/
Текст
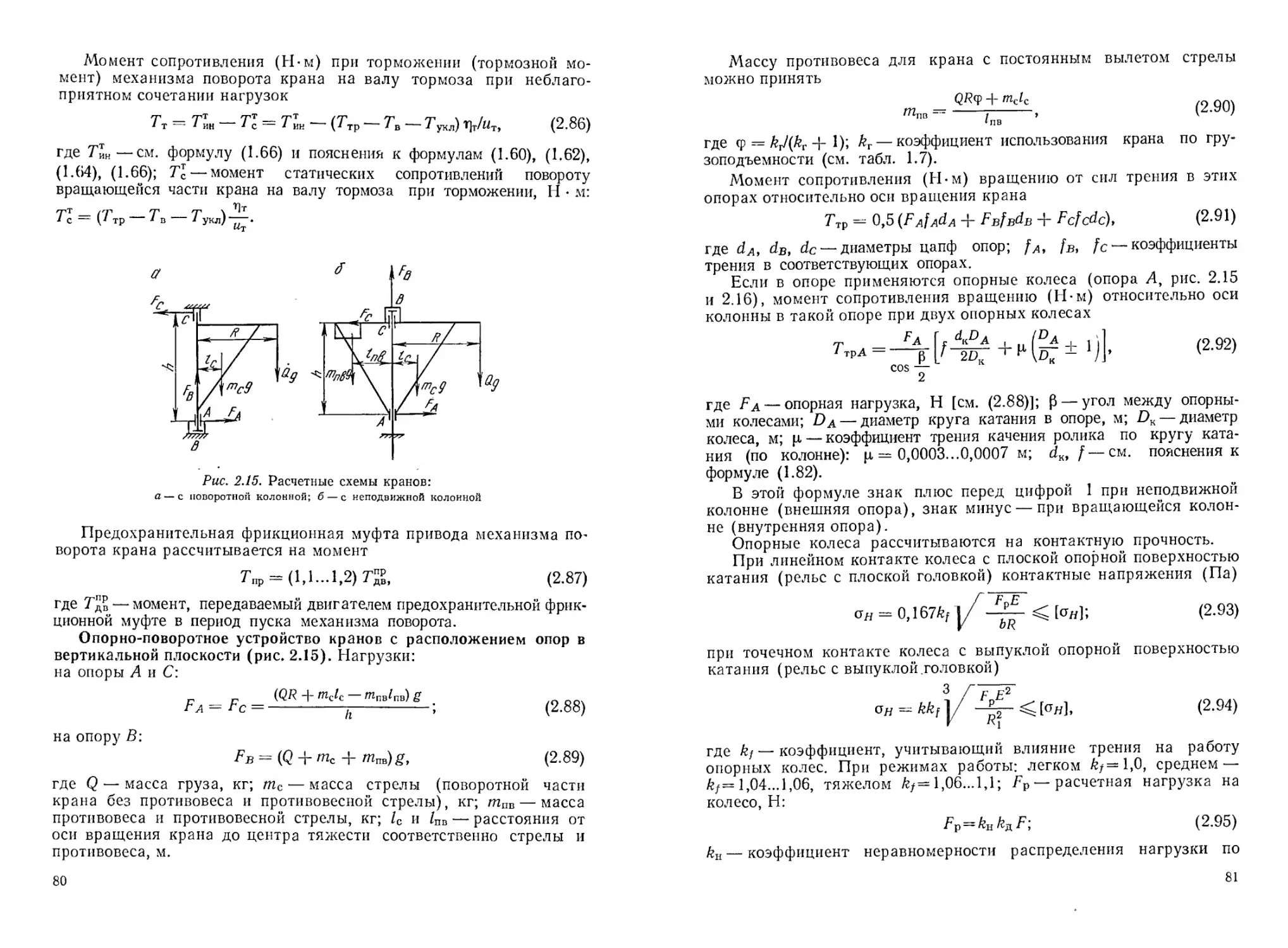
А. В. КУЗЬМИН, Ф. Л. МАРОН
СПРАВОЧНИК
ПО РАСЧЕТАМ
МЕХАНИЗМОВ
ПОДЪЕМНО -
ТРАНСПОРТНЫХ
МАШИН
А. В. КУЗЬМИН, Ф. Л. МАРОН
СПРАВОЧНИК
ПО РАСЧЕТАМ
МЕХАНИЗМОВ
ПОДЪЕМНО-
ТРАНСПОРТНЫХ
МАШИН
Издание второе,
переработанное и дополненное
МИНСК
«ВЫШЭЙШАЯ ШКОЛА»
1 983
ББК 39.9я2
К 89
УДК 621.86.001.66 (035.5)
Рецензенты: кафедра «Детали машин» Таллинского политехнического
института
3601030000—116
К М 304(05)—83 90—83
© Издательство «Вышэйшая школа», 1983.
ПРЕДИСЛОВИЕ
В первых двух разделах справочника изла-
гаются общие расчеты механизмов подъемно-
транспортных машин, методика выбора и про-
верки электродвигателей, редукторов, муфт,
тормозов и расчеты наиболее характерных
специальных деталей подъемно-транспортных
машин (канатов, грузоподъемных и тяговых
цепей, барабанов, конвейерных лент и др.),
последовательность расчета каждого механиз-
ма. Приводятся необходимые сведения о нор-
мативных документах, значениях расчетных
величин и др. В конце первого раздела даны
примеры расчета основных механизмов грузо-
подъемных машин (подъема груза, передви-
жения, изменения вылета, поворота), а в кон-
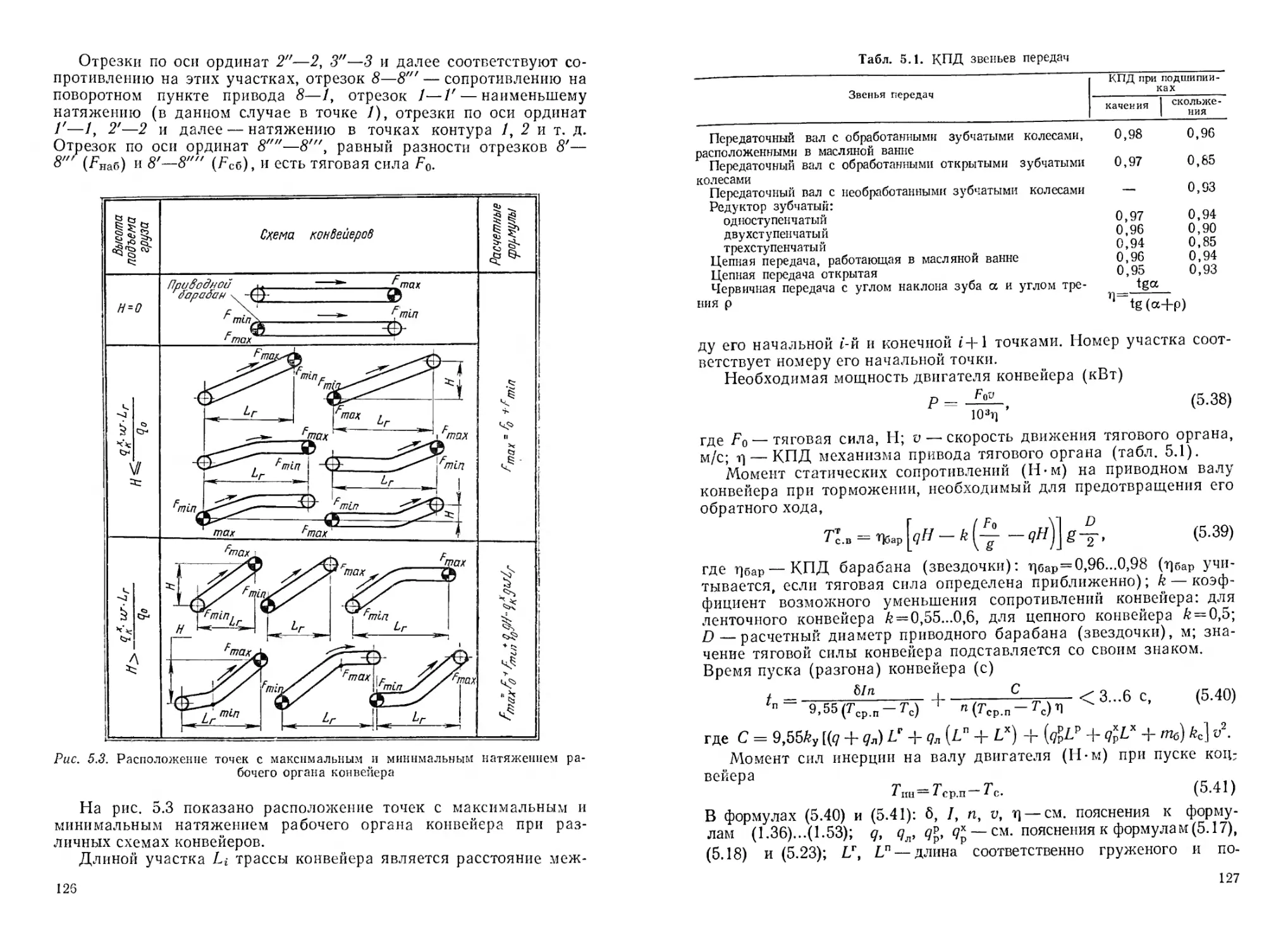
це второго — примеры расчета конвейеров.
В третьем разделе приводятся справочные
данные о применяемых в подъемно-транспорт-
ных машинах основных стандартных и норма-
лизованных узлах и специальных деталях
(электродвигателях, редукторах, муфтах, тор-
мозах, канатах, цепях и др.).
Второе издание книги обусловлено появле-
нием новых нормативных материалов, исполь-
зуемых в расчетах подъемно-транспортных
машин, вводом в действие международной си-
стемы единиц физических величин (СИ) и до-
полнением книги расчетами имеющих широ-
кое распространение крутонаклонных, скреб-
новых, подвесных, тележечных и качающихся
конвейеров. Во втором издании справочник
значительно переработан, учтены замечания
и предложения, полученные после выхода
первого издания. При работе над книгой
использованы работы известных ученых в
области расчетов подъемно-транспортных ма-
шин А. О. Спиваковского, Н. Ф. Руденко,
А. А. Вапнсона, М. П. Александрова,
В. К. Дьячкова, Р. Л. Зенкова, а также дру-
гие материалы из указанной в прилагаемом
перечне литературы.
Справочник написали: А. В. Кузьмин — па-
раграф 1.10; гл. 3, 7, 9... 11, 15 и 16; Ф. Л. Ма-
рон— гл. 1 (кроме § 1.10), 2, 4...6, 8, 12...14.
Остальная часть книги написана авторами
совместно.
Лвторы
Раздел I. ГРУЗОПОДЪЕМНЫЕ МАШИНЫ
Глава 1. ИСХОДНЫЕ ДАННЫЕ ДЛЯ РАСЧЕТОВ
ГРУЗОПОДЪЕМНЫХ МАШИН
1.1. ПАРАМЕТРЫ И РЕЖИМЫ РАБОТЫ
ГРУЗОПОДЪЕМНЫХ КРАНОВ
Основными параметрами грузоподъемных кранов являются:
грузоподъемность, скорость движения механизмов (перемещения
груза, передвижения крана и тележки, изменения вылета, поворо-
та), высота подъема, вылет, пролет.
Номинальная (максимальная) грузоподъемность крана соот-
ветствует максимально допустимой массе поднимаемого и переме-
щаемого груза, включая массу грейфера, кюбеля, бадьи, грузового
магнита, траверсы и других грузозахватных приспособлений, под-
вешиваемых на крюк крана. Масса крюковой подвески в грузо-
подъемность крана не включается.
Номинальная грузоподъемность крана с переменным вылетом
относится к минимальному вылету, указанному в паспорте.
Вылет крана — это расстояние от оси вращения поворотной ча-
сти стрелового крана до оси его грузозахватного органа.
Пролет крана — горизонтальное расстояние между осями рель-
сов кранового пути кранов пролетного типа (мостовых, козловых
и др.).
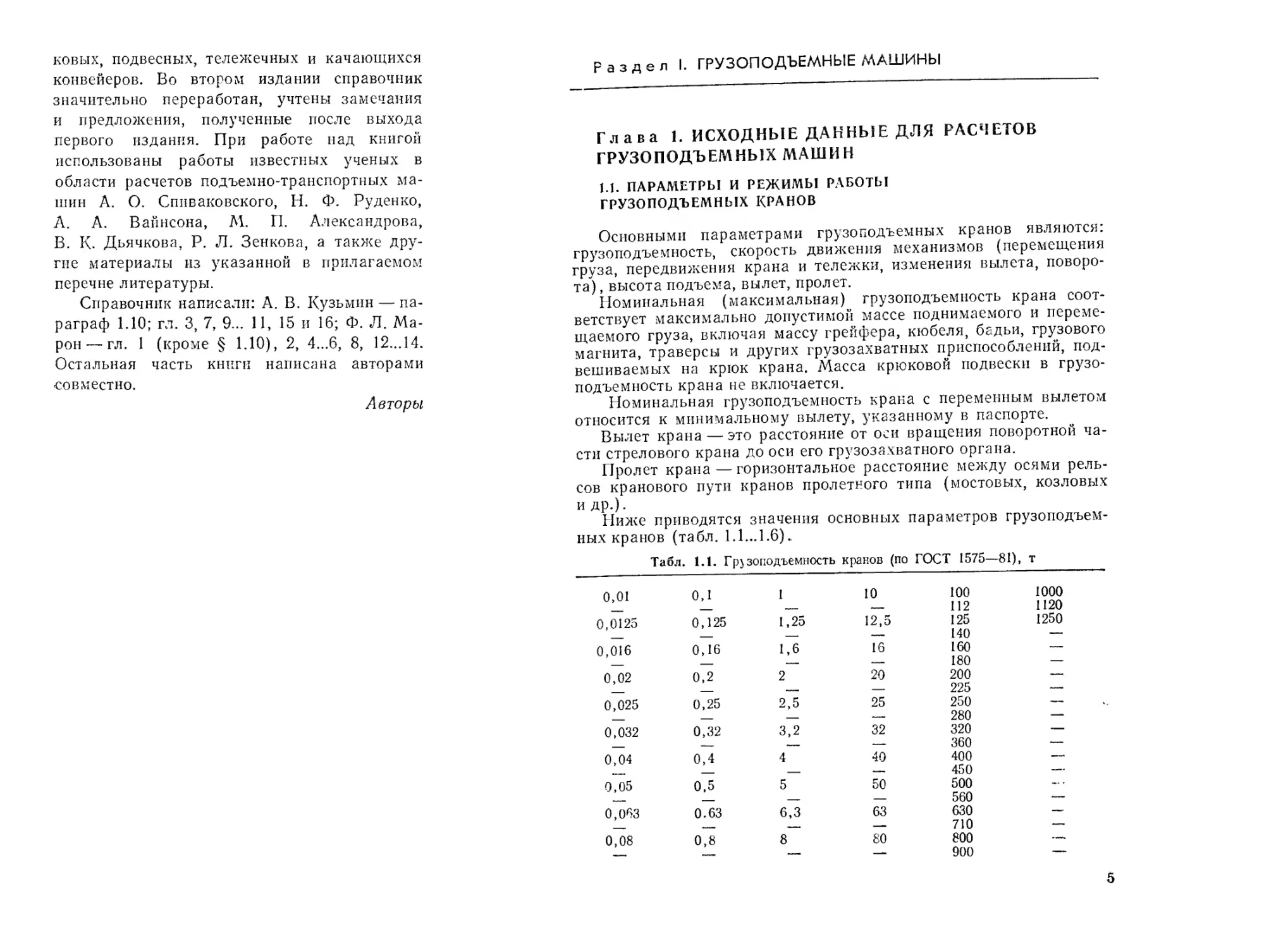
Ниже приводятся значения основных параметров грузоподъем-
ных кранов (табл. 1.1...1.6).
Табл. 1.1. Грузоподъемность кранов (по ГОСТ 1575—81), т
0,01 0,1 1 10 100 1000
— — — 112 1120
0,0125 0,125 1,25 12,5 125 1250
— — — 140 ——
0,016 0,16 1,6 16 160 —
— — — — 180 —
0,02 0,2 2 20 200
— — — — 225
0,025 0,25 2,5 25 250 —
— — — — 280 —
0,032 0,32 3,2 32 320 —
— — — — 360 —
0,04 0,4 4 40 400
— — — — 450 —
0,05 0,5 5 50 500 —.
— — — — 560 —
0,063 0.63 6,3 63 630 —
—- — — — 710 —
0,08 0,8 8 80 800 ......
— — — — 900 —
5
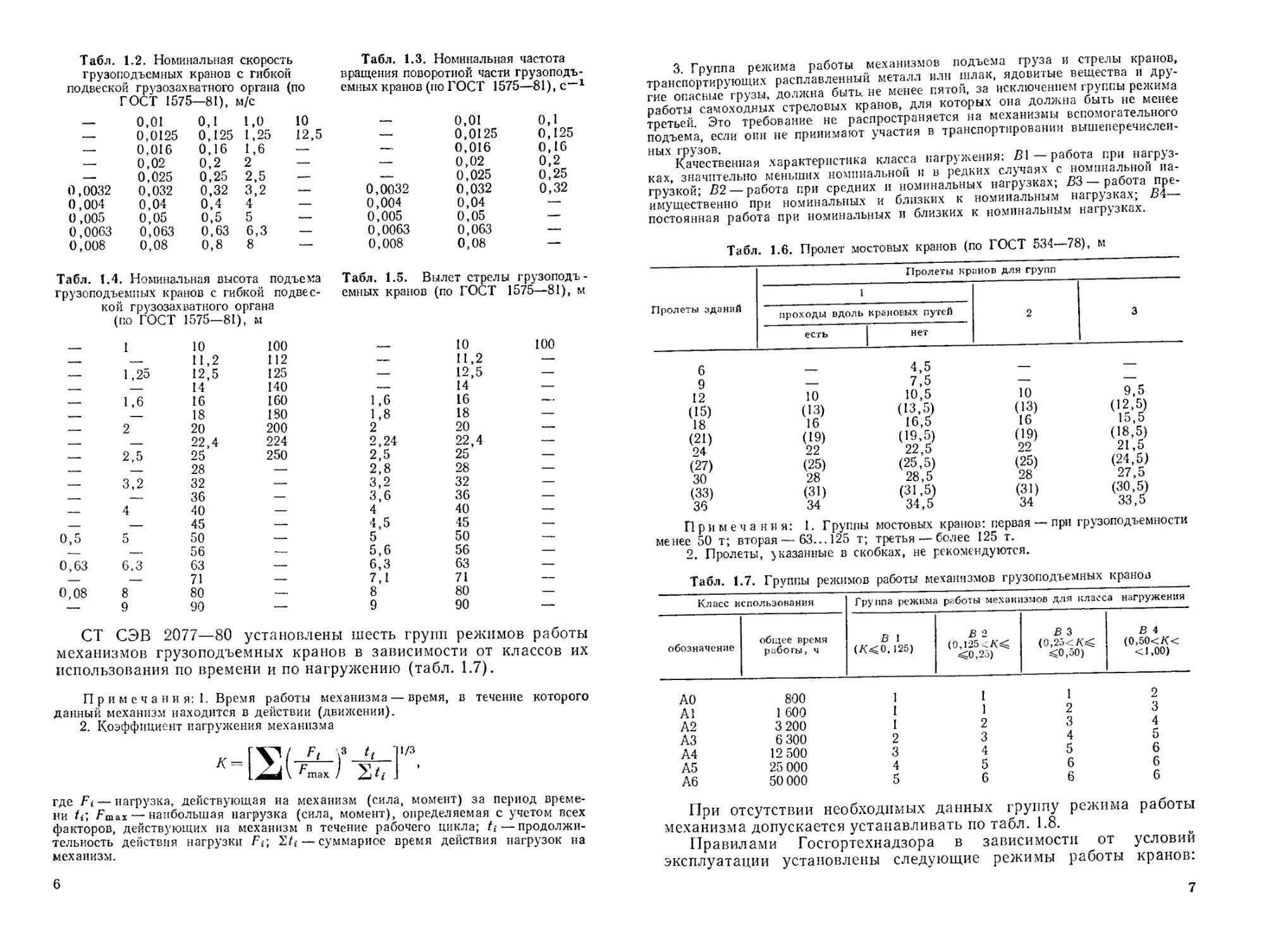
Табл. 1.2. Номинальная скорость Табл. 1.3. Номинальная частота
грузоподъемных кранов с гибком вращения поворотной части грузоподъ-
подвеской грузозахватного органа (по емных кранов (по ГОСТ 1575—81), с*”1
ГОСТ 1575—81), м/с
— 0,01 о,1 1,0 10 — 0,01 0,1
— 0,0125 0,125 1,25 12,5 — 0,0125 0,125
— 0,016 0,16 1,6 — 0,016 0,16
— 0,02 0,2 2 — — 0,02 0,2
— 0,025 0,25 2,5 — — 0,025 0,25
0,0032 0,032 0,32 3,2 — 0,0032 0,032 0,32
0,004 0,04 0,4 4 — 0,004 0,04 —
0 ,005 0,05 0,5 5 — 0,005 0,05 —
0,0063 0,063 0,63 6.3 — 0,0063 0,063 —
0,008 0,08 0,8 8 — 0,008 0,08 —
Вылет стрелы
Табл. 1.5.
емных кранов (по ГОСТ 1575—81), м
грузоподъ -
Табл. 1.4. Номинальная высота подъема
грузоподъемных кранов с гибкой подвес-
кой грузозахватного органа
(по ГОСТ 1575—81), м
— 1 10 100 — 10 100
— — 11,2 112 11,2 —
— 1,25 12,5 125 — 12,5 —
— — 14 140 — 14 —
— 1,6 16 160 1,6 16
— — 18 180 1,8 18 —
— 2 20 200 2 20 —
— — 22,4 224 2,24 22,4 —
— 2,5 25 250 2,5 25 —
— — 28 — 2,8 28 —
— 3,2 32 — 3,2 32 —
— —, 36 — 3,6 36 —
— 4 40 — 4 40 —
— — 45 — 4,5 45 —
0,5 5 50 — 5 50 —
— — 56 — 5,6 56 —
0,63 6.3 63 — 6,3 63 —
— —- 71 — 7,1 71
0,08 8 80 — 8 80 —
— 9 90 — 9 90 —
СТ СЭВ 2077—80 установлены шесть групп режимов работы
механизмов грузоподъемных кранов в зависимости от классов их
использования по времени и по нагружению (табл. 1.7).
Примечания:!. Время работы механизма — время, в течение которого
данный механизм находится в действии (движении).
2. Коэффициент нагружения механизма
где Fi — нагрузка, действующая на механизм (сила, момент) за период време-
ни ti\ Fmax — наибольшая нагрузка (сила, момент), определяемая с учетом всех
факторов, действующих на механизм в течение рабочего цикла; Ц — продолжи-
тельность действия нагрузки Х/г- — суммарное время действия нагрузок на
механизм.
3. Группа режима работы механизмов подъема груза и стрелы кранов,
транспортирующих расплавленный металл или шлак, ядовитые вещества и дру-
гие опасные грузы, должна быть, не менее пятой, за исключением группы режима
работы самоходных стреловых кранов, для которых она должна быть не менее
третьей. Это требование не распространяется на механизмы вспомогательного
подъема, если они не принимают участия в транспортировании вышеперечислен-
ных грузов.
Качественная характеристика класса нагружения: £?1—работа при нагруз-
ках, значительно меньших номинальной н в редких случаях с номинальной на-
грузкой; В2 — работа при средних и номинальных нагрузках; ВЗ— работа пре-
имущественно при номинальных и близких к номинальным нагрузках; Bi—
постоянная работа при номинальных и близких к номинальным нагрузках.
Табл. 1.6. Пролет мостовых кранов (по ГОСТ 534—78), м
Пролеты зданий Пролеты кранов для групп
1 2 3
проходы вдоль крановых путей
есть нет
6 4,5
9 — 7,5 — —
12 10 10,5 10 9,5
(15) (13) (13,5) (13) (12,5)
18 16 16,5 16 15,5
(21) (19) (19,5) (19) (18,5)
24 22 22,5 22 21,5
(27) (25) (25,5) (25) (24,5)
30 28 28,5 28 27,5
(33) (31) (31,5) (31) (30,5)
36 34 34,5 34 33,5
Примечания: I. Группы мостовых кранов: первая — при грузоподъемности
менее 50 т; вторая— 63... 125 т; третья — более 125 т.
2. Пролеты, указанные в скобках, не рекомендуются.
Табл. 1.7. Группы режимов работы механизмов грузоподъемных кранов
Класс использования Группа режима работы механизмов для класса нагружения
обозначение общее время работы, ч В 1 (/«0.125) В 2 (0,!25</« <0,25) В 3 (0,25<7« <0,50) В 4 (0,50<К< <1,00)
АО 800 1 1 1 2
А1 1 600 1 1 2 3
А2 3 200 1 2 3 4
АЗ 6 300 2 3 4 5
А4 12 500 3 4 5 6
А5 25 000 4 5 6 6
А6 50 000 5 6 6 6
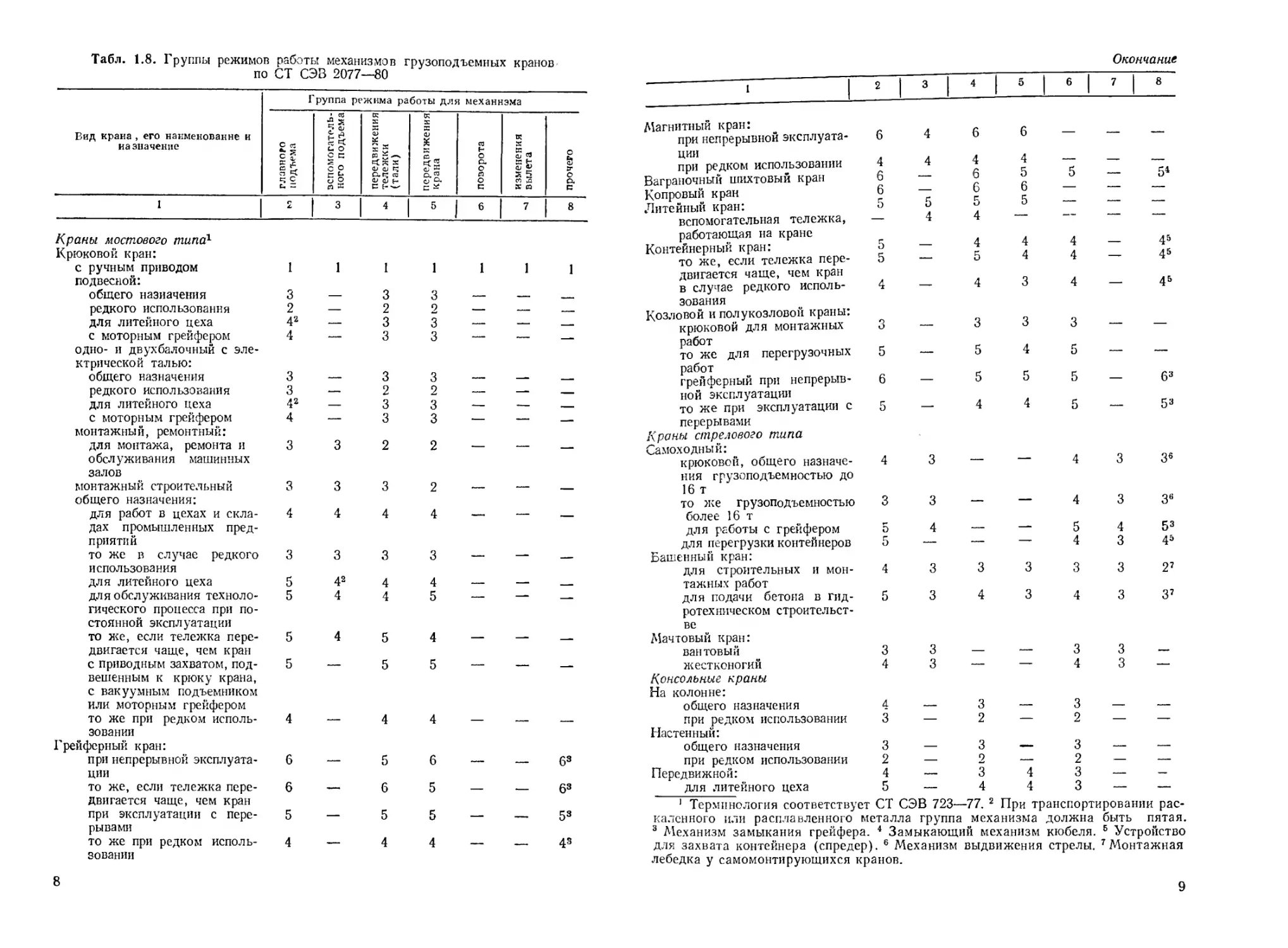
При отсутствии необходимых данных группу режима работы
механизма допускается устанавливать по табл. 1.8.
Правилами Госгортехнадзора в зависимости от условий
эксплуатации установлены следующие режимы работы кранов:
7
Табл. 1.8. Группы режимов работы механизмов грузоподъемных кранов
по СТ СЭВ 2077—80
Вид крана , его наименование и назначение Группа режима работы для механизма
главного подъема вспомогатель- ного подъема передвижения тележки (тали) передвижения крана поворота 1 ( изменения вылета прочего
1 2 3 4 5 1 6 7 8
Краны мостового типа1 Крюковой кран: с ручным приводом 1 1 1 1 1 1 1
подвесной: общего назначения 3 — 3 3 — „
редкого использования 2 — 2 2 — — —
для литейного цеха 42 — 3 3 — — —.
с моторным грейфером 4 — 3 3 — — —
одно- и двух балочный с эле- ктрической талью: общего назначения 3 3 3
редкого использования 3 — 2 2 — — —
для литейного цеха 42 — 3 3 -— -— —
с моторным грейфером 4 — 3 3 — — —
монтажный, ремонтный; для монтажа, ремонта и 3 3 2 2 — —
обслуживания машинных залов монтажный строительный 3 3 3 2
общего назначения: для работ в цехах и скла- 4 4 4 4 — —
дах промышленных пред- приятий то же в случае редкого 3 3 3 3
использования для литейного цеха 5 42 4 4 — —
для обслуживания техноло- 5 4 4 5 — — —
гического процесса при по- стоянной эксплуатации то же, если тележка пере- 5 4 5 4
двигается чаще, чем кран с приводным захватом, под- 5 — 5 5 — — —
вешенным к крюку крана, с вакуумным подъемником или моторным грейфером то же при редком исполь- 4 4 4
зовании Грейферный кран: при непрерывной эксплуата- 6 5 6 63
ции то же, если тележка пере- 6 —. 6 5 63
двигается чаще, чем кран при эксплуатации с пере- 5 — 5 5 — — 53
рывами то же при редком исполь- 4 — 4 4 — — 4з
зовании
8
Окончание
1 2 1 3 1 4 1 5 1 6 1 7 1 8
Магнитный кран: при непрерывной эксплуата- 6 4 6 6 — — —
ции при редком использовании 4 4 4 4 — — -
Ваграночный шихтовый кран 6 — 6 5 5 — 54
Копровый кран 6 — 6 6 — — —
Литейный кран: 5 5 5 — — —
вспомогательная тележка, — 4 4 — -— — —
работающая на кране Контейнерный кран: 5 — 4 4 4 — 45
то же, если тележка пере- 5 — 5 4 4 — 45
двигается чаще, чем кран в случае редкого исполь- 4 — 4 3 4 — 45
зования Козловой и полукозловой краны: крюковой для монтажных 3 3 3 3
работ то же для перегрузочных 5 — 5 4 5
работ грейферный при непрерыв- 6 — 5 5 5 — 63
ной эксплуатации то же при эксплуатации с 5 — 4 4 5 53
перерывами Краны стрелового типа Самоходный: крюковой, общего назначе- 4 3 4 3 Зб
ния грузоподъемностью до 16 т то же грузоподъемностью 3 3 4 3 3е
более 16 т для работы с грейфером 5 4 — — 5 4 53
для перегрузки контейнеров 5 — — — 4 3 45
Башенный кран: для строительных и мон- 4 3 3 3 3 3 27
тажных работ для подачи бетона в гид- 5 3 4 3 4 3 З7
ротехническом строительст- ве Мачтовый кран: вантовый 3 3 3 3
жестконогий 4 3 — —_ 4 3 - -
Консольные краны На колонне: общего назначения 4 3 3
при редком использовании 3 — 2 — 2
Настенный: общего назначения 3 3 3
при редком использовании 2 — 2 2
Передвижной: 4 — 3 4 3
для литейного цеха 5 — 4 4 3 — —
1 Терминология соответствуй ет СТ СЭВ 723- -77. 2 При транспортировании рас-
каленного или расплавленного металла группа механизма должна быть пятая.
Механизм замыкания грейфера. 4 Замыкающий механизм кюбеля. 6 Уст1 эойство
для захвата контейнера (спредер). 6 Механизм выдвижения стрелы. 7Монтажная
лебедка у самомонтирующихся кранов.
9
с ручным приводом — Р; с машинным приводом: легкий — Л, сред-
ний — С, тяжелый — Т, весьма тяжелый — ВТ.
Режим работы определяется для каждого механизма в отдель-
ности. Режим работы крана в целом устанавливается по режиму
работы механизма главного подъема.
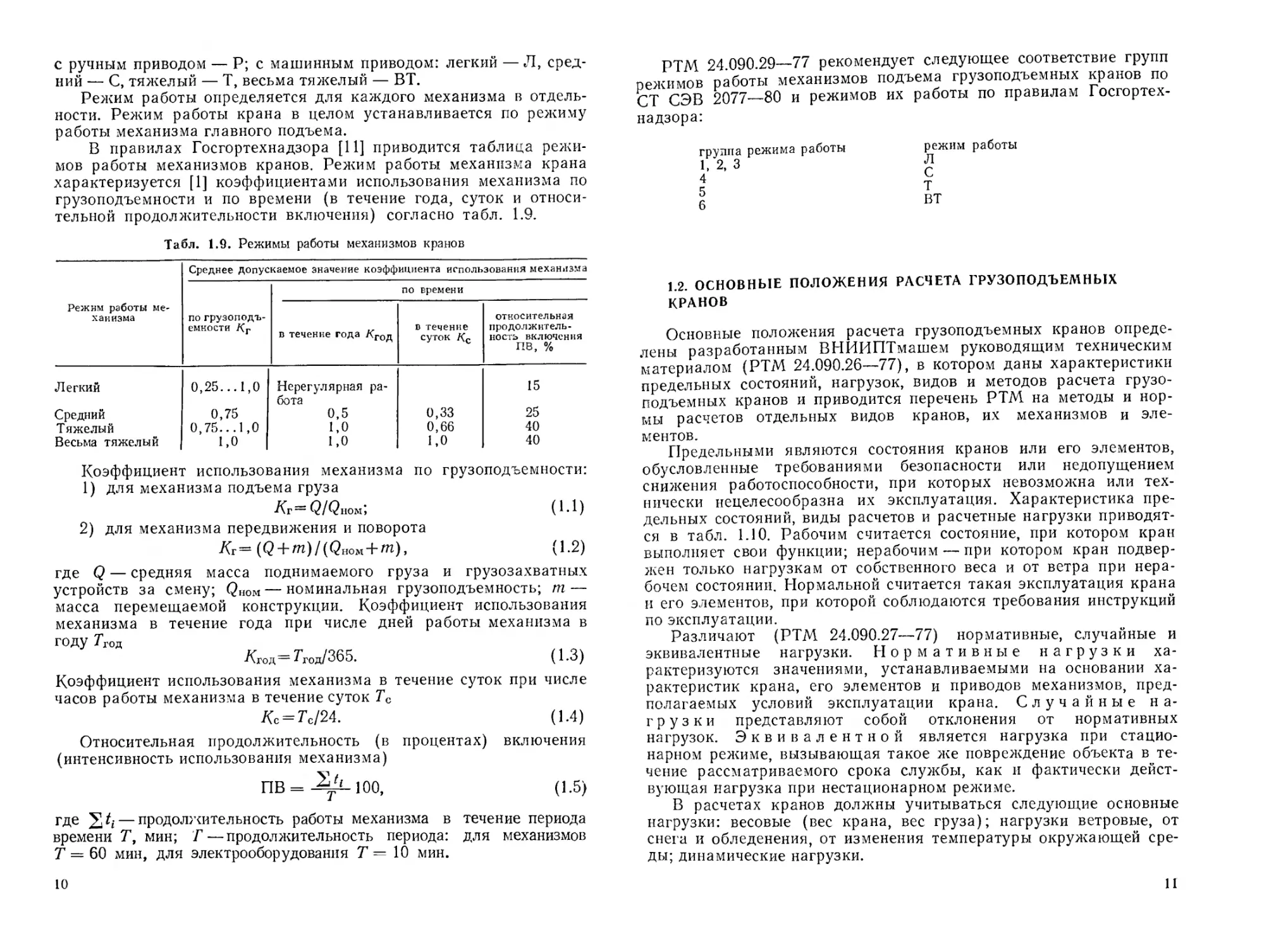
В правилах Госгортехнадзора [11] приводится таблица режи-
мов работы механизмов кранов. Режим работы механизма крана
характеризуется [1] коэффициентами использования механизма по
грузоподъемности и по времени (в течение года, суток и относи-
тельной продолжительности включения) согласно табл. 1.9.
Табл. 1.9. Режимы работы механизмов кранов
Режим работы ме- ханизма Среднее допускаемое значение коэффициента использования механизма
по грузоподъ- емности по времени
в течение года КГОд в течение суток Кс относительная продолжитель- ность включения ПВ, %
Легкий 0,25...1,0 Нерегулярная ра- бота 15
Средний 0,75 0,5 0,33 25
Тяжелый 0,75...1,0 1,0 0,66 40
Весьма тяжелый 1.0 1,0 1,0 40
Коэффициент использования механизма по грузоподъемности:
1) для механизма подъема груза
Kr=Q/QiioM*, (1.1)
2) для механизма передвижения и поворота
Kr=(Q + m)/(Q ном + т), (1.2)
где Q — средняя масса поднимаемого груза и грузозахватных
устройств за смену; QHom — номинальная грузоподъемность; т —
масса перемещаемой конструкции. Коэффициент использования
механизма в течение года при числе дней работы механизма в
году Ггод
Кгод=Ггод/365. (1.3)
Коэффициент использования механизма в течение суток при числе
часов работы механизма в течение суток Гс
Кс = Тс/24. (1.4)
Относительная продолжительность (в процентах) включения
(интенсивность использования механизма)
ПВ = ^-100, (1.5)
где — продолжительность работы механизма в течение периода
времени Т, мин; Г — продолжительность периода: для механизмов
Т = 60 мин, для электрооборудования Т = 10 мин.
10
РТМ 24.090.29—77 рекомендует следующее соответствие групп
режимов работы механизмов подъема грузоподъемных кранов по
СТ СЭВ 2077—80 и режимов их работы по правилам Госгортех-
надзора:
группа режима работы
1, 2, 3
4
5
6
режим работы
Л
С
Т
ВТ
1.2. ОСНОВНЫЕ ПОЛОЖЕНИЯ РАСЧЕТА ГРУЗОПОДЪЕМНЫХ
КРАНОВ
Основные положения расчета грузоподъемных кранов опреде-
лены разработанным ВНИИПТмашем руководящим техническим
материалом (РТМ 24.090.26—77), в котором даны характеристики
предельных состояний, нагрузок, видов и методов расчета грузо-
подъемных кранов и приводится перечень РТМ на методы и нор-
мы расчетов отдельных видов кранов, их механизмов и эле-
ментов.
Предельными являются состояния кранов или его элементов,
обусловленные требованиями безопасности или недопущением
снижения работоспособности, при которых невозможна или тех-
нически нецелесообразна их эксплуатация. Характеристика пре-
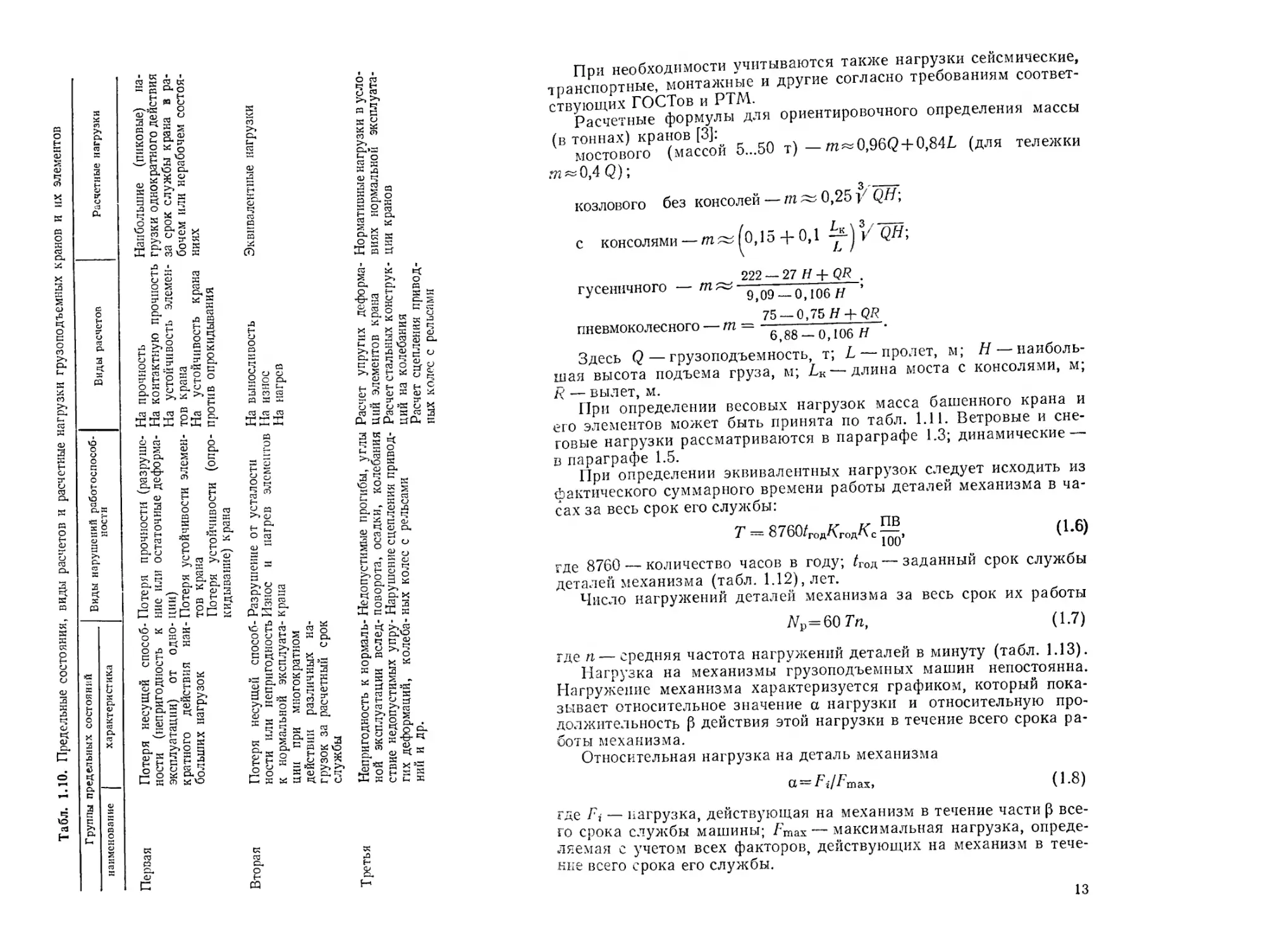
дельных состояний, виды расчетов и расчетные нагрузки приводят-
ся в табл. 1.10. Рабочим считается состояние, при котором кран
выполняет свои функции; нерабочим — при котором кран подвер-
жен только нагрузкам от собственного веса и от ветра при нера-
бочем состоянии. Нормальной считается такая эксплуатация крана
п его элементов, при которой соблюдаются требования инструкций
по эксплуатации.
Различают (РТМ 24.090.27—77) нормативные, случайные и
эквивалентные нагрузки. Нормативные нагрузки ха-
рактеризуются значениями, устанавливаемыми на основании ха-
рактеристик крана, его элементов и приводов механизмов, пред-
полагаемых условий эксплуатации крана. Случайные на-
грузки представляют собой отклонения от нормативных
нагрузок. Эквивалентной является нагрузка при стацио-
нарном режиме, вызывающая такое же повреждение объекта в те-
чение рассматриваемого срока службы, как и фактически дейст-
вующая нагрузка при нестационарном режиме.
В расчетах кранов должны учитываться следующие основные
нагрузки: весовые (вес крана, вес груза); нагрузки ветровые, от
снега и обледенения, от изменения температуры окружающей сре-
ды; динамические нагрузки.
11
Табл. 1.10. Предельные состояния, виды расчетов и расчетные нагрузки грузоподъемных кранов и их элементов
Группы предельных состояний ~
---------. Виды нарушений работоспособ-
нование--характеристика-----------ностн Виды расчетов Расчетные нагрузки
и
При необходимости учитываются также нагрузки сейсмические,
транспортные, монтажные и другие согласно требованиям соответ-
ствующих ГОСТов и РТМ.
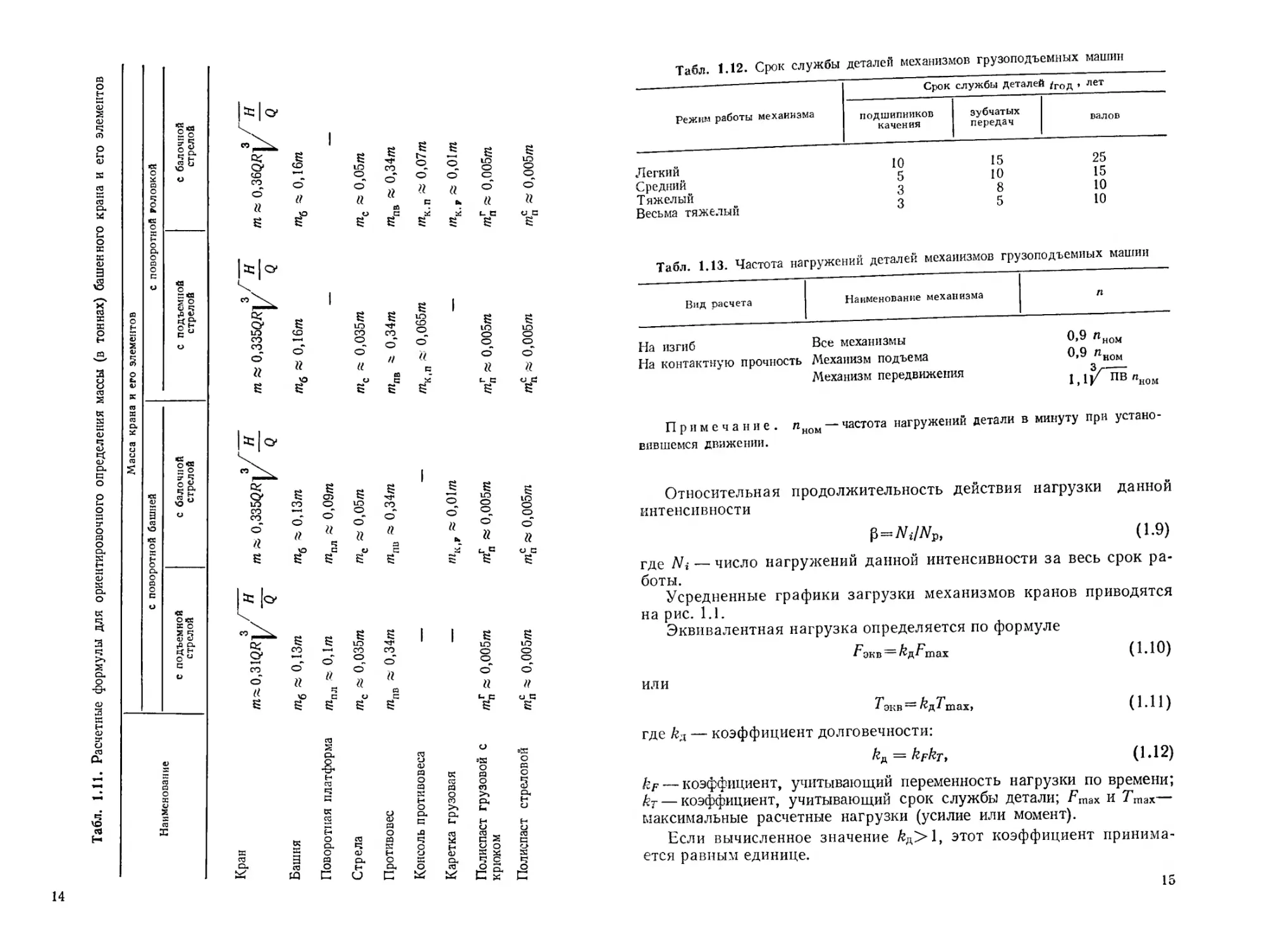
Расчетные формулы для ориентировочного определения массы
(в тоннах) кранов [3]:
мостового (массой 5...50 т) —m«0,96Q+0,84L
т ~ 0,4 Q);
3----
козлового без консолей — т ~ 0,25 У
с консолями — +
гусеничного —
222 — 27 H + QR .
9,09-0,106 /7 ’
(для тележки
75 —0,75 /7+ W
пневмоколесного - m = —.
Здесь Q — грузоподъемность, т; L — пролет, м; Н — наиболь-
шая высота подъема груза, м; LK — длина моста с консолями, м;
/? — вылет, м.
При определении весовых нагрузок масса башенного крана и
его элементов может быть принята по табл. 1.11. Ветровые и сне-
говые нагрузки рассматриваются в параграфе 1.3; динамические —
в параграфе 1.5.
При определении эквивалентных нагрузок следует исходить из
фактического суммарного времени работы деталей механизма в ча-
сах за весь срок его службы:
7 = 8760/ГОД^ОД^^, (1.6)
где 8760 — количество часов в году; /год — заданный срок службы
деталей механизма (табл. 1.12), лет.
Число нагружений деталей механизма за весь срок их работы
7Vp=60Tn,
(1-7)
где п— средняя частота нагружений деталей в минуту (табл. 1.13).
Нагрузка на механизмы грузоподъемных машин непостоянна.
Нагружение механизма характеризуется графиком, который пока-
зывает относительное значение а нагрузки и относительную про-
должительность Р действия этой нагрузки в течение всего срока ра-
боты механизма.
Относительная нагрузка на деталь механизма
а = Fi/Fmax, (1.8)
где Fj — нагрузка, действующая на механизм в течение части р все-
го срока службы машины; Fmax— максимальная нагрузка, опреде-
ляемая с учетом всех факторов, действующих на механизм в тече-
ние всего срока его службы.
13
14
Табл. 1.12. Срок службы деталей механизмов грузоподъемных машин
Срок службы деталей /год , лет
Режим работы механизма
подшипников
качения
зубчатых
передач
валов
Легкий 10 25
Средний 5 10 15
Тяжелый £ °
Весьма тяжелый 3 5 10
Табл. 1.13. Частота нагружений деталей механизмов грузоподъемных машин
Вид расчета Наименование механизма п
На изгиб На контактную прочность Все механизмы 0,9 пном Механизм подъема 0,9 пном Механизм передвижения 3/”7гп 1>1у ив пном
Примечание. пном— частота нагружений детали в минуту при устано
вившемся движении.
Относительная продолжительность действия нагрузки данной
интенсивности
(1.9)
где Ni~ число нагружений данной интенсивности за весь срок ра-
боты.
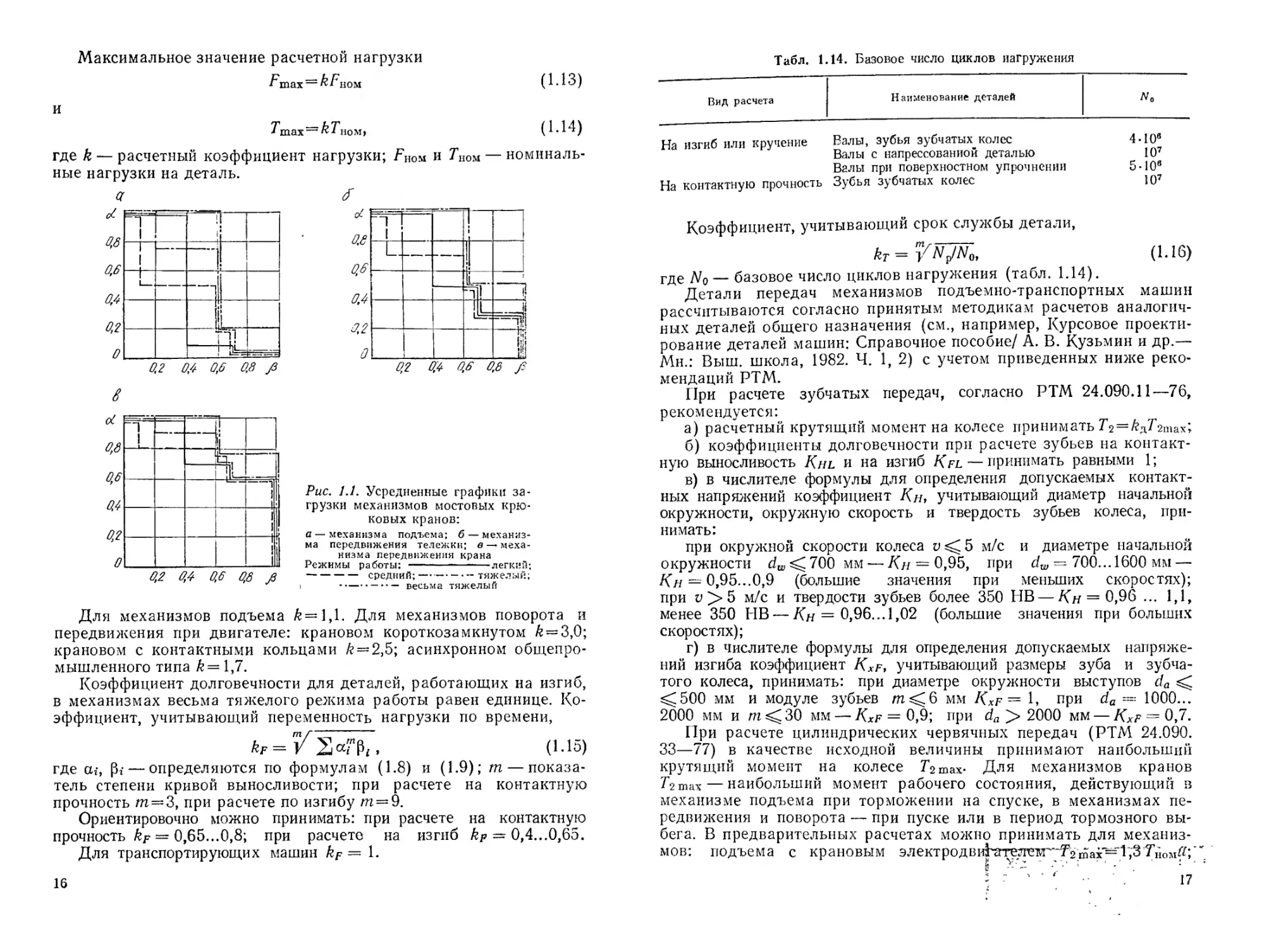
Усредненные графики загрузки механизмов кранов приводятся
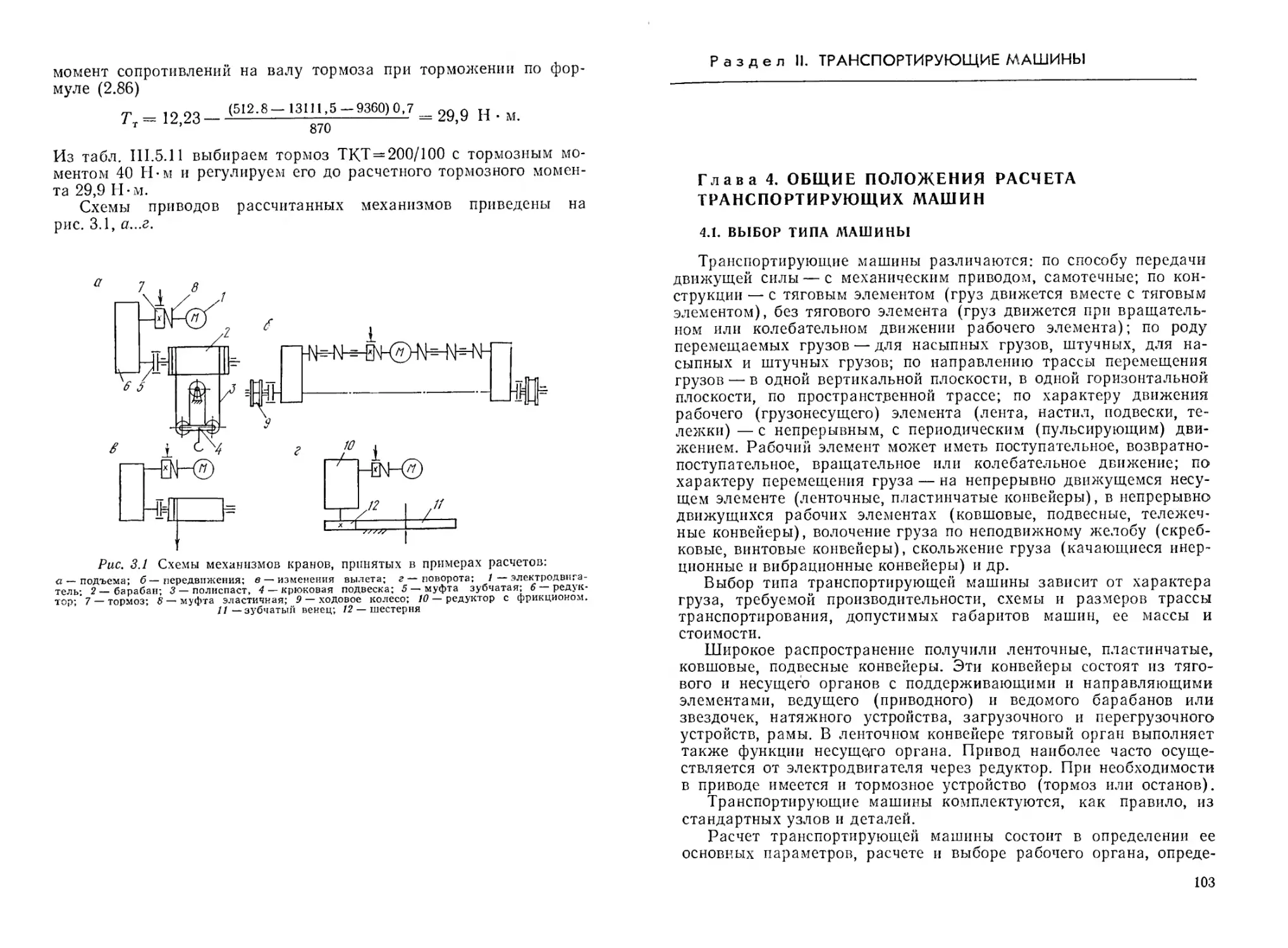
на рис. 1.1.
Эквивалентная нагрузка определяется по формуле
Fэкв = ^д/?шах (1.10)
ИЛИ
^экв — ^д^'тах, (1.11)
где /гд — коэффициент долговечности:
£д = Ыг, (1.12)
kp — коэффициент, учитывающий переменность нагрузки по времени;
kT — коэффициент, учитывающий срок службы детали; Fmax и Гтах_______
максимальные расчетные нагрузки (усилие или момент).
Если вычисленное значение &д>1, этот коэффициент принима-
ется равным единице.
Максимальное значение расчетной нагрузки
Fmax
ном
max— kTno^t
(1.13)
где k — расчетный коэффициент нагрузки; ГНом и Тном — номиналь-
ные нагрузки на деталь.
Рис, 1.1. Усредненные графики за-
грузки механизмов мостовых крю-
ковых кранов:
а — механизма подъема; б — механиз-
ма передвижения тележки; а—-меха-
низма передвижения крана
Режимы работы: --------------легкий;
---------средний;---------тяжелый,
--------------------------• — • • — весьма тяжелыГг
Для механизмов подъема k~ 1,1. Для механизмов поворота и
передвижения при двигателе: крановом короткозамкнутом & = 3,0;
крановом с контактными кольцами /г = 2,5; асинхронном общепро-
мышленного типа &=1,7.
Коэффициент долговечности для деталей, работающих на изгиб,
в механизмах весьма тяжелого режима работы равен единице. Ко-
эффициент, учитывающий переменность нагрузки по времени,
= (1.15)
где а;, Рг — определяются по формулам (1.8) и (1.9); т — показа-
тель степени кривой выносливости; при расчете на контактную
прочность т = 3, при расчете по изгибу т==9.
Ориентировочно можно принимать: при расчете на контактную
прочность kP — 0,65...0,8; при расчете на изгиб kp = 0,4...0,65.
Для транспортирующих машин kp — 1.
16
Табл. 1.14. Базовое число циклов нагружения
Вид расчета Наименование деталей No
На изгиб или кручение Валы, зубья зубчатых колес 4-10”
Валы с напрессованной деталью 107
Валы при поверхностном упрочнении 5-10е
На контактную прочность Зубья зубчатых колес 107
Коэффициент, учитывающий срок службы детали,
(1.16)
где дг0— базовое число циклов нагружения (табл. 1.14).
Детали передач механизмов подъемно-транспортных машин
рассчитываются согласно принятым методикам расчетов аналогич-
ных деталей общего назначения (см., например, Курсовое проекти-
рование деталей машин: Справочное пособие/ А. В. Кузьмин и др.—
Мн.: Выш. школа, 1982. Ч. 1, 2) с учетом приведенных ниже реко-
мендаций РТМ.
При расчете зубчатых передач, согласно РТМ 24.090.11—76,
рекомендуется:
а) расчетный крутящий момент на колесе принимать
б) коэффициенты долговечности при расчете зубьев на контакт-
ную выносливость Kiil и на изгиб Kfl — принимать равными 1;
в) в числителе формулы для определения допускаемых контакт-
ных напряжений коэффициент К и, учитывающий диаметр начальной
окружности, окружную скорость и твердость зубьев колеса, при-
нимать:
при окружной скорости колеса v 5 м/с и диаметре начальной
окружности <4,^700 мм— Кн — 0,95, при dw = 700... 1600 мм —
Кн — 0,95.. .0,9 (большие значения при меньших скоростях);
при а >5 м/с и твердости зубьев более 350 НВ — Кн = 0,96 ... 1,1,
менее 350 НВ — Кн = 0,96... 1,02 (большие значения при больших
скоростях);
г) в числителе формулы для определения допускаемых напряже-
ний изгиба коэффициент КхР, учитывающий размеры зуба и зубча-
того колеса, принимать: при диаметре окружности выступов da
^500 мм и модуле зубьев т^б мм KxF = 1, при da ~ 1000...
2000 мм и т^ЗО мм — КхР = 0,9; при da > 2000 мм — = 0,7.
При расчете цилиндрических червячных передач (РТМ 24.090.
33—77) в качестве исходной величины принимают наибольший
крутящий момент на колесе Тгтах- Для механизмов кранов
Т2 max — наибольший момент рабочего состояния, действующий в
механизме подъема при торможении на спуске, в механизмах пе-
редвижения и поворота — при пуске или в период тормозного вы-
бега. В предварительных расчетах можно принимать для механиз-
мов: подъема с крановым электродвиКгтетгет^^
17
передвижения и поворота с крановыми короткозамкнутыми элек-
тродвигателями Г2тах = 3 Гноми, крановыми электродвигателями с
контактными кольцами 72 max =^2,5 TH0MtZ, асинхронными Г2тах =
= 1,7ГномН, где Люм — номинальный момент двигателя (ведущего
вала передачи), и—передаточное число червячной передачи.
Для транспортирующих машин Г2тах — наибольший длительно
действующий момент.
Расчетный крутящий момент на червячном колесе при расчете
зубьез на контактную выносливость принимают Т2//£ = ^дТ2тах.
Для легкого (1, 2), среднего (2, 3), тяжелого (4, 5) и весьма
тяжелого (6) режимов работы (в скобках — группы режимов по СТ
СЭВ 2077—80): 1) при материале колеса БР ОНФ и БР ОФЮ-1
коэффициент долговечности принимают равным соответственно
0,4; 0,5; 0,63 и 0,8; 2) при БР АЖ9-4Л — 0,63; 0,71; 0,8 и 0,9. Для
транспортирующих машин &д=1.
При расчете шлицевых соединений (РТМ 24.090.15—76) на-
ибольший крутящий момент Гтах, передаваемый соединением при
повторяющихся пиковых нагрузках, определяется динамическим
расчетом механизма (см. параграф 1.5).
При расчете призматических шпонок (РТМ 24.090.16—76) до-
пускаемое напряжение смятия [осм] определяется в зависимости от
режима работы механизма.
Для легкого (1, 2), среднего (2, 3), тяжелого (4, 5) и весьма тя-
желого (6) режимов работы допускаемое напряжение смятия равно
соответственно при нагрузке: знакопостоянной—0,65 от, 0,60 от,
0,55 от и 0,50 огт; знакопеременной — 0,43 огт, 0,40 ат, 0,36 <ут и 0,33 от;
ударной — 0,22 От, 0,20 от, 0,18 от и 0,16 от, где от— предел текуче-
сти материала.
При расчете валов и осей (РТМ 24.090.12—76) за исходную рас-
четную нагрузку принимают: в расчете на прочность — наиболь-
шую пиковую нагрузку, на выносливость — эквивалентную нагруз-
ку, на жесткость — нормативную нагрузку (см. параграф 1.2).
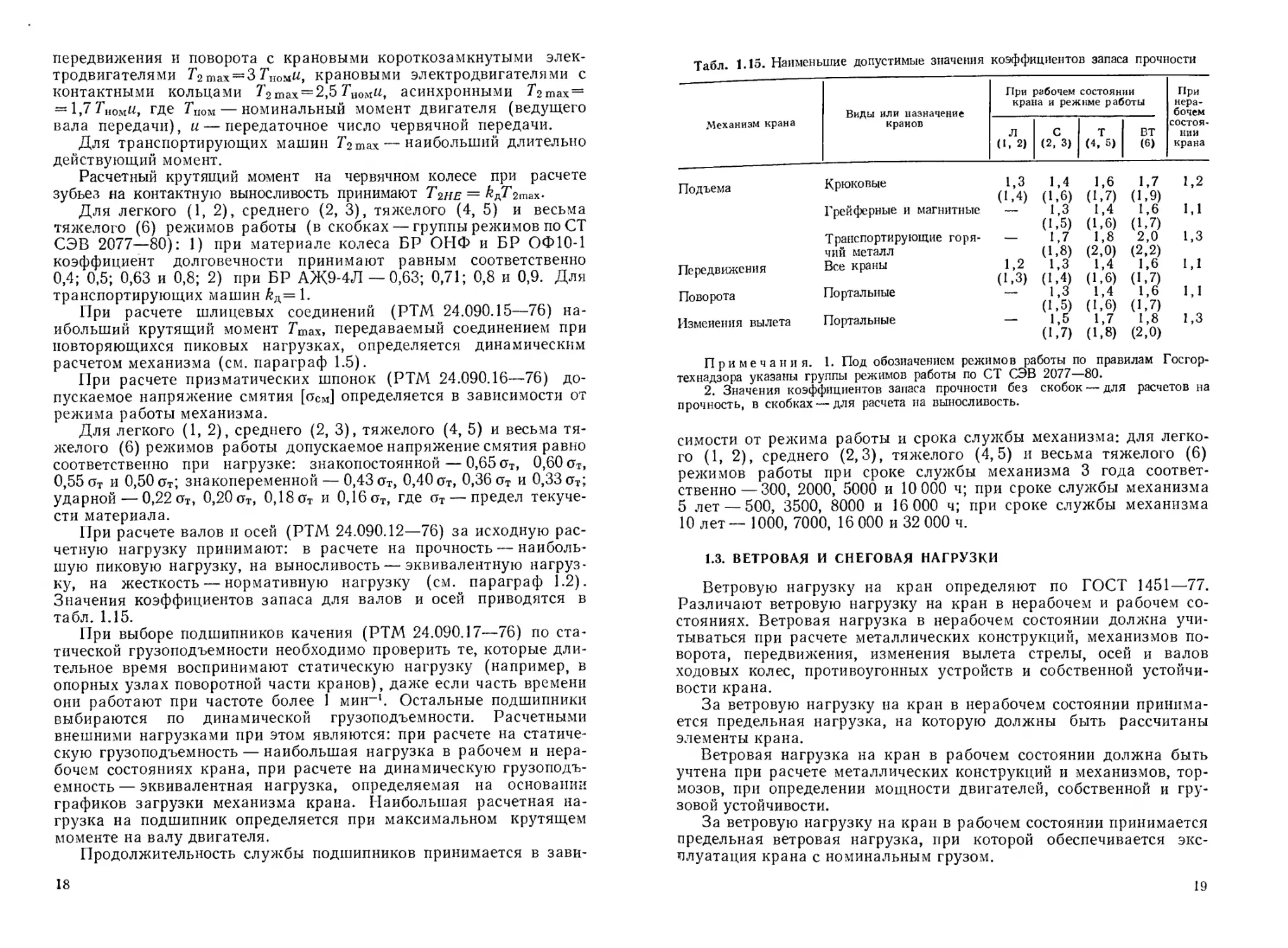
Значения коэффициентов запаса для валов и осей приводятся в
табл. 1.15.
При выборе подшипников качения (РТМ 24.090.17—76) по ста-
тической грузоподъемности необходимо проверить те, которые дли-
тельное время воспринимают статическую нагрузку (например, в
опорных узлах поворотной части кранов), даже если часть времени
они работают при частоте более 1 мин-1. Остальные подшипники
выбираются по динамической грузоподъемности. Расчетными
внешними нагрузками при этом являются: при расчете на статиче-
скую грузоподъемность — наибольшая нагрузка в рабочем и нера-
бочем состояниях крана, при расчете на динамическую грузоподъ-
емность — эквивалентная нагрузка, определяемая на основании
графиков загрузки механизма крана. Наибольшая расчетная на-
грузка на подшипник определяется при максимальном крутящем
моменте на валу двигателя.
Продолжительность службы подшипников принимается в зави-
18
Табл. 1.15. Наименьшие допустимые значения коэффициентов запаса прочности
Механизм крана Виды или назначение кранов При рабочем состоянии крана и режиме работы При нера- бочем состоя- нии крана
Л (1, 2) С (2, 3) т (4, 5) ВТ (6)
Подъема
Передвижения
Поворота
Изменения вылета
Крюковые
Грейферные и магнитные
Транспортирующие горя-
чий металл
Все краны
Портальные
Портальные
1,3 1,4 1,6 1,7 1,2
(1,4) (1,6) (1,7) (1,9)
1,3 1,4 1.6 1,1
(1,5) (1,6) (1,7)
— 1,7 1,8 2,0 1,3
(1.8) (2,0) (2,2)
1,2 1,3 1,4 1.6 1,1
(1,3) (1,4) (1,6) (1.7)
1,3 1,4 1,6 1,1
(1,5) (1,6) (1,7)
— 1,5 1,7 1,8 1,3
(1,7) (1,8) (2,0)
Примечания. 1. Под обозначением режимов работы по правилам Госгор-
технадзора указаны группы режимов работы по СТ СЭВ 2077—80.
2. Значения коэффициентов запаса прочности без скобок — для расчетов на
прочность, в скобках — для расчета на выносливость.
симости от режима работы и срока службы механизма: для легко-
го (1, 2), среднего (2,3), тяжелого (4,5) и весьма тяжелого (6)
режимов работы при сроке службы механизма 3 года соответ-
ственно— 300, 2000, 5000 и 10 000 ч; при сроке службы механизма
5 лет — 500, 3500, 8000 и 16 000 ч; при сроке службы механизма
10 лет — 1000, 7000, 16 000 и 32 000 ч.
1.3. ВЕТРОВАЯ И СНЕГОВАЯ НАГРУЗКИ
Ветровую нагрузку на кран определяют по ГОСТ 1451—77.
Различают ветровую нагрузку на кран в нерабочем и рабочем со-
стояниях. Ветровая нагрузка в нерабочем состоянии должна учи-
тываться при расчете металлических конструкций, механизмов по-
ворота, передвижения, изменения вылета стрелы, осей и валов
ходовых колес, противоугонных устройств и собственной устойчи-
вости крана.
За ветровую нагрузку на кран в нерабочем состоянии принима-
ется предельная нагрузка, на которую должны быть рассчитаны
элементы крана.
Ветровая нагрузка на кран в рабочем состоянии должна быть
учтена при расчете металлических конструкций и механизмов, тор-
мозов, при определении мощности двигателей, собственной и гру-
зовой устойчивости.
За ветровую нагрузку на кран в рабочем состоянии принимается
предельная ветровая нагрузка, при которой обеспечивается экс-
плуатация крана с номинальным грузом.
19
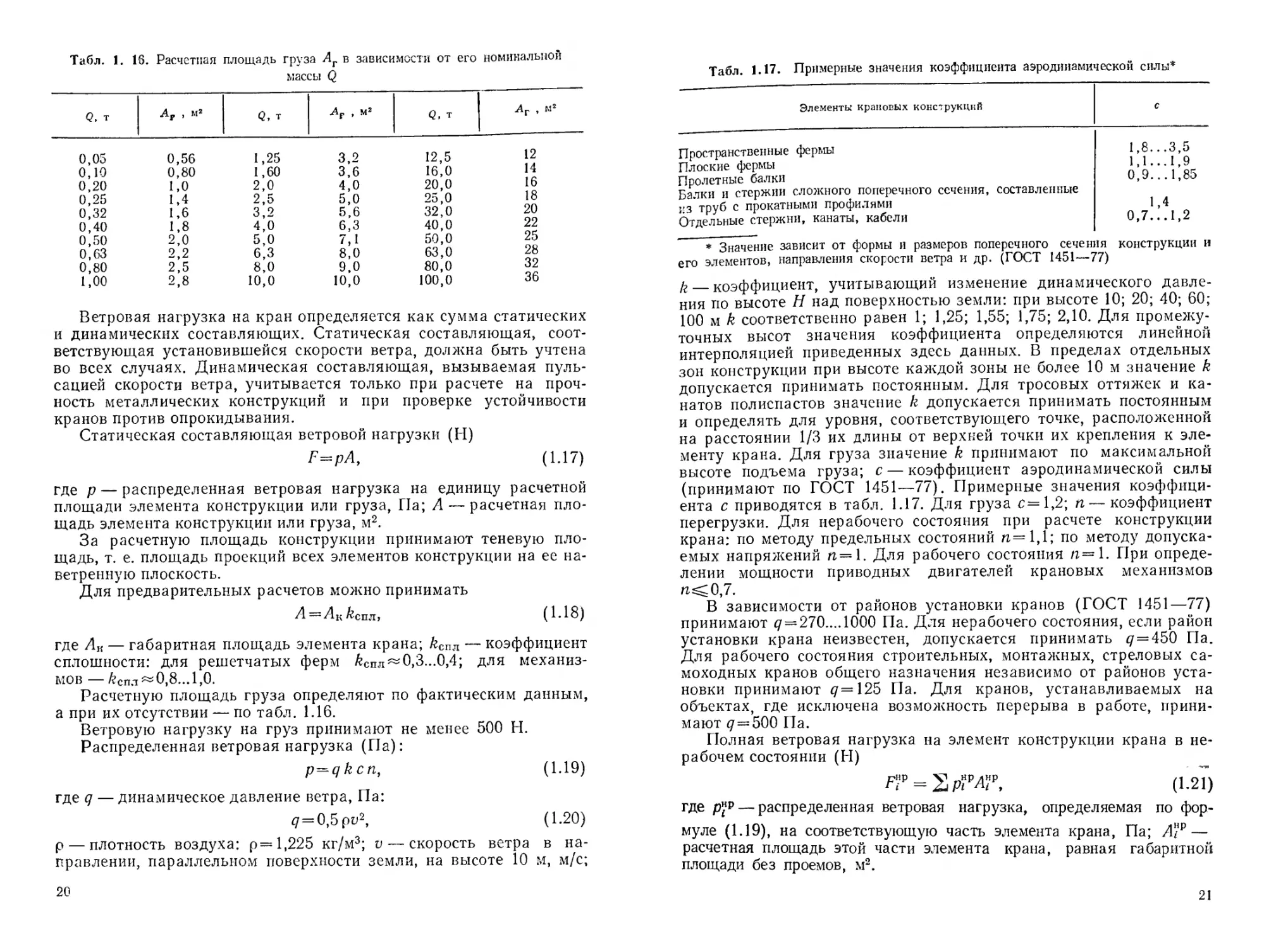
Табл. 1. 16. Расчетная площадь груза Лг в зависимости от его номинальной
массы Q
Q, т АР , м2 Q, т jAj, , м2 Q, т Лг , м2
0,05 0,56 1,25 3,2 12,5 12
0,10 0,80 1,60 3,6 16,0 14
0,20 1,0 2,0 4,0 20,0 16
0,25 1,4 2,5 5,0 25,0 18
0,32 1.6 3,2 5,6 32,0 20
0,40 1,8 4,0 6,3 40,0 22
0,50 2,0 5,0 7,1 50,0 25
0,63 2,2 6,3 8,0 63,0 28
0,80 2,5 8,0 9,0 80,0 32
1,00 2.8 10,0 10,0 100,0 36
Ветровая нагрузка на кран определяется как сумма статических
и динамических составляющих. Статическая составляющая, соот-
ветствующая установившейся скорости ветра, должна быть учтена
во всех случаях. Динамическая составляющая, вызываемая пуль-
сацией скорости ветра, учитывается только при расчете на проч-
ность металлических конструкций и при проверке устойчивости
кранов против опрокидывания.
Статическая составляющая ветровой нагрузки (Н)
(1-17)
где р— распределенная ветровая нагрузка на единицу расчетной
площади элемента конструкции или груза, Па; Л — расчетная пло-
щадь элемента конструкции или груза, м2.
За расчетную площадь конструкции принимают теневую пло-
щадь, т. е. площадь проекций всех элементов конструкции на ее на-
ветренную плоскость.
Для предварительных расчетов можно принимать
Л=Лк^СПЛ,
где Ли — габаритная площадь элемента крана; /?СпЛ — коэффициент
сплошности: для решетчатых ферм £Спл— 0,3...0,4; для механиз-
мов — /?спл — 0,8...1,0.
Расчетную площадь груза определяют по фактическим данным,
а при их отсутствии — по табл. 1.16.
Ветровую нагрузку на груз принимают не менее 500 Н.
Распределенная ветровая нагрузка (Па):
p^q ken,
(1-19)
где q — динамическое давление ветра, Па:
7=0,5 рц2, (1.20)
р — плотность воздуха: р = 1,225 кг/м3; v— скорость ветра в на-
правлении, параллельном поверхности земли, на высоте 10 м, м/с;
20
Табл. 1.17. Примерные значения коэффициента аэродинамической силы*
Элементы крановых конструкций
Пространственные фермы
Плоские фермы
Пролетные балки
Балки и стержни сложного поперечного сечения, составленные
из труб с прокатными профилями
Отдельные стержни, канаты, кабели
* Значение зависит от формы и размеров поперечного сечения
его элементов, направления скорости ветра и др. (ГОСТ 1451—77)
1,8...3,5
1,1...1,9
0,9...1,85
1,4
0,7...1,2
конструкции и
/г — коэффициент, учитывающий изменение динамического давле-
ния по высоте Н над поверхностью земли: при высоте 10; 20; 40; 60;
100 м k соответственно равен 1; 1,25; 1,55; 1,75; 2,10. Для промежу-
точных высот значения коэффициента определяются линейной
интерполяцией приведенных здесь данных. В пределах отдельных
зон конструкции при высоте каждой зоны не более 10 м значение k
допускается принимать постоянньш. Для тросовых оттяжек и ка-
натов полиспастов значение k допускается принимать постоянным
и определять для уровня, соответствующего точке, расположенной
на расстоянии 1/3 их длины от верхней точки их крепления к эле-
менту крана. Для груза значение k принимают по максимальной
высоте подъема груза; с — коэффициент аэродинамической силы
(принимают по ГОСТ 1451—77). Примерные значения коэффици-
ента с приводятся в табл. 1.17. Для груза 6=1,2; п — коэффициент
перегрузки. Для нерабочего состояния при расчете конструкции
крана: по методу предельных состояний п=1,1; по методу7 допуска-
емых напряжений п=1. Для рабочего состояния п=1. При опреде-
лении мощности приводных двигателей крановых механизмов
п^0,7.
В зависимости от районов установки краиов (ГОСТ 1451—77)
принимают 9 = 270....1000 Па. Для нерабочего состояния, если район
установки крана неизвестен, допускается принимать 9 = 450 Па.
Для рабочего состояния строительных, монтажных, стреловых са-
моходных кранов общего назначения независимо от районов уста-
новки принимают (7=125 Па. Для кранов, устанавливаемых на
объектах, где исключена возможность перерыва в работе, прини-
мают 9 = 500 Па.
Полная ветровая нагрузка на элемент конструкции крана в не-
рабочем состоянии (Н)
- "ч*7В
= (1.21)
где — распределенная ветровая нагрузка, определяемая по фор-
муле (1.19), на соответствующую часть элемента крана, Па; А?р—
расчетная площадь этой части элемента крана, равная габаритной
площади без проемов, м2.
21
Полная ветровая нагрузка на кран (т. е. на все элементы кон-
струкции) в нерабочем состоянии
Полная ветровая нагрузка на элемент крана в рабочем состоя-
нии (Н)
на соответствующую часть элемента крана, Па;
Р? = Хр№, (1.23)
где р?— распределенная ветровая нагрузка, определяемая по фор-
муле (1.19),
Л/—расчетная площадь этой части элемента крана, м2.
Ветровая нагрузка на все элементы конструкции крана в рабо-
чем состоянии
(1-24)
Ветровая нагрузка на груз (Н)
где рр — распределенная ветровая нагрузка на груз в рабочем со-
стоянии крана [см. (1.19)], Па; Лг — расчетная площадь груза, м2
(табл. 1.16).
Полная ветровая нагрузка на кран (т. е. на все его элементы и
на груз) в рабочем состоянии
Динамическую составляющую ветровой нагрузки на строитель-
ные башенные краны следует определять по ГОСТ 13994—81, в
остальных случаях — по нормам проектирования кранов данного
типа.
Снеговая нагрузка определяется весом снега на площади гори-
зонтальной проекции воспринимающей поверхности крана. Для
средней полосы СССР эта нагрузка принимается равной 1000 Па.
Нагрузка от льда при обледенении конструкции крана опреде-
ляется по площади поверхности, подвергающейся обледенению,
при толщине слоя льда 0,01...0,012 м и его плотности 900 кг/м3.
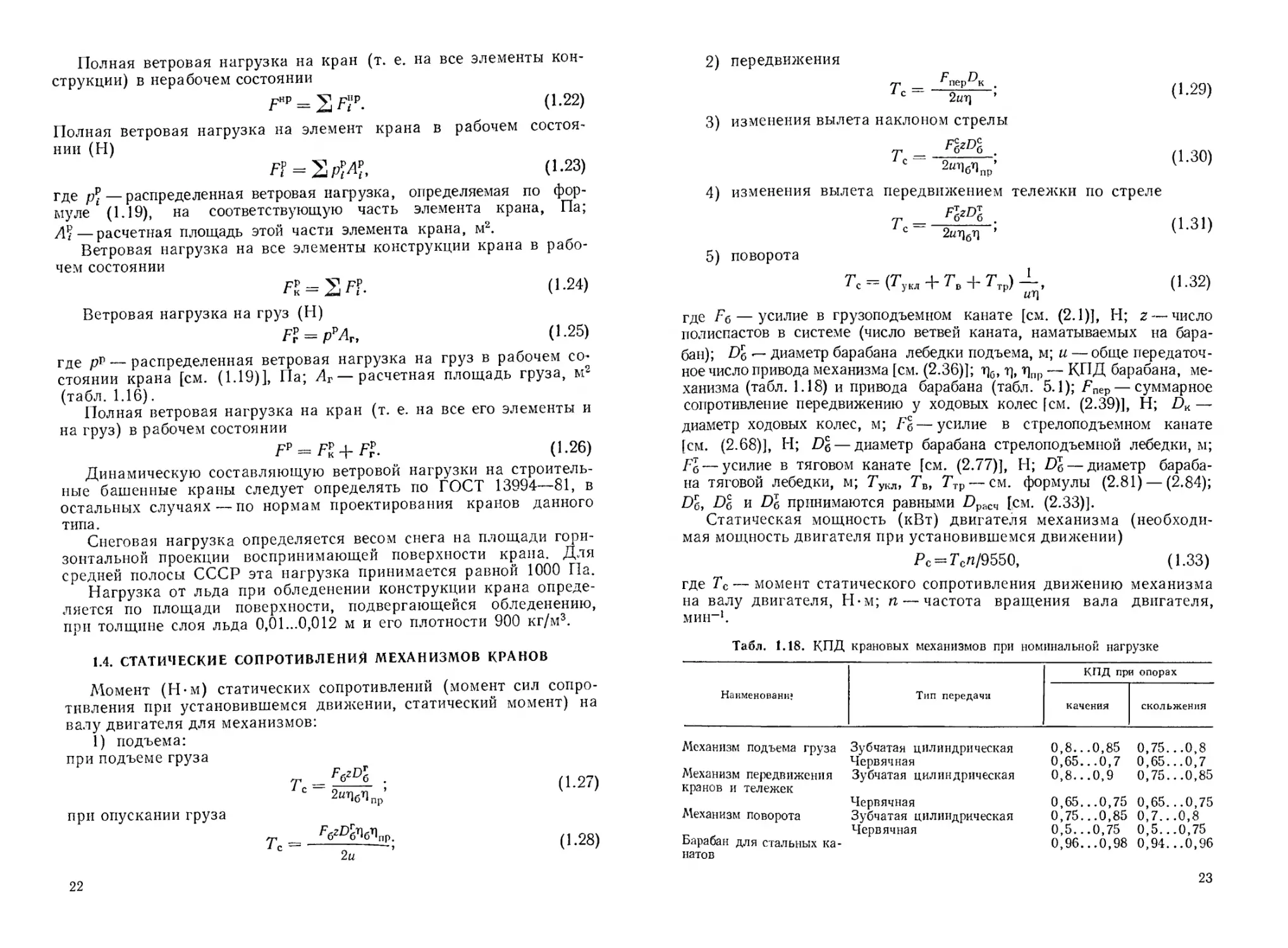
1.4. СТАТИЧЕСКИЕ СОПРОТИВЛЕНИЯ МЕХАНИЗМОВ КРАНОВ
Момент (Н-м) статических сопротивлений (момент сил сопро-
тивления при установившемся движении, статический момент) на
валу двигателя для механизмов:
1) подъема:
при подъеме груза
при опускании груза
_ W .
: 2ит1бПпр’
(1-27)
(1-28)
22
2) передвижения
пер к
2иТ]
(1-29)
3) изменения вылета наклоном стрелы
2и11бПпр’
(1.30)
изменения вылета передвижением тележки по стреле
. _ ' б4^б .
с ~ ЗиПбП ’
5) поворота
Гс = (Лкл + Л + ЛР)~, (1.32)
где Fe — усилие в грузоподъемном канате [см. (2.1)], Н; z— число
полиспастов в системе (число ветвей каната, наматываемых на бара-
бан); Об — Диаметр барабана лебедки подъема, м; и — обще передаточ-
ное число привода механизма [см. (2.36)]; т)б, т], т]пр — КПД барабана, ме-
ханизма (табл. 1.18) и привода барабана (табл. 5.1); Опер — суммарное
сопротивление передвижению у ходовых колес [см. (2.39)], Н; Ок —
диаметр ходовых колес, м; Об—усилие в стрелоподъемном канате
[см. (2.68)], Н; — диаметр барабана стрелоподъемной лебедки, м;
Об — усилие в тяговом канате [см. (2.77)], Н; Dr6 — диаметр бараба-
на тяговой лебедки, м; Тукл, Тв, Ттр — см. формулы (2.81) — (2.84);
Об, Въ и Об принимаются равными Орасч [см. (2.33)].
Статическая мощность (кВт) двигателя механизма (необходи-
мая мощность двигателя при установившемся движении)
Ос = Гси/9550, (1.33)
где Тс — момент статического сопротивления движению механизма
на валу двигателя, Н-м; п— частота вращения вала двигателя,
мин-1.
Табл. 1.18. КПД крановых механизмов при номинальной нагрузке
Наименование Тип передачи КПД пр качения и опорах скольжения
Механизм подъема груза
Механизм передвижения
кранов и тележек
Механизм поворота
Барабан для стальных ка-
натов
Зубчатая цилиндрическая
Червячная
Зубчатая цилиндрическая
Червячная
Зубчатая цилиндрическая
Червячная
0,8...0,85 0,75...0,8
0,65...0,7 0,65...0,7
0,8...0,9 0,75...0,85
0,65...0,75 0,65...0,75
0,75...0,85 0,7...0,8
0,5...0,75 0,5...0,75
0,96...0,98 0,94...0,96
23
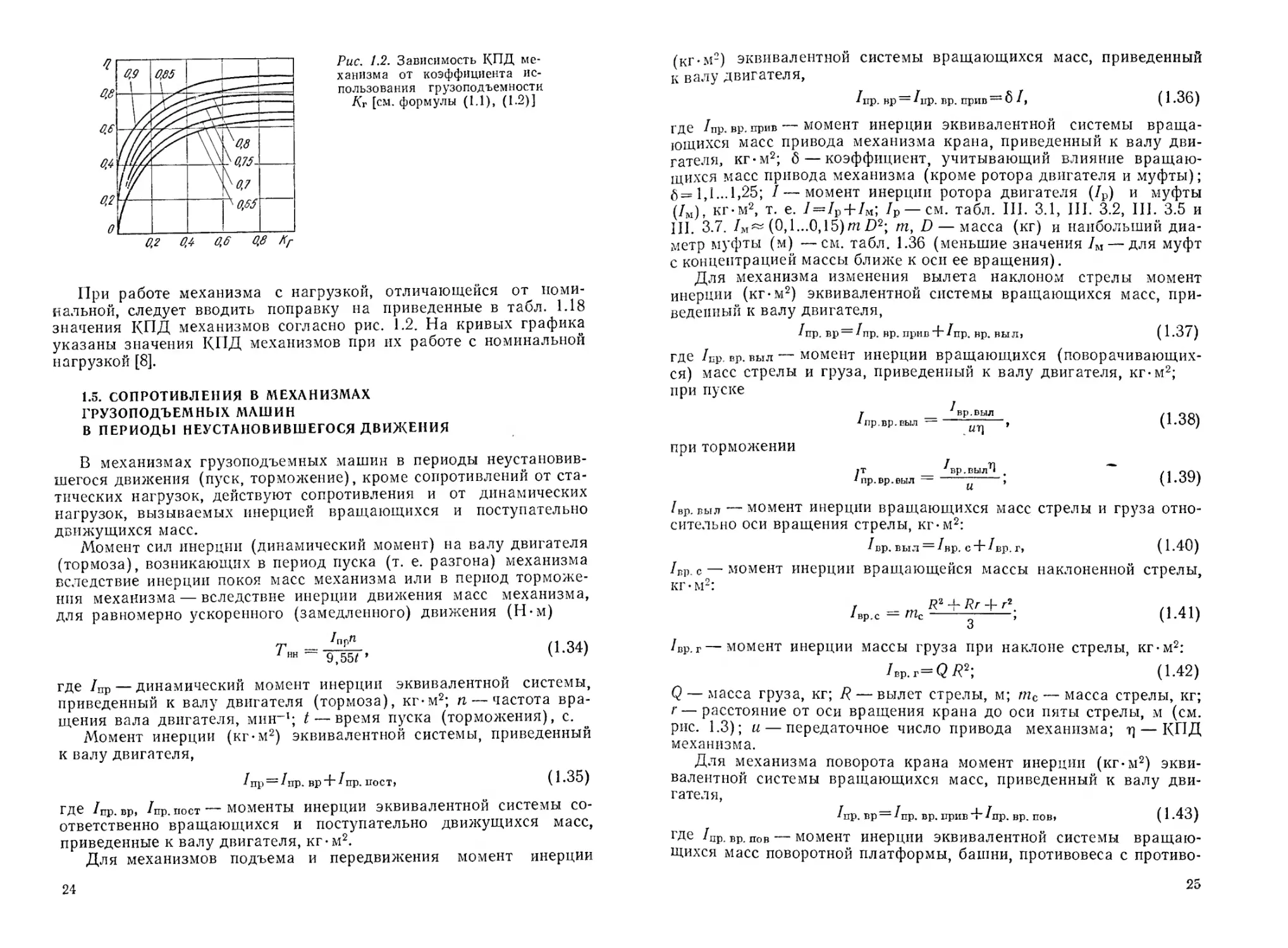
Рис. 1.2. Зависимость КПД ме-
ханизма от коэффициента ис-
пользования грузоподъемности
Кг [см. формулы (1.1), (1-2)]
При работе механизма с нагрузкой, отличающейся от номи-
нальной, следует вводить поправку на приведенные в табл. 1.18
значения КПД механизмов согласно рис. 1.2. На кривых графика
указаны значения КПД механизмов при их работе с номинальной
нагрузкой [8].
1.5. СОПРОТИВЛЕНИЯ В МЕХАНИЗМАХ
ГРУЗОПОДЪЕМНЫХ МАШИН
В ПЕРИОДЫ НЕУСТАНОВИВШЕГОСЯ ДВИЖЕНИЯ
В механизмах грузоподъемных машин в периоды неустановив-
шегося движения (пуск, торможение), кроме сопротивлений от ста-
тических нагрузок, действуют сопротивления и от динамических
нагрузок, вызываемых инерцией вращающихся и поступательно
движущихся масс.
Момент сил инерции (динамический момент) на валу двигателя
(тормоза), возникающих в период пуска (т. е. разгона) механизма
вследствие инерции покоя масс механизма или в период торможе-
ния механизма — вследствие инерции движения масс механизма,
для равномерно ускоренного (замедленного) движения (Н-м)
, I прЯ
нн ’
(1-34)
где Др — динамический момент инерции эквивалентной системы,
приведенный к валу двигателя (тормоза), кг-м2; п — частота вра-
щения вала двигателя, мин-1; t — время пуска (торможения), с.
Момент инерции (кг-м2) эквивалентной системы, приведенный
к валу двигателя,
пр —
пр. пост,
(1.35)
где Др. Вр, Др. пост — моменты инерции эквивалентной системы со-
ответственно вращающихся и поступательно движущихся масс,
приведенные к валу двигателя, кг-м2.
Для механизмов подъема и передвижения момент инерции
24
(кг-м2) эквивалентной системы вращающихся масс, приведенный
к валу двигателя,
пр. вр — / пр. вр. прив — О /,
(1.36)
где /пр. вр. прпв — момент инерции эквивалентной системы враща-
ющихся масс привода механизма крана, приведенный к валу дви-
гателя, кг-м2; 6 — коэффициент, учитывающий влияние вращаю-
щихся масс привода механизма (кроме ротора двигателя и муфты);
6= 1,1...1,25; /— момент инерции ротора двигателя (/р) и муфты
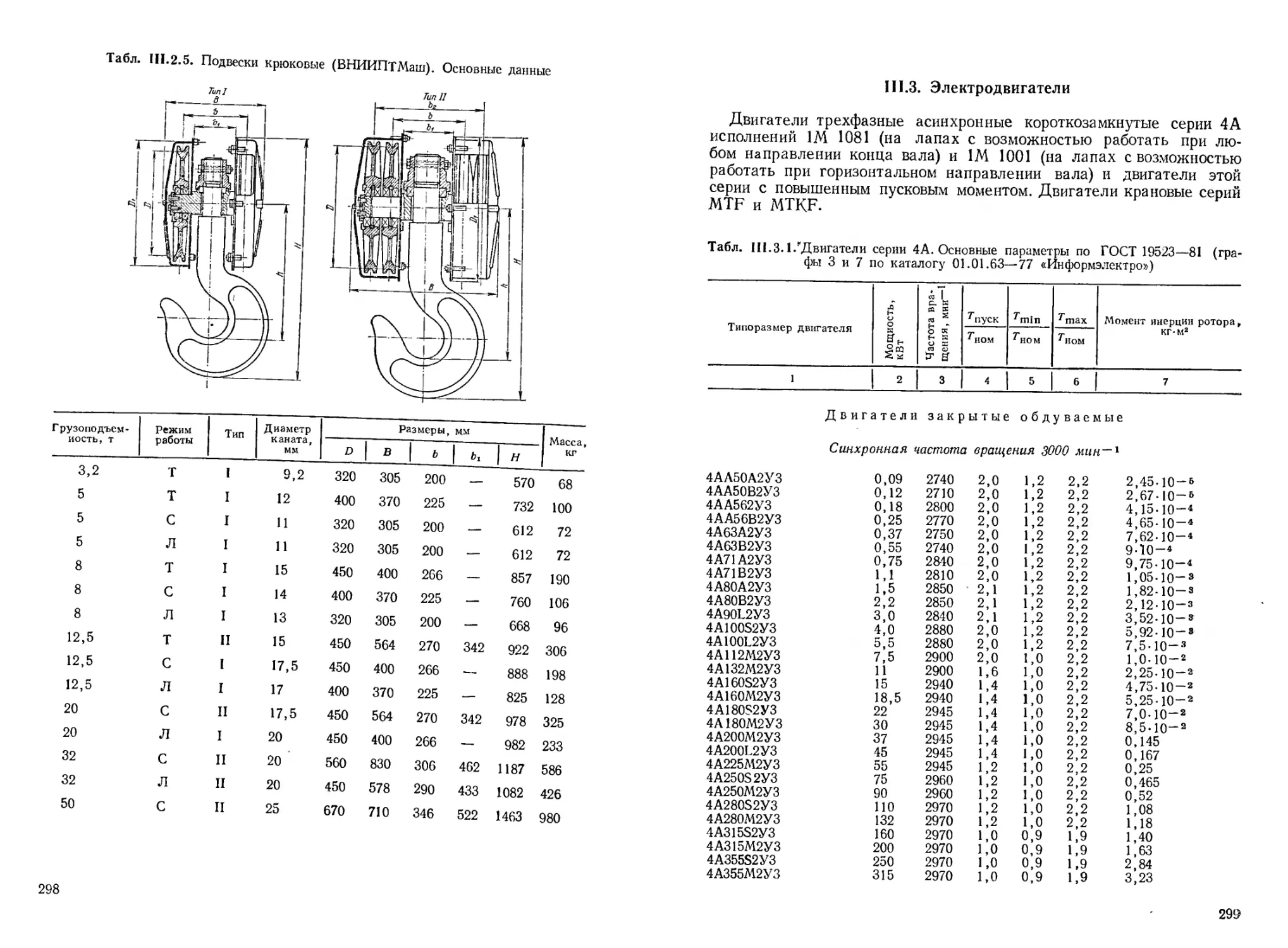
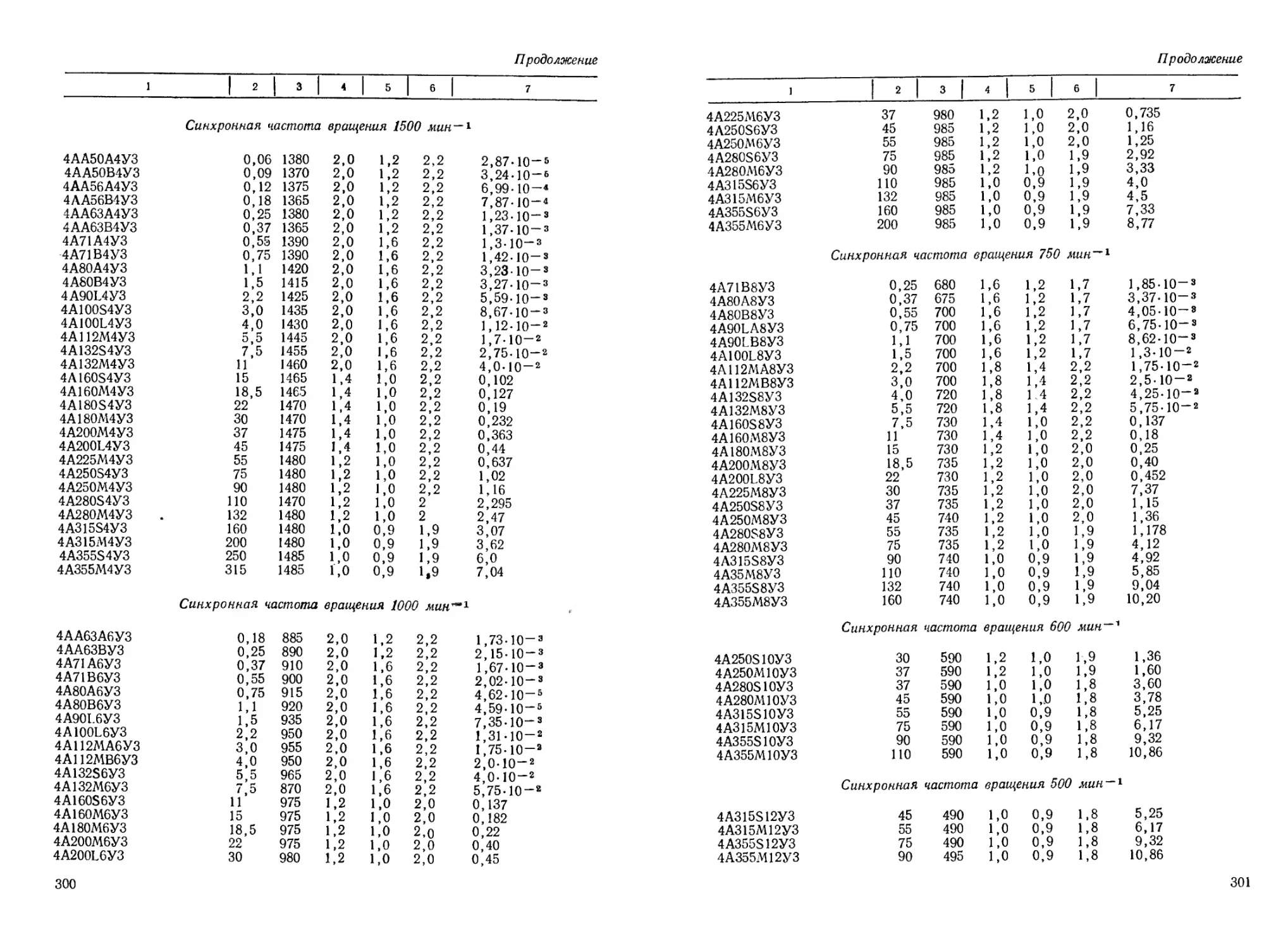
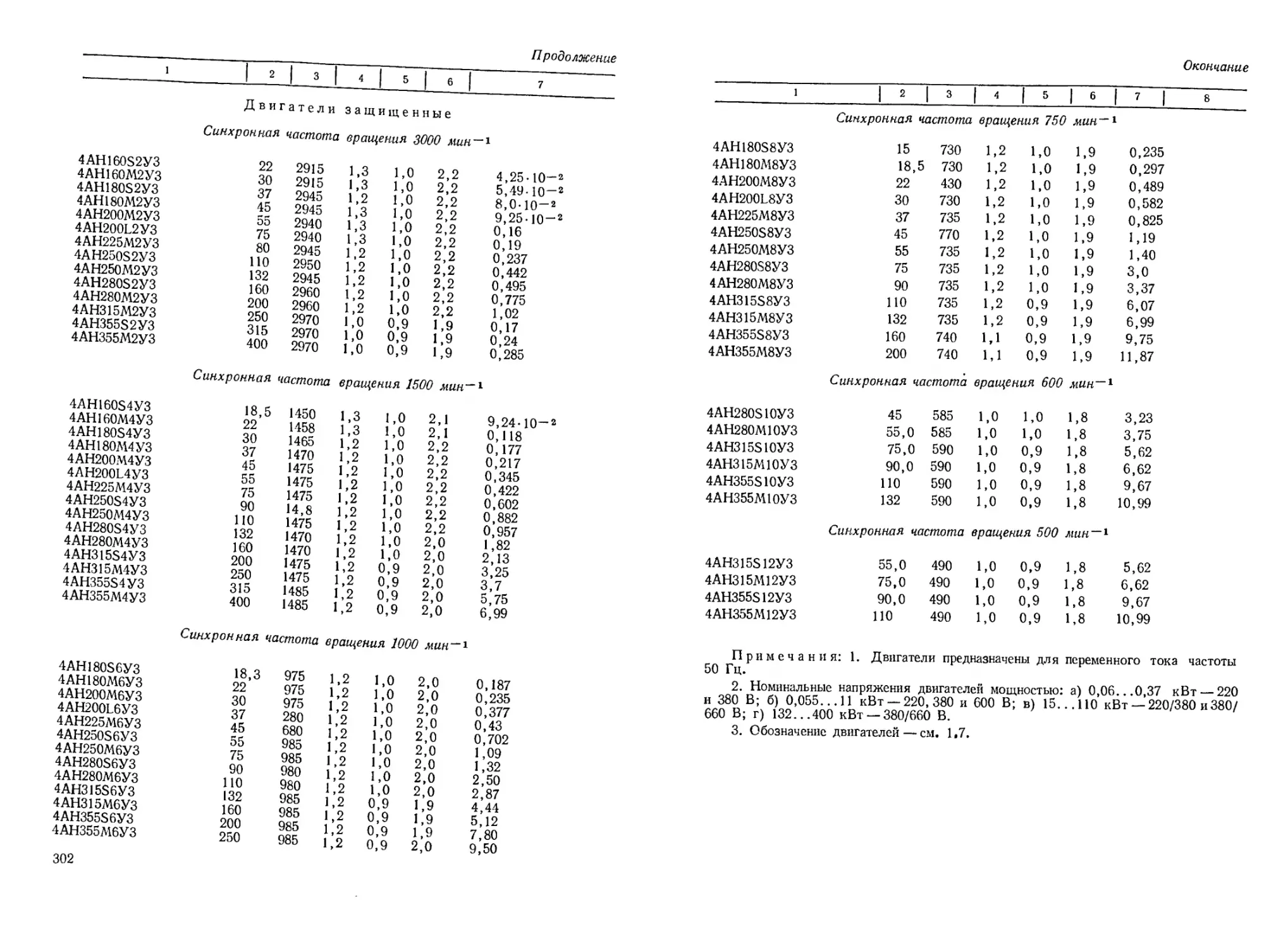
(/м), кг-м2, т. е. /==/р + /м; /р — см. табл. III. 3.1, III. 3.2, III. 3.5 и
III. 3.7. /м~ (0,1...0,15)m Z)2; m, D — масса (кг) и наибольший диа-
метр муфты (м) —см. табл. 1.36 (меньшие значения /м— для муфт
с концентрацией массы ближе к осп ее вращения).
Для механизма изменения вылета наклоном стрелы момент
инерции (кг-м2) эквивалентной системы вращающихся масс, при-
веденный к валу двигателя,
/пр. вр = /пр. вр. прпв 4"/пр. вр. выл, (1.3/)
где /цр. Ер. выл—момент инерции вращающихся (поворачивающих-
ся) масс стрелы и груза, приведенный к валу двигателя, кг-м2;
при пуске
Г _ Др.ВЫЛ /1 QQ\
•“Пр.вр.выл — — —, (1.00)
при торможении
/т _ Др.ВЫЛ1? . "
1 пр. вр. выл — ~ (1.ОУJ
Др. выл — момент инерции вращающихся масс стрелы и груза отно-
сительно оси вращения стрелы, кг-м2:
/вр. ВЫЛ = Др. с + /вр. г, (1.40)
/вр. с — момент инерции вращающейся массы наклоненной стрелы,
кг • м2:
, D2 Щ 1 г2
/вР.с==/пс^—(1.41)
О
/вр.г—момент инерции массы груза при наклоне стрелы, кг-м2:
/вр.г=0/?2; (1.42)
Q — масса груза, кг; R— вылет стрелы, м; тс — масса стрелы, кг;
г — расстояние от оси вращения крана до оси пяты стрелы, м (см.
рис. 1.3); и— передаточное число привода механизма; ц— КПД
механизма.
