+5^
Регулирующие гидроклапаны
Напорный гидроклапан:
прямого действия, нерегулируемый
прямого действия, регулируемый
прямого действия, с дистанционным управлением
непрямого действия, регулируемый
непрямого действия с электромагнитным управлением
L-Г W
L-f 4
L-Г W
1
""frrW
ГГгП_[ Fhl
' Til
_.JS=J=J_.—i
Редукционный гидроклапан:
двухлинейный, прямого действия, нерегулируемый; регулируемый
двухлинейный прямого действия с дистанционным управлением
двухлинейный непрямого действия, регулируемый
трехлинейный прямого действия, регулируемый
W
4
W
W
&
281
Приложение
Продолжение табл. П2.2
Клапан разности давлений
Клапан соотношения давлений
ГА
KJ
Ы.
L-qi
K_J
Устройства управления расходом
Дроссель нерегулируемый
Дроссель регулируемый
Дроссель с обратным клапаном
Дроссель регулируемый, механическое управление роликом
Двухлинейный регулятор расхода
Трехлинейный регулятор расхода
Делитель потока
Сумматор потока
ш
ггИ^
Ф
L
Ф
**
I
/■ Устройства контроля и индикации
Указатель давления
Манометр
Дифференциальный манометр
Манометр электроконтактный
Переключатель манометра
Реле давления
Конечный выключатель
О
282
/72. Условные обозначения элементов на схемах
Продолжение табл. П2.2
Термометр
Термометр электроконтактный
Указатель расхода
Расходомер
Расходомер интегрирующий
Указатель уровня жидкости (изображается только вертикально)
Ф
Q
-©-
Элементы трубопроводов
Место присоединения к источнику гидравлической энергии
Линии всасывания, нагнетания, слива
Линия управления
Соединение трубопроводов
Пересечение трубопроводов без соединения
Гибкий трубопровод, шланг
Место присоединения несоединенное
Место присоединения соединенное
Общее обозначение разъемного соединения
Фланцевое соединение
Штуцерное резьбовое соединение
Поворотное соединение однолинейное
Быстроразъемное соединение без запорного элемента:
соединенное
несоединенное
Быстроразъемное соединение с запорным элементом:
соединенное
несоединенное
Место присоединения измерительного прибора
Вентиль
-х
■*<-
О
->*
283
Приложение
Продолжение табл. П2.2
Элементы модульного монтажа
Отверстие подключения гидроаппарата
Соединительный канал
Отверстие подключения трубопровода, заглушённое резьбовой пробкой
Открытое резьбовое отверстие на стороне подключения трубопроводов
Отверстие подключения гидроаппарата, соединенное с отверстием
подключения трубопровода, заглушённым резьбовой пробкой
Отверстие подключения гидроаппарата, соединенное с отверстием
подключения трубопровода
Канал, перекрытый разделительной пластиной
Канал не перекрытый разделительной пластиной
Канал, перекрытый между плитой и гидроаппаратом
'*. \ Ч ""- "" Гидробак и смазочный бак
Общее обозначение
Со сливным трубопроводом выше уровня рабочей жидкости
Со сливным трубопроводом ниже уровня рабочей жидкости
Со сливным трубопроводом ниже уровня рабочей жидкости с воздушным фильтром
С мешалкой
С механическим поджимом смазочного материала
С давлением выше атмосферного
С давлением ниже атмосферного
Заливная горловина, заправочный штуцер
W
w
ш
ш
'! !'
I !
1—I
<D
284
/72. Условные обозначения элементов на схемах
Продолжение табл. П2.2
Устройства управления гидроаппаратами ,
Управление мускульной силой:
без уточнения типа
кнопка
рычаг
педаль
Механическое управление:
толкатель (кулачок)
ролик
ролик с ломающимся рычагом
пружина
фиксатор
Гидравлическое управление:
прямой нагружением
непрямое нагружением
непрямое разгрузкой
за счет разности площадей
Электрическое управление:
электромагнит с одной обмоткой
электромагнит с двумя встречными обмотками
электромагнит с пропорциональным управлением
электромагнит с пропорциональным управлением и обратной связью
шаговый электродвигатель
Комбинированное управление:
электромагнитное и непрямое гидравлическое
электромагнитное или непрямое гидравлическое
непрямое гидравлическое с ручным дублированием
электромагнит и пружина
ОЧ ; - "
С
«С
*с
4Z
<:
©с
G^
ллС
*с
-HZ
-ЕС
нас
-( t>
rzC
еС
• Ьц
Г
@с
EEC
-И_
-С
£С
..
