/


























































Похожие




Текст
МИНИ' TtK'tM *»OPCKorn
>ЛПГЛ
УСТРОЙСТВА
ГРУЗОЗАХВАТНЫЕ КРАНОВЫЕ.
ГИПОВЫЕ РАСЧЕТЫ.
МЕТОДИКА
РД 31.1Г» T-ч:
Москва* В/О «Морт* хинформрек..ама»
19*41
Устройства грузозахватные крановые. Типовые расчеты
Методика. ^РД 31.45.03—82. М.: В/О «Мортехинформреклама»,
РАЗРАБОТАН Черноморским ЦПКБ
Главный инженер — В. И. Афанащенко
Зав. отделом стандартизации
и управления качеством —Б. И. Рапопорт
Зав. отделом технологии, организации
перевозок и грузовых работ — И. Е. Касап
Руководитель темы — О. П. Давыдов
Ответственный исполнитель —Е. Я. Гурфинкель
СОГЛАСОВАН Балтийским ЦПКБ
Главный инженер — Е. А. Маланюк
УТВЕРЖДЕН Главфлотом ММФ
Главный эксперт — Э. В. Адамовский
Устройства грузозахватные
крановые. Типовые расчеты.
Методика
РД 31.45.03—82
Взамен РТМ 31.4001—75
Директивным письмом Минморфлота
от 17 сентября № ГФ-5/3153 1982 г. срок
введения в действие установлен с 1 января
1983 г.
Настоящий руководящий документ (РД) распространяется на
расчеты грузозахватных крановых устройств, применяемых в мор-
ских портах и на других предприятиях Минморфлота на грузо-
подъемных кранах всех типов.
РД не распространяется на расчеты грейферов, а также уст-
ройств, работающих в горячих цехах, агрессивной среде и т. п.
РД устанавливает:
1) виды и содержание расчетов;
2) нагрузки, учитываемые при выполнении расчетов;
3) методику определения допустимых усилий и напряжений;
4) методики расчета основных типов грузозахватов и их состав-
ных частей.
1. ТИПЫ КРАНОВЫХ ГРУЗОЗАХВАТНЫХ
УСТРОЙСТВ
1.1. Устройство грузозахватное крановое (грузозахват) — из-
делие, навешиваемое на крюк либо присоединяемое к грузовым
канатам крана и предназначенное для захвата, перемещения и ос-
вобождения груза.
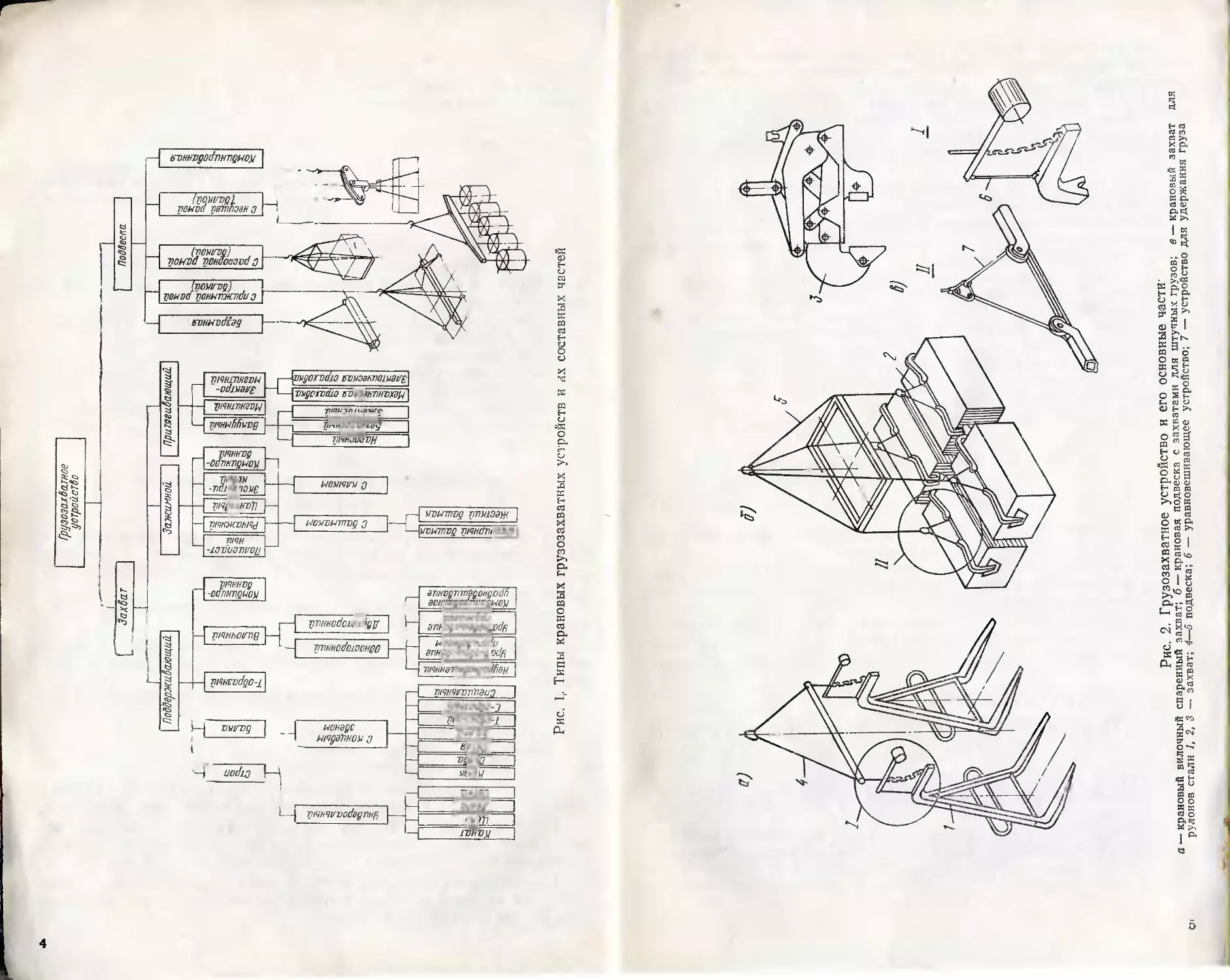
1.2. Грузозахват включает две основные составные части — за-
хват и подвеску (рис., 1).
1.3. Захваты по способу удержания груза делятся на три основ-
ных типа: поддерживающие, зажимные и притягивающие (см.
рис. 1).
1.4. Захват состоит из следующих основных частей (рис. 2):
1) . захватного органа;
2) устройства удержания груза;
3) дополнительного устройства.
Два последних устройства могут отсутствовать.
1.5. Захватным органом называется часть захвата, которая
вступает с грузом в непосредственный контакт и удерживает его.
1.6. Устройство удержания груза служит для обеспечения не-
обходимой силы сжатия зажимных захватов, разрежения в ваку-
умных захватах и питания в электромагнитных захватах.
1.7. Дополнительное устройство служит для обеспечения специ-
фических требований к отдельным типам захватов: уравновешива-
ния вил, подстраховки, прижима и т. п.
\ 3
Грузозахватное
устройство
Рис. I,. Типы крановых грузозахватных устройств и их составных частей
Рис. 2. Грузозахватное устройство и его
Рис 2 Грузозахватное устройство и его основные части'
1.8. Подвеской называется часть грузозахвата, предназначен-
ная для присоединения одного или нескольких захватов к крюку
грузоподъемного крана.
1.9. Подвески по конструкции делятся на следующие типы:
безрамная, с прижимной рамой (балкой), с распорной рамой (бал-
кой), с несущей рамой (балкой). Возможны комбинированные
подвески, представляющие собой сочетания подвесок указанных
типов.
1.10. Подвески, по способу определения действующих в них
сил, делятся на следующие типы:
1) статически определимые. Усилия в их элементах определяют-
ся линейными геометрическими размерами и не зависят от дефор-
маций и неточности изготовления;
2) гибкие. Усилия в них могут быть достаточно достоверно оп-
ределены при допустимой точности изготовления элементов;
3) жесткие. Распределение усилии в них резко меняется да-
же при небольших неточностях изготовления или деформациях.
Отнесение подвески к типу 2) или 3) зависит от гибкости не
только конструкции подвески, но и от гибкости груза.
1.11. Грузозахват может включать захваты и подвески различ-
ных типов в любых сочетаниях.
В отдельных случаях подвеска может отсутствовать.
2. ВИДЫ И СОДЕРЖАНИЕ РАСЧЕТОВ
2.1. Виды расчетов
При проектировании и выборе грузозахватов выполняют два
вида расчетов: приближенные и уточненные.
Как правило, при проектировании, проверке надежности удер-
жания и прочности, а также при выборе грузозахватов выполняют
приближенные расчеты.
Уточненные расчеты выполняют при расчете грузозахватов, к
габаритным размерам и к массе которых предъявляются жест-
кие требования, а условия работы изделия достоверно известны
2.2- Нагрузки, учитываемые при выполнении расчетов.
2.2.1. Расчетная нагрузка G, используемая при расчете грузо-
захвата, включает нагрузку от веса груза Grp и дополнительные
нагрузки.
Нагрузка от веса груза GrP — сила, действующая на грузоза-
хват при подъеме груза массой, соответствующей его номинальной
грузоподъемности QH.
Номинальной грузоподъемностью QH грузозахвата является
максимально допустимая масса груза, поднимаемая и переме-
щаемая этим грузозахватом.
Grp = QH g >
(О
6
где Q„— номинальная грузоподъемность;
g— ускорение свободного падения (9,8 м/с).
Состав учитываемых дополнительных нагрузок может быть
различным в зависимости от вида расчета и конструкции грузо-
захвата.
2.2.2. Приближенные расчеты выполняют, принимая следующие
допущения:
1) расчетная нагрузка G приложена в центре тяжести груза.
Расчетная нагрузка равна сумме веса груза Grp и собственного
веса грузозахватного устройства G3 или его части, передаваемой
на рассчитываемый элемент.
Рис 3. Нагрузки, вызванные
смещением центра тяжести
груза
Рис. 4. Нагрузки, вызванные отступлением
размеров от проектных
Если собственный вес захвата G3 составляет менее 10% веса
груза Grp, то его можно не учитывать;
2) центр тяжести груза расположен на оси симметрии грузо-
захватного устройства или заданном проектном положении. Си-
лы перекоса, вызванные возможным смещением положения цент-
ра тяжести груза от проектного (кроме случаев, когда по услови-
ям эксплуатации допускается большое смещение центра тяжести
или перекос грузозахватного устройства, а также особо оговорен-
ных) , не учитываются;
3) коэффициент динамичности, входящий ь коэффициент запа-
са прочности, не зависит от типа грузоподъемного крана, на ко-
тором используется грузозахватное устройство. При этом предпо-
лагается, что в процессе работы обеспечены плавный пуск и тор-
можение.
7
Силы инерции в расчетные нагрузки не включаются;
4) собственный вес самозатягивающихся зажимных захватов,
даже если он значителен, не влияет на условия удержания груза
и в расчет не принимается.
2.2.3. При выполнении уточненных расчетов учитывают:
1) веса отдельных частей грузозахватного устройства, прило-
женные в их центрах тяжести. Они используются в расчетах проч-
ности и при проверке условий удержания груза;
2) нагрузки на элементы, вызванные силами перекоса от воз-
можного смещения центра тяжести груза от оси симметрии
Гпис .41 •
3) перераспределение сил и дополнительные нагрузки на эле-
менты конструкции, вызванные отступлением фактических разме-
ров элементов устройств от проектных (например, неравенство
длин ветвей четырехветвевого стропа (рис. 4) и т. п.;
4) влияние условий работы на динамическую нагрузку;
5) влияние КПД зажимного устройства зажимных захватов,
определенного, исходя из расчетных усилий в элементах и разме-
ров шарниров.
Факторы, влияние которых заведомо мало, могут не
ваться.
учиты-
При уточненных расчетах рекомендуется
шенных коэффициентов запаса прочности.
использование умень-
2.3. Содержание расчетов
В общем случае должны быть выполнены следующие расчеты
грузозахвата:
1) расчет удержания груза;
2) расчет равновесия грузозахвата с грузом и без груза;
3) расчет на прочность грузозахвата и его составных частей.
2.3.1. Расчет удержания груза
2.3.1.1. Расчет удержания груза выполняется для зажимных и
притягивающих захватов.
Расчет сводится к проверке соответствия веса поднимаемого
груза удерживающей силе.
2.3.1.2. Для притягивающих захватов предельная удерживаю-
щая сила Р должна быть в п раз больше веса груза Gip, где п —
коэффициент запаса, а Р — сила, соответствующая отрыву груза
от грузозахвата.
2.3.1.3. Величина силы, необходимая для удержания грузов
зажимными захватами, обеспечивается необходимым значением
передаточного числа i зажимного устройства и соответствующим
исполнением рабочего органа, сцепляющегося с боковой поверх-
ностью груза.
2.3.2. Расчет равновесия захвата
8
2.З.2.1. Расчет равновесия выполняется, в основном, для под-
держивающих захватов.
Например, расчет кранового вилочного
проверке обеспечения требуемого положения
груза (рис. 5). Расчет должен быть выпол-
нен для возможных крайних и несколь-
ких промежуточных положений точки при-
ложения расчетной нагрузки.
2.3.3. Расчет на прочность грузозахвата
и его элементов
2.3.3.1. Прочность устройства определя-
ется прочностью его элементов.
2.3.3.2. Проверка прочности включает в
себя следующие виды расчетов:
1) расчет прочности при расчетной на-
грузке;
2) расчет выносливости.
2.3.3.3. Проверку прочности при расчет-
ной нагрузке производят для всех элемен-
тов грузозахвата при различных условиях
захвата сводится к
вил с грузом и без
Рис. 5. Крановый ви-
лочный захват
2.3.3.4. Условие прочности сводится к тому, чтобы расчетное
усилие, напряжение или удельное давление не превышали до-
пускаемые
(2)
или
(3)
(4)
где S — расчетное усилие, действующее на элемент;
[S] — допускаемое усилие;
а — расчетное нормальное напряжение в элементе;
[о] — допускаемое нормальное напряжение;
т— расчетное касательное напряжение;
[т] — допускаемое касательное напряжение в элементе.
Формула (2) используется для расчета стандартных элемен-
тов, формулы (3) и (4) — для остальных.
2.3.3.5. Величины наибольших возникающих напряжений
должны быть близки к допускаемым.
Расчет выполняется методом последовательного приближения.
2.3.3.6. Расчет выносливости производится для стальных эле-
ментов грузозахватных устройств, число циклов которых превыша-
ет 100000, и для элементов, выполненных из легких сплавов, при
любом числе циклов.
9
2.3.3.7. Число циклов грузозахватного устройства определяется
по формуле
z = Lt4z4,
(5)
где L— срок службы грузозахвата в годах;
Д— число часов работы грузозахвата;
z4— число циклов работы грузозахвата в час.
2.3.3.8. Условие выносливости сводится к тому, чтобы расчет-
ное напряжение не превышало допускаемое
(6)
2.3.3.9. Методики определения нагрузок, действующих на со-
ставные части захватов и подвесок различных типов, приведены в
соответствующих разделах. Указания по определению изгибающих
моментов и напряжений даны в тех же разделах и частично в
разделе, излагающем методы расчета различных элементов грузо-
захватов. При расчетах прочности, выносливости и удельных дав-
лений используются одни и те же значения расчетных нагрузок.
2.3.3.10. Методика определения допускаемых нагрузок, напря-
жений и удельных давлений приведена в разд. 3. Допускаемые на-
пряжения зависят от вида расчета-
2.3.3.11. Расчетное напряжение при одноосном напряженном
состоянии определяется по формулам:
1) при растяжении и изгибе
° — °р + °и; (7)
2) при растяжении, изгибе и сдвиге
о==/10р_|_0и)2+ 3t2; (8)
3) при смятии
О = Осм , (9)
где ор— напряжение растяжения-сжатия;
Пи— напряжение изгиба;
Осм— напряжение смятия;
т— касательное напряжение.
При чистом сдвиге (срезе или кручении) используется расчет-
ное касательное напряжение.
Допускаемое усилие на канаты и цепи определяется по формуле
[S] = %-, (10)
"р
где SP— разрывное усилие (разрушающая нагрузка);
«р— коэффициент запаса прочности по разрывному усилию.
Расчет этих элементов приведен в разд. 5.
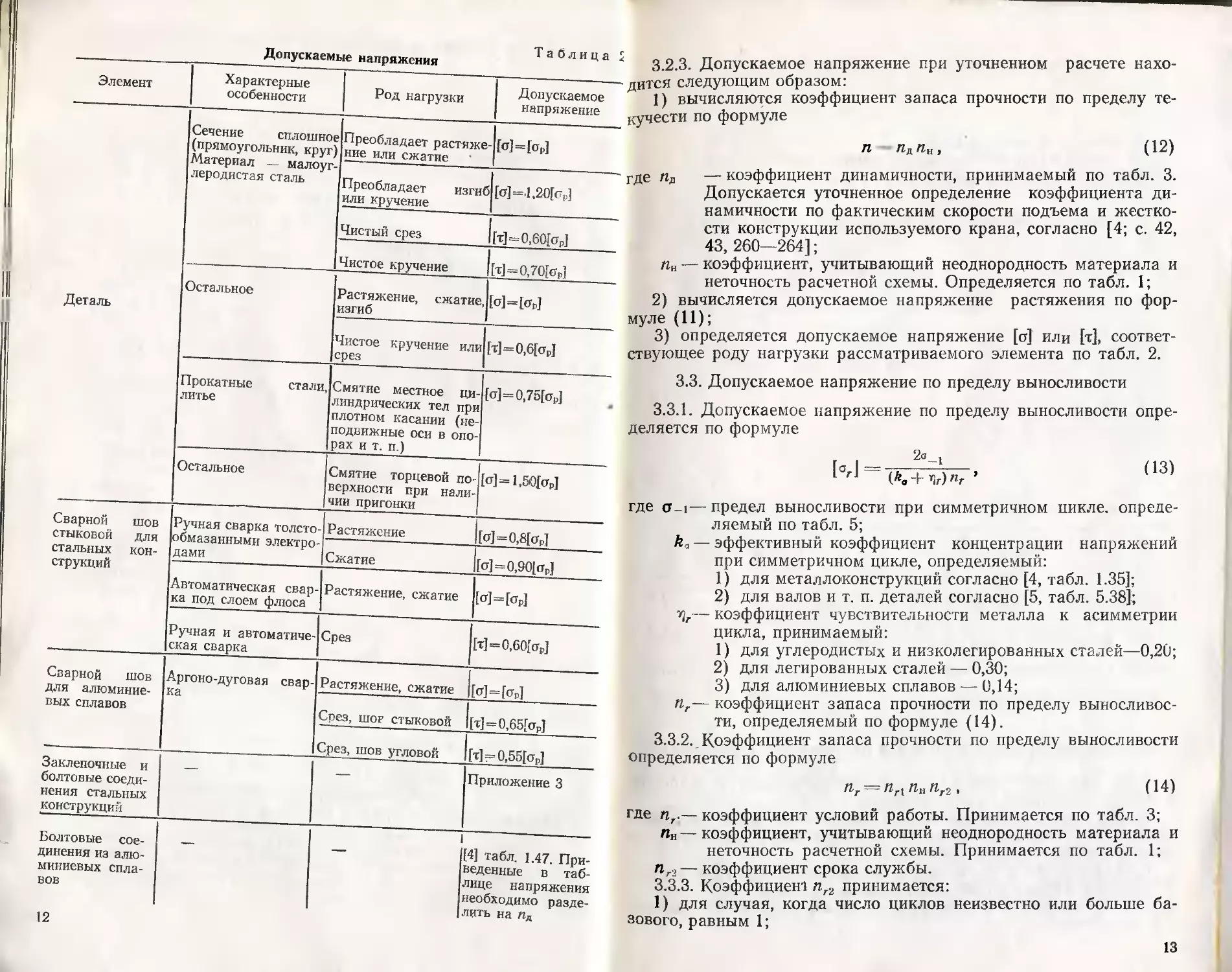
3.2. Допускаемые напряжения при расчетных нагрузках
3.2.1. Допускаемое напряжение при приближенном расчете
находится следующим образом:
1) вычисляется допускаемое напряжение растяжения по фор-
муле
(Н)
1аР1 = ЪГ’
где От— предел текучести материала при растяжении, определяе-
мый по табл. 5;
пт — коэффициент запаса прочности по пределу текучести, оп-
ределяемый по табл.1;
Таблица 1
Коэффициенты запаса прочности пт и коэффициенты, учитывающие
неоднородность материала и неточность расчетной схемы, пн
Прокат и поковки из малоуглеродистой
и низколегированной стали
Прокат и поковки из высокоуглеродистой
стали
Стальные отливки и конструкции из лег-
ких сплавов
Прибли- женный расчет, пт Уточненный расчет, n«_
определен уточненно только коэффи- циент дина- мичности определены уточненно напряжения в элементах
2,10 1.50 1,30
2,25 1,60 1,40
2,50 1,80 1,60
Материал
3. ОПРЕДЕЛЕНИЕ ДОПУСКАЕМЫХ УСИЛИЙ
И НАПРЯЖЕНИЙ
3.1. Допускаемые усилия
Допускаемые усилия (нагрузки) на стандартные крюки, скобы
и другие элементы грузозахватов приведены в соответствующих
стандартах.
2) по табл. 2 определяется допускаемое напряжение [о] или
[т], соответствующее роду нагрузки рассматриваемого эле-
мента.
3.2.2. В разд. 7 приведены допускаемые напряжения отдельных
специфических элементов (крюков, проушин и т. п.), отличающих-
ся от указанных выше. В таких случаях следует пользоваться дан-
ными, приведенными в этих разделах.
11
10
__ Допускаемые напряжения Таблица I „ „ „ 3 2.3. Допускаемое напряжение при уточненном расчете нахо-
Элемент Характерные особенности Род нагрузки следующим образом: Допускаемое п вычисляются коэффициент запаса прочности по пределу те- напряжение ™ <Клпмипг>
Деталь Сечение сплошн (прямоугольник, кру Материал - малоу леродистая сталь ое Преобладает растя» Ч ние или сжатие г- — Преобладает изп или кручение Чистый срез _ Чистое кручение ____ кучести по формуле 'е-М=[ор] п пап„, (12) где пр — коэффициент динамичности, принимаемый по табл. 3. *б [а]=.1,20[ор] Допускается уточненное определение коэффициента ди- — намичности по фактическим скорости подъема и жестко- г. сти конструкции используемого крана, согласно [4; с. 42, _ т-и.бЩсгр] 43> 260—264]; jf-rj—0 70Гст 1 Пи— коэффициент, учитывающий неоднородность материала и
Остальное Растяжение, сжатие изгиб Чистое кручение ил! _ £Рез । — неточность расчетной схемы. Определяется но табл. 1; г,1[а]=[ар] 2) вычисляется допускаемое напряжение растяжения по фор- 1 муле (11); 3) определяется допускаемое напряжение [ст] или [т], соответ- 1 М=0,6[<тр] ствующее роду нагрузки рассматриваемого элемента по табл. 2.
прокатные стали питье (Смятие местное ци (линдрических тел при 1 плотном касании (не- подвижные оси в опо- фах и т. п.) 0 3.3. Допускаемое напряжение по пределу выносливости 3.3.1. Допускаемое напряжение по пределу выносливости опре- деляется по формуле 2с
( Остальное Смятие торцевой по- верхности при нали- чии пригонки [о]=1,501<Тр] (ka+T>r)nr ’ где о 1— предел выносливости при симметричном цикле опреде-
Сварной шов |Р стыковой ДЛЯ |О< стальных кон- д струкций — А кг учная сварка толсто- эмазанными электро- ами втоматическая свар- под слоем флюса Растяжение j Сжатие эастяжение, сжатие ~ ' - ляемый по табл. 5; [gl=0,8[gp] ka — эффективный коэффициент концентрации напряжений o]=0,90[gp] ПРИ симметричном цикле, определяемый: ~ ’— 1) для металлоконструкций согласно [4, табл. 1.35]; <т]=[<тр] 2) для валов и т. п. деталей согласно [5, табл. 5.38];
Р) _____ СК лшая и автоматиче-1( ая сварка | 2рез ( цикла, принимаемый: 4=0,60[gp] j) для углеродистых и низколегированных сталей—0,20;
-Варной шов Ар Зля алюминие- ка зых сплавов гоно-дуговая свар- J С |с ’астяжение, сжатие Г рез, шор стыковой [i рез, шов угловой |[т — 2) для легированных сталей — 0,30; т]=[пр] 3) для алюминиевых сплавов — 0,14; -— пг— коэффициент запаса прочности по пределу выносливое- -]=0,65[gpi ти, определяемый по формуле (14). 3.3.2. Коэффициент запаса прочности по пределу выносливости
о а клепочные и болтовые соеди- нения стальных конструкций ~ П риложение 3 Пг = Пл Пи Пг.. , (14) где пт.— коэффициент условий работы. Принимается по табл. 3;
Болтовые сое- динения из алю- миниевых спла- вов 12 1 ~ [4] ве ли не< ли -— — пн — коэффициент, учитывающий неоднородность материала и табл 1 47 п неточность расчетной схемы. Принимается по табл. 1; ценные в таб- пп—коэффициент срока службы. не напряжения 3.3.3. Коэффициент пг2 принимается: эбходимо разде- 1) для случая, когда число циклов неизвестно или больше ба- гь на Яд зового, равным 1;
13
2) для случая, когда число циклов меньше базового,
^2=|/v-> (15) S
r zo ,o
I где z0 — базовое число циклов; н
т — показатель степени кривой выносливости.
Величины z0 и т определяются по табл. 4-
Таблица S
Коэффициент динамичности пд и коэффициент условий работы пг1
Условия работы Скорость подъема груза, м /с Пд
Грузовые операции. Подъем менее 0,33 1,2 1,0
с подхватом на полной 0,33—0,70 1,3 1,1
скорости не исключен более 0,70 1,4 1,2
Монтажные или редкие тех- любая 1„1 1,0
нологические операции.
Подъем с подхватом ис-
ключен
Таблица 4
Ш сказатель степени .кривой выносливости т и базовое число циклов z0
Тип элемента т
Стальные детали после механической обработки (оси, валы) S 10- 10s
Сварные и клепаные листовые стальные конструкции 6 2-10й
Сварные стальные решетчатые конструкции 3 5-1,0е
Конструкции из алюминиевых сплавов 4-6 2- IQ®
ппименяемые для изготовления грузозахватных устройств
3.4. Материалы, применяемые для изготовления грузозахватов
3.4.1. Для изготовления грузозахватов применяют, в основном,
углеродистые и низколегированные стали.
В конструкциях, где необходимо значительное снижение массы
захвата, а усталостная прочность (выносливость) обеспечена, до-
пустимо применение алюминиевых сплавов.
3.4.2. Сведения о материалах, применяемых при проектирова-
нии грузозахватных устройств, приведены в табл. 5.
Табл. 5 не следует рассматривать как ограничение на примене-
ние материалов.
14
и тз л
S3 о Сх ф Я s
о
1)
а Я ф й ф сх со сопритиь ление Uj МПа
ф ВЫНОСЛИ- ВОСТИ O-h МПа
СХ С сучести г, МПа
Ф
Толщина проката, мм
\6 03 о W
н &
W
к к
ъ ф
S ф
3 S
J к
в ►Q
О
о
сз
И Е
03 «
н-1 сх О
к
Сталь 10ХСНД — 4—32 400 180 540 хорошая
ГОСТ 19282-73 33—40 170 520
15
Марка, норматив Область применения Термооб- работка Толщина проката, мм Пр текучести От, МПа гдел выносли- вости П-1, МПа Про Временное сопротив- ление Св, МПа цолжение Сваривае- мость
Сталь ГОСТ 1.5ХСНД 19282—73 Металлоконструкция захвата — 4—32 350 500 хорошая
Высокоуглеродистые стали
Стале ГОСТ 45 1050—74 Валы и оси, ответственные бол- нормализа- менее 80 ты, крюковые траверсы, баш- ция более 80 маки, катки 360 — 610 590 ограничен- ная
Сталь 60 ГОСТ 1050-—74 Вилы сплошного сечения нормали- зация любая 410 — 690 плохая
Сталь 60С2 ГОСТ 14959—79 Пружины горячей навивки (прутки 0 8 мм и выше), кольца пружинные закалка, и отпуск не более 50 1200 — 1300 не свари- вается
Проволока П ГОСТ 9389—75 Пружины холодной навивки (проволока 0 до 8 мм) не тре- буется 0,7 2,0 — — 2200—2600 1800—2050 то же
Проволока П ГОСТ 9389—75 Пружины холодной навивки (проволока 0 до 8 мм) не тре- буется 4,0 6,0 8,0 — — 150,0—1750 1350—1000 1250—1450 »
Стальные отливки
Заказ № 719
Отливка 25Л ГОСТ 977—75 Отливки для свариваемых де талей нормализа- ция, отпуск любая 240 — 450 хорошая
* Ирод олж.ение
Предел Временное сопротив- ление Os, МПа
Маркам норматив Область применения Термооб- работка Толщина проката, мм текучести от, МПа выносли- вости О-1, МПа Сваривае- мость
Отливка 35Л Блоки, ступицы, катки нормализа- любая 280 — 500 удовлетво- рительная
ГОСТ 977-75 иия- ОТПУСК
Легкие сплавы
АМг61-М ОСТ 1-92014—78 Металлоконструкция захвата отжиг любая 180 — 380 В среде ар- гона
АМго-М ГОСТ 4784—74 Металлоконструкция захвата отжиг любая 130 — 260 В среде ар- гона
Примечания- 1. В таблице приведен предел выносливости o-i прокат-
ной стали при растяжении-сжатии. При отсутствии в таблице данных принимает-
ся 0-1 = 0,35 Ов
2. При изгибе стальных конструкций принимается 0-1=0,43 О», при кручении
т-1—6,22 ов.