Для механизма поворота крана момент инерции (кг-м2) экви-
валентной системы вращающихся масс, приведенный к валу дви-
гателя,
/пр. вр = /пр. вр. прив + /пр. вр. нов, (1.43)
где /Цр. вр. пов — момент инерции эквивалентной системы вращаю-
щихся масс поворотной платформы, башни, противовеса с противо-
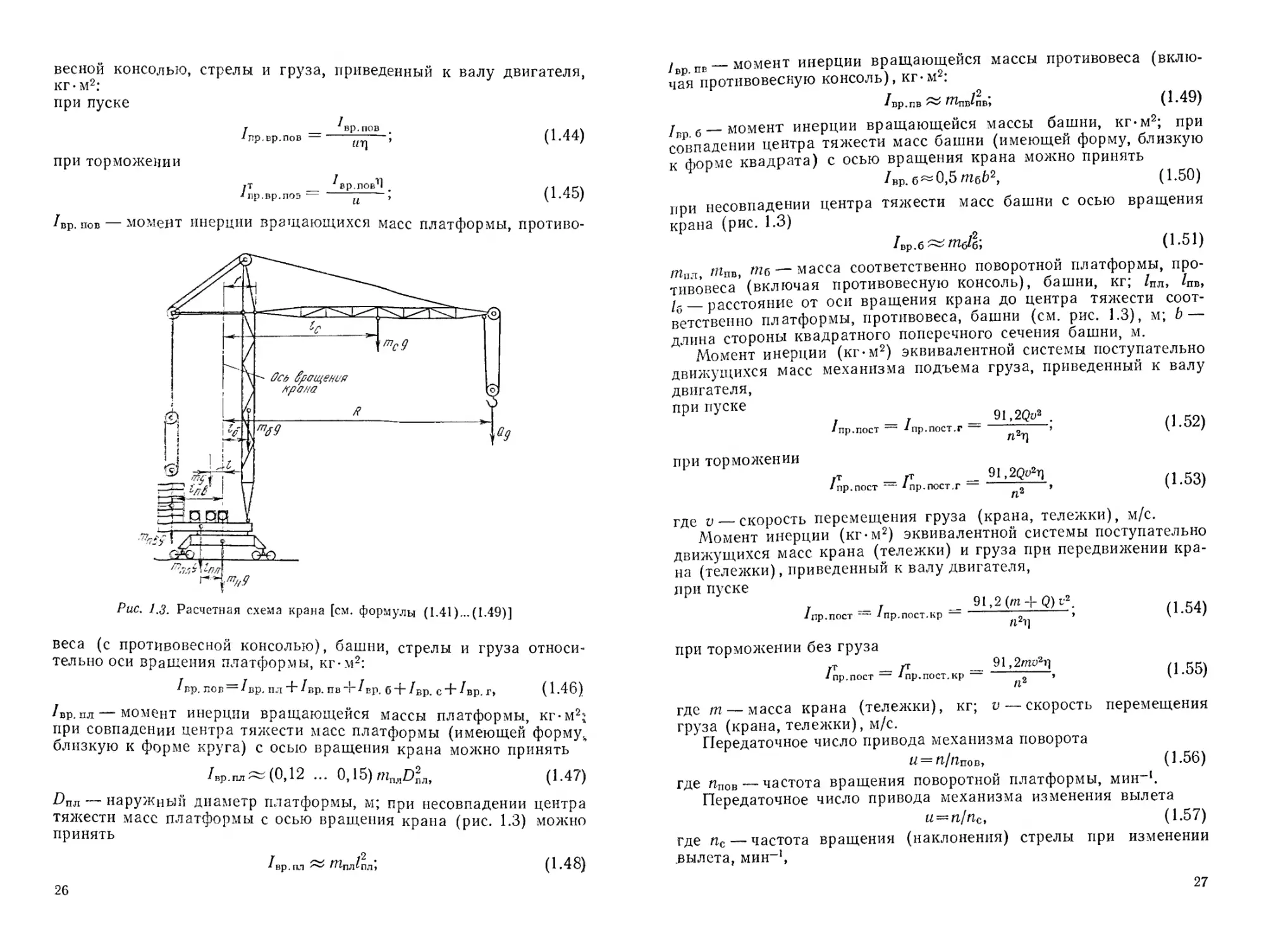
25
весной консолью, стрелы и груза, приведенный к валу двигателя,
кг - м2:
при пуске
__ вр.пов
Пр.Ер.ПОВ - ——
при торможении
»т __'вр.лов1!
* пр, вр. ПОЭ ~ \
(1.44)
(1-45)
/вр. нов — момент инерции вращающихся масс платформы, противо-
Рис. 1.3. Расчетная схема крана [см. формулы (1.41)... (1.49)]
веса (с противовесной консолью), башни, стрелы и груза относи-
тельно оси вращения платформы, кг-м2:
/вр. ЛОВ = /вр. ПЛ + /вр. ПВ Ч"/вр. б + /вр. с + /вр. г, (1.46)
/вр.пл — момент инерции вращающейся массы платформы, кг-м2*
при совпадении центра тяжести масс платформы (имеющей формуъ
близкую к форме круга) с осью вращения крана можно принять
/вр.пл~(0,12 ... 0,15) шплО*л, (1-47)
/^пл — наружный диаметр платформы, м; при несовпадении центра
тяжести масс платформы с осью вращения крана (рис. 1.3) можно
принять
вр.пл Щ^ПЛ^ПЛ»
(1-48)
26
/ ив — момент инерции вращающейся массы противовеса (вклю-
чая противовесную консоль), кг-м2:
/вр.ПВ ~ ^ПВ^ПВ»
(1-49)
/ б— момент инерции вращающейся массы башни, кг-м2; при
совпадении центра тяжести масс башни (имеющей форму, близкую
к форме квадрата) с осью вращения крана можно принять
/вр. 6^0,5 шбЬ2, (1.50)
при несовпадении центра тяжести масс башни с осью вращения
крана (рис. 1.3)
/вр.б (1.51)
/Пил, аппв, — масса соответственно поворотной платформы, про-
тивовеса (включая противовесную консоль), башни, кг; /Пл, 4тв,
/б— расстояние от оси вращения крана до центра тяжести соот-
ветственно платформы, противовеса, башни (см. рис. 1.3), м; b —
длина стороны квадратного поперечного сечения башни, м.
Момент инерции (кг-м2) эквивалентной системы поступательно
движущихся масс механизма подъема груза, приведенный! к валу
двигателя,
при пуске
/ — I — 91,2Qti2 . kq\
1 пр.ПОСТ 1 Пр.ПОСТ.Г ”,
Л2Т]
при торможении
гт __ гт __ 91,2(Ь2т)
1 пр. ПОСТ * пр. ПОСТ, Г ” 9
л2
(1.53)
где v — скорость перемещения груза (крана, тележки), м/с.
Момент инерции (кг-м2) эквивалентной системы поступательно
движущихся масс крана (тележки) и груза при передвижении кра-
на (тележки), приведенный к валу двигателя,
при пуске
Г — I -- 91,2 (m -|- Q) и2ф .. _
<пр.пост пр.пост.кр “ > II. и1* J
Л2?]
при торможении без груза
/т — р __ 91 ,2/na2i] z. j--v
1 пр. пост — -«пр.пост.кр — -, ^1.00/
Л2
где т — масса крана (тележки), кг; v — скорость перемещения
груза (крана, тележки), м/с.
Передаточное число привода механизма поворота
Н = И//7щ)в> (1.56)
где Ипов — частота вращения поворотной платформы, мин-1.
Передаточное число привода механизма изменения вылета
u = nlnCt (1.57)
где ис — частота вращения (наклонения) стрелы при изменении
.вылета, мин-1,
27
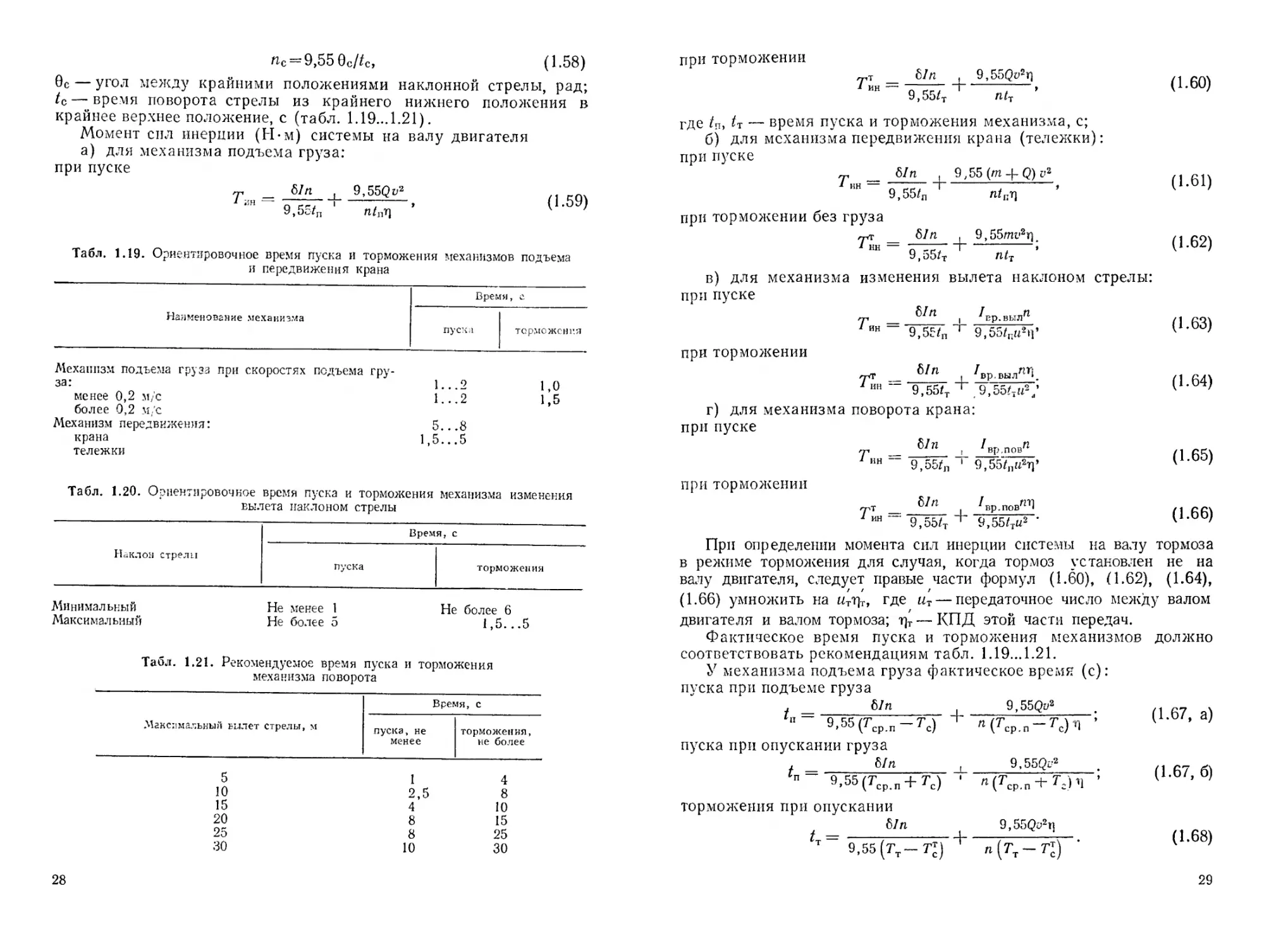
nc==Q,55Qc/tc, (1.58)
0c — угол между крайними положениями наклонной стрелы, рад;
/с — время поворота стрелы из крайнего нижнего положения в
крайнее верхнее положение, с (табл. 1.19...1.21).
Момент сил инерции (Н-м) системы па валу двигателя
а) для механизма подъема груза:
при пуске
67 n t 9,55Qd2
9,55/п 1 п/лИ
(1.59)
Табл. 1.19. Ориентировочное время пуска и торможения механизмов подъема
и передвижения крана
Наименование механизма В pet. пуска [я, е торможения
Механизм подъема груза при скоростях подъема гру-
за:
менее 0,2 м/с
более 0,2 м/с
Механизм передвижения:
крана
тележки
1...2
1...2
5...8
1,5...5
1,0
1,5
Табл. 1.20. Ориентировочное время пуска и торможения механизма изменения
вылета наклоном стрелы
Наклон стрелы Время, с
пуска торможения
Минимальный Не менее 1 Не более 6
Максимальный Не более 5 1,5...5
Табл. 1.21. Рекомендуемое время пуска и торможения
механизма поворота
Время, с
Максимальный вылет стрелы, м пуска, не менее торможения, не более
5
10
15
20
25
30
1
2,5
4
8
8
10
4
8
10
15
25
30
28
при торможении
,т _ Ып , 9,55Qa2n
9,55/*р м
где /п, — время пуска и торможения механизма, с;
б) для механизма передвижения крана (тележки):
при пуске
у, 6/ п . 9,55 (т (?) v2
ИН 9,55/л п/пт]
при торможении без груза
/wr _ 67n ! 9,55mt'2r).
7 нн — ” I " >
9, o5/-f м Zf
в) для механизма изменения вылета наклоном стрелы:
при пуске
у» __ | ^Ер.ВЫЛ^
1 йн “ 9,55/п 9,55/пи2п*
(1.60)
(1.61)
(1.62)
(1.63)
(1-64)
(1.65)
(1.66)
при торможении ^ИН < ^вр.вылпг1.
9,55/т ' 9,55^и2;
г) для механизма поворота крана: при пуске т Sin 1„Т. ппвп АТЛ 1 о Р , 11 и Ь
1 НН 9,55/л ' 9,55/nu2n’
при торможении Тт — . ^вр.ПОВ^1!
1 ИН 9,55/т 1 9,55/ти2 '
При определении момента сил инерции системы на валу тормоза
в режиме торможения для случая, когда тормоз установлен не на
валу двигателя, следует правые части формул (1.60), (1.62), (1.64),
(1.66) умножить на пт?]т, где иТ — передаточное число между валом
двигателя и валом тормоза; т]т — КПД этой части передач.
Фактическое время пуска и торможения механизмов должно
соответствовать рекомендациям табл. 1.19...1.21.
У механизма подъема груза фактическое время (с):
пуска при подъеме груза
. 67 м । 9155Qy2 /л Н7 \
п = Т55(Гср,п-Тс)’ + п (Гср<п-Гс)Г; 1 ‘ V
пуска при опускании груза
. 67п
Гп-Т,55(7ср>п + Гс)
торможения при опускании
67п
/т = ----1-----+
9,55 (Тт— TJ)
9,55Qu2
«(Гср.п + Гг)11 ’
(1.67,6)
9,55Q<?2h
пЦт-^) ’
(1.68)
29
У механизма передвижения крана (тележки) фактическое вре-
мя (с):
пуска
z__________6/п_______। 9,55 (т 4-Q) и2 . п
л“ 9,55(7ср.п-Гс) + п(Гср>п^Тс)П ’ >
торможения без груза
6/п 9,55/пЛ]
Гт ~~ Т СК ^т\ * 7 • V1 • /и'
9,55 (Гт — TJ) п (Тт“~ Тс)
У механизма изменения вылета наклоном стрелы фактическое
время, с:
пуска
tn --------—--------+--------; (1.71)
9.55 (Тср.п - Гс) 9,55^ (Тср.п-Тс)п
торможения
_______I______^Вр.ВЫлГСЛ___
т“ 9,55(7^-77) 9,55w2(Tt-TJ)
У механизма поворота фактическое время, с:
пуска
_______ | _______^вр,повп____.
п“ 9,55 (Тср п — Тс) "И 9,55и2(Твр.п-Тс)П ’
(1.72)
торможения
где Тср.п — средний пусковой момент двигателя, Н-м [см. (1.89) и
(1.90)]; TCt Tl—момент статического сопротивления соответст-
венно на валу двигателя при пуске [см. (1.27)...(1.32)] и па валу
тормоза при торможении механизма, Н • м [см. (2.37), (2.46)] и
пояснения к (2.86)]; Гт — тормозной момент по [см. (1.79),
(2.38) п (2.86)].
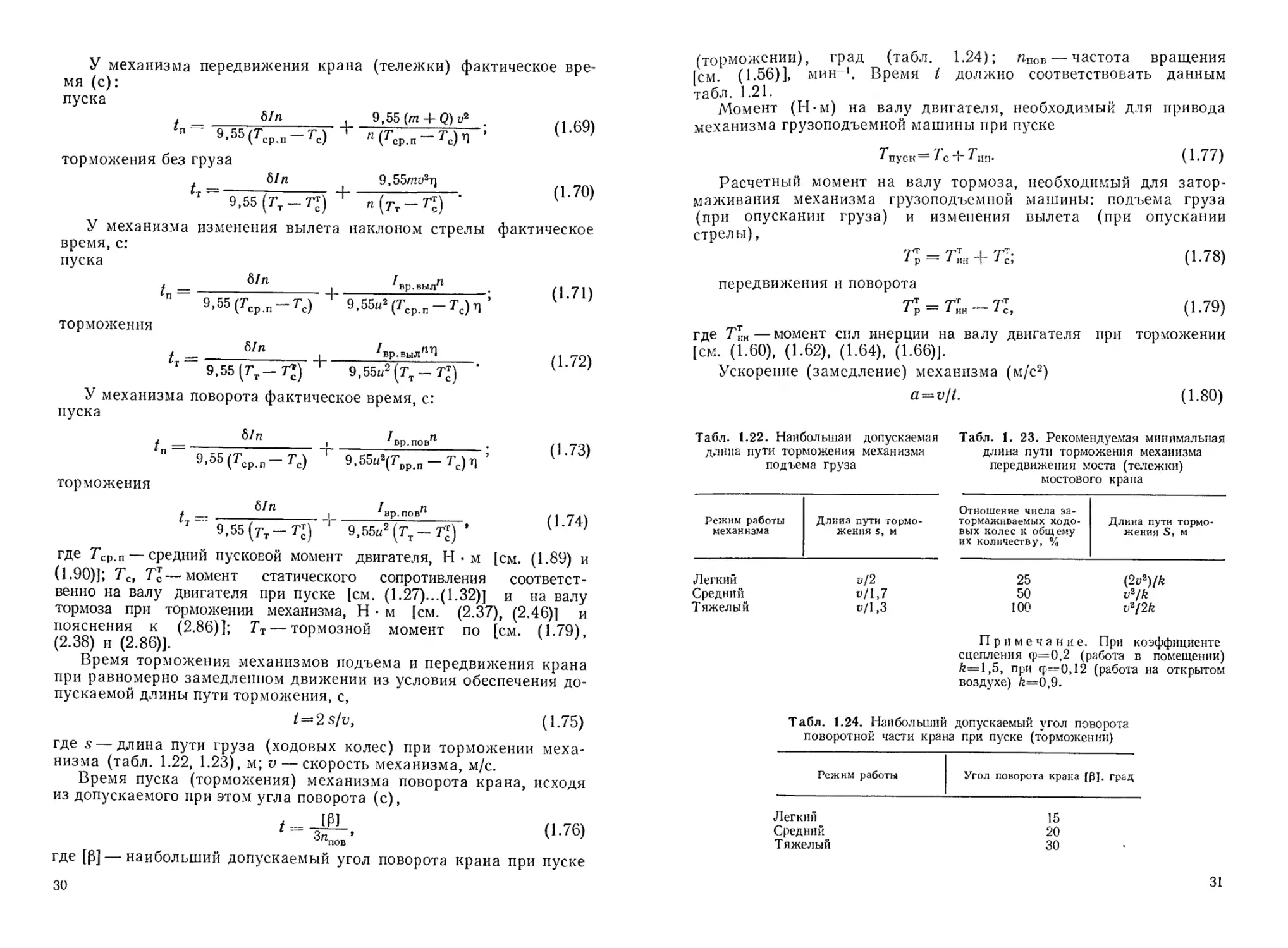
Время торможения механизмов подъема и передвижения крана
при равномерно замедленном движении из условия обеспечения до-
пускаемой длины пути торможения, с,
/ = 2 s/v, (1-75)
где s — длина пути груза (ходовых колес) при торможении меха-
низма (табл. 1.22, 1.23), м; v — скорость механизма, м/с.
Время пуска (торможения) механизма поворота крана, исходя
из допускаемого при этом угла поворота (с),
IP1
З^пов
(1.76)
где [р]—наибольший допускаемый угол поворота крана при пуске
30
(торможении), град (табл. 1.24); ппов — частота вращения
[см. (1.56)], мин"1. Время t должно соответствовать данным
табл. 1.21.
Момент (Н-м) на валу двигателя, необходимый для привода
механизма грузоподъемной машины при пуске
^пуск
— Тс "Г Т'ип»
(1.77)
Расчетный момент на валу тормоза,
маживания механизма грузоподъемной
(при опускании груза) и изменения
стрелы),
о^т _________________________ лгт । 'Т'™ •
* р — ин । с,
необходимый для затор-
машины: подъема груза
вылета (при опускании
(1-78)
передвижения и поворота
Гт гтрт
р “ V ин с,
(1-79)
где ТиН—момент сил инерции на валу двигателя при торможении
[см. (1.60), (1.62), (1.64), (1.66)].
Ускорение (замедление) механизма (м/с2)
a = v[t.
(1.80)
Табл. 1.22. Наибольшая допускаемая
длина пути торможения механизма
подъема груза
Табл. 1. 23. Рекомендуемая минимальная
длина пути торможения механизма
передвижения моста (тележки)
мостового крана
Режим работы
механизма
Длина пути тормо-
жения S, м
Отношение числа за-
тормаживаемых ходо-
вых колес к общему
их количеству, %
Длина пути тормо-
жения S, м
Легкий
Средний
Тяжелый
и/2
v/lj
и/1,3
25
50
100
(2v2)/k
v2/k
v2[2k
Примечание. При коэффициенте
сцепления <р=0,2 (работа в помещении)
k—1,5, при ср=0,12 (работа на открытом
воздухе) &=0,9.
Табл. 1.24. Наибольший допускаемый угол поворота
поворотной части крана при пуске (торможении)
Режим работы Угол поворота крана [р]. град
Легкий
Средний
Т яжелый
15
20
30
31
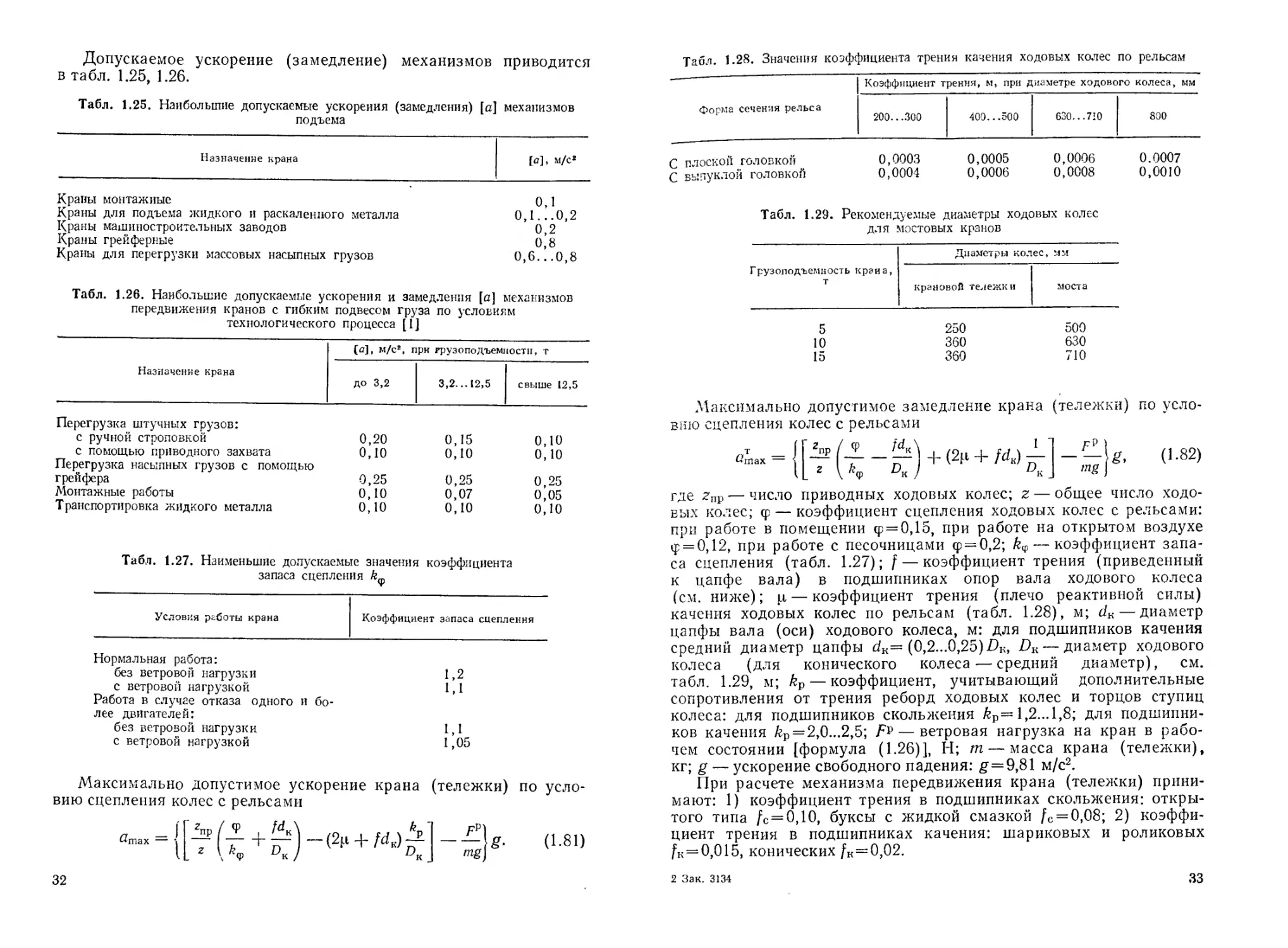
Допускаемое ускорение (замедление) механизмов приводится
в табл. 1.25, 1.26.
Табл. 1.25. Наибольшие допускаемые ускорения (замедления) [а] механизмов
подъема
Назначение крана
[а], м/с*
Краны монтажные
Краны для подъема жидкого и раскаленного металла
Краны машиностроительных заводов
Краны грейферные
Краны для перегрузки массовых насыпных грузов
0,1
0,1...0,2
0,2
0,8
0,6...0,8
Табл. 1.26. Наибольшие допускаемые ускорения и замедления [а] механизмов
передвижения кранов с гибким подвесом груза по условиям
технологического процесса [1]
[я], м/с*, при грузоподъемности, т
Назначение крана до 3,2 3,2...12,5 свыше 12,5
Перегрузка штучных грузов:
с ручной строповкой 0,20 0,15 0,10
с помощью приводного захвата 0,10 0,10 0,10
Перегрузка насыпных грузов с помощью
грейфера 0,25 0,25 0,25
Монтажные работы 0,10 0,07 0,05
Транспортировка жидкого металла 0,10 0,10 0,10
Табл. 1.27. Наименьшие допускаемые значения коэффициента
запаса сцепления
Условия работы крана
Коэффициент запаса сцепления
Нормальная работа:
без ветровой нагрузки
с ветровой нагрузкой
Работа в случае отказа одного и бо-
лее двигателей:
без ветровой нагрузки
с ветровой нагрузкой
1,2
1,1
1,1
1,05
Максимально допустимое ускорение крана (тележки) по усло-
вию сцепления колес с рельсами
32
Табл. 1.28. Значения коэффициента трения качения ходовых колес по рельсам
Коэффициент трення, м, при диаметре ходового колеса, мм
форма сечения рельса 200...300 400...500 630...7’0 800
С плоской ГОЛОВКОЙ!
С выпуклой ГОЛОВКОЙ
0,0003 0,0005 0,0006 0.0007
0,0004 0,0006 0,0008 0,0010
Табл. 1.29.
Рекомендуемые диаметры ходовых колес
для мостовых кранов
Грузоподъемность крана, т Диаметры колес, мм
крановой тележки моста
5 250 500
10 360 630
15 360 710
Максимально допустимое замедление крана (тележки) по усло-
вию сцепления колес с рельсами
где гпр— число приводных ходовых колес; г— общее число ходо-
вых колес; <р — коэффициент сцепления ходовых колес с рельсами:
при работе в помещении qp = 0,15, при работе на открытом воздухе
qp = O, 12, при работе с песочницами <р = 0,2; — коэффициент запа-
са сцепления (табл. 1.27); f — коэффициент трения (приведенный
к цапфе вала) в подшипника,х опор вала ходового колеса
(см. ниже); ц — коэффициент трения (плечо реактивной силы)
качения ходовых колес по рельсам (табл. 1.28), м; — диаметр
цапфы вала (оси) ходового колеса, м: для подшипников качения
средний диаметр цапфы dK~ (0,2...0,25) DKt DK — диаметр ходового
колеса (для конического колеса — средний диаметр), см.
табл. 1.29, м; kp— коэффициент, учитывающий дополнительные
сопротивления от трения реборд ходовых колес и торцов ступиц
колеса: для подшипников скольжения ^р= 1,2...1,8; для подшипни-
ков качения /гр = 2,0...2,5; №— ветровая нагрузка на кран в рабо-
чем состоянии (формула (1.26)], Н; т — масса крана (тележки),
кг; g — ускорение свободного падения: g=9,81 м/с2.
При расчете механизма передвижения крана (тележки) прини-
мают: 1) коэффициент трения в подшипниках скольжения: откры-
того типа fc = 0,10, буксы с жидкой смазкой fc = 0,08; 2) коэффи-
циент трения в подшипниках качения: шариковых и роликовых
fK=0,015, конических /к = 0,02.
2 Зак. 3134
33
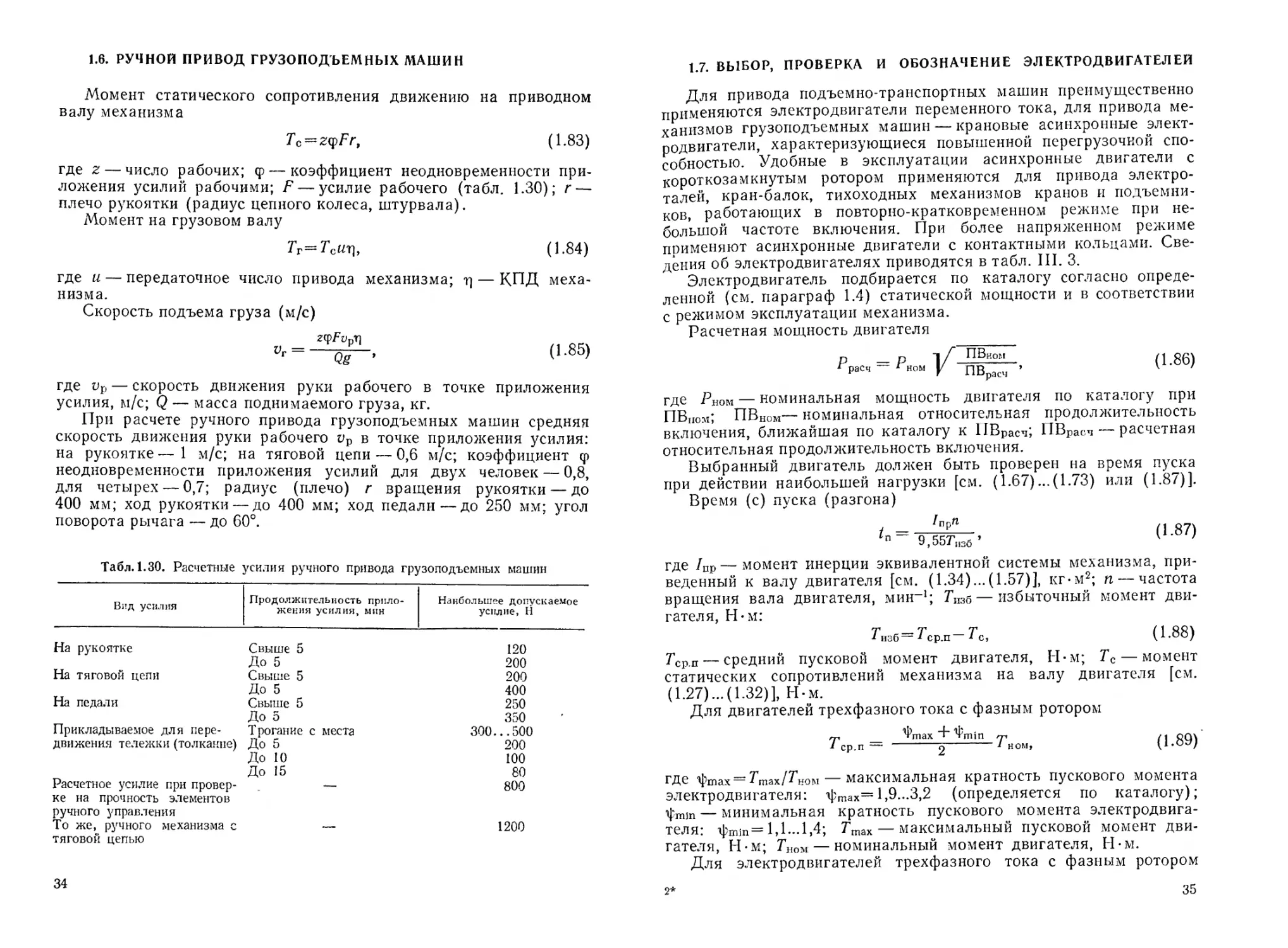
1.6. РУЧНОЙ ПРИВОД ГРУЗОПОДЪЕМНЫХ МАШИН
Момент статического сопротивления движению на приводном
валу механизма
Тс = zq)Fr,
где z— число рабочих; ф—коэффициент неодновременности при-
ложения усилий рабочими; F— усилие рабочего (табл. 1.30); г —
плечо рукоятки (радиус цепного колеса, штурвала).
Момент на грузовом валу
Гг=Гсит],
(1.84)
где и — передаточное число привода механизма; т] — КПД меха-
низма.
Скорость подъема груза (м/с)
zcpfbpT]
(1.85)
где Гр — скорость движения руки рабочего в точке приложения
усилия, м/с; Q — масса поднимаемого груза, кг.
При расчете ручного привода грузоподъемных машин средняя
скорость движения руки рабочего гр в точке приложения усилия:
на рукоятке—1 м/с; на тяговой цепи — 0,6 м/с; коэффициент ф
неодновременности приложения усилий для двух человек — 0,8,
для четырех — 0,7; радиус (плечо) г вращения рукоятки — до
400 мм; ход рукоятки — до 400 мм; ход педали—до 250 мм; угол
поворота рычага — до 60°.
Табл. 1.30. Расчетные усилия ручного привода грузоподъемных машин
Вид усилия Продолжительность прило- жения усилия, мин Наибольшее допускаемое усилие, Н
На рукоятке Свыше 5 120
До 5 200
На тяговой цепи Свыше 5 200
До 5 400
На педали Свыше 5 250
До 5 350
Прикладываемое для пере- Трогание с места 300...500
движения тележки (толкание) До 5 200
До 10 100
До 15 80
Расчетное усилие при провер- — 800
ке на прочность элементов
ручного управления
То же, ручного механизма с *— 1200
тяговой цепью
34
1.7. ВЫБОР, ПРОВЕРКА И ОБОЗНАЧЕНИЕ ЭЛЕКТРОДВИГАТЕЛЕЙ
Для привода подъемно-транспортных машин преимущественно
применяются электродвигатели переменного тока, для привода ме-
ханизмов грузоподъемных машин — крановые асинхронные элект-
родвигатели, характеризующиеся повышенной перегрузочной спо-
собностью. Удобные в эксплуатации асинхронные двигатели с
короткозамкнутым ротором применяются для привода электро-
талей, кран-балок, тихоходных механизмов кранов и подъемни-
ков, работающих в повторно-кратковременном режиме при не-
большой частоте включения. При более напряженном режиме
применяют асинхронные двигатели с контактными кольцами. Све-
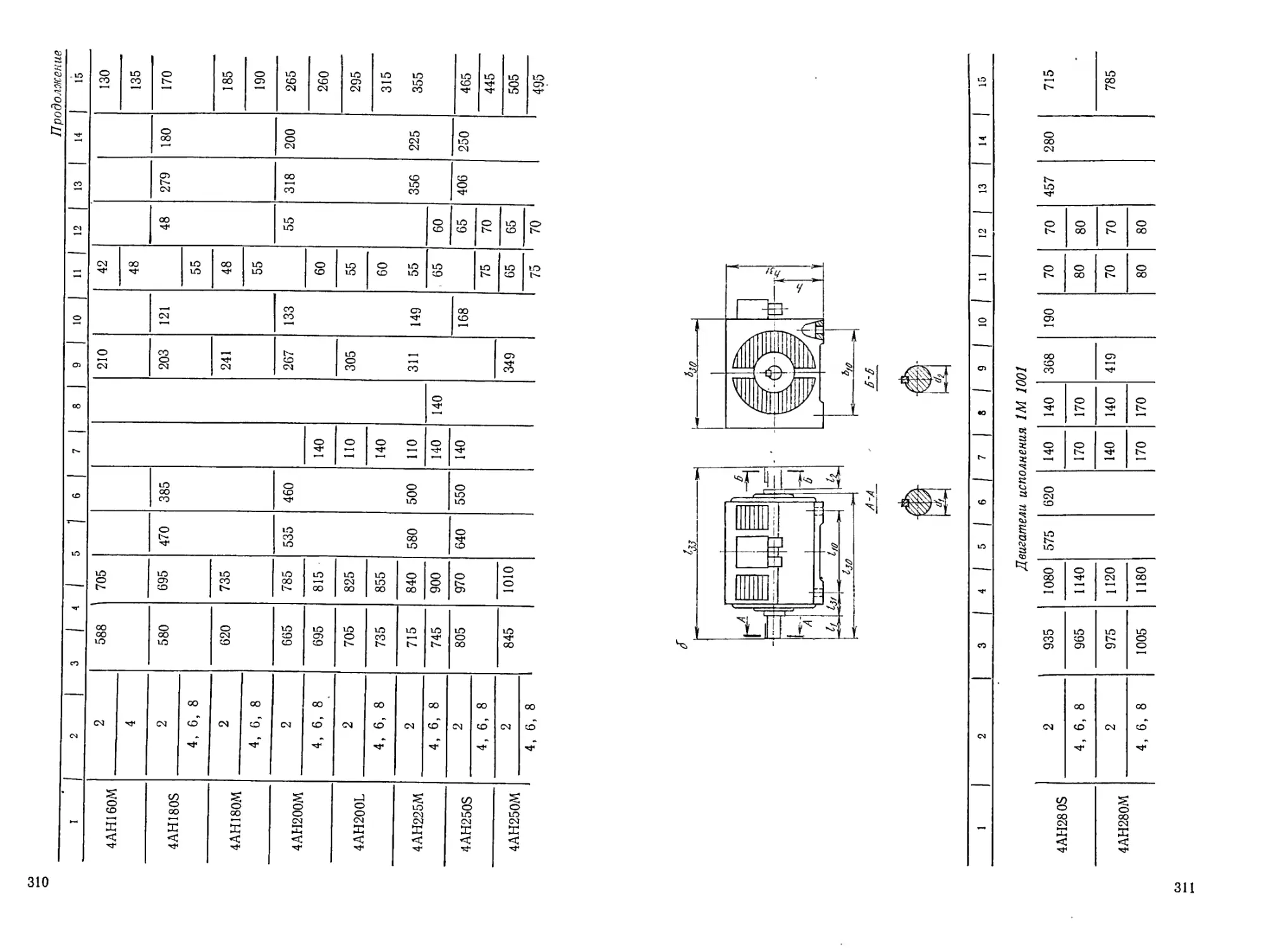
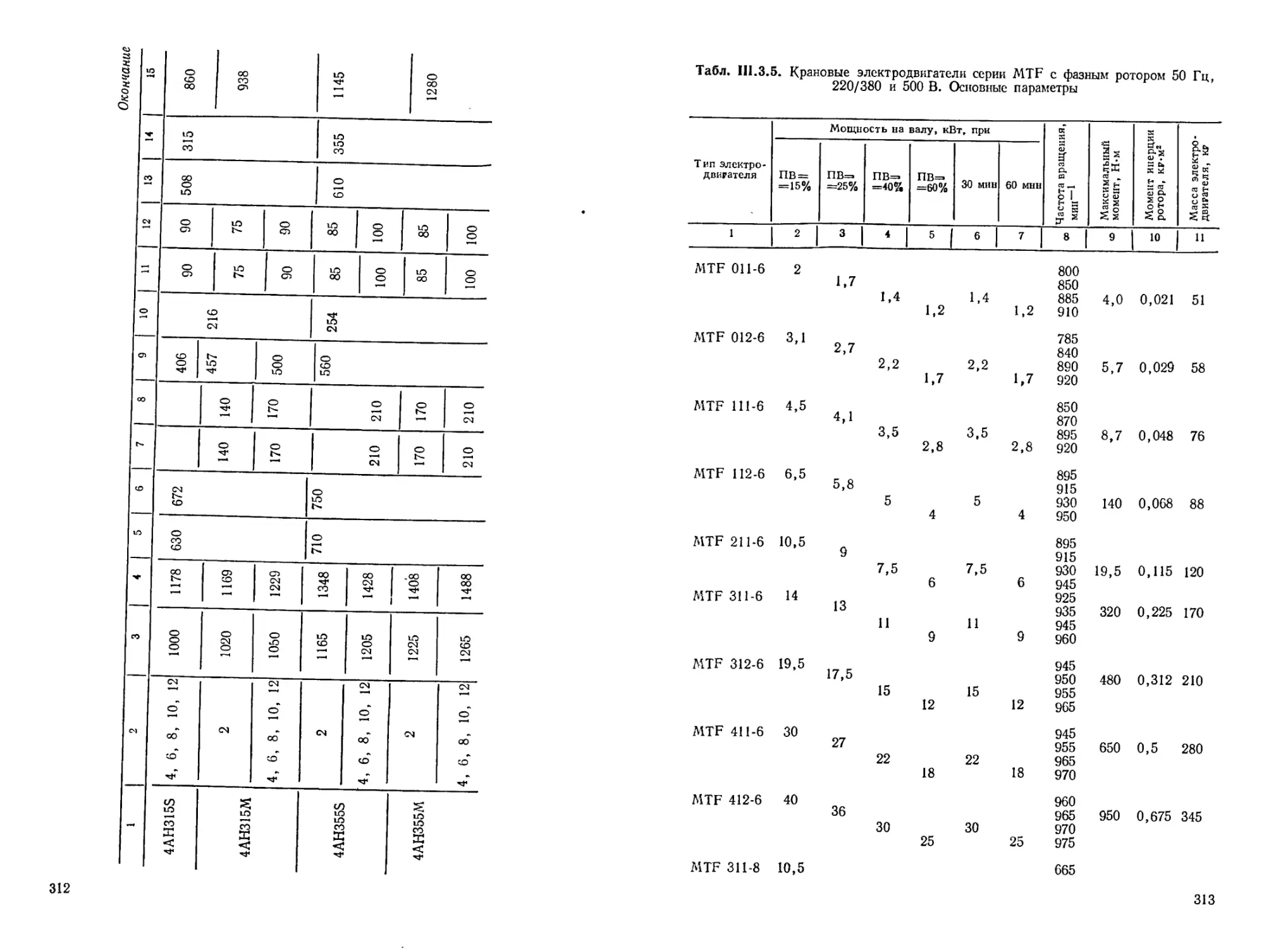
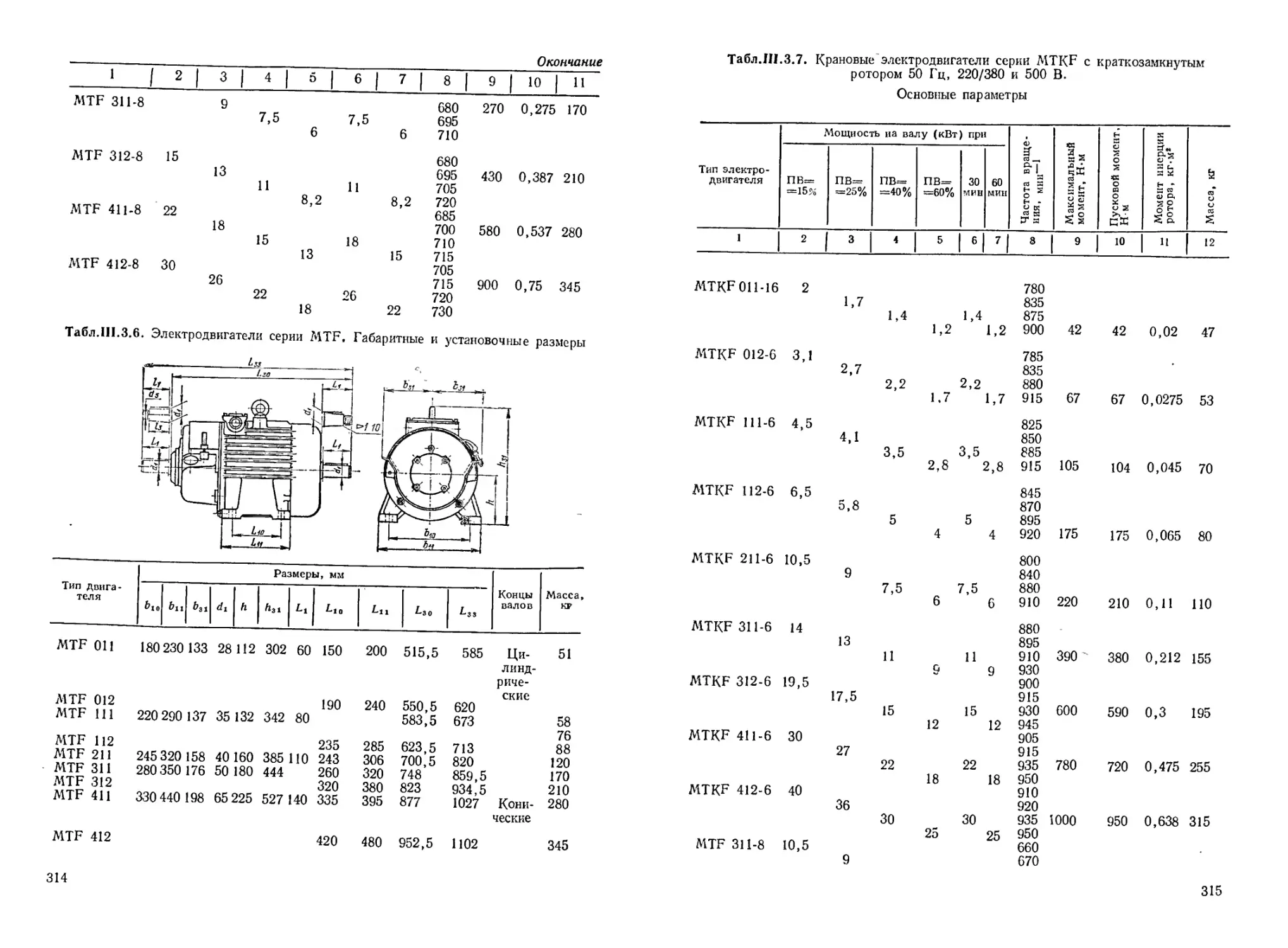
дения об электродвигателях приводятся в табл. III. 3.
Электродвигатель подбирается по каталогу согласно опреде-
ленной (см. параграф 1.4) статической мощности и в соответствии
с режимом эксплуатации механизма.
Расчетная мощность двигателя
Ррасч — Рном ПВрасч ’
где Рном — номинальная мощность двигателя по каталогу при
ПВцом; ПВном— номинальная относительная продолжительность
включения, ближайшая по каталогу к ПВрасч; ПВрасч — расчетная
относительная продолжительность включения.
Выбранный двигатель должен быть проверен на время пуска
при действии наибольшей нагрузки [см. (1.67) ...(1.73) или (1.87)].
Время (с) пуска (разгона)
/ПО^
(,87)
изо
где /Пр—момент инерции эквивалентной системы механизма, при-
веденный к валу двигателя [см. (1.34)...(1.57)], кг-м2; п— частота
вращения вала двигателя, мин-1; ГПЗб— избыточный момент дви-
гателя, Н-м:
/^изб^/^ср.п Гс, (1.88)
/’ср.п — средний пусковой момент двигателя, Н-м; Тс — момент
статических сопротивлений механизма на валу двигателя [см.
(1.27)...(1.32)], Н-м.
Для двигателей трехфазного тока с фазным ротором
Г^тах + 'Фпйп лр Z1
ср.п — 9 * ном,
где фтах — Т'тах/Т'ном — максимальная кратность пускового момента
электродвигателя: фтах= 1,9...3,2 (определяется по каталогу);
финн — минимальная кратность пускового момента электродвига-
теля: фтт= 1,1...1,4; Гтах— максимальный пусковой момент дви-
гателя, Н-м; Гном — номинальный момент двигателя, Н-м.
Для электродвигателей трехфазного тока с фазным ротором
2*
35
можно принимать ГСр.п= (1,5...1,6) Гном. Для двигателей с коротко-
замкнутым ротором
Гср.п = 0,852 tn Т’иом, (1 -90)
где — кратность пускового момента двигателя (принимается по
каталогу); 0,852 — коэффициент, учитывающий возможность ра-
боты при падении напряжения в сети до 85 % от номинального.
Для электродвигателей с короткозамкнутым ротором можно
принимать ГСр.п= (0,7...0,8) Ттах.
Для обеспечения разгона двигателей трехфазного тока реко-
мендуется, чтобы Гср.п>1,5Гс н Тср.п=0,5(Ттах + Гс).
Во избежание перегрева электродвигателя необходимо, чтобы
развиваемая двигателем среднеквадратичная мощность
воряла условию
НОМ’
Среднеквадратичная мощность электродвигателя (кВт)
Т п
Р ___________________________ 1 ср
ср ~ 9550 ’
где Гср — среднеквадратичный момент преодолеваемый
двигателем, Н-м:
удовлет-
(1-91)
(1.92)
электро-
где ^/п — общее время пуска (разгона) механизма в разные периоды
работы с различной нагрузкой [см. (1.67) ... (1.73)], с; — сум-
ма произведений квадрата момента статических сопротивлений дви-
жению при данной нагрузке [см. (1.27) ... (1.32)] на время устано-
вившегося движения при этой нагрузке; — общее время включе-
ния электродвигателя за цикл, с.
Если /п>//60, то в знаменателе подкоренного выражения в
формуле (1.93)’должно быть + Х^у> гДе Р — коэффициент, учи-
тывающий ухудшение условий охлаждения двигателя в процессе
пуска: для закрытых двигателей р = 0,85...0,99, для защищенных
и открытых — р = 0,62...0,68; У/у — общее время установившегося
движения за цикл, с.
При отсутствии достоверного графика работы крана предвари-
тельная проверка электродвигателя по условиям нагрева может
быть произведена методом номинального режима работы [18], т. е.
методохм отнесения крановых механизмов к режимам работы [14].
Коэффициент перегрузки двигателя при номинальной нагрузке
Ct—^с/^ноМ’ (1*94)
Перегрузочная способность двигателя
Тщах/^НОМ’
Значения к приводятся в каталогах
(табл. Ш.З).
электродвигателей
36
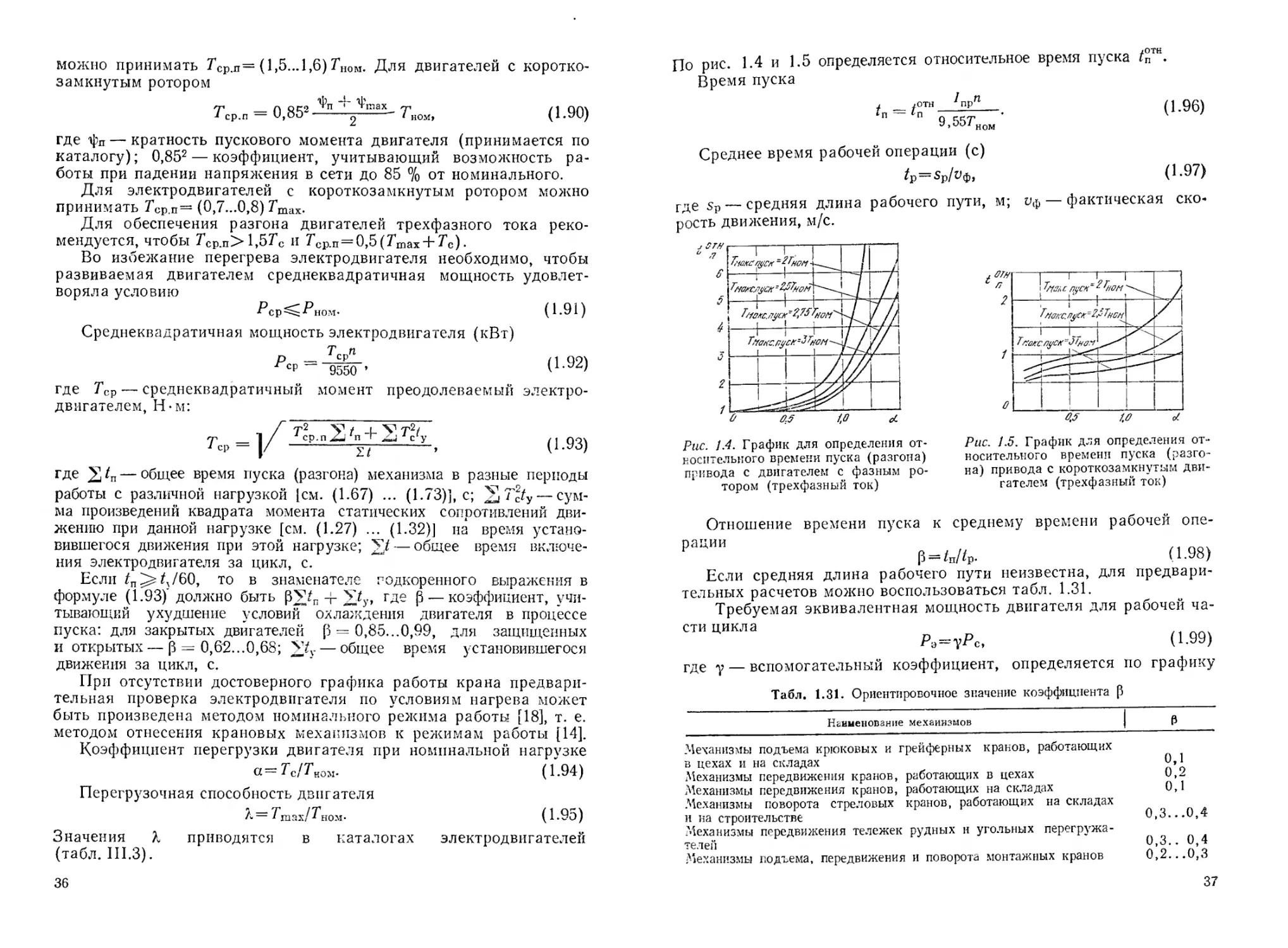
По рис. 1.4 и 1.5 определяется относительное время пуска
Время пуска
tn = t
отн
п
(1.96)
9»55ТНОМ
Среднее время рабочей операции (с)
/р = 5р/^ф,
(1.97)
где sp — средняя длина рабочего пути, м; — фактическая ско-
рость движения, м/с.
Рис. 1.4. График для определения от-
носительного времени пуска (разгона)
привода с двигателем с фазным ро-
тором (трехфазный ток)
Рис. 1.5. График для определения от-
носительного времени пуска (разго-
на) привода с короткозамкнутым дви-
гателем (трехфазный ток)
Отношение времени пуска к среднему времени рабочей опе-
рации
Р-Ор. (1-98)
Если средняя длина рабочего пути неизвестна, для предвари-
тельных расчетов можно воспользоваться табл. 1.31.
Требуемая эквивалентная мощность двигателя для рабочей ча-
сти цикла
Р^уРс, (1.99)
где у — вспомогательный коэффициент, определяется по графику
Табл. 1.31. Ориентировочное значение коэффициента [3
Наименование механизмов
.Механизмы подъема крюковых и грейферных кранов, работающих
в цехах и на складах 0,1
Механизмы передвижения кранов, работающих в цехах 0,2
Механизмы передвижения кранов, работающих на складах 0,1
Механизмы поворота стреловых кранов, работающих на складах
и на строительстве 0,3...0,4
.Механизмы передвижения тележек рудных и угольных перегружа-
телей 0,3.. 0,4
Механизмы подъема, передвижения и поворота монтажных кранов 0,2...0,3
37
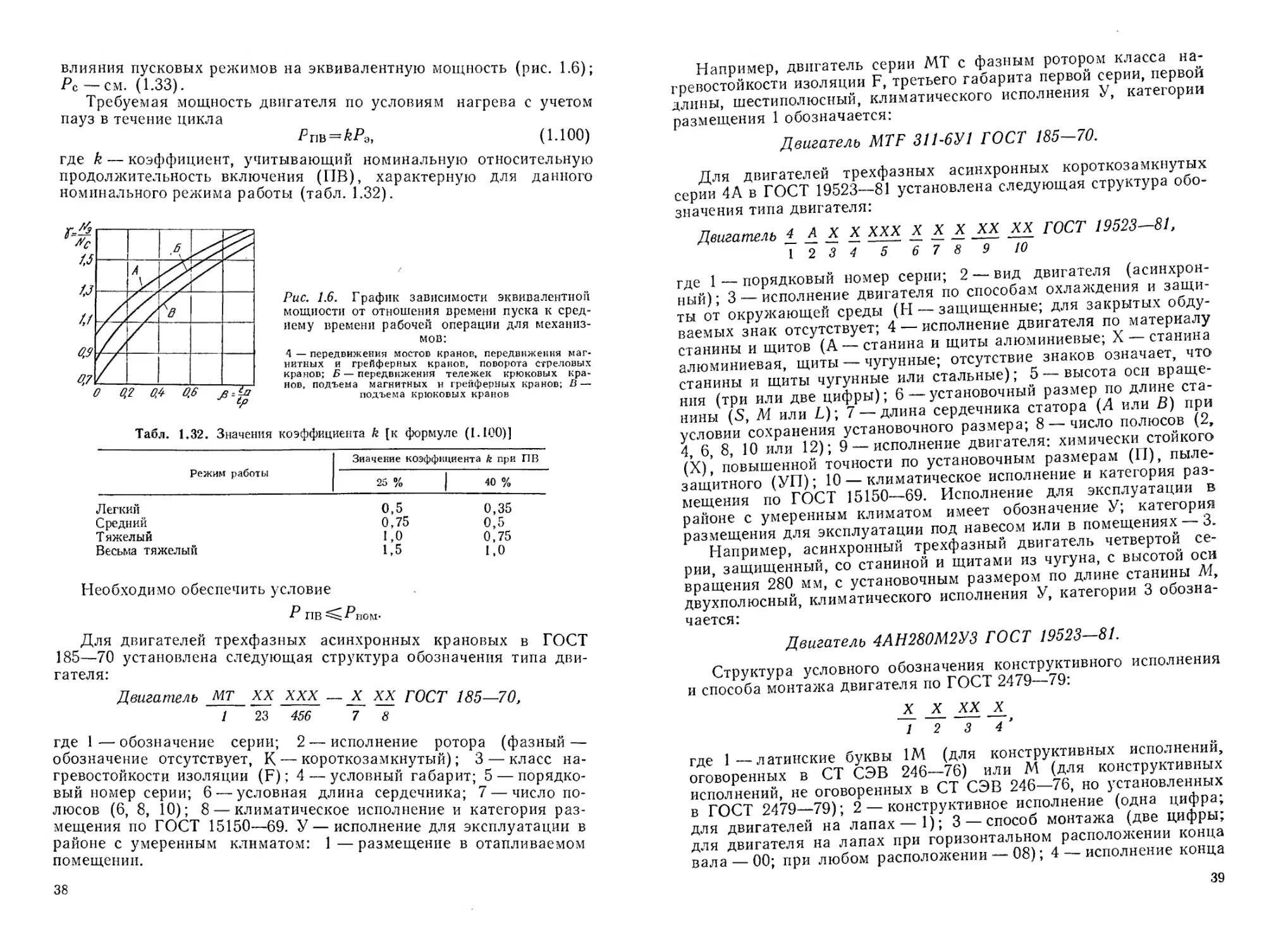
влияния пусковых режимов на эквивалентную мощность (рис. 1.6);
Рс — см. (1.33).
Требуемая мощность двигателя по условиям нагрева с учетом
пауз в течение цикла
^пв=^Рэ, (1.100)
где k — коэффициент, учитывающий номинальную относительную
продолжительность включения (НВ), характерную для данного
номинального режима работы (табл. 1.32).
Рис, 1,6. График зависимости эквивалентной
мощности от отношения времени пуска к сред-
нему времени рабочей операции для механиз-
мов:
4 — передвижения мостов кранов, передвижения маг-
нитных и грейферных кранов, поворота стреловых
кранов; Б — передвижения тележек крюковых кра-
нов, подъема магнитных и грейферных кранов; В —
подъема крюковых кранов
коэффициента k [к формуле (1.100)]
Режим работы Значение коэффициента k при ПВ
25 % 40 %
Легкий 0,5 0,35
Средний 0,75 0,5
Т яжелый 1,0 0,75
Весьма тяжелый 1,5 1.0
Необходимо обеспечить условие
ПВ * пом*
Для двигателей трехфазных асинхронных крановых в ГОСТ
185—70 установлена следующая структура обозначения типа дви-
гателя:
Двигатель МТ XX XXX — XX ГОСТ 185—70,
1 23 456 7 8
где 1—обозначение серии; 2 — исполнение ротора (фазный —
обозначение отсутствует, К — короткозамкнутый); 3 — класс на-
гревостойкости изоляции (F); 4 — условный габарит; 5 — порядко-
вый номер серии; 6 — условная длина сердечника; 7 — число по-
люсов (6, 8, 10); 8 — климатическое исполнение и категория раз-
мещения по ГОСТ 15150—69. У—исполнение для эксплуатации в
районе с умеренным климатом: 1—размещение в отапливаемом
помещении.
38
Например, двигатель серии МТ с фазным ротором класса на-
гревостойкости изоляции F, третьего габарита первой серии, первой
длины, шестиполюсный, климатического исполнения У, категории
размещения 1 обозначается:
Двигатель MTF 311-6У1 ГОСТ 185—70.
Для двигателей трехфазных асинхронных короткозамкнутых
серии 4А в ГОСТ 19523—81 установлена следующая структура обо-
значения типа двигателя:
Двигатель f. А X X XXX X X X XX XX ГОСТ 19523—81,
12 3 4 5 6 7 8 9 10
где 1 — порядковый номер серии; 2 — вид двигателя (асинхрон-
ный); 3 — исполнение двигателя по способам охлаждения и защи-
ты от окружающей среды (Н — защищенные; для закрытых обду-
ваемых знак отсутствует; 4 — исполнение двигателя по материалу
станины и щитов (А — станина и щиты алюминиевые; X — станина
алюминиевая, щиты — чугунные; отсутствие знаков означает, что
станины и щиты чугунные или стальные); 5 — высота осп враще-
ния (три или две цифры); 6 — установочный размер по длине ста-
нины (3, М или L); 7 — длина сердечника статора (А или В) при
условии сохранения установочного размера; 8 — число полюсов (2,
4, 6, 8, 10 или 12); 9 — исполнение двигателя: химически стойкого
(X), повышенной точности по установочным размерам (II), пыле-
защитного (УП); 10 — климатическое исполнение и категория раз-
мещения по ГОСТ 15150—69. Исполнение для эксплуатации в
районе с умеренным климатом имеет обозначение У; категория
размещения для эксплуатации под навесом или в помещениях — 3.
Например, асинхронный трехфазный двигатель четвертой се-
рии, защищенный, со станиной и щитами из чугуна, с высотой оси
вращения 280 мм, с установочным размером по длине станины М,
двухполюсный, климатического исполнения У, категории 3 обозна-
чается:
Двигатель 4АН280М2УЗ ГОСТ 19523—81.
Структура условного обозначения конструктивного исполнения
и способа монтажа двигателя по ГОСТ 2479—79:
X X XX X
1 2 3 4 '
где 1—латинские буквы 1М (для конструктивных исполнений,
оговоренных в СТ СЭВ 246—76) или М (для конструктивных
исполнений, не оговоренных в СТ СЭВ 246—76, но установленных
в ГОСТ 2479—79); 2 — конструктивное исполнение (одна цифра;
для двигателей на лапах — 1); 3 — способ монтажа (две цифры;
для двигателя на лапах при горизонтальном расположении конца
вала — 00; при любом расположении — 08); 4 — исполнение конца
39
вала (одна цифра по ГОСТ 18709—73). Подробнее см. ГОСТ
2479—79.
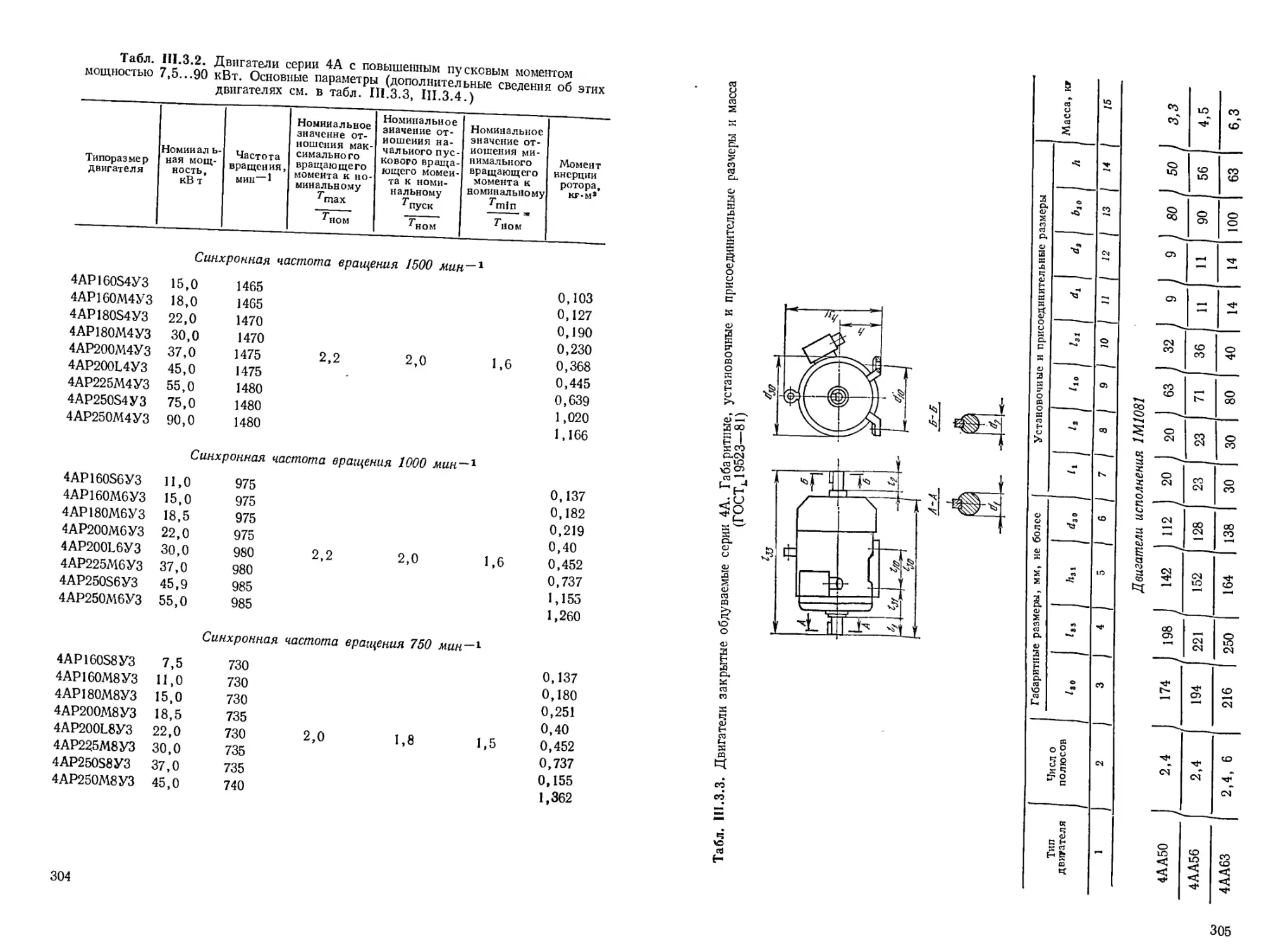
Обозначение двигателей с повышенным пусковым моментом п</
ГОСТ 20818—75 отличается от обозначения двигателей основного
исполнения дополнительной буквой Р после обозначения серии и
номером стандарта. Например,
Двигатель 4АР 180М4УЗ ГОСТ 20818—75.
Сведения о двигателях серии 4А приводятся в табл. IIL3.1...
III.3.4; о крановых двигателях — в табл. III.5...III.7.
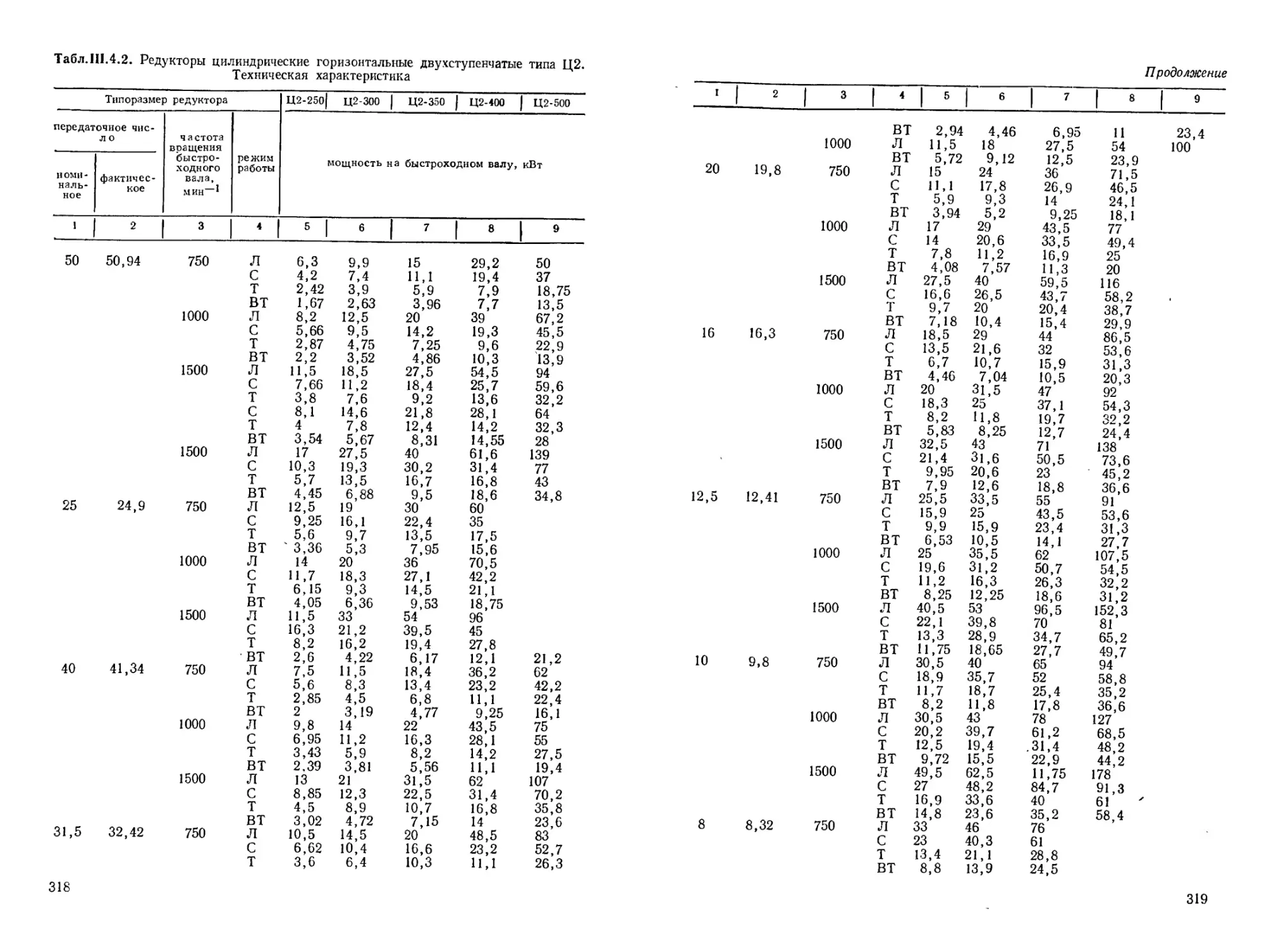
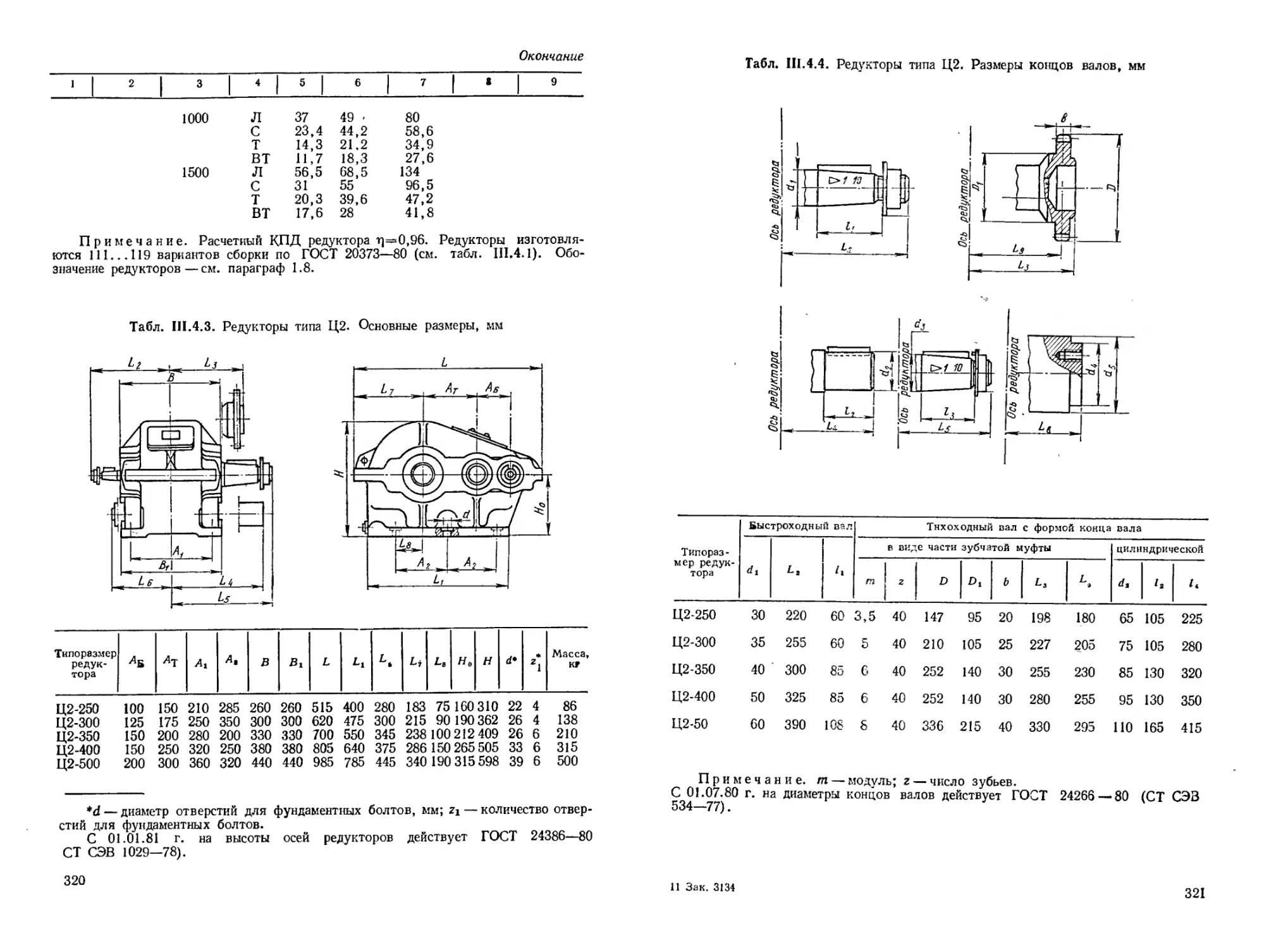
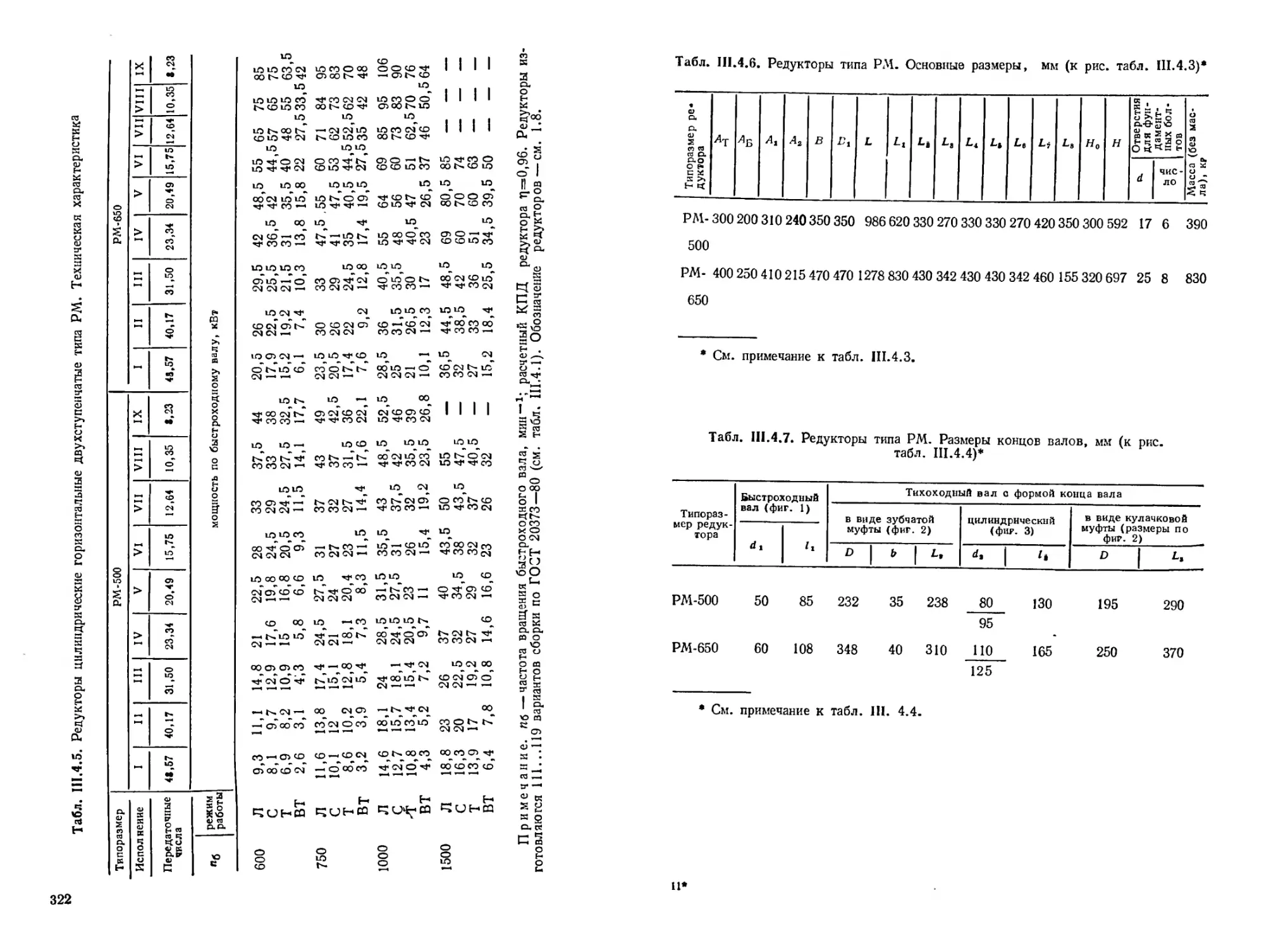
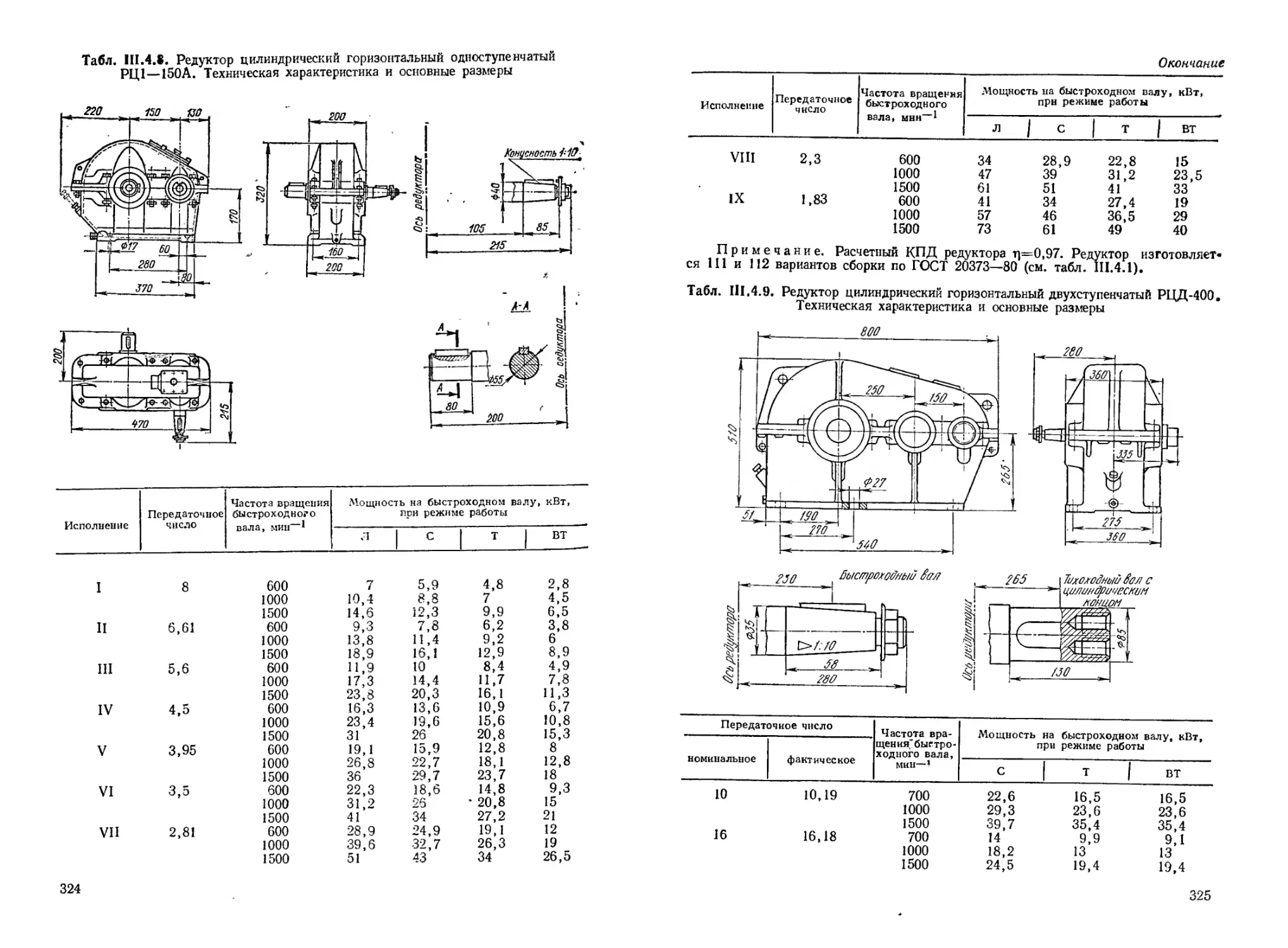
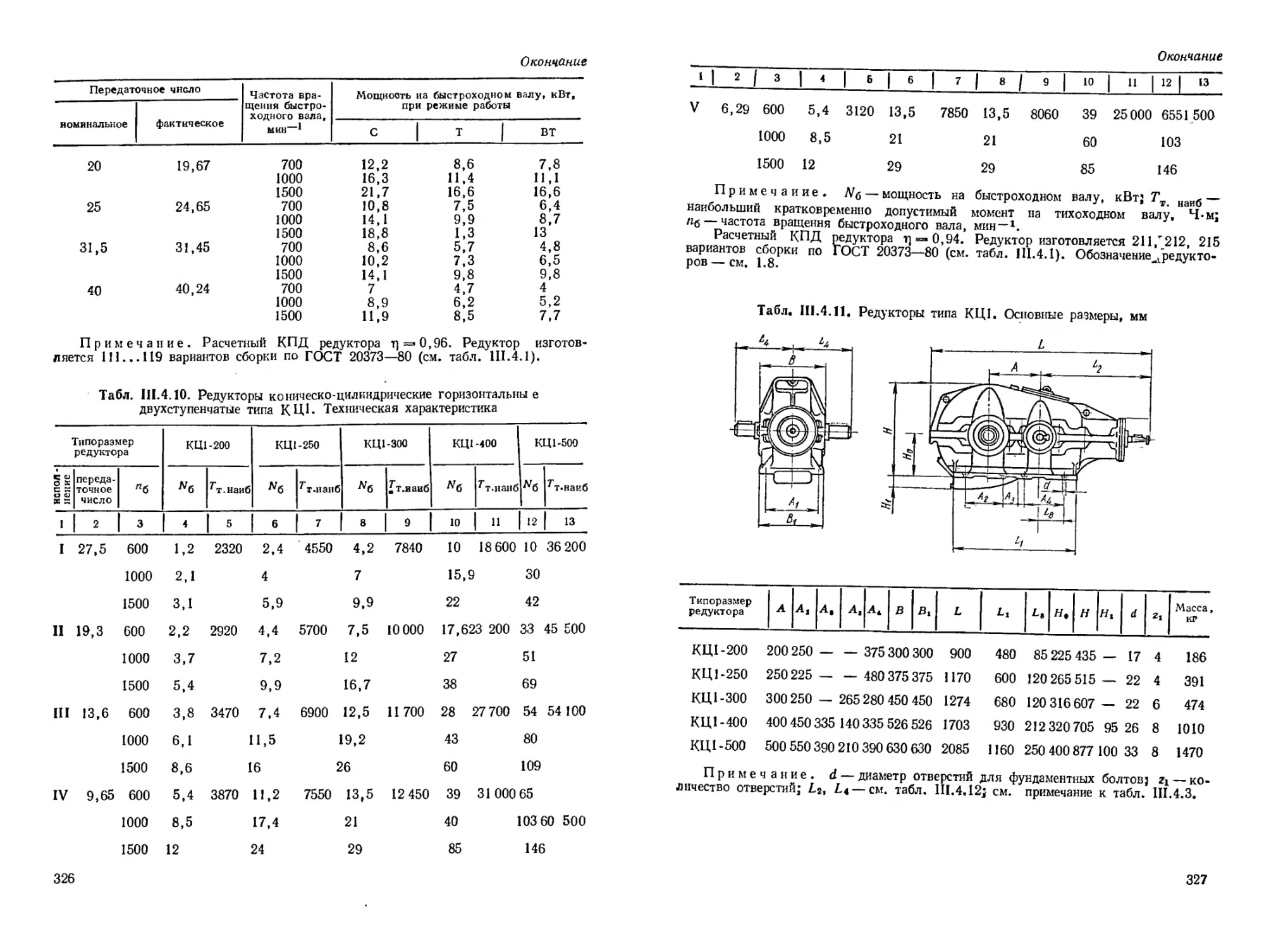
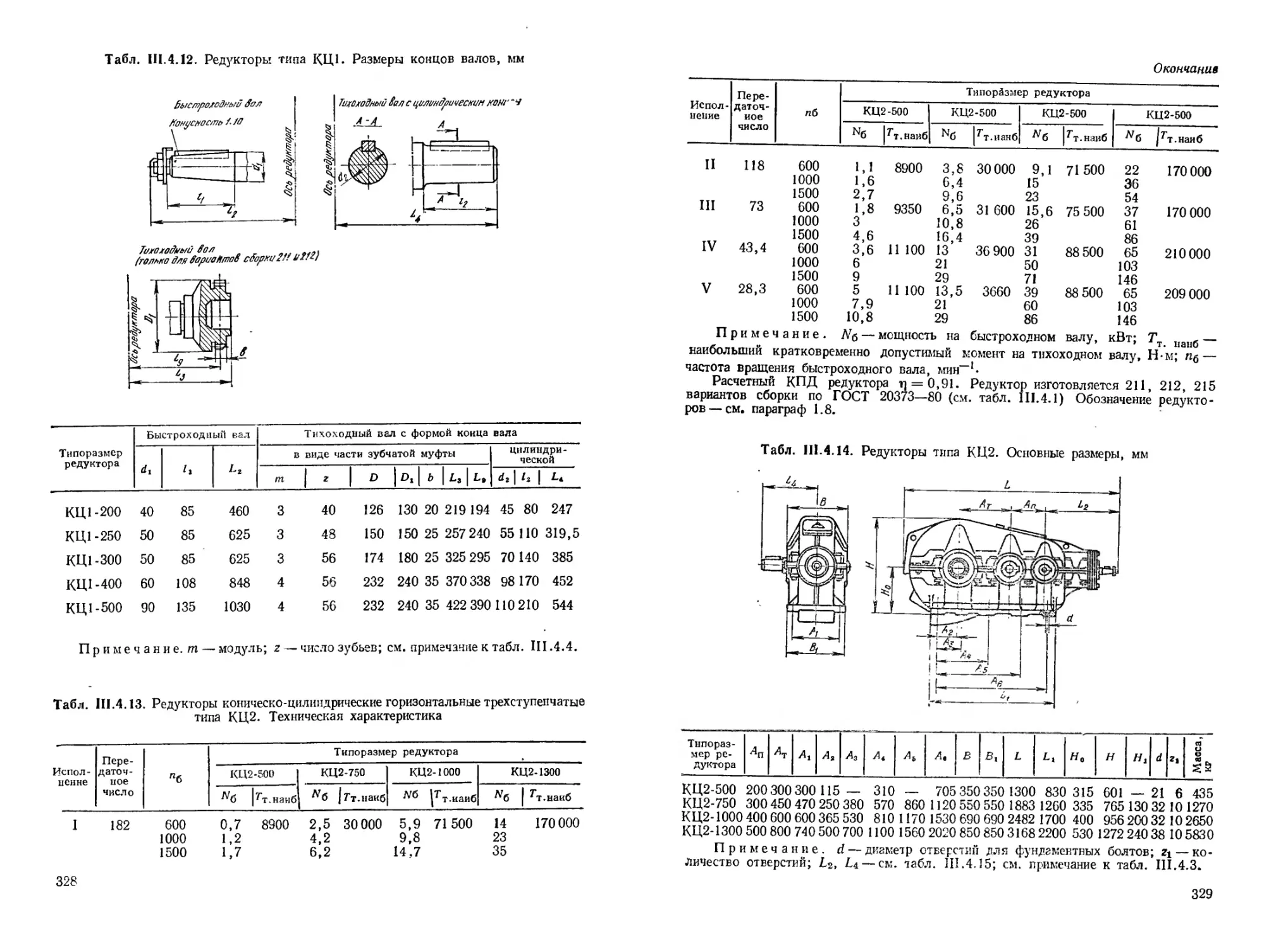
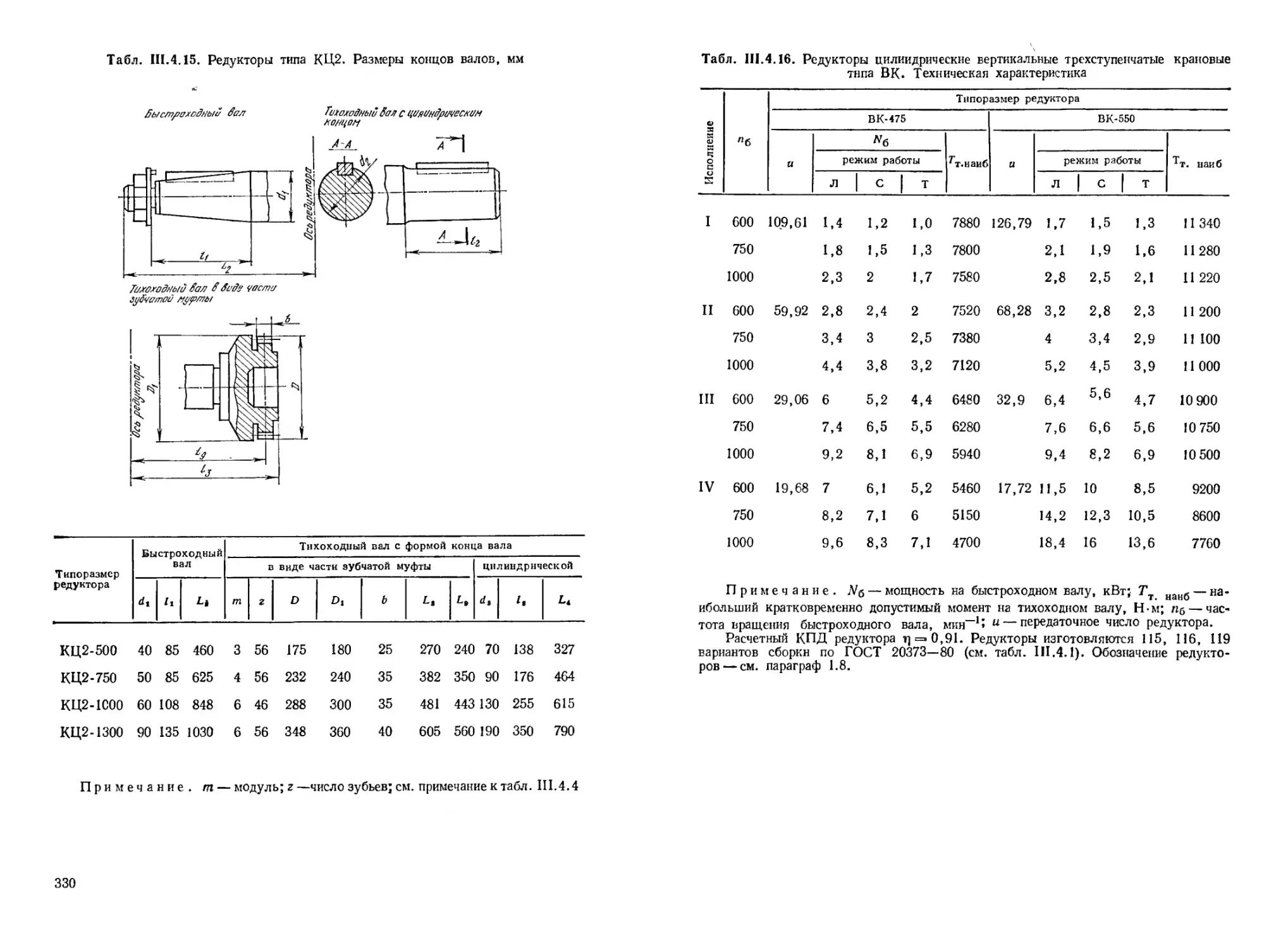
1.8. ВЫБОР И ОБОЗНАЧЕНИЕ РЕДУКТОРОВ
Редукторы выбираются по мощности (или крутящему моменту)
с учетом условий работы и затем проверяются на предельные кон-
сольные нагрузки [7].
Для горизонтальных редукторов типа РЦ1-150А и КЦ расчет-
ная мощность на быстроходном валу
= (1.101)
где kv — коэффициент, учитывающий условия работы редуктора
(табл. 1.33); Р — наибольшая мощность, передаваемая редуктором
при нормально протекающем процессе работы механизма.
Для горизонтальных редукторов типа РМ и Ц2 расчетная мощ-
ность на быстроходном валу также определяется по формуле
(1.101). Для приводов механизмов подъема кранов и машин непре-
рывного действия &р=1 и Р — наибольшая статическая мощность;
для приводов механизмов поворота и передвижения кранов коэф-
фициент Ар принимают в зависимости от режима работы (табл.
1.34).
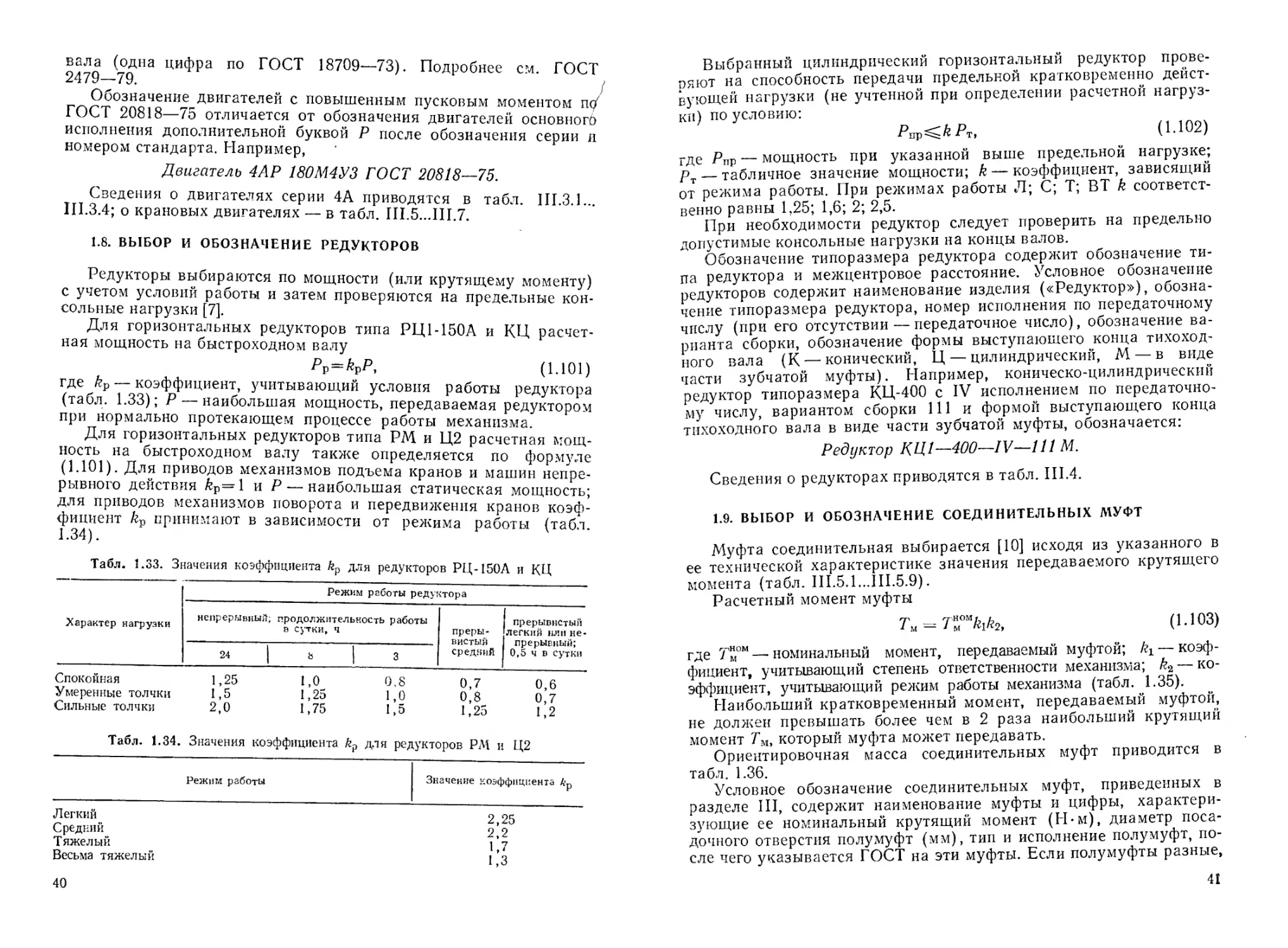
Табл. 1.33. Значения коэффициента для редукторов РЦ-150Л и КЦ
Характер нагрузки Режим работы редуктора
непрерывный; продолжительность работы в сутки, ч преры- вистый средний прерывистый легкий или не- прерывный; 0,5 ч в сутки
24 Ь 3
Спокойная 1,25 1,0 0,8 0,7 0,6
Умеренные толчки 1.5 1,25 1.0 0,8 0,7
Сильные толчки 2,0 1,75 1.5 1,25 1,2
Табл. 1.34. Значения коэффициента k? для редукторов РхМ и Ц2
Режим работы
Значение коэффициента &р
Легкий
Средний
Тяжелый
Весьма тяжелый
2,25
2.2
1.7
1,3
40
Выбранный цилиндрический горизонтальный редуктор прове-
ряют на способность передачи предельной кратковременно дейст-
вующей нагрузки (не учтенной при определении расчетной нагруз-
ки) по условию:
P^kPTt (1.Ю2)
где Рпр — мощность при указанной выше предельной нагрузке;
Рт — табличное значение мощности; k — коэффициент, зависящий
от режима работы. При режимах работы Л; С; Т; ВТ k соответст-
венно равны 1.25; 1,6; 2; 2,5.
При необходимости редуктор следует проверить на предельно
допустимые консольные нагрузки на концы валов.
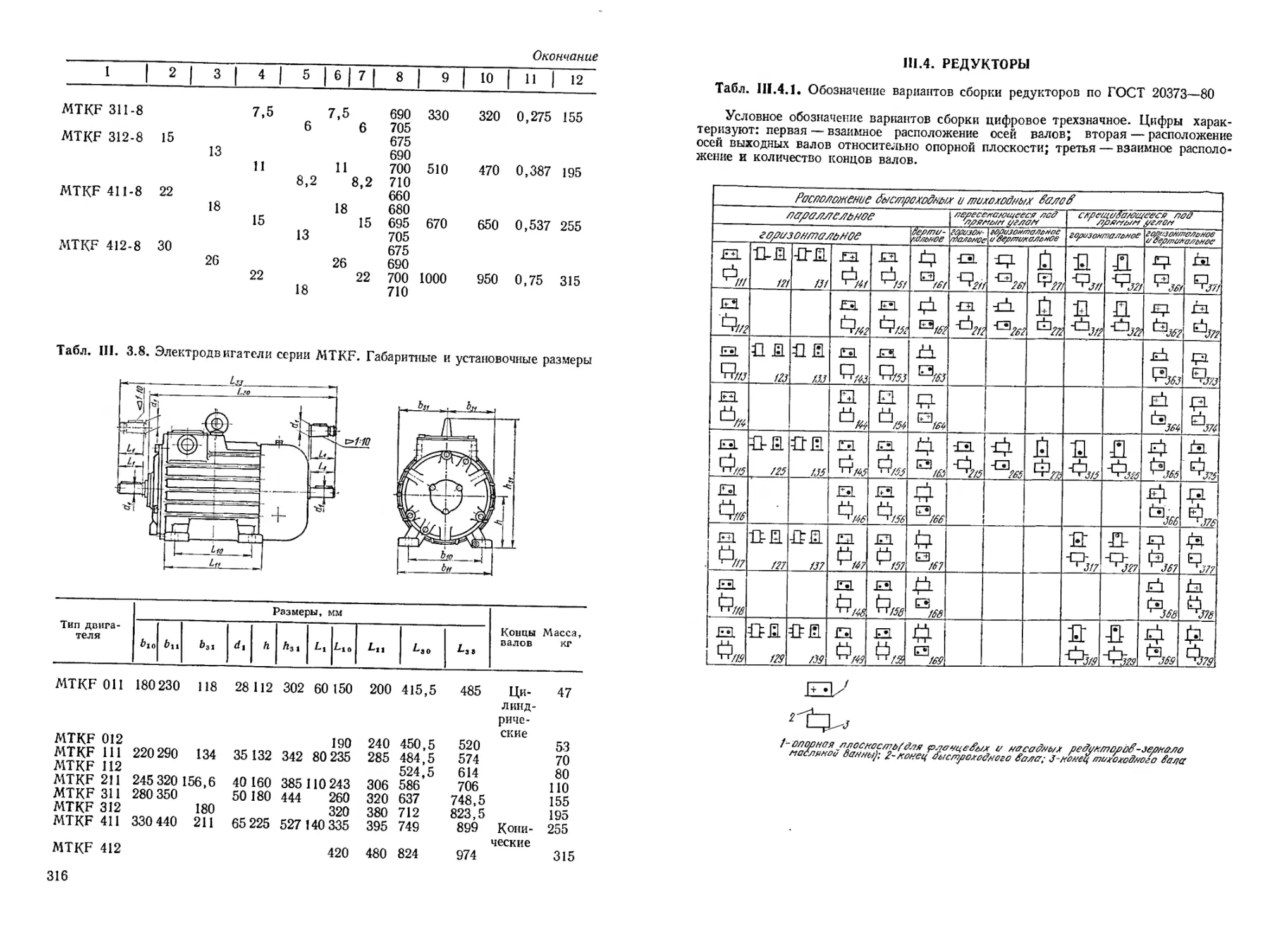
Обозначение типоразмера редуктора содержит обозначение ти-
па редуктора и межцентровое расстояние. Условное обозначение
редукторов содержит наименование изделия («Редуктор»), обозна-
чение типоразмера редуктора, номер исполнения по передаточному
числу (при его отсутствии — передаточное число), обозначение ва-
рианта сборки, обозначение формы выступающего конца тихоход-
ного вала (К — конический, Ц — цилиндрический, М — в виде
части зубчатой муфты). Например, коническо-цилиндрический
редуктор типоразмера КЦ-400 с IV исполнением по передаточно-
му числу, вариантом сборки 111 и формой выступающего конца
тихоходного вала в виде части зубчатой муфты, обозначается:
Редуктор КЩ—400—IV—lllM.
Сведения о редукторах приводятся в табл. III.4.
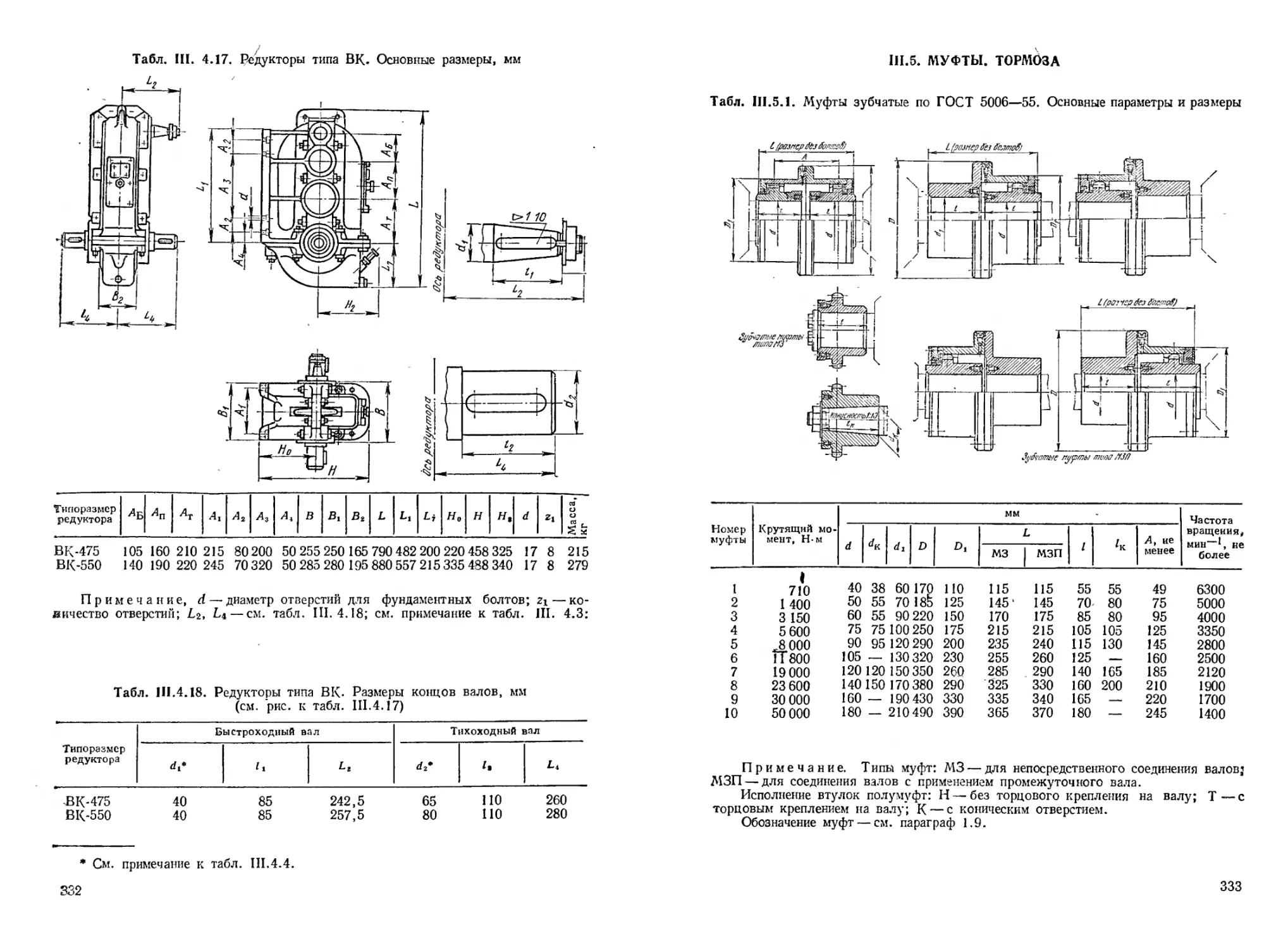
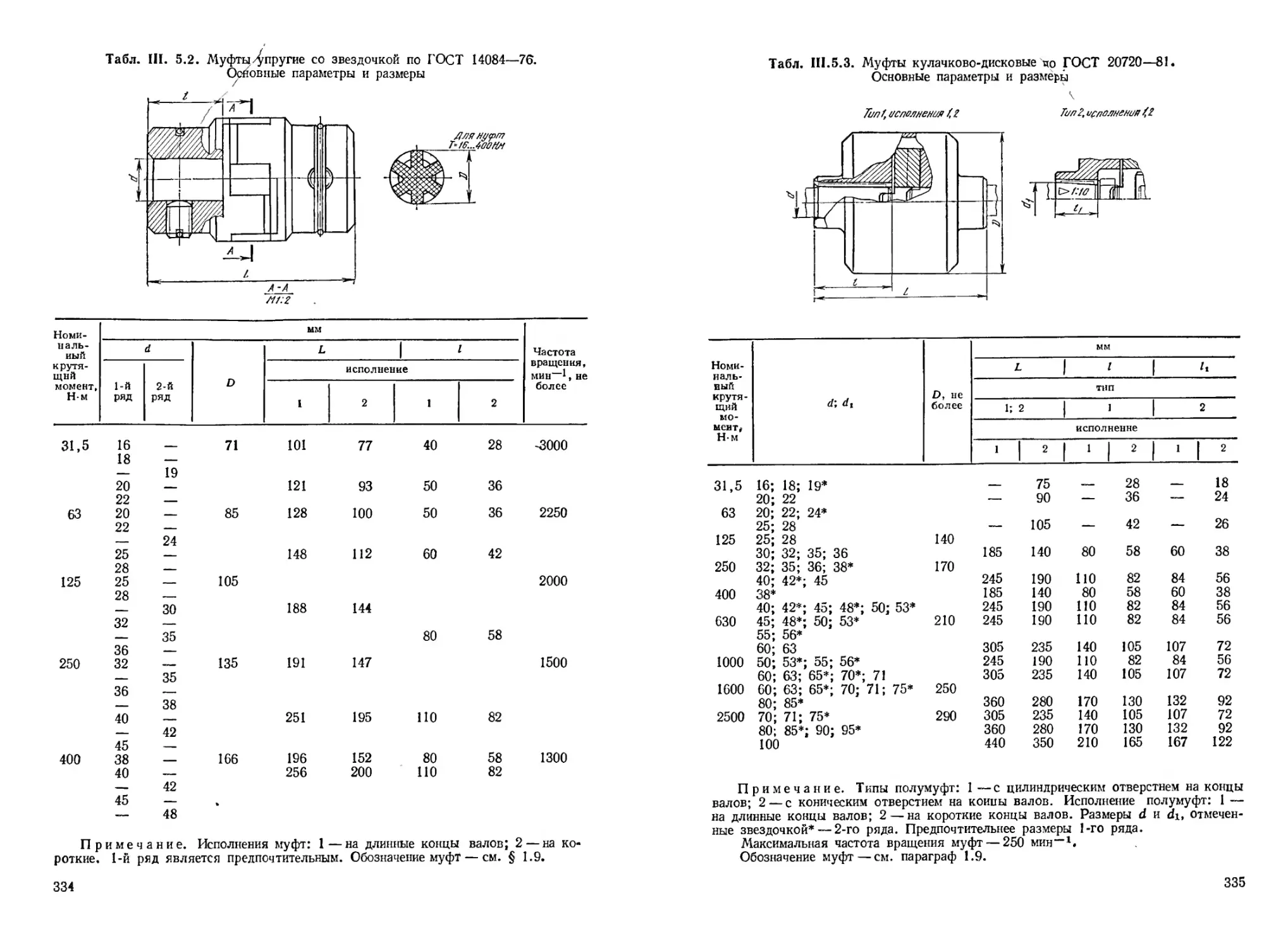
1.9. ВЫБОР И ОБОЗНАЧЕНИЕ СОЕДИНИТЕЛЬНЫХ МУФТ
Муфта соединительная выбирается [10] исходя из указанного в
ее технической характеристике значения передаваемого крутящего
момента (табл. III.5.1...III.5.9).