285
Приложение
Продолжение табл. П2.2
Линии механической связи
Общее обозначение
Движение прямолинейное в одном направлении
Движение прямолинейное в обоих направлениях
Движение вращательное в одном направлении
Даижение вращательное в обоих направлениях
Устройства систем смазки
Точка смазывания:
общее обозначение
разбрызгиванием
капельная
смазочное сопло
форсунка
Безнапорная емкостная масленка
(например, регулируемая трехотводная)
Напорная емкостная масленка:
колпачковая
пневматическая
пресс-масленка
>
В
Масляновоздушный смеситель
Дроссельный смазочный дозатор (регулируемый, на три точки смазки)
Смазочный питатель:
импульсный
последовательный
последовательный с индикатором
двухмагистральный
о
286
/72. Условные обозначения элементов на схемах
Окончание табл. П2.2
Элементы систем СОЖ ,
Отстойник бассейновый
Фильтр-сепаратор одноступенчатый
Гидроциклон
Фильтр барабанный
Фильтр ленточный
Фильтр ковшовый конвейерный
^Х
У
287
Выдвижной блок
ГМ1
Вперед-*
1.11& Н— ^_ —Н $ 1-12
S1 а Г} в S2
Зажим детали
ГЦ2.1 ГЦ2.2
— —*■ Отпустить Зажать -* »- Отпустить
Салазки подачи
ГЦЗ
Рабочая подача 001 и/с
U '-J
Транспортировка
ГЦ4
4.8_ _ 4.9
22x2 Т2
ГО
СО
■
О
о\
■о
0)
м
Ф
!
г
о
о
Ф
S
X
Ф
X
S
S<
о
X
5
3
S
я
X
г
X
<|>
ф
ф
х
н
о
я
■1
S
■о
о
а
■о
S
я
ё
о
я
Список использованной литературы
1. Авруцкий Л.И., Морозов В.И. Оборудование для смазки, фильтрации и очистки СОЖ. Отраслевой
каталог. М.: ВНИИТЭМР, 1989. 104 с
2. Автоматизированные смазочные системы и устройства / В.Я. Семенов, П.М. Курганский, В.И. Кузмин и
др.; Под ред. Д.Н. Гаркунова. М.: Машиностроение, 1982. 176 с.
3. Автоматизированные смазочные системы и устройства. / В.Я. Семенов, П.М. Курганский, В.И. Кузмин и
др. М.: Машиностроение, 1982. 176 с.
4. Гидравлика, гидромашины и гидроприводы / Т.М. Башта, С.С. Руднев, Б.Б. Некрасов, О.В. Байбаков,
Ю.Л. Кирилевский. М.: Машиностроение, 1982, 423 с.
5. Бердичевский Е.Г. Смазочно-охлаждающие средства для обработки материалов. Справочник. М.:
Машиностроение, 1984. 224 с.
6. Волоцкий В.М. Гидроприводы машин и их оборудование. Харьков: НПП «Гидроэлекс», 1995, 155 с.
7. ДеньгубВ.М., СмирновВ.Г. Единицы величин: Словарь-справочник. М.: Изд-востандартов, 1990,240 с.
8. Пропорциональная техника и техника сервоклапанов. / X. Дёрр, Р. Эвальд, Й. Хуттер, Д. Кретц и др. Лор
на Майне: «Маннесманн Рексрот ГмбХ», 1986, 328 с.
9. Идельчик И.Е. Справочник по гидравлическим сопротивлениям. Под ред. М.О. Штейнберга. М.:
Машиностроение, 1992, 671 с.