3 Свариваемость: хорошая - без подогрева и отпуска удовлетворительная -
предварительный или сопутствующий подогрев до 100-300° и отпуск, ограничен-
ная-предварительный подогрев до 300-400° и отпуск, плохая- предваритель-
ный нагрев до 350—650° и отпуск.
4. ВЫБОР И РАСЧЕТ СТРОПОВ
4.1. Типы стропов
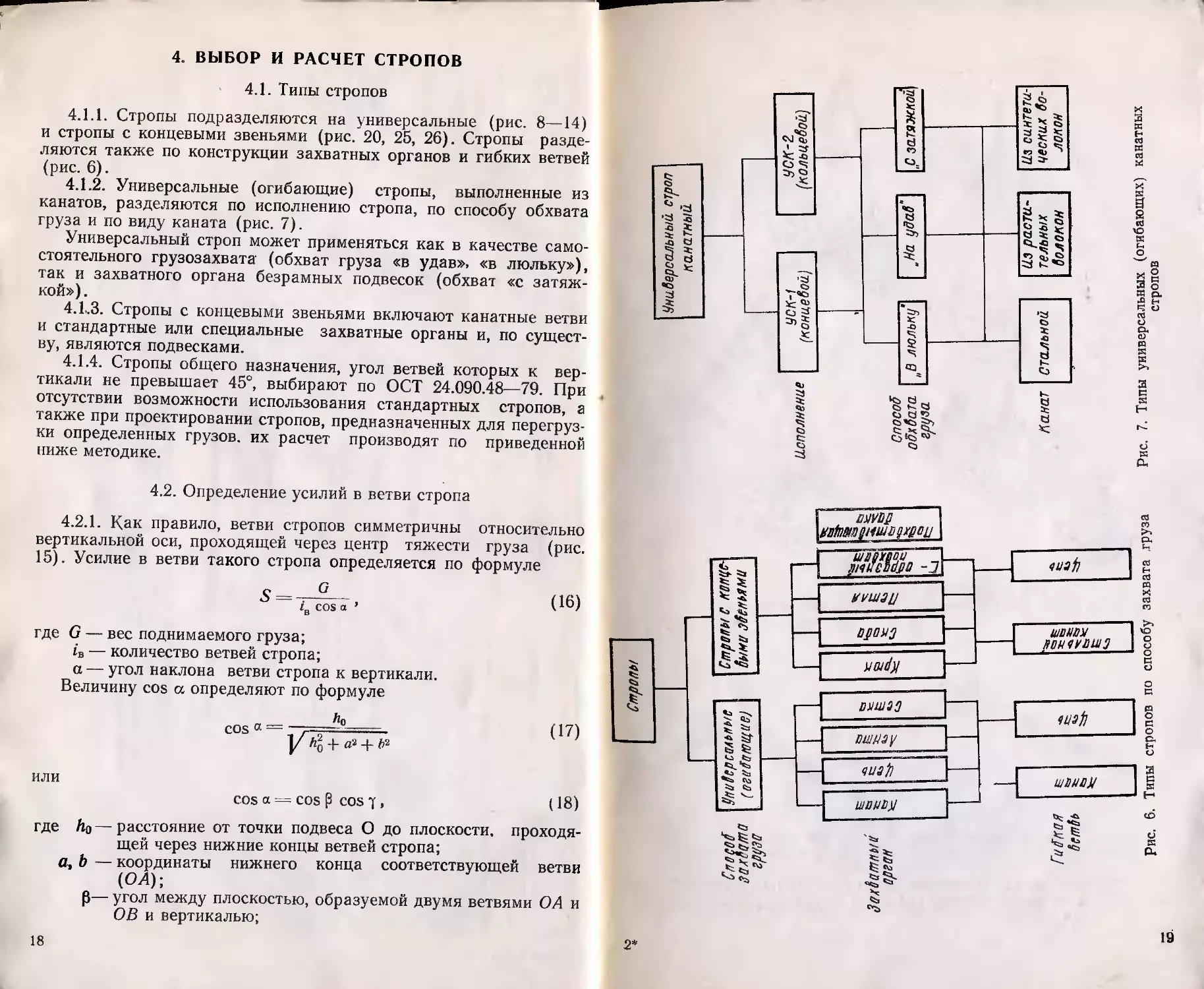
4.1.1. Стропы подразделяются на универсальные (рис. 8—14)
и стропы с концевыми звеньями (рис. 20, 25, 26). Стропы разде-
ляются также по конструкции захватных органов и гибких ветвей
(рис. 6).
4.1.2. Универсальные (огибающие) стропы, выполненные из
канатов, разделяются по исполнению стропа, по способу обхвата
груза и по виду каната (рис. 7).
Универсальный строп может применяться как в качестве само-
стоятельного грузозахвата (обхват груза «в удав», «в люльку»),
так и захватного органа безрамных подвесок (обхват «с затяж-
кой») .
4.1..3 . Стропы с концевыми звеньями включают канатные ветви
и стандартные или специальные захватные органы и, по сущест-
ву, являются подвесками.
4.1.4. Стропы общего назначения, угол ветвей которых к вер-
тикали не превышает 45°, выбирают по ОСТ 24.090.48—79. При
отсутствии возможности использования стандартных стропов, а
также при проектировании стропов, предназначенных для перегруз-
ки определенных грузов, их расчет производят по приведенной
ниже методике.
4.2. Определение усилий в ветви стропа
4.2.1. Как правило, ветви стропов симметричны относительно
вертикальной оси, проходящей через центр тяжести груза (рис.
15). Усилие в ветви такого стропа определяется по формуле
ZB COS а ’
где G — вес поднимаемого груза;
iB — количество ветвей стропа;
а — угол наклона ветви стропа к вертикали.
Величину cos а определяют по формуле
(16)
(17)
(18)
проходя-
cwa - у— -------
У h20 + й2 + Ь2
ИЛИ
cos а = cos ₽ cos if,
где hg—расстояние от точки подвеса О до плоскости,
щей через нижние концы ветвей стропа;
а, b — координаты нижнего конца соответствующей ветви
(ОА);
Р— угол между плоскостью, образуемой двумя ветвями О А и
ОВ и вертикалью;
18
2*
Рис. 8. Обхват груза «на удав»:
п стропом УСК-1 (концевым); б — стропом УСК-2 (кольцевым)
Рис. 9. Варианты заводки стропов «на удав»:
а — ввод стропа через ролик: б — ввод стропа через скользящий крюк
7 — угол между проекцией вертикали на плоскость, образуе-
мую двумя ветвями О А и ОВ, и соответствующей ветвью
20
Рис. 10. Обхват груза «с затяжкой'> Рис. 11. Подхват груза лентой
с прилегающей затяжкой
Рис. 12. Обхват груза сеткой.
21
Рис. 13. Исполнение универсальных (огибающих) ка Рис. 14 Обхват груза «в люльку»:
натных стропов а - стропом УСК-1 (концевым); б — стропом УСК-2 (кольцевым)
22
Рис. 15. Схема симметричных стропов:
а — одноветвевой строп; б — двухветвевой блок; в — трехветвевой строп; г — четырех-
ветвевой строп
Если угол наклона ветви стропа к вертикали конструкцией не
задан, то принимается а=45°.
Примечания: 1. При количестве ветвей стропа iB=4 (или более), форму-
ла (16) может быть использована в следующих случаях:
1) при наличии блока или балансира, уравнивающего натяжение двух (или
более) ветвей (рис. 16);
2) при расчете ветвей универсальных (огибающих) стропов;
3) при расчете зацепляющих устройств, предназначенных для подъема ков-
шей (см. рис. 15,г), распорных рам и других нежестких конструкций. При этом
Должно быть обеспечено достаточно точное соблюдение длин стропов (отклоне-
ние не более 1 % длины) и координат мест их крепления на грузе.
2. В остальных случаях усилия в ветвях четырехветвевого стропа могут зна-
чительно отличаться друг от друга. При подъеме жестких конструкций (напри-
мер, массивов), а также в случае значительных отклонений длин ветвей стропов
или координат мест их крепления к грузу от проектных, в стропе практически
работают две ветви из четырех (рис. ,17). В этом случае в формулу (16) следует
подставить iB=2.
3. Допускается уточненный расчет сил в ветвях стропов, учитывающий жест-
кость стропов и груза и фактическое отступление размеров от проектных.
23
Рис. 10. Схема натяжения ветвей: рис 17 Схема нягпмжениа
уравнительный балансир; 6 - уравнительный блок стропОВ при6 ПОДЪем^
кой конструкции
24
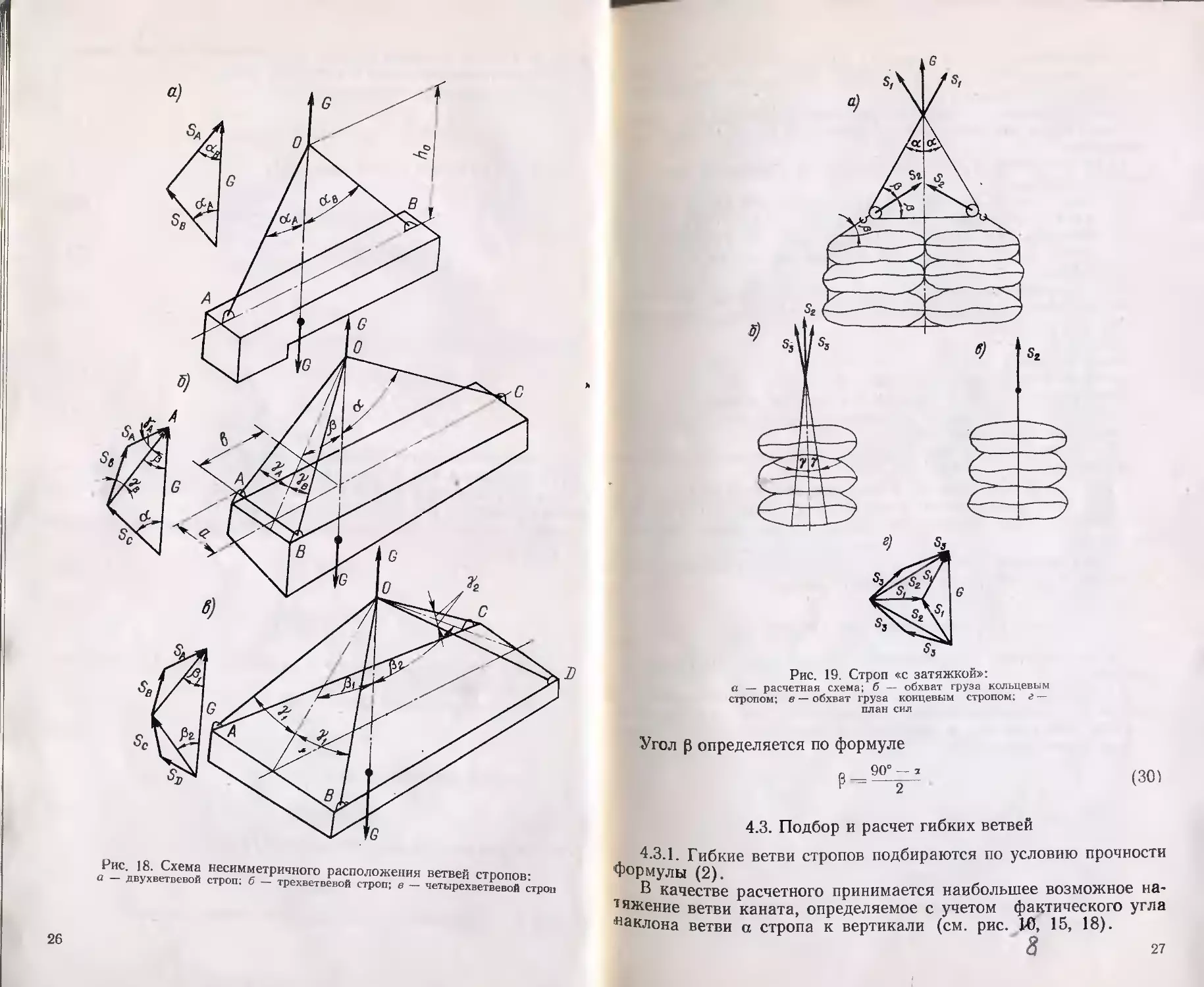
4 2.2. В случае несимметричного расположения ветвей стропов
усилия в них определяются по следующим формулам:
У 1) для двухветвевого стропа (рис. 18,а)
л sin aR sin ал
5л==08Й1(ад + ав); = G Sin (ал + ав);
(19)
2) для трехветвевого стропа (рис. 18,6)
с _ q sin ° sin (20)
Л Sin (а + р ) sin (уд + ув) ’
« sm а sin 7д . в ~ • sin (а + р) sin (уд + ув) ’ (21)
с п sin р ° sin («Н- ₽) ’ (22)
3) для четырехветвевого стропа (рис. 18,в)
е с zy Pi 1 А ^sin^ + Ps) 2 cos у/ (23)
о с* sin Pi 1 с D sin (₽! + р2) 2 COS Уз (24)
Для четырехветвевого стропа см. примечания к п. 5.2.1.
Угол наклона ветви к вертикали определяется по формуле
(17) или (18). Размеры h0, а, b и углы р и у—у.д, соответствующие
одной из ветвей О А стропа, приведены на рис. 18.
Углы р и у могут быть выражены через линейные размеры
формулами:
«о
(25)
tgy
(26)
4.2.3. Усилия в ветвях стропа с затяжкой (рис. 19) определя-
ются по следующим формулам:
1) для ветви каната затяжки
«=2^ <27>
2) для ветви концевого стропа (рис. 19,в)
<28>
3) для ветви кольцевого стропа (рис. 19,6)
, '(29)
3 4 sin р cos у ’
гДе а, р, у— углы наклона ветвей, показанные на рис. 19.
25
26
Рис. 19. Строп «с затяжкой»:
а. — расчетная схема; б — обхват груза кольцевым
стропом; в — обхват груза концевым стропом; г —
план сил
Угол р определяется по формуле
90° — з
2
(30)
4.3. Подбор и расчет гибких ветвей
4.3.1. Гибкие ветви стропов подбираются по условию прочности
Формулы (2).
В качестве расчетного принимается наибольшее возможное на-
тяжение ветви каната, определяемое с учетом фактического угла
наклона ветви а стропа к вертикали (см. рис. 1-0. 15, 18).
8 27
Допускаемое усилие (нагрузка) на стандартную ветвь опред
ляют в соответствии с ОСТ 24.090-48—79, на нестандартную .
вычисляют по формуле (10).
4.3.2. Разрывное усилие (разрушающая нагрузка) 3Р канат(
и цепей гибких ветвей стропов принимается по стандартам на эз
элементы.
Цепи и канаты стропов рекомендуется подбирать по следуц
щим стандартам:
1) цепи — по ГОСТ 228—79, ГОСТ 2319—70, ГОСТ 7070—7;
2) канаты стальные — по ГОСТ 3071—74, ГОСТ 3079—8(
ГОСТ 3085—80, ГОСТ 7665—80, ГОСТ 7668—80, ГОСТ 7670—8(
3) канаты из растительных волокон — по ГОСТ 483—75
ГОСТ 1088—71.
4.3.3. Коэффициенты запаса прочности гибких ветвей стропе
«р по разрывному усилию (разрушающей нагрузке) принимаютс
следующими:
цепь — 5;
стальной канат — 6;
канат из растительных волокон — 8.
Необходимость увеличения запаса прочности сверх этих вели
чин определяет организация, проектирующая стропы, с учетом кон
кретных условий их работы.
4.3.4. Концевые и соединительные звенья ветвей стропов под
бираются по ОСТ 24.090.49—79.
При отсутствии возможности использования стандартных звень
ев могут быть использованы нестандартные звенья, расчет кото
рых производят в соответствии с указаниями, приведенными f
пп. 7.3—7.5.
4.3.5. Указания, приведенные в п. 4.3, распространяются такж(
на подбор и расчет гибких элементов подвесок.
4.4. Стропы с [-образными подхватами
Схемы стропов с [-образными подхватами приведены на
рис. 20.
На рис. 20,а представлена схема двухветвевого стропа, на
рис. 20,6 — четырехветвевого, состоящего из двух двухветвевых.
Сила, действующая в плоскости двухветвевого стропа, равна:
для стропа по рис. 20,о
V= G; (31)
для стропа по рис. 20,6
V = , (32)
2 cos т ’ '
где у — угол между плоскостями, образуемыми двухветвевыми
стропами.
28
строп двухветвевой;
29
Рис 21. Расчетные схемы двухветвевых стропов с
[-образными подхватами:
а — строп симметричный; б — строп несимметричный; в — строп *
с затяжкой; г — строп с полиспастом; д — план сил
Таблица 6
Определение усилий в двухветвевом стропе
91 я 1/ sin о# Левая ветвь sui(ai+a2) S2 90°—ai
pi ft л? sin Gi рис. V -т—7 ; г Правая ветвь sin(ai+a2) Si 90°—a2
Sl'cos2a+(l+sin a)2 90°—a
*" 2cos а 2
Sycos2a(iB-|-sin a)2 „ cos a
2cos а 1в+sin a
Здесь iB — количество ветвей каната, перерезаемых сечением A—A
Условия работы [-образного подхвата зависят от его разме-
ров, формы и направления силы S. Пересечение линией действия
силы S участка CD подхвата (рис. 22,а) обеспечивает его приле-
гание к грузу по всей нижней плоскости. Прохождение этой ли-
нии через участок ВС приводит к контакту в точках В и С (рис.
22,6). Прохождение линии действия силы над точкой В вызывает
поворот подхвата до упора точки А в груз (рис. 22,в, в)-
При определенных условиях подхват может выскальзывать
из-под груза (рис. 22,в). Это явление имеет место при прохожде-
нии линии действия силы S над точкой В. Для предупреждения
Двухветвевой строп, как являющийся самостоятельным
выскальзывания необходимо либо сместить точку приложения си-
лы S (рис. 22,а), либо изменить направление результирующей си-
лы, приложенной к точке F (рис. 22,6).
Указанные рекомендации не учитывают силы трения в точках
С и А, снижающие возможность выскальзывания подхвата. При
стро- Уточненных расчетах допускается учитывать эти силы, отклоняя
пом, так и частью четырехветвевого стропа, может быть выполнен Реакции Rc и Яд на угол трения р=7° от соответствующих норма-
по одной из схем, приведенных на рис. 21. — -
Строп для перемещения грузов в горизонтальном положении
показан на рис. 21,а, для перемещения в наклонном положении___
на рис. 21,6.
Для облегчения установки подхватов и увеличения силы их при
жима к грузу используется строп с затяжкой (рис- 21,в).
Для этой же цели может быть использован строп с полиспас-
том (рис. 21,г).
Усилие S в ветви стропа, сила Р давления гибких ветвей на
подхват и угол р наклона силы Р к горизонтали определяются
по формулам, приведенным в табл. 6.
Лей (рис. 22,в).
В некоторых случаях необходимо обеспечивать перемещение
подхвата, первоначально установленного с зазором, до упора в
гРУз (рис. 22,е). Для этого необходимо, чтобы величина горизон-
гальной составляющей силы превышала суммарную величину гори-
зонтальных составляющих сил трения при расчетном угле трения
Р=14°.
Для условия работы по рис. 22,а, 22,6 изгибающий момент в.
г°чке Е определяется по формуле
Alg = Sn,
где а -— плечо силы S, показанное на рис. 22.
(33)
30
31
ЭпюРа изгибающих моментов для этого случая приведена на
23 в-
рИСфОр’мулы (33), (34), (35) применимы при расчете двухветве-
bix стропов или четырехветвевых, в которых сила S расположена
а)
Рис. 23. Эпюры изгибающих моментов:
а — к рис. 22,а; б — к рис. 22,6; в — к рис., 22,е
в плоскости симметрии Г-образного рычага подхвата (рис. 24,а).
При работе четырехветвевыми стропами по схеме, показанной на
рис. 20,6, подхватами с вертикальной плоскостью симметрии
Рис. 22. Расчетные схемы [-образных подхватов:
а— прилегание по линии СД; б — касание в точках В и С; в— подхват вы-
скальзывает; г — смещение точки приложения силы S; д — изменение на
правления силы; е— касание в точках А, В и С
Эпюры изгибающих моментов для этих случаев приведены
рис. 23,а, б.
Для условий работы по рис. 22,д реакция 7?д и изгибающий
момент в точке Е определяются по формулам:
на
Рис. 24. Расчетные схемы четырехветвевых подхватов:
а— подхват с наклонной плоскостью симметрии Г-образного
рычага; б — подхват с вертикальной плоскостью симметрии
где а, в, с — плечи сил.
32
ra=s-^-
Me — RaC,
(34)
(35)
(рис. 24,6) сила S заменяется горизонтальной силой и силой,
лежащей в плоскости симметрии подхвата Sy
Sx
3 Заказ № 71g
G .
4 ctg у ’
(36)
33
sy=/ s2-sL
(3]
где S — усилие в стропе.
Изгибающие моменты в точке Е определяются по формула\
М Ех = 5^ е;
УИду =• CL ,
где е, а — плечи сил и .
(38
(39
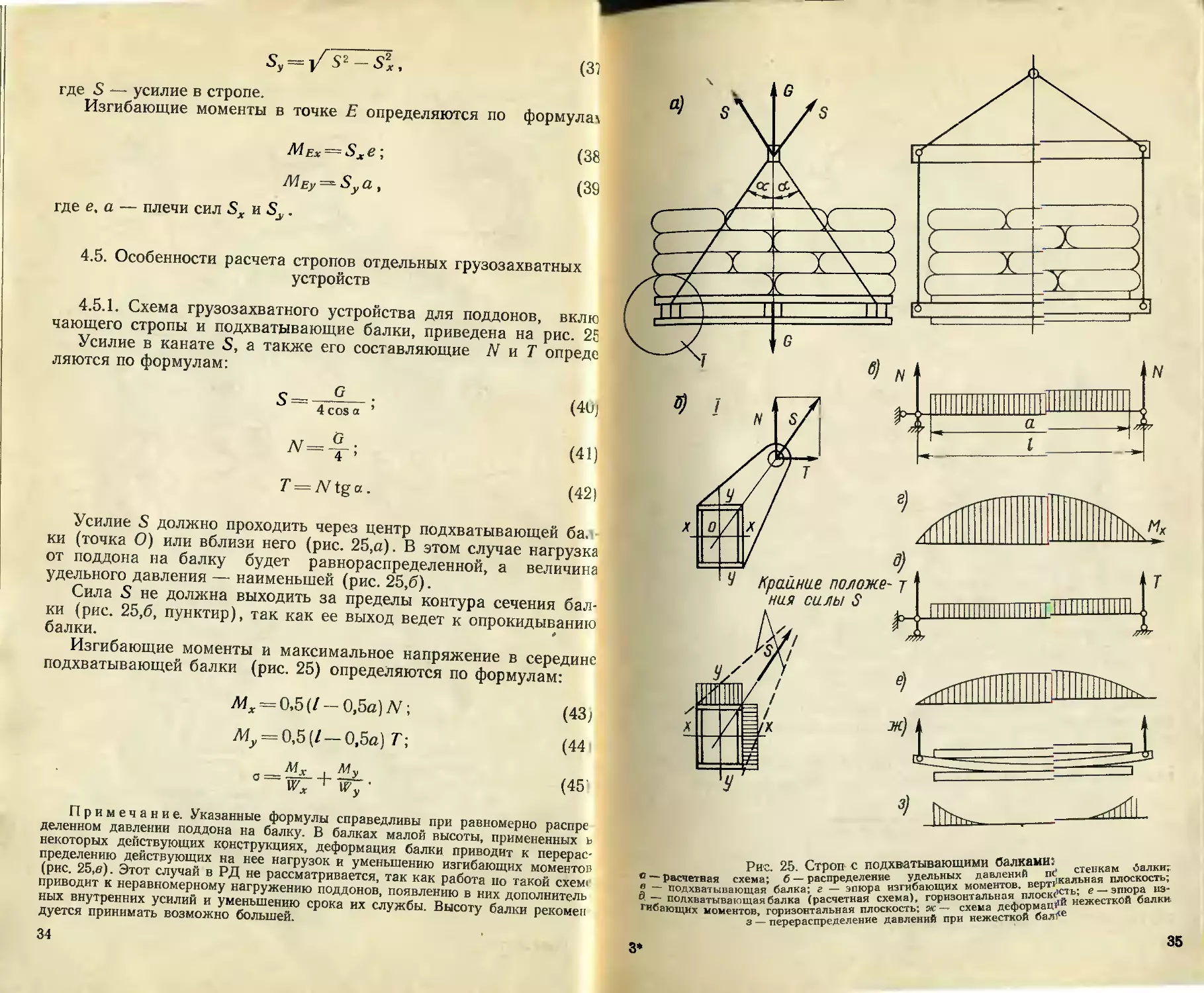
4.5. Особенности расчета стропов отдельных грузозахватных
устройств
4.5.1. Схема грузозахватного устройства для поддонов, вклю
чающего стропы и подхватывающие балки, приведена на рис. 25
Усилие в канате S, а также его составляющие N и Т опреде
ляются по формулам;
S = “7---- >’ (40]
4 cos а ' 1
(41)
r = /Vtga. (42)
Усилие S должно проходить через центр подхватывающей ба.
ки (точка О) или вблизи него (рис. 25,а). В этом случае нагрузка
от поддона на балку будет равнораспределенной, а величина
удельного давления — наименьшей (рис. 25,6).
Сила S не должна выходить за пределы контура сечения бал-
ки (рис. 25,6, пунктир), так как ее выход ведет к опрокидыванию
балки.
Изгибающие моменты и максимальное напряжение в середине
подхватывающей балки (рис. 25) определяются по формулам:
Afx = O,5(Z — 0,5а) TV; (43;
Л4у = 0,5 (/— 0,5а.) Г; (44
° ~ Wx + Wy <45
Примечание. Указанные формулы справедливы при равномерно распре
деленном давлении поддона на балку. В балках малой высоты, примененных ь
некоторых действующих конструкциях, деформация балки приводит к перерас-
пределению действующих на нее нагрузок и уменьшению изгибающих моментов
(рис. 25,в). Этот случай в РД не рассматривается, так как работа но такой схем<
приводит к неравномерному нагружению поддонов, появлению в них дополнитель
ных внутренних усилий и уменьшению срока их службы. Высоту балки рекомен
дуется принимать возможно большей.