Расчетный момент муфты
(1.103)
где 7м0М — номинальный момент, передаваемый муфтой; /?х — коэф-
фициент, учитывающий степень ответственности механизма; k% — ко-
эффициент, учитывающий режим работы механизма (табл. 1.35).
Наибольший кратковременный момент, передаваемый муфтой,
не должен превышать более чем в 2 раза наибольший крутящий
момент Ль который муфта может передавать.
Ориентировочная масса соединительных муфт приводится в
табл. 1.36.
Условное обозначение соединительных муфт, приведенных в
разделе III, содержит наименование муфты и цифры, характери-
зующие ее номинальный крутящий момент (Н-м), диаметр поса-
дочного отверстия полумуфт (мм), тип и исполнение полумуфт, по-
сле чего указывается ГОСТ на эти муфты. Если полумуфты разные,
41
Табл. 1.35. Значения коэффициента ki и
Наименование механизма ki k2 при режимах
Л с т ВТ
Подъема Передвижения Изменения вылета Поворота 1,3 1,2 1,4 1,4 1,1 1,2 1,3 1,5
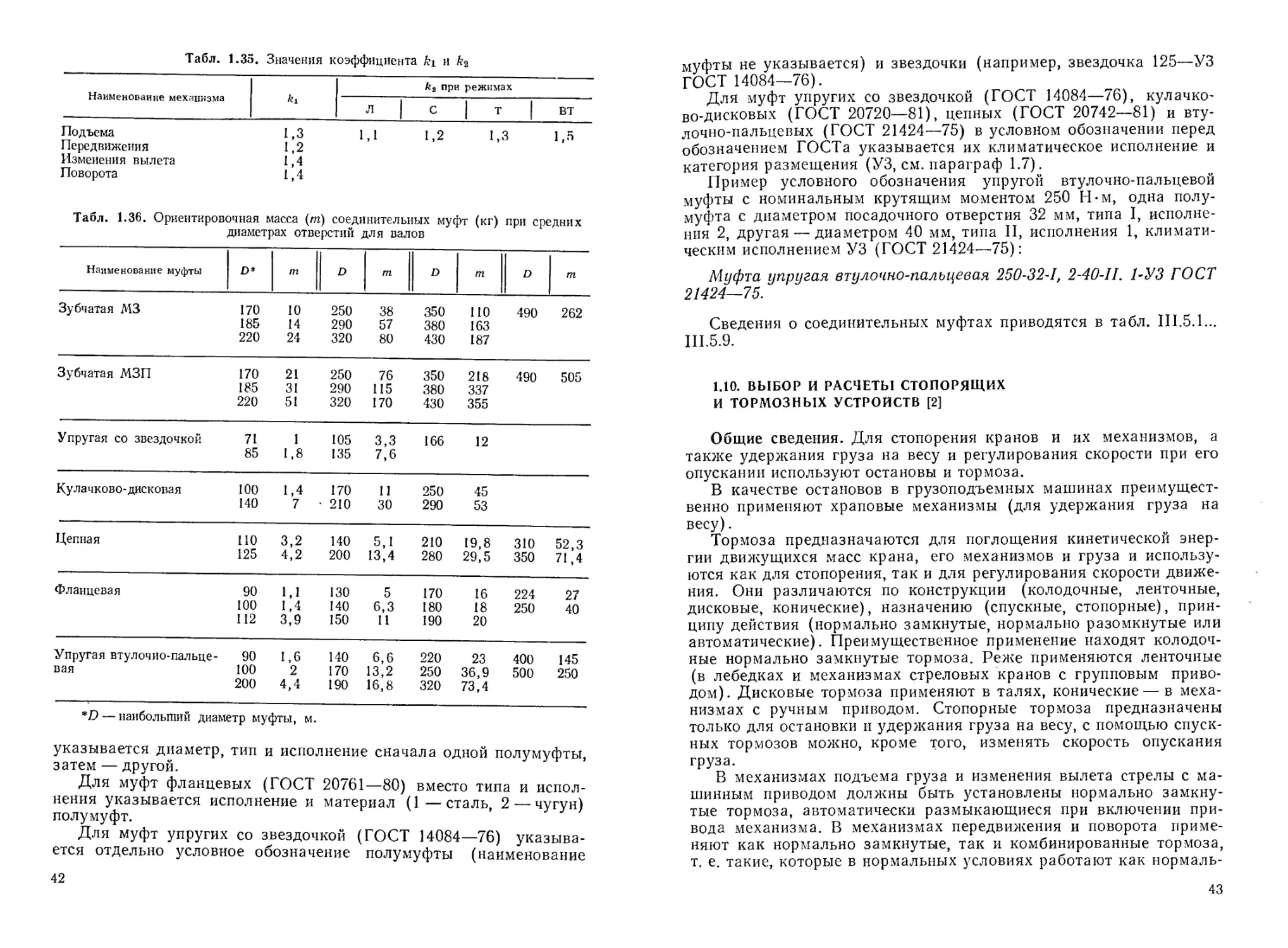
Табл. 1.36. Ориентировочная масса (т) соединительных муфт (кг) при средних
диаметрах отверстий для валов
Наименование муфты D* т D т D т D т
Зубчатая М3 170 10 250 38 350 НО 490 262
185 14 290 57 380 163
220 24 320 80 430 187
Зубчатая МЗП 170 21 250 76 350 218 490 505
185 31 290 115 380 337
220 51 320 170 430 355
Упругая со звездочкой 71 1 105 3,3 166 12
85 1,8 135 7,6
Кулачково-дисковая 100 1,4 170 11 250 45
140 7 • 210 30 290 53
Цепная 110 3,2 140 5,1 210 19,8 310 52,3
125 4,2 200 13,4 280 29,5 350 71,4
Фланцевая 90 1,1 130 5 170 16 224 27
100 1,4 140 6,3 180 18 250 40
112 3,9 150 11 190 20
Упругая втулочио-пальце- 90 1,6 140 6,6 220 23 400 145
вая 100 2 170 13,2 250 36,9 500 250
200 4,4 190 16,8 320 73,4
*D — наибольший диаметр муфты, м.
указывается диаметр, тип и исполнение сначала одной полумуфты,
затем — другой.
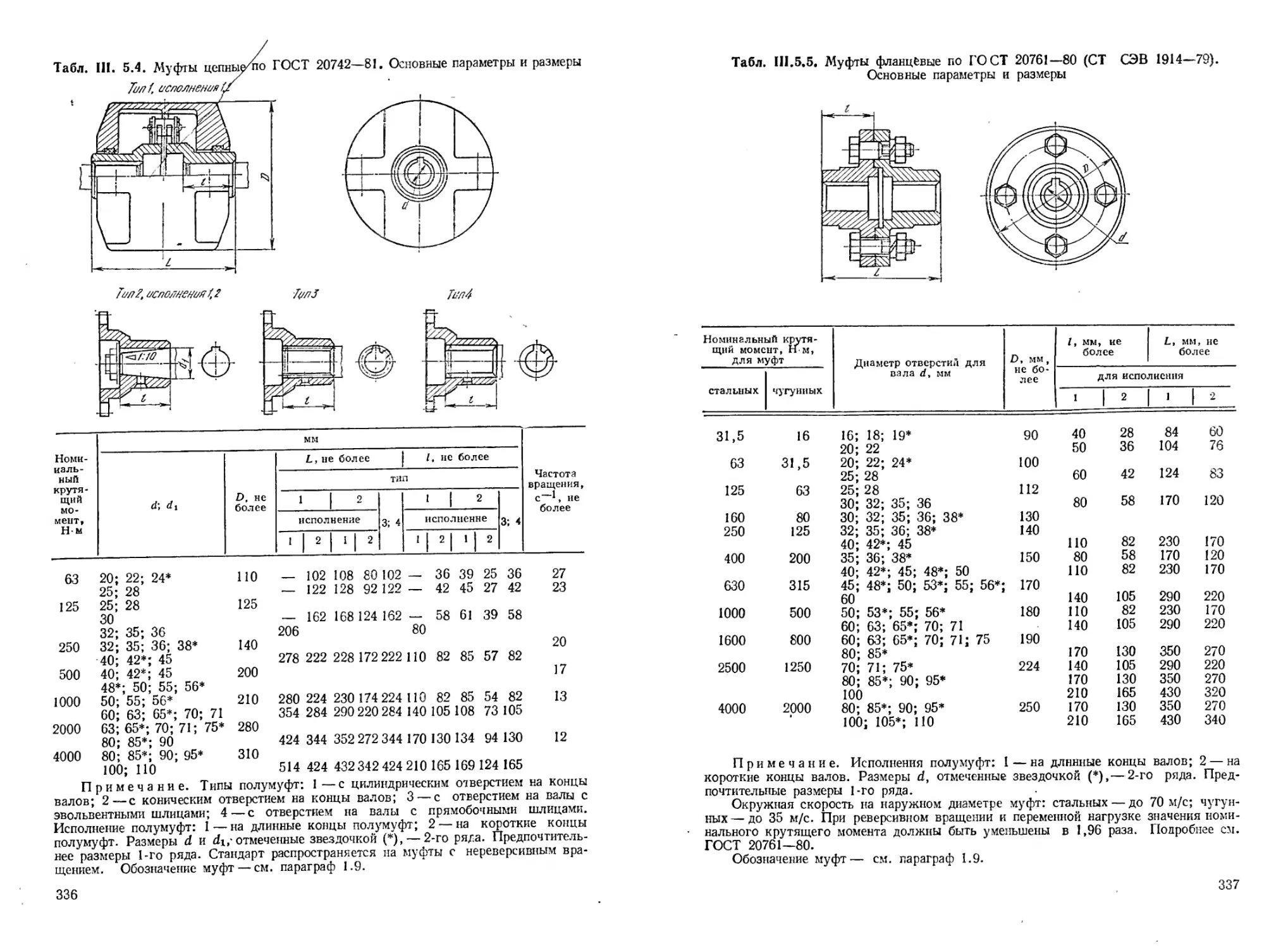
Для муфт фланцевых (ГОСТ 20761—80) вместо типа и испол-
нения указывается исполнение и материал (1—сталь, 2 — чугун)
полумуфт.
Для муфт упругих со звездочкой (ГОСТ 14084—76) указыва-
ется отдельно условное обозначение полу муфты (наименование
42
муфты не указывается) и звездочки (например, звездочка 125—УЗ
ГОСТ 14084—76).
Для муфт упругих со звездочкой (ГОСТ 14084—76), кулачко-
во-дисковых (ГОСТ 20720—81), цепных (ГОСТ 20742—81) и вту-
лочно-пальцевых (ГОСТ 21424—75) в условном обозначении перед
обозначением ГОСТа указывается их климатическое исполнение и
категория размещения (УЗ, см. параграф 1.7).
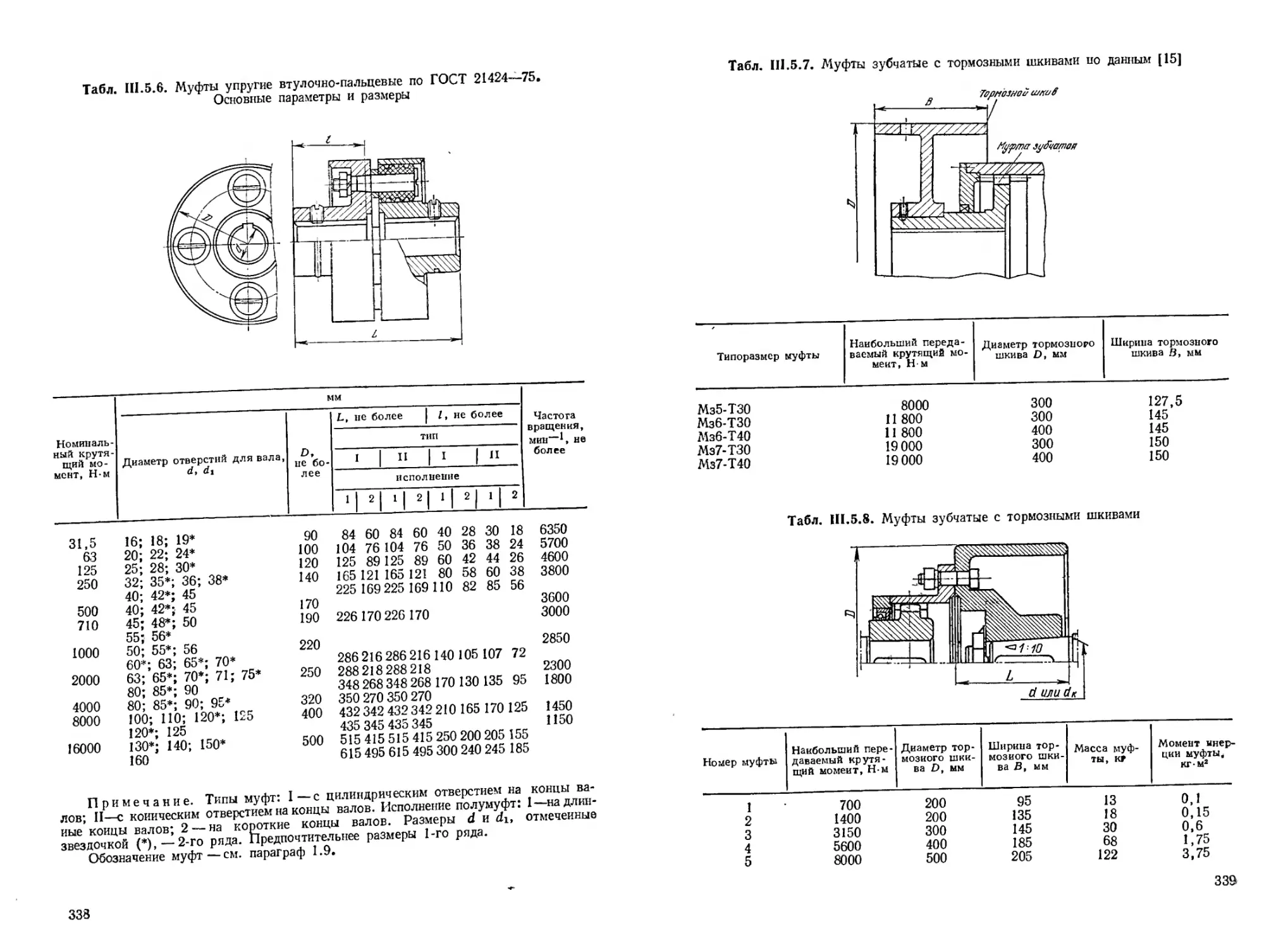
Пример условного обозначения упругой втулочно-пальцевой
муфты с номинальным крутящим моментом 250 Н-м, одна полу-
муфта с диаметром посадочного отверстия 32 мм, типа I, исполне-
ния 2, другая — диаметром 40 мм, типа II, исполнения 1, климати-
ческим исполнением УЗ (ГОСТ 21424—75):
Муфта упругая втулочно-палъцевая 250-32-1, 2-40-11. 1-УЗ ГОСТ
21424—75.
Сведения о соединительных муфтах приводятся в табл. II 1.5.1...
III.5.9.
1.10. ВЫБОР И РАСЧЕТЫ СТОПОРЯЩИХ
И ТОРМОЗНЫХ УСТРОЙСТВ [2]
Общие сведения. Для стопорения кранов и их механизмов, а
также удержания груза на весу и регулирования скорости при его
опускании используют остановы и тормоза.
В качестве остановов в грузоподъемных машинах преимущест-
венно применяют храповые механизмы (для удержания груза на
весу).
Тормоза предназначаются для поглощения кинетической энер-
гии движущихся масс крана, его механизмов и груза и использу-
ются как для стопорения, так и для регулирования скорости движе-
ния. Они различаются по конструкции (колодочные, ленточные,
дисковые, конические), назначению (спускные, стопорные), прин-
ципу действия (нормально замкнутые, нормально разомкнутые или
автоматические). Преимущественное применение находят колодоч-
ные нормально замкнутые тормоза. Реже применяются ленточные
(в лебедках и механизмах стреловых кранов с групповым приво-
дом). Дисковые тормоза применяют в талях, конические—в меха-
низмах с ручным приводом. Стопорные тормоза предназначены
только для остановки и удержания груза на весу, с помощью спуск-
ных тормозов можно, кроме того, изменять скорость опускания
груза.
В механизмах подъема груза и изменения вылета стрелы с ма-
шинным приводом должны быть установлены нормально замкну-
тые тормоза, автоматически размыкающиеся при включении при-
вода механизма. В механизмах передвижения и поворота приме-
няют как нормально замкнутые, так и комбинированные тормоза,
т. е. такие, которые в нормальных условиях работают как нормаль-
43
но разомкнутые, а в аварийных условиях — как тормоза нормально
замкнутые действием замыкающего усилия.
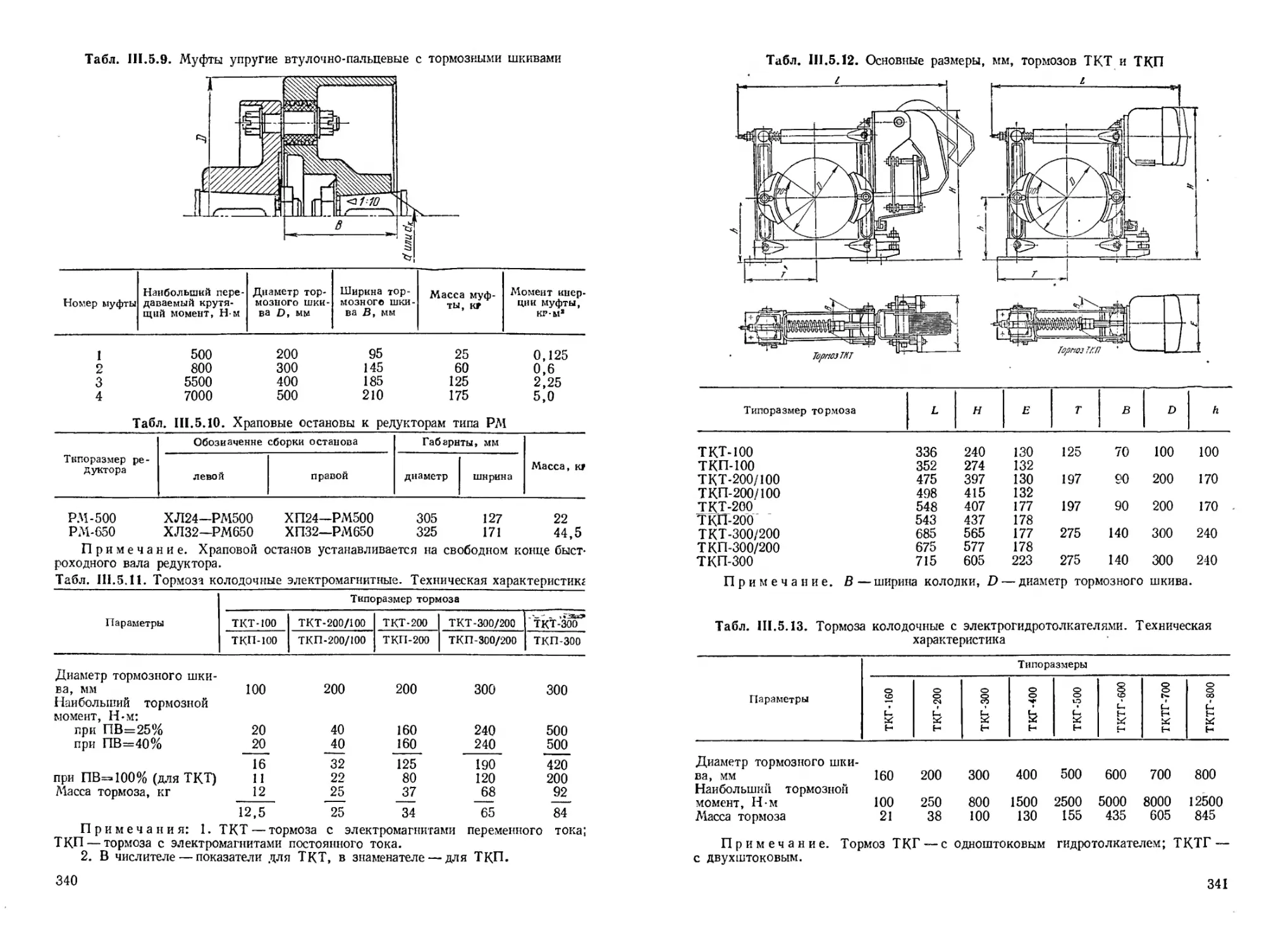
Тормоза обычно устанавливаются на наиболее быстроходном
валу механизма, где действует наименьший крутящий момент (ча-
ще всего на одной из полумуфт соединения двигателя с редукто-
ром). Выбираются они исходя из расчетного тормозного момента.
Из табл. П1.5.11...IIL5.14 можно выбрать подходящий типоразмер
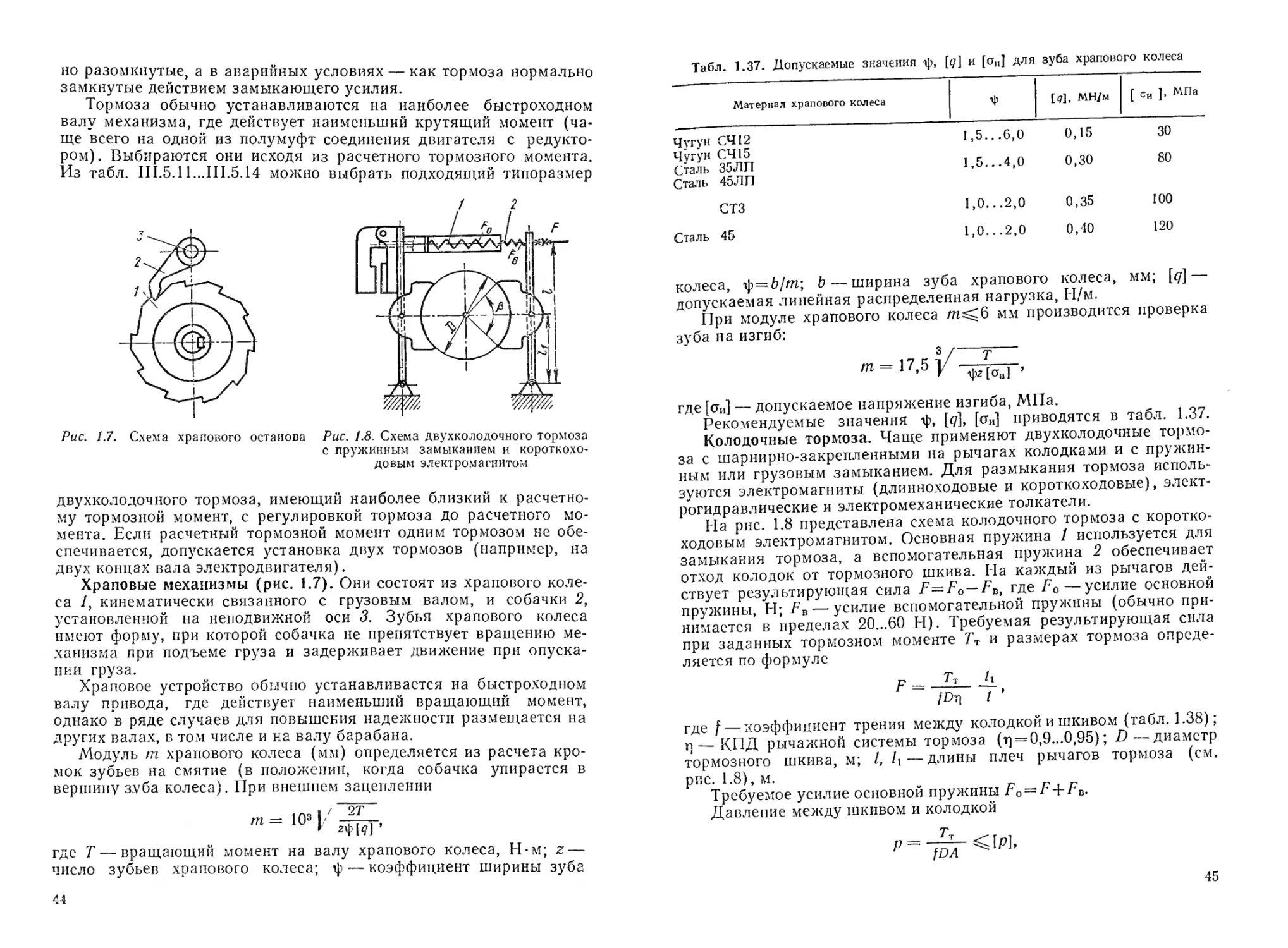
Рис. 1.7. Схема храпового останова Рис. 1.8. Схема двухколодочного тормоза
с пружинным замыканием и короткохо-
довым электромагнитом
двухколодочного тормоза, имеющий наиболее близкий к расчетно-
му тормозной момент, с регулировкой тормоза до расчетного мо-
мента. Если расчетный тормозной момент одним тормозом не обе-
спечивается, допускается установка двух тормозов (например, на
двух концах вала электродвигателя).
Храповые механизмы (рис. 1.7). Они состоят из храпового коле-
са /, кинематически связанного с грузовым валом, и собачки 2,
установленной на неподвижной оси 3. Зубья храпового колеса
имеют форму, при которой собачка не препятствует вращению ме-
ханизма при подъеме груза и задерживает движение при опуска-
нии груза.
Храповое устройство обычно устанавливается на быстроходном
валу привода, где действует наименьший вращающий момент,
однако в ряде случаев для повышения надежности размещается на
других валах, в том числе и на валу барабана.
Модуль т храпового колеса (мм) определяется из расчета кро-
мок зубьев на смятие (в положении, когда собачка упирается в
вершину зуба колеса). При внешнем зацеплении
т — 103}/
2Т
гЩГ’
где Т — вращающий момент на валу храпового колеса, Н-м; z—
число зубьев храпового колеса; ф — коэффициент ширины зуба
44
Табл. 1.37. Допускаемые значения ф, [7] и [ап] для зуба храпового колеса
Материал храпового колеса ip МН/м [ Си ]» МПа
Чугун СЧ12 1,5...6,0 0,15 30
Чугун СЧ15
Сталь 35ЛП 1,5...4,0 0,30 80
Сталь 45ЛП
СТЗ 1,0...2,0 0,35 100
Сталь 45 1,0...2,0 0,40 120
колеса, ф=Ь/т; b — ширина зуба храпового колеса, мм; [9] —
допускаемая линейная распределенная нагрузка, Н/м.
При модуле храпового колеса мм производится проверка
зуба на изгиб:
т = 17,5 V
где [сгц] — допускаемое напряжение изгиба, МПа.
Рекомендуемые значения ф, [</], [<Ти] приводятся в табл. 1.37.
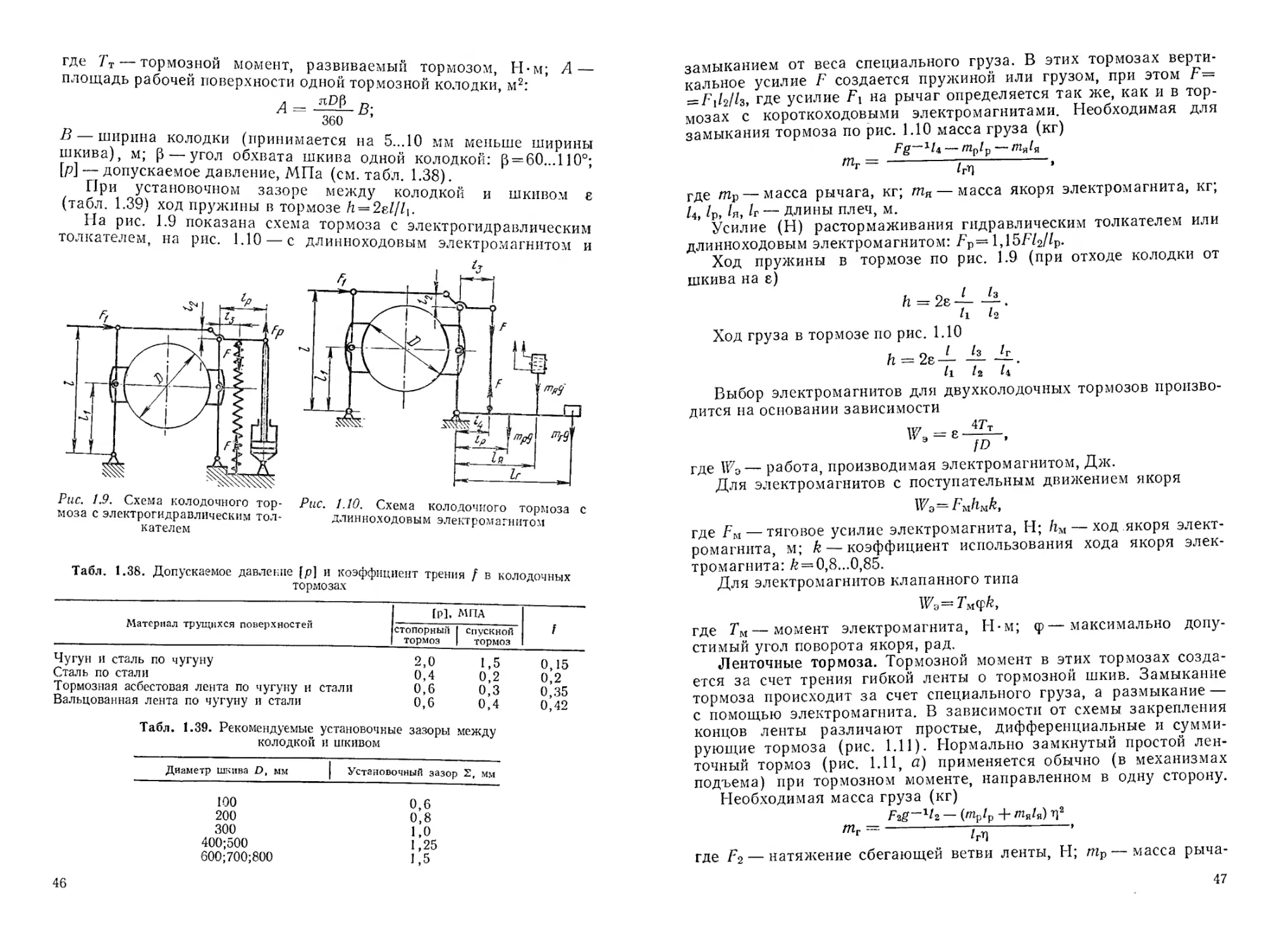
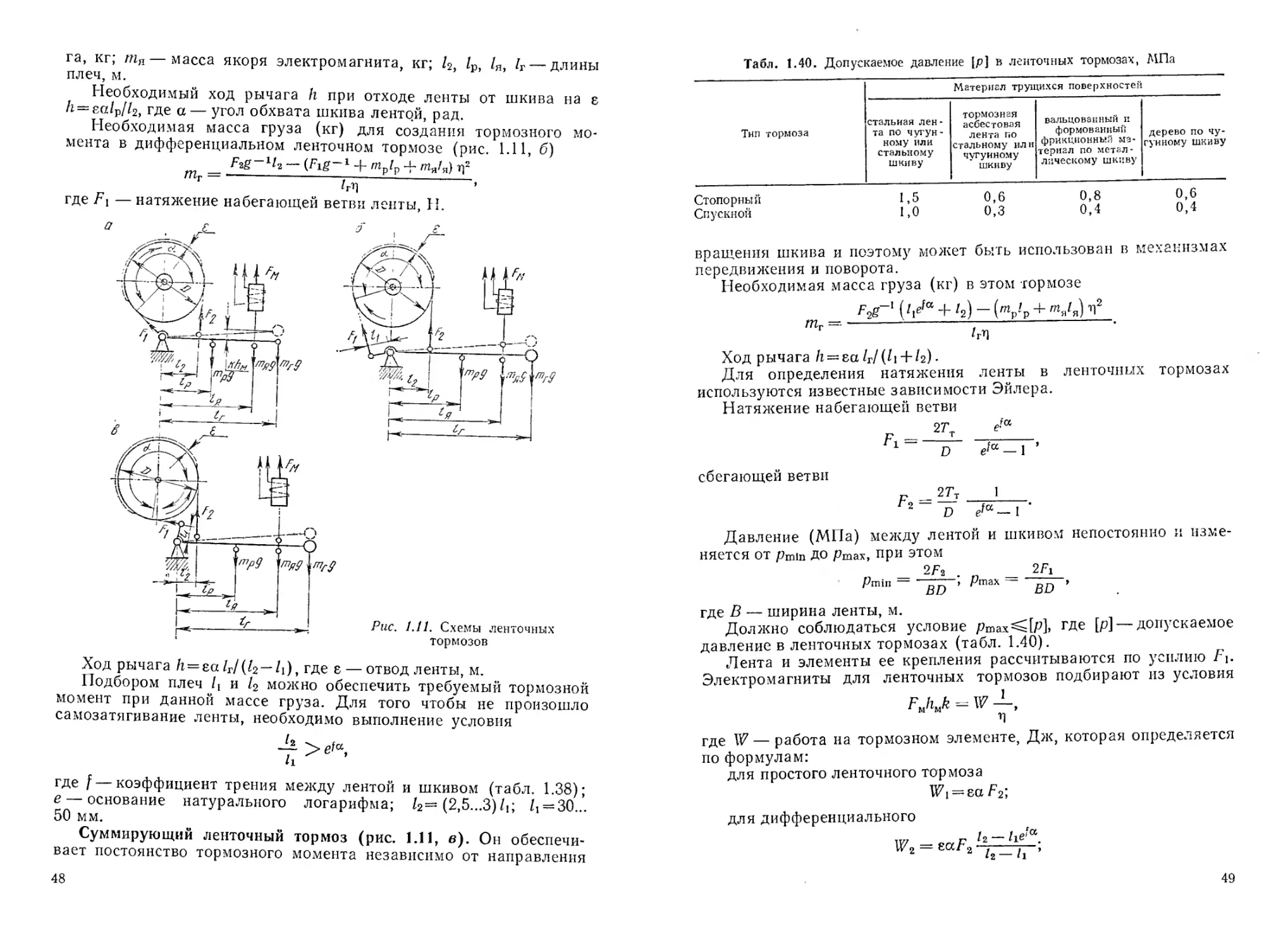
Колодочные тормоза. Чаще применяют двухколодочные тормо-
за с шарнирно-закрепленными на рычагах колодками и с пружин-
ным пли грузовым замыканием. Для размыкания тормоза исполь-
зуются электромагниты (длинноходовые и короткоходовые), элект-
рогидравлические и электромеханические толкатели.
На рис. 1.8 представлена схема колодочного тормоза с коротко-
ходовым электромагнитом, Основная пружина 1 используется для
замыкания тормоза, а вспомогательная пружина 2 обеспечивает
отход колодок от тормозного шкива. На каждый из рычагов дей-
ствует результирующая сила F~F0 — FBt где Fo—усилие основной
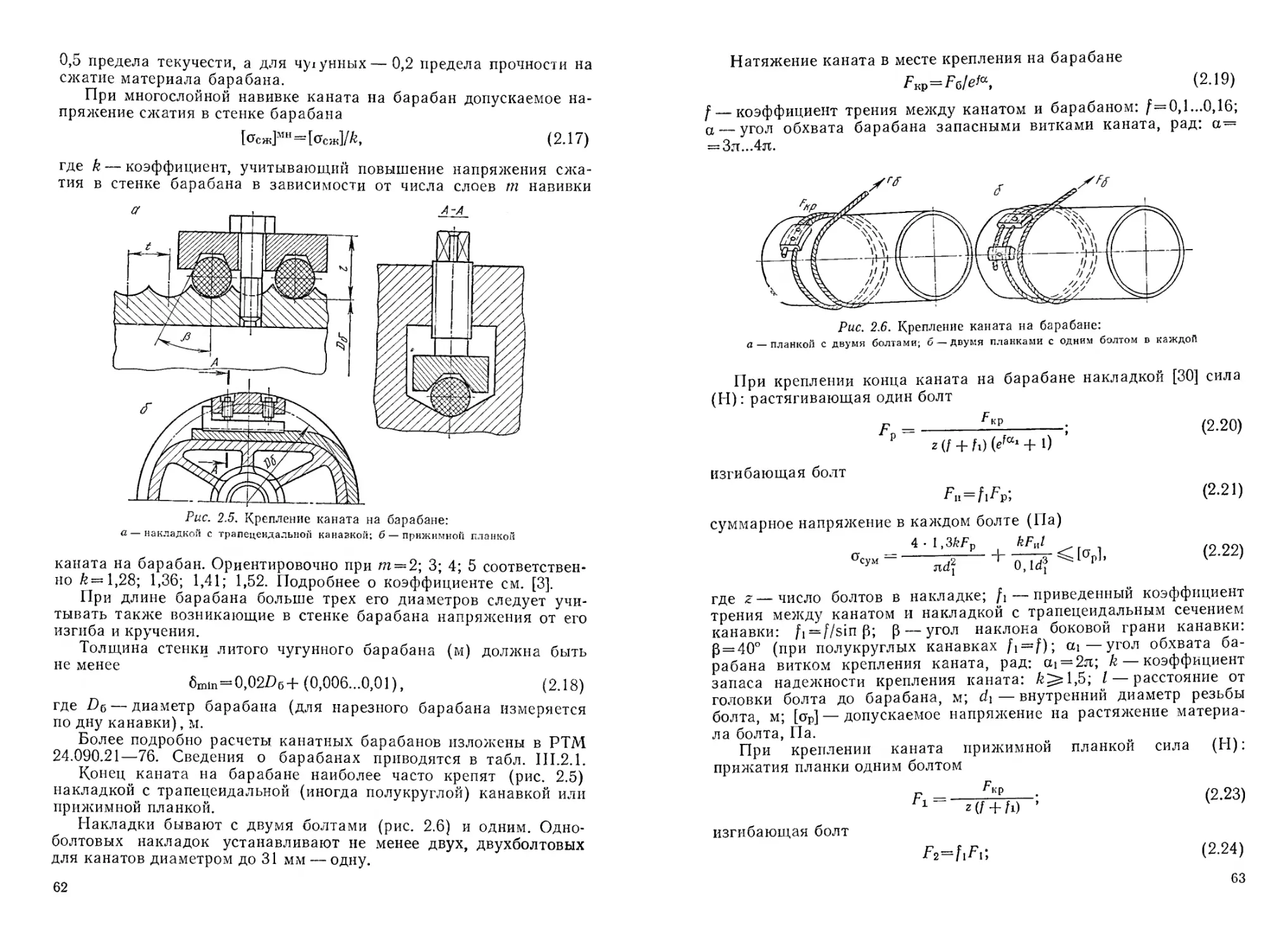
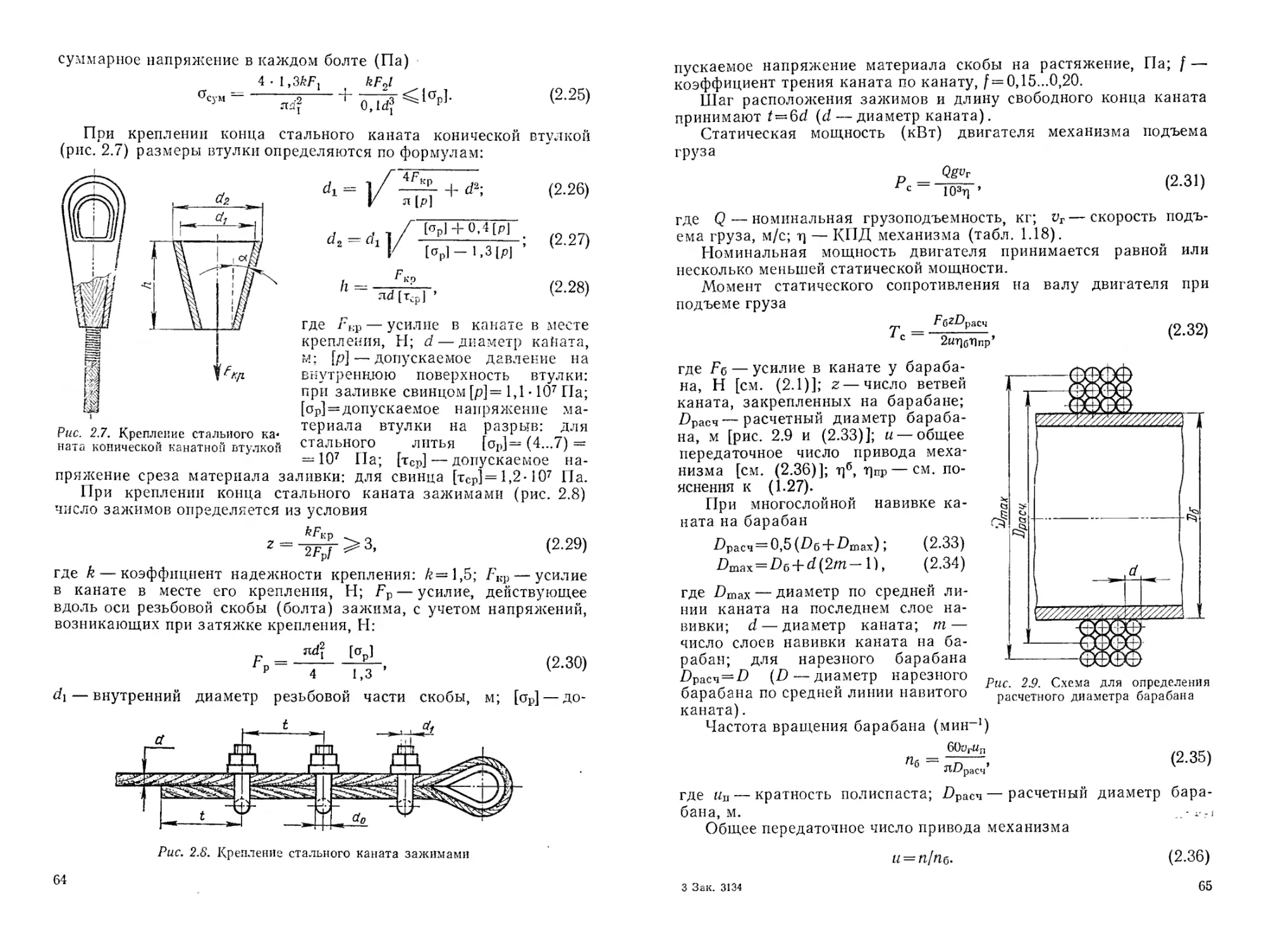
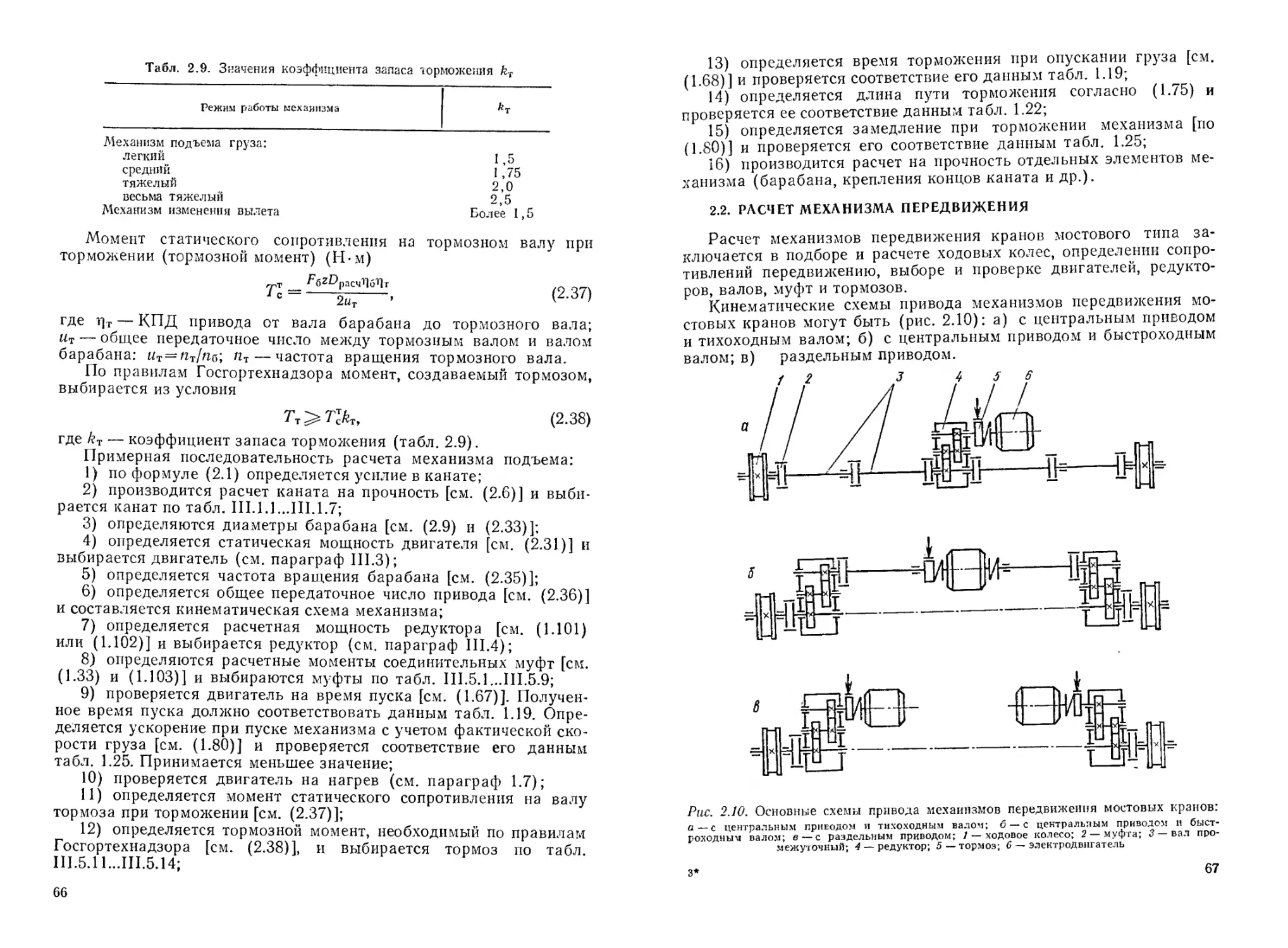
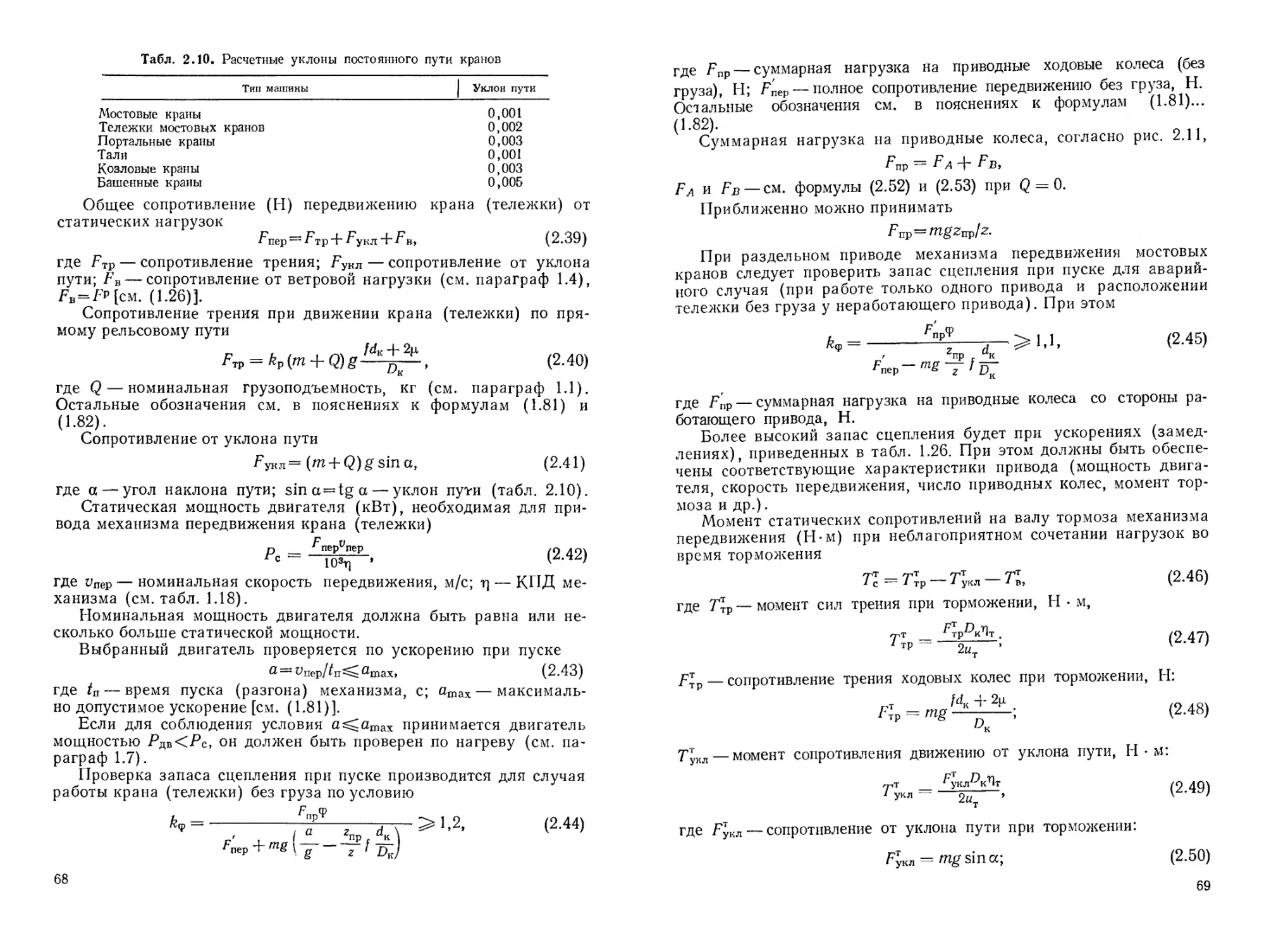
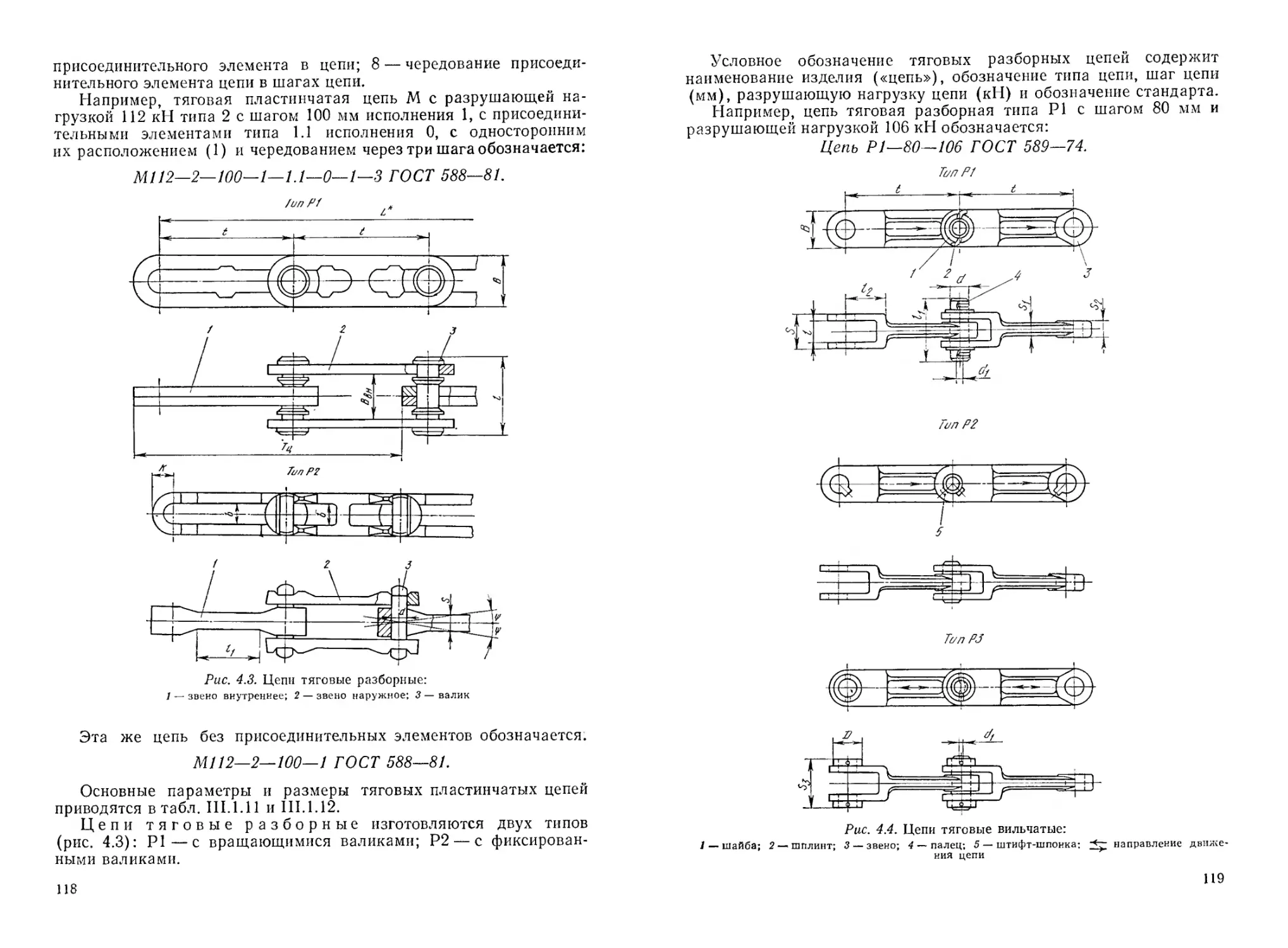
пружины, Н; — усилие вспомогательной пружины (обычно при-
нимается в пределах 20...60 Н). Требуемая результирующая сила
при заданных тормозном моменте ТТ и размерах тормоза опреде-
ляется по формуле
- fDy\ I '
где f — коэффициент трения между колодкой и шкивом (табл. 1.38);
т) — КПД рычажной системы тормоза (т] = 0,9...0,95); D—диаметр
тормозного шкива, м; /, —длины плеч рычагов тормоза (см.
рис. 1.8), м.
Требуемое усилие основной пружины /7O==F+/7B.
Давление между шкивом и колодкой
45
где Тт — тормозной момент, развиваемый тормозом, Н-м; А—
площадь рабочей поверхности одной тормозной колодки, м2:
Л = -^-В;
360
В — ширина колодки (принимается на 5...10 мм меньше ширины
шкива), м; [3 — угол обхвата шкива одной колодкой: [3 = 60...110°;
[р] — допускаемое давление, МПа (см. табл. 1.38).
При установочном зазоре между колодкой и шкивом е
(табл. 1.39) ход пружины в тормозе h — 2&l!lx.
На рис. 1.9 показана схема тормоза с электрогидравлическим
толкателем, на рис. 1.10 — с длинноходовым электромагнитом и
Рис. 1.9. Схема колодочного тор- Рис. 1.10. Схема колодочного тормоза с
моза с электрогидравлическим тол- длинноходовым электромагнитом
кателем
[р], МПА f
стопорный тормоз спускной тормоз
Табл. 1.38. Допускаемое давление [р] и коэффициент трения f в колодочных
тормозах
Материал трущихся поверхностей
Чугун и сталь по чугуну 2,0 1,5 0,15
Сталь по стали 0,4 0,2 0,2
Тормозная асбестовая лента по чугуну и стали 0,6 0,3 0,35
Вальцованная лента по чугуну и стали 0,6 0,4 0,42
Табл. 1.39. Рекомендуемые установочные зазоры между
колодкой И ШКИВОМ
Диаметр шкива D, мм
Установочный зазор S, мм
100 0,6
200 0,8
300 1,0
400;500 1,25
600;700;800 1,5
46
замыканием от веса специального груза. В этих тормозах верти-
кальное усилие F создается пружиной или грузом, при этом F~
^F\h!h, где усилие F\ на рычаг определяется так же, как и в тор-
мозах с короткоходовыми электромагнитами. Необходимая для
замыкания тормоза по рис. 1.10 масса груза (кг)
—/Пр/р — /пя/я
где — масса рычага, кг; тя — масса якоря электромагнита, кг;
/4, /р, /я, /г — Длины плеч, м.
Усилие (Н) растормаживания гидравлическим толкателем или
длинноходовым электромагнитом: Fp= l,15F/2/Zp.
Ход пружины в тормозе по рис. 1.9 (при отходе колодки от
шкива на е)
/г = 2е — —,
/1 /2
Ход груза в тормозе по рис. 1.10
й = 2е — А Д.
Zi /2 /4
Выбор электромагнитов для двухколодочных тормозов произво-
дится на основании зависимости
где — работа, производимая электромагнитом, Дж.
Для электромагнитов с поступательнььм движением якоря
где /;м— тяговое усилие электромагнита, И; /гм— ход якоря элект-
ромагнита, м; k — коэффициент использования хода якоря элек-
тромагнита: & = 0,8...0,85.
Для электромагнитов клапанного типа
W^T^k,
где Гм—момент электромагнита, Н-м; ф—максимально допу-
стимый угол поворота якоря, рад.
Ленточные тормоза. Тормозной момент в этих тормозах созда-
ется за счет трения гибкой ленты о тормозной шкив. Замыкание
тормоза происходит за счет специального груза, а размыкание —
с помощью электромагнита. В зависимости от схемы закрепления
концов ленты различают простые, дифференциальные и сумми-
рующие тормоза (рис. 1.11). Нормально замкнутый простой лен-
точный тормоз (рис. 1.11, а) применяется обычно (в механизмах
подъема) при тормозном моменте, направленном в одну сторону.
Необходимая масса груза (кг)
— (mp/p + тМ ц2
где F2 — натяжение сбегающей ветви ленты, Н; тр — масса рыча-
47
га, кг; тл — масса якоря электромагнита, кг; /2, /р, /я, I? — длины
плеч, м.
Необходимый ход рычага h при отходе ленты от шкива на 8
Л=еа/р//2> где а — угол обхвата шкива лентой, рад.
Необходимая масса груза (кг) для создания тормозного мо-
мента в дифференциальном ленточном тормозе (рис. 1.11, б)
Fzg-llz — (Fig-1 + mpZp + тя/я) тц
тг =------------------—---------,
где F\ — натяжение набегающей ветви лепты, Н.
тормозов
Ход рычага /г=еа/г/(^ —/1), где е — отвод ленты, м.
Подбором плеч 1{ и /2 можно обеспечить требуемый тормозной
момент при данной массе груза. Для того чтобы не произошло
самозатягивание ленты, необходимо выполнение условия
у >
где f — коэффициент трения между лентой и шкивом (табл. 1.38);
е — основание натурального логарифма; /2= (2,5...3)/ь /] = 30...
50 мм.
Суммирующий ленточный тормоз (рис. 1.11, в). Он обеспечи-
вает постоянство тормозного момента независимо от направления
48
Табл. 1.40. Допускаемое давление [р] в ленточных тормозах, ?АПа
Тип тормоза Материал трущихся поверхностей
стальная лен- та по чугун- ному или стальному шкиву тормозная асбестовая лента по стальному или чугунному шкиву вальцованный и формованный фрикционный ма- териал по метал- лическому шкиву дерево по чу- гунному шкиву
Стопорный 1,5 0,6 0,8 0,6
Спускной 1,0 0,3 0,4 0,4
вращения шкива и поэтому может быть использован в механизмах
передвижения и поворота.
Необходимая масса груза (кг) в этом тормозе
e2g-' (/tefa + /2) — [т ! 4- тя/я) т]2
тг —-----------------———-------------.
/ГТ]
Ход рычага h — zalT! (Z1 + /2).
Для определения натяжения ленты в ленточных тормозах
используются известные зависимости Эйлера.
Натяжение набегающей ветви
2?т
1 D efa — 1 ’
сбегающей ветви
п 27т 1
/ О - - г •
D efa—l
Давление (МПа) между лентой и шкивом непостоянно и изме-
няется ОТ Pmin ДО Ртах, При ЭТОМ
_ 2Г2 2Р1
' Pmin “ bd ’ Ртах ~ BD ’
где В — ширина ленты, м.
Должно соблюдаться условие ртах^[р], где [р] — допускаемое
давление в ленточных тормозах (табл. 1.40).
Лента и элементы ее крепления рассчитываются по усилию /д.
Электромагниты для ленточных тормозов подбирают пз условия
где W — работа на тормозном элементе, Дж, которая определяется
по формулам:
для простого ленточного тормоза
F2;
для дифференциального
W2 = eaF2 -г-2,- Z1.e'
49
для суммирующего
1 _Да
F3 = 6ccF2 -/
где 8 — отвод ленты, м.
Табл. 1.41. Коэффициент трения / и допускаемое давление [р] (МПа) в дисковых
тормозах
Материалы трущихся поверхностей Вид смазкн масляная ваииа| густая смазка без смазки
f [р] f [р] f [р]
Сталь по стали или чугуну 0,06 0,8 0,1 0,4 0,15 0,3
Прессованный и вальцованным фрикцион- ный материал по металлу 0,16 1,2 0,12 1,0 0,42 0,6
Тканый и плетеный фрикционный мате- риал по металлу 0,12 0,8 0,1 0,6 0,15 0,3
-Дисковые тормоза. Тормозной момент в этих тормозах
(рис. 1.12) создается за счет трения между неподвижными 1 и под-
вижными 2 дисками, прижимаемыми друг к другу пружиной. За-
мыкание тормоза производится также весом груза (грузовые тор-
моза) или усилием человека.
Осевое усилие, создающее тормозной момент Гт,
где z — число пар поверхностей трения; f — коэффициент трения
между дисками (табл. 1.41); 7?с — средний радиус поверхности
трения, м:
7?с=(/?н+/?в)/2,
Rh и Rв — наружный и внутренний радиусы дисков, м.
Давление (МПа) на поверхностях трения
р “ » («S - «;) *,/’1'
Центробежный дисковый тормоз (рис. 1.13). Тормоза этого типа
предназначены для регулирования скорости опускания груза,
используются главным образом в лебедках подъемников. На дис-
ке 2, закрепленном на валу /, установлен диск 4, который имеет
возможность осевого перемещения. Расположенные на диске 4 гру-
зы 5 под действием центробежной силы стремятся сблизить диски
2 и 4 и зажать расположенный между ними неподвижный фрик-
ционный диск 3, Пружина 6 стремится раздвинуть диски 2 и 4,
Fa определяется из условия, что при заданной частоте вращения
тормоз еще не включается:
Р __ / 2Тт
Г ° “ тг ( 30 ) rZr~ (DH + DB) fz'
50
где пгг—масса одного груза, кг; п — частота вращения грузов,
мин-1; /ь /2— плечи рычага, м; г — расстояние центра тяжести гру-
зов до оси вращения вала /, м; гг — число грузов (от 2 до 6); ТТ —
тормозной момент на валу тормоза при спуске груза, Н-м; DBt
Dn — наружный и внутренний диаметры дисков трения, м.
Рис. 1.12. Схема дискового тормоза с пру-
жинным замыканием
Рис. 1.13. Схема центробежного
дискового тормоза
Давление (МПа) на поверхностях трения дисков
где допускаемое давление [р] принимается по табл. 1.41.
Тепловой расчет тормозов. Этот расчет имеет целью ограниче-
ние нагрева поверхностей трения. Упрощенный расчет основан на
уравнении теплового баланса тормоза
Qo^Qi + Qs + Qk
где Qo — количество теплоты, выделяющееся на поверхности тре-
ния в течение часа; Qi—количество теплоты, отводимое в течение
часа в окружающую среду лучеиспусканием; Q2— количество те-
плоты, отводимое в течение часа конвекцией при неподвижном
шкиве; Q3 — количество теплоты, отводимое в течение часа кон-
векцией с поверхности вращающегося шкива.
Qo, Qi, Q2 и Оз (Вт) определяются по формулам (1.104)...
(1.109).
/Т
Qo^P—~, (1-Ю4)
/00
где /пр — приведенный к тормозному валу момент инерции враща-
ющихся и поступательно движущихся элементов крана и груза,
кг • м2; пт — частота вращения тормозного шкива, при которой на-
51
чинается торможение, мин-1; г— число торможений в час, прини-
маемое в зависимости от р' жима работы механизма (легкий — 60;
средний—120; тяжелый—180; весьма тяжелый — 300); р—коэф-
фициент, устанавливающий соотношение между энергией движущих-
ся масс механизма и энергией, затрачиваемой на их торможение:
для механизмов подъема
(1.105)
для механизмов передвижения
р=-7тЬт7-<1’ <|Л06)
/гт — коэффициент запаса торможения (см. табл. 2.9); Гс — мо-
мент сопротивления передвижению механизма с грузом; Гт — тор-
мозной момент.
где Ci—коэффициент излучения от полированной поверхности:
Ci = l,5 Вт/(м2-град4); с2— коэффициент излучения от матовой
поверхности, с2 = 5 Вт/(м2-град4); Ах— площадь поверхности тре-
ния тормозного шкива, не закрытой тормозными колодками, м2;
Л2 — площадь торцевых поверхностей тормозного шкива, м2; t —
максимально допускаемая температура нагрева для данного
фрикционного материала (для тканой ленты — 200 °C, для валь-
цованной— 220°; для чугуна и стали — 150 °C); £2— температура
окружающей среды (принимается равной 35°C).
32 = ш43(Л-Ч2)(1~ПВ), (1.108)
где а—коэффициент теплопередачи от неподвижной поверхности,
контактирующейся с воздухом, а = 5,8...8,7 Вт/(м2*°С); /13 — пло-
щадь поверхности шкива, не перекрытой колодками, м2:
А3^А1+Л2; (1.109)
(1 —ПВ) —часть общего времени работы тормоза, в течение кото-
рого шкив неподвижен; ПВ — относительная продолжительность
включения механизма (в долях единицы).
Q3 = ПВ (/, — /2) 7,15 (А^™ + 2А1 и?’78 + 2А^’78 + ... + 2Д-с?>78),
где А4 — площадь внутренней и наружной поверхностей обода
шкива без учета площадей поверхностей, перекрытых колодками,
м2, которые имеют среднюю скорость vQ, м/с; A'lt А'2, А\ — пло-
щади (м2) колец на боковых поверхностях шкива, имеющих
соответственно средние скорости с2, ..., м/с.
Глава 2. РАСЧЕТЫ МЕХАНИЗМОВ
ГРУЗОПОДЪЕМНЫХ МАШИН
2.1. РАСЧЕТ МЕХАНИЗМА ПОДЪЕМА ГРУЗА
Общий расчет механизма подъема груза включает выбор крю-
ка с подвеской, полиспаста, двигателя, редуктора, муфт, тормоза;
выбор и расчет каната, расчет барабана и крепления концов ка-
ната.
Простейшие грузоподъемные механизмы (домкраты, ручные
лебедки, тали) выбираются непосредственно по их основным пара-
метрам.
В табл. III.6 приводятся сведения об электрических талях.
В ГОСТ 22584—77 установлена следующая структурная схема
условного обозначения электроталей:
ТЭ XXX — X X X XX — XX ГОСТ 22584—17*
/2 3 4 5 6 7
где 1—сокращенное название изделия; 2 — грузоподъемность
(первая цифра—целое число тонн, последующие — десятые и со-
тые доли тонны, запятая опускается); 3 — исполнение (5-е испол-
нение— продольное расположение подъемного механизма отно-
сительно пути; механизм передвижения с шарнирной приводной и
шарнирной неприводной тележками; 9-е исполнение — продольное
расположение подъемного механизма относительно пути; две четы-
рехкатковые шарнирные приводные тележки и др.); 4 — условное
обозначение высоты подъема (для исполнений 5 и 9 гысота подъ-
ема 6, 9, 12 м условно обозначается соответственно 1; 2; 3); 5 —
условное обозначение числа скоростей механизма подъема (1—для
односкоростных талей); G — скорость передвижения, м/мин; 7 —
дополнительные данные (00 — без них: 01—тали с двигателями
серии 4А).
Например, таль электрическая грузоподъемностью 0,5 т, испол-
нения 5, при высоте подъема 6 м, с односкоростным механизмом
подъема обозначается:
Таль электрическая ТЭ050—51120—00 ГОСТ 22584—77.
Излагаемая в настоящем параграфе методика расчетов кана-
тов п барабанов механизмов подъема относится и к расчетам этих
деталей других механизмов грузоподъемных машин.
Усилие (II) в канате, набегающем на барабан при подъеме
груза,
(2.1)
1д? Q — номинальная грузоподъемность крана, кг; z— число поли-
53
спастов в системе (рис. 2.1); цп— кратность полиспаста; -q0—
общий КПД полиспаста и обводных блоков:
Т]о — ^пТ)об}
(2.2)
т)п — КПД полиспаста; т]об — КПД обводных блоков.
Коэффициент полезного действия полиспаста, предназначен-
ного для выигрыша в силе (концевая ветвь сбегает с подвижного
блока):
wn
(2.3)
где 1]бл — КПД одного блока (табл. 2Д).
Рис. 2.1. Схемы полиспастов:
a, Jj, в — одиночные для выигрыша в силе; г — сдвоенный для выигрыша в силе; д — для
выигрыша в пути и скорости
Табл. 2.1. Коэффициент полезного действия блоков
Тип под- шипника Условия работы г<бл т2 'бл Г‘бл т‘бл у5 г'бл Т’бл 4 г8 т‘бл
Скольже- Плохая смазка, 0,94 0,884 0,83 0,782 0,74 6,69 0,65 0,61
ПИЯ высокая темпе- ратура
Нормальная смазка 0,96 0,922 0,885 0,85 0,815 0,785 0,75 0,72
Качения Плохая смазка, высокая темпе- ратура 0,97 0,941 0,913 0,886 0,86 0,835 0,81 0,785
Нормальная смазка 0,98 0,96 0,942 0,922 0,905 0,885 0,87 0,85
54
Табл. 2.2. Рекомендуемая кратность полиспастов
Сдвоенный полиспаст Простой полиспаст
грузоподъемность, т кратность одного по- лиспаста грузоподъемность, т кратность одного по- лиспаста
До 8 2 До 1 1...2
10...16 2...3 1,25...6,3 2...3
20...32 3...4 8. ..16 3...4
40...50 4...5 20...32 5...6
Табл. 2.3. Наименьший допускаемый коэффициент запаса прочности стальных
канатов k по правилам Госгортехнадзора
Назначение канатов Привод механизма Режим работы k
Грузовые и стреловые Канаты лебедок, предназначенные для Ручной Машинный Легкий Средний Тяжелый Весьма тяжелый 4,0 5,0 5,5 6,0 6,0 4,0
изменения вылета стрелы без груза
Коэффициент полезного действия полиспаста для выигрыша в
пути и скорости (концевая ветвь сбегает с подвижного блока)
Иц 2 Uy] 1
Пбл -Пбл /ПЛЧ
т]п = «пПбл -------7.---• (2-4)
Коэффициент полезного действия обводных блоков
•Ноб = (2-5)
где 2 — число обводных блоков.
Кратность полиспастов механизмов подъема груза выбирают
в зависимости от типа полиспаста и грузоподъемности механизма
(табл. 2.2).
Расчет стальных канатов на прочность производится согласно
правилам Госгортехнадзора. Расчетное разрывное усилие ка-
ната (Н)
F^FKk, (2.6)
где FK — наибольшее натяжение в канате (без учета динамиче-
ских нагрузок), Н; k — коэффициент запаса прочности (табл. 2.3).
Признаки стальных канатов приводятся в табл. 2.4. Кроме того,
канаты различаются по диаметру каната, по маркировочной груп-
пе (для подъемно-транспортных машин 1372, 1470, 1568, 1666,
1764, 1862, 1960, 2156, 2254, 2352 МПа), по количеству проволок
в прядях и количеству прядей в канате, по материалу сердечника
(пеньковый, асбестовый, стальной) и др.
55
Установлена следующая структурная схема условного обозна-
чения стальных канатов:
Канат X—X—X—X—X — X —X — X — X
1 23456789 10'
где 1 — название изделия; 2 — диаметр каната, мм; 3 — обозначе-
ние назначения каната (ГЛ, Г); 4 — обозначение марки (механи-
ческих свойств) проволок (В, I, II); 5—обозначение вида покры-
тия поверхности проволок (—, ОЖ, Ж, С); 6 — обозначение на-
правления свивки прядей (—, Л); 7 — обозначение сочетания
направлений свивки элементов каната (—, О, К); 8 — обозначение
Табл. 2.4. Обозначение признаков стальных канатов
Признаки, по которым подразделяются канаты
Назначение:
грузолюдские
грузовые
Механические свойства проволок:
высшей марки
первой марки
второй марки (с согласия потребителя)
Вид покрытия поверхности проволок:
из проволоки без покрытия
из оцинкованной проволоки для особо жестких агрессивных ус-
ловий работы
из оцинкованной проволоки для жестких агрессивных условий
работы
из оцинкованной проволоки для средних агрессивных условий
работы
Направление свивки прядей:
правая
левая
Сочетание направлений свивки элементов каната:
крестовая
односторонняя
комбинированная
нераскручивающиеся
раскручивающиеся
Род свивки:
с точечным касанием проволок одинакового диаметра
с линейным касанием проволок одинакового диаметра в отдель-
ных слоях пряди
с линейным касанием проволок разных диаметров в верхнем
слое пряди
с линейным касанием проволок разного и одинакового диаметра
по отдельным слоям пряди
с линейным касанием и заполняющими проволоками меньшего
диаметра между двумя слоями проволок
с точечным и линейным касанием проволок в пряди
Кратность свивки:
одинарная (спиральная)
двойная (тросовая)
тройная (кабельная)
Обозначение
ГЛ
Г
В
I
И
ож
ж
с
о
к
н
р
тк
ЛК-0
лк-р
ЛК-РО
лк-3
тлк
л
56
способа свивки каната (Н, Р); 9 — маркировочная группа, МПа;
10 — обозначение стандарта на выбранный тип каната.
Если отсутствует обозначение какого-нибудь признака каната
согласно табл. 2.4, то в записи характеристики каната условное
обозначение этого признака опускается.
Пример обозначения характеристики стального каната диамет-
ром 11,5 мм, грузового, изготовляемого из материала марки I со
светлой поверхностью проволок, с правой свивкой прядей, кресто-
вой свивкой элементов каната, нераскручивающегося, из проволок
маркировочной группы 1568 МПа, по ГОСТ 3077—80:
Канат 11,5—Г—I—H—1568 ГОСТ 3077—80.
В этой записи опущены как не имеющие обозначения указания
на то, что поверхность проволок светлая, свивка прядей правая,
сочетание свивки проволок в прядях крестовое. Это и означает, что
канат заказывается из светлой проволоки, правой крестовой
свивки.
Рекомендуемые для грузоподъемных машин стальные ка-
наты даны в табл. 2.5. Сведения об этих канатах приводятся в
табл. Ш.1.1...Ш.1.7.
В грузоподъемных машинах с ручным приводом применяются
также грузовые сварные и пластинчатые цепи (табл. Ш.1.8...
Ш.1.10).
Сварные цепи (ГОСТ 2319—70) по точности изготовления под
разделяются на некалиброванные и калиброванные. Последни
имеют более жесткие допуски по шагу и ширине звена, что позво-
ляет использовать их для работы со звездочками и барабанами,
имеющими гнезда для лучшего контакта со звеньями цепи (приме-
няются при скоростях на барабане не более 1 м/с и на звездочке
не более 0,1 м/с).
Условное обозначение сварных круглозвенных грузовых и тяго-
вых цепей содержит наименование изделия («Цепь»), указание
калиброванная (СК) или некалиброванная (СН), калибр (диа-
метр цепной стали) цепи (d, мм), шаг звена (£, мм) и обозначение
стандарта.
Табл. 2.5. Канаты, рекомендуемые для грузоподъемных машин [33]
гост Диаметр каната, мм
для кранов для лифтов для талей
2688—80 8,3...42 — 4,1...1,5
3069—80 — — 3,7...5,9
3077—80 —- 11,5...25,4 —
3079—80 35...62 —-
7665—80 8,1...45 11,5-..25,5 8,1...16
7668—80 18...46,5 —- —
7670—60 8,3...34 —- —*
57
Например, сварная цепь калиброванная, d==16 мм, / = 44 мм
обозначается:
Цепь СК 16 44 ГОСТ 2319—70.
Основные параметры круглозвенных цепей приводятся в табл.
Пластинчатые цепи в сравнении со сварными более надежны
в работе и обладают большей гибкостью. Существенным недостат-
ком их является невозможность нагружения усилием, действующим
под углом к плоскости вращения звеньев цепи. Кроме того, шар-
ниры цепи плохо работают в пыльной среде. Применяются при
скоростях не более 0,25 м/с.
Грузовые пластинчатые цепи по ГОСТ 191—75 изготовляются
четырех типов (рис. к табл. III.1.9): 1—с расклепкой валиков;
2 — с расклепкой валиков с шайбами; 3 — со шплинтами; 4—со
шплинтами и гладкими валиками.
Цепи всех типов бывают двух исполнений: 1 — без концевых
пластин; 2 — с концевыми пластинами.
Условное обозначение грузовых пластинчатых цепей по ГОСТ
191—75 содержит наименование изделия («Цепь»), обозначение
типа цепи, шаг цепи (мм), обозначение исполнения и стандарта.
Например, пластинчатая грузовая цепь типа 2 с шагом 50 мм
исполнения I обозначается:
Цепь 2—50—1 ГОСТ 191—75.
Основные параметры грузовых пластинчатых цепей по ГОСТ
191—75 приводятся в табл. III.1.9.
Грузовые пластинчатые цепи с закрытыми валиками (ГОСТ
23540—79) изготовляются четырех типов: 1—с сочетанием 2 + 2;
2 — с сочетанием 4 + 4; 3 — с сочетанием 6 + 6; 4—с сочетанием
8 + 8.
Цифры в сочетаниях указывают количество пластин на валике.
Условное обозначение грузовой пластинчатой цепи с закрытыми
валиками по ГОСТ 23540—79 содержит наименование изделия
(«Цепь»), букву П (пластинчатая), шаг (мм), разрушающую на-
грузку (кН), цифровое обозначение типа, указание о наличии кон-
цевых пластин на отрезке: односторонние (1), двусторонние (2),
без концевых пластин (не указывается) и обозначение стандарта.
Например, цепь грузовая пластинчатая с закрытыми валиками,
с шагом 15,875 мм, с разрушающей нагрузкой 50 кН, типа 2, без
концевых пластин обозначается:
Цепь п — 15,875—50—2 ГОСТ 23540—79.
Основные параметры грузовых пластинчатых цепей по ГОСТ
23540—79 приводятся в табл. III.1.10.
Расчет грузовых сварных и пластинчатых цепей производится
аналогично расчету стальных канатов [см. (2.6)]. Наименьший до-
пускаемый коэффициент k запаса прочности для этих цепей при-
веден в табл. 2.6.
58
Табл. 2.6. Наименьший допускаемый коэффициент запаса прочности сварных
и грузовых пластинчатых цепей k
k при приводе
Назначение цепи
ручном машинном
Грузовая, работающая на гладком барабане
Грузовая калиброванная, работающая на звездочке
Для стропов
Табл. 2.7. Наименьшие допускаемые значения коэффициента е по правилам
Госгортехнадзора
Тип грузоподъемной машины Тип привода меха- низма Режим работы меха- низма е
Грузоподъемные машины всех типов Ручной — 18 за исключением стреловых кранов, Машинный Легкий 20 лектроталей и лебедок Средний 25 Тяжелый 30 Весьма тяжелый 35 Краны стреловые Ручной — 16 Машинный Легкий 16 Средний 18 Тяжелый 20 Весьма тяжелый 25 Электрические тали — — 20 Грейферные лебедки: машин, указанных в п. 1 данной — — 30 таблицы стреловых кранов — — 20 Лебедки для подъема грузов Ручной — 12 Машинный — 20
Допускаемый диаметр блока или барабана для сварных цепей
принимается:
при ручном приводе £>б^2(М;
при машинном приводе £>б^ЗОй,
(27)
(2.8)
где d — калибр цепи.
Число зубьев звездочек принимают не менее: для сварных це-
пей — 5; для пластинчатых — 8.
Допускаемый диаметр блока и барабана по средней линии на-
витого стального каната
D^de,
(2.9)
где d — диаметр каната; е — коэффициент, зависящий от типа
машины, привода механизма и режима работы механизма
(табл. 2.7).
Допускается принимать диаметры: барабанов 0,857); уравни-
тельных блоков всех грузоподъемных машин, кроме электроталей
59
и стреловых кранов, 0,8£>; уравнительных блоков электроталей и
стреловых самоходных кранов 0,6Z).
Длина каната, навиваемого на барабан с одного полиспаста,
LK — Httn + nD (^1+^2),
(2.Ю)
где п—высота подъема груза; нп— кратность полиспаста;
Рис. 2.2. Профиль канавок на ба-
рабане
диаметр барабана по средней линии
навитого каната; z\—число запас-
ных (неиспользуемых) витков на
барабане до места крепления: г< =
= 1,5...2; — число витков каната,
находящихся под зажимным устрой-
ством на барабане: Z2 = 3...4.
Рабочая длина барабана для ка-
ната, свиваемого с одного поли-
спаста,
б = --9
пт (md + D) <р
(2.11)
где LK — длина каната, навиваемого на барабан; t — шаг витка
(рис. 2.2 и табл. 2.8); т — число слоев навивки; d — диаметр ка-
ната (табл. 2.8); D—диаметр барабана по средней линии нави-
того каната; ф— коэффициент неплотности навивки; для гладких
барабанов ф = 0,9...0,95, для нарезных барабанов ф = 1,0.
При навивке каната в несколько слоев барабан делается глад-
ким, в один слой — нарезным.
Наибольший угол отклонения набегающего на барабан каната
от плоскости, проходящей через блок, с которого канат сбегает
(рис. 2.2), принимается: для гладких барабанов уг=2°; для нарез-
ных барабанов ун=6°.
Минимальное расстояние между осями блока и барабана
Табл. 2.8. Размеры профиля канавок барабанов (рис. 2.2), мм
Диаметр каната d, мм Радиус г Глуби- на h Шаг t Диаметр каната d, мм Радиус г Глуби- на h Шаг t
7,4. ..8 4,5 2,5 9 21,5.. .23 12,5 7 26
8. ..9 5 2,5 10 23.. .24,5 13,5 7,5 28
9. ..10 5,5 3 11 24,5.. .26 14 8 29
10. ..11 6 3,5 12,5 26.. .27,5 15 8,'5 32
И. ..12 6,5 3,5 13,5 27,5.. .29 16 9 34
12. ..13 7 4 15 29.. .31 17 9,5 36
13. ..14 7,5 4,5 16 31.. .33 18 10 38
14. ..15 8,5 4,5 17 33.. .35 19 10,5 40
15. ..16 9 5 18 35.. .37,5 21 11,5 42
16. . .17 9,5 10 5,5 19 37,5.. .40 22 12 44
17. ..18 5,5 20 49.. .42,5 23 13 48
18. ..19 10,5 6 22 42,5.. .45,5 25 14 50
19. ..20 11 6 23 45,5.. .47,5 26 14,5 52
20. ..21,5 12 6,5 24
60
{рис. 2.3) для одинарного полиспаста:
для гладкого барабана
/ir=0,5L6ctg2°; (2.12)
для нарезного барабана
/iH-0,5L6ctg6°, (2.13)
где Лб — рабочая длина барабана
Рис. 2.3. Схема к определению ми-
нимального расстояния между осями
блока и барабана
Рис. 2.4. Схема к определению дли-
ны ненарезной части барабана для
сдвоенного полиспаста
Длина ненарезной части барабана для сдвоенного полиспаста
(рис. 2.4):
минимальная
—2/гн tg 6°; (2.14)
максимальная
/max = 5 + 2ftHtg6°, (2.15)
где В — расстояние между центрами блоков крюковой обоймы.
Толщина стенки барабанов мостовых кранов (м) из расчета на
сжатие
б = —, (2.16)
где — усилие в канате, Н; t — шаг витков каната на бараба-
не, м; [осж] — допускаемое напряжение сжатия для материала
барабана, 11а. Для стальных барабанов [сгСж] принимают равным
61
0,5 предела текучести, а для чугунных— 0,2 предела прочности на
сжатие материала барабана.
При многослойной навивке каната на барабан допускаемое на-
пряжение сжатия в стенке барабана
[осж]ми=[осж]/Л, (2.17)
где k — коэффициент, учитывающий повышение напряжения сжа-
тия в стенке барабана в зависимости от числа слоев т навивки
Рис. 2.5. Крепление каната на барабане:
а — накладкой с трапецеидальной канавкой; б — прижимной планкой
каната на барабан. Ориентировочно при т = 2; 3; 4; 5 соответствен-
но 1,28; 1,36; 1,41; 1,52. Подробнее о коэффициенте см. [3].
При длине барабана больше трех его диаметров следует учи-
тывать также возникающие в стенке барабана напряжения от его
изгиба и кручения.
Толщина стенки литого чугунного барабана (м) должна быть
не менее
бтш=0,027) б + (0,006...0,01), (2.18)
где 7)б — диаметр барабана (для нарезного барабана измеряется
по дну канавки), м.
Более подробно расчеты канатных барабанов изложены в РТМ
24.090.21—76. Сведения о барабанах приводятся в табл. Ш.2.1.
Конец каната на барабане наиболее часто крепят (рис. 2.5)
накладкой с трапецеидальной (иногда полукруглой) канавкой или
прижимной планкой.
Накладки бывают с двумя болтами (рис. 2.6) и одним. Одно-
болтовых накладок устанавливают не менее двух, двухболтовых
для канатов диаметром до 31 мм — одну.
62
Натяжение каната в месте крепления на барабане
(2.19)
f — коэффициент трения между канатом и барабаном: /=0,1...0,16;
а — угол обхвата барабана запасными витками каната, рад: а=
= 3л...4л.
Рис, 2.6. Крепление каната на барабане:
а — планкой с двумя болтами; б— двумя планками с одним болтом в каждой
При креплении конца каната на барабане накладкой [30] сила
(Н): растягивающая один болт
г и + fl) (efa‘ + 1)
изгибающая болт
суммарное напряжение в каждом болте (На)
4 • 1,3/fFp
°сум = ^г~
(2.20)
(2-21)
(2.22)
0,14 р
где z—число болтов в накладке; fi — приведенный коэффициент
трения между канатом и накладкой с трапецеидальным сечением
канавки: fi = //sinp; [3 — угол наклона боковой грани канавки:
р=40° (при полукруглых канавках fi=/); щ—угол обхвата ба-
рабана витком крепления каната, рад: ai = 2n; k — коэффициент
запаса надежности крепления каната: Л^1,5; I — расстояние от
головки болта до барабана, м; d\—внутренний диаметр резьбы
болта, м; [ор] — допускаемое напряжение на растяжение материа-
ла болта, Па.
При креплении каната прижимной планкой сила (Н):
прижатия планки одним болтом
F кр
4f + fl) ;
(2.23)
изгибающая болт
(2.24)
63
суммарное напряжение в каждом болте (Па)
4-1,3/fF, kF2l
1 flflj 0,ld| 1
(2.25)
При креплении конца стального каната конической втулкой
(рис. 2.7) размеры втулки определяются по формулам:
Pwc. 2.7. Крепление стального ка-
ната конической канатной втулкой
где гкр — усилие в канате в месте
крепления, Н; d — диаметр кайата,
м: [р] — допускаемое давление на
внутреннюю поверхность втулки:
при заливке свинцом [р]= 1,1 • 107 Па;
[ор]=допускаемое напряжение ма-
териала втулки на разрыв: для
стального литья [ор] = (4...7) ~
=^107 Па; [тСр] — допускаемое на-
пряжение среза материала заливки: для свинца [тСр]= 1,2-107 На.
При креплении конца стального каната зажимами (рис. 2.8)
число зажимов определяется из условия
2==w>3, (2-29)
где k — коэффициент надежности крепления: /г—1,5; FKp— усилие
в канате в месте его крепления, Н; Fp — усилие, действующее
вдоль оси резьбовой скобы (болта) зажима, с учетом напряжений,
возникающих при затяжке крепления, Н:
ndf [ср]
(2.30)
d\ — внутренний диаметр резьбовой части скобы,
м; kp] —до-
Рис. 2.8. Крепление стального каната зажимами
64
пускаемое напряжение материала скобы на растяжение, Па; f —
коэффициент трения каната по канату, /=0,15...0,20.
Шаг расположения зажимов и длину свободного конца каната
принимают t~6d (d — диаметр каната).
Статическая мощность (кВт) двигателя механизма подъема
груза
QgVr
10^ ’
(2.31)
где Q — номинальная грузоподъемность, кг; V?— скорость подъ-
ема груза, м/с; т] — КПД механизма (табл. 1.18).
Номинальная мощность двигателя принимается равной или
несколько меньшей статической мощности.
Момент статического сопротивления на валу двигателя при
подъеме груза
Р б^^расч
ЗиДбИпр’
где Fa — усилие в канате у бараба-
на, Н [см. (2.1)]; z— число ветвей
каната, закрепленных на барабане;
Грасч—расчетный диаметр бараба-
на, м [рис. 2.9 и (2.33)]; и — общее
передаточное число привода меха-
низма [см. (2.36)]; дб, т]цр — см. по-
яснения к (1.27).
При многослойной навивке ка-
ната на барабан
Грасч = 0,5 (Гб + ^Dmax) ; (2.33)
rmax = r6 + d(2m-l), (2.34)
где jDmax — диаметр по средней ли-
нии каната на последнем слое на-
вивки; d — диаметр каната; т —
число слоев навивки каната на ба-
рабан; для нарезного барабана
Грасч=Г (D — диаметр нарезного
барабана по средней линии навитого
каната).
Частота вращения барабана (мин
(2.32)
Рис. 2.9. Схема для определения
расчетного диаметра барабана
)
бОигпл
JiD
расч
(2.35)
где — кратность полиспаста; Грасч— расчетный диаметр бара-
бана, м. v.-i
Общее передаточное число привода механизма
и = п1п§.
(2.36)
3 Зак. 3134
65
Табл. 2.9. Значения коэффициента запаса торможения kT
Режим работы механизма kT
Механизм подъема груза:
легкий 1,5
средний 1,75
тяжелый 2,0
весьма тяжелый 2,5
Механизм изменения вылета Более 1,5
Момент статического сопротивления на тормозном вал}7 при
торможении (тормозной момент) (И-м)
Тт _ ^б^расчЛбЛт
1с~ 2ит ’
где г|т — КПД привода от вала барабана до тормозного вала;
ит — общее передаточное число между7 тормозным валом и валом
барабана: и^=^Пт[п^\ — частота вращения тормозного вала.
По правилам Госгортехнадзора момент, создаваемый тормозом,
выбирается из условия
(2.38)
где /?т — коэффициент запаса торможения (табл. 2.9).
Примерная последовательность расчета механизма подъема:
1) по формуле (2.1) определяется усилие в канате;
2) производится расчет каната на прочность [см. (2.6)] и выби-
рается канат по табл. III.1.1...III.1.7;
3) определяются диаметры барабана [см. (2.9) и (2.33)];
4) определяется статическая мощность двигателя [см. (2.31)] и
выбирается двигатель (см. параграф Ш.З);
5) определяется частота вращения барабана [см. (2.35)];
6) определяется общее передаточное число привода [см. (2.36)]
и составляется кинематическая схема механизма;
7) определяется расчетная мощность редуктора [см. (1.101)
или (1.102)] и выбирается редуктор (см. параграф III.4);
8) определяются расчетные моменты соединительных муфт [см.
(1.33) и (1.103)] и выбираются муфты по табл. III.5.1...III.5.9;
9) проверяется двигатель на время пуска [см. (1.67)]. Получен-
ное время пуска должно соответствовать данным табл. 1.19. Опре-
деляется ускорение при пуске механизма с учетом фактической ско-
рости груза [см. (1.80)] и проверяется соответствие его данным
табл. 1.25. Принимается меньшее значение;
10) проверяется двигатель на нагрев (см. параграф 1.7);
11) определяется момент статического сопротивления на валу
тормоза при торможении [см. (2.37)];
12) определяется тормозной момент, необходимый по правилам
Госгортехнадзора [см. (2.38)], и выбирается тормоз по табл.
Ш.5.11...III.5.14;
66
13) определяется время торможения при опускании груза [см.
(1.68)] и проверяется соответствие его данным табл. 1.19;
14) определяется длина пути торможения согласно (1.75) и
проверяется ее соответствие данным табл. 1.22;
15) определяется замедление при торможении механизма [по
(1.80)] и проверяется его соответствие данным табл. 1.25;
16) производится расчет на прочность отдельных элементов ме-
ханизма (барабана, крепления концов каната и др.).
2.2. РАСЧЕТ МЕХАНИЗМА ПЕРЕДВИЖЕНИЯ
Расчет механизмов передвижения кранов мостового типа за-
ключается в подборе и расчете ходовых колес, определении сопро-
тивлений передвижению, выборе и проверке двигателей, редукто-
ров, валов, муфт и тормозов.
Кинематические схемы привода механизмов передвижения мо-
стовых кранов могут быть (рис. 2.10): а) с центральным приводом
и тихоходным валом; б) с центральным приводом и быстроходным
валом; в) раздельным приводом.
Рис. 2.10. Основные схемы привода механизмов передвижения мостовых кранов:
а—с центральным приводом и тихоходным валом; б — с центральным приводом и быст-
роходным валом; в — с раздельным приводом; / — ходовое колесо; 2—муфта; 3 — вал про-
межуточный; 4 — редуктор; 5 — тормоз; 6 — электродвигатель
3*
67
Табл. 2.10. Расчетные уклоны постоянного пути кранов
Тип машины
Уклон пути
Мостовые краны
Тележки мостовых кранов
Портальные краны
Тали
Козловые краны
Башенные краны
0,001
0,002
0,003
0,001
0,003
0,005
Общее сопротивление (Н) передвижению крана (тележки) от
статических нагрузок
Fnep“ FTp + Гукл 4~FB, (2.39)
где FTp — сопротивление трения; рукл — сопротивление от уклона
пути; FB — сопротивление от ветровой нагрузки (см. параграф 1.4),
Fb=Fp[cm. (1.26)].
Сопротивление трения при движении крана (тележки) по пря-
мому рельсовому пути
Ftp = kp (т + Q) g fdK 2|Х , (2.40)
где Q — номинальная грузоподъемность, кг (см. параграф 1.1).
Остальные обозначения см. в пояснениях к формулам (1.81) и
(1.82).
Сопротивление от уклона пути
/?укл= (m + Q)gsina, (2.41)
где a — угол наклона пути; sina=tga — уклон пути (табл. 2.10).
Статическая мощность двигателя (кВт), необходимая для при-
вода механизма передвижения крана (тележки)
F v
р — nepvnep /9
Гс ~ 103Т] *
где Упер — номинальная скорость передвижения, м/с; т] — КПД ме-
ханизма (см. табл. 1.18).
Номинальная мощность двигателя должна быть равна или не-
сколько больше статической мощности.
Выбранный двигатель проверяется по ускорению при пуске
^тах, (2.43)
где tn — время пуска (разгона) механизма, с; атах— максималь-
но допустимое ускорение [см. (1.81)].
Если для соблюдения условия a^amax принимается двигатель
мощностью PflB<Fc, он должен быть проверен по нагреву (см. па-
раграф 1.7).
Проверка запаса сцепления при пуске производится для случая
работы крана (тележки) без груза по условию
k =___________________________Гпрф_______
ф , I а гпр f dK
61—
(2.44)
68
где Fnp— суммарная нагрузка на приводные ходовые колеса (без
груза), И; Fnep — полное сопротивление передвижению без груза, Н.
Остальные обозначения см. в пояснениях к формулам (1.81)...
(1.82).
Суммарная нагрузка на приводные колеса, согласно рис. 2.11,
F пр = ?а + Fb,
Fa и Fb — см. формулы (2.52) и (2.53) при Q = 0.
Приближенно можно принимать
F rngz^l z.
При раздельном приводе механизма передвижения мостовых
кранов следует проверить запас сцепления при пуске для аварий-
ного случая (при работе только одного привода и расположении
тележки без груза у неработающего привода). При этом
/
(2.45)
где Fnp — суммарная нагрузка на приводные колеса со стороны ра-
ботающего привода, Н.
Более высокий запас сцепления будет при ускорениях (замед-
лениях), приведенных в табл. 1.26. При этом должны быть обеспе-
чены соответствующие характеристики привода (мощность двига-
теля, скорость передвижения, число приводных колес, момент тор-
моза и др.).
Момент статических сопротивлений на валу тормоза механизма
передвижения (Н-м) при неблагоприятном сочетании нагрузок во
время торможения
гт>Т _ rpl rriT
* С - тр — укл — в,
где Ттр — момент сил трения при торможении, Н • м,
FT D YI
гт>Т ________________________________ тр К <Т .
1 тр ~ ’
(2.46)
(2-47)
Pip — сопротивление трения ходовых колес при торможении, Н:
fdK 4- 2р
тр = mg —-—;
^к
(2.48)
Тукл — момент сопротивления движению от уклона пути, Н-м:
гт =
укл ----
Т D Т1
укл кЧт
(2.49)
где Рукл — сопротивление от уклона пути при торможении:
Рукл = mg sin а;
(2.50)
69
Тв — момент от ветровой нагрузки, Н • м:
ГГ __ /*в/)кТ]т
в — 7 ’
2wT
(2-51)
11т — КПД механизма передвижения при торможении: пт — общее
передаточное число между валом тормоза и ходовыми колесами.
Расчетный тормозной момент определяется по формуле (1.79).
Опорные нагрузки на ходовые колеса кранов мостового типа,
согласно рис. 2.11:
Наибольшая нагрузка на ходовые колеса будет при Д = 0 и при
7, j 7/ 7/ф.
Опорные нагрузки на ходовые колеса тележки мостового крана,
согласно рис. 2.11:
(2.56)
(2.57)
(2.58)
(2.59)
В формулах (2.52)...(2.59): Q—номинальная грузоподъемность
крана, кг; ты, /ит, /ггтр, тмех, tnKa6 — масса соответственно моста,
тележки, тролеев на мосту, привода механизма передвижения, каби-
70
ны с аппаратурой, кг; F%— ветровая нагрузка на кран в рабочем
состоянии, воспринимаемая конструкцией крана (см. параграф 1.3), Н;
F™ — горизонтальная инерционная нагрузка на кран от его веса , Н;
F? — ветровая нагрузка на кран в рабочем состоянии, воспринимае-
мая грузом, Н; F™— горизонтальная инерционная нагрузка накрап
от груза, Н; /г™, Лк— ордината точки приложения нагрузки соот-
ветственно У7”11 и F? относительно головки подкранового рельса, м;
йг—ордината осп барабана относительно подтележечного рельса, м.
Рис. 2.11. Расчетная схема для определения опорных нагрузок ходовых колес
моста и тележки мостового крана
Опорные нагрузки на ходовые колеса рельсоповоротных кранов
переменны и зависят не только от действующих нагрузок, но и от
положения поворотной части крана относительно его неповоротной
части.
Согласно рис. 2.12, опорные нагрузки:
и,оь л*о ,, cos а
----------щ-------
2L , 2L
2/
0,5L -t- хр , у, cos а , .. sin а
2L ' ‘ ~2L~~ 21 ’
sin а
(2.60)
(2.61)
(2.62)
(2.63)
где — масса неповоротной части, кг; FB —вертикальная состав-
ляющая равнодействующей всех сил, действующих на поворотную
часть, Н; х0— расстояние от силы FB до центра симметрии непово-
ро’ной части, м; а — угол между радиусом R и продольной осью
71
крана, град; М— сумма моментов сил Fn и Fr, действующих на не-
поворотную часть, Н-м; M~F^R + FTH; R— расстояние от точки
приложения силы FB до оси вращения крана, м; Fr — горизонталь-
ная составляющая равнодействующей всех сил, действующих на
поворотную часть, Н; L, Z, И — см. рис. 2.12.
Угол а, при котором данные опорные нагрузки будут наиболь-
Рис. 2.12. Схема для определения
опорных нагрузок ходовых колес
стреловых кранов
шимп, определится после прирав-
нивания нулю производной соот-
ветствующей нагрузки.
При неровностях рельсового
пути и жесткой раме неповорот-
ной части возможно опирание
крана только в трех точках (опо-
ра В теряет контакт с рельсом —
см. рис. 2.12). Такие условия ха-
рактерны для башенных кранов.
При этом
(2.64)
М
I cos а
( г~
(2.65)
= (2.66)
2 2 \ L ) 2 ’
Максимальная нагрузка на наиболее нагруженную опору
*о 1 лл i sin В . cos В \
г- + —Л , (2.67)
Ъ La 4 у
где р — см. рис. 2.12.
Допустимые нагрузки на колеса приведены в табл. III.2.2. Рас-
чет ходовых колес на контактную прочность см. параграф 2.4 и
РТМ 24.090.28—77.
Примерная последовательность расчета механизма передвиже-
ния крана (тележки):
1) определяется масса крана (тележки) [см. параграф 1.2];
2) определяется общее сопротивление передвижению крана (те-
лежки) [см. (2.39)];
3) определяется общая статическая мощность для привода ме-
ханизма по (2.42);
4) составляется кинематическая схема механизма и выбирается
двигатель (см. параграф III.3). В случае раздельного привода ме-
ханизма (см. параграф 2.2) статическая мощность каждого двига-
72
теля (с учетом возможного неравномерного распределения нагруз-
ки на каждый из них) принимается равной (0,5...0,6)Рс;
5) определяется частота вращения ходовых колес:
бО^пер
И = -------
К лРк ’
6) определяется требуемое передаточное число привода соглас-
но (2.36);
7) определяется расчетная мощность редуктора [см. (1.101) или
(1.102)] и выбирается редуктор (см. параграф III.4);
8) определяются расчетные моменты соединительных муфт [см.
(1.103)] и выбираются муфты по табл. III.5.1...III.5.9;
9) определяется фактическая скорость передвижения и прове-
ряется соответствие ее данным табл. 1.2;
10) определяется максимально допустимое ускорение при пуске
[см. (1.81)] по условию сцепления колес с рельсами;
11) определяется наименьшее допускаемое время пуска соглас-
но (2.43).
12) проверяется двигатель на время пуска и на нагрев (см. па-
раграф 1.7). Полученное время пуска должно соответствовать дан-
ным табл. 1.19;
13) проверяется запас сцепления ходовых колес с рельсами при
пуске [см. (2.44) и (2.45)];
14) определяется максимальное допустимое замедление по
(1.82) и проверяется его соответствие данным табл. 1.26; принима-
ется меньшее значение;
15) определяется время торможения согласно (2.43) при атах =
т
“ ^тах>
16) определяется момент статических сопротивлений на тор-
мозном валу при торможении без груза по (2.46);
17) определяется момент сил инерции при торможении без гру-
за по (1.62);
18) по (1.79) определяется расчетный тормозной момент на ва-
лу тормоза при торможении без груза и выбирается тормоз по
табл. Ш.5.11...III.5.14.
Определение тормозного момента для торможения крана (те-
лежки) с грузом, при попутном ветре и при уклоне пути в
сторону движения производится с учетом этих факторов. Во
избежание резкого торможения при отсутствии последних может
применяться двухступенчатое торможение. Подробнее см. [1] и
РТМ 24.090.28—77;
19) определяется минимальная длина пути торможения X по
табл. 1.26;
20) определяется фактическая длина пути торможения Хф со-
гласно (1.75) и проверяется условие Хф^Х;
21) производится расчет на прочность отдельных элементов ме-
ханизма (ходовых колес и др.).
73
2.3. РАСЧЕТ МЕХАНИЗМА ИЗМЕНЕНИЯ ВЫЛЕТА
Изменение вылета стреловых кранов осуществляется наклоном
стрелы или передвижением грузовой тележки по ее направляющим
балкам. В первом случае общий расчет механизма изменения вы-
лета состоит в определении усилия в канате полиспаста, выборе и
расчете каната и барабана, выборе двигателя, редуктора, муфт и
тормоза.
При изменении вылета передвижением грузовой тележки расчет
аналогичен расчету механизма передвижения с учетом разности
натяжений конечных ветвей грузового каната, сопротивления
вследствие провисания хвостовой части тягового каната и центро-
бежной силы инерции массы груза и тележки при повороте крана
(для поворотных кранов).
При изменении вылета наклоном стрелы усилие в канате стре-
лового полиспаста у барабана
с
б
с ’
(2.68)
где Fn — см. формулу (2.70); — кратность стрелового полиспаста;
Чо — КПД стрелового полиспаста и обводных блоков [см. (2.2)].
^Момент статического сопротивления на валу двигателя при
подъеме стрелы
Dc
Fc = (2.69)
2WlnP v 7
где DpaC4 — расчетный диаметр барабана лебедки изменения вылета
[см. (2.33)]; н, т]б, цпр — см. пояснения к формуле (1.30).
Статическая мощность двигателя определяется по формуле
(1.33).
Усилие в стреловом полиспасте (Н) (рис. 2.13)
/ \ I flc
Q + 0,5mc + 0,5mcn + + 0,5F₽ + F^~ + H
cc ut?ln \ n !
Г n — — ------— ....................................... — ------— >
H cos 6 + 4 sin 6
(2.70)
где Q—масса груза при номинальной грузоподъемности (см. параг-
раф 1.1), кг; тс— масса стрелы, кг; — масса стрелового полис-
паста, кг; Lc — длина горизонтальной проекции стрелы, м; игп —
кратность грузоподъемного полиспаста; т]п — КПД грузоподъемного
полиспаста; F? — ветровая нагрузка на груз (см. параграф 1.3), Н;
F? — ветровая нагрузка на стрелу, Н; F? — центробежная сила
от груза и грузового полиспаста, Н; F£— центробежная сила
стрелы, Н; FnU — центробежная сила от стрелового полиспаста
74
(учитывается половина его массы), Н; б — угол наклона полиспаста
стрелы от горизонтали (рис. 2.13); Н, he, d — длина плеч сил
(рис. 2.13).
Знак плюс перед вторым слагаемьнм знаменателя принимается,
когда стреловой полиспаст наклонен от головки стрелы вверх, знак
минус — при обратном наклоне.
Рис. 2.13. Схема для определения усилия в стреловом полиспасте
Для стрел с вылетом до 25 м у кранов с частотой вращения до
1 мин”1 центробежные силы могут не учитываться.
Максимальное усилие в стреловом полиспасте будет при наи-
большем вылете стрелы. Расчетное усилие в стреловом полиспасте
для определения необходимой мощности двигателя можно прини-
мать равным полусумме усилий в полиспасте при крайних положе-
ниях стрелы.
Центробежная сила (Н) от массы груза
.. Ол2п2 А?
Fr‘=-——, (2.71)
900 v '
где пПов — частота вращения поворотной части крана, мин”1; R —
вылет стрелы, м.
Центробежная сила (Н) от массы стрелы
ц tnQA Ипов
f'=~iSir
(2.72)
где г, Лс, 0 — см. рис. 2.13.
Ордината центробежной силы (рис. 2.13)
Зг -f- 2LC sin 9
2r -j- Lc sin 0
*-,c
-r- COS 0.
(2.73)
Ход стрелового полиспаста (м)
AL = /-max
min, (2.74)
где Lmax, Lmin— длина стрелового полиспаста при наибольшем и
наименьшем вылетах стрелы.
Длина каната, наматываемого на барабан стреловой лебедки,
ZK = Д£^. (2.75)
Рис. 2.14. Расчетная схема канатного механизма передвижения грузовой те-
лежки
Средняя скорость навивки каната на барабан
0К=/КД, (2.76)
где t — заданное время наклона стрелы при переходе из одного
крайнего положения в другое, с.
Л1омент статических сопротивлений на валу тормоза при тормо-
жении определяется по (2.37), в которой /Д — Fl [см. (2.68)].
Далее расчет производится так же, как и для механизма подъ-
ема (см. параграф 2.1).
Коэффициент запаса торможения /?т для механизма изменения
вылета подъемом и опусканием стрелы принимают не менее 1,5.
При изменении вылета посредством перемещения грузовой те-
лежки по направляющим балкам стрелы с помощью тягового кана-
та (рис. 2.14) усилие в этом канате
/Д “/Дер +/Д+/Д +/Др, (2.77)
где /Дер — сопротивление передвижению тележки от трения, уклона
пути и ветровой нагрузки [см. (2.39)], Н; /Д— центробежная сила
инерции, создаваемая массой груза и тележки при повороте кра-
на, И:
Р (Q + "Ч п2»пов^
ц 900
Q — номинальная грузоподъемность (см. параграф 1.1), кг;
тт — масса тележки, кг; /Д— разность натяжений ветвей грузового
полиспаста, Н:
(2.78)
(2.79)
76
Flt Fi — натяжение первой и конечной ветвей каната грузового по-
лиспаста (рис. 2.14); т]бл —КПД канатного блока (см. табл. 2.1);
z — количество ветвей каната в системе грузового полиспаста: z=
= п£+2; и' — кратность грузового полиспаста; Fnp — сопротивле-
ние от провисания хвостовой ветви тягового каната, Н:
пр
(2.80)
qu— погонная масса хвостового каната, кг/м; I — длина (наиболь-
шая) хвостовой ветви тягового каната, м; h — провисание, допу-
скаемое для хвостовой ветви тягового каната, м: h— (0,01...0,02)/.
