/











































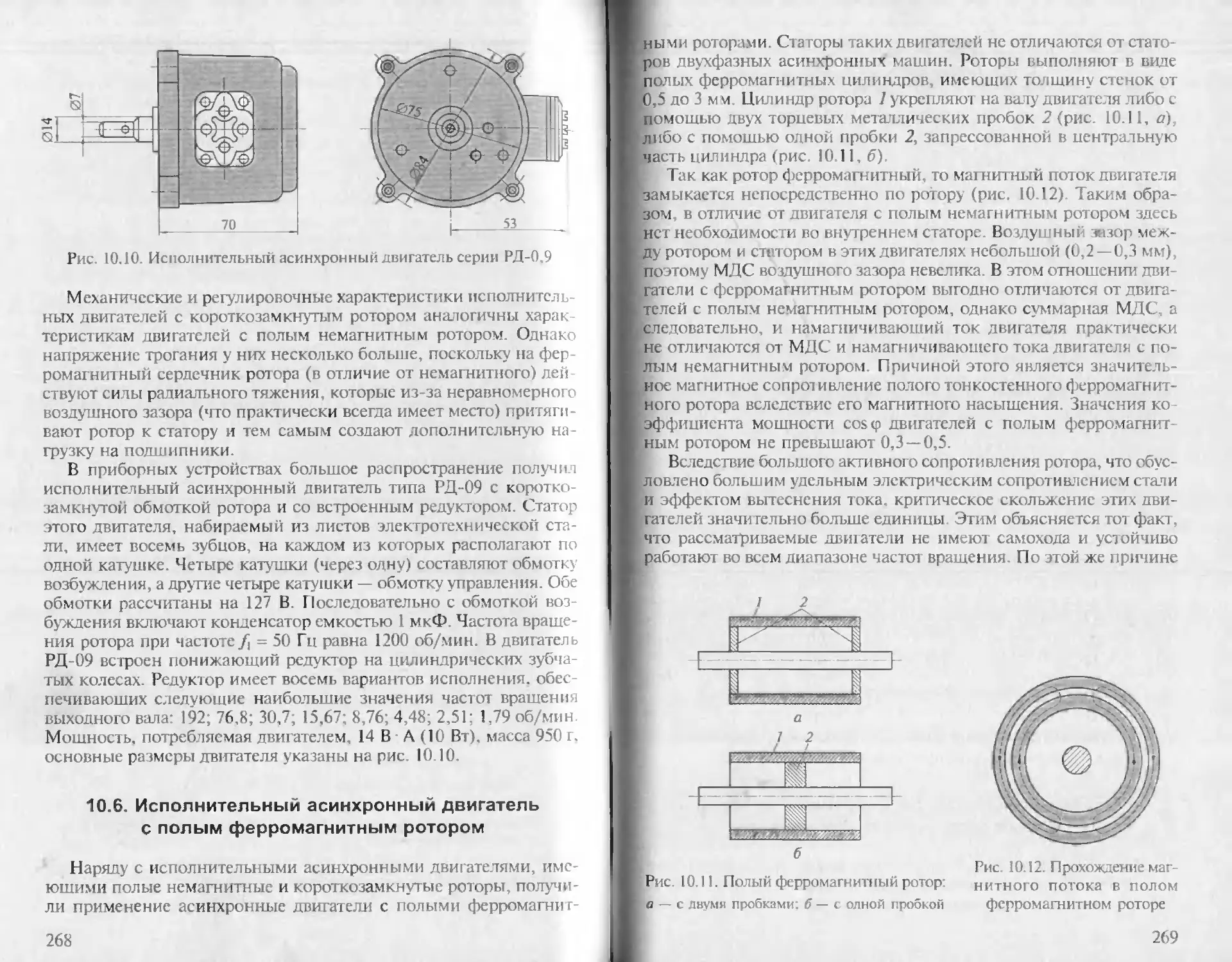

















Автор: Кацман М.М.
Теги: электротехника электрические машины и аппараты электронно-и аппаратостроение электрические сети электрические машины
ISBN: 5-7695-2366-2
Год: 2006
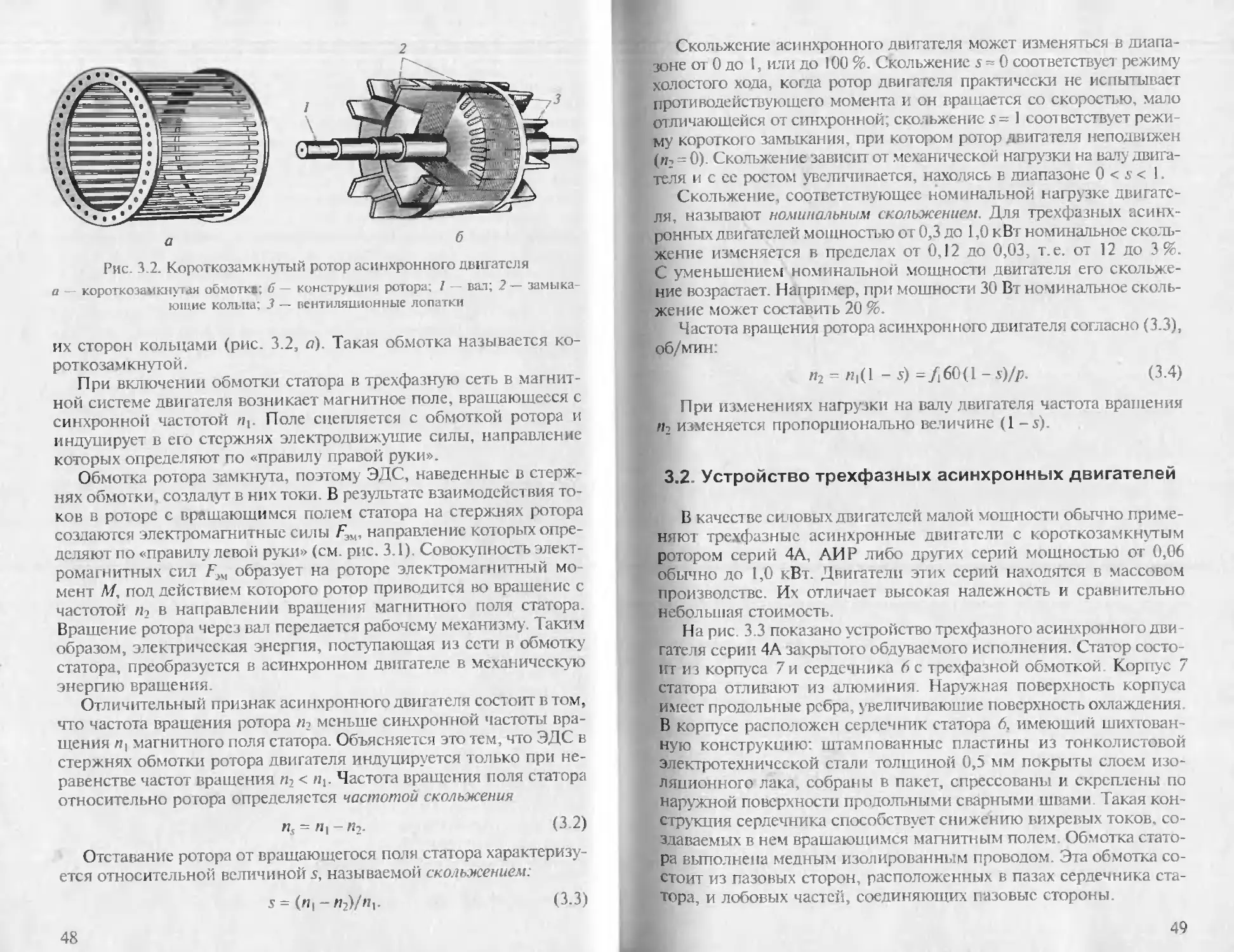
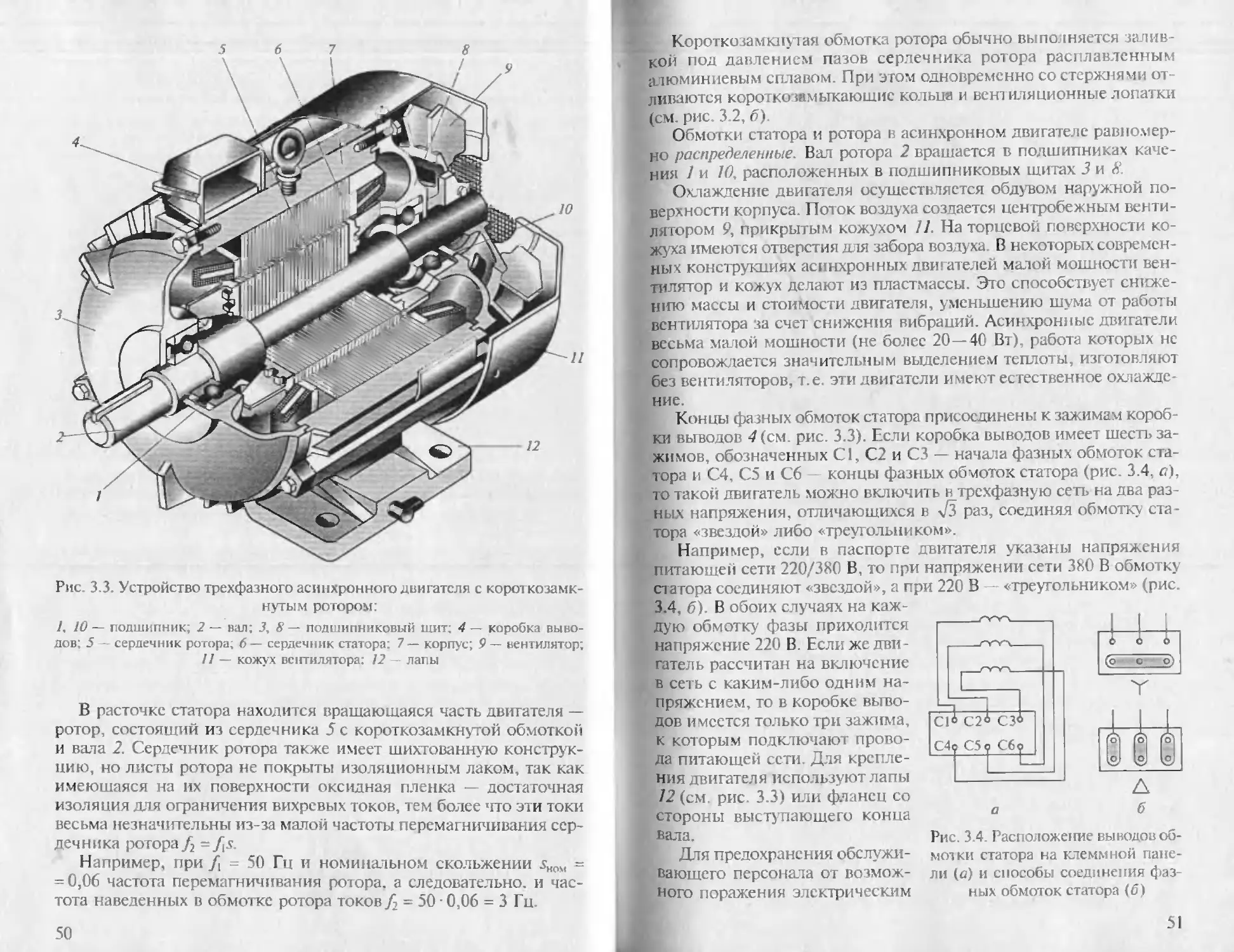
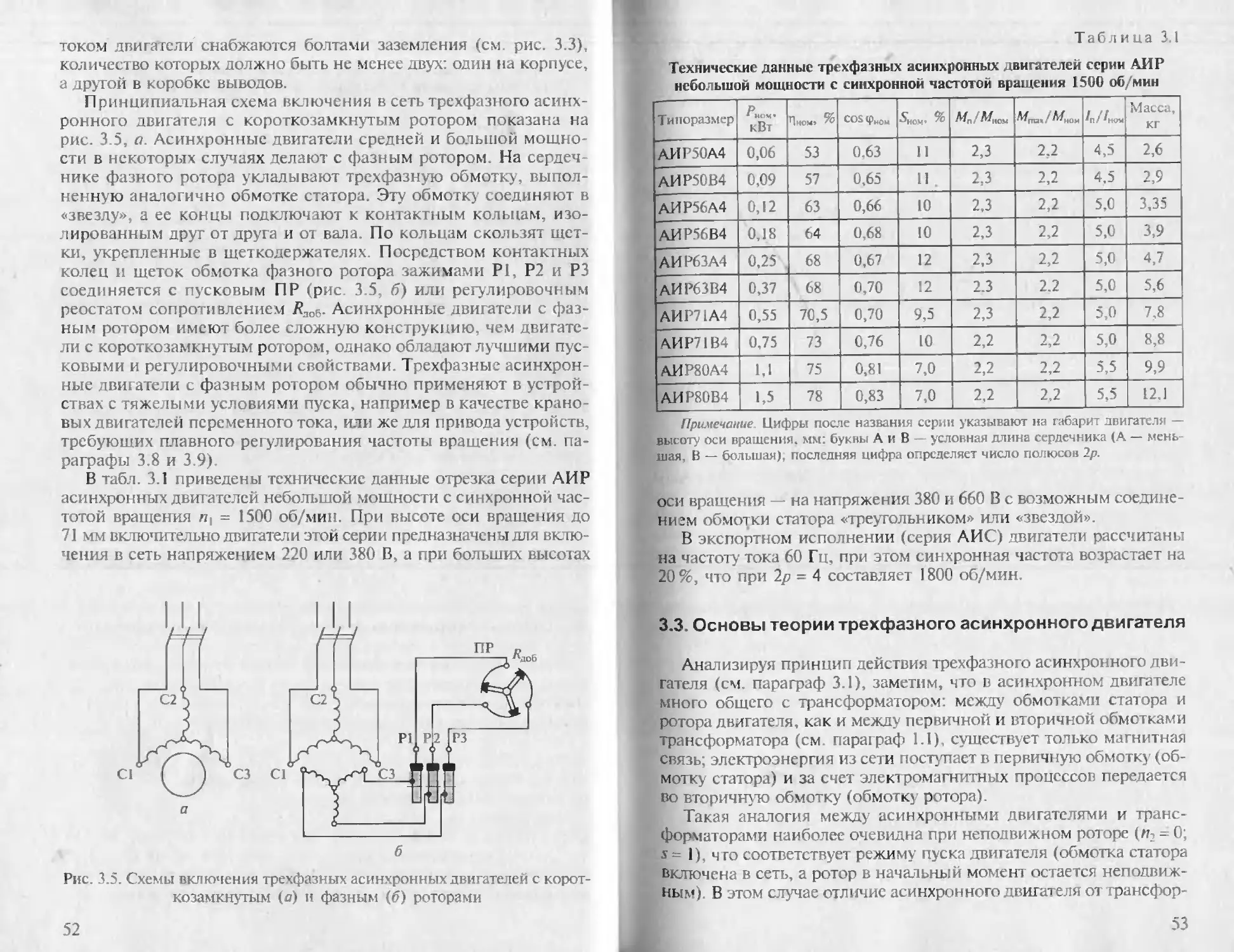
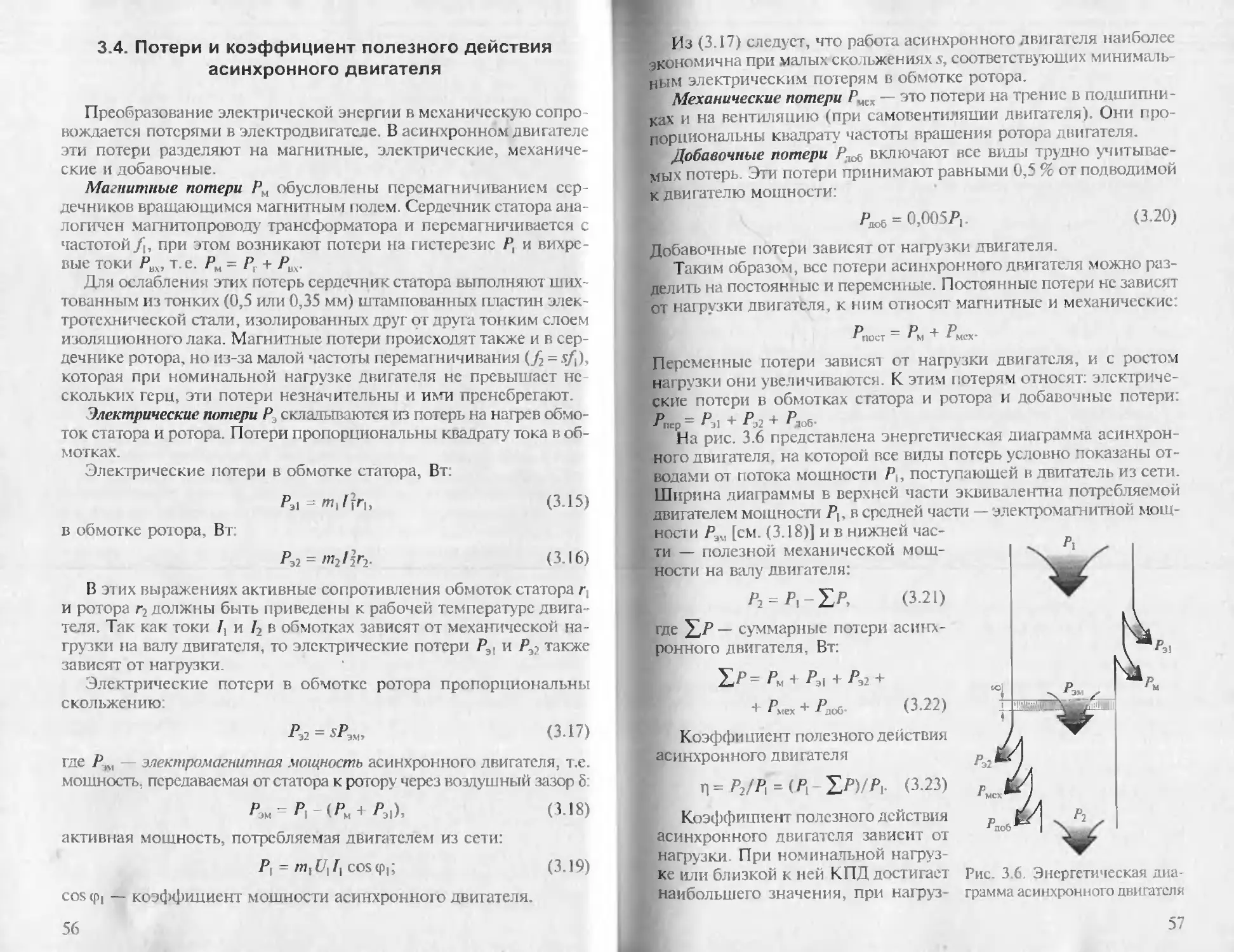
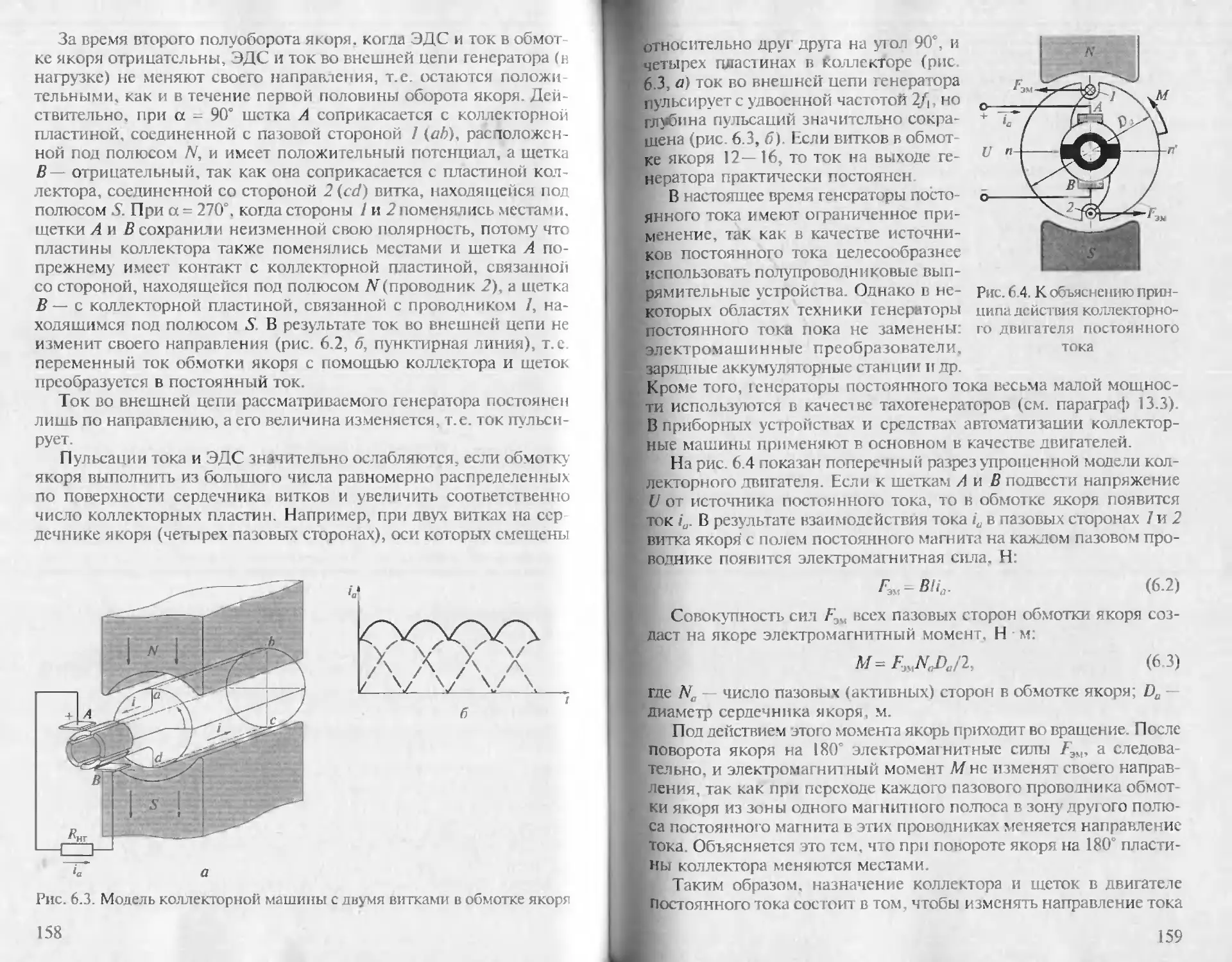
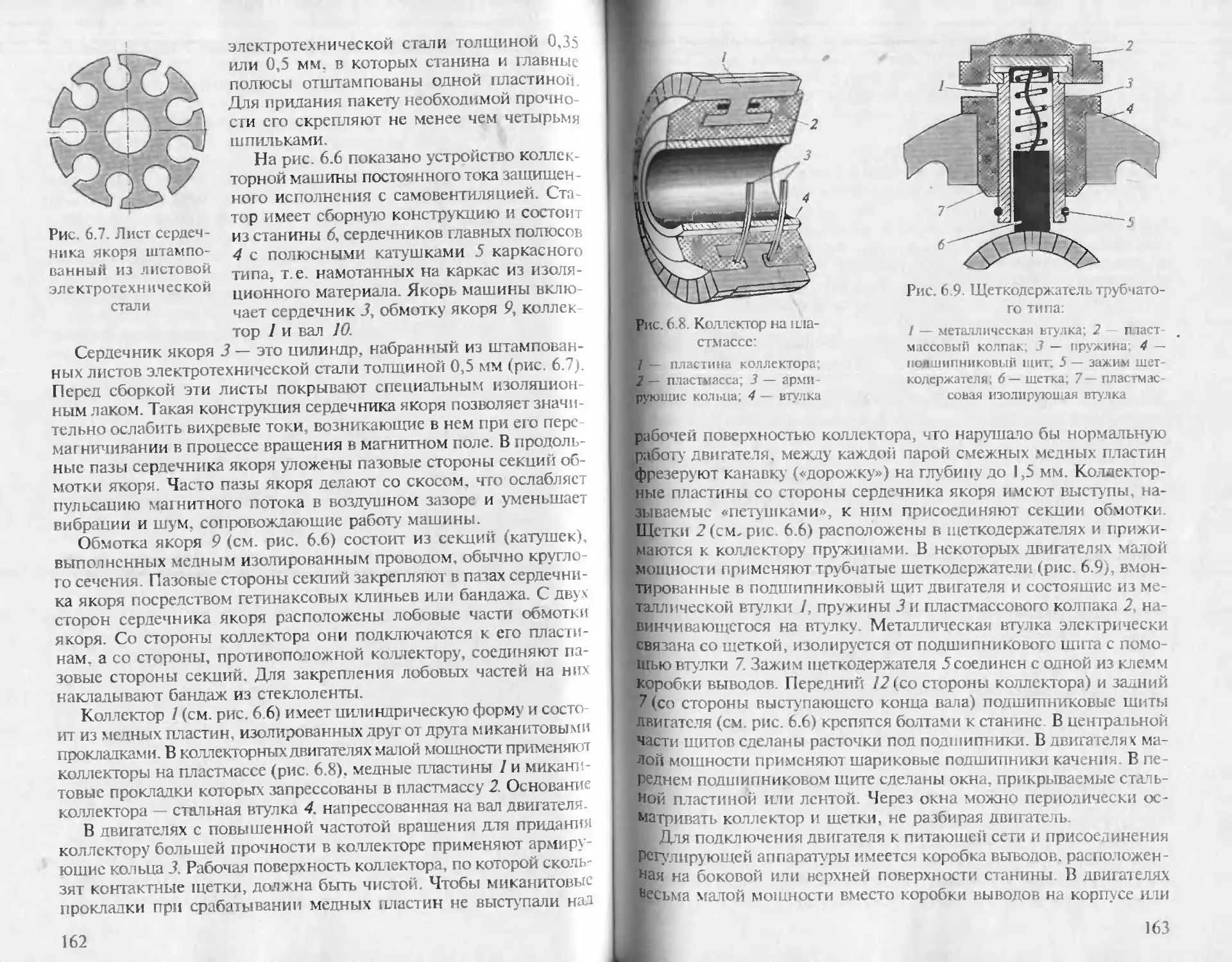
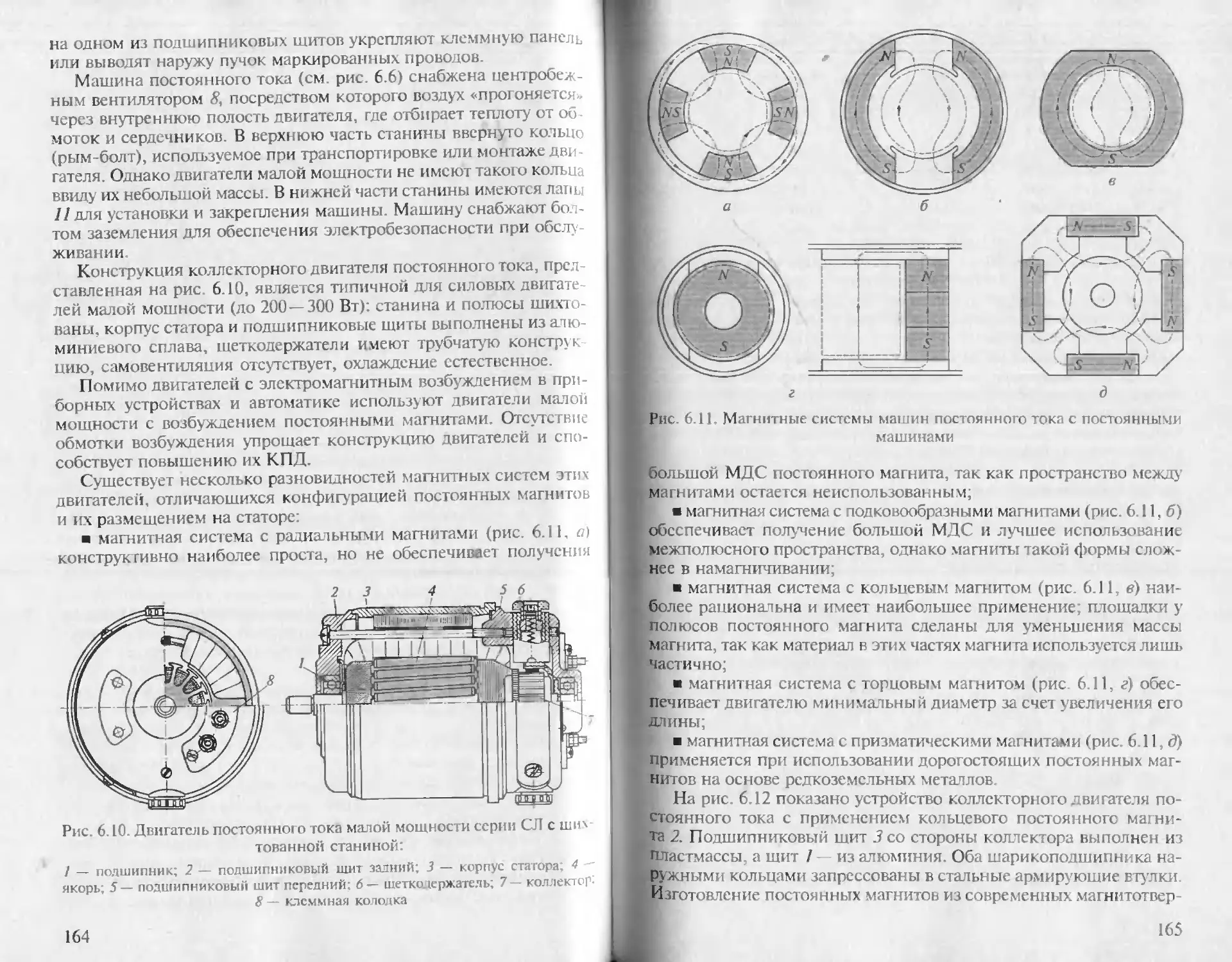
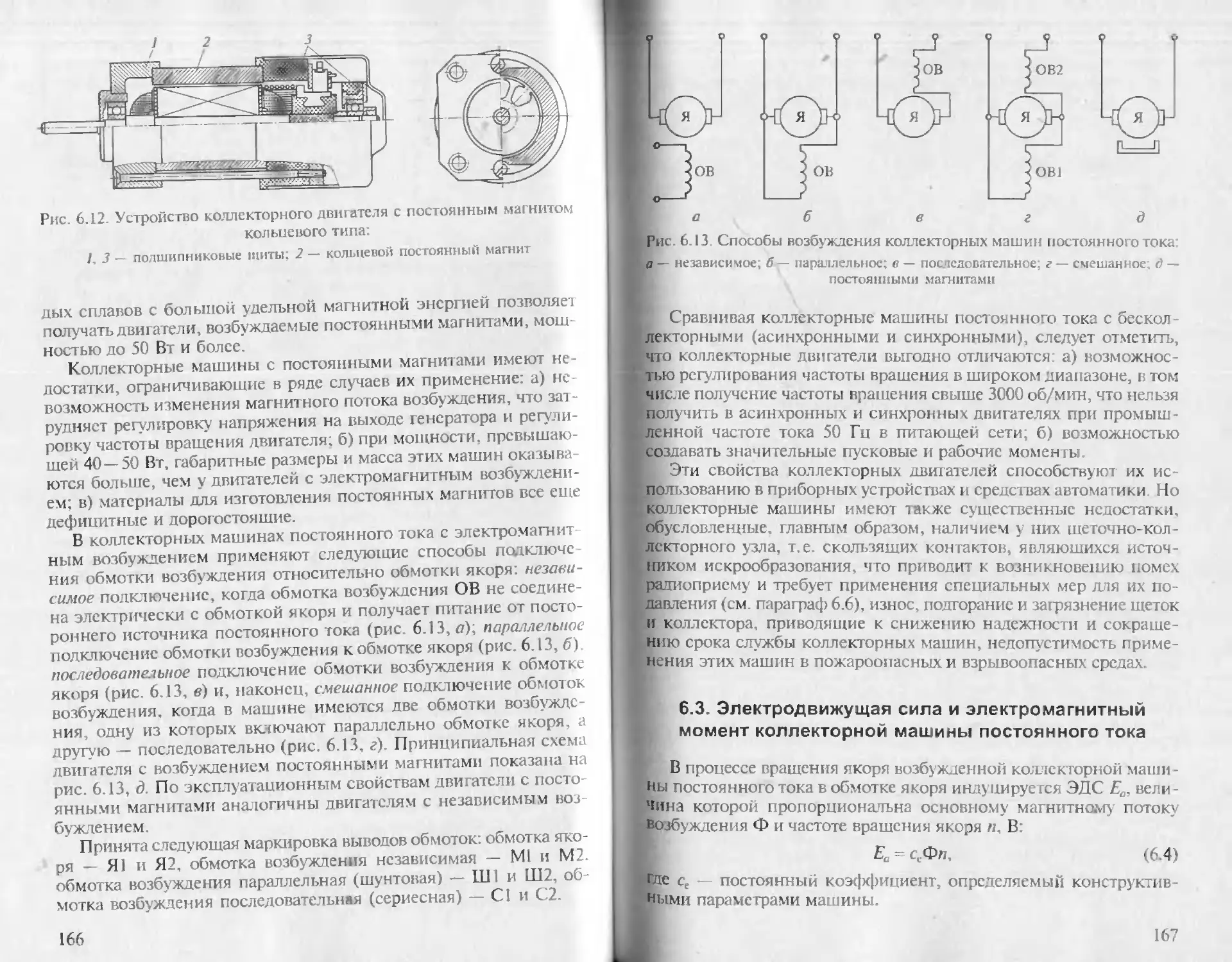
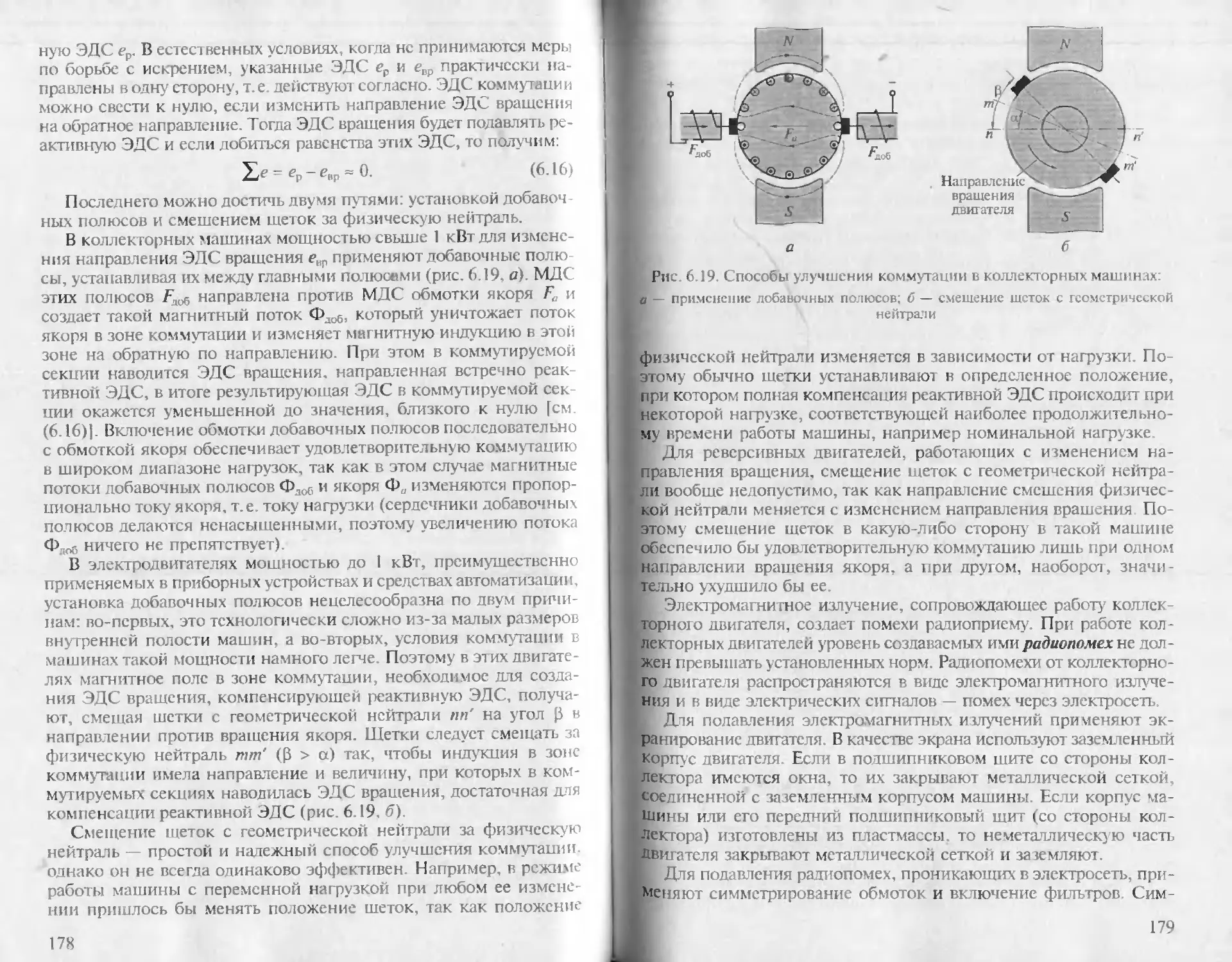
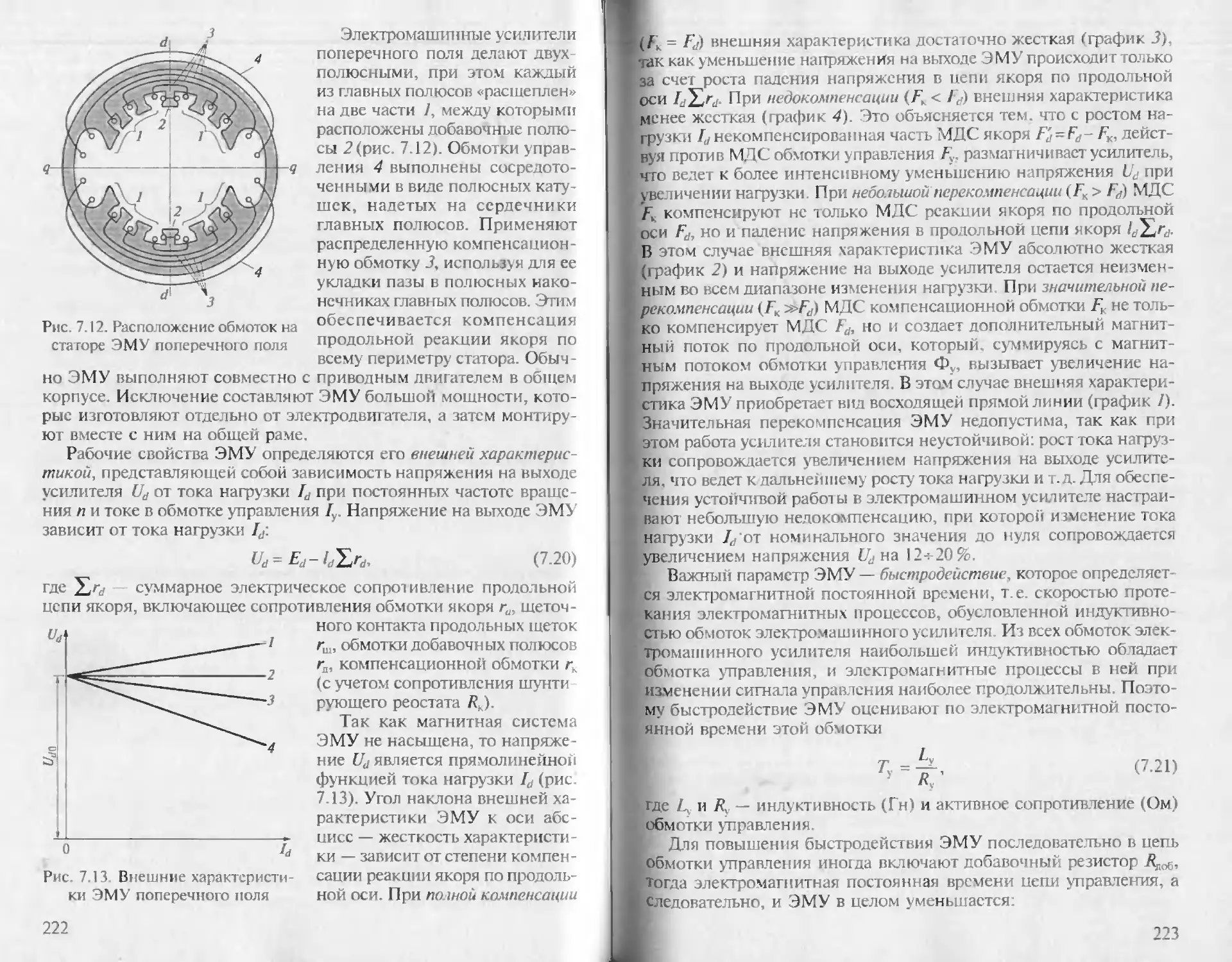
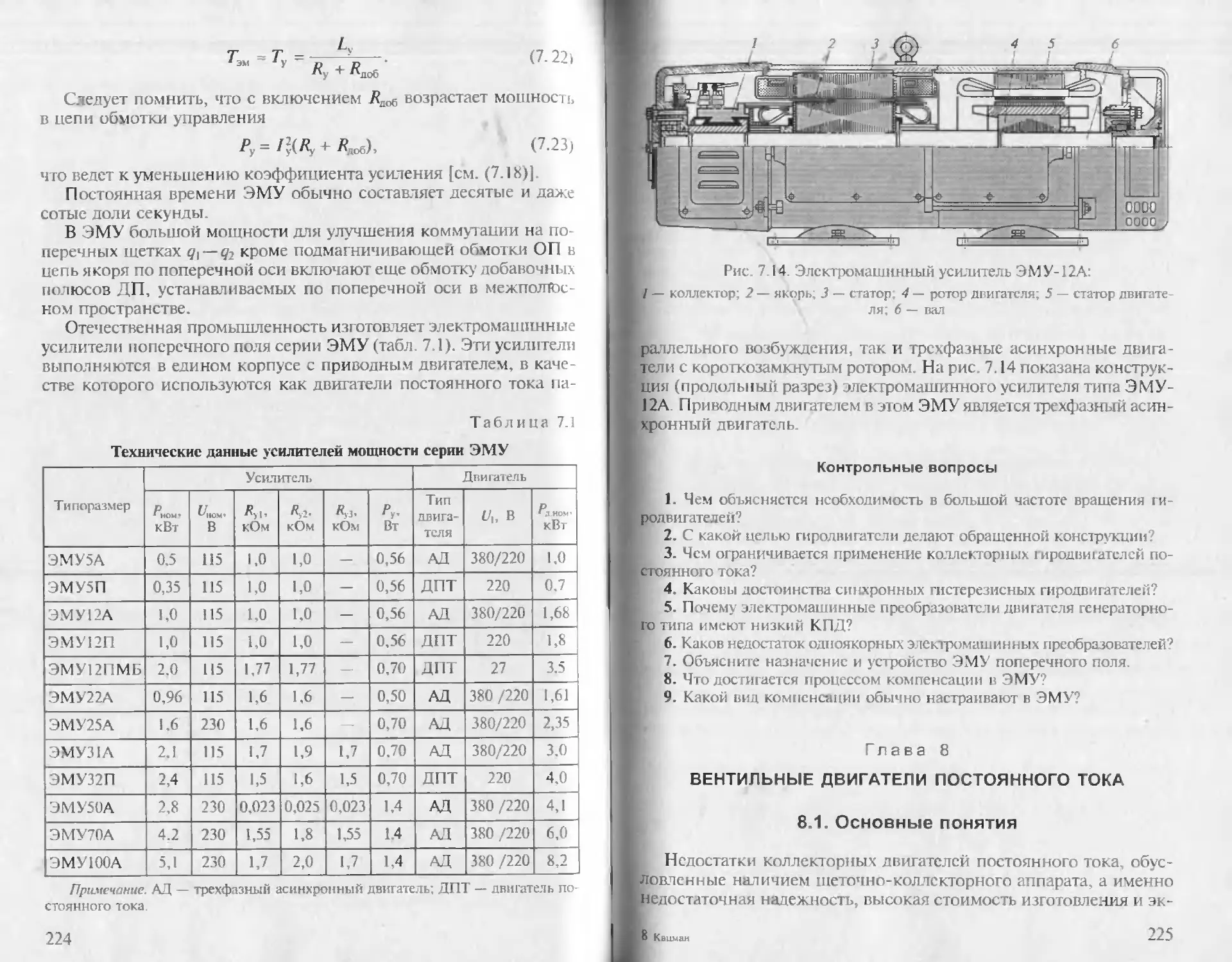
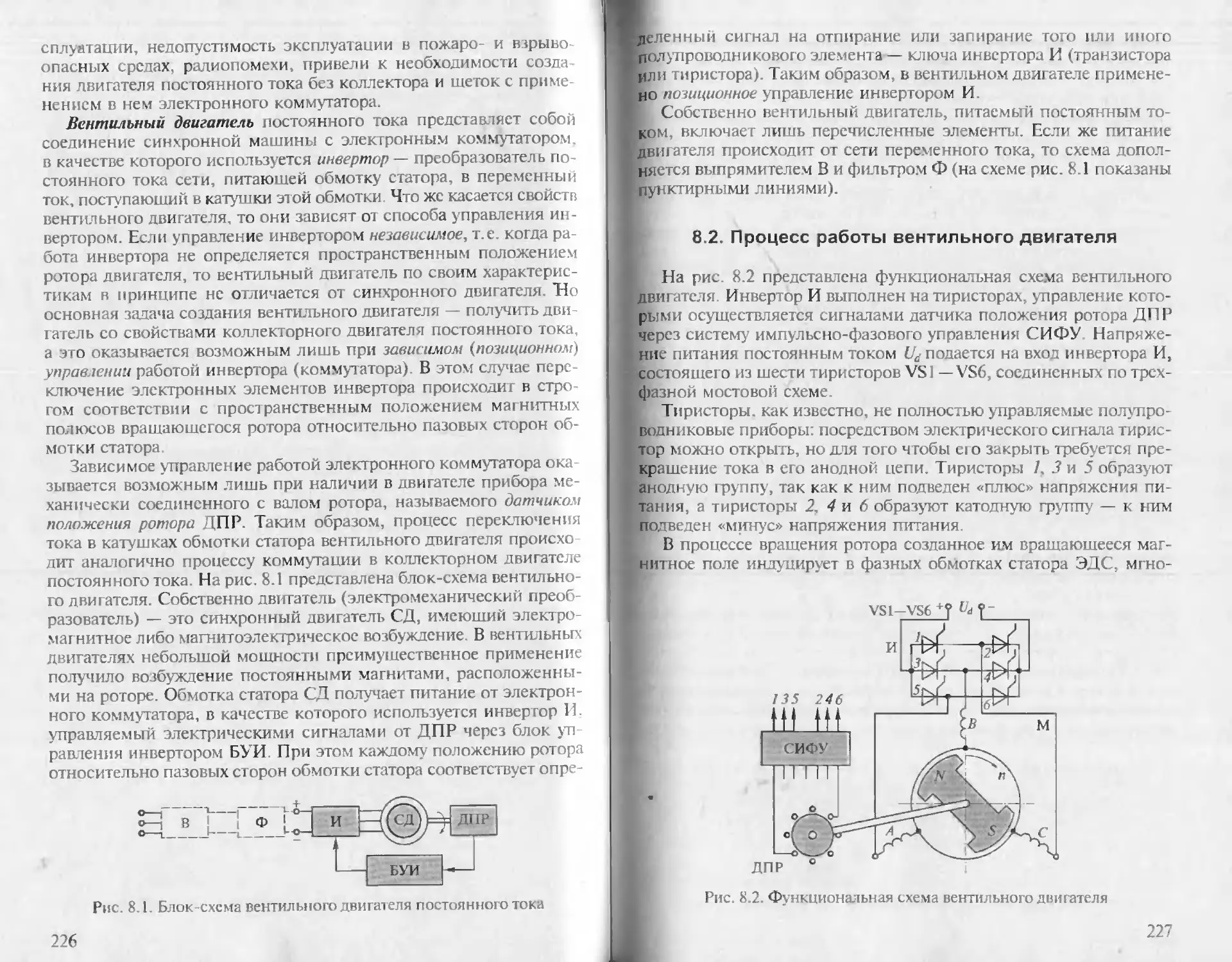
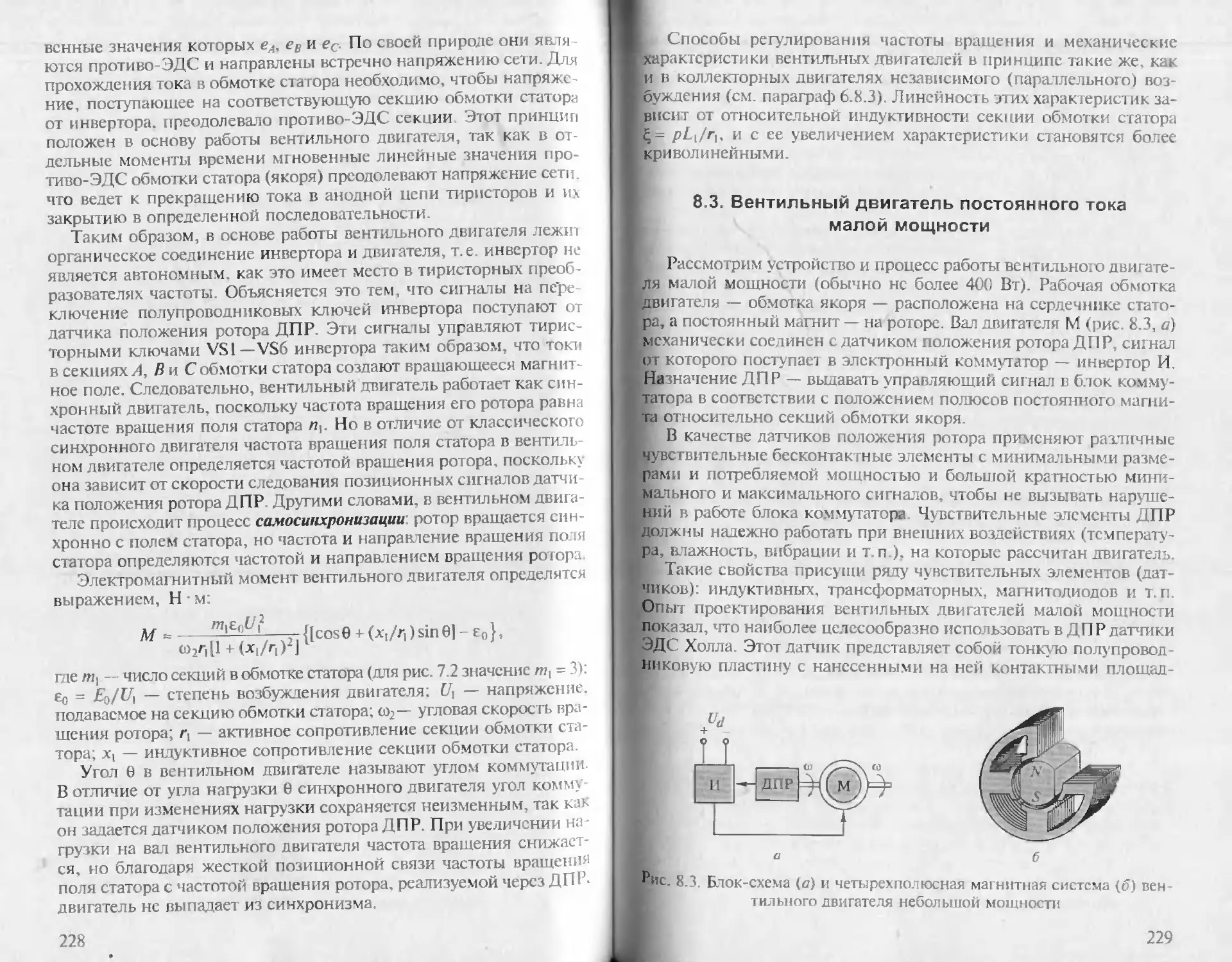
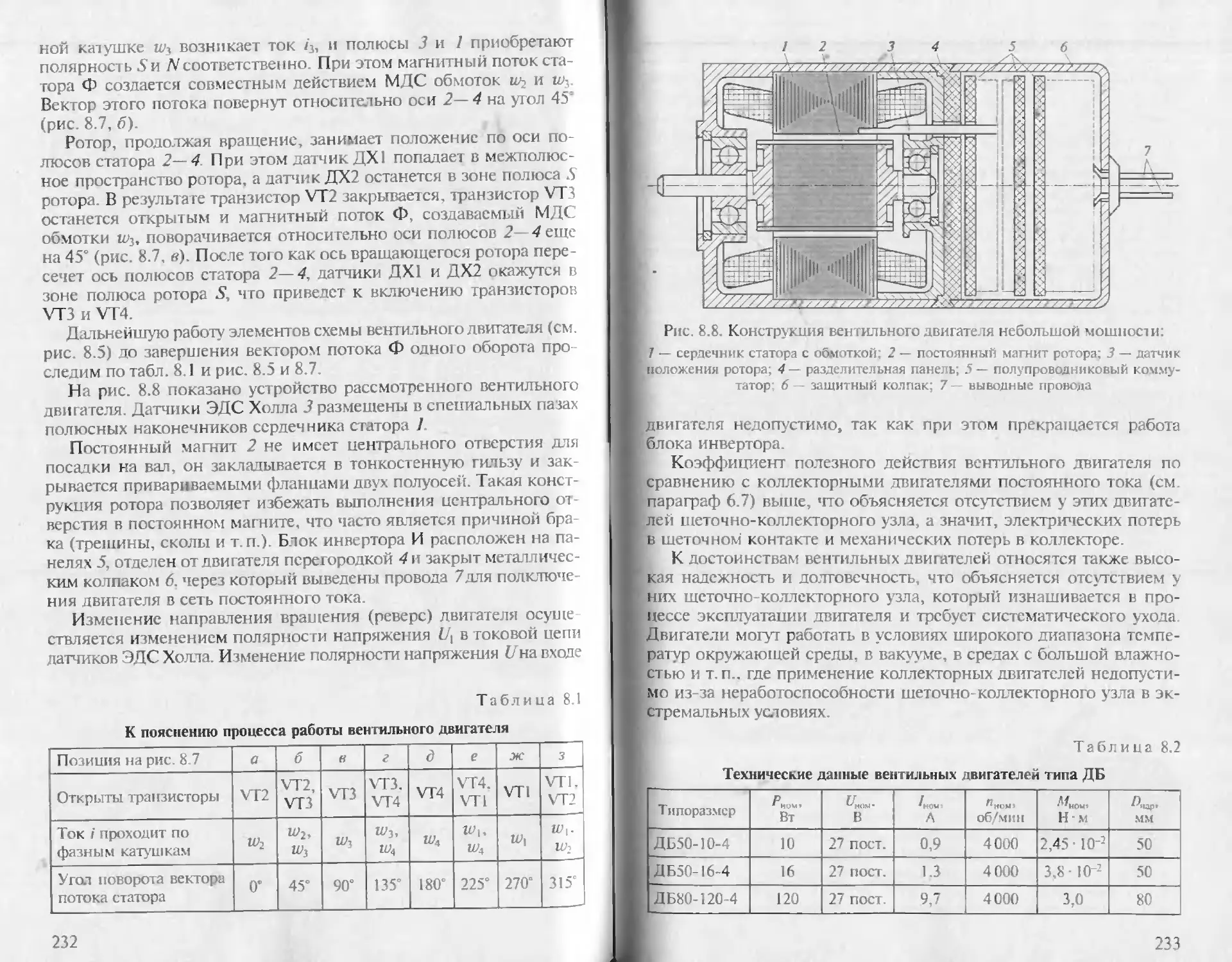
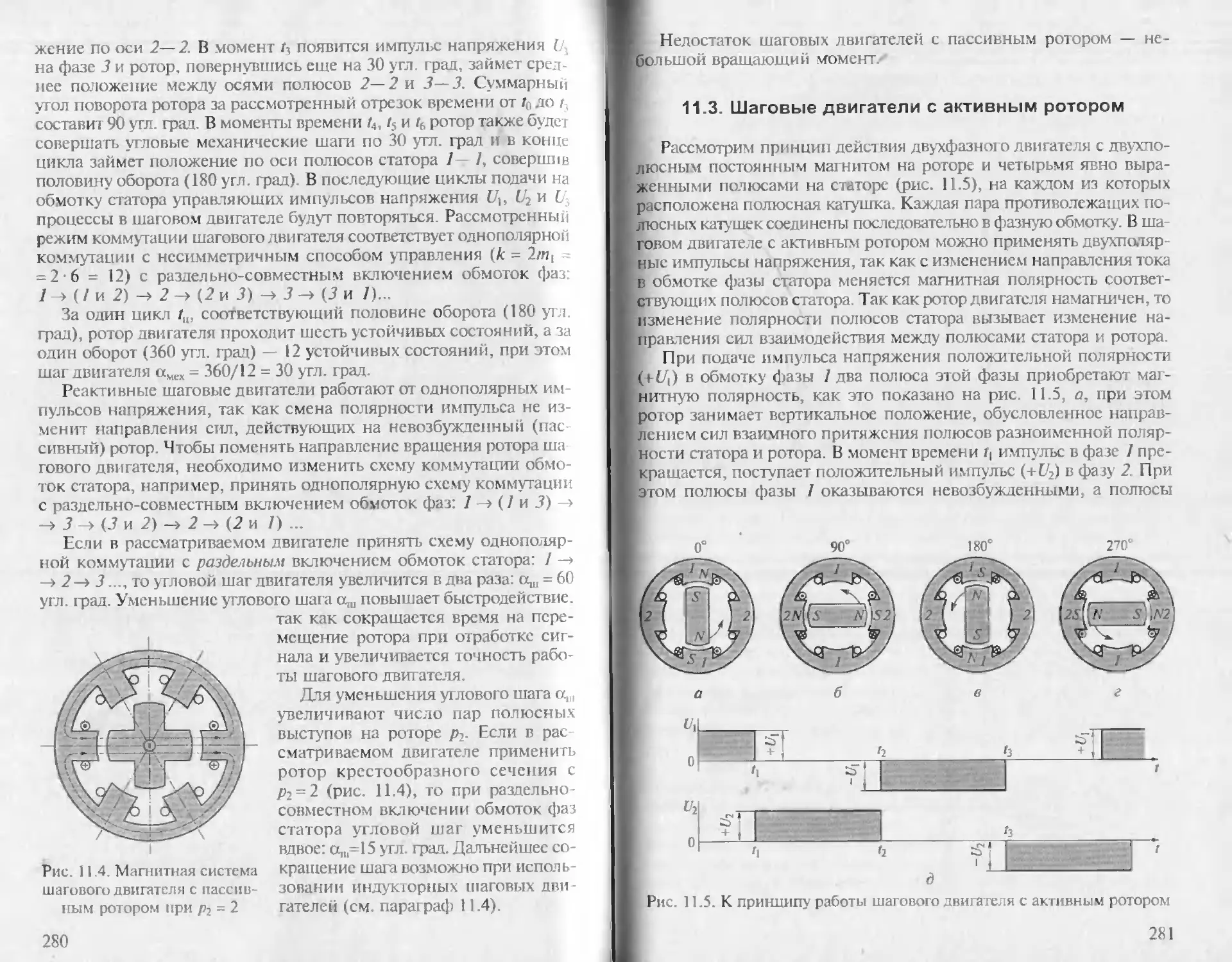
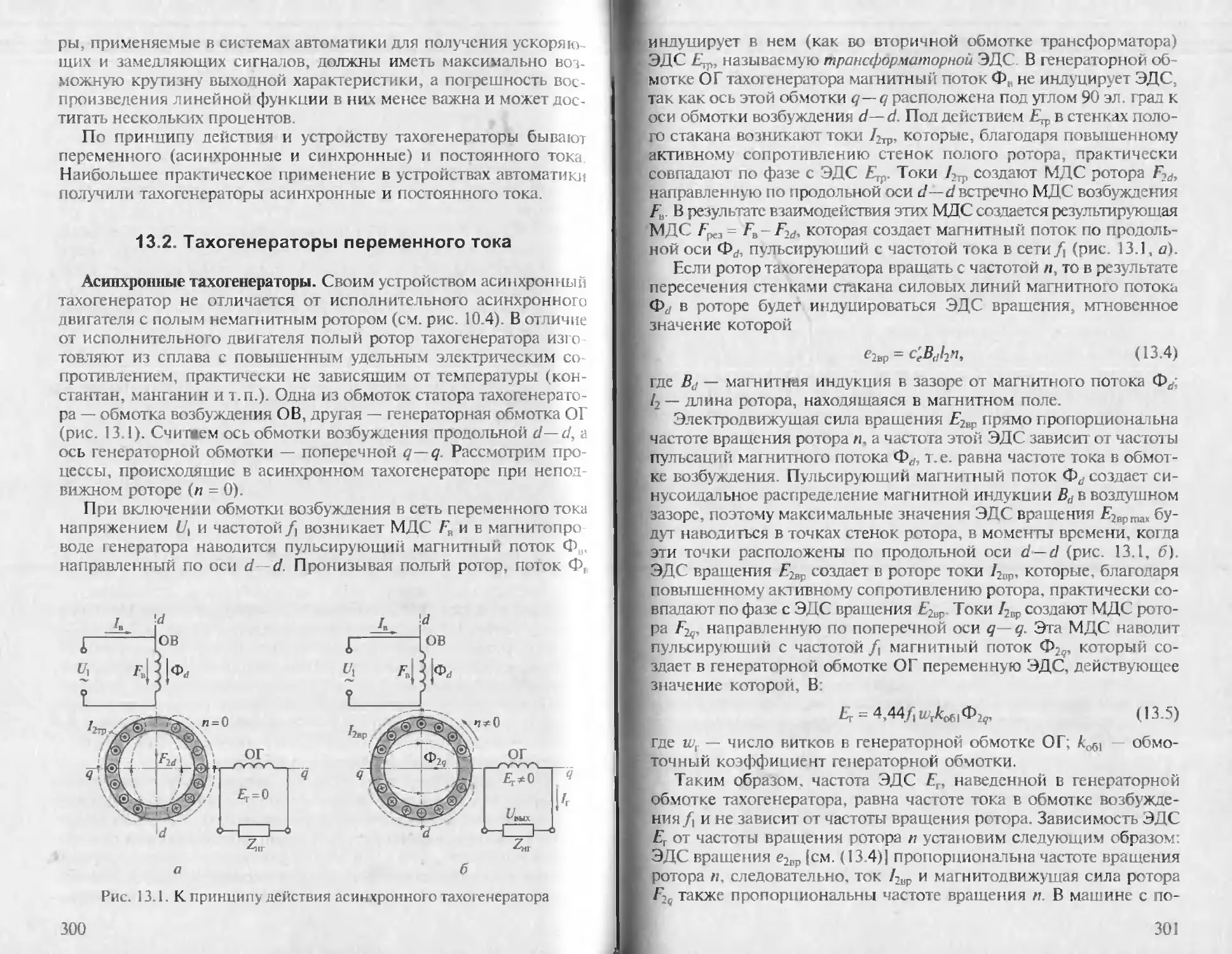
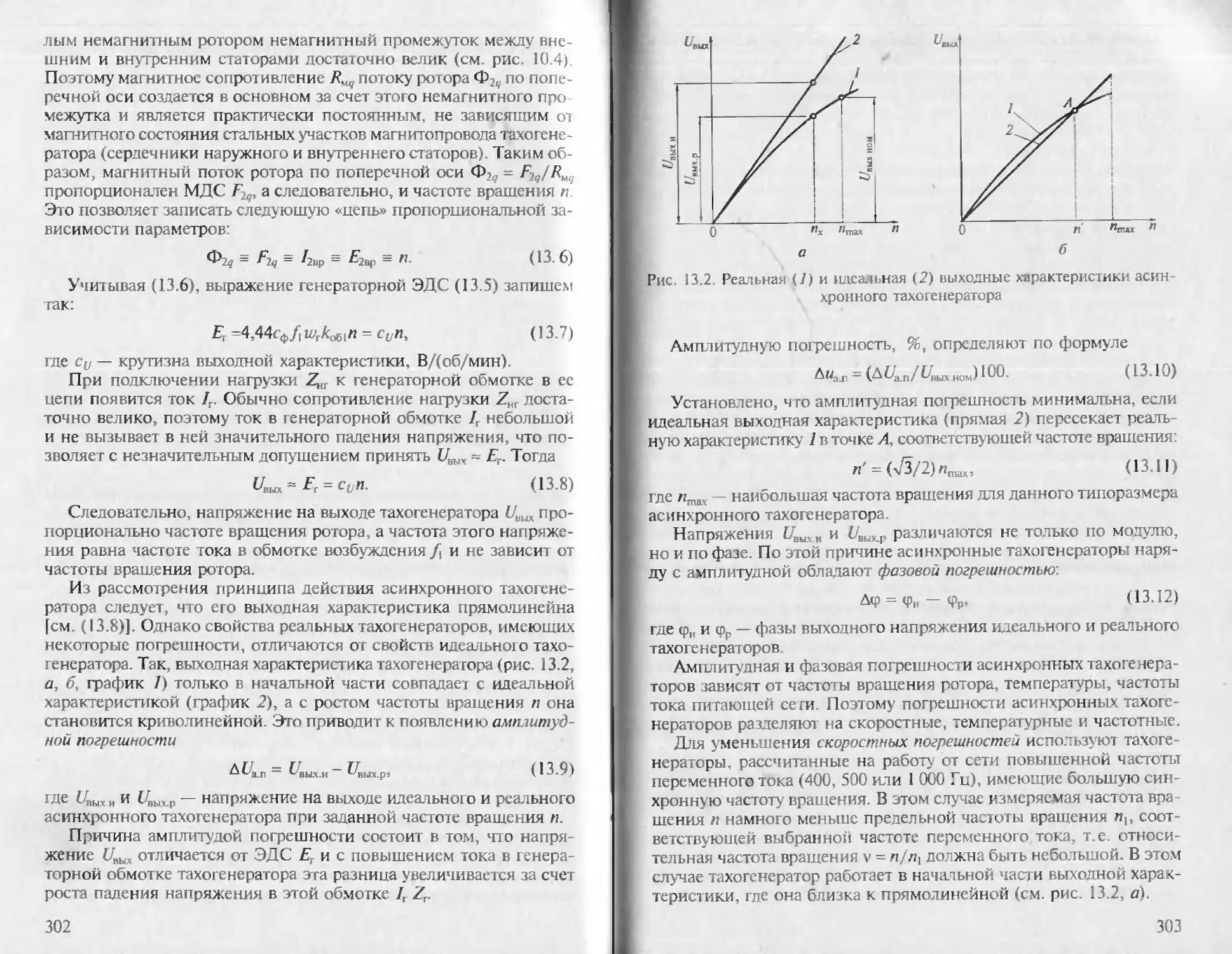
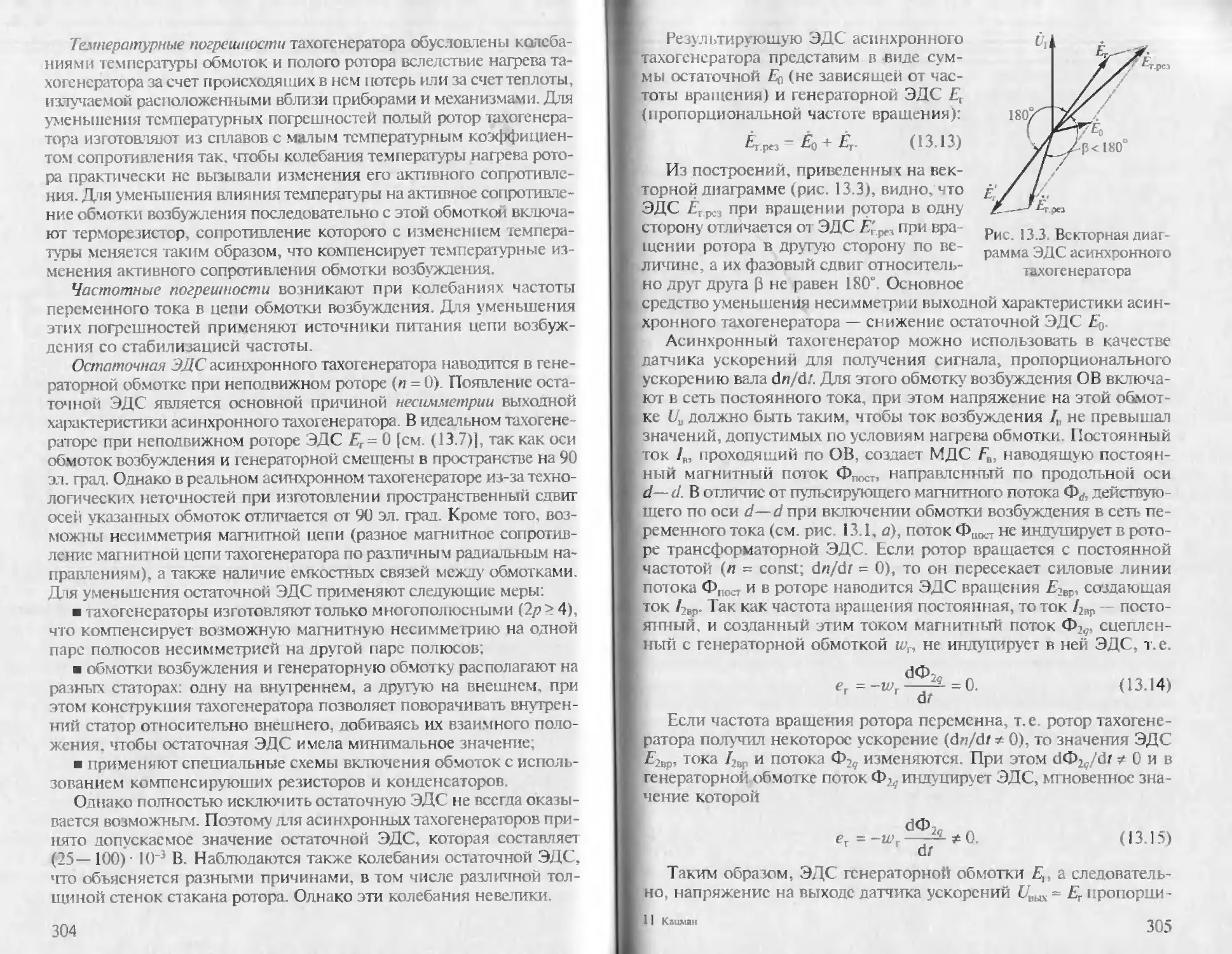
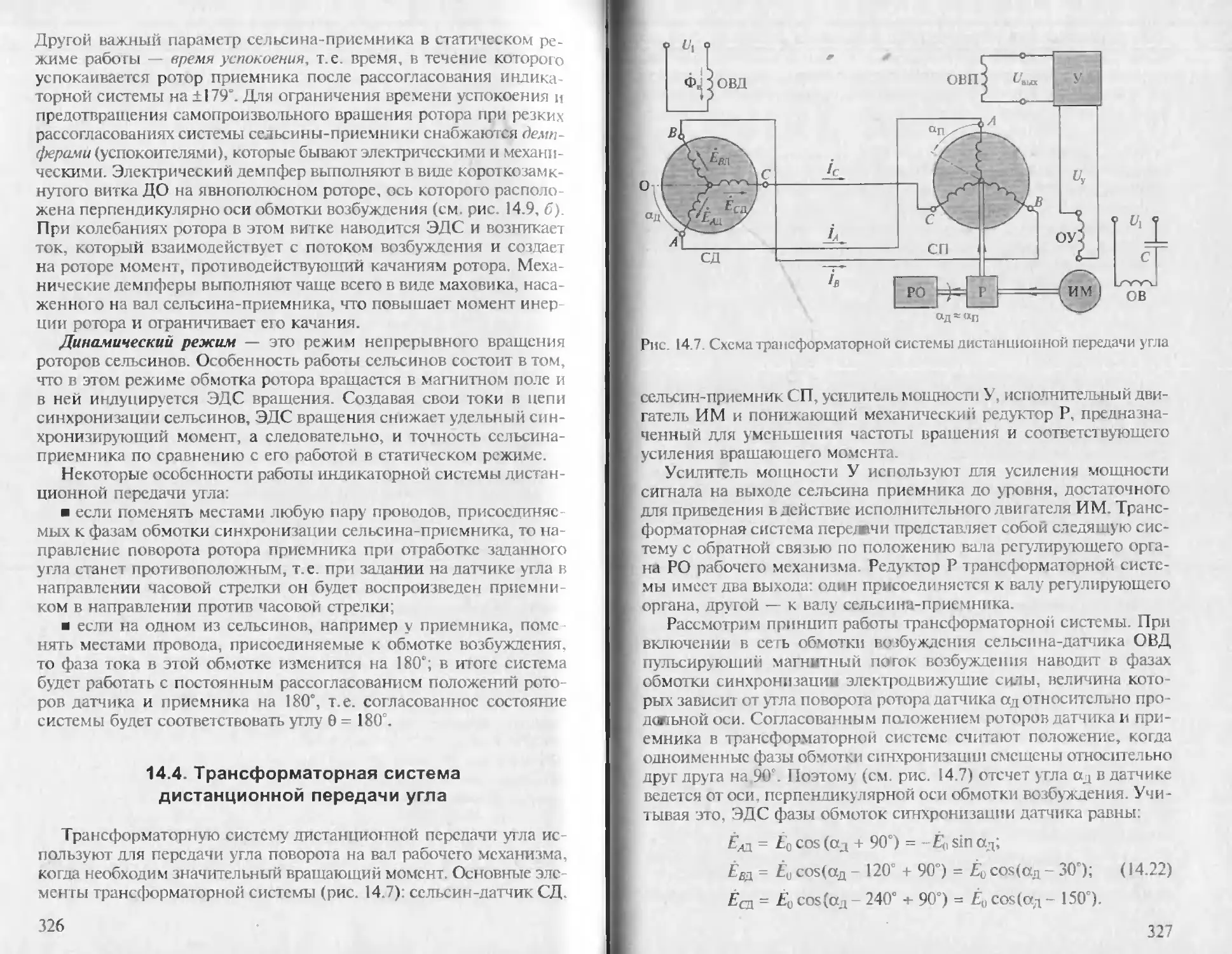
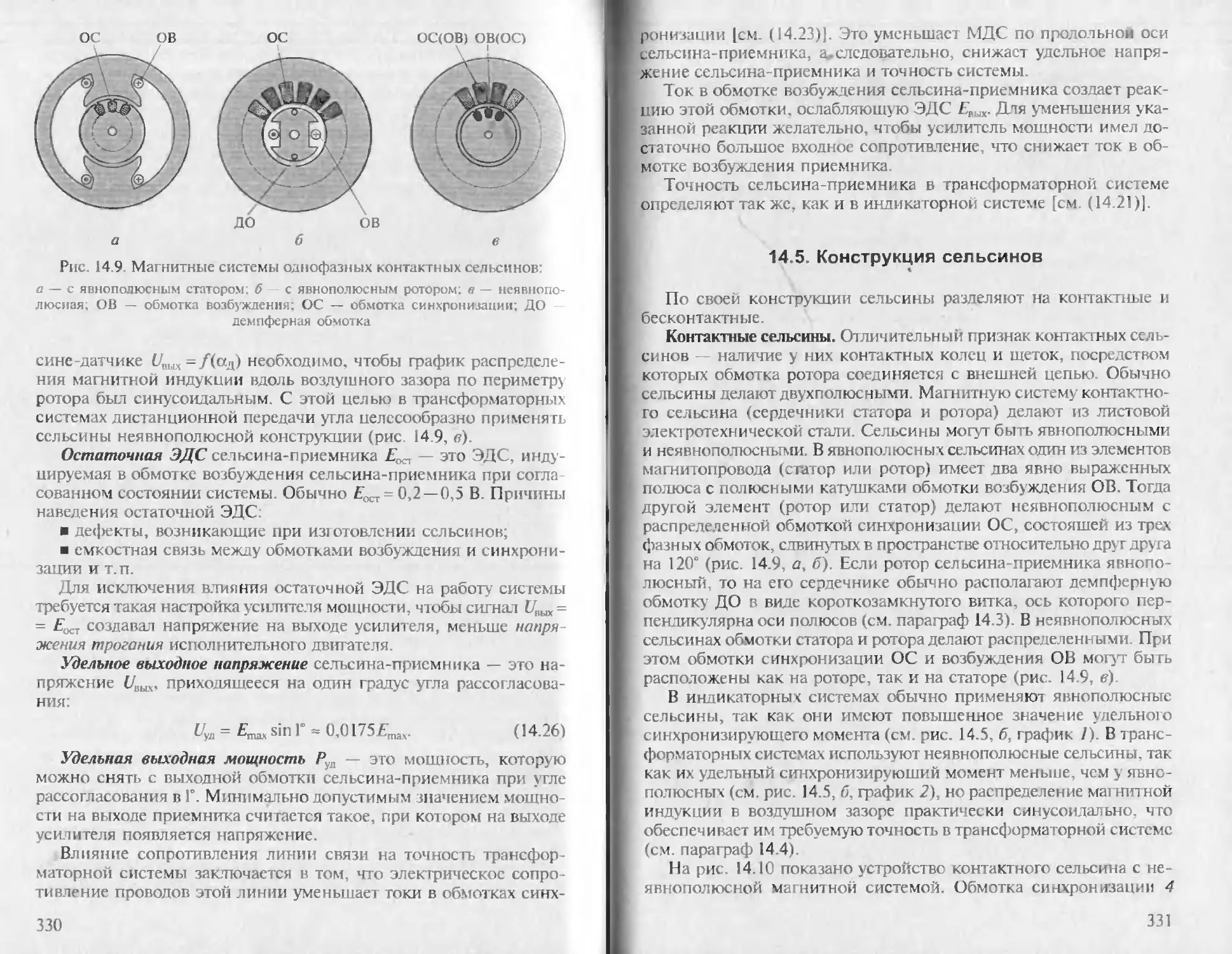
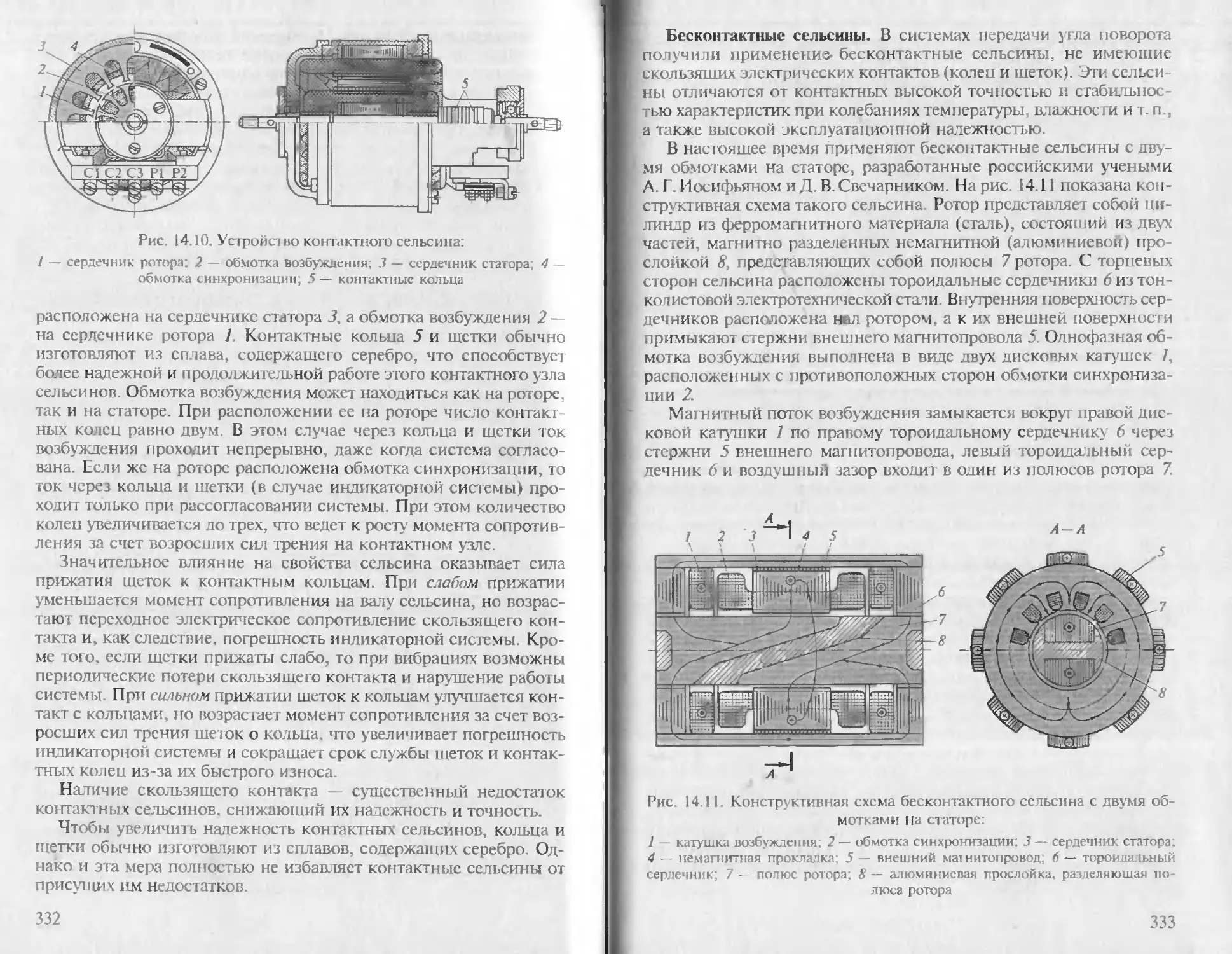
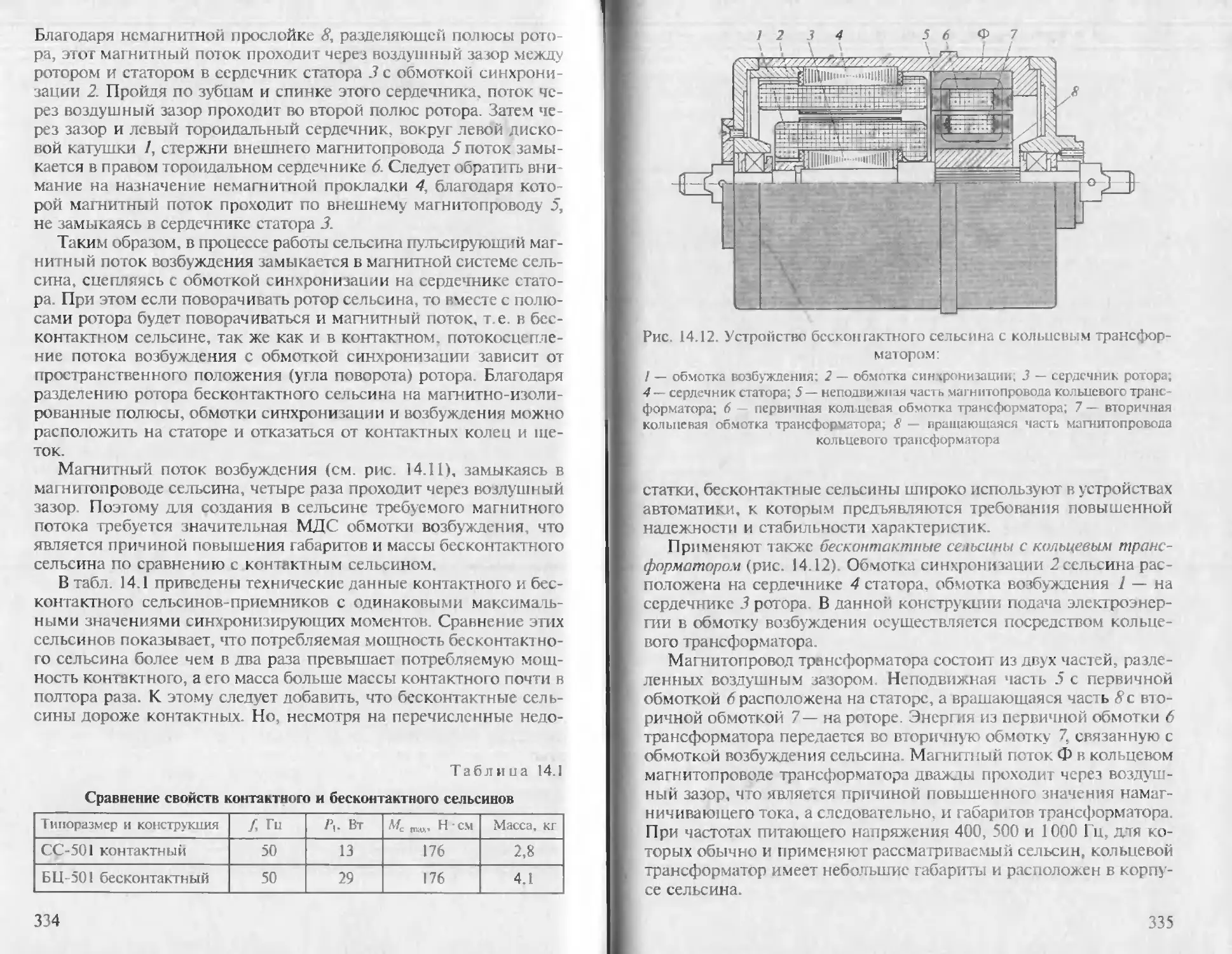
Текст
УЧЕБНОЕ ПОСОБИЕ СРЕДНЕЕ ПРОФЕССИОНАЛЬНОЕ ОБРАЗОВАНИЕ
М. М.Кацман
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
ПРИБОРНЫХ УСТРОЙСТВ
И СРЕДСТВ АВТОМАТИЗАЦИИ
СРЕДНЕЕ ПРОФЕССИОНАЛЬНОЕ ОБРАЗОВАНИЕ
М. М. КАЦМАН
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
ПРИБОРНЫХ УСТРОЙСТВ
И СРЕДСТВ АВТОМАТИЗАЦИИ
Допущено
Министерством образования Российской Федерации
в качестве учебного пособия
для студентов образовательных учреждений
среднего профессионального образования
Би блиотека
СЕВМАШВТУЗА
Москва
ACADEMA
2006
УДК 621.313(075.32)
ББК 31.261я723
К307
Рецензенты:
проф С.Н. Стоменский (кафедра вычислительной техники Чувашского
государственного университета);
С. Ц. Малиновская (Московский радиотехнический колледж)
Кацман М. М.
К.307 Электрические машины приборных устройств и средств
аэтома гизации: Учеб, пособие для студ. учреждений сред. проф.
образования / Марк Михайлович Кацман. — М.: Издатель-
ский центр «Академия», 2006. — 368 с.
ISBN 5-7695-2366-2
В учебном пособии рассмотрены принцип работы, устройство, основы
теории, характеристики различных видов силовых электрических машин и
трансформаторов малой мощности (микромашин), исполнительных дви-
гателей, информационных электрических машин, получивших наиболь-
шее применение в приборных устройствах и средствах автоматизации в
общепромышленных и специальных областях техники.
Для студентов образовательных учреждении среднего профессиональ-
ною образования, обучающихся по специальностям «Приборостроение» и
«Автоматизация и управление».
Будет полезно студентам высших учебных заведений и специалистам,
занимающимся вопросами приборостроения и автоматизации производ-
ственных процессов.
УДК 621.313(075.32)
ББК 31.261я723
Оригинал-макет данного издания является собственностью
Издательского центра «Академия», и его воспроизведение любым способом
без согласия правообладателя запрещается
ISBN 5-7695-2366-2
© Кацман М.М., 2006
© Образовательно-издательским центр «Академия», 2006
© Оформление. Издательский центр «Академия», 2006
ПРЕДИСЛОВИЕ
В условиях роста технического уровня производств и внедрения
комплексной автоматизации технологических процессов особую
актуальность приобретают вопросы качественной подготовки
специалистов, непосредственно занятых в сфере эксплуатации и
проектирования систем автоматики. В обширном комплексе при-
борных устройств и автоматики ведущее место занимают электри-
ческие машины и трансформаторы малой мощности (микрома-
шины).
В книге изложены принцип действия, устройство, особенности
эксплуатации и конструкции электрических машин и трансфор-
маторов малой мощности, получивших широкое применение для
привода механизмов и устройств, используемых в приборных уст-
ройствах и средствах автоматизации. Рассмотрены электромашин-
ные элементы, составляющие основу современных автоматических
систем: исполнительные двигатели постоянного и переменного
тока, электромашинные усилители, вращающиеся преобразовате-
ли, шаговые двигатели, информационные электрические маши-
ны (тахогенераторы, сельсины, магнесины, вращающиеся транс-
форматоры), электродвигатели гироскопических устройств.
Цель данной книги — научить будущего специалиста обосно-
ванно и правильно применять силовые электродвигатели и элект-
ромашинные элементы автоматики в приборных устройствах и
средствах автоматизации.
Учитывая специфику обучения студентов в техникумах и кол-
леджах, автор при изложении материала книги уделил особое вни-
мание рассмотрению физической сущности явлений и процессов,
поясняющих работу рассматриваемых устройств. Принятая в книге
методика изложения курса основана на многолетнем опыте пре-
подавания в образовательных учреждениях среднего професси-
онального образования.
ВВЕДЕНИЕ
В.1. Назначение электрических машин
и трансформаторов
»
Технический уровень любого современного производственного
предприятия оценивается в первую очередь состоянием автома-
тизации и комплексной механизации основных технологических
процессов. При этом все большее значение приобретает автомати-
зация не только физического, но и умственного труда.
Автоматизированные системы включают большое разнообразие
элементов, отличающихся не только функциональным назначе-
нием, но принципом действия. Среди множества элементов, со-
ставляющих автоматизированные комплексы, определенное мес-
то занимают электромашинные элементы. Принцип работы и кон-
струкция этих элементов либо практически не отличаются от элек-
трических машин (являются электродвигателями или электроге-
нераторами), либо весьма близки к ним по конструкции и проте-
кающим в них электромагнитным процессам.
Электрическая машина — это электрическое устройство, осу-
ществляющее взаимное преобразование электрической и механи-
ческой энергий.
Если проводник перемещать в магнитном поле так. чтобы он
пересекал магнитные силовые линии, то в этом проводнике будет
индуцироваться электродвижущая сила (ЭДС). Любая электриче-
ская машина состоит из неподвижной части и подвижной (враща-
ющейся). Одна из этих частей (индуктор) создает магнитное поле,
а другая имеет рабочую обмотку, представляющую собой систему
проводников. Если к электрической машине подвести механиче-
скую энергию, т. е. вращать ее подвижную часть, то в соответствии
с законом электромагнитной индукции в ее рабочей обмотке
будет индуцироваться ЭДС. Если же к выводам этой обмотки под-
ключить какой-либо потребитель электрической энергии, то в цепи
возникнет электрический ток. Таким образом, в результате про-
исходящих в машине процессов механическая энергия вращения
оудет преобразовываться в электрическую энергию. Электриче-
ские машины, осуществляющие такое преобразование, называют
электрическими генераторами. Электрические генераторы состав-
ляют основу электроэнергетики — их применяют на электростан-
циях, где они преобразуют механическую энергию турбин в элек-
трическую.
Если в магнитное поле перпендикулярно магнитным силовым
линиям поместить проводник и пропустить по нему электриче-
ский ток, то в результате взаимодействия этого тока с магнитным
полем на проводник будет действовать механическая сила. Поэто-
му если рабочую обмотку электрической машины подключить к
источнику электрической энергии, то в ней появится ток. а так
как эта обмотка находится в магнитном поле индуктора, то на ее
проводники будут действовать механические силы. Под действием
этих сил подвижная часть электрической машины начнет вращаться.
При этом электрическая энергия будет преобразовываться в меха-
ническую. Электрические машины, осуществляющие такое преоб-
разование, называют электрическими двигателями. Электродвига-
тели широко используются в электроприводе станков, подъемных
кранов, транспортных средств, бытовых приборов и т.д.
Электрические машины обладают свойством обратимости, т.е.
любая электрическая машина может работать как в режиме гене-
ратора, так и двигателя. Все зависит от вида подводимой к машине
энергии. Однако обычно каждая электрическая машина имеет кон-
кретное назначение: либо она генератор, либо двигатель.
Основой для создания электрических машин и трансформато-
ров был открытый М. Фарадеем закон электромагнитной индук-
ции. Начало практического применения электрических машин было
положено академиком Б. С. Якоби, который в 1834 г. создал конст-
рукцию электрической машины, явившуюся прототипом совре-
менного коллекторного электродвигателя.
Широкому' применению электрических машин в промышлен-
ном электроприводе способствовало изобретение русским инже-
нером М О. Доливо-Добровольским (1889) трехфазного асинхрон-
ного двигателя, отличавшегося от применявшихся в то время кол-
лекторных электродвигателей постоянного тока простотой конст-
рукции и высокой надежностью.
К началу XX в. было создано большинство видов электрических
машин, применяемых и в настоящее время.
В.2. Классификация электрических машин
Разделение электрических машин на генераторы и двигатели
является принципиальным, так как это определяет направление
преобразования энергий. Однако применение электрических ма-
шин более разнообразно, поскольку их использование возможно
не только в качестве генераторов и двигателей, но и в качестве
преобразователей, усилителей, компенсаторов, информационных
датчиков и т.д. Однако целесообразно классифицировать электри-
ческие машины не по назначению, а по принципу действия, тем
более что именно такое разделение электрических машин положе-
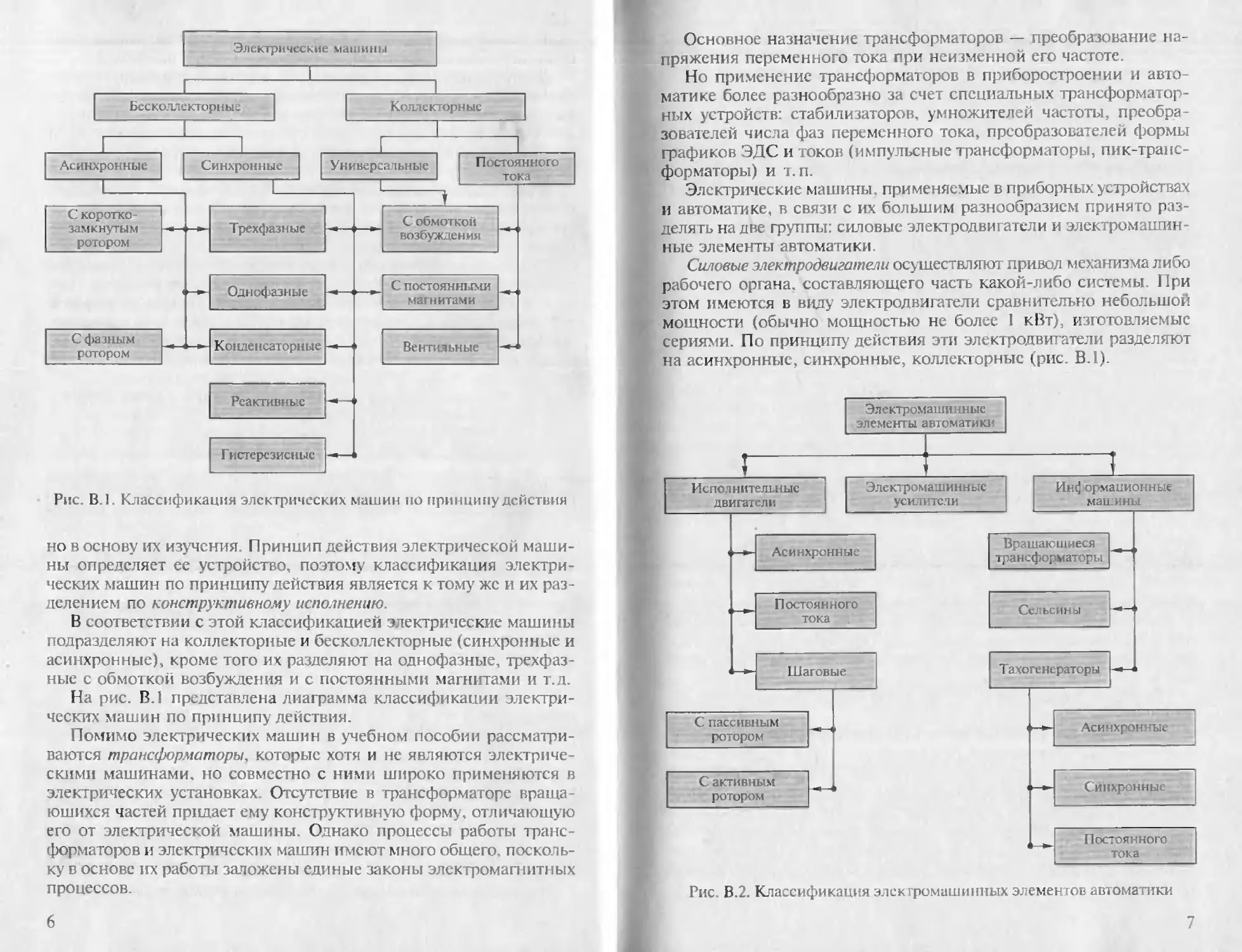
Рис. ВЛ. Классификация электрических машин по принципу действия
но в основу их изучения. Принцип действия электрической маши-
ны определяет ее устройство, поэтому классификация электри-
ческих машин по принципу действия является к тому же и их раз-
делением по конструктивному исполнению.
В соответствии с этой классификацией электрические машины
подразделяют на коллекторные и бесколлекторные (синхронные и
асинхронные), кроме того их разделяют на однофазные, трехфаз-
ные с обмоткой возбуждения и с постоянными магнитами и т.д.
На рис. В.1 представлена диаграмма классификации электри-
ческих машин по принципу действия.
Помимо электрических машин в учебном пособии рассматри-
ваются трансформаторы, которые хотя и не являются электриче-
скими машинами, но совместно с ними широко применяются в
электрических установках. Отсутствие в трансформаторе враща-
ющихся частей придает ему конструктивную форму, отличающую
его от электрической машины. Однако процессы работы транс-
форматоров и электрических машин имеют много общего, посколь-
ку в основе их работы заложены единые законы электромагнитных
процессов.
Основное назначение трансформаторов — преобразование на-
пряжения переменного тока при неизменной его частоте.
Но применение трансформаторов в приборостроении и авто-
матике более разнообразно за счет специальных трансформатор-
ных устройств: стабилизаторов, умножителей частоты, преобра-
зователей числа фаз переменного тока, преобразователей формы
графиков ЭДС и токов (импульсные трансформаторы, пик-транс-
форматоры) и т.п.
Электрические машины, применяемые в приборных устройствах
и автоматике, в связи с их большим разнообразием принято раз-
делять на две группы: силовые электродвигатели и электромашин-
ные элементы автоматики.
Силовые электродвигатели осуществляют привод механизма либо
рабочего органа, составляющего часть какой-либо системы. При
этом имеются в виду электродвигатели сравнительно небольшой
мощности (обычно мощностью не более 1 кВт), изготовляемые
сериями. По принципу действия эти электродвигатели разделяют
на асинхронные, синхронные, коллекторные (рис. В.1).
Рис. В.2. Классификация элсктромашиниых элементов автоматики
Электромашинныс элементы автоматики составляют более раз-
нообразную группу электрических машин как по назначению, так
и по конструктивному исполнению. Основную часть этой группы
элементов составляют: исполнительные двигатели, электромашин-
ные усилители, тахогенераторы, машины синхронной связи, вра-
щающиеся трансформаторы.
К электромашинным элементам автоматики предъявляются
повышенные требования по надежности и точности воспроизве-
дения поступающих электрических сигналов. По этой причине элек-
громашинные элементы автоматики обычно изготовляют из высо-
кокачественных магнитных, проводниковых и изоляционных ма-
териалов с применением современных технологий.
На рис. В.2 представлена классификация электромашинных эле-
ментов автоматики.
ЧАСТЬ ПЕРВАЯ. ТРАНСФОРМАТОРЫ
И СИЛОВЫЕ ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
МАЛОЙ МОЩНОСТИ
РАЗДЕЛ I
ТРАНСФОРМАТОРЫ
Трансформаторы — это наиболее распространенные устройства
в электрических установках. Трансформаторы большой мощности
на напряжение до сотен киловольт составляют основу системы
передачи электроэнергии от электростанций к потребителям по-
средством линий электропередач. Данные трансформаторы повы-
шают напряжение переменного тока до значений, необходимых
для экономичной передачи электроэнергии на значительные рас-
стояния. В местах распределения электроэнергии между потребите-
лями применяют трансформаторы, понижающие напряжение до
требуемых для потребителей значений. Наряду с этим трансфор-
маторы являются элементами электроприводов, нагревательных и
других установок, где они осуществляют преобразование напря-
жения питающей сети до значений, необходимых для работы элек-
тродвигателей, нагревательных печей и других электроустройст в.
В данном разделе рассматриваются силовые трансформаторы
малой мощности для устройств автоматизации, связи, сигнализа-
ции, приборной и измерительной техники при напряжении до
1000 В, а также специальные трансформаторные устройства: пик-
трансформаторы, импульсные трансформаторы, удвоители и ут-
роители частоты, ферромагнитные и феррорезонансные стабили-
заторы напряжения.
Глава 1
СИЛОВЫЕ ТРАНСФОРМАТОРЫ
1.1. Назначение и принцип действия силового
трансформатора
Трансформатор — это электромагнитный статический преоб-
разователь с двумя или более неподвижными обмотками, который
преобразует параметры переменного тока: напряжение, ток, час-
тоту, число фаз. Возможно также использование трансформаторов
для преобразования синусоидального переменного тока в несину-
соидальный ток.
Преимущественное применение в электрических установках
получили силовые трансформаторы, преобразующие напряжение
переменного тока при неизменной частоте.
Силовые трансформаторы широко используют в энергосисте-
мах при передаче электроэнергии от электростанции к потребите-
лям, а также в различных электроустановках для получения на-
пряжений требуемой величины.
В настоящей главе рассматриваются силовые трансформаторы
(для краткости будем их называть трансформаторами) неболь-
шой мощности (не более нескольких киловольт-ампер), полу-
чившие наибольшее применение в блоках электропитания при-
борных устройств и средств автоматизации, вычислительной тех-
ники и связи.
Трансформаторы разделяют:
по числу фаз преобразуемого напряжения: однофазные и мно-
гофазные (обычно трехфазные);
по числу обмоток, приходящихся на одну фазу трансформи-
руемого напряжения: двухобмоточные и многообмоточные;
по способу охлаждения: сухие (с воздушным охлаждением) и
масляные (погруженные в металлический бак, заполненный транс-
форматорным маслом).
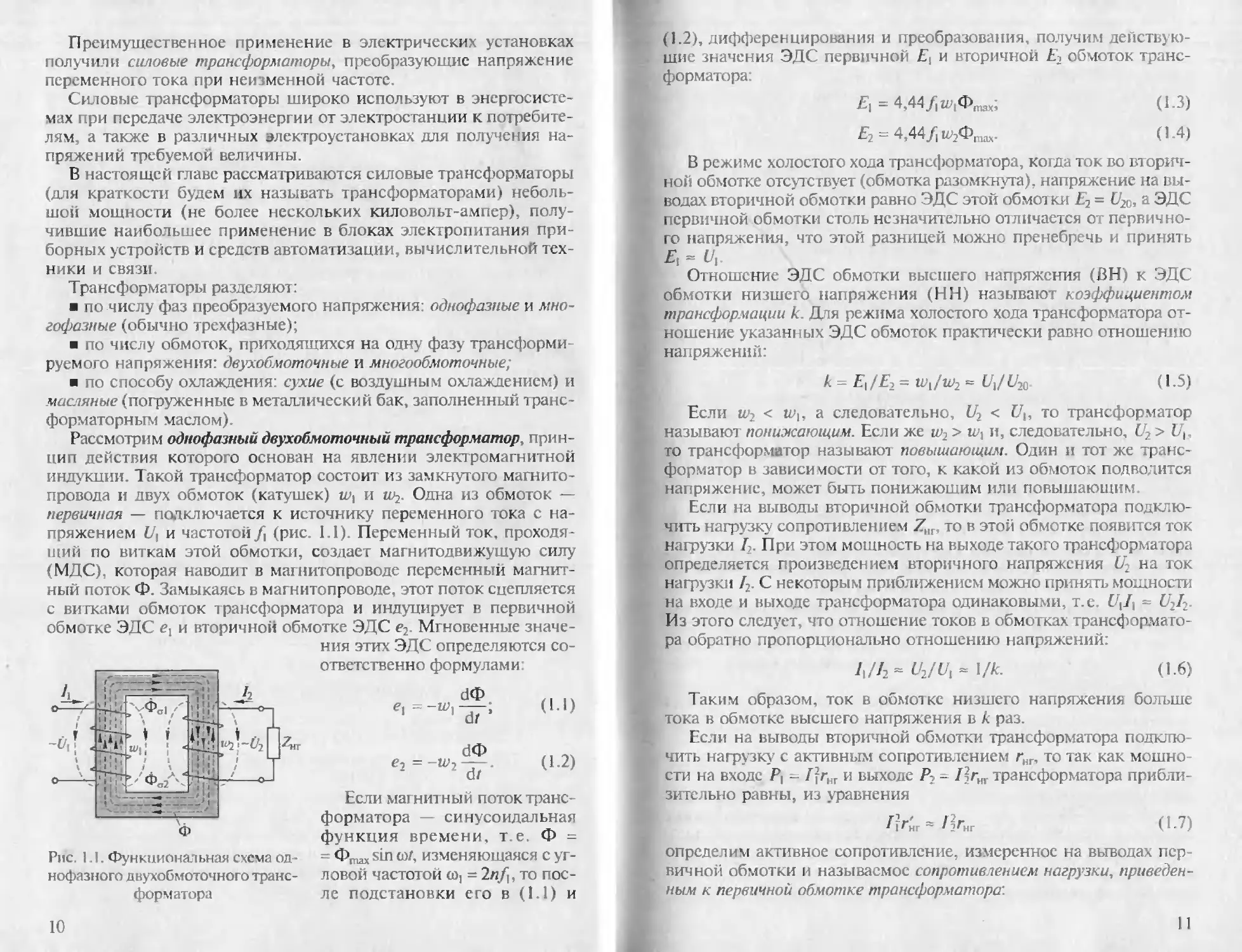
Рассмотрим однофазный двухобмоточный трансформатор, прин-
цип действия которого основан на явлении электромагнитной
индукции. Такой трансформатор состоит из замкнутого магнито-
провода и двух обмоток (катушек) и Одна из обмоток —
первичная — подключается к источнику переменного тока с на-
пряжением Ц и частотой/; (рис. 1.1). Переменный ток, проходя-
щий по виткам этой обмотки, создает магнитодвижущую силу
(МДС), которая наводит в магнитопроводе переменный магнит-
ный поток Ф. Замыкаясь в магнитопроводе, этот поток сцепляется
с витками обмоток трансформатора и индуцирует в первичной
обмотке ЭДС е1 и вторичной обмотке ЭДС е2. Мгновенные значе-
Рис. 1.1. Функциональная схема од-
нофазного двухобмоточного транс-
форматора
ния этих ЭДС определяются со-
ответственно формулами:
с!Ф .. ..