34
Рис. 25. Строп с подхватывающими балками:
расчетная схема; б — распределение удельных давлений nd стенкам салки;
___ подхватывающая балка; г — эпюра изгибающих моментов, верт^кальная плоскость,
гихДОДхватывающая балка (расчетная схема), горизонтальная плоск<’^7ъ’ е u3“
ающих моментов, горизонтальная плоскость; ж — схема деформаций нежесткой балки
з — перераспределение давлений при нежесткой бал1<е
3*
35
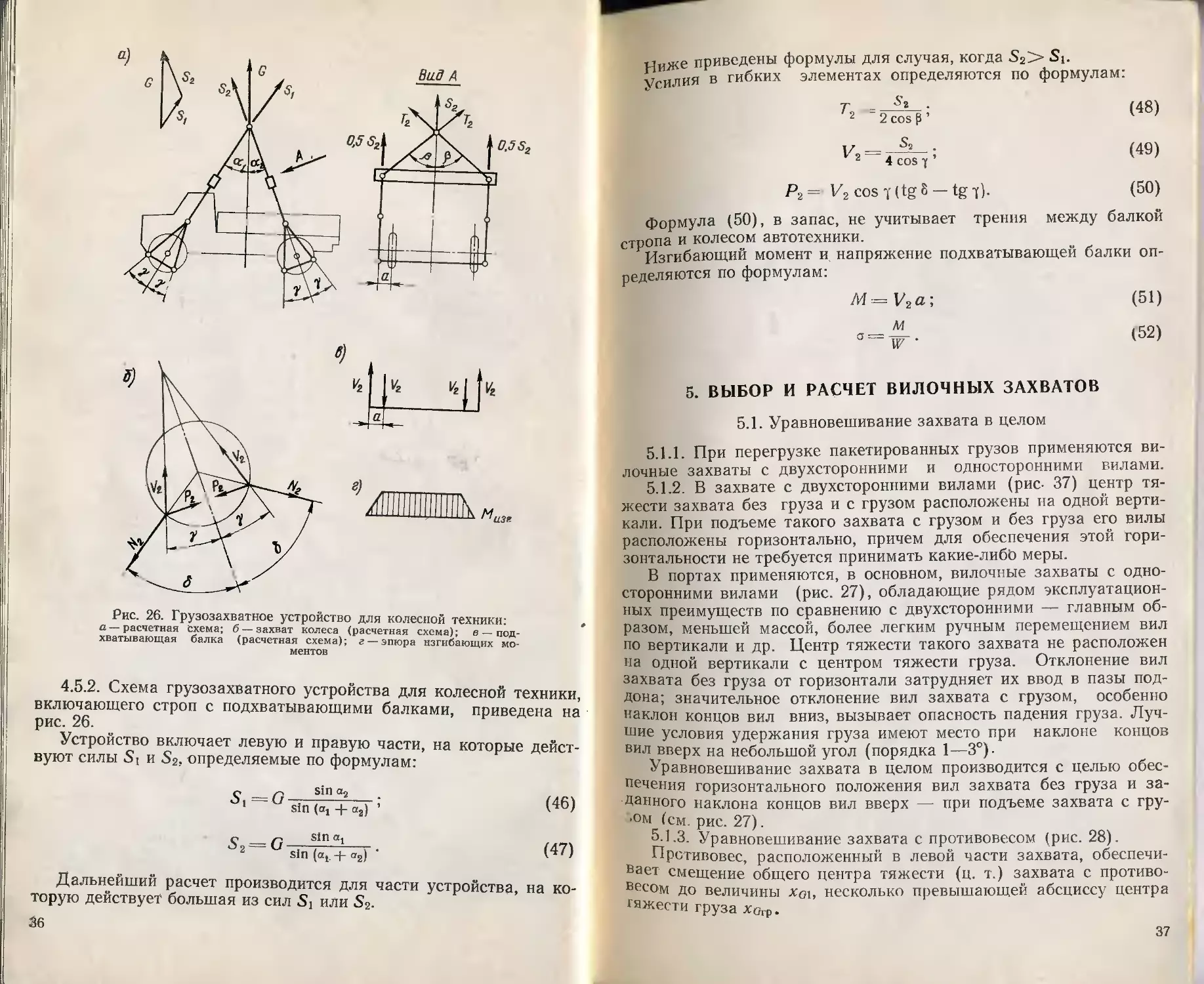
Рис. 26. Грузозахватное устройство для колесной техники:
а — расчетная Схема; б — захват колеса (расчетная схема); в —под-
хватывающая балка (расчетная схема); г — эпюра изгибающих мо-
ментов
4.5.2. Схема грузозахватного устройства для колесной техники,
включающего строп с подхватывающими балками, приведена на
рис. 26.
Устройство включает левую и правую части, на которые дейст-
вуют силы St и S2, определяемые по формулам:
<«>
Дальнейший расчет производится для части устройства, на ко-
торую действует большая из сил Sj или S2.
36
Ниже приведены формулы для случая, когда S2> Sb
усилия в гибких элементах определяются по формулам:
1Z2=‘S—; (49)
* 4 cos y
Р2= 1/2 cos T(tg 8 — tg?). (50)
формула (50), в запас, не учитывает трения между балкой
стропа и колесом автотехники.
Изгибающий момент и напряжение подхватывающей балки оп-
ределяются по формулам:
УИ=Ц2а; (51)
м
a~~W
(52)
5. ВЫБОР И РАСЧЕТ ВИЛОЧНЫХ ЗАХВАТОВ
5.1. Уравновешивание захвата в целом
5.1.1. При перегрузке пакетированных грузов применяются ви-
лочные захваты с двухсторонними и односторонними вилами.
5.1.2. В захвате с двухсторонними вилами (рис- 37) центр тя-
жести захвата без груза и с грузом расположены на одной верти-
кали. При подъеме такого захвата с грузом и без груза его вилы
расположены горизонтально, причем для обеспечения этой гори-
зонтальности не требуется принимать какие-либо меры.
В портах применяются, в основном, вилочные захваты с одно-
сторонними вилами (рис. 27), обладающие рядом эксплуатацион-
ных преимуществ по сравнению с двухсторонними — главным об-
разом, меньшей массой, более легким ручным перемещением вил
по вертикали и др. Центр тяжести такого захвата не расположен
на одной вертикали с центром тяжести груза. Отклонение вил
захвата без груза от горизонтали затрудняет их ввод в пазы под-
дона; значительное отклонение вил захвата с грузом, особенно
наклон концов вил вниз, вызывает опасность падения груза. Луч-
шие условия удержания груза имеют место при наклоне концов
вил вверх на небольшой угол (порядка 1—3°)-
Уравновешивание захвата в целом производится с целью обес-
печения горизонтального положения вил захвата без груза и за-
данного наклона концов вил вверх — при подъеме захвата с гру-
зом (см. рис. 27).
5.1.3. Уравновешивание захвата с противовесом (рис. 28).
Противовес, расположенный в левой части захвата, обеспечи-
вает смещение общего центра тяжести (ц. т.) захвата с противо-
весом до величины xoi, несколько превышающей абсциссу центра
тяжести груза хОгр.
37
Рис. 27. Уравновешивание захвата в целом: Рис. 28. Захват с противовесом (расчетная схема)
а — захват без груза; б — захват с грузом
38
f баРйТ противовеса по оси х не должен выходить за габарит
(53)
тд остаток — оольшои сооственныи вес.
Пи проектировочном расчете вес противовеса определяется
о приближенной формуле
Q _ XOrP~X3~h° tga° Q
п хп — •*'Огр ~ *2 “с
Хог > Хз> Хп — абсциссы центров тяжести груза, захвата и про-
где гр ’ тивовеса соответственно;
ас—угол наклона вил захвата с грузом к горизон-
тали;
ha — расстояние по вертикали между центром тяже-
сти захвата с грузом и точкой О подвеса за-
хвата.
Допускается использование уточненной формулы:
Г ___ b —-jfb2 — 4ас
(54)
2а
где
а = hoig^a,
b = Огр (х„ — хОгр) — (2GS + Огр) а ;
С = Оз 0гр (хОгр Х3) -f- 03 (Оз 4“ Огр) а •
(55)
(56)
(57)
Здесь Grp — вес поднимаемого груза;
G3 — собственный вес захвата без противовеса.
При использовании приближенной формулы (53) угол ас, опре-
деленный при последующем проверочном расчете, будет несколько
отличаться от заданного, что может потребовать небольшой кор-
ректировки веса противовеса либо координат его ц. т.
При использовании уточненной формулы (54) угол ас, опреде-
ленный при последующем проверочном расчете, равен заданному,
заложенному в формулу (53). Вычисления по формулам (54) —
(57) должны производиться с точностью до четырех значащих
Цифр.
Абсцисса точки О подвеса захвата принимается равной абсцис-
мулвНТРа Тяжести захвата с противовесом, определяемой по фор-
G3 х3 Хп
X(ii =-----—------f
r®G1 = G3 + Gn — собственный вес захвата с противовесом,
ордината точки О подвеса захвата
Уо==Уо4-йс- (59)
39
Здесь уа- ордината центра тяжести захвата с грузом, опре^
ляемая по формуле
Grpi'rp + G3y3 +- СпУп
уо=—v-------------Q--------------
где уа, у3, Уп — ордината центров тяжести груза, захвата (бр
противовеса) и противовеса.
При проверочном расчете определяется угол наклона вил зг,
хвата к горизонтали по формуле
tg ао =
*огр —
ло
(61)
Здесь ха — абсцисса центра тяжести захвата с грузом, определяе-
мая по формуле
XG =
(62)
Проверка угла ас по формуле (61) должна дополнять проекти-
ровочный расчет.
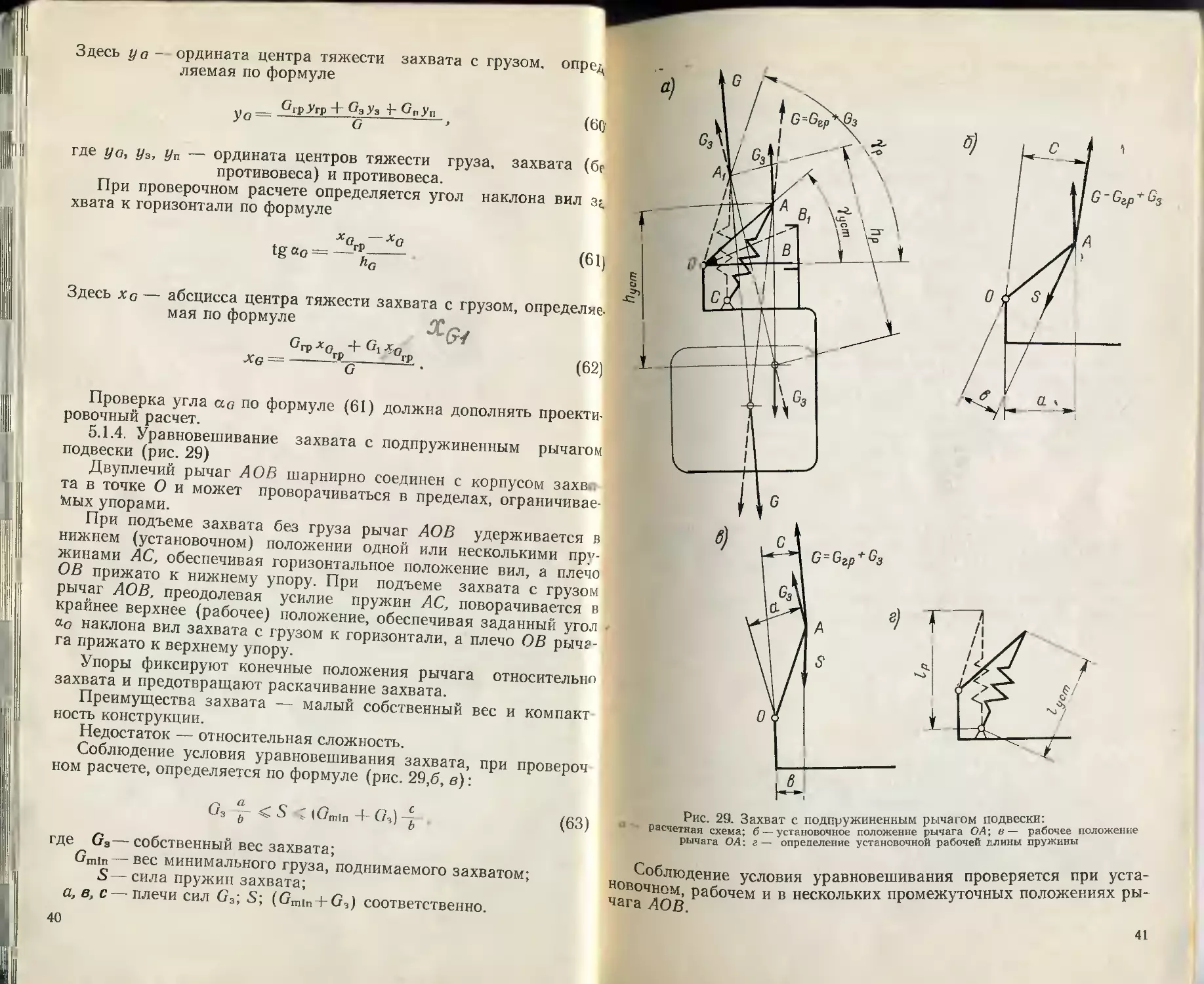
5.1.4. Уравновешивание захвата с подпружиненным рычагом
подвески (рис. 29)
Двуплечий рычаг АОВ шарнирно соединен с корпусом захв..
та в точке О и может проворачиваться в пределах, ограничивае-
мых упорами.
При подъеме захвата без груза рычаг АОВ удерживается в
нижнем (установочном) положении одной или несколькими пру-
жинами АС, обеспечивая горизонтальное положение вил, а плечо
ОВ прижато к нижнему упору. При подъеме захвата с грузом
рычаг АОВ, преодолевая усилие пружин АС, поворачивается в
крайнее верхнее (рабочее) положение, обеспечивая заданный угол
а0 наклона вил захвата с грузом к горизонтали, а плечо ОВ рыча-
га прижато к верхнему упору.
Упоры фиксируют конечные положения рычага относительно
захвата и предотвращают раскачивание захвата.
Преимущества захвата — малый собственный вес и компакт
ность конструкции.
Недостаток — относительная сложность.
Соблюдение условия уравновешивания захвата, при провероч
ном расчете, определяется по формуле (рис. 29,6, в):
Рис. 29. Захват с подпружиненным рычагом подвески:
Р счетная схема; б — установочное положение рычага ОА; в— рабочее положение
рычага ОД: г — определение установочной рабочей длины пружины
Оз S ' \Gn,in 4 G,) ~
(63)
где G3— собственный вес захвата;
Gmin—вес минимального груза, поднимаемого захватом;
S—сила пружин захвата;
а, в, с— плечи сил G3; S; (Gmin+G-s) соответственно.
Соблюдение условия уравновешивания сложениях ры-
новочном, рабочем и в нескольких промежуточных положена у
чага АОВ.
41
40
Подбор пружин при проектировочном расчете рекомендует^ 13765-68 определяется щГ такой
производить в следующем порядке: 7) по ГОС > я в отведенное место. При отсутствии так
1) определяется установочная сила пружин по формуле сТ' ее встр веЛичивают либо диаметр D„ пружины, лиоо длину
а зможн°стЙЬ и повторяют расчет;
«S’ycT = ^уст 03, (6^^ рычага сЯ проверочный расчет по формуле (63).
8) произвол. м из условий обеспечения минимальных раз-
где йУст=1,05—1,1 — коэффициент запаса установочной силы пру. Отметим, является возможно меньшее отличие между собой
и ЖИНЫ; Ь / опкч р0В И S при всех положениях рычага О А (коэффициент
аУст, Руст — плечи а и b (рис. 29,6), соответствующе 1НЦИН G3 г и 1 „„„ „П„<;ппр
установочному положению рычага АОВ\ емится к единице). Это следует учитывать р Р
2) определяется работа пружин при переходе от установочно. стр,нат точек О, А и С.
го состояния к рабочему по формуле орД $ уравновешивание
A = kA О3(ЛуСТ-Ар), (65)ис- 30)
где kA= 1,1—1,5 — соотношение работы растяжения пружины и
работы опускания захвата.
Меньшее значение kA дает возможность применить пружины с
уменьшенными размерами и весом, но усложняет подбор коорди-
нат точек О, А и С, при которых выполняется условие формулы
(63). Большее значение приводит к увеличению размеров и веса
пружин, но облегчает подбор координат указанных точек;
3) определяется рабочая сила пружин по формуле
SP = -7-^7----SyCT, (661
где Ip, /уст — рабочая и установочная длины пружин (рис. 29,а);
4) проверяется соблюдение условия формулы (63) при рабочем
положении рычага АОВ. Если условие не соблюдается, то увеличи-
вают длину АО;
5) определяется сила одной пружины при установочной рабо-
чей и максимальной деформациях по формулам:
Л=^-; (67)
*пр
= (68)
*пр
Р3 = (1,1-1,2)Р2, (69)
где Pi, Р2, Рз —силы одной пружины при установочной, рабочей
и максимальной деформациях соответственно;
in.} — количество пружин рычага захвата;
6) по ГОСТ 13772—68 подбираются параметры пружин, соот-
ветствующие силе Р3, — диаметр проволоки d, наружный диаметр
DH и жесткость одного витка z\-
Определяется число рабочих витков пружины по формуле
/вит = ; (70)
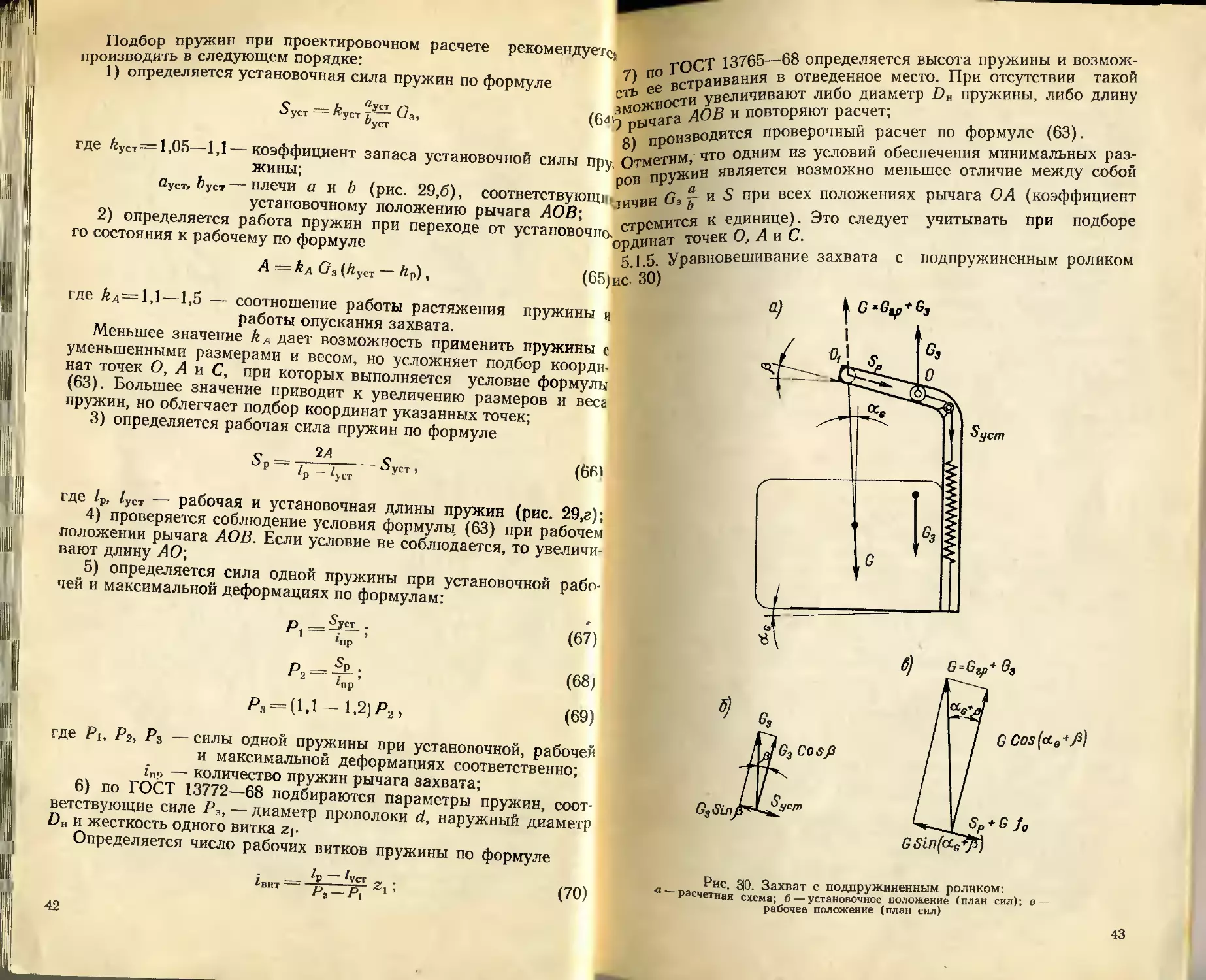
подпружиненным роликом
захвата с
Рис. 3|0. Захват с подпружиненным роликом:
расчетная схема; б — установочное положение (план сил); в
рабочее положение (план сил)
43
42
Захват снабжен наклонной направляющей, по которой пер( АпРгчения ввода вил в пазы поддона, наклоненного отно-
тывается ролик, соединенный с пружиной канатом, проходя! Для °°Д польной оси применяют захваты, снабженные устрой-
через отклоняющий блок. Ролик соединен с канатом или це гельно продольной ос р
навешиваемой на крюк крана. ,оМ ДлЯ наклон<1 . „„
При подъеме захвата без груза пружина удерживает пол. 5 2.2- Уравновешивание вил пружинами (рис. 31, 32)
крайнем нижнем положении. В этом случае7 точка О наход. Захват состоит из траверсы с подпружиненным рычагом под
на одной вертикали с центром тяжести захвата без груза ппи г и и двух вил, шарнирно соединенных с траверсой тяг м .
зонтальном положении вил. ПриХеме груза ролРик прХХи вил, тяги и траверса образуют шарнирные параллелограм-
вая усилие пружины и сопротивление перемещению ’сдвигам допускающие независимое перемещение каждой вилы,
в крайнее верхнее положение (точка О,). Этим достигается п Собственный вес захвата в целом уравновешивается рычагом
мещение точки подвеса захвата, обеспечивающее заданный спружиной EF. Вес каждой вилы уравновешивается пружина-
наклона ао вил захвата с грузом к горизонтали i ВС.
реимущество захвата уменьшенный габарит по высоте Преимущество захвата — малый собственный вес.
емкость иТрТазме7пруж№НеНИе К0НСтрукции’ Увинченные эне( недостаток - усложнение конструкции.
Соблюдение условия уравновешивания
формулами:
Методика уравновешивания собственного веса захвата в целом,
вата пРовеРяе.лЮчающая рекомендацию по подбору пружин, приведена в
6.1.4.
' Уравновешивание вилы сводится к подбору пружины ВС, сила
второй почти полностью компенсирует вес вилы и сопрягающихся
ней частей захвата (тяг и т. п.) при всех ее положениях.
____ .1 подъема-опускания вилы, не должна
Удельное сопротивление перемещению
муле
± Pi 4- 2ЛК ,
/о - 7) «доп,
— диаметр ролика;
— диаметр оси ролика;
____ « «
вил производится в следующем по-
где
ОА в крайних и промежуточных по-
^к = 0,05 см
&доп
pi — коэффициент трения подшипников,
мый по приложению 4;
— плечо трения качения;
_____, . -
*$p<(Omin + Оз) [ Sin (а -|- р) — /J.
э определяется по ф Сила, необходимая для
эевышать 50—80 Н-
Расчет уравновешивания
адке (рис. 32,6):
1) вычерчивается рычаг
эжениях;
опредеп 2) отрезок ВС переносится параллельно самому себе так, чтобы
)чка С совпала с точкой А, а длина пружины ВС сохранилась.
__коэйнЬипие * -------’ Гак как Устан°вочное перемещение вил относительно траверсы —
Поинимяр НТ дополнительных сопротивленоступателыюе движение, указанный перенос не изменяет вели-
1 о. „„„ „Тся для подшипников скольжени^шу деформации, силы и работы пружины и, следовательно, не
для подшипников качения - 2 ’ лияет на условия уравновешивания);
3) определяется длина и сила пружины ВС при всех положе-
иях рычага ОА-,
4) веса тяг, пружин и других элементов, соединенных с вилой
дей— ”а вилу °-"тра-
иуд им и vn.nunca ---- . операций Поэтому г, ° все силы, действующие на вилу, заменяются приведенным
захватов допускает f С°М вилы
_ХЛЛ.
Принимается для подшипников ск
1,3; для подшипников качения — 2
5.2. Уравновешивание вил захвата
1711, нрулиян
5.2.1. В связи с высокими скоростями подъема и опускания г) траверсой, заменяются
за портовыми кранами и трудностью их тппипй ----------- ------ Л
щение вил с пазами поддонов по высоте i
ные трудности и удлиняет время грузовых
новых конструкций крановых вилочных г _________ .
большое вертикальное установочное перемещение вил, облегча
щее их ввод в пазы поддона.
Для возможности выполнения установочного перемещения ie Gn — собственный вес одной вилы;
вручную собственный вес вил этих конструкций уравновешивз!
G/в - часть веса сопрягаемых частей, передаваемая на вилу.
пружинами или противовесами. Сила G прикладЬ1вается к точке А (перенос внешних сил,
Для облегчения ввода вил в поддон, установленный накл^ействующих на поступательно перемещающуюся вилу параллель-
но, в конструкциях предусматривается раздельное перемещено самим себе не влияет на уравновешивающую силу S пружины);
каждой вилы.
44
б/прив Св С In ,
(74)
45
й
а
0J
§
б) вилы уравновешены, если выполняется условие
Оприв О ~ Sb ,
с____. сила пружины;
гДе < размеры, приведенные на рис. 32,6.
v" сличение силы S пружины, по мере ее растяжения, должно
пенсироваться уменьшением плеча Ь.
К°Пни проектировании устройства вначале обеспечивается урав-
ешивание вилы в крайних положениях, затем проверяются про-
Сила, необходимая для подъема вилы, определяется по фор-
муле ,
Р = Оприв — 5 — .
(75)
(76)
rt
J?
S *3
И S а
£ Й S
К й
В х
И *
й *
Подбор пружины уравновешивания вилы, при проектировочном
асчете, производится в соответствии с указаниями, приведенными
в п 5 1.4. При этом, вместо условий формул (63) и (64), исполь-
зуется условие формулы (75), а работа пружины вычисляется по
формуле _
А -- Оприв , ( ' ' )
где Оприв — приведенный вес вилы;
йв —полное перемещение вилы по вертикали (см. рис. 32).
5.2.3. Уравновешивание вилы противовесами (рис. 33, 34)
Конструкция захвата аналогична описанной в п. 5.2.2, однако
уравновешивание захвата и вил производится не пружинами, а
противовесами, причем для уравновешивания вил и захвата в це-
лом используются те же противовесы.
При подъеме захвата без груза вилы расположены горизонталь-
но и могут быть вручную приподняты или опущены.
При подъеме груза вилы опускаются в нижнее положение и
располагаются под углом а? к горизонтали. Ограничение хода
вил вниз производится цепями или тягами.
Преимущество захвата — простота конструкции.
Недостаток — большой собственный вес.
Вес противовеса, необходимый для уравновешивания захвата
в целом (т. е. суммарный вес двух противовесов вил) определяет-
ся по формулам (53) — (57), приведенным в п. 5.1.3. При этом вес,
абсцисса и ордината захвата без груза, входящие в указанные
Формулы, определяются по уравнениям:
ТО ?
га 2 3
nS*
~д В
° s f
г> & 5
В CL,
® о с
Оз = Ов + GT;
°в хв + хт
Хз сг3
OByp + GTyT
Уз ~ «3
GB~- суммарный вес двух вил;
хв, ув— абсцисса и ордината ц.т. вил;
ъ хт> Ут— вес, абсцисса и ордината ц.т. траверсы.
(78)
(79)
(80)
46
47
48
тяг и других элементов, соединяющих вилы, тяги и про-
®ес^, заменяются приложенными в шарнирах силами, кото-
гивовеС ’ ваЮтся при определении весов и координат ц. т. вил, тра-
Рые Уд противовесов.
ве Нила уравновешена, если выполняется условие
5 GBlB.^G„ln, (81)
- G ,Опт~ вес одной вилы и одного противовеса;
6ГДе °lL In— размеры, показанные на рис. 34.
Веса вил могут несколько отличаться друг от друга из-за раз-
мещения на одной из вил дополнительных элементов управления
Чем. и. 5.2). В этом случае соответственно отличаются и веса или
координаты ц. т. противовесов.
<, 5.2.4. Управление наклоном вил
в Схема захвата с управляемым наклоном вил приведена на
*рис. 35, 36.
э Захват облегчает ввод вил в пазы поддона, наклоненного отно-
сительно продольной оси. Он образуется путем присоединения ме-
ханизма наклона вил к захвату по п. 5.2.3. Механизм представля-
ет собой систему тяг, позволяющую принудительно поворачивать
си рычаг подвески относительно захвата и не препятствующую раз-
щльному перемещению каждой вилы. Поворот рычага подвески в
у или другую сторону вызывает соответствующий наклон вил
(рис. 35). Сила управления рукояткой Рг направлена по горизон-
тали, что обеспечивает управление наклоном вил без их верти-
кального перемещения.
j Шарнир О соединения рычага подвески с захватом размещен
/йад центром тяжести А захвата, причем расстояние е между точ-
'•ками О и А невелико (порядка 100—200 мм). Этим обеспечива-
’ ются малые величины работы и горизонтальной силы Рг, необхо-
> димые для наклона вил — порядка 50—80 Н. Силы Рв, необхо-
£ димые для вертикального перемещения вил, уравновешенных про-
о 1 ивовесами, того же порядка.
