/
















































































































































































































































































Текст
СБ.ОЛЫПАМОВСКИЙ
СУДОВОЖДЕНИЕ
И ПРАВИЛА
ПЛАВАНИЯ
ПО ВНУТРЕННИМ
СУДОХОДНЫМ
ПУТЯМ
С. Б. Ольшамовский
СУДОВОЖДЕНИЕ
И ПРАВИЛА
ПЛАВАНИЯ
ПО ВНУТРЕННИМ
СУДОХОДНЫМ
ПУТЯМ
Издание третье, переработанное
и дополненное
Допущено Управлением кадров
и учебных заведений Минречфлота
в качестве учебника для речных училищ
и техникумов
МОСКВА • «ТРАНСПОРТ» • 1976
SCANNED by Е69 • 2017
УДК 656.62.052(075.3) + 351.813.22 (075.3)
Судовождение и правила плавания по внутренним судоходным
путям. Изд. 3-е, перераб. и доп. Ол ьш амовс ки й С. Б. М.,
«Транспорт», 1976 г., 296 с.
В книге рассмотрены методы судовождения на реках, каналах,
водохранилищах, • озерах и при плавании в прибрежно-морских
районах, их теоретическое обоснование. Изложены правила пла-
вания по внутренним судоходным путям и приводятся рекомен-
дации по обеспечению безопасности движения судов и составов.
Учебник рассчитан на учащихся речных училищ и техникумов.
Он может быть полезен командному составу судов, работникам
судоходных инспекций и студентам институтов водного транспорта.
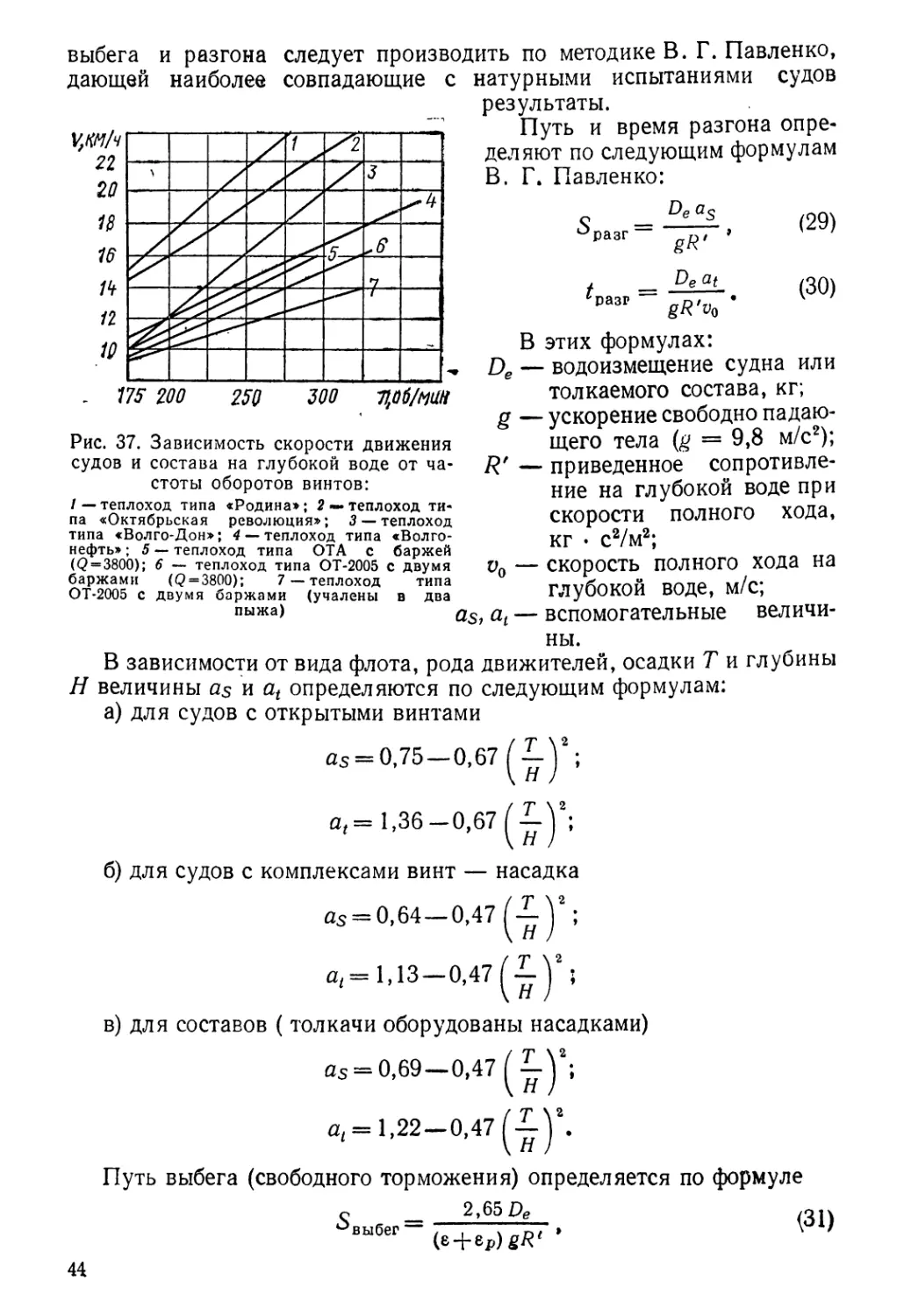
Рис. 222, табл. 41, список лит. 32 назв.
Первое издание учебника вышло в 1965 г. под названием «Судо-
вождение на внутренних водных путях».
О
31807—334
049(01) — 76
334-76
© Издательство «Транспорт», 1976.
ОТ АВТОРА
За годы социалистического строительства в СССР судоходство на
внутренних водных путях получило значительное развитие. При об-
щем увеличении судоходных водных путей более чем в 2,3 раза их
длина с гарантированными глубинами увеличилась более чем
в 7 раз.
Протяженность рейса современного речного судна превышает за-
частую 4—5 тыс. км, грузоподъемность толкаемых составов достигает
27 тыс. т и более, а скорость отдельных пассажирских судов находится
в пределах 90—100 км/ч.
В основных направлениях развития народного хозяйства СССР
на 1976— 1980 гг. предусматривается проведение на транспорте
мероприятий по дальнейшему повышению безопасности движения.
Плавание речных судов с помощью современных навигационных
приборов осуществляется практически при любой погоде.
Теперь от судоводителей требуются глубокие теоретические и прак-
тические знания вопросов управления судами и составами, высокая
производственная культура, организованность и дисциплина.
«Судовождение и правила плавания на внутренних водных путях» —
ведущая дисциплина при подготовке судоводителей, в которой изу-
чаются вопросы управления судами и составами в соответствии с тре-
бованиями Правил плавания.
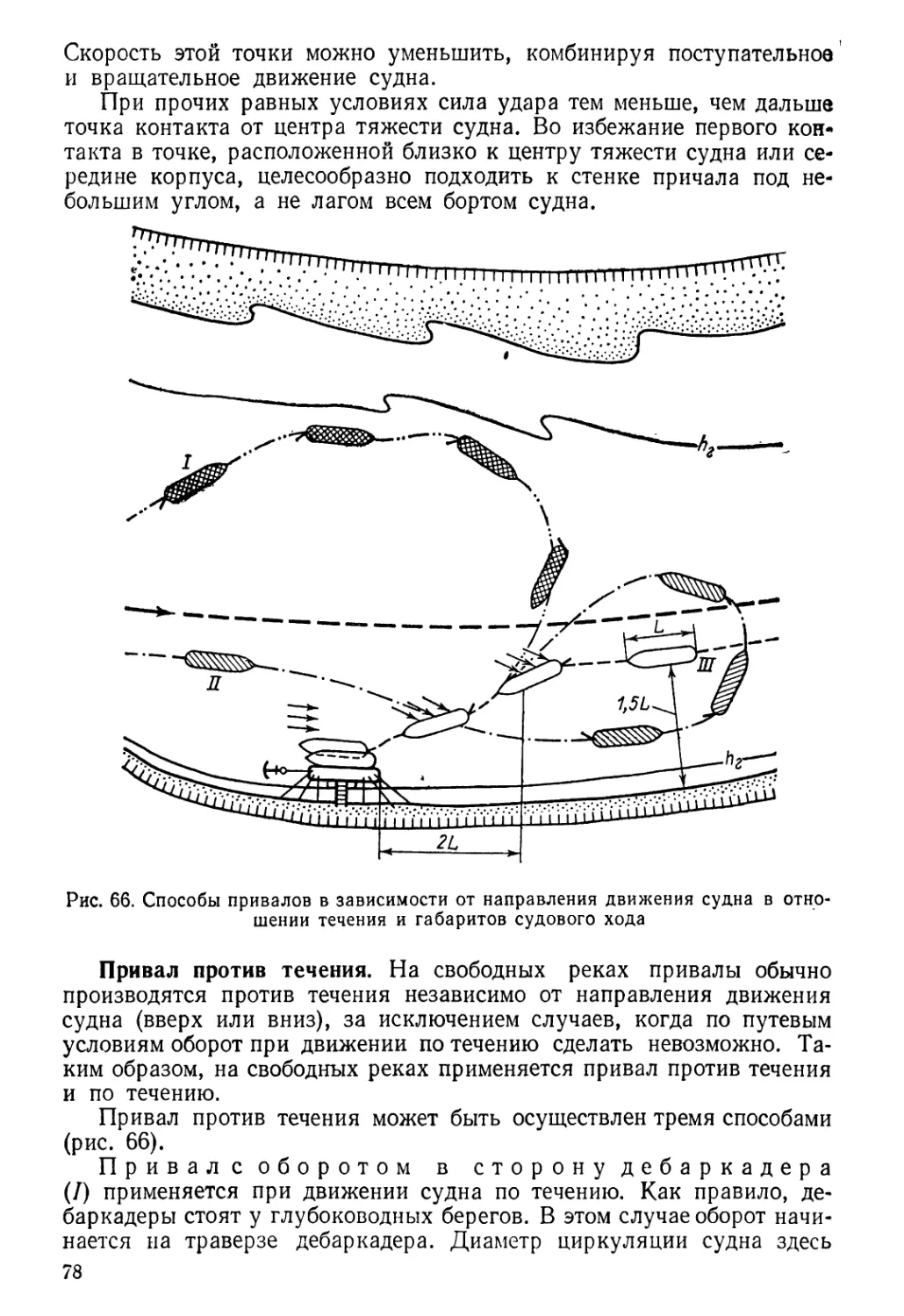
Движение судов и составов подчинено физическим законам, поэто-
му в дисциплине важное место отводится изучению сил и моментов,
действующих на судно, их влиянию на параметры движения су-
дов.
В широком смысле управление судном означает целенаправленное
воздействие судоводителя на органы управления ( рулевое устройство,
3
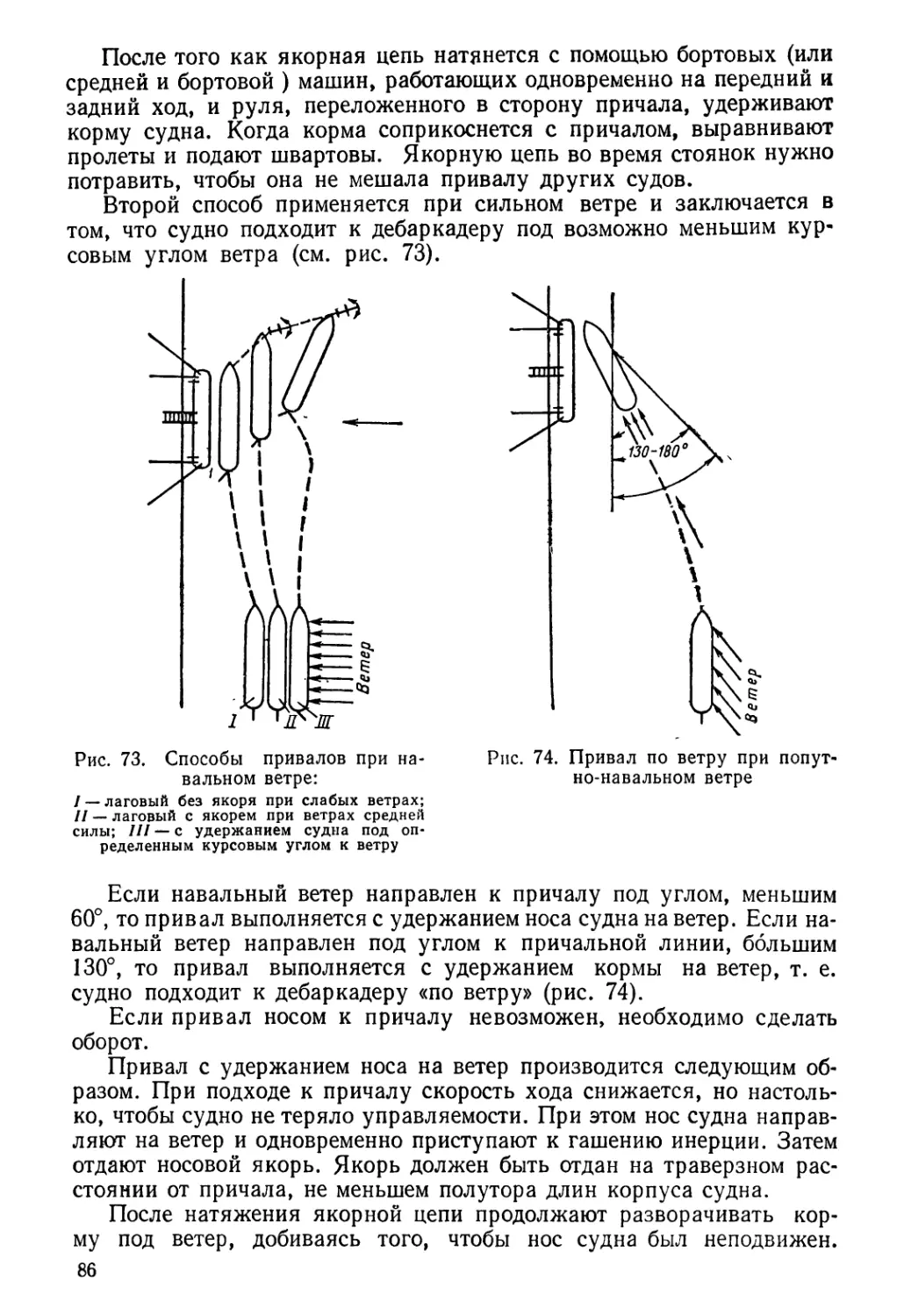
движители и др.), производимое с учетом закономерностей движения
своего и других судов в определенных условиях плавания для дости-
жения наибольшей безопасности и скорости движения. Поэтому ква-
лификация судоводителя находится в прямой зависимости от знаний
специальной и общей лоций, маневренных качеств своего и других су-
дов (составов), общих и местных правил плавания, методов судовож-
дения и приемов управления судами и т. п.
В книге автор старался отразить передовой опыт судоводителей-
новаторов по управлению судами и составами, а также результаты на-
учных исследований в области судовождения.
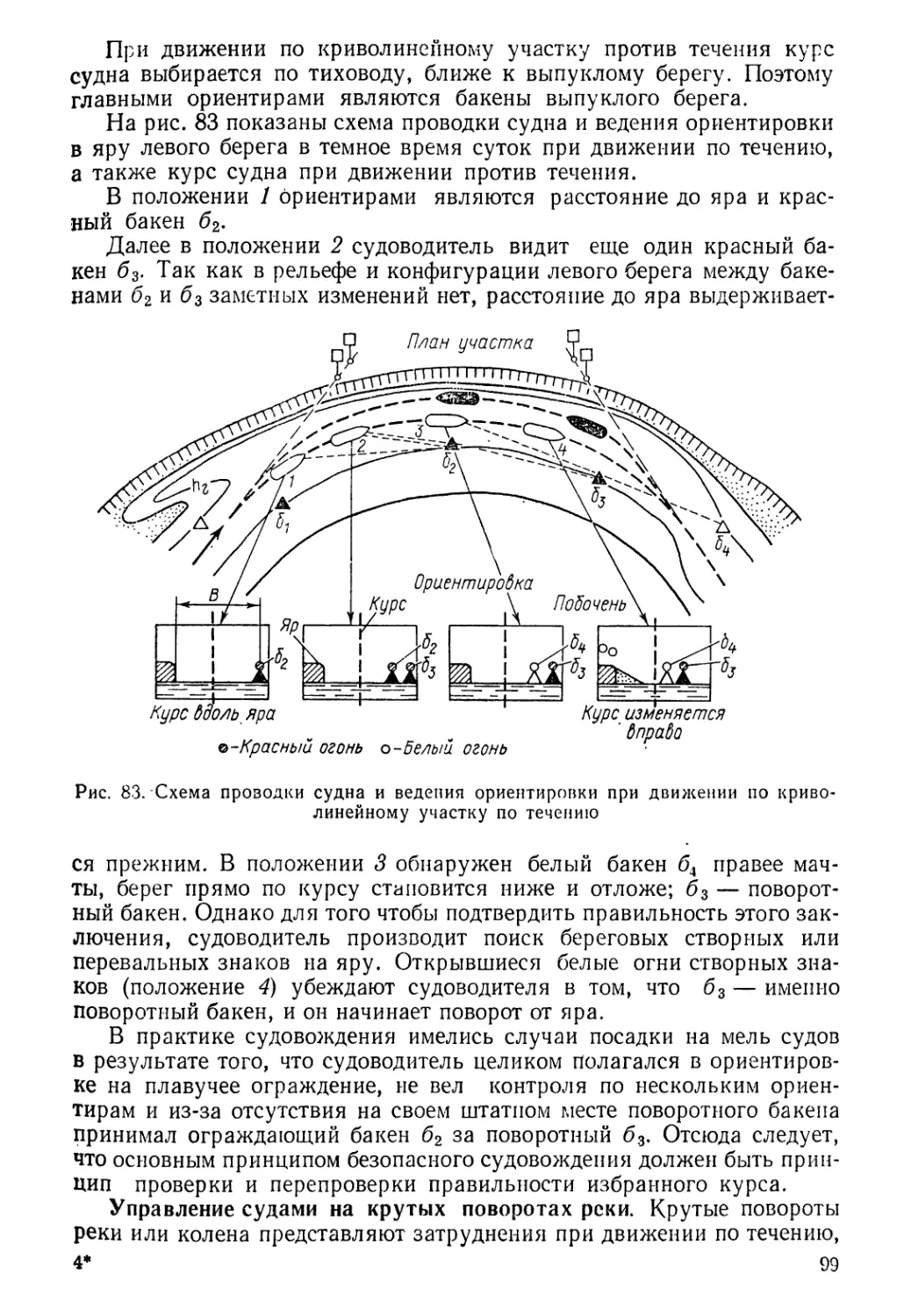
По сравнению со вторым изданием книга дополнена новыми мате-
риалами.
Глава I
МЕТОДЫ СУДОВОЖДЕНИЯ.
ОСНОВЫ УПРАВЛЯЕМОСТИ СУДОВ
§ !. СОВРЕМЕННЫЕ МЕТОДЫ
СУДОВОЖДЕНИЯ
При плавании на реках, водохранилищах, озерах и в прибрежно-
морских районах применяются следующие методы судовождения:
глазомерный, глазомерно-радиолокационный, глазомерно-навигацион-
ный, навигационный, глазомерно-ифралокационный, радиолокацион-
ный, радионавигационный, электронавигационный, инерциально-на-
вигационный.
На реках и водохранилищах основными являются глазомерный
метод при хорошей видимости огней и знаков и глазомерно-радиоло-
кационный метод при неудовлетворительной видимости, на крупных
озерах и в прибрежно-морских районах — навигационный и радиона-
вигационный, а при неудовлетворительной видимости —радиолока-
ционный.
Глазомерный метод. Основу глазомерного метода судовождения
составляет непрерывное наблюдение за окружающей навигационной
обстановкой и поведением своего судна или состава для определения
местоположения судна относительно оси судового хода, выбора курса
или направления движения. Местоположение определяется по ориен-
тирам: знакам судоходной обстановки, характерным особенностям ме-
стности, наблюдаемой судоводителем.
В зависимости от положения ориентиров относительно курса судна
различают три способа глазомерной ориентировки: с круговым об-
зором; с фронтальным обзором; с секторным обзором.
При круговом обзоре судоводитель наблюдает ориентиры на кур-
совых углах от 0 до 180° левого и правого борюв, при фронтальном
обзоре — на курсовых углах от 0 до 90° обоих бортов, при секторном
обзоре на курсовых углах от 0 до 10° наблюдаются ориентиры, находя-
щиеся впереди мачты судна внутри конуса острого зрения.
Наиболее острое зрение лежит в пределах конуса с углом 3—6°.
Однако зрение совершенно удовлетворительно и в пределах угла,
равного 20°.
Каждому виду ориентировки соответствуют различное время и,
стало быть, частота коррекции курса и точность вождения судна.
Точность проводки судна при глазомерном методе уменьшается
с удалением ориентиров и зависит от ширины и кривизны судового
хода.
5
В табл. 1 приведены экспериментальные данные о точности провод-
ки судов, характеризуемые величиной среднеквадратических ошибок в
при различной ширине судового хода на прямолинейных участках
пути.
Таблица 1
Ширина судового хода 13^ х « м 100 — 200 200-300 300 — 400 400 — 500
Среднеквадратическая ошибка а, м 15 30 45 | 60
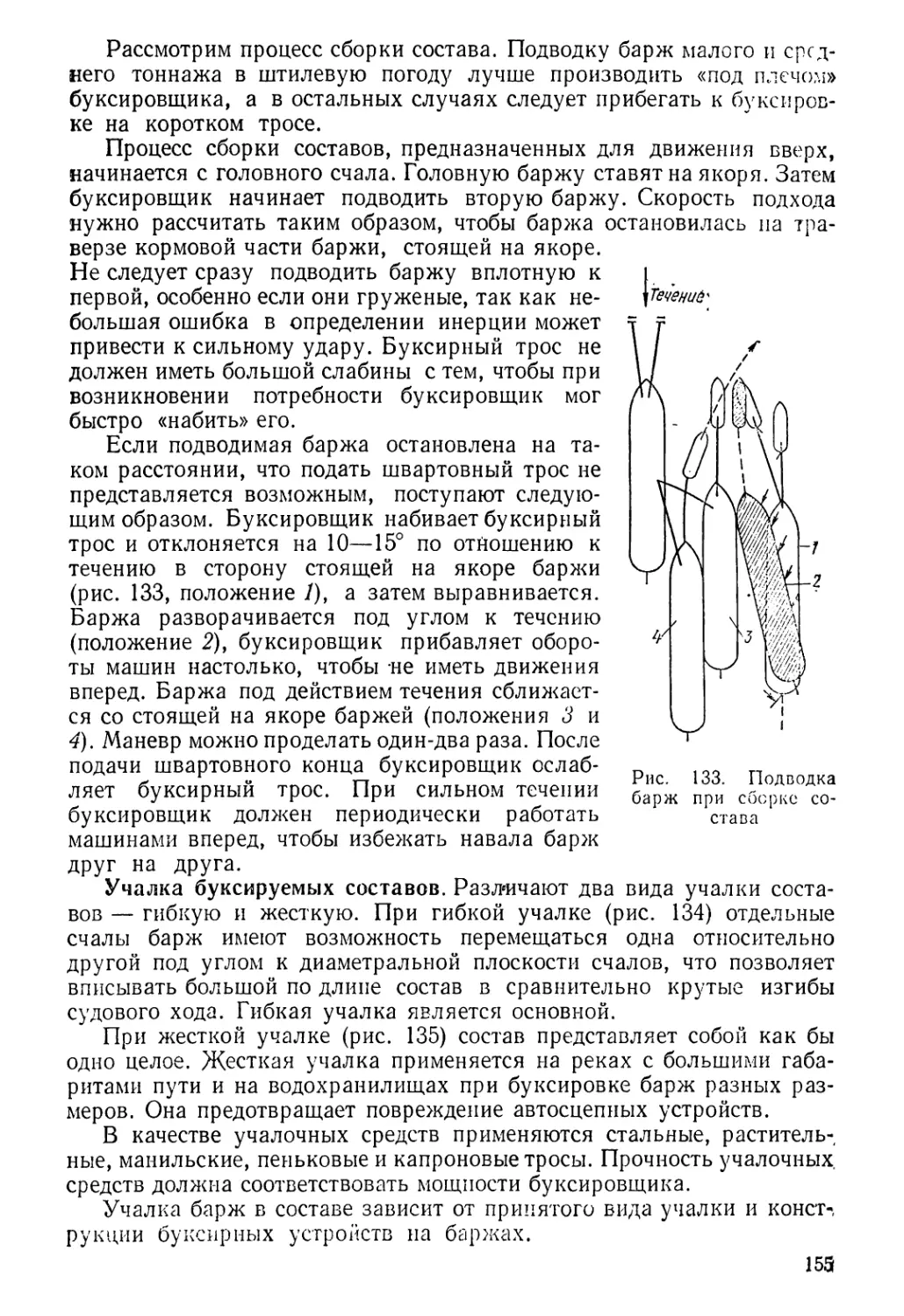
В табл. 2 приводятся величины а возможных уклонений судов от
оси судового хода на поворотах из-за запаздывания времени поступ-
ления информации об ориентирах. Здесь же приводится время, затра-
чиваемое судоводителем на каждый цикл ориентировки при различных
ее видах, /ор.
Таблица 2
Тип судна Скорость хода, км/ч Круговой обзор Фронтальный обзор Секторный обзор
f, G а9 м *ОР’ с at м *сек’ с а, м
«Ракета» 60 12 84 1,76 4,0 0,8 2,0
«Родина» 25 12 25 1,76 1,0 0,8 0,5
Состав 10 12 5 1,76 0,5 0.8 0,1
Ориентировка с круговым обзором является основной и обеспечи-
вает необходимую точность при проводке составов, для одиночных су-
дов основным видом ориентировки служит фронтальный обзор, а для
скоростных судов — секторный.
Глазомерно-радиолокационный метод. На индикаторе кругового
обзора судоводитель видит светоплан окружающей местности, опоз-
нает ориентиры, определяющие судовой ход, и глазомерно оценивает
положение центра развертки (местонахождения своего судна) в отно-
шении оси судового хода. Положение курсовой черты, указывающее
направление движения судна, сравнивается с направлением оси судо-
вого хода и производится корректировка курса судна. Рулевой удер-
живает заданное направление движения с помощью компаса. Судово-
дитель должен вести непрерывную глазомерно-радиолокационную
ориентировку, возможно чаще уточняя курс. Время для производства
одного цикла ориентировки
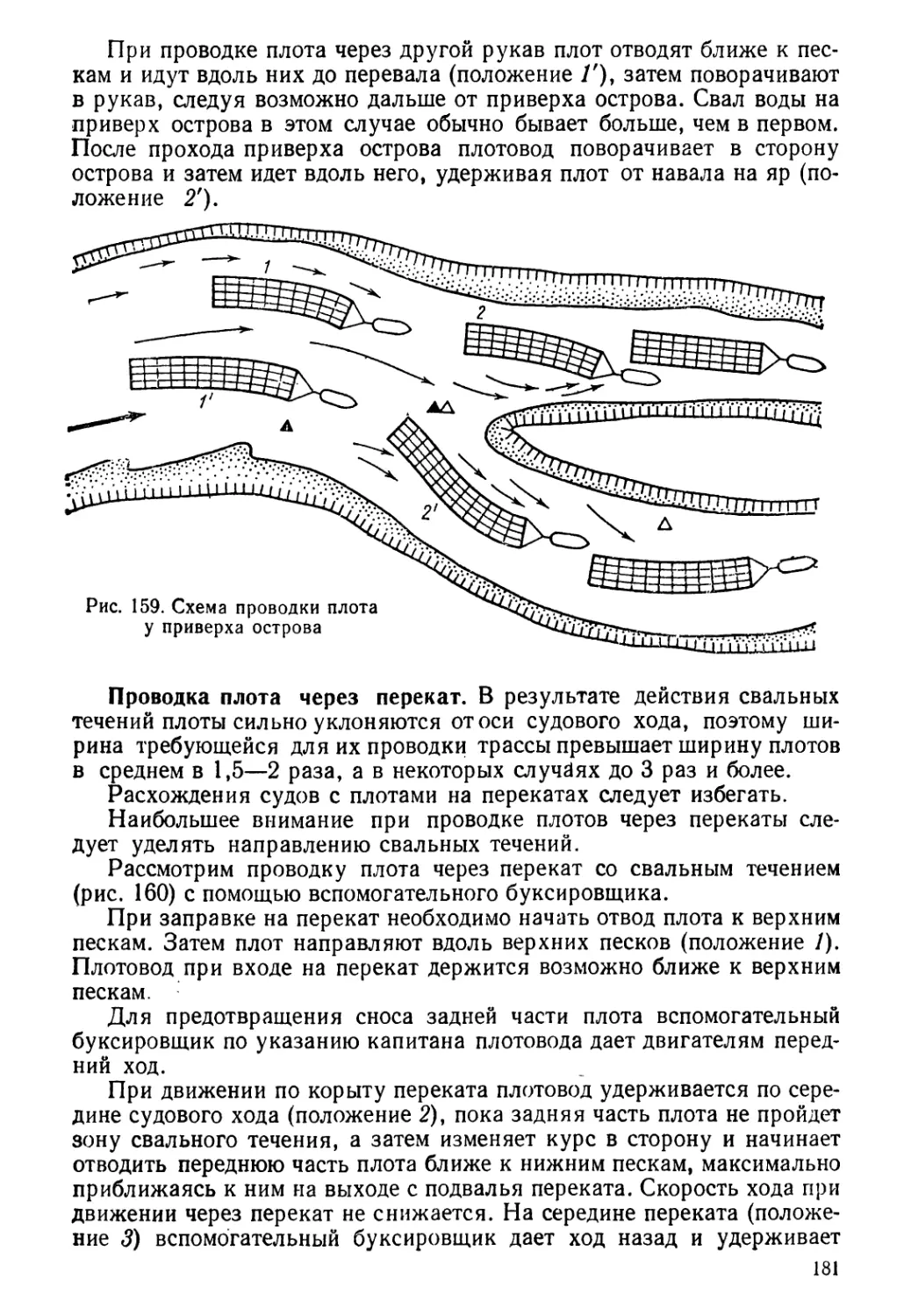
^р. о = ^рлс + ^0 4“ “Ь ^02» 0)
где ^рлс — время, необходимое для образования радиолокационного
изображения местности на индикаторе РЛС — светоплана
(/рлс = k, здесь п — число оборотов антенны в минуту,
k = 1,5 4- 2 — коэффициент, учитывающий послесвече-
ние экрана);
/0 — время опознавания ориентира на индикаторе РЛС;
— время реакции на ориентир и подачи команды;
/г2 — время реакции рулевого на поданную команду о новом
курсе.
Среднеквадратические ошибки при проводке судна данным ме-
тодом на речных участках с помощью РЛС «Донец-2» составляют 20—
25 м.
В табл. 3 приведены величины возможных уклонений судов от оси
судового хода при различных радиусах кривизны 7? и углах поворота а,
если они управляются с помощью РЛС «Донец-2».
Таблица 3
Тип судна Скорость хода, км/ч Уклонения а, м, при радиусах кривизны R, м, и углах поворота а, град
400 600 800
30 60 90 30 60 | 90 30 | 60 90
«Ракета» 60 100 144 167 98 141 159 92 139 158
«Родина» 25 36 50 56 35 49 55 34 50 55
Состав 10 20 29 32 22 28 32 20 26 31
С увеличением кривизны судового хода и углов поворота укло-
нения увеличиваются. Большие величины уклонений теплоходов «Ра-
кета» и «Родина» свидетельствуют о том, что частота информации РЛС
«Донец» недостаточна для безопасной проводки этих судов без значи-
тельного снижения скорости. В настоящее время суда оборудуются
радиолокатором Р-722-2 с повышенной частотой информации, лишен-
ным вышеотмеченного недостатка.
Глазомерно-инфралокационный метод. На экране прибора ночного
видения, работающего в диапазоне инфракрасных лучей, судоводитель
видит фотографическое черно-белое изображение местности. Ориенти-
ровка осуществляется так же, как и при глазомерном методе. Она не
зависит от освещенности атмосферы и может производиться ночью
и днем. К недостаткам метода относится невозможность отличить по
цвету белые и красные бакены и буи, резкое уменьшение дальности
видимости при туманах. Сектор обзора современного прибора ночного
видения «Мгла» составляет 10°, а дальность действия при чистой ат-
мосфере до 1,5 км. Прибор практически безынерционен, поэтому точ-
ность этого метода судовождения близка к точности глазомерного.
В ближайшем будущем следует ожидать появление светолокационного
метода судовождения. Работающие на лазерах светолокаторы уже на-
шли применение в авиации.
Глазомерно-навигационный метод. При плавании на водохранили-
щах и плесовых участках рек в условиях пониженной видимости на
участках, где судовой ход значительно удален от берега, ориентиры
визуально не обнаруживаются. Глазомерным способом вести судно
становится невозможно, хотя дальность видимости позволяет своевре-
менно обнаруживать встречные суда и расходиться с ними. В таких
7
случаях применяется глазомерно-навигационный метод судовожде-
ния.