10. Гидравлическое оборудование металлургических цехов. / A.M. Иоффе, О.Н. Кукушкин, Ф.А. Наумчук,
Е.К, Левчук, В.А. Сергиени. М.: Металлургия, 1989, 249 с.
11. Контак ГА., Ломачинский B.C. Монтаж и наладка централизованной системы смазки, гидравлической и
пневматической систем. М.: Стройиздат, 1981. 175 с.
12. Лепешкин А.В., МихайлинАА. Гидравлические и пневматические системы. Издательский центр
«Академия», 2004, 332 с.
13. Гидравлические средства автоматики. / Д. Меркле, Б. Шрадер, М. Томес. Эсслинген: «Фесто Дидактик
ГмБх», 1988, 409 с.
14. Петров И.В. Обслуживание гидравлических и пневматических приводов дорожно-строительных машин.
М.: Транспорт, 1985, 170 с.
15. Попов Д.Н. Механика гидро- и пневмоприводов. М.: Изд-во МГГУ им. Н.Э. Баумана, 2002, 319 с.
16. Свешников В.К. Гидрооборудование. Международный справочник. М: Издательский центр «Техинформ
МАИ», 2002.
17. Свешников В.К. Станочные гидроприводы. Справочник. М.: Машиностроение, 2004, 512 с.
18. Топлива, смазочные материалы и технические жидкости. Справочник. / И.Г. Анисимов, К.М. Бадыштова,
С.А. Бнатов и др.; Под ред. В.М. Школьникова. М.: Издательский центр «Техинформ», 1999, 596 с.
19. Худобин Л.В., Бердичевский Е.Г. Техника применения смазочно-охлаждающих средств в
металлообработке. М.: Машиностроение, 1977. 189 с.
20. Централизованные смазочные системы. Краткий каталог. Николаев: НПП «МЕТАЛЛПРОМСЕРВИС»,
1999. 52 с.
21. Шмитт А. Учебный курс гидравлики. Лор на Майне, «Маннесманн Рексрот ГмбХ», 1980, 226 с.
22. Гидропривод, Основы и компоненты. / X. Экснер, Р. Фрейтаг, X. Гайс, Р. Ланг и др. г. Эрбах: Бош Рексрот АГ,
Сервис Автоматизация, Дидиктика, 2003, 322 с.
23. Centralized Lubrication Systems. Catalog. LUBRIQUIP, INC., A Unit of IDEX Corporation. USA, 2001.
24. LUBRIQUIP School of Centralized Lubrication. Introduction to Lubrication. LUBRIQUIP, INC., A Unit of IDEX
Corporation. USA, 1981.
289
Предметный указатель
А
Автоколебание 112
Автоматизация 8, 14
Амплитуда 153
Арматура 37, 48
Аэрогидромеханика 16
Аэрозоль 239
Б
Баланс мощности 175
Блок
- импульсных питателей 233
- монтажный 168
- переключения смазочный 235
- управления гидроаккумулятором 70
- функциональный 14, 164
- цилиндров 60
Буртик золотника 65, 92, 113, 149
Быстродействие 112, 159, 195
В
Вакуум 17, 25
Вес удельный 18
Вискозиметр Энглера 20
Волна ударная 41
Вытеснитель 55
Вязкость 19, 20, 21, 33, 45, 225, 227
Г
Гидравлика 16
Гидравлический боуденовский трос 190
Гидроаккумулятор 68
- баллонный 69
- гидропневматический 69
- грузовой 68
- мембранный 69
- поршневой 69
- применение 68
- пружинный 69
Гидробак 68, 71
Гидроаппарат 12, 83, 87
- золотникового типа 87
- клапанного типа 87
- кранового типа 87
- седельного типа 88
*
- направляющие 87, 89
- основные параметры 88
-регулирующие 87, 110
- встраиваемого исполнения 161
- модульного исполнения 125, 164, 167, 238
- резьбового исполнения 160
- стыкового исполнения 162
Гидродвигатель линейный 78
- поворотный 78, 84
- вращательного действия 78, 86
Гидродинамика 26
Гидрозамок 106, 107
-двусторонний 109
Гидролинии 53
Гидромеханика 16
Гидромотор 86, 192, 217
Гидропривод 9, 11
- динамический 9
- объемный 9