и 1реимущество захвата — облегчение ввода вил в наклоненный
g 1 ’оддон.
Недостаток — большой собственный вес.
Сила на рукоятке Рг, углы отклонения рычага подвески от вер-
₽ и от оси симметрии захвата (а+р), а также ход рукоят-
г определяются в зависимости от угла наклона вил к горизон-
тали а по (Ьопмч.пям-
по формулам:
Рт =0^'Т^ Sln а; (82)
sin Р = -^ sin а ; (83)
er= (а + (84)
£*2
Г -Ц0 Q Л
ь ь а2, Ь2 — размеры, приведенные на рис- 35.
4 Заказ № 71д
ьо
S
3
§
§
и
х ;
сз
СО
ft’
Рис. 37. Захват с жесткими Вилами:
w расчетная схема и эпюры изгибающих моментов; б — вилы корот-
кие (-4-<ot5); в — вилы длинные (—М); г — определение плеча а; д —
эпюра удельных давлений в шарнире
5.3. Расчет на прочность
(подхват^аХ)ЙТ С ДВУХСТОРОННИМИ жесткими поворотными вилами
должно”3 захват висит без груза, его вилы направлены вдоль про-
грузОмИ °СИ (Рис- 37,а, пунктир). После установки захвата над
Для осВИ«Ы П0В0Рачиваются на 90°, обеспечивая удержание груза,
ние. в°б°ждения груза вилы возвращаются в исходное положе-
П тт
4, ° равнодействующей силы давления груза на вилы, зави-
51
сящее от отношения у (рис. 37,в), определяется по графЛ
(рис. 37,г).
Изгибающие моменты в указанных на рис. 37,а сечениях ощ
деляются по формулам:
М । = 0,25 Огр а ; (8
Vf2 = 0,25 ОГр (с — а); (8
М3 = 0,25 Огр L . (8
Стойки вил рассчитываются на совместное действие растя«
ния и изгиба, остальные элементы — на изгиб-
Максимальное удельное давление в оси вращения вилы (р
37,5) определяется по формуле
6
P—WT- (8
5.3.2. Захват с двумя стойками вил (рис. 38)
При расчете собственным весом захвата пренебрегают, вид
считают расположенными горизонтально, а давление груза на в
лы заменяется силами по 0,5 Grp, приложенными под центром т
жести груза. При расчете горизонтального участка вил давлен
груза на вилы условно заменяется нагрузкой, равномерно ра
пределенной вдоль ширины поддона (т- е. несколько выступа
щей за края вил) -
Изгибающие моменты и напряжения определяются по форм
лам:
в сечении А—А: Мд - ^гр — • л - 2/ 2 ’ _ мА (8. 1
в сечении Б—Б: МБ = 0,5 Grp с : (9
„ , мг, ,0,5 Grp £> г> (9
в сечении В—В: /Ив = 0,5 Grp b ; (9
MR
°в—^в 5 (9‘
в сечении С—С: •Мс = 0,5 Огр с; (9
с — f Мс I 0,5^ч> . °C «С В7С ' рс ’ (9
в сечении Д—Д: Мд = Мс = 0,5 Огр с ; (9
я _ МД , 0,5Grp (9!
Рис. 38. Захват с двумя вертикальными стойками вил
а —расчетная схема и эпюры изгибающих моментов; 6-
схема нагружения захвата при симметричной нагрузке; в
схема нагружения захвата при боковом смещении груза
сечении Е—Е: 0,25 Orp d ; (99)
6^=^ , (ЮО)
гДе К7Л 5,в,с.д., моменты сопротивлении сечений А—А, Б—Б, В—
В, С—С, Д—Д и Е— Е, определяемые по форму-
лам приложения 7;
, Е1 — площади сечений С—С и Д—Д;
Вв.в.с—коэффициенты, учитывающие кривизну балки
(см. п. 7.3).
Примечание. Приведенный расчет не учитывает сил, вызванных случай-
^поперечным смещением (рис. 38,в) центра тяжести груза относительно оси
в®трии захвата. Он может быть использован при углах поперечного перекоса
На У, не превышающих 2—3°.
53
52
Угол -у определяется по формуле
Если угол у превышает 2—3°, необходим дополнительный р
чет элементов захвата на изгиб и кручение от сил перекоса Т, 1
пряжения от которых суммируются с напряжениями от основр
сил.
5.3.3. Захват с наклонными стойками (рис. 39)
В захвате вилы могут перемещаться по балке АВ, а расстоян,
между вилами — изменяться.
Рис. 39. Захват с наклонными стой-
ками вил (расчетная схема и эпю-
ры изгибающих моментов)
Изгибающий и крутящий моменты расчетного сечения балки А
М, =0,5Grp6; (102
Mk- -G,5GTfa. (IOS
Изгибающий момент и растягивающая сила балок АС и В
cos 1
—
cos р
В остальном расчет аналогичен приведенному в п. 5.3.2.
5.3.4. Захват с одной вертикальной стойкой (рис. 40)
54
М
(104
s2
(10t
изгибающих и крутящих моментов от симметричной на-
ЭпЮРа 1веДена на рис. 40,а. Моменты и напряжения определя-
(I ' рУзКИ Ппчсно указаниям, приведенным в п. 5.3.2.
^тсяс’гл
в,<>гр
Рис. 40. Захват с одной вертикальной стойкой:
о — расчетная схема при симметричной нагрузке и эпюры изгибаю-
щих и крутящих моментов; б — расчетная схема при боковом смеще-
нии груза и эпюры изгибающих и крутящих моментов; в — схема
нагружения захвата при симметричной нагрузке; г — схема нагруже-
ния захвата при боковом смещении груза; <Э —расчетная схема за-
хвата с поперечным перемещением вил и эпюры изгибающих мо-
ментов
вызыСЛИ ПОпеРечное смещение центра тяжести груза е (рис. 40,г)
захваВЭеТ ПеРекос захвата на угол у^2°, то элементы АВ и ВС
Та подлежат дополнительному расчету (рис. 40,6).
55
Горизонтальная сила перекоса Т, а также изгибающие и > I
тяшие моменты определяются по формулам: *1
Силы
гам:
в тягах и ограничителе хода вил определяются по фор-
do
(П2)
Т “Grp sin 7;
Ж, Tb;
(1Q
(10
=. Та-,
(Ю
— 0,5 Grp-у-;
с___Г) 5 Г? cos Р
г, — и,Grp sin ((р_₽)
UI3)
(Н4)
Л/2 = Тс-,
В остальном расчет аналогичен приведенному в п. 5.3.2.
(И
Mkz'- Tb.
111.
Напряжения от сил перекоса суммируются
'6. ВЫБОР И РАСЧЕТ ЗАЖИМНЫХ ЗАХВАТОВ
6.1. Основные понятия
—у* vrwi перекоса суммируются с напряжениями
симметричной нагрузки. При этом может быть принят понйже
ный запас прочности, определяемый согласно указаниям к уто
ненным расчетам.
Разновидностью захвата является конструкция,
и эпюра изгибающих -------
дены на рис. 40,6.
5.3.5. Определение
шением вил (рис. 41)
схема которо
моментов от симметричной нагрузки прпв
сил в тягах захвата с независимым перем
Рис. 41. Схема определения сил в
тягах захвата с независимым пере-
мещением вил
6.1.1- Настоящая методика распространяется на самозатягиваю-
.-я захваты, в которых сила сжатия пропорциональна весу
Захват состоит из захватных органов и зажимного устройст-
ва. Захватные органы прижимаются к боковым поверхностям гру-
и удерживают его силой трения. Зажимное устройство обеспе-
необходимую силу сжатия.
i 1.2. Сила Р взаимодействия захвата с грузом может быть
рх.. хена на горизонтальную N и вертикальную Р (рис. 42,а, ле-
вая сторона) или на нормальную V и касательную Т (рис- 42,а,
авая сторона) составляющие.
При уменьшении сил N или V ниже определенной величины
н^ I "ит проскальзывание захвата по грузу. Силы, соответствую-
Щ' началу такого проскальзывания, называются предельными
(рис. 42,6, в, г). Они определяются по формулам:
1) нормальная
р,-.*я залиаш, о ш
, лаемого груза.
G
^пр 2 (sill а + р- COS а) ’
d горизонтальная
/Vnp-
G cos а — р. sin а G
2 Sin а + р. COS а 2tg(cc-i-p)
(Н5)
(Н6)
г G — вес груза;
М — коэффициент трения захватного органа по грузу;
Р угол трения захватного органа по грузу;
а угол наклона боковой поверхности груза к вертикали
а 1ри наклоне боковых поверхностей груза по рис. 42,а, б угол
веп°ЛО>Кителен’ по Рис- 42,в — отрицателен, при вертикальных по-
Рхностях (рис. 42,а) — равен нулю.
Додж Я Надежного удержания груза действующие силы V и N
нЬ1х ЯЬ1 быть больше предельных при любых практически возмож-
ЗДебаниях коэффициента трения, потерь в шарнирах и т. п.
56
57
V„p
a-сила ДавленРи“за^т^нРаИТРТ«Тоа71Х3еа;
пения захвата на rnv<* «>»п- о предельная сила дав-
на груз “<а^ 1л^дм>наяв<вд?ед^пенияСзах^тааМна!Игруза,ап>1о
6-2. Передаточное число
Даться1у<5овИ”адеЖНОГ° УДерЖаш,я гРУза аа^>том должно собл»
(117)
тде / - передаточное число зажимного устройства-
[I] допускаемое передаточное число
чина ереДаТ0ЧНым числом зажимного устройства называется вел*
i 2N
(118
ГДе ^~груРзИЗ(Ориса 42Т оХаё ";реДаТМаЯ Захватным орган™ на
При опРрУе3д^ в шарнирах.
вило, не учитывается собственный вес G3 захвата, как пра-
58
При уточненных расчетах захватов, собственный вес кото-
Приме я н и е. * г уеса поднимаемого груза, допускается учитывать вес
с<, тавл°₽т бол®а (,илы Веса всех жестких звеньев захвата должны быть
?я-' ата. В ..ом слу тяжести, а при расчете горизонтальной силы от собст-
пр to- гны к и*л“ ны учитываться моменты этих сил. При этом юризонтальная
венног . ределяется по формуле
Ar = /Vo +/V3) (119)
гр
М — сила от веса груза;
г‘е (?гр_ сила от веса захвата.
‘V(?3
Не едаточное число захвата обычно меняется при изменении
ширины поднимаемого груза.
При проверке условия удержания груза следует исходить из
минимального передаточного числа.
При проектировании захвата следует стремиться к минималь-
ному изменению передаточного числа в рабочем диапазоне. В ря-
де Г учаев целесообразно иметь два передаточных числа захва-
та малое (нерабочее), обеспечивающее широкое раскрытие за-
хвата при малом ходе подъемного каната, и большое, обеспечиваю-
щее надежное удержание груза.
Передаточное число типового захвата определяется по форму-
ле, приведенной в п. 6.6.
Передаточное число захвата, не включенного в п. 6.6, опреде-
ляется по формуле (118).
Определение горизонтальной силы N производится по методу
Н. Е. Жуковского или из условия равновесия отдельных звеньев.
Первый метод предпочтительнее для сложных -захватов, вто-
рой — для простых.
6.2.2. Определение горизонтальной силы N по методу Н. Е. Жу-
ковского производится следующим способом (рис. 43):
I) строится план скоростей, повернутый на 90°. При этом в
качестве базы может быть принято любое звено устройства;
2) прикладываются силы N и G к точкам плана, соответствую-
щим скоростям мест приложения этих сил (к точкам a, h)-,
о) определяется полюс плана скоростей, исходя из условия
оризонтального перемещения сил (V; отрезки оа и 004 повернуто-
плана скоростей вертикальны;
4) план скоростей рассматривается как жесткий рычаг.
мы пределяется сила N, исходя из условия равенства нулю сум-
моментов сил N и G относительно полюса плана скоростей-
ко 9 шэигЛ е 4 а н и е- При построении плана скоростей (рис. 43,яс) захвата зве-
ну лю пр-ЯТ° в качестве базового. При этом скорости точек Е, Ei, D, Di, равные
пре *„ вставлены на плане скоростей точками е, eIt d, di. Скорость точки С
ну <.<*,), '1 отРезком ес произвольной длины, направленным параллельно отрез-
пер * |д| Улярно фактическому направлению скорости точки С). Так как
ки С и из"г ЗВена — поступательное, скорости точек А и В равны скорости точ-
точк| “ ражаются тем же отрезком. Точка ft, характеризующая скорость efi
к । Х0Дится в месте пересечения линий е/у и eft, параллельных отрезкам
в Ме ' ‘пееМЫ захвата- Точка h, характеризующая скорость точки//, находится
Лельной отрезеЧеНр вг°РизонтаДИ. проведенной через точку е, и линии fih, парал-
н Ку Г1Н. Точки di, bi, ci, f определяются из условий симметрии.
59
ZP-0
60
жатии груза звено 9 не является неподвижным, а движется
Так *аК прИ пится корректировка полюса плана скоростей. Скорости то-
то пРоИЗВОСцаЮщихся по горизонтали, изображаются на плане скоростей,
। И Ai’ наР90° вертикальными отрезками, равными между собой из условия
летрии „плюс О плана скоростей находится делением отрезка аа^ по-
фактическии пилш
дам. Л7 и О 5G приложены к точкам а и ш, сила G •— к точке h.
'-1ла N определяется из условия 2Л4о=0 по формуле
г 1О
N==G2T’
I — плечи сил G и N (рис. 43,ж)
а> ‘Л
6 2 3 Определение горизонтальной силы N из условия равнове-
£ j сия Звеньев (рис. 43):
г ; выделяются отдельные звенья или группы звеньев (звенья
, 2, ?; группа звеньев 4, 8);
£ \
CU -5
S3
tf •
CD й!
§ «
е" жены внешние силы, то реакции примыкающих звеньев действу-
s
3
я
л
ч
(120)
о
с
ЕО tj•
X с
сЗ
S Ч
. со.
о >>*
S I
а- 1»
сй-
2
Ф
X
о ;
«•
« “
s
о>
Й
’' 2) акции примыкающих звеньев заменяются силами, прило-
,• энными в соответствующих шарнирах;
3) к концевым звеньям прикладываются внешние силы (G,
П К G, N);
4) если к звену, содержащему только два шарнира, не прило-
ют на него по линии, соединяющей шарниры, равны по величине и
противоположно направлены (/?i2——Rw и т. Д|). Это положение
_ используется для определения направления усилий в тягах;
S Т. из условий равновесия отдельных звеньев определяются
1 дей_ ?вующие на них реакции примыкающих звеньев. При рассмот-
рении условий равновесия следующих звеньев эти реакции, взятые
с обратным знаком, рассматриваются как известные силы;
6) расчет начинается с рассмотрения условия равновесия зве-
на или группы звеньев, на которые действуют не более трех неиз-
вестных сил. При этом реакция, неизвестная ни по величине, ни
по направлению, дает две неизвестные силы, реакция, известная
по направлению, — одну неизвестную силу;
7) если на звено действует более трех неизвестных сил, го неиз-
вестные по направлению реакции разлагают на взаимно перпенди-
кулярные составляющие. Направление разложения выбирают так,
не°б В РассматРиваемых условиях равновесия звена участвовали
€ЛуЛее тРех неизвестных сил, а остальные исключались. В этом
погоде еИЗВеСТНЫе силы 0ПРеДеляются из условий равновесия од-
весДРИ отсУтствии возможности такого разложения часть неиз-
сываю Х СИЛ опРеделяется путем решения системы уравнений, опи-
8) п*ИХ УСЛ0ВИЯ Равновесия двух или нескольких звеньев;
всех шарнТр заканчивается определением силы N и реакций во
произвеп^иг,6^ а н и е- Определение реакций в шарнирах захвата по рис. 43,о
1) из v В следУющ>ем порядке:
условия равновесия узла Н определены силы S (рис. 43,6);
61
2) из условия равновесия звена 3 (рис. 43,в) 2Л4£ =0 определена касатР I
„г Sa
ная реакция /?13 = —;
3) из условия равновесия звена 2 определено направление реакции RK, R^ I
= -$12;
4) из условий равновесия звена 1 (рис. 43,г) 2г/=0 и 2]Л4е==0 определил
.. ^J3+0,5Gcosa Nd-0,5Ge
сила п= -------;------- и реакция /?2. = ---------;
sin a r с
5) из силового многоугольника звена 1 (рис. 43,5) определены величина *
направление реакции R'^. Эта сила должна быть параллельна линии СЕ,
используется для контроля точности вычислений;
6) из силового многоугольника звена 3 (рис. 43,е) определена реакция R
6.3. Определение допускаемого передаточного числа
6.3.1. Допускаемое передаточное число [i] определяется по фор
муле
= <121
где п — коэффициент запаса сжимающей силы;
ц — коэффициент полезного действия зажимного устройства 1
Для захватов с вертикальными боковыми поверхностями фор-
мула (118) принимает вид
и (122)
6.3.2. Коэффициент трения р башмака захвата с грузом прини-
мается по табл. 7.
В случае применения трущихся пар, отсутствующих в таблице,
коэффициент трения может быть определен по другим источникам
или экспериментально.
6.3.3. Коэффициент запаса п=1,5 — при использовании тру-,
щихся пар, коэффициенты трения которых приведены в настоящем
РД, других руководствах по расчету грузозахватных устройств
или исследованиях грузозахватных устройств, 74=1,9-—в осталь-
ных случаях.
6.3.4. Коэффициент полезного действия зажимного устройства
принимается:
1) при установке подшипников качения во всех шарнирах
т]=1;
2) при приближенном расчете рычажных захватов т]=0,9, по-
лиспастных и рычажно-полиспастных т]=0,85;
3) при уточненном расчете типового захвата — во формуле,
приведенной в п. 6.6. При этом коэффициент щ трения в шарнира
определяется по приложению 4, а коэффициент сопротивлений в
блоке и коэффициент полезного действия блока — по формула»
(рис. 44):
и>бл = 2 sin : (123'.
7]бл - 1 — К’бл .
(124)
гДр
р__диаметр блока;
л—диаметр оси блока;
абл-—угол огибания блока канатом (рис. 44).
Отношение диаметра блока к диаметру каната в захватах, как
правило, значительно ниже, чем в кранах, вследствие чего жест-
Згть каната ..., ------
сиятельство
__ ncizkj - — -__ JKCCT"
оказывает существенное влияние на потери. Это об-
рекомендуется учитывать путем подстановки в фор-
Peg. 45
по канавке блока (рис. 45).
мулу (123) диаметра D, замеренного_______
вместо теоретически обоснованного диаметра Dk по оси каната.
Примечание. При уточненном расчете захвата, \не включенного в
—. 6.6, КПД определяется по формуле
, b.N
(1.25)
гд< (V— горизонтальная сжимающая сила, определенная без учета трения;
'..V — потери силы N, вызванные трением. При этом потери от трения"допуска-
ется определять не от фактических усилий, а от усилий, определенных
‘ без учета трения.
Формула (125) в развернутом виде преобразуется для полиспастных захва-
тов в формулу (126), для рычажных захватов — в формулу (129).
6.3.5. При уточненном расчете полиспастного захвата, не вклю
ченного в разд. 6.6, КПД определяется по формулам:
(126)
(127)
7j = т)0Т 7jn ;
40т =Трбл Т]2бл • • TJm бл :
1 - т.бл
(128)
zln "Ti-T(6^V’
Яот — КПД отклоняющих блоков;
T)n — КПД полиспаста;
т,1бл> т]2бл ... т] тбл— КПД блока;
in— кратность полиспаста.
63
62
Т а б л и
Коэффициенты трения башмака захвата с грузом
Трущаяся пара
башмак груз Коэффициент трения р Примечание
сталь 0,18 0,10 1 всухую слабая смазка
чугун 0,15—0,18 0,10 всухую слабая смазка
гладкий стальной бронза 0,16 0,12 всухую смазка
кожа 0,20
алюминий 0,60 0,15 всухую смазка
дерево 0,30—0,40 0,10—0,05 всухую смоченный водой
пробка 0,15—0,38
рифленый металличе- ский металл 0,3—0,4 насечка закалена
бронза 0,16 0,10 всухую смазка
чугунный чугун 0,20—0,25 0,10 всухую смазка
кожа 0,2—0,25 0 08 всухую смазка -4
сталь 0,5—06
обрезиненный чугун 0,55—0,8
медный сталь 0,53 0,1.8 всухую смазка
лента тормозная асбесто- вая сталь 0,35—0,4
64
Продолжение
Гру.цаяся пара башмак груз Коэффициент трения р, Примечание
|еКст°лИТ 0.18 всухую сталь 0,12 смазка
^й”мёдачеСКИЙ бетон 0,65—0,50 Большие значения отно- сятся к удельному дав- лению 1 МПа, меньшие к давлению 5, МПа
рифленый металличе- бетон 0,70—0,55
гладкий деревянный 0,075р+0,42 Удельное давление бетон 0,1.25—0,3 МПа 0,65 Удельное давление 0,3— 4 МПа
, брезиненный 0,04р+0,75 Удельное давление . 0,,125—0,56 МПа бетон 0,97 Удельное давление 0,56—4 МПа Твердость резины 65—75 по Шору
тальной гладкий тальной с насечкой ’угунныи гладкий угунный с насечкой ен_а тормозная асбесто- вая без насечки '3 же, с насечкой ента тормозная вальцо- ванная гладкая Т0Рм°зная вальцо- «»= „амая с "с ™- |тинаКс гладКИЙ •’Чакс с насечкой 0,20 0,53 0,28 0,54 0,32 бумага в 0,35 Удельное давление рулонах 0,04—0,8 /МПа 0,52 0,60 0,45 1,26 0,38
5 , Удельное давление ЭКаз № 719 U'J
6.3.6. При уточненном расчете рычажного захвата, не BJ
ченного в разд. 6.6, КПД может быть вычислен по формуле i
т
Е \Rlj\\WlJ\dii
7j = 1 - 0,5 н -----------------
1 1 Grvva
(1
где т— количество шарниров зажимного устройства 3axBJ
— абсолютная величина силы взаимодействия звев
i и j, примыкающих к шарниру k, определенная
гласно п. 6.2.3;
Iwi/I —абсолютная величина угловой скорости звена i
сительно звена j-,
dij — диаметр оси, установленной в шарнире k;
Vq — скорость подъема шарнира, соединенного с крюком
крана.
Абсолютная величина угловой скорости определяется по ф
муле
Wij =\Wj — wtl.
(1
Угловая скорость любого звена i определяется по формуле
VAB
lAB
где Vab— скорость любой точки А жесткого звена i относится»
любой точки В этого звена. При практических расчет,
точки А и В совмещают с шарнирами звена;
1ав — расстояние между точками А и В.
Коэффициент pi трения в шарнирах определяется по прил
жению 4.
КПД блока определяется по формуле (124).
6.3.7. Формула (126) не учитывает влияния наклонных вет»
захвата на КПД. При кратности полиспаста меньшей, чем три»
отклонении ветви стропа от вертикали на угол более 30° рекой
дуется учитывать влияние наклонных ветвей, определяя КПД 1
уточненной формуле
7] =- 1 - Ч 11 ~
4- Sin а
или приближенной формуле
Здесь
! _ *ф [ S и>от + 0.5о6л (0,5/ф — 1)| . |j
«ф 4- sin а '
г)' — КПД, определенный по формуле (126);
ч’ф — количество ветвей фрикционного полиспастного 3
хвата в сечении А—А (рис. 46);
66
a — угол наклона ветви к вертикали (см. рис. 46);
2syOT — сумма коэффициентов потерь отклоняющих блоков
одного полиспаста;
йУбл — коэффициент потерь блока полиспаста, определяе-
мый по формуле (123).
6 3.8. Для захватов, удерживающая
спеЦифическими особенно-
стями захватного органа или
С0уза (врезание клыков в мяг-
кий материал, взаимное про-
скальзывание слоев груза
и т. п.)> допускаемое переда-
точное число определяется экс-
периментально или на основа-
нии опыта длительной эксплуа-
тации аналогичных конструк-
ций. При этом удельные на-
грузки захватного органа про-
ектируемой конструкции и про-
тотипа должны быть одинако-
вы. Величины удельных нагру-
зок должны обеспечивать сохранность удерживаемого груза.
сила которых определяет-
Рис. 46. Фрикционный полиспастный за-
хват:
1 — блоки отклоняющие; 2 — блоки полиспаста
6.4. Расчет на прочность
6.4.1. Расчетная нагрузка захвата выбирается согласно разд. 2.
6.4.2. Расчетными нагрузками элементов захватов являются
силы в шарнирах, определяемые для типовых захватов по форму-
лам, приведенным в п. 6.6, для остальных — согласно пункту
6.2.3.
При этом в расчетные зависимости следует подставлять вместо
веса груза Grp величину G = Grp+G3 (вес груза плюс собствен?
ный вес захвата).
6.4.3. Силы в шарнирах определяются при нескольких положе-
ниях захвата. При этом обязателен расчет для крайних положений
и положения, соответствующего наибольшему передаточному чис-
ЛУ- Наиболее неблагоприятное усилие каждого элемента является
Для него расчетным.
6-4.4. Удельное давление в шарнирах фрикционных захватов
определяется по формуле
<134)
гДе S — уСилие в шарнире;
I — длина втулки шарнира;
— диаметр оси шарнира.
67
При захвате и освобождении груза это давление н'епостоянь
(рис. 47). °
На угле <руСт, соответствующем компенсации или созданию
зоров между захватом и грузом, удельное давление Руст, опреде'
лямое собственным весом захвата, невелико. На участке, соответ,
ствующем сжатию груза и упругой деформации элементов захвата
это давление на малом угле поворота возрастает до макса’
Рис. 47. Зависимость удельного
давления в шарнире от угла его
поворота
6.4.5. Расчет прочности
2. 3 и 7.
мальнои величины рр. учитывая
это обстоятельство, максималь-
ное удельное давление в шар ни.
рах, оси которых выполнены из
стали, шлифованной и закален-
ной до HRC 56—62, а втулки из
стали 45, может быть доведено
до величин:
1) для шарниров башмаков
и нижних шарниров захвата
(угол поворота <рр которых край-
не мал) [р]=60—90 МПа;
2) для остальных шарниров
[р] = 30—40 МПа.
нтов производится согласно разд.
6.5. Определение удельного давления башмака на груз
6.5.1. Удельное давление в месте контакта башмака с грузом
принимается линейно распределенным по высоте и равномерно по
ширине.
Для обеспечения прилегания башмака к грузу по всей высо-
те и уменьшения максимального давления размеры башмака
должны удовлетворять определенным условиям. В пп. 6.5.2 —6.5.8
приведены формулы для определения удельных давлений, возни-
кающих при сжатии грузов с вертикальными стенками, в п. 6.5.9—
с наклонными.
6.5.2. Положение равнодействующих сил давления груза на шар-
нирный башмак (рис. 48) определяется формулами:
0,5 G
е — С /у • (135)
hl = a — е, (136)
где а, с, е, hi — размеры, показанные на рис. 48.
6.5.3. Равнодействующая А' сил давления груза на жестко за-
крепленный башмак проходит точку пересечения сил S и 0,5 G
(рис. 49) либо S и (0.5G + /?) (рис. 50).
Изменение ширины поднимаемого груза приводит к изменению
направления силы S и перемещению равнодействующей N по вы
соте башмака.
68
пучае выхода силы S за пределы контура башмака будет
В Содить поворот рычага с башмаком относительно одной из
пр°0С* тех пор, пока сила S не пройдет через эту кромку
Г р, ,, „
Рис. 49
Рис. 48
(см. рис. 50). При проектировании захвата указанный линейный
.онтакт жестко закрепленного башмака не допускается.
6.5.4. При совместной работе шарнирного и жесткого башмаков
(рис. 51) расстояние ei между силами N, действую-
щими на шарнирный и жесткий башмаки, опреде- s/
ляется по формуле
^=^4’ <137) /
где с — размер, показанный на рис. 51.
Показанный на рис. 51 размер е определяется f
по формуле (135). Рис 50
6.5.5. Для обеспечения прилегания башмака к
грузу по всей высоте должно соблюдаться условие
(138)
Рис. 51. Совместная работа жест-
кого и шарнирного башмаков
Рис. 52. Обеспечение равномер-
ного давления по высоте баш-
мака
69
6.5.6. При соблюдении условия формулы (138) удельное дав
ление в крайних точках башмака определяется по формулам:
P.=-^-(2ft-3fti;; (139)
A = ^(3ft1 - ft). (140)
где b — ширина башмака.
