/























































































































































































































Автор: Ильин В.А. Позняк Э.Г.
Теги: геометрия топология аналитическая геометрия высшая математика
ISBN: 5-9221-0511-6
Год: 2004




Текст
УДК 514.122
ББК 22.151.5
И 46
Учебник удостоен
Государственной премии СССР за 1980 год
Ильин В. А., Позняк Э. Г. Аналитическая геометрия: Учеб.
Для вузов. — 7-е изд., стер. — М.: ФИЗМАТЛИТ, 2004. — 224 с. — (Курс
высшей математики и математической физики.) — ISBN 5-9221-0511-6.
Учебник написан на основе опыта преподавания авторов в Московском
государственном университете им. М.В. Ломоносова. Первое издание вышло
в 1968 г., второе A971 г.) и третье A981 г.) издания стереотипные, четвертое
издание A988 г.) было дополнено материалом, посвященным линейным и
проективным преобразованиям.
Для студентов физических и физико-математических факультетов и
факультетов вычислительной математики и кибернетики университетов.
Ил. 85.
ISBN 5-9221-0511-6 © ФИЗМАТЛИТ, 2001, 2004
ОГЛАВЛЕНИЕ
От редакторов серии 9
Предисловие 10
Введение 11
Глава 1. Системы координат. Простейшие задачи аналитической гео-
геометрии 13
§ 1. Декартовы координаты на прямой 13
1. Направленные отрезки на оси A3). 2. Линейные операции над направленными от-
отрезками. Основное тождество A4). 3. Декартовы координаты на прямой A5).
§ 2. Декартовы координаты на плоскости и в пространстве 16
1. Декартовы координаты на плоскости A6). 2. Декартовы координаты в пространстве
A6).
§ 3. Простейшие задачи аналитической геометрии 17
1. Понятие направленного отрезка в пространстве. Проекция направленного отрезка
на ось A7). 2. Расстояние между двумя точками A8). 3. Деление отрезка в данном
отношении A9). 4. Барицентрические координаты B1).
§ 4. Полярные, цилиндрические и сферические координаты 22
1. Полярные координаты B2). 2. Цилиндрические координаты B3). 3. Сферические
координаты B4).
Дополнение к главе 1. Определители второго и третьего порядков 24
1. Понятие матрицы и определителя второго порядка B4). 2. Система двух линейных
уравнений с двумя неизвестными B5). 3. Определители третьего порядка B8). 4. Свой-
Свойства определителей B9). 5. Алгебраические дополнения и миноры C1). 6. Система
трех линейных уравнений с тремя неизвестными с определителем, отличным от нуля
C4). 7. Однородная система двух линейных уравнений с тремя неизвестными C6).
8. Однородная система трех линейных уравнений с тремя неизвестными C8). 9. Не-
Неоднородная система трех линейных уравнений с тремя неизвестными с определителем,
равным нулю C9).
Глава 2. Векторная алгебра 42
§ 1. Понятие вектора и линейные операции над векторами 42
1. Понятие вектора D2). 2. Линейные операции над векторами D3). 3. Понятие линей-
линейной зависимости векторов D8). 4. Линейные комбинации двух векторов D9). 5. Ли-
Линейные комбинации трех векторов E0). 6. Линейная зависимость четырех векто-
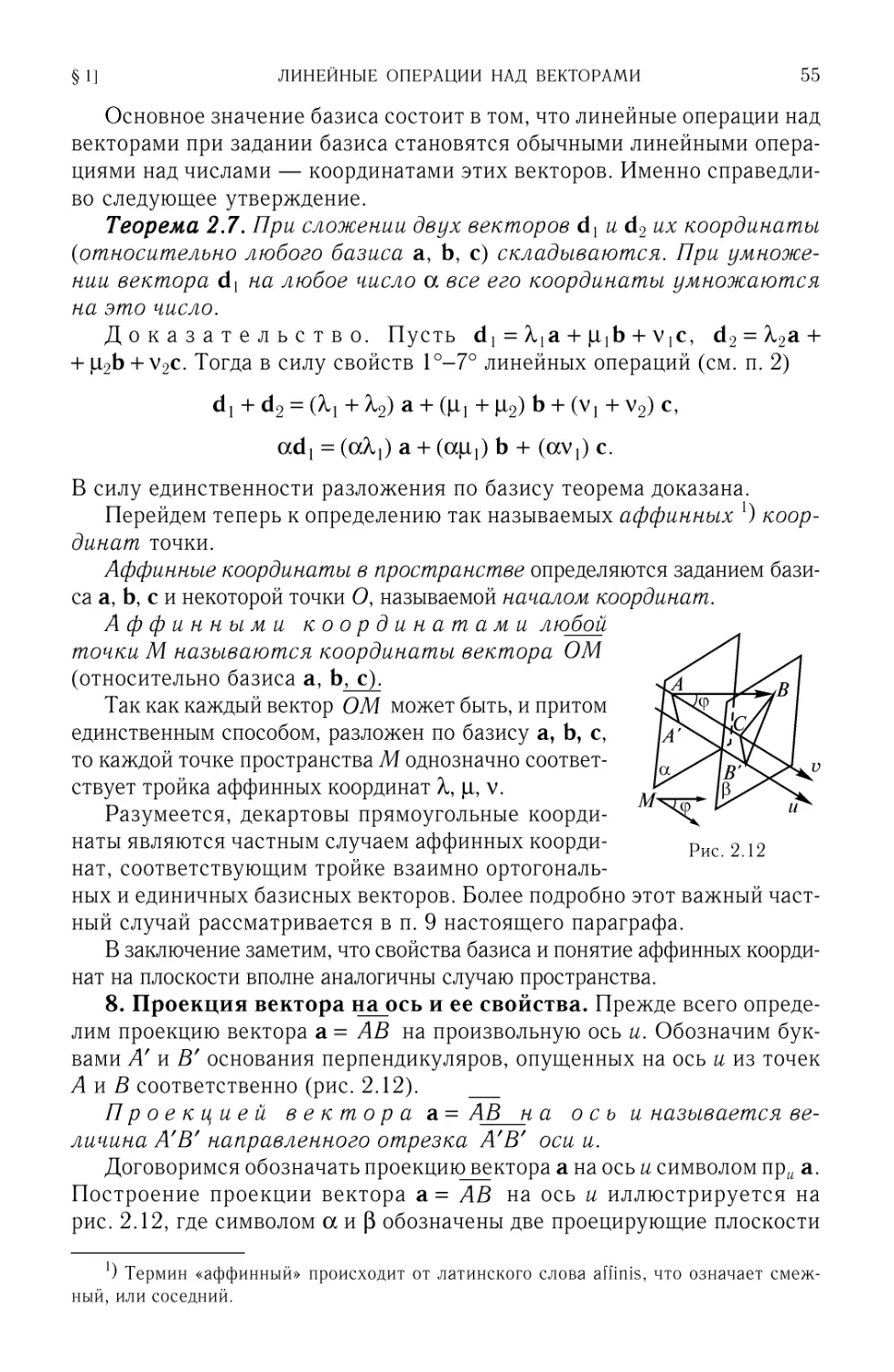
векторов E2). 7. Понятие базиса. Аффинные координаты E3). 8. Проекция вектора на ось
и ее свойства E5). 9. Декартова прямоугольная система координат как частный случай
аффинной системы координат E7).
§ 2. Скалярное произведение двух векторов 59
1. Определение скалярного произведения E9). 2. Геометрические свойства скалярно-
скалярного произведения F0). 3. Алгебраические свойства скалярного произведения F1). 4. Вы-
Выражение скалярного произведения в декартовых координатах F2).
§ 3. Векторное и смешанное произведения векторов 63
1. Правые и левые тройки векторов и системы координат F3). 2. Определение вектор-
векторного произведения двух векторов F4). 3. Геометрические свойства векторного произ-
произведения F5). 4. Смешанное произведение трех векторов F7). 5. Алгебраические свой-
свойства векторного произведения F8). 6. Выражение векторного произведения в декар-
декартовых координатах G2). 7. Выражение смешанного произведения в декартовых
координатах G3). 8. Двойное векторное произведение G4).
б ОГЛАВЛЕНИЕ
Глава 3. Преобразование декартовых прямоугольных координат на плос-
плоскости и в пространстве 76
§ 1. Преобразование декартовых прямоугольных координат на плос-
плоскости 76
§ 2. Преобразование декартовых прямоугольных координат в про-
пространстве 79
1. Общие формулы преобразования G9). 2. Выяснение геометрического смысла. Углы
Эйлера (81).
§ 3. Линейные преобразования 83
1. Понятие линейных преобразований плоскости (83). 2. Аффинные преобразования
плоскости (84). 3. Основное свойство аффинных преобразований плоскости (86). 4. Ос-
Основной инвариант аффинного преобразования плоскости (88). 5. Аффинные преобра-
преобразования пространства (89). 6. Ортогональные преобразования (90).
§ 4. Проективные преобразования 92
Глава 4. Уравнение линии на плоскости. Уравнения поверхности и ли-
линии в пространстве 95
§ 1. Уравнение линии на плоскости 95
1. Понятие об уравнении линии (95). 2. Параметрическое представление линии (96).
3. Уравнение линии в различных системах координат (98). 4. Два типа задач, связан-
связанных с аналитическим представлением линии A00). 5. Классификация плоских ли-
линий A00). 6. О пересечении двух линий A02).
§ 2. Уравнение поверхности и уравнения линии в пространстве 102
1. Понятие об уравнении поверхности A02). 2. Уравнения линии в пространстве A04).
3. Цилиндрические и конические поверхности A04). 4. Параметрические уравнения
линии и поверхности в пространстве A07). 5. Классификация поверхностей A08).
6. О пересечении поверхностей и линий в пространстве A09). 7. Заключительные за-
замечания A10).
Глава 5. Линейные образы 111
§ 1. Различные виды уравнения прямой на плоскости 111
1. Общее уравнение прямой A11). 2. Неполные уравнения прямой. Уравнение прямой
в отрезках A13). 3. Каноническое уравнение прямой A14). 4. Параметрические урав-
уравнения прямой A15). 5. Прямая с угловым коэффициентом A15). 6. Угол между двумя
прямыми. Условия параллельности и перпендикулярности двух прямых A16). 7. Нор-
Нормированное уравнение прямой. Отклонение точки от прямой A18). 8. Уравнение пуч-
пучка прямых A21).
§ 2. Некоторые задачи на прямую линию на плоскости 123
1. Нахождение прямой, проходящей через данную точку М{{хь у{) и составляющей
заданный угол ср с данной прямой у = kxx + Ъх A23). 2. Нахождение биссектрис углов,
образованных данными прямыми A24). 3. Условия, при которыхданная прямая пере-
пересекает данный отрезок АВ A24). 4. Определение местоположения данной точки М
и начала координат О относительно углов, образованных двумя данными прямы-
прямыми A24). 5. Условие пересечения трех прямых в одной точке A25). 6. Нахождение
прямой, проходящей через точку пересечения двух данных прямых и удовлетворяю-
удовлетворяющей еще одному условию A26).
§ 3. Различные виды уравнения плоскости 127
1. Общее уравнение плоскости A27). 2. Неполные уравнения плоскости. Уравнение
плоскости в отрезках A29). 3. Угол между двумя плоскостями. Условия параллельно-
параллельности и перпендикулярности плоскостей A30). 4. Уравнение плоскости, проходящей
через три различные точки, не лежащие на одной прямой A31). 5. Нормированное
уравнение плоскости. Отклонение точки от плоскости A32). 6. Пучки и связки плос-
плоскостей A34).
§ 4. Прямая линия в пространстве 135
1. Канонические уравнения прямой в пространстве A35). 2. Уравнения прямой, про-
проходящей через две различные точки М{(хьуь zx) и М2(х2, у2, z2) A37). 3. Параметри-
ОГЛАВЛЕНИЕ 7
ческие уравнения прямой в пространстве A37). 4. Угол между прямыми в простран-
пространстве. Условия параллельности и перпендикулярности прямых A37). 5. Условие
принадлежности двух прямых к одной плоскости A38). 6. Угол между прямой и
плоскостью. Условия параллельности и перпендикулярности прямой и плоскости
A38). 7. Условия принадлежности прямой 3- = Z—Zl = L к плоскости
/ т п
Ах + By + Cz + D = 0 A39). 8. Связка прямых A39).
§ 5. Некоторые задачи на прямую и плоскость в пространстве 140
1. Условие пересечения трех плоскостей в одной и только в одной точке A40). 2. На-
Нахождение биссектральных плоскостей двугранного угла, образованного двумя дан-
данными плоскостями A40). 3. Условия, при которых данная плоскость пересекает
данный отрезокЛБ A41). 4. Определение местоположения двух данных точек Л и
В относительно двугранных углов, образованных данными плоскостями A41).
5. Уравнения прямой, проходящей через данную точку Мх(хх, уь zx) и перпендику-
перпендикулярной данной плоскости Ах + By + Cz + D = 0 A41). 6. Уравнение плоскости, про-
проходящей через данную точку М0(х0, у0, z0) и параллельной заданной плоскости
Ахх + Вху + C\Z + D{ = 0A41). 7. Уравнение плоскости, проходящей через заданную точ-
точку М0(х0, у0, z0) и перпендикулярной заданной прямой ——— = ——— = A41).
8. Уравнение плоскости, проходящей через данную прямую L = ——— = L и
I m n
через заданную не лежащую на этой прямой точку М0(х0, у0, z0) A42). 9. Уравнение
Х-Хх У-Ух 2-2х
плоскости, проходящей через данную прямую —-—- = - = и параллель-
параллельной другой данной прямой —-—- = - = A42). 10. Уравнение плоскости,
/2 /и2 п2
проходящей через заданную прямую Lx и перпендикулярной заданной плоскос-
плоскости п A43). 11. Уравнения перпендикуляра, опущенного из заданной точки Мо на дан-
данную прямую Lx A43). 12. Нахождение расстояния отданной точки Мо до данной пря-
прямой L\ A43). 13. Нахождение общего перпендикуляра к двум скрещивающимся пря-
прямым Lx и L2 A43). 14. Нахождение кратчайшего расстояния между двумя данными
скрещивающимися прямыми Lx и L2 A43).
Глава 6. Линии второго порядка 144
§ 1. Канонические уравнения эллипса, гиперболы и параболы 144
1. Эллипс A44). 2. Гипербола A47). 3. Парабола A48).
§ 2. Исследование формы эллипса, гиперболы и параболы по их ка-
каноническим уравнениям 149
1. Исследование формы эллипса A50). 2. Исследование формы гиперболы A51). 3. Ис-
Исследование формы параболы A55).
§ 3. Директрисы эллипса, гиперболы и параболы 155
1. Эксцентриситет эллипса и гиперболы A56). 2. Директрисы эллипса и гипербо-
гиперболы A57). 3. Определение эллипса и гиперболы, основанное на их свойстве по отноше-
отношению к директрисам A61). 4. Эллипс, гипербола и парабола как конические сечения
A64). 5. Полярные уравнения эллипса, гиперболы и параболы A65).
§ 4. Касательные к эллипсу, гиперболе и параболе 167
1. Уравнения касательных к эллипсу, гиперболе и параболе A67). 2. Оптические свой-
свойства эллипса, гиперболы и параболы A68).
§ 5. Кривые второго порядка 169
1. Преобразование коэффициентов уравнения линии второго порядка при переходе к
новой декартовой системе координат A70). 2. Инварианты уравнения линии второго
порядка. Понятие типа линии второго порядка A72). 3. Центр линии второго поряд-
порядка A75). 4. Стандартное упрощение любого уравнения линии второго порядка путем
поворота осей A76). 5. Упрощение уравнения центральной линии второго порядка
(/2 Ф 0). Классификация центральных линий A77). 6. Упрощение уравнения линии па-
параболического типа (/2 = 0). Классификация линий параболического типа A80). 7. Рас-
Распадающиеся кривые второго порядка A83).
8 ОГЛАВЛЕНИЕ
Глава 7. Поверхности второго порядка 184
§ 1. Понятие поверхности второго порядка 184
1. Преобразование коэффициентов уравнения поверхности второго порядка при пе-
переходе к новой декартовой системе координат A85). 2. Инварианты уравнения повер-
поверхности второго порядка A86). 3. Центр поверхности второго порядка A87). 4. Стан-
Стандартное упрощение любого уравнения поверхности второго порядка путем поворота
осей A87).
§ 2. Классификация поверхностей второго порядка 189
1. Классификация центральных поверхностей A89). 2. Классификация нецентраль-
нецентральных поверхностей второго порядка A92).
§ 3. Исследование формы поверхностей второго порядка по их кано-
каноническим уравнениям 194
1. Эллипсоид A94). 2. Гиперболоиды A96). 3. Параболоиды A98). 4. Конус и цилинд-
цилиндры второго порядка B00). 5. Прямолинейные образующие поверхностей второго по-
порядка B02).
Приложение. Проблемы оснований геометрии и обоснования мето-
метода координат 205
§ 1. Аксиомы элементарной геометрии 205
1. Аксиомы принадлежности B05). 2. Аксиомы порядка B07). 3. Аксиомы конгруэнт-
конгруэнтности B09). 4. Аксиомы непрерывности B11). 5. Обоснование метода координат B11).
6. Аксиома параллельности B16).
§ 2. Схема доказательства непротиворечивости геометрии Евклида 217
§ 3. Схема доказательства непротиворечивости геометрии Лобачев-
Лобачевского 220
§ 4. Заключительные замечания о проблемах аксиоматики 222
ОТ РЕДАКТОРОВ СЕРИИ
Данный выпуск серии представляет собой учебник по курсу аналити-
аналитической геометрии. Кроме традиционно излагаемого материала, он содер-
содержит изложение некоторых вопросов, находящих применение в физике и в
теоретической механике (понятие о барицентрических координатах, вы-
выяснение роли углов Эйлера в вопросах преобразования координат, пред-
представление произвольного преобразования в виде трансляции и одного по-
поворота в пространстве, оптические свойства кривых второго порядка и
т.п.).
Представляет интерес и приложение, содержащее аксиоматику Гиль-
Гильберта, обоснование метода координат и дающее представление о неевкли-
неевклидовой геометрии.
А. Тихонов, В. Ильин, А. Свешников
ПРЕДИСЛОВИЕ
Эта книга возникла на основе лекций, читавшихся авторами на физи-
физическом факультете МГУ в течение ряда лет.
Отметим некоторые особенности изложения. Во-первых, отметим, что
по всей книге идет параллельное рассмотрение случаев плоскости и про-
пространства.
Весьма подробно излагается векторная алгебра. При ее изложении
сразу же вводится понятие линейной зависимости векторов, и на его осно-
основе устанавливается возможность однозначного разложения вектора по
аффинному базису. Отличаются от общепринятых доказательство рас-
распределительного свойства векторного произведения и формулы для двой-
двойного векторного произведения.
В связи с потребностями теоретической механики детально рассмат-
рассматривается преобразование декартовых прямоугольных координат. Выяс-
Выясняется роль углов Эйлера и устанавливается, что, каковы бы ни были два
базиса одной ориентации, один из них может быть преобразован в другой
посредством параллельного переноса и одного поворота вокруг некото-
некоторой оси в пространстве.
При описании линейных образов, наряду с изложением традиционно-
традиционного теоретического материала, рассмотрено большое число задач идейно-
идейного характера. Нам кажется, что разбор этих задач принесет пользу сту-
студентам, приступающим к упражнениям.
Не оставлены без внимания и имеющие прикладной характер вопросы
теории образов второго порядка (оптические свойства, полярные уравне-
уравнения и т.п.).
Приложение к книге содержит материал, не входящий в традиционные
курсы аналитической геометрии. Здесь дается представление об аксиома-
аксиоматике Гильберта. Проводится обоснование метода координат, дается пред-
представление о системе развертывания основных геометрических понятий,
об евклидовой и неевклидовой геометриях и о доказательствах их непро-
непротиворечивости.
По программе, действующей в настоящее время, этот материал не вхо-
входит ни в один математический курс. Тем не менее этот материал актуален
не только с точки зрения логических принципов построения геометрии,
но и для понимания ряда разделов современной физики.
При написании этой книги мы широко пользовались советами и дру-
дружеской критикой А.Н. Тихонова и А.Г. Свешникова, которым приносим
свою глубокую благодарность.
Нам хочется также поблагодарить Н.В. Ефимова и А.Ф. Леонтьева за
прочтение рукописи и сделанные ими замечания.
1968 г. В. Ильин, Э. Лозняк
ВВЕДЕНИЕ
Аналитическая геометрия имеет своей задачей изучение свойств гео-
геометрических объектов при помощи аналитического метода.
В основе этого метода лежит так называемый метод координат, впер-
впервые систематически примененный Декартом 0.
Основные понятия геометрии (точки, прямые линии и плоскости) от-
относятся к числу так называемых начальных понятий. Эти понятия мож-
можно описать, но всякая попытка дать определение каждого их этих понятий
неизбежно сведется к замене определяемого понятия ему эквивалентным.
С научной точки зрения логически безупречным методом введения ука-
указанных понятий является аксиоматический метод', в развитии и завер-
завершении которого величайшая заслуга принадлежит Гильберту 2).
Аксиоматический метод излагается в Приложении в конце настоящей
книги. Там дается представление о всей системе аксиом геометрии и о так
называемой неевклидовой геометрии, к которой приводит замена одной
из аксиом (так называемой аксиомы параллельности) утверждением, ее
отрицающим.
Там же выясняется вопрос о непротиворечивости как евклидовой, так
и неевклидовой геометрии и устанавливается, что конкретной реализаци-
реализацией совокупности объектов, удовлетворяющих аксиомам геометрии, являет-
является введение точек как всевозможных упорядоченных троек (х, у, z) веще-
вещественных чисел, прямых — как множества троек (х, у, z), удовлетворяю-
удовлетворяющих системе двух линейных уравнений, и плоскостей — как множества
троек (х, у, z), удовлетворяющих одному линейному уравнению.
Аксиоматический метод закладывает фундамент и для лежащего в ос-
основе аналитической геометрии метода координат. Ради простоты рассмот-
рассмотрим вопрос о введении координат на прямой. Возможность введения ко-
координат на прямой основывается на возможности установления взаим-
взаимно однозначного соответствия между множеством всех точек прямой
и множеством всех вещественных чисел. Доказательство возможности
установления такого соответствия базируется на аксиомах геометрии и
на аксиомах (свойствах) множества вещественных чисел 3) и приводится в
Приложении к настоящей книге.
0 Рене Декарт — великий французский математик и философ A596-1650).
2) Давид Гильберт — великий немецкий математик A862-1943).
3) Свойства вещественных чисел и аксиоматический метод введения множества
вещественных чисел излагаются в гл. 2 и в Приложении к выпуску 1 настоящего
курса.
12 ВВЕДЕНИЕ
Таким образом, в Приложении к настоящей книге читатель найдет обо-
обоснование как системы развертывания основных геометрических понятий,
так и лежащего в основе аналитической геометрии метода координат.
Метод координат представляет собой глубокий и мощный аппарат,
позволяющий привлекать для исследования геометрических объектов
методы алгебры и математического анализа.
ГЛАВА 1
СИСТЕМЫ КООРДИНАТ. ПРОСТЕЙШИЕ ЗАДАЧИ
АНАЛИТИЧЕСКОЙ ГЕОМЕТРИИ
В этой главе вводятся декартовы координаты {) на прямой, на плоско-
плоскости и в пространстве. Рассматриваются простейшие задачи аналитичес-
аналитической геометрии (расстояние между двумя точками, деление отрезка в дан-
данном отношении). Дается понятие о других системах координат (поляр-
(полярных, цилиндрических и сферических).
§ 1. Декартовы координаты на прямой
1. Направленные отрезки на оси. Прямую линию 2) с указанным на
ней направлением будем называть осью. Отрезок на оси называется на-
направленным, если указано, какая из его граничных точек является нача-
началом и какая — концом. Будем обозначать направленный отрезок с нача-
началом в точке А и концом в точке В символом АВ (на рис. 1.1 изображены
направленные отрезки АВ и CD). Мы будем рассматривать также и так
называемые нулевые направленные отрезки,
у которых начало и конец совпадают. 4 »ff 4+ 9
С каждым направленным отрезком сопос-
сопоставляется его числовая характеристика— так Рис. 1.1
называемая величина направленного отрез-
ка. Величиной АВ направленного отрезка АВ называется число, равное
длине отрезка АВ, взятой со знаком плюс, если направление АВ совпадает
с направлением оси, и со знаком минус, если направление АВ противопо-
противоположно направлению оси. Величины всех нулевых направленных отрезков
считаются равными нулю.
1) Координаты (от латинских слов со — совместно, ordinatus — упорядоченный,
определенный) — числа, заданием которых определяется положение точки на пря-
прямой, на плоскости или в пространстве (соответственно на линии или на поверхности).
Заслуга введения метода координат, с помощью которого задачи геометрии могут
быть истолкованы на языке математического анализа, и, обратно, факты анализа мо-
могут приобрести геометрическое толкование, принадлежит французскому ученому
Р. Декарту.
2) В Приложении в конце этой книги рассматривается аксиоматическое введение
основных геометрических понятий (точек, прямых, плоскостей). Кроме того, в этом
же Приложении устанавливается связь между геометрическим понятием прямой ли-
линии и понятием числовой оси (см. вып. 1 «Основы математического анализа»).
14 СИСТЕМЫ КООРДИНАТ. ПРОСТЕЙШИЕ ЗАДАЧИ [ГЛ. 1
2. Линейные операции над направленными отрезками. Основ-
Основное тождество. Предварительно определим равенство направленных от-
отрезков. Направленные отрезки мы будем перемещать вдоль оси, на кото-
которой они лежат, сохраняя при этом их длину и направление 0.
Два ненулевых направленных отрезка называются равными, если
при совмещении начал этих отрезков совпадают и их концы. Любые
два нулевых направленных отрезка считаются равными.
Очевидно, необходимым и достаточным условием равенства двух
направленных отрезков на данной оси является равенство величин
этих отрезков.
Линейными операциями над направленными отрезками будем назы-
называть операции сложения таких отрезков и умножения направленного
отрезка на вещественное число.
Перейдем к определению этих операций.
Для определения сум м ы направленных отрезков АВ и CD совмес-
совместим начало С отрезка CD с концом^ отрезка АВ (рис. 1.2). Полученный
при этом нагтрав_ленный отрезок AD называется суммой направленных
отрезков АВ и CD и обозначается символом АВ + CD .
Справедлива следующая основная теорема.
Теорема 1.1. Величина суммы направленных отрезков равна сум-
сумме величин слагаемых отрезков.
Доказательство. Пусть хотя бы один ш_ отрезков АВ и CD
являете^ нулевым. Если, например, отрезок CD нулевой, то сумма
АВ + CD совпадает с отрезком_Л5^и_утверждение теоремы справедли-
справедливо. Пусть теперь оба отрезка AB_n_CD ненулевые. Совместим начало С
отрезка CD с концом В отрезка АВ. Тогда АВ + CD = AD . Нам нужно
доказать справедливость равенства АВ + CD = AD .Рассмотрим случай,
когда оба отрезка АВ h_CD направлены в одну сторону_(рис._и_2). В этом
случае длина отрезка AD равна сумме длин отрезков АВ и CD и, кроме
того, направле_ние отрезка AD совпадает с направлением каждого из от-
отрезков АВ и CD . Поэтому интересующее нас равенство АВ + CD-AD
справедливо. Рассмотрим, наконец, еще один возможный случай, когда
отрезки АВ и CD направлены в противоположные стороны (рис. 1.3).
А
С
В
Рис. 1.2
D
А
D
Рис.
1.3
С
В
В этом случае величины отрезков АВ и CD имеют разные знаки, и поэто-
поэтому длина отрезка AD равна | АВ + CD \. Так как направление отрезка АР
совпадает с направлением наибольшего по длине из отрезков АВ и CD ,
О Вопрос о возможности перемещения отрезков связан с аксиомами конгру-
конгруэнтности (см. Приложение в конце книги и, в частности, сноску на с. 209).
§1] ДЕКАРТОВЫ КООРДИНАТЫ НА ПРЯМОЙ 15
то знак величины отрезка AD совпадает со знаком числа АВ + CD, т.е.
справедливо равенство АВ + CD =AD. Теорема доказана.
Следствие. При любом расположении точек А, В, С на числовой
оси величины направленных отрезков АВ, ВС и АС удовлетворяют
соотношению
АВ + ВС = АС, A.1)
которое называется основным тождеством.
Операция умножения направленного отрезка на вещественное число а
определяется следующим образом.
Произведением направленного о тр е з к а АВ на
число а называется направленный отрезок, обозначаемый а • АВ ^дли-
^длина которого равна произведению числа \ а \ на длину отрезка АВ и
направление которого совпадает с_направлением отрезка АВ при а > О
и противоположно направлению АВ при а < 0.
Очевидно, величина направленного отрезка а • АВ равна а • АВ.
3. Декартовы координаты на прямой. Декартовы координаты на
прямой вводятся следующим образом. Выберем на прямой определенное
направление 0 и некоторую точку О — нача-
начало координат (рис. 1.4). Кроме того, укажем о—-—о
единицу масштаба. Рассмотрим теперь произ- —*- «- >
вольную точку М на прямой. Декарто-
Декартовой координатой х точки М ис>
будем называть величину направленного отрезка ОМ .
Тот факт, что точка М имеет координату х, символически обозначают
так: М(х).
Замечание. Введение декартовых координат на прямой представ-
представляет собой один из способов, с помощью которого любой точке М пря-
прямой ставится в соответствие вполне определенное вещественное
число х. Вопрос о том, исчерпывается ли при этом способе все множе-
множество вещественных чисел, т.е. будет ли указанное соответствие взаимно
однозначным, положительно решается в Приложении в конце книги.
(См. по этому поводу также Приложение к вып. I.)
Пусть Мх(хх) и М2(х2) — две точки на оси. В следующем утверждении
устанавливается выражение величины М{М2 направленного отрезка
МХМ2 через координаты ххях2 — его начала и конца.
Теорема 1.2. Величина М{М2 направленного отрезка М{М2 равна
х2-хх, т.е.
М1М2 = х2-х1. A.2)
Доказательство. Рассмотрим на оси три точки О, Мь М2. Со-
Согласно теореме 1.1 справедливо равенство
ОМ1+М1М2 = ОМ2. A.3)
) Напомним, что прямая с указанным на ней направлением, называется осью.
16 СИСТЕМЫ КООРДИНАТ. ПРОСТЕЙШИЕ ЗАДАЧИ [ГЛ. 1
Так как ОМХ = хх, ОМ2 = х2, то из A.3) вытекает нужное нам соотношение
A.2). Теорема доказана.
Следствие. Расстояние р (Мх, М2) между точками Мх(хх) и М2{х2)
может быть найдено по формуле
р(М1,М2)=\х2-х1\. A.4)
§ 2. Декартовы координаты на плоскости
и в пространстве
1. Декартовы координаты на плоскости. Две перпендикулярные
оси на плоскости с общим началом и одинаковой масштабной единицей
(рис. 1.5) образуют декартову прямоугольную систему координат на
плоскости. Одну из указанных осей называют осью Ох или осью абс-
абсцисс, другую — осью Оу или осью ординат. Эти оси называют также
координатными осями. Обозначим через Мх и М
У i
О
У
соответственно проекции произвольной точки М
Л/Г плоскости на оси Ох и Оц.
\ Декартовыми прямоугольными
\ ^ координатами х и у точки М будем на-
Мх х зывать соответственно величины направленных
отрезков ОМХ и ОМу .
рис 15 Декартовы координаты х и у точки М называют-
называются соответственно ее абсциссой и ординатой. Тот
факт, что точка М имеет координаты х и у, символически обозначают
так: М (х, у).
Координатные оси разбивают плоскость на четыре квадранта, нуме-
нумерация которых указана на рис. 1.6. На этом же рисунке указана расста-
расстановка знаков координат точек в зависимости от их расположения в том
или ином квадранте.
2. Декартовы координаты в пространстве. Декартовы координаты
в пространстве вводятся в полной аналогии с декартовыми координатами
на плоскости.
Три взаимно перпендикулярные оси в пространстве (координатные оси)
с общим началом О и одинаковой масштабной единицей (рис. 1.7) обра-
образуют декартову прямоугольную систему координат в пространстве. Одну
из указанных осей называют осью Ох или осью абсцисс, другую — осью Оу
или осью ординат, третью — осью Oz или осью аппликат. Пусть Мх, Му
иМг — проекции произвольной точки М пространства на оси Ох, Оу и Oz
соответственно.
Декартовыми прямоугольными координатами
х, у и z точки М будем называть соответственно величины направ-
направленных отрезков ОМХ , ОМу и OMZ .
§3]
ПРОСТЕЙШИЕ ЗАДАЧИ АНАЛИТИЧЕСКОЙ ГЕОМЕТРИИ
17
Декартовы координаты x,ynz точки М называются соответственно ее
абсциссой, ординатой и аппликатой. Тот факт, что точка М имеет ко-
координаты х, у и 2, символически обозначают так: М (х, у, z).
х<0
х<0
У ,
II
,У>0
0
III
, у<0
I
х>0,
у>0
X
IV
х>0,
у<0
Рис. 1.6
Рис. 1.7
Попарно взятые координатные оси располагаются в так называемых
координатных плоскостях хОу, yOz и zOx (рис. 1.7). Эти плоскости
разбивают пространство на восемь октантов. Читатель без труда выяс-
выяснит расстановку знаков координат точек в зависимости от их расположе-
расположения в том или ином октанте.
§ 3. Простейшие задачи аналитической геометрии
1. Понятие направленного отрезка в пространстве. Проекция на-
направленного отрезка на ось. Отрезок в пространстве называется направ-
направленным, если указано, какая из его граничных точек является началом и
какая — концом. Как и в п. 1 § 1 этой главы символом АВ будем обозна-
обозначать направленный отрезок с началом в точке А и концом в точке В.
Рассмотрим в пространстве направленный отрезок МХМ2 и ось Ох
(рис. 1.8). При этом будем считать, что на оси Ох введены декартовы коор-
координаты точек.
Проекцией направленного отрезка МХМ2 на ось Ох (прОх МХМ2 )
называется величина направленного отрезка М1хМ2х , началом МХх ко-
которого служит проекция начала отрезка МХМ2 , а концом М2х — проек-
проекция конца отрезка МХМ2 .
Пусть точки М1х и М2х имеют на оси Ох координаты хх и х2 соответ-
соответственно. Из определения прОх МХМ2 и теоремы 1.2 вытекает справедли-
справедливость соотношения
A.5)
прОх МХМ2 =х2-хх
Установим еще одну формулу для вычисления прОх МХМ2 . Для этого пе-
перенесем направленный отрезок МХМ2 параллельно самому себе так, что-
чтобы его начало совпало с какой-либо точкой оси Ох (на рис. 1.8 этой точ-
точкой является точка МХх). Обозначим через ф наименьший угол между на-
направлением оси Ох и направлением отрезка МХхМ2х , полученного
18
СИСТЕМЫ КООРДИНАТ. ПРОСТЕЙШИЕ ЗАДАЧИ
[ГЛ. 1
указанным выше параллельным переносом отрезка МХМ2 . Отметим, что
угол ф заключен между 0 и тт. При этом очевидно, что угол ф острый, если
направление отрезка М1хМ2х совпадает с направлением Ох, и тупой,
если направление М1хМ2х противоположно направлению Ох. Используя
это, легко убедиться в справедливости следующей нужной нам формулы:
A.6)
прОх М{М2 = | МХМ2 | cos ф,
в которой | МХМ2 | обозначает длину отрезка МХМ2 .
2. Расстояние между двумя точками. В этом пункте мы установим
формулу для вычисления расстояния между двумя точками по извест-
известным координатам этих точек. Эта задача уже решена для случая точек на
прямой в п. 3 § 1 этой главы (см. формулу A.4)). Ради определенности под-
подробно остановимся на случае, когда точки расположены в пространстве.
Рассмотрим в пространстве декартову систему координат Oxyz и
точки Мх{хх, ух, zx) и М2{х2, Уъ Z2) (рис. 1.9). Очевидно, расстояние
pGVf], M2) между точками Мх и М2, равное длине направленного отрезка
МХМ2 , равно также длине диагонали параллелепипеда, грани которого
параллельны координатным плоскостям и проходят через точки Мх и М2
(на рис. 1.9 этот параллелепипед изображен штриховой линией). Длина па-
параллельного оси Ох ребра этого параллелепипеда равна, очевидно, абсо-
абсолютной величине проекции отрезка МХМ2 на ось Ох, т.е., согласно форму-
формуле A.5), равна | х2 - хх \. По аналогичным соображениям длины ребер, па-
параллельных осям Оу и Ог, равны соответственно | у2 — ух \ и | z2 — zx \.
О
,л—
K-'-i-i'
i
-LL
—1—>
м
Рис. 1.8
Рис. 1.9
Используя теорему Пифагора, получим следующую формулу для
Р(мим2у.
J-xlf+(y2-ylf+(z2-zlf. A.7)
Замечание. Формула расстояния между двумя точками в случае
их расположения в плоскости Оху имеет следующий вид:
р(Мь М2) =
(г/2 -yxf
A.8)
§3]
ПРОСТЕЙШИЕ ЗАДАЧИ АНАЛИТИЧЕСКОЙ ГЕОМЕТРИИ
19
3. Деление отрезка в данном отношении. Рассмотрим в простран-
пространстве две различные точки М{ и М2 и прямую, определяемую этими точ-
точками. Выберем на этой прямой некоторое направление (рис. 1.10). На
полученной оси точки М{ и М2 определяют направленный отрезок М1М2 .
Пусть М — любая отличная от М2 точка указанной выше оси. Число
мхм
ММ,
A.9)
называется отношением, в котором точка М делит направленный от-
отрезок М{М2 . Таким образом, любая, отличная от М2 точка М делит отре-
отрезок МХМ2 в некотором отношении X, где X определяется равенством A.9).
Замечание 1. При изменении направления на прямой, проходя-
проходящей через точки М{ и М2, меняют знак величины всех направленных
отрезков. Поэтому отношение
МХМ
ММ,
в правой части формулы A.9) не
зависит от выбора направления на
прямой МХМ2.
Рассмотрим задачу о вычислении
координат точки М, делящей от-
отрезок МХМ2 в отношении X, считая
известными координаты точек Мх и
М2 и число X, где X не равно -1.
Рассмотрим в пространстве декар-
тову прямоугольную систему коорди-
координат Oxyz, и пусть в этой системе коор-
координат точки Мь М2 и М имеют соответственно координаты (хь уь z{),
(х2, у2, z2) и (х, у, z). Спроецируем точки Мь М2 и М на координатные оси
(на рис. 1.10 указаны лишь проекции М1х, М2х и Мх точек Mh M2 и М на
ось Ох). Очевидно, точкаМх делит направленный отрезок М1хМ2х в отно-
отношении X. Поэтому
Рис. 1.10
м1хмх = х
A.10)
Согласно теореме 1.2MlxMx = x-xhaMxM2x = х2-х. Отсюда и из соотно-
соотношения A.10) найдем, что х равняется
¦ Хх0
¦. Совершенно аналогично
вычисляются координаты у и z точки М. Таким образом,
¦ Хх9 Цу + Ху2
х,
х = —
1
_
У~
„ _
(l.ii)
20 СИСТЕМЫ КООРДИНАТ. ПРОСТЕЙШИЕ ЗАДАЧИ [ГЛ. 1
Формулы A.11) называются формулами деления отрезка в данном от-
отношении X.
Замечание 2. Очевидно, если X = 1, то точка М делит отрезок
МХМ2 пополам. Получающиеся при этом из соотношений A.11) формулы
называются формулами деления отрезка пополам.
Замечание 3. Для положительных значений X точка М лежит
между точками Мх и М2 (в этом случае, как это видно из A.9), отрезки
МХМ и ММ2 одинаково направлены), а для отрицательных значений —
вне отрезка М{М2.
Замечание 4. Соотношения A.11) имеют смысл для любых значе-
значений X Ф -1. Этим, в частности, и объяснялось указанное ранее ограниче-
ограничение для значений X.
Пример. Решим задачу о вычислении координат центра тяжес-
тяжести системы материальных точек.
Используем следующие два допущения, отвечающие известным физи-
физическим предпосылкам:
1) Центр тяжести системы из двух точек Мх и М2 с массами соответ-
соответственно тх и т2 находится на отрезке МХМ2 и делит этот отрезок в отно-
отношении Х = т2/тх.
2) Центр тяжести системы точек Мх, М2, ..., Мп_х, Мп с массами соот-
соответственно тх, т2, ..., тп_х, тп совпадает с центром тяжести системы из
двух точек, одна из которых является точкой Мп с массой тп, а другая
находится в центре тяжести системы точекМх, М2, , Мп_х (с массами
тх, т2, ..., тп_х) и имеет массу тх + т2 +... + тп_х.
Из первого допущения и формул A.11) вытекает, что координаты х,
у я z центра тяжести системы из двух точекМх(хх, ух, zx) nM2(x2, y2, z2)
с массами тх и т2 равны соответственно ——
тх + т2 тх + т2
mxzx + т2г2
. Поэтому следует ожидать, что координаты х, у и z центра
тх + т2
тяжести системы из п точек Mt (xb yb zt), /=1,2, ..., п, с массами ^мо-
^могут быть вычислены по формулам
х = т\х\ +- + тпхп т\У\ +- + тпУп
т + + т ' т + + т '
п,х -г ... -г пьп ,чх -г ... -г nvn fl 12)
2 = —^ tLJL.
тх +... + тп
В справедливости этих формул можно убедиться по индукции, если ис-
использовать второе допущение. В самом деле, пусть эти формулы справед-
справедливы для системы точек Мх, ..., Мп_х с массами от тх, , тп_х. Тогда,
например, для абсциссы х рассматриваемой системы точек Мх, ..., Мп,
§ 3] ПРОСТЕЙШИЕ ЗАДАЧИ АНАЛИТИЧЕСКОЙ ГЕОМЕТРИИ 21
согласно второму допущению и формуле для абсциссы х системы из двух
точек, получим выражение
X = ¦
+ т
из которого сразу же вытекает первая формула A.12). Выражения для у
и z получаются аналогично.
Замечание. Если система точек Mt с массами ть расположена в
плоскости Оху, то координаты х и у центра тяжести этой системы могут
быть найдены по первым двум формулам A.12).
4. Барицентрические координаты. Формулы A.12) используются для введе-
введения так называемых барицентрических координат. Рассмотрим барицентрические
координаты на плоскости. В целях упрощения рассуждений будем считать, что на
плоскости введены и декартовы координаты Оху. Рассмотрим какие-либо три различ-
различные точки Мх(хх, ух), М2(х2, у2), М3(х3, Уз), не лежащие на одной прямой, и любую
данную точку М(х, у). Выясним, существуют ли такие три числа тх, т2, т3, удов-
удовлетворяющие условию
т{ + т2 + т3 = 1, A-13)
что данная точка М (х, у) будет центром тяжести системы точек Мх, М2, М3 с
массами тх, т2, т3 соответственно. Ниже мы убедимся, что при сформулирован-
сформулированных требованиях числа тх, т2, т3 определяются однозначно для каждой точки М.
Они называются барицентрическими координатами точки М относительно базис-
базисных точек Mi, M2 и М3.
Сформулированная задача о существовании чисел тх, т2, т3 при условии A.13)
сводится, очевидно, к исследованию вопроса об однозначной разрешимости следую-
следующей системы трех линейных уравнений 0 относительно тх, т2, т3:
тххх + т2х2 + т3х3 = х, A-14)
Известно, что для однозначной разрешимости квадратной системы линейных уравне-
уравнений (система, у которой число уравнений равно числу неизвестных) необходимо и
достаточно, чтобы определитель этой системы был отличен от нуля (см. Дополнение
к этой главе). Для рассматриваемой системы этот определитель имеет вид
1 1 1
х{ х2 хъ
У\ У2 Уз
= (х2-х1)(уг-у1)-(хг-х1)(у2-у1).
О Последние два уравнения этой системы представляют собой следствия первых
двух соотношений A.12) и соотношения A.13).
22 СИСТЕМЫ КООРДИНАТ. ПРОСТЕЙШИЕ ЗАДАЧИ [ГЛ. 1
Хо — хх у2 — у л
Этот определитель отличен от нуля, иначе мы получили бы пропорцию =
*з-*1 Уъ~У\
и, обозначив каждое из указанных отношений через -Х(кф-\, ибо точки М2 и М3
различны), пришли бы с точностью до обозначений к первым двум равенствам A.11).
Это означало бы, что точка Мх делит отрезок М2М3 в отношении X, т.е. означало бы,
что точки Мь М2 и М3 лежат на одной прямой. Таким образом, система A.14) одно-
однозначно разрешима относительно ть т2, т3. Следовательно, положение любой точ-
точки М на плоскости однозначно определяется относительно базисных точек Mh M2, М3
этой плоскости посредством барицентрических координат mh m2 и т3.
Барицентрические координаты в пространстве вводятся совершенно аналогично. Для
этого используются четыре базисные точки, не располагающиеся в одной плоскости.
§ 4. Полярные, цилиндрические
и сферические координаты
1. Полярные координаты. Полярные координаты на плоскости вво-
вводятся следующим образом. Выберем на плоскости некоторую точку О
(полюс) и некоторый выходящий из нее луч Ох (рис. 1.11). Кроме того,
укажем единицу масштаба. Полярными координатами
точки М называются два числа риф, пер-
первое из которых {полярный радиус р) равно рас-
расстоянию точки М от полюса О, а второе (поляр-
т\ м ный угол ф) — угол, на который нужно повернуть
против часовой стрелки луч Ох до совмещения с
лучом ОМ х).
Точку М с полярными координатами риф обо-
значают символом М(р, ф).
Для того чтобы соответствие между отличны-
отличными от полюса точками плоскости и парами по-
полярных координат (р, ф) было взаимно однозначным, обычно считают,
что риф изменяются в следующих границах:
0<р< + оо, 0<ф<2тг. A.15)
Замечание. В некоторых задачах, связанных с непрерывным пе-
перемещением точки по плоскости, требуется непрерывное изменение по-
полярных координат этой точки. В таких задачах удобнее отказаться от
ограничений для риф, указанных в соотношениях A.15). Если, например,
рассматривается вращение точки по окружности против часовой стрел-
стрелки (р = const), то естественно считать, что полярный угол этой точки мо-
может принимать, при большом числе оборотов, значения, большие 2тг. Если
же рассматривается движение точки по прямой, проходящей через полюс
) При этом предполагается, что точка М отлична от полюса. Для полюса О
полярный радиус р равен нулю, а полярный угол неопределенный, т.е. ему можно
приписать любое значение.
§4]
ПОЛЯРНЫЕ, ЦИЛИНДРИЧЕСКИЕ И СФЕРИЧЕСКИЕ КООРДИНАТЫ
23
(ф = const), то естественно считать, что при переходе через полюс ее по-
полярный радиус меняет знак.
Закон изменения величин риф выясняется в каждом конкретном случае.
Установим связь между полярными координатами точки и ее декар-
декартовыми координатами. При этом будем предполагать, что начало декарто-
декартовой прямоугольной системы координат находится в полюсе, а положитель-
положительная полуось абсцисс совпадает с полярной осью (рис. 1.11). Пусть точка М
имеет декартовы координаты хиуя полярные координаты риф. Очевидно,
х = рсоБф, z/ = psincp. A-16)
Полярные координаты риф точки М определяются по ее декартовым
координатам хну, очевидно, следующим образом: р = ^/х2 + у2 . Для того
чтобы найти величину угла ф, нужно, используя знаки х и у, определить
квадрант, в котором находится точка М (см. п. 1 § 2 этой главы и рис. 1.6),
и, кроме того, воспользоваться тем, что тангенс угла ф равен у/х.
2. Цилиндрические координаты. Цилиндрические координаты в
пространстве вводятся следующим образом. Выберем на фиксированной
плоскости П некоторую точку О и выходящий из нее луч Ох (рис. 1.12).
Кроме того, рассмотрим ось Oz, проходя-
проходящую через О перпендикулярно плоско-
плоскости П. Пусть М — любая точка простран-
пространства, N — проекция этой точки на плос-
плоскость П, a Mz — проекция М на ось Oz.
Цилиндрическими координа-
координатами точки М называются три
числа р, ф и z, первые два из которых (р
и ф) являются полярными координатами
точки N в плоскости П относительно по-
полюса О и полярной оси Ох, а число z есть
величина отрезка 0М2. Точку М с цилинд-
цилиндрическими координатами р, ф и z обозна-
обозначают М (р, ф, z). Наименование «цилиндрические координаты» связано с
тем, что координатная поверхность р = const (т.е. поверхность, все точ-
точки которой имеют одну и ту же координату р) является цилиндром, пря-
прямолинейные образующие которого параллельны оси Oz (на рис. 1.12 та-
такой цилиндр изображен штриховыми линиями). Если выбрать оси декар-
декартовой прямоугольной системы координат Oxyz так, как указано на
рис. 1.12, то декартовы координаты х, у, z точки М будут связаны с ее
цилиндрическими координатами р, ф, z соотношениями
х = рсоБф, y = psmq>, z-z. A-17)
Замечание. Так как первые две цилиндрические координаты риф
являются полярными координатами проекции N точки М на плос-
плоскость П, то к этим двум координатам относятся замечание и выводы, сде-
сделанные в предыдущем пункте.
N
Рис. 1.12
24
СИСТЕМЫ КООРДИНАТ. ПРОСТЕЙШИЕ ЗАДАЧИ
[ГЛ. 1
3. Сферические координаты. Для введения сферических координат
в пространстве рассмотрим три взаимно перпендикулярные оси Ох, Оу и
Oz с общим началом О (рис. 1.13). Пусть М — любая, отличная от О
точка пространства, N — ее проекция на плоскость Оху, р — расстоя-
расстояние М от О. Пусть, далее, 9 — угол, ко-
торый образует направленный отрезок
ОМ с осью z, а ф — угол, на который
нужно повернуть против часовой стрел-
стрелки ось Ох 0 до совмещения с лучом ON.
Углы 9 и ф называют широтой и долго-
долготой соответственно.
Сферическими коорди-
координатами точки М называются
три числа: р, ф и 9 2).
Наименование «сферические коорди-
координаты» связано с тем, что координатная
поверхность р = const (т.е. поверхность,
все точки которой имеют одну и ту же координату р) является сферой (на
рис. 1.13 такая сфера изображена штриховой линией).
Для того чтобы соответствие между точками пространства и тройками
сферических координат (р, ф, 9) было взаимно однозначным, обычно счи-
считают, что риф изменяются в следующих пределах:
0<р< + оо, 0<ф<2тг.
Координата 9 по самому определению заключена между 0 и тт. Отметим,
что в задачах, связанных с непрерывным перемещением точки в простран-
пространстве, часто отказываются от указанных ограничений на изменение сфери-
сферических координат (см. замечание в п. 1 этого параграфа).
Если выбрать оси декартовой прямоугольной системы координат так,
как указано на рис. 1.13, то декартовы координаты х, у, z точки М связа-
связаны с ее сферическими координатами р, ф, 9 соотношениями
л; = р sin 0 cos ф, у = р sin 9 sin ф, 2 = pcos9. A-18)
Рис. 1.13
ДОПОЛНЕНИЕ К ГЛАВЕ 1
ОПРЕДЕЛИТЕЛИ ВТОРОГО И ТРЕТЬЕГО ПОРЯДКОВ
1. Понятие матрицы и определителя второго порядка. Прямоу-
Прямоугольную таблицу из чисел, содержащую произвольное число т строк и
О Если при этом смотреть на вращение Ох со стороны положительного направле-
направления оси Oz.
) Если точка М совпадает с точкой О, то р = 0. Для точки О координаты ф и 6 не
имеют определенного значения.
§4]
ПОЛЯРНЫЕ, ЦИЛИНДРИЧЕСКИЕ И СФЕРИЧЕСКИЕ КООРДИНАТЫ
25
произвольное число п столбцов, называют матрицей. Для обозначения
матрицы используют либо сдвоенные черточки, либо круглые скобки.
Например,
2
7,2
-9
5
1
7
13,1
0
6
или
2
7,2
-9
5
1
7
13,1
0
6
Если число строк матрицы совпадает с числом ее столбцов, то матрица
называется квадратной. Числа, входящие в состав матрицы, обычно на-
называют ее элементами.
Рассмотрим квадратную матрицу, состоящую из четырех элементов:
а2 Ь2
СД1.1)
Определителем второго порядка, соответствую-
соответствующим матрице (Д1.1), называется число, равное axb2 - афх и обозначае-
обозначаемое символом
Итак, по определению
СД1.2)
Элементы, составляющие матрицу данного определителя, обычно назы-
называются элементами этого определителя.
Справедливо следующее утверждение: для того чтобы опре-
определитель второго порядка был равен нулю, необходимо и достаточ-
достаточно, чтобы элементы его строк {или соответственно его столбцов)
были пропорциональны.
Для доказательства этого утверждения достаточно заметить, что каж-
каждая из пропорций ах/а2 = Ьх/Ь2 и ax/bx = a2/b2 эквивалентна равенству
ахЬ2 = афх, а последнее равенство в силу (Д1.2) эквивалентно обращению
в нуль определителя.
2. Система двух линейных уравнений с двумя неизвестными.
Покажем, как применяются определители второго порядка для исследо-
исследования и отыскания решения системы двух линейных уравнений с двумя
неизвестными
a2x + b2y =
(Д1.3)
26
СИСТЕМЫ КООРДИНАТ. ПРОСТЕЙШИЕ ЗАДАЧИ
[ГЛ. 1
(коэффициенты ax,bx,a2,b2n свободные члены hx и h2 считаются при этом
заданными). Напомним, что пара чисел х0, у0 называется решением сис-
системы (Д1.3), если подстановка этих чисел на место х и у в систему (Д1.3)
обращает оба уравнения (Д1.3) в тождества.
Умножая первое уравнение системы (Д1.3) на Ьъ а второе — на -Ьх и
затем складывая полученные при этом равенства, будем иметь
(axb2-аФ\)х - b2hx -bxh2. (Д1.4)
Аналогично путем умножения уравнений системы (Д1.3) на -а2 и ах соот-
соответственно получим
(axb2-a2bx)y = axh2- a2hx. (Д1.5)
Введем следующие обозначения:
А =
ах
а2
\
Ь2
А
х ~
К
h2
\
ь2
А
у ~
ах
а2
h2
(Д1.6)
С помощью этих обозначений и выражения для определителя второго
порядка уравнения (Д1.4) и (Д1.5) могут быть переписаны в виде
А-х = Ах,А-у = Ау. (Д1.7)
Определитель А, составленный из коэффициентов при неизвестных сис-
системы (Д1.3), принято называть определителем этой системы. Заметим,
что определители Ах и Ау получаются из определителя системы А посред-
посредством замены первого или соответственно второго столбца свободными
членами.
Могут представиться два случая: 1) определитель А системы от-
отличен от нуля; 2) определитель этот равен нулю.
Рассмотрим сначала случай А Ф 0. В этом случае из уравнений (Д1.7)
мы сразу же получаем формулы для неизвестных, называемые формула-
формулами Крамера'.
Полученные формулы Крамера (Д1.8) дают решение системы (Д1.7) и по-
потому доказывают единственность решения исходной системы (Д1.3). В
самом деле, система (Д1.7) является следствием системы (Д1.3), и поэто-
поэтому всякое решение системы (Д1.3) (в случае, если оно существует!) долж-
должно являться решением и системы (Д1.7). Итак, пока доказано, что если у
исходной системы (Д1.3) существует при А Ф0 решение, то это реше-
решение однозначно определяется формулами Крамера (Д1.8).
Легко убедиться и в существовании решения, т. е. в том, что при А Ф 0
два числа х и у, определяемые формулами Крамера (Д1.8), будучи под-
подставлены на место неизвестных в уравнения (Д1.3), обращают эти уравне-
ДОПОЛНЕНИЕ К ГЛАВЕ 1 27
ния в тождества. (Предоставляем читателю самому расписать выражения
для определителей А, Ах и Ау и убедиться в справедливости указанных
тождеств.)
Приходим к следующему выводу: если определитель А системы (Д1.3)
отличен от нуля, то существует, и притом единственное, решение
этой системы, определяемое формулами Крамера (Д1.8).
Рассмотрим теперь случай, когда определитель А системы равен нулю.
Могут представиться два подслучая:а) хотя бы один из определи-
определителей Ах или Ау отличен от нуля; б) оба определителя Ах и Ау равны нулю 0.
В подслучае а) оказывается невозможным хотя бы одно из равенств
(Д1.7), т. е. система (Д1.7) не имеет решений, а поэтому не имеет решений
и исходная система (Д1.3) (следствием которой является система (Д1.7)).
В подслучае б) исходная система (Д1.3) имеет бесчисленное мно-
множество решений. В самом деле, из равенств А = Ах = Ау = О и из утвержде-
утверждения в конце п. 1 заключаем, что ах/а2 = bx/b2 = hx/h2, т.е. что второе урав-
уравнение системы (Д1.3) является следствием первого и его можно отбро-
отбросить. Но одно уравнение с двумя неизвестными
имеет бесчисленно много решений (хотя бы один из коэффициентов ах
или Ь\ отличен от нуля, и стоящее при нем неизвестное может быть опре-
определено из уравнения (Д1.9) через произвольно заданное значение другого
неизвестного).
Приходим к следующему выводу: если определитель А системы (Д1.3)
равен нулю, то система (Д1.3) либо вовсе не имеет решений {в случае,
если хотя бы один из определителей Ах или Ау отличен от нуля), либо
имеет бесчисленное множество решений (в случае, когда Ах = Ау = 0).
В последнем случае два уравнения (Д1.3) можно заменить одним и при ре-
решении его одно неизвестное задавать произвольно.
Замечание. В случае, когда свободные члены h{ и h2 равны нулю,
линейная система (Д1.3) называется однородной. Отметим, что однород-
однородная система всегда имеет так называемое тривиальное решение: х = 0,
у = 0 (эти два числа обращают оба однородных уравнения в тождества).
Если определитель А системы отличен от нуля, то однородная система
имеет только тривиальное решение. Если же А = 0, то однородная систе-
система имеет бесчисленное множество решений (поскольку для однородной
системы возможность отсутствия решений исключена). Таким образом,
однородная система имеет нетривиальное решение в том и только в
том случае, когда определитель ее равен нулю.
0 Из утверждения в конце п. 1 вытекает, что если определитель А и один из
определителей Ах и Ау равны нулю, то и другой из указанных определителей равен
нулю. В самом деле, пусть, например, Д = 0 и Ах = 0, т. е. al/a2 = bl/b2 и hl/h2 = bl/b2.
Тогда из этих пропорций получим, что al/a2 = hl/h2, т. е. А^ = 0.
28
СИСТЕМЫ КООРДИНАТ. ПРОСТЕЙШИЕ ЗАДАЧИ
[ГЛ. 1
3. Определители третьего порядка. Рассмотрим квадратную мат-
матрицу, состоящую из девяти элементов:
(Д1.Ю)
Определителем третьего порядка,соответствую-
порядка,соответствующим матрице (Д1.10), называется число, равное
(Д1.11)
и обозначаемое символом
Итак, по определению
А =
= ахЪ2съ + Ьхс2аъ + сха2Ъъ - cxb2a3 - Ьха2съ - ахсфъ
(Д1.12)
Как и в случае определителя второго порядка, элементы матрицы (Д1.10)
будем называть элементами самого определителя. Кроме того, договорим-
договоримся называть диагональ, образованную элементами аь Ь2 и с3, главной, а
диагональ, образованную элементами а3, Ь2ись — побочной.
Для запоминания конструкции слагаемых, входящих в выражение для
определителя (Д1.11), укажем два правила.
Заметим, что первые три слагаемых, стоящих в (Д1.11) со знаком плюс,
представляют собой произведение элементов определителя, взятых по три
так, как указано различными пунктирами на нижеприведенной схеме:
,-У
.Л, N
/ ^ ч
з h c3
Последние же три слагаемых, стоящих в (Д1.11) со знаком минус, пред-
представляют собой произведение элементов, взятых по три так, как указано
различными пунктирами на следующей схеме:
ДОПОЛНЕНИЕ К ГЛАВЕ 1
29
.А
\>С2
ч а3 53 ^с3 ;
Правило составления шести слагаемых, входящих в выражение (Д1.11)
для определителя, опирающееся на указанные две схемы, обычно назы-
называют правилом треугольника.
Укажем идругое правило составления выражения для опреде-
определителя, требующее еще меньшего напряжения внимания и памяти. Для
этого к матрице, из которой составлен определитель, допишем справа пер-
первый, а затем второй столбец. В полученной при этом матрице
ах
а2
аъ
Л
С2 а2
сплошной чертой соединены три тройки членов, получаемые параллель-
параллельным переносом главной диагонали и отвечающие трем слагаемым, входя-
входящим в выражение (Д1.11) со знаком плюс; пунктирной же чертой соеди-
соединены три другие тройки членов, получаемые параллельным переносом
побочной диагонали и отвечающие трем слагаемым, входящим в выра-
выражение (Д1.11) со знаком минус.
4. Свойства определителей. В этом пункте мы установим ряд свойств
определителей. Эти свойства мы будем формулировать и устанавливать
применительно к определителям третьего порядка, хотя, конечно, они
справедливы и для определителей второго порядка и, как выяснится поз-
позже (см. выпуск «Линейная алгебра»), эти же свойства справедливы и для
определителей любого порядка п (там же см. понятие определителя по-
порядка я).
Свойство 1. Величина определителя не изменится, если строки и
столбцы этого определителя поменять местами, т.е.
а, а9
(Д1.13)
Для доказательства этого свойства достаточно расписать определите-
определители, стоящие в левой и в правой частях (Д1.13), по правилу треугольника
30
СИСТЕМЫ КООРДИНАТ. ПРОСТЕЙШИЕ ЗАДАЧИ
[ГЛ. 1
(или по другому указанному в предыдущем пункте правилу) и убедиться в
равенстве полученных при этом членов.
Свойство 1 устанавливает полную равноправность строк и столб-
столбцов. Поэтому все дальнейшие свойства определителя можно формулиро-
формулировать и для строк, и для столбцов, а доказывать или только для строк, или
только для столбцов.
Свойство 2. Перестановка двух строк (или двух столбцов) опреде-
определителя равносильна умножению его на число -1.
Доказательство также получается из правила треугольника (мы пре-
предоставляем его читателю).
Свойство 3. Если определитель имеет две одинаковые строки (или
два одинаковых столбца), то он равен нулю.
В самом деле, при перестановке двух одинаковых строк, с одной стороны,
определитель А не изменится, а с другой стороны, в силу свойства 2 он изме-
изменит знак на противоположный. Таким образом, А = -А, т.е. 2А = 0, или А = 0.
Свойство 4. Умножение всех элементов некоторой строки (или
некоторого столбца) определителя на число X равносильно умноже-
умножению определителя на это число X.
Иными словами, общий множитель всех элементов некоторой стро-
строки (или некоторого столбца) определителя можно выносить за знак
этого определителя. Например,
a2 b2
Для доказательства этого свойства достаточно заметить, что опре-
определитель выражается в виде суммы (Д1.12), каждый член которой со-
содержит один и только один элемент из каждой строки и один и толь-
только один элемент из каждого столбца.