Далее расчет привода лебедки механизма передвижения тележ-
ки производится так же, как и привода механизма передвижения
мостового крана (см. параграф 2.2).
Примерная последовательность расчета механизма изменения
вылета наклоном стрелы:
1) определяется усилие в стреловом полиспасте для крайних
положений стрелы [см. (2.70)];
2) определяется максимальное и минимальное усилие в канате
стрелового каната у барабана [см. (2.68)];
3) определяется среднее усилие в канате /*б.Ср, равное полусум-
ме максимального и минимального усилий;
4) определяется средняя скорость навивки каната на барабан
по (2.76);
5) определяется необходимая мощность двигателя согласно (2.42)
при FnepVnep = ^б.ср^к и т] = т]бт]пр, где т)б — КПД барабана (см.
табл. 1.18); т]Пр—КПД привода механизма. По табл. III.3 выби-
рается двигатель;
6) производится расчет каната на прочность по (2.6) и выби-
рается канат по табл. III.1.1...III.1.7;
7) определяются диаметры барабана по (2.9) и (2.33);
8) определяется частота вращения барабана согласно (2.35)
при ^к, где vK — см. (2.76);
9) определяется общее передаточное число привода по (2.36)
и составляется кинематическая схема механизма;
10) определяется расчетная мощность редуктора по (1.101) или
(1.102) и выбирается редуктор (см. параграф III.4);
11) определяются расчетные моменты соединительных муфт при
максимальных нагрузках стрелового полиспаста согласно (1.30) при
* б — * б.иаиб >
12) проверяется двигатель на время пуска по (1.71) при макси-
мальном и минимальном усилии в канате. Полученное время долж-
но соответствовать данным табл. 1.20;
13) определяется момент статического сопротивления на валу
ТОрМОЗа При ТОрМОЖеНИИ Тс.наиб ПО (2.37), ПрИНИМаЯ Fq = Гб.нанб;
14) определяется тормозной момент, необходимый по правилам
77
Госгортехнадзора, по (2.38) при — Ттс Наиб и выбирается тормоз по
табл. Ш.5.Н...111.5.14;
15) определяется время торможения по (1.72) при максималь-
ном усилии в канате и проверяется его соответствие данным
табл. 1.20;
16) проверяется правильность выбора двигателя по пусковому мо-
менту при наибольшей нагрузке Fl Наиб (т. е. при крайнем нижнем
положении стрелы) из условия Ттах Т^р.п, где Ттах— максималь-
ный момент на валу двигателя согласно (2.69) при Fl = Fl н2Иб,
Гср.п — среднепусковой момент двигателя [см. (1.89)]. Проверка дви-
гателя на* нагрев может не производиться, так как его мощность
определена по средней нагрузке, которая при приближенных рас-
четах принимается как среднеквадратичная. Более подробно см. [12].
17) производится расчет на прочность отдельных элементов ме-
ханизма (барабана, крепления концов каната и др.).
При изменении вылета посредством передвижения грузовой те-
лежки последовательность расчета механизма передвижения те-
лежки аналогична такому же расчету механизма передвижения
крана (см. параграф 2.2). При этом усилие в канате лебедки опре-
деляется по (2.77).
2.4. РАСЧЕТ МЕХАНИЗМА ПОВОРОТА
Общий расчет механизма поворота. Он заключается в определе-
нии нагрузок на опоры поворотной части крана, в определении со-
противлений вращению, выборе двигателя, редуктора, муфт, тор-
моза и расчете конечного звена передачи — зубчатой, цевочной или
канатной.
Момент сопротивления вращению поворотной части крана на
валу двигателя в период пуска (разгона)
пуск
U1]’
(2.81)
где Тин — момент сопротивления от сил инерции при пуске [см.
(1.65)]; Тукл — момент статического сопротивления от веса крана и
груза относительно оси вращения крана при нахождении крана на
уклоне; Тв — момент статического сопротивления от ветровой на-
грузки относительно оси вращения крана; Ттр — момент статиче-
ского сопротивления от сил трения относительно оси вращения
крана; Тс, и, т] — [см. формулу (1.32)].
Наибольший момент сопротивления (Н-м) вращению от веса
поворотной части крана и груза при нахождении крана на уклоне
Тукл— (^пов ^пов + Q/?)gsina,
(2.82)
где пгвов — масса поворотной части крана, кг: тпов =/«цл+/Ппв +
+ тб + /72с (соответственно масса поворотной платформы, противо-
78
веса с противовесной стрелой, башни, стрелы); /Пов — расстояние
от оси вращения крана до центра тяжести поворотной части кра-
на, м;
Ь ^пв^пв + + mc/c
пов
^пов
/пл, 1пв, /б и 1с — соответственно расстояния от оси вращения крана
до центра тяжести соответственно платформы, противовеса, башни
и стрелы, м; Q — масса груза при номинальной грузоподъемности
(см. параграф 1.1), кг; R — вылет крана, м; а — угол наклона пути
крана.
Наибольший момент сопротивления (Н-м) вращению поворот-
ной части крана от ветровой нагрузки относительно осп вращения
крана
Тв = F*r3 + F?/?,
(2.83)
где F*, Ff — ветровые нагрузки на кран и груз (1.3), II; гв — рас-
стояние от оси вращения до центра тяжести площади наветренной
поверхности крана, м.
Момент сопротивления (Н-м) вращению поворотной части кра-
на от сил трения относительно оси вращения крана
7\р
2 Fifirh
(2.84)
где Fi, fi, Гг — опорные нагрузки (см. ниже), Н, коэффициенты тре-
ния [см. пояснения к формулам (1.81) и (1.82)], радиусы действия
сил трения опор поворотной части крана, м.
Статическая мощность (кВт) двигателя привода механизма по-
ворота крана
Рс
(2.85)
где Тс— момент статических сопротивлений вращению поворотной
части крана относительно оси вращения крана, Н-м: 7с = ТУкл +
+ 7"вЧ-Гтр [см. (2.81)]; пПов — частота вращения поворотной части
крана, мин-1; т] — КПД привода механизма поворота (см.
табл. 1.18).
Двигатель предварительно выбирают по статической мощности
Рс, принимая при этом из каталога ближайший больший по мощно-
сти. После определения необходимого пускового момента механиз-
ма поворота Гпуск [см. (2.81)] согласно формуле (2.85) определяют
по этому моменту необходимую мощность двигателя при пуске
РПуск. Необходимая номинальная мощность двигателя может быть
определена из условия Рдв^А’Рпусн, где k — коэффициент, учиты-
вающий допустимую перегрузку двигателя в период пуска (k =
= 0,35...0,5). Затем двигатель проверяется согласно указаниям па-
раграфа 1.7.
79
?у!омент сопротивления (Н-м) при торможении (тормозной мо-
мент) механизма поворота крана на валу тормоза при неблаго-
приятном сочетании нагрузок
Тт — Тин -- Тс = Тин - (ЛР -- Тв -Тукл) ^т/^т, (2.86)
— см. формулу (1.66) и пояснения к формулам (1.60), (1.62),
сопротивлений повороту
где Тин •
(1.64), (1.66); Ттс — момент статических
вращающейся части крана на валу тормоза при торможении, Н-м:
Рис. 2.15. Расчетные схемы кранов:
а — с поворотной колонной; б — с неподвижной колонной
Предохранительная фрикционная муфта привода механизма по-
ворота крана рассчитывается на момент
Тпр-(!,!...!,2) Т^,
(2.87)
где Тдв — момент, передаваемый двигателем предохранительной фрик-
ционной муфте в период пуска механизма поворота.
Опорно-поворотное устройство кранов с расположением опор в
вертикальной плоскости (рис. 2.15). Нагрузки:
на опоры А и С:
г г (QP + ^пв^пв) g ОО\
Тл = гс =-----------; (2.88)
на опору В:
FB = (Q-\-mz + m™)g, (2.89)
где Q — масса груза, кг; тс — масса стрелы (поворотной части
крана без противовеса и противовесной стрелы), кг; тпв — масса
противовеса и противовесной стрелы, кг; 1С и /Пв — расстояния от
оси вращения крана до центра тяжести соответственно стрелы п
противовеса, м.
80
Массу противовеса для крана с постоянным вылетом стрелы
можно принять
(2.91)
-г nt,cl,c
=------7-----, (2-90)
< пв
где ср = kj(kr + 1); kv — коэффициент использования крана по гру-
зоподъемности (см. табл. 1.7).
Момент сопротивления (Н-м) вращению от сил трения в этих
опорах относительно оси вращения крана
7"Тр — 0,5 + Рв?в<1в + Fcfcdc),
где dA, dB, dc — диаметры цапф опор; [в, fc — коэффициенты
трения в соответствующих опорах.
Если в опоре применяются опорные колеса (опора А, рис. 2.15
и 2.16), момент сопротивления вращению (II-м) относительно оси
колонны в такой опоре при двух опорных колесах
cos —
2ОК
где Fa — опорная нагрузка, Н [см. (2.88)]; р — угол между опорны-
ми колесами; Da — диаметр круга катания в опоре, м; DK — диаметр
колеса, м; р — коэффициент трения качения ролика по кругу ката-
ния (по колонне): р — 0,0003...0,0007 , dK, с . пояснения
формуле (1.82).
В этой формуле знак плюс перед цифрой 1 при неподвижной
колонне (внешняя опора), знак минус — при вращающейся колон-
не (внутренняя опора).
Опорные колеса рассчитываются на контактную прочность.
При линейном контакте колеса с плоской опорной поверхностью
катания (рельс с плоской головкой) контактные напряжения (Па)
Он — 0,1 &7kf
(2.93)
при точечном контакте колеса с выпуклой опорной поверхностью
катания (рельс с выпуклой головкой)
3 /~ £ £2
Он-kkfJ/ (2.94)
где kf — коэффициент, учитывающий влияние трения на работу
опорных колес. При режимах работы: легком &/ = 1,0, среднем —
kf— 1,04...1,06, тяжелом 1,06...1,1; Fv — расчетная нагрузка на
колесо, Н:
(2.95)
ku— коэффициент неравномерности распределения нагрузки по
81
ширине рельса: для рельсов с плоской головкой feH=2, с выпуклой
головкой — fen = 1,1; йд— коэффициент динамичности, зависящий
от скорости передвижения колеса v. При v (м/с) менее 1; 1...1,5;
1,5...3; более 3 соответственно равен 1,0; 1,1; 1,2; 1,3. F — макси-
мальная нагрузка на колесо при номинальных нагрузках на кран в
рабочем состоянии, II; Е — приведенный модуль упругости мате-
риала колеса и рельса, Па:
2£iE2
£1 + £2 ’
(2.96)
Е[ и £2 — модуль упругости материала
рельса, Па; b — рабочая
лений, м; R— радиус
колеса, м; fe — коэф-
фициент, зависящий от
отношения Rz/R < 1;
Ал — больший из ра-
диусов колеса и скруг-
ления (выпуклости)
соответственно колеса и
ширина головки рельса без учета за круг-
Рис. 2.16. Расчетная схе-
ма опорных нагрузок на
катки крана с неподвиж-
ной колонной
Рис. 2.17. Расчетные схемы опорно-поворотного
устройства:
а — нагружения; б — опорного участка; в — для уста-
новления расчетного пролета, определяющего опор-
ные реакции
62
головки рельса, м; R2 — меньший из радиусов колеса и скругления
головки рельса, м:
k « 0,09 V (RM4-
(2.97)
Допускаемые контактные напряжения [он] составляют 0,7...0,9
предела текучести материала колеса 25-107...32-107 Па. Подробнее
см. [1].
Опорно-поворотные устройства кранов с расположением опор в
горизонтальной плоскости (рис. 2.17). Все действующие на опорно-
поворотные устройства силы можно свести к вертикальной силе FB,
приложенной по оси опорно-поворотного устройства, горизонталь-
ной силе Л, приложенной к опорным элементам по центру тяжести
тел качения и к моменту Л1, определяемому из условия
Л1 — F в F 4- Рг ht
(2.98)
где L и h — см. рис. 2.17.
Средняя нагрузка (II) на один опорный элемент в секторе с
углом р опорно-поворотного устройства:
а) каткового (опорная реакция вертикальна)
(2.99)
б) шарикового или роликового (опорная реакция наклонена под
углом у к вертикали)
1
z' cos у
р г
Др COS /
Л1
(2.100)
где z’ — число опорных элементов в секторе с углом р; £>ср — диа-
метр опорного круга по средней линии качения (диаметр беговой
дорожки тел качения), м; р — центральный угол между точками
пересечения окружности диаметром Z)cp с осями продольных (хреб-
товых) балок рамы неповоротной части крана (см. рис. 2.17); у —
угол наклона опорной реакции к вертикали.
Для опорно-поворотного устройства шарикового, роликового и
многокаткового
г' = 2р/(2л)
(2.101)
где z— общее количество опорных элементов в опорно-поворотном
устройстве (шариков, роликов, катков).
Для опорно-поворотного устройства с опорными колесами z
равно 2 или 4 (по два колеса на балансире).
Для опорно-поворотных устройств с кольцами из хромистой или
марганцовистой стали, при твердости рабочей поверхности 47...55
HRC, со стандартными шариками или роликами (диаметр ролика
равен его длине) предельная допустимая нагрузка (МН):
83
на шарик
(2.102)
на ролик
^m=--45d„;
= 30dp,
(2.103)
где dm, dp — диаметр соответственно шарика и ролика, м.
Момент сил трения (Н-м) в шариковых и роликовых опорно-
поворотных устройствах относительно оси вращения может быть
принят равным
0,025М + 0,005FbZ)cd
7 1 7 о ср
ТР cos у
(2.104)
Момент сил трения (Н-м) в опорно-поворотных устройствах
многокатковых и с опорными колесами может быть принят равным
+ (2-105)
где DKt du, р, f — см. пояснения к формулам (1.81) и (1.82).
Примерная последовательность расчета механизма поворота:
1) определяются опорные нагрузки по (2.88), (2.89), (2.99),
(2.100);
2) определяются моменты сопротивления вращению от уклона
пути, ветровой нагрузки и сил трения по (2.82), (2.83), (2.91),
(2.105);
3) определяется статическая мощность двигателя по (2.85) и
выбирается двигатель (см. параграф III.3);
4) определяется общее передаточное число привода согласно
(2.36) при А1б = ^пов и составляется кинематическая схема меха-
низма;
5) определяется расчетная мощность редуктора по (1.101) или
(1-102);
6) определяются расчетные моменты соединительных муфт [см.
(1.33) и (1.103)] и выбираются муфты (табл. III.5.1...III.5.9);
7) определяется время пуска (торможения) по (1.76) и прове-
ряется соответствие его данным табл. 1.21;
8) определяется момент сопротивления вращению поворотной
части крана на валу двигателя при пуске по (2.81);
9) определяется необходимая мощность двигателя при пуске
согласно (2.85) при Гс = Гпуск и производится его проверка соглас-
но пояснениям к формуле (2.85);
10) проверяется двигатель на нагрев (см. параграф 1.7);
11) определяется момент сопротивления на валу тормоза при
торможении по (2.86) и выбирается тормоз по табл. Ш.5.11...
Ш.5.14;
12) производится расчет на прочность отдельных элементов ме-
ханизма (опорных колес, предохранительной фрикционной муфты
и др.).
84
Глава 3. ПРИМЕРЫ РАСЧЕТОВ МЕХАНИЗМОВ
ГРУЗОПОДЪЕМНЫХ МАШИН
3.1. ПРИМЕР РАСЧЕТА МЕХАНИЗМА ПОДЪЕМА ГРУЗА
Рассчитать механизм подъема груза электрического мостового
крана грузоподъемностью Q = 5 т для перегрузки массовых грузов.
Скорость подъема груза цг=0,25 м/с. Высота подъема //=15 м. Ре-
жим работы — средний, ПВ —25 % (группа 4 режима работы по
табл. 1.8).
Принимаем механизм подъема со сдвоенным двукратным поли-
спастом (см. табл. 2.2).
Усилие в канате, набегающем на барабан [см. (2.1)],
F = 5000-9,8£ = 12386 н
2-2-0,99
Поскольку обводные блоки отсутствуют, по формуле (2.3)
По = Пп = -7-
^4
1 — 0,982
1-0,98
0,99,
где Лбл = 0,98 (см. табл. 2.1).
Расчетное разрывное усилие в канате [см. (2.6)] при максималь-
ной нагрузке на канат FK=Fo= 12 386 Н и 6 = 5,5
F = 12386-5,5 = 68 123 Н.
С учетом данных табл. 2.5 из табл. III.1.1 выбираем по ГОСТ
2688—80 канат двойной свивки типа ЛК-Р конструкции 6X19(1 +
4-64-6/6+ 1 о.с.) диаметром d= 11 мм, имеющий при маркировоч-
ной группе проволок 1764 МПа разрывное усилие ^=68 800 II.
Канат грузовой (Г), первой марки (1), из проволоки без покры-
тия ( —), правой крестовой свивки ( —), нераскручивающийся (И)
согласно (2.1) обозначается:
Канат—1i^r—I—H—1764 ГОСТ 2688—80.
Фактический коэффициент запаса прочности каната
= 5,55 > k = 5,5.
ф 12 386
Требуемый диаметр барабана по средней линии навитого сталь-
ного каната [см. (2.9)] /7=11-25 = 275 мм. Принимаем диаметр ба-
рабана D = 300 мм.
По табл. 111.2.5 выбираем подвеску крюковую типа 1 грузоподъ-
емностью 5 т, имеющую блоки диаметром 320 мм с расстоянием
между блоками 6 = 200 мм.
Длина каната, навиваемого на барабан с одного полиспаста
[см. (2.10)] при 2! = 2, г2 = 3,
£к= 15-2+3,14-0,3(2 + 3) =34,7 м.
85
Рабочая длина барабана для навивки каната с одного полиспа-
ста при t= 12,5 мм, /и = 1 и <р= 1 [см. (2.11)]
т 34,7-0,0125 п...
ZzA —------------------------— - 0,444 м.
3,14 - 1 (1 - 0,011 +0,3) 1
Приняв расстояние между правой и левой нарезками на бара-
бане (длина ненарезной части) равным расстоянию между ручьями
блоков в крюковой обойме, т. е. /=6 = 0,2 м, найдем полную длину
барабана
Минимальная толщина стенки литого чугунного барабана [см.
(2.18)] б
Ьб = Ь —й! = 0,3 —0,011 =0,289 м. Принимаем б= 14 мм.
Приняв в качестве материала барабана чугун марки СЧ 15
(ов = 650 МПа, [ослЛ^ИЗО МПа), по формуле (2.16) найдем напря-
жение сжатия в стенке барабана:
осж =-------— --------- = 70,78 • 10вПа=70,78МПа<130МПа.
12,5 • 10-3 • 14 - 10-3
Статическая мощность двигателя [см. (2.31)] при т] = 0,85
5000 9,81 0,25 = 13 4б rBt
103-0,85
С учетом указаний к формуле (2.31) из табл. III.3.5 выбираем
крановый электродвигатель с фазным ротором MTF 211-6, имею-
щим при ПВ = 25 % номинальную мощность РНом==9 кВт и частоту
вращения п = 915 мин-1. Момент инерции ротора /р=0,115 кг-м2,
максимальный пусковой момент двигателя 7тах=195 Н-м.
Частота вращения барабана [см. (2.35)] при Т^расч—D— 0,3 М
= 31,8 мин-1.
пип=0,02-О,289 + 0,006...0,01 =0,012...0,016 м=12..,16 мм, где
лб =
с
Передаточное число привода
и = /1/пб = 915/31,8 = 28,8.
Расчетная мощность редуктора [см. (1.101)] при 6Р=1 и Р = Р
Рр= 1,0-13,46= 13,46 кВт.
Из табл. Ш.4.2 по передаточному числу и мощности выбираем
редуктор цилиндрический, двухступенчатый, горизонтальный, кра-
новый типоразмера Ц2-300 с передаточным числом пр=32,42 и мощ-
ностью на быстроходном валу при среднем режиме работы Рр =
= 14,6 кВт.
Момент статического сопротивления на валу двигателя в период
пуска [см. (1.27)] с учетом того, что на барабан навиваются две вет-
ви каната, при т)б = 0,94 и 1]пр=0,9 (ориентировочно)
т = 12 386 • 2 0,3 = j35 н
2-32,42-0,94-0,9
Номинальный момент, передаваемый муфтой, принимается рав-
ным моменту статических сопротивлений Тм°м — Тс = 135 Н-м.
86
Номинальный момент на валу двигателя по формуле (1.33)
= 9550 — = 9550— = 93,9 Н-м.
п 915
Расчетный момент для выбора соединительной муфты [см.
(1.103)]
Гм= 135-1,3-1,2=211 Нм.
Из табл. III.5.9 выберем ближайшую по требуемому крутящему
моменту упругую втулочно-пальцевую муфту № 1 с тормозным
шкивом диаметром £)т = 200 мм и наибольшим передаваемым кру-
тящим моментом 500 Н-м.
Момент инерции муфты /м = 0,125 кг-м2. Момент инерции рото-
ра двигателя и муфты /=7р+7м = О,225 + 0,125 = 0,35 кг-м2.
Средний пусковой момент двигателя [см. (1.89)] при -фтт=1Д
тпуск = Тср п = 2,08+ ’4 93,9 = 163,4 Н - м,
где •фтах = —— = 2,08.
Уо у У
Время пуска при подъеме груза [см. (1.67)]
_ 1,1 • 0,35 • 915 , 9,55 • 5000 • 0,222
п— 9,55(163,4— 135) ' 915(163,4— 135) 0,85
Фактическая частота вращения барабана по формуле (2.36)
Л п. 915
пб = — = 32 42 = 28,2 мин Ч
Г
Фактическая скорость подъема груза по формуле (2.35)
_ 3,14-0,3-28,2
60ип ~ 60-2
= 0,22 м/с.
Эта скорость отличается от ближайшего значения 0,2 м/с из стан-
дартного ряда на 10 %, что допустимо.
Ускорение при пуске, согласно (1.80),
V? 0,22
а = -г- — . . =0,16 м/с2.
Zn 1
Полученные значения t и а соответствуют рекомендациям табл.
1.19 и 1.25.
Поскольку график действительной загрузки механизма подъема
не задан, воспользуемся усредненным графиком использования ме-
ханизма по грузоподъемности (см. рис. 1.1, а), построенным на
основе опыта эксплуатации кранов. Определим моменты, развива-
емые двигателем, и время его пуска при подъеме и опускании гру-
за в различные периоды работы механизма. Согласно графику, за
время цикла (подъем и опускание груза) механизм будет работать
с номинальным грузом Q = 5000 кг—1 раз, с грузом 0,5 Q =
= 2500 кг — 5 раз, с грузом 0,2Q=1000 кг—1 раз, с грузом
0,05 Q = 250 кг — 3 раза.
87
Табл. 3.1. Моменты, развиваемые двигателем, и время его пуска
Наименование показателя
Обозначе- ние Единица Результаты расчета при мас- се поднимаемого груза, кг
5000 2500 1000 250
КПД (см. рис. 1.2)
Натяжение каната у барабана при
подъеме груза по (2.1)
Момент при подъеме груза по (1.27)
Время пуска при подъеме по (1.67)
Натяжение каната у барабана при
опускании груза [в формуле (2.1)
коэффициент т)о должен быть в
числителе]
Момент при опускании груза по
(1.28)
Время пуска при опускании по (1.67)
л Гб н 0,85 12 386 0,8 6579 0,65 3239 0,5 1053
Те Нм 135 71,7 35,3 11,5
с 13 0,42 0,29 0,24
Г°" н 12 195 6478 3189 1036
<рОП 1 с Н-м 97,4 51,7 25,5 8,28
Л)П с 0,15 0,18 0,20 0,22
В табл. 3.1 избыточный момент при опускании груза — сумма
среднего пускового момента двигателя и момента статических со-
противлений механизма при опускании груза.
Результаты расчетов приводятся в табл. 3.1.
Средняя высота подъема груза составляет 0,5...0,8 номинальной
высоты 77=15 м. Примем //Ср = 0,8 /7 = 0,8-15= 12 м.
Тогда время установившегося движения
vr 0,22 54,5 с
Сумма времени пуска при подъеме и опускании груза за цикл
работы механизма = 1,4 + 5 • 0,42 + 1,029 + 3 • 0,24 0,15 +
+ 5 • 0,18 + 1 • 0,2 + 3 • 0,22 = 6,42 с.
Общее время включений двигателя за цикл ^ — 2(1+54*1 +
+ 3) /у + v/n = 2 • 10 • 54,5 + 6,42 = 1096,42 с.
Среднеквадратичный момент [см. (1.93)]
/163,42 • 6,42 + (1352 + 5 • 71,72 + 35,32 + 4 - 11,52 + 97,42 + 5 X
X 51,72 + 25,52 + 4 • 8,292)54,5
1096,42
— 60,1 Н • м.
Среднеквадратичная мощность двигателя по (1.92)
ср
60,1 • 915
9550
= 5,76
кВт.
Следовательно, условие (1.91) соблюдается (5,76<9).
Момент статического сопротивления на валу двигателя при тор-
можении механизма по (2.27)
12 386 - 2 • 0,3 • 0,98 • 0,85
2 -32,42
= 95,47 Н • м.
88
Необходимый по нормам Госгортехнадзора момент, развива-
емый тормозом [см. (2.38)], при йт=1,75 7\ = 95,47-1,75= 167 Н-м.
Из табл. III.5.11 выбираем тормоз ТКТ-300/200 с тормозным мо-
ментом 240 Н-м, диаметром тормозного шкива Z)T = 300 мм. Регу-
лировкой можно получить требуемый тормозной момент 7\ =
= 167 Н-м.
По формуле (1.68) определим время торможения при опускании
груза (при подъеме груза это время будет меньше, так как в этом
случае момент от веса груза и тормозной момент действуют в одном
направлении):
. 1,1.0,35-915 , 9,55 • 5000 • 0,222 • 0,85 л
L = —i----!-------------:-----------------~ 0,54 с.
9,55(167 — 95,47) 915 (167 — 95,49)
Из табл. 1.22 для среднего режима работы находим путь тормо-
жения механизма подъема груза
0,22
-----= 0,13 м.
s=^
Время торможения в предположении, что скорости подъема и
опускания груза одинаковы, согласно (1.75),
mav 5 0,13
^ах =------ =------1----= 1,18 с > /т = 0,54 с.
0,5^ 0,5-0,22 т
Замедление при торможении
v? 0,22
Qt = X =
что соответствует данным табл. 1.25.
= 0,4 м/с2,
3.2. ПРИМЕР РАСЧЕТА МЕХАНИЗМА ПЕРЕДВИЖЕНИЯ
Исходные данные. Рассчитать механизм передвижения электри-
ческого мостового крана грузоподъемностью Q = 5 т, предназначен-
ного для перегрузки штучных грузов в закрытом помещении. Про-
лет крана Л=16 м. Скорость передвижения апер=1,3 м/с. Режим
работы средний, ПВ = 25 % (группа режима работы 4 по табл. 1.8).
Привод центральный с быстроходным валом.
Определение сопротивлений передвижению крана. Согласно ре-
комендациям параграфа 1.2, ориентировочная масса мостового кра-
на m=0,96Q+0,84А = 0,96 • 5 + 0,84 • 16 = 18,24 т.
По табл. 1.29 найдем рекомендуемый диаметр ходовых колес
Z)K = 500 мм.
Коэффициент трения качения ходовых колес по рельсам с пло-
ской головкой р = 0,0005 м (табл. 1.28). Коэффициент трения в под-
шипниках качения ходовых колес /=0,02 (подшипники конические).
Диаметр цапфы вала ходового колеса [см. пояснения к формуле
(1.81)] dK=0,2-500= 100 мм. Примем также Ар=2,5.
89
Общее сопротивление передвижению крана, согласно
(2.40),
Л,ер = Лр = ftp (rn + Q) g = 2,5 (18 240 -f-
+ 5000) 9,81 0,02'0>1Д2' 0,0005 = 3420 Н.
(2.39) и
Выбор электродвигателя, соединительных муфт и редуктора.
Статическая мощность привода по формуле (2.42) при г] = 0,85
(табл. 1.18)
3420 - 1,3
103 . 0,85
= 5,23 кВт.
Из табл. 111.3.5 выбираем крановый электродвигатель типа MTF
112-6 мощностью Р = 5,8 кВт при ПВ = 25 % с частотой вращения
п = 915 мин-1. Момент инерции ротора 0,021 кг-м2.
Номинальный момент двигателя
Тном = 9550— = 9550 = 60,5 Н • м.
п 915
Частота вращения ходового колеса
60ипер 60 • 1,3
п =-------- =-----------= 49,66 мин-1.
к лРк 3,14-0,5
Требуемое передаточное число привода, согласно (2.36),
П 915 1 о ла
и -- — =------ — 18,42.
пк 49,66
Поскольку в приводе рассчитываемого механизма передвиже-
ния должно быть установлено два одинаковых редуктора, на каж-
дый из них (с учетом неравномерности распределения) приходится
мощность, равная (0,5...0,6)Рс, т. е. 2,6...3,1 кВт, Расчетная мощ-
ность для выбора редуктора, согласно (1.101) и табл. 1.34, Рр=
= ftp Рс = 2,2-3=6,6 кВт. Исходя из этой мощности и требуемого пе-
редаточного числа, из табл. Ш.4.16 выбираем для среднего режима
работы и частоты вращения быстроходного вала д?б=Ю00 мин-1
дуктор типа ВК-475 с передаточным числом 19,68 и мощностью
ре-
Номинальный момент, передаваемый двумя муфтами двигате-
ля, принимается равным моменту статических сопротивлений, со-
3420 • 0,5
пер к _ - т г — . . _ ।
2upn "“Т 19,68 • 0,85 “ 0 ,1 ’
Расчетный момент для выбора соединительных муфт [см. (1.103)];
kik2 — 51,1 • 1,2 • 1,2 = 73,6 II • м (fej и k2 см. табл. 1.35).
Учитывая, что крутящий момент передается двигателем на две муф-
ты (привод центральный с быстроходным валом) и возможно нерав-
/т-»НОМ
* М
ном
м
90
номерное распределение нагрузок между ними, расчетный момент
для одной муфты Тм = 0,6 Гм = 0,6 • 73,6 — 44,2 Н • м. Из табл.
III.5.6 выбираем упругую втулочно-пальцевую муфту с крутящим
моментом 63 Н • м. Диаметр муфты D ~ 100 мм, момент инерции
[см. пояснения к (1.36)] /м ~ 0,lmD2 = 0,1 • 2 • 0,12 ~ 0,002 кг-м2.
Для трансмиссионного быстроходного вала предусматриваем та-
кие же промежуточные муфты и со стороны ходовых колес. Всего
на быстроходном валу предусматривается шесть муфт.
Фактическая скорость передвижения крана
^пер = = 1,3 • 18,42/19,68 — 1,22 м/с
отличается от ближайшего значения 1,25 м/с из стандартного ряда
(табл. 1.2) на 2,4 %, что допустимо.
Полагаем, что общее число ходовых колес крана z = 4, из них
приводных znp — 2. Примем коэффициент сцепления ходовых колес с
рельсами <р = 0,15, коэффициент запаса сцепления = 1,2 [см. по-
яснения к (1.81)].
По формуле (1.81) максимально допустимое ускорение крана
при пуске в предположении, что ветровая нагрузка Fp = 0,
) — (2 - 0,0005 + 0,02 • 0,1) —
0,5 / 0,5
= 0,48 м/с2.
9,81 =
Наименьшее допускаемое время пуска по условию сцепления
. V 1,22 о ..
/доп — ~ 0 48 ~ с.
max v»
Средний пусковой момент двигателя [см. (1-89)]
ср.п
г,25+ 1,1,60 5 = 101 6 н • м.
2
Момент статических сопротивлений согласно (1.29) при работе
крана без груза (определение значений FneP = Fnep приводится ниже)
f'd„ 2683 -0,5
= 2мр1| = 2 • 19,68 • 0,85 = ‘ м-
Момент инерции ротора двигателя /р = 0,021 кг • м2 и муфт
быстроходного вала 1М —- 6/м — 6 • 0,002 = 0,012 кг • м2.
] = /р + /м = 0,021 + 0,012 = 0,033 кг • м2.
Фактическое время пуска механизма передвижения без груза
[см. (1.69)]
, 1,2.0,033-915 . 9,55 • 18 240 • 1,222 с ,0 Л
tn ~ I — 0,4 о С,
9,55(101,6 — 40,1) 915(101,6 — 40,1)0,85
что согласуется с данными табл. 1.19. Коэффициент 6 — 1,2 [см. по-
яснения к формуле (1.36)].
91
Фактическое ускорение крана без груза при пуске согласно
] 22
аФ = = °’22 м/с2 < = °’48 к1/с2-
Проверяем фактический запас сцепления. Для этого найдем:
а) суммарную нагрузку на приводные колеса без груза [см. по-
яснения к (2.44)]:
/?пр = яг+ 18 240-^- 9,81 = 89467 Н;
Хи JL
б) сопротивление передвижению крана без груза согласно
/ fdK + 2ц
Fnep = kpmg „ = 2,5 • 18 240 • 9,81
0,02 • 0,1 + 2 • 0,0005
0 +
Ф —-----------------
2683+ 18 240 - 9,81
По формуле (2.44) фактический запас сцепления
а __ 89 467» 0,15_____________
0,22 2 0,1 \ —
--- — — 0,02——
9,81 4 0,5 /
Проверка электродвигателя на нагрев выполняется,
мере 3.1.
Определение тормозных моментов и выбор тормоза. Макси-
мальное допустимое замедление крана при торможении по форму-
как В При-
0,15 0,02-0,1
ТД 0,5 / 1 0,5
По табл. 1.26 принимаем ^ах —0,15 м/с2.
Время торможения крана без груза, согласно (2.43)
1 22
___________________ пер 1
Т__________________*г
ашах
нтах —
2 • 0,0005 + 0,02 • 0,11
9,81 = 0,65 м/с2.
= 8,13 с.
0,15
4
Сопротивление при торможении крана без груза [см. (2.48)]
18 240-9,81
FTT[) =---—----(0,02 - 0,1 +2 - 0,0005) = 1074 Н.
U j э
Момент статических сопротивлений на тормозном валу при
торможении крана, согласно (2.46) и (2.47), в предположении, что
тормоз установлен на валу двигателя и нет уклона пути,
6ттрОкД 1074 • 0,5 • 0,85
Тс 2и 2 • 19,68 1,8 ” ' h
Г
Момент сил инерции при торможении крана без груза
[см. (1.62)]
. 1,2.0,33-915 9,55 • 18240 • 1,252 0,85
Ти" ~ 9,55 • 8,13 915 • 8,13 ~ 88,77 ’ м’
92
Расчетный тормозной момент на валу тормоза [см. (1.79)]
1 ин — * с
= 35,77— 11,6
~ 25 Н • м.
Из табл. III.5.13 выбираем тормоз типа ТКГ-160 с диаметром
тормозного шкива /)т=160 мм и наибольшим тормозным момен-
том Тт= 100 Н-м, который следует отрегулировать до 7\ = 25 Н-м.
Минимальная длина пути торможения по табл. 1.26 S = v2/k =
= 1,222/1,5=1 м.
Фактическая длина пути торможения, согласно (1.75), 5ф =
= 0,5ц/т = 0,5-1,22-8,13 = 4,96 м>1 м, что соответствует рекоменда-
циям табл. 1.26.
3.3. ПРИМЕР РАСЧЕТА МЕХАНИЗМА
ИЗМЕНЕНИЯ ВЫЛЕТА СТРЕЛЫ
Рассчитать механизм изменения вылета с помощью наклона
стрелы (см. рис. 2.13). Грузоподъемность при всех вылетах Q = 5 т.
Масса стрелы тс=1,5 т. Длина Лс = 21 м. Длина стрелового поли-
спаста при максимальном вылете Дпах=19 м. Угол наклона поли-
спаста стрелы при максимальном вылете 6i = 13°.
При минимальном вылете: угол наклона полиспаста стрелы
б2=55°( расстояние от обводного блока грузового полиспаста до
оси корневого шарнира d = 0,6 м, длина стрелового полиспаста при
минимальном вылете Lmin= 13,6 м. Наибольший угол наклона стре-
лы к вертикали 0 = 25°. Расстояние между осью шарнира стрелы и
осью вращения крана (см. рис. 2.13) г=2 м.
Кратность грузового полиспаста игп — 2, его КПД т)п = 0,99. На-
грузка от ветрового напора на стрелу Ff = 1200 Н, на груз
F*= 1500 II.
При минимальном вылете длина проекций стрелы: горизонталь-
ной Lc = Fc sin 0 — 21 • sin 25° — 9м, вертикальной — Н = Lc cos 0 =
= 21 • cos 25° — 19 м.
Время перевода стрелы из крайнего нижнего в крайнее верх-
нее положение t—1 мин. Режим работы средний, частота вращения
поворотной части крана пП0В= 1 мин-1.
Определим по формуле (2.70) усилия в стреловом полиспасте
для крайнего нижнего и крайнего верхнего положений стрелы. При
этом считаем, что в крайнем нижнем положении стрела будет рас-
полагаться почти горизонтально, и для этого случая можно при-
нять /7=0 и d = 0. Поскольку частота вращения поворотной части
крана не превышает 1 мин-1, а вылет крана менее 25 м, то инер-
ционными силами можно пренебречь [см. пояснения к (2.70)].
При крайнем нижнем положении стрелы
с
п max
(Q-|-0,5mt)g
sin
(5000 + 0,5 • 1500) • 9,81
sin 13°
= 250 754 H.
93
Здесь массой полиспаста также пренебрегаем.
При крайнем верхнем положении стрелы
(Q + 0,5/nc)^~-^r + (/?4
пЧп
С
п min —
Н cos 62 — LTC sin 6
5000 • 9,81 • 0,6
(5000 + 0,5 • 1500)9,81-9 —
2
2 • 0,99
Примем кратность
Лбл = 0,98 (табл. 2.1).
19 cos 55° — 9 sin 55 '
= 151 078 Н.
стрелового полиспаста = 6, КПД блока
По формуле (2.2) общий КПД полиспаста
где КПД обводного блока т)эб = т]бл — 0,98
и КПД полиспаста по (2.3)
1-0^ = gj
п 6 1—0,98
Усилие в ветви каната стрелового полиспаста, набегающей на
барабан при крайнем нижнем положении стрелы [см. (2.68)],
р 250 754
max = 6 . 0>93- = 44 938 Н.
При крайнем верхнем положении стрелы
с 151 078
Fб min = 5 . q ’93 — 27 0/5 Н.
Среднее расчетное усилие в ветви каната, набегающей на ба-
рабан,
6 min
рС ____ 1 б max
Г б. ср —----
Ход стрелового полиспаста [см. (2.75)]
= 36006 н.
Длина каната, наматываемого на барабан [см. (2.75)],
Средняя скорость навивки каната на барабан [см. (2.76)]
32,4
»к =
Необходимая мощность
— ЦбЩф
= 0,54 м/с.
60
двигателя, согласно (2.42), при i] =
F6crnt’ 36 006-0,54
Р = _б._срк ---------->_ = 22 87 кВ
103т) 103 • 0,85
где т]б=0,94; т)пр=0,9 (ориентировочно); т] = 0,85.
Из табл. Ш.3.5 выбираем крановый электродвигатель с фазным
ротором типа MTF 312-6 мощностью Р=17,5 кВт при и = 950 мин"1,
с моментом инерции ротора /р=0,312 кг-м2, максимальным пуско-
вым моментом ЛпаХ = 480 Н-м.
94
Согласно (2.6), разрывное усилие каната
F = Fc6 maxfe = 44 938 - 5,5 = 247 159 Н.
Из табл. III.1.5 выбираем канат 22,5Т-1-Н-1568 ГОСТ 7665—80
с разрывным усилием 250 500 II. Диаметр барабана и блоков
[см. (2.9) и табл. 2.7)] D = 22,5-18 = 405 мм.
Согласно пояснениям к формуле (2.9), диаметр барабана D6 =
= 0,85D = 0,85-405 —345 мм. Принимаем Do —360 мм (из стандарт-
ного ряда). Согласно табл. 2,8, примем шаг канавок на барабане
f = 26 мм.
Рабочая длина барабана, согласно (2.11),
lKt 32,4-0,026
= л (d + D6) = 3,14(0,022 + 0,36) 0,7 М*
Частота вращения барабана, согласно (2.35),
60сд- 60-0,54
Пб = --— Тм—ТГоТ" — 28.6о мин Ч
0 ttDo 3.14 • 0,36
Требуемое передаточное число механизма изменения вылета
[см. (2.36)]
« = 915/28,65 = 31,94.
Расчетная мощность для выбора редуктора [см. (1.101)]
Рр= 1-22,87=22,87 кВт.
Из табл. II 1.4.2 выбираем редуктор типоразмера Ц2-400 с пере-
даточным числом ир = 32,42 и мощностью на быстроходно1М валу
28,1 кВт при частоте его вращения 1000 мин-1.
Фактическая частота вращения барабана
л п 913
Пб = — = = 28,2 мин-1.
Фактическая скорость навивки каната на барабан
ф__лРбп$_ 3,14.0,36.28,2
— — — — 0,эЗ м< с.
60 60
Эта скорость отличается от стандартного значения (см.
табл. 1.2) на 6 %, что допустимо.
Фактическое время перевода стрелы из крайнего нижнего в
крайнее верхнее положение
незначительно отличается от заданного.
Номинальный момент двигателя, согласно (1.33),
Тном = 9550— = 9550 = 182,6 Н • м.
п 915
Максимальный статический момент двигателя [см. (1.30)] при
ГС_ г с
1 б— Т'б max
95
max
с
44 938-1-0-36 = 29q 5
2-32,42-0,85 ’
H • м.
По этому моменту выбираем соединительную муфту.
Полагая = Т™ах = 293,5 Н • м, получим расчетный момент
муфты [см. (1.103) и табл. 1.35] Тм = 293,5 • 1,4 • 1,2 — 493 II • м.
Минимальный статический момент двигателя при Fc = Fq mjn
27 075 • 1 • 0,36
-2-32,4Г 0^5- 177 11
Средний пусковой момент двигателя [см. (1.89)]
182,6 — 340 Н • м;
cp.n —
Фгпах —
480
182,6
Из табл. III.5.9 выбираем упругую втулочно-пальцевую муфту
№ 2 с тормозным шкивом и наибольшим крутящим моментом
800 Н-м. Диаметр тормозного шкива 300 мм. Момент инерции муф-
ты /м = 0,6 кг-м2.
Момент инерции ротора двигателя и муфты /=7Р+/М = 0,312+
+ 0,6 = 0,912 кг-м2.
Момент инерции вращающихся масс системы и груза относи-
тельно оси поворота (оси корневого шарнира) стрелы [см. (1.40)...
(1.42) и рис. 1.3]
/вр.выл = 150 0 232 + 23 • 2-+22 + 5000 • 232 = 2 934 500 кг • м2,
3
при вылете стрелы /? = Лс + /'=21 +2 = 23 м.
Передаточное число [формулы (1.57) ...(1.58)]
и = 915-61,1 5180 ,0 == 90о _ Оо = 90о _ 250 = 65° = 1,13 рад).
9,55 1,13 '
Время пуска механизма при максимальном усилии в стреловом
полиспасте [см. (1.71)] при Тс — Тс^ит) = Ло'Пб'Опр ~ 0,93-0,94-0,9 —
~ 0,8
t _ 1,2 - 0,912 - 915___________2 934 500 915____— 2 52 С
п - 9,55 (340 — 293,5) * 9,55 • 51802 (340 — 293,5) 0,8 ~ ’
что согласуется с данными табл. 1.20.
Время пуска при минимальном усилии в стреловом полиспасте
rj* ___ min
с с
1,2 . 0,912 - 915
9,55 (340 — 177)
________2 931 500 - 915
9,55 • 51802 (340— 177) - 0,8
= 0,71 С,
что примерно соответствует данным табл. 1.20.
Выбор тормоза произведем для случая наиболее неблагоприят-
ного горизонтального положения стрелы.
96
Статический момент при торможении (считается, что тормоз
установлен на валу двигателя) при максимальном вылете стрелы,
согласно (2.37),
Тт _ ^тах^ _ 44 938. 1 .0,36.0,8 _
/ с наиб — л" — К QO Л о — ** *
Требуемый тормозной момент [см. (2.38)]
ZT = 212-1,5=318 Н-м.
Здесь коэффициент запаса торможения для механизма измене-
ния вылета £т = 1,5 (табл. 2.9).
Из табл. III.5.11 выбираем колодочный тормоз типа ТКТ-300
с диаметром тормозного шкива 0 = 300 мм и тормозным моментом
500 Н-м, который следует отрегулировать до требуемого тормоз-
ного момента Гт=318 Н-м.
Производим проверку продолжительности торможения при
действии максимального и минимального моментов.
Минимальный тормозной момент (при минимальном вылете
стрелы)
т 27 075 • 1 • 0,36 - 0,8
ГсТпип - --------------- =- 127’7 11 • М-
Время торможения при максимальном усилии в стреловом по-
лиспасте [см. (1.72)]
t __ 1,2 - 0,912 - 915 2 934 500 - 915 > 0,8 _ j ] с
т“ 9,55(318 — 212) 9,55 • 51802 (318 — 212) “ ’
что примерно соответствует данным табл. 1.20.
Время торможения при минимальном усилии в стреловом поли-
спасте
1,2 - 0,912 - 915 2 934 500 - 915 - 0,8
9,55(318— 127,7) 9,55 • 51802 (318 — 127,7)
соответствует данным табл. 1.20. Проверяем правильность выбора
двигателя по пусковому моменту (см. параграф 2.3):
7щах—7с шах — 293,5 IГ м<С 7Ср.п=340 Н-м.
3.4. ПРИМЕР РАСЧЕТА МЕХАНИЗМА ПОВОРОТА
Рассчитать механизм поворота стрелового крапа общего назна-
чения с неподвижной колонной (см. рис. 2.15). Грузоподъемность
крана Q= 10 т, вылет R = 8 м, высота установки до 10 м, частота
вращения ггПов=1 мин-1. Масса вращающейся части крана (без
противовеса) тс = 2,5 т, расстояние от центра тяжести поворотной
части крана до оси его вращения /с = 3,8 м, расстояние от центра
тяжести противовеса до оси вращения крана /пв = 5 м, расстояние
между верхней и нижней опорами ft = 4,2 м. Режим работы — сред-
ний, ПВ = 25 %. Кран установлен на открытом воздухе. Возможное
отклонение оси колонны от вертикали сс~ 1°.
4 Зак. 3134
97
Масса противовеса по формуле (2.90)
10 • 8 • 0,43 4-2,5 • 3,8
/72 '--------—
=-- 8,78 т
0 75
при ф — —-—— = 0,43, kr = 0,75 для среднего режима
1 —|— 0,7э
(см. табл. 1.9).
Вертикальная реакция [см. (2.89)]
работы
FB= (104-2,5 + 8,78)9,81=208,8 кН.
После предварительной конструктивной проработки примем:
расчетную площадь противовесной консоли (с учетом расположен-
ных на ней балласта и механизмов) 1,2 м2, расчетную площадь
груза 10 м2 (см. табл. 1.16), расчетную площадь контура стрелы
6,4 м2, расстояние от точки приложения ветровой нагрузки на стре-
лу до оси вращения крана Zi = 4 м, расстояние от точки приложения
ветровой нагрузки на противовесную консоль до оси вращения
крана Z2=2,5 м.
По формуле (2.88) горизонтальные реакции в опорах А и С
(в предположении, что горизонтальные внешние силы отсутствуют,
т. е. Fk = 0, так как ветровая нагрузка на конструкцию крана
незначительна — см. ниже):
(Ю • 8
= 106,5 кН.
Из каталога выбираем для верхней опоры по статической на-
грузке FB = 208,8 кН (при нПОв=1 мин-1) упорный однорядный ша-
рикоподшипник легкой серии 8217 (ГОСТ 6874—75) с допускаемой
осевой статической нагрузкой 234,4 кН, внутренним диаметром
85 мм, наружным диаметром 125 мм.
По горизонтальной реакции Fc —106,5 кН выбираем радиаль-
ный однорядный шарикоподшипник 319 (ГОСТ 8338—75) с до-
пускаемой радиальной статической нагрузкой 109 кН, внутренним
диаметром 95 мм и наружным диаметром 200 мм.
Примем для упорного подшипника средний диаметр опоры
BdB = (85-r 125)/2 = 105 мм, для радиального подшипника средний
диаметр опоры С de ~ (95 4- 200)/2 = 147,5 мм, а коэффициент тре-
ния в обоих подшипниках /—0,015 [см. пояснения к формуле (1.82) |.
На нижнее опорное устройство (см. рис. 2.16) действует гори-
зонтальная сила Fa =106,5 кН, которая приходится на два ро-
лика, расположенных друг к другу под углом р = 60°. Усилие,
действующее на каждый ролик,
F _ Ра
Г г р 2 cos 30°
2 cos —
2
— 61,5 кН.
98
По этому усилию выбираем для роликов радиальные шарико-
подшипники 314 (ГОСТ 8338—75) с допускаемой радиальной ста-
тической нагрузкой 63,3 кН, внутренним диаметром 70 мм и наруж-
ным — 150 мм.
Приняв диаметр цилиндрической части колонны, по которой пе-
рекатываются ролики, — 360 мм, найдем частоту вращения ро-
ликов (при частоте вращения поворотной части крана .чпов = 1 мин-1)
zip
Ипов
= 0,36
— 2 мин-1,
где DK — принятый наружный диаметр ролика: DK = 180 мм.
Учитывая, что продолжительность включения механизма вра-
щения крана невелика (ПВ = 25 %), можем допустить выбор под-
шипника по статической нагрузке.
Как следует из формулы (2.84), момент сопротивления враще-
нию от сил трения в опорах относительно оси вращения крана
тр —
0,015 °’07'-0’--6 _i_ 0,0003/0,36
2-0,18
где Та, Тв и Тс—моменты трения в соответствующих опорах.
По формуле (2.92) при р = 0,0003 м
_ 106 500
1 А “ 60°
cos —
0,18
Момент сил трения в упорном подшипнике опоры В
dp 0,105
Тв= = 208 800—5— 0,015 = 164,4 Н • м.
Момент сил трения в радиальном подшипнике опоры С
dr 0,1475
Тс^ Fc-K-f= 106500-^- 0,015 = 117,8 Н-м.
£ £
Суммарный момент от сил трения в опорах
7тр = ТА + Тв + Тс = 230,6 + 164,4 < 117,8 = 512,8 Н • м.
Распределенная ветровая нагрузка на наветренную часть поверх-
ности конструкций крана в рабочем состоянии [см. (1.19)]
р£ = 125 - 1 - 1,9 - 1 =237,5 Па.
Полная ветровая нагрузка на стрелу в рабочем состоянии крана
по формуле (1.23) и с учетом (1.8) при &Спл = 0,3
Fi = p$Ackctu, = 237,5 • 6,4 • 0,3 = 456 Н.
То же на противовесную консоль при АСпл= 1,0
Fpm = = 237,5 • 1,2 1,0 = 285 Н.
Момент от ветровой нагрузки, действующей на кран,
П = ^1 —Щ = 456- 4 — 285 - 2,5 = 1111,5 Н-м.
4*
99
Распределенная ветровая нагрузка на груз
рр = qkcn — 125 • 1 • 1,2 • 1 — 150 Па.
Момент от ветровой нагрузки, действующей на груз [с учетом
(1-25)],
Тр = = 150 • 10 • 8 = 12000 II • м.
Момент от ветровых нагрузок, действующих на кран в рабочем
состоянии,
Тв = 7> + П = 12 000 + 1111,5 - 13111,5 Н • м.
Момент сопротивления вращению крана от уклона пути
[см. (2.82)]
ГУкл=(-Н 280-2,12+10 000-8)-9,81 -sin 1°=9360 Н-м,
где тПОв — масса поворотной части крана: тПов=^с + тпв=2,5 +
+ 8,78=11,28 т; /Пов — расстояние от оси вращения до центра тя-
жести поворотной части крана [см. пояснения к формуле (2.82)]:
^пов 11,28
Знак минус означает, что /Пов откладывается в противоположную
от груза сторону.
Суммарный статический момент относительно оси вращения
крана
Гс = Гтр+Гв + 7укл = 512,8 +13111,5 + 9360 = 22984,3 Н-м.
Необходимая статическая мощность двигателя [см. 2.85)]
22 984,3 - 1
9550 • 0,7
= 3,44 кВт.
КПД механизма поворота т] = 0,7 принят по табл. 1.18 в предполо-
жении, что в механизме будут использованы пара цилиндрических
зубчатых колес и редуктор.
Из табл. 1II.3.5 выбираем крановый электродвигатель с фазным
ротором типа MTF 111-6 мощностью 4,1 кВт при п = 870 мин-1. Мо-
мент инерции ротора /р=0,048 кг-м2.
Необходимое общее передаточное число привода механизма
поворота
и = п/пП0в=870/1 = 870.
Примем привод из червячного редуктора (wp=40) с предохра-
нительным фрикционом и зубчатой пары (шестерня — зубчатый
венец) с передаточным числом ц3.п=пД/р=870/40 = 21,75.
Расчетный момент фрикционной муфты, согласно (2.87),
ГПР = 1,2 Гпуск£/рт)р =1,2-61,19-40-0,8 = 2350 11 • м,
где Гпуск — см. ниже; т]р — КПД редуктора; т)р=0,8 (ориентиро-
вочно).
100
Расчетный момент для выбора соединительной муфты между
двигателем и редуктором [см. (1.103) и табл. 1.35]
Тм= 18,4 - 1,4 • 1,2 = 31 Н-м,
где Тм°м — номинальный (статический) момент, передаваемый муфтой,
ноМ==7сП_ 22 984.0,7
м и 870
= 18,4 Н • м.
Из табл. IIL5.6 принимаем упругую втулочно-пальцевую полумуф-
ту с наружным диаметром 100 мм и номинальным крутящим мо-
ментом 63 Н-м. Ориентируясь на параметры тормоза (см. ниже),
диаметр тормозной полумуфты принимаем равным 200 мм. При
этом (см. параграф 3.2) 0,045 кг-м2.
Для выбора тормоза определим:
момент инерции ротора двигателя и Муфты:
I = /р+/м = 0,048 + 0,045 = 0,093 кг• м2;
момент инерции поворотной части крана относительно оси враще-
ния платформы, согласно (1.41), (1.42), (1.46) и (1.49):
/вр нов = + тпв/™ + QR2 = 2500 • 3,82 + 8780 52 + 10.000 82 =
= 895 600 кг • м2;
момент сил инерции (Н-м) механизма поворота крана при пуске
на валу двигателя [см. (1.65)]:
1,2.0,093 • 870 . 895 600 - 870
9,55 • 7 9,55 • 7 * 8702 * 0,7
= 23,45 Н • м,
где время пуска, определенное по формуле
= 6,67 с, принято равным 7 с;
момент сопротивления на валу двигателя
(2.81),
(1-76),
/п=20/(3-1) =
при пуске, согласно
пуск
1 с
UT)
22 984
870 • 0,7 = 61,19 И *
требуемую мощность двигателя при пуске
ГпускИ 61,19-870
РцУск = 9550 = 9550
= 5,57 кВт.
Согласно пояснению к формуле (2.85), необходимая номинальная
мощность двигателя должна быть не менее kPnyGK=0,5 -5,57 =
= 2,88 кВт. Принят двигатель мощностью Р=4,1 кВт.
Проверка двигателя на нагрев выполняется аналогично расчету
в параграфе 3.1:
момент сил инерции на валу тормоза при торможении [(см. 1.66)]
|Т
ин
1,2 - 0,093 - 870 895 600 - 870 - 0,7
‘ 9,55 • 7 • 8702
9,55 . 7
при времени торможения tt=tn=l с;
101
момент сопротивлений на валу тормоза при торможении по фор-
муле (2.86)
= __ <512.8-Hin.S-HCOX).; _ 2 н . м
т 870
Из табл. III.5.11 выбираем тормоз ТКТ = 200/100 с тормозным мо-
ментом 40 Н-м и регулируем его до расчетного тормозного момен-
та 29,9 Н-м.
Схемы приводов рассчитанных механизмов приведены на
рис. 3.1, а,..г.
Рис. 3.1 Схемы механизмов кранов, принятых в примерах расчетов:
а — подъема; б—передвижения; в — изменения вылета; г—поворота; 1—электродвига-
тель; 2—барабан; 3 — полиспаст, 4 — крюковая подвеска; 5 — муфта зубчатая; 6 — редук-
тор; 7 — тормоз; 5 —муфта эластичная; 9 — ходовое колесо; 10 — редуктор с фрикционом.
11—зубчатый венец; 12 — шестерня
Раздел II. ТРАНСПОРТИРУЮЩИЕ МАШИНЫ
Глава 4. ОБЩИЕ ПОЛОЖЕНИЯ РАСЧЕТА
ТРАНСПОРТИРУЮЩИХ МАШИН
4.1. ВЫБОР ТИПА МАШИНЫ
Транспортирующие машины различаются: по способу передачи
движущей силы — с механическим приводом, самотечные; по кон-
струкции — с тяговым элементом (груз движется вместе с тяговым
элементом), без тягового элемента (груз движется при вращатель-
ном или колебательном движении рабочего элемента); по роду
перемещаемых грузов — для насыпных грузов, штучных, для на-
сыпных и штучных грузов; по направлению трассы перемещения
грузов — в одной вертикальной плоскости, в одной горизонтальной
плоскости, по пространственной трассе; по характеру движения
рабочего (грузонесущего) элемента (лента, настил, подвески, те-
лежки) — с непрерывным, с периодическим (пульсирующим) дви-
жением. Рабочий элемент может иметь поступательное, возвратно-
поступательное, вращательное или колебательное движение; по
характеру перемещения груза — на непрерывно движущемся несу-
щем элементе (ленточные, пластинчатые конвейеры), в непрерывно
движущихся рабочих элементах (ковшовые, подвесные, тележеч-
ные конвейеры), волочение груза по неподвижному желобу (скреб-
ковые, винтовые конвейеры), скольжение груза (качающиеся инер-
ционные и вибрационные конвейеры) и др.
Выбор типа транспортирующей машины зависит от характера
груза, требуемой производительности, схемы и размеров трассы
транспортирования, допустимых габаритов машин, ее массы и
стоимости.
Широкое распространение получили ленточные, пластинчатые,
ковшовые, подвесные конвейеры. Эти конвейеры состоят из тяго-
вого и несущего органов с поддерживающими и направляющими
элементами, ведущего (приводного) и ведомого барабанов или
звездочек, натяжного устройства, загрузочного и перегрузочного
устройств, рамы. В ленточном конвейере тяговый орган выполняет
также функции несущего органа. Привод наиболее часто осуще-
ствляется от электродвигателя через редуктор. При необходимости
в приводе имеется и тормозное устройство (тормоз или останов).
Транспортирующие машины комплектуются, как правило, из
стандартных узлов и деталей.
Расчет транспортирующей машины состоит в определении ее
основных параметров, расчете и выборе рабочего органа, опреде-
103
лении мощности и выборе двигателя, выборе элементов передач, !
определении тормозного момента и выборе тормоза (или оста-
нова).
При расчете и выборе элементов привода конвейеров можно
воспользоваться соответствующими материалами первого раздела
книги.
4.2. ОСНОВНЫЕ СВОЙСТВА ТРАНСПОРТИРУЕМЫХ ГРУЗОВ
Грузы делятся на насыпные и штучные.
Основными свойствами насыпных грузов являются: грануло-
метрический состав, плотность, влажность, угол естественного
откоса, абразивность, липкость, слеживаемость, смерзаемость, со-
противление перемещению относительно твердых поверхностей.
Гранулометрический состав характеризуется кусковатостью, коли-
чественным распределением частиц груза по их крупности. Харак-
теристика свойств насыпных грузов приведена в табл. 4.1.
Коэффициент однородности размеров частиц груза
ko = ^max/^min, (4.1)
где Птах, — соответственно наибольший и наименьший размер
частицы.
При &О>2,5 груз считается рядовым, при &О<2,5— сортирован-
ным. Куски груза размером от 0,8птах до «шах составляют группу
наибольших кусков. Размер типичного куска принимается:
а) для рядового материала при массе группы наибольших
кусков меньше 10 °/о массы пробы
й' = 0,8Птах1 (^*2)
б) для рядового материала при массе группы наибольших кус-
ков больше 10 % массы пробы
й/ = <11Пах‘, (4.3)
в) для сортированного материала
fl' = Qmax+frnin. (4,4)
Плотность насыпного груза—отношение массы материала к
занимаемому им объему. Различают плотность при свободной на-
сыпке (плотность насыпная) р и уплотненного насыпного груза ру.
Коэффициент уплотнения насыпного груза
^у=ру/р. (4.5)
По плотности насыпные грузы классифицируются на: легкие —
при плотности менее 0,6 т/м3; средние — 0,6...1,1 т/м3; тяжелые —
1,2...2,0 т/м3; весьма тяжелые — более 2,0 т/м3.
Угол естественного откоса — угол между поверхностью свобод-
ного откоса насыпного груза и горизонтальной плоскостью. Разли-
чают углы естественного откоса насыпного груза в состоянии: по-
коя груза — <р и движения — фд.
104
Табл. 4.1. Характеристика свойств насыпных грузов
Наименование груза Насыпная плот- ность, т/м* Угол естест- венного отко- са, град Коэффициент трения в состо- янии покоя Группа абра- зивнос- ти
в покое в дви- жении по стали по резине
1 2 3 4 5 6 7
Агломерат желез- ной руды 1,7...2 45 0,8...1 D
Алебастр:
молотый 1,2...1,3
кусковой 1,25...1,6
Антрацит мелко-
кусковой сухой 0,8...0,95 45 27 0,84 0,61 С
Бетон:
со щебнем 1,8...2,2
с гравием и пес-
ком 2,2
Брикеты угольные 1...1.1
Галька круглая 1,47...1,8 30
Глина:
мелкокусковая 0,7...1,5 50 40 0,75...1,0 В
сухая
мокрая 1,9...2,0 30.. .25
Гравий рядовой 1,5...2,0 45 30 0,58...1 В
Земля грунтовая:
сухая 1,1...1,6 29...40 0,8 С
сырая 1,6...1,9 27...45
Зола сухая 0,4...0,72 50 40 0,6...0,85 D
Известняк:
мелкокусковой 1,47...2,22 45 30 0,66...0,76 В
порошкообраз-
ный 1,57 40 30
Известь:
гашеная в по-
рошке 0,32...0,81 30...50 15.„25 0,3
обожженная 1,0...1,1 30...40
Камень:
крупнокусковой 1,8...2,2 45 30
средне- и мел-
кокусковой 1,31...1,5 45 30 0,6...0,81
Керамзит кусковой 0,5...0,7
Кокс срсднекуско-
вой 0,48...0,53 35...0 0,84 D
Мел:
молотый в по-
рошке 0,95...1,2
средне- и мелко-
кусковой 1,4...2,5 39
ЛУрамор кусковой и
зернистый 1,52...1,69
Мусор строитель-
ный 1,2...1,4
Опилки древесные
сухие 0,16...0,32 39 0,39...0,83 0,51...0,65 А
105
Окончание
i 2 з
Пемза:
в порошке кусковая Песок: 0,3...0,75 0,4...0,64
сухой 1,4...1,65 45
влажный 1,5...1,7 50
Пыль: угольная 0,4...0,7 15
Дорожная 0,64
Руда железнаи мел- ко- и среднекуско- вая 2,1...3,5 30...50
Сильвинит молотый (1,5... 5 мм) 1.1...1,14 41
Соль техническая 0,72...1,28 40
Стружка древесная 0,2...0,88
Стружка стальная и чугувная (мелкая крошка, кусочки и ДР-) 1,5...2,0
Торф фрезерный: сухой 0,33...0,4 45
влажный 0,5...0,6 55
Уголь бурый (воз- душно-сухой) 0,6...0,78 35...50
Уголь древесный 0,15...0,22
Уголь каменный: кусковой рядо- вой 0,6...0,8 35...40
мелкокусковой сортированный (орсшковый) 0,8...1,0
Цемент 1,0...1,8 40
Шлак каменно - угольный: сухой 0,6... 1,0 35...50
влажный 0,62...0,71
Шлак торфяной по- рошкообразный мо- лотый 1,3...1,9
Щебень сухой 1,2...1,8 45
4 5 6 7
30 0,32...0,7 0,46
35 0,52...0,81 0,56
1,2 D
35 0,49...1,2 0,63
32 0,27...0,75 А
40 0,52...0,66 Д
0,84
0,42...0,6 0,55
30 0,8...0,65 0,64 с
0,4...1,19 0,46...0,66 G
0,4...0,6 0,46
35 0,47...0,53 D
Приближенно принимают
<рд~0,7 <р.
(4-6)
Для вибрационных и инерционных конвейеров срд=О. Угол
естественного откоса характеризует подвижность частиц груза.
Истирающей способностью (абразивностью) насыпных грузов
называется свойство их частиц истирать во время движения со-
прикасающиеся с ними поверхности. По степени абразивности
насыпные грузы делятся на группы: А — неабразивные; В — мало-
абразивные, С — среднеабразивные; D — высокоабразивные.
106
Табл. 4.2. Классификация насыпных грузов по крупности кусков
Наименование груза
Размер типичных кус-
ков, мм
Примеры грузов
Особо крупнокусковои
а'>320
Крупнокусковой
Среднекусковой
Мелкокусковой
Крупнозернистый
Мелкозернистый
320>а'>160
160>а'>60
60>а'>10
10>а'>2
2:>о'>0,5
Порошкообразный
Пылевидный
0,5>а' >0,005
0,05>а'
Камни при добыче взрывом
Руда
Каменный уголь
Щебень
Гравий мелкий
Песок крупный
Песок мелкий
Цемент
Слеживаемость насыпных грузов — свойство многих грузов те-
рять подвижность своих частиц при длительном нахождении этих
грузов в покое.
Сопротивление перемещению насыпных грузов относительно
поверхностей твердых тел характеризуется коэффициентами тре-
ния этих грузов (в состоянии покоя груза—f0, в состоянии движе-
ния груза — /д):
fa«(O,7...O,9)fo;
/=tgp.
(4.7)
(4.8)
где р — угол трения.
Штучными называются грузы, которые транспортируются шту-
ками или группами. Различают непосредственно штучные и тар-
ные грузы. Тарные грузы — насыпные или штучные грузы, поме-
щенные в тару (ящики, бочки, мешки и др.). Размеры тары стан-
дартизованы.
4.3. ПАРАМЕТРЫ ТРАНСПОРТИРУЮЩИХ МАШИН (КОНВЕЙЕРОВ)
Основными параметрами транспортирующих машин являются:
а) производительность: массовая — Q, т/ч, или объемная —
V, м3/ч;
б) параметры трассы транспортирования: длина — L, м; длина
горизонтальной проекции — Аг, м; высота подъема груза — //, м;
угол наклона а, град;
в) масса машины — т, кг (т).
Транспортирующие машины характеризуются также показате-
лями удельных массы и мощности.
Удельная масса
Удельная мощность — отношение мощности двигателя Р к про-
изводительности машины Q:
Kp^PiQ-
(4.Ю)
107
Основными исходными данными для проектирования конвейе-
ров являются: характеристика транспортируемого груза; эксплуа-
тационная производительность; режим и условия работы; схема и
параметры трассы транспортирования грузов.
4.4. ТЯГОВЫЕ ЭЛЕМЕНТЫ ТРАНСПОРТИРУЮЩИХ МАШИН
Общие сведения. Основными частями конвейеров с тяговым
органом являются: а) бесконечная лента, канаты или цепи в ка-
честве тягового органа, к которому прикрепляется несущий орган
(пластины или ковши); б) устройства, поддерживающие и на-
правляющие тяговый орган; в) натяжные и приводные устройства
тягового органа; г) привод, включающий редуктор (или иную си-
стему передач), муфты, двигатель, останов или тормоз (если тре-
буется); д) загрузочные и разгрузочные устройства; е) рама ма-
шины.
В ленточных конвейерах лента является не только тяговым
органом, но и несущим. Основными тяговыми элементами кон-
вейеров являются ленты конвейерные и цепи тяговые.
«Ленты конвейерные. Применяются резинотканевые
(ГОСТ 20—76, ГОСТ 23831—79), резинотросовые (ТУ 38-105841—
75) и стальные (ТУ-14-1-525—73) ленты.
Сведения о резинотканевых конвейерных лентах приводятся в
табл. 4.3...4.11.
Условное обозначение резинотканевой конвейерной ленты со-
держит наименование изделия («лента»), буквенные и цифровые
индексы, обозначающие тип и вид ленты, ее ширину (мм), число
тканевых тяговых прокладок, сокращенное наименование ткани,
толщину резиновых обкладок на рабочей и нерабочей сторонах
ленты (мм), класс обкладочной резины и обозначение стандарта
на ленты.
Например, лента конвейерная типа 2, теплостойкая, шири-
ной 1000 мм, с восемью тяговыми прокладками из ткани типа
БКИЛ-150, с рабочей обкладкой толщиной 4,5 мм и нерабочей —
2 мм из резины класса С обозначается:
Лента 2Т-1000—8—БКНЛ-150—4Л—2—С ГОСТ 20—76.
Для ленточных ковшовых элеваторов могут применяться как
резинотканевые конвейерные ленты по ГОСТ 20—76 (табл. 4.4),
так и ремни плоские приводные резинотканевые (ГОСТ 23831—79)
шириной 125, 160, 200, 250, 315, 400, 450, 500, 560 и 700 мм.
Ремни общего и морозостойкого назначения изготовляются с
прокладками каркаса из тканей марок БКНЛ-65; БК.НЛ-65-2,
ТК-150, TA-150, ТК-200-2, ТК-300 и ТА-300 (см. табл. 4.6). Коли-
чество прокладок каркасов ремней приведено в табл. 4.10. Толщи-
на и максимальная допустимая рабочая нагрузка прокладок при-
ведены в табл. 4.11. Наружные обкладки ремней из резины клас-
сов Б, В, С (см. табл. 4.8) имеют толщину 1,0; 1.5; 2; 3; 4; 5; 6 мм.
108
Табл. 4.3. Резинотканевые конвейерные ленты (ГОСТ 20—76)
с Н Назначение Вид Условное обозначение*** Класс прочности резины наружных обкладок О 4 Температура транспортируемого материала ъ и окружающего о ВОЗД уха, °C
1 Транспортирование высокоабра- Общего назначе- 1 А, зивных крупнокусковых (куски НИЯ размером до 500 мм) грузов* Морозостойкая 1М В Б —45 60 —60 60
2Р Транспортирование абразивных Общего назначе- 2Р 1 среднекусковых (куски размером ния до 350 мм) грузов* Транспортирование крупнокус- Морозостойкая 2РМ ковых угля (куски размером до Негорючая для 2РШ 700 мм) и породы (куски раз- угольных шахт мером до 500 мм) подземными конвейерами угольных шахт* Х,В,В —45 60 В —60 60 Г, С —25 60
2 Транспортирование абразивных, Общего назначе- 2 малоабразивных и неабразивных ния средне- и мелкокусковых грузов (куски размером до 150 мм) Морозостойкая 2М Повышенной тепло- 2ПТ стойкости Транспортирование среднекуско- Теплостойкая 2Т вых угля (куски размером до 500 мм) и породы (куски раз- мером до 300 мм) подземными конвейерами угольных шахт Пищевая ?П Негорючая для 2Ш угольных шахт Б, В —45 60 С —25 60 —60 В 60 С Не бо- лее 200** С Не бо- лее 100** С —25 60 Г, С —25 60
3 Транспортирование малоабразив- Общего назначе- 3 В пых и иеабразнвных мелкокус- ния С ковых (куски размером до 80 мм), сыпучих и штучных грузов Пищевая ЗП С —45 60 —25 60 —25 60
4 Транспортирование мелкокуско- Общего назначе- 4 вых (куски размером до 80 мм), ния сыпучих и мелкоштучных гру- зов Пищевая 4П С С —25 60 —25 60
* Угол перегиба ленты на смежных роликах не должен превышать 36°.
** Температура рабочей обкладки теплостойких лент в месте загрузки не должна пре-
вышать 80 °C, лент повышенной теплостойкости — 150 °C. Температура окружающего возду-
ха не регламентируется.
*** Лента 3 — с односторонней резиновой обкладкой. Остальные леиты — с двусторонней
резиновой обкладкой. У ленты 1 под резиновой обкладкой рабочей поверхности имеется
защитная тканевая прокладка У ленты 2Р под резиновой обкладкой рабочей поверхности
имеется брекерная (разреженная) прокладка.
109
04 04 04 04 V 4 04 04 ^—4 04 » 4 ^111
04 04 04 04 04 04 04 04 1 1 1
—« 0 -4 4 * 4 1—“4 * 1 * н V—< 1 1 1
ю Ю со ОО 00 00 00 оо 00
xf 1
• »* « • • • • 1
со со СО со СО со со xt< xf xt*
Ю СО со СО
1 1 | • • 1 1 1
1 1 1 со СО СО со xf 1 1
ю ю со 00 00 00 оо оо оо 00
1 • •
1 со со со СО со со xb xf хЬ xh
ю оо оо оо 00 00 00 CO
1 со со со со со со xf xt* •
«^4 СО 00 оо 00 ОО 00 CO
1 • « • • • « •
1 1 со со со xf ю ю to xf
СО оо
• * • «
1 1 1 1 1 1
1 1 1 со СО Xfr> id
СО 00 00 00 оо 00
♦ • • • • «
1 1 1 1 • • • * * • 1
1 I 1
СО со хГ ю ю to
СО 00
• • • •
1 1 1 • • * • 1 1 1
1 1 1 1 1 I
со СО xf ю
1.0 СО СО
• •
СО со co 00 • оо • оо CO ♦
• •
1 1 1 1 * to * * СО • * 00 * xf id id •
• • •
04 04 со
Ю СО 00 оо оо CO
• • • • • •
1 1 1 1 | • • • • в •
1 1 1 1 1 со xf xf to to xf
СО со СО СО
1 1 1 1 ♦ « • • • • в • 1 1 1
1 1 1 1 со ♦ xf xt< 1 1 1
40 СО СО СО CO
1 1 1 1 1 • • • • • 1
1 1 1 1 1 • • • I
со со *т+4 Ю
со г- оо оо
о о
о о
с^^оооо о о о о о о
. - . ► о Ю О О О ООО оо
О О Ю СО 00 О 04 xt< СО О tO О
ОО i »—< 04 04 СО
—' СО
Для лент с прокладками из тканей типа К-10-2-2Т или А-10-2-ЗТ.
110
Табл. 4.5. Максимальная допустимая рабочая нагрузка тяговых тканевых прокла
док резинотканевых конвейерных лент (ГОСТ 20—76)
Вид ленты Угол уста- новки кон- вейера, град Число тя- говых про- кладок Максимальная допустимая рабочая нагруз- ка тяговой прокладки при номинальной проч- ности прокладки, Н/мм
400 I 300 200 150 100 55
Общего назначе- До 10 До 5 50 36 25 18 12 7
ння, морозостойкая, Более 10 Болес 5 45 32 22 16 11 6 г*
пищевая, негорючая До 5 45 32 22 16 11 6
для угольных шахт Теплостойкая Более 5 40 30 20 15 10 5,5
Любой Любое — 30 20 15 10 5,5
Повышенной теп- лостойкости Любой Любое — 15 10 7,5 5 2,8
Примечание. При определении максимальной допустимой нагрузки ленты
учитывается допустимая нагрузка только тяговых тканевых прокладок.
Табл. 4.6. Ткани, применяемые для изготовления конвейерных лент (ГОСТ 20—76)
Прочность ткани по основе, Н/мм Марка ткани из нитей
комбинированных полиамидных
65 БКНЛ-65; БКНЛ-65-2 —
100 БКНЛ-100 ТК-ЮО; ТА-100
150 БКНЛ-150 ТК-150; ТА-150
200 ТК-200
300 ТК-300; ТА-300
400 — ТК-400; ТА-400
П р и м е ч а н и е. БКНЛ — бельтинг из комбинированных нитей с лавсаном
Т—ткань; К — капроновая; А — анидная.
Табл. 4.7. Толщина тканевых прокладок резинотканевых конвейерных лент
(ГОСТ 20—76), мм
Номинальная проч- ность прокладки, Н/мм Тяговые прокладки с резиновой прослойкой Тяговые прокладки без резиновой прослойки, из комбинированных ни- тей
из синтетических нитей из комбинированных нитей
400 2,0 — .
300 1,9 —* —
200 1,4 — —
150 1,3 1,9 1,6
100 1,2 1,6 1,3
55 1,15
111
Табл. 4.8. Прочность резины наружных обкладок резино-
тканевых конвейерных лент (ГОСТ 20—76)
Класс прочности Предел прочности при растяжении, МПа
А 25
Б 20
В 15
Г 12
С 10
Табл. 4.9. Толщина наружных обкладок резинотканевых конвейерных лент
(ГОСТ 20—76), мм
Толщина обкладок рабочих поверхностей 6р
Условное обо- значение лен- ты класс прочности резины (см. табл. 4 3)
А в в г с
1 6; 4,5 8; 6; 4,5 — —
151 — — 6; 4,5 !
2Р 6; 4,5 8; 6; 4,5 6; 4,5 —
2Р51 — — 6; 4,5 — —
2РШ — — — 6; 4,5 6; 4,5
9 8;6; 4,5;3 6; 4,5;3 з2
251 —— — 6; 4,5;3 —> —
2ПТ — — — 10; 8; 6
2Т — — — — 4,5; 3
2П - —~ — — — 3
2Ш — — — 4,5; З2 4,5; З2
3 — 9 — 3;2
ЗП — — — — 3; 2
4 1 -—» —> ~ 3; 2; 1
4П — — — 3; 2; 1
Толщина обкладок нерабочих поверхностей 5И
___________________£Р _________________I___________________%____________________
4,5 и более 2
3 и менее 1
Примечав и я: I. Расчетная толщина обкладок рабочих поверхностей лент
2Р, 2РМ и 2РШ определяется с учетом толщины брекерной прокладки.
2. У этих лент 6Н =1,5. 3. Ленты 3 и ЗП обкладок нерабочих поверхностей
не имеют.
Табл. 4.10. Количество тканевых прокладок плоских приводных резинотканевых
ремней (ГОСТ 23831—79)
Ширима ленты, мм Количество прокладок при номинальной прочности прокладок по основе, Н/мм
55 | 150 200 | ЗОЭ
125; 160 200; 250; 315 3...6 3...6 3;4 3; 4 3; 4 3; 4 3
400; 450; 500; 560 3...6 3.. .5 3; 4 —
700 — 3...5 3; 4 3;4
112
Табл. 4.11 Толщина и максимальная допустимая рабочая нагрузка тканевых про-
кладок плоских приводных резинотканевых ремней (ГОСТ 23831—79)
Показатели ремня При номинальной прочности прокладок по основе, Н/мм 55 | 150 200 300
Толщина прокладок ремня, мм: с резиновой прослойкой между про- кладками без резиновой прослойки между про- кладками Максимально допустимая рабочая наг- рузка прокладок, Н/мм 1,2 1,3 1,4 1,5 1,0 - - - 5,5 15 20 30
Условное обозначение ремня содержит наименование изделия
(«ремень»), буквенные и цифровые индексы вида ремня (общего
назначения, морозостойкий — М), его ширину (мм), количество
тканевых прокладок каркаса, марку ткани, толщину резиновых
обкладок (мм), класс обкладочной резины и обозначение стан-
дарта.
Например, ремень общего назначения шириной 200 мм с четырь-
мя прокладками из ткани ТА-150, с наружными обкладками 3 мм
и 1 мм из резины класса В обозначается:
Ремень 200-4—ТА-150—3—1—В ГОСТ 23831—79.
Погонная масса резинотканевой ленты (масса ленты длиной
1 м), кг/м,
?л = р5б, (4.11)
где р — плотность ленты, кг/м3: р = 1100 кг/м3; В, 6 — соответствен-
но ширина и толщина ленты, м.
Табл. 4.12. Типы резинотросовых конвейерных лент общего назначения
(ТУ 38 105841—75)
Тип ленты Расчетная прочность лент на 1 мм шири- ны сердечника леиты, Н/мм Условия эксплуатации лент Температура окружающего воздуха, °C от до
2РТЛ 1500 1500 Транспортирование мел- —45 60 2РТЛ 1500 У 1500 ко- и среднекусковых ма- 2РТЛ 1600 1600 териалов Транспортирование мел- —45 60 2РТЛ 2500 2500 ко-, средне- икрупнокус- 2РТЛ 3150 3150 ковых материалов
Примечания: 1. По согласованию с заводом-изготовителем могут изго-
товляться ленты типов 1РТЛ 2500 и 1РТЛ 3150 с тканевыми полиамидными
прокладками (по одному слою с обеих сторон сердечника), которые учитываются
в общей расчетной толщине ленты.
Ленты типа 2РТЛ изготовляются без тканевых прокладок.
2. Температура транспортируемого материала должна быть в пределах ука-
занного интервала температур окружающего воздуха.
113
Табл. 4.13. Показатели резинотросовых конвейерных лент общего назначения (ТУ 38 105841—75)
114
Толщина ленты
6—^6п.Т“Ьбп.З'Тбр~|“.6н, (4.12)
где z — количество тяговых тканевых прокладок (см. табл. 4.4
п 4.10); бп.т — толщина тяговой тканевой прокладки (см. табл. 4.7
и 4.11); бп.з — толщина защитной тканевой прокладки (имеется у
ленты типа 1): бп.з = 3,2 мм;бр— толщина резиновой обкладки ра-
бочей поверхности конвейерной ленты (см. табл. 4.9); бы — толщи-
на резиновой обкладки нерабочей поверхности конвейерной ленты
(см. табл. 4.9).
В резинотросовых конвейерных лентах тяговое усилие воспри-
нимается сердечником из латунированных стальных тросов. Типы
резинотросовых лент и условия их эксплуатации указаны в
табл. 4.12 и 4.13, а их показатели — в табл. 4.13.
внутренний
резиноЗь/й слой
Наружная резиновая
о йеной л а
йатупиройан- ТнанеЗс/с
лъ/й спрос лроллсйли
Рис. 4.1. Резинотросовая конвейерная лента:
а — типа 1РТЛ; б —- типа 2РТЛ
Ширина сердечника ленты (мм)
Bc = B-2K+t,
(4.13)
где В — ширина ленты (табл, 4.13), мм; К — расстояние от центра
крайнего троса до борта ленты (см. табл. 4.13, рис. 4.1), мм; t —
расстояние между центрами тросов (см. табл. 4.13, рис. 4.1), мм.
Погонная масса (кг/м) резннотросовой конвейерной ленты
Ял = тя1В, (4.14)
где тл — масса ленты площадью 1 м2 (см. табл. 4.13), кг/м2.
Условное обозначение резинотросовой конвейерной ленты содер-
жит наименование изделия («лента»), обозначение типа ленты,
ширину ленты (мм) и номер ТУ.
Например, лента 2РТЛ 1500 шириной 1000 мм обозначается:
Лента 2РТЛ 1500X1000 ТУ 38 105841—75.
115
Стальные конвейерные ленты применяются [4] для транспорти-
рования горячих и острокромочных материалов. Эти ленты изготов-
ляются согласно ТУ 14-1-525—73. Их основные показатели приво-
дятся в табл. 4.14.
Табл. 4.14. Показатели стальных конвейерных лент по ТУ 14-1-525—73
Толщина, мм Ширина, мм Марка стали Временное сопротивле- ние при растяжении, МПа Предел теку- чести, МПа
0,8 400;500 85 900 650
1.0 400; 500;600 85 900 650
При необходимости получить ленту большей ширины приме-
няют продольную сшивку лент стандартных размеров.
Цепи тяговые. Основные параметры тяговых цепей: разрушаю-
щая нагрузка; шаг цепи; погонная масса.
Применяются тяговые цепи: пластинчатые (ГОСТ 588—81;
СТ СЭВ 1011—78); разборные (ГОСТ 589—74); вильчатые
(ГОСТ 12996—79).
Стандарт устанавливает следующие типы тяговых пла-
стинчатых цепей (рис. 4.2): 1—втулочные; 2—роликовые;
3 — катковые гладкие; 4 — катковые с ребордами.
По конструкции предусматриваются тяговые пластинчатые цепи
каждого типа следующих исполнений: 1—неразборная цепь со
сплошными валиками (индекс М); 2 — разборная цепь со сплош-
ными валиками (индекс М); 3 — неразборная цепь с полыми вали-
ками (индекс МС).
Для этих цепей стандартом предусматриваются присоедини-
тельные элементы:
а) типов 1.1; 1.2 и 1.3 — специальные пластины соответственно
с одним, двумя или тремя отверстиями в полке; 2.1; 2.2 и 2.3 — спе-
циальные пластины без полки соответственно с одним, двумя или
тремя отверстиями; 3 — удлиненные валики;
б) с исполнением по межцентровому расстоянию отверстий:
0 — отсутствует (одно отверстие); 1 — наименьшее; 2 — среднее;
3 — наибольшее;
в) с расположением элементов в цепи: 1 —одностороннее; 2 —
двустороннее.
В ГОСТ 588—81 установлена следующая структура обозначе-
ния тяговых пластинчатых цепей:
х-х-х-х-х-х-х-х ГОСТ 588 — 81,
1 2 3 4 5 6 7 8
где 1 —номер цепи; 2 — цифровое обозначение типа цепи; 3 — шаг
цепи, мм; 4 — цифровое обозначение исполнения цепи; 5 — цифро-
вое обозначение типа присоединительного элемента; 6 — цифровое
обозначение исполнения присоединительного элемента по меж-
центровому расстоянию; 7 — цифровое обозначение расположения
116
Тип 1 Исполнение f Tun 2 Исполнение 2
Рис, 4.2. Цепи тяговые пластинчатые:
валик; 2—втулка; 3 — внутренняя пластина; 4 — наружная пластина; 5—ролик; 6—ригель; 7 — болт; 5 —шайба, 9 — полым
валик; 10 — каток; 11 — каток с ребордой
присоединительного элемента в цепи; 8 — чередование присоеди-
нительного элемента цепи в шагах цепи.
Например, тяговая пластинчатая цепь М с разрушающей на-
грузкой 112 кН типа 2 с шагом 100 мм исполнения 1, с присоедини-
тельными элементами типа 1.1 исполнения 0, с односторонним
их расположением (1) и чередованием через три шага обозначается:
М112—2—100—1—1.1—0—1—3 ГОСТ 588—81.
Рис, 4.3. Цепи тяговые разборные:
1 — звено внутреннее; 2 — звено наружное; 3 — валик
Эта же цепь без присоединительных элементов обозначается.
М112—2—100—1 ГОСТ 588—81.
Основные параметры и размеры тяговых пластинчатых цепей
приводятся в табл. IIL1.11 и III.1.12.
Цепи тяговые разборные изготовляются двух типов
(рис. 4.3): Р1—с вращающимися валиками; Р2 — с фиксирован-
ными валиками.
118
Условное обозначение тяговых разборных цепей содержит
наименование изделия («цепь»), обозначение типа цепи, шаг цепи
(мм), разрушающую нагрузку цепи (кН) и обозначение стандарта.
Например, цепь тяговая разборная типа Р1 с шагом 80 мм и
разрушающей нагрузкой 106 кН обозначается:
Цепь Р1—80—106 ГОСТ 589—74.
Т(//7Р/
Гил Г 2
Рис. 4.4. Цепи тяговые вильчатые:
1 — шайба; 2 — шплинт; 3— звено; 4 — палец; 5 — штифт-шпонка;
ния цепи
направление движе-
119
Основные параметры цепей тяговых разборных приводятся в
табл. III.1.13.
Цепи тяговые вильчатые изготовляются трех типов
(рис. 4.4): Р1—разборная, с фиксацией пальца проволочным
шплинтом; Р2 — легкоразборная, с фиксацией пальца штифтом-
шпонкой; РЗ — разборная, с фиксацией пальца проволочным
штифтом, реверсивная.
Эти цепи могут быть двух категорий прочности: Н — нормаль-
ной прочности; В — высокой прочности.
Для вильчатых тяговых цепей по ГОСТ 12996—79 рекомендует-
ся следующий ряд скоростей: 0,16; 0,2; 0,25; 0,315; 0,4 м/с.
Условное обозначение тяговых вильчатых цепей содержит на-
именование изделия («цепь»), обозначение типа цепи, шаг цепи
(мм), обозначение категории прочности цепи и обозначение стан-
дарта.
Например, цепь типа Р2, с шагом 160 мм, высокой категории
прочности обозначается:
Цепь Р2—160 В ГОСТ 12996—79.
Основные параметры тяговых вильчатых цепей приводятся в
табл. III.1.14.
Глава 5. ОСНОВЫ ОБЩИХ РАСЧЕТОВ
ТРАНСПОРТИРУЮЩИХ МАШИН
5.1. ПРОИЗВОДИТЕЛЬНОСТЬ КОНВЕЙЕРОВ
Расчетная (конструктивная) часовая производительность кон-
вейера (т/ч)
где Qcm — требуемая сменная производительность конвейера, т;
k — коэффициент неравномерности поступления грузов на кон-
вейер: &= 1,0...1,5; 7см — продолжительность смены, ч; &вр — коэф-
фициент использования конвейера по времени: &Вр = 0,75...0,94.
Объемная производительность конвейера (м3/ч)
V- 1000 Q/p, (5.2)
где р — насыпная плотность груза, кг/м3; Q — массовая произво-
дительность конвейера, т/ч.
Погонная масса груза (средняя масса груза на 1 м длины за-
груженного участка рабочей ветви конвейера) при непрерывном
потоке груза на конвейере (кг/м)
9=Лр, (5.3)
где А — площадь поперечного сечения потока груза на конвейе-
ре, м2.
120
Для ленточных конвейеров:
а) на плоской ленте
А— 0,05 В2; (5.4)
б) на желобчатой ленте с углом наклона боковых роликов 20°
Л «0,11 В2; (5.5)
в) на желобчатой ленте с углом наклона боковых роликов 30°
Л«0,14 В2. (5.6)
В формулах (5.4)... (5.6) В — ширина ленты, м.
Для пластинчатых конвейеров:
а) на настиле без бортов
А - 0,18В2/гр tg(0,4<p); (5.7)
б) на настиле с бортами
А = 0,25В2£р tg (0,4ф) + В/гф (5.8)
(при крупнокусковом грузе А = B/ity), где В — ширина настила (для
настила с бортами — расстояние между бортами), м; /гр — коэффи-
циент, зависящий от наклона конвейера (см. табл. 8.11); <р — угол
естественного откоса груза в состоянии покоя (см. табл. 4.1), град;
h— высота борта, м; ф— коэффициент наполнения настила по вы-
соте бортов: ф = 0,65...0,8 (для крупнокусковых грузов ф —
= 0,8...0,9).
Для винтовых конвейеров
А - (5.9)
4
где D — диаметр винта, м; ф — коэффициент заполнения желоба
(см. табл. 13.3); ftp — см. табл. 13.4.
Погонная масса груза при перемещении его отдельными пор-
циями в ковшах (кг/м)
= (5.10)
где i — вместимость ковша, м3; ф — коэффициент наполнения ков-
ша (см. табл. 12.5); /к — шаг ковшей, м.
Погонная масса штучного груза (кг/м)
q = mjtY, (5.Н)
где tn — масса одного груза или партии грузов, кг; /г—шаг рас-
положения грузов или партий грузов на конвейере, м.
Производительность конвейера (т/ч)
Q = 3,6?v, (5.12)
где v — скорость перемещения груза, м/с.
Производительность конвейера (т/ч) при непрерывном потоке
груза
Q = 3,64vp. (5.13)
121
Производительность конвейера при перемещении штучных гру-
зов (т/ч)
Q = 0,001mZ, (5.14)
где Z— количество штук пли партий груза, перемещаемых за 1 ч:
Z = 3600 —.
(5.15)
5.2. СОПРОТИВЛЕНИЕ ДВИЖЕНИЮ ТЯГОВОГО ОРГАНА
И МОЩНОСТЬ ДВИГАТЕЛЯ
/Мощность двигателя машины расходуется на преодоление со-
противления движению элементов конвейера и перемещению груза.
Часть сопротивления преодолевается по всей длине конвейера и
часть — в отдельных его пунктах: на барабанах (звездочках), в ме-
стах расположения погрузочных, разгрузочных, очистных и других
устройств.
При расчетах сопротивления пользуются коэффициентом сопро-
тивления перемещению груза, который показывает долю общего
сопротивления движению, приходящуюся на единицу веса груза.
Коэффициент сопротивления перемещению груза (коэффициент
сопротивления)
w = —, (5.16)
gm
где F — сопротивление при перемещении груза, Н; т — масса пере-
мещаемого груза, кг.
Сопротивление (Н) на прямолинейном загруженном участке ра-
бочей ветви конвейера
FT = wg[[q + qT)Lrr + qlLT\+[q-\-q.t')gH, (5.17)
где q — погонная масса груза, кг/м [см. (5.3); (5.10); (5.11)];
(?т — погонная масса тягового органа (ходовой части) конвейера (масса
1 м длины тягового органа), кг/м; для ленточного конвейера qT = дл,
учитываемая только для ленточного конвейера.
qv — т II ,
р/ р’
(5.18)
где qjl — погонная масса ленты [см. (4.11), (4.14)], кг/м; q? — погон-
ная масса вращающихся частей ролнкоопор рабочей ветви конвейе-
ра, кг/м; тр — масса вращающихся частей ролнкоопор рабочей вет-
ви конвейера (ориентировочно равна 0,6 массы всей роликоопоры),
кг; /р — шаг ролнкоопор рабочей ветви конвейера (см. табл. 6.14), м;
w — коэффициент сопротивления перемещению груза (см. табл. 6.19,
8.12, 11.2); Ц — длина горизонтальной проекции загруженного учас-
тка конвейера, м:
Lr — Lr cos р,
(5.19)
122
Lr—длина загруженного участка конвейера, м; р— угол наклона
участка; И — высота подъема груза, м:
/7=Arsinp. (5.20)
Сопротивление (Н) на прямолинейном порожнем участке рабо-
чей ветви конвейера
Fn = wg ± <7Т£#П, (5.21)
где Л? — длина горизонтальной проекции порожнего участка рабо-
чей ветви конвейера, м; Нп— высота вертикальной проекции
участка, м.
Сопротивление (Н) на прямолинейном участке холостой ветви
конвейера
Здесь первый член выражения в скобках относится к холостым
участкам только ленточного конвейера (£х—длина холостого участ-
ка, м), для которых
<7Рх=уЧ (5-23)
*Х
где —-погонная масса вращающихся частей ролнкоопор холостой
ветви конвейера, кг/м; тк — масса вращающихся частей одной ро-
ликоопоры холостой ветви конвейера (ориентировочно равна 0,6 всей
массы роликоопоры), кг; /х— шаг ролнкоопор холостой ветви кон-
вейера, м; L* — длина горизонтальной проекции участка холостой
ветви конвейера, м; Н*— высота вертикальной проекции участка, м.
Знак плюс в формулах (5.21), (5.22) принимается при переме-
щении груза вверх, знак минус — при перемещении вниз.
Сопротивление (Н) на криволинейном участке трассы при оги-
бании лентой батареи ролнкоопор:
а) при выпуклой ленте
(5.24)
где Т^наб — натяжение ленты в начале участка, Н; k — коэффициент,
учитывающий увеличение натяжения ленты от сопротивления ба-
тареи ролнкоопор,
k =- еп, (5.25)
w—см. табл. 6.19; а — центральный угол криволинейного участ-
ка, рад: а= 1,06...1,08 рад;
б) при вогнутой ленте сопротивление равно нулю.
Сопротивление (Н) на поворотных пунктах при приближенных
расчетах принимают
/*пов = /?наб (&п 1), (5.26)
где РНаб—натяжение тягового органа в точке набегания на бара-
бан (звездочку) поворотного пункта, II; kn — коэффициент увели-
123
чения натяжения тягового органа от сопротивления на поворотном
пункте.
При угле обхвата тяговым органом барабана (звездочки): а =
= 90°—ftn= 1,03... 1,05; а=180° —£п = 1,05... 1,07.
Сопротивление (II) на погрузочном пункте при сообщении гру-
зу скорости тягового органа можно принять
F погр ~ Qgv/36, (5.27)
где Q — производительность конвейера, т/ч; v — скорость переме-
щения груза, м/с.
Сопротивление (Н) от направляющих бортов загрузочного лот-
ка при приближенных расчетах
F^50Z, (5.28)
где I — длина лотка, м.
Сопротивление (Н) очистительных устройств конвейера
/?оч=^очВ, (5.29)
где а»оч — коэффициент сопротивления очистительного устройства,
Н/м: для скребков и плужков шоч=300...500 Н/м, для вращающих-
ся щеток 150...250 Н/м; В — ширина рабочего органа (ленты,
настила и др.), м.
Сопротивление (Н) плужкового разгрузчика ленточного кон-
вейера
FnP~(27...36)?B. (5.30)
Сопротивление (II) двухбарабанного разгрузочного устройства
ленточного конвейера
Fcp—(Fp+qgh)kn, (5.31)
где Fp — наибольшее натяжение ленты в конце разгрузочного
устройства, Н; ft — высота подъема груза на разгрузочном устрой-
стве, м; ftn — коэффициент увеличения натяжения ленты от сопро-
тивления на поворотных пунктах [см. (5.26)].
Наименьшее допустимое натяжение (II) тягового органа:
для ленточного конвейера
(50... 100) (9"Ь ?л) Zp. (5.32)
Большие значения Лпт принимаются для быстроходных сильно
нагруженных лент; для пластинчатого конвейера Fniin= 1000...
3000 Н; для ленточного элеватора
0, 1/?0> 1000, (5.33)
где Fq — тяговая сила (окружное усилие) на приводном бараба-
не, Н; для цепного элеватора
бОО^Лпт^бО?. (5.34)
Тяговая сила конвейера с тяговым органом определяется [17]
методом обхода по контуру (трассе) конвейера, т. е. обхода по
точкам сопряжений прямолинейных и криволинейных участков.
Эти точки нумеруются начиная от точки сбегания тягового органа
124
с приводного элемента в направлении его движения (рис. 5.1).
Обход начинают от точки с наименьшим натяжением. Натяжение
в каждой последующей точке равно сумме натяжения в предыду-
щей точке и сопротивления на участке между этими точками при
обходе по ходу тягового органа [см. (5.35)] и их разности — при
обходе против хода тягового органа [см. (5.36)];
Л+1 = Л+Л...(Ж); (5.35)
^г = Л+1-Л...(Ж). (5.36)
где Г г и Лч-1 — натяжение в i-й и (t'4- 1)-й соседних точках контура;
Л-...(г+1) — сопротивление на участке между t-й и (i-bl)-fi точками.
Рис. 5.1. Контур конвейера с
нумерацией точек сопряжений
прямолинейных и криволиней-
ных участков
7 —8
Тяговая сила конвейера /о = ^наб —/сб,
(5.37)
где /'наб — натяжение в набегающей на приводной элемент ветви
тягового органа (с учетом сопротивлений на поворотном пункте
8—1 (см. рис. 5.1); /сб — натяжение в сбегающей ветви тягового
органа (в точке сбегания с приводного элемента).
Натяжное усилие равно сумме натяжений набегающей и сбе-
гающей ветвей тягового органа у натяжного барабана (звездочки).
Расчет тяговой силы может быть представлен графически. По
оси абсцисс графика
(рис. 5.2) начиная от точ-
ки 1 в масштабе откладыва-
ют последовательно длины
отдельных участков кон-
вейера (длина участка на
поворотном пункте на гра-
фике принимается равной
нулю), а по осп ординат в
масштабе — сопротивление
па этих участках. Наимень
шее допустимое натяжение
тягового органа откладыва-
ется вниз от точки с наи-
меньшим натяжением. От-
резки по оси абсцисс Г—2',
3'—4' и далее на рис. 5.2
Рис. 5.2. График натяжений тягового ор-
гана (применительно к контуру конвейера
по рис. 5.1)
соответствуют длинам уча-
стков конвейера 1—2, 3—4
п далее на рис. 5.1.
125
Отрезки по оси ординат 2"—2, 3"—3 и далее соответствуют со-
противлению на этих участках, отрезок 8—8'" — сопротивлению на
поворотном пункте привода 8—/, отрезок 1—Г — наименьшему
натяжению (в данном случае в точке /), отрезки по оси ординат
Г—Л 2'—2 и далее — натяжению в точках контура /, 2 и т. д.
Отрезок по оси ординат 8”"—8"', равный разности отрезков 8'—
8'" (^наб) и 8'—8'"' (Feo), и есть тяговая сила Fo.
Рис. 5.3. Расположение точек с максимальным и минимальным натяжением ра-
бочего органа конвейера
На рис. 5.3 показано расположение точек с максимальным и
минимальным натяжением рабочего органа конвейера при раз-
личных схемах конвейеров.
Длиной участка Li трассы конвейера является расстояние меж-
126
КПД при подшипни- ках
качения скольже- ния
Табл. 5.1. КПД звеньев передач
Звенья передач
Передаточный вал с обработанными зубчатыми колесами, 0,98 0,96
расположенными в масляной ванне
Передаточный вал с обработанными открытыми зубчатыми 0,97 0,85
колесами
Передаточный вал с необработанными зубчатыми колесами —— 0,93
Редуктор зубчатый:
одноступенчатый 0,97 0,94
двухст упенчаты й 0,96 0,90
трехступенчатый 0,94 0,85
Цепная передача, работающая в масляной ванне 0,96 0,94
Цепная передача открытая 0,95 0,93
Червичная передача с углом наклона зуба а и углом трс- tga
ния р П tg (а+Р)
ду его начальной f-й и конечной Z+1 точками. Номер участка соот-
ветствует номеру его начальной точки.
Необходимая мощность двигателя конвейера (кВт)
103т) ’
где Fq — тяговая сила, II; v— скорость движения тягового органа,
м/с; т) — КПД механизма привода тягового органа (табл. 5.1).
Момент статических сопротивлений (Н-м) на приводном валу
конвейера при торможении, необходимый для предотвращения его
обратного хода,
Гс.в = Пбар \qH - k - <?//)] g-^, (5.39)
L \ s /J
где т]бар — КПД барабана (звездочки): т]бар=0,96...0,98 (t]бар учи-
тывается, если тяговая сила определена приближенно); k — коэф-
фициент возможного уменьшения сопротивлений конвейера: для
ленточного конвейера k = 0,55...0,6, для цепного конвейера 6 = 0,5;
D—расчетный диаметр приводного барабана (звездочки), м; зна-
чение тяговой силы конвейера подставляется со своим знаком.
Время пуска (разгона) конвейера (с)
tn = 9.55(Тср,п-Тс) + п (тср.п - Тс) т, < 3 "6 С’ <5Л0)
где С = 9,55АУ [(<? + q„) Lr + q„ (Лп + Lx) + + ™б) *с] 'Z
Момент сил инерции на валу двигателя (Н-м) при пуске коц:
вейера
Лш=7Ср.п-7'с. (5.41)
В формулах (5.40) и (5.41): б, I, п, v, г]— см. пояснения к форму-
лам (1.36)...(1.53); q, qn, q?, q*— см. пояснения к формулам(5.17),
(5.18) и (5.23); Lr, L" — длина соответственно груженого и по-
127
рожнего участков рабочей ветви, м; £х, Lp — длина соответственно
холостой и рабочей ветвей конвейера, м: Lp = Lr Ln; ky — коэф-
фициент, учитывающий упругость тягового органа, благодаря кото-
рой не все элементы конвейера приходят в движение одновременно:
для резинотканевых лент ky — 0,5...0,7, для резинотросовых лент
А’у — 0,85...0,95; для цепей = 0,85 ... 0,95 (меньшие значения —
для конвейеров длиной более 100 м; большие — для коротких кон-
вейеров); тС)— масса вращающихся барабанов конвейера, кг; kc —
коэффициент, учитывающий уменьшение скорости вращающихся час-
тей конвейера относительно скорости тягового органа: для ленточ-
ных конвейеров kc — 0,7...0,9; для цепных конвейеров kc — 0,5...
0,7; Т'ср.п — средний пусковой момент двигателя [см. (1.89) и (1.90)],
Н * м; Тс — момент статических сопротивлений на валу двигате-
ля, Н • м:
Тс = тс в -Г (5.42)
где и — передаточное число привода; 7\в — момент статических
сопротивлений на приводном валу конвейера, Н-м,
Т с.в — 0,5F qZ),
(5.43)
где D — диаметр приводного барабана или приводной звездочки
конвейера, м.
Момент сил инерции на приводном валу (Н-м) при пуске кон-
вейера
— ТпнИГ).
Z'lfH.B
(5.44)
Момент от сил инерции и статических сопротивлений на при-
водном валу (Н-м) при пуске (разгоне) конвейера
ZnyCK= Z'hh в + гсв. (5.45)
Окружное усилие (II) на приводно?у1 барабане (звездочке) при
пуске конвейера
Z*nyCK — (2ТПуСК) / D.
(5.46)
Усилие (II) в набегающей на приводной барабан ветви ленты
конвейера при пуске
(5-47)
где ks — см. формулу (6.20).
Усилие (Н) в набегающей на приводные звездочки ветви цепно-
го тягового органа при пуске
*пуск (
(5.48)
где Гдин — динамическая нагрузка на цепи [см. (8.11)]; FCo — на-
тяжение ветви тягового органа, сбегающей с приводной звездочки;
F сб = Лшп-
128
Коэффициент перегрузки тягового органа при пуске конвейера
(5.49)
где Тдоп — допускаемая нагрузка на тяговый орган. Для резино-
тканевых конвейерных лент в соответствии с формулой (6.16)
/доп^^рВг; для резинотросовых лент [см. (6.17)] F3on^Sc(FT/Z),
для пластинчатых тяговых цепей [см. (8.14)] F^Gn^Fpa3p/k.
Момент сил инерции на валу двигателя (Н-м) при торможении
6/л Ст]
9,55/т + п/т ’
(5.50)
где tn — время торможения конвейера, определяемое в предполо-
жении линейного изменения во времени скорости v до полной оста-
новки, с.
Максимальный путь торможения конвейера /т, работающего в
технологической цепи (во избежание засыпки грузом узла пере-
грузки), можно принять равным 2...3 м. При этом время торможе-
ния (с) конвейера
/т = (2/T)/v. (5.51)
Момент сил инерции на приводном валу (Н-м) при торможе-
нии конвейера
т
ин. в
(5.52)
Расчетный тормозной момент (Н-м) на валу двигателя кон-
вейера, работающего в технологической цепи, аналогично (1.78):
ггчТ _________________________ rpl ।
* р - ин « с»
где Тс — момент статических сопротивлений конвейера на валу дви-»
гателя при торможении, Н • м:
__ грТ
* с — * с.в
(5.53)
Расчетный тормозной момент на приводном валу (Н-м) кон-
вейера в этом случае
/у»Т ____ грЧ ।
* р.в -- * ИН.В I « С.В*
(5.54)
Необходимый тормозной момент на валу двигателя для пре-
дотвращения самопроизвольного обратного движения ходовой части
конвейера при случайном выключении двигателя и полностью за-
груженной рабочей ветви тягового органа конвейера определяется
по формуле (5.39), правая часть которой должна быть умножена на
коэффициент запаса торможения kT = 1,25. Если Тс.в^О, тормоз не
требуется.
Тормозное устройство (тормоз или останов) выбирается по
большему из определенных выше тормозных моментов. Сведения о
тормозах и остановах приводятся в табл. Ш.5.7...111.5.14.
5 Зак 3134
129
5.3. ПОСЛЕДОВАТЕЛЬНОСТЬ РАСЧЕТА КОНВЕЙЕРА
1. Уточняются основные исходные данные для проектирования
(основные свойства транспортируемого материала; эксплуатацион-
ная производительность конвейеров; длина конвейера; длина про-
екции трассы на горизонтальную и вертикальную плоскости; длина
отдельных участков конвейера, измеренная между точками пересе-
чения прямолинейных участков; способ разгрузки груза и др.).
2. Устанавливаются нормативные значения расчетных величин:
допустимый угол наклона конвейера, скорость рабочего органа,
минимальные размеры рабочего органа исходя из гранулометри-
ческого состава груза и др.
3. Определяется необходимая расчетная производительность
конвейера исходя из заданной эксплуатационной производитель-
ности по (5.1).
4. Определяются предварительные основные параметры рабо-
чего органа.
5. Выбираются основные конструктивные элементы конвейера
(барабаны, звездочки, роликоопоры, натяжные устройства, разгру-
зочные устройства и др.).
6. Определяется приближенно тяговое усилие.
7. Проверяется прочность тягового органа.
8. При необходимости предварительно определяется мощность
привода конвейера.
9. Уточняется тяговый расчет (методом обхода по контуру).
10. Производится расчет тягового органа на прочность и уточ-
няются его основные размеры.
И. Определяется необходимая мощность привода конвейера и
выбирается двигатель.
12. Производится кинематический расчет и выбираются эле-
менты передач.
13. Проверяется двигатель на достаточность пускового момента
по продолжительности пуска (разгона) согласно (5.40).
14. Определяется усилие в набегающей на приводной барабан
(приводные звездочки) ветви тягового органа конвейера при пуске
и проверяется условие (5.49).
15. Определяется расчетный тормозной момент конвейера и
выбирается тормозное устройство.
Глава 6. ЛЕНТОЧНЫЕ КОНВЕЙЕРЫ
6.1. ОБЩИЕ СВЕДЕНИЯ
Ленточные конвейеры предназначаются для транспортирования
преимущественно сыпучих или штучных грузов (небольшой массы).
Эти конвейеры состоят из рабочего органа в виде замкнутой
конвейерной ленты, являющейся грузонесущим и тяговым элемен-
130
том, опор, приводного и
хвостового барабанов, на-
тяжного устройства, за-
грузочного устройства и
рамы. При необходимости
предусматриваются на-
правляющие ролики и от-
клоняющие барабаны для
ленты, разгрузочные
устройства, устройства
для очистки ленты.
Привод осуществляет-
ся от электродвигателя
через редуктор. При не*
о бход и мости п редусм ат-
ривается тормоз или оста-
нов для предотвращения
самопроизвольного дви-
жения рабочего органа в
обратном направлении.