6.5.7. Для обеспечения
Рис. 53
равномерного распределения давления
по высоте башмака (рис. 52) должно
соблюдаться условие
а = 0,5ft 4-е. (141)
Удельное давление при этом опре-
деляется по любой из формул (139)
или (140).
6.5.8. При несоблюдении условия
формулы (138), башмак прилегает к
грузу на участке высотой ft3 (рис. 53)
Л3 = ЗЛ„ (142)
а максимальное удельное давление определяется по формуле
2 N
3W <143)
6.5.9. Удельное давление в месте контакта башмака и наклон-
ной боковой поверхности груза (рис. 54) определяется по приве-
денным выше формулам, в которые вместо величин N и 0,5G под-
ставляются величины V и Т, вычисляемые по формулам:
V — /Vcos а -|- 0,5G sin а;
Т = — TVsin а + 0,5Gcos а .
(144)
(145)
70
асчете следует учитывать знак силы Т, которая при боль-
ПРИ а принимает отрицательные значения.
(Х УгЛ
6.6. Расчет типовых захватов
. Схемы типовых захватов, применяемых в морских пор-
?аКЯ{е планы сил, действующих на отдельные элементы,
введены на рис. 55-71.
л омулы Для вычисления передаточного числа захвата, силы
ия груза, усилий в элементах и для определения коэффициен-
' Т пезного действия захвата приведены в табл. 8.
6°б2. Захват когтевой с гибкой ветвью (рис. 55) состоит из гиб-
ветвей и захватных органов, выполненных в виде когтей. Он
’ ичается простотой конструкции, однако имеет малую сжимаю-
•Ю
6 6.3. Захват с затяжкой (рис. 56) включает канат, огибающий
оки, установленные на захватных органах. Горизонтальная ветвь
вата (затяжка) способствует увеличению силы сжатия груза.
6.6.4. Захват с полиспастом (рис. 57) включает горизонтально
^положенный полиспаст, стягивающий захватные органы. Он
сспечивает большую силу сжатия, чем предыдущие захваты.
6.6.5. Передаточное число захватов по пп. 6.6.2—6.6.4 зависит
размеров поднимаемого груза, что может привести к чрезмер-
му сжатию грузов большой ширины (а также к неоправданно
1соким внутренним усилиям в элементах) и недостаточному сжа-
тию грузов малой ширины.
В захвате с постоянным передаточным числом (рис. 58) угол
'Клона ветвей к вертикали не зависит от размеров груза (а—
fi0°=const), благодаря чему обеспечивается одинаковый коэф-
щиент запаса сжимающей силы при подъеме грузов разной ши-
' вы. Указанное позволяет также избежать неоправданно высоких
утренних усилий в элементах.
6.6.6. Однокапатный захват с постоянным передаточным чис-
м (рис. 59) аналогичен захвату по п. 6.6.5 и обеспечивает то же
редаточное число. При запасовке каната по рис. 59,г передаточ-
|,е число увеличится, однако будет трудно предотвратить упор
ир4>хнюю плоскость груза (см. п. 6.6.8).
D-6.7. Захваты по пп. 6.6.2—6.6.6 при подъеме груза самоуста-
авливаются так, что равнодействующая Р проходит через ось
I аЩения шарнирного башмака, точку контакта когтей с грузом
площадку соприкосновения жесткого башмака с грузом.
Вйю ЗМенение ШИРИНЫ захватываемого груза приводит к измене-
на Управления силы Р и повороту когтей или кронштейнов шар-
баптНЫх башмаков. Нельзя допускать линейный контакт жестких
ПазонеКОВ (СМ' рис. 50) при изменении ширины груза в рабочем диа-
для^асчетные зависимости в указанных захватах справедливы
вер *°УТрукций, в которых исключен упор захватных органов в
ЮК> плоскость груза.
71
Рис. 55. Захват когтевой с гибкой, ветвью:
с —расчетная схема; б— узел А (план сил)
Рис. 56. Захват с затяжкой:
а —расчетная схема; б — узел А (план сил); и - звено I
(план сил)
6.6.8. В захватах с большим передаточным числом равно дейс1
вующая Р сил давления канатов на захватный орган направл6*1
близко к горизонтали, из-за чего часто конструктивно невозмоЯ'11
обеспечить такую самоустановку захватного органа, при котор0
предотвращен его упор в верхнюю плоскость груза.
79
Рис 57. Захват а полиспастом: Рис. 58. Захват с постоянным передаточным числом:
расчетная схема; б —узел А (план сил); в — звено 1 а —расчетная схема; б — узел А (план сил); в — звено
(план сил) (план снл)
in
74
Рис. 61ч. Захват когтевой жесткий
а — расчетная схема; б—план сил
(план сил)
(р В захвате с дополнительным упором в верхнюю плоскость груза
Пр С’ 60) захватный орган не может быть повернут в положение,
УпОпКот°Р°м линия действия силы Р проходит через точку С, из-за
Ход а Точки В в груз. В этом случае линия действия силы Р про-
3gXgT ИаД точкой С, а в точке В возникает сила R взаимодействия
Мцт атного органа и груза, которая так же. как и сила G, стре-
я вЬ1толкнуть груз из захвата.
75
Рис. 63. Рычажный захват с убывающим передаточным
i числом:
а — расчетная схема; б — узел А (план сил); в — звено 1 (расчетная
схема); г — звено 1 (план сил)
Передаточное число захвата определяется по формуле
2/v
1 ~ G + 2R •
В табл. 8 величина i выражена через передаточное число io за?'
вата, в котором упор захватного органа в верхнюю плоскость грУз8
отсутствует. В формуле'для определения КПД р2 — коэффициеН1
трения между захватным органом и грузом в точке В.
6.6.9. Захват когтевой жесткий (рис. 61) отличается от захвЯ1'®
с гибкой ветвью только конструктивным исполнением звеньев.
6.6.10. Несимметричный рычажный захват (рис. 62) отличаетс’
простотой конструкции и сравнительно малым передаточным ч(1С”
лом.
76
Определение основных параметров типовых фрикционных захватов
77
00 _ Продолжение
Наименование захвата (рис.) Передаточное число i Сила сжатия N Усилия в элементах Коэффициент полезного , действия т]
Захват ногтевой жесткий (рис. 61) Т “tga 0,5Gtga "йСо II 1' to Сь. Т]=1
Несимметричный рычаж- ный захват (рис. 62) е+с Ь ' 0,5G , ч — (е+с) Р = В 1 ,, ^i^oi+ rfi2+Gdoi
' Gib *
Рычажный захват с убыва- ющим передаточным числом (рис. 63) ~Ь 0.5G , ч — (е±с) “Хэ Со IIII toib. —— — К 1 ^01+^136(13 + 5(^+1)^12+5^02 Gib k = —— lAB
Рычажный захват с совме- щенным шарниром (рис. 64) е+с Ь 0.5G , ч — (е+с) то же To же
Рычажный захват с возра- еч-с оч/';, » D j . стающим передаточным чи- а —т— +±с) । Р в1+Р1зб(1з+5(^ l)rfi2+5fedo2 слом (рис. 65) ° Gib 7 *** ы 1АВ Рычажные захваты для рас- е- : n r.G , . ^РмУ„а , Пр одолжение
Наименование захвата (рис.) Передаточное число i Сила сжатия N Усилия в элементах Коэффициент полезного действия т)
Цанговый захват (рис. 67) cos а—Hi sin ct С(=сумме гори- sin a+p.icos а зонтальных сил, г действующих на груз Эксцентриковый захват с _ 1 0 5G — P=0,5G)'!2+l 1—0,5pi-у Vi2+1 (рис. 68) b tg a ’ b Рычажно-полиспастный за- 2(яд+с G(no+0,5Gc — формула ( ) хват (рис. 69) b b Кулисный захват (рис. 70) 1 / a+^d ± X -г т 1— Hi"" Gib b Uina+^cosa (- 2 (sin a+p.2coS a) Gib \ ( a+jiid л f. cos«—p2sm a X'sin a+g2cos a 1 1 2 (sin a+p2cos a)
CD
Рычажно-эксцентриковый захват (рис. 71) a -4 — 0,5G (a + COS a \ c j S=4 — COS fl )
b b
Примечание. */1 = _2_ **B = V№+(0,5G)2; 2 COS a ***Iab > lBC —длины отрезков AB и ВС на рис. 65 67.
Рис. 64. Рычажный захват с совмещенным
шарниром:
а — расчетная схема; б— узел А (план сил)' в — аве-
но 1 (.расчетная схема); г—звено 1 (план сил)
Рис. 65, Рычажный захват с возрастающим, передаточ-
ным числом:
п - г,_-четная схема; б — учел Н (план сил); в — '
( счетная схема); * -звено 1 (план сил)
Рис. 66. Рычажные захваты для распора груза изнутри:
2 — с совмещенным шарниром; б — с убывающим передаточным
числом; в — с возрастающим передаточным числом
Рис. 67. Цанговый захват:
а —схема захвата; б — конус (расчетная схема); в — сегмент
(расчетная схема)
6.6.11. Захваты по рис. 63, 64, 65 близки между собой по к
структивной схеме и методике расчета. Они позволяют обеспечь’
большее передаточное число, чем предыдущий. В захватах по Л
63, 64 передаточное число при уменьшении толщины груза убыва
а в захвате по рис. 65 — возрастает.
Захват по рис. 64 отличается
него средние шарниры рычагов
ризонтальное звено отсутствует.
от захвата по рис. 63 тем, что
совмещены в один шарнир, а
Го.
Рис. 68. Эксцентриковые захваты;
а —захват с одним эксцентриком (расчетная схема); б — захват с
двумя эксцентриками (расчетная схема); в — построение логарифми-
ческой спирали
6.6.12. Рычажные захваты для распора груза изнутри (рис. 66
по конструктивной схеме и методике расчета близки к захватам
рис. 63, 64, 65. Они могут быть использованы для подъема грузе®
в которых имеется отверстие с большими размерами.
6.6.13. Цанговый захват (рис. 67) предназначен для подъем1
грузов, имеющих круглое отверстие достаточного диаметра.
Он состоит из конических сегментов, вставляемых в отверст1*'
груза, и внутреннего конуса, прижимающего сегменты к поверх
ности отверстия. Передаточное число захвата зависит от коэфф11
82
РРис. 09. Рычажно-полиспастный Зс®ат: _
а — расчетная схема; б — звено 2 (расчетная cxeiP’ 6 звено 1
(расчетная схема)
Чиента трения щ сеегментов о конус. При проётиРоввании захвата
следует избегать маалых углов а, при которых можеет произойти
заклинивание. Так 1как трение сегментов о коёс Учт,гено в форму-
1,16 Для определения! передаточного числа захваа» коэффициент по-
лезного действия прьинят т)=1.
6.6.14. Эксцентрииковый захват (рис. 68) сос,оит изз эксцентрика
Дсесткого башмак<а или из двух эксцентрике3» заключенных в
Щий корпус. Сжиьмающая сила захватов обои: ТИПОБв при равных
араметрах эксцентриков одинакова, однако з^ваты i второго типа
еспечивают вдвоем больший ход.
Постоянство углаа а давления эксцентрика н1 ГРУ31 при измене-
к толщины груза может быть достигнуто вы1олнеинием рабочей
83
Рис. 70. Кулисный захват: Рис. 71, Рычажно-эксцентрико-
-расчетная схема: б — звено 3 (расчетная схема); в —звено 3 (план сил); вый захват:
г-звено 1 (расчетная схема); д - звено 1 (план сил) а - схема захвата; б-узел А (план
сил); о — эксцентрик (расчетная
схема)
поверхности эксцентрика в виде логарифмической спирали (рис.
68,в). В этом случае передаточное число захвата постоянно, а на-
грузка, используемая при расчете прочности захвата, минимальна.
Примечание. В случае разных коэффициентов трения груза по эксцентри-
ку и по неподвижному башмаку в формулу (122) подставляется р,=Цэкс при
рэ> <^Цбаш, При Цэкс^>Цбаш,
Н = 0>5 ;Р-экс + Маш) , (147)
гд< Р-экс — коэффициент трения груза по эксцентрику;
Цваш — коэффициент трения груза по башмаку.
6.6.15. Рычажно-полиспастный захват (рис. 69) отличается от
захвата по рис. 61 наличием полиспаста, обеспечивающего значи-
тельное увеличение сжимающей силы.
6.6.16. Кулисный захват (рис. 70) включает рычажную систему
и кулисный механизм. Кулиса состоит из двух участков с разным
наклоном к вертикали. Участок с большим наклоном соответству-
ет нерабочей части хода, компенсирующей зазор между захватны-
ми органами и грузом.
Участок с меньшим наклоном используется для сжатия груза.
Придав этому участку соответствующую конфигурацию, можно
обеспечить постоянное передаточное число захвата в рабочем
диапазоне.
Формула для определения передаточного числа захвата учиты-
вает трение в кулисе, формула для определения КПД — только
трение в рычагах.
При выполнении камня кулисы в виде ползуна коэффициент
ц2 трения в направляющих принимается по приложению 4, при
Выполнении в виде ролика — по формуле (73), в которой пола-
га гея p2=f0.
6.6.17. Рычажно-эксцентриковый захват (рис. 71) включает
зажимное устройство, выполненное в виде сочетания рычажного
и эксцентрикового устройств.
7. РАСЧЕТЫ ПРОЧНОСТИ ОТДЕЛЬНЫХ
ЭЛЕМЕНТОВ ГРУЗОЗАХВАТНЫХ УСТРОЙСТВ
7.1. Стержни
7.1.1. Стержни грузозахватных устройств должны удовлетво-
рят. условиям прочности, устойчивости и жесткости. Условия
прочности и устойчивости проверяются по формуле
с<[а], (148)
о — расчетное напряжение, определяемое согласно указани-
ям настоящего раздела;
[о] — допускаемое напряжение, определяемое согласно разд. 3.
Проверка условий устойчивости производится только для сжа-
Ь1Х (п. 7.1.7) и сжато-изогнутых (пп. 7.1.8—7.1.11) стержней.
85
Условие жесткости, ограничивающее гибкость стержней, прй
дено в п. 7.1.6. 6‘-
7.1.2. Стержень относится к центрально растянутым или ц&
рально сжатым, если все действующие на него силы направлю
по центральной оси стержня (рис. 72,а) или отклоняются от д
на величину е, не превышающую указанной на рис. 73 величий
emax (величина етах соответствует 10%-ному превышению максЬ1
мального напряжения над средним).
При проектировании подвесок грузозахватных устройств Сл
дует по возможности обеспечивать работу распорных балок в'
центральное сжатие.
При определении эксцентриситета е необходимо учитывать нав
большие возможные отклонения размеров груза и грузозахватщу
го устройства от номинальных (рис. 72,6, в). Если эскцентриситет
превышает величину етах, то стержень относится к растянуто-изог-
нутым или сжато-изогнутым.
7.1.3. Расчетное напряжение при проверке прочности централь-
но растянутых и центрально сжатых стержней определяется цл
формуле
С =-5Т-
(149)
где N— растягивающая или сжимающая сила;
F — площадь поперечного сечения нетто (площадь сечения,
ослабленного отверстиями под болты, заклепки, оси
и т. п.).
7.1.4. Расчетное напряжение при проверке прочности растяну-
то-изогнутых и сжато-изогнутых стержней определяется по фор-
муле
а ==
(150)
(151)
которая для опасной точки стержня прямоугольного поперечного
сечения принимает вид
„ N . Мх Му
F J Wx r Wy
а для опасной точки стержня круглого (сплошного или трубчато-
го) сечения имеет вид
N
a — r
(152)
IF.
Здесь Мх, М. - изгибающие моменты относительно главных цент*
ральных осей сечения (для симметричных сечений^
относительно осей симметрии);
1Х, 1У — моменты инерции сечения нетто относительно те5!
же осей;
W х, Wy—моменты сопротивления сечения нетто относитесь'
но тех же осей;
х, у — координаты опасной точки сечения.
86
87
Формулы для определения моментов инерции и моментов '
ротивления распространенных сечений приведены в приложен^ I
7.1.5. Гибкость сплошностенчатого стержня постоянного Л I
ния, т. е. стержня, состоящего из одного элемента или составнг?"’
элементы которого соединены друг с другом вплотную или
прокладки (рис. 74), определяется по формуле
ги U&3)
где I — длина элемента (расстояние между опорами);
рг— коэффициент длины, учитывающий характер закреплено
концов стержня, определяемый по табл. 9;
ги — радиус инерции стержня.
Рис. 74. Сечения сплошностенчатых стержней
В формулу (153) подставляются следующие значения рад» са
инерции:
1) в случае, когда характер закрепления не препятствует поте-
ре устойчивости в плоскости минимальной жесткости (напри: ‘Р>
для одиночных уголков, закрепленных только по концам) — мини-
мальный радиус инерции;
2) в случае, когда рассматриваемый вид потери устойчивости
возможен только в определенной плоскости — относительно оси.
перпендикулярной к этой плоскости.
Радиус инерции сечения определяется по формуле
ги = ]/^₽, (154)
где /ер — момент инерции сечения брутто.
Расчет гибкости сквозного стержня, т. е. стержня, элементы К°'
торого соединены планками или решетками (рис. 75), а такЖс
расчеты соединительных элементов сквозного стержня производя1''
ся согласно [2], [3] или [4].
88
Коэффициент длины ц/
Таблица 9
Схема закрепления концоИ стержня Пример конструкции /<1
. Л-ГГ —у. S о,с
"———’
S г ’ к—' 5 ^4 \4 1
4 п
S t 44
—*
1 \ 1 /
S . — — —
•Л_ — **
। ✓* с ——II „-—- X” i г
Рис. 75
89
7.1.6. Условие жесткости стержня проверяется по формуле
Х<Хпр. (155)
Предельная гибкость сжатых стержней ограничивается
предотвращения потери устойчивости от случайных нагру3о^
(эксцентриситета, изгиба от собственного веса и т. п.). Предельная
гибкость растянутых стержней ограничивает их прогиб от собст.
венного веса и время затухания колебаний.
Предельные гибкости Хпр стержней грузозахватных устройств
составляют:
1) сжатые стальные стержни — 120;
2) сжатые алюминиевые стержни — 100;
3) растянутые стальные стержни — 150;
4) растянутые алюминиевые стержни — 120.
7.1.7. Расчетное напряжение при проверке устойчивости цент-
рально-сжатых стержней определяется по формуле
где Гбр— площадь сечения брутто (без учета местных ослабле-
ний отверстиями для болтов, осей и т. п.);
Ф — коэффициент продольного изгиба центрально-сжатых
стержней, определяемый по табл. 10 как функция гибко-
сти % стержня (п. 7.1.5).
7.4.8. Устойчивость сжато-изогнутых стержней постоянного
сечения в плоскости действия момента, совпадающей с плоскостью
симметрии, проверяется в следующем порядке:
1) определяется гибкость К стержня по п. 7 1.5;
2) определяется относительный эксцентриситет по формуле
т = (157)
где е — фактический эксцентриситет силы N внецентренносжатого
стержня;
W — момент сопротивления, вычисленный для наиболее сжа-
того волокна.
При продольно-поперечном изгибе в формулу (157) подставля-
ется величина
е =
W •
(158)
где М — максимальный изгибающий момент, действующий на стер-
жень.
При уточненном расчете стержня с шарнирно опертыми конца-
ми допускается подставлять в формулу (158) величину М, опреде-
ленную согласно [2] или [3];
90
Таблица 10
Коэффициент «р продольного изгиба для центрально сжатых стержней
—- Гибкость цементов 7 Сталь Алюминиевые сплавы
углеро- дистая низколеги- рованная АМгб-М АМг61-М Д16-Т
0 1„00 1,00 1,00 1,00 1,00
40 0.92 0,89 0,83 0,78 0,70
ЭД 0,89 0,84 0,73 0,66 0,57
60 0,86 0,78 0,63 0,56 0.46
70 0,81 0,71 0,54 0,46 0,35
80 0.75 0,63 0,46 0,39 0,29
90 0,69 0,54 0,39 0,33 0,23
100 0,60 0,40 0,33 0,29 0,19
ПО 0,52 0.39 0,28 0,24 0,15
120 0,45 0,33 0,24 0.20 0,13
130 0,40 0,29 0,2.1 0,17 0,11
140 0,36 0,25 0.18 0,15 0,10
150 0,32 0,23 0,16 0,13 0.08
,160 0,29 0,21, — — —
180 0,23 0,17 — — —
200 0,19 0,13 — — —
220 0.16 0,11 — — —
, Для стали марки ,10ХСНД <р в среднем меньше: для 7=40—60 на 3%, для
^=70—100 на 5%, Для 7>100 на 7%.
3) для стальных сплошностенчатых стержней вычисляется при-
ВеДенный эксцентриситет по формуле
т} — (159)
гДе — коэффициент влияния формы сечения, определяемый по
табл.11;
91
Коэффициент <р“" продольно-поперечного изгиба сплошностенчатых стержней
из сталей марок Ст 3, Ст 4 и сталь 20
Гибкость X
Значения <рвн при приведенном эксцент эиситете mi
0,25 0,50 0,75 1,00 1,25 1,50 1,75 2,00 2,50 3,00 3,50 4,00 5,00 7,00 10,00 20,00
40 0,85 0,74 0,07 0,61 0,56 0,52 0,48 0,45 0,40 0,36 0,32 0,29 0,24 0„18 0,14 0,07
50 0,82 0,71 0,63 0,57 0,53 0,49 0,46 0,43 0,38 0,34 0,30 0,28 0,23 0,18 0,13 0,07
60 0,79 0,67 0,60 0,54 0,50 0,4,6 0,43 0,40 0,36 0,32 0,29 0,20 0,22 0.17 одз 0,07
70 0,76 0,63 0,56 0,51, 0,46 0,43 0,40 0,38 0,33 0,30 0,27 0,25 0,21 0,16 0,12 0,07
80 0,70 0,59 0,52 0,47 0,43 0,40 0,37 0,35 0,31 0,28 0,26 0,24 0,20 0,16 0,12 0,07
90 0,65 0,55 0,48 0,44 0,40 0,37 0,35 0,33 0,29 0,27 0,24. 0,22 0,19 0,15 0,11 0,06
100 0,59 0,50 0,44 0,40 0,37 0,35 0,32 •0,31 0,28 Ю,25 10,23 0,21 0,18 0,14 0,11 0,06
120 0,45 0,41 0,37 0,34 0,32 0,30 0,28 0,26 0,24 0,22 0,20 0,19 0,17 0,13 0,10 0,06
140 0,36 0,34 0,31 0,29 0,27 0,25 0,24 0,23 0,21 0,19 0,1,8 0,17 0,15 0,12 0,10 0,05
160 0,29 0,28 0,26 0,24 0,23 0,22 0,21 .0,20 038 0,17 0,16 0,15 0,13 0,11 0,09 0,05
180 0,23 0,23 0,22 0,20 0,1.9 0,19 0,18 0,17 0,15 0,15 0,1(4 0,13 0,12 0,10 0,08 0,05
200 0,19 0,19 0,18 0,1.7 0,17 0,16 0,15 0Д5 0,14 0,13 0,13 0,12 0,11 0,09 0,08 0,05
1. Для сталей других марок с расчетным сопротивлением R коэффициенты
Примечания:
<рвя определяются по данной
таблице с заменой гибкости X условной гибкостью X |/ 2100
Марка стали 09Г2, 09Г2С 10Г2С1, 15ХСНД 10ХСНД
Я 2500 2900 3400
2. Значения срвя принимаются не выше значений ср, приведенных в табл. 10.
со
05
6) вычисляется расчетное напряжение по формуле
N
(!б0)
7) проверяется соблюдение условия формулы (148).
7.1.9. Устойчивость внецентренно сжатых стержней постоянно
го сечения из плоскости действия момента при их изгибе в плос'
кости наибольшей жесткости /Л>/у, совпадающей с плоскость^
симметрии, проверяется согласно [2], [3] или [4].
Для случая, когда моменты инерции 1Х и Is, отличаются друг
от друга незначительно, а расчетная длина стержня в плоско-
сти у не превышает расчетную длину в плоскости х, производить
проверку устойчивости по данному пункту не требуется.
7.1.10. Внецентренно сжатые элементы при изгибе в плоскости
наименьшей жесткости /у<Д и еу #=0 и при кроме про-
верки по формуле (160), должны проверяться на устойчивость
из плоскости действия момента как центрально сжатые стержни
по формуле
где ф* — определяется по табл. 10.
При проверки устойчивости по данному пункту не тре-
буется.
7.1.11. Устойчивость стержней, подверженных сжатию и изгибу в
обеих главных плоскостях, проверяется согласно [2], [3] или
7.2. Балки
7.2.1. К балкам грузозахватных устройств относятся элементы,
в которых преобладает изгиб, а в отдельных случаях — сдвиг или
кручение.
Условие прочности определяется формулой (148), а при чистом
сдвиге или кручении — формулой
х<К], (162)
где т — расчетное касательное напряжение, определяемое со-
гласно указаниям настоящего раздела;
[т] — допускаемое касательное напряжение, определяемое со-
гласно разд. 3.
Устойчивость балок грузозахватных устройств, как правило,
проверке не подлежит.
7.2.2. Расчетное напряжение в балках, изогнутых в двух плос-
костях, при наличии растягивающей или сжимающей силы N, опре-
деляется по формулам (150), (151), (152).
При изгибе в одной плоскости формулы (151), (152) принимают
вид
94
лично напряжения в балках, вызванные силой N, малы. В этих
учаях в формулах (151), (152) и (153) первый член можно
лпустить.
0 7.2.3. Для изгибаемых тонкостенных балок требуется проверка
аСательных'напряжений по формуле
г = ^-,
/6рЬ ’
(164)
где Q — перерезывающая сила;
Sct—статический момент (брутто) сдвигающейся части сече-
ния относительно нейтральной оси;
7бр— момент инерции (брутто) всего сечения;
б — суммарная толщина стенок сечения (одной — в одно-
стенчатой балке — рис. 76,а, двух — в коробчатой бал-
ке — рис. 76,6 и т. д.).
Рис. 76
Предварительно касательное напряжение вычисляется по приб-
лиженной формуле
’ = 4- (165)
При малой величине касательного напряжения уточнять его
по формуле (164) не требуется.
Для сечений балки, в которых одновременно имеют место вы-
сокие М и Q, суммарное напряжение определяется по формуле
/2 . 2
зи 4- лт2,
(166)
где Пи — нормальное напряжение изгиба (или изгиба с растяже-
нием).
В формулу (166) подставляются напряжения <ти и т в крайнем
волокне стенки (точка А на рис. 76).
Нормальное напряжение в точке А вычисляется по формуле
7.2.4. В балках, испытывающих кручение, касательное напряже-
ние определяется по формуле
мк
Wk'
(167)
гДе Мк — крутящий момент;
95
U7K — момент сопротивления кручению, определяемый по сип
вочному приложению. 1ра'
Моменты сопротивления кручению тонкостенных балок с
крытым профилем сечения принимаются согласно [4].
В грузозахватных устройствах не рекомендуется применят
тонкостенные балки открытого профиля, работающие на кручение
Расчетные напряжения в балках, испытывающих изгиб с kdv
чением, определяются по формуле (166) ру‘
Рис. 77
7.2.5. При изгибе коробчатых и двутавровых балок, имеющих
большую ширину и малую длину нормальные напряже-
ния распределены по ширине поясов неравномерно (рис. 77). Наи-
большие напряжения в полке по оси стенки будут такими же, как
и в верхних волокнах стенки, а дальше по ширине полки они бу-
дут убывать.
При расчете таких балок используется полезная ширина по-
лок Bi, распределение напряжения по которой принимается рав-
номерным.
При расчете используются приведенные выше формулы.
Полезная ширина балок всех профилей (двутавровые и тавро-
вые профили, коробчатые прямоугольного сечения), кроме швелле-
ров и уголков, для свободно опертых балок принимается равной
одной трети пролета, а у балок с заделанными концами — одной
шестой. У швеллеров и уголков полезная ширина полок вдвое
меньше.
7.2.6. Проверка местной устойчивости стенок и поясов произ-
водится только для тонкостенных балок с большими размерами
поперечного сечения. Она выполняется согласно [4].
Для балок, выполненных из стали СтЗ или стали 20, для кото-
рых соотношение высот поясов и стенок к толщинам соответствУ'
ет данным, приведенным на рис. 78, проверки местной устойчиво-
сти не требуется. Для стали других марок приведенные на рис. 78
соотношения следует умножить на , где R — расчетное со-
противление материала, принимаемое согласно примечанию к
табл. 12.
96
J*
Рис. 78
7.3. Кривые брусья
7.3.1. К кривым брусьям относятся элементы, у которых отно-
шение радиуса кривизны центральной оси (т. е. оси, проходящей
через центр тяжести сечения) к высоте сечения меньше пяти
(рис. 79).