Свойство 5. Если все элементы некоторой строки (или некоторого
столбца) определителя равны нулю, то и сам определитель равен нулю.
Это свойство вытекает из предыдущего (при Х= 0).
Свойство 6. Если элементы двух строк (или двух столбцов) опре-
определителя пропорциональны, то определитель равен нулю.
В самом деле, в силу свойства 4 множитель пропорциональности мож-
можно вынести за знак определителя, после чего остается определитель с дву-
двумя одинаковыми строками, равный нулю, согласно свойству 3.
Свойство 7. Если каждый элемент п-й строки (или п-го столбца)
определителя представляет собой сумму двух слагаемых, то опреде-
определитель может быть представлен в виде суммы двух определителей,
первый из которых имеет в п-й строке (в п-м столбце) первые из упо-
упомянутых слагаемых и те же элементы, что и исходный определитель,
ДОПОЛНЕНИЕ К ГЛАВЕ 1
31
в остальных строках (столбцах), а второй определитель имеет в п-й
строке (в п-м столбце) вторые из упомянутых слагаемых и те же эле-
элементы, что и исходный определитель, в остальных строках (столб-
(столбцах). Например,
а[ + a" b[ + I
а2 b2
аз b3
C2
C3
=
a[
a2
a3
К
b2
Ьз
c2
C3
+
a"
a2
a3
К
b2
Ьз
с
с
с
Для доказательства этого свойства снова достаточно заметить, что опре-
определитель выражается в виде суммы слагаемых, каждое из которых содер-
содержит один и только один элемент из каждой строки и один и только один
элемент из каждого столбца.
Свойство 8. Если к элементам некоторой строки (или некоторого
столбца) определителя прибавить соответствующие элементы дру-
другой строки (другого столбца), умноженные на произвольный множи-
множитель X, то величина определителя не изменится.
В самом деле, полученный в результате указанного прибавления опре-
определитель можно (в силу свойства 7) разбить на сумму двух определителей,
первый из которых совпадает с исходным, а второй равен нулю вследствие
пропорциональности элементов двух строк (или столбцов) и свойства 6.
Для формулировки еще одного фундаментального свойства опре-
определителя нам понадобятся новые понятия.
5. Алгебраические дополнения и миноры. Соберем в выражении
(Д1.12) для определителя члены, содержащие какой-нибудь один элемент
этого определителя, и вынесем указанный элемент за скобки; величина,
остающаяся при этом в скобках, называется алгебраическим дополне-
дополнением указанного элемента.
Алгебраическое дополнение данного элемента мы будем обозначать
большой латинской буквой того же наименования, что и данный элемент,
и снабжать тем же номером, который имеет данный элемент. Например,
алгебраическое дополнение элемента Ь2 будем обозначать через В2, ал-
алгебраическое дополнение элемента а3 — через А3 и т.д.
Непосредственно из выражения для определителя (Д1.12) и из того,
что каждое слагаемое в правой части (Д1.12) содержит один и только один
элемент из каждой строки и один и только один элемент из каждого стол-
столбца, вытекают следующие равенства:
А = ахАх + ЬХВХ + схСх, А = а2А2 + Ь2В2 + с2С2,
А = ахАх + а2А2 + а3А3, А = ЬХВХ + Ь2В2 + ЬЪВЪ,
А = схСх + с2С2 + с3С3.
(Д1.14)
(Д1.15)
32
СИСТЕМЫ КООРДИНАТ. ПРОСТЕЙШИЕ ЗАДАЧИ
[ГЛ. 1
Эти равенства выражают следующее свойство определителя: определи-
определитель равен сумме произведений элементов какой-либо строки (како-
(какого-либо столбца) на соответствующие алгебраические дополнения
элементов этой строки (этого столбца).
Равенства (Д1.14) принято называть разложением определителя по
элементам соответственно первой, второй или третьей строки, а
равенства (Д1.15) — разложением определителя по элементам соот-
соответственно первого, второго или третьего столбца.
Введем теперь важное понятие минора данного элемента определите-
определителя. М и н о р о м данного элемента определителя п-го порядка 0 на-
называется определитель (п - \)-го порядка, получаемый из данного оп-
определителя путем вычеркивания той строки и того столбца, на пере-
пересечении которых стоит данный элемент.
Например, минор элемента ах равен
Ь2 с2
ъъ сз
, минором элемента а2
служит определитель
, и т.д.
Предлагаем читателю самому убедиться в том, что алгебраические до-
дополнения и миноры связаны между собой по следующему правилу:
алгебраическое дополнение любого элемента определителя равняет-
равняется минору этого элемента, взятому со знаком плюс, если сумма номе-
номеров строки и столбца, на пересечении которых стоит данный эле-
элемент, есть число четное, и со знаком минус — в противном случае.
Таким образом, соответствующие алгебраическое дополнение и ми-
минор могут отличаться только знаком.
Следующая таблица дает наглядное представление о том, каким зна-
знаком связаны соответствующие алгебраическое дополнение и минор:
Установленное правило позволяет в формулах (Д1.14) и (Д1.15) разложе-
разложения определителя по элементам строк и столбцов всюду вместо алгебра-
алгебраических дополнений писать соответствующие миноры (с нужным знаком).
Так, например, последняя из формул (Д1.14), дающая разложение оп-
определителя по элементам третьей строки, принимает вид
А =
ах
а2
а3
К
ь2
h
с2
сз
-а3
Ьх
ь2
С2
h
ах
а2
ci
с2
+ сз
ах
а2
Ьх
ь2
(Д1.16)
) В рассматриваемом случае п = 3.
ДОПОЛНЕНИЕ К ГЛАВЕ 1
33
В заключение установим следующее фундаментальное свойство опре-
определителя.
Свойство 9. Сумма произведений элементов какого-либо столбца
определителя на соответствующие алгебраические дополнения эле-
элементов этого {другого) столбца равна величине этого определителя
{равна нулю).
Конечно, аналогичное свойство справедливо и применительно к стро-
строкам определителя. Случай, когда алгебраические дополнения и элементы
отвечают одному и тому же столбцу, уже рассмотрен выше. Остается
доказать, что сумма произведений элементов какого-либо столбца на со-
соответствующие алгебраические дополнения элементов другого столбца
равна нулю.
Докажем, например, что сумма произведений элементов первого или
второго столбца на соответствующие алгебраические дополнения элемен-
элементов третьего столбца равна нулю.
Будем исходить из третьей формулы (Д1.15), дающей разложение оп-
определителя по элементам третьего столбца:
ах Ьх
+ с2С2
(Д1.17)
Так как алгебраические дополнения Сх, С2 и С3 элементов третьего столб-
столбца не зависят от самих элементов сх, с2 и с3 этого столбца, то в равен-
равенстве (Д1.17) числа сх, с2и с3 можно заменить произвольными числами
hx, h2 и h3, сохраняя при этом в левой части (Д1.17) первые два столбца
определителя, а в правой части величины Сь С2 и С3 алгебраических
дополнений.
Таким образом, при любых hx, h2n h3 справедливо равенство
2 ^2 ^2
;3 ^3 h3
= КС + hoC9
(Д1.18)
Беря теперь в равенстве (Д1.18) в качестве hx,h2nh3 сначала элементы ах,
а2 и а3 первого столбца, а затем элементы Ьь Ь2и Ь3 второго столбца и
учитывая, что определитель с двумя совпадающими столбцами в силу свой-
свойства 3 равен нулю, мы придем к следующим равенствам:
хСх
ЬХС
ХСХ
Тем самым доказано, что сумма произведений элементов первого или вто-
второго столбца на соответствующие алгебраических дополнения элементов
третьего столбца равна нулю.
34 СИСТЕМЫ КООРДИНАТ. ПРОСТЕЙШИЕ ЗАДАЧИ [ГЛ. 1
Аналогично доказываются равенства
ахВх + а2В2 + а3В3 = О, схВх + с2В2 + с3В3 = О,
ЬХАХ + Ь2А2 + Ь3А3 = О, схАх + с2Л2 + с3А3 = О
и соответствующие равенства, относящиеся не к столбцам, а к строкам:
ахА3 + ЬХВ3 + схС3 = О, а2Л3 + Ь2В3
ахА2 + ^^2 + ctC2 = 0, а3
= О,
+ Ъ2ВХ
= 0, а3А
3Ах
= 0.
6. Система трех линейных уравнений с тремя неизвестными с
определителем, отличным от нуля. В качестве приложения изложен-
изложенной выше теории рассмотрим систему трех линейных уравнений с тремя
неизвестными
(Д1.19)
а2х + b2y + c2z = h2,
(коэффициенты ah a2, a3, bh Ъъ Ь3, сь съ с3 и свободные члены hh h2, h3
считаются заданными). Тройка чисел х0, у0, z0 называется решением систе-
системы (Д1.19), если подстановка этих чисел на место х, у, г в систему (Д1.19)
обращает все три уравнения (Д1.19) в тождества.
Фундаментальную роль в дальнейшем будут играть следующие четыре
определителя:
А =
А. =
Определитель А принято называть определителем системы (Д1.19) (он
составлен, из коэффициентов при неизвестных). Определители Ах, Ау
и А2 получаются из определителя системы А посредством замены сво-
свободными членами элементов соответственно первого, второго и третье-
третьего столбцов.
Для исключения из системы (Д1.19) неизвестных у яг умножим урав-
уравнения (Д1.19) соответственно на алгебраические дополнения АЬА2 и А3
ДОПОЛНЕНИЕ К ГЛАВЕ 1 35
элементов первого столбца определителя А системы и после этого сло-
сложим эти уравнения. В результате получим
{ахАх + а2А2 + а3А3)х + {ЬХАХ + Ь2А2 + Ь3А3)у + {схАх + с2А2 + c3A3)z =
= НХАХ + h2A2 +h3A3. (Д1.20)
Учитывая, что сумма произведений элементов данного столбца опре-
определителя на соответствующие алгебраические дополнения элементов это-
этого (другого) столбца равна определителю (нулю) (см. свойство 9), получим
ахАх + а2А2 + а3А3 = А, ЪХАХ + Ъ2А2 + Ъ3А3 = 0,
схАх + с2А2 + с3А3 = 0. (Д1.21)
Кроме того, посредством разложения определителя Ах по элементам пер-
первого столбца получается формула
Ах = НХАХ + Н2А2 + Н3А3. (Д1.22)
С помощью формул (Д1.21) и (Д1.22) равенство (Д1.20) перепишется в
следующем (не содержащем неизвестных у и г) виде:
Совершенно аналогично выводятся из системы (Д1.19) равенства А • у = Ау
иА- z = A2l).
Таким образом, мы установили, что система уравнений
А-х = Ах, А-у = \, A-z = A2 (Д1.23)
является следствием исходной системы (Д1.19).
В дальнейшем мы отдельно рассмотрим два случая:
1) когда определитель А системы отличен от нуля;
2) когда этот определитель равен нулю.
Здесь мы рассмотрим лишь первый случай (рассмотрение второго слу-
случая отложим до п. 9).
Итак, пусть А Ф 0. Тогда из системы (Д1.23) мы сразу получаем форму-
формулы для неизвестных, называемые формулами Крамера:
х = Ах/А, у = Ау/А, 2 = А2/А. (Д1.24)
Полученные нами формулы Крамера дают решение системы (Д1.23) и
потому доказывают единственность решения исходной системы (Д1.19),
ибо система (Д1.23) является следствием системы (Д1.19), и всякое реше-
решение системы (Д1.19) обязано быть решением и системы (Д1.23).
0 Для получения этих равенств следует сначала умножить уравнения (Д1.19)
соответственно на алгебраические дополнения элементов второго и третьего столб-
столбцов, а затем сложить полученные равенства.
36 СИСТЕМЫ КООРДИНАТ. ПРОСТЕЙШИЕ ЗАДАЧИ [ГЛ. 1
Итак, мы доказали, что если у исходной системы (Д1.19) сущест-
существует приАфО решение, то это решение однозначно определяется фор-
формулами Крамера (Д1.24).
Чтобы доказать, что решение в самом деле существует, мы должны
подставить в исходную систему (Д1.19) на место х, у и z их значения,
определяемые формулами Крамера (Д1.24), и убедиться в том, что все
три уравнения (Д1.19) обращаются при этом в тождества. Убедимся, на-
например, что первое уравнение (Д1.19) обращается в тождество при под-
подстановке значений х,уиг, определяемых формулами Крамера (Д1.24).
Учитывая, что Ах = hxAx + h2A2 + h3A3, Ау = hxBx + h2B2 + h3B3,
Az = h\C\ + h2C2 + h3C3, будем иметь, подставив в левую часть первого из
уравнений (Д1.19) значения x,ynz, определяемые формулами Крамера:
Ах . А А
a l-JL + о {-^ + cl^L =
А А А
{(hAhAh
+cl(hlCl+h2C2+h3C3)}.
Группируя внутри фигурной скобки члены относительно huh2n h3, будем
иметь
а{х + Ь!у + с{2 = — {/г{{а{А{+ Ь{В{+ с{С{) + h2 [а{А2 +Ь1В2+с]С2\ +
В силу свойства 9 в последнем равенстве обе квадратные скобки равны
нулю, а круглая скобка равна определителю А. Таким образом, мы полу-
получим п\Х + Ь\у + C\Z = hi, и обращение в тождество первого уравнения сис-
системы (Д1.19) установлено. Аналогично устанавливается обращение в тож-
тождество второго и третьего уравнений системы (Д1.19).
Мы приходим к следующему выводу: если определитель А системы
(Д1.19) отличен от нуля, то существует, и притом единственное,
решение этой системы, определяемое формулами Крамера (Д1.24).
7. Однородная система двух линейных уравнений с тремя
неизвестными. В этом и в следующем пунктах мы разовьем аппарат, не-
необходимый для рассмотрения неоднородной системы (Д1.19) с определи-
определителем, равным нулю. Сначала рассмотрим однородную систему двух ли-
линейных уравнений с тремя неизвестными
а2х + b2y + c2z = 0. (Д1.25)
ДОПОЛНЕНИЕ К ГЛАВЕ 1
37
Если все три определителя второго порядка, которые можно соста-
составить из матрицы
(Д1.26)
равны нулю, то в силу утверждения из п. 1 коэффициенты первого из урав-
уравнений (Д1.25) пропорциональны соответствующим коэффициентам второ-
второго из этих уравнений. Стало быть, в этом случае второе уравнение (Д1.25)
является следствием первого, и его можно отбросить. Но одно уравнение с
тремя неизвестными ахх + Ьху + cxz = О, естественно, имеет бесчисленное
множество решений (двум неизвестным можно предписывать произволь-
произвольные значения, а третье неизвестное определять из уравнения).
Рассмотрим теперь систему (Д1.25) для случая, когда хотя бы один из
определителей второго порядка, составленных из матрицы (Д1.26),
отличен от нуля. Не ограничивая общности, будем считать, что опреде-
определитель О
(Д1.27)
Тогда мы можем переписать систему (Д1.25) в виде
а2х + b2y = -c2z,
и утверждать, что для каждого z существует единственное решение этой
системы, определяемое формулами Крамера (см. п. 2, формулы (Д1.8)):
х--г
С2
«1
а2
b2
b2
У =-2
ах
а2
ах
а2
сх
с2
ьх
Ь2
(Д1.28)
Для дальнейшего удобно ввести в рассмотрение алгебраические до-
дополнения А3, В3 и С3 элементов третьей строки определителя:
) Это предположение не снижает общности, ибо порядок следования неизвест-
неизвестных х, у и z находится в нашем распоряжении.
38
СИСТЕМЫ КООРДИНАТ. ПРОСТЕЙШИЕ ЗАДАЧИ
[ГЛ. 1
В силу результатов п. 5 о связи алгебраических дополнений и миноров
можно записать
В3=- ' ' , С3= ' ' . (Д1.29)
а2 с2 а2 Ь2
Основываясь на (Д1.29), мы можем переписать формулы (Д1.28) в виде
(Д1.30)
y=i
Для того чтобы получить решение в виде, симметричном относительно
всех неизвестных х, у и z, положим t = z/C3 (отметим, что в силу (Д1.27)
определитель С3 отличен от нуля). Поскольку z может принимать любые
значения, то и новая переменная t может принимать любые значения.
Мы приходим к выводу, что в случае, когда определитель (Д1.27)
отличен от нуля, однородная система (Д1.25) имеет бесчисленное
множество решений, определяемых формулами
= A3t, y = B3t, z = C3t,
(Д1.31)
в которых t принимает какие угодно значения, а алгебраические до-
дополнения А3, В3 и С3 определяются формулами (Д1.29).
8. Однородная система трех линейных уравнений с тремя
неизвестными. Рассмотрим теперь однородную систему трех линейных
уравнений с тремя неизвестными
(Д1.32)
а2х + b2y + c2z = О,
а3х + Ь3у + c3z = 0.
Очевидно, что эта система всегда имеет так называемое тривиальное ре-
решение: x = 0,y = 0,z = 0.
В случае, когда определитель системы А Ф 0, это тривиальное решение
является единственным (в силу п. 6).
Докажем, что в случае, когда определитель /нравен нулю, однород-
однородная система (Д1.32) имеет бесчисленное множество решений.
Если все определители второго порядка, которые можно составить из
матрицы
(Д1.33)
равны нулю, то в силу утверждения из п. 1 соответствующие коэффициен-
коэффициенты всех трех уравнений (Д1.32) пропорциональны. Но тогда второе и
ДОПОЛНЕНИЕ К ГЛАВЕ 1 39
третье уравнения (Д1.32) являются следствиями первого и могут быть
отброшены, а одно уравнение ахх + Ьху + cxz = О, как уже отмечалось в
предыдущем пункте, имеет бесчисленное множество решений.
Остается рассмотреть случай, когда хотя бы один минор матрицы
(Д1.33) отличен от нуля. Так как порядок следования уравнений и неиз-
неизвестных находится в нашем распоряжении, то, не ограничивая общнос-
общности, мы можем считать, что отличен от нуля определитель (Д1.27). Но
тогда, как установлено в предыдущем пункте, система первых двух
уравнений (Д1.32) имеет бесчисленное множество решений, определяе-
определяемых формулами (Д1.31) (при любом t).
Остается доказать, чтох, уиг, определяемые формулами (Д1.31) (при
любом t), обращают в тождество и третье уравнение (Д1.32). Подставляя в
левую часть третьего уравнения (Д1.32) х,уиг, определяемые формула-
формулами^ 1.31), будем иметь
аъх + Ьъу + съг = (а3Л3 + Ь3В3 + с3С3) t = A-t.
Мы воспользовались тем, что в силу свойства 9 выражение в круглых
скобках равно определителю А системы (Д1.32). Но определитель А по
условию равен нулю, и поэтому при любом t мы получим а3х + Ьъу + съг = 0.
Итак, доказано, что однородная система (Д1.32) с определителем А,
равным нулю, имеет бесчисленное множество решений. Если отличен
от нуля минор (Д1.27), то эти решения определяются формулами (Д1.31)
при произвольно взятом t.
Полученный результат можно сформулировать еще и так: однород-
однородная система (Д1.32) имеет нетривиальное решение в том и только в
том случае, когда определитель ее равен нулю.
9. Неоднородная система трех линейных уравнений с тремя не-
неизвестными с определителем, равным нулю. Теперь мы располагаем
аппаратом для рассмотрения неоднородной системы (Д1.19) с определи-
определителем А, равным нулю. Могут представиться два случая: а) хотя бы
один из определителей Ах, Ау или А2 отличен от нуля; б) все три определи-
определителя Ах, Ау и А2 равны нулю.
В случае а) оказывается невозможным хотя бы одно из равенств (Д1.23),
т. е. система (Д1.23) не имеет решений, а поэтому не имеет решений и
исходная система (Д1.19) (следствием которой является система (Д1.23)).
Переходим к рассмотрению случая б), т. е. случая, когда все четыре
определителя А, Ах, Ау и А2, равны нулю. Начнем с примера, показываю-
показывающего, что в этом случае система может не иметь ни одного решения.
Рассмотрим систему
х + у + 2=1,
2z = 3,
Зх + Ъу + Ъг = 4.
40 СИСТЕМЫ КООРДИНАТ. ПРОСТЕЙШИЕ ЗАДАЧИ [ГЛ. 1
Ясно, что эта система не имеет решений. В самом деле, если бы решение
*о> Уо> 2о существовало, то из первых двух уравнений мы получили бы
хо + yo + zo= I, 2хо+ 2yo + 2zo = 3, а отсюда, умножая первое равенство
на 2, получили бы, что 2 = 3. Далее, очевидно, что все четыре определите-
определителя А, Ах, Ау и Az равны нулю. В самом деле, определитель
А =
1 1 1
2 2 2
3 3 3
имеет три одинаковых столбца, определители Ах, Ау и А2 получаются
путем замены одного из этих столбцов свободными членами и, стало быть,
имеют по два одинаковых столбца. В силу свойства 3 все эти определи-
определители равны нулю.
Докажем теперь, что если система (Д1.19) с определителем А, рав-
равным нулю, имеет хотя бы одно решение, то она имеет бесчисленное
множество различных решений.
Предположим, что указанная система имеет решение х0, у0, z0. Тогда
справедливы тождества
а2х0 + Ь2у0 + c2z0 = h2, (Д1.34)
Вычитая почленно из уравнений (Д1.19) тождества (Д1.34), получим сис-
систему уравнений:
ах(х-х0) + bx(y-y0) + c^z-Zq) = 0,
а2(х-х0) + Ь2(у-у0) + c2(z-z0) = 0, (Д1.35)
а3(х - х0) + Ъъ(у - у0) + c3(z - г0) = 0,
эквивалентную системе (Д1.19). Но система (Д1.35) является однород-
однородной системой трех линейных уравнений относительно трех неизвестных
(х - х0), (у - ух0) n(z- 20) с определителем А, равным нулю. Согласно п. 8
последняя система (а стало быть, и система (Д1.19)) имеет бесчисленное
множество решений. Например, в случае, когда отличен от нуля минор
(Д1.27), мы с помощью формул (Д1.31) получим следующее бесконечное
множество решений системы (Д1.19):
x = xo + A3t, y = yo + B3t, z = zo + C3t
(t принимает любые значения).
Рассматриваемое утверждение доказано, и мы можем сделать следую-
следующее заключение: если А = Ах = Ау = Аг = 0, то неоднородная система
ДОПОЛНЕНИЕ К ГЛАВЕ 1 41
(Д1.19) либо совсем не имеет решений, либо имеет их бесконечное
множество.
В качестве примеров предлагаем читателю рассмотреть следующие три
системы:
х + 2у + 2 = 4,] х + у + z = 2,
3x-5y + 3z = l\
2х + 7у-2 = 8,J Ах + Ъу
и убедиться в том, что первая система имеет единственное решение
х=\,у=\,2=\ (для нее А = Ах = Ау = Az = 33), вторая система не
имеет решений (для нее А = О, А^ = 1), а третья система имеет бесчис-
бесчисленное множество решений (для нее А = Ах = Ау = Az = 0), определяемых
при произвольном t формулами: х = 1, у = t, 2 = -t.
ГЛАВА 2
ВЕКТОРНАЯ АЛГЕБРА
В этой главе изучаются векторные величины (или просто векторы),
т.е. такие величины, которые, кроме своего численного значения, ха-
характеризуются еще направленностью. Физическими примерами век-
векторных величин могут служить смещение материальной точки, двигаю-
двигающейся в пространстве, скорость и ускорение этой точки, а также дей-
действующая на нее сила.
В главе изучаются простейшие операции над векторами (сложение
векторов, умножение векторов на число), вводится понятие линейной
зависимости векторов и рассматриваются основные приложения этого
понятия, изучаются различные типы произведений векторов, актуаль-
актуальные для физических приложений (скалярное и векторное произведе-
произведение двух векторов, смешанное и двойное векторное произведение трех
векторов).
§ 1. Понятие вектора и линейные операции
над векторами
1. Понятие вектора. Абстрагируясь от конкретных свойств встреча-
встречающихся в природе физических векторных величин, мы приходим к поня-
понятию геометрического вектора, или просто вектора.
Геометрическим вектором (или просто вектором) бу-
будем называть направленный отрезок.
Мы будем обозначать вектор либо как направленный отрезок симво-
символом АВ , где точки А и В обозначают соответственно начало и конец
данного направленного отрезка (вектора), либо од-
одной жирной латинской буквой, например а или Ь. На
чертеже будем изображать вектор стрелкой, причем
латинскую букву, обозначающую этот вектор, будем
Рис 2 1 писать у его конца (рис. 2.1).
Начало вектора называют точкой его приложе-
приложения. Если точка А является началом вектора а, то мы будем говорить,
что вектор а приложен в точке А. Для обозначения длины вектора бу-
дем пользоваться символом модуля (или _аб_солютной величины). Так,
| АВ | и |а| обозначают длины векторов АВ и а соответственно.
§ 1] ЛИНЕЙНЫЕ ОПЕРАЦИИ НАД ВЕКТОРАМИ 43
Вектор называется нулевым, если начало и конец его совпа-
совпадают. Нулевой вектор не имеет определенного направления и имеет
длину, равную нулю. Это позволяет при записи отождествлять нулевой
вектор с вещественным числом нуль.
Введем важное понятие коллинеарности векторов. Векторы назы-
называются коллинеарными, если они лежат либо на одной пря-
прямой, либо на параллельных прямых.
Теперь можно сформулировать понятие равенства двух
векторов: два вектора называются равными, если они колли-
неарны, т. е. имеют одинаковую длину и одина-
одинаковое направление. Все нулевые векторы счита-
считаются равными.
На рис. 2.2 изображены слева неравные, а спра-
ва равные векторы а и Ь.
Из определения равенства векторов непосред-
непосредственно вытекает следующее утверждение: каковы ис> '
бы ни были вектор а и точка Р, существует, и притом единствен-
единственный, вектор PQ с началом в точке Р, равный вектору а 0.
Иными словами, точка приложения данного вектора а может быть
выбрана произвольно (мы не различаем двух равных векторов, имею-
имеющих разные точки приложения и получающихся один из другого парал-
параллельным переносом). В соответствии с этим векторы, изучаемые в гео-
геометрии, называют свободными (они определены с точностью до точки
приложенияJ).
2. Линейные операции над векторами. Линейными операция-
операциями принято называть операцию сложения векторов и операцию умно-
умножения векторов на вещественные числа.
Сначала определим операцию сложения двух векторов.
Определение 1. Суммой а + b двух векторов г.иЪ называет-
называется вектор, идущий из начала вектора а в конец вектора b при усло-
условии, что вектор b приложен к концу вектора а.
0 В самом деле, существует лишь одна прямая, проходящая через точку Р и парал-
параллельная той прямой, на которой лежит вектор а. На указанной прямой существует един-
единственная точка Q такая, что отрезок PQ имеет длину, равную длине вектора а, и направ-
направлен в ту же сторону, что и вектор а.
2) В механике и физике, кроме свободных векторов, иногда рассматривают скользя-
скользящие и связанные векторы. Скользящими называют такие векторы, которые считаются
эквивалентными, если они не только равны, но и лежат на одной прямой. Примером сколь-
скользящего вектора может служить сила, приложенная к абсолютно твердому телу (извест-
(известно, что две силы, равные и расположенные на одной прямой, оказывают на абсолютно
твердое тело одинаковое механическое воздействие). Связанными называются такие
векторы, которые считаются эквивалентными, если они не только равны, но и имеют об-
общее начало. Примером связанного вектора может служить сила, приложенная к некото-
некоторой точке нетвердого (например, упругого) тела.
44 ВЕКТОРНАЯ АЛГЕБРА [ГЛ. 2
Правило сложения двух векторов, содержащееся в этом определе-
определении, обычно называют правилом треугольника.
Это название объясняется тем, что в соответствии с указанным пра-
правилом слагаемые векторы а и b (в случае, если они не коллинеарны) и
их сумма а + b образуют треугольник (рис. 2.3).
Правило сложения векторов обладает теми же самыми четырьмя
свойствами, что и правило сложения вещественных (или рациональ-
рациональных) чисел 0:
1° а + b = b + а (первместительное свойство)',
2° (а + Ь) + с = а + (Ь + с) {сочетательное свойство);
3° существует нулевой вектор О такой, что а + 0 = а для любого
вектора а (особая роль нулевого вектора);
4° для каждого вектора а существует противоположный ему век-
вектор а' такой, что а + а' = 0.
Убедимся в справедливости этих свойств. Свойство 3° непосредствен-
непосредственно вытекает из определения 1. Для доказательства свойства 4° опреде-
определим вектор а', противоположный вектору а, как вектор, коллинеар-
ный вектору а, имеющий одинаковую с вектором а длину и противопо-
противоположное направление ). Очевидно, что взятая, согласно определению 1,
сумма вектора а с таким вектором а' дает нулевой вектор.
Рис. 2.3 Рис. 2.4
Для доказательства свойства 1° приложим два произвольных вектора а
и b к общему началу О (рис. 2.4). Обозначим буквами А и В концы векто-
векторов а и b соответственно и рассмотримшраллелограш^ОВСА. Из определе-
определения равенства векторов следует, что ВС = О А = а, АС = ОВ = Ь.
Из определения 1 и из рассмотрения треугольника ОАС следует, что
диагональ ОС указанного параллелограмма представляет собой сумму
векторов а + Ь, а из рассмотрения треугольника ОВС следует, что та же
самая диагональ ОС представляет собой сумму векторов b + а. Тем са-
самым свойство 1 установлено.
Остается доказать свойство 2°. Для этого приложим вектор а к про-
произвольной точке О, вектор b к концу вектора а и вектор с к концу векто-
0 См. вып. 1, гл. 2.
2) Для получения А' достаточно поменять местами начало и конец вектора А.
§1]
ЛИНЕЙНЫЕ ОПЕРАЦИИ НАД ВЕКТОРАМИ
45
pa b (рис. 2.5). Обозначим буквами А, В и С концы векторов a, b и с
соответственно. Тогда
Рис. 2.5
а + (Ь + с) = ОА + (AS + ВС) = ОА + ~АС = ~ОС,
т.е. свойство 2° доказано.
Замечание 1. При доказательстве свойства 1° обосновано еще
одно правило сложения векторов, называемое правилом параллело-
параллелограмма', если векторы а и b приложены к общему началу и на них
построен параллелограмм, то сумма а + Ь
{или b + а) этих векторов представляет собой
диагональ указанного параллелограмма, иду-
идущую из общего начала векторов а и b x).
Доказанные свойства 1°-4° позволяют опери-
оперировать с суммой векторов так же, как с суммой
вещественных чисел. В частности, при сложении
трех векторов a, b и с нет необходимости указы-
указывать, как мы понимаем сумму а + b + с (как
а + (Ь + с) или как (а + Ь) + с). Свойства 1°-4° позволяют нам распро-
распространить правило сложения на сумму любого конечного числа векто-
векторов. При этом нет необходимости производить сложе-
сложение последовательно, фиксируя каждый промежуточ-
промежуточный результат; сумма любого числа векторов может
быть построена с помощью следующего правила:
если приложить вектор а2 к концу вектора at, век-
вектор а3 к концу вектора а2,..., вектор а.п к концу век-
вектора г.п_х, то сумма at + а2 + а3 +... + ап будет представ-
представлять собой вектор, идущий из начала вектора г.х в
конец вектора ая.
Сформулированное правило сложения, проиллюст-
проиллюстрированное на рис. 2.6, естественно назвать правилом замыкания ло-
ломаной до многоугольника (на рис. 2.6 ломаная ОА{А2А3... Ап замыкает-
замыкается до многоугольника путем добавления звена ОАп ).
Наконец, свойства 1°-4° позволяют исчерпывающим образом решить
вопрос о вычитании векторов.
Определение 2. Разностью а-b вектора а и вектора Ъ на-
называется такой вектор с, который в сумме с вектором Ъ дает век-
вектор а.
О Следует особо оговорить случай, когда векторы а и b коллинеарны. В этом случае
параллелограмм, построенный на векторах а и Ь, вырождается в отрезок, понятие его
диагонали теряет смысл, а сумма векторов а и b может быть получена из определения 1.
46 ВЕКТОРНАЯ АЛГЕБРА [ГЛ. 2
С помощью свойств 1°—4° элементарно доказывается, что сущест-
существует, и притом единственный, вектор с, представляющий собой раз-
разность а - Ь, причем этот вектор равен с = а + Ь', где Ь' — вектор,
противоположный Ь.
В самом деле, если с = а + Ь', то на основании свойств 1°-4°
c + b = (a + b') + b = a + (b'+ b) = а + 0 = а,
т.е. вектор с представляет собой разность а - Ь.
Убедимся теперь в однозначности разности а - Ь. Предположим, что,
кроме вектора с = а + Ь', существует еще один вектор d такой, что
d + b = а. Тогда, с одной стороны, (d + b) + b' = а + b' = с, с другой сто-
стороны, (d + b) + b' = d + (b + b') = d + 0 = d, т. е. с = d.
Непосредственно из определения 2 и из правила треугольника сло-
сложения векторов вытекает следующее правило построения
разности а-b: разность а - b приведенных к общему началу век-
векторов &иЪ представляет собой вектор, идущий из конца вычитае-
вычитаемого вектора b в конец уменьшаемого вектора а.
Это правило иллюстрируется на рис. 2.7.
Перейдем, наконец, к рассмотрению операции умножения вектора
на вещественное число.
Определение3. Произведением аа(илиаа) вектора а
на вещественное ч и ел о а называется вектор Ъ, колли-
неарный вектору а, имеющий длину, равную |а| • |а|, и имеющий
а-ь направление, совпадающее с направлением векто-
вектора а в случае а > О и противоположное направлению
вектора а в случае а < 0.
^ Замечание 2. В случае, когда а = 0 или a = 0,
произведение аа представляет собой нулевой вектор,
Рис 2 7
' ' направление которого неопределенно.
Геометрический смысл операции умножения вектора на число мож-
можно выразить так: при умножении вектора а на число а вектор а «рас-
«растягивается» в а «раз».
Конечно, надо тут же оговорить условность термина «растягивает-
«растягивается», ибо действительное растяжение происходит лишь при а> 1; при
0 < а < 1 происходит не растяжение, а сжатие, а при отрицательном а,
кроме растяжения (при | ос | > 1) или сжатия (при | а | < 1), происхо-
происходит еще изменение направления вектора на противоположное.
Операция умножения вектора на число обладает следующими тремя
свойствами:
5° а(а + Ь) = аа + ab (распределительное свойство числового сомно-
сомножителя относительно суммы векторов);
6° (а + Р)а = аа + (За (распределительное свойство векторного со-
сомножителя относительно суммы чисел);
§ 1] ЛИНЕЙНЫЕ ОПЕРАЦИИ НАД ВЕКТОРАМИ 47
7° а(ра) = (ар)а {сочетательное свойство числовых сомножителей).
Для доказательства свойства 5° приложим векторы а и b к общему
началу О и построим на них параллелограмм, диагональ которого будет
представлять собой сумму а + b (рис. 2.8). При «растяжении» х) сторон
этого параллелограмма в а раз в силу свойств аа
подобия диагональ также «растягивается» в /
а раз, но это и означает, что сумма аа + ab
равна а(а + b). \^
Свойства 6° и 7° почти очевидны из нагляд- О Ь ab
ных геометрических соображений. С учетом Рис. 2.8
оговоренной выше условности термина «растяжение» свойство 6° озна-
означает, что при «растяжении» вектора а в (а + C) раз получается такой же
вектор, как при сложении вектора а, «растянутого» в а раз, с вектором а,
«растянутым» в C раз.
Свойство 7° в тех же терминах означает, что при «растяжении» век-
вектора а сначала в C раз, а потом еще в а раз получается такой же вектор,
как и при «растяжении» вектора а сразу в ар раз. Итак, мы установили,
что линейные операции над векторами обладают свойствами 1°-7°.
Эти свойства имеют фундаментальное значение, ибо они позволяют
производить выкладки в векторной алгебре по тем правилам, по кото-
которым производятся аналогичные выкладки в обычной алгебре.
В заключение докажем следующее утверждение.
Теорема 2.1. Если вектор b коллинеарен ненулевому вектору а,
то существует вещественное число X такое, что Ъ = Хз..
Доказательство. Приложим векторы а и b к общему началу О.
Тогда эти векторы расположатся на одной прямой, на которой мы вы-
выберем начало отсчета, масштабный отрезок и положительное направ-
направление. Возможны два случая: 1) векторы а и b направлены в одну сторо-
сторону; 2) указанные векторы направлены в противоположные стороны2).
На рис. 2.9 изображен первый из указанных случаев.
Обозначим буквами А и В концы векторов а и b соответственно и
заметим, что, поскольку вектор а ненулевой, точка А отлична от О.
Но тогда, исключив тривиальный случай совпадения точек Л и В 3), мы
(в силу п. 3 § 3 гл. 1) можем утверждать, что точка О делит направ-
направленный отрезок ВА в некотором отношении, которое мы обозначим
через -X, т.е.
^ = -К BЛ)
ОА
О Термин «растяжение» следует понимать в указанном выше условном смысле. Ри-
Рисунок 2.8 отвечает случаю а > 1.
2) Тривиальный случай, когда вектор b нулевой и направление его неопределенно, можно
исключить из рассмотрения, ибо в этом случае равенство b = Ха. реализуется при X = 0.
3) В этом случае векторы а и b совпадают и равенство b = Ха. реализуется при X = 1.
48 ВЕКТОРНАЯ АЛГЕБРА [ГЛ. 2
или, что то же самое О,
ОВ = Х- ОА. B.2)
В случае, когда векторы а и b направлены в одну сторону (как на
рис. 2.9), точка О лежит вне отрезка ВА, и потому отношение B.1)
а ь отрицательно, а X > 0. Если же векторы а и b направле-
—' н—н—*~ ны в противоположные стороны, то точка О лежит
внутри отрезка ВА, и потому отношение B.1) поло-
Рис. 2.9 жительно, а X <0.
Докажем, что в обоих случаях b = Хз. Достаточно доказать, что два
вектора b и Хз. 1) коллинеарны; 2) имеют одинаковую длину, 3) имеют
одинаковое направление.
Коллинеарность векторов b и Хз вытекает из коллинеарности векто-
векторов а и b и определения произведения вектора на число. Равенство длин
векторов b и Хз непосредственно следует из определения произведения
вектора на число и соотношения B.2). Наконец, тот факт, что векторы b
и Хз имеют одинаковое направление, следует из определения произведе-
произведения вектора на число и из того, что X > 0, когда а и b одинаково направле-
направлены, и А, < 0, когда а и b противоположно направлены. Теорема доказана.
3. Понятие линейной зависимости векторов. Линейной
комбинацией п векторов зх, а2,..., зп будем называть сумму про-
произведений этих векторов на произвольные вещественные числа, т.е.
выражение вида
щзх + а2а2 + ... + апзп, B.3)
где аь а2, ..., осп — какие угодно вещественные числа.
Определение 1. Векторы аь а2, ..., зп называются линейно
зависимыми, если найдутся такие вещественные числа
аь а2, ..., ап, из которых хотя бы одно отлично от нуля, что линей-
линейная комбинация векторов зх, а2, ..., зп с указанными числами обра-
обращается в нуль, т.е. имеет место равенство
щзх + а2а2 + ... + 0^ = 0.
Векторы зх, а2, ..., зп, не являющиеся линейно зависимыми, будем
называть линейно независимыми.
Дадим другое определение линейно независимых векторов, основан-
основанное на логическом отрицании содержания определения 1.
Определение 2. Векторы зх, а2, ..., зп называются линейно
независимыми, если равенство нулю их линейной комбинации
B.3) возможно лишь в случае, когда все числа а{, а2,..., ап равны нулю.
Имеют место следующие два утверждения.
Теорема 2.2. Если хотя бы один из векторов аь а2, ..., зп являет-
является нулевым, то эти векторы являются линейно зависимыми.
О Здесь под ОА и ОВ следует понимать величины направленных отрезков.
§ 1] ЛИНЕЙНЫЕ ОПЕРАЦИИ НАД ВЕКТОРАМИ 49
Доказательство. Пусть, ради определенности, вектор з.{ яв-
является нулевым 0, а остальные векторы а2, ..., ая произвольны. Тогда
обращается в нуль линейная комбинация B.3) указанных векторов с
числами 0^ = 1, а2 = а3 = ... = ап = О, одно из которых отлично от нуля.
Теорема доказана.
Теорема 2.3. Если среди п векторов какие-либо п - 1 векторов
линейно зависимы, то и все п векторов линейно зависимы.
Доказательство. Пусть для определенности векторы аь а2, ..., &п-\
линейно зависимы, а вектор з.п произволен 2). По определению линей-
линейной зависимости найдутся такие вещественные числа аь а2, ..., ап_ь из
которых хотя бы одно отлично от нуля, что имеет место равенство
щах + а2а2 + ... + а^а^ = 0. B.4)
Равенство B.4) сохранится, если мы добавим в левую часть этого равен-
равенства равное нулю слагаемое 0 • а„, т.е. справедливо равенство
а{а{ + а2а2 +... + ап_{ап_{ + 0 • а„ = 0. B.5)
Так как среди чисел аь а2, ..., ап_ь О хотя бы одно отлично от нуля, то
равенство B.5) доказывает линейную зависимость векторов аь а2,..., а„.
Теорема доказана.
Замечание. Конечно, утверждение теоремы 2.3 о линейной зави-
зависимости п векторов останется в силе, если среди этих векторов линейно
зависимыми являются не п - 1, а любое меньшее п число векторов.
4. Линейные комбинации двух векторов.
Теорема 2.4. Необходимым и достаточным условием линейной
зависимости двух векторов является их коллинеарность.
Доказательство. 1) Необходимость. Пусть два векто-
вектора а и b линейно зависимы. Докажем коллинеарность этих векторов.
По определению линейной зависимости найдутся такие веществен-
вещественные числа аир, хотя бы одно из которых отлично от нуля, что справед-
справедливо равенство
oca + pb = 0. B.6)
Пусть для определенности отлично от нуля число р. Тогда из равенства
B.6) (посредством деления этого равенства на р и переброски одного члена
в правую часть) получим следующее равенство:
b = —а
Р
О Мы всегда можем поменять порядок следования векторов так, чтобы нулевым ока-
оказался первый из векторов.
2) Поменяв порядок следования векторов, мы всегда можем добиться того, чтобы ли-
линейно зависимыми оказались первые п - 1 векторов.
50 ВЕКТОРНАЯ АЛГЕБРА [ГЛ. 2
Вводя обозначение X = -ос/р, получим, что b = Ха.. Таким образом, век-
вектор b равен произведению вектора а на вещественное число X. По опре-
определению произведения вектора на число векторы а и b коллинеарны.
Необходимость доказана.
2) Достаточность. Пусть векторы а и b коллинеарны. Дока-
Докажем, что эти векторы линейно зависимы. Если хотя бы один из векторов
а и b нулевой, то эти векторы линейно зависимы в силу теоремы 2.2.
Таким образом, нужно рассмотреть лишь случай, когда векторы а и b
ненулевые. Но если вектор а ненулевой, то из коллинеарности векторов
а и b в силу теоремы 2.1 вытекает существование такого вещественного
числа X, что b = Ха., или, что то же самое,
А,а + (-1)Ь = 0. B.7)
Так как из двух чисел X, -1 одно заведомо отлично от нуля, то равенство
B.7) доказывает линейную зависимость векторов а и Ь. Достаточность
доказана.
Следствие 1. Если векторы а и Ъ не коллинеарны, то они линей-
линейно независимы.
Следствие 2. Среди двух неколлинеарных векторов не может
быть нулевого вектора (иначе бы эти векторы оказались линейно за-
зависимыми).
5. Линейные комбинации трех векторов.
Определение. Векторы называются компланарными, если
они лежат либо в одной плоскости, либо в параллельных плоскостях.
Теорема 2.5. Необходимым и достаточным условием линейной
зависимости трех векторов является их компланарность.
Доказательство. 1) Необходимость. Пусть три вектора
a, b и с линейно зависимы. Докажем компланарность этих векторов.
По определению линейной зависимости найдутся такие веществен-
вещественные числа а, р и у, хотя бы одно из которых отлично от нуля, что спра-
справедливо равенство
oca + pb + yc = 0. B.8)
Пусть для определенности отлично от нуля число у. Тогда из равенства B.8)
(посредством деления этого равенства на у и переброски двух членов в пра-
правую часть) получим следующее равенство:
с = —а —Ь.
У У
Вводя обозначения X = -ос/у, \± = -р/у, перепишем последнее равенство
в виде
B.9)
§ 1] ЛИНЕЙНЫЕ ОПЕРАЦИИ НАД ВЕКТОРАМИ 51
Если все три вектора a, b и с приложены к общему началу О, то из
равенства B.9) следует О, что вектор с равен диагонали параллелограм-
параллелограмма, построенного на двух векторах: на векторе а, «растянутом» в X раз, и
векторе Ь, «растянутом» 2) в \х раз (рис. 2.10).
Но это означает, что векторы a, b и с лежат в одной плоскости, т.е.
компланарны. Необходимость доказана.
2) Достаточность. Пусть векторы a, b и с компланарны. Дока-
Докажем, что эти векторы линейно зависимы.
Прежде всего, исключим случай, когда какая-либо пара из указан-
указанных трех векторов коллинеарна. Тогда в силу теоремы 2.4 указанная
пара векторов линейно зависима, а стало быть
(в силу теоремы 2.3), и все три вектора a, b и с
линейно зависимы.
Остается рассмотреть случай, когда в тройке
векторов а, Ь, с ни одна пара векторов не колли-
коллинеарна (и, в частности, отсутствуют нулевые век-
векторы 3)).
Перенесем три компланарных вектора a, b и с
на одну плоскость и приведем их к общему нача-
началу О (рис. 2.10). Проведем через конец С вектора с прямые, параллель-
параллельные векторам а и Ь. Обозначим буквой А точку пересечения прямой, па-
параллельной вектору Ь, с прямой, на которой лежит вектор а, а буквой В
точку пересечения прямой, параллельной вектору а, с прямой, на которой
лежит вектор Ь. (Существование указанных точек пересечения вытекает
из того, что векторы а и b не коллинеарны.) В силу прав_ил_а параллелограм-
ма сложения векторов вектор с равен сумме векторов О А и ОВ , т.е.
с = ОА + ОВ. B.10)
Так как вектор О А коллинеарен ненулевому вектору а (с которым
он лежит на одной прямой), то в силу теоремы 2.1 найдется веществен-
вещественное число X такое, что
ОА = Хъ. B.11)
Из аналогичных соображений вытекает существование веществен-
вещественного числа [I такого, что
ОВ = цЬ. B.12)
В
М
ь\
о
/
Рис.
/
/
2.10
С
4\
0 В силу правила параллелограмма сложения векторов и определения произведения
вектора на число (см. п. 2). При этом мы исключаем тривиальный случай, когда векто-
векторы а и b коллинеарны. В этом случае компланарность векторов a, b и с вытекает из того,
что эти три вектора, будучи приведены к общему началу О, лежат на двух проходящих
через точку О прямых: на одной лежит вектор с, на другой — оба вектора а и Ь.
2) Термин «растянутый» следует понимать в указанном в п. 2 условном смысле.
3) В силу следствия 2 из теоремы 2.4 в паре неколлинеарных векторов не могут содер-
содержаться нулевые векторы.
52 ВЕКТОРНАЯ АЛГЕБРА [ГЛ. 2
Вставляя B.11) и B.12) в B.10), будем иметь
c = ?ta + |ab. B.13)
Равенство B.13) можно переписать в виде
Так как из трех чисел А,, |1, — 1 одно заведомо отлично от нуля, то послед-
последнее равенство доказывает линейную зависимость векторов a, b и с. До-
Достаточность доказана.
Попутно доказаны следующие утверждения:
Следствие 1. Каковы бы ни были неколлинеарные векторы &иЪ
для любого вектора с, лежащего в одной плоскости с векторами а
и Ь, найдутся такие вещественные числа X и ц, что справедливо ра-
равенство
B.13)
Следствие 2. Если векторы a, b и с не компланарны, то они ли-
линейно независимы.
Следствие 3. Среди трех некомпланарных векторов не может
быть двух коллинеарных векторов и не может быть ни одного нуле-
нулевого вектора 0.
6. Линейная зависимость четырех векторов.
Теорема 2.6. Любые четыре вектора линейно зависимы.
Доказательство. Прежде всего исключим случай, когда какая-
нибудь тройка из указанных четырех векторов компланарна. Тогда в
силу теоремы 2.5 указанная тройка векторов линейно зависима, а стало
быть (в силу теоремы 2.3), и все четыре вектора
линейно зависимы.
Остается рассмотреть случай, когда среди
четырех векторов а, Ь, с и d никакая тройка
векторов не компланарна (и, стало быть, нет
ни одной пары коллинеарных векторов и ни од-
О^аА ного нУлевого вектора 2)).
Приведем все четыре вектора а, Ь, с и d к об-
общему началу О и проведем через конец D
вектора d плоскости, параллельные плоскостям, определяемым парами
векторов be, ас и ab 3) (рис. 2.11). Точки пересечения указанных плос-
плоскостей с прямыми, на которых лежат векторы a, b и с, обозначим соот-
соответственно буквами А, В и С. (Существование указанных точек пересе-
пересечения вытекает из того, что векторы a, b и с некомпланарны.)
в
/
) Иначе эти векторы оказались бы линейно зависимыми.
) Согласно следствию 3 из теоремы 2.5 в тройке некомпланарных векторов не может
содержаться ни одной пары коллинеарных векторов и ни одного нулевого вектора.
) Векторы, входящие в каждую из указанных трех пар, не коллинеарны, а поэтому
каждая из указанных трех пар определяет некоторую плоскость.
§ 1] ЛИНЕЙНЫЕ ОПЕРАЦИИ НАД ВЕКТОРАМИ 53
Убедимся в том, что вектор d = OD равен сумме трех векторов ОА ,
ОВ и ОС , т.е.
d= ОА + ОВ + ОС . B.14)
В самом деле, из правила параллелограмма сложения векторов и из па-
параллелограмма OCDE (рис. 2.11) вытекает, что d_^OC + ОЕ, а из па-
параллелограмма ОВЕА вытекает, что ОЕ = ОА + ОВ . Тем самым равен-
равенство B.14) установлено.
Так как вектор ОА коллинеарен ненулевому вектору а (с которым
он лежит на одной прямой), то в силу теоремы 2.1 найдется веществен-
вещественное число X такое, что
ОА =Ха. B.15)
Из аналогичных соображений вытекает существование вещественных
чисел \1 и v таких, что
~ОВ =ц,Ь, ОС =vc. B.16)
Вставляя B.15) и B.16) в B.14), будем иметь
d = ?ta + |ab + vc. B.17)
Равенство B.17) можно переписать в виде
Ха. + jab + vc + (-l)d = 0. B.18)
Так как из четырех чисел X, ц, V, -1 одно заведомо отлично от нуля, то
равенство B.18) доказывает линейную зависимость векторов а, Ь, с и d.
Теорема доказана.
Попутно доказано следующее утверждение:
Следствие 1. Каковы бы ни были некомпланарные векторы a, b
и с, для любого вектора d найдутся такие вещественные числа X, ц
и v, что справедливо равенство
d = X<L + [ib + vc. B.17)
7. Понятие базиса. Аффинные координаты.
Определение 1. Говорят, что три линейно независимых векто-
вектора a, b и с образуют в пространстве базис, если любой вектор d
может быть представлен в виде некоторой линейной комбинации
векторов a, b и с, т.е. если для любого вектора d найдутся такие веще-
вещественные числа X, [I и v, что справедливо равенство B.17).
Аналогично определяется базис на некоторой плоскости тт.
Определение 2. Говорят, что два лежащих в плоскости п линейно
независимых вектора а и Ъ образуют на этой плоскости базис,
если любой лежащий в плоскости к вектор с может быть представ-
представлен в виде некоторой линейной комбинации векторов а иЪ, т.е. если
54 ВЕКТОРНАЯ АЛГЕБРА [ГЛ. 2
для любого лежащего в плоскости к вектора с найдутся такие веществен-
вещественные числа Хи \±, что справедливо равенство B.13).
Справедливы следующие фундаментальные утверж-
утверждения:
1) любая тройка некомпланарных векторов a, b и с образует ба-
базис в пространстве]
2) любая пара лежащих в данной плоскости неколлинеарных век-
векторов а и b образует базис на этой плоскости.
Для доказательства первого из этих утверждений достаточно заме-
заметить, что, каковы бы ни были три некомпланарных вектора a, b и с, они
линейно независимы (в силу следствия 2 из теоремы 2.5), и для любого
вектора d найдутся вещественные числа X,[inv такие, что справедливо
равенство B.17) (в силу следствия из теоремы 2.6). Утверждение 2) до-
доказывается аналогично (с помощью следствия 1 из теоремы 2.4 и след-
следствия 1 из теоремы 2.5).
В дальнейшем для определенности будем рассматривать базис в про-
пространстве. Итак, пусть а, Ь, с — произвольный базис в пространстве, т.е.
произвольная тройка некомпланарных векторов. Тогда (по определению
базиса) для любого вектора d найдутся такие вещественные числа X, \±
и v, что будет справедливо равенство
c. B.17)
Принято называть равенство B.17) разложением вектора d no базису
а, Ь, с, а числа А,, ц, и v — координатами вектора d относительно
базиса а, Ь, с.
Докажем, что каждый вектор d может быть единстве нным
способом разложен по базису а, Ь, с, или (что то же самое) коор-
координаты каждого вектора d относительно базиса а, Ь, с о п р е д е-
л я ю т с я однозначно.
Допустим, что для некоторого вектора d, наряду с разложением B.17),
справедливо еще и другое разложение по тому же самому базису
d = A,'a + |/b + v'c. B.19)
Почленное вычитание равенств B.17) и B.19) приводит к соотношению О
(к - АГ)а + (ц, - мОЬ + (v - v')c = 0. B.20)
В силу линейной независимости базисных векторов а, Ь, с соотношение
B.20) приводит к равенствам
X - X = О, [I - ц' = 0, v - v' = О,
или X = X, \1 = (/, v = v'. Единственность разложения по базису доказана.
О Возможность почленного вычитания равенств B.17) и B.19) и производимой груп-
группировки членов вытекают из свойств линейных операций над векторами (см. п. 2).
§ 1] ЛИНЕЙНЫЕ ОПЕРАЦИИ НАД ВЕКТОРАМИ 55
Основное значение базиса состоит в том, что линейные операции над
векторами при задании базиса становятся обычными линейными опера-
операциями над числами — координатами этих векторов. Именно справедли-
справедливо следующее утверждение.
Теорема 2.7. При сложении двух векторов d{ и d2 их координаты
(относительно любого базиса а, Ь, с) складываются. При умноже-
умножении вектора dj на любое число а все его координаты умножаются
на это число.
Доказательство. Пусть d{ = X{a.-\- [i{b + v{c, d2 = А,2а +
+ |a2b + v2c. Тогда в силу свойств 1°-7° линейных операций (см. п. 2)
d2 = (k{ + Х2) а + (Ш +fe)b + (Vi + v2) с,
а&х = (а^) а + (ащ) b + (av{) с.
В силу единственности разложения по базису теорема доказана.
Перейдем теперь к определению так называемых аффинных 0 коор-
координат точки.
Аффинные координаты в пространстве определяются заданием бази-
базиса а, Ь, с и некоторой точки О, называемой началом координат.
Аффинными координатами любой
точки М называются координаты вектора ОМ
(относительно базиса а, Ь, с).
Так как каждый вектор ОМ может быть, и притом
единственным способом, разложен по базису а, Ь, с,
то каждой точке пространства М однозначно соответ-
соответствует тройка аффинных координат X, ja, v.
Разумеется, декартовы прямоугольные коорди-
координаты являются частным случаем аффинных коорди- Рис 2 \%
нат, соответствующим тройке взаимно ортогональ-
ортогональных и единичных базисных векторов. Более подробно этот важный част-
частный случай рассматривается в п. 9 настоящего параграфа.
В заключение заметим, что свойства базиса и понятие аффинных коорди-
координат на плоскости вполне аналогичны случаю пространства.
8. Проекция вектора на ось и ее свойства. Прежде всего опреде-
определим проекцию вектора а = АВ на произвольную ось и. Обозначим бук-
буквами А' и В' основания перпендикуляров, опущенных на ось и из точек
А и В соответственно (рис. 2.12).
Проекцией вектора а= АВ н а о с ъ и называется ве-
величина А'В' направленного отрезка А'В' оси и.
Договоримся обозначать проекцию вектора а на ось и символом при а.
Построение проекции вектора а= АВ на ось и иллюстрируется на
рис. 2.12, где символом аир обозначены две проецирующие плоскости
О Термин «аффинный» происходит от латинского слова affinis, что означает смеж-
смежный, или соседний.
56 ВЕКТОРНАЯ АЛГЕБРА [ГЛ. 2
(т.е. плоскости, перпендикулярные оси и и проходящие через концы А
и В вектора а = АВ).
Для дальнейшего нам понадобится понятие угла наклона
вектора а = АВ к оси и. Этот угол может быть определен как угол ф
между двумя выходящими из произвольной точки М лучами, один из
которьи^_имеет направление, совпадающее с направлением векто-
вектора а = АВ, а другой — направление, совпадающее с направлением
оси и (рис. 2.12).
Очевидно, на величину угла наклона вектора а к оси и не влияют вы-
выбор точки М выхода указанных выше лучей и замена оси и любой другой
осью и, имеющей то же направление, что и ось и.
Докажем следующее утверждение.
Теорема 2.8. Проекция вектора а на ось и равна длине векто-
вектора а, умноженной на косинус ф угла наклона вектора а к оси и.
Доказательство. Обозначим через v ось, проходящую через
начало А вектора а и имеющую то же направление, что и ось и (рис. 2.12),
и пусть С — проекция В на ось v. Тогда ZBAC равен углу ф наклона
вектора а = АВ к любой из осей и или и, причем точка С заведомо ле-
лежит в указанной на рис. 2.12 проецирующей плоскости C (т.е. в плоско-
плоскости, перпендикулярной оси и и проходящей через точку В).
Далее, можно утверждать, что А'В' = АС 0, ибо оси unv параллель-
параллельны и одинаково направлены и отрезки этих осей, заключенные между
параллельными плоскостями аир, равны. Так как по определению
при а = А'В\ то мы приходим к равенству
пр^а = ЛС. B.21)
Но_величина АС представляет собой проекцию направленного отрез-
отрезка АВ на ось v, которая (в силу п. 1 § 3 гл. 1) равна
АС = | АВ | cos ф = | а | cos ф. B.22)
Из сопоставления равенств B.21) и B.22) вытекает равенство
при а= |а| cos ф. B.23)
Теорема доказана.
Основные свойства проекции вектора на ось заключаются
в том, что линейные операции над векторами приводят к соответствую-
соответствующим линейным операциям над проекциями этих векторов (на произволь-
произвольную ось).
Именно справедливо следующее утверждение:
При сложении двух векторов d{ и d2 их проекции на произволь-
произвольную ось и складываются. При умножении вектора d{ на любое
О Здесь под А'В' следует понимать величину направленного отрезка А'В' оси и, а
под АС — величину направленного отрезка АС оси v.
§ 1] ЛИНЕЙНЫЕ ОПЕРАЦИИ НАД ВЕКТОРАМИ 57
число а проекция этого вектора на произвольную ось и также ум-
умножается на число а.
Доказательство этого утверждения отложим до п. 9. Описанные свой-
свойства проекции вектора на ось естественно назвать линейными свойствами.
9. Декартова прямоугольная система координат как частный
случай аффинной системы координат. Как уже отмечалось выше,
декартова прямоугольная система координат является частным случаем
аффинной системы, отвечающей тройке взаимно ортогональных и еди-
единичных базисных векторов.
В случае декартовой прямоугольной системы базисные векторы при-
принято обозначать не буквами а, Ь, с, а буквами i, j, k. Итак, каждый из
векторов i, j, k имеет длину, равную единице, причем эти три вектора
взаимно ортогональны (обычно направления векторов i, j, k берут со-
совпадающими с направлениями декартовых осей Ох, Оу и Oz соответ-
соответственно).
В силу основных результатов п. 7 каждый вектор d может быть, и
притом единственным способом, разложен по декартову прямо-
прямоугольному базису i, j, k, т.е. для каждого вектора d найдется, и при-
притом единственная, тройка чисел X, Y и Z 0 такая, что справедливо
равенство
&=X\+Y] + Zk. B.24)
Числа X, Y, Z называются декартовыми прямоугольными коорди-
координатами вектора d. Если М — любая точка пространства, то опреде-
определенные в гл. 1 декартовы прямоугольные координаты этой точки совпа-
дают с декартовыми прямоугольными координатами вектора ОМ .
Если вектор d имеет декартовы прямоугольные координаты X, Y, Z,
то мы будем использовать следующую символику:
d = {X, Y,Z}.
Геометрический смысл декартовых прямоугольных координат векто-
вектора позволяет сделать следующее утверждение.
Теорема 2.9. Декартовы прямоугольные координаты X, Y и Z
вектора d равны проекциям этого вектора на оси Ох, Оу и Oz соот-
соответственно.
Доказательство. В полной аналогии с рассуждениями, прове-
проведенными при доказательстве теоремы 2.6 (п. 6), приложим вектор d к
началу О декартовой системы и проведем через конец D этого вектора
три плоскости, параллельные координатным плоскостям Oyz, Oxz и Оху
(рис. 2.13). Точки пересечения указанных плоскостей с осями Ох, Оу и
Oz соответственно обозначим буквами А, В и С.
О В случае декартовой прямоугольной системы для координат вектора d вместо X, ц, у
мы будем использовать обозначения X, Y, Z.
58 ВЕКТОРНАЯ АЛГЕБРА [ГЛ. 2
Как и при доказательстве теоремы 2.6, получим, что
d = ОА + ~ОВ + ОС.
Дальнейшие рассуждения упомянутой теоремы (с учетом изменивших-
изменившихся обозначений) приводят нас к равенствам
OA = Xi, ~OB = Y\, OC = Zk. B.25)
В рассматриваемом случае декартовой прямоугольной системы па-
параллелепипед, построенный на базисных векторах i, j, k и имеющий век-
вектор d своей диагональю, является прямоугольным. Поэтому проекции
jy вектора d на оси Ох, Оу и Oz соответственно рав-
равны величинам ОА, ОВ и ОС. Для доказательства
теоремы нам остается убедиться в том, что ОА = X,
OB =Y, OC = Z.
Убедимся, например, в равенстве ОА = Х. В
силу B.25) ОА =Xi. Отсюда и из того, что i —
0 . А единичный вектор, вытекает, что | ОА\ = \Х\. Но
и знаки чисел ОА и X совпадают, ибо в случае, ког-
ис> ' да векторы ОА и i направлены в одну_сторону, оба
числа ОА и X положительны, а в случае, когда векторы ОА и i направ-
направлены в противоположные стороны, оба числа ОА и Xотрицательны. Итак,
ОА =Х. Аналогично доказываются равенства ОВ= Y и OC = Z. Теоре-
Теорема доказана.
Обозначим буквами а, C и у углы наклона вектора d к осям Ох, Оу и
Oz соответственно.
Три числа cos a, cos C и cos у принято называть направляющими
косинусами вектора d.
Из теорем 2.9 и 2.8 (см. формулу B.23)) вытекают следующие фор-
формулы для координат X, Y и Z вектора d:
X=|d|cosa, y=|d|cosp, Z=|d|cosy. B.26)
Так как квадрат диагонали прямоугольного параллелепипеда равен сум-
сумме квадратов его сторон, то из равенств ОА = X, OB =Yn ОС = Z мы полу-
получим следующее выражение для длины вектора d через его координаты:
|d| = VX2+72+Z2. B.27)
Из формул B.26) и B.27) вытекают следующие выражения для на-
направляющих косинусов вектора d через координаты этого вектора:
X Y
cos a = , , cos p = . ,
cos у = . . B.28)
§ 2] СКАЛЯРНОЕ ПРОИЗВЕДЕНИЕ ДВУХ ВЕКТОРОВ 59
Возводя в квадрат и складывая равенства B.28), получим, что
cos2 a + cos2 p + cos2 у = 1,
т.е. сумма квадратов направляющих косинусов любого вектора рав-
равна единице.