Схемы ленточных кон-
вейеров см. на рис. 6.1.
6.2. НОРМАТИВНЫЕ
МАТЕРИАЛЫ ДЛЯ РАСЧЕТА
ЛЕНТОЧНЫХ КОНВЕЙЕРОВ
Угол наклона конвей-
ера. Наибольший угол
наклона принимается на
10...15° меньше угла тре-
ния груза о ленту
(табл. 6.1).
Скорость ленты. Номи-
нальные скорости (м/с)
по ГОСТ 22644—77 долж-
ны выбираться из ряда:
Рис. 6.1. Схемы ленточных конвейеров:
а — горизонтального с разгрузочной тележкой; б —
наклонно-горизонтального; в — наклонного; г — гори-
зонтально-наклонного; д — горизонтальио-наклонно-
горнзонтального; L — длина конвейера; Lv и Н —•
длины проекций трассы; Г?» Ьз — длины отдель-»
ных участков, — угол наклона конвейера (участка
конвейера)
0,25 0,315; 0,4; 0,5; 0,63;
0,8; 1,0; 1,25; 1,6; 2,0; 2,5;
3,15; 4,0; 5,0; 6,3; 8,0; 10,0.
Допускается отклонение
скорости в пределах
±10%. Ориентировочные
значения предельных ско-
ростей резинотканевых
лент приводятся в табл. 6,2, 6,3.
Скорость стальной конвейерной ленты рекомендуется прини-
мать до 1 м/с. При необходимости увеличения производительности
конвейера с разгрузкой транспортируемого материала через голов-
ной барабан она может быть принята: а) при транспортировании
5*
131
легкосыпучих материалов (песок, щебень, цемент, железная руда,
кокс) — 1,3 м/с; б) при транспортировании влажных материалов
со значительным внутренним сцеплением (глина влажная, земля
формовочная) — 1,6 м/с.
Табл. 6.1. Наибольший угол наклона стационарных ленточных конвейеров с глад-
кой прорезиненной лентой при рекомендуемых для данных грузов скоростях ленты
Наименование груза
Допустимый угол
наклона конвейера
к горизонту, град
Антрацит 17
Гипс порошкообразный 22
Глина:
сухая кусковая 18
сухая пылевидная 22
Гравий:
мытый 15
несортированный 18
Земля рыхлая:
сухая 20
влажная 21
Известь порошкообразная 23
Камень:
сортированный 18
несо pi про ванный 20
Песок:
сухой чистый 15
в смеси с гравием 20
рядовой из карьера 20
влажный 20
Уголь каменный:
сортированный крупный 16
рядовой 18
Цемент 20
Шлак каменноугольный влажный 12
Щебень 18
Пр и меч а ни я: 1. При более высоких скоростях ленты и для передвиж-
ных (переносных) конвейеров допустимые углы наклона уменьшаются.
2. При ленте с поперечными выступами угол наклона принимается на
10... 15° меньше угла естественного откоса груза.
3. При транспортировании штучных грузов с рифленой обкладкой допуска-
ется угол наклона 26...300.
Номинальная производительность ленточных конвейеров с ре-
зинотканевой лентой по ГОСТ 22644—77 приводится в табл. 6.4.
Минимальная ширина ленты. При транспортировании насып-
ных грузов минимальная ширина ленты (мм) принимается:
а) для рядового груза
В = 2а'4-200; (6.1)
б) для сортированного груза
В = 3,3а'4-200, (6.2)
где а' — размер типичного куска, мм.
Толщину обкладок прорезиненной ленты принимают согласно
рекомендациям табл. 6.5.
132
Табл. 6.2. Ориентировочная скорость (м/с) резинотканевой ленты при транспорти-
ровании насыпных грузов и разгрузке через приводной барабан
Ширина ленты, мм
Транспортируемый груз 400 500 650 еоо юоо 1200 1400 1600 2000 2500 3000
Неабразивный и мало абразив-
ный, крошение которого не по-
нижает его качества (уголь ря-
довой, соль, песок, торф и др.)
Абразивный мелко- и средне-
кусковой с размером кусков до
160 мм (гравий, руда, камень и
ДР-)
Абразивный крупнокусковой с
размером кусков более 160 мм
(порода, руда, камень и др.)
Хрупкий, крошение которого
понижает его качество (кокс,
уголь сортированный, уголь дре-
весный и др.)
Сильно пылящий (цемент, апа-
тит и др.)
1,0...1,6 1,25...2,0 1,6...3,5 2,5...4,0 5,0...6,0
1,0...1,25 1,0...1,6 1,6...2,0 2,0...3,153,15...4,0
— 1,0...1,6 1,0...1,6 1,6...2,0 2,0...3,5
1,0...1,25 1,0...1,6 1,25...1,6 1,6...2,0 —
— 0,8...1,25 0,8...1,25 — —
Примечание. Предельные скорости ленты (м/с): при барабанной разгру*
зочной тележке — 2; при плужковом разгрузчике для мелкозернистых грузов —
1,6; при плужковом разгрузчике для кусковых грузов— 1,25.
Табл. 6.3. Скорость (м/с) резинотканевой ленты при транспортировании штучных
грузов
Транспортируемый груз Скоро рекомендуе- мая сть ленты предельная
Цемент и известь в мешках
Ящики, бочки
Размеры барабанов. Наименьший
бана (мм) для резинотканевой ленты
РТП1П
п.б — KZ,
0,3...0,5 1,6
0,2...0,4 1,0
диаметр приводного бара-
(6.3)
где k — (см. табл. 6.6); z — число прокладок в ленте.
Для резинотросовых лент рекомендуются следующие мини-
мальные диаметры приводных барабанов: при типе ленты
РТЛ1500; РТЛ1500У; РТЛ1600; РТЛ2500; РТЛ3150; РТЛ4000
соответственно 800; 800;-800; 1000; 1250; 1600 мм.
Барабаны для резинотросовых и стальных лент должны быть
футерованы.
Для стальной ленты диаметр приводного барабана (мм) при-
нимают:
а) при длине конвейера менее 30 м
£>п.б^ 12006;
(6.4)
133
Табл. 6.4. Номинальная производительность ленточных конвейеров с резиноткане-
вой лентой по ГОСТ 22644—77 (форма рабочей ветви ленты желобчатая, скорость
леиты 1 м/с, разгрузка через головной барабан)
Ширина ленты, мм Производительность, м’/ч, не менее Ширина ленты, мм Производительность, ма/ч, не менее
300 - 1200 400
400 40 1400 500
500 63 1600 630
650 100 2000 1000
800 160 2500 1600
1000 250 3000 2500
Примечание. Производительность конвейеров при рабочей ветви ленты
плоской формы составляет 40 % приведенных значений. При ширине ленты 300 мм
она равна 12,5 м3/ч.
Табл. 6.5. Рекомендуемая минимальная толщина обкладки с рабочей (грузовой)
стороны резинотканевых лент
Транспортируемый груз
6р , мм
Насыпной
Зернистый, порошкообразный, пылевидный неабразивный 2
Мелкокусковой, зернистый, порошкообразный, пылевидный абра- 2...3
вивный
Среднекусковой малоабразивный 3
Среднекусковой абразивный 4,5
Крупнокусковой весьма тяжелый 6
Штучный
Легкий в мягкой упаковке 1
Тяжелый в мягкой упаковке 2...3
В жесткой таре массой до 15 кг 2...3
В жесткой таре массой более 15 кг 3...4,5
Штучный без упаковки 4,5...6
Табл. 6.6. Наименьшие значения коэффициента k для определения диаметра при
водного барабана* [к формуле (6.3)]
Наименование ткаии тяговых прокладок прорезиненной леиты k
БКНЛ-65; БКНЛ-65-2 125
БКНЛ-100; ТА-100; ТК-100 140
БКНЛ-150; ТА-150; ТК-150 150
ТК-200; ТЛК-200 160
TA-300; ТК-300; ТЛК-300; МЛК-300 200
TA-400; ТК-400; МК-400/120; МЛК-400/120 250
* При угле обхвата барабана лентой 180...240°.
134
Табл. 6.7. Значения коэффициента сцепления между прорезиненной лентой и бара*
баном
Материал наружного слоя барабана Влажность окружающего воздуха Коэффициент сцепления
Чугун, сталь Очень влажный 0,1
Влажный 0,2
Сухой 0,3
Дерево, резина (футерованные бара- Очень влажный 0,15
баны) Влажный 0,25
Сухой 0,4
б) при длине конвейера более 30 м
Гп.б^ 10006, (6.5)
где 6 —толщина ленты, мм.
Диаметры концевых и натяжных барабанов принимают рав-
ными 0,8£>п.б, отклоняющего барабана — 0,65£)п.б-
Диаметры барабанов (мм) должны соответствовать ряду по
ГОСТ 22644—77: 160; 200; 250; 315; 400; 500; 630; 800; 1000; 1250;
1400; 1600; 2000; 2500.
Правильность выбора диаметра приводного барабана прове-
ряется по давлению между конвейерной лентой и барабаном из
условий:
а) для резинотканевых и резинотросовых лент
ЗбОГр
В [р]ла/ ’
(6.6)
б) для стальной ленты
(6.7)
В формулах (6.6) и (6.7): 7>п.б— диаметр приводного барабана, м;
Fo — тяговая сила [см. (5.37)], Н; В— ширина ленты, м; [р]— до-
пустимое среднее давление между лентой и барабаном, Па: для
резиновых лент [р]=105...1,1 • 105 Па; для стальной ленты и футеро-
ванного барабана [р] = 4-105 Па; а — угол обхвата барабана
лентой, град; f — коэффициент сцепления между лентой и бараба-
ном (табл. 6.7).
Длина барабанов принимается согласно ГОСТ 22644—77
(табл. 6.8).
Длину барабана для стальных лент принимают равной 0,8 В.
Табл. 6.8. Длина барабана для резинотканевых и рези-
нотросовых конвейерных лент (ГОСТ 22644—77)
Ширина ленты В, мм
Длина барабана, мм
300...650
800; 1000
1200...2000
2500; 3000
В+100
Я+150
В-}-200
В +300
135
Рис. 6.2. Схема барабана с центрирую-
щей выпуклостью
Стрела центрирующей выпукло-
сти профиля барабана (рис. 6.2)
принимается по табл. 6.9.
Роликоопоры. Типы ролико-
опор для поддержания резино-
тканевой конвейерной ленты
(рис. 6.3) выбираются согласно
табл. 6.10, 6.11.
При транспортировании сы-
пучих грузов диаметры роликов
роликоопор принимают в за-
висимости от насыпной плотности груза и ширины ленты
(табл. 6.12), их количество в ролпкоопоре — по табл. 6.13.
Расстояние между роликоопорами рабочей ветви ленточного
конвейера принимают по табл. 6.14.
Табл. 6.9. Стрела выпуклости барабана
Длина барабана, мм Стрела выпуклости, мм Длина барабана, мм Стрела выпуклости, мм
500 1,5 1400 3,5
600 1,5 1600 4
750 2 1800 4.5
950 2,5 2000 5,5
1150 3 2200 6
Ti/лы П, ПФ
Тилы X,
Тилы НМНЦ'НЦЛ,
НЦ<РЛ
Рис. 6.3.
Тилы НЖ, НЖЛ> НЖД,
НЖДДНЖФ.НЖФЛ
136
Табл. 6.10. Типы и обозначения роликоопор ленточных конвейеров (ГОСТ 22645—77)
Тип Обозначение ро- лика, входящего в комплект роли- коопоры Обозна- чение Назначение Область применения
1 2 1 3 4 5
Верхняя прямая Г п Для поддержа- ния рабочей ветви ленты В конвейерах с пло- ской лентой шириной 300...2000 мм
Верхняя желобчатая ж В конвейерах с же- лобчатой лентой ши- риной 400...3000 мм
Верхняя желобчатая центрирующая ЖЦ В конвейерах с же- лобчатой лентой ши- риной 400...3000 мм для центрирования хо- да ленты
Верхняя желобчатая амортизирующая А ЖА В конвейерах с же- лобчатой лентой ши- риной 400...3000 мм для смягчения ударов материала о ленту при его загрузке
Нижняя прямая Н и НЛ Н;НЛ Для поддержа- нии холостой вет- ви ленты В конвейерах с лен- той шириной 300... 2000 мм
Нижняя прямая цен- трирующая НЦ;- НЦЛ В конвейерах с лен- той шириной 400... 2000 мм дли центриро- вания хода ленты
Нижняя желобчатая НЖ; нжл В конвейерах с лен- той шириной 800... 3000 мм
Нижняя прямая дис- ковая Д И дл НД; ндл В кон- вейерах, транспор- тирую- щих на- липаю- щие ма- териалы С лентой шириной 400...2000 мм
Нижняя желобчатая дисковая НЖД; нждл С лентой шириной 800...3000 мм
Верхняя прямая фу- терованная ф ПФ Для поддержа- ния рабочей ветви ленты конвейеров, В конвейерах с плос- кой лентой шириной 400.. .2000 мм
137
Окончание
1 2 3 4 5
Верхняя желобчатая футерованная ЖФ транспортирующих налипающие, абра- зивные или агрес- сивные материалы В конвейерах с же- лобчатой лентой ши- риной 400.. .3000 мм
Верхняя желобчатая центрирующая футеро- ванная ЖЦФ В конвейерах с же- лобчатой лентой ши- риной 400...3000 мм для центрирования хо- да ленты
Нижняя прямая фу- терованная НФ и НФЛ НФ; НФЛ Для поддержа- ния холостой ветви ленты конвейеров, транспортирующих налипающие, абра- зивные или агресси- вные материалы В конвейерах с лен- той шириной 400... 2000 мм
Нижняя прямая цен- трирующая футерован- ная НЦФ; НЦФЛ В конвейерах с лен- той шириной 400... 2000 мм
Нижняя желобчатая футерованная В конвейерах с лен- той шириной 800... 3000 мм
Табл. 6.11. Основные размеры роликоопор ленточных конвейеров по ГОСТ
22645—77 (см. рис. 6.3)
Ширина ленты В, мм Диаметр ролика D, мм Длина ролика Угол наклона бо- нового ролика, град
L, мм, для конвейеров Lif мм La, мм
* 6 в
стационарных и катучнх передвижных для карьеров
1 2 3 4 5 6 7 8
300** 63 400 — — ' — — —•
400 63; 89; 108 500 —* 160 * 10; 20; 30 (45;60)*** —
500 63; 89; 108 600 200 —* —
650 750 —• 250 —* —*
,800 . •*-. - 63; 89; 108; 133; 159; 194; 219; 245 950 1150 315 465 —
1000 89; 108; 159; 194; 219; 245 1150 1400 380 600 10; 20; 30; 45 10
1200 1400 1600 465 670
138
Окончание
1 2 3 4 5 6 | 7 8
1400 108; 133; 159; 194; 219; 245 1600 1800 530 750
1600 1800 2000 600 900
1800 133; 159; 194; 219; 245 2000 2200 670 1000
2000 159; 194; 219; 245 2200 2400 750 1150
2250 — 800 1250
2500 — — 900 1400
2750 —— — 1000 1500
3000 —— — 1150 1600
* Угол наклона бокового ролика щ = 10° допускается только в верхних
желобчатых роликоопорах, устанавливаемых у барабанов в головной и конечной
частях конвейера (переходные роликоопоры).
* * Для конвейеров с шириной ленты 300 мм используются только ролико-
опоры типов П н Н.
* ** Углы наклона бокового ролика 45 и 60° допускаются при транспорти-
ровании зерна и зерновых продуктов.
Табл. 6.12. Данные для выбора диаметра роликов роликоопоры рабочей ветви
резинотканевой конвейерной ленты (ГОСТ 22647—77)
Диаметр ролика D, мм Ширина леиты В, мм Насыпная плотность транспортируемого ма- териала, т/мв, ие более Скорость движения ленты Ci м/с, не более
63 300...800 1,00 1,25
89 400...650 1,60 2,00
800 2,50
108 400...650 2,00
800...1200 1,60
133 800...1200 2,00
159 800...1200 3,15 4,00
1400 2,00 3,15
1600...2000 1,25
194 1400 3,15 4,00 6,30
1600...2000
139
Табл. 6.13. Рекомендуемое количество роликов в роликоопоре
Ширина леиты, мм Количество роликов в роликоопоре
рабочей ветви холостой ветвя
До 300 1 1
400...500 2 или 3 1
650 и более 3 1 или 2
Табл. 6.14. Предельные расстояния между роликоопорами рабочей ветви резино-
тканевой ленты ленточного конвейера
Насыпная плот- ность груза, т/м8 Предельное расстояние между роликоопорами рабочей ветви, мм, при ширине ленты, мм 400: 500 650; 800 1000; 1200 1400; 1600 2000
До 1 До 2 До 3,15 1500 1400 1300 1200 1100 1400 1300 1200 1100 1000 1300 1200 1100 1000 900
При транспортировании тяжелых штучных грузов (более 20 кг)
расстояние между роликоопорами рабочей ветви не должно пре-
вышать половины размера груза в направлении движения, а для
легких (менее 20 кг) — 1,0...1,4 м.
Расстояние между роликоопорами холостой ветви — 2...3,5 м.
Меньшие значения принимаются для более широких лент. Расстоя-
ние между роликоопорами на выпуклых участках трассы должно
быть равным половине расстояния между роликоопорами на пря-
молинейных участках трассы.
Диаметр ролика роликоопоры рабочей ветви резинотканевой
конвейерной ленты выбирается в зависимости от ширины ленты и
насыпной плотности транспортируемого груза согласно табл. 6.12,
а количество роликов в роликоопоре по табл. 6.13.
Условное обозначение ролнкоопор содержит слово «роликоопо-
ра», обозначение типа роликоопоры, ширину ленты (см), диаметр
ролика (мм), угол наклона бокового ролика (град) и обозначение
стандарта. Например, роликоопора верхняя центрирующая футеро-
ванная типа ЖЦФ для ленты шириной 120 см, с диаметром ролика
133 мм и углом наклона бокового ролика 20° обозначается:
Роликоопора ЖЦФ 120—133—20 ГОСТ 22645—77.
Натяжное устройство. Ход натяжного устройства (м) прини-
мается:
а) для лент резинотканевых с прокладками из нитей комбини-
рованных
s = 0,0251+ 0,3;
(6.8)
140
б) для лент резинотканевых с
прокладками из нитей полиамид-
ных
s= (0,02...0,04) L 4-0,3; (6.9)
в) для лент резинотросовых
s = 0,01A4-Ac, (6.10)
где L — длина конвейера, м; Lc— Рис. 6.4. Загрузочная воронка
длина стыкового соединения, м.
Для лент типов 2РТЛ1500У; 2РТЛ1500, 2РТЛ1600; 2РТЛ2500;
2РТЛ3150; 1РТЛ2500; 1РТЛ3150 £с соответственно равна 1,1; 1,3;
1,9; 3,3; 2,1; 3,5 м.
Для стальных конвейерных лент ход натяжного устройства при-
нимается равным 300...500 мм.
Загрузочные воронки. Основные размеры загрузочной воронки
для ленточных конвейров (рис. 6.4) можно принимать по табл. 6.15
в зависимости от ширины ленты.
Табл. 6.15. Основные размеры загрузочной воронки ленточного конвейера (к рис. 6.4)
Размеры, мм Ширина леиты, мм 500 650 800 1000 ) 1200
Расстояние между бортами Длина бортов 340 430 530 660 800 1200 1500 2000 2000 2000
6.3. ПРЕДВАРИТЕЛЬНЫЙ РАСЧЕТ ЛЕНТОЧНОГО КОНВЕЙЕРА
Ширина ленты (м) при транспортировании насыпных грузов
(6.11)
где Q — производительность конвейера, т/ч; v — скорость ленты, м/с
(см. табл. 6.2, 6.3); р — насыпная плотность груза, т/м3 (см. табл. 4.1);
k — коэффициент, зависящий от угла естественного откоса груза
(табл. 6.16); k$— коэффициент, зависящий от угла наклона конвей-
ера (табл. 6.17).
Размер ширины ленты проверяется по формулам (6.1) и (6.2)
и согласовывается с табл. 4.4, 4.13 и 4.14.
Погонная масса (кг/м) движущихся частей конвейера (средняя
масса движущихся частей конвейера на 1 м его длины)
Р । х
?к — ?к г
(6.12)
где <7к=<?л + <?Е; = <7л+<7р—см. формулы (5.18) и (5.23).
Для ориентировочных расчетов при отсутствии необходимых
данных погонную массу ролнкоопор можно принимать по табл. 6.18.
141
Табл. 6.16. Значение коэффициента k [к формуле (6.11)]
Форма ленты Угол наклона боковых ро- ликов, град Угол откоса насыпно- го груза на ленте, град*
15 20
Плоская 240 325
Желобчатая на двухроликовой опоре 15 450 535
Желобчатая на трехроликовой опоре 20 470 550
30 550 625
36 585 655
* Угол естественного откоса насыпного груза на ленте принимают равным по-
ловине угла естественного откоса этого груза в движении [см. формулу (4.6.)].
Табл. 6.17. Значения коэффициента [к формуле (6.11)]
Угол наклона конвейера 3, град Угол наклона конвей- ера р, град *3
До 10 1 16 0,92
12 0,97 18 0,89
14 0,95 20 0,85
Табл. 6.18. Ориентировочная погонная масса вращающихся частей роликоопор
Ветвь конвейера Погонная масса вращающихся частей роликоопор, кг/м, при ленты, мм ширине
400 500 650 800 1000 1200 1400 1600 20С0
Рабочая 8,4 10 10,2 18,4 21 24,2 42 58,4 132,5
Холостая 2,5 3,2 4,4 7,8 9,2 11,1 16,7 23,8 52,5
Приближенно для прЯлМолинейного конвейера тяговая сила (Н)
Fo = (q + qK) ± qH] gkK + Fn.P,
(6.13)
где w — коэффициент сопротивления (табл. 6.19); Lr — длина
проекции конвейера на горизонтальную плоскость, м; q — погонная
масса груза, кг/м [см. (5.3) и (5.11)]; qK — погонная масса движу-
щихся частей конвейера, кг/м [см. (6.12)]; Н — высота подъема
(знак плюс) или опускания (знак минус) груза, м; /гк— коэффи-
циент, учитывающий геометрические и конструктивные особенно-
сти конвейера: (табл. 6.20); Fn.P—сопротивление
плужкового разгрузчика [см. (5.30)], учитывается при его наличии.
Максимальное статическое натяжение ленты (Н) прямолиней-
ных конвейеров
Ffnax = ksFQf (6.14)
где ks — коэффициент [формула (6.15) и табл. 6.21]:
142
Табл. 6.19. Значения коэффициента сопротивления w дли ленточных конвейеров
Тип опор роликов Условия работы конвейера ' w для ролико- опор
прямых желоб" чатых
Подшипники Чистое сухое помещение без пыли 0,018 0,02 качения Отапливаемое помещение, небольшое содержание 0,022 0,025 абразивной пыли, нормальная влажность воздуха Неотапливаемое помещение и работа вне помещения, большое содержание абразивной пыли, повышенная 0,035 0,04 влажность воздуха Подшипники Очень тяжелые условия работы 0,04 0,06 скольжения Средние условия работы 0,06 0,065
Табл. 6.20. Значения коэффициентов ki, k*, ki, kt, k$ для конвейеров
с барабанами на подшипниках качении [13] к формуле (6.13)
Обозначе-
ние коэф-
фициента
Отличительные признаки конвейера
Значение коэффи-
циента
ki
кг
кз
кь
Конвейер длиной до 15 м
То же 15.. .30 м
» 30...150 м
» более 150 м
Конвейер прямолинейный или имеющий перегиб трас-
сы выпуклостью вниз
Конвейер имеет перегиб трассы выпуклостью вверх:
в головной части
в средней части
в хвостовой части
Привод головной
Привод промежуточный или хвостовой
Натижная станция хвостовая
Натяжная станция промежуточная, имеющая г бараба-
нов
С разгрузкой через головной барабан
С моторной разгрузочной тележкой при одно барабан-
ном приводе конвейера
1,5 .
2,1 •
1,1-
1,05
1
1.2*
1,2*
1,05*
1,06
1,04
1,02
1
1,05... 1,08*
1
1+0,02 z
1
1,3
* Меньшие значения — для легких условий работы.
Табл. 6.21. Значения коэффициента ks [к формуле (6.14)]
Коэффициент сцепления барабана о лентой f Значение коэффициента ks при угле обхвата барабана лентой
180° 200° 225°
0,15 1,5 1,42 1,35
0,25 1,85 1,73 1,61
0,35 2,65 2,46 2,26
143
е,а
k---------
Ks — ’
e^a — 1
(6.15)
где f — коэффициент сцепления барабана с лентой (табл. 6.7);
а — угол обхвата барабана лентой, рад.
Число тяговых прокладок резинотканевой конвейерной ленты
выбирается по табл. 4.4, оно должно удовлетворять условию
z>zmin=4r-. (6.16)
где z — принятое число тяговых прокладок; — необходимое ми-
нимальное число тяговых прокладок; Fmax— определяется при
приближенном расчете по формуле (6.14), при проверочном и уточ-
ненном— из тягового расчета (см. параграф 5.2); kp—максималь-
ная допустимая рабочая нагрузка прокладок (см. табл. 4.5), Н/мм;
В — ширина ленты, мм.
Прочность резинотросовой конвейерной ленты проверяется по
условию
Л ^->Лпах, (6.17)
где FT — агрегатная прочность троса (см. табл. 4.13), Н; Вс — ши-
рина сердечника ленты [см. (4.13)], мм; t — расстояние между
центрами тросов (см. табл. 4.13), мм.
Прочность стальной конвейерной ленты [9] должна удовлетво-
рять условию
а = + 1 25Е — < [а],
вь ’ О*
(6.18)
где Fmax — см. формулу (6.14); В — ширина ленты, м; б — толщина
ленты, м; Е — модуль упругости материала ленты, Па: £=
= 2,1-10й Па; £>б — диаметр барабана, м; о, [о] — соответственно
фактическое и допускаемое напряжения растяжения в материале
ленты, Па: [о] = 375-106 Па.
6.4. ПРОВЕРОЧНЫЙ РАСЧЕТ ЛЕНТОЧНОГО КОНВЕЙЕРА
1. Уточняется погонная масса груза и конвейера.
2. Выполняется уточненный тяговый расчет конвейера методом
обхода по контуру [см. параграф (5.2)] с использованием формулы
Эйлера /?наб=/?сб^/а.
3. По уточненному максимальному натяжению проверяется
прочность конвейерной ленты [см. (6.16) ...(6.18)].
4. Проверяется правильность выбора диаметра приводного ба-
рабана по среднему давлению [см. (6.6), (6.7)].
5. По уточненной тяговой силе определяется необходимая мощ-
ность на приводном валу конвейера, мощность двигателя и выби-
рается двигатель.
144
Мощность на приводном валу конвейера (кВт)
р _ FqV
Q “ Ю37]бар ’
(6.19)
где Fo— уточненная тяговая сила конвейера [см. (5.37)], Н: для пря-
молинейного конвейера можно принимать Fq^Fq; v—скорость лен-
ты (см. табл. 6.2, 6.3), м/с; Tfcap — КПД приводного барабана (учи-
тывается только, если тяговая сила определена приближенно).
КПД приводного барабана ленточного конвейера
*1бар--1+^(2^—!) ’ <6’20)
где Wq — коэффициент сопротивления барабана: Шб = 0,03...0,05;
ks — см. (6.14).
Мощность привода конвейера (с учетом коэффициента запаса),
по которой выбирается двигатель (см. табл. III.3),
P = kP^ (6.21)
где k — коэффициент запаса: k= 1,1... 1,35; Ро—расчетная мощ-
ность на приводном валу конвейера; т] — КПД передач от двигате-
ля к приводному валу (см. табл. 5.1).
6. Определяется частота вращения вала (мин-1) приводного
барабана конвейера
60и
Ип.В - Г)
льв.б
(6.22)
где Dn.6 —диаметр приводного барабана, м.
7. Определяется необходимое передаточное число между валом
двигателя и валом приводного барабана
и = п1пв.в, (6.23)
где и — частота вращения вала двигателя, мин-1.
8. Из конструктивных соображений составляется кинематиче-
ская схема привода конвейера, выбирается соответствующий ре-
дуктор (см. табл. III.4).
9. Уточняется скорость ленты (м/с) исходя из фактического
передаточного числа привода:
60иф
(6.24)
где Пф — фактическое общее передаточное число привода кон-
вейера.
Фактическая скорость ленты должна быть согласована с зада-
нием на проектирование и рекомендациями, приведенными в пара-
графе 6.1.
10. Уточняется производительность конвейера (т/ч):
Q = kk^ (0,9В — 0,05)2 цфр, (6.25)
где k — см. табл. 6.16; — см. табл. 6.17; В — ширина ленты, м;
р— насыпная плотность груза (табл. 4.1), т/м3.
145
11. По уточненному тяговому расчету определяется усилие на-
тяжного устройства по формуле
(6.26)
где F„a6 — сила натяжения ленты в точке набегания на натяжной ба-
рабан; Fee — сила натяжения ленты в точке сбегания с натяжного
барабана.
12. Определяется угол обхвата лентой приводного барабана а
из формулы
е'* = FHa6/Fc6, (6.27)
где / и а — см. (6.15); FHa6 и ГСб— см. формулу (5.37).
Если угол конструктивно неприемлем, следует увеличить натя-
жение ленты.
Требуемая дополнительная сила натяжения (Н)
рДоп
* н
Р _____ Р afcc'
гнаб 7 c6g
0,5efa' — 1 ’
(6.28)
где а' — требуемый угол обхвата лентой барабана.
Эта проверка выполняется, если тяговая сила определена мето-
дом обхода по контуру конвейера и если расчет выполняется исхо-
дя из усилия Emin согласно формуле (5.32).
13. Проверяется достаточность пускового момента двигателя по
продолжительности пуска (разгона) согласно условию (5.40).
14. Определяется усилие в набегающей на приводной барабан
ветви ленты при пуске [см. формулы (5.41)...(5.48)] и проверяется
коэффициент снижения запаса прочности ленты при пуске
[см. (5.49)].
15. Определяется расчетный тормозной момент [см. формулы
(5.50) ...(5.54)] и выбирается тормозное устройство.
Глава 7. КРУТОНАКЛОННЫЕ КОНВЕЙЕРЫ
7.1. ОБЩИЕ СВЕДЕНИЯ
Крутонаклонными называются конвейеры, у которых грузоне-
сущее полотно имеет угол подъема, больший критического (при ко-
тором груз на гладком грузонесущем полотне еще не имеет грави-
тационного перемещения).
Возможны следующие способы удержания груза на грузонесу-
щем элементе: путем повышения коэффициента сцепления груза с
поверхностью полотна, увеличения давления груза на полотно, со-
здания подпора груза на полотне.
По роду перемещаемых грузов различают крутонаклонные кон-
вейеры для насыпных и штучных грузов. По количеству тяговых
146
элементов могут быть конвейеры с одним, двумя и четырьмя тяго-
выми элементами.
Получили распространение крутонаклонные конвейеры со спе-
циальными лентами, ленточно-цепные, пластинчатые и двухленточ-
ные конвейеры.
В конвейерах со специальными лентами последние снабжены
выступами (рифлением) или перегородками, обеспечивающими
удерживание груза на ленте, наклоненной под углом 30...60°.
Рис. 7.1. Ленточно-цепной конвейер:
а__схема; б — поперечное сечение; в —ходовая часть; Б — оборотный барабан; П1 и П2
приводные механизмы; НУ—натяжное устройство
В ленточно-цепных конвейерах функции тягового и грузонесу-
щего элементов разделены соответственно между цепью и лентой
(рис. 7.1). Конвейер состоит из пластинчатой или, чаще, кругло-
звенной цепи /, снабженной опорными площадками 2, на которых
лежит лента 3. Желобчатую форму ленте придают роликоопоры 4
без среднего ролика, на месте которого проходит тяговая цепь, дви-
жущаяся на катках 6 по направляющим путям 5. Лента приводит-
ся в движение только за счет трения между ней и опорной площад-
кой цепи (фрикционная связь). Крутонаклонные ленточно-цепные
конвейеры различают: по количеству цепей — одно- и двухцепные;
по способу соединения ленты с цепью — с фрикционной пли жест-
кой связью; по типу ходовых элементов — с ходовыми или стацио-
нарными роликами; по относительному расположению ленты и
цепи — с внутренним или внешним расположением. Есть конвейе-
ры, в которых лента является тяговым органом, а цепь удерживает
груз от сползания с ленты.
В качестве крутонаклонного может использоваться обычный
147
пластинчатый конвейер с бортовым или коробчатым настилом
(угол наклона 45...60°).
Основы общих расчетов крутонаклонных конвейеров остаются
такими же, как и для ленточных и пластинчатых конвейеров
(см. гл. 6 и 8).
7.2. НОРМАТИВНЫЕ МАТЕРИАЛЫ ДЛЯ РАСЧЕТА
КРУТОНАКЛОННЫХ КОНВЕЙЕРОВ
СО СПЕЦИАЛЬНЫМИ ЛЕНТАМИ
Конвейерные ленты с выступами. Для увеличения сцепления
ленты с транспортируемым материалом используются специальные
рифленые ленты (рис. 7.2) и ленты с выступами (рис. 7.3), пред-
назначаемые для штучных и реже насыпных грузов с углом
естественного откоса 30...35°. Конструктивной основой для этих
лент является обычная стандартная лента, на рабочей поверхности
которой сделаны выступы высотой 2... 10 мм.
В табл. 7.1 приведены допустимые углы наклона конвейеров
с лентами, имеющими выступы, и с гладкими лентами для наибо-
лее характерных насыпных грузов. Для других материалов допу-
стимые углы наклона конвейеров могут быть приняты по аналогии
на основе данных этой таблицы в зависимости от физико-механиче-
ских свойств этих материалов.
Для транспортирования насыпных грузов под углом 35...38° ре-
комендуются ленты с угловыми выступами, имеющие вертикаль-
ные прорези для их перегиба на желобчатых роликоопорах, а так-
же ленты со смещенными относительно друг друга выступами
©©©©©©©©©
©©©©©©©©©
Рис. 7.2. Конструкции рифленых леит
148
Рис. 7.3. Конвейерные ленты с выступами:
а — примеры расположения выступов па рабочей поверхности леиты; б — конструкция лен-
ты ВНИИПТмаша
(см. рис. 7.3). Для транспортирования насыпных грузов под углом
25...28° рекомендуются ленты с поперечными выступами, имеющими
длину, равную ширины ленты. Высота выступов на ленте
для транспортирования песка, гравия, угля, известняка мелкого
дробления составляет 6... 10 мм, для рядового насыпного груза —
10... 16 мм и для крупнокускового — 16...25 мм.
Для очистки ленты от налипших частиц грузов средней влажно-
сти используются виброочистные устройства или вращающиеся
щетки с капроновыми нитями. При транспортировании влажных и
липких грузов применяется гидравлический метод очистки ленты.
Для предотвращения обратного движения материала через выступ
на ленте максимальный размер транспортируемых кусков должен
быть меньше удвоенной высоты выступов.
Конвейерные ленты с перегородками. Эти ленты применяют при
угле подъема конвейера до 60...70°. Плоская лента в зависимости
от ее ширины может иметь одну, две и три поперечные перегородки
с шагом 200...600 мм (рис. 7.3). В табл. 7.2 приведены ориентиро-
вочные размеры таких лент. С их помощью можно транспортиро-
вать насыпные грузы с кусками размером до 30 мм под углом
до 60°. Для обеспечения прохождения ленты по дисковым роли-
кам холостой ветви между перегородками предусмотрены дорожки.
149
Табл. 7.1. Допустимые углы наклона конвейеров, град
Тип ленты
Транспортируемый груз
гл адкая
с выступом
Зернистые и мелко кусковые материалы
Земля формовочная горелая (влажность 3 %) 24 34
Каменный уголь (влажность 4,5 %) 22 33
Опилки древесные (влажность 1,9 %) 27 34
Песок грунтовый сухой (влажность 2 %) 15 ... 18 26
Песок грунтовый влажный (влажность 6 %) 17 ... 27 35
Песок формовочный (влажность 5 %) 17 ... 27 35
Черный колчедан (влажность 3 %) 16 26
Щебень (крупность кусков 0,5...30 мм) 18 32
Песок и гравий 18 27
Песок мелкий сухой 20 30
Песок мелкий мокрый 28 35
Песок кремниевый сухой 15 23
Зола мелкая 22 30
Шлак гранулированный 18 27
Удобрения азотнокислые 20 30
Грунт рыхлый 22 30
Уголь каменный мелкий 21 36
Известняк мелкого дробления 20 35
Гравийно-песочная смесь 22 34
Среднекусковые и крупно кусковые материалы
Уголь каменный рядовой (с круглыми кусками) 18 25
Кирпич битый (размеры кусков 10 . . . 160 мм) 18 24
Кокс рядовой (размеры кусков 10 ... 160 мм) 18 25
Шлак каменноугольный (влажность 6,4 %) с круглы-
ми кусками 22 26
Уголь каменный рядовой 19 34
Известняк крупного дробления 17 30
Щебень из гранита 18 32
Битуминозный уголь:
несортированный 18 27
крупнокусковои 15 27
среднекусковой 18 30
с размером кусков 25 ... 50 мм 18 27
Антрацит (размер кусков 13 ... 19 мм) 15 27
Кокс:
крупиокусковой 20 28
сортированный 18 30
дробленый 18 30
Камень (размер кусков 25 мм) 20 30
Штучные материалы
Кирпич целый (при укладке плашмя)
Мешки бумажные (с сыпучим материалом)
20 32
20 33
Для конвейеров с особо крутым подъемом применяют ленты с пере-
городками углового (рис. 7.4, а) и лоткового типов (рис. 7.4, 6).
Увеличение угла подъема конвейера возможно также при
использовании лент с бортами и перегородками (рис. 7.5,
табл. 7.3...7.5).
150
Рис. 7.4. Конструктивные разновидности поперечных выступов (перегородок)
лент крутонаклонных конвейеров
Рис. 7.5. Конвейер с гофрированными бортами и перегородками
Табл. 7.2. Размеры плоских лент с перегородками (рис. 7.3), мм
Число пе- регородок Ширина леиты Ширина перего- родки Расстояние от борта лен- ты до крайней перегородки Ширина до- рожки между перегородка- ми Высота пере- городки
1 400 . . . 500 280 . . . 380 60 100 . . . 150
2 650 . . . 800 240 . . . 315 60 50 100 . . . 200
3 1000 . . . 1400 225 . . . 350 63 50 100 . . . 200
151
Табл. 7.3. Размеры лент с бортами и перегородками (рис. 7.4, 7.5), мм
Количество перегородок на 1 м длины ленты Общая ширина ленты Расстояние между бортами Ширина перегородок (при высоте 80 мм)
3 400 260 200
4 500 360 300
4 600 480 400
4 650 510 450
5 800 550 490
6 1000 750 690
Табл. 7.4. Техническая характеристика лент с бортами и перегородками
Ширина леиты, мм Высота бортов, мм Производительность конвейера (м’/ч) при скорости 1 м/с
лента с бортами иа роликоопорах леита без бортов и а желобчатых ро- ликоопорах
прямых желобчатых
400 60 84 107 51
500 60 120 164 80
650 80 216 288 135
800 100 332 443 205
1000 100 468 656 320
1200 100 630 915 460
Табл. 7.5. Область применения лент с бортами и перегородками
Отрасль промышленности
Транспортируемые грузы
Машиностроительная
Химическая
Строительные материалы
Пищевая
Металлургическая
Формовочная земля, сухой песок, уголь, кокс
Апатит, суперфосфат, серный колчедан, сода, тальк,
удобрения
Песок, гравий, гипс, мел, известь, цемент, щебень,
керамзит и др.
Зерно, крупа, комбикорма, соль
Шамот, глинозем, кварцит, кокс, доломит
Допустимый угол наклона. Для конвейера с рифленой лентой
угол наклона при транспортировании штучных грузов принимают
равным 30...35°. Допустимый угол наклона конвейера при транс-
портировании насыпных грузов на ленте с выступами принимается
по табл. 7.1. На лентах с поперечными перегородками возможен
подъем насыпного и штучного грузов под углом 45...60°.
Скорость ленты. При транспортировании насыпных грузов ре-
комендуется принимать скорость ленты 0,5...5 м/с (меньшие значе-
ния— при больших углах наклона). Для штучных грузов она мо-
жет быть определена по формулам (5.14) и (5.15) в зависимости
от производительности конвейера и выбрана в пределах 0,1... 1,0 м/с.
Скорость транспортно-технологических конвейеров определяется
заданным ритмом операций. Скорость ленты должа соответство-
вать рекомендациям, приведенным в параграфе 6.2.
152
7.3. РАСЧЕТ КРУТОНАКЛОННЫХ КОНВЕЙЕРОВ
СО СПЕЦИАЛЬНЫМИ ЛЕНТАМИ
Методика расчета этих конвейеров остается такой же, как и для
обычных ленточных конвейеров (см. параграфы 6.3, 6.4). Необхо-
димая ширина ленты (м)
<7Л>
где Q — производительность конвейера, т/ч; ki — коэффициент, за-
висящий от угла наклона конвейера и формы поперечного сечения
ленты (табл. 7.6); v — скорость ленты, м/с; р — насыпная плот-
ность груза, т/м3.
Табл. 7.6. Коэффициент ki [к формуле (7.1)] при угле наклона боковых
роликов роликоопор 30'
Угол наклона кон- вейера, град Угол естественного откоса груза в покое, град
30 35 40 45
20 230 250 270 300
30 225 240 260 280
40 215 230 245 270
50 205 215 230 255
60 190 200 210 240'
Ширина ленты округляется до ближайшего большего размера
из стандартного ряда (см. табл. 4.4).
Погонная масса (кг/м) рифленой конвейерной ленты
9л = 11506В, (7.2)
а ленты с выступами [9]
9л — 1,1 В (бп.т^ ®Р *4* бн) +
2hb 1
sin а
где бп.т — толщина одной тяговой прокладки, мм; z — количество
прокладок; 6Р и бн— толщина обкладок с рабочей и нерабочей по-
верхностей, мм; h — высота выступа, мм; b — ширина выступа, мм;
а — угол, образуемый выступом с продольной осью ленты (для
угля а=35...40°, для известняка а = 30...35°);
ленты с перегородками
qn = 1, IB (6 + 0,8/гпбп (7.4)
где hn — высота перегородки, мм; 6П — толщина перегородки, мм:
6п = 5...10 мм (см. табл. 7.2); tn— расстояние между перегородками,
мм: (^п = 2ОО...6ОО мм);
ленты с бортами и перегородками
где Ла — высота борта, мм; 6б — толщина борта, мм;
груза на рифленой ленте
153
q = В2 [0,15^ tg (0,35ф) + 0,05] pA>r, (7.6)
где k$— коэффициент, учитывающий уменьшение площади попереч-
ного сечения груза при увеличении угла наклона конвейера р (табл. 7.7);
Ф — угол естественного откоса насыпного груза (см. табл. 4.1); kv—
геометрический коэффициент: = 0,95 ... 0,98. q можно определить
и по формуле (5.12).
Табл. 7.7. Коэффициент [к формуле (7.6)]
₽, град град *0
0 . . . 10 1,0 36 . . 40 0.81
11 ... 15 0,95 41 . . 45 0,76
16 ... 20 0,9 46 . . 50 0,72
21 ... 25 0,88 51 . . 55 0,66
26 31 ... 30 ... 35 0,86 0,84 56 . . 60 0,64
Погонная масса груза на ленте при перемещении насыпного
груза отдельными порциями или при перемещении штучного груза
может быть определена по формуле (5.11).
Расстояние /р между роликоопорами рабочей ветви конвейера
принимается 1...2 м, холостой ветви /х — 2...4 м (меньшие значения
принимают для более широких лент).
Погонную массу вращающихся частей ролнкоопор qv можно
принимать по данным табл. 6.18 или определять по формуле
?Р=(ЮВ+А)//Р, (7.7)
где k — коэффициент: для желобчатых ролнкоопор fe=7, для пря-
мых /? —3.
Сопротивление движению на рабочей и холостой ветвях кон-
вейера определяется по формулам (5.17) и (5.22), при этом коэф-
фициент сопротивления движению а* = 0,015...0,03 (меньшие значе-
ния— при больших углах наклона конвейера); сопротивление на
криволинейных участках конвейера — по формуле (5.24); загру-
зочных устройств — по формулам (5.27) и (5.28), очистительных
устройств — по формуле (5.29).
Тяговая сила конвейера определяется по формуле (5.37), натя-
жение набегающей и сбегающей ветвей тягового органа — методом
обхода по контуру конвейера [см. параграф 5.2 и формулы (5.35)
и (5.36)]. Расчет начинается с точки контура с минимальным натя-
жением (обычно в месте набегания тягового органа на натяжной
барабан Fmin=500...2000 Н).
Мощность двигателя для привода конвейера определяется по
формулам (6.19) и (6.21), проверка прочности ленты производится
по формуле (6.16).
Усилие натяжного грузового устройства (Н)
/7в=2,1Гнаб + тт^т cos р, (7.8)
где FHa6 — усилие в ветви, набегающей на натяжной барабан, Н;.
154
m-r — масса натяжной тележки, кг; — коэффициент сопротивле-
ния движению натяжной тележки (при движении на катках wT~
= 0,05, на ползунах — wT = 0,5); р — угол наклона конвейера.
Требуемый тормозной момент, при котором исключается само-
произвольное движение тягового элемента под действием веса
груза определяется по формуле (5.39).
Для конвейеров с трассой простой конфигурации можно огра-
ничиться расчетом тяговой силы по формуле (6.13). При этом по-
гонную массу ленты следует определять по (7.3).
7.4. РАСЧЕТ ЛЕНТОЧНО-ЦЕПНЫХ И ПЛАСТИНЧАТЫХ
КРУТОНАКЛОННЫХ КОНВЕЙЕРОВ
Параметры и производительность ленточно-цепного конвейера
определяются так же, как и ленточного (см. гл. 6).
В качестве тягового элемента чаще всего применяют
сварные комбинированные цепи (табл. III.1.10), пластинчатые
(табл. III.1.11), реже — роликовые и специальные цепи. Несущим
элементом служит конвейерная лента по ГОСТ 20—76 (см. пара-
граф 4.4).
Во избежание проскальзывания цепи по ленте должно быть
выдержано условие:
tg P^Mc-w(l-^c), (7.9)
где р—угол наклона конвейера, град; f — коэффициент трения
между лентой и площадкой цепи: f=0,3...0,4; w — коэффициент со-
противления движению ленты по боковым роликам: ш = 0,04...0,05;
kc — коэффициент распределения нагрузки на опорную площадку
цепи: Асе^0,45...0,5.
Табл. 7.8. Параметры ходовой части пластинчатых конвейеров, имеющих настил
с бортами
Ширина насти- ла, мм Высота бор- тов, мм Толщина настила, мм Тяговая цепь Погонная мас- са ходовой части, кг/м
шаг, мм тяговое усилие це- пей, кН диаметр валика це- ли, мм
400 100 4 250 11,2 18 13 45
250 16 55
500 125 4 250 18 16 65
320 28 20 80
320 45 24 85
650 160 4 320 28 20 85
320 45 24 100
400 71 30 100
800 200 5 320 28 20 105
400 71 30 130
400 112 36 160
1000 250 5 400 71 30 165
500 112 36 190
1200 320 5 400 71 30 220
500 180 44 260
155
Тяговый расчет конвейера ведется методом обхода по контуру
(см. параграф 5.2).
Расчет пластинчатых крутонаклонных конвейеров производится
по методике, изложенной в параграфах 8.2 и 8.3. Ширина настила
конвейера с бортами определяется по формуле (8.5), и из табл. 7.8
выбираются основные параметры ходовой части конвейера.
Глава 8. ПЛАСТИНЧАТЫЕ КОНВЕЙЕРЫ
8.1. ОБЩИЕ СВЕДЕНИЯ
Пластинчатые конвейеры предназначаются для транспортиро-
вания острокромочных или горячих материалов, кусковых пли
штучных грузов (рис. 8.1).
Эти конвейеры состоят из тягового органа (в виде одной или
Рис, 8.1. Схемы пластинчатых конвейеров:
а — горизонтального; б — наклонно-горизонталь-
ного; в — наклонного; г — горизонтально-наклон-
но-горизоитального; ПМ — приводной механизм;
НУ — натяжное устройство
двух бесконечных тяго-
вых цепей) с прикреплен-
ным к нему настилом из
отдельных пластин, при-
водного и натяжного
устройств, загрузочного
устройства и рамы. При
плоском настиле возмож-
но наличие и разгрузоч-
ного устройства в виде
плужкового сбрасывате-
ля. Привод наиболее ча-
сто осуществляется от
электродвигателя через
редуктор.
8.2. НОРМАТИВНЫЕ
МАТЕРИАЛЫ ДЛЯ
РАСЧЕТА ПЛАСТИНЧАТЫХ
КОНВЕЙЕРОВ
Типы конвейеров. Пла-
стинчатые конвейеры раз-
личаются в основном
конструкцией настила
(рис. 8.2). Тип конвейера
выбирается в зависимости
от его назначения. Сведе-
ния о пластинчатых кон-
вейерах приводятся в
табл. 8.1...8.3.
156
Гл л ЛР
Гил ПС
Рис. 8.2. Типы пластинчатых конвейеров (к табл. 8.1)
Табл. 8.1. Типы пластинчатых конвейеров (ГОСТ 22281—76) и область
их применения
Обозначение типа конвейера Тип конвейера Область применения
ПР Плоский разомкнутый
ПС Плоский сомкнутый
В Безбортовой волнистый
Б В Бортовой волнистый
КМ Коробчатый мелкий
КГ Коробчатый глубокий
Для транспортирования штучных гру-
зов
Для транспортирования штучных и на-
сыпных (кусковых) грузов
Для транспортирования насыпных и
штучных грузов
Для транспортирования насыпных гру-
зов
Табл. 8.2. Основные размеры пластинчатых конвейеров (ГОСТ 22281—76)
Ширина настила* ходовой части В, мм Высота борта Л**, мм Шаг тяговой цепи /, мм Число зубьев звездо чек
400; 500; 650; 800; 80; 100; 125; 160; 80; 100; 125; 160; 6; 7; 8; 9; 10;
1000; 1200; 1400; 1600 200; 250; 315; 355; 200; 250; 315; 400; 11; 12; 13
400; 450; 500 500; 630; 800
* Для конвейеров типа БВ, КМ и КГ — по внутреннему размеру.
** Внутренний размер.
157
Табл. 8.3. Скорость движения ходовой части и номинальная производительность
пластинчатых конвейеров (ГОСТ 22281—76)
Скорость движения ходовой части, м/с (± 10 %)
Номинальная производительность по насып-
ному грузу, м’/ч
0,01; 0,016; 0,025; 0,04; 0,05; 0,063;
0,08; 0,1; 0,125; 0,16; 0,2; 0,25; 0,315;
0,4; 0,5; 0,63; 0,8; 1,0
10; 16; 25; 32; 40; 63; 80; 100; 125;
160; 200; 250; 320; 400; 500; 630; 800;
1000; 1250; 1600; 2000
Пластинчатые конвейеры бывают двух исполнений: с ходовой
частью с катками; с ходовой частью без катков — катки (опорные
ролики) являются элементом металлоконструкции.
Настил и борта. Ширина настила (мм) при транспортировании
насыпных грузов принимается из условия
В^йа'+200,
(8.1)
где k — коэффициент; для сортированного груза /г = 2,7; для рядо-
вого груза & = 1,7; а' — наибольший размер типичного куска груза,
мм [см. формулы (4.2) ...(4.4)].
Ширина настила при транспортировании штучных грузов долж-
на удовлетворять условию
+ (8.2)
где bi — наибольший поперечный размер груза (рис. 8.3), мм;
Bi—запас ширины настила: для безбортовых конвейеров Bi =
= 50...100 мм, для бортовых В, = 100...150 мм.
Высота бортов при транспортировании насыпных грузов выби-
рается из табл. 8.4 с учетом данных табл. 8.5.
Высота бортов h при транспортировании штучных грузов при-
нимается 100...160 мм.
Полученные ширина наспи
Рис. 8.3. Расположение штучных гру-
зов на настиле конвейера:
а—при автоматической укладке; б — при
ручной укладке
а и высота бортов должны быть
округлены до ближайших разме-
ров по ГОСТ 22281—76 (см.
табл. 8.2).
Цепи тяговые. Для пластин-
чатых конвейеров тяговые цепи
выбираются согласно данным
таблиц IIL1.11...III.1.14. Шаг це-
пей назначается в зависимости
от ширины настила (табл. 8.6).
Скорость ходовой части (по-
лотна) пластинчатых конвейеров
выбирается в зависимости от ши-
рины настила согласно рекомен-
дациям табл. 8.7.
Угол наклона. Наибольший
158
Табл. 8.4. Рекомендуемая высота бортов при
транспортировании насыпных грузов
Наибольший размер типичного куска груза, мм Наименьшая высота бортов> мм
160 100
200 125
250 160
350 200
450 250
550 320
Табл. 8.5. Рекомендуемая высота бортов пластинчатого конвейера, мм
Прн номинальной ширине настила, мм
400 500 650 800 1000 1200 ( 1400 | 1690
100 100 100 100 100 100 100 100
125 125 125 125 125 125 125 125
160 160 160 | 160 160 160 160 160
200 200 200 200 200 200 200 200
250 250 250 250 250 250 250
320 । 320 320 320 320 320
Примечание. Предпочтительны размеры, помещенные между линиями .
Табл.8.6. Рекомендуемый шаг цепей пластинчатых конвейров
Ширина настила, мм
Шаг цепи, мм
400
500
650
800
1000
1200
1400
1600
250
320
400
400
500
500
630
630
Табл. 8.7. Рекомендуемая скорость движения полотна пластинчатых
конвейеров
Ширина иаотила, мм
Скорость движения полотна, м/с
400; 500
650; 800
1000; 1200
1400; 1600
0,125 ... 0,4
0,125 ... 0,5
0,2 .. . 0,63
0,25 . . . 0,63
159
Табл. 8.8. Наибольшие допустимые углы наклона пластинчатых конвейеров
при транспортировании сыпучих грузов
Наибольший допустимый угол, град Тип пастила
гладкий волнистый бортовой глубокий коробчатый
без борта с бортом без борта с бортом
Ртах р*—9° р — 6° р— 5° р—3° 35° 35°
* р — угол трения груза (настил в движении), град.
Табл. 8.9. Рекомендуемые размеры хода натяжного устройства
пластинчатого конвейера
Шаг цепи, мм
Ход натяжного устройства, мм
100; 125
200; 250
320; 400
500; 630
300
320
500
800
Табл. 8.10. Основные размеры загрузочной воронки пластинчатого
конвейера
Ширина настила, мм Расстояние между борта- ми вороикн Bg , мм Длина бортов Iq , мм
400 270 1000
500 340 1200
650 430 1500
800 580 2000
1000 660 2000
1200 800 2000
1400 940 2500
1600 1060 2500
угол наклона пластинчатого конвейера при транспортировании на-
сыпных грузов выбирается по табл. 8.8.
При этом необходимо, чтобы угол,-наклона конвейера
Р<Фд-5°, (8.3)
где фд — угол естественного откоса груза в движении, град
[см. 4.6)].
Натяжное устройство. Ход натяжного устройства выбирается в
зависимости от шага тяговых цепей (табл. 8.9).
Загрузочные воронки. Основные размеры загрузочной воронки
для пластинчатых конвейеров (рис. 8.4) в зависимости от ширины
настила можно принимать по табл. 8.10.
Условное обозначение пластинчатого конвейера. Условное обо-
значение стационарного пластинчатого конвейера общего назначе-
но
Рис. 8.4. Размеры загрузочной ворон-
ки пластинчатого конвейера (к табл.
8 10)
ния, согласно ГОСТ 22281—76, содержит наименование изделия
(«конвейер пластинчатый») обозначение типа конвейера и испол-
нения, ширину настила ходовой части (см) и обозначение стан-
дарта.
Например, стационарный пластинчатый конвейер общего на-
значения бортовой волнистый (БВ), исполнения 1, с шириной на-
стила ходовой части В = 800 мм обозначается:
Конвейер пластинчатый БВ—1—80 ГОСТ 22281—76.
8.3. ПРЕДВАРИТЕЛЬНЫЙ РАСЧЕТ
ПЛАСТИНЧАТОГО КОНВЕЙЕР/А
Ширина настила без бортов (м) при транспортировании насып-
ных грузов
/~ Q
В = ]/ 648ф/гр tg (0,4<р)’ (8’4)
где Q — производительность конвейера, т/ч; и — скорость движения
полотна, м/с; р — насыпная плотность груза (табл. 4.1), т/м3; —
коэффициент, зависящий от угла наклона конвейера (табл. 8.11); ср —
угол естественного откоса груза в состоянии покоя (табл. 4.1).
Ширина настила с бортами (расстояние между бортами) (м)
при транспортировании насыпных грузов
В = , / а | ; 2 ------W—
|/ 900vpfefjtg (0,4ф *ptg(0,4(p) ’ 1 7
где h — высота борта (см. параграф 8.2), м; ф— коэффициент, ха-
рактеризующий степень использования высоты борта, ф = 0,65...0,8.
Полученная ширина настила уточняется согласно указаниям
параграфа 8.2.
Тяговая сила конвейера (И)
Fo = 1,05 [Fmin + g(wqLpr + 2t^x.4Lr ± qH) + F6 + Fn.p], (8.6)
где Fniin — наименьшее натяжение цепей (см. параграф 5.2), Н; w—
коэффициент сопротивления пластинчатого конвейера (табл. 8.12)1
q—погонная масса груза на конвейере [формулы (5.3) и (5.11)], кг/м;
7/г—длина горизонтальной проекции загруженной части рабочей вет-
ви-конвейера, м; qx ч— погонная масса ходовой части конвейера, кг/м;
Lr—длина горизонтальной проекции конвейера, м; Н — высота подъ-
ема груза, м; Fq — сопротивление трения груза о неподвижные борта
[формула (8.8)], Я; Fn р — сопротивление плужкового разгрузчика [фор-
мула (5.30)].
6 Зак 3134
161
Табл. 8.11. Значения коэффициента [к формулам (8.4) и (8.5)]
Угол наклона конвейера, град Тип настила
без бортов с бортами
До 10 1,0 1,0
10 ... 20 0,9 0,95
Более 20 0,85 0,9
Табл. 8.12. Значения коэффициента сопротивления w для пластинчатых конвейеров
Тип цепи конвейера по ГОСТ 588—81 Обоз- начение цепи Диаметр вали- ка цепи, мм Условия работы конвейера**
хорошие средние тяжелые
Втулочная 1 [0,2.. .0,25* ** 0,3...0,35* 0,4...0,45*
Роликовая 2 0,2...0,25* 0,3...0,35* 0,4...0,45*
Катковая с гладкими 3 До 20 0,07 0,09 0,11
катками Более 20 0,06 0,08 0,10
Катковая с ребордами 4 До 20 0,08 0,10 0,13
на катках Более 20 0,07 0,09 0,12
* Большие значения принимаются при путях с центрирующими устройствами,
предохраниющими цепь от сдвига.
** При работе в зимних условиях в неотапливаемом помещении или на откры-
том воздухе приведенные значения увеличиваются в 1,5 раза.
В формуле (8.6) знак плюс перед qH принимается при подъеме
груза, знак минус — при его опускании.
Сопротивление трения насыпных грузов о неподвижные бор-
та (И)
До « 1О-3/7грР£/б, (8.7)
где f — коэффициент трения насыпного груза о стенки борта
(табл. 4.1); hp — рабочая высота борта (по высоте груза), м; р —
насыпная плотность груза, т/м3 (см. табл. 4.1); /б — длина бор-
тов, м.
Погонная масса ходовой части конвейера определяется по ка-
талогу.
Приближенно погонную массу (кг/м) ходовой части конвейера
можно принять
^х.ч^бО В+ТС,
(8-8)
где В — ширина настила, м; К — см. табл. 8.13.
Мощность на приводном валу конвейера (кВт)
р _
° ~ ЮзП11 в ’
где т]п.н — КПД приводного вала, Цп.в^0,94...0,96.
162
Табл. 8.13. Значения К [к формуле (8.8)]
Характеристика груза по плотности (р, т/м8) Ширина настила без бортов, м Ширина настила с бортами, м
0,4; 0,5 0,65; 0,8 1,0 и более 0,4; 0,5 0,65; 0,8 1,0 и более
Легкий, р<1 35 45 60 40 50 70 Средний, р = 1.. .2 50 60 90 60 70 100 Тяжелый, р>2 70 100 130 80 НО 150
Табл. 8.14. Значения коэффициента k± [к формуле (8.11)]
Длина конвейера, м k<
Менее 25 25 ... 60 Более 60 2 1,5 1
Мощность двигателя для привода конвейера определяется по
формуле (6.19).
Максимальное статическое натяжение тягового органа
,05 + о) ?
(8.10)
где Fmin — наименьшее натяжение тягового органа (1000...3000 II).
Динамическая нагрузка на цепи (или цепь) (Н)
г, 60l>2L / I д \ /О
^дин ГТ (^ + ^1^Х.ч), (8. 11)
где L — длина конвейера, м; z—число зубьев ведущей звездочки
тяговой цепи; t — шаг тяговой цепи, м; — коэффициент приведе-
ния массы (учитывающий, что не все элементы конвейера движут-
ся с максимальным ускорением, а также — влияние упругости це-
пи) (табл. 8.14).
При скорости полотна до 0,2 м/с динамические нагрузки на
цепи можно не учитывать.
Расчетное натяжение тягового органа
расч
max j 1 дин
(8.12)
Если тяговый орган двухцепной, расчетное натяжение одной
цепи
Драсч = 0,6Грасч. (8.13)
Для одноцепного тягового органа Fpac4 — FpaC4.
Разрушающая нагрузка цепи
Гразр > АГрасч, (8-14)
где k — коэффициент запаса прочности цепи: для горизонтальных
конвейеров 6 = 6...8, с наклонными участками — 6 = 8...10.
6*
163
8.4. ПРОВЕРОЧНЫЙ РАСЧЕТ
ПЛАСТИНЧАТОГО КОНВЕЙЕРА
1. Выполняется уточненный тяговый расчет конвейера методом
обхода по контуру (см. параграф 5.2).
2. По уточненному максимальному натяжению тягового органа
делается проверочный расчет цепи на прочность [см. (8.10)...(8.14)].
3. По уточненному значению тяговой силы определяется необхо-
димая мощность на приводном валу конвейера [формула (8.9) без
учета т]п.в], мощность двигателя [см. (6.19) и (6.21)] и по каталогу
выбирается двигатель (табл. III.3).
4. Определяется частота вращения приводного вала конвейера
(мин-1):
^П.В --
60и 60и
лВо zt
(8.15)
где v — скорость тягового органа, м/с; Dq — диаметр делительной
окружности приводной звездочки, м; z — числов зубьев приводной
звездочки; t— шаг тяговой цепи, м.
5. Определяется необходимое передаточное число между валом
двигателя и приводным валом конвейера [формула (6.23)].
6. Из конструктивных соображений составляется кинематичес-
кая схема привода конвейера. По каталогу подбирается редуктор
(табл. III.4).
7. Уточняется скорость ходовой части (м/с) исходя из фактичес-
кого передаточного числа привода:
__ ztn
(8.16)
где «ф — фактическое общее передаточное число привода кон-
вейера.
8. Уточняется производительность (т/ч) конвейера:
у конвейеров без бортов
Оф = 648В2^^фр tg (0,4ф); (8.17)
у конвейеров с бортами
Оф = 900В??фр [В^р tg (0,4ф) + 4/гф].
(8.18)
Обозначения те же, что и в формулах (8.4) и (8.5).
9. Проверяется достаточность пускового момента двигателя по
продолжительности пуска (разгона) согласно условию (5.40).
10. Определяется усилие в цепи, набегающей на приводную звез-
дочку, при пуске конвейера [формулы (5.41)...(5.48)] и определя-
ется коэффициент снижения прочности тяговых цепей при пуске
конвейера [формула (5.49)].
И. Определяется расчетный тормозной момент [формулы (5.50)...
(5.54)] и выбирается тормозное устройство.
164
Глава 9. СКРЕБКОВЫЕ КОНВЕЙЕРЫ
9.1. ОБЩИЕ СВЕДЕНИЯ
Скребковым называется конвейер, где груз транспортируется
по желобу или другому направляющему устройству движущимися
скребками, прикрепленными к тяговому элементу. Различают кон-
вейеры со сплошными и контурными (фигурными) скребками.
Сплошные скребки бывают высокими (их высота примерно равна
Рис. 9.1. Схема скребковых конвейеров:
а — с высокими сплошными скребками; б — с низкими погруженными скребками; в — с кон-
турными скребками; г — трубчатый конвейер
высоте желоба) и низкими (их высота в несколько раз меньше вы-
соты желоба). Применяются также трубчатые конвейеры с круг-
лыми (иногда прямоугольными) скребками. В зависимости от ха-
рактера движения различают скребковые конвейеры с непрерывным
поступательным и с возвратно-поступательным движением тягово-
го элемента.
На рис. 9.1 показаны схемы некоторых распространенных типов
конвейеров с непрерывным поступательным движением. Конвей-
еры (рис. 9.1, а) порционного волочения груза с высокими сплошны-
ми скребками состоят из скребков /, прикрепленных к цепи 4, хо-
довые катки 3 которой перемещаются по направляющим 2. Конвей-
165
еры сплошного волочения груза с низкими скребками показаны на
рис. 9.1, б, конвейер с контурными скребками — на рис. 9.1, в, схе-
ма трубчатого конвейера — на рис. 9.1, г.
Конвейеры с высокими скребками используются для транспорти-
рования материалов, крошение которых не снижает их качества,
или для не крошащихся грузов. Конвейеры с низкими скребками
имеют большее распространение, так как перемещение материала
происходит с меньшим его измельчением.
Производительность, скорость движения и длина скребковых
конвейеров ограничиваются значительным сопротивлением переме-
щению груза и износом элементов конвейера. Обычно производи-
тельность конвейеров находится в пределах 50...350 т/ч, скорость —
0,16...1,0 м/с, длина— 60...100 м.
9.2. НОРМАТИВНЫЕ МАТЕРИАЛЫ ДЛЯ РАСЧЕТА
СКРЕБКОВЫХ КОНВЕЙЕРОВ
Тяговые элементы. В скребковых конвейерах применяют различ-
ные цепи: в конвейерах с высокими скребками — втулочно-катко-
вые тяговые пластинчатые (ГОСТ 588—81) с шагом 160, 200, 250,
320 и 400 мм; в конвейерах со сплошными низкими скребками —
тяговые пластинчатые втулочные или роликовые (ГОСТ 588—81)
и специальные вильчатые цепи; в трубчатых скребковых конвей-
ерах— тяговые разборные (ГОСТ 589—74), пластинчатые втулоч-
ные, калиброванные круглозвенные (ГОСТ 2319—70), а также
специальные двухшарнирные цепи [30].
Число тяговых цепей (одна или две) определяется главным
образом устойчивостью скребка. При ширине скребка до 500 мм
применяют одну цепь, при большей ширине — две. Параметры це-
пей приведены в табл. III.1.10...III.1.14.
Скребки и желоба. В зависимости от сечения желоба и типа
конвейера скребки могут быть прямоугольной, трапецеидальной,
круглой и других форм. Изготовляются скребки из листовой стали
(толщиной 3...8 мм), чугуна, пластмассы. Шаг скребков всех типов
конвейеров обычно принимают равным двум шагам цепи. Для
трубчатых конвейеров шаг скребков tc принимают из условий:
где — конструктивные коэффициенты: для кон-
вейеров с прямолинейной трассой (горизонтальных и наклонных)
^!=2...6, ^2=2...3; для конвейеров с комбинированной трассой, име-
ющих вертикальные участки, й] = 2...4, ^2=1; t— шаг цепи; D —
диаметр трубы. Диаметр скребка принимают на 10...15 мм меньше
внутреннего диаметра трубы.
Желоба конвейеров делают сварными или штампованными из
листовой стали толщиной 4...6 мм. Для желобов используют также
швеллеры и стандартные трубы с наружным диаметром 108...219 мм
и толщиной стенок 3...6 мм. Секции желобов имеют длину 4...6 м.
Зазор между скребком и желобом принимается равным 5... 15 мм с
каждой стороны. Находят применение конвейеры с подвижными
166
Табл. 9.1. Рекомендуемые параметры трубчатых скребковых конвейеров
Размеры трубы, мм Параметры ходовой части, мм Погоиная масса хо- довой час- ти, кг/м Расчетная произ- водительность, м8/ч (при скорос- ти 0,16 м/с)
наружный диаметр толщина стенки диаметр скребка шаг скребков для конвейера
горизонталь- ного с комбиниро- ванной трассой
108 4 94 320.. .400 160.. .200 8,7 4
159 4,5 142 320.. .400 160.. .200 11,6 9
219 6 198 480.. .600 320.. .400 17,6 16
Табл. 9.2. Основные параметры нормализованных скребковых конвейеров
с высокими сплошными скребками
эазмер скреб- ка, мм Шаг скреб- ка, мм Тип скребка Шаг звень- ев цепи, мм • Коли- чество цепей Произво- дитель- ность*, м8/ч Наибольшие раз- меры кусков гру- за, мм
шири- на высота рядо- вого сортиро- ванного
200 100 320 Консольный 160 1 30 50 30
250 125 320 То же 160 1 50 60 40
320 160 500 » 250 1 60 80 50
400 200 500 Консольный и симметричный 250 2 100 180 200
500 200 640 Ящичный 320 2 125 220 155
650 250 640 То же 320 2 200 300 200
800 250 640 » 320 2 250 300 220
1000 320 800 » 400 2 400 350 300
1200 400 800 » 400 2 630 400 350
* При горизонтальном транспортировании груза со скоростью 0,5 м/с.
Табл. 9.3. Основные параметры конвейеров с погруженными скребками
Производительность (м8/ч) при скорости
движения цепей, м/с
Размеры, мм
желоба скребка
0,16 0,20 0,25 0,32 ширина высота ширина высота
4,0 5,0 6,3 8,0 100 80 75 70
6,2 8,0 10,0 12,5 125 100 ПО 90
10,0 12,5 16,0 20,0 160 125 140 ПО
12,5 16,0 20,0 25,0 200 125 180 по
20,0 25,0 32,0 40,0 250 160 230 145
31,5 40,0 50,0 63,0 320 200 295 180
50,0 63,0 80,0 100 400 250 375 225
внутренние звенья тя-
которых
боковыми стенками (ящичные),
говых цепей одинаковой высоты со скребками.
Привод конвейера. Наиболее часто применяется привод редук-
торного типа с предохранительной муфтой, устанавливаемый на
концевой звездочке. Параметры редукторов приведены в табл. III.4.
167
Натяжное устройство. В скребковых конвейерах применяются
винтовые, пружинно-винтовые и грузовые натяжные устройства.
Ход натяжного устройства — не менее 1,6 шага цепи.
В табл. 9.1...9.3 приводятся рекомендуемые параметры некото-
рых типов скребковых конвейеров.
9.3. РАСЧЕТ СКРЕБКОВЫХ КОНВЕЙЕРОВ
Расчет скребковых конвейеров состоит в определении размеров
поперечного сечения желоба, усилий в отдельных характерных точ-
ках тяговой цепи методом обхода по контуру (см. параграф 5.2),
проверке цепи на прочность, определении нагрузки на натяжное
устройство и его выборе, подборе двигателя и привода. Расчет про-
изводится так же, как и для пластинчатых конвейеров (см. гл. 8).
Производительность (т/ч) скребкового конвейера со сплошны-
ми высокими скребками
Q = ЗбОО/гйжф^р^, (9.1)
где k — коэффициент: k — Вк/1гж — 2...4; Вж и /гж — рабочие ши-
рина и высота желоба, м; ф — коэффициент заполнения желоба: для
легкосыпучих мелких грузов ф = 0,5...0,6, для плохосыпучих ку-
сковых грузов ф = 0,7...0,8; k$— коэффициент, учитывающий угол
наклона конвейера (табл. 9.4); р — насыпная плотность груза, т/м3;
v — скорость транспортирования, м/с (обычно v = 0,1 ... 0,63 м/с).
Рабочая высота желоба (высота слоя груза) (м)
3600-^р/?^ ф*
(9-2)
Конструктивная высота скребка принимается на 25...50 мм боль-
ше, чем рабочая высота желоба.
Полученные расчетом размеры скребка следует согласовать с
данными табл. 9.2. Ширина желоба Вж и шаг скребков tc должны
быть проверены исходя из заданного наибольшего размера типич-
ного куска груза а' [см (4.2)...(4.4) и табл. 4.2]. Рекомедустся при-
нимать
B^kca' и /с^1,5^. (9.3)
Коэффициент kc принимают равным: для двухцепных конвей-
еров при сортированном грузе 3...4; рядовом грузе —2...2,5; для
одноцепных конвейеров соответственно 5...7 и 3...3,5.
Табл. 9.4. Средние значения коэффициента
Характеристика транспор- тируемого груза Угол наклона конвейера, град 0 10 20 30 35 40
Легкосыпучий 1
Плохосыпучий, кус-
ковой 1
0,85 0,65 0,5
1 1 0,75 0,6 0,5
168
Для конвейеров со сплошными низкими скребками производи-
тельность (т/ч)
Q = 3600Вж/гж1|)ир^р, (9.4)
где ф ~ 0,8...0,85; = 0,8...0,9 (йр вводится только дтя поло-
гонаклопных конвейеров; для горизонтальных k$ — 1).
Ширина желоба (м)
3600/гжг|хр£р
Размеры желоба и скребка должны быть согласованы с данными
табл. 9.3.
Производительность трубчатого конвейера определяется по фор-
tcD2
муле (5.13), в которой А —------ф, где D — внутренний диаметр тру-
4
бы, м; ф — 0,8 ... 0,9 — коэффициент заполнения сечения. Скорость
движения скребков принимают 0,1 ... 0,4 м/с.
При тяговом расчете скребковых конвейеров учитывается, что
их тяговые элементы и груз перемещаются с различным сопротивле-
нием движению. Общее сопротивление движению загруженной
ветви
F — (qcdi 4* 7ц0)ц) Lrg ± (q + 7ч) Нg, (9*5)
где q, q^—соответственно погонная масса груза и цепи, кг/м; шг,
з?ц — соответственно коэффициенты сопротивления движению гру-
за и цепи (табл. 9.5); £г — длина горизонтальной проекции конвей-
ера, м; Н — высота подъема груза, м. Знак плюс принимается при
движении груза вверх, знак минус — при движении груза вниз.
Погонная масса груза g в скребковых конвейерах определяется
ил формулы (5.12). Погонная масса ходовой части конвейера
(цепей и скребков) qn определяется по данным завода-изготови-
теля. Для конвейеров с высокими скребками q^^k^q, где kn — эмпи-
рический коэффициент: £ц=0,5...0,6—для одноцепных конвейеров,
/гц=0,6...0,8—для двухцепных. Для конвейеров с низкими скребка-
ми 7ц (кг/м):
<7ц = 6 + "цР(зГ.^0Г°б1ц) , (9-7)
где Ьц — ширина цепного звена, м; £г— длина горизонтальной про-
екции конвейера, м; //общ — общая высота подъема груза, м. Для
трубчатых конвейеров при определении qn можно пользоваться
данными табл. 9.1.
Минимальное натяжение цепи (Н) в конвейерах с высокими
скребками должно быть проверено по условию устойчивости скре-
бка:
9,5ГСЙж//ц, (9.8)
где Fc — сопротивление перемещению порции груза между скреб-
ками, Н: FG — qtcg (corcos p + sin р); tc — шаг скребков, м; р — угол
наклона конвейера, град; — шаг цепи, м.
169
Табл. 9.5. Коэффициенты сопротивления движению в скребковых конвейерах
[к формуле (9.6)]
Коэффициент сопротивления движению
Тип конвейера
Со сплошными высокими
скребками и низкими
скребками
Т рубчатые
1 >1 fnif д— коэффициент
трения груза по желобу
в движении)
0,6...0,7 — для гори-
зонтальных участков;
2,5...3— для вертикаль-
ных участков
0,1...0,13 — для цепей с
катками; 0,25...0,4 — для
цепей без катков
0,3...0,5 —для стальной
трубы и стального или пласт-
массового скребка;
0,5...0,6—для обрезинен-
ного скребка
Обычно принимают 7*’min = 3...1O кН. Для трубчатых конвейеров
с прямолинейной трассой Fmtn = 0,5... 1,0 кН, для конвейеров с за-
круглениями Fmin= 1,5...2 кН. Тяговая сила и требуемая мощность
двигателя конвейера определяются соответственно по формулам
(5.37) и (5.38). Прочность цепи проверяется по формуле (8.14).
Частота вращения приводного вала конвейера определяется по
формуле (8.15), а передаточное число привода — по формуле (6.23).
Прочность тяговых цепей в период пуска определяется по фор-
муле (5.49).
Глава 10. ПОДВЕСНЫЕ КОНВЕЙЕРЫ
10.1. ОБЩИЕ СВЕДЕНИЯ
Подвесным называется конвейер с тяговым элементом в виде
цепи или каната, на котором укреплены каретки с подвесками для
транспортирования груза, движущиеся по подвешенному жесткому
пути.
Подвесные конвейеры предназначаются для транспортирования
штучных грузов (иногда насыпных грузов в таре) по замкнутому
контуру пространственной или одноплоскостной, например горизон-
тальной, трассы.
В зависимости от типа тягового элемента подвесные конвейеры
делятся на цепные (наиболее распространенные) и канатные. По
способу перемещения грузов различают подвесные конвейеры
грузонесущие (рис. 10.1, а), толкающие (рис. 10.1, б), грузоведу-
щие (рис. 10.1, в). Цепь 5 связана с каретками 3, имеющими хо-
довые катки, которые перемещаются по тяговым подвесным пу-
тям 4. Они обычно прикреплены к частям здания. Цепь приводится
в движение с помощью звездочки или гусеничного привода.
У грузонесущих конвейеров каретки соединены с подвесками 2,
на которых установлены грузы /. У толкающих конвейеров цепи 5,
перемещающиеся по тяговым путям 4, выполнены с кулачками б,
которые толкают подвески 2 с тележками (каретками) 7, переме-
170
щающимися на грузовом подвесном пути 8. Каретки 3 грузоведу-
щих (грузотянущих) конвейеров соединены со штангами 9 наполь-
ных тележек 10 с перемещаемыми грузами.
На рис. 10.1, г изображена схема пространственного подвес-
ного конвейера, трасса которого разбита на отдельные характер-
ные участки, ограниченные точками, обозначенными цифрами. Для
Рис. 10.1. Схема подвесных конвейеров:
Д — грузонесущего; б — грузотолкающего; в — грузоведущего; г — схема трассы подвесного
конвейера
поворота направляющего подвесного пути в горизонтальной плос-
кости используются специальные поворотные устройства в виде
звездочек, блоков, роликовых батарей и направляющих путей
(участки 6, S, /2, 14, 4). Повороты в вертикальной плоскости осу-
ществляются вертикальными плавными перегибами направляющего
пути (участки 2, 10). Первоначальное натяжение тягового органа
создается натяжным устройством, обычно грузовым (участок 4).
Наибольшее применение нашли грузонесущие конвейеры.
10.2. НОРМАТИВНЫЕ МАТЕРИАЛЫ ДЛЯ РАСЧЕТА
ПОДВЕСНЫХ КОНВЕЙЕРОВ
Тяговые элементы и звездочки. Для конвейеров, расположенных
в одной горизонтальной плоскости, тяговым элементом является
цепь (редко — канат).
Для пространственных конвейеров применяют тяговые разбор-
ные цепи по ГОСТ 589—74 (табл. III. 1.13), специальные пластинча-
тые цепи с увеличенными зазорами в шарнирах и сварные из круг-
лой стали по ГОСТ 2319—70 (табл. III.1.10). Применяются также
171
Табл. 10.1. Диаметры делительных окружностей звездочек и диаметры блоков
поворотных устройств подвесных грузонесущих конвейеров (ГОСТ 5946—79)
Обозначение конвейера Шаг звена цепи, мм Число зубьев з вездочки Диаметр дели- тельной окружности звездочки, мм Диаметр бло- ка, мм Радиус гори- зонтального поворота пути мм
ЦПК-80Р 80 8 413,5 377 203
10 514,9 479 254
13 667,7 633 331
16 820,6 787 408
20 1022,0 989 509
ЦПК-100Р 100 6 390,7 — 189
8 516,9 — 253
10 643,6 600 318
13 834,6 792 414
16 1025,7 984 510
20 1277,5 1238 637
ЦПК-160Р 160 6 625,7 — — 302
8 827,1 — 406
10 1029,8 965 509
13 1235,4 1273 663
16 1641,2 1581 817
специальные двухшарнирные цепи, допускающие работу на поворо-
тах трассы с малыми радиусами перегибов. Предпочтительны тяго-
вые разборные цепи.
Для подвесных конвейеров с пространственной трассой рекомен-
дуется применять разборные цепи типа Р2 (ГОСТ 589—74), конст-
рукция которых допускает поворот звеньев в плоскости продольных
осей шарниров на угол до 13°, что позволяет уменьшить радиусы
вертикальных перегибов трассы.
Число зубьев z приводных звездочек принимают: для цепей
сварных—16...24; пластинчатых—8...20; разборных—6...20 (гт]П=
= 4).
При выборе шага цепи и числа зубьев звездочки следует учиты-
вать возможность прохождения грузов на поворотных звездочках.
В табл. 10.1 приводятся число зубьев, диаметр делительных ок-
ружностей звездочек и диаметр блоков для подвесных конвей-
еров.
Каретки. Предназначаются для крепления подвесок с грузами,
вместе с которыми перемещаются по подвесным путям, и для под-
держания тягового элемента. Наиболее часто применяются типовые
каретки, основные характеристики которых приводятся в табл. 10.2.
Работоспособность типовой каретки обеспечивается при соблю-
дении следующих условий:
по прочности каретки
Гр Г к max*, (Ю.1)
по нагрузке на подшипники каретки
(Ю.2)
172
Табл. 10.2» Основные характеристики типовых кареток (ГОСТ 5946—79)
Обозначение кон- вейера Цепь Предельная нагрузка на ка- ретку, кН, не менее Профиль пу- ти—двутавро- вая балка (ГОСТ 8329—72) Масса каретки кг, не более
шаг звена, мм разрушающая нагрузка, кН, не менее
ЦПК-80Р 80 106 2,5 10 3,0
ЦПК-Ю0Р 100 220 5,0 14 5,5
ЦПК-160Р 160 400 8,0 16 13,0
Размеры каретки, мм Наиболь- ший угол подъема (спуска) пути, не более Размеры поворотного роликового устройст- ва, мм, не более
н в h hi
не более не менее
DP 1
62 75 125 20 12 60° 70 90
83 105 155 25 17 115
125 125 200 35 20 45° 170
Примечания: 1. Предельная нагрузка на каретку соответствует грузо-
несущей способности каретки в состоянии покоя на горизонтальном участке пути.
2. Для устройства вертикальных поворотов пути допускается применение
других двутавровых балок, если при этом не ухудшаются эксплуатационные
качества конвейера.
где — расчетная (предельная) нагрузка на каретку (приводится
в табл. 10.2); FKmax — максимальная нагрузка на каретку, которая
обычно имеет место на вертикальном перегибе трассы по дуге ми-
нимального радиуса с выпуклостью вверх, расположенном на участ-
ке с наибольшим натяжением ГНаиб (Н) тягового элемента конвей-
ера:
Гк max = FCOS Гнаиб, (10.3)
F — нагрузка на загруженную каретку, слагающаяся из веса под-
173
вешенного груза, подвески, каретки и тягового элемента на участ-
ке между каретками, Н; р — угол, соответствующий дуге перегиба;
/к — шаг кареток, м; R— минимальный радиус вертикального пере-
гиба, м; — допускаемая полезная нагрузка на подшипники
каретки;
^.0=^-^, (10.4)
k\—коэффициент, учитывающий скорость движения конвейера.
При скорости, равной 0,067; 0,1; 0,13; 0,17; 0,2; 0,27; 0,33; 0,4 м/с,
kx равен соответственно 0,8; 0,7; 0,63; 0,52; 0,55; 0,5; 0,45; 0,42; k2—
коэффициент, учитывающий температурный режим работы конвей-
ера. При температуре окружающей среды до 125; 125; 150; 175;
225; 250 °C k2 равен соответственно 1,0; 0,95; 0,91; 0,87; 0,74; 0,70;
/гн — коэффициент неравномерности распределения нагрузки на
катки каретки: kH= 1,1... 1,2; F3KB — эквивалентная нагрузка на под-
шипники каретки, Н.
Для рабочей каретки конвейера, имеющего вертикальные пере-
гибы,
где L — общая длина трассы конвейера, м; Fr = mg + Fx — нагруз-
ка на рабочую каретку на горизонтальном загруженном участке трас-
сы, Н; Fx = Qxgt — то же, на незагруженном участке, Н; т — мас-
са транспортируемого груза, приходящаяся на каретку, кг; — по;
гонная масса ходовой части холостой ветви конвейера, кг/м [см. (10.12)]-
£г и L* — длина горизонтальной проекции загруженной (£г) и холо-
стой (£х) ветвей конвейера, м; Ln—длина n-го перегиба, м: Ln =
— L&n — Ьвп = 0,0175рп7?п; Рп — угол вертикального перегиба пути
конвейера, град; Rn — радиус вертикального перегиба, м; F ап — сум-
марная нагрузка на рабочую каретку на кривой вертикального пере-
гиба с выпуклостью вниз (абсолютная величина), Н: FAn ~ Fr cos —
F" t
---ь—к; Fbh — то же, на кривой с выпуклостью вверх: FBn~Fr X
К Ап
В t
v , rn . Bn*Al r*H rMi ~
X cos----1—5—; г Art, FBn—натяжение тягового элемента в кон-
2 квп
це дуги А (в нижней части перегиба) и дуги В (в верхней части пе-
региба) /г-го вертикального перегиба. Значения Fah и Fbh опреде-
ляются из тягового расчета конвейера методом обхода по контуру
от первого до последнего перегиба на трассе; п — номер перегиба на
трассе конвейера (перегибы нумеруются отдельно); Fnn — Fr cos р/2 —
нагрузка на рабочую каретку на наклонном участке вертикального
перегиба, Н; £нп — длина наклонного участка /г-го перегиба, м.
Для конвейеров с трассой в одной горизонтальной плоскости
174
формула для F3KB упрощается, так как отпадают слагаемые, отно-
сящиеся к вертикальным перегибам. Для упрощения расчетов по-
казатель степени в этой формуле можно принимать равным 3.
Если условия работоспособности каретки [см. (10.1) и (10.2)]
не обеспечиваются, груз при помощи траверсы подвешивают на
двух или четырех каретках (траверсные каретки). Траверса пред-
ставляет собой фасонную балку, которая по концам подвешивается
к кареткам, а в середине имеет отверстие для шарнирного крепле-
ния подвески. Каретки для поддержания траверсы ставят через два
пли четыре звена цепи.
Допускаемая нагрузка на траверсу
д.к, ( 1 0.6)
где £Тр — коэффициент неравномерности распределения нагрузки
на каретки (для конвейеров с одноплоскостной трассой йтр= 0,9, для
конвейеров с пространственной трассой Лтр = 0,75...0,8); z—число
кареток, на которые подвешивается траверса, обычно г=2...4);
Ед.к — допускаемая нагрузка на одну каретку (см. выше).
В соответствии с ГОСТ 5946—79 шаг кареток /к (мм) должен
выбираться из ряда: при шаге цепи /=80 мм /к= 160; 320; 480; 640;
800; при /=100 мм /к=200; 400; 600; 800; 1000 и при /=160 мм
/к = 320; 640; 960; 1280.
Шаг кареток для конвейеров с пространственной трассой при-
нимается не более 960 мм. Шаг подвесок согласовывается с шагом
кареток. Если шаг подвесок больше максимального шага кареток,
для ограничения чрезмерного провисания цепи между рабочими ка-
ретками устанавливают холостые каретки. У горизонтальных кон-
вейеров максимальный шаг кареток может быть принят до 1280 мм.
Шаг кареток может быть неодинаковым по условиям их крепле-
ния к цепи, а также по другим производственным обстоятельствам.
Он должен быть кратным двум шагам цепи, т. е. шаг кареток
/к=2г/, где / — шаг цепи; z— любое целое число.
На рис. 10.2 показаны примеры расстановки рабочих (Р), хо-
лостых (X) и траверсных (Г) кареток на цепи конвейера.
Выбранный шаг подвесок должен быть проверен по условию про-
ходимости груза наибольших размеров на наиболее крутых на-
клонных и вертикальных участках трассы и горизонтальных пово-
ротах (рис. 10.3).
Минимально допустимый шаг Ртш подвесок на наклонных
участках
min
cosB ^max
pmax
(Ю.7)
+ A)>
на вертикальных участках
(10.8)
где Ртах — наибольший угол наклона пути конвейера на вертикаль-
ном перегибе; /гаах — наибольшая длина груза в плоскости движе-
175
Рис, 10.2. Расстановка кареток на тяговом элементе конвейера
Рис. 10.3. Расчетные схемы возможности прохода грузов на трассе:
а— с наклонными участками; б — с вертикальными; в — на горизонтальных поворотах; г —
расположение комплекта грузов
1/6
Рис. 10.4. Поворотное устройство со звездочкой (блоком)
ния конвейера с учетом размеров подвески; А — минимальный за-
зор между грузами, исключающий их столкновение; /гтах — наи-
большая высота груза с учетом размера подвески.
Для грузонесущих конвейеров А=0,15...0,2 м, для толкающих
конвейеров А ==0,2...0,3 м (учитывается раскачивание грузов). Воз-
177
можность прохода грузов на горизонтальных поворотах проверяют
графически, учитывая заданный зазор Д.
Расчетный шаг Т подвесок принимается равным или большим
шага, определенного из условий свободного прохода грузов по трас-
се. Кроме того, он должен быть кратным двум шагам цепи:
T=2zt^Tniin, (10.9)
где 2=1, 2, 3, ...; t — шаг цепи.
Для толкающего и грузоведущего конвейеров расчетный шаг
расстановки толкателей и грузовых тележек принимается равным
расчетному шагу подвесок с грузами. Шаг толкателей должен быть
одинаковым на всей трассе конвейера.
Поворотные устройства. Для поворота трассы конвейера в го-
ризонтальной плоскости используются поворотные устройства в ви-
де звездочек, блоков, роликовых батарей и направляющих путей.
Выбор поворотного устройства зависит от типа тягового элемента,
его натяжения и радиуса поворота.
На рис. 10.4 показано типовое поворотное устройство со звез-
дочкой (блоком), а в табл. 10.1 приведены его характеристики. По-
воротный участок пути 1 крепится к сварной опоре 4, на которой
закреплена неподвижная ось 5 с подшипниками качения и поворот-
ная звездочка 3 или блок 2,
На рис. 10.5 показана секция роликовой батареи. Эти батареи
применяют для разборных и пластинчатых цепей при изменениях
их направления на угол менее 90° или же при больших радиусах
горизонтального поворота (более 750 мм). Диаметр роликов при-
нимают равным 65... 130 мм. Применяют секции с углами поворота
на 15, 30 и 45°. Радиусы роликовых батарей, измеряемые по оси
огибаемой цепи, выбираются равными 0,63; 0,8; 1,0; 1,25; 1,6; 2,0;
2,5 м. Для подвесных грузоведущих конвейеров радиусы роликовых
батарей назначают большими — до 6 м.
Направляющие пути. Подвесные пути конвейеров бывают одно-
рельсовыми и двухрельсовыми. Однорельсовые пути делают из дву-
тавровых балок № 10...18 (ГОСТ 8239—72), из труб диаметром
100...150 мм и гнутых профилей коробчатого сечения, двухрельсо-
вые пути — из двух уголков или двух гнутых профилей.
Допускаемые нагрузки на каретку для двутавровых ходовых
путей различных номеров исходя из прочности балок приводятся
в табл. 10.3.
Табл. 10.3. Допускаемые нагрузки на каретку
по прочности двутавра
Номер двутавра поГОСТ 8239—72 (СТ СЭВ 2209—80) Допускаемая нагрузка на ка- ретку, кН
10 2,8
12 3,2
14 3,4
16 3,6
18 3,9
18М 8,15
178
В соответствии с ГОСТ 5946—79 рекомендуется нормальный ряд
радиусов (м) вертикальных перегибов балки ходового пути: 1,0;
1,25; 1,6; 2,0; 2,5; 3,15; 4,0; 5,0; 6,3; 8,0; 10,0. В зависимости от шага
кареток /к и натяжения цепи рекомендуемые радиусы вертикаль-
ных перегибов приводятся в табл. 10.4.
Рис. 10.5. Секция роликовой батареи
Радиус горизонтального поворота 7?п пути конвейера прини-
мается в зависимости от типа поворотного устройства, его радиуса
и размеров цепи.
При поворотном устройстве со звездочкой
/?п«0,5К/); —(10.10)
где Do — диаметр делительной окружности звездочки; I — шаг
цепи.
179
Табл. 10.4. Рекомендуемые радиусы вертикальных перегибов, м
Тип цепи Шаг цепи, мм Натяжение цепи на перегибе, % от допускаемого
до 50 | 75 | 100
при шаге кареток ZK , равном
At | 6/ | 8/ | 4t | Ы | 8/ | At | 6t | 8t
Разборная 80 1,6 2,0 2,5 2,0 2,5 3,15 2,5 3,15 4,0
по ГОСТ 100 2.5 3,15 3,15 2,5 3,15 4,0 3,15 4,0 5,0
589—74 160 4,0 5,0 6,3 5,0 5,0 6,3 5,0 6,3 8,0
Разборная 80 1,25 1,6 2,0 1.6 2,0 2,5 2,0 2,5 3,15
специальная 100 1,6 2,0 2,5 2,0 2,5 3,15 2,5 3,15 4,0
160 2,5 3,15 4,0 3,15 4,0 5,0 4,0 5,0 6,3
Тележки толкающих и грузоведущих конвейеров. Тележки тол-
кающих конвейеров (см. рис. 10.1, б) бывают с двумя, четырьмя
(наиболее распространенные) и шестью катками. Тележки изго-
товляются с номинальной грузоподъемностью 50, 125, 500 и 1250 кг
для тяговых цепей: двухшарнирной с шагом 200 мм, разборной с
шагами 80 и 100 мм, разборной с шагом 100 мм и разборной с ша-
гом 160 мм. Катки тележек и их подшипники рассчитываются
так же, как и катки кареток.
Грузы, имеющие большие размеры и массу, транспортируют на
нескольких тележках, соединенных траверсами (сцепами).
Грузоподъемность тележек грузоведущих конвейеров
(рис. 10.1, в) выбирают из ряда г 125, 250, 500 и 1000 кг.
Массу тележек, подвесок и траверс принимают по проектным
данным или по аналогии с действующими установками.
Привод конвейера. Приводы, передающие тяговое усилие за-
цеплением, бывают угловые (со звездочкой или кулачковым бло-
ком) и гусеничные (со специальной приводной цепью и кулаками).
Угловые приводы применяются на повороте трассы на 90° или 180°,
гусеничные — на прямолинейных участках. При гусеничном при-
воде размеры приводного механизма меньше (см. рис. 11.4 и пара-
граф 11.2).
Наиболее часто применяются приводы с коническо-цилиндри-
ческими редукторами типа КДВ. В табл. 10.5 и 10.6 приведены ха-
рактеристики этих редукторов.
Для обеспечения минимальных натяжений в цепи конвейера
привод располагают, как правило, в наивысшей точке загруженной
части конвейера или несколько ниже ее (после длинных тяжелоза-
груженных горизонтальных участков или больших подъемов).
Определение наивыгоднейшего положения привода см. в [5]. Для
горизонтальной трассы привод обычно располагают в конце загру-
женной ветви цепи.
Натяжные устройства. Обычно применяют грузовые натяжные
устройства. Выбор типа натяжного устройства зависит от длины
и условий работы конвейера и конфигурации его трассы. Усилие
Гнат (Н) для передвижения тележки натяжного устройства, по ко-
180
^Табл. 10.5. Характеристика редукторов типа КД В и КДВ-М2
Параметр Тип редуктора
КДВ-160 1 КДВ-200М2 1 КДВ-250М2 | КДВ-350/М2
Максимальный крутящий момент на валу приводной звездочки, Н-м Диапазон скоростей движе- ния цепи (м/с) при частоте вра- щения двигателя (мин”"1): 1000 1500 Общая масса редуктора, кг Тип грузонесущего конвей- ера 800 0,007... 0,016 0,012...0,37 145 ЦПК-80Р 1600 4000 0,007.. .0,019 0,011.. .0,029 0,01...0,39 0,016. ..0,38 250 360 ЦПК-ЮОР ЦПК-Ю0Р цпк-16ор 10 000 0,014...0,03 0,015...0,39 1250 ЦПК-160Р
Примечание. Диапазон передаточного числа редуктора при 17 исполне-
ниях — 81... 2909; КПД — 0,9... 0,92.
Табл. 10.6. Характеристика редукторов КДВ-М1
Максимальная мощность на быстроходном валу, кВт
Исполне- ние Переда- точное число при 1500 мии~1 при 1000 мнн 1
КДВ200-М КДВ250-М1 КДВ350-М1 КДВ 200-М1 КДВ 250-М1 КДВ 350-Ml
I 2124 0,13 0,32 0,80 0,09 0,22 0,54
II 1815 0,15 0,38 0,95 0,10 0,25 0,63
III 1382 0,20 0,50 1,23 0,13 0,33 0,82
IV 1052 0,26 0,65 1,62 0,17 0,43 1,08
V 801 0,34 0,85 2,14 0,23 0,57 1,42
VI 634 0,43 1,1 2,7 0,28 0.72 1,8
VII 501 0,55 1,4 3,5 0,36 0,90 2,27
VIII 397 0,69 1,7 4,34 0,46 1,15 2,87
IX 350 0,76 1,9 4,9 0,51 1,3 3,26
X 263 1,05 2,5 6,4 0,65 1,7 4,32
XI 703 1,32 3,3 8,44 0,87 2,2 4,32
XII 160 1,96 4,1 10,7 1,1 2,8 7,1
торому ведется его расчет (т. е. вес груза, нагрузка на пружину
или усилие на винт),
^нат = /ч + ^г-Н + ^тел, (10.11)
где Fi и Fi+i — натяжение сбегающей и набегающей ветвей тяго-
вого органа, Н; FTQn — сопротивление передвижению тележки, Н.
При установке тележки на колесах FTe,4= (0,05...0,1)тТелё’; на пол-
зунах— /?тел = 0,4ттелйг, где ттел — масса тележки с подвижным
участком пути и находящимися на нем каретками и подвесками с
грузом (в среднем ттел = 350 кг). Необходимая масса^ натяжного
груза с учетом потерь в отклоняющих блоках для бесполиспастной
натяжки тг~ М^пат/^-
181
Табл. 10.7. Рекомендуемые скорости для транспортных подвесных конвейеров
Назначение конвейера и наименование характерных грузов Масса груза, кг Способ загрузки и разгрузки Характерная ско- рость, м/с
Внутрицеховое или До 1000 Грузоподъемны- 0,067
межцеховое транспорти- рование отливок, поковок или отдельных узлов 10 ми средствами Вручную 0,167
Транспортирование де- 5 50...100 100...500 То же" Автоматически Грузоподъемны- 0,2 0,3 0,167
талей машин (заготовок) между станками 10 ми средствами Вручную 0,1
Транспортирование ли- 10 Вручную 0,067...01
тейных стержней на сбор- ку форм Межоперационное тран- 100...200 Грузоподъемны- 0,167
спортирование изделий и заготовок 100...200 ми средствами Автоматически 0,2
Транспортирование тю- 10 20 5...10 Вручную Автоматически Вручную 0,25 0.3 0,3
ков, связок, пачек на 50...100 Автоматически 0,27...0,4
складах и в экспедициях Полный ход натяжной тележки составляет 250...600 мм. Чтобы
уменьшить нагрузку на натяжное устройство, его устанавливают
на участке с наименьшим натяжением тягового органа или близко
от него — обычно на повороте после наиболее загруженного спуска
трассы конвейера за приводом. При горизонтальной трассе или при
малых по высоте спусках натяжное устройство размещают непо-
средственно после привода.
Скорость конвейера. Для транспортных подвесных конвейеров
скорость назначается в зависимости от массы грузов, заданной
производительности [см. (5.15)] и способа загрузки и разгрузки кон-
вейера. Рекомендуемые скорости приводятся в табл. 10.7.
Принятую скорость (м/с) следует согласовать с нормальным
рядом скоростей по ГОСТ 5946—79: 0,005; 0,00625; 0,0089; 0,01;
0,0125; 0,016; 0,02; 0;025; 0,03; 0,04; 0,05; 0,0625; 0,08; 0,1; 0,125;
0,16; 0,2; 0,25; 0,32; 0,4.
10.3. ПРЕДВАРИТЕЛЬНЫЙ РАСЧЕТ
ПОДВЕСНОГО КОНВЕЙЕРА
Для расчета конвейера должы быть заданы: схема его трассы
(с указанием высоты и длины участков, места и способа загрузки
и разгрузки), характеристика и условия работы конвейера, масса,
габариты и характеристика грузов, производительность конвейера.
Проектирование подвесного конвейера начинают с выбора по-
рядка размещения грузов на подвеске и подбора ее конструкции в
182
соответствии с выполняемым транспортно-технологическим про-
цессом. Затем выбирается типоразмер цепи (см. 10.2) и каретки
(см. табл. 10.2). Назначается минимально возможный шаг подве-
сок исходя из максимальных габаритных размеров грузов и их сво-
бодного прохода на горизонтальных поворотах и вертикальных
перегибах [см. (10.7) и (10.8)]. Из формулы (5.15) определяется
скорость транспортирования, которая согласовывается с данными
табл. 10.7, производится расстановка кареток (см. рис. 2.23), затем
производится определение максимального натяжения тягового эле-
мента. Для этого предварительно определяется погонная масса
холостой и загруженной q? ветвей.
Погонная масса холостой ветви (кг/м)
q*=тп/Г+Шк/^к+q^ (10.12)
загруженной ветви (кг/м)
qv=q*+.nirlTt (10.13)
где тп, tnK> тт — соответственно масса подвески, каретки и груза,
кг; Т — шаг подвесок, м; tK — шаг кареток, м; ql1t — погонная масса
тягового органа, кг/м.
При необходимости пропуска неразгруженных подвесок на хо-
лостую ветвь принимается расчетная погонная масса
<7х = <7х + (0,08 ... 0,12)-/-.
Предварительное значение максимального натяжения цепи
конвейера (Н) можно определить [5] по формуле
Лпах = + Wy.q^Lf) (1 + kwWz) g + qrHg, (10.14)
где Fmin—минимальное натяжение цепи, H: Fmin ~ 500... 1000 Н;
— —суммарный коэффициент, учитывающий сосредоточен-
ные (местные) сопротивления на всей трассе; wB, wn, — коэффи-
циенты, учитывающие сопротивления на каждой дуге вертикального
перегиба, горизонтального поворота на звездочке и роликовой бата-
рее соответственно; х, у, z— количество дуг вертикальных переги-
бов, горизонтальных поворотов на звездочках и роликовых батареях
па всей трассе конвейера, для каждого полного вертикального пе-
региба с верхней и нижней дугами х == 2; и —коэффициенты
сопротивления движению на прямолинейных участках загруженной и
холостой ветвей конвейера (при приближенных расчетах можно при-
нимать w* — wr — ш); Дг, L* — длина соответственно горизонтальных
проекций загруженной и холостой ветвей конвейера, м; kM—коэффи-
циент концентрации местных сопротивлений, зависящий от количе-
ства перегибов и поворотов и их расположения на трассе конвейера:
kM = 0,5 при х + у + 2^5 и = 0,35 при x + y + z>5; Н —
наибольшая высота подъема груза на трассе конвейера, м.
Значения коэффициентов w, для конвейеров ЦПК-80Р
и ЦПК-100Р приведены в табл. 10.8 и 10.9. Приближенно эти дан-
183
Табл. 10.8. Коэффициенты сопротивления w движению подвесных
конвейеров на прямолинейных участках в отапливаемых помещениях
Коэффициент сопротивления при нагрузке на капетчу» Н
Произведет - венные условия 100 200 500 1000 ;&» ! 1 2000
Хорошие 0.060 0,035 0,020 0,014 0,013 0.CI2
Средние 0,080 0,045 0,026 (0,038) 0,020 0,018 0,016
Т яжелые 0,10 0,056 0,032 (0,045) 0,025 0,022 0,020
П р и м е ч а н и е. В скобках даны коэффициенты сопротивления при работе в
неотапливаемых помещениях (температура до —20 СС).
Табл. 10.9 Коэффициенты, учитывающие со противления движению на
криволинейных участках подвесных конв ейерсв при работе
в отапливаемых помещениях
Условия На поворотных звездочках и блоках и»п На роликовых батареях и’р На вертикальных перегибах
работы Углы поворота, град
90 | 180 | До 30 | 45 | 60 | 90 | 180 ; | До 20 | 35 | 45
Хорошие 1,020 1,030 1,020 1,025 1,030 1,040 1,07 1,01 1,015 1,025 Средние 1,025 1,035 1,025 1,030 1,040 1,05 1,09 1,012 1,020 1,030 (1,040) (1,050) (1,035) (1,040) (1,045) (1,065) (1,10) (1,025) (1,035) (1,045) Тяжелые 1,035 1,050 1,030 1,040 1,045 1,060 1,20 1,015 1,025 1,035 (1,055) (1,065) (1,040) (1,050) (1,055) (1,07) (1,15) (1,03) (1,04) (1,05) Примечание. В скобках даны коэффициенты при работе в неотапливаемых помещениях (температура до —20 °C).
ные могут быть приняты и для конвейера ЦПК-160Р. Характери-
стика условий работы конвейеров приводится в табл. 10.10.
Выбранный типоразмер цепи проверяют по условию Гщах^^доп,
где ^Доп — допускаемая нагрузка на цепь по ее несущей способ-
ности:
F k
^оп==-^Л (10.15)
где Fpa3p — разрушающая нагрузка цепи (выбирается из
табл. III.1); &тк — коэффициент, учитывающий свойства материа-
лов цепи: &тк = 0,6...0,85 (меньшие значения для незакаленной ста-
ли, большие — для закаленной); kH — расчетный запас прочности
по несущей способности цепи: для одноплоскостного конвейера
&н=3,5...6, для конвейеров с пространственной трассой &н = 4...9;
kn — коэффициент, учитывающий напряженное состояние звена
цепи: &и==1,5...5 (если звенья не подвергаются изгибу, можно при-
нимать Ли=1; в остальных случаях kn определяется расчетом внут-
184
Табл. 10.10. Характеристика условий работы подвесных грузонесущих
конвейеров (ГОСТ 5946 — 79)
Условия работы Характеристика окружающей среды и производственных условий Основная область применения
Хорошие
Средние
Тяжелые
Чистое отапливаемое сухое помещение с
искусственной вентиляцией; отсутствие
абразивнощпыли, содержание неабразивной
пыли в воздухе (не более 5 мг/м3) от-
сутствие паров и газов, вредно влияю-
щих на элементы конвейера; односмен-
ная работа конвейера, возможность двух-
сменной работы; хорошие условия для
обслуживания и ремонта конвейера
Отапливаемое помещение с искусственной
вентиляцией; неабразивная пыль или не-
большое содержание в воздухе абразив-
ной пыли (до 10 мг/м3); отсутствие паров
и газов, вредно влияющих на элементы
конвейера; относительная влажность воз-
духа не более 60%, конденсация влаги
отсутствует; двухсменная работа, воз-
можность трехсменной работы; средние
условия для обслуживания и ремонта
Отапливаемые и неотапливаемые помеще-
ния при значительном содержании в воз-
духе абразивной пыли (более 10 мг/м3);
повышенная влажность (до 90 %), нали-
чие в воздухе паров воды, химических
растворов, красящих веществ, возможна
конденсация влаги; трехсменная или
круглосуточная работа конвейера; тяже-
лые условия обслуживания и ремонта
конвейера; работа при повышенных тем-
пературах
Механические и сбороч-
ные цехи машинострои-
тельных и приборострои-
тельных заводов; книго-
хранилища; почтовые пред-
приятия; пошивочные
фабрики легкой промыш-
ленности; экспедиция ти-
пографий
Цехи по производству
резинотехнических изде-
лий; холоднопрессовые
цехи без отделений мой-
ки и окраски; межцехо-
вой транспорт в закры-
тых отапливаемых галере-
ях
Выбивные и обрубные
отделения литейных це-
хов; моечные, окрасоч-
ные и сушильные каме-
ры; межцеховой транс-
порт на открытом возду-
хе (без галерей); откры-
тые склады
реннего звена цепи на разрыв и изгиб на горизонтальных поворо-
тах и вертикальных перегибах; в среднем Аи=3).
По более точному дифференциальному методу [5] kn~kxk2k^k4kb,
где k\ — коэффициент безопасности (для конвейеров с одноплоско-
стной трассой ^1 = 1, с пространственной трассой при массе транс-
портируемых грузов до 125 кг ^ = 1,2, при массе грузов более
125 кг ^! = 1,5); k2— коэффициент ответственности конвейера (для
конвейеров отдельных неответственных производственных линий
k2 —1,2, для конвейера, обслуживающего несколько линий, k2 =
= 1,4....1,8); £3 — коэффициент, учитывающий износ цепи (большие
значения — при больших сроках службы конвейера и напряжен-
ном режиме его работы): k3 = 1,4...1,8; — коэффициент, учиты-
вающий степень достоверности расчетных и нагрузочных данных:
k4 = 1,2...1,3; &5— коэффициент динамических нагрузок. При скоро-
сти v конвейера до 0,083 м/с &5=1; при v = 0,083...0,27 м/с ^5=1,15;
при v = 0,27 м/с ^5= 1,25.