При входе на прямолинейный участок судоводитель определяет
ось судового хода, выводит на нее судно и замечает время и компас-
ный курс. При утрате глазомерной ориентировки судно следует ком-
пасным курсом. В конце прямолинейного участка судно приближается
к берегу или к знакам судоходной обстановки, и судоводитель восста-
навливает глазомерную ориентировку. С выходом на новый прямо-
линейный участок поступают аналогично.
Величина уклонения в конце прямолинейного участка будет зави-
сеть от точности определения угла между осью судового хода и линией
курса при входе на прямолинейный участок, величины пройденного
расстояния и точности удержания судна на курсе. Точность опреде-
ления угла между осью судового хода и линией курса около 1—2\
Величина уклонения судна (в м) от оси судового хода в конце прямо-
линейного участка составит
а = (0,020-4-0,035)L, (2)
где L — длина прямолинейного участка, м.
На каждый километр пройденного пути судно отклоняется на 20—
35 м. Исходя из точности метода, ширины судового хода и скорости
движения судна можно определить максимальный интервал (в мин)
между двумя последующими глазомерными ориентировками:
/ ^с.х — 2ДВ
где Вс>х — ширина судового хода участка, м;
АВ — минимальное расстояние, на которое можно приближать-
ся к границе судового хода (АВ = 25 м);
v — скорость движения судна, км/ч.
В табл. 4 приведены величины возможных уклонений судна от оси
судового хода а, максимальный интервал между двумя последующими
ориентировками и безопасная длина прямолинейного участка, прохо-
Если на судне есть РЛС, при ухудшении видимости нужно перехо-
дить на более точный глазомерно-радиолокационный метод.
Радионавигационные методы. Сущность радионавигационных ме-
тодов судовождения состоит в определении места судна с помощью ра-
8
диотехнических средств (РТС), расположенных на судне и на берегу
или искусственных спутниках земли. РТС судовождения бывают:
угломерные или азимутальные, дающие возможность измерять
пеленги на источник излучения радиоволн. К ним относятся радио-
пеленгаторы и радиомаяки направленного действия;
дистанционные или дальномерные, дающие возможность измерять
расстояния до источника излучения радиоволн. К ним относятся радио-
дальномер, радиол аг;
разностно-дистанционные, или гиперболические, дающие возмож-
ность измерять разность расстояний до двух береговых станций. К ним
относятся фазовые и импульсные радионавигационные системы (РНС).
В первых разность расстояний измеряется по разности промежутка
времени между моментами прихода радиоимпульсов, а во вторых — по
разности фаз.
В морской навигации получила широкое распространение отечест-
венная РНС «Координатор», работающая в диапазоне средних волн.
Приемниками сигналов радионавигационных систем на судах явля-
ются «Пирс-1» и «КПИ-4».
В табл. 5 приведена характеристика зарубежных РНС.
Таблица 5
Год пост- ройки Система Точность, км Дальность действия, км Зона действия Частота ра- диосигнала, кГц
1947 «Декка» 0,4—0,6 450 Воды Европы, побережья Индийского и Тихого океа- нов 100
1948 «Лоран-А» • 2—10 1300 Районы северного полушария 1850 1900 1950
1957 «Лоран-С» 0?5—2 2400 То же 100
1967 Система спутни- ков 0,02—0,5 — Весь земной шар 400
1973 «Омега» 1—4 11000 То же 10,2 11,33 13,6
Наибольшей точностью определения места судна обладает спут-
никовая радионавигационная система. Поэтому в будущем она явится
наиболее перспективной для использования при плавании в прибреж-
но-морских районах, на озерах, водохранилищах и шлюзованных ре-
ках.
В навигацию 1962 г. фазовая система применялась на Волге для
записи траектории движения теплохода типа «Ракета» во время опыт-
ных ночных рейсов. Принцип работы фазовой системы состоит в сле-
дующем. На берегу устанавливается цепь четырех радиостанций —
одной ведущей и трех ведомых, работающих синхронно. Ведущая
станция располагается в центре, а ведомые — в вершинах прибли-
9
зительно равностороннего треугольника. Все станции цепи работают
непрерывно. Сигналы ведущей станции принимаются ведомыми, затем
трансформируются в строго определенном соотношении и снова излу-
чаются в атмосферу.
На судне сигналы ведущей и ведомых станций принимаются при
помощи специального многоканального приемника, имеющего несколь-
ко (по числу станций) измерителей разности фаз —фазометров.
Линиями равных значений разности фаз являются гиперболы
(рис. 1). По показаниям одного фазометра можно определить лишь но-
мер гиперболы линии положения судна, т. е. установить, что судно
находится где:то^а линии т — п. Для того чтобы определить место
нахождения суднй, нужно определить как минимум две гиперболы,
Рис. 1. К принципу работы фазовой
радионавигационной системы:
А — ведущая радиостанция; В, С ведо-
мые радиостанции; т — п — линия равных
разностей фаз от А и В; mлиния
равных разностей фаз от Л я С; Dit D2 —
расстояния от радиостанций до судна
Рис. 2. Система спутников:
Pti, P4t4 —» последовательные положения
спутников в моменты /ь t4\
4/ь .... Д/ч — соответствующие интервалы
времени между положениями спутника
для чего следует иметь в тот же момент времени еще одну разность фаз,
которой соответствует другая гипербола. Точка пересечения двух ги-
пербол от трех станций и будет определять местонахождение судна
(см. рис. 1). В практике используются для большей точности три ги-
перболы от четырех радиостанций.
Для непрерывной автоматической записи координат движущегося
судна используются путепрокладчики.
В 1967 г. начала использоваться в навигационных целях система
трех спутников с полярными орбитами (рис. 2), обеспечивающая
зону действия — весь земной шар.
Расстояние — Р^2, пролетаемое спутником за интервал
и равное около 100 км, можно рассматривать аналогичным длине
базовой линии ме^ду ведущей и ведомой станциями в наземной си-
стеме (см. рис. 1). Если измерить в первом интервале разницу времени
прохождения радиосигнала между судном и двумя последователь-
ными положениями спутника, то местоположение судна должно на-
ходиться на поверхности определенного гиперболоида. Во втором
интервале Д/2 получают вторую базовую линию и аналогично опре-
деляют второй гиперболоид. Эти два гиперболоида, пересекаясь с по-
10
верхностью земного шара, образуют две линии, точка пересечения
которых определяет местонахождение судна.
Работа системы зависит от точности сведений о местонахождении
спутника, поэтому со спутника постоянно передается информация о па-
раметрах орбиты.
Электронавигационный метод. Состоит в использовании для оп-
ределения места судна электромагнитного поля, создаваемого перемен-
ным электрическим током с частотой 100—200 Гц, пропускаемым по
кабелю, уложенному на дне водоема.
На судне устанавливается аппаратура, измеряющая величину
горизонтальной и вертикальной составляющих электромагнитного
Ведущий кабель От бортовой электросети
Рис. 3. Схема аппаратуры автоматического управления судном по системе веду-
щего кабеля
поля, усиливающая эти величины и позволяющая по стрелочным ука-
зателям определить положение судна в отношении кабеля. Комплект
этой аппаратуры на судне (рис. 3) состоит из приемной рамки ПР,
представляющей собой крестообразный ферритовый сердечник с двумя
обмотками. В обмотках вертикального стержня сердечника выделяет-
ся вертикальная, а горизонтального — горизонтальная составляющая.
Сигналы усиливаются в усилителе горизонтальной составляющей си-
лового поля УГС в усилителе вертикальной составляющей силового
поля УВС и поступают в индикатор курса ИК и индикатор отклоне-
ния ИО. ИК показывает судоводителю, в какую сторону отклонилось
судно от кабеля, а ИО — на какую величину (в м) оно отклонилось.
На основании этого судоводитель, производит корректировку курса
судна. Это устройство получило название электролоцмана. Принцип
автоматизации управления судном состоит в использовании усиленных
сигналов от электромагнитного поля кабеля для непосредственного
воздействия на рулевой привод. Способ обеспечивает проводку судна
при безветренной погоде с точностью до ±1 м на прямолинейных и 1 —
5 м на криволинейных участках.
11
§ 2. УПРАВЛЯЕМОСТЬ И РУЛЕВЫЕ
УСТРОЙСТВА
Рис. 4. Поворотная направля-
ющая насадка (в неотклонен-
ном положении)
Управляемостью называется качество судна, позволяющее ему
следовать по заданной траектории или менять направление движения
в соответствии с желанием судоводителя. Управляемость в большой
степени зависит от внешних условий плавания судна. Например,
судно, управляемое в условиях спокойной глубокой воды и безветрия,
может оказаться неуправляемым при наличии сильного ветра, волне-
ния, течения или мелководья. В связи с этим следует различать управ-
ляемость на тихой и глубокой воде ( при отсутствии течения и ветра),
управляемость при ветре, на волнении,
на течении, на мелководье, при одно-
временном действии на судно несколь-
ких внешних факторов (течения и ветра
и т. д.). На управляемость оказывает
влияние и загрузка судна.
Понятие «управляемость» объединяет
два свойства судна или состава — по-
воротливость и устойчивость на курсе.
Способность судна изменять направле-
ние своего движения от действия руле-
вых устройств и описывать траектории
заданной кривизны называется . пово-
ротливостью. Способность судна сохра-
нять заданное прямолинейное направ-
ление движения называется устойчи-
востью на курсе.
Управляемость судна обеспечивается рулевыми устройствами.
В настоящее время наиболее распространенными органами управ-
ления судном являются рули, поворотные насадки, реверсивно-руле-
вые и движительно-рулевые устройства. В дополнение к основным ор-
ганам управления устанавливаются подруливающие устройства, ак-
тивные рули и рули заднего хода.
Рули. Современный судовой руль представляет собой крыло
симметричного профиля. При отклонении руля от прямого положения
на нем возникает сила, поворачивающая судно. Рули могут быть про-
стые и балансирные. Как правило, они размещаются за винтами. Ру-
левая сила зависит от скорости хода и режима работы машин.
Поворотные насадки. Поворотная насадка (рис. 4)
представляет собой направляющую насадку гребного винта, укреп-
ленную на вертикальном баллере, ось которого пересекается с осью
гребного вала в плоскости диска винта. Насадка, отклоненная от сред-
него положения, работает как кольцевое крыло, на котором возникает
поперечная боковая сила, вызывающая поворот судна.
Величина поперечной боковой силы, действующей на насадку, в ос-
новном зависит от режима работы движителя. Суда, оборудованные
насадками, имеют хорошую поворотливость на переднем и на заднем
ходу.
12
Для уменьшения рыскливости судна в кормовой части насадки уста-
навливают вертикальное крыло (стабилизатор поворотной насадки)
с симметричным профилем. Высота крыла равна диаметру выходного
сечения насадки. Стабилизатор, как правило, входит внутрь насадки на
расстояние, равное части длины насадки. В последнее время на су-
дах применяют рулевые комплексы, состоящие из поворотных насадок
и поворотных рулей.
Рис. 5. Реверсивно-рулевые
устройства водометных судов с полуподводным вы-
бросом струи:
I — водометная труба; 2 — рули; 3 — каналы заднего хода (и. х. — передний ход; з. х. — зад-
ний ход)
Реверсивн о-p улевые устройства водомет-
ных судов. На судах с водометными движителями применяются
различные конструкции реверсивно-рулевых устройств. Эффектив-
ным реверсивно-рулевым комплек-
сом является устройство, показан-
ное на рис. 5. Оно состоит из руля, I
расположенного в диаметральной
плоскости, и двух створок заднего
хода. При переднем ходе маневри-,
рование производится с помощью]
балансирного руля. Некоторые ре-'
версивно-рулевые устройства не{
имеют руля, и управление судном;
производится поворотом самих
створок.
Движительно-р улевые
устройства. К числу таких
устройств относится крыльчатый
движитель, выполняющий одно-
временно функции движителя и руля (рис. 6). Он представляет собой
диск, установленный в плоской части днища судна и вращающийся
вокруг вертикальной оси. На диске монтируется несколько поворот-
ных крылообразных лопастей, расположенных равномерно по окруж-
ности диска. Лопасти могут поворачиваться вокруг своих продольных
осей при помощи механизма. Каждая лопасть при вращении переме-
Рис. 6. Крыльчатый движитель (рас-
положение на корпусе)
13
щается так, что перпендикуляр к ней все время проходит через одну
и ту же точку, называемую точкой управления. Перемещением точки
управления можно изменять направление упора, создаваемого лопа-
стями, на 360° и менять величину упора от максимального его значения
до нуля без реверса главных двигателей.
Суда с крыльчатыми движителями обладают высокими маневрен-
ными качествами.
Рис. 7. Подруливающее устройство на
теплоходах типа «Родина», построен-
ных в ГДР:
а — поперечный разрез по шпангоуту; б —
сечение по электромотору
Подруливающие устройства. В последнее время
новые крупные суда речного и морского флота оснащаются подрули-
вающими устройствами, которые в зависимости от места установки
на судне разделяются на носовые и кормовые. По принципу действия
подруливающие устройства могут быть реактивными (водометными)
и активными. Первые получили большее распространение на самоход-
ных отечественных и зарубежных судах, вторые — на толкаемых со-
ставах за рубежом.
Реактивные подруливающие устройства работают по принципу
водомета, т. е. упор создается за счет реактивного действия струи,
отбрасываемой движителем.
В нашей стране установка подруливающих устройств впервые была
осуществлена на пассажирских дизель-электроходах типа «Ленин»
14
мощностью 2700 л. с. Подруливающая установка состоит из двух ре-
активных подруливающих устройств — носового и кормового.
На теплоходах типов «Родина», «Октябрьская революция», «Вол-
го-Дон», «Волгонефть» и др. имеются только носовые подруливающие
устройства, установленные ниже грузовой
ватерлинии (рис. 7). Управление под-
руливающим устройством производится из
рубки.
Подруливающее устройство активного
действия (рис. 8) представляет собой вер-
тикальный вал, установленный в диамет-
ральной плоскости носовой части баржи.
На нижнем конце вертикального вала
установлен горизонтальный вал с винтом.
С помощью дополнительного устройства
винт можно поворачивать на 360° и, сле-
довательно, изменять направление упора
подруливающего устройства.
Активный руль. ~
обычных рулей на активном
лен вспомогательный винт.
Фланкирующие
рули заднего хода. Впереди каж-
дого винта на одинаковом расстоянии от
вала устанавливается по два руля заднего хода в дополнение к одно-
му основному рулю, расположенному позади винта. Эти рули полу-
чили широкое распространение на толкачах в США.
Рис. 8. Подруливающее уст-
ройство в носовой части
баржи толкаемого состава
В отличие от
руле установ-
р у л и, или
§ 3. ВЛИЯНИЕ РУЛЯ НА
УПРАВЛЯЕМОСТЬ СУДНА
Силы, действующие на судно при перекладке руля на переднем ходу.
При движении судна по прямой линии и положении руля в диаметраль-
ной плоскости сила упора движителей уравновешивается силами со-
противления воды движению корпуса судна (течение и ветер отсут-
ствуют). Руль и корпус судна симметрично обтекаются встречными
струями воды, и никаких сил, отклоняющих судно, не возникает.
При перекладке руля на некоторый угол со стороны, обращенной
к обтекаемому потоку, на руле образуется повышенное давление, а
на противоположной стороне руля — пониженное.
Разность давления на сторонах руля создает силу Р (рис. 9) дав-
ления на перо руля, зависящую от скорости натекания воды на руль,
угла перекладки, формы и площади руля.
После перекладки руля судно некоторое время по инерции про:
должает двигаться прямолинейно, а затем поворачивается в сторону
перекладки руля.
Рассмотрим действие силы Р на судно в первый момент после пере-
кладки руля.
15
Разложим силу Р (см. рис. 9) по правилу параллелограмма на две
составляющие силы: Ру, перпендикулярную диаметральной плоскости
судна (рулевую силу), и Рх, направленную по диаметральной плоско-
сти. Приложенные в центре тяжести (ц. т.) судна две противоположно
направленные силы PL и Р2 равны по величине силе Ру и параллель-
пару сил. Поворачивающий момент
/Ир этой пары сил называется мо-
ментом руля:
/Ир = Руа, (4)
где а — плечо пары сил Ру и Р2
(можно принимать, что а равно
половине длины судна L).
Силу Ру при движении пря-
мым курсом определяют по фор-
муле
= SD(M)2(a + ₽c),
(5)
где k} — коэффициент, учитывающий увеличение рулевой силы от
постановки на руль рулевых шайб (ft, = 1,15 4-1,20, т. е. ру-
левая сила от постановки шайб увеличивается на 15—20%);
k2 — коэффициент, учитывающий влияние близости пера руля
к корпусу судна (k2 = 1,05 4- 1,3; при меньшем зазоре меж-
ду рулем и корпусом берется большее значение);
ср — угловой коэффициент, определяемый по формуле
ны ей.
а.
Pf
/Уд
Нис. 9. Силы, действующие на судно
в первый момент после перекладки
руля:
Р — сила давления воды на перо руля;
— сила упора движителей; Мр — пово-
рачивающий' момент (момент руля); R—
сила сопротивления воды
у и Р2
А
~ Pz
/ (в этой формуле ftp — высота пера руля, м);
р — массовая плотность воды (для пресной воды р=з
= 102 кгс • с2/м4);
Sp — площадь пера руля, м2;
k„ — коэффициент, учитывающий изменение скорости натекания
воды на руль, от действия гребного винта и корпуса судна
(k„ — 1,104-1,55; большие значения берутся при толкании
составов, меньшие—для одиночных судов);
v — скорость натекания воды на руль, м/с;
а — угол перекладки руля, град;
рс — угол скоса потока воды за кормой, вызванного обводами
корпуса судна. (У одновинтовых и трехвинтовых судов
Рс = 2—4°, у двухвинтовых судов с двумя рулями Рс — 0,
так как увеличение рулевой силы от скоса потока одного
руля компенсируется уменьшением рулевой силы другого
руля).
Из рис. 9 видно, что при перекладке руля на судно начинают дей-
ствовать поворачивающий момент /Ир, направленный в сторону откло-
16
Рис. 10. Силы, действующие
на судно после перекладки
руля:
С — центробежная; R — сопро-
тивления воды; Мр — момент
руля
нения руля, сила Ру, смещающая судно в сторону, противоположную
повороту, и сила Рх9 увеличивающая сопротивление воды движению.
Увеличение сопротивления судна при перекладке руля уменьшает
скорость движения, поэтому при движении постоянным курсом
следует избегать частых перекладок руля. При движении по прямой
и углах перекладки руля на 5° падение скорости составляет около 2%,
на 10° — 3%. Практически опытные рулевые при движении постоян-
ным курсом в среднем отклоняют руль не более чем на 0,8—1,0°, и по-
тери скорости при этом не превышают
0,5 — 0,6%.
Смещение или дрейф судна в сторо-
ну, противоположную повороту руля,
достигает наибольшего значения в кор-
мовой части судна. Это обстоятельство
необходимо учитывать при выполнении
поворотов вблизи причалов,* судов или
отмелей.
После преодоления сил инерции суд-
но начинает двигаться по криволиней-
ной траектории (рис. 10). В это время
на судно, как на всякое тело, движу-
щееся по кривой, начинает действовать центробежная сила С,
направленная в сторону, противоположную повороту. Эта сила
приложена в центре тяжести судна. Она пропорциональна массе суд-
на /и, квадрату скорости vc поступательного движения и обратно про-
порциональна радиусу кривизны траектории движения г:
На корпусе судна происходит перераспределение гидродинамиче-
ских сил сопротивления воды. Увеличивается давление воды на наруж-
ный борт. Струи воды набегают на наружный борт под некоторым углом
к диаметральной плоскости, поэтому равнодействующая сил сопротив-
ления воды R будет направлена под углом к диаметральной плоскости
судна. Точка приложения силы R смещается в сторону набегающего
потока тем больше, чем больше скорость движения и угол натекания
струй на корпус судна. Как показывают модельные испытания, она на-
ходится в носовой части судна на расстоянии около - длины корпуса
от форштевня.
Приложим в центре тяжести судна две противоположно направ-
ленные силы 7?! и R2 (см. рис. 10), равные и параллельные силе R.
Силы R и образуют пару сил, поворачивающий момент Л1п, называ-
емый позиционным моментом:
Мп = Rb. (8)
'С и6йвлеййём "углойой скорости поворота на судно действуют мо-
м^вд.,руля2 н дозициОнфш момент.
17
Рис. И. Силы, действующие на
судно в первый .момент после пере-
кладки руля на заднем ходу
слушаться руля и может потерять
Величина позиционного момента зависит от формы и габаритов
корпуса судна, скорости движения судна и угловой скорости поворота.
Изменением скорости (оборотов двигателя) после начала поворота мож-
но изменить величину позиционного момента, т. е. уменьшить или уве-
личить радиус поворота.
Вращательное движение судна вызывает появление момента со-
противления воды вращению, который носит название демпфирующего
момента Этот момент направлен в сторону, противоположную на-
правлению вращения судна. Об-
щий момент Л40б, действующий
на судно, будет равен
Моб=Мр + Л4п--Мя. (9)
^Силы, действующие на судно
при перекладке руля на заднем
ходу. После остановки движите-
лей давление воды на руль резко
уменьшается. С уменьшением
скорости судно начинает плохо
управляемость. При работе винта
назад на стороне руля, обращенной к винту, создается пониженное
давление, поэтому при руле, переложенном вправо, судно уклоняется
влево, и наоборот (т. е. корма судна отклоняется в сторону отклоне»
ния руля). Сила давления на руль при движении задним ходом в пер-
вый момент перекладки руля определяется по формуле
PV = cy^SDv\ . (10)
Рассмотрим действие силы Р на судно при движении судна задним
ходом.
Отклонение руля ( рис. 11) вызывает появление поворачивающего
момента от пары сил Р и Pit увеличение сопротивления воды движе-
нию корпуса, уменьшение скорости от силы Рх и дрейф судна в сторо-
ну перекладки руля.
При циркуляции на заднем ходу под действием рулевой силы уве-
личивается давление воды на кормовую часть борта, в сторону кото-
рого переложен руль (сила R'y на рис. И).
Сила Ry создает поворачивающий момент, противоположный по
направлению поворачивающему моменту руля. Общий поворачиваю-
щий момент от перекладки руля на заднем ходу в начальный момент
циркуляции равен разности поворачивающих моментов руля и со-
противления воды корпусу судна. Поэтому даже при равном давлении
на руль поворотливость на переднем ходу будет лучше, чем на заднем.
Через некоторое время после начала поворота угловая скорость
начинает увеличиваться, и наступает такой момент, когда гидродина-
мические силы со стороны наружного борта становятся больше гидро-
динамической силы Ry, вызванной перекладкой руля. В это время
поворачивающий момент судна будет состоять из суммы двух момен-
тов: момента руля и позиционного момента. При этом скорость поворо-
18
та значительно возрастает. Как показывают натурные наблюдения,
величина момента руля примерно равна величине позиционного мо-
мента. Поэтому, если в данный момент переложить руль в сторону, об-
ратную повороту, то судно может не выйти из циркуляции. Учитывая
это явление, при движении на заднем ходу не следует допускать боль-
ших скоростей поворота и движения. Для вывода судна из циркуля-
ции необходимо дать машинам ход вперед и затем работать рулем, как
при движении передним ходом.
На трехвинтовых судах наилучшая поворотливость на заднем ходу
достигается при работе двух бортовых машин на малом заднем ходу
и средней машины вперед малым ходом.
§ 4. ВЛИЯНИЕ ДВИЖИТЕЛЕЙ
НА УПРАВЛЯЕМОСТЬ
Колесные суда на переднем ходу, как правило, имеют худшую уп-
равляемость по сравнению с винтовыми судами из-за меньшего дав-
ления воды на перо руля. На заднем ходу управляемость колесных су-
дов обычно лучше, чем у винтовых, вследствие больших размеров руля
и отсутствия отрицательных поворачивающих моментов, наблюдаю-
щихся у винтовых судов.
Рассмотрим влияние работы винтов на управляемость судна, име-
ющего один, два и три винта.
Одновинтовые суда. У судов с правым вращением винта
с момента пуска двигателя на передний ход, или начала вращения вин-
та, и до момента установления постоянного числа оборотов гидро-
статическое давление Di воды на лопасть винта будет больше при про-
хождении лопастью нижней точки по сравнению с гидростатическим
давлением D2 воды при прохождении лопастью верхней точки вслед-
ствие разницы давления воды по глубине (рис. 12). В результате
этого корма судна начнет смещаться вправо, а нос — влево, но этот
процесс занимает очень малое время. С момента установившегося чис-
ла оборотов винта поперечная тангенциальная составляющая Pi гид-
родинамического давления струи воды от действия винта на перо руля
с правой нижней стороны будет больше, чем давление Р2 с левой верх-
ней стороны, вследствие большего давления нижних струй воды и
большего ускорения. У всех одновинтовых судов разность гидроста-
тического давления воды на лопасти винта меньше разности танген-
циальных составляющих гидродинамического давления воды на перо
руля:
Pi — P2Z> Di — D2.
Поэтому поворачивающий момент от равнодействующей этих сил
всегда направлен в сторону вращения винта, т. е. при винте правого
вращения — вправо, а левого—влево. В результате при повороте впра-
во судна с винтом правого вращения требуется ширина акватории на
10—15% меньше, чем при повороте влево.
Для удержания одновинтового судна на постоянном курсе обычно
приходится держать руль отклоненным от диаметральной плоскости
на 2—4° в сторону, противоположную направлению вращения винта.
19
При работе винта правого вращения на задний ход разность гидро-
статических давлений воды на лопасти винта Dj и D2 (рис. 13) будет
направлена в сторону силы D\. Разность тангенциальных составляю-
щих гидродинамического давления на корпус судна от работы винта
(силы Р, и Р2) направлена в ту же сторону, т. е. в сторону силы Dt.
Виш правив—„ е^Га&°^иЯ
на переднем ходи *
Рис. 12. Силы, возникающие на лопа-
сти винта и руле одновинтового суд-
на на переднем ходу (Di>D2;
Pi >Р2)
Рис. 13. Силы, возникающие на лопа-
сти винта и корпусе одновинтового
судна(Ц1>/?2; P2>Pi)
Рис. 14. Циркуляция одновинтового
судна с правым вращением винта на
переднем и заднем ходу
Следует отметить, что сила Р2 значительно превосходит силу Рь так
как струя воды от работы винта на правой верхней стороне ударяет в
кормовой подзор, а на левой нижней стороне плавно обтекает корпус
судна и уходит под днище. Поэтому поворачивающий момент от резуль-
тирующей силы Q направлен в ту же сторону, что и на переднем ходу,
т. е. у винта правого вращения —
вправо, левого вращения — влево.
Необходимо учитывать, что ве-
личина поворачивающего момента
результирующей силы Q при вра-
щении винта на задний ход в это
время больше поворачивающего
момента руля.
На рис. 14 показаны возможные
траектории движения одновинто-
вого судна с винтом правого враще-
ния: 0 — 1 — при обороте на перед-
нем ходу; 0 — 2 — при обороте
влево на переднем ходу; 0 — 3 —
на переднем ходу при руле, пере-
ложенном вправо на борт, и винте,
работающем на задний ход; 0—4—
на переднем ходу при руле, пере-
ложенном влево на борт, и винте,
работающем на задний ход; 0— 5 —
при движении задним ходом и руле, переложенном на левый борт;
О — в — при движении задним ходом и руле, переложенном на правый
борт.
У судна с винтом левого вращения влияние винта аналогично, но
силы и моменты действуют в противоположном направлении.
20
Одновинтовое судно имеет плохую управляемость в тех случаях,
когда движение осуществляется с работающим на задний ход винтом.
Когда судно движется вперед, а винт работает на задний ход, нос
судна уклоняется вправо, если даже руль переложен влево. При дви-
жении задним ходом в этом случае корма судна уклоняется в сторону
левого борта, даже если руль переложен на правый борт.
Основной причиной недостаточной управляемости одновинтовых
судов на заднем ходу является то, что силы, вызываемые работающим
на задний ход винтом, иногда превосходят рулевые силы. Это обстоя-
тельство необходимо учитывать при выполнении всех маневров, свя-
занных с остановкой судна при движении задним ходом, например при
подходе к причалам, шлюзовании, постановке на якорь, оборотах,
маневрах, направленных на избежание столкновений с судами или
неподвижными предметами, и в других случаях.
Двухвинтовые суда. У двухвинтового судна отрица-
тельное влияние на управляемость тангенциальных составляющих
гидродинамического давления струи воды от работы винта и гидро-
динамического давления воды на лопасти винта устраняется путем уста-
новки винтов различного вращения. При этом возможны два варианта
вращения винтов: наружное, когда левый винт—левого вращения, а
правый — правого, и внутреннее, когда левый винт—правого вращения,
а правый —левого. Оба варианта с точки зрения маневрирования при
одновременной работе винтов на передний или задний ход равноценны.
Циркуляция при поворотах влево и вправо при всех прочих равных ус-
ловиях' одинакова.
Рис. 15. Силы, возникающие на вин-
тах, руле и корпусе при одновремен-
ной работе машин на передний и зад-
ний ход и наружном вращении винтов
у двухвинтового судна
Рис. 16. Силы, возникающие на вин-
тах, руле и корпусе при одновремен-
ной работе машин па передний и зад-
ний ход и внутреннем вращении вин-
тов у двухвинтового судна
Однако при одновременной работе винтов на передний и задний
ход эти варианты имеют существенное различие. Например, когда осу-
ществляется поворот судна вправо, если правой машине дается задний,
ход, а левой—передний и рули перекладываются вправо, при винтах
с наружным вращением струи воды от правого винта, работающего на
задний ход, вызывают на корпусе судна гидродинамическое давление,
тангенциальная составляющая которого направлена влево, как пока-
зано на рис. 15; сила Р способствует повороту носа судна вправо. Об-
щий поворачивающий момент вправо будет равен сумме пяти момен-
тов: руля за левым винтом, сил упора машин, работающих на передний
и задний ход, тангенциальной составляющей гидродинамического дав-
21
ления на корпус судна от правого винта, моментов от гидростатическо-
го давления воды на лопасти двух винтов.
При ринтах с внутренним вращением (рис. 16), если выполняет-
ся этот же маневр, благоприятное действие гидродинамического дав-
ления тангенциальной составляющей струи на корпус судна от винта,
работающего на задний ход, значительно ухудшится. Гидростатическое
давление воды на лопасти обоих винтов будет препятствовать повороту,
следовательно, и общий поворачивающий момент при прочих равных
условиях будет меньше. Поэтому судно с наружным вращением винтов
в случае работы машин на передний и задний ход будет иметь лучшую
поворотливость, чем судно с винтами внутреннего вращения.
Рис. 17. Силы, возникающие на сред-
нем винте и руле трехвинтового суд-
на на переднем ходу (Di>D2;
Рис. 18. Силы, возникающие на сред-
нем винте и корпусе трехвинтового
судна на заднем ходу (D\Z>D2\
Pi>P2)
Преимущество же судов с внутренним вращением винтов состоит
в том, что незначительно увеличивается сила упора винтов, а главное,
уменьшается скорость кильватерной струи, отбрасываемой винтами, —
это уменьшает сопротивление буксируемого состава. Внутреннее вра-
щение винтов применяется, как правило, на буксирных судах, но ино-
гда и на пассажирских.
Трехвинтовые суда. При наружном вращении бортовых
винтов средний винт может быть как левого, так и правого вращения.
На многих отечественных судах принят первый вариант, поэтому оста-
новимся на нем.
На рис. 17 показано направление вращения винтов на переднем
ходу. Как уже отмечалось, поворачивающие моменты бортовых винтов,
вращающихся в противоположные стороны, взаимно уравновешива-
ются. Рассмотрим силы, возникающие от вращения среднего винта,
расположенного позади бортовых винтов. Со стороны правого бор-
та лопасти среднего винта при прохождении нижней точки встре-
чают струю от работы правого винта (правого вращения), со сторо-
ны левого борта — от левого винта (левого вращения). Поэтому
гидростатическое давление воды на лопасти винта со стороны правого
борта будет больше, чем со стороны левого.
Тангенциальные составляющие гидродинамического давления струи
на перо руля от воздействия струй бортовых винтов выравниваются,
т. е. с левой и правой сторон будут приблизительно одинаковы. Поэто-
му при одновременной работе трех винтов на передний ход возникает
поворачивающий момент, направленный вправо. Диаметр циркуляции
22
трехвинтового судна с наружным вращением бортовых винтов меньше
тогда, когда оно совершается в сторону, противоположную направ-
лению вращения среднего винта (в рассматриваемом примере —
вправо).
Суммарный эффект от действия давления на перо руля и сил со-
противления движению лопастей при наличии у судна трех одновре-
менно работающих винтов показан в табл. 6. При работе всех трех ма-
шин на задний ход силы Рь Р2, Рз— равнодействующие гидродина-
мического давления струи винта на корпус судна.
Таблица 6
Винты Силы Направление поворо- та на переднем ходу Направление поворо- та на заднем ходу
носа КОрМЫ ноеа кормя
Левый результирующая Qx Влево Вправо Вправо Вправо Влево Влево Вправо Влево Влево Влево Вправо Вправо
Средний Ра, &г> результирующая Влево Вправо Вправо Вправо Влево Влево Вправо Влево Влево Влево Вправо Вправо
Правый Р3, D3, результирующая Q3 Суммарны! Вправо Влево Влево а эффект Влево Вправо Вправо Влево Вправо Вправо Вправо Влево Влево
Pi + Pz + Pt Влево Вправо Влево I Влево
+ Цг + D3 Вправо Влево Влево Вправо
Qi +Q2 + O3 Вправо Влево Влево | Вправо
При остановленных бортовых винтах поворот судна будет проис-
ходить лучше в сторону, совпадающую с направлением вращения сред-
него винта. При остановленном среднем винте повороты в одну и дру-
гую стороны будут происходить одинаково.