- электрогидравлический 144
- режим работы 214
Гидростатика 23
Гидроудар 41, 101
Гидроциклон 254
Гидроцилиндр 78
- двустороннего действия 80
-дифференциальный 80, 185
- одностороннего действия 80
- плунжерный 79
- поршневой 79
- телескопический 82
- крепление 83
- основные параметры 78
Грязесъемник 173
д
Давление абсолютное 18
- атмосферное 18
- барометрическое 17
- вакуумметрическое 18
- весовое 31
- гидромеханическое 17, 31
- гидростатическое 23
- динамическое 31
-дифференциальное 18
- зарядки гидроаккумулятора 69
- избыточное 18
290
Предметный указатель
- насыщенных паров 21
- номинальное 54, 88, 212
- рабочее 215
-управления 103, 107
- экстремальное 226
Датчик 15
-давления 135,206
-положения 146, 151, 152,158
-температуры 140,206
-ультразвуковой 138
-уровня 142
- фотоэлектронный 143
Декомпрессор 107
Делитель потока 129, 191
Демпфирование 81, 112
Диагностика 205, 206
Диаграмма «Перемещение-время» 189
Диаметр условного прохода 100
Дифференциальная схема 185
Домкрат гидравлический 24
Диффузор 38
Дросселирование 38
Дроссель 66, 81
-балансный 130
- квадратич н ы й 122
-линейный 122
- нерегулируемый 122
- путевой 124
- регулируемый 122
- регулирующий 126
- с обратным клапаном 124
- сдвоенный 125
- смазочный 231
-установочный 126
Е
Единица измерения вязкости 20, 21
- давления 17, 25
- расхода 27
- силы 17
Ж
Жидкость 16
- капельная 16, 19
- идеальная 26, 29
- реальная 31
-смазывающе-охлаждающая 10,249
- рабочая 16, 44, 198, 212
- синтетическая 47
- требования 44
- обозначение 47
-выбор 212
3
Затвор 104, 161
Закон основной гидростатики 23
Паскаля 23
Пуазейля 35
Золотник 92, 130
- распределительный 234, 237
- регулирующий 65
- тип перекрытия 96, 159
И
Индекс вязкости 45
Индикатор загрязненности 34
- превышения давления 244
- разрыва 244
- цикла 244
- цифровой 135
К
Кавитация 22, 40
Камера рабочая 54, 56, 59, 86
Канал 89, 162
-управления 106
Кислотное число 46, 226
Клапан встраиваемый 161
- гидроуправляемый 161
-давления 110, 148
- наполнения 108
- напорный 110, 188
- непрямого действия 113, 116
-обратный 52, 104, 107
- отключения 117
- перепускной 75
- подпиточный 105
- подпорный 103
- последовательности 118
- постоянной разности давлений 152
- предельного давления 149
- предохранительный 63, 105
-редукционный 110, 149, 187
-двухлинейный 118
-трехлинейный 119,149
Класс чистоты 72
Кольцо врезающееся 51
- опорное 172
- статорное 58
291
Предметный указатель
- уплотнительное
- металлическое 170
- резиновое 170
Кондиционирование 12
Контрольная точка 132
Конфузор 38
Коэффициент Дарси 34
- динамической вязкости 20
- запаса по прочности 216
- запаса по скорости 213
- запаса по усилию 213
- использования номинального
-давления 214
- кинематической вязкости 20
- Кориолиса 31,33
- объемного расширения 19
- сжатия 19
- потерь 34
- на местном сопротивлении 37, 219
- на трение в уплотнениях 220
- подлине 34,219
- приведенной длины 216
- продолжительности работы под
- нагрузкой 214
-расхода 39, 122
- сжатия 39
- скорости 39
- теплопередачи 222
- теплопроводности 22
- трения 216
- усиления 157
КПД гидропривода 174
- насоса
- полный 54
- объемный 214, 221
Л
Линия дренажа 93
- пьезометрическая 30