185
Табл. 10.11. Допускаемые усилия в тяговой цепи
Шаг звена цепи, мм Условия рабо- ты конвейера Характеристика трассы Разрушающая нагрузка цепи, кН Допускаемое уси- лие и цепи (кН) при скорости дви- жения ходовой части v, м/с
до 0,13 свыше 0,13
80 Хорошие Простая 106 9,0 8,0
Хорошие Сложная 8,0 7,5
Средние Простая
Средние Сложная 7,5 7,0
Тяжелые Простая
Тяжелые Сложная 7,0 6,0
100 Хорошие Простая 220 13,0 12,5
Хорошие Сложная 12,5 11,5
Средние Простая
Средние Сложная 11,5 11,0
Т яжелые Простая
Тяжелые Сложная 11,0 10,0
160 Хорошие Простая 400 32,0 30,5
Хорошие Сложная 30,5 ‘ 28,5
Средние Простая
Средние Сложная 28,5 27,0
Т яжелые Простая
Тяжелые Сложная 27,0 25,0
Примечание. Трассу конвейера считают простой при общем числе горизон-
тальных и вертикальных поворотов до 20. Каждый высотный перепад (переход с
одного горизонтального уровня на другой) считают за два поворота.
Если условие Emax^ERon нс удовлетворяется, следует изменить
типоразмер цепи и шаг подвесок и кареток и повторить расчет.
Допускаемые усилия в тяговой цепи для подвесных грузонесу-
щих конвейеров можно также определять по данным табл. 10.11 в
зависимости от условий работы конвейера (см. табл. 10.10) и ско-
рости движения ходовой части.
Необходимая мощность электродвигателя привода конвейе-
ра (кВт)
^с^^гпах
IO3)]
(10.16)
где kc — коэффициент неучтенных сопротивлений: kc= 1,1...1,2; Ft ~
окружное усилие на приводной звездочке, Н; атах— максимальная
скорость конвейера, м/с; ц — общий КПД механизма привода кон-
вейера.
Окружное усилие на приводной звездочке при предварительном
расчете
E/=(Emax Emin) ^п, (10.17)
где &уп — коэффициент, учитывающий сопротивление на приводной
звездочке (см. табл. 10.9).
186
По найденной мощности выбирают из каталога электродвига-
тель ближайшей большей мощности и типовой привод. Как пра-
вило, электродвигатели мощностью менее 1 кВт устанавливать не
рекомендуется из-за возможного увеличения сопротивления от за-
густения смазочного материала при пуске конвейера.
Частота вращения приводного вала конвейера определяется со-
гласно (6.22) при Dyig^Dq. Необходимое передаточное число при-
вода определяется по (6.23).
10.4. ПРОВЕРОЧНЫЙ РАСЧЕТ
ГРУЗОНЕСУЩЕГО КОНВЕЙЕРА
Для уточненного тягового расчета конвейера необходимо опре-
делить местоположение точки с минимальным натяжением тяговой
цепи на трассе конвейера и установить это натяжение
Fmin у конвейера с пространственной трассой следует ожидать на
участке после наибольшего по высоте загруженного спуска, а у го-
ризонтального конвейера — в точке сбега тягового элемента с при-
водной звездочки или блока.
Тяговый расчет грузонесущего конвейера выполняется методом
обхода трассы по точкам. Для этого трассу конвейера разбивают
на отдельные расчетные участки (прямолинейные, подъемы, спуски,
повороты и др.). Нумерацию точек, ограничивающих эти участки,
обычно начинают от точки с минимальным натяжением. После
этого определяют местоположение привода (см. параграф 10.2).
Расчет натяжений начинают от точки с наименьшим натяже-
нием и продолжают до приводной звездочки по направлению дви-
жения тягового элемента конвейера. При этом натяжение Fi в конце
каждого рассматриваемого участка определяется из условия
Fw = Fi+Fc, (10.18)
где Fc — сопротивление на участке от (/— 1)-й до Лй точки. Натя-
жение тягового элемента (Н) в конце прямолинейного участка
(рис. 10.6, а):
загруженной ветви конвейера
Л-н = Fi + wqiLig, (10.19)
порожней ветви
Л-+1 = Fi + wq^Lig, (10.20)
где Ft и Лч-i—натяжение в начале (соответственно загруженно-
го и порожнего) и в конце участка, Н; Li—длина f-го участка, м;
w — коэффициент сопротивления движению (см. табл. 10.8, при
этом нагрузка на каретку равна нагрузке от веса участка цепи
между каретками, транспортируемого груза, каретки и подвески);
характеристику условий работы — см. табл. 10.10; qr и qx— погон-
ная масса соответственно загруженной и порожней ветви конвейе-
ра [см. (10.12), (10.13)], кг/м.
187
Натяжение ветви тягового элемента (Н), сбегающей с поворот-
ной звездочки (рис. 10.6, б),
Л-+1 = ^пЛ,
где — см. табл. 10.9.
<7
"ффффф/ .
____z___ Г
Г
(10.21)
Рис. 10.6. Расчетные схемы для определения натяжений на отдельных участках
трассы конвейера:
а — горизонтальном прямолинейном; б — криволинейном на звездочках или блоках; в —
криволинейном на роликовой батарее; г — вертикальных перегибов с движением вверх; д —
вертикальных перегибов с движением вниз
Натяжение ветви тягового элемента (Н), сбегающей с ролико-
вой батареи (рис. 10.6, в),
Fi+! = WpFi,
(10.22)
где — коэффициент сопротивления (см. табл. 10.9).
Натяжение ветви тягового элемента (Н) в конце вертикального
перегиба длиной Li (м) при подъеме (рис. 10.6, г)
Л+1 = (wBFi 4- wq'Lig 4- q'hg); (10.23)
при спуске (рис. 10.6, д)
Л-н = wB (wbFi 4- wq'Lig - q'hg), (10.24)
где wB—коэффициент сопротивления на вертикальном перегибе (см.
табл. 10.9); q'—погонная масса тягового органа, кг/м: для загру-
женной ветви q' — qri Для порожней ветви qf = q* или q' == qx.
Затем по максимальному натяжению и принятым радиусам вер-
тикальных перегибов определяется максимальная нагрузка /’’кmax
на каретку [см. (10.3)] и сравнивается с расчетной нагрузкой
[см. (10.1)]. Работоспособность каретки проверяется также по на-
грузке на подшипники [см. (10.2)].
Окончательная проверка правильности выбора типоразмера
цепи производится по натяжениям и нагрузкам, полученным из
тягового расчета конвейера методом обхода по точкам.
188
Определяется мощность двигателя привода конвейера по фор-
муле (10.16), в которой
F t= (Рнаб ^сб)^1ь (10.z5)
где FHao и ^сб — натяжение соответственно набегающей и сбегаю-
щей ветви цепи на приводной звездочке, Н (определяются в резуль-
тате тягового расчета конвейера).
10.5. ТЯГОВЫЙ РАСЧЕТ ТОЛКАЮЩЕГО КОНВЕЙЕРА
Типовое оборудование толкающих конвейеров аналогично обо-
рудованию грузонесущих конвейеров, поэтому выбор типоразмера
тягового элемента, кареток с толкателями и тележек с подвесками
для грузов производится так же, как и для грузонесущих конвейе-
ров (см. параграф 10.2).
По заданной производительности и принятой скорости движе-
ния конвейера определяют шаги подвесок, тележек с грузами и ка-
реток [см. (5.11), (5.12), (5.14), (5.15)].
Погонная масса тяговой ветви (кг/м)
7т = тк/^к+7ц-Т ^т.к/Т4;
(10.26)
на грузовой порожней ветви
7Х = (>] т? + тп)/Т;
на грузовой загруженной ветви
7г — 7* +
(10.27)
(10.28)
2Х
где тю тт.к, тт, тп, — масса соответственно каретки, комплекта
толкателя, тележки, подвески, груза, кг; 2К — количество подвесок
в комплекте грузов; — шаг кареток, м; 7Ц— погонная масса тяго-
вого органа, кг/м; Т — шаг подвесок, м.
При транспортировании грузов на сцепах 2Ж — суммарная мас-
са всех тележек сцепа; при перемещении груза на одной тележке
V тт = тт — масса одной тележки.
Максимальное натяжение цепи конвейера (Н) с приводом за-
цеплением от звездочки или от кулаков гусеничной цепи опреде-
ляется по приближенной формуле
= ЛтшД’с + [wq7Lg 4- Wig \qrLrr 4- qxL*)] (1 4- kMwc) 4- qrHg,
(10.29)
где ^min—минимальное натяжение тягового органа, Н: 7?min =
= 1,5...3 Н; w — коэффициент сопротивления движению кареток
(см. табл. 10.8); L — общая длина горизонтальной проекции кон-
вейера, м; Wi — коэффициент сопротивления движению тележек по
грузовому пути (табл. 10.12); остальные обозначения — см. пара-
189
Табл. 10.12. Средние значения коэффициента сопротивления движению
для тележек с типовыми катками при работе в отапливаемых помещениях
Условия работы конвейера При нагрузке на тележку, Н
меиее 300 | 600 1200 1500 2400
Хорошие 0,040 0,025 0,020 0,016 0,015
Средние 0,052 0,032 0,026 0,022 0,020
Тяжелые 0,072 0,045 0,036 0,027 0,020
графы 10.3, 10.4 и в пояснениях к формуле (10.14); шс— см. в по-
яснениях к формуле (10.14).
Для тягового расчета конвейера методом обхода по контуру
определяются сопротивления движению на отдельных его участках,
а затем натяжения ветвей в конце каждого участка.
Натяжение тягового органа (Н) в конце прямолинейного участ-
ка длиной Li (м)
загруженной ветви конвейера
(wqT+wxqr)Lig; (10.30)
порожней грузовой ветви
Л+1= Fi-V (wq-t + w^Lig} (10.31)
тяговой ветви (без учета сопротивления на грузовом пути)
Л-н = Fi + (10.32)
Обозначения смотри в пояснениях к формулам (10.19), (10.20),
(10.21).
Натяжение ветви, сбегающей с поворотной звездочки грузово-
го пути,
Fг+\ = ^п(^'г"1~^'с.к + ^'с.т) , (10.33)
где wn— коэффициент сопротивления движению (см. табл. 10.9);
Fi — натяжение цепи перед поворотом; Fc.k — сопротивление дви-
жению двухколесных кареток на повороте:
fc.K^l,l^T2^-^^, (10.34)
где R — радиус поворота пути, м; а — угол поворота, град; Fc.t—
сопротивление движению четырехколесных грузовых тележек на
повороте:
F с ,т = wyzm'Tgf (10.35)
wT — коэффициент сопротивления движению одной тележки на
повороте (табл. 10.13); z = — количество тележек на повороте;
Т — шаг тележек, м; — суммарная масса частей, нагружающих
тележку: тт = тт + тп + пгг — для загруженной ветви; mT = тт +
-ф тп — для незагруженной ветви; mT, mn, тг — масса соответствен-
но тележки, подвески и груза, кг.
190
Табл. 10.13. Средние значения коэффициента wT
Угол поворота, град Условия работы
хорошие | средние | тяжелые
90 0,05 0,06 0,02...0,09
180 0,08 0,10 0,12...0,15
Натяжение ветви, сбегающей с роликовой батареи,
на тяговом и грузовом путях
Fi+l ~ (Fi + ^с.к“|-^с.т) J (10.36)
на тяговом участке без грузовых путей
Fw = Wp (Fi + Fc,k) , (10.37)
где Wp — коэффициент сопротивления движению (см. табл. 10.9).
Натяжение цепи в конце вертикального перегиба
для загруженного участка
Л+1 = ^в[^вЛ’+ (wqT + Wiqr)Lig± (q?+qr)hg]; (10.38)
для незагруженного участка
Л+1= ^в[^вА+ (wqT + Wiqx)Lig± (qT + qx)hg]-> (10.39)
для тяговой ветви без грузовых путей
Л*+1 = wB (wBFi 4- wqTLig± qThg), (10.40)
где — см. табл. 10.9; Ц— длина горизонтальной проекции вер-
тикального перегиба; k — длина вертикальной проекции перегиба
(высота подъема или спуска). Знак плюс у последнего члена в
этих формулах — при подъемах, а знак минус — при спусках.
Остальную часть тягового расчета толкающего конвейера ведут
так же, как и грузонесущего (см. параграфы 10.3 и 10.4).
10.6. ТЯГОВЫЙ РАСЧЕТ ГРУЗОВЕДУЩЕГО КОНВЕЙЕРА
Порядок расчета грузоведущего конвейера такой же, как и для
грузонесущего. Расчет начинают с выбора типоразмеров цепи, ка-
реток и тележек для грузов (см. 10.2); шаги кареток и тележек
определяют по заданной производительности и принятой скорости
движения конвейера [см. (5.11), (5.12), (5.14) и (5.15)]; скорость
принимают 0,17...0,75 м/с.
Расчетная погонная масса ветвей определяется по формулам
(10.26), (10.27) и (10.28), а предварительное значение максималь-
ного натяжения цепи конвейера — по формуле (10.29). Коэффи-
циенты сопротивлений выбирают по рекомендациям, изложенным
выше, кроме коэффициента сопротивления движению тележек
который для средних условий работы определяется по табл. 10.14
(для хороших условий может быть уменьшен на 10 %, а для
тяжелых — увеличен в 1,5 раза).
191
Табл. 10.14. Коэффициенты сопротивления Wi движению
грузоведущих конвейеров
Тип дорожного покрытия Тип катка тележки
на резиновых грузо- | вых шинах на пневматичес- ких шинах
Асфальт 0,033 0,025
Бетонное покрытие 0,028 0,020
Деревянный настил 0,030 0,024
Грунт — 0,080
Сухой песок — 0,015
При тяговом расчете конвейера методом обхода по контуру на-
тяжения тяговой цепи на прямолинейных участках определяют по
формулам (10.30)... (10.32), при этом коэффициент сопротивления
движению тележек гец принимают по табл. 10.14.
Минимальное натяжение цепи /7пнп= 1500...3000 Н.
Натяжение ветви цепи, сбегающей с роликовой батареи,
для грузовой загруженной ветви
Л+1 = ! Л + 2лR -£ kBw,qrg};
' obO /
для грузовой незагруженной ветви
Fl+i = wp (Ft 4- 2лR ~ kB Wi qxg i
\ obu /
для тяговой ветви без тележек
Fi-H ~ ъ
(10.41)
(10.42)
(10.43)
где R — радиус поворота пути конвейера, м: /? = 3...6 м; kB — коэф-
фициент, учитывающий сопротивление от трения в опорах верти-
кальной оси рояльных катков тележек (меньшие значения—для
хороших, большие — для тяжелых условий работы конвейера):
/гв= 1,03...1,05; а — угол поворота пути на батарее, град.
Требуемая мощность двигателя определяется по формуле
(10.16) с учетом формулы (10.25).
В качестве приводного устройства часто используют гусеничный
привод, устанавливаемый в горизонтальной плоскости на прямо-
линейном участке трассы конвейера. При этом гусеничная цепь на
участке зацепления располагается параллельно оси конвейера.
В качестве гусеничной цепи применяют специальную пластинчатую
цепь. Диаметры звездочек привода принимают 400...500 мм (9... 15
зубьев), а расстояние между ними — 0,9... 1,2 м (см. рис. 11.4 и табл.
11.3 и 11.4, а также параграф 11.2).
Трасса грузоведущих конвейеров, как правило, горизонтальная.
Горизонтальные повороты трассы грузовсдущих подвесных конвейе-
ров выполняют поворотными устройствами с роликовыми батарея-
ми, имеющими радиусы 3...6 м.
192
Глава 11. ТЕЛЕЖЕЧНЫЕ КОНВЕЙЕРЫ
11.1. ОБЩИЕ СВЕДЕНИЯ
Т'ележечным называется конвейер, грузонесущим элементом ко-
торого являются тележки-платформы, связанные с тяговым эле-
ментом и двигающиеся по направляющим. Тележечные конвейеры
делятся на вертикально-замкнутые и горизонтально-замкнутые.
Рис. 11.1. Схема вертикально-замкнутого конвейера с опрокидывающимися те-
лежками
Выбор типа конвейера зависит от характеристики перемещаемо-
го груза, характера обслуживаемого технологического процесса и
планировки производственного помещения.
Вертикально-замкнутые конвейеры применяются обычно на
сборочных операциях тяжелых и громоздких изделий (моторов,
автомашин, тракторов, их узлов и др.). Горизонтально-замкнутые
конвейеры применяются для транспортирования легких малогаба-
ритных изделий, а также в технологических цепях (например, кон-
вейеры испытательных станций, литейные и др.).
Габариты и масса транспортируемого груза определяют основ-
ные параметры тележечного конвейера — грузоподъемность и раз-
меры тележки. Грузы, как правило, располагают длинной стороной
вдоль продольной оси конвейера. Соотношение длины L и ширины В
тележки рекомендуется принимать в пределах 1,25...2.
Вертикально-замкнутые конвейеры могут быть с опрокидываю-
щимися и неопрокидывающимися тележками. В первом случае при
колее тележки меньше четырех шагов цепи используется одна тяго-
вая цепь, в остальных случаях — две.
На рис. 11.1 показана схема вертикально-замкнутого конвейера
с опрокидывающимися тележками. Конвейеры с неопрокидываю-
щимися тележками всегда должны иметь две тяговые цепи. Их
трасса может быть только прямолинейной и горизонтальной. Они
имеют малое распространение из-за высокой стоимости и сложно-
сти конструкции.
Горизонтально-замкнутые конвейеры могут иметь центральное
и боковое (смещенное) расположение тяговой цепи относительно
продольной оси тележки (применяются для перемещения легких
и малогабаритных грузов).
В зависимости от числа направляющих путей и конструкции
тележек различают конвейеры двух- и однорельсовые. Однорельсо-
вые конвейеры имеют более простую конструкцию и меньшую стои-
мость. Их недостатки — значительная высота и возможность боко-
вого качания тележки. Они применяются в качестве литейных
7 Зак. 3134
193
Рис. 11.2. Горизонтально-замкнутый тележечный конвейер для литейных форм
конвейеров для легких форАм массой до 300 кг. Более широко рас-
пространены двухрельсовые тележечные конвейеры с нижним цент-
ральным расположением тяговой цепи. На рис. 11.2 показан гори-
зонтально-замкнутый тележечный конвейер для литейных форм. Он
состоит из тяговой цепи 13, к которой жестко прикреплены двух-
катковые тележки 11 с платформами 10, перемещающиеся по рель-
сам /2. Направляющие 14 предотвращают боковое смещение по-
лотна. Щитки 2 между тележками предохраняют цепь от загрязне-
ния. Гусеничный привод полотна состоит из электродвигателя 3,
ременных передач 5, вариатора 4, редуктора 6, открытой зубчатой
передачи 1, гусеничной цепи 9 с кулаками <5. Предварительное на-
тяжение цепи осуществляется натяжным устройством 7.
Для литейных конвейеров длина отдельных участков определя-
ется продолжительностью технологических процессов. Обычно учас-
ток формовки и сборки имеет длину £ф = 30...50 м, заливки £3ал =
= 10...15 м, охлаждения АОхл = 40...60 м, выбивки ЛВыб=3...1О м.
11.2. НОРМАТИВНЫЕ МАТЕРИАЛЫ ДЛЯ РАСЧЕТА
ТЕЛЕЖЕЧНОГО КОНВЕЙЕРА
Тяговые элементы. Для вертикально-замкнутых тележечных
конвейеров применяются цепи пластинчатые по ГОСТ 588—81
(табл. III.1.11 и III.1.12) с шагом 80...320 мм и разборные по ГОСТ
589—74 (табл. III.1.13) с шагом 100 и 160 мм.
Для горизонтально-замкнутых конвейеров, особенно литейных,
применяется одна пластинчатая втулочно-катковая цепь (табл.
III.1.11 и III.1.12). Для конвейеров с боковым расположением теле-
жек может быть использована разборная цепь (табл. III.1.13), для
пространственных конвейеров применяется специальная двухшар-
нирная цепь. В двухрельсовых тележечных конвейерах с нижним
Табл. 11.1. Шаг цепей тележечных конвейеров, мм
Тип конвейера Обоз- наче- ние шага Длина платформы, мм
320 400 500 650 800 1000 1250 1600
Г оризоптал ьно - зам-
кнутый однорельсо-
вый
Горизонтально-зам-
кнутый с боковым
расположением лепи
Вертикально-замк-
нутый конвейер с
опрокидывающими-
ся тележками
*1 — — 250 320 400 500 — —
t2 — — 400 500 650 800 — —
t 400 500 630 800 1000 — — —
t 80 100 260 200 250 320
Примечание, ti и — шаг соответственно меньшего и большего звена
специальной тяговой цепи (рис. 11.4); t — шаг цепи по ГОСТ 588—8L
7*
195
расположением тяговой цепи используются специальные пластин-
чатые втулочно-катковые цепи, выполненные в виде отдельных
секций из двух или четырех звеньев с подвижными шарнирами.
Рекомендуемый шаг цепей тележечных конвейеров приведен
в табл. 11.1,
Тележки и опорные узлы. Конструкция тележки или опорного
Рис. 11.3. Типы платформ горизонтально-замкнутых тележечных конвейеров для
литейных форм:
а — с плоской плитой; б — с роликовым настилом; в — с поворотными плитами
узла конвейера должна обеспечивать удобство установки и съема
грузов, а также их устойчивое положение на всей трассе кон-
вейера.
Платформы тележки литейных конвейеров изготовляются в
196
трех исполнениях: с плоской плитой (рис. 11.3, а), роликовым на-
стилом (рис. 11.3, б) ис поворотными плитами (рис. 11.3, в). Плат-
формы с плоскими плитами применяются для тяжелых форм при
загрузке и разгрузке конвейера краном или электроталью пли же
для легких форм — при загрузке и разгрузке вручную. Платформы
с роликовым настилом применяются для форм массой до 2000 кг
при загрузке с роликовых конвейеров и разгрузке с помощью тол-
Рис. 11.4. Схема гусеничного привода горизонтально-замкнутого тележечного
конвейера:
1 — приводная (гусеничная) цепь; 2 — тяговая цепь конвейера; 3 — платформа; 4 — направ-
ляющие шнны; 5 — кулак-толкатель гусеничной цепи; 6 — приводная звездочка
кателя. Платформы с поворотными плитами делают шириной до
650 мм и используются для транспортирования безопочного литья.
В соответствии с ГОСТ 5938—73 тележечные конвейеры для
литейных форм должны изготовляться следующих типов: Г —
конвейеры с раздельными платформами для перемещения литейных
форм по горизонтально-замкнутой трассе; ГС — конвейеры с пере-
крывающимися платформами (сплошной настил) для перемещения
литейных форм по горизонтально-замкнутой трассе; П — конвей-
еры с раздельными платформами для перемещения литейных форм
по замкнутой трассе, имеющей повороты в горизонтальной и верти-
кальной плоскостях.
Платформы конвейера типа Г должны изготовляться с плоской
плитой и с роликовым настилом. Платформы конвейеров типов ГС
и П должны изготовляться с плоской плитой.
Грузоподъемность и размеры тележек выбираются по массе и
габаритам перемещаемых грузов. У литейных конвейеров размеры
платформ принимаются на 100...150 мм больше габаритных разме-
ров опок. По размерам тележек-платформ выбирают их шаг, кото-
рый должен быть кратным длине секции цепи.
В табл. 11.2 даны основные параметры и размеры тележечных
литейных конвейеров. Приведенный в этой таблице чертеж не опре-
деляет схемы трасс и конструкций конвейеров.
Привод конвейера. В вертикально-замкнутых конвейерах при*
197
Табл. 11.2. Основные параметры и размеры тележечных конвейеров для
литейных форм (ГОСТ 5938—73)
Ширина платфор- мы, мм Полезная длина платфор- мы, мм Шар плат- формы Т, мм Номиналь- ная гру- зоподъем- ность платфор- мы * КР Наименьший радиус поворота* мм Погонная масса хо- довой час- ти, кг/м, не более Коэффиц- енг сопро тивления движению
в горизон- тальной плоскости R в верти- кальной плоскости
1 2 3 4 5 6 7 8
500 650 800 1000 800 1000 1250 500 1250 5000 220 200 180 0,025
650 650 800 1600 260 0,02
800 1000 225
1000 320
1000 1250 500 210
1000 290
1250 1600 250
800 800 1000 2000 340 0,018
1000 1250 320
2000 380
198
Окончание
1 2 3 4 5 6 7 8
1250 1600 1000 2000 5000 280
2000 340
1600 2000 8000 320
1000 1000 1250 2500 430 0,015
1250 1600 370
4000 780
1600 2000 2000 350
4000 690
2000 2500 590
1200 1250 1600 3150 860 0,014
1600 2000 780
8000 980
2000 2500 4000 680
8000 880
2500 3150 2500 790
Примечания: 1. В конвейерах с цепным тяговым органом размеры
шагов платформ могут быть приняты отличными от указанных, но кратными
шагам цепей.
2. Радиусы поворота в горизонтальной плоскости более указанных в табли-
це должны выбираться из следующего ряда: 1600, 2000, 2500, 3150, 4000,
5000 мм.
3. Погонная масса ходовой части дана для конвейеров типов Г и Н с
плоской плитой. Масса ходовой части конвейеров типа Г с платформами, имею-
щими роликовый настил, и конвейеров типа ГС может быть больше указанной
в таблице.
4. Пример условного обозначения тележечного конвейера типа Г с плат-
формой шириной В=800 мм, с плоской плитой, шагом Т=1600 мм, номинальной
грузоподъемностью 2000 кг:
Конвейер тележечный Г 80—160—2 ГОСТ 5938—73.
199
Табл. 11. 3. Основные параметры гусеничных приводов (см. рис. 11.4)
горизонтально -замкнутых конвейеров
Платформа Шаг цепи кон- вейера, мм Шаг кулаков гусеничного привода, мм Число ша- гов гусе- ничной це- пи в одном шаге кула- ков Теоретический шаг гусеничной цепи, мм Рас- четный шаг гусе- ничной цепи, мм
шири- ной В, мм дли- ной 1, мм с рав- ными шагами t с не- равны- ми ша- гами G/G с рав- ными шагами *к с не- равны- ми ша- гами *к с равными шагами / Гк *з=— г' с неравны- ми шагами / Г'к Ц= z"
г' г* ^г.р
320 320 200 — 400 — 3 — 133,3 — 160 400 250 — 500 — 3 — 166,7 — 500 320 200/100 640 600 4 4 160 150 650 400 250/160 800 820 5 4 160 164 400 400 250 — 750 — 4 — 187,5 — 200 500 320 200/100 640 600 3 3 213,3 200 650 400 250/160 800 820 4 4 200 205 800 500 320/200 1000 1040 5 5 200 208 500 500 320 200/100 640 600 3 3 213,2 200 200 650 400 250/160 800 820 4 4 200 205 800 500 320/200 1000 1040 5 5 200 208 1000 630 400/250 630 650 3 3 210 216,7 650 650 400 250/100 800 820 3 3 266,7 273,3 250 800 500 320/200 1000 1040 4 4 250 260 1000 630 400/250 1260 1300 5 5 252 260 1250 800 500/320 800 820 3 3 266,7 273,3 800 800 500 320/200 1000 1040 4 4 250 260 250 1000 630 400/250 1260 1300 5 5 252 260 1250 800 500/320 800 820 3 3 266,7 273,3 1600 1000 630/400 1000 1030 4 4 250 257,5 1000 1000 630 400/250 1280 1300 4 4 315 325 320 1250 800 500/320 1600 1640 5 5 320 328 1600 1000 630/400 1000 1030 3 3 333,3 343,3 2000 1250 800/500 1250 1300 4 4 325 325 1250 1250 800 500/320 1600 1640 5 5 320 328 320 1600 1000 630/400 1000 1030 3 3 333,3 343,3 2000 1250 800/400 1250 1300 4 4 312,5 325 2500 — 1000/630 — 1630 5 — — 326
Табл. 11.4. Количество кулаков гусеничной цепи привода
Число шагов цепи между
кулаками z
Количество кулаков
гусеничной цепи
3
4
5
8...9
6...7
6
200
меняется привод обычного типа со звездочкой. В приводе имеются
типовые редукторы, а в ряде случаев — дополнительная цепная или
зубчатая передача. В конвейере с непрерывным движением, как
правило, применяется вариатор для плавного регулирования ско-
рости движения конвейера.
На горизонтально-замкнутых конвейерах с боковыми и высоким
нейтральным расположением тяговой цепи привод устанавливают
на поворотной звездочке. На конвейерах с низким центральным
расположением тяговой цепи установка поворотных звездочек не-
возможна и поэтому используется гусеничный привод (табл. 11.3).
В типовых гусеничных приводах (рис. 11.4) расстояние между звез-
дочками 1,5...2,5 м, шаг кулаков 648... 1255 мм, тяговое усилие
25...60 кН.
Шаг кулаков гусеничной цепи /к принимается в зависимости от
шага тяговой цепи конвейера t и должен быть кратным шагу гусе-
ничной цепи /з (рис. 11.4). Число кулаков в гусеничной цепи приво-
да принимается по табл. 11.4.
Натяжные устройства. В вертикально-замкнутых конвейерах
применяются винтовые или пружинно-винтовые натяжные устрой-
ства. В горизонтально-замкнутых конвейерах натяжное устройство
устанавливается на повороте конвейера на 180° и представляет со-
бой специальную раму с закрепленными на ней криволинейными
участками рельсов и направляющих путей, концы которых с по-
мощью раздвижных стыков сопрягаются с неподвижными частями.
Рама может передвигаться на специальных опорах с помощью
натяжного винта (см. рис. 11.2).
Рекомендуемый ход натяжного устройства тележечных конвей-
еров приводится в табл. 11.5.
Табл. 11. 5. Рекомендуемый ход натяжного устройства
Конвейер горизонтально-замкнутый с гусеничным приводом Конвейеры с приводом от звездочки
ширина’-платформы, мм ход, мм шаг цепи, мм ход, мм
320 400 100 200
400 400 125 200
500 500 160 320
650 650 200 320
800 800 250 320
1000 800 320 500
1250 800 400 500
500 800
630 800
800 1000
201
11.3. РАСЧЕТ ТЕЛЕЖЕЧНЫХ КОНВЕЙЕРОВ
11.3.1. Расчет вертикально-замкнутых конвейеров
Для расчета конвейера должны быть заданы: схема его трассы
и планировка производственного помещения, условия технологиче-
ского процесса, размеры и масса транспортируемых грузов, произ-
водительность конвейера, характеристика производственных
условий.
”4
Рис. 11.5. Расчетная схема вертикально-замкнутого тележечного конвейера
Проектирование начинают с выбора типа конвейера и подбора
тележек-платформ в зависимости от габаритов и массы перемеща-
емого груза на последней технологической операции, включая мас-
су устанавливаемых на тележку приспособлений (рис. 11.5). Шаг
тележек Т выбирается по длине тележек, определяемой продольным
размером груза.
Время (с), в течение которого одно изделие сходит с конвейера,
определяется по формуле
^в-ЗбООМв^т/Zc, (ИЛ)
где Тк — число рабочих часов в смене; z — число рабочих смен в
сутки; — коэффициент использования конвейера во времени,
обычно &в = 0,9...0,95; feT = 0,85...0,9— коэффициент использования
тележек на конвейере; Zc — суточная производительность конвейе-
ра, шт./сут.
При выполнении рабочих операций на непрерывно движущемся
конвейере время выполнения рабочей операции = при пуль-
сирующем движении конвейера, когда операция выполняется во
время остановки, £Р = /в~ ^п, где — время передвижения конвей-
ера на одну позицию. Скорость непрерывного движения конвей-
ера (м/с)
v = zTTjt^ (11.2)
где zT— количество изделий на одной тележке. Обычно v =
= 0,01...0,1 м/с при непрерывном движении и ^ = 0,1...0,13 м/с при
пульсирующем движении конвейера.
Количество рабочих мест на конвейере при равномерном распре-
делении рабочих операций во времени
?М = Tz /tBt
где Tz — общее время сборки изделия, с.
Общая длина технологической линии на конвейере £т = 7>м. Если
изделие проходит па конвейере сушку, охлаждение или испытание,
202
длина участка, где производятся эти операции, L=vt (t — время
операций, с).
Для выполнения тягового расчета методом обхода конвейера
по контуру (см. параграф 5.2) нагрузки определяются по задан-
ному графику загрузки тележек (см. рис. 11.5) в соответствии с
производственным процессом. При этом масса тележки тт прини-
мается по проектным данным или по аналогии с действующими
установками.
Погонная масса (кг/м) ьго участка рабочей ветви с массой
груза mi (рис. 11.5) при шаге тележек Т (м) и погонной массе
цепи f/ц (кг/м)
<7к = <7ч + (т«' + ГП1)/Т. (11.3)
Погонная масса
(кг/м) на порожней ветви конвейера
7к — ’Т’ m^/Т.
Максимальное натяжение цепи конвейера при
расчетах (Н)
Рmax “ (Рmin У
\ i /
(Н.4)
предварительных
(11.5)
где — коэффициент сопротивления движению на поворотных
звездочках: wn— 1,08...1,12; /’’mm — минимальное натяжение цепи,
обычно Fmin=1...2 кН; w — коэффициент сопротивления движению
ходовой части конвейера (см. табл. 8.12); qi — погонная масса f-ro
участка конвейера [см. (11.3) и (11.4)]; Li — длина гго участка, м.
Прочность цепи конвейера предварительно может быть провере-
на по условию (8.14) с учетом формул (8.12) и (8.13), при этом
следует подставлять значение Гтах, определенное по формуле (11.5).
11.3.2. РАСЧЕТ ГОРИЗОНТАЛЬНО-ЗАМКНУТЫХ
КОНВЕЙЕРОВ
Для расчета используются данные, что и для вертикально-замк-
нутых конвейеров. Расчет начинают с выбора размеров тележек-
платформ и тяговой цепи. Средняя расчетная скорость движения
сборочных конвейеров определяется по формуле (11.2), а для тех-
нологических конвейеров — по заданной производительности из
формулы (5.15). Скорость движения конвейера (с допускаемым
отклонением ±10 %) должна выбираться из ряда: 0,016; 0,02; 0,025;
0,033; 0,04; 0,05; 0,063; 0,08; 0,1; 0,125; 0,16; 0,2 м/с.
Тяговый расчет выполняется методом обхода конвейера по
точкам (см. параграф 5.2), При определении нагрузок массу ходо-
вой части конвейера принимают по аналогии с существующими уста-
новками; для литейных конвейеров ее можно принимать по табл.
11.2. Первоначальное натяжение принимают /4^= 1,0...1,5 кН.
Коэффициенты сопротивления движению на прямолинейных участ-
ках литейных конвейеров приведены в табл. 11.2.
203
При более точных расчетах коэффициент сопротивления опре-
деляют по формуле
и> = kp, (11.6)
dl
где f— коэффициент трения в цапфах: при установившемся режиме
и подшипниках скольжения со смазкой f=fc = 0,15...0,25, при под-
шипниках качения f= /к = 0,01.. .0,06 в зависимости от за-
пыленности помещения (при пусковом режиме принима-
ют f в 1,5 раза больше); d — диаметр цапфы или втулки, м; ц —
коэффициент трения качения катков по направляющим (обычно
для стальных катков и направляющих ц = 0,0005...0,002 м); d}—
диаметр ходового катка, м; kv— коэффициент сопротивления в ре-
бордах катков: при безребордных катках &р= 1,05, при ребордных
£р= 1,25... 1,5.
Сопротивления на криволинейных участках определяют в зави-
симости от конструкции тележек и поворотного устройства конвей-
ера раздельно для тележек и цепи. Для одноосных тележек и двух-
осных тележек с шарнирным креплением осей сопротивление опре-
деляют так же, как и на прямолинейном участке, принимая его длину
равной длине дуги поворота. Для двухрельсовых литейных конвей-
еров значения этих сопротивлений умножают на коэффициент kT =
= 1,02...1,03, учитывающий дополнительное трение на повороте.
Сопротивление повороту (Н) двухосных тележек с жесткой ба-
зой:
па рабочей ветви
Лр = (<7 + <7к) Ка («> + 0.24 ^-) g; (11.7)
на холостой ветви
FKp = + 0,48 g, (11.8)
где q — погонная масса груза, кг/м; q*—см. формулу (11.4); R —
радиус закругления пути, м; а — угол поворота пути, рад; Sg —
жесткая база пути, м; w — коэффициент сопротивления на прямоли-
нейном участке.
Сопротивления движению цепи на звездочках определяют по
формуле (5.26).
Натяжение цепи, сбегающей с направляющей шины, Н,
__1
Fc6 = Л,абе“''а 4- {q + ?к) w'R g, (11.9)
где FHa6 — натяжение набегающей ветви, Н; wr — коэффициент со-
противления на направляющих роликах; w'f&iw; w — коэффициент
сопротивления на ходовых катках; R — радиус закругления пути, м.
Если тяговый элемент движется по шине скольжением, то вместо
w' подставляется коэффициент трения скольжения.
В конвейерах с боковым расположением тяговой цепи при дви-
жении на прямолинейном участке появляется дополнительное со-
204
противление от трения реборды катка о рельс из-за несимметрич-
ного расположения тягового органа. Это сопротивление определя-
ют по формуле (5.17) при /7=0, причем вместо коэффициента w
следует подставлять [6] коэффициент
(11.10)
где fp — коэффициент трения реборд о рельсы: /Р%Д,2; К— колея
катков, м; Ко — расстояние от оси катка до оси тяговой цепи, м;
Вк — база катков, м; Di{— диаметр ходового катка, м; DH —
диаметр реборды ходового катка, м.
Тяговое усилие на приводном устройстве определяется по фор-
муле (5.37), а требуемая мощность двигателя — по формуле (5.38).
Двигатели мощностью менее 1 кВт устанавливать не рекомендуется
из-за повышенных инерционных усилий при пуске конвейера. Для
гусеничного привода усилие на кулаках приводной цепи определя-
ется максимальным натяжением Fmax тяговой цепи конвейера на
прямолинейном участке.
Для предварительных расчетов натяжение тяговой цепи гусенич-
ного привода с учетом потерь в гусеничном приводе
Т^гус = 1,65/?max. (11«11)
Расчетное усилие на одну из двух винтовых натяжек в гусеничном
приводе
Гнат 0,33Fryc. (11.12)
Глава 12. ЭЛЕВАТОРЫ КОВШОВЫЕ ВЕРТИКАЛЬНЫЕ
12.1. ОБЩИЕ СВЕДЕНИЯ
Элеваторы (табл. 12.1... 12.4) предназначаются для подъема
насыпных грузов на высоту до 50 м. Они состоят из тягового орга-
на (в виде замкнутой конвейерной ленты или одной или двух тяго-
Рис. 12.1. Типы ковшовых элеваторов (к табл. 12.2)
205
вых цепей) с жестко прикрепленными к нему ковшами, приводного
и натяжного устройств, загрузочного и разгрузочного башмаков и
кожуха (рис. 12.1). Привод осуществляется от электродвигателя
через редуктор. Предусматривается тормоз или останов для предот-
вращения самопроизвольного движения рабочего органа в обрат-
ном направлении.
Табл. 12.1. Типы, обозначение и основные размеры ковшей
элеватора (ГОСТ 2036 — 77)
Тип ковшей Обоз- наче- ние ков- шей Внутренние размеры ковшей, мм Вмести- мость ков- ша на ли- пин X—X, л (±2%)
В 1 h г
Глубокие
Мелкие
Остроугольные
Скругленные
Г 100 75 80 25 0,2
125 90 95 30 0,4
160 105 НО 35 0,6
200 125 135 40 1,3
250 140 150 45 2,0
320 175 190 55 4,0
400 195 210 60 6,3
500 235 255 75 12,0
650 250 265 85 16,8
м 100 50 65 25 0.1
125 65 85 30 0,2
160 75 100 35 0,35
200 95 130 40 0,75
250 120 160 55 1,4
320 145 190 70 2,7
400 170 220 85 4,2
500 195 250 100 6,8
650 225 285 115 11,5
О 160 105 155 *» 0,65
200 125 195 1,3
250 140 195 *> 2,0
320 165 245 — 4,0
400 225 310 — 7,8
с 320 165 235 60 6,4
400 215 305 80 14,0
500 270 385 100 28,0
650 340 485 125 60,0
800 435 615 160 118,0
1000 435 615 160 148,0
206
12.2. НОРМАТИВНЫЕ МАТЕРИАЛЫ
ДЛЯ РАСЧЕТА ЭЛЕВАТОРОВ
Основные элементы элеваторов и их параметры. Тяговым эле-
ментом элеватора является лента (или ремень) или цепь (одна
или две).
В качестве лент применяются: конвейерные резинотканевые лен-
ты (ГОСТ 20—76); ремни приводные плоские резинотканевые
(ГОСТ 23832—79).
Применяются главным образом тяговые пластинчатые цепи
(ГОСТ 588—81). Скорость движения ковшей выбирается из ряда:
0,4; 0,5; 0,63; 0,8; 1,0; 1,25; 1,6; 2,0; 2,5 м/с (допускаемое отклоне-
ние±10%); номинальная производительность элеваторов—1,6;
2,0; 3,2; 4; 5; 6,3; 10; 16; 25; 40; 63; 100; 160; 250; 320 м3/ч (допуска-
емое отклонение ±10 %).
По СТ СЭВ 1335—78: а) ширина ковша: 80; 100; 125; 160; 200;
250; 315, (320); 400; 500; 630 (650); 800; 1000; 1250 мм (допускаемое
отклонение ±10%); б) номинальная скорость движения ковшей:
0,25; 0,315; 0,4; 0,5; 0,63; 0,8; 1,0; 1,25; 1,6; 2,0; 2,5; 3,15; 4,0;
4,5; 5,0 м/с (допускаемое отклонение ±10%); в) номинальная
производительность: 3,15; 4; 5; 6,3; 10; 16; 25; 40; 63; 100; 125; 160;
200; 250; 315; 400; 500; 630 м3/с (допускаемое отклонение ±10 %).
Число зубьев звездочек для пластинчатых цепей выбирается
из ряда: 6; 7; 8; 10; 12; 13; 14; 15; 16; 18; 20; 22; 24; 25; 28; 30.
Диаметры барабанов (мм) должны соответствовать ГОСТ
2036—77 (табл. 12.3).
Типы элеваторов, ковшей и скорость ковшей выбираются в за-
висимости от характеристики транспортируемых грузов согласно
данным табл. 12.5.
Ширина ковшей назначается по табл. 12.1 в зависимости от их
вместимости [см. (12.2)]. При перемещении кусковых грузов про-
веряется вылет ковша по условию
Anin ^-> ^тах^к,
(12.1)
где^тт—минимальный вылет ковша (табл. 12.1); атах— наиболь-
ший размер кусков транспортируемого груза; kK— коэффициент:
для рядовых грузов &к = 2...2,5; для сортированных — йк=4...5.
Шаг пластинчатых цепей и число зубьев звездочек для цепных
ковшовых элеваторов выбираются в зависимости от шага ковшей
(табл. 12.6).
Натяжное устройство элеваторов бывает винтовое, пружинно-
винтовое и грузовое (редко).
Ход натяжного устройства цепного элеватора выбирается в за-
висимости от шага ковшовой цепи по табл. 8.9. Ход натяжного уст-
ройства ленточного элеватора принимается равным 0,03...0,05 вы-
соты элеватора.
207
Табл. 12.2. Типы вертикальных ковшовых элеваторов (ГОСТ 2036—77)
Обоз- наче- ние Наименование Тип ТЯГО- ВОГО органа Ковши Способ разгрузки ковшей
обоз- наче- ние ти- па способ крепления к тягово- му органу располо- жение на тяговом органе
лг Ленточный быстроходный с расставленными глубокими ковшами Лента или ре- мень Г Задней стенкой Расстав- ленные Центро- бежный
лм Ленточный быстроходный с расставленными мелкими ковшами м
ло Ленточный тихоходный с сомкнутыми остроугольными ковшами О Сомкну- тые Г равита- ционный
ЦГ Цепной быстроходный с расставленными глубокими ковшами Цепь г Расстав- л енные Сомкну- тые Центро- бежный
цм Цепной быстроходный с расставленными мелкими ков- шами м
цо Цепной тихоходный с сом- кнутыми остроугольными ковшами Цепь О Боковы- ми стен- ками Г равита- ц ионный
цс Цепной тихоходный с сом- кнутыми скругленными ков- шами с Гравита- ционный
ЦГТ Цепной тихоходный с рас- ставленными специальными ковшами —— Расстав- ленные
Примечание. Для элеваторов типа ЦГТ ковши не устанавливаются.
Необходимая вместимость ковша
Iq — 1п^к,
(12.2)
Где 4П — необходимая погонная вместимость ковшей, л/м [см.
(12.14)]; tK — шаг ковшей, м.
Вместимость ковшей и соответствующий шаг ковшей выбирают-
ся по табл. 12.7.
208
Табл. 12.3. Основные параметры ленточных ковшовых элеваторов (ГОСТ 2036—77)
Типораз- меры эле- ваторов Ширина ковша В, мм Шаг ковшей ,мм Ширима ленты или ремня, мм Диаметр приводного барабана, мм Скорость дви- жения ковшей, м/о Произво- дитель- ность , м3/ч, не менее
1-й ряд 2-й ряд
1 2 3 4 5 6 7 8
лг-юо 100 200 125 — 250 1,00...2,00 3,2
ЛГ-125 125 320 160 150 320 4
ЛГ-160 160 200 — 400 5
ЛГ-200 200 400 250 —- 10
ЛГ-250 250 300 315 500 16
ЛГ-320 320 500 370 400 1,25...2,50 25
ЛГ-400 400 450 500 630 40
ЛГ-500 500 630 550 600 63
ЛГ-650 650 700 — 100
ЛМ-100 100 200 125 — 250 1,00...2,00 1.6
ЛМ-125 125 320 160 150 320 2
ЛМ-160 160 200 1 400 3,2
ЛМ-200 200 400 250 — 5
<71М-250 250 300 315 500 10
ЛМ-320 320 500 370 400 1,25...2,50 16
Л.М-400 400 630 450 500 630 25
ЛМ-500 500 550 600 40
ЛМ-650 650 700 — 63
ЛО-160 160 160 200 — 400 0,40...0,63 6,3
ЛО-200 200 200 250 10
Л О-250 250 300 315 500 16
209
Окончание
1 2 3 4 5 6 7 8
Л 0-320 320 250 370 400 25
ЛО-400 400 320 450 500 630 40
Примечания: 1. Диаметр указан для нефутерованного приводного бара-
бана, для футерованного он должен быть увеличен на удвоенную толщину футеров-
ки. 2. Ширина ленты или ремня по первому ряду является предпочтительной.
Табл. 12.4. Основные параметры цепных ковшовых элеваторов (ГОСТ 2036—77)
Типоразмеры элеваторов Ширина ковшей В, мм Шаг ков- шей fK , мм Количество цепей Скорость дви- жения ков- шей, м/с Производи- тельность , м’/ч, не ме- нее
тяговых пластин- чатых тяговых свар- ных кругло- звенных
1 2 3 4 5 6 7
ЦГ-100 100 200 1 — 1,00...2,00 3,2
ЦГ-125 125 320 4,0
ЦГ-160 160 2 5
ЦГ-200 200 400 10
ЦГ-250 250 16
ЦГ-320 320 500 1,25...2,50 25
ЦГ-400 400 40
ЦГ-500 500 630 — 63
ЦГ-650 650 100
ЦМ-100 100 200 1 1,00...2,00 1.6
ЦМ-125 125 320 2
ЦМ-160 160 2 3,2
ЦМ-200 200 400 5
ЦМ-250 250 10
ЦМ-320 320 500 1,25...2,50 16
ЦМ-400 400 25
ЦМ-500 500 630 — 40
ЦМ-650 650 63
210
Окончание
1 2 3 4 5 6 7
ЦО-160 160 160 1 0,40...0,63 6,3
ЦО-200 200 200 10
ЦО-250 250 16
ЦО-320 320 250 25
ЦО-400 400 320 40
ЦС-320 320 250 2 40
ЦС-400 400 320 63
ЦС-500 500 400 100
ЦС-650 650 500 160
ЦС-800 800 630 250
ЦС-1000 1000 320
ЦГТ-200 ЦГТ-250 200 250 400
ЦГТ-320 ЦГТ-400 320 400 500 2
ЦГТ-500 ЦГТ-650 500 650 630
. <
ЦГ Т-800 ЦГТ-1000 800 1000 800
Примечании: 1. В таблице приведены номинальные значения шагов ков-
шей. Фактические значения шагов должны приниматься кратными шагам применяе-
мых цепей.
2. Производительность элеваторов типа ЦГТ в каждом отдельном случае оп-
ределяется в зависимости от формы и размеров принятого ковша.
Погонная масса (кг/м) транспортируемого груза
9=1пфр, (12-3)
где ф — коэффициент заполнения ковшей; р — насыпная плотность
груза (см. табл. 4.1), т/м3.
Погонная масса ходовой части элеватора:
ленточного
<7к = <7.тЬ<7ков, (12.4)
где дл — погонная масса ленты [см. (4.11)]; ^ков — погонная масса
ковшей [см. (12.6)];
211
Табл. 12.5. Рекомендации [17] по выбору типа элеватора, типа и скорости движения ковшей
м/с цепи
л
г >
Скорое ленты
<2 1 2 S « s Л05 ® 3 К р, <и 3 ?«= = Ё <т> <□ о к О ж О a =f Е
а С Э . ЬОо'ЙЙ * f-
тип
Рекомендуемый элеватора
1ЫХ
о. <и
Примеры xapaKi грузов
?еристика насыпных грузов
СЗ сх «3 X
212
цепного
Qi\—7ц4“7ков, (12.5)
где 7ц — погонная масса цепей, кг/м (см. табл. III.1.11).
Погонная масса ковшей (кг/м)
------ ^ков д
7коз---_~ *К)
*к
(12.6)
где mF0B — масса одного ковша, кг (табл. 12.8); — шаг ковшей, м;
kK— коэффициент, учитывающий массу крепежных деталей:
/гк^.1,14.
Для ориентировочных расчетов погонная масса (кг/м) ходовой
части элеватора может быть принята
qj&Qk,
где Q — расчетная производи-
тельность элеватора, т/ч; k —
коэффициент (табл. 12.9).
Разгрузка ковшей бывает
(рис. 12.2): центробежная — при
самотечная — при />гз;
смешанная — при гъ<1^га.
Полюсное расстояние (м)
(12.7)
а
I = 895/Яп.б,
(12.8)
где Ип.б — частота вращения ве-
дущего барабана (или ведущих
звездочек), мин-1.
Диаметр (м) приводного бара-
бана (начальной окружности звез-
дочки) рекомендуется принимать:
а) для быстроходного элевато-
ра с центробежной разгрузкой
Dn.6^0,204u2; (12.9)
б) для быстроходного элевато-
ра со смешанной разгрузкой
Пп.б = 0,245^; (12.10)
Рис. 12.2. Схемы разгрузки ковшей:
а — центробежная; б — самотечная; в — сме-
шанная; В — полюс; I — полюсное расстояние:
г, га. г б—расстояние от центра барабана
(звездочки) соответственно до центра тяжес-
ти груза в ковше, до наружной кромки ков-
ша, до внутренней стенки ковша; Fm и Fr—
соответственно сила тяжести и цетробежная
сила массы груза в ковше; F — равнодейст-
вующая сил Fm н F г
6
213
Табл. 12.6. Рекомендуемый шаг пластинчатых цепей и число зубьев звездочек
Расположение
Параметры
расставленное
Шаг ковшей, мм 200 320 400 500 630
Шаг цепей, мм Число зубьев при- 100 160 100 200 125 250 315
водной звездочки Число зубьев на- 13 8 16 8 13 6 6
тяжной звездочки 10 6 13 6 10 6 6
Табл. 12.7. Вместимость и рекомендуемый шаг ковшей
Тип ковшей Шаг ков- шей, мм
глубокий мелкий остроугольный скругленный
• 1п ♦ ♦ *0 0 i 0 О
4,06 0,65 —— 160
1 0,2 0,5 0,1 6,5 1,3 —- —— 200
-11 1 —» — 10 2 «> —— 200
"» -> — — 16 4 25,6 6,4 250
1,3 0,4 0,66 0,2 24,4 7,8 43,7 14 320
2 0,6 1,17 0,35 — ' — —- 320
3,24 1,3 1,87 0,75 40 16 70 28 400
5 2 3,5 1,4 — -» 1 « —— 400
8 4 5,4 2,7 —— -» 120 60 500
12,6 6,3 8,4 4,2 — — — 500
19 12 — —~ 187 118 630
— ' *— —— 235 148 630
* Погонная вместимость ковшей, л/м;
** Вместимость ковша, л.
Табл. 12.8. Ориентировочная масса ковшей вертикальных элеваторов, кг
Ширина ковша, мм Толщина стен - ки ковша, мм Тип ковшей
глубокие мелкие остро- угольные скругленные
160
250
320
400
500
650
0,9
3,0
4,4
9,0
0,7
2,0
4,1
9,0
1,2
3,0
4,4
9,5
14,7
15,3
24,7
45,5
214
в зависимости от расположения и шага ковшей элеваторов
ковшей
сомкнутое
800 160 200 250 320 400
200 400 160 200 250 160 320 200 400
12 6 8 8 12 16 8 12 6
10 6 6 6 12 12 6 12 6
Табл. 12.9. Значения коэффициента k [к формуле (12.7)]
Расчетная производи- тельность элеватора, т/ч Тип элеватора (см. табл. 12.2)
ленточный одноцепной двухцепной
ЛГ; М ло ЦГ; ЦМ ЦО ЦГ; ЦМ ЦО; ЦС
До 10 0,6 — 1,1 _ _ _ 10...25 0,5 — 0,8 1,1 1,2 — 25...50 0,45 0,6 0,6 0,85 1,0' — 50...100 0,4 0,55 0,5 0,7 0,8 1,1 Свыше 100 0,35 0,5 — — 0,6 0,9
Табл. 12.10. Ориентировочное значение коэффициента &зач
Вид груза Тип конвейера
ленточный и одноцепной । двухцепной
при скорости движения ковшей, м/с
0,5 0,75 1.0 1,25 1,6 0.5 0,75 1,0 1,25 1,6
Пылевидный,
порошкооб-
разный, зер-
нистый, мел-
козернистый
Средне- и
крупнокус-
ковой
3
в) для среднескоростного элеватора со смешанной разгрузкой
£)п6=0,306у2; (12.11)
г) для тихоходного элеватора с самотечной разгрузкой
Дп.б> 0,6^2, (12.12)
215
где v — скорость тягового элемента, м/с.
Сопротивление зачерпыванию груза (Н)
^зач—^б^зач, (12.13)
где бзач — коэффициент зачерпывания (табл. 12.10).
Условное обозначение элеватора (ГОСТ 2036—77). Условное
обозначение вертикального элеватора содержит наименование изде-
лия («элеватор»), обозначение типа элеватора, ширину ковша и
обозначение стандарта. Например, цепной элеватор типа ЦГ с ков-
шом шириной В = 250 мм обозначается:
Элеватор ЦГ-250 ГОСТ 2036—77,
12.3. ПРЕДВАРИТЕЛЬНЫЙ РАСЧЕТ ЭЛЕВАТОРА
Необходимая погонная вместимость ковшей (л/м)
З.бшрр’
(12.14)
где Q — расчетная производительность элеватора, т/ч [см. (5.1)];
v — скорость движения ковшей (см. табл. 12.5), м/с; ф— коэффи-
циент заполнения ковшей (табл. 12.5); р — насыпная плотность
груза (табл. 4.1), т/м3.
Необходимая вместимость ковша определяется по формуле
(12.2).
Требуемая мощность на приводном валу для работы элеватора
(кВт)
P = 0,0027QZ/(l+W//),
(12.15)
где Н — высота подъема груза, м; £3ач— см. формулу (12.13).
Окружное усилие (Н) на приводном барабане (на начальной ок-
ружности звездочки)
F= 103P/v.
(12.16)
Усилие для предварительного выбора ленты
max
efa
(12.17)
где efa — тяговый фактор (табл. 12.11); / — коэффициент сцепления
между лептой и барабаном (см. табл. 6.7); а—угол обхвата лентой
барабана, рад.
Необходимое число прокладок в ленте
* max
где Fmax — наибольшее расчетное усилие в ленте, Н;
^р,
(12.18)
В — см.
216
Табл. 12.11. Значения efa при а = л
f f efa
0.1 1,37 0,25 2,18
0,12 1,46 0,30 2,56
0,15 1,60 0,35 3,01
0,20 1,87 0,40 3,51
формулу (6.16); k0 — коэффициент, учитывающий ослабление лен-
ты в местах крепления ковшей: £0~Д9.
При этом требуется, чтобы
2 10.Dn.6,
(12.19)
где £)п.б — диаметр приводного барабана [см. (12.9)...(12.12)], м.
Предварительный выбор тяговой цепи одноцепного элеватора
производится по разрывному усилию
/^разр— (15...17,5) Ft,
где Ft — окружное усилие на начальной
звездочки.
Предварительный выбор тяговой цепи
производится по разрывному усилию
окружности
двухцепного
(12.20)
приводной
элеватора
Т^разр 0, GF разр* (12.21)
12.4. ПРОВЕРОЧНЫЙ РАСЧЕТ ЭЛЕВАТОРА
1. Выполняется уточненный тяговый расчет элеватора методом
обхода по контуру.
Примерный порядок тягового расчета:
1) натяжение (Н) в точке 1 (рис. 12.3)
F\ — F min,
(12.22)
где Fmin — натяжное усилие, Н;
2) натяжение (Н) в точке 2
зач,
(12.23)
где ku — коэффициент увеличения натяжения тягового органа от
сопротивления на поворотном пункте [см. (5.26)]; Гзач— сопротивле-
ние зачерпыванию груза [см. (12.13)], Н;
3) натяжение (Н) в точке 3
F3 = FHa6=/72+ (Q + q^)gfit (12.24)
где /*наб — усилие набегающей ветви в точке 3, Н; q — погонная
217
масса транспортируемого груза, кг/м; qK— погонная масса ходовой
части [см. (12.4) и (12.5)], кг/м; И — высота подъема груза, м;
4) натяжение (Н) в точке 4
F4=FC6=Fi + qxgH,
(12.25)
где FC6 — усилие в сбегающей ветви в точке 4, Н;
5) для ленточного элеватора во избежание скольжения ленты
по барабану необходимо, чтобы
F3 < F±efa,
(12.26)
где — см. формулу (12.17).
Из формул (12.22) ...(12.25) определяется необходимое натяж-
ное усилие Fmin, которое должно удовлетворять условиям формул
(5.33) и (5.34).
2. По наибольшему уси-
лию в тяговом органе
Fmax=^3 делается уточнен-
ный расчет на прочность
ленты [по формуле (12.18)]
или тяговой цепи [по форму-
лам^.12)...(8.14)]. При этом
динамическая нагрузка (Н)
на тяговый орган цепного
элеватора
Рис. 12.3. Расчетная схема (а) и диаграм-
ма натяжений (б) тягового органа верти-
кального элеватора
^дни~ —+ 9*)- (12.27)
Обозначения см. к форму-
ле (8.11).
3. Определяется тяговая
сила на барабане (звездоч-
ке) с учетом сопротивлений
на барабане (звездочке)
FG==knF3-F4. (12.28)
4. Проверяется правильность выбора диаметра приводного ба-
рабана (для ленточного элеватора) по среднему давлению [см.
(6.6)].
5. Определяется мощность на приводном валу элеватора
[см. (8.9)].
6. Определяется мощность двигателя для привода элеватора
[см. (6.21)]. При этом коэффициент запаса 6=1,25.
7. Определяется частота вращения приводного вала элеватора:
ленточного — по формуле (6.22); цепного — по формуле (8.15).
8. Определяется необходимое передаточное число между валом
двигателя и приводным валом элеватора [см. (6.23)].
218
9. Из конструктивных соображений составляется кинемати-
ческая схема привода элеватора. При редукторной схеме по катало-
гу выбирается редуктор (см. табл. III.4).
10. Уточняется скорость движения ковшей исходя из фактиче-
’ ского передаточного числа привода: для ленточного элеватора —
по формуле (6.24); для цепного элеватора — по формуле (8.16).
11. Уточняется производительность элеватора (т/ч):
<2ф = ЗЛ’о^фФрЛк, (12.29)
где io — вместимость ковша, л; иф — фактическая скорость ковшей,
м/с; ф— коэффициент заполнения ковшей (см. табл. 12.5); р — на-
сыпная плотность груза (см. табл. 4.1), т/м3; /к — шаг ковшей, м.
Допускается отклонение от заданной производительности ±10 %.
12. Проверяется двигатель на достаточность пускового момен-
та по продолжительности пуска (разгона) согласно условию (5.40).
13. Определяется усилие в набегающей на приводной барабан
(приводные звездочки) ветви тягового органа конвейера при пуске
конвейера [см. (5.41)...(5.48)] и определяется коэффициент сниже-
ния прочности тягового органа при пуске [см. (5.49) j.
14. Определяется расчетный тормозной момент [см. (5.50)...
(5.54)] и выбирается тормозное устройство.
Глава 13. ВИНТОВЫЕ КОНВЕЙЕРЫ
13.1. ОБЩИЕ СВЕДЕНИЯ
Винтовой конвейер стационарный общего назначения предназ-
начается для транспортирования сыпучих, мелкокусковых, вязких
и тестообразных материалов на расстояние до 30...40 м. Он вклю-
чает (рис. 13.1) винт (в качестве рабочего органа), неподвижный
желоб, загрузочное и разгрузочное устройства и привод. Вал вин-
та имеет концевые и промежуточные (подвесные) опоры. Одна кон-
цевая опора должна иметь упорный подшипник и располагаться
так, чтобы от действующей на винт осевой силы вал винта работал
на растяжение.
Рис. 13.1. Схема винтового кон-
вейера:
1 — двигатель; 2 — муфты; 3 — редук-
тор; 4 — загрузочный люк; 5 — желоб;
6 — виит; 7 — подшипник подвесной;
8 — разгрузочный люк
219
Рис, 13.2. Конструкции винтов
Согласно ГОСТ 2037—82, вин-
товые конвейеры бывают: с гори-
зонтальным (Г) или наклонным
(Н) желобом, с постоянным (П1)
или переменным (ГЬ) диаметром
винта, с постоянным (Пз) или
переменным (П4) шагом винта, с
одиозаходным (1) или двухза-
ходным (2) винтом, с правым (П),
левым (Л) или комбинированным
(К) направлением спирали винта.
Винты конвейера бывают
(рис. 13.2, а — г): сплошные —
для транспортирования неслежи-
вающихся насыпных мелкозерни-
стых и порошковых грузов (це-
мента, мела, гипса, золы, сухого
песка и др.); ленточные — для
транспортирования насыпных
мелкокусковых грузов (гравия,
песчаника, известняка и пр.) фа-
сонные — для транспортирования
тестообразных грузов (глины,
бетона, цементного раствора и
пр.); лопастные — для транспор-
тирования тестообразных грузов
с одновременным интенсивным
их перемешиванием.
13.2. НОРМАТИВНЫЕ МАТЕРИАЛЫ ДЛЯ РАСЧЕТА
СТАЦИОНАРНЫХ ВИНТОВЫХ КОНВЕЙЕРОВ
ОБЩЕГО НАЗНАЧЕНИЯ
Угол наклона конвейера к горизонту принимается не более 20°.
Расстояние между опорами вала винта принимается 2,5...3,3 м.
Диаметр и шаг винта назначается согласно данным табл. 13.1
(меньший шаг винта принимается для транспортирования мате-
риалов с большей насыпной плотностью). При перемещении куско-
Табл. 13.1. Диаметр и шаг винта винтового конвейера (ГОСТ 2037—82)
Диаметр, мм Шаг, мм Диаметр, мм Шаг, мм
100 80; 100 320 250; 320
125 100; 125 400 320; 400
160 125; 160 500 400; 500
200 160; 200 650 500; 650
250 320; 250 800 650; 800
220
Табл. 13.2. Рекомендуемая частота вращения винта винтового конвейера
Наименование груза
Размеры кус-
ков, мм
Допускаемая
частота враще-
нии винта,
МИН 1
Гипс, известь, мел, песок сухой, цемент
Глина сухая, гравий, известняк
Глина сухая, шлак кусковой
Песок сырой
Бетон, глина сырая, цементный раствор
Менее 60
Более 60
50...120
40...100
40...80
40...80
30...60
Табл. 13.3. Значения коэффициента k (к формуле 13.2.), коэффициента заполне-
ния желоба ф и коэффициента сопротивления w передвижению груза в винтовом
конвейере
Группа груза Примеры грузов k Ф W
Легкие неабразивные Древесные опилки 65 0,4 1,2
Легкие малоабразивные Мел, асбест 50 0,32 1,6
Тяжелые малоабразивные Глина сухая 45 0,25 2,5
Тяжелые абразивные Цемент, зола, песок, шлак 30 0,125 4,0
вых грузов диаметр винта проверяется на пропускную способность
по условию
Д mln ^тах^к,
(13.1)
где «тах — наибольший размер кусков транспортируемого груза;
kK — коэффициент, для рядовых грузов &к=4, для сортирован-
ных — kK = 12.
Частоту вращения винта принимают в зависимости от рода и
размеров транспортируемого груза согласно табл. 13.2.
Наибольшую допустимую частоту вращения (мин-1) винта ре-
комендуется определять из условия
n™x = k/V~D, (13.2)
где k — коэффициент (табл. 13.3); D — диаметр винта, м.
Номинальную частоту вращения винта, согласно ГОСТ 2037—
82, следует выбирать из ряда: 6; 7,5; 9,5; 11,8; 15; 19; 23,6; 30; 37,5;
47,5; 60; 75; 95; 118; 150; 190 мин-1. Допускается отклонение в пре-
делах ± 10 %.
Расчетную объемную производительность следует выбирать из
ряда: 0,025; 0,032; 0,04; 0,05; 0,063; 0,08; 0,1; 0,125; 0,16; 0,25; 0,32;
0,4; 0,5; 0,63; 0,8; 1; 1,25; 1,6; 2,5; 3,2; 4; 5; 6,3; 8; 10; 12,5; 16;
25; 32; 40; 50; 63; 80; 100; 125; 160; 250; 400; 500 м3/ч.
Уменьшение производительности наклонных конвейеров при дви-
жении груза вверх учитывается коэффициентом k$ (табл. 13.4).
221
Табл. 13.4. Значения коэффициента уменьшения
производительности винтовых конвейеров в
зависимости от угла наклона конвейера
3, град
0 1,0
5 0,9
10 0,8
15 0,7
20 о,6
Согласно ГОСТ 2037—82, условное обозначение винтового кон-
вейера содержит наименование конвейера, расположение желоба и
число заходов винта, диаметр винта (см) и его обозначение (если
диаметр переменный — указывается наибольший диаметр), шаг
винта (см) и его обозначение (если шаг переменный — указывает-
ся наибольший шаг), направление спирали винта и обозначение
стандарта.
Например, наклонный винтовой конвейер с двухзаходным вин-
том переменного диаметра (наибольший диаметр 200 мм) и пере-
менного шага (наибольший шаг 160 мм), правого направления
спирали обозначается:
Конвейер винтовой Н2—20П2—16П4—П ГОСТ 2037—82.
13.3. РАСЧЕТ ВИНТОВОГО КОНВЕЙЕРА
1. Необходимый диаметр винта (м)
D = 0,275]/ , / , (13.3)
где Q — расчетная производительность конвейера [см. (5.1)], т/ч; ko —
отношение шага винта к его диаметру: для абразивных материалов
ko =0,8, для пеабразивных k& = 1,0; пв — частота вращения винта,
мин—1; предварительно принимается по табл. 13.2, затем проверяет-
ся по формуле (13.2) и согласовывается с ГОСТ 2037—82 (см. па-
раграф 13.2); ф— коэффициент заполнения желоба (табл. 13.3); р —
насыпная плотность груза (см. табл. 4.1), т/м3; — коэффициент
уменьшения производительности в зависимости от угла наклона кон-
вейера (табл. 13.4).
Диаметр винта должен проверяться по формуле (13.1) и согла-
совываться с данными табл. 13.1.
2. Необходимая мощность на валу винта (кВт)
Po==0,0027Q(Lrw±/7),
(13.4)
где Lr — длина горизонтальной проекции конвейера [см. (5.19)], м;
w — коэффициент сопротивления перемещению груза (см. табл.
222
13.3 ); Н — высота подъема (плюс) или опускания (минус) груза
[см. (5.20)], м.
3. Мощность двигателя для привода винтового конвейера опре-
деляется по формуле (6.21). При этом коэффициент запаса прини-
мают К— 1,25.
4. Необходимое передаточное число между валом двигателя и
валом винта определяется по формуле (6.23).
5. Фактическое передаточное число привода конвейера опреде-
ляется после уточнения кинематической схемы конвейера.
6. Фактическая частота вращения винта (мин-1)
= (13.5)
где п — частота вращения вала двигателя, мин-1; иф— фактиче-
ское передаточное число привода.
Фактическая частота вращения винта не должна отличаться от
ближайшей номинальной частоты по ГОСТ 2037—82 более чем
на 10 %.
7. Фактическая производительность конвейера (т/ч)
Сф = 47D2S4v!*p/e₽> (13.6)
где S — ход винта, м: при однозаходном винте S = t (t — шаг вин-
та), при двухзаходном винте S=2t
Если фактическая производительность отличается от расчетной
более чем на 10 %, производится перерасчет конвейера.
8. Крутящий момент па валу винта (Н-м)
То = 955ОР0/4- (13>)
9. Осевое усилие на винт (Н)
от
= (,3-8>
где k — коэффициент, учитывающий, что сила приложена на сред-
нем диаметре винта: ^ = 0,7...0,8; D — диаметр винта, м; а — угол
подъема винтовой линии винта; р — угол трения груза о винт [см.
формулу (4.8) и табл. 4.1].
10. Поперечная нагрузка (Н) на участок винта между двумя
опорами
Тпопер = -^-, (13-9)
kDL
где I — расстояние между опорами вала винта, м; L — общая дли-
на вала винта, м.
11. Вал винта рассматривается как разрезной и рассчитывается
на скручивание моментом Го, растяжение или продольное сжатие
силой Гос, изгиб от распределенной по длине I поперечной нагрузки
Гпопер и изгиб под действием собственного веса на длине Z.
Прогиб винта не должен превышать 40 % зазора между винтом
и желобом.
223
Глава 14. РОЛИКОВЫЕ КОНВЕЙЕРЫ
14.1. ОБЩИЕ СВЕДЕНИЯ
Роликовые конвейеры предназначаются для транспортировки
штучных грузов. Они состоят из последовательно расположенных
на раме вращающихся роликов, по которым перемещается груз.
Трасса конвейера может быть прямолинейной или криволинейной.
Роликовые конвейеры различают: по приводу — приводные
(рис. 14.1) (ролики приводятся во вращение от двигателя) и не-
приводные; по степени подвижности — стационарные (или перенос-
ные) и передвижные (на колесах); по направлению трассы —
прямолинейные, прямолинейные с криволинейными участками и
разветвляющиеся (с переводными стрелками или с поворотными
кругами); по конструкции рамы — со сплошной рамой или секци-
онные.
Рис. 14.1. Схемы роликовых конвейеров:
а — приводного; б — неприводиого
Рис. 14.2. Ролик с индивидуальным
приводом
а — передача от ролика к ролику; б — пере-
дача секциями; в — передача одной цепью
224
Рис. 14.4. Неприводные роликовые конвейеры:
а — криволинейный участок; б — подъемная секция; в — поворотный крут
Привод роликов приводных
конвейеров бывает: индивидуаль-
ный (рис. 14.2); групповой —
через продольный вал с кониче-
скими колесами (рис* 14Д а),
через цепи или через ремни
(рис. 14.3).
Неприводные конвейеры (рис.
14.4) обычно — гравитационные,
у которых движущей силой явля-
ется продольная составляющая
веса груза, находящегося на ро-
ликах наклонно (вниз) установ-
Рис. 14.5. Дисковые ролики
ленного конвейера.
Неприводные роликовые конвейеры бывают однорядные — КРО
и многорядные — КРМ (собираются с роликами, указанными в
табл. 14.2), а ролики — цилиндрические (рис. 14.1, 14.3) и дисковые
(рис. 14.5).
14.2. НОРМАТИВНЫЕ МАТЕРИАЛЫ ДЛЯ РАСЧЕТА
РОЛИКОВЫХ КОНВЕЙЕРОВ
Ширина конвейера принимается на 50... 100 мм больше ширины
груза.
Угол наклона гравитационных конвейеров принимается по
табл. 14.1.
8 Зак. 3134
225
Табл. 14.1. Рекомендуемый угол наклона гравитационных роликовых конвейеров
Наименование груза Масса единицы груза, кг Угол наклона конвой ера, град
Контейнеры из листового металла До 30 2...3
30...150 2...2,5
150...500 1,5...2
500...1000 1...1.5
Деревянные поддоны, ящики из строганых До 25 2...2,5
досок 25...125 1,5...2
500...1200 0,5...1,5
100...600 0,5...1,5
Брусья деревянные, доски строганые До 15 2...2,5
Сталь листовая:
рихтованная До 30 1... 1,5
нерихтоваппая До 30 2...3
Бетонные изделия До 100 2...3
Табл. 14.2. Расчетная (статическая) нагрузка на ролики и размеры роликов
неприводных конвейеров (ГОСТ 8324—71)
Диаметр роли- ка, мм Статическая нагрузка, Н, на ролик при длине ролика, мм
обрабо- танно- го необ- рабо- танно- го 160 200 250 320 400 500 650 <00 1000 1200
40 42 980 930 980 980 980 784 588 1 — ••
57 60 . —- 2940 2940 I960 I960 1568 980 980 — —
73 76 —** 4900 4900 4900 4900 4900 3920 3920 2940 «*
105 108 —*• —* —* 9800 9800 9800 9800 9800 7840 7840
155 159 — — 19600 19600 19600 19600 19600 19600 15680
Минимальная скорость движения груза на гравитационном кон-
вейере принимается 0,35 м/с, наибольшая—2 м/с.
Основные параметры и размеры роликов неприводиых конвей-
еров могут выбираться по табл. 14.2.
Шаг роликов 0,2/г=С^р^0,45/г, где /г — длина груза. По ГОСТ
8324—71 шаг роликов выбирается из ряда: 50; 60; 80; 100; 125; 160;
200; 250; 315; 400; 500; 630 мм (допускаются смешанные шаги);
радиус поворотных секций — из ряда: 400; 500; 630; 800; 1000;
1250; 1600; 2000; 2500; 3150; 4000 мм.
Средняя нагрузка на один ролик может определяться по
табл. 14.3. Эта нагрузка является расчетной для выбора ролика
(см. табл. 14.2).
Массу роликов для предварительных расчетов можно принимать
по табл. 14.4.
В условном обозначении роликового конвейера, согласно ГОСТ
8324—71, указывается: тип конвейера; ширина конвейера, мм; диа-
226
Табл. 14.3. Средняя нагрузка Гр на ролик, Н
Соотношение между длиной
груза и шагом роликов
Р
2/р <С /р < 3/р
З/р <С /г < 4/р
4tp < Zr < 5fp
0,5 mg
0,33 mg
0,25 mg
Примечание. В таблице m — масса одного груза,
кг; g 9,81 м/с2.
Табл. 14.4. Масса роликов неприводных роликовых конвейеров
Масса роликов, кр, при длине ролика, мм
Диаметр роли- ка, мм 100 200 250 320 400 500 650 800 1000 1200
42 1.1 1.3 1.5 1.8 2,2 2,7 3,5 — —
60 2,1 2,4 2,8 3,2 4,3 4,8 5.3 ' —м
76 — 3,2 3,7 4,5 5,2 6,0 7,5 9,0 11,0 —
108 1 ** 8,0 10,2 13,2 14,2 18,0 21,0 25,0 30,0
159 — — — 19,2 22,0 25,0 30,0 34,0 40,0 46,0
метр ролика, мм; номер стандарта — ГОСТ 8324—71. Например,
роликовый однорядный конвейер КРО шириной 400 мм с диаметром
роликов 57 мм обозначается:
Конвейер КРО 400—57 ГОСТ 8324—71.
14.3. РАСЧЕТ РОЛИКОВОГО КОНВЕЙЕРА
1. Производительность конвейера (т/ч)
Q = 3,6ym//r, (14.1)
где v — скорость движения груза, м/с; т — масса одного груза, кг;
/г — шаг расположения грузов на конвейере, м.
2. Штучная производительность конвейера (шт./ч)
Z-1000Q/m. (14.2)
3. Число грузов, одновременно находящихся на конвейере (шт.),
го-7А/(360Оу)>1, (14.3)
где L — длина конвейера, м.
4. Сопротивление движению одного груза на неприводном го-
ризонтальном конвейере (Н)
т
ГПр2&
~Т~9
+ g + k
(14.4)
где ц — коэффициент трения качения груза по роликам (зависит от
материала груза): для строительных деталей ц[«а10~3 м; для метал-
8*
227
Табл. 14.5. Значения коэффициентов трения в цапфах роликов
Условия работы конвейера Подшипники
качения скольжения
Хорошие 0,03 0,15
Средние 0,04 0,20
Т яжелые 0,06 0,25
лических деталей р^510~4 м; D — диаметр ролика (табл. 14.2), м;
тр—масса одного ролика (табл. 14.4), кг; г7— число роликов, на
которых лежит груз [см. (14.5)]; f — коэффициент трения в цапфе
ролика (табл. 14.5); d—диаметр цапфы ролика, м: ttei(0,2...0,25)D;
k — коэффициент, учитывающий распределение массы вращающей-
ся части ролика по его поперечному сечению: Z? = 0,8...0,9; z — число
роликов в конвейере; L — длина пути перемещения груза (длина
конвейера), м.
5. Число роликов, на которых лежит груз (шт.),
(14.5)
При дробном z' его принимают ближайшим большим целым.
6. Коэффициент сопротивления движению груза на конвейере
w = FI(tng). (14.6)
7. Необходимый угол наклона р гравитационного конвейера
определяется из условия
tg р>ш. (14.7)
8. Сопротивление движению (Н) всех грузов, одновременно на-
ходящихся на приводном конвейере,
. №
Р6 D
(14.8)
Знак плюс перед sinp -принимается при движении груза вверх,
знак минус — при движении груза вниз.
9. Мощность двигателя приводного конвейера (кВт)
(14.9)
где г] — КПД передач от двигателя к роликам.
10. Наибольший крутящий момент, передающийся на один ро-
лик приводного конвейера (Н-м),
(14.10)
где k\— коэффициент неравномерности распределения груза на
ролики: 1,15...1,2.
228
Глава 15. КАЧАЮЩИЕСЯ КОНВЕЙЕРЫ
15.1. ОБЩИЕ СВЕДЕНИЯ
Качающимся называется конвейер, представляющий собой под-
вешенный или опирающийся на неподвижную раму желоб (трубу),
который совершает колебательные движения для перемещения гру-
за, находящегося в желобе (трубе).
Качающийся конвейер, в котором перемещение груза осущест-
вляется силами инерции без отрыва его от желоба, называется
инерционным. В этих конвейерах амплитуда колебаний желоба со-
ставляет 10...150 мм, а частота—0,67...6,67 колебаний в секунду.
Рис. 15.1. Качающийся конвейер с постоянным давлением груза на дно желоба:
а — схема конвейера; б— схема двухкрнвошипиого привода; в — диаграмма скоростей же*
лоба груза (vР) и ускорения желоба (аж)
Качающийся конвейер, в котором перемещение груза осущест-
вляется микробросками с отрывом части груза от желоба, называ-
ется вибрационным. В этих конвейерах амплитуда колебаний не
превышает 0,5...15 мм, а частота — более 7,5...50 колебаний в се-
кунду.
Различают инерционные конвейеры с постоянным и переменным
давлением груза на дно желоба.
Конвейер с постоянным давлением груза (рис. 15.1) состоит из
желоба /, опорных катков 3 и двухкривошипного привода (рис.
15.1, б). Привод состоит из шатуна 2, коленчатого вала <?, соеди-
нительной планки 7, кривошипа 6, клиноременной передачи 5,
электродвигателя 4 и маховика 9. При такой кинематической схеме
обеспечивается прямолинейное переменно-возвратное движение
желоба и перемещение вперед находящегося в нем груза.
229
Конвейер с переменным давлении груза (рис. 15.2) состоит из
желоба /, упругих стоек 4, жестко прикрепленных к желобу и опор-
ной раме под углом р к вертикали, рамы 3 и кривошипного привода
(рис. 15.2, б), включающего шатун 2, двигатель 5, клиноременную
передачу 6, коленчатый вал 7, маховик 8. На рис. 15.2, в представ-
лена диаграмма скоростей желоба и», груза иг и ускорения желоба
аж. При такой схеме конвейера давление груза на желоб при пря-
мом и обратном ходе различно.
Рис. 15.2. Качающийся конвейер с переменным давлением груза на дно желоба:
а — схема конвейера; б —привод; в — диаграмма скоростей желоба (ож), груза (иг) и уско-
рения желоба (аж); Т — период колебаний
Вибрационные конвейеры различаются: по направлению пере-
мещения груза — горизонтальные, пологонаклонные и вертикаль-
ные; по способу крепления грузонесущего элемента — на свободных
упругих подвесках-амортизаторах и на наклонных направляющих
стойках; по количеству одновременно колеблющихся масс — одно-
массные, двухмассные, многомассные; по динамической уравно-
вешенности— неуравновешенные и уравновешенные; по количеству
грузонесущих элементов (желобов или труб) —одноэлементные и
двухэлементные; по характеристике и настройке упругой систе-
мы — с резонансной, дорезонансной или зарезонансной настройкой.
На рис. 15.3 приведены схемы основных типов вибрационных
конвейеров.
Вибрационный конвейер подвесной конструкции со свободно
колеблющейся одномассной системой (рис. 15.3, а) состоит из грузо-
несущего элемента 1 (труба или желоб), свободно подвешенного
на амортизаторах 2 и получающего направленные колебания от
электромеханического центробежного привода— вибратора <3, рас-
положенного под углом р к направлению колебания (обычно
= 20...30°) ниже (сплошная линия) или выше (штриховая линия)
230
грузонесущего элемента. В другом конструктивном варианте грузо-
несущий'Элемент может опираться на амортизаторы.
Широко применяются горизонтальные двухтрубчатые динами-
чески уравновешенные виброконвейеры на упругих стойках
(рис. 15.3, б). Когда одна труба движется вперед, другая — назад,
но в обеих трубах груз всегда движется в одном (заданном) направ-
лении. Кривошипно-шатунный механизм нагружен незначительно,
так как колеблющаяся масса имеет резонансную настройку. Груз
Рис. 15.3. Схемы вибрационных конвейеров:
с — однотрубный на пружинных подвесках с электровибратором; б — двухтрубный на упру-
гих стойках с эксцентриковым вибратором; в — однотрубный на упругих стойках с экс-
центриковым вибратором и уравновешивающей балкой
движется в сторону отклонения нижнего шарнира коромысла по
отношению к вертикальной плоскости, проходящей через верхний
шарнир. В конвейере на схеме рис. 15.3,в уравновешивающим
элементом является специальная балка.
Наиболее перспективными являются вибрационные конвейеры,
в которых груз не крошится, не пылит и почти не вызывает изна-
шивание желоба. Применение инерционных конвейеров ограничено
из-за повышенного износа желоба, вызываемого постоянным тре-
нием груза о его стенки, высоких динамических нагрузок и неурав-
новешенности машины. Из инерционных чаще применяются конвей-
еры с переменным давлением груза на дно желоба.
Областью применения качающихся конвейеров является герме-
231
тичное транспортирование пылящих, горячих, химически агрессив-
ных насыпных грузов. Эти конвейеры не могут транспортировать
липкие грузы и плохо транспортируют тонкодисперсные пылевид-
ные грузы (например, цемент).
15.2. НОРМАТИВНЫЕ МАТЕРИАЛЫ ДЛЯ РАСЧЕТА
КАЧАЮЩИХСЯ КОНВЕЙЕРОВ
Грузонесущими элементами являются стандартные трубы и же-
лоба, которые делаются сварными (обычно прямоугольного сече-
ния) из листовой стали толщиной 3...5 мм (или из профильного
проката). Для абразивных грузов применяется износостойкая сталь.
а ЛоЗача груза
Рис. 15.4. Трубчатый желоб:
с— с закрытыми краями (концами); б — с одним закрытым концом
Желоба при большой длине конвейера состоят из секций длиной
4...6 м на фланцевых болтовых соединениях. Для пылевидных гру-
зов применяют закрытые желоба прямоугольного сечения или тру-
бы. Ширина желоба или диаметр трубы определяется в зависимости
от производительности конвейера. В типовых конструкциях подвес-
ных виброкоивейеров применяют трубы диаметром 160, 200, 320 и
400 мм. Длина подвесных виброконвейеров — до 4 м, однотрубных
конвейеров опорной конструкции — до 30...35 м, двухтрубных — до
50 м. Ширина желоба инерционных конвейеров обычно 200... 1200 мм.
Загрузочные и разгрузочные отверстия конвейера имеют разме-
ры: для труб — не менее l,5d, для желобов с прямоугольным сече-
нием— не менее 1,5В (d— диаметр трубы; В — ширина желоба).
Размеры вибрационных подвесных конвейеров и питателей должны
выбираться из следующих рядов: с трубчатым желобом (рис.
15.4) — по ИСО 1815—75: номинальный диаметр трубы d: 100, 125,
160, 200, 250, 315, 400, 500, 630, 800 мм; высота загрузки и выгрузки
h при диаметрах труб 100...315 мм и 400...800 мм должна быть рав-
на соответственно 50 и 100 мм; длина желоба I —400, 750, 1000,
1250, 1500, 1750, 2000, 2500, 3000, 3500, 4000 мм; с прямоугольным
232
или трапецеидальным желобом (рис. 15.5)—по ИСО 1049—75:
ширина желоба В —125, 160, 200, 250, 315, 400, 500, 630, 800, 1000,
1250, 1600 мм; высота желоба h—80, 100, 125, 160, 200, 250, 315,
400 мм; длина желоба I—500, 750, 1000, 1250, 1500, 1750, 2000,
2500, 3000, 3500, 4000 мм.
Поперечные сечения желобов вибрационных конвейеров опорной
конструкции также желательно выбирать из приведенных выше
рядов.
Рис. 15.5. Формы желобов вибрационных конвейеров
В качестве упругих элементов (связей) применяются плоские
единичные рессоры и пакеты из них, Витые цилиндрические и плос-
кие пружины, а также резинометаллические блоки. Материал рес-
сор и пружин — сталь 55С2, 60С2, 60С2Н2А с допускаемым напря-
жением изгиба [ои]= 100... 110 МПа. Толщина рессорной стали
6 = 2...6 мм.
После предварительной конструктивной проработки определяется
количество рессор в конвейере и их размеры. При известной жест-
кости одной рессоры С\ требуемая ее толщина (м)
6
(15.1)
где k — коэффициент увеличения рабочей длины рессоры: k — 1,05;
I — длина рабочей (свободной) части рессоры, м; b — ширина рессо-
ры, м; Е—модуль упругости рессорной стали, МПа: Е=2,15 • 105 МПа.
Напряжение изгиба рессоры (Па) у ее заделки проверяется по
условию
ЪЕЪяЬз
о —
(15.2)
где а — амплитуда колебаний, м; к3 — коэффициент, учитывающий
жесткость заделки: £3 = 0,96 при креплении рессор с металлически-
ми прокладками между ними, й3 = 0,68— с резиновыми прокладками.
233
Скорость движения груза в инерционных конвейерах достигает
0,2 м/с, в вибрационных — до 0,25...0,3 м/с, в отдельных случаях —
до 0, 5 м/с.
Для возбуждения колебаний грузонесущего элемента чаще все-
го используются электромеханические (центробежные и эксцентри-
ковые) и электромагнитные приводы.
Центробежные приводы подразделяются на дебалансные с ма-
ятниковым (упругошарнириым) креплением (рис. 15.6, а) и само-
Рис. 15.6. Схема электромеханических приводов вибрационных конвейеров:
а — центробежный с дебалансиым маятниковым креплением; б — эксцентриковый с жестким
шатуном; в — эксцентриковый с упругим шатуном
балансные направленного действия с двумя разделенными дебалан-
сными мотор-вибраторами.
Дебалансный центробежный привод (рис. 15.6, а) состоит из
электродвигателя /, на валу 2 которого закреплены неуравновешен-
ные (дебалансные) грузы 3. Двигатель установлен на опорной пли-
те 4 с упругими шарнирами 5, через которые конвейеру передается
только продольная составляющая центробежной силы Fy, при этом
поперечная составляющая Fx воспринимается упругим шарниром.
Центробежная сила (Н) при вращении грузов
F = /ПоГо®о,
где т0—масса неуравновешенного груза, кг; г0— эксцентриситет
неуравновешенного груза, м; со0— угловая скорость вращения
груза, рад/с.
Центробежные приводы применяют для подвесных и опорных
конвейеров и питателей.
Эксцентриковые (кривошипно-шатунные) приводы бывают с
жестким (рис. 15.6, б) и упругим (рис. 15.6, в) шатунами. Упругий
(полужесткий) шатун (обычно их бывает два) имеет упругий эле«
мент (цилиндрическую пружину или резинометаллические пакеты)
с определенной жесткостью. Во время пуска конвейера шатун ра-
ботает как упругий, а при установившемся движении — как жест-
кий. Такие приводы применяют на уравновешенных двухтрубных
234
конвейерах, иногда — на однотрубных. Максимальное усилие (Н)
в шатунах при установившемся движении конвейера определяется
из уравнения движения для одного грузонесущего элемента
(15.3)
где г — радиус эксцентрика, м; С — суммарная жесткость упругой
системы одного грузонесущего элемента, включая и резинометалли-
ческие втулки, Н/м: С = тсо2 или С = Сг + С2 С3, Сх — жесткость
рессор: Сх == Cj2p, Н/м; zp— число рессор; С2— приведенная жест-
кость больших резинометаллических шарниров: C2 = C'2z (С'2—приве-
денная жесткость одного шарнира: С2~4 • 104 Н/м; z— число боль-
ших резинометаллических шарниров); С3— приведенная жесткость ма-
лых резинометаллических шарниров: С3 = (С3 — приведенная же-
сткость одного малого резинометаллического шарнира: С3^ 101 Н/м;
zx — число малых резинометаллических шарниров); w0 — общий коэффи-
циент сопротивлений от внутреннего трения в упругих элементах,
трения в подшипниках привода и перемещению груза (для стальных
упругих связей &уо~О,1, для резиновых — 0,25...0,3); со —
круговая частота возмущающей силы, рад/с; соо — частота собствен-
ных колебаний системы, рад/с; ш0 — 1Л С/tn (при резонансном режи-
ме соо = co); tn — общая масса колеблющихся частей одного грузоие-
сущего элемента конвейера (включая массу транспортируемого груза),
кг: т = tn-s + тп + тД, — масса одной трубы или желоба с при-
крепленными узлами, кг; тп — масса привода, связанного с желобом
(трубой), кг; тР — масса груза, находящегося в трубе (желобе), с
учетом коэффициента заполнения, кг; X — коэффициент, учитываю-
щий, какая часть груза колеблется вместе с желобом (трубой), оп-
ределяется он на основе экспериментальных данных по рис. 15.7 в
зависимости от коэффициента Г (см. ниже).
Электромагнитные приводы выполняются в виде однотактных и
двухтактных вибраторов с частотой колебаний 50 Гц.
Мощность однотактного вибратора до 1 кВт. Применяются они
для конвейеров и питателей легкого и среднего типов производи-
тельностью до 40 м3/ч.
Рис. 15.7. График X=f(P) [к формуле
(15.3)]
235
Табл. 15.1. Технические характеристики мотор-вибраторов
Параметры Тип вибратора
С-357 С-433А С-412А С-413 С-414 * С-482 С-483 С-484 С-485 • С-783
дебалаисный маятниковый само- балан- сный
Число экс- 224232244 центрпков Возмущаю- 4 6,3;46,3;4; 4 5,65 4; 2,56,3; 4 0... 0...20 щаясила,кН 2,5 12,5 Число коле- 2800 2800 2800 2800 2800 2800 2800 2800 2800 баний в ми- нуту Мощность 0,4 0,6 0,6 0,4 0,7 0,4 0,6 0,9 1,2 электродви- гателя, кВт Масса, кг 17 23 20,5 41 44 35 37 97 100 8 0...40 2800 1,2X2 140
Табл. 15.2. Технические характеристики электромагнитных вибраторов
Тип Габаритные размеры, мм Мощность Двойная амплиту- да вибрации, мм Масса, кр
367-Рм 1095 x 710 x 405 0,5 кВт 1,4 510
411-Рм 1400 x 840x 476 1 кВт 1,5 940
372-Рм 1723x960x570 2 кВт 1,6 1710
388-Рм 2180X1250 X 865 8 кВт 2,2 4330
ГВК1-08 1495X1150X780 4 кВт 1,8 3020
ЭП76А 1840 X 920 X 655 2 кВт 1,6 1350
СЭП-4 2110X1170X773 4 кВт 1,8 2845
С-917 190X160X110 НО ВА 1 4,5
С-918 270x144 x 260 330 ВА 1,6 17
С-919 290X175X265 440 ВА 1,6 27
С-920 550x290x395 2200 ВА 1,6 100
С-921 720x360 x 470 6600 ВА 2 200
Мощность двухтактных электромагнитных вибраторов — 0,5...
8 кВт. Они применяются для двухмассных подвесных питателей и
конвейеров с производительностью 50...650 т/ч.
Электромагнитный привод применяется в конвейерах малой
длины (до 2,5...6 м).
В табл. 15.1 и 15.2 приведены характеристики вибраторов, вы-
пускаемых отечественной промышленностью.
236
15.3. ОСНОВЫ ТЕОРИИ КАЧАЮЩИХСЯ КОНВЕЙЕРОВ
Режимы работы качающихся конвейеров [17] определяются
коэффициентом режима работы Г, который характеризует динами-
ческие нагрузки на элементы конвейера и кинематику движения
груза на несущем элементе:
67(О2 sin р
g cos а
(15-4)
где а — амплитуда колебаний грузонесущего элемента, м; со —
угловая скорость возбудителя колебаний, рад/с; р— угол направ-
ления колебаний (см. рис. 15.2, 15.6); а — угол наклона грузонесу-
щей плоскости к горизонту; g = 9,81 м/с2. Для горизонтальных кон-
вейеров 0,1 czco2sinp.
При Г менее 1 груз будет лежать на колеблющейся плоскости
и перемещаться, не отрываясь от нее (режим инерционных конвейе-
ров); при Г более 1 груз будет отрываться от колеблющейся плоско-
сти и перемещаться микробросками (режим вибрационных конвейе-
ров); при Г= \ условия движения груза будут неопределенными.
Для вибрационного конвейера оптимальные значения Г, при
которых обеспечивается наиболее эффективное движение частиц
груза при минимальных динамических нагрузках, находятся в пре-
делах 1...3,3. Рекомендуемые значения коэффициента Г приведены
в табл. 15.3.
В качающихся конвейерах с постоянным давлением груза на
дно желоба (см. рис. 15.1) процесс перемещения груза состоит из
отдельных этапов. В период времени t\ прямого хода желоба нахо-
дящийся в нем груз движется вместе с ним без скольжения. Начи-
ная от точки А груз по инерции продолжает двигаться вперед с
некоторым замедлением даже и при обратном ходе желоба, кото-
рый как бы выскальзывает из-под груза. На участке В — С груз
скользит по желобу назад, а на участке С — D движется назад
вместе с желобом. Груз движется вперед в течение времени t\ + t2
и назад—в течение небольшого промежутка времени /з + /4. Время
Табл. 15.3. Значения коэффициента Г [к формуле (15. 4)]
Вид груза
Конструкция конвейера
Тип привода
пылевидный и
порошкообраз-
ный
кусковой
Однотрубные (одножелобные) легкого
и среднего типов (при Q^50 т/ч)
подвесной и опорной конструкций
То же, тяжелого типа (при Q>50 т/ч)
Двухтрубные и однотрубные уравно-
вешенные, легкого и среднего типов
(при Q 50 т/ч и L < 20 м)
То же, тяжелого типа (при Q>50 т/ч
и L > 20 м)
Центробежный
или электромаг-
нитный
То же
Эксцентриковый
То же
3,0...3,3
2,0...2,5
1,6...2,8
1,3...2,5
2,8...3,0
1,8...2,3
1,5...2,5
1,2...2,0
237
/з + ^4 должно быть минимально, чтобы в итоге обеспечивалось пе-
ремещение груза вперед за весь период времени Т. Груз будет дви-
гаться вместе с желобом при условии где — ускорение
желоба, fo — коэффициент трения груза по желобу в покое. Груз
будет скользить по желобу вперед при условии где —
коэффициент трения груза по желобу в движении. Давление груза
на дно желоба, а также сила трения между ними постоянны.
Средняя скорость движения груза по горизонтальному желобу
(м/с)
^г.ср — 5нКр/60, (15.5)
где S — путь (м), проходимый грузом за один оборот вала криво-
шипа, определяемый по диаграмме скорости (см. рис. 15.1, в), и
равный заштрихованной площади фигуры АСВА, ограниченной кри-
вой скорости и абсциссой времени:
(15.6)
где и fir — масштабные коэффициенты скоростей и времени,
м/(с-мм), с/мм; А — площадь фигуры АСВА, мм2; пКр — частота
вращения приводного вала, мин-1.
Диаграммы скоростей и ускорений, приведенные на рис. 15.1,
строятся графоаналитическим методом, излагаемым в курсе теории
механизмов и машин.
Радиус ведущего кривошипа, а следовательно, и амплитуду ко-
лебания желоба принимают г=я = 50... 150 мм; частота вращения ве-
дущего вала (частота колебаний) — 40...50 мин-1.
В горизонтальных конвейерах (см. рис. 15.2) для обеспечения
перемещения груза вперед при прямом и обратном ходе ускорение
желоба выбирается таким, чтобы: а) груз не отрывался от желоба
и б) сила инерции груза в период замедления прямого хода желоба
(участок ЛВ) была больше силы трения груза о желоб и обеспе-
чила бы грузу движение вперед также и при обратном ходе желоба.
Первое условие обеспечивается при
«Кр0 • „
-7Z-sinp<g, (15.7)
второе условие — при
fa
90
fog
cos Р—/osin Р*
(15.8)
где пкр — частота вращения кривошипа, мин-1 (рекомендуется
пКр = 300...400 мин-1); а — амплитуда колебания желоба, равная
радиусу кривошипа, м: а=г=10...20 мм.
При соблюдении этих условий груз будет двигаться вперед со
скоростью vr отдельно от желоба. Средняя скорость движения груза
в горизонтальном желобе (м/с)
238
иг= 0,21пкра/д tg p, (15.9)
где /д — коэффициент трения груза о дно желоба в движении (для
угля и руды /д=0,35).
Частота и амплитуда колебаний вибрационных конвейеров вы-
бираются из табл. 15.4 в зависимости от типа привода и транспор-
тируемого груза.
На виброконвейерах среднего и тяжелого типов преимуществен-
но применяется резонансная настройка упругой системы, при кото-
рой частота возмущающей силы вибропобудителя (вибратора,
вибропривода) со и частота собственных колебаний упругой систе-
мы соо совпадают или их отношение находится в пределах 0,85...1,25.
При этом обеспечивается малый расход энергии при установившей-
ся работе конвейера, его высокая производительность, однако тре-
буются значительные пусковые усилия из-за большой жесткости
упругой системы.
При зарезонансной настройке, когда со^>со0> жесткость упругой
системы невысокая, пусковые усилия невелики, однако имеет место
повышенный расход энергии при установившемся режиме работы
конвейера. При пуске и остановке конвейера, когда система прохо-
дит через область резонанса, возможно значительное увеличение
напряжений в ее упругих элементах. Зарезонансная настройка при-
меняется для подвесных конструкций и в опорных конвейерах лег-
кого типа. Дорезонансная настройка (со<Ссоо) применяется редко.
В соответствии с ИСО 1815—75 и ИСО 1049—75 число колеба-
ний в минуту и соответствующий ход (амплитуда) а (мм) подвес-
ных виброконвейеров должны выбираться из ряда: при частоте
колебаний 750, 1000, 1500, 3000 и 6000 ход соответственно должен
находиться в пределах 5...32; 2,5... 17; 1,2...8; 0,3...3 и 0,07... 1.
Угол направления колебаний р принимается в зависимости от
их частоты: при частоте, большей или равной 1000 мин“1, р = 20...25°,
при частоте, меньшей 1000 мин-1, р = 30...35°, в среднем принимают
р-30°.
Табл. 15.4. Амплитуда и частота колебаний вибрационных конвейеров
Тип привода-вибропобудителя Частота коле- баний, МИИ 1 Амплитуда колебаний для грузов, мм
пылевидных и по- рошкообразных кусковых
Электромагнитный 3000 0,75...1,2 0,75...1,0
Эл ектромеханические:
центробежный 2800 0,8...1,2 0,8...1,0
дебалансный 1500 2...3 1,5...2,5
Центробежный:
направленного действия 1500...1000 2...4 2...3
эксцентриковый 800...450 5...15 4...8
239
Табл. 15.5. Значения коэффициентов ki и k2
Вид насыпного груза Размер частиц, мм Влажность, % *1 кл
Кусковой 10...200 0,9...1,1 1,5...2,0
Зернистый 0,5...10 0,5...10 0,8...1,0 1,6...2,5
Порошкообразный 0,05...0,5 0,5...5 0,4...0,5 1,8...3,0
Пылевидный Менее 0,05 0,8...5 0,2...0,5 2...5
Скорость транспортирования груза в вибрационных конвейе-
рах (м/с)
у ~(^i + fe2 sin а) а со cos р]/1 — 1/Г2 (15.10)
(знак минус в скобках — при транспортировании груза вверх, а
знак плюс — соответственно вниз).
Для горизонтальных конвейеров а=0 и
V = а (О cos Р У Т— 1/Г2. (15.11)
Эмпирические коэффициенты k} и k2, зависящие от физико-ме-
ханических свойств транспортируемых грузов, приведены в
табл. 15.5.
В этой таблице меньшие значения коэффициента kt и большие
значения коэффициента k2 относятся к грузам с частицами мень-
ших размеров.
15.4. РАСЧЕТЫ КАЧАЮЩИХСЯ КОНВЕЙЕРОВ
Производительность качающихся конвейеров всех типов может
быть определена в зависимости от скорости транспортирования
груза (см. параграф 15.3) по формуле (5.13) при площади сечения
груза, находящегося в трубе, Д = гл^2ф/4 и при площади сечения
груза, находящегося в прямоугольном желобе, А = В/г, где z —
число труб; d — диаметр трубы; В — ширина желоба; h — высота
слоя груза (в среднем 50...100 мм): А = /гбф, /хб— высота борта;
ф — коэффициент заполнения сечения (ф = 0,5...0,6 для инерцион-
ных конвейеров; ф = 0,6...0,9 для открытых желобов; ф = 0,6...0,8 для
прямоугольных труб и ф = 0,5...0,6 для круглых труб вибрационных
конвейеров).
В табл. 15.6 приводится рекомендуемая толщина слоя и ско-
рость транспортирования на виброконвейерах некоторых типовых
грузов.
По заданной производительности из формулы (5.13) можно
определить требуемую площадь сечения груза А в трубе или жело-
бе. Для вибрационных конвейеров размеры желоба должны быть
согласованы с данными параграфа 15.2. Их можно использовать
также при назначении размеров желобов инерционных конвейеров.
Необходимая мощность приводных двигателей (кВт) качаю-
щихся конвейеров определяется по формулам:
240
Табл. 15.6. Толщина слоя и скорость некоторых типовых грузов при
транспортировке их на виброконвейерах
Наименование грузов Крупност ь средняя, мм Толщина слоя (средняя), мм Средняя скорость транспортирования, м/с^ для конвейеров
с амплитудой 12,5 мм и числом колебаний 470 в минуту с амплитудой 2.5 мм н числом колебаний 825 в минуту
Гравий 9,5...12,7 127 0,325 0,11
Зерно 6,3,..9,5 152 0,35 0,115
Известняк 9,5...31,7 102 0,35 0,115
Стружка стальная 6,3...12,7 102 0,275 0,09
Уголь 19...38 127 0,8 0,1
а) для инерционного конвейера с постоянным давлением груза
на дно желоба
,4 • 10~4 (тк 4- mr) g, (15.12)
где тк — общая масса движущихся частей конвейера, включая 0,67
массы шатуна и 0,25 массы опорных катков, кг; тт — масса груза,
находящегося на конвейере, кг: mr=qrL\ L — длина конвейера, м;
qY — погонная масса груза [см. (5.12)], кг/м;
б) для инерционного горизонтального конвейера с переменны?л
давлением груза на дно желоба
4 » 10~4?L
Гр%
кр
6 • 10-4
(15.13)
где Q — производительность конвейера, т/ч; т] — КПД механизмов
привода: т] = 0,8...0,85; р— угол наклона упругих опорных стоек к
горизонту; г — радиус кривошипа, м; пкр — частота вращения кри-
вошипа, мин'1; /д — коэффициент трения груза по желобу
[см. (4.7)];
в) для вибрационного конвейера длиной м
Р ~" 10»rf 0,367 (15.14)
длиной L> 10 м
2- 1043 + (L-10)4. + t^
(15.15)
где Атр — коэффициент транспортабельности груза: для кусковых
и зернистых грузов (песок, уголь, шлак, зерно) йтр=1; для по-
рошкообразных и пылевидных грузов (цемент, апатит, огарки)
&тр= 1,5...2,0; Н — высота подъема груза (при наклонном транспор-
тировании), м; т] — КПД механизмов привода: = 0,95...0,97; k3 и
k4 — коэффициенты, учитывающие удельные затраты мощности при
перемещении груза массой 1 т на 1 м (табл. 15.7).
Для расчетов качающихся конвейеров должны быть заданы про-
изводительность, характеристика транспортируемого материала,
длина конвейера и угол его наклона к горизонту.
241
Тип вибрационного конвейера
Табл. 15.7. Значения коэффициентов и /г4 к формулам (15.14) и (15.15)
Расчетная произ- водительность конвейера, т/ч Коэффициенты
ks
Одномассный с центробежным при-
водом:
подвесной 5...50 6.. .7 —
более 50 7.. .10 —
опорный на стойках 5...50 7.. .10 5. ..6
более 50 5.. .6 3,5. ..4
Двухтрубный и однотрубный с эксцент- 5...50 10.. .12* 8. ..10*
риковым приводом 4,5.. .5* 3,5. ..4**
более 50 5.. .5** 3. ..3,5**
• Для конвейеров с жесткими шатунами* ** То же с упругими шатунами.
При расчете конвейера с постоянным давлением груза на дно
желоба необходимо вначале выбрать радиус ведущего кривошипа
и частоту вращения ведущего вала, а затем построить диаграммы
скоростей и ускорений желоба и скорости груза за один оборот ве-
дущего вала кривошипа (см. рис. 15.1). По формуле (15.5) опреде-
ляется средняя скорость движения груза, при этом путь, проходи-
мый за один оборот кривошипа, определяется по формуле (15.8).
Из формулы (5.13) по заданной производительности находится тре-
буемая площадь сечения груза в желобе или трубе (см. параграф
15.4). Мощность приводного двигателя определяется по формуле
(15.12), а максимальная нагрузка, при которой рассчитывается
шатун привода конвейера,— по формуле (15.3).
При расчете конвейера с переменным давлением груза на дно
желоба вначале выбирается радиус и частота вращения кривошипа
и угол наклона упругих стоек. Режим работы конвейера назначает-
ся с соблюдением условий (15.7) и (15.8). Средняя скорость дви-
жения груза определяется по формуле (15.9), ширина желоба и вы-
сота его бортов в зависимости от заданной производительности —
по формуле (5.13), мощность приводного двигателя — по формуле
(15.13).
Передаточное число привода инерционного конвейера (обычно
используется клиноременная передача) определяется по формуле
и = nln^
где п, Икр — частота вращения вала соответственно двигателя и
кривошипа.
При расчете вибрационного конвейера, конструкция которого
предварительно выбирается по табл. 15.3, для эксцентрикового
привода принимают коэффициент режима работы Г. Задавшись
амплитудой колебаний (см. табл. 15.4), по формуле (15.4) опреде-
ляют угловую скорость эксцентрикового вала со и частоту его вра-
щения пКр = 30(о/л. Скорость транспортирования находят по фор-
242
муле (15.10) или (15.11). По формуле (15.13) определяется пло-
щадь сечения груза в трубе или желобе (учитывается количество
труб в конвейере). Ширину желоба и диаметр трубы назначают с
учетом размеров кусков грузов. Максимальный их размер ятах не
должен превышать: для несортированного груза */4, а Для сорти-
рованного —7з ширины желоба или диаметра трубы. Необходимая
мощность приводного двигателя определяется по формуле (15.14)
или (15.15). Для настройки упругой системы находят собственную
круговую частоту колебаний со0 загруженного конвейера [см. поясне-
ния к формуле (15.3)]. Если в качестве вибропобудителя исполь-
зуются мотор-вибраторы или вибраторы, их характеристики мож-
но выбрать из табл. 15.1 или 15.2.
Глава 16. ПРИМЕРЫ РАСЧЕТОВ
ТРАНСПОРТИРУЮЩИХ МАШИН
16.1. ПРИМЕР РАСЧЕТА ЛЕНТОЧНОГО КОНВЕЙЕРА
Рассчитать ленточный конвейер (рис. 16.1) для транспортиро-
вания несортированного щебня с насыпной плотностью р= 1,6 т/м3
при заданной производительности Q = 400 т/ч. Максимальный раз-
мер куска атах=70 мм, в
общей массе груза таких кус-
ков до 10 %. Длина наклон-
ного участка конвейера LH=
= 24 м, длина горизонталь-
ного участка Егор = 26 м, вы-
сота подъема груза Я~4 м.
Конвейер установлен в за-
крытом неотапливаемом по-
мещении. Привод конвейера
осуществляется через голов-
ной барабан; разгрузка —
плужковым разгрузчиком, установленным на расстоянии
от приводного барабана.
Принимаем скорость движения лепты v
Рис. 16.1. Схема к расчету наклонно-го-
ризонтального ленточного конвейера
Л12 —6 М
1,25 м/с (см. табл. 6.2)
с учетом наличия плужкового разгрузчика.
По табл. 4.1 угол естественного откоса груза в движении 35°.