При одновременной работе движителей на задний ход поворачива-
ющие моменты от бортовых винтов будут равны и направлены в про-
тивоположные стороны. Отбрасываемые бортовыми винтами струи не
оказывают влияния на средний винт, так как он расположен сзади бор-
товых винтов.
Гидростатическое давление воды на лопасти винта от разности сил
Di — D2 (рис. 18) направлено вправо, гидродинамическое давление на
корпусе судна от разности тангенциальных составляющих сил Р{ —
Р2 — также вправо. Поэтому в рассматриваемом примере при одно-
временной работе трех винтов на задний ход (или одного среднего вин-
та) нос судна будет уклоняться влево, а корма — вправо. Как пока-
зывают натурные испытания, величина уклонения от первоначального
курса за время гашения инерции полного хода вперед работой движи-
телей на задний ход у судов типа «Родина» равна 25—30 м.
На управляемость винтовых судов, кроме перечисленных выше сил,
существенное влияние оказывают боковые силы Ту винтов, возникаю-
щие от косого натекания на винт потока воды. Эти силы в основном
зависят от числа оборотов, характеристик винта и угла натекания на
винт потока воды. Чем больше число оборотов винта и больше угол
натекающего на винт потока воды по отношению диаметральной пло-
скости судна, тем больше боковые силы винта. Косое натекание на винт
потока будет наблюдаться при выполнении циркуляции, при дрейфе
от ветра. Боковые силы винтов всегда направлены в сторону борта,
противоположного набегающему потоку.
На рис. 19 показаны боковые силы двух винтов Ту1 и ТУ2, вызван-
ные косым натеканием потока под углом 0 при выполнении поворота
вправо на переднем ходу. Косое
натекание на винты потока выз-
вано появлением дрейфа.
Поворачивающий момент от
этих сил 7ИТу направлен в сто-
рону, противоположную пово-
роту, т. е. винты оказывают ста-
билизирующее действие на курс
судна. Величина момента
Л1Гу =ТУ1Ь> (П)
где 1Ъ — расстояние от винта до
Рис. 19. Силы и моменты, действующие
на судно при повороте
центра тяжести судна.
У двухвинтового и трехвинтового судов сила Ту со стороны борта,
на который набегает поток воды, больше, чем у винта противополож-
ного борта, так как этот винт экранируется корпусом и угол скоса по-
тока у винта, расположенного на противоположном борту по отно-
шению набегающего потока, меньше. При ветровом дрейфе сила Ту
всегда направлена в сторону, противоположную дрейфу.
После остановки винтов и уменьшения скорости хода судно, дви-
жущееся по инерции, практически перестает слушаться руля, т. е.
теряет управляемость. При работе движителей на задний ход у судна,
движущегося Вперед по инерции, потеря управляемости наступает
раньше при несколько большей скорости. Это свойство сильно ослож-
няет выполнение маневров по остановке судна в определенном месте.
Этот недостаток у двух (и более) винтовых судов может быть устра-
нен одновременной работой движителей на передний и задний ход.
Для сохранения прямолинейного движения необходимо, чтобы
поворачивающий момент Л4М, создаваемый упором движителей, был ра-
вен поворачивающему моменту руля Л4Р, направленному в противо-
положную сторону, т. е. Л4М = Л4Р, или
MM = /=’M(CD)b1 = P1yCOsa,
(12)
где ^д(ср) — осредненный упор движителей, работающих одновре-
менно на передний и задний ход;
— расстояние между осями гребных валов.
24
У всех судов момент руля больше момента машин, т. е. Л4Р > Л4М.
Поэтому для придания судну прямолинейного движения достаточна
перекладка руля на 10—15°.
Составляющая силы давления воды на перо руля Ру будет создавать
незначительный дрейф.
Для того чтобы судно прекратило движение вперед, необходимо,
чтобы (рис. 20)
+ (13)
При одном и том же числе оборотов сила упора винта, работающего
на задний ход, на 20—30% меньше силы упора винта, работающего на
передний ход. Следовательно, движитель, работающий на задний ход,
должен развивать большее число оборо-
тов. Например, если машине, работаю-
щей на передний ход, дают малый ход, то
машине, работающей на задний ход, дают
средний ход, т. е. на одну ступень выше.
Из рассмотрения схемы сил, возни-
кающих при одновременной работе дви-
жителей на передний и задний ход, сле-
дует, что действие руля обеспечивает
заданный курс даже при отсутствии по-
ступательной скорости, причем поворот
в сторону того борта, движитель которого
работает на задний ход, происходит луч-
ше, чем в противоположную сторону.
При маневрировании судами с двумя
Рис. 20. Схема поворота судна
при одновременной работе ма-
шин на передний и задний ход
(и более) винтами в узкостях это обстоя-
тельство широко используется судово-
дителями для производства маневров.
При этом, как показано на рис. 20, суд-
но разворачивается под действием двух моментов Л4М и Л4Р. Сила Ру
за время поворота создает смещение центра тяжести относительно
центра поворота судна.
Ширина акватории, необходимая для производства маневра, в дан-
ном случае незначительно превышает длину корпуса судна. Время
выполнения оборота в этом случае больше в 1,5—2 раза по сравнению
с временем оборота при работе движителей на передний ход.
§ 5. ПОВОРОТНЫЕ НАСАДКИ
И УПРАВЛЯЕМОСТЬ
На грузовых теплоходах и толкачах большое распространение по-
лучили поворотные насадки на винты. Замена рулей поворотными на-
садками приводит к увеличению упора винта и рулевой силы, которая
возрастает в 2 раза и более.
Суда, оборудованные поворотными насадками, имеют хорошую по-
воротливость, если винты работают одновременно на передний ьли
задний ход. Диаметр циркуляции на переднем ходу уАменьшается на
25
40% и более по сравнению с диаметром однотипных судов, оборудован-
ных рулями. Это происходит за счет увеличения рулевой силы и сла-
бого влияния угла дрейфа на рулевую силу насадки.
Для обеспечения управляемости судна при малых скоростях по-
воротная насадка снабжается стабилизатором, т. е. рулем длиной в
Ьс = (0,6 4- 0,65)/H (/н — длина насадки), который на величину
0,25 Ьс входит в выходное отверстие насадки и приваривается к ней.
Длина поворотных насадок /н = (0,8 4- 0,9) DB (DB — диаметр
винта).
На большинстве новых судов поворотные насадки снабжены инди-
видуальными рулевыми машинами для независимого (раздельного)
управления каждой насадкой.
Рулевая сила поворотной насадки, перпендикулярная ДП, может
быть определена по формулам:
при ходе вперед
pv “ tfiAtga; <14)
при ходе назад
^ = <7^Ktga. (15)
В этих формулах:
qy ж 4,2, q'y « 2,1 —для грузовых теплоходов и толкачей
при ходе без состава;
qy 1,70 q'y 1,5 — то же, при ходе с составом;
Рк — упор комплекса винт — насадка;
а — угол поворота насадки.
Перекладка поворотной насадки приводит к отклонению струи
воды от диаметральной плоскости судна. Угол отклонения струи при-
близительно равен углу отклонения насадки а.
Рассмотрим действие поворотной насадки во время циркуляции,
когда судно движется с углом дрейфа рк. Скорость подтекания воды
к насадке обозначим ve, скорость струи, выходящей из насадки, ц,
и угол перекладки насадки а (рис. 21).
Геометрическая разность Ду скоростей подтекания и скорости вы-
ходящей струи будет определять силу упора Р насадки, направлен-
ную противоположно скорости Ди. Разложив силу упора на составля-
ющие по направлению ДП судна и перпендикулярно ей, получим дви-
жущую силу насадки Рх и рулевую силу Ру. Из рис. 21 можно опре-
делить, что при угле дрейфа рк, равном углу перекладки насадки, ру-
левая сила Ру незначительно отличается от Р'у, тогда как у судна, обо-
рудованного рулем, она будет близка к нулю. Рулевая сила насадки
увеличивается при увеличении угла перекладки.
Рассмотренный принцип работы поворотной насадки позволяет
установить и ее значительный недостаток.
Если на движущемся судне будет остановлен винт, то скорость под-
текания воды к насадке будет приблизительно равна скорости выте-
кания, следовательно, геометрическая разность скоростей будет рав-
на нулю. В результате будут равны нулю упор и рулевая сила насадки.
Управляемость судна резко ухудшится, так как при отклонении на-
садки от ДП рулевая сила насадки как руля из-за малых ее габаритов
невелика.
26
Теоретически возможен случай, когда рулевая сила насадки и при
работающем винте может быть равна нулю. Если скорость подтекания
воды к насадке будет равна скорости, которую винт сообщает выходя-
щей из насадки струе воды, то упор насадки и рулевая сила будут рав-
ны нулю.
При движении по мелководным участкам скорости . обтекания
кормовой части корпуса судна значительно увеличиваются. У судна,
оборудованного рулями, рулевая сила в данном случае увеличивает-
ся, а у судна, оборудованного насадками, уменьшается, в результате
появляется рыскливость, а при больших скоростях движения насту-
Рис. 21. Схема действия поворотной
насадки
Рис. 22. Силы, возникающие при ра-
боте винтов на задний ход и насад-
ках, переложенных вправо
пает потеря управляемости (описанный недостаток поворотных насадок
может быть устранен установкой на судне среднего руля). Поэтому
мелководные участки следует проходить на пониженных скоростях.
При движении вдоль бровок каналов и причальных стенок шлюзов
лучше работает насадка борта, противоположного бровке или причаль-
ной стенке, так как скорости обтекания здесь меньше. Управляемость
судна будет лучше и в том случае, если идти на одной бортовой машине,
противоположной бровке канала.
Поворотные насадки обеспечивают хорошую управляемость судна
при движении задним ходом.
Если на двухвинтовом судне дать винтам задний ход и насадки пере-
ложить на правый борт, то на судно будут действовать силы, показан-
ные на рис. 22.
Рулевые силы насадок Ру смещают корму судна вправо. Струя воды,
выходящая из правой насадки, будет создавать гидродинамическое
давление воды F на кормовую часть корпуса (струя воды, выходящая
из левой насадки, проходит мимо корпуса). Разложив силу F на состав-
27
ляющие Fy и Fx, увидим, что сила Fy препятствует смещению кормы
вправо. Таким образом, общий поворачивающий момент от сил Ру и Fu
Моб = 2МРу-Мру, (16)
где Мру — поворачивающий момент силы Ру;
Мру — поворачивающий момент силы Fy.
Так как ^Мру > MFyi то нос судна будет уклоняться в сторону,
противоположную направлению перекладки насадок (в данном случае
влево), а корма судна будет уклоняться вправо, т. е. в сторону пере-
кладки насадок. При перекладке насадок влево—наоборот. Следует
иметь в виду, что при работе винтов на задний ход эффективность
поворотной насадки со стороны борта, противоположного их пере-
кладке, возрастает.
При выполнении поворотов на заднем ходу с появлением угла дрей-
фа на судно действует позиционный момент от сопротивления корпуса.
Позиционный момент грузовых теплоходов, оборудованных поворот-
ными насадками, меньше величины общего поворачивающего момента
Л40б, поэтому суда успешно выполняют циркуляцию при движении
задним ходом. Толкачи с составами, вследствие большой величины
позиционного момента, из циркуляции на заднем ходу выводятся
плохо.
Рассмотрим действие поворотных насадок при работе винтов одно-
временно на передний и задний ход. Если левый винт работает вперед,
а правый назад и насадки переложены на правый борт, то, как видно
из рис. 23, силы Ру будут уравновешиваться и общий поворачивающий
момент
M!,6 = Pxb + Fy±. (17)
При перекладке насадок на левый борт (рис. 24), при том же режиме
работы машин, на судно будет действовать поворачивающий момент
от пары сил Рх, направленный вправо. Нос судна будет поворачиваться
в правую сторону, но очень медленно, так как этот момент невелик.
Для поворота судна влево необходимо, чтобы упор винта, работаю-
щего на передний ход, был значительно больше упора винта, рабо-
тающего на задний ход.
Из изложенного выше следует, что работу машин на передний и зад-
ний ход следует применять лишь при производстве оборотов в узких
местах при благоприятных гидрометеорологических условиях. В слу-
чаях подхода к причалу, входа в шлюз и т. д. следует работать на зад-
ний ход одной или двумя машинами, не прибегая к работе винтов на
передний и задний ход, как это рекомендовалось для судов с рулями.
Раздельное управление насадками позволяет применять работу
винтов на передний и задний ход при маневрировании. Для поворота
судна влево (рис. 25) левую машину пускают вперед, а правую назад,
левую насадку перекладывают на левый борт, а правую — на правый.
Общий поворачивающий момент
Мм = 2Мру-Мрх--Мру. (18)
28
Но 2 Мру значительно больше Мрх + Л1ру, поэтому судно будет по-
ворачивать влево.
Если судну нужно повернуть вправо, не изменяя режим работы ма-
шин, то левую насадку поворачивают вправо, правую — влево
(рис. 26). В этом случае
M'o6=2MPy + Psb.
(19)
Рис. 23. Силы, возникающие при од-
новременной работе винтов на перед-
ний и задний ход и насадках, перело-
женных вправо
Рис. 24. Силы, возникающие при од-
новременной работе винтов на перед-
ний и задний ход и насадках, пере-
ложенных влево
М'ог
Рис. 25. Силы, действующие на судно
во время поворота влево при раздель-
ном управлении насадками
Рис. 26. Силы, действующие на судно
во время поворота вправо при раз-
дельном управлении насадками
29
При работе винтов на передний и задний ход одновременно поворот-
ливость судна с раздельными поворотами насадки значительно улуч-
шается.
Если правый винт работает на передний, а левый—на задний ход,
то при повороте влево нужно переложить правую насадку влево, ле-
вую — вправо. В этом случае при повороте вправо правая насадка
перекладывается вправо, левая—влево.
При работе машин на передний и задний ход одновременно направ-
ление перекладки насадки винта, работающего на передний ход, оп-
ределяет направление поворота судна, при этом вторая насадка пере-
кладывается в противоположную повороту сторону.
При выполнении поворотов судами, оборудованными поворотными
насадками, нужно учитывать особенности размещения насадок отно-
сительно корпуса судна. У одних судов поворотные насадки проек-
тируются на диаметральную плоскость судна, и при отклонении на
большие углы в сторону диаметральной плоскости поток от винта
ударяется в корпус судна и создает на корпусе давление, препятствую-
щее повороту. В этом случае при повороте вправо более эффективно
работает правая насадка, при повороте влево—левая. Так установ-
лены насадки, например, на судах типа «Шестая пятилетка». У боль-
шинства других судов поворотные насадки при работе движителей
на передний ход не создают давления воды на корпус судна и сил,
препятствующих повороту, не возникает. Поэтому, например, при по-
вороте вправо будет более эффективно работать левая насадка, при
повороте влево — правая.
Для судов, у которых поворотные насадки сильно экранируются
диаметральной плоскостью судна, при правом повороте рекомендуется
до перекладки насадок на правый борт перевести левый винт на режим
заднего хода. Для судов, у которых поворотные насадки не экраниру-
ются диаметральной плоскостью, при повороте вправо рекомендуется
переложить насадки на правый борт, левый винт включить на режим
переднего хода, а правый — на режим заднего хода. Направление вра-
щения судна на разных режимах работы гребных винтов показано
в табл. 7, составленной Л. М. Рыжовым.
Таблица 7
Положение наса- док относительно диаметральной плоскости Направление работы гребных винтов Направление вращения судна
левого правого
На правом бор- ту То же Передний ход То же В перед-стоп Задний ход Назад-стоп Назад По часовой стрелке По часовой стрелке усилителя По часовой стрелке за- медлится, затем —про- тив часовой стрелки
30
П родолжсние
Положение наса- док относительно диаметральной плоскоети Направление работы гребных винтов Направление вращения судна
левого правого
На правом бор- ту То же Задний ход Назад-стоп Назад Передний ход Вперед Вперед-стоп По часовой стрелке По часовой стрелке уси- лится По часовой стрелке за- медлится, затем —про- тив часовой стрелки
На левом борту То же » » Передний ход То же Вперед-стоп Задний ход Назад-стоп Задний ход Против часовой стрелки Против часовой стрелки усилится Против часовой стрелки замедлится, затем —по часовой стрелке
Задний ход Назад-стоп Задний ход Передний ход То же Вперед-стоп Против часовой стрелки Против часовой стрелки усилится Против часовой стрелки замедлится, затем—по часовой стрелке
Для определения направления вращения судна при разных ком-
бинациях режимов работы гребных винтов и положениях синхронно
управляемых насадок можно пользоваться табл. 8, составленной так-
же Л. М. Рыжовым.
Таблица 8
Положение насадок относительно диамет- ральной плоскости Режим работы гребных винтов Направление вращения судна
левого правого
В диаметральной пло- скости То же Передний ход Задний ход По часовой стрелке
Задний ход Передний ход Против часовой стрелки
На правом борту То же Передний ход Задний ход По часовой стрелке
Задний ход Передний ход То же
На левом борту То же Передний ход Задний ход Против часовой стрелки
Задний ход Передний ход То же
3J
Таблица 9
Положение насадок Режим работы гребных винтов Направление вращения судна
левой | правой левого | правого
Правый борт Левый Задний Передний Против часовой стрелки
борт ход ход
Правый борт Левый Задний Передний Против часовой стрелки
борт ход ход
Правый борт Левый Передний Передний Поворот не происходит
борт ход ход
Правый борт Левый Задний Задний Поворот не происходит
борт ход ход
Левый борт Правый Задний Передний По часовой стрелке
борт ход ход
Левый борт Правый Передний Задний Против часовой стрелки
борт ход ход
Левый борт Правый Передний Передний Поворот не происходит
борт ход ход
Левый борт Правый Задний Задний Поворот не происходит
борт ход ход
Для определения направления вращения судна при разных ком-
бинациях режимов работы гребных винтов и положениях раздельно
управляемых насадок можно воспользоваться табл. 9.
§ 6. ПОДРУЛИВАЮЩЕЕ
УСТРОЙСТВО И УПРАВЛЯЕМОСТЬ '
Дополнительное рулевое устройство, предназначенное для улуч-
шения поворотливости судна на малых скоростях или при отсутствии
хода, называется подруливающим устройством (ПУ). Сила подрули-
вающего устройства создается за счет реакции струи воды, отбрасы-
ваемой пропеллерным насосом или винтом у водометных подруливаю-
щих устройств или крыльчатым движителем — у ротаторных. Если
струя отбрасывается на правый борт, то сила упора Рв подруливаю-
щего устройства направлена на левый борт, и наоборот. Упор под-
руливающего устройства может быть определен по выражению
Ра = Р<&,
где р — массовая плотность воды;
Q — производительность насоса;
v — скорость вытекания воды из трубы подруливающего устрой-
ства.
В табл. 10 приведены величины сил упора подруливающих устройств
на отечественных судах.
Подруливающие устройства находят широкое применение на гру-
зовых и пассажирских судах речного флота. Для правильного исполь-
зования судоводителю необходимо знать область их эффективного при-
менения и влияние на поворотливость судна.
32
Таблица 10
Тип судна Тип подруливаю- щего устройства Мощность, кВт Сила упора, Н
Пассажирский дизель-электроход «Ленин» Водометное 180 14 200
Пассажирский теплоход «Родина» . . . Пассажирский теплоход «Октябрьская » 50 4 900
революция» Грузовой теплоход проекта № 507 «Вол- Ротаторное 53 8 800
ге -Дон» Водометное 47,5 7 350
Грузовой теплоход проекта № 507А . . » 90 13 200
Поскольку тяга ПУ в большинстве случаев направлена нормально
к ДП, движение щщ отсутствии течения и ветра под действием только
силы упора ПУ сводится к вращению судна. Однако это вращение не-
избежно сопровождается перемещением судна в сторону оконечности,
на которой расположено ПУ, так что, строго говоря, под действием
одного ПУ вращение судна на месте невозможно. Поскольку сила упо-
ра ПУ приложена в оконечности, центр поворота должен распола-
гаться между центром тяжести G и противоположной оконечностью
судна. При этом центр тяжести будет иметь окружную скорость и, сле-
довательно, на судно будет действовать центробежная сила с, на-
правленная в сторону ПУ и вызывающая смещение судна. Судно, вра-
щаясь, перемещается в сторону оконечности, на которой расположено
ПУ. Это перемещение может быть нейтрализовано работой винтов.
Если на двигающемся вперед судне включить носовое подрулива-
ющее устройство, то под действием силы Рп возникает дрейф носа суд-
на в сторону поворота. Наличие дрейфа приводит к появлению угла
дрейфа, поток воды, первоначально набегавший параллельно диамет-
ральной плоскости, начинает набегать на внутренний (по отношению
к направлению поворота) борт (рис. 27). Это обусловливает возникно-
вение силы бокового сопротивления /?у, приложенной, как правило,
ближе к носу от центра тяжести судна и направленной противополож-
но дрейфу. Общий поворачивающий момент будет состоять из трех мо-
ментов:
М^М^-М^-Мд, (20)
где — момент упора подруливающего устройства;
М% — позиционный момент сопротивления движению;
Мд — демпфирующий момент сопротивления вращению.
Если на том же судне имеется кормовое подруливающее устройство
(рис. 28), то при его включении возникает дрейф кормы судна в сто-
рону, противоположную повороту судна, поток воды начнет набегать
на борт, внешний по отношению к направлению поворота. Схема сил
и моментов будет аналогична возникающей при перекладке руля.
Общий поворачивающий момент
М'б=МР. + М^-Мд> (21)
где Мр^ — момент силы упора кормового подруливающего устрой-
ства.
2 С. Б. Ольшамовский
Сравнивая уравнения (20) и (21), видим, что при условии равен-
ства поворачивающих моментов носового и кормового подруливающих
устройств Моб> Л1об, так как позиционный момент при работе кор-
мового подруливающего устройства способствует повороту, а при
работе носового — препятствует ему. Отсюда при движении передним
ходом целесообразнее применять при маневрировании кормовое, а
при движении на заднем ходу — носовое подруливающее устройство.
Рис. 28. Схема сил, действующих на
судно при повороте с помощью кор-
мового подруливающего устройства:
Рк сила упора подруливающего устрой-
ства; 1—1 — циркуляция
Рис. 27. Схема сил, действующих на
судно при повороте с помощью носо-
вого подруливающего устройства:
Рп — упор подруливающего устройства;
R — сила сопротивления воды; Rx, Ry —
составляющие силы R; 3 — угол дрейфа;
v — скорость движения судна; (о — угло-
вая скорость поворота; /—1 — циркуляция
С увеличением скорости движения подруливающие устройства ста-
новятся малоэффективными, поэтому их следует применять при ма-
неврах, производящихся на малых скоростях.
Если на судне имеются носовое и кормовое подруливающие уст-
ройства, то для осуществления движения лагом достаточно включить
оба подруливающих устройства на один борт, а для оборота «на месте»—
на разные борта. Скорость движения лагом при этом составляет 0,3—
0,4 м/с, а угловая скорость поворота 4—5 град/мин.
Рис. 29. Схема сил, действую-
щих на судно при движении ла-
гом с помощью носового подру-
ливающего устройства (R — си-
ла сопротивления воды корпусу
судна)
Движение судна лагом и оборот «на месте» можно производить и о
одним носовым подруливающим устройством, используя его совмест-
но с работой движителей и руля. Например, для сообщения судну дви-
жения лагом вправо нужно включить носовое подруливающее устрой-
ство на правый борт, левой машине дать задний, а правой — передний
ход и переложить руль влево на 10—15°. Схема сил, действующих на
судно в этом случае, показана на рис. 29. Если сумма моментов отно-
сительно центра тяжести судна от движителей М?д и руля Мру, соз-
дающая поворот влево, будет равна моменту от подруливающего уст-
ройства Мр , создающего поворот вправо,
МЕд + М^ = Мрп, (22)
34
то судно разворачиваться не будет и за счет сил Ру и будет двигать-
ся лагом.
Для разворота «на месте» носовое подруливающее устройство нуж-
но включить в сторону поворота. Например, для поворота влево «на
месте» схема сил аналогична изображенной на рис. 29, за исключе;
нием того, что сила Рп будет направлена в противоположную сторону’,
а сила R = 0. Тогда
Моб = + М/>п.
(23)
§ 7. ПОВОРОТЛИВОСТЬ СУДОВ
Способность судна изменять направление движения под действием
рулевых средств называется поворотливостью. Поворотливость су-
дов характеризуется величиной угловой скорости поворота, которую
может развивать судно при отклонении пуля (насадок) от диаметраль-
ной плоскости. Кривая линия, кото-
рую описывает центр тяжести судна
при перекладке руля, называется
циркуляцией (рис. 30).
Следует различать три харак-
терных периода циркуляции. Ма-
невренный период / (см. рис. 30)
характеризуется временем от на-
чала перекладки руля до начала
поворота судна. В теории управ-
ляемости принято считать манев-
ренный период, равный времени
от начала до конца перекладки
руля.
Эволюционный период 11 начи-
нается с момента окончания перек-
ладки руля и продолжается до
момента начала установившегося
движения. Период установившейся
циркуляции III характерен тем,
что судно в это время движется с
постоянной поступательной и угловой скоростью и его траектория
движения близка к окружности. Диаметр этой окружности Оц на-
зывается диаметром установившейся циркуляции.
Назовем важнейшие характеристики циркуляции, по которым су-
доводитель определяет габариты акватории, необходимой для безопас-
ного выполнения маневра поворота.
Тактический диаметр циркуляции DT — расстояние между диа-
метральной плоскостью судна на прямом курсе и положением ее после
поворота судна на 180°; обычно DT = (1,1 4- 1,2) £)ц.
Выдвиг — расстояние от центра тяжести судна в момент начала
перекладки руля до диаметральной плоскости после поворота судна
на 90°; = (0,6 4- 1,5)
2*
Прямое смещение Z2 — расстояние, на которое смещается в сторо-
ну поворота центр тяжести судна после поворота судна на 90°; обычно
Z2 = (0,25 0,5) Оц.
Обратное смещение /3 — наибольшее расстояние, на которое сме-
щается центр тяжести судна в сторону, противоположную повороту;
обычно Z3 не превышает 0,1 Оц.
Полюс поворота — точка, лежащая на диаметральной плоскости
или ее продолжении, вокруг которой происходит поворот судна в дан-
ный момент времени. Расстояние Сц от центра тяжести до полюса по-
Рис. 31. График для определения коэф-
фициента /?ц
ворота при установившемся
движении у большинства су-
дов равно (0,2 4- 0,7) длины
судна L.
Период циркуляции Тц—
время поворота судна на
360В 9. Период установившейся
циркуляции
л-, зтОц
' у = >
где рц — скорость движения
судна на установившейся
циркуляции.
Угловая скорость враще-
ния судна на установившейся
циркуляции
2vu 2 л.
СО — —- = —>
Г>ц Гц
ИЛИ
6876 С/’п
со = -----— .
В первом случае в рад/с, во втором в град/мин.
Угол, дрейфа на циркуляции Рц — угол между вектором скорости
и диаметральной плоскостью судна.
Диаметр установившейся циркуляции можно определить по фор-
муле
D 2£ц V * ^24)
Ру
где р — массовая плотность воды, равная 102 кгс • с2/м4;
— скорость хода судна до выхода на циркуляцию, м/с;
V — объемное водоизмещение судна, м3;
Ру — поперечная сила рулевых органов, кгс;
— экспериментальный коэффициент, который определяется
V
в зависимости от отношения 57 (S2 — площадь подводной
части ДП) с помощью графика (рис. 31).
Наибольший интерес с точки зрения выполнения маневров пред-
ставляет тактический диаметр циркуляции. За меру поворотливости
36
судов в практике принимают отношение диаметра циркуляции к дли-
не судна.
В табл. 11 приведены значения меры поворотливости серийных пас-
сажирских и грузовых судов.
Таблица 11
Тип судна Мощность, Л. 0. Габарит- ная длина еудна Lt м Тактиче- ский диа- метр цир- куляции Г>т, м Относи- тельный диаметр DJL
«Ленин» 2700 121,4 380 2,5
«Октябрьская революция» 1575 96,27 320 3,3
«Родина» ..... 1200 95,8 280 2.9
«Россия» 800 80,22 160 2,0
«Ерофей Хабаров» 800 77 150 2,0
«Байкал» 800 65,2 130 2,0
ОМ-451 450 44,9 90 2,0
«Волго-Дон» 2000 140,00 340 2,4
«50 лет Советской власти» 1320 114,02 220 9 О
«Балтийский-37» 1320 96,0 210 2,1
«Шестая пятилетка» 1000 93,9 200 2,1
«Калининград» 1050 86,4 200 2,1
«Нефте рудовоз-1» 1320 119,4 240 2,1
Тактический диаметр циркуляции у пассажирских судов с рулями
в 2—3 раза превосходит габаритную длину судна, у грузовых судов
с поворотными насадками — в 2—2,5 раза.
На элементы циркуляции оказывает влияние первоначальная ско-
рость движения судна. Чем меньше первоначальная скорость движе-
ния, тем меньше выбег. На рис. 32 показаны циркуляции теплохода
«Октябрьская революция» на малом, среднем и полном ходу. Диаметры
циркуляции мало зависят от первоначальной скорости хода, хотя
и уменьшаются с уменьшением скорости хода. Значительное снижение
диаметра циркуляции при отсутствии ветра и течения может быть до-
стигнуто путем уменьшения первоначальной скорости до малого хода
и включения подруливающих устройств дополнительно к основному
рулевому устройству.
На рис. 33 показано изменение относительного диаметра циркуля-
ции дизель-электрохода «Ленин» в зависимости от скорости движения,
угла а перекладки рулей на циркуляции, включения носового или кор-
мового подруливающих устройств.
На судах с поворотными раздельно управляемыми насадками умень-
шение диаметра циркуляции в 1,5—2 раза может быть достигнуто пе-
рекладкой насадок на разные борта и работой машин на передний и
задний ход. Например, диаметр циркуляции теплохода «Волго-Дон-
500» грузоподъемностью 5000 т, имеющего габаритную длину 138,3 м,
при перекладке насадок на один борт составляет 320 м, на разные бор-
та — 160 м (при повороте вправо в этом случае правая насадка пере-
кладывается на левый борт, левая — на правый, правая машина рабо-
тает «полный назад», левая — «полный вперед»).
З7
Улучшение поворотливости, уменьшение диаметра тактической
циркуляции может быть достигнуто следующими конструктивными
и эксплуатационными мерами: уменьшением отношения 4(L — длина
о
Т
сунна, В — ширина), или у (Т — осадка судна); увеличением отно-
шения увеличением коэффициента общей полноты 6, полноты кор-
мы, площади руля, диаметра и длины поворотных насадок; приданием
судну дифферента на нос, что в то же время ухудшает устойчивость на
курсе; устранением крена; увеличением углов перекладки рулей на
Рис. 32. Циркуляция теплохода «Ок-
тябрьская революция» при разных режи-
мах движения
Рис. 33. График —f (a; vH) I за-
I. ь J
висимости диаметра циркуляции от
угла перекладки' рулей и от скорости
хода судна при работающих носовом
(/) и кормовом (2) подруливающих
устройствах
50—60° и более; постановкой на руле продольных горизонтальных
шайб; увеличением количества рулей; применением более мощных ру-
левых комплексов, крыльчатых движителей, подруливающих уст-
ройств.
Крен судна на циркуляции. В маневренный период циркуляции по-
перечная сила Ру (рис. 34, а), возникающая на руле, уравновешивается
силой инерции Flv приложенной в центре тяжести судна, и вместе они
создают небольшой крен в сторону поворота судна.
В эволюционный период циркуляции появляется кренящий момент,
направленный в сторону, противоположную повороту судна. Попереч-
ная составляющая центробежной силы ийерции су (рис. 34, б) прило-
жена в центре тяжести судна. Эта сила уравновешивается поперечно
гидродинамической силой на корпусе судна Ry, приложенной в центре
давления гидродинамических сил ц. д., находящемся ниже центра тя-
жести ц. т. Эти силы создают пару сил, кренящую судно в наружную
сторону циркуляции Чем больше скорость хода судна, выше центр
тяжести и меньше радиус циркуляции, тем больше крен.
38
В практике судовождения имелись случаи опрокидывания судов
во время выполнения циркуляции. Появившийся на циркуляции крен
вызывал перемещение груза и увеличение кренящего момента и крена.
Через открытые иллюминаторы в корпус судна начинала поступать
вода. В результате судно опрокидывалось и тонуло.
Рис. 34. Крен судна на циркуляции.
а —в маневренный период (крен на правый борт); б — в эволюционный период (крен на ле-
вый борт)
Величина кренящего момента на циркуляции 7Икр может быть оп-
ределена по формуле
^кр С L
(25)
где с — коэффициент (с = 0,029 для винтовых и водометных су-
дов; с = 0,045 для колесных судов);
D — водоизмещение судна, т;
Ь — длина судна, м;
vQ — скорость хода до выхода на циркуляцию, м/с;
гц — ордината ц. т., м;
Т — осадка судна, м;
а9 — коэффициент, определяемый по нормам Речного Регистра
РСФСР в зависимости от отношения ширины судна В к
осадке 7. Значения а3 можно найти из табл. 12.
Таблица 12
в т 2,5 и менее 3,0 4.0 5,0 6,0 7,0 8,0 10 и более
аз 0,75 0,45 —0,30 — 1,30 —2,45 —3,75 —5,25 —7,70
Максимальный динамический угол крена (в град) на циркуляции
0ц=114,бЛгд-азП (26)
ьЛо
где hQ — метацентрическая высота, м.
Угол дрейфа на циркуляции и наивыгоднейший угол перекладки
руля. Существенная особенность движения судна на циркуляции —
наличие угла дрейфа.