Так как вектор d однозначно определяется заданием трех его коор-
координат, то из формул B.26) ясно, что вектор d однозначно определяет-
определяется заданием его длины и трех направляющих косинусов.
В заключение докажем сформулированные в конце предыдущего
пункта линейные свойства проекции вектора на ось, т.е. докажем,
что при сложении двух векторов dx и d2 их проекции на произволь-
произвольную ось и складываются, а при умножении вектора d{ на любое чис-
число а его проекция на произвольную ось и умножается на число а.
Пусть дана произвольная ось и и любые векторы d{ и d2. Введем декар-
декартовы прямоугольные координаты так, чтобы ось и совпала с осью Ох.
Пусть
d1=X1i+ yj + Zjk, d2 = X2i+Y2) + Z2k.
Тогда в силу теоремы 2.7
adj = (аХ{) i + (aYx) j + {aZx) k.
Но в силу теоремы 2.9 и того, что ось и совпадает с осью Ох, можно
утверждать, что
Таким образом, щи (dx + d2) = Щи d{ + upu d2, npu (ad^ = a upu d{, и сфор-
сформулированное утверждение доказано.
§ 2. Скалярное произведение двух векторов
1. Определение скалярного произведения.
Определение 1. Скалярным произведением двух век-
векторов называется число, равное произведению длин этих векторов
на косинус угла между ними.
Скалярное произведение векторов а и b будем обозначать симво-
символом аЬ. Если угол между векторами а и b равен ф, то по определению
скалярное произведение этих двух векторов выражается формулой
аЬ= |а| |b| cos (p. B.29)
Сформулируем другое определение скалярного произведе-
произведения двух векторов, эквивалентное определению 1. Для этого воспользуемся
60 ВЕКТОРНАЯ АЛГЕБРА [ГЛ. 2
понятием проекции вектора b на ось, определяемую вектором а. В соот-
соответствии с обозначениями п. 8 § 1 будем обозначать проекцию вектора b
на ось, определяемую вектором а, символом пра Ь. На основании теоре-
теоремы 2.8 получим
npab= |b| cos (р. B.30)
Сопоставление равенств B.29) и B.30) приводит нас к следующему вы-
выражению для скалярного произведения:
ab= |a| npab. B.31)
Конечно, в проведенных рассуждениях можно было бы поменять места-
местами векторы а и Ь. При этом мы пришли бы к следующему выражению
для скалярного произведения:
ab= |b| пр6а. B.32)
Выражения B.31) и B.32) приводят нас к следующему определению
скалярного произведения (эквивалентному определению 1).
Определение 2. Скалярным произведением двух век-
векторов называется число, равное произведению длины одного из этих
векторов на проекцию другого вектора на ось, определяемую пер-
первым из указанных векторов.
Понятие скалярного произведения векторов родилось в механике.
Если вектор а изображает силу, точка приложения которой перемеща-
перемещается из начала в конец вектора Ь, то работа w указанной силы определя-
определяется равенством
w= |a| |b| cos ф,
т.е. равна скалярному произведению векторов а и Ь.
2. Геометрические свойства скалярного произведения.
Теорема 2.10. Необходимым и достаточным условием ортого-
ортогональности двух векторов является равенство нулю их скалярного
произведения.
Доказательство. 1) Необходимость. Пусть векторы а
и b ортогональны, ф — угол между ними. Тогда cos ф = 0 и в силу форму-
формулы B.29) скалярное произведение ab равно нулю.
2) Достаточность. Пусть скалярное произведение ab равно
нулю. Докажем, что векторы а и b ортогональны. Прежде всего исклю-
исключим тривиальный случай, когда хотя бы один из векторов а или b явля-
является нулевым (нулевой вектор имеет неопределенное направление, и
его можно считать ортогональным любому вектору). Если же оба век-
вектора а и b ненулевые, то |а| >0и |b| > 0, и поэтому из равенства ab = 0
и из формулы B.29) вытекает, что cos ф = 0, т.е. векторы а и b ортого-
ортогональны.
Теорема доказана.
§2] СКАЛЯРНОЕ ПРОИЗВЕДЕНИЕ ДВУХ ВЕКТОРОВ 61
Прежде чем сформулировать следующее утверждение, уточним по-
понятие угла ф между векторами а и Ь. Приведем произвольные векторы
а и b к общему началу О (рис. 2.14). Тогда в качестве угла ф между
векторами аи b можно взять любой из двух указанных на рис. 2.14
углов ф! и ф2. В самом деле, сумма углов q>{ и ф2 равна 2тг, и поэтому
cos ф! = cos ф2, а в определение скалярного произве-
произведения входит только косинус угла между векторами.
Из двух углов q>{ и ф2 один заведомо не превосхо-
превосходит п (на рис. 2.14 не превосходит тг угол ф^. Дого-
Договоримся в дальнейшем под углом между двумя век-
векторами подразумевать тот угол, который не пре- 0~
восходит тт.
~ Рис. 2.14
Тогда справедливо следующее утверждение.
Теорема 2.11. Два ненулевых вектора г.иЪ составляют острый
{тупой) угол тогда и только тогда, когда их скалярное произведе-
произведение положительно {отрицательно).
Доказательство. Так как векторы а и b ненулевые, то в силу
формулы B.29) знак скалярного произведения совпадает со знаком
cos ф. Но если угол ф не превосходит тс, то cos ф положителен тогда и
только тогда, когда ф — острый угол, и отрицателен тогда и только
тогда, когда ф — тупой угол. Теорема доказана.
3. Алгебраические свойства скалярного произведения. Скаляр-
Скалярное произведение векторов обладает следующими четырьмя свой-
свойствами:
1° ab = ba {переместительное свойство);
2° (aa)b = a(ab) {сочетательное относительно числового множите-
множителя свойство);
3° (а + Ь)с = ас + be {распределительное относительно суммы век-
векторов свойство);
4° аа > 0, если а — ненулевой вектор, и аа = 0, если а — нулевой
вектор х).
О Отметим, что в курсе линейной алгебры вместо множества векторов рассматрива-
рассматривают множество элементов а, Ь, ... любой природы. Если для элементов этого множества
определены операция сложения и операция умножения на вещественное число и для этих
операций справедливы те же самые свойства 1°-7°, которые установлены нами для ли-
линейных операций над векторами (см. п. 2 § 1), то указанное множество элементов назы-
называется линейным пространством.
Произвольное линейное пространство называется евклидовым пространством, если:
1) известно правило, посредством которого любым двум элементам а и b этого простран-
пространства ставится в соответствие число, называемое скалярным произведением этих эле-
элементов и обозначаемое символом ab; 2) указанное правило таково, что для скалярного
произведения справедливы только что сформулированные свойства 1°-4°.
Таким образом, пространство всех геометрических векторов с определенными нами
линейными операциями и скалярным произведением представляет собой один из приме-
примеров линейного евклидова пространства.
62 ВЕКТОРНАЯ АЛГЕБРА [ГЛ. 2
Убедимся в справедливости этих свойств. Свойство 1° непо-
непосредственно вытекает из формулы B.29).
Для доказательства свойства 2° воспользуемся определением 2 ска-
скалярного произведения, т.е. формулой B.32). Учитывая, что проекция
вектора на ось обладает линейным свойством пр6 (аа) = = а пр6 а (см.
конец п. 8 и конец п. 9 § 1), получим
(аа) b = | b | • npb (aa) = a | b | • npb а = a • (ab).
Тем самым свойство 2° доказано.
Для доказательства свойства 3° снова воспользуемся формулой B.32)
и линейным свойством проекции вектора на ось прс (а + Ь) = прс а + прс b
(см. п. 8 § 1). Получим
(а + Ь) с = | с | • прс (а + Ь) = | с | • (прс а + прс Ь) =
Нам остается доказать свойство 4°. Для этого заметим, что непос-
непосредственно из формулы B.29) вытекает, что аа = | а |2, т.е. скалярный
квадрат вектора равен квадрату длины этого вектора. Отсюда, в
частности, вытекает, что скалярный квадрат аа положителен, когда век-
вектор а ненулевой, и равен нулю, когда вектор а нулевой.
Доказанные свойства имеют фундаментальное значение. Они позво-
позволяют при скалярном перемножении векторных многочленов выпол-
выполнять действия почленно, не заботясь при этом о порядке векторных
множителей и сочетая числовые множители. Указанная возможность
будет существенно использована в следующем пункте.
4. Выражение скалярного произведения в декартовых коор-
координатах.
Теорема 2.12. Если два вектора &иЪ определены своими декар-
декартовыми прямоугольными координатами
sl = {X{, Y{,Z{}, b = {X2, Y2,Z2},
то скалярное произведение этих векторов равно сумме попарных
произведений их соответствующих координат, т.е.
ab = ХХХ2 + YXY2 + ZXZ2. B.33)
Доказательство. Составим из тройки базисных векторов i, j
и к все возможные пары и для каждой из пар определим скалярное про-
произведение. Учитывая, что базисные векторы являются попарно орто-
ортогональными и имеют единичную длину, получим
ij = l, ji = 0, ki = O,
I j = 0, jj = l, kj = O, B.34)
ik = 0, jk = O, kk=l.
§ 3] ВЕКТОРНОЕ И СМЕШАННОЕ ПРОИЗВЕДЕНИЯ ВЕКТОРОВ 63
Далее, учитывая, что з. = Х{1 + Yx j + Zx к, b = Х2i + Y2} + Z2k,nопираясь
на установленную в предыдущем пункте возможность почленного скаляр-
скалярного перемножения векторных многочленов, получим
+ ZXX2 к i + Z{ Y2 k j + ZXZ2 k k.
Из последнего равенства и соотношений B.34) вытекает формула B.33).
Теорема доказана.
Следствие 1. Необходимым и достаточным условием ортого-
ортогональности векторов
<i = {Xx,Yx,Zx} и b = {X2,Y2,Z2)
является равенство
X{X2+Y{Y2 + Z{Z2 = 0.
Это следствие непосредственно вытекает из теоремы 2.10 и форму-
формулы B.34).
Следствие 2. Угол ф между векторами
а = {Хх, Yx, Zx}ub = {Х2, Y2, Z2}
определяется по формуле
Х{Х2 + YlY* + Z{Z* B.35)
44
о ab
В самом деле, соэф = , и нам остается воспользоваться фор-
а || h
мулой B.33) для скалярного произведения и формулой B.27) для длины
вектора.
§ 3. Векторное и смешанное произведения векторов
1. Правые и левые тройки векторов и системы координат.
Определение 1. Три вектора называются упорядоченной
тройкой {или просто тройкой), если указано, какой из этих
векторов является первым, какой — вторым и какой — третьим.
При записи тройки векторов мы всегда будем располагать эти век-
векторы в порядке их следования. Так, запись Ьас означает, что первым
элементом тройки является вектор Ь, вторым — вектор а и третьим —
вектор с.
Определение 2. Тройка некомпланарных векторов abc называется
правой (левой), если выполнено одно из следующих трех условий:
64 ВЕКТОРНАЯ АЛГЕБРА [ГЛ. 2
1° если эти векторы, будучи приведены к общему началу, распо-
располагаются так, как могут быть расположены соответственно
большой, несогнутый указательный и средний пальцы правой (ле-
(левой) руки;
2° если после приведения к общему началу вектор с располагает-
располагается по ту сторону от плоскости, определяемой векторами &иЪ, от-
откуда кратчайший поворот от а кЪ кажется совершающимся про-
против часовой стрелки (по часовой стрелке);
3° если, находясь внутри телесного угла, образованного приве-
приведенными к общему началу векторами а, Ь, с, мы видим поворот от а
к Ъ и от него к с совершающимся против часовой стрелки (по часо-
часовой стрелке).
Легко проверить, что условия 1°, 2° и 3° эквивалентны между со-
собой. Предоставляем читателю с помощью каждого из условий 1°, 2°
и 3° убедиться в том, что тройка abc, изображенная на рис. 2.15, яв-
является правой, а тройка abc, изображенная
на рис. 2.16, является левой.
Замечание. Понятие правой и левой
тройки теряет смысл для компланарных век-
векторов.
Если две тройки векторов либо обе яв-
Рис 2 15 Рис 2 16 ляются правыми, либо обе являются левыми,
то говорят, что эти тройки одной ориента-
ориентации. В противном случае говорят, что рассматриваемые две тройки про-
противоположной ориентации.
Всего из трех векторов a, b и с можно составить следующие шесть
троек:
abc, bca, cab, B.36)
bac, acb, cba. B.37)
С помощью условия 3° определения 2 легко проверить, что все три
тройки B.36) той же ориентации, что и тройка abc, а все три трой-
тройки B.37) имеют ориентацию, противоположную abc.
Определение 3. Аффинная или декартова система координат на-
называется правой (левой), если три базисных вектора образу-
образуют правую (левую) тройку.
Ради определенности договоримся в дальнейшем рассматривать
только правые системы координат.
2. Определение векторного произведения двух векторов.
Определение. Векторным произведением вектора а
на вектор Ъ называется вектор с, обозначаемый символом с = [ab]
и удовлетворяющий следующим трем требованиям:
§ 3] ВЕКТОРНОЕ И СМЕШАННОЕ ПРОИЗВЕДЕНИЯ ВЕКТОРОВ 65
1) длина вектора с равна произведению длин векторов а и Ъ на
синус угла ф между ними О, т.е.
|с| = | [ab] | = |а.| |b| sin ф; B.38)
2) вектор с ортогонален к каждому из векторов а иЪ;
3) вектор с направлен так, что тройка векторов abc является
правой 2).
Понятие векторного произведения также родилось в механике. Если
вектор b изображает приложенную в некоторой точке М силу, а вектор а
идет из некоторой точки О в точку М, то вектор с = [ab] представляет
собой момент силы b относительно точки О.
3. Геометрические свойства векторного произведения.
Теорема 2.13. Необходимым и достаточным условием колли-
коллинеарности двух векторов является равенство нулю их векторного
произведения.
Доказательство. 1) Необходимость вытекает из самого опре-
определения векторного произведения: для коллинеарных векторов а и b
векторное произведение по определению равно нулю (см. формулу B.38)
и сноску 3)).
2) Достаточность. Пусть векторное произведение [ab] равно
нулю. Докажем, что векторы а и b коллинеарны.
Прежде всего исключим тривиальный случай, когда хотя бы один из
векторов а или b является нулевым (нулевой вектор имеет неопреде-
неопределенное направление, и его можно считать коллинеарным любому векто-
вектору). Если же оба вектора а и b ненулевые, то |а| >0и |b| > 0, и поэто-
поэтому из равенства [ab] = 0 и из формулы B.38) вытекает, что sin ф = 0, т.е.
векторы а и b коллинеарны.
Теорема доказана.
Теорема 2.14. Длина {или модуль) векторного произведения [ab]
равняется площади S параллелограмма, построенного на приведен-
приведенных к общему началу векторах а иЪ.
Доказательство. Так как площадь параллелограмма равна про-
произведению смежных сторон этого параллелограмма на синус угла меж-
между ними, то теорема непосредственно вытекает из формулы B.38).
О В соответствии с договоренностью, принятой в п. 2 § 2, в качестве угла между
векторами берем тот угол ф, который не превосходит п. При этом всегда sin ф > 0 и
величина B.38) неотрицательна. Из формулы B.38) следует также, что в случае кол-
линеарных векторов а и Ъ определяемый вектор с = [ab] является нулевым.
2) Требования 1) и 2) определяют вектор с с точностью до двух взаимно противопо-
противоположных направлений. Требование 3) отбирает одно из этих двух направлений. В случае,
когда а и b коллинеарны, тройка abc является компланарной, но в этом случае уже из
требования 1) вытекает, что с = 0.
) Если векторы а и b коллинеарны (и, в частности, если хотя бы один из векторов а
и b нулевой), формула B.39) остается справедливой, ибо в этом случае равны нулю как
векторное произведение [ab], так и площадь 5 построенного на векторах а и b паралле-
параллелограмма.
66 ВЕКТОРНАЯ АЛГЕБРА [ГЛ. 2
Чтобы получить следствие из теоремы 2.14, введем понятие орта.
Определение. Ортом произвольного ненулевого вектора с на-
назовем единичный вектор, коллинеарный с и имеющий одинаковое с с
направление.
Следствие из теоремы 2.14. Если е — орт векторного произве-
произведения [ab], a S — площадь параллелограмма, построенного на при-
приведенных к общему началу векторах а и Ь, то для векторного про-
произведения [ab] справедлива следующая формула:
[ab] = Se. B.39)
Замечание. Из определений орта и векторного произведения вы-
вытекает, что тройка abe является правой (ибо тройка ab[ab] является
правой).
Следующее свойство устанавливает важную для дальнейшего формулу.
Теорема 2.15. Если с — какой-нибудь вектор, п — любая содержа-
содержащая его плоскость, е — единичный вектор, лежащий в плоскости к и
ортогональный к с, g — единичный вектор, ортогональный к плоско-
плоскости п и направленный так, что тройка ecg является правой, то для
любого лежащего в плоскости п вектора а справедлива формула
[ас] = преа- |с| g. B.40)
Доказательство. Достаточно доказать, что векторы, стоящие
в левой и правой частях B.40): 1) имеют одинаковую длину, 2) колли-
неарны, 3) имеют одинаковое направление.
В силу теоремы 2.14 | [ас] | =S, где 5 — площадь построенного на
приведенных к общему началу векторах а и с параллелограмма. Длина
вектора, стоящего в правой части B.40), равна | с | | пре а |, т.е. тоже равна
S, ибо если за основание указанного парал-
параллелограмма принять вектор с, то высота его
h будет равна | пре а |, (рис. 2.17).
Коллинеарность векторов, стоящих в
левой и правой частях B.40), вытекает из
того, что оба эти вектора ортогональны
Рис 2 17
к плоскости к (вектор [ас] в силу опреде-
определения векторного произведения, а вектор пре а • | с | g в силу того, что
вектор g по условию ортогонален к плоскости тг).
Остается проверить, что векторы, стоящие в левой и правой частях
B.40), одинаково направлены.
Для этого достаточно заметить, что векторы [ас] и g одинаково на-
направлены (противоположно направлены), когда тройка acg является
правой (левой), т.е. когда векторы а и е лежат по одну сторону от с (по
разные стороны от с 0) и проекция пре а является положительной (от-
0 При этом мы исключаем тривиальный случай, когда вектор а коллинеарен векто-
вектору с. В этом тривиальном случае [ас] = 0 и пре а = 0, так что равенство B.40) очевидно.
§ 3] ВЕКТОРНОЕ И СМЕШАННОЕ ПРОИЗВЕДЕНИЯ ВЕКТОРОВ 67
рицательной), но это и означает, что векторы [ас] и пре а • | с | g всегда
одинаково направлены.
Теорема доказана.
4. Смешанное произведение трех векторов. Пусть даны три про-
произвольных вектора a, b и с. Если вектор а векторно умножается на
вектор Ъ, а затем получившийся при этом вектор [ab] скалярно ум-
умножается на вектор с, то в результате получается число [ab] с, на-
называемое смешанным произведением в е к то р о в a, b и с.
Геометрический смысл смешанного произведения поясняет следую-
следующая теорема.
Теорема 2.16. Смешанное произведение [ab] с равно объему па-
параллелепипеда, построенного на приведенных к общему началу век-
векторах a, b и с, взятому со знаком плюс, если тройка abc правая, и
со знаком минус, если тройка abc левая. Если же векторы a, b и с
компланарны, то [ab] с равно нулю.
Доказательство. Прежде всего, исключим тривиальный слу-
случай, когда векторы а и b коллинеарны. В этом случае векторы a, b и с
компланарны 0, и нам требуется доказать, что смешанное произведе-
произведение [ab] с равно нулю. Но последнее очевидно, ибо векторное произве-
произведение [ab] двух коллинеарных векторов а и b равно нулю.
Остается рассмотреть случай, когда векторы з.иЪ не коллинеарны.
Обозначим через 5 площадь параллелограмма, построенного на приве-
приведенных к общему началу векторах а и Ь, а через е — орт векторного
произведения [ab].
Тогда, как доказано в предыдущем пункте, справедлива формула
B.39). С помощью этой формулы и формулы B.31) для скалярного про-
произведения получим
[ab] с = (Se) с = S(ec) = 5 | е | • пре с = 5 • пре с. B.41)
Сначала предположим, что векторы з.,Ъисне компланарны. Тогда
пре с с точностью до знака равна высоте h параллелепипеда, построен-
построенного на приведенных к общему началу век-
векторах a, b и с, при условии, что основанием
служит параллелограмм, построенный на
векторах а и b (рис. 2.18).
Таким образом, с точностью до знака
правая часть B.41) равна объему V постро-
построенного на векторах a, b и с параллелепипе-
параллелепипеда. Остается уточнить знак.
Очевидно, что пре с= +h, если векторы Рис- 218
е и с лежат по одну сторону от плоскости, определяемой векторами а и Ь,
и пре с = -h, если векторы е и с лежат по разные стороны от указанной
О Ибо среди трех некомпланарных векторов не может быть двух коллинеарных век-
векторов (см. следствие 3 из теоремы 2.5).
68 ВЕКТОРНАЯ АЛГЕБРА [ГЛ. 2
плоскости. Но это означает, что пре с = +Л, если тройки abc и abe од-
одной ориентации, и пре с = -h, если указанные тройки противоположной
ориентации. Так как по определению векторного произведения тройка
abe является правой (см. конец предыдущего пункта), то
{+h, если abc — правая тройка,
—п, если abc — левая тройка.
Для завершения доказательства теоремы достаточно вставить это зна-
значение пре с в правую часть B.41).
В случае, когда векторы a, b и с компланарны, вектор с лежит в
плоскости, определяемой векторами а и Ь, откуда следует, что пре с = О,
и по формуле B.41) [ab] с = 0. Теорема полностью доказана.
Следствие 1. Справедливо равенство [ab] c = a [be].
В самом деле, из переместительного свойства скалярного произведе-
произведения вытекает, что a [be] = [be] а, и достаточно доказать, что [ab] с = [be] a.
С точностью до знака, последнее равенство очевидно, ибо как правая,
так и левая его части с точностью до знака равны объему параллелепипе-
параллелепипеда, построенного на векторах a, b и с. Но и знаки правой и левой частей
последнего равенства совпадают, ибо обе тройки abc и Ьса относятся
к группе троек B.36) и имеют одинаковую ориентацию (см. п. 1).
Доказанное равенство [ab] с = a [be] позволяет записывать сме-
смешанное произведение трех векторов a, b и с просто в виде abc, не
указывая при этом, какие именно два вектора {первые два или по-
последние два) перемножаются векторно.
Следствие 2. Необходимым и достаточным условием компланар-
компланарности трех векторов является равенство нулю их смешанного про-
произведения.
В самом деле, компланарность векторов в силу теоремы 2.16 влечет
равенство нулю их смешанного произведения. Обратное вытекает из
того, что для некомпланарных векторов смешанное произведение (в силу
той же теоремы) равно отличному от нуля объему параллелепипеда.
Следствие 3. Смешанное произведение трех векторов, два из ко-
которых совпадают, равно нулю.
В самом деле, такие три вектора заведомо компланарны.
5. Алгебраические свойства векторного произведения. Вектор-
Векторное произведение векторов обладает следующими четырьмя свой-
свойствами:
1° [ab] =—[ba] (свойство антиперестановочности сомножителей);
2° [(oca)b] = oc[ab] {сочетательное относительно числового множи-
множителя свойство);
3° [(а + Ь) с] = [ас] + [be] {распределительное относительно суммы
векторов свойство);
4° [аа] = 0 для любого вектора а.
§ 3] ВЕКТОРНОЕ И СМЕШАННОЕ ПРОИЗВЕДЕНИЯ ВЕКТОРОВ 69
Убедимся в справедливости этих свойств.
Для доказательства свойства 1° положим с = [ab], d = [ba]. Если
векторы а и b коллинеарны, то в силу теоремы 2.13 с = d = 0, и свой-
свойство 1° доказано. Если же а и b не коллинеарны, то векторы cud, во-
первых, имеют одинаковую длину (в силу формулы B.38) для длины
векторного произведения) и, во-вторых, коллинеарны (в силу того, что
оба вектора end ортогональны к плоскости, определяемой векторами а
и Ь). Но тогда либо с = d, либо с = —d. Если бы имела место первая воз-
возможность, то по определению векторного произведения обе тройки abc
и Ьас оказались бы правыми, но это невозможно, ибо в силу п. 1 эти
тройки противоположной ориентации 0.
Итак, с = —d, и свойство 1° полностью доказано.
Для доказательства свойства 2° положим с = [(оса)b], d = a[ab]
и прежде всего исключим тривиальные случаи, когда вектор а колли-
неарен b или когда ос = 0. В этих случаях (в силу теоремы 2.13 и опреде-
определения произведения вектора на число) мы получим, что с = d = 0, и свой-
свойство 2° доказано.
Пусть теперь векторы а и b не коллинеарны иафО. Докажем, что и
в этом случае векторы end равны. Обозначим буквой ф угол между
векторами а и Ь, а буквой ц/ угол между векторами оса и Ь. По определе-
определению длины векторного произведения и произведения вектора на число
можно утверждать, что
| с | = | а | | а | | b | sin ц/, |d| = |cc||a||b| sin (p. B.42)
Учтем теперь, что могут представиться два случая: 1)ц/ = ф (когда
а > 0 и векторы а и оса направлены в одну сторону; рис. 2.19); 2) \|/ = тг - ф
(когда а <0 и векторы а и оса направлены в противоположные стороны;
рис. 2.20). В обоих случаях sin \j/ = sin ф и в силу формул B.42) | с | = | d |,
т.е. векторы cud имеют одинаковую длину.
Далее, очевидно, что векторы cud коллинеарны, ибо ортогональ-
ортогональность к плоскости, определяемой векторами оса и Ь, означает ортогональ-
ортогональность и к плоскости, определяемой
векторами а и Ь.
Для доказательства равенства
векторов end остается прове-
проверить, что эти векторы имеют оди-
одинаковое направление. Пусть 6 а аа оГа О S
а > 0 (а < 0); тогда векторы а и аа (а>0) (°к0)
одинаково направлены (противо- Рис. 2.19 Рис. 2.20
положно направлены), и, стало
быть, векторы [ab] и [(оса)Ь] также одинаково направлены (противопо-
(противоположно направлены), а это означает, что векторы d = a [ab] и с = [(oca)b]
всегда одинаково направлены. Свойство 2° доказано.
Одна из этих троек входит в группу B.36), а другая — в группу B.37).
70 ВЕКТОРНАЯ АЛГЕБРА [ГЛ. 2
Переходим к доказательству свойства 3°. Рассмотрим отдельно
два случая: 1) случай, когда векторы a, b и с компланарны] 2) слу-
случай, когда эти векторы не компланарны.
В первом случае векторы a, b и с, будучи приведены к общему началу,
располагаются в одной плоскости, которую мы обозначим буквой тт. Пусть
е — единичный вектор, принадлежащий плоскости тг и ортогональный к
вектору с, a g — единичный вектор, ортогональный к плоскости тг и такой,
что тройка ecg является правой.
Согласно теореме 2.15
[ас] = пре а • | с | g, [be] = пре b • | с | g,
[(а + Ь)с] = пре (а + Ь) • | с | g.
Свойство 3° непосредственно вытекает из последних трех формул и
из линейного свойства проекции пре а + пре b = пре (а + Ь) (п. 8 § 1).
Пусть теперь векторы a, b и с не компланарны. Так как три вектора
[(а + Ь) с], [ас] и [be] ортогональны к вектору с, то эти три вектора ком-
компланарны, а стало быть (в силу теоремы 2.5), линейно зависимы. Но это
означает, что найдутся такие числа X, \± и v, хотя бы одно из которых
не нуль, что справедливо равенство
) с] = n,[ac]+v[bc]. B.43)
Остается доказать, что X = \inX = v 0. Докажем, например, что X = \±. Для
этого, пользуясь уже доказанным (в п. 3 § 2) распределительным свой-
свойством 3° скалярного произведения, умножим равенство B.43) скалярно
на вектор b и учтем, что смешанное произведение [be] b равно нулю
(в силу следствия 3 из теоремы 2.16). В результате получим
А,[(а + Ь)с]Ь = ц,[ас]Ь.
Поскольку векторы a, b и с не компланарны, смешанное произведение
[ас] b не равно нулю, и для доказательства равенства X = \± достаточ-
достаточно доказать равенство смешанных произведений [(а + Ь) с] b и [ас] Ь.
Равенство абсолютных величин указанных смешанных произведений
вытекает из того, что (в силу теоремы 2.16) эти абсолютные величины
равны объемам двух параллелепипедов с равновеликими основания-
основаниями 2) (на рис. 2.21 эти равновеликие основания заштрихованы штрихами
0 Так как по условию хотя бы одно из указанных чисел отлично от нуля, то, дока-
доказав, что X = \i = v, мы можем поделить равенство B.43) на число X = \i = v, в результате
чего получим свойство 3°.
2) Основанием одного параллелепипеда служит параллелограмм, построенный на век-
векторах а и Ь, а другого — параллелограмм, построенный на векторах а + b и Ь. Равновели-
кость указанных параллелограммов вытекает из того, что они имеют общее основание,
совпадающее с вектором Ь, и общую высоту, опущенную из конца вектора а + b на век-
вектор Ь.
§3] ВЕКТОРНОЕ И СМЕШАННОЕ ПРОИЗВЕДЕНИЯ ВЕКТОРОВ 71
разных наклонов) и с общей высотой h, опущенной из конца вектора с
(рис. 2.21).
Равенство знаков указанных смешанных произведений вытекает из
определения правой (левой) тройки с помощью у с л ов и я 3° (см. п. 1),
ибо из этого условия 0 очевидно, что тройки acb и (а + b) cb одной
ориентации. Равенство X = [i доказано.
Аналогично (посредством умножения
B.43) скалярно на вектор а) доказывается
равенство X = V. Свойство 3° полностью до-
доказано.
Остается доказать свойство 4°, ут-
утверждающее, что векторный квадрат
любого вектора равен нулю, но это свой-
свойство непосредственно вытекает из теоремы
2.13 и из того, что любой вектор а колли- Рис 2 21
неарен сам с собой.
Замечание. Оба свойства 2° и 3° формулируются применитель-
применительно к первому сомножителю векторного произведения. (Свойство
2° утверждает возможность сочетания числового множителя ас пер-
первым множителем векторного произведения, а свойство 3° утверждает
возможность распределения относительно суммы векторов первого
сомножителя векторного произведения.)
Естественно возникает вопрос, справедливы ли аналогичные свой-
свойства применительно ко второму сомножителю векторного произведения,
т.е. можно ли утверждать, что
[a(ab)]=a [ab] и [a(b + c)] = [ab] + [ac]. B.44)
Оказывается, свойства B.44) уже являются следствиями
свойств 2° и 3° и свойства антиперестановочности 1°. В самом деле, из
свойств 1°, 2° и 3° вытекает, что
[a (ab)] = -[(ab) а] = -а [Ьа] = a [ab]
и аналогично
[а (Ь + с] = -[(Ь + с) а] = -{[Ьа] + [са]} = [ab] + [ас].
В заключение отметим, что доказанные свойства имеют фундамен-
фундаментальное значение. Они позволяют при векторном перемножении век-
векторных многочленов выполнять действия почленно и производить
сочетание числовых множителей {но при этом необходимо либо со-
сохранять порядок векторных множителей, либо при изменении это-
этого порядка менять знак на противоположный^.
В следующем пункте мы будем существенно использовать эти свойства.
О А также из того, что вектор а + b лежит в одной плоскости с векторами аиЬ, при-
причем «между ними».
72 ВЕКТОРНАЯ АЛГЕБРА [ГЛ. 2
6. Выражение векторного произведения в декартовых коор-
координатах.
Теорема 2.17. Если два вектора &иЪ определены своими декар-
декартовыми прямоугольными координатами
SL = {Xlt YX,ZX}, Ъ = {Х2, Y2,Z2},
то векторное произведение этих векторов имеет вид
[ab] = {YXZ2 - Y2ZX, ZXX2 - Z2XX, XXY2 - X2YX}. B.45)
Для запоминания формулы B.45) удобно использовать символ опре-
определителя 0 и переписать эту формулу в виде
[ab] =
J
Y,
X,
B.450
Раскрывая определитель, стоящий в правой части B.450, по элементам
первой строки, мы получим разложение вектора [ab] по базису i, j, k,
эквивалентное B.45).
Доказательство теоремы 2.17. Составим из тройки ба-
базисных векторов i, j и к все возможные пары и для каждой из пар под-
подсчитаем векторное произведение. Учитывая, что базисные векторы вза-
взаимно ортогональны, образуют правую тройку и имеют единичную дли-
длину, получим )
[ii] = 0, [ji]=-k,
-i, B.46)
[kk] = o.
Далее, принимая во внимание, что а = Х{ i + Y{ j + Zx k, b = X2 i + Y2 j +
+ Z2 k, и опираясь на установленную в предыдущем пункте возможность
почленного векторного перемножения векторных многочленов, получим
[ab] = XxX2[ii] + Хх y2[ij] + XxZ2[ik] + ^[ji] + Yx 72[jj] +
+ YxZ2[]k] + ZxX2[ki] + Zx y2[kj] + ZxZ2[kk].
Из последнего равенства и соотношений B.46) вытекает разложение
[ab] = (YXZ2 - Y2ZX) i + (ZXX2 - Z2XX) j + (XXY2 - X2YX) k,
эквивалентное равенству B.45). Теорема доказана.
0 Теория определителей второго и третьего порядков изложена в Дополнении к главе 1.
2) При этом мы учитываем также, что векторный квадрат вектора равен нулю (свой-
(свойство 4° из п. 5), и принимаем во внимание, что, поскольку тройка i j k является правой,
обе тройки j k i и к i j являются правыми, а все три тройки j i k, i k j и k j i — левыми (см.
п. 1, формулы B.36) и B.37)).
§3]
ВЕКТОРНОЕ И СМЕШАННОЕ ПРОИЗВЕДЕНИЯ ВЕКТОРОВ
73
Следствие. Если два вектора а = {Хх, Yx, Zx} и b = {Х2, Y2, Z2} кол-
линеарны, то координаты их пропорциональны, т.е.
Заметим, что в знаменателях последних равенств могут стоять нули.
Чтобы обойти эту трудность, мы раз и навсегда договоримся всякую про-
пропорцию a/b = c/d понимать в смысле равенства ad = be.
Для доказательства следствия достаточно заметить, что из равенства
нулю векторного произведения и из формулы B.45) вытекают равенства
1 2 = 2 1' 12 = 2 1' 1 2 = 2 1'
которые в силу сделанного выше замечания эквивалентны доказывае-
доказываемым пропорциям.
7. Выражение смешанного произведения в декартовых коор-
координатах.
Теорема 2.18. Если три вектора a, b и с определены своими де-
декартовыми прямоугольными координатами
то смешанное произведение abc равняется определителю, строки
которого соответственно равны координатам перемножаемых век-
векторов, т.е.
[abc] =
X, Yx
Л. 2 У2
Zx
X, К Z,
B.47)
Доказательство. Так как смешанное произведение abc равно
скалярному произведению векторов [ab] и с и поскольку координаты
вектора [ab] определяются формулой B.45), а координаты с равны
{Х3, Y3, Z3}, то в силу выражения B.33) для скалярного произведения
векторов в координатах получим
abc = Х3 (Y{Z2 - Y2ZX) + Y3 (X2Z{ - XXZ2) + Z3 (Xx Y2 - X2YX).
Если воспользоваться выражением для определителя второго поряд-
порядка и символом такого определителя, то последнее выражение можно
переписать в виде
abc =
х2 z2
+ z3
Y V
¦^2 ^2
B.48)
74 ВЕКТОРНАЯ АЛГЕБРА [ГЛ. 2
Формулы B.47) и B.48) эквивалентны, ибо при разложении определи-
определителя, стоящего в правой части B.47), по третьей строке получается вы-
выражение, стоящее в правой части B.48) 0. Теорема доказана.
Следствие. Необходимым и достаточным условием компланар-
компланарности трех векторов а = {Хь Yx, Zx}, Ъ = {Х2, Y2, Z2} и с = {Х3, Y3, Z3}
является равенство нулю определителя, строками которого слу-
служат координаты этих векторов, т.е. равенство
Y V У
Х2 Y2 Z2
Y V 7
Л3 Г3 Z3
= 0.
В самом деле, достаточно привлечь следствие 2 из теоремы 2.16 и
воспользоваться формулой B.47).
8. Двойное векторное произведение. Пусть даны три произволь-
произвольных вектора a, b и с. Если вектор Ъ векторно умножается на век-
вектор с, а вектор а также векторно умножается на векторное про-
произведение [be], то получающийся при этом вектор [a [be]] называет-
называется д в о и н ы м векторным произведением.
Теорема 2.19. Для любых векторов a, b и с справедлива формула 2)
[a [be]] = b (ас) - с (ab). B.49)
Доказательство. Рассмотрим отдельно два случая: 1) век-
векторы b и с коллинеарны; 2) векторы b и с не коллинеарны.
В первом случае обозначим через с0 орт вектора с и учтем, что
с = | с | • с0, b = ± | b | • с0, где знак плюс берется для случая, когда векто-
векторы b и с одинаково направлены, а знак минус — для случая, когда b и с
противоположно направлены. С помощью этих формул для с и b полу-
получим, что Ь(ас) - с (ab) = 03), т.е. правая часть B.49) равна нулю. Но и левая
часть B.49) равна нулю, ибо векторное произведение [be] двух колли-
неарных векторов равно нулю. Для первого случая теорема доказана.
Переходим к доказательству теоремы для случая, когда векторы b
и с не коллинеарны. Так как вектор [a [be] ] ортогонален вектору [be],
а последний ортогонален плоскости, определяемой векторами b и с, то
векторы [a [be]], b и с компланарны, а поэтому (в силу следствия 1 из
теоремы 2.5) вектор [a [be]] можно разложить по двум неколлинеарным
) См. формулу (Д1.16) из п. 5 Дополнения к главе 1.
) Для запоминания этой формулы удобно следующее правило: двойное вектор-
векторное произведение равно среднему вектору, умноженному на скалярное произведение
двух остальных, минус другой вектор внутреннего произведения, умноженный на
скалярное произведение двух остальных. Это правило годится и для случая, когда внут-
внутреннее векторное произведение относится к первым двум векторам: с его помощью полу-
получается следующая формула [[ab] с] = b (ас) - a (be), являющаяся следствием B.49).
) В самом деле, элементарный подсчет показывает, что как b (ас), так и с (ab) равно
±|Ь|- | с | • (ас0) • с0.
§ 3] ВЕКТОРНОЕ И СМЕШАННОЕ ПРОИЗВЕДЕНИЯ ВЕКТОРОВ 75
векторам b и с как по базису, т.е. найдутся вещественные числа аир
такие, что
[a [be]] = ab + рс. B.50)
Остается доказать, что а = ас, р = -аЬ. Докажем, например, что а = ас.
Воспользуемся теоремой 2.15. Для этого обозначим буквой к плоскость,
определяемую векторами b и с, буквой е — единичный вектор, лежащий
в тг и ортогональный к с, буквой g — единичный вектор, ортогональный
плоскости тг и такой, что тройка ecg является правой. По теореме 2.15
npeb- |c| -g. B.51)
Если с0 — орт вектора с, то правая тройка ecog образует декартов
прямоугольный базис. Разложим вектор а по этому базису, учитывая,
что координаты равны проекциям вектора а на базисные векторы:
а = е • пре а + с0 • прс а + g • пр^ а. B.52)
Умножая векторно B.52) на B.51) и учитывая, что [eg] =—с0, [cog] = e,
[gg] =0 (сравните с формулами B.46)), получим
[а [be]] = -с0 • пре а • пре b • | с | + е • прс а • пре b • | с |. B.53)
Сравнивая формулы B.50) и B.53), будем иметь
ab + рс = -с0 • пре а • пре b • | с | + е • прс а • пре b • | с |. B.54)
Остается умножить обе части B.54) скалярно на е и учесть, что
be = пре Ь, сое = 0, ее = 1. Окончательно получим
a • пре b = прс а • пре b • | с | или a = | с | • прс а = ас.
Для доказательства равенства р = -ab следует в проведенных рассуж-
рассуждениях поменять ролями векторы с и b и учесть, что [а [cb] =-[а [be]].
Теорема доказана.
Замечание. Дадим другое доказательство теоремы 2.19, основанное на специаль-
специальном выборе декартовой прямоугольной системы и на непосредственном просчете в коор-
координатах всех выражений, участвующих в формуле B.49). Направим ось Oz вдоль векто-
вектора с, а ось Оу возьмем в плоскости векторов b и с. Тогда векторы а, Ь и с будут иметь
следующие координаты:
а = {Х, Y,Z}, b = {0, Y',Z'}, с = {0, 0, Z"}.
Применяя формулу для векторного произведения B.45), будем иметь [be] = {Y'Z", 0, 0},
а отсюда по той же формуле B.45)
[а [Ьс]] = {0, ZY'Z", -YY'Z"}. B.55)
Далее, очевидно, что (ас) = ZZ"', (ab) =YY' + ZZ', а поэтому
b (ас) = {0, Y'ZZ", Z'ZZ"}. B.56)
c(ab) = {0, 0, YY'Z" + ZZ'Z"}. B.57)
Из сопоставления равенств B.55), B.56) и B.57) вытекает формула B.49).
ГЛАВА 3
ПРЕОБРАЗОВАНИЕ ДЕКАРТОВЫХ
ПРЯМОУГОЛЬНЫХ КООРДИНАТ
НА ПЛОСКОСТИ И В ПРОСТРАНСТВЕ
В этой главе устанавливаются формулы, по которым преобразуются
координаты произвольной точки плоскости (или соответственно про-
пространства) при переходе от одной декартовой прямоугольной системы к
произвольной другой декартовой прямоугольной системе.
Мы доказываем, что координаты произвольной точки относительно
первой системы являются линейными функциями координат той же
точки М относительно второй системы.
Попутно мы устанавливаем, что если две декартовы прямоугольные
системы на плоскости к (в пространстве) образованы парами (тройками)
одной ориентации, то одна из этих систем может быть совмещена с дру-
другой посредством параллельного переноса и последующего поворота на
некоторый угол ф в плоскости тг (вокруг некоторой оси в пространстве).
§ 1. Преобразование декартовых прямоугольных координат
на плоскости
Пусть на плоскости к заданы две произвольные декартовы прямоуголь-
прямоугольные системы координат: первая, определяемая началом О и базисными
векторами i и j, ивторая, определяемая нача-
началом О'и базисными векторами Г и j' (рис. 3.1).
Поставим перед собой цель — выразить коор-
координаты х и у произвольной точки М плоскости тг
относительно первой системы координат че-
через координаты х' и у' этой же точки М относи-
относительно второй системы координат.
Заметим, что координаты х и у совпадают с
Рис- 31 координатами вектора ОМ в разложении его по
базису i j, а координаты х' и у' совпадают с координатами вектора О'М
в разложении его по базису i'j', т.е.
--xi + y'j, C.1)
(УМ=хТ + уу. C.2)
§ 1] ПРЕОБРАЗОВАНИЕ КООРДИНАТ НА ПЛОСКОСТИ 77
Если обозначить через а и Ь координаты начала О' второй системы от-
относительно первой системы, то
~ОО} =ai + bj. C.3)
Так как любой вектор на плоскости тс можно разложить по базису ij,
то найдутся числа ап, а12, ос2\ и а22 такие, что
j' = a21i + a22j. C.4)
В силу правила треугольника сложения векторов (см. рис. 3.1)
ОМ = ОО' + О'М. C.5)
Вставляя в правую часть C.2) значения V и j', определяемые формулами
C.4), и после этого подставляя в C.5) значения ОМ , О'М и 00', опре-
определяемые формулами C.1), C.2) и C.3), и группируя слагаемые относи-
относительно i и j, получим О
х\ + у] = (а + апх' + а2\У') i + (& + a12x' + a22z/') j. C.6)
В силу единственности разложения вектора по базису из равенства
C.6) получим искомые формулы преобразования координат:
х = а + апх' + Щ\у\
y = b + a12x' + а22у'. C.7)
Мы приходим к следующему замечательному выводу: каковы бы ни
были две произвольные декартовы системы на плоскости тс, коорди-
координаты любой точки плоскости тс относительно первой системы явля-
являются линейными функциями координат той же точки
относительно второй системы.
Установив этот фундаментальный алгебраический факт, перейдем к
геометрической интерпретации полученных формул. Для этого догово-
договоримся обозначать символом cos (ab) косинус угла между векторами а
и Ь. Помножая каждое из равенств C.4) скалярно сначала на i, а затем
на j и учитывая, что ii = 1, jj = 1, ij = 0, получим 2)
an = cos (Pi), a12 = cos(fj),
a21 = cos (j'i), a22 = cos (j j).
Будем существенно различать следующие два случая: 1) случай, когда
базисные векторы направлены так, что оба кратчайших поворота от i к j
О Возможность сгруппировать слагаемые относительно i и j вытекает из свойств ли-
линейных операций над векторами (см. п. 2 § 1 гл. 2).
2) Учитываем также, что скалярное произведение двух единичных векторов равно
косинусу угла между ними.
78 ПРЕОБРАЗОВАНИЕ ДЕКАРТОВЫХ ПРЯМОУГОЛЬНЫХ КООРДИНАТ [ГЛ. 3
от i' к j' совершаются в одном направлении (либо оба по часовой стрел-
стрелке, либо оба против часовой стрелки); 2) случай, когда базисные векто-
векторы направлены так, что кратчайшие повороты от i к j и от i' к j' совер-
совершаются в противоположных направлениях.
В обоих случаях обозначим через ф угол между базисными вектора-
векторами i и i', отсчитываемый в направлении, отвечающем кратчайшему по-
повороту от i к j. Тогда ocn = cos ф.
В первом случае угол между базисными векторами j и j' также
равен ф, и поэтому первая система координат может быть совме-
совмещена со второй посредством параллельного пе-
переноса вдоль вектора 00' и последующего по-
поворота в плоскости к вокруг начала на угол ф
(этот случай изображен на рис. 3.1).
Во втором случае угол между базисными
векторами j и j' равен тг - ф и первую систему ко-
координат невозможно совместить со второй по-
посредством параллельного переноса и поворота,
не выводящего из плоскости к (нужно еще изме-
изменить направление оси ординат на противоположное или, что то же са-
самое, взять изображение плоскости тг в плоском зеркале. Второй случай
изображен на рис. 3.2).
Пользуясь формулами C.8), подсчитаем для обоих случаев коэффи-
коэффициенты осп, а12, oc2i и а22 *).
В первом случае получим: ап = со8ф, а22 = cos ф, а12 =
(п Л . (и Л
= COS ф = БШф, ОС21 = COS —+ ф = -БШф .
Во втором случае получим: an = cos ф, а22 = cos (тг - ф) == -cos ф,
(п Л . Гтс Л
а12 = cos — ф = sin ф, а21 = cos — ф = sin ф.
Таким образом, в первом случае формулы преобразования коор-
координат C.7) принимают вид
х = а + х' cos ф - у' sin ф, у = Ь + х' sin ф + у' cos ф. C.9)
Во втором случае соответствующие формулы преобразования
принимают вид
х = а + xf cos ф + у' sin ф, у = b + x' sin ф - у' cos ф. C.10)
Если мы примем договоренность рассматривать только такие
системы координат, у которых кратчайший поворот от первого
О Все углы отсчитываются в направлении, отвечающем кратчайшему повороту от i к j.
§ 1] ПРЕОБРАЗОВАНИЕ КООРДИНАТ НА ПЛОСКОСТИ 79
базисного вектора ко второму происходит против часовой стрел-
стрелки (будем называть такие системы правыми), то второй случай будет
исключен и любое преобразование координат будет определяться
формулами C.9).
Приходим к выводу, что, каковы бы ни были две правые системы
координат Оху и О'х'у', первая из них может быть совмещена со
второй посредством параллельного переноса вдоль вектора 00' и
последующего поворота вокруг начала на некоторый угол (р.
Разрешая уравнения C.9) относительно х' и у', получим обратные
формулы, выражающие координаты х' и у' любой точки М относитель-
относительно второй системы через координаты ее относительно первой системы 0:
у' = -(х-а) sin q> + (y-b) cos ф.
Общее преобразование координат C.9) распадается на сумму двух
преобразований, одно из которых отвечает только параллельному пере-
переносу системы, а другое — только повороту системы вокруг начала на
угол ф.
В самом деле, полагая в формулах C.9) угол поворота ф равным нулю,
получим формулы преобразования координат при параллельном пе-
переносе системы вдоль вектора 00' = {а, Ь}\
х = а + х', у = Ь + у'. C.12)
Полагая в тех же формулах C.9) координаты аи b вектора 00' рав-
равными нулю, получим формулы преобразования координат при пово-
повороте системы вокруг начала на угол ф (в направлении против часо-
часовой стрелки)
х = х' cos ф - у' sin ф, у = х' sin ф + у' cos ф. C.13)
§ 2. Преобразование декартовых прямоугольных координат
в пространстве
1. Общие формулы преобразования. Пусть в пространстве зада-
заданы две произвольные декартовы прямоугольные системы координат:
первая, определяемая началом О и базисными векторами i j k, и вто-
вторая, определяемая началом О' и базисными векторами i'j'k'.
Поставим перед собой цель — выразить координаты х, у и z произ-
произвольной точки М относительно первой системы через координаты х', у' и
z' этой же точки М относительно второй системы.
0 Так как определитель системы C.9) равен единице, то эту систему можно разре-
разрешить относительно х'иг/'.
80 ПРЕОБРАЗОВАНИЕ ДЕКАРТОВЫХ ПРЯМОУГОЛЬНЫХ КООРДИНАТ [ГЛ. 3
Заметим, что координаты х, у, z совпадают с координатами вектора
ОМ в разложении его по базису i j k, и координаты x',y',z' совпадают
с координатами вектора О'М в разложении его по базису i'j'k', т.е.
0М = х\ + у] + zk, C.14)
Если обозначить через а, Ь и с координаты начала О' второй системы
относительно первой системы, то
~66' = а\ + Ь] + ск. C.16)
Так как любой вектор можно разложить по базису i j k, то найдутся де-
девять чисел щт A = 1, 2, 3; т = 1, 2, 3) таких, что
i' = ani + a12j + a13k, j' = a21i + a22 j + a23k,
В силу правила треугольника сложения векторов
ОМ = 00' + О'М. C.18)
Вставляя в правую часть C.15) значения V, У и к', определяемые
формулами C.17), и после этого подставляя в C.18) значения ОМ,
О'М и 00', определяемые формулами C.14), C.15) и C.16), и груп-
группируя слагаемые относительно i, j и к, получим
х1 + у'] + zk = (
+ (b + al2x' + a22y' + ос32<г 0 j + (c + a13x' + a23z/' + а33<г О к. C.19)
В силу единственности разложения вектора по базису из равенства
C.19) получим искомые формулы преобразования координат:
х =
y = b + al2x' + а22у' + ос32<г', C.20)
z = с + a13x' + a23y' + а33<г'.
Итак, доказано следующее фундаментальное утверждение: каковы
бы ни были две произвольные декартовы прямоугольные системы
координат, координаты х, у и z любой точки пространства отно-
относительно первой системы являются линейными функциями коорди-
координат х', у' и zf той же точки относительно второй системы.
Умножая каждое из равенств C.17) скалярно сначала на i, а затем на
j и на к, получим следующие выражения для чисел а1т:
ап =cos (i'i), a12 = cos (ij), a13 = cos (i'k),
a21 = cos (j'i), a22 = cos (j j), a23 = cos (j'k),
a31 = cos (kl), a32 = cos (к j), a33 = cos (k'k ).
§2]
ПРЕОБРАЗОВАНИЕ КООРДИНАТ В ПРОСТРАНСТВЕ
81
2. Выяснение геометрического смысла. Углы Эйлера. Уясним
геометрический смысл формул преобразования C.20). Для вычисле-
вычисления чисел щт и их геометрического значения пред-
предположим, что первая и вторая системы имеют
общее начало (т.е. а = Ь = с = 0).
Ради определенности будем считать, что обе
системы Oxyz и Ox'y'z' являются правыми.
Введем в рассмотрение три угла, полностью ха-
характеризующие расположение осей второй систе-
системы относительно первой. Обозначим через и ось,
совпадающую с линией пересечения координат-
координатной плоскости Оху первой системы с координат-
координатной плоскостью Ох'у' второй системы и направленную так, что три
направления Oz, Oz' и и образуют правую тройку рис. 3.3).
Пусть теперь ц/ — угол между осями Ох и и, отсчитываемый в плос-
плоскости Оху от оси Ох в направлении кратчайшего поворота от Ох к Оу,
9 — не превосходящий тг угол между осями Oz и Oz' и, наконец, ф —
угол между осями и и Ох, отсчитываемый в плоскости Ох'у' от оси и в
направлении кратчайшего поворота от Ох' к Оу'.
Три угла ф, ц/ и 9 называются углами Эйлера 0. Очевидно, по трем
углам Эйлера и по направлениям осей Ох, Оу и Oz однозначно опре-
определяются направления осей Ох', Оу' и Oz'.
Если заданы три угла Эйлера, то преобразование первой системы
Oxyz во вторую систему Ох 'у 'z' можно представить в виде последова-
последовательного проведения следующих трех поворотов:
1) поворота системы Oxyz на угол \j/ вокруг оси Oz, переводящего
эту систему в систему Oxxyxzx (рис. 3.4);
2) поворота системы Oxxyxzx на угол 9 вокруг оси Охх, переводящего
эту систему в систему Ох2у2^2 (Рис- 3.5);
3) поворота системы Ох2у2^2 на Угол Ф вокруг оси Oz2 = Oz'
дящего эту систему в систему Ox'y'z' (рис. 3.6).
перево-
перевоРис. 3.4
Рис. 3.5
Рис. 3.6
Каждый из указанных трех поворотов производится в одной из ко-
координатных плоскостей соответствующей системы. Поэтому для
0 Леонард Эйлер A707-1783) — великий математик, член Петербургской Акаде-
Академии наук, большую часть жизни провел в России, по происхождению швейцарец.
82 ПРЕОБРАЗОВАНИЕ ДЕКАРТОВЫХ ПРЯМОУГОЛЬНЫХ КООРДИНАТ [ГЛ. 3
соответствующих координат при каждом таком повороте будут справед-
справедливы формулы вида C.13) (см. § 1).
Это позволяет написать следующие формулы:
1) для первого поворота
х-хх cosy - ух sin\|/, у-хх sin\|/ + ух cos\j/, z = zx; C.21)
2) для второго поворота
хх = х2, ух = У2 cos 9 - 22 sin 9, zx = y2 sin 9 + z2 cos 9; C.22)
3) для третьего поворота
х2 = х' cos ф - у' sin ф, у2 = х' sin ф + у' cos ф, z2 = z'. C.23)
Внося C.23) в C.22), а затем C.22) в C.21), получим
х - (х' cos ф - у' sin ф) cos \|/ -
- [(х' sin ф + у' cos ф) cos 9 - z' sin 9] sin \j/,
y = (x' cos ф - у' sin ф) sin \j/ +
+ [(x' sin ф + z/' cos ф) cos 9 - z' sin 9] cos \|/, C.24)
2 = (xr sin ф + у' cos ф) sin 9 + z' cos 9.
Сравнивая формулы C.24) с формулами C.20) (при a = b= =c = 0),
окончательно получим выражения для чисел щт через углы Эйлера:
ах х = cos \|/ cos ф - sin \j/ cos 9 sin ф,
a12 = sin \|/ cos ф + cos \|/ cos 9 sin ф,
a13 = sin 9 sin9,
a21 = - cos \|/ sin ф - sin \|/ cos 9 cos ф,
a22 = - sin \|/ sin ф + cos \|/ cos 9 cos ф, C.25)
a23 = sin 9 cos ф,
a31 = sin \|/ sin 9,
a32 = -cos \|/ sin 9,
a33 = cos9.
Для вывода формул C.25) мы использовали допущение, что обе сис-
системы имеют общее начало. Разумеется, отказ от этого допущения не
изменит вида формул C.25), ибо ни направление осей координат, ни ве-
величина углов Эйлера не зависят от того, где выбрано начало первой и
второй систем.
Самое общее преобразование координат представляет собой су-
суперпозицию {последовательное проведение) параллельного перено-
§ 3] ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ 83
са и трех производимых в соответствующих координатных плос-
плоскостях поворотов и определяется формулами C.20), в которых {при
условии, что обе системы являются правыми) числа щт выражают-
выражаются через углы Эйлера по формулам C.25).
Формулы, аналогичные C.25), могут быть получены и для случая,
когда системы Oxyz и О 'х 'у 'z' либо обе являются левыми, либо имеют
разную ориентацию.
Замечание. Если Oxyz и O'x'y'z' — две произвольные правые
декартовы прямоугольные системы в пространстве, то первая из них
может быть совмещена со второй посредством параллельного переноса,
совмещающего их начала, и одного поворота вокруг некоторой оси
в пространстве.
Для нахождения указанной оси, во-первых, учтем, что она проходит
через общее начало О' совмещенных посредством параллельного перено-
переноса систем (ибо это начало остается неподвижным при повороте), и, во-вто-
во-вторых, заметим, что если О'М' — произвольный вектор, лежащий на иско-
искомой оси вращения, то координаты точки М' не изменяются при повороте.
Отсюда вытекает, что для нахождения координат х', у' и z' точки М'
в системе O'x'y'z' следует в системе C.20) (взятой при а = Ь = с = 0)
положить х = х', у = у', z = z'. Это приведет нас к следующей однород-
однородной системе трех уравнений с тремя неизвестными:
(ссп - \)х' + a2ly' + a3lz' = 0,
al2x' + (a22- \)y' + a32z' = 0, C.26)
al3x' + a23y' + (a33- 1) z' = 0.
С помощью формул C.25) можно показать, что определитель этой сис-
системы равен нулю. Стало быть, в силу п. 8 Дополнения к гл. 1 система
C.26) имеет нетривиальные решения, которые определяют совокуп-
совокупность коллинеарных векторов О'М', лежащих на оси вращения.
Одним из таких векторов будет вектор O'Mq = {х', у', 1}, координа-
координаты х' и у' которого определяются из первых двух уравнений C.26) при
z'=\.
§ 3. Линейные преобразования
1. Понятие линейных преобразований плоскости. Линейным
преобразованием плоскости п называется преобразование, при кото-
котором каждая точка М (х, у) этой плоскости переходит в точку М', коор-
координаты х', у' которой определяются формулами
х' = апх + аХ2у + а13,
у' = а2Хх + а22у + #23- C.27)
84 ПРЕОБРАЗОВАНИЕ ДЕКАРТОВЫХ ПРЯМОУГОЛЬНЫХ КООРДИНАТ [ГЛ. 3
Обычно говорят, что соотношения C.27) задают линейное преобразова-
преобразование плоскости. Определитель
А=
C.28)
называется определителем линейного преобразования C.27). В слу-
случае А Ф О преобразование C.27) называется невырожденным, а в слу-
случае А = 0 — вырожденным. Мы в дальнейшем будем рассматривать
невырожденные линейные преобразования, т.е. будем считать
А фО {). Такие линейные преобразования называются аффинными.
Замечание. Наименование линейное преобразование объясня-
объясняется тем, что координаты х', у' точек М' — образов точек М (х, у) (сами
эти точки называются прообразами точек М') являются линейными
функциями координат х, у. Отметим, что определение линейных преоб-
преобразований инвариантно относительно выбора декартовой системы ко-
координат, поскольку координаты точки в одной декартовой системе коор-
координат выражаются линейно через ее координаты в любой другой декар-
декартовой системе координат.
2. Аффинные преобразования плоскости. В предыдущем пунк-
пункте мы отметили, что аффинные преобразования плоскости — это линей-
линейные преобразования C.27), для которых А^О. Перечислим некоторые
свойства таких преобразований.
1°. Последовательное выполнение двух аффинных преобразова-
преобразований является аффинным преобразованием.
Это свойство проверяется непосредственно.
2°. Тождественное преобразование х' = х, у' = у также является
аффинным.
Действительно, для этого преобразования
А =
1 О
О 1
= 1*0.
3°. Преобразование, обратное данному аффинному (т.е. преобра-
преобразование плоскости тг, переводящее точки М'(х', у') в точки М(х, у)),
также является аффинным.
Докажем это свойство. Обратное преобразование может быть полу-
получено следующим образом. Найдем х и у из соотношений C.27). Для это-
этого перепишем их следующим образом:
22y = y'-a23.
) Если А = 0, то с помощью преобразования C.27) все точки М (х, у) плоскости п пре-
преобразуются в точки М' (х', у'), расположенные на некоторой прямой. Действительно, если
А = 0,тоап= Ха2\, а^х — ^22- Поэтому, если мы умножим на —X второе из соотношений C.27)
и сложим с первым, то получим х' — Ху' = = а13 — А,а2з- Мы видим, что координаты х', у'
точек М' удовлетворяют линейному уравнению, т.е. все точки М' лежат на прямой.
§ 3] ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ
Решение этой системы имеет такой вид:
х = Ах /А> У = АУ /А>
85
C.29)
где
А =
a 2i
«12
а22
Ф
0, Ах =
х'
у'
-«13
"«23
«12
а22
' АУ =
У
ап >
«21 4
''-«13
^ " ^23
(см. Дополнение к гл. 1, формулы (Д1.8) и (Д1.6)). Раскроем выражения
для Ах и Ау по формуле (Д1.2) и подставим полученные значения в C.29).
Получим следующие выражения для обратного преобразования:
22 / 12 /
А А А
^23
а, 9
22
C.30)
Видим, что обратное преобразование является линейным. Чтобы убе-
убедиться, что оно является аффинным, остается доказать, что его опреде-
определитель А' Ф 0. В самом деле,
А' =
апа22 -а12а21 _ _^_ _ j_
А2 А2 А '
Итак, доказано, что преобразование, обратное данному аффинному,
также является аффинным.
4°. Аффинное преобразование представляет собой взаимно од-
однозначное преобразование плоскости.
Это означает, что каждая точка М' (х\ у') есть образ единственной
точки М (х, у) ив свою очередь каждая точка М (х, у) представляет со-
собой прообраз лишь одной точки М' (х', у'). _
Докажем это свойство. Предположим, что две точки М (х, у)иМ(х,у)
преобразуются с помощью C.27) в одну точку М' (х\ у'). Тогда путем
вычитания из соотношений C.27) аналогичных соотношений для коор-
координат х, у точки М получим следующую систему линейных уравнений
для разностей х-х, у - у:
- х) + а22(у — у) = 0.
86 ПРЕОБРАЗОВАНИЕ ДЕКАРТОВЫХ ПРЯМОУГОЛЬНЫХ КООРДИНАТ [ГЛ. 3
Эта система имеет нулевое решение х - х =0, у - у =0, а так как ее оп-
ределитель А =
Ф 0 , то это нулевое решение единственно.
Итак, х = х, у = у, т.е. точки М и М совпадают. Таким образом, каждая
точка М'(х', у') есть образ единственной точки М(х, у). Обращаясь к
формулам C.30), путем аналогичных рассуждений мы убедимся, что
каждая точка М (х, у) представляет собой прообраз лишь одной точки
М\х',у').
3. Основное свойство аффинных преобразований плоскости.
Докажем следующее утверждение:
Теорема 3.1. При аффинном преобразовании плоскости каждая
прямая переходит в прямую и параллельные прямые переходят в
параллельные прямые.