При изгибе этих элементов нейтральная ось сечения не совпа-
дает с центральной, а распределение напряжений по высоте сече-
ния отклоняется от линейного закона, причем напряжения во внут-
ренних волокнах больше, чем у прямолинейных элементов, а в на-
ружных — меньше.
Для лучшего использования материала сечение кривых брусь-
Часто развивают по мере приближения к центру кривизны
'Рис. 80).
Заказ № 719
97
ТЗ.Ъ. Напряжение изгиба кривых брусьев вычисляется по ф
муле
„ _ 44 [ У 1 I
°H~FR I k0(R—y) ~ Ч’ (168)
где R - радиус кривизны центральной оси;
у — расстояние рассматриваемой точки сечения от центра^,
ной оси (если точка смещена от центральной оси к цеВт'
ру кривизны, то значение у положительно, в противном
случае — отрицательно);
k0 — коэффициент, зависящий от формы сечения
Напряжения изгиба в крайних волокнах определяются по фОр.
мулам: р'
М г Л1 . i
31и ~ FR Lo [R - Ч’ <169)
М г — й2 ,1
°2и “ яИ — Ч ’ (17°)
где fti, й2 — расстояния крайних волокон сечения до центральной
оси (см. рис. 79). В формулы (169) и (170) подстав-
ляются положительные значения hi и h2.
Как правило, лимитиру-
ет напряжение внутреннего
волокна.
Формулы для определе-
ния коэффициента k0 приве-
дены в табл. 13.
В табл. 14 приведены
числовые значения коэффи-
циента k0 для ряда соотно-
шений размеров сечений и
Рис 80
радиусов кривизны.
Таблица 13
Формулы для коэффициента kD кривого бруса
Эскиз сечения
*и=4-а2+4 «4+4-ие
О О /
Л
и — ——
2R
98
Продолжение
*О = ^Ц» + ^_И4+^.И6
h
U~ 2R
Центр
кривизны
ь R 1
«О =---------1
V г
________bifi + bjfj + b3f3___________
ft, 1п + fcj In ftg In -£-
кривизны
7*
99
Числовые значения коэффициентов k0 и кривого бруса
0,0039 1,10 0,0052 1,09 0,0045 1,09 0,0050 1,09 0,0052 1.09
0,0025 1,08 0,0033 1,07 0,0029 1,07 0,0032 1,07 0,0033 1.07
100
Таблица 15
Числовое значение коэффициента gj
7777 7777
X 1 X X X X
Ofitz X
\\/////Л г У//
0,5tz
tt ь л h 0 R h
0,6 (0,8 1,0 .1,2 1,5 2,0 . 3,0 5,0
0,5 0,05 0,50 1,52 1,30 1,22 1,17 1,13 1,09 1,06 1,03 0,75 1,6Ю 1,31 1,22 1,17 1,12 1,09 1,06 1,03 1,00 1,72 1,32 1,21 1,16 1,12 1,08 1,05 1,03
0,10 0,50 1,64 1,36 1,25 1,19 1,15 1,10 1,07 1,04 0,75 1,75 1,36 1,24 1,18 1,13 1,09 1,06 1,03 1,00 1,94 1,37 1,24 1,18 1,13 1,09 1,05 1,03
0,20 0,50 1,97 1,52 1,36 1,28 1,21 1,14 1,09 1,05 0,75 2,13 1,52 1,34 1,26 1,19 1,13 1,08 1,04 1,00 2,40 1„53 1,36 1,26 1,18 1,12 1,07 1,04
0,2 0,05 0,50 1,95 1,50 1,35 1,27 1,20 1,14 1,09 1,05 0,75 2,05 1,52 1,,36 1,27 1,21 1,15 1,09 1,05 1,00 2,16 1,54 1,36 1,28 1,21 1,15 1,09 1,05
0„Ю 0,50 1,94 1,49 1,34 1,26 1,20 1,14 1,09 1,05 0,75 2,07 1,51 1,34 1,26 1,19 1,14 1,09 1,05 1,00 2,22 1,52 1,35 1,26 1,19 1,13 1,08 1,05
0.20 0,50 2,13 1„58 1,40 1,30 1,23 1,16 1,10 1,06 0,75 2,30 1,59 1,39 1,30 1,22 1,15 1,09 1,05 1.00 2,49 1,60 1,39 1,29 1,21 1,14 1,09 1,05
Напряжения изгиба в крайних волокнах кривых брусьев могут
быть определены также по формулам:
I (171)
= (172)
гДе Вг— коэффициенты, учитывающие различие работы пря-
мых и кривых брусьев;
W2— моменты сопротивления (для сечений, симметричных
относительно центральной оси, 1(7, — W2).
В табл. 14, 15 приведены числовые значения коэффициента gi,
^численные для ряда соотношений размеров сечений и радиусов
кривизны.
101
Формулой (171) рекомендуется пользоваться при расчете сеч
ний, для которых коэффициент gi приведен в табл. 14, 15, форцЛ'
лами (169) и (170) — в остальных случаях.
д
Примечание Расчет сечений с < 1 РД не регламентируется.
7.3.3. Напряжение растяжения-сжатия кривого бруса опреде
ляется по формуле
N
ap = ~F’ (173)
где N — сила, нормальная к рассматриваемому сечению.
Касательное напряжение определяется по формуле (165).
7.3.4. Расчетные напряжения в крайних волокнах сечения, кото,
рые, как правило, являются лимитирующими, определяются по
формуле
а = Ор4-аи. (174)
Для тонкостенных брусьев проверяется расчетное напряжение
на уровне крайних волокон стенки, определимое по формуле (166).
Соблюдение условия прочности проверяется по формуле (148).
7.3.5 Допускаемое напряжение кривых брусьев сплошного се-
чения, выполненных из вязкой малоуглеродистой стали, опреде-
ляется согласно п. 7.4.8. в остальных случаях — согласно разд. 3.
7.3.6. Кривые брусья, в которых допускаемые напряжения оп-
ределяются согласно п. 7.4.8, подлежат дополнительной провер-
ке, как прямые балки (коэффициент gi = l), при допускаемых на-
пряжениях, определенных согласно разд. 3.
7.4. Крюки
7.4.1. В грузозахватных устройствах используются стандартные
крюки, выбираемые по следующим нормативным документам:
ГОСТ 6627—74;
ГОСТ 6628—73;
ГОСТ 6619—75;
ОСТ 24.090.49—79.
При этом в качестве крюков могут быть использованы следую-
щие звенья стропов по ОСТ 24.090.49—79:
k\ — крюки с замком;
kz — крюки без замка;
k$ — крюки с утопленным носком;
kp — карабины.
В случаях, когда из-за формы и размеров груза или по другим
соображениям использование стандартных крюков невозможно ил0
неудобно, допускается применение нестандартных крюков, расчег
прочности которых должен производиться по приводимой ниже
методике.
102
7 4.2. Расчет крюков может быть произведен по общим форму-
м кривого бруса, приведенным в п. 7.3.
'8 Обычно сила Р, действующая на крюк, проходит через центр
апвизны осевой линии крюка (рис. 81), а опасным является го-
ризонтальное сечение А—А. Формулы расчета таких крюков упро-
аются
а)
а — типы крюков; б — расчетная схема
7.4.3. Расчетное напряжение (алгебраическая сумма нормаль-
ных напряжений изгиба и растяжения) в любой точке сечения
1—А определяется по формуле
I расчетное напряжение в крайних волокнах — по формулам:
я р
l~ F k0Rt ’
Р h2
°2 ~ F kbR2’
(176)
(177)
103
4
где й0— коэффициент, определяемый по табл. 13 или 14,
Дь Да—радиусы кривизны внутреннего и наружного вопп,
(см. рис. 81). Кон
Для сечений, приведенных в табл. 16, 17 и 18, максималЬн
расчетное напряжение может быть определено по формуле °6
а~ F kp> (178)
где kF — коэффициент, характеризующий использование матерИа
ла сечения.
Таблица ,й
Значения коэффициента kF для коробчатого и двутаврового сечения
1 1 5 9,«3 9,80 10,56 11,53 12,59 13,69 14,82 15,97
1 1 10 9,83 9,80 1,0,56 11,53 12,59 13,69 14,82 15,97
1 2,5 5 6,98 7,07 7,67 8,40 9,19 10,01 10,86 11,70
1 2,5 10 6,90 7,10 7,75 8,52 9,34 10,19 11,05 11,92
1 5 5 5,88 5,99 6,52 7,16 7,84 8,55 9,27 9,99
1) 5 10 5,40 5,06 6,22 6,86 7,54 8,24 8,9,4 9,65
1 10 5 5,30 5,42 5,91 6,49 7,11 7,75 8,41 9,07
1 10 10 4,50 4,76 5,26 5,81 6,40 6,99 7,60 8,20
1,5 1 5 7,99 8,12 8,83 9,70 10,64 11,61 12,60 13,60
1,5 1 10 8,28 8,45 9,20 10,11 11,09 12,10 13,12 14,17
1,5 2,5 5 5,77 5,92 6,46 7,11 7,80 8,52 9,25 9,98
1,5 2,5 1,0 5,65 5,93 6,53 7,22 7,95 8,70 9,45 10„22
1,5 5 5 4,94 5,08 5,56 6,12 6,71 7,33 7,95 8,58
1,5 5 10 4,43 4,70 5,21 5,77 6,36 6,90 7,57 8,19
1,5 10 5 4,52 4,65 5,08 5,59 6,13 6,69 7,27 7,84
1,5 110 10 3,72 3,98 4,41 4,90 5,40 5,91 6,43 6,95
2 1 5 6,96 7,15 7,82 8,63 9,48 1'0,37 11,27 12,18
2 1 10 7,25 7,52 8,25 9,10 10,01 10,95 11,90 12,86
2 2,5 5 5,1,5 5,32 5,83 6,43 7,07 7,73 8,40 9,08
2 2,5 10 4,92 5,22 5,79 6,43 7,09 7,77 8,46 9,15
2 5 5 4,49 4,6,4 5,09 5,61 0,17 6,74 7,32 7,90
2 5 НО 3,90 4,18 4,64 5,16 5,70 6,24 6,80 7,35
2 10 5 4,15 4,29 4,70 5,18 5,69 6,21 6,75 —7,35
2 10 10 3,33 3,57 3,98 4,42 4,88 5,34 5,82 6,29
Примечание, ных волокон. . Знак «—» указывает, что лимитируе! ’ напряжение пару»
104
Таблица 17
Значения коэффициента kP для трапецеидального сечения
LaL
А й
0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1
03 7,53 7,67 7,87 8,10 8,35 8,60 8,86 9,12 9,38 9,63 0 4 7,84 7,94 8,12 8,34 8,57 8,81 9,06 9,31 9,56 9,80 0 5 8,25 8,33 8,49 8,69 8,92 9,16 9,40 9,65 9,90 10,14 0 6 8,71 8,76 8,91 9,11 9,33 9,57 9,82 10,07 10,31 10,56 0 7 9,20 9,23 9,37 9,56 9,79 10,03 10,28 10,53 10,78 11,03 08 9,70 9,71 9,85 10,04 1,0,26 10,51 10,76 11,02 11,27 11,53 0.9 1:0,22 10,22 10,34 10,53 10,76 11,00 11,26 11,53 11,79 12,05 1 10,75 10,72 10,84 11,03 11,26 11,52 11,78 12,05 12,32 12,59
Таблица 18
Значения коэффициента kP для круглого и эллиптического сечений
Ri/h
0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1
19,23 1,4,67 13,73 13,68 13,98 14,45 15,01 15,64 16,30 16,99
7.4.4. Напряжение в вертикальном сечении Б—Б крюка опре-
деляется исходя из того, что ветви стропов могут быть отклонены
От линии действия силы Р на угол а (см. рис. 8|,.
Нормальное напряжение в сечении (учитывающее растяжение
и Изгиб) вычисляется по формуле (176), (177) или (178), в кото-
рую вместо силы Р подставляется сила
. (179)
1 2 COS а
105
Если угол а не задан, то принимается а=45°.
Касательное напряжение определяется по формуле
2/; '
(180)
расчетное напряжение — по формуле (166).
7.4.5. Расчетное напряжение в сечении В—В хвостовой Час
крюка определяется по формуле (173), где Р — сила, направлю®
ная вдоль крюка (см. рис. 81), F — площадь сечения В—В
7.4.6. Расчетное касательное напряжение в резьбе определяете
по формуле
Р
ТT^ikmk\Hr ’ (181)
где — внутренний диаметр резьбы;
— высота гайки;
k\ — коэффициент полноты резьбы (отношение длины осно-
вания витка к шагу резьбы). Для метрической резьбы
£1 = 0,87, для трапецеидальной — = 0,65;
km— коэффициент, учитывающий неравномерность распреде-
ления нагрузки по виткам.
Для у до 9 — йт=5у; для 16>у > 9—£т=0,56, где d, s —
наружный диаметр и шаг резьбы.
Для крюков следует применять резьбу —^15.
7.4.7. Расчетные напряжения в проушине крюка определяются
согласно п. 7.6.
7.4.8. Допускаемые напряжения криволинейной части кованых
и штампованных крюков, выполненных из вязкой малоуглероди-
стой стали (сталь СтЗ или сталь 20), принимаются по табл. 19.
Таблица 19
Допускаемые напряжения криволинейной части кованых
и штампованных крюков
Допускаемое напряжение Режим работы .
Ручной привод Легкий и средний Тяжелый и весьма тяжелый
ст От Ст
1,05 1,30 1,65
Здесь от — предел текучести материала при растяжении, принимаемый п°
табл. 5.
Низкие запасы прочности приняты в связи с тем, что пластиче'
ские деформации внутренних волокон зева крюка, возникают15
при перегрузке, оказывают влияние на работоспособность крю1*
лишь при большом числе циклов.
106
gTo обстоятельство учтено изменением запаса прочности в за-
йсцмости от режима работы.
р остальных случаях (составные крюки; крюки, выполненные
других материалов, и т. п.) допускаемые напряжения опреде-
лится согласно разд. 3.
7.4-9- Допускаемое напряжение в прямолинейной части крюка
{ХВ0Гтовика по рис. 81), рассчитываемой на растяжение, прини-
мается а= -°г- -
(Высокий запас прочности принят в связи с трудностью полного
включения изгиба прямолинейной части).
7.4.10. Допускаемое касательное напряжение в резьбе при
расчете по формуле (181) принимается [т]=0,6[о], где [о] —
допускаемое напряжение по п. 7.4.9.
7.5. Звенья стропов
7.5.1. Звенья стропов выбирают по ОСТ 24.090.49—79 и другим
нормативным документам.
При необходимости применения специальных звеньев они рас-
считываются по приводимой методике.
7.5.2. Схемы звеньев стропов приведены на рис. 82. Расчет сво-
дится к раздельной проверке прочности звеньев при растяжении
(п. 7.5.3) и при изгибе (п. 7.5.4).
7.5.3. Расчетное напряжение растяжения определяется по фор-
муле
Р
2Fsin₽
(182)
где F — площадь поперечного сечения прутка звена;
р — угол наклона прутка к горизонтали.
Допускаемое напряжение растяжения определяется по фор-
муле
(183)
'де ов—временное сопротивление материала, определяемое по
табл. 5.
Условие прочности на растяжение проверяется по формуле
(148).
7.5.4. Изгибающие моменты в звеньях определяются по форму-
лам, приведенным в табл. 20.
Расчетные напряжения изгиба, возникающие в крайних волок-
нах прутка звена (см. рис. 82), определяются по упрощенным фор-
мулам:
для внутреннего волокна
МЛ1 R
°1И- !х R-h, :
(184)
107
Рис. 83
108
Таблица 20
Изгибающие моменты в звеньях стропов
фоРма звена (рис. 82) Соотношение основных размеров Основная расчетная формула
Крузовая петля овоид- ₽=75° Zi=l,5Z? Afmax——0.28РР
грузовая петля треуголь- ная II II ЗвЧ} Мтах = -0,25РЯ
Икольно с прямоугольной частью — ЛА Г) О ^*4“^ Л1тах- IR 2l+nR
1 — кольцо овоидное Р = 75° JRi=2/?2 Л=.1,5Л1 Л4тах=—0.28РЯ,
( - г- кольцо круглое — Afmax-=—0.318Р7?
е - .кольцо треугольное ₽=60° Rt=2R2 h=l,5R; Л/тах = —0.325РЯ1
для наружного волокна
— Mh2 R
~R + th’
где R радиус кривизны центральной оси сечения с максималь-
ным изгибающим моментом.
Для звеньев по рис. 82,а, е в формулы (184), (185) следует
вместо R подставлять значение большего радиуса — Изги-
бающие моменты подставляются в формулы с соответствующим
знаком. Положительное значение напряжения соответствует растя-
жению волокон, отрицательное — сжатию.
Сечение прутка, как правило, симметрично относительно оси х
Ри< 83,6). В этом случае проверяется напряжение только внут-
' о..его волокна прутка по формуле
С1И— Я—0,.5Л (186)
в формулы (184) — (186) величина момента подставляется с
Учетом знака, остальные величины — положительны.
Допускаемое напряжение изгиба определяется по формуле
п
°Т
= (187>
г^е От - предел текучести материала, определяемый по табл. 5;
109
обобоюв / г г 5 л =--------
......... *4,
Рис. 84. Зависимость коэффициента эквивалент-
ности от кривизны бруса (материал — сталь,
<Тт=ЙОО—260 МПа):
1 — прямоугольное сечение; 2 — круглое сечение; .3 —
эллиптическое сечение; 4 — трапецеидальное сечение
ет— коэффициент эквивалентности, зависящий от величин!»1
~ Для ПРЯМОГО бруса %=1.
Для стали СтЗ по ГОСТ 380—71 и стали 20 по ГОСТ 1050—74
коэффициент х принимается по рис. 84, для других материалов
согласно [1].
(Коэффициент эквивалентности ет, больший единицы, и низкий
запас прочности (1,25) учитывают то обстоятельство, что некото*
рые остаточные деформации внутренних волокон звеньев не прив°'
дят к потере их работоспособности).
но
Условие прочности при изгибе сводится к тому, чтобы напря-
нце О1и и абсолютная величина напряжения о2и были мень-
7.6. Проушины
7.6.1- Изгибающие моменты и напряжения в сечениях проушины
(рис 85) зависят не только от силы Р и площади F сечения про-
-т.иины, но и от соотношений размеров-^; , а также вели-
.цны азора е между отверстием проушины и осью. Увеличение раз-
мера Ь, при прочих равных данных, приводит к уменьшению изги-
бающего момента и напряжения
внутренних волокон сечения
А-А.
При малом зазоре ® наиболь-
ший изгибающий момент имеет,
место в сечении А—А. При боль-
-эм зазоре е максимальный из-
гибающий момент и напряжение
ко центрической проушины (а=
^Ь) возрастают и имеют место
в г -чении Б—Б.
7.6.2. Расчет проушины, неза-
висимо от характера разрушения
(разрыв по сечениям А—А, Б—
Б, Г—Г или срез по сечению
В В), производится по условно-
му напряжению разрыва сечения
А А,
с — ЛПр — ^пр 2^5 > (188)
Р
Рис 85
Где Р—растягивающая сила;
F— площадь сечения А—А;
6 - толщина проушины;
а — размер, показанный на рис. 85;
kn, — коэффициент, учитывающий влияние изгибающего момен-
та, перераспределение напряжений, вызванное кривизной,
и др. факторы.
7.6.3. При проектировании проушины рекомендуется принимать
I 1,3 а.
При соблюдении этой рекомендации, выполнении проушины из
Малоуглеродистой стали, максимальном зазоре между проушиной
й осыю «sC 0,003 с?^2 мм принимается knp= 1,3.
Это же значение knP можно принимать при 1,3 а.
7.6.4. Коэффициент knp проушин грузозахватных устройств,
предназначенных для редких операций и выполненных из мало-
углеродистой стали при малом зазоре в соединении (не выше зна-
111
чений, соответствующих ходовой посадке 4-го класса
размере е=с, может быть определен по формулам:
и
— у ’•
ф = 0,56 + 0,46 — - 0,1 4-•
1 ’ а а
ТОЧНОСТИ)
<189)
(190)
7.6.5. Коэффициент &пр концентрических проушин (рис. 86) оп-
ределяется по графику (рис. 87) в зависимости от соотношения
размеров и угла контакта апр (рис. 88).
Угол контакта апр принимается по графику (см. рис. 88) в зави-
симости от величины
= 091)
где Е — модуль упругости материала (для стали £=2,1 • 105 МПа).
При предварительных расчетах можно принимать апр=20°.
7.6.6. Соблюдение условия прочности проверяется по формуле
(148).
Допускаемые напряжения при определении ЛПР по пп. 7.6.3 и
7.6.4 принимаются согласно разд. 3, при определении />пр по
п. 7.6.5 — так же, как и для изгибаемых частей крюков (п. 7.4.8).
Примечание. При использовании данных пп. 7.6.3 и 7.6.4 не исключены
остаточные деформации в весьма малой зоне, не оказывающие существенного
влияния на прочность проушин, выполненных из пластичной стали,
Данные по п. 7.6.5 учитывают максимальные напряжения, дей-
ствующие в ограниченной зоне, которые для пластичного материа-
ла при сравнительно небольшом числе циклов не опасны. Это об-
стоятельство в определенной степени учтено назначением увеличен-
ных допускаемых напряжений, зависящих от режима работы.
7.7. Сварные соединения
7.7.1. Размеры сварных швов следует назначать возможно мень-
шими по расчету на прочность или по технологическим условиям.
7.7.2. Сварные стыковые швы, воспринимающие продольные
силы и имеющие допускаемое напряжение, равное допускаемому
напряжению материала свариваемых элементов, должны выпол-
няться прямыми с подваркой корня и выводом концов шва за пре-
делы стыка. Такие швы считаются равнопрочными с основньпм
металлом и не требуют проверки расчетом.
При применении в стыковых швах наплавленного металла, Д°'
пускаемое напряжение которого ниже, чем допускаемое напряже-
ние материала свариваемых элементов, швы могут выполняться
прямыми или косыми. Равнопрочным с целым элементом будет ко-
сой шов, направленный под углом а^60° к осевому усилию. При"
менение стыковых накладок не рекомендуется.
112
Рис. 87. Определение knp для концентрических
проушин по рис. 86
Рис. 88. Определение угла контакта ап₽
Заказ № 719
113
Напряжение в прямых стыковых швах, не отвечающих указ ным выше требованиям, проверяется по формулам: 1) при растяжении, сжатии Р р
2) при изгибе 3) при срезе а 51st 1 II к3 ' *1 в О' 1 II > О U92) (193)
/ш» ’ где Р, М, Q — продольная сила, изгибающий момент, (194) перерезы-
вающая сила, действующие в сечении;
Гш площадь сечения шва;
Ц7Ш — момент сопротивления сечения шва;
/ш — момент инерции сечения сварного шва;
/щ, 6 расчетная длина и толщина шва;
£ш — статический момент относительно нейтральной оси
части сечения сварного шва, расположенной выше
(ниже) уровня рассматриваемых волокон.
Расчетная длина шва I принимается фактической, если концы
шва выведены на выводные планки, в противном случае длина пта
уменьшается на 10 мм. Толщина стыкового шва должна быть
равна наименьшей из толщин свариваемых листов.
Стыковые швы, удовлетворяющие условию прочности, одновре-
менно удовлетворяют и условию выносливости.
7.7.3. Угловыми швами выполняются соединения внахлестку,
впритык (тавровое) или в угол.
Все соединения с угловыми швами при работе на осевую про-
дольную силу проверяются на срез по формуле
Т = —-—, (195)
ЕЛШ/Ш
где Р — расчетное усилие;
/гш=/ша,— расчетная высота сечения шва;
/ш — коэффициент, зависящий от соотношения размеров
катетов шва (табл. 21);
а,Ъ — размеры меньшего и большего катетов шва.
При расчете сварных соединений с угловыми швами, воспри-
нимающими изгибающий момент, необходимо рассмотреть два слу-
чая:
1) изгибающий момент воспринимается одним швом;
2) изгибающий момент воспринимается двумя швами.
В первом случае напряжения определяются по формуле (193)-
При расчете сварных соединений для второго случая определя-
ют силы, воспринимаемые швами
р о96)
где Н — расстояние между центрами тяжести сварных швов.
114
Таблица 21
Коэффициент
Отношение катетов шва 6/а 1,0 1,5
рсчна* * полуавтоматическая сварка дрто атическая сварка 07/0,4 0,8/0,6
1,0/0,7 1,0/0,9
Чи .штель — плоские швы, знаменатель — вогнутые.
Затем рассчитывают сварные швы по формуле (195).
7.7.4. Угловые швы в местах соединения поясов и стенок балок
вутаврового и коробчатого сечений рассчитываются по формуле:
I 097)
где Qn — наибольшая перерезывающая сила в рассматриваемом
сечении;
S„ — статический момент (брутто) пояса относительно нейт-
ральной оси;
/бР — момент инерции (брутто) всего сечения;
h — расчетная высота сечения шва.
7.7.5. Допускаемые напряжения при расчете сварных швов оп-
ределяются по табл. 2.
7.7.6. Рекомендации по проектированию сварных швов приве-
дены в [4], [6].
8. РАСЧЕТ УСТОЙЧИВОСТИ ПОДВЕСОК
8.1. Ряд грузозахватных устройств для поддонов, колесной тех-
ники и др. выполнен по схемам, приведенным на рис. 89,а, б.
Пр.и случайном наклоне груза (неизбежном при эксплуатации)
возникает момент Могре, стремящийся вернуть устройство в перво-
начальное положение (рис. 89,в), либо увеличивать наклон (рис.
89,г).
В последнем случае может произойти падение груза из устрой-
ства, или повреждение груза, вызванное его упором в вертикаль-
ные ветви стропов.
Конструкция подвески должна обеспечивать устойчивое равно-
Несие. т. е. возврат устройства в первоначальное равновесное по-
ложение при случайном наклоне груза.
8.2. Условие устойчивости устройств по рис. 89,а, б опреде-
ляется по формуле
H>h, (198)
Де Н — расстояние по вертикали от точки подвеса захвата к кра-
новому крюку до точки крепления вертикальных ветвей
стропа к поперечной балке подвески;
и 115
Рис. 89. Подвески:
а — Л<Н подвеска устойчива; б — li>H подвеска неустойчива;
в — момент Ge восстанавливает равновесие; г — момент Ge опро-
кидывает подвеску; д — трапецеидальная подвеска; е —треуголь-
ная подвеска (устойчивость обеспечена); ж — трапецеидальная
подвеска
h — расстояние по вертикали между центром тяжести груза
и местом его застропки.
8.3. Соблюдение условия формулы (198) обеспечивает также
устойчивое равновесие устройств, выполненных по рис. 89,5.
Устойчивость равновесия устройства, выполненного по рис. 89,е,
всегда обеспечена и проверки не требует.
8.4. Проверка устойчивости равновесия устройства по рис. 89Х
или определение минимального размера Н устройства по рис. 89,5
могут быть произведены графически.