39
Углом дрейфа называют угол, образующийся между касательной
к траектории движения или направлением мгновенной скорости и ди-
аметральной плоскостью судна. Величина этого угла по длине судна
неодинакова. Для выявления изменения величины угла дрейфа по дли-
не судна разложим сложное циркуляционное движение на поступатель-
ное движение со скоростью v и вращательное движение с угловой ско-
ростью о (рис. 35). Примем условно, что вращение происходит вокруг
оси, проходящей через точку О (от выбора точки, через которую про-
Рис. 35. Изменение угла дрейфа по длине
судна:
v — скорость точек А, О, В при поступа-
тельном движении; ид, vq — скорости точек
при вращательном движении; vq, vq —
суммарные скорости точек А, О, В; Зл’РоРв-"
углы дрейфа в точках А, О, В
ходит ось вращения, наше дока-
зательство не изменится).
Скорости движения произ-
вольно взятых точек Л, О и В
в поступательном движении рав-
ны v и параллельны (см. рис. 35).
При вращательном движении
окружные скорости точек Л, О
и В будут
= соЛО, vo = (o0 = 0,
Vb = (&ВО
и направлены в сторону вра-
щения перпендикулярно диамет-
ральной плоскости. Складывая
векторы поступательных v и
окружных vf скоростей по пра-
вилу параллелограмма, получим направления и величины векторов
скорости циркуляционного движения vaVo и Vb для точек Л, О и В.
Согласно определению угла дрейфа углы между векторами этих
скоростей и диаметральной плоскостью будут углами дрейфа точек
Л, О и В (т. е. рл, ₽о и рв).
Из рис. 35 видно, что Рв > Ро > Рл« Угол дрейфа имеет макси-
мальное значение в корме судна и уменьшается по направлению
к носу.
Угол атаки руля при движении на циркуляции приближенно ра-
вен разности двух углов: угла перекладки руля и угла дрейфа в центре
давления воды на руль.
Угол дрейфа в кормовой части судна достигает 35° и более.
С появлением угла дрейфа величина поперечной силы уменьшается.
Наивыгоднейший угол перекладки руля в этом случае будет равен
сумме двух углов: наивыгоднейшего угла перекладки на прямолиней-
ном курсе, равном 35°, и угла дрейфа в районе кормы. У толкаемых
составов наивыгоднейший угол перекладки руля может достигать
70—80Q.
При выходе из циркуляции наивыгоднейший угол атаки руля будет
равен разности двух углов — угла перекладки руля и угла дрейфа.
Поэтому судно быстрее выходит из циркуляции на прямолинейный
курс, если руль вначале поставить прямо, а затем, после уменьшения
угловой скорости, переложить на 35—40° в сторону, противополож-
ную циркуляции.
40
Таковы наивыгоднейшие углы перекладки руля без учета струи,
отбрасываемой винтом,—т. е. приведенные выше доказательства будут
характеризовать работу руля буксируемого судна. У винтовых судов
угол атаки руля будет меньше, так как отклонение потока от винта,
который омывает руль, будет всегда меньше величины угла дрейфа.
Для приближенной оценки угла атаки руля, расположенного за
винтом, можно принять отклонение потока винта равным половине
угла дрейфа.
Тогда наивыгоднейший угол перекладки руля на циркуляции будет
атах » 35р + ~ 55®,
при выходе из циркуляции
атах«35е-
§ 8. УСТОЙЧИВОСТЬ НА КУРСЕ
И РЫСКЛИВОСТЬ СУДОВ
При плавании судна на характер его движения оказывают влия-
ние неравномерность в работе движителей или рулевых средств,
волнение, ветер, течение, при небольших глубинах — неровности
дна и берегов и другие факторы. Все они в совокупности вносят изме-
нения в элементы движения.
Восстановление заданного движения (курса) судна после прекра-
щения возмущающего воздействия может происходить как автомати-
чески (без перекладки рулей), так и с помощью перекладки рулей (на-
садок). Поэтому различают теоретическую (автоматическую) и эксплу-
атационную устойчивость движения.
Если по прекращении какого-либо воздействия судно при неподвиж-
ном руле возвращается к прямолинейному движению, то такое судно
считается теоретически устойчивым на курсе; если для поддержания
прямолинейного движения требуется перекладка руля (насадок), то
считают, что судно имеет эксплуатационную устойчивость.
Теоретическая устойчивость движения судна определяется рас-
четным путем на основе общей теории устойчивости движения
А. М. Ляпунова, эксплуатационная устойчивость — с помощью на-
турных (испытаний) экспериментов.
Различают два вида теоретической устойчивости: асимптотическую
и неасимптотическую. Если возмущенное движение с течением времени
затухает до нуля, то такое движение называют асимптотически устой-
чивым. Если возмущенное движение затухает не до нуля, а прибли-
жается к одному из видов нового установившегося движения, такое
движение называют неасимптотически устойчивым.
Плохая устойчивость на курсе требует повышенного внимания
к управлению судном или составом.
Все суда и составы в какой-то степени не устойчивы на курсе, по-
этому необходимо периодически прибегать к перекладке руля. Нап-
41
более важными характеристиками эксплуатационной устойчивости
являются частота и величина угла перекладки руля, необходимые для
удержания судна на курсе, а также амплитуда изменения,курсового
угла при этом. Эксплуатационная устойчивость считается допустимой,
если при движении на глубокой воде в штилевую погоду для удержа-
ния судна на курсе приходится перекладывать руль не более 4—6 раз
в минуту на угол 2—3° и при этом амплитуда угла ухода с курса не
превышает 2—3Q.
В противном случае судно называют рыскливым. Под рыскли-
востью понимают свойство судна самопроизвольно изменять направ-
ление движения. Рыскливость является отрицательным качеством суд-
на, которое может быть причиной посадки на мель или столкновения.
Суда и составы с большой рыскливостью не должны допускаться к эк-
сплуатации.
Рыскливость судна зависит от наличия крена и дифферента, типа
и количества движителей, глубин, течения, от волнения и ветра. Чем
больше крен судна, тем больше рыскливость; большинство судов за-
рыскивает в сторону крена, особенно в момент увеличения скорости
хода. Дифферент на нос увеличивает рыскливость, на корму — умень-
шает. Одновинтовые суда имеют большую рыскливость, чем двухвин-
товые. Суда с рулями имеют меньшую рыскливость, чем суда с по-
воротными насадками. Буксируемые на тросе составы имеют боль-
шую рыскливость, чем толкаемые составы. С увеличением длины
буксирного троса рыскливость увеличивается. При движении
против течения вдоль мелководных песчаных берегов с крупны-
ми затругами возникают сильные отдельные зарыски в сторону
этого берега. На каналах судно, идущее вдоль берега канала, за-
рыскивает в сторону оси канала. При приближении к месту с малыми
глубинами судно зарыскивает в сторону от мели. Чем больше высота
волн и угол между бегом волн и курсом судна, тем больше рыскли-
вость. Необходимо всегда помнить, что любое судно или состав имеет
свои особенности, поэтому судоводитель должен изучать поведение
судна или состава при различных гидрометеорологических условиях
плавания.
§ 9. ХОДКОСТЬ И ИНЕРЦИОННЫЕ
ХАРАКТЕРИСТИКИ СУДОВ
Ходкость. Способность судна двигаться с определенной скоростью
при данной мощности главных двигателей называется ходкостью.
Свойство судна сохранять свою скорость называют инерцией. Чем
больше скорость хода судна и его водоизмещение, тем больше его инер-
ция. Под инерционными характеристиками понимают длину пути
и время, в течение которого судно может остановиться (тормозной путь
и время) или из неподвижного состояния достичь определенной ско-
рости хода (длина пути и время разгона). Скорость судна на глубокой
воде обычно определяют на мерной линии. Основным оборудованием
мерной линии являются две пары секущих створов и одни ведущие
(рис. 36). Определение скорости хода производят при различных
42
Рис. 36. Схема мерной линии:
1 — верхние секущие створы; 2 — нижние се-
кущие створы; 3 — ведущие створы
осадках (обычно порожнем и в полном грузу) на полном, среднем и ма-
лом ходах. Перед началом испытаний устраняют крен и дифферент,
измеряют осадку судна, направление и скорость ветра, которая не
должна быть более 4 баллов.
Достигнув необходимого для испытаний числа оборотов двигателей,
заранее, до подхода к секущим створам, судно выводят на ведущий
створ. При входе на мерную линию на траверзе первых секущих створов
включают секундомер, а на
траверзе вторых секущих
створов выключают его. Ско-
рость судна (в км/ч) на каж-
дом пробеге определяется по
формуле
v=3-^-. (27)
где S — расстояние между
секущими створа-
ми, м;
t — время пробега, с.
Для исключения влияния
течения следует сделать тро-
екратный пробег вверх и
вниз, выдерживая одни и те
же обороты главных двигате-
лей. Скорость движения суд-
на относительно воды вычис-
ляют по формуле
О = ,?1+2^+рз t (28)
где v2i v3 — скорости судна
при первом, втором и третьем
пробегах.
При каждом пробеге запи-
сывают обороты главных дви-
гателей. Затем строят график зависимости скорости хода v от часто-
ты вращения п главных двигателей. На рис. 37 приведены такие
графики для основных типов, судов и составов.
Знание судоводителем скоростей движения судна при различных
режимах работы в ряде случаев может оказать решающее значение на
правильное выполнение маневра и безопасность движения.
Инерционные характеристики. Если на судне, движущемся с оп-
ределенной скоростью, застопорить машину или дать задний ход, то
судно остановится не сразу, а пройдет еще некоторое расстояние. На-
зовем процесс гашения инерции движения судна с помощью реверса
движителей—торможением, тот же процесс, но при выключенных дви-
гателях— выбегом, процесс достижения судном установившейся ско-
рости—разгоном. Определение длины пути и времени торможения,
41
выбега и разгона следует производить по методике В. Г. Павленко,
дающей наиболее совпадающие с натурными испытаниями судов
Рис. 37. Зависимость скорости движения
судов и состава на глубокой воде от ча-
стоты оборотов винтов:
/ — теплоход типа «Родина»; 2 — теплоход ти-
па «Октябрьская революция»; 3 — теплоход
типа «Волго-Дон»; 4 — теплоход типа «Волго-
нефть»; 5 — теплоход типа ОТА с баржей
(Q = 3800); 6 — теплоход типа ОТ-2005 с двумя
баржами (Q = 3800); 7 — теплоход типа
ОТ-2005 с двумя баржами (учалены в два
пыжа)
результаты.
Путь и время разгона опре-
деляют по следующим формулам
В. Г. Павленко:
Dp de
<30)
В этих формулах:
De — водоизмещение судна или
толкаемого состава, кг;
g — ускорение свободно падаю-
щего тела (g = 9,8 м/с2);
R' — приведенное сопротивле-
ние на глубокой воде при
скорости полного хода,
кг • с2/м2;
v0 — скорость полного хода на
глубокой воде, м/с;
, at — вспомогательные величи-
ны.
В зависимости от вида флота, рода движителей, осадки Т и глубины
Н величины as и at определяются по следующим формулам:
а) для судов с открытыми винтами
as = 0,75 — 0,67 ( — Г
V н J
at = 1,36-0,67 ^р,
б) для судов с комплексами винт — насадка
/ Т \ 2
as = 0,64—0,47 (—) ;
\ Н J
(т \ 2
— ) ;
н /
в) для составов ( толкачи оборудованы насадками)
(т \ 2
— ) ;
Н /
at = 1,22-0,47^
Путь выбега (свободного торможения) определяется по формуле
е _____ 2,65 De ,oi\
°выбег — 7~.~ , „ог .
(е+ер)
44
где е — вспомогательная величина, определяемая по выражению
8 = 1 + 0,33( — } + 1,1 (—Г;
\Н ) \Н/
ер — вспомогательная величина, определяемая по формуле
п2
о — А А А _££_
Ср —у2/3 *
(32)
В последней формуле:
kx — коэффициент; kx = 0,3 — для одновинтовых судов, в осталь-
ных случаях kx =1,0;
kp — коэффициент, значение которого зависит от вида движителя;
k}) = 2,3 — для судов с реверс-редуктором и открытыми вин-
тами, kp = 16,6 — для судов без реверс-редуктора и откры-
тыми винтами, £р=6,9—для судов с комплексами винт—на-
садка и реверс-редуктором, kp — 34,0 — для судов с комплек-
сами винт — насадка без реверс-редуктора;
fe6 — коэффициент, принимается равным 0,75 для составов, а для
самоходных судов подсчитывается по формуле kQ = 46(1 — 6),
где б — коэффициент общей полноты;
£>в — диаметр винта, м;
V — объемное водоизмещение, м3.
Время выбега определяется по формуле
± __ bt De
1 выбег 1 „ \ п/ »
(е + ер) vq
где bt — вспомогательная величина, определяемая по формуле
(Т \ 2
— ) .
Н J
Чтобы определить путь и время торможения, необходимы данные
для расчета разгона, при этом предполагается, что время выбега /выбсг
уже определено. Время торможения расссчитывается по формуле
/ _/I Ф (^1 4~ ^т) /оо\
ZTOPM-Z1+ . М)
где tL — время периода реверса движителей; — 25 -4- 35 с — для
грузовых и пассажирских теплоходов со скоростями полного
хода ис менее 18 км/ч; = 35 4- 40 с — для тех же судов
со скоростями = 18 4- 20 км/ч; tx = 40 4- 50 с для су-
дов со скоростями более 20 км/ч; = 15 — 20 с для тепло-
ходов-толкачей с составами, идущими со скоростями менее
18 км/ч, и /] = 20 4- 30 с для тех же составов, идущих со
скоростями 18 км/ч и более;
Gj — вспомогательная величина, определяемая по формуле
G, = 0,836 + 0,033 (-Т ) ;
ит — скорость течения, м/с; — берется со знаком плюс при
торможении по течению и минус — против течения;
45
— скорость судна (состава) в конце периода реверса движи-
телей, определяется по формуле
г>! =
Цг во
8,54 /1
F 7—~
*выбег
Значение определяется по выражению
для судов с открытыми винтами или по выражению
щ = 1— 0,137 ( —) — 0,365 ( — Г
\Н J \Н J
для судов (составов) с комплексами винт — насадка.
Путь торможения рассчитывается по формуле
•^торм = Цг ^торм + На ЧЛ ( 1 3,63 - Н”
\ Гвы';ег /
+ (У2_Г2)
gR'vt V 1 ’
где О2 — вспомогательная величина, определяемая по формуле
G„ = 0,407 +0,020 — .
Н
Преимущество приведенной методики состоит в более высокой точ-
ности и универсальности. При отсутствии течения нужно принять ц, =
= 0 и пользоваться теми же формулами.
В табл. 13 приведены инерционные характеристики серийных транс-
портных судов для скорости полного хода на глубокой воде при полной
осадке. Сведения об инерционных характеристиках приводятся в пас-
портах судов и справочниках.
(34)
Таблица 13
Тип судна Скорость, движения, км/ч Водоиз- мещение, т Торможение Выбег Разгон
Путь, м Время, мин Путь, м Время, мин Путь, м Время, мин
«Ленин» 26 2080 530 2,3 1710 9,20 982 3,3
«Октябрьская револю- ция» 25 1600 530 2,4 1650 9,20 1010 3,5
«Родина» . 22 1337 445 2,3 1410 8,90 870 3,5
«Россия» 19,2 1002 450 2,7 1450 10,60 920 4,2
«Ом» ......... 19,5 180 230 1,4 680 4,90 410 1,9
«Вол го-Дон» 21 6729 600 3,5 1900 19,0 995 4,2
«50 лет Советской вла- сти» 19,8 4097 300 2,0 1700 20,0 1100 5,8
Танкер «Великий» . . . 19,6 6460 445 3,0 1580 21,0 1050 5,4
«Шестая пятилетка» . . 19,2 2740 515 3,0 1340 13,3 ИЗО 5,7
«Калининград» .... 20,0 1620 390 2,0 1400 12,0 990 5,1
«Окский-1» 16,6 1632 345 2,6 1180 13 840 4,1
«Нефтерудовоз» «... 20,3 4367 310 2,1 1750 18 1100 5,7
46
В конце периода торможения винтовые суда с рулями могут поте-
рять управляемость и значительно уклониться от первоначального
курса.
Большое значение имеет знание инерционных характеристик при
различных скоростях хода и изменении оборотов двигателей (рис. 38).
Правые кривые на графиках (см. рис. 38, а, б, в, г) показывают, как из-
меняется скорость с течением времени, левые—какое расстояние при
этом проходит судно.
Рис. 38. Инерционные характеристики теплоходов:
□ — «Октябрьская революция»; б — «Максим Горький»; в — «Волго-Дон»; г — «Балтийский»;
1 — изменение скорости по времени при уменьшении оборотов машины с полного хода вперед
на средний ход вперед; Г — изменение скорости в зависимости от пройденного пути при
уменьшении оборотов машины с полного хода вперед на средний ход вперед; 2—изменение
скорости по времени при уменьшении оборотов машины с полного хода вперед на малый ход
вперед; 2' — изменение скорости в зависимости от пройденного пути при уменьшении оборо-
тов машины с полного хода вперед на малый ход вперед; 3 — изменение скорости по времени
при уменьшении оборотов машины со среднего хода вперед на малый ход вперед; 3' — из-
менение скорости в зависимости от пройденного пути при уменьшении оборотов машины со
среднего хода вперед на малый ход вперед; 4 — изменение скорости по времени при изме-
нении режима движения с полного хода вперед на полный ход назад; 4' — изменение скоро-
сти в зависимости от пройденного пути при изменении режима движения с полного хода впе-
ред на полный ход назад; 5 — изменение скорости по времени при изменении режима дви-
жения со среднего хода вперед на полный ход назад; 5' — изменение скорости в зависимости
от пройденного пути при изменении режима движения со среднего хода вперед на полный
ход назад
Пример. Теплоход «Октябрьская революция» шел полным ходом со ско-
ростью v = 25 км/ч, и судоводитель дал машинам средний ход вперед. Опреде-
лим, как изменится скорость теплохода через 40 с и какое он пройдет расстояние.
На горизонтальной оси графика (см. рис. 38, а) от деления, соответствующего
цифре 40 (точка Л), восстановим перпендикуляр до пересечения с кривой 1
и против полученной точки В на вертикальной оси скорости находим, что ско-
рость теплохода будет равна 22,5 км/ч. Проведем из точки В линию, параллельную
горизонтальной оси, до пересечения с кривой Г. Из точки пересечения С опустим
перпендикуляр на горизонтальную ось и получим точку £), которая и показывает,
что теплоход за 40 с пройдет расстояние, равное 200 м. Если бы с полного хода
вперед был дан не средний ход, а полный ход назад, то, как показано па этом
графике, за 40 с скорость уменьшилась бы до 13,5 км/ч и судно прошло бы путь,
равный 130 м. Пользование другими графиками аналогично.
47
§ 10. МАНЕВРЕННЫЕ КАЧЕСТВА
СУДОВ НА ПОДВОДНЫХ КРЫЛЬЯХ
И НА ВОЗДУШНОЙ ПОДУШКЕ
Принципы движения скоростных судов. Наиболее радикальным
способом повышения скорости судов является подъем корпуса судна
из воды в воздух — в среду, почти в 800 раз менее плотную по срав-
нению с водой. Способами подъема судна из воды и снижения его со-
противления являются: глиссирование, подводные крылья, воздушная
подушка (статическая или динамическая).
Глиссирование представляет собой движение судна по поверхности
воды с использованием как поворотного, так и подъемного действия
водного потока на днище судна для подъема корпуса из воды. При
Рис. 40. Схема сил, действующих на судно
в вертикальной плоскости при установившемся
движении на крыльях
Рис. 39. Глиссирование судна
глиссировании (рис. 39) сила веса судна D уравновешивается гидроди-
намической силой давления воды на днище Fa, а момент силы Мд урав-
новешивается суммой моментов Мо от силы упора винта, от струй
воды на кормовую, смоченную часть плоского днища и от подъемной
силы воздушного потока, обтекающего днище. К глиссирующим су-
дам относятся теплоходы типа «Заря».
У судна на подводных крыльях при установившемся движении
подъемные силы носового YH и кормового крыльев уравновешива-
ют вес судна D (рис. 40). Подводные крылья в плане могут быть эллип-
тической, прямоугольной или стреловидной формы. Суда типов «Ра-
кета», «Метеор» и «Буревестник» имеют стреловидные крылья.
Поток воды, набегающий на крыло со скоростью v под углом а,
называемым углом атаки, на нижней стороне крыла замедляется, а на
верхней ускоряется. При этом в соответствии с законом Бернулли на
верхней стороне крыла давление уменьшается, а под крылом увели-
чивается, вследствие чего возникает подъемная сила крыла. Пример-
но третья часть подъемной силы крыла создается за счет повышения
давления на нижней кромке крыла, две трети—за счет разрежения или
понижения давления в верхней части крыла. На рис. 41 показана схе-
ма сил, действующих на подводное крыло. Величины сил лобового
48
сопротивления крыла X и подъемной силы Y определяются по следу-
ющим формулам:
X=Cx^S\
X 2
Y — Cy — S.
у 2
(35)
(36)
В этих формулах р — плотность воды;
v — скорость потока;
S — площадь крыла;
Сх, Су — опытные гидродинамические коэффициенты.
Судоводитель должен придавать большое значение вопросу рав-
номерного распределения груза (пассажиров) на глиссирующих су-
дах и судах на подводных крыльях, так как подъемная сила корпуса
или крыльев зависит от положения центра тяжести судна, крена и диф-
ферента.
Рис. 41. Схема сил, действующих на
подводное крыло
Рис. 42. Схема образования воздуш-
ной подушки:
1 — гибкое ограждение («юбка»)
Принципы движения на воздушной подушке впервые четко сфор-
мулировал К. Э. Циолковский. В тридцатых годах В. И. Левковцм
был создан первый катер на воздушной подушке. В настоящее время
суда на воздушной подушке имеются как в нашей стране, так и за ру-
бежом. Различают три типа судов на воздушной подушке: со статиче-
ской воздушной подушкой, с динамической воздушной подушкой, со
статической и динамической воздушными подушками.
Суда со статической воздушной подушкой поднимаются и удержи-
ваются над водой елоем сжатого воздуха, нагнетаемого под корпус вен-
тиляторами или другими видами нагнетателей. Сила веса судна G при
этом уравновешивается равнодействующей сил давления сжатого воз-
духа под корпусом судна Рп (рис. 42).
Для уменьшения расхода воздуха, нагнетаемого под корпус судна,
у судов с полным отрывом от воды (суда амфибийного типа) по перимет-
ру судна устраивается гибкое ограждение — «юбка» (см. рис. 42) из
прочных синтетических материалов. У судов с частичным отрывом от
Боды или без отрыва от воды «юбка» устанавливается в передней части
корпуса судна, а по бортам устанавливаются продольные кили-скеги.
49
Кормовая часть судна с движительно-рулевым комплексом находится
в воде. К судам на воздушной подушке первого типа относятся суда
па воздушной подушке «Нева», «Сормович», второго — «Зарница»,
«Орион».
У судов с динамической воздушной подушкой отделение корпуса
от воды возникает от действия подъемной силы воздушного крыла (как
и у самолета) и увеличения подъема силы крыла за счет экрана ( т. е.
расположенной близко от крыла поверхности воды или земли). Эти
суда называют экранолетами. Экранолет мощными маршевыми двига-
телями разгоняется до скорости около 100 км/ч, а затем за счет появ-
ления динамической воздушной подушки отделяется от воды и парит
над ней на высоте 2—6 м, постепенно увеличивая скорость. Суда со
Рис. 43. Экраноплан
статической и динамической воздушными подушками называют экра-
нопланами (рис. 43). У этих судов воздух нагнетается под корпус, и они
отделяются от воды за счет статической воздушной подушки. Затем
с помощью маршевых двигателей (реактивных турбин или воздушных
винтов) судно набирает скорость, появляется воздушная подушка,
которая в дальнейшем удерживает судно над водой, а стартовые дви-
гатели после набора скорости выключаются. Одной из самых важных
характеристик судов на динамической воздушной подушке является
их аэродинамическое качество, под которым понимают отношение подъ-
емной силы крыла Ув к силе лобового сопротивления Хв, или отношение
соответствующих аэродинамических коэффициентов крыла Сув и Схв:
= — = Сув
*в Схв
Значение аэродинамического качества у современных транспорт-
ных самолетов достигает 16—17, вертолетов — 4, у судов на динами-
ческой воздушной подушке—20—25. Это значит, что суда на динами-
ческой подушке более экономичны.
Маневренные качества судов на подводных крыльях. Особенностью
маневренных качеств судов на подводных крыльях по сравнению о
обычными судами является резкое увеличение (в 2—3 раза) диаметра
циркуляции с увеличением скорости хода. По данным натурных ис-
пытаний судов, диаметры циркуляции DT, а также DJL приведены
в табл. 14.
50
Таблица 14
Теплоход Мощность Ni, л.с. Длина L, м Диаметр циркуляции при ходе
на корпусе на крыльях
DT> м DT/L DT, м 1
«Буревестник» 5400 43,2 170—210 4—5 520—600 12—14
«Метеор» 1700 34,6 140—175 4—5 525—600 15—17
«Ракета» 1000 27,0 50—80 2—3 160—190 6—7
«Беларусь» 1000 18,6 40—90 3—4 250—300 15-16
Как показали натурные испытания, при ходе на крыльях угловая
скорость поворота судов после перекладки руля очень быстро дости-
гает установившейся величины, т. е. повороты выполняются практи-
чески с постоянной угловой скоростью.
Кривая линия пути судна при повороте на угол 90°, как показали
исследования автора, близка по своему виду к усеченной по оси X пе-
реходной кривой, называемой кривой-радиоидой или клотхоидой.
Участок клотхоиды может быть легко построен по уравнениям ее ор-
динат:
х=|/ ^-^-50; (38)
Z/=]/^k'v. (39)
В этих формулах: х — ордината по оси X, совпадающей с ДП судна
в начале поворота;
у — ордината У, перпендикулярная ДП в начале
поворота;
q— опытная величина, учитывающая поперечные
импульсы ускорения и зависящая от поворот-
ливости судна (для судов типа «Метеор»
q = 0,1 м/с3, типа «Ракета» и «Спутник»
9 = 0,2 м/с3).
Значения krx и для углов поворота от 0 до 90Q приведены
в табл. 15.
Таблица 15
а, град k‘x *у а, град к'у
0 0 0 50 1,73 0,55
5 0,59 0,02 55 1,79 0,59
10 0,83 0,05 60 1,83 0,66
15 1,02 0,09 65 1,87 0,74
20 1,17 0,14 70 1,90 0,81
25 1,30 0,17 75 1,92 0,88
30 1,41 0,25 80 1,93 0,96
35 1г51 0,31 85 1,94 1,03
40 1,59 0,38 90 1,95 1,10
45 1,67 0,44 — — —
51
Длина дуги клотхоиды L, или длина пути судна при движении в
эволюционный период циркуляции, определяется по формуле
/.= 1/^2^. (40)
Знание характера кривой на участке циркуляции при ходе на
крыльях от начала поворота до поворота на 90° позволяет судоводителю
теоретически грамотно решать ряд задач, например, определить воз-
можность прохождения криволинейного участка с малыми радиусами
кривизны, величину опасного расстояния до встречного и обгоняемого
судов, при котором сделать отворот невозможно, и т. д.
Знание величины диаметра циркуляции при раеличных режимах
работы двигателей позволяет судоводителю находить правильное ре-
шение таких, например, задач, как определение возможности прохож-
дения криволинейного участка с малым радиусом кривизны или вы-
бор точки начала поворота.
При выполнении циркуляции с перекладкой руля на угол более
15—209 кормовая часть корпуса судна начинает касаться воды, резко
возрастает сопротивление воды движению, двигатель испытывает пе-
регрузку, снижается число оборотов и теплоход переходит в режим
плавания на корпусе. Чтобы избежать этого, нужно руль переклады-
вать плавно на величину 10—12° у теплоходов типа «Ракета» и 20 —
259 — типа «Метеор». При необходимости произвести крутой поворот
и резко переложить руль следует уменьшить обороты двигателя.
Несмотря на большую скорость движения, суда на подводных
крыльях быстро гасят инерцию, как только корпус начинает касаться
воды. В табл. 16 приведены инерционные характеристики судов на
подводных крыльях-.
Таблица 16
Тип судна Водоизме- щение V, т Скорость движения V, км/ч Выбег 'выб’ м Торможе- ние /т, м
«Бу ревес гни к» 70,8 94 250 160
«Метеор» 53,4 70 200 120
«Ракета» 25,4 60 130 100
«Беларусь» 9,6 65 80 50
Возможность быстрого гашения инерции позволяет выполнять
маневры, заканчивающиеся остановкой судна (привалы, шлюзование
и др.), на более высоких скоростях по сравнению с обычными судами.
При ходе на крыльях неправильные течения (суводи, майданы,
прижимные и свальные течения) на управляемость теплохода прак-
тически не оказывают влияния. При движении по взволнованной по-
верхности судно испытывает толчки, удары, ухудшается и его устой-
чивость на курсе. Для ослабления силы этих ударов нужно снижать
скорость движения до тех пор, пока удары будут незначительными.
52
Правилами Речного Регистра РСФСР разрешается движение на
крыльях—для «Ракеты» при высоте волны До 0,8 м, «Метеора»—1,3 м,
«Буревестника»—1 м; движение на корпусе—для «Ракеты» при высо-
те волны до 1,5 м, для «Метеора» и «Буревестника» — до 2 м.
При столкновении с плывущими бревнами происходят сильные толч-
ки и перегрузки. Как правило, эти толчки приходятся на крыльевое
устройство, гребной вал и винт, поэтому судоводитель должен непре-
рывно просматривать поверхность воды впереди судна и при обнару-
жении плывущих предметов не допускать попадания их под корпус
судна.
Маневренные качества судов на воздушной подушке. В качестве
органов управления для судов на воздушной подушке (СВП) приме-
няются: воздушные рули, устанавливаемые в отходящем от винтов
потоке воздуха; бортовые жалюзи или захлопки; воздушные винты
регулируемого шага, установленные на поворотных пилонах, а на су-
дах со скегами — водяные рули. Изменение направления тяги винтов
является очень эффективным способом управления.
Диаметр циркуляции амфибийных СВП зависит от скорости дви-
жения. С уменьшением скорости диаметр циркуляции уменьшается.
Величину диаметра установившейся циркуляции амфибийных
СВП можно определить по формуле
ц gtg0 ’
(41)
где v — скорость на циркуляции, м/с;
g — ускорение свободно падающего тела, м/с2;
0 — угол крена, град.
В табл. 17 приведены характеристики поворотливости амфибийного
СВП «Сормович», скегового СВП «Зарница» в сравнении с глиссирую-
щим судном «Заря».
Таблица 17
Тип судна Мощность Ne. л. с. Lra6’ м vt км/ч DT, м
«Сормович» 1800 29,2 40 150
«Зарница» 235 22,3 34 180
«Заря» 830 22,14 43 100
При движении полным ходом со скоростью 100—120 км/ч диаметр
циркуляции СВП «Сормович» увеличивается в 5—6 раз.
После создания воздушной подушки амфибийные СВП увеличивают
скорость до полного хода, проходя путь 500—700 м. Величину гашения
инерции амфибийного СВП при движении на воздушной подушке мож-
но определить по выражению
Pvl k
(42)
53
где Р — весовое водоизмещение;
и — скорость хода;
F3X — УПОР движителей на заднем ходу;
k — коэффициент, для СВП «Сормович» k = 0,035.
§ 11. ВЛИЯНИЕ ВНЕШНИХ
ФАКТОРОВ НА УПРАВЛЯЕМОСТЬ
И МАНЕВРЕННОСТЬ СУДОВ
Действие ветра на движущееся судно. К внешним факторам, ока-
зывающим большое влияние на управляемость и маневренные элемен-
ты судна, относятся ветер, течение, рельеф дна и берегов и мелководье.
При решении задач о влиянии ветра на движущееся судно необходимо
отличать истинный, действительный ветер от относительного или ка-
жущегося. Кажущийся ветер тот, который ощущается на движущемся
судне. При движении судна скорость истинно-
М. го ветра геометрически складывается со
скоростью набегающего воздушного потока,
называемого курсовым ветром, скорость ко-
торого равна скорости судна. Направление
ветра обозначается названием той части
горизонта, откуда дует ветер.
При отсутствии на судне ветрочета (круга
СМО) или других приборов истинный ветер
$ можно вычислить графически следующим об-
Рис. 44. Графический разом. Через произвольную точку О (рис. 44)
способ определения на- на листе бумаги проводят линию меридиана
правления и скорости ис- — $ Под углом, равным курсу, отклады-
тинного ветра:
, * вают произвольным масштабом от точки О
1 — курс судна; 2 — кажу- г „ . . . о
щийся ветер; 3-истинный ОТреЗОК, рЗВНЫИ СКОрОСТИ СуДНЗ (в М/С). За-
ветер тем из точки О проводят линию в ту сторо-
ну, откуда дует кажущийся ветер, и откла-
дывают его скорость в том же масштабе (в м/с). Соединив концы
векторов прямой, получают скорость истинного ветра. Направление
его будет в компас и параллельно линии, соединяющей концы век-
торов. Истинный ветер всегда отклонен от курса больше, чем кажу-
щийся, и дует в тот же борт, который называется наветренным. Про-
тивоположный борт называется подветренным.
При действии ветра, направленного под углом к диаметральной
плоскости судна, возникают его боковой снос (называемый ветровым
дрейфом), крен судна, разворот на ветер или под ветер, изменение ско-
рости движения.
Угол Рв между диаметральной плоскостью судна и направлением
вектора скорости движения называется углом ветрового дрейфа
(рис. 45).
Чтобы обеспечить заданное направление движения судна, нужно
внести поправку на ветровой дрейф, для чего изменить курс на вели-
чину угла дрейфа.
54
При бортовых ветрах, дующих под углом к ДП, меньшим 90°, точка
приложения силы А из центра парусности смещается к носу, при уг-
лах, больших 90°, — к корме. По данным К. К. Федяевского, это сме-
щение Д/ может быть определено по выражению
Д/= fo,25 ——А, (43)
\ 2л)
где ак — угол кажущегося ветра.