Доказательство. Рассмотрим на плоскости к прямую L, опре-
определяемую уравнением
Ах + Ву + С = 0. C.31)
Чтобы выяснить, что представляет собой совокупность точекМ' (х', у') —
образов точек М(х, у), расположенных на прямой L, — подставим в урав-
уравнение C.31) вместо хиуих выражения через х\ у' по формулам C.30). В
результате получим соотношение вида
А'х' + В'у'+С' = 0. C.32)
Мы видим, что х' и у' удовлетворяют линейному уравнению C.32), т.е.
точки М'{х\ у') расположены на прямой Z/, определяемой уравнением
C.32).
Итак, доказано, что все точки прямой L при аффинном преобразова-
преобразовании C.27) переходят в точки прямой Z/. Так как при обратном аффин-
аффинном преобразовании C.30) все точки прямой L' перейдут в точки пря-
прямой L, то в силу взаимной однозначности аффинного преобразования
(см. п. 2, свойство 4°), прямая L переходит в прямую L'. Итак, при аф-
аффинном преобразовании прямая переходит в прямую.
Перейдем к доказательству второй части теоремы. Пусть Lx и L2 —
параллельные прямые, a L{ и L2' — их образы при аффинном преобразо-
преобразовании C.27) плоскости тт. Допустим, что прямые L{ и L2r имеют общую
точку М'. Так как аффинное преобразование взаимно однозначно, то
М' — образ только одной точки М, причем М должна принадлежать и
L{ и L2, что невозможно, поскольку L{ и L2 параллельны. Следователь-
Следовательно, L{ и L{ не имеют общих точек, т.е. параллельны. Теорема доказана.
Естественно поставить вопрос о геометрическом способе задания
аффинного преобразования плоскости. Определенный ответ на этот во-
вопрос дает следующее утверждение:
§3]
ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ
87
Теорема 3.2. Аффинное преобразование плоскости определено од-
однозначно, если заданы образы трех точек, не лежащих на одной пря-
прямой и эти образы также не располагаются на одной прямой.
Доказательство. Пусть точки Мх{хх, ух), М2{х2, у2), М3(х3, у3)
плоскости тг не лежат на одной прямой и точки М({х{, у{), М2{х2, у2),
Щ(х? Уз) этои плоскости также не лежат на одной прямой. Убедимся,
что существует единственное аффинное преобразование плоскости тг,
переводящее точки Мх, М2, М3 в точки М{, М2, М{ соответственно.
Пусть искомое аффинное преобразование задается соотношениями
C.27) с неизвестными коэффициентами ап, аХ2, ахъ, а2Х, а22, а2Ъ. Дока-
Докажем, что при наших предположениях эти коэффициенты определяются
однозначно и, кроме того, определитель А, вычисленный по формуле
C.28), отличен от нуля. Этим, очевидно, и будет завершено доказатель-
доказательство теоремы.
С помощью первой из формул C.27) получим соотношения
хх =
C.33)
которые можно рассматривать как систему трех линейных уравнений
относительно неизвестных ап, аХ2, ахз. Определитель этой системы
Ух
У2
Уз
х2 -хх у2- ух
Н ~хх Уз- Ух
C.34)
отличен от нуля, так как по абсолютной величине равен площади парал-
лелограмма, построенного на неколлинеарных векторах МХМ2 я МХМ3 {).
Поэтому система C.33) однозначно разрешима относительно ахх, аХ2 и а13.
Обращаясь ко второй из формул C.27), с помощью аналогичных рассуж-
рассуждений убедимся, что и величины а2Х, а22 и а23 определяются однозначно.
Таким образом, однозначно определяется линейное преобразование C.27),
переводящее точки Мх, М2 и М3 соответственно в точки М{, М2 и М{.
Остается доказать, что определитель А (см. C.28)) полученного преобра-
преобразования отличен от нуля. Обратимся к определителю
У2 ~У\
Уз ~ У[
C.35)
) Так как точки М{, М2 и М3 не лежат на одной прямой, то векторы МХМ2 и MXM% не
коллинеарны. В системе координат Oxyz (ось Oz перпендикулярна плоскости к) эти век-
векторы соответственно имеют координаты {х2 - хъ у2 - уъ 0} и {хъ - хъ у3 - уъ 0}. Поэто-
Поэтому модуль векторного произведения этих векторов равен модулю определителя C.34) и,
как известно, равен площади параллелограмма, построенного на данных векторах.
ПРЕОБРАЗОВАНИЕ ДЕКАРТОВЫХ ПРЯМОУГОЛЬНЫХ КООРДИНАТ
[ГЛ.З
Этот определитель отличен от нуля, так как по абсолютной величине
равен площади параллелограмма, построенного на неколлинеарных век-
векторах М{М2 и М[М'Ъ 0. С помощью первой из формул C.27) получим
для элемента х{- х{определителя C.35) следующее выражение:
х{- х{= ап(х2 - хх) + аХ2(у2 ~ У\)-
Аналогичные выражения получим с помощью формул C.27) и для ос-
остальных элементов определителя C.35). Подставляя найденные выра-
выражения для х2- х{, у2- у{, х{- х{и у{- у {в C.35), после несложных пре-
преобразований получим
~х\ Уч~ У\
хз ~ х\ Уз ~ У\
Так как определители
Х2 ~х\ У2~ У\
Н ~х\ Уз- У\
C.36)
х2 - хх у2- ух
хъ ~ х\ Уъ ~ У\
х2 - хх у2- ух
хъ ~х\ Уъ~ У\
а, 9
а91
-^22
отличны от нуля, то из C.36) следует, что и А =
доказана.
Замечание. Аффинное преобразование, для которого А =
Ф 0 . Теорема
^22
= 1,
называется эквиаффинным, т.е. сохраняющим площади. Для таких пре-
преобразований соотношение C.36) означает равенство площадей парал-
лелограммов, построенных на векторах МХМ2 и МХМ3 и на векторах
М[М2 и М[М'Ъ .
4. Основной инвариант аффинного преобразования плоско-
плоскости. Простым отношением трех точек А, В и С на прямой L назы-
называется число
\Z\nL, 1 — , yo.ol)
которое, очевидно, равно отношению, в котором точка В делит на-
направленный отрезок АС.
Докажем следующее утверждение:
Теорема 3.3. Простое отношение трех точек на прямой явля-
является инвариантом аффинного преобразования.
Иными словами, простое отношение трех точек на прямой не меня-
меняется при аффинных преобразованиях.
0 Эти векторы неколлинеарны, так как точки М{, М2'и М3' не лежат на одной пря-
прямой. См. предыдущую сноску.
§ 3] ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ 89
Доказательство. Рассмотрим три точки А(хх, ух), В(х2, у2) и
С(х3, Уз) на прямой L. Из формул A.11) гл. 1 для координат точки, деля-
делящей отрезок АС в отношении Х = АВ/ВС, получаем для рассматривае-
рассматриваемого случая следующее выражение для X:
Х3 ~ Х2 Уз ~ У2
Пусть А '(х{, у{), В\х2\ у2) и С'(х3' Уз) — образы точек Л, В и С соответ-
соответственно при аффинном преобразовании C.27). Точка В' делит отрезок
А'С' в отношении А/, причем
Л'= 4—Г- C-39)
Х3 ~ Х2
Из C.27) получаем
х2-х{= аи(х2 -х{) + а{2(У2 - У\),
C.40)
х{- xz = ап(х3 - х2) + al2(y3 - у2).
Из соотношений C.38) получим, что х2 - хх = Х(х3 - х2) и у2- ух =
= Х(у$- у2). Подставляя найденные значения х2 —хх и у2 — ух в первую
из формул C.40), получим
х{- х{= Х[ап(х3 - х2) + аХ2{уъ - у2)].
Подставим теперь в числитель правой части C.39) найденное выраже-
выражение для х2- х{, а в знаменатель — выражение для х3/-х2/(см- вторую
формулу C.40)). После сокращения на ап(хъ-х2)+ аХ2(уъ-у2) получим
Х = Х'.ТжкжХ = АВ/ВС=(АВС)иХ' = А'В'/В'С'==(А'В'С')(см.C.37)),
то (ABC) = (A'B'C), т.е. при аффинном преобразовании простое отно-
отношение трех точек не меняется. Теорема доказана.
Замечание. Простое отношение трех точек называется основным
инвариантом аффинного преобразования, так как через него могут быть
выражены все другие инварианты аффинного преобразования.
5. Аффинные преобразования пространства. Аффинным пре-
преобразованием пространства называется преобразование, при котором
каждая точка М (х, у, z) пространства переходит в точку М', координа-
координаты х'', у'', ze которой определяются формулами
х' = апх-\- аХ2у + ахзг + аХ4,
у' = а2Хх + а22у + a23z + a24, C.41)
90 ПРЕОБРАЗОВАНИЕ ДЕКАРТОВЫХ ПРЯМОУГОЛЬНЫХ КООРДИНАТ
причем определитель
[ГЛ.З
А =
hi
av
a
^32
считается отличным от нуля: А^О.
В полной аналогии со случаем плоскости доказываются следующие
свойства аффинных преобразований пространства.
1°. Последовательное выполнение аффинных преобразований про-
пространства является аффинным преобразованием пространства.
2°. Тождественное преобразование является аффинным.
3°. Преобразование, обратное данному аффинному, также явля-
является аффинным.
4°. Аффинное преобразование пространства взаимно однозначно.
Основное свойство аффинного преобразования пространства форму-
формулируется следующим образом: при аффинном преобразовании про-
пространства плоскости переходят в плоскости, прямые в прямые,
параллельные плоскости и прямые переходят в параллельные плос-
плоскости и прямые.
Геометрический способ задания аффинных преобразований простран-
пространства основан на следующем утверждении: аффинное преобразование
пространства определено однозначно, если заданы образы четырех
точек, не лежащих на одной плоскости, и эти образы также не ле-
лежат на одной плоскости.
Как и в случае плоскости, основным инвариантом аффинного преоб-
преобразования пространства служит простое отношение трех точек.
6. Ортогональные преобразования. Линейное преобразование на
плоскости
х = апх + а12у + а13,
называется ортогональным, если выполняются соотношения
2 2 1 2 2 1 гл
ап + а2Х = \, aX2-va22—\, anaX2 +a2Xa22 = \j.
Из соотношений C.43) следует, что
C.42)
C.43)
А =
^22
Поэтому ортогональное преобразование всегда является аффинным.
Докажем основное свойство ортогональных преобразований.
§3] ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ 91
Теорема ЗА. При ортогональных преобразованиях сохраняют-
сохраняются расстояния между точками.
Доказательство. Пусть точки М{(х{, ух) и М2(х2, у2) посред-
посредством ортогонального преобразования C.42) переводятся соответствен-
соответственно в точки Мх{хх\ ух) и М2(х2, у2). Требуется доказать, что отрезки
МХМ2 и МХМ2 имеют равные длины. С помощью формул C.42) и C.43)
получаем
\М{М^\2 = [х2' - x{f + M - у{]2 =
= [аи (х2 - хх) + аХ2 (у2 ~ 2
+ [а2Х (х2 - хх) + а22 (у2 ~
= (а2и + а\х) (х2 - х{J + (а212 + а\2) (у2 - ухJ +
+ 2 (апа12 + а2Ха22) (х2 - хх) (у2 - ух) =
= (х2-ххJ + (у2-ухJ=\МхМ2\2.
Итак, lyi/fjTl^l = | М{М2 |. Теорема доказана.
Замечание. Так как при ортогональных преобразованиях расстоя-
расстояния сохраняются, то любая фигура на плоскости преобразуется в рав-
равную ей фигуру {). Иными словами, ортогональное преобразование на
плоскости можно рассматривать как движение этой плоскости. При дви-
движении ортогональная система координат переходит в ортогональную
систему координат. Этим можно объяснить термин ортогональное пре-
преобразование.
Ортогональные преобразования обладают следующими свойствами 2):
1°. Последовательное выполнение двух ортогональных преобра-
преобразований есть ортогональное преобразование.
2°. Тождественное преобразование х' = х, у/ = у является орто-
ортогональным преобразованием (для этого преобразования соотношения
C.43), очевидно, выполняются).
3°. Преобразование, обратное ортогональному, также являет-
является ортогональным.
Линейное преобразование в пространстве
х' = аххх + аХ2у + aX3z + а14,
у' = а2Хх + а22у + a23z + а24, C.44)
О Например, любой треугольник преобразуется в равный треугольник (равенство по
трем сторонам).
) Эти свойства становятся особенно наглядными, если рассматривать ортогональ-
ортогональное преобразование как движение.
92 ПРЕОБРАЗОВАНИЕ ДЕКАРТОВЫХ ПРЯМОУГОЛЬНЫХ КООРДИНАТ [ГЛ. 3
называется ортогональным, если выполняются соотношения
а\
а\х + а\х + а\х = 1, апа12 + а21а22 + аъхаЪ2 = О,
а\2 + а|2 + <42 = 1, а12а13 + а22а23 + а32а3з = 0, C.45)
а\ъ + 4з + «33 = !' п\Ъа\\ + а23а21 + ^33^31 = О-
Ортогональное преобразование является аффинным. Справедливо
следующее основное свойство ортогональных преобразований: при та-
таких преобразованиях сохраняются расстояния между точками. Доказа-
Доказательство может быть проведено в полной аналогии с доказательством
теоремы 3.4.
Ортогональные преобразования в пространстве обладают следующи-
следующими свойствами.
1°. Последовательное выполнение ортогональных преобразова-
преобразований является ортогональным преобразованием.
2°. Тождественное преобразование х' = х, у' = у, z' = z — ортого-
ортогональное преобразование.
3°. Преобразование, обратное ортогональному, также ортого-
ортогональное.
§ 4. Проективные преобразования
Проективными преобразованиями на плоскости называются пре-
преобразования вида
n l2y al3 апх + а22у + а23
х = ' У = ' C 46)
а31х + а32у + а33 а31х + а32у + а33 v ' ;
коэффициенты а(]- которых удовлетворяют условию О
А =
а23
При проективном преобразовании C.46) плоскости особую роль играет
прямая L, определяемая уравнением
Для точек этой прямой знаменатели в выражениях для х' и у' (см. C.46))
обращаются в нуль, и поэтому преобразование C.46) не определено для
точек этой прямой.
0 Геометрически это условие означает, что три прямые апх + а12У + #13 = 0,
а2\Х + а22у + #23 - 0 и #3ix + п32у + а3з = 0 не пересекаются в одной точке (см. п. 5 § 2 гл. 3).
§4] ПРОЕКТИВНЫЕ ПРЕОБРАЗОВАНИЯ 93
Отметим, что проективное преобразование инвариантно относитель-
относительно выбора декартовой системы координат, так как формулы перехода от
одной декартовой системы координат к другой линейны и поэтому при
переходе к новой системе координат вид преобразований C.46) не
меняется. Непосредственной проверкой можно убедиться, что после-
последовательное проведение двух проективных преобразований является
проективным преобразованием, тождественное преобразование и
преобразование, обратное проективному, — также проективные преоб-
преобразования. При проективных преобразованиях точки, лежащие на пря-
прямой, переходят в точки, также лежащие на прямой.
Основным инвариантом проективного преобразования является так
называемое сложное {ангармоническое) отношение (ABCD) любых
четырех точек Л, В, С и D на прямой, которое определяется как частное
двух простых отношений:
(ABCD) = (ACB) : (ADВ).
Инвариантность сложного отношения (ABCD) четырех точек прямой
может быть обоснована так же, как и инвариантность простого отноше-
отношения при аффинных преобразованиях.
Проективными преобразованиями в пространстве называются
преобразования вида
Л/ —
aAlx + aA2y -
= a2Xx + a22y + a23z + a24
a41x + a42z/ + a43z + a44
^, _ a3lx + a32j/ + a33z + a34
<2 —
a4lx + a42z/ + a432 + a44
для которых четыре плоскости
апх + al2y + al3z + a14 = 0
аАХх + аА2У + аАЪг + а44 = О
не пересекаются в одной точке.
Отметим, что проективное преобразование в пространстве не опре-
определено для точек плоскости, определяемой уравнением
а4{х + а42у О
94 ПРЕОБРАЗОВАНИЕ ДЕКАРТОВЫХ ПРЯМОУГОЛЬНЫХ КООРДИНАТ [ГЛ. 3
Непосредственной проверкой можно убедиться, что последователь-
последовательное проведение двух проективных преобразований, тождественное пре-
преобразование и преобразование, обратное проективному, — также проек-
проективные преобразования. При проективных преобразованиях точки, ле-
лежащие в одной плоскости, переходят в точки, также лежащие в одной
плоскости, а точки, лежащие на прямой, переходят в точки, лежащие на
прямой.
Основным инвариантом проективного преобразования в пространстве
является сложное отношение (ABCD) = (АСВ) : (ADB) любых четырех
точек А, В, С и D на прямой.
ГЛАВА 4
УРАВНЕНИЕ ЛИНИИ НА ПЛОСКОСТИ.
УРАВНЕНИЯ ПОВЕРХНОСТИ
И ЛИНИИ В ПРОСТРАНСТВЕ
В этой главе рассматривается один из важнейших вопросов анали-
аналитической геометрии — вопрос об аналитическом представлении ли-
линии на плоскости и поверхности и линии в пространстве при помо-
помощи уравнений, связывающих их координаты ). Обсуждаются простей-
простейшие задачи, связанные с таким аналитическим представлением, и
приводится классификация плоских линий и поверхностей. Доказыва-
Доказывается, что порядок алгебраической линии (и соответственно поверхнос-
поверхности) не зависит от выбора декартовой прямоугольной системы.
§ 1. Уравнение линии на плоскости
1. Понятие об уравнении линии. Предположим, что на плоскости тг
нам заданы: 1) декартова прямоугольная система координат Оху и 2) не-
некоторая линия L. Рассмотрим некоторое уравнение, связывающее две
переменные величины хну2)
Ф(х,у) = 0. D.1)
Определение. Уравнение D.1) называется уравнением ли-
линии L (относительно заданной системы координат), если этому
уравнению удовлетворяют координаты х и у любой точки, лежа-
лежащей на линии L, и не удовлетворяют координаты хиу ни одной точ-
точки, не лежащей на линии L.
С точки зрения этого определения сама линия L представляет собой
(в заданной системе координат) геометрическое место точек, коор-
координаты которых удовлетворяют уравнению D.1)
Если (в заданной системе координат) рассматриваемое уравнение
вида D.1) является уравнением линии L, то мы будем говорить, что это
уравнение определяет линию L.
О По поводу самого понятия линии (или соответственно поверхности) отсылаем чи-
читателя к гл. 11 вып. 1 настоящего курса.
2) Равенство Ф(х, у) = О, где Ф(х, у) — заданная функция двух переменных х и у,
называется уравнением, если это равенство справедливо не для всех пар вещественных
чисел х, у. Равенство Ф(х, у) = О, справедливое для всех пар вещественных чисел х, у,
называется тождеством.
96 УРАВНЕНИЯ ПОВЕРХНОСТИ И ЛИНИИ [ГЛ. 4
Замечание. Нетрудно указать такое уравнение вида D.1), кото-
которое либо определяет геометрический образ, отличный от того, что мы
привыкли понимать под термином «линия», либо вообще не определяет
никакого геометрического образа. Так, уравнение х2 + у2 = 0 определя-
определяет на плоскости Оху лишь одну точку @,0), а уравнение х2 + у2 + 1 = 0
вообще не определяет никакого геометрического образа. Для того что-
чтобы уравнение вида D.1) определяло геометрический образ, отвечаю-
отвечающий нашему привычному представлению о линии, следует, вообще го-
говоря, подчинить функцию Ф(х, у) некоторым ограничениям (например
требованию однозначной разрешимости функционального уравнения
D.1) относительно одной из переменных). Эти ограничения выясняют-
выясняются в курсе математического анализа (см. вып. 1, гл. 15, § 2, п. 3).
Пример. Убедимся в том, что уравнение
f bf = r2 D.2)
является уравнением окружности радиуса г > 0 с центром в точке
М0(а, Ь). В самом деле, точка М(х, у) лежит на указанной окружности
тогда и только тогда, когда расстояние между точками М (х, у) и М0(а, Ь)
равно г, т.е. тогда и только тогда, когда квадрат расстояния между ука-
указанными точками (х - аJ + (у - ЬJ равен г2. Таким образом, координа-
координаты любой точки М(х, у), лежащей на указанной окружности, удовлет-
удовлетворяют уравнению D.2), а координаты любой точки, не лежащей на ука-
указанной окружности, не удовлетворяют уравнению D.2).
Уравнение окружности радиуса г > 0 с центром в начале координат
имеет более простой вид, а именно
х2 + у2 = г2. D.3)
2. Параметрическое представление линии. Для аналитического
представления линии L часто бывает удобно выражать переменные ко-
координаты х и у точек этой линии при помощи третьей вспомогательной
переменной (или параметра) t:
х = <р(О, # = V@, D-4)
где функции ф(Г) и \j/(f) предполагаются непрерывными по параметру t
(в некоторой области {t} изменения этого параметра). Исключение из
двух уравнений D.4) параметра t приводит к рассмотренному выше урав-
уравнению вида D.1) 0.
Параметрическое представление линии на плоскости естественно
возникает, если эту линию рассматривать как путь, пройденный мате-
материальной точкой, непрерывно движущейся по определенному закону.
В самом деле, если переменная t представляет собой время, отсчитывае-
0 Такое исключение заведомо возможно, если хотя бы одна из функций х = (р@ или
у = \|/G) имеет обратную (достаточные условия для этого см. в п. 4 § 2 гл. 15 вып. 1).
§1]
УРАВНЕНИЕ ЛИНИИ НА ПЛОСКОСТИ
97
мое от некоторого начального момента, то задание закона движения и
представляет собой задание координат х и у движущейся точки как не-
некоторых непрерывных функций x = <p(t) и у = \j/(f) времени t.
Примеры. 1) Установим параметрические уравнения окружности
радиуса г > 0 с центром в начале координат. Пусть М {х, у) — любая точка
этой окружности, a t — угол между радиусом-вектором ОМ и осью Ох,
отсчитываемый против часовой стрелки (рис. 4.1). Очевидно, что
y = rs'mt. D.5)
Уравнения D.5) и представляют собой параметрические уравнения рас-
рассматриваемой окружности. Параметр t может принимать любые значе-
значения, но для того чтобы точка М (х, у) один раз обошла окружность, сле-
следует ограничить область изменения параметра полусегментом 0 < t < 2тг.
Заметим, что для исключения параметра t из уравнений D.5) достаточ-
достаточно возвести в квадрат и сложить эти уравнения; мы получим при этом
уравнение D.3) предыдущего пункта.
2) Установим параметрические уравнения так называемой циклои-
циклоиды, которая определяется как путь, описываемый одной из точек М ок-
окружности, катящейся без скольжения по неподвижной прямой. Примем
за ось Ох декартовой прямоугольной системы ту прямую, по которой
катится окружность, за начало координат — одну из точек, в которых
точка М катящейся окружности выходит на указанную прямую, и на-
направим ось Оу так, чтобы ее положительная полуось лежала по ту же
сторону от Ох, что и катящаяся окружность (рис. 4.2).
м
Рис. 4.1
Рис. 4.2
Фиксируем произвольное положение катящейся окружности и обо-
обозначим для этого положения буквой С центр, а буквой А точку каса-
касания с осью Ох. Примем за параметр t угол, на который повернулась
катящаяся окружность при перемещении из положения с точкой каса-
касания в начале координат О в положение с данной точкой касания А. Так
как качение происходит без скольжения, то ОА = Rt, где R — радиус
окружности.
В силу того, что декартовы прямоугольные координаты х и у точки М
равны проекциям вектора ОМ на оси координат (см. п. 9 § 1 гл. 2), и в
98 УРАВНЕНИЯ ПОВЕРХНОСТИ И ЛИНИИ [ГЛ. 4
силу линейного свойства проекции вектора на ось (см. п. 8 и 9 § 1 гл. 2)
получим
х = прх ОМ =прх ОА +прх АС +прх СМ, ^^
у = пру ОМ = пру ОА + пр^ АС + пр^ СМ.
Учитывая, что угол АСМ, отсчитываемый от вектора СА в направлении
по часовой стрелке (рис. 4.2), может отличаться от угла t лишь на
величину, кратную 2тг, будем иметь
прх ОА = Rt, прх ~АС = О, прх СМ = -R sin t,
иру ОА = 0, щу~АС = R, иру CM =-R cos t.
Вставляя эти значения в формулы D.6), окончательно получим пара-
параметрические уравнения циклоиды
x = R(t-smt), y = R(t-cost). D.7)
Параметр t в уравнениях D.7) может принимать какие угодно значения.
Замечание. Часто линию L определяют не уравнением D.1), а
разрешенным (например, относительно у) уравнением
y = f(x). D.8)
Подчеркнем, что определение линии разрешенным уравнением D.8)
представляет собой частный случай параметрического определения этой
линии (при x = t, y = f{t)).
3. Уравнение линии в различных системах координат. Вид
уравнения линии L зависит не только от вида самой линии L, но и от
выбора системы координат. Уравнение линии меняется как при пере-
переходе от одной декартовой системы координат к другой, так и при пере-
переходе от декартовых к каким-нибудь другим координатам.
Если D.1) представляет собой уравнение линии L относительно де-
декартовой прямоугольной системы координат Оху, то, чтобы получить
уравнение той же линии L относительно любой другой системы коорди-
координат, достаточно подставить в D.1) на место х и у их выражения через
новые координаты.
Так, например, линия L, определяемая в декартовой системе Оху урав-
уравнением D.1), в полярной системе 0 будет определяться уравнением
Ф^р, ф) = 0,
где введено обозначение Oi(p, (р) = Ф(р cos ф, р sin ф) (см. формулы пере-
перехода от декартовых координат к полярным; гл. 1, § 4).
) Конечно, при этом предполагается, что полюс совмещен с началом декартовых ко-
координат, а полярная ось — с осью Ох.
§1]
УРАВНЕНИЕ ЛИНИИ НА ПЛОСКОСТИ
99
Использование для определения некоторых линий недекартовых си-
систем координат объясняется тем, что уравнение линии имеет при этом
более простой вид.
Пример. Предположим, что ось и вращается (против часовой стрел-
стрелки) вокруг неподвижной точки О и по этой вращающейся оси движется
точка М так, что длина р вектора ОМ пропорциональ- v u
на углу ф поворота оси и, отсчитываемому от некото-
некоторой неподвижной оси Ох (рис. 4.3).
Линия, описываемая точкой М, называется спи-
спиралью Архимеда.
Если ввести полярную систему координат, помес-
поместив полюс в точку О и направив полярную ось вдоль
оси Ох, то по самому определению спирали Архиме- Рис. 4.3
да ее уравнение имеет вид
р = а ф, D.9)
где р — полярный радиус, ф — полярный угол, а — коэффициент про-
пропорциональности, который будем считать отличным от нуля. На рис. 4.3
сплошной линией изображена часть спирали Архимеда для случая а > О,
а штриховой линией — часть спирали Архимеда для случая а < О 0.
Уравнение D.9) спирали Архимеда в полярной системе координат отличается чрез-
чрезвычайной простотой. Для того чтобы читатель убедился, насколько сложно выглядит урав-
уравнение той же спирали Архимеда в декартовой прямоугольной системе, приведем это урав-
уравнение для случая а > 0. Имея в виду, что
arctg — + 2пп при х > 0,
х
arctg — + к + 2пп при х < 0,
X
— sgny + 2nn при х = 0,
где п = 0, ±1, ±2, ..., мы получим, что для случая а > 0 спираль Архимеда определяется сле-
следующей бесконечной системой уравнений (номер п принимает значения 0, ±1, ±2, ...):
]х2 + у2 = а\ arctg - + 2кп при х > 0,
V х )
V )
^х2 +у2 = а\ arctg- + п + 2кп при х < 0,
\ х )
| у | = а — sgn у + 2пп\ при х = 0.
0 Конечно, при неограниченном изменении угла ф (в случае а > 0 в положительную,
а в случае а < 0 в отрицательную сторону) как сплошная, так и штриховая спирали будут
иметь бесчисленно много завитков, не изображенных на рис. 4.3.
100 УРАВНЕНИЯ ПОВЕРХНОСТИ И ЛИНИИ [ГЛ.4
4. Два типа задач, связанных с аналитическим представлением
линии. В связи с аналитическим представлением линии возникают зада-
задачи двух типов. Задачи первого типа заключаются в изучении
свойств линии при помощи заранее данного уравнения этой линии.
Такое изучение проводится средствами математического анализа и выхо-
выходит за рамки аналитической геометрии. В самом деле, уравнение линии
устанавливает функциональную зависимость между координатами то-
точек этой линии и задача первого типа, по существу, представляет собой
геометрическое исследование графика функции (см. гл. 9 вып. 1).
Задачи второго типа заключаются в выводе уравнения линии, заранее
заданной геометрически (например, линии, заданной как геометричес-
геометрическое место точек, удовлетворяющих некоторым условиям).
Примерами задач второго типа могут служить все рассмотренные в
пп. 1-3 задачи (вывод уравнения окружности, циклоиды и спирали Ар-
Архимеда).
5. Классификация плоских линий. Исходя из аналитического
представления линий относительно декартовых прямоугольных си-
систем координат, устанавливают следующую классификацию плоских
линий.
Определение 1. Линия называется алгебраической, если
в некоторой декартовой прямоугольной системе координат она оп-
определяется уравнением
Ф(х,у) = 0, D.1)
в котором функция Ф {х, у) представляет собой алгебраический по-
полином 0.
Определение 2. Всякая неалгебраическая линия называется
трансцендентной.
Определение 3. Алгебраическая линия называется линией по-
порядка п, если в некоторой декартовой прямоугольной системе ко-
координат эта линия определяется уравнением D.1), в котором функ-
функция Ф {х, у) представляет собой алгебраический полином п-й степени.
Иными словами, линией п-го порядка называется линия, определяе-
определяемая в некоторой декартовой прямоугольной системе алгебраическим
уравнением степени п с двумя неизвестными.
Для установления корректности определений 1, 2 и 3 необходимо
доказать следующее утверждение.
Теорема 4.1. Если линия в некоторой декартовой прямоуголь-
прямоугольной системе координат определяется алгебраическим уравнением
степени п, то эта линия и в любой другой декартовой прямоуголь-
прямоугольной системе координат определяется алгебраическим уравнением
той же степени п.
0 То есть сумму конечного числа слагаемых вида akixkyl, где k и / — целые неотри-
неотрицательные числа, akt — некоторые постоянные.
§ 1] УРАВНЕНИЕ ЛИНИИ НА ПЛОСКОСТИ 101
Доказательство. Предположим, что линия L в некоторой де-
декартовой прямоугольной системе координат определяется уравнением
Ф(х,у) = 0, D.1)
левая часть которого представляет собой алгебраический полином сте-
степени п, т.е. сумму слагаемых вида
aklxkyl,
где k и / — целые неотрицательные числа, причем наибольшее значение
суммы k + / равно п, аш — некоторые постоянные, причем хотя бы для
одной пары k и /, составляющих в сумме п, постоянная аы отлична от
нуля.
Возьмем на той же плоскости любую новую декартову прямоуголь-
прямоугольную систему координат О'х'у'. Тогда, как доказано в § 1 гл. 3, для коор-
координат любой точки в старой и новой системах справедливы формулы
преобразования C.7). Чтобы получить уравнение линии L в новой сис-
системе О 'х 'у', достаточно подставить в левую часть D.1) на место хиуих
значения, определяемые формулами C.7). Мы получим при этом сумму
слагаемых вида
аы (а + апх' + Щху')к (Ь + а12х' + Щ2У'I-
Отсюда ясно, что уравнение линии L в новой системе О'х'у' будет пред-
представлять собой алгебраическое уравнение степени не выше, чем п.
Если в проведенных рассуждениях поменять ролями системы Оху и
О'х'у', то мы убедимся в том, что указанное алгебраическое уравнение
(в системе О'х'у') имеет степень не ниже чем п (иначе переход от О'х'у'
к Оху повысил бы степень уравнения). Таким образом, линия L опреде-
определяется в новой системе О'х'у' алгебраическим уравнением степени, рав-
равной п. Теорема 4.1 доказана.
Примером алгебраической линии второго порядка может
служить окружность, уравнение D.3) которой в некоторой декарто-
декартовой прямоугольной системе является алгебраическим уравнением
второй степени. Примером трансцендентной линии может
служить спираль Архимеда, уравнение которой в декартовой прямоу-
прямоугольной системе не является алгебраическим (см. п. 3).
Замечание. Будем называть алгебраическую линию L распадающейся, если ал-
алгебраический полином Ф(х, у) степени п>2, стоящий в левой части .уравнения этой ли-
линии, распадается на произведение Ф\(х, у)Ф2(х, у) двух алгебраических полиномов
Ф\(х, у) и Ф2(х, у) степеней k > 1 и п — k > 1 соответственно.
Из равенства Ф(х, у) = Ф\(х, у) Ф2(х, у) очевидно, что координаты хи у точки М удов-
удовлетворяют уравнению Ф(х, у) = 0 тогда и только тогда, когда эти координаты удовлетво-
удовлетворяют хотя бы одному из уравнений Ф\(х, у) = 0 или Ф2(х, у) = 0. Это означает, что линия L,
определяемая уравнением Ф(х, у) = 0, распадается на две линии: линию Lh определяе-
определяемую уравнением Ф\(х, у) = 0, и линию L2, определяемую уравнением Ф2(х, у) = 0.
102 УРАВНЕНИЯ ПОВЕРХНОСТИ И ЛИНИИ [ГЛ.4
Так, линия четвертого порядка, определяемая уравнением
хА + уА + 2х2у2 - Ъх2 - Ъу2 + 4 = (х2 + у2 - 1) (х2 + у2 - 4) = 0,
распадается на две окружности, определяемые уравнениями х2 + у2 -\ =0их2 + у2 - 4 = 0.
Линия четвертого порядка, определяемая уравнением
хА + уА + 2х2у2 -2х2 -2у2 + 1 =(х2 + у2 - 1J = 0,
распадается на две «слившиеся» окружности, определяемые уравнением второго поряд-
порядка х2 + у2 - 1 = 0. В отношении этой последней линии следует договориться, какое из
чисел 2 или 4 мы будем понимать под ее порядком,
6. О пересечении двух линий. Важную роль в аналитической гео-
геометрии играет задача о нахождении точек пересечения двух произволь-
произвольных линий Lx и L2, определяемых уравнениями Фх(х, у) = 0 и Ф2(х, у) = 0
соответственно. Так как искомые точки пересечения в случае, если они
существуют, должны одновременно лежать как на линии Lb так и на
линии L2, то координаты этих точек должны удовлетворять каждому из
уравнений Фх(х, у) = 0 и Ф2(х, у) = 0.
Таким образом, для нахождения координат всех точек пересечения
следует решить систему уравнений
Фх(х,у) = 0, Ф2(х,у) = 0. D.10)
Каждое решение системы D.10) определяет точку пересечения ли-
линий Lx и L2. Если система D.10) не имеет решений, то линии Lx и L2 не
пересекаются.
Так, для нахождения точек пересечения двух окружностей, опреде-
определяемых уравнениями х2 + у2 = 1 и (х- IJ + у2 = 2, решаем систему урав-
уравнений
x2 + z/2-l=O, (x- lJ + z/2-2 = 0. D.11)
Вычитая из первого уравнения D.11) второе,
получим 2х = 0, откуда х = 0. Вставляя это зна-
значение х в первое уравнение, найдем, что у = ±1.
Получаем две точки пересечения М{@, 1) и
М2@,-1) (рис. 4.4).
Можно доказать, что если Lx и L2 — две нераспадаю-
М2@,-1) ^ ^ щиеся алгебраические линии порядков тип соответствен-
соответственно и если одна из этих линий не содержится целиком в дру-
другой, то эти линии имеют не более чем т • п точек пересече-
Рис- 4.4 ния (см любой курс высшей алгебры).
§ 2. Уравнение поверхности и уравнения линии
в пространстве
1. Понятие об уравнении поверхности. Предположим, что нам
заданы: 1) декартова прямоугольная система координат Oxyz в простран-
§2] УРАВНЕНИЯ ПОВЕРХНОСТИ И ЛИНИИ 103
стве и 2) некоторая поверхность 5. Рассмотрим некоторое уравнение,
связывающее три переменные величины х, у и г:
Ф(х,у, г) = 0. D.12)
Определение. Уравнение D.12) называется уравнением по-
поверхности S (относительно заданной системы координат),
если этому уравнению удовлетворяют координаты х, у и z любой
точки, лежащей на поверхности S, и не удовлетворяют координа-
координаты х, у и z ни одной точки, не лежащей на поверхности S.
С точки зрения этого определения сама поверхность 5 представляет
собой (в заданной системе координат) геометрическое место точек,
координаты которых удовлетворяют уравнению D.12).
Если (в заданной системе координат) рассматриваемое уравнение
D.12) является уравнением поверхности S, то мы будем говорить, что
это уравнение определяет поверхность S.
Конечно, не всякое уравнение с тремя переменными вида D.12) оп-
определяет геометрический образ, отвечающий нашему привычному пред-
представлению о поверхности (и вообще определяет реальный геометричес-
геометрический образ: рассмотрите уравнение х2 + у2 + 22 + 1 = 0). Чтобы уравнение
вида D.12) определяло геометрический образ, отвечающий нашему пред-
представлению о поверхности, следует, вообще говоря, подчинить функцию
Ф(х, у, 2) некоторым ограничениям (например, требованию однозначной
разрешимости функционального уравнения D.12) относительно одной
из переменных). Эти ограничения выясняются в курсе математического
анализа (см. вып. 1, гл. 15, § 2).
Аналогично определяется уравнение поверхности 5 в любой другой (не
обязательно декартовой прямоугольной) системе координат. Если D.12)
представляет собой уравнение поверхности 5 в декартовой прямоугольной
системе координат 0ху2, то, чтобы получить уравнение той же поверхнос-
поверхности 5 относительно любой другой системы координат, достаточно подста-
подставить в D.12) на место х, у и 2 их выражение через новые координаты.
Использование для определения некоторых поверхностей недекар-
недекартовых систем координат объясняется тем, что уравнение поверхности
имеет при этом более простой вид.
Легко убедиться в том, что в декартовой прямоугольной системе 0ху2
уравнение сферы радиуса R>0c центром в точке Мо(а, Ь, с) имеет вид 0
(х - aJ + (y- bf + B-cf = R 2. D.13)
В самом деле, точка М (х, у, 2) лежит на указанной сфере тогда и толь-
только тогда, когда квадрат расстояния между точками М(х, у, 2) и М0(а, Ь, с)
(х - аJ + (у - bf + B- сJ
) Эта сфера определяется как геометрическое место точек М(х, у, z), расстояние
каждой из которых от точки М0(а, Ь, с) равно R.
104 УРАВНЕНИЯ ПОВЕРХНОСТИ И ЛИНИИ [ГЛ.4
равен R . В случае, когда центром Мо сферы служит начало координат
(т.е. а = 0, Ь = 0, с = 0), уравнение D.13) принимает более простой вид:
x2 + y2 + z2 = R2. D.14)
Если ввести сферические координаты г, 9, ф, связанные с декартовы-
декартовыми координатами так, как указано в п. 3 § 4 гл. 1, то уравнение сферы
радиуса R с центром в начале координат принимает вид г = R.
Это последнее уравнение, сразу вытекающее из геометрического оп-
определения сферы, может быть получено и посредством подстановки в
D.14) на место х, у и z их выражений через сферические координаты.
2. Уравнения линии в пространстве. Линию в пространстве есте-
естественно рассматривать как пересечение двух поверхностей, т.е. как гео-
геометрическое место точек, находящихся одновременно на двух по-
поверхностях.
Если Oi(x, у, г) = 0 и Ф2(х, у, г) = 0 суть уравнения двух поверхнос-
поверхностей, пересечением которых является данная линия L, то: 1) координаты
любой точки, лежащей на линии L, удовлетворяют обоим указанным
уравнениям; 2) обоим указанным уравнениям не удовлетворяют коор-
координаты ни одной точки, не лежащей на линии L.
Таким образом, два уравнения
Ф{(х,у,2) = 0, Ф2(х,у,г) = 0 D.15)
совместно определяют линию L, т.е. являются уравнениями этой линии.
Разумеется, данную линию L можно представить двумя уравнениями
бесчисленным множеством способов: вместо данных двух поверхностей
можно взять любую пару поверхностей, пересекающихся по той же линии L.
Аналитически это означает, что вместо системы D.15) можно взять любую
эквивалентную систему.
Например, уравнения двух сфер
совместно определяют лежащую в плоскости Оху окружность радиу-
радиусом, равным единице, с центром в начале координат. Ту же самую ок-
окружность можно определить и двумя уравнениями:
^ =R2,
во втором из которых в качестве R можно взять любое вещественное
число, превосходящее единицу.
3. Цилиндрические и конические поверхности. Предположим,
что в пространстве задана декартова прямоугольная система координат
Оху z.
Определение 1. Поверхность S называется цилиндричес-
цилиндрической поверхностью с образующей, параллельной оси 02, если
§2] УРАВНЕНИЯ ПОВЕРХНОСТИ И ЛИНИИ 105
она обладает следующим свойством: какова бы ни была лежащая
на этой поверхности точка М0(х0, у0, z0), прямая линия, проходя-
проходящая через эту точку и параллельная оси Oz, целиком лежит на по-
поверхности S.
Любую целиком лежащую на цилиндрической поверхности 5 прямую
называют образующей этой поверхности.
Совершенно аналогично определяются цилиндрические поверхнос-
поверхности с образующими, параллельными осям Ох или Оу.
Определение 2. Поверхность S называется конической с
вершиной в начале координат О, если она обладает следующим свой-
свойством: какова бы ни была лежащая на этой поверхности и отлич-
отличная от начала координат точка М0(х0, у0, z0), прямая линия, прохо-
проходящая через точку Мо и через начало координат О, целиком лежит
на поверхности S.
Постараемся выяснить, какими уравнениями определяются цилинд-
цилиндрические и конические поверхности.
Ради определенности будем рассматривать цилиндрическую поверх-
поверхность с образующей, параллельной оси Oz.
Докажем, что всякое уравнение вида
F(x,y) = 0, D.16)
связывающее две переменные х и у и не содержащее z, определяет
цилиндрическую поверхность с образующей, параллельной оси Oz.
Пусть М0(х0, у0, z0) — любая точка, лежащая на поверхности S, оп-
определяемой уравнением D.16). Тогда координаты этой точки должны
удовлетворять уравнению D.16), т.е. справедливо равенство
F(xo,yo) = O. D.17)
Достаточно доказать, что любая точка М прямой, проходящей через
Мо и параллельной оси Oz, также лежит на поверхности S, т.е. имеет
координаты, удовлетворяющие уравнению D.16).
Какова бы ни была точка М прямой, проходящей через М0(х0, у0, z0)
и параллельной оси Oz, ее абсцисса и ордината те же, что и у точки Мо,
т.е. равны соответственно х0 и у0, а аппликата z имеет какое угодно зна-
значение. Но в уравнение D.16) входят только абсцисса и ордината, а они в
силу равенства D.17) удовлетворяют этому уравнению.
Тем самым доказано, что 5 — цилиндрическая поверхность с образую-
образующей, параллельной оси Oz.
Заметим, что на координатной плоскости Оху уравнения D.16) опре-
определяет плоскую линию, которую обычно называют направляющей рас-
рассматриваемой цилиндрической поверхности. В пространстве эта линия
определяется двумя уравнениями:
F(x, y) = 0, 2 = 0,
106 УРАВНЕНИЯ ПОВЕРХНОСТИ И ЛИНИИ [ГЛ.4
первое из которых определяет рассматриваемую цилиндрическую
поверхность, а второе — координатную плоскость Оху 0.
В качестве примера приведем уравнение х2 + у2 = г2, определяющее
круглый цилиндр с образующей, параллельной оси Oz, и с направляющей,
представляющей собой лежащую в плоскости Оху окружность единичного
радиуса с центром в начале координат.
Перейдем к выяснению вида уравнения конической поверхности.
Напомним, что определенная для любых значений аргументов функ-
функция F(x, у, z) называется однородной функцией {степени п), если, ка-
каково бы ни было вещественное число k, справедливо равенство
F(kx, ky, kz) = knF(x, у, z). D.18)
Докажем, что уравнение
F(x,y, z) = 0, D.19)
в котором F(x, у, г) является однородной функцией любой степе-
степени п, определяет коническую поверхность.
Пусть М0(х0, у0, zq) — любая отличная от начала координат точка,
лежащая на поверхности S, определяемой уравнением D.19). Тогда спра-
справедливо равенство
F(xo,yo,zo) = O. D.20)
Достаточно доказать, что, какова бы ни была точка М(х, у, z), лежащая
на прямой, проходящей через точку М0(х0, у0, z0) и через начало коорди-
координат О, координаты х, у и z этой точки удовлетворяют уравнению D.19).
Так как векторы ОМ и ОМ0 коллинеарны (как лежащие на одной
прямой) и вектор ОМ0 является ненулевым, найдется (в силу теоре-
теоремы 2.1) вещественное число k такое, что ОМ = k • ОМ0 . На основании
линейных свойств координат вектора (см. п. 8 § 1 гл. 2) можно утверж-
утверждать, что координаты вектора ОМ равны соответствующим координа-
координатам вектора ОМ0 , умноженным на число k, т.е.
х = kx0, у = ky0, z = kz0.
Из последних равенств и из того, что F (х, у, г) (как однородная функ-
функция некоторой степени п) удовлетворяет соотношению D.18), получим
F(х, у, z) = F(kx0, ky0, kz0) = knF(x0, y0, z0),
а отсюда в силу равенства D.20) окончательно будем иметь
F(x,y,z) = 0.
Доказательство того, что поверхность S, определяемая уравнением D.19)
с однородной функцией F(x, у, z), является конической, завершено.
0 Ибо уравнению 2 = 0 удовлетворяют координаты любой точки, лежащей на плоско-
плоскости Оху, и не удовлетворяют координаты ни одной точки, не лежащей на этой плоскости.
§2] УРАВНЕНИЯ ПОВЕРХНОСТИ И ЛИНИИ 107
Заметим, что прямые, целиком лежащие на конической поверхнос-
поверхности, называются ее образующими и что все образующие (как это видно
из проведенного доказательства) проходят через начало координат О.
Простейшим примером конической поверхности может служить круг-
круглый конус, определяемый уравнением х2 + у2-z2 = 0. Эта поверхность
исследуется в п. 4 § 3 гл. 7. Функция F (х, у, г) = = х2 + у2 - z2, задаю-
задающая ее уравнение, является однородной функцией второго порядка.
4. Параметрические уравнения линии и поверхности в про-
пространстве. В п. 2 мы рассматривали линию в пространстве как пересече-
пересечение двух поверхностей. Возможен и очень естествен с кинематической
точки зрения и другой подход к понятию линии в пространстве, основан-
основанный на рассмотрении этой линии как пути, пройденного материальной
точкой, непрерывно движущейся по определенному закону.
Как и для случая плоской линии (см. п. 2 § 1), этот подход приводит к
параметрическому представлению линии в пространстве, заключаю-
заключающемуся в том, что координаты х, у и z любой точки данной линии зада-
задаются как непрерывные функции некоторого параметра t (представляю-
(представляющего собой время). Итак, при таком подходе координаты х, у, z любой
точки линии L задаются как три функции
* = <р@, y = V(t), z = x(t), D.21)
определенные и непрерывные в некотором промежутке изменения па-
параметра t.
Конечно, этот способ определения линии в пространстве эквивален-
эквивалентен определению ее в виде пересечения двух поверхностей. Чтобы убе-
убедиться в этом, предположим, что хотя бы одна (например, третья) из
функций D.21) допускает обратную. В таком случае из третьего равен-
равенства D.21) получим, что t = %~\z), и, подставляя это значение t в первые
два равенства D.21), получим уравнения двух поверхностей
пересечением которых служит данная линия.
В качестве примера приведем параметрические уравнения окружно-
окружности радиуса г > 0, лежащей в координатной плоскости Оху и имеющей
центр в начале координат. В декартовой прямоугольной системе на плос-
плоскости Оху такая окружность определяется одним уравнением х2 + у2 = г2
(см. п. 1 § 1), в пространстве же эта окружность определяется двумя
уравнениями:
х2 + у2 = г2, 2 = 0,
первое из которых определяет цилиндрическую поверхность, направляю-
направляющей которой служит рассматриваемая окружность и образующая кото-
которой параллельна оси Oz, a второе уравнение определяет координатную
плоскость Оху.
108 УРАВНЕНИЯ ПОВЕРХНОСТИ И ЛИНИИ [ГЛ.4
Из п. 2 § 1 мы уже знаем, что на плоскости Оху параметрические
уравнения окружности х1 + у2 = г2 имеют вид х = г cos t, у = rsint, где
0<^<2тг.
Очевидно, та же окружность в пространстве задается тремя уравне-
уравнениями:
x = rcost, y = rsmt, 2 = 0,
причем параметр t пробегает полусегмент 0 < t < 2тг.
Для параметрического задания поверхности координаты любой точ-
точки этой поверхности должны быть заданы как функции не одного, а двух
параметров р и q. Убедимся в том, что три уравнения
х = ф (р, q), y = y(p,q), z = x(p, q) D.22)
определяют в пространстве некоторую поверхность.
Для этого предположим, что хотя бы одна пара из трех уравнений D.22)
может быть разрешена относительно параметров р и q. Допустим, напри-
например, что из первых двух уравнений D.22) р и q могут быть выражены как
функции х и у: р = Ф\(х, у), q = <t>2(x, у).
Вставляя эти значения р и q в третье уравнение D.22), мы получим
уравнение с тремя переменными:
2-%[Ф{(х,у),Ф2(х,у)]=0,
определяющее, как нам известно, некоторую поверхность 0.
В качестве примера приведем параметрические уравнения сферы
радиуса г > 0 с центром в начале координат:
х = г cos 9 sin ф, у = r sin 9 sin ф, 2 = г cos ф.
Здесь параметры 9 и ф представляют собой угловые сферические коор-
координаты (долготу и широту) точек поверхности сферы (см. § 4 гл. 1). Для
того чтобы все точки сферы обходились один раз, следует ограничить
область изменения параметров промежутками 0 < 9 < 2тг, 0 < ф < тт.
5. Классификация поверхностей. В полной аналогии с класси-
классификацией плоских кривых устанавливают следующую классификацию
поверхностей.
Определение 1. Поверхность называется алгебраической,
если в некоторой декартовой прямоугольной системе координат она
определяется алгебраическим уравнением с тремя переменными.
Определение 2. Всякая не алгебраическая поверхность назы-
называется трансцендентной.
Определение 3. Алгебраическая поверхность называется
поверхностью порядка п, если в некоторой декартовой
прямоугольной системе координат она определяется алгебраичес-
алгебраическим уравнением степени п с тремя переменными.
Конечно, при этом требуются некоторые ограничения.
§2] УРАВНЕНИЯ ПОВЕРХНОСТИ И ЛИНИИ 109
Для установления корректности этих определений необходимо до-
доказать следующее утверждение.
Теорема 4.2. Если поверхность в некоторой декартовой прямо-
прямоугольной системе координат определяется алгебраическим уравне-
уравнением степени п, то эта поверхность и в любой другой декартовой
прямоугольной системе координат определяется алгебраическим
уравнением той же степени п.
Доказательство теоремы 4.2 вполне аналогично доказательству тео-
теоремы 4.1 и опирается на доказанное в§2гл. Зутверждение: каковы
бы ни были две произвольные декартовы прямоугольные системы ко-
координат, координаты х,у иг любой точки пространства относитель-
относительно первой системы являются линейными функциями координат х', у'
и z' той же точки относительно второй системы. С помощью этого
утверждения и рассуждений, полностью аналогичных тем, которые про-
проводятся при доказательстве теоремы 4.1, мы получим, что если поверх-
поверхность 5 в некоторой декартовой прямоугольной системе Oxyz опре-
определяется алгебраическим уравнением степени п, то эта поверхность в
любой другой декартовой прямоугольной системе O'x'y'z' определяет-
определяется алгебраическим уравнением степени не выше п. Поменяв роля-
ролями системы Oxyz и O'x'y'z', мы завершим доказательство теоремы 4.2.
Замечание 1. Так же как и в случае плоской линии, вводится
понятие распадающейся алгебраической поверхности.
Замечание 2. Пространственная линия называется алгебраи-
алгебраической, если она может быть определена как пересечение двух алгебра-
алгебраических поверхностей.
Всякая не алгебраическая линия называется трансцендентной.
6. О пересечении поверхностей и линий в пространстве. Для
отыскания точек пересечения поверхностей или линий (или поверхнос-
поверхностей и линий) следует рассмотреть совместно уравнения, определяющие
указанные геометрические объекты. Решение полученной при этом сис-
системы и определит нам координаты всех точек пересечения. Если полу-
полученная система не имеет решений, то точек пересечения нет.
Так, например, если заданы две линии, первая из которых определяет-
определяется уравнениями Фх(х, у, z) = 0 и Ф2(х, у, z) = 0, а вторая — уравнения-
уравнениями Фз(Х у, z) = 0 и Ф4(х, у, z) = 0, то координаты точек пересечения этих
двух линий (в случае, если точки пересечения существуют) обязаны быть
решением системы четырех уравнений с тремя неизвестными:
Фх(х, у, z) = 0, Ф2О, у, z) = 0,
Ф3(х,у, z) = 0, ФА(х,у, z) = 0.
Так как число неизвестных меньше числа уравнений, то последняя сис-
система, вообще говоря, не имеет решений, т.е. две линии в пространстве,
вообще говоря, не пересекаются.
ПО УРАВНЕНИЯ ПОВЕРХНОСТИ И ЛИНИИ [ГЛ.4
7. Заключительные замечания. Линии и поверхности выше вто-
второго порядка не входят в учебные курсы аналитической геометрии (им
посвящены специальные курсы). В нашем курсе мы ограничимся изуче-
изучением плоских линий и поверхностей первого и второго порядков.
В гл. 5 будут рассмотрены линии и поверхности первого порядка (их
называют также линейными образами О). В гл. 6 изучаются плоские
линии второго порядка, в гл. 7 — поверхности второго порядка.
) Термин «линейный» объясняется тем, что в левой части уравнения первого поряд-
порядка стоит линейная функция.
ГЛАВА 5
ЛИНЕЙНЫЕ ОБРАЗЫ
Эта глава посвящена всестороннему изучению прямых линий на плос-
плоскости и плоскостей и прямых линий в пространстве.
Убедившись в том, что этими объектами исчерпываются все линей-
линейные образы (т.е. геометрические объекты, определяемые линейными
уравнениями), мы вводим в рассмотрение различные виды уравнений
прямой и плоскости и останавливаемся на их использовании для реше-
решения важнейших задач.
§ 1. Различные виды уравнения прямой
на плоскости
1. Общее уравнение прямой. Докажем сначала, что если на плос-
плоскости тг задана произвольная прямая линия L и фиксирована произ-
произвольная декартова прямоугольная система Оху, то прямая L опре-
определяется в этой системе уравнением первой степени.
Достаточно доказать, что прямая L определяется уравнением первой
степени при каком-то одном специальном выборе декартовой прямоу-
прямоугольной системы на плоскости тг, ибо тогда она будет определяться урав-
уравнением первой степени и при любом выборе декартовой прямоугольной
системы на плоскости тг (в силу теоремы 4.1). Направим ось Ох вдоль пря-
прямой L, а ось Оу перпендикулярно к ней. Тогда уравнением прямой будет
уравнение первой степени у = О.В самом деле, этому уравнению будут
удовлетворять координаты любой точки, лежащей на прямой L, и не бу-
будут удовлетворять координаты ни одной точки, не лежащей на прямой L.
Утверждение доказано.
Докажем теперь, что если на плоскости тг фиксирована произволь-
произвольная декартова прямоугольная система Оху, то всякое уравнение
первой степени с двумя переменными х и у определяет относитель-
относительно этой системы прямую линию.
В самом деле, пусть фиксирована произвольная декартова прямоу-
прямоугольная система Оху и задано уравнение первой степени
Ах + Ву + С = 0, E.1)
в котором А, В и С — какие угодно постоянные, причем из постоянных
А и В хотя бы одна отлична от нуля. Уравнение E.1) заведомо имеет
112 ЛИНЕЙНЫЕ ОБРАЗЫ [ГЛ.5
хотя бы одно решение х0, у о 0, т.е. существует хотя бы одна точка
М0(х0, у0), координаты которой удовлетворяют уравнению E.1):
Ахо + Вуо + С = О. E.2)
Вычитая из уравнения E.1) тождество E.2), мы получим уравнение
уо) = О, E.3)
эквивалентное уравнению E.1). Достаточно доказать, что уравнение
E.3) определяет относительно системы Оху некоторую прямую. Мы
докажем, что уравнение E.3) (а стало быть, и E.1)) определяет пря-
прямую L, проходящую через точку М0(х0, у0) и перпендикулярную век-
вектору п = {А, В} (так как Л и В одновременно не равны нулю, то вектор п
ненулевой).
В самом деле, если точка М (х, у) лежит на указанной прямой L, то ее
координаты удовлетворяют уравнению E.3), ибо в этом случае векторы
п = {А, В} и М0М ={х-х0, у - у0} ортогональны и их скалярное про-
произведение
уо) E.4)
равно нулю. Если же точка М (х, у) не лежит на указанной прямой L,
то ее координаты не удовлетворяют уравнению E.3), ибо в этом слу-
случае векторы п и М0М не ортогональны, и поэтому их скалярное про-
произведение E.4) не равно нулю. Утверждение доказано.
Уравнение E.1) с произвольными коэффициентами А, В и С таки-
такими, что А и В не равны нулю одновременно, называется общим
уравнением прямой. Мы доказали, что прямая, определяемая
общим уравнением E.1), ортогональна к вектору п = {А, В}. Этот пос-
последний вектор мы будем называть нормальным в е к т ор о м
прямой E.1).
Заметим, что если два общих уравнения Ах + By + С = О и
Ахх + Вху + Сх=0 определяют одну и ту же прямую, то найдется
такое число t, что справедливы равенства
Ax=At, Bx = Bt, Cx = Ct, E.5)
т.е. коэффициенты Аь Вь Сх второго уравнения равны соответ-
соответствующим коэффициентам А, В и С первого уравнения, умножен-
умноженным на некоторое число t.
В самом деле, по условию прямые, определяемые уравнениями
Ах + By + С = 0 и Ахх + Вху + С{ = 0, сливаются. Стало быть, нормаль-
нормальные векторы п = {А, В}ищ = {Ах, В^коллинеарны.Таккак, кроме того,
вектор п ненулевой, найдется (в силу теоремы 2.1) число t такое, что
О В самом деле, Л и В одновременно не равны нулю. Пусть, например, В ф 0. Тогда,
взяв произвольное х0, мы получим из уравнения E.1) у0 = х0 .
В В
§ 1] РАЗЛИЧНЫЕ ВИДЫ УРАВНЕНИЯ ПРЯМОЙ НА ПЛОСКОСТИ 113
п{ = nt, а отсюда и из линейного свойства координат вектора вытекают
первые два из равенств E.5). Докажем справедливость и последнего ра-
равенства E.5). Слившиеся прямые имеют общую точку М0(х0, у0), так что
Ах0 + Вуо + С = О и А{х0 + В{у0 + С{ = 0. Умножая первое из этих равенств
на t и вычитая из него второе равенство, будем иметь (At-A{)x0 + (Bt -
- В{)у0 + (Ct - С{) = 0. Отсюда в силу первых двух равенств E.5) Ct -Сх = О,
т.е. С{ = Ct.
2. Неполные уравнения прямой. Уравнение прямой в отрезках.
Общее уравнение прямой E.1) называется полным, если все его
коэффициенты А, В и С отличны от нуля. Если хотя бы один из ука-
указанных коэффициентов равен нулю, уравнение называется неполным.
Рассмотрим все возможные виды неполных уравнений.
1) С = 0, уравнение Ах + By = 0 определяет прямую, проходящую че-
через начало координат (поскольку координаты начала удовлетворяют это-
этому уравнению).
2) В = 0, уравнение Ах + С = 0 определяет прямую, параллельную
оси Оу (поскольку нормальный вектор этой прямой п = {А, 0} ортогона-
ортогонален оси Оу).
3) А = 0, уравнение Ву + С = 0 определяет прямую, параллельную
оси Ох (поскольку нормальный вектор этой прямой п = {О, В} ортогона-
ортогонален оси Ох).
4) В = 0 и С = 0, уравнение Ах = 0 определяет ось Оу (в самом деле,
эта прямая параллельна оси Оу и проходит через начало координат).
5) А = О, С = 0, уравнение By = 0 определяет ось Ох (ибо эта прямая
параллельна оси Ох и проходит через начало координат).
Рассмотрим теперь полное уравнение прямой E.1) и покажем, что
оно может быть приведено к следующему виду:
^ = 1, E.6)
а Ъ
называемому уравнением прямой в отрезках.
В самом деле, так как все коэффициенты А, В и С отличны от нуля,
мы можем переписать уравнение E.1) в виде
-С/А -С/В
и затем положить а = -С/А, Ь = -С/В.
Заметим, что в уравнении «в отрезках» E.6) числа а и Ь имеют про-
простой геометрический смысл: они равны величинам отрезков, которые
отсекает прямая на осях Ох и Оу соответственно (отрезки отсчитыва-
ются от начала координат, рис. 5.1). Чтобы убедиться в этом, достаточ-
достаточно найти точки пересечения прямой, определяемой уравнением E.6), с
114 ЛИНЕЙНЫЕ ОБРАЗЫ [ГЛ.5
осями координат. Например, точка пересечения с осью Ох определяет-
определяется из совместного рассмотрения уравнения прямой E.6) с уравнением
у = О оси Ох. Мы получим координаты точки пересечения х = а, у = 0.
Аналогично устанавливается, что координаты точки пересечения пря-
прямой E.6) с осью Оу имеют вид х = 0, у = Ь.
Уравнение прямой в виде «отрезков» удобно использовать для по-
построения этой прямой на чертеже.
3. Каноническое 0 уравнение прямой. Любой
ненулевой вектор, параллельный данной прямой,
будем называть направляющим вектором этой
прямой.
Поставим перед собой задачу: найти уравнение
прямой, проходящей через данную точку Мх(хх, ух)
и имеющей заданный направляющий вектор
Рис. 5.1 q = {l, m}.
Очевидно, точка М {х, у) лежит на указанной прямой тогда и только
тогда, когда векторы МХМ ={х-хх, у - ух} и q = {/, т} коллинеарны,
т.е. тогда и только тогда, когда координаты этих векторов пропорцио-
пропорциональны (см. следствие из теоремы 2.17):
E.7)
д
/ т
Уравнение E.7) и есть искомое уравнение прямой. Это уравнение назы-
называют обычно каноническим уравнением прямой.
Заметим, что в каноническом уравнении E.7) один из знаменателей /
или т может оказаться равным нулю (оба числа / и т равняться нулю
не могут, ибо вектор q = {/, т} ненулевой). Так как всякую пропорцию
a/b = c/d мы договорились понимать как равенство ad = be, обращение
в нуль одного из знаменателей в E.7) означает обращение в нуль и
соответствующего числителя. В самом деле, если, например, 1 = 0,
то, поскольку тф§, из равенства / (у -У\) = т{х-х{) заключаем, что
х-х{ = 0.
В заключение запишем уравнение прямой, проходящей через две
данные точки М{(хь ух) и М2(х2, у2) (конечно, эти точки считаются от-
отличными друг от друга). Так как за направляющий вектор такой прямой
можно взять вектор q= M^M^ ={х2-х{, у2~У\} и прямая проходит
через точку Мх{хх, ух), то из канонического уравнения E.6) получим
уравнение искомой прямой в виде
~ Х\ У2 ~ У\
E.8)
0 Термин «канонический» (от греческого kocvcov — правило, предписание, образец)
понимается здесь как «типовой», «традиционный».