Примем для рабочей ветви ленты желобчатую трехроликовую опо-
ру с углом наклона боковых роликов 30° (см. табл. 6.11). Опреде-
ляем угол подъема наклонного участка конвейера (3: sinp=#/LH=
= 4/24=0,167; 0 = 9°35', т. е. меньше наибольшего угла наклона кон-
вейера (₽тах== 18°) для принятой скорости движения ленты (см.
табл. 6.1).
Размер типичного куска транспортируемого рядового несорти-
рованного щебня [см. (4.2)] а'=0,8-70=56 мм. Согласно табл. 4.2,
243
транспортируемый щебень можно отнести к категоРии мелкокуско-
вых насыпных грузов.
Требуемая ширина конвейерной ленты [см. (6.11)]
В = 1,1 (У 1>25 . 1(6.550 . । + 0,05^ = 0,72 м.
С учетом рекомендаций параграфа 4.2 выбираем (см- табл. 4.3) кон-
вейерную ленту общего назначения типа 2 шириной (см- табл. 4.4)
В = 800 мм с тремя тяговыми прокладками прочностью 160 Н/мм из
ткани БКНЛ-100 (см. табл. 4.6), допускающим*1 рабочую нагрузку
(см. табл. 4.5) /?р = 12 Н/мм, с толщиной резинов°й обкладки клас-
са прочности Б (см. табл. 4.9) рабочей поверхности 6Р = 4,5 мм, не-
рабочей поверхности би = 2 мм.
Обозначение выбранной ленты:
Лента 2—800—3—БКНЛ—100—4,5—2—& ГОСТ 20—76.
Допускаемая минимальная ширина ленты [сМ- (6.1)] Pmin=2-56 +
+.200 = 312 мм<800.
Погонная масса ленты без защитной тканевой прокладки
(6п.з=0) толщиной [см. (4.12)] 6 = 3-1,3 + 4,5 + 2 = Ю,4 мм (при чис-
ле тяговых прокладок z=3, толщине прокладки без резиновой про-
слойки по табл. 4.7 6п.т=1,3 мм) согласно формуле (5.12): дл =
= 1100-0,8-0,0104 = 9,15 кг/м.
Согласно рекомендациям табл. 6.12, приниМаем диаметр роли-
ков роликоопор dp=108 мм.
Погонная масса вращающихся частей роликов (см. табл. 6.18): ра-
бочей ветви = 18,4 кг/м, холостой ветви q? = 7,8 кг/м.
Погонная масса движущихся частей конвейеРа, согласно фор-
муле (6.12) и табл. 6.18,
= <7к + = [qn + <7р) + [ял + 7р) =9,16+ 18,4 +
+ 9,15 + 7,8 = 44,5 кг/м.
Для предварительного расчета определим ’ тяговую силу кон-
вейера по формуле (6.13), приняв: а) коэффициент сопротивления
ш=0,04 (см. табл. 6.19); б) длину горизонтальной проекции кон-
вейера Lr=LHcos p + Lrop = 24-cos9°35' + 26 = 49,7 м; в) коэффи-
циент £к=1,1-1,04-1-1-1 = 1,14 (см. табл. 6.21); г) сопротивление
плужкового разгрузчика [см. (5.30)] Fn.P= (27.-36)-89-0,8=1920...
2560 Н; принимаем Fn.p = 2500 Н.
Тяговая сила конвейера Fo=[0,04-49,7 (89 Л-44,5) + 89-4]9,81Х
X 1,14 + 2500 = 9450 Н.
Из табл. 6.7 коэффициент сцепления между резинотканевой лен-
той и стальным барабаном (для влажного окружающего воздуха)
/ = 0,25. Приняв угол обхвата лентой приводногс? барабана а=200°,
из табл. 6.21 найдем &s=l,73.
Максимальное статическое натяжение ленты [см. (6.14)] Fmax =
= 1,73-9450=16 348 Н.
244
Проверяем необходимое минимальное число тяговых прокладок
в ленте [см. (6.16)]: гтщ= 16 348/(12-800) =1,7<3.
Наименьший диаметр приводного барабана [см. (6.3)]: -О^бП= 140 X
X 3 = 420 мм. Принимаем 7)п.б = 500 мм (из номинального ряда по
ГОСТ 22644—77) (см. параграф 6.2).
Определим тяговое усилие конвейера методом обхода по его
контуру. Разобьем трассу конвейера на отдельные участки (пра-
вила их нумерации см. в параграфе 5.2), пронумеровав их грани-
цы согласно схеме на рис. 16.1. Определим натяжение ленты в от-
дельных точках трассы конвейера. Обход начинаем с точки /, натя-
жение ленты в которой обозначим Л.
Сопротивление на отклоняющих барабанах Fn0B [см. (5.26)]
определим при kB — 1,03 в предположении, что угол обхвата лентой
отклоняющего барабана около 90°.
В соответствии с формулой (5.35) натяжение ленты в точке 2
F2 = F14-FnoB = F14-FHa6(^n-l) = Fi + Fj(1,03~1) = l,03Fb Сопротив-
ление на прямолинейном горизонтальном участке 2 холостой ветви
[см. (5.22)]
F2_3 = Fx=0,04-9,81 (7,8-264-9,15-26) = 173 Н, при погонной массе
движущихся частей холостой ветви конвейера q* — 7,8 кг/м,
= <7л = 9,15 кг/м и L* = Ax=F2^Lrop = 26 м.
Натяжение в точке 3 F3 = F24-F2_3=l,03FI4-173 Н.
Примем центральный угол криволинейного участка <3 а =
= 1,06 рад. При этом [см. (5.25)] 6 = 2,718°’04*1’06= 1,04. Сопротивле-
ние на криволинейном участке 3 (батарея роликов) по формуле
(5.24) F3_4 = FkP=F3 (1,04 - 1) = 0,04F3.
Натяжение в точке 4 F4 = F34-FKp=F34-0,04F3= l,04F3 = 1,04X
X (1,03Fi4-173) = 1,07Fi4-173 H. Сопротивление на участке 4 [см.
(5.22)]F4-5=0,04-9,81 (7,8-23,54-9,15-23,17)-9,15-9,81-3,92 = —
-495 Н.
Здесь принято: ~ 23,5; Lpx = Ltcos р = 23,5 • cos 9°35' = 23,17 м;
/7х = L4 sin р = 23,5 • sin 9°35' = 3,92 м.
Второй член выражения со знаком минус учитывает составляю-
щую веса движущихся масс на участке 4 холостой ветви конвейера,
направленную в сторону движения.
Натяжение в точке 5 F5 = F44-F4-5 = 1,07/714-173 — 495= l,07Fi —
-322 Н.
Натяжение в точке 6 FQ=^F5+FT[OB^Fb+F&(k—l)=F^+F3(ifl3 —
- 1) = 1,03F5 = 1,03 (1,072ч — 322) = 1,1 /4 — 322 Н.
Натяжение в точке 7 при kn= 1,05 (а=180°), ^7 = Рб4-^ПОв = ^б +
4-F6(*-l)=F6+F6(l,05-l) = l,05F6= 1,05(1,1Fj —322) = 1,152ч -
-349 Н.
Сопротивление на погрузочном пункте от сообщения грузу ско-
рости тягового органа [см. (5.27)]
' 400 • 9,81 • 1,25 u
2* погр — lob гт.
□о
245
Сопротивление от направляющих бортов загрузочного лотка
длиной 1=2 м [см. (5.28) ]F„«50-2= 100 Н.
Общее сопротивление при загрузке F7_8 = F3arp=Fnorp+Fn =
= 136+100=236 Н.
Натяжение в точке 8 F8=F7+F7-8= 1,15Fj — 349 + 236= 1,15Fi —
-113 Н.
Сопротивление на участке 8 согласно (5.17)
Fg—9 = F, = 0,04 • 9,81 [(89 + 9,15)23,17 + 18,4 • 23,5] +
+ (89 + 9,15) 9,81 • 3,92 = 5520 Н,
где —погонные массы движущихся частей груженой части рабо-
чей ветви конвейера <?₽ и qT = qn были определены^ выше; L* =
= L8 cos — 0,5) cos 0 = (24 — 0,5) cos 9°35'= 23,17 м; Н =
= 23,5 sin 9°35' = 3,92 м.
Натяжение в точке 9 F9=F8+F8_9=],l5Fl —113 + 5520= l,15Fi +
‘+.5407 Н.
Сопротивление на криволинейном участке 9 (батарея роликов)
F io=Fkp=Fna6 (& 1) = Fq (1,04 — 1) =0,04Fg.
Натяжение в точке 10 Fi9=F9+F9_10 = F9+0,04F9= l,04F9=
l,04(l,15F1 + 5407) = l,2F1 + 5623 Н.
Сопротивление на участке 10 F10-ii = (q+q£)gwLi0= (89 +
+.27,55)9,81-0,04-20 = 915 Н, где £ю=£гор-£12=2б-6=20 м.
Натяжение в точке 11 F11 = Fi0+Fi0_n = l,2F! + 5623 + 915=
= l,2Fi+6538 Н.
Сопротивление в точке 12 от плужкового разгрузчика (см. вы-
ше) F1I_]2=Fnp=2500 Н.
Натяжение в точке 12 F12 = F11 + F,i_12=l,2F1+6538+2500 =
= l,2Fi+9038 Н.
Сопротивление на участке 12 [согласно (5.21)]
F12-13 = Fn = qlgwL" = 27,55 • 9,8 • 1 • 0,04 • 6 = 65 Н.
Натяжение в точке 13 F13 = Fi2 + Fi2-i3=1,2Fj + 9038+65 =
= l,2Fi + 9103 Н.
Натяжение в набегающей на приводной барабан ветви тягового
органа с учетом сопротивления на поворотном пункте 13 (на при-
водном барабане) Fna6 = Fl3 + F|3(ftn-1) = F13 + F)3(l,03-1) =
= 1,03Fl3 = 1,03 (1,2Fi + 9103) = 1,24F, + 9376 H.
.Согласно формуле Эйлера
FHa6 = = Fj = Fi e°.25-3,s = 2,4Fj,
где FC6 — натяжение в сбегающей с приводного барабана ветви
ленты: Fcc = Fi; f— коэффициент сцепления между лентой и при-
водным барабаном (см. выше): f = 0,25; а — угол обхвата лентой
приводного барабана (см. выше): а=200°=3,5 рад.
При этом
1,24F]+.9376=2,4F,; F, = 8083 Н.
246
Определяем натяжение (Н) конвейерной ленты в остальных
точках трассы:
F2 = 1,0 3Z7! = 1,03 • 8083=8325;
F3 = 1,03Л + 173 = 1,03 • 8083 +173 = 8498;
F4 = 1,Q7Ft + 173 = 1,07 8083 +173 = 8822;
Fs = 1,07Fj - 322 = 1,07 • 8083 - 322=8327;
F6= 1,1Fi—349 = 1,1- 8083-322 = 8569;
F7 = 1,1 5Fi - 349 = 1,1 • 8083 - 349=8946;
F6= 1.15F] —113= 1,15-8083 —113=9182;
Fs = 1,15F, + 5047 = 1,15 • 8083 + 5047 = 14703;
Fi0 = 1,2Fi + 5623 =1,2- 8083 + 5623 = 15323;
Fn = l,2Fi+ 6538= 1,2-8083 + 6538= 16238;
F12 = 1,2Ft + 9038 = 1,2 • 8083 + 9038= 18738;
Fi3= l,2Fj + 9103= 1,2-8083 + 9103= 18803;
Fna6 = 1,24Fi + 9376 = 1,24 • 8083+9376 = 19399.
Строим график натяжений ленты (рис. 16.2).
Рис. 16.2. К расчету натяжений ленты ленточного конвейера
По уточненному значению Fmax = Fna6 = 19 399 Н проверяем
прочность леиты [см. (6.16)]. Необходимое минимальное число про-
кладок Zmm = 19 399/(12 -800) =2,02<3.
Проверяем правильность выбора диаметра приводного барабана
по давлению между лентой и барабаном [см. (6.6)] 7)Пб^360х
IX 11 316/(0,8-105-3,14-200-0,25) =0,324 м.
Принят £>п.б=0,5 м.
Здесь тяговая сила F0=Fna6 — Fcq = 19 399 — 8083= 11 316 Н.
Мощность на приводном валу конвейера согласно (6.19) Ро=
= 10-3F0v==10~3-ll 316-1,25= 14,14 кВт.
Необходимая мощностьдвигателя [см. (6.21)] P = l,l X 14,14/0,96=
= 16,2 кВт, КПД передачи т] = 0,96 принят из табл. 5.1 в предполо-
жении, что в приводе будет использован двухступенчатый цилинд-
рический редуктор.
Из табл. III.3.1 выбираем электродвигатель типа 4А180М6УЗ
номинальной мощностью Рдв= 18,5 кВт при частоте вращения
п = 975 мин-1. Момент инерции ротора /р=0,22 кг-м2. Кратность
максимального момента фтах = 2,0.
Частота вращения вала приводного барабана [см. (6.22)]
пп.в=60-1,25/ (3,14- 0,5) = 47,7 мин-1.
Требуемое передаточное число привода [см. (6.23)] и = 975/47,7 =
= 20,44.
Для приближения фактической производительности конвейера
к заданной, учитывая, что ширина ленты принята больше расчетной,
примем передаточное число привода несколько большим. Согласно
пояснениям к формуле (1.101), расчетная мощность па быстроход-
ном валу редуктора для машин непрерывного действия принимает-
ся равной наибольшей статической мощности. В нашем случае
Рр = Р = 16,2 кВт.
Из табл.. III.4.2 выбираем редуктор типоразмера Ц2-300 с пере-
даточным числом = 24,9, имеющий при частоте вращения быстро-
ходного вала 1000 мин-1 мощность Р = 18,3 кВт; КПД редуктора
= 0,96.
Для выбора соединительной муфты между двигателем и редукто-
ром определяем номинальный крутящий момент двигателя Гиоч =
= 9550 Рдв/п = 9550-18,5/975 =182 Н-м.
С учетом коэффициента кратности максимального момента дви-
гателя примем расчетный момент муфты
Тм “ фтахДюм = 2 • 182 = 364 Н • м.
Предполагая, что для предотвращения обратного движения за-
груженной конвейерной ленты необходим тормоз, предусматриваем
упругую втулочно-пальцевую муфту с тормозным шкивом. Из
табл. Ш.5.9 выбираем муфту № 1 с наибольшим передаваемым
крутящим моментом Тм = 500 Н-м, большим Гм = 364 Н-м, с диамет-
ром тормозного шкива £> = 200 мм. Момент инерции муфты /м =
= 0,125 кг-м2.
Уточняем скорость ленты [см. (6.24)]: ^ф = 3,14-0,5-975/(бОХ
Х24,9) = 1,02 м/с, при фактическом передаточном числе привода
(передаточное число редуктора) Нф = ир=24,9.
Фактическая производительность конвейера [см. (6.25)] фф=
= 550 -1 • (0,9 • 0,8-0,05)2 • 1,02-1,6=403 т/ч>400 т/ч.
Усилие натяжного устройства [см. (6.26)] Гн=Гб4-Г’7 = 85694-
4-8946=17 515 Н.
Определяем диаметры барабанов (см. параграф 6.2): натяжного
£)й = 0,8£)п.б = 0,8-500=400 мм, что соответствует ГОСТ 22644—77;
248
отклоняющего Z)Ot = 0,65 Dn.6 = 0,65-500 = 325 мм. Согласно размер-
ному ряду ГОСТ 22644—77, принимаем £>От=400 мм.
Требуемое минимальное натяжение в ленте [см. (5.32)] Fmin =
= (50... 100) • (89 + 9,15) 1,3 = 6380...12 760 Н.
Фактическое минимальное натяжение ленты Fmin — 8083 Н на-
ходится в требуемых пределах.
Время пуска конвейера (с) [см. (5.40)]
t = 1,2-0,345.975 ,_______38 640_______ = 0 91 с< 3 С
п 9,55(209,5— 118,3) 975 (209,5 — 118,3) 0,96
Здесь момент инерции вращающихся масс на валу двигателя
/=/р+/м=0,22 + 0,125 = 0,345 кг-м2; С = 9,55-0,65(89+9,15)44 +
+ 9,15(6+50) + (18,4-50 + 7,8-50) + 610)0,6-1,022 = 38 640; Lr=
= Ан+ЛГОр — 2Lj2=24 + 26 — 6=44 м; Z+ = Zq2 = 6 м; Ах=Ан+^гор =
24 + 26 = 50 м; £₽=Лн+^гор = 50 м.
Масса вращающихся частей барабанов конвейера тб = тп.б +
+ /?гн+2гаОт1~.350 +100 + 2-80 = 610 кг принята ориентировочно.
Средний пусковой момент двигателя (Н-м) [см.(1.90)]
Тср.п = 0,852 1,2+-- 181,2 = 209,5 Н • м.
2
Номинальный момент двигателя Гном=9550Рдв/п = 9550 X
X 181,2 Н-м.
ЛТомент статических сопротивлений на валу двигателя [см.
(5.42), (5.43)] Тс = 0,5-11 316-0,5-1/(24,9-0,96) = 118,3 Н-м. Момент
сил инерции на валу двигателя (Н-м) при пуске конвейера [см.
(5.41)] Тив = 242,2- 118,3 = 123,9 Н - м.
Момент на приводном валу (Н-м) при пуске конвейера соглас-
но (5.43)... (5.45) Тпуск = Лш.в + Тс.в = + 0.5FoD = 123,9 • 24,9 X
Х0,96+0,5-11 316-0,5=5791 Н-м.
Окружное усилие на приводном барабане (Н) при пуске кон-
вейера [см. (5.46)] +пуск — 2-5791/0,5=23 164 Н.
Усилие в набегающей на приводной барабан ленте конвейера
(Н) при пуске [см. (5.47)]
= 1,71 • 23 164 = 39610 Н,
где коэффициент [см. (6.15)]
_ 2,7180’25-3-5
S 2,7180,25’3,5 — 1
=1,71.
Коэффициент перегрузки конвейерной ленты при пуске [см. (5.49)]
Апер=39610/28 800=1,37<1,5 при Faon=APBz= 12-800-3 = 28 800 Н.
Момент сил инерции на валу двигателя при торможении
[см. (5.50)]
1,2 - 0,345 - 975 . 38 640 - 0,96 1£?л и
/ == - .1 — —I— ----------- = I п 4- fl • М
Время торможения [см. (5.51)]/т = 2-2,5/1,02=4,9 с.
249
Момент статических сопротивлений на валу двигателя при тор-
можении [см. (5.39), (5.53)]
То = 1*89 -4 — 0,6 89 • 4')!9,81
\ 9,81 /
0,5 0,96
2 24,9
Расчетный тормозной момент на валу двигателя [см. (1.78)],
необходимый для предотвращения засыпки узла перегрузки,
Тгр = 16,4 — 11,53 = 4,87 Н • м.
Таким образом, для предотвращения самопроизвольного обратного
движения ходовой части конвейера при случайном выключении дви-
гателя тормоз не требуется/ так как < 0. Однако тормоз необхо-
дим для предотвращения засыпки узла перегрузки. Расчетный тор-
мозной момент 4,87 Н-м. Из табл. III. 5.11 выбираем тормоз
ТКТ-200/100 с наибольшим тормозным моментом 40 Н-м, который
следует регулировать на нужный тормозной момент. Выбор этого
типоразмера тормоза обусловлен выбором муфты данного диаметра.
16.2. ПРИМЕР РАСЧЕТА КРУТОНАКЛОННОГО КОНВЕЙЕРА
Рассчитать крутонаклонный конвейер, имеющий ленту с пере-
городками, для транспортирования мелкокусковой сухой глины на
расстояние £г=25 м (по горизонтали). Производительность кон-
вейера Q = 250 т/ч, угол наклона р = 40°. Работа — круглосуточная
(режим работы — тяжелый).
Из табл. 4.1 для мелкокусковой сухой глины плотность (насып-
ная) р= 1,0 т/м3, угол естественного откоса в покое <р = 50°.
Скорость транспортирования примем равной v = 2 м/с (см. па-
раграфы 6.2, 7.2).
По формуле (7.1) определяем ширину ленты:
В = 270.2 . 1,0 “ 0’68 м.
Здесь коэффициент £][5£270 принят из табл. 7.6 для угла естествен-
ного откоса груза <р=45° и угла наклона конвейера р = 40°.
Из табл. 4.3 выбираем в качестве тягового органа резиноткане-
вую ленту общего назначения типа 3 с классом прочности резино-
вой обкладки С. Из табл. 4.4 выбираем ленту шириной В = 650 мм
с пятью тяговыми прокладками прочностью 55 Н/мм, что соответ-
ствует (см. табл. 4.6) марке ткани прокладок БКНЛ-65. Макси-
мально допустимая рабочая нагрузка тяговой прокладки (см.
табл. 4.5) йр=6 Н/мм.
Толщина конвейерной ленты согласно (4.12) 6 = г6п.т + 6р =
= 5-1,15 + 3 = 8,75 мм. Здесь бп.т= 1,15 мм (см. табл. 4.7); бр=3 мм
(см. табл. 4.9).
Погонная масса ленты [см. (7.4)] q^= 1,1 -0,65(8,75 + 0,8- 150Х
;Х 5/600) = 6,97 кг/м при высоте перегородки 1гп= 150 мм, толщине
6П = 5 мм, шаге перегородок (см. табл. 7.2 для ленты с двумя пере-
городками), fn=600 мм.
250
По формуле (5.12) погонная масса груза g = Q/(3,6y) =
= 250/(3,6-2) =34,71 кг/м.
Принимаем шаг роликоопор рабочей ветви /р=1,5 м, холостой
ветви /х = 3 м (см. параграф 7.3). Погонная масса вращающихся
частей роликоопор рабочей ветви (имеющей желобчатую форму се-
чения) по формуле (7.7)
= (10 • 0,65 + 7) — = 9 кг/м;
1,5
то же на холостой ветви (имеющей сечение плоской формы)
ql = (ЮВ 4- k) ~ = (10 • 0,65 4- 3)— — 3,2 кг/м.
л 3
Тяговая сила конвейера, согласно (6.13), с учетом сопротивле-
ния на погрузочном пункте /?0=[ш£г(^ + ?к)+^7Л^к + 77погр =
=[0,02-25(34,71 +26,14) + 34,71 -20,98] 9,81-1,2+140 = 9070 Н.
Здесь коффициент сопротивления движению иу = 0,02 (по реко-
мендациям параграфа 7.3); погонная масса движущихся частей
конвейера согласно (6.12), (5.18) и (5.23)
4- <7р = 2 • 6,97 4- 9 4- 3,2 = 26,14 кг/м;
высота подъема груза H = L tg р=25 tg 40° = 20,98 м; коэффициент
£к = 1,2-1-1-1-1 = 1,2; сопротивление в пункте погрузки по формуле
(5.27) £Погр = 250-9,81 -2/36^ 140 Н.
Мощность привода согласно (6.19) и (6.21) Р = й£о^/(Ю3г|барл) =
= 1,35- 9070 • 2/ (103• 0,91 • 0,96) = 28,03 кВт. #
В последней формуле коэффициент k принят равным 1,35, КПД
барабана т]баР определен по формуле (6.20):
n. п = --------------------= 0,91
*ар 14-0,03(2-2,15 — 1)
при
Л2-3.14
определенном по формуле (6.15) при коэффициенте сцепления ба-
рабана с лентой /=0,2 (табл. 6.7) и угле обхвата лентой барабана
а=180°=л рад. Коэффициент сопротивления барабана со = О,ОЗ
[см. пояснения к формуле (6.20)], КПД передачи т] = 0,96 выбран
из табл. 5.1 в предположении, что в приводе конвейера будет уста-
новлен двухступенчатый редуктор. Из табл. III.3.2 выбираем
электродвигатель с повышенным пусковым моментом типа
4АР225М8УЗ мощностью 30 кВт при частоте вращения п =
= 735 мин-1.
По фомуле (6.14) максимальное статическое натяжение ленты
Лпах = 2,15-9070= 19 500 Н.
По формуле (6.16) проверим прочность ленты. Требуемое число
тяговых прокладок z= 19 500/(6-0,65-103) =5, что соответствует
ранее выбранному числу тяговых прокладок в ленте. Прочность
ленты обеспечивается.
251
По формуле (6.3) определим наименьший диаметр приводного
барабана £>п.б= 135-5=675 мм, где k — коэффициент, выбираемый
из табл. 6.6, согласно которой ^mm= 125. Примем k= 135.
Принимаем диаметр барабана из стандартного ряда по
ГОСТ 22644—77 (см. параграф 6.2) равным £>п.б = 800 мм.
По формуле (6.6) проверим правильность выбора диаметра при-
водного барабана: £>п.б = 0,8 м>360-9070/(0,65-105-3,14-180-0,2) =
= 0,44 м, т. е. условие (6.6) обеспечивается.
Длину барабана (см. табл. 6.8) примем равной /п.б = В+100=
= 650-1-100 = 750 мм, стрела выпуклости барабана равна 2,0 мм
(см. табл. 6.9).
Частоту вращения приводного барабана определим по формуле
• (6.22): Лп.в=60-2/(3,14-0,8) =47,75 мин-1.
Передаточное число привода по формуле (6.23) п = 735/47,75=
= 15,39.
Согласно пояснениям к формуле (1.101), расчетная мощность
на быстроходном валу редуктора для машин непрерывного дей-
ствия принимается равной наибольшей статической мощности: Рр=
— Pq—28,03 кВт.
Из табл. III.4.2 принимаем редуктор цилиндрический двухсту-
пенчатый горизонтальный типоразмера Ц2-400 с передаточным
числом нр= 12,41 и мощностью на быстроходном валу при тяжелом
режиме работы 31,3 кВт.
При этом фактическая скорость ленты [см. (6.24)] ^ф = 3,14-0,8Х
Х735/(6О-12,41) =2,48 ivf/c, что соответствует рекомендациям
ГОСТ 22644—77 (см. параграф 6.2).
Фактическая производительность из формулы (7.1)
Q. = ^k.v.p = 0,652 • 270 • 2,48 • 1,0 = 283 т/ч.
'•ф ф ] фЬ ' ’ ’
Согласно (5.12), определим фактическую погонную массу гру-
за: ^ф = <2ф/(3,6иф) =283/(3,6-2,48) =31,7 кг/м. q$ = 31 ,Kq =
= 34,71 кг/м, следовательно, несколько меньшими будут необходи-
мая тяговая сила конвейера [см. (6.13)] и максимальное статиче-
ское натяжение леиты [см. (6.14)].
Проверка двигателя па достаточность пускового момента, на
перегрузку тягового органа при пуске и выбор тормоза произво-
дится аналогично расчету, приведенному в параграфе 16.1.
16.3. ПРИМЕР РАСЧЕТА ПЛАСТИНЧАТОГО КОНВЕЙЕРА
Рассчитать пластинчатый горизонтальный конвейер при задан-
ной производительности Q = 130 т/ч (см. рис. 8.1, а) для перемеще-
ния штучных грузов плотностью р = 0,95 т/м3 с размером по диаго-
нали 700 мм, массой т=180 кг. Длина конвейера £ = 45 м. Раз-
грузка— в конце загруженной ветви. Условия работы — средние.
На основании рекомендаций табл. 8.1 принимаем конвейер типа
ПР плоский разомкнутый с ходовой частью с катками.
252
Исходя из размеров груза выбираем по формуле (8.2) ширину
настила 5 = 700+100 = 800 мм.
По ГОСТ 22281—76 (табл. 8.2) принимаем ширину настила
5 = 800 мм. По табл. 8.6 принимаем шаг цепи /=400 мм. В соответ-
ствии с данными табл. 8.3 и 8.7 принимаем скорость ходовой части
г = 0,2 м/с.
В качестве тягового органа предварительно принимаем (см. па-
раграф 4.4) две пластинчатые катковые с ребордами на катках
(тип 4) разборные цепи со сплошными валиками (исполнение 2) и
разрушающей нагрузкой (табл. III.1.11) Fpa3p=112 кН. Номер
цепи — Ml 12, обозначение цепи:
Цепь тяговая М112—4—400—2 ГОСТ 588—81.
Погонная масса груза, согласно (5.12), ^ = Q/(3,6n) = 130/(3,6Х
Х0,2) = 180 кг/м.
Из формулы (5.11) найдем шаг расположения грузов на насти-
ле tr=m!q= 180/180= 1 м.
Приближенно погонная масса ходовой части конвейера по фор-
муле (8.8) 60-0,8+ 45 = 93 кг/м, где для легкого груза (р<1)
из табл. 8.13 принят К = 45.
Из табл. 8.12 выбираем коэффициент сопротивления движению
w = 0,1 (диаметр валика цепи — менее 20 мм).
Приняв наименьшее натяжение цепей в точке их сбегания с при-
водных звездочек Fmm = F1 = 1000 Н (см. параграф 5.2), найдем из
формулы (8.6) тяговую силу конвейера (Гб и Fn.p равны нулю):
Fo = Ипйп + 9 (щХ + 2wqr , I,)] =
= 1,05(10004-9,81(0,1 • 180 • 45 + 2 • 0,1 • 93 • 45)] = 18015 Н.
Из табл. 8.2 число зубьев звездочек для тяговых цепей z=6.
Динамическая нагрузка на цепи по формуле (8.11)
~ <180 + ’-5• 93> = 2396 н-
Определим натяжение в характерных точках конвейера мето-
дом обхода по контуру и уточним значение Fo. Обход начинаем от
точки с наименьшим натяжением Frnin=Fi = 1000 Н.
Сопротивление на участке холостой ветви конвейера согласно
(5.22) Fx = qX'4gwL==№-9,81 -0,1 -45 = 4105 Н; то же, на загруженной
ветви согласно (5.17) Fr= (q + qx4}gwL= (180 + 93)9,81 -0,1 -45 =
= 12 052 И.
Натяжение цепей в точке набегания цепей на натяжные звез-
дочки согласно (5.35) F2 = Fj + FX= 1000 + 4105 = 5105 Н.
Сопротивление па натяжных звездочках по формуле (5.26)
FnoB = F2(l,05-l)=0,05F2.
Натяжение цепей в точке сбегания с натяжных звездочек F3 =
= F2 + FnoB=F2 + 0,05F2 = 1,05 • 5105 = 5360 H.
Натяжение в точке набегания загруженных ветвей цепей на при-
водные звездочки 54 = 5з + 5г=5360+12 052= 17 412 Н.
253
Натяжение в набегающих на приводные звездочки тяговых це-
пях с учетом сопротивлений на поворотном пункте 4 (на приводных
звездочках) 1) =knFt= 1,05-17412= 18283 Н.
Уточненное значение тяговой силы конвейера согласно (5.37)
Fo = ^иаб — Fi = 18 283— 1000 ~ 17 283 Н, что отличается от полу-
ченного ранее на 4 %.
Из формул (8.12) и (8.13) найдем расчетное натяжение одной
цепи
г-Ц
Г расч
= 0,6 (Fmax + Гдни) = 0,6 (18,283 4- 2396) = 12 407 Н,
Где /*тах — ^паб.
Разрушающая нагрузка цепи при коэффициенте запаса прочно-
сти 6 = 8 по условию (8.14) Fpa3p=8-12 407=99 256 Н=99,26 кН,
т. е. меньше разрушающей нагрузки (112 кН) выбранной цепи.
Необходимая мощность на приводном валу конвейера согласно
(8.9) и пункту 3 параграфа 8.4
Ро = 1(T3F^ = 10~3 • 17283 • 0,2 = 3,45 кВт.
Требуемая мощность двигателя по формуле (6.21) при КПД при-
вода т]=0,94 (табл. 5.1) и коэффициенте запаса 6 = 1,2 Р=1,2Х
'X 3,45/0,94 = 4,41 кВт.
Из табл. Ш.3.1 выбираем электродвигатель 4А132М8УЗ мощ-
ностью 5,5 кВт с частотой вращения 720 мин-1.
Частота вращения приводного вала конвейера по формуле
(8.15) пп.в=60‘0,2/(6-0,4)=5 мин-1.
Передаточное число привода по формуле (6.23) « = 720/5=144.
Принимаем кинематическую схему привода, состоящую из кли-
ноременной передачи и редуктора.
С учетом пояснений к формуле (1.101), из которых следует, что
для машин непрерывного действия 6Р=1, из табл. Ш.4.13 выбираем
редуктор КЦ2-750, имеющий передаточное число «р = 118, с мощ-
ностью на быстроходном валу Рр = 6,5 кВт при частоте вращения
этого вала Пб = 600 мин-1.
При этом передаточное число клииоременной передачи нКп=
= «/«р= 144/118= 1,22.
Проверка двигателя на достаточность пускового момента и
определение коэффициента перегрузки тягового органа при пуске
конвейера выполняются аналогично расчету, изложенному в пара-
графе 16.1.
16.4. ПРИМЕР РАСЧЕТА СКРЕБКОВОГО КОНВЕЙЕРА
Рассчитать скребковый конвейер (рис. 16.3) для транспорти-
рования каменного угля насыпной плотностью р = 0,8 т/м3 на рас-
стояние Л = 60 м под углом 6° к горизонту. Производительность кон-
вейера Q = 60 т/ч, максимальный размер кусков рядового (несорти-
254
ровашюго) груза птах = 200 мм. Работа круглосуточная при постоян-
ной нагрузке.
Выбираем конвейер с высокими сплошными скребками (см. па-
раграф 9.2). При этом полагаем, что возможное крошение угля в
процессе транспортирования не снижает его качества.
В соответствии с пояснениями к формуле (9.1) примем: коэффи-
циент А = 2, коффицнент заполнения желоба ф=0,7; скорость транс-
портирования ^=0,5 м/с; коэффициент, учитывающий угол наклона
конвейера k2= 1 (табл. 9.4).
По формуле (9.2) найдем рабочую высоту желоба:
йж — 3600.2.0,5 • 0,8 - 1 • 0,7 ~ °’172 М‘
больше рабочей
Рис. 16.3. Схема скребкового
। конвейера (к
примеру расчета — параграф 16.4)
Требуемая ширина желоба Вш=£йш=2-0,172=0,345 м. Конструк-
тивную высоту скребка /гс принимаем на 25 мм
высоты желоба, т. е. йс= 172 + 25= 197 мм.
Ориентируясь на дан-
ные табл. 9.2, примем
высоту скребка равной
200 мм, ширину — 400 мм.
Соответствующий конвей-
ер имеет шаг скребков
tc = 500 мм, шаг звеньев
цепи — 250 мм, количест-
во тяговых цепей — 2,
объемную производитель-
ность V=100 м3/ч, ско-
рость транспортирования — 0,5 м/с. Производительность этого кон-
вейера Q = Vp= 100-0,8 = 80 т/ч, т. е. больше требуемой.
По рекомендациям параграфа 9.2 зазор между скребком и же-
лобом должен быть равным 5... 15 мм с каждой стороны. Приняв
равным 10 мм, получим окончательно ширину желоба Вж=
400+2-10 = 420 мм.
/ГЛ Пр°тРеРим Размеры желоба при а' = атах [см. (4.3)1 по условию
<9-3): В® = 420>2-2°0=400 мм, tc=5001,5x200=300 мм.
У;? фоРмУлы (5.12) определяем погонную массу груза: q =
= (?/(3,6ц)=60/(3,6-0,5) =33,33 кг/м.
Погонная масса qA ходовой части (цепей и скребков) двухцепного
конвейера при Лц=о,7[см. пояснения к формуле (9.6)] <?ц=0,7-33,33»
~23,3 кг/м.
Для выполнения тягового расчета разобьем конвейер на отдель-
ные участки (рис. 16.3) и определим натяжение в отдельных точ-
ках цепи методом обхода по контуру. Минимальное натяжение
тяговой цепи в точке 1 примем равным Fr =3000 Н (см. параграф
9.3). Предварительно выберем в качестве тягового органа две кат-
???<?£ цепи типа 4 (с ребордами на катках) по ГОСТ 588—81
(М224) с шагом /ц=250 мм, разрушающей нагрузкой 224 кН (цепь
255
с таким шагом рекомендует и табл. 9.2 для выбранного нами кон-
вейера) .
Коэффициент трения [см. табл. 4.1 и (4.7)] рядового кускового
каменного угля по стальному желобу /д=0,54. Из табл. 9.5 коэффи-
циент сопротивления движению груза по желобу wr = l,lfA= 1,1 X
X 0,54 —0,6, коэффициент сопротивления движению тяговой цепи с
катками шц=0,12.
Длина горизонтальной проекции конвейера [см. (5.19)]
Lj = 60 cos 6° = 59,67 м.
Высота подъема груза по формуле (5.20) Нг=60 sin 6° = 6,27 м.
Сопротивление на прямолинейном загруженном участке кон-
вейера согласно формуле (9.6)
^3-4 = + ?цшц) + (9 -к ?ц) = (33,33.0,6 + 23,33.0,12) X
X 59,67 • 9,81 + (33,33 + 23,3) 6,27 • 9,81 = 16 826 Н.
Сопротивление на прямолинейном холостом участке конвейера
получим из формулы (9.6) при 9 = 0. Поскольку холостая ветвь
движется вниз, перед вторым слагаехмым этой формулы должен
быть знак «минус»:
— /7х) - 23,3 • 9,81 (0,12 • 59,67 — 6,27) = 203 Н.
1 АД ' АД '
Натяжение цепей в точке 2, согласно формуле (5.35), F2 = Fi +
+ /71-2 = 3000+203 = 3203 Н.
Сопротивление на участке 2 (на звездочках) определим соглас-
но формуле (5.26), приняв коэффициент kn~ 1,06: /72-з=7?2(^п— 1) =
= 3203(1,06— 1) = 192 Н.
Натяжение цепей в точке 5, согласно формуле (5.35), F^=F2+
+ f2_3 = 3203 4-192 = 3395 Н.
Натяжение цепей в точке 4 /74=/?з + Р3_4 = 3395+16 826 =
= 20 220 Н.
Натяжение в набегающих на приводные звездочки тяговых це-
пях с учетом сопротивлений на поворотном пункте 4 (на приводных
звездочках) Гнаб = Л+7?4(йп- 1) =^Л= 1,06-20220 = 21 433 Н.
Тяговая сила конвейера по формуле (5.37) 7?о = 21 433 — 3000 =
= 18 433 Н.
Необходимая мощность двигателя конвейера по формуле (5.38)
Р=18 433-0,5/(103-0,96) =9,6 кВт. Здесь КПД привода конвейера
(см. табл. 5.1) т| = 0,96.
Из табл. Ш.3.2 выбираем двигатель 4АР16ОМ8УЗ с повышен-
ным пусковым моментом мощностью 11 кВт и частотой вращения
н = 730 мин-1.
Частота вращения приводного вала конвейера по формуле
(8.15) лп.в=60-0,5/(7-0,25) =17,14 мин-1.
Здесь принято число зубьев звездочки z—7 (см. табл. 8.2).
Требуемое передаточное число привода [см. (6.23)] и =
= 730/17,14 = 42,59.
256
Согласно пояснениям к формуле (1.101), расчетная мощность
на быстроходном валу редуктора для машин непрерывного дей-
ствия принимается равной наибольшей статической мощности:
Рр=Р = 9,6 кВт.
Из табл. Ш.4.2 выбираем редуктор типа Ц2-400 с передаточ-
ным числом fzp=41,34, с мощностью на быстроходном валу при тя-
желом режиме работы 11,1 кВт.
Проверка двигателя на достаточность пускового момента и
определение коэффициента перегрузки тягового органа при пуске
конвейера выполняется аналогично расчету, изложенному в пара-
графе 16.1.
16.5. ПРИМЕРЫ РАСЧЕТОВ ПОДВЕСНЫХ КОНВЕЙЕРОВ
16.5.1. Пример расчета подвесного
грузонесущего конвейера
Рассчитать подвесной грузонесущий конвейер, предназначенный
для транспортирования в отапливаемом помещении деталей со
склада в механосборочный цех (см. рис. 10.1, г). Масса одной дета-
ли т = 40 кг, наибольшие размеры 550x300x200 мм.
Производительность конвейера Z=1500 деталей в час. Длина и
высота участков (м): Lx = 60; L2=15; L3 = 25; £s = 3; £7=80; £9=37;
Lio=15; £ц = 45; £i3 = 81; ftj = 7; /i2 = 7.
Загрузка и разгрузка конвейера автоматическая. Из конструк-
тивных соображений привод конвейера установлен на участке 1 (по-
вороте трассы), а натяжное устройство — на участке 4.
В качестве тягового органа конвейера предварительно принимаем
из табл. III.1.13 тяговую разборную цепь Р2—100—220 ГОСТ 589—
74 с шагом £=100 мм, массой 1 м дц=5,2 кг/м и разрушающей на-
грузкой 220 кН (см. рекомендации параграфа 10.2).
Принимаем для выбранной цепи звездочку с числом зубьев z=
= 16 и диаметром делительной окружности £)о = 1025,7 мм (см.
табл. 10.1). Угол наклона конвейера на вертикальном перегибе
трассы (участки 10 и 2)
Ртах = arctg ~ = arctg = arctg -2— да 25°.
L2 Ею 15
Наибольшая длина грузов в плоскости движения конвейера,
исходя из их заданных габаритных размеров, /тах = 550 мм. Примем
минимальный зазор между грузами (см. рис. 10.3, а) Д = 150 мм.
Из условия свободного прохода грузов на наклонных участках ми-
нимальный допустимый шаг подвесок [см. (Ю.7)]
(550 + 150) = 773 мм;
min cos 25°
на вертикальных участках при заданной высоте груза /гтах = 200 мм
[см. (10.8)] Гтш = 200+150=350 мм.
9 Зак. 3134
Учитывая условие (10.9), примем расчетный шаг подвесок с гру-
зами Т=2-4-100 = 800>773 мм.
Возможность свободного прохода грузов па горизонтальных по-
воротах тягового органа проверяем графическим построением
(см. рис. 10.3, в) при диаметре делительной окружности звездочки
Z)o = 2/?min= 1025,7 мм и убеждаемся, что зазор между грузами до-
статочен.
Из формулы (5.15) определим скорость цепи при условии, что
на каждой подвеске будет располагаться по одной детали: v —
= Z/r/3600= 1500-0,8/3600 = 0,33 м/с. Здесь принято /г = £=0,8 м.
Из табл. 10.2 выбираем для шага цепи /=100 мм типовую ка-
ретку конвейера ЦПК-100Р массой т = 5,5 кг с предельной нагруз-
кой 5 кН. Это обеспечивает возможность транспортирования грузов
большей массы, чем задано в нашем случае, однако работоспособ-
ность выбранной каретки может оказаться недостаточной по усло-
виям (10.1) и (10.2).
Полученная скорость у = 0,33 м/с соответствует требованиям
ГОСТ 5946—79 и данным табл. 10.7. После предварительной кон-
структивной проработки примем массу одной подвески тп = 9,5 кг.
Шаг кареток принимаем равным шагу подвесок /к = £=800 мм.
Погонная масса холостой ветви (10.12) /?х = 9,5/0,8 + 5,5/0,84-5,2 =
=23,95 кг/м. Погонная масса загруженной ветви [см. (10.13)]^г =
= 23,95 + 40/0,8 = 73,95 кг/м. Для определения предварительного
значения максимального натяжения цепи конвейера Fmax по фор-
муле (10.14) найдем следующие величины.
Минимальное натяжение цепи примем Гт1п = 500 Н (см. пара-
граф 10.4); из табл. 10.9 выберем для хороших условий работы
коэффициенты, учитывающие сопротивление движению, с^в= 1,015,
Шп90=1,02, Wn 180= 1,03 при угле вертикального перегиба до 35°
(см. табл. 10.10); согласно заданной схеме трассы конвейера, число
вертикальных перегибов х = 4, количество горизонтальных поворо-
тов с углом 90° уэо=4, количество горизонтальных поворотов с
углом 18O°z/i8o = l.
Коэффициент сопротивления движению тягового органа выби-
рается из табл. 10.8 в зависимости от нагрузок на каретки и от
условий работы конвейера.
Нагрузка на каретки: а) загруженной ветви FKS=qTTg=
= 73,95-0,8-9,81=580 Н; б) холостой ветви FK х=q^Jg — 23,95- 0,8 X
X 9,81 = 188 Н.
Для хороших условий работы конвейера (табл. 10.10) коэффициен-
ты сопротивления движению (см. табл. 10.8) загруженной ветви
йУг = ш==0,02 [см. пояснения к формуле (10.14)]. Общая длина го-
ризонтальных проекций загруженных участков конвейера L* = +-
+ £9 + + £п -г £13 + £i =- 80 + 37 + 15 + 45 + 81 + 60 = 318 м;
общая длина горизонтальных проекций порожних участков конвейера
£₽<— £2 + £з + £5 = 15 + 25 + 3 = 43 м. Поскольку х + z/goH-i/iso +
+ г = 4 + 4+1+0 = 9>5, коэффициент концентрации местных
258
сопротивлений принимаем kM = 0,35 [см. пояснения к формуле (10.14)].
Наибольшая высота подъема груза на трассе конвейера Н — 1 м;
коэффициент wc, входящий в формулу (10.14), в данном случае
= i.01^4 • 1,024 • 1.031 .1 = 1,18.
Здесь z = 0 (роликовой батареи нет); w® = 1.
Fmax = 500.1,18 + (0,02 • 73,95 - 318 + 0,02 - 23,95 •43)•(1+ 0,35 X
X1,18) 9,81 + 73,95 • 7 - 9,81 = 12 468 Н.
По условию (10.5) проверяем правильность выбора типораз-
мера цепи: Fflon = 220-0,85/(3,82-3) = 16,318 кН=16318 Н>Лпах=
= 12 468 Н, т. е. цепь выбрана правильно. Здесь/7Разр = 220 кН; &тк =
= 0,85; &и=3; расчетный коэффициент запаса прочности по диффе-
ренциальному методу ^и=^1^2^з^4^5= 1,2-1,4-1,4-1,3-1,25 = 3,82
[см. пояснения к формуле (10.15)]. Проверяем выбранный типораз-
мер цепи на основе данных табл. 10.11, откуда для простой трассы
(общее число поворотов до 20) и хороших условий работы />on =
= 12,5 кН. FflOn=12,5 кН> 12,468 кН. Условие (10.15) удовлетво-
ряется.
Поскольку будет выполняться подробный тяговый расчет мето-
дом обхода по контуру конвейера, предварительно мощность дви-
гателя не определяем.
Начинаем тяговый расчет с точки <3, расположенной после спус-
ка с наклонного участка. В этой точке ожидается минимальное
натяжение цепи, которое принято /?пцп = Гз=500 Н. Коэффициенты
сопротивления движению принимаем такими же, как и при прибли-
женном расчете.
Натяжение в точке 4, согласно (10.20), /?4 = /?з+шдх7'з£==500 +
+ 0,02-23,95-2,5-9,81=617 Н.
Натяжение в точке 5, согласно (10.21), +5 = ^п 180^4= 1,03-617 =
= 636 Н.
Натяжение в точке 6, согласно (10.20), ^б=Р5+ш7х^5^=636+
+ 0,02-23,95-3-9,81 = 650 Н.
Натяжение в точке 7, согласно (10.21), F7 = wn90^6 = 1,02-650 =
= 663 Н.
Натяжение в точке S, согласно (10.19), Fs = F7 + wqvL7g==663 +
+ 0,02 - 73,95 • 80 - 9,81 = 1824 Н.
Натяжение в точке 9, согласно (10.21), F9=wn90^8= 1,02-1824 =
= 1860 Н.
Натяжение в точке 10, согласно (10.19), Fi()=Fg-]-wqrLgg =
= 1860 + 0,02 • 73,95 • 37 • 9,81 = 2397 Н.
Натяжение в точке 11, согласно (10.23), Fu = wb(wbFiq +
+ u^rL10£+?r/i2£) = 1,015(1,015-2397+0,02-73,95-15-9,81 + 73,95 X
Х7-9,81) =7845 Н.
Натяжение в точке /2, согласно (10.19), F12 = FI1 + ^7rLng’=
= 7845 + 0,02-73,95-9,81 -45=8498 Н.
Натяжение в точке 13, согласно (10.21), Fi3= 1^90^12 = 1,02X
Х8498=8668 Н.
9*
259
Натяжение в точке 14, согласно (10.19), F^—Fi3-^-wqrLi3g=
= 8668+0,02*73,95*81-9,81 = 9843 Н.
Для определения натяжения в точках 1 и 2 расчет необходимо
вести против хода конвейера начиная с точки 5, где /?3=500 Н. Из
формулы (10.24) для холостой ветви конвейера получим:
Л+1— wq*Lig + q*
в данном случае
= 4- (Ч F-‘ - +’-Ч - dir (гяг500 - °'02 х
X 23,95 • 15 • 9,81 + 23,95 • 7 • 9,8Й = 2037 Н.
Рис. 16.4. К расчету натяжений под-
весного грузонесущего конвейера
Натяжение в точке 1 согласно формуле (10.30) Fx = F<2—wqvL\g =
= 2037 - 0,02 * 73,95 • 60 • 9,81 = 1170 Н.
Строим диаграмму натяжений
цепи конвейера (рис. 16.4). Мак-
симальное натяжение цепи — в
точке 14: F14=9843 Н. Условие
(10.15) удовлетворяется, так как
/?доп=И518 Н больше Fmax=
= Fi4 = 9843 Н, т. е. проверка по-
казывает, что цепь выбрана пра-
вильно.
Нагрузка на натяжное устрой-
ство по формуле (10.11) при
установке тележки на колесах
^нат = F4 + F5 + Т^тел = 617+636 +
+ 343=1596 Н.
Здесь принято сопротивление передвижению тележки F7ejI =
= 0,1 mTexg=0,1 *350*9,81 = 343 Н, где ттел = 350 кг.
Требуемая масса натяжного груза тг= 1,1/7йат/Я== 1>1 X
X 1596/9,81'^180 кг.
Проверяем работоспособность каретки по условиям (10.1) и
(10.2). Максимальная нагрузка на каретку по формуле (10.3)
FKmax = 580 cos — + -Л12- 7845 = 2149 H
2 4000
где F — нагрузка на загруженную каретку, F = Т^.г = 580 Н (см.
выше); р — угол, соответствующий дуге перегиба (см. выше): р =
= 25°; Лтамб — натяжение цепи на загруженном участке трассы с
вертикальным перегибом выпуклостью вверх: /7Наиб=7?ц =7845 Н.
Из табл. 10.4 для шага кареток £к = 8/=800 мм при натяжении цепи
на перегибе Л[аиб = 7845 Н, составляющем около 75 % допускаемого
натяжения цепи FAon=ll 518 Н, рекомендуемый радиус вертикаль-
ного перегиба пути R = 4 м.
260
Условие (10.1) по прочности каретки удовлетворяется, так как
Fp-5000 Н> FK max—2149 Н.
Для определения эквивалентной нагрузки на подшипники ка-
ретки необходимо определить: общую длину трассы конвейера:
i j + £2/cosp 4-A3 4~ Т5 + Ад+Лю/cosp + Д i + Дз— 60 + 15/cos25° +
+ 25+3 + 80 + 37+15/cos25°+45+81 =364 м;
длину перегиба (в верхней и нижней частях перегиба эти длины
одинаковы):
A„ = 0,0175₽J?n = 0,0175-25-4= 1,75 м;
суммарную нагрузку на рабочую каретку на кривой вертикального
перегиба выпуклостью вниз:
FM« F, cos ₽- -4^ = “О ~ 2397 °-8 = 87 Н,
2 %А 2 4
где натяжение цепи в нижней части перегиба Fa — F[0 = 2397 Н
принято из диаграммы натяжений (см. рис. 16.4); Ra = R = 4 м;
суммарную нагрузку на каретку на кривой вертикального пере-
гиба выпуклостью вверх:
г? п о Р । пол । 7845 • 0,8 oiqr Т-Г
— г cos — 4----п— = 580 cos------------------= 2135 Н,
в г 2 Дв 2 4
где Fв = Fn = 7845 Н принято из диаграммы натяжений; RB =*
= Ra = R = 4 м;
нагрузку на рабочую каретку на наклонном участке вертикального
перегиба:
Fnn — /?rcos[3n = 580• cos 25°=526 Н;
длину наклонного участка:
АНп = Аю/cosp — 2Ln = 15/cos25° —2-1,75= 13,05 м.
Эквивалентная нагрузка на подшипники каретки по формуле
(10.5) при одном загруженном вертикальном перегибе (/г=1)
з,зз/—j------------------------------------------------------
FsKB = Г "збГ [58°3,33 • 3,8 + 1883,33 • 43 + 1’75 (873,334-21353,33) 4-
5263’33 • 13,05] = 624 Н
при Fr = FK.r = 580 Н; F* = 188 Н; L? = 318 м; Lpx = 43 м.
Допускаемая полезная нагрузка на подшипники каретки по
формуле (10.4) Ад.п = 5000-0,45-1/1,2= 1875 Н. Здесь коэффициент,
учитывающий скорость конвейера, при ^=0,33 м/с kY = 0,45; коэф-
фициент, учитывающий температуру окружающей среды, &2=1
(при температуре до 125°C); коэффициент неравномерности на-
грузки на катки каретки &н= 1,2.
Таким образом, условие (10.2) удовлетворяется, так как Ад=
= 1875 Н больше АЭКв=624 Н.
261
Окружное усилие на приводной звездочке по формуле (10.25)
Ft = (Fj 4 _ F{) wn 9о = (9843 - 1170) • 1,02 = 8846 Н.
Необходимая мощность приводного электродвигателя по фор-
муле (10.16) Р= 1,2-8846-0,33/(103-0,9) =3,89 кВт.
Из табл. III.3.1 выбираем электродвигатель 4А100Г4УЗ мощ-
ностью 4 кВт с частотой вращения п= 1430 мин-1.
Частота вращения приводной звездочки диаметром Do —
= 1025,7 мм по (8.15) изв=60-0,33/(3,14-1,026) =6,143 мин-1.
Требуемое передаточное число редуктора по (6.23) и =
= 1430/6,143 = 232,78.
Из табл. 10.6 выбираем редуктор типа КДВ-350М1 исполнения
X с передаточным числом ир = 263, мощностью 6,4 кВт при частоте
вращения быстроходного вала 1500 мин-1.
Фактическая скорость цепи из (8.15) иф= (л£Щ>в.ф)/60 = 3,14Х
X 1,026-5,44/60=0,29 м/с, где фактическая частота вращения зве-
здочки из (6.23) пзв.ф = гг/«р= 1430/263 = 5,44 мин-1. Фактическая
производительность конвейера, согласно (5.15), Z= (3600пф)£г =
= 3600-0,29/0,8= 1305 шт./ч. Отклонение от заданной производи-
тельности составляет (1500—1305)/1500-100= 13 %. При необхо-
димости строгого обеспечения заданной производительности сле-
дует предусмотреть в приводе дополнительную передачу.
16.5.2. Пример расчета подвесного
грузоведущего конвейера
Рассчитать подвесной грузоведущнй конвейер с горизонтальной
трассой, схема которой показана на рис. 16.5. Длина участков кон-
вейера: 7,2 = 30 м; 7,4=40 м; 7,5 = 50 м; L7 = 30 м; 7,9 = 80 м; 7,ю = 8 м.
Производительность конвейера Q = 50 т/ч, масса груза на одной
тележке тг=115 кг. Конвейер расположен в закрытой отапливае-
мой галерее с асфальтовым
Рис, 16,5. К расчету подвесного грузоведу-
щего конвейера
покрытием пола.
В качестве тягового ор-
гана (см. табл. III.1.13)
предварительно выбираем
разборную цепь Р2-100-160
ГОСТ 589—74 с шагом t —
= 100 мм, разрушающей на-
грузкой 160 кН, погонной
массой цепи дц=3,8 кг/м.
Для транспортирования
грузов выберем (см. пара-
граф 10.2) тележку с
рояльными катками на ре-
зиновых грузовых шинах грузоподъемностью 125 кг и массой
(ориентировочно) тт = 30 кг. Примем шаг кареток /К = 2г/ = 2’4Х
tX 100=800 мм, скорость конвейера (см. 10.6) ^ = 0,5 м/с.
Из формул (5.14) и (5.15) требуемый шаг тележек с грузами
262
T=3,6vmr/Q = 3,6-0,5-115/50 = 4,14 м. Примем Т=4 м, тогда для
обеспечения заданной производительности скорость цепи должна
быть v = TQ/(3,6mr) = 4-50/(3,6-115) =0,48 м/с.
Для обеспечения горизонтальных поворотов пути конвейера
используем роликовые батареи с радиусом поворота 7? = 5 м [см.
пояснения к формулам (10.41) и (10.42)].
Тяговый расчет конвейера начнем с точки /, натяжение в кото-
рой примем равным: Fi=Fmm= 1500 Н [см. (10.6)].
Погонная масса движущихся частей конвейера: а) тяговой ветви
конвейера, согласно (10.26), qr= (mK+mB)/^к + <7ц= (5,54-3)/0,8 +
+ 3,8=14,42 кг/м. Здесь из табл. 10.2 для шага цепи £=100 мм при-
нята типовая каретка ЦПК-Ю0Р с расчетной нагрузкой 5 кН, мас-
сой тк = 5,5 кг; масса вилки каретки (ориентировочно), ведущей
тележку, тв=3 кг;
б) грузовой порожней ветви (подвески отсутствуют), согласно
формуле (10.27), 7х = тт/Т = 30/4 = 7,5 кг/м;
в) грузовой загруженной ветви, согласно формуле (10.28), ^г=
= <7х + тг/Т=7,5+115/4 = 36,25 кг/м.
Натяжение в конце роликовой батареи (в точке 2) определим
по формуле (10.42):
F2 = 1,05 ( 1500 ч- 2 • 3,14 • 4 —22—1,03 • 0,033 • 7,5 • 9,81) = 1591 Н.
Из табл. 10.9 для средних условий работы (см. табл. 10.10) при
угле поворота батареи 90° принято сор= 1,05, kB= 1,03 и Wi =0,033
из табл. 10.14 (для асфальтового дорожного покрытия).
Натяжение цепи в точке 3 по формуле (10.31) 7,3 = 1591 +
+ (0,08-14,42 + 0,033-7,5) -30-9,81 =2003 Н.
Коэффициент сопротивления движению се> = 0,08 принят из
табл. 10.8 для средних условий работы при нагрузке па каретку
7'к= (шк + тв + <Гц/к)§= (5,5 + 3 + 3,8-0,8)9,81 = 113 Н.
Натяжение в точке 4 по формуле (10.42) F4 = 1,05 2003 + 2 X
X 3,14 • 4 —- 1,03 • 0,033 • 7,5 • 9,8р = 2120 Н.
360 /
Натяжение в точке 5 по формуле (10.31) 75 = 2120+ (0,08-14,42 +
+ 0,033-7,5) -40-9,81=2669 Н.
Натяжение в точке 6 по формуле (10.30) /?б=х2669 + (0,08-14,42 +
+ 0,033-36,25)50-9,81=3820 Н.
Натяжение в точке 7 по формуле (10.41)
F1 = 1,05 (3820 4-2-3,14 • 4-^- 1,03 • 0,033 • 36,25 • 9,81) =
\ 360 )
= 3896 Н.
Натяжение в точке 8 по формуле (10.30) F8 = 3896+ (0,08-14,42 +
+ 0,033-36,25)30-9,81 = 4587 Н.
263
Натяжение в точке 9 по формуле (10.41) = 1,05 (4587 4-2X
х 3,14 • 4 — 1,03 • 0,033 • 36,25 • 9,81) = 4663 Н.
360 /
Натяжение в точке 10 по формуле (10.30) Fi0 = 46634-(0,08х
X 14,42 + 0,033 • 36,25) 80- 9,81 = 6507 Н.
Натяжение в точке 11 по формуле (10.31) £ц = 65074-(0,08х
X 14,424-0,033-7,5) -8-9,81=6617 Н.
Для рассчитываемого конвейера используем гусеничный привод.
Натяжение тяговой цепи гусеничного привода по формуле (11.11)
Ггус = 1,65/^max = 1,65F] i = 1,65 • 6617 = 10 918 Н.
Требуемая мощность привода Ргус = 10-3Frycf = 10“3-10 918Х
X 0,48 = 5,24 кВт.
Расчетное усилие на одну из двух винтовых натяжек в гусе-
ничном приводе по формуле (11.12) /^=0,33/^0 = 0,33-10 918 =
= 3603 Н.
16.5.3. Пример расчета подвесного
толкающего конвейера
Рассчитать подвесной толкающий конвейер для транспортиро-
вания и сборки изделий. Исходные данные для расчета см. в пара-
графе 16.5.1.
В качестве тягового органа конвейера из табл. III.1.13 пред-
варительно выбираем тяговую разборную цепь Р2-100-220
ГОСТ 589—74 с шагом 100 мм, погонной массой цепи дц=5,2 кг/м,
разрушающей нагрузкой 220 кН.
Принимаем для выбранной цепи звездочку с числом зубьев
z=16 и диаметром делительной окружности Do = 1025,7 мм (см.
табл. 10.1).
В табл. 10.7 для внутрицехового транспортирования грузов мас-
сой до 100 кг с автоматизированной загрузкой и разгрузкой реко-
мендуется скорость цепи и = 0,3 м/с. Согласно ряду скоростей,, при-
веденному в ГОСТ 5946^-79 (см. 10.2), принимаем и =0,32 м/с.
Из формулы (5.15) требуемый шаг подвесок с грузами, кареток
и тележек /Г=Т = /К = 3600^/7=3600-0,32/1500 = 0,768 м. Из условия
(10.9) при шаге цепи /=100 мм принимаем T = 2z/=2-4-100 =
= 800 мм.
При этом производительность конвейера по (5.15) 7 = 3600Х
X0,32/0,8= 1440 шт./ч, т. е. меньше заданной на 4 %.
Из табл. 10.2 выбираем типовую каретку ЦПК-100Р с расчетной
нагрузкой 5 кН, массой тк=5,5 кг. Примем ориентировочно массу
четырехколесной тележки на грузовом пути тт=15 кг, подвески
для груза т = 7,5 кг, комплекта толкателя шт.к = 3 кг, приспособле-
ния для крепления каретки к цепи тпр = 2 кг.
Погонная масса на тяговой ветви, согласно формуле (10.26),
Qt = (^к4-^пр)//к4-4"^т.к/Г = (5,54"2)/0,84-5,24-3/0,8= 18,32 кг/м^
264
на грузовой порожней ветви по формуле (10.27) q^= (1,5 + 7,5)/0,8 =
=28,12 кг/м; на грузовой загруженной ветви по формуле (10.28)
дг=28,12+40/(0,8-1) =78,12 кг/м. Груз размещен на одной под-
веске (2К=1).
В соответствии с рекомендацией, приведенной в пояснениях к
формуле (10.29), примем первоначальное натяжение цепи rmin =
= 1500 Н. Для определения натяжений в тяговом органе начнем
обход трассы конвейера с точки 3, натяжение цепи в которой пред-
положительно будет минимальным: Гз = Гт1п= 1500 Н. Натяжение
в последующих точках определим при следующих значениях коэф-
фициентов сопротивления движению: оу = 0,05 из табл. 10.8 при
нагрузке на каретку Гк = (/пк+тПр+./Птк + ?цМ^= (5,5 + 2 + 3 +
+ 5,2-0,8)9,81 = 144 Н; W\ = 0,025 из табл. 10.12 для хороших усло-
вий работы при нагрузке на тележку FT= (mT + mn + mr)g = (15 +
+ 7,5 + 40)9,81=613 Н.
Из табл. 10.9 9о= 1,02; iso = 1,03; wB= 1,015 (при угле пере-
гиба р = 25°).
Натяжение в точке 4 по формуле (10.30) Г4= 1500+ (0,05-18,32 +
+ 0,025 • 28,12) 25 • 9,81 = 1897 Н.
Натяжение в точке 5, согласно формуле (10.33), F5 = wn 180Х
X (Гп+Гс.к + Гс.т) = 1,03(1897+ 16 + 35) =2006 Н.
Сопротивление движению [см. (10.34)] двухколесных кареток на
повороте радиусом R = 0,5Do = 0,5 • 1025,7^513 мм^0,5 м; Гс.к~
1,1 • 0,05 • 18,32 • 2 • 3,14 • 0,5 • 180/360 • 9,81 = 16 Н; сопротивле-
ние движению четырехколесных грузовых тележек на повороте по
формуле (10.35) FC.T = wTzm'Tg — 0,08 • 2 • 22,5 • 9,81 = 35 Н, где из
табл. 10.13 для угла поворота 180° коэффициент сопротивления дви-
жению на повороте wT i80 = 0,08; суммарная масса частей, нагружаю-
щих тележку, для незагруженной ветви т'т = tnT + tnB = 15 + 7,5 —
= 22,5 кг, количество тележек на повороте с углом а = 180°
[см. (10.35)] 2 = 2-3,14-0,5- 180/(360-0,8)^1,96, т. е. 2 = 2.
Натяжение в точке 6 по формуле (10.30) Г6 = 2006+(0,05X
X 18,32+0,025-28,12) -3-9,81=2054 Н.
Натяжение в точке 7, согласно формуле (10.33), Г7 = шП9о(/?б+
+ Гс.к+Гс.т) = 1,02 (2054 + 8 +11) = 2115 Н, где Fc.k^ 1, Ь 0,05 X
X 18,32-2-3,14-0,5 (90/360) 9,81^8 Н; FC.T = w^zm\g=0,05 -1X
Х22,5-9,81 = 11 Н; шП9О = 0,05 из табл. 10.13 для угла поворота
а = 90°; число тележек на повороте z=l (т. е. в два раза меньше,
чем на повороте с углом а= 180°); т'Т =22,5 кг.
• Натяжение в точке 8 по формуле (10.30) Г8 = 2115+(0,05Х
X 18,32 + 0,025-78,12)80-9,81=4367 Н.
Натяжение в точке 9, согласно формуле (10.33), Г9 =^п90(Г8 -|~
+ Гс.к + Гс.т) = 1,02 (4367 + 8 + 31) = 4494 Н, где FCK = 8 Н (см.
выше); FC.T = wT ^zm\g = 0,05 • 1 • 62,5 • 9,81 = 31 Н; 2=1; =
= тТ + тп + тР = 15 + 7,5 + 40 = 62,5 кг (для загруженной ветви).
Натяжение в точке 10 по формуле (10.30) Г10 = 4494+ (0,05X
X 18,32 + 0,025 • 72,12)37- 9,81 = 5535 Н.
265
Натяжение в точке 11, согласно формуле (10.38), Гц=швХ
X [иУвЛо 4-. (wq? + w]qr)Liog+ (qT + qr) h2g] = 1,015[ 1,015 • 5535 4-
4- (0,05-18,324-0,025-78,12) 15-9,81 4- (18,324-78,12)7-9.81] =
= 12 853 H.
Натяжение в точке 12 по формуле (10.30) F12 = 12 8534- (0,05Х
X 18,324-0,025-78,12)45-9,81 = 14 120 Н.
Натяжение в точке 13, согласно формуле (10.33), /?1з = &,пдоХ
X (F124-/?c.k + Fc.t) -1,02(14 1204-84-31) = 14 442 Н.
Натяжение в точке 14 по формуле (10.30) /44= 14 4424-(0,05X
X18,32 4- 0,025 - 78,12) 81 • 9,81 = 16 722 Н.
Для определения натяжений в точках 1, 2 расчет будем вести
против хода конвейера начиная от точки 3, где Д = 1500 Н. Из фор-
мулы (10.39) для незагруженного вертикального перегиба
р
——-------(и»<7т + ®19х) Lig н- (qT + <?х) hg
%
Натяжение в точке 2
1___ 1500
1,015 [1,015
— (0,05 • 18,32 + 0,025 • 28,12) 15 - 9,81 4- (18,32 4~
+ 28,12) 7 - 9,81 -4364 Н.
Натяжение в точке 1 по формуле (10.30) Fx = 4364— (0,05X
X18,324- 0,025 • 78,12) 60 • 9,81 = 2675 Н.
Максимальное натяжение цепи — в точке 14: /44= 16 722 Н.
Допускаемая нагрузка на цепь по (10.15) /7доп=(220х
Х0,85)/(3-3) =20,778 кН = 20 778 Н. Здесь расчетный запас проч-
ности принят в соответствии с пояснениями к соотношению (10.15):
Лн= 1,2-1,2-1,4-1,2-1,25^3; коэффициенты £т.к=0,85 и 6И=3.
Таким образом, условие прочности цепи удовлетворяется, так
как /?доп=20 778 Н больше Лпах=Л4= 16 722 Н.
Окружное усилие на приводной звездочке, согласно (10.25),
Fo= (F14-Fi)шп9о= (16 722-2675) 1,02= 14 328 Н.
Необходимая мощность электродвигателя по формуле (10.16)
Р— (1,2* 14 328-03)/(103-0,9) =5,73 кВт, где коэффициент неучтен-
ных сопротивлений &с = 1,2; общий КПД механизма привода т] = 0,9.
Из табл. III.3.1 выбираем электродвигатель 4A132S4Y3 мощ-
ностью 7,5 кВт с частотой вращения 1455 мин”1.
Расчеты катков и подшипников кареток и тележек, а также вы-
бор редуктора привода и натяжного устройства выполняются как
и для грузоиесущего конвейера (см. параграф. 16.5.1).
16.6. ПРИМЕР РАСЧЕТА ТЕЛЕЖЕЧНОГО КОНВЕЙЕРА
Рассчитать горизонтально-замкнутый тележечный конвейер для
литейных форм (см. рис. 11.2), имеющий горизонтальную трассу.
Масса транспортируемого изделия на участках заливки и охлаж-
дения /И1 = 450 кг, на остальных участках т2 = 350 кг, размеры
266
(IXbxh) =870X400X450 мм. Производительность конвейера Z =
= 180 шт./ч, длина участков конвейера: формовки £ф = 45 м,
заливки L3ajI=15 м, охлаждения £охл = 50 м, выбивки £выб=10 м.
Согласно параграфу 11.2, выбираем конвейер типа Г. Из
табл. 11.2 в соответствии с заданными размерами и массой груза
определяем следующие параметры конвейера: ширина платформы
5 = 500 мм (на 100 мм больше ширины груза), длина платформы
5 = 1000 мм (на 130 мм больше длины груза), шаг платформы Г=
= 1250 мм, номинальная грузоподъемность платформы 500 кг, по-
гонная масса ходовой части £/х.ч = 180 кг/м, радиус поворота R =
= 1250 мм.
Из формулы (5.15) определяем расчетную скорость конвейера
v = ZT/3600 =180-1,25/3600 = 0,0625 м/с.
Ближайшее значение скорости из стандартного ряда (см. па-
раграф 11.3) 0,063 м/с (±10 %). Поскольку отклонение расчетной
скорости от стандартной составляет (0,063— 0,0625)/0,063 = 0,008,
или 0,8 %, дальнейший расчет будем вести по расчетной скорости.
Погонная масса груза па участках заливки и охлаждения
д' “ = 450/1,25 = 360 кг/м,
на участках формовки и выбивки
= mjT = 350/1,25 = 280 кг/м.
Расчет натяжений в цепи выполним методом обхода по контуру
(см. параграф 5.2). Первоначальное натяжение в точке цепи после
привода (в начале участка выбивки) примем Fmin=1500 Н
(см. 11.3).
Длина каждого криволинейного участка (дуги поворота) /Кр=
= л7? = 3,14-1,25 = 4 м. Сопротивление движению на участке выбив-
ки соответственно формуле (5.17)
Гвыб = (?; + 9х.ч) = (280 + 180) 10 - 0,025 • 9,81 = 1128 Н.
Здесь коэффициент сопротивления движению w = 0,025 принят из
табл. 11.2 одинаковым по всей трассе конвейера.
Натяжение цепи в конце участка выбивки по формуле (5.35)
Fi = 1500±l 128 = 2628 Н.
Сопротивление на дуге поворота (параграф 11.3.2) /7пов(дг +
±7х.ч)/кро^т = (280± 180)4-0,025-9,81 • 1,025=462 Н.
Здесь коэффициент &т, учитывающий дополнительное трение на
повороте, принят равным 1,025.
Натяжение цепи в начале участка формовки по формуле (5.35)
г2 = 2628 ±462 = 3090 Н.
Сопротивление на участке формовки, согласно формуле (5.17)
5Ф = (7; + gx,4) L^wg = (280 + 180) 45 - 0,025 • 9,81 = 5076 Н.
Натяжение цепи в конце участка формовки по формуле (5.35)
Fs = 3090 ±5076 = 8166 Н.
267
Сопротивление движению на участке заливки, согласно формуле
(5.17), Рзал - (?; + ^.ч)1зал^ = (360 + 180) 15 • 0,025-9,81 —1986 Н.
Натяжение цепи в конце участка заливки по формуле (5.35)
7+1 = 8166+ 1986= 10 152 Н.
Натяжение цепи в начале участка охлаждения по формуле
(5.35) Г5= 10 152 + 462 = 10 614 Н.
Сопротивление на участке охлаждения, согласно формуле (5.17),
ЛжЛ = (q'F + 7Х) Loxnwg = (360 + 180) 50 • 0,025 - 9,81 = 6622 Н.
Натяжение цепи в конце участка охлаждения по формуле (5.35)
Fq= 10 614 + 6622= 17 236 Н. '
Натяжение тяговой цепи гусеничного привода, который уста-
навливается между участками охлаждения и выбивки, по формуле
(11.11) Гтах = Г6=17 236 Н Fryc=lt65/?max= 1,65-17 236 = 28 439 Н.
Требуемая мощность привода Р= 10~3Frycf= 10~3-28 439Х
Х0,0625= 1,78 кВт.
Поскольку скорость конвейера меньше 0,2 м/с, при выборе цепи
динамические нагрузки можно не учитывать [см. пояснения к фор-
муле (8.11)]. Расчетная нагрузка на цепь по формуле (8.12)
Т+асч = Лпах = 17 236 Н. Разрушающая нагрузка цепи по формуле
(8.14) Гразр = 6-17 236 = 103 416Н^103,4 кН.
Согласно параграфу 4.4, принимаем по ГОСТ 588—81 тяговую
пластинчатую цепь типа 3 (с гладкими катками) исполнения 3 с
полыми валиками (индекс МС). Из табл. III. 1.11 выбираем цепь
помер MCI 12 с разрушающей нагрузкой 112 кН (больше F^3p=
= 103,4 кН) и шагом ^ц=250 мм. Обозначение цепи
МС112—3—250—3 ГОСТ 588—81,
16.7. ПРИМЕР РАСЧЕТА КОВШОВОГО ЭЛЕВАТОРА
Рассчитать вертикальный ковшовый элеватор (см. рис. 12.3, а)
для транспортирования фрезерного торфа насыпной плотностью
р=0,5 т/м3. Расчетная производительность элеватора Q = 20 т/ч.
Высота подъема груза /7 = 20 м. Работа трехсменная.
По табл. 12.2 и 12.5 рекомендуется для данного случая ленточ-
ный быстроходный элеватор типа ЛГ с расставленными глубокими
ковшами и центробежной разгрузкой. Средний коэффициент за-
полнения ковшей ф = 0,8, рекомендуемая скорость ленты v = l,25...
2,0 м/с, принимаем v =1,75 м/с.
Необходимая погонная вместимость ковшей [(12.14)] in=
=20/(3,6-1,75-0,8-0,5) =7,94 л/м.
Из табл. 12.7 выбираем глубокий ковш вместимостью io=4 л и
шаг ковшей 500 мм.
При объемной производительности элеватора V = Q/p = 20/0,5 =
= 40 м3/ч и в соответствии с шагом ковшей из табл. 12.3 выбираем
ширину ковшей Вк = 400 мм и ширину ленты Вл = 500 мм.
Из табл. 4.3 выбираем конвейерную ленту общего назначения
типа 3 с тремя тяговыми прокладками прочностью 55 Н/мм (см.
268
табл. 4.5), что соответствует (см. табл. 4.6) марке ткани прокладок
БКНЛ-65. Максимально допустимая рабочая нагрузка тяговой про-
кладки (см. табл. 4.5) йр=6 Н/мм.
Погонная масса груза из формулы (5.12)
q = Q/(3fiv) =20/(3,6-1,75) =3,17 кг/м.
Толщина конвейерной ленты [см. (4.12)] 6 = 3-1,154-3 = 6,45 мм
при 6п.т = 1,15 мм (см. табл. 4.7); 6п.3=0; 6Р = 3 мм и 6н = 0 (см.
табл. 4.9).
Погонная масса ленты [см. (4.11)] qn = 1100-0,5-0,00645 =
=3,55 кг/м.
Погонная масса ковшей [см. (12.6)] дКов= (9/0,5) • 1,14 =
= 20,52 кг/м, где тКОв=9 кг (см. табл. 12.8).
Погонная масса ходовой части конвейера [см. (12.4)] 7К = 3,554-
4-20,52 = 24,07 кг/м.
Сопротивление зачерпыванию груза [см. (12.13)] Тзач = 3,17х
X 9,81-3 = 93,3 Н.
Мощность на приводнОхМ валу элеватора [см. (12.15)]
Р = 0,0027 • 20 • 20 1 4-
—= 1,24 кВт.
20 /
Окружное усилие на приводном барабане [см. (12.16)]
F = Ю3 • 1.24 = 7W н
1,75
Максимальное усилие в лепте [формула (12.17)] Ртах = 710 х
X 1,37/(1,37— 1) = 2628 Н, при / = 0,1 (см. табл. 6.7); а = 180° =
= л; — 2,718°’1я = 1,37 (см. табл. 12.11).
Необходимое число тяговых прокладок в ленте [см. (12.18)] 2^
^2628/(6-500-0,9) =0,97. В расчете принято число тяговых про-
кладок г = 3"(минимальное для выбранного типа ленты).
Согласно табл. 12.3, принимаем диаметр приводного барабана
£)Пб = 630 мм и проверяем его по условию (12.19): 3< 10-0,63 = 6,3,
т. е. условие соблюдается. Проверяем выполнение условия обеспе-
чения центробежной разгрузки ковшей (12.9): Dn.6^0,204• 1,752 =
= 0,62 м, что незначительно отличается от принятого диаметра при-
водного барабана. Можно считать условие (12.9) соблюденным.
Выполним уточненный тяговый расчет элеватора методом обхо-
да по контуру. Обход начинаем от точки 1 (см. рис. 12.3, б), где
натяжение —
Натяжение в точке 2 [см. (12.23)] /?2 = ^п7?14-/?зач = 1,05т7!4-
4- 93,3 Н, где /<п = 1,05 [см. (5.26)]; F^ — см. выше.
Натяжение в точке 3 [см. (12.24)] F3= 1,05/4 4-93,3 4-(3,174-
4-24,7)-9,81-20 = 1,05744-5561 Н.
Натяжение в точке 4 [см. (12.25)] F4 = F14-24,7-9,81 •20 = Т14-
4-4846 Н.
Решая совместно уравнения для F3 и из формулы (12.26)
269
получим: F3^1,37F4; 1,05^ + 5561^1,37(01 + 4846); ^ = -3369 Н.
С учетом условия (5.33) принимаем F1=Fmin=1000 Н. При этом
F2 = 1,05Л + 93,3 = 1,05 • 1 000 + 93,3 = 1143,3 Н; F3 = 1,05F, +5561 =
= 1,05-1000 + 5561=6611 Н; F4 = F} + 4846= 1000 + 4846 = 5846 Н.
Наибольшее натяжение в ленте F3 = 6611 Н, что больше пред-
варительно определенного значения Fmax=2628 Н. Уточняем необ-
ходимое количество прокладок [см. (12.18)]:
2 = 6611/6-500-0,9 = 2,44<3.
Тяговая сила на приводном барабане [см. (12.28)] Fo= 1,05X
Х6611-5846= 1095 Н.
Мощность на приводном валу элеватора [см. (6.19)] Р=10~3Х
X 1095-1,75= 1,92 кВт.
Необходимая мощность двигателя [см. (6.21)] F=(1,2X
X 1,92)/0,96 = 2,4 кВт при КПД двухступенчатого зубчатого редук-
тора (см. табл. 5.1) т] = 0,96.
'Из табл. III.3.1 принимаем двигатель типа 4А112Л1А6УЗ мощ-
ностью Р = 3 кВт с частотой вращения и=953 мин-1. Кратность
пускового момента +n = 2. Момент инерции ротора /Р=1,75Х
X Ю~2 кг-м2.
Частота вращения приводного барабана [см. (6.22)] пПб =
= 60 -1,75/ (3,14 - 0,63) = 53 мин-1.
Требуемое передаточное число привода [см. (6.23)] и = 953/53 =
= 17,98.
Из табл. Ш.4.2 выбираем ближайший больший по мощности
редуктор типа Ц2-250 с передаточным числом нр= 16,3 и мощ-
ностью на быстроходном валу Рр = 8,2 кВт [с учетом пояснений к
формуле (1.101), из которых следует, что для машин непрерывного
действия коэффициент &р= 1].
Исходя из принятого передаточного числа, уточняем скорость
ленты [см. (6.24)]: 3,14-0,63-953/(60-16,3) = 1,93 м/с, что соот-
ветствует требованиям, изложенным в параграфе 12.2.
По формуле (12.29) уточняем производительность конвейера
(?Ф = 3,6-4-1,93-0,8-0,5-1/0,5=22,2 т/ч, что больше заданной про-
изводительности в допустимых пределах.
Для выбора соединительной муфты между двигателем и редук-
тором определяем номинальный крутящий момент двигателя: ТНом =
= 9550РИОм/п = 9550-3/953 = 29,6 Н-м.
С учетом кратности пускового момента выбранного двигателя
фп = 2 принимаем расчетный момент муфты
П = ТГЧп = 29,6 - 2 = 59,2 Н - м.
Из табл. III.5.6 выбираем упругую втулочно-пальцевую муфту
с номинальным крутящим моментом Гм = 63 Н-м, наибольшим
диаметром 0 = 100 мм. Согласно табл. 1.36, момент инерции муфты
/м = 2,0-10~3 кг-м2.
Необходимый тормозной момент для случая, если тормозное
устройство устанавливается на валу двигателя (при установке
270
тормозного устройства на другом валу следует сделать соответ-
ствующий перерасчет с учетом фактической частоты вращения тор-
мозного вала), определяется по формуле (5.50). Аналогичный рас-
чет выполнен в параграфе 16.1.
Проверка достаточности пускового момента двигателя и пере-
грузки тягового органа при пуске также выполняется аналогично
расчету, приведенному в параграфе 16.1.
16.8. ПРИМЕР РАСЧЕТА ВИНТОВОГО КОНВЕЙЕРА
Рассчитать винтовой горизонтальный конвейер для перемеще-
ния сырого песка насыпной плотностью 1,6 т/м3. Расчетная произво-
дительность Q = 40 т/ч, длина конвейера L = 20 м.
Принимаем отношение шага винта к его диаметру kp = 0,8 (для
абразивных материалов) согласно пояснению к формуле (13.3). В со-
ответствии с ГОСТ 2037—82 и рекомендациями табл. 13.2 принима-
ем^частоту вращения винта пв = 40 мин-1. Из табл. 13.3 коэффици-
ент заполнения желоба ф = 0,125.
Необходимый диаметр винта [см. (13.3)]
D = 0,275 ]/ 0 8 ф 40 0>125\ 1>б . j = 508 м,
принимаем === 1, так как конвейер^горизонтальный (табл. 13.5).
По даннььм табл. 13.1 назначаем диаметр винта £> = 500 мм, шаг
винта S=400 мм (винт однозаходный).
По условию (13.2) максимально допустимая частота вращения
винта
nmax _ ---30----— 42 4 МИН-1
в Г 0,5
т. е. пв = 40 меньше п™ах = 42,4 мин-1. Коэффициент k ~ 30 при-
нят по табл. 13.3.
ДУощность на валу винта, потребляемая при работе конвейера
[см. (13.4)], Ро=0,0027-40-20-4 = 8,64 кВт, где w — коэффициент
сопротивления движению груза, по табл. 13.3 принят ш = 4.
Мощность двигателя для привода конвейера [см. (6.21)] Р=
= (1,25-8,64)/0,96 =11,25 кВт, где т] = 0,96 (см. табл. 5.1), предпо-
лагая, что в приводе будет использован двухступенчатый редуктор.
По табл. III.3.2 выбираем электродвигатель с повышенным пус-
ковым моментом типа 4АР16086УЗ с поминальной мощностью
11 кВт при частоте вращения п=975 мин”1 (табл. Ш.3.1).
Необходимое передаточное число привода [см. (6.23)] и —
=975/40=24,37. Из табл. Ш.4.2 выбираем редуктор типоразмера
Ц2-250 с передаточным числом ир = 24,9.
Фактическая частота вращения винта нв.ф=975/24,9 = 39,15 мин-1,
т. е. отличается от номинальной на 2 %, что допустимо.
Фактическая производительность конвейера [см. (13.6)] фф =
271
= 47-0,52-0,4 • 0,125-39,15-1,6 = 36,7 т/ч, т. е. отличается от расчет-
ной в допустимых пределах.
Вращающий момент на валу винта [см. (13.7)] Го= (9550-8,64)/
39,15 = 2107 Н-м.
Тангенс угла подъема винтовой линии (по наружному диаметру
винта) tga — — 0,4/(3,14 • 0,5) = 0,255, при этом а = 14°17\
лО
Приняв из табл. 4.2 коэффициент трения влажного песка по ста-
ли (в состоянии покоя) fo = O,6, найдем из соотношения (4.7) коэф-
фициент трения в состоянии относительного движения груза /д =
= 0,8 /о = О,8-0,6=0,48, а из соотношения (4.8) угол трения р=
= arct g /д=arctg 0,48 = 25°40'.
Осевое усилие на винте из формулы (13.8)
__________2 . 2107_________
0,7 • 0,5tg(14°17' 4-25°40')
= 14 367 Н, 70С ис-
пользуется при выборе подшипников.
16.9. ПРИМЕР РАСЧЕТА РОЛИКОВОГО КОНВЕЙЕРА
Рассчитать гравитационный роликовый конвейер (см. рис.
14.1, б) с прямолинейной трассой для транспортирования металли-
ческих контейнеров массой т = 200 кг со скоростью v = 0,5 м/с. Длина
контейнера /=1,8 м, ширина—0,6 м. Производительность конвей-
ера Z=250 шт./ч, длина конвейера L = 30 м. Условия работы
средние.
Из формулы (14.2) производительность конвейера Q = mZ-10-3 =
= 200-250-10-3 = 50 т/ч.
Из формулы (14.1) расстояние между грузами
. 3,6t’/rz 3,6 • 0,5 • 200 ~ п
г = —---- = —----------- = 7 У м
Из табл. 14.1 выбираем угол наклона конвейера 2°. Шаг роликов
не должен превышать 0,45 длины груза, т. е. 810 мм, принимаем
шаг роликов /р = 630 мм (см. параграф 14.2). Ширина конвейера
(длина ролика) принимается (см. параграф 14.2) на 50... 100 мм
больше ширины груза. Примем ширину конвейера 650 мм.
Число роликов, на которых лежит груз, по формуле (14.5)
z' = 1,8/0,63 = 2,86. Принимаем г' = 3.
Средняя нагрузка на один ролик (см. табл. 14.3) 7Р =
= 0,5-200-9,81=981 Н.
Из табл. 14.2 при нагрузке, приходящейся на один ролик,
981 Н^<980 Н и длине ролика 650 мм выбираем диаметр необрабо-
танного ролика Z) = 60 мм.
Из табл. 14.4 масса одного ролика тр = 4,8 кг. Диаметр цапфы
ролика принимаем d= (0,2...0,25) D= (0,2...0,25)-60= 12...15 мм
[см. пояснения к формуле (14.4)]. Принимаем d=12 мм. Число ро-
ликов в конвейере <г = ЛДр=30/0,63 = 48.
272
Принимаем коэффициент трения качения груза по роликам
р=5-10~4 м [см. пояснения к формуле (14.4)]. Из табл. 14.5 коэф-
фициент трения в цапфах роликов примем для средних условий ра-
боты f=0,04 (ролики па подшипниках качения).
Сопротивление движению одного груза определяем по формуле
(14.4):
F = [200 2-5-10 *
I 0,06
+ (200 Н- 4,8 • 3)
0,04 • 0,012"
0,06
9,81 +
0 85.4'8-У= 51 н.
30
Коэффициент сопротивления движению груза на конвейере по
формуле (14.6) ^ = 51/(200-9,81) =0,026.
При принятом угле наклона гравитационного конвейера (3 = 2°
проверяем условие (14.7): tgp = tg2°=0,0348>ш = 0,026. Посколь-
ку условие (14.7) удовлетворяется, движение грузов за счет про-
дольной составляющей силы тяжести груза обеспечивается.
16.10. ПРИМЕРЫ РАСЧЕТОВ КАЧАЮЩИХСЯ КОНВЕЙЕРОВ
16.10.1. Пример расчета качающегося
инерционного конвейера
Рассчитать инерционный горизонтальный конвейер с перемен-
ным давлением груза на дно желоба для транспортирования агломе-
рата железной руды с насыпной массой р= 1,8 т/м3. Производитель-
ность конвейера Q = 70 т/ч, длина £ = 35 м (схема конвейера — см.
рис. 15.2).
Амплитуду колебаний желоба а (равную радиусу кривошипа
г) принимаем равной 15 мм, частоту вращения кривошипа — иКр =
= 320 мин-1 [см. пояснения к формулам (15.7) и (15.8)]. Примем
угол направления колебаний (угол наклона упругих стоек) р = 30°
(см. параграф 15.3).
Из табл. 4.1 найдем для агломерата железной руды коэффици-
ент трения в покое по стали /0 —0,8. По формуле (4.7) коэффициент
трения груза в движении /д= (0,7...0,9) /0= (0,7...0,9) 0,8 = 0,56...0,72;
примем /д = 0,6.
Проверим режим работы конвейера по условиям (15.7) и (15.8):
3202 • 0,015 . опо о со л oi /2
---------------------sin 30 = 8,53 < 9,81 м/с2;
90
32021010 15 17Q6> .. 0,8^9,81 =
90 cos30° • 0,8sin30°
т. е. условия соблюдаются. При несоблюдении этих условий следует
соответственно изменить частоту вращения кривошипа или его ра-
диус.
Средняя скорость движения груза по формуле (15.9) vr=
= 0,21-320-0,015-0,6-tg 30°=0,35 м/с. Из формулы (5.13) требуемая
273
площадь сечения желоба А = Bh = Q/(ЗбОО^р) =70/(3600-0,35* 1,8) =
= 0,031 м2. В соответствии с рекомендациями параграфа 15.4 при-
мем высоту слоя груза в желобе 1г = 0,05 м. Тогда высота борта же-
лоба /гб = Л/Ф = 0,05/0,5 = 0,1 м, где коэффициент заполнения сечения
ф = 0,5 (см. параграф 15.4). Требуемая ширина желоба B—A/h =
= 0,031/0,05 = 0,62 м.
Принимаем окончательно ширину желоба из стандартного ряда
В = 630 мм и высоту he— 100 мм (см. параграфы 15.2, 15.4).
Приняв КПД привода т] = 0,85, по формуле (15.13) определяем
мощность двигателя:
4 - 10-4.7Q . 35 / 1о_4 0,015 - 3202
0,85 tg 30° 0,6
= 5,06 кВт.
Из табл. III.3.2 выбираем двигатель с повышенным пусковым
моментом типа 4AP160S8Y3 мощностью 7,5 кВт при частоте враще-
ния /: = 730 мин-1.
Требуемое передаточное число привода (клиноременная пере-
дача) и = и/пкр=730/320 = 2,28.
16.10.2. Пример расчета вибрационного конвейера
Рассчитать горизонтальный двухтрубный (двухэлементный)
динамически уравновешенный виброконвейер (см. рис. 15.3, б) для
транспортирования агломерата железной руды с насыпной массой
р=1,8 т/м3. Производительность конвейера Q= 150 т/ч, длина L =
= 30 м, максимальная крупность куска груза ^тах=Ю0 мм, мини-
мальная Ят1п = 50 мм.
Из пояснений к формуле (4.1) видно, что груз можно считать
сортированным, так как amax/£min= 100/50 = 2<2,5.
Из табл. 15.3 для двухтрубного конвейера тяжелого типа с
эксцентриковым приводом (Q>50 т/ч и Л>20 м) рекомендуемый
коэффициент режима работы Г= 1,2...2,0; примем Г = 2. В табл. 15.4
рекомендуемая амплитуда колебаний трубы при эксцентриковом
приводе а = г = 4...8 мм; примем а = 4 мм.
Из формулы (15.4) угловая скорость возбудителя колебаний
при а = 0 и среднем угле направления колебаний (3 = 30°
® = ]/ а sfn р = 0,004 • sin 30° ~ 99’°4 рад/с.
Частота вращения эксцентрикового вала пКр = 30со/л = 30 *99,04/
/3,14 = 946 мин-1.
Скорость транспортирования из формулы (15.11)
v = kidcd cos р 1-----= 1,0 • 0,004 • 99,04 • cos 30° X
X ]/”1 — = 0,297 м/с.
Здесь коэффициент ^ = 1 (табл. 15.5) для кускового груза с раз-
274
мерами частиц 5...200 мм (в данном случае максимальный размер
куска атах= 100 мм).
Из формулы (5.13) требуемая площадь сечения груза в двух
трубах Л = Q/(3600up) = 150/(3600*0,297* 1,8) =0,078 м2.
Требуемый диаметр одной трубы (см. параграф 15.4) при числе
труб z=2 и коэффициенте заполнения ф = 0,5
л — 1/ 4А 1/ 4*0,078 noir ,
d V znt|> V 2-3,14-0,5 0,3 5 М’
Этот диаметр трубы согласуется с международным стандартом ИСО
1815 — 75 (см. параграф 15.2). Принимаем J=315 мм.
Проверка на кусковатость грузов (см. 15.9) удовлетворительная,
так как Птах=100 меньше d/3 = 315/3= 105 мм. Частота собствен-
ных колебаний системы при резонансной настройке соо = (о =
= 99,04 рад/с [см. пояснения к формуле (15.3)].
Общая масса колеблющейся части конвейера (одной трубы)
вместе с грузом и прикрепленными к трубе частями [см. пояснения
к формуле (15.3)] m = mT + mn4-mrX=900 + 504-2430-0,15= 1315 кг.
Принимаем массу трубы т ПрИ ее толщине бт = 3 мм и плот-
ности стали р = 7800 кг/м3 m'T = ^TL = 23,16*30=694,8 кг.
Масса 1 м трубы дт = рлДбт = 7800*3,14*0,315*0,003 = 23,16 кг/м;
длина конвейера £ = 30 м; масса трубы вместе с прикрепленными к
ней частями mT=l,3 т"= 1,3*694,8^900 кг (коэффициент 1,3 учи-
тывает массу прикрепленных к трубе частей); масса части привода,
связанная с трубой (в основном шатун и кривошип) ти^50 кг;
масса груза, находящегося в одной трубе, тг = дг£ = 81 *30 = 2430 кг,
где масса 1 м груза, находящегося в одной трубе, из формулы (5.14)
9r = Q/(2*3,6^) = 150/(2*3,6*0,257) =81 кг/м; коэффициент Х=0,15
принят по рис. 2.49, при коэффициенте режима работы Г = 2.
Требуемую жесткость упругой системы найдем из формулы
[см. пояснения к формуле (15.3)]
С = со2т = 99,042 • 1315 = 129 • 105 Н/м.
Суммарную жесткость упругой системы можно представить как
сумму жесткостей рессор С], больших С% и малых С3 резинометал-
лических шарниров [см. пояснения к формуле (15.3)]: С = С\С2Ч-
+ Сз, отсюда жесткость рессор Ci = C — C2—C3 = 129*105—16*105 —
— 8* 105= 105* 105 Н/м.
Для ориентировочных расчетов принимаем: число стоек в кон-
вейере— 10 (по пять с каждой стороны), число больших резиноме-
таллических шарниров в одной стойке *— 4, всего больших шарниров
10 • 4 = 40; число малых резинометаллических шарниров — 80
(по восемь в каждой стойке); приведенную жесткость одного боль-
шого шарнира С2 = 4* 104 Н/м [см. пояснения к формуле (15.3)],
всех больших шарниров С2 = C2z — 4 • 104 - 40 = 16 ♦ 105 Н/м, одно-
го малого шарнира С3 = 104 Н/м, всех малых шарниров С3 = C3Zi =
= 104 - 80 — 8 • Ю5 Н/м; количество рессор zp = 320.
275
Жесткость одной рессоры [см. пояснения к формуле (15.3)]
с\ = с}/2р = 105- 105/320 = 3,28 • 104 Н/м.
Приняв ширину рессоры 6 = 0,1 м, длину Z=0,4 м, по формуле
(15.1) определим ее толщину:
о 3,28-104
6 = А71/ —= 1,05 • 0,41/ --------------гг =0,0048 м.
V ЬЕ Г 0,1 • 2,15 . 1011
Принимаем 6 = 5 мм.
По формуле (15.2) определим напряжение изгиба в месте задел-
ки рессоры:
6£6afe3 = 6 . 2,15 . 1011 . 0,005 004 . 0,68 __
Z2 ~ 0,43 “
= 109,65 - 10е Па = 109,65 МПа<[пи]= ПО МПа.
Здесь принято: а = 0,004 мм; коэффициент 63 = 0,68 (при резино-
вых прокладках между рессорами).
Усилие в шатуне при установившемся движении по формуле
(15.3) при шо = О,2
f ш = гС у f 1 — + Wo2 = 0,004 • 129 105 X
Х1/ (1 — -9-04^У + 0.22 = 10320 H.
V 99,042 /
Усилие в шатуне в начале пуска, когда со = 0 [см. (15.3)],
= гС 1/ fl — +4 = 0,004 • 129 • 105 X
V \ «о /
xl/f1--------+У + 0,22 = 55810 Н.
Г \ 99,042 /
По этому усилию рассчитываются на прочность и жесткость
элементы кривошипно-шатунного механизма.
Мощность электродвигателя для конвейера длиной более 10 м
определяется по формуле (15.15):
1 . 150
10s • 0,95
10 • 4,5+ (30 — 10)3,5
0
0,367
= 18,16 кВт.
Коэффициент транспортабельности груза 6тр=1 (для кусковых
грузов); /?з = 4,5; &4 = 3,5 (из табл. 15.9).
Из табл. III.3.2 выбираем электродвигатель с повышенным пус-
ковым моментом типоразмера 4АР1800М6УЗ мощностью 18,5 кВт
при частоте вращения 975 мин-1. Передаточный механизм не требу-
ется, так как частота вращения кривошипного вала (пкр = 946 мин-1)
и частота вращения двигателя отличаются незначительно.
Раздел III. СПРАВОЧНЫЕ МАТЕРИАЛЫ
III. 1. КАНАТЫ. ЦЕПИ
Табл. III. 1.1 Канат двойной свивки типа ЛК-Р конструкции 6х 19 (1 +6+6/6)+
+ 1о.с. по ГОСТ 2688—80
К J. cd S3 X Маркировочная группа, МПа
У О г ° « о 5 1372 1568 | 1764 | 1960
Диаметр капа- Ж
та, мм So н— О
К L. щ Я О "Т" О ж разрывное усилие каната в целом, Н, не менее
® £ =
8,3 256,0 — 34 800 38 150 41 600
9,1 305,0 41 550 45 450 49 600
9,9 356,6 — 48 850 53 450 58 350
11,0 461,6 62 850 66 800 75 150
12,0 527,0 — 71 750 78 550 85 750
13,0 596,6 71 050 81 250 89 000 97000
14,0 728,0 86700 98 950 108 000 118000
15,0 844,0 100 000 114 500 125 500 137 000
16,5 1025,0 121 500 139000 152 000 166000
18,0 1220,0 145 000 166 000 181 500 198 000
19,5 1405,0 167 000 191 000 209 000 228 000
21,0 1635,0 194 500 222 000 243 500 265 500
22,5 1850,0 220 000 251 000 275 000 303 500
24,0 2110,0 250 500 287 000 314 000 343 000
25,5 2390,0 284 000 324 500 355 500 388 500
27,0 2685,0 319 000 365 000 399 500 346 500
28,0 2910,0 346 500 396 000 434 000 473 500
30,5 3490,0 415 500 475 000 520 000 567 500
32,0 3845,0 458 000 523 500 573 000 625 500
33,5 4220,0 502 500 574 000 748 000 686 000
37,0 5015,0 597 500 683 000 629 000 816 000
39,5 5740,0 684 000 781 500 856 000 938 000
42,0 6335,0 779 000 890 000 975 000 1 060 000
Примечание. Канаты, значени я разрывного усилия которых приведение
правой стороны линии, изготовляются из проволоки без покрытия. Обозначение
канатов — см. параграф 2.1.
277
Табл. III.1.2. Канат двойной свивки типа ЛК-0 конструкции 6x7 (1+6)+ 1 о.с.
по ГОСТ 3069—80*
Диаметр кана- Ориентировочная масса 1000 м сма- Маркировочная группа, МПа
1568 1764 | I960 2156
та, мм заиного каната, кг разрывное усилие каната в целом, Н, не менее
3,7 47,7 6740 7595 8290 8 945
• 4,0 54,0 7640 8590 9375 10 100
4,9 83,7 11 850 13050 14 350 —-
5,9 120,0 16950 18 700 20 450 —
* Смотри примечание к табл. III. 1.1.
Табл. III.1.3. Канат двойной свивки типа ЛК-0 конструкции 6X19 (1+9+9)+
+ 1 о.с. по ГОСТ 3077—80*
Ориентирово чная Маркировочная группа, МПа
Диаметр кана- масса 1000 м сма- 1372 | 1568 1764 | I960
та, мм заиного каната.
кг разрывное усилие каната в целом, Н, не менее
11,5 487,0 — 66 150 72 450 79 050
12,0 530,0 — 72 000 78 850 86 050
13,0 597,3 — 81000 88 700 96 800
14,0 719,0 — 97 750 106 500 116 500
15,0 852,5 — 115 500 126 500 138 000
16,5 996,5 118 000 135 000 147 500 161 500
278
Окончание
Диаметр кана- та, мм Ориентировочная масса 1000 м сма- занного каната, кг Маркировочная группа, МПа
1372 1568 I 1761 | 1960
разрывное усилие каната в целом, Н, не менее
17,5 1155,0 136500 156 000 171 500 187000
19,5 1370,0 162 500 183 000 203 500 221 500
20,5 1550,0 184 000 210 500 230 500 251 500
22,0 1745,0 207 000 236 500 259 000 283000
23,0 1950,0 231 000 247 500 289 000 316000
25,5 2390,0 284 000 | 304 000 355 500 388 000
Табл. III.1.4. Канат двойной свивки типа ТЛК-0 конструкции 6x37 (1+6+15+15)+
+1 о.с. по ГОСТ 3079—80*
Ори ентирово чн ая Маркировочная группа, МПа
Диаметр ка- ната, мм масса 1000 м сма - занного каната, 1372 1568 1764 I960
КР разрывное усилие каната в целом, Н, не менее
35,0 4435,0 519 000 590 000 650 000 709000
39,0 5395,0 632 000 722 000 791 000 863 000
43,0 6675,0 781500 893 000 980 000 1 065 000
47,0 7845,0 918 500 1 045 000 1 145 000 1 250 000
50,0 9110,0 1 060 000 1 215 000 1 330 000 1 455 000
52,0 9910,0 1 155 000 1 320 000 1 455 000 1 575 000
54,0 10 600,0 1 235 000 1 415 000 1 550 000 1 695 000
56,0 11 450,0 1 335 000 1 525 000 1 675 000 1 830 000
58,0 12 050,0 1 410 000 1 610 000 1 765 000 1 925 000
62,0 13 950,0 1 630 000 1 860 000 2 000 000 —
* Смотри примечание к табл. III. 1.1.
279
Табл. П1.1.5» Канат двойной свивки типа ЛК-3 конструкции 6x25 (1-|-6 -{-6-р 12) 4-
+ 1 о.с. по ГОСТ 766 5—80*
Ориентировоч Маркировочная группа, МПа
Дизметр ка- ната, мм ная масса 1000 мм смазанного кана- 1372 1568 1 1764 | 1960
та, кг разрывное усилие каната в целом. Н, не менее
8,1 236,5 31 900 35 100 38 050
9,7 342,5 — 46300 50850 55 100
11,5 464,0 54 900 62 700 68 900 74 750
13,0 605,0 71 500 81750 89 450 97 200
14,5 763,6 90 350 102 500 113 000 122 500
16,0 941,5 110 500 126500 139 500 151 000
17,5 1140,0 134 500 153 500 169 000 183 000
19,5 1357,5 160 000 183 000 201 000 218 500
21,0 1594,0 188 500 215 000 236 500 256 500
22,5 1857,0 219 000 250 500 275 000 298 500
24,0 2132,0 251 500 288 000 316 500 343 000
25,5 2426,0 286 500 327 500 360 000 390 500
27,5 2739,0 323 500 369 500 406 500 ’ 441 000
29,0 3071,0 363 000 415 000 456 000 494 500
32,0 3768,0 445 500 509 500 559 500 607 000
35,5 4562,5 539 000 616 500 677 500 735 000
38,5 5405,0 639 000 730 500 795 000 868 500
42,0 6349,0 751 000 857 500 943 000 1 015 000
45,0 7397,0 874 500 999 500 1 095 000 1 190 000
48,5 8496,0 999 500 1 145 000 1 255 000 1 365 000
• Смотри примечание к табл. III. 1.1.
280
Табл. III. 1.6. Канат двойной свивки типа ЛК-РО конструкции ЛК-РО 6x36X
Х(1-(-7+7+7/74-14) + I о.с. по ГОСТ 7668-80*
Ориентировочная Маркировочная группа, МПа
Диаметр кана- та, мм масса 1000 м сма- занного каната, 1372 1568 1764 I960
кг разрывное усилие каната в целом, Н, не менее
18,0 1245,0 — 161 500 175 500 190 500
20,0 1520,0 197 500 215 000 233 500
22,0 1830,0 207 500 237 500 258 500 280 500
23,5 2130,0 242 500 277 000 304 000 338 000
25,5 2495,0 283 500 324 000 352 500 383 000
27,0 [2800,0 318 500 364 500 396 500 430 500
29,0 3215,0 366 000 417 500 454 500 493 500
31,0 3655,0 41С000 475 000 517 000 561 500
33,0 4155,0 473 000 540 500 588 000 638 500
34,5 4550,0 518 000 592 000 644 500 700000
36,5 4965,0 565 500 646 000 703 500 754 000
39,5 6080,0 . 692 500 791 500 861 000 935 000
42,0 6750,0 768 500 878 500 955 500 1 030 000
43,0 7120,0 806 500 919 500 100 500 1 080 000
44,5 7770,0 885 000 100 500 1 095 000 1 185 000
46,5 8400,0 956 500 1 090 000 1 180 000 1 280 000
* Смотри примечание к табл. Ill. 1.1.
281
Табл. III. 1.7. Канат двойной свивки типа ЛК-Р конструкции 8х 19 (1+6+6/6)+
+ 1 о.с. по ГОСТ 7670—80*
Ориентировочная Маркировочная группа, МПа
Диаметр кана- та» мм масса 10’00 м сма- занного каната. 1372 1568 ; 1764 I960
KF разрывное усилие каната в целом, Н, не менее
8,3 242,5 - - — 32 000 35 050 38 200
10,0 351,5 — 46 450 50 850 55 450
11,0 419,0 — 55 350 60 650 66 190
12,0 492,5 — 65 100 71 300 77 800
13,5 634,0 — 83 800 91 800 99 950
15,5 819,0 94 800 10 800 118 500 129 000
17,0 999,1 115 500 131 500 144 500 157 500
18,5 1160,0 133 500 152 500 167 500 182 500
20,0 1405,0 162 500 185 000 202 500 220 500
22,0 1675,0 193 500 221 000 242 500 264 504
23,5 1930,0 222 500 254 500 279 000 304 500
25,5 2245,0 259 000 296 000 324 500 354 000
27,0 2535,0 293 000 335 000 367 000 400 500
29,0 2895,0 334 500 382 500 418 500 457 000
31,0 3280,0 378 500 433 000 474 500 517 000
34,0 * Смотри 4000,0 462 500 примечание к табл. III. 1.1. 528 500 579 000 631 500
Табл. III.1.8. Цепи сварные круглозвенные грузовые и тяговые нормальной проч-
ности по ГОСТ 2319—70*
Калибр цепи мм Шаг звена t, мм Ширина цепи В, мм Нагрузка разрушаю- щая, Н, не менее Масса 1 м цепи, кг
6 19 21 13 700 0,75
7 22 23 17 600 1,0
8 23 27 25 500 1,35
Окончание
Калибр цепи d, мм Шаг звена t, мм Ширина цепи В, мм Нагрузка разрушаю- щая, II, не менее Масса 1 м цепи, кг
9 27 32 31 000 1,8
10 28 34 39 000 2,25
11 31 36 45 000 2,7
13 36 43 64 700 3,8
16 44 53 10000 5,8
* Обозначение цепей—см. параграф 2.1.
Табл. III. 1.9. Цепи грузовые пластинчатые по ГОСТ 191—75. Основные параметры
и размеры
Тип цепи ^Разрушающая ^нагрузка, кН, не менее Размеры, мм Число пластин в одном зве- не, не менее Масса 1 м це- пи, кг, не бо- лее
t ®вн» не менее d di bi, не более Л,, не более
1 2 3 4 5 6 7 8 9 10 И
1 1,25 6 4 3,0 2.3 И 5 — 2 0,13
1,60 8 6 3,5 2,5 13 7 0,20
15
1 2,50 10 8 4,0 3,0 18 8 0,32
283
Окончание
1 2 3 4 5 6 7 8 9 10 11
5,00 15 12 5,0 4,0 25 12 20 0,56
12,50 20 25 8,0 6,0 28 15 25 0,80
25,00 25 18 10,0 8,0 36 18 30 1,40
40,00 30 20 11,0 9,0 51 20 40 4 2,30
63,00 35 22 12,0 9,0 53 26 45 3,00
80,00 40 25 14,0 11,0 59 30 50 3,40
2 100,00 45 30 17,0 14,0 63 35 55 4 5,30
160,00 50 35 22,0 18,0 90 38 60 8,40
200,00 55 40 24,0 21,0 108 40 65 11,00
250,00 60 45 26,0 22,0 114 45 70 14,00
400,00 70 50 32,0 26,0 148 55 85 6 20,00
500,00 80 60 36,0 28,0 159 60 100 23,00
3 800,00 90 70 40,0 30,0 184 70 120 39,00
1000,00 100 80 45,0 35,0 224 80 140 53,00
1250,00 НО 90 50,0 40,0 236 90 160 8 70,00
1600,00 120 100 55,0 45,0 262 100 180 90.00
4 2000,00 140 120 60,0 — 342 120 200 10 150,00
2500,00 170 145 70,0 — 405 130 250 210,00
3200,00 200 170 85,0 — 450 160 250 305,00
Примечание. Допускается изготовление цепей типа 4 с шагом90, 100, 110,
120 мм. Обозначение цепей см. 2.1.