^=-^2-7-- 0-2)
СИ
Если магнитный поток транс-
форматора — синусоидальная
функция времени, т.е. Ф =
= Фпшх sin о/, изменяющаяся с уг-
ловой частотой И] = 2nfu то пос-
ле подстановки его в (1.1) и
(1.2), дифференцирования и преобразования, получим действую-
щие значения ЭДС первичной Е{ и вторичной Е, обмоток транс-
форматора:
£| - 4,44Дгд1Ф1ПЗХ;
Д? ~ 4,44/j К^Фтах-
(1-3)
(1-4)
В режиме холостого хода трансформатора, когда ток во вторич-
ной обмотке отсутствует (обмотка разомкнута), напряжение на вы-
водах вторичной обмотки равно ЭДС этой обмотки £2 = С/20, а ЭДС
первичной обмотки столь незначительно отличается от первично-
го напряжения, что этой разницей можно пренебречь и принять
Д = (/,.
Отношение ЭДС обмотки высшего напряжения (ВН) к ЭДС
обмотки низшего напряжения (НН) называют коэффициентом
трансформации к. Для режима холостого хода трансформатора от-
ношение указанных ЭДС обмоток практически равно отношению
напряжений:
А = £|/£2 = 1Д1 /1Д2 ~ U\/Uiq.
(1.5)
Если и>2 < W|, а следовательно, (А < U{, то трансформатор
называют понижающим. Если же и>2 > и> следовательно, U2 > Ui t
то трансформатор называют повышающим. Один и тот же транс-
форматор в зависи мости от того, к какой из обмоток подводится
напряжение, может быть понижающим или повышающим.
Если на выводы вторичной обмотки трансформатора подклю-
чить нагрузку сопротивлением Zlir, то в этой обмотке появится ток
нагрузки I. При этом мощность на выходе такого трансформатора
определяется произведением вторичного напряжения (7 на ток
нагрузки /2. С некоторым приближением можно принять мощности
на входе и выходе трансформатора одинаковыми, т.е. (ДД = Uzh-
Из этого следует, что отношение токов в обмотках трансформато-
ра обратно пропорционально отношению напряжений:
Д/Л = U2/Ut = \/к.
(1.6)
Таким образом, ток в обмотке низшего напряжения больше
тока в обмотке высшего напряжения в к раз.
Если на выводы вторичной обмотки трансформатора подклю-
чить нагрузку с активным сопротивлением гнг, то так как мощно-
сти на входе А) - 1]гт и выходе Р2 = 12гт трансформатора прибли-
зительно равны, из уравнения
/?гнг (1.7)
определим активное сопротивление, измеренное на выводах пер-
вичной обмотки и называемое сопротивлением нагрузки, приведен-
ным к первичной обмотке трансформатора'.
r'„, » rw(h/h>- - r.,A-, (1.8)
т.е. оно изменится в к2 раз по сравнению с сопротивлением на-
грузки гиг.
Это свойство трансформаторов используется в межкаскадных
трансформаторах, предназначенных для согласования входного
сопротивления какого-либо каскада (блока) с выходным сопро-
тивлением предыдущего каскада (блока).
Трансформатор является аппаратом переменного тока. Если пер-
вичную обмотку трансформатора включить в сеть постоянного тока,
то магнитный поток в магнитопроводе трансформатора окажется
постоянным как по величине, так и по направлению, т.е. бФ/<1/ = 0.
Такой поток нс будет индуцировать ЭДС в обмотках трансформа-
тора, что исключит передачу электроэнергии из первичной цепи
во вторичную. Кроме того, отсутствие ЭДС в первичной обмотке
трансформатора приведет к возникновению в ней тока недопусти-
мо большой величины, следствием чего будет выход из строя это-
го трансформатора.
1.2. Устройство трансформаторов
Основные части трансформаторов — магнитопровод и обмот-
ки. Магнитопровод состоит из стержней и ярм. На стержнях рас-
полагают обмотки, а ярма служат для соединения магн итопрово-
да в замкнутую систему. Магнитопроводы трансформаторов изго-
товляют из тонколистовой электротехнической стали. При часто-
те переменного тока 50 Гц применяют листы (полосы) такой
стали толщиной 0.5 или 0,35 мм. при повышенных частотах (400
Гц и более) — толщиной 0,2 — 0,08 мм (чем выше частота пере-
менного тока, тем меньше требуемая толщина листов). При час-
тотах 1000 Гц и выше магнитопроводы изготовляют из железони-
келевых сплавов типа пермаллой, характеризующихся улучшен-
ными магнитными свойствами по сравнению с электротехничес-
кими сталями: более высокой магнитной проницаемостью и мень-
шей коэрцитивной силой.
В зависимости от способа изготовления магнитопроводы транс-
форматоров подразделяют на пластинчатые и ленточные. Магни-
топроводы однофазных трансформаторов бывают трех видов:
стержневые, броневые и тороидальные.
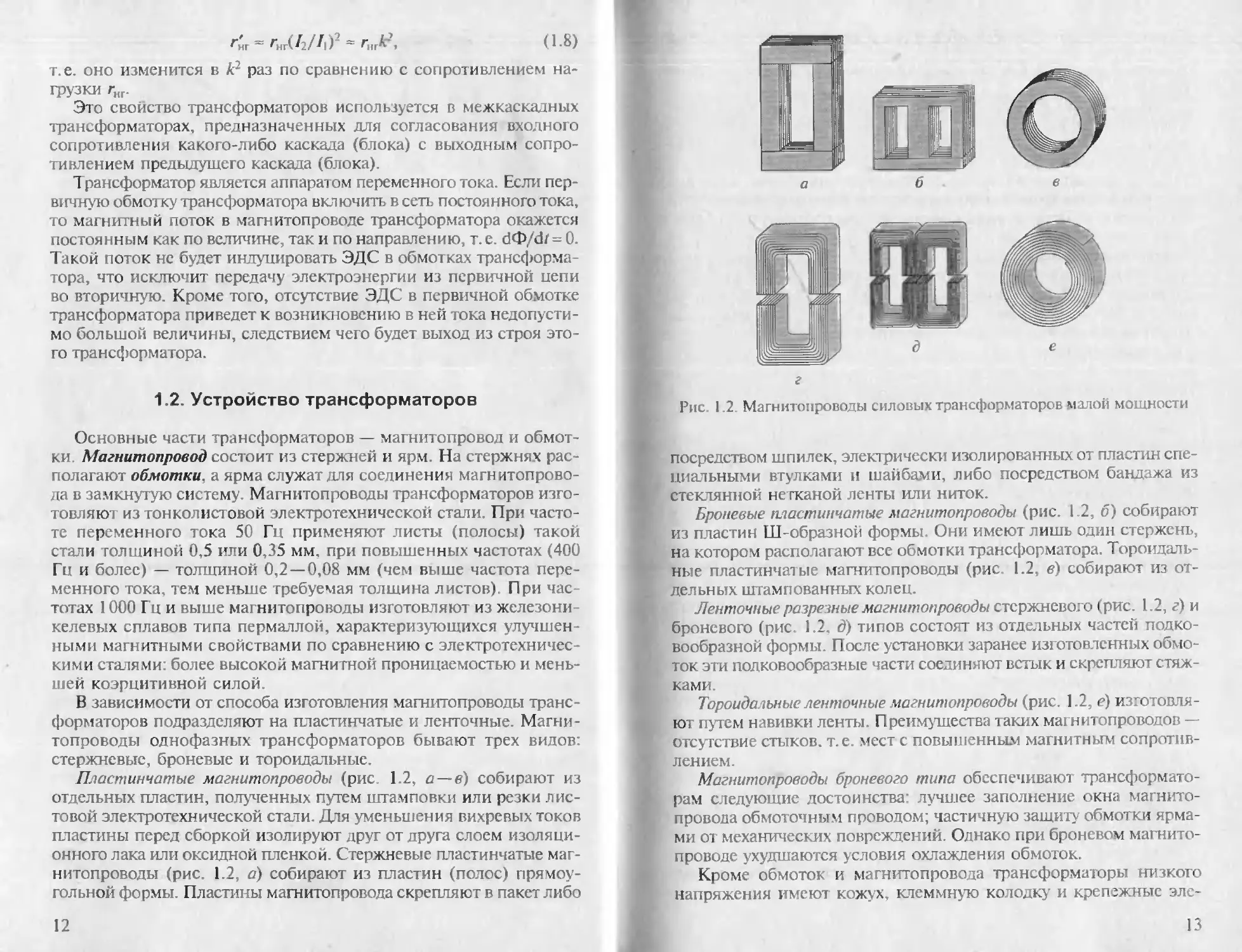
Пластинчатые магнитопроводы (рис. 1.2, а—в) собирают из
отдельных пластин, полученных путем штамповки или резки лис-
товой электротехнической стали. Для уменьшения вихревых токов
пластины перед сборкой изолируют друг от друга слоем изоляци-
онного лака или оксидной пленкой. Стержневые пластинчатые маг-
нитопроводы (рис. 1.2, а) собирают из пластин (полос) прямоу-
гольной формы. Пластины магнитопровода скрепляют в пакет либо
Рис. 1.2. Магнитопроводы силовых трансформаторов малой мощности
посредством шпилек, электрически изолированных от пластин спе-
1 циальными втулками и шайбами, либо посредством бандажа из
1 стеклянной не гканой ленты или ниток.
Броневые пластинчатые магнитопроводы (рис. 1 2, б) собирают
из пластин Ш-образной формы. Они имеют лишь один стержень,
на котором располагают все обмотки трансформатора. Тороидаль-
ные пластинчатые магнитопроводы (рис. 1.2, в) собирают из от-
дельных штампованных колец.
। Ленточные разрезные магнитопроводы стержневого (рис. 1.2, г) и
броневого (рис. 1.2. д) типов состоят из отдельных частей подко-
вообразной формы. После установки заранее изготовленных обмо-
ток эти подковообразные части соединяют встык и скрепляют стяж-
ками.
I Тороидальные ленточные магнитопроводы (рис. 1.2, е) изготовля-
ют путем навивки ленты. Преимущества таких магнитопроводов —
отсутствие стыков, т. е. мест с повышенным магнитным сопротив-
лением.
Магнитопроводы броневого типа обеспечивают трансформато-
рам следующие достоинства: лучшее заполнение окна магнито-
провода обмоточным проводом; частичную защиту обмотки ярма-
ми от механических повреждений. Однако при броневом магнито-
проводе ухудшаются условия охлаждения обмоток.
Кроме обмоток и магнитопровода трансформаторы низкого
напряжения имеют кожух, клеммную колодку и крепежные эле-
менты. Металлический кожух соединяют с магнитопроволом и за-
земляют. Эта мера необходима по условиям электробезопасности.
Высоковольтные трансформаторы делают масляными — магнито-
провод с обмотками помещают в металлический бак, заполнен-
ный трансформаторным маслом, которое увеличивает электриче-
скую прочность изоляции обмоток и способствует лучшему охлаж-
дению обмоток и магнитопровода трансформатора.
1.3. Основные зависимости и соотношения
в трансформаторах
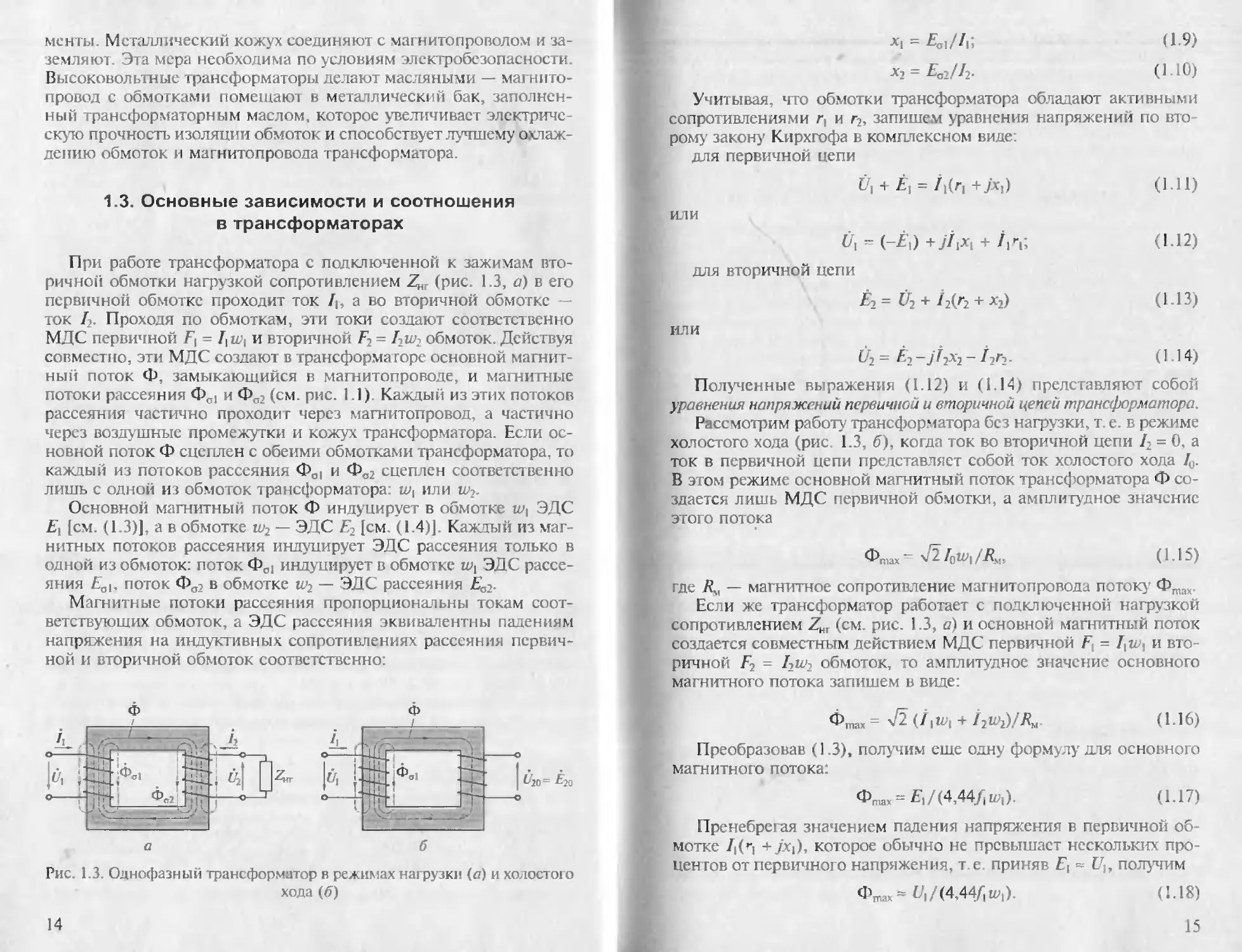
При работе трансформатора с подключенной к зажимам вто-
ричной обмотки нагрузкой сопротивлением 2^- (рис. 1.3, а) в его
первичной обмотке проходит ток 1\, а во вторичной обмотке —
ток Проходя по обмоткам, эти токи создают соответственно
МДС первичной F\ = I\W\ и вторичной F2 = I2w2 обмоток. Действуя
совместно, эти МДС создают в трансформаторе основной магнит-
ный поток Ф, замыкающийся в магнитопроводе, и магнитные
потоки рассеяния ФО| и Ф ,2 (см. рис. 1.1). Каждый из этих потоков
рассеяния частично проходит через магнитопровод, а частично
через воздушные промежутки и кожух трансформатора. Если ос-
новной поток Ф сцеплен с обеими обмотками трансформатора, то
каждый из потоков рассеяния Фо) и Фо2 сцеплен соответственно
лишь с одной из обмоток трансформатора: wt или w2.
Основной магнитный поток Ф индуцирует в обмотке wt ЭДС
£( [см. (1.3)], а в обмотке w2 — ЭДС Е2 [см. (1.4)]. Каждый из маг-
нитных потоков рассеяния индуцирует ЭДС рассеяния только в
одной из обмоток: поток Фо1 индуцирует в обмотке иц ЭДС рассе-
яния Eoi, поток Фо2 в обмотке w2 — ЭДС рассеяния Еа2.
Магнитные потоки рассеяния пропорциональны токам соот-
ветствующих обмоток, а ЭДС рассеяния эквивалентны падениям
напряжения на индуктивных сопротивлениях рассеяния первич-
ной и вторичной обмоток соответственно:
Рис. 1.3. Однофазный трансформатор в режимах нагрузки (а) и холостого
хода (б)
Х2 = Eallh-
(1.10)
Учитывая, что обмотки трансформатора обладают активными
сопротивлениями и и г2, запишем уравнения напряжений по вто-
рому закону Кирхгофа в комплексном виде:
для первичной цепи
I7i + Ёх = tx(rx + jxx)
(1.11)
или
для вторичной цепи
(1 12)
(1-13)
или
(А — £j— jf2^2 ~ 72Г2.
(1.14)
Полученные выражения (1.12) и (1.14) представляют собой
уравнения напряжений первичной и вторичной цепей трансформатора.
Рассмотрим работу трансформатора без нагрузки, т. е. в режиме
холостого хода (рис. 1.3, б), когда ток во вторичной цепи /2 = 0, а
ток в первичной цепи представляет собой ток холостого хода /0.
В этом режиме основной магнитный поток трансформатора Ф со-
здается лишь МДС первичной обмотки, а амплитудное значение
этого потока
Фщах — ^2 IqW\ //?м,
(1-15)
где 7?ч — магнитное сопротивление магнитопровода потоку Фтах.
Если же трансформатор работает с подключенной нагрузкой
сопротивлением 2^ (см. рис. 1.3, а) и основной магнитный поток
создается совместным действием МДС первичной F = Ixwx и вто-
ричной Fj = Fw2 обмоток, то амплитудное значение основного
магнитного потока запишем в виде:
Фтах - (j \wl +
(1-16)
Преобразовав (1.3), получим еше одну формулу для основного
магнитного потока:
Фптах = £’|/(4,44/11д1).
(1.17)
Пренебрегая значением падения напряжения в первичной об-
мотке /|(г| + jxx), которое обычно не превышает нескольких про-
центов от первичного напряжения, т.е. приняв £) = Ux, получим
Фтх~ Ц/(4,44/;ш|).
(1.18)
Из (1.18) следует, что основной магнитный поток не зависит
от нагрузки трансформатора. Это позволяет приравнять выраже-
ния (1.15), (1.16) и получить уравнение МДС трансформатора
/01Д] = I W\ + /2ИЪ.
(1-19)
Из уравнения (1.19) следует, что сумма МДС первичной /|U’( и
вторичной l2w2 обмоток в режиме работы трансформатора под
нагрузкой равна МДС холостого хода /owb необходимой для наве-
дения в магнитопроводе трансформатора основного магнитного
потока Фтах.
Такое взаимодействие МДС Iи I2w2 объясняется их встреч-
ным направлением, т.е. если МДС t\W\ оказывает на магнитопро-
вод намагничивающее действие, то МДС /2и>2 стремится размаг-
нитить этот магнитопровод. Несмотря на такое взаимодействие
указанных МДС. магнитный поток в магнитопроводе ФП13Х в про-
цессе работы трансформатора остается практически неизменным,
так как во всем диапазоне изменений тока нагрузки /2 (в пределах
номинального значения) МДС первичной обмотки I\W\ оказыва-
ется больше, чем МДС вторичной обмотки /2^2> На величину МДС
холостого хода /ои>].
Для объяснения этого явления воспользуемся уравнением то-
ков трансформатора, которое получим из (1.19), разделив его обе
части на число витков W\.
+ (1.20)
или
А = /о + (-/2), (1-21)
где !'>= I>(w2/W|) — ток вторичной обмотки трансформатора, при-
веденный к числу витков первичной обмотки w{, т.е. ток, который
в обмотке с числом витков wt создает такую же МДС, что и ток I
во вторичной обмотке w^. Таким образом, I2w{ = 12и>2.
Из уравнения токов трансформатора (1.21) следует, что ток
первичной обмотки 7( представляет собой сумму двух составляю-
щих, одна из которых /0 создает МДС iow}, необходимую для на-
ведения в магнитопроводе основного магнитного потока Ф т, а
другая (~/2) создает МДС Z2wb компенсирующую размагничиваю-
щее действие МДС вторичной обмотки / ,w2.
Этим объясняется тот факт, что любое изменение тока нагруз-
ки трансформатора /2 в его вторичной цепи вызывает соответству-
ющее изменение тока / ] в первичной обмотке трансформатора.
1.4. Потери и КПД трансформатора
В процессе работы трансформатора под нагрузкой часть актив-
ной мощности Pt, поступающей в первичную обмотку из сети,
рассеивается в трансформаторе на покрытие потерь. В итоге ак-
тивная мощность Л» потребляемая нагрузкой, оказывается мень-
ше мощности Р} на величину суммарных потерь в трансформато-
ре ^Р:
+ (1-22)
В трансформаторе происходя г потери двух видов — магнитные
и электрические.
Магнитные потери Ри в стальном магнитопроводе, по которо-
му замыкается переменный магнитный поток Ф111ах> складываются
из потерь на гистерезис Рг и вихревые токи Рю:
ЛЗ^ГЗЗ
Ри = Л + Лх- (1 -23)
Магнитные потери пропорциональны массе магнитопровода и
квадрату магнитной индукции в нем. Они также зависят от свойств
стали, из которой изготовлен магнитопровод. Уменьшению потерь
на гистерезис способствует изготовление магнитопровода из фер-
ромагнитных материалов (листовой электротехнической стали или
листовой стали из сплава пермаллой), обладающих небольшой
коэрцитивной силой (узкой петлей гистерезиса). Для уменьшения
потерь на вихревые токи магнитопровод делают шихтованным (из
тонких пластин текстурованной электротехнической стали, изо-
лированных друг от друга тонким слоем лака или оксидной плен -
кой) или витым из стальной ленты. Магнитные потери зависят
также от частоты переменного тока: с увеличением частот ы маг-
нитные потери возрастают как за счет потерь на гистерезис Р{, так
и потерь на вихревые токи Рнх.
Ранее было установлено, что основной магнитный поток в маг-
нитопроводе не зависит от натрузки трансформатора [см. (1.17)], и
при изменениях последней магнитные потери остаются практи-
чески неизменными. По этой причине магнитные потери называ-
ют постоянными потерями.
Электрические потери Р3 — это потери в обмотках трансформа-
тора, обусловленные нагревом обмоток проходящими по ним то-
ками:
+ ^э2 ~ Г1 +
(1.24)
Электрические потери являются переменными, так как их зна-
чение пропорционально квадрату токов в обмотках трансформатора.
Электрические потери при любой нагрузке трансформатора, Вт:
э ~
(1.25)
где Р , п,— электрические потери при номинальной нагрузке транс-
форматора; р — коэффициент токовой нагрузки трансформатора,
₽ = Л/АноЧ; Аном - номинальное 3Ha4eHto^^jj^^^^j^a
ричной обмотке трансформатора.
СЕВМАШВТУЗД
____=Г ‘ ПЧГГМЧГ* 1 *
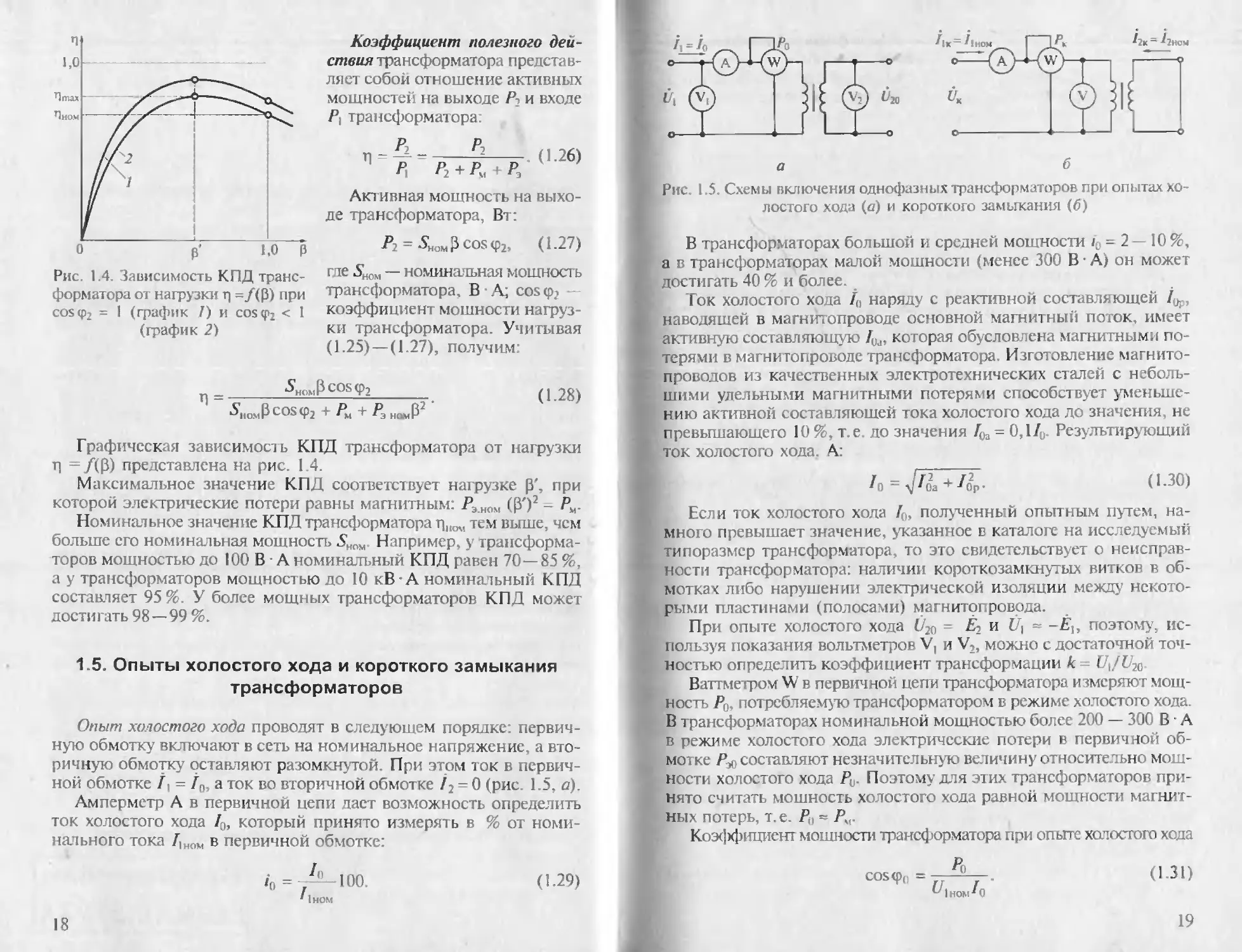
Рис. 1.4. Зависимость КПД транс-
форматора от нагрузки т| =/(Р) при
cos(p2 = 1 (график 7) и cos(p2 < 1
(график 2)
Коэффициент полезного дей-
ствия трансформатора представ-
ляет собой отношение активных
мощностей на выходе Л и входе
Рх трансформатора:
Активная мощность на выхо-
де трансформатора, Вт:
Л = Show 3 COS ф2, (1.27)
где 5Н0м — номинальная мощность
трансформатора, В-A; cos<p2 —
коэффициент мощности нагруз-
ки трансформатора. Учитывая
(1.25) — (1.27), получим:
^HOMpCOStp,
5ltoM₽cos<p2 + Ри + Рэ
номР
(1.28)
Графическая зависимость КПД трансформатора от нагрузки
т| = Др) представлена на рис. 1.4.
Максимальное значение КПД соответствует нагрузке при
которой электрические потери равны магнитным: Р ном ([У)2 -
Номинальное значение КПД трансформатора rjllov тем выше, чем
больше его номинальная мощность 5НОМ. Например, у трансформа-
торов мощностью до 100 В • А номинальный КПД равен 70—85 %,
а у трансформаторов мощностью до 10 кВ - А номинальный КПД
составляет 95 %. У более мощных трансформаторов КПД может
достигать 98—99 %.
1.5. Опыты холостого хода и короткого замыкания
трансформаторов
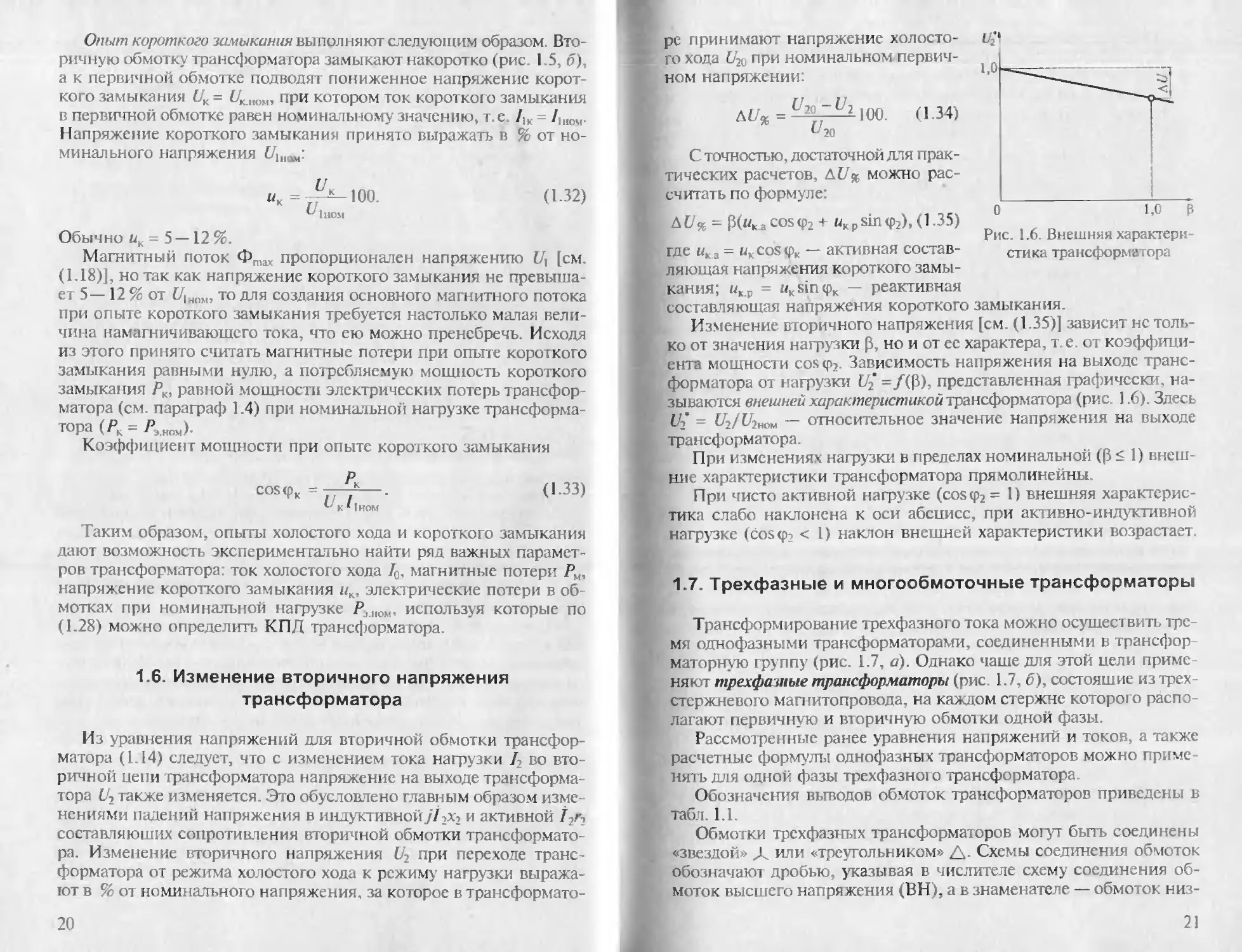
Опыт холостого хода проводят в следующем порядке: первич-
ную обмотку включают в сеть на номинальное напряжение, а вто-
ричную обмотку оставляют разомкнутой. При этом ток в первич-
ной обмотке 1\ = /0, а ток во вторичной обмотке /2 = 0 (рис. 1.5, а).
Амперметр А в первичной цепи даст возможность определить
ток холостого хода /0, который принято измерять в % от номи-
нального тока /|НОМ в первичной обмотке:
/0 = -4-100.
' 1ном
(1.29)
а
Рис. 1.5. Схемы включения однофазных трансформаторов при опытах хо-
лостого хода (а) и короткого замыкания (б)
б
В трансформаторах большой и средней мощности /0 — 2 — 10 %,
а в трансформаторах малой мощности (менее 300 В* А) он может
достигать 40 % и более.
Ток холостого хода /0 наряду с реактивной составляющей
наводящей в магнитопроводе основной магнитный поток, имеет
активную составляющую /Od, которая обусловлена магнитными по-
терями в магнитопроводе трансформатора. Изготовление магнито-
проволов из качественных электротехнических сталей с неболь-
шими удельными магнитными потерями способствует уменьше-
нию активной составляющей тока холостого хода до значения, не
превышающего 10 %, т.е. до значения - 0,1/0. Результирующий
ток холостого хода. А:
Ор*
(1-30)
Если ток холостого хода /0, полученный опытным путем, на-
много превышает значение, указанное в каталоге на исследуемый
типоразмер трансформатора, то это свидетельствует о неисправ-
ности трансформатора: наличии короткозамкнутых витков в об-
мотках либо нарушении электрической изоляции между некото-
рыми пластинами (полосами) магнитопровода.
При опыте холостого хода й2о = и k | ~ -£15 поэтому7, ис-
пользуя показания вольтметров Vj и V2, можно с достаточной точ-
ностью определить коэффициент трансформации к ~ UJU
2С-
Ваттметром W в первичной цепи трансформатора измеряют мощ-
ность Ро, потребляемую трансформатором в режиме холостого хода.
В трансформаторах номинальной мощностью более 200 — 300 В ’ А
в режиме холостого хода электрические потери в первичной об-
мотке Рэо составляют незначительную величину относительно мощ-
ности холостого хода Р^. Поэтому для этих трансформаторов при-
нято считать мощность холостого хода равной мощности магнит-
ных потерь, т. е. Р(] ~ Рч.
КоэсМлщиент мощности трансформатора при опыте холостого хода
cos<p(]
U 1 ном А)
(1.31)
Опыт короткого замыкания выполняют следующим образом. Вто-
ричную обмотку трансформатора замыкают накоротко (рис. 1.5, б),
а к первичной обмотке подводят пониженное напряжение корот-
кого замыкания t/K = t/K„OM, при котором ток короткого замыкания
в первичной обмотке равен номинальному значению, т.е. /1к = /1|10м.
Напряжение короткого замыкания привяло выражать в % от но-
минального напряжения
«к=7^100-
V 11ЮМ
(1-32)
Обычно и* = 5 —12 %.
Магнитный поток Фтах пропорционален напряжению U\ [см,
(1.18)], но так как напряжение короткого замыкания не превыша-
ет 5—12 % от Цном, то для создания основного магнитного потока
при опыте короткого замыкания требуется настолько малая вели-
чина намагничивающего тока, что ею можно пренебречь. Исходя
из этого принято считать магнитные потери при опыте короткого
замыкания равными нулю, а потребляемую мощность короткого
замыкания Рк, равной мощности электрических потерь трансфор-
матора (см. параграф 1.4) при номинальной нагрузке трансформа-
тора (Рк = Л.ном).
Коэффициент мощности при опыте короткого замыкания
cos(pK =
О к Ином
(1.33)
Таким образом, опыты холостого хода и короткого замыкания
дают возможность экспериментально найти ряд важных парамет-
ров трансформатора: ток холостого хода 70, магнитные потери Р.„
напряжение короткого замыкания ик, электрические потери в об-
мотках при номинальной нагрузке Р,|1ОМ, используя которые по
(1.28) можно определить КПД трансформатора.
1.6. Изменение вторичного напряжения
трансформатора
Из уравнения напряжений для вторичной обмотки трансфор-
матора (1.14) следует, что с изменением тока нагрузки I во вто-
ричной цепи трансформатора напряжение на выходе трансформа-
тора иг также изменяется. Это обусловлено главным образом изме-
нениями падений напряжения в индуктивнойj/2x2 и активной /2г2
составляющих сопротивления вторичной обмотки трансформато-
ра. Изменение вторичного напряжения (72 при переходе транс-
форматора от режима холостого хода к режиму нагрузки выража-
ют в % от номинального напряжения, за которое в трансформато-
ре принимают напряжение холосто-
го хода С72о при номинальном первич-
ном напряжении:
Д(/% = f-J юо. (1.34)
^20
С точностью, достаточной для прак-
тических расчетов, А {7% можно рас-
считать по формуле:
Д(/% = Р(мкл cos <р2 + и* р sin <р2), (1.35)
Рис. 1.6. Внешняя характери-
стика трансформатора
где и¥ з = wkcos<pK — активная состав-
ляющая напряжения короткого замы-
кания; = wKsincpK — реактивная
составляющая напряжения короткого замыкания.
Изменение вторичного напряжения [см. (1.35)] зависит нс толь-
ко от значения нагрузки р, но и от ее характера, т.е. от коэффици-
ента мощности cos<p2. Зависимость напряжения на выходе транс-
форматора от нагрузки U2 =/(Р)? представленная графически, на-
зываются внешней характеристикой трансформатора (рис. 1.6). Здесь
Ui - С4/^2ном — относительное значение напряжения на выходе
трансформатора.
При изменениях нагрузки в пределах номинальной (р < 1) внеш-
ние характеристики трансформатора прямолинейны.
При чисто активной нагрузке (cos(p2 = О внешняя характерис-
тика слабо наклонена к оси абсцисс, при активно-индуктивной
нагрузке (cos<p2 < 1) наклон внешней характеристики возрастает.
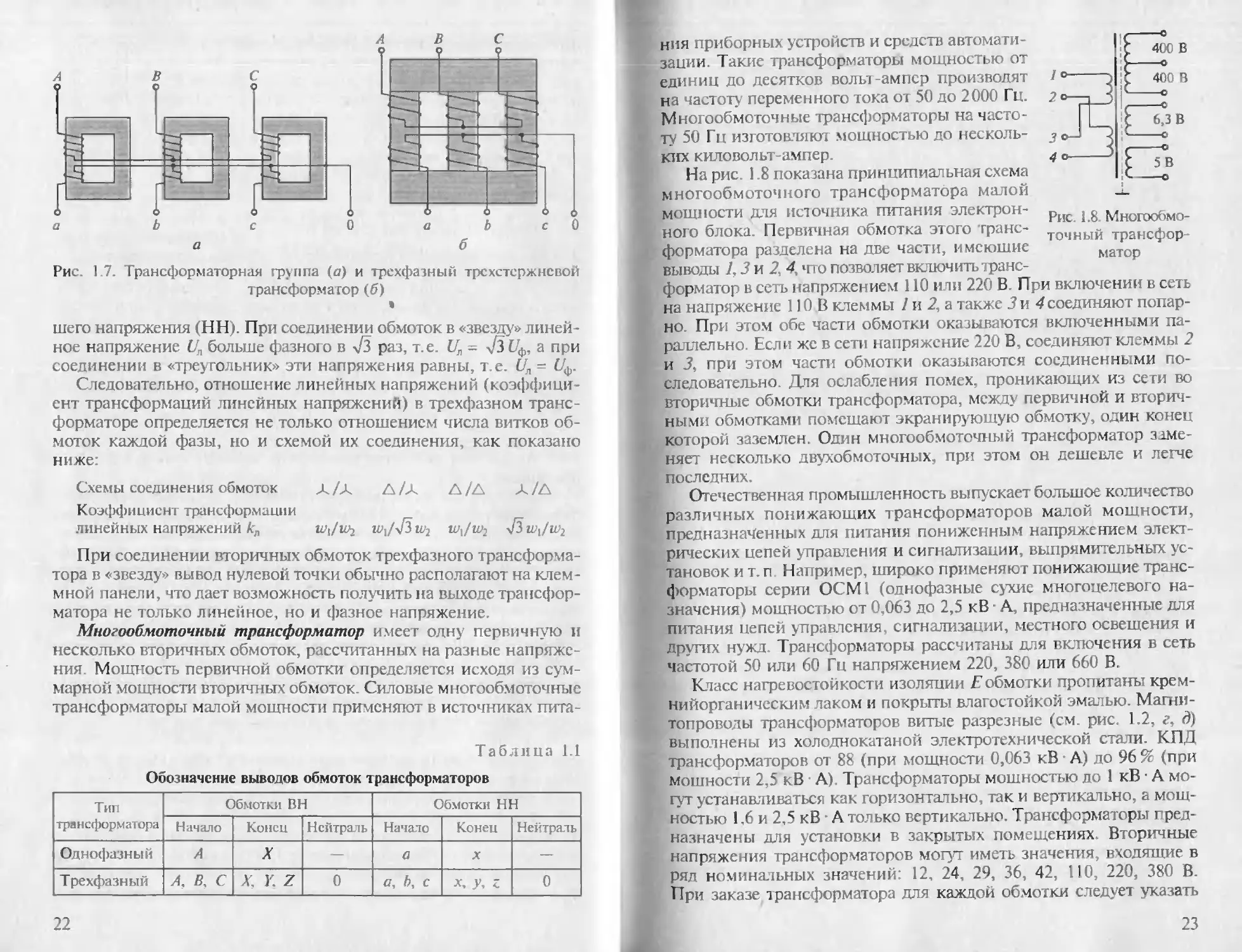
1.7. Трехфазные и многообмоточные трансформаторы
Трансформирование трехфазного тока можно осуществить тре-
мя однофазными трансформаторами, соединенными в трансфор -
маторную группу (рис. 1.7, а). Однако чаше для этой цели приме-
няют трехфазные трансформаторы (рис. 1.7, 6), состоящие из трех-
стержневого магнитопровода, на каждом стержне которого распо-
лагают первичную и вторичную обмотки одной фазы.
Рассмотренные ранее уравнения напряжений и токов, а также
расчетные формулы однофазных трансформаторов можно приме-
нять для одной фазы трехфазного трансформатора.
Обозначения выводов обмоток трансформаторов приведены в
табл. 1.1.
Обмотки трехфазных трансформаторов могуч быть соединены
«звездой» А или «треугольником» △. Схемы соединения обмоток
обозначают дробью, указывая в числителе схему соединения об-
моток высшего напряжения (ВН), а в знаменателе — обмоток низ-
Рис. 1.7. Трансформаторная группа (а) и трехфазный трехстержневой
трансформатор (б)
*
шего напряжения (НН). При соединении обмоток в «звезду» линей-
ное напряжение СЦ больше фазного в >/3 раз, т.е. Un = х/3/7ф, а при
соединении в «треугольник» эти напряжения равны, т.е. Un- С/ф.
Следовательно, отношение линейных напряжений (коэффици-
ент трансформаций линейных напряжений) в трехфазном транс-
форматоре определяется не только отношением числа витков об-
моток каждой фазы, но и схемой их соединения, как показано
ниже:
Схемы соединения обмоток
△ /А А/Л
Коэффициент трансформации
линейных напряжений кл wjuh
Wj/л/З w2 W\/w2 >/3 wx/w2
При соединении вторичных обмоток трехфазного трансформа-
тора в «звезду» вывод нулевой точки обычно располагают на клем-
мной панели, что дает возможность получить на выходе трансфор-
матора не только линейное, но и фазное напряжение.
Многообмоточный трансформатор имеет одну первичную и
несколько вторичных обмоток, рассчитанных на разные напряже-
ния. Мощность первичной обмотки определяется исходя из сум-
марной мощности вторичных обмоток. Силовые многообмоточные
трансформаторы малой мощности применяют в источниках пита-
Таблииа 1.1
Обозначение выводов обмоток трансформаторов
Тип трансформатора Обмотки BH Обмотки НН
Начало Коней Нейтраль Начало Коней Нейтраль
Однофазный А X — а % “
Трехфазный А, В, С X, Y. Z 0 a, ft, с X, у, < 0
Рис. 1.8. Многообмо-
точный трансфор-
матор
ния приборных устройств и средств автомати-
зации. Такие трансформаторы мощностью от
единиц до десятков вольт-ампер производят
на частоту переменного тока от 50 до 2000 Гц.
Многообмоточные трансформаторы на часто-
ту 50 Гц изготовляют мощностью до несколь-
ких киловольт-ампер.
На рис. 1.8 показана принципиальная схема
многообмоточного трансформатора малой
мощности для источника питания электрон-
ного блока. Первичная обмотка этого транс-
форматора разделена на две части, имеющие
выводы Л 5 и 2, 4 что позволяет включить транс-
форматор в сеть напряжением 110 или 220 В. При включении в сеть
на напряжение НОВ клеммы 1 и 2, а также 3 и 4 соединяют попар-
но. При этом обе части обмотки оказываются включенным и па-
раллельно. Если же в сети напряжение 220 В, соединяют клеммы 2
и 5, при этом части обмотки оказываются соединенными по-
следовательно. Для ослабления помех, проникающих из сети во
вторичные обмотки трансформатора, между первичной и вторич-
ными обмотками помещают экранирующую обмотку, один конец
которой заземлен. Один многообмоточный трансформатор заме-
няет несколько двухобмоточных, при этом он дешевле и легче
последних.
Отечественная промышленность выпускает большое количество
различных понижающих трансформаторов малой мощности,
предназначенных для питания пониженным напряжением элект-
рических цепей управления и сигнализации, выпрямительных ус-
тановок и т. п Например, широко применяют понижающие транс-
форматоры серии ОСМ1 (однофазные сухие многоцелевого на-
значения) мощностью от 0,063 до 2,5 кВ * А, предназначенные для
питания цепей управления, сигнализации, местного освещения и
других нужд. Трансформаторы рассчитаны для включения в сеть
частотой 50 или 60 Гц напряжением 220, 380 или 660 В.
Класс нагревостойкости изоляции Е обмотки пропитаны крем-
нийорганическим лаком и покрыты влагостойкой эмалью. Магни-
топроводы трансформаторов витые разрезные (см. рис. 1.2, г, д)
выполнены из холоднокатаной электротехнической стали. КПД
трансформаторов от 88 (при мощности 0,063 кВ А) до 96 % (при
мощности 2,5 кВ * А). Трансформаторы мощностью до 1 кВ • А мо-
гут устанавливаться как горизонтально, так и вертикально, а мощ-
ностью 1,6 и 2,5 кВ • А только вертикально. Трансформаторы пред-
назначены для установки в закрытых помещениях. Вторичные
напряжения трансформаторов могут иметь значения, входящие в
ряд номинальных значений: 12, 24, 29, 36, 42, ПО, 220, 380 6.
При заказе трансформатора для каждой обмотки следует указать
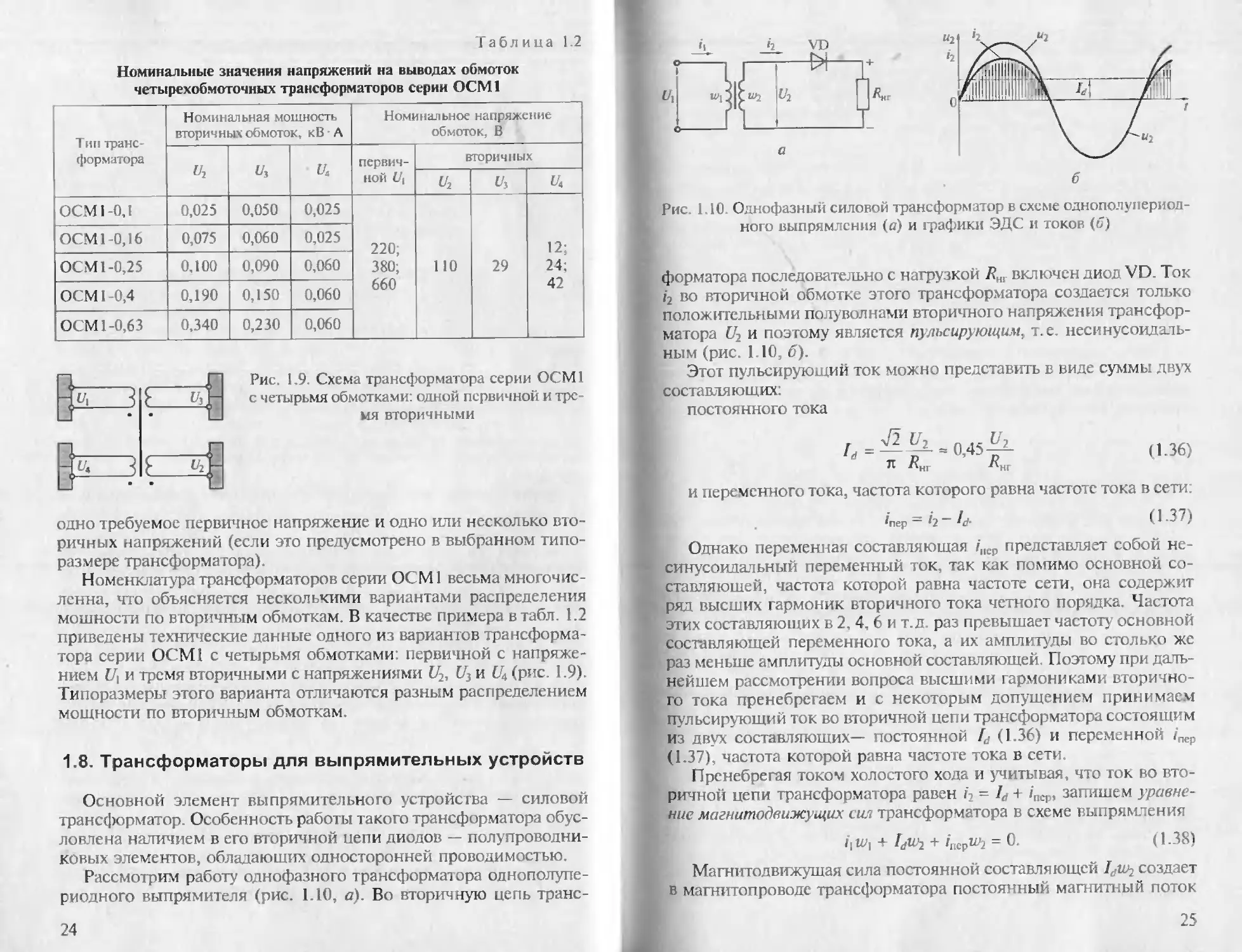
Таблица 1.2
Номинальные значения напряжений на выводах обмоток
четырехобмоточных трансформаторов серии ОСМ1
Тип транс- форматора Номинальная мощность вторичных обмоток, кВ* А Номинальное напряжение обмоток, В
<4 <4 ил первич- НОЙ t/| вторичных
<4 Ц
ОСМ I -0,1 0,025 0,050 0,025 220; 380; 660 ПО 29 12; 24; 42
ОСМ 1-0,16 0,075 0,060 0,025
ОС Ml-0,25 0,100 0,090 0,060
ОСМ 1 -0,4 0,190 0,150 0,060
ОСМ 1-0,63 0,340 0,230 0,060
Рис. 1.9. Схема трансформатора серии ОСМ1
с четырьмя обмотками: одной первичной и тре-
мя вторичными
одно требуемое первичное напряжение и одно или несколько вто-
ричных напряжений (если это предусмотрено в выбранном типо-
размере трансформатора).
Номенклатура трансформаторов серии ОС М1 весьма многочис-
ленна, что объясняется несколькими вариантами распределения
мощности по вторичным обмоткам. В качестве примера в табл. 1.2
приведены технические данные одного из вариантов трансформа-
тора серии ОСМ1 с четырьмя обмотками: первичной с напряже-
нием Ux и тремя вторичными с напряжениями U21 U3 и (рис. 1.9).
Типоразмеры этого варианта отличаются разным распределением
мощности по вторичным обмоткам.
1.8. Трансформаторы для выпрямительных устройств
Основной элемент выпрямительного устройства — силовой
трансформатор. Особенность работы такого трансформатора обус-
ловлена наличием в его вторичной цепи диодов — полупроводни-
ковых элементов, обладающих односторонней проводимостью.
Рассмотрим работу однофазного трансформатора однополупе-
риодного выпрямителя (рис. 1.10, а). Во вторичную цепь транс -
Рис. 1.10. Однофазный силовой трансформатор в схеме однополупериод-
ного выпрямления (а) и графики ЭДС и токов (б)
форматора последовательно с нагрузкой /?иг включен диод VD. Ток
/2 во вторичной обмотке этого трансформатора создается только
положительными полуволнами вторичного напряжения трансфор-
матора U2 и поэтому является пульсирующим, т.е. несинусоидаль-
ным (рис. 1.105 б).
Этот пульсирующий ток можно представить в виде суммы двух
составляющих:
постоянного тока
/d= л ^Le0’45TL П-36)
Л Лнг 1\т
и переменного тока, частота которого равна частоте тока в сети:
*пер - 4 - 4/- (1 -37)
Однако переменная составляющая /||ср представляет собой не-
синусоидальный переменный ток, так как помимо основной со-
ставляющей, частота которой равна частоте сети, она содержит
ряд высших гармоник вторичного тока четного порядка. Частота
этих составляющих в 2, 4. 6 и т.д. раз превышает частоту основной
составляющей переменного тока, а их амплитуды во столько же
раз меньше амплитуды основной составляющей. Поэтому при даль-
нейшем рассмотрении вопроса высшими гармониками вторично-
го тока пренебрегаем и с некоторым допущением принимаем
пульсирующий ток во вторичной цепи трансформатора состоящим
из двух составляющих— постоянной fd (1.36) и переменной /пер
(1.37), частота которой равна частоте тока в сети.
Пренебрегая током холостого хода и учитывая, что ток во вто-
ричной цепи трансформатора равен ъ = 4 + zncP> запишем уравне-
ние магнитодвижущих сил трансформатора в схеме выпрямления
/] W} + FdW2 + /Пср^2 = °'
(1.38)
Магнитодвижущая сила постоянной составляющей создает
в магнитопроводе трансформатора постоянный магнитный поток
называемый потоком вынужденного намагничивания, посколь-
ку, будучи постоянным, он не индуцирует ЭДС в обмотках транс-
форматора. Этот поток компенсируется магнитодвижущей силой
первичной обмотки В итоге поток создает дополнительное
подмагничивание магнитопровода трансформатора, что ведет к
усилению магнитного насыщения магнитопровода и вызывает уве-
личение намагничивающего тока, а следовательно, и рост пер-
вичного тока i\. В результате возрастают потери и усиливается на-
грев трансформатора, а его КПД уменьшается. Так в однофазной
схеме однополупериодного выпрямления мощность на входе транс-
форматора в 2,69 раза превышает полезную мощность на выходе
Pd=UdId, (1.39)
т.е. Р] = 2,69Pd. В схемах двухполупериодного выпрямления ток в
нагрузке 7?нг создается в течение обоих полупериодов переменного
тока. В этом случае потребляемая трансформатором мощность Pt =
= 1,23 Ра, т. е. условия работы трансформатора более благоприятные.
Выбор силового трансформатора для выпрямителя ведется по
типовой мощности Sj, представляющей собой среднеарифметиче-
ское значение номинальных мощностей первичной 51 и вторич-
ной А обмоток трансформатора:
•5т — 0,5(S1T + = 0,5/n(t/|HOM/|HOM + (АномЛном)» (^-40)
где т — число фаз (т = 1 для однофазного и т - 3 для трехфазного
трансформаторов).
В случае трехфазного трансформатора в (1.40) подставляют фаз-
ные значения токов напряжений.
Типовую мощность выбранного трансформатора запишем в виде
^т^/номЛ/ном» (1.41)
где kr — коэффициент типовой мощности; 1^ном и 4ном — требуе-
мые номинальные значения постоянного напряжения и тока.
Таблица 1.3
Параметры схем выпрямления
Схема выпрямления Значения коэффициентов
ku к
Однофазная однополупериодная 2,22 3,09
Однофазная двухполупериолная мостовая 1.11 1,23
Однофазная двухполупериолная с нулевым выводом 1,11 1.48
Трехфазная с нулевым выводом 0,855 1,345
Трехфазная мостовая 0,427 1,05
Типовая мощность трансформатора всегда больше его мощнос-
ти на выходе, т.е. Ат > 1. Объясняется это тем, что при любой схеме
выпрямления U2 > Udn [2> 4 Поэтому в трансформаторах, работа-
ющих в выпрямительных схемах, полезная мощность определяет-
ся постоянной составляющей вторичного тока /Л а нагрев обмо-
ток трансформатора происходит полными первичным /, и вторич-
ным / токами, содержащими гармонические составляющие. Зна-
чение коэффициента типовой мощности характеризует степень
использования трансформатора: чем меньше Лт отличается от еди-
ницы, тем лучше используется трансформатор в данной схеме
выпрямления.
Требуемое номинальное значение вторичного напряжения
тран сформатора
Р ^4ном — ( 1 .42)
где ки — коэффициент напряжения.
При выборе или проектировании силового трансформатора для
выпрямительной установки необходимо знать значения коэффи-
циентов JtT и соответствующих принятой схеме выпрямления
(табл. 1.3). Анализ данных табл. 1.3 показывает, что лучшее исполь-
зование трансформаторов происходит в мостовых схемах выпрям-
ления.
1.9. Автотрансформаторы
Автотрансформатор в отличие от трансформатора имеет одну
обмотку, часть витков которой принадлежит одновременно пер-
вичной и вторичной цепям.
На рис. LI 1, а показана схема понижающего автотрансформа-
тора. в котором участок аХ — общая часть витков с током /12.
Рис. 1.11. Принципиальные схемы однофазного (а) и трехфазного (tf)
автотрансформаторов
Как в обычном трансформаторе первичный 1\ и вторичный 1
токи автотрансформатора практически находятся в противофазе,
т.е. их векторы сдвинуты относительно друг дру1а на угол, близ-
кий к 180°. Из этого следует, что ток /|2 в обшей части витков аХ
равен разности вторичного и первичного токов автотрансформа-
тора:
Л2= А-А (1.43)
или
А= А + Лз- (1.44)
Мощность, передаваемая нагрузке 7НГ, В-А:
5д= iA/4 (145)
С учетом (1.44) получим
5а = 14(7, + /12) = и2Ц + Ц/12 = 5Э + 5ЗМ, (1.46)
где 5Э = U2lx — мощность, передаваемая во вторичную цепь авто-
трансформатора электрическим путем благодаря электрической
связи между первичной и вторичной цепями; 5ЭМ = и2Ц ? — мощ-
ность, передаваемая во вторичную цепь автотрансформатора элек-
тромагнитным путем, посредством магнитного потока.
Габаритные размеры трансформатора или автотрансформатора
определяются их электромагнитными мощностями: для трансфор-
матора 5ЭМ т = Е212, для автотрансформатора S t А = Ег1{ >. В этих
выражениях принимаем Еэ - U2. Известно, что в автотрансформа-
торе электромагнитным путем передается только часть всей посту-
пающей во вторичную цепь мощности, т.е. < 5эмТ, что позво-
ляет уменьшить сечение магнитопровода автотрансформатора и,
следовательно, сократить среднюю длину витка обмотки. Это ведет
к уменьшению расходов электротехнической стали и обмоточной
меди на изготовление автотрансформатора и уменьшению магнит-
ных и электрических потерь. Таким образом, автотрансформатор
по сравнению с трансформатором равной мощности обладает мень-
шими размерами и массой, более высоким КПД, меньшей сто-
имостью.
Указанные преимущества автотрансформатора тем значитель-
нее, чем большая доля мощности передается в нагрузку электри-
ческим путем, т.е. чем больше составляющая мощности автотран-
сформатора, передаваемая во вторичную цепь электрическим пу-
тем 5Э. Эта мощность обратно пропорциональна коэффициенту7
трансформации:
(1.47)
где kK - w^x/waX— коэффициент трансформации автотрансформа-
тора.
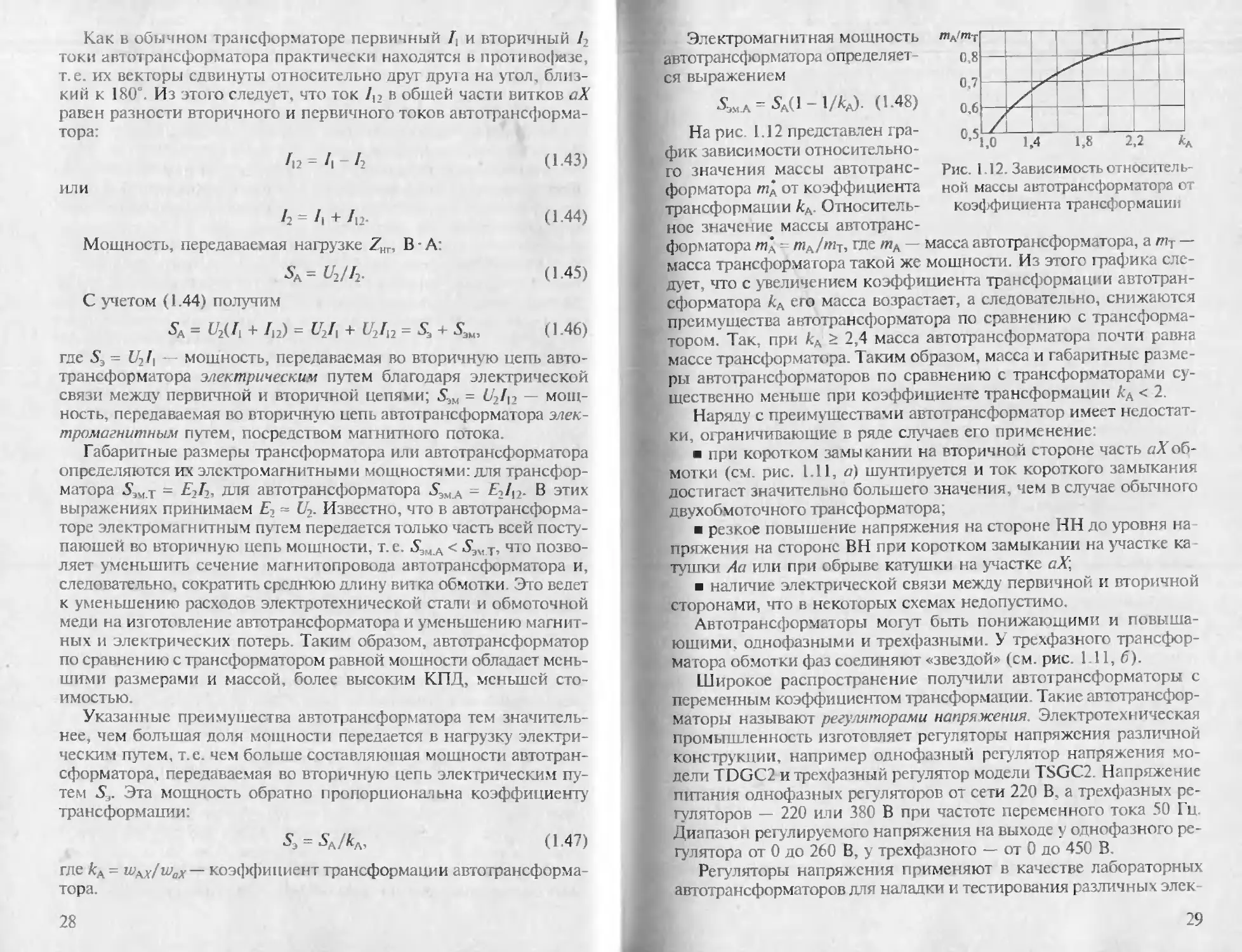
Электромагнитная мощность
автотрансформатора определяет-
ся выражением
£ма = $д(1 - 1/*д). (1 48)
На рис. 1.12 представлен гра-
фик зависимости относительно-
го значения массы автотранс-
форматора /Ид от коэффициента
трансформации ЛА. Относитель-
Рис. 1.12. Зависимость относитель-
ной массы автотрансформатора от
коэффициента трансформации
ное значение массы автотранс-
форматора тд = /иА//ит> где /иА — масса автотрансформатора, а /ит —
масса трансформатора такой же мощности. Из этого графика сле-
дует, что с увеличением коэффициента трансформации автотран-
сформатора Аа его масса возрастает, а следовательно, снижаются
преимущества автотрансформатора по сравнению с трансформа-
тором. Так, при /сА > 2,4 масса автотрансформатора почти равна
массе трансформатора. Таким образом, масса и габаритные разме-
ры автотрансформаторов по сравнению с трансформаторами су-
щественно меньше при коэффициенте трансформации < 2.
Наряду с преимуществами автотрансформатор имеет недостат-
ки, ограничивающие в ряде случаев его применение:
при коротком замыкании на вторичной стороне часть аХоб-
мотки (см. рис. 1.11, л) шунтируется и ток короткого замыкания
достигает значительно большего значения, чем в случае обычного
двухобмоточного трансформатора;
резкое повышение напряжения на стороне НН до уровня на-
пряжения на стороне ВН при коротком замыкании на участке ка -
тушки Аа или при обрыве катушки на участке аХ\
наличие электрической связи между первичной и вторичной
сторонами, что в некоторых схемах недопустимо.
Автотрансформаторы могут быть понижающими и повыша-
ющими, однофазными и трехфазными. У трехфазного трансфор-
матора обмотки фаз соединяют «звездой» (см. рис. 1.11, б).
Широкое распространение получили автотрансформаторы с
переменным коэффициентом трансформации. Такие автотрансфор-
маторы называют регуляторами напряжения. Электротехническая
промышленность изготовляет регуляторы напряжения различной
конструкции, например однофазный регулятор напряжения мо-
дели TDGC2 и трехфазный регулятор модели TSGC2. Напряжение
питания однофазных регуляторов от сети 220 В, а трехфазных ре-
гуляторов — 220 или 380 В при частоте переменного тока 50 Гц.
Диапазон регулируемого напряжения на выходе у однофазного ре-
гулятора от 0 до 260 В, у трехфазного — от 0 до 450 В.
Регуляторы напряжения применяют в качестве лабораторных
автотрансформаторов для наладки и тестирования различных элек-
Рис. 1.13. Схемы включения регулировочных автотрансформаторов:
а — однофазного; б — трехфазного
а
Рис. 1.14. Внешний вид однофазного (а) и трехфазного (б) регулировоч-
ных автотрансформаторов
трических приборов и установок. Однофазный регулятор выпол-
нен на тороидальном магнитопроводе с навитой катушкой из мед-
ного провода. Катушка имеет неизолированную «дорожку» для кон-
такта со скользящей угольной щеткой. Трехфазный регулятор вы-
полнен на трех тороидальных магнитопроводах, расположенных
вертикально друг над другом, с катушками, соединенными «звез-
дой». Схемы включения регуляторов напряжения представлены на
рис. 1.13, а на рис. 1.14 показан внешний вид однофазного (я) и
трехфазного (б) регулировочных автотрансформаторов.
Все модели регуляторов снабжены шкалой поворота ручки ре-
гулятора и вольтметром, указывающим напряжение на выходе ре-
гулятора.
Контрольные вопросы
1. Почему обмотку низшего напряжения трансформатора выполняют
проводом большего сечения?
2. Почему с увеличением вторичного тока трансформатора растет ток
в первичной обмотке?
3. На что расходуется мощность, потребляемая трансформатором в
режимах холостого хода и короткого замыкания?
4. В чем особенность выбора трансформатора для выпрямительной ус-
тановки?
5. Каковы достоинства и недостатки автотрансформаторов по сравне-
нию с двухобмоточными трансформаторами?
Глава 2
ТРАНСФОРМАТОРНЫЕ УСТРОЙСТВА СО СПЕЦИАЛЬНЫМИ
СВОЙСТВАМИ
2.1. Пик-трансформаторы
Пик-трансформаторы применяют для преобразования синусо-
идального напряжения в импульсы пикообразной формы. Такие
импульсы напряжения с крутым фронтом необходимы для управ-
ления тиристорами либо другими полупроводниковыми или элек-
тронными устройствами.
Принцип работы пик-трансформатора основан на явлении маг-
нитного насыщения ферромагнитного материала. Существует не-
сколько конструктивных исполнений пик-трансформаторов. Рассмот-
рим пик-трансформатор с магнитным шунтом (рис. 2.1). Первичная
обмотка расположена на стержне увеличенного сечения, благо-
даря чему при подведенном к этой обмотке синусоидальном напря-
жении и в стержне не наступает состояния магнитного насыщения.
Стержень со вторичной обмоткой дь имеет уменьшенное сечение,
и при некотором значении напряжения и} (магнитного потока Ф2)
в нем наступает магнитное насыщение. Третий стержень — это маг-
нитный шунт, отделенный от остальной части магнитопровода воз-
S2
Рис. 2.1. Функциональная схема пик трансформатора с магнитным шунтом
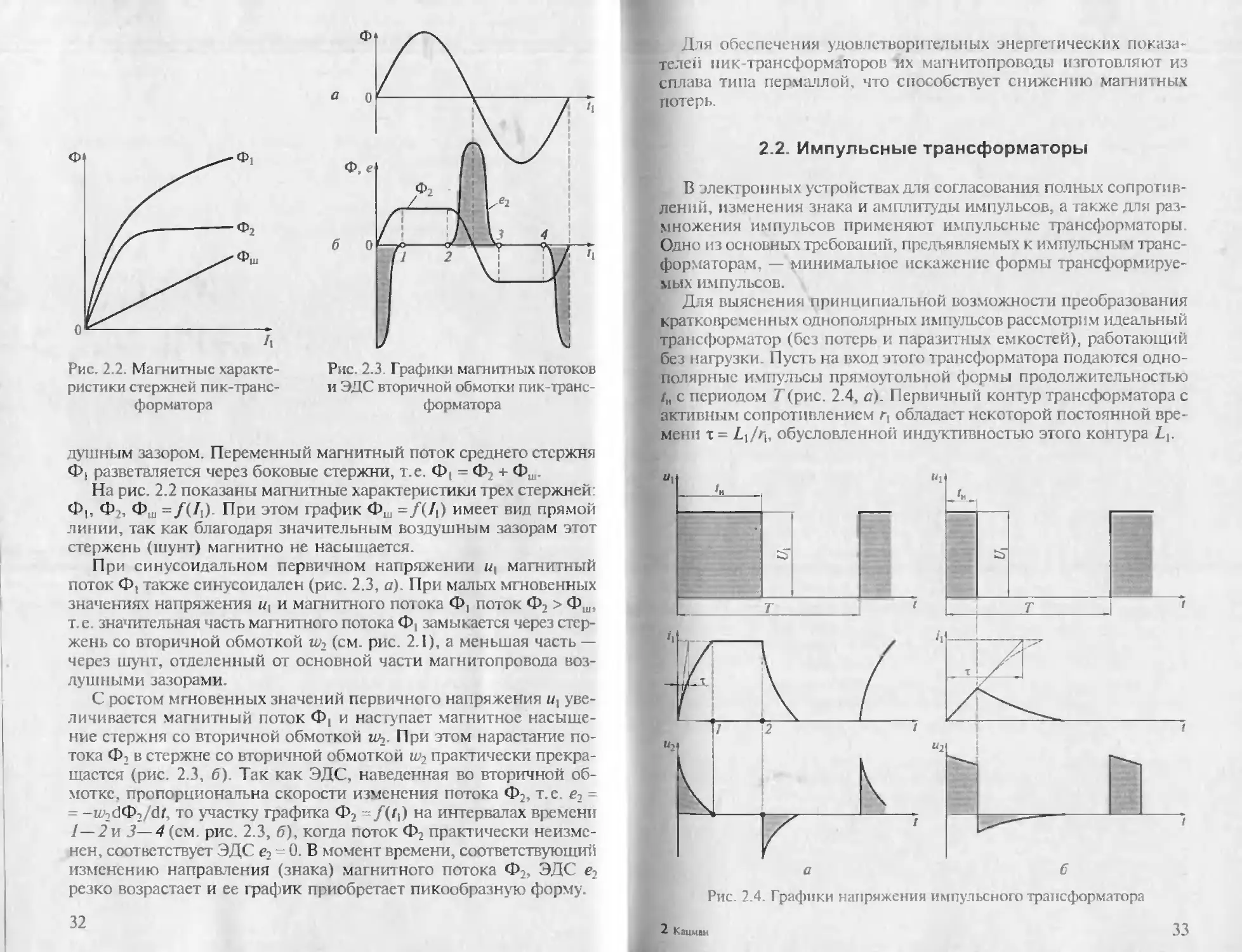
Рис. 2.3. Графики магнитных потоков
и ЭДС вторичной обмотки пик-транс-
форматора
Рис. 2.2. Магнитные характе-
ристики стержней пик-транс-
форматора
душным зазором. Переменный магнитный поток среднего стержня
Ф| разветвляется через боковые стержни, т.е. Ф( = Ф + Фш.
На рис. 2.2 показаны магнитные характеристики трех стержней:
Ф|, Ф2, Ф u = /(Л). При этом график Ф,, =/(/() имеет вид прямой
линии, так как благодаря значительным воздушным зазорам этот
стержень (шунт) магнитно не насыщается.
При синусоидальном первичном напряжении U| магнитный
поток Ф( также синусоидален (рис. 2.3, а). При малых мгновенных
значениях напряжения и магнитного потока Ф, поток Ф2 > Фш.
т. е. значительная часть магнитного потока Ф1 замыкается через стер-
жень со вторичной обмоткой w2 (см. рис. 2.1), а меньшая часть —
через шунт, отделенный от основной части магнитопровода воз-
душными зазорами.
С ростом мгновенных значений первичного напряжения «, уве-
личивается магнитный поток Ф1 и наступает магнитное насыще-
ние стержня со вторичной обмоткой w2. При этом нарастание по-
тока Ф2 в стержне со вторичной обмоткой w2 практически прекра-
щается (рис. 2.3, б). Так как ЭДС. наведенная во вторичной об-
мотке. пропорциональна скорости изменения потока Ф2, т.е. е2 =
= -и>2<ЗФ2,'й(, то участку графика Ф2 = /(/,) на интервалах времени
1—2 и 3—4 (см. рис. 2.3, б), когда поток Ф2 практически неизме-
нен, соответствует ЭДС е2 - 0. В момент времени, соответствующий
изменению направления (знака) магнитного потока Ф2, ЭДС е2
резко возрастает и ее график приобретает пикообразную форму.
Для обеспечения удовлетворительных энергетических показа-
телей пик-трансформаторов их магнитопроводы изготовляют из
сплава типа пермаллой, что способствует снижению магнитных
потерь.
2.2. Импульсные трансформаторы
В электронных устройствах для согласования полных сопротив-
лений, изменения знака и амплитуды импульсов, а также для раз-
множения импульсов применяют импульсные трансформаторы.
Одно из основных требований, предъявляемых к импульсным транс-
форматорам, — минимальное искажение формы трансформируе-
мых импульсов.
1 Дтя выяснения принципиальной возможности преобразования
кратковременных однополярных импульсов рассмотрим идеальный
трансформатор (без потерь и паразитных емкостей), работающий
без нагрузки. Пусть на вход этого трансформатора подаются одно-
полярные импульсы прямоугольной формы продолжительностью
/„ с периодом Т(рис. 2.4, а). Первичный контур трансформатора с
активным сопротивлением г, обладает некоторой постоянной вре-
мени т = £|/Г|, обусловленной индуктивностью этого контура Lt.
Рис. 2.4. Графики напряжения импульсного трансформатора
Рассмотрим случай, когда постоянная времени первичного кон-
тура намного меньше продолжительности импульса, т.е. т При
этом график первичного тока 7| = f(f) имеет вид, отличающийся от
прямоугольника, а график вторичного напряжения и2 =/(/) значи-
тельно искажен: в интервале времени 7—2 напряжение и2 = 0, так
как при /! = const ЭДС е2 = M(dz/dr) = 0, где М — взаимная индук-
тивность обмоток. Следовательно, при т <к7„ трансформирование
импульсов сопровождается их значительным искажением.
Рассмотрим случай, когда постоянная времени намного больше
продолжительности импульса, т.е. т »Г„, что более реально, так
как продолжительность импульсов обычно не превышает 10~4 с.
Теперь, когда импульс напряжения щ прекращается еще до окон-
чания переходного процесса в первичной цепи, импульсы напря-
жения и2 на выходе трансформатора не имеют значительных иска-
жений (рис. 2.4, б\ Возникающая отрицательная часть импульса и2
легко устраняется включением полупроводникового диода во вто-
ричную цепь трансформатора.
Рассмотренные явления определяют лишь принципиальную
возможность преобразования кратковременных однополярных им-
пульсов без особого искажения их формы. Однако в реальных ус-
ловиях работы импульсного трансформатора электромагнитные
процессы в нем оказываются намного сложнее, так как на них
влияют: гистерезис (остаточный магнетизм) материала магнито-
провода, вихревые токи, паразитные емкостные связи между
витками и обмотками, а также индуктивности, обусловленные
магнитным рассеянием обмоток. Для ослабления нежелательного
влияния перечисленных факторов импульсные трансформаторы
проектируют так, чтобы в рабочем режиме их магнитопровод не
был насыщен, т.е. магнитная индукция в магнитопроводе долж-
на быть такой, чтобы рабочая точка на графике намагничивания
была расположена ниже зоны магнитного насыщения магнито-
провода трансформатора. Кроме того, материал магнитопровода
должен обладать малой коэрцитивной силой (иметь узкую петлю
гистерезиса).
Для понижения остаточной индукции магнитопровод импульс-
ного трансформатора выполняют с небольшим воздушным зазо-
ром. Иногда применяют подмагничивание импульсного трансфор-
матора постоянным током, полярность которого противоположна
полярности трансформируемых однополярных импульсов, что по-
зволяет снизить магнитную индукцию в магнитопроводс транс-
форматора в интервале между импульсами.
Магнитопроводы импульсных трансформаторов изготовляют из
магнитных материалов с повышенной магнитной проницаемос-
тью (холоднокатаная электротехническая сталь, железоникелевые
сплавы типа пермаллой) при толщине ленты 0,02—0,35 мм. В не-
которых случаях магнитопровод изготовляют из феррита.
Для уменьшения паразитных емкостей и индуктивностей рас-
сеяния обмоток последние делают с небольшим числом витков.
При этом малая продолжительность трансформируемых импуль-
сов позволяет выполнять обмотки импульсных трансформато-
ров проводом уменьшенного поперечного сечения, не вызывая
при этом недопустимого перегрева. Это способствует уменьше-
нию габаритных размеров и массы импульсных трансформато-
ров.
2.3. Умножители частоты
Трансформаторные устройства, состоящие из магнитопроводов
и обмоток, можно использовать для повышения частоты перемен-
ного тока, т.е. увеличивая ее в целое число раз. Практическое при-
менение получили удвоители и утроители частоты.
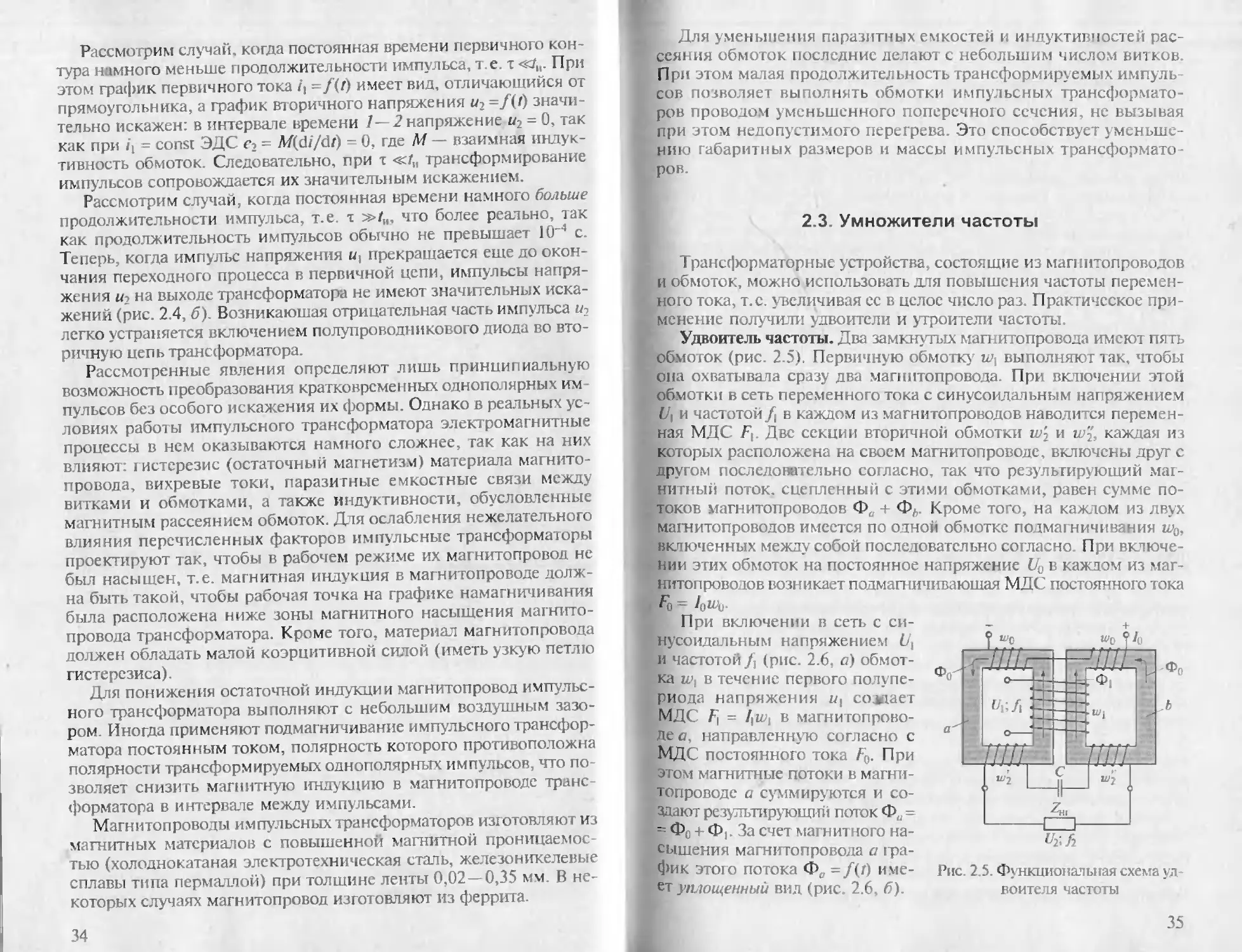
Удвоитель частоты. Два замкнутых магнитопровода имеют пять
обмоток (рис. 2.5}. Первичную обмотку ъщ выполняют так, чтобы
она охватывала сразу два магнитопровода. При включении этой
обмотки в сеть переменного тока с синусоидальным напряжением
С/и и частотой / в каждом из магнитопроводов наводится перемен-
ная МДС F|. Две секции вторичной обмотки w'2 и ш2, каждая из
которых расположена на своем магнитопроводе, включены друг с
другом последовательно согласно, так что результирующий маг-
нитный поток, сцепленный с этими обмотками, равен сумме по-
токов магнитопроводов Фа ч- ФА. Кроме того, на каждом из двух
магнитопроводов имеется по одной обмотке подмагничивания w0,
включенных между собой последовательно согласно. При включе-
нии этих обмоток на постоянное напряжение Uo в каждом из маг-
нитопроводов возникает подмагничивающая МДС постоянного тока
Fo = /о^и-
При включении в сеть с си-
нусоидальным напряжением Ц
и частотой /j (рис. 2.6. а) обмот-
ка в течение первого полупе-
риода напряжения щ создает
МДС F\ = I\W{ в магнитопрово-
Де а. направленную согласно с
МДС постоянного тока Fo. При
этом магнитные потоки в магни-
топроводе а суммируются и сс-
ылают результирующий поток Ф =
= Фо + Фн За счет магнитного на-
сыщения магнитопровода а фа-
фик этого потока Ф = /(г) име-
ет уплощенный вид (рис. 2.6, б).
Рис. 2.5. Функциональная схема уд-
воителя частоты
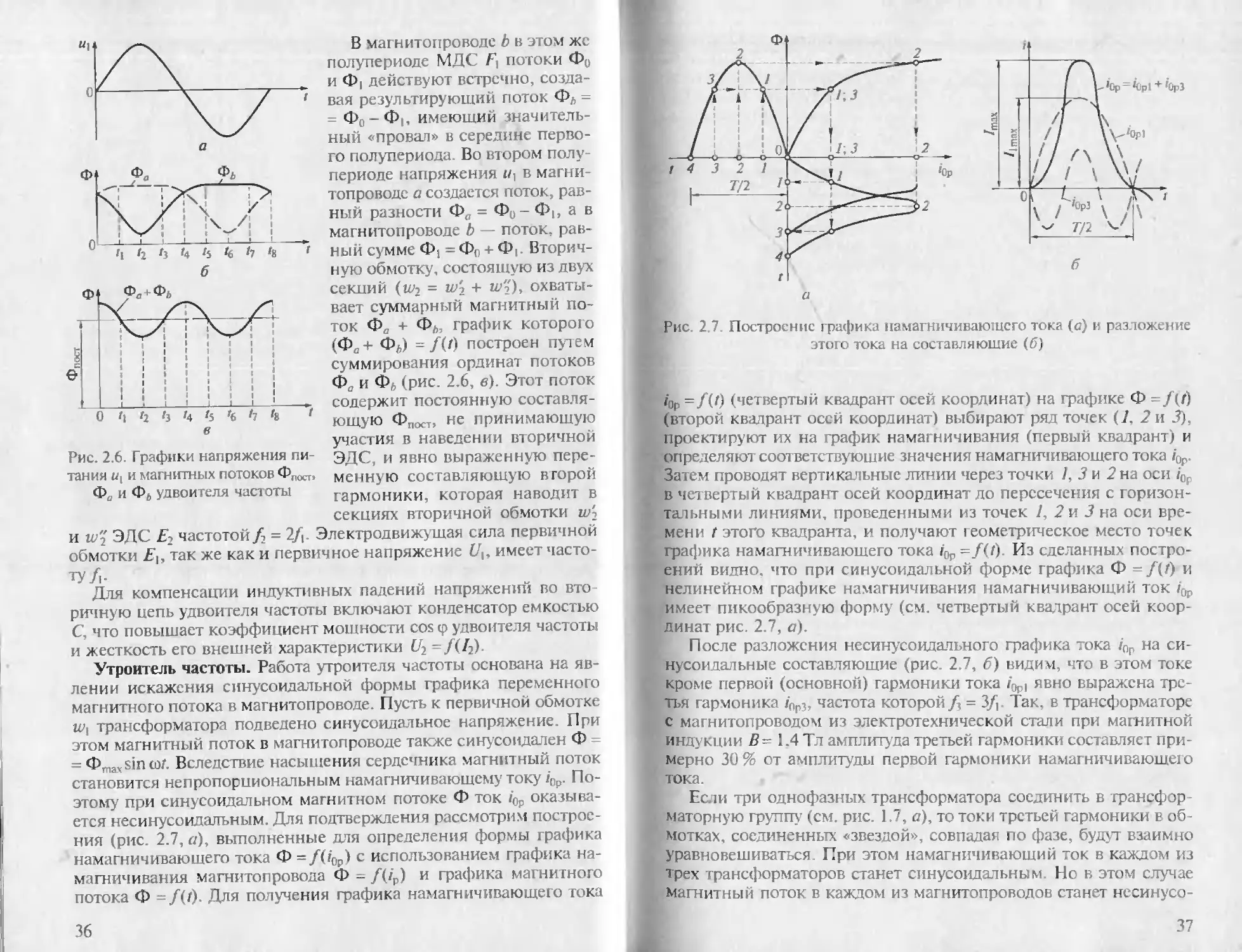
Рис. 2.6. Графики напряжения пи-
тания и магнитных потоков Флосг,
Фо и Ф6 удвоителя частоты
В магнитопроводе b в этом же
полупериоде МДС F\ потоки Фо
и Ф] действуют встречно, созда-
вая результирующий поток ФЛ =
= Фо-Ф|, имеющий значитель-
ный «провал» в середине перво-
го полупериода. Во втором полу-
периоде напряжения в магни-
топроводс а создается поток, рав-
ный разности Фа = Фо- Фь а в
магнитопроводе b — поток, рав-
ный сумме Ф| = Фо + Ф|. Вторич-
ную обмотку, состоящую из двух
секций (w2 = w7 + охваты-
вает суммарный магнитный по-
ток Ф + ФЛ, график которого
(Фо+ ФЛ) = /(г) построен путем
суммирования ординат потоков
Ф, и Ф (рис. 2.6, в). Этот поток
содержит постоянную составля-
ющую Фпост, не принимающую
участия в наведении вторичной
ЭДС, и явно выраженную пере-
менную составляющую в горой
гармоники, которая наводит в
секциях вторичной обмотки w2
и ы2 ЭДС Е2 частотой/2 = 2/(. Электродвижущая сила первичной
обмотки £], так же как и первичное напряжение Ub имеет часто-
ту/].
Для компенсации индуктивных падений напряжений во вто-
ричную цепь удвоителя частоты включают конденсатор емкостью
С, что повышает коэффициент мощности cos ср удвоителя частоты
и жесткость его внешней характеристики U2 =
Утроитель часто гы. Работа утроителя частоты основана на яв-
лении искажения синусоидальной формы графика переменного
магнитного потока в магнитопроводе. Пусть к первичной обмотке
Wi трансформатора подведено синусоидальное напряжение. При
этом магнитный поток в магнитопроводе также синусоидален Ф =
= Ф ,3Vsin со/. Вследствие насыщения сердечника магнитный поток
становится непропорциональным намагничивающему току /Ор. По-
этому при синусоидальном магнитном потоке Ф ток /'ор оказыва-
ется несинусоидальным. Для подтверждения рассмотрим построе-
ния (рис. 2.7, а), выполненные для определения формы графика
намагничивающего тока Ф = /(гОр) с использованием графика на-
магничивания магнитопровода Ф = /(/р) и графика магнитного
потока Ф = /(/). Для получения графика намагничивающего тока
a
Рис. 2,7. Построение графика намагничивающего тока (а) и разложение
этого тока на составляющие (б)
70р = f(j) (четвертый квадрант осей координат) на графике Ф - f(t)
(второй квадрант осей координат) выбирают ряд точек (У, 2 и 3),
проектируют их на график намагничивания (первый квадрант) и
определяют соответствующие значения намагничивающего тока /Ор.
Затем проводят вертикальные линии через точки 7, 3 и 2 на оси /Ор
в четвертый квадрант осей координат до пересечения с горизон-
тальными линиями, проведенными из точек 7, 2 и 3 на оси вре-
мени t этого квадранта, и получают геометрическое место точек
графика намагничивающего тока /Ор= /(/). Из сделанных постро-
ений видно, что при синусоидальной форме графика Ф = /(г) и
нелинейном графике намагничивания намагничивающий ток /Ор
имеет пикообразную форму (см. четвертый квадрант осей коор-
динат рис. 2.7, а).
После разложения несинусоидального графика тока /Ор на си-
нусоидальные составляющие (рис. 2.7, б) видим, что в этом токе
кроме первой (основной) гармоники тока /Ор) явно выражена тре-
тья гармоника /Ор3, частота которой = 3/ь Так, в трансформаторе
с магнитопроводом из электротехнической стали при магнитной
игрукции В- 1.4 Тл амплитуда третьей гармоники составляет при-
мерно 30% от амплитуды первой гармоники намагничивающею
тока.
Если три однофазных трансформатора соединить в трансфер -
матерную групп}’ (см. рис. 1.7, а), то токи третьей гармоники в об-
мотках, соединенных «звездой», совпадая по фазе, будут взаимно
уравновешиваться. Ери этом намагничивающий ток в каждом из
трех трансформаторов станет синусоидальным. Но в этом случае
магнитный поток в каждом из магнитопроводов станет несинусо-
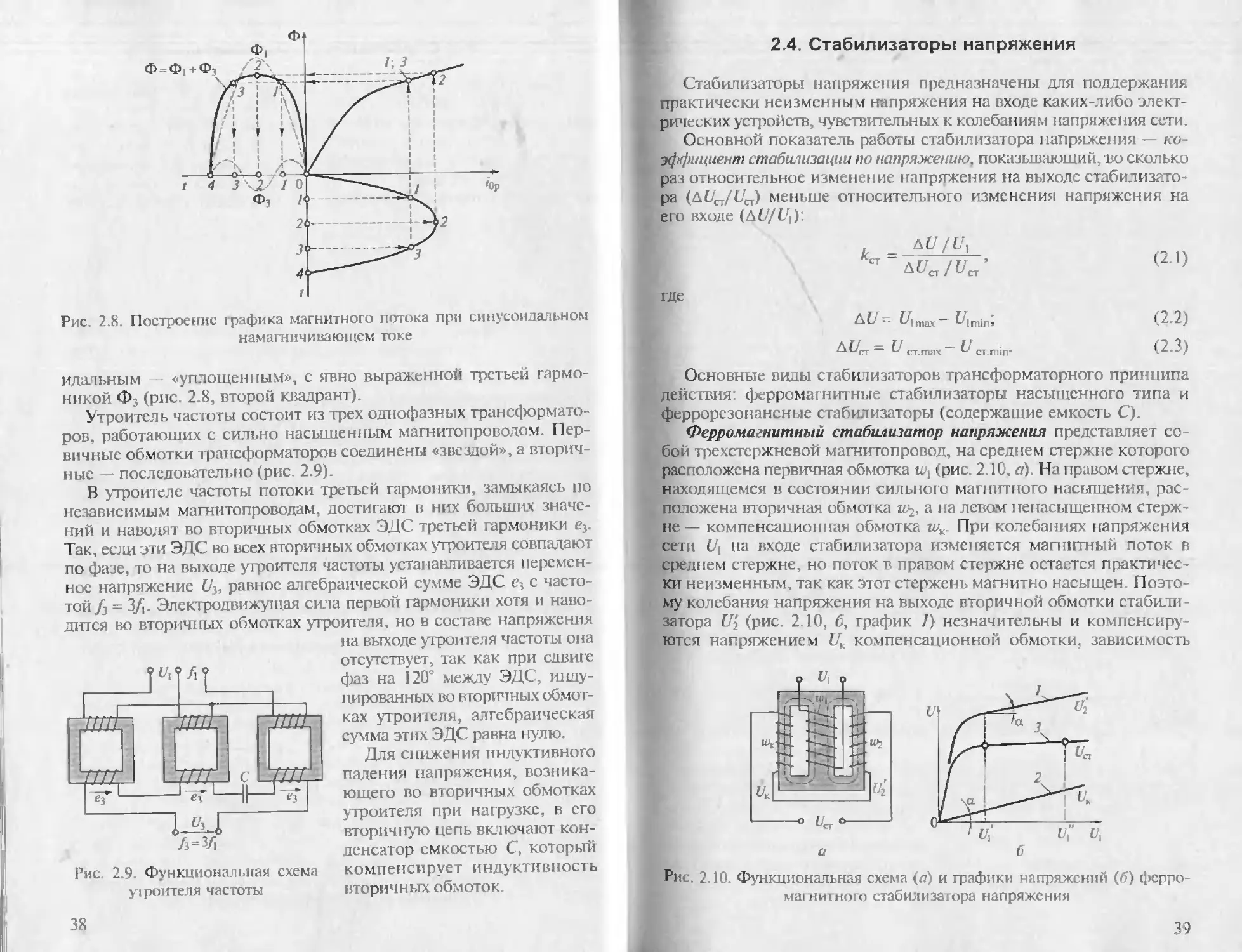
Рис. 2.8. Построение графика магнитного потока при синусоидальном
намагничивающем токе
идальным — «уплощенным», с явно выраженной третьей гармо-
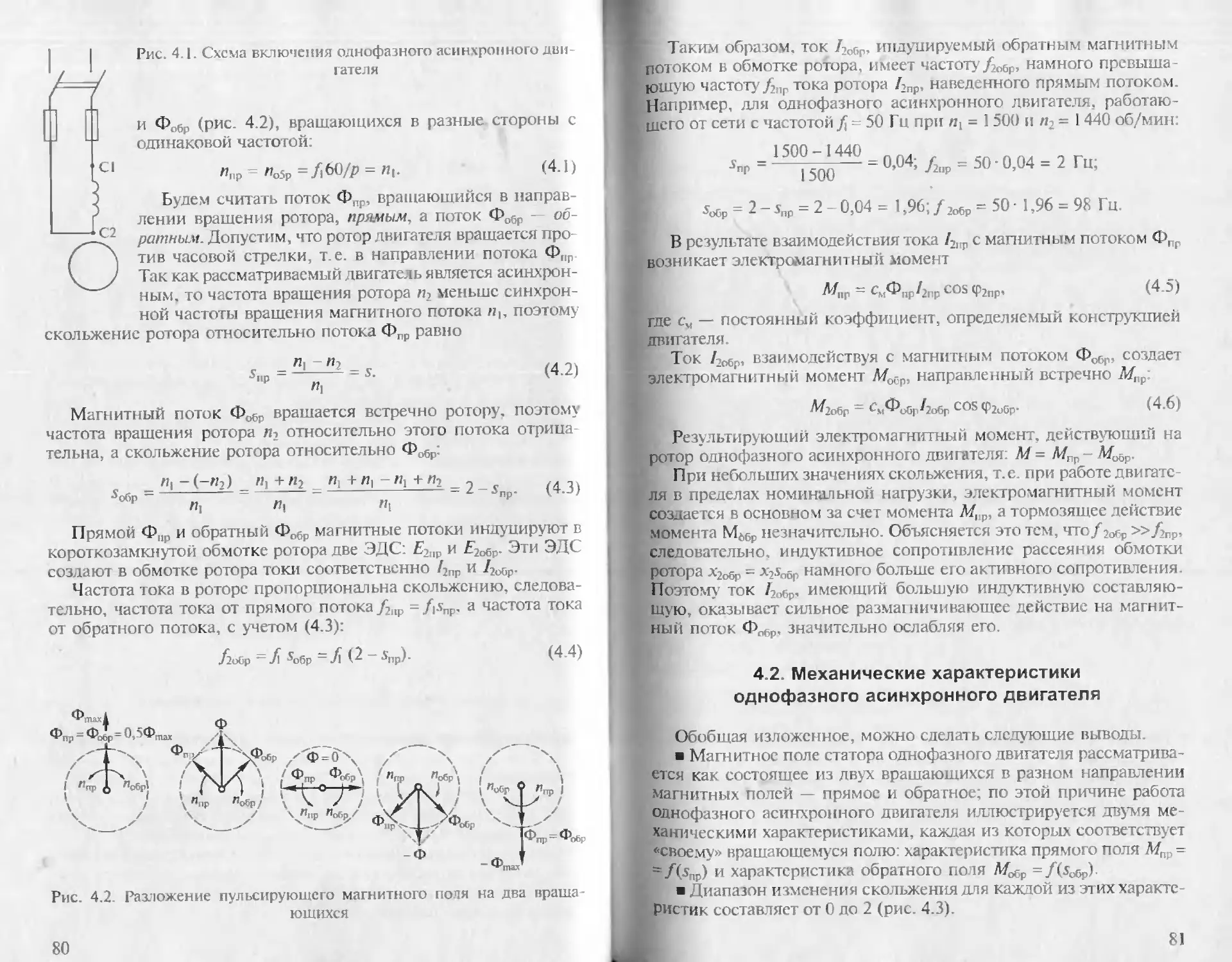
никой Ф3 (рис. 2.8, второй квадрант).
Утроитель частоты состоит из трех однофазных трансформато-
ров, работающих с сильно насыщенным магнитопроводом. Пер-
вичные обмотки трансформаторов соединены «звездой», а вторич-
иые — последовательно (рис. 2.9).
В утроителе частоты потоки третьей гармоники, замыкаясь по
независимым магнитопроводам, достигают в них больших значе-
ний и наводят во вторичных обмотках ЭДС третьей гармоники е3.
Так, если эти ЭДС во всех вторичных обмотках утроителя совпадают
по фазе, то на выходе утроителя частоты устанавливается перемен-
ное напряжение t/3, равное алгебраической сумме ЭДС е3 с часто-
той = 3/. Электродвижущая сила первой гармоники хотя и наво-
дится во вторичных обмотках утроителя, но в составе напряжения
на выходе утроителя частоты она
отсутствует, так как при сдвиге
фаз на 120° между ЭДС, инду-
цированных во вторичных обмот-
ках утроителя, алгебраическая
сумма этих ЭДС равна нулю.
Для снижения индуктивного
падения напряжения, возника-
ющего во вторичных обмотках
утроителя при нагрузке, в его
вторичную цепь включают кон-
денсатор емкостью С, который
Рис. 2.9. Функциональная схема
утроителя частоты
компенсирует индуктивность
вторичных обмоток.
2.4. Стабилизаторы напряжения
Стабилизаторы напряжения предназначены для поддержания
практически неизменным напряжения на входе каких-либо элект-
рических устройств, чувствительных к колебаниям напряжения сети.
Основной показатель работы стабилизатора напряжения — ко-
эффициент стабилизации по напряжению, показывающий, во сколько
раз относительное изменение напряжения на выходе стабилизато-
ра (△С4т/£4т) меньше относительного изменения напряжения на
его входе (△£//£/]):
А£//<7,
где
(2-1)
(2.2)
(2.3)
= и
ст. max
сгпйл
Основные виды стабилизаторов трансформаторного принципа
действия: ферромагнитные стабилизаторы насыщенного типа и
феррорезонансные стабилизаторы (содержащие емкость С).
Ферромагнитный стабилизатор напряжения представляет со-
бой трехстержневой магнитопровод, на среднем стержне которого
расположена первичная обмотка (рис. 2.10, л). На правом стержне,
находящемся в состоянии сильного магнитного насыщения, рас-
положена вторичная обмотка а на левом ненасыщенном стерж-
не — компенсационная обмотка wK. При колебаниях напряжения
сети U{ на входе стабилизатора изменяется магнитный поток в
среднем стержне, но поток в правом стержне остается практичес-
ки неизменным, так как этот стержень магнитно насыщен. Поэто-
му колебания напряжения на выходе вторичной обмотки стабили-
затора (рис. 2.10, б, график /) незначительны и компенсиру-
ются напряжением UK компенсационной обмотки, зависимость
Рис. 2.10. Функциональная схема (а) и графики напряжений (б) ферро-
магнитного стабилизатора напряжения
которого от напряжения Ц имеет вид прямой линии, так как ле-
вый стержень стабилизатора ненасыщен (прямая 2на рис. 2.10, б).
При правильном подборе параметров обмоток и магнитопровода
стабилизатора угол наклона а прямолинейного участ ка графика I
равен углу наклона прямой 2. В этом случае напряжение на выходе
оказывается стабилизированным:
U„=U^.-UK. (2.4)
Так, при колебаниях напряжения Ъ\ в пределах ±20 % от номи-
нального значения при неизменных нагрузке и частоте тока вы-
ходное напряжение колеблется в пределах ±3 %, т. е. коэффициент
стабилизации по напряжению к„ = 7. Обычно для ферромагнитных
стабилизаторов к„ нс превышает 10.
Основные недостатки ферромагнитных стабилизаторов: неболь-
шой коэффициент стабилизации по напряжению, низкий КПД
(не более 40 — 60%), небольшой коэффициент мощности (не бо-
лее 0,4), несинусоидальнос выходное напряжение. Указанные не-
достатки ограничивают применение ферромагнитных стабилиза-
торов напряжения.
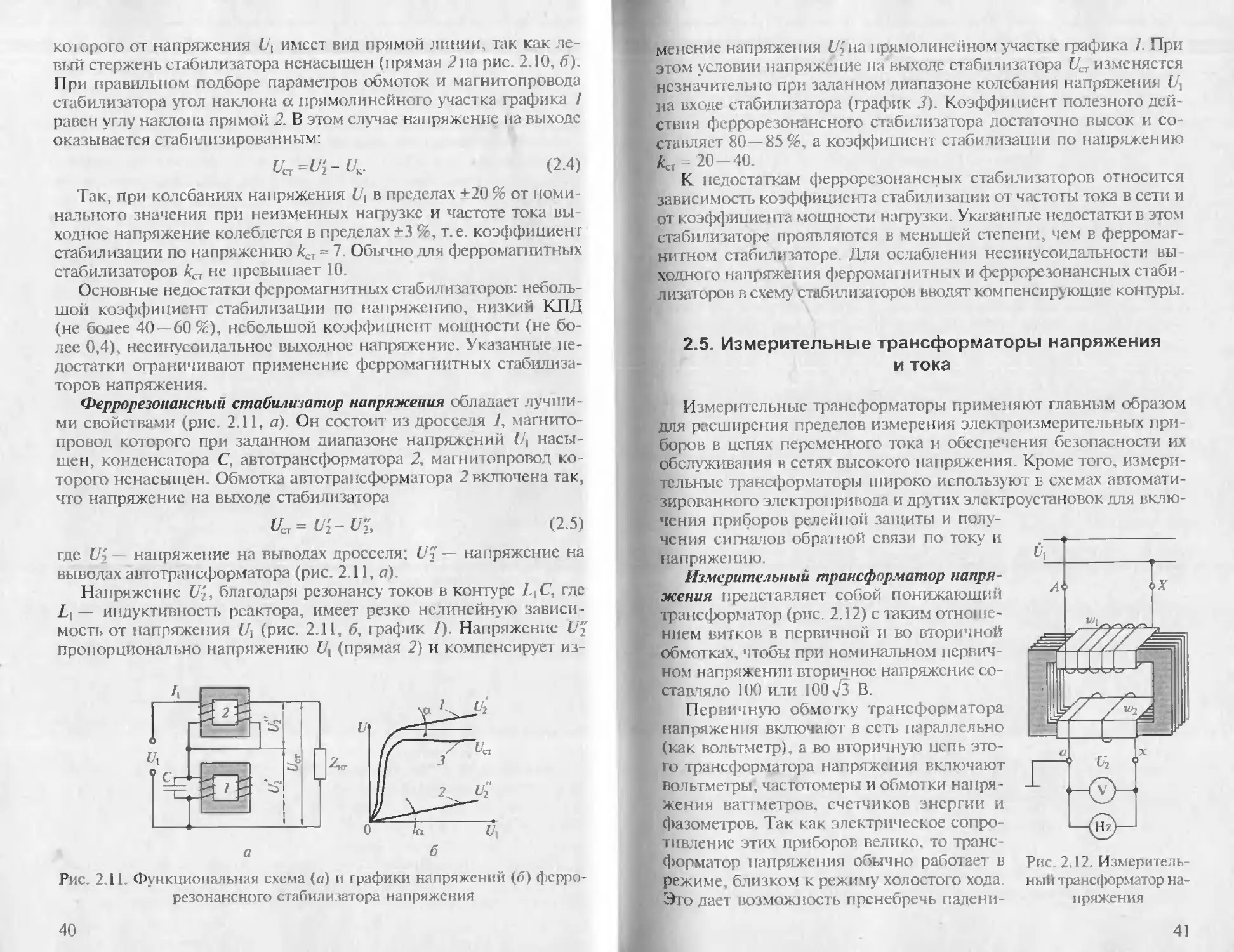
Феррорезонансный стабилизатор напряжения обладает лучши-
ми свойствами (рис. 2.11, а). Он состоит из дросселя 1, магнито-
провод которого при заданном диапазоне напряжений U\ насы-
щен, конденсатора С, автотрансформатора 2, магнитопровод ко-
торого ненасыщен. Обмотка автотрансформатора 2 включена так,
что напряжение на выходе стабилизатора
(2-5)
где Ui — напряжение на выводах дросселя; U'{ — напряжение на
выводах автотрансформатора (рис. 2.11, а).
Напряжение Щ, благодаря резонансу токов в контуре L\C, где
L[ — индуктивность реактора, имеет резко нелинейную зависи-
мость от напряжения (рис. 2.11, б, график /). Напряжение U'{
пропорционально напряжению (прямая 2) и компенсирует из-
Рис. 2.11. Функциональная схема (а) и графики напряжений (б) ферро-
резонансного стабилизатора напряжения
менение напряжений Щ на прямолинейном участке трафика /. При
этом условии напряжение на выходе стабилизатора изменяется
незначительно при заданном диапазоне колебания напряжения Ц
на входе стабилизатора (график 5). Коэффициент полезного дей-
ствия фсррорезонансного стабилизатора достаточно высок и со-
ставляет 80—85%, а коэффициент стабилизации по напряжению
Асг - 20-40.
К недостаткам феррорезонансных стабилизаторов относится
зависимость коэффициента стабилизации от частоты тока в сети и
от коэффициента мощности нагрузки. Указанные недостатки в этом
стабилизаторе проявляются в меньшей степени, чем в ферромаг-
нитном стабилизаторе. Дия ослабления несинусоидальности вы-
ходного напряжения ферромагнитных и феррорезонансных стаби -
лизаторов в схему стабилизаторов вводят компенсирующие контуры.