116
ПРИЛОЖЕНИЕ 1
(обязательное)
ОСНОВНЫЕ ТЕРМИНЫ И ОБОЗНАЧЕНИЯ,
ПРИНЯТЫЕ В РД
Таблица 1
Термины, расположенные в алфавитном порядке
№ п/л Термин Обозначение Применены в разделе
1 Вес захвата Сз
2 Вес захвата с грузом G
3 Вес захвата с противовесом Gi 5
•4 Вес груза Grp 5
5 Вес вилы G'B 5
6 Вес двух вил GB 5
7 Вес вилы приведенный GnpHB 5
8 Вес сопрягаемых частей, передаваемых на G/в 5
вилу
9 Вес противовеса Gn 5
10 Вес минимального груза, поднимаемого за- Gmin 5
хватом
11 Вес траверсы GT 5
12 Высота захвата до точки подвеса Уо 5
13 Высота башмака h 6
14 Высота сечения шва расчетная йш 7
15 Высота гайки Wr 7
'6 Грузоподъемность грузозахватного устрой- Qh 2
ства, номинальная
17 Гибкость стержня A 7
18 Гибкость стержня предельная Anp 7
19 Давление удельное в шарнире P 5,6
20 Давление удельное допустимое Гр1 5,6
21 Давление удельное между башмаком и p 6
грузом
22 Длина пружины установочная /уст 5
23 Длина пружины рабочая Zp 5
24 Длина элемента I 7
'5 Длина сварного шва /ш 7
?6 Диаметр оси ролика dp 5
.7 Диаметр ролика, блока, оси D 4,5,6
8 Диаметр каната, проволоки d 4,5
9 Диаметр пружины (наружный) Ph 5
: 0 Диаметр резьбы внутренний di 7
61 Диаметр резьбы наружный d s 7
32 Жесткость одного витка пружины 21 5
33 Зазор диаметральный между проушиной и 8 7
осью
ч Коэффициент запаса прочности по разру- np 3,4
шающей нагрузке
35 Коэффициент запаса сжимающей силы n 6
36 Коэффициент запаса прочности по пределу /2т 3
текучести
37 Коэффициент запаса прочности по пределу nT 3
выносливости
38 Коэффициент динамичности Пд 3
117
« Продолжение тп
№ п/п Термин Обозначение / Применен^ в Разделе
39 Коэффициент, учитывающий неоднород- ность материала и неточность расчетной схемы Пн 3
40 Коэффициент условий работы «Г1 3
41 Коэффициент срока службы «Г2 3
42 Коэффициент концентрации напряжений для симметричного цикла (эффективный) ka 3
43 Коэффициент чувствительности металла к асимметрии цикла lb 3
44 Коэффициент запаса установочной силы kycT 5
45 Коэффициент трения в подшипнике, шар- нире 5
46 Коэффициент трения в направляющих 1>2 5,6
47 Коэффициент трения верхней кромки груза о рычаг захвата Из 6
48 Коэффициент трения захватного органа по грузу M- 6
49 Коэффициент дополнительных сопротивле- ний ^доп 5
50 Коэффициент длины ю 7
51 Коэффициент продольного изгиба <₽ 7
52 Коэффициент влияния формы сечения 7
53 Коэффициент продольного изгиба внецент- ренно сжатых стержней фВН 7
54 Коэффициент для расчета кривого бруса ko 7
55 Коэффициенты, учитывающие различие ра- боты прямых и кривых брусьев В1> 5а 7
56 Коэффициент, характеризующий использо- вание материала сечения k F 7
57 Коэффициент полноты резьбы k\ 7
58‘ Коэффициент, учитывающий неравномер- ность распределения нагрузки по виткам &т 7
59 Коэффициент эквивалентности е," 7
60 Коэффициент неравномерности напряжений в проушине 7
61 Коэффициент полезного действия зажимно- го устройства 11 6
62 Коэффициент полезного действия блока Г]бл 6
63 Коэффициент полезного действия полиспа- ста Пп 6
64 Коэффициент полезного действия откло- няющих блоков 6
65 Коэффициент сопротивлений в блоке а>бл 6
66 Координаты Ц.т. захвата без противовеса Хз> Уз 5
67 Координаты ц.т. захвата с противовесом XGV Ув1 5
68 Координаты ц.т. груза *Ч7гр’ У Grp 5
69 Координаты ц.т. противовеса Хя., Уп 5
70 Координаты ц.т. захвата с грузом хо< Уа 5
71 координаты Ц.т. траверсы Хт» Ут 5
72 Координаты ц.т. вил хв, ув 5
73 Координаты опасной точки сечения х,у 7
74 количество ветвей стропа 4
75 Количество ветвей фрикционных полиспаст- ных захватов в сечении А—А (рис. 46) 6
76 Количество пружин рычага захвата 1пр 5
118
Продолжение табл. 1
Х? п/п Термин Обозначение Применены в разделе
п Количество рабочих витков пружины £вит 5
78 Количество шарниров зажимного устройст- ва захвата m 6
т9 Количество блоков ^бл 6
80 Кратность полиспаста tn 6
81 Линейные размеры 1, а, Ь, с, d, е
82 Моменты изгибающие относительно главных центральных осей мх, му
83 Моменты инерции относительно главных центральных осей (нетто) Аг- 1у
м Момент инерции относительно главной цент- ральной оси (брутто) 7бр 7
85 Моменты сопротивления сечения (нетто) относительно главных центральных осей Wx, Wy
86 Момент статический сдвигающейся части сечения относительно нейтральной оси Set 7
87 Момент статический (брутто) пояса отно- сительно центральной оси S- 7
88 Момент статический относительно нейтраль- ной оси части сечения сварного шва, рас- положенной выше (ниже) уровня рассмат- риваемых волокон £ш 7
89 Момент крутящий MK 7
90 Момент сопротивления кручению wK 7
91 Модуль упругости E 7
92 Напряжение расчетное c 4
93 Напряжение изгиба СГи 2
94 Напряжение растяжения Op 2
95 Напряжение смятия Осм 2
96 Напряжение касательное T 2
97 Напряжение допускаемое нормальное [a] 2
98 Напряжение допускаемое касательное W 2
99 Напряжение допускаемое по пределу вынос- ливости 3
100 Предел прочности материала <Tb 3,7
101 Предел текучести материала при растяже- нии От 2
102 Предел выносливости при симметричном цикле 0-1 3
103 Показатель степени кривой выносливости m 3
104 Плечо трения качения kj. 5;6
105 Площадь поперечного сечения — нетто F 7
106 Площадь поперечного сечения — брутто F ep 7
107 Радиус инерции r« 7
108 Размер меньшего катета шва #IH 7
109 Размер большего катета шва Ьш 7
1 Расстояние по вертикали между ц.т. захва- та с грузом и подвеской hG 5
111 Расстояние между точками А и В рычага захвата lAB 6
112 Расстояние крайних волокон сечения до центральной оси fit, h2 7
113 Реакции взаимодействия звеньев RiJ 6
114 Реакции взаимодействия звеньев (абсо- лютная величина) 6
115 Работа пружин при подъеме груза A 5
119
Продолжение табл ]
№ п/п
Термин
Обозначение Применены
< в разделе
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
120
Радиус кривизны центральной оси
Радиус кривизны нейтральной оси
Радиус кривизны внутреннего и наружного
волокон
Расстояние точки сечения до центральной
оси
Сила уравновешенных пружин установоч-
ная
Сила уравновешивающих пружин рабочая
Сила одной пружины установочная
Сила одной пружины рабочая
Сила пружины максимальная
Сила вертикальная для перемещения вил
Сила горизонтальная для наклона вил
Силы сжатия предельные:
1,) нормальная
2) горизонтальная
Сила сжатия горизонтальная от веса гру-
за
Сила сжатия горизонтальная от веса за-
хвата
Сила перерезывающая
Скорость угловая звена i относительно зве-
на j (абсолютная величина)
Скорость угловая звена i относительно зве-
на j
Скорость подъема шарнира, соединенного с
крюком крана
Скорость точки А относительно точки В
Сопротивление удельное перемещения ро-
лика
Срок службы грузозахвата в годах
Толщина сечения суммарная
Толщина сварного шва
Угол наклона ветви стропа к вертикали
Угол наклона вил к горизонтали
Угол наклона силы, действующей на за-
хватный орган полиспастного захвата к го-
ризонтали
Угол между плоскостью, образуемой двумя
ветвями стропов и вертикалью
Угол между проекцией вертикали на плос-
кость, образуемую двумя ветвями и ветвью
Угол огибания блока канатом
Угол контакта в проушине
Угол трения захватного органа по грузу
Угол наклона боковой поверхности груза к
вертикали
Усилие, действующее на элемент
Усилие допускаемое
Усилие разрывное (разрушающая нагруз-
ка)
Усилие в ветви стропа
Усилие в гибких элементах стропов
R 7
г 7
Ri, Rz 7
У 7
Syct 5
sp 5
Pl 5
Pi 5
Рз 5
Р» 5
Pr 5
Vnp 6
Nnp 6
6
K03 6
Qn 7
1 «'</ 6
WlJ 6
vo 6
VAB 6
fo 5
L 3
6 7
б ш 7
a 4
«С 5
₽ 6
₽ 4
T 4
ССбл 6
ttnp 6
P 6
a 6
S 2
r«l 2
Sp 2,5
s 4
T, V, P 4
Окончание табл. 1
№ п/п Термин Обозначение Применены в разделе
154 Число циклов работы грузозахватного уст- Z 2
роиства
155 Число циклов базовое 2о 2
156 Число циклов работы грузозахвата в час гч 3
157 Число часов работы грузозахвата t4 3
158 Число передаточное зажимного устройства i 6
159 Число передаточное допускаемое fl] 6
160 Шаг резьбы 3 7
161, Ширина башмака b 6
162 Эксцентриситет силы e 7
163 Эксцентриситет наибольший fynax 7
164 Эксцентриситет относительный tn 7
165 Эксцентриситет приведенный tni 7
Таблица 2
Обозначения величин, расположенные в алфавитном порядке
Обозначение № no табл. 1 Обозначение № по табл. 1 Обозначение № по табл. 1
Латинский алфавит А Ы5 ho 110 mi 165 а. Ь, с, d 81 / / 83 Mip 128 Ю8 V 84 ^Огр 129 b 161 i 158 Nn 130 109 [i] 159 „ 35 £ on 'в 74 «Р 34 ^.к 1в"Т 77 ПТ 36 j ?? 4бл 79 пЛ 38 ^1 30 !ф 75 п 40 <£р 2? in 80 41 Г о К* Г°4 пк 39 е К, 42 Рв 125 е 162 /густ 44 Рг 126 еТх J37 *ДОП 49 Р 153 / Ю5 k0 54 Рх 122 ff6₽ 106 k 56 p2 123 133 ki 57 P3 124 io I3 ; 1 kLP 137 M 20 °', 3 I 24 QH 16 с c Gct 22 1'3.1 €• F § 4 a t lit GT 11 Mx, My 82 Rlr’R2 Jo7 Hr 15 MK 89 f“ Л 13 m Щ4 hi, hi 112 m 78 d 14a hw 14 m 103 S 152
121
* Продолжение тпв„
Обозначение № no табл. 1 Обозначение Ns по табл. 1 1 Обозначение i "— № по Табл. 1
rsi «Sct 150 86 90 133 Уз Ут 66 67
«$п •SycT 87 120 \™lj\ 132 65 У Grp 68
Sp 121 x3 66 Уп 69
SP 150 xai 67 Ус 70
5 88 160 XGrp 68 69 Ут Уз 71 72
T 153 70 У 73
V 153 G У 119
Vnp 127 71 Z1 32
VG 134 Xb 72 2 154
VAB 135 X 73 20 155
Wx, 85 Уо 12 гч 156
Греческий а л ф а в и т
a 140 Т]бл 62 О 92
a 148 T]n 63 Ои 93
aG 141 Т]от 64 Ор 94
145 Or 43 С^см 95
146 X 17 м 97
142 Хпр 18 ГсЧ 99
₽ 143 И1 45 Ов 100
V 144 Ц2 46 Пт 101
6 138 Из 47 G-1 И02
бш 139 33 59 К 48 т 96
e И/ 50 Гт] 98
о 61 51, 55 Ф 51
Од 52 р 147 (рви 53
ПРИЛОЖЕНИЕ 2
(обязательное)
ЛИТЕРАТУРА, НЕОБХОДИМАЯ ПРИ ПОЛЬЗОВАНИИ РД
1. ВНИИПТмаш. Расчеты крановых механизмов и их деталей. Изд. 3-е. М-,
Машгиз, 1971.
2. Нормы проектирования. Алюминиевые конструкции. СНиП П-24—74. Гос-
стройиздат, 1975.
3. Нормы проектирования. Стальные конструкции. СНиП П-В. 3—72. М-,
Госстройиздат, 1974.
4. Справочник по кранам. Под редакцией А. И. Дукельского. Т. 1, изд. 2-е.
Л., Машгиз, 1971.
5. Справочник по кранам. Под редакцией А. И. Дукельского. Т. 2, изд. 2-е-
Л., Машгиз, 1972.
6. С и р е н к о А. Н., К р у м б о р д т М. Н., Б а г р я н с к и й К. В. Расчет свар-
ных соединений и конструкций. Примеры и задачи. Киев, «Вища школа», 1977.
122
ПРИЛОЖЕНИЕ 3
(обязательное)
допускаемые напряжения для заклепочных
И БОЛТОВЫХ СОЕДИНЕНИИ СТАЛЬНЫХ КОНСТРУКЦИИ
Род соединения Род напряжения Марки стали заклепок и болтов
Низколе- гированная Ст2, СтЗ
в конструкциях из стали
низколегированной СтЗ, Ст4
Заклепки с полукруг- Срез 0,80[аР] 0,55 [Пц] 0,80[<тР1 лой головкой Смятие 2,00(сгР1 1,40Г<тр] 2,00ГоР] Растяжение (отрыв 0,60[<тр] O^OftTpl ОДОГо’р] головок) Болты чистые и полу- Растяжение 0,70[сГр] 0,50 [аР] 0,70Г<гР] чистые Срез 0,70faP] 0,50ГаР] 0,70|at | Смятие 2,00|'oPj 1,40[<тР] 2,00[<тР] Болты черные Растяжение — 0,50Г<тР1 0,70[аР1 Срез — 0,35 ГаР] 0,50 [<тР| Смятие — 0,80 [<тР] l,00fcrp]
Анкерные болты Растяжение
0,45 Г<Тр] 0;65[ст₽1
Примечания: 1. Для монтажных заклепок допускаемые напряжения
понижаются на 10%.
2. Для заклепок с потайными или полупотайными головками допускаемые
напряжения понижаются на 20%.
ПРИЛОЖЕНИЕ 4
(обязательное)
КОЭФФИЦИЕНТЫ ТРЕНИЯ ПОДШИПНИКОВ
Тип подшипника Материал и тип трущихся пар Коэффициент Ц1 Смазка отсутствует густая
сталь по стали 0,14—0,10 0,09—0,11 Скольжения сталь по чугуну 0,11—0,13 0,07—0,09 сталь по бронзе 0,10 0,06—0,08
Качения
шариковые
роликовые
игольчатые
0,01—0,015
0,015—0,020
0,05—0,07
123
ПРИЛОЖЕНИЕ ч
(рекомендуе>1о^
ПРИМЕРЫ РАСЧЕТА
Пример 1 Расчет цепного стропа общего назначения
Подобрать симметричный трехветвевой цепной строп общего назначения Дл
подъема груза массой Q=3200 кг. При этом в стропе возникает усилие
=3200-9,8=32000 Н = 32 кН (3,2 тс). \ "
По ОСТ 24.090.48—79 принимаем строп ЗСЦ-3,2 с допускаемой нагрузили
32 кН (3,2 тс). и
Строп может быть использован при угле наклона ветвей к вертикали а^45«
Пример 2. Расчет специального цепного стропа
Подобрать специальный симметричный трехветвевой цепной строп для подъе-
ма груза массой Q = 3200 кг с углом наклона ветвей к вертикали а=25°.
Усилие в ветви стропа (формула 1,6)
„ Qg 3200-9,8 117КЛИ „ 17, ,
S = —= 11750 Н 11,75 кН (1,175 тс).
zB cos а 3 cos 25 ' '
В стропе с углом наклона ветвей к вертикали си=45° натяжение 3=
= 11,75 кН (1,175 тс) возникает при подъеме груза массой
SzBcosai 11750-3cos45°
Qi = —-------------------------= 2490 кг .
9,8
Принимаем строп ЗСЦ-2,5 по ОСТ 24.090.48—-79 с допускаемой нагрузкой
25 кН (2,5 тс).
Как видно из примера, уменьшение угла наклона ветвей позволило перейти
к меньшему типоразмеру стропа.
Пример 3. Расчет канатного пенькового стропа
Подобрать пеньковый строп для подъема груза массой Q=3200 кг. Строп
охватывает груз «на удав» (см. рис. 10,6). Количество ветвей — 2-
Усилие в одной ветви стропа (формула 16)
У = -^- = 32^» 16000 /У.
zB cos а 2-1
Необходимый запас прочности каната из растительных волокон (п. 5.3.3)
пр=8
Необходимое разрывное усилие каната (формула 10) Sp=Snp=16000-8=
= 108000 Н = 108 кН (1.0,8 тс).
Выбираем канат пеньковый смоленый с разрывным усилием 188 кН
(1880 кгс) по ГОСТ 483—75.
Размеры каната в мм:
по окружности — 222;
по диаметру — 71,7.
Пример 4. Расчет канатного стропа общего назначения
Подобрать четырехветвевой симметричный канатный строп общего назначе-
ния, предназначенный для подъема груза массой 3200 кг.
Усилие в стропе 6=3200-9,8 = 32000 //=32 кН (3,2 тс).
Принимаем строп 4СК-3.2 по ОСТ 24.090.48—79. Строп может быть исполь-
зован при угле наклона ветвей к вертикали а ^45°.
124
Приложение 5
(продолжение)
Пример 5. (Расчет специального канатного стропа
Подобрать четырехветвевой симметричный канатный строп, предназначенный
ля подъема ковшей с грузом массой 3200 кг. Схема застропки приведена на
,яс. 15,г. 5э=2000 мм; 2а=1500 мм; 2'5=1000 мм.
Угол наклона каната к вертикали (формула 17)
cos в =---Ъ = — 2 — = 0,91 ; а = 24°
/К1 + а» + 52 у 22 + 0,752 _|_ 0,5s
Усилие в ветви стропа (формула 16)
5 =. - = 3^;8 = 8800 И = 8,8 кН (0,88 тс).
iB COS а 4-0,91
В стропе с углом наклона ветвей к вертикали со =45° натяжение S = 8,8 кН
в»никает при подъеме груза массой Qi=StB cos со =8,8-4 cos 45°=25 кН
fg 5 тс).
Принимаем строп 4СК-2.5 по ОСТ 24.090.48—79. Уменьшение угла наклона
всгвей позвслило перейти к меньшему типоразмеру стропа.
Пример 6. Расчет канатного стропа для подъема массивов
Подобрать четырехветвевой канатный строп, предназначенный для подъема
гггаов массой 16000 кг. Взаимное расположение и размеры рымов разных мас-
сивов значительно отличаются между собой.
Как следует из примечания к п. 5.2.1, в стропе будут работать две ветви
из четырех. Так как угол а не задан, принимаем а = 45°.
Усилие в ветви стропа (формула 16)
_ Qg 16000-9,8 160000 ,
5=.-—-------= =— ’ = ———= 113000 27=113 кН (11,3 тс .
iB cos а 2 cos 45 2-0,707
В четырехветвевом стропе общего назначения натяжение 5=113 кН воз-
। »кает при подъеме груза массой 32 т. Принимаем строп 4СК-32 по
< СТ 24.090.48—79 с допускаемой нагрузкой в ветви 125 кН (12,5 тс).
В данном случае из-за неравномерной загрузки ветвей потребовалось при-
менить строп значительно большей грузоподъемности.
Пример 7. Расчет [-образного подхвата
Произвести расчет подхвата при подъеме четырех стальных листов 16Х
Х1800Х6000. Ветви стропов расположены в вертикальной плоскости и состав-
ляют с вертикалью угол а = 30°. Усилие в ветви стропа 14,4 кН. Материал под-
хвата ВСтЗсп4 ГОСТ 380—71. Схема подхвата приведена на рис. 90.
Как видно из рис. 90, опасное сечение расположено на расстоянии а=11О мм
от линии действия силы 5.
Изгибающий момент равен M = Sa =14400-О,11 = 1585 Нм.
Максимальное напряжение изгиба имеет место на внутренней поверхности
зева подхвата и определяется по формуле (171)
a = g, А = 1,53^^® = 135-10® Па = 135 МПа (1350 кгс/см«),
И/ 1 о
где
12-Зг
6
= 18
см3;
6
125
Приложение 5
(продолжение)
R 30
61=1,53 для -у = -ду- =1 (см. табл. 14)
Допускаемое напряжение, согласно п. 3.2.1 и табл. 1, для среднего режима
работы равно
[а] = Ji- = => 185 МПа (1850 кгс/смЗ),
1,0 1,0
что больше расчетного.
Напряжение в сечении, определенное без учета коэффициента 6i> составляет
= = .l58^16! 87,8-10в Па = 87,8 МПа (878 кгс/см«).
Допускаемое напряжение балки для этого случая равно
[а] = = Ц:?— - 137 МПа .
1 J лт 2,1
что больше расчетного.
Следовательно, прочность подхвата обеспечена.
Так как линия действия силы проходит через участок АВ (см. рис. 22,0),
то будет обеспечено плотное прилегание подхвата к листу по всему участку
АВ и исключено выскальзывание подхвата.
Пример 8. Расчет грузозахватного устройства для поддонов
Произвести расчет грузозахватного устройства для поддонов грузоподъем*
ностью 3,2 т, приведенного на рис. 91.
Распорная балка выполнена в виде трубы 45X3.
Сечение балки стропа показано на рис. 91,а.
/7=650 мм; /1=400 мм; а1 = 45°; а2 = 20°.
126
Приложение 5
(продолжение)
Рис. 91. Грузозахватное устройство для поддонов:
а — расчетная схема; б — подхватывающая балка (действие усилий
стропов); в — подхватывающая балка (качалка, расчетная схема);
г — подхватывающая балка (размеры сечений); О — распорная бал-
ка нагрузки; е — распорная балка (сила Sприложена эксцентрично)
Расчетный грузопоток <2общ=200090 т.
Материал распорной балки и балок стропа — сталь СтЗ.
1. Число циклов работы (формула 5)
z = = 62500 < 100000
Uh
Проверка выносливости не требуется.
2. Условие устойчивости равновесия и. 8.1 H>h (650>400) соблюдается
При случайных наклонах груза поддон возвратится в первоначальное по-
ложение.
127
Приложение 5
(продолжение)
3. Определение усилий в элементах
Усилие в ветвях подвески (формула 16)
О
81 - ------ о2°°';’Л =22500 Н =* 22,5 кН
iB cos at iB cos aj 2 cos 45 '
Осевая сила в распорной балке 82=0,5Gtg ai= 0,5-32000
= 16 кН.
Усилие в ветвях стропа (формула 16)
G 3200-9,8 осла и оки
— = 8500 Н «= 8,5 кН
£ ______________________
я iB cos а2 4 cos 20'
Усилие Ss не выходит за контур сечения балки стропа — балка полностью
прилегает к поддону по вертикальной и горизонтальной плоскостям.
Вертикальная и горизонтальная составляющие опорных реакций балки
_ G 3200-9,8
оду — ----=ol)(JU П = О КП
4
83ж = 1g «2 = 8000 tg 20° = 2900 Н = 2,9 кН .
Максимальные изгибающие моменты в балке (формулы 43 и 44) Мх=
=<01,5 (1,27—0,5-1,20)-8000 = 0.335-8000= 26,8-102 Нм; Л4„= 0,335-2900=9,7У
ХЮ2 Нм.
4. Расчет прочности элементов
4.1. Необходимый запас прочности канатов подвески и канатов качалки
(п. 5.3.3) пр=6.
Необходимое разрывное усилие канатов:
подвески 8pi=8In = 22,5-6 = 135 кН;
качалки 8Р2 = 82и= 16-6=96 кН.
Принимаем канат 17,0-Г-1-Н-160 ГОСТ 3079—80.
Разрывное усилие 145 кН (14500 кгс).
4.2. Распорная балка подвески работает на центральное сжатие Для нее
лимитирующим является условие устойчивости.
Радиус инерции (справочное приложение 7)
i = -i- /О2 +W = -L /4 52 + 3.92 = 1,48 см.
Гибкость (формула 153)
PZ/_1-127_
Л-----1--
Коэффициент продольного изгиба (табл. 10) <р=0,72.
Расчетное напряжение (формула 156)
° = р = 'nT-TV/c ~ 5S’11)6 Па = 56 МПа (560 кгс/сма,,
’рг'бр U,72-3,96 ' ' ’
где 7 = (£» _ d2) = ЗЛ4 (452_^92) = 3>96 см2
Коэффициент запаса прочности (табл. 1) п=2,1.
Предел текучести материала (табл. 5) От=240 МПа.
Допускаемое напряжение (формула 11)
240
(0J = ±Y=114 МПа;
[»]>’
Условие формулы (3) соблюдается.
128
Приложение 5
(продолжение)
4.3. Моменты сопротивления балки-качалки (справочное приложение 7)
5,6-8,63 —4,4-7,43 _
6-8,6 “
34,5 смл;
8,6-5,63 — 7,4-4,4з
6^6
26,2 см3 ч. *
Расчетное напряжение изгиба (формула 150)
96 8-108 9 7-108
у „о в ш у,1 ! 15 1()е Па = П5 МПа (над кгс/см’)
и/у 34.5 zb,z
Напряжением сжатия пренебрегаем.
Допускаемое напряжение то же, что и для распорной балки [о] = 114 МПа.
Условие формулы (3) соблюдается, о»[о].
Пример 9. Расчет распорной балки
Проверить распорную балку примера 7 при эксцентриситете силы Sj;
Ь= 1,5 см.
Эксцентриситет превышает величину, приведенную на рис. 73
ч. . М
° = °сж Т “и = р Т
5*2 -S g £___
+ W ~
1у^06-+ 160'0,015 = 101-106 Па = 101 МПа (1010 кгс/см»),
где 1^=0,ID3 ^1— (справочное приложение 7).
W =0,1-4,5з(1
3,9<\ „ —
^)=3,9/ смз.
а< [я] = 114 МПа.
Условие формулы (3) соблюдается.
Условие устойчивости в плоскости действия момента.
Относительный эксцентриситет (формула 157)
Г . - 3,96 , .
т~ е W ~ 1,5 3.97 ,5’
Приведенный эксцентриситет (формула 159)
nii — 1,13-1,5 = 1,7,
гдет)р=1,3—0,002Х=1,3—0,002-86= 1„ 13 (табл. 11).
Расчетное напряжение (формула 160)
я = -5^- = = 112-Ю6 * Па = 112 МПа (1120|кгс/сма),
<f й Гбп 0,36-3,96 “
где <рвн=0,36 — табл. 12;
ст»; [о] = 114 МПа.
Условие формулы (3) соблюдается.
9 Заказ № 719
129
Приложение «:
(продолжение)
Пример 10. Расчет уравновешивания кранового вилочного захвата
Определить вес противовеса, необходимый для уравновешивания крановог
вилочного захвата по рис. 92.
Масса поднимаемого груза Q=3,2 т.
Основные размеры захвата, а также координаты центров тяжести захвата
(без противовеса), груза и противовеса показаны' на рис. 92. Собственная
масса захвата <2з=260 кг. При отсутствии груза вилы должны быть горизон-
тальны. При подъеме груза вилы должны отклониться вверх на угол «с=1г5<>
Расстояние по вертикали от оси подвески до центра тяжести захвата с
грузом принять ho =190 см.
Рис. 92. Крановый вилочный захват, уравновешенный противовесом
Вес противовеса по приближенной формуле (53)
„ хсгр-*з + МКа0 68 - 25+190-0,0262
- лп — xG -AGtgaG 3 ~ 120 — 68 — 190-0,0262 20и'У’ “
гр
= 2£+260 9,8 = 2653 // = 2,653 кН (265,3 кгс).
120 — Ьо — 4,97о
Для окончательного определения веса противовеса воспользуемся форму-
лами (54)—(57)
„ Ь — V — 4ас
Сгп-------------------
2а
130
Приложение 5
(продолжение)
Вспомогательные величч пя a = /tGtg а= 190-0,0262 = 4,978 см;
b=Grp (х„—х Orp)—(2G3+ Grp) а=32000 (120—68)—(2 -2600+32000)4,978=
== 147,8818-1|04 Нем =14,788 кНм;
c=G3Grp (xOrp-x3)4-G3(G3+Grp)a=2600-32000 (68—25)4-2600 (2600+
-f Q2|000) 4,978= 402,542 • 1О6 Н^м.
147,8818-10* —-/147,88182-108- 4-4,978-402-542-106
Gn— 2-4,978 “
= 2747,5 Н = 2,75 кН (274,75 кге).
Масса противовеса
Оп = — = 274 кг.
g
Произведем для контроля проверочный расчет по формулам (58)—(62). Вес
захвата с противовесом
G, / G3 + Gn = 2600 + 2747,5 = 5347,5 Н (534,75 кге);
G3(xs + Gaxn 2600-25 + 2747,5-12 ' 394700
X°i ^~Gi 5347,5 — 5347,5 73,81 СМ ’
Grp хо + G3 х3 4- G„ хп 32000 68 + 394700
хс =--------------------------= -12066 + 5347,5 = 68’83 СМ ’
Gyrp+ G3>3+ Опуп 32000-55 + 2600-110 + 2747,5-230
У° G 32000 + 5347,5 — 71,7 см,
tg ао = = 73,81 —68,83 = 0 0у62 .
а = 1,5°,
т. е. угол отклонения соответствует заданному.
координаты оси С подвески захвата (т. е. точки, жестко связанной с захва-
том и соединенной с гибким элементом, одеваемым на крюк крана) для обеспе-
чения заданных условий должны быть следующими: хс=73,8 см; yc=yQ+hQ=
=71,74-190 ^262 см.
Пример 11. Расчет прочности кранового вилочного захвата
Определить прочность вил и вертикальной стойки захвата по примеру 10. Не-
обходимые для расчета размеры приведены на рис. 92.
Стойка захвата соединена с поперечной балкой прямым стыковым сварным
1ивом, расположенным в нижней части стойки.