§ 1] РАЗЛИЧНЫЕ ВИДЫ УРАВНЕНИЯ ПРЯМОЙ НА ПЛОСКОСТИ 115
4. Параметрические уравнения прямой. Параметрические урав-
уравнения прямой элементарно получаются из канонического уравнения этой
прямой. Примем за параметр t величину, стоящую в левой и в правой час-
частях E.7). Так как один из знаменателей E.7) отличен от нуля, а соответ-
соответствующий числитель может принимать какие угодно значения, то обла-
областью изменения параметра t является вся вещественная ось: -оо <t<oo.
Мы получим х - Х\ = It, у - i)\ = mt или окончательно
x = x{ + lt, y = y{ + mt. E.9)
Уравнения E.9) и есть искомые параметрические уравнения пря-
прямой. Уравнения E.9) допускают наглядную механическую интерпре-
интерпретацию. Если считать, что параметр t — это время, отсчитываемое от
некоторого начального момента, то параметричес-
параметрические уравнения E.9) определяют закон движения ма-
териальной точки по прямой линии с постоянной
скоростью v = V/2 + т2 (такое движение происхо-
происходит по инерции).
5. Прямая с угловым коэффициентом. Рас-
J/A Mx
смотрим любую прямую, не параллельную оси Ох. /
Введем понятие угла наклона этой прямой к оси Ох. Рис. 5.2
Предположим, что рассматриваемая прямая пересе-
пересекает ось Ох в точке А (рис. 5.2). Возьмем на оси Ох произвольную точ-
точку М, лежащую по ту сторону от точки А, куда направлена ось Ох, а на
рассматриваемой прямой произвольную точку N, лежащую по ту сторо-
сторону от точки А, куда направлена ось Оу. Угол а = Z NAM назовем углом
наклона данной прямой к оси Ох.
Если прямая параллельна оси Ох или совпадает с ней, то угол накло-
наклона этой прямой к оси Ох мы будем считать равным нулю.
Тангенс угла наклона прямой к оси Ох назовем угловым ко-
коэффициентом этой прямой. Если обозначить буквой k уг-
угловой коэффициент данной прямой, а буквой а угол наклона этой пря-
прямой к оси Ох, то по определению можно записать & = tg ос.
Заметим, что для прямой, параллельной оси Ох, угловой коэффициент
равен нулю, а для прямой, перпендикулярной оси Ох, угловой коэффи-
коэффициент не существует (в последнем случае иногда формально говорят,
что угловой коэффициент «обращается в бесконечность»).
Выведем уравнение прямой, проходящей через данную точку
^i(xb У\) и имеющей данный угловой коэффициент k.
Для этого докажем сначала следующее утверждение: если пря-
прямая не параллельна оси Оу и имеет направляющий вектор q = {/, т},
то угловой коэффициент этой прямой k равен k = т/1.
Пусть а — угол наклона прямой к оси Ох, а 9 — угол наклона на-
направляющего вектора q = {/, т} к оси Ох. Так как прямая может быть
116 ЛИНЕЙНЫЕ ОБРАЗЫ [ГЛ.5
наклонена к оси Ох под острым или под тупым углом и ее направляю-
направляющий вектор q может иметь два противоположных направления, то воз-
возможны четыре случая, изображенных на рис. 5.3. В случаях 1) и 3) 9 = а
и для проекций на оси вектора q справедливы формулы
/= | q | cos 9,
т = | q | cos 9 = | q | sin 9.
В случаях 2)и4)9 = тг-аи для проекций вектора q справедливы фор-
формулы / = | q | cos 9, т = - | q | sin 9.
Таким образом, в случаях 1) и 3)
tg 9 = tg а и т/1 = tg 9, а в случаях 2) и 4)
tg 9 = -tg а и т/1 = -tg 9.
Стало быть, во всех четырех случаях
tg a = т/1, и утверждение доказано.
Для того чтобы вывести уравнение пря-
прямой, проходящей через заданную точку
М{(хьу{) и имеющей заданный угловой
q коэффициент k, умножим обе части кано-
' ' нического уравнения E.7) на т и учтем, что
Рис-5-3 m/l = k.
Получим искомое уравнение в виде
у - ух =k(x - хх). E.10)
Если теперь обозначить через Ъ постоянную b = y{ -kxx, то уравнение
E.10) примет вид
y = kx + b. E.11)
Уравнение E.11) называется уравнением прямой с угловым коэф-
коэффициентом. В этом уравнении k обозначает угловой коэффициент дан-
данной прямой, а Ь представляет собой величину отрез-
отрезка, отсекаемого данной прямой на оси Оу, начи-
начиная от начала координат. Чтобы убедиться в этом,
достаточно рассмотреть совместно уравнение E.11)
и уравнение х = 0 оси Оу и найти координаты точки
Рис 5 4 пересечения оси Оу и прямой E.11): х = 0, у = Ь
(рис. 5.4).
6. Угол между двумя прямыми. Условия параллельности и
перпендикулярности двух прямых.
а) Пусть сначала две прямые Lx и L2 заданы общими уравнениями
§ 1] РАЗЛИЧНЫЕ ВИДЫ УРАВНЕНИЯ ПРЯМОЙ НА ПЛОСКОСТИ 117
Так как нормальным вектором прямой Lx является вектор щ = {Ль Вх},
а нормальным вектором прямой L2 является вектор щ = {А2, В2}, то за-
задача об определении угла между прямыми Lx и L2 сводится к определе-
определению угла ф между векторами щ и щ 1).
Из определения скалярного произведения п^ = | п{ \ \ щ | cos ф и из
выражения в координатах длин векторов п{ и щ и их скалярного произ-
произведения получим
АХА2 + ВХВ2
cos(p = \ Л= E12)
Итак, угол ф между прямыми Lx и L2 определяется с помощью форму-
формулы E.12).
Условие параллельности прямых Lx и L2, эквивалентное
условию коллинеарности векторов щ и п2, заключается в пропорцио-
пропорциональности координат этих векторов, т.е. имеет вид )
А2 В2
E.13)
Условие перпендикулярности прямых Lx и L2 может
быть извлечено из формулы E.12) (при cos ф = 0) или выражено равен-
равенством нулю скалярного произведения п{ • п2. Оно имеет вид
А1А2 + В1В2 = 0. E.14)
б) Пусть теперь две прямые Lx и L2 заданы каноническими уравне-
уравнениями
х-хх _у-ух и х - х2 =у-у2
1Х тх 12 т2
Так как направляющими векторами прямых Lx и L2 служат векторы
q1 = {lh m{}nq2 = {/2, m2}, то в полной аналогии со случаем а) мы получим
1) формулу для угла ф между прямыми L{ и L2:
lxl2+mxm2 # E 120
E.13')
+ Щ
2) условие параллельности прямых Lx и L2\
/2
0 Любые две пересекающиеся прямые образуют два угла, в сумме равных п. Нам до-
достаточно определить одни из них.
2) При этом, как и выше, мы понимаем пропорцию a/b = c/d в смысле равенства
ad = be.
118 ЛИНЕЙНЫЕ ОБРАЗЫ
3) условие перпендикулярности прямых Lx и L2\
lxl2 + тхт2 = 0.
[ГЛ.5
E.140
в) Пусть, наконец, две прямые Lx и L2 заданы уравнениями с угло-
угловым коэффициентом
= kxx
и y =
Если ах и а2 — углы наклона прямых Lx и L2 к оси Ох, а ф — один из
углов между этими прямыми, то из элементарных соображений (рис. 5.5)
вытекает, что
Ф = а2 - ах.
Таким образом,
tg oc9 - tg a, k^ - к
tg ф = tg (a2 - o^) = ——-—-—- = — .
1 + tg CXjtg 0C2 1 + kxk2
Мы получаем следующую формулу для определения угла ф:
Псу Кл
1 + kxk2
E.12")
J
У
0
/
al>
г/
т
1
Рис. 5.5
Если в этой формуле поменять местами kx и k2 (от
чего фактически лишь изменится знак на противо-
противоположный), то эта формула определит нам другой
угол между прямыми, смежный по отношению к
прежнему углу (эти два угла в сумме составляют тг и
тангенсы их отличаются лишь знаком).
Прямые параллельны, когда тангенс угла меж-
между ними равен нулю, т.е. условие параллельности
имеет вид
kx = k2 E.13")
(при этом числитель в E.12") равен нулю, а знаменатель строго положи-
положителен).
Условие перпендикулярности прямых Lx и L2 также можно получить
из E.12"). Оно отвечает случаю, когда тангенс угла ф не существует,
т.е. случаю обращения знаменателя формулы E.12") в нуль: kxk2 +1=0.
Итак, условие перпендикулярности прямых Lx и L2 имеет вид
*,=-!/*,.
E.14")
7. Нормированное уравнение прямой. Отклонение точки от
прямой. Рассмотрим какую угодно прямую L. Проведем через начало
§ 1] РАЗЛИЧНЫЕ ВИДЫ УРАВНЕНИЯ ПРЯМОЙ НА ПЛОСКОСТИ 119
координат О прямую п, перпендикулярную L, и обозначим буквой Р точ-
точку пересечения указанных прямых (рис. 5.6). На прямой п возьмем еди-
единичный вектор п, направление которого совпа-
совпадает с направлением отрезка ОР (в случае со-
совпадения точек О и Р направление п выберем
произвольно).
Поставим перед собой цель — выразить
уравнение прямой L через два параметра: -qL
1) длину р отрезка ОР ; 2) угол Q между век-
вектором п и осью Ох.
Так как п — единичный вектор, то его координаты, соответственно
равные его проекциям на оси координат, имеют вид О
n = {cose, sine}. E.15)
Очевидно, точка М{х, у) лежит на рассматриваемой прямой L
тогда и только тогда, когда проекция вектора ОМ на ось, опреде-
определяемую вектором п, равна р, т.е. при условии
щп ОМ =р. E.16)
Так как п — единичный вектор, то в силу определения 2 скалярного
произведения (см. п. 1 § 2 гл. 2)
прп0М =п-ОМ. E.17)
Имея в виду, что ОМ = {х, у}, а вектор п определяется равенством E.15),
мы получим следующее выражение для скалярного произведения этих
векторов:
п- ОМ =х cos в + у sine. E.18)
Из сопоставления E.16), E.17) и E.18) вытекает, что точка М (х, у)
лежит на прямой L тогда и только тогда, когда координаты этой
точки удовлетворяют уравнению
х cos е + у sin е - р = 0; E.19)
E.19) и есть искомое уравнение прямой L (выраженное через два пара-
параметра: е и р). Это уравнение называется нормированным уравнением
прямой.
Введем теперь фундаментальное понятие отклонения произвольной
точки М от данной прямой L. Пусть число d обозначает расстояние от
точки М до прямой L. Назовем отклонением 5 точки М от
прямой L число +d в случае, когда точка М и начало координат О
лежат по разные стороны от прямой L, и число —d в случае, когда М
и О лежат по одну сторону от L.
О В силу того, что проекция вектора на любую ось равна модулю этого вектора, умно-
умноженному на косинус угла наклона к оси (см. п. 8 § 1 гл. 2).
120 ЛИНЕЙНЫЕ ОБРАЗЫ [ГЛ.5
Если же начало координат О лежит на прямой L, мы положим откло-
отклонение равным +d в случае, когда М лежит по ту сторону от L, куда на-
направлен вектор п, и равным -d в противном случае.
Выясним геометрический смысл левой час-
части уравнения E.19) при любых х и у.
Теорема 5.1. Левая часть нормированно-
нормированного уравнения прямой E.19) равна отклоне-
отклонению точки М с координатами х, у от пря-
прямой L, определяемой уравнением E.19).
Доказательство. Спроецируем точ-
Рис 57 ку УН на ось, определяемую вектором п. Пусть
Q — проекция точки М. Отклонение 5 точ-
точки М от прямой L равно PQ, где PQ обозначает величину направлен-
направленного отрезка PQ оси, определяемой вектором п. Далее, из основного
тождества (см. гл. 1) очевидно (рис. 5.7), что
8 = PQ = OQ-OP=OQ-p. E.20)
Но OQ = прп ОМ, а последняя проекция в силу формул E.17) и E.18)
равная х cos 9 + у sin 9. Итак,
OQ = х cos 9 + у sin 9. E.200
Сопоставляя формулы E.200 и E.20), получим
5 = х cos 9 + у sin 9 -р. E.21)
Теорема доказана.
Теорема 5.1 приводит нас к следующему правилу: для нахожде-
нахождения отклонения 5 точки М (х0, у о) от прямой L следует в левую часть
нормированного уравнения прямой L подставить на место х и у ко-
координаты х0 и у0 точки М.
Разумеется, это правило позволяет отыскивать и расстояние от точ-
точки М до прямой L, ибо расстояние равно модулю отклонения.
В заключение укажем алгоритм приведения общего уравнения пря-
прямой Ах + By + C = 0 к нормированному виду E.19).
Так как указанное общее уравнение и уравнение E.19) должны опре-
определять одну и ту же прямую, то (в силу замечания в конце п. 1) найдется
число t такое, что
L4 = cos9, ^ = sin9, tC = -p. E.22)
Возвышая в квадрат первые два равенства и затем складывая их, полу-
получим 12(А2 + В2) = 1, откуда
t = ± . l =. E.23)
§ 1] РАЗЛИЧНЫЕ ВИДЫ УРАВНЕНИЯ ПРЯМОЙ НА ПЛОСКОСТИ 121
Остается уточнить, какой из знаков ± следует взять в формуле E.23).
Так как по смыслу расстояние р всегда неотрицательно, то из третьего
равенства E.22) заключаем, что знак t противоположен знаку С.
Итак, для приведения общего уравнения прямой Ах + By + С = О к
нормированному виду E.19) следует умножить его на нормирующий
множитель E.23), знак которого противоположен знаку С.
8. Уравнение пучка прямых. Совокупность лежащих на данной
плоскости тг прямых, проходящих через некоторую точку 5 этой плоско-
плоскости, принято называть пучком прямых с центром в S.
Центр 5 пучка прямых полностью определяется заданием двух раз-
различных прямых этого пучка. Зная центр пучка S(xx, ух), легко написать
уравнение любой прямой этого пучка: для этого можно, например, ис-
использовать уравнение E.10) прямой, проходящей через точку S(xx, ух)
и имеющей заданный угловой коэффициент k. Однако при решении за-
задач представляется удобным уметь писать уравнение любой прямой,
проходящей через точку пересечения двух данных прямых, не вычисляя
координат этой точки пересечения.
В этом пункте и решается задача о нахождении уравнения пучка пря-
прямых, центром которого служит точка пересечения двух данных прямых,
определяемых уравнениями
Alx + Bly+Cl=Q и А2х + В2у+ С2 = 0.
Докажем следующую основную теорему.
Теорема 5.2. Если Ахх + Вху + Сх=0 и А2х + В2у + С2 = 0 суть урав-
уравнения двух различных прямых, пересекающихся в некоторой точке S,
ааи$ — какие угодно не равные одновременно нулю числа, то
а (Ахх + Вху + Сх) + р (А2х + В2у + С2) = 0 E.24)
есть уравнение прямой, проходящей через точку S. Более того, ка-
какова бы ни была наперед заданная проходящая через точку S пря-
прямая, она определяется уравнением E.24) при некоторых аи$.
Доказательство. Прежде всего установим, что при любых а
и C, не равных одновременно нулю, равенство E.24) представляет со-
собой уравнение первого порядка (т.е. в этом равенстве хотя бы один из
коэффициентов при х или при у не равен нулю). Собирая в равенстве
E.24) коэффициенты при х и у, перепишем это равенство в виде
(осА j + рЛ2) х + (аВх + рБ2) у + (аСх + рС2) = 0. E.240
Если бы имели место равенства аАх + рЛ2 = 0 и аВх + р52 = 0, то из этих
равенств, предполагая, например, что а^О 0, мы получили бы
AJA2 = -$/a, Bx/B2 = -$/a, т.е. АХ/А2 = ВХ/В2.
) По условию одно из чисел аир отлично от нуля.
122 ЛИНЕЙНЫЕ ОБРАЗЫ [ГЛ.5
Последнее равенство (см. п. 6) есть условие параллельности прямых,
определяемых уравнениями Ахх + Вху + С{ = О и А2х + В2у + С2 = 0, и
противоречит предположению о том, что эти прямые пересекаются и не
совпадают.
Итак, E.24) при любых а и C, не равных одновременно нулю, пред-
представляет собой уравнение первой степени, определяющее (в силу резуль-
результатов п. 1) некоторую прямую.
Эта прямая заведомо проходит через точку 5 (х0, у о) пересечения двух
прямых, определяемых уравнениями
Ахх + Вху + С{ =0 и А2 + В2у+ С2 = 0.
В самом деле, так как S(x0, у0) принадлежит каждой из двух указанных
прямых, то справедливы равенства
А{х0 + В{у0 + С{ =0 и А2х0 + В2Уо + С2 = О,
из которых вытекает, что при любых аир
а (Ахх0 + Вху0 + Q) + Р (А2х0 + В2у0 + С2) = О,
т.е. координаты х0 и у0 точки 5 удовлетворяют уравнению E.24).
Остается доказать, что, какова бы ни была наперед заданная
проходящая через точку 5 прямая, она определяется уравнением E.24)
при некоторых аир. Наперед заданная проходящая через точку 5 (х0, у0)
прямая однозначно определяется заданием еще одной отличной от 5
точки УН* (х*, у*), ей принадлежащей. Таким образом, достаточно дока-
доказать, что не равные одновременно нулю аир можно выбрать так, что
координаты х*, у* наперед заданной точки М * будут удовлетворять урав-
уравнению E.24) при этих аир. Подставляя в E.24) на место х и у коорди-
координаты х* и у* точки М*, получим равенство
а (А{х* + В{у* + С{) + р (Л2х* + В2у* + С2) = 0. E.25)
Прежде всего заметим, что E.25) представляет собой уравнение относи-
относительно а и р. В самом деле, оба выражения в круглых скобках, являющие-
являющиеся коэффициентами при аир, обратиться в нуль не могут, ибо это означало
бы, что две прямые, определяемые уравнениями Ахх + Вху + Сх =0 и
А2х + В2у + С2 = 0, проходят через точку М*. (Последнее невозможно в
силу того, что эти прямые не совпадают и проходят через точку S, от-
отличную от М*.) Итак, хотя бы одна из круглых скобок в E.25) отлична
от нуля. Пусть, например, А±х* + В±у* + Сх Ф 0. Тогда, задав произволь-
произвольно р Ф 0, мы определим из уравнения E.25) коэффициент а:
а= А2х*+В2у*+С2
C
§2] НЕКОТОРЫЕ ЗАДАЧИ НА ПРЯМУЮ ЛИНИЮ НА ПЛОСКОСТИ 123
При указанных аир прямая, определяемая уравнением E.24), проходит
через точку УИ*(х*, у*). Случай, когда отлична от нуля вторая из круглых
скобок в E.25), рассматривается аналогично. Теорема доказана.
Замечание. Так как в уравнении пучка E.24) хотя бы одно из
чисел аир отлично от нуля, то можно записывать уравнение пучка не с
двумя коэффициентами а и р, а с одним коэффициентом X, равным их
отношению. Так, если отлично от нуля а, то, поделив E.24) на а и поло-
положив X = р/а, мы получим уравнение пучка в виде
(Ахх + Вху + СХ) + Х (А2х + В2у + С2) = 0. E.26)
Следует, однако, отметить, что уравнение E.26) содержит все прямые,
проходящие через точку пересечения прямых, определяемых уравнени-
уравнениями Ахх + Вху + Сх = 0 и А2х + В2у + С2 = 0, за исключением одной пря-
прямой — прямой, определяемой уравнением А2х + В2у + С2 = 0 (она не
получится из E.26) ни при каком X).
§ 2. Некоторые задачи на прямую линию
на плоскости
Выше уже был рассмотрен ряд задач на прямую линию на плоскости
(нахождение угла между двумя прямыми, установление условий парал-
параллельности и перпендикулярности двух прямых, вычисление отклонения
и расстояния точки от прямой, нахождение уравнения прямой, проходя-
проходящей через точку пересечения двух данных прямых).
В этом параграфе мы рассмотрим ряд задач, развивающих и углубля-
углубляющих материал предыдущего параграфа.
1. Нахождение прямой, проходящей через данную точку
Mx(xi, yd и составляющей заданный угол ф с данной прямой
у = kiX + b\. Будем искать уравнение прямой, проходящей через точку
М\(х\, у\) и составляющей заданный угол ф с прямой, определяемой урав-
уравнением y = kxx + bu в форме E.10):
y-yx=k{x-xx).
Прямая E.10) проходит через точку Мх(хх, ух), и нам остается выбрать
ее угловой коэффициент k так, чтобы она составляла угол ф с прямой
у = kxx + Ь\. Заметим, что, взяв уравнение искомой прямой в виде E.10),
мы исключаем из рассмотрения прямую х = хх, проходящую через точку
Мх(хх,ух) и перпендикулярную оси Ох. Так как искомая прямая
y = kx + {yx- kxx) и прямая у = kxx + Ьх составляют угол ф, то в силу фор-
формулы E.12")
k-kx
I + kkx
124 ЛИНЕЙНЫЕ ОБРАЗЫ [ГЛ.5
Из последнего уравнения определяем угловой коэффициент k искомой
прямой: к - kx = ± tg ф ± kkx tg ф, и, стало быть, при A ± kx tg ф) Ф О по-
получим
А±*Ф E.27)
1 +
В случае, если знаменатель в формуле E.27) обращается в нуль, угло-
угловой коэффициент не существует, и искомую прямую, очевидно, следует
определить уравнением х = хх.
Итак, окончательно, получаем уравнения двух искомых прямых:
1) у-ух= l + f** {х-хх) и у-у{= l
\-kxig(p 1 ч- ^
2) у-ух = — — (х-хх) и х = хх при kx tg ф = -1;
ач ^i — tg ф / ч 1 1
3) х = хх и г/ — г/х = — —\x-Xi) при ^! tg ф = I.
2. Нахождение биссектрис углов, образованных данными пря-
прямыми. Запишем уравнения двух прямых в нормированном виде. Пусть
это будут
х cos 9 + z/sin9-p = 0 и х cos Qx+ у sin 9j - px = 0.
Левые части этих уравнений равны отклонениям дх и 52 точки М (х, у)
соответственно от первой и от второй прямых. На одной из биссектрис
(отвечающей тому углу, в котором лежит начало координат) эти откло-
отклонения равны и по модулю, и по знаку; на другой биссектрисе отклоне-
отклонения 8Х и 52 равны по модулю и противоположны по знаку. Таким обра-
образом, уравнения искомых биссектрис имеют вид
(х cos 9 + у sin 9 - р) - (х cos Qx+ у sin дх - рх) = О,
(х cos 9 + у sin 9 - р) + {х cos Qx+y sin вх - рх) = 0.
3. Условия, при которых данная прямая пересекает данный
отрезок АВ. Запишем уравнение прямой в нормированном виде:
х cos 9 + у sin 9 - р = 0 и, подставив в левую часть последнего уравне-
уравнения сначала координаты точки А, а затем координаты точки В, найдем
отклонения дА и дв соответственно точек А и В от данной прямой. Для
того чтобы данная прямая пересекала отрезок АВ, необходимо и достаточ-
достаточно, чтобы точки А и В лежали по разные стороны от этой прямой, т.е. необ-
необходимо и достаточно, чтобы отклонения дЛ и дв имели разные знаки.
4. Определение местоположения данной точки М и начала ко-
координат О относительно углов, образованных двумя данными
прямыми. Пусть заданы две пересекающиеся прямые и требуется оп-
§2]
НЕКОТОРЫЕ ЗАДАЧИ НА ПРЯМУЮ ЛИНИЮ НА ПЛОСКОСТИ
125
ределить: в одном, в смежных или в вертикальных углах, образованных
этими прямыми, лежат данная точка М и начало координат О. Запишем
уравнения данных прямых в нормированном виде и, подставив в левые
части указанных уравнений координаты точки М, вычислим отклоне-
отклонения 8{ и 52 точки М от первой и второй прямых соответственно. По опре-
определению отклонения точка М и начало координат О лежат в одном углу,
если оба отклонения 5j и 52 отрицательны, в вертикальных углах, если
отклонения д{ и 52 оба положительны, и в смежных углах, если д{ и 52
имеют разные знаки.
5. Условие пересечения трех прямых в одной точке. Найдем
условие, необходимое и достаточное для того, чтобы три прямые, опре-
определяемые уравнениями
А
А2
в2
Аъ В3
и
Аъ
в2
В3
С{ =0, А2х + В2у + С2 = 0 и А3х + В3у + С3 = 0,
пересекались в одной и только в одной точке.
Так как мы ищем условия, при которых точка пересечения только
одна, то необходимо предполагать, что из трех данных прямых ка-
какие-нибудь две прямые пересекаются в одной точке (ибо в против-
противном случае у трех прямых либо вовсе не будет точек пересечения, либо
будет их бесконечно много). Таким образом, необходимо требовать,
чтобы из трех определителей второго порядка
E.28)
хотя бы один был отличен от нуля.
Ради определенности предположим, что первые две из указанных трех
прямых пересекаются в одной точке (т.е. предположим, что отличен от
нуля первый из определителей E.28)). Тогда, для того чтобы три пря-
прямые пересекались в одной точке, необходимо и достаточно, чтобы тре-
третья прямая А3х + В3у + С3 = 0 принадлежала пучку, образованному пер-
первыми двумя прямыми
а (А{х + Вху + С{) + р (А2х + В2у + С2) = 0.
В силу замечания в конце п. 1 § 1 найдется некоторое число (обозна-
(обозначим его -у) такое, что все коэффициенты последнего уравнения рав-
равны соответствующим коэффициентам уравнения А3х + В3у + С3 = 0,
умноженным на это число, т.е.
иАх + р;
или аВ} + В/
аС{ + рС2 + уС3 = 0.
126 ЛИНЕЙНЫЕ ОБРАЗЫ [ГЛ.5
Последние равенства представляют собой однородную систему трех урав-
уравнений относительно трех неизвестных а, р и у. Так как образующие пучок
коэффициенты а и р не равны нулю одновременно, то указанная систе-
система обязана иметь нетривиальное решение, для чего необходимо и доста-
достаточно (см. Дополнение к гл. 1, п. 8), чтобы определитель этой системы
А Л2
С} С^
А
с2
E.29)
был равен нулю.
Итак, для того чтобы три прямые, определяемые уравнениями
Ахх + Вху + Сх = 0, А2х + В2у + С2 = 0 и А3х + В3у + С3 = 0, пересекались
в одной и только в одной точке, необходимо и достаточно, чтобы
обращался в нуль определитель E.29) и был отличен от нуля хотя
бы один из определителей E.28).
Мы пришли к этому утверждению, предположив, что первые две из
указанных трех прямых пересекаются в одной точке. К этому же резуль-
результату приводит и предположение о том, что пересекаются в одной точке
любые другие две из указанных трех прямых (впрочем, последнее ясно
из соображений симметрии).
6. Нахождение прямой, проходящей через точку пересечения
двух данных прямых и удовлетворяющей еще одному условию.
Пусть требуется найти уравнение прямой, проходящей через точку пе-
пересечения двух неколлинеарных 0 прямых, определяемых уравнения-
уравнениями Ахх + Вху + Сх = 0 и А2х + В2у + С2 = 0, и, кроме того, удовлетворяю-
удовлетворяющей одному из следующих трех условий: а) отсекающей на осях отрезки
равной длины; б) параллельной заданной прямой А3х + В3у + С3 = 0;
в) перпендикулярной заданной прямой А3х + В3у + С3 = 0.
Искомая прямая принадлежит пучку
а (Ахх + Вху + Сх) + р (А2х + В2у + С2) = 0. E.30)
Для определения постоянных а и р (а точнее, их отношения) будем ис-
использовать дополнительное условие.
В случае а) мы должны собрать в E.30) коэффициенты при х и у и
приравнять друг другу модули этих коэффициентов (мы приравни-
приравниваем друг другу не сами коэффициенты при х и у, а их модули, так как
требуется, чтобы отсекаемые на осях отрезки имели равную длину, а не
величину). В результате получим уравнение | аАх + рЛ21 = | рБ2 + аВх | или
а(Ах + Вх) =-р(Л2 + В2). Заметим, что обе круглые скобки обратиться
в нуль не могут (так как прямые Ахх + Вху + Сх = 0 и А2х + В2у + С2 = 0
рямые называются неколлинеарными, если они не параллельны и не совпадают.
§3] РАЗЛИЧНЫЕ ВИДЫ УРАВНЕНИЯ ПЛОСКОСТИ 127
не коллинеарны), и, стало быть, из последнего равенства, задавая про-
произвольно один из коэффициентов аир, мы найдем другой из этих ко-
коэффициентов.
В случае б) учтем, что у двух параллельных прямых коэффициенты
при х и у пропорциональны (см. § 1, п. 6, условие E.13)).
Таким образом, мы получим
Заметим, что в последнем равенстве обе круглые скобки не могут обра-
обратиться в нуль (иначе бы прямые Ахх + Вху + Сх = О и А2х + В2у + С2 = О
оказались коллинеарными), и поэтому из последнего равенства, зада-
задавая произвольно один из коэффициентов аир, мы найдем другой из этих
коэффициентов.
В случае в) используем для прямой E.30) и прямой А3х + В3у + С3 = 0
условие перпендикулярности E.14) (см. § 1, п. 6). В результате полу-
получим (оАх + рЛ2)Л3 + (аВх + рБ2)Б3 = 0 или а(АхА3 + ВХВ3) =-р(Л2Л3 + В2В3).
Заметим, что обращение в нуль обеих круглых скобок последнего равен-
ства невозможно (иначе мы получили бы, что Т~ ~ Т~ и прямые А хх + Вху +
+ С{ = 0 и А2х + В2у + С2 = 0 коллинеарны). Таким образом, задавая в ука-
указанном равенстве произвольно один из коэффициентов аир, мы опре-
определим из него другой из этих коэффициентов.
§ 3. Различные виды уравнения плоскости
1. Общее уравнение плоскости. Содержание этого пункта полнос-
полностью аналогично содержанию п. 1 § 1. Мы докажем два утверждения.
1°. Если в пространстве задана произвольная плоскость к и фикси-
фиксирована произвольная декартова прямоугольная система Oxyz, то плос-
плоскость п определяется в этой системе уравнением первой степени.
2°. Если в пространстве фиксирована произвольная декартова
прямоугольная система Oxyz, то всякое уравнение первой степени
с тремя переменными х, у и z определяет относительно этой сис-
системы плоскость.
Для доказательства первого утверждения достаточно установить, что
плоскость тг определяется уравнением первой степени при каком-то
одном специальном выборе декартовой прямоугольной системы, ибо
тогда она определяется уравнением первой степени и при любом дру-
другом выборе декартовой прямоугольной системы (в силу теоремы 4.2).
Расположим оси ОхиОув плоскости тг, а ось Oz направим перпендикуляр-
перпендикулярно этой плоскости. Тогда уравнением плоскости тг будет уравнение пер-
первой степени (z = 0). В самом деле, этому уравнению будут удовлетворять
128 ЛИНЕЙНЫЕ ОБРАЗЫ [ГЛ.5
координаты любой точки, лежащей на плоскости тс, и не будут удовлет-
удовлетворять координаты ни одной точки, не лежащей на плоскости тс. Утверж-
Утверждение 1° доказано.
Для доказательства утверждения 2° фиксируем произвольную декар-
тову прямоугольную систему Oxyz и рассмотрим произвольное уравне-
уравнение первой степени
Ax + By + Cz + D = 0, E.31)
в котором А, В, С и D — какие угодно постоянные, причем из посто-
постоянных А, В и С хотя бы одна отлична от нуля. Уравнение E.31)
заведомо имеет хотя бы одно решение х0, у0, z0{), т.е. существует хотя
бы одна точка М0(х0, у0, z0), координаты которой удовлетворяют урав-
уравнению E.31):
Ах0 + Ву0 +Czo + D = O. E.32)
Вычитая из уравнения E.31) тождество E.32), получим уравнение
А(х - х0) + В(у - у0) + С{г - г0) = О, E.33)
эквивалентное уравнению E.31). Достаточно доказать, что уравнение
E.33) определяет относительно системы Oxyz некоторую плоскость. Мы
докажем, что уравнение E.33) (а стало быть, и уравнение E.31)) опреде-
определяет плоскость тс, проходящую через точку М0(х0, у0, z0) и перпендику-
перпендикулярную вектору п = {А, В, С} (так как хотя бы одна из постоянных А, В и
С не равна нулю, то вектор п ненулевой).
В самом деле, если точка М (х, у, г) лежит на указанной плоскости тс,
то ее координаты удовлетворяют уравнению E.33), ибо в этом случае
векторы п = {А, В, С } и М0М ={х- х0, у - у0, z - z0} ортогональны и
их скалярное произведение
А(х-хо) + В(у- уо) + С[г- z0) E.34)
равно нулю. Если же точка М (х, у, z) не лежит на указанной плоскости тс,
то ее координаты не удовлетворяют уравнению E.33), ибо в этом случае
векторы п и М0М не ортогональны и поэтому их скалярное произведе-
произведение E.34) не равно нулю. Утверждение 2° доказано.
Уравнение E.31) с произвольными коэффициентами А, В, С и D
такими, что из коэффициентов А, В и С хотя бы один отличен от
нуля, называется общим уравнением плоскости.
Мы доказали, что плоскость, определяемая общим уравнением
E.31), ортогональна к вектору п = {А, В, С). Этот последний вектор
мы будем называть нормальным вектором плоскости E.31).
) В самом деле, хотя бы одна из постоянных Л, В, С отлична от нуля. Пусть, например,
А В
С Ф 0. Тогда, взяв произвольные х0 и у0, получим из уравнения E.31) z0 = х0 у0 .
§3] РАЗЛИЧНЫЕ ВИДЫ УРАВНЕНИЯ ПЛОСКОСТИ 129
Заметим, что если два общих уравнения
Ax + By + Cz + D = 0, Ахх + Вху + Cxz + Dx=0
определяют одну и ту же плоскость, то найдется такое число t,
что справедливы равенства
Ax=At, Bx=Bt, Cx = Ct, Dx=Dt,
т.е. коэффициенты Аь Вь Сх и Dx второго уравнения равны соот-
соответствующим коэффициентам А, В, С и D первого уравнения, умно-
умноженным на некоторое число t.
Доказательство этого утверждения вполне аналогично доказатель-
доказательству утверждения, содержащегося в замечании в конце п. 1 § 1. Мы пре-
предоставляем читателю провести его самому.
2. Неполные уравнения плоскости. Уравнение плоскости в от-
отрезках. Общее уравнение плоскости E.31) называется полным,
если все его коэффициенты А, В, С и D отличны от нуля. Если хотя
бы один из указанных коэффициентов равен нулю, уравнение называет-
называется неполным.
Рассмотрим все возможные виды неполных уравнений:
1) D = О, уравнение Ах + By + Cz = О определяет плоскость, проходя-
проходящую через начало координат (поскольку координаты начала удовлетво-
удовлетворяют этому уравнению).
2) А = О, уравнение By + Cz + D = 0 определяет плоскость, параллель-
параллельную оси Ох (поскольку нормальный вектор этой плоскости п = {О, В, С}
перпендикулярен оси Ох).
3) В = О, уравнение Ах + Cz + D = О определяет плоскость, параллель-
параллельную оси Оу (ибо этой оси перпендикулярен нормальный вектор
п = {А, О, С}).
4) С = 0, уравнение Ах + By + D = 0 определяет плоскость, параллель-
параллельную оси Oz (ибо этой оси перпендикулярен нормальный вектор
п = {А, В, 0}).
5) А = 0, В = 0, уравнение Cz + D = 0 определяет плоскость, парал-
параллельную координатной плоскости Оху (ибо эта плоскость параллельна
осям Ох и О у).
6) А = 0, С = 0, уравнение By + D = 0 определяет плоскость, парал-
параллельную координатной плоскости Oxz (ибо эта плоскость параллельна
осям Ох и Oz).
7) В = 0, С = 0, уравнение Ах + D = 0 определяет плоскость, парал-
параллельную координатной плоскости Oyz (ибо эта плоскость параллельна
осям Оу и Oz).
8) А = 0, В = 0, D = 0, уравнение Cz = 0 определяет координатную
плоскость Оху (ибо плоскость параллельна Оху и проходит через нача-
начало координат).
130 ЛИНЕЙНЫЕ ОБРАЗЫ [ГЛ.5
9) А = 0, С = О, D = О, уравнение By = 0 определяет координатную
плоскость Oxz (ибо плоскость параллельна 0x2 и проходит через нача-
начало координат).
10) В = 0, С = О, D = 0, уравнение Ах = О определяет координатную
плоскость 0у2 (ибо плоскость параллельна 0у2 и проходит через нача-
начало координат).
Рассмотрим теперь полное уравнение плоскости E.31) и покажем,
что оно может быть приведено к следующему виду:
- + ^ + - = 1, E.35)
a b с
называемому уравнением плоскости в отрезках.
В самом деле, так как все коэффициенты А, В, С hD отличны от нуля,
мы можем переписать уравнение E.31) в виде
-D/A -D/B -D/C
и затем положить a = -D/A, b = -D/B, с = -D/C.
Заметим, что в уравнении «в отрезках» E.35) числа а, Ъ и с имеют
простой геометрический смысл: они равны величинам отрезков, кото-
которые отсекает плоскость на осях Ох, Оу и 02 соот-
соответственно (отрезки отсчитываются от начала ко-
координат, см. рис. 5.8). Чтобы убедиться в этом,
достаточно найти точки пересечения плоскости, оп-
определяемой уравнением E.35), с осями координат.
Например, точка пересечения с осью Ох определит-
определится из совместного рассмотрения уравнения плоско-
плоскости E.35) с уравнениями у = 0 и 2 = 0 оси Ох. Мы
ис> ' получим координаты точки пересечения х = а, у = О,
2 = 0. Аналогично устанавливается, что координаты точки пересечения
плоскости E.35) с осью Оу равны х = 0, у = Ь, 2 = 0 и с осью 02 равны
х = 0, у = 0, 2 = с.
3. Угол между двумя плоскостями. Условия параллельности
и перпендикулярности плоскостей. Пусть две плоскости щ и к2 за-
заданы общими уравнениями Ахх + Вху + С{2 + D{ = 0 и А2х + В2у +
+ С22 + D2 = 0. Очевидно, вопрос об определении угла между указанны-
указанными плоскостями сводится к определению угла ф между их нормальными
векторами п{ = {Аь Вх, Сх} и щ = {А2, В2, С2} 0.
0 Любые две пересекающиеся плоскости образуют два угла, в сумме равных п. Нам
достаточно определить один из этих углов.
§3] РАЗЛИЧНЫЕ ВИДЫ УРАВНЕНИЯ ПЛОСКОСТИ 131
Из определения скалярного произведения щщ = | n.x | | щ | cos ф и из
выражения в координатах длин векторов п{ и щ и их скалярного произ-
произведения, получим
аха2 + вхв2 + схс2
coscp = -= _ . E.36)
/222/222
Итак, угол ф между плоскостями пх и щ определяется с помощью
формулы E.36).
Условие параллельности плоскостей щ и щ, эквивалентное усло-
условию коллинеарности векторов п{ и щ, заключается в пропорционально-
пропорциональности координат этих векторов, т.е. имеет вид О
9
E.37)
Условие перпендикулярности плоскостей щ и щ может быть извле-
извлечено из формулы E.36) (при cos ф = 0) или выражено равенством нулю ска-
скалярного произведения векторов пх и п2. Оно имеет вид
АХА2 + ВХВ2 + СХС2 = 0. E.38)
4. Уравнение плоскости, проходящей через три различные
точки, не лежащие на одной прямой. Поставим перед собой цель —
вывести уравнение плоскости, проходящей через три различные точки
М{(хь уъ z{), М2(х2, Уъ %2) и Щ(х?» Уъ> 2з)' не лежащие на одной прямой.
Так как указанные три точки не лежат на одной прямой, векторы
МХМ2 ={х2-хь у2~У\, Z2~z\} и М{М3 = {х3-хь Уз~У\, 23-2Х} не
коллинеарны, а поэтому точка М (х, у, г) лежит в одной плоскости
с точками Мь М2 и М3 тогда и только тогда, когда векторы М{М2 ,
М{М3 и МХМ ={х- хь у - уь z - z{} компланарны, т.е. тогда и толь-
только тогда, когда смешанное произведение этих трех векторов равно нулю
(см. гл.2, §3, п. 4).
Используя выражение смешанного произведения в координатах, мы
получим необходимое и достаточное условие принадлежности
М(х, у, 2) к указанной плоскости в виде (см. гл. 2, § 3, п. 7)
у-ух z-zx
22 —
хз ~ х\ Уъ ~ У\ 2ъ ~ 2\
= 0. E.39)
0 При этом, как и всюду выше, мы понимаем всякую пропорцию a/b = c/d в смысле
равенства ad = be.
132 ЛИНЕЙНЫЕ ОБРАЗЫ [ГЛ.5
Уравнение первой степени E.39) и является уравнением искомой плос-
плоскости.
5. Нормированное уравнение плоскости. Отклонение точки от
плоскости. Рассмотрим какую угодно плоскость п. Проведем через на-
начало координат О прямую п, перпендикулярную
плоскости тг, и обозначим буквой Р точку пересече-
пересечения прямой п и плоскости тг (рис. 5.9). На прямой п
возьмем единичный вектор п, направление которо-
которого совпадает с направлением отрезка ОР (в случае
совпадения точек О и Р направление п выберем про-
произвольно).
р 5 g Поставим перед собой цель — выразить уравне-
ние плоскости тг через следующие параметры: 1) дли-
длину р отрезка ОР ; 2) углы а, C и у наклона вектора п к осям Ох, Оу и Oz
соответственно.
Так как п — единичный вектор, то его координаты, соответственно
равные его проекциям на оси координат, имеют вид О
n = {cos a, cos p, cos у}. E.40)
Очевидно, точка М (х, у, г) лежит на рассматриваемой плоско-
плоскости к тогда и только тогда, когда проекция вектора ОМ на ось,
определяемую вектором п, равна р, т.е. при условии
ирп ОМ =р. E.41)
Так как п — единичный вектор, то в силу определения 2 скалярного
произведения (см. п. 1 § 2 гл. 2)
прп0М =п- ОМ. E.42)
Имея в виду, что ОМ = {х, у, z}, а вектор п определяется равенством
E.40), мы получим следующее выражение для скалярного произведе-
произведения этих векторов:
п • ОМ = х cos a + у cos р + z cos у. E.43)
Из сопоставления E.41), E.42) и E.43) вытекает, что точка М{х, у, z)
лежит на плоскости п тогда и только тогда, когда координаты
этой точки удовлетворяют уравнению
х cos a + у cos p + 2 cos у- р = 0. E.44)
E.44) и есть искомое уравнение плоскости тг, выраженное через пара-
параметры р, а, р и у. Это уравнение называется нормированным уравне-
уравнением плоскости.
0 В силу того, что проекция вектора на любую ось равна модулю этого вектора, умно-
умноженному на косинус угла наклона к оси (см. п. 8 § 1 гл. 2).
§3] РАЗЛИЧНЫЕ ВИДЫ УРАВНЕНИЯ ПЛОСКОСТИ 133
Введем теперь фундаментальное понятие отклонения произвольной
точки М от данной плоскости тс. Пусть число d обозначает расстоя-
расстояние от точки М до плоскости тс.
Назовем отклонением 5 точки М от плоскости тс число +d
в случае, когда точка М и начало координат О лежат по разные
стороны от плоскости тс, и число -d в случае, когда Ми О лежат по
одну сторону от тс.
Если же начало координат О лежит на плоскости тс, положим откло-
отклонение равным +d в случае, когда М лежит по ту сторону от тс, куда на-
направлен вектор п, и равным -d в противном случае.
Имеет место следующее важное утверждение.
Теорема 5.3. Левая часть нормированного уравнения плоскости
E.44) равна отклонению точки М с координатами х, у, z от плоскос-
плоскости тс, определяемой уравнением E.44).
Доказательство. Спроецируем точку М на ось, определяемую
вектором п. Пусть Q — проекция точки М (рис. 5.9). Отклонение 5 точ-
точки М от плоскости тс равно PQ, где PQ обозначает величину направлен-
направленного отрезка PQ оси, определяемой вектором п. Далее, из основного
тождества (см. гл. 1) очевидно (см. рис. 5.9), что
8 = PQ = OQ-OP=OQ-p. E.45)
Но OQ = прп ОМ, а последняя проекция в силу формул E.42) и E.43)
равна х cos a + у cos р + 2 cos у. Итак,
OQ = х cos a + у cos р + z cos у. E.46)
Сопоставляя формулы E.45) и E.46), получим 8 = х cos a + у cos р +
+ z cos у - р. Теорема доказана.
Теорема 5.3 приводит нас к следующему правилу: для нахожде-
нахождения отклонения 5 точки М0(х0, у0, z0) от плоскости тс следует в ле-
левую часть нормированного уравнения плоскости тс подставить на
место х, у и z координаты х0, у0 и z0 точки Мо.
Разумеется, это правило позволяет отыскивать и расстояние от точ-
точки М до плоскости тс, ибо расстояние равно модулю отклонения.
В заключение укажем алгоритм приведения общего уравнения плоско-
плоскости E.31) к нормированному виду E.44). Так как указанное общее уравне-
уравнение и уравнение E.44) должны определять одну и ту же плоскость, то (в
силу замечания в конце п. 1 этого параграфа) найдется число t такое, что
M = coscc, *B = cosP, tC = cos y, tD = -p. E.47)
Возвышая в квадрат первые три равенства E.47), складывая их и учиты-
учитывая, что сумма квадратов направляющих косинусов равна единице (см.
п. 9 § 1 гл. 2), получим 12(А2 + В2 + С2)= 1, откуда
t = ± , 1 E.48)
7л2 +в2 + с2
134 ЛИНЕЙНЫЕ ОБРАЗЫ [ГЛ.5
Остается уточнить, какой из знаков ± следует взять в формуле E.48).
Так как по смыслу расстояние р всегда неотрицательно, то из последне-
последнего равенства E.47) заключаем, что знак t противоположен знаку D.
Итак, для приведения общего уравнения плоскости Ах + By +
+ Cz + D = 0 к нормированному виду E.44) следует умножить его на
нормирующий множитель E.48), знак которого противоположен
знаку D.
6. Пучки и связки плоскостей. Совокупность всех плоскостей,
проходящих через одну и ту же прямую L, называется пучком
плоскостей (с центром в L).
В полной аналогии с теоремой 5.2, относящейся к пучку прямых, до-
доказывается следующее утверждение:
Если Ахх + Вху + Cxz + Dx = 0 и А2х + В2у + C2z + D2 = 0 суть урав-
уравнения двух различных и не параллельных плоскостей, пересечением
которых служит некоторая прямая L, а а и р — какие угодно не
равные одновременно нулю числа, то
а (Ахх + Вху + Cxz + Dx) + C (А2х + В2у + C2z + D2) = 0 E.49)
есть уравнение плоскости, проходящей через прямую L. Более того,
какова бы ни была наперед заданная проходящая через прямую L плос-
плоскость, она определяется уравнением E.49) при некоторых а и р.
Доказательство этого утверждения (не содержащее по сравнению с до-
доказательством теоремы 5.2 никаких новых идей) представляем читателю.
Сформулированное утверждение позволяет задавать прямую L, яв-
являющуюся линией пересечения двух не совпадающих и не параллель-
параллельных плоскостей Ахх + Вху + Cxz + Dx=0 и А2х + В2у + + C2z + D2 = 0,
не только двумя уравнениями этих плоскостей, но и любыми двумя
различными уравнениями пучка E.49) (полученными при каких угод-
угодно а и р).
Совокупность всех плоскостей, проходящих через данную точку
М0(х0, у0, z q) называется связкой плоскостей (с центром
вЩ.
Легко убедиться в том, что уравнение связки с центром в
М0(х0, у0, 2q) имеет вид
А(х-хо) + В(у- у0) + C(z-zo) = 0, E.50)
где А, В и С — какие угодно числа, не равные одновременно нулю.
В самом деле, всякая плоскость, определяемая уравнением E.50),
проходит через точку М0(х0, у0, z0). С другой стороны, если к — наперед
заданная плоскость, проходящая через точку М0(х0, у0, z0), то эта плос-
плоскость однозначно определяется заданием, кроме точки М0(х0, у0, z0), еще
нормального вектора п = {А, В, С} и потому определяется уравнением
E.33) (см. п. 1 этого параграфа), совпадающим с уравнением E.50).
§4] ПРЯМАЯ ЛИНИЯ В ПРОСТРАНСТВЕ 135
§ 4. Прямая линия в пространстве
1. Канонические уравнения прямой в пространстве. Выше (см.
п. 6 предыдущего параграфа) уже отмечалось, что прямую линию в про-
пространстве, являющуюся линией пересечения двух различных и не парал-
параллельных плоскостей, определяемых уравнениями Ахх + Вху + Cxz + Dx = О
и А2х + В2у + C2z + D2 = 0 0, можно задавать либо двумя уравнениями этих
плоскостей, либо двумя любыми различными уравнениями пучка
а (Ахх + Вху + Cxz + Dx) + р (А2х + 52z/ + C2z + D2) = 0
(отвечающими произвольно взятым числам а и C).
При решении многих задач более удобным является специальный вид
уравнений прямой в пространстве, к выводу которого мы и переходим.
Договоримся называть любой ненулевой вектор, параллельный дан-
данной прямой, направляющим вектором этой прямой.
Выведем уравнения прямой, проходящей через данную точку про-
пространства Мх(хх, ух, zx) и имеющей заданный направляющий вектор
q = {/, т, п}. Для этого заметим, что точка М (х, у, г) лежит на указан-
указанной прямой тогда и только тогда, когда векторы МХМ ={х-хх, у - ух, z - zx}
и q = {/, т, п} коллинеарны, т.е. тогда и только тогда, когда координаты
этих векторов пропорциональны (см. следствие из теоремы 2.17)
х-х, _yzJL=z-zL E51)
/ т п
Уравнения E.51) суть искомые уравнения прямой, проходящей через
точку Мх(хх, ух, zx) и коллинеарной вектору q = {/, т, п}. Эти уравне-
уравнения принято называть каноническими уравнениями прямой.
Заметим, что в канонических уравнениях E.51) одно или два из чи-
чисел /, т и п могут оказаться равными нулю (все три числа /, т и п рав-
равняться нулю не могут, так как вектор q = {/, т, п} ненулевой). Так как
всякую пропорцию a/b = c/d мы договорились понимать как равенство
ad = be, обращение в нуль одного из знаменателей в E.51) означает
обращение в нуль и соответствующего числителя. В самом деле,
пусть, например, 1 = 0, а п Ф О (хотя бы одно из трех чисел /, т и п не
равно нулю). Тогда из пропорции = , эквивалентной равен-
/ п
ству (х — хх)п = {z — zx)l, заключаем, что х - хх = 0.
В заключение покажем, как прямую, заданную уравнениями двух
различных и не параллельных плоскостей
{х+ ху+ xz+ х- ,
А2х + В2у + C2z + D2 = 0,
1) Из п. 3 §3 следует, что для того, чтобы плоскости, определяемые уравнениями
Ахх + Вху + Cxz + D{ = 0 и А2х + В2у + C2z + D2 = 0, не совпадали и не были параллельны, необ-
необходимо и достаточно, чтобы нарушалась хотя бы одна из пропорций AxjA2 = Bl/B2 = С^/С2.
136
ЛИНЕЙНЫЕ ОБРАЗЫ
[ГЛ.5
привести к каноническому виду E.51). Достаточно найти: 1) хотя бы одну
точку М\(х\, ух, z{), через которую проходит прямая E.52); 2) направляю-
направляющий вектор q = {/, т, п} прямой E.52).
Начнем с нахождения координат хь уь zx точки Мь через которую
проходит прямая E.52). Так как плоскости, определяемые уравнениями
E.52), не параллельны и не сливаются, то нарушается хотя бы одна из
„ а я а _
пропорции —- = —- = —-. Это означает, что хотя бы один из трех опре-
Вс, С0
делителей второго порядка
А
А2
В2
в2
с,
с2
А2
с,
с2
отличен от нуля
(см. Дополнение к гл. 1 п. 1). Пусть ради определенности отличен от нуля
определитель
. Тогда, взяв вместо z произвольное число zx и
подставив его в уравнения E.52), определим из системы E.52) соответ-
соответствующие этому zx значения хх и у{:
У\ =
Bx(C2zx +D2)-B2(Clzl +D{)
Л{В2 - Л2В{
Л2 (Cxzx +РХ)-АХ (C2z{ + D2)
АХВ2-А2ВХ
E.53)
В частности, можно взять zx = 0. Тогда, воспользовавшись форму-
формулами E.53), мы получим, что прямая E.52) проходит через точку
BXD2 - B2DX
A2DX - AXD2
о
^ АХВ2 - А2ВХ АХВ2 - А2ВХ
Для нахождения координат /, т, п направленного вектора q прямой
E.52) заметим, что вектор q ортогонален каждому из нормальных век-
векторов щ = {Аь Вь С{} и щ = {А2, В2, С2} плоскостей E.52), так что мож-
можно положить вектор q = {/, т, п} равным векторному произведению
[п1п2]. Пользуясь выражением векторного произведения в координатах
(см. п. 6 § 3 гл. 2), мы получим: / = ВХС2 - В2С{, т = СХА2 - С2А{,
п=АхВ2-А2Вх.
Таким образом, для случая, когда отличен от нуля определитель
А В
канонические уравнения прямой E.52) имеют вид
А, В,
BXD2 - B2DX
АХВ2 - А2ВХ
ВХС2 — В2СХ
у-
А2РХ-АХР2
АХВ2 - А2ВХ _ z
12 2 1 12 2 1
случая, когда отличен от нуля определитель
или
§4] ПРЯМАЯ ЛИНИЯ В ПРОСТРАНСТВЕ 137
Аналогично записываются канонические уравнения прямой E.52) для
А Г '
2 2
2. Уравнения прямой, проходящей через две различные точ-
точки Afi(jCi, z/i, 2t) и Л12(#2> #2* Z2)- Эти уравнения имеют вид
X - Хх У - У\ 2 - 2Х
уСо A'l v 9 v 1 »v о ^i
Для получения их достаточно заметить, что прямая проходит через точку
Мх{хх, ух, zx) и имеет направляющий вектор q= M{M2 = {х2-хх, у2-ух,
z2-zx}, и воспользоваться каноническими уравнениями E.51).
3. Параметрические уравнения прямой в пространстве. Пара-
Параметрические уравнения прямой в пространстве элементарно получаются
из канонических уравнений E.51) этой прямой. Примем за параметр t
каждое из отношений E.51). Так как один из знаменателей E.51) отличен
от нуля, а соответствующий числитель может принимать какие угодно
значения, то областью изменения параметра t является вся веществен-
вещественная ось: - оо < t < + оо. Мы получим х- xx = lt,y - yx = mt,z- zx = nt, или
окончательно
Уравнения E.54) и есть искомые параметрические уравнения пря-
прямой. Если принять параметр t за время, отсчитываемое от некоторого
начального момента, то параметрические уравнения E.54) определяют
закон движения материальной точки по прямой линии с постоянной ско-
скоростью v = 4l2 +m2 +n2 (такое движение происходит по инерции).
4. Угол между прямыми в пространстве. Условия параллель-
параллельности и перпендикулярности прямых. Пусть две прямые в простран-
пространстве Lx и L2 заданы своими каноническими уравнениями:
X — Хл U — Цл 2 — 2л X — Хо II — II0 2 — 20
1Х тх пх 12 т2 п2
Тогда задача определения угла между этими прямыми сводится к оп-
определению угла ф между их направляющими векторами:
Пользуясь определением скалярного произведения qiQ2 ^ I Qi I IЯ21 cos ф
и выражением в координатах указанного скалярного произведения и
длин векторов q{ и q2, мы получим для определения угла ф следующую
формулу:
1{12 + т1т2 + п{п2
cos ф = —= . =. E.55)
у]if f f ф^ l \
138 ЛИНЕЙНЫЕ ОБРАЗЫ [ГЛ.5
Условие параллельности прямых Lx и L2, эквивалентное условию
коллинеарности векторов qx и q2, заключается в пропорциональности
координат этих векторов, т.е. имеет вид О
1х/12 = тх/т2 = пх/п2. E.56)
Условие перпендикулярности прямых Lx и L2 может быть извлече-
извлечено из формулы E.55) (при coscp = 0) или выражено равенством нулю
скалярного произведения qiq2. Оно имеет вид
1Х12 + тхт2 + пхп2 = 0. E.57)
5. Условие принадлежности двух прямых к одной плоскости.
Две прямые в пространстве Lx и L2 могут: 1) пересекаться; 2) быть па-
параллельными; 3) скрещиваться. В первых двух случаях прямые Lx и L2
лежат в одной плоскости.
Установим условие принадлежности одной плоскости двух пря-
прямых, заданных каноническими уравнениями
X - Хх _ у - ух _ 2 - 2Х X - Х2 _ у - у2 _ 2 - 22
1Х тх пх 12 т2 п2
Очевидно, что для принадлежности двух указанных прямых одной плос-
плоскости необходимо и достаточно, чтобы три вектора МХМ2 ={х2-хх,
у2 - ух, z2 - zx}, qx = {lx, тх, пх} и q2 = {/2, т2, п2} были компланарны, для
чего в свою очередь необходимо и достаточно, чтобы смешанное произ-
произведение указанных трех векторов равнялось нулю. Записывая смешан-
смешанное произведение указанных трех векторов в координатах (см. п. 7 § 3
гл. 2), приходим к следующему необходимому и достаточному условию
принадлежности двух прямых Lx и L2 одной плоскости
У2 ~ У\
/2 т2
= 0. E.58)
Если прямые Lx и L2 удовлетворяют условию E.58), то они либо пересе-
пересекаются, либо параллельны. Так как условие параллельности прямых Lx
и L2 имеет вид E.56), то для пересечения прямых Lx и L2 необходимо и
достаточно, чтобы они удовлетворяли условию E.58) и чтобы на-
нарушалась хотя бы одна из пропорций 1х/12 = тх/т2 = пх/п2.
6. Угол между прямой и плоскостью. Условия параллельнос-
параллельности и перпендикулярности прямой и плоскости. Рассмотрим плос-
0 Как и всюду выше, любую пропорцию a/b = c/d понимаем в смысле равенства
ad = be.
§4] ПРЯМАЯ ЛИНИЯ В ПРОСТРАНСТВЕ 139
кость тг, заданную общим уравнением Ах + By + Cz + D = О, и прямую L,
т
Рис. 5.10
заданную каноническими уравнениями
Поскольку угол ф между прямой L и плоскостью тг
является дополнительным к углу \|/ между направляю-
направляющим вектором прямой q = {/, т, п) и нормальным век-
вектором плоскости п = {Д В, С} (рис. 5.10), то из опре-
определения скалярного произведения qn = | q | | n | cos \|/
и из равенства cos \|/ = sin ф мы получим для опре-
определения угла ф между прямой L и плоскостью тг
следующую формулу:
А1 + Вт + Сп
51Пф =
VЛ2 + Б2 + С2 V/2 + га2 + я2
Условие параллельности прямой L и плоскости тг (включающее в
себя принадлежность L к тг) эквивалентно условию перпендикулярнос-
перпендикулярности векторов п и q и выражается равенством нулю скалярного произве-
произведения этих векторов:
А1 + Вт + Сп = 0. E.59)
Условие перпендикулярности прямой L и плоскости тг эквивален-
эквивалентно условию параллельности векторов п и q и выражается пропорцио-
пропорциональностью координат этих векторов 0:
= В/т = С/п.
7. Условия принадлежности прямой
_У~Уг _г-гх
к
I m n
плоскости Ах + By + Cz + D = O. Эти условия выражаются двумя ра-
равенствами:
Ахх +Вух + Czx+D = 0,
А1 + Вт + Сп = 0, E.60)
первое из которых означает, что точка М{(х{, у{, z{), через которую про-
проходит прямая, принадлежит плоскости, а второе есть условие параллель-
параллельности прямой и плоскости E.59).
8. Связка прямых. Совокупность всех прямых, проходящих че-
через данную точку М{(хь у{, z{), называется связкой прямых
(с центром в точке М{). Легко убедиться в том, что уравнения
связки прямых с центром в точке М{(х{, уъ zx) имеют вид
Х-Х
{ =
E.61)
где /, т и п — какие угодно числа, не равные одновременно нулю.
Как всегда, всякую пропорцию a/b = c/d понимаем в смысле равенства ad = be.
140 ЛИНЕЙНЫЕ ОБРАЗЫ [ГЛ.5
В самом деле, всякая прямая, определяемая уравнениями E.61), про-
проходит через точку Мх(хх, ух, zx). С другой стороны, если L — наперед
заданная прямая, проходящая через точку Мх(хх, ух, zx), то эта прямая
однозначно определяется заданием, кроме точки Мх(хх, уъ zx), еще на-
направляющего вектора q = {/, т, п} и потому определяется канонически-
каноническими уравнениями E.51), совпадающими с уравнениями E.61).
§ 5. Некоторые задачи на прямую и плоскость
в пространстве
1. Условие пересечения трех плоскостей в одной и только в
одной точке. Для того чтобы три плоскости, соответственно определяе-
определяемые уравнениями
Ахх + Вху + Cxz + Dx = 0,
А2х + В2у + C2z + D2 = 0, E.62)
А3х + В3у + C3z + D3 = 0,
пересекались в одной и только в одной точке, необходимо и достаточно,
чтобы был отличен от нуля определитель
Л в1 с,
с2
E.63)
В самом деле, в этом и только в этом случае система E.62) имеет един-
единственное решение (см. Дополнение к гл. 1).
2. Нахождение биссектральных плоскостей двугранного угла,
образованного двумя данными плоскостями. Запишем уравнения
двух данных плоскостей в нормированном виде. Пусть это будут:
х cos ах+ у cos p! + z cos yx - p{ = 0 и х cos a2 + у cos p2 + z cos Ъ~р2- 0.
Левые части этих уравнений соответственно равны отклонениям Ъх
и 52 точки М(х, у, z) от первой и от второй плоскостей. На одной из бис-
биссектральных плоскостей (отвечающей тому двугранному углу, в кото-
котором лежит начало координат) эти отклонения равны и по модулю, и по
знаку, на другой биссектральной плоскости отклонения Ъх и 52 равны по
модулю и противоположны по знаку.
Таким образом, уравнения искомых биссектральных плоскостей
имеют вид
(х cos ах+ у cos pj + z cos yx - px) -
- (x cos a2 + у cos p2 + z cos y2 - p2) = 0,
(x cos щ+у cos pj + z cos Yi - Pi) +
+ (x cos a2 + у cos p2 + z cos y2 - p2) = 0.
§ 5] НЕКОТОРЫЕ ЗАДАЧИ НА ПРЯМУЮ И ПЛОСКОСТЬВ ПРОСТРАНСТВЕ 141
3. Условия, при которых данная плоскость пересекает дан-
данный отрезок АВ. Записав уравнение данной плоскости в норми-
нормированном виде и подставив в левую часть последнего уравнения
сначала координаты точки А, а затем координаты точки В, найдем от-
отклонения 5Л и дв точек А и В соответственно от данной плоскости.
Для того чтобы данная плоскость пересекала отрезок АВ, необходи-
необходимо и достаточно, чтобы точки А и В лежали по разные стороны от плос-
плоскости, т.е. необходимо и достаточно, чтобы отклонения дА и Ъв имели
разные знаки.