Рассмотрим систему сил и моментов, действующих на судно, дви-
жущееся прямолинейным курсом при бортовом ветре ( см. рис. 45).
На судно будет действовать аэродинамическая сила давления вет-
ра А, создающая смещение судна—ветровой дрейф по направлению дей-
ствия ветра со скоростью v. Скорость движения судна v будет слагаться
из скорости движения vx, создаваемой упором движителей Ад, и ско-
рости ветрового дрейфа vy.
Рис. 45. Схема сил, действующих на судно при бортовом ветре
При равномерном движении с углом дрейфа 0В равнодействующая
сил сопротивления воды R будет отклонена от диаметральной плоско-
сти в сторону действия ветра. Составляющая перпендикулярная
диаметральной плоскости, будет уравновешивать давление ветра, т. е.
А = Ry. Составляющая Rx уравновешивает упор винтов Ад. Точка
приложения силы Л, или аэродинамический центр давления (ц. д.),
не совпадает с точкой приложения силы Ry, или гидродинамическим
центром давления. Эти силы образуют моменты, которые поворачивают
судно на ветер или под ветер в зависимости от взаимного расположения
точек приложения сил R и А. Момент силы А называется ветровым мо-
ментом AfB.
Точки приложения сил Ry и А находятся на разной высоте, поэтому
возникают кренящий момент и крен в сторону силы Л. У судов с боль-
шой парусностью при сильном шквалистом ветре ветровой крен может
достичь опасных значений.
Для того чтобы судно двигалось прямолинейно по линии 1 — /,
нужно с помощью руля создать поворачивающий момент А1Р, направ-
ленный в противоположную сторону, т. е. руль надо переложить на
несколько градусов вправо (как показано на рис. 45).
55
Давление ветра Ау, дующего перпендикулярно ДП, определяют
по формуле
— су (^В ув),
(44)
где су — коэффициент, учитывающий обводы корпуса в надводной
части (су = 1,2);
рв — массовая плотность воздуха (рв = 0,125 кгс
Sn — площадь парусности (берется из паспорта судна), м2;
ов — скорость кажущегося ветра на высоте рубки судна, м/с;
kB — коэффициент, учитывающий уменьшение ветра с вы-
сотой; feB = 0,9 в не защищенных от ветра местах
рек, kB = 0,75 — 0,6 вблизи причалов, шлюзов и бе-
регов.
Ветровой момент мФкно определить по формуле
< = Ay lB = 1,2 (kB ов)2 Sn sin а ( 0,25 +
L,
(45)
где ак — угол между диаметральной плоскостью судна и направ-
лением кажущегося ветра (считая от носа судна);
Qi = ^2 (^ц.п—отстояние центра парусности от мидель-шпан-
гоута).
Величина скорости ветрового дрейфа г>др под действием силы Ау
может быть определена по формуле
гдр = ’ (46)
где (Оооо — коэффициент силы сопротивления воды движению судна
лагом (о)9о° = 0,7 4- 0,9);
ж Ь — длина судна, м;
Т — осадка судна, м.
На судно, движущееся по прямой передним ходом, при бортовом
ветре будут действовать четыре поворачивающих момента: ветровой
7ИВ, позиционный рулевой /Ир и момент боковой силы Мту,
возникающей на винтах от косого натекания на винты потока воды.
Ветровой момент в зависимости от расположения ц. п., ц. т. или
вида силуэта надводной части судна может быть направлен на ветер
(ц. п. ближе к корме судна, чем ц. т.) или под ветер (ц. п. ближе к носу
судна, чем ц. т.).
Позиционный момент от гидродинамической силы давления
воды на корпус судна, движущегося с углом дрейфа, будет направлен
на ветер. Момент от боковой силы на винтах всегда будет направлен
под ветер. Момент руля Мр — на ветер или под ветер в зависимости от
знаков и величин вышеперечисленных моментов.
Так как скорость ветра с течением времени постоянно изменяется,
для удержания судна на прямом курсе требуется часто изменять угол
56
перекладки руля, поэтому устойчивость на курсе всех судов при ветре
ухудшается.
Если в рассматриваемом примере не перекладывать руль, то судно
будет разворачиваться на ветер и курсовой угол начнет уменьшаться.
На рио. 46 изображен случай, когда ветровой момент направлен
в подветренную сторону. Сила Ау образует ветровой момент, который
направлен вправо, т. е. под ветер. Для того чтобы судно двигалось пря-
молинейно, руль нужно переложить влево, т. е. на ветер. Таким об-
разом, возможны два характерных взаимных положения центров ги-
дродинамических и аэродинамических сил:
1) центр гидродинамических сил расположен дальше от центра тя-
жести, чем центр аэродинамических сил (см. рис. 45);
2) центр гидродинамических сил расположен ближе к центру тя-
жести судна, чем центр аэродинамических сил (см. рис. 46).
Рис. 46. Схема сил, действу-
ющих на судно при остром
курсовом угле ветра:
1 — линия пути судна; R — сила
сопротивления корпуса; 4 — си-
ла давления ветра
При движении задним ходом центр гидродинамических сил сме-
щается ближе к корме. Поэтому у большинства судов с развитой над-
стройкой при движении задним ходом ветровой момент направлен в
сторону ветра, т. е. корма разворачивается на ветер, нос — под ветер.
За счет увеличения плеча ветрового момента при движении задним хо-
дом корма разворачивается на ветер лучше, чем нос на переднем ходу,
и это необходимо учитывать при маневрировании.
Судоводитель может изменять величину ветрового момента, изме-
няя режим работы движителей. Увеличение оборотов движителя во
время маневра приводит к перемещению центра гидродинамических
сил в сторону носа на переднем и в сторону кормы на заднем ходу.
Если в это время ветровой момент направлен на ветер, то он бу-
дет расти за счет увеличения плеча ветрового момента и разворот судна
на ветер будет происходить быстрее.
Если ветровой момент направлен в сторону ветра, увеличение обо-
ротов движителей приведет к уменьшению плеча ветрового момента
и уклонение судна в сторону ветра будет медленнее или прекратится.
Если циркуляция выполняется при ходе против ветра, прямое
смещение циркуляции уменьшается, а диаметр циркуляции увели-
чивается, при ходе по ветру прямое смещение и диаметр циркуляции
увеличиваются. Если циркуляция начинается при бортовом ветре, то
небольшое увеличение прямого смещения дает уменьшение диаметра
циркуляции при повороте на ветер и увеличение при повороте в сто-
рону подветренного борта. Если имеется ветровое волнение, диаметр
циркуляции возрастает.
57
При выполнении маневров на переднем ходу на малых скоростях
во время сильных ветров ветровой момент может быть больше момента
руля, и тогда судно теряет управляемость.
В практике замечено, что крупные пассажирские винтовые
суда при повороте на ветер и работе винтов на передний и задний ход
в сторону поворота теряют управляемость начиная со скоростей ветра
около 10 м/с и более (т. е. при ветрах силой 6 баллов и больше).
В целях правильного выполнения маневра судоводители в своей
практической работе должны знать: минимальные скорости движения,
удерживающие судно на курсе при ветрах различной силы; безопас-
ный курсовой угол ветра для движения с минимальной скоростью;
минимальную скорость на циркуляции, обеспечивающую управляе-
мость в течение всего маневра.
Влияние течения на маневренность и движение судна. На манев-
ренные качества судов и их движение существенное влияние оказы-
вают течения. На озерах, крупных водохранилищах и в прибрежных
морских районах, не имеющих постоянных течений, могут возникать
течения, вызванные действием ветра. Для средних широт скорость
ветрового течения определяется по формуле
VT = 0,1—. (47)
Д/sin Ф
где ав — скорость ветра, м/с;
Ф — широта места.
Движение при течении зависит от скорости хода и скорости течения.
Назовем скорость судна относительно суши (дна) абсолютной или ис-
тинной скоростью пп, скорость относительно воды — относительной
zj0, а скорость течения воды относительно дна — переносной ит.
Тогда согласно механическому принципу относительности Галилея
будем иметь равенство
Уп = (48)
которое означает, что вектор абсолютной скорости равен геометричес-
кой сумме векторов относительной скорости судна и переносной ско-
рости течения.
Отложив на карте от данной точки величину и направление век-
торов v0 и vT как стороны параллелограмма, величину ии находят
как диагональ параллелограмма (рис. 47). При постоянных и vT
величину z?u определяют по формуле
= Уу? + У?—2у0 vt cos ,
где 7Т — угол между диаметральной плоскостью судна и направ-
лением течения.
Угол между линией пути судна (ОЛ на рис. 47) и диаметральной
плоскостью судна называют углом сноса от течения (Зт.
По теореме синусов найдем угол Рт:
sin рт = — sin qT = — sin р.
Уи ^0
58
На рис. 48 приведен график для определения угла сноса, сос-
тавленный А.В. Васильевым. Пользование графиком покажем на при-
мере. Определим угол сноса рт, если скорость судна относительно
воды v0 = 4,18 м/с, скорость течения ит = 1,42 м/с. Угол между на-
правлением течения и диаметральной плоскостью судна qT = 47°.
Находим отношение скоростей ~ = 0,34.
На оси абсцисс из точки а (см. рис. 48), соответствующей углу
qT = 47°, восстанавливаем перпендикуляр до пересечения его
с кривыми = 0,30 и = 0,40. Интерполяцией находим точку
/, соответствующую приблизительно = 0,34. Проектируем ее на
ось ординат и находим точку с на этой оси. Угол сноса Рт = 11°.
Рис. 47. Определение при течении ис-
тинной скорости и угла сноса
Рис. 48. График для определения уг-
ла сноса
При выполнении циркуляции на течении ее форма и размеры из-
меняются в связи со сносом судна. На рис. 49 изображена характер-
ная циркуляция на течении. Если бы течение отсутствовало, то
циркуляция судна имела бы форму, показанную пунктиром. Снос суд-
на по течению определяется длиной отрезков между соответствующи-
ми точками фактической циркуляции и той, которую судно совер-
шало бы при отсутствии течения (отрезки 2—2'\ 3—3'\ 4—4' и т. д.).
Прямое смещение при выполнении циркуляции во время хода по тече-
нию возрастает, а при ходе против течения — уменьшается. Диаметр
циркуляции, как правило, увеличивается тем больше, чем больше
скорости течения.
Влияние мелководья на маневренные элементы и движение судна.
При движении судна по мелководному участку скорость движения
уменьшается, возрастает волнообразование и сопротивление воды дви-
жению, увеличивается приращение осадки, возрастает рыскливость
судна и ухудшается поворотливость. Пока скорость движения судна
на мелководье невелика, длина образующихся волн незначительно
отличается от длины волн на глубокой воде.
Это условие соблюдается, когда соотношение скорости движения
судна и глубины h определяется неравенством
0,4 Vg/i,
где g — ускорение свободно падающего тела.
;э
При дальнейшем увеличении скорости движения происходит слия-
ние расходящихся волн с поперечными волнами в одну одиночную,
которая тем больше, чем меньше отношение глубины к осадке. Оди-
ночная волна образуется при скорости v = 0,75 и достигает наи-
большей величины при скорости v = ~\/gh, называемой критической.
В это время несколько впереди форштевня и ахтерштевня образуют-
ся одиночные волны в виде поперечного вала, движущегося вместе
с судном,
6
Рис. 49. Циркуляция судна на течении
Увеличивать скорость движения судна до значений, больших
0,8 укр, не рекомендуется. При образовании одиночной волны уро-
вень воды в районе миделя судна понижается.
За счет увеличения сил поддержания в носовой части образуется
дифферент на корму.
Увеличение осадки судна за счет дифферента и понижения уровня
уменьшает зазор между днищем судна и грунтом дна, что приводит
к увеличению скоростей обтекания днища судна водой. Кроме того,
скорости обтекания днища увеличиваются и за счет работы движи-
телей. Все это ведет к уменьшению давления воды под днищем
судна.
Особенно резко эти явления наблюдаются у судов с полными обво-
дами и плоским днищем, когда глубины превышают осадку в 1,5 раза
и менее. Таким образом, создается прогрессирующее погружение суд-
на, которое может привести к удару о выступы дна и пролому корпуса
судна, повреждению движителей или рулей.
60
Общее приращение осадки на корме судна ДТср (м) при движении
на мелководье рекомендуется определить по формуле Г. И. Ваганова
для толкаемых сбставоз
Д7„ = 0,52ОУ
(49)
ДЛЯ
(50)
и по формуле А. М. Полунина
одиночных судов
ДТср = ( 0.08 + 0,34 — ) — .
V J 2g
В этих формулах:
v — скорость судна (состава), м/с;
Т — осадка, м;
Hc.z — глубина, м;
g — ускорение свободно падающе-
го тела, м/с2.
Приращение осадки у крупнотон-
судов достигает 60—
и Fr
Т
нажных речных
70 см и более.
Используя ' приведенные _______
формулы, А.Д. Ненюхиным опре-
делены безопасные скорости движения судов (табл. 18) и составов
(табл. 19) в зависимости от глубины судового хода и статического
(в неподвижном состоянии) запаса воды под корпусом судна A/iCT.
выше
Таблица 18
Глубина судового хода, м Безопасная скорость движения одиночных судов, км/ч, в зависимости от AhCT, см
15 1 20 1 30 | 40 | 50
1,5 5,8 8,3 12,3 15,9 19,6
1,5—3,0 5,7 8,1 11,9 15,2 18,6
3,0 5,6 8,0 11,4 14,3 17,2
Таблица 19
Глубина судового хода, м Безопасная скорость движения толкаемых составов, км/ч, в зависимости от A/iCT, см
15 20 1 30 1 1 «О 1 50
1,5 7,8 10,0 13,0 15,3 17,5
1,5—3,0. 7,76 9,87 12,7 14,8 16,7
3,0 7,7 9,75 12,5 14,5 16,0
Мелководье оказывает существенное влияние на поворотливость
и устойчивость на курсе судов. На рис. 50 показана зависимость от-
носительного радиуса циркуляции водометного судна от отно-
61
сительной глубины фарватера и числа Фруда Fr =
у
получен-
ная ВТ. Белинским. Эта зависимость показывает, что для чисел Фру-
да Fr = 0,15 -г- 0,20 (т. е. для тихоходных судов) с увеличением ско-
рости движения судна величина /?ц несколько снижается, а затем
начинает резко возрастать.
При движении по мелководным участкам с резкими изменениями
глубин (подводные косы, заструги, осередки и т. д.) судовые волны
частично отражаются от неровностей дна. Это создает повышенный
горизонт и давление воды на борт со стороны отмели. Появляется по-
ворачивающий момент, направленный от отмели. Если отмели распо-
ложены и справа и слева, судно будет рыскать в ту и другую сторону.
Чем больше скорость движения, тем интенсивнее волнообразование,
а стало быть, и больше рыскливость. При движении по мелководью
с большими неровностями дна снижение скорости хода до выхода на
мелководный участок уменьшает рыскливость и улучшает поворот-
ливость. При прохождении мелководных участков пути судоводители
должны запомнить места расположения подводных отмелей, кос и заст-
руг с тем, чтобы при приближении к ним своевременной переклад-
кой руля и снижением скорости хода предотвратить зарыскивание
судна, могущее привести к посадке па мель или столкновению судов.
Влияние волнения на управляемость. При движении судов на вол-
нении, когда длина волны меньше длины корпуса судна или состава,
нарушается плавность качки. Удары волн в отдельные части корпуса
судна приводят к появлению рыскливости и снижению скорости хода.
При подъеме кормы на гребень волны периодически происходит рез-
кое уменьшение упора винтов и эффективности рулей или поворотных
насадок. Принимая при качке и ударах волн на палубу воду, судно
увеличивает водоизмещение. Все эти факторы ухудшают поворот-
ливость и устойчивость судов на курсе при волнении.
Глава II
УПРАВЛЕНИЕ ОДИНОЧНЫМИ САМОХОДНЫМИ
СУДАМИ
•
§ 12. УПРАВЛЕНИЕ СУДАМИ ПРИ
ПРОИЗВОДСТВЕ ПОВОРОТОВ
И ОБОРОТОВ
Маневры и звуковые сигналы. Маневром называют изменение нап-
равления или скорости движения судна под действием рулевых
средств или движителей судна. Совокупность маневров называют ма-
неврированием. При плавании по внутренним водным путям большую
и сложную часть процесса судовождения составляет маневрирование.
Маневры бывают простые и сложные.
62
Простой маневр — это изменение только направления или толькс
скорости движения (выход на створы, остановка судна и т. п.).
Сложный маневр включает одновременное изменение и направ-
ления и скорости движения (оборот, подход к причалу).
В зависимости от количества судов, одновременно участвующих
в выполнении маневра, различают одиночные и групповые маневры.
К групповому маневру относится расхождение судов.
В зависимости от места производства маневры подразделяются на
рейдовые и путевые.
Для предупреждения судоводителей других судов о выполняемых
маневрах Правилами плавания установлены определенные звуковые
сигналы.
Четыре коротких звуковых сигнала означают: «Делаю оборот, ста-
новлюсь на якорь». Два продолжительных — «Мои машины рабо-
тают на задний ход». Такой же сигнал подается при расхождении с суд-
на, следующего задним ходом, по в этом случае дается дополнительно
и сигнал-отмашка с соответствующего борта.
Один продолжительный, три коротких, один продолжитель-
ный — «Обращаю внимание». Подается во всех случаях, когда су-
доводитель хочет привлечь внимание других судов к своему судну.
Этот сигнал дается также при подходе к канатным переправам, если
с буксирных судов опущены якоря, лоты или цепи-волокуши. Работ-
ники переправы после этого сигнала отсоединяют один конец тро-
са, по которому перемещается паром переправы.
В практике зачастую возникают ситуации, при которых необхо-
димы согласованные действия судоводителей при выполнении груп-
повых маневров. Для этих целей предназначены также звуковые сиг-
налы.
Четыре продолжительных звуковых сигнала означают: «Требую
уменьшить ход». Несамоходные суда подают сигнал об уменьшении
скорости хода частыми ударами в колокол.
Один продолжительный, один короткий означают: «Требую уве-
личить ход».
Пять и более коротких звуковых сигналов означают предупреж-
дение о грозящей опасности, в связи с которой требуется прекраще-
ние движения. Несамоходные суда сигнализируют об этом частыми
ударами в колокол.
Длительность коротких звуковых сигналов составляет около 1 с,
продолжительных — от 4 до 6 с.
Повороты. Изменение курса судна называют поворотом. Для осу-
ществления поворотов вахтенным начальником судна подаются ко-
манды, относящиеся к степени перекладки руля.
«Право (лево) руля» — по этой команде руль плавно переклады-
вается в указанную сторону на 10—15°.
Во время выполнения крутых поворотов подается команда «Пра-
во (лево) на борт». По этой команде руль перекладывается с максималь-
ной быстротой на максимально возможный угол.
«Прямо руль» — по этой команде руль устанавливается по на-
правлению диаметральной плоскости судна.
63
Для увеличения угловой скорости поворота подается команда
«Больше право (лево)», а для уменьшения — «Одерживай». В первом
случае угол перекладки руля увеличивают, во втором уменьшают или
перекладывают руль в сторону, обратную направлению поворота.
После окончания поворота и выхода судна на нужный курс пода-
ется команда «Так держать». В этом случае судно должно двигаться
прямолинейно.
Место и направление оборота. Поворот судна на обратный курс
называют оборотом. До начала оборота судоводитель должен выбрать
место и направление оборота с учетом направления и силы течения и
Рис. 51. Выбор направления оборота с учетом скоростей течения:
Мт — поворачивающий момент от течения; /Ир — поворачивающий момент от руля; / — пра-
вильное направление оборота; ZZ — неправильное направление оборота
ветра, а также особенностей данного судна и габаритов пути с тем,
чтобы обеспечить безопасность маневра, быстроту его выполнения и
наименьший радиус циркуляции. Оборот лучше всего производить
в местах с шириной судового хода, превышающей диаметр циркуля-
ции судна. Следует избегать оборотов в узких мелководных местах
и в местах с неправильными течениями.
Если при движении по течению судно будет выполнять оборот
с места, где слабое течение в сторону более сильного течения (стреж-
ня), то в момент, когда диаметральная плоскость судна будет пример-
но перпендикулярна направлению струй течения, центр давления те-
чения будет находиться от центра тяжести ближе к носу судна и сила
давления струй воды Рт будет создавать поворачивающий момент
МТ9 направленный в сторону, противоположную обороту (рис. 51).
При больших скоростях течения и малой скорости оборота может нас-
тупать равенство моментов руля и течения и выполнение оборота бу-
дет невозможным.
64
Если при движении по течению судно будет производить оборот
из места более сильного течения (стрежня) в сторону слабого течения,
то в процессе оборота равнодействующая давления воды Рт будет рас-
положена за центром тяжести, ближе к корме судна, поэтому создава-
емый ею поворачивающий момент Мт будет способствовать обороту
судна и диаметр его циркуляции будет меньшим. Следовательно, при
движении по течению оборот надо делать из стрежня в тиховод,
а при движении против течения — из тиховода в стрежень.
В ходовых ярах с небольшой шириной судового хода оборот нуж-
но делать от яра к песку независимо от направления движения.
Влияние ветра на судно аналогично влиянию течения, с той лишь
разницей, что течение действует на подводную часть корпуса неравно-
мерно, а ветер на надводную равномерно. Оборот рекомендуется выпол-
нять на ветер. В этом случае, если оборот по каким-либо причинам не
получается, судоводитель может остановить машину и дать задний
ход, тогда будет наблюдаться снос судна в сторону судового хода. При
выполнении же оборота под ветер судно будет сноситься в сторону бе-
рега. При одновременном действии на судно течения и ветра для про-
изводства оборота учитывается только один фактор, оказывающий
на судно наибольшее воздействие.
Выбрав направление оборота, судоводитель сообщает о принятом
решении рулевому.
Управление судном при оборотах. При выполнении оборотов
нужно следить за движением не только носа, но и кормы судна. Сле-
дует учитывать, что на практике трудно бывает определить, пройдет
ли мимо какого-либо предмета корма или заденет его. С мостика обыч-
но представляется, что центр циркуляции находится на траверзе,
в действительности же в маневренный и эволюционный периоды он ле-
жит впереди траверза и поэтому диаметр циркуляции фактически
больше, чем кажется.
В судовождении различают следующие виды оборотов: оборот
на переднем ходу; оборот с якорем; оборот на переднем и затем заднем
ходу; оборот с упором носа судна в берег.
Оборот на переднем ходу применяется в случае, когда
ширина судового хода больше тактического диаметра циркуляции
судна.
До начала оборота необходимо убедиться в отсутствии встречных
-и обгоняющих судов. Сначала курс судна изменяют в сторону, проти-
воположную обороту, и снижают скорость до среднего или малого хода.
Если оборот делается для подхода к причалу, то его лучше начи-
нать, пройдя траверз причала не менее чем на половину длины кор-
пуса. Руль перекладывают на 35—36° в сторону оборота и затем увели-
чивают обороты движителей и перекладку руля до максимально воз-
можного угла. Заканчивая оборот, судно выводят на курс, параллель-
ный берегу.
Иногда в момент окончания оборота создается угроза навала кор-
мы на берег. В этом случае руль перекладывают в положение «прямо»
или на несколько градусов в сторону другого борта («одерживают»
корму), и судно выходит на нужный курс. На двух-и трехвинтсвых
3 С. Б. Ольшамовский
судах диаметр циркуляции уменьшают, включая на задний ход маши*
ну с того борта, в сторону которого делают оборот.
Оборот с якорем применяется в случаях, когда габариты
судового хода недостаточны для выполнения предыдущего вида обо-
рота. При движении по течению оборот производится с носовым яко-
рем, а при движении против течения — с кормовым.
При подходе к месту оборота готовят к отдаче носовой якорь с бор-
та, в сторону которого будет производиться оборот. Снижают ход до
Рис. 52. Оборот с якорем на течении
Рис. 53. Оборот на переднем и зад-
нем ходу двухвинтового судна при
ветре
самого малого и начинают заход на оборот с учетом дрейфа кормы во
время производства оборота (рис. 52). Затем руль перекладывают
в сторону оборота на угол 35—36°, и судно начинает совершать цир-
куляцию. Погасив инерцию, отдают носовой якорь и вытравливают
якорную цепь на длину не более полутора-двух глубин (если выт-
равить якорную цепь на большую длину, во время натяжения ее может
произойти сильный рывок). После натяжения якорной цепи, если кор-
ма судна разворачивается медленно, якорную цепь потравливают.
В дальнейшем разворот судна происходит за счет натяжения якор-
ной цепи и давления воды на борт судна. После выполнения разворота
судно снимается с якоря и идет в нужном направлении.
Если течение отсутствует, оборот с носовым якорем выполняется
несколько иначе. Заход на оборот производят на самом малом ходу
и в это время готовят к отдаче носовой якорь с борта, в сторону ко-
торого производится оборот. Переложив руль в сторону оборота, ос-
танавливают машины и отдают якорь. После того как якорь заберет
грунт, дают малый ход вперед, и судно, удерживаемое якорем, развора-
чивается. На двух-и трехвинтовых судах оборот ускоряется одновре-
менной работой машин на передний и задний ход.
Оборот на переднемизатем на заднемходу
чаще всего применяется при наличии ветра. Здесь используется свой-
ство кормы большинства судов идти на ветер при движении задним
ходом. Этот вид оборота обычно применяется тогда, когда не представ-
ляется возможным выполнить оборот на переднем ходу. На малом или
среднем ходу судно ведут к наветренному берегу (рис. 53, положение
/), затем руль перекладывают под ветер, машины останавливают,
66
и дают ход назад (положение 2), В это время под действием ветра
происходят разворачивание судна и дрейф в сторону судового хода
(положение 3). Обычно, как только судно погасит инерцию, на-
чинается сильный разворот кормы на ветер и судно получает задний
ход. Руль перекладывают на 15—20° на противоположный борт. Пос-
ле того как судно завершит оборот, машины останавливают и дают ход
вперед (положение 4). При отсутствии ветра одновинтовые суда могут
выполнить этот вид оборота только в сторону вращения винта.
Рис. 54. Оборот с упором носа судна в берег при отсутствии течения
Оборот с упором носа судна в берег чаще всего
применяется на колесных и одновинтовых судах в узких местах с боль-
шими глубинами и чистыми берегами.
Двигаясь самым малым ходом или по инерции, судно направляют
к берегу под углом около 45° (рис. 54, положение 1—2), Нос судна ос-
торожно подводят к берегу, перекладывают руль в сторону поворота
и дают машине малый ход вперед (положение 3). Под действием руля
корма судна начнет разворачиваться (положения 4, 5), и когда судно
повернется больше чем на 90°, машину останавливают, руль перекла-
дывают в сторону берега, у которого производился оборот, и дают
задний ход. Судно заканчивает оборот (положение 6), двигаясь задним
ходом.
Этот вид оборота при течении и вязком грунте нужно производить
осторожно, так как может произойти навал судна на берег.
§ 13. ОТВАЛ СУДНА
Подготовка к отвалу. Маневр судна, связанный с отходом от де-
баркадера, причальной стенки, эстакады, берега или другого судна,
называется отвалом. До производства отвала вахтенный начальник
должен:
подготовить главные машины к работе;
подготовить к действию рулевое устройство, машинные телегра-
фы, дистанционное управление двигателями, судовую свяЗь, зву-
ковую сигнализацию;
3* G7
получить прогноз погоды;
проверить наличие членов экипажа судна, выполнявших задание
или отдыхавших на берегу;
собрать сведения о количестве посаженных пассажиров, погру*
женном багаже и грузе;
осмотреть рейд и убедиться в отсутствии проходящих мимо судов
и составов, а также мелких судов, стоящих за кормой;
выбрать способ отвала, сообразуясь с конкретными условиями;
установить осадку судна;
дать сигнал на уборку трапа и на прекращение сообщения" между
судном и берегом.
Особое внимание при отвале в темное время суток судоводитель
должен уделять световым сигналам.
Для отдачи носового швартовного троса даются три коротких зву-
ковых сигнала, кормового — один короткий, если на судне отсутствует
командно-вещательная установка.
На стоянке самоходные сухогрузные суда при длине корпуса более 30 м
и ширине более 5 м несут один белый клотиковый огонь на передней мачте, рас-
положенный на высоте не менее 6 м над верхней палубой или 4 м над палубным
грузом, видимый по горизонту на 360°, один белый огонь на краю капитанского
мостика с ходовой стороны, видимый с трех сторон (по траверзу, с носа и кормы),
гакабортные и гаковый огни.
Все сухогрузные суда длиной менее 30 м и шириной менее 5 м несут на стоян-
ке один белый клотиковый огонь на мачте или флагштоке на высоте не менее
2 м над палубными надстройками или грузом.
Суда, груженные нефтегрузами 1-го класса, взрывчатыми или отравляю-
щими веществами, на стоянке несут на передней мачте два красных огня, а гру-
женные нефтегрузами 2, 3 и 4-го классов —один красный огонь, видимый по го-
ризонту на 360Q. Кроме того, все эти суда несут на носовом флагштоке на высоте
2 м от фальшборта один белый огонь, видимый по горизонту на 360°, один белый
огонь на краю капитанского мостика с ходовой стороны, видимый с носа, кормы
и по траверзу, гаковый и гакабортные белые огни.
Днем эти суда как на стоянке, так и на ходу несут на носовой мачте два
(с грузом 1-го класса) или один (с грузом 2, 3 и 4-го классов) красные флаги раз-
мером 1 X 1 м.
При отвале или съемке с якоря стояночные огни заменяются на ходовые.'
Все одиночные самоходные суда, за исключением сухогрузных, нефтеналив-
ных грузовых теплоходов и судов, груженных взрывчатыми или отравляющими
веществами, и пожарных судов, на ходу на передней мачте несут один белый то-
повый огонь, видимый спереди на расстоянии не менее 8 км (при чистой атмосфе-
ре) по дуге горизонта 225° (по 112,5Q со стороны левого и правого бортов). Грузо-
вые сухогрузные суда в дополнение к этому огню несут ниже его на расстоянии
не менее 1 м один зеленый огонь с теми же характеристиками, что и белый.
Грузовые самоходные суда с нефтегрузами 1-го класса, взрывчатыми или от-
равляющими веществами на ходу на передней мачте несут три топовых огня,
расположенных вертикально, — один белый, а под ним два красных. Грузовые
суда с грузами 2, 3, 4-го классов (или с остатками их) на передней мачте несут
два топовых огня — белый, а под ним красный. Пожарно-спасательные суда при
следовании на тушение пожара или оказание помощи судну, терпящему бедствие,
на мачте несут один красный огонь, а днем — красный квадратный флаг.
Кроме топовых огней, все одиночные самоходные суда несут бортовые ог-
ни—зеленый на правом борту и красный на левом, видимые с расстояния не ме-
нее 4 км по дуге горизонта 112,5s (считая от диаметральной плоскости до траверза
и позади траверза на 22,5°), белый гаковый огонь — по дуге горизонта в 135s,
дальностью видимости не менее 4 км, гакабортные белые огни —по дую горизон-
та 180°, видимые на расстоянии не менее 4 км.
68
Рис. 55. Схема отвала от дебаркадера
на переднем ходу
Суда с габаритной шириной корпуса менее 5 м гакабортных огней не несут.
Устройство и установка сигнальных огней на судах должны соответствовать
Правилам Речного Регистра РСФСР.
Отвал при штилевой погоде. При штилевой погоде в зависимости
от конструкции и места расположения причала, типа судна и занятос-
ти акватории другими судами могут быть применены три способа от-
вала: на переднем ходу, на заднем и лагом.
Отвал на переднем ходу (рис. 55) является наиболее
распространенным способом отвала. На колесных и одновинтовых
судах при отвале на переднем ходу
отдаются средние и носовой швар-
товы. Затем кратковременной рабо-
той движителя на задний ход
«набивают» кормовой швартов. Под
действием поворачивающего момен-
та от напряжения швартовного
конца и упора движителя нос суд-
на начнет разворачиваться от при-
чала. После разворота на 10—15°
машина останавливается. Отдается
кормовой швартов, машине дают
малый ход вперед и руль перекла-
дывают в-сторону причала для того,
чтобы отвести корму от причала.
После образования свободного интервала между кормой судна и при-
чалом руль ставят прямо или на несколько градусов в сторону сво-
бодного борта и ход машин увеличивают до полного.
Большие суда начинают отвал от небольшого дебаркадера движе-
нием вперед для выравнивания кормы судна с кормой причала.
На двух-и трехвинтовых судах принцип отвала на переднем ходу
аналогичен описанному. Разница состоит лишь в том, что одновремен-
но отдаются все швартовы и для разворота судна на 10—15° машине,
находящейся со стороны причала, дают ход вперед, а машине проти-
воположного борта — назад и руль перекладывают в сторону от
причала. Для того чтобы судно в это время не двигалось вперед, маши-
не, работающей на задний ход, дают большее число оборотов.
Отвал на заднем ходу применяют, если впереди отвали-
вающего судна акватория или причальная линия занята другими су-
дами или движение вперед вообще невозможно, когда судно стоит
у причала носом по течению.
На колесных и одновинтовых судах при отвале на заднем ходу сна-
чала отдают кормовой и средние швартовы. Затем кратковременной
работой движителя на передний ход набивают носовой швартов и од-
новременно перекладывают руль в сторону борта, обращенного
к причалу. За счет поворачивающих моментов, возникающих от руля,
упора движителя и натяжения швартова, корма судна начинает раз-
ворачиваться от причала. После разворота на 15—20° машину оста-
навливают, отдают носовой швартов, машине дают задний ход, и суд-
но отходит от причала.
69
На двух-и трехвинтовых судах при развороте кормы машине со
стороны борта, обращенного к причалу, дают ход назад, а со стороны
борта, обращенного к судовому ходу, — ход вперед.
На крупнотоннажных грузовых и грузо-пассажирских судах при
развороте судна у причала происходит сближение кормы с берегом;
так как большая часть причалов значительно меньше длины судна,
возникает опасность повреждения винтов.