Смещение центра тяжести груза относительно оси симметрии захвата мала
и им можно пренебречь.
Материал вил — сталь 60.
Материал стойки вил — сталь 20.
Грузопоток, который должен быть перегружен захватом за время его экс-
плуатации, не превышает <2Общ= lOOfOOQO т.
1|. Расчет производим для следующих опасных сечений:
сечения А—А у корня вил. В этом сечении имеют место напряжения растя-
жения и изгиба, причем напряжения изгиба увеличены из-за кривизны;
9* 131
Приложение 5
(продолжение)
сечения Б—Б стойки. В этом сечении имеют)место напряжения растяжения
и изгиба, причем напряжения изгиба увеличены из1-за кривизны;
сечения В—В вблизи стыкового сварного шра. В этом сечении имеет место
концентрация напряжений, вызванная сваркой.
2. Определение допускаемых напряжений
2.1. Определим допускаемые напряжения при расчетной нагрузке
L PJ „ »
(формула 11)
[3] = [°₽] •
Для стали 60 От=410 МПа (4100 кгс/см2) (табл. 5), запас прочности
пт=2,25 (табл. 1).
410
[о]= —- =18!) МПа (180,0 кгс/см2).
Для стали 20 <тт=250 МПа (2500 кгс/см2) (табл. 5);
Пт = 2,1 (табл. 1);
[а] =|^=119 МПа (1190 кгс/см2).
2.2. Проверим необходимость расчета на выносливость.
Число циклов работы захвата проверяем по формуле (5)
z = = wwboo = 3]2000> 100000.
Расчет на выносливость необходим.
2.3. Допускаемое напряжение по пределу выносливости определяется по
формуле (12)
2®-1
[сгг1 =-----------.
J (k^ + t\r)nr
Для стали 20 предел выносливости 0-1 = 142 МПа (1420 кгс/см2). Коэффи-
циент концентрации напряжений определяем по [4, табл. 1.35], = 1,4 при свар-
ке нормального качества.
Коэффициент чувствительности металла к асимметрии цикла т)г=0,2 для
углеродистых сталей согласно п. 3.3.1.
Коэффициент запаса прочности по пределу выносливости определяем по фор-
муле (14) nr = nTt пк иг.2.
Коэффициент условий работы пГ1= 1,15 (табл. 3).
Коэффициент, учитывающий неоднородность материала и неточность рас-
четной схемы =1,5 (табл. 1).
Коэффициент срока службы определим по формуле (15)
Величины z0 и т определим по табл. 4.
° /"0 312-106 ____
«Г2= [/ =/0,156 = 0,735;
пг = 1,15-1,5-0,735 = 1,27;
132
Приложение о
(продолжение)
9.142 -1 СМ’
[с,] = 2 по 1'97~ = ,40’106 Па = 140 МПа 1400 КГС/СМ'2)
(1,4 -1~ 0,2) 1,27
ы>н-
Для стали 60 O-I = 690-0,43=377 МПа (3770 кгс/см2);
/г3=1 при отсутствии концентратора напряжений;
q/7 =0,2 для низколегированных сталей;
пг = 1,5.
1’г] = , = 415 МПа I4150 кгс/см2), Ы > [о].
(1 0,2) 1,0
Следовательно, лимитирует в данном
3. Расчет прочности
3.1. Прочность вил.
Сечение А—А./
Напряжение определим по формуле
I а = £ М..Г-
Wx
случае расчет на прочность.
Grp
Изгибающий момент Мл=32000-0,63 = 20200 Нм.
Момент сопротивления одной вилы
TV. 15-63 .... .
Wx — ~g- =90 см3.
Коэффициент, учитывающий кривизну бруса, при ^- = gQ = l Равен 51 = 1,52
(табл. 14). Площадь сечения F=6-15=90 см2.
а=1,52 —+ 329о.21()6 = 174-Ю3 Па=174 МПа<[о].
3 2 Расчет прочности стойки
Сечение Б—Б.
Напряжение изгиба определим по формуле (171)
Изгибающий момент М=32000-0,68=218-102 Нм.
Момент сопротивления (справочное приложение 7)
,w ВН*—Ы£ 12-163 — 10-13,63
и/ V — ---Л—77 —— . . ..
Соотношения размеров сечения
R _ 25,5 t, _ 2 _
Л 16 ’’ Ь 12
1
0,^67;
По табл 15 для =1,5; =0,2; =0,05 и =1 находим приближен-
п и fl «з
ное значение Bi= 1,21.
133
Приложение 5
(продолжение)
Приближенное значение напряжения изгиба с учетом кривизны
, 218-10г-10в
°и =---248“—1,21 “ 106‘ 10° Па = 106 МПа (1060 кгс/см2> •
Так как фактические соотношения размеров сечения заметно отличаются от
приведенных в табл. 15, для контроля проверим напряжение изгиба по фоп-
муле (184)
М
FR
ht
k0 (R - Л,)
Коэффициент k0 вычислим по формуле табл. 13
. R 1
— —----1
12-1,2-2 4-2-1-13,6
18.7 , 32,3 , , 33,5
2 П 17,5 + 2 1п 18,7 + 2 П 32,3
24,16 см ;
й0 = ^-1 =0.056'
Площадь сечения F= 16-12—10-13,6=56 см2.
Напряжение изгиба
218-102.10е г о,08 1
°и~ 56-25,5 10,056(0,255 — 0,08) ’I
= 109-106 Па = 109 МПа (1090 кгс/см2),
т. е. точность приближенного решения достаточна (погрешность менее 5%).
Напряжение растяжения
а = = _g2000-10^ =57оо Па=57 МПа (57 кгс/см2).
г об
Суммарное напряжение о= аи+пр= 109+5,7= 114,7 МПа (1147 кгс/см2).
о<[о].
Сечение В—В.
Сечение такое же, как и Б—Б. Оно расположено на прямом (а не на криво-
линейном) участке.
Так как выносливость в этом сечении не вызывает опасений, то оно заве-
домо прочно.
Пример 12. Расчет стойки кранового вилочного захвата при боковом смещении
груза
Проверить прочность стойки кранового вилочного захвата по примеру 10
при допустимом смещении груза е=100 мм.
1. Определение допускаемых напряжений
134
Приложение 5
(продолжение)
Для уточненного расчета запас прочности пг=пЛп„ (формула 12) Коэф-
фициент динамичности определяем по табл. 3.
Ид =4,4.
Коэффициент пн=1,3 (табл. 1), пт= 1,4-1,3= 1,82.
[а] = = 137 МПа (1370 кгс/см2).
2. Прочность.
Нормальное напряжение от основной нагрузки в опасном сечении В—В
определим по формуле
М , Grp
°о= w + р
Изгибающий момен)г Л4=32000-10,68'=121,8 1Ю3 Нм.
Момент сопротивления
12-16»-10-13,63 см3_
6-16
Площадь сечения F=56 см2.
Суммарное напряжение изгиба и растяжения от центральной нагрузки Grp
gG = 21 1 °6~ + - 3-^-2' =94 106 Па = 94 МПа (940 кгс/см2).
оо
Угол отклонения захвата от вертикали y=arc tg ^ = агс tg 0,0526 = 3°.
Сила перекоса 7=32000-0,0526=1680 Н.
Изгибающий момент, вызванный перекосом, Му—~ 1680-2,1 =352(0 Нм.
Момент сопротивления
16-123- 103-13,6 .
1Гц = ------——-------- = 195 см3
6-12
Напряжение изгиба от перекоса
352-^~ = 18-10° Па = 18 МПа (180 кгс/см2).
1УО
°n
Суммарное нормальное напряжение ан=Оо+<тп = 94+18 = 112 МПа
(1120 кгс/см2).
Момент кручения от силы /•—Л4К= 1680-0,738-—1240 Нм.
Момент сопротивления кручению U7t.=2/’\6rnin (справочное приложение 8).
Площадь контура, описанного средней линией сечения Кк=11-14,8 = 163 см2.
Минимальная толщина стенки 6min=l см.
Подставляя значения, получим ^=2-163-1=326 см3.
Касательное напряжение
Л4& 1240-106
= —чгз— ~ 4- Ю6 Па = 4 МПа (40 кгс/см2).
w h ozo
Суммарное приведенное напряжение о=1/<ти2+3т2 =}’112г+3-42=112Х
Х1РбПа=112 МПа (1120' кгс/см2).
Условие прочности стойки а< [а] выполнено.
135
Прилоэюение 5
(продолжение)
Рис. 93. Зажимной захват для бумаги:
а—расчетная схема; б —узел А (план сил); в —звено Г (расчетная
схема); г —звено 1 (план сил)
Пример 13. Расчет типового зажимного захвата
Определить сжимающую силу, усилия в шарнирах и КПД захвата для ру-
лонов бумаги грузоподъемностью 1,2 т.
Схема захвата приведена на рис. 93.
Диаметры шарниров doi=dos=3 см, di3=d6S=3,5 см, d4s=d2i=d42=2,5 см.
Допускаемое передаточное число [г] определяем по формуле (122)
Коэффициент трения бумаги по стальному башмаку с насечкой ц=0,5
(табл. 7).
Коэффициент запаса сжимающей силы п=1,5, так как коэффициент трения
приведен в настоящем РД.
136
Приложение б
(продолжение)
Коэффициент полезного действия при приближенном расчете принимают
4=0,9.
1 5
^ода-3’33-
Передаточное число захвата определим по типовой методике (табл. 8)
е — с 100 — 7 „
/ = ~Г~------25 ’3,72‘
с стоит в формуле со знаком минус, так как звенья 1 и б отклонены в сто-
рону, уменьшающую сжимающую силу N.
Условие удержания груза (117) выполнено ♦
i> [I].
Для определения КПД найдем усилия в шарнирах.
Усилия S, действующие в шарнирах звеньев 2 и 4, определяем из условия
равновесия узла А, разлагая силу G на составляющие по направлению звеньев
2 и 4 (рис. 93,6) S=6,9 кН.
Зажимное усилие и усилие в шарнирах R& и R& определяем из условия
равновесия звена 1 (рис. 93,в).
На звено 1 действуют силы S и 0.5G, известные по величине и направ-
лению, и силы N и Да:, известные по направлению (Дз1 совпадает с направленн-
ой звена 3, так как на это звено не действуют никакие внешние силы). 2Шд='О.
дг_6-9-.86~6-7. = 223 кН (223 тс)
Проверка: определим величину N, исходя из передаточного числа
N = ~ «= = 22,3 кН (2,23 тс).
Силы У, вычисленные двумя способами, совпадают.
Реакции в шарнирах Рз1 и Р определяем из силового многоугольника
(рис. 93,г) Дз1=26 кН; Р=23,2 кН.
Коэффициент трения в шарнирах (приложение 4) pii=0,15.
Соотношение угловых скоростей звеньев 2 и 1
ВС 33 _
k = AB =53 = 0-623-
Коэффициент полезного действия зажимного устройства
1 + «31 ^31 + ^12 (1 + А) + k
7]=<1-Н -----------------
, 22,3-3 + 26-3,5 + 6,9-2,5(1 +0.623)+6,9-2,5-0,623 пп_.
= 1 - 0,15------------------12-3.72.25----------------~ °’974 *
т. е. близок к единице.
С учетом уточненного значения КПД допускаемое передаточное число
составит
1 5
W=6^roJ = 3-O8<i = 3-72’
т. е. условие удержания груза обеспечено.
137
Приложение 5
(продолжение)
Пример 14. Расчет специального зажимного захвата
Определить сжимающую силу, усилия в шарнирах и КПД захвата для ящи-
ков с кирпичом грузоподъемностью 2 т. Схема захвата — рис. 94.
Диаметры шарниров: dii—d3i=dg3=dg2=dg3=d97=dj3==des—6 см; d78==
=4Z43 = d^=4 см.
Методика расчета такого захвата приведена на рис. 42.
Допускаемое передаточное число [i] определяем по формуле (122)
Коэффициент трения дерева по башмаку р, = 0,35 (см. табл. 7).
Коэффициент запаса сжимающей силы п=1,5, так как коэффициент тре-
ния приведен в настоящем РД.
Коэффициент полезного действия при приближенном расчете принимают
т]=0,9.
1 'i
И=-бл>бд =3’33-
Для определения действительного передаточного числа необходимо опре-
делить сжимающую силу N захвата.
Воспользуемся методом Н. Е. Жуковского. Для этого строим план скоро-
стей, повернутый на 90° (рис. 94,6).
Построение производим, исходя из горизонтального перемещения точек А
и Ai звеньев 1 и 5. Прикладываем в точках а и ах плана скоростей силы N, а
в точке h силу G. Рассматривая сумму моментов внешних сил относительно
полюса плана скоростей, определяем величину Л\
.. GIo 20-13,6 _ „ ,
N = ----= 68 кН (6,8 тс).
2/Л' 4
Передаточное число захвата
Условие удержания груза (117) »>[i] выполнено с большим запасом.
Усилия в шарнирах определяем из условия равновесия звеньев Так как за-
хват симметричный, определяем силы, действующие на половину захвата. Уси-
лия в звеньях 8 и 4 определяем из условия равновесия узла Н, разлагая силу G
на составляющие по направлениям звеньев 8 и 4, определим силу S (рис
94,в). 3=11,7 кН (1,17 тс).
Рассматриваем условие равновесия звена 3 (рис. 94,г). На него действуют
сила 3, известная по величине и направлению, сила Р13, которая неизвестна ни
по величине, ни по напоавлению, и реакция в точке Е. Разлагаем силу Р13 на
составляющие 7?,3 , и рассматриваем сумму моментов сил относительно
точки Е
11 7-44
Л13 = 40 -=13,5 кН (1,35 тс).
Для определения горизонтальной силы N рассмотрим условие равновесия
звена /. Ось у проводим по направлению силы /?31. При этом проекции сил
7?^ и Д21 на ось у равны нулю.
Еу = 0.
.. 13,5+ 10 cos 20’ „ „ .
ЛГ=-----И5--------“ 68 кН (6>8 тс> •
138
Приложение 5
(продолжение)
5~20кН
139
Приложение 5
(продолжение;
Значение силы П совпадает с полученными ранее по методу Н. Е. Жуков-
ского.
Сила /?21 определяется из уравнения моментов относительно точки С.
Е Мс = 0 ;
68-65—10-4 0
Rit =------------= 139 кН (13,9 тс);
и!
/?2е — /?21 = 139 кН (13.9 тс).
R3i определяется из силового многоугольника. Контролем является парал-
лельность сил Rn и R^3. /?13 = 73 кН (7,3 тс); R^ =71 кН (7,1 тс).
Силу Rss определяем из многоугольника сил, действующих на звено 3 (см
рис. 94,ж) /?9з=72 кН (7,2 тс).
Коэффициент полезного действия определяем общим методом (и. 7.4.4)
Е Л/у 11 wtj | du
. = i_o,5h2z^__---------------.
Реакции в шарнирах Rij определены, скорость точки приложения силы G
определяем из плана скоростей (см. рис. 94,6).
Необходимо определить угловые скорости звеньев.
Угловая скорость звеньев 1 и 5 равна нулю, так как во время сжатия груза
они движутся поступательно, звено 9 также движется поступательно, поэтому
его угловая скорость также равна 0, tt>9=wi=0.
Угловые скорости звеньев 2 и 3 равны
ге'2 = «'8 = 4^ = ^ = °-15 Ис.
Угловая скорость звена 4
= = ^ = 0,132 1/с
lHF, 40
®si = = &ге = Щю = 0,15 1/с ;
= I W4 — W8 I = Wt + W8 .
Так как при сжатии груза звенья 3 и 4 поворачиваются относительно шарнира
F в разные стороны
ш4з = 0,132+0,15= 0,282.
, R-ц d-л + Rix w3i + Rtf> wis + Ria ^3ii К’зо+'^^в “'«s+Wib
. = 1 - H -----------------------------
Коэффициент трения в шарнирах p.i = 0,15 (приложение 4).
. п,.( 13° - 6-0,15 + 73-6-0.15 + 139-6-0,15 + 72-6-0,15
. = 1-0,15(-------------------2Й36---------------------+
, 11,7-4-0,282+ 11,7-4-0,132 \ П77в
+-----------2+36-----------) = °’778 ’
т. е. в отдельных специфических захватах, включающих много шарниров боль-
шого диаметра, загруженных большими внутренними силами, КПД может быть
140
Приложение 5
(продолжение)
ниже значения, заложенного в приближенный расчет. При приближенном расче-
те таких захватов следует принимать увеличенный запас сжимающей силы.
Условие удержания груза рассматриваемым захватом обеспечено.
Пример 15. Расчет сварного стыкового шва
На пластину А, приваренную встык к пластине Б ручной сваркой, действует
сила Р, составляющая с продольной осью угол а (рис. 95). Произвести прове-
рочный расчет стыкового шва, если материал пластин сталь 09Г2; Р=100 кН,
/ш=300 мм, 6 = 20 мм, а=600 мм, «=30°, начало и конец шва выведены на
технологические планки.
Рис. 95
Так как сила Р приложена к пластине под углом а, то она вызовет в шве
нормальные и касательные напряжения.
Разложим силу Р на нормальную N и касательную т силы и определим их
величины N—P cos а; Т=Р sin а.
Нормальные напряжения определим по формуле (192)
Pcos «
Ъ1Ш
Чтобы оценить действие на шов касательной силы Т, приложим в любой
точке оси шва две уравновешивающие силы Т. Образовавшаяся пара сил дает
момент М=Та, под действием которого в шве возникнут нормальные напряже-
ния, определяемые по формуле (193)
М б Ра sin а
При этом в точке 1 нормальные напряжения будут растягивающими, а в точке
2 — сжимающими.
Так как допускаемые напряжения в шве на сжатие больше, чем на растя
жение, то максимальные нормальные напряжения в точке /.
Оставшаяся сила Т вызовет в шве напряжения среза, определяемые по
формуле (194)
т_
/ш» ’
Максимальная величина касательных напряжений в центре длины шва
Т 12 В/2 ЗР sin а
ттах- ь 6/3--g = 2В/ J
Чпах- . /J”'.. 125-10* Па = 125 МПа.
141
Приложение 5
(продолжение)
Допускаемые напряжения для сварного шва будут равны (табл. 2)
[°]' = 0,8 [а,] = & = 120 МПа ;
[т]с = 0,6 [о^] = = 90 МПа .
Так как величина максимальных касательных напряжений значительно мень-
ше допускаемых, а их расположение не совпадает с расположением максималь-
ных значений нормальных сил, то касательные напряжения не учитываем.
Суммарное значение нормальных напряжений в точке 1.
Р cos а , баР sin а
атах + см ~ gf I j/s
105/3 , 6-0,6-106
0,3-0,02-2 + 0,02-0,3s-2
115-10е Па = 115 МПа.
Условие прочности соблюдено.
ПРИЛОЖЕНИЕ 6
(справочное)
СООТНОШЕНИЕ ЕДИНИЦ МЕЖДУНАРОДНОЙ СИСТЕМЫ
С ЕДИНИЦАМИ ДРУГИХ СИСТЕМ
Единицы времени
1 с=1/60 мин
1 с= 1/3600 ч
1 с= 1/86400 сут
Единицы плоского угла
1 рад=57°3'
Единицы силы
1 Н=0,102 кге
1 Н= 1,02-10-’ тс
1 кН=0,102 тс
Единицы скорости
1 м/с=3,6 км/ч
142
Единицы частоты вращения
1 с—1 = 1 об/с
1 с-’=60 об/мин
Единицы момента силы
1 Нм=0,102 кгс-hc
1 Нм =110,2 кге-см
Единицы работы, энергии
I Дж=0.102 кге-м
Единицы давления
1 Па=0,102 кге/м2
1 Па=1,02-10-7 кгс/мма
1 Па= 1,02-10~4 тс/ма
1 МПа=0,102 кге/мм2
1 МПа =10,2 кгс/см2
ПРИЛОЖЕНИЕ 7
(справочное)
ГЕОМЕТРИЧЕСКИЕ ХАРАКТЕРИСТИКИ СЕЧЕНИИ
Л
F=b(H—h);
(№-h3) ;
, H—h b
hi
Wy— —-—(H—h); iy=0,289 b
ix=0,289У/72+ЯЛ+Л2
В +26 ,
У1 3(B+b) h’
_ №({&+№)+№)
x ~ 36(B+6) ’
6Wr’'2"J’+4B'’+'”>
E=BH+bh;
BH3+bh3
12
BH*+b№
r- 6W
=0,289’ j/
BH^+bh?
BH+bh
F=BH—bh;
BH3—bh3
BH3—bh3
6H ’
ix—0,289
BH3—bh3
bH—bh
143
Продолжение приложения 7
F-aH-\-bc\
1 a/P-h&c2
У'~ T aH+bc ’
У2—Н—У1;
<x = -7- (By\—bh?+ay\)
О
F—6С14-с(Л+Л1) 4-Bc;
_ (2Я—c()
У' 2(а/У+В)С4-61с1) ’
b—bi—a,
У2 = Н—У1\
/л=4г (By*)—Bx№+by\—bxh^)
F—aH ~j~2b (cj-f-Ca) >
= lB3(H~h)+hia3+
-V~- (fi*—a4)];
®'-w 1BH‘- -ir
h—hi
a~ ~2T
F=h(2H—A);
H2-\-hH—h2
У2~ 2(2H—h) cos 45° ’
Ix ~ -I" [2с*-2(с-Л)4+й(Я-2с+
+4)’]
c=yx cos 45°
F = 6(a+A);
a2-H>6 №+<18
X1” 2(a+b) ’ У>~ 2(h+d) ’
Ix- 4 [б(Л-А1)3+ОД13-d(yi-S)3];
iу = 4г t6(°—л;1)3+/!х13—6 (*i—б)3];
abdhb
'x* = — ’ 4(a+fe)
144
Продолжение приложения 7
F=cP; h=^a\2\
Wx =0,118 a3
IQ Заказ № 719
F=bh\ yi=y2— -к- (h cos a+fe sin a);
Ix = (/j2 cos2a+&2 sin2a);
_ bh ft2 cos2oH-6 s.n a .
x 6 b cos a+6 sin a
tx =0,289Т'Л2 cos2 a+62 sin2 a
145
ПРИЛОЖЕНИЕ 8
(справочное)
МОМЕНТЫ СОПРОТИВЛЕНИЯ КРУЧЕНИЮ
Схема сечения
Момент сопротивления Wk
0,2d3
л
1 (п—0,63)
О
(в точках длинной стороны)
0,45 (п—0,63) &
(в середине коротких сторон)
261 (а—6) (Ь—61)
(в середине длинной стороны)
26 (а—6) (b—6i)
(в середине короткой стороны)
2F6ml-n,
где F — площадь, охватываемая
средней линией
146
Продолжение приложения 8
Схема сечения
Момент сопротивления
а3
20“
(в серединах сторон)
kdF
(для шестиугольника 6=0,217, для
восьмиугольника 6=0,223)
г
блг+1,86
10*
СОДЕРЖАНИЕ
1. Типы крановых грузозахватных устройств 3
2. Виды и содержание расчетов . . ... . . 6
2.1. Виды расчетов . ............................. —
2.2. Нагрузки, учитываемые при выполнении расчетов ... . —
2.3. Содержание расчетов . ........ 8
3. Определение допускаемых усилий и напряжений 10
З.1. . Допускаемые усилия........................................... —
3.2. Допускаемые напряжения при расчетных нагрузках . 11
3.3. Допускаемое напряжение по пределу выносливости . 13
3.4. Материалы, применяемые для изготовления грузозахватов . . .14
4. Выбор и расчет стропов ;8
4.1. Типы стропов . ................ . ... —
4.2. Определение усилий в ветви стропа . —
4.3. Подбор и расчет гибких ветвей ... . 27
4.4. Стропы с [-образными подхватами . . .28
4.5. Особенности расчета стропов отдельных грузозахватных устройств . 34
5. Выбор и расчет вилочных захватов . . 37
5.1. Уравновешивание захвата в целом . . . . , —
5.2. Уравновешивание вил захвата . ... 44
5.3. Расчет на прочность .... 51
в. Выбор и расчет зажимных захватов 57
6.1. Основные понятия . . ... —
6.2. Передаточное число.................. . 58
6.3. Определение допускаемого передаточного числа 62
6.4. Расчет на прочность........................................... 67
6.5. Определение удельного давления башмака на груз . . . 68
6.6. Расчеты типовых захватов.......................................71
7. Расчеты прочности отдельных элементов грузозахватных устройств 85
7.1. Стержни . . .................. . —
7.2. Балки ... .94
7.3. Кривые брусья .... 97
7.4. Крюки . . . 102
7.5. Звенья стропов . . 107
7.6. Проушины .... .111
7.7. Сварные соединения . . . . . .112
8. Расчет устойчивости подвесок . .115
Приложение 1 (обязательное). Основные термины и обозначения, принятые
в РД.......................................................... . . 117
Приложение 2 (обязательное). Литература, необходимая при пользовании
РД................................................................ . 122
148
Приложение 3 (обязательное). Допускаемые напряжения для заклепочных
и болтовых соединений стальных конструкций . - .123
Приложение 4 (обязательное). Коэффициенты трения подшипников . —
Приложение 5 (рекомендуемое). Примеры расчета: ..... . 124
Пример 1. Расчет цепного стропа общего назначения . —
Пример 2. Расчет специального цепного стропа . . —
Пример 3. Расчет канатного пенькового стропа ... —
Пример 4. Расчет канатного стропа общего назначения . —
Пример 5. Расчет специального канатного стропа .... 125
Пример 6. Расчет канатного стропа для подъема массивов —
Пример 7. Расчет [-образного подхвата........................—
Пример 8. Расчет грузоз:.„ватного устройства для поддонов 126
Пример 9. Расчет распорной балки ....... 129
Пример 10. Расчет уравновешивания кранового вилочного
захвата................................................130
Пример 11. Расчет прочности кранового вилочного захвата 131
Пример 12. Расчет стойки кранового вилочного захвата при
боковом смещении груза.....................................134
Пример 13. Расчет типового зажимного захвата .... 136
Пример 14. Расчет специального зажимного захвата . 138
Пример 15. Расчет свар1" . о стыкового шва.................141
Приложение 6 (справочное). Соотношение единиц Международной системы
с единицами других ст> гем............................................... 142
Прилои тие 7 (справочное). Геометрические характеристики сечений 143
Приложение 8 (справочное). Моменты сопротивления кручению . . 146
Устройства грузозахватные крановые.
Типовые расчеты. Методика
РД 31.45.03—82
Отв. за выпуск Е Я. Гурфинкель
Редактор Э. А. Андреева
Технический редактор Б. Г. Колобродова
Корректор Г. Е. Потапова
Сдано в набор 31.08.83 г. Подписано в печать 26.12.83 г. Формат изд.
60X90/16. Бум. кн.-журн. Гарнитура литературная. Печать высокая.
Пе« л. 9,5 Уч.-изд. л. 110,23. Тираж liOOO. Йзд № 421/3-Т. Заказ
тип. № 719. Бесплатно
В/О «Мортехинформреклама»
125080, Москва, Волоколамское ш., д. 14
Типография «Моряку, Одесса, ул. Ленина, 26
Опечатки к изд. № 421 /3-Т «Устройства грузозахватные крановые»
Страница Следует читать
7, рис. 3 27, последняя строка G2<0,56G<G1 (см. рис. 8, 15, 18) <^rp-*G + Glx0I
4'0, формула (62) 60, к рис. 43,д 62, формула (123) 69, рис. 48, 51, 52 75, рис. 62.а 78, к рис. 63 82, рис. 68,в „ Т XG О д — звено 1 (план сил) — см. рис. 94,е (1 л %7бл=2р1 -Д'sin "2“ е е 1—Gib r—raetf e=2,718
84, рис, 70,в
91, примечание к табл. 10 92, табл. 11, 3-я графа, 1-я строка снизу 94, в п. 7.1.9 99, последняя формула, в числителе и знамена- теле 101, рис. к табл. 15 105, п. 7.4.4 106, к формуле (181) 130, рис. 92. правый верх- ний для X>100 на 7%. 1,3—0.002Л Uli d№ не читать: Eji (см. рис. 81) Нг— высота гайки е=100 /
132, п. 2.2 Qo6in 1 000 000 г— Q ~ 3,2 2
133, 4-я строка снизу 142, правая колонка, 10-я строка снизу 143, 1-я строка сверху; 10-я строка снизу b ~ 12 —°'167 1 Нм=0,102 кгс-м F=bh 1г3(В2+4ВЬ+62), Z*~ 36(B+fe) ’
!44, 9-я строка сверху 7Л= (By^—Btf+byh-bihh)
13-я строка сверху
7-я строка снизу 45, второй рис. сверху ft + 2 ) J: D — внешний диаметр d — внутренний диаметр
46, к рис. 4-му снизу, в пояснении 4- (n—0.63) Ь3 О