4. Определение местоположения двух данных точек А и В
относительно двугранных углов, образованных данными плос-
плоскостями. Пусть заданы две пересекающиеся плоскости и требуется
определить: в одном, в смежных или в вертикальных углах, образо-
образованных двумя данными плоскостями, лежат две данные точки А и В.
Записав уравнения данных плоскостей в нормированном виде, вы-
вычислим отклонения Ъ^ и 5д2) точки А от первой и второй плоскостей и
отклонения 5^1} и 5^2) точки В от первой и второй плоскостей. По знакам
этих четырех отклонений заключаем, по одну или по разные стороны от
каждой из плоскостей лежит каждая из точек А и В. Очевидно, если
точки Аи В лежат по одну сторону от первой плоскости и по одну сторо-
сторону от второй плоскости, то эти точки лежат в одном углу, образо-
образованном данными плоскостями. Если точки А и В лежат по одну сторону
от одной плоскости и по разные стороны от другой плоскости, то эти
точки лежат в смежных углах. Если, наконец, точки А и В ле-
лежат по разные стороны и от той, и от другой плоскости, то эти точки
лежат в вертикальных углах.
5. Уравнения прямой, проходящей через данную точку
Мх(хь уь zt) и перпендикулярной данной плоскости Ах + By + Cz +
X - Х] У - У] 2-2,
+ и - 0. Эти уравнения имеют вид = = , ибо направ-
ляющим вектором искомой прямой служит нормальный вектор плоско-
плоскости п = {Л, В, С}.
6. Уравнение плоскости, проходящей через данную точку
М0(х0, у0, 20) и параллельной заданной плоскости Ахх + Вху + Cxz +
+ Dx = 0. Это уравнение имеет вид Ах(х - х0) + Вх(у - у0) + Cx(z - z0) = 0. В
самом деле, искомая плоскость принадлежит связке плоскостей E.50) и
имеет тот же нормальный вектор п = {Аь Вь С{}, что и данная плоскость.
7. Уравнение плоскости, проходящей через заданную точку
х - хх
Л10(а:0, г/о, z0) и перпендикулярной заданной прямой —-— =
= = -. Это уравнение имеет вид 1(х - х0) + т(у - у0) +
т п
+ п(г — zq) = 0. В самом деле, искомая плоскость принадлежит связке
плоскостей E.50) и имеет в качестве нормального вектора направляю-
направляющий вектор заданной прямой q = {/, т, п}.
142 ЛИНЕЙНЫЕ ОБРАЗЫ [ГЛ.5
8. Уравнение плоскости, проходящей через данную прямую
* - *i _У-Ух _z-zx
~ - - и через заданную не лежащую на этой пря-
прямой точку Л10(а:0, г/о, z0). Искомая плоскость принадлежит связке
плоскостей E.50), т.е. определяется уравнением А (х -хо) + В (у- у0) +
+ С (z - z0) = 0. Используя условия E.60) принадлежности данной пря-
прямой к искомой плоскости, получим следующие равенства:
А {хх -хо) + В {ух -уо) + С {zx - г0) = 0,
E.64)
А1 + Вт + Сп = 0.
Точка М0(х0, у0, 2q) по условию не лежит на данной прямой. Это озна-
чает, что нарушается хотя бы одна из пропорции = =
= — -, и поэтому из системы E.64) два из коэффициентов А, В, С
можно определить через третий. Выбрав затем произвольно этот тре-
третий коэффициент (например, положив его равным единице), мы по-
получим уравнение искомой плоскости.
9. Уравнение плоскости, проходящей через данную прямую
х - хх _у-ух _z-zx
1 ~ ™ ~ „ и параллельной другой данной прямой
I j УПХ Пх
X - Х2 у - у2 2 - 22
0
22
2 у у2 2
} = = 0. Пусть Ах + By + Cz + D = 0 — уравнение
2 ^^2 2
искомой плоскости. Используя условия E.60) принадлежности данной
прямой к искомой плоскости, получим Ахх + Вух + Czx + D = 0,
Ali + Втх + Спх = 0. Кроме того, используя условие E.59) парал-
параллельности искомой плоскости и второй данной прямой, получим
А12 + Вт2 + Сп2 = 0. В результате получим систему трех уравнений:
А1х+Втх + Спх=0,
А12 + Вт2 + Сп2 = 0,
из которой три из коэффициентов А, В, С, D могут быть выражены через
четвертый (в силу того, что две данные прямые не параллельны и наруша-
нарушается хотя бы одна из пропорций 1х/12 = тх/т2 = пх/п2, получим, что хотя
бы один из определителей третьего порядка матрицы
хх
к
к
У\
тх
пх
п2
1
0
0
Предполагается, что две данные прямые не параллельны.
§ 5] НЕКОТОРЫЕ ЗАДАЧИ НА ПРЯМУЮ И ПЛОСКОСТЬВ ПРОСТРАНСТВЕ 143
отличен от нуля, и поэтому какие-то три из коэффициентов А, В, С, D
можно выразить через четвертый). Положив указанный четвертый ко-
коэффициент равным единице, мы получим уравнение искомой плоскости.
10. Уравнение плоскости, проходящей через заданную пря-
прямую Lt и перпендикулярной заданной плоскости п. Эта задача сво-
сводится к предыдущей. Чтобы убедиться в этом, мы сначала через точки Мх
прямой Lx проведем прямую L2, перпендикулярную плоскости тг (такая
задача решена в п. 5), и затем через прямую Lx проведем плоскость, па-
параллельную прямой L2.
11. Уравнения перпендикуляра, опущенного из заданной точ-
точки Мо на данную прямую Lt. Искомый перпендикуляр представляет
собой линию пересечения двух плоскостей: 1) плоскости, проходящей
через точку Мо и прямую Lx (такая плоскость найдена в п. 8); 2) плоско-
плоскости, проходящей через точку Мо и перпендикулярной к прямой L{ (такая
плоскость найдена в п. 7).
12. Нахождение расстояния от данной точки Мо до данной пря-
прямой Lt. В предыдущем пункте найдены уравнения перпендикуляра L2,
опущенного из точки Мо на прямую Lx. Решая совместно уравнения пря-
прямых L{ и L2, мы найдем точку М{ основания указанного перпендикуля-
перпендикуляра, а затем и искомое расстояние, равное длине отрезка М0М{ .
13. Нахождение общего перпендикуляра к двум скрещиваю-
скрещивающимся прямым Lt и L2. Проведем через прямую Lx плоскость тг0, па-
параллельную прямой L2 (эта задача решена в п. 9). После этого проведем
две плоскости щ и тг2, перпендикулярные плоскости тг0 и проходящие
через прямые L{ и L2 соответственно (см. п. 10). Искомый перпендику-
перпендикуляр представляет собой линию пересечения плоскостей щ и тг2.
14. Нахождение кратчайшего расстояния между двумя дан-
данными скрещивающимися прямыми Lx и L2. Для решения этой зада-
задачи достаточно построить плоскость тг0, указанную в предыдущем пунк-
пункте, и найти расстояния от любой точки прямой L2 до плоскости тг0.
ГЛАВА 6
ЛИНИИ ВТОРОГО ПОРЯДКА
В этой главе изучаются геометрические свойства эллипса, гипербо-
гиперболы и параболы, представляющих собой линии пересечения кругового
конуса с плоскостями, не проходящими через его вершины. Эти линии
часто встречаются в различных вопросах естествознания. Например,
движение материальной точки под воздействием центрального поля силы
тяжести происходит по одной из этих линий.
Исследуются также кривые второго порядка, т.е. линии, определяе-
определяемые в декартовых координатах, алгебраическими уравнениями второй
степени.
В частности, выясняется, что эллипс, гипербола и парабола являют-
являются такими линиями и что этими тремя линиями и изученными в преды-
предыдущей главе линейными образами исчерпываются все линии, определяе-
определяемые алгебраическими уравнениями второй степени.
§ 1. Канонические уравнения эллипса,
гиперболы и параболы
В начале этой главы мы говорили о том, что эллипс, гипербола и
парабола представляют собой линии пересечения кругового конуса
с плоскостями, не проходящими через его вершину. Именно, если секу-
секущая плоскость пересекает все прямолинейные образующие одной полости
конуса, то в сечении получится линия, называемая эллипсом (рис. 6.1 а).
Если секущая плоскость пересекает образующие обеих полостей кону-
конуса, то в сечении получится линия, называемая гиперболой (рис. 6.1 б).
И, наконец, если секущая плоскость параллельна одной из образующих
конуса (на 6.1 в — это образующая АВ), то в сечении получится линия,
называемая параболой. Рисунок 6.1 дает читателю наглядное представ-
представление о форме рассматриваемых линий.
В этом параграфе даются специальные определения эллипса, гипер-
гиперболы и параболы, основанные на их фокальных свойствах, и выводят-
выводятся так называемые канонические уравнения этих кривых. Ниже, в п. 4
§ 3, будет установлена равносильность этих специальных определений
и определений эллипса, гиперболы и параболы как конических сечений.
1. Эллипс.
Определение. Эллипсом называется геометрическое место
точек плоскости, для которых сумма расстояний до двух фиксиро-
§1]
КАНОНИЧЕСКИЕ УРАВНЕНИЯ
145
ванных точек Fx и F2 этой плоскости, называемых фокусами,
есть величина постоянная 0.
Эллипс
Гипербола
Парабола
Рис. 6.1
При этом не исключается совпадение фокусов эллипса. Очевидно,
если фокусы совпадают, то эллипс представляет собой окружность.
Для вывода канонического уравнения эллипса выберем начало О де-
декартовой системы координат в середине
отрезка FXF2, a оси Ох и Оу направим так, у\ М(х,у)
как указано на рис. 6.2 (если фокусы Fx и
F2 совпадают, то О совпадает с Fx и F2, а за
ось Ох можно взять любую ось, проходя- 0^^^
щую через О). /^(-с,0) О] F2(c,0) x
Пусть длина отрезка FXF2 равна 2с. Тог-
Тогда в выбранной системе координат точки Рис- 6-2
Fx и F2 соответственно имеют координаты (-с, 0) и (с, 0). Обозначим че-
через 2а постоянную, о которой говорится в определении эллипса. Оче-
Очевидно, 2а > 2с, т.е. а > с. Пусть М — точка плоскости с координатами
(х, у) (рис. 6.2). Обозначим через гх и г2 расстояния от точки М до точек
Fx и Fx соответственно. Согласно определению эллипса равенство
гх + г2 = 2а F.1)
является необходимым и достаточным условием расположения точ-
точки М (х, у) на данном эллипсе.
Используя формулу расстояния между двумя точками (см. формулу
A.8) п. 2 § 3 гл. 1), получим
h ~
с) + У2'
:-C)W
F.2)
0 Если М — точка эллипса (рис. 6.2), то | MF{ \ + \ MF2 \ = 2а, а так как сумма двух
сторон MFX и MF2 треугольника MFXF2 больше третьей стороны FXF2 = 2с, то 2а > 2с.
Случай 2а = 2с естественно исключить, так как тогда точка М располагается на отрезке
FXF2 и эллипс вырождается в отрезок.
146 ЛИНИИ ВТОРОГО ПОРЯДКА [ГЛ.6
Из F.1) и F.2) вытекает, что соотношение
+ cJ +y2 + ^{x-cf + у2 =2а F.3)
представляет собой необходимое и достаточное условие располо-
расположения точки М с координатами х и у на данном эллипсе. Поэтому
соотношение F.3) можно рассматривать как уравнение эллипса. Пу-
Путем стандартного приема «уничтожения радикалов» это уравнение при-
приводится к виду
2 2
где
Ь2 = а2-с21). F.5)
Так как уравнение F.4) представляет собой алгебраическое следствие
уравнения эллипса F.3), то координаты х и у любой точки М эллипса бу-
будут удовлетворять и уравнению F.4). Поскольку при алгебраических
преобразованиях, связанных с избавлением от радикалов, могли появить-
появиться «лишние корни», мы должны убедиться в том, что любая точка М, ко-
координаты которой удовлетворяют уравнению F.4), располагается на дан-
данном эллипсе. Для этого, очевидно, достаточно доказать, что величины гх
и г2 для каждой точки удовлетворяют соотношению F.1). Итак, пусть ко-
координаты х и у точки М удовлетворяют уравнению F.4). Подставляя зна-
значение у2 из F.4) в правую часть выражения F.2) для гь после несложных
преобразовании найдем, что п = х \ а + — х\ . Так как а + —х > О ), то
VV а ) а
гх =а + -х . Совершенно аналогично найдем, что г2 -а — х . Таким
а а
образом, для рассматриваемой точки М
с с
гх=а + —х, г2 = а—х, F.6)
а а
т.е. г{ + г2 = 2а, и поэтому точка М располагается на эллипсе. Уравне-
Уравнение F.4) называется каноническим уравнением эллипса. Величины а
и Ъ называются соответственно большой и малой полуосями эллипса
(наименование «большая» и «малая» объясняется тем, что а> Ь).
Замечание. Если полуоси эллипса а и Ъ равны, то эллипс пред-
представляет собой окружность, радиус которой равен R = a = b, a центр со-
совпадает с началом координат.
) Напомним, что а > с, и поэтому а -с > 0.
) Поскольку | х | < а и с/а < 1. Заметим, что неравенство | х \ < а непосредственно
вытекает из уравнения F.4), из которого ясно, что х /а < 1.
§ 1] КАНОНИЧЕСКИЕ УРАВНЕНИЯ 147
2. Гипербола.
Определение. Гиперболой называется геометрическое ме-
место точек плоскости, для которой абсолютная величина разности
расстояний до двух фиксированных точек F{ и F2 этой плоскости,
называемых фокусами, есть величина постоянная 0.
Для вывода канонического уравнения гиперболы выберем начало
координат в середине отрезка FXF2, а оси Ох и Оу направим так, как
указано на рис. 6.2. Пусть длина отрезка FXF2 равна 2с. Тогда в выбран-
выбранной системе координат точки F{ и F2 соответственно имеют координаты
{-с, 0) и {с, 0). Обозначим через 2а постоянную, о которой говорится в
определении гиперболы. Очевидно, 2а < 2с, т.е. а<с2).
Пусть М — точка плоскости с координатами (х, у) (рис. 6.2). Обозна-
Обозначим через гх и г2 расстояния MFX и MF2. Согласно определению гипер-
гиперболы равенство
\rl-r2\=2a F.7)
является необходимым и достаточным условием расположения точ-
точки М на данной гиперболе.
Используя выражения F.2) для г{ и г2 и соотношение F.7), получим
следующее необходимое и достаточное условие расположения точ-
точки М с координатами х и у на данной гиперболе:
= 2а. F.8)
Используя стандартный прием «уничтожения радикалов», приведем
уравнение F.8) к виду
2 2
^-^ = 1 F.9)
а2 Ъ2
где
Ь2 = с2-а2. F.10)
Мы должны убедиться в том, что уравнение F.9), полученное путем
алгебраических преобразований уравнения F.8), не приобрело новых кор-
корней. Для этого достаточно доказать, что для каждой точки М, координаты
) Фокусы F{ и F2 гиперболы естественно считать различными, ибо если указанная
в определении гиперболы постоянная не равна нулю, то нет ни одной точки плоскости
при совпадении F{ и F2, которая бы удовлетворяла требованиям определения гипербо-
гиперболы. Если же эта постоянная равна нулю и F{ совпадает с F2, то любая точка плоскости
удовлетворяет требованиям определения гиперболы.
) Если М — точка гиперболы, то | MF{ \ - \ MF2 \ = 2а, а так как разность двух сторон
MF{ и MF2 треугольника MF{F2 меньше третьей стороны FXF2 = 2с, то 2а > 2с. Случай
2а = 2с естественно исключить, так как тогда точка М располагается на прямой F{F2 вне
отрезка F{F2 и гипербола вырождается в два луча.
148
ЛИНИИ ВТОРОГО ПОРЯДКА
[ГЛ.6
х и у которой удовлетворяют уравнению F.9), величины гх и г2 удовле-
удовлетворяют соотношению F.7). Проводя рассуждения, аналогичные тем,
которые были сделаны при выводе формул F.6), найдем для интересую-
интересующих нас величин гх и г2 следующие выражения 0:
а + — х при х > О,
а х при х < О,
а
-а + — х при х > О,
а —х при х < 0.
а
F.11)
= 2а, и
Таким образом, для рассматриваемой точки М имеем | г{ - r2 \
поэтому она располагается на гиперболе.
Уравнение F.9) называется каноническим уравнением гиперболы.
Величины а и Ъ называются соответственно действительной и мнимой
полуосями гиперболы.
3. Парабола.
Определение. Параболой называется геометрическое мес-
место точек плоскости, для которых расстояние до некоторой фик-
фиксированной точки F этой плоскости равно расстоянию до неко-
некоторой фиксированной прямой, также
расположенной в рассматриваемой
плоскости.
Указанная в определении точка F на-
называется фокусом параболы, а фиксиро-
фиксированная прямая — директрисой 2) парабо-
параболы. Для вывода канонического уравнения
параболы выберем начало О декартовой
системы координат в середине отрезка FD,
представляющего собой перпендикуляр,
рис б.з опущенный из фокуса F на директрису 3),
а оси Ох и Оу направим так, как указано
на рис. 6.3. Пусть длина отрезка FD равна р. Тогда в выбранной системе
координат точка F имеет координаты (р/2, 0). Пусть М — точка плоско-
плоскости с координатами (х, у). Обозначим через г расстояние от М до F, а
через d — расстояние от М до директрисы (рис. 6.3). Согласно опреде-
определению параболы равенство
r=d F.12)
1
5
<^>
Дир
D
У i
0
d
f
/
/
/
I
F(p/2
M(x,y)
У) x
0 При этом мы должны учесть, что | х \ > а и с/а > 1. Заметим, что неравенство | х \ > а
непосредственно вытекает из уравнения F.9).
2) Слово директриса означает направляющая.
3) Естественно считать, что фокус F не лежит на директрисе, ибо в противном случае
точки плоскости, для которых были бы выполнены условия определения параболы, рас-
располагались на прямой, проходящей через F перпендикулярно директрисе, т.е. парабола
выродилась бы в прямую.
§2] ИССЛЕДОВАНИЕ ФОРМЫ ЭЛЛИПСА, ГИПЕРБОЛЫ И ПАРАБОЛЫ 149
является необходимым и достаточным условием расположения точ-
точки М на данной параболе. Так как
у\ О, F.13)
то, согласно F.12), соотношение
Hi
F.14)
представляет собой необходимое и достаточное условие располо-
расположения точки М с координатами х и у на данной параболе. Поэтому
соотношение F.14) можно рассматривать как уравнение параболы. Пу-
Путем стандартного приема «уничтожения радикалов» это уравнение при-
приводится к виду
у2 = 2рх. F.15)
Убедимся в том, что уравнение F.15), полученное путем алгебраи-
алгебраических преобразований уравнения F.14), не приобрело новых корней.
Для этого достаточно доказать, что для каждой точки М, координаты х
и у которой удовлетворяют уравнению F.15), величины г и d равны (вы-
(выполнено соотношение F.12)).
Из соотношения F.15) вытекает, что абсциссы х рассматриваемых
точек неотрицательны, т.е. х > 0. Для точек с неотрицательными абс-
абсциссами d = — + х . Найдем теперь выражение для расстояния г от точ-
точки М до F. Подставляя у из выражения F.15) в правую часть выражения
для г F.13) и учитывая, что х > 0, найдем, что г = — + х . Таким образом,
для рассматриваемых точек r = d, т.е. они располагаются на параболе.
Уравнение F.15) называется каноническим уравнением параболы.
Величина р называется параметром параболы.
§ 2. Исследование формы эллипса, гиперболы
и параболы по их каноническим уравнениям
Мы уже имеем наглядное представление о форме эллипса, гипербо-
гиперболы и параболы (см. рис. 6.1). Исследование канонических уравнений этих
линий позволяет выяснить свойства, более точно характеризующие их
форму.
О Эта формула верна лишь для точек с неотрицательными абсциссами х. Для точек с
отрицательными абсциссами, как легко видеть, выполняется соотношение г > d,n поэто-
поэтому такие точки можно исключить из рассмотрения.
150 ЛИНИИ ВТОРОГО ПОРЯДКА [ГЛ.6
1. Исследование формы эллипса. Для удобства запишем еще раз
каноническое уравнение эллипса F.4):
4 + 4 = 1- F.4)
а Ъ
При этом будем считать а > Ь.
1°. Эллипс имеет две взаимно перпендикулярные оси симметрии
{главные оси эллипса) и центр симметрии {центр эллипса) х). Дей-
Действительно, в уравнении F.4) величины х и у фигурируют в четных сте-
степенях. Следовательно, если координаты х и у точки М удовлетворяют
уравнению F.4) (т.е. точка М располагается на эллипсе), то этому урав-
уравнению удовлетворяют координаты (—х, у) и (х, -у) симметричных ей то-
точек относительно осей координат и координаты (—х, -у) точки, симмет-
симметричной М относительно начала координат (рис. 6.4).
Таким образом, если эллипс задан своим каноническим уравнением
F.4), то главными осями этого эллипса являются оси координат, а
центром эллипса — начало координат. Точки пересечения эллипса с
главными осями называются вершинами эллипса. Точки Д В, С, D на
рис. 6.4 — вершины эллипса. Очевидно, эти вершины имеют соответ-
соответственно координаты (-а, 0), @, Ь), (а, 0), @, -Ь).
Замечание 1. Очевидно, длины отрезков, образованных пере-
пересечением эллипса с главными осями, равны 2а и 2Ь. Так как 2а > 2Ь, то
главная ось, образующая в пересечении с эллипсом отрезок 2а, называ-
называется большой осью эллипса. Другая главная ось называется малой осью
эллипса.
Если эллипс задан уравнением F.4), то при а > Ь большой осью бу-
будет ось Ох, а малой — ось Оу. При Ъ > а большой осью будет ось Оу, а
малой — ось Ох.
Замечание 2. Очевидно, фокусы эллипса располагаются на его
большой оси.
2°. Весь эллипс содержится внутри прямоугольника \х\ <а,
| у | < Ъ (на рис. 6.4 этот прямоугольник не заштрихован). В самом деле,
из канонического уравнения F.4) вытекает, что х2/а2< 1 и у2/Ь2< 1.
Эти неравенства, очевидно, эквивалентны неравенствам |х| <а и
\у\<ь.
3°. Эллипс может быть получен посредством равномерного сжа-
сжатия окружности. Рассмотрим окружность (рис. 6.5), заданную урав-
уравнением
0 Если эллипс представляет собой окружность, то любая прямая, проходящая через
центр окружности, является осью симметрии. Отметим, что центром эллипса является
точка пересечения главных осей.
§2]
ИССЛЕДОВАНИЕ ФОРМЫ ЭЛЛИПСА, ГИПЕРБОЛЫ И ПАРАБОЛЫ
151
Произведем теперь равномерное сжатие плоскости к оси Ох, т.е. та-
такое преобразование, при котором точка с координатами (х, у) перейдет
в точку с координатами (х, у), причем х = х , а у = —у . Очевидно, при
этом преобразовании о_кружность F.16) перейдет в кривую, определяе-
~2 2
х у 1
мую уравнением —- н—- = 1, т.е. в эллипс.
а Ь
Рис. 6.4
Рис. 6.5
2. Исследование формы гиперболы. Обратимся к каноническо-
каноническому уравнению гиперболы F.9)
1°. Гипербола имеет две оси симметрии {главные оси гиперболы) и
центр симметрии (центр гиперболы). При этом одна из этих осей пере-
пересекается с гиперболой в двух точках, которые называются вершинами
гиперболы. Эта ось называется действительной осью гиперболы.
Другая ось не имеет общих точек с гиперболой и поэтому называется
мнимой осью гиперболы.
Таким образом, мнимая ось гиперболы разделяет плоскость на правую
и левую полуплоскости, в которых расположены симметричные относи-
относительно этой оси правая и левая ветви гиперболы.
Справедливость указанного свойства симметрии гиперболы вытекает
из того, что в уравнении F.9) величины х и у фигурируют в четных сте-
степенях. Следовательно, если координаты х и у точки М удовлетворяют
уравнению F.9) (т.е. точка М располагается на гиперболе), то этому урав-
уравнению удовлетворяют координаты (-х, у) и (х, -у) симметричных ей то-
точек относительно осей координат и координаты (-х, -у) точки, симмет-
симметричной М относительно начала координат (рис. 6.6).
Таким образом, если гипербола задана своим каноническим урав-
уравнением F.9), то главными осями этой гиперболы являются оси ко-
координат, а центром гиперболы — начало координат.
152
ЛИНИИ ВТОРОГО ПОРЯДКА
[ГЛ.6
У
Рис. 6.6
Убедимся теперь, что ось Ох является действительной осью ги-
гиперболы, точки А (-а, 0) и В (а, 0) — вершинами гиперболы и ось Оу
является мнимой осью гиперболы. Для этого достаточно доказать, что
ось Ох пересекает гиперболу в точ-
точках А и В, г ось Оу не имеет общих
точек с гиперболой. Так как ордина-
ординаты точек оси Ох равны нулю, то для
выяснения величины абсцисс точек
пересечения этой оси с гиперболой
нужно в уравнении F.9) положить
у = 0. После этого мы получим уравне-
уравнение х2/а2 = 1, из которого находятся
абсциссы точек пересечения оси Ох
с гиперболой. Полученное уравнение
имеет решения х = -а и х = а. Следо-
Следовательно, ось Ох пересекает гипер-
гиперболу (т.е. является ее действительной
осью) в точках А (-а, 0) и В (а, 0) (т.е. эти точки и есть вершины ги-
гиперболы). Поскольку абсциссы точек оси Оу равны нулю, то для орди-
ординат точек пересечения этой оси с гиперболой получаем из F.9) уравне-
уравнение —у/Ь = 1, которое не имеет действительных решений. Следователь-
Следовательно, ось Оу является мнимой осью гиперболы.
Замечание. Фокусы гиперболы располагаются на ее действитель-
действительной оси.
2°. Рассмотрим область G, которая получена объединением прямоу-
прямоугольника Д координаты х и у точек которого удовлетворяют неравен-
неравенствам | х | < а, \у\ <Ь,и тех двух углов, образованных диагоналями это-
этого прямоугольника, в которых располагается мнимая ось гиперболы (на
рис. 6.6 эта область заштрихована). Убедимся, что в области G нет то-
точек гиперболы.
Разобьем область G на две части Gx и G2, где Gx представляет собой
полосу, абсциссы х точек которой удовлетворяют неравенству \х\ <а,
a G2 — остальная часть области G 1). Очевидно, в полосе Gx нет точек
гиперболы, так как абсциссы х точек, расположенных на гиперболе, удов-
удовлетворяют неравенству \х\ >а2). Обратимся теперь к точкам облас-
области G2. Заметим, что каждая точка G2 либо лежит на диагонали прямо-
прямоугольника Д либо за его диагональю 3). Поскольку диагонали D опре-
0 Область G{ представляет собой, очевидно, полосу, заключенную между безгранич-
безгранично продолженными вертикальными сторонами прямоугольника D. Область G2 состоит из
четырех частей, каждая из которых располагается в одном из координатных углов.
2 2
) Из канонического уравнения гиперболы вытекает, что — = 1 + — , т.е. х /а > 1.
Последнее неравенство эквивалентно неравенству \х\ >а.
3) Будем говорить, что точка М плоскости лежит за диагональю прямоугольника D, если
перпендикуляр, опущенный из М на ось Ох, пересекает эту диагональ.
§ 2] ИССЛЕДОВАНИЕ ФОРМЫ ЭЛЛИПСА, ГИПЕРБОЛЫ И ПАРАБОЛЫ 153
ь ъ
деляются уравнениями у = —х и у — —х, то координаты х и у точек
а а
G2 в силу их расположения удовлетворяют неравенству Ь/а < \у\/\х\ 1).
Из этого неравенства вытекает неравенство | х \ /а < \ у \ / Ъ, из которого
х2 у2
в свою очередь следуют неравенства — —- < 0 < 1, а так как для точек
а Ъ
х2 у2
гиперболы — —- = 1, то в области G2 нет точек гиперболы.
а Ъ
3°. Установим важное свойство гиперболы, связанное с ее располо-
расположением относительно диагоналей прямоугольника Д о котором говори-
говорилось выше.
В общих чертах это свойство заключается в том, что ветви гипербо-
гиперболы приближаются к диагоналям прямоугольника D.
В силу симметрии гиперболы это свойство достаточно выяснить
для части гиперболы, расположенной в первой четверти. Координаты
х и у точек гиперболы, расположенных в первой четверти, удовлетворяют
условиям х>а, у > 0 ). Обращаясь к уравнению F.9), мы видим, что при
указанных условиях это уравнение эквивалентно соотношению
F.17)
Иными словами, рассматриваемая часть гиперболы представляет
собой график функции F.17K). Легко убедиться, что эта функция мо-
может быть представлена в следующей форме:
у = -х /^=. F.18)
а х + \х2 -а2
Обратимся теперь к диагонали прямоугольника D, расположенной в
первой четверти. Она определяется уравнением
Y = -x. F.19)
а
Сравним величины ординат Y и у рассматриваемой диагонали и части
гиперболы для одного и того же значения х, т.е. рассмотрим разность
У - у (рис. 6.7 а). Используя соотношения F.18) и F.19), получим
Y-y = *_. F.20)
х + Vx -a
0 Абсциссы х точек G2 не равны нулю.
) В силу свойства 2° гиперболы F.9) абсциссы ее точек удовлетворяют условию
| х | > а. Для точек первой четверти это условие может быть записано в виде х> а.
) По поводу понятия график функции см. вып. 1, гл. 1, § 2, п. 4.
154
ЛИНИИ ВТОРОГО ПОРЯДКА
[ГЛ.6
Из соотношения F.20) следует, что при х —> 0 разность У - у стремится к
нулю. Абсолютная величина | У — у\ равна длине отрезка MN (рис. 6.7 а).
Так как расстояние МР от точки М гиперболы до рассматриваемой диа-
диагонали не превышает длины отрезка MN, то при удалении точки М ги-
гиперболы в бесконечность (т.е. при х —» 0) расстояние МР стремит-
стремится к нулю. Следовательно, рассматриваемая часть ветви гиперболы
приближается к соответствующей диагонали прямоугольника D.
В силу симметрии аналогичным свойством обладают и другие части ги-
гиперболы, расположенные во второй, третьей и четвертой четвертях.
Рис. 6.7
Диагонали прямоугольника D обычно называются асимптотами
гиперболы. Отметим, что асимптоты гиперболы определяются уравне-
уравнениями
у = —х и у-—х. F.21)
а а
4°. Наряду с гиперболой F.9) рассматривают так называемую сопря-
сопряженную по отношению к ней гиперболу. Сопряженная гипербола оп-
определяется каноническим уравнением
4 = -!')¦ F-22)
На рис.6.7 б изображены гипербола F.9) и сопряженная ей гипербо-
гипербола F.22). Очевидно, что сопряженная гипербола имеет те же асимпто-
асимптоты, что и данная. Иными словами, асимптоты сопряженной гиперболы
определяются уравнениями F.21). Заметим, что гипербола F.9) в свою
очередь является сопряженной по отношению к гиперболе F.22).
) Чтобы убедиться, что уравнение F.22) определяет гиперболу, достаточно положить
х = У > У = * и умножить обе части этого уравнении на -1.
§3]
ДИРЕКТРИСЫ ЭЛЛИПСА, ГИПЕРБОЛЫ И ПАРАБОЛЫ
155
3. Исследование формы параболы. Обратимся к каноническому
уравнению параболы F.15):
' = 2рх.
F.15)
У
О
Ell
Fip/% 0)
М(х,у)
Рис. 6.8
1°. Парабола имеет ось симметрии (ось параболы). Точка пересе-
пересечения параболы с осью называется вершиной параболы. Действитель-
Действительно, в уравнении F.15) величина у фигури-
фигурирует в четной степени. Следовательно, если
координаты х и у точки М удовлетворяют
уравнению F.15) (т.е. точка М располага-
располагается на параболе), то этому уравнению
удовлетворяют координаты (х, —у) симмет-
симметричной ей точки относительно оси Ох
(рис. 6.8). Таким образом, если парабола
задана своим каноническим уравнением
F.15), то осью этой параболы является
ось Ох. Очевидно, вершиной параболы яв-
является начало координат.
2°. Вся парабола расположена в пра-
правой полуплоскости плоскости Оху. В са-
самом деле, так какр > 0, то уравнению F.15) удовлетворяют координаты
точек лишь с неотрицательными абсциссами. Такие точки располагают-
располагаются в правой полуплоскости.
3°. Из рассуждений п. 3 § 1 этой главы вытекает, что директриса
параболы, определяемой каноническим уравнением F.15), имеет
уравнение
у = -р/2. F.23)
4°. Любые две параболы подобны друг другу. Пусть у2 = 2рх и
у2 = 2р*х — канонические уравнения этих парабол в декартовой сис-
системе Оху; у = kx — уравнение произвольной прямой, проходящей че-
через О, а (х, у) и (х*, г/*) — координаты точек пересечения этой прямой
с параболами. Используя канонические уравнения, получим х = 2p/k2,
у = ±2p/k, х* = 2p*/fe2, z/* = ±2p*/fe. Из последних формул вытекает, что
х и
— = р/р* , -*- = р/р* . Но эти равенства означают подобие рассматри-
х* у*
ваемых парабол относительно точки О.
5°. Отметим, что кривая у2 = 2рх при р < 0 также является парабо-
параболой, которая целиком располагается в левой полуплоскости плоскости
Оху. Чтобы убедиться в этом, достаточно заменить х на -х и -р на р.
§ 3. Директрисы эллипса, гиперболы и параболы
Определение параболы, данное в п. 3 § 1 этой главы, базировалось
на свойстве этой кривой, которое связано с ее фокусом и директрисой.
156 ЛИНИИ ВТОРОГО ПОРЯДКА [ГЛ.6
Это свойство можно сформулировать также и следующим образом: пара-
парабола есть геометрическое место точек плоскости, для которых от-
отношение расстояния до фокуса к расстоянию до отвечающей этому
фокусу директрисы есть величина постоянная, равная единице.
Оказывается, отличный от окружности эллипс и гипербола облада-
обладают аналогичным свойством: для каждого фокуса х) эллипса или ги-
гиперболы можно указать такую прямую, называемую д up e к т р и-
с о й, что отношение расстояния от точек этих кривых до фокуса
к расстоянию до отвечающей этому фокусу директрисы есть вели-
величина постоянная.
Данный параграф посвящен выяснению этого свойства эллипса и
гиперболы.
1. Эксцентриситет эллипса и гиперболы. Обратимся к эллипсу
(гиперболе). Пусть с — половина расстояния между фокусами эллип-
эллипса ) (гиперболы), а — большая полуось эллипса (действительная полу-
полуось гиперболы).
Определение. Эксцентриситетом эллипса (гиперболы)
называется величина е, равная отношению с/а:
е = с/а. F.24)
Замечание 1. Учитывая связь величины с с длинами аи Ь боль-
большой и малой полуосей эллипса (с длинами действительной и мнимой
полуосей гиперболы) (см. формулы F.5) и F.10)), легко получить следую-
следующие выражения для эксцентриситета е\
F.25)
для гиперболы е = Jl + —, F.250
Из формул F.25) и F.250 вытекает, что эксцентриситет эллипса мень-
меньше единицы, а эксцентриситет гиперболы больше единицы 3).
Отметим, что эксцентриситет окружности равен нулю (для ок-
окружности Ь = а).
Замечание 2. Два эллипса (две гиперболы), имеющих одинако-
одинаковый эксцентриситет, подобны. В самом деле, из формулы F.25) для экс-
эксцентриситета эллипса (из формулы F.250 для эксцентриситета гипер-
гиперболы) вытекает, что эллипсы с одинаковым эксцентриситетом имеют оди-
одинаковое отношение b/а малой и большой полуосей (гиперболы с
для эллипса е = J1 ,
) Напомним, что отличный от окружности эллипс и гипербола имеют по два фокуса.
) Если эллипс представляет собой окружность, то с = 0.
) Напомним, что величина Ъ как для эллипса, так и для гиперболы не равна нулю.
§3]
ДИРЕКТРИСЫ ЭЛЛИПСА, ГИПЕРБОЛЫ И ПАРАБОЛЫ
157
одинаковым эксцентриситетом имеют одинаковое отношение b/а мни-
мнимой и действительной полуосей). Такие эллипсы (гиперболы) подобны 0.
Замечание 3. Эксцентриситет эллипса можно рассматривать как
меру его «вытянутости»: чем больше эксцентриситет е (см. формулу
F.25)), тем меньше отношение b/а малой полуоси эллипса Ъ к его боль-
большой полуоси а. На рис. 6.9 изображены эллипсы с разными эксцентри-
эксцентриситетами, но с одинаковой большой полуосью а.
Замечание 4. Эксцентриситет гиперболы можно рассматривать
как числовую характеристику величины раствора угла между ее асимп-
асимптотами. В самом деле, отношение b/а равно тангенсу половины угла меж-
между асимптотами гиперболы.
2. Директрисы эллипса и гиперболы.
1°. Директрисы эллипса. Мы выяснили, что любой, отличный от ок-
окружности эллипс имеет большую и малую оси и центр — точку пересе-
пересечения этих осей (см. п. 1 § 2 этой главы). Обозначим через с половину
расстояния между фокусами F{ и F2 эллипса, через а его большую полу-
полуось и через О его центр (рис. 6.10).
е = 0
А
dx
(г1
а/е
—
0
—^М d2
А
X
Рис. 6.9
Рис. 6.10
Пусть е — эксцентриситет этого эллипса (так как эллипс отличен от
окружности, то е Ф 0) и тг — плоскость, в которой расположен эллипс.
Малая ось эллипса разбивает эту плоскость на две полуплоскости. Обо-
Обозначим через 71! (/= 1, 2) ту из этих полуплоскостей, в которой лежит
фокус Fx(i= 1, 2).
Определение. Директрисой Dt (i = 1, 2) эллипса, отве-
отвечающей фокусу F{ (/= 1, 2), называется прямая, расположенная в
полуплоскости щ (i = 1, 2) перпендикулярно большой оси эллипса на
расстоянии а/е от его центра.
Замечание 1. Выберем начало декартовой прямоугольной сис-
системы координат в середине отрезка F{F2, а оси Ох и Оу направим так,
0 Чтобы убедиться в этом, достаточно расположить эти эллипсы (соответственно
гиперболы) так, чтобы их центры и одноименные главные оси совпадали. Тогда из кано-
канонических уравнений легко следует подобие кривых с равными отношениями Ь/а.
158 ЛИНИИ ВТОРОГО ПОРЯДКА [ГЛ.6
как указано на рис. 6.10. Тогда, очевидно, уравнения директрис
Dt(i = \, 2) эллипса можно записать следующим образом:
уравнение директрисы D,: х = -ale,
F.26)
уравнение директрисы D2: х = а/е.
Замечание 2. Директрисы эллипса расположены вне эллип-
эллипса. Действительно, эллипс расположен в прямоугольнике |х| < а, \у\ <Ь
(см. п. 1 § 2 этой главы и рис. 6.4), стороны которого перпендикулярны
большой и малой осям эллипса.
Из определения директрис вытекает, что они параллельны двум пер-
перпендикулярным большой оси эллипса сторонам этого прямоугольни-
прямоугольника. Поскольку упомянутые стороны отстоят от центра эллипса на рас-
расстоянии а, а директрисы — на расстоянии а/е > а @ < е < 1), то директ-
директрисы расположены вне прямоугольника, а следовательно, и вне эллипса.
Замечание 3. Мы только что выяснили, что директрисы распо-
расположены вне эллипса. Отсюда вытекает, что точки эллипса и его центр
расположены по одну сторону от каждой из его директрис.
Замечание 4. Обозначим через р расстояние от фокуса эллипса
до соответствующей этому фокусу директрисы. Поскольку расстояние
от центра эллипса до директрисы равно а/е, а расстояние от центра эл-
эллипса до фокуса равно с, то р равно —с 0. Так как с = ае, то для р
е
получаем следующее выражение:
] а]—^. F.27)
Докажем теорему, выясняющую важное свойство отличного от ок-
окружности эллипса и его директрис.
Теорема 6.1. Отношение расстояния г{ от точки М эллипса до
фокуса Ft к расстоянию dt от этой точки до отвечающей этому
фокусу директрисы Д равно эксцентриситету е этого эллипса.
Доказательство. Пусть FxnF2 — фокусы эллипса 2). Выберем
декартову прямоугольную систему координат так, как это указано в заме-
замечании 1 этого пункта (см. рис. 6.10). В п. 1 § 1 этой главы мы выяснили,
что при таком выборе системы координат расстояния гх и г2 от точки
М(х, у) эллипса до фокусов Fx и F2 определяются формулами F.6). Так
как отношение с/а равно эксцентриситету е этого эллипса, то для гх и г2 мы
получим выражения
гх = а + ех, г2 = а-ех. F.28)
0 Напомним, что центр эллипса и его фокусы расположены на большой оси, которая
перпендикулярна директрисам. Поэтому с учетом расположения центра, фокуса и отве-
отвечающей ему директрисы (рис. 6.10) р равно а/е - с.
2) Так как эллипс отличен от окружности, то его фокусы не совпадают.
§3]
ДИРЕКТРИСЫ ЭЛЛИПСА, ГИПЕРБОЛЫ И ПАРАБОЛЫ
159
Найдем теперь расстояния dt от точки М эллипса до директрис Д. Ис-
Используя уравнения директрис Д (см. формулы F.26)), легко убедиться
в том, что нормированные уравнения директрис имеют вид (см. п. 7 § 1
гл. 5):
нормированное уравнение директрисы Dx
-х-- = 0,
е
F.29)
нормированное уравнение директрисы D2: х — = '
Так как точка М (х, у) эллипса и начало координат находятся по одну сто-
сторону от каждой из директрис (см. замечание 3 этого пункта), то расстоя-
расстояние d\ и d2 от точки М (х, у) до директрис D{ и D2 равны соответствую-
соответствующим отклонениям М(х, у) от D{ и D2, взятым со знаком минус, и мы
получим (в силу F.29) и теоремы 5.1):
а + ех а — ех
ах = , а2 = ,
F.30)
Используя формулы F.28) и F.30), найдем, что
rt/dt = e, i=\, 2.
Теорема доказана.
2°. Директрисы гиперболы. Обозначим через с половину расстоя-
расстояния между фокусами F{ и F2 гиперболы, через а ее действительную по-
полуось и через О ее центр (рис. 6.11). Пусть е — эксцентриситет этой
гиперболы и тг — плоскость, в которой расположена гипербола. Мнимая
ось гиперболы разбивает эту плоскость на
две полуплоскости. Обозначим через пг
(i = 1, 2) ту из этих полуплоскостей, в ко-
которой лежит фокус Ft (/=1,2).
Определение. Директрисой
Dt (i = 1, 2) гиперболы, отвечающей фо-
фокусу Ft (/= 1, 2), называется прямая,
расположенная в полуплоскости nt
(i=\, 2) перпендикулярно действитель-
действительной оси гиперболы на расстоянии а/е от
ее центра.
Замечание 5. Выберем начало
декартовой прямоугольной системы коор-
координат в середине отрезка FXF2, а оси Ох и Оу направим так, как указано
на рис. 6.11. Тогда, очевидно, уравнения директрис Dt (i = 1, 2) гипер-
гиперболы можно записать следующим образом:
Рис. 6.11
уравнение директрисы Dx: х = -а/е,
уравнение директрисы D2: x = а/е.
F.31)
160 ЛИНИИ ВТОРОГО ПОРЯДКА [ГЛ.6
Замечание 6. Директрисы гиперболы целиком расположены в
области G, не содержащей точек гиперболы (см. 2° п. 2 § 2 этой главы
и рис. 6.6). В самом деле, в 2° п. 2 § 2 этой главы мы убедились, что поло-
полоса Gh определяемая в выбранной в замечании 5 системе координат Оху
неравенством \х\ <а, содержится в области G. Но эта полоса содержит
директрисы гиперболы, так как, согласно F.31), для точек директрис
| х | = - < а , ибо для гиперболы е > 1. Расположение директрис гипербо-
е
лы указано на рис. 6.11.
Замечание 7. Только что сделанное замечание позволяет обо-
обосновать расположение директрис гиперболы, указанное на рис. 6.11.
Именно, очевидно, что точки левой (правой) ветви гиперболы и ее
центр О расположены по разные стороны от директрисы D{ (D2), a
точки правой (левой) ветви гиперболы и ее центр О расположены по
одну сторону от директрисы Dx (D2).
Замечание 8. Обозначим через р расстояние от фокуса гипербо-
гиперболы до соответствующей этому фокусу директрисы. Поскольку расстоя-
расстояние от центра гиперболы до директрисы равно а/е, а расстояние от цен-
а и
тра гиперболы до фокуса равно с, то р = с — ). Так как с = ае, то для р
получаем формулу
LI>| a^zl. F.32)
е
Докажем теорему, выясняющую важное свойство гиперболы и ее дирек-
директрис.
Теорема 6.2. Отношение расстояния г{ от точки М гиперболы
до фокуса Ft к расстоянию dt от этой точки до отвечающей этому
фокусу директрисы Д равно эксцентриситету е этой гиперболы.
Доказательство. Для доказательства этой теоремы нужно рас-
рассмотреть следующие четыре случая: 1) точка М находится на левой вет-
ветви гиперболы, исследуется фокус F{ и директриса D{; 2) точка М нахо-
находится на правой ветви гиперболы; исследуется фокус Fx и директриса D{;
3) точка М находится на левой ветви, исследуется фокус F2 и директри-
директриса D2; 4) точка М находится на правой ветви, исследуется фокус F2 и
директриса D2. Так как рассуждения для каждого из случаев однотип-
однотипны, то мы ограничимся лишь первым случаем.
Расположим систему координат так, как это указано в замечании 5
этого пункта. Так как абсцисса х любой точки М (х, у) левой ветви ги-
гиперболы отрицательна, то расстояние г{ от этой точки до фокуса F{, co-
0 Напомним, что центр гиперболы и ее фокусы расположены на действительной оси,
которая перпендикулярна директрисам. Поэтому с учетом расположения центра, фокуса и
отвечающей ему директрисы (см. рис. 6.11) р =с — .
е
§3] ДИРЕКТРИСЫ ЭЛЛИПСА, ГИПЕРБОЛЫ И ПАРАБОЛЫ 161
гласно формулам F.11), равно -а — х . Так как с/а = е, то для гх полу-
а
чим выражение
rx=-a- ex. F.33)
Директриса D{ определяется первым из уравнений F.31). Согласно п. 7
§ 1 гл. 5 нормированное уравнение этой директрисы имеет вид
-х-- = 0. F.34)
е
Так как точка М левой ветви гиперболы и начало координат находятся
по разные стороны от директрисы D{ (см. замечание 7 этого пункта),
то расстояние dx от точки М до директрисы Dx равно отклонению М от
D{, и мы получим (в силу F.34) и теоремы 5.1)
-а-ех
dx = . F.35)
е
Используя формулы F.33) и F.35), найдем, что r{/d{ = е. Для перво-
первого случая теорема доказана. Остальные случаи рассматриваются анало-
аналогично.
3. Определение эллипса и гиперболы, основанное на их свой-
свойстве по отношению к директрисам. Теоремы 6.1 и 6.2, доказанные в
предыдущем пункте, выясняют свойство отличного от окружности эл-
эллипса и гиперболы, связанное с директри-
директрисами этих кривых. Убедимся в том, что это
свойство эллипса и гиперболы может быть
принято в качестве их определения. Рас-
Рассмотрим в плоскости тг точку F и прямую D
(рис. 6.12). Будем предполагать, что точка F
не лежит на прямой D. Докажем следующее
утверждение.
Теорема 6.3. Геометрическое место
{М} точек М плоскости п, для которых
отношение е расстояния г до точки F к
расстоянию d до прямой D есть величина постоянная, представ-
представляет собой эллипс {при е<\) или гиперболу {при е > 1).
При этом точка F называется фокусом, а прямая D — д и-
ректрисой рассматриваемого геометрического места.
Доказательство. Убедимся, что в некоторой, специально вы-
выбранной системе координат геометрическое место точек, удовлетворяю-
удовлетворяющее требованиям сформулированной теоремы, определяется при е < 1
2 2
X U
уравнением -— + —- = 1 (т.е. является эллипсом), а при е > 1 — уравнением
а Ъ
У,
0
А
М(х,у) d
F(c,O)
а/е
D
R *х
162 ЛИНИИ ВТОРОГО ПОРЯДКА [ГЛ.6
х2 и2
= 1 (т.е. является гиперболой) 0. Пусть R — точка пересече-
а Ъ
ния прямой D и прямой Л, проходящей через F перпендикулярно D
(рис. 6.12). На прямой А выберем положительное направление от F к R
при е < 1 и от R к F при е > 1 (на рис. 6.12 показан случай е < 1). Так как
дальнейшие рассуждения для случая е > 1 и е < 1 идентичны, мы прове-
проведем их подробно для е < 1, т.е. для случая, определяющего эллипс. Обо-
Обозначим через р расстояние между точками F и R. Вспоминая располо-
расположение директрисы эллипса относительно его центра (см. п. 2 этого па-
параграфа), естественно выбрать начало О координат на прямой А слева
от точки R на расстоянии а/е. При заданных вир величина а/е может
быть определена при помощи формулы F.27) (см. также замечание 4
п. 2 этого параграфа). Иными словами, естественно положить
- = г^т- F-36)
е 1-е
Будем теперь считать прямую А с выбранным началом О и направле-
направлением от F к R осью абсцисс. Ось ординат направим так, как указано на
рис. 6.12. В выбранной системе координат фокус F имеет координаты
(с, 0), где 2
с = р-^2\ F.37)
1 - е
а директриса D определяется уравнением
* = - = ^. F.38)
е 1-е
Перейдем теперь к выводу уравнения рассматриваемого геометричес-
геометрического места точек. Пусть М — точка плоскости с координатами (х, у) (см.
рис. 6.12). Обозначим через г расстояние от точки М до фокуса F и че-
через d расстояние от точки М до директрисы D. Соотношение
r/d = e F.39)
является необходимым и достаточным условием расположения точ-
точки М на геометрическом месте {М}.
Используя формулу расстояния между двумя точками М и F (см.
формулу A.8) п. 2 § 3 гл. 1) и формулу для расстояния от точки М до
прямой D (см. п. 7 § 1 гл. 5), получим
r = J(x-cY+y\ F.40)
0 Эти уравнения, как было выяснено в § 1 этой главы, являются уравнениями эллип-
эллипса и гиперболы.
2) Формула F.37) вытекает из формулы с = RO -RFn формул RF = р и RO = — = —-— .
е 1-е2
§3] ДИРЕКТРИСЫ ЭЛЛИПСА, ГИПЕРБОЛЫ И ПАРАБОЛЫ 163
d = --x '). F.41)
е
Из F.39), F.40) и F.41) вытекает, что соотношение
F.42)
представляет собой необходимое и достаточное условие располо-
расположения точки М с координатами х и у на геометрическом месте {М}.
Поэтому соотношение F.42) является уравнением геометрического
места {М}. Путем стандартного приема «уничтожения радикалов», а
также используя формулы F.36) и F.37), это уравнение легко привести
к виду
х2 и2
а Ъ
тяеЬ2 = а2-с2.
Для завершения доказательства нам нужно убедиться в том, что в
процессе преобразования уравнения F.42) в уравнение F.43) не появи-
появились «лишние корни».
Рассуждая, как и в п. 1 § 1 этой главы, мы убеждаемся, что расстоя-
расстояние г от точки М, координаты х и у которой удовлетворяют уравнению
с
F.43), до точки F (с, 0) может быть вычислено по формуле г = а — х .
а
Используя соотношение F.37) и формулу а = ——, получим для г сле-
1 - е1
дующее выражение:
г = а-ех. F.44)
Так как точка М, координаты х и у которой удовлетворяют F.43), распо-
расположена слева от прямой D (для таких точек х < а, а для точек прямой D:
х = а/е, где е < 1), то для расстояния d от М до D справедлива формула
F.41). Отсюда и из формулы F.44) вытекает, что для рассматриваемых
точек М выполняется соотношение r/d = е, т.е. уравнение F.43) явля-
является уравнением геометрического места {М}. Аналогично рассматрива-
рассматривается случай е > 1.
Замечание. Используя доказанную теорему и определение пара-
параболы, мы можем сформулировать следующее определение отличного от
окружности эллипса, гиперболы и параболы.
О Формула F.41) верна лишь для точек М (х, у), расположенных слева от прямой D.
Однако точки, расположенные справа от прямой D, равно как и точки прямой D, можно
исключить из рассмотрения, так как для этих точек r/d > 1, а мы рассматриваем точки,
для которых r/d = e<\.
164
ЛИНИИ ВТОРОГО ПОРЯДКА
[ГЛ.6
В
Определение. Геометрическое место {М} точек М плоскости тс,
для которых отношение е расстояния г до точки F этой плоскости
к расстоянию d до прямой D, расположенной в плоскости тс, есть
величина постоянная, представляет собой либо эллипс (при
0<е< 1), либо параболу (при е=\), либо гиперболу (при е>\). Точка F
называется фокусом, прямая D —директрисой, ае —экс-
—эксцентриситетом геометрического места {М}.
4. Эллипс, гипербола и парабола как конические сечения. В начале этой главы
указывалось, что эллипс, гипербола и парабола представляют собой линии пересече-
пересечения кругового конуса с плоскостями, не проходящими через его вершину. В этом пунк-
пункте мы докажем теорему, обосновывающую справедливость этого утверждения.
Теорема 6.4. Пусть L — кривая, являющаяся эллипсом 0, гиперболой или пара-
параболой. Можно указать такой круговой конус К и такую плоскость л, что линия пе-
пересечения плоскости л с конусом К представ-
представляет собой кривую L.
Прежде чем перейти к доказательству этой
теоремы, сделаем следующее замечание.
Замечание. Пусть L* — линия пересе-
пересечения конуса К с некоторой плоскостью л*, не
проходящей через вершину конуса, a L — линия,
подобная L*. Найдется таже плоскость л, линией
пересечения которой с К будет линия L.
Существование такой плоскости очевидно,
ибо параллельные плоскости пересекают ко-
конус К по подобным линиям, коэффициент подо-
подобия которых равен отношению расстояний от
вершины конуса до этих плоскостей.
Доказательство теоремы 6.4. Оче-
Очевидно, линия пересечения конуса К с плоско-
плоскостью, перпендикулярной его оси и не проходящей
через его вершину, представляет собой окруж-
окружность, т.е. эллипс, эксцентриситет е которого
равен нулю.
Рассмотрим плоскость л*, не перпендикуляр-
перпендикулярную оси АВ конуса К и не проходящую через его
вершину О (рис. 6.13). Пусть L* — линия пересе-
пересечения этой плоскости и конуса. Впишем в конус
сферу S, касающуюся плоскости л* в точке F.
Пусть со — плоскость окружности R, по которой
сфера 5 касается конуса К, и D — прямая, по ко-
которой пересекаются плоскости л* и со. Убедим-
Убедимся, что L* удовлетворяет требованиям определения, сформулированного в предыдущем
пункте, т.е. является либо отличным от окружности эллипсом, либо параболой, либо ги-
гиперболой. В процессе рассуждений выясним, что в зависимости от наклона плоскости л*
и от величины угла, который составляют образующие конуса с его осью, кривая L* мо-
может иметь любой положительный эксцентриситет е. Этим, очевидно, и будет завер-
завершено доказательство теоремы, так как любые две кривые второго порядка 2) с одина-
одинаковым эксцентриситетом подобны (см. пп. 3 и 4 § 2 этой главы и замечание 2 п. 1 § 3
Рис. 6.13
) При этом эллипс может представлять собой окружность.
) То есть эллипс, гипербола или парабола.
§3] ДИРЕКТРИСЫ ЭЛЛИПСА, ГИПЕРБОЛЫ И ПАРАБОЛЫ 165
этой главы), а согласно сделанному перед доказательством теоремы замечанию, любая
кривая L, подобная линии L* пересечения конуса К с плоскостью л*, также пред-
представляет собой линию пересечения этого конуса с некоторой плоскостью п.
Пусть М — произвольная точка кривой L*, МР — перпендикуляр из этой точки на
плоскость со, MQ — перпендикуляр из М на прямую D, MF — отрезок, соединяющий
точки М и F, MN — отрезок образующей конуса (эта образующая проходит через точ-
точку М, г N — точка пересечения с окружностью R). Так как MF и MN — касательные к
сфере 5 из одной точки М, то | MF \ = \ MN \.
Обозначим через C угол, который составляет образующая конуса К с его осью, а че-
через а — угол между плоскостями л* и со. Очевидно, значения C заключены в пределах
О < C < п/2, а значения а — в пределах 0 < а < п/2 1).
Из рассмотрения треугольников MPN и MPQ, а также из равенства |M/V| = \MF\
вытекает, что
\MF\ = |MP|/cos C, \MQ\ = |MP|/sin a.
Таким образом, для любой точки М кривой L* справедливо равенство
\MF\/\MQ\ = sin a/cos C.
Поскольку для заданного конуса /Си фиксированной плоскости л* отношение sin a/cos C
не зависит от точки М, то для кривой L* выполнены условия определения предыдуще-
предыдущего пункта, т.е. эта кривая L* является либо отличным от окружности эллипсом,
либо гиперболой, либо параболой. При этом эксцентриситет е кривой L* может быть
вычислен по формуле
е = sin a / cos C. F.45)
Докажем, что путем выбора углов а и C можно получить для е любое положительное
значение. Выберем, во-первых, C так, чтобы величина е cos C была меньше 1. Такой вы-
выбор C возможен, так как C — любое число из интервала @, п/2). Остается выбрать а так,
чтобы выполнялось равенство sin a = e cos C (эта формула представляет собой записан-
записанную иначе формулу F.45)). Очевидно, достаточно положить a = arcsin (e cos C). Теорема
доказана.
5. Полярные уравнения эллипса, гиперболы и параболы. Об-
Обратимся сначала к окружности радиуса R. Если полюс полярной систе-
системы поместить в центр окружности, а полярную ось — произвольно в
плоскости окружности, то, очевидно, искомое полярное уравнение бу-
будет иметь вид
р = Д. F.46)
Рассмотрим теперь кривую L, представляющую собой отличный от ок-
окружности эллипс или параболу. Пусть F — фокус кривой L, D — отвеча-
отвечающая этому фокусу директриса, р — расстояние от F до D и е — эксцент-
эксцентриситет L. Пусть полюс полярной системы координат совпадает с F, а
полярная ось перпендикулярна D и направлена так, как указано на
рис. 6.14. Пусть М — любая точка L. Согласно определению L (см. п. 3
этого параграфа)
lFMl=e. F.47)
МР
О а Ф 0, так как плоскость л* не перпендикулярна
оси конуса.
166 ЛИНИИ ВТОРОГО ПОРЯДКА [ГЛ.6
Так как \FM\ =p, a \MP\ = \PN + NM\ ^p + pcoscp1), то из F.47) на-
находим следующее выражение для р:
F.48)
ре
1 -
Соотношение F.48), представляет собой полярное уравнение от-
отличного от окружности эллипса или параболы.
\
D
Рис. 6.14
Рис. 6.15
Обратимся теперь к гиперболе. Пусть F — один из ее фокусов, D —
отвечающая этому фокусу директриса, р — расстояние от F до D, е —
эксцентриситет гиперболы. Пусть W{ — ветвь гиперболы, отвечающая
фокусу F, a W2 — другая ветвь гиперболы (на рис. 6.15 F — правый фо-
фокус гиперболы и W{ — правая ее ветвь).
Рассуждая, как и в случае эллипса или параболы, легко убедиться,
что полярное уравнение ветви W{ гиперболы имеет вид F.48). Для вет-
ветви W2 полярное уравнение имеет иной вид. Заметим, во-первых, что для
точек М ветви W2 справедливо соотношение F.47). Выражения для
| FM | и | МР | имеют следующий вид:
\FM\ =p, \MP\ = \MN-PN\ =-pcoscp-p2).
F.49)
Используя формулы F.49), найдем из F.47) следующее полярное урав-
уравнение ветви W2:
1 + ecoscp
Таким образом, полярное уравнение гиперболы имеет вид
Р = 1
ре
1 - ecoscp
-ре
1 + ecoscp
для ветви
для ветви W9.
F.50)
О Эта формула верна и в случае, когда М находится левее FN, ибо в этом случае cos ф < 0.
2) Так как для ветви W2 угол ф тупой, то cos ф < 0, и поэтому MN = -р cos ф.
§4] КАСАТЕЛЬНЫЕ К ЭЛЛИПСУ, ГИПЕРБОЛЕ И ПАРАБОЛЕ 167
Замечание. Знаменатель в правой части соотношений F.48) и F.50) не обраща-
обращается в нуль. В случае эллипса, когда 0 < е < 1, это очевидно. Для параболы е = 1, но ф
изменяется на интервале @, 2п), и поэтому | е cos ф| < 1. В случае гиперболы легко убе-
убедиться, что для ветви Wx угол ф изменяется на интервале arccos-, 27i-arccos- , и
\ е е)
поэтому произведение е cos ф либо заключено между нулем и единицей, либо отрица-
отрицательно. Для ветви W2 угол ф изменяется на arccos -- , 2%-arccos -- . Для этих
V V е) \ е))
значений ф выражение е cos ф отрицательно, но больше 1 по абсолютной величине.
§ 4. Касательные к эллипсу, гиперболе и параболе
1. Уравнения касательных к эллипсу, гиперболе и параболе. Убедимся, что каж-
каждая из кривых L, являющаяся эллипсом, гиперболой или параболой, представляет собой
объединение графиков двух функций. Рассмотрим, например, каноническое уравнение эл-
эллипса F.4). Из этого уравнения следует, что часть эллипса, точки которой имеют неотри-
неотрицательные ординаты у, есть график функции
у = Ь М при —а<х<а, F.51)
V а
а часть эллипса, точки которой имеют неположительные ординаты, есть график функции
y = -bJ\—- при -а < х < а. F.52)
Обращаясь к каноническому уравнению гиперболы F.9), найдем, что гипербола пред-
представляет собой объединение графиков функций
у = ЬЛ—-\ и у = -ЬА— -1 при х>а и х<-а, F.53)
V а V а
а из канонического уравнения параболы F.15) вытекает, что эта кривая есть объедине-
объединение графиков функций
у = sJ2px и у = -^2рх при х>0. F.54)
Рассмотрим теперь вопрос о касательных к эллипсу, гиперболе и параболе. Естествен-
Естественно, что касательные к этим кривым будут также касательными к графикам функций F.51)—
F.54). Вопрос о касательных к графикам функций подробно рассмотрен в вып. 1 настоя-
настоящего курса (см. вып. 1, гл. 5, § 1, п. 4). Найдем, например, уравнение касательной к эл-
эллипсу в его точке М (х, у), считая при этом у ф 0 (пусть ради определенности у > 0). Пусть
X, Y — текущие координаты точки касательной. Так как ее угловой коэффициент k = у',
xb
где у' = . — производная функции F.51), вычисленная в точке х, то уравне-
уравнение касательной имеет вид 0
(Х ) F55)
Y-y =
См. гл. 5, уравнение E.10).
168
ЛИНИИ ВТОРОГО ПОРЯДКА
[ГЛ.6
Учитывая, что точка М(х, у) лежит на эллипсе (т.е. ее координаты х и у удовлетворяют
уравнениям F.51) и F.4)), получим после несложных преобразований уравнение каса-
касательной к эллипсу в следующей форме:
Ь2
F.56)
Рассуждая аналогично для случая гиперболы и параболы, получим следующие уравне-
уравнения касательных к этим кривым:
для гиперболы: — = 1,
а2 Ь2
для параболы: Yy = р(Х + х).