ЭЭ1Г -€>9 ЭН ‘JM ‘ин -ЭП К I ВОЭВЭД СО П-12, 7—2000—1 12,7 10,4 5,08 5,13 2,00 11,8 15 18 8 2+2 20 0,43 П-12, 7-4000—2 18,6 4+4 40 0,85 П-12 , 7—6300—4 26,8 6+ 6 63 1,27
ЭЭНЭК эн ‘ди ‘bmeAcIjbh С-1
эу.нь’вя ВН НИХ ЭВ If U эинвхэьоэ
Размеры, мм СЧ 43 о С- 00 го ю х?
ЭЭ1Г -09 эн ‘*2/
ЭЭ1Г -09 ЭН ‘2/
ю
43
43
ЭЭ1Г -09 эи *q СО
С')
Обозначение цепи
285
Окончание
to
oo
о
I 2 3 4 5 6 7 8 9 10 11 12 13
11-15, 875—26,50—1 15,875 10,7 5,96 6,01 2,00 14,8 20 20 10 2+2 26,5 0,66
П-15, 875—5000—2 18,9 4+4 50 1,27
П-15, 875—8000—3 27,1 6+6 80 1,89
П-19,05—3150—1 19,05 11,9 7,95 8,00 2,20 18,2 25 25 12 2+2 31,5 1,03
П-19,05-6700-2 19,9 4+4 67 1,97
П-19,05—9500—3 29,9 6+6 95 2,96
П-19,05-12500—4 41,9 8+8 125 3,98
П-25,4—6700—1 25,4 17,4 9,58 9,58 3,25 24,2 30 32 14 2+2 67 1,90
П-25,4—13200—2 30,6 4+4 132 3,61
П-25,4—20000—3 43,8 6+6 200 5,24
П-25,4—26500—4 57,0 8+8 265 8,19
П-31,75—9500—1 31,75 21,3 11,12 11,17 4,00 30,2 40 40 16 2+2 95 2,55
П-31,75—20000-2 37,5 4+4 200 5,00
П-31,75—26500—3 53,7 6+6 265 7,44
П-31,75—35500—4 70,0 8+8 355 9,87
П-38,1—12500—1 38,1 26,8 12,72 12,77 4,80 36,2 50 50 18 2Н (-2 125 3,47
П-38,1—26500—2 46,2 4- 265 6,78
П-38,1—37500—3 65,6 6П Ь6 375 10,10
П-38,1—47500—4 85,0 8- 475 13,38
П-44,45—16000—1 44,45 30,6 14,29 14,34 5,60 42,4 55 60 20 2Н Н2 160 5,03
П-44,45—35500—2 53,2 4Н И 355 9,81
П-44,45—47500—3 75,8 6п (-6 475 14,53
П-44,45—60000—4 98,4 8Н 1-8 600 19,41
П-50,8—25000—1 50,8 34,8 17,46 17,51 6,40 48,3 60 70 22 24 -2 250 6,19
П-50,8—50000—2 60,6 4Н И 500 12,06
П-50,8—71000—3 86,4 64 Н6 710 17,95
П-50,8—95000—4 112,4 8- 1-8 950 23,80
Примечание. Обозначение цепей—см. параграф 2.1.
Табл. Ш.1.11. Цени тяговые пластинчатые по ГОСТ 588—81. Основные параметры и размеры (см. рис. 4.2), мм
Номер цепи 9 ♦ Разрушающая нагрузка, кН, не менее Шаг 1 1СПИ bi, не более Ь2, не более Ь3. не менее не более d di d 2 ^3 dt db /г, не более S
М20 20 40* **- -160 35 3,5 15 49 6,0 9,0 12,5 25 35 18 2,5
М28 28 50**. -200 40 4,0 17 56 —-W 7,0 10,0! 15,0 30 40 20 3,0
М40 40 63 -250 45 4,5 19 63 8,5 12,53 18,0 36 45 25 3,5
М56 56 63**- -250 52 5,0 23 72 10,0 15,0 21,0 42 55 30 4,0
М80 80 80 - -315 62 6,0 27 86 12,0 18,0 25,0 50 65 35 5,0
Ml 12 112 80**- -400 73 7,0 31 101 - 15,0 21,0 30,0 60 75 40 6,0
М160 160 100**- -500 85 8,5 36 117 18,0 25,0 36,0 70 90 45 7,0
М224 224 125**- -630 98 10,0 42 134 21,0 30,0 42,0 85 105 56 8,0
М315 315 160**- -630 112 12,0 47 154 1 25,0 36,0 50,0 100 125 60 10,0
М450 450 200 - -800 135 14,0 55 185 30,0 42,0 60,0 120 150 70 12,0
М630 630 250 - -1000 154 16,0 65 214 36,0 50,0 70,0 140 175 85 14'0
М900 900 250**- -1000 180 18,0 76 254 44,0 60,0 85,0 170 210 105 16,0
Ml 250 1250 315**- -1000 230 22,0 90 310 50,0 71,0 100,0 200 250 120 20,0
Ml 800 1800 400 - -1000 260 24,0 ПО 370 60,0 85,0 118,0 236 276 150 22,'О
МС28 28 63 - -160 42 4,5 17 8,3 13,0 17,5 22,5 36 45 26 3,0
МС56 56 80 - -250 48 5,0 23 10,3 15,5 21,0 27,0 50 65 36 4,0
MCI 12 112 100 - -315 67. 7,0 31 14,3 22,0 29,0 38,0 70 90 51 6,0
MC224 224 160 - -500 90 10,0 42 —— 20,3 31,0 41,0 53,0 100 ’125 72 8,0
* Шаг цепи выбирается из ряда: 40, 50, 63, 80, 100, 125, 160, 200, 250, 315, 400, 500, 630, 800, 1000 мм.
** Применение шагов, отмеченных **, для катковых цепей не допускается.
Обозначение цепей — см. параграф 4.4.
Табл. Ш.1.12. Цепи тяговые пластинчатые по ГОСТ 588—81. Масса 1 м цепи
to
00
оо
Тип цепи Номер цепи 1 1 Масса 1 м цепи, кг, не боле е для шага цепи t, мм
40 50 63 80 100 125 160 200 250 315 400 500 630 800 1000
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15' 16 17
1 М20 1,26 1,14 1,05 0,96 0,93 0,88 0,85 — ЖЖЖЖ ^^вв — жж
М28 1,58 1,45 1,34 1,26 1,20 1,15 1,10 1 1 — •в 1 " " 1 в
М40 —. в» 2,10 2,05 1,90 1,76 1,70 1,65 1,58 —• — — — ж-ж.
М56 3,34 3,06 2,82 2,62 2,46 2,38 2,30 •в 1 1 — 1
М80 в 1 •ж^ж 4,80 4,40 3,95 3,80 3,66 3,47 3,30 — 1 — — 1
М112 1 11 1 7,26 6,00 5,80 5,30 5,05 4,80 4,55 4,40 1 — । 1
Ml 60 1 вв-ж 9,15 8,20 7,75 7,05 6,64 6,28 5,95 5,75 В 1 В в
М224 —ж *^₽^ж — — 12,70 11,40 10,70 9,80 9,28 8,76 8,45 8,00 —
M3I5 — —жж —-в •жЖ. 15,90 15,60 13,60 12,60 12,00 11,47 10,89 1 ~~ —
М450 - i*l * ^^ВВ -^ж. — 1 21,60 20,00 18,60 17,20 16,80 15,78 15,30 в
М630 — ж^ж « 1 в.»«« ж— ^^вж 29,50 27,60 25,80 24,60 23,00 22,20 21,50
М900 .—Ж^в —ж **-ж^в •жж 1 ^В*Ж 44,50 41,60 37,65 35,35 33,65 32,00 30,75
Ml 250 1 ^^жж «.^ж вж— ^^ЖЖ в 61,20 57,10 52,90 50,60 48,00 46,00
М1800 74,20 78,40 73,10 68,50 66,10
МС28 в 2,26 2,05 1,88} 1,74 1,62 — в в- ' ' в в
МС56 — । - 4,19 3,80 3,49 3,22 3,04 2,88 — в 1 в
MCI 12 ^жж 1 ^в». 9,09 8,22 7,44 6,89 6,46 6,10 — — 1 - —
МС224 — — — ^в« вв^в 'В 16,92 15,43 14,22 13,23 12,42 11,81 в ~ -
2 М20 1,42 1,27 1,16 1,04 1,00 0,93 0,80 •В 1 1 — 1 —
М28 1,84 1,64 1,50 1,40 1,30 1,22 1,16 * 1 1 1 в
М40 ж 2,38 2,28 2,10 2,00 1,82 1,75 1,70 — _ « — —
М56 1 ““В 3,23 3,45 3,15 2,85 2,65 2,55 3,37 1 - в 1 — '
М80 1 «»вж 5,40 4,90 4,35 4,10 3,90 3,67 3,46 — в в в
М112 —^ж — 8,40 6,40 6,10 5,90 5,46 5,15 4,80 4,65 1 1 ' —
Ml 60 —— *«— — ^^вж 10,60 9,35 8,70 7,80 7,25 6,75 6,30 6,05 — । " в
М224 Ж*Ж —В — ж.. —• 14.30 12,70 11,70 10,60 9,95 9,27 8,86 8,20 в ' —>
М315 ^^вв ^^вв в ^в»ж ^^вв 18,10 16,40 15,00 13,70 12,90 12,17 11,53 1 1
М450 «—в •“Ж ^ж*ж —* “"Ж» — 24,80 22,40 20,60 18,70 18,00 16.77 15,98
М630 в— — 1 1 в — в — 33,30 30,65 ' 28,20 26,40 24,60 23,40 22,50
10 Зак. 3134
Продолжение
М900 Ml 250 — —-в —-в
Ml 800 МС28 —— 2,56 2,29 2,07 1,89 1,74
МС56 MCI 12 — —-B 4,65 4,18 10,20 3,79 9,11 3,45 8,13 18,70 1,05 1 КС
МС224 М20 — 1,80 1,58 1,37 1,26 1.15
М28 2,44 2,22 1,89 1,70 1,55 о с\ г*
М40 - 3,47 3,14 2,78 SOIOOJIO ^ОООСО О см со о>со 2,25
М56 MgO Ml 12 М160 Illi — 4,90 8,05 4,30 7,00 10,00 3,38 5,38 8,12 12,00 18,80
М224 —в —— в “ •
М315 “W — •в Ж ж— в в •—«В
М450 —В —-B в в —-в в в «жж
М630 — —-B —-в — 1 —— вж.
М900 ^вж —-в —-в в ж 1 в —
Ml 250 в в в в — в —
Ml 800 «ъжж» — , жж. •в в в " ЛК Л
MC28 ж—— — 3,99 3,41 2,97 2,61 2,30
MC56 — ж 7,99 6,84 5,92 5,12
MCI 12 MC224 —— ж 17,35 14,83 12,61 31,39
M20 2,04 1,80 1,52 1,38 1,25 1,12
M28 2,45 2,35 2,05 1,85 1,65
M40 ЖЖ— 3,80 3,40 3,00 2,60 2,38
M56 — • — - — «ъж^ж 5,38 4,68 4,10 3,60
M80 - 8,80 7,00 6,50 5,78
M112 - ^ж_ — _ 10,80 10,00 8,00
M160 M224 —в — в в 13,80 12,10 19,60
•— 51,30 46,90 69,90 41,90 64,00 88,40 38,75 58,40 86,20 36,40 55,00 81,00 34,00 54,40 74,70 32,50 48,60 71,10
3,23 3,03 1 ж — в Вв Ж жж. —
7,45 6,90 6,45 — в в — —В В' 1
16,85 15,36 14,13 13,13 12,38 — 1 в- вв
вв Ж В ж в -В 1 в
1,40 В — — в 1 ~~ в в
2,05 1,95 вв ж “В в —-в В' в
3,15 2,85 в ж —-в в В' —-в В'
4,96 4,50 4,10 в - в - в ж— В' 1
7,24 6,58 5,95 5,50 — — —-в В'
10,48 9,38 8,45 7,65 7,12 В' —-в в
16,60 14,50 13,00 11,70 10,62 9,82
23,78 20,90 18,40 16,56 15,12 13,88 ж— жж.
37,15 32,35 28,45 24,90 22,98 20,77 19,18 1
49,20 43,20 38,10 34,40 29,90 28,40 26,40
67,90 59,35 52,15 47,50 42,80 39,50
91,35 80,30 72,45 65,Ю 59,60
В ж в- в 132,00 124,80 НО 97,50 89,30
М^ж < в жж. -в “-в В В.
4,56 4,09 —-в в -В жж. вв в
11,02 9,76 8,72 — ж— в вв в 1 .
27,00 23,48 20,57 18,20 16,44 -в в в 1 .
в жж. в в в жж. 1 в В
1,50 — 1 ~~ —-в в - в вв в в 1 .
2,18 2,15 в Ж в в в вв
3,30 3,10 — — —-в —-в
5,26 4,75 4,38 в - 1 ~~ жж. вв в
7,55 6,88 6,17 5,70 — В' в 1 ~~ в
10,60 9,45 8,50 7,70 7,15 в в — *
17,10 15,00 13,40 12,00 11,05 10,75 в в.
Табл. III. 1.13. Цепи тяговые разборные по ГОСТ 589—74. Основные параметры и
размеры (см. рис. 4.3), мм
Наименование параметров н размеров Обо- значе- ние Нормы
Шаг звена расчетный t 63 80 100 125 160 200 250
Шаг зацепления: номинальный предельное отклонение тп 126 160 200 250 320 400 500
+2,0 ±2,5 ±3,0
Ширина звена, не более в 18 30 42 32 37 46 40 59 66 80
Расстояние между нару- жными звеньями, не ме- нее Яви 15 21 32 27 27 34 34 42 52 63
Длина валика, не более Z 35 48 73 56 60 • 73 73 92 107 127
Нагрузка, кН, не менее: пробная разрушающая Qn «р 38 63 60 106 174 290 96 160 132 220 150 250 174 290 240 400 380 630 600 1000
Масса 1 м цепи, кг, не более — 1,4 3,2 8,7 3,8 5,2 7,4 5,7 9,1 16,5 24,0
Обозначение цепей—см. параграф 4.4.
Ю*
CD
№
Табл. 111.1.14. Цепи тяговые вильчатые по ГОСТ 12996—79. Основные параметры и размеры (см. рис. 4.4), мм
Шаг цепи t Ширина звена В Толщина вилки звена s Толщина стержня звеиа Si Толщина хвостовика звеиа s2, ие более Расстояние между внутренними плоскостями вилкн 1 Длина вилки звена 12 Диаметр пальца d Длина пальца /1, не бо- лее для цепи типа^ Диаметр отверстия под шплиит Ji пепи типа PI и РЗ Диаметр выступов D цепи тина РЗ Толщина вилки по выступам s3 типа РЗ Количество штифтов-шпонок на пальце цепи типа Р2, шт. Нагрузка кН Масса I м цепи, кг, не более
номинальный предельное отклонение разрушающая, не меиее рекомендуемая рабочая*
CU 1 Р2 и РЗ для цепи категории
Н в Н В
100 ±0,38 38 27 8 11 12 30 16 48 30 4 32 47 1 160 220 5,7 10 4,9
125 ±0,46 42 35 10 15 16 36 20 56 38 4 36 60 1 240 330 10,5 18 7,6
160 ±0,46 50 43 12 20 22 45 25 70 46 6 42 72 2 400 550 19,0 33 9,5
200 ±0,55 64 52 15 23 25 56 32 82 56 6 55 90 2 640 880 28,0 50 15,6
250 ±0,55 80 66 18 30 32 70 40 95 70 6 70 ПО 2 1000 1400 46,5 81 25,5
* Для средних условий работы. К средним условиям работы цепей относится транспортирование насыпного груза малой
абразивности со скоростью до 0,25 м/с при температуре до 45° С.
Фактическая рабочая нагрузка цепи назначается с учетом условий работы цепи: абразивность транспортируемого груза, тем-
пература, скорость движения цепи, число перегибов н др.
293
111. 2. БАРАБАНЫ. КОЛЕСА. КРЮКИ. ПОДВЕСКИ КРЮКОВЫЕ
Табл. 1П. 2.1 Барабаны крановые типа БК
(V нм t CJ подъ- (боль- м Размеры барабана, мм с.
Обозначь барабана S q Диаметр ната, ms Высота ема (паи шая), м ^бар ^б н R В ь L Li 1 /1 Is - Масс г
БК260
260 10,5
10,5
10,5
13,5
13,5
12
12
12
12
10
14
18
10
14
8
12,5
16
8
1300
330
450
560
490
560
225
330
420
200 150
200
200
250
250
250
250
250
250
176
265
210
1327
55
146
146
144
144
297
297
297
297
Окончание
БК335 335 14 14 .12,5 16 1420 380 480 200 200 190 220 330 160 1452 65 8 60 100 И 293
17 8 325 50 293
17 12,5 480 50 290
17 16 610 50 290
10,5 8 170 80 290 ГЬ Л
10,5 12 255 80 328
10,5 16 340 80 328 л л о
13,5 8 215 170 328 НН J
13,5 12 325 170 334
БК400 400 16,5 16,5 16 8 1200 425 288 50 50 235 265 390 320 1241 72 10 80 130 16 334 338 о о о
16,5 12 390 50 338 Л Л /-s
16,5 16 510 50 338
• 19,5 8 325 170 338 л j 1
19,5 12 450 170 341 Q А 1
17 8 420 170 341 л г» Г*
17 12,5 630 170 835 ПОР
БК510 510 20 20 8 12,5 2300 485 730 270 270 300 340 410 390 2320 90 17 80 130 16 835 825 оок
23 8 625 270 825 О 1 Р
23 12,5 900 270 815 815
Скорость передви- жения, м/с
Наибольшие допустимые нагрузки на колесо при режимах работы
О
и н
S3
о
tn н
ь
о
W н
Табл. III.2.3. Колеса крановые одно- и двух ребордные. Допустимые нагрузки, кН
Скорость пе- редвижения , м/с Наибольшие допустимые нагрузки на колесо при режимах работы
Л С т ВТ 1 л с т ВТ л с т ВТ л с т ВТ
160/P8* 200/P11 250/P15 320/P24 °-32 26,8 15,4 10,8 7,7 42,5 23,2 16,3 11,6 70 58,3 50 36,8 123 102 65 51,5 0,63 22,9 12,6 8,7 6,2 34,6 19,0 13,2 9,4 58,3 41,5 29,7 123 84,5 59 42 1«° I9-8 11.0 7,8 5,4 29,8 16,5 11,5 8,2 52 36,2 26 123 74,5 51,5 36,6 !’25 18.6 10,2 7,1 5,1 28,0 15,4 10,7 7,7 48,5 38,8 24 123 68,5 47,8 34 1>6 I7'3 9.6 6,6 4,8 26,3 14,4 10 7,2 46,6 31,6 22,5 115 64 44,5 31,8 2>0 16,2 9,0 6,2 4,4 24,4 13,4 9,4 6,7 42,2 29,6 21 108 60 42 29,7 2>5 15.1 8,8 5,8 1,0 22,9 12,5 8,8 6,2 39,5 27,5 19,7 101 55,8 33 27,7 400/P38 500/KP70 560/KP70 630/KP70 °.32 218 188 128 96,5 320 296 229 165 400 356 302 216 490 409 350 260 0.63 218 159 110 79 267 188 143 353 246 176 409 296 210 1.0 218 138 96 68,5 235 164 117 308 216 156 366 258 184 1.25 218 128 90 66 220 153 109 288 200 143 345 240 171 1.6 218 120 84 60 206 144 102 268 188 134 322 223 160 2.0 200 112 78 56 192 134 95 256 175 125 300 209 150 2>5 190 104 74 52 178 124 89 234 163 117 280 195 141
* В числителе — диаметр колеса,
мм, в знаменателе — тип рельса.
О^ООЧОСЛДСОГО^ ОсООО-ЧОСЛн^СОЬО
ОФ* ю U1 О СТ> jo о оо о
о о о О о О СП О О Со
о
о
со to to •—
to сл о о
W *• *• **
о о о о
to О 00 О СП
«• W W М <•
сл О О со о
OOtOOOOO>CH4i>OOtO
^WWWWM'******
OOUiOOCoOOtOCH
OOOOQQOQOO
fso^b-.Ь-ОООООО
OOtOOOOCOCH4SbCOtO
QOCnOOCOOOtOCH
Номер заготовки ' крюка
Для машни и меха- низмов с ручным приводом
легкий (Л) и сред- ний (С) Режимы для машин и механизмов с приводом
тяжелый (Т) тяжелый
£
as
E
s
p
s\
Sa
as
E
5
Табл. III.2.5. Подвески крюковые (ВНИИПТМаш). Основные данные
Тип I
Л
Тип II
Грузоподъем- ность, т Режим работы Тип Диаметр каната, мм размеры, мм Масса, кг
D в ь th н
3,2 Т 1 9,2 320 305 200 — 570 68
5 т I 12 400 370 225 732 100
5 с I 11 320 305 200 — 612 72
5 л I 11 320 305 200 — 612 72
8 т I 15 450 400 266 857 190
8 I 14 400 370 225 —— 760 106
8 л I 13 320 305 200 — 668 96
12,5 т II 15 450 564 270 342 922 306
12,5 с 1 17,5 450 400 266 888 198
12,5 л I 17 400 370 225 — 825 128
20 с II 17,5 450 564 270 342 978 325
20 л I 20 450 400 266 982 233
32 с II 20 560 830 306 462 1187 586
32 л II 20 450 578 290 433 1082 426
50 с II 25 670 710 346 522 1463 980
298
111.3. Электродвигатели
Двигатели трехфазные асинхронные короткозамкнутые серии 4А
исполнений 1М 1081 (на лапах с возможностью работать при лю-
бом направлении конца вала) и 1М 1001 (на лапах с возможностью
работать при горизонтальном направлении вала) и двигатели этой
серии с повышенным пусковым моментом. Двигатели крановые серий
MTF и MTKF.
Табл. III.3.1.''Двигатели серии 4А. Основные параметры по ГОСТ 19523—81 (гра-
фы 3 и 7 по каталогу 01.01.63—77 «Информэлектро»)
Типоразмер двигателя Мощность, кВт Частота вра- щения, мин ^пуск Лп1п ^тах Момент инерции ротора, кг-м2
Люм Люм Люм
1 2 3 4 5 6 7
Двигатели закрытые обдуваемые
Синхронная частота вращения 3000 мин—1
4АА50А2УЗ 0,09 2740 2,0 1,2 2,2 2,45-10—6
4АА50В2УЗ 0,12 2710 2,0 1,2 2,2 2,67-10—5
4АА562УЗ 0,18 2800 2,0 1,2 2,2 4,15-10—4
4АА56В2УЗ 0,25 2770 2,0 1,2 2,2 4,65-10—»
4А63А2УЗ 0,37 2750 2,0 1,2 2,2 7,62-10-»
4А63В2УЗ 0,55 2740 2,0 1,2 2,2 9-10—4
4А71А2УЗ 0,75 2840 2,0 1,2 2,2 9,75-10-»
4А71В2УЗ 1,1 2810 2,0 1,2 2,2 1,05-10-»
4А80А2УЗ 1.5 2850 2,1 1,2 2,2 1,82-10-»
4А80В2УЗ 2,2 2850 2,1 1,2 2,2 2,12-10-»
4А90Ь2УЗ 3,0 2840 2,1 1,2 2,2 3,52-10-»
4А10052УЗ 4,0 2880 2,0 1,2 2,2 5,92-10-»
4А1001.2УЗ 5,5 2880 2,0 1,2 2,2 7,5-Ю-з
4А112М2УЗ 7,5 2900 2,0 1,0 2,2 1,0-Ю-2
4А132М2УЗ 11 2900 1,6 1,0 2,2 2,25-10-»
4А16052УЗ 15 2940 1,4 1,0 2,2 4,75-10-2
4А160М2УЗ 18,5 2940 1,4 1,0 2,2 5,25-10-8
4А18082УЗ 22 2945 1,4 1,0 2,2 7,0-10-2
4А180М2УЗ 30 2945 1,4 1,0 2,2 8,5-10-2
4А200М2УЗ 37 2945 1,4 1,0 2,2 0,145
4А200Е2УЗ 45 2945 1,4 1,0 2,2 0,167
4А225М2УЗ 55 2945 1,2 1,0 2,2 0,25
4А25052УЗ 75 2960 1,2 1,0 2,2 0,465
4А250М2УЗ 90 2960 1,2 1,0 2,2 0,52
4А28052УЗ НО 2970 1,2 1,0 2,2 1,08
4А280М2УЗ 132 2970 1,2 1,0 2,2 1,18
4А31552УЗ 160 2970 1,0 0,9 1,9 1,40
4А315М2УЗ 200 2970 1,0 0,9 1,9 1,63
4А35582УЗ 250 2970 1,0 0,9 1.9 2,84
4А355М2УЗ 315 2970 1,0 0,9 1,9 3,23
299
Продолжение
2 3 4 5 6
Синхронная частота вращения 1500 мин — 1
4АА50А4УЗ 0,06 1380 2,0 1,2 2,2 2.87-10-5
4АА50В4УЗ 0,09 1370 2,0 1,2 2,2 3,24-10-5
4АА56А4УЗ 0,12 1375 2,0 1,2 2,2 6,99-10—А
4АА56В4УЗ 0,18 1365 2,0 1,2 2,2 7,87-10 —4
4АА63А4УЗ 0,25 1380 2,0 1,2 2,2 1,23.10-3
4АА63В4УЗ 0,37 1365 2,0 1.2 2,2 1,37-10-3
4А71А4УЗ 0,55 1390 2,0 1,6 2,2 1,3-Ю-з
4А71В4УЗ 0,75 1390 2,0 1,6 2,2 1,42-Ю—з
4А80А4УЗ 1,1 1420 2,0 1.6 2,2 3,23-10-з
4А80В4УЗ 1,5 1415 2,0 1,6 2,2 3,27-10-з
4А901.4УЗ 2,2 1425 2,0 1.6 2,2 5,59-Ю-з
4А10054УЗ 3,0 1435 2,0 1,6 2,2 8,67-Ю-з
4А100Е4УЗ 4,0 1430 2,0 1,6 2,2 1,12-10 — 2
4А112М4УЗ 5,5 1445 2,0 1,6 2,2 1,7-10 — 2
4А13254УЗ 7.5 1455 2,0 1,6 2,2 2,75-10—2
4А132М4УЗ 11 1460 2,0 1,6 2,2 4,0-10 — 2
4А16054УЗ 15 1465 1,4 1,0 2,2 0,102
4А160М4УЗ 18,5 1465 1,4 1.0 2,2 0,127
4А18054УЗ 22 1470 1.4 1.0 2,2 0,19
4А180М4УЗ 30 1470 1.4 1,0 2,2 0,232
4А200М4УЗ 37 1475 1,4 1,0 2,2 0,363
4А200Е4УЗ 45 1475 1,4 1,0 2,2 0,44
4А225М4УЗ 55 1480 1,2 1,0 2,2 0,637
4А25054УЗ 75 1480 1,2 1,0 2,2 1,02
4А250М4УЗ 90 1480 1,2 1,0 2,2 1,16
4А28054УЗ 110 1470 1,2 1,0 2 2,295
4А280М4УЗ 132 1480 1,2 1,0 2 2,47
4А31554УЗ 160 1480 1.0 0,9 1,9 3,07
4А315М4УЗ 200 1480 1,0 0,9 1,9 3,62
4А35554УЗ 250 1485 1.0 0,9 1,9 6,0
4А355М4УЗ 315 1485 1,0 0,9 1.9 7,04
Синхронная
частота вращения 1000 мин™*1
4АА63А6УЗ 0,18 885 2,0 1,2 2,2 1,73-10—3
4АА63ВУЗ 0,25 890 2,0 1,2 2,2 2,15-Ю-3
4А71А6УЗ 0,37 910 2,0 1,6 2,2 1,67-10-3
4А71В6УЗ 0,55 900 2,0 1,6 2,2 2,02-Ю-3
4А80А6УЗ 0,75 915 2,0 1,6 2,2 4,62-10—5
4А80В6УЗ 1,1 920 2,0 1,6 2,2 4,59-10—5
4А901.6УЗ 1,5 935 2,0 1,6 2,2 7,35-10—3
4А100Е6УЗ 2,2 950 2,0 1,6 2,2 1,31-Ю-2
4А112МА6УЗ 3,0 955 2,0 1.6 2,2 1,75-10—2
4А112МВ6УЗ 4,0 950 2,0 1,6 2,2 2,0-10—2
4А13286УЗ 5,5 965 2,0 1,6 2,2 4,0-10—2
4А132М6УЗ 7,5 870 2,0 1,6 2,2 5,75-10—а
4А16056УЗ 11 975 1,2 1,0 2,0 0,137
4А160М6УЗ 15 975 1,2 1,0 2,0 0,182
4А180М6УЗ 18,5 975 1,2 1,0 2,0 0,22
4А200М6УЗ 22 975 1,2 1,0 2,0 0,40
4А200Ь6УЗ 30 980 1,2 1,0 2,0 0,45
300
Продолжение
1 2 3 4 5 6 7
4А225М6УЗ 37 980 1.2 1,0 2,0 0,735
4A250S6Y3 45 985 1,2 1,0 2,0 1,16
4А250М6УЗ 55 985 1,2 1,0 2,0 1,25
4A280S6Y3 75 985 1,2 1,0 1,9 2,92
4А280М6УЗ 90 985 1,2 1,0 1,9 3,33
4A315S6Y3 110 985 1,0 0,9 1,9 4,0
4А315М6УЗ 132 985 1,0 0,9 1,9 4,5
4A355S6Y3 160 985 1,0 0,9 1,9 7,33
4А355М6УЗ 200 985 1,0 0,9 1,9 8,77
Синхронная частота вращения 750 мин" -1
4А71В8УЗ 0,25 680 1,6 1,2 1,7 1,85-10—3
4А80А8УЗ 0,37 675 1,6 1,2 1,7 3,37-10-э
4А80В8УЗ 0,55 700 1,6 1,2 1,7 4,05-Ю-з
4A90LA8Y3 0,75 700 1,6 1,2 1,7 6,75-10-з
4А901.В8УЗ 1,1 700 1,6 1.2 1,7 8,62-Ю-з
4А1001.8УЗ 1.5 700 1,6 1,2 1,7 1,3*10-2
4А112МА8УЗ 2,2 700 1,8 1,4 2,2 1,75-10-2
4А112МВ8УЗ 3,0 700 1,8 1,4 2,2 2,5-10-г
4A132S8Y3 4,0 720 1,8 1 4 2,2 4,25-10-2
4А132М8УЗ 5,5 720 1,8 1,4 2,2 5,75-10-2
4А16058УЗ 7,5 730 1,4 1,0 2,2 0,137
4А160М8УЗ 11 730 1,4 1,0 2,2 0,18
4А180М8УЗ 15 730 1,2 1,о 2,0 0,25
4А200М8УЗ 18,5 735 1,2 1,0 2,0 0,40
4A200L8Y3 22 730 1,2 1,0 2,0 0,452
4А225М8УЗ 30 735 1,2 1,0 2,0 7,37
4A250S8Y3 37 735 1,2 1,0 2,0 1,15
4А250М8УЗ 45 740 1,2 1,0 2,0 1,36
4А28088УЗ 55 735 1,2 1,0 1,9 1,178
4А280М8УЗ 75 735 1,2 1,0 1,9 4,12
4А31558УЗ 90 740 1,0 0,9 1,9 4,92
4А35М8УЗ 110 740 1.0 0,9 1,9 5,85
4А35558УЗ 132 740 1,0 0,9 1,9 9,04
4А355М8УЗ 160 740 1,0 0,9 1,9 10,20
Синхронная частота вращения 600 мин — 1
4А250810УЗ 30 590 1,2 1,0 1,9 1,36
4А250М10УЗ 37 590 1,2 1,0 1,9 1,60
4А280510УЗ 37 590 1,0 1.0 1,8 3,60
4А280М10УЗ 45 590 1,0 1,0 1,8 3,78
4А315510УЗ 55 590 1.0 0,9 1,8 5,25
4А315М10УЗ 75 590 1,0 0,9 1,8 6,17
4А355810УЗ 90 590 1,0 0,9 1,8 9,32
4А355М10УЗ 110 590 1,0 0,9 1,8 10,86
Синхронная частота вращения 500 мин — 1
4А315812УЗ 45 490 1,0 0,9 1.8 5,25
4А315М12УЗ 55 490 1,0 0,9 1,8 6,17
4А355512УЗ 75 490 1,0 0,9 1,8 9,32
4А355М12УЗ 90 495 1,0 0,9 1,8 10,86
301
Продолжение
1 2 3 4 5 6 7
Двигатели защищенные
Синхронная частота вращения 3000 мин~~г
4АН16052УЗ 22 2915 1,3 1,0 2,2 4,25-10-2
4АН160М2УЗ 30 2915 1,3 1,0 2,2 5,49-10-2
4AH180S2V3 37 2945 1,2 1,0 2,2 8,0-10-2
4АН180М2УЗ 45 2945 1,3 1,0 2,2 9,25-10-2
4АН200М2УЗ ээ 2940 1,3 1,0 2,2 0,16
4АН200Е2УЗ 75 2940 1,3 1,0 2,2 0,19
4АН225М2УЗ 80 2945 1.2 1,о 2,2 0,237
4АН25052УЗ НО 2950 1,2 1,0 2,2 0,442
4АН250М2УЗ 132 2945 1,2 1,0 2,2 0,495
4АН28052УЗ 160 2960 1,2 1,0 2,2 0,775
4АН280М2УЗ 200 2960 1,2 1,0 2,2 1,02
4АН315М2УЗ 250 2970 1,0 0,9 1,9 0,17
4АН35582УЗ 315 2970 1,0 0,9 1,9 0,24
4АН355М2УЗ 400 2970 1.0 0,9 1,9 0,285
Синхронная частота вращения 1500 мин~ -1
4АН16084УЗ 18,5 1450 1,3 1,0 2,1 9,24-10~2
4АН160М4УЗ 22 1458 1,3 1,0 2,1 0,118
4АН18084УЗ 30 1465 1,2 1,0 2,2 0,177
4АН180М4УЗ 37 1470 1,2 1,0 2,2 0,217
4АН200М4УЗ 45 1475 1,2 1,0 2,2 0,345
4ЛН2001ЛУЗ 55 1475 1,2 1,0 2,2 0,422
4АН225М4УЗ 75 1475 1.2 1.0 2,2 0,602
4АН25084УЗ 90 14,8 1,2 1,0 2,2 0,882
4АН250М4УЗ 110 1475 1,2 1,0 2,2 0,957
4АН28084УЗ 132 1470 1,2 1,0 2,0 1,82
4АН280М4УЗ 160 1470 1,2 1,0 2,0 2,13
4АН31584УЗ 200 1475 1,2 0,9 2,0 3,25
4АН315М4УЗ 250 1475 1,2 0,9 2,0 3,7
4АН35554УЗ 315 1485 1,2 0,9 2,0 5,75
4АН355М4УЗ 400 1485 1,2 0,9 2,0 6,99
Синхронная частота вращения 1000 мин~~ 1
4АН18086УЗ 18,3 975 1,2 1,0 2,0 0,187
4АН180М6УЗ 22 975 1,2 1,0 2,0 0,235
4АН200М6УЗ 30 975 1,2 1,0 2,0 0,377
4АН200Ь6УЗ 37 280 1,2 1,0 2,0 0,43
4АН225М6УЗ 45 680 1,2 1,0 2,0 0,702
4АН25086УЗ 55 985 1,2 1,0 2,0 1,09
4АН250М6УЗ 75 985 1,2 1,о 2,0 1,32
4АН28086УЗ 90 980 1,2 1,0 2,0 2,50
4АН280М6УЗ 110 980 1,2 1,0 2,0 2,87
4АН31556УЗ 132 985 1,2 0,9 1,9 4,44
4АН315М6УЗ 160 985 1,2 0,9 1,9 5,12
4АН35556УЗ 200 985 1,2 0,9 1,9 7,80
4АН355М6УЗ 250 985 1,2 0,9 2,0 9,50
302
Окончание
Синхронная частота вращения 750 мин~1
4АН18058УЗ 15 730 1,2 1,0 1,9 0,235
4АН180М8УЗ 18,5 730 1,2 1,0 1,9 0,297
4АН200М8УЗ 22 430 1,2 1.0 1,9 0,489
4АН200Е8УЗ 30 730 1,2 1,0 1,9 0,582
4АН225М8УЗ 37 735 1,2 1,0 1,9 0,825
4АН25058УЗ 45 770 1,2 1,0 1.9 1,19
4АН250М8УЗ 55 735 1,2 1,0 1,9 1,40
4АН28058УЗ 75 735 1,2 1,0 1,9 3,0
4АН280М8УЗ 90 735 1,2 1,0 1,9 3,37
4АН31558УЗ 110 735 1,2 0,9 1,9 6,07
4АН315М8УЗ 132 735 1,2 0,9 1,9 6,99
4АН35558УЗ 160 740 1,1 0,9 1,9 9,75
4АН355М8УЗ 200 740 1,1 0,9 1.9 11,87
Синхронная частота вращения 600 мин— 1
4АН280510УЗ 45 585 1.0 1,0 1,8 3,23
4АН280М10УЗ 55,0 585 1,0 1,0 1,8 3,75
4АНЗ]5510УЗ 75,0 590 1,0 0,9 1,8 5,62
4АН315М10УЗ 90,0 590 1,0 0,9 1,8 6,62
4АН355510УЗ ПО 590 1,0 0,9 1,8 9,67
4АН355М10УЗ 132 590 1,0 0,9 1,8 10,99
Синхронная частота вращения 500 мин —1
4АН315512УЗ 55,0 490 1,0 0,9 1,8 5,62
4АН315М12УЗ 75,0 490 1,0 0,9 1,8 6,62
4АН355812УЗ 90,0 490 1,0 0,9 1,8 9,67
4АН355М12УЗ 110 490 1,0 0,9 1,8 10,99
Примечания: 1. Двигатели предназначены для переменного тока частоты
50 Гц.
2. Номинальные напряжения двигателей мощностью: а) 0,06...0,37 кВт — 220
н 380 В; б) 0,055. ..11 кВт —220,380 и 600 В; в) 15. ..110 кВт — 220/380 и380/
660 В; г) 132...400 кВт —380/660 В.
3. Обозначение двигателей — см. 1.7.
Табл. П1.3.2. Двигатели серии 4А с повышенным пусковым моментом
мощностью 7,5...90 кВт. Основные параметры (дополнительные сведения об этих
двигателях см. в табл. 1П.З.З, III.3.4.)
Типоразмер двигателя Номии ал fa- ная мощ- ность, кВ т Частота вращения, мин 1 Номинальное значение от- ношения мак- симального вращающего момента к но- минальному Лпах Люм Номинальное значение от- ношения на- чального пус- кового враща- ющего момен- та к номи- нальному Т'пуск 7*ном Номинальное значение от- ношения ми- нимального вращающего момента к номинальному Лп1п Люм Момент инерции ротора, KP-M8
Синхронная частота вращения 1500 мин—1
4АР16054УЗ 15,0 1465 0,103
4АР160М4УЗ 18,0 1465 0,127
4АР18054УЗ 22,0 1470 0,190
4АР180М4УЗ 30,0 1470 0,230
4АР200М4УЗ 37,0 1475 2,2 2,0 1.6 0,368
4АР200Е4УЗ 45,0 1475 * 0,445
4АР225М4УЗ 55,0 1480 0,639
4АР25054УЗ 75,0 1480 1,020
4АР250М4УЗ 90,0 1480 1,166
Синхронная частота вращения 1000 мин—1
4АР16056УЗ 11,0 975 0,137
4АР160М6УЗ 15,0 975 0,182
4АР180М6УЗ 18,5 975 0,219
4АР200М6УЗ 22,0 975 0,40
4АР200Е6УЗ 30,0 980 2,2 2,0 1,6 0,452
4АР225М6УЗ 37,0 980 0,737
4АР25056УЗ 45,9 985 1,155
4АР250М6УЗ 55,0 985 1,260
Синхронная частота вращения 750 мин—1
4АР16088УЗ 7,5 730 0,137
4АР16ОМ8УЗ 11,0 730 0,180
4АР180М8УЗ 15,0 730 0,251
4АР200М8УЗ 18,5 735 0,40
4АР200Е8УЗ 22,0 730 2,0 1,8 1,5 0,452
4АР225М8УЗ 30,0 735 0,737
4АР25058УЗ 37,0 735 0,155
4АР250М8УЗ 45,0 740 1,362
304
305
Продолжение
со
о
а>
1 2 3 4 5 6 7 8 9 1 10 1 11 12 1 13 1 14 15
4А71 2,4. 6,8 285 330 201/223 170 40 40 90 45 19 19 112 71 15,1
4А80А 2,4, 6,8 300 355 218 186 50 50 100 50 22 22 125 80 17,5
4А80В 2,4, 6,8 320 375 20,0
4A90L 2,4, 6,8 350 405 243/260 208 125 56 24 24 140 90 28,7
4A100S 2,4, 6,8 365 427 265 235 60 60 112 63 28 28 160 100 36
4A100L 2,4, 6,8 395 457 280 140 42
4А112М 2,4, 6,8 452 534 310 260 80 80 140 70 32 32 190 112 56
4A132S 4,6, 8 480 560 350 302 89 38 38 216 132 77
4А132М 2,4, 6,8 530 610 178 93
4A160S 2 624 737 430 358 но НО 178 108 42 42 254 160 130
4,6, 8 48 135
4А160М 2 667 780 210 42 145
4,6, 8 48 160
4A180S
2 662 778 470 410 203 121 48 48 279 180 165
4,6, 8 55 175
4А180М 2 702 818 241 48 1 185
4,6, 8 55 195
4А200М 2 760 875 535 450 267 133 55 318 200 255
4,6, 8 790 905 140 60 270
4A200L 2 800 915 110 305 55 280
4,6, 8 830 945 140 60 310
4А225М 2 810 925 575 494 ПО 311 149 55 356 225 355
4,6, 8 840 985 140 140 65 60 355
4A250S 4А250М 2 915 1060 640 554 168 65 406 250 470
4,6, 8 75 70 490
2 995 1100 349 65 65 510
4,6, 8 75 70 535
со
о
Двигатели исполнения 1М 1001
4A280S 2 1140 1320 700/722 660 140 140 368 190 70 65 457 280 785
4,6, 8,10 1170 1350 170 80
Окончание
1 2 3 4 5 6 7 8 9 10 И 12 13 14 15
4А280М 2 1180 1360 140 419 70 835
4,6, 8,10 1210 1390 170 80
4A315S 2 1235 1415 765 710 140 406 216 75 508 315 875
4,6, 8,10, 12 1285 1445 170 90
4А315М 2 1285 1465 140 457 75 1100
4,6, 8,10,12 1315 1495 170 90
4A355S 2 1350 1530 855 795 170 500 254 85 75 610 355 1355
4,6, 8,10,12 1400 1570 210 100
4А355М 2 1410 1590 170 560 85 1570
4,6, 8,10,12 1450 1630 210 100
Примечания (для двигателей исполнения 1MI081): 1. Размеры Л31 в знаменателе даны для двигателей с числом вы-
водных концов более шести.
2. Для двигателей с высотами оси вращения 71...100 мм н пылезащищенном исполнении размер hsi увеличивают на 9 мм.
Табл. III. 3.4. Двигатели защищенные серии 4А. Габаритные, установочные и присоединительные размеры и масса
(ГОСТ 19523-81)
А-А
Тип двигателя Число полюсов Габаритные размеры, мм, не более Установочные и присоединительные размеры, мм Масса, кг
1зо /зз ^3 1 Ьзо 11 /» /ю /з 1 di dt bio h
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
4AH160S
309
Двигатели исполнения 1М 1001
533 650 430 332 110 НО 178 108 42 42 254 160 НО
48 115
П родолжение
• I СО из Т" — со О) 9 10 11 12 13 14 15
4АН160М 2 588 705 210 42 130
4 48 135
4AH180S 2 580 695 470 385 203 121 48 279 180 170
4, 6, 8 55
4АН180М 2 620 735 241 48 185
4, 6, 8 55 190
4АН200М 2 665 785 535 580 460 500 267 133 149 55 318 356 200 225 265
4, 6, 8 « 695 815 140 60 260
4AH200L 2 705 825 ПО 305 311 55 295
4, 6, 8 735 855 140 ПО 60 55 315 355
4АН225М 2 715 840
4, 6, 8 745 900 140 140 . 65 60
4AH250S 2 805 970 640 550 140 168 65 406 250 465
4, 6, 8_ 75 70 445
4АН250М 2 845 1010 349 65 65 505
4, 6, 8 75 70 495
1 2 3 4 5 6 7 8 9 10 и 12 13 14 15
4AH280S 2 935 Д 1080 eusamej 575 ш испо 620 лнения 140 1М и 140 Ю1 368 190 70 70 457 280 715
4, 6, 8 965 1140 170 170 80 80
4АН280М 2 975 1120 140 140 419 70 70 785
4, 6, 8 1005 1180 170 170 80 80
Окончание
312
Табл. III.3.5. Крановые электродвигатели серии MTF с фазным ротором 50 Гц,
220/380 и 500 В. Основные параметры
Тип электро- двигателя Мощность на валу, кВт, при 'и Частота вращения, мин”1 Максимальный момент, Н«м Момент инерции ротора, кр«м2 Масса электро- двигателя, кр
пв= = 15% пв= =25% пв= =40% ПВ=> =60% 30 мин 60 мнн
1 2 3 4 5 6 7 8 9 10 И
MTF 011-6 2 800
1,7 850
1,4 1,4 885 4,0 0,021 51
1,2 1,2 910
MTF 012-6 3,1 785
2,7 840
2,2 2,2 890 5,7 0,029 58
1,7 1,7 920
MTF 111-6 4,5 850
4,1 870
3,5 3,5 895 8,7 0,048 76
2,8 2,8 920
MTF 112-6 6,5 895
5,8 915
5 5 930 140 0,068 88
4 4 950
MTF 211-6 10,5 895
9 915
7,5 7,5 930 19,5 0,115 120
6 6 945
MTF 311-6 14 925
13 935 320 0,225 170
11 11 945
9 9 960
MTF 312-6 19,5 945
17,5 950 480 0,312 210
15 15 955
12 12 965
MTF 411-6 30 945
27 955 650 0,5 280
22 22 965
18 18 970
MTF 412-6 40 960
36 965 950 0,675 345
30 30 970
25 25 975
MTF 311-8 10,5 665
313
Окончание
1 23456789 10 И
MTF 311-8 9 680 270 0,275 170
7,5 7,5 695
6 6 710
MTF 312-8 15 680
13 695 430 0,387 210
И И 705
8,2 8,2 720
MTF 411-8 22 685
18 700 580 0,537 280
15 18 710
13 15 715
MTF 412-8 30 705
26 715 900 0,75 345
22 26 720
18 22 730
Табл.111.3.6.
и установочные размеры
Электродвигатели серии MTF, Габаритные
Тип двига-
теля
Размеры, мм
&10 ^31 h bt bi о Ьц Ьзо Ь3з
Концы
валов
Масса
КР
MTF 011 180230 133 28 112 302 60 150 200 515,5 585 Ци- 51
линд-
риче-
ские
MTF 012 190 240 550,5 620
MTF 111 220 290 137 35 132 342 80 235 285 583,5 623,5 673 713 58 76 88
MTF 112
MTF 211 245 320 158 40 160 385 110 243 306 700,5 820 120
MTF 311 280350 176 50 180 444 260 320 748 859,5 170
MTF 312 320 380 823 934,5 210
MTF 411 330 440 198 65 225 527 140 335 395 877 1027 Кони- 280
ческие
MTF 412 420 480 952,5 1102 345
314
Табл.Ш.3.7. Крановые'электродвигатели серии MTKF с краткозамкнутым
ротором 50 Гц, 220/380 и 500 В.
Основные параметры
Тип электро- двигателя Мощность на валу (кВт) прн Частота враще- ния, мнн 1 Максимальный момент, Н-м Пусковой момент, Нм Момент инерции ротора, кг-м* Масса, кг
ПВ= =15% пв= =25% пв= =40% пв= =60% 30 мин 60 мин
1 2 3 4 5 6 7 8 9 10 И 12
MTKF 011-16 2 780 835 875 900 42 42 0,02 47
1,7 1,4 1,2 1,4 1,2
MTKF 012-6 3,1 785
2,7 835
2,2 2,2 880
1 , I 1,7 915 67 67 0,0275 53
MTKF 111-6 4,5 825
4,1 850
3,5 3,5 885
2,8 2,8 915 105 104 0,045 70
MTKF 112-6 6,5 845
5,8 870
5 5 895
4 4 920 175 175 0,065 80
MTKF 211-6 10,5 800
9 840
7,5 7,5 880
6 6 910 220 210 0,11 110
MTKF 311-6 14 880 -
13 895
11 11 910 390 " 380 0,212 155
G 9 930
MTKF 312-6 19,5 900
17,5 915
15 15 930 600 590 0,3 195
12 12 945
MTKF 411-6 30 905
27 915
22 22 935 780 720 0,475 255
1 8 18 950
MTKF 412-6 40 910
36 920
30 30 935 1000 950 0,638 315
25 25 950
MTF 311-8 10,5 660
9 670
315
Окончание
1 2 3 4 5 6 7 8 9 10 И 12
MTKF 311-8 7,5 7,5 690 330 320 0,275 155 6 6 705 MTKF 312-8 15 675 13 690 11 11 700 510 470 0,387 195 8,2 8,2 710 MTKF 411-8 22 660 18 18 680 15 15 695 670 650 0,537 255 13 705 MTKF 412-8 30 675 26 26 690 22 22 700 1000 950 0,75 315 18 710
Табл. III. 3.8. Электродвигатели серии A1TKF. Габаритные и установочные размеры
риче-
ские
MTKF 012 190 240 450,5 520 53
MTKF 111 220290 134 35 132 342 80 235 285 484,5 574 70
MTKF 112 524,5 614 80
MTKF 211 245 320 156,6 40 160 385 110 243 306 586 706 110
MTKF 311 280 350 50 180 444 260 320 637 748,5 155
MTKF 312 180 320 380 712 823,5 195
MTKF 411 330 440 211 65 225 527140 335 395 749 899 Кони- 255
ческие
MTKF 412 420 480 824 974 315
316
!П.4. РЕДУКТОРЫ
Табл. 111.4.1. Обозначение вариантов сборки редукторов по ГОСТ 20373—80
Условное обозначение вариантов сборки цифровое трехзначное. Цифры харак-
теризуют: первая — взаимное расположение осей валов; вторая — расположение
осей выходных валов относительно опорной плоскости; третья — взаимное располо-
жение и количество концов валов.
Расположение дь/етраходнь/х и тихоходных РалоР
лараллеленое лелесе/га/ои/еекя лаЛ л/г я мим йглам скре/цида/оа/еесл под Г прямо/м //гл он
е проз он/налоное tep/nu- webHoe гсризон- таллкое ео/х/зон/паллное и ее/2/7///хиллное горизонталы/ое гол//зон/полиное и оер/пикальное
3 “// H-J3. /// м /7/ 4/ 5 ^15/ § -ЦЕ 1 ^2// .й-0 5г й 43. 'сЯу/ q-в- f ^37/
£?/// Ч<2 ^/32 -ГТ] ^202 й. Я ^3/2 £L ^522 м § EJ43 JU? ।
R/j Ий /Л/ та ZJJ 4^7 Ь- Чч ^7J
ЙЛЛ /54 В£| §> 4S [ч *| ^304 ^374
п-ш /25 ОШ /35 ^/55 t/43 -й ^2/5 ^/05 й ~^з/з § >4 *
6// т й ^/4£ ^/88 й. l-3Trz. obb § \J78
та /27 ОШ /37 й '/47 ^157 ^ЕСГ "4/7 ~^327 ^357 .-пи xi f
^//8 Й ^448 &/5д /08
ft» ОШ /29 /39 ^/49 в» ^/09 ~СЬ/9 § W <//«7
/-опорная плоскость?для рлинцедых и насадных редактор од-зеркало
масляной ваннер 2-конец быстроходного дала; 3-конец /пихоходкого дала
Табл.1П.4.2. Редукторы цилиндрические горизонтальные двухступенчатые типа Ц2.
Техническая характеристика
Типоразмер редуктора Ц2-250 Ц2-300 Ц2-350 Ц2-400 Ц2-500
передаточное чис- л о ч астота вращения быстро- ходного вала, мин-1 режим работы мощность на быстроходном валу, кВт
и оми - наль- ное фактичес- кое
1 2 3 4 5 6 7 8 9
50 50,94 750 Л 6,3 9,9 15 29,2 50 С 4,2 7,4 11,1 19,4 37 Т 2,42 3,9 5,9 7,9 18,75 ВТ 1,67 2,63 3,96 7,7 13,5 1000 Л 8,2 12,5 20 39 67,2 С 5,66 9,5 14,2 19,3 45,5 Т 2,87 4,75 7,25 9,6 22,9 ВТ 2,2 3,52 4,86 10,3 13,9 1500 Л 11,5 18,5 27,5 54,5 94 С 7,66 11,2 18,4 25,7 59,6 Т 3,8 7,6 9,2 13,6 32,2 С 8,1 14,6 21,8 28,1 64 Т 4 7,8 12,4 14,2 32,3 ВТ 3,54 5,67 8,31 14,55 28 1500 Л 17 27,5 40 61,6 139 С 10,3 19,3 30,2 31,4 77 Т 5,7 13,5 16,7 16,8 43 ВТ 4,45 6,88 9,5 18,6 34,8 25 24,9 750 Л 12,5 19 30 60 С 9,25 16,1 22,4 35 Т 5,6 9,7 13,5 17,5 ВТ ' 3,36 5,3 7,95 15,6 1000 Л 14 20 36 70,5 С 11,7 18,3 27,1 42,2 Т 6,15 9,3 14,5 21,1 ВТ 4,05 6,36 9,53 18,75 1500 Л 11,5 33 54 96 С 16,3 21,2 39,5 45 Т 8,2 16,2 19,4 27,8 ВТ 2,6 4,22 6,17 12,1 21,2 40 41,34 750 Л 7,5 11,5 18,4 36,2 62 С 5,6 8,3 13,4 23,2 42,2 Т 2,85 4,5 6,8 11,1 22,4 ВТ 2 3,19 4,77 9,25 16,1 1000 Л 9,8 14 22 43,5 75 С 6,95 11,2 16,3 28,1 55 Т 3,43 5,9 8,2 14,2 27,5 ВТ 2,39 3,81 5,56 11,1 19,4 1500 Л 13 21 31,5 62 107 С 8,85 12,3 22,5 31,4 70,2 Т 4,5 8,9 10,7 16,8 35,8 ВТ 3,02 4,72 7,15 14 23,6 31,5 32,42 750 Л 10,5 14,5 20 48,5 83 С 6,62 10,4 16,6 23,2 52,7 Т 3,6 6,4 10,3 11,1 26,3
318
П родолжение
I 2 3 4 5 6 7 8 9
ВТ 2,94 4,46 6,95 И 23,4
1000 л 11,5 18 27,5 54 100
ВТ 5,72 9,12 12,5 23,9
20 19,8 750 л 15 24 36 71,5
с 11,1 17,8 26,9 46,5
т 5,9 9,3 14 24,1
ВТ 3,94 5,2 9,25 18,1
1000 л 17 29 43,5 77
14 20,6 33,5 49,4
т 7.8 И,2 16,9 25
ВТ 4,08 7,57 11,3 20
1500 л 27,5 40 59,5 116
с 16,6 26,5 43,7 58,2 1
т 9,7 20 20,4 38,7
ВТ 7,18 10,4 15,4 29,9
16 16,3 750 л 18,5 29 44 86,5
с 13,5 21,6 32 53,6
т 6,7 10,7 15,9 31,3
ВТ 4,46 7,04 10,5 20,3
1000 л 20 31,5 47 92
с 18,3 25 37,1 54,3
т 8,2 11,8 19,7 32,2
ВТ 5,83 8,25 12,7 24,4
1500 л 32,5 43 71 138
1 с 21,4 31,6 50,5 73,6
т 9,95 20,6 23 45,2
ВТ 7,9 12,6 18,8 36,6
12,5 12,41 750 л 25,5 33,5 55 91
с 15,9 25 43,5 53,6
т 9,9 15,9 23,4 31,3
ВТ 6,53 10,5 14,1 27,7
1000 л 25 35,5 62 107,5
с 19,6 31,2 50,7 54,5
т 11,2 16,3 26,3 32,2
ВТ 8,25 12,25 18,6 31,2
1500 л 40,5 53 96,5 152,3
с 22,1 39,8 70 81
т 13,3 28,9 34,7 65,2
ВТ 11,75 18,65 27,7 49,7
10 9,8 750 л 30,5 40 65 94
с 18,9 35,7 52 58,8
т 11,7 18,7 25,4 35,2
ВТ 8,2 11,8 17,8 36,6
1000 л 30,5 43 78 127
с 20,2 39,7 61,2 68,5
т 12,5 19,4 .31,4 48,2
ВТ 9,72 15,5 22,9 44,2
1500 л 49,5 62,5 11,75 178
с 27 48,2 84,7 91,3
т 16,9 33,6 40 61
ВТ 14,8 23,6 35,2 58,4
8 8,32 750 л 33 46 76
с 23 40,3 61
т 13,4 21,1 28,8
ВТ 8,8 13,9 24,5
319
Окончание
1 2 3 4 5 6 7 8 9
1000 Л 37 С 23,4 Т 14,3 ВТ 11,7 1500 Л 56,5 С 31 Т 20,3 ВТ 17,6 49 80 44,2 58,6 21,2 34,9 18,3 27,6 68,5 134 55 96,5 39,6 47,2 28 41,8
Примечание. Расчетный КПД редуктора т]=0,96. Редукторы изготовля-
ются 111... 119 вариантов сборки по ГОСТ 20373—80 (см. табл. III.4.1). Обо-
значение редукторов—см. параграф 1.8.
Табл. III.4.3. Редукторы типа Ц2. Основные размеры, мм
Типоразмер редук- тора ЛБ АТ В Вх L в? La Но н d* * г1 Масса, KF
Ц2-250 100 150 210 285 260 260 515 400 280 183 75 160 310 22 4 86 Ц2-300 125 175 250 350 300 300 620 475 300 215 90 190 362 26 4 138 Ц2-350 150 200 280 200 330 330 700 550 345 238100212 409 26 6 210 Ц2-400 150 250 320 250 380 380 805 640 375 286150 265505 33 6 315 Ц2-500 200 300 360 320 440 440 985 785 445 340 190 315598 39 6 500
*d — диаметр отверстий для фундаментных болтов, мм; Zi — количество отвер-
стий для фундаментных болтов.
С 01.01.81 г. на высоты осей редукторов действует ГОСТ 24386—80
СТ СЭВ 1029—78).
320
Табл. III.4.4. Редукторы типа Ц2. Размеры концов валов, мм
Типораз- мер редук- тора Быстроходный вал Тихоходный вал с формой конца вала
d. я в виде части зубчатой муфты цилиндрической
т Z D Di b ьа L dt
Ц2-250 30 220 60 3,5 40 147 95 20 198 180 65 105 225
Ц2-300 35 255 60 5 40 210 105 25 227 205 75 105 280
Ц2-350 40 300 85 6 40 252 140 30 255 230 85 130 320
Ц2-400 50 325 85 6 40 252 140 30 280 255 95 130 350
Ц2-50 60 390 108 8 40 336 215 40 330 295 ПО 165 415
Примечание, т — модуль; z — число зубьев.
С 01.07.80 г. на диаметры концов валов действует ГОСТ 24266 — 80 (СТ СЭВ
534-77).
11 Зак. 3134
321
Табл. III.4.5. Редукторы цилиндрические горизонтальные двухступенчатые типа РМ. Техническая характеристика
Типоразмер РМ-500 РМ-650
Исполнение I II Ш IV V VI VII VIII IX I II III IV V VI VII VIII IX
Передаточные числа 41,57 40,17 31,50 23,34 20,49 15,75 12,64 10,35 1,23 43,57 40,17 31,50 23,34 20,49 15,75 12,64 10,35 3,23
«б
режим
работы
мощность по быстроходному валу, кВт
600 Л 9,3 Н,1 14,8 21 22,5 19,8 28 33 37,5 44 20,5 26 29,5 42 48,5 55 65 75 85
С 8,1 9,7 12,9 17,6 24,5 29 33 38 17,9 22,5 25,5 36,5 42 44.5 57 65 75
Т 6,9 8,2 10,9 15 16,8 20,5 24,5 27,5 32,5 15,2 19,2 21,5 31 35,5 40 48 55 63,5 142
ВТ 2,6 3,1 4,3 5,8 6,6 9,3 11,5 14,1 17,7 6,1 7,4 10,3 13,8 15,8 22 27,533,5
750 л 11,6 13,8 17,4 24,5 27,5 31 37 43 49 23,5 30 33 47.5 .55 60 71 84 95
с 10,1 12 15,1 21 24 27 32 37 42,5 20,5 26 29 41 47,5 53 62 73 83
т 8,6 10,2 12,8 18,1 20,4 23 27 31,5 36 17,4 22 24,5 35 40,5 44. 5 52.5 62 70
Вт 3,2 3,9 5,4 7,3 8,3 11,5 14,4 17,6 22,1 7,6 9,2 12,8 17,4 19,5 27,5 35 42 48
1000 л 14,6 18,1 24 28,5 31,5 35,5 43 48,5 52,5 28,5 36 40,5 55 64 69 85 95 106
с -Г. 12,7 15,7 18,1 1 24,5 27,5 31 37,5 42 46 25 31,5 35,5 48 56 60 73 яз 90
10,8 13,4 15,4 20,5 23 26 32 35,5 39 21 26,5 30 40,5 47 51 62.5 70 76
ВТ 4,3 5,2 7,2 9,7 11 15,4 19,2 23,5 26,8 10,1 12,3 17 23 26,5 37 46 50,5 64
1500 л 18,8 23 26 37 40 43,5 50 55 36,5 44,5 48,5 69 80,5 85
с т 16,3 13,9 20 17 22,5 19,2 32 27 34,5 29 38 32 43,5 37 47,5 40,5 — 32 27 38,5 33 42 36 60 51 70 60 74 63 — —
ВТ 6,4 7,8 10,8 14,6 16,6 23 26 32 15,2 18,4 25,5 34,5 39,5 50 —— ——
Примечание, «б—частота вращения быстроходного вала, мин —
готовляюгся 111...119 вариантов сборки по ГОСТ 20373—80 (см. табл.
расчетный КПД редуктора т]=0,96. Редукторы из-
III.4.1). Обозначение редукторов—см. 1.8.
s
г
S
(Т>
СА
to
CD
СИ
О
00
00
to
Сп
СП
00
ьо
ГО
СП
to
00
СП
to
2S
Я ।
Е п
а сх
Ч л
• М
к>о
Я
—ч Я
X
£
Wft>
'-'п
я
»
5 »
to
о я»
2 и
т> «с
я И
Е
Ь 8
в»
к
Е
о
м
О
О
я
о»
со
ВЗ
М
о 5 Типоразмер ре* я
о дуктора fa •
со о н*
о
о се"* 1—ч £
330 г* CD ТЗ 03
330 •7* СО к CD
270 г* о TJ £
420 s
350 СЮ "я
300 о рис
592 5: • н 03
си Отверстия Для фун- СП fa •
СП чис- ло дамент- ных бол- тов III.4
390 Масса ла), кр (без мае* »
Табл. III.4.8. Редуктор цилиндрический горизонтальный одноступенчатый
РЦ1—150А. Техническая характеристика и основные размеры
Исполнение Передаточное число Частота вращения быстроходного вала, мин 1 Мощность на быстроходном валу, кВт, при режиме работы
Л С т ВТ
1 8 600 7 5,9 4,8 2,8 1000 10,4 8,8 7 4,5 1500 14,6 12,3 9,9 6,5 II 6,61 600 9,3 7,8 6,2 3,8 1000 13,8 11,4 9,2 6 1500 18,9 16,1 12,9 8,9 III 5,6 600 11,9 10 8,4 4,9 1000 17,3 14,4 11,7 7,8 1500 23,8 20,3 16,1 11,3 IV 4,5 600 16,3 13,6 10,9 6,7 1000 23,4 19,6 15,6 10,8 1500 31 26 20,8 15,3 V 3,95 600 19,1 15,9 12,8 8 1000 26,8 22,7 18,1 12,8 1500 36 29,7 23,7 18 VI 3,5 600 22,3 18,6 14,8 9,3 1000 31,2 26 - 20,8 15 1500 41 34 27,2 21 VII 2,81 600 28,9 24,9 19,1 12 1000 39,6 32,7 26,3 19 1500 51 43 34 26,5
324
Окончание
Исполнение Передаточное ЧИСЛО Частота вращения быстроходного вала, мнн 1 .Мощность на быстроходном валу, кВт, прн режиме работы
л 1 С Т I ВТ
VIII 2,3 600 34 28,9 22,8 15 1000 47 39 31,2 23,5 1500 61 51 41 33 IX 1,83 600 41 34 27,4 19 1000 57 46 36,5 29 1500 73 61 49 40
Примечание. Расчетный КПД редуктора т)=0,97. Редуктор изготовляет*
ся 111 и 112 вариантов сборки по ГОСТ 20373—80 (см. табл. 111,4.1).
Табл. 111,4.9. Редуктор цилиндрический горизонтальный двухступенчатый РЦД-400.
Техническая характеристика и основные размеры
Передаточное число Частота вра- щения,’быстро- ходного вала, мин—> Мощность на быстроходном валу, кВт, при режиме работы
номинальное фактическое
С Т ВТ
10 10,19 700 22,6 16,5 16,5 1000 29,3 23,6 23,6 1500 39,7 35,4 35,4 16 16,18 700 14 9,9 9,1 1000 18,2 13 13 1500 24,5 19,4 19,4
325
Окончание
Передаточное число Частота вра- щения быстро- ходного вала, мин 1 Мощность на быстроходном валу, кВт, при режиме работы
номинальное фактическое
С т ВТ
20 19,67 700 12,2 8,6 7,8 1000 16,3 11,4 11,1 1500 21,7 16,6 16,6 25 24,65 700 10,8 7,5 6,4 1000 14,1 9,9 8,7 1500 18,8 1,3 13 31,5 31,45 700 8,6 5,7 4,8 1000 10,2 7,3 6,5 1500 14,1 9,8 9,8 40 40,24 700 7 4,7 4 1000 8,9 6,2 5,2 1500 11,9 8,5 7,7
Примечание. Расчетный КПД редуктора т) => 0,96. Редуктор изготов-
ляется 111... 119 вариантов сборки по ГОСТ 20373—80 (см. табл. 1IL4.1).
Табл. III.4.10. Редукторы коническо-цилиндрические горизонтальные
двухступенчатые типа К ЦК Техническая характеристика
Типоразмер редуктора КЦ1-200 КЦ 1-250 КЦ1-300 КЦ1-400 КЦ 1-509
1 испол- нение переда- точное число лб "б т 1 т.наиб "б ^т-иаиб "б т . т.иаиб Л'б ^т.иаиб "б ^т.наиб
2 3 4 5 6 7 8 9 10 11 12 13
1 27,5 600 1,2 2320 2,4 4550 4,2 1000 2,1 4 7 1500 3,1 5,9 9,9 II 19,3 600 2,2 2920 4,4 5700 7,5 1000 3,7 7,2 12 1500 5,4 9,9 16,7 III 13,6 600 3,8 3470 7,4 6900 12,5 1000 6,1 11,5 19,2 1500 8,6 16 26 IV 9,65 600 5,4 3870 11,2 7550 13,5 1000 8,5 17,4 21 1500 12 24 29 7840 10 18 600 10 36 200 15,9 30 22 42 10000 17,623 200 33 45 500 27 51 38 69 11700 28 27 700 54 54 100 43 80 60 109 12 450 39 31000 65 40 103 60 500 85 146
326
Окончание
1 I 2 | 3 | 4 | 6 | 6 | 7 | 8 I 9 | 10 | 11 | 12 | 13
V 6,29 600 5,4 3120 13,5
7850 13,5 8060 39 25 000 6551 500
1000 8,5 21 21 60 103
1500 12 29 29 85 146
Примечание. N& — мощность на быстроходном валу, кВт; Тт наиб —
наибольший кратковременно допустимый момент па тихоходном валу, Ч«м;
Пб — частота вращения быстроходного вала, мин—1.
Расчетный КПД редуктора т]«-0,94. Редуктор изготовляется 211/212, 215
вариантов сборки по ГОСТ 20373—80 (см. табл. 111.4.1). Обозначение .редукто-
ров— см. 1.8.
Табл, III.4.И. Редукторы типа КЦ1. Основные размеры, мм
Типоразмер редуктора 21 А. А. 4, в В1 L г» Н. н d 21 Масса, КР
КЦ1-200 200 250 ---- 375 300 300 900 480 85 225 435 — 17 4 186
КШ-250 250225 ------ 480375375 1170 600 120 265 515 — 22 4 391
КЦ1-300 300 250 — 265280 450 450 1274 680 120 316 607 — 22 6 474
КЦ1-400 400 450 335 140 335 526 526 1703 930 212320 705 95 26 8 1010
КЦ1-500 500 550 390 210 390 630 630 2085 1160 250 400 877 100 33 8 1470
Примечание, d — диаметр отверстий для фундаментных болтов; — ко-
личество отверстий; М— см. табл. III.4.12; см. примечание к табл. III.4.3.
327
Табл. III.4.12. Редукторы типа КЦ1. Размеры концов валов, мм
5ь/сл?рояоднь/о &7Л
TuJtOJrofab/ti 00Л
(только для 0о/шайглоо соорки?*- От.Т]
Типоразмер редуктора Быстроходный вал Тихоходный вал с формой конца вала
d. в виде части зубчатой муфты цилиндри- ческой
m 2 D Di b L, dt Z« | 1.
КЦ1-200 40 85 460 3 40 126 130 20 219 194 45 80 247
КЦ1-250 50 85 625 3 48 150 150 25 257 240 55 110 319,5
КЦ 1-300 50 85 625 3 56 174 180 25 325 295 70140 385
КШ-400 60 108 848 4 56 232 240 35 370 338 98 170 452
КЦ 1-500 90 135 1030 4 56 232 240 35 422 390 110 210 544
Примечание, m —
г — число зубьев; см. примечание к табл. III .4.4.
Табл. III.4.13. Редукторы коническо-цилиндрические горизонтальные трехступепчатые
типа КЦ2. Техническая характеристика
Испол- нение Пере- даточ- ное число пб Типоразмер редуктора »
ЦЦ2-500 КЦ2-750 КЦ2-1000 КЦ2-1300
Кб Т'т.наиб Кб | Гт. наиб Кб |^т.иаиб Кб ^т.наиб
I 182 600 0.7 8900 2,5 30000 5,9 71 500 14 170 000
1000 1,2 4,2 9,8 23
1500 1,7 6,2 14.7 35
328
Окончание
Испол- нение Пере- даточ- ное число пб Типоразмер редуктора
КЦ2-500 КЦ2-500 КЦ2-500 КЦ2-500
Т'т.навб Т'т.ианб Ьтб Т'т.наиб j^T-наиб
II 118 600 1,1 8900 3,8 30 000 9,1 71500 22 170 000
1000 1,6 6,4 15 36
1500 2,7 9,6 23 54
III 73 600 1,8 9350 6,5 31 600 15,6 75 500 37 170 000
1000 3 10,8 26 61
1500 4,6 16,4 39 86
IV 43,4 600 3,6 11 100 13 36 900 31 88 500 65 210000
1000 6 21 50 103
1500 9 29 71 146
V 28,3 600 5 11 100 13,5 3660 39 88 500 65 209 000
1000 7,9 10,8 21 60 103
1500 29 86 146
п ри м е ч а н и е . N6~ мощность на быстроходном валу, кВт; Л. наиб
наибольший кратковременно допустимый момент на тихоходном _ । валу, Н-м; ng —
частота вращения быстроходного вала, мин •
Расчетный КПД редуктора т] = 0,91. Редуктор изготовляется 211, 212, 215
вариантов сборки по ГОСТ 20373—80 (см. табл. 111.4.1) Обозначение редукто-
ров— см. параграф 1.8.
Табл. III.4.14. Редукторы типа КЦ2. Основные размеры, мм
Типораз-
мер ре-
дуктора
Ла Аз
И*
At
А
КЦ2-500 200 300 300 115 — 310 — 705 350 350 1300 830 315 601 — 21 6 435
КЦ2-750 300 450 470 250 380 570 860 1120 550 550 1883 1260 335 765 130 32 10 1270
КЦ2-1000 400 600 600 365 530 810 1170 1530 690 690 2482 1700 400 956 200 32 10 2650
КЦ2-1300 500 800 740 500 700 1100 1560 2020 850 850 3168 2200 530 1272 240 38 10 5830
Примечание, d — диаметр отверстий для фундаментных болтов; — ко-
личество отверстий; £2, L*— см. табл. Ш.4.15; см. примечание к табл. 111,4.3.
329
Табл. Ш.4.15. Редукторы типа КЦ2* Размеры концов валов, мм
быстрохойны7 йал
Тихоходный Тал с цонднйриуесном
корцоц
Тихоходный Тол Я йодо оослно
syfyamou Мурты
Типоразмер редуктора Быстроходный вал Тихоходный вал с формой конца вала
в виде части зубчатой муфты цилиндрической
li т z D Di b Lt d> Zf
КЦ2-500 40 85 460 3 56 175 180 25 270 240 70 138 327 КЦ2-750 50 85 625 4 56 232 240 35 382 350 90 176 464 КЦ2-1С00 60 108 848 6 46 288 300 35 481 443 130 255 615 КЦ2-1300 90 135 1030 6 56 348 360 40 605 560 190 350 790
Примечание, т — модуль; г —число зубьев; см. примечание к табл. III. 4.4
330
Табл. III.4.16. Редукторы цилиндрические вертикальные трехступенчатые крановые
типа ВК. Техническая характеристика
Типоразмер редуктора
О) Я ВК-475 ВК-550
S О) »-Н п6 Л'б
ч о с и режим работы ^т.наиб и режим работы Тт. наиб
fQ Л С т Л С т
I 600 109,61 1,4 1,2 1,0 7880 126,79 1,7 1,5 1,3 11340
750 1,8 1,5 1,3 7800 2,1 1,9 1,6 11280
1000 2,3 2 1,7 7580 2,8 2,5 2,1 11 220
II 600 59,92 2,8 2,4 2 7520 68,28 3,2 2,8 2,3 11 200
750 3,4 3 2,5 7380 4 3,4 2,9 11 100
1000 4,4 3,8 3,2 7120 5,2 4,5 3,9 11000
III 600 29,06 6 5,2 4,4 6480 32,9 6,4 5,6 4,7 10 900
750 7,4 6,5 5,5 6280 7,6 6,6 5,6 10 750
1000 9,2 8,1 6,9 5940 9,4 8,2 6,9 10 500
IV 600 19,68 7 6,1 5,2 5460 17,72 11,5 10 8,5 9200
750 8,2 7,1 6 5150 14,2 12,3 10,5 8600
1000 9,6 8,3 7,1 4700 18,4 16 13,6 7760
Примечание. — мощность на быстроходном валу, кВт; Тт нанб — на-
ибольший кратковременно допустимый момент на тихоходном валу, Н • м; — час-
тота вращения быстроходного вала, мин-1» и — передаточное число редуктора.
Расчетный КПД редуктора т]=»0,91. Редукторы изготовляются 115, 116, 119
вариантов сборки по ГОСТ 20373—80 (см. табл. III.4.1). Обозначение редукто-
ров— см. параграф 1.8.
Табл. III. 4.17. Редукторы типа ВК. Основные размеры, мм
Типоразмер редуктора ЛБ Ап >4^ 41 А% Л В Вг L Li Н d 21
cd
о
о
cd
ВК-475 105 160 210 215 80200 50 255 250165 790482 200 220 458 325 17 8 215
ВК-550 140 190 220 245 70320 50 285 280195 880 557215335488 340 17 8 279
ПР имечанке, d — диаметр отверстий для фундаментных болтов; — ко-
аичество отверстий; £2, Ь4— см. табл. III. 4.18; см. примечание к табл. III. 4.3:
Табл. III.4.18. Редукторы типа ВК. Размеры концов валов, мм
(см. рис. к табл. III.4.17)
Типоразмер редуктора Быстроходный вал Тихоходный вал
df ^2* £4
ВК-475 40 85 242,5 65 НО 260
ВК-550 40 85 257,5 80 110 280
* См. примечание к табл. III.4.4.
332
Ш.5. МУФТЫ. ТОРМОЗА
Табл. 111.5.1. Муфты зубчатые по ГОСТ 5006—55. Основные параметры и размеры
Номер муфты Крутящий мо- мент, Н-м мм Частота вращения, мин—1, не более
d di D Di L 1 А, не менее
М3 МЗП
1 710 40 38 60 170 ПО 115 115 55 55 49 6300 2 1 400 50 55 70 185 125 145' 145 70 80 75 5000 3 3 150 60 55 90220 150 170 175 85 80 95 4000 4 5 600 75 75100250 175 215 215 105 105 125 3350 5 8 000 90 95 120290 200 235 240 115 130 145 2800 6 1Г800 Ю5 — 130320 230 255 260 125 — 160 2500 7 19000 120120 150350 260 285 290 140 165 185 2120 8 23 600 140150 170380 290 ' 325 330 160 200 210 1900 9 30000 160 — 190430 330 335 340 165 — 220 1700 10 50000 180 — 210490 390 365 370 180 — 245 1400
Примечание. Типы муфт: М3 — для непосредственного соединения валов;
МЗП — для соединения валов с применением промежуточного вала.
Исполнение втулок полумуфт: Н — без торцового крепления на валу; Т—с
торцовым креплением на валу; К — с коническим отверстием.
Обозначение муфт — см. параграф 1.9.
333
Табл. III. 5.2. Муфты Упругие со звездочкой по ГОСТ 14084—76.
Основные параметры и размеры
/У/;£
Номи- наль- ный крутя- щий момент. Нм ММ Частота вращения, мин“1, не более
d D L 1
1-й ряд 2-й ряд исполнение
1 2 1 2
31,5 16 71 101 77 40 28 -3000
18 —
— 19
20 —- 121 93 50 36
22
63 20 — 85 128 100 50 36 2250
22 —
— 24
25 — 148 112 60 42
28 —
125 25 105 2000
28 -
— 30 188 144
32
—— 35 80 58
36 —-
250 32 135 191 147 1500
—— 35
36 —
— 38
40 251 195 ПО 82
—— 42
45 —
400 38 166 196 152 80 58 1300
40 — 256 200 ПО 82
42
45 — *
48
Примечание. Исполнения муфт: 1 — на длинные концы валов; 2 — на ко-
роткие. 1-й ряд является предпочтительным. Обозначение муфт — см. § 1.9.
334
Табл. III.5.3. Муфты кулачково-дисковые но ГОСТ 20720—81
Основные параметры и
размеры
Тип/, исполнения f, 2
Тип 2, исполнения (2
Номи- наль- ный крутя- щий мо- мсиг, Нм 4; </> D, не более мм
L 1 /1
тип
1; 2 1 2
исполнение
1 2 1 2 1 2
31,5 16; 18; 19* — 75 — 28 — 18 20; 22 _ 90 — 36 — 24 63 20; 22; 24* 25; 28 — 105 — 42 — 26 125 25; 28 140 30; 32; 35; 36 185 140 80 58 60 38 250 32; 35; 36; 38* 170 40; 42*; 45 245 190 ПО 82 84 56 400 38* 185 140 80 58 60 38 40; 42*; 45; 48*; 50; 53* 245 190 110 82 84 56 630 45; 48*; 50; 53* 210 245 190 ПО 82 84 56 55 * 56* 60; 63 305 235 140 105 107 72 1000 50; 53*; 55; 56* 245 190 ПО 82 84 56 60; 63; 65*; 70»; 71 305 235 140 105 107 72 1600 60; 63; 65*; 70; 71; 75* 250 80; 85* 360 280 170 130 132 92 2500 70; 71; 75* 290 305 235 140 105 107 72 80; 85*; 90; 95* 360 280 170 130 132 92 100 440 350 210 165 167 122
Примечание. Типы полумуфт: 1 — с цилиндрическим отверстием на концы
валов; 2 — с коническим отверстием на коииы валов. Исполнение полумуфт: 1 —
на длинные концы валов; 2 — на короткие концы валов. Размеры d и di, отмечен-
ные звездочкой* — 2-го ряда. Предпочтительнее размеры 1-го ряда.
Максимальная частота вращения муфт — 250 мин-1.
Обозначение муфт — см. параграф 1.9.
335
125
250
500
1000
2000
25; 28
30
32; 35; 36
32; 35; 36; 38*
40; 42*; 45
40; 42*; 45
48*; 50; 55; 56*
50; 55; 56*
60; 63; 65*; 70;
63; 65*; 70; 71; 75*
80; 85*; 90
80; 85*; 90; 95*
100; ПО
125
140
200
71
210
206
162
168 124 162 —
80
278 222 228 172 222 ПО
58
82
61
85
39
57
58
82
20
17
4000
280
280
354
224
284
82
85
230 174 224 НО
290 220 284 140 105 108
82
54
73 105
13
310
424
344
352 272 344 170 130 134
94 130
12
514
424 432 342 424 210 165 169 124 165
Примечание. Типы полумуфт: 1 — с цилиндрическим отверстием на концы
валов; 2—с коническим отверстием на концы валов; 3 — с отверстием на валы с
эвольвентными шлицами; 4—с отверстием па валы с прямобочными шлицами.
Исполнение полумуфт: 1 — на длинные концы полумуфт; 2 — на короткие концы
полумуфт. Размеры d и di/отмеченные звездочкой (*), — 2-го ряда. Предпочтитель-
нее размеры 1-го ряда. Стандарт распространяется на муфты с нереверсивным вра-
щением. Обозначение муфт — см. параграф 1.9.
336
Табл. Ш.5.5. Муфты фланцевые по ГОСТ 20761—80 (СТ СЭВ 1914—79).
Основные параметры и размеры
Номинальный крутя- щий момент, Нм, для муфт Диаметр отверстий для вала мм D, мм, не бо- лее Z, мм, ие более L, мм, не более
стальных чугунных для исполнения
1 1 2 1 1 > 1 2
31,5 16 16; 18; 19* 90 40 28 84 60 20; 22 50 36 104 76 63 31,5 20; 22; 24* 100 25; 28 60 42 124 83 125 63 25; 28 112 30; 32; 35; 36 80 58 170 120 160 80 30; 32; 35; 36; 38* 130 250 125 32; 35; 36; 38* 140 40; 42*; 45 НО 82 230 170 400 200 35; 36; 38* 150 80 58 170 120 40; 42*; 45; 48*; 50 НО 82 230 170 630 315 45; 48*; 50; 53*; 55; 56*; 170 60 140 105 290 220 1000 500 50; 53*; 55; 56* 180 ПО 82 230 170 60; 63; 65*; 70; 71 140 105 290 220 1600 800 60; 63; 65»; 70; 71; 75 190 80; 85* 170 130 350 270 2500 1250 70; 71; 75* 224 140 105 290 220 80; 85*; 90; 95* 170 130 350 270 100 210 165 430 320 4000 2000 80; 85*; 90; 95* 250 170 130 350 270 100; 105*; ПО 210 165 430 340
Примечание. Исполнения полумуфт: 1 — на длинные концы валов; 2 — на
короткие концы валов. Размеры d, отмеченные звездочкой (*),—2-го ряда. Пред-
почтительные размеры 1-го ряда.
Окружная скорость на наружном диаметре муфт: стальных — до 70 м/с; чугун-
ных— до 35 м/с. При реверсивном вращении и переменной нагрузке значения номи-
нального крутящего момента должны быть уменьшены в 1,96 раза. Подробнее см.
ГОСТ 20761—80.
Обозначение муфт— см. параграф 1.9.
337
Табл. Ш.5.6. Муфты упругие втулочно-пальцевые по ГОСТ 21424—75.
Основные параметры и размеры
мм
L, не более | Z, не более Частота
Номиналь- ный крутя- щий мо- мент, Н-м £>, не бо- тип вращения, мин—1, не
Диаметр отверстий для вала, d, di 1 1 11 1 1 111 более
лее исполнение
1 2| 1| 2| 1 2| > 2
31,5 63 125 250 500 710 1000 2000 4000 8000 16000 16; 18; 19* 20; 22; 24* 25; 28; 30* 32; 35*; 36; 38* 40; 42*; 45 40; 42*; 45 45; 48*; 50 55; 56* 50; 55*; 56 60*; 63; 65*; 70* 63; 65*; 70*; 71; 75* 80; 85*; 90 80; 85*; 90; 95* 100; ПО; 120*; 125 120*; 125 130*; 140; 150* 160 90 100 120 140 170 190 220 250 320 400 500 84 60 84 60 40 28 30 18 104 76 104 76 50 36 38 24 125 89125 89 60 42 44 26 165 121 165 121 80 58 60 38 225 169 225 169 110 82 85 56 226170226170 286 216 286 216 140 105 107 72 288218288218 348 268 348 268 170 130 135 95 350 270 350270 432 342 432342210 165 170 125 435 345 435 345 515 415 515 415 250 200 205 155 615 495 615 495 300 240 245 185 6350 5700 4600 3800 3600 3000 2850 2300 1800 1450 1150
Примечание. Типы муфт: I —с цилиндрическим отверстием на концы ва-
лов; II—с коническим отверстием на концы валов. Исполнение полумуфт: 1—на длин-
ные концы валов; 2 —на короткие концы валов. Размеры d и di, отмеченные
звездочкой (*),—2-го ряда. Предпочтительнее размеры 1-го ряда.
Обозначение муфт—см. параграф 1.9.
338
Табл. III.5.7. Муфты зубчатые с тормозными шкивами ио данным [15]
Типоразмер муфты
Наибольший переда-
ваемый крутящий мо-
мент, Нм
Диаметр тормозного
шкива D, мм
Ширина тормозного
шкива В, мм
Мз5-Т30 8000 300 Мзб-ТЗО 11 800 300 Мз6-Т40 11 800 400 М37-ТЗО 19000 300 Мз7-Т40 19000 400 127,5 145 145 150 150
Табл. III.5.8. Муфты зубчатые с тормозными шкивами
d или с/к
Номер муфты Наибольший пере- даваемый крутя- щий момент, Н-м Диаметр тор- мозного шки- ва D, мм Ширина тор- мозного шки- ва В, мм Масса муф- ты, кг Момент инер- ции муфты. кг-м2
1 700 200 95 13 0,1
2 1400 200 135 18 0,15
3 3150 300 145 30 0,6
4 5600 400 185 68 1,75
5 8000 500 205 122 3,75
339
Табл. 111.5.9. Муфты упругие втулочно-пальцевые с тормозными шкивами
Но у ер муфты Наибольший пере- даваемый крутя- щий момент, Н-м Диаметр тор- мозного шки- ва D, мм Ширина тор- мозного шки- ва В, мм Масса муф- ты, КГ Момент инер- ции муфты, КР-М*
1 500 200 95 25 0,125
о 800 300 145 60 0,6
3 5500 400 185 125 2,25
4 7000 500 210 175 5,0
Табл. Ш.5.10. Храповые остановы к редукторам типа РМ
Типоразмер ре- дуктора Обозначение сборки останова Габариты, мм Масса, к»
левой правой диаметр ширина
РМ-500 ХЛ24-РМ500 ХП24—РМ500 305 127 22 РМ-650 ХЛ32—РМ650 ХП32—РМ650 325 171 44,5 Примечание. Храповой останов устанавливается на свободном конце быст- роходного вала редуктора. Табл. 111.5.11. Тормоза колодочные электромагнитные. Техническая характеристика
Параметры Типоразмер тормоза
ТКТ-100 ТКТ-200/100 ТКТ-200 ТКТ-300/200 ' ткт-зоо’
ТКП-100 ТКП-200/100 ТКП-200 ТКП-300/200 ткп-зоо
Диаметр тормозного шки- ва, мм 100 200 200 300 300 Наибольший тормозной момент, Н-м; при ПВ=25% 20 40 160 240 500 при ПВ=40% 20 40 160 240 500 16 32 125 190 420 при ПВ-100% (для ТКТ) 11 22 80 120 200 Масса тормоза, кг 12 25 37 68 92 12,5 25 34 65 84 Примечания: 1. ТКТ — тормоза с электромагнитами переменного тока; ТКП — тормоза с электромагнитами постоянного тока. 2. В числителе — показатели для ТКТ, в знаменателе — для ТКП.
340
Табл. III.5.12. Основные размеры, мм, тормозов ТКТ и ТКП
Типоразмер тормоза L Н Е Т В D h
ТКТ-100 336 240 130 125 70 100 100
ткп-юо 352 274 132
ТКТ-200/100 475 397 130 197 90 200 170
ТКП-200/100 498 415 132
ТКТ-200 548 407 177 197 90 200 170
ТКП-200 543 437 178
ТКТ-300/200 685 565 177 275 140 300 240
ТКП-300/200 675 577 178
Т КП-300 715 605 223 275 140 300 240
Примечание. В — ширина колодки, D — диаметр тормозного шкива.
Табл. III.5.13. Тормоза колодочные с электрогидротолкателями. Техническая
характеристика
Типоразмеры
Параметры ТКГ-160 о о <х в О 3 в Т КГ-400 ТКГ-500 ТКТГ-600 ТКТГ-700 О QO 5
Диаметр тормозного шки- ва, мм Наибольший тормозной момент, Н-м 160 200 300 400 500 600 700 800
100 250 800 1500 2500 5000 8000 12500
Масса тормоза 21 38 100 130 155 435 605 845
Примечание. Тормоз ТКГ — с одноштоковым
гидро толкателем; ТКТГ —
с двухштоковым.
341
Табл. III.5.14. Основные размеры, мм, тормозов ТКГ и ТКТГ
Тормоз /КТГ
Типоразмер тормоза L Н Е Т В D h
ТКГ-160 490 415 201 147 70 160 144
ТКГ-200 603 436 213 198 90. 200 170
ТКГ-300 772 526 227 275 140 300 240
ТКГ-400 940 620 227 375 180 400 320
ТКГ-500 1160 735 227 435 200 500 400
ТКТГ-600 1428 940 288 560 240 600 476
ТКТГ-700 1640 1081 288 625 280 700 550
ТКТГ-800 1898 1216 288 695 320 800 600
Примечание. В — ширина колодки; D — диаметр тормозного шкива.
1П.6.ТАЛИ ЭЛЕКТРИЧЕСКИЕ
Табл. III.6.1. Тали электрические по ГОСТ 11584—77. Техническая характеристика
Исполнение Грузоподъем- ность, т Высота подъема, м Ско- рость, м/мкн Номинальная мощность электродвига- теля, кВт, не более Номера про- филей дву- тавровых ба- лок подвес- ного пути по ГОСТ 19425—74 Наимень- ший ра- диус за- кругле- ния, м Расчетная нагруз- ка на каток, Н Масса та- ли, кг, для высоты подъема, м
подъема передви- жения'
подъ- ема пере- движе- ния 6 12 18
5 0,25 6 8 20 0,60 0,08 18М; 24М 0,5 1127,8 85 — — 0,5 12; 18 8 20 0,75 0,12 18М; 24М 0,8 3187,2 —111 126 1,0 6; 12 8 20 1,7 0,18 18М; 24М 1,0; 1,5* 4903,3 195 220 245 18 ЗОМ; 36М 9 5 6; 12; 18 8 20 7,5 1,2 ЗОМ; 36М; 2,0; 2,5* 10885,4 700 755 815 45М
высотой подъема 18 м.
Условные обозначения
* Радиус указан для талей с
талей — см. параграф 2.1.
342
Табл. III.6.2. Тали электрические по ГОСТ 22584—77. Основные размеры
Мелолнемае 5 ймалнеш/е 9
"Размер для Дерянега положения лр/окодаи лодРески дез груза
**Размер для страдам
*** Размер /?о корпусам придодны* /пележек
|О tr ,7 мм
Обозначение о £ Высота подъ- д 1 * 1 И » Л>ие _ £ 1 £‘
а! ема, м не более 1 менее не более
ТЭ025-511 0,25 6 210 570 ПО 550 5500 20 640
ТЭ050-521 0,5 12 390 450 250 780 11700 20 725
ТЭ050-531 18 17700 915
ТЭ100-511 1,0 6 330 325 160 855 5900 20 655
ТЭ100-521 12 11900 870
ТЭ100-531 18 17900 1085
ТЭ500-911 5,0 6 500 360 250 1250 6500 25 1000 1250
ТЭ500-921 12 12500 1200 1470
ТЭ500-931 18 18500 1410 1700
ПРИЛОЖЕНИЕ
П. 1. ГОСУДАРСТВЕННЫЕ СТАНДАРТЫ
ПО ГРУЗОПОДЪЕМНЫМ МАШИНАМ
Наименование гост
Канаты стальные. Канат двойной свивки типа ЛК-3 конструк- ции 6 X 25 + 1 о.с. Канаты стальные. Канат двойной свивки типа ЛК-РО конст- рукции 6Х74-1 о.с. Канаты стальные. Канат двойной свивки типа ЛК-О конст- рукции 6 X 19 4-1 о.с. Канаты стальные. Канат двойной свивки типа ЛК-Р конструк- ции 8 X 19 4* 1 о.с. Канаты стальные. Канат двойной свивки типа ЛК-РО конст- рукции 6 X 19 1 о.с. Канаты стальные. Канат двойной свивки типа ЛК-РО конст- рукции 6 X 36 -F I о.с. Канаты стальные. Канат двойной свивки типа ТЛК-0 конст- рукции 6 X 37 4“ 1 о.с. Канаты стальные. Технические условия Канаты капроновые. Технические условия Колеса крановые Коуши стальные для стальных канатов Кошки с ручным приводом. Типы. Основные параметры и раз- меры Краны башенные строительные. Нормы расчета 7665—80 3069—80 3077—80 7670—80 2688—80 7668—80 3079—80 3241—80 10293—77 3569—74 2224—72 47—63 13994—81
Краны башенные строительные передвижные. Основные пара- метры Краны башенные строительные. Технические требования Краны грузоподъемные. Нагрузка ветровая. Нормы и метод определения Краны козловые крюковые электрические общего назначения. Типы, основные параметры и размеры Краны консольные стационарные поворотные ручные. Типы. Основные параметры и размеры Краны мостовые опорные. Пролеты Краны мостовые электрические однобалочные опорные. Типы. Основные параметры и размеры Краны мостовые ручные однобалочные подвесные общего на- значения. Технические условия Краны подвесные электрические однобалочные общего назна- чения Краны портальные для районов с умеренным климатом. Об- щие технические условия Крюки двурогие. Заготовки. Типы. Конструкция и размеры Крюки однорогие. Заготовки. Конструкция и размеры Крюки пластинчатые однорогие и двурогие Лебедки ручные однсбарабанные Лебедки электрические реверсивные однобарабанные. Техниче- ские условия Оборудование подъемно-транспортное. Конвейеры, тали, по- грузчики и штабелеры. Термины и определения 13555—79 13556—76 1451—77 7352—81 19494 -74 534—78 22045—82 7413—80Е 7890—73 11283—72 6628—73 6627-74 6619—75 7014—74 2914—80 18501—73
344
П р одолжение
Наименование ГОСТ
Подъемники мачтовые строительные. Типоразмеры и основные
параметры
Краны грузоподъемные . Ряды основных параметров
Рельсы крановые
Тали ручные и кошки. Общие технические требования
Тали ручные передвижные червячные. Основные параметры
и размеры
Тали ручные шестеренные. Типы, основные параметры и раз-
меры
Тали ручные червячные. Основные параметры и размеры
Тали электрические. Ряды основных параметров
Тали электрические канатные. Технические условия
Цепи грузовые пластинчатые
Цепи грузовые пластинчатые с закрытыми валиками
Цепи круглозвеиные грузовые и тяговые нормальной проч-
ности
Цепи круглозвеиные сварные общего назначения
14092—68
1575—81
4121—76
6899—75
1106—74
2799—75
1107—62
25274—82
22584—77
191—75*
23540-79
2319—70**
7070—75
П. 2. ГОСУДАРСТВЕННЫЕ СТАНДАРТЫ
ПО ТРАНСПОРТИРУЮЩИМ. МАШИНАМ
Наименование ГОСТ
Вибропрнводы электромагнитные кругового движения. Ти-
пы, основные параметры и размеры
Затворы бункерные секторные. Основные параметры и при-
соединительные размеры
Затворы плоские для бункеров общего назначения. Основ-
ные присоединительные размеры
Конвейеры вибрационные горизонтальные. Технические
требования
Конвейеры винтовые стационарные общего назначения
Конвейеры грузоведущие напольные тележечные. Типы,
основные параметры и размеры
Конвейеры ленточные передвижные общего назначения
Конвейеры ленточные. Основные параметры и размеры
Конвейеры ленточные. Ролики. Типы и основные размеры
Конвейеры ленточные. Роликоопоры. Типы и основные
размеры
Конвейеры ленточные. Технические условия
Конвейеры роликовые (рольганги) стационарные пепривод-
ные общего назначения
Конвейеры пластинчатые стационарные общего назначения.
Технические условия
Конвейеры цепные подвесные грузонесущие общего назна-
чения. Технические условия
20796—75
8415—78
8288—74
11732—78
2037-82
15517—77
2103—78
22644—77
(СТ СЭВ 1333—78)
22 646—77
(СТ СЭВ 1334—78)
22645—77
22647—77
(СТ СЭВ 1332—78)
8324—71
22281—76
5946—79Е
345
Окончание
Наименование гост
Конвейеры роликовые приводные для транспортирования производственной тары. Основные параметры и размеры Конвейеры скребковые с погруженными скребками. Основ- ные параметры Конвейеры тележечные для литейных форм Ленты конвейерные резинотканевые. Технические условия Ткани полиамидные технические для конвейерных лент и плоских приводных ремней Ткани смешанные технические для конвейерных лент Ремни приводные плоские резинотканевые Цепи тяговые вильчатые Цепи тяговые пластинчатые 20708—75 23939—79 5938—73 20—76 18215—80 19700-74 23831—79 12996—79 588—81 (СТ СЭВ 1011—78)
Цепи тяговые разборные 1 589—74 (СТ СЭВ 535-77)
Элеваторы ковшовые вертикальные. Технические условия • С 01.07 1983 г. введен в действие ГОСТ 191 — 82 i ** С 0.01 1983 г. введен в действие ГОСТ 2319 — 81 2036—77 (СТ СЭВ 2642—80) (СТ СЭВ 2639—80)
ЛИТЕРАТУРА
1. Александров М. П. Подъемно-транспортные машины.— 5-е изд.— М.:
Высш, школа, 1979.— 558 с.
2. Александров М. П. Тормоза подъемно-транспортных машин.— 3-е изд.—
М.: Машиностроение, 1976.—383 с.
3. Вайнсон А. А. Подъемно-транспортные машины.—3-е изд.— М.: Машино-
строение, 1975.—431 с.
4. Дьячков В. К., Зенков Р. Л, Конвейеры со стальной лептой.— М.: Машгиз,
1952.—163 с.
5. Дьячков В. К. Подвесные конвейеры.— 3-е изд.— М.: Машиностроение,
1976.—320 с.
6. Зенков Р. Л., Ивашко в И. И., Колобов Л. Н. Машины непрерывного
транспорта.— М.: Машиностроение, 1980.— 304 с.
7. Краузе Г. Е.> Крутилин Н. Д., Сыцко С. А. Редукторы. Справочное посо-
бие.—2-е изд.— Л.; Машиностроение, 1972.—144 с.
8. Парницкий А. Б., Шабатов А. П., Лысяков А. Г. Мостовые краны обще-
го назначения.— 4-е изд.—М.: Машиностроение, 1971.—350 с.
9. Пертен Ю. А. Крутонаклонные конвейеры.— Л.: Машиностроение, 1977.—
216 с.
10. Поляков В. С., Барабаш И. Д., Ряховский О. А. Справочник по муф-
там.— 2-е изд.— Л.: Машиностроение, 1979.— 343 с.
11. Правила устройства и безопасной эксплуатации грузоподъемных кра-
нов.— М.: Металлургия, 1981.-168 с.
12. Расчеты грузоподъемных и транспортирующих машин/ Ф. К. Иванченко
и др.— 2-е изд.— Киев: Вища школа, 1978.—576 с.
13. Расчеты конвейеров. ВНИИПТмаш.— М.: ОТИ, 1961. Ч. 1—142 c.j
ч. 2—183 с.
14. Расчеты крановых механизмов и их деталей. ВНИИПТмаш.— 3-е изд.—
М.: Машиностроение, 1971.—495 с.
15. Редукторы, муфты, тормоза: Каталог. 1—12—78.— Л.: Механобр.,
1979.-46 с.
16. Руденко Н. Ф., Александров М. П., Лысяков А. Г. Курсовое проектиро-
вание грузоподъемных машин.—3-е изд.—М.: Машиностроение, 1971.-464 с.
17. Спиваковский А. О„ Дьячков В. К. Транспортирующие машины.—
2-е изд.— М.: Машиностроение, 1968.—504 с.
18. Справочник по кранам/Под ред. А. И. Дукельского.— М.: Машино-
строение, 1971. Т. 1—399 с.; 1973. Т. 2—504 с.
ОГЛАВЛЕНИЕ
Предисловие........................................................ 3
Раздел 1. ГРУЗОПОДЪЕМНЫЕ МАШИНЫ
Глава 1. Исходные данные для расчетов грузоподъемных машин
1.1. Параметры и режимы работы грузоподъемных кранов ... 5
1.2. Основные положения расчета грузоподъемных кранов .... 11
1.3. Ветровая и снеговая нагрузки...............................19
1.4. Статические сопротивления механизмов кранов................22
1.5. Сопротивления в механизмах грузоподъемных машин в периоды
неустановившегося движения......................................24
1.6. Ручной привод грузоподъемных машин.........................34
1.7. Выбор, проверка и обозначение электродвигателей .... 35
1.8. Выбор и обозначение редукторов.............................40
1.9. Выбор и обозначение соединительных муфт....................41
1.10. Выбор и расчеты стопорящих и тормозных устройств ... 43
Г л а в а 2. Расчеты механизмов грузоподъемных машин
2.1. Расчет механизма подъема груза.............................53
2,2. Расчет механизма передвижения..............................67
2.3. Расчет механизма изменения вылета..........................74
2.4. Расчет механизма поворота..................................78
Глава 3. Примеры расчетов механизмов грузоподъемных машин
3.1. Пример расчета механизма подъема груза.....................85
3.2. Пример расчета механизма передвижения.......................89 •
3.3. Пример расчета механизма изменения вылета стрелы .... 93
3.4. Пример расчета механизма поворота..........................97
Раздел 11. ТРАНСПОРТИРУЮЩИЕ МАШИНЫ
Г л а в а 4. Общие положения расчета транспортирующих машин
4.1. Выбор типа машины.........................................103
4.2. Основные свойства транспортируемых грузов.................104
4.3. Параметры транспортирующих машин (конвейеров) .... 107
4.4. Тяговые элементы транспортирующих машин...................108
Г л а в а 5. Основы общих расчетов транспортирующих машии
5.1. Производительность конвейеров ............................120
5.2. Сопротивление движению тягового органа и мощность
двигателя......................................................122
5.3. Последовательность расчета конвейера......................130
348
Г л а в a 6. Ленточные конвейеры
6.1. Общие сведения............................................ 130
6.2. Нормативные материалы для расчета ленточных конвейеров . . 131
6.3. Предварительный расчет ленточного конвейера.................141
6.4. Проверочный расчет ленточного конвейера.....................144
Глава 7. Крутонаклониые конвейеры
7.1. Общие сведения......................................... . 146
7.2. Нормативные материалы для расчета крутонаклонных конвейеров
со специальными лептами..........................................148
7.3. Расчет крутонаклонных конвейеров со специальными лентами . . 153
7.4. Расчет ленточно-цепных и пластинчатых крутонаклонных
конвейеров.......................................................155
Г л а в а 8. Пластинчатые конвейеры
8.1. Общие сведения.............................................156
8.2. Нормативные материалы для расчета пластинчатых конвейеров 156
8.3. Предварительный расчет пластинчатого конвейера . . . . 161
8.4. Проверочный расчет пластинчатого конвейера.................161
Гл а в а 9. Скребковые конвейеры
9.1. Общие сведения........................................ . 165
9.2. Нормативные материалы для расчета скребковых конвейеров . . 166
9.3. Расчет скребковых конвейеров...............................168
Глава 10. Подвесные конвейеры
10.1. Общие сведения........................................ . 170
10.2. Нормативные материалы дли расчета подвесных конвейеров . . 171
10.3. Предварительный расчет подвесного конвейера................182
10.4. Проверочный расчет грузонесущего конвейера.................187
10.5. Тяговый расчет толкающего конвейера........................189
10.6. Тяговый расчет грузоведущего конвейера.....................191
Глава 11. Тележечные конвейеры
11.1. Общие сведения.............................................193
11.2. Нормативные материалы для расчета тележечного конвейера . . 195
11.3. Расчет тележечных конвейеров...............................202
11.3.1. Расчет вертикально-замкнутых конвейеров..................202
11.3.2. Расчет горизонтально-замкнутых конвейеров................203
Глава 12. Элеваторы ковшовые вертикальные
12.1. Общие сведения........................................... 205
12.2. Нормативные материалы для расчета элеваторов...............207
12.3. Предварительный расчет элеватора...........................216
12.4. Проверочный расчет элеватора...............................217
Глава 13. Винтовые конвейеры
13.1. Общие сведения.............................................219
13.2. Нормативные материалы для расчета стационарных винтовых
конвейеров общего назначения ....................................220
13.3. Расчет винтового конвейера.................................222
Глава 14. Роликовые конвейеры
14.1. Общие сведения........................................... 224
349
14.2. Нормативные материалы для расчета роликовых конвейеров , . 225
14.3. Расчет роликового конвейера.....................................227
Глава 15. Качающиеся конвейеры
15.1. Общие сведения..................................................229
15.2. Нормативные материалы для расчета качающихся конвейеров . 232
15.3. Основы теории качающихся конвейеров.............................237
15.4. Расчеты качающихся конвейеров...................................240
Глава 16. Примеры расчетов транспортирующих машин
16.1. Пример расчета ленточного конвейера.............................243
16.2. Пример расчета крутонаклонного конвейера........................250
16.3. Пример расчета пластинчатого конвейера..........................252
16.4. Пример расчета скребкового конвейера.......................... 254
16.5. Примеры расчетов подвесных конвейеров...................257
16.5.1. Пример расчета подвесного грузоиесущего конвейера , . . 257
16.5.2. Пример расчета подвесного грузоведущего конвейера . . . 262
16.5.3. Пример расчета подвесного толкающего конвейера .... 264
16.6. Пример расчета тележечного конвейера...........................266
16.7. Пример расчета ковшового элеватора.......................268
16.8. Пример расчета винтового конвейера.......................271
16.9. Пример расчета роликового конвейера.......................272
16.10. Примеры расчетов качающихся конвейеров.........................273
16.10.1. Пример расчета качающегося инерционного конвейера . . . 273
16.10.2. Пример расчета вибрационного конвейера..................... 274
Раздел III. СПРАВОЧНЫЕ МАТЕРИАЛЫ
II 1.1. Канаты. Цепи..................................................277
III.2. Барабаны. Колеса. Крюки. Подвески крюковые.....................293
II 1.3. Электродвигатели..............................................299
II 1.4. Редукторы................................................... 317
II 1.5. Муфты. Тормоза................................................333
II 1.6. Тали электрические............................................342
Приложение...............................................................344
Литература...............................................................347
4
Артур Васильевич Кузьмин,
Фишель Липович Марон
СПРАВОЧНИК ПО РАСЧЕТАМ
МЕХАНИЗМОВ ПОДЪЕМНО-
ТРАНСПОРТНЫХ МАШИН
Зав. редакцией В. Г. Самарина
Редактор Ж. И. Васюк
Мл. редактор Л. П. Берлина
Обложка Ю. С. Сергачева
Худож. редактор А. Г. Звонарев
Техн, редактор И. П. Тихонова
Корректор В. В. Неверно
ИБ № 1641
Сдано в набор 23.11.82. Подписано в печать 22.07.83. АТ
16761. Формат 60 X90’/ie. Бумага тип. № I. Гарнитура
литературная. Высокая печать. Усл. печ. л. 22. Усл.-кр.
отт. 22. Уч.-нзд. л. 25. Тираж 21 000 экз. Заказ 3134.
Цена 1 р. 80 к.
Издательство «Вышэйшая школа» Государственного ко-
митета БССР по делам издательств, полиграфии и книж-
ной торговли. 220048, Минск, проспект Машерова, 11.
Минский ордена Трудового Красного Знамени полиграф-
комбинат МППО им. Я. Коласа. 220005, ул. Красная, 23.
Кузьмин А. В., Марон Ф. Л.
К 89 Справочник по расчетам механизмов подъем но-транс«
портных машин.— 2-е изд., перераб. и доп.— Мп.: Выш. шк.,
1983.—350 с., ил.
В пер.: 1 р. 80 к.
Изложена методика расчетов механизмов грузоподъемных и транспортирующих
машин: определение действующих нагрузок, необходимых мощностей и тормозных
моментов, а также общие кинематические расчеты для подбора двигателей,
редукторов, муфт, тормозов и др. Приведены нормативные значения расчетных ве-
личин, основные параметры нормализованных узлов и деталей, примеры расчетов.
Справочник предназначен студентам машиностроительных вузов и инженерно-
техническим работникам.
3601030000—116
К М304(05)—83 90~83
ББК 39.9я2