Отвал лагом применяется на судах, оборудованных под-
руливающими устройствами, при стесненных условиях маневра. Пос-
ле отдачи швартовных тросов бортовым машинам дают одновременно
Рис. 56. Отвал от причала в стесненных условиях
передний и задний ход с созданием поворачивающего момента, направ-
ленного в сторону борта, обращенного к причалу, и включают носовое
подруливающее устройство так, чтобы сила его упора была направ-
лена в сторону от причала. Руль перекладывают в сторону причала
(рис. 56). За счет силы упора подруливающего устройства и силы дав-
ления воды на перо руля судно получает перемещение лагом и отхо-
дит от причала. После удаления от причала на безопасное расстояние
машинам дают ход вперед и подруливающее устройство выключают.
На судах, не оборудованных подруливающими устройствами,
до начала отвала на переднем ходу нужно корму судна выровнять
с кормой причала, продвинувшись вперед.
Отвал лагом применяется также в случаях, когда причальная ли-
ния или акватория впереди и позади судна занята другими судами.
§ 14. СПОСОБЫ ОТВАЛА ПРИ
НАВАЛЬНОМ ВЕТРЕ
В зависимости от направления ветра по отношению к причалу сле-
дует различать встречно-навальные, навальные, попутно-навальные
и встречно-отвальные, отвальные, попутно-отвальные ветры (рис. 57).
При ветрах отвальных направлений затруднений при отвале не возни-
кает. После отдачи швартовных концов за счет давления ветра судно
дрейфует от причала; если дрейф не возникает, то поступают так же,
как при отвале без ветра. Отвалы при сильных навальных ветрах и
отсутствии течения являются сложными, а иногда и опасными манев-
70
рами. При этом в практике судовождения применяют пять способов
отвалов.
Отвал на переднем ходу производится так же, как и
при отсутствии ветра (рис. 58). Если нос судна не уклоняется на ветер,
то обороты главных двигателей и подруливающего устройства посте-
пенно увеличивают до пре-
дела.
После того как нос судна
отклонится от причала на
угол 25—30е, останавливают
машину, работающую на зад-
ний ход, отдают кормовой
швартов, перекладывают руль
в сторону причала, машинам
дают ход вперед.
Когда корма судна отой-
дет от причала, руль пере-
кладывают в противополож-
ную от причала сторону, кор-
мовое подруливающее устрой-
ство выключают, и судно
выходит на судовой ход.
Отвал на переднем
ходу сносов ым яко-
рем применяют при сильном
навальном ветре (рис. 59).
Якорь, как правило, отдается
Рис. 57, Направление ветра по отношению
к причалу
во время привала к причалу.
Отвод насоса на ветер производится так же, как и на переднем хо-
ду, с той разницей, что создается дополнительное усилие от брашпиля
F6p. После того как нос отойдет от причала на угол 20—25°, следует,
Рис. 59. Отвал с помощью носового
якоря:
Ш — швартов; В — ветер; сила упо-
ра движителей; Рбр — усилие от браш-
пиля
Рис. 58. Отвал с помощью .машин, руля,
носового подруливающего устройства и
кормового швартовного конца:
Ш — швартов; — сила упора движите-
лей; В — ветер; Рн — сила упора носового
подруливающего устройства
не прекращая подъема якоря, остановить машину, работающую на
задний ход, и отдать кормовой швартов. Затем всем машинам дают
передний ход, перекладывают руль в сторону причала, предупреждая
удар кормой судна о него. Как только якорь выйдет из воды, обороты
машин увеличивают до полного хода, чтобы уменьшить дрейф
71
в сторону причала. Давать полный ход до отрыва якоря от грунта
не следует, так как может возникнуть рывок, способный привести
к поломке брашпиля или обрыву якорной цепи.
Отвал на заднем ходу (рис. 60, положения 1—4) произ-
водится при сильном попутно-навальном ветре, если два предыду-
щих способа не дали положительного результата.
Отвал осуществляется следующим образом. Отдают средние и кор-
мовые швартовы. Бортовой машине со стороны судового хода дают
Рис. 60. Отвал на заднем ходу
ход вперед, со стороны причала—
назад. Средней машине дают ход
вперед, но перед этим с помощью
брашпиля набивают носовой швар-
тов и прочно закрепляют его на
кнехтах. Руль перекладывают в
сторону причала. Если корма
отваливает медленно, обороты ма-
шин постепенно увеличивают и
Вете^
Рис. 61. Отвал с выдвигом судна вы-
ше причала
доводят их до полных. Отвал кормы на ветер производят до
угла 30 — 35° или до тех пор, пока она не встанет против вет-
ра (против ветра корму ставят в тех случаях, когда курсовой угол
ветра превышает 110—120°). Затем останавливают машины, работаю-
щие на передний ход, отдают носовой швартов, включают подрули-
вающие устройства в сторону от причала, ставят руль в положение
«прямо» и дают всем машинам задний ход, не допуская навала судна
на причал. Запаздывание или нерешительность судоводителя при уве-
личении скорости заднего хода может принести к навалу на причал
или на берег.
Когда судно отойдет от причала на безопасное расстояние, оста-
навливают машины и дают им ход вперед. Подруливающие устройства
в это время выключают.
Отвал свыдвигом судна выше причала
(рис. 61) применяют в тех случаях, когда отвал на заднем ходу, вслед-
ствие сильного ветра, невозможно осуществить. Кратковременной ра-
ботой машин на передний ход нос судна выдвигается выше причала
настолько, чтобы ветровой момент, препятствующий отвалу судна,
значительно уменьшился и стал менее поворачивающего момента от
действия движителей и рулей. Отвал кормы на ветер производи ! ся так
72
же, как при отвале на заднем ходу. Перед отвалом следует убедиться,
что крамболы, якоря и тросы дебаркадера не будут мешать отвалу.
Отвал с упором носа судна в берег (рис. 62)
производится при невозможности применить все предыдущие способы
отвала. Процесс включает следующие операции: выдвиг носа судна
выше причала, упор носа судна в берег, перемещение кормы на
ветер, отход задним ходом от берега.
При этом способе отдают все швартовы, затем дают кратковремен-
ный ход вперед и продвигают судно вдоль причала до тех пор, пока
не появится возможность подвести
нос судна к берегу. Такую опера-
цию можно выполнить при любой
скорости навального ветра, так
как при длине выдвига, близкой
к половине длины судна, момент
от ветра близок к нулю.
После упора носа судна в берег
продолжают движение кормы на
ветер, и борт судна отделяется от
причала. Когда судно развернется
кормой против ветра, машинам
дают задний ход, и судно отхо-
дит от берега. В качестве меры
Рис. 62. Отвал с упором носа судна
в берег:
Р — рули; F& — сила упора движителей;
В — ветер; — сила упора кормового
подруливающего устройства
предосторожности следует дер-
жать кормовой якорь готовым к отдаче. При ветрах с курсовым
углом меньше 70° применять данный способ нецелесообразно.
Отвал тем или иным способом невозможен,
если ветровой момент Мв равен или больше суммы моментов 2Л1С,
разворачивающих судно на ветер, т. е.
Мв = у су рв Sp vl kl I sin <p > SAfc,
(51;
где cy — коэффициент;
pB — плотность воздуха;
Sp — площадь парусности;
<p — курсовой угол ветра;
vB — скорость ветра на высоте рубки судна;
kB — коэффициент, учитывающий изменение ветра по высоте;
I — расстояние от точки вращения до центра давления ветра.
Из уравнений равновесия моментов сил, действующих на судно при
отвале, можно определить скорость ветра, до которой еще возможно
применение того или иного способа отвала.
При отвале на переднем ходу эта скорость определяется по фор-
муле _______________
г Су рв 5^ L sin ср
где L — расстояние от точки вращения судна при развороте на ветер
до центра парусности;
73
Me — сумма моментов, разворачивающих судно на ветер;
<р — угол между ДП судна и направлением ветра.
При отвале с якорем — по формуле
vl’ = 1,41
2Л4с +УИя
<Т/Рв*в S<pLsin,P
(53)
где Л4Я — момент, возникающий при выборе якоря.
При отвале на заднем ходу — по формуле
= 1,41
ЪМ'в'
Су Рв *в Sq> sin
(54)
где SM0 — сумма моментов сил, разворачивающих корму судна на
ветер.
При отвале с выдвигом судна выше причала — по формуле
иГ= 1,41 х
ТсрЬ+ TqB-\-2Py(L—Lmax)+/>K(L—с—/max) 4"Umax—a)
2 / 1 i \ i ’
Су Рв I Sy — /шах Hcp sin <P 1 L sin ф
(55)
где Tcp — осредненный упор бортовых винтов, работающих на пе-
редний и задний ход;
TQ — упор средней машины на заднем ходу;
b — расстояние между осями бортовых гребных валов;
В — ширина корпуса судна;
/Шах — допускаемая длина выдвига судна выше или ниже при-
чала;
с — расстояние от ахтерштевня до оси кормового подрули-
вающего устройства;
а — расстояние от форштевня до оси носового подруливаю-
щего устройства;
/7CD — осредненная высота надводной части корпуса судна.
При отвале на заднем ходу с упором носа в берег — по формуле
= 1,41 1/ ----3PyL + PK(L-c)-----,
V Су Рв^1 Sin ((> + <() S(9+6)
(56)
где 6 — угол, на который развернется судно при подходе к бе-
регу.
74
На рис. 63 приводится график для выбора спосо-
ба отвала судов типа «Родина», полученный по приведенным фор-
мулам. Пользование графиком покажем на примере. Нужно выбрать
способ отвала теплохода «Родина», если направление навального вет-
ра с диаметральной плоскостью судна составляет ср = 120°, а скорость
ветра ив = 13 м/с. Наносим на график по известным направлению
и скорости ветра точку А и определяем ближайшую кривую линию,
лежащую выше точки Л Название этой кривой указывает оптималь-
ный способ отвала, в данном случае — «на заднем ходу». Если точка
А подает в область графика выше
всех кривых линий, это значит, что
отвал можно произвести только
с посторонней помощью, например
с помощью рейдового буксиров-
щика.
Для обеспечения безопасного и
быстрого выполнения маневра су-
доводитель должен не только хоро-
шо знать способы выполнения
маневров, но и располагать инфор-
мацией о ветре с точностью до 10—
20° по направлению и 1—2 м/с по
его скорости. Такая информация
необходима для выбора опти-
мального способа маневра швар-
товки или шлюзования. Обуслов-
ленную выше точность, особенно
в темное время суток, органы
чувств человека обеспечить не в
состоянии, поэтому ошибки в вы-
боре способа маневра при ветре
допускают даже опытные судово-
Рис. 63. График для выбора способа
отвала теплохода типа «Родина»:
I — граница применения отвала на перед-
нем ходу; II — граница применения отва-
ла с носовым якорем; /// — граница при-
менения отвала на заднем ходу; IV —
граница применения отвала с выдвижени-
ем носа судна выше причала; V — грани-
ца применения отвала с упором носа
судна в берег
дители.
Для выбора способа отвала рекомендуется применять прибор
«указатель маневров» при ветре УМО-1 (автор С. Б. Оль-
шамовский).
Этот прибор служит для быстрого определения во время ветра
наиболее безопасного и экономичного способа маневра при швар-
товке и шлюзовании крупнотоннажных речных судов с большой па-
русностью. Кроме того, прибор позволяет в любой момент времени
определить скорость и направление ветра по отношению к диаметраль-
ной плоскости судна, что способствует повышению качества любого
маневрирования и облегчает управление судном при ветре.
Прибор состоит из блока датчиков скорости и направления ветра
(рис. 64) и приемной части.
Датчики ветра устанавливаются на крыше рулевой рубки, на вы-
соте от нее не менее 2 м.
Приемная часть устанавливается в рубке судна и представляет со-
бой настенный прибор с панелью (рис. 65).
75
При наличии течения отвалы при навальном ветре упрощаются..
Величина ветрового момента уменьшается за счет действия момента
от течения, который направлен в сторону, противоположную наваль-
ному ветру. Отвалы на переднем ходу, с якорем и на заднем ходу вы-
полняются так же, как и при отсутствии течения. Отвалы с выдвигом
судна выше причала и с упором носа в берег при наличии течения не
применяются. На судах с бортовыми колесами применяется отвал
на переднем ходу с предварительным выдвигом кормы судна ниже при-
чала.
Рис. 64. Блок датчиков скорости и на-
правления ветра прибора УМО-1:
1 — ориентир; 2 — крепежные болты; 3 —
вертушка; 4 — корпус
Рис. 65. Приемная часть прибора
УМО-1:
/ — указатель направления ветра относи-
тельно диаметральной плоскости судна;
2 — указатель скорости кажущегося ветра;
3 — шкала маневров; 4 — стрелка указателя
маневров и скорости истинного ветра; 5 —
шкала скорости ветра; 6 — рукоятка стрел-
ки указателя маневров; 7 — рукоятка для
определения истинной скорости ветра; 8 —
выключатели
При сильных навальных ветрах на грузо-пассажирском судне
с большой парусностью отвал производится с помощью рейдового
буксировщика.
§ 15. ПРИВАЛ СУДНА
Подготовка к привалу. Привалом называют маневр судна, свя-
занный с подходом к причалу, другому судну или к берегу для произ-
водства пассажирских, грузовых операций или для выполнения спе-
циального задания.
При привалах судоводитель должен учитывать: величину инерции
судна при данной загрузке; направление и скорость течения и ветра;
конструктивные особенности судна и причала; занятость причальной
линии и акватории вблизи причала другими судами.
76
До начала привала вахтенный начальник должен произвести сле-
дующую подготовку:
на грузо-пассажирском судне — оповестить пассажиров о назва-
нии порта или пристани и о продолжительности стоянки;
подготовить к сдаче грузовые документы, груз и багаж, идущий
в адрес данного порта (пристани);
подготовить сведения о наличии свободных пассажирских мест и о
количестве груза на борту;
выбрать способ привала, сообразуясь с конкретными условиями;
подготовить к работе швартовные и подруливающие устройства,
якоря и кранцы.
При подходе к причалу пассажирские суда подают один продол-
жительный звуковой сигнал, а все другие суда — сигнал «Обращаю
внимание».
Маневрирование вблизи причала. Успех швартовки во многом
определяется выбранным способом привала и умением судоводителя
правильно осуществлять маневрирование судном в непосредственной
близости от причала. На маневрирование у причала оказывают влия-
ние многие факторы — ветер, течение, точность в определении ско-
рости, курса и маневренных качеств судна, поэтому сложность манев-
ров в непосредственной близости у причала возрастает с увеличением
размеров судов и уменьшением габаритов причала и прилегающей
к нему акватории.
При маневрировании судна в непосредственной близости у при-
чала можно рассмотреть четыре характерных случая сближения
с причалом:
1) при поступательном движении;
2) при вращательном движении;
3) когда вращательное движение превалирует над поступатель-
ным;
4) когда поступательное движение превалирует над вращатель-
ным.
При равных скоростях точки судна, входящей в контакт с прича-
лом, количество энергии, поглощенной причалом, будет меньше, если
судно имеет только вращательное движение.
В частном случае, когда судно в момент касания поставлено строго
параллельно причалу, количество поглощенной энергии будет одина-
ково.
Таким образом, при подходе к причалу в момент контакта с ним
швартовку лучше производить, сообщая судну вращательное движе-
ние в сторону от причала.
Принимая во внимание обводы судна и положение центра тяжести
по длине судна, маневрирование при швартовке порожних грузовых
и пассажирских судов должно осуществляться так, чтобы первый кон-
такт с причалом был в районе скулы корпуса судна.
При швартовке груженых грузовых теплоходов и танкеров пер-
вый контакт с причалом лучше иметь в кормовой оконечности судна.
Сила навала на причал, кроме того, определяется скоростью точ-
ки корпуса судна, которая первой вступает в контакт с причалом.
77
Скорость этой точки можно уменьшить, комбинируя поступательное'
и вращательное движение судна.
При прочих равных условиях сила удара тем меньше, чем дальше
точка контакта от центра тяжести судна. Во избежание первого кон-
такта в точке, расположенной близко к центру тяжести судна или се-
редине корпуса, целесообразно подходить к стенке причала под не-
большим углом, а не лагом всем бортом судна.
Рис. 66. Способы привалов в зависимости от направления движения судна в отно-
шении течения и габаритов судового хода
Привал против течения. На свободных реках привалы обычно
производятся против течения независимо от направления движения
судна (вверх или вниз), за исключением случаев, когда по путевым
условиям оборот при движении по течению сделать невозможно. Та-
ким образом, на свободных реках применяется привал против течения
и по течению.
Привал против течения может быть осуществлен тремя способами
(рис. 66).
Привале оборотом в сторону дебаркадера
(/) применяется при движении судна по течению. Как правило, де-
баркадеры стоят у глубоководных берегов. В этом случае оборот начи-
нается на траверзе дебаркадера. Диаметр циркуляции судна здесь
78
будет увеличен, так как оборот совершается из тиховода на стрежень.
Способ выбирают в том случае, если габариты судового хода по ши-
рине значительно превосходят диаметр циркуляции судна.
Привал с оборотом отдебаркадера (//) начинает-
ся обычно оборотом ниже дебаркадера. Применяется тогда, когда габа-
риты судового хода не позволяют сделать оборот в сторону дебаркаде-
ра. В некоторых случаях оборот производится выше дебаркадера с
последующим спуском судна задним ходом ниже него.
Привал без оборота (///) производится в случае, если
судно движется против течения и до начала привала идет на расстоя-
нии одной-двух длин корпуса от берега. Двухвинтовые суда подходят
обычно на машине, находящейся со стороны причала, машину проти-
воположного борта приготавливают для работы назад. На трехвин-
товом судне лучше всего подходить на средней машине, обеспечиваю-
щей лучшую управляемость. У судов с бортовыми колесами и у од-
новинтовых судов двигатель должен работать вперед самым малым
ходом. На расстоянии около двух-трех длин судна от дебаркадера
судно направляют на носовое плечо дебаркадера или несколько выше.
При подходе носа к корме дебаркадера судно направляют параллель-
но причалу. В это время или несколько раньше, в зависимости от
скорости судна, приступают к гашению инерции. На двух- и трехвин-
товых судах увеличивают обороты машины, работающей на задний
ход, а обороты машины, работающей вперед, снижают. На судах с
бортовыми колесами и одновинтовых судах машину останавливают
и затем дают задний ход. Инерция судна гасится с таким расчетом,
чтобы судно остановилось в тот момент, когда пролет судна будет не-
сколько выше пролета дебаркадера. Интервал между бортом судна и
бортом дебаркадера должен быть возможно меньшим.
При привале на крупнотоннажных судах не следует стремиться
подходить к причалу вплотную, так как небольшое запаздывание
в гашении инерции может привести к удару. Необходимо помнить,
что на одновинтовых судах при работе машины на задний ход происхо-
дит отклонение носа в сторону, одноименную с направлением враще-
ния винта.
К моменту остановки судна подаются носовой и кормовой шварто-
вы. По команде вахтенного начальника выбирают носовой швартов,
руль перекладывают в сторону от причала, когда судно сближается
с дебаркадером вплотную, подают средний и обратный швартовы.
Затем, регулируя работу машин, выравнивают пролеты судна и дебар-
кадера, выбирают слабину швартовов и закрепляют их. Подается
трап, и привал заканчивается.
Привал против течения при навальном ветре. При сильном на-
вальном ветре могут применяться два способа привала (рис. 67):
привал с оборотом от дебаркадера (/); привал
без оборота (//). Первый способ применяется при движении
по течению, второй — против течения.
Маневр подхода и привала при сильном навальном ветре выпол-
няется на больших скоростях, чем маневр подхода и привала при от-
сутствии ветра. Маневрирование машинами в зависимости от числа
79
и вида движителей производится так же, как и при привале в штиль.
На расстоянии двух-трех длин судна от дебаркадера курс избирается
с учетом величины дрейфа, несколько выше причала.
При подходе к дебаркадеру на расстояние примерно около одной
длины судна руль перекладывают в сторону от причала и судно плав-
но выводят на направление, близкое к направлению равнодейству-
ющей сил ветра и течения для данного типа судна. Судно в это время
Рис. 67. Привалы против течения при навальном ветре
движется малым ходом. Когда судно будет подходить к траверзу де-
баркадера, приступают к гашению инерции. Судно проходит выше
дебаркадера примерно на половину своей длины.
После остановки судна отдается носовой якорь с борта, противо-
положного причалу. Периодически потравливая якорную цепь,
подводят корму судна к дебаркадеру. Если держащей силы якоря не-
достаточно для удержания судна, включают кормовое подруливаю-
щее устройство или дают кратковременный ход вперед, а руль пере-
кладывают на несколько градусов в сторону причала, и дрейф кормы
прекращается. С кормы судна для смягчения возможного удара сле-
дует спустить кранец. После подхода кормы к дебаркадеру якорную
цепь травят, и судно подходит к причалу всем бортом. После этого
подают швартовы, с помощью машин выравнивают пролет судна
с пролетом дебаркадера, затем подают трап.
Привал против течения при отвальном ветре. В отвальный ветер
могут применяться два вида привала (рис. 68) : при движении по
течению — привал с оборотом в сторону дебарк а-
80,
дера (/); при движении против течения — привал без обо-
рота (II).
Приблизившись к дебаркадеру на малом ходу на расстояние двух-
трех длин судна, берут курс на кормовое плечо дебаркадера с таким
расчетом, чтобы диаметральная плоскость судна составляла с направ-
лением равнодействующей сил течения и ветра возможно меньший
угол. В этом случае судно имеет наименьший дрейф. По мере прибли-
Рис. 68. Привалы против течения при отвальном ветре
жения к дебаркадеру перекладывают руль в сторону стрежня для то-
го, чтобы судно двигалось по кривой траектории, касательной к кото-
рой является борт дебаркадера (способ «с раскатом»). В это же время
приступают к гашению инерции. Затем подают швартовы, с помощью
которых, работая машинами одновременно на передний и задний ход,
подводят судно вплотную к дебаркадеру.
При привалах в отвальный ветер большую роль играет незамедли-
тельная подача носового и кормового швартовов.
Иногда на судах применяется «постенный» способ привала.
Сущность его состоит в том, что судно подходит параллельно причалу
81
с минимально допустимым интервалом. Подойдя к корме дебаркаде-
ра, быстро производят реверс машины с малого переднего на полный
задний ход. Быстрое гашение инерции позволяет подать швартовы
до того, как судно начнет дрейфовать от причала.
Привал по течению. Если при движении по течению оборот
сделать невозможно, применяется привал по течению. На одновин-
товых или колесных судах привал по течению производится на заднем
ходу (рис. 69). Судно проходит мимо дебаркадера на малом ходу на
расстоянии около 40—50 м. Спустившись ниже дебаркадера на рас-
стояние около половины длины судна, руль перекладывают в сторону
от дебаркадера и, как только судно начнет поворот, машину останав-
ливают и дают задний ход. Во время гашения инерции корму судна
Рис. 69. Схема привала по течению
направляют несколько выше носового плеча дебаркадера. Угол между
диаметральной плоскостью и причальной линией к моменту остановки
судна не должен превышать 10—15°. При движении к дебаркадеру
задним ходом руль перекладывается от дебаркадера, чтобы судно по
мере подхода к нему разворачивалось параллельно течению. Судно
останавливают так, чтобы пролет был выше пролета дебаркадера на
4—5 м, и подают кормовой швартов. Корма судна с помощью кормо-
вого швартова подводится вплотную к причалу, после чего подаются
средние и носовой швартовы. Если в момент подхода создается угроза
удара кормой судна о дебаркадер, дается кратковременный ход вперед
и руль перекладывается в сторону причала.
На двух- и трехвинтовых судах привал по течению выполняется
несколько иначе. К снижению скорости до самого малого хода при-
ступают на расстоянии не менее десяти длин корпуса судна. Затем
сближаются с берегом, у которого стоит дебаркадер, и идут парал-
лельно ему с таким расчетом, чтобы расстояние между бортом судна и
бортом дебаркадера было около 15—20 м. На расстоянии до причала
около трех-четырех длин корпуса судна машине со стороны борта,
противоположного причалу, дают задний ход. Средний двигатель рабо-
82
тает вперед для обеспечения управляемости. Работая бортовыми маши-
нами или средней и бортовой одновременно на передний и задний ход,
гасят инерцию с таким расчетом, чтобы судно остановилось на травер-
ве причала. После остановки с помощью руля разворачивают корму
в сторону причала на угол 10—15°, подают кормовой швартов и ставят
судно параллельно причалу, затем подают средние и носовой швар-
товы. Обороты машины регулируют таким образом, чтобы судно не
имело перемещений вперед и назад.
Привал при отсутствии течения. На расстоянии около десяти —
двенадцати длин судна до причала приступают к постепенному сни-
жению скорости хода до самого малого”и сближаются с берегом, у ко-
торого стоит причал (рис. 70).
Рис. 70. Схема привала на шлюзованной реке или водохранилище при отсутствии
течения
На расстоянии от причала около пяти-шести длин корпуса судна
останавливают средний двигатель. На двухвинтовом судне оста-
навливают стрежневой двигатель. В дальнейшем средний двигатель
используется для гашения инерции. Затем этому двигателю дают зад-
ний ход и судно направляют выше носового плеча дебаркадера. По
мере приближения к дебаркадеру обороты машины, работающей на
задний ход, увеличивают с таким расчетом, чтобы судно останови-
лось на траверзе причала. Между бортом судна и причальной линией
должен быть интервал не менее 5—6 м.
Затем включается носовое подруливающее устройство в сторону
причала. За счет силы упора подруливающего устройства нос судна
подводят к причалу вплотную и подают швартовы. При отсутствии
подруливающего устройства его функции выполняет носовой
швартов.
Как только нос судна подойдет вплотную к причалу, подаются
средние швартовы, и если пролеты судна и причала совпадают, ма-
шины останавливают и привал заканчивается. Если же пролет судна
оказался ниже пролета дебаркадера, снижают обороты машины, рабо-
тающей на задний ход, или увеличивают обороты машины, работаю-
щей на передний ход. В случае, когда пролет судна оказался выше
пролета причала, снижают обороты машины, работающей на перед-
ний ход, и увеличивают обороты машины, работающей на задний ход.
83*
При привалах к небольшим причалам, расположенным вблизи
вогнутых берегов, возникает угроза повреждения винта бортовой ма-
шины со стороны берега или подводной отмели. В таких случаях осо-
бенно необходимо работать одновременно на передний и задний ход
средней и стрежневой машинами.
Привал при отвальном ветре. Выбор способа привала при очень
слабом течении или отсутствии его зависит от скорости и направле-
ния ветра.
Рис. 71. Способы привалов против ве-
тра:
/ — при встречно-отвальном ветре; 11 — при
встречно-навальном ветре
Рис. 72. Способы привалов при от-
вальном и попутно-отвальном ветрах:
I — с раскатом при отвальном и слабом
попутно-отвальном ветре; 11 — с оборотом
против ветра при сильном попутно-отваль-
ном ветре
При встречно-отвальном ветре лучшим и наиболее безопасным
является привал против ветра, т. е. тогда, когда курсовой угол ветра
должен быть равен нулю (рис. 71). Во избежание повреждений прича-
ла и судна от несвоевременно погашенной инерции во время подходов
под большим углом к причальной линии судно следует направлять
несколько выше причала. Чем точнее выведено судно на направле-
ние против ветра, тем меньшую скорость движения можно иметь на
подходе к причалу и тем безопаснее будет маневр. В случае потери
управляемости большую пользу может оказать подруливающее уст-
ройство, поэтому оно должно быть готово к действию.
К моменту остановки судна у причала подается носовой швартов
и судно подводится вплотную к причалу. Под действием вращающих
84
.моментов бортовых (или средней и бортовой) машин, работающих одно-
временно на передний и задний ход, и рулей судно разворачивается
параллельно причальной линии, подаются средние и кормовой швар-
товы. На колесных судах для сближения судна с причалом при силь-
ных ветрах подаются носовой и средний швартовы. Работая машина-
ми на передний или задний ход, за счет натяжения среднего шварто-
ва судно подводится вплотную к причалу.
Отвальные ветры оказывают меньшее влияние на условия привала
судна, так как большая часть причалов защищена от ветра высоким
берегом, постройками и надстройками дебаркадера. При таком на-
правлении ветра хорошие результаты дает способ привала «с раска-
том».
Наибольшие затруднения вызывает привал при попутно-отвальном
ветре. В зависимости от скорости попутно-отвального ветра в данном
случае могут быть два способа привала: «с раскатом» и «с оборотом»
(рис. 72). Если скорость попутно-отвального ветра велика, то следует
сделать оборот и подходить против ветра. Если скорость ветра неве-
лика, следует применять способ привала «с раскатом».
Для успешного выполнения маневров, связанных с привалами и
отвалами, каждый судоводитель должен знать граничное значение си-
лы ветра, при которой эффективен способ привала с раскатом и
свыше которой необходимо уже применять способ привала с оборотом.
Эту скорость можно определить по формуле
где L — длина судна.
Для теплохода типа «Волго-Дон» эта скорость, например, равна
14 м/с, типа «Родина» — 9—10 м/с.
Привалы при навальных ветрах. При слабых и умеренных наваль-
ных ветрах независимо от их направления почти всегда применяется
лаговый способ привала без отдачи якоря. Он заключается в том, что
судно останавливается параллельно причалу на расстоянии 5—7 м
и под действием ветра подходит к причалу (рис. 73). Одновремен-
ной работой машин на передний и задний ход подруливающими
устройствами и рулями нос и корма судна удерживаются от удара
о дебаркадер.
При свежих и сильных ветрах привал осуществляется с отдачей
одного или обоих носовых якорей, а иногда и кормового. Здесь мо-
гут быть применены два способа: лаговый с отдачей якоря и с удержа-
нием судна под острым курсовым углом к ветру и отдачей якоря
(см. рис. 73).
Первый способ применяется при умеренном ветре и состоит в сле-
дующем. Судно останавливают при расстоянии по траверзу между
бортом судна и причалом около половины длины судна — несколько
выше причала, если ветер встречный, и ниже причала, если ветер по-
путный. С наветренного борта отдается носовой якорь.
85
После того как якорная цепь натянется с помощью бортовых (или
средней и бортовой ) машин, работающих одновременно на передний и
задний ход, и руля, переложенного в сторону причала, удерживают
корму судна. Когда корма соприкоснется с причалом, выравнивают
пролеты и подают швартовы. Якорную цепь во время стоянок нужно
потравить, чтобы она не мешала привалу других судов.
Второй способ применяется при сильном ветре и заключается в
том, что судно подходит к дебаркадеру под возможно меньшим кур-
совым углом ветра (см. рис. 73).
Рис. 73. Способы привалов при на-
вальном ветре:
/ — лаговый без якоря при слабых ветрах;
// — лаговый с якорем при ветрах средней
силы; /// — с удержанием судна под оп-
ределенным курсовым углом к ветру
Рис. 74. Привал по ветру при попут-
но-навальном ветре
Если навальный ветер направлен к причалу под углом, меньшим
60°, то привал выполняется с удержанием носа судна на ветер. Если на-
вальный ветер направлен под углом к причальной линии, большим
130°, то привал выполняется с удержанием кормы на ветер, т. е.
судно подходит к дебаркадеру «по ветру» (рис. 74).
Если привал носом к причалу невозможен, необходимо сделать
оборот.
Привал с удержанием носа на ветер производится следующим об-
разом. При подходе к причалу скорость хода снижается, но настоль-
ко, чтобы судно не теряло управляемости. При этом нос судна направ-
ляют на ветер и одновременно приступают к гашению инерции. Затем
отдают носовой якорь. Якорь должен быть отдан на траверзном рас-
стоянии от причала, не меньшем полутора длин корпуса судна.
После натяжения якорной цепи продолжают разворачивать кор-
му под ветер, добиваясь того, чтобы нос судна был неподвижен.
86
В это время курсовой угол к ветру обычно не превышает 30—40°. За-
тем дрейф кормы сдерживают рулем, машинами, подруливающим ус-
тройством. Если с помощью машин и руля прекратить дрейф кормы
в сторону причала невозможно, то следует отдать кормовой якорь.
После подхода кормы к причалу травят якорную цепь носового
якоря, и борт судна сближается с при-
чалом.
Задачу о выборе способа привала
при навальном ветре можно решать
аналитически. Для того чтобы избежать
удара о причал, необходимо поставить
судно под таким курсовым углом б к
ветру, чтобы сила давления ветра
Ре sin б была равна или меньше суммы
сил 2РС, которые судоводитель противо-
поставляет этой силе, т. е. Рв sin б
Решение этого уравнения удобно
представить графически. Как показано
на рис. 75, кривые /, 2, 3, 4, 5 показывают
Рис. 75. График для выбора
способа привала судов типа
«Родина»
давление ветра на судно (в тс) в зависимости от скорости ветра ов при
курсовых углах ветра б, равных 10, 30, 40, 50 и 90°. На оси ординат
отложена сумма сил SPC (в тс), противопоставляемых ветру (держа-
щая сила носового, кормового якоря, упора подруливающего устрой-
ства и т. д.), и проведена прямая, параллельная оси абцисс. Точки
Рис. 76. К выбору способа привала с помощью графика
пересечения этой прямой с кривыми /, 2, 3, 4, 5 удовлетворяют реше-
ниям уравнения Рв sin б = SPC, т. е. указывают курсовой угол б
и скорость ветра, при которых судно может удержаться на месте за
счет противопоставляемых ветру сил.
Практическое применение графика покажем на примере. При под-
ходе к причалу в положении 1 (рис. 76) судоводитель определил, что
скорость истинного ветра ов ж 18 м/с, курсовой угол б = 120°. На
графике (см. рис. 75) из точки со скоростью vB = 18 м/с восстановим
перпендикуляр до пересечения с прямой 2РС и получим точку А,
которая располагается между кривыми давлений ветра с курсовыми
87
углами 6 = 10е и 6 = 30°. Путем интерполяции устанавливаем, что
точка А лежит на кривой с 6 = 25°, т. е. судоводитель может остано-
вить теплоход «Родина» с помощью имеющихся в его распоряжении
средств при курсовом угле ветра не более 25°.