F.57)
F.58)
Замечание 1. В предыдущих рассуждениях был исключен случай у = 0. В соот-
соответствующих точках эллипса, гиперболы и параболы касательные вертикальны. Легко
убедиться, что уравнения F.56)-F.58) справедливы и в этом случае.
Замечание 2. Отметим, что касательная к эллипсу имеет с ним только одну об-
общую точку — точку касания. Аналогичным свойством обладают касательные к гипербо-
гиперболе и параболе.
2. Оптические свойства эллипса, гипер-
гиперболы и параболы. Установим следующее оп-
оптическое свойство эллипса: лучи света, исхо-
исходящие из одного фокуса Fx эллипса, после зер-
зеркального отражения от эллипса проходят
через второй фокус F2 (рис. 6.16). Геометричес-
Геометрически указанное свойство означает, что отрезки
MFX и MF2 образуют с касательной в точке М
эллипса равные углы.
Допустим, что эллипс не обладает указан-
указанным свойством, т.е. щ Ф а2 (рис. 6.16). Пусть
Рис. 6.16
F* — зеркальное отражение фокуса Fx относительно касательной К в точке М. Соеди-
Соединим F* с М и F2. Так как oq Ф а2, то точка М* пересечения прямой F*F2 с касатель-
касательной К не совпадает с точкой М. Поэтому
FXM*\ + \F2M*\ = \F{*F2\ < \F{M\ + \F2M\ =2a
F.59)
(a — длина большой полуоси эллипса). Будем теперь перемещать точку М* по касатель-
касательной К от точки М. При таком перемещении сумма | F^M* \ + \ F2M* \ неограниченно уве-
увеличивается. В начальный момент перемещения эта сумма, согласно F.59), была меньше
2а. Поэтому в некоторый момент эта сумма будет равна 2а, а это означает, что на каса-
касательной К, кроме точки М, будет еще одна точка М* эллипса, отличная от М. Согласно
замечанию 2 предыдущего пункта этого не может быть. Таким образом, указанное выше
свойство эллипса действительно справедливо.
Совершенно аналогично устанавливаются следующие оптические свойства гипербо-
гиперболы и параболы:
1°. Лучи света, исходящие из одного фокуса F{ гиперболы, после зеркального от-
отражения от гиперболы кажутся исходящими из другого ее фокуса F2 (рис. 6.17).
2°. Лучи света, исходящие из фокуса параболы, после зеркального отражения
от параболы образуют пучок, параллельный оси параболы (рис. 6.18).
Замечание 1. Оптические свойства эллипса, гиперболы и параболы широко ис-
используются в инженерном деле. В частности, оптическое свойство параболы использует-
используется при конструировании прожекторов, антенн и телескопов.
Замечание 2. Назовем фронтом волны точечного источника света F линию,
для всех точек Q которой путь, проделанный световым лучом, пришедшим из источника
§5]
КРИВЫЕ ВТОРОГО ПОРЯДКА
169
F в точку Q, одинаков. Если волна, вышедшая из точечного источника F, не претерпе-
претерпевает отражений, то фронт ее, очевидно, будет представлять собой окружность. Если же
указанная волна отражается от некоторой кривой L, то форма ее фронта меняется в зави-
зависимости от вида кривой L. Парабола обладает следующим замечательным свойством:
фронт Ф отраженной от параболы волны при условии расположения источника све-
света в фокусе F параболы представляет собой прямую, параллельную директрисе D
этой параболы (рис. 6.18).
В самом деле, рассмотрим прямую Ф, параллель-
параллельную директрисе D. Пусть Q — произвольная точка
этой прямой. Из оптического свойства параболы вы-
вытекает, что если FM — падающий луч, приходящий
после отражения в точку Q, то отраженный луч MQ
D
Рис. 6.17
Рис. 6.18
перпендикулярен директрисе D. Обозначим через Р точку пересечения луча MQ с директ-
директрисой D. Очевидно, сумма | QM \ + \ MF | равна | QM \ + \ МР | 0. Так как | QM \ + \ МР \ = d,
где d — не зависящее от точки Q расстояние между прямыми Ф и D, то для любой
точки Q линии Ф сумма | QM \ + \ MF \ одна и та же (равна d), т.е. Ф — фронт отражен-
отраженной волны.
§ 5. Кривые второго порядка
Обращаясь к каноническим уравнениям эллипса, гиперболы и пара-
параболы (см. уравнения F.4), F.9) и F.15) этой главы), мы видим, что пере-
перечисленные кривые представляют собой алгебраические линии второ-
второго порядка (см. гл. 4, § 1, п. 5). Естественно поставить вопрос о том,
какие еще линии являются алгебраическими линиями второго по-
порядка. Этот вопрос и рассматривается в настоящем параграфе.
Рассмотрим общее алгебраическое уравнение второго порядка
апх2 + 2а12ху + а22у2 + 2а13х + 2а23у + а33 = 0. F.60)
Линия L, определяемая этим уравнением (т.е. алгебраическая линия
второго порядка), рассматриваемая как геометрический объект ), не
0 Согласно определению параболы (см. п. 3 § 1 этой главы).
) Может оказаться, что уравнение F.60) не определяет линии: этому уравнению могут
удовлетворять координаты лишь одной точки или не найдется ни одной точки, координа-
координаты которой удовлетворяют F.60). Однако и в этом случае мы будем говорить о геометри-
геометрических объектах, определяемых уравнением F.60), называя эти объекты вырожденны-
вырожденными или мнимыми. Подробнее об этих вопросах см. в гл. 4.
170 ЛИНИИ ВТОРОГО ПОРЯДКА [ГЛ.6
меняется, если от данной декартовой прямоугольной системы коорди-
координат перейти к другой декартовой системе координат.
Отметим, что исходное уравнение F.60) и уравнение, полученное после
преобразования координат, алгебраически эквивалентны (см. п. 5 § 1
гл. 4). Можно ожидать, что при специальном выборе декартовой системы
координат уравнение F.60) примет настолько простой вид, что геометри-
геометрическая характеристика линии L не будет представлять затруднений.
Этим методом мы воспользуемся для выяснения всех типов линий вто-
второго порядка. В процессе рассуждений мы укажем правила, с помощью
которых выбирается система координат, в которой уравнение линии L
выглядит наиболее просто. Мы сформулируем также признаки, позволя-
позволяющие узнать тип линии второго порядка по ее исходному уравнению.
1. Преобразование коэффициентов уравнения линии второго
порядка при переходе к новой декартовой системе координат.
Так как переход от одной декартовой прямоугольной системы коорди-
координат на плоскости к другой декартовой прямоугольной системе коорди-
координат может быть осуществлен путем некоторого параллельного перено-
переноса системы координат и последующего поворота (включая в поворот и
зеркальное отражение (см. § 1 гл. 3)), мы рассмотрим отдельно вопрос
о преобразовании коэффициентов уравнения F.60) при параллельном
переносе и при повороте. При этом, конечно, будем считать, что в урав-
уравнении F.60) по крайней мере один из коэффициентов ап, а12 или а22
отличен от нуля.
Условимся о следующей терминологии: группу слагаемых апх2 +
+ 2а12ху + а<22У2 левой части F.60) будем называть группой старших
членов этого уравнения, а группу слагаемых 2al3x + 2a23z/ + а33 будем
называть линейной частью уравнения F.60). При этом коэффициенты
ап, а12, а22 будем называть коэффициентами группы старших чле-
членов, а коэффициенты а13, а23 и а33 — коэффициентами линейной час-
части F.60). Коэффициент а33 обычно называется свободным членом урав-
уравнения F.60).
1°. Преобразование коэффициентов при параллельном переносе.
Пусть декартова прямоугольная система координат О'х'ц' получена па-
параллельным переносом системы Оху вдоль вектора ОО'. Как известно,
старые и новые координаты точки связаны соотношениями
х = xf + Xq, У = у' + Уо> F.61)
где Xq, Uq — координаты начала О' в системе Оху (см. гл. 3, § 1, форму-
формулы C.12)). Подставляя выражения F.61) для х и у в левую часть F.60),
мы получим уравнение L в системе О'х'у'. Очевидно, это уравнение име-
имеет вид
апх'2 + 2апх'у' + а22у'2 + 2а[ъх' + 2а'2Ъу' + а'зг = 0, F.62)
§5] КРИВЫЕ ВТОРОГО ПОРЯДКА 171
где
а23> F-63)
«зз = а\ \хъ + 2а\2ЧУъ + а22Уо + 2а13х0 + 2a23z/0 + «зз-
Обращаясь к уравнению F.62), мы можем сделать следующий важ-
важный вывод: при параллельном переносе системы координат коэффи-
коэффициенты группы старших членов не изменяются, а коэффициенты
группы линейных членов преобразуются по формулам F.63).
Замечание 1. Используя первую и вторую из формул F.63),
можно, очевидно, выражению для а3'з придать следующий вид:
аъъ = (fli3 + а1з) хо + @23 + а2з) У о + азз- F-64)
2°. Преобразование коэффициентов при повороте. Пусть декарто-
декартова прямоугольная система координат Ох'у' получена поворотом систе-
системы Оху на угол ф (при этом не исключается поворот на угол ф, равный
нулю). Как известно, старые и новые координаты точки связаны соотно-
соотношениями
х = х' cos ф - у' sin ф, у = х' sin ф + у' cos ф F.65)
(см. гл. 3, § 1, формулы C.13)). Подставляя выражения F.65) для х и у в
левую часть F.60) и группируя коэффициенты при различных степенях
х' и у', мы получим уравнение L в системе Ох'у'. Очевидно, это урав-
уравнение имеет вид
а'пх'2 + 2а{2х'у/ + а'22у'2 + 2а{3х' + Чсб^у' + а'зг = 0, F.66)
где1)
ai I = ai2 sm 2ф + - (#i 1 - #22) cos 2ф ч—(ап + а22),
а[2 = — (а\\ - а22) sin 2ф + #i2 cos 2ф,
а22 = -аХ2 sin2ф — (ап -a22)cos29 + -(an +a22), F.67)
а[ъ = а13 cos ф + а23 sin ф,
а23 = а23 cos ф - а13 sin ф,
аз'з = азз-
) При выводе этих формул использовались равенства 2 sin ф cos ф = sin 2ф,
. 9 l-cos2© 9
smz ф = -, cos ф =
172 ЛИНИИ ВТОРОГО ПОРЯДКА [ГЛ.6
Мы можем сделать следующий важный вывод:
При повороте системы координат коэффициенты а{ь а{2, #22
группы старших членов уравнения F.66) выражаются лишь через
угол ф поворота и через коэффициенты ап, а12, а22 группы старших
членов уравнения F.60); коэффициенты а[ъ и а23 уравнения F.60)
выражаются лишь через угол ф и коэффициенты а13 и а23 уравнения
F.60); свободный член не изменяется {т.е. а33 = #зз).
Замечание 2. Обозначим через Д В и С соответственно вели-
величины
I — («11 — «22 ) I ' -(ЯЦ+Я22)> Va13 + fl23 •
а19 2V^11 ^22/
Введем, далее, угол а, считая cos а =-^, sinoc = ^ приЛ^О
А А
и а = 0 при А = 0, и угол C, считая cos C = а23/С, sin C = а13/С при С Ф 0 и
Р = 0 при С = 0 0. Тогда, очевидно, выражения F.67) для коэффициен-
коэффициентов а'ц можно переписать в следующем виде:
а'п=А sin Bф + а) + Б,
а[2 -A cos Bф + а),
В,
F.68)
азз - азз-
Отметим, что величины А, В и С и углы а и C не зависят от ф.
2. Инварианты уравнения линии второго порядка. Понятие
типа линии второго порядка. Назовем инвариантом уравнения
F.60) линии второго порядка относительно преобразований декартовой
системы координат такую функцию f(an, a12, .., a33) от коэффициентов
atj этого уравнения, значения которой не меняются при переходе к но-
новой декартовой прямоугольной системе координат. Таким образом, если
/(an, a12, .., a33) — инвариант и а'ц — коэффициенты уравнения линии
второго порядка в новой системе декартовых координат, то
/(ап, а12, ..., a33) = f(a[u а[ъ ..., а3'3).
Докажем следующую теорему.
0 Известно, что, каковы бы ни были величины Р и Q, удовлетворяющие условию
Р + Q ф 0, можно найти такой угол у, что cos у = _ и sin у = . _ .
§5]
КРИВЫЕ ВТОРОГО ПОРЯДКА
173
Теорема 6.5. Величины
L =a
9, L =
F.69)
являются инвариантами уравнения F.60) линии второго порядка
относительно преобразований декартовой системы координат.
Доказательство. Очевидно, инвариантность величин /ь /2, /3
достаточно доказать отдельно для параллельного переноса системы ко-
координат и для поворота.
Рассмотрим сначала параллельный перенос системы координат. Мы
установили в 1° предыдущего пункта, что при этом преобразовании ко-
координат коэффициенты группы старших членов не изменяются. Поэто-
Поэтому не изменяются и величины 1{ и /2. Займемся величиной /3. В новой
системе координат О'х'у' величина /3 равна
Вычитая из последней строки этого определителя первую строку, умно-
умноженную на х0, и вторую, умноженную на у0 (х0 и у0 — координаты ново-
нового начала О'), и используя при этом выражения для а[ъ и а23 формул
F.63) и выражение F.64) для а33, найдем, что этот определитель равен О
а\Ъ
п2Ъ
пЪЪ
Если теперь вычесть из последнего столбца полученного определителя
первый столбец, умноженный на х0, и второй, умноженный на у0, и ис-
использовать при этом выражения для аC и а2'3 из формул F.63), то в ре-
результате получится определитель, стоящий в правой части выражения
для /3 в формулах F.69). Итак, инвариантность /3 при параллельном пе-
переносе системы координат доказана.
Рассмотрим теперь поворот декартовой системы координат. В 2°
предыдущего пункта мы нашли, что при этом преобразовании коэффи-
коэффициенты а'ц уравнения линии L в новой системе связаны с коэффициента-
коэффициентами а,ц уравнения этой линии в старой системе с помощью формул F.68)
О Напомним, что при указанных преобразованиях значение определителя не меняет-
меняется (см. Дополнение к гл. 1).
174
ЛИНИИ ВТОРОГО ПОРЯДКА
[ГЛ.6
(см. замечание 2 предыдущего пункта). Докажем теперь инвариантность
/ь /2 и /3. Имеем, согласно F.68),
/[ = а'п + а2'2 = 2В = ап + а22,
/2 = cl[\Q>22 ~а\2 = В2 -А2 = апа22 -#iV
Таким образом, инвариантность 1Х и /2 доказана. Обратимся теперь к
12 22
^23
^23 u33
Разлагая этот определитель по элементам последнего столбца, учитывая
только что доказанную инвариантность /2, т.е. равенство
а\2
«l'2
^22
ап
а\2
«12
и равенство а^ = а33 (см. последнюю из формул F.67)), получим
= a
/
13
«l'2 «22
f f
«13 ^23
~ ^23
a[x a[2
f f
«13 ^23
F.70)
Согласно формулам F.68) первое слагаемое в правой части F.70) мо-
может быть преобразовано следующим образом:
^13
Л cos Bср + а) -Л sin Bф + а) + В
Csin(cp + p)
F.71)
Совершенно аналогично получается равенство
^23
= С2 cos (ф + р) {A sin (ф + а - р) + В cos (<p + р)}. F.72)
Из соотношений F.70)—F.72) получаем
Ц = АС2 sin Bр - а) - ВС2 + а33/2. F.73)
Так как величины А, В, С, углы а, р и /2 не зависят от угла ф (это вытека-
вытекает из инвариантности /2 и замечания 2 предыдущего пункта), то из F.73)
следует, что /3 также не зависит от угла ф, т.е. при любом значении ф
имеет одно и то же значение. Но а'ц = а,ц при ф = 0, и поэтому /3 = /3. Та-
Таким образом, инвариантность /3 также установлена. Теорема доказана.
§5] КРИВЫЕ ВТОРОГО ПОРЯДКА 175
Геометрические характеристики линий второго порядка и их распо-
расположение вполне определяются значениями инвариантов /ь /2 и /3. В за-
зависимости от знака инварианта /2 эти линии разделяют на следующие
три типа:
эллиптический тип, если /2 > О,
гиперболический тип, если /2 < О,
параболический тип, если /2 = 0.
Очевидно, тип линии не меняется при изменении декартовой систе-
системы координат. Ниже мы дадим полную классификацию каждого из ука-
указанных типов линий.
3. Центр линии второго порядка. В предыдущем пункте мы уста-
установили, что при параллельном переносе декартовой системы изменяют-
изменяются лишь коэффициенты группы линейных членов уравнения линии вто-
второго порядка.
Попытаемся найти такую декартову систему координат О'х'у' (по-
(полученную параллельным переносом системы Оху), в которой уравнение
F.62) данной линии L второго порядка не содержало бы слагаемых 2a[$x'
и 2а,2зу', т-е- коэффициенты a[$ и а23 были бы равны нулю. Пусть х0 и
у0 — координаты начала О' искомой системы. Обращаясь к формулам
F.63), найдем, что величины х0, у0 представляют собой решение сле-
следующей системы линейных уравнений:
01 i*o + а\2Уо + а13 = 0, а12х0 + а22у0 + а2Ъ = 0. F.74)
Уравнения F.74) называются уравнениями центра линии второго
порядка, а точка О' с координатами (х0, у0), где х0 и у0 — решения сис-
системы F.74), называется центром этой линии.
Поясним смысл наименования «центр» линии. Пусть начало коорди-
координат перенесено в центр О'. Тогда уравнение линии L примет вид
апх'2 + 2а12х'у' + а22у'2 + а33 = 0. F.75)
Пусть точка М (х', у') расположена на L. Это означает, что ее координаты
хе и у' удовлетворяют уравнению F.75). Очевидно, точка М*(-х', -у'),
симметричная с М относительно О', также расположена на L, ибо ее
координаты также удовлетворяют уравнению F.75). Таким образом, если
у линии L существует центр О', то относительно центра точки L рас-
располагаются симметрично парами, т.е. центр линии L является ее
центром симметрии.
Замечание 3. Если линия L второго порядка имеет центр, то
инварианты /2, /3 и свободный член а3'з в уравнении F.75) связаны соот-
соотношением
/3 = /2а3'3. F.76)
176 ЛИНИИ ВТОРОГО ПОРЯДКА [ГЛ.6
В самом деле, в силу инвариантности /3 получим в системе координат
О'х'у'
а12 а22 О
О 0 а'ъъ
Из последней формулы и вытекает соотношение F.76).
Наличие центра у линии второго порядка связано с разрешимостью
уравнений центра F.74). Если уравнения центра имеют единствен-
единственное решение, то линию L второго порядка будем называть цент-
центральной1). Так как определитель системы F.74) равен /2, а необхо-
необходимым и достаточным условием существования единственного решения
этой системы является неравенство нулю ее определителя, то мы мо-
можем сделать следующий важный вывод: линии эллиптического типа
(/2 > 0) и гиперболического типа (/2 < 0) — и только эти линии — яв-
являются центральными.
Замечание 4. Если начало координат перенесено в центр О'
центральной линии L второго порядка, то уравнение этой линии будет
иметь вид
ах {х'2 + 2а12х'у' + а22 у'2 + ^- = 0. F.77)
Действительно, после переноса начала в центр уравнение линии при-
примет вид F.75). Так как для центральной линии /2 Ф 0, то из формулы F.76)
найдем, что а33 = 13/12. Подставляя это выражение для а33 в формулу
F.75), мы получим уравнение F.77).
4. Стандартное упрощение любого уравнения линии второго
порядка путем поворота осей. Докажем, что любое уравнение F.60)
линии L второго порядка путем специального поворота координат-
координатной системы может быть приведено к уравнению, в котором не бу-
будет содержаться слагаемое 2а[2х'у', т.е. коэффициент аB будет ра-
равен нулю. Такое упрощение уравнения второго порядка мы будем назы-
называть стандартным.
Естественно, мы будем предполагать, что в исходном уравнении
F.60) коэффициент а12 не равен нулю, ибо в случае а12 = 0 поставлен-
поставленный вопрос является решенным.
Пусть ф — угол поворота искомой повернутой системы координат.
Обращаясь ко второй из формул F.67), найдем, что искомый угол ф яв-
является решением следующего тригонометрического уравнения:
— (ап -а22)зт2ф + а12 соэ2ф = 0, F.78)
) Таким образом, центральная линия имеет единственный центр.
§5] КРИВЫЕ ВТОРОГО ПОРЯДКА 177
в котором, по предположению, а12 Ф 0. При этом предположении очевид-
очевидно, что F.78) имеет следующее решение:
ctg2<p = (an-a22)/2a12. F.79)
Итак, если мы повернем систему координат на угол ф, определенный из
равенства F.79), то в повернутой системе координат уравнение линии L
не будет содержать слагаемого 2а1'2х'у' и, кроме того, согласно форму-
формулам F.67), а3'3 = а33. Иными словами, это уравнение будет иметь следую-
следующий вид:
а[хх'2 + а'22у'2 + 2а[гх' + 2а?гу' + а33 = 0. F.80)
5. Упрощение уравнения центральной линии второго поряд-
порядка (/2 Ф 0). Классификация центральных линий. Выводы, сделан-
сделанные в предыдущих двух пунктах, позволяют решить вопрос о классифи-
классификации всех центральных линий второго порядка. Решение этого вопроса
мы проведем по следующей схеме. Во-первых, путем переноса начала
координат в центр линии F.60) мы приведем ее уравнение к виду F.77).
После этого произведем стандартное упрощение уравнения F.77):
1) если а12 = 0, то оставим систему координат О'х'у' неизменной
и изменим лишь обозначение х' на х", у' на у", пц на а";
2) если а\2 Ф 0, то перейдем к повернутой системе координат О 'х "у ",
вычисляя угол поворота ф по формуле F.79) и используя при этом фор-
формулы F.67) (с заменой а'ц на а") и формулу F.80). В обоих указанных
случаях найдем, что уравнение любой центральной линии L в системе
координат О 'х "у " имеет вид
а?хх + а$2у +^ = 0. F.81)
Дальнейшая классификация линий основывается на анализе уравне-
уравнения F.81). При этом используется связь коэффициентов а п и а 22 с ин-
инвариантами 1Х и /2.
Рассмотрим отдельно линии эллиптического типа и линии гипербо-
гиперболического типа.
1°. Линии эллиптического типа (/2 > 0). Обратимся к исходному
уравнению F.60) линии L эллиптического типа. Так как /2 = ana22-
- а\2 > 0, то ппа22 > 0, т.е. коэффициенты ап и а22 оба отличны от нуля
и имеют одинаковый знак, совпадающий со знаком /ь поскольку
Ix = an + a22. Без ущерба для общности можно считать оба эти коэффи-
коэффициента положительными (этого всегда можно добиться нормировкой
исходного уравнения F.60), т.е. умножением его на -1 (при такой нор-
нормировке знак инварианта 1Х станет положительным, знак инварианта /2
не меняется).
178 ЛИНИИ ВТОРОГО ПОРЯДКА [ГЛ.6
Справедливо следующее утверждение.
Теорема 6.6. Пусть уравнение F.60) линии L эллиптического
типа (/2 > 0) нормировано так, что 1{ > 0. Тогда при /3 < 0 это урав-
уравнение представляет собой эллипс. При /3 = 0 уравнению F.60) удов-
удовлетворяют координаты лишь одной точки. При /3 > 0 уравнению
F.60) не удовлетворяют координаты никакой точки плоскости.
При /3 = 0 уравнение F.60) называется уравнением вырожденного
эллипса. При /3 > 0 F.60) называется уравнением мнимого эллипса.
Доказательство. Так как для уравнения F.81) 1{ = а/{{ + а, а
/2 = а^а 22, то из условия 1{ > 0 и /2 > 0 вытекает положительность а п и
а 22- Поэтому уравнение F.81) линии L может быть записано следую-
следующим образом:
при/3<0 , ?*,+—?=-7 = 1, F-82)
при /3 = (
при/3>0 , , ,+тг?=т = -1- F-84)
Очевидно, что уравнение F.82), отвечающее случаю /3 < 0, представля-
представляет собой каноническое уравнение эллипса с полуосями I—— и I—— .
\12ап V /2а22
Уравнению F.83), отвечающему случаю /3 = 0, удовлетворяют коорди-
координаты лишь одной точки х" = 0, у" = 0. Уравнению F.84) не удовлетво-
удовлетворяют координаты никакой точки плоскости, ибо левая часть этого урав-
уравнения не отрицательна, а правая отрицательна. Для завершения доказа-
доказательства теоремы достаточно заметить, что каждое из уравнений F.82),
F.83), F.84) эквивалентно исходному уравнению F.60) соответствен-
соответственно для случаев /3 < 0, /3 = 0, /3 > 0, и поэтому сделанные выше геометри-
геометрические выводы для уравнений F.82), F.83) и F.84) справедливы и для
уравнения F.60). Теорема доказана.
Замечание 5. Остановимся подробнее на случае, когда урав-
уравнение F.60) эллиптического типа определяет эллипс. При этом мы
будем считать, что это уравнение нормировано так, что 1Х > 0. Коорди-
Координаты (х0, у о) центра этого эллипса представляют собой решение систе-
§5] КРИВЫЕ ВТОРОГО ПОРЯДКА 179
мы F.74). Так как новая ось О'х" является одной из главных осей эл-
эллипса (это вытекает из того, что в системе О 'х "у " уравнение эллипса
имеет канонический вид, и поэтому оси координат О'х" и О'у" совпа-
совпадают с главными осями эллипса (см. п. 1 § 2 этой главы)), то угол на-
наклона ф этой оси со старой осью Ох может быть найден по формуле
F.79). Наконец, из уравнения F.82) вытекает, что полуоси эллипса
равны /—ъ— и I—ъ— , причем коэффициенты а"х и а22 выражаются
\/2«ц \^2а22
через коэффициенты а,ц исходного уравнения F.60) (см. первую и тре-
третью формулы F.67); при этом нужно положить а"хх = а'хх и а22 = а22).
Итак, зная инварианты и формулы преобразования координат, мож-
можно вычислить полуоси эллипса и выяснить его расположение относи-
относительно исходной системы координат Оху.
2°. Линии гиперболического типа (/2 < 0). Справедливо следующее
утверждение.
Теорема 6.7. Уравнение F.60) линии L гиперболического типа при
/3 Ф 0 представляет собой гиперболу, а при /3 = 0 — пару пересекаю-
пересекающихся прямых.
Доказательство. Так как для уравнения F.81) /2 = а"ха22, то из
условия /2 < 0 вытекает, что а"хх и а22 имеют разные знаки. Для определен-
определенности будем считать а"хх > 0, а<0 (случай а"хх < 0, а>0 рассматрива-
рассматривается аналогично). Тогда уравнение F.81) может быть записано следую-
следующим образом:
при/3<0 , ?!_Ч,-—z^=rr = -l, F-85)
при/3 = 0 tJL^7- , ., =0' <6-86)
пРи/3>0 , , ^—-^1. F.87)
Очевидно, уравнение F.85), отвечающее случаю /3 < 0, представляет со-
собой каноническое уравнение гиперболы, для которой ось Оу является дей-
действительной осью, а ось Ох — мнимой осью, причем мнимая и действитель-
действительная полуоси этой гиперболы соответственно равны
180 ЛИНИИ ВТОРОГО ПОРЯДКА [ГЛ.6
Уравнение F.87), отвечающее случаю /3>0, также представляет собой
каноническое уравнение гиперболы, для которой ось Ох является действи-
действительной осью, а ось Оу — мнимой осью, причем мнимая и действительная
полуоси этой гиперболы соответственно равны /— 3 п и /—ъ— .
Уравнение F.86), отвечающее случаю /3 = 0, можно записать в виде
1 = 0.
Этому последнему уравнению удовлетворяют лишь координаты точек,
расположенных на прямых
Для завершения доказательства теоремы достаточно заметить, что каж-
каждое из уравнений F.85)-F.87) эквивалентно исходному уравнению F.60)
соответственно для случаев /3 < 0, /3 = 0, /3 > 0, и поэтому сделанные выше
геометрические выводы для уравнений F.85)-F.87) справедливы и для
уравнения F.60). Теорема доказана.
Замечание 6. Остановимся подробнее на случае, когда уравне-
уравнение F.60) гиперболического типа определяет гиперболу, т.е. когда /3 Ф 0.
Координаты (х0, у0) центра этой гиперболы представляют собой ре-
решение системы F.74). Угол наклона ф оси Ох' (являющейся либо дей-
действительной, либо мнимой осью гиперболы) со старой осью Ох может
быть найден по формуле F.79). Наконец, в процессе доказательства те-
теоремы были указаны величины действительной и мнимой полуосей ги-
гиперболы. Их значения вычисляются через /2, /3, а"п и а. Коэффициен-
Коэффициенты а"\ и а22 выражаются через коэффициенты пц исходного уравнения
F.60) (см. первую и третью формулы F.67); при этом нужно положить
а"х=а п и а 22 = #п)- Уравнения асимптот гиперболы без труда могут быть
найдены по ее каноническим уравнениям F.85) или F.87).
Итак, зная инварианты и формулы преобразования координат, мож-
можно вычислить действительную и мнимую полуоси гиперболы и выяснить
ее расположение относительно исходной системы координат Оху.
6. Упрощение уравнения линии параболического типа (/2 = 0).
Классификация линий параболического типа. Заметим, во-первых,
что для уравнения F.60) параболического типа инвариант 1{ отличен от
нуля. В самом деле, если 1Х = ап + а22 = 0, то /?= а\х + а\2 + + 2апа22 = 0,
§5] КРИВЫЕ ВТОРОГО ПОРЯДКА 181
2 2
т.е. апа22 =— — • Так как I2 = a,\i&22 - а\2 - 0, то, используя толь-
2 2
ко что полученное выражение для апа22, найдем, что —— —— = а\2 >
откуда следует, что ап = а22 = а12 = 0. Но, по предположению, по край-
крайней мере один из коэффициентов ап, а22, а12 отличен от нуля. Итак, J фО.
Произведем стандартное упрощение уравнения F.60): 1) если а12 = О,
то оставим систему координат Оху неизменной и изменим лишь обозна-
обозначение х на х', у на у', atj на а'ц\ 2) если а12^0, то перейдем к поверну-
повернутой системе координат Ох 'у', вычисляя угол поворота по формуле F.79)
и используя при этом формулы F.67). В обоих указанных случаях урав-
уравнение F.60) примет вид F.80). Так как для уравнения F.80)^ = а'п + а22,
/2 = а[\ а22, то из условия 1Х Ф 0, /2 = 0 вытекает, что один из коэффициен-
коэффициентов а[х и а22 равен нулю, а другой не равен нулю.
Для определенности будем считать а'п =0, а22^0 (случай а'п ^0,
а22 = 0 рассматривается аналогично). При этом предположении 1Х = а22, так
как I{ = ali + a22- Итак, уравнение линии F.60) параболического типа пос-
после стандартного упрощения может быть записано в следующей форме 0:
1ху'2 + 2а{3х' + 2а'23у' + а33 = 0. F.88)
Дальнейшее упрощение уравнения F.88) может быть достигнуто путем
специального параллельного переноса системы координат Ох'у'. Пред-
Предварительно перепишем F.88) в следующей форме:
/2
+¦ 2а'13х' + а33 - — = 0. F.89)
Вид уравнения F.89) подсказывает, как выбрать специальный параллель-
параллельный перенос системы координат Ох'у'. Нам нужно, чтобы первое слагае-
слагаемое /J//4 — в левой части F.89) имело вид 1{у , а остальные слагае-
слагаемые сохранили свой вид. Поэтому следует положить у" равным у' + — , а
А
х" равным х'. Итак, перейдем теперь к новой системе координат, полу-
полученной путем следующего параллельного переноса:
х" = х', у" = у' + ^. F.90)
А
) Если a[i ^ 0' ^ = 0' т0 h = ап и вместо уравнения F.88) мы получим уравнение
1хх + 2а(з-^/ + а-2зУ' + азз = ^ > которое путем изменения обозначений х' на у', у' на х',
а[3 на а23 и а2'з на а[3 переходит в уравнение F.88).
182 ЛИНИИ ВТОРОГО ПОРЯДКА [ГЛ.6
Введем обозначения
,2
а» =а' а» -а _^2з_ F 91)
В силу соотношений F.89), F.90) и F.91) уравнение линии L параболи-
параболического типа в новой системе координат О"х"у" примет вид
1{у + 2а{'3х" + а?3 = 0. F.92)
Докажем теперь следующее утверждение.
Теорема 6.8. Уравнение F.60) линии L параболического типа при
13ф0 представляет собой параболу, а при /3 = 0 — либо пару парал-
параллельных действительных прямых (которые могут быть слившими-
слившимися), либо пару мнимых параллельных прямых 0.
Доказательство. Выясним вопрос о связи между величинами
а и /3. Для уравнения F.92) имеем
h =
0
0
0
h
0
0
F.93)
Так как /t ^ 0, то при 1%Ф§ и а Ф 0, если же /3 = 0, mo w a^3 = 0. Исполь-
Используя этот вывод, мы можем записать уравнение F.92) следующим образом:
при /3 Ф 0 (т.е. при а^3 ^ 0)
Дг/ + 2af31 ^ + — 1 = 0. F-94)
I 2Г)
af3
I 2аГ3)
при /3 = 0 (т.е. при а'[ъ - 0)
/у^+а^ =0. F.95)
Очевидно, уравнение F.94), отвечающее случаю /3 = 0, представляет
собой параболу. Чтобы убедиться в этом, совершим следующий парал-
параллельный перенос системы координат:
= */", F.96)
и введем обозначение
Кз
р=Кз/Л1-
Тогда вместо F.94) мы получим уравнение Y2 = 2рХили Y2 = -2рХ, кото-
которое является каноническим уравнением параболы.
) Термин «мнимые параллельные прямые» будет разъяснен в процессе доказательства.
§5] КРИВЫЕ ВТОРОГО ПОРЯДКА 183
Уравнение F.95), отвечающее случаю /з = 0, может быть записано
так:
у =-c&lh. F.98)
Если —Язз/Л > О' то Уравнение F.98) представляет собой пару парал-
параллельных прямых: у" = V~a33Ih и У" ~ ~4~аъъIh ' если ~a'izlh =0>
то F.98) представляет собой ось Ох", уравнение которой у" = 0 (это
уравнение можно рассматривать как предельный случай при а"з —> О,
т.е. как пару слившихся прямых). Если, наконец, -а/1{ < 0, то уравне-
уравнению F.98) не удовлетворяют координаты никакой точки плоскости, т.е.
геометрический образ является мнимым. Обычно говорят, что в послед-
последнем случае уравнение F.98) определяет пару мнимых параллельных
прямых. Теорема доказана.
Замечание 7. Для случая /3Ф0, когда уравнение F.60) парабо-
параболического типа определяет параболу, читатель без труда найдет пара-
параметр р этой параболы и ее расположение относительно исходной коорди-
координатной системы Оху. Для этого нужно использовать переход от уравне-
уравнений F.60) к уравнению F.88), описанный в начале этого пункта, и формулы
F.90), F.91), F.96), F.97).
7. Распадающиеся кривые второго порядка. Линию L второго порядка, опреде-
определяемую уравнением F.60), будем называть распадающейся, если левая часть этого урав-
уравнения может быть представлена в виде произведения двух многочленов первой степени.
Очевидно, если в данной декартовой прямоугольной системе координат линия L являет-
является распадающейся, то она будет распадающейся в любой другой декартовой прямоуголь-
прямоугольной системе координат: при преобразовании координат многочлен первой степени остает-
остается многочленом первой степени и каждый многочлен-сомножитель преобразуется неза-
независимо от других сомножителей. Это свойство многочленов позволяет сформулировать
необходимое и достаточное условие распадения кривой второго порядка.
Теорема 6.9. Для того чтобы линия L второго порядка была распадающейся,
необходимо и достаточно обращение в нуль инварианта /3.
Доказательство. Мы доказали (см. теоремы 6.6-6.8), что уравнение любой ли-
линии L второго порядка может быть приведено к одному из видов F.82)-F.87), F.94) и F.95).
Распадающимися среди этих линий являются лишь те, для которых /3 = 0 и, наобо-
наоборот, если /3 = 0, то уравнение линии приводится к виду, из которого, очевидно, следует
свойство распадения. Теорема доказана.
ГЛАВА 7
ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
В этой главе мы познакомимся с понятием и основными типами по-
поверхностей второго порядка. Кроме того, будут указаны способы иссле-
исследования таких поверхностей.
§ 1. Понятие поверхности второго порядка
В силу определений 1 и 3 из п. 5 § 2 гл. 4 поверхностью S
второго порядка, будем называть геометрическое место то-
точек, декартовы прямоугольные координаты которых удовлетворя-
удовлетворяют уравнению вида
апх2 + а22у2 + ^зз^2 + 2a12xz/ + 2a23yz + 2al3xz +
+ 2аых + 2а24у + 2aMz + а44 = 0, G.1)
в котором по крайней мере один из коэффициентов ап, а22, а33, аХ2, а23,
а13 отличен от нуля.
Уравнение G.1) будем называть общим уравнением поверхности
второго порядка.
Очевидно, поверхность второго порядка, рассматриваемая как гео-
геометрический объект 0, не меняется, если от данной декартовой пря-
прямоугольной системы координат перейти к другой декартовой системе
координат. Отметим, что исходное уравнение G.1) и уравнение, по-
полученное после преобразования координат, алгебраически эквива-
эквивалентны.
Ниже мы убедимся, что для каждого уравнения G.1) можно указать
такую специальную систему координат, в которой уравнение G.1) при-
примет столь простой вид, что геометрическая характеристика поверхнос-
поверхности 5 не будет представлять затруднений.
Используя этот метод, мы дадим полное описание всех типов поверх-
поверхностей второго порядка.
) Может оказаться, что уравнение G.1) не определяет поверхности: этому уравне-
уравнению могут удовлетворять лишь координаты точек, расположенных на прямой линии, или
координаты лишь одной точки, или не найдется ни одной точки, координаты которой удов-
удовлетворяют G.1). Однако и в этих случаях мы будем говорить о геометрических объектах,
называя их соответственно вырожденными или мнимыми.
§1] ПОНЯТИЕ ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА 185
1. Преобразование коэффициентов уравнения поверхнос-
поверхности второго порядка при переходе к новой декартовой системе
координат. Рассмотрим отдельно параллельный перенос и поворот
координатных осей.
Условимся о следующей терминологии: группу слагаемых
апх2 + а22У2 + ^зз^2 + 2a12xz/ + 2a23yz + 2aX3xz
левой части G.1) будем называть группой старших членов этого урав-
уравнения, а группу слагаемых
2анх + 2a24z/ + 2aMz + а44
будем называть линейной частью уравнения G.1). При этом коэффи-
коэффициенты ап, а22, а3з, ai2' a23> ai3 будем называть коэффициентами груп-
группы старших членов, а коэффициенты а14, а2А, аЗА, аАА — коэффициен-
коэффициентами линейной части G.1). Коэффициент а44 обычно называется сво-
свободным членом уравнения G.1).
Рассмотрим сначала параллельный перенос декартовой
системы координат. Как известно, старые и новые координаты точки свя-
связаны соотношениями
х = х' + х0, У = у' + Уо> z = z' + z0, G.2)
где х0, у0, z0 — координаты нового начала О' в старой системе Oxyz (см.
гл. 3, формулы C.20)). Подставляя выражения G.2) для х, у, z в левую
часть G.1), получим уравнение 5 в новой системе O'x'y'z'. Это уравне-
уравнение имеет вид
апх/2 + а22у'2 + a33z/2 + 2al2x'y' + 2a2Zy'z' + 2al3x'z' +
+2aDx/ + 2a24y' + 2a'34z' + a44 = 0, G.3)
где
aU = a\\xo + а\2Уо + a\3zo + aw
33^0 + ^34' G-4)
a22y\ + a33z20 +2al2x0y0 + 2a23y0z0 +
+ 2a13x020 + 2a14x0 + 2a24y0 + 2a3420 + a44
Обращаясь к уравнению G.3), мы можем сделать следующий важный
вывод: при параллельном переносе системы координат коэффициен-
коэффициенты группы старших членов не изменяются, а коэффициенты груп-
группы линейных членов преобразуются по формулам G.4).
186
ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
[ГЛ.7
Рассмотрим теперь поворот декартовой системы координат.
Как известно, старые и новые координаты точки связаны соотноше-
соотношениями (см. гл. 3, формулы C.20))
х = тпх
у = т2Хх'
тХ2у
т22у'
G.5)
где гпц =
ц ji суть косинусы углов, которые составляют друг с другом ста-
старые и новые координатные оси. Подставляя выражения G.5) для х, у иг
в левую часть G.1) и группируя коэффициенты при различных степенях
х', у' и z', мы получим уравнение 5 в системе O'x'y'z'.
Это уравнение имеет вид
а'пх
'2
+ а22у/2 + a'ssz'2 + 2а[2х'у' + 2a'23y'z' + 2а[ъх'г'
+2а[Ах' + 2а'2Ау' + 2a'Mz' + a'u = 0. G.6)
Легко убедиться в справедливости следующего важного вывода о структу-
структуре коэффициентов а'ц: при повороте системы координат коэффициен-
коэффициенты группы старших членов уравнения G.6) выражаются лишь через
величины Шф фигурирующие в соотношениях G.5), и через коэффициен-
коэффициенты группы старших членов уравнения G.1); коэффициенты а(А, а^, а%А
уравнения G.6) выражаются лишь через величины mtj и коэффици-
коэффициенты а14, а24, ам уравнения G.1); свободный член не изменяется (т.е.
а'АА = аАА). При этом, если в исходном уравнении все коэффициенты
а1А, а2А, аЗА были равны нулю, то все коэффициенты а(А, а2А, а$А также
будут равны нулю. Из выводов этого пункта следует, что путем парал-
параллельных переносов можно упрощать группу линейных членов уравне-
уравнения G.1), не меняя при этом коэффициентов группы старших чле-
членов, а путем поворотов системы можно упрощать группу старших
членов этого уравнения.
2. Инварианты уравнения поверхности второго порядка. Спра-
Справедливо следующее утверждение:
Величины
аи а12
а12 а22
а22
^23
^23
^33
аъъ
«13
«13
«11
и =
^33
^34
являются инвариантами уравнения G.1) поверхности второго поряд-
порядка относительно преобразований декартовой системы координат.
§1] ПОНЯТИЕ ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА 187
Доказательство этого утверждения приведено в выпуске «Линейная
алгебра» настоящего курса.
3. Центр поверхности второго порядка. Попытаемся найти та-
такую декартову систему координат О fx 'у fz' (полученную параллельным
переносом системы Oxyz), в которой уравнение G.3) данной поверхнос-
поверхности 5 второго порядка не содержало бы слагаемых 2а[Ах', 2а^у' и 2a3Az',
т.е. коэффициенты а[А, а2'4 и а3'4 были бы равны нулю. Пустьх0, уоиго —
координаты начала О' искомой системы. Обращаясь к формулам G.4),
найдем, что величины х0, у0, z0 представляют собой решение следую-
следующей системы линейных уравнений:
011*0
а12х0 + а22у0 + a23z0 + а24 = 0, G.7)
а2зУо + азз2о + а34 = °-
Уравнения G.7) называются уравнениями центра поверхности вто-
второго порядка, а точка О' с координатами (х0, у0, z0), где х0, у0 и z0 — реше-
решения системы G.7), называется центром этой поверхности.
Допустим, что поверхность 5 второго порядка имеет центр О' (т.е.
система G.7) имеет решение (х0, Уо, z0)). Перенесем начало координат в
центр О'. Так как при параллельном переносе коэффициенты группы
старших членов не изменяются и начало координат переносится в центр,
то уравнение поверхности 5 в системе O'x'y'z' примет вид
апх'2 + а22у/2 + a33z'2 + 2a{2x/y/ +
+2a2Zy'z' + 2a[3x'y' + а44 =0. G.7')
Очевидно, если точка М(х', у', zf) расположена на поверхности 5 (т.е.
ее координаты х\ у\ zf удовлетворяют уравнению G.7')), то и точка
М*(—х', -у', —zf), симметричная с М относительно О', также располо-
расположена на 5. Таким образом, если у поверхности 5 существует центр О',
то относительно центра точки S располагаются симметричными
парами, т.е. центр поверхности является ее центром симметрии.
Наличие центра у поверхности второго порядка связано с разреши-
разрешимостью уравнений центра G.7). Если уравнения центра имеют един-
единственное решение, то поверхность S второго порядка будем назы-
называть центральной1).
Отметим, что центральными поверхностями являются лишь те,
для которых инвариант /3 отличен от нуля, ибо этот инвариант ра-
равен определителю системы G.7) уравнений центра.
4. Стандартное упрощение любого уравнения поверхности
второго порядка путем поворота осей. Докажем, что в некоторой
Таким образом, центральная поверхность имеет единственный центр.
188 ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА [ГЛ.7
декартовой прямоугольной системе координат уравнение данной по-
поверхности S второго порядка не содержит слагаемых 2а[2х'у',
2a'^y'z' и 2a[zx'z', т.е. в уравнении поверхности S коэффициенты
а[ъ а2'3 и а[ъ равны нулю.
Обозначим через F группу старших членов уравнения G.1)
F = апх2 + а22у2 + ^зз^2 + 2аХ2ху + 2a23yz + 2al3xz, G.8)
и рассмотрим значения F в точках сферы тг радиуса 1 с центром в начале
координат. Иными словами, рассмотрим значения Р (х, у, z) для всех тех
значений х, у и z, которые связаны соотношением О
х2 + у2 + г2=1. G.9)
Пусть Р — та точка сферы тс, в которой значение F (х, у, z) является мак-
максимальным 2). Направим новую ось Oz' из начала координат в точку Р, а
оси Ох' и Оу' перпендикулярно оси Ozf. Очевидно, в системе коорди-
координат Ox'y'z' точка Р имеет координаты @, 0, 1).
Так как в новой системе координат О 'х 'у fz' выражение для F имеет
вид3)
F = а'пх'2 + а'22у'2 + a'33z'2 + 2a'l2x'y' + 2a'23y'z' + 2a'l3x'z', G.10)
а сфера тс определяется уравнением
x'2+y'2+z'2 =1, G.11)
то значения F в точках тс могут быть получены с помощью G.10) для
всех тех значений (х', у', z'), которые связаны соотношением G.11). В
частности, максимальное значение F будет в точке @, 0, 1).
Убедимся, что в выражении G.10) группы старших членов в системе
Ox'y'z' коэффициенты а^з и а\з равны нулю. Докажем, например, что
аC = 0 (доказательство равенства а2'з = О проводится аналогично). Для
этой цели рассмотрим значения F в точках окружности L, являющейся
линией пересечения сферы G.11) с плоскостью уf = 0, т.е. с плоскостью
Ox'z'. Пусть 9 — угол, который образует радиус-вектор точки М на ок-
окружности L с осью Oz'. Координаты х', у', z' точки М, очевидно, равны
x^sinG, y' = 0, z' = cosQ. G.12)
О Соотношение G.9) представляет собой уравнение сферы радиуса 1 с центром в на-
начале координат.
2) Сфера л; является замкнутым ограниченным множеством и служит областью зада-
задания непрерывной функции F трех переменных х,уиг. Отсюда следует существование на
сфере тс такой точки Р, в которой F имеет максимальное значение (см. вып. 1 курса, гл. 14,
теорему 14.7).
3) Напомним, что при повороте коэффициенты группы старших членов выражаются
лишь через величины mir фигурирующие в соотношениях G.5), и через коэффициенты
группы старших членов в выражении G.8) (см. п. 1 этого параграфа).
§2] КЛАССИФИКАЦИЯ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА 189
Подставляя эти значения х', у' и z' в G.10), получим следующее выра-
выражение для F в точках L:
F = а'п sin2 0 + азз cos2 0 + 2а[ъ sin 0 cos 0 =
2 2 13
Таким образом, значения F в точках L могут быть представлены в виде
функции G.13) угла 0. Эта функция имеет при 0 = 0 максимальное зна-
значение (из формул G.12) следует, что значению 0 = 0 отвечает точка с
координатами @, 0, 1), в которой значение F максимально). Отсюда вы-
вытекает, что производная функции G.13) равна нулю в точке 0 = 0. Диф-
Дифференцируя G.13) по 0 и полагая в полученном выражении 0 = 0, полу-
получим равенство 2а1'3 = 0, из которого вытекает равенство нулю коэффи-
коэффициента a[$. Для доказательства равенства а23 = 0 нужно рассмотреть
значения F на окружности N, являющейся линией пересечения сферы
G.11) с плоскостью х' = 0, и повторить проведенные выше рассуждения.
Итак, в системе координат Ох 'у fz' группа F старших членов уравнения
поверхности 5 второго порядка имеет вид
F = а'пх'2 +2a'l2x'y' + a'22y'2 +a'33z'2, G.14)
причем на выбор осей Ох' и Оу' не накладывалось никаких требований,
кроме требований перпендикулярности оси Ozf. Иными словами, при
повороте системы Ox'y'z' вокруг оси Oz' на любой угол группа F стар-
старших членов будет иметь вид G.14). При этом координаты х' и у' преоб-
преобразуются по формулам поворота системы координат на плоскости, а ко-
координата zf не меняется. Поэтому можно выбрать такую систему коор-
координат, в которой коэффициент а[2 при произведении х'у' будет равен
нулю.
Итак, мы убедились в том, что существует такая система прямо-
прямоугольных декартовых координат Ox'y'z', в которой уравнение по-
поверхности S имеет вид
а'пх'2 + а22у'2 + a'33z'2 + 2a'lAx' + 2а24у' + 2a'Mz' + a'u =0. G.15)
Приведение уравнения G.1) поверхности 5 к виду G.15) мы будем назы-
называть стандартным упрощением уравнения поверхности.
§ 2. Классификация поверхностей второго порядка
1. Классификация центральных поверхностей. Пусть 5 — цент-
центральная поверхность второго порядка. Перенесем начало координат в
центр этой поверхности, а затем произведем стандартное упрощение
190 ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА [ГЛ.7
уравнения этой поверхности. Используя выводы пп. 1, 3 и 4 § 1 этой гла-
главы, легко убедиться, что в результате указанных операций уравнение
поверхности примет вид 1)
апх2 + а22у2 + ^зз^2 + а44 = 0- G.16)
Так как инвариант /3 для центральной поверхности отличен от нуля и его
значение, вычисленное для уравнения G.16), равно ап • а22 • &зз> то коэф-
коэффициенты ап, а22 и а33 удовлетворяют условию
апф0, а,22ф0, а33^0. G.17)
Возможны следующие случаи.
1°. Коэффициенты ап, а22, а33 одного знака, а коэффициент а44
отличен от нуля. В этом случае поверхность 5 называется эллип-
эллипсоидом.
Если коэффициенты ап, а22, а33, а44 одного знака, то левая часть
G.16) ни при каких значениях х, у, z не обращается в нуль, т.е. уравне-
уравнению поверхности 5 не удовлетворяют координаты никакой точки. В этом
случае поверхность 5 называется мнимым эллипсоидом.
Если знак коэффициентов ап, а22, а33 противоположен знаку коэф-
коэффициента а44, то поверхность 5 называется вещественным эллипсои-
эллипсоидом. В дальнейшем термином «эллипсоид» будем называть лишь веще-
вещественный эллипсоид.
Обычно уравнение эллипсоида записывают в канонической форме.
Очевидно, числа -а44/ап, -аА4/а22, -аАА/а33 положительны2). Обозна-
Обозначим эти числа соответственно а2, Ь2, с2. После несложных преобразова-
преобразований уравнение эллипсоида G.16) можно записать в следующей форме:
2 2 2
х-+Ь+г-=х- GЛ8)
а Ъ с
Уравнение G.18) называется каноническим уравнением эллипсоида.
Если эллипсоид задан своим каноническим уравнением G.18), то оси
Ох, Оу и Oz называются его главными осями.
2°. Из четырех коэффициентов ап, а22, а33, а44 два одного знака, а
два других — противоположного. В этом случае поверхность 5 назы-
называется однополостным гиперболоидом.
Обычно уравнение однополостного гиперболоида записывают в ка-
канонической форме. Пусть, ради определенности, ап > 0, а22 > 0, а33 < 0,
а44 < 0. Тогда числа -а44/ап, -аА4/а22, аА4/а33 положительны. Обозна-
Обозначим эти числа соответственно а2, Ь2, с2. После несложных преобразова-
0 При этом окончательную систему координат мы обозначим Oxyz.
) Согласно G.17) и определению эллипсоида коэффициенты ап, а22> азз> аа не Рав'
ны нулю и знак а44 противоположен знаку ап, а22> азз-
§2] КЛАССИФИКАЦИЯ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА 191
ний уравнение G.16) однополостного гиперболоида можно записать в
следующей форме:
4+4-4-»- <*¦»>
а Ь с
Уравнение G.19) называется каноническим уравнением однополост-
однополостного гиперболоида.
Если однополостный гиперболоид задан своим каноническим урав-
уравнением G.19), то оси Ох, Оу и Oz называются его главными осями.
Замечание 1. Если знаки коэффициентов ап, а22, а33, аАА распре-
распределены иначе, чем в рассмотренном случае, то каноническое уравнение
A7.19) легко может быть получено путем переименования осей координат.
3°. Знак одного из первых трех коэффициентов ап, а22, а33, а44
противоположен знаку остальных коэффициентов. В этом случае по-
поверхность 5 называется двуполостным гиперболоидом.
Запишем уравнение двуполостного гиперболоида в канонической
форме. Пусть ради определенности ап < 0, а22 < 0, а33> 0, аАА < 0. Тогда
аАА/ап > 0, аАА/а22 > 0, -аАА/а33 > 0. Обозначим эти числа соответствен-
соответственно через а2, Ь2, с2. После несложных преобразований уравнение G.16)
двуполостного гиперболоида можно записать в следующей форме:
VfrV (-0)
а Ь с
Уравнение G.20) называется каноническим уравнением двуполост-
двуполостного гиперболоида.
Если двуполостный гиперболоид задан своим каноническим уравне-
уравнением, то оси Ох, Оу и Oz называются его главными осями.
Замечание 2. Если знаки коэффициентов ап, а22, а33, аАА распре-
распределены иначе, чем в рассмотренном случае, то каноническое уравнение
G.20) легко может быть получено путем переименования осей координат.
4°. Коэффициент аАА равен нулю. В этом случае поверхность 5 на-
называется конусом второго порядка.
Если коэффициенты ап, а22, а33 одного знака, то левая часть G.16)
обращается в нуль (а44 = 0) лишь для х = у = z = 0, т. е. уравнению по-
поверхности 5 удовлетворяют координаты только одной точки. В этом слу-
случае поверхность 5 называется мнимым конусом второго порядка. Если
коэффициенты ап, а22, а33 имеют разные знаки, то поверхность 5 яв-
является вещественным конусом второго порядка.
Обычно уравнение вещественного конуса второго порядка записы-
записывают в канонической форме. Пусть ради определенности ап > 0, а22 > 0,
а33<0. Обозначим 1/ап, 1/а22, -1/а33 соответственно через а2, Ь2, с2.
Тогда уравнение G.16) можно записать в виде
Ъ
192 ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА [ГЛ.7
Уравнение G.21) называется каноническим уравнением веществен-
вещественного конуса второго порядка.
Замечание 3. Если знаки коэффициентов ап, а22, а33 распреде-
распределены иначе, чем в рассмотренном случае, то каноническое уравнение G.21)
легко может быть получено путем переименования осей координат.
Замечание 4. В следующем параграфе мы докажем, что веще-
вещественный конус второго порядка образован прямыми линиями, проходя-
проходящими через фиксированную точку.
2. Классификация нецентральных поверхностей второго по-
порядка. Пусть 5 — нецентральная поверхность второго порядка, т.е. по-
поверхность, для которой инвариант /3 равен нулю (см. п. 3 § 1 этой гла-
главы). Произведем стандартное упрощение уравнения этой поверхности.
В результате уравнение поверхности примет вид G.15). Так как инвари-
инвариант /3 = 0 и его значение, вычисленное для уравнения G.15), равно
а\\ ' aTi' аззто один или два из коэффициентов а[х, а22, &з'з равны нулю 0.
В соответствии с этим рассмотрим следующие возможные случаи.
1°. Один из коэффициентов а[х, а22, &з'з равен нулю. Ради опреде-
определенности будем считать, что а3'з = 0 (если равен нулю какой-либо другой
из указанных коэффициентов, то можно перейти к рассматриваемому
случаю путем переименования осей координат). Перейдем от координат
х', у', zf к новым координатам х, у, z по формулам
х = х' + ^1, y = / + ^k, z = z'. G.22)
ап а'22
Подставляя x',y',z', найденные из G.22), в левую часть G.15) и заме-
заменяя затем а[х на ап, а22 на а22, &з'з на р и а'АА на q, получим следующее
уравнение поверхности 5 в новой системе координат Oxyz:
апх2 + а22у2 + 2pz + q = 0. G.23)
1) Пусть р = О, q = 0. Поверхность S распадается на пару плоско-
плоскостей
х ± yl-a22/an у = 0.
При этом, очевидно, эти плоскости будут мнимыми, если знаки ап и
а22 одинаковы, и вещественными, если знаки ап и а22 различны.
2) Пусть р = 0, q Ф 0. Уравнение G.23) принимает вид
2 2 + q = 0. G.24)
Известно (см. п. 3 § 2 гл. 4), что уравнение G.24) является уравнением
цилиндра с образующими, параллельными оси Oz. При этом, если ап, а22
и q имеют одинаковый знак, то левая часть G.24) отлична от нуля для лю-
любых х и у, т.е. цилиндр будет мнимым. Если же среди коэффициентов ап,
) Все перечисленные коэффициенты не могут быть равны нулю, так как при преобра-
преобразовании координат порядок уравнения не изменяется (см. гл. 4).
§ 2] КЛАССИФИКАЦИЯ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА 193
а22 и q имеются коэффициенты разных знаков, то цилиндр будет веществен-
вещественным. Отметим, что в случае, когда ап и а22 имеют одинаковые знаки, a q —
противоположный, то величины -q/an и -q/a22 положительны. Обозначая
их соответственно через а2 и Ь2, мы приведем уравнение G.24) к виду
4 + 4 = 1- G-25)
а о
Таким образом, в отмеченном случае мы имеем эллиптический цилиндр.
В случае, когда ап и а22 имеют различные знаки, получим гиперболи-
гиперболический цилиндр. Легко убедиться, что уравнение гиперболического ци-
цилиндра может быть приведено к виду
4~4 = L G-26)
а Ь
3) Пусть р Ф§. Произведем параллельный перенос системы коорди-
координат, выбирая новое начало в точке с координатами 0, 0 - — . При этом
оставим старые обозначения координат х, у, z. Очевидно, для того что-
чтобы получить уравнение поверхности 5 в новой системе координат, дос-
достаточно заменить в уравнении G.23) z на z—— . Получим следующее
уравнение: ^
апх2 + а22у2 + 2pz = 0. G.27)
Уравнение G.27) определяет так называемые параболоиды. Причем,
если ап и а22 имеют одинаковый знак, то параболоид называется эллип-
эллиптическим. Обычно уравнение эллиптического параболоида записывают
в канонической форме:
2 = 4 + 4- G-28)
а Ъ
Уравнение G.28) легко получается из G.27). Если ап и а22 имеют раз-
разные знаки, то параболоид называется гиперболическим. Каноническое
уравнение гиперболического параболоида имеет вид
z 44- G-29)
а Ь
Это уравнение также легко может быть получено из G.27).
2°. Два из коэффициентов а'п, а^, &зз равны нулю. Ради опреде-
определенности будем считать, что а'п =0 и а2'2 = 0 (если равны нулю какие-
либо другие два из указанных коэффициентов, то можно перейти к рас-
рассматриваемому случаю путем переименования осей координат). Перей-
Перейдем от х', у', zf к новым координатам х, у, z по формулам
х = х\ у = у>, 2 = 2> + ?к. G.30)
194 ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА [ГЛ.7
Подставляя х', у' и z', найденные из G.30), в левую часть G.15) и заме-
заменяя затем азз на а33, а[А на р, а^ на q и а 44 на г, получим следующее
уравнение поверхности 5 в новой системе координат Oxyz:
a33z2 + 2px + 2qy + r = 0. G.31)
1) Пусть р = 0, g = 0. Поверхность 5 распадается на пару парал-
параллельных плоскостей
z = ±V-r/a33. G.32)
При этом, очевидно, эти плоскости будут мнимыми, если знаки а33 и г
одинаковы, и вещественными, если знаки а33 и г различны, причем
при г = 0 эти плоскости сливаются в одну.
2) Хотя бы один из коэффициентов р или q отличен от нуля. В э-
том случае повернем систему координат вокруг оси Oz так, чтобы новая
ось абсцисс стала параллельной плоскости 2рх + 2qy + г = 0. Легко убе-
убедиться, что при таком выборе системы координат, при условии сохране-
сохранения обозначения х, у и z для новых координат точек, уравнение G.31)
примет вид
a33z2 + 2q 'у = 0, G.33)
которое является уравнением параболического цилиндра с образую-
образующими, параллельными новой оси Ох.
§ 3. Исследование формы поверхностей второго порядка
по их каноническим уравнениям
1. Эллипсоид. Для исследования формы эллипсоида обратимся к его
каноническому уравнению G.18) (см. п. 1 предыдущего параграфа)
2 2 2
Ь + 7*Ь-1 G18)
Из уравнения G.18) вытекает, что координатные плоскости являют-
являются плоскостями симметрии эллипсоида, а начало координат — цент-
центром симметрии. Числа а, Ь, с называются полуосями эллипсоида и пред-
представляют собой длины отрезков, от начала координат до точек пересе-
пересечения эллипсоида с осями координат. Эллипсоид представляет собой
ограниченную поверхность, заключенную, как это видно из G.18), в па-
параллелепипеде | х | < а, \у\ <Ь, \z\ <c. Чтобы более наглядно предста-
представить себе форму эллипсоида, выясним форму линий пересечения его
плоскостями, параллельными какой-либо из координатных плоскостей.
Ради определенности рассмотрим линии Lh пересечения эллипсоида
с плоскостями
z = h, G.34)
§3]
ИССЛЕДОВАНИЕ ФОРМЫ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА
195
параллельными плоскости Оху. Уравнение проекции L\ линии Lh на плос-
плоскости Оху получается из уравнения G.18), если положить в нем z = h.
Таким образом, уравнение этой проекции имеет вид
Если положить
то уравнение G.35) можно записать в виде
2 2
a* = ajl-—, b* = bJl-
G.35)
G.36)
G.37)
т.е. L\ представляет собой эллипс с полуосями а* и Ь*, которые могут
быть вычислены по формулам G.36). Так как Lh получается «подъемом»
L\ на высоту h по оси Oz (см. G.34)), то и Lh представляет собой эллипс.
Представление об эллипсоиде можно получить следующим образом.
Рассмотрим на плоскости Оху семейство эллипсов G.37) (рис. 7.1), по-
полуоси а* и Ь* которых зависят от h (см. G.36)), и каждый такой эллипс
снабдим отметкой h, указывающей, на какую высоту по оси Oz должен
быть «поднят» этот эллипс. Мы получим своего рода «карту» эллипсои-
эллипсоида. Используя эту «карту», легко представить себе пространственный
вид эллипсоида. На рис. 7.2 изображен эллипсоид.
У i
h=0
Рис. 7.1
Рис. 7.2
Эллипсоид может быть получен равномерным сжатием сферы отно-
относительно двух перпендикулярных плоскостей. Именно, если а — наи-
наибольшая полуось эллипсоида, то он может быть получен из сферы О
) Очевидно, сфера представляет собой эллипсоид с равными полуосями.
196 ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА [ГЛ.7
равномерным сжатием ее сначала относительно плоскости Оху с коэф-
коэффициентом сжатия b/a, a затем относительно плоскости 0x2 с коэффи-
коэффициентом сжатия с/а.