2.5. Измерительные трансформаторы напряжения
и тока
Измерительные трансформаторы применяют главным образом
для расширения пределов измерения электроизмерительных при-
боров в цепях переменного тока и обеспечения безопасности их
обслуживания в сетях высокого напряжения. Кроме того, измери-
тельные трансформаторы широко использ^тот в схемах автомати-
зированного электропривода и других электроустановок для вклю-
чения приборов релейной защиты и полу-
чения сигналов обратной связи по току и
напряжению.
Измерительный трансформатор напря-
жения представляет собой понижающий
трансформатор (рис. 2.12) с таким отноше-
нием витков в первичной и во вторичной
обмотках, чтобы при номинальном первич-
ном напряжении вторичное напряжение со-
ставляло 100 шли 100 V3 В.
Первичную обмотку трансформатора
напряжения включают в сеть параллельно
(как вольтметр), а во вторичную цепь это-
го трансформатора напряжения включают
вольтметры, частотомеры и обмотки напря-
жения ваттметров, счетчиков энергии и
фазометров. Так как электрическое сопро-
тивление этих приборов велико, то транс-
форматор напряжения обычно работает в
режиме, близком к режиму холостого хода.
Это дает возможность пренебречь палени-
Рис. 2.12. Измеритель-
ный трансформатор на-
пряжения
й2
Рис. 2.13. Угловая погрешность
измерительных трансформа'
торов
ем напряжения в обмотках и принять
U} - -Д; U2 = а так как = к1{Еъ
то напряжение первичной обмотки
U' = -к. и2, (2.6)
где кц = Wt/Wi — коэффициент транс-
формации трансформатора напряже-
ния.
Из выражения (2.6) следует, что
первичное и вторичное напряжения
в измерительном трансформаторе на-
пряжения сдвинуты по фазе относи-
тельно друг друга на 180°. Однако даже небольшая нагрузка, кото-
рую создает измерительный прибор, включенный во вторичную
цепь, вызывает некоторое падение напряжения, кроме того, в
трансформаторе имеют место магнитные потери. Все эти причины
в комплексе вызывают фазовый сдвиг между первичным и вторич -
ным напряжениями трансформатора и создают в нем угловую по-
грешность, определяемую углом 8(/(рис. 2.13, а).
Кроме того, в измерительном трансформаторе напряжения имеет
место относительная погрешность напряжения, обусловленная вклю-
чением измерительного трансформатора в сеть, %:
= kJh U\ ] 00 (2.7)
В зависимости от допускаемых погрешностей стационарные транс-
форматоры напряжения подразделяют на три класса точности. Допу-
стимые значения каждого вида погрешностей для соответствующего
класса точное™ определяются действующим стандартом (табл. 2.1).
Для уменьшения погрешностей измерительных трансформато-
ров при их изготовлении принимают следующие меры:
обмотки выполняют медными проводами повышенного по-
перечного сечения, что способствует снижению падения напря-
жения в них;
Табл и ца 2.1
Допустимые значения погрешностей для разных классов точности
измерительных трансформаторов напряжения
Класс точности 0,5 1 3
Максимальная относительная погрешность по напряжению при измеряемом напряжении от 0,8 до l,2t/HOM ±0.5 ±1,0 ±3,0
Угловая пофешность, мин ±20 +40 Не нормируется
магнитопроводы изготовляют из легированной магнитомяг-
кой стали такого сечения, чтобы в процессе работы трансформа-
тора магнитопровод оставался ненасыщенным и магнитные поте-
ри в нем были минимальными.
При напряжении сети до 3000 В измерительные трансформато-
ры напряжения делают сухими, прикрытые защитным кожухом с
естественным воздушным охлаждением. При более высоком на-
пряжении сети измерительные трансформаторы напряжения из-
готовляют масляными, при этом активную часть трансформатора
(магнитопровод с обмотками) помещают в бак, заполненный
трансформаторным маслом, что обеспечивает необходимую элек-
трическую прочность изоляции обмоток и более эффективное ох-
лаждение трансформатора.
В целях электробезопасности кожух и один из выводов вторич-
ной обмотки трансформатора заземляют.
Измерительный трансформатор тока применяют для включе-
ния амперметров и обмоток тока ваттметров, счетчиков энергии и
фазометров.
К Первичную обмотку трансформатора тока выполняют прово-
дом большого сечения и включают в сеть последовательно посред-
ством клемм Л1 и Л2 (рис. 2.14, а). Количество витков в обмотках
трансформатора выбирают таким, чтобы при номинальном токе в
сети, т.е. в первичной обмотке трансформатора тока, значение тока
во вторичной цепи было равно 5 А.
К Так как электрическое сопротивление обмоток приборов, вклю-
чаемых во вторичную цепь, незначительно, то режим работы транс-
форматора тока близок к режиму короткого замыкания, при кото-
ром магнитный поток в магнитопроводе (см. параграф 1.5) на-
И1 И2
Рис 2.14. Измерительные трансформаторы тока
столько мал, что им можно пренебречь. Тогда, по аналогии с урав-
нением токов (1.21), для опыта короткого замыкания, приняв ток
холостого хода /0 = 0, можно записать следующее равенство для
трансформатора тока:
/i = -/2(w2/W|) = (2.8)
где = uh/W\ — коэффициент трансформации измерительного
трансформатора тока.
В измерительных трансформаторах тока также имеются два вида
погрешностей: угловая, измеряемая углом 8, (см. рис. 2.13, б), и
погрешность по току
у,- = у| 100.
Л
(2.9)
В зависимое™ от значения допускаемых погрешностей стацио-
нарные измерительные трансформаторы тока подразделяют на пять
классов точности. Допустимые значения этих погрешностей зави-
сят от относительного значения первичного тока (табл. 2.2).
При включении трансформатора тока в сеть заземляют кожух и
одну из клемм вторичной обмотки.
Табз ица 2.2
Параметры измерительных трансформаторов тока разных классов
точности
Класс Первичный ток, % от номинального Предельное значение погрешности Пределы вторичной нагрузки. % от
точности токовой, % угловой, мин номинальной при coscp - 0,8
0,2 10 20 100-120 ±0.50 ±0,35 ±0,20 ±20 ±15 ±10 25-100
0,5 10 20 100-120 ±1 +0,75 + 0,50 ±60 ±45 ±30 25-100
I 10 20 100-120 +2 ±1,5 ±1 ±120 ±90 ±60 25-100
3 50-120 ±3 Не норми- руется 50-100
10 50-120 ± 1 0 Не норми- руется 50-100
Если во время работы трансформатора тока разомкнуть его вто-
ричную обмотку, то ток в ней прекратится, а первичный ток оста-
нется прежним. При этом он будет полностью намагничивающим
и вызовет значительное увеличение магнитного потока. Магнит-
ные потери возрастут пропорционально квадрату потока, что при-
ведет к перегреву магнитопровода, опасному для целостности изо-
ляции. В итоге это может привести электрическую линию к корот-
кому замыканию на землю. Кроме того, ЭДС вторичной обмотки
возрастет пропорционально магнитному потоку и достигнет зна-
чении, опасных для обслуживающего персонала. Поэтому размы-
кание вторичной цепи трансформатора тока при наличии тока в
первичной обмотке является недопустимым и крайне опасным для
обслуживающего персонала. Для того чтобы отключить измеритель-
ный прибор или другое устройство, включенные во вторичную
обмотку измерительного трансформатора тока, необходимо клем-
мы этой обмотки предварительно замкнуть накоротко.
Получили применение малогабаритные измерительные транс-
форматоры тока, смонтированные на проходном изоляторе (рис.
2.14, б). Медный стержень 2 внутри проходного изолятора / явля-
ется первичной обмоткой. Вторичная обмотка навивается на торо-
идальный (см. рис. 1.2, е) магнитопровод J, надеваемый на про-
ходной изолятор.
Контрольные вопросы
1. Объясните назначение и процесс работы пик-трансформатора.
2. При каком соотношении постоянной времени и продолжительнос-
ти импульса импульсный трансформатор работает без значительных ис-
кажений?
3. Почему утроитсль частоты изготовляют на раздельных ма1 нитопро-
водах?
4. Какова разница между ферромагнитным и фсррорезонансным ста-
билизаторами?
5. Дайте сравнительную оценку свойств ферромагни гных и феррорс-
зонансных стабилизаторов напряжения.
6. С какой целью при отключении прибора от трансформатора тока
вторичную обмотку трансформатора замыкают накоротко?
7. Какие виды погрешностей имеют место в измерительных трансфор-
маторах и чем они обусловлены?
РАЗДЕЛ II
СИЛОВЫЕ ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
МАЛОЙ МОЩНОСТИ
Электродвигатель — это основной элемент электропривода, осу-
ществляющий преобразование электрической энергии в механи-
ческую, для приведения в движение различных станков и меха-
низмов, транспортных и подъемных средств, подвижных частей
приборов и аппаратов. Наибольшее применение в современном
электроприводе получили асинхронные электродвигатели, отли-
чающиеся простотой конструкции и надежностью, высокими тех-
нико-экономическими показателями.
В данном разделе рассматриваются силовые электродвигатели
малой мощности (микродвигатели) — от нескольких ватт до одно-
го киловатта, применяемые в приборных устройствах и средствах
автоматизации, а также в электробытовых устройствах, электро-
инструменте и т. п. Эти электродвигатели весьма разнообразны по
своему конструктивному исполнению, условиям эксплуатации и
характеристикам. Так, асинхронные и синхронные электродвига-
тели малой мощности бывают трехфазные, двухфазные и одно-
фазные. Коллекторные электродвигатели разделяют на двигатели
постоянного тока и универсальные, с электромагнитным возбуж-
дением и возбуждением постоянными магнитами. Используют и
другие разновидности силовых электродвигателей малой мощнос-
ти. Так, все более широкое применение тюлуча’ют бесконтактные
двигатели постоянного тока, называемые вентильными двигате-
лями.
Глава 3
ТРЕХФАЗНЫЕ АСИНХРОННЫЕ ДВИГАТЕЛИ
С КОРОТКОЗАМКНУТЫМ РОТОРОМ
3.1. Принцип действия трехфазного асинхронного
двигателя
Трехфазныс асинхронные двигатели имеют наиболее широкое
применение в различных областях техники. Не менее 80 % всех элек-
тродвигателей, применяемых в электроприводах, являются асинх-
ронными. Такое широкое использование эти двигатели получили
благодаря простоте конструкции и надежности в работе.
Принцип действия трехфазных асинхронных двигателей осно-
ван на способности многофазной системы переменного тока со-
здавать вращающееся магнитное поле. Так, если обмотку статора
этого двигателя, состоящую из трех катушек, смешенных в про-
странстве относительно друг друга под углом 120 эл. град., вклю-
чить в сеть трехфазного тока, то возникнет вращающееся магнит-
ное поле. Частота вращения этого поля ль называемая синхронной
частотой вращения, прямо пропорциональна частоте переменно-
го тока /j в питающей сети и обратно пропорциональна числу пар
полюсов р трехфазной обмотки статора двигателя:
«i=/}6Q/a (3.1)
Ниже приведен ряд синхронных частот вращения магнитного
поля статора, соответствующих разному числу пар полюсов р3 при
промышленной частоте переменного тока/ = 50 Гц:
Число пар полюсов р
Синхронная частота
вращения Л|, об/мин
............1 2 3 4 5 6
...........3000 1500 1000 750 Ь00 500
При необходимости изменить направление вращения магнит-
ного поля меняют порядок следования фаз трехфазной системы
напряжений, подводимых к трехфазной обмотке. Число полюсов
асинхронного двигателя определяется конструкцией обмотки ста-
тора, при этом число полюсов ротора с короткозамкнутой обмот-
кой равно числу полюсов статора.
Для объяснения принципа действия трехфазного асинхронно-
го двигателя воспользуемся его упрошенной моделью, состоя-
щей из неподвижной части 1 —
статора и вращающейся части 2 —
ротора, разделенных воздушным
зазором (рис. 3.1). Сердечник ста-
тора состоит из спинки (ярма),
через которую замыкается магнит-
ный поток вращающегося магнит-
ного поля, и зубцов, между кото-
рыми находятся пазы с располо-
женной в них трехфазной обмот-
кой. В расточке сердечника стато-
ра находится ротор, состоящий из
вала, цилиндрического сердечни-
ка и обмотки, расположенной в
пазах сердечника. Обмотка ротора
состоит из медных или алюмини-
евых стержней, замкнутых с обс-
Рис. 3.1. Функциональная схема
асинхронного двигателя
2
б
Рис. 3.2. Короткозамкнутый ротор асинхронного двигателя
а — короткозамкнутая обмотка; б — конструкция ротора; 7 — вал; 2 — замыка-
ющие кольиа: 3 — вентиляционные лопатки
их сторон кольцами (рис. 3.2, л). Такая обмотка называется ко-
роткозамкнутой.
При включении обмотки статора в трехфазную сеть в магнит-
ной системе двигателя возникает магнитное поле, вращающееся с
синхронной частотой пх. Поле сцепляется с обмоткой ротора и
индуцирует в его стержнях электродвижущие силы, направление
которых определяют по «правилу правой руки».
Обмотка ротора замкнута, поэтому ЭДС, наведенные в стерж-
нях обмотки, создадут в них токи. В результате взаимодействия то-
ков в роторе с вращающимся полем статора на стержнях ротора
создаются электромагнитные силы направление которых опре-
деляют по «правилу левой руки» (см. рис. 3.1). Совокупность элект-
ромагнитных сил образует на роторе электромагнитный мо-
мент Л/, под действием которого ротор приводится во вращение с
частотой /ъ в направлении вращения магнитного поля статора.
Вращение ротора через вал передается рабочему механизму. Таким
образом, электрическая энергия, поступающая из сети в обмотку
статора, преобразуется в асинхронном двигателе в механическую
энергию вращения.
Отличительный признак асинхронного двигателя состоит в том,
что частота вращения ротора /ь меньше синхронной частоты вра-
щения Л| магнитного поля статора. Объясняется это тем, что ЭДС в
стержнях обмотки ротора двигателя индуцируется только при не-
равенстве частот вращения и2 < Частота вращения поля статора
относительно ротора определяется частотой скольжения
ns = n{-n2. (3.2)
Отставание ротора от вращающегося поля статора характеризу-
ется относительной величиной s, называемой скольжением:
S = («I - м2)/и1- (3-3)
Скольжение асинхронного двигателя может изменяться в диапа-
зоне от 0 до 1, или до 100 %. Скольжение 5=0 соответствует режиму
холостого хода, когда ротор двигателя практически не испытывает
противодействующего момента и он вращается со скоростью, мало
отличающейся от синхронной; скольжение 5 = 1 соот встствует режи-
му короткого замыкания, при котором ротор двигателя неподвижен
- 0). Скольжение зависит от механической нагрузки на валу двига-
теля и с ее ростом увеличивается, находясь в диапазоне 0 < 5 < 1.
Скольжение, соответствующее номинальной нагрузке двигате-
ля, называют номинальным скольжением. Для трехфазных асинх-
ронных двигателей мощностью от 0,3 до 1,0 кВт номинальное сколь-
жение изменяется в пределах от 0,12 до 0,03, т.е. от 12 до 3 %.
С уменьшением номинальной мощности двигателя его скольже-
ние возрастает. Например, при мощности 30 Вт номинальное сколь-
жение может составить 20 %.
* Частота вращения ротора асинхронного двигателя согласно (3.3),
об/мин:
• п2 = z?|(l - 5) =Z60(l - s)/p. (3.4)
При изменениях нагрузки на валу двигателя частота вращения
/ь изменяется пропорционально величине (1 -s).
3.2. Устройство трехфазных асинхронных двигателей
В качестве силовых двигателей малой мощности обычно приме-
няют трехфазныс асинхронные двигатели с короткозамкнутым
ротором серий 4А, АИР либо других серий мощностью от 0,06
обычно до 1,0 кВт. Двигатели этих серий находятся в массовом
производстве. Их отличает высокая надежность и сравнительно
небольшая стоимость.
На рис. 3.3 показано устройство трехфазного асинхронного дви -
гателя серии 4А закрытого обдуваемого исполнения. Статор состо-
ит из корпуса 7 и сердечника 6 с трехфазной обмоткой. Корпус 7
статора отливают из алюминия. Наружная поверхность корпуса
имеет продольные ребра, увеличивающие поверхность охлаждения.
В корпусе расположен сердечник статора 6. имеющий шихтован-
ную конструкцию: штампованные пластины из тонколистовой
электротехнической стали толщиной 0,5 мм покрыты слоем изо-
ляционного лака, собраны в пакет, спрессованы и скреплены по
наружной поверхности продольными сварными швами Такая кон-
струкция сердечника способствует снижению вихревых токов, со-
здаваемых в нем вращающимся магнитным полем. Обмотка стато-
ра выполнена медным изолированным проводом. Эта обмотка со-
стоит из пазовых сторон, расположенных в пазах сердечника ста-
тора, и лобовых частей, соединяющих пазовые стороны.
I
5
6
7
8
Рис. 3.3. Устройство трехфазного асинхронного двигателя с короткозамк-
нутым ротором:
7. 10 — подшипник; 2 — вал; 3, 8 — подшипниковый шит; 4 — коробка выво-
дов; 5 — сердечник ротора; 6— сердечник статора: 7 — корпус; 9 — вентилятор;
11 — кожух вентилятора: 12 — лапы
В расточке статора находится вращающаяся часть двигателя —
ротор, состоящий из сердечника 5 с короткозамкнутой обмоткой
и вала 2. Сердечник ротора также имеет шихтованную конструк-
цию, но листы ротора не покрыты изоляционным лаком, так как
имеющаяся на их поверхности оксидная пленка — достаточная
изоляция для ограничения вихревых токов, тем более что эти токи
весьма незначительны из-за малой частоты перемагничивания сер-
дечника ротора/2 -f\S.
Например, при / = 50 Гц и номинальном скольжении sHOM =
= 0,06 частота перемагничивания ротора, а следовательно, и час-
тота наведенных в обмотке ротора токов/? = 50 • 0,06 = 3 Гц.
Короткозамкнутая обмотка ротора обычно выполняется залив-
кой под давлением пазов сердечника ротора расплавленным
алюминиевым сплавом. При этом одновременно со стержнями от-
ливаются короткозамыкаюшис кольца и вентиляционные лопатки
(см. рис. 3.2, б).
Обмотки статора и ротора в асинхронном двигателе равномер-
но распределенные. Вал ротора 2 врашается в подшипниках каче-
ния 1 и 10, расположенных в подшипниковых щитах 3 и 8.
Охлаждение двигателя осуществляется обдувом наружной по-
верхности корпуса. Поток воздуха создается центробежным венти-
лятором 9, прикрытым кожухом И. На торцевой поверхности ко-
жуха имеются отверстия для забора воздуха. В некоторых современ-
ных конструкциях асинхронных двигателей малой мощности вен-
тилятор и кожух делают из пластмассы. Это способствует сниже-
нию массы и стоимости двигателя, уменьшению шума от работы
вентилятора за счет снижения вибраций. Асинхронные двигатели
весьма малой мощности (не более 20—40 Вт), работа которых не
сопровождается значительным выделением теплоты, изготовляют
без вентиляторов, т.е. эти двигатели имеют естественное охлажде-
ние.
Концы фазных обмоток статора присоединены к зажимам короб-
ки выводов 4 (см. рис. 3.3). Если коробка выводов имеет шесть за-
жимов, обозначенных Cl, С2 и СЗ — начала фазных обмоток ста-
тора и С4, С5 и С6 — концы фазных обмоток статора (рис. 3.4, а),
то такой двигатель можно включить в трехфазную сеть на два раз-
ных напряжения, отличающихся в V3 раз, соединяя обмотку ста-
тора «звездой» либо «треугольником».
Например, если в паспорте двигателя указаны напряжения
питающей сети 220/380 В, то при напряжении сети 380 В обмотку
статора соединяют «звездой», а при 220 В — «треугольником» (рис.
3.4, б). В обоих случаях на каж-
дую обмотку фазы приходится
напряжение 220 В. Бели же дви -
гатель рассчитан на включение
в сеть с каким-либо одним на-
пряжением, то в коробке выво-
дов имеется только три зажима,
к которым подключают прово-
да питающей сети. Для крепле-
ния двигателя используют лапы
12 (см. рис. 3.3) или фланец со
стороны выступающего конца
вала.
Для предохранения обслужи-
вающего персонала от возмож-
ного поражения электрическим
Рис. 3.4. Расположение выводов об-
МО1КИ статора на клеммной пане-
ли (а) и способы соединения фаз-
ных обмоток статора (б)
током двигатели снабжаются болтами заземления (см. рис. 3.3),
количество которых должно быть не менее двух: один на корпусе,
а другой в коробке выводов.
Принципиальная схема включения в сеть трехфазного асинх-
ронного двигателя с короткозамкнутым ротором показана на
рис. 3.5, а. Асинхронные двигатели средней и большой мощно-
сти в некоторых случаях делают с фазным ротором. На сердеч-
нике фазного ротора укладывают трехфазную обмотку, выпол-
ненную аналогично обмотке статора. Эту обмотку соединяют в
«звезду», а ее концы подключают к контактным кольцам, изо-
лированным друг от друга и от вала. По кольцам скользят щет-
ки, укрепленные в щеткодержателях. Посредством контактных
колец и щеток обмотка фазного ротора зажимами Pl, Р2 и РЗ
соединяется с пусковым ПР (рис. 3.5, б) или регулировочным
реостатом сопротивлением 7?ло6. Асинхронные двигатели с фаз-
ным ротором имеют более сложную конструкцию, чем двигате-
ли с короткозамкнутым ротором, однако обладают лучшими пус-
ковыми и регулировочными свойствами. Трехфазные асинхрон-
ные двигатели с фазным ротором обычно применяют в устрой-
ствах с тяжелыми условиями пуска, например в качестве крано-
вых двигателей переменного тока, или же для привода устройств,
требующих плавного регулирования частоты вращения (см. па-
раграфы 3.8 и 3.9).
В табл. 3.1 приведены технические данные отрезка серии АИР
асинхронных двигателей небольшой мощности с синхронной час-
тотой вращения л, = 1500 об/мин. При высоте оси вращения до
71 мм включительно двигатели этой серии предназначены для вклю-
чения в сеть напряжением 220 или 380 В, а при больших высотах
Рис. 3.5. Схемы включения трехфазных асинхронных двигателей с корот-
козамкнутым (о) и фазным (б) роторами
Таблица 3.1
Технические данные трехфазных асинхронных двигателей серии АИР
небольшой мощности с синхронной частотой вращения 1500 об. мин
Типоразмер ^ном» кВт Ином» % COS фном *5нО.М’ Ч/ ^ном ^Атах/^ном 41/ AtVM Масса, кг
АИР50А4 0,06 53 0,63 11 2,3 2.2 4,5 2,6
АИР50В4 0,09 57 0,65 11 • 2,3 2,2 4,5 2,9
АИР56А4 0,12 63 0,66 10 2,3 2,2 5,0 3,35
АИР56В4 0,18 64 0,68 10 2,3 2,2 5,0 3,9
АИ Р63А4 0,25 68 0,67 12 2,3 2,2 5,0 4,7
АИР63В4 0,37 68 0,70 12 2.3 2.2 5,0 5,6
АИР71А4 0,55 70,5 0,70 9,5 2,3 2,2 5,0 7.8
АИР71В4 0,75 73 0,76 10 2,2 э э 5,0 8,8
АИР80А4 1,1 75 0,81 7,0 2,2 2,2 5,5 9,9
АИР80В4 1,5 78 0,83 7,0 2,2 2,2 5,5 12.1
Примечание. Цифры после названия серии указывают на габарит двигателя —
высоту оси вращения, мм: буквы А и В — условная длина сердечника (А — мень-
шая, В — большая), последняя цифра определяет число полюсов 2р.
оси вращения — на напряжения 380 и 660 В с возможным соедине-
нием обмотки статора «треугольником» или «звездой».
В экспортном исполнении (серия АИС) двигатели рассчитаны
на частоту тока 60 Гц, при этом синхронная частота возрастает на
20 %, что при 2р = 4 составляет 1800 об/мин.
3.3. Основы теории трехфазного асинхронного двигателя
Анализируя принцип действия трехфазного асинхронного дви-
гателя (см. параграф 3.1), заметим, что в асинхронном двигателе
много общего с трансформатором: между обмотками статора и
ротора двигателя, как и между первичной и вторичной обмотками
трансформатора (см. параграф 1.1), существует только магнитная
связь; электроэнергия из сети поступает в первичную обмотку (об-
мотку статора) и за счет элект ромагнитных процессов передается
во вторичную обмотку (обмотку ротора).
Такая аналогия между асинхронными двигателями и транс-
форматорами наиболее очевидна при неподвижном роторе (д2 = 0;
s = 1), что соответствует режиму пуска двигателя (обмотка статора
включена в сеть, а ротор в начальный момент остается неподвиж-
ным). В этом случае отличие асинхронного двигателя от трансфор-
матора только конструктивное, касающееся прежде всего конст-
рукции сердечников и обмоток статора и ротора, наличия воздуш-
ного зазора в магнитопроводе (между статором и ротором), замк-
нутой накоротко обмотки ротора. Несмотря на это, электромаг-
нитные процессы в асинхронном двигателе аналогичны электро-
магнитным процессам в трансформаторе, что позволяет основные
соотношения, выведенные для трансформатора в виде уравнении
напряжений для первичной (1.12) и вторичной (1.14) цепей, а
также токов (1.21), применить к асинхронному двигателю. Исходя
из этого, уравнение напряжения для фазы обмотки статора асин -
хронного двигателя имеет вид:
Уравнение напряжения для короткозамкнутой обмотки фазы
неподвижного ротора (К = 0) имеет вид:
о = £2 — Аг?* (3.6)
Уравнение токов двигателя
/, = /о + (-Л), (3.7)
где /j — приведенное значение тока ротора,
1'1 = М/, (3-8)
к, — коэффициент трансформации тока; для трехфазного асинхрон-
ного двигателя с короткозамкнутой обмоткой ротора (см. рис. 3.2):
kj = IniiWt(3.9)
Здесь и>| — число последовательно соединенных витков в обмотке
фазы статора; — обмоточный коэффициент обмотки статора,
учитывающий особенность его конструкции (для двигателей ма-
лой мощности &об| =0,95 — 0,96); т2 — число фаз обмотки ротора,
равное количеству стержней в короткозамкнутой обмотке Z2.
В уравнениях напряжений (3.5) и (3.6) индуктивные сопротив-
ления рассеяния обмоток статора х, и ротора х2 обусловлены маг-
нитными потоками рассеяния статора и ротора соответственно.
Электродвижущая сила фазы обмотки статора наведенная ос-
новным вращающимся магнитным потоком Ф'
Ei = 4.44Ф/ Wikrfi. (3.10)
Электродвижущая сила фазы обмотки неподвижного ротора,
наведенная вращающимся основным магнитным потоком Ф:
Е2 = 4,44Ф/| и>2коа2, (3.11)
где w2 — число витков в фазе обмотки ротора (для короткозамкну-
того ротора обмоткой фазы является стержень, у которого число
витков w2 = 0,5; обмоточный коэффициент к^ - 1).
В процессе работы асинхронного двигателя его ротор вращается
в направлении вращения магнитного поля статора с частотой вра-
щения < пь при этом основной вращающийся магнитный поток
ф обгоняя ротор с частотой скольжения ns = nt - п2, индуцирует в
обмотке ротора ЭДС Еъ, частота которой f2 = sft. Учитывая это, а
также выражение (3.11), ЭДС. индуцируемую в фазе обмотки вра-
щающегося ротора, запишем в виде
Еъ - 4,44O/Itt^s = EqS,
(3.12)
где Ei — ЭДС, наведенная основным вращающимся потоком в
неподвижном роторе, т.е. при 5=1.
Индуктивное сопротивление рассеяния обмотки вращающего-
ся ротора также пропорционально скольжению = х25. Учитывая
все это, из (3.5) получим уравнение напряжения для вращающе-
гося ротора
О = EtS- jEx2s - /2г2
или, разделив уравнение на скольжение 5, получим
1 0 = Ё2 - jEx2- t2r2/s. (3.13)
Из уравнения токов асинхронного двигателя (3.7) следует, что
ток статора /, имеет две составляющие: /0 — ток намагничивания
магнитной системы двигателя, не зависящий от нагрузки двига-
теля, т.е. Zo = const; (-/2) — ток. компенсирующий размагничи-
вающее действие тока ротора и определяемый нагрузкой на валу
асинхронного двигателя. Таким образом, любое изменение меха-
нической нагрузки на валу двигателя сопровождается соответ-
ствующим изменением тока ротора /2, а следовательно, и тока в
обмотке статора / за счет его составляющей -Л = (-Ё/к). Такое
влияние механической нагрузки на валу двигателя на потребляе-
мый из сети ток /| обусловлено тем, чго изменение механичес-
кой нагрузки вызывает изменение скольжения. Это в свою оче-
редь влияет на ЭДС обмотки ротора Ё25 = Ё-s [см. (3.11)|, а следо-
вательно. и на ток ротора, выражение для которого получим из
(3.13):
h = E2/{jx2 + r/s). (3.14)
Так, в режиме холостого хода (механическая нагрузка на валу
Двигателя отсутствует) скольжение s ® 0, поэтому ток ротора Е ~ О
и ток статора равен только намагничивающей составляющей Е - /0.
Если ротор дви| атсля неподвижен (/ь = 0; 5= 1), что соответствует
начальному периоду пуска двигателя, то ЭДС ротора достигает
наибольшего значения Еь= Е2 и ток ротора максимален: /2 = /2к =
= E2/(jx2 ч г2), чго приводит к значительному увеличению тока
статора: /|к = /0 + (-&), где /2к = /2к/к;.
3.4. Потери и коэффициент полезного действия
асинхронного двигателя
Преобразование электрической энергии в механическую сопро-
вождается потерями в электродвигателе. В асинхронном двигателе
эти потери разделяют на магнитные, электрические, механиче-
ские и добавочные.
Магнитные потери Р( обусловлены перемагничиванием сер-
дечников вращающимся магнитным полем. Сердечник статора ана-
логичен магнитопроводу трансформатора и перемагничивается с
частотой/, при этом возникают потери на гистерезис и вихре-
вые токи Рих, т.е. Рм = РГ + Puv
Для ослабления этих потерь сердечник статора выполняют ших-
тованным из тонких (0,5 или 0,35 мм) штампованных пластин элек-
тротехнической стали, изолированных друг от друга тонким слоем
изоляционного лака. Магнитные потери происходят также и в сер-
дечнике ротора, но из-за малой частоты перемагничивания (/ =
которая при номинальной нагрузке двигателя не превышает не-
скольких герц, эти потери незначительны и ими пренебрегают.
Электрические потери Р( складываются из потерь на нагрев обмо-
ток статора и ротора. Потери пропорциональны квадрату тока в об-
мотках.
Электрические потери в обмотке статора, Вт:
в обмотке ротора, Вт:
РЭ1 =
(3-15)
(3.16)
В этих выражениях активные сопротивления обмоток статора г
и ротора г2 должны быть приведены к рабочей температуре двига-
теля. Так как токи Д и А в обмотках зависят от механической на-
грузки на валу двигателя, то электрические потери Р и Рэ2 также
зависят от нагрузки.
Электрические потери в обмотке ротора пропорциональны
скольжению:
эм>
(3.17)
где Pw — электромагнитная мощность асинхронного двигателя, т.е.
мощность, передаваемая от статора к ротору через воздушный зазор 6:
Лм = Л-(/’м + Л1), (3.18)
активная мощность, потребляемая двигателем из сети:
Г, = m}U\l\ cosipi; (3.19)
cos (p| — коэффициент мощности асинхронного двигателя.
56
Из (3.17) следует, что работа асинхронного двигателя наиболее
экономична при малых скольжениях s, соответствующих минималь-
ным электрическим потерям в обмотке ротора.
Механические потери Р^х — это потери на трение в подшипни-
ках и на вентиляцию (при самовентиляции двигателя). Они про-
порциональны квадрату частоты вращения ротора двигателя.
Добавочные потери РзоЬ включают все виды трудно учитывае-
мых потерь. Эти потери принимают равными 0,5 % от подводимой
к двигателю мощности:
РдоЬ = 0,005Рн (3.20)
Добавочные потери зависят от нагрузки двигателя.
Таким образом, все потери асинхронного двигателя можно раз-
делить на постоянные и переменные. Постоянные потери нс зависят
от нагрузки двигателя, к ним относят магнитные и механические:
пост “
мех
Переменные потери зависят от нагрузки двигателя, и с ростом
нагрузки они увеличиваются. К этим потерям относят: электриче-
ские потери в обмотках статора и ротора и добавочные потери:
п _ р р , р
* пер • э! 1 1 1
На рис. 3.6 представлена энергетическая диаграмма асинхрон-
ного двигателя, на которой все виды потерь условно показаны от-
водами от потока мощности Р,, поступающей в двигатель из сети.
Ширина диаграммы в верхней части эквивалентна потребляемой
двигателем мощности Рь в средней части — электромагнитной мощ-
ност и Рэч [см. (3.18)] и в нижней час-
ти — полезной механической мощ-
ности на валу двигателя:
j Рг = ^-ХР, (3.21)
где ^Р — суммарные потери асинх-
ронного двигателя, Вт:
Коэффициент полезного действия
асинхронного двигателя
[ n=P2/P, = (P1-SWi- (3-23)
Коэффициент полезного действия
асинхронного двигателя зависит от
нагрузки. При номинальной нагруз-
ке или близкой к ней КПД достигает
Рис. 3.6. Энергетическая диа-
грамма асинхронного двигателя
наибольшего значения, при нагруз-
ках меньших номинальной или перегрузках двигателя КПД умень-
шается. Коэффициент полезного действия при номинальной на-
грузке зависит от мощности двигателей: у двигателем средней и
большой мощности номинальное значение КПД п,|ОМ = 0,88 — 0,92,
у двигателей малой мощности 1]ном = 0,5 — 0,80, у двигателей мощ-
ностью в несколько ватт ч,юм = 0,2—0,3.
3.5. Электромагнитный момент асинхронного двигателя
Электромагнитный момент асинхронного двигателя пропор-
ционален его электромагнитной мощности, Н • м:
М=/’эм/со1, (3.24)
где а>! — угловая синхронная скорость, с
(Di = 2лЛ]/60 = 0,105»|.
Электромагнитная мощность в соответствии с (3.16) и (3.17)
Рзм =Рз1/$ = mJlr2/s, (3.25)
или, переходя к приведенным значениям параметров ротора, по-
лучим
PjM
(3.26)
где г'2 — приведенное значение активного сопротивления ротора:
Г? —
(3.27)
к- — коэффициент приведения сопротивлений обмотки ротора:
к =
Приведенное значение тока ротора пропорционально напря-
жению сети:
(3.28)
где х'2 = х2кг — приведенное значение индуктивного сопротивле-
ния рассеяния обмотки ротора.
Используя (3.26) и (3.28), запишем зависимость электромаг-
нитного момента асинхронного двигателя от скольжения, Н • м:
_____ __________________
2я/,[(/1+Г2'Л)2+(х.+х92]'
(3.29)
Так как значения активных и индуктивных сопротивлений об-
моток статора и ротора при работе двигателя с различными часто-
Рис. 3.7. Механические характеристики асинхронного двигателя:
о - Л/=/(5); б - л=/(М)
тами вращения ротора (скольжениями 5) остаются приблизитель-
но одинаковьши, а также неизменными остаются и параметры
питающей сети и fy то выражение (3.29) дает возможность
установить зависимость электромагнитного момента М от сколь-
жения 5.
Графически выраженная зависимость М = /(5) представляет
собой механическую характеристику асинхронного двигателя (рис.
17, а).
Анализ механической характеристики показывает, что при вклю-
чении двигателя в сеть, когда вращающееся поле имеет частоту
вращения а ротор в этот момент под влиянием сил инерции
еще остается неподвижным (я2 = 0, 5 = 1), на роторе создается
начальный пусковой момент Мц, выражение которого получаем из
(3.29), задавшись значением скольжения 5 = 1:
Мп
_____________________________
2n/|[(/i + г>')2 +(*i +Х2)2]
(3.30)
Под действием начального пускового момента Мп ротор двига-
теля приходит во вращение, при этом скольжение уменьшается, а
вращающий момент увеличивается. При критическом скольжении
sKfl момент достигает максимальною значения. Критическое сколь-
жение лкр пропорционально активному сопротивлению обмотки
ротора:
(3.31)
Максимальный электромагнитный момент асинхронного двига-
теля, т.е. момент, соответствующий критическому скольжению,
определяется выражением
После достижения моментом значения (см. рис. 3.7, а) ча-
стота вращения ротора продолжает увеличиваться, а момент начи-
нает уменьшаться. Так продолжается до тех пор. пока электромаг-
нитный момент М не станет равным сумме противодействующих
моментов: М = Л/о + ЛЛ, где Л/о — момент холостого хода; М —
полезный нагрузочный момент, создаваемый рабочей машиной,
приводимой во вращение двигателем.
Пусть электромагнитный момент Л/ном соответствует номиналь-
ной нагрузке двигателя, тогда установившийся режим работы дви-
гателя определится точкой N на механической характеристике с
координатами Л/ном и где Л/||ОМ и sIloM — номинальные значения
электромагнитного момента и скольжения.
Из анализа механической характеристики следует, чзо устой-
чивая работа асинхронного двигателя возможна при скольжениях
5<5кр, т.е. на участке ОА механической характеристики, где изме-
нения нагрузки на валу двигателя сопровождаются соответствую-
щими изменениями электромагнитного момента.
Так, если двигатель работал в режиме номинальной нагрузки,
а затем статический момент нагрузки М увеличился до М\ что
соответствует работе двигателя в режиме точки В на механической
характеристике, то равенство моментов нарушится (Л/ > Л/Ном), ча-
стота вращения ротора начнет убывать, а скольжение 5 — увели-
чиваться. Это приведет к росту электромагнитного момента до зна-
чения М ~ М\ равного противодействующему моменту, равнове-
сие моментов восстановится, т.е. двигатель вновь будет работать
устойчиво, но уже в режиме точки В.
Если же при работе двигателя с номинальной нагрузкой (точка
N) статический момент нагрузки уменьшится до значения Л/", то
равенство моментов вновь нарушится (М" < Мном). При этом час-
тота вращения ротора начнет увеличиваться, а скольжение 5 умень-
шаться. что приведет к снижению электромагнитного момента
двигателя до значения Л/ = М", при этом уменьшение частоты
вращения ротора прекратится. На механической характеристике
этому режиму соответствует точка устойчивой работы двигателя С.
Таким образом, работа двигателя на рабочем участке механиче-
ской характеристики обеспечивает ему статическую устойчивость.
К тому же следует иметь в виду; что работа двигателя на этом
участке механической характеристики, т.е. при s<sKr, еще и наибо-
лее экономична, так как соответствует малым значениям сколь-
жения, а следовательно, и небольшим электрическим потерям в
обмотке ротора: Рз2 = $РЭМ.
Работа асинхронного двигателя при 5 > sKP неустойчива. так как
рост нагрузочного момента в этом случае сопровождается умень-
[пением электрома! нитного вращающею момента, и ротор двига-
теля останавливается (5= 1), т.е. наступает режим короткого замы-
кания. Этот режим является аварийным, так как сопровождается
недопустимым увеличением токов в обмотках двигателя. В режиме
короткого замыкания должна сработать защита двигателя (плав-
кие предохранители или автоматический выключатель) и отклю-
чить его от сети.
Чтобы случайные кратковременные перегрузки или колебания
питающего напряжения не привели к возникновению режима ко-
роткого замыкания, необходимо, чтобы асинхронные двигатели
обладали перегрузочной способностью, которая определяется отно-
шением максимального момента к номинальному: = Л/тах/Л/ном.
Асинхронные двигатели общего назначения малой мошносз и имеют
перегрузочную способность = 2,0—2,5.
В некоторых случаях механическую характеристику асинхрон-
!ного двигателя представляют как зависимость частоты вращения
ротора п2 от момента М, т.е. п2 -/(Л<) (рис. 3.7, б).
3.6. Влияние напряжения сети и активного
сопротивления обмотки ротора
на механическую характеристику
Из формул (3.29), (3.30), (3.32) следует, что электромагнит-
ный момент асинхронного двигателя пропорционален квадрату
напряжения сети подводимого к обмотке статора, т.е. М =
Анализ (3.31) показывает, что критическое скольжение не зави-
сит от напряжения сети L\. Все это позволяет построить механи-
ческие характеристики асинхронного двигателя Л/ =f(s) для раз-
личных значений питающего напряжения, например: U\ =бгном;
< t/KDM; U"> t7HOM (рис. 3.8. а). Анализ этих характеристик пока-
зывает, что колебания напряжения относительно его номи-
нального значения сопровождаются изменениями максимально-
го и пускового моментов, а также изменениями скольжения и
частоты вращения ротора при номинальном нагрузочном момен-
те на валу двигателя.
К Сравнивая рис. 3.8, а и б видим, что в двигателях с повышен-
ным активным сопротивлением обмотки ротора изменения на-
пряжения питания C/j оказывают большее влияние на значения
скольжения (частоты вращения), чем это происходит в двигате-
лях с меньшим значением активного сопротивления обмотки
ротора.
Перегрузочная способность асинхронного двигателя изменяет-
ся пропорционально квадрату напряжения питающей сети, т.е. ко-
лебания напряжения сети в значительной степени влияют на пе-
регрузочную способность двигателя. Например, если напряжение
Рис. 3.8. Механические характеристики асинхронных двигателей с раз-
ным значением сопротивления обмотки ротора при различных напряже-
ниях сети:
а — двигатель с небольшим активным сопротивлением обмотки ротора; б —
двигатель с повышенным активным сопротивлением обмотки ротора
сети уменьшится на 20% и составит 0,8f/hlOM, то перегрузочная
способность составит 0,82 = 0,64 от первоначального значения, т. е.
уменьшится на 36 %.
Рассмотрим влияние активного сопротивления обмотки ротора
г? на форму механической характеристики асинхронного двигателя.
Из (3.32) следует, что максимальный момент асинхронного дви-
гателя Мп не зависит от активного сопротивления /*□, а критиче-
ское скольжение $кр пропорционально сопротивлению г'2 |см. (3.31)].
На рис. 3.9 изображено несколько механических характеристик
Л/=/($) асинхронного двигателя для ряда нарастающих значений
Рис. 3.9. Механические характеристики асинхронного двигателя при раз-
личных значениях активного сопротивления ротора
активного сопротивления ротора: г?| < r2ii < Г2Ш < <>iv- Вес харак-
теристики имеют одинаковую амплитуду (Л/^ = const), но разные
значения критического скольжения хкр. С увеличением г2 до опре-
деленного значения (r4|n) начальный пусковой момент возрастает
до максимального значения Л/п1И = Это сопровождается так-
же ростом скольжения 5 (уменьшением частоты вращения п2), со-
ответствующего заданному значению статического нагрузочного
момента Л/ст.
Таким образом, изменяя активное сопротивление в цепи рото-
ра, можно влиять на основные свойства асинхронного двигате-
ля — частоту вращения и начальный пусковой момент. В асинхрон-
ных двигателях с фазным ротором регулирован не сопротивления
цепи ротора осуществляется введением в цепь ротора добавочного
резистора с переменным активным сопротивлением в виде пуско-
вого реостата ПР (см. рис. 3.5, о).
3.7. Рабочие характеристики трехфазных
асинхронных двигателей
Рабочие характеристики асинхронного двигателя (рис. 3.10) пред-
ставляют собой зависимости частоты вращения ротора полезного
(нагрузочного) момента на валу Л/?, тока статора коэффициента
мощности costpj и КПД т| от полезной мощности двигателя Р2.
Зависимость частоты вращения п2 = /(Л) имеет вид графика,
слабо наклоненного к оси абсписс. Такая форма графика объясня-
ется тем, что трехфазпые асинхронные двигатели работают с не-
большим скольжением, которое даже при номинальной нагрузке
не превышает 0,02—0,10. При этом частота вращения ротора с
Рис. 3.10. Рабочие характеристики трехфазного асинхронного дви] ателя:
Люм - 180 Вт. £/| = 220 В, w(1ON - 1400 об/мин
ростом нагрузки уменьшается пропорционально величине (1 - у)
[см. (3.4)].
Зависимость полезного момента М2 = /(Д?) определяется выра-
жением
М, = Р /в)2 =3QP>/(nn2) = 9,55Р2/(п2), (3.33)
где со> = 2ял2/60 — угловая скорость вращения ротора, с-1.
Так как с ростом Р2 частота вращения п2 уменьшается, график
зависимости М2 = f(P2) несколько отклоняется от прямой линии.
Зависимость тока статора /, = f(P2) представляет собой гра-
фик, не выходящий из начала осей координат, так как двига-
тель в режиме холостого хода (Л - 0) потребляет из сети ток
холостого хода /0, значение которого у асинхронных двигателей
больше, чем у трансформаторов, что объясняется двумя причи-
нами: во-первых, наличием у двигателя воздушного зазора 6
между статором и ротором, а во-вторых, механическими поте-
рями, сопровождающими вращение ротора двигателя. Ток холо-
стого хода у асинхронных двигателей малой мощности достига-
ет /у = 30 — 50 % и более от номинального тока статора (с умень-
шением номинальной мощности двигателя величина /0 увели-
чивается).
Зависимость коэффициента мощности cos<pi = f(P2) показывает,
что коэффициент мощности изменяется в значительном диапазо-
не при переходе двигателя от режима холостого хода к режиму
поминальной нагрузки. Это объясняется тем, что при любой на-
грузке, так же как и в режиме холостого хода при М2 = 0, двигатель
потребляет из сети намагничивающий (реактивный) ток прибли-
зительно одинаковой величины (для данного двигателя). Поэтому
при небольших нагрузках потребляемый из сети ток Ц имеет зна-
чительную реактивную составляющую, что является причиной низ-
кого коэффициента мощности (cos <р| = 0,2—0,3). С возрастанием
нагрузки увеличивается активная составляющая тока Ц и коэффи-
циент мощности повышается, достигая при номинальной нагруз-
ке значений 0,6—0,85. При перегрузках двигателя заметно повы-
шается скольжение s и cos<p1 уменьшается. Объясняется это тем,
что с ростом скольжения 5 увеличивается частота тока в роторе/i -
=f\S и соответственно возрастает индуктивное сопротивление рас-
сеяния х>, величина которой пропорциональна частоте тока в об-
мотке ротора.
Иногда для повышения коэффициента мощности двигателя,
работающего при значительной недогрузке, его обмотку статора
соединяют «звездой».
Зависимость КПД т] -f(Pi) имеет вид, характерный для элект-
рических машин и трансформаторов: при малых нагрузках КПД
небольшой, а затем с ростом нагрузки до Р2 = (0,7— I 0) Рмы до-
стигает наибольшего значения.
3.8. Пусковые свойства трехфазных
асинхронных двигателей
Пусковые свойства двигателей характеризуются пусковым током
I или его кратностью 1п/1 к м и начальным пусковым моментом М}
иди его кратностью Мп/М,^. Анализируя формулы пускового тока
и пускового момента (3.30), делаем следующие выводы:
уменьшение подводимою к двигателю напряжения U{ спо-
собствует не только снижению пускового тока, но и значительно-
му уменьшению пускового момента; объясняется это тем, что пус-
ковой ток пропорционален напряжению сети t/b а пусковой мо-
мент пропорционален квадрату этого напряжения, т.е. U-;
увеличение активного сопротивления обмотки ротора — эф-
фективное средство улучшения пусковых свойств, так как в этом
случае уменьшение пускового тока сопровождается ростом пуско-
вого момента (см. рис. 3.9), при этом оказывается возможным уве-
личить пусковой момент до максимального значения; однако реа-
лизовать это возможно лишь в двигателях с фазным ротором (см.
рис. 3.5, б), которые допускают включение в цепь ротора добавоч-
ного резистора в виде пускового реостата ПР;
у трехфазных асинхронных двигателей с короткозамкнутым
ротором мощностью менее 1 кВт кратность пускового тока обыч-
но не превышает 2,5—4,5; учитывая небольшое значение номи-
нального тока статора, пусковой ток при такой кратности не дос-
тигнет значений, способных вызвать нежелательные явления в
питающей сети либо в двигателе, поэтому при пуске асинхронных
двигателей малой мощности обычно не применяют специальных
мер для ограничения пускового тока; при пуске двигателей мощ-
ностью более 1 кВт, кратность пускового тока которых 5,5—7,5,
иногда используют меры по ограничению пускового тока путем
снижения напряжения на время пуска двигателя при условии, что
нагрузочный момент в этом интервале времени невелик.
3.9. Регулирование частоты вращения
трехфазных асинхронных двигателей
Преобразовав формулу (3.4), получим
/ь = fi 60 (1 - s)/p,
(3.35)
откуда следует, что частоту' вращения трехфа зных асинхронных дви-
гателей можно ретушировать, изменяя скольжение s, частоту тока в
Цепи статора /j или число пар полюсов обмотки статора р.
Рассмотрим некоторые способы регулирования частоты вращения.
3.9.1. Регулирование частоты вращения изменением
активного сопротивления в цепи ротора
Этот способ регулирования используют только в асинхрон-
ных двигателях с фазпь1М ротором. Он основан на изменении
скольжения путем введения в цепь ротора регулировочного рео-
стата 7?)б. Механические характеристики асинхронного двигате-
ля для различных значений активного сопротивления цепи ро-
тора (см. рис. 3.9) показывают, что с увеличением активного
сопротивления скольжение возрастает и соответствует заданно-
му нагрузочному моменту М , а частота вращения ротора умень-
шается.
Недостатки способа: большие потери энергии в /?доб, увеличе-
ние электрических потерь в обмотке ротора Рэ2, вызванное повы-
шением скольжения л [см. (3.17)], ограниченная область примене-
ния (только для двигателей с фазным ротором), возможность ре-
гулирования частоты вращения ротора только в сторону уменьше-
ния от номинальной.
3.9.2. Регулирование частоты вращения изменением
частоты питающего напряжения
В связи с широким применением в электроприводе полупро
водниковых преобразователей частоты (ПЧ) этот способ peiynn-
рования частоты вращения асинхронных двигателей является наи-
более перспективным. При частотном регулировании различают
обычно три возможных режима работы электропривода — режим
постоянного момента, режим постоянной мощности и режим вен-
тиляторной нагрузки.
Режим постоянного момента, когда статический момент на-
грузки при изменениях частоты вращения остается неизменным
Л/ = /(ль) - const, например, в электроприводе подъемных меха-
низмов. В этом случае напряжение U\ и частота должны изме-
няться таким образом, чтобы во всем диапазоне регулирования
электромагнитный момент оставался приблизительно неизмен-
ным. При этом мощность двигателя становится величиной пере-
менной, так как при изменении частоты вращения п2 и неиз-
менном моменте М ~ const мощность двигателя Р = 0,105Мп2 -
= var. Для реализации этого режима необходимо подводимое к
двигателю напряжение изменять пропорционально изменению
частоты:
= С4«>ы(/|//Ном)> (З.зб)
где (/иом и fHOM — номинальные значения напряжения и частоты
тока, подводимого к обмотке статора асинхронного двигателя;
и/, — фактические значения напряжения и его частоты.
Рис, 3.11. Механические характеристики асинхронного двигателя при ча-
стотном регулировании:
а — режим постоянного момента; б — режим постоянной мощности; в — режим
вентиляторной нагрузки
При этом способе регулирования отношение физических зна-
чений напряжения и частоты тока/j является величиной посто-
явной, т.е. Ut/f = UUOM/fHOV = const.
Форма механических характеристик асинхронного двигателя для
этого случая показана на рис. 3.11, а: во всем диапазоне нагрузок
рабочие участки механических характеристик остаются жесткими,
а перегрузочная способность сохраняется неизменной.
Исключение составляет случай регулирования частоты враще-
ния при увеличении частоты тока f выше номинальной. Предпо-
лагаемое при этом повышение напряжения U\ сверх номинально-
го значения недопустимо по правилам эксплуатации двигателей.
В этих условиях увеличение частоты тока происходит при неиз-
менном напряжении питания, оставляя его равным номинально-
му значению. При этом частота вращения увеличивается, а макси-
мальный момент Л/щах, а следовательно, и перегрузочная способ-
ность двигателя уменьшаются. Этому режиму на рис. 3.11, а соот-
ветствует механическая характеристика при частоте тока/3 >/.
Потребляемая двигателем мощность при этом способе регули-
рования не остается постоянной, а изменяется пропорционально
частоте вращения двигателя л2.
Если же график статического момента нагрузки Л/, = f(n2) име-
ет вид, показанный на рис. 3.11, б, что имеет место в электропри-
воде металлообрабатывающих станков, регулирование частоты вра-
щения двигателя происходит при условии неизменной мощности
Двигателя, т. е. соблюдается режим постоянной мощности:
L Р- 0,105Л/л2 ~ const, (3.37)
и подводимое напряжение следует изменять в соответствии с вы-
ражением
т.е.
= const. (3.39)
Электромагнитный момент двигателя, работающего в режиме
постоянной мощности, изменяется обратно пропорционально час-
тоте вращения
М=9,55Р/л2. (3.40)
И наконец, режим вентиляторной нагрузки, когда напря жение
С/ь подводимое к обмотке статора, необходимо изменять пропор-
ционально квадрату частоты переменного тока:
U\/f2 = const. (3.41)
Механические характеристики для этого случая частотного ре-
гулирования представлены на рис. 3.11, в\ момент двигателя растет
пропорционально квадрату частоты вращения.
3.9.3. Регулирование частоты вращения изменением
подводимого напряжения
Напомним, что при изменении подводимого к обмотке статора
двигателя напряжения U} максимальный момент меняется
пропорционально квадрату этого напряжения, а критическое сколь-
жение остается неизменным, так как его величина не зависит от
напряжения. В асинхронных двигателях общего назначения диапа-
зон такого регулирования получается весьма узким, так как меха-
нические характеристики этих двигателей жесткие (см. рис. 3.8, а).
Несколько лучше этот метод реализуется в асинхронных двигате-
лях с повышенным скольжением (повышенным сопротивлением
короткозамкнутой обмотки ротора), у которых механические ха-
рактеристики менее жесткие (см. рис. 3.8. б).
Изменять подводимое к двигателю напряжение можно только
«вниз» от номинального напряжения, так как подводить к двига-
телю напряжение свыше номинального недопустимо. Таким обра-
зом, при уменьшении напряжения частота вращения ротора
при неизменном нагрузочном моменте уменьшается (скольжение
увеличивается). Но при этом возрастают электрические потери в
обмотке ротора, величина которых пропорциональна скольжению s
[см. (3.17)].
Это ведет к значительному снижению КПД двигателя, особен-
но при низких частотах вращения. Например, при уменьшении
частоты вращения в два раза относительно синхронной частоты
вращения (.v = 0,5) половина электромагнитной мощности двига -
теля затрачивается на покрытие электрических потерь в роторе.
А если учесть еще и потери в статоре, то КПД двигателя уменьша-
ется более чем в два раза.
Рис. 3.12. Способы регулировки напряжения, подводимого к асинхрон-
ному двигателю:
а — трехфазным автотрансформатором; 6 — дросселем насыщения (магнитным
усилителем); в — тиристорным регулятором напряжения
Такой неблагоприятный режим работы асинхронных двигателей
при регулировании частоты вращения изменением напряжения Li}
обусловлен тем, что ток /ь потребляемый двигателем из сети,
пропорционален напряжению Ult а электромагнитный момент
двигателя пропорционален квадрату этого напряжения. Поэтому
по мере уменьшения напряжения электромагнитный момент дви-
гателя Л/убывает быстрее, чем уменьшается ток /(, потребляемый
двигателем из сети, т.е. отношение этих величин {Ц/М) увеличи-
вается. В итоге получение небольшой частоты вращения сопряжено
с возникновением значительного тока статора Следствием та-
ких неблагоприятных соотношений являются большие потери в
регулируемом двигателе и его чрезмерный перегрев.
Изменять напряжение, подводимое к обмотке статора асин-
хронного двигателя, можно посредством трехфазного регулировоч-
ного автотрансформатора АТ, включенного в линейные провода
между сетью и обмоткой статора (рис. 3.12, а).
Напряжение питания Ut можно регулировать также трехфаз-
ным дросселем насыщения ДН (рис. 3.12, б). Рабочие обмотки дрос-
селя РО создают в цепи питания двигателя индуктивное сопротив-
ление XL, при этом напряжение непосредственно на входе двига-
теля равно, В:
Обмотка управления ОУ подключена к источнику постоянного
тока. Величина тока в обмотке управления влияет на индуктивное
сопротивление рабочих обмоток. С увеличением тока управления
Усиливается магнитное насыщение сердечников дросселя, а ин-
дуктивное сопротивление X его рабочих обмоток уменьшается (при
этом напряжение на обмотке статора двигателя увеличивается), и
Наоборот, с понижением тока управления индуктивное сопротив-
ление рабочих обмоток дросселей возрастает, что ведет к сн иже-
нию напряжения на обмотке статора двигателя, а следовательно,
к уменьшению его частоты крашения. Громоздкие дроссел и увели-
чивают габариты и удорожают электропривод, что является при-
чиной, ограничивающей их применение.
Более рациональным является применение тиристорных регу-
ляторов напряжения (ТРН). Силовая часть такого регулятора состо-
ит из шести тиристоров VS1 — VS6 (по два в каждой фазе), вклю-
ченных по встречно-параллельной схеме (рис. 3.12, в), которая
обеспечивает прохождение тока в течение обоих полупериодов:
положительный полупериод тока через один тиристор (нечетный),
а отрицательный — через другой тиристор (четный). Управление
тиристорами осуществляется посредством системы импульсно-
фазового управления (СИФУ) импульсами управления С/у11р, по-
ступающими на управляемые электроды тиристоров с требуемым
углом управления а в функции сигнала управления Ur Если угол
управления а = 0°, то напряжение на выходе 1 РН равно напряже-
нию на его входе (падение напряжения на тиристорах практиче-
ски равно нулю) и на обмотку статора двигателя подастся полное
напряжение сети. При а > 0° напряжение на выходе ТРН, а следо-
вательно, на зажимах обмотки статора двигателя уменьшается. Рас-
смотренный регулятор напряжения является нереверсивным. Для
создания реверсивного ТРН. осуществляющего реверсирование
трехфазного двигателя, необходимо пять пар тиристоров.
Тиристорный регулятор напряжения используется также при
пуске асинхронного двигателя, обеспечивая «мягкий» пуск, ис-
ключающий значительные броски пускового тока.
3.9.4. Регулирование частоты вращения изменением числа
полюсов обмотки статора
Этот способ регулирования является ступенчатым, так как при
переходе с одного числа полюсов на другое синхронная частота
меняется скачкообразно [см. (3.1)].
Обмотка статора таких асинхронных двигателей имеет конст-
рукцию, позволяющую пуз ем переключения катушечных групп
менять в ней число полюсов 2р (рис. 3.13). Такие двигатели называ-
ют многоскоростными.
Так как полезная мощность асинхронного двигателя пропорцио-
нальна частоте вращения ротора
Л = 0,105Л/2л2, (3.43)
то при переключении обмотки статора с большего числа полюсов
на меньшее, т.е. при переходе с меньшей частоты вращения на
большую, номинальная мощность двигателя возрастает. Это под-
тверждается техническими данными двухскоростных трехфазных
асинхронных двигателей малой мощности отрезка серии АИР
Рис. 3.13. Схема включения секционных групп обмотки статора на разное
число полюсов;
а — схема с 2р = 4; б — схема с 2р = 2
Табл и на 3.2
Технические данные двухскоростных асинхронных двигателей серии АИР
Типоразмер р 1 ном, кВт Л НОМ» об/мин Лнпмэ & COS Фном ^п/^ном -Л^ном Масса, кг
АИР63А4/2 0,190 1380 55,0 0,66 3,5 1,6 1,8 6,1
0,265 2640 61,0 0,75 4.0 1,2 1,8
АИР63В4/2 0,265 1380 57,0 0,70 3,5 1,6 2,0 6,9
0,370 2640 61,0 0.88 4,0 1,2 1,7
АИР71А4/2 0,480 1360 69.0 0,82 4,5 1,5 1,9 8,9
0,620 2780 68,0 0,85 4,5 1,5 1,9
АИР71В4/2 0,710 1360 69,0 0.84 4.5 1.75 1,9 9,7
0,850 2780 68,0 0,86 4.5 1,85 2,0
АИР80А4/2 1,120 1410 74.0 0,78 5,0 1.9 2,2 13,5
1,500 2730 73,0 0,85 5,0 1,9 2,0
АИР80В4/2 1.500 1380 75,0 0.75 5.0 2,0 2.0 14,9
2,000 2720 75,0 0,84 5,0 2,0 2,1
(табл. 3.2). Многоскоростные асинхронные двигатели по сравне-
нию с обычными двигателями (односкоростными) имеют большие
габариты, массу и стоимость.
3.9.5. Импульсное регулирование частоты вращения
Н При импульсном способе регулирование частоты вращения асин-
. хронного двигателя происходит за счет изменения времени, в те-
чение которого к обмотке статора двигателя подается напряжение
Рис. 3.14. Принципиальная схема (л) и графики напряжений и частоты
вращения (6) асинхронного двигателя при частотном регулировании
сети. В результате этого работа двигателя представляет собой чере-
дование периодов разгона ротора (при подаче импульса) и его
торможения (при прекращении импульса). При этом двигатель по-
стоянно находится в переходном режиме.
Периодическое подключение трехфазного асинхронного двига-
теля к сети с напряжением U\ осуществляется посредством кон-
тактора КМ (рис. 3.14, а), на катушку которого подаются импульсы
постоянного напряжения продолжительностью гр, чередующиеся
с паузами Гп.
Если принять, что время срабатывания и отпускания контакто-
ра равно нулю, то график изменения частоты вращения ротора
двигателя можно совместить с графиком чередования управляю-
щих импульсов. За время импульса /р частота вращения ротора на-
растает до wp, а за время паузы она убывает до значения лп (рис.
3.14, б). В итоге ротор вращается с некоторой средней частотой
вращения:
«ср = («р + «п)/2. (3.44)
Средняя частота вращения ротора зависит от коэффициента
управления у = /Р/Г: чем больше у, тем больше средняя частота
вращения лср. Здесь Г- fp + гп называется периодом.
Диапазон колебаний частоты вращения при импульсном ре-
гулировании за время одного периода Т составляет от п? до п1 и
эти колебания тем меньше, чем больше момент инерции вращаю-
щихся частей привода и чем больше частота следования импуль-
сов UK.
Контактор КМ не обеспечивает достаточной надежности рабо-
ты установки из-за разрушающего действия электрических дуг на
размыкающихся контактах, коммутирующих силовую цепь двига-
теля. Более надежными являются бесконтактные коммутирующие
устройства, например тиристоры или транзисторы.
3.10. Линейные асинхронные двигатели
Подвижная часть линейного двигателя совершает поступатель-
ное движение, поэтому линейные двигатели применяют для при-
вода рабочих .машин с поступательным движением рабочего
органа.
Возможны линейные двигатели четырех видов: электромагнит-
ные (соленоидные), магнитоэлектрические (с применением по-
стоянного магнита), электродинамические и асинхронные. В на-
стоящее время благодаря простоте конструкции и высокой надеж-
ности получили практическое применение асинхронные (индук-
ционные) линейные двигатели.
Для объяснения принципа работы этого двигателя обратимся к
асинхронному двигателю с врашательным движением ротора. Если
статор асинхронного двигателя (рис. 3.15, а) мысленно «разрезать»
и «развернуть» так, чтобы он образовал дугу а (рис. 3.15, б), то
диаметр ротора увеличится. При этом получим асинхронный дви-
гатель с дуговым статором. Частота вращения поля такого двига-
теля (синхронная скорость) равна:
«1Л = /^[а/(2л)1, (3.45)
где л® - (f 6Q)/p — синхронная частота вращения асинхронного
двигателя до «разрезания» статора (см. рис. 3.15, а).
При а = 360° статор полностью «охватывает» ротор и получается
обычный двигатель с синхронной частотой вращения л,.
Если же уменьшить угол а, то можно получить дуговой асинхрон-
ный двигатель на любую синхронную частоту вращения Л|Я <
На рис. 3.15, б показан асинхронный дуговой двигатель с а - 165°,
у которого синхронная частота
вращения
«1Л = wli'[a/360] =
L = н?(165/360) = 0,46//®.
’ Дуговые двигатели применя-
ют для привода устройств, тре-
бующих небольшой частоты вра-
щения. В этом случае привод уп-
рощается, так как нс требуется
понижающий механический ре-
дуктор.
Если же «разрезанный» ста-
тор полностью развернуть на
плоскости (а = 0 ) (рис. 3.15, <?),
то получим линейный асинхронный
двигатель.
Рис. 3.15. К объяснению принципа
действия дугового и линейного
асинхронных двигателей:
1 — индуктор; 2 — вторичный элемент
Принципиальное отличие линейного асинхронного двигателя
от асинхронного двигателя с врашательным движением ротора
состоит в том. что его первичный элемент (индуктор) создает не
вращающееся а бегущее магнитное поле. Подвижную часть такого
двигателя с короткозамкнутой обмоткой (или без нес) называют
вторичным элементом. В принципе вторичным элементом может
быть стальной брус, перемещающийся при работе линейного дви-
гателя вдоль своей оси.
Скорость бегущего поля в линейном двигателе, м/с:
Di = 2 т/; = A/i/p,
(3.46)
где т — полюсное деление, m;/J — частота тока в обмотке статора,
Гц; /| = 2рх — длина статора (индуктора), м.
Принцип действия линейного асинхронного двигателя основан
на способности многофазной (трехфазной) системы токов созда-
вать бегущее магнитное поле (рис. 3.16). При этом бегущее поле
индуктора /, сцепляясь с короткозамкнутой обмоткой 3 вторич-
ного элемента 2 двигателя, индуцирует в ней ЭДС. Возникающие в
стержнях этой короткозамкнутой обмотки токи взаимодействуют
с бегущим полем индуктора и создают на индукторе и вторичном
элементе электромагнитные силы F3M, направленные в разные сто-
роны и стремящиеся переместить подвижную част ь двигателя от-
носительно неподвижной.
Значение возникшей электромагнитной силы Ем пропорцио-
нально магнитному потоку Фй в зазоре между неподвижным и
подвижным элементами двигателя, току 1п в подвижной части и
косинусом угла уф1 между указанными потоком и током, Н
Гэм = СрФгГ2со5уф|, (3.47)
где С — постоянный коэффициент, определяемый конструкцией
двигателя.
В некоторых конструкциях линейных двигателей подвижной ча-
стью является индуктор, а в некоторых — вторичный элемент —
Рис. 3.16. Электромагнитная схема линейного асинхронного двигателя
бегунок^ Если вторичный элемент невозможно изготовить с корот-
козамкнутой обмоткой, то применяют вторичные элементы в виде
полосы мели, алюминия или ферромагнитной стали. Наиболее
удовлетворительные характеристики линейного двигателя получа-
ются при составном вторичном элементе: полосы из ферромаг-
нитной стали, покрытой слоем меди.
Основной недост а ток асинхронных линейных и дуговы к двига -
телей — возникновение краевого эффекта — комплекса электро-
магнитных процессов, обусловленных разомкнутой конструкцией
статора (индуктора). Это явление заметно ухудшает энергетические
показатели линейных и луговых двигателей, так как создает на
подвижной части двигателя силы, противодействующие ее движе-
нию.
L Линейные асинхронные двигатели применяют для привода зас-
лонок, ленточных конвейеров и подъемно-транспортных механиз-
мов (мостовых кранов). Мощные линейные двигатели используют
в качестве тяговых двигателей транспортных средств монорельсо-
вых железных дорог. Линейные двигатели небольшой мощности
применяют в летательных аппаратах, морских судах, механиче-
ских роботах и т.д.
На рис. 3.17 показано устройство привода тележки мостового
крана с использованием линейного двигателя. На тележке 3 рас-
положен индуктор линейного двигателя, состоящий из шихто-
ванного сердечника 6, в пазах кото-
рого расположена обмотка 5, колеса
2тележки, свободно вращающиеся на
своих осях; опирают ся на несущую
двутавровую стальную балку 1. К ниж-
ней полке несущей балки приварена
стальная полоса 4 Бептцее магнитное
поле индуктора б индуцирует в сталь-
ной полосе 4токи. В результате взаи-
модействия этих токов с магнитным
полем индуктора между этим индук-
тором и стальной полосой 4 возни-
кает электромагнитная сила, переме-
тающая тележку вдоль двутавровой
балки 1.
В приводах механических роботов,
металлообрабатывающих станках и
Других производственных механизмах
получили применение линейные асин-
хронные двигатели возвратно посту-
Рис. 3.17. Линейный асинх-
ронный двигатель привода
тележки мостового крана
пательного движения (рис. 3.18). В мо-
мент окончания движения бегунка в
одном из направлений меняется по-
Рис. 3.18. Линейный асинхронный
двигатель возвратно-поступатель-
ного движения
рядок чередования фаз трехфазной системы питающего напряже-
ния. При этом изменяется направление движения бегущего поля и
бегунок движется в обратном направлении. Ограничительные пла-
стины 1 и 2, снабженные амортизационным устройством, напри-
мер пружинами, замедляют движение бегунка при его подходе к
крайним положениям.
3.11. Управление пуском трехфазного асинхронного
двигателя с короткозамкнутым ротором посредством
нереверсивного контактора
Для управления асинхронными электродвигателями применя-
ют различные коммутирующие средства: рубильники, пакетные
выключатели, кнопки, реле, контакторы, магнитные пускатели.
Для дистанционного управления трехфазными асинхронными дви-
гателями с короткозамкнутым ротором наибольшее применение
получили схемы с использованием контактных коммутирующих
устройств.
Рис.3.19. Схема нереверсивного управления пуском трехфазного асинх-
ронного двигателя с короткозамкнутым ротором
Подобная схема, представленная на рис. 3.19, является наибо-
f лее распространенной в электроприводах с короткозамкнутыми
асинхронными двигателями малой и средней мощности напряже-
нием до 1 кВ, допускающих прямое их включение в сеть без тор-
можения и реверса. Эта схема состоит из силовой и управляющей
частей. Силовая часть схемы содержит двигатель М, контакты ли-
нейного контактора КМ1, плавкие предохранители FU и нагрева-
тельные элементы тепловых реле КК. Управляющая часть схемы
содержит кнопки управления SB I «Пуск» и SB2 «Стоп», катушку
линейного контактора КМ1 и нормально замкнутые (размыкаю-
щиеся) контакты тепловых реле КК.
Управляющая часть схемы может быть электрически соединена
с силовой частью или электрически с ней не связана, как это
показано на рис. 3.19. Во втором случае появляется возможность
применить для электропитания управляющей части схемы напря-
жение управления Ц пониженного значения, что обеспечит элек-
। тробезопасность обслуживания схемы.
I При нажатии кнопки SB1 «Пуск» замыкается цепь питания ка-
тушки линейного контактора КМ1, который срабатывает и свои-
ми силовыми контактами КМ 1 подключает к сети обмотку статора
двигателя М. Одновременно замыкаются блокировочные контакты
КМ1, шунтирующие кнопку SB 1 «Пуск», чем обеспечивается пи-
тание обмотки контактора при отпускании указанной кнопки.
Отключение двигателя выполняется нажатием кнопки SB2
«Стоп». При этом размыкается цепь питания катушки контактора
КМ 1, что приводит к размыканию всех его силовых контактов КМ 1,
отключающих обмотку статора двигателя от сети, и контактов,
i шунтирующих кнопку SB 1.
При отпускании кнопки SB2 ее контакты замыкаются, но цепь
катушки контактора КМ1 остается разомкнутой. В качестве кнопок
управления обычно применяют блок из двух кнопок, объединен-
ных в общем корпусе («кнопочный пост»), — кнопка черного цве-
та «Пуск», кнопка красного цвета «Стоп».
В рассмотренной схеме управления применена защита двигате-
ля от перегрузки посредством двух тепловых реле КК Если двига-
тель окажется перегруженным и потребляемый им ток превысит
допустимое значение, то выделяемая нагревательным элементом в
тепловом реле К К теплота вызовет такой изгиб биметаллической
пластины, при котором разомкнутся контакты КК в цепи пита-
ния катушки линейного контактора КМ 1 и двигатель будет отклю-
чен от сети. Для защиты от короткого замыкания в схеме исполь-
зованы плавкие предохранители FU. Возможно применение и дру-
гих защитных устройств, например воздушных автоматических
выключателей.
При необходимости дистанционного управления двигателем с
Двух мест и более схема управления содержит соответствующее
Рис.3.20. Управляющая часть схе-
мы дистанционного управления
асинхронным двигателем с двумя
кнопочными постами
количество кнопочных постов.
Такая схема с двумя кнопочны-
ми постами представлена на рис.
3.20: первый пост КП1 (кнопки
SВ11 и SB21), второй пост КП2
(кнопки SB 12 и SB22).
На рис. 3.21 представлена схе-
ма дистанционного управления
двумя трехфазными асинхрон-
ными двигателями с коротко-
замкнутыми ротором. В схеме
применена взаимная блокировка
двигателей: включение двигате-
ля М2 возможно лишь при ус-
ловии предварительного включе-
ния двигателя Ml. В управляю-
щей части схемы применены два
линейных контактора КМ1 и
КМ2. При этом в цепь катушки
контактора КМ2, контактами
которого включается в сеть двигатель М2, включены контакты
контактора КМ1 Таким образом, включение двигателя М2 воз-
можно лишь при включенном двигателе М1, т.е. только после того,
как сработает контактор КМ I и своими контактами замкнет цепь
катушки контактора КМ2. Такая взаимная блокировка двигателей
используется в некоторых фрезерных станках с раздельными при-
Рис. 3.21. Схема дистанционного управления асинхронными двигателями
со взаимной блокировкой включения
водами вращения фрезы и подачи: привод подачи М2 может быть
включен только при вращающейся фрезе Ml.
Контрольные вопросы
1. Почему частота вращения ротора асинхронного двигателя меньше
синхронной частоты вращения?
2. Какое скольжение называют номинальным9
3. Почему с увеличением механической нагрузки на вал асинхронно-
го двигателя возрастает потребляемый двигателем ток?
4. Как влияет напряжение сети на перегрузочную способность асин-
хронного двигателя?
5. Какие существуют способы регулирования частоты вращения трех-
фазных асинхронных двигателей? Дайте им сравнительную оценку.
6. Объясните, в чем разница между режимами постоянного момента и
постоянной мощности при частотном регулировании частоты вращения
асинхронного двигателя.
7. От чего зависит частота вращения дугового асинхронного двигателя?
8. Что такое «краевой эффскг» в линейном асинхронном двигателе и
как он влияет на параметры двигателя?
9. Приведите примеры применения линейных асинхронных двигате-
лей в промышленных устройствах.
Глава 4
ОДНОФАЗНЫЕ И КОНДЕНСАТОРНЫЕ
АСИНХРОННЫЕ ДВИГАТЕЛИ
4.1. Принцип действия однофазного
асинхронного двигателя
Однофазные асинхронные двигатели — это двигатели неболь-
шой мощности, широко применяемые в приборных устройствах и
средствах автоматизации. По конструкции они почти не отличают-
ся от трехфазных асинхронных двигателей с короткозамкнутым
ротором. Различие состоит в том, что на сердечнике статора этого
двигателя уложена однофазная обмотка, занимающая 2/3 пазов
сердечника.
При включении однофазной обмотки статора Cl—С2 в сеть
(рис. 4.1) переменный ток, проходя по обмотке, создает пульси-
рующий магнитный поток, неподвижный в пространстве, но из-
меняющийся ПО значению ОТ +Фтах ДО - Фтах- Для объяснения прин-
ципа действия однофазного асинхронного двигателя воспользуем-
ся графическим методом разложения пульсирующего магнитного
потока на два одинаковых, равных Фтах/2, ма1 нитных потока Ф
Рис. 4.1. Схема включения однофазного асинхронного дви-
гателя
и Ф бр (рис. 4.2), вращающихся в разные стороны с
одинаковой частотой:
«пр = «о5р = fi W/P = «I- (4-1)
Будем считать поток Фпр, вращающийся в направ-
лении вращения ротора, прямым, а поток Фобр — об-
ратным. Допустим, что ротор двигателя вращается про-
тив часовой стрелки, т.е. в направлении потока Ф|1р.
Так как рассматриваемый двигатель является асинхрон-
ным, то частота вращения ротора п2 меньше синхрон-
ной частоты вращения магнитного потока Л|, поэтому
скольжение ротора относительно потока Фгр равно
пр -
«1
(4-2)
Магнитный поток Ф^р вращается встречно ротору, поэтому
частота вращения ротора /ь относительно этого потока отрица-
тельна, а скольжение ротора относительно Фобр:
«I - (.-th) п, + п2 п} + л, - Л] + Лт
5обр= л, ' ’ =
(4.3)
Прямой Фп и обратный Фобр магнитные потоки индуцируют в
короткозамкнутой обмотке ротора две ЭДС: £2пр и Е1о^ Эти ЭДС
создают в обмотке ротора токи соответственно /2пр и /2обр.
Частота тока в роторе пропорциональна скольжению, следова-
тельно, частота тока от прямого потока /2пр = f\^ а частота тока
от обратного потока, с учетом (4.3):
(2 ~ $пр)-
(4.4)
Рис. 4.2. Разложение пульсирующего магнитного поля на два враща-
ющихся
Таким образом, ток 12оЬр, индуцируемый обратным магнитным
потоком в обмотке ротора, имеет частотуЛобР, намного превыша-
ющую частоту ^пр тока ротора /2пр, наведенного прямым потоком.
Например, для однофазного асинхронного двигателя, работаю-
щего от сети с частотой f\ = 50 Гц при П\ = 1500 и п2 = 1 440 об/мин:
5пр = "ISOQ — = °’°4; А,₽ = 50’°’°4 = 2 ГЦ;
5<ЛР - 2 - 5ЛР = 2 - 0,04 = 1,96; / 2о6р = 50 • 1,96 = 98 Гц.
В результате взаимодействия тока /2пр с магнитным потоком Ф,,р
возникает электромагнитный момент
I ^пр ^мФцр^Зпр COS (р2пр, (4.5)
где сч — постоянный коэффициент, определяемый конструкцией
двигателя.
Ток /_о6р, взаимодействуя с магнитным потоком Ф^, создает
электромагнитный момент М<$р, направленный встречно Мпр:
^^Зобр *-.м^\>б| А?обр COS (р2обр* (4.61
Результирующий электромагнитный момент, действующий на
ротор однофазного асинхронного двигателя: М = Л/Пр-
При небольших значениях скольжения, т.е. при работе двигате-
ля в пределах номинальной нагрузки, электромагнитный момент
создается в основном за счет момента М||р, а тормозящее действие
момента М66р незначительно. Объясняется это тем, что/2обр »А,Р,
следовательно, индуктивное сопротивление рассеяния обмотки
ротора л2обр = х250бр намного больше ею активного сопротивления.
Поэтом}’ ток /2обр, имеющий большую индуктивную составляю-
щую. оказывает сильное размагничивающее действие на магнит-
ный поток Фобр, значительно ослабляя его.
4.2. Механические характеристики
однофазного асинхронного двигателя
Обобщая изложенное, можно сделать следующие выводы.
Магнитное поле статора однофазного двигателя рассматрива-
ется как состоящее из двух вращающихся в разном направлении
магнитных полей — прямое и обратное; по этой причине работа
однофазного асинхронного двигателя иллюстрируется двумя ме-
ханическими характеристиками, каждая из которых соответствует
«своему» вращающемуся полю: характеристика прямого поля Л/пг =
= /(sqp) и характеристика обратного поля = /(.$обр)-
Диапазон изменения скольжения для каждой из этих характе-
ристик составляет от 0 до 2 (рис. 4.3).
Рис. 4.3. Механические характеристики однофазного асинхронного дви-
гателя
При скольжении 5 = 1 ротор неподвижен и наступает режим
короткого замыкания; развиваемый при этом энектромагнитный
момент Л/к одинаков для обеих характеристик по величине и про-
тивоположен по направлению (знаку). По этой причине однофаз-
ный асинхронный двигатель не создает начального пускового мо-
мента. Частота тока в обмотке ротора при этом равна частоте тока
в питающей сети, т. е./2 = f{.
При скольжениях s > 1 частота тока в роторе превышает час-
тоту тока сети, а при 5 = 2 она равна 2/r С ростом частоты тока в
роторе его индуктивное сопротивления возрастает пропорциональ-
но частоте тока, при этом уменьшается коэффициент мощности в
цепи ротора:
cos ф3обр - . Э . (4.7)
\Г2 ^2обр
На рис. 4.3 показаны механические характеристики однофазно-
го двигателя: характеристика, соответствующая прямому вращаю-
щемуся полю Л/Пр = /(snp), и характеристика Л/Обр =/(5обр), соответ-
ствуюшая обратному вращающемуся полю. На каждой характерис-
тике отмечены характерные точки:
Л/, iX и Мбр.тах — максимальные значения моментов соответ-
ственно для прямого и обратного вращающихся магнитных полей;
Д ,р т1П и Л/()бр т1Г1 — минимальные значения моментов, соответ-
ствующие скольжениям 5=2 для прямого и обратного враща-
ющихся магнитных полей;
f 5Пг кр и уобр.кр — критические скольжения, соответствующие мак-
симальным значениям моментов при прямом и обратном враща-
ющимся магнитным полям.
Что же касается свойств однофазного асинхронного двигателя,
то они определяются результирующей механической характеристи-
кой = /(5). На рис. 4.3 эта характеристика изображена пунктир-
ной линией. Она получена путем сложения ординат электромаг-
нитных моментов от прямого и обратного магнитных полей для
всего диапазона скольжений.
Если за основное принять прямое вращающееся поле, то мож-
но сделать вывод, что при небольших значениях скольжения 5 = 5пр,
т.е. при работе двигателя в пределах номинальной нагрузки, элек-
тромагнитный момент создается в основном за счет Л/пр. Тормозя-
щее действие момента от обратного поля Л/обр — незначительно
(см параграф 4.1). Результирующая механическая характеристика
Л/ =f(s) пересекает ось абсцисс в точке 5 = 1. Из этого следует,
чю однофазный асинхронный двигатель нс создает начального
пускового момента (Л/г = 0), поэтому при включении в сеть ротор
такого двигателя остается неподвижным.
Отсутствие пускового момен-
та в однофазном двигателе при
неподвижном роторе можно
объяснить еще и тем, что в этих
условиях короткозамкнутая об-
мотка неподвижного ротора ана-
логична вторичной обмотке
трансформатора, сцепленной с
переменным (пульсирующим)
магнитным потоком Ф|1ер, наве-
денным в магнитопроводе пер-
вичной обмоткой (однофазной
обмоткой статора), включенной
в сеть переменного тока. Из по-
строений, выполненных на рис.
4.4, видно, что электромагнит-
ные силы Гэм, действующие на
проводники ротора слева и спра-
ва от оси результирующего маг-
нитного потока Ф„,„, взаимно
J I*—Л
Рис. 4.4. Электромагнитные силы на
стержнях неподвижного коротко-
замкнутого ротора однофазного
уравновешиваются и не создают на роторе пускового момента. Для
того чтобы началось вращение ротора двигателя, необходимо на-
рушить равенство моментов короткого замыкания, соответствую-
щих прямому и обратаому вращающимся магнитным полям М, пр =
= Л/кобр. Для этого достаточно придать ротору двигателя первона-
чальное вращение (например, «от руки») в любую сторону. На-
пример, если ротор повернуть в направлении прямого поля, то
равенство моментов нарушится и Мк пр > МК{£Р. В итоге ротор двига-
теля начнет вращение в направлении прямого поля. Если же ротор
повернуть в противоположном направлении, то вращение ротора
будет в направлении обратного поля.
л
4.3. Пуск однофазного асинхронного двигателя
Дая создания пускового момента в однофазном асинхронном
двигателе необходимо, чтобы обмотка статора создавала враща-
ющееся магнитное поле. В основу процесса пуска однофазного асин-
хронного двигателя положена способность двухфазной системы то-
ков. состоящей из двух переменных токов, сдвинутых по фазе от-
носительно друг друга на угол \|/, создавать вращающееся магнит-
ное поле.
При этом на статоре двигателя, помимо основной (рабочей)
обмотки А. занимающей 2/3 пазов сердечника, в оставшихся 1/3
пазов располагают вспомогательную (пусковую) обмотку В.
Для получения вращающегося магнитного поля оси указанных
обмоток должны быть смещены в пространстве относительно друг
друга на угол 90 эл. град (рис. 4.5, а), а токи 1А и 1В в обмотках
должны быть сдвинуты по фазе относительно друг друга. Так как
обе обмотки включены в однофазную сеть параллельно, то для
получения фазового сдвига между токами этих обмоток в цепь вспо-
могательной (пусковой) обмотки В включают фазосмешаюший
элемент ФЭ, в качестве которого используют активное сопротив-
ление (резистор), индуктивность (дроссель) или емкость (конден-
сатор). Принцип образования вращающегося магнитного поля двух-
фазной системой токов показан на рис. 4.5, б. Выполнив построе-
ние вектора МДС F, создаваемой двумя обмотками на статоре для
моментов времени z0, /ь /2, h и /4, получаем, что за один период
переменного тока вектор МДС поворачивается на 360", т.е. делает
один оборот.
После того как ротор двигателя разгонится до частоты враще-
ния, близкой к установившейся, пусковую обмотку В отключают.
Таким образом, во время пуска двигатель работает как двухфаз-
ный. а по окончании пуска — как однофазный.
Для получения кругового вращающегося магнитного поля в дви-
гателе с использованием двух обмоток на статоре, оси которых
Рис. 4.5. Принцип образования вращающегося магнитного поля двухфаз-
ной системой переменных токов
смещены в пространстве относительно друг друга на угол 90 эл.
град, необходимо, чтобы МДС обмоток были равны (Д, = FB), а
токи в обмотках сдвинуты по фазе относительно друг друга на угол
у = 90 эл. град.
Круговое поле характерно тем, что пространственный вектор Ф
магнитного потока этого поля вращается равномерно (nj = const)
и его значение в любой момент времени постоянно Ф = const
(рис. 4.6, а). Такое поле обеспечивает получение наибольшего пус-
а б
Рис. 4.6. Диаграммы кругового (а) и эллиптического (б) вращающихся
магнитных полей
кового момента Л/п, так как оно не содержит обратной составляю-
щей, оказывающей на ротор тормозящее действие.
При частичном нарушении какого-либо условия, например
неравенство МДС (/> * Fb) или когда токи в обмотках 1А и 1В сдви-
нуты по фазе на угол у * 90 эл. град, обмотки статора двигателя
создают вращающееся эллиптическое поле (рис. 4 6, б). Простран-
ственный вектор магнитного потока этого поля вращается нерав-
номерно (/?!= var) и в разных пространстве иных положениях не-
одинаков (Ф = var). Эллиптическое вращающееся поле состоит из
двух неравных по величине вращающихся в разные стороны кру-
говых полей: прямого (большего) и обратного (меньшего). Обрат-
ное вращающееся поле создает тормозной момент и ухудшает свой-
ства однофазного двигателя.
Если же, например, МДС FB = 0 или токи 1А и 1В совпадают по
фазе, то магнитное поле статора становится пульсирующим, у
которого прямая и обратная составляющие одинаковы. В этих усло-
виях, как было показано ранее, двигатель не создает пускового
момента (см. рис. 4.3).
Из векторных диаграмм, приведенных на рис. 4 7, а. о, видно,
что включение в цепь вспомогательной обмотки В резистора с актив-
ным сопротивлением гили дросселя индуктивностью L в качестве
фазосдвигающего элемента не обеспечивает фазового сдвига меж-
ду токами 1Л и !в на 90 эл. град. Лишь включение конденсатора
емкостью С в качестве ФЭ обеспечивает фазовый сдвиг между то-
ками jA и 1В на угол у = 90 эл. грал (рис. 4.7, в). При этом емкость
конденсатора выбирают такой, чтобы ток 1В в момент пуска дви-
гателя (5=1) опережал по фазе напряжение сети й} на угол <рд,
дополняющий угол <рл до 90 эл. град: у = <рл + фд = 90 эл. град.
Если при этом обе обмотки создают одинаковые МДС, то вра-
щающееся поле статора будет круговым.
Рис. 4.7. Сравнение свойств фазосмешаюших элементов (ФЭ) для одно-
фазных асинхронных двигателей:
а — активное сопротивление; б — индуктивность; в — емкость; г — механиче-
ские характеристики однофазных двигателей для разных ФЭ
Таким образом, только использование конденсатора в качестве
фЭ обеспечивает однофазному асинхронному двигателю наилуч-
ШИС пусковые свойства. Однако применение конденсаторов не все-
гда оправдано из-за их больших габаритных размеров. Например,
для однофазного асинхронного двигателя мощностью 40 Вт, вклю-
чаемого в сеть напряжением 220 В., частотой 50 Гц, необходим
пусковой конденсатор емкостью 20 мкФ при рабочем напряжении
400 В. Габаритные размеры такого конденсатора довольно значи-
тельны, занимаемый им объем составляет примерно половину
объема двигателя. Когда условия работы двигателя не требуют боль-
шого пускового момента, используются однофазные асинхронные
двигатели с активным сопротивлением в качестве ФЭ. При этом
не требуется включения дополнительного резистора, так как актив-
ное сопротивление пусковой обмотки повышается за счет обмо-
точного провода уменьшенного сечения по сравнению с прово-
дом рабочей обмотки. Пусковая обмотка такого двигателя включе-
на лишь на время пуска, продолжительность которого не превы-
шает нескольких секунд, поэтому уменьшение сечения провода
этой обмотки вполне допустимо. Пусковой момент таких двигате-
лей не превышает номинального, но этого достаточно для боль-
шинства случаев применения однофазных асинхронных двигате-
лей, включаемых в есть при небольшой нагрузке на валу. Отече-
ственная промышленность выпускает однофазные асинхронные
двигатели с активным сопротивлением в качестве ФЭ серии АОЛ Б
номинальной мощностью от 18 до 600 Вт при синхронной частоте
вращения 3 000 и 1 500 об/мин, предназначенные для включения в
сеть напряжением 127, 220 или 380 В, частотой 50 Гц.
При использовании в качестве фазосмешаюшего элемента ФЭ
конденсатора пусковой момент однофазного двигателя при правиль-
но подобранной емкости С может составить Мп = (1,6 — 2,0) А/ном.
Механические характеристики однофазных асинхронных двигате-
лей приведены на рис. 4 7, г: характеристика / — при использова-
нии активного сопротивления в качестве ФЭ, характеристика 2 —
при использовании для этого емкости (конденсатора), пунктир-
ной линией изображена характеристика двигателя при отсутствии
ФЭ в пусковой обмотке.
При одинаковых габаритных размерах мощность однофазного
Двигателя составляет приблизительно 40—45 % от мощности трех-
фазного двигателя. Например, трехфазный асинхронный двигатель
серии АОЛ типа АОЛ22-4 имеет номинальную мощность 400 Вт, а
однофазный асинхронный двигатель с повышенным активным
сопротивлением пусковой обмотки этой серии типа АОЛБ22-4 с
такими же габаритами, что и трехфазный, — всего лишь 180 Вт.
Асинхронные однофазные двигатели с пусковым сопротивле-
нием типа АОЛ Б имеют кратность пускового момента 1,0 —1,2, а
асинхронные однофазные двигатели с пусковой емкостью типа
АОЛ Г такого же диапазона мощности имеют кратность пускового
момента 2,0—2,5. Что же касается рабочих свойств, то они у этих
двигателей одинаковы.
4.4. Конденсаторные асинхронные двигатели
Конденсаторный асинхронный двигатель — это двухфазный
двигатель, на статоре которого расположены две фазовые обмот-
ки, занимающие одинаковое число пазов. Оси этих обмоток сме-
щены в пространстве относительно друг друга на 90 эл. град. Пита-
ние двигателя осуществляется от однофазной сети, при этом об-
мотка фазы А включается в сеть непосредственно, а обмотка фазы
В— через рабочий конденсатор Qa6 (рис. 4.8, а). В процессе рабо-
ты конденсаторного двигателя обе обмотки включены постоянно.
Таким образом, если однофазный асинхронный двигатель по окон-
чании процесса пуска работает с пульсирующим магнитным по-
лем, то конденсаторный двигатель — с вращающимся полем. Кру-
говое вращающееся поле в конденсаторном двигателе может быть
получено одним из трех способов.
1. Правильным выбором коэффициента трансформации к и ем-
кости конденсатора Сра6 при заданном напряжении сети U\ (см.
рис. 4.8, а). В этом случае емкость Сра6, мкФ, соответствующая
круговому вращающемуся полю:
, _ /лСО5<рл -106
раб — ~
(4.8)
2nf]U\k
где к — коэффициент трансформации, представляющий собой
отношение эффективных чисел витков вспомогательной и глав-
Рис. 4.8. Схемы включения асинхронных конденсаторных двигателей
ной обмоток: к = , здесь кА и кв — обмоточные коэффици-
[
енты обмоток А и В соответственно.
Емкость Cpag, рассчитанная по формуле 14.8), обеспечивает по-
лучение кругового поля при условии, что к = tg <рА, где <рл — угол
сдвига фаз между током /, и напряжением йА при круговом поле.
Г 2. Правильным выбором напряжений на фазах и емкости кон -
денсатора мкФ, при заданном коэффициенте трансформа-
ции к (рис. 4.8, б):
Г r _ Ia sinep^ 10,j ,4 q
I ра6 " 2л/! UAk ’
При этом напряжения на фазных обмотках двигателя должны на-
ходиться в отношении ИА/ив- tg<pA/k.
Г 3. Включением последовательно с емкостью Сраб добавочного
резистора сопротивлением /?до6 и правильным выбором емкости
[Cpj5. мкФ (рис. 4.8, в), при заданных значениях напряжения сети
и коэффициенте трансформации к < tg <р/.
(tg<Pzi -*); (4.10)
COS<p,<
2л/]1/|/:со5<рл(А tg <рл + 1)
(4.11)
Анализ выражений (4.7) —(4.11) показывает, что при заданных
значениях коэффициента трансформации к (для первого случая),
отношения напряжений па обмотках ИА/UB (для второго случая) и
сопротивления резистора /?аоб (в третьем случае), независимо от
емкости рабочего конденсатора С^б, круговое вращающееся поле
возможно только при одном определенном режиме работы конденса-
торного двигателя. Объясняется это тем, что при изменении режи-
ма работы меняется угол фазового сдвига между векторами тока 1Л
и напряжения VA в обмотке wA. При отклонении режима работы
от расчетного вращающееся поле конденсаторного двигателя ста -
новится эллиптическим и рабочие свойства двигателя ухудшаются.
Обычно расчет параметров для получения кругового поля ведут
для номинального режима работы двигателя.
В этом случае двигатель имеет хорошие рабочие свойства: зна-
чительную мощность на валу при высоком КПД (60—75 %) и вы-
соком коэффициенте мощности (0,8 — 0,95), но в то же время его
пусковые свойства оказываются неудовлетворительными.
Напряжение на конденсаторе (/с, включенном последовательно
в цепь одной из обмоток конденсаторного двигателя, при круго-
вом врашаюшемся поле превышает напряжения сети Ut:
I Uc=Ujl + k2. (4.12)
Пуск
Рис. 4.9. Механические характеристики (а) и схехмы включения асинхрон-
ного конденсаторного двигателя с рабочей и пусковой емкостями (6, в)
При выборе конденсатора необходимо следить за тем, чтобы
рабочее напряжение, указанное на конденсаторе, было не меньше
напряжения Uc.
На рис. 4.9, а приведена механическая характеристика конденса-
торного двигателя с рабочей емкостью (график /), из которой сле-
дует, что кратность пускового момента двигателя не пре-
вышает 0,5. Объясняется это тем, что магнитное поле двигателя
при пуске значительно отличается от кругового, поэтому двигате-
ли с рабочей емкостью применяют лишь для привода устройств,
не требующих больших пусковых моментов.
Пусковой момент конденсаторного двигателя может быть зна-
чительно повышен, если параллельно рабочей емкости Срзб крат-
ковременно включить пусковую емкость Сп (рис. 4.9, 6). Она должна
отключаться при достижении ротором частоты вращения 60 —70 %
от синхронной частоты. После этого двигатель будет работать толь-
ко с рабочей емкостью. Необходимость отключения пусковой ем-
кости вызвана опасностью наступления в цепи двигателя явления
резонанса напряжений или состояния, близкого к резонансу, что
может привести к пробою изоляции обмотки либо конденсатора.
Чтобы исключить возможность работы конденсаторного двигателя
с включенной пусковой емкостью, в схеме двшателя можно при-
менить реле времени КТ с задержкой на размыкание контактов
при включении этого реле (рис. 4.9, в). Необходимое время выдер-
жки реле времени устанавливается экспериментально, поскольку
оно зависит от параметров, влияющих на продолжительность пус-
ковой операции: величины начального пускового момента двига-
теля и механической нагрузки на вал двигателя. После отключения
двигателя от сети реле КТ также оказывается выключенным, и его
контакты вновь подключают пусковой конденсатор Сш подгото-
вив двигатель к следующему пуску.
Емкость пускового конденсатора намного больше емкости ра-
бочего конденсатора. Выбор величины пусковой емкости зависит
90
от необходимой кратности пускового момента, которая может бы гъ
доведена до двух и более. Механическая характеристика конденса-
торного двигателя с пусковой емкостью приведена на рис. 4.9. а
I (график 2). При наличии пусковой емкости вращающееся поле
двигателя при пуске приближается к круговому, а магни гный по-
ток увеличивается. Все это способствует повышению пускового
момента. Значительные габариты конденсаторов, используемых в
качестве пусковой емкости, иногда ограничивают их применение
в конденсаторных двигателях, так как они в некоторых случаях
оказываются почти такими же, что и габариты самого двигателя.
Обычно в каталогах на однофазные конденсаторные двигатели
приводится значение рабочей емкости Сраб, соответствующей кру-
говому вращающемуся полю при номинальной нагрузке данного
двигателя.
(В табл. 4.1 приведены технические данные асинхронных конден-
саторных двигателей серии АИРЕ на синхронные скорости 3000 и
1500 об/мин. Двигатели предназначены для включения в сеть на-
пряжением 220 В. частотой 50 Гн. Там же указаны значения рабочей
емкости С(аб при требуемом напряжении конденсатора Uc- 450 В.
На рис. 4.10 показано устройство конденсаторного двигателя се-
рии АИРЕ.
Таблица 4.1
Технические данные асинхронных конденсаторных двигателей серин АИРЕ
Типоразмер р 1 ном* •кВт ^ном* об/мин Ином» COS<p| 41/А«Н! ^Апах/^ном Срцб. мкФ
ЛИРЕ71А2 0,55 2850 75 0,90 4,3 - 2,0 0.50 16
АИРЕ71В2 0,76 2790 71 0,90 4,0 1,9 0,55 26
АИРЕ71С2 1,10 2790 76 0,90 3,8 2,0 0,55 36
АИРЕ71А4 0,37 1360 64 0,90 3.0 2,0 0,6 14
АИРЕ71В4 0,55 1340 69 0,90 3,0 1.8 0,6 16
АИРЕ71С4 0,76 1340 64 0.90 3,0 1.8 0,55 25
АИРЕ80А2 1,10 2790 74 0,95 3,6 2,0 0,45 *•
АИРЕ8ОВ2 1.50 2790 76 0.95 4.0 1,9 0,45 40
АИРЕ80С2 2.20 2790 76 0.95 3,4 1,9 0,45 50
АИРЕ80А4 0,76 1400 71 0,92 3,0 1.8 0,50 26
ДИРЕ80В4 1.10 1350 71 0,95 2,8 1,8 - 0.46 30
АИРЕ80С4 1.50 1350 71 0,95 2,8 1,8 0.46 40
AHPF100S4 u — ~ 2.20 1400 76 0,95 3.2 1,9 0,46 60
Рис. 4.10. Устройство асинхронного конденсаторного двигателя серии
АИРЕ:
/ — сердечник статора; 2 — обмотка статора; 3 — ротор короткозамкнутый; 4 —
корпус с ребрами охлаждения; 5 — вентилятор наружного обдува (пластмассо-
вый); 6 — конденсатор; 7 — коробка выводов
Конденсаторные асинхронные двигатели, будучи двухфазными,
могут работать и без конденсатора или другого фазосмещающего
элемента. Но при этом к обмотке статора необходимо подвести
напряжения UA и {/в, сдвинутые по фазе относительно друг друга
на 90 эл. град. Для получения таких напряжений можно использо-
вать трехфазный источник питания с нулевым проводом (рис. 4.11, а)ч
включив одну обмотку двигателя на линейное напряжения дру-
гую — на фазное Uc через регулировочный автотрансформатор А Г
(для выравнивания напряжений на фазных обмотках).
Возможно также включение двигателя в трехфазную сеть без
нулевого провода (рис. 4 11, б), но в этом случае напряжения на
Рис. 4.11. Схемы включения двухфазного двигателя в трехфазную сеть
92
обмотках А и //будут сдвинуты по фазе на 120 эл. град, что приве-
дет к некоторому ухудшению пусковых и рабочих свойств двигате-
ля. Однако схема включения двигателя намного упростится.
| Для изменения направления вращения (реверсирования) рото-
ра конденсаторного асинхронного двига геля необходимо поменять
местами провода, соединяющие одну из обмоток статора (напри-
мер, обмотку А) с источником питания. Переключение проводов
сразу на двух обмотках статора не приведет к изменению направ-
ления вращения ротора.
4.5. Включение трехфазного асинхронного двигателя
в однофазную сеть
Трехфазные асинхронные двигатели малой мощности могут ра-
ботать от однофазной сети. При этом двигатели могут быть исполь-
зованы как однофазные с пусковым резистором г„ (рис. <12, а)
Рис. 4.12. Схемы включения трехфазных асинхронных двигателей в одно-
фазную сеть
Рис. 4.13. Механические характери-
стики трехфазного асинхронного
двигателя при различных схемах сю
включения
или с пусковым конденсатором
Сп (рис. 4.12, о, в), либо как кон-
денсаторные с постоянно вклю-
ченным рабочим конденсатором
Сраб и включаемым на время
пуска пусковым конденсатором
Сп (рис. 4.12, г, d, е). Для опре-
деления требуемой емкости ра-
бочего конденсатора сначала
предварительно рассчитывают
эту емкость (при частоте тока
50 Гн), мкФ, по формулам (4.13).
(4.14) и (4 15) для схем рис.
4.12, г, б, е соответственно:
= 27407|ном/<7,;
G>a6 = 2800/|HOM/6|;
Ц»б - 4800/|НОМ/Ult
(4.13)
(4.14)
(4.15)
гце /|ном — номинальный (фазный) ток статора трехфазного дви-
гателя, Л; Ц — напряжение однофазной сети. В
Окончательно значение С^,6 уточняется экспериментально, при
этом токи в обмотках фаз двигателя при работе с нагрузкой не
должны превышать номинального значения.
На рис. 4.13 приведены механические характеристики трехфаз-
ного асинхронного двигателя при его работе от трехфазной (/ ) и
однофазной сети: с рабочим конденсатором (2), без ФЭ (5), с
рабочим и пусковым конденсаторами (4).
Рис. 4.14. Устройство универсального асинхронного двигателя серии УАД:
1 — сердечник статора; 2 — короткозамкнутая обмотка ротора; 3 — сердечник
ротора; 4 — трехфазная обмотка статора; 5 — выводы обмотки статора
Технические данные асинхронных двигателей серии У АД
в однофазном и трехфазном режимах
1 Типе- размер ^ИОМ* в режиме Я,.ом, Об/мин, в режиме I А ЧНОМ* кпд, % мкФ
одно- фазном трех- фазном одно- фазном трех- фазном одно- фазный трех- фазный одно- фазный трех- фазный
[УАД-12 1 1,5 2750 2700 0,055 0,061 10 14 0,5
| УАД 32 5 7 2750 2700 0,11 0,11 25 30 1,5
|УАД-34 2 2,5 1280 1280 0.10 0,11 11 11 1
1 УАД 52 18 20 2750 2700 0,19 0J8 50 55 э
УАД-54 8 9 1300 1280 0,16 0,17 75 75 2
У АД-62 30 40 2750 2700 0,32 0,25 54 60 4
УАД 72 50 70 2750 2700 0,42 0.40 60 65 5
УАД-74 25 30 1300 1280 0,30 0,30 45 50 4
При работе трехфазного асинхронного двигателя от однофаз-
ной сети без рабочего конденсатора, т. е. как однофазного, его но-
минальная мощность используется на 40 — 50%, а при работе с
рабочим конденсатором — на 75 —80%.
В приборных устройствах и средствах автоматики применяют
универсальные асинхронные двигатели (УАД), которые могут ра-
ботать как от трехфазной, так и однофазной сети напряжением
220 В. частотой 50 Гц. Трехфазная обмотка статора соединена «звез-
дой». Устройство двигателя серии УАД показано на рис. 4,14.
Двигатели этой серии охватывают диапазон мощности от 1 до
76 Вт. В табл. 4.2 приведены технические данные асинхронных дви-
гателей серии УАД в однофазном и трехфазно.м режимах работы.
В трехфазном режиме обмотку статора соединяют «звездой», а в
однофазную сеть двигатели включают по схеме рис. 4.12, в.
4.6. Однофазные асинхронные двигатели
с экранированными полюсами
Однофазные асинхронные двигатели с экранированными по-
люсами имеют на шихтованном сердечнике статора 7 явно выра-
женные полюсы 3 с полюсными катушками 2 (рис. 4.15, а). Все
катушки соединены последовательно и образуют обмотку, вклю-
чаемую в однофазную сеть. Каждый полюс разделен продольным
Пазом на две неравные части таким образом, что оси, проведен-
ные через середины указанных частей полюсов, располагаются под
a
Рис. 4.15. Электромагнитная схема (с), распределение магнитных пото-
ков (0 и векторная диаграмма (в) однофазного асинхронного двигате-
ля с экранированными полюсами
углом 6 относительно друг друга. Одну из частей полюса (мень-
шую) охватывает короткозамкнутый медный виток < называе-
мый экраном. Ротор 5 двигателя обычный, короткозамкнутый.
При включении однофазной обмотки статора в сеть в магнито-
проводе двигателя возникает пульсирующий магнитный поток Ф.
большая часть которого Ф ’ проходит через нсэкранированную часть
полюса, а меньшая Ф" — через экранированную часть полюса (рис.
4.15, 6). Поток Ф" индуцирует в короткозамкнутом витке ЭДС £к,
и в нем появляется ток /к, который за счет индуктивности витка
отстает по фазе от ЭДС £к на угол (рк. Ток/к создает магнитный
поток Фк, направленный встречно потоку Ф", создавая результи-
рующий поток в экранированной части полюса Ф , = Ф -Ф,. Век-
тор потока Фэ опережает по фазе ЭДС £к на 90°. В результате век-
торных построений (рис. 4.15, в) видим, что результирующий маг-
нитный поток экранированной части полюса Фэ сдвинуз во време-
ни относительно магнитного потока Ф' в нсэкранированной части
полюса на угол у.
Пространственный 0 и временной у углы сдвига между потока-
ми Фэ и Ф' создают условия для возникновения в двигателе вра-
щающегося эллиптического магнитного поля, поскольку' Фэ Ф\
0 < 90 и v < 90°. Поэтому пусковые и рабочие свойства данного
двигателя невысоки.