Чтобы поставить теплоход в такое положение, в данном случае
необходимо предварительно сделать оборот, как показано на рис. 76.
Попытка остановить судно на тра-
Рис. 77. График для выбора способа
привала при навальных ветрах судов
типа «Волго-Дон»
верзе причала без оборота в дан-
ной ситуации может привести к
повреждению судна или причала.
Графиком можно пользоваться
и при оборотах, производимых
с якорем в узких местах, где ветро-
вой дрейф с якорем недопустим.
Привал судна к не оборудован-
ному причалом берегу. При выпол-
нении транспортных заданий грузо-
вые суда иногда производят грузо-
вые операции, пришвартовавшись
к откосному берегу, или у берегов,
где ошвартован плавкран, про-
изводящий разгрузочные работы.
Слабое или отсутствующее течение, малые глубины вблизи от берега,
наличие ветра осложняют маневр привала.
В качестве примера рассмотрим привал теплохода «Волго-Дон»
к не оборудованному причалом берегу, где установлен плавкран, при
Рис. 78. Привал судна к необорудованному причалу при навальнохМ ветре
навальном ветре S = 90° и vB = 124-14 м/с (7 баллов). Для выбора
способа привала воспользуемся графиком (рис. 77). Определим точку
А на перпендикуляре, восстановленном на оси абцисс из точки, со-
ответствующей скорости ветра 14 м/с, которая располагается выше
кривых давления ветра (/—5, см. рис. 77). Так как с помощью сум-
мы сил SPC = 12 тс (держащая сила носового якоря Рн.я — 4370 кге,
кормового якоря Рк.я = 3120 кге, силы упора носового подруливаю-
щего устройства Рп>у = 1350 кге, упора от двух переложенных на раз-
88
ные борта насадок 2Рнас = 3072 кгс) при ветре со скоростью 14 м/с
удержать теплоход лагом к ветру возможно, назначаем лаговый спо-
соб привала с носовым и кормовым якорями.
Привал будет выполняться следующим образом. Судно подводит-
ся к месту привала вдоль берега на малом ходу с углом дрейфа |3 (по-
ложение I, рис. 78). В положении // увеличивают угол перекладки
левой насадки на правый борт и число оборотов левого винта, рабо-
тающего на передний ход, и переводят судно в положение ///. Затем
судно останавливают и отдают носовой якорь. Режим работы гребных
винтов изменяют на противоположный (левому двигателю дают зад-
ний, правому — передний ход), правую насадку перекладывают на-
лево, левую — направо и потравливают якорную цепь. В результате
судно становится в положение IV. Отдают кормовой якорь, затем тра-
вят цепь кормового якоря, пока судно не займет положение V. При
этом следят за изменением глубины у берега. Непосредственно
к плавкрану лучше сначала подвести носовую часть судна и, убедив-
шись, что глубина достаточна, подвести корму судна. Швартовные тро-
сы подаются на кран (понтон) и на берег.
§ 16. ПОСТАНОВКА НА ЯКОРЬ
И СЪЕМКА С ЯКОРЯ
Место якорной стоянки. Судам рекомендуется вставать на якорь
вне фарватера на расстоянии не ближе 100 м от перевальных и створ-
ных знаков, 200 м — от стоечных судов (дебаркадеров, доков),
300 м — от судов с нефтегрузами 1-го класса, 500 м — от наплавных
мостов и водосливных плотин. Запрещается вставать на якорь на
перекатах, в узкостях, в крутых коленах, у берегов с прижимными
течениями, в местах прокладки подводных кабелей, тоннелей или
трубопроводов, между сигнальными мачтами железнодорожных мос-
тов. Место якорной стоянки должно иметь по возможности ровное*
дно со слабым течением и безопасными глубинами.
При постановке на якорь в нижних бьефах плотин необходимо учи-
тывать наличие суточных колебаний уровня воды, амплитуда кото-
рых достигает 2 м и более.
В водохранилищах, озерах и устьях крупных рек место якорной
стоянки выбирают с учетом высоты волн, при этом минимально допус-
тимая глубина якорной стоянки может быть определена по формуле
Я = (т + 0,6+-|-/г), (58)
где Т — осадка судна, м;
h — наибольшая высота волны для данного времени года, м;
0,6 — запас воды под днищем, м.
В устьевых участках рек необходимо учитывать колебания уров-
ня воды от приливов и отливов. При постановке судна на якорь и дли-
тельной остановке необходимо выбирать место якорной стоянки с уче-
том возможного изменения направления ветра. Поэтому необходимо
определить радиус безопасной циркуляции, так как при изменении
89
направления ветра или течения судно будет описывать окружность,
в центре которой будет лежать отданный якорь.
Для практических целей при вычислении радиуса безопасной цир-
куляции R6 стоящего на якоре судна можно пользоваться формулой
/?б = Л+ V/FZF+Д/, (59)
Рис. 79. Определение радиуса безо-
пасной циркуляции при стоянке на
якоре
где Ь — длина судна (состава), м;
/я — длина якорной цепи, м;
h — глубина в месте отдачи якоря, м;
Д/ — запас на возможное травление якорной цепи при усилении
ветра.
Сняв циркулем с карты расстояние равное /?б, из места пред-
лагаемой якорной стоянки описываем окружность (рис. 79). В эту
окружность не должны входить на-
,птт।н»вигационные опасности, а глубины
-----------------------должны быть не менее величины
И, определяемой по формуле (58).
При выборе места якорной сто-
янки необходимо также учитывать
степень защищенности его от ветра
и волнения.
Следует избегать якорной стоян-
ки выше приверхов островов, вбли-
зи проранов, на огрудках, в су-
водях и майданах, а весной — в
не защищенных от ледохода местах
и вблизи затопленных берегов.
Одним из основных факторов,
определяющих выбор места якор-
ной стоянки, является грунт. На
скалистых грунтах якорная стоян-
ка затруднена при любом типе яко-
ря. Кроме того, на скалистом грун-
те якорь может оказаться между крупными камнями или в трещине,
и тогда будет очень трудно выбрать его на борт судна. На илистых грун-
тах хорошо держат якоря всех систем, но плохо отделяются от них
вследствие засасывания. На песчаных грунтах якоря держат удовле-
творительно. Хорошим грунтом считается суглинок, мелкая галька.
В табл. 20 приведена держащая сила якорей различных типов для
илистых и песчаных грунтов.
Таблица 20
Характер грунта
Ил...............................
Плотный песок....................
Число» показывающее во сколько раз
максимальная держащая сдла
превышает вес якоря
Холла Адмирал- тейского Матросова
4,8 5,3 \23,9
2,3 7,5 51,5
90
При постановке на якорь в темное время суток не следует выбирать
место якорной стоянки там, где стояночные огни судна будут на фоне
скопления береговых и плавучих огней. В этом случае стоящее на
якоре судно не может быть своевременно обнаружено проходящими
судами.
Места якорных стоянок можно разбить на две группы: постоян-
ные, хорошо известные места; места случайных якорных стоянок,
выбираемые в пути следования.
Управление судном при постановке на якорь. Нормальная поста-
новка судна на якорь осуществляется против течения, поэтому суда,
идущие вниз по течению, предварительно делают оборот.
По мере сокращения расстояния между судном и выбранным мес-
том остановки постепенно снижается скорость движения. Если сзади
следуют другие суда, то, согласно Правилам плавания, их нужно пре-
дупредить о постановке на якорь подачей четырех коротких звуковых
сигналов. Затем отдается распоряжение приготовить якоря к отдаче.
По мере приближения к месту якорной стоянки скорость движе-
ния судна нужно уменьшить до минимума, при котором судно еще сох-
раняет удовлетворительную управляемость, а инерция судна может
быть погашена кратковременной работой машин назад. Подходить
к месту якорной стоянки следует против ветра, течения или под углом
к ним, не превышающим 15—20°. В противном случае после отдачи
якоря при натяжении якорной цепи могут произойти сильный рывок
и ее обрыв. При решении вопроса, какой якорь нужно отдать, руко-
водствуются конкретными условиями, а также равномерностью износа
обоих якорных устройств. Исходя из этого, рекомендуется придер-
живаться следующих основных правил.
1. Если судно подходит к месту отдачи якоря, где нет течения и
ветра, а также при отработке машиной назад дрейф судна не имеет
большого значения, можно отдавать любой якорь.
2. Если течение или ветер направлены на какой-либо один борт,
то отдается якорь этого борта.
3. Если ветер или течение очень сильные, то на одновинтовых су-
дах следует отдавать якорь, разноименный с шагом винта. Так, на-
пример, если судно имеет винт правого вращения, то следует отда-
вать левый якорь.
4. Если ветер и течение имеют разные направления, судно подхо-
дит против течения и в правый борт дует ветер, отдавать надо правый
якорь.
5. Если якорь отдают с целью уменьшения циркуляции при обо-
роте или дрейфе, то отдавать его нужно с борта, противоположного
направлению дрейфа.
6. При швартовке судна у берега или у другого судна отдают якорь
с противоположного борта, т. е. если швартовы подаются с правого
борта, то отдается левый якорь.
Перед отдачей якоря измеряется глубина. Лучшим моментом для
отдачи якоря считается момент начала движения судна назад. Если
отдать якорь с неподвижного судна, то якорная цепь может попасть
на якорь и запутаться; если отдать якорь при небольшом движении
91
судна вперед, то он уйдет под корпус и при малых глубинах может на-
нести повреждение корпусу судна. Кроме того, при наличии течения
и ветра, когда судно будет сплывать, оно приобретает большую инер-
цию к моменту натяжения якорной цепи и возникает рывок.
В судоводительской практике есть два случая, когда якорь’ отда-
ется на переднем ходу: при постановке судна на кормовые якоря; при
возникновении потребности в быстром гашении инерции, но при обя-
зательном наличии больших глубин.
После отдачи якоря якорную цепь вытравливают на длину, рав-
ную полутора-двум глубинам, и после ее натяжения начинают пос-
тепенно гасить инерцию судна, потравливая якорную цепь до полной
остановки судна. В это время нужно внимательно следить за положе-
нием якорной цепи с тем, чтобы определить, забрал якорь грунт или
нет. Если якорная цепь туго натянута и дрожит, значит, якорь хоро-
шо забрал грунт; если якорная цепь, немного натянувшись, сразу ос-
лабевает, надо ее потравить.
При сильном течении или ветре для того, чтобы ускорить атаку
грунта якорем, не допускают рывка якорной цепи, периодически ее
потравливая.
Постановка на якорь считается законченной, если судно пол-
ностью остановится, что устанавливают по неподвижным ориентирам
или при помощи наметки. Стоянка судна считается надежной, если
провисающий участок якорной цепи в своей нижней точке является
касательной к грунту, а веретено якоря находится в горизонтальном
положении. Длина вытравленной якорной цепи зависит от внешних
нагрузок и определяется по приближенной формуле
/„= (59а)
где 1г — расстояние от дна до клюза;
R — внешняя нагрузка от течения и ветра;
q — вес 1 пог. м якорной цепи.
Во время стоянки необходимо вести постоянное наблюдение за
окружающей обстановкой и за тем, чтобы судно стояло неподвиж-
но. Если судно все же движется, то якорную цепь необходимо стравли-
вать.
Если место якорной стоянки находится на судовом ходу, необхо-
димо включать УКВ радиостанцию на дежурный прием и установить
радиовахту. В темное время суток нужно включить стояночные огни.
Виды постановки судов на якоря. Различают следующие виды по-
становки судна на якоря: постановка на два. носовых якоря, поста-
новка на носовой и кормовой якоря, постановка на шпринг.
Постановка судна на два носовых якоря (рис. 80, последователь-
ные положения 1—4) производится при больших скоростях течения
или ветра, когда держащая сила одного якоря недостаточна. В этом
случае сначала ставят судно на один якорь, затем разворачивают его
на угол около 30° в сторону, противоположную отданному якорю,
и дают малый ход вперед. Выйдя на линию отданного якоря или немно-
92
го ниже него, гасят инерцию и отдают второй якорь, после чего пе-
риодически травят якорную цепь до тех пор, пока обе цепи не будут
иметь одинаковую длину, а судно будет неподвижно.
Постановка на носовой и кормовой якоря применяется в местах
с ограниченной шириной и при боковых ветрах. Сначала отдают носо-
вой якорь, дают малый ход назад и травят якорную цепь на длину,
большую потребной. Затем, отклонив корму на ветер и погасив инер-
цию заднего хода, отдают кормовой якорь, выбирают брашпилем но-
совую якорную цепь до требующей длины и
кормовую якорную цепь. Затем обе якорные
цепи берут на стопор. В тех случаях, когда
предстоит длительная стоянка на якорях
вблизи берега, помимо якорей, на берег по-
дают швартовные тросы и у берегового
борта ставят упорные свайки, предохра-
няющие от навала на берег и посадки на
мель.
Постановка на шпринг производится
при отсутствии течения или на слабом тече-
нии с тем, чтобы поставить крупное судно
бортом к ветру для защиты от волнения ма-
лых судов, производящих грузовые операции
у борта крупного судна.
Шпринг или металлический трос крепят к
якорной скобе, затем разносят по борту и под-
вязывают на шкимушгаре небольшой прочнос-
одновременно набивают
Рис. 80. Постановка суд-
на на два носовых якоря
ти за бортом судна со стороны отдаваемого якоря; второй конец шприн-
га крепят за кормовые кнехты. Судно ставят под углом к ветру и от-
дают якорь, который увлекает за собой шпринг, обрывая шкимуш-
гар. Когда якорная цепь натянется, ее постепенно вытравливают на
длину, равную длине шпринга, и судно встает бортом к ветру. Этот
способ получил название «постановки на шпринг с хода».
Второй способ «постановки с якоря» отличается тем, что шпринг
крепят не к якорной скобе, а к якорной цепи стоящего на якоре
судна. Крепление шпринга к якорной цепи производится с помощью
мягкого стального стропа. Судно ставят под ветер, начинают травить
якорную цепь, и оно становится бортом к ветру.
Стоянка при постановке с якоря будет надежнее, чем при поста-
новке с хода. Максимальные скорости ветра, при которых возможна
постановка на шпринг, не должны быть более 6—8 м/с.
Постановка на бочку. На рейдах устьевых портов, подвержен-
ных действию приливно-отливного течения, стоянка на носовых яко-
рях требует больших акваторий. В течение суток судно будет разво-
рачивать на 180°, что может привести к навалу судов друг на друга.
Поэтому такие рейды оборудованы швартовными бочками.
На водохранилищах изменение направления ветра может вызвать
такой же эффект, как и действие приливно-отливного течения. Швар-
товная бочка удерживается неподвижно с помощью мертвого якоря
на цепи-бриделе.
93
Постановка на бочку выполняется следующим образом. Подходят
к бочке против течения или против ветра на расстояние 5—6 м. В это
время на баке готовят швартовный трос, крепят к нему на расстоя-
нии около 1 м от коуша пеньковый трос-проводник, спускают шлюпку,
подают с нее ходовой конец проводника на бочку, пропускают его свер-
ху вниз через швартовный рым и затем снова подают на судно. При
подаче легких швартовных тросов в качестве проводника можно
использовать легость.
Выбирая проводник, подтягивают коуш швартовного троса к ры-
му и с помощью такелажной скобы соединяют их. Затем отдают провод-
ник и, выбрав слабину, закрепляют швартовный трос на кнехтах.
Если предусматривается постановка судна на носовую и кормовую
бочки, то приступают к подаче кормового швартовного троса. С этой
целью корму судна на заднем ходу подводят к кормовой бочке, а но-
совой швартов травят и на кнехтах не закрепляют.
После подачи швартовного троса на кормовую бочку его закреп-
ляют на кормовых кнехтах. Носовой швартов выбирают с помощью
брашпиля до тех пор, пока оба троса не натянутся. На этом постанов-
ка на бочку заканчивается.
При длительных стоянках на морских рейдах вместо троса для
большей надежности на бочку подается якорная цепь.
Перед съемкой с бочки проводят такую же подготовку, как и при
съемке с якоря. Если судно стояло на двух бочках, то сначала снима-
ются с кормовой, а затем с носовой бочки.
Съемка с якоря. Перед съемкой с якоря должна быть произведена
проверка якорного и рулевого устройств, машинного телеграфа, дис-
танционного управления двигателями и ходовых огней. Судовые
шлюпки и штормтрапы должны быть подняты. После этого отдается
команда подготовить машины и брашпиль. Когда брашпиль будет го-
тов, вахтенному начальнику сообщают, что к съемке с якоря готовы.
Вахтенный начальник после команды «Якорь поднять» дает машине
самый малый ход вперед для уменьшения натяжения якорной цепи и
ускорения съемки с якоря.
Продвигаясь вперед, нельзя допускать, чтобы якорь оказался под
корпусом. Постоянно наблюдая за положением якорной цепи, вахтен-
ный матрос или боцман сообщает на мостик о положении якоря в от-
ношении судна: «Якорь слева», «Якорь справа», «Якорь прямо» или
«Якорь под корпусом». На основании этой информации вахтенный
начальник изменяет курс судна или режим работы машины. Когда
якорная цепь займет отвесное положение, на мостик докладывают:
«Якорь встал».
После выхода якоря из воды сообщают: «Якорь вышел чист»; если
на якоре имеются посторонние предметы — тросы, цепи и т. п.., —
«Якорь вышел нечист». При «чистом» якоре увеличивают обороты ма-
шин и выходят на судовой ход. Машинам дается полный ход после
того, как якорь закрепят по-походному. При наличии на якоре по-
сторонних предметов их удаляют, грязь смывают водой из шланга.
Если судно стояло на кормовом и носовом якорях, то сначала подни-
мают кормовой, отдав стопор якорной цепи носового якоря. .
94
При стоянке на двух носовых якорях выборку обеих якорных це-
пей начинают одновременно. Затем, отсоединив один цепной бара-
бан брашпиля и закрепив якорную цепь стопором, начинают выбирать
якорную цепь второго якоря. Если мощность брашпиля достаточна,
то можно оба якоря выбирать одновременно.
При съемке со шпринга сначала травят шпринг, и судно развора-
чивается носом против ветра. Затем выбирают якорную цепь до того
места, где закреплен шпринг, и отсоединяют его. Шпринг выбирают
на корму с помощью шпиля. После этого судно снимают с якоря обыч-
ным путем.
§ 17. ДВИЖЕНИЕ НА ПЛЕСОВЫХ
УЧАСТКАХ РЕК
Ориентировка по навигационным знакам. Для обеспечения безо-
пасного движения на плесовых участках судоводитель должен знать:
Правила плавания по внутренним судоходным путям;
расположение судового хода и ориентиры, его определяющие;
место судна относительно судового хода и направление движения.
В зависимости от очертаний русла плесовые участки бывают пря:
молинейные и криволинейные.
Ориентирами, указывающими расположение судового хода отно-
сительно берегов, являются знаки судоходной обстановки, а также
характерные приметы местности.
В темные ночи ориентировка может производиться по траверзному
расстоянию между судном и берегом путем подвески берега прожекто-
ром.
Судоводителю важно знать ориентиры, с помощью которых опре-
деляется поворот судового хода. Такими ориентирами являются знаки
береговой и плавучей обстановки, а иногда форма берега и расти-
тельность. Чтобы уверенно и быстро опознать знак судоходной об-
становки, нужно точно знать схему расстановки знаков на участке.
При движении по прямолинейному участку следует выдерживать
постоянный интервал между бортом судна и ходовым берегом и избе-
гать частых перекладок руля. На рис. 81 показана схема проводки
судна и ведения ориентировки на прямолинейном участке при дви-
жении ночью. Ориентировка производится по видимым огням знаков
обстановки. Для шести характерных положений судна показаны ориен-
тиры, которые видит судоводитель в перспективе из рубки судна
ночью. Положение носового флагштока в отношении ориентиров или
курс судна показан штрихпунктирной линией.
В положении 1 судно следует параллельно берегу с определенным
интервалом. Правее мачты виден огонь ходового знака а,
В положении 2 правее мачты обнаружен более тусклый огонь крас-
ного буя В курс судна изменения не вносятся, так как этот огонь
должен быть оставлен справа.
В положении 3 ходовой знак пройден, остается один огонь крас-
ного буя; курс прежний, но следует приступить к поиску следующих
ориентиров. Ориентировку судна необходимо производить по воз-
можности по нескольким ориентирам.
95
В положении 4 левее курса обнаружен огонь второго красного буя
б2, но курс судна не изменяется, так как нужно дойти до траверза пер-
вого красного буя и только после этого изменять курс в соответствии
с новым ориентиром.
В положении 5 судоводитель производит поиск створного знака за
кормой судна, ориентиров впереди курса и плавно поворачивает суд-
но влево до тех пор, пока красный буй не будет справа (положение 6).
При движении против течения ориентировка производится анало-
гично, но курс судна, как показано на рис. 81, проходит дальше от
ходового берега — у тиховода левого берега.
Красный огонь
Рис. 81. Схема проводки судна и ведения ориентировки на прямолинейном уча-
стке:
а — ходовой знак; бь б2 — красные буи; С — створы
Движение через перевалы. Перевалом называют участок реки, где
судовой ход переходит от одного берега к другому. Перевалы обычно
возникают на перегибах русла между двумя ярами правого и левого
берегов.
Типичными знаками ограждения перевала являются бакены, ограж-
дающие песчаные косы, створные и перевальные знаки. Повороты
на перевал обычно имеют большие радиусы кривизны, поэтому манев-
рирование на перевале не вызывает затруднений. Рассмотрим при-
мер проводки судна через перевал.
В целях обеспечения безопасного двустороннего движения суд-
но из тиховода у песчаной косы выпуклого правого берега переходит
в тиховод у правого яра, следуя правой стороной судового хода. При
этом на перевале под действием струй течения, направленных от пес-
96
ков ухвостья правой косы, судно будет сноситься в левую сторону.
Поэтому судоводитель сближается с поворотным бакеном (рис. 82,
и выходит на его траверз близко к правой кромке судового хода. Пос-
ле поворота курс избирается на створный или перевальный знак (по-
ложение /). Створные огни по отношению к линии курса будут нес-
колько в расстворе. По мере приближения к створным знакам за
счет дрейфа, вызванного центробежными силами во время поворота и
сноса течением, направленным в сторону оси судового хода, расствор
створных знаков уменьшается.
ст бора стоора
О-бвлый огонь
0 - Красный огонь
Рис. 82. Схема проводки судна и ведение ориентировки на перевалах при движе-
нии вниз и ночью
Для того чтобы удержать судно на правой стороне судового хода,
курс судна несколько изменяется вправо (положение 2). При дальней-
шем движении вниз по перевалу нужно вначале, ориентируясь кормо-
выми створами, вывести судно на створы левого берега (положение 5),
а затем сразу же изменить курс правее створа. При наличии красного
буя б3 на этом перевале курс судна избирается приблизительно
посередине между буем и створами (положение 4).
Курс судна при движении на перевалах против течения показан
пунктиром на рис. 82. Для обеспечения движения по левой сто-
роне судового хода судоводитель должен исходить из того же прин-
ципа.
Управление судном на криволинейных участках рек. На криволи-
нейных участках рек, в результате воздействия на водный поток цент-
робежных сил, возникает внутренняя поперечная циркуляция воды.
4 С, Б. Ольшамовский §7
Вогнутый берег размывается, а на противоположном берегу отклады-
ваются наносы.
Ось судового хода на криволинейных участках проходит на рас-
стоянии около трети ширины русла от вогнутого берега (яра). При
движении по течению курс судна избирается там, где имеются неболь-
шие скорости течения. При движении против течения курс судна из-
бирается по тиховодам. Однако следует использовать только глубоко-
водные тиховоды, так как при небольших запасах воды под днищем
потери скорости хода от увеличения сопротивления корпуса на мел-
ководье будут больше приращения скорости за счет использования
более слабых струй течения. Кроме того, при движении по мелко-
водью увеличивается рыскливость судна, что также уменьшает ско-
рость движения.
При движении по криволинейному участку руль перекладывают
на такой угол, чтобы судно двигалось по кривой с радиусом, прибли-
зительно равным радиусу кривизны судового хода. На судно в это
время действует центробежная сила, направленная в сторону вогну-
того берега. Судно движется с углом дрейфа.
Естественными ориентирами в начале и конце вогнутого берега
являются плечи яров, песчаные побочни и косы. В средней части об-
рывистый берег яра является хорошим естественным ориентиром
днем и ночью. В начале и конце яра устанавливаются створные или
перевальные знаки, а песчаные косы в конце обычно обставляются ба-
кенами, которые выполняют функции поворотных. При большой про-
тяженности яра на нем устанавливаются ходовые или створные знаки.
В темные ночи в затемненных ярах осуществлять движение за-
труднительно. Если яр и его контуры не просматриваются, ориен-
тировка ведется по плавучим знакам, ограждающим косы выпукло-
го берега, или по траверзному расстоянию до яра, при этом яр ос-
вещается прожектором.
Препятствиями для судоходства в ярах являются высыпки из ов-
рагов, карчи, огрудки, одинцы и гряды, которые ограждаются баке-
нами.
Рассмотрим принципы управления судном при движении вдоль
криволинейного правого берега. После спуска в яр при движении по
течению курс судна избирается по стрежню, т. е. на расстоянии при-
мерно одной трети ширины ходовой полосы. Следуя вдоль яра, судово-
дитель определяет ориентиры нижнего плеча яра, где надо начинать
поворот от яра. Естественными ориентирами обычно являются при-
верх побочня — продолжение яра и берег уменьшающейся кривиз-
ны на плечах яра. Поворот от яра следует начинать, не доходя до этих
ориентиров.
Более точными ориентирами, по которым определяется момент
напала поворота, являются траверз перевального знака, створные
знаки, поворотный бакен.
Необходимо помнить, что свал воды при выходе из яра направлен
в сторону побочня, являющегося продолжением яра. Во время павод-
ков не следует избирать курс вблизи затопленных яров, так как обыч-
но имеется сильный свал воды на бровку яра.
98
При движении по криволинейному участку против течения курс
судна выбирается по тиховоду, ближе к выпуклому берегу. Поэтому
главными ориентирами являются бакены выпуклого берега.
На рис. 83 показаны схема проводки судна и ведения ориентировки
в яру левого берега в темное время суток при движении по течению,
а также курс судна при движении против течения.
В положении 1 ориентирами являются расстояние до яра и крас-
ный бакен б2.
Далее в положении 2 судоводитель видит еще один красный ба-
кен б3. Так как в рельефе и конфигурации левого берега между баке-
нами б2 и б3 заметных изменений нет, расстояние до яра выдерживает-
Рис. 83. Схема проводки судна и ведения ориентировки при движении по криво-
линейному участку по течению
ся прежним. В положении 3 обнаружен белый бакен б4 правее мач-
ты, берег прямо по курсу становится ниже и отложе; б3 — поворот-
ный бакен. Однако для того чтобы подтвердить правильность этого зак-
лючения, судоводитель производит поиск береговых створных или
перевальных знаков на яру. Открывшиеся белые огни створных зна-
ков (положение 4) убеждают судоводителя в том, что б3 — именно
поворотный бакен, и он начинает поворот от яра.
В практике судовождения имелись случаи посадки на мель судов
в результате того, что судоводитель целиком полагался в ориентиров-
ке на плавучее ограждение, не вел контроля по нескольким ориен-
тирам и из-за отсутствия на своем штатном месте поворотного бакена
принимал ограждающий бакен б2 за поворотный б3. Отсюда следует,
что основным принципом безопасного судовождения должен быть прин-
цип проверки и перепроверки правильности избранного курса.
Управление судами на крутых поворотах реки. Крутые повороты
реки или колена представляют затруднения при движении по течению,
4* 99
особенно если участок узкий и радиусы кривизны близки к гаранта*
рованным, т. е. превышают длину судна в 3—4 раза. Обычно такие ко-
лена обставлены знаками «Сигнал» и расхождение в них запрещено.
Маневрирование судов сильно усложняется при одновременном под-
ходе к крутому повороту двух судов. Судоводитель снизу идущего
судна должен остановить свое судно.
При движении вниз по криволинейному участку судно будет на-
ходиться к струям течения под углом, примерно равным углу дрей-
фа, поэтому скорость сноса судна в сторону вогнутого берега
tiCH = vT sinpo. (60)
где ц. — скорость течения, м/мин;
р0 — угол дрейфа, град.
Опасность навала судна возникает в конце закругления. Величи-
на сноса в конце закругления
^сн ~ усн
ИЛИ (61)
ВСн = усн •
В этих формулах:
t — время прохождения участка, мин;
I — длина закругления, м;
vc — скорость движения судна, м/мин.
Чем больше скорость движения судна, тем меньше время про-
хождения участка и тем меньше снос по течению. Но увеличение ско-
рости движения усложняет управление судном (ввиду быстрой сме-
ны ориентиров), кроме того, увеличивается дрейф от центробежных
сил, при подходе к повороту судно уклоняют ближе к вогнутому бе-
регу и обычно снижают скорость движения. Однако чрезмерное сни-
жение скорости хода может привести к навалу на вогнутый берег от
сноса течением.
Безопасная скорость движения по крутому колену может быть
определена по формуле
-----0122зЛ---- (б2)
6 Вс. х-2 (0,1 +В)
где Вс<х — ширина судового хода;
В — ширина корпуса судна.
Например, безопасная скорость движения теплохода типа «Родина»
при движении по Молчановскому колену р. Дона, определенная по
этой формуле, составляет 16,2 км/ч.
Учитывая наличие постоянного сноса и дрейфа в сторону вогну-
того берега, курс судна при входе в закругление следует избирать
ближе к выпуклому берегу (рис. 84).
Для безопасного прохождения криволинейного участка необ-
ходимо, чтобы радиус циркуляции судна был меньше радиуса кривиз-
ны участка. При ошибках в определении точки начала поворота, в уг-
ле перекладки руля или в скорости движения судоводитель путем
100
увеличения угла перекладки руля на борт и увеличения оборотов
двигателей может отвести судно от вогнутого берега. Потребность
в выполнении такого маневра возникает в конце движения по криво-
линейному участку.
При движении вверх по криволинейному участку снос судна под
действием течения мал, так как судно движется почти против течения.
Курс судна при движении по
закруглению следует избирать
ближе к выпуклому берегу.
Управление судами на рей-
дах. Рейды относятся к участкам
пути, где судоводитель должен
проявлять особое внимание, бди-
тельность, осторожность и высо-
кую культуру движения. Без-
опасность плавания по рейду мо-
жет быть обеспечена лишь при
условии твердых знаний судово-
дителем правил движения судов
и умением их применять к любым
складывающимся транспортным
Рис. 84. Схема проводки судна в кру-
том колене
ситуациям, а также знания мест стоянок судов и ориентиров,
обозначающих судовые ходы рейда. Границы рейдов обозначают
рейдовыми створными знаками.
Акватория каждого рейда со стороны судового хода и берега долж-
на ограждаться плавучими предостерегательными знаками.
Рейды в зависимости от ширины акватории делятся на линии. Ин-
тервалы между линиями судов, стоящих на рейде, устанавливаются
местными правилами плавания. Например, для рейдов Волжского
бассейна эти интервалы должны быть не менее 75 м для сухогрузных
судов, 100 м для нефтеналивных с грузом 2 — 4-х классов и не
менее 300 м для наливных судов с грузом 1-го класса.
На лесных запанях и гаванях в голове и через каждые 100 м по всей длине
на высоте 2 м у правого берега зажигаются красные огни, а при расположении
их у левого берега — белые.
Рейды сплотки, формирования и стоянки плотов ограждаются со стороны
судового хода через каждые 500 м у правого берега красными, а у левого — бе-
лыми огнями.
При подходе к крупным рейдам областных городов судоводители
по рации должны связаться с диспетчером движения и получить от
него необходимую навигационную информацию о месте постановки
судна или состава или указания по безопасности движения.
На крупных рейдах интенсивность движения судов увеличивает-
ся по сравнению с плесовыми участками в 2—3 раза. Наибольшая ин-
тенсивность наблюдается в середине дня и наименьшая в утренние ча-
сы — от 4 до 6 ч. Средняя плотность движения достигает 0,7—1 судов
на километр.
В этих условиях часто наблюдается движение судов в кильва-
терной колонне, причем из-за несоблюдения интервалов движения меж-
101
ду судами иногда возникают столкновения судов. Величина безопас-
ного интервала (дистанции) между судами зависит от инерционных
характеристик судов, наблюдательности, динамического глазомера
и реакции судоводителей и скорости движения. Величину безопасно-
го интервала движения (Лг) рекомендуется определять по графику
(рис. 85), рассчитанному по методике автора.
Движение судов на рейдах в черте областных городов осуществля-
ется, как правило, без применения звуковых сигналов, за исклю-
чением особых случаев (например, при объявлении неучебных судовых
тревог, при появлении угрозы столкновения судов или помех движе-
нию от лодок, катеров, при вызове судов на радиосвязь). Движение су-
дов на рейдах осуществляется на пониженных скоростях.
Рис. 85. График для определения
безопасных интервалов между суда-
ми, движущимися в кильватерной ко-
лонне:
1 — теплоход типа «Родина» движется за теп-
лоходом типа «Родина»; 2 — теплоход типа
«Балтийский» движется за теплоходом типа
«Балтийский»; 3 — теплоход типа «Шестая
пятилетка» движется за теплоходом типа
«Шестая пятилетка»; 4 — теплоход типа
«Шестая пятилетка» движется за теплоходом
типа «Балтийский»; 5 — теплоход типа «Роди-
на» движется за теплоходом типа «Шестая
пятилетка» или толкаемый теплоходом типа
«Дунайский» состав движется за толкаемым
теплоходом типа «Дунайский» другим составом
На рейдах существует постоянное движение маломерных судов
в направлении, пересекающем транзитный судовой ход. Габариты
судового хода обычно ограничены стоящими на якорях судами и при-
чалами или маневрирующими судами и составами. В темное время
суток ориентировка осложнена из-за наличия большого скопления
посторонних огней. Все это требует от судоводителя при движении по
рейду строгого соблюдения установленных правил и порядка движе-
ния, проявления большого внимания и осторожности при управлении
судном. Наличие паромных переправ и установленных местными пра-
вилами плавания зон для пересечения судового хода моторными,
спортивными и гребными лодками вызывает необходимость ведения
наблюдения за курсами судов, движущихся не только по судовому ходу,
но и за его пределами. При движении по рейду необходимо включить
УКВ радиостанцию.