- рециркуляции 75
- связи 14
-тока 26
- управления 102
м
Манжеты 171
Манометр 18, 131
-дифференциальный 132
- стрелочный 131
Масла минеральные 45
Маслостанция 43
Маслоуказатель 72, 141
Момент крутящий 84, 86, 174
- электромагнитный 158
Монтаж блочный 168
- модульный 166
- гидроцилиндров 83
- секционный 168
- стыковой 165
-труб 48
-трубный 165
- шлангов 49
Мощность 174
- выходного сигнала 153
- потери 175
Мультипликатор 24
н
Напор 30
Насос 54
- аксиально-поршневой 60
- винтовой 62
- многоотводный 230
- пластинчатый 57
- радиально-поршневой 59
- смазочный 230, 248
- центробежный 251
- шестеренный 55
Ниппель 51
О
Объем бака 71
- жидкости 23, 71
-рабочий 54, 192, 215
- смазочного материала 245
Область автомодельности 36
Облитерация 76, 92
Обозначение гидролиний 53
- каналов и соединений 167
- масел 226
- отверстий 88
- позиционное 13
- соединений 52
-условное графическое 13, 75, 89, 91
- упрощенное 109
- цифровое 89
Обратная связь 15, 146, 151, 158, 159
Окисляемость 226
Осцилляция 154
Охладитель 76
292
Предметный указатель
П
Пара трения 246
Пенетрация 227
Пенообразование 21
Переключатель манометра 133
Пистолет СОЖ 257
Питатель импульсный 232
- двухмагистральный 234
- последовательного действия 236
Плита монтажная 162, 166
- переходная 166
- установочная 238
Плотность 18
Плунжер 79, 106, 109, 134, 230
Поверхностное натяжение 21
Подача 54, 58
Позиционирование 146, 176, 178
Поршень 24, 59, 61, 65, 80, 84, 86
-дозирующий 234
Потери гидравлические 33, 37
- местные 37
- давления на трение по длине 34
- мощности 129, 175
- напора 31, 38
- энергии 32, 33
Поток 19
- гидравлической энергии 13
- рабочей жидкости 12
Присадки 45, 249
Пульсация 48, 56, 68
Пьезометр 25
Пьезометрическая высота 25
Р
Распределитель дросселирующий 149, 157
- золотниковый 92, 95
- клапанный 97
- крановый 98
- мембранный 256
- основной 100
- пилотный 100
- прямого действия 99
- смазочный 238
- способы управления 90
- схема 95
- дискретное электромагнитное
- управление 99
- пропорциональное электрическое
- управление 144
Растяжение 22
Расход 27, 39
- объемный 27, 28
- номинальный 88
- смазочного материала 246
Расходомер 136-138
Регулирование дроссельное 121,129
-объемное 121
Регенерация 74
Регулятор давления 65
-двухлинейный 126
- мощности 67
- расхода 66
- с пропорциональным управлением 152
-трехлинейный 128
Режим работы гидропривода 214
- течения
- ламинарный 32, 224
- турбулентный 32, 224
Реле давления 134
- контроля подачи 244
- расхода 136, 260
-уровня 142, 240
- цикла 244
Ротор 57, 61
С
Сапун 72
Свойства жидкостей 18
Секция рабочая 237
Сепаратор 253
Сжимаемость 19, 45
Сила давления 17, 23
- инерции 105
-объемная 16
- поверхностная 16, 17
- трения 17, 92
- центробежная 57, 251, 254
- электромагнита 99
Система автоматического управления 14
-смазки 10
СОЖ 10, 249
-управления 8, 159
Скорость выходного звена 181
- потока 27
- средняя 28
Смазочные материалы 224
Смазочные системы 227
Смеситель масляновоздушный 241
Соединение труб быстроразъемное 52
293
Предметный указатель
- поворотное 50
- разъемное 50
Сопло-заслонка 157
Сопло-смеситель 259
Статор 57
Струйка элементарная 26
Текучесть 16, 19
Температура впышки 226
- застывания 226