Механическая характеристика двигателя с экранированными по-
люсами в принципе такая же, что и у однофазного асинхронного
двигателя с эллиптическим магнитным полем, но отличается на-
личием заметного провала при частоте вращения, равной пример-
но одной трети от синхронной частоты вращения. Причиной этого
является возникновение в двигателе нежелательного электромаг-
нитного момента от МДС третьей гармоники Л/3, который при
скольжении 5 ~ 0,67 становится отрицательным и оказывает на
ротор тормозящее действие. При этом результирующий момент при
Рис. 4.16. Способы улучшения свойств асинхронных двигателей с экра-
нированными полюсами
скольжении 0,67 оказывается меньше пускового момента. В неко-
торых случаях это приводит к тому, что при наличии статического
нагрузочного момента двигатель разгоняется лишь до частоты вра-
щения п ~ (МУ)пх. Для преодоления указанного недостатка в конст-
рукцию двигателя с экранированными полюсами вносят дополне-
ния: под неэкранированной частью полюса увеличивают воздуш-
ный зазор, что несколько ослабляет поток Ф', а между полюсны-
ми наконечниками помешают магнитные шунты (стальные плас-
тины) 6 (см. рис. 4.15, а). Это приводит к увеличению потока экра-
нированной части полюса Ф,. С этой же целью применяют и дру-
гие меры: под неэкранированной частью полюса увеличивают воз-
душный зазор примерно в два раза (рис. 4.16, а) или на экраниро-
ванной части полюса располагают два или даже три короткозамк-
нутых витка (рис. 4.16, б).
Однако кратность пускового момента таких двигателей все же
не превышает 0,6; перегрузочная способность не более 1,4; КПД
намного ниже, чем у конденсаторных двигателей такой же мощ-
ности, что объясняется значительными электрическими потерями
в короткозамкнутом витке. Поэтому в некоторых конструкциях рас-
сматриваемых двигателей короткозамкнутые витки на полюсах не
применяют, а нссиммстрия магнитной системы создается за счет
разных воздушных зазоров между частями каждого полюса (рис.
4.16, в). Пусковые свойства таких двигателей ухудшаются, но КПД
повышается.
И Двигатели с экранированными полюсами нереверсивные — ротор
всегда вращается в направлении от неэкранированной часта полю -
са к экранированной. Обычно эти двигатели изготовляют мощнос-
тью не более 30 Вт и применяют для привода устройств, нс требую-
Ших большого пускового момента. 11 ромы тленность выпускает асин-
хронные двигатели с экранированными полюсами нескольких ти-
пов. Наиболее широкое применение получили двигатели типа ДАО
•йодификагпга ДАО 60, ДАО 83. Д\О 88 и ДАО 90. Указанные дви-
гатели имеют открытую конструкцию, отличающуюся простотой и
технологичностью при изготовлении, имеют сравнительно неболь-
Рис. 4.17. Внешний вид асинхронного двигателя с экранированными по-
люсами типа ДАО88:
/, 6 — короткозамкнутые витки (экраны); 2 — подшипниковый щит; 3 — ротор;
4 — сердечник статора; 5 — обмотка статора; 7 — выводы обмотки статора,
8 — вал
шую стоимость, высокую надежность. Благодаря перечисленным
качествам эти двигатели широко применяют в бытовых и промыш-
ленных приборах. Двигатели указанных модификаций предназначе-
ны для привода рукосушителей, воздухоочистителей, вентилято-
ров, диапроекторов и других приборов с вентиляторной нагрузкой,
работающих при отсутствии значительного пускового момента.
Двигатель (рис. 4.17) состоит из явнополюсного статора 4 с со
средоточенной обмоткой 5 в виде катушки, намотанной на кар
кас; на экранированных частях каждого полюса имеется два экра-
на (замкнутых колец) 1 и 6. Ротор 3 двигателя короткозамкнутый с
одним или двумя выходными концами вала 8 В двигателях типа
ДАО применены подшипники скольжения, расположенные в под-
Табл ила 4.3
Технические данные однофазных асинхронных двигателей
с экранированными полюсами типа ДАО
(напряжение питания 220 В, частота 50 Гц)
Типоразмер Р\нрм> ЙТ ^ном» об/мин Чнсм> / А Ж./ ^ноы Масса, кг
ДАО 60-2,9 2,9 2650 15 0,22 1,25 0,66
ДАО 83-4 4 2500 16 0.28 0.8 0.6
ДАО 88-10 10 2450 16,5 0,48 0,65 1.2
ДАО 88-16 16 2500 19 0,69 0.6 1,2
ДАО 90-16 16 2500 22 0,64 0,68 1,2
Таблnua 4.4
Технические данные однофазных асинхронных двигателей типа АД...Е
(напряжение питания 220 Б, частота 50 Гц)
Типоразмер Р Вт ' НОМ" "пои* об/мин кпд ^п/^ном Масса, кг
"дД-2,5-4/40Е 2,5 1250 0,19 0,10 0,6 0,58
дД-4-4/40Е 4 1300 0,26 0,12 0,6 0,69
АД-6/4/40Е 6 1300 0,31 0,15 0,6 0,85
АД-10-4/45Е 10 1300 0.46 0.19 0,5 1,08
АД 16-4/45Е 16 1300 0,63 0,22 0,5 1.42
М-25-4/45Е 25 1300 0,93 0,24 0,5 2,50
шипниковых щитах 2 Рабочее положение двигателей горизонтальное.
Цифры после названия типа (60, 83, 88 и 90) определяют габарит
двшателя В (ширину сердечника статора). Двигатели предназначе-
ны для включения в сеть напряжением 220 В, частотой 50 Гц. Тех-
нические данные указанных двигателей представлены в табл. 4.3.
Промышленность выпускает также однофазные двигатели с эк-
ранированными полюсами типа АД—Е (табл. 4.4), которые в отли-
чие от рассмотренных двигателей имеют традиционное для элекз -
рических машин конструктивное исполнение (статор цилиндри-
ческой формы).
4.7. Асинхронные машины с заторможенным
фазным ротором
Конструктивная особенность рассматриваемых асинхронных ма-
шин состоит в том, что их роторы заторможены посредством чер-
вячной передачи, которая не только удерживает ротор в заданном
положении, но и позволяет плавно поворачивать его относитель-
но статора.
1 Практическое применение трехфазных асинхронных машин с
заторможенным фазным ротором ограничивается их использова-
нием либо в качестве индукционного регулятора, либо фазорегу-
лятора. Указанные устройства обычно применяют в лабораторной
практике для поверки и регулирования электрических приборов и
средств автоматизации.
Индукционный регулятор напряжения (ИР) представляет собой
Трехфазную асинхронную машину с фазным ротором, предназна-
ченную для плавного регулирования напряжения переменного тока.
Обмотки статора и фазного ротора в ИР имеют автотрансформа-
Рис. 4.18. Схема соединений индукционного регулято-
ра напряжения
торную связь (рис. 4.18), поэтому индукционный
регулятор иногда называют поворотным автотран-
сформатором. При этом фазные обмотки ротора
соединены «звездой», а фазные обмотки статора
не соединены.
Напряжение сети U} подводится к обмотке фаз-
ного ротора, при этом ротор создает вращающее
ся магнитное поле, индуцирующее в обмотке ро-
тора ЭДС Е| =-(?ь а в обмотке статора — ЭДС Е
(рис. 4.19, а). Фазовый сдвиг этих ЭДС относитель-
но друг друга зависит от взаимного пространствен-
ного положения осей обмоток статора и ротора, определяемою
углом а. При а = 0 оси обмоток совпадают, вращающееся поле
одновременно сцепляется с обеими обмотками и ЭДС Е, и Ё2 со-
впадают по фазе (при этом Ё2 и находятся в противофазе). При
а = 180 эл. град ЭДС Е| и Ё2 окажутся в противофазе (Ё2 и Ц совпа-
дают по фазе).
Если пренебречь внутренними падениями напряжения, то на-
пряжение на выходе ИР определяется геометрической суммой:
й2 = ё, + ё2.
(4.16)
При повороте ротора ИР концы векторов Е2 и Ё2 описывают
окружность (рис. 4.1% б), при этом Ё2 изменяется от Ё2п11П = Ux - Ё2
при а = 0 до U2max = Ё| + Ё2 при а - 180 эл. град (рис. 4.19, в).
Индукционные регуляторы применяют в случаях, когда необ-
ходима плавная регулировка напряжения переменного тока.
Рис. 4.19. Векторные диаграммы индукционного регулятора напряжения
100
Фазорегулятор (ФР) предназна-
чен для изменения фазы вторично-
го напряжения относительно пер-
вичною при неизменном вторичном
напряжении. В отличие от ИР обмот-
ки ротора и статора ФР электриче-
ски не соединены друг с другом, т. е,
имеют трансс]юрматорную связь (рис
4.20, а), поэтому ФР иногда назы-
вают поворотным трансформатором.
Изменение фазы вторичного на-
пряжения осуществляется поворо-
{том ротора относительно статора на
угол р. При изменении фазы вторич-
ного напряжения U2 относительно
первичного Ux величина вторично-
го напряжения остается неизменной
(рис. 4.20, б). Первичной обмоткой в
ФР обычно является обмотка стато-
K нагрузке
а
Рис. 4 20. Схема соединений (я)
и векторная диаграмма (б) фа-
зорегулятора
ра. Фазорегуляторы применяют во всех случаях, когда требуется плавное
изменение фазы вторичного напряжения относительно первичного.
Контрольные вопросы
Г1. Почему в однофазном асинхронном двигателе не создается пуско-
вого момента?
2. Каковы условия получения вращающегося магнитного поля в одно-
фазном асинхронном двигателе?
3. Чем различаются конденсаторный и однофазный асинхронные дви-
гатели?
4. Как увеличить пусковой момент конденсаторного асинхронного дви-
гателя?
5. Каково назначение короткозамкнутых витков в экранированном
асинхронном двигателе?
6. Объясните работу и назначение индукционных регуляторов и фазо-
регуляторов.
Глава 5
СИНХРОННЫЕ МАШИНЫ
5.1. Общие сведения о синхронных машинах
В Синхронными называют бесколлекторлые электрические маши -
ны переменного тока, у которых магнитное поле, созданное мно-
гофазной обмоткой переменного тока, вращается в пространстве
с той же частотой, что и ротор, т.е. синхронно с ротором. Частота
переменного тока /ь вырабатываемого синхронным генератором,
зависит от частоты вращения рогора л1 и числа пар полюсов р:
/60. (5.1)
Практически вся производимая электрическая энергия пере-
менного тока вырабатывается на электростанциях посредством
синхронных генераторов. На тепловых и атомных электростанциях
синхронные генераторы приводятся во вращение паровыми тур-
бинами, преобразующими энергию перегретого пара в механиче-
скую энергию вращения вала генератора. В этих случаях синхрон-
ные генераторы называют турбогенераторами. На гидроэлектрос
танциях синхронные генераторы приводятся во вращение гидро-
турбинами и называются гидрогенераторами.
Наряду с этим широко применяют агрегаты для автономного
электроснабжения, которые могут быть стационарными и пере-
движными. Основным видом приводного двигателя в таких агрега-
тах являются дизельные двигатели, а применяемые при этом син-
хронные генераторы называют дизелъ-генераторами.
Синхронные машины используют не только в качестве гене-
раторов. В силовом электроприводе применяют синхронные двига-
тели. Синхронные двигатели получили широкое применение в
приборных устройствах и средствах автоматизации, где использу-
ется их основное свойство — при постоянной частоте тока пита-
ющей сети /| ротор двигателя вращается со строго постоянной
(синхронной) частотой вращения, независимо от нагрузочного
момента на валу:
Л1 = 60/1/р. (5,2)
Любая синхронная машина состоит из двух основных частей:
неподвижного статора и вращающегося ротора, разделенных воз-
душным зазором. Статор синхронной машины в принципе нс от-
личается от статора асинхронной машины (см. рис. 3.1) и состоит
из ипгхтованного сердечника цилиндрической формы с пазами на
внутренней поверхности. В эти пазы уложены активные стороны
распределенной трехфазной или двухфазной обмотки статора. С по-
явлением тока в обмотке статора последняя создает вращающееся
магнитное поле.
Ротор синхронных машин конструктивно выполняют либо с
явно выраженными полюсами, либо с неявно выраженными по-
люсами (рис. 5.1). На роторе располагают обмотку возбуждения,
питаемую от источника постоянного тока. Таким образом, ротор
синхронной машины создает свой магнитный поток, возбуждаю-
щий синхронную машину. В процессе работы синхронной машины
этот поток вращается вместе с ротором с синхронной частотой л(.
В этом заключается принципиальное отличие синхронной маши-
Рис. 5.1. Роторы синхронных машин:
а — с явно выраженными полюсами; б — с неявно выраженными полюсами
ны от асинхронной, в которой ротор не создает возбуждающего
магнитного поля.
К Явнополюсный ротор (рис. 5.1, с) состоит из обода, на внеш-
ней поверхности которого расположены сердечники полюсов с
полюсными наконечниками. Число полюсов обычно четыре и бо-
лее. На полюсах расположены катушки возбуждения. Будучи элек-
трически соединенными, эти катушки образуют обмотку возбуж-
дения. Полярность полюсов ротора чередуется.
Неявнополюсный ротор (рис. 5.1, б) имеет всего лишь два по-
люса. Конструктивно он представляет собой цилиндр с продоль-
1 ными пазами на наружной поверхности, в которые уложена об-
мотка возбуждения. Такие роторы обычно применяют в синхрон-
ных машинах очень большой мощности, работающих с большой
частотой вращения (турбогенераторы), при которой явно выра-
женные полюсы могут быть разрушены действием значительных
центробежных сил. В синхронных машинах малой мощности при-
меняют обычно роторы с явно выраженными полюсакги.
Ж На рис. 5.2 показана конструкция синхронной машины с че-
тырьмя явно выраженными полюсами на роторе. Возбуждение ма-
шины электромагнитное, питание обмотки возбуждения постоян-
ным током осуществляется через контактные кольпа 7 и щетки,
расположенные в щеткодержателях 2. Полюсные катушки 5, рас-
положенные на сердечниках с полюсными наконечниками < со-
единены последовательно и образуют обмотку возбуждения. На
сердечнике статора 5 расположена распределенная обмотка Ох-
лаждение машины осуществляется посредством центробежного вен-
тилятора 6, закрепленного на валу 7.
В синхронных машинах малой мощности чаше используют маг-
нитоэлектрическое возбуждение, т.е. на роторе размешают посто-
янные магниты, а обмотка возбуждения отсутствует. Это позволяет
Упростить конструкцию и повысить надежность машины, избавив
ее от контактных колец и шеток.
Синхронные машины малой мощности, применяемые в при-
борных устройствах и средствах автоматизации, используют в ос-
Рис. 5.2. Синхронная машина с явно выраженными полюсами:
/ — контактные кольца; 2 — щеткодержатели; 3 — полюс ротора с полюсной
катушкой; 4 — подюсный наконечник; 5 — сердечник статора с распределенной
обмоткой; 6— вентилятор; 7— вал
новном в двигательном режиме. В генераторном режиме примене-
ние синхронных машин ограничено электромашинными преобра-
зователями и тахогенераторами.
5.2. Синхронные генераторы
5.2.1. Принцип действия синхронного генератора
Рассмотрим работу трехфазного синхронного генератора (рис. 5.3).
обмотка статора которого соединена «звездой» с нулевым выводом
и подключена к устройству являющимся нагрузкой генератора.
При этом ток нагрузки генератора в цепи статора может изме-
няться от /j = 0 (режим холостого хода) до /1|ЮМ (режим номиналь-
ной нагрузки). Возможно также изменение характера натрузки. Об-
мотка возбуждения ОВ генератора с числом витков через контак-
тные кольца и щетки получает питание от источника постоянного
Рис. 5.3. Схема включения трехфаз- Рис. 5.4. Магнитное поле син-
ного синхронного генератора с хронного генератора при от-
электромагнитным возбуждением сутствии нагрузки
тока с напряжением UB. Ток возбуждения /в можно регулировать
I потенциометром RP Вращение ротора генератора с синхронной ча-
стотой вращения и, осуществляется приводным двигателем.
Когда генератор работает с отключенной нагрузкой (/t = 0), в
нем действует лишь основное магнитное поле, создаваемое МДС
обмотки возбуждения ОВ при прохождении по ней тока /в. Величи -
на МДС на пару полюсов:
/ю ~ (5.3)
МДС FBfl направлена по продольной оси полюсов d—d и враща-
ется с частотой вращения ротора п{ (рис. 5.4).
Основной магнитный поток Фп этого поля, сцепляясь с обмот-
кой статора, индуцирует в ее фазах ЭДС
- 4,44/i
(5.4)
где/ — частота ЭДС, индуцированной в обмотке статора, Гц:
/i=P«i/60, (5.5)
р — число пар полюсов генератора; — число последовательно
соединенных витков в обмотке статора; к^ — обмоточный коэф-
фициент обмотки статора, зависящий от типа обмотки статора
(^-0.8-0,9).
При подключении нагрузки Zlr в обмотке статора появляется
ток нагрузки При этом обмотка статора создает свое вращающееся
магнитное поле, которое воздействует на основное магнитное поле
возбуждения. МДС, создаваемая обмоткой статора на пару полю-
сов, пропорциональна току нагрузки генератора
F} = 0?45 /Л] Г, Wj Аоб,
(5.6)
где т — число фаз в обмотке статора при трехфазной обмотке т, = 3.
Таким образом, в нагруженном синхронном генераторе дей-
ствуют две магнитодвижущие силы: МДС возбуждения Ею и МДС
статора F. Но так как указанные МДС действуют в одной магнит-
ной системе синхронной машины, то они взаимодействуют. Точ-
нее МДС обмотки статора, вызванная нагрузкой генератора, воз-
действует на МДС обмотки возбуждения, т.е. на основное магнит-
ное поле синхронной машины.
5.2.2. Реакция якоря в синхронном генераторе
Степень воздействия поля статора на основное поле генератора
зависит от величины и характера нагрузки синхронного генерато-
ра. Явления, связанные с воздействием поля статора на основное
магнитное поле синхронной машины, называют реакцией якоря.
Синхронные генераторы, как правило, работают на смешан-
ную нагрузку (активно-индуктивную или акзивно-емкостную). Но
для выяснения вопроса о влиянии реакции якоря рассмотрим слу-
чаи работы синхронного генератора при нагрузках предельного
характера: чисто активная, чисто индуктивная, чисто емкостная.
Воспользуемся лля этого картинами магнитых полей и векторны-
ми диаграммами, представленными на рис. 5.5.
Активная нагрузка. Напомним, что при чисто активной нагруз-
ке ток статора Ц совпадает по фазе с ЭДС Ео, т.е. фазовый угол
у, = 0. На рис. 5.5, а представлены статор и ротор двухполюсного
генератора. На статоре показана часть фазной обмотки. Ротор вра-
Рис. 5.5. Реакция якоря синхронного генератора при активной (о), ин-
дуктивной (б) и емкостной (в) видах нагрузки
Вдастся против движения часовой стрелки с частотой В рассмаз -
риваемый момент времени ротор занимает вертикальное положе-
ние, что соответствует максимуму ЭДС £0 в фазной обмотке стато-
ра. Так как ток Д при активной нагрузке совпадает по фазе с ЭДС
£0, то указанное положение ротора соответствует также и макси-
муму тока.
Изобразив линии магнитной индукции поля возбуждения (ро-
тора) и линии магнитной индукции поля обмотки статора, ви-
дим, что МДС статора Ё\ направлена по поперечной оси полюсов
q — q, т.е. перпендикулярно МДС возбуждения £в0. Это подтверж-
дается векторной диаграммой, построенной для данного случая.
Порядок построения диаграммы следующий; в соответствии с про-
странственным положением ротора генератора проводим вектор
МДС возбуждения £р0; под углом 90 к этому вектору в сторону
отставания проводим вектор ЭДС Ео, наведенной магнитным по-
лем возбуждения в обмотке статора; при подключении чисто ак-
тивной нагрузки ток в обмотке статора /1 совпадает по фазе с ЭДС
£Оэ поэтому вектор МДС Fb создаваемый этим током, сдвинут в
пространстве относительно вектора на 90°.
Такое воздействие МДС статора Ff на МДС возбуждения
вызовет искажение результирующего поля машины: магнитное поле
машины ослабляется под набегающим краем полюса и усиливается
под сбегающим краем полюса (рис. 5.6). Вследствие насыщения маг-
нитной цепи результирующее магнитное поле машины несколько
ослабляется.
Объясняется это тем, что размагничивание набегающих краев
полюсных наконечников и находящихся над ними участков зубцо-
вого слоя статора происходит беспрепятственно, а подмагничива-
ние сбегающих краев полюсных наконечников и находящихся над
ними участков зубцового слоя ста-
тора ограничивается магнитным на-
сыщением этих элементов магнит-
ной цепи. В итоге результирующий
магнитный поток машины ослабля-
ется, т.е. магнитная система гене-
ратора несколько размагничивает-
ся, что ведет к уменьшению ЭДС
машины £|.
Индуктивная нагрузка. При чис-
то индуктивной нагрузке генерато-
ра ток статора /| отстает по фазе от
ЭДС £0 на 90°, т.е. ч|/| = 90°. Поэтому
। Ток /j достигает максимального зна-
чения лишь после поворота ротора
вперед на 90 относительно его по-
ложения. соответствующего макси-
Рис. 5.6. Мап пи ное поле синх-
ронного генератора при актив-
ной нагрузке
муму ЭДС Ео (см. рис. 5.5, б). При этом МДС статора (якоря) F,
действует вдоль оси полюсов ротора встречно МДС возбуждения
F о. В этом мы также убеждаемся, построив векторную диаграмму
Такое действие МДС статора Fj ослабляет магнитное поле ма-
шины. Следовательно, реакция якоря в синхронном генераторе при
чисто индуктивной нагрузке оказывает продолъно-размагничивающее
действие на магнитную систему генератора. В отличие от реакции
якоря при активной нагрузке в рассматриваемом случае магнит-
ное поле машины не искажается.
Емкостная нагрузка. Так как ток статора /t при емкостной на-
грузке опережает по фазе ЭДС Ёо на 90°, т.е. = -90е, то своего
наибольшего значения этот ток достигает раньше, чем ЭДС, т.е
когда ротор займет положение, показанное на рис. 5.5, в. Магни-
тодвижущая сила статора Еь так же как и в предыдущем случае,
действует по оси полюсов, но теперь уже согласно с МДС возбуж-
дения Ёв0. При этом происходит усиление магнитного поля воз-
буждения. Таким образом, при чисто емкостной нагрузке синхрон-
ного генератора реакция якоря оказывает продольно-намагничива-
ющее действие. Магнитное поле при этом не искажается.
Смешанная нагрузка. При смешанной нагрузке синхронного
генератора ток статора Д сдвинут по фазе относительно ЭДС Г
на угол V], значения которого находятся в пределах 0 < xgi < ±90 .
Для выяснения вопроса о влиянии реакции якоря при смешанной
нагрузке воспользуемся диаграммами МДС, представленными на
рис. 5.7. При активно-индуктивной нагрузке (рис. 5.7, а) вектор ЁА
отстает по фазе от вектора Eq на угол 0 < у < 90°. Разложим вектор F
на две составляющие: продольную составляющую МДС статора Fw =
= F sin Vi и поперечную составляющую МДС статора Г1<7= Ё| cos
Такое же разложение МДС статора F\ на составляющие можно
сделать в случае активно-емкостной нагрузки (рис. 5.7, б). Попе-
речная составляющая МДС статора Е\^ представляющая собой МД
Рис. 5.7. Векторные диаграммы МДС. ЭДС и токов синхронного генера-
тора при активно-индуктивно!4 (а) и активно-емкостной (d) видах сме-
шанной нагрузки
реакции якоря по поперечной оси, пропорциональна активной
составляющей тока нагрузки = /j cosyb т.е.
Fiv=F|Cosvi, (5.7)
а продольная составляющая МДС статора (якоря) Ё^, представля-
ющая собой МДС реакции якоря по продольной оси, пропорцио-
нальна реактивной составляющей тока нагрузки ild- sin уь т.е.
Г Ёи = F|Sinvi- (5.8)
При этом если реактивная составляющая тока нагрузки от-
стает по фазе от ЭДС Ёо (нагрузка активно-индуктивная), то МДС
F\d размагничивает генератор, если же реактивная составляющая
тока опережает по фазе ЭДС Ёо (нагрузка активно-емкостная),
то МДС Fld подмагничивает генератор.
Направление вектора Ёи относительно вектора £в0 определяет-
ся характером реакции якоря, который при токе нагрузки от-
стающем по фазе от ЭДС Ёо (нагрузка активно-индуктивная), явля-
ется размагничивающим, а при токе /ь опережающем по фазе Ео
(нагрузка активно-емкостная), — подмагничивающим.
5.2.3. Уравнения напряжений синхронного генератора
Напряжение на выводах генератора, работающего с нагрузкой,
отличается от напряжения генератора в режиме холостого хода. Это
объясняется влиянием ряда причин: реакцией якоря, магнитным
потоком рассеяния, падением напряжения в активном сопротив-
лении обмотки статора.
Как было установлено, при работе нагруженной синхронной
машины в ней возникает несколько МДС, которые, взаимодей-
ствуя, создают результирующий магнитный поток Однако при учете
факторов, влияющих на напряжение синхронного генератора, ус-
ловно исходят из предположения независимого действия всех МДС
генератора, т.е. предполагается, что каждая из МДС создает соб-
ственный магнитный поток.
I Такое представление не соответствует физической сущности
явлений, так как в одной магнитной системе возникает один лишь
магнитный поток — результирующий. Но в данном случае предпо-
ложение независимости магнитных потоков дает возможность лучше
понять влияние всех факторов на работу синхронной машины.
Итак, выясним, каково же влияние магнитодвижущих сил на
работу явнополюсного синхронного генератора.
МДС обмотки возбуждения F создает магнитный поток воз-
буждения Фп, который, сцепляясь с обмоткой статора, наводит в
ней основную ЭДС генератора £0.
МДС реакции якоря по продольной оси Fid создает магнит-
ный поток Ф|Л который наводит в обмотке статора ЭДС реакции
якоря по продольной оси Ei(h значение которой пропорционально
индуктивному сопротивлению реакции якоря по продольной оси
xlld. Это сопротивление характеризует степень влияния реакции якоря
по продольной оси на работу синхронного генератора. Так. при
насыщенной магнитной системе машины магнитный поток реак-
ции якоря по продольной оси Ф|^ меньше, чем при ненасыщен-
ной магнитной системе. Объясняется это тем, что поток почти
полностью проходит по стальным участкам магнитопровода, пре-
одолевая небольшой воздушный зазор 8 между сердечником ста-
тора и полюсным наконечником ротора, поэтому при магнитном
насыщении сопротивление этому потоку заметно возрастает, а
индуктивное сопротивление xad уменьшается.
МДС реакции якоря по поперечной оси F[g создает магнит-
ный поток Ф^, наводящий в обмотке статора ЭДС реакции якоря
по поперечной оси Ё[д, значение которой пропорционально ин-
дуктивному сопротивлению реакции якоря по поперечной оси хад.
Это сопротивление не зависит от магнитного насыщения маши-
ны, так как при явнополюсном роторе поток Ф1<7 проходит в ос-
новном по воздуху межполюсного пространства.
Магнитный поток рассеяния обмотки статора ФлЬ анало-
гично обмотке статора асинхронного двигателя, наводит в об-
мотке статора ЭДС рассеяния значение которой пропорцио-
нально индуктивному сопротивлению рассеяния фазы обмотки
статора
£О1 = -ЛЛ- (5.9)
Ток в обмотке статора /, создает активное падение напряже-
ния в активном сопротивлении фазы обмотки статора и:
= (5.10)
Геометрическая сумма всех перечисленных ЭДС, наведенных в
обмотке статора, определяет напряжение на выходе синхронного
генератора:
где ~ геометрическая сумма всех ЭДС, наведенных в обмотке
статора результирующим магнитным полем машины, образован-
ным совместным действием всех МДС (Fb0, Ё[д) и потоком рас-
сеяния статора Фо1.
Полученное выражение (5.11) представляет собой уравнение на-
пряжений явнополюсного синхронного генератора.
5.2.4. Характеристики синхронного генератора
Свойства генератора определяются его характеристиками, из
которых наиболее важными являются внешняя и регулировочная.
Рис. 5.8. Внешние (а) и регулировочные (б) характеристики синхронно-
го генератора
Внешняя характеристика синхронного генератора представляет
собой зависимость напряжения на выводах обмотки статора от тока
нагрузки: Ц = f(I{) при IB = const; coscpj = const; п = Л| - const.
На рис. 5.8, а представлены внешние характеристики синхрон-
ного генератора, соответствующие различным по характеру на-
грузкам.
При активной нагрузке (coscpj - 1) уменьшение тока нагрузки I
* сопровождается ростом напряжения 6ГЬ что объясняется уменьше-
нием падения напряжения в обмотке статора и ослаблением раз-
магничивающего действия реакции якоря по поперечной оси (см.
рис. 5.6). '
I При активно-индуктивной нагрузке (coscpj < 1; инд.) увеличе-
ние Ux при сбросе нагрузки более интенсивно, так как с уменьше-
нием тока нагрузки ослабляется размагничивающее действие про-
I дольной составляющей реакции якоря.
| При активно-емкостной нагрузке генератора (cos ср! < I; е.мк.)
уменьшение тока нагрузки сопровождается понижением напряже-
ния что объясняется ослаблением подмагничивающего дей-
ствия продольной составляющей реакции якоря.
V Изменение напряжения синхронного генератора, вызванное
сбросом номинальной нагрузки при неизменных значениях тока в
обмотке возбуждения - const и частоты вращения ротора -
= const, называют номинальным изменением напряжения, %:
I 100. (5.12)
б |ном
И При активно-емкостной нагрузке генератора сброс нагрузки
вызывает уменьшение напряжения на выходе генератора, поэтому
А б„см принимают со знаком минус. В процессе эксплуатации синх-
ронного генератора обычно напряжение (7, при колебаниях на-
грузки поддерживается неизменным посредством автоматических
регуляторов тока в обмотке возбуждения.
Регулировочная характеристика показывает, как следует изме-
нять ток возбуждения генератора при колебаниях нагрузки, чтобы
напряжение на зажимах генератора оставалось равным номиналь-
ному: /в = /(4) при l/J= = const; п = = const и coscpj = const.
На рис. 5.8, б представлены регулировочные характеристики
синхронного генератора. При активной нагрузке (cosep! = 1) уве-
личение тока нагрузки сопровождается уменьшением напряжения
Ux. Для поддержания этого напряжения неизменным по мере уве-
личения тока нагрузки следует повышать ток возбуждения. При
увеличении нагрузки активно-индуктивного характера (cos <pt < 1;
инд.) происходит более резкое понижение напряжения на выходе
генератора (см. рис. 5.8, а). поэтому ток возбуждения, необходи-
мый для поддержания U\ = t/lnoM, следует повышать в большей
степени. При активно-емкостном характере нагрузки (coscpj < 1;
ем к.) увеличение нагрузки сопровождается ростом напряжения
поэтому для поддержания этого напряжения на уровне номи-
нального значения ток возбуждения следует уменьшать.
5.2.5. Синхронные генераторы,
возбуждаемые постоянными магнитами
Постоянные магниты — это изделия определенной формы (диск,
кольцо, подкова, призма, стержень) из предварительно намагни-
ченного магнитотверлого материала. Постоянные магниты способ-
ны сохранять длительное время значительную остаточную магнит-
ную интуицию, находясь вне намагничивающего магнитного поля.
Постоянные магниты намагничиваются до состояния магнитного
насыщения в сильных магнитных полях напряженностью в тысячи
и лаже сотни тысяч А/м. При этом циклы намагничивания повто-
ряются несколько раз. Постоянные магниты характеризуются вы-
сокими значениями коэрцитивной силы и остаточной магнитной
индукции. К постоянным магнитам, применяемым в электриче-
ских машинах, помимо общих требований, характеризующих маг-
нитные свойства, предъявляются требования стойкости к темпе-
ратурным воздействиям и вибрациям, которым подвержены элек-
трические машины.
В настоящее время в электрических машинах малой мощности
магнитоэлектрического возбуждения применяют постоянные маг-
ниты:
металлокерамические у полученные путем прессования и спе-
кания порошков магнитотвердых сплавов на основе жслезо-алю-
миний-никель-кобальта; магнитные свойства таких магнитов ниже,
чем у литых, но они обладают высокой механической прочностью
и не требуют механической обработки;
оксидные, изготовляемые из порошков ферритов бария и
стронция методом прессования и спекания; недостатком ферри-
товых магнитов является их подверженность температурным воз-
действиям;
на основе соединений кобальта с редкоземельными элементами,
превосходя другие постоянные магниты по своим свойствам, они
имеют сравнительно высокую стоимость и сложную технологию
изготовления;
на основе неодима-железа-бора, которые являются менее до-
рогостоящими и менее подверженными образованию сколов и тре-
1 шин, но они имеют невысокую температурную стабильность.
В электрических машинах весьма малой мощности (миниатюр-
ных) иногда используют тонкие пленки, получаемые методом
напыления магнитотверлого материала на рабочую поверхность.
В синхронных магнитоэлектрических генераторах применяют
постоянные магниты следующих форм.
При весьма малой мощности используют постоянный магнит
«звездочка» 2, напрессованный на вал / (рис. 5.9, а), при несколько
большей мощности применяют ротор с когтеобразными полюсами
Ви постоянным магнитом 2 в виде полого цилиндра (рис. 5.9, б).
Когтеобразные полюсы и постоянный магнит закреплены на валу
через немагнитную втулку 4. Система когтеобразных полюсов за-
щищает постоянный магнит от размагничивающего воздействия
ударного тока при внезапном коротком замыкании генератора.
Недостаток роторов с когтеобразными полюсами — небольшой
объем, занимаемый постоянным магнитом. Этот недостаток устра-
няется применением двух цилиндрических магнитов (рис. 5.10, а)
при сдвоенной когтеобразной конструкции ротора.
При еше большей мощности синхронного генератора целесо-
образно использовать ротор из набора призматических постоян-
ных магнитов (рис. 5.10. б). Такой ротор содержит несколько по-
стоянных магнитов / призматической формы, расположенных ра-
диально.
Рис. 5.9. Роторы синхронных генераторов с постоянными магнитами:
/ — вал; 2 — постоянный магнит; 3— полюс когтеобразный; 4 — немаг-
нитная втулка
Рис, 5.10. Сдвоенный когтеобразный ротор (а) и ротор с призматически-
ми магнитами (б):
/ — постоянный магнит; 2 — немагнитная вставка; 3 — полюсный наконечник;
4 — успокоительная обмотка; 5 — немагнитная втулка
Своими внутренними торцами эти магшггы примыкают к не-
магнитной втулке 5, а наружными торцами они примыкают к свар-
ному цилиндру, состоящему из полюсных наконечников 3 и не-
магнитных вставок 2 (для предотвращения замыкания магнитного
потока постоянных мат нит ов в этом цилиндре). В пазах цилиндра
на участках между немагнитными вставками, являющимися по-
люсными наконечниками располагают короткозамкнутую успоко-
ительную (демпферную) обмотку 4. Эта обмотка выполняет двоя-
кую роль: она устраняет возможные качания ротора относительно
статора и в то же время защищает постоянные магниты от разма! -
ничивающего воздействия токов, вызванных нестабильными ре-
жимами работы генератора.
Следует иметь в виду, что применение магнитоэлектрического
возбуждения в синхронных генераторах имеет недостаток, обус-
ловленный отсутствием обмотки возбуждения с возможным регу-
лированием тока возбуждения, а следовательно, изменением вы-
ходного напряжения генератора. Это обстоятельство затрудняет
стабилизацию напряжения магнитоэлектрических генераторов при
колебаниях нагрузки. В принципе такая стабилизация возможна,
хотя и связана с усложнением конструкции, а следовательно, с
повышением стоимости генератора. Например, можно воздейство-
вать на величину магнитного потока постоянного магнита, изме-
няя магнитное сопротивление сердечника статора путем его под-
магничивания посредством тороидальной обмотки (рис. 5.11, а).
нанесенной на этот сердечник. Практически тороидальная обмот-
ка с внугренней стороны сердечника укладывается на дне каждого
паза, а с внешней стороны располагается hi поверхности сердеч-
ника статора (рис. 5.11, 5). Тороидальная обмотка получает пита-
ние от источника постоянного тока через регулятор.
При увеличении подмагничивающего тока / возрастает маг-
нитный поток Фл в сердечнике статора и усиливается его магнит-
ное насыщение. При этом возрастает магнитное сопротивление
рис. 5 11. Стабилизация напряжения
генератора с постоя иным, магнитом
путем подмагничивания сердечни-
ка статора тороидальной обмоткой:
й ___ функциональная схема; б — распо
вожение витков тороидальной обмот-
ки. 1 — обмотка статора; 2 — обмотка
подмагничивания
а
потоку возбуждения постоянного магнита, величина которого ос-
лабевает, и напряжение на выходе генератора снижается. Если же
уменьшать ток подмагничивания, то напряжение на выходе гене-
ратора будет возрастать. Если нагрузка генератора активная или
активно-индуктивная, то в режиме холостого хода величина под-
магничивающего тока /г наибольшая. Затем, по мере возрастания
нагрузки генератора, ток 7П следует уменьшать таким образом, чтобы
напряжение на выходе генератора оставалось неизменным.
5.3. Синхронные двигатели
I с электромагнитным возбуждением
I 5.3.1. Принцип действия и устройство
I синхронного явнополюсного двигателя
с электромагнитным возбуждением
Характерный признак синхронного двигателя — вращение рото-
ра с синхронной частотой независимо от нагрузки на валу (в пре-
делах допустимой). Этим определяется основное применение синх-
ронных двигателей в приборах и средствах автоматизации для при-
вода механизмов, требующих строго стабильной частоты вращения.
Синхронные двигатели, аналогично синхронным генераторам.,
состоят из неподвижного статора и вращающегося ротора, разде-
ленных воздушным зазором (у синхронных двигателей этот зазор
Несколько больше). Конструктивное исполнение синхронных дви-
гателей малой мощности такое же. что и синхронных генераторов:
явно выраженные полюса на роторе, возбуждение электромагнит-
ное (см. рис. 5.2) либо магнитоэлектрическое, т.е. постоянными
магнитами. Кроме того, синхронные двигатели могут быть реак-
тивными (с невозбужденным ротором) и гистерезисными.
Рассмотрим принцип работы синхронных двигателей на при-
мере явнополюсного двигателя с электромагнитным возбуждением.
| Такие двигатели изготовляют обычно мощностью в несколько
киловатт и более и поэтому в приборных устройствах и средствах
Рис. 5.12. К принципу действия синхронного двигателя
автоматизации практически не применяют. Однако основные по-
ложения теории этих двигателей используют при изучении синх-
ронных двигателей малой мощности с возбуждением постоянны
ми магнитами и других типов.
Для изучения принципа действия синхронного двигателя с элек-
тромагнитным возбуждением используем модель, представляющую
собой две разделенные воздушным зазором магнитные системы
с явно выраженными полюсами — внешнюю I и внутреннюю 2
(рис. 5.12, а). Если внешняя система полюсов неподвижна, то бла-
годаря силам магнитного притяжения внутренняя система полю-
сов (ротор) расположится так. что ее полюсы будут находиться
под полюсами внешней системы противоположной полярности.
При этом силы FM магнитного притяжения, действующие на внут-
реннюю систему, не будут создавать электромагнитного момента
(рис. 5.12, 6), так как они направлены радиально (по оси полю-
сов) и не имеют тангенциальной составляющей.
Если же внешнюю систему полюсов вращать с небольшой час-
тотой то в начальный момент времени эта система сместится
относительно внутренней на некоторый угол 6 (рис. 5.12, в). При
этом вектор силы магнитного притяжения FM также повернется
относительно оси полюса ротора. Теперь эта сила состоит из двух
составляющих: FM = Fn + Ff, причем нормальная составляющая F,,
направлена по оси полюса ротора, а тангенциальная Ft — перпен-
дикулярно оси полюса. Совокупность составляющих Fh действую-
щих на все полюсы ротора, создает на роторе электромагнитный
вращающий момент Л/, приводящий ротор во вращение с синх
ронной частотой т.е. синхронно вращению внешней системе
полюсов.
Трсхфазный синхронный двигатель отличается от рассмотрен-
ной модели тем, что в нем вместо внешней системы полюсов име-
ется неявнополюсный статор с распределенной трехфазной об-
моз кой, аналогичный статору асинхронного трехфазного двигателя.
Ротор синхронного двигателя —
явнополюсной конструкции с элект-
ромагнитным возбуждением. При
этом на полюсах ротора 2 располага-
ют полюсные катушки 3 (рис. 5.13),
которые при последовательном соеди-
нении образуют обмотку возбуждения
ОВ. При подключении обмотки воз-
буждения К ИСТОЧНИКУ' постоянного
тока возникает основной магнитный
поток возбуждения Ф(„ замыкающий-
ся в сердечнике статора /. При вклю-
чении обмотки статора в трехфазнуло
сеть создается вращающееся с синх-
ронной частотой «1 магнитное поле с
таким же числом полюсов, как на
Рис. 5.13. Магнитная система
четырехполюсного синхрон-
ного двигателя
роторе. Благодаря взаимодействию полей статора и ротора возни-
кает электромагнитный момент, вращающий ротор с синхронной
частотой. В результате электрическая энергия сети, поступившая в
двигатель, преобразуется в механическую энергию вращения ро-
тора этого двигателя.
5.3.2. Пуск синхронного двигателя
► с электромагнитным возбуждением
Предположим, что ротор синхронного двигателя вращается с
частотой, отличающейся от частоты вращения поля статора. Тогда
в некоторые моменты времени возбужденные полюсы ротора ока-
жутся под одноименными полюсами поля статора, что приведет к
возникновению сил магнитного отталкивания между полюсами
статора и ротора. При этом суммарный электромагнитный момент
окажется равным нулю и ротор двигателя остановится. По этой
причине синхронный двигатель при подключении его обмоток к
источнику питания не развивает пускового момента. Ротор из-за
своей инерционности не может мгновенно достичь синхронной
частоты вращения магнитного поля статора, которая устанавли-
вается почти одновременно с включением обмотки статора в сеть.
Поэтому между полюсами возбужденного ротора и вращающегося
поля статора не возникает устойчивой магнитной связи, создаю-
щей синхронный вращающий момент.
| Для пуска синхронного двигателя необходимо предварительно
привести ротор во вращение с частотой, близкой частоте враще-
ния поля статора. При этом поле статора будет настолько медлен-
но перемещаться относительно полюсов ротора, что при подклю-
чении обмотки возбуждения к источнику питания между полюса-
ми ротора и вращающегося поля статора возникнет устойчивая
Рис. 5.14. Схема включения синхронного двига-
теля с электромагнитным возбуждением при
асинхронном пуске (а) и консгрукния пуско-
вой обмотки двигателя (б)
магнитная связь, обеспечивающая создание синхронного электро-
магнитного момента. Под действием этого момента ротор втягивает-
ся в синхронизм, т.е. начинает вращаться с синхронной частотой
Существует несколько способов пуска синхронного двигателя,
но практическое применение получил асинхронный способ пуска.
Для реализации этого способа в пазах полюсных наконечников
ротора располагают стержни пусковой короткозамкнутой обмот-
ки, выполненной аналогично обмотке короткозамкнутого ротора
(см. рис, 3.2). Обычно стержни этой обмотки делают из латуни или
меди и замыкают с двух сторон медными кольцами.
Для пуска синхронного двигателя с электромагнитным возбужде-
нием замыкают обмотку возбуждения на резистор г (рис. 5.14. а).
подключают к трехфазной сети обмотку статора. Вращающееся поле
статора с магнитной индукцией В5 индуцирует в короткозамкну-
той пусковой обмотке ротора ЭДС, которая создает в стержнях
обмотки токи. В результате взаимодействия этих токов с вращаю-
щимся полем статора на каждый стержень ротора действует элект-
ромагнитная сила F {(рис. 5.14, б). Совокупность таких сил созда-
ет пусковой (асинхронный) электромагнитный момент под дей-
ствием которого ротор начинает вращаться в ту же сторону, что и
поле статора. После разгона ротора до частоты вращения, близкой
к синхронной (л = 0,95^]), обмотку возбуждения подключают к
источнику постоянного тока. Двигатель возбуждается (полюса ро-
тора намагничиваются), между вращающимся полем статора и по-
люсами ротора устанавливается устойчивая магнитная связь, со-
здающая синхронный электромагнитный момент М, и двигатель
втягивается в синхронизм, т.е. его ротор начинает вращаться син-
хронно с вращающимся магнитным полем. В пусковой обмотке
ротора больше не наводится ЭДС и асинхронный момент не созда-
ется, т.е. Ма - 0.
Короткозамкнутая пусковая обмотка в режиме синхронного
вращения ротора выполняет роль демпферной (успокоительной)
обмотки, ограничивая возможные колебания (качания) ротора,
вызванные изменениями нагрузки на валу двигателя. Переход ро
тора от частоты вращения п2 < Л| к синхронной щ происходит
скачком.
С ростом нагрузки на валу’ двигателя вхождение в синхронизм
затрудняется. При нагрузке, превышающей предельно допустимую,
вхождения в синхронизм не происходит. Максимальный момент
нагрузки на валу синхронного двигателя, при котором ротор еще
«втягивается» в синхронизм, называют моментом входа в синхро-
низм
Не допускается пуск синхронного двигателя с подключенной
обмоткой возбуждения к источнику постоянного тока, так как в
этом случае магнитный поток возбуждения Ф„ при разгоне ротора
будет индуцировать в обмотке статора ЭДС. В результате взаимо-
действия проходящего на обмотке статора тока, вызванного этой
ЭДС, с полем возбуждения возникает тормозящий момент, ухуд-
шающий пусковые свойства синхронного двигателя.
При пуске синхронного двигателя обмотку возбуждения следу-
ет замкнуть на резистор с активным сопротивлением г примерно в
10 раз превышающим активное сопротивление обмотки возб^окде-
ния. Если оставить обмотку возбуждения разомкнутой, то вращаю-
щееся поле статора, обгоняя ротор с большой скоростью, наведет
в его обмотке значительную ЭДС, способнуло вызвать пробой меж-
витковой изоляции обмотки возбуждения.
Пусковые параметры синхронного двигателя — асинхронный
пусковой момент и кратность пускового тока — в значительной
степени зависят от активного сопротивления пусковой обмотки
ротора г (см. параграф 3.6).
5.3.3. Потери, КПД и электромагнитный момент синхронного
двигателя с электромагнитным возбуждением
В синхронном двигателе, как и в любой электрической маши-
не, преобразование электрической энергии в механическую со-
провождается потерями.
Потери и КПД. Потери разделяют на основные и добавочные.
Основные потери синхронною дви1ателя складываются из маг-
нитных и электрических потерь в статоре, потерь на возбуждение
и механических. Магнитные потери в сердечнике статора Рм, элек-
трические потери в обмотке статора P3t. добавочные потери Р^ и
КПД определяют, так же как и для асинхронных двигателей, по
(3.15), (3.20) и (3.23).
Потери на возбуждение, Вт:
В
(5.13)
где г„ — активное сопротивление обмотки возбуждения, приве-
денное к рабочей температуре, Ом; Д(/щ = 2 В — падение напряже-
ния в щетках цепи возбуждения.
Механические потери Рмех состоят из потерь на трение в под-
шипниках и контактных кольцах и потерь на вентиляцию.
Суммарные потери в синхронном двигателе с электромагнит-
ным возбуждением, Вт:
(5.14)
Коэффициент полезного действия синхронного двигателя за-
висит от нагрузки на валу Л и коэффициента мощности cos (р(. Для
синхронных двигателей малой мощности (до 1 кВт) КПД при но-
минальной нагрузке не превышает 80 %.
Электромагнитный момент. Электромагнитная мощность синх-
ронного двигателя, Вт:
Рм ~ ~ (Л1 + Л.|)
(5.15)
затрачивается в основном на создание электромагнитного момен-
та, Н • м:
Л/ Р
(5.16)
Электромагнитный момент синхронного явнополюсного дви-
гателя с электромагнитным возбуждением, Н • м:
М =
/и.ВД
sin 20,
(5.17)
где Ео — ЭДС, наведенная в фазной обмотке статора магнитным
потоком обмотки возбуждения Фв, В; xq и xd — индуктивные со-
противления обмотки статора соответственно по поперечной и
продольной осям, Ом; 0 — угол нагрузки синхронного двигателя,
град.
Неравенство индуктивных сопротивлений xd > хч обусловлено
неравномерностью воздушного зазора явнополюсного синхронно-
го двигателя: по продольной оси d— d (по оси полюсов ротора)
воздушный зазор намного меньше зазора по поперечной оси q—q
(по оси, проходящей через середину межполюсного пространства).
Поэтому магнитные сопротивления вращающемуся магнитном)
потоку статора Ф| по указанным осям также неодинаковы: маг-
нитное сопротивление по продольной оси d—d меньше магнит-
ного сопротивления по поперечной оси q~q (рис. 5.15).
Анализ формулы (5.17) показывает, что электромагнитный
момент синхронного двигателя с явнополюсным ротором и элек-
тромагнитным возбуждением представляет собой сумму двух со-
ставляющих:
основного момента
Е^Ц sin 9
^осп
(5.18)
и реактивного момента
sin 29.
(5.19)
Основной момент сн пропорционален ЭДС обмотки статора
£v, а следовательно, и магнитному потоку Фр (так как £о = Фв) и
напряжению питания Ux. Реактивный момент Afp не зависит от
потока возбуждения Фв. но пропорционален квадрату напряже-
ния питания t/j. Следовательно, реактивный момент Л/р действует
на ротор явнополюсного двигателя даже при отключенном воз-
буждении (Фв = 0). Таким образом, электромагнитный момент явно-
] полюсного синхронного двигателя с электромагнитным возбужде-
нием равен
14 Л/ = Чен + м]у. (5.20)
Т Возникновение реактивного момента обусловлено разностью
магнитных сопротивлений магнитопровода явнополюсной синх-
ронной машины по продольной и
поперечной осям (см. рис. 5.15).
Даже при отсутствии возбуждения
в синхронном явнополюсном двига-
теле магнитное поле статора за счет
магнитного притяжения явно выра-
женных полюсов ротора создает силу
/р. С появлением на роторе нагрузоч-
ного момента ротор смешается отно-
сительно статора и между осями поля
статора и полюсов ротора появляется
угол 9. При этом возникает тангенци-
альная составляющая F/p силы Fp, ко-
торая стремится повернуть ротор в
положение, при котором вращаю-
| Шийся магнитный поток статора ис-
пытывает минимальное магнитное
Рис. 5.15. Продольные и попе-
речные оси магнитопровода
явнополюсной синхронной
машины с 2р - 4
Рис. 5.16. К объяснению возникно-
вения реактивного момента явно-
полюсного синхронного двигателя
сопротивление ^рис. зло;, сово-
купность сад Frp, действующих
на каждый полюс ротора, созда-
ет реактивный момент Мр, на-
правленный в сторону вращения
поля статора ’ у
Если же ротор двигателя не-
явнополюсный (например, как
в асинхронном двигателе), то
магнитные сопротивления по
всем осям ротора одинаковы,
следовательно, и реактивный
момент не возникает.
Из выражений (5.18) и (5.19)
следует, что основной и реак-
тивный моменты синхронного
явнополюсного двигателя зави-
сят от угла нагрузки двигателя 6
(рис. 5.17). Зависимость основного
момента от угла нагрузки Л/1КН =
= /(0) представляет собой синусоиду с максимальным значением
момента при значении угла нагрузки 0 = 90°, а зависимость реак-
тивного момента Л/р = /(0) представляет собой синусоиду с двумя
максимальными значениями: положительным при значении угла
нагрузки 0 = 45 и отрицательным при 0 = 135°. Зависимость резуль-
тирующего момента Л/ = /(0), полученная путем сложения орди-
нат графиков составляющих моментов и Мр, называют угло-
вой характеристикой синхронного явнополюсного двигателя.
С увеличением нагрузочного момента на валу двигателя растет
угол нагрузки 0. При этом момент Л/сначала увеличивается и при
0= достигает максимального значения Мтах. Дальнейший рост
нагрузки, а следовательно, рост угла 0 сопровождается уменьшени-
Рис. 5.17. Угловые характеристики
синхронного двигателя
ем электромагнитного момента
Л/. При этом неуравновешенная
часть нагрузочного момента вы-
зывает снижение частоты враще-
ния ротора, что ведет к «выпаде-
нию» синхронного двигателя из
синхронизма. В итоге двигатель
либо остановится, либо его ро-
тор будет продолжать вращение
под действием асинхронного мо-
мента Максимальный синх-
ронный момент Л/тах называют
моментом выхода двигателя из
синхронизма, а отношение этого
момента к номинальному значению момента М(юм называют пере-
грузочной способностью синхронного двигателя Лм = М^/М^. Обыч-
но перегрузочная способность синхронных явнополюсных двигате-
лей с электромагнитным возбуждением К*, = 2—3.
5.4. Синхронные двигатели с постоянными магнитами
Синхронные двигатели с постоянными магнитами не имеют
обмотки возбуждения, что упрощает их конструкцию, делает се
более надежной из-за отсутствия контактных колеи и щеток. Тре-
буемый для возбуждения магнитный поток в этих двигателях со-
здается постоянными магнитами, расположенными на роторе. При
этом статор двигателя выполнен так же, как у синхронных двига-
телей с электромагнитным возбуждением. Основные понятия, свя-
занные с применением постоянных магнитов в электрических ма-
шинах, изложены в параграфе 5.2.5.
| Синхронные двигатели малой мощности, возбуждаемые посто-
янными магнитами, изготовляют в двух исполнениях: с радиаль-
ным и аксиальным расположением постоянных магнитов.
При радиальном расположении постоянных магнитов шихтован -
ный пакет ротора с пусковой клеткой, выполненный в виде поло-
го цилиндра 2, закрепляют на наружной поверхности явно выра-
женных полюсов постоянного магнита 3 (рис. 5.18). С внутренней
стороны этого цилиндра делают межполюсные прорези, предотв-
ращающие замыкание магнитного потока постоянного магнита в
этом цилиндре. Обычно прорези делают несквозными, оставляя
между полюсами небольшие перемычки, называемые мостиками
насыщения. Такая конструкция повышает механическую прочность
ротора и улучшает пусковые свойства двигателя.
При аксиальном расположении магнитов ротор имеет конструк-
цию, аналогичную ротору короткозамкнутого асинхронного дви-
Рис. 5.18. Синхронный двигатель с радиальным расположением постоян-
ных магнитов:
1 — статор; 2 — короткозамкнутый ротор; 5 — постоянный мат нит
Рис. 5.19. Синхронный двигатель с
аксиальным расположением посто-
янных магнитов
гателя. К торцам ротора 2 при-
жаты кольцевые постоянные
магниты 3 (рис. 5.19). Двигатели
с аксиальным расположением
магнитов применяют при не-
больших диаметрах статора / и
мощности не более 100 Вт. В дви-
гателях с большим диаметром
статора и мощностью 500 Вт и
более применяют конструкцию
с радиальным расположением
призматических постоянных
магнитов (см. рис. 5.10, б).
Пуск синхронных двигателей
с постоянными магнитами име-
ет особенность, обусловленную включением этих двигателей в
сеть при возбужденном роторе. В этом случае при разгоне на ро-
тор двигателя, помимо асинхронного момента Мо и статического
момента сопротивления Л/с, действует еще и тормозной (по от
ношению к асинхронному моменту Ма) момент Л/г, возникаю-
щий от взаимодействия магнитного поля ротора (поля постоян-
ных магнитов) с токами, наведенными в обмотке статора этим
полем (токи замыкаются через источник питания обмотки стато-
ра). Эти токи пропорциональны асинхронной частоте вращения
ротора п2 = -s). Поэтому если максимальное значение асинх-
ронного вращающего момента М соответствует небольшому кри-
тическому скольжению 5кр (см. параграф 3.5), то максимум тор-
мозного момента Л/ттах соответствует большому значению сколь-
жения 5ткр. Тормозной момент Л/т направлен встречно вращаю
Рис. 5.20. Графики асинхронных
пусковых моментов синхронного
двигателя с постоянными магни-
тами
шему асинхронному моменту
Ма и ухудшает пусковые свой-
ства синхронных двигателей с
постоянными магнитами.
На рис. 5.20 показаны графи-
ки зависимости асинхронного
М7 и тормозного Л/т моментов
от скольжения 5.1 рафик резуль-
тирующего момента = f(s)
получен сложением ординат мо-
ментов = ЛГд + Мг и имеет
провал при скольжении вблизи
5Г кр, т. е. при малых частотах вра-
щения ротора. Тормозной мо-
мент М ослабляет результиру-
ющий момент входа в синхро-
низм MJlxpc3, который оказыва-
ется меньше момента входа в синхронизм Л/вх д, соответствующего
пуску двигателя при невозбужденном роторе.
Г Для обеспечения надежного пуска рассматриваемых двигате-
лей необходимо, чтобы минимальный результирующий момент
Д л в асинхронном режиме и момент входа в синхронизм Мвх.рез
были больше статического момента нагрузки Мс. Форма графика
результирующего момента пускового момента синхронного дви-
гателя с постоянными магнитами зависит от активного сопро-
тивления обмотки статора /у и от степени возбужденности двига-
теля постоянными магнитами, которая характеризуется величи-
ной сп =(£0/Д). где £0 — ЭДС фазы статора, наведенная потоком
возбуждения в режиме холостого хода при синхронном враще-
нии ротора. При увеличении г и е„ тормозной момент Мт возрас-
тает и провал графика результирующего пускового момента
увеличивается. Поэтому в рассматриваемых двигателях со сравни-
тельно большим активным сопротивлением обмотки статора Г|
степень возбужденности £, должна быть небольшой. При слиш-
ком большом значении еп двигатель может не войти в синхро-
низм.
► Процессы, сопровождающие работу синхронных двигателей с
постоянными магнитами, аналогичны процессам, протекающим
при работе синхронных двигателей с электромагнитным возбуж-
дением. Постоянные магниты в рассматриваемых двигателях под-
вержены размагничиванию действием вращающегося поля стато-
ра. Наибольшее размагничивающее действие этого поля имеет ме-
сто при пуске двигателя, когда ротор, вращаясь асинхронно, пе-
риодически проходит положения, при которых МДС обмотки ста-
тора направлена встречно МДС постоянных магнитов ротора. Ко-
роткозамкнутая пусковая обмотка ротора несколько ослабляет раз-
магничивание постоянных магнитов, оказывая на них экранизи-
рующее действие.
I абл и на 5.1
Технические данные синхронных двигателей с постоянными магнитами
серии ДС
Типоразмер Номинальные данные Примечание
Мощность. Вт Частота вращения, об/мин Напря- жение сети, В
полез- ная потреб- ляемая
ДС-22-1500/750 16/10 48 1500/750 380 Трехфа иным двухскоростной
ДС10-1500М 10 28 1 500 220 Конденсаторны й
JIG-12-3000 0,25 2.5 3000 127 Конденсаторный
Достоинства синхронных двигателей с постоянными магнитами:
простота и надежность конструкции, обусловленные отсут-
ствием полюсных катушек на роторе, контактных колец и теток;
равномерность вращения;
сравнительно высокие энергетические показатели (КПД и
coscpi).
Недостаток синхронных двигателей с постоянными магнита-
ми — ухудшенные пусковые свойства и повышенная стоимость.
Синхронные двигатели с постоянными магнитами изготовляют
трехфазными или двухфазными (конденсаторными) на неболь-
шие мощности и применяют в приборных устройствах и средствах
автоматизации для привода механизмов, требующих стабильной
частоты вращения, не зависящей от нагрузки.
В табл. 5.1 приведены технические данные синхронных двигате-
лей с постоянными магнитами некоторых типоразмеров серии ДС,
предназначенных для включения в сеть частотой 50 Гц.
5.5. Тихоходные многополюсные синхронные
двигатели
Стремление получить тихоходный синхронный двигатель при-
вело к созданию многополюсных синхронных двигателей с чис-
лом полюсов 2/?= 16. Такое число полюсов в синхронной машине
традиционной конструкции (см. рис. 5.2) привело бы к чрезмерно-
му увеличению ее габаритных размеров. При частоте переменного
тока 50 или 60 Гц и 2р = 16 синхронная частота сравнительно
невелика и для пуска такого синхронного двигателя при условии
его малойнернионности не требуется пусковой клетки, т.е. он ста-
новится самозапус кающимся.
5.5.1. Тихоходные однофазные синхронные двигатели
типов ДСО32 и ДСОР32
Отечественная промышленность для применения в приборных
устройствах изготовляет тихоходные многополюсные однофазные
синхронные двигатели типа ДСО32 (двигатель синхронный одно-
фазный, наружный диаметр корпуса 32 мм) полезной мощностью
до 0,4 Вт. Многополюсная конструкция этого двигателя отличается
от традиционной тем, что в нем применены полюсы статора, вы-
полненные по принципу когтеобразных полюсов, и представляют
собой тонкие металлические пластины, прикрепленные к подшип-
никовым щитам. Каждый подшипниковый щит имеет по восемь
таких полюсов. Общее число полюсов I6 обеспечивает синхрон-
ную частоту вращения 375 об/мин (при частоте переменного тока
50 Гц) или 450 об/мин (при частоте переменного тока 60 Гц).
Рис. 5.21. Часть развернутой поверхности статора и устройство тихоходного
многополюсного синхронного однофазного двигателя типа ДСО32:
7 — вал: 2 — подшипники скольжения; 3 — медная экранирующая пластина;
4— подшипниковые шиты; 5 — пластмассовые шпильки: 6 — полюс статора;
7 — катушка статора: 8 — постоянный Mas нит; 9— выводы катушки статора
Для пояснения обратимся к рис. 5.21, а. на котором показаны в
развернутом виде: цилиндрическая катушка 7, включаемая в од-
нофазную сеть переменного тока, и два подшипниковых шита 4 с
полюсами в виде тонких пластин. В течение положительного полу-
периода если один из подшипниковых щитов (правый) и при-
крепленные к нему полюсы нам ггничиваются полярностью У, то
другой подшипниковый шит и прикрепленные к нему полюсы
намагничиваются полярностью 5. В течение другого полупериода
полярности этих подшипниковых щитов и соответствующих по-
люсов меняются. Таким образом, полярность полюсов двигателя
чередуется, а для того чтобы создаваемое ими магнитное поле было
вращающимся, на некоторых полюсах применены экраны в виде
медных пластин (на рис. 5.21, а эти экраны не показаны).
На рис, 5.21, б показано устройство синхронного однофазного
двигателя типа ДСО32.
Обмотка статора двшатсля выполнена в виде катушки 7, намо-
танной в несколько слоев на цилиндрический пластмассовый кар-
кас, имеющий со стороны подшипниковых щитов пластмассовые
шпильки 5, скрепляющие все части двигателя. Катушку статора
выводами 9 включают в однофазную сеть переменного тока, и она
создает пульсирующее магнитное поле. При этом полюсы одного
подшипникового шита приобретают одну полярность, а полюсы
Другого подшипникового шита — другую полярность. Полярности
63
Рис. 5.22. Внешний вид однофазного синхронного редукторного двигате-
ля типа ДСОР32
56 + 2
указанных полюсов меняются в соответствии со сменой полупери-
одов переменного тока в катушке статора.
Ротор двигателя представляет собой закрепленный на валу 16-по-
люсный постоянный магнит 8, намагниченный в радиальном на-
правлении так, что его полюсы обращены к полюсам статора. По-
стоянный магнит ротора опрессован пластмассой и закреплен на
Таблица 5.2
Технические данные синхронных однофазных двигателей
с постоянными магнитами типов ДСО32 и ДСОР32
Типоразмер f, Ги ^ном- об/мин З^ЦОМ1 Н СМ ^тзх» Н - СМ Масса, кг
ДСО32-0,1-0,375 50 375 0,1 0.13 0,068
ДСО32-0,08-0,450 60 450 0,08 0,10 0,068
ДСОР32-0.4-60 50; 60 60 0,40 0,38* 0,16
ДСОР32-0.32-72 60 72 0,32 0,38* 0,16
ДСОР32-Ю-2 50; 60 2 10 15* 0,165
ДСОР32-10-2,4 60 2,4 10 12* 0,165
ДСОР32-25-0,2 50; 60 0-2 25 25* 0.17
ДСОР32-30-1/300 50; 60 1/300 30 30* 0,18
* Предельное значение момента ограничено прочностью зубчатого зацепле-
ния редуктора.
о---------
а
б
Рис. 5.23. Схемы вклю-
чения двигателей типов
ДСО и ДСОР на напря-
жение 380 В
Ьалу I, который вращается в пластмассо-
вых подшипниках скольжения 2, закреп-
ленных в центральных отверстиях подшип-
никовых щитов 4. Для того чтобы магнит-
ное поле статора было вращающимся, часть
полюсов 6 статора экранированы медными
пластинами 3. Рассматриваемый двигатель
нереверсивен, так как магнитное поле ста-
тора всегда вращается в одну сторону. Кро-
ме того, этот двигатель не имеет пусковой
клетки на роторе и обладает самозапуском,
что обеспечивается небольшой частотой
вращения поля статора, малым моментом
инерции ротора и фиксированным направ-
лением его вращения (от неэкранирован -
ных полюсов статора к экранированным). На базе двигателей типа
I ДСО промышленность изготовляет редукторные двигатели типа
ДСОР32, которые отличаются от рассмотренного двигателя ДСО
нал ичием механического понижающего редуктора, позволяющего
понизить частоту вращения выходного вала при соответствующем
И увеличении вращающего момента.
Наличие в двигателе редуктора повышает стой мость и габариты
двигателя. Но применение таких двигателей позволяет избавиться or
редуктора в рабочем механизме прибора. На рис. 5.22 показан вне-
шний вид двигателя типа ДСОР32 и указаны его габаритные и при-
соединительные размеры, а в табл. 5.2 приведены технические дан-
ные двигателей типов ДСО32 и ДСОР32. Потребляемая мощность
двигателей ДСО32 и ДСОР32 составляет 3 В • А. Двигатели изготов-
ляют на номинальные напряжения 12. 24, 40, 60, ПО, 127 и 220 В
частотой 50 и 60 Гц. Двигатели, рассчитанные для включения в сеть
напряжением 220 В, можно включать в сеть напряжением 380 В, но
при этом в цепь катушки статора необходимо последовательно вклю-
чить элемент, гасящий избыточное напряжение (рис. 5.23): резистор
(сопротивлением 16 кОм мощностью 3 Вт) либо конденсатор (ем-
костью 0,075 мкФ с рабочим напряжением 500 В).
5.5.2. Тихоходные конденсаторные синхронные двигатели
типов ДСК и ДСРК
В результате дальнейшего совершенствования двигателей типа
ДСО32 был разработан и выпускается промышленностью тихо-
ходный конденсаторный синхронный двигатель типа ДСК.
Двигатель состоит из двух одинаковых модулей 1 и II (рис. 5.24).
Каждый модуль имеет свой внешний 2 и внутренний 5 магнитопро-
йоды чашеобразной формы. Со стороны, обращенной к общему ро-
(постоянному магниту' 7), в магнитопроводах по всему пери-
Рис. 5.24. Устройство многополкх
ного синхронного конденсаторно-
го двигателя типа ДСК:
1 — подшипниковый шит; 2 — вне-
шний магнитопровод; J — внутренний
магнитопровод; 4 — полюсы статора.
5— катушка; 6 — каркас катушки.
7 — постоянный магнит
Таблица 5 3
Технические данные синхронных конденсаторных двигателей типа
ДСК и ДСРК
Типоразмер Uh В Гц об/мин Л/ ‘ 'ММ’ Н - см Л^пах» Н • см мкФ t/c,B Масса, кг
ДСК-0,5-0,375 12 50 375 0.5 0,7 20 20 0,07
ДСК-0.5-0.450 24 60 450 0.5 0,7 5 30 0,07
ДСРК-0.4-60 40 50 60 0,4 0,48* 2 40 0,16
ДСРК-0.4-72 110 60 72 0,4 0.48* 1 160 0,16
ДСРК-10-2 но 50 2 10 15* 1 160 0,165
ДСРК-10-2,4 127 60 2,4 10 15* 1 160 0,165
ДСРК-25-0.2 220 50; 60 0,2 25* 25* 0.4 250 0,17
ДСРК-30-1/300 220 50; 60 1/300 30* 30* 0,4 250 0,18^
ДСРК-200-1,0 36 50 1 200* 200* 10 60 1,5
ДСРК-250-0,5 220 50 0,5 250* 250* 0,5 250 1,5
ДСРК-300 0,25 220 50 0,25 300* 300» 0,5 250 1,5
* Предельное значение момента ограничено прочностью зубчатого зацепле-
ния редуктора.
Рис. 5.25. Схемы включения двигателей типов ДСК и ДСРК:
д — при напряжении питания 12 и 24 В, о — при напряжении питания 36, 40,
110, 127, 220 В
метру выштампованы 16 клювообразных полюсов 4 (по 8 полюсов
на модуль). При включении статорных кольцевых катушек 5 обеих
модулей, размещенных в пластмассовых каркасах 6, указанные по-
люсы намагншпгваются. Каждый из модулей создает пульсирующее
магнитное поле. Но если обмотки получают питание от двухфазной
системы напряжений или в цепь одной из обмоток включен фазос-
двигающий конденсатор и токи в обмотках сдвинуты по фазе, то
результирующее поле, действующее на общий ротор, является вра-
щающим. В итоге ротор, представляющий собой постоянный маг-
нит с шестнадцатью полюсами, намагниченными радиально, на-
чинает синхронное вращение. Двигатели, укомплектованные пони-
жающим редуктором, обозначаются ДСРК. Технические данные этих
двигателей типов ДСК и ДСРК приведены в табл. 5.3.
• Потребляемая мощность двигателей не более 4,9 В • А. Частота
тока в питающей сети 50 и 60 Гц. Двигатель является реверсивным,
так как при переключении конденсатора из катушки одного моду-
ля в катушку другого модуля поле статора меняет направление сво-
его вращения (рис. 5.25).
В- 5.6. Синхронные реактивные двигатели
Синхронный реактивный двигатель (СРД) представляет собой
явнополюсный синхронный двигатель с невозбужденными полю-
сами ротора. Магнитное поле в двигателе создается только одной
Магнитодвижущей силой обмотки статора. В этом отношении син-
хронный реактивный двигатель аналогичен асинхронному двига-
телю и отличается от него лишь тем, что сердечник ротора имеет
Явно выраженные полюсы.
И Для выяснения принципа действия СРД обратимся к выраже-
нию электромагнитного момента синхронного явнополюсного дви-
гателя [см. (5.17)]. Если в двигателе с электромагнитным возбуж-
дением отключить обмотку возбуждения, то ЭДС статора £0 = 0.
При этом основная составляющая электромагнитного момента М.х ,
Рис. 5.26. К объяснению принципа действия синхронного реактивного
двигателя
становится равной нулю и вращение ротора двигателя происходит
за счет реактивного момента Afp [см. (5.19)].
Процесс работы синхронного реактивного двигателя можно
объяснить следующим образом. При подключении обмотки статора
к сети возникает вращающееся магнитное поле. Когда ось этого поля
d'—d' займет положение в расточке статора, при котором она будет
смещена относительно продольной оси невозбужденных полюсов
ротора d-dua угол нагрузки 0 в сторону вращения (рис. 5.26. л),
между полюсами вращающегося поля и явно выраженными полю-
сами невозбужденного ротора возникнет сила Fp магнитного при-
тяжения полюса ротора к полюсу вращающеюся поля статора. Век-
тор этой силы смещен относительно продольной оси ротора также
на угол 0. поэтому сила Fp имеет две составляющие: нормальную
/яр, направленную по продольной оси полюсов ротора, и танген-
циальную Ёр, направленную перпендикулярно продольной оси
полюсов ротора. Совокупность тангенциальных составляющих 7 ,т
на всех полюсах невозбужденного ротора создаст вращающий ре-
активный момент Л/ , который приведет ротор во вращение с син-
хронной угловой скоростью евр С ростом механической нагрузки
на валу СРД угол нагрузки 0 увеличивается и реактивный момент
двигателя М возрастает.
Однако при значении угла 0 = 90° реактивный момент -
(см. рис. 5.17). Такая зависимость момента Л/р от угла 0 является
принципиальной для реактивного момента, отличающая его от
основного электромагнитного момента синхронного двигате-
ля с возбужденными полюсами, которая при 0 = 90е достигает
максимального значения.
Из рис. 5.26, 6 видно, что при 0 = 90° реактивные силы магнит-
ного притяжения Fp, действующие на каждый полюс невозбужлеН'
кого ротора, взаимно уравновешиваются и реактивный момент
Мр = 0. Максимальное значение реактивного момента Л/рта, насту-
пает при значении угла нагрузки 0 = 45°. Зависимость реактивного
момента от угла нагрузки 0 определяется выражением (см. рис. 5.17):
' Л/р = Mpmax sin 20. (5.21)
Необходимое условие возникновения реактивного момента —
явнополюсная конструкция ротора, так как именно в этом случае
индуктивные сопротивления обмотки статора по продольной и
поперечной осям не равны (xd * хч).
Полезная мощность и развиваемый момент СРД меньше, чем у
синхронного двигателя с возбужденными (активными) полюсами
ротора. Это объясняется тем, что у СРД из-за отсутствия магнит-
ного потока ротора ЭДС £0 - 0 и поэтому основная составляющая
электромагнитного момента Л/ОС11 = 0 [см. (5.18)]. Поэтому при
одинаковых размерах синхронного двигателя с возбужденными
полюсами ротора и синхронного реактивного двигателя мощность
на валу и развиваемый момент у СРД намного меньше.
Недостатки СРД — невысокие значения коэффициента мощ-
ности и КПД. Это объясняется большим значением намагничива-
ющего тока статора, так как возбуждение СРД происходит только
за счет магнитного поля статора, т.е. за счет реактивной мощнос-
ти, поступающей из сети в статор двигателя.
Ротор С РД выполняется с короткозамкнутой обмоткой, что
обеспечивает возможность асинхронного пуска двигателя. На
рис. 5.27, а показана традиционная конструкция ротора СРД, ко-
торый отличается от ротора асинхронного двигателя наличием меж-
полюсных впадин в сердечнике, обеспечивающих ротору явнопо-
люсную конструкцию. Чем больше эти впадины, тем больше реак-
тивный момент Л/р. Однако с увеличением межполюсных впадин
растет среднее значение воздушного зазора, что ведет к увеличе-
нию намагничивающего тока статора, а следовательно, к сниже-
Рис. 5.27. Конструкция роторов синхронных реактивных двигателей:
а — простая; б — секционированная
Hino энергетических показателей двигателя — коэффициента мощ-
ности и КПД
С увеличением межполюсных впадин уменьшаются размеры
пусковой обмотки на роторе, что сокращает пусковой асинхрон-
ный момент, а следовательно, и момент входа в синхронизм.
Наилучшие результаты дает следующее соотношение размеров
ротора: bjx = 0,5—0,6 и 8^/6^ = 10—12, где т — полюсное
деление; — ширина полюса ротора.
При соблюдении этих условий удается получить отношение
индуктивных сопротивлении xd/xq ~ 2.
Более совершенна секционированная конструкция ротора СРД.
представляющая собой цилиндр, в котором стальные полосы 2
залиты алюминием / (рис. 5.27, б). Такая конструкция позволяет
получить отношение сопротивлений xd/xq = 4—5. За счет этого
значительно возрастает максимальное значение реактивного мо-
мента М тах при сохранении намагничивающего тока на допусти-
мом уровне. На торцах секционированного ротора имеются отли-
тые из алюминия кольца, замыкающие алюминиевые прослойки
ротора, образуя короткозамкнутую пусковую обмотку.
Простота конструкции и высокая эксплуатационная надежность
обеспечили СРД малой мощности широкое применение в при-
борных устройствах и средствах автоматизации для привода само-
пишущих приборов и других установках, требуюших стабильности
частоты врашения.
Промышленность выпускает синхронные реактивные двигате-
ли мощностью от долей до нескольких десятков ватт. Например,
конденсаторный синхронный реактивный двигатель типа СД-10
номинальной мощностью 10 Вт имеет следующие параметры: час-
тота врашения 3000 об/мин; КПД Т|ном = 0,28; costpj = 0,77; крат-
ность пускового момента Л/П/Мном - 1; перегрузочная способность
Д iax /М >м = 2; емкость = 1 или 3 мкФ, номинальное напряже-
ние 220 или 127 В, частота 50 Гц.
Для привода лентопротяжных механизмов, в автоматических
мостах, потенциометрах и других приборных устройствах, где тре-
буется постоянство частоты вращения, широко используют кон-
денсаторный синхронный реактивный двигатель типа СД-54 со
встроенным редуктором. Этот двигатель предназначен для включе-
ния в сеть частотой 50 Гц, частота врашения ротора 1500 об/мин.
Обмотка статора двухфазная, состоящая из двух одинаковых фаз-
ных обмоток. При этом обмотки фаз состоят из полюсных кату-
шек, каждая катушка располагается на отдельном зубце, а сердеч-
ник статора составлен из этих зубцов. Такая конструкция сердеч
ника статора и его обмотки обеспечивает простоту изготовления,
что важно при массовом производстве двигателей.
Редуктор двигателя, понижающий частоту врашения, имеет 9
вариантов комплектации цилиндрическими зубчатыми колесами.
Рис. 5.28. Внешний вид (о) и схемы включения (б) однофазного синх-
ронного реактивного редукторного двигателя типа СД-54
к что обеспечивает получение следующих частот вращения выход-
ного вала двигателя, об/мин (при частоте врашения ротора п =
- 1500 об/мин): 96.0; 60,0; 38,4; 24,0; 19,59; 10,94; 5,6; 3,14; 2,24 об/мин
[ На рис. 5.28 показаны внешний вил и схемы включения в сеть
реактивного синхронного двигателя типа СД-54.
5.7. Синхронные гистерезисные двигатели
Конструктивная особенность синхронною гистерезисного дви-
гателя — наличие цилиндрического (неявнополюсного) ротора.
Принцип работы синхронного гистерезисного двигателя осно-
ван на действии гистерезисного момента. На рис. 5.29, а показана
упрощенная модель этого двигателя, состоящая из постоянного
магнита, между полюсами которого расположен цилиндр (ротор)
из магнитотвердого материала. Под действием внешнего магнитного
поля ротор намагничивается. При этом на стороне ротора, обра-
щенной к северному полюсу постоянного магнита, возбуждается
Южный магнитный полюс, а на стороне, обращенной к южному
I полюсу постоянного магнита, — северный магнитный полюс. В ре-
зультате на ротор двигателя действуют силы магни гного притяже-
ния А» направленные радиально к его поверхности. Если же по-
Рис. 5.29. К понятию о гистерезисном моменте:
а — направление сил F* при неподвижном внешнем магнитном поле; 6 — на-
правление сил при вращении внешнего магнитного поля; в — угол гистерезис-
кого сдвига у между векторами магнитных потоков статора Ф( и ротора Ф;
люсы постоянного магнита вращать вокруг ротора, т.е. создать вра-
щающееся магнитное поле, то вследствие магнитного запаздывания
(явление гистерезиса) активная часть ротора не будет перемагни-
чиваться одновременно с изменением направления внешнего вра-
щающегося магнитного поля: между осью поля ротора и осью внеш-
него поля появится угол сдвига у. Силы /м, действующие на ротор,
изменят свое направление на угол у, а тангенциальные составляю-
щие этих сил Ff создадут гистерезисный момент М, (рис. 5.29. 6).
Явление магнитного запаздывания заключается в том. что час-
тицы ферромагнитного материала ротора, представляющие собой
элементарные магниты, стремятся ориентироваться в соответствии
с направлением внешнего магнитного поля. Если внешнее магнитное
поле изменит свое направление, то элементарные частицы также
меняют ориентацию. Однако повороту элементарных частиц в маг-
нитотвердом материале препятствуют силы молекулярного трения.
Этим и объясняется появление угла магнитного запаздывания у.
значение которого зависит от магнитных свойств материала ротора.
На преодоление сил молекулярного трения расходуется часть
подводимой мощности, которая составляет потери на гистерезис.
Значение этих потерь зависит от частоты перемагничивания рото-
ра /2 а следовательно, от скольжения s:
р = sP
1 Г Г.К7
где Ргк — потери на гистерезис при неподвижном роторе, т.е. при
s =1, fir
Электромагнит ная мощность,
передаваемая ротору. Вт:
[ Л м = Л/s = Л.к- (5.22)
I Гйстерезисный момент, Н • м:
I Л/г ~ Л.м/®1 = Лк/®1> (3-23)
где о>1 — синхронная угловая
скорость магнитного поля ста-
тора.
Следовательно, гистерезис-
Рис. 5.30. Механические характери-
стики гистерезисного двигателя
ный момент не зависит от час-
тоты вращения ротора (скольже-
ния). График Л/, =/($) представ-
ляет собой прямую, параллель-
ную оси абсцисс (рис. 5.30). Угол магни гного запаздывания у за-
висит от ширины петли гистерезиса — чем шире петля гистерези-
са ферромагнитного материала, т. е. чем больше коэрцитивная сила
постоянного магнита, тем больше угол сдвига у, а следовательно,
тем больше гистерезисный момент. Современные магнитотвердые
материалы допускают получение угла магнитного запаздывания
у=30—60°. На рис. 5.31, а показаны петли гистерезиса обычной
стали 2 и сплава викаллой /. При изготовлении ротора обычная
электротехническая сталь не обеспечивает получение гистерезис-
ного момента достаточной величины. Только с помощью магни-
тотвердых сплавов (обычно сплав викаллой) получают гистере-
зисный момент требуемого значения.
Роторы гистерезисных двигателей обычно делают сборными:
магнитотвердую часть выполняют в виде шихтованного или мас-
сивного кольца 1 из сплава викаллой, размешенного на втулке 2
(рис. 5.31, б), которая жестко насажена на вал 3. В машинах с мас-
сивным ротором вращающееся поле статора наводит в роторе
вихревые токи. В результате взаимодействия токов с врашающим-
[Ис. 5.31. Петля гистерезиса электротехнической стали и сплава викаллой
(а) и конструкция сборного ротора гистерезисного двигателя (б)
ся полем статора возникает электромагнитный момент вихревых
токов, Н м:
Л^в.т = в.т.к/^l» (5.24;
где Рктк — потери от вихревых токов в роторе при скольжении 5=1,
т.е. в режиме короткого замыкания, когда ротор неподвижен, Вт.
Момент Л/, достигает наибольшего значения при неподвиж-
ном роторе (,s = I), т.е. при пуске двигателя. Затем по мерс возрас-
тания частоты вращения (уменьшения скольжения) момент М,,
убывает (см. рис. 5.30), при синхронной частоте вращения он ста-
новится равным нулю.
Таким образом, при асинхронном вращении (n2 < д() электро-
магнитный вращающий момент гистерезисного двигателя создает-
ся совместным действием асинхронного момента от вихревых то-
ков Мс т и гистерезисного момента Мг:
М = Мвл + М- (5Рв.тж/®|) + (Рг.к/®1) = ОА.тж + Л.к)/®1- (5-25)
Характер зависимости результирующего момента гистерезисно-
го двигателя от скольжения М - f(s) (см. рис. 5.30) определяется
соотношением моментов Мпл и Мг. При достижении ротором частоты
вращения, близкой к синхронной, двигатель втягивается в синхро-
низм, после чего на ротор действует только гистерезисный момент.
Гистерезисный двигатель может работать с синхронной или асин-
хронной частотой вращения. Работа двигателя с асинхронной час-
тотой вращения неэкономична, так как сопровождается значи-
тельными потерями главным образом на перемагничивание мас-
сивного магнитотвердого кольца (см. рис. 5.31, б), которые возра-
стают с увеличением скольжения.
Достоинства гистерезисных двигателей — простота конструк-
ции, эксплуатационная надежность, малый уровень шума, боль-
шой пусковой момент, сравнительно высокий КПД, небольшая
кратность пускового тока (Л,//11ОМ- 1,3* 1,4).
Недостатки гистерезисных двигателей — низкий коэффициент
мощности (coscpi = 0,3—0,45) и сравнительно высокая стоимость.
Кроме того, гистерезисные двигатели при резких колебаниях на-
грузки на валу склонны к качаниям, что создает неравномерность
вращения ротора. Это объясняется отсутствием у гистерезисных
двигателей пусковой обмотки, которая при резких колебаниях на-
грузки оказывала бы на ротор двигателя успокаивающее (демпфи-
рующее) действие (см. параграф 5.3.2). Наибольшие качания быва-
ют в гистерезисных двигателях с шихтованным ротором, в кото-
ром величина вихревых токов, которые могли бы оказывать на
ротор успокаивающее действие, в значительной степени ограни-
чена.
Отечественная промышленность выпускает гистерезисные дви-
гатели на частоту переменного тока 50, 400, 500 и 1000 Гц с трех-
Рис.
фазной или двухфазной обмоткой статора. Анализ рабочих харак-
теристик (рис. 5.32) гистерезисного двигателя показывает, что при
переходе из синхронного режима в асинхронный резко уменьша-
ются полезная мощность Р2, частота вращения п2 и КПД двигателя.
Табл и и а 5 4
Технические данные синхронных гистерезисных двигателей серии Г
Типо- размер Схема, вклю чения по рис. 5.34 JO F^T 1 НОМ’ 191 Ц, В Ц«ОМ’ об/мин ЛНОМУ cos чц С, мкФ
Г2О5 Однофазная 1,6 220 3000 8,4 0,96 2
Г216 Однофазная 0,8 127 1500 5 0,84 5
Г304 Трехфазная 12 220 3000 30 0,405 —
[гз1з Трехфазная 7 220 1500 21,9 0,465 —
[_Г314 Однофазная 8 220 3000 23.5 0,91 2,5
[г316 Однофазная 4 220 1500 14 0.81 7 Uta
[Г411 Трехфазная 30 220 3000 43 0,36 -
[_Г412 Трехфазная 20 220 1500 35,1 0,35 —
[_Г413 Однофазная 16 220 3000 26,7 0,68 5
[_Г415 Однофазная 12 220 1500 30,8 0.56 А
|~Г504 Трехфазная 60 220 300 50 0,275 -—
[Г5О7 Трехфазная 45 220 1500 42,9 0,25 —
Рис. 5.33. Устройство гистерезисного двшателя
вращение
вращение
а
Рис. 5.34. Схемы включения двигателей серии Г:
а — трехфазная; б — однофазная
Правое
вращение
Таким образом, стабильная частота врашения гистерезисного
двигателя обеспечивается лишь при нагрузке на его вал, не превы-
шающей номинальное значение.
На рис. 5.33 показано устройство гистерезисного двигателя. В кор-
пус 1 запрессован шихтованный сердечник статора 2 с обмоткой Л
ротор двигателя сборный, состоит из магнитотвердого кольца 4-
втулки 5и вала 6, подшипниковый щит 7 обеспечивает фланцевое
крепление двигателя в месте его установки.
Синхронные гистерезисные двигатели серии Г (табл. 5.4) трех-
фазные и однофазные для комплектации механизмов, требующих
строгого постоянства вращения, предназначены для включения в
сеть частотой 50 Гц.
На рис. 5.34 представлены схемы включения гистерезисных дви-
гателей серии Г.
5.8. Реактивно-гистерезисные двигатели
с экранированными полюсами
В приборных устройствах и автоматике для привода программ-
ных и лентопротяжных механизмов, реле времени, электрических
часов и т. п. широко применяют рсактивно-гистерезисныс двигате-
ли. Такой двигатель имеет магнитопровод 7, представляющий со-
бой двухполюсный сердечник статора с явно выраженными полю-
сами (рис. 5.35). Магнитопровод разъемный, состоит из двух поло-
вин, что упрощает установку однофазной катушки 2, являющейся
обмоткой статора трансформаторного типа. Полюсы сердечника
статора имеют полюсные наконечники. Каждый полюс разделен
продольным пазом на две равные части, на одной из которых рас-
положены короткозамкнутые медные витки (экраны) 3, обеспечи-
вающие получение в однофазном двигателе вращающегося маг-
нитного поля (см. параграф 4.6). Ротор 4 состоит из шести-семи
пластин (дисков) толщиной! по 0,4 мм из закаленной магнито-
твердой стали. Продольная прорезь на пластинах позволяет надеж-
но закрепить их на валу. Кольцевой обод на пластинах ротора обес-
печивает получение асинхронного момента за счет действия вих-
ревых токов и гистерезисного момента. Диаметральная перемычка
на пластинах ротора делает ротор явнополюсным, что обеспечива-
ет получение на роторе еще и реактивного момента.
I Таким образом, в реактивно-гистерезисном двигателе создает-
ся три электромагнитных вращающих момента При пуске двигате-
ля на ротор действуют два момента — асинхронный и гистерезис-
ный. Посл'е пуска ротор втягивается в синхронизм и вращается с
неизменной синхронной частотой под действием реактивного и
гистерезисного моментов. При
синхронном вращении ротора
гистерезисный момент в 2—3
раза больше реакз ивного.
Ротор реактивно-гистерезис-
ного двигателя вращается толь-
ко в одну сторону — от неэкра-
нированной части полюса стато-
ра к экранированной.
Вал двигателя связан с редук-
тором, понижающим частоту
вращения и увеличивающим вра-
щающий момент. Ротор с редук-
тором заключен в герметичный
корпус из немагнитного металла.
Однофазные синхронные ре-
активно-гистерезисные двигате-
ли имеют две модификации:
Рис. 5.35. Устройство реакгивпо-
гисгсрсзисного двигателя:
7 — магнитопровод; 2— катушка; 3 —
короткозамкнутые витки (экраны);
4 — потоп
_____65,5
Рис. 5.36. Внешний вид двигателя типа ДСД:
1 — полюс; 2 — ротор с редуктором; 3 — катушка
ДСД и ДСДР. Двигатели типа ДСДР (реверсивные) отличаются
тем, что на полюсах статора вместо короткозамкнутых экранирую-
щих витков расположены четыре катушки, по две на каждом по-
люсе на обеих его половинах. Концы катушек выведены на клемм -
ную панель. Замыкая ту или иную пару катушек, осуществляют
реверс (изменение направления вращения) двигателя.
Синхронные реактивно-гистерезисные двигатели типов ДСД и
ДСДР имеют низкие энергетические показатели (КПД и coscpj) при
сравнительно больших габаритах и массе. Однако благодаря просто-
те конструкции и технологичности они получили широкое примене-
ние в приборных устройствах. Они рассчитаны для включения в сеть
на частоту переменного тока 50 Гц напряжением 12, 24, 36, 127 или
220 В. Механическая мощность таких двигателей не превышает
14 мкВт. На рис. 5.36 показан внешний вид двигателя типа ДСД.
5.9. Индукторные синхронные машины
Индукторная машина — это синхронная машина, у которой
процесс преобразования энергии обусловлен пульсациями магнит-
ной индукции, вызванной зубчатостью поверхности ротора. Ин-
дукторными могут быть как синхронные генераторы, так и синх-
ронные двшатели.
5.9.1. Индукторные синхронные генераторы
Рассмотрим принцип работы одноименно-полюсного индуктор-
ного синхронного генератора (рис. 5.37). Катушка возбуждения
A —A
Рис. 5.37. Устройство одноименно-полюсного индукторного синхронного
генератора:
/ — втулка ротора; 2 — полюс (зубец) ротора; 3 — полюсная катушка статора;
4 — полюс (зубец) статора; 5 — ярмо статора; 6 — подшипниковый щит; 7 —
катушка возбуждения
расположена на выступе подшипникового щита 6. При включении
в сеть постоянного тока эта катушка наводит в магнитной системе
генератора постоянный магнитный поток Фо. В ярме статора 5и во
втулке ротора 1 этот поток направлен по оси генератора, а в воз-
В душном зазоре 8 и активных зубцовых зонах статора 4 и ротора 2
этот поток имеет радиальное направление.
В процессе вращения ротора магнитный поток в полюсах (зуб-
цах) статора становится пульсирующим, периодически изменяясь
от Фтах ПРИ расположении полюса (зубца) статора на одной оси с
полюсом (зубцом) ротора до Ф.г в полюсах (зубцах) статора,
если они оказались между полюсами (зубцами) ротора. Число по-
люсов (зубцов) на статоре больше, чем на роторе. Пульсирующий
магнитный поток имеет две составляющие: постоянную Ф . и пе-
ременную Фпер (рис. 5.38).
Полюсам (зубцам) ротора придают форму, при которой гра-
фик изменения переменной составляющей магнитного потока в
полюсах статора был бы приближен к синусоиде. Переменная со-
ставляющая пульсирующего магнитного потока, сцепляясь с об-
моткой статора, катушки которой расположены на полюсах (зуб-
1Нах) статора, индуцирует в ней переменную ЭДС. Частота ЭДС
пропорциональна числу полюсов (зубцов) ротора Z и частоте вра-
щения ротора
I /=Д2/ь/60. (5.26)
Рис. 5.38. Графики магнитных пото-
ков индукторного синхронного ге-
нератора
ЭДС в обмотке статора инлук-
торного синхронного генерато-
ра определяется выражением,
аналогичным (3.9), В.
Е) = 4.44/1и/Лоб,Фпер1 (5.27)
где Фдер — амплитуда перемен-
ной составляющей потока (см.
рис. 5.38).
Расположив на роторе индук-
торного генератора большое чис-
ло зубиов, можно получить на
выходе генератора ЭДС частотой
от нескольких сотен до несколь-
ких тысяч герц. Следует отме-
тить, что в катушке возбужде-
ния 7(см. рис. 5.37) поток Ф(| не
индуцирует ЭДС, так как вели-
чина этого потока в процессе ра-
боты генератора остается неиз-
менной.
Индукторные синхронные генераторы по сравнению с синх-
ронными генераторами традиционной конструкции имеют низ-
кий КПД. Это объясняется возросшими добавочными потерями,
вызванными высокой частотой перемагничивания и повышенны-
ми электрическими потерями в обмотке статора из-за усиленного
проявления эффекта вытеснения тока на высоких частотах пере-
Рис. 5.39. Устройство разноименно-
полюсного индукторного синхрон-
ного генератора:
1 — обмотка возбуждения; 2 — полюс
(зубец) ротора; 3 — полюсная катуш-
ка обмотки статора; 4 — полюс (зу-
бец) ротора
менного тока.
Помимо одноименно-полюс-
ного индукторного синхронно-
го генератора, существуют раз-
ноименно-полюсные индуктор-
ные генераторы. В таком генера-
торе (рис. 5.39) обмотка возбуж-
дения /, расположенная гори-
зонтально внутри сердечника
статора, включена в сеть посто-
янного тока, и создаваемый ею
магнитный поток направлен ра-
диально, проходя через зубцы
статора и ротора. При вращении
ротора каждый его зубец пооче-
редно меняет свою полярность в
зависимости от положения в
магнитном поле, созданном об-
моткой возбуждения 1, которая
р данной конструкции является соленоидной. Работа такого ин-
дукторного генератора в принципе не отличается от рассмотрен-
ного одноименно-полюсного генератора.
5.9.2. Индукторные синхронные двигатели
Индукторные синхронные машины, обладая свойством обра-
тимости, могут работать не только в генераторном, но и в двига-
тельном режиме.
I Особенность индукторных двигателей состоит в том, что они
работают не на первой (основной), а на высших гармониках вра-
щающегося магнитного поля статора. Частота вращающегося маг-
нитного поля, созданною высшей гармоникой, в v раз меньше
частоты вращения первой (основной) гармоники поля статора
(здесь v — номер высшей гармоники поля). Отношение частоты
вращения поля статора >ц к частоте вращения ротора th называют
коэффициентом редукции
^рел = ^1/«2- (5.28)
Таким образом, индукторные двигатели обладают свойством
редукции скорости — понижением частоты вращения. По этой
причине индукторные двигатели часто называют редукторными.
Индукторные двигатели могут быть с электромагнитным воз-
буждением, с возбуждением постоянными магнитами или реак-
тивными, т.е. нс имеющими специального источника возбужде-
ния. В качестве двигателей малой мощности для приборных уст-
ройств преимущественное при-
менение получили реактивные
индукторные двигатели.
Для объяснения принципа
действия индукторного (редук-
торного) реактивного двигате-
ля воспользуемся его упрошен-
ной моделью (рис. 5.40), состо-
ящей из внешней магнитной
системы с числом полюсов ста-
тора 2р - 8 и ротором с числом
ненамагниченных зубцов Z2 = 10.
В общем случае разность (2р -
- Z>) должна быть равна четно-
му числу. Внешняя магнитная
система, вращающаяся с синх-
ронной частотой Л], и создает
вращающееся поле статора, об-
мотка которого включена в сеть
с частотой тока
Рис. 5.40. Упрошенная модель ин-
дукторного синхронного реактив-
ного дви1 ателя
Рассмотрим упрощенно, без разложения поля на высшие гар-
моники, принцип действия редукторного двигателя. Допустим, что
магнитный поток статора вращается по часовой стрелке и в рас-
сматриваемый момент направлен по оси Я—/4 , проходящей через
зубпы статора 1 и 5. Ротор при этом занимает положение, соответ-
ствующее минимальному магнитному сопротивлению на пул и по-
тока; его зубцы Г и 6' располагаются против зубцов статора 1 и 5
В следующий момент времени магнитный поток статора, повер-
нувшись на одно полюсное деление статора, соответствующее углу
а, = 360°/(2р), будет направлен по оси В—В'. Ротор, стремясь за-
нять положение, при котором сопротивление потоку было бы ми-
нимальным, повернется на некоторый угол так что под зубца-
ми статора 2 и 6 расположатся зубцы ротора 2' и 7. При этом угол
поворота ротора а2 будет меньше угла поворота магнитного пото-
ка статора cq на величину (360°/^):
а2 = (360/2р) - (ЗбО/Тэ).
(5.29)
Для конструкции, представленной на рис. 5.40, угол поворота
ротора а2 = (360/8) - (360/10) = 9°, что в пять раз меньше угла
поворота вращающегося поля статора 360/8 = 45°, т. е. одному оборо-
ту поля статора соответствует поворот ротора на угол 360/5 = 72\
В общем случае частота вращения ротора индукторного реак
тивного двигателя, об/мин:
Z2 - 2р 60/|
(5.30)
Для рассматриваемого случая (2р- 8,/j = 50 Гц, Z2 = 10) полу-
чим частоту вращения ротора:
Рис. 5.41. Индукторный синх-
ронный двигатель с явно вы-
раженными полюсами на ста-
торе (2р = 6; Z\ - 12; Z2 - 16)
10-860-50
n2 = ——----— = 150 об/мин.
Если полюсы статора выполнить
явно выраженными и каждый по-
люсный наконечник этих полюсов
разделить на несколько зубцов, то
можно получить индукторный дви-
гатель с еще большей редукцией
скорости.
В качестве примера рассмотрим
конструкцию индукторного двигате-
ля, представленную на рис. 5.41, где
статор содержит 2р = 6 полюсов. По-
люсный наконечник каждого полю-
са статора разделен на два зубца так.
что число зубцов на статоре Z{ = 12.
число зубцов на роторе Z2 = 16.
В этом случае частота врашения ротора определится выражением
аналогичным (5.30), но вместо 2р в формулу подставим Zb тотда
,ь = Z2~Z1 . (5.31)
Z2 р
II Таким образом, приняв f - 50 Гц, получим частоту врашения
ротора:
16-12 60-50 •_ п .
п-> =------------- 250 об/мин.
16 3
Если бы полюсы на статоре не имели зубцов, то частота враще-
ния ротора составила:
Z -2р60/, 16-6 60-50
п2 = = —-------— - 625 об/мин.
Z р 16 3
Таким образом, применяя на статоре полюсные наконечники
зубчатой конструкции, можно получить индукторный двигатель
на весьма малую частоту вращения, избежав применения в элект-
роприводе механических редукторов, что упростит электропривод
и сделает его более надежным. Кроме того, малая частота враше-
ния индукторного двигателя способствует повышению его надеж-
ности При этом если учесть бесконтактностъ индукторных двига-
телей, т.е. отсутствие у них контактных колец и шеток, то они
вообще не нуждаются в каком-либо уходе в процессе эксплуата-
ции.
5.10. Синхронные двигатели
Г с электромеханической редукцией скорости
Синхронные двигатели, составной частью которых является
элемент механического редуктора с большим передаточным чис-
лом. называют двигателями с электромеханической редукцией
скорости. К ним относятся двигатели с катящимся ротором и вол-
новые двигатели.
5.10.1. Синхронные двигатели с катящимся ротором (ДКР)
Конструкция этих двигателей отличается от традиционной экс-
центричным расположением ротора в расточке статора (т. е. центр
окружности ротора не совпадает с центром расточки статора) и
тем, что обмотками статора создается несимметричное вращаю-
щееся поле с резко выраженным максимумом магнитной индук-
ции.
На рис. 5.42 показан поперечный разрез упрощенной модели
ДКР. Внешнее кольцо 1 с центром Ot и внутренним диаметром
Рис. 5.42. К объяснению принципа работы двигателя с катящимся ротором
D[ — статор двигателя, внутри которого расположен гладкий ших
тованный ротор 2 цилиндрической формы из электротехнической
стали с центром 02 и внешним диаметром D2. Пусть статор создаст
несимметричное магнитное поле, вращающееся с частотой
максимум которого в рассматриваемый момент времени совпадает
с точкой А расточки статора (рис. 5 42, а). Ротор под действием силы
магнитного притяжения займет положение, при котором он
будет касаться внутренней поверхности статора в этой же точке А.
При повороте магнитного поля статора против часовой стрелки
на угол oq на такой же угол сместится максимум этого поля и
совместится с точкой А' (рис. 5.42, б). При этом сила магнитного
притяжения ротора FM, совпадающая по направлению с максиму-
мом магнитной индукции, также повернется на угол oq. Под дей-
ствием составляющей силы магнитного притяжения FK =FMsincX|
ротор катится по внутренней поверхности статора (точка А пере-
мещается синхронно с полем). При этом ось (центр) ротора 0г
совершает круговое движение против часовой стрелки с частотой
п вокруг центра расточки статора Oj и ротор вращается вокруг
собственного центра О2 в направлении часовой стрелки с часто-
той во много раз меньшей частоты вращения поля статора п\.
Если магнитное поле статора совершит один оборот (сХ] - 360°), то
ротор, врашаясь против часовой стрелки по внутренней поверхно
сти статора длиной лД, повернется вокруг собственной оси О2 по
часовой стрелке на угол а2, равный разности длин окружности
статора лД и ротора деленной на радиус ротора R2 = D2 /2:
а2 = 2п(Л|— D2)/D2. (5.32)
Из (5.30) следует, что если диаметры ротора D2 и статора D\
приблизительно равны, то угол а? поворота ротора очень мал. На
основании (5.30) частота вращения ротора вокруг собственной оси
п2 = Л|( - D2)/D2 nfa, (5.33)
где коэффициент редукции ско-
рости
Ар = (Р|-А)/Л = лэ/«и (534)
Коэффициент редукции ско-
рости в современных ДКР дос-
тигает весьма малых значений
(]0-4 и менее).
Рассмотрим способ получе-
ния несимметричного вращаю-
щегося магнитного поля. Суще-
ствует несколько способов полу-
чения такого поля. Рассмотрим
один из них, основанный на
Рис. 5.43. Графики магнитной ин-
дукции несимметричного магнит-
ного поля двигателя с катящимся
том, что симметричное враша- ротором
юшееся магнитное поле трехфаз-
ной или двухфазной обмотки статора с индутсцией В\ (рис. 5.43)
накладывают на униполярное магнитное поле (поле с неизменной
полярностью) с индукцией В2, создаваемое постоянными магни-
тами или обмоткой, питаемой от сети постоянного тока. Получен-
ное результирующее вращающееся магнитное поле является не-
симметричным с максимальным значением магнитной индукции
Вщзу ~ $1тах ^2*
(5.35)
Двигатель с катящимся ротором и несимметричным вращаю-
щимся полем (рис. 5.44) состоит из стальной станины 1. в которую
запрессованы сердечник статора 4 с трехфазной обмоткой б, фер-
7 — станина; 2 — ферромагнитные тороиды; 3 — тороидальные катушки; 4
сердечник статора; 5 — сердечник ротора: б — трехфазная обмотка статора: 7 —
катки статора; 8 — шихтованные магнитопроводы, 9 — катки ротора; 10 — вал
ромагнитные тороиды 2 и катки статора 7. Мехау тороидами и
сердечником статора помещены две соединенные последователь-
но тороидальные катушки J, которые при подключении к источ-
нику постоянного тока создают магнитный поток Ф2 с индукниеи
В2. На валу 10 закреплены шихтованный сердечник 5 ротора без
обмотки и два шихтованных пакета магнитопровода 8. через кото-
рые замыкается униполярный магнитный поток Ф2. На обеих сто-
ронах вала 10 расположены катки ротора 9, которые при работе
двигателя перекатываются по каткам статора 7.
Через воздушный зазор между сердечниками статора и ротора
проходят униполярный магнитный поток Ф2 и вращающееся сим-
метричное магнитное поле Фь создаваемое обмоткой статора. Оба
потока, накладываясь друг на друга, образуют несимметричное
вращающееся магнитное поле ДКР, обеспехшвающее работу дви-
гателя в соответствии с изложенным принципом действия (см. рис.
5.42) с той разницей, что сердечник ротора в рассматриваемом
двигателе (см. рис. 5.43) не касается внутренней поверхности сер-
дечника статора и между ними имеется воздушный зазор 5.
Процесс перекатывания происходит на катках статора и рото-
ра. которые в некоторых случаях имеют зубчатую поверхность.
Диаметры катков отличаются от диаметров статора и ротора, по
этому в (5.31) вместо диаметров статора Di и ротора D2 принима-
ют диаметры катков D[K и О2к.
Рассмотренный двигатель с катящимся ротором — это синх-
ронный двигатель с электромагнитным возбуждением. Возможна
конструкция ДКР с магнитоэлектрическим возбуждением. В случае
зубчатых поверхностей катков статора и ротора коэффициент ре-
дукции по скорости определяется соотношением чисел зубцов ста-
тора Z} и ротора Z2:
kp = (Zl-Z2)/Z2. (5.36)
Так как ротор ДКР расположен эксцентрично относительно
расточки статора, то для передачи вращающего момента от ротора
к рабочему механизму применяют специальную механическую
передачу. Обычно такую передачу выполняют с помощью кардан-
ного вала. На рис. 5.45 показана конструкция двухстаторного ДКР с
механической передачей вращающегося момента посредством кар
данного вала. Два сердечника статора 2 с обмотка ми переменно! о
тока 7 закреплены в станине 3. Между сердечниками расположена
тороидальная обмотка подмагничивания 4. Сердечники ротора 11
закреплены на полой ферромагнитной втулке 12. В конструкции
нет специальных катков, а сердечники ротора 11 катятся непос-
редственно по внутренней поверхности сердечников статоров 2.
Наличие двух статоров способствует повышению вращающего мо-
мента двигателя. Втулка ротора 72 соединена с выходным валом 5
карданной передачей, состоящей из шарниров 10 и 13 и кардан-
Рис. 5.45. Конструкция лвухстаторного двигателя с катящимся рото-
ром:
7 — обмогки статоров; 2 — сердечники статоров; 3 — станина; 4 — обмотка
подмагничивания
5 — упругие
подшипник;
9 — выходной вад
стержни; 6 —
двигателя; 10.
карданный вал; 7 — фланец; 8 —
13 — шарниры; И — сердечники
ротора; 12 — втулка ротора
ного вала 6. Выходной вал 9 вращается в подшипнике 8, разме-
шенном во фланце 7. Этот фланец в совокупности с другими
стержнями 5 образует эластичную подвеску, которая гасит вибра-
ции двигателя, не передавая их рабочему механизму.
Двигатели с катящимся ротором создают значительный пуско-
вой момент при небольшом пусковом токе, а также имеют малое
время разгона и торможения (при отключении обмотки статора от
сети переменного тока за счет униполярного поля с магнитной
индукцией В2 = const создается большой тормозной момент).
Недостатки ДКР' необходимость использования карданного вала;
значительные вибрации и шумы, вызванные несбалансированно-
стью эксцентрично расположенного ротора относительно статора;
нестабильная работа двигателя при ударных нагрузках; низкий КПД.
Величина КПД зависит от номинальных значений мощности и
частоты вращения — при частотах вращения п =2 10 об/мин
КПД не превышает 5 %, а при - 100—200 об/мин он достигает
30- 40 %.