В заключение отметим, что линии пересечения эллипсоида с плоско-
плоскостями представляют собой эллипсы.
В самом деле, такая линия представляет собой ограниченную линию
второго порядка 1) (ограниченность линии вытекает из ограниченности
эллипсоида), единственной же ограниченной линией второго порядка
является эллипс.
2. Гиперболоиды.
1°. Однополостный гиперболоид. Обратимся к каноническому урав-
уравнению G.19) однополостного гиперболоида
2 2 2
X- + b-2- = X- GЛ9)
а Ъ с
Из уравнения G.19) вытекает, что координатные плоскости являют-
являются плоскостями симметрии, а начало координат — центром сим-
симметрии однополостного гиперболоида.
Рассмотрим линии Lh пересечения однополостного гиперболоида плос-
плоскостями z = h. Уравнение проекции L\ такой линии на плоскость Оху
получается из уравнения G.19), если положить в нем 2 = h. Полагая
G.38)
z
найдем, что уравнение этой проекции имеет вид
т.е. L\ представляет собой эллипс с полуосями а* и Ь*.
Рассмотрим «карту» расположенной над плоскостью Оху части одно-
однополостного гиперболоида 2), т.е. семейство эллипсов G.39), каждый из
которых снабжен отметкой h, указывающей, на какую высоту по оси 02
должен быть поднят этот эллипс (рис. 7.3). Обращаясь к карте однопо-
однополостного гиперболоида, мы видим, что наименьший из рассматриваемых
эллипсов G.39) получается для h = О (см. также формулы G.38)).
Этот эллипс называется горловым. С увеличением h размеры эллипса
G.39) неограниченно увеличиваются. Таким образом, однополостный ги-
0 Преобразуем систему координат так, чтобы в новой системе координат Ox'y'z'
секущая плоскость определялась уравнением z' = 0. После такого преобразования эл-
эллипсоид будет определяться уравнением второго порядка. Полагая в этом уравнении
z' = 0, мы получим уравнение второго порядка линии пересечения эллипсоида и плоско-
плоскости z' = 0.
2) Расположенная под плоскостью Оху часть однополостного гиперболоида симмет-
симметрична рассматриваемой части относительно этой плоскости.
§3]
ИССЛЕДОВАНИЕ ФОРМЫ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА
197
перболоид представляет собой поверхность, состоящую из одной полос-
полости и подобную трубке, неограниченно расширяющейся в положительном
и отрицательном направлении по оси Oz (рис. 7.4). Отметим, что сечения
однополостного гиперболоида плоскости Oyz и Oxz представляют собой
гиперболы, определяемые соответственно уравнениями
-^ = 1 и
Эти гиперболы изображены на рис. 7.4.
Горловой
Горловой эллипс
Рис. 7.3 Рис. 7.4
2°. Двуполостный гиперболоид. Из канонического уравнения G.20)
4+4-4=-! G-2°)
а Ъ с
двуполостного гиперболоида вытекает, что координатные плоскости
являются его плоскостями симметрии, а начало координат — его
центром симметрии.
Линии Lh пересечения двуполостного гиперболоида плоскостями z = h
представляют собой эллипсы, уравнения проекций которых на плос-
плоскость Оху имеют вид
Х" ^ ' G.40)
Ь*2
где
а- = а
b* =
G.41)
Из формул G.41) вытекает, что секущая плоскость z = h начинает пересе-
пересекать двуполостный гиперболоид лишь при \h\ >cl). Иными словами, в слое
между плоскостями z = -c и z = c не содержится точек рассматриваемой
поверхности; в силу симметрии относительно плоскости Оху она состоит
из двух полостей, расположенных вне указанного выше слоя.
0 При \h\ < с подкоренное выражение в формулах G.41) отрицательно.
198
ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
[ГЛ.7
На рис. 7.5 изображена «карта» верхней полости двуполостного ги-
гиперболоида. Из формул G.41) следует, что при увеличении h эллипсы
G.40) неограниченно увеличиваются, так что полости двуполостного ги-
гиперболоида представляют собой бесконечные чаши. На рис. 7.6 изобра-
изображен двуполостный гиперболоид. Отметим, что се-
сечения двуполостного гиперболоида плоскостями
Oyz и Oxz представляют собой гиперболы (см.
рис. 7.6).
3. Параболоиды.
1°. Эллиптический параболоид. Обращаясь к
каноническому уравнению G.28) эллиптического
параболоида
Ь
G.28)
yL=
Рис. 7.5
Рис. 7.6
мы видим, что для него 0x2 и 0у2 являются плоскостями симметрии.
Ось 02, представляющая линию пересечения этих плоскостей, называет-
называется осью эллиптического параболоида. Из уравнения G.28) вытекает, что
эллиптический параболоид расположен в полупространстве 2 > 0. Линии
Lh пересечения эллиптического параболоида плоско-
плоскостями 2 = h, h>0, представляют собой эллипсы, про-
проекции L* которых на плоскости Оху определяются
уравнением
где
G.42)
G.43)
Рис. 7.7
Из формулы G.43) следует, что при увеличении h
эллипсы G.42) неограниченно увеличиваются, так
что эллиптический параболоид представляет собой бесконечную чашу.
На рис. 1.1 изображен эллиптический параболоид.
§3] ИССЛЕДОВАНИЕ ФОРМЫ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА 199
Обратимся к сечениям эллиптического параболоида плоскостями
у = Ни х = h, параллельными соответственно координатным плоскостям
Oxz и Oyz.
Плоскость x = h, например, пересекает эллиптический параболоид
по параболе
*-^ = 4' x = h- G'44)
a b
Очевидно, парабола G.44) получается таким параллельным перено-
переносом параболы
z = y2/b2, х = 0, G.45)
представляющей собой сечение эллиптического параболоида плоскостью
х = 0, при котором ее вершина, имеющая координаты @, 0, 0), перехо-
переходит в точку с координатами (х = h, у = 0, г = h2/a2). Иными словами, эл-
эллиптический параболоид образуется путем параллельного переме-
перемещения параболы G.45), когда ее вершина движется вдоль параболы
z = х2/а2, у = 0, представляющей собой сечение эллиптического па-
параболоида плоскостью у = 0.
Совершенно аналогично можно убедиться в том, что эллиптический
параболоид может быть получен путем параллельного перемещения па-
параболы, представляющей собой сечение параболоида плоскостью у = 0
вдоль сечения плоскостью х = 0.
2°. Гиперболический параболоид. Из канонического уравнения G.29)
гиперболического параболоида вытекает, что плоскости Oxz и Oyz яв-
являются плоскостями симметрии. Ось Oz называется осью гипербо-
гиперболического параболоида.
Линии z = h пересечения гиперболического параболоида с плоско-
плоскостями z = h представляют собой при h > 0 гиперболы
х2 и2
—ik-1 G-46)
с полуосями
a* = a4h, b* = b4h. G.47)
а при h < 0 — сопряженные гиперболы для гипербол G.46)
?-?-¦ G48)
с полуосями
а* = а 4-
b* = b 4-h. G.49)
200
ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
[ГЛ.7
Используя формулы G.46)-G.49), легко построить «карту» гиперболичес-
гиперболического параболоида (рис. 7.8). Отметим еще, что плоскость 2 = 0 пересекает
гиперболический параболоид по двум прямым:
а
G.50)
Из формул G.47) и G.49) вытекает, что прямые G.50) являются асимп-
асимптотами гипербол G.46) и G.48).
Карта гиперболического параболоида дает представление о его про-
пространственной форме (рис. 7.9). Как и в случае эллиптического парабо-
параболоида, можно убедиться в том, что гиперболический параболоид может
быть получен путем параллельного перемещения параболы, представ-
представляющей собой сечение плоскостью 0x2 @у2), когда ее вершина дви-
движется вдоль параболы, являющейся сечением параболоида плоскостью
0у2 @x2).
h>0
h = 0
Рис. 7.8
Рис. 7.9
4. Конус и цилиндры второго порядка.
1°. Конус второго порядка. В предыдущем параграфе мы назвали
вещественным конусом второго порядка поверхность S, определяемую
уравнением G.21):
Убедимся, что вещественный конус S образован прямыми линиями,
проходящими через начало О координат. Естественно называть точ-
точку О вершиной конуса.
Для доказательства сформулированного утверждения, очевидно, до-
достаточно установить, что прямая L, соединяющая произвольную, от-
отличную от начала координат точку М0(х0, у0, 20) конуса G.21) и нача-
начало координат О (рис. 7.10), целиком располагается на конусе, т.е. ко-
§3]
ИССЛЕДОВАНИЕ ФОРМЫ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА
201
ординаты (х, у, z) любой точки М прямой L удовлетворяют уравнению
G.21).
Так как точка М0(х0, у0, z0) лежит на конусе G.21), то
2
Уо
о _
, Уо 2о _
Ь2 2
G.51)
Координаты (х, у, z) любой точки М прямой L
равны соответственно tx0, t y0, t z0, где t —
некоторое число. Подставляя эти значения
для х, у и zb левую часть G.21), вынося t2 за
скобки и учитывая G.51), мы убедимся в том,
что М лежит на конусе. Таким образом, утверж-
утверждение доказано. Представление о форме кону-
конуса может быть получено методом сечений.
Легко убедиться, что сечения конуса плоско-
плоскостями z = h представляют собой эллипсы с
полуосями а* = -h, b* = -h .
с с
2°. Цилиндры второго порядка. В про-
процессе классификации поверхностей второго
порядка нам встретились эллиптический, гиперболический и пара-
параболический цилиндры. Уравнения этих поверхностей соответственно
имеют вид
Рис. 7.10
2 2 2 2
X у 1 X у 1 о _ к
— + —= 1, — = 1, у =2рх ).
2 Ъ2 2 Ъ2 У У
а- Ъ1 а1 Ъ1
Рисунок 7.11 дает представление о форме этих цилиндров.
G.52)
Эллиптический
цилиндр
Гиперболический
цилиндр
Рис. 7.11
Параболический
цилиндр
0 Уравнение параболического цилиндра у = 2рх легко получается из уравнения G.33)
путем переименования осей координат и простых арифметических операций.
202
ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
[ГЛ.7
Заметим, что цилиндры G.52) состоят из прямых линий, параллель-
параллельных оси Oz.
5. Прямолинейные образующие поверхностей второго поряд-
порядка. Кроме конуса и цилиндров, поверхностями второго порядка, состоя-
состоящими из прямолинейных образующих, являются однополостный гипер-
гиперболоид и гиперболический параболоид. Более точно, справедливо сле-
следующее утверждение.
Через каждую точку однополостного гиперболоида и гиперболи-
гиперболического параболоида проходят две различные прямые линии, цели-
целиком располагающиеся на указанных поверхностях.
Таким образом, однополостный гиперболоид и гиперболический
параболоид покрыты двумя различными семействами прямолиней-
прямолинейных образующих. На рисунках 7.12 и 7.13 показано расположение пря-
прямолинейных образующих соответственно на однополостном гипербо-
гиперболоиде и гиперболическом параболоиде.
Рис. 7.12
Рис. 7.13
Рассмотрим сначала однополостный гиперболоид, заданный своим
каноническим уравнением
G.19)
Очевидно, любая прямая Г\, определяемая как линия пересечения плос-
плоскостей
U с) b
G.53)
при любом отличном от нуля значении X целиком располагается на ги-
гиперболоиде G.19), ибо уравнение G.19) представляет собой алгебраи-
§ 3] ИССЛЕДОВАНИЕ ФОРМЫ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА 203
ческое следствие уравнений G.53) (уравнение G.19) получается из урав-
U X Z
нений G.53) путем их перемножения). Прямая Г^: 1 — = 0, —ь — = 0
Ъ ас
соответствует уравнениям G.53) при X = оо. Точно так же легко убедиться,
что любая прямая Г\, определяемая как линия пересечения плоскостей
Ы X Z
куда включается прямая Г^: 1 + - = 0, — + - = 0 , соответствующая
Ъ ас
Х = оо, при любом значении X располагается на гиперболоиде G.19).
Нетрудно заметить, что прямые Г\ и Г^ различны. Таким образом, на
однополостном гиперболоиде имеются два различных семейства прямых
Г\ и Г\. Для завершения доказательства утверждения достаточно убе-
убедиться, что через любую точку гиперболоида проходит некоторая пря-
прямая семейства Г\ и некоторая прямая семейства Г*х. Мы ограничимся
доказательством этого лишь для семейства Г\, ибо для семейства Г^ до-
доказательство аналогично.
Пусть точка М0(х0, у0, z0) находится на гиперболоиде G.20), так что
4+4-4=i- (?-54)
a b с
Если точка Мо лежит на прямой Г^ или Го, то утверждение очевид-
очевидно. В противном случае выберем такое значение X, чтобы числа х0, у0, z0
удовлетворяли первому из уравнений G.53), и обозначим его через Хо.
Таким образом,
** (M\ G.55)
Убедимся, что при выбранном значении Х = Х0 числа х0, у0, z0 удовлетво-
удовлетворяют и второму из уравнений G.53), что означает, что точка М0(х0, у0, z0),
принадлежащая гиперболоиду, принадлежит также и прямой G.53).
Допустим, что это не так. Тогда
^U ^ G.56)
Перемножая G.55) и G.56), получим неравенство
2 2 2
Х0 20 _j_ 1 У0
а2 с2 Ь2'
204 ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА [ГЛ. 7
которое противоречит соотношению G.54). Таким образом, прямая Г\о
располагается на гиперболоиде и проходит через заданную его точку
МО(ХО, у0, 20).
Совершенно аналогично рассуждая, можно убедиться, что гипербо-
х2 у2
лическии параболоид г- — покрыт двумя семействами прямых
а Ъ
Х\ и П^, которые соответственно задаются уравнениями
х у\ . х
. (х у\ . х у л / \
z = Х\—- , Х = — + -, где А, €(-оо, оо).
V а Ъ ) а Ъ
ПРИЛОЖЕНИЕ
ПРОБЛЕМЫ ОСНОВАНИЙ ГЕОМЕТРИИ
И ОБОСНОВАНИЯ МЕТОДА КООРДИНАТ
§ 1. Аксиомы элементарной геометрии
Будем рассматривать три множества объектов любой
природы: объекты первого множества будем именовать точками и обо-
обозначать большими латинскими буквами Л, В, С, ..., объекты второго мно-
множества будем именовать прямыми и обозначать малыми латинскими
буквами а, Ь, с, ..., объекты третьего множества будем именовать плос-
плоскостями и обозначать греческими буквами а, C, у, ...
Будем считать, что в рассматриваемых множествах каким-либо спо-
способом определены соотношения между объектами, выражаемые
тремя терминами: принадлежит, лежит между и конгруэнтен 0. На-
Например, точка А принадлежит прямой а или плоскости а; точка В, при-
принадлежащая прямой а, лежит между принадлежащими той же прямой
точками Аи С; отрезок прямой а, ограниченный принадлежащими этой
прямой точками А и В, конгруэнтен отрезку прямой Ь, ограниченному
принадлежащими этой прямой точками С и D.
Будем требовать, чтобы указанные соотношения удовлетворяли фор-
формулируемым ниже двадцати аксиомам ).
Все аксиомы разделяются на пять групп.
Группа I содержит восемь аксиом принадлежности.
Группа II содержит четыре аксиомы порядка.
Группа III содержит пять аксиом конгруэнтности.
Группа IV содержит две аксиомы непрерывности.
Группа V содержит одну аксиому параллельности.
Переходим к формулировке аксиом по группам. Одновременно будем
указывать некоторые утверждения, вытекающие из формулируемых аксиом.
Это поможет нам выяснить основные принципы логического развертыва-
развертывания геометрии и обосновать возможность установления взаимно однознач-
однозначного соответствия между множеством всех точек прямой и множеством
всех вещественных чисел, т.е. обосновать метод координат.
1. Аксиомы принадлежности.
I, 1. Каковы бы ни были две точки А и В, существует прямая а,
которой принадлежат обе эти точки.
0 То есть «равен».
2) Во всем остальном как природа самих объектов, так и способ задания соотношений
между этими объектами являются произвольными.
206 ПРИЛОЖЕНИЕ. ПРОБЛЕМЫ ОСНОВАНИЙ ГЕОМЕТРИИ
I, 2. Каковы бы ни были две различные точки А и В, существует
не более одной прямой, которой принадлежат эти точки.
I, 3. Каждой прямой а принадлежат по крайней мере две точки.
Существуют по крайней мере три точки, не принадлежащие одной
прямой.
Указанные три аксиомы исчерпывают список аксиом принадлежнос-
принадлежности планиметрии. Следующие пять аксиом вместе с указанными тремя
аксиомами завершают список аксиом принадлежности стереометрии.
1, 4. Каковы бы ни были три точки А, В и С, не принадлежащие
одной прямой, существует плоскость а, которой принадлежат эти
три точки. Каждой плоскости принадлежит хотя бы одна точка.
I, 5. Каковы бы ни были три точки А, В и С, не принадлежащие
одной прямой, существует не более одной плоскости, которой при-
принадлежат эти точки.
I, 6. Если две принадлежащие прямой а различные точки А и В
принадлежат некоторой плоскости а, то каждая принадлежащая
прямой а точка принадлежит указанной плоскости.
I, 7. Если существует одна точка А, принадлежащая двум плос-
плоскостям а и р, то существует по крайней мере еще одна точка В,
принадлежащая этим плоскостям.
I, 8. Существуют по крайней мере четыре точки, не принадле-
принадлежащие одной плоскости.
С целью использования привычной для нас геометрической термино-
терминологии договоримся отождествлять между собой следующие выражения:
1) «точка А принадлежит прямой а (плоскости а)»; 2) «прямая а (плос-
(плоскость а) проходит через точки А», 3) «точка А лежит на прямой а (на плос-
плоскости а)»; 4) «точка А является точкой прямой а (плоскости а)» и т.п.
С помощью указанных аксиом уже могут быть доказаны некоторые
теоремы. Так, из аксиомы I, 2 непосредственно вытекает следующее ут-
утверждение.
Теорема 1. Две различные прямые не могут иметь больше одной
общей точки.
Предоставляем читателю доказательство следующих утверждений,
вытекающих из аксиом I, 1-8 0.
Теорема 2. Две плоскости либо совсем не имеют общих точек,
либо имеют общую прямую, на которой лежат все их общие точки.
Теорема 3. Плоскость и не лежащая на ней прямая не могут
иметь больше одной общей точки.
Теорема 4. Через прямую и не лежащую на ней точку или через
две различные прямые с общей точкой проходит одна и только одна
плоскость.
0 В случае возникновения затруднений отсылаем читателя к книге Н.В. Ефимова
«Высшая геометрия». — М.: Наука, 1978.
§1] АКСИОМЫ ЭЛЕМЕНТАРНОЙ ГЕОМЕТРИИ 207
Теорема 5. Каждая плоскость содержит по крайней мере три
точки.
2. Аксиомы порядка.
II, 1. Если точка В прямой а лежит между точками Аи С той же
прямой, то А, В и С — различные точки указанной прямой, причем В
лежит также и между С и А.
II, 2. Каковы бы ни были две различные точки А и С, на определяе-
определяемой ими прямой существует по крайней мере одна точка В такая,
что С лежит между А и В.
II, 3. Среди любых трех различных точек одной прямой сущест-
существует не более одной точки, лежащей между двумя другими.
Сформулированные три аксиомы относятся к расположению геомет-
геометрических объектов на прямой и поэтому называются линейными аксио-
аксиомами порядка. Формулируемая ниже последняя аксиома порядка отно-
относится к расположению геометрических объектов на плоскости. Для
того чтобы сформулировать эту аксиому, введем понятие отрезка.
Пару различных точек Л и В назовем отрезком и будем обозначать сим-
символом АВ или ВА. Точки А и В будем называть концами отрезка АВ. Точки
прямой, определяемой Аи В, лежащие между Л и В, будем называть внут-
внутренними точками или просто точками отрезка АВ. Остальные точки ука-
указанной прямой будем называть внешними точками отрезка АВ.
II, 4 (аксиома Паша). Если А, В и С — три точки, не лежащие на
одной прямой, и а — некоторая прямая в плоскости, определяемой
этими точками, не содержащая ни одной из указанных точек и про-
проходящая через некоторую точку отрезка АВ, то эта прямая про-
проходит также либо через некоторую точку отрезка АС, либо через
некоторую точку отрезка ВС.
Подчеркнем, что из одних аксиом порядка II, 1-4 еще не вытекает,
что любой отрезок имеет внутренние точки. Однако, привлекая еще ак-
аксиомы принадлежности I, 1-3, можно доказать следующее утверждение.
Теорема 6. Каковы бы ни были две различные точки А и В, на пря-
прямой, ими определяемой, существует по крайней мере одна точка С,
лежащая между А и В.
Предлагаем читателю, опираясь на аксиомы I, 1-8 принадлежности
и аксиомы II, 1-4 порядка, последовательно доказать следующие утверж-
утверждения 0.
Теорема 7. Среди любых трех различных точек одной прямой
всегда существует одна точка, лежащая между двумя другими.
Теорема 8. Если точки А, В и С не принадлежат одной прямой и
если некоторая прямая а пересекает 2) какие-либо два из отрезков
0 Впрочем, доказательство всех приводимых ниже утверждений можно найти в кни-
книге Н.В. Ефимова «Высшая геометрия» (см. сноску на с. 206).
2) Под термином «прямая пересекает отрезок» мы подразумеваем, что указанная пря-
прямая содержит некоторую внутреннюю точку этого отрезка.
208 ПРИЛОЖЕНИЕ. ПРОБЛЕМЫ ОСНОВАНИЙ ГЕОМЕТРИИ
АВ, ВС и АС, то эта прямая не пересекает третий из указанных
отрезков.
Теорема 9. Если В лежит на отрезке АС и С — на отрезке BD, то
В и С лежат на отрезке AD.
Теорема 10. Если С лежит на отрезке AD, а В — на отрезке АС,
то В лежит также на отрезке AD, а С — на отрезке BD.
Теорема 11. Между любыми двумя различными точками прямой
существует бесконечно много других ее точек.
Теорема 12. Пусть каждая из точек С и D лежит между точками
А и В. Тогда если М лежит между С и D, то М лежит и между А и В.
Теорема 13. Если точки С и D лежат между точками А и В, то
все точки отрезка CD принадлежат отрезку АВ (в этом случае мы
будем говорить, что отрезок CD лежит внутри отрезка АВ).
Теорема 14. Если точка С лежит между точками Аи В, то: 1) ника-
никакая точка отрезка АС не может быть точкой отрезка СВ, 2) каждая
отличная от С точка отрезка АВ принадлежит либо отрезку АС, либо
отрезку СВ.
Указанные утверждения позволяют упорядочить множество точек
любой прямой и выбрать на этой прямой направление.
Будем говорить, что две различные точки А и В прямой а лежат по
разные стороны (по одну сторону) от третьей точки О той же прямой,
если точка О лежит (не лежит) между Л и В. Из указанных выше утверж-
утверждений вытекает следующая теорема.
Теорема 15. Произвольная точка О каждой прямой а разбивает
все остальные точки этой прямой на два непустых класса так, что
любые две точки прямой а, принадлежащие одному и тому же клас-
классу, лежат по одну сторону от О, а любые две точки, принадлежа-
принадлежащие разным классам, лежат по разные стороны от О.
Таким образом, задание на любой прямой двух различных точек ОиЕ
определяет на этой прямой луч или полупрямую ОЕ, обладающую тем
свойством, что любая ее точка и точка Е лежат по одну сторону от О.
Выбрав на прямой а две различные точки О и Е, мы можем теперь
определить порядок следования точек на прямой по следующему пра-
правилу: 1) если А и В — любые точки луча ОЕ, то будем говорить, что А
предшествует В, если А лежит между О и В; 2) будем говорить, что
точка О предшествует любой точке луча ОЕ; 3) будем говорить, что
любая точка, не принадлежащая лучу ОЕ, предшествует как точке О,
так и любой точке, принадлежащей лучу ОЕ; 4) если А и В — любые
точки, не принадлежащие лучу ОЕ, то мы будем говорить, что А пред-
предшествует В, если В лежит между Аи О.
Легко проверить, что для выбранного порядка следования точек
прямой а справедливо свойство транзитивности: если
А предшествует В, а В предшествует С, то А предшествует С.
§1] АКСИОМЫ ЭЛЕМЕНТАРНОЙ ГЕОМЕТРИИ 209
Аксиомы, приведенные выше, позволяют упорядочить и точки, при-
принадлежащие произвольной плоскости а. Предлагаем читателю доказать
следующее утверждение *).
Теорема 16. Каждая прямая а, принадлежащая плоскости а, раз-
разделяет не лежащие на ней точки этой плоскости на два непустых
класса так, что любые две точки А и В из разных классов опреде-
определяют отрезок АВ, содержащий точку прямой а, а любые две точки
А и А' из одного класса определяют отрезок АА', внутри которого
не лежит ни одна точка прямой а.
В соответствии с утверждением этой теоремы мы будем говорить,
что точки Аи А' (одного класса) лежат в плоскости а по одну сторо-
сторону от прямой а, а точки Аи В (разных классов) лежат в плоскости а
по разные стороны от прямой а.
3. Аксиомы конгруэнтности.
III, 1. Если Аи В — две точки на прямой а, А' — точка на той же
прямой или на другой прямой а', то по данную от точки А' сторону
прямой а' найдется, и притом только одна, точка В' такая, что
отрезок А'В' конгруэнтен отрезку АВ. Каждый отрезок АВ конг-
конгруэнтен отрезку В А 2).
III, 2. Если отрезки А'В' и А"В" конгруэнтны одному и тому же
отрезку АВ, то они конгруэнтны и между собой.
III, 3. Пусть АВ и ВС — два отрезка прямой а, не имеющие общих
внутренних точек, А'В' и В'С' — два отрезка той же прямой или
другой прямой а', также не имеющие общих внутренних точек. Тог-
Тогда, если отрезок АВ конгруэнтен отрезку AfBf, а отрезок ВС конг-
конгруэнтен отрезку В'С, то отрезок АС конгруэнтен отрезку А'С.
Сформулированные три аксиомы относятся к конгруэнтности отрез-
отрезков. Для формулировки двух следующих аксиом нам понадобится поня-
понятие угла и его внутренних точек.
Пара полупрямых Ник, выходящих из одной и той же точки О и не
лежащих на одной прямой, называется углом и обозначается символом
Z(h, к) или Z(k, ft).
Если полупрямые Ник задаются двумя своими точками ОА и ОВ, то
мы будем обозначать угол символом ZAOB или ZBOA.
В силу теоремы 4 любые два луча Ник, составляющие угол Z(h, к),
определяют, и притом единственную, плоскость а.
0 В случае затруднений см. книгу Н.В. Ефимова «Высшая геометрия» (см. снос-
сноску на с. 206).
2) Из этой аксиомы вытекает возможность перемещения отрезка АВ вдоль прямой, на
которой он лежит (с сохранением его длины и направления). Будем говорить, что на-
направленный отрезок CD получен в результате перемещения направленного отрез-
отрезка АВ , если отрезок CD конгруэнтен отрезку АВ и если либо отрезок AD лежит внутри
отрезка ВС, либо отрезок ВС лежит внутри отрезка AD.
210 ПРИЛОЖЕНИЕ. ПРОБЛЕМЫ ОСНОВАНИЙ ГЕОМЕТРИИ
Внутренними точками Z(h, k) будем называть те точки плоскости а,
которые, во-первых, лежат по ту сторону от прямой, содержащей луч h,
что и любая точка луча k, и, во-вторых, лежат по ту сторону от прямой,
содержащей луч k, что и любая точка луча h.
Ill, 4. Пусть даны Z(h, k) на плоскости а, прямая а' на этой же
или на какой-либо другой плоскости а' и задана определенная сто-
сторона плоскости а' относительно прямой а'. Пусть h' — луч пря-
прямой а', исходящий из некоторой точки О'. Тогда на плоскости а'
существует один и только один луч k' такой, что Z(h, k) конгруэн-
конгруэнтен Z(h', k'), и при этом все внутренние точки Z(h', k') лежат по
заданную сторону от прямой а'. Каждый угол конгруэнтен самому
себе.
III, 5. Пусть А, В и С — три точки, не лежащие на одной прямой,
А', В' и С — другие три точки, также не лежащие на одной пря-
прямой. Тогда, если отрезок АВ конгруэнтен отрезку А'В', отрезок АС
конгруэнтен отрезку А'С и ZBAC конгруэнтен ZB'A'C, то ZABC
конгруэнтен ZA'B'C и ZACB конгруэнтен ZA'C'B'.
Договоримся теперь о сравнении неконгруэнтных отрезков и углов.
Будем говорить, что отрезок АВ больше отрезка А 'В', если на пря-
прямой, определяемой точками Аи В, найдется лежащая между этими точ-
точками точка С такая, что отрезок АС конгруэнтен отрезку А'В'. Будем
говорить, что отрезок АВ меньше отрезка А 'В', если отрезок А 'В' боль-
больше отрезка АВ.
Тот факт, что отрезок АВ меньше отрезка А 'В' (конгруэнтен отрез-
отрезку Л'Б'), символически будем записывать так:
АВ<А'В' (АВ=А'В').
Будем говорить, что ZAOB больше ZA'O'B', если в плоскости,
определяемой ZAOB, найдется луч ОС, все точки которого являются
внутренними точками ZAOB, такой, что ZAOC конгруэнтен ZA'O'B'.
Будем говорить, что ZAOB меньше ZA'O'B', если ZA'O'B' больше
ZAOB.
С помощью аксиом принадлежности, порядка и конгруэнтности мож-
можно доказать целый ряд классических теорем элементарной геометрии.
Сюда относятся: 1)три широко известные теоремы о конгруэнтности
(равенстве) двух треугольников; 2) теорема о конгруэнтности вертикаль-
вертикальных углов; 3) теорема о конгруэнтности всех прямых углов; 4) теорема о
единственности перпендикуляра, опущенного из точки на прямую; 5) тео-
теорема о единственности перпендикуляра, восстановленного из данной
точки прямой; 6) теорема о внешнем угле треугольника; 7) теорема о
сравнении перпендикуляра и наклонной.
Предлагаем читателю самому последовательно доказать только что
перечисленные теоремы.
§1] АКСИОМЫ ЭЛЕМЕНТАРНОЙ ГЕОМЕТРИИ 211
4. Аксиомы непрерывности. С помощью аксиом принадлежнос-
принадлежности, порядка и конгруэнтности мы произвели сравнение отрезков, позво-
позволяющее заключить, каким из трех знаков <, = или > связаны данные два
отрезка.
Указанных аксиом, однако, недостаточно: 1) для обоснования возмож-
возможности измерения отрезков, позволяющего поставить в соответствие каж-
каждому отрезку определенное вещественное число; 2) для обоснования
того, что указанное соответствие является взаимно однозначным.
Для проведения такого обоснования следует присоединить к аксио-
аксиомам I, II, III две аксиомы непрерывности.
IV, 1 (аксиома Архимеда). Пусть АВ и CD — произвольные от-
отрезки. Тогда на прямой, определяемой точками А и В, существует
конечное число точек Ах,А2,...,Ап, расположенных так, что точка Ах
лежит между А и А2, точка А2 лежит между Ах и А3, ..., точка Ап_х
лежит между Ап_2 и Ап, причем отрезки ААХ, АХА2, ...,Ап_хАп конгруэнт-
конгруэнтны отрезку CD и точка В лежит между А и Ап.
IV, 2 (аксиома линейной полноты). Совокупность всех точек про-
произвольной прямой а нельзя пополнить новыми объектами {точками)
так, чтобы: 1) на пополненной прямой были определены соотношения
<<лежит между» и <<конгруэнтен», определен порядок следования
точек и справедливы аксиомы конгруэнтности III, 1-3 и аксиома
Архимеда IV, 1; 2) по отношению к прежним точкам прямой опреде-
определенные на пополненной прямой соотношения «лежит между» и «кон-
«конгруэнтен» сохраняли старый смысл.
Мы сейчас докажем, что присоединение к аксиомам I, 1-3, II и III, 1-3
аксиомы Архимеда IV, 1 позволяет поставить в соответствие каждой
точке произвольной прямой а определенное вещественное число х, на-
называемое координатой этой точки, а присоединение еще и аксиомы ли-
линейной полноты IV, 2 позволяет утверждать, что координаты всех точек
прямой а исчерпывают множество всех вещественных чисел.
5. Обоснование метода координат. Прервем на время изложение
аксиом геометрии, чтобы на основании уже изложенных аксиом дать
обоснование метода координат на прямой.
Сначала докажем следующее утверждение.
Первая основная теорема. Аксиомы I, 1-3, II, III, 1-3 и аксиома
IV, 1 Архимеда позволяют ввести на любой прямой а координаты
так, что выполнены следующие требования:
1°. Каждой точке М прямой а соответствует определенное ве-
вещественное число х, называемое ее координатой.
2°. Разным точкам соответствуют разные координаты, причем
точка М2 лежит между М{ и М3 тогда и только тогда, когда либо
хх< х2< х3, либо хх > хх > х3 (здесь хх, х2 и х3 — координаты точек Мх,
М2 и М3 соответственно).
212 ПРИЛОЖЕНИЕ. ПРОБЛЕМЫ ОСНОВАНИЙ ГЕОМЕТРИИ
3°. Отрезки МХМ2 и М[М2 конгруэнтны тогда и только тогда,
когда х2 - хх = х2 - х[ (здесь хь х2, х[ и х2 — координаты точек Мь
М2, М[ и М2 соответственно).
4°. Если вещественные числа хх и х2 представляют собой коорди-
координаты некоторых точек, то и вещественное число хх ± х2 представ-
представляет собой координату некоторой точки.
Доказательство. Выберем на прямой а произвольную точку О
в качестве начала координат и произвольную отличную от О точку Е в
качестве точки с координатой единица. Пусть М — произвольная точка
прямой а. Ради определенности предположим, что М лежит с той же
стороны от О, что и Е (аксиомы I, 1-3, II и III, 1-3 обеспечивают возмож-
возможность установления порядка следования точек на прямой а). Каковы бы
ни были целое положительное число п и целое неотрицательное число т,
мы можем, откладывая отрезок ОМ в одном и том же направлении пос-
последовательно п раз, построить отрезок п • ОМ и аналогично построить
отрезок т • ОЕ (возможность откладывать конгруэнтный отрезок в лю-
любом направлении и брать сумму конгруэнтных отрезков, не имеющих
общих внутренних точек, вытекает из аксиом I, 1-3, II и III, 1-3).
В силу только что упомянутых аксиом любые два отрезка мы можем
сравнивать. Стало быть, и отрезки п • ОМ и т • ОЕ при различных пит
будут связаны либо знаком <, либо знаком >.
Рассмотрим все возможные рациональные числа т/п. Их можно раз-
разбить на два класса, относя к верхнему классу те из них, для которых
п- ОМ<т- ОЕ, (П.1)
и к нижнему классу те, для которых
п- ОМ >т-ОЕ. (П.2)
Убедимся в том, что эти два класса однозначно определяют веще-
вещественное число х, которое мы и поставим в соответствие точке М и назо-
назовем ее координатой.
Сначала убедимся в том, что любое рациональное число из верх-
верхнего класса больше любого рационального числа из нижнего класса.
Приводя, любые два рациональных числа из разных классов к общему
знаменателю и обозначая последний через п, мы из (П.1) и (П.2) полу-
получим, что числитель числа из верхнего класса больше числителя числа
из нижнего класса. Отсюда и вытекает, что число из верхнего класса
больше числа из нижнего класса.
Далее заметим, что оба класса не являются пустыми: нижнему
классу заведомо принадлежит рациональное число нуль, а для установ-
установления непустоты верхнего класса достаточно положить п = 1 и заметить,
что аксиома Архимеда IV, 1 гарантирует существование такого натураль-
натурального числа т, что при п = 1 справедливо неравенство (П.1).
§1] АКСИОМЫ ЭЛЕМЕНТАРНОЙ ГЕОМЕТРИИ 213
В силу теоремы о точных гранях непустого ограниченного сверху (сни-
(снизу) множества 0 существует точная верхняя грань х рациональных чи-
чисел нижнего класса и точная нижняя грань х рациональных чисел верх-
верхнего класса.
Убедимся в том, что эти грани х и х заключены между как угодно
близкими рациональными числами и поэтому совпадают. Достаточно
доказать, что существуют как угодно близкие числа разных классов, а
это вытекает из того, что для как угодно большого номера п найдется но-
номер т такой, что рациональное число (т+ 1)/я принадлежит верхнему
классу, а рациональное число т/п принадлежит нижнему классу 2).
Положим теперь х = х = х и поставим вещественное число х в соот-
соответствие точке М, назвав его координатой этой точки. Требование 1°
обосновано.
Пусть теперь Мх и М2 — какие угодно две точки, лежащие по ту
же сторону от О, что и Е, и такие, что М{ лежит между О и М2, т.е.
ОМ2 > ОМХ. Докажем, что если х{ и х2 — координаты точек Мх и М2
соответственно, то х2>х{.
Выберем номер п настолько большим, чтобы разность отрезков ОМ2
и ОМХ, повторенная п раз, превзошла отрезок ОЕ (это можно сделать в
силу все той же аксиомы Архимеда IV, 1). Тогда, обозначая через т наи-
наибольшее целое число, для которого
п • ОМ{ >т- ОЕ,
мы получим, что
п- ОМх<(т+\)- ОЕ, (П.З)
и в силу сделанного выше выбора номера п
п- ОМ2>(т+ 1)- ОЕ. (ПА)
Из (П.З) заключаем, что рациональное число (т+ \)/п относится к
верхнему классу по отношению к точке Мх, т.е. (т + 1)/я > х \, а из (П.4)
заключаем, что то же самое рациональное число (т + \)/п относится к
нижнему классу по отношению к точке М2, и поэтому х2 > (т+ 1)/я.
Тем самым неравенство х2 > х{ доказано.
Если теперь мы имеем на прямой а какое угодно число точек, идущих
в порядке О, Мх, М2,..., Мп (в сторону Е3)), то из только что доказанного
утверждения для координат этих точек получим О < х{ < х2 <... < хп.
Тем самым для случая расположения точек по ту же сторону от О,
что и Е, требование 2° доказано. Для точек М, лежащих на прямой а по
О См. вып. 1, теорему 2.1.
2) Тот факт, что для любого номера п найдется указанный номер т (такой, что спра-
справедливо (П.1)), снова вытекает из аксиомы Архимеда IV, 1.
3) В дальнейшем эта сторона именуется положительной.
214 ПРИЛОЖЕНИЕ. ПРОБЛЕМЫ ОСНОВАНИЙ ГЕОМЕТРИИ
другую сторону от О, совершенно аналогично вводятся отрицательные
координаты и повторением тех же рассуждений мы устанавливаем тре-
требования 1° и 2° в общем виде.
Для установления требований 3° и 4° мы сначала докажем, что если
на прямой а в положительную сторону от О взяты точки Мх, М2 и
М, причем Мх лежит между О и Ми отрезки МХМ и ОМ2 конгруэнт-
конгруэнтны, то х = хх + х2 (здесь х, ххих2 — координаты точек М, Мх и М2 соот-
соответственно).
Возьмем из нижних классов, отвечающих координатам хх и х2, два
произвольных рациональных числа, обозначив их (после приведения к
общему знаменателю п) соответственно через тх/п и т2/п. Тогда
п • ОМj > т1 • ОЕ, п • ОМ2 > т2 • ОЕ.
Складывая последние два неравенства, получим
п • ОМ > (тх +т2) • ОЕ. (П.5)
Точнее говоря, в левой части (П.5) мы получим сумму п раз отложенно-
отложенного отрезка ОМ{ и п раз отложенного отрезка ОМ2, но после перегруппи-
перегруппировки слагаемых мы и получим п раз повторенную сумму отрезков ОМХ
и ОМ2, т.е. п • ОМ 0.
Из неравенства (П.5) заключаем, что рациональное число — + —
п п
принадлежит нижнему классу, отвечающему координате х.
Совершенно аналогично, взяв любые рациональные числа тх/п и т2/п
из верхних классов, отвечающих координатам хх и х2, мы убедимся в
том, что рациональное число —1- -\—2- принадлежит верхнему классу,
отвечающему координате х. п п
Но тогда из определения суммы вещественных чисел и из того, что
рациональные числа как из верхнего, так и из нижнего классов как угод-
угодно точно приближают соответствующую координату, мы получим, что
вещественное число х равно сумме хх + х2.
Тем самым нами доказано, что отложить от точки Мх с координа-
координатой хх (в положительную сторону) отрезок ОМ2 — это все равно,
что построить точку М с координатой х, удовлетворяющей усло-
условию х = хх + х2, где х2 > 0 — координата точки М2.
Это утверждение мы доказали для случая хх > 0, но легко распрост-
распространить его и на общий случай (предоставляем это читателю). Из дока-
0 То, что в геометрической сумме отрезков мы можем, не меняя суммы, переставлять
слагаемые, вытекает из следующих соображений. Достаточно убедиться в возможности
перестановки для двух слагаемых, а это непосредственно вытекает из аксиомы III, 3, в
формулировке которой ничего не сказано о порядке, в котором «приставляются» друг к
другу слагаемые отрезки А'В' и В'С. При любом их порядке сумма А'С конгруэнтна
отрезку АС.
§1] АКСИОМЫ ЭЛЕМЕНТАРНОЙ ГЕОМЕТРИИ 215
занного утверждения сразу же вытекает требование 4°, а для доказа-
доказательства утверждения 3° достаточно заметить, что откладывание дан-
данного отрезка равносильно добавлению к координате точки постоянного
слагаемого. Первая основная теорема полностью доказана 0.
Замечание. Особо подчеркнем, что в первой основной теореме
не утверждается, что каждому вещественному числу х соответствует
определенная точка на прямой (т.е. не утверждается, что соответствие
между точками прямой и вещественными числами является взаимно
однозначным).
Мы сейчас увидим, что это невозможно доказать, опираясь только
на аксиомы I, 1-3, II, III, 1-2 и IV, 1 и не привлекая аксиому линейной
полноты IV, 2.
Вторая основная теорема. Пусть справедливы аксиома I, 1-3,
II, III, 1-3, IV, 1 и на прямой а введены координаты. Тогда, для того
чтобы каждому вещественному числу х отвечала некоторая точка
прямой а, т.е. для того, чтобы между всеми точками прямой а и
всеми вещественными числами существовало взаимно однозначное
соответствие, необходимо и достаточно, чтобы была справедлива
аксиома линейной полноты IV, 2.
Доказательство. 1) Достаточность. Докажем, что если
существуют вещественные числа х, которым не отвечает никакая точка
прямой а, то аксиома IV, 2 заведомо несправедлива.
Пусть существуют указанные вещественные числа х. Каждое из них
мы назовем новой точкой и присоединим все новые точки к совокупно-
совокупности прежних точек прямой а.
На пополненной прямой (назовем ее а) уже каждому вещественно-
вещественному числу отвечает точка, и обратно.
Определим на а соотношения «лежит между» и «конгруэнтен». Бу-
Будем говорить, что точка М2 прямой а лежит между Мх и М3, если либо
хх < х2 < х3, либо хх > х2 > х3, где под хх, х2 и х3 нужно понимать коорди-
координату соответствующей точки М{, М2 и М3, если эта точка прежняя, и
саму эту точку, если она новая. Очевидно, что в применении к прежним
точкам определенное на а соотношение «лежит между» сохраняет ста-
старый смысл.
Будем говорить, что отрезок МХМ2 прямой а конгруэнтен отрезку
той же прямойМ[М2, еслих2-Х! =х2-х[, где подхь х2, х[ их2 нужно
понимать координату соответствующей точки Мх, М2, М[ и М2, если эта
точка прежняя, и саму эту точку, если она новая. Снова очевидно, что в
применении к прежним точкам определенное на а соотношение «конг-
«конгруэнтен» сохраняет старый смысл.
0 Подчеркнем, что при доказательстве первой основной теоремы аксиомы I, 1-3 и II
использовались лишь для установления порядка следования точек на прямой.
216 ПРИЛОЖЕНИЕ. ПРОБЛЕМЫ ОСНОВАНИЙ ГЕОМЕТРИИ
Очевидно также, что для точек пополненной прямой а определен
порядок следования и справедливы аксиомы конгруэнтности III, 1-3 и
аксиома Архимеда IV, 1.
Тем самым мы установили возможность пополнения прямой, проти-
противоречащую аксиоме линейной полноты IV, 2.
Достаточность доказана.
2. Необходимость. Докажем, что если аксиома линейной пол-
полноты IV, 2 не имеет места, то координаты всех точек прямой а не исчер-
исчерпывают всех вещественных чисел.
Если аксиома VI, 2 не имеет места, то существует пополненная новы-
новыми точками прямая а , для всех точек которой определены соотношения
«лежит между» и «конгруэнтен», определен порядок следования и спра-
справедливы аксиомы конгруэнтности III, 1-3 и аксиома Архимеда IV, 1. В
силу первой основной теоремы на пополненной прямой а можно ввести
координаты (в этой теореме аксиомы I, 1-3 и II использовались лишь в
форме возможности установления на данной прямой порядка следования
точек).
Мы получим, что каждой точке пополненной прямой а отвечает оп-
определенное вещественное число, причем разным точкам отвечают раз-
различные вещественные числа. Но отсюда следует, что те вещественные
числа, которые отвечают точкам, производящим пополнение, не будут
соответствовать ни одной точке исходной прямой а. Необходимость до-
доказана. Вторая основная теорема полностью доказана.
6. Аксиома параллельности. Самая последняя аксиома играет в
геометрии фундаментальную роль, определяя разделение геометрии на
две логически непротиворечивые и взаимно исключающие друг друга
системы: евклидову и неевклидову геометрии.
В геометрии Евклида эта аксиома формулируется так:
V. Пусть а — произвольная прямая и А — точка, лежащая вне
прямой а, тогда в плоскости а, определяемой точкой А и прямой а,
существует не более одной прямой, проходящей через Айне пересе-
пересекающей а.
Долгое время геометры выясняли вопрос о том, не является ли аксио-
аксиома параллельности V следствием всех остальных аксиом I, II, III, IV. Этот
вопрос был решен Лобачевским 0, который доказал, что аксиома V не
является следствием аксиом I—IV.
По-другому результат Лобачевского можно сформулировать так: если
к аксиомам I—IV присоединить утверждение, отрицающее справед-
справедливость аксиомы V, то следствия всех этих положений будут со-
составлять логически непротиворечивую систему {неевклидову гео-
геометрию Лобачевского).
) Николай Иванович Лобачевский — великий русский математик A793-1856).
§2] НЕПРОТИВОРЕЧИВОСТЬ ГЕОМЕТРИИ ЕВКЛИДА 217
Схема доказательства непротиворечивости геометрии Лобачевского
излагается в § 3 настоящего Приложения.
Здесь же мы отметим, что систему следствий, вытекающих из од-
одних только аксиом I—IV, обычно называют абсолютной геометрией.
Абсолютная геометрия является общей частью как евклидовой, так и
неевклидовой геометрий, ибо все предложения, которые могут быть
доказаны только с помощью аксиом I—IV, верны как в геометрии Евк-
Евклида, так и в геометрии Лобачевского (примеры таких предложений
читатель найдет в предыдущих пунктах).
§ 2. Схема доказательства непротиворечивости
геометрии Евклида
Наметим схему доказательства непротиворечивости всех пяти групп
аксиом геометрии Евклида.
Ради простоты ограничимся доказательством непротиворечи-
непротиворечивости планиметрии Евклида, т.е. установим непротиворе-
непротиворечивость системы аксиом I, 1-3, II—V.
Для доказательства достаточно построить какую-нибудь конкретную
реализацию совокупности объектов, удовлетворяющих всем указанным
аксиомам.
Мы построим так называемую декартову или арифметическую
реализацию совокупности объектов, удовлетворяющих аксиомам пла-
планиметрии. Тем самым вопрос о непротиворечивости планиметрии Евк-
Евклида будет сведен к вопросу о непротиворечивости арифметики.
Назовем точкой любую упорядоченную пару вещественных чисел
(х, у), а прямой — отношение трех вещественных чисел (и : v : w) при
условии, что и2 + и2 Ф О 0.
Будем говорить, что точка (х, у) принадлежит прямой (и : v : w), если
справедливо равенство
ux + vy + w = 0. (П.6)
Докажем справедливость аксиом I, 1-3.
Каковы бы ни были две различные точки (хь ух) и (х2, у2), прямая 2)
(У\ — У2 '• Х2 — х\ '• Х\У2 — Х2У\)> как легко убедиться, содержит эти точки
(аксиома I, 1).
Далее из уравнений
их{ + vy{ + w = 0, их2 + vy2 + w = О
0 Отношением (и : v : w) называется совокупность трех вещественных чисел a, v, w
при условии, что при любом X Ф 0 совокупности и, v, w и Хи, Xv, Xw рассматриваются как
тождественные.
) Так как точки (х{, у{) и (х2, у2) различны, то (х{ — х2) + (У\ — у2) Ф 0.
218 ПРИЛОЖЕНИЕ. ПРОБЛЕМЫ ОСНОВАНИЙ ГЕОМЕТРИИ
вытекает, что и : v : w = {ух - у2) : (х2 - хх) : (хху2 - х2у\), так что точками
{хх, ух) и {х2, у2) определяется только одна прямая (и : v : w) (аксиома I, 2).
Наконец, справедливость аксиомы I, 3 вытекает из того, что уравне-
уравнение (П.6) с двумя неизвестными х и у всегда имеет бесчисленное мно-
множество решений и не всякая пара х и у есть решение уравнения (П.6).
Теперь определим соотношение «лежит между». Так как и2 + и2фО,
то либо и Ф 0, либо v Ф 0.
Если v Ф 0, то будем говорить, что точка {х2, у2) лежит между {хх, ух)
и (*з> Уъ)> если либо х{ < х2 < х3, либо х{> х2> х3. Если же v = 0 (при этом
заведомо ифО), то будем говорить, что точка (х2, у2) лежит между
(хь ух) и (х3, уз), если либо ух<у2< у3, либо ух>у2> уъ.
Справедливость аксиом II, 1-3 проверяется тривиально. Несколько
кропотливую проверку аксиомы Паша II, 4 мы опустим.
Обратимся теперь к определению соотношения «конгруэнтен». С этой
целью рассмотрим так называемое ортогональное преобразование.
Преобразование
х' = ахх + Ьху + сх, у' = а2х + Ь2у + с2, (П.7)
переводящее произвольную точку (х, у) в определенную точку (х', у'),
называется ортогональным, если выполнены соотношения
ах+Ьх=\, а| + й|=1» ala2 + blb2 = O. (П.8)
Легко доказать, что всякое ортогональное преобразование (П.7), (П.8)
можно представить в одной из следующих форм: либо в виде
х' = ах - $у + сх, у' = $х + ау + с2, (П.9)
либо в виде
х' = ах + $у + сх, у' = $х-ау + с2, (П. 10)
причем в обоих случаях а2 + р2 = 1. Преобразования (П.9) и (П. 10) обычно
называют ортогональными преобразованиями соответственно первого
и второго рода.
Пусть даны произвольная прямая (и : v : w) и на ней некоторая точка
(х0, г/о), так что их0 + ш/0 + w = 0.
Легко убедиться в том, что совокупность точек (х, у), где
x = xo + vt, y = yo-ut, (П. 11)
принадлежит прямой (и : v : w) для любого вещественного числа t. Да-
Далее ясно, что при t > 0 все указанные точки (х, у) лежат по одну сторо-
сторону от точки (х0, Уо), а при t < 0 эти точки лежат по другую сторону от
§2] НЕПРОТИВОРЕЧИВОСТЬ ГЕОМЕТРИИ ЕВКЛИДА 219
Иными словами, уравнения (П. 11) при всевозможных положитель-
положительных t определяют все точки полупрямой, исходящей из точки (х0, у о) и
лежащей на прямой (и : v : w). Эту полупрямую мы будем обозначать
символом (х0, Уо, v, -и).
Оказывается, всякое ортогональное преобразование (как первого, так
и второго рода) переводит любую полупрямую снова в полупрямую. Бо-
Более точно, справедливо следующее утверждение: ортогональное пре-
преобразование (П.9) или (П. 10) переводит полупрямую (х0, у0, и, -и) в
полупрямую (д: о, у о, v1', -и'), где для случая преобразования (П.9)
v' = аи + $и, и' = -ри - ош,
и для случая преобразования (П. 10)
v' = аи - $и, и'= -ри - ош,
Теперь назовем отрезок АВ конгруэнтным отрезку А'В\ если су-
существует ортогональное преобразование, которое переводит точку А в
точку А', а точку В в точку В'. Угол Z(h, k) назовем конгруэнтным
Z(h', k'), если существует ортогональное преобразование, переводящее
полупрямую h в полупрямую h' и полупрямую k в полупрямую k'.
Далее нужно перейти к проверке аксиом III, 1-5. Аксиома III, 2 выте-
вытекает из групповых свойств ортогонального преобразования, в силу ко-
которых как последовательное проведение двух ортогональных преобра-
преобразований, так и преобразование, обратное к ортогональному, снова яв-
являются ортогональными преобразованиями. Проверка остальных аксиом
группы III требует кропотливой техники и использования указанного
выше утверждения, и мы ее опустим.
Что же касается аксиом непрерывности, то аксиома Архимеда IV, 1
проверяется непосредственно, а справедливость аксиомы полноты IV, 2
вытекает из того, что между всеми точками любой прямой и всеми ве-
вещественными числами можно установить взаимно однозначное соот-
соответствие (см. вторую основную теорему из п. 5 § 1).
Нам остается еще проверить справедливость аксиомы параллельно-
параллельности V. Пусть (и : v : w) — произвольная прямая и (х0, у0) — точка вне ее,
так что их0 + vy0 + w ФО.
Пусть (и' : Vе : w') — прямая, проходящая через точку (х0, у0), т.е.
удовлетворяющая условию
u'xo + v'yo + w' = O. (П. 12)
220 ПРИЛОЖЕНИЕ. ПРОБЛЕМЫ ОСНОВАНИЙ ГЕОМЕТРИИ
Поскольку эта прямая не пересекает прямую (и : v : w), должна быть
несовместна система уравнений
и 'х + v 'у + w' = 0, их + vy + w = 0. (П. 13)
Из несовместности системы (П. 13) заключаем, что и': u = v': v, или,
что то же самое, и' = Хи, ve = Xv, где X — некоторое число. Но тогда из
(П. 12) получим w' = -X(uxo + ш/0), т.е. и' : v' : w' = и : v : -(uxo + vyo).
Итак, отношения и' : и' : w' однозначно определены, т.е. существует
единственная прямая (и' :v' :w'), проходящая через (х0, у о) и не пере-
пересекающая прямой (и : v : w).
Тем самым доказательство непротиворечивости планиметрии Евкли-
Евклида завершено.
Замечание. Аналогично доказывается непротиворечи-
непротиворечивость стереометрии Евклида. Для этого мы называем точ-
точкой любую упорядоченную тройку вещественных чисел (х, у, z), пря-
прямой — совокупность всех троек (х, у, z), элементы х, у, z которых связа-
связаны системой двух линейных уравнений, плоскостью — совокупность
всех троек (х, у, z), элементы х, у, z которых удовлетворяют одному ли-
линейному уравнению.
§ 3. Схема доказательства непротиворечивости
геометрии Лобачевского
Для простоты ограничимся доказательством непроти-
непротиворечивости планиметрии Лобачевского, т.е. по-
построим конкретную реализацию совокупности объектов, удовлетворяю-
удовлетворяющих аксиомам I, 1-3, II—IV и аксиоме, отрицающей справедливость V.
Для построения указанной реализации мы будем опираться на уже уста-
установленную нами непротиворечивость планиметрии Евклида, т.е. сведем
вопрос о непротиворечивости планиметрии Лобачевского к вопросу о
непротиворечивости планиметрии Евклида. Излагаемая в этом парагра-
параграфе модель принадлежит А. Пуанкаре 0.
Рассмотрим на евклидовой плоскости горизонтальную прямую х и
опирающуюся на нее верхнюю полуплоскость.
Все точки этой верхней полуплоскости мы назовем неевклидовыми
точками, а все лежащие в верхней полуплоскости полуокружности с
центром на прямой х и все вертикальные полупрямые, исходящие из
точек прямой х, назовем неевклидовыми прямыми (кстати, указанные
полупрямые удобно рассматривать как полуокружности бесконечно
большого радиуса).
) Анри Пуанкаре — французский математик A854-1912).
§3] НЕПРОТИВОРЕЧИВОСТЬ ГЕОМЕТРИИ ЛОБАЧЕВСКОГО 221
Мы определим между неевклидовыми точками и неевклидовыми
прямыми соотношения «принадлежит», «лежит между» и «конгруэн-
«конгруэнтен» и убедимся в справедливости всех аксиом абсолютной
геометрии (т.е. аксиом I, 1-3, II—IV). После этого мы покажем, что
в построенной модели справедлива аксиома параллельности Лобачев-
Лобачевского (т.е. отрицание аксиомы V Евклида).
Мы будем говорить, что неевклидова точка А принадлежит неевк-
неевклидовой прямой а, если точка верхней полуплоскости А лежит на полу-
полуокружности а.
Справедливость аксиом I, 1-3 устанавливается тривиально. Так, ак-
аксиомы I, 1 и I, 2 эквивалентны утверждению, что через две точки верх-
верхней полуплоскости можно провести только одну окружность, имеющую
центр на прямой х. Аксиома I, 3 эквивалентна утверждению, что на лю-
любой полуокружности имеются по крайней мере две точки и имеется хотя
бы одна точка вне этой полуокружности.
Перейдем к установлению соотношения «лежит между». Пусть
А, В, С — три точки неевклидовой прямой, изображаемой полуокруж-
полуокружностью а. Будем говорить, что точка В (в неевклидовом смысле) лежит
между А и С, если В на полуокружности а лежит между Л и С (в евкли-
евклидовом смысле).
При таком определении соотношения «лежит между» легко уста-
устанавливается справедливость аксиом II, 1-3. Впрочем, порядку следо-
следования точек на неевклидовой прямой, изображаемой полуокруж-
полуокружностью а, можно придать и более наглядный вид. Выпуская из центра
О полуокружности а всевозможные лучи, мы с помощью этих лучей
можем взаимно однозначно спроецировать все точки полуокружнос-
полуокружности а на все точки некоторой прямой у, параллельной х и лежащей выше
полуокружности а.
Тогда порядок следования точек неевклидовой прямой а соответ-
соответствует порядку следования образов этих точек на прямой у. Попутно
докажем, что все точки любой неевклидовой прямой а находятся во
взаимно однозначном соответствии с множеством всех веществен-
вещественных чисел.
Нам еще следует проверить аксиому II, 4 Паша, но доказательство
этой аксиомы является наглядно вполне очевидным, и мы его опустим.
Теперь мы перейдем к определению соотношения «конгруэнтен». В
надлежащем его определении и состоит остроумие модели Пуанкаре.
Не вдаваясь в детали, остановимся на основных идеях определения это-
этого соотношения.
Введем в рассмотрение специальное преобразование евклидовой
плоскости, известное под названием инверсии. Пусть фиксирована про-
произвольная окружность радиуса г с центром в точке А. Инверсией отно-
относительно указанной окружности называется такое преобразование
222 ПРИЛОЖЕНИЕ. ПРОБЛЕМЫ ОСНОВАНИЙ ГЕОМЕТРИИ
точек плоскости, при котором любая, отличная от А точка плоскости М
переходит в точку М', лежащую на одном с точкой М луче, выходящем
из А, и такую, что выполнено условие AM' • AM = r .
Назовем неевклидов отрезок АВ конгруэнтным неевклидову отрез-
отрезку А'В\ если существует такая последовательность инверсий, что их
произведение отображает евклидову круговую дугу АВ в круговую дугу
А'В'.
Неевклидовым углом будем называть совокупность двух неевклидо-
неевклидовых полупрямых, исходящих из одной точки.
Назовем неевклидов угол Z(h', k ') конгруэнтным неевклидову углу
Z(h, k), если существует такая последовательность инверсий, что их
произведение отображает стороны первого угла на стороны второго.
После принятых определений проверка аксиом конгруэнтности III, 1-5
превращается в техническую работу, которую мы можем опустить.
Проверка аксиомы Архимеда IV, 1 также не вызывает никаких труд-
трудностей и использует лишь свойства инверсий.
Последняя аксиома абсолютной геометрии — аксиома полноты IV, 2
справедлива вследствие того, что (как это установлено выше) между
всеми точками любой «неевклидовой прямой» и всеми вещественными
числами можно установить взаимно однозначное соответствие (см. вто-
вторую основную теорему из п. 5 § 1).
Итак, для нашей модели справедливы все аксиомы абсолютной гео-
геометрии (I, 1-3, II—IV).
Как же обстоит дело с аксиомой параллельности V ? Возьмем любую
«неевклидову прямую», изображаемую полуокружностью а, и любую
точку Л, ей не принадлежащую. Легко проверить, что через точку Л про-
проходит бесконечно много различных полуокружностей, имеющих цент-
центры на прямой х и не имеющих общих точек с полуокружностью а.
Это означает, что в рассматриваемой нами модели справедлива ак-
аксиома параллельности Лобачевского.
Тем самым мы завершили доказательство непротиворечивости пла-
планиметрии Лобачевского и одновременно показали, что аксиома парал-
параллельности V Евклида не является следствием аксиом I, 1-3, II—IV абсо-
абсолютной геометрии.
§ 4. Заключительные замечания
о проблемах аксиоматики
При изучении любой системы аксиом естественно возникают следую-
следующие три проблемы: 1) проблема непротиворечивости системы аксиом;
2) проблема минимальности системы аксиом (выясняющая вопрос о том,
не является ли каждая из рассматриваемых аксиом следствием осталь-
остальных); 3) проблема полноты системы аксиом (принято систему аксиом
§ 4] ЗАКЛЮЧИТЕЛЬНЫЕ ЗАМЕЧАНИЯ О ПРОБЛЕМАХ АКСИОМАТИКИ 223
называть полной, если между элементами двух любых ее реализаций
можно установить взаимно однозначное соответствие, сохраняющее ус-
установленные между элементами соотношения).
В § 3 и 4 мы установили непротиворечивость системы аксиом как
геометрии Евклида, так и геометрии Лобачевского.
Проблема минимальности системы аксиом геометрии является
очень трудоемкой и требует обстоятельного исследования. Примером
такого исследования является установленный нами факт, что аксиома
параллельности V не является следствием остальных аксиом.
Полнота системы аксиом геометрии устанавливается посредством
введения для любой реализации координатной системы и последующе-
последующего установления взаимно однозначного соответствия (с сохранением всех
соотношений) между точками, прямыми и плоскостями данной реализа-
реализации (в координатной записи) и декартовой реализации, изученной в § 2.
Учебное издание
ИЛЬИН Владимир Александрович
ПОЗНЯК Эдуард Генрихович
АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ
Серия: «Курс высшей математики и математической физики»
Редактор Д.А. Миртова
Оригинал-макет: О.А. Пелипенко
ЛР №071930 от 06.07.99. Подписано в печать 04.06.04.
Формат 60x90/16. Бумага офсетная. Печать офсетная.
Усл. печ. л. 14. Уч.-изд. л. 15,76. Заказ №
Издательская фирма «Физико-математическая литература»
МАИК «Наука/Интерпериодика»
117997 Москва, ул. Профсоюзная, 90
E-mail: fizmat@maik.ru, fmlsale@maik.ru
http://www.fml.ru
Отпечатано с готовых диапозитивов в ПФ «Полиграфист»
160001, г. Вологда, ул. Челюскинцев, 3
Тел.: (8172) 72-55-31, 72-61-75, факс: (8172) 72-60-72
E-mail: form.pfp@votel.ru http://www.vologda/~pfpv
ISBN 5-9221-0511-6
9 785922 1051 18