- каплепадения 227
- рабочей жидкости 40, 198
Теплоемкость 22
Теплообмен 70
Теплообменный аппарат
- водздушный 77
Теплопроводность 22
Термометр 140
Термосопротивление 141
Течение в коротких каналах 38
- ламинарное 32
- неустановившееся 26
- струйное 26
- турбулентное 32
- установившееся 26, 27, 28
- напорное 27
- безнапорное 27
Трение 225
Трубка Бурдона 131
- Пито 30
-тока 26
Трубопровод 42, 48, 165, 218
Усилитель электронный 153
-электрогидравлический 157
Условный проход 88, 100, 161
Утечки 8, 68, 88, 92, 172, 194
Фильтр воздушный 72
- глубинный 73
- грубой очистки 74, 252
- заливной 72
- нормальной очистки 73, 252
- особо тонкой очистки 75
- поверхностный 73
- сливной 74
- тонкой очистки 9, 71, 239
- транспортер 252
Фланец 50
Формула Альтшуля 36
- Блазиуса 35
- Вейсбаха 37
- Вейсбаха-Дарси 34
-Жуковского 42
Характеристика нерегулируемых насосов 63
- регулируемых 64, 67
- нагрузочная 121
- напорного клапана 112,114
- пропорционального электромагнита 146
- фильтров 75
Ход золотника 103
- якоря 146
Уплотнения 169
Управление автоматическое 14
- гидравлической энергией 12
- дистанционное 115
- пропорциональное электрическое 144
- скоростью выходного звена 181
- усилием на выходном звене 187
Уравнение неразрывности 28
- Бернулли 28
Уровень абсолютного вакуума 17
- барометрического давления 17
- жидкости 25, 222
- управляющего сигнала 144
Цепь управления 13
Центрифуга 254
Цикл смазки 236
Циркуляция рабочей жидкости 211
Частота вращения 221
- пропускания 151
Число Рейнольдса 33, 35
Чистота рабочей жидкости 72, 143
ш
ШИМ 153
294
Предметный указатель
Шланг 48, 132
Шероховатость труб 35
Эксплуатация гидроприводов 196
Электромагнит 99
- постоянного тока 99
- переменного тока 99
- с «сухим» якорем 100
- с «мокрым» якорем 100
- пропорциональный 145, 147
Элемент запорно-регулирующий 87, 110
Эмульсия 46, 249
Энергия 8, 9,11
-давления 30
- кинетическая 29, 41, 81
- механическая 29
- потенциальная 29
-тепловая 123, 222
- удельная давления 29
- удельная кинетическая 29
Эпюра скоростей 32
Эрозия гидравлическая 40
Якорь 99, 157
295
Наземцев Аркадий Семенович
Пневматические и гидравлические приводы и системы
Часть 2. Гидравлические приводы и системы. Основы.
Учебное пособие
Редактор Н.Е. Овчеренко
Компьютерная верстка А.В. Антипов
Художник А.С. Наземцев
Издательство "ФОРУМ"
101831, Москва - Центр, Колпачный пер., д. 9а
Тел./факс: (495) 625-32-07, 625-52^13
E-mail: forum-books@mail.ru
Сдано в набор 12.06.2006. Подписано в печать 26.12.2006
Формат 60x90 1/8. Бумага офсетная. Гарнитура «Ариал»
Печать офсетная. Усл. печ. л. 38. Уч.-изд. л. 37,8.
Тираж 3000 экз.
Заказ №6319.
Отпечатано с электронных носителей издательства.
ОАО 'Тверской полиграфический комбинат". 170024, г. Тверь, пр-т Ленина, 5.
Телефон: (4822) 44-52-03, 44-50-34, Телефон/факс (4822) 44-42-15
Home page - www.tverpk.ru Электронная лочта (E-mail) - sales@tverpk.ru
*
wmmmm
пневматические и гидравлические приводы и системы
— Часть2
Наземцев А.С.
Рыбальченко Д.Е
1.0
1
В1
Г^
3 fa
1.03
о'с&аеш
•£"'тэ
*?
и
it ■»
"v. J
о
III *'
*, й^
в |
If
к $°
se* .
'•*■». -
1.1
2.1
W
1.1
к
р
(.7
р
0.5
0.4
0.6
u
Р 0.2
J : I
r~V р
1_
■ Т
|ip--©s
30 л/мин