5.10.2. Волновые синхронные двигатели
Волновой двигатель представляет собой конструктивное объе-
динение
механической волновой передачи и электродвигателя.
В вол-
новой передаче вращение с входного вала на выходной вал пере-
дается за счет волн
деформации в так называемом гибком элемен-
те
2 (рис.
5.46) с зубьями на наружной поверхности и находящем-
ся в зацеплении с жестким неподвижно закрепленным элементом
Рис. 5.46. Принцип действия волновой механической передачи:
а — исходное положение генератора волн; б — генератор волн повернулся на
90'; в — один оборот генератора волн; 1 — жесткий элемент; 2 — гибкий эле-
мент; 5 — генератор волн
1 с зубьями на внутренней поверхности. Гибкий элемент вставлен
внутрь жесткого элемента и расположен с ним соосно. Источни-
ком деформации гибкого элемента (генератором волн 3) служит
сдвоенный кулачок с роликами на концах, закрепленный на вход-
ном валу передачи и вставленный внутрь гибкого элемента 2. Чис-
ло волн деформации зависит от числа кулачков; в рассматривае-
мом случае имеет место две волны деформации. В вершинах волн
деформации зубья гибкого элемента входят в зацепление с зубья-
ми жесткого элемента, а во впадинах волн полностью выходят из
зацепления.
При вращении генератора волн происходит обкатывание внут-
ренней поверхности жесткого элемента I гибким внутренним эле-
ментом 2. Разница чисел зубьев гибкого и жесткого элементов обыч-
но равна числу волн деформации или кратна этому числу. Если,
например, число зубьев гибкого элемента Zr = 200, жесткого эле-
мента Z* = 202, передача двухволновая, то при вращении генера-
тора волн по часовой стрелке за один полный оборот генератора
волн гибкий элемент сместится относительно жесткого на два зуба
или на угол ф = 2(360/200) = 3,6°, в направлении, противополож-
ном вращению генератора волн.
Таким образом, одному обороту гибкого элемента соответству-
ет 100 оборотов генератора волн, следовательно, передаточное
отношение рассматриваемой волновой передачи i = 100.
Вад новой двигатель отличается от рассмотренной волновой пе-
редачи способом создания ваш деформации гибкого элемента.
В двигателе волны деформации создаются силами магнитного тя
жения /\t, создаваемыми вращающимся полем статора, при этом
жесткий элемент расположен на статоре. Сила Гм пропорциональ-
на квадрату магнитной индукции поэтому направление сиды
не зависит от знака магнитной индукции в воздушном зазоре
В5, т.е. силы всегда направлены к статору (рис. 5. 47).
В:
Рис. 5.47. Деформация гибкого элемента волнового двигателя силами маг-
нитного тяжения
На рис. 5.48 представлена одна из возможных конструктивных
схем волнового двигателя. На П-образных сердечниках магнито-
провода статора I расположены катушки 2 образующие трех- или
двухфазную обмотку, которая создает двухполюсное (2р - 2) вра-
щающееся магнитное поле. На статоре укреплен жесткий зубчатый
элемент 3 с числом зубцов Ротор выполнен в виде цилиндри-
ческого тонкостенного стакана 5 с гибким зубчатым элементом 4
с числом зубцов Zr. Внутри стакана на эластичной втулке 9 разме-
щены секторы 6 магнитопровода ротора. Секторы имеют возмож-
2
Рис. 5.48. Устройство волнового двигателя с явно выраженными по иоса-
И ми на статоре и роторе:
I / — магнитопровод полюса статора; 2 — полюсная катушка статора; 3- жесткий
[зубчатый элемент, 4 — гибкий зубчатый элемент; 5 — гибкий тонкостенный
t стакан, 6~ сектор магнито прово да ротора; 7 — фланеп выходного вала с зубча-
тым колесом; 8 — зубчатое колесо на гибком стакане, ° — эластичные втулки
ротора
ность перемещаться относительно друг друга в радиальном направ-
лении в пределах максимальной деформации стакана. Число волн
максимальных деформаций ротора равно числу полюсов поля ста-
тора.
При включении в сеть обмотки статора волны деформации ста-
кана перемещаются синхронно с магнитным полем статора с час-
тотой вращения а гибкий стакан с элементом 4 обкатывает
жесткий элемент 3 и вращается с частотой
«2 = «1 /^р
(5.37)
где к? = / — коэффициент редукции скорости волнового двигателя
(передаточное отношение волнового редуктора /):
кр = / = 2;/c4-zr).
(538)
Вращение ротора передается на выходной вал двигателя через
зубчатую передачу, состоящую из зубчатых колес 7 (на гибком
стакане) и 8 (на фланце, закрепленном на выходном валу двига-
теля).
Волновой двигатель не имеет специальной обмотки возбужде-
ния или заменяющего ее постоянного магнита. Поэтому волновой
двигатель по существу является реактивным. Электромагнитный
момент волнового двигателя, Н • м:
(539)
где Л/р — реактивный момент явнополюсного синхронного двига-
теля [см.(5.19)|.
Волновые двигатели в отличие от ДКР более сбалансированы
и, следовательно, имеют меньший уровень шума и вибраций.
Контрольные вопросы
1. Какими силами создастся электромагнитный момент в синхронном
двигателе?
2. В чем состоит процесс асинхронного пуска синхронного двигателя?
3. Какие виды потерь происходят в синхронном двигателе?
4. Почему электромагнитный момент синхронного двигателя при явно-
полюсном роторе больше, чем при неявнополюсном?
5. Почему угловая характеристика синхронного явнополюсного двига-
теля не синусоидальна?
6. Какова конструкция синхронных двигателей с постоянными маг-
нитами?
7. Почему при пуске сшгхронных двигателей с постоянными магнита-
ми возникает тормозной момент?
8. Что такое момент входа в синхронизм и момент выхода из синхро-
низма?
9. Как будут изменяться рабочие и пусковые свойства синхронного
реактивного двигателя при увеличении впадин на роторе?
10. Почему ротор синхронного гистерезисного двигателя неявнопо-
Косный, а ротор СРД — явнополюсный?
11. В чем принципиальное отличие индукторных синхронных генера-
торов от генераторов традиционной конструкции0
12. Чем вызвано понижение КПД в индукторном синхронном генера-
торе?
13. Объясните устройство и работу индукторного синхронного двига-
теля по рис. 5.41.
14. Чем вызваны повышенный шум и вибрации при работе двигателей
с катящимся ротором?
15- Объясните устройство и работу волнового синхронного двигателя
по рис. 5.48.
| Глава 6
I КОЛЛЕКТОРНЫЕ МАШИНЫ
Основным признаком коллекторной электрической машины
является наличие коллектора, через который обмотка якоря со-
единяется с сетью. Так как коллектор и обмотка якоря расположе-
ны на вращающемся якоре, то соединение коллектора с сетью
осуществляется посредством неподвижных контактных щеток, на-
ложенных на коллектор Коллектор и щетки образуют механичес-
ки! коммутатор — устройство, назначение которого зависит от
режима работы коллекторной машины:
в коллекторных генераторах постоянного тока коммутатор
выполняет преобразование переменного тока обмотки якоря в
постоянный ток. передаваемый во внешнюю цепь, т. с. выполняет
функцию механического выпрямителя^
в коллекторных двигателях постоянного тока коммутатор вы -
полняет функцию механического инвертора и осуществляет пре-
образование постоянного тока питающей сети в переменный ток
обмотки якоря.
Возбуждение коллекторной машины постоянного тока осуще-
ствляется посредством обмотки возбуждения, расположенной на
неподвижном статоре в виде полюсных катушек, подключаемых к
сети постоянного тока.
Наличие скользящего контакта в механическом коммутаторе
снижает надежность коллекторных машин и неизбежно связано с
искрением, что создает пожаро- и взрывоопасность при эксплуата-
ции коллекторных двигателей. Стремление избавиться от этого не-
достатка привело к созданию вентильных электрических машин,
применяемых исключительно в качестве двигателей постоянного тока.
I Преобразование постоянного тока в переменный ток в вентильных
Двигателях выполняется полупроводниковым инвертором, построен-
ным на вентильных элементах — транзисторах и тиристорах.
6.1. Принцип действия коллекторных машин
постоянного тока
Рассмотрим принцип действия машины постоянного тока в
генераторном режиме, когда подводимая к машине механическая
энергия преобразуется в электрическую энергию постоянного тока.
Для этого воспользуемся упрошенной моделью машины постоян-
ного тока (рис. 6.1). В магнитном поле постоянного магнита враща-
ется стальной сердечник, в продольных пазах которого располо-
жен виток из медного изолированного провода abed со сторонами
ab и cd. Начало d и конец а этого витка присоединены к двум
взаимно изолированным медным полукольцам, образующим кол-
лектор, который вращается вместе со стальным цилиндром. По
коллектору скользят неподвижные контактные щетки А и В, от
которых отходят провода к потребителю энергии — нагрузке Янг.
Стальной сердечник с витком (обмоткой) и коллектором образу-
ет вращающуюся часть машины постоянного тока — якорь. Если с
помощью какой-либо внешней силы вращать якорь, то стороны
витка будут пересекать магнитное поле полюсов с индукцией В, в
результате чего в обмотке якоря будет индуцироваться ЭДС, В
e = 2Blv. (6.1)
где / — длина пазовой стороны витка, м; v — линейная скорость
перемещения пазовых сторон витка, м/с.
Так как длина пазовых сторон обмотки якоря и скорость их
перемещения неизменны, то ЭДС е обмотки якоря пропорцио-
нальна магнитной индукции В. а форма графика ЭДС определяет-
ся законом распределения магнитной индукции В в воздушном за-
Рис. 6.L Упрошенная модель коллекторной машины постоянного тока
Рис. 6.2. К объяснению принципа действия коллекторного генератора
постоянного тока
зоре между поверхностью якоря и полюсами магнита по перимет-
ру якоря. Так, магнитная индукция в точках зазора, лежащих на
оси полюсов, имеет максимальные значения — под северным маг-
нитным полюсом положительное и под южным — отрицательное.
В точках п и п\ лежащих на геометрической нейтрали, т.е. на ли-
нии, проходящей через середину мсжполюсного пространства, маг-
нитная индукция В=0 (см. рис. 6.4). Допустим, что магнитная ин-
дукция в воздушном зазоре рассматриваемой модели распределена
синусоидально: В= Bniaxsin а. В этом случае ЭДС витка при враще-
нии якоря будет также изменяться по синусоидальному закону. Угол
а определяет изменение положения якоря по отношению к исход-
ному. На рис. 6.2, а показан ряд положений витка abed (обмотки
якоря) с пазовыми сторонами I (ab) и 2 (cd) и присоединенных
к нему коллекторных пластин в различные моменты времени за
один оборот якоря. При а - 0°, а = 180°, а = 360° ЭДС я коря равна
нулю, а при а = 90' и а = 270° она имеет максимальные значения,
причем в первом случае положительное, а во втором — отрица-
тельное. Таким образом, в обмотке якоря генератора постоянною
тока индуцируется переменная ЭДС, а следовательно, при под-
ключении нагрузки RHl по обмотке проходит переменный ток час-
тотой /(рис. 6.2, б, сплошная линия).
За время второго полуоборота якоря, когда ЭДС и ток в обмет
ке якоря отрицательны, ЭДС и ток во внешней цепи генератора (в
нагрузке) не меняют своего направления, т.е. остаются положи-
тельными. как и в течение первой половины оборота якоря. Дей-
ствительно, при а - 90° шетка А соприкасается с коллекторной
пластиной, соединенной с пазовой стороной 7 (ah)3 расположен-
ной под полюсом /V, и имеет положи тельный потенциал, а шетка
В~ отрицательный, так как она соприкасается с пластиной кол-
лектора, соединенной со стороной 2 (cd) витка, находящейся под
полюсом 5. При а - 270°. когда стороны 1 и 2 поменялись местами,
щетки А и В сохранили неизменной свою полярность, потому что
пластины коллектора также поменялись местами и шетка А по-
прежнему имеет контакт с коллекторной пластиной, связанной
со стороной, находящейся под полюсом ЛГ(проводник 2), а щетка
В — с коллекторной пластиной, связанной с проводником 7, на-
ходящимся под полюсом 5. В результате ток во внешней цепи не
изменит своего направления (рис. 6.2, 6, пунктирная линия), т.е.
переменный ток обмотки якоря с помощью коллектора и щеток
преобразуется в постоянный ток.
Ток во внешней цепи рассматриваемого генератора постоянен
лишь по направлению, а его величина изменяется, т.е. ток пульси-
рует.
Пульсации тока и ЭДС значительно ослабляются, если обмотку
якоря выполнить из большого числа равномерно распределенных
по поверхности сердечника витков и увеличить соответственно
число коллекторных пластин. Например, при двух витках на сер
дечнике якоря (четырех пазовых сторонах), оси которых смещены
Рис. 6.3. Модель коллекторной машины с двумя витками в обмотке якоря
относительно друг друга на yi ол 90°, и
четырех пластинах в Коллекторе (рис.
6.3, а) ток во внешней цепи генератора
пульсирует с удвоенной частотой 2/, но
глубина пульсаций значительно сокра-
щена (рис. 6.3, б). Если витков в обмот-
ке якоря 12—16, то ток на выходе ге-
нератора практически постоянен.
В настоящее время генераторы посто-
янного тока имеют ограниченное при-
менение, так как в качестве источни-
ков постоянного тока целесообразнее
использовать полупроводниковые вып-
Рис. 6 4. К объяснению прин-
ципа действия коллекторно-
го двигателя постоянного
тока
рямительные устройства. Однако в не-
которых областях техники генераторы
постоянного тока пока не заменены:
электромашинные преобразователи,
зарядные аккумуляторные станции и др.
Кроме того, генераторы постоянного тока весьма малой мощнос-
ти используются в качестве тахогенераторов (см. параграф 13.3).
В приборных устройствах и средствах автоматизации коллектор-
ные машины применяют в основном в качестве двигателей.
На рис. 6.4 показан поперечный разрез упрощенной модели кол-
лекторного двигателя. Если к щеткам А и В подвести напряжение
U от источника постоянного тока, то в обмотке якоря появится
ток ia. В результате взаимодействия тока iu в пазовых сторонах 7 и 2
витка якоря с полем постоянного магнита на каждом пазовом про-
воднике появится электромагнитная сила, Н:
(6-2)
Совокупность сил F v всех пазовых сторон обмотки якоря соз-
даст на якоре электромагнитный момент, Н • м:
М =
(6.3)
где N, — число пазовых (активных) сторон в обмотке якоря; Do
диаметр сердечника якоря, м.
Под действием этого момента якорь приходит во вращение. После
поворота якоря на 180' электромагнитные силы /эм, а следова-
тельно, и электромагнгп ный момент Мне изменят своего направ-
ления, так как при переходе каждого пазового проводника обмот-
ки якоря из зоны одного магнитного полюса в зону другого полю-
са постоянного магнита в этих проводниках меняется направление
тока. Объясняется это тем, что при повороте якоря на 180° пласти-
ны коллектора меняются местами.
, Таким образом, назначение коллектора и щеток в двигателе
Постоянного тока состоит в том, чтобы изменять направление тока
в витках обмотки якоря при их переходе из зоны одного магнитно-
го полюса в зону другого полюса. Только в этом случае направле-
ние электромагнитных сил, создающих электромагнитный враща-
ющий момент М, остается неизменным.
П ри прохождении пазовых сторон 1 и 2 витка обмотки якоря
через точки п и п\ лежащие на геометрической нейтрали, элект-
ромагнитные силы F м = 0, так как магнитная индукция в этих
точках В = 0, а электромагнитный момент при этом также равен
нулю: М = 0. С увеличением числа пазовых проводников вращение
якоря становится равномерным. Например, при двух витках в об-
мотке якоря (четырех пазовых проводниках) и четырех пластинах
в коллекторе (см. рис. 6.3) электромагнитный момент двигателя
при любом пространственном положении якоря больше нуля (М > 0).
Так, если в точках геометрической нейтрали лил' окажутся две
пазовые стороны одного витка обмотки якоря, то электромагнит-
ный момент двигателя будет создаваться электромагнитными си-
лами, действующими на пазовые стороны другого витка, которые
в этот момент времени будут находиться под серединой полюсов
постоянного магнита, где магнитная индукция В максимальна.
6.2. Устройство коллекторной машины
постоянного тока
Силовой коллекторный двигатель постоянного тока состоит из
неподвижного статора и вращающегося якоря. Статор включает ста-
нину и главные полюсы с полюсными катушками. Обычно в кол-
Рис. 6.5. Статоры коллекторных машин:
а — сборный; б — цельный шихтованный: / — станина; 2 — сердечник полюса:
5 — полюсные катушки; 4 — сердечник якоря
екгорных двигателях малой мощности с электромагнитным воз-
рождением приметают двухполюсные статоры (2р = 2) двух конст-
рукций — сборный или цельный шихтованный. Станина сборного
Статора (рис. 6.5, а) представляет собой цельнотянутую трубу /, к
внутренней поверхности которой винтами прикрепляются полюсы.
Сердечники 2 главных полюсов делают в виде стального бруса либо
набирают из штампованных стальных пластин толщиной 0,5 — 1 мм.
Каждый главный полюс на стороне, обращенной к сердечнику якоря
4. имеет полюсный наконечник, обеспечивающий требуемое рас-
пределение магнитной индукции в воздушном зазоре. Полюсные
катушки J соединяются последовательно и образуют обмотку воз-
буждения, при подключении которой к источнику постоянного тока
в магнитной системе двигателя создается магнитное поле.
В двигателях постоянного тока мощностью до 200— 250 Вт обычно
приметают шихтованный статор (рис. 6.5, 0. Такой статор пред-
ставляет собой пакет пластин сложной конфигурации из листовой
Рис. 6.6. Устройство коллекторной машины постоянноготока:
— коллектор; 2 — тетки; 3 — сердечник якоря; 4 — сердечник полюса; 5 —
полюсные катушки; 6 — станина; 7 — подшипниковый щит задний; 8 — венти-
лятор; 9 — обмотка якоря; 10— вал; /7 — лапы; 12 — подшипниковый шт
передний
Рис. 6.7. Лист сердеч-
ника якоря штампо-
ванный из листовой
электротехнической
стали
электротехнической стали толщиной 0,35
или 0,5 мм. в которых станина и главные
полюсы отштампованы одной пластиной.
Для придания пакету необходимой прочно-
сти его скрепляют не менее чем четырьмя
шпильками.
На рис. 6.6 показано устройство коллек-
торной машины постоянного тока защищен -
ного исполнения с самовентиляцией. Ста-
тор имеет сборную конструкцию и состоит
из станины б, сердечников главных полюсов
4 с полюсными катушками 5 каркасного
типа, т.е. намотанных на каркас из изоля-
ционного материала. Якорь машины вклю-
чает сердечник 5, обмотку якоря 9, коллек-
тор 1 и вал 10,
Сердечник якоря 3 — это цилиндр, набранный из штампован-
ных листов электротехнической стали толщиной 0,5 мм (рис. 6.7).
Перед сборкой эти листы покрывают специальным изоляцион-
ным лаком. Такая конструкция сердечника якоря позволяет значи-
тельно ослабить вихревые токи, возникающие в нем при его пере-
магничивании в процессе вращения в магнитном поле. В продоль-
ные пазы сердечника якоря уложены пазовые стороны секций об-
мотки якоря. Часто пазы якоря делают со скосом, что ослабляет
пульсацию магнитного потока в воздушном зазоре и уменьшает
вибрации и шум, сопровождающие работу машины.
Обмотка якоря 9 (см. рис. 6.6) состоит из секций (катушек),
выполненных медным изолированным проводом, обычно кругло-
го сечения. Пазовые стороны секций закрепляют в пазах сердечни-
ка якоря посредством гетинаксовых клиньев или бандажа. С двух
сторон сердечника якоря расположены лобовые части обмотки
якоря. Со стороны коллектора они подключаются к его пласти-
нам, а со стороны, противоположной коллектору, соединяют па-
зовые стороны секций. Для закрепления лобовых частей на них
накладывают бандаж из стеклоленты.
Коллектор / (см. рис. 6.6) имеет цилиндрическую форму и состо-
ит из медных пластин, изолированных друг от друга миканитовыми
прокладками. В коллекторных двигателях малой мощности применяют
коллекторы на пластмассе (рис. 6.8), медные пластины 1 и микани-
товые прокладки которых запрессованы в пластмассу 2. Основание
коллектора — стальная втулка 4, напрессованная на вал двигателя.
В двигателях с повышенной частотой вращения для придания
коллектору большей прочности в коллекторе применяют армиру-
ющие кольца 3, Рабочая поверхность коллектора, по которой сколь-
зят контактные щетки, должна быть чистой. Чтобы миканитовые
прокладки при срабатывании медных пластин не выступали над
Рис. 6.8. Коллектор на пла-
стмассе:
/ — пластина коллектора;
2 — пластмасса; 3 — арми-
рующие кольца; 4 — втулка
Рис. 6.9. Щеткодержатель трубчато-
го типа:
! — металлическая втулка; 2 — пласт-
массовый колпак; 3 — пружина; 4 —
подшипниковый щит; 5 — зажим щет-
кодержателя; 6— щетка; 7 — пластмас-
совая изолирующая втулка
рабочей поверхностью коллектора, что нарушало бы нормальную
работу' двигателя, между каждой парой смежных медных пластин
фрезеруют канавку («дорожку») на глубину до 1,5 мм. Коллектор-
ные пластины со стороны сердечника якоря имеют выступы, на-
зываемые «петушками», к ним присоединяют секции обмотки.
Щетки 2 (см, рис. 6.6) расположены в щеткодержателях и прижи-
маются к коллектору пружинами. В некоторых двигателях малой
мощности применяют трубчатые щеткодержатели (рис. 6.9), вмон-
тированные в подшипниковый щит двигателя и состоящие из ме-
таллической втулки /, пружины 5 и пластмассового колпака 2, на-
винчивающегося на втулку. Металлическая втулка электрически
связана со щеткой, изолируется от подшипникового шита с помо-
щью втулки 7. Зажим щеткодержателя 5соединен с одной из клемм
коробки выводов. Передний 12 (со стороны коллектора) и задний
7 (со стороны выступающего конца вала) подшипниковые шиты
двигателя (см. рис. 6.6) крепятся болтами к станине.. В центральной
части щитов сделаны расточки под подшипники. В двигателя к ма-
лой мощности применяют шариковые подшипники качения. В пе-
реднем подшипниковом щите сделаны окна, прикрываемые сталь-
Ной пластиной или лентой. Через окна можно периодически ос-
матривать коллектор и щетки, не разбирая двигатель.
Н Для подключения двигателя к питающей сети и присоединения
Регулирующей аппаратуры имеется коробка выводов, расположен -
Ная на боковой или верхней поверхности станины В двигателях
весьма малой мощности вместо коробки выводов на корпусе или
на одном из подшипниковых щитов укрепляют клеммную панель
или выводят наружу пучок маркированных проводов.
Машина постоянного тока (см. рис. 6.6) снабжена центробеж-
ным вентилятором 8, посредством которого воздух «прогоняется;,
через внутреннюю полость двигателя, где отбирает теплоту от об-
моток и сердечников. В верхнюю часть станины ввернуто кольцо
(рым-болт), используемое при транспортировке или монтаже дви-
гателя. Однако двигатели малой мощности не имеют такого кольца
ввиду их небольшой массы. В нижней части станины имеются лапы
//для установки и закрепления машины. Машину снабжают бол-
том заземления для обеспечения электробезопасности при обслу-
живании
Конструкция коллекторного двигателя постоянного тока, пред-
ставленная на рис. 6.10, является типичной для силовых двигате-
лей малой мощности (до 200—300 Вт): станина и полюсы шихто-
ваны, корпус статора и подшипниковые щиты выполнены из алю-
миниевого сплава, щеткодержатели имеют трубчатую конструк-
цию, самовентиляция отсутствует, охлаждение естественное.
Помимо двигателей с электромагнитным возбуждением в при-
борных устройствах и автоматике используют двигатели малой
мощности с возбуждением постоянными магнитами. Отсутствие
обмотки возбуждения упрощает конструкцию двигателей и спо-
собствует повышению их КПД.
Существует несколько разновидностей магнитных систем этих
двигателей, отличающихся конфигурацией постоянных магнитов
и их размещением на статоре:
магнитная система с радиальными магнитами (рис. 6.11, а)
конструктивно наиболее проста, но не обеспечивает получения
Рис. 6.10. Двигатель постоянного тока малой мощности серии СЛ с
тованной станиной:
/ — подшипник; 2 — подшипниковый шит задний; 3 — корпус статора; 4 —
якорь; 5 — подшипниковый шит передний: б — щеткодержатель; 7— коллектор-
8 — клеммная колодка
Рис. 6.1L Магнитные системы машин постоянного тока с постоянными
машинами
большой МДС постоянного магнита, так как пространство между
магнитами остается неиспользованным;
магнитная система с подковообразными магнитами (рис. 6.11, б)
обеспечивает получение большой МДС и лучшее использование
межполюсного пространства, однако магниты такой формы слож-
нее в намагничивании;
магнитная система с кольцевым магнитом (рис. 6.11, ё) наи-
более рациональна и имеет наибольшее применение; площадки у
полюсов постоянного магнита сделаны для уменьшения массы
магнита, так как материал в этих частях магнита используется лишь
частично;
магнитная система с торцовым магнитом (рис 6.11, г) обес-
печивает двигателю минимальный диаметр за счет увеличения его
длины;
магнитная система с призматическими магнитами (рис. 6.11, д)
применяется при использовании дорогостоящих постоянных маг-
нитов на основе редкоземельных металлов.
На рис. 6.12 показано устройство коллекторного двигателя по-
стоянного тока с применением кольцевого постоянного магни-
та 2. Подшипниковый щит 3 со стороны коллектора выполнен из
пластмассы, а шит / — из алюминия. Оба шарикоподшипника на-
ружными кольцами запрессованы в стальные армирующие втулки.
Изготовление постоянных магнитов из современных магнитотвер-
Рис. 6.12. Устройство коллекторного двигателя с постоянным магнитом
кольцевого типа:
/, 3 — подшипниковые шиты; 2 — кольцевой постоянный магнит
дых сплавов с большой удельной магнитной энергией позволяет
получать двигатели, возбуждаемые постоянными магнитами, мощ-
ностью до 50 Вт и более.
Коллекторные машины с постоянными магнитами имеют не-
достатки, ограничивающие в ряде случаев их применение; а) не-
возможность изменения магнитного потока возбуждения, что зат-
рудняет регулировку напряжения на выходе генератора и регули-
ровку частоты вращения двигателя; б) при мощности, превышаю-
щей 40—50 Вт, габаритные размеры и масса этих машин оказыва-
ются больше, чем у двигателей с электромагнитным возбуждени-
ем; в) материалы для изготовления постоянных магнитов все еще
дефицитные и дорогостоящие.
В коллекторных машинах постоянного тока с электромагнит-
ным возбуждением применяют следующие способы подключе-
ния обмотки возбуждения относительно обмотки якоря: незави-
симое подключение, когда обмотка возбуждения ОВ не соедине-
на электрически с обмоткой якоря и получает питание от посто-
роннего источника постоянного тока (рис. 6.13, параллельное
подключение обмотки возбуждения к обмотке якоря (рис. 6.13, б).
последовательное подключение обмотки возбуждения к обмотке
якоря (рис. 6.13, в) и, наконец, смешанное подключение обмоток
возбуждения, когда в машине имеются две обмотки возбужде-
ния, одну из которых включают параллельно обмотке якоря, а
другую — последовательно (рис. 6.13, г). Принципиальная схема
двигателя с возбуждением постоянными магнитами показана на
рис. 6.13, д. По эксплуатационным свойствам двигатели с посто-
янными магнитами аналогичны двигателям с независимым воз-
буждением.
Принята следующая маркировка выводов обмоток: обмотка яко-
ря — Я1 и Я2, обмотка возбуждения независимая — Ml и М2,
обмотка возбуждения параллельная (шунтовая) — Ш i и III2, об-
мотка возбуждения последовательная (сериесная) — С1 и С2.
Рис. 6.13. Способы возбуждения коллекторных машин постоянного тока:
а — независимое; б — параллельное; в — последовательное; г — смешанное; д —
постоянными .магнитами
Сравнивая коллекторные машины постоянного тока с бескол-
лекторными (асинхронными и синхронными), следует отметить,
что коллекторные двигатели выгодно отличаются: а) возможнос-
тью регулирования частоты вращения в широком диапазоне, в том
числе получение частоты вращения свыше 3000 об/мин, что нельзя
получить в асинхронных и синхронных двигателях при промыш-
ленной частоте тока 50 Гп в питающей сети; б) возможностью
создавать значительные пусковые и рабочие моменты.
I Эти свойства коллекторных двигателей способствуют их ис-
пользованию в приборных устройствах и средствах автоматики. Но
коллекторные машины имеют также существенные недостатки,
обусловленные, главным образом, наличием у них щеточно-кол-
лекторного узла, т.е. скользящих контактов, являющихся источ-
ником искрообразования, что приводит к возникновению помех
радиоприему и требует применения специальных мер для их по-
давления (см. параграф 6.6), износ, подгорание и загрязнение щеток
и коллектора, приводящие к снижению надежности и сокраще-
нию срока службы коллекторных машин, недопустимость приме-
нения этих машин в пожароопасных и взрывоопасных средах.
6.3. Электродвижущая сила и электромагнитный
момент коллекторной машины постоянного тока В
В процессе вращения якоря возбужденной коллекторной маши-
ны постоянного тока в обмотке якоря индуцируется ЭДС Ее, вели-
чина которой пропорциональна основному магнитном)7 потоку
возбуждения Ф и частоте вращения якоря п. В:
Еа = ссФл,
(6.4)
где се — постоянный коэффициент, определяемый конструктив-
ными параметрами машины.
Рис. 6.14. Действие ЭДС в цепи
якоря машины постоянного
тока в режимах генератора (о)
и двигателя (б)
Рис. 6 15. Направление проги -
во-ЭДС в обмотке якоря кол-
лекторного двигателя посто-
янного тока
Если машина работает в режиме генератора, то эта ЭДС создает
на выходе генератора напряжение U, определяемое уравнением:
V=E0-Ja^r, (6.5)
где / — ток в цепи якоря; — суммарное сопротивление в цепи
якоря (сопротивление обмотки якоря, щеточных контактов и со-
противления других обмоток, если они включены последователь-
но в цепь якоря).
Из уравнения (6.5) следует, что в генераторе постоянного тока
напряжение на выходе Uменьше ЭДС якоря Еа на величину пале-
ния напряжения в цепи якоря I^r.
На рис. 6.14, а показана схема электрической цепи якоря гене-
ратора постоянного тока, которому соответствует уравнение (6.5).
Для выяснения вопроса о действии ЭДС якоря в двигателе по-
стоянного тока обратимся к рис. 6.15. В результате взаимодействия
тока ir в проводнике а обмотки якоря с внешним магнитным по-
лем возникает электромагнитная сила Е,ч, создающая электромаг-
нитный момент Л/, который приводит якорь во вращение (в рас-
сматриваемом случае якорь вращается против часовой стрелки). При
этом пазовый проводник пересекает силовые линии поля возбуж-
дения с магнитной индукцией Z?, и в соответствии с явлением элек-
тромагнитной индукции в проводнике индуцируется ЭДС еа, на-
правление которой определяют по правилу «правой руки». Элект-
родвижущая сила еа, индуцированная в пазовом проводнике, на-
правлена встречно току ia, проходящему по этому проводник}'.
Поэтому ЭДС обмотки якоря двигателя называют противо-ЭДС.
Величина этой ЭДС, как и в случае генератора, определяется вы-
ражением (6.4).
Рассмотрим электрическую цепь обмотки якоря двигателя (см.
рис. 6.14, 6), по которой проходит ток якоря /д. Применив второй
закон Кирхгофа, получим уравнение напряжении двигателя
(6.6)
из которого следует, что ЭДС якоря Еа в двигателе меньше напря-
жения сети U на величину падения напряжения в цепи якоря
Электромагнитная мощность машины постоянного тока,, Вт:
(6.7)
Электромагнитный момент, Н • м:
М= смФ/о = 9,55Рэм/л.
(6.8)
Таким образом, электромагнитная мощность и электромаг-
нитный момент коллекторной машины постоянного тока зави-
сят от магнитного потока возбуждения Ф, частоты вращения
якоря п и от величины тока в обмотке якоря !а, т.е. от нагрузки
машины.
6.4. Магнитное поле машины постоянного тока.
Реакция якоря
В коллекторной машине постоянного тока имеется две обмот-
ки — возбуждения и якоря. При работе машины каждая обмотка
создает своё магнитное поле, эти поля взаимодействуют и создают
результирующее поле машины. Таким образом, результирующее
магнитное поле электрической машины постоянного тока можно
рассматривать как сумму двух магнитных полей.
[ При идеальном холостом ходе машины постоянного тока, ког-
да ток в обмотке якоря отсутствует (7О = 0), в машине действует
только МДС обмотки возбуждения FB, которая и создает магнитное
поле возбуждения, симметрично распределенное относительно осей
полюсов. График распределения магнитной индукции б6 в воздуш-
ном зазоре представляет собой трапецеидальную кривую линию
(рис. 6.16, а).
В этом случае физическая нейтраль, т. е. линия, проведенная че-
рез точки на окружности якоря, где магнитная индукция равна
нулю, совпадает с геометрической нейтралью пп — линией, про-
ходящей через середину межполюсного пространства перпендику-
лярно оси полюсов.
С появлением нагрузки в обмотке якоря возникает ток 70, со-
здающий МДС якоря Fa} неподвижную в пространстве и направ-
ленную вдоль оси щеток (рис. 6.16, б). Таким образом. МДС якоря
Fa создаст магнитное поле якоря.
N
a
Рис. 6.16. Влияние реакции якоря на магнитное поле коллекторной ма-
шины постоянного тока и графики распределения магнитной индукции
в воздушном зазоре машины
Обмотка якоря машины постоянного тока устроена так, что по
одну сторону от линии щеток ток по обмотке якоря протекает в
одном направлении, а по другую сторону — в другом направлении
(см. рис. 6.16, б). Таким образом, якорь можно рассматривать как
катушку с осью, совпадающей с линией щеток. МДС якоря Fa все-
гда направлена по оси шеток. Если щетки расположены на геомет-
рической нейтрали, то F, совпадает с геометрической нейтралью,
т.е. она направлена по поперечной оси машины.
На рис. 6.16, б показана картина магнитного поля, созданного
МДС обмотки якоря Fo (график 1) при отсутствии тока в обмотке
возбуждения. На этом рисунке также приведен график распределе-
ния магнитной индукции в зазоре (график 2) от магнитного пото-
ка обмотки якоря. Уменьшение индукции на геометрической ней-
трали, где МДС обмотки якоря Fa имеет наибольшее значение,
объясняется увеличением магнитного сопротивления потоку яко-
ря в межполюсном пространстве.
k При работе машины с нагрузкой (7И # 0) одновременно дей-
ствую! две МДС: возбуждения FB и якоря /у, в результате чего в
машине создается результирующее магнитное поле. Воздействие
магни гного поля якоря на магнитное поле возбуждения машины
постоянного тока называют реакцией якоря. На рис. 6.16, в показа-
ны картина результирующего магнитного поля машины и график
распределения магнитной индукции результирующего магнитного
поля в воздушном зазоре машины.
Из сравнения рис. 6.16. а и в следует, что реакция якоря ис-
кажает магнитное поле машины. Ось результирующего поля сме-
щается относительно оси полюсов, поворачивая при этом физи-
ческую нейтраль тт' относительно геометрической нейтрали пп'
на угол а в направлении вращения якоря при работе машины в
генераторном режиме и в обратном направлении при работе ма-
шины в двигательном режиме.
I С увеличением нагрузки (тока в обмотке якоря) угол смешения
физической нейтрали о возрастает. Если при этом щетки занима-
ют положение, соответствующее геометрической нейтрали, то
смещение физической нейтрали приводит к тому, что в местах
пересечения поверхности якоря с геометрической нейгралыо маг-
нитная индукция приобретает некоторое значение В, и в активных
сторонах секций в момент их перехода через геометрическую ней-
траль наводится ЭДС. Это нарушает нормальную работу щеточного
контакта, вызывая искрение на коллекторе (см. параграф 6.5).
Искажение магнитного поля машины приводи» к тому, что одни
Края полюсных наконечников и расположенные под ними участки
зубцового слоя якоря подмагничиваются, а другие — размагничи-
ваются. Если бы магнитная цепь машины была ненасыщенной,
Подмагничивающее и размагничивающее действия реакции якоря
Не влияли бы на величину результирующею магнитного потока,
так как подмагничивание одних краев полюсных наконечников
компенсировалось бы размагничиванием других краев. Однако в
реальных условиях магнитная цепь машины насыщена. Это, с
ной стороны, ограничивает увеличение магнитного потока одних
краев полюсных наконечников и расположенного под ними зуб-
цового слоя якоря, а с другой — не ограничивает размагничива-
ние — уменьшение потока других краев полюсных наконечников
В итоге реакция якоря вызывает некоторое ослабление результи-
рующего магнитного потока машины.
Влияние реакции якоря на результирующий магнитный поток
зависит также от положения щеток: при расположении их на гео-
метрической нейтрали МДС якоря направлена по поперечной оси
и в машине имеет место поперечная реакция якоря; при смеше-
нии щеток генератора постоянного тока с геометрической нейтра-
ли по направлению вращения якоря или щеток двигателя — про-
тив направления вращения (рис. 6.17, «) размагничивающее дей-
ствие реакции якоря усиливается.
Объясняется это тем, что вместе со щетками изменяется на-
правление МДС якоря Fa — она всегда направлена по оси щеток
При этом МДС якоря Fa помимо поперечной составляющей Faq-
= Fflcos р, направленной перпендикулярно оси полюсов, приобре -
тает еше и продольную составляющую Fad= Fasin Р, направленную
по оси полюсов. Таким образом, в коллекторных машинах возмож-
ны три варианта воздействия реакции якоря на работу машины:
щетки установлены на геометрической нейтрали и тогда ре-
акция якоря является только поперечной Foq,
щетки смещены с геометрической нейтрали и реакция якоря
имеет две составляющие — поперечную Faq и продольную Fath на-
Рис. 6.17. Влияние положения щеток коллекторной машины постоянного
тока на действие реакции якоря
Оправленную встречно МДС обмотки возбуждения FB, и поэтому
оказывающее на машину размагничивающее действие;
щетки расположены по оси полюсов, т.е. 0 = 90° (рис. 6.17, 6);
в этом случае машина становится неработоспособной, так как в
генераторном режиме в обмотке якоря не индуцируется ЭДС, а в
двигательном режиме электромагнитный момент М - 0.
Г Если щетки смешены в направлении вращения якоря (генера-
тора), то продольная составляющая МДС якоря /^действует встреч-
но МДС возбуждения что ведет к ослаблению основного потока
машины. Если же щетки сместить в противоположном направле-
нии, то продольная составляющая МДС якоря Fad будет действо-
вать согласно с МДС возбуждения что приведет к некоторому
увеличению основного магнитного потока машины (рост резуль-
тирующего магнитного потока в машине ограничивается состоя-
нием магнитного насыщения магнитопровода).
Вредное влияние реакции якоря на работу машины проявляет-
ся еще и в том, что перераспределение магнитной индукции под
полюсами, вызванное реакцией якоря (см. рис. 6.16, в), обуслов-
ливает наведение ЭДС повышенного значения в секциях обмотки
якоря в момент попадания их активных сторон в зону с усиленной
магнитной индукцией (участки /). Последнее ведет к возникнове-
нию между отдельными соседними коллекторными пластинами
напряжений, превышающих предельно допустимые значения (25 —
60 В). Это, в свою очередь, может вызвать ионизацию пространства
между пластинами и возникновение электрической дуги на кол-
лекторе. При интенсивном развитии этого процесса дуга перебра-
сывается на щетки и корпус машины. Описанное явление, назы-
ваемое круговым огнем, может вызвать оплавление коллектора и
вызвать в этой машине пожар.
6.5. Коммутация в коллекторных машинах
постоянного тока
Работа коллекторной машины, как правило, сопровождается
искрением между щеткой и коллектором. Искрение на коллекто-
ре — явление нежелательное и вредное. Оно приводит к подгора-
нию коллектора и щеток, загрязнению машины, к недопустимос-
ти применения коллекторных машин в пожаро- и взрывоопасных
помещениях, нестабильности характеристик этих машин из-за
изменяющегося сопротивления контакта шетка — коллектор и т.д.
Причины, вызывающие искрение, могут быть разделены на три
группы: механические, потенциальные и коммутационные.
К механическим причинам относятся: слабое прижа-
тие щеток к коллектору, неправильная конфигурация или не-
гладкая поверхность коллектора, загрязнение поверхности кол-
лектора, выступание изоляции над коллекторными пластинами,
неплотное закрепление траверсы, пальцев или щеткодержателей
а также другие недостатки в конструкции и производственном
изготовлении машины. При указанных неисправностях, особен-
но в условиях тряски и вибрации, в отдельные моменты времени
нарушается контакт тетки с коллектором, что приводит к ис-
крению.
Потенциальные причины появляются при возникно-
вении напряжения (разности потенциалов) между соседними
коллекторными пластинами, превышающего допустимые преде-
лы; для машин мощностью до 1 кВт это напряжение не должно
превышать 25—30 В. В этом случае искрение наиболее опасно, так
как оно может перейти в «круговой огонь».
Коммутационные причины искрения обусловлены про-
цессами коммутации в коллекторной машине.
Иногда искрение вызывается комплексом причин. Выяснение
причин искрения следует начинать с механических, так как они
обычно обнаруживаются при внешнем осмотре коллектора и ще-
точного аппарата. Наибольшие трудности в обнаружении и устра-
нении представляют коммутационные причины искрения, поэто-
му весьма полезно разобраться в физической сущности процесса
коммутации.
При вращении якоря машины коллекторные пластины пооче-
редно вступают в соприкосновение со щетками. При этом пере-
ход щетки с одной пластины на другую сопровождается пере-
ключением какой-либо секции обмотки якоря из одной парал-
лельной ветви в другую и изменением направления тока в этой
секции.
Совокупность явлений, связанных с изменением тока в сек-
циях обмотки якоря при переключении этих секций из одной
параллельной ветви в другую, называется коммутацией. Секция,
в которой происходит коммутация, называется коммутируемой.
а время, в течение которого происходит процесс коммутации, —
периодом коммутации. Период коммутации определяется отрез-
ком времени, начиная с момента, когда коллекторная пластина
вступает в соприкосновение со щеткой, и кончая моментом, когда
пластина полностью выходит из соприкосновения с ней.
Рассмотрим процесс коммутации, предположив, что в комму-
тируемой секции в течение всего периода коммутации не индук-
тируются никакие ЭДС. При этом ширину щетки примем равной
ширине коллекторной пластины.
В начальный момент коммутации (рис. 6.18, а) контактная по-
верхность щетки касается только пластины 7, а секция / (комму-
тируемая секция) относится к левой параллельной ветви обмотки
якоря и в ней протекает ток ia = 7/2, где 7 — ток, проходящий через
рассматриваемую щетку. Затем пластина 7 постепенно сбегает со
€
a
Рис. 6.18. Изменение направления и величины тока в коммутируемой
секции в процессе коммутации
щетки и на смену ей набегает пластина 2. В результате коммутиру-
емая секция оказывается замкнутой накоротко и ток в ней посте-
пенно уменьшается. Когда же контактная поверхность щетки рав-
номерно перекрывает обе коллекторные пластины (рис. 6.18, 0,
рабочий ток в коммутируемой секции становится равным нулю.
В конце процесса коммутации (рис. 6 18, в) щетка полностью пе-
реходит на пластину 2, а ток в коммутируемой секции вновь дости-
гает величины //2. Однако по направлению этот ток противопо-
ложен току в начале коммутации, а сама коммутируемая секция
теперь оказывается в правой параллельной ветви обмотки якоря.
Таким образом, за период коммутации ток в коммутируемой сек-
ции изменился от +Z/2 до -1/1.
Однако в реальных условиях работы электрических машин по-
стоянного тока процесс коммутации протекает значительно слож-
нее. Дело в том, что период коммутации весьма мал — измеряется
микросекундами. При таком быстром изменении тока в коммути-
руемой секции, расположенной в пазе сердечника якоря и обла-
дающей индуктивностью £с, наводится ЭДС самоиндукции
(6-9)
Обычно ширина щетки больше ширины коллекторной пласти-
ны, поэтому в машине одновременно коммутируют несколько маг-
нитно-связанных между собой секций. Наличие магнитной связи
между секциями приводит к тому, что в коммутируемых секциях,
кроме ЭДС самоиндукции eL, наводится еще и ЭДС взаимоиндукции
ель которая, так же как и eL> является реактивной. Совместно эти
ЭДС составляют реактивную ЭДС коммутируемой секции
~ eL + еМ'
(6.10)
Кроме реактивной ЭДС ер в коммутируемой секции наводится
еще ЭДС вращения евр. Возникновение этой ЭДС объясняется тем,
что магнитное поле машины, искаженное реакцией якоря, созда-
ет в зоне коммутации магнитную индукцию Вк (см. рис. 6.16, в),
которая и является причиной индуцирования в коммутируемой
секции ЭДС вращения:
efip = BK2lwcv,
(6.11)
где / — длина активной стороны секции, м; — число витков в
секции; v — линейная скорость движения секций, м/с.
Полная ЭДС коммутируемой секции равна сумме всех ЭДС,
индуцированных с коммутируемой секции за период коммутации:
реактивной ЭДС и ЭДС врашения евр:
(6.12)
В процессе коммутации коммутируемая секция замкнута щет-
кой накоротко и под действием ЭДС Xе в этой секции возникает
ток /к, называемый током коммутации. В момент окончания пери-
ода коммутации, когда щетка теряет контакт с одной из пластин
коллектора, размыкается цепь тока /к коммутируемой секции. При
этом энергия магнитного поля
0,5£с/;,
(6.13)
накопленная за период коммутации, затрачивается на поддержа-
ние тока коммутации в коммутируемой секции. Это приводит к
тому, что в момент размыкания секции щеткой между сбегающей
пластиной коллектора и сбегающим краем щетки возникает элек-
трическая искра. Процесс искрообразования повторяется при сбе-
гании щетки с каждой коллекторной пластины, т.е. практически
продолжается непрерывно, пока машина работает, что создает
непрекрашающееся искрение на щетках.
Таким образом, причиной неудовлетворительной коммутации в
машинах постоянного тока является добавочный ток коммутации.
создаваемый суммарной ЭДС Xе* индуцируемой в коммутируе-
мых секциях. Неудовлетворительная коммутация, сопровождаемая
искрением, ведет к подгоранию щеток и появлению почернения
на коллекторе, что является причиной дальнейшего усиления ис-
крения. Кроме того, искрение является быстропротекаюшим элек-
тромагнитным процессом, в результате которого возникают излу-
чения электромагнитных волн, создающие помехи радиоприему.
Последнее обстоятельство необходимо учитывать при работе кол-
лекторных машин вблизи радиоустройств.
6.6. Способы улучшения коммутации и подавления
помех радиоприему
В конечном итоге способы улучшения коммутации сводятся к
уменьшению или полному устранению тока коммутации, опреде-
ляемого выражением
К 4 = Х^/Хйс, (6-14)
где Xrk — сумма электрических сопротивлений току' коммутации,
а именно: сопротивлений секции, переходного контакта между
коллекторными пластинами и щеткой, а также собственно щетки
Из перечисленных сопротивлений наибольшую величину име-
ют сопротивления переходного контакта и собственно щетки Хгш-
Поэтому с некоторым приближением можно записать
'к = Х^/Ейц- (6-15)
Из формулы (6.15) следует, чго уменьшить ток /к, а следова-
тельно, улучшить коммутацию можно либо увеличением сопротив-
ления „ либо уменьшением величины суммарной ЭДС Xе в ком-
мутируемой секции. Величина сопротивления Хг зависит от тех-
нических данных щеток, используемых в машине. С точки зрен ия
хорошей коммутации целесообразно применять щетки с большим
удельным электрическим сопротивлением, например угольно-гра-
фитные. Однако такие щетки допускают пониженную плотность
тока в щеточном контакте, что требует увеличения поверхности
коллектора главным образом за счет его длины. Поэтому примене-
ние в машине щеток повышенного сопротивления привело бы к
увеличению габаритов машины и. следовательно, к дополнитель-
ному расходу меди.
Уменьшить полную ЭДС Х^ в коммутируемой секции можно
несколькими способами, например, применяя секции обмотки
якоря с небольшим числом витков. Однако последнее не всегда
выполнимо, так как требует для сохранения неизменным общего
числа проводников якоря W увеличения числа секций, а следова-
тельно, и числа коллекторных пластин.
Применяя более узкие щетки, можно уменьшить величину ЭДС
взаимоиндукции. Однако это нецелесообразно, так как для сохра-
нения неизменной площади контактной поверхности щеток при-
шлось бы увеличить их длину, а следовательно, и длину коллекто-
ра, что привело бы к увеличению габаритов машины. Обычно ши-
рина щетки принимается равной ширине двух-трех коллекторных
Пластин.
L Наиболее эффективным методом уменьшения ЭДС в коммути-
руемой секции является создание в зоне коммутации магнитного
потока такой величины и направления, чтобы в коммутируемых
секциях наводилась ЭДС вращения еяр, компенсирующая реактив-
ную ЭДС ер. В естественных условиях, когда нс принимаются меры
по борьбе с искрением, указанные ЭДС ер и евр практически на-
правлены в одну сторону, т.е. действуют согласно. ЭДС коммутации
можно свести к нулю, если изменить направление ЭДС вращения
на обратное направление. Тогда ЭДС вращения будет подавлять ре-
активную ЭДС и если добиться равенства этих ЭДС, то получим:
= ep-eBp = 0- (6.16)
Последнего можно достичь двумя путями: установкой добавоч-
ных полюсов и смешением щеток за физическую нейтраль.
В коллекторных машинах мощностью свыше 1 кВт для измене-
ния направления ЭДС вращения екр применяют добавочные полю-
сы, устанавливая их между главными полюсами (рис. 6.19, а). МД
этих полюсов направлена против МДС обмотки якоря Fa и
создает такой магнитный поток ФДОб, который уничтожает поток
якоря в зоне коммутации и изменяет магнитную индукцию в этой
зоне на обратную по направлению. При этом в коммутируемой
секции наводится ЭДС вращения, направленная встречно реак-
тивной ЭДС, в итоге результирующая ЭДС в коммутируемой сек-
ции окажется уменьшенной до значения, близкого к нулю [см.
(6.16)]. Включение обмотки добавочных полюсов последовательно
с обмоткой якоря обеспечивает удовлетворительную коммутацию
в широком диапазоне нагрузок, так как в этом случае магнитные
потоки добавочных полюсов Ф10б и якоря Ф„ изменяются пропор-
ционально току якоря, т.е. току нагрузки (сердечники добавочных
полюсов делаются ненасыщенными, поэтому увеличению потока
Фдоб ничего не препятствует).
В электродвигателях мощностью до 1 кВт, преимущественно
применяемых в приборных устройствах и средствах автоматизации,
установка добавочных полюсов нецелесообразна по двум причи-
нам: во-первых, это технологически сложно из-за малых размеров
внутренней полости машин, а во-вторых, условия коммутации в
машинах такой мощности намного легче. Поэтому в этих двигате-
лях магнитное поле в зоне коммутации, необходимое для созда-
ния ЭДС вращения, компенсирующей реактивную ЭДС, получа-
ют, смещая шетки с геометрической нейтрали пп' на угол [3 в
направлении против вращения якоря. Щетки следует смещать за
физическую нейтраль шт' (£ > а) так, чтобы индукция в зоне
коммутации имела направление и величину, при которых в ком-
мутируемых секциях наводилась ЭДС вращения, достаточная для
компенсации реактивной ЭДС (рис. 6 19, 6j.
Смещение щеток с геометрической нейтрали за физическую
нейтраль — простой и надежный способ улучшения коммутации,
однако он не всегда одинаково эффективен. Например, в режиме
работы машины с переменной нагрузкой при любом ее измене-
нии пришлось бы менять положение шеток, так как положение
a
Рис. 6.19. Способы улучшения коммутации в коллекторных машинах:
а — применение добавочных полюсов; б — смешение шеток с геометрической
нейтрали
физической нейтрали изменяется е зависимости от нагрузки. По-
этому обычно шетки устанавливают в определенное положение,
при котором полная компенсация реактивной ЭДС происходит при
некоторой нагрузке, соответствующей наиболее продолжительно-
му времени работы машины, например номинальной нагрузке.
Для реверсивных двигателей, работающих с изменением на-
1 правления вращения, смещение щеток с геометрической нейтра-
* ли вообще недопустимо, так как направление смешения физичес-
кой нейтрали меняется с изменением направления вращения По-
этому смешение шеток в какую-либо сторону в такой машине
обеспечило бы удовлетворительную коммутацию лишь при одном
направлении вращения якоря, а при другом, наоборот, значи-
тельно ухудшило бы ее.
Электромагни гное излучение, сопровождающее работу' коллек-
торного двигателя, создает помехи радиоприему. При работе кол -
лекторных двигателей уровень создаваемых ими радиопомех не дол-
жен превышать установленных норм. Радиопомехи от коллекторно-
го двигателя распространяются в виде электромагнитного излуче-
ния и в виде электрических сигналов — помех через электросеть
В Дтя подавления электромагнитных излучений применяют эк-
ранирование двигателя. В качестве экрана используют заземленный
корпус двигателя. Если в подшипниковом шите со стороны кол-
лектора имеются окна, то их закрывают металлической сеткой,
соединенной с заземленным корпусом машины. Если корпус ма-
шины или его передний подшипниковый шит (со стороны кол-
лектора) изготовлены из пластмассы, то неметаллическую часть
Двигателя закрывают металлической сеткой и за земляют.
J Для подавления радиопомех, проникающих в электросеть, при-
меняют симметрирование обмоток и включение фильтров. Сим-
Рис. 6.20. Схема включения помехозащитно-
го фильтра
метрирование состоит в том, что каждую
обмотку, включаемую последовательно в
цепь якоря (обмотку возбуждения, обмотку
добавочных полюсов и т.п.), разделяют на
две равные части и присоединяют симмет-
рично обмотке якоря, подключая к щеткам
разной полярности. В качестве фильтров ис-
пользуют конденсаторы, включенные между
каждым токонесущим проводом и заземлен-
ным корпусом двигателя (рис. 6.20).
Значение емкости конденсаторов подби-
рают опытным путем. Конденсаторы долж-
ны быть рассчитаны на рабочее напряже
ние двигателя. Предпочтительнее применять
проходные конденсаторы типа КБП, у ко-
торых один из зажимов — их металлический корпус, прикрепляе-
мый непосредственно к корпусу двигателя и заземляемый вместе
с ним. Иногда конденсаторы фильтра располагают в коробке вы-
водов машины.
6.7. Потери и КПД коллекторных машин
постоянного тока
Потери в коллекторных машинах постоянного тока разделяют
на основные и добавочные. Основные потери включают в себя маг-
нитные, электрические и механические.
Магнитные потери складываются из потерь на вихревые токи
Pt i г и на перемагничивание (явление гистерезиса) Р|э возникаю
щих в сердечнике якоря, вращающемся в магнитном поле:
А. = + Л- (6.17)
Магнитные потери в якоре зависят от частоты его перемагни-
чивания
(6.18)
толщины листов электротехнической стали, из которых набран
пакет якоря, ее магнитных свойств и качества изоляции межд)
листами пакета якоря.
Потери холостого хода — это сумма магнигных и механических
потерь:
ме*-
(6 19)
Для двигателя независимого (параллельного) возбуждения,
работающего в режиме холостого хода, электрическая мощность,
потребляемая от сети, Вт:
(6.20)
откуда потери холостого хода
(6.21)
Таким образом, потери холостого хода можно определить экспе-
риментально?
Электрические потери в коллекторных машинах постоянного
тока происходят в обмотках якоря и возбуждения, также в щеточ-
ном контакте.
Электрические потери в обмотке якоря пропорциональны
квадрату тока якоря:
(6.22)
Электрические потери в
возбуждения
независимой (параллельной) обмотке
(6.23)
где (/„ и /в — напряжение
Электрические потери
и ток в обмотке возбуждения,
в щеточном контакте
(6-24)
где д[/ш — падение напряжения в щетках.
Механические потери Рмех представляют собой потери на тре-
ние в подшипниках, в щеточном контакте на коллекторе, а также
потери на вентиляцию.
Добавочные потери составляют небольшую величину, которая
согласно ГОСТ 183 — 74 принимается равной 1 % от подводимой
мощности Р\.
Суммарные потери в двигателе постоянного тока:
(6.25)
Ао - Л + Л
Л) — Ло ” Л 4-
3 В
Коэффициент полезного действия двигателя постоянного тока
определяется по (3.23). Подводимая к двигателю мощность, Вт:
Р, = Uala + иДъ. (6.26)
При номинальной нагрузке КПД двигателей мощностью от 100
До 1000 Вт т||ЮМ = 0,5 —0,8, а при мощности 5,0 — 50 Вт Ином = 0,15—
10.40. График зависимости КПД двигателя от нагрузки аналогичен
графику’для асинхронного двигателя (см. рис. 3.10).
6.8. Коллекторные двигатели постоянного тока
6.8.1. Основные зависимости и соотношения
Двигатели постоянного тока, несмотря на недостатки, обус-
ловленные наличием коллектора и щеток, до настоящего времени
применяют в приборных устройствах и средствах автоматизации.
Это объясняется прежде всего тем, что они позволяют плавно и в
широком диапазоне регулировать частоту вращения, имеют срав-
нительно малые габариты и массу и способны развивать значи-
тельный электромагнитный момент.
Принцип действия двигателей постоянного тока (см. параграф
6.1) основан на взаимодействии тока проводников обмотки якоря
с магнитным полем возбуждения, в результате чего на каждый
проводник обмотки якоря действует электромагнитная сила (см.
рис. 6.4).
Совокупность всех этих сил, действующих на проводники об-
мотки якоря, создает электромагнитный момент М, который при-
водит якорь двигателя во вращение. Значение этого момента опре-
деляется электромагнитной мощностью двигателя PJM = Еа1а'
М-смФ/Л = 9,55Рэм/л,
где см — постоянный коэффициент, определяемый конструктив-
ными параметрами двигателя.
Как было показано в параграфе 6.3, ЭДС Еа, индуцируемая в
обмотке якоря двигателя, направлена встречно приложенному к
цепи якоря напряжению (см. рис. 6.15). Из уравнения напряжений
коллекторного двигателя постоянного тока (6 6):
и= Еоа la Sr
получим формулу тока якоря двигателя, А:
а
(6.27)
Используя выражения (6.4) и (6.6), получим формулу частоты
вращения коллекторного двигателя, об/мин:
(6.28)
Из (6.28) следует, что частота вращения якоря коллекторного
двигателя пропорциональна напряжению U, подведенному к цепи
якоря двигателя, обратно пропорциональна основному магнитно-
му потоку возбуждения Ф и зависит также от падения напряжения
в цепи якоря /0 Sr-
6.8.2. Двигатели независимого и параллельного
Б возбуждения
В двигателях независимого возбуждения обмотка возбуждения
ОВ электрически не связана с обмоткой якоря (рис. 6.21, с). Часто
напряжение возбуждения Ц отличается от напряжения в цепи якоря
[J, Если же напряжения равны, то обмотку возбуждения подклю-
чают параллельно обмотке якоря (рис. 6.21, б).
Эксплуатационные качества двигателей постоянного тока оп-
ределяются их рабочими и механическими характеристиками, а
также регулировочными свойствами.
Рабочие характеристики представляют собой зависимость час-
тоты вращения л, тока 1а в обмотке якоря, полезного момента ЛГ2
от полезной мощности двигателя А при неизменных значениях
напряжения питания Uи тока в обмотке возбуждения /„ (рис. 6.22).
Характеристика частоты вращения п = /(/?) имеет вид графи-
ка, немного наклоненного к оси абсцисс. Такая форма характери-
стики объясняется тем, что с ростом нагрузки двигателя А уве-
личивается ток якоря 1а, следовательно, возрастает падение на-
пряжения в цепи якоря В итоге уменьшается числитель выра-
жения (6.28), что ведет к уменьшению частоты вращения. Одно-
временно с ростом нагрузки усиливается реакция якоря (см. пара -
граф 6.4), что уменьшает основной магнитный поток Ф и способ-
ствует увеличению частоты вращения. В двигателях малой мощнос-
ти с небольшим магнитным насыщением размагничивающее вли-
яние реакции якоря невелико и характеристика п = /(Р2) приобре-
тает вид прямой, слабо наклоненной к оси абсцисс. В двигателях
большей мощности размагничивающее влияние реакции якоря про-
является значительнее, поэтому с ростом нагрузки в таких двига-
Рис, 6.21. Принципиальные схемы включения коллекторных двигателей
постоянного тока независимого (а) и параллельного (б) возбуждения
Рис. 6.22. Рабочие характеристики
двигателей постоянного тока неза-
висимого и параллельного возбуж-
дения
телях основной магнитный по-
ток уменьшается, что может
привести к росту частоты враще-
ния. В этом случае работа двига-
теля становится неустойчивой
Для преодоления этого недостат-
ка двигатели снабжаются легкой
(несколько витков) стабилизи-
рующей обмоткой, включенной
последовательно в цепь якоря,
чтобы ее МДС ГС1 была направ-
лена согласно с МДС обмотки
возбуждения Fu. При увеличении
нагрузки одновременно с усиле-
нием реакции якоря увеличива-
ется МДС FCT, которая компен-
сирует размагничивающее дей-
ствие реакции якоря.
График полезного момента на валу двигателя М2 = /(Рт) опре-
деляется выражением, Н • м:
М = 9,55 Р2/п.
(6.29)
Если п = const, то график М: = f(P2) представляет собой пря-
мую линию, выходящую из начала осей координат. Однако с рос-
том нагрузки двигателя частота вращения уменьшается, что при
водит к нелинейности рассматриваемой характеристики.
График тока в цепи якоря Ia =f(P2) не выходит из начала осей
координат, так как в режиме холостого хода (Р2 = 0) двигатель
потребляет из сети ток холостого хода и развивает момент хо-
лостого хода Л/о, обусловленный механическими и магнитными
потерями в двигателе.
Параметры двигателя, соответствующие номинальной мощно-
сти на валу двигателя Р1ЮМ, называют номинальными: ниом, 4НОМ,
Л/,
/М2но.м*
Механическая характеристика двигателя представляет собой
графически выраженную зависимость частоты вращения якоря п
от электромагнитного момента М при неизменных значениях на-
пряжения питания (U = const) и сопротивления реостата в цепи
возбуждения (r^ = const).
Подставим в (6.28) значение тока якоря 10 = М/(с, Ф). Тогда
U М^г
сесмФ2
(6.30)
= и0 - Ди,
где — частота вращения двигателя при идеальном холостом ходе
(Л/- 0; I= 0); Ди — изменение частоты вращения якоря под дей-
ствием нагрузки двигателя М = Мо + Л/2.
Рис. 6.23. Механические характеристики двигателя
постоянного тока не-
зависимого (параллельною) возбуждения
Если пренебречь размагничивающим действием реакции якоря
и принять Ф = const, то механическая характеристика двигателя
независимого (параллельного) возбуждения примет вид прямой,
наклоненной к оси абсцисс (рис. 6.23, с, график 7). Эта характери-
стика называется естественной. Если в цепь якоря двигателя ввести
добавочное сопрот ивлен ие /?до6 (см. рис. 6.21), то механическая ха-
рактеристика будет определяться выражением
п =
и M^r + R^)
ссФ сесуФ
(6.31)
= «о - Дл.
из которого следует, что с ростом /?1об частота вращения идеаль-
ного холостого хода я0 останется неизменной, а перепад частоты
вращения Ди, вызванный повышением нагрузки, возрастет, при
этом угол наклона механической характеристики к оси абсцисс
увеличится (рис. 6.23, а. графики 2 и 3). Полученные механиче-
ские характеристики называют искусственными.
[ Естественная характеристика двигателя независимого (парал-
лельного) возбуждения, т.е. механическая характеристика, соот-
ветствующая R,,. 5 = 0, — «жесткая», так как при изменении на-
грузки на валу двигателя от холостого хода до номинальной часто-
та вращения изменяется незначительно (на 5—10 %). Искусствен-
ные механические характеристики двигателя с ростом добавочно-
го сопротивления в цепи якоря становятся более «мягкими»,
так как изменение нагрузки на валу двигателя в этом случае со-
провождается значительными изменениями частоты вращения Ди.
На форму механических характеристик влияет значение основ-
ного магнитного потока Ф. При уменьшении Ф увеличиваются ча-
стота вращения идеального холостого хода и0 и перепад частоты
вращения &п под влиянием нагрузки. Это приводит к резкому из-
менению жесткости механической характеристики (рис. 6.23, б).
При регулировке напряжения на якоре двигателя U частота вра-
щения якоря и;, изменяется, а перепад частоты вращения Ал остает-
Таблица 6.1
Технические данные двигателей малой мощности серии 2П
Тип л шпателя Номинальные данные
Мощность, кВт КПД Частота вращения, об/мин, при номи- нальном напряжении в цепи якоря, В
НО 220 440
0,13 0,475 800 750 750
0,18 0,555 1000 1000 1 120
2ПБ90М 0,28 0,635 1600 1500 1600
0,40 0,685 2360 2 200 2240
0.55 0.710 3000 3000 3150
0,18 0,530 750 750 750 ।
0,25 0,615 1000 1120 1060 '
2FIB90L 0,37 0,675 1500 1500 1600
0.53 0,730 2200 2240 2200
0.75 0,770 3000 3150 3150
ся неизменным. Следовательно, жесткость .механических характе-
ристик (если нс учитывать реакции якоря) не меняется — они
смещаются по высоте, оставаясь параллельными друг другу (рис.
6.23, &).
Двигатели с постоянными магнитами по своим рабочим и ме-
ханическим характеристикам аналогичны двигателям с независи-
мым возбуждением, за исключением характеристик, полученных
при изменении основного магнитного потока, который в таких
двигателях обычно не регулируется.
Таблица 6.2
Технические данные двигателей серии ПЛ 6-го габарита
Тип двигателя Номинальные данные
Мощность, Вт Частота вращения, об/мин кпд Ток в цепи якоря А. при напряжении, В
110 220
ПЛ061 60 1500 0,50 0,9 0,45
90 3000 0,52 1,4 0,70
ПЛ062 90 1500 0,55 1,3 0,65
120 3000 0.57 1.9 0.95
Отечественная промышленность изготовляет коллекторные дви-
гатсли постоянного ток? малой мощности независимого возбуж-
дения различного конструктивного исполнения* В табл.. 6.1 привс-
дены технические данные отрезка серии 2П двигателей постояв-
• ного тока малой мощности закрытого исполнения с естественным
охлаждением. Напряжение возбуждения двигателей 110 или 220 В
независимо от номинального напряжения в цепи якоря. Широкое
применение в автоматизированном электроприводе постоянного
Цока получили коллекторные двигатели независимого возбужде-
ния серии ПЛ 6-го габарита защищенного исполнения с самовен-
тиляцией (табл. 6.2).
6.8.3. Регулирование частоты вращения двигателем
В независимого и параллельного возбуждения
I Хорошие регулировочные свойства двигателей постоянного
тока — одна из основных причин их применения в современном
электроприводе, несмотря на существенные недостатки, обуслов-
ленные наличием у них щеточно-коллекторного узла. Лучшие ре-
I гулировочные свойства у двигателей независимого и параллельно-
5 го возбуждения. Способы регулирования частоты вращения ха-
рактеризуются диапазоном и плавностью регулирования, эконо-
мичностью, определяемой стоимостью регулирующей аппаратуры
и величиной потерь в ней.
I Рассмотрим некоторые способы регулирования частоты враще-
ния коллекторных двигателей независимого и параллельного воз-
буждения. .
Регулирование частоты вра-
щения изменением подводимого
к обмотке якоря напряжения.
Как следует из (6.28), с изме-
нением напряжения (7, подво-
димого к цепи якоря двигателя,
частота вращения двигателя из-
меняется пропорционально это-
му напряжению. Так как превы-
шение номинального напряже-
ния недопустимо, то этот спо-
I соб позволяет изменять частоту’
вращения двигателя только в
сторону уменьшения относи-
тельно ее номинального значе-
Рис. 6.24. Схемы включения коллек-
торных двигателей постоянного
тока небольшой мощности при ре-
гулировании частоты вращения
ния. В двигателях мощностью до
100—120 Вт напряжение, под-
водимое к обмотке якоря, мож-
но изменять посредством потен-
пиометра RP (рис. 6.24, <з), потери в котором вследствие неболь-
шой передаваемой мощности невелики. Если питание двигателя
осуществляется через автономные выпрямители (В 1 — в цепи об-
мотки якоря и В2 — в цепи обмотки возбуждения ОВ), то регули-
ровать частоту вращения можно посредством автотрансформатора
АТ, на выход которого включен выпрямитель Bi (рис. 6.24, б). При
этом напряжение возбуждения остается неизменным.
Данный способ регулирования частоты вращения успешно при-
меняется при мощности двигателя до 500—600 Вт. Двигатель с воз-
буждением постоянными магнитами упрощает схему включения,
так как отпадает необходимость в выпрямителе В2.
Регулирование частоты врашения изменением сопротивления до-
бавочного резистора в цепи обмотки якоря. Этот способ регулиро-
вания также позволяет изменять частоту вращения только в сторо-
ну уменьшения от ее номинального значения и осуществляется
посредством резистора /?лоб (см. рис. 6.21). Недостатки рассматрива-
емого способа: значительные потери на нагрев резистора, пропор-
циональные квадрату тока якоря (42/?ЛОб)-
С изменением сопротивления резистора /?доб меняется жесткость
механических характеристик двигателя (см. рис. 6.23, а). Способ
обычно применяют лишь в двигателях мощностью до 200—300 Вт.
Регулирование частоты вращения изменением магнитного потока
возбуждения. Этот способ регулирования весьма экономичен, так
как изменение магнитного потока осуществляется реостатом в цепи
обмотки возбуждения, ток в которой
у рассматриваемых двигателей в не-
сколько раз меньше тока в цепи об-
мотки якоря. Способ позволяет изме-
нять частоту врашения в сторону уве-
личения относительно ее номиналь-
ного значения. При возрастании со-
противления реостата грег (см. рис.
6.21) уменьшается ток в обмотке воз-
буждения /п. а следовательно, и маг-
нитный поток Ф, что вызывает уве-
личение частоты вращения якоря дви-
гателя [см. (6.28)].
Зависимость частоты вращения
двигателя от магнитного потока п -
-/(Ф) при неизменных значениях на-
пряжения U и статического момента
нагрузки М называют регулировочной
характеристикой двигателя. Из регу-
лировочной характеристики (рис. 6.25.
график I) следует, что при уменьше-
нии магнитного потока Ф до значе-
Рис. 6.25. Регулировочная ха-
рактеристика двигателя по-
стоянного тока независимо-
го (параллельного) возбужде-
ния
ния Ф частота вращения п увслштвается по гиперболическому
закону [см. (6.28)] и при Ф' достигает максимального значения
При дальнейшем уменьшении магнитного потока частота враще-
ния понижается. Это объясняется тем, что уменьшение потока Ф
сопровождается ростом тока в цепи якоря /о (рис. 6.25, график 2).
Такая зависимость следует из формулы /с - Л?/(с„Ф), полученной
преобразованием (6.8). При Ф < Ф ток достигает значений, при
которых падение напряжений в цепи якоря luzLr приближается к
напряжению U. Из (6.28) следует, что с ростом тока А увеличива-
ется второе слагаемое числителя этого выражения 1а 2^г, а поэтому
при значительном токе 1а уменьшение потока Ф сопровождается
понижением частоты вращения п.
Максимальная частота вращения лтах при небольшой нагрузке
на валу двигателя во много раз превышает номинальную частоту
врашения лном и недопустима по условиям коммутации и механи-
ческой прочности двигателя. Поэтому при выборе реостата грег не-
обходимо следить, чтобы при полностью введенном его сопротив-
лении частота вращения двигателя не превышала допустимого зна-
чения. Например, для двигателей серии 2П допускаемое значение
частоты вращения wJ0I1 < (2— 3)/г|ЮМ (это значение указано в катало-
ге для конкретных типоразмеров двигателей серии). Необходимо
следить за надежностью электрических соединений в цепи обмот-
ки возбуждения двигателя, так как при разрыве этой цепи магнит-
ный поток Ф уменьшается до значения потока остаточного магне-
тизма Ф( „ при котором в случае малых нагрузок на валу' двигате-
ля частота вращения может превысить максимально допустимое
значение. .
[ Недостаток данного способа регулирования состоит в том. что
при изменении потока Ф в значительной степени меняется жест-
кость механических характеристик двигателя (см. рис. 6.23, б).
6.8.4. Двигатели последовательного возбуждения
В двигателях последовательного возбуждения обмотка возбуж-
дения включена последовательно с обмоткой якоря (рис. 6.26, а),
при этом ток возбуждения равен току якоря (7В = /с), что придает
этим двигателям особые свойства. При небольших нагрузках, ког-
да У < /„ >м, магнитная система двигателя не насыщена и магнит-
ный поток пропорционален току якоря (Ф s 1О). В этих условиях
электромагнитный момент пропорционален квадрату тока в об-
мотке якоря:
Л/ СЧ)Ф/с — •
(6.32)
С ростом тока нагрузки магнитная система двигателя насыща-
ется и пропорциональность между током /0 и магнитным потоком
Ф нарушается. При значительном насыщении магнитный поток Ф
Рис. 6.26. Двигатель постоянного тока последовательного возбуждения:
а — принципиальная схема; б — рабочие характеристики; в — механические
характеристики
с ростом 1а практически не увеличивается. График зависимости
Л/=/(/о) (рис. 6.26, б) в начальной части (когда магнитная система
не насыщена) имеет форму параболы, затем при насыщении он
отклоняется от параболы и в области больших нагрузок переходит
в прямую линию.
Зависимость частоты вращения п от тока якоря для двигателя с
последовательным возбуждением определяется из формулы (6.28)
с учетом прямой пропорциональности между магнитным потоком
и током при нагрузке, меньше номинальной:
где С= \/с' — постоянный коэффициент, определяемый конструк-
тивными параметрами двигателя.
Полученное выражение (6.33) подтверждает, что в двигателях
последовательного возбуждения при небольших нагрузках график
зависимости n=f(la) представляет собой гиперболу. При нагрузке
двигателя, близкой к номинальной и превышающей ее, механи-
ческая характеристика становится более жесткой и постепенно пе-
реходит в прямую линию (рис. 6.26, в, график 7).
Недопустимо включение двигателей последовательного возбуж-
дения в сеть в режиме холостого хода (без нагрузки на валу) или с
нагрузкой менее 25 % от номинальной. Объясняется это тем, что
при малых нагрузках частота вращения якоря двигателей последо-
вательного возбуждения резко возрастает (рис. 6.26, б'), достигая
значений, при которых нарушается коммутация и возникает опас-
ность механического разрушения двигателя. Поэтому в приводах с
двигателями последовательного возбуждения нельзя применять
ременную или фрикционную передачу, так как при нарушении
этих передач, например при обрыве ремня, двигатель переходит в
режим холостого хода. Исключение составляют двигатели после-
довательного возбуждения номинальной мощностью нс более 100—
150 Вт, которые могут работать без внешней нагрузки на валу. Дело
в том, что мощность механических и магнитных потерь с ростом
частоты вращения возрастает настолько, что создаваемая при этом
нагрузка двигателя становится достаточной для ограничения час-
тоты вращения.
Механическая характеристика двигателя постоянного тока пос-
ледовательного возбуждения л = f (М) при неизменном напряже-
нии питания Uпредставлена на рис. 6.26, в (график /). При введе-
нии в цепь якоря добавочного сопротивления 7?до5 механическая
характеристика становится более мягкой (график 2).
I Способность двигателей последовательного возбуждения разви-
вать большой электромагнитный момент обеспечивает им хоро-
шие пусковые свойства и способность преодолевать значительные
механические нагрузки.
Регулирование частоты вращения двигателей последовательного
возбуждения изменением напряжения U и включением добавоч-
ного резистора сопротивлением Лдоб выполняется так же, как и в
двигателях независимого (параллельного) возбуждения.
Регулирование частоты вращения изменением магнитного по-
тока возбуждения Ф осуществляется посредством реостата по од-
ному из двух вариантов схемы (см. рис. 6.26, а). В первом варианте
реостат включен параллельно обмотке возбуждения. В этом слу-
чае для увеличения частоты вращения необходимо уменьшить со-
противление этого реостата, что приведет к увеличению тока 1^в
через реостат R и к уменьшению тока /в в обмотке возбуждения:
в ~ ‘а ЛиьВ'
(6.34)
Во втором варианте схемы реостат Д и включен параллельно
обмотке якоря. Для уменьшения частоты вращения двигателя не-
обходимо снизить сопротивление реостата R ш что приведет к
увеличению тока возбуждения за счет возросшего тока /шл7 в реос-
тате так как /в = 1а + /ш,о.
Недостатком обоих вариантов схемы регулирования является
их неэкономичность, обуслоапенная тем, что регулировочные ре-
остаты включены в цепь рабочего тока и потери в них пропорцио-
нальны квадрату этого тока. К тому же эти варианты не обеспечи-
вают широкого диапазона регулирования.
|| Для двигателей последовательного возбуждения малой мощно-
сти основной способ регулировки частоты вращения — изменение
подводимого к двигателю напряжения. В двигателях мощностью до
100—200 Вт это делают посредством потенциометра, а при пита-
нии двигателя от индивидуального выпрямительного устройства —
изменением напряжения переменного тока с помошью регулиро-
вочного автотрансформ агора на входе выпрямителя аналогично
двигателю независимого возбуждения (см. рис. 6.24. б).
Для реверсирования двигателя последовательного возбуждения
необходимо изменить направление тока в обмотке возбуждения
ОВ. т.е. поменять местами провода, присоединяемые к клеммам С]
и С2 (см. рис. 6.26, а).
6.9. Универсальные коллекторные двигатели
Универсальный коллекторный двигатель работает как от сети
постоянного, так и переменного тока.
Возможность работы коллекторного двигателя последователь-
ного возбуждения от сети переменного тока объясняется тем, что
при изменении полярности подводимого переменного напряже-
ния происходит изменение направления токов как в обмотке яко-
ря, так и в обмотке возбуждения. При этом смена полярности по-
люсов статора практически совпадает с изменением направления
тока в обмотке якоря. В итоге направление электромагнитного вра-
щающего момента остается неизменным:
М = см1аФ = см(-4)(-Ф)- (6-35)
Следует иметь в виду, что описанные процессы имеют место
лишь при последовательном возбуждении двигателя. Поэтому в
качестве универсальных двигателей используют лишь двигатели
последовательного возбуждения. При независимом (параллельном)
возбуждении двигателя обмотка возбуждения имеет большое чис-
ло витков, а следовательно, обладает значительной индуктивнос-
тью, которая пропорциональна квадрату числа витков. Электро-
магнитная постоянная времени этой обмотки в несколько раз пре-
вышает постоянную времени обмотки якоря. По этой причине из-
менение направления тока в обмотке возбуждения намного отста-
ет во времени от аналогичного процесса в обмотке якоря, и по-
этому электромагнитный момент двигателя при смене полярности
переменного напряжения меняет свое направление [см. (6.35)], что
делает невозможным использование этих двигателей в цепи пере-
менного тока.
Если двигатель подключить к сети синусоидального перемен-
ного тока, то ток якоря /и и магнитный поток Ф будут изменяться
по синусоидальному закону:
' = 4м sin (co,z); Ф = Фпихйп (cotz- 8), (6.36)
где 5 — угол сдвига фаз между током возбуждения и магнитным
потоком, обусловленный магнитными потерями в двигателе.
Используя выражения (6.36), получим формулу электромаг-
нитно! о момента коллекторного двигателя последовательного воз-
буждения, включенного в сеть синусоидального переменного тока,
И • м:
АС = 5) = 0,5смcos 8-
OT5cfcl/rn;txsin(2cDiZ — 8).
(6.37)
Г Первое слагаемое выражения (6.37) представляет собой посто-
_ янную составляющую электромагнитного момента Л/пост (рис. 6.27, а),
а второе слагаемое — переменную составляющую этого момента
М (рис. 6.27, 6), изменяющуюся во времени с частотой, равной
удвоенной частоте напряжения сети.
График результирующего момента Л/рез = /(Г) (рис. 6.27, в) полу-
чен сложением графиков его составляющих:
А^рез
+ ( ^пер) •
(6.38)
м
jrjHOCT
Таким образом результирующий электромагнитный момент
при работе двигателя от сети переменного тока пульсирует. Не-
большие участки графика М. .=/(/) с отрицательным тормозящим
значением момента обусловлены фазовым сдвигом 5 между маг-
нитным потоком и током в об-
мотке возбуждения Чем меньше
магнитные потери в магнитной
системе двигателя, тем меньше
отрицательный момент. Пульса-
ции электромагнитного момен-
та практически не нарушают ра-
боту’ двигателя. Объясняется это
тем, что при значительной час-
тоте пульсаций электромагнит-
ного момента (/м = 2/t) и боль-
шом моменте инерции якоря
вращение последнего оказыва-
ется равномерным.
При работе универсального
коллекторного двигателя от сети
переменного тока перемагничи-
ванию подвергается вся магнит-
ная система двигателя, включая
станину’ и полюса. Это приводит
К увеличению магнитных потерь,
Для уменьшения которых стани-
ну и полюсы статора приходит-
ся делать шихтованными (см рис
6.5, б).
в
Рис. 6.27. Графики электромагнит-
ного момента и его составляющих
универсального коллекторного
двигателя при его работе от сети
переменного тока
Коэффициент полезного действия универсального двигателя при
его работе от сети переменного тока ниже, чем от сети постоянно-
го тока, что объясняется повышенным значением магнитных по-
терь. Другой недостаток универсального двигателя — тяжелые ус-
ловия коммутации, вызывающие интенсивное искрение на кол-
лекторе при включении двигателя в сеть переменного тока. Этот
недостаток объясняется наличием трансформаторной связи между
обмотками возбуждения и якоря, что ведет к индуцированию в
коммутируемых секциях трансформаторной ЭДС, ухудшающей
процесс коммутации.
Универсальные коллекторные двигатели проектируют таким об-
разом, чтобы получить примерно одинаковые частоты вращения
при номинальной нагрузке как при питании от сети постоянного,
так и переменного тока. Достигается это тем, что обмотка возбужде-
ния двигателя выполнена с ответвлениями: при работе двигателя от
сети постоянного тока обмотка используется полностью, а при ра-
боте от сети переменного тока — частично (рис. 6.28). Однако при
нагрузках, отличающихся от номинальной, характеристики двига-
теля при его работе от сети постоянного и переменного тока не
совпадают из-за влияния индуктивных сопротивлений обмоток якоря
и возбуждения при их питании от сети переменного тока.
На рис. 6.29 приведены рабочие характеристики универсально-
го коллекторного двигателя (пунктирными линиями при работе
двигателя от сети переменного тока и сплошными — при работе
от сети постоянного тока). Номинальные данные двигателя: Р110м =
= 55 Вт: л|ЮМ = 2000 об/мин; напряжение сети б^юст/Цкр = • Ю/127 В.
Номинальное значение момента этого двигателя
Мюм = 9,55 Ряом/лном = 9,55 • 55/2000 = 0,26 Н • м.
При одинаковых нагрузках ток в обмотке якоря двигателя при
его работе от сети переменного тока больше, чем от сети постоян-
ного тока, что объясняется наличием реактивной составляющей
тока.
Рис. 6.28. Принципиальная схема вклю-
чения универсального коллекторного
двигателя
Рис. 6.29. Рабочие характеристики универсального коллекторного двига-
теля
Частота вращения универсальных двигателей регулируется так
Же. как и в двигателях постоянного тока последовательного воз-
буждения (см. параграф 6.8.4).
Шеточно-коллекторный узел является причиной ряда недостат-
ков универсальных коллекторных двигателей, особенно при их
работе на переменном токе (искрение на коллекторе, радиопоме-
хи. повышенный шум, снижение надежности). Однако эти двига-
тели по сравнению с асинхронными и синхронными и меют пре-
имущество — при частоте питающего напряжения 50 Гн универ-
сальные коллекторные двигатели позволяют получать частот}/ вра-
щения до 10000 об/мин и более, тогда как в асинхронных и син-
хронных двигателях наибольшая синхронная частота врашения при
частоте тока 50 Гц равна 3000 об/мин.
Отечественная промышленность изготовляет несколько серий
универсальных коллекторных двигателей.
I Универсальные коллекторные двигатели серии УЛ-04 предназ-
начены для работы от сети постоянного или однофазного пере-
менного тока частотой 50 Гц, номинальная мощность двигателей
25, 40 и 60 Вт (табл. 6.3). Внешний вид двигателя представлен на
рис. 6. 30, а на рис. 6.31 показана схема включения двигателя серии
УЛ-04: клеммы С1 и С2 используются для подключения двигателя
к сети постоянного тока; клеммы OI и 02 — для подключения к
однофазной сети переменного тока; для реверсирования двигате-
ля необходимо поменять местами провода, присоединенные к клем-
мам Я1 и Я2. Исполнение двигателя по способу монтажа — флан-
цевое со стороны выходного вала.
к Помимо универсальных коллекторных двигателей изготовляют
Коллекторные двигатели переменного тока, предназначенные для
Таблица 6.3
Технические данные универсальных коллекторных двигателем
серии УЛ-04
Типоразмер Р Вт 1 HOM’ и. в /.А л. об/мин КПД, % cos<p
УЛ-041-25 -110 -127 0,49 0.50 5000 46 42 0,85
УЛ-041-25 25 -220 -220 0,25 0.29 5000 46 42 0,85
УЛ-041-18 40 -110 -127 0,72 0,68 8000 53 49 0,90
УЛ-041-28 40 -220 -220 0,34 0,39 8000 53 49 0,90
УЛ-042-15 40 -НО -127 0,73 0,74 5000 51 48 0,85
УЛ-042-25 40 -220 -220 0,37 0,43 5000 51 48 0,85
УЛ-042-18 60 -ПО -127 0,99 0,98 8000 58 51 0,85
УЛ-042-28 60 -220 -220 0,57 0,50 8000 58 51 0.90
УЛ-042-181 60 -НО 1,2 8000 50 0,90
Рис. 6.30. Универсальный коллекторный двгпа-
тель серии УЛ-04:
1 — вал: 2 — подшипниковый шит с фланцем для
монтажа двигателя; 3 — коробка выводов; 4 — кожух
[неточно-коллекторного устройства; 5 — щеткодер-
жатель
Рис. 6.31. Схема со-
единений универ'
сального коллек-
торного двигателя
серии УЛ-04
работы только от сети переменного тока. В основном эти двигатели
применяют в электроинструменте и бытовых электроприборах.
610. Стабилизация частоты вращения двигателей
постоянного тока
В процессе работы двигателя постоянного тока его частота вра-
щения не всегда сохраняет заданное значение. Объясняется это
возможными колебаниями нагрузочного момента и непредвиден-
ными изменениями напряжения сети. Если к двигателю предъяв-
ляется
требование
стабильности частоты
вращения, то приходит-
ся применять специальные меры. В двигателях средней и большой
мощности
для
стабилизации частоты
вращения используют спе-
циальные схемы с применением отрицательной обратной связи
по скорости (см. параграф 13.4.3). Что же касается двигателей ма-
лой мощности (от нескольких ватт до нескольких сотен ватт), то в
них для стабилизации частоты вращения применяют центробеж-
но-вибрационные стабилизаторы частоты вращения.
I Такой стабилизатор (рис. 6.32, а) представляет собой следую-
щую конструкцию. На тонком легком диске /, закрепленном на
валу двигателя и вращающимся вместе с ним, на некотором рас-
стоянии от центра вращения расположена контактная группа: под-
вижной контакт 3, закрепленный на плоской пружинящей плас-
тине 2, и два неподвижных контакта 4 и 5. Указанные контакты
изолированы от диска и друг от друга. Контакт ы 3 и 4 образуют
пару нормально разомкнутых контактов, а контакты 3 и 5— пару
нормально замкнутых контактов. Электрическая связь эт их контак-
тов с элементами двигателя осуществляется посредством двух кон-
Рис. 6.32. Устройство центробежно-вибрационного регулятора частоты
вращения (г?) и принципиальная схема двигателя постоянного тока па-
раллельного возбуждения с регулятором частоты вращения, включен-
ном в цепь обмотки возбуждения (б)
Рис. 6.33. Графики изменения со-
противления в цепи возбуждения
(о) и изменения частоты врашения
при стабилизации (б)
тактных колец и наложенных на
них щеток. Конденсатор С пред-
назначен для уменьшения искре -
ния на контактах стабилизатора.
Рассмотрим работу стабилиза-
тора частоты вращения в двига -
теле постоянного тока параллель-
ного возбуждения (рис. 6.32, б),
в котором последовательно с об-
моткой возбуждения ОВ включен
резистор гло6, концы которого
подключены к контактам 3 и 4
регулятора. Пока якорь д вигателя
вращается с частотой меньше
значения лтах (рис. 6.33). центро-
бежная сила, действующая на
подвижной контакт 3, недоста-
точна, чтобы деформировать пла-
стину 2. При этом резистор гдоб
ограничивает ток возбуждения до значения: IB min = U/(rB + гдо6), где
г — сопротивление обмотки возбуждения.
Этому значению тока возбуждения соответствует частота враше-
ния nmdX. Когда частота врашения якоря начинает превышать значе-
ние лтах, пластина 2 с подвижным контактом 3 пол действием цен -
тробежной силы изгибается и контакты 3 и 4 замыкаются, шунти-
руя резистор г й. При этом ток возбуждения увеличивается до зна-
чения tnax = и/гЛ, а частота врашения якоря уменьшается до значе-
ния Лдйп, при которой центробежная сила, действующая на пласти-
ну 2 и подвижной контакт 3, ослабевает настолько, что контакты .'
и 4 размыкаются, а контакты 3 и 5 замыкаются. При этом ток воз-
буждения снижается до значения /в min, при котором частота враще-
ния якоря увеличивается до значения лтах, и т.д. Таким образом,
частота врашения якоря двигателя совершает колебания от лП1ах до
Рис. 6.34. Принципиальная схема двигателя постоянного тока с возбуж-
дением постоянным .магнитом с включенным центробежно-вибрацион-
ным регулятором частоты вращения
л,™ около среднего значения, являющимся заданным стабилизиро-
ванным значением частоты врашения: = (лт1Х + итш)/2.
Для двигателей постоянного тока малой мощности с возбуждени-
ем постоянными магнитами применяют схему стабилизации частоты
врашения с включением резистора г10б в цепь якоря (рис. 6.34). При
этом используют нормально замкнутые контакты 3 и 5 (см. рис. 6.32,
а), которые шунтируют резистор г10б. Когда частота вращения дости-
гает значения п^, центробежные силы размыкают контакты Зи 5и
добавочный резистор оказывается включенным последовательно в
цепь якоря и общее сопротивление цепи якоря возрастает до значе-
ния 2Z+ гдоб. Это вызывает снижение частоты вращения якоря дви-
гателя, и при частоте контакты регулятора 3 и 5 замыкаются и
зашунтируюг резистор г.10б. Частота вращения вновь возрастает и т.д.
Точность стабилизации частоты вращения двигателей малой мощ-
ности при использовании центробежно-вибрационного стабилиза-
тора составляет от ±1 до ±2 %. В некоторых случаях такая точность
стабилизации
может оказаться
недостаточной
Другим недостатком
центробежно-вибрационных стабилизаторов является их небольшой
срок службы из-за эрозии контактов. Однако этот недостаток пре-
одолевается применением в регуляторе силовых транзисторов.
6.11. Генераторы постоянного тока
Генераторы постоянного тока предназначены для преобразова-
ния механической энергии в электрическую энергию постоянного
тока. В процессе работы генератора проводники обмотки вращающе-
гося якоря пересекают магнитное поле полюсов и в обмотке якоря
индуцируется ЭДС Еа, величина которой пропорциональна основ-
ному магнитному потоку Ф и частоте вращения якоря п: Ео = сеФп.
При этом на выходных выводах генератора устанавливается на-
пряжение, определяемое уравнением ЭДС генератора (6.5): U =
г Еа - 1в^г.
Ток в обмотке якоря взаимодействует с магнитным потоком
возбуждения, что приводит к возникновению электромагнитного
Момента (6.8): М = смФ/о = 9,55Рэм/л.
В отличие от двигателей, где этот момент приводит якорь во
вращение, в генераторах он противодействует вращению якоря,
т.е создает на валу механическую нагрузку приводному двигателю.
6.11.1. Генератор независимого возбуждения
В генераторе независимого возбуждения обмотка возбуждения
Получает питание от постороннего источника постоянного тока и
электрически не связана с обмоткой якоря (рис. 6.35, а). Последо-
вательно с обмоткой возбуждения включают регулировочный рео-
стат Гр.,, с помощью которого изменяют ток возбуждения, а сле-
Рис. 6.35. Генератор постоянного тока независимого возбуждения:
а — принципиальная схема; б — характеристика холостого хода; в — внешняя
характеристика, г — регулировочная характеристика
довательно. магнитный поток Ф. ЭДС якоря Еа и выходное на-
пряжение генератора U.
О свойствах генератора принято судить по его основным харак-
теристикам — холостого хода, внешней и регулировочной.
Характеристика холостого хода генератора представляет зави
симость ЭДС генератора в режиме холостого хода Eq от тока воз-
буждения 7Н при постоянной частоте вращения л и отсутствии тока
в якоре, т.е. при отключенной нагрузке (Rw = «°):
Ео = 7(4) при п - const и 1а = 0.
При снятии этой характеристики ток возбуждения /в плавно
увеличивают от 1К = 0 до значения, при котором Ео = 1,25 (7НОМ. а
затем уменьшают до нуля. При изменении тока возбуждения изме-
няются магнитный поток машины Ф, а следовательно, и ЭДС якоря
Eq (рис. 6.35. б).
При увеличении тока возбуждения /0 вначале, пока машина не
насыщена, ЭДС Ео растет пропорционально току Затем по мере
насыщения магнитной цепи рост Ео замедляется и при полном
магнитном насыщении почти совсем прекращается. При сниже-
нии тока возбуждения процесс протекает в обратном направле-
нии, т.е. ЭДС Eq уменьшается, однако величина ее, соответствую-
шаг любому току возбуждения, при этом будет больше, чем при
увеличении тока возбуждения (нисходящая кривая 2 лежит выше
восходящей 7). Последнее объясняется наличием остаточного маг-
I нетиз.ма (гистерезиса) в магнитной системе генератора. Этим же
I явлением объясняется и то, тго при токе возбу ждени а 7С = О ЭДС
I якоря Ес нс равна нулю, а составляет некоторую величину Т ,
наведенную магнитю :м потоком остаточного Mai нетизма
При расчетах и построениях за характеристику холостого хода
I обычно принимается средний между восходящей и нисходящей
I ветвями график (штриховая линия на рис 6.35 Г).
Внешняя характеристика генератора — зависимость напряжс-
I ния на выводах генератора U от тока нагрузки (тока якоря) /0 при
постоянных токе возбуждения /„ и частоте вращения п
U - f(Q ПРИ 4 - const и /1 = const.
Характеристика на >ывае гея вн. шней потому' что она определяет
I зависимость < внешних» парам, т] >ов напряжения на вывотных клем-
мах Дот тока нагрузки 1е. Она является одной из важнейших харак-
I теристик, определяющих эксплуатационные свойства генератора
Вид внешней характеристики (рис. 6.35, в) можно объяснить
b исходя из основного уравнения генератора (( 5)- Д = Е6 1а^г
При увеличении тока нагрузки / повышается над ни.-напряже-
ния на внутреннем сопротивлении цепи якоря, что приводит к
снижени! з напряжения генератора Д Однако это не единственная
причина уменьшения напряжения генератора. Депо в том, что с
увеличением тока нагрузки 7, возрастает размагничивающее дей-
I ствие ре акции якоря (см. параграф 6.4), что приводит к снижению
магнитного потока возбуждения Ф машины, уменьшению ЭДС Еа
I обмотки якоря генератора, а следовательно, и к снижению напря-
- жения U на его зажимах.
Таким образом, причинами уменьшения напряжения на зажи-
1 мах генератора являются, во-первых, падение напряжения на внут-
реннем сопротивлении цепи якоря ДД, = Z и во-вторых, р з-
I магничивающее действие реакции якоря ДД2:
Д=£’а-ДД,-дД2. (6.39)
Номинальным напряжением генератора Сном называют напряже-
ние. соответствующее номинальному току нагрузки 1гнт Измене-
ние напряжения генератора дД, ом при изменении нагрузки от хо-
лостого хода до номиналы юй обычно выражается в % от с, о5:
Аб7„ом --т=--ноч100. (6 40)
В'ном
У генераторов независимого возбуждения ЛДНОМ обьнно не пре-
Квышдет 10— 12 % Небольшая величина изменения напряжения — до-
| стоинств ’ генераторов поел ынн ш шока независимого возбуждения
Регулировочная характеристика генератора — это зависимость
тока возбуждения от тока нагрузки при постоянном напряжении
генератора Ц10М и постоянной частоте вращения п:
4 = /(4) при иноы и п = лном = const.
Так как цепи возбуждения и якоря генератора независимого
возбуждения электрически не связаны, то /в, не зависит от 1а, Регу-
лировочная характеристика показывает, как нужно изменять ток в
обмотке возбуждения 7В, для того чтобы при изменении тока на-
грузки 1а напряжение на зажимах генератора U оставалось неиз-
менным, равным номинальному напряжению.
Внешняя характеристика (рис. 6.35, в) показывает, что напря-
жение генератора с ростом нагрузки уменьшается. Единственным
(при п = const) способом поддержания напряжения постоянным
является увеличение тока возбуждения 7В. При этом повышается
магнитный поток Ф. а следовательно, возрастает ЭДС Еа. Таким
образом, увеличивая ток возбуждения, можно скомпенсировать
падение напряжения на внутреннем сопротивлении цепи якоря
△С/] и уменьшение магнитного потока Ф, вызванное размагничи-
вающим влиянием реакции якоря, т.е. скомпенсировать Af72 и под-
держивать напряжение U генератора неизменным.
Каким образом нужно изменять 7В, указывает регулировочная
характеристика (рис. 6.35, г).
Основной недостаток генераторов независимого возбуждения,
несколько ограничивающий их применение, — необходимость в
постороннем источнике постоянного тока — возбудителе.
6.11.2. Генератор параллельного возбуждения
В генераторе параллельного возбуждения обмотка возбуждения
включена параллельно обмотке якоря (рис. 6.36, а). Для питания
обмотки возбуждения этого генератора не требуется постороннего
источника питания.
Напряжение на обмотку возбуждения подается с зажимов яко-
ря того же генератора. Ток в обмотке возбуждения 7В = 1//гв, где
U— напряжение на выходе генератора; гв — сопротивление цепи
обмотки возбуждения.
В основу принципа работы генератора параллельного возбужде-
ния положен принцип самовозбуждения. основанный на том, что
магнитная система генератора, будучи однажды намагниченной,
сохраняет небольшой магнитный поток за счет остаточного маг-
нетизма Фост- При вращении якоря этот поток индуцирует в обмот-
ке якоря небольшую ЭДС Е^, под действием которой в цепи воз-
буждения возникает небольшой ток 7В. Если МДС возбуждения Ivu^
создаст поток, направленный согласно с потоком Фост» то ПР°~
изойдет увеличение магнитного потока машины. Это в свою оче-
Рис. 6.36. Генератор постоянного тока параллельного возбуждения:
а — принципиальная схема; 6 — характеристика холостого хода; в — внешняя
характеристика
редь приведет к дальнейшему повышению ЭДС генератора, а сле-
довательно, и тока возбуждения / и т.д. Процесс постепенного
нарастания ЭДС продолжается до тех пор, пока напряжение гене-
ратора не достигнет вполне определенной величины, зависящей
от параметров генератора.
Чтобы разобраться в процессе самовозбуждения, рассмотрим рис.
6.36, б, где 1 — характеристика холостого хода Eq =/( Гк) генератора;
2— вольт- амперная характеристика цепи возбуждения £ =/(/„!£?„)
Будем считать, что самовозбуждение происходит при холостом ходе,
когда напряжение на выходе генератора равно ЭДС (U= £0).
I Характеристика холостого хода показывает зависимость ЭДС,
наводимой потоком Ф в обмотке якоря генератора, от тока воз-
буждения. Вольт-амперная характеристика показывает, какая ЭДС
£0 необходима для получения тока возбуждения данного значения
/„ Например, току возбуждения /11Г соответствует ЭДС £^(. Наклон
вольт-амперной характеристики к оси абсцисс определяется элек-
трическим сопротивлением цепи возбуждения RB = Е'Л/1В = tga.
* Сопротивление цепи возбуждения, при котором углы наклона
вольт-амперной характеристики и начальной части характеристики
холостого хода к оси абсцисс одинаковы, называется критическим гкс
(вольт-амперная характеристика при гв = гкт> на рис. 6.36, б — пря-
мая 3), а угол наклона, соответствующий этому сопротивлению, акр.
Если а < акр, то характеристики пересекаются. Это свидетель-
ствует о том, что самовозбуждение генератора возможно. Действи-
телъно, от начала координат до точки А характеристика холостого
хода идет выше вольт-амперной характеристики. Это значит, что
при данном сопротивлении гв ЭДС Ей, индуцируемая в обмотке
якоря генератора, будет больше ЭДС Eq, необходимой для созда-
| Ния тока /в1. При этом ток в цепи возбуждения /в будет увеличи-
ваться, что вызовет повышение Е , а следовательно, и дальнейшее
нарастание тока /0. Это будет происходить до тех пор. пока не
станет равной Eq, т.е. пока характеристика холостого хода не пере-
сечется с вольт-амперной характеристикой (точка Л). В точке А
процесс самовозбуждения закончится.
Величина ЭДС Ео, до которой самовозбудится генератор, зави-
сит от угла наклона вольт-амперной характеристики а, т.е. от со-
противления цепи возбуждения гв. Следовательно, чем больше г₽
(больше а), тем меньше ЭДС Ео, до которой самовозбуждается ге-
нератор. При гв > гкр, т.е. а > акр, генератор не самовозбуждается.
Из изложенного следует, что самовозбуждение генератора с
параллельным возбуждением возможно лишь при соблюдении сле-
дующих условий:
• в магнитной цепи машины должен быть магнитный поток
остаточного магнетизма;
магнитный поток, создаваемый обмоткой возбуждения, дол-
жен быть направлен согласно с потоком остаточного магнетизма;
электрическое сопротивление цепи возбуждения дол кно быть
меньше критического.
Внешняя характеристика генератора параллельного возбуждения
U-f(I) при п = const и rR = const. Как видно из рис. 6.36, в, внешняя
характеристика генератора параллельного возбуждения (график /).
расположена ниже внешней характеристики генератора независи-
мого возбуждения (график 2). Следовательно, увеличение тока на-
грузки у генератора параллельного возбуждения сопровождается
более интенсивным падением выходного напряжения.
Объясняется это тем, что в генераторе параллельного возбужде-
ния ток возбуждения (/в = i//rB) при увеличении нагрузки не оста-
ется неизменным, как это имело место в генераторе независимою
возбуждения, а уменьшается из-за снижения напряжения U(за счет
падения напряжения на внутреннем сопротиатении цепи якоря) А -
= и размагничивающего влияния реакции якоря ДС/2 = А£р.й.
Уменьшение тока 4 вызывает снижение магнитного потока Ф.
а следовательно, и ЭДС генератора. Таким образом, в генераторе
параллельного возбуждения уменьшение выходного напряжения
при увеличении тока нагрузки происходит за счет:
падения напряжения на внутреннем сопротивлении якоря AL|i
размагничивающего действия реакции якоря Al/2 = АЕ^Я;
уменьшения тока возбуждения АЕ3 = АЕ^.
Напряжение на выходе генератора параллельного возбуждения
определяется уравнением:
и = Ео - Д £р.я - Д£а -Га^г- (6.41)
Этими же факторами объясняется и то. что при постепенном
уменьшении сопротивления нагрузки /?нг ток нагрузки /увеличива-
ется лишь до критического значения /кр, а затем начинает умень-
шаться. Реакция якоря и уменьшение тока в обмотке возбуждения
приводят машину к такому состоянию, при котором даже небольшое
уменьшение сопротивления нагрузки Лнг сопровождается значитель-
ным понижением ЭДС. В итоге ЭДС начинает уменьшаться быстрее,
чем сопротивление нагрузки. Д(Г и ток генератора снижаются до нуля.
Номинальное изменение напряжения А6НОМ у генератора па-
раллельного возбуждения |см. (6.40)] больше, чем у генератора не-
зависимого возбуждения, и составляет 20 —30 % от номинального
напряжения.
Регулировочные характеристики генератора параллельного воз-
буждения /в = при f/HOM = U - const и п = лном = const.
। Так как необходимо соблюдение условия неизменности напря-
жения генератора U = const, то в генераторе параллельного воз-
буждения третий фактор, вызывающий снижение выходного на-
пряжения Л£/3 = Д£о, т.е. уменьшение тока возбуждения, не прояв-
ляется, а поэтому регулировочные характеристики генераторов па-
раллельного и независимого возбуждения одинаковы.
Контрольные вопросы
1. Какую роль выполняет щеточно-коллекторный аппарат в генерато-
ре и двигателе постоянного тока?
2. Как влияет основной магнитный поток на частот)/ вращения и на
электромагнитный момент двигателя постоянного тока?
3. Каковы способы регулирования частоты вращения в двигателях по-
стоянного тока независимого и последовательного возбужденияВ 9
4. Объясните процесс самовозбуждения в генераторе постоянного тока
параллельного возбуждения.
5. Почему внешние характеристики генераторов независимого и па-
раллельного способов возбуждения неодинаковы?
6. Можно ли сделать универсальный коллекторный двигатель с парал-
лельным возбуждением?
7. Почему КПД универсального двигателя на переменном токе ниже,
чем на постоянном?
Глава 7
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ СПЕЦИАЛЬНЫХ КОНСТРУКЦИЙ
И СВОЙСТВ
7.1. Гироскопические двигатели
7.1.1. Назначение и особые свойства гироскопических
двигателей
В Гироскопические двигатели (гиродвигатели) предназначены для
Применения в гироскопических приборах. Такие приборы исполь-
Рис. 7.1. Гироскоп в карданном под-
весе
зуют в навигационных, ре гул и -
рующих и стабилизирующих ус-
тройствах, получивших широкое
применение в авиации, космо-
навтике, судостроении и т.д.
Основной элемент гироско-
пического прибора — гироскоп,
который состоит из быстро вра-
щающегося динамически сим-
метричного твердого тела (рото-
ра) и подвеса, обеспечивающе-
го ему две или три степени сво-
боды. На рис. 7.1 изображен ги-
роскоп с тремя степенями сво-
боды: ротор 1 установлен на кар-
данном подвесе и может вращаться относительно трех осей: ос-
новной оси вращения ротора АВ, оси DE при повороте внутрен-
ней рамки 2 относительно рамки 3. Последняя в свою очередь мо-
жет поворачиваться вокруг оси GK относительно основания ги-
роскопа 4. Будучи приведенным в быстрое вращение, ротор /стре-
мится сохранить неизменным в пространстве положение своей оси
вращения АВ Чем больше частота вращения ротора и больше его
момент инерции, тем устойчивей положение в пространстве оси
врашения ротора.
Особенности конструкции гиродвигателей обусловлены предъяв-
ляемыми к ним основными требованиями:
большая величина кинетического момента ротора;
постоянство частоты вращения ротора;
минимгтьное время разгона ротора до установившегося зна-
чения.
Кинетический момент (кг • м2/с) определяют произведением мо-
мента инерции ротора J (кг - м2) на угловую скорость его враще-
ния со2 (с“1):
Л/кнн — /тОэ- (7.1)
Если для двигателей обычной конструкции основным парамет-
ром является номинал ьное значение отдаваемой мощности, то для
гиродвигателей, работающих в режиме холостого хода, а поэтому
нс отдающих мощность, основным параметром является кинети-
ческий момент. С целью получения большого момента инерции
ротора гиродвигатели делают обращенными — с внутренним стато-
ром и наружным ротором, чем достигаются большие значения
наружного 0нар и внутреннего Дн диаметров ротора, а следова-
тельно, большое значение момента инерции ротора:
нар 1
При этом ротор делают подобно маховику со значительной мас-
сой т2. * z
Большая угловая скорость в гиродвигателях переменного тока
достигается электропитанием их от источника тока повышенной
частоты: 500—2000 Гц. Так как гиродвигатели делают двухполюс-
ными, то их синхронная частота вращения может достигать от 30 000
до 120000 об/мин.
Причинами нарушения постоянства угловой скорости враше-
ния ротора гиродвигателя могут быть колебания параметров ис-
точника питания (напряжение и частоты) и изменения механи-
ческой нагрузки вследствие изменения моментов трения в под-
шипниках и трения ротора о газ, в котором происходит его враще-
ние, вызванное колебаниями температуры, и атмосферного дав-
ления окружающей среды. Это относится в первую очередь к ги-
родвигателям, применяемым в гироскопических приборах летатель-
ных аппаратов. Для обеспечения стабильности скорости вращения
желательно, чтобы механическая характеристика гиродвитатслсй
сс>2 =f(M) была достаточно жесткой. Это достигается применением
в качестве гиродвигателей синхронных двигателей, механическая
характеристика которых абсолютно жесткая, и асинхронных дви-
гателей с минимальны и активным сопротивлением короткозамк-
нутой обмотки ротора.
Время разгона ротора гиродвигателя зависит от пускового мо-
мента Л/, . Известно, что наибольший пусковой момент М, можно
получить в двигателях постоянного тока. Однако наличие коллек-
тора и щеток приводит к увеличению сил трения и возникнове-
нию интенсивного искрения на коллекторе, особенно при боль-
ших частотах врашения гиродвигателей. Эти причины ограничива-
ют применение коллекторных двигателей постоянного тока в ка-
честве гиродвигателей. Кроме того, эти двигатели создают радио-
помехи и являются источником пожаро- и взрывоопасности.
При работе гиродвигателя в установившемся режиме с угловой
скоростью (0уСТ на его ротор не действуют никакие внешние нагру-
зочные моменты, кроме моментов трения в подшипниках Л/_ п и о
газовую среду Л/П,_г. По этой причине за полезную мощность гирод-
вигателя принимают потери на трение:
В ^2 = ( ^тр.гт ^Ар.г) В)уСТ. (7.3)
7.1.2. Конструкция гироскопических двигателей
Наибольшее применение получили трехфазные асинхронные
гиролвигатели с короткозамкнутым наружным ротором и внут-
ренним статором. Такая конструкция гиродвигателя позволяет при
I заданных габаритах получить двигатель с большим диаметром ро-
тора, что обеспечит создание наибольшего момента инерции ро-
Рис. 7.2. Конструктивная схема асинхрон-
ного гироскопического двигателя:
/— подшипниковые! шит; 2 — маховик (обод),
3 — сердечник ротора с короткозамкнутой об
моткой; 4 — сердечник статора с трехфазной
обмоткой; 5 — неподвижный вал; 6 — отвер-
стие для выводов обмотки статора; 7— шари-
коподшипник
Рис. 7.3. Асипхропный двухстаторный гироскопический двигатель:
/ — корпус; 2 — маховик; 3 — подшипниковый шит; 4 — шарикоподшипник:
5 — гайка; 6 — фланец; 7 — шайба: 8 — статор; Р — сердечник ротора; 10 —
герметичный кожух
тора,
а следовательно.
чивость
стабильность
придаст гиродвигателю требуемую устой-
врашения. На рис. 7.2 показана конструк-
тивная
схема асинхронного гиродвигатсля:
сердечник статора 4 с
трехфазной
обмоткой
закреплен
на неподвижном
валу 5, в кото-
ром имеется специальное отверстие 6 для выводов обмотки стато-
ра; на сердечник ротора 3 с короткозамкнутой обмоткой напрес-
сован
маховик 2 (обычно латунный)
с полированной наружной
и
поверхностью, обеспечивающий ротору необходимый момент инер-
ции; с двух сторон двигатель прикрыт подшипниковыми щитами
1 с шарикоподшипниками 7.
В гироскопических приборах высокой точности обычно приме-
няют двухстаторныс асинхронные гиродвигатели с симметричным
ротором (рис. 7.3). Для уменьшения трения гиродвигатель обычно
помешают в герметичную оболочку, заполненную газом малой
плотности — гелием или водородом.
Наиболее важным этапом работы гироскопического двигателя
является его пуск. Вследствие большого момента инерции ротора
двигателя
и сравнительно небольшого пускового момента (коротко-
замкнутая обмотка ротора имеет небольшое активное сопротивле-
ние) процесс пуска гиродвигателя может продолжаться от несколь-
Рис. 7.4 Синхронный гистерезисный гироскопический двигатель:
/ — активная чисть статора; 2 — маховик; 3 — медная прокладка; 4 — активная
часть ротора
ких минут до нескольких часов. В некоторых случаях для сокраще-
ния продолжительности разбега гиродвигателя на время пуска уве-
личивают подводимое к обмотке статора напряжение выше номи-
нального t/KOM до значения U', При этом пусковой момент гиродви-
гателя Л/' возрастает пропорционально квадрату кратности этого
повышения напряжения, т.е. Л/' = Mn(U'/ UHO*)2.
Применение синхронных двигателей с постоянными магнита-
ми в качестве гиродвигателей не оправдано из-за трудности вхож-
дения этих двигателей в синхронизм (см. параграф 5.4). Использо-
вание синхронных гиродвигателей с электромагнитным возбужде-
нием ограничено сложностью их пуска (см. параграф 5.3.2) и на-
личием у этих двигателей контактных колеи и шеток. Применение
однофазных двигателей переменного тока в качестве гиродвитатс-
лей нецелесообразно по причине их неудовлетворительных пуско-
вых свойств.
Сокращению времени пуска гиродвигателей способствует при-
менение синхронных гистерезисных гиродвигателей (рис. 7.4), вы-
годно отличающихся хорошими пусковыми свойствами и легкос-
тью вхождения в синхронизм (см. параграф 5.7).
7.2. Электромашинные преобразователи
Электромашинный (вращающийся) преобразователь — это элек-
трическая машина или электромашинный агрегат для преобразо-
вания электрической энергии. Например, преобразование посто-
янного тока — в переменный ток или преобразование частоты
переменного тока и т.п. По принципу действия и конструктивно-
му исполнению электромашинные преобразователи разделяют на
два типа: двигатель-генераторные и одноякорные.
7.2.1. Электромашинные преобразователи
двигатель-генераторного типа
Электромашинный преобразователь двигатель-генераторного
типа представляет собой агрегат, состоящий из двигателя и гене-
ратора, механически соединенных обшим валом и заключенных в
общий корпус. Такие преобразователи применяют для электропита-
ния устройств автоматики и связи, навигационных, радиолокаци-
онных либо других приборов. Промышленность изготовляет преобра-
зователи постоянного тока низкого напряжения 12, 24 и 27 В (это
напряжения батарей кислотных и щелочных аккумуляторов) в по-
стоянный ток более высокого напряжения (110, 220 В) шли пере-
менный ток требуемой частоты и напряжения, а также преобразова-
тели частоты переменного тока (например, переменный ток час-
тоты 50 Гц в переменный ток частот 200, 400, 500, 1000, 2000 Гц)
+ 27 В - 36 В; 400 Ги
Рис. 7.5. Схема врашаюшегося преобразователя двигатель-1 операторного
типа
Рассмотрим электромашинный преобразователь постоянного
тока в переменный, который состоит из двигателя М постоянного
тока (рис. 7.5), рассчитанного на включение в сеть напряжением
27 В, и трехфазного синхронного генератора СГ с возбуждением
постоянными магнитами. Напряжение на выходе генератора 36 В
частотой 400 Гц. Якорь двигателя и ротор генератора расположены
на одном валу. При включении двигателя в сеть его якорь приводит
во вращение ротор генератора, магнитное поле последнего стано-
вится вращающимся. Сцепляясь с обмоткой статора, это поле ин-
дуцирует в ней трехфазную ЭДС и на выходе генератора создается
напряжение. Смешанное возбуждение двигателя постоянного тока
осуществляется параллельной ОВ1 и последовательной ОВ2 об-
мотками. Такой способ возбуждения обеспечивает стабильную ча-
стоту вращения якоря при изменениях нагрузки генератора.
С помощью реостата R в цепи параллельной обмотки возбужде-
ния двигателя регулируется частота вращения его якоря п при не-
обходимости корректировки частоты переменного тока синхрон-
ного генератора f=p2n/f&), где р2 — число пар полюсов постоянно-
го магнита синхронного генератора.
I Конструктивно рассматриваемый электромашинный преобра-
зователь представляет собой агрегат из двух электрических машин
(двигателя постоянного тока и генератора переменного тока), со-
вмещенных в общем корпусе 2 (рис. 7.6). Для двигателя этот корпус
выполняет функцию станины, т.е. является элементом магнито-
провода. На внутренней поверхности части корпуса, относящейся
к двигателю, расположены два сердечника полюса 5 с катушками
возбуждения. Внутри части корпуса, относящейся к генератору,
расположен сердечник статора 3 с трехфазной распределенной
обмоткой. На валу 8 преобразователя расположены коллектор 7 и
сердечник якоря 6 с обмоткой двигателя постоянного тока, а гак-
Рис. 7.6. Конструкция вращающегося преобразователя двигатель-генсра-
торного типа:
I — разъем; 2 — корпус; 3 — сердечник статора; 4 — ротор генератора с посто-
янными магнитами; 5 — сердечник полюса с катушкой возбуждения, 6 — сер-
дечник якоря; 7 — коллектор двигателя; 8 — вал
же шестиполюсный ротор 4генератора с постоянными магнитами.
Присоединение преобразователя к внешней сети выполняется с
помощью разъема 7
Рассмотрим устройство электромашинкою преобразователя типа
АМГ для преобразования трехфазного переменного тока частотой
50 Гц в переменный ток частотой 500 Гц и постоянный ток напря-
жением 110 В. Функциональная схема преобразователя АМГ пред-
ставлена на рис. 7.7. Преобразователь состоит из трехфазного асин-
хронного двигателя с короткозамкнутым ротором, трехфазного ге-
нератора переменного тока индукторного типа с обмоткой воз-
буждения, расположенной на общем сердечнике статора генера-
тора совместно с его трехфазной рабочей (якорной) обмоткой РОГ.
Обмотка возбуждения индукторного генератора ОВГ питается от
генератора постоянного тока, в параллельную обмотку возбуждения
которого включен регулировочный резистор, предназначенный для
регулирования напряжения постоянного тока. В преобразователях
других типов, не имеющих генератора постоянного тока, обмотка
возбуждения индукторного генератора получает питание от стати-
ческого выпрямителя, включенного в сеть переменного тока.
Принцип действия индукторного генератора основан на изме-
нении величины проводимости воздушного зазора между отлель-
Рис. 7.7. Функциональная схема преобразователя АМ'
ными зубцами статора и вращающегося ротора (индуктора), а сле-
довательно, изменении магнитного потока в зубцах статора (см.
параграф 5.9.1). Секции рабочей (якорной) обмотки генератора
располагаются в пазах сердечника статора. Ротор индукторного ге-
нератора — зубчатый и не имеет обмотки. Для уменьшения потерь
в сердечнике ротора он сделан шихтованным из листовой элект-
ротехнической стали. Индукторный генератор отличается от обыч-
ного синхронного генератора тем, что в нем магнитный поток,
сцепленный с рабочей (якорной) обмоткой, пульсирует, изменя-
ясь по величине от + Фтах до +ФтП- Обычно Фт|П = 0,2 Фтах.
Частота ЭДС, индуцируемой в рабочей обмотке индукторного
генератора, зависит от частоты вращения ротора п2 и от числа
зубцов индуктора Z2:
/=Z2n2/60. (7.4)
I Для улучшения формы графика ЭДС, индуцируемой в якорной
обмотке индукторного генератора, т. е. для ослабления ее высших
гармонических составляющих, на зубчатом роторе делают скос зуб-
цов.
В преобразователе типа АМГ-15 (рис. 7.8) двигатель и генера-
тор трехфазного тока расположены в общем корпусе 5, к нижней
части которого приварены лапы. В этой же части корпуса имеют-
ся вентиляционные отверстия (жалюзи), защищенные сетками
21 и 23.
В корпус запрессованы статоры асинхронного двигателя б и син-
хронного генератора 11. Во избежание смещения статор генерато-
ра крепится в корпусе винтами 22.
Катушка возбуждения генератора 9 уложена в больш их пазах
статора. Ротор асинхронного двигателя 24 и ротор синхронного
генератора 12 расположены на общем валу 8, установленном в двух
радиальных подшипниках 1 и 20. Для предотвращения смещения
Подшипников имеются упорные фланцы, которые закреплены бол-
тами. Ротор асинхронного двигателя 24 имеет короткозамкнут;,то
Рис. 7.8. Конструкция преобразователя АМ Г’-15:
/, 17, 20 — подшипники: 2 — болт; 3 — шиток-сегка; < 14, 16, 19 — подшипниковые щиты; 5 — корпус преобразователя; 6 —
статор двигателя; 7 — сальник; — вал преобразователя; 9— катушка возбуждения генератора; 10 — коробка выводов; // — статор
генератора: 12 — ротор генератора; 13 — вентилятор; 15 — гайка; 18 — корпус; 21, 23 — сетка» 22— винт; 24— ротор асинхронного
двигателя
[обмотку, состоящую из круглых медных стержней, замыкаемых
накоротко с двух сторон кольцами. Сердечники роторов двигателя
и генератора собирают из отдельных штампованных листов, на -
прессовывают на вал и закрепляют кольцами На валу 8преобра-
зователя установлен центробежный вентилятор 13 с радиальными
ж лопатками.
Преобразователь закрыт с двух сторон подшипниковы ми щита-
ми 4 и 74, которые установлены в корпусе на центрирующих зам-
ках. Щит 4 закреплен болтами к корпусу 5; шит 14 совместно с
I фланцевым щитом генератора постоянного тока 16 надевают на
I шпильки и закрепляют гайками 15.
| Выводные концы двигателя и генератора переменного тока под-
соединены к колодкам коробки выводов 10, установленной на кор-
пусе.. Кабели внешних соединений в коробку выводов вводят через
сальники 7.
С преобразователем сочленен генератор постоянного тока,
выполненный в отдельном корпусе 18 с подшипниковым щитом
16 Вал генератора постоянного тока соединен с валом преобразо-
вателя <?при помощи пакета плоских стальных пружин и сухарей.
I Якорь генератора смонтирован на двух шарикоподшипниках 77,
установленных в щитах 16 и 19.
Генератор имеет собственную коробку выводов, в которой име-
ется свободный зажим для присоединения системы автоматичес-
кой стабилизации напряжения. В коробке укреплены конденсато-
ры для подавления радиопомех, создаваемых генератором.
Охлаждение агрегата осуществляется вентилятором 13. Венти-
I ляционные отверстия в подшипниковом шите 4 защищены щит-
ком-сеткой 3.
V Общими недостатками всех электромашинных преобразовате-
лей, выполненных по двигатель-генераторному принципу, явля-
ются сравнительно высокая стоимость, повышенные габариты и
низкий КПД Последнее объясняется тем. что электроэнергия, по-
। ступающая в преобразователь, дважды претерпевает преобразова-
ние: сначала в двигателе, а затем в генераторе. В связи с этим КПД
двигатель-генераторного агрегата т] определяется произведением
КПД двигателя г|г и КПД генератора т|г: т] = р 1 т]г. Например, если
КПД двигателя 75 %, а КПД генератора 80 %, то КПД преобразо-
вателя т| = 0,75 • 0.80 = 0.6. Если же агрегат состоит из трех машин,
то его КПД окажется еше меньше.
7.2.2. Одноякорные преобразователи
В одноякорном преобразователе двигатель и генератор совме-
щены в одной машине, при этом имеются общий якорь (ротор) и
общая обмотка возбуждения. Рассмотрим работу одноякорного
преобразователя постоянно-переменного тока.
и
Рис. 7.9. Функциональная схема
одноякорного преобразователя
Обмотка якоря этого преобра-
зователя с одной стороны якоря
присоединена к коллектору, а с
другой стороны — к контактным
кольцам (рис. 7.9). Число контак-
тных колец определяется числом
фаз преобразуемого переменно-
го тока: для однофазного тока два
кольца, для трехфазного — три и
т.д. На статоре преобразователя
размешены главные полюсы с об-
моткой возбуждения. При работе
одноякорного преобразователя
для преобразования переменно-
го тока в постоянный ток на кон -
тактные кольца подается напря-
жение из сети переменного тока.
Трехфазный ток, поступив в обмотку якоря, создает вращающее-
ся магнитное поле. В результате якорь преобразователя приходит во
вращение.
Таким образом, со стороны переменного тока одноякорный пре-
образователь работает как синхронный двигатель. Одновременно в
обмотке якоря индуцируется ЭДС. создающая на выходе преобра-
зователя благодаря работе щеп очно-коллекторного устройства,
постоянное напряжение. Следовательно, со стороны коллектора
преобразователь работает в режиме генератора постоянного тока
параллельного возбуждения. В результате электрической связи це-
пей постоянного и переменного токов величина напряжения на
стороне постоянного тока (7ПОСГ находится в определенном соотно-
шении с напряжением со стороны переменного тока С/пср, которое
определяется выражением
пер
. 180*
sin----,
т
(7.5)
где т — число контактных колец в преобразователе.
Так, для однофазного преобразователя (от = 2) получим (7пер =
= 0,707 (/пост, а для трехфазного (от = 3) Unep = 0,612(/ПОСТ.
По сравнению с преобразователем двигатель-генераторного
типа, олноякорный преобразователь имеет меньшие габариты и
более высокий КПД. Кроме того, при перевозбуждении в цепи
этого преобразователя на стороне переменного тока появляется
переменный ток, опережающий по фазе напряжение, что способ-
ствует повышению коэффициента мощности в сети переменного
тока. Однако взаимная зависимость напряжений постоянного и
переменного тока затрудняет регулировку напряжения на выходе
одноякорного преобразователя. Регулировка напряжения возмож-
на лишь при изменении напряжения на входе преобразователя. Такая
регулировка возможна; например, посредством автотрансформа-
тора, включенного между сетью переменного тока и контактными
кольцами преобразователя.
7.3. Электромашинные усилители мощности
7.3.1. Основные понятия
Электромашинный усилитель — это специальный коллекторный
генератор постоянного тока с электромагнитным возбуждением,
у которого выходная .мощность регулируется в широком диапазоне
мощностью в цепи обмотки возбуждения (управления). Электро-
машинные усилители применяют в системах автоматического уп-
равления для усиления мощности электрических сигналов.
Простейшим электромашинным усилителем может служить ге-
нератор постоянного тока независимого возбуждения (см. пара-
граф 6.11.1). У этого генератора мощность на выходе РВЬ1Х, т.е. в
цепи якоря, зависит от ЭДС Еа, которая при постоянной частоте
вращения якоря, п зависит исключительно от основного магнит-
ного потока возбуждения, а следовательно, от мощности , подве-
денной к обмотке возбуждения Р3, называемой в данном случае
обмоткой управления. Одним из важных параметров электромашин -
ного усилителя является коэффициент усиления по мощности, оп-
ределяемый отношением мощности на выходе усилителя к мощ-
ности на его входе, т.е. мощности на обмотке управления Рк:
(7-6)
Рис. 7.10. Двухкаскад: гый злек-
тромашинный усилитель
Такой усилитель называют одноступенчатым, так как усиление
в нем происходит только на одной ступени «обмотка управления —
обмотка якоря». Максимальный коэффициент усиления по мощ-
ности кр при мощности от 0,5 до 3,0 кВт обычно не превышав!
40—50, что слишком мало для практического применения усили-
теля. Если же использовать каскадное
соединение двух таких усилителей
(рис. 7.10), т.е. на выходные зажимы
первого усилителя подключить обмот-
ку управления второго усилителя, то
коэффициент усиления по мощности
такого электромашинного усилителя
кр будет определяться произведени-
ем коэффициентов усиления первого
Усилителя Ар| на коэффициент усиле-
ния второго усилителя кр2-
~ ^pl^pZ
»Ых2
ш lx I
(7.7)
В этом случае коэффициент усиления может достигнуть значе-
ния кр < 2500. Однако такой усилитель непригоден для примене-
ния в системе автоматического управления, так как он обладает
большой электромагнитной инерционностью, да к тому же его
габариты значительны.
7.3.2. Электромашинные усилители поперечного поля
Рис. 7.11. Принципиальная
схема элсктромашинного уси-
лителя поперечного поля
Наибольшее применение получили электромашинные усилители
поперечного поля (ЭМУ), в которых основным рабочим потоком
является магнитный поток обмотки якоря по поперечной оси, пред-
ставляющий собой магнитный поток реакции якоря (см. рис. 6.16, б).
На коллекторе ЭМУ (рис. 7.11) установлены щетки qx—q2 по по-
перечной оси, т.е. по геометрической нейтрали, и щетки dx — d2~
по продольной оси. т.е. по оси главных полюсов. Щетки qx—q2
замкнуты накоротко, а к щеткам dx—d2 подключена нагрузка. Поми-
мо обмотки якоря, ЭМУ имеет одну или несколько обмоток уп-
равления (на схеме ЭМУ их показано две: У( и У2), компенсацион-
ную обмотку ОК, поперечную подмагничивающую обмотку ОП и
обмотку добавочных полюсов ОД. Якорь усилителя приводится во
вращение электродвигателем (асинхронным или постоянного тока).
Если к одной из обмоток управле-
ния, например Уь подвести напря-
жение управления Uy, то возникший
при этом ток управления /у] создаст
МДС управления Д. = wy), которая
в свою очередь создаст магнитный
поток Фу, направленный по продоль-
ной оси dx — d2. Этот поток пересека-
ет вращающийся якорь и индуцирует
в его обмотке ЭДС Еч в цепи попе-
речных щеток qx — q2. Электродвижу-
щая сила Ед невелика, потому что
поток управления Ф. мал. Но так как
цепь щеток qx—q2 замкнута накорот-
ко, то ЭДС Еч вызовет в цепи попе-
речных щеток значительный ток 1д.
который создаст МДС F4 и магнит-
ный поток Ф9, неподвижный в про-
странстве и направленный по попе-
речной оси (по геометрической ней-
трали). В обмотке вращающегося яко-
ря поток Ф, индуцирует ЭДС Еа, ко-
корая снимается продольными щетками di~d2. Если к выводам
ЭМУ подключить нагрузку гнг, то под действием ЭДС Ес в цепи
продольных щеток d{ — d2 появится ток нагрузки
Г Таким образом, в ЭМУ можно выделить две ступени усиления
мощности: ступень «цепь управления — поперечная цепь обмотки
якоря» и ступень «поперечная цепь обмотки якоря — продольная
(выходная) цепь обмотки якоря». Усиление мощности на каждой
ступени оценивается коэффициентом усиления по мощности. Коэф-
фициент усиления на первой ступени равен отношению мощ-
ностей в поперечной цепи обмотки якоря Р = ЕдЦ и в цепи обмот-
ки управления Р = Ц/у:
I *₽1=4- (7-8)
ГУ
Коэффициент усиления ку2 на второй ступени равен отноше-
нию мощности на выходе ЭМУ Р^- к мощности в попереч-
ной цепи обмотки якоря Рд = ЕдГ:
Коэффициент усиления ЭМУ по мощности в целом определя-
ется произведением коэффициентов усиления ня отдельных сту-
пенях:
| ^ = М« = 4 = тгг- <7-io)
ГУ и у У
Коэффициент усиления ЭМУ по мощности зависит от его на-
грузки Pd. Так, в режиме холостого хода, когда Pd - 0, коэффици-
ент усиления равен нулю. В этом случае можно говорить лишь о
коэффициенте усиления по напряжению kv= Ud/Uy С подключе-
нием нагрузки начинается потребление мощности ЭМУ Pd и по-
нятие коэффициента усиления по мощности приобретает физи-
ческий смысл. С ростом нагрузки Pd коэффициент усиления по
мощности увеличивается, так как мощность в цепи управления Р
остается неизменной. Принято указывать коэффиниен г усиления
по мощности при номинальной нагрузке. Для ЭМУ поперечного
поля коэффициент усиления по мощности при номинальной на-
грузке в среднем составляет от 103 до 104.
I Мощность на выходе ЭМУ Pd — это преобразованная механи-
ческая мощность электродвигателя, приводящего во вращение якорь
ЭМУ:
Pd = Л1 — ХТ’д- Х^ЭМУ, (711)
где Ра\ — мощность, потребляемая приводным электродвигателем
из сети; ХЛ — мощность суммарных потерь в этом двигателе;
Х^эму — мощность суммарных потерь в ЭМУ.
Мощность на выходе ЭМУ можно представить в виде
(7.12;
ЭДС якоря по продольной оси Fd индуцируется магнитным по-
током по поперечной оси
(7.13)
где R ыд — магнитное сопротивление потоку Ф.?.
Тогда ЭДС якоря по продольной оси
.(7.14)
где ced и сед — постоянные коэффициенты ЭМУ, определяемые
параметрами обмотки якоря; waq — число витков в обмотке якоря
по поперечной оси.
Ток в цепи якоря по поперечной оси
_ ^су^Фу
«
(7.15)
где — сопротивление обмотки якоря по поперечной оси; Фу —
магнитный поток обмотки управления
фу=4^’ <71б>
<*'м.у
где wv — число витков в обмотке управления; R — магнитное
сопротивление потоку Фу.
Ток в цепи якоря по продольной оси
(7.17)
Используя выражения (7.10) —(7.17), получим формулу коэф-
фициента усиления мощности ЭМУ поперечного поля:
' г /?2 р2
у*нгг'м.у
(7.18)
где С — постоянный для данного усилителя коэффициент, опреде-
ляемый его конструктивными параметрами:
л2 л4
(7.19)
Из выражения (7.18) следует, что при постоянные обмоточных
параметрах якоря ЭМУ коэффициент усиления прямо пропорцио-
нален частоте вращения якоря в четвертой степени и4, числу вит-
ков в обмотке управления в квадрате wj и обратно пропорционален
сопротивлению цепи обмотки управления R , сопротивлению на-
грузки г1Г и квадрату магнитных сопротивлений по продольной
Ri у и поперечной R^ осям.
Таким образом, для повышения коэффициента усиления ЭМУ
требуется: увеличение частоты вращения якоря и числа витков в
обмотке управления при снижении ее сопротивления Ry, уменьше-
ние сопротивления нагрузки гнг (в пределах номинального значения
тока нагрузки /Д снижение магнитного насыщения магнитопрово-
да ЭМУ при минимальном воздушном зазоре, так как оба эти фак-
тора способствуют понижению магнитного сопротивления.
По этой причине для привода ЭМУ поперечного поля приме-
няют либо двухполюсные трехфазные асинхронные двигатели,
которые при частоте тока в сети 50 Гц имеют синхронную частоту
вращения 3000 об/мин, либо двигатели постоянного тока парал-
лельного возбуждения, если необходима частота вращения якоря
ЭМУ более 3 000 об/мин. Однако не следует забывать, что с увели-
чением частоты вращения ухудшаются условия коммутации как
на продольных, так и на поперечных щетках ЭМУ, что может при-
вести к интенсивному искрению на коллекторе и создать опас-
ность преждевременного выхода ЭМУ из строя.
Обмотка добавочных полюсов ОД в ЭМУ поперечного поля
предназначена для улучшения коммутации на продольных щетках
c/j — d-. Поперечная подмагничивающая обмотка ОП усиливает
магнитный поток по поперечной оси, что позволяет уменьшить
значение тока в цепи поперечных щеток §] — q2 обмотки якоря, а
следовательно, улучшить коммутацию на этих щетках (в ЭМУ не-
большой мощности эта обмотка отсутствует).
В ЭМУ ток нагрузки Id создает МДС по продольной оси Fd, на-
правленную встречно МДС обмотки управления F, . Так как МДС
якоря по продольной оси Fd намного превышает МДС обмотки
управления Fv, то даже при небольшой нагрузке размагничиваю-
щее влияние реакции якоря по продольной оси настолько велико,
что усилитель размагничивается, и напряжение на его выходе умень-
шается практически до нуля. Для устранения этого явления служит
компенсационная обмотка ОК, включаемая в цепь продольных
щеток d|—d2. Магнит но-движущая сила компенсационной обмот-
ки Г, = IdwK направлена по продольной оси встречно МДС реакции
якоря Fd. Для полной компенсации необходимо соблюдение ра-
венства МДС Fd= FK. Настройка требуемого вида компенсации осу-
ществляется посредством реостата RK, шунтирующего компенсаци-
онную обмотку ОК Изменяя сопротивление этого реостата, уда-
ется регулировать ток в компенсационной обмотке и ее МДС FK.
Рис. 7.12. Расположение обмоток на
статоре ЭМУ поперечного поля
но ЭМУ выполняют совместно с
Электромагшшные усилители
поперечного поля делают двух-
полюсными, при этом каждый
из главных полюсов «расщеплен»
на две части /, между которыми
расположены добавочные полю-
сы 2 (рис. 7.12). Обмотки управ-
ления 4 выполнены сосредото-
ченными в виде полюсных кату-
шек, надетых на сердечники
главных полюсов. Применяют
распределенную компенсацион-
ную обмотку Л используя для ее
укладки пазы в полюсных нако-
нечниках главных полюсов. Этим
обеспечивается компенсация
продольной реакции якоря по
всему периметру статора. Обыч-
приводным двигателем в общем
корпусе. Исключение составляют ЭМУ большой мощности, кото-
рые изготовляют отдельно от электродвигателя, а затем монтиру-
ют вместе с ним на общей раме.
Рабочие свойства ЭМУ определяются его внешней характерис-
тикой, представляющей собой зависимость напряжения на выходе
усилителя Ud от тока нагрузки Id при постоянных частоте враще-
ния п и токе в обмотке управления I, Напряжение на выходе ЭМУ
зависит от тока нагрузки Id.
Ud=Ed-ldXr* (7.20)
где — суммарное электрическое сопротивление продольной
цепи якоря, включающее сопротивления обмотки якоря га, щеточ-
Рис. 7.13. Внешние характеристи-
ки ЭМУ поперечного поля
ного контакта продольных щеток
гш, обмотки добавочных полюсов
гд, компенсационной обмотки г
(с учетом сопротивления шунти-
рующего реостата /?к).
Так как магнитная система
ЭМУ не насыщена, то напряже-
ние Ud является прямолинейной
функцией тока нагрузки Id (рис.
7.13). Угол наклона внешней ха-
рактеристики ЭМУ к оси абс-
цисс — жесткость характеристи-
ки — зависит от степени компен-
сации реакции якоря по продоль-
ной оси. При полной компенсации
(f = Fd) внешняя характеристика достаточно жесткая (график 5),
так как уменьшение напряжения на выходе ЭМУ происходит только
за счет роста падения напряжения в цепи якоря по продольной
оси При недокомпенсации (7\ < Fd) внешняя характеристика
менее жесткая (график 4). Это объясняется тем. что с ростом на-
грузки некомпенсированная часть МДС якоря Fd-Fd- FK, дейст-
вуя против МДС обмотки управления размагничивает усилитель,
что ведет к более интенсивному уменьшению напряжения Ud при
увеличении нагрузки. При небольшой перекомпенсации (FK > Fd) МДС
X компенсируют не только МДС реакции якоря по продольной
оси Fd, но и паление напряжения в продольной цепи якоря ld^rd.
В этом случае внешняя характеристика ЭМУ абсолютно жесткая
(график 2) и напряжение на выходе усилителя остается неизмен-
ным во всем диапазоне изменения нагрузки. При значительной не-
декомпенсации (FK y>Fd) МДС компенсационной обмотки Fv не толь-
ко компенсирует МДС Fd9 но и создает дополнительный магнит-
ный поток по продольной оси, который, суммируясь с магнит-
ным потоком обмотки управления Фу, вызывает увеличение на-
пряжения на выходе усилителя. В этом случае внешняя характери-
стика ЭМУ приобретает вид восходящей прямой линии (график /).
Значительная перекомпснсация ЭМУ недопустима, так как при
этом работа усилителя становится неустойчивой: рост тока нагруз-
ки сопровождается увеличением напряжения на выходе усилите-
ля, что ведет к дальнейшему росту тока нагрузки и т.д. Для обеспе-
чения устойчивой работ ы в электромашинном усилителе настраи-
вают небольшую недокомпенсацию, при которой изменение тока
нагрузки //от номинального значения до нуля сопровождается
увеличением напряжения Ud на 12+20%.
Важный параметр ЭМУ — быстродействие, которое определяет-
ся электромагнитной постоянной времени, т.е. скоростью проте-
кания электромагнитных процессов, обусловленной индуктивно-
стью обмоток электромашинного усилителя. Из всех обмоток элек-
тромаш инного усилителя наибольшей индуктивностью обладает
обмотка управления, и электромагнитные процессы в ней при
изменении сигнала управления наиболее продолжительны. Поэто-
му быстродействие ЭМУ оценивают по электромагнитной посто-
янной времени этой обмотки
| (7.21)
Ку
где Ly и R — индуктивность (Гн) и активное сопротивление (Ом)
обмотки управления.
г Для повышения быстродействия ЭМУ последовательно в цепь
обмотки управления ино(да включают добавочный резистор 2?лоб,
тогда электромагнитная постоянная времени цепи управления, а
следовательно, и ЭМУ в целом уменьшается:
Следует помнить, что с включением 7?доб возрастает мошност ь
в цепи обмотки управления
Ру = / у(Ру + 7?доб), (7.23)
что ведет к уменьшению коэффициента усиления (см. (7.18)).
Постоянная времени ЭМУ обычно составляет десятые и даже
сотые доли секунды.
В ЭМУ большой мощности для улучшения коммутации на по-
перечных щетках q} — q2 кроме подмагничивающей обмотки ОП в
цепь якоря по поперечной оси включают еще обмотку' добавочных
полюсов ДП, устанавливаемых по поперечной оси в межполос-
ном пространстве.
Отечественная промышленность изготовляет электромашинные
усилители поперечного поля серии ЭМУ (табл. 7.1). Эта усилители
выполняются в едином корпусе с приводным двигателем, в каче-
стве которого используются как двигатели постоянного тока па-
Таблица 7.1
Технические данные усилителей мощности серии ЭМУ
Типоразмер Усилитель Двигатель
^НОМ’ кВт ^НОМ* в кОм кОм Ryi. кОм Ру. Вт Тип двига- теля ии в р 1 ДНОМ’ кВт
ЭМУ5А 0.5 115 1,0 1,0 — 0,56 380/220 1,0
ЭМУ5П 0,35 115 1,0 1,0 — 0,56 ДПТ 220 0.7
ЭМУ12А J.0 115 1.0 1,0 — 0,56 380/220 1,68
ЭМУ12П 1,0 115 1,0 1,0 — 0.56 ДПТ 220 1,8 ,
ЭМУ12ПМБ 2.0 115 1.77 1,77 1 0,70 ДПТ 27 3.5
ЭМУ22А 0,96 115 1,6 1.6 — 0,50 АД 380 /220 1,61
ЭМУ25А 1.6 230 1,6 1.6 —- 0,70 Д 380/220 2,35
ЭМУ31А 2.1 115 1,7 1,9 1,7 0.70 380/220 3.0
ЭМУ32П 2,4 115 1,5 1,6 1,5 0,70 ДПТ 220 4.0
ЭМУ50А 2,8 230 0.023 0.025 0.023 1,4 АД 380 /220 4,1
ЭМУ70А 4.2 230 1,55 1.8 1,55 1.4 АД 380 /220 6,0
ЭМУ100А 5,1 230 1,7 2,0 1,7 1,4 /\Д 380 /220 8,2
Примечание. АД — трехфазный асинхронный двигатель; ДПТ — двигатель по-
стоянного тока.
Рис. 7.14. Электромашинный усилитель ЭМУ-12А:
/ — коллектор; 2 — якорь; 3 — статор; 4 — ротор двигателя; 5 — статор двигате-
ля; 6 — вал
раллельного возбуждения, так и трехфазные асинхронные двига -
тели с короткозамкнутым ротором. На рис. 7.14 показана конструк-
ция (продольный разрез) элекгромашинного усилителя типа ЭМУ-
12А. Приводным двигателем в этом ЭМУ является трехфазный асин-
хронный двигатель.
Контрольные вопросы
1. Чем объясняется необходимость в большой частоте вращения ги-
родвигатедей?
2. С какой целью гиродвигатели делают обращенной конструкции?
3. Чем ограничивается применение коллекторных гиродвигателей по-
стоянного тока?
4. Каковы достоинства синхронных гистерезисных гиродвигателей?
5. Почему электромашинные преобразователи двигателя генераторно-
го типа имеют низкий КПД?
6. Каков недостаток одноякорных электромашин ных преобразователей?
7. Объясните назначение и устройство ЭМУ поперечного поля.
8. Что достигается процессом компенсации в ЭМУ?
9. Какой вид компенсации обычно настраивают в ЭМУ?
Глава 8
ВЕНТИЛЬНЫЕ ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА
8.1. Основные понятия
Недостатки коллекторных двигателей постоянного тока, обус-
ловленные наличием шеточно-коллскторного аппарата, а именно
недостаточная надежность, высокая стоимость изготовления и эк-
сплуатации, недопустимость эксплуатации в пожаро- и взрыво-
опасных средах, радиопомехи, привели к необходимости созда-
ния двигателя постоянного тока без коллектора и щеток с приме-
нением в нем электронного коммутатора.
Вентильный двигатель постоянного тока представляет собой
соединение синхронной машины с электронным коммутатором,
в качестве которого используется инвертор — преобразователь по-
стоянного тока сети, питающей обмотку статора, в переменный
ток, поступающий в катушки этой обмотки. Что же касается свойств
вентильного двигателя, то они зависят от способа управления ин-
вертором. Если управление инвертором независимое, т.е. когда ра-
бота инвертора не определяется пространственным положением
ротора двигателя, то вентильный двигатель по своим характерис-
тикам в принципе не отличается от синхронного двигателя. Но
основная задача создания вентильного двигателя — получить дви-
гатель со свойствами коллекторного двигателя постоянного тока,
а это оказывается возможным лишь при зависимом (позиционном)
управлении работой инвертора (коммутатора). В этом случае пере-
ключение электронных элементов инвертора происходит в стро-
гом соответствии с пространственным положением магнитных
полюсов вращающегося ротора относительно пазовых сторон об-
мотки статора
Зависимое управление работой электронного коммутатора ока-
зывается возможным лишь при наличии в двигателе прибора ме-
ханически соединенного с валом ротора, называемого датчиком
положения ротора ДПР. Таким образом, процесс переключения
тока в катушках обмотки статора вентильного двигателя происхо-
дит аналогично процессу коммутации в коллекторном двигателе
постоянного тока. На рис. 8.1 представлена блок-схема вентильно-
го двигателя. Собственно двигатель (электромеханический преоб-
разователь) — это синхронный двигатель СД, имеющий электро-
магнитное либо магнитоэлектрическое возбуждение. В вентильных
двигателях небольшой мощности преимущественное применение
получило возбуждение постоянными магнитами, расположенны-
ми на роторе. Обмотка статора СД получает питание от электрон-
ного коммутатора, в качестве которого используется инвертор И.
управляемый электрическими сигналами от ДПР через блок уп-
равления инвертором БУИ. При этом каждому положению ротора
относительно пазовых сторон обмотки статора соответствует опре-
Рис. 8,1. Блок-схема вентильного двигателя постоянного тока
(деленный сигнал на отпирание или запирание того или иного
f полупроводникового элемента — ключа инвертора И (транзистора
или тиристора). Таким образом, в вентильном двигателе примене-
но позиционное управление инвертором И.
Собственно вентильный двигатель, питаемый постоянным то-
ком, включает лишь перечисленные элементы. Если же питание
двигателя происходит от сети переменного тока, то схема допол-
няется выпрямителем В и фильтром Ф (на схеме рис. 8.1 показаны
пунктирными линиями).
I 8.2. Процесс работы вентильного двигателя
На рис. 8.2 представлена функциональная схема вентильного
Идеигатсля. Инвертор И выполнен на тиристорах, управление кото-
рыми осуществляется сигналами датчика положения ротора ДП Р
через систему импульсно-фазового управления СИФУ. Напряже-
ние питания постоянным током Uj подается на вход инвертора И,
состоящего из шести тиристоров VS 1 — VS6, соединенных по трех-
фазной мостовой схеме.
||Г Тиристоры, как известно, не полностью управляемые полупро-
водниковые приборы: посредством электрического сигнала тирис-
тор можно открыть, но для того чтобы ei о закрыть требуется пре-
кращение тока в его анодной цепи. Тиристоры 7, 3 и 5 образуют
анодную группу, так как к ним подведен «плюс» напряжения пи-
тания, а тиристоры 2, 4 и 6 образуют катодную группу — к ним
подведен «минус» напряжения питания.
• В процессе вращения ротора созданное им вращающееся маг-
нитное поле индуцирует в фазных обмотках статора ЭДС, мгно-
VS1-VS6 £2
Рис. 8.2. Функциональная схема вентильного двигателя
венные значения которых еАч ев и ес- По своей природе они явля-
ются противо-ЭДС и направлены встречно напряжению сети. Для
прохождения тока в обмотке статора необходимо, чтобы напряже-
ние, поступающее на соответствующую секцию обмотки статора
от инвертора, преодолевало противо-ЭДС секции. Этот принцип
положен в основу работы вентильного двигателя, так как в от-
дельные моменты времени мгновенные линейные значения про-
тиво-ЭДС обмотки статора (якоря) преодолевают напряжение сети,
что ведет к прекращению тока в анодной пели тиристоров и их
закрытию в определенной последовательности.
Таким образом, в основе работы вентильного двигателя лежит
органическое соединение инвертора и двигателя, т.е. инвертор не
является автономным, как это имеет место в тиристорных преоб-
разователях частоты. Объясняется это тем, что сигналы на пере-
ключение полупроводниковых ключей инвертора поступают от
датчика положения ротора ДПР. Эти сигналы управляют тирис-
торными ключами VS1 — VS6 инвертора таким образом, что токи
в секциях А, Ви С обмотки статора создают вращающееся магнит-
ное поле. Следовательно, вентильный двигатель работает как син-
хронный двигатель, поскольку частота вращения его ротора равна
частоте вращения поля статора пх. Но в отличие от классического
синхронного двигателя частота вращения поля статора в вентиль-
ном двигателе определяется частотой вращения ротора, поскольку
она зависит от скорости следования позиционных сигналов датчи-
ка положения ротора ДПР Другими словами, в вентильном двига-
теле происходит процесс самосинхронизации: ротор вращается син-
хронно с полем статора, но частота и направление вращения поля
статора определяются частотой и направлением вращения ротора
Электромагнитный момент вентильного двигателя определятся
выражением, Н • м:
М -
СО2ЛД1 +(Х|/Г|);]
{[cos 6 + (X, Д) sin el - е0 },
где т} — число секций в обмотке статора (для рис. 7.2 значение тх - 3):
Ео = E$/Ux — степень возбуждения двигателя; U\ — напряжение,
подаваемое на секцию обмотки статора; <о2— угловая скорость вра-
щения ротора; г, — активное сопротивление секции обмотки ста-
тора; Х| — индуктивное сопротивление секции обмотки статора.
Угол 6 в вентильном двигателе называют углом коммутации.
В отличие от угла нагрузки 0 синхронного двигателя угол комму-
тации при изменениях нагрузки сохраняется неизменным, так как
он задается датчиком положения ротора ДПР. При увеличении на-
грузки на вал вентильного двигателя частота вращения снижает-
ся, но благодаря жесткой позиционной связи частоты вращения
поля статора с частотой вращения ротора, реализуемой через ДПР*
двигатель не выпадает из синхронизма.
Способы регулирования частоты вращения и механические
характеристики вентильных двигателей в принципе такие же, как
и в коллекторных двигателях независимого (параллельного) воз-
буждения (см. параграф 6.83). Линейность этих характеристик за-
висит от относительной индуктивности секции обмотки статора
£ = р£|/л, и с ее увеличением характеристики становятся более
кри воли нейными.
8.3. Вентильный двигатель постоянного тока
малой мощности
Рассмотрим устройство и процесс работы вентильного двигате-
I ля малой мощности (обычно нс более 400 Вт). Рабочая обмотка
двигателя — обмотка якоря — расположена на сердечнике стато-
ра, а постоянный магнит — на роторе. Вал двигателя М (рис. 83, а)
механически соединен с датчиком положения ротора ДПР, сигнал
от которого поступает в электронный коммутатор — инвертор И.
Назначение ДПР — выдавать управляющий сигнал в блок комму-
I татора в соответствии с положением полюсов постоянного магни-
1та относительно секций обмотки якоря.
В качестве датчиков положения ротора применяют различные
чувствительные бесконтактные элементы с минимальными разме-
рами и потребляемой мощностью и большой кратностью мини-
мального и максимального сигналов, чтобы не вызывать наруше-
ний в работе блока коммутатора Чувствительные элементы ДПР
должны надежно работать при внешних воздействиях (температу-
ра, влажность, вибрации и т.п.), на которые рассчитан двигатель.
И Такие свойства присущи ряду7 чувствительных элементов (дат-
чиков): индуктивных, трансформаторных, магнитолиодов и т.п.
Опыт проектирования вентильных двигателей малой мощности
показал, что наиболее целесообразно использовать в ДП Р датчики
ЭД< Холла. Этот датчик представляет собой тонкую полупровод-
никовую пластину с нанесенными на ней контактными площал,-
|Ис. 83. Блок-схема (с) и четырехполюсная магнитная система (б) вен-
тильного двигателя небольшой мощности
Рис. 8.4. Датчик ЭДС
Холла
ками (рис. 8.4), к которым припаяны вы-
воды 1—2. подключенные к источнику на-
пряжения U\, и выводы 3— 4, с которых сни-
мают выходной сигнал U2. Если в цепи 7—
2 проходит ток А а датчик находится в
магнитном поле, вектор индукции В ко-
торого перпендикулярен плоскости плас-
тины датчика, то в последнем наводится
ЭДС и на выводах 3— 4 появляется напря-
жение U2. Значение ЭДС датчика Холла за-
висит от тока 7 и магнитной индукции К
а полярность — от направления тока I в
цепи 7—2 и направления вектора магнит-
ной индукции В
Рассмотрим работу бесконтактного дви-
гателя постоянного тока, для управления которым в ДПР примене-
ны датчики ЭДС Холла и коммутатор, выполненный на транзисто-
рах VT1 — VT4 (рис. 8.5). Четыре обмотки (фазы) двигателя W\— гщ
расположены на явно выраженных полюсах шихтованного сердеч-
ника якоря (см. рис. 8.3, б). Датчики ЭДС Холла ДХ1 и ДХ2 уста-
новлены в пазах полюсных наконечников двух смежных полюсов.
Силовые транзисторы VT1 — VT4 работают в релейном (ключевом)
режиме (см. рис. 8.5). Сигнал на открытие транзистора поступает от
Рис. 8.5. Принципиальная схема вентильного двигателя постоянного тока
небольшой мощности с чстырехфазной обмоткой статора
Н1КЗ
К1 нз
Рис. 8.6. Расположение секций
обмотки четырехполюсного
статора
соответствующего датчика Холла (дат-
чика положения ротора). Питание дат-
чиков Холла (выводы 1—2) осуществ-
ляется от источника напряжением (/Р
Каждая обмотка (фаза) выполне-
на из двух катушек, расположенных
на противолежащих полюсах сердеч-
ника статора и соединенных последо-
вательно (рис. 8.6). Если по какой-либо
из обмоток (фазе) статора проходит
ток от начала Hl —Н4 к концу К1 —
К4, то полюса сердечника статора при-
обретают полярность соответственно
5 и N.
При положении ротора, показан-
ном на рис. 8.5, в зоне магнитного полюса находится датчик
ДХ1. При этом на выходе датчика появляется сигнал, при кото-
ром транзистор VT2 переходит в открытое состояние. В обмотке
статора w2 появляется ток /2> проходящий от Н2 к К2. При этом
полюсы статора с обмотками 2 и 4 приобретают полярность 5 и N
(рис. 8.7, а). В результате взаимодействия магнитных полей статора
и ротора (постоянного магнита) появляется электромагнитный
момент Л/, вращающий ротор. После поворота ротора относитель-
но оси полюсов статора 1 — 3 на угол а = 45° против часовой стрел-
ки датчик ДХ2 окажется в зоне магнитного полюса ротора 5. при
этом по сигналу с датчика ДХ2 включается транзистор VT3. В фаз-
Рис. 8.7. К объяснению работы вентильного двигателя небольшой мощ-
ности
ной катушке возникает ток /3, и полюсы 3 и 1 приобретают
полярност ь 5и 7V соответственно. При этом магнитный поток ста-
тора Ф создается совместным действием МДС обмоток ин и
Вектор этого потока повернут относительно оси 2—4 на угол 45е
(рис. 8.7, б).
Ротор, продолжая вращение, занимает положение по оси по-
люсов статора 2—4 При этом датчик ДХ1 попадает в межполюс-
ное пространство ротора, а датчик ДХ2 останется в зоне полюса 5
ротора. В результате транзистор VT2 закрывается, транзистор VT3
останется открытым и магнитный поток Ф, создаваемый М (
обмотки поворачивается относительно оси полюсов 2— 4 еще
на 45° (рис. 8.7, в). После того как ось вращающегося ротора пере-
сечет ось полюсов статора 2—4, датчики ДХ1 и ДХ2 окажутся в
зоне полюса ротора 5, что приведет к включению транзисторов
VT3 и VT4.
Дальнейшую работу элементов схемы вентильного двигателя (см.
рис. 8.5) до завершения вектором потока Ф одного оборота про-
следим по табл. 8.1 и рис. 8.5 и 8.7.
На рис. 8.8 показано устройство рассмотренного вентильного
двигателя. Датчики ЭДС Холла 3 размешены в специальных пазах
полюсных наконечников сердечника статора 7
Постоянный магнит 2 не имеет центрального отверстия для
посадки на вал, он закладывается в тонкостенную гильзу и зак-
рывается привариваемыми фланцами двух полуосей. Такая конст-
рукция ротора позволяет избежать выполнения центрального от-
верстия в постоянном магните, что часто является причиной бра-
ка (трешины, сколы и т.п.). Блок инвертора И расположен на па-
нелях 5, отделен от двигателя перегородкой 4 и закрыт металличес-
ким колпаком 6. через который выведены провода 7для подключе-
ния двигателя в сеть постоянного тока.
Изменение направления вращения (реверс) двигателя осуще-
ствляется изменением полярности напряжения U\ в токовой цепи
датчиков ЭДС Холла. Изменение полярности напряжения I/ на входе
Таблица 8.1
К пояснению процесса работы вентильного двигателя
Позиция на рис. 8.7 а б « г д е Ж 3
Открыты транзисторы VT2 VT2, VT3 VT3 VT3. VT4 VT4 VT4. VT1 VT1 VT1, VT2
Ток / проходит по фазным катушкам w3 #3 1^31 ША WA и>ь 1Р4 а>1 Uh
Угол поворота вектора потока статора О’ 45° 90’ 135’ 180° 225° 270° 315°
Рис. 8.8. Конструкция вентильного двигателя небольшой мощности:
7 — сердечник статора с обмоткой; 2 — постоянный магнит ротора; 3 — датчик
положения ротора; 4 — разделительная панель; 5 — полупроводниковый комму-
татор; 6 — защитный колпак; 7 — выводные провода
двигателя недопустимо, так как при этом прекращается работа
блока инвертора.
Коэффициент полезного действия вентильного двигателя по
сравнению с коллекторными двигателями постоянного тока (см.
параграф 6.7) выше, «по объясняется отсутствием у этих двигате-
лей шеточно-коллекторного узла, а значит, электрических потерь
в щеточном контакте и механических потерь в коллекторе.
К достоинствам вентильных двигателей относятся также высо-
кая надежность и долговечность, что объясняется отсутствием у
них щеточно-коллекторного узла, который изнашивается в про-
цессе эксплуатации двигателя и требует систематического ухода.
Двигатели могут работать в условиях широкого диапазона темпе-
ратур окружающей среды, в вакууме, в средах с большой влажно-
стью и т.п., где применение коллекторных двигателей недопусти-
мо из-за неработоспособности шеточно-коллекторного узла в эк-
стремальных условиях.
Таблица 8.2
Технические данные вентильных двигателей типа ДБ
Т нпоразмср р • ном» Вт ^ном- в Аюм» А ^ном» об/мин м /МИОМ1 Н - М Д|Лр» мм
[дБ50-10-4 10 27 пост. 0,9 4000 2,45 • IO’3 50
[ДБ50-1б-4 16 27 пост. 1.3 4 000 3,8 • IO"2 50
|дБ80-120-4 120 27 пост. 9,7 4000 з,о 80
Таблица 8.3
Технические данные вентильных двигателей серии ДБУ“О
Типоразмер р • ном* Вт в А ^ном* Нм ^п/^МОМ ^иом» об/мин
ДБУ70-90-3-300 90 220 пер. 0,5 0,35 2,28 3000
ДБУ70-120-6-300 120 220 пер. 1,2 0,3 2,33 6000
ДБУ70-90-3-27 90 27 пост. 5 0,35 4,0 3000
ДБУ70-120-6-27 120 27 пост. 6 0,3 4,0 6000
ДБУ70-370-9-300 370 220 пер. 2 0,37 2,0 9000
ДБУ70-370-12-300 370 220 пер. 2 0,37 2,0 12000
ДБУ70-370-12-27 370 27 пост. 14 0.37 1,5 12000
ДБУ70-90-3-12 90 12 пост. 10 0,35 2,86 3000
ДБУ70-120-6-12 120 12 пост. 13 0,3 1.7 6000
ДБУ70-200-9-12 200 12 пост. 20 0,25 1.5 9000
ДБУ70-250-12-12 250 12 пост. 25 0,25 1,5 12000
Недостаток БДЛТ — повышенная стоимость, обусловленная
наличием полупроводникового блока инвертора, чувствительных
элементов (датчиков ЭДС Холла) и постоянного магнита.
Промышленность изготовляет несколько серий вентильных дви-
гателей малой мощности, которые благодаря перечисленным выше
достоинствам получают все более широкое применение в современ-
ных приборных устройствах и средствах автоматизации. Вентильные
двигатели типа ДБ (двигатели постоянного тока бесконтактные, с
постоянным магнитом на роторе) предназначены для применения
в системах автоматического регулирования, работают в комплекте
с полупроводниковым коммутатором (инвертором). Двигатели ре-
версивные с электродинамическим тор-
можением рассчитаны для включения в
сеть постоянного тока 27 В (табл. 8.2). Креп-
ление двигателей фланцевое со стороны
выступающего конца вала.
Серия высокоскоростных вентильных
двигателей малой мощности ДБУ70 (на-
ружный диаметр корпуса 70 мм) с по-
стоянным магнитом из ферритов бария
на роторе. Двигатели широко применяются
в быстроходных сепараторах и центрифу-
гах, вентиляторах и насосах, в медицин-
ских приборах, электроинструменте и т. п.
Рис. 8.9. Вентильный дви-
гатель серии ДБУ70
Двигатели работают в комплекте с полупроводниковыми ком-
мутаторами, которые-* обеспечивают реверсирование и торможе-
ние двигателей. В двигателях ДБУ70 возможно регулирование час-
тоты вращения кратностью до 1:10. Крепление двигателей флан-
цевое со стороны выступающего конца вала (рис. 8.9). Серия вен-
тильных двигателей ДБУ70 включает типоразмеры, различающие-
ся мощностью от 90 до 370 Вт и частотой вращения от 3 000 до
12 000 об/мин. Напряжение питания возможно от сети переменно-
го тока частотой 50 Гц либо от сети постоянного тока 12 или 27 В
(табл. 8.3).
Контрольные вопросы
1. Объясните назначение элементов блок-схемы вентильного двигате-
ля постоянного тока по рис. 8.1.
2. Объясните принцип позиционного управления коммутатором в вен-
тильном двигателе.
3. Какое назначение имеют датчики ЭДС Холла в вентильном двигателе?
4. Объясните работу схемы вентильного двигателя по рис. 8.5.
5. Почему при четырехполюсном статоре в двигателе применено толь-
ко два датчика ЭДС Холла?
6. Как изменить направление вращения вентильного двигателя, вы-
полненного по схеме рис. 8.5?
ЧАСТЬ ВТОРАЯ. ЭЛЕКТРОМАШИННЫЕ
ЭЛЕМЕНТЫ ПРИБОРНЫХ УСТРОЙСТВ И СРЕДСТВ
АВТОМАТИЗАЦИИ
РАЗДЕЛ III
ИСПОЛНИТЕЛЬНЫЕ ДВИГАТЕЛИ
Исполнительные {управляемые) двигатели предназначены для
преобразования управляющего электрического сигнала в пропор-
циональное ему механическое вращение вала. Такие двигатели ра-
ботают в условиях частых пусков и остановов, так как управляю-
щий сигнал систематически меняется в соответствии с програм-
мой автоматического регулирования.
Глава 9
ИСПОЛНИТЕЛЬНЫЕ ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА
9.1. Требования к исполнительным двигателям
и схемы управления исполнительными двигателями
постоянного тока
В приборных устройствах и средствах автоматизации применяют
исполнительные двигатели трех видов — постоянного тока, асин-
хронные и синхронные (шаговые). По характеру работы исполни -
тельные двигатели делят на двигатели непрерывного и дискретно-
го (прерывистого) действия.
В исполнительных двигателях непрерывного действия угловое
перемещение (вращение) вала происходит в течение всего вре-
мени действия управляющего сигнала, при этом частота враще-
ния вала двигателя зависит от параметров этого сигнала (амп-
литуды или фазы напряжения). К исполнительным двигателям
непрерывного действия относят двигатели постоянного тока и
асинхронные.
В исполнительных двигателях дискретного действия угловое пе-
ремещение вала происходит шагами (скачками), т.е. при поступ-
лении управляющего сигнала на обмотку двигателя вал поворачи-
вается на определенный угол (шаг) независимо от продолжитель-
ности действия этого сигнала. К исполнительным двигателям дис-
кретного действия относят шаговые двигатели.
Специфические условия работы исполнительных двигателей
определяют предъявляемые к ним требования:
отсутствие самохода, т.е. при прекращении ^управляющего
сигнала ротор двигателя должен остановиться;
минимальная криволинейность механических и регулировоч-
ных характеристик, что обеспечит устойчивую работу двигателя е
широком диапазоне частот вращения;
| надежность и экономичность способов управления;
быстродействие (малоинсрпионность), т.е. минимальное вре-
мя разгона ротора до установившейся частоты вращения;
минимальное напряжение трогания — минимальное значение
управляющего сигнала, вызывающее вращение ротора двигателя.
При решении вопроса о целесообразности применения двига-
теля в качестве исполнительного исходят из того, в какой мере он
удовлетворяет перечисленным требованиям. Кроме этого испол-
нительные двигатели должны удовлетворять общим требованиям,
предъявляемым к электрическим машинам: минимальные габари-
ты и масса, высокие эксплуатационные показатели (надежность,
КПД, коэффициент мощности), удобство и безопасность обслу-
живания, соответствие внешним воздействиям, климатических!
условиям и т.п.
При оценке эксплуатационных свойств исполнительных двига-
телей непрерывного действия пользуются главным образом меха-
ническими и регулировочными характеристиками.
В качестве исполнительных двигателей постоянного тока при-
меняют двигатели с независимым электромагнитным возбужде-
нием или с возбуждением постоянными магнитами. Наличие ще-
точно-коллекторного узла усложняет эксплуатацию этих исполни-
тельных двигателей и делает невозможным их применение во взры-
воопасных и пожароопасных средах, создает радиопомехи. Меха-
ническое трение щеток о коллектор вносит погрешность в управ-
ление такими двигателями.
Исполнительные двигатели постоянного тока имеют ряд досто-
инств: их механические и регулировочные характеристики прак-
тически прямолинейны, способы управления просты, габаритные
размеры и масса меньше, чем у асинхронных двигателей.
В исполнительных двигателях постоянного тока с электромаг-
нитным возбуждением применяют якорное и полюсное управле-
ние, а в двигателях с возбуждением постоянными магнитами —
только якорное.
При якорном управлении исполнительного двигателя с электро-
магнитным возбуждением (рис. 9.1, а) обмотка полюсов является
обмоткой возбуждения ОВ, а обмотка якоря — обмоткой управле-
ния ОУ. Во время работы исполнительного двигателя к обмотке
возбуждения подводится неизменное напряжение постоянного тока
( 6В, на обмотку управления подается управляющий сигнал (напря-
жение управления) Ц от блока управления БУ, являющегося эле-
ментом автоматической системы. Напряжение £/ подается в мо-
Рис. 9.1. Схемы включения исполнительных двигателей постоянного тока:
а, б — с якорным управлением; в — с полюсным управлением
менты времени, определяемые автоматической системой управле-
ния, когда требуется включение исполнительного двигателя. В дви-
гателях с возбуждением постоянными магнитами обмотка возбуж-
дения отсутствует, и к двигателю подводят лишь управляющий
сигнал (рис. 9.1, б).
При полюсном управлении обмотка якоря является обмоткой
возбуждения ОВ, а обмотка полюсов — обмоткой управления ОУ
(рис. 9.1 в). Для ограничения тока возбуждения 4я в неподвижном
якоре, когда противо-ЭДС £GD = 0, и в обмотке якоря проходит ток
короткого замыкания = /к = при мощности двигателя
более 10 Вт в цепь якоря последовательно включают резистор со-
противлением Ляоб.
Изменение направления вращения (реверс) исполнительного
двигателя постоянного тока осуществляется изменением полярно-
сти управляющего сигнала.
В последнее время благодаря развитию полупроводниковой тех-
ники получил применение импульсный способ управления испол-
нительными двигателями постоянного тока. Принцип такого спо-
соба управления состоит в том, что к двигателю подводят сигнал
управления неизменной величины, но разной продолжительности
(см. параграф 6.8.3).
Все характеристики исполнительных двигателей принято сгро-
ить в относительных единицах, что позволяет более объективно
оценить их свойства. При расчете относительных параметров ис-
полнительных двигателей постоянного тока за базовую величину
при определении относительного электромагнитного момента т
принимают начальный пусковой момент М ,1ОМ при номинальных
напряжениях на обмотках ОВ и ОУ:
т=М/Мпмом. (9.1)
Уровень управляющего сигнала оценивается коэффициентом
сигнала
а= Ц/</в.
(9.2)
9.2. Якорное управление исполнительными
двигателями постоянного тока
При якорном управлении самоход в двигателе не возникает,
так как при снятии управляющего сигнала Ц = 0 ток управления
Д = 0, магнитный поток возбуждения Ф 0. при этом электромаг-
нитный момент двигателя М- смФ/5 = 0.
Уравнение механической характеристики исполнительного дви-
гателя при якорном управлении
т = a- v, (9.3)
где v = п/hq — относительная частота вращения двигателя; —
частота вращения двигателя в режиме идеального холостого хода,
т. е. при 7И=0.
Из (9.3) следует, что механическая характеристика исполни-
тельного двигателя постоянного тока m =/(v) при а = const прямо-
линейна. На рис. 9.2, а показаны механические характеристики дви-
гателя при якорном управлении, построенные для различных зна-
чений коэффициента сигнала а. Анализ этих характеристик пока-
зывает. что механические характеристики исполнительного дви-
гателя при якорном управлении прямолинейны и параллельны:
двигатель развивает максимальный вращающий момент при пуске
v ~ 0; относительный пусковой момент равен коэффициенту сиг-
нала (тп ~ а). Из выражения (8.3) получим уравнение регулиро-
вочной характеристики двигателя
Рис. 9.2. Характеристики исполнительного двигателя с якорным управле-
нием:
а — механические; б — регулировочные; в — механической .мощности
откуда следует, что регулировочная характеристика двигателя с
якорным управлением v = /(а) при т = const прямолинейна.
Анализ этих характеристик (рис. 9.2, б), построенных для раз-
личных значений момента т, показывает, что частота вращения
двигателя пропорциональна коэффициенту сигнала а во всем диа-
пазоне нагрузок двигателя; наибольшая частота вращения двига-
теля соответствует a -1.
Механическая мощность исполнительного двигателя в относи-
тельных единицах р2 = mv. Используя (9.3), получим уравнение ха-
рактеристики механической мощности
р2 = ctv — v2. (9.5)
Из выражения (9.5) следует, что характеристика механической
мощности исполнительного двигателя с якорным управлением
р2 =f(v) при a = const — квадратичная функция частоты вращения v.
Анализ этих характеристик, построенных при различных значени-
ях коэффициента сигнала а (рис. 9.2, в), показывает, что снижение
коэффициента сигнала а в значительной степени уменьшает меха-
ническую (а следовательно, и полезную) мощность двигателя. Это
объясняется тем, что максимальное значение механической мощ-
ности р2п}„ при заданном а пропорционально квадрату коэффици-
ента сигналар2тах = ог/4. Следовательно, при работе исполнитель-
ного двигателя с малыми значениями коэффициента сигнала а
неудовлетворительно используется механическая мощность двига -
теля. Максимальное значение механической мощности /Ътах насту-
пает при относительной частоте вращения v' = 0,5a.
Мощность возбуждения исполнительного двигателя с якорным
управлением равна электрическим потерям в обмотке возбужде-
ния (обмотке полюсов), Вт:
Рв = Цгв. (9.6)
Так как ток возбуждения двигателей постоянного тока незави-
симого возбуждения в несколько раз меньше тока якоря в номи-
нальном режиме, то мощность потерь на возбуждение составляет
сравнительно небольшую величину. Мощность возбуждения не за-
висит от нагрузки двигателя, а в двигателях с возбуждением от
постоянных магнитов эта мощность равна нулю.
Мощность управления для исполнительных двигателей с якор-
ным управлением, В г:
Л = ЦЛ = Р2 + Z2,.Zr + Л, + Р^ (9-7)
т.е. она равна сумме полезной механической мощности А и сумме
электрических потерь в обмотке управления (якоря) /2yZZ, маг"
нитных потерь в сердечнике якоря Рм и механических Рмех. Эту
мощность представим равной разности всей потребляемой двига-
телем мощности Р[ и потерь на возбуждение двигателя, Вт:
(9-8)
Мощность возбуждения составляет от 5 (в двигателях мощнос-
тью 250 Вт и более) до 30% (в двигателях мощностью до 7 Вт).
Таким образом, мощность управления исполнительных двигателей
с якорным управлением равна соответственно 95 —70 % от всей под-
водимой к двигателю мощности. Этот недостаток якорного управле-
ния приводит к необходимости применения в схемах якорного уп-
равления усилителей повышенной мощности.
9.3. Полюсное управление исполнительными
двигателями постоянного тока
Существенный недостаток полюсного управления исполнитель-
ными двигателями постоянного тока — возможность самохода. Это
объясняется тем, что после прекращения подачи сигнала управле-
ния двигатель остается возбужденным за счет небольшого магнит-
ного потока остаточного магнетизма ФОС1 и на якорь продолжает
действовать небольшой электромагнитный момент, Н • м:
^ОСТ ” СмФоС1 4
ОС]
(99)
который при небольшой нагрузке на валу двигателя может вызвать
самопроизвольное вращение якоря при отсутствии сигнала управ-
ления а = 01 Для устранения самохода двигатель должен иметь на
валу постоянно действующую статическую нагрузку Мс >
Уравнение механической характеристики двигателя с полюсным
управлением
т = а (1 - av).
(9.10)
Из выражения (9.10) следует, что механические характеристи-
ки двигателя с полюсным управлением прямолинейны, но в от-
личие от механических характеристик двигателя с якорным управ-
лением они не параллельны друг другу (рис. 9.3, а), т.е. при разных
коэффициентах сигнала жесткость характеристик неодинакова
(с уменьшением коэффициента сигнала о. жесткость характеристик
возрастает).
При полюсном управлении частота вращения идеального холо-
стого хода обратно пропорциональна коэффициенту сигнала:
Vo = 1/а
(9.11)
так как частота вращения обратно пропорциональна магнитному’
Потоку, который при полюсном управлении создается обмоткой
Управления ОУ.
Рис. 9.3. Характеристики исполнительно-
го двигателя с полюсным управлением:
а — механические; б — регулировочные; в —
механической мощности
Для исполнительных двигателей мощностью до 10 Вт такое вли-
яние коэффициента сигнала а на частоту вращения не опасно, так
как механическая нагрузка на якорь двигателей, вызванная трени-
ем в подшипниках, щеток о коллектор и вращающегося якоря о
воздух, достаточна для ограничения частоты врашения двигателя
даже при отсутствии полезной нагрузки на валу. В исполнительных
двигателях мощностью в несколько десятков ватт и более собствен-
ный момент нагрузки, вызванный трением, не оказывает на дви-
гатель достаточного тормозящего действия. Поэтом}’ после прекра -
щения подачи сигнала управления частота вращения якоря такого
двигателя может достигнуть недопустимого значения. Для предот-
вращения этого необходимо создать на валу исполнительного дви-
гателя постоянно действующий статический момент нагрузки ве-
личиной, достаточной для устранения самохода.
Уравнение регулировочной характеристики исполнительного дви-
гателя с полюсным управлением v - /(а) при т = const имеет вид
а - т
(9.12)
что свидетельствует о криволинейное™ регулировочных характе-
ристик исполнительных двигателей с полюсным управлением (рис
9.3, о). Это представляет собой серьезный недостаток полюсного
управления, тем более что при малых нагрузочных моментах
(wk0,5) регулировочные характеристики неоднозначны, т.е. при
двух различных значениях коэффициента сигнала а можно полу-
чить одинаковую частоту вращения. Этот недостаток ограничивает
применение полюсного управления только для привода устройств,
которые создают момент сопротивления на валу двигателя не мень-
ше 0,5 М1? т.е. т > 0,5.
Используя формулы (9.10) и (9.12), получим выражение меха-
нической мощности исполнительного двигателя с полюсным уп-
равлением в относительных единицах
р2 = /nv = av - a2v2.
(9.13)
Из характеристик механической мощности исполнительного
двигателя с полюсным управлением = /(v) (рис. 9.3, в) видно,
что максимум механической мощности соответствует частоте вра-
шения v' = l/(2a). Подставляя v = l/(2a) в (9.13), получим выраже-
ние максимальной механической мощности
a a2 1
P2rnm -2a 4o?”4
(9.14)
Из (9.14) следует, что максимальная механическая мощность при
полюсном управлении не зависит от коэффициента сигнала а. Это
является достоинством полюсного управления, так как позволяет
при небольших значениях коэффициента сигнала а (напряжения
управления Ц) получать значительную механическую мощность.
Мощность управления двигателя постоянного тока с полюс-
ным управлением идет лишь на покрытие электрических потерь в
обмотках полюсов:
(9.15)
Величина этой мощности по сравнению со всей мощностью,
потребляемой двигателем, а также по сравнению с мощностью воз-
буждения весьма незначительна, особенно при малых напряжениях
управления (коэффициентах сигнала а). Даже при номинальном
значении напряжения управления (a = 1) она составляет не более
30 % от всей мощности, потребляемой исполнительными двигате-
лями мощностью до 10 Вт и не более 5 % — мощностью до 250 Вт.
Малая мошност ь управления — положительное качество двига -
телей с полюсным управлением и большое их преимущество пе-
ред двигателями с якорным управлением, так как позволяет в зна -
чительной степени уменьшить мощность усилителей в схемах по-
люсного управления.
9.4. Электромеханическая постоянная времени
исполнительных двигателей постоянного тока
Одно из основных требований к исполнительным двигателям —
быстродействие (малоинерционность). При подаче управляющего
сигнала на соответствующую обмотку исполнительного двигате-
ля, соответствующую способу управления, якорь начинает враще-
ние и, разгоняясь, через некоторое время достигает установив-
шейся частоты вращения. Время разгона якоря двигателя опреде-
ляется электромеханическими процессами, обусловленными пе-
реходным процессом. Для количественной оценки быстродействия
исполнительного двигателя используют величину, называемую
электромеханической постоянной времени^ представляющую собой
время (с), за которое якорь (ротор) разгоняется из неподвижного
состояния до частоты вращения, равной 0,633 сод, где соо — угловая
скорость вращения якоря в режиме идеального холостого хода:
(До = 0,105ло. (9.16)
Электромеханическая постоянная времени исполнительного дви-
гателя пропорциональна моменту инерции якоря J2 этого двига-
теля
Тэм = 0,105
У эЛд
(9.17)
Мп ’
где Мп ~ начальный пусковой момент двигателя, Н • м; J2 — мо-
мент инерции якоря
GD$
(9.18)
GDI — маховый момент якоря, Н • м2; G — сила тяжести якоря, Н;
D2 — диаметр якоря, м; g = 9,81 м/с2 — ускорение свободного
падения.
Используя (9J8), получим еще одно выражение электромеха-
нической постоянной времени, с:
Т,ч = 2,7-10-3
GDjng
МП
(9.19)
Следовательно, повышению быстродействия (снижению Тэы)
исполнительного двигателя способствуют: увеличение пускового
момента, уменьшение силы тяжести якоря (ротора), его наружно-
го диаметра и частоты вращения идеального холостого хода.
При уменьшении наружного диаметра якоря (ротора) увели-
чивают его длину, чтобы мощность двигателя оставалась неизмен-
ной.
Быстродействие исполнительного двигателя зависит также от
способа управления. Для двигателей постоянного тока с якорным
управлением электромеханическая постоянная времени определи -
ется по (9.19), т.е. = Т^, а при полюсном управлении Тзып =
= Гэч/а2, т.е. она в значительной степени зависит от коэффициента
сигнала а.
Если к исполнительному двигателю постоянного тока не
предъявляют особых требований по быстродействию, то в каче-
стве такого двигателя применяют двигатель постоянного тока с
обычной конструкцией якоря. Частые пуски, остановки и ревер-
сы, сопровождающие работу' исполнительного двигателя, вызыва-
ют интенсивное перемагничивание магнитной системы двигате-
ля. включая станину и сердечники полюсов. Поэтому сердечник
якоря и станину с полюсами в исполнительных двигателях делают
шихтованными (см. рис. 6.5, б). Примеры таких конструкций —
исполнительные двигатели серии СЛ (см. рис. 6.10) иди исполни-
тельные двигатели с постоянными магнитами, например серии
ДПМ. Если же к исполнительному двигателю предъявляются тре-
бования повышенного быстродействия, то используют малоинср-
ционные двигатели специальной конструкции, из которых наи-
большее применение получили малоинерционные двигатели
постоянного тока с полым, дисковым или с гладким (беспазо-
вым) якорем.
9.5. Импульсное управление исполнительным
двигателем постоянного тока
В принципе импульсное управление исполнительными двигате-
лями является якорным управлением, так как управляющий сиг-
нал при этом способе управления воздействует на цепь якоря. Од-
нако при импульсном управлении регулирование частоты враще-
ния исполнительного двигателя достигается не изменением значе-
ния подводимого к цепи якоря напряжения, а изменением време-
ни, на которое это напряжение подается в цепь якоря.
На рис. 9 А а представлена одна из возможных схем импульсно-
го управления исполнительным двигателем постоянного тока, где
в качестве бесконтактного коммутирующего устройства использу-
ется транзистор VT в ключевом режиме, имеющий два устойчивых
состояния: «открыто» и «закрыто». С поступлением импульса на-
пряжения прямоугольной формы транзистор открывается на вре-
мя действия указанного рабочего импульса продолжительностью
/г, в течение которого транзистор открывается и в цепь якоря дви-
гателя подается номинальное напряжение (/ном (рис. 9-4, 0, При
этом ток в цепи якоря постепенно нарастает, а якорь двигателя
приходит во вращение. После прекращения импульса транзистор
закрывается, но ток в цепи якоря прекращается не сразу, так как
под действием запасенной электромагнитной энергии якорь про-
должает вращение, а по обмотке якоря через обратный диод VD.
постепенно убывая, проходит ток /с, не изменив своего направле-
ния. По истечении времени г наступает пауза tn и на транзистор
импульс не поступает, в результате он переходит в состояние «за-
Рис. 9.4. Импульсное управление исполнительными двигателями посто-
янного тока:
а — схема включения двигателя, б — графики напряжения и частоты вращения
перто». Затем вновь подается импульс напряжения, и цикл повто-
ряется. За время цикла - гр + гп в цепи якоря двигателя напряже-
ние изменяется от нуля до т.е. в цепи якоря действует неко-
торое среднее значение напряжения:
t/cp = 0,5f/HOM. (9.20)
При этом частота вращения якоря теоретически должна изме-
няться от wmin до лтах, не успевая достигнуть установившихся зна-
чений ни за время действия импульса напряжения /р, ни за время
паузы Г„, так как их продолжительность очень маленькая, а якорь
двигателя и приводимого им во вращение механизма обладают
моментом инерции. В итоге якорь вращается с некоторой устано-
вившейся средней частотой вращения
+ Wniax)‘ (9,21)
При неизменных значениях статического момента нагрузки Мс
на валу исполнительного двигателя и напряжения на обмотке воз-
буждения £7В средняя частота вращения зависит исключительно
от относительной продолжительности включения:
т = Гр/Гц. (9.22)
Диапазон колебаний частоты вращения между и wmin тем
меньше, чем больше момент инерции вращающейся массы двига-
теля и рабочего механизма. При этом среднее значение частоты
вращения остается неизменным, а его регулирование возможно
только за счет изменения значения относительной продолжитель-
ности включения т.
Для того чтобы исполнительный двигатель с импульсным уп-
равлением работал устойчиво и регулировался исключительно из-
менснием величины т, необходимо во время паузы воздействие
на якорь тормозного момента. В противном случае частота враще-
ния якоря двигателя при любом значении т будет постепенно на-
растать. Указанное торможение якоря может выполняться либо ме-
ханическим способом посредством специального тормозно! о уст-
ройства, либо электрическим способом, например методом дина-
мического торможения.
| Таким образом, работа исполнительного двигателя постоянно-
го тока при импульсном управлении состоит из чередующихся
периодов разгона якоря и его торможения. Управление, при кото-
ром изменяется соотношение между длительностью импульса ( и
продолжительностью паузы гл при неизменной продолжительнос-
ти цикла Гц, называют широтно-импульсным управлением.
Сигнал управления Ц в системах автоматического управления
представляет собой импульс напряжения постоянного тока раз-
личной амплитуды и продолжительности. При этом в схему им-
пульсного управления исполни тельным двигателем вводят специ-
альное устройство — генератор импульсов ГИ Назначение генера -
тора импульсов ГИ. включаемого в сеть с напряжением U, —
преобразовывать изменяющийся сигнал управления Ц, поступа-
ющий на его вход, в последовательность импульсов прямоуголь-
ной формы и неизменной амплитуды. Но относительная продол -
жительность включения т этих импульсов должна соответствовать
сигналу управления Uy.
Механические характеристики исполнительных двигателей при
импульсном управлении vcp = /(wcp) прямолинейны и выходят из
одной точки на оси ординат — точки идеального холостого хода с
координатами vcp = 1 и шср = 0 (рис. 9.5, а\ Наибольшее среднее
значение пускового момента (?ncp = 1) соответствует относитель-
ной продолжительности включения т = 1, когда продолжитель-
а
Рис. 9.5. Механические (а) и регулировочные (£) характеристики испол-
нительного двигателя постоянного тока с импульсным управлением
ность импульса равна циклу (/р = Тц), a = 0. С уменьшением т
пусковой момент уменьшается, одновременно снижается жесткость
механических характеристик.
Регулировочные характеристики vcp = /(т) при импульсном уп-
равлении нелинейны (рис. 9.5, б). При этом регулирование часто-
ты вращения двигателя возможно только при наличии статическо-
го нагрузочного момента на валу двигателя (Л/с > 0). Объясняется
это тем. что при отсутствии нагрузки (Л/с = 0) установившееся
значение средней частоты вращения двигателя лср = л0, т.е. vcp = 1
при любом значении т.
Для пуска двигателя с импульсным управлением необходимо
соблюдение неравенства: т > тс.
При импульсном способе управления потребляемая двигателем
мощность меньше, чем при других способах управления. Этот спо-
соб управления наиболее удобен для вентильных двигателей по-
стоянного тока, имеющих транзисторный коммутатор, посредством
которого проще реализовать импульсное управление двигателем.
9.6. Конструкции исполнительных двигателей
постоянного тока
9.6.1. Исполнительный двигатель постоянного тока
с полым якорем
Для уменьшения момента инерции вращающейся части испол-
нительного двигателя обмотку якоря двигателя выполняют в виде
полого стакана. В процессе изготовления обмотку укладывают на
цилиндрический пластмассовый каркас, соединяют с коллекто-
ром и заливают эпоксидной смолой. В итоге получается механичес-
ки прочная конструкция в виде полого стакана, одной стороной
закрепленного на валу (рис. 9.6, а). В полученной конструкции об-
мотка якоря механически отделена от сердечника. Индуктивность
такой обмотки якоря намного меньше, чем у обмотки якоря тра-
диционной конструкции, уложенной в пазы ферромагнитного сер-
дечника якоря. Это существенно улучшает коммутацию, и работа
двигателя при пусках и реверсах практически не сопровождается
искрением на коллекторе, что в 2 — 3 раза увеличивает срок служ-
бы коллектора и щеток, упрощает уход за двигателем и повышает
стабильность его характеристик.
Отечественная промышленность изготовляет двигатели с по-
лым якорем серии ДПР. Станина 1 такого двигателя (рис. 9.6, б)
выполнена из магнитомягкой стали. Внутри полого якоря 2 рас-
положен постоянный магнит 3 цилиндрической формы, осуще-
ствляющий возбуждение двигателя. Через центральное отверстие в
магните проходит вал 4, изготовленный из нержавеющей стали, не
Рис. 9.6. Исполнительный двигатель постоянного тока с полым якорем:
а — полый якорь; б — устройство двигателя: / — станина; 2 — полый якорь; 3 —
постоянный магнит; 4 — вал; 5 — коллектор; 6 — шмшипниковый шит
обладающей ферромагнитными свойствами. Постоянный магнит
жестко прикреплен к подшипниковому щиту 6, выполненному из
алюминиевого сплава, его центральное отверстие для установки
подшипника армировано стальной втулкой. Коллектор 5 имеет пла -
стмассовую основу (см. рис. 6.8).
Двигатели с полым якорем имеют между постоянным магни-
том и станиной большой немагнитный промежуток, который скла-
дывается из двух воздутиных зазоров и толщины стакана якоря. Из-
за наличия этого промежутка требуется значительное повышение
МДС возбуждения. В двигателях с постоянными магнитами прихо-
дится увеличивать размеры постоянного магнита. В двигателях с
электромагнитным возбуждением с этой целью увеличивают ко-
личество витков обмотки возбуждения. В итоге увеличиваются по-
тери на возбуждение. Однако КПД двигателей постоянного тока с
полым якорем больше, чем двигателей с зубцовым якорем, что
объясняется меньшими механическими потерями (полый якорь во
много раз легче зубцового) и отсутствием магнитных потерь в не-
подвижном сердечнике якоря. Большой немагнитный промежуток
между постоянным магнитом и станиной значительно ослабляет
действие реакции якоря (см. параграф 6.4), что благоприятно вли-
яет на свойства двигателя.
Электромеханическая постоянная времени двигателей с полым
якорем серии ДПР = 15 <20 мс.
9.6.2. Двигатели постоянного тока
с печатными обмотками якоря
Исполнительные двигатели с печатными обмотками изготов-
ляют в двух конструктивных вариантах: с дисковым (рис. 9.7) и
цилиндрическим (рис. 9.8) якорями.
Рис. 9.7. Исполнительный двигатель постоянного тока с дисковым печат-
ным якорем:
а — дисковый печатный якорь; б — устройство двигателя: / — якорь; 2 — постоян-
ный магнит; 3 — кольцо; 4 — полюсный наконечник; 5 — шстка; 6 — статор
Дисковый печатный якорь (рис. 9.7. а) представляет собой пла-
стмассовый диск, на обе поверхности которого печатным спосо-
бом нанесена обмотка якоря. Такая конструкция якоря видоизме-
нила и другие элементы двигателя (рис. 9.7, б). Возбуждение дви-
гателя осуществляется постоянными магнитами 2, расположен-
ными на статоре 6 и обращенными своими полюсными наконеч-
никами 4 к одной стороне дискового якоря /. С другой стороны
якоря размещено кольцо 3 из ферромагнитного материала, вы-
полняющее функцию неподвижного сердечника якоря, т.е. это
элемент магнитной системы двигателя.
Возможна конструкция подобного двигателя с электромагнит-
ным возбуждением. В этом случае каждый сердечник полюса снаб-
жают полюсной катушкой. Обычно двигатели с дисковым якорем
не имеют отдельного коллектора, а электрический контакт щеток
5 с обмоткой якоря происходит непосредственно на одной из сто-
рон печатного якоря.
Электромагнитный момент в двигателях с дисковым якорем
создастся так же, как и в двигателях обычной конструкции.
Обмотка якоря наносится на обе стороны пластмассового дис-
ка электрохимическим способом, методом травления фольги. Так
как секции печатной обмотки одновитковые, а количество секций
Рис, 9.8. Цилиндрический якорь с печатной обмоткой:
/ — печатная обмотка якоря, 2 — коллектор; 5 — сердечник якоря; 4 — вал; 5 —
подшипник
ограничено площадью диска, то двигатели с дисковым якорем
обычно выполняют на низкое напряжение.
Легкий якорь, не имеющий стального сердечника, обеспечива-
ет двигателям с дисковым якорем высокое быстродействие и улуч-
шенные условия работы щеточно-коллекторного узла.
Недостатки двигателей с дисковым якорем — сравнительно
малый срок службы вследствие износа плоской печатной обмот-
ки, по которой непосредственно скользя! щетки, а также дефор-
мация диска при нагреве в процессе эксплуатации. Чтобы повы-
сить долговечность обмотки, иногда концы секций обмотки яко-
ря, расположенной на диске, выводят к коллектору небольшого
диаметра, который размещают на одном валу с диском. Однако
при этом усложняется устройство двигателя.
Цилиндрический печатный якорь (рис. 9.8) представляет собой
полый цилиндр I из изоляционного материала, снаружи и изнут-
ри которого наносил части печатной обмотки. Концы секций об-
мотки выводя! к коллектору 2, расположенному на валу 4 двигате-
ля. Чтобы уменьшить магнитное сопротивление на пути потока воз-
буждения, внутри цилиндрического якоря располагают сердечник
3 из ферромагнитного материала.
Однако этот сердечник не влияет на быстродействие двигателя,
так как он не имеет жесткой связи с валом, а соединен с после-
дним через подшипники 5.
По конструкции двигатель с цилиндрическим печатным яко-
рем аналогичен двигателю с полым якорем. Их отличие заключает-
ся лишь в устройстве и технологии изготовления якоря.
Из сравнения дискового и цилиндрического печатных якорей
следует, что цилиндрический якорь имеет меньший момент инер-
ции и большую механическую прочность, чем дисковый.
По характеристикам двигатели с печатными обмотками анало-
гичны двигателям с полым якорем. Их положительные качества —
малоинсргшонность, технологичность изготовления якоря, безыс-
кровая коммутация (вследствие малого индуктивного сопротивле
ния рассеяния обмотки якоря).
По габаритам, массе и энергетическим показателям исполни-
тельные двигатели постоянного тока с печатными обмотками при-
мерно одинаковы с исполнительными двигателями постоянного
тока обычной конструкции, а по быстродействию — значительно
превосходят их.
9.6.3. Двигатель постоянного тока с гладким (беспазовым)
якорем
В отличие от двигателя с зубцовым якорем двигатель с беспазо-
вым (гладким) якорем не имеет зубпов на сердечнике якоря, а
двухслойная обмотка якоря расположена на гладкой поверхности
сердечника (рис. 9.9). Якорь бандажируется стеклолентой и залива-
ется в вакууме компаундом или пропитывается лаком.
Исполнительные двигатели с гладким якорем допускают уве-
личение магнитной индукции в зазоре в 2 — 3 раза больше, чем
при зубцовом якоре, в котором большое значение магнитной
индукции недопустимо из-за сильного магнитного насыщения
зубцового слоя якоря и резко возрастающих при этом магнит-
ных потерях. Открытое расположение проводников обмотки якоря
на гладком сердечнике и отсутствие зубцового слоя позволяют
сушественно увеличить нагрузку двигателя при заданных габа-
ритах; большой немагнитный промежуток между сердечником
якоря и главными полюсами и открытое расположение провод-
ников обмотки якоря способствуют безыскровой работе щеточ-
но-коллекторного узла и ослабляют действие реакции якоря.
Обычно для возбуждения исполнительных двигателей с глад-
ким якорем применяют постоянные магниты. Двигатели с глад-
ким якорем по своему быстродействию аналогичны двигателям
Рис. 9.9. Устройство глад-
кого якоря;
1 — главный полюс; 2 —
провод обмотки якоря; 3 —
компаунд; 4 — сердечник
якоря
с полым якорем (см. рис. 9.6). Это объяс-
няется тем. что улучшенные условия
коммутации позволяют применить в этих
двигателях якорь малого диаметра D2 и
большой длины, что значительно сни-
жает электромеханическую постоянную
времени Гэм. которая пропорциональна
квадрату диаметра якоря [см. (9.19)]. Вве-
дем понятие относительного значения
электромеханической постоянной вре-
мени 7"*эм — ^эм/^эм.з» где Тзулу элект-
ромеханическая постоянная времени
двигателей с зубцовым (обычного типа)
якорем. Ниже приведены средние зна-
чения относительной электромеханичес-
кой постоянной времени для двигателей с различной конструк-
цией якоря: * z
Конструкция якоря......зубцовый
полый,
гладкий
0,4
с печатной
обмоткой
0,15
Промышленность изготовляет исполнительные двигатели по-
стоянного тока различного конструктивного исполнения. Напри-
мер, двигатели с постоянными магнитами и полым якорем типов
ДП35, ДП40, ДП50 и ДП60 (цифры указывают на размер наруж-
ного диаметра корпуса), предназначенные для электропривода
механизмов подач металлорежущих станков с ЧПУ, приводов про-
мышленных роботов, автоматических систем и приборных устройств.
Контрольные вопросы
1. Каковы требования к исполнительным двигателям?
2. Какие способы управления применяются в исполнительных двига-
телях постоянного тока?
3. Сравните способы управления и укажите на достоинства и недо-
статки каждого из них.
4. Почему при полюсном управлении исполнительными двигателями
требуется создание на якоре постоянно действующей механической на-
грузки?
5. Объясните процесс работы исполнительного двигателя при импуль-
сном управлении.
6. С какой целью в схеме импульсного управления применен генера-
тор импульсов I И?
Глава 10
АСИНХРОННЫЕ ИСПОЛНИТЕЛЬНЫЕ ДВИГАТЕЛИ
10.1. Способы управления асинхронными
исполнительными двигателями
В качестве исполнительных двигателей переменного тока ис-
пользуют преимущественно двухфазные асинхронные двигатели. На
статоре такого двигателя имеются две обмотки: обмотка возбужде-
ния ОВ и обмотка управления ОУ, оси которых сдвинуты в про-
странстве относительно друг друга на 90 эл. град (рис. ЮЛ). Обмот-
ка возбуждения постоянно включена в сеть переменного тока на
напряжение возбуждения (/в, а на обмотку управления подастся
электрический сигнал — напряжение управления Ц. От величины
или фазы напряжения управления зависят развиваемый ротором
Рис. 10.1. Схема испол-
нительного асинхрон-
ного двигателя
врашающий момент, частота вращения, а
следовательно, и мощность на валу испол-
нительного двигателя.
Фазовый сдвиг токов (напряжении) в
обмотках возбуждения и управления дости-
гается применением фазовращателей или
включением конденсаторов.
На практике управление исполнительны-
ми асинхронными двигателями осуществля-
ется одним из трех способов:
изменением величины (амплитуды) на-
пряжения управления при неизменной его
фазе —- амплитудное управление;
изменением фазы напряжения управления при неизменном
его значении — фазовое управление;
одновременным изменением амплитуды напряжения управ-
ления и угла фазового сдвига между векторами напряжений уп
равления 1/у и возбуждения t7B — амплитудно-фазовое управление.
Каждому способу управления соответствует своя схема включе-
ния исполнительного двигателя.
При амплитудном управлении (рис. 10.2, а) обмотка возбужде-
ния ОВ подключается к сети с неизменным по величине напряже-
Ui-UD
Элемент,
смещающий
фазу напря-
жения на 90°
ОУ
|<4
ов
ОВ
ОУ
р = const
\ £/y=var
С/у=const
о
Фазо-
вращатель
а
Рис. 10.2. Схемы управления исполнительными асинхронными двигате-
лями:
а — амплитудное; б — фазовое; в — амгшггудно-фазовое
нием Up - U\. На обмотку управления ОУ полается сигнал — на-
пряжение управления йу. имеющее фазовый сдвиг, создаваемый
схемой управления, на 1/4 периода (90°) относительно напряже-
ния возбуждения С'в. Величину напряжения управления Ц, которое
в процессе регулирования меняется по амплитуде, обычно оцени-
вают эффективным коэффициентом сигнала ае, равным отноше-
нию напряжения управления Uy. к приведенному (к числу витков
обмотки управления) напряжению возбуждения Up = U„/k'.
а*=777 = Л7Г> (Ю.1)
V в k в
. ^>Лв 11 1
где к = —— — коэффициент трансформации напряжении: отно-
WyKy
шение эффективного числа витков обмоток возбуждения и уп-
равления wy. kn и — обмоточные коэффициенты обмоток стато-
ра данного двигателя.
Круговое вращающееся поле при амплитудном управлении соот-
ветствует коэффициенту сигнала ае= 1, т.е. равенству напряжений
управления Ц и возбуждения L/'. Напряжение управления, соот-
ветствующее этому случаю, считается номинальным. При всех других
значениях напряжения управления вращающееся магнитное поле
исполнительного двигателя эллиптическое.
Реверсирование двигателя при амплитудном управлении дос-
тигается изменением фазы напряжения управления на половину
периода, т.е. на 180°.
При фазовом управлении (рис. 10.2, б) на обмотку возбуждения,
так же как и при амплитудном управлении, подается неизменное
по величине напряжение сети Ua - На обмотку управления
подается постоянное по величине (амплитуде), но изменяющееся
по фазе напряжение управления Ц, равное приведенному напря-
жению возбуждения Щ = UJk,
Управление двигателем осуществляется изменением фазы на-
пряжения управления — изменением угла р между векторами Uy и
бр посредством фазовращателя (см. параграф 15.2.4) Величина
сигнала управления обычно оценивается коэффициентом сигна-
ла, в качестве которого в этом случае принимается величина sin р.
При сдвиге по фазе напряжений Ц и на 90‘ (sin р = 1) в
двигателе, независимо от режима работы, имеет место кротовое
вращающееся поле. При коэффициентах сигнала sinp, больших
нуля, но меньших единицы, т.е. (I > sinp > 0), поле двигателя
становится эллиптическим; при sinp = 0 — пульсирующим.
Лмплитудно-фазовое управление исполнительными асинхронны-
ми двигателями может быть осуществлено двумя путями:
в схемах, где напряжение на обмотке возбуждения постоян-
но, т.е. равно напряжению сети (f/B= — путем одновременного
изменения как по значению (амплитуде), так и по фазе напряже-
ния на обмотке управления Ц;
в конденсаторных исполнительных асинхронных двигателях —
путем изменения по значению (амплитуде) напряжения управле-
ния Uy.
Рассмотрим подробно второй случай, получивший наибольшее
расп ростране н ие.
В схемах автоматики, где напряжение управления Uy совпадает
по фазе с напряжением сети t7b в которую включена обмотка воз-
буждения ОВ, для сдвига по фазе токов в обмотках последователь-
но с обмоткой возбуждения обычно включают конденсатор С (рис.
10.2, в).
В этом случае управление двигателем осуществляется измене
нисм по амплитуде напряжения Ц, подводимого к обмотке уп-
равления, в связи с чем одновременно меняется амплитуда и фаза
напряжения возбуждения L/K непосредственно на выводах обмотки
возбуждения. Напряжение UB отличается от неизменного по вели-
чине и фазе напряжения сети Ц\ на величину напряжения на кон-
денсаторе <7с(см. рис. 10.2, в):
uB=u}-uc.
Напряжение на конденсаторе пропорционально току’ в цепи
обмотки возбуждения Uc =
Исполнительные конденсаторные двигатели обычно рассчиты-
вают так, чтобы при номинальном напряжении управления Ц.||ОМ
и заданной емкости конденсатора С в двигателе имело место кру-
говое вращающееся поле в режиме пуска (при п2 = 0). В этом случае
напряжение управления Uy равно приведенному к числу витков
обмотки управления напряжению UB = UB/k и сдвинуто по фазе
относительно его на 90°. При этом коэффициент сигнала управле-
ния считается номинальным:
«о= UyMOJL\. (10.2)
Особенностью конденсаторного исполнительного двигателя
является то, что круговое вращающееся поле получается здесь толь-
ко в одном режиме работы — режиме пуска, при номинальном на-
пряжении управления Во всех других режимах и при всех
других значениях напряжения управления Uy (кроме Uy = 0) поле
двигателя эллиптическое. При О = 0 магнитное поле двигателя
пульсирующее.
При всех способах управления частота вращения асинхронных
исполнительных двигателей меняется за счет деформации враща-
ющегося магнитного поля: для уменьшения частоты вращения из-
меняют коэффициент сигнала относительно его номинального
значения а0 и магнитное поле из кругового превращается в эллип-
тическое. При этом происходит уменьшение прямого магнитного
поля и, следовательно, прямою вращающего момента, и увеличе-
ние обратного поля — Обратного (тормозного) момента, что при-
водит к уменьшению частоты вращения исполнительного двигателя.
Изменение характера магнитного поля путем изменения вели-
чины (или фазы) напряжения на обмотке управления позволяет
регулировать частоту вращения как в режиме холостого хода, так и
в режиме нагрузки. При одновременном изменении напряжений
на обеих обмотках при отсутствии нагрузки на валу двигателя (ре-
жим холостого хода) частота вращения остается неизменной (л ~
к = const).
Недостаток используемого в исполнительных асинхронных дви-
гателях метола регулирования частоты вращения — его малая эко-
номичность. Объясняется это большими электрическими потеря-
ми в статоре и роторе, вызванных нежелательным действием об-
ратной составляющей вращающегося магнитного поля.
В зависимости от конструкции ротора исполнительные асинх-
ронные двигатели разделяются на двигатели:
I с полым немагнитным ротором;
| с полым ферромагнитным ротором;
I с обычным (зубцовым) ротором и короткозамкнутой обмот кой
в виде беличьей клетки.
К исполнительным асинхронным двигателям предъявляются
примерно такие же требования, как и к исполнительным двигате-
лям постоянного тока (см. параграф 9.1):
отсутствие самохода;
широкий диапазон регулирования частоты вращения;
небольшая электромеханическая инерционность;
линейность механических и регулировочных характеристик.
10.2. Самоход в исполнительных асинхронных
двигателях и пути его устранения
Асинхронный двигатель имеет самоход, если его ротор враща -
стся при отсутствии сигнала управления (ас - 0, sin fj = 0, а = 0).
На практике встречаются два вида самоходов: принципиаль-
ный параметрический самоход, причиной которого является не-
правильный расчет при проектировании двигателя, и технологи-
ческий самоход, появляющийся вследствие некачественного изго-
товления двигателя.
Параметрический самоход обычно проявляется при снятии сиг
нала управления у двигателя, работающего с малым моментом
сопротивления на валу. Причина этого — недостаточное активное
сопротивление ротора. Объясняется это следующим образом.
При снятии сигнала управления магнитное поле исполнительно-
го двигателя становится пульсирующим — двигатель из двухфаз-
ного превращается в однофазный. Известно, что однофазные асин-
хронные двигатели с малым активным сопротивлением ротора и,
следовательно, малым критическим скольжением (5кр < 1) при /ь = О
не создают пускового момента. Однако при п2 * 0 они развивают
вращающий момент (см. параграф 4.3). Это значит, что при отклю-
чении одной из обмоток у работающего двухфазного двигателя он
превращается в однофазный асинхронный двигатель и его ротор
продолжает вращаться, т.е. двигатель имеет самоход.
Для устранения параметрического самохода асинхронные ис-
полнительные двигатели выполняются с повышенным активным
сопротивлением ротора г2- Увеличение активного сопротивления
ротора (см. параграф 3.6) вызывает смещение максимума механи-
ческой характеристики, соответствующего критическому скольже-
нию 5кр в сторону меньших, а затем и отрицательных частот вра-
щения (скольжений, больших
единицы). В связи с этим резуль
тирующий вращающий момент
М - Мпр + Л^р уменьшается, а
Рис. 10.3. Влияние активного сопро-
тивления обмотки ротора исполни-
тельного асинхронного двигателя
на самоход
при 5кр < 1 становится отрица-
тельным (рис. 10.3).
Так, если в качестве испол-
нительного двигателя использо-
вать двигатели с небольшим ак-
тивным сопротивлением ротора,
соответствующим укр = 0.2 (рис.
10.3, а), то после снятия сигна-
ла управления, когда магнитное
поле в двигателе станет пульси-
рующим, резулы ируюший мо-
мент Мостается положительным
и ротор будет продолжать вра-
щение в прежнем направлении.
Если использовать двигатель с
повышенным активным сопро-
тивлением ротора, соответству-
ющим 5кр = 1, то после снятия
сигнала управления при пульси-
рующем поле (рис. 10.3, в) вра-
щающий момент становится
отрицательным и останавливает
ротор двигателя.
В этом случае время останова
ротора за счет действия отрица-
тельного (тормозного) момента
даже меньше, чем при одновре-
менном снятии напряжений с
обеих обмоток (управления и возбуждения), когда вращающий
момент становится равным нулю.
J В схемах автоматики сигнал управления может сниматься (по-
нижаться до нуля) двумя способами: без разрыва цепи управления
I либо с разрывом цепи, В первом случае явление самохода устранить
I значительно проще.
I В исполнитсяьных асинхронных двигателях для; устранения само-
| хода активное сопротивление ротора выбирают весьма значитель-
ным с таким расчетом, чтобы критическое скольжение 5кр = 2-М.
I Значительное повышение активного сопротивления ротора г2>
(способствуя устранению самохода, отрицательно сказывается на
энергетических показателях двигателя: возрастают электрические
потери в роторе (снижение КПД), а вызываемое увеличением г
смешение механической характеристики в сторону меньших час-
’ тот вращения (больших скольжений) приводит к резкому сниже-
|нию механической мощности на валу двигателя (А - а при
lsKP > I еще и к уменьшению пускового момента. Именно поэтому
! номинальная мощность исполнительных асинхронных двигателей
Кв два-три раза меньше номинальной мощности силовых асинх-
I ронных двигателей (с малыми значениями г2) тех габаритов.
I Технологический самоход проявляется сразу после включения в
сеть обмотки возбуждения, когда сигнал управления еще не по-
едай. но ротор двигателя уже начинает вращение.
В Причина технологического самохода — возникновение слабого
эллиптического поля при некачественном изготовлении двигателя:
наличие замыканий между листами стали в сердечнике статора;
’ появление короткозамкнутых витков в обмотке;
В неодинаковая магнитная проводимость в различных радиаль-
ных направлениях, например, из-за неравномерности воздушного
I разора;
разнотолшинность стенок полых роторов и т.п,
И Для устранения технологического самохода необходимо обес-
печить качественное изготовление двигателей: тщательная изоля-
ция обмоток и листов стали в сердечниках; сборка пакетов стали
веером и т. п.
10.3. Устройство исполнительного асинхронного
двигателя с полым немагнитным ротором
II Двигатели с полым немагнитным ротором являются наиболее
распространенными исполнительными асинхронными двигателя-
ми. Основное их достоинство — малоинерционность, обеспечива-
ется особой конструкцией ротора.
I Полый немагнитный ротор выполняется в виде тонкостенного
[алюминиевого стакана и не имеет сердечника. Такая конструкция
Рис. 10.4. Исполнительный асинх-
ронный двигатель с полым немаг-
нитным ротором:
7 — внешний статор; 2 — полый ротор;
3 — внутренний статор; 4 — обмотка
статора; 5 — вал: 6 — опорная втулка
полого ротора
обладает малым моментом инер-
ции и обеспечивает двигателю
весьма ценное свойство — быс-
тродействие.
Двигатели с полым немагнит-
ным ротором выпускают мощно-
стью от долей до сотен ватт как
на промышленную частоту 50 Гц.
так и на повышенные частоты -
400, 500, 800 и 1000 Гц.
Конструкция двигателя с по-
лым немагнитным ротором пред-
ставлена на рис. 10,4. Принцип
действия этого двигателя состо-
ит в следующем: переменный
ток, проходя по обмоткам внеш-
него статора /, создает вращаю-
щееся (в общем случае эллипти-
ческое) магнитное поле, кото
рое проходит через воздушный зазор и замыкается в сердечнике
внутреннего статора 3. При этом вращающееся поле пересекает
стенки полого немагнитного (алюминиевого) ротора 2 и индуци-
рует в нем вихревые токи. В результате взаимодействия этих токов
с вращающимся магнитным полем статора возникает вращающий
электромагнитный момент, который, действуя на ротор, увлекает
его в сторону врашения поля. Внешний статор 1 не отличается от
статора асинхронного двигателя обычной конструкции: его сер-
дечник набирается из изолированных друг от друга листов элект-
ротехнической стали; в пазах этого сердечника располагают об
мотки управления и возбуждения, оси которых сдвинуты в про-
странстве на 90 эл. град. Эти обмотки выполняют разделенными
(рис. 10.5, а) либо соединенными по мостиковой схеме (рис. 10.5, б).
Мостиковая схема представля-
ет собой замкнутую обмотку с
пайками через 90 эл. град. Она
позволяет сравнительно просто
осуществить пространственный
сдвиг обмоток точно на 90 эл. град
и способствует лучшему распре-
делению в них токов. Однако из-
за наличия электрической связи
цепей возбуждения и управления,
а также из-за значительного чис-
ла отпаек в двигателях с большим
числом пар полюсов (2р) мости-
ковая схема применяется реже.
а б
Рис. 10.5. Схемы обмоток статора
исполнительных асинхронных дви-
гателей:
а — разделенное; б — мостиковое
Внутренний статор 3 (см. рис. 10 4) набирают из листов электро-
технической стали на цилиндрическом выступе одного из подшип-
никовых щитов. Этот статор предназначен для уменьшения магнит-
ного сопротивления основному (рабочему) магнитному потоку.
Полый ротор двигателя 2 выполняют в виде тонкостенного ста-
кана из немагнитного материала — чаще всего из сплавов алюми-
ния.
Ротор жестко укреплен на валу 5, который свободно вращается
в подшипниках. Толщина стенок ротора зависит от мощности дви-
гателя и составляет от 0,2 до 1 мм. Уменьшение толщины стенок
ограничено технологической сложностью изготовления тонкостен-
ного стакана ротора.
Между стенками ротора и внешним и внутренним статорами
имеются воздушные зазоры, размеры которых обычно не превы-
шают 0,25 мм. В двигателях мощностью менее 1,5 Вт обмотки воз-
буждения и управления часто размещают в пазах внутреннего ста -
тора. При этом внешний статор не имеет пазов и служит лишь для
уменьшения магнитного сопротивления. Такая конструкция зна-
чительно облегчает процесс укладки обмоток в пазы, что особен -
но важно при малых диаметрах расточки статора, и способствует
некоторому повышению электромагнитного момента. При этом для
увеличения обмоточного пространства на внутреннем статоре при-
ходится несколько увеличивать диаметр ротора, чго приводит к
некоторому возрастанию момента инерции ротора. Для частичного
уменьшения этого недостатка иногда одну из обмоток размещают
на внутреннем, а другую — на наружном статоре.
I Характерная особенность двигателя с полым немагнитным ро-
тором — большой немагнитный промежуток на пути магнитного
потока. Этот промежуток состоит из двух возщтпных зазоров (меж-
ду внешним статором и ротором; между ротором и внутренним
статором) и толщины стенки немагнитного стакана ротора. Таким
образом, общая величина немагнитного промежут ка между вне-
шним и внутренним статорами может составить от О,4 до 1,5 мм.
Вследствие большого немагнитного зазора двигатели с полым
немагнитным ротором имеют большой намагничивающий ток (0,8 —
0,9 от номинального значения тока статора) и, следовательно,
низкий коэффициент мощности. Последний недостаток у двигате-
лей с конденсаторным сдвигом фаз практически мало ощущается,
но большая величина намагничивающего тока всегда приводит к
большим электрическим потерям в обмотках двигателя и значи-
тельно снижает его КПД.
В отличие от всех типов роторов, применяемых в исполнитель-
ных асинхронных двигателях, полый немагнитный ротор при боль-
шом активном сопротивлении г2 обладает весьма незначительным
индуктивным сопротивлением х2- Это свойство ротора способствует
приближению механических и регулировочных характеристик дви-
гателей к прямолинейным.
10.4. Характеристики исполнительного асинхронного
двигателя с полым немагнитным ротором
О рабочих свойствах исполнительных асинхронных двигателей
с полым немагнитным ротором принято судить по их характерис-
тикам, основными из которых являются: 1
механические характеристики — зависимости вращающего
момента М от частоты вращения п2 при постоянном сигнале уп-
равления:
Л/ =/(л2) при иу = const или Р = const;
регулировочные характеристики — зависимости частоты вра-
щения /ь от величины или фазы сигнала управления Uy при посто-
янном моменте сопротивления на валу:
л2 = f(Uy) или п2 = /(sin р) при М = const;
зависимости механической мощности на валу Р2 от частоты
вращения /ь при постоянном сигнале управления:
Я = /(л2) при = const или р = const.
Для придания характеристикам универсальности, т.е. пригод-
ности для опенки свойств двигателей различных мощностей, час-
тот вращения и т.п., их строят в относительных единицах. За базо-
вые (единичные) величины в системе относительных единиц при-
нимают величины, постоянные для любого двигателя:
за единицу момента — пусковой момент Мпу<м ПРИ круговом
вращающемся поле;
за единицу частоты вращения — синхронную частоту л(;
за единицу мощности — мощность Р^о, потребляемую двига-
телем при пуске, при круговом вращающемся поле:
за единицу напряжения управления — номинальное напряже-
ние управления Ц.ном, обеспечивающее круговое вращающееся поле
при пуске.
Значения вращающего момента /и, частоты вращения v, мощ-
ности р2, напряжения управления, т.е. коэффициента сигнала а,,
выражаются в относительных единицах, определяемых как отно-
шения действительных величин М, п2 Р2, Uy к соответствующим ба-
зовым (единичным) величинам:
Щ — М/Л/цускО* Р2 ^2.' ^nycxOi
= ^'/^у.иом'
На рис. 10.6— 10.8 приведены механические и регулировочные
характеристики, а также зависимости механической мощности на
валу от частоты вращения для исполнительных асинхронных дви-
a
Рис. 10.6. Механические характеристики исполнительного асинхронного
I двигателя с полым немагнитным ротором при способах управления:
а — амплитудном; п — фазовом; в — амплитудно фазовом
0.2 0,4 0,6 0,8 v
6
гателсй с полым немагнитным ротором при различных способах
управления.
[ Механические характеристики исполнительного асинх-
ронного двигателя с полым немагнитным ротором. При различных
способах управления (рис. 10.6} эти характеристики почти не от-
личаются друг на друга. Максимальный момент имеет место при
пуске (при v = 0). С увеличением частоты вращения момент посте-
пенно уменьшается и при частоте вращения холостого хода стано-
вится равным нулю. Максимальный вращающий момент и макси-
мальную частоту вращения холостого хода двигатель имеет при
коэффициенте сигнала, равном единице (ае = I. sin Р = 1). При
уменьшении коэффициента сигнала наблюдается смешение меха-
нических характеристик в сторону меньших частот вращения и
вращающих моментов.
Механические характеристики при всех способах управления
нелинейны — вращающий момент уменьшается с возрастанием
частоты вращения не по линейному закону. Наиболыщто линей-
ность имеют характеристики при фазовом управлении, наимень-
шую — при амплитудно-фазовом.
I Сравнивая механические характеристики при амплитудном (рис.
10.6. а) и амплитудно-фазовом (рис. 10.6, в) способах управления,
видим, что при амплитудно-фазовом управлении двигатель разви-
вает больший момент при средних частотах вращения, но имеет
Меньшие частоты вращения холостого хода. Первое объясняется
тем, что с увеличением частоты вращения v напряжение возбуж-
дения t/u непосредственно на обмотке возбуждения конденсатор-
ного двигателя (после конденсатора) нс остается постоянны м. как
при других способах управления, а возрастает. Это вызывает ^сли-
чение магнитною потока машины, а следовательно, и вращающе-
го момента.
Рис. 10.7. Регулировочные характерно ики исполнительного асинхронно-
го двигателя с полым немагнитным ротором при способах управления:
а — амплитудном; б — фазовом; в — амплитудно-фазовом
Уменьшение частоты вращения холостого хода в конденсатор-
ном двигателе по сравнению с двигателем при амплитудном уп-
равлении объясняется наличием обратного вращающегося поля,
которое имеет место при всех режимах амплитудно-фазового уп-
равления, кроме пускового (v = 0) при ае = Оо.
Регулировочные характеристики (рис. 10.7). Эти характеристики
нелинейны — частота вращения двигателя при всех способах уп-
равления с увеличением сигнала управления (ае, sinp, а/«о) рас-
тет не по прямолинейному закону. Последнее является весьма су-
щественным недостатком исполнительных асинхронных двигате-
лей, так как в схемах автоматического управления всегда стремят-
ся к линейному регулированию.
Наибольшую линейность имеют характеристики при фазовом
управлении (рис. 10.7, б), наименьшую — при амплитудно-фазо-
вом (рис. 10.7, в).
Регулировочные характеристики при всех способах управле-
ния имеют наиболее линейные участки при малых относитель-
ных частотах вращения (в начальной их части). Именно поэтому
на практике стараются работать в режимах, соответствующих ма-
лым относительным частотам вращения. С этой целью целесооб-
разно применение исполнительных асинхронных двигателей, рас-
считанных на повышенные частоты переменного тока, например
= 400 Гц.
Рассматривая семейства регулировочных характеристик, нетруд-
но заметить, что напряжение (сигнал) трогания двигателя, т. е. то
минимальное напряжение управления, при котором ротор двига-
теля, имея определенную нагрузку на валу, трогается с места,
пропорционально моменту сопротивления (Ц.™ = М). Напряже-
ние трогания в относительных единицах (коэффициенты сигнала
ar, sinp, ot/oto) равно моменту сопротивления т.
Зависимости механической мощности на валу от частоты враще-
ния рг = /(v) (рис. 10.8). Эти характеристики можно получить из
Таблица 10.1
Технические данные исполнительных асинхронных двигателей с полым немагнитным ротором серии АДП
ИН ‘Ш1И1ПГХСЦЭИЕИр 50 х 87 ос о X «П 50 x 90 70x 122 70x 122 85 x 135 85 x 135 lOSx 183
з 'инэиэйя квннвоиои БСЯООЬИН1?ХЭИОЙ1ХЭ1Г£ 0,048 m in -***• -1 • - 0,032 0,006 m 0.082
-Д'-ЛЯ ‘Edoiod ИИПбЭНИ £НЭПО|\ ЭС о 4 ОС 1 166- кг8 166- l(H 390- IO-8 sc 1 *—* s m 490- IO'8
% ‘TL1N уннчшшиион 1 1 ГД CM m nj 3, in
фяк ‘кинэтг -ЖЛОЕОН инэп Н Ч1ЭОЛКЗ m о о m CM 1 m чО 1 m
Номинальные токи, А ВИНЭЕЖЛдЕОН 0,36 m О 0,22 0.23 oc m 4 О 0,55 m rn
KHH3EHEduX 0,15 1 CM < 0,58 0,75 0,65 Cn 4—• 0.75
Я ‘винэппгйиЛ эинэж -KdUEH ЭОНЧгеКИЭМВОД Ш m 1 in c ГЧ о ГЧ «VW» о ГЧ ГД
И.'н ‘1НЭКОН ИИГПОГ -eniEds И1чн<плшинон 0,004 0,006 10’0 0,05 0,04 0.095 0,057
ник /до ‘винатпрЦя HlOOdONO КВНЧ1ГЕНИДОН 9000 4000 4000 1850 000 9 1950 6000 000 9
10 ‘чхэонтпои BEHEOL'OU КЕНЧЕЕНИКОр! сЛ гд 4 « e* in •* o> in СД
IIJ Чнэз СЛСЛЭЕ^ 1П 400-500 400-500 о о in »n uS c c
0 •(кинэгжХдЕОЯ ин эм) И1ээ эинажкдиин Sj *—< О о c » 1 4 < c
Типоразмер 1 i r E 5 г* । J I АДП-262 r r 4 1 АДП-362 АДП-363 in > 5
Рис. 10.8. Характеристики механической мощности на валу исполнитель
ного асинхронного двигателя с полым немагнитным ротором при спо-
собах управления:
а — амплитудном; б — фазовом; в — амплитудно-фазовом
механических характеристик путем умножения вращающего мо-
мента т на соответствующую ему частоту вращения v:
р2 = wtv. (10.3)
Механическая мощность на валу р2 равна нулю при пуске, ког-
да v = 0, и холостом ходе, когда т = 0, и достигает максимума при
частотах, равных примерно половине частоты вращения холостого
хода.
За номинальную мощность исполнительного асинхронного дви-
гателя обычно принимают максимальную механическую мощность
/?2пшх- Частота вращения, соответствующая этой мощности, счита-
ется номинальной.
Чем больше механическая характеристика приближается к ли-
нейной, тем меньше максимальная механическая мощность дви-
гателя и тем ближе номинальная частота вращения к частоте, рав-
ной половине частоты холостого хода. Наибольшие номинальные
частоты врашения, а следовательно, и максимальные механичес-
кие мощности имеют двигатели с амплитудно-фазовым управле
нием (рис. 10.8, в), наименьшие — двигатели с фазовым управле-
нием (рис. 10.8, б).
К положительным свойствам двигателей с полым немагнит-
ным ротором следует отнести: малую инерционность ротора, зна-
чительный диапазон регулирования частоты вращения, высокую
надежность, бесшумность, стабильность характеристик.
Недостатками этих двигателей являются низкие КПД и cos <р.
большие габариты (табл. 10.1).
10.5. Исполнительный асинхронный двигатель
с короткозамкнутым ротором
В схемах автоматического управления, где приводимый во вра-
щение механизм обладает значительным моментом инерции или
a
Рис. 10.9. Исполнительный асинхронный двигатель сквозной конструкции:
а — конструктивная схема; б — устройство двигателя
быстродействие системы не имеет существенного значения, нет
необходимости в малоинерционных исполнительных двигателях.
В этом случае с успехом используются исполнительные асинхрон-
ные двигатели с короткозамкнутой обмоткой ротора традицион-
ной конструкции (см. рис. 3.2). Электромеханическая постоянная
времени этих двжателей составляет от 0,2 до 1,5 с.
В отличие от двигателя с полым немагнитным ротором двига-
тель с короткозамкнутым ротором имеет небольшой односторон-
ний воздушный зазор (0,03 — 0,15 мм), что способствует увеличе-
нию вращающего момента, уменьшению намагничивающего тока,
а следовательно, повышению coscp и КПД двигателя.
| Для получения минимального воздушного зазора применяют
«сквозную» конструкцию двигателя (рис. 10.9). У таких двигателей
внутренний диаметр статора D\ равен наружному диаметру под-
шипников D„. Это позволяет производить окончательную обработ-
ку внутренней поверхности статора и отверстий под подшипники
в сборке статора с подшипниковыми щитами с одного установа,
что исключает возможную несоосность отверстий в подшипнико-
вых шитах под посадку подшипников и внутренней поверхности
сердечника статора. При качественной обработке цилиндрической
поверхностей ротора двигатель сквозной конструкции надежно
работает лаже при одностороннем воздушном зазоре в 0,03 — 0,05 мм.
Чтобы уменьшить момент инерции ротора, его делают малого
диаметра Ь2, а необходимую мощность получают за счет увеличе-
ния длины ротора L2. Обычно отношение L-JD , - 2—3.
Увеличенный за счет малого воздушного зазора пусковой вра-
щающий момент Мп и малый диаметр ротора D-, позволяют полу-
чил ь двигатели с хорошим быстродействием, т.е. с небольшим зна-
чением электромеханической постоянной времени Т.м [см. (9.19)],
примерно равной постоянной времени двигателей с полым немаг-
нитным ротором.
Рис. 10.10. Исполнительный асинхронный двигатель серии РД-0,9
Механические и регулировочные характеристики исполнитель-
ных двигателей с короткозамкнутым ротором аналогичны харак-
теристикам двигателей с полым немагнитным ротором. Однако
напряжение трогания у них несколько больше, поскольку на фер-
ромагнитный сердечник ротора (в отличие от немагнитного) дей-
ствуют силы радиального тяжения, которые из-за неравномерного
воздушного зазора (что практически всегда имеет место) притяги-
вают ротор к статору и тем самым создают дополнительную на-
грузку на подшипники.
В приборных устройствах большое распространение получил
исполнительный асинхронный двигатель типа РД-09 с коротко-
замкнутой обмоткой ротора и со встроенным редуктором. Статор
этого двигателя, набираемый из листов электротехнической ста-
ли, имеет восемь зубцов, на каждом из которых располагают по
одной катушке. Четыре катушки (через одну) составляют обмотку
возбуждения, а другие четыре катушки — обмотку управления. Обе
обмотки рассчитаны на 127 В. Последовательно с обмоткой воз-
буждения включают конденсатор емкостью 1 мкФ Частота враще-
ния ротора при частоте/ = 50 Гц равна 1200 об/мин. В двигатель
РД-09 встроен понижающий редуктор на цилиндрических зубча-
тых колесах. Редуктор имеет восемь вариантов исполнения, обес-
печивающих следующие наибольшие значения частот вращения
выходного вала: 192; 76,8; 30,7; 15,67; 8,76; 4,48; 2,51; 1,79 об/мин.
Мощность, потребляемая двигателем, 14 В • А (10 Вт), масса 950 г,
основные размеры двигателя указаны на рис. 10.10,
10.6. Исполнительный асинхронный двигатель
с полым ферромагнитным ротором
Наряду с исполнительными асинхронными двигателями, име-
ющими полые немагнитные и короткозамкнутые роторы, получи-
ли применение асинхронные двигатели с полыми ферромагни г-
ними роторами. Статоры таких двигателей не отличаются от стато-
ров двухфазных асинхронных машин. Роторы выполняют в виде
полых ферромагнитных цилиндров, имеющих толщину стенок от
0,5 до 3 мм. Цилиндр ротора 1 укрепляют на валу двигателя либо с
помощью двух торцевых металлических пробок 2 (рис. 10.11, а)
либо с помощью одной пробки 2, запрессованной в центральную
часть цилиндра (рис. 10.11, 6).
В Так как ротор ферромагнитный, то магнитный поток двигателя
замыкается непосредственно по ротору (рис. 10.12). Таким обра-
зом, в отличие от двигателя с полым немагнитным ротором здесь
нет необходимости во внутреннем статоре. Воздушный зазор меж-
ду ротором и статором в этих двигателях небольшой (0,2 —0,3 мм),
поэтому МДС воздушного зазора невелика. В этом отношении дви-
гатели с ферромагнитным ротором выгодно отличаются от двига-
телей с полым немагнитным ротором, однако суммарная МДС, а
следовательно, и намагничивающий ток двигателя практически
не отличаются от МДС и намагничивающего тока двигателя с по-
лым немагнитным ротором. Причиной этого является значитель-
ное магнитное сопротивление полого тонкостенного ферромагнит-
ного ротора вследствие его магнитного насыщения. Значения ко-
эффициента мощности cos cp двигателей с полым ферромагнит-
ным ротором не превышают 0,3 —0,5.
Вследствие большого активного сопротивления ротора, что обус-
ловлено большим удельным электрическим сопротивлением стали
и эффектом вытеснения тока, критическое скольжение этих дви-
гателей значительно больше единицы. Этим объясняется тот факт,
что рассматриваемые двигатели не имеют самохода и устойчиво
работают во всем диапазоне частот вращения. По этой же причине
Рис. 10.11. Полый ферромагнитный ротор:
а — с двумя пробками; б — с одной пробкой
Рис. 10.12. Прохождение маг-
нитного потока в полом
ферромагнитном роторе
механические и регулировочные характеристики двигателей с по-
лым ферромагнитным ротором весьма близки к линейным, Они
более линейны, чем характеристики двигателей с полым немаг-
нитным ротором и короткозамкнутым ротором. Характеристики
двигателя становятся более прямолинейными с увеличением час-
тоты питающей сети, так как при этом увеличивается частота тока
в роторе и усиливается эффект вытеснения тока. Но одновременно
из-за чрезмерно большого активного сопротивления ротора у та-
ких двигателей, рассчитанных на повышенную частоту тока, на-
блюдается некоторое уменьшение (по сравнению с двигателями,
имеющими полый немагнитный ротор) вращающего момента,
мощности на валу и увеличение потерь в роторе. Последнее обсто-
ятельство приводит к снижению КПД двигателя.
Для устранения указанных недостатков у некоторых двигателей
производят омеднение ротора: гальваническими путем покрывают
цилиндрическую поверхность ротора слоем меди толщиной 0,05 —
0,1 мм, а торцевые поверхности — слоем меди толщиной до 1 мм
Омеднение ротора способствует уменьшению его активного со-
прогивления, а следовательно, увеличению момента и полезной
мощности двигателя. Причем омеднение цилиндрической поверх-
ности менее эффективно, так как оно одновременно с увеличени-
ем момента и мощности на валу двигателя вызывает повышение
потерь в роторе и обмотке статора от возрастающего (вследствие
увеличения немагнитного промежутка между статором и ротором)
намагничивающего тока.
Электромеханическая постоянная времени этого двигателя со-
ставляет от 1 до 3 с, что объясняется значительным моментом
инерции полого ферромагнитного ротора. Другим существенным
недостатком двигателя с полым ферромагнитным ротором являет-
ся то, что его ротор при неравномерном воздушном зазоре (чего
практически нельзя избежать в процессе производства) испыты-
вает силы магнитного тяжения к статору. Это увеличивает момент
трения в подшипниках, а у некоторых двигателей приводит к «за-
липанию» ротора. Перечисленные недостатки рассматриваемых
двигателей в ряде случаев ограничивают их применение.
10.7. Электромеханическая постоянная времени
исполнительных асинхронных двигателей
Электромеханическая постоянная времени исполнительных
асинхронных двигателей может быть определена аналогично элек-
тромеханической постоянной времени (с) исполнительных двига-
телей постоянного тока [см. (9.17)]:
7^ = 0,105^?-. (10.4)
Таблица 10.2
Значения электромеханической постоянного времени
исполнительных асинхронных двигателей с разной конструкцией ротора
Асинхронн ый исполните льный двигатель Электромеханическая постоянная вре- мени Гзм, с, при частоте тока/j. Гц
50 400-500
С полым немагнитным ротором 0,005 - 0,1 0.02-0,15
С короткозамкнутым ротором: а) обычной конструкции 1 б) сквозной конструкции 0,2-1,0 0.3-1.5 0,007—0.06
С полым ферромагнитным ротором 1-2 1.5-3,0
В случае прямолинейной механической характеристики Т,ы рав-
на времени разгона ротора двигателя в режиме холостого хода от
Пг = 0 до пг = 0,633л'|.
У исполнительных асинхронных двигателей механические ха-
рактеристики нелинейны (см. рис. 10.6). Во всем диапазоне частот
вращения от v = 0 до v = 1 график вращающш о момента двигателя
/и = /(v) лежит выше прямой, проведенной через точки (/я = 1;
v = 0) и (т = 0; v = 1) (на рис. 10.6 штриховые прямые линии). Это
значит, что реальная электромеханическая постоянная времени
7^м двигателя меньше, чем Тэм, определенная по выражению (10.4).
Однако разница эта небольшая.
На величину Тзы влияет также частота тока питающей сети / и
число пар полюсов р, которые определяют синхронную частоту
врашения при идеальном холостом ходе: л, = 60fjp. Значения Тэм
при круговом вращающемся поле для большинства асинхронных
исполнительных двигателей, выпускаемых в настоящее время,
приведены в табл. 10.2.
10.8. Моментные исполнительные двигатели
Моментный двигатель предназначен для создания вращающего
электромагнитного момента при ограниченном перемещении ро-
тора (якоря), неподвижном его состоянии (режим короткого за -
мыкания) или весьма медленном вращении. В качестве моментных
двигателей могут применяться двигатели постоянного тока с элек-
тромагнитным возбуждением либо с возбуждением постоянными
магнитами, а также двигатели переменного тока — асинхронные и
синхронные. В последнее время получили широкое применение в
качестве моменгных двигателей бесконтактные двигатели посто-
янного тока с электронным коммутатором.
Рис. 10.13. Схема гироскопической
системы:
ГД — гиродвигатель; ДУ — датчик угла;
ДМ — двигатель моментный; У — уси-
литель
Первоначальное применение
моментные двигатели получили
в гироскопических системах в
качестве корректирующих двига-
телей, удерживающих ось гирос-
копа в заданном положении.
Дело в том, что в реальных ус-
ловиях эксплуатации, например
на борту летательного аппарата,
на ось ротора гироскопа (рис.
10.13) действуют посторонние
силы, стремящиеся сместить эту
ось относительно заданного по-
ложения. Эти возмущающие воз-
действия могут создаваться вра-
щением Земли, изменением гео-
графических координат объекта
и его пространственного поло
жения, наличием моментов сопротивления, вызванных трением.
Смешение оси гироскопа фиксируется датчиком угла ДУ, элект-
рический сигнал которого после усиления поступает на момент-
ный двигатель ДМ. Под действием вращающего момента этого дви-
гателя ось гироскопа возвращается в заданное положение.
В качестве моментного двигателя переменного тока применяют
двухфазные асинхронные двигатели с полым немагнитным ротором
или ферромагнитным омедненным ротором. Вращающий момент
такого двигателя пропорционален квадрату подведенного напряже-
ния. В двухфазном двига геле для регулирования момента достаточно
изменять напряжение на одной из обмоток — обмотке управления.
Моментные двигатели постоянного тока обычно делают магни-
тоэлектрическими, т.е. с постоянными магнитами. Принцип дей-
ствия такого моментного двигателя основан на взаимодействии
тока в обмотке управления, которая является единственной в этом
двигателе, с магнитным полем постоянного магнита.
Наиболее простым по конструкции и удобным в управлении
является моментный двигатель постоянного тока, показанный на
рис. 10.14, а. На роторе двигателя расположен постоянный магнит
4. а статор / представляет собой кольцевой магнитопровод — то-
роид. На этом магнитопроводе расположена обмотка в виде двух
тороидальных катушек 2 и 5, соединенных последовательно таким
образом, что магнитные потоки, создаваемые катушками в торои-
дальном сердечнике, направлены встречно друг другу (рис. 10.14, (5).
Витки каждой катушки равномерно распределены на соответству-
ющей половине сердечника статора. К концам обмотки статора
подводят управляющий сигнал постоянного тока. Постоянный
магнит 4 закреплен на валу двигателя так, что при отсутствии сиг-
Рис. 10.14. Моментный двигатель тороидального типа:
/ — тороидальный сердечник статора; 2, 5 — катушки статора; 4 — постоянный
магнит ротора
нала в обмотке статора этот магнит занимает положение, совпала*
юшее с линией а—о/, соединяющей середины катушек, как по-
[казано на рисунке. С появлением сигнала в обмотке на постоянный
магнит ротора действует электромагнитный момент
М = DJw^IB^
(10.5)
где 7) — внутренний диаметр статора; I— осевая длина двигателя;
wu — число витков в одной катушке; I — сила тока в катушке; В —
магнитная индукция в зоре между сердечником статор ! и посто-
янным магнитом.
Величина создаваемого двигателем момента регулируется силой
тока в катушке. При повороте ротора в пределах угла ±50° значение
момента Л/ Сохраняется практически неизменным. При изменении
полярности сигнала управления меняется направление момента М
Зависимость момента Мот напряжения сигнала близка к линейной.
Если требуется, чтобы двигатель работал в режиме вращения
ротора, то катушки статора разделяют на секции и коммутация
тока в них осуществляется посредством электронного коммутато-
ра подобно тому, как это делается в вентильных двигателях посто-
янного тока (см. гл. 8).
В большинстве случаев моментные двигатели с целью получе-
ния значительных моментов делают большого диаметра D при срав-
нительно небольшой осевой длине /: D/I ~ 2 — 3.
Помимо рассмотренного примера моментные двигатели при-
меняют также:
в системах управления положением различных объектов, на-
пример антенн;
в качестве натяжных устройств, чтобы регулировать или со-
хранять неизменной силу натяжения провода, ленты, цепи и т.п.;
для управления запорными устройствами (заслонками, кла-
панами). тормозными устройствами, электрическими выключате-
лями и т.п.;
в электроприводах подач метал дорежу ши х станков и в другш
случаях.
Требования, предъявляемые к моментным двигателям, во мно-
гом аналогичны требованиям, предъявляемым к исполнительным
двигателям (см. параграф 9.1). Наряду с этим к моментным двига-
телям предъявляются специфические требования:
обеспечивать заданный диапазон углов поворота и требуемые
зависимости момента от угла поворота ротора и от величины уп-
равляющего сигнала (обычно требуется зависимость линейная или
достаточно близкая к ней);
при отсутствии тока в обмотке управления остаточный мо-
мент должен отсутствовать или его величина должна быть настоль-
ко малой, чтобы работа системы не нарушалась;
электромеханическая и электромагнитная постоянные време-
ни должны быть минимальными, чтобы быстродействие момент-
ного двигателя не снизилось до значений, способных нарушить
устойчивость системы;
чувствительность моментного двигателя, определяемая наи-
меньшей мощностью управляющего сигнала, на которую двига
тель реагирует, должна быть достаточной, чтобы работа системы
не нарушалась;
моментный двигатель должен быть устойчивым к внешним
воздействиям (температура, вибрации, удары, давление, влаж-
ность, радиация и т.п.).
В моментных двигателях с неограниченным углом поворота ча-
стота вращения достаточно высока, так что эти двигатели практи-
чески нс отличаются от обычных. Примером этого могут служить
универсальные коллекторные моментные двигатели последователь
ного электромагнитного возбуждения типа УВ-061-М64, предназ-
наченные для привода дистанционных выключателей в схемах ав-
томатического управления. Двигатели имеют встраиваемое испол-
Рис. 10.15. Моментный универсальный коллекторный двигатель УВ-061-М64
^ение (рис. 10.15), работают от сета постоянного и переменного
(50 Гц) тока напряжением 220 В, схема включения двигателя см.
рис. 6.28. Пусковой момент Л/ = 6,27 Н • м, масса двигателя 3,3 кг.
К некоторым моментным двигателям предъявляется требова-
ние способности работы «на упор» — после поворота ротора (яко-
ря) двигателя на угол, соответствующий срабатыванию приводи-
мого устройства, двигатель не отключается от сети и продолжает
работу' в режиме короткого замыкания. При этом температура пе-
регрева двигателя не должна превышать допустимого значения. Если
же моментный двигатель не обладает способностью работы «на
упор», то привод следует дополнить устройством, удерживающим
вал двигателя от самопроизвольного вращения при отключении
двигателя от сети. Таким устройством может быть электромагнит-
ный тормоз.
Контрольные вопросы
1. Какие применяют способы управления исполнительными асинх-
ронными двигателями?
2. Какие виды самохода имеют место в исполнительных асинхронных
двигателях и каковы способы их устранения?
3. Какие возможности по улучшению свойств исполнительных асинх-
ронных двигателей с короткозамкнутым ротором дает «сквозная» конст-
рукция?
4. Каково назначение внутреннего статора в асинхронном двигателе с
полым немагнитным ротором?
5. Какой из способов управления наиболее благоприятен с точки зре-
ния получения линейных характеристик?
6. Почему при амплитудно-фазовом способе управления механичес-
кие характеристики двигателя не получаются линейными?
7. Объясните назначение и особые свойства исполнительных момент-
ных двигателей.
Глава 11
ИСПОЛНИТЕЛЬНЫЕ ШАГОВЫЕ ДВИГАТЕЛИ
11.1. Основные понятия
В некоторых приборных устройствах и средствах автоматизации
возникает необходимость в исполнительном электродвигателе с
дискретным (скачкообразным) угловым перемещением ротора.
С этой целью применяют шаговые (импульсные) синхронные дви-
гатели, в которых при подаче на обмотку статора импульсов на-
пряжения возникающее магнитное поле вращается не равномер-
но, а поворачивается дискретно, реатируя на каждый импульс.
Взаимодействие этого поля с ротором приводит к повороту' после-
днего на определенный угол.
Хотя шаговые двигатели по своему принципу действия и явля-
ются синхронными, но они конструктивно отличаются от обыч-
ных синхронных двигателей (см. гл. 5), предназначенных для рав-
номерного вращения ротора при постоянно действующем напря-
жении, подведенном к обмотке статора.
При поступлении импульса напряжения на обмотку управле-
ния (обмотку статора) шагового двигателя его ротор поворачива-
ется на некоторый угол аш, называемый угловым шагом, после
этого ротор фиксируется в этом новом положении до подачи на
обмотку управления следующего импульса напряжения.
Рассмотрим работу простейшего шагового двигателя (рис. 11.1).
состоящего из двухполюсного несимметричного ротора 2 с клю-
вообразными полюсами и четырехполюсного статора. Два проти-
волежащих полюса на статоре выполнены из постоянных магни-
тов 5, а два других полюса несут обмотку управления в виде кату-
шек 7, соединенных последовательно. Пока тока в обмотке управ-
ления нет (сигнал управления отсутствует), ротор занимает поло-
жение по оси постоянных магнитов. В таком положении ротор удер-
живается (фиксируется) за счет магнитного потока полюсов по-
стоянного магнита Ф1ЬМ. При подаче на обмотку управления на-
пряжения постоянного тока (сигнала управления) в двигателе воз-
никает магнитный поток управления Фу, примерно в два раза пре-
вышающий поток постоянных магнитов Ф м. Поэтому силы маг-
нитного притяжения, действующие на несимметричный ротор с
клювообразными полюсами, преодолевают силы, фиксирующие
Рис. 11.1. Однофазный шаго-
вый двигатель с клювообраз-
ным ротором и постоянными
магнитами:
/ — катушка обмотки управле-
ния; 2 — ротор; 3 — постоян-
ным магнит
ротор по оси постоянных магнитов,
и создают на роторе электромагнит-
ный момент управления М,. Этот мо-
мент поворачивает ротор в сторож
клювообразных выступов (против ча-
совой стрелки) и, преодолевая ста-
тический момент нагрузки и момент
фиксации ротора постоянными маг-
нитами, ставят его в положение по
оси полюсов статора с катушками
управления. Пока действует сигнал
управления, ротор фиксируется в ука-
занном положении. После прекраще-
ния действия импульса напряжения
ротор вновь поворачивается под дей-
ствием сил, создаваемых потоком
постоянных магнитов, в направлении
против часовой стрелки, т.е. совер-
шает еще один шаг. Следует отметить.
что фиксация ротора в этом положении происходит за счет маг-
нитного потока постоянного магнита Фпмз т.е. без затраты элект-
роэнергии.
Рассматриваемый двигатель является нереверсивным, так как
поворот его ротора возможен только в направлении клювообраз-
ных выступов на роторе. Изменение полярности напряжения, под-
водимого в обмотки управления, не влияет на направление вра-
щения, так как ротор не возбужден, т.е. пассивен, и его полюсы
не намагничены.
Существуют также шаговые двигатели с активным (возбужден-
ным) ротором в виде постоянных магнитов, а также шаговые ин-
дукторные двигатели.
Управляющие сигналы поступают на обмотки статора шагового
двигателя от электронного коммутатора, назначение которого не
только выдавать импульсы напряжения определенной формы и
продолжительности, но и распределять эти импульсы по фазным
обмоткам статора в соответствии с принятой схемой коммутации.
В соответствии с этими требованиями электронный коммутатор
ЭК шагового двигателя (рис. 11.2) содержит формирователь им-
пульсов ФИ и распределитель импульсов РИ. Но прежде чем эти
импульсы поступят на фазные обмотки статора шагового двигате-
ля, они усиливаются усилителем мощности УМ. Все элементы элек-
тронного коммутатора получают питание из сети постоянного тока
напряжением Uc. Импульсы, поступающие в фазные обмотки ша-
гового двигателя, могут быть только положительными (+{/), если
управление двигателем однополярное, или положительными и от-
рицательными (+J7и -t/), если управление двигателем двухполяр-
ное. Двухполярная коммутация возможна только при четном числе
фаз в обмотке статора. Управление шаговым двигателем ШД назы-
вается симметричным, если импульсы в течение всего периода ра-
боты двжателя подаются на одинаковое число фаз, или несиммет-
ричным. если число подключаемых фаз статора меняется в опреде-
ленной последовательности.
Питание фазных обмоток шагового двигателя импульсами на-
пряжения должно быть таким, чтобы обеспечивать не только по-
ворот ротора на заданный угол, но и фиксацию (удержание) ро-
тора после его поворота на этот угол. В связи с этим существует два
способа управления шаговыми двигателями: импульсное и потен-
циальное. При импульсном
лении напряжение на фазу ста-
тора подается только на время
действия управляющего сигнала
, поступающего на блок элек-
тронного коммутатора ЭК (см,
рис. 11.2), после прекрашения
Рис. 11.2. Блок-схема шагового дни -
гателя
этого сигнала электропитание
фазы прекращается, а фиксация ротора выполняется каким-либо
другим устройством. Например, в рассмотренном простейшем ша-
говом двигателе (см. рис. 11.1) устройством, фиксирующим ротор,
является постоянный магнит. При потенциальном управлении на-
пряжение, поданное на фазу, сохраняется на ней для фиксации
ротора вплоть до поступления следующего сигнала напряжения на
другую фазу этого двигателя. Таким образом, ротор двигателя все-
гда фиксируется за счет магнитного поля фазы, вызвавшей оче-
редное угловое перемещение ротора.
Угловое перемещение ротора шагового двигателя под воздей-
ствием импульса напряжения, поступившего на фазную обмотю
статора, называется шагом и представляет собой угол между ус-
тойчивыми соседними состояниями ротора и измеряется в утло-
вых градусах:
360
Лр2 ’
(11.1)
где к — число устойчивых состояний ротора за цикл; р2 ~* число
пар полюсов на роторе двигателя.
Число устойчивых состояний к зависит от числа катушек управ-
ления на статоре от вида коммутации (однополярная или лвух-
полярная) и способа управления (симметричное или несиммет-
ричное):
к = пц — при однополярной коммутации и симметричном спо-
собе управления;
к = 2 т — при двухполярной коммутации с симметричным
управлением и при однополярной коммутации с несимметрич-
ным управлением;
к = 4 — при двухполярной коммутации с несимметричным
управлением.
Шаг двигателя, эл. град:
(Хэл ~ /?2‘ *411-
(И.2)
При одной паре полюсов на роторе (р = 1) = аш.
Частота вращения ротора шагового двигателя при непрерывной
подаче импульсов на обмотку статора зависит от значения шага аш
в угловых градусах (11.1) и от частоты подачи управляющих им-
пульсов напряжения fv (имп/с) на обмотку статора, об/мин:
п =Х«ш/60.
11.2. Шаговые двигатели с пассивным ротором
Рассмотрим работу шагового реверсивного двигателя с пас-
сивным ротором. Статор этого двигателя (рис. 11.3) имеет шесть
явно выраженных полюсов (по два полюса на фазу) с полюсны-
Рис. 11.3. К принципу работы шагового двигателя с пассивным ротором
ми катушками, а ротор — два невозбужденных полюса (р2 - 1).
Пара катушек противолежащих полюсов образуют одну фазу (фаз-
ную обмотку); всего три фазные обмотки, на каждую из которых
в определенные моменты времени поступают сигналы напряже-
ния Ux определенной продолжительное™, где х — номер фазной
обмотки.
В двигателе принят вид коммутации: однополярная коммутация
с несимметричным управлением — раздельно-совместное включе-
ние обмоток. В момент времени г0 при подаче импульса напряже-
ния l/j на обмотку7 фазы I статора ротор зани мает положение, при
котором его ось совмещается с осью 1—1 полюсов статора этой
фазы. В следующий момент времени rh когда импульс U\ еще не
прекратился, на обмотку фазы 2 поступает импульс иг. В этом
случае на ротор действуют силы магнитного притяжения, обус-
ловленные одновременным намагничиванием полюсов 1— 1 и 2—
2. В результате ротор повернется на угловой шаг = 30 утл. град.
В момент времени г2 импульс напряжения U{ на фазе 1 прекратит-
ся и ротор, совершив еще один шаг аш - 30 утл. град, займет поло-
жение по оси 2—2. В момент /3 появится импульс напряжения L
на фазе 3 и ротор, повернувшись еше на 30 угл. град, займет сред-
нее положение между осями полюсов 2—2 и 3—3, Суммарный
угол поворота ротора за рассмотренный отрезок времени от г0 ДО Л
составит 90 угл. град. В моменты времени /4, /5 и г6 ротор также будет
совершать угловые механические шага по 30 угл. град и в конце
цикла займет положение по оси полюсов статора /— /, совершив
половину оборота (180 угл. град). В последующие циклы подачи на
обмотку статора управляющих импульсов напряжения С2 и U
процессы в шаговом двигателе будут повторяться. Рассмотренный
режим коммутации шагового двигателя соответствует однополярной
коммутации с несимметричным способом управления (к = 2?И| ~
= 2 -6 = 12) с раздельно-совместным включением обмоток фаз:
М ( / и 2) ч 2 ч (2 и J) ч J ч (J и /)...
За один цикл ( , соответствующий половине оборота (180 угл.
град), ротор двигателя проходит шесть устойчивых состояний, а за
один оборот (360 угл. град) — 12 устойчивых состояний, при этом
шаг двигателя амех = 360/12 = 30 угл. град.
Реактивные шаговые двигатели работают от однополярных им-
пульсов напряжения, так как смена полярности импульса не из-
менит направления сил, действующих на невозбужденный (пас
сивный) ротор. Чтобы поменять направление вращения ротора ша
гового двигателя, необходимо изменить схему коммутации обмо-
ток статора, например, принять однополярную схему коммутации
с раздельно-совместным включением обмоток фаз: 1 —> (/ и 3)
3 -> (3 и 2) 2 -> (2 и /) ...
Если в рассматриваемом двигателе принять схему однополяр-
ной коммутации с раздельным включением обмоток статора: /
->2-^5..., то угловой шаг двигателя увеличится в два раза: осш = 60
угл. град. Уменьшение углового шага Ощ повышает быстродействие.
Рис. 11.4. Магнитная система
шагового двигателя с пассив-
ным ротором при Pi = 2
так как сокращается время на пере-
мещение ротора при отработке сиг-
нала и увеличивается точность рабо-
ты шагового двигателя.
Для уменьшения углового шага allf
увеличивают число пар полюсных
выступов на роторе /ъ* Если в рас-
сматриваемом двигателе применить
ротор крестообразного сечения с
Pi = 2 (рис. 11.4), то при раздельно-
совместном включении обмоток фаз
статора угловой шаг уменьшится
вдвое: ап=15 угл. град. Дальнейшее со-
кращение шага возможно при исполь-
зовании индукторных шаговых дви -
гателей (см. параграф 11.4).
Недостаток шаговых двигателей с пассивным ротором — не-
большой вращающий момент.'
11.3. Шаговые двигатели с активным ротором
Рассмотрим принцип действия двухфазного двигателя с двухпо-
люсным постоянным магнитом на роторе и четырьмя явно выра-
женными полюсами на статоре (рис. П.5), на каждом из которых
расположена полюсная катушка. Каждая пара противолежащих по-
люсных катушек соединены последовательно в фазную обмотку. В ша-
говом двигателе с активным ротором можно применять двухполяр-
ные импульсы напряжения, так как с изменением направления тока
в обмотке фазы статора меняется магнитная полярность соответ-
ствующих полюсов статора. Так как ротор двигателя намагничен, то
изменение полярности полюсов статора вызывает изменение на-
правления сил взаимодействия между полюсами статора и ротора.
При подаче импульса напряжения положительной полярности
(+Ц) в обмотку фазы 1 два полюса этой фазы приобретают маг-
нитную полярность, как это показано на рис. 11.5, г?, при этом
ротор занимает вертикальное положение, обусловленное направ-
лением сил взаимного притяжения полюсов разноименной поляр-
ности статора и ротора. В момент времени Г| импульс в фазе 1 пре-
кращается, поступает положительный импульс (+С/2) в фазу 2 При
этом полюсы фазы 7 оказываются невозбужденными, а полюсы
Рис. 11.5. К принципу работы шагового двигателя с активным ротором
фазы 2 приобретают магнитную полярность, как показано на рис.
11.5. б. В результате ротор поворачивается против часовой стрелки
на угол аш = 90 угл. град. В момент времени /2 на обмотку фазы 7
подастся импульс напряжения отрицательной полярности (-ед, а
с обмотки фазы 2 импульс напряжения (+fA) снимается. В резуль-
тате полюсы фазы / приобретут полярность, как показано на рис.
11.5, в, и ротор повернется против часовой стрелки еще на 90 угл.
град. Затем в момент времени г3 импульс напряжения отрицатель-
ной полярности поступит на обмотку фазы 2 и ротор повер-
нется еще на 90 угл. град (рис. 11.5, г). При подаче импульса напря-
жения (+£/|) на обмотку’ фазы I ротор заканчивает полный оборот
и занимает исходное положение (см. рис. 11.5, а). Работа рассмат-
риваемого шагового двигателя соответствует двухполярной ком-
мутации с симметричным (раздельным) управлением:
(+ед ->(+ед -> (-ед (-ед -> (+ед.
Если в рассмотренном двигателе применить коммутацию с не-
симметричным (раздельно-совместным) управлением, то шаговый
двигатель будет работать с угловым шагом аш = 45 угл. град, при этом
вращаюший момент на роторе возрастет примерно в 1,5 раза.
На рис. 11.6 показана схема соединений двухфазного шагового
двигателя с активным ротором. Последовательность поступления
импульсов разной полярности на клеммы 1—8 от электронного
коммутатора ЭК (см. рис. 11.2) происходит в соответствии с задан-
ной программой коммутации.
Шаговые двигатели с активным ротором работают также с од-
нополярными импульсами напряжения, но при этом число обмо-
ток на статоре (и число полюсов) увеличивается. По сравнению с
шаговыми двигателями с пассивным ротором, двигатели с актив-
ным ротором создают большие вращающие моменты, обеспечива-
ют фиксацию ротора при снятии управляющего сигнала. Недоста-
ток двигателей с активным ротором — большой угловой шаг (15 —
90°). Это объясняется технологи-
।
Рис. 11.6. Схема соединений шаго-
вого двигателя с активным рото-
ром
чсскнми трудностями изготовле-
ния ротора с постоянными маг-
нитами при большом числе по-
люсов. Для уменьшения углово -
го шага увелштивают число фаз
в обмотке статора ади применя-
ют лвухстаторную конструташю.
Двухстаторные двигатели имеют
два одинаковых сердечника ста-
тора с одинаковыми обмотками,
но на валу у этою двигателя раз-
мещены два ротора, при этом
сердечники статоров смещены
относительно друг друга на половину зубцового деления (роторы
расположены соосно). Недостаток таких двигателей — сложность
изготовления.
11.4. Индукторные шаговые двигатели
Индукторные шаговые двигатели по своей конструкции анало-
гичны индукторным синхронным двигателям (см. рис. 5.41). Сер-
дечники статора и ротора делают шихтованными из листовой элек-
тротехнической стали. Поверхность ротора имеет зубчатую струк-
туру, при этом продольные зубцы и пазы равномерно распределе-
ны по периметру ротора (рис. 11.7). Сердечники полюсов статора
образуют открытые пазы, в которых размещается обмотка статора.
Полюсные наконечники этих полюсов имеют продольные зубцы и
пазы, которые образуют гребенчатую зону на каждом полюсе. Пазы
на статоре и роторе выполняют с одинаковым шагом. Основная
задача применения индукторных шаговых двигателей состоит в по-
лучении небольшого углового шага.
В современных индукторных шаговых двигателях угловой шаг
составляет от 1,0 до 3 угл. град. Недостатки этих двигателей — не-
большой вращающий момент и отсутствие фиксации ротора при
снятии импульсов напряжения с фазных обмоток статора. Исклю-
чение составляют индукторные шаговые двигатели с возбуждени-
ем постоянными магнитами или с независимым электромагнит-
ным возбуждением.
В * rLnj lZ(O)Z) r/z Рис. 11.7. Листы статора и ро- тора индукторного шагового двигателя ОУ ОЕ ОУ % К! нк Н]Н3 н2н4 СО ОООО о о Рис. 11.8. Схема индукторного ша- гового двигателя с независимым электромагнитным возбуждением
На рис. 11.8 показана схема индукторного шагового двигателя с
независимом электромагнитным возбуждением. На восьми полю-
сах статора разметены четыре обмотки управления ОУ, начала и
концы которых обозначены соответственно Нь Н2, Н3, Н4 и К
К2, К3, К4. На этих же полюсах размешена обмотка возбуждения
ОВ, витки которой равномерно распределены на всех полюсах ста-
тора. Эта обмотка подключается к сети постоянного тока незави-
симо от электронного блока управления двигателем и поэтому она
не создает этому блоку дополнительной нагрузки. Такой двигатель
обеспечивает фиксацию ротора при отсутствии импульсов напря-
жения на обмотках управления.
11.5. Основные параметры и режимы работы
шаговых двигателей
Рассматривая принцип действия шагового двигателя, влияние
нагрузочного момента на валу двигателя не учитывалось. Если же
на вал шагового двигателя действует статический нагрузочный
момент Мс, то при переключении управляющего импульса с од-
ной фазной обмотки на другую вектор МДС статора повернется на
угол аш, а ротор двигателя, поворачиваясь за вектором МДС, бу-
дет отставать от него на угол Двсз называемый углом статической
ошибки шагового двигателя, эл. град:
△6С = arcsin ——
М
max
(11.3)
где МП1ах — максимальный момент шагового двигателя, соответ-
ствующий углу смещения ротора относительно вектора МДС ста-
тора на угол 0 = 90 эл. град.
Показателем точности отработки углового шага является погреш-
ность отработки углового шага. %:
даш = “ а'" 100,
аш
(11-4)
где — фактический угловой шаг двигателя при номинальной
нагрузке Л/ном на валу, угл. град.
Быстродействие шаговых двигателей определяется скоростью
протекания электромагнитных процессов при переключении уп
равняющих импульсов напряжения с одной фазной обмотки ста
тора на другую. Скорость протекания процессов оценивается элек-
тромагнитной постоянной времени, с:
(11.5)
где £ф — индуктивность обмотки фазы статора, Гн; гф — активное
сопротивление обмотки этой фазы, Ом.
I Для повышения быстродействия шагового двигателя в обмотки
фаз статора включают последовательно добавочные резисторы Лдоб,
тогда
I Лм = * • (11-6)
"ф + лдой
Одним из основных параметров шаговых двигателей является
частота приемистости/пр, представляющая собой наибольшую ча-
стоту следования управляющих импульсов, при которой ротор дви-
гателя втягивается в синхронизм с места (из неподви жного состо-
яния) без потери шага.
Частота приемистости зависит от нагрузки на вал шагового дви-
гателя: в режиме холостого хода частота приемистости наиболь-
шая Лр.тах, а с появлением нагрузки уменьшается. Частоту при-
емистости при номинальной нагрузке шаговых двигателей назы-
иают номинальной/пр.(1ОМ (Гц). Обычно/Пргпах//Пр ном
= 1,2— 2,0. При
увеличении углового шага аш, так же как и с ростом нагрузки на
вал шагового двигателя, частота приемистости уменьшается. Зна-
чение /гг при установленной нагрузке зависит и от момента инер-
ции вращающихся частей присоединенной к валу двигателя меха-
нической нагрузки /нг: с увеличением /1Г частота приемистости
снижается. Современные шаговые двигатели обладают частотой
приемистости от 100 до 1500 Гц — большие значения относятся к
индукторным шаговым двигателям (аш = 1—9 угл. град), а мень-
шие — к двигателям с активным ротором в виде постоянных маг-
нитов (ац1 = 15 — 90 угл. град).
I Энергетический показатель шагового двигателя — потребляе-
мая мощность Р|.
Частота вращения шаговых двигателей регулируется изменени-
ем частоты подачи управляющих импульсов fy напряжения на об-
мотку статора, в зависимости от которой меняются режимы рабо-
ты шаговых двигателей: статический, квазистатический, устано-
вившийся и переходный.
I Статический режим — режим, при котором по обмоткам фаз
статора проходит постоянный ток, создающий неподвижное в
пространстве магнитное поле. При этом ротор двигателя находится
в состоянии статического равновесия, а прикладываемый к валу
двигателя статический нагрузочный момент Л/с отклоняет ротор в
ту или иную сторону от уравновешенного состояния на угол А0С,
т е. на угол статической ошибки |см. (11.3)].
Квазистатический режим — режим работы шагового двигателя
при единичных угловых шагах, когда к началу последующего шага
все переходные процессы, связанные с отработкой предыдущего
шага, полностью заканчиваются. Для обеспечения требуемой час-
тоты отработки шагов в квазистатическом режиме применяют раз-
личные способы торможения (фиксации) ротора.
Установившийся режим — режим, соответствующий постоян-
ной частоте следования управляющих сигналов. Ротор двигателя в
этом режиме имеет постоянную частоту вращения, однако при
переходе из одного установившегося состояния в другое могут воз-
никать колебания ротора. Характер колебаний ротора зависит от
соотношения между частотой следования управляющих сигналов
fy и частотой собственных колебаний ротора fQ: если /у < то воз-
никают свободные колебания ротора с частотой Jo, если fy > Jo —
вынужденные колебания ротора с частотой fy; если Jv =Jo или отно-
шение fy/fa — целое число, то появляется электромеханический
резонанс, который при недостаточном демпфировании ротора
приводит к нарушению работы шагового двигателя и выпадению
его из синхронизма (четкому следованию шагов ротора поступаю-
щим импульсам напряжения).
Частота собственных колебаний ротора шагового двигателя
/о = 0,135 ’ <It7>
где J2 и JHr — моменты инерции ротора и присоединенной к валу
двигателя нагрузки соответственно, кг ’ м2.
Шаговые двигатели в установившемся режиме вращения рото-
ра применяют в приводах небольшой мощности: часовых механиз-
мов, роботов, вычислительных устройств и т.п. При частоте вра-
щения 2000—3 000 об/мин используют шаговые двигатели с по-
стоянными магнитами на роторе, врашаюший момент которых в
режиме номинальной нагрузки составляет Л/11ОМ < ЮН- см. При
меньших частотах вращения (до 1 000 об/мин) при нагрузке Л/ном <
< 25 Н • см применяют индукторные шаговые двигатели.
Переходный режим — это основной режим работы (пуск, уско-
рение, торможение, реверс) исполнительного шагового двигате-
ля, работающего в автоматизированном электроприводе.
Основное требование к исполнительным шаговым двигателям
в любом режиме работы — точная отработка управляющих им-
пульсов напряжения, поступающих на обмотку статора, с задан-
ной частотой без потери шага.
Ниже приводятся описания и основные технические данные
некоторых типов шаговых двигателей.
Шаговые двигатели типов ДШ34, ДШ40, ДШ48, ДШ80, ДШ46,
ДШ65, ДШ78 предназначены для отработки дискретных угловых
перемещений путем переключений их обмоток с помощью специ-
альных электронных коммутирующих устройств. Цифры в обозначе-
нии указывают размер наружного диаметра корпуса в мм. Напряже-
ние питания коммутирующего устройства 27 В постоянного тока.
Двигатели четырехфазные, одностаторные, реверсивные.
Рис. 11.9. Устройство шаговых двигателей типов ДШ46, ДШ65, ДШ78:
/ — подшипниковый щит; 2. 6’— шарикоподшипники, 3 — корпус статора; < —
вад; 5 — сердечник ротора; 6 — сердечник статора, 7 — обмотка статора
Двигатели ДШ46, ДШ65, ДШ78 — индукторного типа с само-
возбуждением (рис. 11.9); сердечник ротора 5 шихтованный из
штампованных листов магнитомягкого материала толщиной 0,2 мм,
напрессован на вал 4
Двигатели типов ДШ34, ДШ40. ДШ48, ДШ80 — с постоянны -
ми магнитами на роторе (рис. 11.10). Ротор 5двигателей имеет фор-
Рис. 11.10. Устройство шаговых двигателей типов ДШ34, ДШ40, ДШ48,
ДШ80:
7 — вал; 2 — подшипниковый щит; 5, 9 — шарикоподшипники; 4 — корпус
статора; 5 — рогор; 6— постоянные магниты; 7 — сердечник статора; 8 — обмот-
ка статора
Таблица U.l
Технические данные исполнительных шаговых двигателей
1 ипоразмер Л/ ***ном? Н • м Ош, град Тпр.НОМ* Ги А аш. % Масса, кг Примечание
ДШ34-0,0025-22,5 2.5 • IO3 22,5 300 10 0,21 С постоянным маг- нитом на роторе
ДШ40-0,006-22,5 6 • КГ3 22,5 430 5 0,38
ДШ48-0.025-22.5 25 10'3 22.5 340 10 0,65
ДШ80-0,16-22,5 0,16 22.5 230 10 2.5
ДШ46-0,004-5,0 4 • 10-’ 5,0 1000 20 0,36 Индукторный с самовозбуждением
ДШ65-0.06-3 0,06 3,0 600 20 1,2
ДШ78-0Д6-1 0,16 1.0 550 20 2.3
му звездочки из восьми магнитных полюсов 6 (постоянных магни
тов). Магниты установлены на гранях втулки ротора и опрессова-
ны термореактивной пластмассой. Подшипниковый щит 2 и кор-
пус статора 4 выполнены из немагнитного материала. Основные
технические данные этих двигателей приведены в табл. 11.1.
Для шагового двигателя со значительным вращающим момен-
том применяют волновой шаговый двигатель типа ДВШ200-16-4096.
Этот двигатель включает торцевую волновую передачу, что по-
зволяет в значительной степени увеличить врашаюший момент и
уменьшить угловой шаг. У рассматриваемого двигателя вращаю-
щий момент на выходном валу равен 16 Н • м, а угловой шаг со-
ставляет аш - 360/4096 угл. град, где 4096 — число фиксированных
(устойчивых) положений ротора за один оборот выходного вала.
Двигатель имеет восемь фаз, напряжение питания на входе ком-
мутирующего устройства 27 В постоянного тока. Конструктивно
двигатель представляет собой спарку из двух волновых шаговых
двигателей, расположенных зеркально в одном корпусе и работа-
ющих на один выходной вал. Погрешность отработки углового шага
Даш не более 20 %, масса двигателя 16 кт.
Глава 12
ПРИМЕРЫ ПРИМЕНЕНИЯ ИСПОЛНИТЕЛЬНЫХ ДВИГАТЕЛЕЙ
12.1. Примеры применения исполнительных
асинхронных двигателей и двигателей постоянного тока
Исполнительные двигатели постоянного и переменного тока
применяют в системах автоматического измерения и контроля.
Рис. 12.1. Функциональная схема аналогового автоматического моста
с исполнительным асинхронным двигателем
например, аналоговых автоматических мостах и потенциометрах,
принцип работы которых состоит в уравновешивании (компенса-
ции) измеряемой величины. Разница между автоматическими мос-
тами и потенциометрами состоит в том, что в автоматическом мосте
измеряемой величиной является электрическое сопротивление,
эквивалентное контролируемому параметру (например, темпера-
туре), а в автоматическом потенциометре измеряемой величиной
является электродвижущая сила, например ЭДС термопары.
На рис. 12.1 представлена упрощенная функциональная схема
аналогового автоматического моста. Параметрический датчик —
тсрморезистор RK включен в мостовую схему тремя проводами
(для компенсации температурных изменений их сопротивления).
Питание схемы происходит переменным напряжением t/b прило-
женным в точках 1 и 2 измерительного моста. Напряжение неба-
ланса моста U2 снимается с движка потенциометра RP и точки 3.
[Это напряжение подается на вход усилителя мощное ги У с фазо-
Гчуствительным выходом. Переменное напряжение Ц снимается с
выхода усилителя и подается на обмотку' управления ОУ исполни-
тельного асинхронного двигателя М. Обмотка возбуждения ОВ дви-
гателя включена в сеть переменного тока через конденсатор С. Вал
исполнительного двигателя через понижающий редуктор Р меха-
нически соединен с движком потенциометра RP.
I При изменении сопротивления терморезистора RK на входе
усилителя мощности У возникает напряжение небаланса Ur После
усиления это напряжение создает на обмотке управления ОУ ис-
полнительного двигателя М напряжение управления Ur При этом
[Двигатель включается и перемещает движок потенциометра RP до
тех пор, пока не восстановится равновесие мостовой схемы те-
перь уже при новом значения сопротивления терморезистора RK.
В зависимости от того, увеличилось или уменьшилось сопротив-
ление терморезистора относительно его первоначального значе-
ния, меняется фаза напряжения Uy на выходе усилителя на 180°,
что определяет направление вращения ротора исполнительного дви-
гателя М. После того как мост будет вновь уравновешен, напряже-
ние U2 окажется равным нулю и исполнительным двигатель оста-
новится. Новое значение измеряемого параметра, в данном случае
значение температуры, будет отмечено на шкале потенциометра
RP Если автоматический .мост работает на переменном токе про-
мышленной частоты (50 Гц), то в качестве исполнительного асин-
хронного двигателя обычно применяют редукторный двигатель типа
РД-09 (см. параграф 10.5).
В аналоговом автоматическом компенсаторе^ упрощенная фун-
кциональная схема которого показана на рис. 12.2, на входе усили-
теля применено устройство сравнения ЭДС термопары Егп и ком-
пенсирующего напряжения f/K, определяемого произведением тока
/к на сопротивление Rx. Значение этого сопротивления зависит от
положения движка потенциометра RP. При полной компенсации
Uw = - ик = 0, (12.1)
и напряжение 1/вх на входе усилителя У, а следовательно, и напря-
жение управления Uy на обмотке якоря исполнительного двигателя
постоянного тока М равны нулю и якорь двигателя неподвижен.
Если же произойдет изменение температуры в контролируемом
объекте, то изменится ЭДС термопары Е™, что приведет к нару-
шению полной компенсации (12.1).
Рис. 12.2. Функциональная схема аналогового автоматического потенцио-
метра с исполнительным двигателем постоянного тока
В итоге на входе усилителя мощности У появится некомпенси-
рованное значение напряжения t/BX, а на обмотке якоря исполни-
тельного двигателя — напряжение управления Uy, Это вызовет вра-
щение якоря двигателя, которое через понижающий редуктор (на
схеме не показан) переместит движок потенциометра RP. Новое
положение движка потенциометра будет соответствовать полной
компенсации изменившегося значения ЭДС термопары. При этом
напряжение
управления
исполнительного двигателя снизится до
и двигатель
остановится.
Одновременно с перемещением движ-
ка реостата произойдет изменение положения стрелки на отсчет -
ном устройстве ОУ, на котором будет отмечено новое значение
изменившейся температуры. Усилитель мощности должен быть
фазочуствительным и реагировать не только на значение несба-
лансированного напряжения на входе, но и
на его знак, а следо-
вательно, влиять на направление вращения якоря двигателя М.
12.2. Пример применения исполнительного
шагового двигателя
Способность исполнительных шаговых двигателей «отрабаты-
вать» импульсы напряжения, поступающие на его фазные обмот-
ки, успешно используется в автоматических установках с число-
вым программным управлением (ЧПУ), применяемым при авто-
матизации различных технологических процессов. Например, та-
кая система используется при автоматизации механизмов подач в
металлообрабагьгваюшич станках.
Программа работы такого механизма задается в виде чисел,
определяющих последовательность операций, величину и скорость
перемещения рабочего органа. Эта программа записывается в виде
кодированной совокупности чисел на какой-либо программоно-
ситель: перфоленту, перфокарту, магнитную ленту и т. п. Наибо-
лее
удобная форма записи программы — двоичным кодом.
Удоб-
ство двоичного кода определяется возможностью представления
чисел в цифровых системах управления элементами с двумя ус-
тойчивыми состояниями: «открыто» (что соответствует единице)
и «закрыто» (что соответствует нулю). Элементами, имеющими два
устойчивых состояния, могут быть реле, транзистор в ключевом
режиме, тиристор и др.
На перфокартах и перфолентах цифре «единица» соответствует
отверстие, вызывающее при считывании программы появление
электрического импульса, а цифре «но ль» — отсутствие отверстия,
а следовательно, импульса. Программоноситель закладывают в ус-
тройство считывания, которое преобразует закодированную ин-
формацию в последовательность электрических импульсов (сигна-
лов), управляющих работой электропривода по перемещению ра-
Перфолента
Рис. 12.3. Функциональная схема
автоматизированного электропри-
вода с ЧП У с применением испол-
нительного шагового двигателя
бочего органа (инструмента или
обрабатываемого изделия) с оп-
ределенной последовательнос-
тью и скоростью.
Наиболее простыми система-
ми ЧПУ являются разомкнутые
системы с применением шаго-
вых двигателей, которые преоб-
разуют электрические импульсы
в угловые или линейные шаго-
вые перемещения. Для переме-
щения рабочего органа РО по
каждой оси координат имеется
свой шаговый электропривод. На
рис. 12.3 показана функциональ-
ная схема шагового электропри-
вода с числовым программным
управлением для перемещения
рабочего органа — суппорта ме
таллообрабатываюшего станка.
Программа записана в определенном коде на перфоленте в виде
двух дорожек — одна дорожка для движения суппорта «вперед»,
другая — для его движения «назад». Перфоленту посредством лен-
топротяжного механизма пропускают через считывающие головки
СГ, которые закодированную на перфоленте программу преобра-
зуют в систему электрических импульсов. После усиления в проме-
жуточном усилителе ПУ импульсы поступают на блок управления
шаговым двигателем БУШД, который распределяет командные им-
пульсы по обмоткам фаз шагового двигателя ШД. Шаговый двига-
тель отрабатывает эти импульсы и через винтовую передачу, пре-
образующую вращательное движение вала двигателя в поступатель-
ное движение суппорта станка. Каждому импульсу программы со-
ответствует один шаг двигателя. Общее число импульсов определя-
ет величину (расстояние) перемещения суппорта, а частота сле-
дования этих импульсов — скорость перемещения этого суппорта.
12.3. Электродвигатели для привода
считывающих устройств
Для хранения программ, используемых в автоматизированном
электроприводе, применяют различного рода накопители памяти.
Такой накопитель можно рассматривать как совокупность носите-
ля памяти и считывающего устройства с электроприводом.
Накопители памяти представляют собой различные запомина-
ющие устройства определенного принципа действия. Основным
свойством и назначением запоминающих устройств является воз-
можность записи, хранения и воспроизведения информации. За-
поминающие устройства принято делить на виды и категории в
связи с их принципами функционирования и эксплуатационно-
техническими характеристиками. Так, наибольшее применение в
настоящее время получили магнитные и оптические носители ин-
формации. Магнитные носители большого объема информации
применяют обычно в виде магнитных лент, а оптические — в виде
лазерных дисков (компакт-дисков).
Для считывания информации, хранящейся в носителях памя-
ти, используют считывающие устройства, непременным элемен-
том которых является электропривод. Конструкция электроприво-
да считывающего устройства определяется видом носителя инфор-
мации.
12.3.1. Лентопротяжные механизмы
Лентопротяжный механизм — это основной узел устройств для
записи и считывания информации на магнитной ленте, использу-
емой в качестве носителя информации. Лентопротяжные механиз-
мы получили широкое применение в различных приборных уст-
ройствах бытового и технического назначения. Назначение лен-
топротяжного механизма — обеспечить равномерное перемеще-
ние магнитной ленты в процессе записи или считывания инфор-
мации. а также для ускоренной ее перемотки. Выполнение пере-
численных функций лентопротяжного механизма может быть осу-
ществлено либо одним, либо тремя двигателями. Лентопротяжные
механизмы с одним двигателем называют одномоторными. они име-
ют минимальные габариты и массу. При повышенных требованиях
к стабильной скорости протяжки ленты и надежности применяют
трехмоторные лентопротяжные механизмы (рис. 12.4, а). Кинема-
тическая схема такого механизма значительно проще и надежнее
одномоторного, поскольку подающий и приемный узлы имеют
свои двигатели, что исключает применение в нем дополнительных
элементов для передачи движения, например, пассиков, фрикци-
онных передач и т.п. Протягивание ленты со стабильной скорос-
тью выполняется двигателем 4 с прижимным роликом 3. Стабиль-
ность частоты вращения этого двигателя обеспечивается его жест-
кой механической характеристикой. Обычно это синхронные дви-
гатели с постоянными магнитами либо вентильные двигатели с
управлением от электронного коммутатора.
Для привода вала 7 подающего узла применен двигатель 2, а
для привода вала 5 приемного узла — двигатель 6. В качестве этих
двигателей обычно используют асинхронные конденсаторные дви-
гатели с мягкой механической характеристикой, чем обеспечива-
ется наличие постоянно действующего момента натяжения ленты
a
Рис. 12.4. Трехмоторный лентопротяжный механизм (л) и ленточное тор
мозное устройство (б)
при ее подмотке на приемную кассету. Такая характеристика обес-
печивается повышенным активным сопротивлением короткозам-
кнутой обмотки ротора этих двигателей. В режиме обратной пере-
мотки ленты ролик 3 отжат и окружное усилие от двигателя 4 на
ленту не передается. Для исключения свободного выбега двигателей,
что нарушило бы работу лентопротяжного механизма при пере-
ключении режимов, все три двигателя снабжены ленточными тор-
мозами (рис. 12.4, б). Пружина 8 с регулировочным винтом 9 обес-
печивает постоянное прижагие ленты к тормозному диску. Отклю-
чение тормоза происходит при выключении электромагнита 7,
Рис. 12.5. Схема включения (о) и внешний вид (6) синхронного двигате-
ля типа ДС-10-1500
Отечественная промышленность для привода лентопротяжных
механизмов с постоянной скоростью изготовляет однофазные син-
хронные прецизионные двигатели. Например, двигатель типа ДС-
10-1500 мощностью 10 Вт. частотой вращения 1500 об/мин, с воз-
буждением постоянным магнитом. Напряжение питания двигателя
220 В частотой 50 Гц. Двигатель имеет высокую стабильность часто-
ты вращения и низкий уровень акустических шумов. Исполнение
двигателя закрытое необдуваемое. Схема включения двигателя и
его внешний вид представлены на рис. 12.5. Емкость рабочего кон-
денсатора Сраб = 2 мкФ, пусковая емкость Q = 4 мкФ, рабочее
напряжение конденсаторов не менее 250 В.
12.3.2. Электропривод устройств для считывания
информации с оптических дисков
Оптические диски называют также лазерными дисками или
компакт-дисками CD (Compact Disc). В простейшем случае диски
изготовляют из алюминия, а на одну из сторон диска (активная
сторона) наносят слой из отражающего материала. Наружный ди-
аметр CD I20 мм. внутренний диамегр 15 мм, толщина 1,2 мм.
При записи информации на такой диск лазерный луч выжигает на
дорожке диска микроскопические пятнышки (углубления), разде-
ленные площадками, которые отражают лазерный луч. Считыва-
ние информации с диска выполняется лазерным лучом меньшей
мощности, чем при записи. На рис. 12.6 представлена функцио-
нальная схема, поясняющая процесс считывания информации с
компакт-диска.
От источника (лазера) 7, расположенного в оптической голов-
ке 2, лазерный луч 3 направляется на активную сторону 5диска 6,
где он проходит сквозь защитный слой, достигая отражающего
слоя из алюминия Отраженный луч 4 попадает на призму 9, кото-
рая направляет его на пластину <*?, преобразующую световые им-
Рис. 12.6. Функциональная схема
устройства для считывания инфор-
мации с компакт-диска:
1 — лазер; 2 — оптическая головка, 3—
лазерный луч; 4—отраженный луч; 5 —
активная сторона диска; 6 — компакт-
диск; 7 — двигатель; 8 — преобразова-
тель световых импульсов в электриче-
ские импульсы; 9 — призма
пульсы в электрические импуль-
сы цифровой системы, как пос-
ледовательность цифр 0 и I.
Врашение диска б осуществ-
ляется миниатюрным синхрон-
ным двигателем 7(см. рис. 12.6),
управляемым электронным ком
мутатором. Этот двигатель имеет
обращенную конструкцию (рис.
12.7), т.е. его ротор / с постоян-
ным магнитом 2 расположен
снаружи, а статор с явно выра-
женными полюсами J— внутри.
На полюсах статора, число ко-
торых равно 9, расположены
полюсные катушки 4. Вал 6дви-
гателя своей нижней частью
опирается на подпятник, а на
его верхней части укреплена
планшайба 5, на которой раз-
мещается лазерный диск и при-
водится двигателем во вращение.
Оптическая головка в процессе
считывания информации с дис-
ка перемешается радиально от
центра к периферии диска по
спиральной дорожке. Это пере-
Рис. 12.7. Синхронный двигатель для
вращения лазерного диска:
7 — ротор; 2 — постоянный магнит; 3 —
полюс статора; 4 — катушка; 5 —
планшайба: 6 — вал
Рис. 12.8. Расположение основных элементов считывающего устройства:
1 — двигатель постоянного тока; 2 — оптическая головка; 3 — оптический диск
(неактивная сторона); 4 — планшайба синхронного двигателя; 5 — реечная пере-
дача
мешение выполняет еще один миниатюрный двигатель — коллек-
торный двигатель постоянного тока с постоянным магнитом. Вра-
щательное движение этого двигателя преобразуется в поступатель-
ное движение посредствам реечной передачи.
На рис. 12.8 показано расположение основных элементов счи-
тывающего устройства: миниатюрный коллекторный двигатель
постоянного тока 7, предназначенный для радиального переме-
щения оптической головки 2, оптический диск 5, расположенный
на планшайбе 4 синхронного двигателя, вращающего диск, рееч-
ная передача 5, преобразующая вращательное движение двигателя
1 в поступательное радиальное перемещение оптической головки
2 по спиральной дорожке.
В заключение следует отметить, что информация, хранимая на
лазерных дисках, в отличие от информации» записанной на маг-
нитную ленту, не подвержена воздействию электрических и маг-
нитных полей. Кроме того, стоимость записи, хранения и считы-
вания единицы информации на лазерном диске существенно мень-
ше, чем на магнитной ленте. Из этого следует, что применение
лазерных дисков в качестве носителей информации является весь-
ма перспективным.
Контрольные вопросы
1. Каково назначение исполнительных шаговых двигателей?
2. Какие элементы содержит электронный коммутатор и каково их
назначение?
3. Перечислите способы управления исполнительными шаговыми дви-
гателями. Дайте объяснение каждому из них
4. Что такое угловой шаг двигателя и от чего зависит его значение?
5. Какова разница в конструкции и свойствах шаговых двигателей с
пассивным и активным роторами?
6. Какая конструкция шаговых двигателей позволяет получить мини-
мальный угловой шаг?
7. Что такое приемистость шагового двигателя?
8. Какой режим работы шагового двигателя является основным?
9. Какие шаговые двигатели следует применять при необходимости
получения значительного врашаюшего момента?
10. Объясните работу электропривода лентопротяжного механизма по
рис. 12.4.
11. Объясните назначение элементов считывающего устройства по
рис. 12.8.
РАЗДЕЛ IV
ИНФОРМАЦИОННЫЕ ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
Информационной называют электрическую машину, предназ-
наченную для выработки электрических сигналов, характеризую-
щих частоту вращения ротора или его угловое положение, а также
для преобразования электрических сигналов в соответствующие
им угловые положения ротора. Информационные машины весьма
разнообразны как по принципу действия и устройству, так и по
функциям, которые они выполняют. Основное требование к ин-
формационным машинам — высокая точность воспроизведения
преобразуемых параметров. Энерге гические показатели этих машин
(потери, КПД, коэффициент мощности) для оценки их качества
не имеют существенного значения.
В данном разделе рассматриваются следующие информацион-
ные электрические машины: тахогенераторы, сельсины, магнеси-
ны, вращающиеся трансформаторы.
Глава 13
ТАХОГЕНЕРАТОРЫ
13.1. Назначение тахогенераторов
и предъявляемые к ним требования
Тахогенератор — информационная электрическая машина, ра-
ботающая в генераторном режиме, используемая для преобразо-
вания частоты вращения какого-либо вала в электрический сиг-
нал (выходное напряжение).
Тахогенераторы, применяемые для измерения частоты враще-
ния, называют измерительными. Тахогенераторы, используемые для
получения электрических сигналов в системах регулирования или
стабилизации частоты вращения вала автоматизированного объек-
та, называют корректирующими. Тахогенераторы применяют так-
же в качестве дифференцирующих и интегрирующих звеньев в
вычислительных устройствах.
Зависимость выходного напряжения тахогенератора UBtM от ча-
стоты вращения ротора (якоря) п определяется выходной характе-
ристикой UBWt = /(л). Уравнение идеальной выходной характерис-
тики тахогенератора
вых — 'О
(131)
где cv — крутизна выходной характеристики, определяющая чув-
ствительность тахогенератора к изменениям частоты вращения.
Чем больше крутизна характеристики cv, тем чувствительнее и
точнее автоматизированная система с тахогенератором.
Тахогенераторы должны удовлетворять ряду специфических тре-
бований:
выходная характеристика тахогенератора, представляющая
собой зависимость напряжения на выходе (/вых от частоты враще-
ния л, должна максимально приближаться к прямолинейной и иметь
наибольшую крутизну;
на форму выходной характеристики практически не должны
влиять внешние факторы (температура, влажность, давление и т.п.);
напряжение на выходе тахогенератора при неподвижном ро-
торе (л = 0), называемое остаточным, должно быть минималь-
ным;
напряжение на выходе тахогенератора должно быть симмет-
ричным, т. е. при вращении тахогенератора с одинаковой частотой,
но в разные стороны [(+л) = (-л)] абсолютные значения соответ-
ствующих выходных напряжений должны быть одинаковы:
1 ^ВЫх) ( ^вых)»
(13.2)
при нарушении этого условия возникает ошибка несимметрии, %:
△^сим
(^вы>) (^вых) 1ЛП
o.sK^j+a/Lx)] ’
(13.3)
где t/uux и (/ВЫХ — значения напряжений на выходе тахогенератора
при вращении его ротора по часовой стрелке и против часовой
стрелки соответственно (обе величины принимаются со знаком
плюс);
выходная мощность тахогенератора должна бы гь достаточной
для работы подключаемых к нему приборов;
пульсация выходного напряжения тахогенератора, обуслов-
ленная электромагнитными процессами в нем, должна быть ми-
нимальной.
Необходимая степень соответствия перечисленным требовани-
ям определяется назначением тахогенератора Тахогенераторы для
счетно-решающих устройств должны иметь выходную характерис-
тику, максимально приближенную к прямолинейной, чтобы по-
грешность воспроизведения линейной зависимости С7ВЫХ = /(л) не
превышала 0,1 %; для измерительных тахогенераторов эта погреш-
ность может составлять 1 —2.5 %. Корректирующие тахогенерато-
ры, применяемые в системах автоматики для получения ускоряю-
щих и замедляющих сигналов, должны иметь максимально воз-
можную крутизну выходной характеристики, а погрешность вос-
произведения линейной функции в них менее важна и может дос-
тигать нескольких процентов.
По принципу действия и устройству тахогенераторы бывают
переменного (асинхронные и синхронные) и постоянного тока.
Наибольшее практическое применение в устройствах автоматики
получили тахогенераторы асинхронные и постоянного тока.
13.2. Тахогенераторы переменного тока
Асинхропиые тахогенераторы. Своим устройством асинхронный
тахогенератор не отличается от исполнительного асинхронного
двигателя с полым немагнитным ротором (см. рис. Ю.4). В отличие
от исполнительного двигателя полый ротор тахогенератора изго-
товляют из сплава с повышенным удельным электрическим со-
противлением, практически не зависящим от температуры (кон-
стантан, манганин и т.п.). Одна из обмоток статора тахогенерато-
ра — обмотка возбуждения ОВ, другая — генераторная обмотка ОГ
(рис. 13.1). Считаем ось обмотки возбуждения продольной d—d, а
ось генераторной обмотки — поперечной q—q. Рассмотрим про-
цессы, происходящие в асинхронном тахогенераторе при непод-
вижном роторе (л = 0).
При включении обмотки возбуждения в сеть переменного тока
напряжением U} и частотой возникает МДС /у и в магнитопро
воде генератора наводится пульсирующий магнитный поток Ф „
направленный по оси d—d. Пронизывая полый ротор, поток Ф„
а
Рис. 13.1. К принципу действия асинхронного тахогенератора
индуцирует в нем (как во вторичной обмотке трансформатора)
ЭДС Б,?, называемую трансформаторной ЭДС. В генераторной об-
мотке ОГ тахогенератора магнитный поток Ф„ не индуцирует ЭДС,
так как ось этой обмотки q—q расположена под углом 90 эл. град к
оси обмотки возбуждения d— d. Под действием Е? в стенках поло-
го стакана возникают токи 7^, которые, благодаря повышенному
активному сопротивлению стенок полого ротора, практически
совпадают по фазе с ЭДС £гр- Токи Л ,, создают МДС ротора
направленную по продольной оси d—d встречно МДС возбуждения
FB. В результате взаимодействия этих МДС создается результирующая
МДС Грез = FB - F2d, которая создает магнитный поток по продоль-
ной оси Фй, пульсирующий с частотой тока в сети f\ (рис. 13.1, а).
Если ротор тахогенератора вращать с частотой п, то в результате
пересечения стенками стакана силовых линий магнитного потока
Фа в роторе будет индуцироваться ЭДС врашения, мгновенное
значение которой
I ( 2вр —' C^Bdl2*19 (13.4)
где Bd — магнитная индукция в зазоре от магнитного потока Ф^;
1> — длина ротора, находящаяся в магнитном поле.
Электродвижущая сила вращения Е2вр прямо пропорциональна
частоте вращения ротора л, а частота этой ЭДС зависиз от частоты
пульсаций магнитного потока ФЛ т. е. равна частоте тока в обмот-
ке возбуждения. Пульсирующий магнитный поток Ф^ создает си-
нусоидальное распределение магнитной индукции Bd в воздушном
зазоре, поэтому максимальные значения ЭДС вращения Е2вргпа, бу-
дут наводи гься в точках стенок ротора, в моменты времени, когда
эти точки расположены по продольной оси d—d (рис. 13.1, б).
ЭДС вращения Е2вр создает в роторе токи 12вр, которые, благодаря
повышенному активному сопротивлению ротора, практически со-
впадают по фазе с ЭДС врашения Е2вр. Токи 12вр создают МДС рото-
ра F2q, направленную по поперечной оси q— д. Эта МДС наводит
пульсирующий с частотой / магнитный поток Ф;?, который со-
здает в генераторной обмотке ОГ переменную ЭДС, действующее
значение которой, В:
, Е = 4,44/’|М/гАоб|Ф29, (13.5)
где wr — число витков в генераторной обмотке ОГ; к^ — обмо-
точный коэффициент генераторной обмотки.
[ Таким образом, частота ЭДС Ег, наведенной в генераторной
обмотке тахогенератора, равна частоте тока в обмотке возбужде-
ния /| и не зависит от частоты вращения ротора. Зависимость ЭДС
£г от частоты вращения ротора л установим следующим образом:
ЭДС врашения е2вр (см. (13.4)] пропорциональна частоте вращения
ротора л, следовательно, ток Лир и магнитодвижущая сила ротора
F2q также пропорциональны частоте врашения л. В машине с по-
лым немагнитным ротором немагнитным промежуток между вне-
шним и внутренним статорами достаточно велик (см. рис. 10.4).
Поэтому магнитное сопротивление потоку ротора Ф2^ по попе-
речной оси создается в основном за счет этого немагнитного про-
межутка и является практически постоянным, не зависящим от
магнитного состояния стальных участков магнитопровода тахогене-
ратора (сердечники наружного и внутреннего статоров). Таким об-
разом, магнитный поток ротора по поперечной оси Фл9 =
пропорционален МДС F а следовательно, и частоте вращения д.
Это позволяет записать следующую «цепь» пропорциональной за-
висимости параметров:
Фз^ — ~ ^2вр ~ ^2вр —
(13.6)
Учитывая (13.6), выражение генераторной ЭДС (13.5) запишем
так:
£; -4?44c0/|iz2rAo6l/i = суп.
(13.7)
где с у — крутизна выходной характеристики, В/(об/мин).
При подключении нагрузки ZHr к генераторной обмотке в ее
цепи появится ток /г. Обычно сопротивление нагрузки Z г доста-
точно велико, поэтому ток в генераторной обмотке Л небольшой
и не вызывает в ней значительного падения напряжения, что по-
зволяет с незначительным допущением принять С4ЫХ ~ £г. Тогда
*4ых ~ ~ СуМ'
(13.8)
Следовательно, напряжение на выходе тахогенератора про-
порционально частоте вращения ротора, а частота этого напряже-
ния равна частоте тока в обмотке возбуждения f и не зависит от
частоты вращения ротора.
Из рассмотрения принципа действия асинхронного тахогене-
ратора следует, что его выходная характеристика прямолинейна
[см. (13.8)]. Однако свойства реальных тахогенераторов, имеющих
некоторые погрешности, отличаются от свойств идеального тахо-
генератора. Так, выходная характеристика тахогенератора (рис. 13.2,
о, б, график 7) только в начальной части совпадает с идеальной
характеристикой (график 2), а с ростом частоты вращения п она
становится криволинейной. Это приводит к появлению амплитуд-
ной погрешности
△ £ ал “ вых.и
ВЬГХ.рз
(13.9)
где С4ыхл1 и £4ых.р — напряжение на выходе идеального и реального
асинхронного тахогенератора при заданной частоте вращения п.
Причина амплитудой погрешности состоит в том, что напря-
жение £вых отличается от ЭДС Ег и с повышением тока в генера-
торной обмотке тахогенератора эта разница увеличивается за счет
роста падения напряжения в этой обмогке /г Zr.
Рис» 13.2. Реальная (/) и идеальная (2) выходные характеристики асин-
хронного тахогенератора
Амплитудную погрешность, %, определяют по формуле
△Цьп ~ (△^а.п/^ных ном) ЮО.
(13.10)
Установлено, что амплитудная погрешность минимальна, если
идеальная выходная характеристика (прямая 2) пересекает реаль-
ную характеристику 1 в точке Л соответствующей частоте вращения:
п' = (Л/2)итах, (13.il)
где лтах — наибольшая частота вращения для данного типоразмера
асинхронного тахогенератора.
Напряжения 17ВЫЛ и и 4/ВЫХ1 различаются не только по модулю,
но и по фазе. По этой причине асинхронные тахогенераторы наря-
ду с амплитудной обладают фазовой погрешностью'.
Аф = Фн — Фр» (13.12)
где <рн и фр — фазы выходного напряжения идеального и реального
тахогенераторов.
Амплитудная и фазовая погрешности асинхронных тахогенера-
торов зависят от частоты вращения ротора, температуры, частоты
тока питающей сеги. Поэтому погрешности асинхронных тахоге-
нераторов разделяют на скоростные, температурные и частотные.
Для уменьшения скоростных погрешностей используют тахоге-
нераторы. рассчитанные на работу от сети повышенной частоты
переменного тока (400, 500 или 1 000 Гц), имеющие большую син-
хронную частоту вращения. В этом случае измеряемая частота вра -
шения п намного меньше предельной частоты вращения пъ соот-
ветствующей выбранной частоте переменного тока, т.е. относи-
тельная частота вращения v = п/п\ должна быть небольшой. В этом
случае тахогенератор работает в начальной части выходной харак-
теристики. где она близка к прямолинейной (см. рис. 13.2, о).
Температурные погрешности тахогенератора обусловлены колеба-
ниями температуры обмоток и полого ротора вследствие нагрева та-
хогенератора за счет происходящих в нем потерь или за счет теплоты,
излучаемой расположенными вблизи приборами и механизмами. Для
уменьшения температурных погрешностей полый ротор тахогенера-
тора изготовляют из сплавов с малым температурным коэффициен-
том сопротивления так. чтобы колебания температуры нагрева рото-
ра практически не вызывали изменения его активного сопротивле-
ния. Дг1я уменьшения влияния темперагуры на активное сопротивле-
ние обмотки возбуждения последовательно с этой обмоткой включа-
ют терморезистор, сопротивление которого с изменением темпера-
туры меняется таким образом, что компенсирует температурные из-
менения активного сопротивления обмотки возбуждения.
Частотные погрешности возникают при колебаниях частоты
переменного тока в цепи обмотки возбуждения. Доя уменьшения
этих погрешностей применяют источники питания цепи возбуж-
дения со стабилизацией частоты.
Остаточная ЭДС асинхронного тахогенератора наводится в гене-
раторной обмотке при неподвижном роторе (п = 0). Появление оста-
точной ЭДС является основной причиной несимметрии выходной
характеристики асинхронного тахогенератора. В идеальном тахогене-
раторе при неподвижном роторе ЭДС ЕГ~ 0 [см. (13.7)], так как оси
обмоток возбуждения и генераторной смещены в пространстве на 90
эл. град. Однако в реальном асинхронном тахогенераторе из-за техно-
логических неточностей при изготовлении пространственный сдвиг
осей указанных обмоток отличается от 90 эл. град. Кроме того, воз-
можны несимметрия магнитной цепи (разное магнитное сопротив-
ление магнитной цепи тахогенератора по различным радиальным на-
правлениям). а также наличие емкостных связей между обмотками.
Для уменьшения остаточной ЭДС применяют следующие меры:
тахогенераторы изготовляют только многополюсными (2р > 4),
что компенсирует возможную магнитную несимметрию на одной
паре полюсов несимметрисй на другой паре полюсов;
обмотки возбуждения и генераторную обмотку располагают на
разных статорах: одну на внутреннем, а другую на внешнем, при
этом конструкция тахогенератора позволяет поворачивать внутрен-
ний статор относительно внешнего, добиваясь их взаимного поло-
жения. чтобы остаточная ЭДС имела минимальное значение;
применяют специальные схемы включения обмоток с исполь-
зованием компенсирующих резисторов и конденсаторов.
Однако полностью исключить остаточную ЭДС не всегда оказы-
вается возможным. Поэтому для асинхронных тахогенераторов при-
нято допускаемое значение остаточной ЭДС, которая составляет
(25— 100) I0"3 В. Наблюдаются также колебания остаточной ЭДС,
что объясняется разными причинами, в том числе различной тол-
щиной стенок стакана ротора. Однако эти колебания невелики.
Результирующую ЭДС асинхронного
тахогенератора представим в виде сум-
мы остаточной Eq (не зависящей от час-
тоты вращения) и генераторной ЭДС £г
(пропорциональной частоте вращения):
грез
= £о + £г.
(13.13)
Из построений, приведенных на век-
торной диаграмме (рис. 13.3), видно, что
ЭДС £грс при вращении ротора в одну
сторону отличается от ЭДС Е' при вра-
щении ротора в другую сторону по ве-
личине, а их фазовый сдвиг относитель-
но друт друга Р не равен 180°. Основное
Рис. 13.3. Векторная диаг-
рамма ЭДС асинхронного
тахогенератора
средство уменьшения несимметрии выходной характеристики асин-
хронного тахогенератора — снижение остаточной ЭДС £0.
Асинхронный тахогенератор можно использовать в качестве
датчика ускорений для получения сигнала, пропорционального
ускорению вала dn/dz. Для этого обмотку возбуждения ОВ включа-
ют в сеть постоянного тока, при этом напряжение на этой обмот-
ке UB должно быть таким, чтобы ток возбуждения /, не превышал
значений, допустимых по условиям нагрева обмотки. Постоянный
ток /в, проходящий по ОВ, создает МДС FB, наводящую постоян-
ный магнитный поток Фпост, направленный по продольной оси
d—d. В отличие от пульсирующего магнитного потока ФЛ действую-
щего по оси d—d при включении обмотки возбуждения в сеть пе-
ременного тока (см. рис. 13.1, а), поток Ф|1ОС1 не индуцирует в рото-
ре трансформаторной ЭДС. Если ротор вращается с постоянной
частотой (п = const; dzj/dr = 0), то он пересекает силовые линии
потока Ф110СТ и в роторе наводится ЭДС вращения £2вр, создающая
ток /2вр. Так как частота вращения постоянная, то ток /2 ф — посто-
янный, и созданный этим током магнитный поток Ф сцеплен-
ный с генераторной обмоткой wr, не инд^тхирует в ней ЭДС, т.е.
(13.14)
Если частота вращения ротора переменна, т.е. ротор тахогене-
ратора получил некоторое ускорение (йп/dt * 0), то значения ЭДС
£2вр, тока /2вр и потока Ф2(? изменяются. При этом бФ2?/б/ / 0 и в
генераторной обмотке поток Ф2? индуцирует ЭДС, мгновенное зна-
чение которой
6Ф.
er=-wr-^-*0. (13.15)
Таким образом, ЭДС генераторной обмотки Д, а следователь-
но, напряжение на выходе датчика ускорений С/вых = £г пропорци-
Технические данные асинхронных тахогенераторов
Типоразмер об/мин Л. Гц В/(об/мин) <4, в А △ ns % iMacca, кг
АТ-201 4000 500 0,0075 110 0,22 0,1 2,5
АТ-231 4000 500 0,0085 но 0,25 0,1 1,9
АТ-261 4000 400 0.0075 но 0,20 0,1 1,8
ТГ-4 6000 400 0,0100 110 0,30 2,5 0,3
ТГ-5А 9000 400 0,0110 115 0,06 2.5 0,3
ТД1 2400 50 0,0080 но 0,15 1,5 з,о
ТД2 2400 50 0,0080 127 0,13 1,5 3,0
онально ускорению 1/вых ж d«/dr. При изменениях знака ускорения
меняется полярность напряжения (7ВЫХ.
Достоинства асинхронного тахогенератора: отсутствие скользя-
щих контактов, что обеспечивает ему эксплуатационную надеж-
ность и стабильность выходной характеристики; малоинерцион-
ность и небольшой статический момент сопротивления из-за не-
значительной массы ротора и отсутствия радиальных и аксиаль-
ных сил, действующих на ротор в процессе работы тахогенератора.
Недостатки асинхронного тахогенератора: нелинейность выход-
ной характеристики; наличие остаточной ЭДС, а следовательно,
несимметричность выходной характеристики: небольшая мощность
на выходе; повышенные габаритные размеры и масса, которые в
2—3 раза больше, чем у тахогенераторов постоянного тока (см.
параграф 13.4).
Несмотря на перечисленные недостатки, асинхронные тахоге-
нераторы широко используют в приборных устройствах и сред-
ствах автоматизации, особенно в случаях повышенного требова-
ния к надежности этих устройств. В табл. 13.1 приведены техничес-
кие данные некоторых типов асинхронных тахогенераторов.
Синхронные тахогенераторы. Синхронный тахогенератор — это
синхронная машина малой мощности, работающая в генератор-
ном режиме. При вращении ротора 7. представляющего собой по-
стоянный магнит (рис. 13.4), создаваемое им магнитное поле так-
же вращается и, пересекая обмотку статора 2, уложенную в пазы
сердечника статора 3, индуцирует в ней ЭДС. действующее значе-
ние которой, В:
Ег = 4,44/^Ф^., (13.16)
где w, — число витков в обмотке статора; fr — частота ЭДС в этой
обмотке, Гц:
/г = рл/60.
(13.17)
Подставив (13.17) в (13.16), полу-
чим выражение ЭДС синхронного та-
хогенератора
£г - 4.44(рл/60)щФ/;об1 - од, (13.18)
где Си — крутизна выходной характе-
ристики.
Из (13.18) следует, что ЭДС синх-
ронного тахогенератора пропорцио-
нальна частоте вращения ротора. Од-
нако выходная характеристика этого
тахогенератора нелинейная. Это объяс-
няется тем, что изменение частоты
Рис. 13.4. Синхронный тахо-
генератор:
1 — ротор; 2 — обмотка статора,
3 — сердечник статора
вращения ротора влияет не только на
ЭДС £г, но и на частоту этой ЭДС /
[см. (13.17)|, что ведет к изменению
индуктивных сопротивлений обмотки
статора и нагрузки. Нелинейность выходной характеристики затруд-
няет применение синхронных тахогенераторов в схемах автоматики.
Синхронные генераторы обычно применяют в качестве изме-
рительных для контроля частоты вращения какого-либо вала. В этом
случае к тахогенератору подключают вольтметр, шкала которого
переградуирована в единицы частоты врашения. Можно приме-
нять синхронный тахогенератор с выпрямителем, т.е. с постоян-
ным током в нагрузке. В этом случае нагрузка обладает только ак-
тивным сопротивлением и нелинейность выходной характеристи-
ки уменьшается. Однако у такого тахогенератора появляются недо-
статки, ограничивающие его применение: выходное напряжение
содержит переменную составляющую, и тахогенератор оказывает-
ся нечувствительным к изменению направления вращения, так
как при любом направлении врашения полярность выходного на-
пряжения остается неизменной.
13.3. Тахогенераторы постоянного тока
I Тахогенератор постоянного тока — это коллекторная машина
постоянного тока с независимым возбуждением или возбуждени-
ем постоянными магнитами, работающая в генераторном режиме.
По конструкции он почти не отличается от ранее расе мотренных
коллекторных машин постоянного тока (см. гл. 6).
На рис. 13.5 показаны принципиальные схемы тахогенераторов
постоянного тока с электромагнитным возбуждением (а) и воз-
буждением постоянными магнитами (б). В случае электромагнитного
возбуждения обмотку возбуждения ОВ подключают к источнику
б
Рис. 13.5. Схемы включения тахогенераторов постоянного тока
постоянного тока (рис. 13.5, а). При этом тахогенератор возбуж-
дается и в нем наводится магнитный поток Фв. Если в этом случае
якорь привести во вращение с частотой л, то на выходе тахогене-
ратора появится постоянное напряжение (Увых. Уравнение выход-
ной характеристики тахогенератора постоянного тока имеет вид
ГТ _ _______in /1 э 1 п\
‘,“’1+Хг/л„ i + Xr/я,,’ (Ш9)
где — сопротивление обмотки якоря, Ом; /?„ — внутреннее
сопротивление прибора, подключенного к тахогенератору (нагрузка
тахогенератора), Ом.
Если пренебречь падением напряжения в щеточном контакте
д[/щ, то
С Ф л
Uawi = 1 /V /V- = с"п- (13.20)
1 + 2, r/RM
Из (13.20) следует, что чем больше сопротивление прибора 7?нг.
тем больше крутизна выходной характеристики си. Наибольшая
крутизна у выходной характеристики, соответствующей режиму
холостого хода тахогенератора, когда обмотка якоря разомкнута
(/?нг = оо). С ростом тока нагрузки (снижением крутизна выход-
ной характеристики уменьшается (рис. 13.6, а).
У современных тахогенераторов постоянного тока крутизна с£/=
= (6—260)' 10" В/(об/мин), что превышает крутизну выходной ха-
рактеристики асинхронных тахогенераторов.
Выходная характеристика тахогенератора постоянного тока в
соответствии с уравнением (13.20) — прямая линия. Однако опыт
показывает, что выходная характеристика прямолинейна только в
начальной части (при малых относительных частотах вращения), а
с ростом частоты вращения она становится криволинейной (см.
рис. 13.6, а). Криволинейность характеристики усиливается при
Рис. 13.6. Выходные характеристики тахогенераторов постоянного тока
снижении сопротивления нафузки /?,„ и увеличении частоты вра-
щения и. Это объясняется размагничивающим действием реакции
якоря в тахогенераторе. Для уменьшения криволинейности выход-
ной характеристики не следует использовать тахогенератор на его
предельных частотах вращения и применять в качестве нафузки
приборы с малым внутренним сопротивлением.
В реальных условиях существует падение напряжения в щеточ-
ном контакте ДСщ, поэтому выходная характеристика тахогенера-
тора выходит не из начала осей координат, а из точки на оси
ординат, отстоящей от начала координат на напряжение:
гг
ш“ 1+Sz/V (13'2,)
Это приводит к; появлению у тахогенераторов постоянного тока
зоны нечувствительности е = ±wmin, в пределах которой он не созда -
ет на выходе напряжения (рис. 13.6, 6). Для уменьшения зоны не-
чувствительности в тахогенераторах применяют щетки с неболь-
шим значением падения напряжения на щетках &UU. т.е. с малым
электрическим сопротивлением этих шеток (медно-графитные или
серебря но-графитные щетки). В тахогенераторах высокой точност и
используют щетки с серебряными или золотыми напайками.
Точность работы тахогенераторов в значительной мере зависит
от правильной установки щеток на геометрической нейтрали. При
смещении шеток с геометрической нейтрали в тахогенераторе по-
является несимметрия выходной характеристики, вызванная на-
рушением условия: при одинаковой частоте вращения якоря, но
разных ее направлениях, напряжения на выходе тахогенератора
должны быть одинаковы [см. (13.2)]. Ошибка несимметрии выход-
ной характеристики тахогенератора постоянного тока может со-
ставлять Дысим - I — 3 % [см. (13.3)].
Источником погрешности является также непостоянство маг-
нитного потока обмотки возбуждения Фи. При электромагнитном
возбуждении тахогенератора причиной этого могут быть колеба-
Рис. 13.7. График намагничивания тахогенератора постоянного тока (а)
и магнитопровод тахогенератора с магнитными шунтами (б)
ния напряжения, подводимого к обмотке возбуждения, или изме-
нение сопротивления этой обмотки вследствие ее нагрева. Обе при-
чины приводят к изменению тока возбуждения, а следовательно,
и магнитного потока возбуждения Фв. Для уменьшения возможных
колебаний магнитного потока Фв магнитную систему тахогенера-
тора выполняют с сильным магнитным насыщением, т.е. рабочую
точку 1 на кривой намагничивания принимают за «коленом» на-
сыщения магнитной системы.
Из построений рис. 13.7, а видно, что изменение тока возбуж-
дения /в на величину Д/в1 в зоне точки 7 вызывает изменение пото-
ка возбуждения на ДФвЬ что намного меньше, чем в зоне точки 2,
лежащей на прямолинейном участке графика намагничивания, рас-
положенном до «колена» насыщения (ДФ, «сДФв2).
Сильное магнитное насыщение магнитной цепи тахогенерато-
ра не всегда целесообразно, потому что увеличиваются объем об-
мотки возбуждения, а следовательно, и габаритные размеры тахо-
генератора. В тахогенераторах с ненасыщенной магнитной систе-
мой для ограничения колебаний потока возбуждения Фв последо-
вательно в цепь обмотки возбуждения включают терморезистор,
компенсирующий изменение сопротивления обмотки при колеба-
ниях температуры, или применяют магнитные шунты МШ (рис.
13.7, 6). изготовленные из сплава, изменяющего свое магнитное
сопротивление при изменении температуры нагрева. Например,
при нагреве обмотки возбуждения ее сопротивление увеличивает-
ся, ток L и поток Фго уменьшаются. Но при этом магнитное сопро-
тивление шунтов возрастает, что снижает поток Фш через шунты и
увеличивает полезный магнитный поток Фп через полюс и якорь
на величину, компенсирующую его уменьшение от изменения тока
возбуждения. При снижении температуры процессы идут в обрат-
ном направлении. В итоге происходят лишь незначительные коле-
бания потока возбуждения.
Все причины, вызывающие отклонение выходной характерис-
тики тахогенератора от прямолинейного вида, ведут к амплитуд-
нои погрешности. Тахогенераторы постоянного тока имеют ампли-
тудную погрешность от 0,5 до 3 % [см. (13.10)]. В тахогенераторах
постоянного тока возможна пульсация выходного напряжения, обус-
ловленная рядом причин:
зубчатой поверхностью сердечника якоря;
неравномерностью воздушного зазора или неодинаковой маг-
нитной проводимое! ью сердечника якоря по разным радиальным
направлениям;
вибрацией щеток и замыканием секций обмотки якоря в про-
цессе коммутации;
небольшим количеством секций в обмотке якоря из-за малых
габаритных размеров машины (см. параграф 6.1).
Пульсации могут вносить помехи в работу автоматических уст-
ройств, элементом которых являются тахогенераторы. Пульсации
напряжения можно ослабить за счет более качест венной техноло-
гии изготовления тахогенератора с применением «веерной» сборки
листов сердечника якоря (листы укладывают в пакет со сдвигом на
одно зубцовое деление), а также подключением сглаживающего
фильтра на выходе тахогенератора. Однако полностью избавиться
от пульсаций не удается. Амплитуды пульсаций выходного напря-
жения тахогенераторов постоянного тока составляют 0,1 — 3 % от
среднего значения выходного напряжения.
Достоинства тахогенераторов постоянного тока по сравнению
с асинхронными тахогенераторами: меньшие габаритные размеры
и масса (в 2—3 раза) при большей выходной мощности; отсут-
ствие фазовой погрешности; возможность возбуждения постоян-
ными магнитами, что позволяет обойтись без источника питания
для цепи возбуждения.
Наряду' с этим тахогенераторы постоянного тока имеют недо-
статки, ограничивающие их применение: наличие скользящего
контакта между щетками и коллектором, что приводит к сниже-
нию надежности тахогенератора и к нестабильности выходной ха-
рактеристики; наличие зоны нечувствительности; пульсация вы-
ходного напряжения; помехи радиоприему, для подавления кото-
рых в некоторых случаях приходится применять специальные меры
(см. параграф 6.6).
Таким образом, любой вид тахогенератора имеет свои достоин-
ства и недостатки. Поэтому7 при выборе тахогенератора необходи-
мо исходить из конкретных условий его работы и требований,
предъявляемых к тахогенератору со стороны устройства, для кото-
рого он предназначен.
Технические данные тахогенераторов постоянного тока
(возбуждение постоянным магнитом)
Типоразмер с и, мВ/(об/.мин) D *'нг» Ом 10} ^НО.М» об/мин Масса, кт
1.6ТГП-2 2,5 10 3000 0.025
2.5ТГП-4 4,0 6 3 000 0,09
II11-5 4,0 10 6000 0,09
ТП20-6-0.5 6,0 10 3000 0,05
ТП20-4-0.2 4,0 10 6000 0.05
ТП20-4-1 4,0 6 3000 0,05
В табл. 13.2 приведены технические данные некоторых типов
тахогенераторов постоянного тока, серийно изготовляемых отече-
ственной промышленностью.
13.4. Примеры применения тахогенераторов
в устройствах промышленной автоматики
13.4.1. Применение тахогенераторов в качестве датчиков
частоты вращения
Тахогенераторы применяют в качестве датчиков максимальной
скорости для предотвращения аварийного режима, связанного с
увеличением частоты вращения сверх предельно допустимого зна-
чения. Например, если частота вращения двигателя М постоянно-
го тока последовательного возбуждения (рис. 13.8) при снижении
Рис. 13.8. Применение тахогенератора в схеме реле максимальной скорости
нагрузки на вал превысит предельно допустимое значение, то на-
пряжение на выходе тахогенератора BR отрегулированное потен-
циометром RP, достигнет значения напряжения срабатыван ия (Z
и вызовет срабатывание реле напряжения KV. Контакты этого реле
разомкнутся, отключив катушку линейного контактора КМ, и дви-
гатель окажется отключенным от сети. Одновременно будет выдан
информационный сигнал на пульт оператора. После устранения
причин, вызвавших нарушение работы электропривода, двигатель
можно вновь подключить к сети нажатием кнопки «Пуск» SB1.
13 4 2. Применение тахогенератора в качестве расходомера
Другим примером применения тахогенератора является расходо-
мер с крыльчаткой, предназначенный для измерения расхода рабо-
чего вещества, подаваемого по трубопро-
воду (газ, жидкость, сыпучий материал).
На пути прохождения рабочего вещества
в трубопроводе ус танавливают крыльчат-
ку — колесо с лопастями (рис. 13.91 Ра-
бочее вещество, попадая на лопасти,
вращает крыльчатку. Чем больше скорость
прохождения вещества в трубопроводе,
а следовательно, чем больше расход это-
го вещества, тем интенсивнее вращение
крыльчатки. Вращающийся вал крыльчат-
ки соединен с тахогенератором BR, на
выходе которого появляется электричес-
кий сигнал ивьп. Уровень этого сигнала
является функцией частоты вращения
Рис. 13.9 Применение тахо-
генератора в расходомере
крыльчатки, т.е. скорости прохождения
вещества в трубопроводе бвых = /(G/t). Зная диаметр трубопровода.
нетрудно по скорости прохождения вещества определить его расход
G за определенное время t, например за смену или сутки.
13.4,3. Применение тахогенератора в электроприводе
с отрицательной обратной связью по скорости
В процессе работы электропривода на двигатель действуют сек-
торы, влияющие на частоту' вращения приводного двигателя: из-
менения нагрузки на вал двигателя, колебания напряжения и ча-
стоты переменного тока в питающей сети и т.п.
Эффективным средством стабилизации частоты вращения дви-
гателя является применение в электроприводе отрицательной об-
ратной связи по скорости с использованием тахогенератора. Рас-
смотрим работу такой замкнутой автоматизированной системы на
примере электропривода постоянного тока.
Рис. 13.10. Применение тахогенератора для стабилизации частоты враще-
ния двигателя постоянного тока
Система состоит из следующих элементов (рис. 13.10):
блока задающего устройства ЗУ, на выходе которого выстав-
ляется величина напряжения 1/зу, соответствующая требуемой ча-
стоте вращения двигателя М;
блока сравнения БС, в котором сигнал (7ЗУ сравнивается с
сигналом обратной связи по скорости С7Осс и на выходе формиру-
ется сигнал С4 = U3y- t/oco
усилителя У, в котором сигнал усиливается до значения,
достаточного для управления системой импульсно-фазового уп-
равления СИФУ;
блока системы СИФУ, которая выдает импульсы, управляю-
щие работой тиристорного преобразователя ТП в соответствии с
управляющим сигналом (/у;
управляемого тиристорного преобразователя трехфазного пе-
ременного тока в постоянный ток ТП;
двигателя постоянного тока М независимого возбуждения;
тахогенератора BR с возбуждением постоянным магнитом,
вырабатывающего сигнал обратной связи по скорости UqCC, соот-
ветствующий фактической частоте вращения двигателя.
Сигнал обратной связи по скорости t/occ подается в блок сравне-
ния БС с полярностью обратной по отношению к задающему сиг-
налу U3y. Таким образом, в рассматриваемой системе электропри-
вода применена отрицательная обратная связь по скорости, при
которой сигнал обратной связи £/Осс в блоке сравнения БС вычи-
тается из заданного сигнала С7ЗУ, в результате чего на усилитель
мощности У подается сигнал: ty = t/3y - t/occ-
При отрицательной обратной связи снижение частоты враще-
ния двигателя (например, вследствие увеличения статического
момента нагрузки) вызовет уменьшение сигнала обратной связи
t/occ и приведет к увеличению сигнала t/z. Это в свою очередь
вызовет повышение напряжения сигнала управления Uy. В итоге
изменится режим работы блока СИФУ таким образом, что про-
изойдет рост частоты вращения двигателя до значения, при кото-
ром сигнал обратной связи по скорости (7qcc, а также значения
сигналов ГЛ и Uy восстановятся и фактическая частота вращения
двигателя будет иметь прежние (заданные) значения.
Если же по каким-либо причинам частота вращения двигателя
превысит заданное значение, что может произойти вследствие
уменьшения нагрузки на вал двигателя, либо роста напряжения в
питающей сети, то сигнал обратной связи £/осс увеличится, а так
как сигнал задающего устройства f73y неизменен, то значения сиг-
налов и Uy уменьшатся, что приведет к снижению частоты вра-
щения двигателя до прежнего (заданного) значения. При этом сиг-
нал обратной связи Uocc восстановит свое значение. Механическая
характеристика п = /(Л/) рассматриваемого двигателя окажется весь-
ма жесткой.
Если же в системе регулирования применить положительную об-
ратную связь, для чего достаточно поменять местами провода, со-
единяющие тахогенератор с блоком сравнения БС, то в этом блоке
будет происходить сложение сигналов Г/ЗУ и Uocc: (Л = £/зу + t/occ.
При этом даже небольшое увеличение частоты вращения двигате-
ля приведет к возрастанию сигнала f4, отчего частота вращения
двигателя станет еще больше. В итоге вместо стабилизации часто-
ты вращения произойдет ее неограниченное нарастание, т.е. сис-
тема электропривода окажется неуправляемой.
При необходимости изменить частоту вращения двигателя сле-
дует воздействовать на величину сигнала задающего устройства <7ЗУ.
Например, для увеличения задаваемой частоты вращения следует
посредством потенциометра задающего устройства ЗУ повысить
напряжение /7ЗУ на входе блока сравнения БС, что приведет к ро-
сту сигналов иъ и £/у. В итоге произойдет увеличение напряжения
на выходе тиристорного преобразователя 1П и частоты вращения
двигателя. Процесс стабилизации в регуляторе будет протекать по-
прежнему, но при более высокой заданной частоте вращения дви-
гателя. Если же необходимо изменить степень влияния обратной
связи по скорости на работу системы, то следует изменить глубину
обратной связи по скорости Р = ^осс/^зу* Для этого нужно посред-
ством потенциометра в цепи тахогенератора изменить уровень сиг-
нала обратной связи t/occ- Механическая характеристика двигате-
ля в этом случае окажется менее жесткой.
Контрольные вопросы
1. Каково назначение тахогенераторов, какие требования к ним предъяв-
ляются?
2. Почему частота тока на выходе асинхронного тахогенератора нс за,
висит от частоты вращения ротора?
3. Какие виды погрешностей имеют место в асинхронных тахогенера-
торах?
4. Перечислите достоинства и недостатки асинхронных тахогенераторов
5. Чем офаничивается применение синхронных тахогенераторов в ав
тематике?
6. Чем объясняется нелинейность выходной характеристики тахогене-
раторов постоянного тока?
7. Каковы недостатки тахогенераторов постоянного тока, ограничива-
ющие их применение?
8. Дайте сравнительную оценку асинхронных тахогенераторов и тахо
генераторов постоянного тока.
Глава 14
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ СИНХРОННОЙ СВЯЗИ
14.1. Основные понятия
В системах автоматическою контроля и регулирования иногда
необходимо передавать на расстояние заданный угол поворота вала
контролируемого или регулируемого объекта или получать инфор-
мацию об угловом положении вала данного объекта. Для этой цели
применяют системы дистанционной передачи угла на электричес-
ких машинах синхронной связи, называемых сельсинами. Сельси-
Рис. 14.1. Структурные схемы дис-
танционных систем передачи угла
поворота на сельсинах:
а — индикаторная; б — трансформа-
торная
ны относятся к информацион-
ным электрическим машинам,
так как преобразуют угол пово-
рота в электрический сигнал и.
наоборот, электрический сигнал
в угловое перемещение.
На рис. 14.1 показаны струк-
турные схемы систем дистанци-
онной передачи угла поворота
вала с помощью сельсина-дат-
чика СД и сельсина-приемника
СП, соединенных линией связи
ЛС. При повороте вала В сель-
сина-датчика на угол ад (рис.
14Л, а) вырабатывается соответ-
ствующий этому углу электри-
ческий сигнал, который переда-
ется по линии связи на сельсин-
приемник СП, где он преобра-
зуется в угловое перемещение
ротора СП на угол ап - ад. Рассмотренная система называется
индикаторной, так как вал сельсина-приемника лишь фиксирует
угол поворота, поворачивая стрелку индикатора И, отмечающую
на шкале этот угол поворота. Таким образом, индикаторная систе-
ма только передает информацию об угловом положении контро-
лируемого вала.
Если же требуется воспроизвесл и угол поворота вала В на ка-
ком-либо рабочем механизме, то система дополняется усилителем
мощности У и исполнительным двигателем М (рис. 14.1, б). Элек-
трический сигнал, эквивалентный заданном}7 на сельсине-датчике
углу поворота, усиливается усилителем мощности и поступает на
обмотку управления исполнительного двигателя, приводя его во
вращение.
В итоге двигатель М через понижающий редуктор Р создает на
валу рабочего механизма РМ вращающий момент, достаточный
для поворота вала рабочего механизма РМ на угол, заданный на
сельсине-датчике. Одновременно поворачивается ротор сельсина-
приемника СП на такой же угол. Такая система дистанционной
передачи называется трансформаторной.
Наибольшее применение в системах дистанционной передачи
угла получили однофазные сельсины. Такой сельсин состоит из
неподвижного статора и вращающегося ротора. На статоре одно-
фазного сельсина (рис. 14.2) расположена однофазная обмотка
возбуждения ОВ, а на роторе — трехфазн обмотка синхрониза-
ции ОС, соединенная «звездой». Для электрической связи обмотки
ротора с внешней цепью используют контактные кольца и щетки.
Кольца закреплены на валу сельсина и изолированы друг от друга.
Между кольцами и щетками осуществляется скользящий контакт,
так как кольца вращаются вместе с ротором, а щетки неподвижны.
Сельсин — индукционная электрическая машина, так как ее
принцип действия основан на трансформаторной связи между об-
мотками на статоре и роторе: напря-
жение, поданное на одну из обмоток,
передается на другую обмотку' за счет
индуктивной связи между ними. В этом
отношении сельсины аналогичны асин-
хронным двигателям с фазным рото-
ром (см. рис. 3.5, о). При необходимос-
ти синхронного вращения нескольких
механизмов, отстоящих друг от друга
на значительном расстоянии и при от-
сутствии механической связи между
ними, применяют систему «электри-
ческого вала». Для привода таких меха-
низмов используют обьпшые асинхрон-
ные двигатели с фазным ротором. сельсина
Рис 14.2. Схема однофазного
Рис. 14.3. Принципиальная схема системы «электрического вала»
На рис. 14.3 показана одна из возможных схем «электрического
вала», состоящая из двух однотипных асинхронных двигателей с
фазным ротором. При синхронном вращении двигателя Ml (при-
вод рабочей машины РМ1) и двигателя М2 (привод рабочей ма-
шины РМ2) токи в обмотках роторов этих двигателей 12\ и 12,
одинаковы по величине и противоположны по направлению, по-
этому они замыкаются в резисторах согласующего реостата СР. Если
же возрастет нагрузка на валу одного из двигателей, например Ml,
то скольжение в этом двигателе и соответственно токи в фазных
обмотках ротора увеличатся. В итоге в соединительных проводах и
обмотках роторов двигателей Ml и М2 появится уравнительный
ток, который увеличит вращающий момент двигателя Ml и умень-
шит его в двигателе М2. Это приведет к восстановлению синхрон-
ности вращения двигателей «электрического вала».
14.2. Индикаторная система
дистанционной передачи угла
Индикаторная система дистанционной передачи угла состоит
из одинаковых сельсина-датчика СД и сельсина-приемника СП,
соединенных линией связи (рис. 14.4).
Пространственное положение ротора сельсина-датчика опре-
деляется углом ад, а ротора сельсина-приемника — углом ап- Если
положение роторов СД и СП неодинаково (ад * ап), то это указы-
вает на то, что между ними имеется угол рассогласования:
6 = ад-ап-
(14.1)
При включении в сеть обмоток возбуждения сельсинов СД и
СП переменные токи возбуждения этих сельсинов создадут пуль-
сирующие во времени МДС и магнитные потоки Ф„, которые,
сцепляясь с обмотками синхронизации, наводят в них ЭДС синх-
ронизации Ел. Ев и Ес. Если какая-либо из обмоток фазы синхро-
Рис. 14.4, Принципиальная схема индикаторной системы передачи угла
низании, например фазы А, занимает такое пространственное
положение, что ее ось совпадает с осью обмотки возбуждения, то
ЭДС обмотки этой фазы синхронизации максимальна. Для фазной
обмотки А максимальное значение ЭДС равно. В:
^Лптах 4,44У| Д^ф^об.фФвэ
(14.2)
где и — количество витков и обмоточный коэффициент
обмотки фазы синхронизации.
Если оси обмотки фазы синхронизации и обмотки возбужде-
ния смещены относительно друг друга на угол а, то ЭДС обмотки
этой фазы. В:
^4 max COS а. (14.3)
Так как в сельсине фазы обмотки синхронизации смещены в
пространстве относительно друг друга на угол 120е, ЭДС обмоток
этих фаз соответственно равны:
ЁА = cos а;
Ёв = £0 cos (а - 120°) = £0 cos р; (14.4)
Ёс = £0 cos (а - 240°) = £0 cosy,
где а — угол поворота ротора сельсина относительно положения,
при котором ось обмотки А совпадает с осью обмотки возбужде-
ния; р = а- 120°; у = а - 240°.
Если роторы сельсинов СД и СП занимают одинаковые положе-
ния относительно собственных обмоток возбуждения (o.j = ап), то в
соответствующих фазных обмотках синхронизации этих се.тьсинов на-
водятся одинаковые ЭДС: £Л1 = £Ж1; Евл = £Л|; Ещ = Есп- В этом
случае разность ЭДС в цепи одноименных фаз обмотки синхронизации
равна нулю, ток в цепи синхронизации (линии связи) отсутствует
(Л, = 0, 1В - 0, /с = 0), и система находится в состоянии равновесия.
Если же ротор сельсина-датчика повернуть на угол ад, а ротор
сельсина-приемника оставить в прежнем положении (ап = 0), то по-
явится угол рассогласования 6 = ад- ап = ад и нарушится равнове-
сие ЭДС в цепи синхронизации, т. е. Е^ * Ё-яъ Ёо * Еви\ Ёд * Е( п.
Так как одноименные фазы обмотки синхронизации датчика и
приемника включены встречно, то в цепях этих обмоток появится
результирующая ЭДС ДЕ, равная разности ЭДС одноименных фаз
обмоток синхронизации. С учетом (14.4) результирующие ЭДС в
каждой из фазных цепей синхронизации соответственно равны:
ДЁЛ = Ёдд - Ёлп = Ёо cos (Хд - Ёо cos О = E0(cos ад - 1);
ДЁВ = ЁВд- Ёвп = E(]cosP-E0cos(-120L) = £0(cosp + 0,5); (14.5)
ДЁС = £( д- ЁСТ1 = £ocosY- Ёо cos (-240°) = £0(cosy + 0,5).
Под действием результирующих ЭДС в обмотках синхрониза-
ции датчика и приемника появятся уравнительные токи:
lB = ^EB/Z; Ic = bEc/Z> (14.6)
где 7 — суммарное сопротивление току синхронизации:
7=7Д + 7П + 7Л.
(14.7)
7q и 7П — сопротивления фазы обмоток синхронизации датчика и
приемника, Ом; 7Я — сопротивление соединительного провода
линии связи. Ом.
Эти токи, проходя по виткам фаз обмоток синхронизации, со-
здают магнитодвижущие силы в датчике (Ёдд, Ёдд и Ёсд) и прием-
нике (Елп, Евп и Ёл1). Токи в фазах обмоток синхронизации датчи-
ка и приемника проходят в одном направлении. Например, если
ток в обмотке фазы А датчика направлен от начала фазы к нулевой
точке, то в обмотке этой фазы приемника он направлен от нуле-
вой точки к началу фазы А. Это же касается направления токов в
фазах В и С (см. схему на рис. 14 4). Учитывая это, значения МДС
всех фаз обмотки синхронизации приемника по отношению к МДС
фаз синхронизации датчика принимаем с противоположным зна-
ком. Обобщая изложенное, МДС для фаз обмоток синхронизации
можно записать в виде:
Ёы - ~Еап -
•
Ёд = -£яп =
Fсл = сп = I cwfp-
Учитывая (14.5) и (14 6), получим
Гдд = -FAn = £o(cos ад - I);
Fвл = -Гдц = Fo(cosp f 0,5);
Fax = ~Fcn = F^cq& у + 0,5),
(14.8)
где
Fo - Eqw^/Z.
(14. Ю>
Результирующие МДС обмоток синхронизации сельсина-дат-
чика и сельсина-приемника определяются выражениями
(14.1J)
(14 12)
где Fad и ЛП(/ — сумма проекций фазных МДС на продольную ось
d—d, т.е. ось обмотки возбуждения; F^ и Fnij — сумма проекций
фазных МДС на поперечную ось q~q, перпендикулярную оси об-
мотки возбуждения.
Допустим, что ротор сельсина-датчика повернули на угол ол =
= 60' против часовой стрелки, при этом угол рассогласования в
системе передачи 0 = сгд-ап - 60° - 0° = 60°. Тогда МДС обмоток фаз
синхронизации датчика и приемника в соответствии с (14.9) и
учетом того, что р = ад - 120° = -60° и у = ад - 240° = -180°, равны:
Аш = A (cos 60' -1) = -0,5Ао;
Am - ОЛА;
Ад = Alcos(-6o°)+o,5j = А;
?ВП ~ “Ai
(14.13)
Ад = A [cos (-180°) + 0,5 J = - 0,5 А; Ап = о,5 А.
Переходя к относительным значениям МДС F’ - F/F$, получим
в
Ачд — 0,5, А^п 0,5,
гдд - 1; Гдп — -1;
(14.14)
Fen ~ “0,5; Aqj - 0,5.
За положительное направление вектора МДС обмотки фазы
синхронизации при построении векторной диаграммы МДС при-
мем направление от нулевой точки к началу обмотки фазы, а за
отрицательное — от начала обмотки фазы к нулевой точке. Векто-
ры относительных значений МДС сельсинов датчика СД и прием-
ника СП по продольной d— d и поперечной q—q осям при ад = 60°
и ап - 0° соответственно равны:
A’rf = (- Ад) + А;д cos 60° - (-А^ cos 60°) - 0,5 +1 0,5 - 0,5 0,5 = 0,75:
Aw = Ап + (-Ап cos 60°) - А^ cos 60° = 0.5 +1 0,5 - 0,5 - 0,5 = 0,75;
Адч -(-/ддСовЗО ) + Ад
cos 30° = 0,5-0,573 + 1 0,5-Тз = 1,29;
А? = Am cos 30° + (-Ап cos 30°) = 0.5 • 0,5>/3 +1 - 0,5<3 = 1.29.
Составляющие МДС по продольной оси Ёш и FIIt/ направлены
навстречу магнитным потокам возбуждения датчика и приемника
соответственно. Но они не оказывают заметного влияния на рабо
ту сельсинов, так как при небольших углах рассогласования 0
которые обычно в реальных условиях работы индикаторных сис-
тем не превышают нескольких градусов, МДС по продольной оси
Fd в 8— 10 раз меньше МДС по поперечной оси Fr
14.3. Синхронизирующие моменты сельсинов
в индикаторной системе
Поперечные составляющие МДС сельсина-датчика /V. и сель-
сина-приемника Fn<j взаимодействуют с магнитными потоками
возбуждения и создают на роторах датчика и приемника вращаю-
щие синхронизирующие моменты Л/сД и Л(п.
Индикаторная система дистанционной передачи угла является
самосинхронизирующейся> т.е. при нарушенш! равновесного поло-
жения роторов датчика и приемника, когда угол рассогласования
0 >0, на роторах датчика и приемника появляются синхронизиру-
ющие моменты. Направление этих моментов таково, что они стре-
мятся вернуть систему в состояние равновесия, при которой угол
рассогласования 0 = 0, т.е. когда роторы датчика и приемника зай-
мут одинаковые положения относительно своих статоров.
Таким образом, синхронизирующий момент датчика Л/д направ-
лен в сторону, противоположную заданному углу поворота о.д (в рас-
сматриваемом примере — по часовой стрелке), а синхронизирую-
щий момент на роторе приемника Л/сП — в сторону заданного на
датчике угла а( и стремится повернуть ротор приемника на угол ап =
= Од. Если роторы датчика и приемника, имеющие угол рассогласо-
вания 0, одновременно растормозить, то каждый из них повернется
на угол, равный половине угла рассогласования (0/2), но в разных
направлениях. После этого датчик и приемник вновь окажутся согла-
сованными. О встречном направлении синхронизирующих моментов
датчика Л/1Д и приемника Л/.п свидетельствует еще и то, что векторы
магнитодвижущих сил F^ и направлены в разные стороны.
Синхронизирующий момент датчика Л/г1 не влияет на состоя-
ние индикаторной системы, поскольку ротор датчика жестко свя-
зан с механизмом, задающим угол поворота ад. Под действием син-
хронизирующего момента приемника Л?сП ротор приемника повора-
чивается на заданный угол. Для придания системе способности са-
мосинхронизации в пределах полного оборота сельсины выполня-
ют двухполюсными. В этом случае электрический угол поворота ра-
вен геометрическому углу. Например, если применить в индикатор-
ной схеме чстырехполюсные сельсины, то заданному на роторе сель-
сина-датчика углу рассогласования соответствуют два устойчивых
। положения ротора сельсина-приемника — одно в пределах одной
половины оборота, а другое в пределах другой половины оборота
I Синхронизирующий момент сельсина-приемника
Мсп = сФвп/тк? sin Ф2, (14.15)
где с — постоянный коэффициент; <р? — утол сдвига фаз между
ЭДС и током в фазе обмотки синхронизации:
<р2 =агс51п(Гф/гф),
(14.16)
г |Ц - соответственно активное и полное сопротивления фазы
обмотки синхронизации.
Магнитодвижущая сила приемника по поперечной оси Fn яв-
ляется функцией угла рассогласования 0, поэтому синхронизиру-
ющий момент Мсп зависит также от угла рассогласования:
^сП — max SIH 6,
(14.17)
к где Л/ .ъ — максимальный синхронизирующий момент сельсина-
приемника, соответствующий углу рассогласования 6 = 90°.
I Таким образом, при изменении угла рассогласования от 0 до
| 360° синхронизирующий момент изменяется по синусоидальному
' закону (рис. 14.5, д). При 0 = 90° и 6 = 270г синхронизирующий
момент соответственно равен Мс тах и nvLX. При значениях угла
рассогласования 0 = 0° и 6 = 180° синхронизирующий момент равен
нулю, т.е. индикаторная система находится в состоянии равновесия.
Однако устойчивое равновесие будет только при 0 = 0°, так как
при повороте ротора приемника в ту или иную сторону от устой-
1 чивого положения ротор возвращается в исходное положение. При
। значении угла рассогласования 0 = 180' равновесие системы неус-
тойчиво. Так, при малейшем отклонении ротора от этого положе-
ния возникает синхронизирующий момент, стремящийся повер-
нуть ротор на 180\ т.е. в положение, соответствующее 0 = 0°.
а
Рис. 14.5 Графики зависимости синхронизирующего момента сельсинов
от угла рассогласования
Синусоидальная зависимость синхронизирующего момента от
угла рассогласования (14.17) справедлива лишь при малых значе-
ниях угла рассогласования 0 < 15”. Объясняется это тем, что при
больших значениях угла рассогласования 0 продольная составляю
щая МДС возрастает настолько, что оказывает заметное раз-
магничивающее влияние на поток возбуждения ФвП. Кроме того,
на форму графика М п = /(0) влияет и конструктивное исполне-
ние сельсина. На рис. 14.5, б приведены наиболее характерные гра-
фики Л/сП = /(6) лля сельсинов с явно выраженными полюсами на
статоре или роторе (график 7) (см. параграф 14.5) и для сельси-
нов с неявно выраженными полюсами (график 2). Сравнивая эти
графики, видно, что для индикаторной системы дистанпионной
передачи угла целесообразно применять сельсины с явно выражен
ними полюсами, у которых синхронизирующий момент при углах
рассогласования 0 < 80° (график У) больше, чем у неявно полюс-
ных сельсинов (график 2). Индикаторная система передачи угла
может работать в двух режимах — статическом и динамическом.
Статический режим — это работа системы при повороте рото-
ров сельсинов на некоторый угол. Основное требование к индика-
торной системе в статическом режиме — максимальная точность
отработки сельсином-приемником заданного на сельсине-датчике
угла поворота. Индикаторная система дистанционной передачи угла
работает таким образом, что одновременно с поворотом ротора
сельсина-датчика происходит поворот ротора сельсина-приемни-
ка. Однако при заданном угле поворота ал ротор сельсина-прием
ника поворачивается на угол ап, который несколько меньше ад.
Следовательно, система работает с некоторой ошибкой, опреде-
ляемой углом рассогласования: 0 = ад-схп.
Величина угла рассогласования зависит от значения момента
Л/пр, противодействующего повороту ротора сельсина-приемника.
Этот момент создается суммой двух составляющих:
Мф = Л/нг + Л/Гр, (14.18)
где М — полезный нагрузочный момент, создаваемый устрой-
ством, вращаемым сельсином-приемником; если стрелка индика-
тора закреплена непосредственно на валу' приемника, то М. = 0;
Л/ — момент трения, обусловленный силами трения в подшип-
никах сельсина-приемника и трением шеток о контактные кольца.
При большом противодействующем моменте ЛÄРошибка ин-
дикаторной системы оказывается значительной. По этой причине
индикаторные системы непригодны для привода рабочих механиз-
мов, создающих значительный нагрузочный момент.
В реальных условиях работы индикаторных систем основное вли-
яние на точность отработки заданного угла поворота оказывает
момент трения М р, значение которого определяется механически-
ми показателями сельсина-приемника, т.е. М1р = М
Точность индикаторной системы оценивается удельным синхрони-
зирующим моментом сельсина-приемника, который представляет
собой синхронизирующий момент, приходящийся на один градус
угла рассогласования, Н • м/град:
Л/уд — I 0,01 75Л/С тах-
(14.19)
Чем больше крутизна графика М, Г1 = /(0) в начальной его части,
тем больше удельный синхронизирующий момент селъсина-прием-
ника. Удельный синхронизирующий момент Л/п определяет синх-
ронизирующую способность сельсина-приемника, т.е. чем больше Л/р,
тем меньше ошибка рассогласования системы. На рис. 14.6 показаны
начальные участки графиков Л/сП -/(0) двух сельсинов-приемников
с разными удельными синхронизирующими моментами Л/уд1 > Л/уд2
(к роторам сельсинов приложены одинаковые противодействующие
моменты Л/ э). Из выполненных построений видно, что ошибка 0|
сельсина с большим значением удельного синхронизирующего мо-
мента М, (график 7) почти в два раза меньше ошибки 02 сельсина с
меньшим значением удельного момента М l2 (график 2).
В некоторых случаях к одному сельсину-датчику подключают
параллельно несколько (/V) сельсинов-приемников. В этом случае
удельный синхронизирующий момент каждого из /V параллельно
включенных сельсинов-приемников уменьшается по сравнению с
удельным синхронизирующим моментом Л/уЛ| сельсина-приемни-
ка, работающего по схеме «приемник—датчик»:
0,52V +Г
(14.20)
Таким образом, включение нескольких сельсинов-приемников
на один сельсин-датчик снижает точность индикаторной системы.
Количественной оценкой точ-
ности сельсина-приемника в ста-
тическом режиме работы индика-
торной системы является погреш-
ность угла рассогласования, град:
А0 - O,5(0Imax + 02mJ, (14 21)
где 0lmax и 02nia.K — максимальные
положительное и отрицательное
отклонения положений ротора
сельсина-приемника относительно
углов, задаваемых датчиком при
его повороте на 360" по часовой
стрелке, а затем против часовой
стрелки.
Погрешность сельсинов-прием-
ников составляет от ±0,5 до 12,5 ’.
Рис. 14.6. К понятию об удельном
синхронизирующем моменте
Другой важный параметр сельсина-приемника в статическом ре-
жиме работы — время успокоения, т.е. время, в течение которого
успокаивается ротор приемника после рассогласования индика-
торной системы на ±179°. Дня ограничения времени успокоения и
предотвращения самопроизвольного вращения ротора при резких
рассогласованиях системы сельсины-приемники снабжаются демп-
ферами (успокоителями), которые бывают электрическими и механи-
ческими. Электрический демпфер выполняют в виде короткозамк-
нутого витка ДО на явнополюсном роторе, ось которого располо-
жена перпендикулярно оси обмотки возбуждения (см. рис. 14.9, б).
При колебаниях ротора в этом витке наводится ЭДС и возникает
ток, который взаимодействует с потоком возбуждения и создает
на роторе момент, противодействующий качаниям ротора. Меха-
нические демпферы выполняют чаще всего в виде маховика, наса-
женного на вал сельсина-приемника, что повышает момент инер-
ции ротора и ограничивает его качания.
Динамический режим — это режим непрерывного вращения
роторов сельсинов. Особенность работы сельсинов состоит в том,
что в этом режиме обмотка ротора вращается в магнитном поле и
в ней индуцируется ЭДС вращения. Создавая свои токи в цепи
синхронизации сельсинов, ЭДС вращения снижает удельный син-
хронизирующий момент, а следовательно, и точность сельсина-
приемника по сравнению с его работой в статическом режиме.
Некоторые особенности работы индикаторной системы дистан-
ционной передачи угла:
если поменять местами любую пару проводов, присоединяе-
мых к фазам обмотки синхронизации сельсина-приемника, то на-
правление поворота ротора приемника при отработке заданного
угла станет противоположным, т.е. при задании на датчике угла в
направлении часовой стрелки он будет воспроизведен приемни-
ком в направлении против часовой стрелки;
если на одном из сельсинов, например у приемника, поме-
нять местами провода, присоединяемые к обмотке возбуждения,
то фаза тока в этой обмотке изменится на 180'; в итоге система
будет работать с постоянным рассогласованием положений рото-
ров датчика и приемника на 180°, т.е. согласованное состояние
системы будет соответствовать углу 0 — 180 .
14.4. Трансформаторная система
дистанционной передачи угла
Трансформаторную систему дистанционной передачи угла ис-
пользуют для передачи угла поворота на вал рабочего механизма,
когда необходим значительный вращающий момент. Основные эле-
менты трансформаторной системы (рис. 14.7): сельсин-датчик СД
Рис. 14.7. Схема трансформаторной системы дистанционной передачи угла
сельсин-приемник СП. усилитель мощности У, исполнительный дви-
гатель ИМ и понижающий механический редуктор Р, предназна-
ченный для уменьшения частоты вращения и соответствующего
усиления вращающего момента.
Усилитель мощности У используют для усиления мощности
сигнала на выходе сельсина приемника до уровня, достаточного
для приведения в действие исполнительного двигателя ИМ. Транс-
форматорная система передачи представляет собой следящую сис-
тему с обратной связью по положению вала регулирующего орга-
на РО рабочего механизма. Редутсгор Р трансформаторной систе-
мы имеет два выхода: один присоединяется к валу регулирующего
органа, друтой — к валу сельсина-приемника.
Рассмотрим принцип работы трансформаторной системы. При
включении в сеть обмотки возбуждения сельсина-датчика ОВД
пульсирующий магнитный поток возбуждения наводит в фазах
обмотки синхронизации электродвижущие силы, величина кото-
рых зависит от угла поворота ротора датчика осл относительно про-
дольной оси. Согласованным положением роторов датчика и при-
емника в трансформаторной системе считают положение, когда
одноименные фазы обмотки агнхронизацил смещены относительно
друг друга на 90°. Поэтому (см. рис. 14.7) отсчет утла ад в датчике
ведется от оси, перпендикулярной оси обмотки возбуждения. Учи -
тывая это, ЭДС фазы обмоток синхронизации датчика равны:
£дц = £о cos (ад + 90°) = - £0 sin ад;
£дц = £0 со5(ад - 120° + 90°) = £0 cos(aa - 30°); (14.22)
£а = £0 cosfotj- 240° + 90°) = £0 со$(«д - 150 ).
Электродвижущие силы создают токи в цепи синхронизации:
Л = Aw/Z = (“A sin aa)/Z;
/в — Ёвп./Z = [ Ёо cos (ад — 30°)] /Z;
ic = WZ = [Z0cos(afl- 150°)]/Z ,
(14.23)
В трансформаторной системе токи синхронизации создаются
только электродвижущими силами, наведенными в датчике, а не
разностью ЭДС, как в индикаторной системе [см. (14.5)]. Токи
синхронизации, проходя по соответствующим обмоткам фаз сель-
сина-приемника, создают пульсирующие МДС, значения кото-
рых принимаем со знаком минус [см. (14.8)]:
Tin — Tosincca;
Ёвп = - A cos (ад - 30°);
(14.24)
Fen = ~F0 cos (ад- 150°),
где Ft) = EqW^/Z.
Результирующая МДС синхронизации сельсина-приемника по
продольной оси (рис. 14.8, a) Fnd создает пульсирующий магнит-
ный поток по продольной оси ФПЛ который наводит в обмотке
возбуждения приемника ЭДС:
ВЫХ
max Sin 0
(14.25)
где Emax — наибольшее действующее значение ЭДС, индуцирован -
ной в обмотке возбуждения сельсина-приемника, соответствую-
щая углу поворота ротора селъсина-дагчика относительно его по-
перечной оси q (см, рис. 14.7) на угол ад = 90' и положению ротора
сельсин а-приемника, при котором ось обмотки фазы синхрониза-
Рис. 14.8. Диаграммы МДС сельси-
на-приемника трансформаторной
системы
ции А этого сельсина располо-
жена по продольной оси т.е.
по оси обмотки возбуждения
ОВП («п = 0)-
Таким образом, обмотка воз-
буждения сельсина-приемника
ОВП в трансформаторной систе-
ме выполняет функцию генера-
торной обмотки и не является
обмоткой, возбуждающей в сель-
сине-приемнике магнитный по-
ток, как это имело место в ин-
дикаторной системе передачи
угла (см. рис. 14,4).
Сигнал напряжения на выхо-
де сельсина-приемника 4/вых ~ Евъа
поступает на вход усилителя мощ-
ности У, на выходе которого включена обмотка управления ОУ
исполнительного двигателя ИМ При этом ротор двигателя прихо-
дит во вращение, которое через понижающий редуктор Р передает-
ся на вал рабочего органа РО рабочего механизма и на ротор сель-
сина-приемника СП По мере отработки заданного угла ад МДС
синхронизации сельсина-приемника по продольной оси Fnd посте-
пенно уменьшается, следовательно, понижается напряжение сигнала
£/вых. После того как ротор приемника повернется на угол ап = ад,
угол рассогласования 6 ~ 0 и выходной сигнал напряжения умень-
шатся до (/ВЬ|)< ~ 0. При этом трансформаторная система придет в
равновесие. Для пояснения обратимся к рис. 14.7 и 14.8. Допустим,
что на сельсине-датчике СД задан угол поворота ад = 60' в направ-
лении относительно исходного положения против часовой стрел-
ки, тогда МДС фазы обмотки синхронизации приемника равны.
Fan = A) sin 60' = 0,5 /3 Fo;
Fen = -Fo cos(60° - 30°) = -0,5 V3F0;
Fen = - Fo cos(60° - 150°) = 0.
Переходя к относительным значениям МДС, запишем
Яп=0,5Л; F^=-0,5>/3; /^=0.
Из диаграммы МДС (см. рис. 14.8, а) получим относительное значе-
ние результирующей МДС обмотки синхронизации приемника по
продольной оси Fnd- FAn + (-Fin cos 60°) = 0,5 J3 + 0,5 уЗ • 0,5 = 1,3.
После поворота ротора приемника на угол ап ~ ад = 60° диаграм-
ма МДС синхронизации приемника примет вид, представленный
на рис. 14.8, б. Из диаграммы следует, что результирующая МДС по
продольной оси равна нулю: F'nd = FAn cos 60 + (-Fin cos 60°) = 0.
Особенность работы трансформаторной системы дистанцион-
ной передачи угла состоит в том, что сельсин-приемник этой си-
стемы самостоятельно не отрабатывает заданный угол поворота, а
только выдает сигнал на включение исполнительного двигателя,
который осуществляет отработку заданного угла поворота. Приме-
нив в системе исполнительный двигатель требуемой мощности,
можно посредством трансформаторной системы передачи угла уп-
равлять угловым положением вала рабочего органа.
Точность работы трансформаторной системы зависит от:
формы и распределения магнитной индукции в воздушном
зазоре сельсинов;
остаточной ЭДС. удельного выходного напряжения, удель-
ной выходной мощности, магнитной несимметрии;
сопротивления .линии связи, количества приемников, под-
ключенных к одному датчику7.
Для обеспечения синусоидальной зависимости напряжения на
выходе сельсина-приемника от угла поворота заданного на сель-
а
ОС
I
ОС(ОВ) ОВ(ОС)
Рис. 14.9. Магнитные системы однофазных контактных сельсинов:
а — с явнополюсным статором; б — с явнополюсным ротором; в — неявнопо-
люсная; ОВ — обмотка возбуждения; ОС — обмотка синхронизании; ДО
демпферная обмотка
сине-датчике €/тцх=/(ад) необходимо, чтобы график распределе-
ния магнитной индукции вдоль воздушного зазора по периметру
ротора был синусоидальным. С этой целью в трансформаторных
системах дистанционной передачи угла целесообразно применять
сельсины неявнополюсной конструкции (рис. 14.9, в).
Остаточная ЭДС сельсина-приемника — это ЭДС. инду-
цируемая в обмотке возбуждения сельсина-приемника при согла-
сованном состоянии системы. Обычно Еост = 0,2 —0,5 В. Причины
наведения остаточной ЭДС;
дефекты, возникающие при изготовлении сельсинов;
емкостная связь между обмотками возбуждения и синхрони-
зации и т.п.
Для исключения влияния остаточной ЭДС на работу системы
требуется такая настройка усилителя мощности, чтобы сигнал (7ВЫХ =
= ЕЖ1 создавал напряжение на выходе усилителя, меньше напря-
жения трогания исполнительного двигателя.
Удельное выходное напряжение сельсина-приемника — это на-
пряжение (7ВЫХ, приходящееся на один градус угла рассогласова-
ния:
Цл = £max sin 1" = 0,0175Emav (14.26)
Удельная выходная мощность Руп — это мощность, которую
можно снять с выходной обмотки сельсина-прие.мника при утле
рассогласования в Г. Минимально допустимым значением мощно-
сти на выходе приемника считается такое, при котором на выходе
усилителя появляется напряжение.
Влияние сопротивления линии связи на точность трансфор-
маторной системы заключается в том, что электрическое сопро-
тивление проводов этой линии уменьшает токи в обмотках синх-
ронизацни [см. (14.23)1. Это уменьшает МДС по продольной оси
сельсина-приемника, а, следователь но, снижает удельное напря-
жение сельсина-приемника и точность системы.
Ток в обмотке возбуждения сельсина-приемника создает реак-
цию этой обмотки, ослабляющую ЭДС Елых. Для уменьшения ука-
занной реакции желательно, чтобы усилитель мощности имел до-
статочно большое входное сопротивление, что снижает ток в об-
мотке возбуждения приемника.
Точность сельсина-приемника в трансформаторной системе
определяют так же, как и в индикаторной системе [см. (14.21)).
14.5. Конструкция сельсинов
По своей конструкции сельсины разделяют на контактные и
бесконтактные.
Контактные сельсины. Отличительный признак контактных сель-
синов — наличие у них контактных колец и щеток, посредством
которых обмотка ротора соединяется с внешней цепью. Обычно
сельсины делают двухполюсными Магнитную систему контактно-
го сельсина (сердечники статора и ротора) делают из листовой
электротехнической стали. Сельсины могут быть явнополюсными
и неявнополюсными. В явнополюсных сельсинах один из элементов
магнитопровода (статор или ротор) имеет два явно выраженных
полюса с полюсными катушками обмотки возбуждения ОВ. Тогда
другой элемент (ротор или статор) делают неявнополюсным с
распределенной обмоткой синхронизации ОС, состояшей из трех
фазных обмоток, сдвинутых в пространстве относительно друг друга
на 120° (рис. 14.9, а, б). Если ротор сельсина-приемника явнопо-
люсный, то на его сердечнике обычно располагают демпферную
обмотку7 ДО в виде короткозамкнутого витка, ось которого пер-
пендикулярна оси полюсов (см. параграф 14.3). В неявнополюсных
сельсинах обмотки статора и ротора делают распределенными. При
этом обмотки синхронизации ОС и возбуждения ОВ могут быть
расположены как на роторе, так и на статоре (рис. 14.9, в).
В индикаторных системах обычно применяют явнополюсные
сельсины, так как они имеют повышенное значение удельного
синхронизирующего момента (см. рис. 14.5, б, график 7). В транс-
форматорных системах используют неявнополюсные сельсины, так
как их удельный синхронизирующий момент меньше, чем у явно-
полюсных (см. рис. 14.5, б, график 2), но распределение магнитной
индукции в воздушном зазоре практически синусоидально, что
обеспечивает им требуемую точность в трансформаторной системе
(см. параграф 14.4).
На рис. 14.10 показано устройство контактного сельсина с не-
явнополюсной магнитной системой. Обмотка синхронизации 4
Рис. 14.10. Устройство контактного сельсина:
/ — сердечник ротора: 2 — обмотка возбуждения; 3 — сердечник статора; 4 —
обмотка синхронизации; 5 — контактные кольца
расположена на сердечнике статора 3, а обмотка возбуждения 2 —
на сердечнике ротора 1, Контактные кольца 5 и щетки обычно
изготовляют из сплава, содержащего серебро, что способствует
более надежной и продолжительной работе этого контактного узла
сельсинов. Обмотка возбуждения может находиться как на роторе,
так и на статоре. При расположении ее на роторе число контакт
ных колец равно двум. В этом случае через кольца и щетки ток
возбуждения проходит непрерывно, даже когда система согласо-
вана. Если же на роторе расположена обмотка синхронизации, то
ток через кольца и щетки (в случае индикаторной системы) про-
ходит только при рассогласовании системы. При этом количество
колец увеличивается до трех, что ведет к росту момента сопротив-
ления за счет возросших сил трения на контактном узле.
Значительное влияние на свойства сельсина оказывает сила
прижатия щеток к контактным кольцам. При слабом прижатии
уменьшается момент сопротивления на валу сельсина, но возрас-
тают переходное электрическое сопротивление скользящего кон-
такта и, как следствие, погрешность индикаторной системы. Кро-
ме того, если щетки прижагы слабо, то при вибрациях возможны
периодические потери скользящего контакта и нарушение работы
системы. При сальном прижатии щеток к кольцам улучшается кон-
такт с кольцами, но возрастает момент сопротивления за счет воз-
росших сил трения шеток о кольца, что увеличивает погрешность
индикаторной системы и сокращает срок службы щеток и контак-
тных колец из-за их быстрого износа.
Наличие скользящего контакта — существенный недостаток
контактных сельсинов, снижающий их надежность и точность.
Чтобы увеличить надежность контактных сельсинов, кольца и
щетки обычно изготовляют из сплавов, содержащих серебро. Од-
нако и эта мера полностью не избавляет контактные сельсины от
присущих им недостатков.
Бесконтактные сельсины. В системах передачи угла поворота
получили применение бесконтактные сельсины, не имеющие
скользящих электрических контактов (колец и шеток). Эти сельси-
ны отличаются от контактных высокой точностью и стабильнос-
тью характеристик при колебаниях температуры, влажности и т. п.,
а также высокой эксплуатационной надежностью.
В настоящее время применяют бесконтактные сельсины с дву-
мя обмотками на статоре, разработанные российскими учеными
А. Г. Иосифьяном и Д. В. Свечарником. На рис. 14.11 показана кон-
структивная схема такого сельсина. Ротор представляет собой ци-
линдр из ферромагнитного материала (сталь), состоящий из двух
частей, магнитно разделенных немагнитной (алюминиевой) про-
слойкой 8, представляющих собой полюсы 7 ротора. С ториевых
сторон сельсина расположены тороидальные сердечники 6 из тон-
колистовой электротехнической стали, Внутренняя поверхность сер-
дечников расположена над ротором, а к их внешней поверхности
примыкают стержни внешнего магнитопровода 5. Однофазная об-
мотка возбуждения выполнена в виде двух дисковых катушек /,
расположенных с противоположных сторон обмотки синхрониза-
ции 2.
Магнитный поток возбуждения замыкается вокруг правой дис-
ковой катушки 1 по правому тороидальному сердечнику* 6 через
стержни 5 внешнего магнитопровода, левый тороидальный сер-
дечник 6 и воздушный зазор входит в один из полюсов ротора 7.
Рис. 14.11. Конструктивная схема бесконтактного сельсина с двумя об-
мотками на статоре:
1 — катушка возбуждения; 2 — обмотка синхронизации; J — сердечник статора:
4 — немагнитная прокладка; 5 — внешний матнитопровод; б — тороидальный
сердечник; 7 — полюс ротора; 8 — алюминиевая прослойка, разделяющая по-
люса ротора
Благодаря немагнитной прослойке 8, разделяющей полюсы рото-
ра, этот магнитный поток проходит через воздушный зазор между
ротором и статором в сердечник статора 3 с обмоткой синхрони-
зации 2. Пройдя по зубцам и спинке этого сердечника, поток че-
рез воздушный зазор проходит во второй полюс ротора. Затем че-
рез зазор и левый тороидальный сердечник, вокруг левой диско-
вой катушки /, стержни внешнего магнитопровода 5 поток замы-
кается в правом тороидальном сердечнике 6. Следует обратить вни -
мание на назначение немагнитной прокладки 4, благодаря кото-
рой магнитный поток проходит по внешнему магнитопроводу 5,
не замыкаясь в сердечнике статора 3.
Таким образом, в процессе работы сельсина пульсирующий маг-
нитный поток возбуждения замыкается в магнитной системе сель-
сина, сцепляясь с обмоткой синхронизации на сердечнике стато-
ра. При этом если поворачивать ротор сельсина, то вместе с полю-
сами ротора будет поворачиваться и магнитный поток, т.е. в бес-
контактном сельсине, так же как и в контактном, потокосцепле-
ние потока возбуждения с обмоткой синхронизации зависит от
пространственного положения (угла поворота) ротора. Благодаря
разделению ротора бесконтактного сельсина на магнитно-изоли-
рованные полюсы, обмотки синхронизации и возбуждения можно
расположить на статоре и отказаться от контактных колец и ще-
ток.
Магнитный поток возбуждения (см. рис. 14.11), замыкаясь в
магнитопроводе сельсина, четыре раза проходит через воздушный
зазор. Поэтому для создания в сельсине требуемого магнитного
потока требуется значительная МДС обмотки возбуждения, что
является причиной повышения габаритов и массы бесконтактного
сельсина по сравнению с контактным сельсином.
В табл. 14.1 приведены технические данные контактного и бес-
контактного сельсинов-приемников с одинаковыми максималь-
ными значениями синхронизирующих моментов. Сравнение этих
сельсинов показывает, что потребляемая мощность бесконтактно-
го сельсина более чем в два раза превышает потребляемую мощ-
ность контактного, а его масса больше массы контактного почти в
полтора раза. К этому следует добавить, что бесконтактные сель-
сины дороже контактных. Но, несмотря на перечисленные недо-
Таблииа 14.1
Сравнение свойств контактного и бесконтактного сельсинов
Типоразмер и конструкция /, Гн А. Вт ПИ<Х’ Масса, кг
СС-501 контактный 50 13 176 2,8
Б Ц - 501 бесконтактный 50 29 176 4.1
Рис. 14.12. Устройство бесконтактного сельсина с кольцевым трансфор-
матором:
/ — обмотка возбуждения: 2 — обмотка синхронизации: 3 — сердечник ротора;
4 — сердечник статора; 5 — неподвижная часть магнитопровода кольцевого транс-
форматора; 6 — первичная кольцевая обмотка трансформатора; 7 — вторичная
кольцевая обмотка трансформатора; 8 — вращающаяся часть магнитопровода
кольцевого трансформатора
статки, бесконтактные сельсины широко используют в устройствах
автоматики, к которым предъявляются требования повышенной
надежности и стабильности характеристик.
Применяют также бесконтактные сельсины с кольцевым транс-
форматором (рис. 14.12). Обмотка синхронизации 2 сельсина рас-
положена на сердечнике 4 статора, обмотка возбуждения 1 — на
сердечнике 3 ротора. В данной конструкции подача электроэнер-
гии в обмотку возбуждения осуществляется посредством кольце-
вого трансформатора.
Магнитопровод трансформатора состоит из двух частей, разде-
ленных воздушным зазором. Неподвижная часть 5 с первичной
обмоткой 6 расположена на статоре, а вращающаяся часть 8с вто-
ричной обмоткой 7— на роторе. Энергия из первичной обмотки 6
трансформатора передается во вторичную обмотку 7, связанную с
обмоткой возбуждения сельсина. Магнитный поток Ф в кольцевом
магнитопроводе трансформатора дважды проходит через воздуш-
ный зазор, что является причиной повышенного значения намаг-
ничивающего тока, а следовательно, и габаритов трансформатора.
При частотах питающего напряжения 400, 500 и 1000 Гц, для ко-
торых обычно и применяют рассматриваемый сельсин, кольцевой
трансформатор имеет небольшие габариты и расположен в корпу-
се сельсина.
14.6. Дифференциальный сельсин
В системах дистанционной передачи угла применяют диффе-
ренциальные сельсины, назначение которых — воспроизводить угол
поворота, равный сумме или разности углов, заданных двумя
сельсинами-датчиками. Дифференциальный сельсин имеет две трех-
фазныс обмотки, одна из которых расположена в пазах неявнопо-
люсного статора, а другая — в пазах неявнополюсного ротора. Вы-
вод обмотки ротора для подключения к внешней сети осуществ-
лен посредством трех контактных колец и щеток.
Рассмотрим принцип работы индикаторной системы дистанци-
онной передачи угла, содержащей два сельсина-датчика СД1 и СД2
и один дифференциальный сельсин-приемник ДС- СП (рис. 14.13 ).
Допустим, что ротор дифференциального сельсина заторможен. При
включении в сеть переменного тока обмоток возбуждения ОВ1 и
ОВ2 сельсинов-датчиков СД1 и СД2 в них создаются пульсирую-
щие магнитные потоки Ф и Фв2. Поток Ф индуцирует в фазах
обмотки синхронизации сельсина-датчика СД1 электродвижущие
силы, под действием которых в цепи синхронизации этого сель-
сина появятся токи. Проходя по обмотке синхронизации Al, В1,
С1 дифференциального сельсина, эти токи создают МДС /дС).
При повороте ротора датчика СД 1 на угол аД1 по часовой стрелке
вектор МДС дифференциального сельсина ГДС1 повернется на та-
кой же угол, но против часовой стрелки. Аналогичные процессы
происходят и в цепи обмотки синхронизации датчика СД2 и об-
мотки синхронизации А2. В2, С2 дифференциального сельсина:
при повороте ротора сельсина-датчика СД2 на угол аД2 < ад по
часовой стрелке вектор МДС Лдс2 обмотки ротора дифферении-
СД2
Дифференциальный сельсин
дс-сп
Рис. 14Л 3, Схема индикаторной системы дистанционной передачи с диф-
ференциальным сельсином
Таблица 14.2
Основные параметры сельсинов
I Тип сельсина В Гц ^гпах» Н'М Масса, кг Конструкция сельсина
I СС440 110 50 0,021 0,8 Контактный
I CC4I0 55 50 0,021 0,8
| СС501 НО 50 0,176 2,8 »
1 БС405А но 50 0,023 1,25 Бесконтактный
| БС501А по 50 0,172 4,0 »
| БС404ПТВ но 400 0,044 1,21 »
НЭД-501ТВ 57 50 0,221 2,8 Дифференциальный
НЭД-101П 100 400 6,39 0.81 »
ального сельсина также повернется на угол «д2, но против часо-
вой стрелки. В итоге между векторами МДС 7ДС, и Тдсз дифферен-
циального сельсина появится пространственный угол, равный раз-
ности углов, заданных сельсинами-датчиками СД1 и СД2:
6 = «Д| - ад2-
(14.27)
В результате взаимодействия МДС Faci и Facl на роторе диффе-
ренциального сельсина возникает вращающий момент ЛГДС. По-
этому если растормозить ротор дифференциального сельсина ДС,
то под действием момента Л/дс ротор повернется на угол 6 так,
чтобы векторы МДС F,1Ci и Fac? совпали по направлению и созда-
ли в магнитной системе дифференциального сельсина результиру-
ющий магнитный поток.
Если роторы датчиков СД1 и СД2 повернуть на углы аЯ1 и аД2 в
разные стороны, то ротором дифференциального сельсина будет
воспроизведен угол поворота, равный сумме заданных }тлов:
® — <ХД| + Ид2-
(14.28)
Особенностью работы индикаторных систем с дифференци-
альными сельсинами является протекание токов в цепях синхро-
низации после отработки дифференциальным сельсином задан-
ных углов, т. е. в согласованном состоянии.
В табл. 14.2 приведены технические данные сельсинов.
14.7. Магнесины
Магнесин — это электромеханическое устройство, состоящее
из тороидального сердечника без пазов, набранного из тонких
Рис. 14.14. Система синхронной связи на магнесинах
листов пермаллоя, и тороидальной обмотки вокруг сердечника.
Внутри тороидального сердечника расположен постоянный маг-
нит цилиндрической формы.
Индикаторная система на магнесинах состоит из магнесина-
датчика Д и магнесина-приемника П. Обмотки магнесинов (рис.
14.14, а) включены в сеть переменного тока, а их выводы Ва-Вп и
Сд- Сп, расположенные под углом 120° относительно друг друга,
соединены линией связи. При подаче напряжения на обмотки
магнесинов в тороидальных сердечниках возникают переменные
магнитные потоки возбуждения Фв, изменяющиеся во времени с
частотой питающей сети/j. Эти потоки индуцируют в обмотках
магнесинов переменную ЭДС Ев частоты /. В момент времени, ког-
да потоки Фв достигнут максимального значения, происходит силь-
ное насыщение сердечников и их магнитная проводимость Л умень-
шается. Таким образом, дважды за один период потоки возбужде-
ния достигают максимальных значений +ФВПта.х и -Фсгпах, а магнит-
ная проводимость Л пульсирует (рис. 13.14, б). Магнитный поток
постоянного магнита Ф, замыкается в сердечнике магнесина, а
так как магнитная проводимость сердечника пульсирует, то маг-
нитный поток Ф также становится пульсирующим и наводит в
обмотке магнесина переменную ЭДС Еп удвоенной частоты/ = 2/
(рис. 14.14, б).
Электродвижущие силы Е„ основной частоты/ в обмотках маг-
несинов не зависят от положения роторов (постоянных магнитов)
датчика и приемника и не создают в обмотках магнесинов элект-
рических токов. Электродвижущие силы Еп удвоенной частот ы /?
при согласованном положении роторов датчика и приемника бу-
дут создавай» одинаковые потенциалы на соответствующих одно-
именных точках обмоток датчика и приемника. Если ротор датчика
повернуть на угол ад, то потокосцепление с потоком Фп измени г-
ся и потенциалы одноименных точек обмоток датчика и приемни-
ка, соединенных проводами линии связи, окажутся неодинаковы-
ми. В итоге в обмотках датчика и приемника системы появятся токи
удвоенной частоты^.
Эти токи, взаимодействуя с потоком Ф(] в датчике и приемни-
ке, создадут синхронизирующие моменты, стремящиеся повер-
нуть роторы датчика и приемника в согласованное положение. После
этого потенциалы одноименных точек обмоток датчика и прием-
ника вновь станут одинаковыми и токи в обмотках магнесинов
прекратятся.
Таким образом, магнесины, как и сельсины, обладают свой-
ством самосинхронизации в пределах одного оборота ротора. Син-
хронизирующий момент магнесинов меньше, чем у сельсина, но
по конструкции они проще сельсинов, не имеют скользящих кон-
тактов и при отсутствии нагрузочного момента на валу магнесина-
приемника обеспечиваю! высокую точность передачи и воспроиз-
ведения заданного угла поворота. Малые габаритные размеры и
массы магнесинов, высокая точность (Д0 < 2,5°) обеспечили им
успешное применение в ряде автоматизированных устройств для
передачи углового положения объектов на сравнительно неболь-
шие расстояния.
14.8. Примеры применения сельсинов в устройствах
промышленной автоматики
14.8.1. Регистрация величины подачи инструмента
в буровых установках
В верхней час ги буровой вышки 7 (рис. 14.15) установлен бара-
бан 2 с тросом. По мере углубления бурильного инструмента (до-
лота) в породу трос сматывается с барабана и крюк, на котором
подвешен бурильный инструмент, опускается. Вращение барабана
через ролик 3 передается на ротор сельсина-датчика СД. Линия
связи ЛС соединяет обмотку синхронизации сельсина-датчика,
расположенного вблизи барабана бурильной установки, с обмот-
кой синхронизации сельсина-приемника СП. находящегося в при-
боре записи величин подачи. Сельсины СД и СП образуют инди-
каторную систему дистанционной передачи уз ла (см. рис. 14.4, а).
Вал сельсина-приемника через редуктор Р. кулачок К и систе-
му рычагов механически соединен со стрелкой регистрирующего
Рис. 14.15. Сельсинная схема регистратора-самописца величины подачи
бурового инструмента
устройства, на конце которой имеется перо самописца, ведущее
запись показаний на бумажной ленте. Указанная лента наматыва-
ется на приемный валик со стабильной скоростью в течение кон-
тролируемого отрезка времени, например в течение рабочей сме-
ны. Передаточное число редуктора и профиль кулачка выбраны
так. что при проходке бурового инструмента на определенную глу-
бину, например на 10 м, стрелка самописца с пером перемешает-
ся на ширину ленты самописца и делает запись на координатной
сетке бумажной ленты, движущейся с определенной скоростью.
В периоды подготовительных и наладочных операций на буриль-
ной установке (наращивание труб, замена бурильного инструмен-
та и т.п.) электропитание цепей возбуждения сельсинов и двига-
теля перемотки ленты самописца отключается.
14.8.2. Регулирование соотношения «топливо — воздух»
в металлургической печи
Регулирование соотношения «топливо — воздух» является весьма
важной технологической операцией, определяющей режим рабо-
ты металлургической печи. Эта операция успешно выполняется
благодаря сельсинной индикаторной системы с применением диф-
ференциального сельсина (рис. 14.16).
Расход горючего газа определяется положением заслонки в га-
зопроводе, которое регулируется исполнительным механизмом ИМ.
Этот же механизм связан с ротором сельсина-датчика СД. Сигнал
с ротора сельсина-датчика поступает на обмотку ротора диффе-
ренциального сельсина ДС. С обмотки статора ДС сигнал подается
Рис. 14.16. Сельсинная схема регулирования соотношения «топливо—воз-
дух» для металлургической печи
на обмотку ротора сельсина-приемника СП Затем с обмотки ста-
тора СП индуцированная в ней ЭДС подается на фазочувствитель-
ный усилитель ФУ После фазировки и усиления сигнал поступает
на усилитель мощности УМ, а затем на обмотку управления ис-
полнительного асинхронного двигателя М. который через пони-
жающий редуктор Р перемещает заслонку в трубопроводе воздуха.
Напряжение на выходе статорной обмотки ДС пропорционально
сумме двух величин: угла поворота ротора СД и угла поворота ро-
тора ДС.
При установленном положении ротора дифференциального сель-
сина относительно своего статора сохраняется неизменным соот-
ношение между количеством подаваемого в печь горючего газа и
количества поступающего воздуха, т.е. в рассматриваемой системе
имеет место слежение заслонки в трубопроводе воздуха за положе-
нием заслонки в трубопроводе горючего газа. С изменением коли-
чества поступающего в печь газа пропорционально меняется ко-
личество подаваемого воздуха.
Соотношение «топливо — воздух» можно регулировать посред-
ством задающего устройства ЗУ вращением ротора дифференци-
ального сельсина ДС относительно статора.
Контрольные вопросы
1. От каких причин зависит угол рассогласования в индикаторной си-
стеме передачи угла?
2. Что изменится в работе индикаторной системы, если поменять ме-
стами провода, присоединенные к обмотке синхронизации или к обмот-
ке возбуждения сельсина?
3. Из каких элементов состоит трансформаторная система передачи
угла и каково назначение каждого из них?
4. Какой угол поворота воспроизводит дифференциальный сельсин?
5. Объясните работу магнесинов по рис. 14.14.
Глава 15
ВРАЩАЮЩИЕСЯ ТРАНСФОРМАТОРЫ
15.1. Назначение и устройство
вращающихся трансформаторов
Вращающиеся (поворотные) трансформаторы (ВТ) предназ-
начены для получения переменного напряжения, зависящего от
угла поворота ротора. По своему назначению они относятся к ин-
формационным электрическим машинам и применяются в систе-
мах автоматического регулирования в качестве измерительных эле-
ментов (датчиков угла) для измерения рассогласования между двумя
вращающимися валами. В вычислительных устройствах вращающи-
еся трансформаторы используют при решении различных матема-
тических задач, связанных с построением треугольников, преоб-
разованием координат, сложением и разложением векторов и т.п.
Вращающийся трансформатор конструктивно представляет со-
бой электрическую машину индукционного типа малой мощности.
Наибольшее применение получили двухполюсные вращающиеся
трансформаторы с двумя парами одинаковых взаимно-перпендику-
лярных обмоток: обмотки и w* с обозначением клемм CI —С2 и
СЗ—С4, расположенных на статоре; обмотки w2 и w3 с обозначени-
ем клемм Pi — Р2 и РЗ—Р4, размещаемых на роторе (рис. 15.1).
СЗ
Рис. 15.1. Принци-
пиальная схема вра-
щающегося транс-
форматора
Обмотки на статоре называют первичными:
обмотку возбуждения Щ| (Cl — С2) включаю!
в сеть переменного тока, а компенсационную
обмотку СЗ — С4 замыкают накоротко или на
резистор. Обмотки на роторе называют вторич-
ными: синусную обмотку w2 с выводами Р1 —
Р2 и косинусную обмотку w3 с выводами РЗ —
Р4 включают по схемам, определяемым назна-
чением вращающегося трансформатора.
Электрический контакт с обмотками ро-
тора осуществляется с помощью контактных
колец и щеток (аналогично контактным сель-
синам) либо посредством спиральных пружин,
если вращающийся трансформатор работает в
режиме ограниченного угла поворота. В после-
днем случае угол поворота ротора ВТ ограни-
чивается максимальным углом закручивания
спиральных пружин.
Принцип работы вращающихся трансфор-
маторов основан на взаимной индуктивности
между обмотками статора и ротора, которая
находится в определенной функциональной
зависимости от угла поворота ротора и может быть синусной, ко-
синусной или линейной, что''определяется назначением вращаю-
щегося трансформатора и схемой соединения его обмоток.
Электродвижущие силы, индуцируемые пульсирующим магнит-
ным потоком возбуждения в обмотках ротора, строго следуют за-
данной зависимости от угла поворота ротора.
Если вращающийся трансформатор используют в качестве изме-
рительного элемента, то поворот ротора происходит в пределах ог-
раниченного угла и осуществляется посредством редукторного ме-
ханизма высокой точности, который либо встраивается в корпус
ВТ, либо монтируется отдельно от него и механически соединяется
с валом вращающегося трансформатора. При этом в качестве пер-
вичных обмоток (возбуждения и компенсационной) используют
обмотки статора, а в качестве вторичных — обмотки ротора.
Если же вращающийся трансформатор работает в режиме непре-
рывного вращения ротора, то обычно применяют «обратное» исполь-
зование обмоток: обмотки ротора служат первичными обмотками
возбуждения и компенсационной, а обмотки статора — вторичны-
ми: В этом случае при замыкании компенсационной обмотки нако-
ротко на роторе используют лишь два контактных кольца, что по-
вышает надежность и точность вращающегося трансформатора.
В зависимости от графика функциональной зависимости ЭДС
вторичной обмотки от угла поворота ротора вращающиеся транс-
форматоры разделяют на следующие типы:
синусно-косинусный вращающийся трансформатор (СКВТ),
у которого напряжение V2 на выходе обмотки w2 находится в си-
нусной зависимости от угла поворота ротора а, а напряжение ил
на выходе обмотки w2 — в косинусной зависимости от угла пово-
рота ротора а;
линейный вращающийся трансформатор (Л ВТ), у которого
напряжение U2 находится в прямолинейной зависимости от yi ла а.
Кроме того, синусно-косинусные вращающиеся трансформа-
торы могут применяться в режиме масштабирования (МВТ) для
согласования напряжений отдельных каскадов автоматического
устройства, в режиме фазовращателей и в режиме электрических
машин синхронной связи в трансформаторных системах дистанци-
онной передачи угла.
На рис. 15.2 показано устройство вращающегося трансформато-
ра. В корпусе 1 расположен шихтованный сердечник статора 2, в
пазы которого уложены распределенные первичные обмотки 3.
В пазах шихтованного сердечника ротора 4 находятся распреде-
ленные вторичные обмотки 5. Включение вращающегося транс-
форматора осуществляется посредством клемм, расположенных на
клеммной колодке 6. Электрический контакт обмоток ротора с
выводными клеммами осуществляется посредством щеток 7 и кон-
тактных колец 8.
Рис. 15.2. Устройство вращающегося трансформатора:
1 — корпус; 2 — сердечник статора; 3 — обмотки статора; 4 — сердечник ротора;
5 — обмотки ротора; 6 — клеммная колодка; 7— пружинная тетка; 8— контакт-
ное кольцо
Выпускаемые промышленностью вращающиеся трансформато-
ры обычно предназначены для работы от сети переменного тока
повышенной частоты (400 или 500 Гц).
15.2. Синусно-косинусный вращающийся
трансформатор
15.2.1. Синусно-косинусный вращающийся трансформатор
в синусном режиме
В этом режиме работы используется только одна обмотка рото-
ра — синусная w2 (рис. 15.3, а). При включении в сеть обмотки
возбуждения в ней появляется ток /ь который создает магнит-
Рис. 15.3. Схемы и диаграммы СКВ Г в синусном (г?, б) и синусно-коси-
нусном (в, г, д) режимах
ный поток возбуждения Ф,. Сцепляясь со вторичной обмоткой ш2,
магнитный поток возбуждения Фв индуцирует в ней ЭДС Е2» кото-
рая зависит от угла поворота ротора а. В режиме холостого хода,
когда вторичная обмотка w2 разомкнута (/2 = 0), напряжение на
выходе синусной обмотки равно
£4 = Й^шах sin а, (15 1)
где Uitnay — максимальное действующее значение напряжения на
выходе синусной обмотки, соответствующее углу поворота ротора
а = 90°.
При подключении нагрузки Zw к зажимам PI —Р2 синусной
обмотки в ее цепи появится ток /7. Созданный этим током маг-
нитный поток Ф7 можно разложить на составляющие:
1) по продольной оси Фм = Ф2 sin а, направленную встречно
магнитному потоку возбуждения Фь и оказывающую размагничи-
вающее влияние на магнитную систему ВТ;
2) по поперечной оси Ф2? = Ф2со$а, направленную перпенди-
кулярно потоку возбуждения Фв и поэтому вызывающую его иска -
жение (рис. 15.3, б).
Размагничивающее влияние составляющей потока по продоль-
ной оси Фм компенсируется увеличением тока в обмотке возбуж-
дения /|. Искажение магнитного потока возбуждения, вызванное
действием поперечной составляющей потока Ф2в, нарушает сину-
соидальную зависимость напряжения f/2 синусной обмотки w2 от
угла поворота ротора и вносит погрешность в работу ( КВТ, воз-
растающую с увеличением тока нагрузки /2. Устранение этого не-
желательного явления осуществляется симметрированием вращаю-
щегося трансформатора, которое может быть первичным или вто-
ричным.
В синусном режиме работы СКВТ, когда используется только
одна вторичная обмотка, применяют первичное симметрирование,
основанное на использовании компенсационной обмотки wK, ко-
торую замыкают на сопротивление
(15.2)
где Z и Zip — внутреннее сопротивление источника переменного
тока и сопротивление проводов, соединяющих обмотку возбужде-
ния W] с этим источником
Обычно сопротивление проводов Znp ~ 0, тогда ZK = Z-. В боль-
шинстве случаев обмотку W\ подключают к источнику большой
мощности, рассчитанному для питания нескольких потребителей.
В этом случае внутреннее сопротивление источника Z = 0 и пер-
вичное симметрирование СКВТ осуществляется замыканием об-
мотки 1дк накоротко.
Составляющая магнитного потока ротора по поперечной оси
Ф2д, сцепляясь с компенсационной обмоткой, наводит в ней ЭДС
£к. Так как обмотка замкнута, то ЭДС Ёк создает в ней ток /к,
который наводит МДС компенсационной обмотки FK, направлен-
ную в соответствии с правилом Ленца встречно потоку Ф2</ (поток
Ф2(/ является причиной возникновения ЭДС Ё* и МДС FK). В резуль-
тате поток по поперечной оси Ф2# будет в значительной степени
ослаблен (скомпенсирован) и погрешность, обусловленная нагруз-
кой, подключенной к синусной обмотке ВТ, намного снизится.
15.2.2. Синусно-косинусный вращающийся трансформатор
в синусно-косинусном режиме
В этом режиме используются обе вторичные обмотки w2 и w},
смещенные в пространстве относительно друг друга на 90' (рис.
15.3, в). Зависимость напряжения й2 на выходе обмотки от угла
поворота ротора определяется выражением (15.1), а зависимость
напряжения на выходе обмотки — выражением, учитывающим
угловой сдвиг этой обмотки относительно обмотки W2 на 90:
V1 = Sin (90е + а) = С/Зтах cos а,
(15.3)
где t/3max — максимальное действующее значение напряжения в
обмотке w3 при ее соосном положении с обмоткой возбуждения
Из выражений (15.1) и (15.3) следует, что на выходе СКВТ
получаю! два напряжения, одно из которых пропорционально sin а,
а другое пропорционально cos а (рис. 15.3, г).
Обмотки w2 и w3 имеют одинаковые параметры (число витков и
сечение обмоточного провода), поэтому максимально действую-
щие значения напряжений этих обмоток также одинаковы:
У2 max ^Зтпах
(15.4)
где Ux — напряжение на входе СКВТ, т.е, на обмотке возбужде-
ния
Таким образом, учитывая (15.4), выражения (15.1) и (15.3)
запишем в виде
й2 = У\ sin а;
(73 = (w3/u\) cos а.
(15.5)
Рассмотрим работу СКВТ при неравенстве нагрузок на зажимах
синусной и косинусной обмоток, т. е. Z„r * Z"r. При подключении
этих нагрузок в цепях вторичных обмоток появятся токи /2и Z
которые создадут магнитные потоки соответственно Ф2 и Ф (рис.
15.3, д). Поперечные составляющие этих потоков Ф;<? = Ф2со$а и
= sin а направлены в противоположные стороны и частично
взаимно компенсируются. Полная взаимная компенсация будет
только при равенстве МДС синусной и косинусной обмоток по
поперечной оси:
I2w2 cos а = /3w3 sin а. (15.6)
Токи во вторичных обмотках СКВТ, соответствующие полной
компенсации:
(w2/w})E} sina
~Z Т' ’
^2 иг
(15.7)
h _ (i^/^i) cos a
7 _ 7" "" 7 7W ’
(15.8)
где 7-i и Z3 — полные сопротивления вторичных обмоток вращаю-
щегося трансформатора.
После подстановки (15.7) и (15.8) в (15.6) получим
(w-Jw\)E\ sin а
Z + Zur
и г cos а =
(w3/W| )£] cos а
//
НГ
i^sina.
(15.9)
Учитывая, что синусную w2 и косинусную w2 обмотки делают
одинаковыми по числу витков и диаметру обмоточного провода, их
полные сопротивления одинаковы (2^ = Z), поэтому эти обмотки
имеют одинаковые параметры и уравнение (15.9) принимает вид
или
Z^ = Z". (15.10)
Таким образом, полная взаимная компенсация поперечных со-
ставляющих потоков выходных обмоток СКВТ происходит при
равенстве нагрузочных сопротивлений в синусной и косинусной
обмотках. Такую компенсацию называют вторичным симметриро-
ванием.
Если же нагрузочные сопротивления Z'r и Z„r не равны, то
вторичное симметрирование получается неполным, так как маг-
нитные потоки по поперечной оси и Ф3? взаимно компенси-
руются только частично и в магнитной цепи СКВТ появляется
результирующий магнитный поток по поперечной оси:
Ф, = Ф2, + Ф3,. (15.11)
Результирующий магнитный поток по поперечной оси Ф9 ока-
зывает влияние на магнитный поток возбуждения Ф„ — нарушает
синусоидальный закон распределения магнитной индукции в воз-
душном зазоре, что ведет к погрешностям в работе СКВТ.
Магнитный поток Фв при Z', * Z"r может быть скомпенсирован
путем первичного симметрирования, т. е. за счет магнитного пото-
ка компенсационной обмотки Фк.
При полном вторичном симметрировании СКВТ входное со-
противление на зажимах Cl — С2 обмотки возбуждения Zu не зави-
сит от положения ротора (от угла а). Поэтому потребляемые СКВ!
ток и активная мощность также не зависят от угла а. На этом осно-
вано симметрирование методом амперметра, т.е. методом подбора
сопротивлений нагрузок в цепях синусной Z'Hi и косинусной Z'^
обмоток, при которых осуществляется полное вторичное симмет-
рирование СКВТ. Сущность этого метода состоит в том, что под-
бираются такие сопротивления нагрузок Z'm и Z"r, при которых
поворот ротора в ту или иную сторону не вызывает изменения
показаний амперметра А, включенного в цепь обмотки возбужде-
ния (рис. 15.3, в).
Более точный метод вторичного симметрирования — метод
вольтметра. Сущность этого метода состоит в том, что при полном
вторичном симметрировании поперечные составляющие потоков
синусной Фэ4 и косинусной Ф3? обмоток взаимно уравновешива-
ются, и в компенсационной обмотке, ось которой располагается
по поперечной оси, они не наводят ЭДС. Следовательно, сопро-
тивления нагрузок Z'm и Z"r подбираются такими, чтобы показание
вольтметра, включенного на выводы разомкнутой компенсацион-
ной обмотки СЗ—С4, было нулевым при любом положении ротора.
Точность вращающегося трансформатора в режиме СКВТ оп-
ределяется следующими показателями:
погрешностью воспроизведения синусной (косинусной) за-
висимости;
асимметрией нулевых точек;
ЭДС компенсационной обмотки;
остаточной ЭДС;
разностью коэффициентов трансформации между обмоткой
возбуждения и вторичными обмотками.
Погрешность воспроизведения синусной (косинусной) зависи-
мости, %:
£ckbt = “I00, (15.12)
max
где Д(/ — наибольшее среднее отклонение напряжения на выходе
СКВТ от расчетного синусоидального или косинусоидального за-
кона зависимости выходного напряжения за полные обороты ро-
тора по часовой стрелке и против часовой стрелки:
Д(/ = 0,5(ДЦ + Д£72),
(15.13)
где ДЦ и й,и2 — максимальные положительное и отрицательное
отклонения выходного напряжения от расчетного; Umax = (Ama> =
= U3 щах — максимальное действующее значение напряжения в вы-
ходной обмотке Jcm. (15.4)].
Асимметрия нулевых точек определяется при питании СКВТ со
стороны каждой из первичных обмоток по формуле:
Дао = 0,5(Да! + Да2),
(15.14)
где Да, и Да2 — максимальные положительное и отрицательное
отклонения (угл. с) ротора СКВТ от углов, кратных 90°, соответ-
ствующих минимальным значениям ЭДС вторичных обмоток
И ^3min-
Электродвижущая сила компенсационной обмотки определяется
в % от номинального напряжения возбуждения Ut:
ек=^100,
(15.15)
где Д; — ЭДС компенсационной обмотки, измеренная на ее выводах
СЗ—С4 при номинальном напряжении на обмотке возбуждения.
Таблица 15.1
Допустимые значения показателей классов точности
синусно-косинусных вращающихся трансформаторов
Погрешность Значения показателей при классах точности СКВТ
0,005 0.01 0.02 0.05 0,1 0,2
есквт> % +0.005 +0,01 ±0,02 +0,05 +0,1 +0,2
Дао, утл. с ±10 +20 +40 + 100 +200 ±400
ек, %, не более 0.04 0.08 0,12 0,3 0,6 1,2
еост, %, не более 0,003 0,006 0,01 0.025 0,05 0,10
ДА, %, не более 0,005 0.01 0,02 0,05 0,1 0,2
Остаточная ЭДС в нулевых точках определяется в % от макси-
мально действующего значения выходного напряжения
^=-^-100, (15.16)
^тэх
где Ею — остаточная (минимальная) ЭДС, измеренная на выво-
дах вторичной обмотки.
Разность коэффициентов трансформации определяет отклоне-
ние параметров синусной и косинусной обмоток С КВТ, %:
&к -
max
mm
100,
(15.17)
max
где и Amin — наибольшее и наименьшее значения коэффици-
ентов трансформации между обмотками.
Существует шесть классов точности СКВТ, которые характе-
ризуются допустимыми показателями, приведенными в табл. 15.1.
Рис. 15.4. Внешний вид статора и
ротора многополюсного встраива-
емого вращающегося трансформа-
тора
Наряду с рассмотренными
двухполюсными BI применяют
многополюсные вращающиеся
трансформаторы. Их обычно ис-
пользуют в устройствах точного
отсчета, а также в схемах с ма-
лым углом поворота. Такие ВТ
выполняют плоскими с относи-
тельно большим диаметром (рис.
15.4), что позволяет применить
в них обмотки с большим чис-
лом полюсов. Благодаря неболь-
шим габаритам и специальной
конструкции эти вращающиеся
трансформаторы встраивают не-
Таблица 15,2
Технические данные синусно-косинусных вращающихся трансформаторов
Типоразмер £, % Д«о. угл. мин % % мм Масса, KI
ВТ-ЗА ±0,06 ±1,5 — —— 45 0,5
5БВТ ±0,02 ±0,67 0,02 0,02 50 0,81
ВТ-5 ±0,02 ±0,5 0.015 0,02 50 0.68
ВТМ-Б ±0,06 ±2 0,33 0,08 56 0,68
ВТ-2А ±0,06 ±1,5 — — 70 2,08
МВТ-2 ±0,02 ± 1 0,05 0,031 38 0,35
МВТ-Б ±0,2 ±6 0,08 0,165 35 0,22
2.5МВТ ±0.05 + 1,67 0,05 0,05 25 0,12
2.5БВТ-2 ±0,1 ±3,3 0,1 0,1 25 —
посредственно в автоматическое или измерительное устройство.
Статор 1 и ротор 2 многополюсных вращающихся трансформато-
ров встраивают в прибор, т.е. закрепляют на тех его частях, отно-
сительное угловое перемещение которых необходимо регистриро-
вать.
В табл. 15.2 приведены технические данные синусно-косинус-
ных трансформаторов.
15.2.3 . Синусно-косинусный вращающийся трансформатор
в режиме масштабирования
Синусно-косинусный вращающийся трансформатор в режиме
масштабирования (МВТ) позволяет согласовывать напряжения
смежных каскадов автоматических устройств небольшой мощнос-
ти Это значит, что такой МВТ, работая как регулятор напряже-
ния, приводит в соответствие выходное напряжение предыдущего
каскада с входным напряжением следующего каскада, не нарушая
функциональных зависимостей этих напряжений В простейшем
случае для решения этой задачи межно воспользоваться вращаю-
щимся трансформатором, включенным по схеме синусного вра-
щающегося трансформатора (см. рис. 15.3. п).
В этом случае напряжение t/b поданное на обмотку возбужде-
ния МВТ, является выходным напряжением предыдущего кас-
када /, а напряжение снятое с синусной обмотки МВТ w2, —
входным напряжением следующего каскада 2 (рис. 15.5). Требуемое
значение напряжения соответствующее заданному значению Uh
выставляется поворотом ротора МВТ посредством понижающего
Рис. 15.5. Синусно-косинусный вращающийся трансформатор в режиме
масштабирования
редуктора Р, представляющего собой червячную механическую
передачу. В таком положении ротор МВТ фиксируется. В этом слу-
чае возможные изменения напряжения U\ вызовут соответствую-
щие изменения U2.
15.2.4 . Синусно-косинусный вращающийся трансформатор
в режиме фазовращателя
Фазовращатели применяют в приборных устройствах и автома-
тизированных системах для получения напряжения, фаза которо-
го может плавно изменяться в широком диапазоне. В частности,
такое устройство необходимо при фазовом управлении исполни-
тельным асинхронным двигателем (см. параграф Ю.1). На рис. 15.6, а
представлена одна из возможных схем фазовращателя, у которого
обмотка возбуждения гщ включена в сеть однофазного тока, а ком-
пенсационная обмотка замкнута (первичное симметрирование).
Такие фазовращатели иногда называют фазовращателями с пуль-
сирующим магнитным полем возбуждения. Их достоинство — про-
стота схемы, так как они не предъявляют специальных требова-
ний к питающему напряжению (наличие двухфазной системы на-
пряжений). необходимо лишь, чтобы питающее напряжение было
стабильно по частоте, напряжению и его синусоидальности.
При повороте ротора на угол а меняется фаза напряжения
относительно питающего напряжения Ut. Для того чтобы при по-
Рис. 15.6. Схема фазоврашателя при питании обмотки возбуждения от
однофазной сети (а) и векторная диаграмма напряжений (б)
вороте ротора изменялась лишь фаза напряжения t/2 в диапазоне
от 0 до 360е (рис. 15.6, б), а его значение (амплитуда) оставалась
неизменной, поступают следующим образом. Обмотки ротора w2 и
w3 соединяют параллельно, но при этом в цепь обмотки и>2 вклю-
чают резистор R2, а в цепь обмотки w3 включают конденсатор ем-
костью С3. При этом необходимо, чтобы параметры обмоток рото-
ра, резистора R2 и конденсатора С3 имели значения, при которых
соблюдались условия:
r2
2л/|Сз
(15.18)
где г и х — активное и индуктивное сопротивления собственно
обмотки ротора (без дополнительно включенных элементов);/, —
частота переменного тока в питающей сети.
15.3. Линейный вращающийся трансформатор
Зависимость выходного напряжения U2 линейного вращающе-
гося трансформатора от угла поворота ротора имеет вид
TJ _Wi Z7]Sina
u2 ---
wx 1 +/wcosa
(15.19)
где m — постоянная величина, определяемая магнитными и элек-
трическими параметрами Л ВТ.
Если т = 0,54, то зависимость U2 = /(а) линейна с погрешнос-
тью не более 1 % в пределах изменения угла поворота ротора от 0
до ±60° (рис. 15.7, а). Для получения указанной зависимости при-
меняют следующую схему включения обмоток Л ВТ: синусную об-
мотку w2 соединяют последовательно с компенсационной обмот-
кой шк, а косинусную обмотку w2 замыкают на неизменное сопро-
тивление Zc (рис. 15.7, б), которое выбирают таким, чтобы обеспе-
чить полное вторичное симметрирование обмоток при заданной
нагрузке Для определения требуемого значения сопротивления
Zc используют уравнение
Zc + Z3-2(Z2 + ZK + Zlir). (15.20)
Таким образом, для полного вторичного симметрирования об-
моток ЛВТ необходимо, чтобы сопротивление цепи косинусной
обмотки было равно удвоенному значению сопротивления цепи
синусной обмотки, включая сопротивления компенсационной
обмотки ZK и нагрузки Однако полное вторичное симметриро-
вание обмоток ЛВТ возможно лишь при неизменной нагрузке 2^|Г =
= const. В случае переменной нагрузки применяют схему первично-
го симметрирования (рис. 15.7, в), в которой обмотка возбуждения
включена последовательно с косинусной обмоткой и сопротивле-
а
в
Рис. 15.7. Линейный вращающийся трансформатор:
а — зависимость U2 = /(a); б — схема ЛВТ; в — схема первичного симметрирова-
ния ЛВТ
нисм Zc, а компенсационная обмотка замкнута нз сопротивление
Z,. Сопротивления Zc и ZK выбирают такими, чтобы магнитные
потоки по поперечной оси компенсационной обмотки Фм и коси-
нусной обмотки Ф были взаимно скомпенсированы при любом
значении угла поворота ротора а.
Точность ЛВТ определяется погрешностью воспроизведения
линейной зависимости выходною напряжения от угла поворота
ротора а в диапазоне ±60° и значением остаточной ЭДС в %.
Погрешность воспроизведения линейной функции, %:
Ел=^-100,
^тах
(15.21)
где A.U — среднее значение максимальных положительных ДГ и
отрицательных AfA отклонений выходного напряжения от расчет-
ного при повороте ротора ЛВТ на 60° по часовой стрелке и против
часовой стрелки:
Af/=O,5(A£7i +Д(/2).
(15.22)
Линейные врашаюшиеся трансформаторы делятся на гри клас-
са точности и характеризуются приведенными ниже допустимыми
показателями:
Класс точности ЛВТ...................0,05 0,0! 0,2
Погрешность воспроизведения
линейной функции ел, %...............±0,05 ±0,02 ±0,2
Остаточная ЭДСет, %..................0.025 0,05 0,1
15.4. Трансформаторная система дистанционной
передачи угла на вращающихся трансформаторах
Вращающиеся трансформаторы, как и сельсины, можно при-
менять в системах дистанционной передачи угла поворота. На рис.
15.8 представлена функциональная схема трансформаторной сис-
темы дистанционной передачи угла, где в качестве датчика Д и
приемника П применены вращающиеся трансформаторы СКВТ.
Обмотки ротора этих ВТ соединены линией синхронизации. При
подаче напряжения U\ на обмотку возбуждения щ ( в ВТ-датчике
возникает пульсирующий магнитный поток Ф,. Положение обмо-
ток ротора ВТ-датчика зависит от заданного угла поворота ротора
ВТ-датчика ад относительно оси обмотки ш1Д. Ма1нт ный поток
Фь сцепляясь с обмотками ротора и w- В Г-датчика, индуциру-
ет в них ЭДС:
Д? Дзтах Ctj,
— £)rnax COS O.|.
Рис. 15.8. Функциональная схема трансформаторной системы дистанци-
онной передачи угла на вращающихся трансформаторах
Пол действием этих ЭДС в цепи синхронизации возникают токи,
которые, проходя по обмоткам ротора ВТ-приемника, создают
пульсирующий магнитный поток Фп. Пространственное положе-
ние вектора Фп определяется углом поворота ротора ВТ-датчика,
т.е. при повороте ротора ВТ-латчика на угол ад вектор потока Фп
поворачивается на такой же угол. Сцепляясь с обмоткой статора
шк п, поток Фп индуцирует в ней ЭДС Еи1М, которая зависит от угла
рассогласования системы 0 = ад-ап. В остальном работа вращаю-
щихся трансформаторов в рассматриваемой системе аналогична
работе сельсинов (см. рис. 14.7).
На выходе обмотки щк1 ВТ-приемника создается напряжение
^вых = Евых, которое поступает на вход усилителя мощности У. После
усиления напряжение поступает на обмотку управления ОУ ис-
полнительного двигателя ИМ Вращение ротора этого двигателя
через редуктор Р передается регулирующему органу РО рабочего
механизма и ротору ВТ-приемника. После поворота ротора ВТ-
приемника на угол ап = ад, где ад — угол, заданный на роторе
ВТ-датчика, система придет в согласованное состояние, при ко-
тором напряжение на выходе ВТ-приемника = 0. Это объясня-
ется тем, что после поворота ротора ВТ-приемника на заданный
угол вектор потока Фп оказывается практически перпендикуляр-
ным оси обмотки щк П и не индуцирует в ней ЭДС (£’вьи = 0).
Важнейший показатель работы системы дистанционной пере-
дачи угла — точность отработки угла, заданного на датчике. Точ-
ность системы будет тем выше, чем меньше погрешность приме-
ненных в ней вращающихся трансформаторов. Кроме тою, для
повышения точности системы необходимо произвести согласо-
вание выходного сопротивления обмоток ротора ВТ-датчика с
входным сопротивлением соответствующих обмоток ВТ-прием-
ника.
Показателем точности системы дистанционной передачи угла
является погрешность следования, представляющая собой разность
угловых положений системы. В зависимости от погрешности следо-
вания трансформаторные системы с вращающимися трансформа-
торами делят на 11 классов точности с погрешностью следования
от 0,1 до 30 угл. мин.
В отличие от трансформаторной системы на сельсинах система
на ВТ обеспечивает большую точность, что объясняется более
высокой точностью вращающихся трансформаторов по сравнению
с сельсинами. Однако мощность на выходе ВТ-приемника меньше
мощности на выходе сельсина-приемника. Поэтому для транс-
форматорных систем на ВТ требуются усилители мощности с боль-
шим коэффициентом усиления.
Контрольные вопросы
1. Какова функциональная зависимость выходных напряжений от угла
поворота ротора С КВТ?
2. Что такое первичное и вторичное симметрирование?
3. Объясните назначение методов амперметра и вольтметра при сим-
метрировании СКВТ.
4. Какими показателями характеризуется точность СКВТ?
5. Объясните назначение и принцип работы СКВ! в режиме масшта-
бирования.
6. Объясните назначение и принцип работы СКВТ в режиме фазовра-
щателя.
7. Какие виды симметрирования применяют в линейных вращающих-
ся трансформаторах?
8. Объясните работу системы дистанционной передачи угла на ВТ и
сравните ее с аналогичной передачей на сельсинах.
9. Что является показателем точности системы дистанционной пере-
дачи угла на СКВТ?
СПИСОК ЛИТЕРАТУРЫ
Балагуров В. А., Гридин В.М, Лозенко В. К Бесконтактные двигатели
постоянного тока с постоянными магнитами, — М.: Энергия, 1975.
Брускин Д. Э., Зорохович А. Е., Хвостов В. С. Электрические машины и
микромашины. — М.: Высшая школа, 1981.
Кацман М М Руководство к лабораторным работам по электрическим
машинам и электроприводу. — М.: Издательский центр «Академия», 2004.
Кацман М.М Электрические машины. — М.: Издательский центр «Ака-
демия», 2003.
Кацман М. М, Электрические машины и электропривод автоматиче-
ских устройств. — М.: Высшая школа, 1987.
Кацман М. М, Юферов Ф. М Электрические машины автоматических
систем. — М.: Высшая школа, 1979.
Кацман М. М. Электрический привод. — М.: Издательский центр «Ака-
демия», 2005.
Кацман М.М. Справочник по электрическим машинам — М.: Изда-
тельский центр «Академия», 2005.
Келим Ю. М. Электрические микродвигатели для видеокомпьютерной
техники. — М : МТУС, 1996.
Келим Ю. М. Типовые элементы систем автоматического управления.
М.: «Форум», 2004.
Осин И.Л.. Юферов Ф.М Электрические машины автоматических уст-
ройств. — М.: Изд-во МЭИ, 2003.
Свечарник Д. В. Дистанционные передачи. — М : Энергия, 1966.
Специальные электрические машины / Под ред. А. И. Бертинова. — М :
Энергоиздат, 1982.
Справочник по средствам автоматики / Под ред. В Э. Низэ и И. В. Ан-
тика. — М.: Энсргоатомиздат, 1983.
Хрущев В. В Электрические микромашины автоматических устройств. —
Л.: Энергия, 1976.
Элементы приборных устройств / Под ред. О.Ф.Тишенко. — М.: Выс-
шая школа, 1982.
предметный указатель
л
Автотрансформатор 27
— с переменным коэффициентом
трансформации 29
Асимметрия нулевых точек 349
Быстродействие 237
Величины базовые 238
Генератор коллекторный постоянного
тока 199
— синхронный 104
— — индукторный 142
с постоянными магнитами 112
Датчик положения ротора 226
— ЭДС Холла 230
Двигатель асинхронный трехфазный
47
---гироскопический 207
---линейный 73
---исполнительный 253
------с полым немагнитным
ротором 259
------ферромагнитным 268
! -----сквозной конструкции 267
---конденсаторный 88
---с экранированными полюсами 95
---однофазный 79
— вентильный 225, 229
। — коллекторный универсальный 192
---постоянного тока 182
—-----исполнительный 236
------с гладким якорем 252
------с печатной обмоткой
якоря 250, 251
------с полым якорем 248
— моментный 271
— синхронный с электромагнитным
возбуждением 115
---гистерезисный 135
---волновой 151
----индукторный 145
----исполнительный шаговый 275
--------с активным ротором 281
—-----с пассивным ротором 278
--------волновой 288
----реактивный 131
----реактивно-гистерезисный 1 41
----с постоянными магнитами 123
----тихоходный 126
Зона нечувствительности тахогенера-
тора 189
Изменение напряжения номинальное
20, Ш, 201
Коммутация 173
Коллектор 162
— на пластмассе 163
Конденсатор пусковой 90
— рабочий 73
Коэффициент полезного действия 16,
49. 85. 119
— токовой нагрузки 17
— стабилизации напряжения 39
— трансформации 11
— управления 72
— усиления мощности 220
Крутизна характеристики 299
Магнесин 337
?4агнитное поле вращающееся 47, 85
Магнитопровод трансформатора 13
Машины электрические информаци-
онные 298
Метол амперметра 348
Механизм лентопротяжный 293
Момент гистерезисный 136
— входа в синхронизм 124
— инерции якоря 2 14
— синхронизирующий 322
— — удельный 325
— электромагнитный 58, 120, 167
----максимальный 60
---- основной 121
---- пусковой 59
----реактивный 121
Мощность возбуждения 240, 243
— выходная удельная 330
— полезная 57
— потребляемая 57
— управления 240
— электромагнитная 57, 169
Напряжение выходное удельное 330
— остаточное 299
— трогания 330
Нейтраль геометрическая 160
— физическая 178
Несиммстрия выходной характери-
стики 304, 309
Обмотка демпферная 119, 330
— пусковая 84. 118
— рабочая 84
— ротора короткозамкнутая 48
фазная 52
— стабилизирующая 184
— статора 50
Огонь круговой 174
Опыт короткого замыкания 20
— холостого хода 19
Охлаждение двигателя 51
Ошибка несимметрик 299
— статическая 284
Петля гистерезиса 137
Пик-трансформатор 31
Погрешность амплитудная 302
— воспроизведения зависимости
линейной 355
------синусной 349
— напряжения относительная 42
— следования 357
угла рассогласования 325
— угловая 42
— фазовая 303
— частотная 304
Поле магнитное бегущее 74
круговое 85
----пульсирующее 86
эллиптическое 86
Помехи радиоприему 179
Постоянная времени электромехани-
ческая 243
Потери в асинхронном двигателе 57
— в двигателе постоянного тока 180
— в синхронном двигателе 119
— в трансформаторе 17
Поток вынужденного намагничива-
ния 26
Противо-ЭДС 168
Пульсация выходного напряжения 311
Пуск двигателя асинхронного
однофазного 84
----синхронного 117
----с постоянными магнитами 124
Реакция якоря 106, 169
Регулирование частоты вращения
двигателей 65, 70, 187
импульсное 72
------частотное 66
Регулятор напряжения 29
----индукционный 99
----тиристорный 69
— центробежно-вибрационный 197
Режим динамический 326
— квазистатический 285
— масштабирования 351
— переходный 286
— статический 285, 324
— установившийся 286
Ротор короткозамкнутый 48
Ротор секционированный 133
— фазный 52
Самоход 236
— параметрический 257
— технологический 259
Сельсин 193
— бесконтактный 333
— дифференциальный 336
— контактный 331
Симметрирование вторичное 348
----первичное 346
Система передачи угла индикатор-
ная 318
------трансформаторная 326, 355
Скольжение 49
— критическое 59
Способы возбуждения 167
— управления исполнительными
двигателями 237, 238, 253
Стабилизатор напряжения ферромаг-
нитный 39
феррорезонансный 40
Статор сборный 160
— шихтованный 160
Степень возбужденности двигателя 125
Тахогенератор асинхронный 300
— постоянного тока 307
— синхронный 306
Трансформатор 9
— вращающийся 342
----линейный 353
----синусно-косинусный 344
— импульсный 33
— многообмоточный 22
— трехфазный 21
Угол рассогласования 318
Удвоитель частоты 35
Управление амплитудное 254
— амплитудно-фазовое 255
— полюсное 241
— фазовое 255
— якорное 239
Уравнения напряжений асинхронного
двигателя 55
----синхронного генератора 110
----трансформатора 15
Усилитель мощности электромашин-
ный 216. 218
Устройство для считывания информа-
ции 295
Утроитель частоты 36
Фазовращатель 352
Фазорегулятор 101
Фильтр помехозащитный 180
Характеристика внешняя трансформа-
тора 21
----генератора постоянного тока 201
----синхронного генератора 111
— усилителя электромашинного
222
— механическая асинхронного
двигателя 59
----двигателя постоянного тока 184
— регулировочная генератора посто-
янного тока 201
------синхронного 111
Характеристики рабочие асинхронно-
го двигателя 63
----двигателя постоянного тока Л 83
----универсального коллекторного
двигателя 195
— угловые синхронного двигателя
122
Частота вращения асинхронная 49
----синхронная 47
— приемистости 285
Шаг угловой 278
Шунты магнитные 310
ЭДС вращения 176
— остаточная 200
— трансформаторная 194
Элемент фазосмещаюший 84
ОГЛАВЛЕНИЕ
Предисловие............................................ 3
Введение . ........... ................................4
В. I. Назначение электрических машин и трансформаторов 4
В.2. Классификация электрических машин.................5
ЧАСТЬ ПЕРВАЯ. ТРАНСФОРМАТОРЫ И СИЛОВЫЕ
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ МАЛОЙ МОЩНОСТИ
РАЗДЕЛ 1
ТРАНСФОРМАТОРЫ
Глава 1. Силовые трансформаторы...............................9
1.1. Назначение и принцип действия силового трансформатора.9
1.2. Устройсво трансформаторов........................12
1.3. Основные зависимости и соотношения в трансформаторах .. .. 14
1.4. Потери и КПД трансформатора..................... . 16
1.5. Опыты холостого хода и корот кого замыкания трансформато-
ров .................................................18
1.6. Изменение вторичного напряжения трансформатора ..20
1 7. Трехфазные и многообмоточные трансформаторы ....21
1 8. Трансформаторы для выпрямительных устройств. 24
1.9. Автотрансформаторы...............................27
Глава 2 Трансформаторные устройства со специальными свойствами 31
2.1. Пик-трансформаторы...............................31
2.2. Импульсные трансформаторы........................33
2.3. Умножители частоты...............................35
2 4 Стабилизаторы напряжения..................... 39
2.5. Измерительные трансформаторы напряжения и тока . 41
РАЗДЕЛ II
СИЛОВЫЕ ЭЛЕКТРИЧЕСКИЕ МАШИНЫ МАЛОЙ МОЩНОСТИ
Глава 3. Трехфазные асинхронные двигатели с короткозамкнутым
ротором.................................................46
3 1. Принцип действия трехфазного асинхронного двигателя..46
3.2. Устройство трехфазных асинхронных двигателей. ... .4$
3.3. Основы теории трехфазного асинхронного двигателя . 53
3 4. 11отери и коэффициент полезного дейст вся асинхронного
двигателя............................................ . 56
3.5. Электромагнитный моменг асинхронного двигателя 58
3.6. Влияние напряжения сети и активного сопротивления обмот-
ки ротора на механическую характеристику................ 61
3.7 Рабо иге характерно гики трехфазных асинхронных двй!атслсй ...63
3.8. Пусковые сво.к гва трехфазных асинхронных двигателей .... 65
3 9 Регулирование частоты врашения трехфазных асинхронных
двигателей ...........................................65
3.9. ' Рет.пирование частоты врашения изменением активно-
го сопротивления в цепи ротора ................. 66
3.9.2 . Регулирование частоты вращения изменением частоты
питающего напряжения.................................. 66
3.9.3 Регулирование частоты вращения изменением подводи-
мого напряжения ...................................... 68
3.9.4 . Регулирование частоты вращения изменением числа
полки ов обмотки ста гора............................. 70
3.9.5 Импульсное регулирование частоты врашения....... 71
3.10. Линейные асинхронные двигатели.......:.............. 73
3.11. Управление пуском трехфазного асинхронного двигателя
с короткозамкнутым ротором посредством нереверсивного
контактора ...............................................76
Глава 4. Однофазные и конденсаторные асинхронные двигатели .. "9
4.1. Принцип действия о лофазного асинхронного двигателя . 79
4.2. Механические характеристики однофазного асинхронного
двигателя............................................... 81
4.3. Пуск однофазного асинхронного двигателя.... ..............81
4.4. Конденсаторные асинхронные двигатели..................88
4.5. Включение трехфазнэго асинхронного двигателя в однофаз-
ную сеть... ..............................................93
4 6 Однофазные асинхроннвге двш атели с экранированными по-
люсами................................................... 95
7. Асинхронные машины с заторможенным фазных: ротором........99
Глава 5. Синхронные машины.......................................101
5.1. Об иие сведения о синхроннвкх машинах.............. 101
5.2. Синхроннвге генераторы . ................. 104
5.2 1 Принцип действия синхронного генератора.........104
5.2 2 Реакция якоря в синхронном генераторе ..........106
5.2 3. Уравнения напряжений синхронного генератора ..109
5 2 4 Характеристики синхронного генератора 110
5.2 5. Синхронные генераторы, возбуждаемые постоянhbi ми
магнитами ......................112
5 3. Синхронные двигатели с электромагнитным возбуждением ... 115
5.3.1. Принцип действия и устройство синхронного явноплиос
ного двигатс гя с электромагнитным возбуждением .... 115
5.3 2 Пуск синхронного лвш ате гя с электромагнитным воз-
буждением ............................................117
5.3 .3. Потери. КПД и электромагнитный момент синхронно-
го двигателя с электромагнитным во >бужлением 119
5.4. Синхронные двигатели с постоянными магнитами........123
5.5. Тихоходные многополюсные синхронные двигатели ......126
5.5.1. Тихоходные однофазггые синхронные двигатели типов
ДСО32 и ДСОР32 .......................................126
5.5.2. Тихоходные конденсаторные синхронные двигатели ти-
пов ДСК и ДСРК....................................... 129
5.6. Синхронные реактивные двигатели.....................131
5.7. Синхронные гистерезисные двигатели ................ 135
5.8. Реактивно-шстерезисные двигатели с экранированными по-
люсами ................................................ 141
5.9. Индукторные синхронные машины.......................142
5 9.1. Индукторные синхронные генераторы ... 142
5 .9.2. Индукторные синхронные двигатели.............145
5.10. Синхронные двигатечи с электромеханической редукцией
скорости.................................................147
5 10.1. Синхронные двш атели с катящимся ротором (ДКР) ... 147
5.10.2. Волновые синхронные двигатели................151
Глава 6. Коллекторные машины................................155
6.1 Принцип действия коллекторных машин постоянного тока . .. 1 56
6.2. Устройство коллекторной машины постоянного гока......160
6.3. Электродвижущая сила и электромагнитный момент коллек-
торной машины постоянного тока...........................167
6.4 Магнитное поле машины постоянного тока Реакция якоря 169
6.5. Коммутация в коллекторных машинах постоянного тока...173
6.f- Способы улучшения коммутации и подавления помех радио-
приему ...................................................177
6.7. Потери и КПД ко.глекторных машин постоянного тока . .180
6.8. Коллекторные двигатели постоянного тока..............182
6.8.1 . Основные зависимости и соотношения........ .. 182
6.8.2 . Двигатели независимого и параллельного возбуждения .. 183
6.8.3 Регулирование частоты вращения двигателей независи-
мого и параллельного возбуждения .................. .187
6.8 4. Двигатели последовательного возбуждения........189
6 9 У нивередльные коллекторные двигатели................192
6-Ю. Стабилизация частоты вращения двигателей постоянного
тока .............................................. 197
6.11 Генераторы постоянного тока.........................199
6.11 1 Генератор независимого возбуждения............199
6.11.2. Генератор параллельного возбуждения........ 202
Глава " Электрические машины специальных конструкций
и свойств...................................................205
7.1. Гироскопические двигатели...........................205
7.1.1 Назначение и особые свойства гироскопических двига
телей ... . 205
7.1.2 . Конструкция гироскопических дпигатслей. .... 207
7.2. Электромашинные преобразователи.....................210
7.2 1. Электромашинные преобразователи двигатель-генера
торного типа ......................................... 210
7.2 .2 Одноякорные преобразоватечи............. ... 215
7.3. Электромашинные усилители мощности............... 217
7.3.1. Основные понятия............................ 217
7.3.2. Электромашинные усилители поперечного поля . ... 218
Глава 8. Вентильные двигатели постоянного тока ...... ... 225
8.1. Основные понятия ..................................225
8.2. Процесс работы вентильного двигателя...............227
8.3. Вентильный двигатель постоянного тока малой мощности ..... 229
ЧАСТЬ ВТОРАЯ ЭЛЕКТРОМАШИННЫЕ ЭЛЕМЕНТЫ
ПРИБОРНЫХ УСТРОЙСТВ И СРЕДСТВ АВТОМАТИЗАЦИИ
РАЗДЕЛ III
ИСПОЛНИТЕЛЬНЫЕ ДВИГАТЕЛИ
Глава 9 Исполнительные двигатели постоянного тока 23b
9 1. Требования к исполнительным двигателям и схемы ^тгравле-
ния исполнительными двигателями постоянного тока . .... 236
9.2. Якорное управление исполнительными двигателями постоян-
ного тока............................................ 239
9.3 Полюсное управление исполнительными двигателями посте
янного тока............................-...... —-..... 241
9.4. Электромеханическая постоянная времени исполнительных
двигателей постоянного тока..................... ... 243
9.5. Импульсное управление исполнительным двигателем посто-
янного тока........................................... 245
9.6. Конструкции исполнительных двигателей постоянного тока . 248
9.6 .1. Исполнительный двигатель постоянного тока с полым
якорем . ... ............................ .248
9-6.2. Двигатели постоянного тока с. печа гными обмотками
якоря..........................................249
9.6 3 Двигатель постоянного тока с гладким (беспазовым;
якорем ..... ...................................... 252
Глаьа 1С Асинхронные исполнительные авигателм 253
10 1 Способы управления асинхронными исполнительными дви-
гателями ........................................ ... 253
10 2 Самоход в исполнительных асинхронных двигателях и пути
его устранения..........................................257
10.3 . Устройство исполнительного асинхронного двигателя с по-
лым немагнитным ротором.............................. 259
10.4 . Характеристики исполнительного асинхронного двигателя
с полым немагнитным ротором .... ..................... 262
10.5 . Исполните (ьный асинхронный двигатель с короткозамкну
тым ротором........................................... 266
10 6. Исполнительный асинхронный двигатель с полым ферро-
Mai нитным ротором.....................................26к
10.7 . Электромеханическая постоянная времени исполнительных
асинхронных двигателей.............................. 270
10.8 Моментные исполнительные двигатели.......................271
Глава 11. Исполнительные шаговые двигатели .................... 275
11.1. Основные понятия.......................................275
11.2. Шаговые двигатели с пассивным ротором..................278
11.3. Шаговые двигатели с активным ротором ...................281
11.4 Индукторные шаговые двигатели............................283
11.5. Основные параметры и режимы работы шаговых двигателей ... 284
Глава 12 Примеры применения исполнительных двигателей......288
12.1. Примеры применения исполнительных асинхронных двига-
телей и двигателей постоянного тока....................288
12.2. Пример применения исполнительного шагового двигателя ...291
12.3. Электродвигатели для привода считывающих устройств......292
12.3.1. Лентопротяжные механизмы..........................293
12.3.2. Электропривод устройств для считывания информа-
ции с оптических дисков............................295
РАЗДЕЛ IV
ИНФОРМАЦИОННЫЕ ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
Глава 13. Тахогенераторы.........................................298
13.1. Назначение тахогенераторов и предъявляемые к ним требо-
вания .................................................298
13.2. Тахогенераторы переменного тока.........................300
13.3. Тахогенераторы постоянного тока.........................307
13.4 Примеры применения тахогенераторов в устройствах про-
мышленной автоматики....................................312
1 3.4.1. Применение тахогенераторов в качестве датчиков
частоты врашения....................................312
13 4.2. Применение тахогенератора в качестве расходомера ....313
13 4.3, Применение тахогенератора в электроприводе с отри-
цательной обратной связью по скорости........313
Глава 14. Электрические машины синхронной связи .................316
14.1 . Основные понятия.......................................316
14 2 Индикаторная система дистанционной передачи угла.. ... 318
14.3 . Синхронизирующие моменты сельсинов в индикаторной
системе................................................322
14.4 Трансформаторная система дистанционной передачи угла .326
14.5 Конструкция сельсинов.................................. 331
14 6. Дифференциальный сельсин . ........................... 336
14.7 Магнесины............................................... 337
14.8 Примеры применения сельсинов в устройствах промышлен-
ной автоматики.........................................339
14.8.1. Регистрация величины подачи инструмента в буро-
вых установках.....................................339
14 8.2 Регулирование соотношения «топливо —воздух»
в металлургической печи......................... — 340
Глава 15 Вращающиеся трансформаторы ........ 342
15.1. Назначение и устройство вращающихся трансформаторов .... 342
15.2. Синусно-косинусный вращающийся трансформатор ... 344
15.2.1 Синусно-косинусный вращающийся трансформатор
в синусном режиме ................................ 344
15.2.2. Синусно-косинусный вращающийся трансформатор
в синусно косинусном режиме------------ ---------- . 346
15.2.3. Синусно-косинусный вращающийся трансформатор
в режиме масштабирования........................ 351
15.2.4. Синусно-косинусный вращающийся трансформатор
в режиме фазовращателя................. .......352
15.3. Линейный вращающийся трансформатор ........... 353
15.4. Трансформаторная система дистанционной передачи угла
на вращающихся трансформаторах.........................355
Список литературы . ................................... 358
Предметный указатель..................................... 359
Учебное издание
Кацман Марк Михайлович
Электрические машины приборных устройств
и средств автоматизации
Учебное пособие
Редактор Т. Ф. Мельникова
Технический редактор Н. И. Горбачева
Компьютерная верстка: Д. В. Федотов
Корректоры В. А Жилкина J Н. Петрова
Диаш зитивы п зедостаьл :ны издательством.
Изд.Х1 A-1528-I. Подписано в печать 29.08.2005. Формат бО<90/16.
Бумага пит. № 2.1 агчитура «Таймс». 1 [ечать офсетная. Усл. псч. л. 23,0.
Тираж 4000 жз. Заказ № 15490.
Издательский центр «Академия», www.academia-moscow.ru
Санитарно-эпилемиопогическлсзаключение№ 77.99.02.953.Д.004796.07.04 от 20.07 2004.
117342, Москва, ул. Бутлерова, 17-Б, к. 360. Тел./факс: (095'134-8337,330-1092.
Отпечатано в ОАО «Саратовский полигра Ьический комбинат».
410004, г Сара-эв. ул. Чсрныш-жсксго. 59
Кацман Марк Михаилович -
автор учебников электромеханического
цикла' «Электрические машины». «Расчет
электрических машин», «Электрические
машины автоматических устройств» и др.
Всего более десяти наименований,
изданных общим тиражом 600 тысяч
экземпляров. Книти широко используются
в учебных заведениях России и за рубежом.
В основе этих книг не только многолетний
педагогический, но и большой
производственный опыт автора в НИИ и КБ
по проектированию электромеханических
устройств и электропривода. М М Кацман -
автор нескольких изобретений, получивших
промышленное применение.
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
ПРИБОРНЫХ УСТРОЙСТВ
И СРЕДСТВ АВТОМАТИЗАЦИИ
Издательский центр
«Академиях
www academia-moscow. ru