При наличии ветра суда, стоящие на якорях, разворачиваются по
направлению ветра и возможен их ветровой дрейф.
Наблюдаются случаи, когда кормовые части барж и судов распо-
лагаются на транзитном судовом ходу. Поэтому при проходе мест сто-
янок судов на якорях нужно избрать курс ближе к подветренной кром-
ке судового хода. При проходе мимо дебаркадеров и причалов со
стоящими судами следует увеличить интервал до них и уменьшить
скорость хода.
При движении по рейдам следует избегать обгона судов, так как
выход судна при обгоне на левую по ходу ходовую полосу судового
хода, предназначенную для судов, движущихся навстречу, сильно
осложняет расхождение.
102
При выборе скорости движения на рейдах необходимо учитывать,
что при очень малых скоростях движения вследствии ухудшения по-
воротливости судов, особенно при ветре, опасность плавания возрас-
тает. При больших скоростях движения из-за уменьшения времени,
необходимого для решения задач безопасного маневрирования, опас-
ность плавания также возрастает.
На рис. 86 приведена гистограмма распределения числа аварий
в процентах в зависимости от скорости движения судов и кривая отно-
сительной аварийности (относительная
аварийность — число, полученное путем
деления числа аварий на число судов
в определенном интервале скорости в
процентах). Эта кривая показывает, что
наиболее безопасно движение на рейдах
со скоростями 10—13 км/ч.
При движении на повышенной ско-
рости вблизи берега, у которого стоит
другое судно (особенно при ограничен-
ных габаритах пути на этом участке),
в первоначальный момент вода, вытес-
няемая движущимся судном (носовая
система волн), вкатывается на берег,
Рис. 86. Гистограмма распреде-
ления числа аварий и кривая
относительной аварийности
повышая уровень у берега. Затем в момент нахождения судна на тра-
верзе уровень воды быстро понижается и становится ниже нормаль-
ного. Под действием кормовой системы волн процесс повторяется.
Эти колебания уровней воды и удары судовых волн вызывают пере-
мещения судов, стоящих у берега, и могут вызвать обрыв шварто-
вов, проломы корпуса и т. д. При движении мимо причалов судоводи-
тели должны снижать скорость хода до пределов, исключающих по-
терю управляемости, и избирать курс возможно дальше от стоящих
судов.
§ 18. ВСТРЕЧА СУДОВ
Звуковые сигналы при встрече судов. В момент обнаружения
встречного судна судоводитель снизу идущегосудна должен, учитывая
скорость движения обоих судов (своего, встречного), определить ве-
роятное место встречи и убедиться в возможности безопасного рас-
хождения. Следует твердо знать места, где расхождение судов запре-
щено. Криволинейные участки с радиусами кривизны менее 1000 м
относятся к числу опасных и неудобных для расхождения крупно-
тоннажных судов. На таких участках рекомендуется установить
по радиотелефону связь со встречным судном и согласовать свои дей-
ствия.
В темное время суток для опознания судов, вышедших на УКВ ра-
диосвязь, подаются по азбуке Морзе световые сигналы «Л» (точка —
тире — две точки) судовым прожектором, направленным вверх. Мож-
но подавать звуковой сигнал «Прошу явиться на радиосвязь» —
один короткий, один продолжительный и один короткий. По ОКС.'Н-
113
чании радиосвязи вызывающая радиостанция называет тип или наз-
вание отвечающего судна, название своего судна и слово «конец» и
получает подтверждение об окончании переговоров отвечаПощей ра-
диостанции.
Содержание разговоров должно быть кратко записано в радиоте-
леграфном журнале.
В ряде случаев (особенно в левобережных стесненных ярах) снизу
идущему судну целесообразнее осуществлять пропуск встречного
судна со стороны правого борта. В этом случае снизу идущее судно
должно уклониться в левую (по ходу) сторону и остановиться у пра-
вой кромки судового хода с тем, чтобы к началу расхождения (т. е.
когда сверху идущее судно приблизится на расстояние около 1,5 км)
снизу идущее судно прекратило движение вперед. В обычных усло-
виях расхождение при встрече производится только левыми бортами.
Судоводитель снизу идущего судна, приблизившись к встречному
судну на расстояние не менее 1,5 км, подает один продолжительный
звуковой сигнал и отмашку с левого борта. Сверху идущее судно обя-
зано немедленно принять указанную сторону расхождения и подать
один продолжительный звуковой сигнал и отмашку с левого борта.
При невозможности расхождения левыми бортами после того, как
снизу идущее судно уклонилось в левую (по ходу) сторону и остано-
вилось, оно подает два коротких звуковых сигнала и отмашку с пра-
вого борта.
При буксировке плотов вниз по реке судоводителю буксировщика
предоставляется право выбора курса и стороны расхождения, так как
определить положение плота по отношению к судовому ходу и направ-
ление его дрейфа трудно.
Если навстречу снизу идущему судну следует одно за другим нес-
колько судов или составов, сигналы на расхождение подаются каж-
дому из них. Суда, следующие одно за другим, принимают ту же сто-
рону расхождения, что и судно, идущее впереди. При движении на
участках пути с осевой обстановкой обгон судов производится левым
бортом.
Управление судами при встрече. До обмена сигналами на расхож-
дение судоводители должны произвести уклонение путем плавного
изменения курса вправо на 4—6° и затем вывести судно на курс, па-
раллельный курсу встречного судна. Интервал между бортами при
расхождении должен быть по возможности наибольшим. В табл. 21
приведены минимально допустимые безопасные интервалы между
бортами судов при встрече и обгоне (определенные по методике
автора).
Во время расхождения следует вести постоянное наблюдение за-
движением своего и встречного судов, не допускать больших перек-
ладок руля в сторону встречного судна и зарыска, вызывающего угро-
зу столкновения судов. На мелководных участках пути для предот-
вращения рыскливости следует снизить скорость хода.
Время расхождения судов при встрече можно определить по гра-
фику, изображенному на рис. 87. На оси абцисс откладывается ско-
рость своего судна. Кривые обозначают скорости встречного судна,
104
Т а б л и и а 21
Ширина судового хода, м До 30 31-60 61-80 81 — 100 101—120
Бесопасные допустимые интервалы, м . 5 10 15 20 30
Продолжение табл. 21
Ширина судового хода, м 121-150 151—200 201—300 301—400
Безопасные допустимые интервалы, м . 40 50 100 150
На вертикальной оси обозначено время t (мин) расхождения судов.
На графике показан пример нахождения / = 2 мин (точка В) при встре-
че судна, идущего со скоростью 19 км/ч, с судном, имеющим ско-
рость 25 км/ч.
Рис. 87. График для определения времени встречи судов
Оптимальный маневр при угрозе столкновения судов. Перечис-
лим наиболее характерные причины, в результате которых возникает
Угроза столкновения судов: неправильное решение задачи, связанной
С пересечением курса встречного судна, и проявление лихачества; не-
105
своевременное обнаружение встречного судна из-за отсутствия све-
товых сигналов; невнимательность, трудность распознать световые
сигналы судна из-за наличия большого скопления огней на воде и
берегу (характерно для рейдов крупных городов); движение в тумане
при отсутствии радиолокатора; неправильное использование радио-
локатора при расхождении; неправильное определение курса или
положения по отношению судового хода встречного судна или соста-
ва во время расхождения судов в темное время суток; зарыскивание
судна (состава); отказ рулевого устройства, ДАУ или главных двига-
телей.
В одном случае угроза столкновения судов возникает внезапно, на
таком расстоянии между судами, когда предотвратить столкно-
вение любыми маневрами невозможно. В другом — угрозу столкно-
вения судов обнаруживают на расстоянии, позволяющем предот-
вратить столкновение маневрами судов. Но в момент принятия реше-
ния у судоводителя в большинстве случаев отсутствует информация
о том, какая из двух ситуаций фактически имеет место.
В первом случае оптимальным будет такой маневр, который обеспе-
чивает наименьшие повреждения судов от удара, а стало быть, на-
ибольшую безопасность для экипажа и пассажиров и наименьшие тех-
нические убытки. За критерий сравнения различных видов маневров,
применяющихся для предупреждения столкновений судов, в данном
случае может быть принята величина технических убытков.
Во втором случае оптимальным будет маневр, который может
предотвратить столкновение при минимальной дистанции между су-
дами. Обоснование выбора лучшего маневра в этом случае произво-
дится с учетом маневренных характеристик судов, хорошей судово-
дительской практики и статистического анализа столкновений.
Наиболее эффективным маневром при появлении угрозы столк-
новения судов, когда расстояние между встречными судами менее
500 м, с учетом первой и второй ситуации является маневр «отворот»
с перекладкой руля на борт в сторону, противоположную грозящей
опасности. При согласованном ранее отмашками направлении рас-
хождения отворот следует делать в сторону, противоположную по-
данной отмашке. Поворот в сторону встречного судна следует начинать
сразу после того, как оспасность столкновения будет ликвидирована.
Безопасный угол отворота при встречном движении для судна,
имеющего большую скорость (^ >> v2), может быть определен по
табл. 22.
Таблица 22
Типы расходящихся судов 1‘2 V1 Безопасный угол отворота a,Q, град
«Родина»—толкаемый состав • ... 0,480 30
«Шестая пятилетка» — толкаемый состав .... 0,600 35
«Ракета» — «Родина» 0,385 24
«Ракета» — «Шестая пятилетка» 0,308 21
«Ракета»— толкаемый состав 0,185 15
10G
Если во время расхождения судно, идущее с большей скоростью,
развернется таким образом, что курсовой угол на встречное судно
будет равен или больше безопасного (аб), то столкновения не произой-
дет. Судно, идущее с меньшей скоростью, в этом случае пройдет за
кормой.
Как показывают анализ аварий и практика судовождения, расстоя-
ние между судами, при котором судоводители ясно обнаруживали уг-
розу столкновения судов, в большинстве случаев равнялось
200—400 м, т. е. у судоводителей сближающихся судов па решение за-
дачи выбора вида маневра и его осуществление имелся резерв време-
ни в 25—60 с, за который можно было при перекладке руля на борт
развернуть крупнотоннажное судно на угол 5—20°. Если дать маши-
нам полный ход назад, скорость движения изменится незначительно.
С момента подачи команды «Стоп» и до момента прекращения подачи
топлива в цилиндры двигателя или закрытия стопорного клапана
у паровэй машины или турбины проходит 4—6 с. С момента прекра-
щения подачи топлива в двигатель и до полной остановки гребного
винта требуется от 10 до 50 с.
У современных крупнотоннажных грузо-пассажирских судов за
время 25—60 с можно остановить только вращение винтов, но нельзя
остановить само судно, если оно двигалось средним или полным хо-
дом. За время торможения движителями два судна проходят рассто-
яние 800—1200 м. Сила удара и повреждение корпуса при столкно-
вении судов будут меньше в тех случаях, когда суда имеют угловую
скорость вращения, направленную в сторону, противоположную мес-
ту удара.
§ 19. ОБГОН СУДОВ
Поток судов характеризуется большим разнообразием скоростей,
поэтому важное значение имеет правильное выполнение обгонов.
Увидев обгоняемое судно, судоводитель обгоняющего судна дол-
жен при наличии радиотелефона установить радиосвязь и запросить
разрешение на обгон, установить место и сторону обгона. Приблизив-
шись к обгоняемому судну на расстояние сверху не ближе 500 м, а сни-
зу — на расстояние 300 м до кормы обгоняемого судна или кормы пос-
леднего счала состава, обгоняющее судно обязано запросить (подачей
двух коротких и одного продолжительного звуковых сигнала) сто-
рону обгона.
Судоводитель обгоняемого судна должен подать два коротких и
один продолжительный звуковые сигналы и отмашку с того борта,
с которого он намерен пропустить обгоняющее судно, уменьшить ход
и уклониться в сторону, противоположную поданной отмашке. На
прямолинейных участках лучше пропускать обгоняющее судно с того
борта, который обращен к линии его курса; если суда движутся
в кильватер, — с правого борта обгоняющего. На криволинейных
участках пути обгоняющее судно лучше пропускать со стороны выпук-
лого берега при ходе против течения и вогнутого берега — при холе
по течению. Обогоняющее судно, получив разрешение на обгон, по-
Ь/7
дает отмашку с соответствующего борта. В случае невозможности об-
гона обгоняемое судно подает сигнал «Предупреждение». Тогда судо-
водитель обгоняющего судна должен уменьшить скорость движения
и следовать параллельным курсом, выдерживая дистанцию до
обгоняемого судна не менее 500 м, пока не будет разрешен обгон. Ми-
нимальное расстояние в начале обгона /б.об, гарантирующее безо-
пасность, должно быть настолько значительным, чтобы обгоняющее
Рис. 88. Графики безопасных расстояний при обгонах для теплоходов типа:
а — «Родина»; б — «Балтийский»; в — «Шестая пятилетка»
судно в случае запрета на обгон, не теряя управляемости, путем рабо-
ты двигателей на передний и задний ход и не приближаясь вплотную
к обгоняемому судну, могло бы уменьшить свою скорость до величи-
ны скорости обгоняемого судна. Сохранение управляемости необхо-
димо потому, что часто причиной запрета на обгон является прибли-
жение встречного судна или состава; судоводитель обгоняющего
судна в этом случае вынужден уменьшить скорость, осуществлять
маневрирование по расхождению со встречным судном. На рис. 88
показаны графики для определения безопасных расстояний при обго-
нах (/б.об).
На горизонтальной оси графика нанесена скорость обгоняюще-
го судна, для которого построен график. Цифры у кривых линий гра-
фика обозначают скорость v2 обгоняемого судна. На вертикальной
оси графика указана величина безопасного расстояния Iq,oq^
Пример. Теплоход «Родина», идущий со скоростью = 24 км/ч, об-
гоняет состав, движущийся со скоростью v2 — 8 км/ч. Восстановим перпенди-
куляр из точки на горизонтальной оси, соответствующей 24 км/ч (см. рис. 88, а),
до пересечения с кривой v2 — 8 км/ч и получим точку А. Против этой точки на
вертикальной оси найдем величину безопасного расстояния /б.об — 390 м.
При следовании судов во время обгона параллельными курсами»
как известно, наблюдается явление «присасывания» их друг к другу,
могущее привести к столкновению, поэтому судоводители должны вы-
держивать интервалы между бортами судов не менее указанных
в табл. 21.
Со стороны внутренних (обращенных один к другому) бортов по-
вышаются скорости обтекания. Силы давления воды со стороны на-
108
ружных бортов становятся больше, чем со стороны внутренних, в ре-
зультате этого происходит присасывание судов друг к другу.
Когда нос обгоняющего судна приближается к траверзу кормы об-
гоняемого, носовая волна увеличивает давление воды в кормовой час-
ти обгоняемого судна, и нос этого судна отклоняется в сторону от
обгоняющего. Когда нос обгоняющего судна будет находиться около
середины длины корпуса обгоняемого судна, это явление прекращается
Рис. 89. График для определения пути и времени обгона
и наблюдается сильное взаимное присасывание судов, достигающее
наибольшей величины при их нахождении на траверзе друг друга.
В это время поворачивающих моментов не возникает и суда идут па-
раллельными курсами. Когда же корма обгоняющего судна прибли-
жается к носу обгоняемого, явление присасывания между носовой
частью обгоняемого судна и кормой обгоняющего вызывает поворот
обгоняемого судна в сторону обгоняющего.
109
Для компенсации действия поворачивающих моментов необходима
перекладка руля в сторону, противоположную направлению их дейст-
вия. При обгоне толкаемых составов в узких местах с небольшими
интервалами между бортами расходящихся судов действие повора-
чивающих моментов может привести к обрыву вожжевых тросов и к
столкновению судов. Для предотвращения обрыва вожжевых тро-
сов суда должны снизить скорость хода.
Для определения времени и расстояния при обгоне можно вос-
пользоваться графиком, приведенным на рис. 89. Здесь на горизонталь-
ной оси графика указана скорость обгоняющего судна v, на вертикаль-
ной оси — путь S, м, требующийся для обгона. На наклонных линиях
показаны величины разности скоростей Ду обгоняющего и обгоняе-
мого судов. У этих линий обозначена величина среднего времени об-
гона /ср.
Пример. Предположим, что одно судно, идущее со скоростью v ~
= 19 км/ч, обгоняет другое судно, скорость которого на малом ходу при обгоне
v = 10 км/ч. Разность скоростей судов Ду = 9 км/ч. Определим время и расстоя-
ние, требующиеся для обгона. На горизонтальной оси из точки, соответствующей
скорости v = 19 км/ч, восстановим перпендикуляр до наклонной линии, обозна-
ченной Ду = 9 км/ч (см. рис. 89, точка Л). По надписи над этой линией опреде-
ляем среднее время расхождения /ср = 5,5 мин. Затем из точки А опустим пер-
пендикуляр и получим точку В на вертикальной оси. Эта точка покажет расстоя-
ние, требующееся для обгона, равное 1900 м.
§ 20. ПРОХОЖДЕНИЕ ПЕРЕКАТОВ
И МЕСТ С ГИДРОТЕХНИЧЕСКИМИ
СООРУЖЕНИЯМИ
Движение через перекат. При подходе к перекату судоводитель
должен убедиться в наличии необходимого запаса воды под днищем
по путевому листу, радиобюллетеню или сигнальной мачте. Запасы
воды под днищем для самоходных судов и составов при прохождении
мелководных участков должны быть не меньше 20 см при глубине
более 3 м, 15 см — при глубине от 1,5 до 3 м и 10 см — при глубинеме-
нее 1,5 м.
Если глубина воды на перекате меньше полуторной осадки судна,
то до подхода к перекату нужно снизить скорость движения.
Безопасная скорость движения судна на мелководье, при кото-
рой сохраняются установленные Правилами плавания запасы воды
под днищем, может быть определена по рекомендациям § 10.
Для правильного захода на перекат судоводитель должен учесть
расположение знаков судоходной обстановки, характерные особен-
ности переката и убедиться в отсутствии встречных судов.
В случае невозможности расхождения наиболее безопасным мес-
том отстоя снизу идущего судна является тиховод у косы или побоч-
ня в нижней плесовой лощине переката (рис. 90), сверху идущего —
тиховод у верхней косы. Во время сильных бортовых ветров стоянка
производится на якорях.
При движении по течению поворот на перекат начинают, не дохо-
110
дя до створной линии, ориентируясь по верхнему поворотному баке-
ну верхней песчаной косы переката (положения 1 и 2).
Поворот выполняется так, чтобы судно вышло на створную линию
приблизительно на середине длины переката (положение 3). Затем,
ориентируясь по бакену нижней косы переката, начинают поворот со
створа в плесовую лощину (положение 4). В этот момент судно полу-
чает дрейф в сторону яра. После выхода с переката (положение 5)
скорость хода увеличивают до полного.
Рис. 90. Схема проводки судна через перекат при движении по течению:
А — место ожидания судна, идущего вверх; Б — место ожидания судна, идущего
вниз
При движении против течения заход на перекат (рис. 91, поло-
жения 1 и 2) выполняется под углом к подвалыо переката, большим
60°. Чем меньше запас воды под днищем, тем меньше должна быть ско-
рость судна.
При остром угле подхода на носовую часть судна со стороны
нижней косы действуют быстрые струи течения, давление которых
создает поворачивающий момент в сторону верхних песков. Кроме то-
го, отраженные от подвалья волны судна будут создавать повышенное
давление воды в носовой части судна и поворачивающий момент, на-
правленный в ту же сторону. Величина этого момента будет тем боль-
ше, чем круче подвалье и мелководнее перекат, больше скорость дви-
жения, осадка судна и острее угол подхода судна к подвалыо перека-
та. В результате действия этих поворачивающих моментов судно мо-
жет рыскнуть в сторону затонской части переката. На подвалье пере-
ката судно выводят на створную линию и следуют по ней.
111
При выходе из переката поворачивают, ориентируясь по верх-
нему бакену верхней косы переката (положение 3) и увеличивают
скорость.
Рис. 91. Схема проводки судна через перекат при движении против течения
Прохождение узкостей с неправильными течениями. Узкости
обычно имеют большие скорости течения и чаще встречаются в мес-
тах, где русло реки разделяется на рукава.
До подхода к узкости необходимо включить УКВ радиостанцию и
установить связь с проходящими узкость судами. При подходе к уз-
кости нужно подать один продолжительный звуковой сигнал.
Движение судов в узкости регулируется двумя семафорами. Для движения
вниз по семафорной мачте поднимают: днем цилиндр черного цвета и ниже него
красный конус раструбом вниз, ночью — зеленый огонь и ниже него красный
огонь. Разрешительными сигналами для движения вверх против течения явля-
ются черный цилиндр и выше него красный конус, а ночью красный огонь и ниже
него зеленый.
Если участок временно закрыт для плавания, то на семафоре поднимают
днем два красных конуса, а ночью зажигают два вертикально расположенных
красных огня.
Если на семафоре отсутствуют сигналы или поднят только один из них, су-
доводитель должен остановиться и сигналом «Обращаю внимание» запросить
сигнальный пост о возможности прохода.
Проходить узкости следует с большой осторожностью, выбирая
курс по середине судового хода. Узкости с повышенными скоростями
течения, если позволяют глубины, следует проходить полным ходом.
При движении по узкости в одном направлении нескольких судов
интервал между ними должен быть не менее 500 м.
112
Суводи значительно усложняют проводку судов и особенно соста-
вов, поэтому их следует по возможности обходить. Если же суводь
обойти невозможно, то при подходе к узкости снизу необходимо
выбирать курс не по стрежню, а по тиховоду за мысом, где имеется
суводь (рис. 92). При входе в суводь на судно будет действовать
поворачивающий момент от давления ее струй, направленный на
берег (положение/), поэтому руль перекладывают в сторону от
берега.
Для уменьшения рыскливости необходимо дать полный ход. Пос-
ле входа в суводь скорость хода уменьшается до среднего. При под-
ходе к мысу на расстояние полторы-две длины судну следует идти
параллельно стрежневому течению, так как при входе в быстрые
стрежневые струи под углом к ним возникает сильное давление воды
на носовую часть судна (положение 2), которое стремится развер-
нуть судно в сторону стрежня. В этот момент ход следует увеличить
до полного.
Рис. 92. Схема маневрирования при прохождении узкости против течения:
1 — средний ход; 2 — полный ход
На траверзе мыса курс судна следует выдерживать параллельно
струям течения. Как правило, глубины на траверзе мыса позволяют
идти на расстоянии от него 20—30 м. Этот курс сохраняется до тех пор,
пока корма судна не пройдет траверз мыса, затем судно меняет курс
в зависимости от конкретных условий пути.
При движении по течению через узкости с суводями, располо-
женными по обоим берегам, курс судна избирается по линии стреж-
невых струй.
Заход в суводь под большим углом представляет опасность, так как
в этом случае кормовая часть судна находится в быстрых струях, а но-
совая — в более слабых струях суводи. В результате возникает пове-
113
рачивающий момент, направленный в сторону суводи. В этих услови-
ях может произойти разворот судна и удар о берег ниже мыса.
Если суводь образована за мысом или рынками гор и расположе-
на у одного из берегов (что характерно для равнинных рек), то судно
следует проводить вдоль берега, не имеющего суводи.
Движение под мостами. Мосты, пересекающие судоходные пути,
по конструкции разделяются на мосты на опорах (с неподвижными
пролетами) и
или разводными
Вид огней с судод
ei t
i® 4
Идти
ziebee
Идти
npabee
Рис. 93. Особенности использования
мостовых створных огней
водитель должен убедиться в наличии
(если таковой имеется) и определить
наплавные.
Мосты на опорах с неподвижными
фермами имеют три вида навигационно-
го ограждения:
направляющие бакены ходового
пролета (устанавливаются для того,
чтобы судоводитель мог определить на-
правление течения);
знаки, показывающие ходовой про-
лет, высоту пролета и ось судового хода.
(Мостовые опоры судоходного пролета
освещаются белыми огнями. Габарит-
ные огни арочных мостов, не имеющих
устоев, устанавливаются на щитах бе-
лого или зеленого цвета, прикреплен-
ных к ферме моста.);
знаки, регулирующие пропуск су-
дов под мост, — семафоры или светофо-
ры (устанавливаются в случае необхо-
димости). При подходе к мосту судо-
разрешительных сигналов на семафоре
ходовой пролет.
При подходе к ходовому пролету курс судна избирается посере-
дине пролета с учетом направления течения. Ориентирами являются
направляющие бакены, щит ходового пролета или створные огни.
При пользовании мостовыми створными огнями следует иметь в виду, лто
верхний огонь устанавливается на лицевой стороне фермы и находится ближе
к судоводителю, а нижний — под фермой па ее обратной стороне, в связи с чем
направление поворота для выхода на створы, если огни расстворились, опреде-
ляется не по нижнему огню, как у линейных створов, а по верхнему (рис. 93).
При наличии свального течения на подходе к мосту устанавлива-
ются направляющая обстановка и свальные бакены.
При движении под мост необходимо также учитывать скорость и
направление ветра. Для уменьшения величины сноса от свального те-
чения или дрейфа от бортового ветра под мост следует идти полным хо-
дом с поправкой курса на дрейф.
Расхождение судов в пролетах мостов запрещено. Перед мостом
нужно проверить исправность рулевого устройства и предупредить
механика о проходе под мост. Во время сильного ливня, снегопада или
тумана, исключающих видимость мостовых сигналов, проход под
мостом воспрещается.
Мосты на опорах с разводными фермами обычно имеют более узкие
пролеты, не превышающие 50 м. Разведение пролетов мостов произ-
водится по определенному расписанию. Поэтому проводка судов но-
114
сит групповой характер. Движение судов должно осуществляться
в кильватерном строе. Общее руководство проводкой судов осуществ-
ляет диспетчер ближайшего к мосту порта, а очередность пропуска
судов устанавливает дежурный капитан рейда.
Световые сигналы в разводных пролетах мостов устанавливаются
местными правилами плавания.
Мосты с узкими пролетами оказывают существенное влияние на
безопасность плавания судов. На рис. 94 показана кривая, показы-
вающая влияние ширины судоходного пролета моста на количество
аварий с судами и составами. Количество аварий Ка резко возрастает
тогда, когда ширина пролета моста превышает ширину судна или сос-
Рис. 94. Влияние ширины пролета мо-
ста на безопасность плавания
Рис. 95. Точность проводки судов в за-
висимости от скорости движения:
Лк — отклонение от оси пролета моста;
v — скорость судна
тава менее чем в 3 раза. Проводку судов и составов в такие пролеты
должны осуществлять только опытные судоводители, хорошо знающие
условия плавания в районе моста.
Важным фактором при проводке судов в пролеты малогабаритных
мостов является правильный выбор скорости движения. Проведен-
ные исследования точности проводки крупнотоннажных судов в про-
леты мостов показали (рис. 95), что наибольшая точность проводки
достигается при скоростях хода 14—16 км/ч, которую следует считать
оптимальной при движении водоизмещающих судов в разводные про-
леты мостов с ограниченными габаритами. Снижение скорости до сред-
него хода необходимо производить и для того, чтобы иметь запас мощ-
ности машин для повышения управляемости судна в случае появления
угрозы навала на устой моста. Если ширина пролета моста в 6 раз и
более превышает ширину корпуса судна, проводку судна можно осу-
ществлять на полном ходу.
Одновременное встречное движение судов в один пролет запре-
щается, право прохода в этом случае предоставляется сверху идущему
судну или составу. Остановка судов для ожидания прохода должна
производиться на расстоянии от моста не ближе знака «Сигнал» или
семафорной мачты.
Проводка судов через наплавные мосты осуществляется в разведенную часть
Моста, которая в темное время суток обставляется с правой по течению стороны
двумя красными и с левой —двумя белыми огнями, расположенными на концах
разведенной части.
115
Движение судов регулируется с помощью семафора, устанавливаемого ца
неразведенной части моста, обычно с правой стороны.
На разведенной части моста — «пленке» зажигается огонь красного цвета,
если пленка находится с правой стороны по течению, и белого цвета, если пленка
находится с левой стороны.
Курс судна избирается посередине разведенной части моста парал-
лельно струям течения. На снос от свальных течений и дрейф от
ветра поправка к курсу вводится так же, как при проводке через мосты
с опорами. Во время проводки судов на неразведенной части моста не
должны находиться люди и транспорт.
§ 21. ПРОХОЖДЕНИЕ МИМО
РАБОТАЮЩИХ
ДНОУГЛУБИТЕЛЬНЫХ
И ДНООЧИСТИТЕЛЬНЫХ
СНАРЯДОВ
Наличие на судовом ходу дноуглубительного или дноочиститель-
ного снаряда осложняет проводку судов.
В темное время суток все дноуглубительные снаряды во время работы несут
на мачте один зеленый огонь, видимый по горизонту на 360°. Кроме того, на рефу-
лерных снарядах со стороны судового хода зажигаются два огня на высоте тента
(на носу и корме) красного цвета, если земснаряд откладывает грунт на правый
берег, и белого цвета, если земснаряд откладывает грунт на левый берег. На ре-
фулерах зажигаются соответственно красные и белые огни через каждые 50 м
по длине трубопровода на высоте 1 м. В случае применения бота-завозни, стоя-
щего на становой цепи, на нем зажигается белый или красный огонь, в зависимости
dt того, к какому берегу отведена цепь (к правому—красный, к левому — белый).
На лотковых снарядах, кроме зеленого огня на мачте и двух огней на высоте
тента, зажигается огонь на выступающем за борт лотке красного цвета при свал-
ке грунта в сторону правого берега и белый, если свалка грунта производится
в сторону левого берега. Черпаковые и штанговые двуглубительные снаряды
несут один зеленый огонь на мачте и на боте-завозне, стоящем на становой цепи.
Во время стоянки за пределами судового хода и во время буксировки зем-
снаряды несут огни, которые установлены для несамоходных сухогрузных судов,
а на трубопроводах (понтонах) — белые огни через каждые 50 м.
При подходе к земснаряду на расстояние 1 км, двигаясь вниз, и на расстоя-
ние 500 м при движении вверх суда запрашивают земснаряд о возможности про-
пуска одним продолжительным звуковым сигналом. Если земснаряд может про-
пустить судно, то с него подают один продолжительный звуковой сигнал и от-
машку с того борта, мимо которого должно пройти судно. Днем отмашку подают
флагом, а ночью — миганием двух горизонтально расположенных огней на вы-
соте тента земснаряда. Если земснаряд пошел в сторону правого борта, мигание
производится красными, а в сторону левого — белыми огнями. В ответ на подан-
ную с земснаряда отмашку с судна без подачи звукового сигнала подается сигнал
отмашки со стороны того борта, который будет обращен к земснаряду во время
прохода по перекату.
Если земснаряд не может в данное время пропустить судно, то с него при
приближении судна не ближе чем на 1 км подают сигнал «Предупреждение»
(не менее пяти коротких звуковых сигналов).
При одновременном подходе двух судов разрешение на право про-
хода, поданное с земснаряда, не освобождает судоводителя на судне,
идущем снизу, от обязанности пропускать сверху идущее судно и ос*
танавливаться в безопасном месте. Получив разрешение на проход, су-
доводитель должен снизить скорость хода судна.
116
При приближении к земснаряду судоводитель должен обратить вни-
мание на положение папильонажных тросов (не натянуты ли они) с тем,
чтобы правильно определить интервал между бортом судна и земсна-
рядом, и внимательно наблюдать за правильностью курса судна.
После прохождения земснаряда и выхода с переката скорость дви-
жения увеличивается.
При расхождении с черпаковыми земснарядами необходимо обра-
щать внимание на работающий у земснаряда шаландер, маневры и дви-
жение которого часто осуществляются под углом к транзитному судо-
вому ходу.
Буксировщики-шаландеры, независимо от способа буксировки, а также и
самоходная шаланда несут бортовые, гаковые и гакабортные огни, а на мачте —
два^топовых вертикально расположенных огня — один белый и выше него зеле-
ный. Так как длина шаланды обычно меньше 50 м, во время стоянки у борта зем-
снаряда и во время буксировки на мачте шаланды поднимается один белый огонь.
При расхождении с шаландером в темное время суток трудно определить
положение и курс шаланды, поэтому следует выдерживать возможно больший
интервал. При толкании шаланды в дополнение к топовым белым огьГям в виде
треугольника, обычно расположенном на шаланде, должен зажигаться огонь на
носовом флагштоке с дугой освещения 225° и дальностью видимости не менее
4 км.
Дноочистительные снаряды, карчеподъемницы, подъемные краны и водолаз-
ные боты при производстве подводных работ несут на мачте два зеленых верти-
кально расположенных огня, видимых по горизонту на 360°. Днем на мачте они
поднимают два квадратных зеленых флага каждый размером 1 X 1 м, располо-
женные один над другим на расстоянии 1 м.
От действия судовых волн проходящих судов возможно поврежде-
ние воздухопроводных шлангов или сигнальных средств связи у ра-
ботающих под водой людей, что может привести к их гибели. Поэ-
тому проходящие суда должны снижать скорость хода до пределов, ис-
ключающих потерю управляемости, и избирать курс на возможно
большем расстоянии от водолазных ботов и дноочистительных
снарядов.
§ 22. ОСОБЕННОСТИ УПРАВЛЕНИЯ
СКОРОСТНЫМИ СУДАМИ
Швартовные маневры и обороты судов на подводных крыльях. Су-
да на подводных крыльях имеют три характерных режима движения:
плавания; движения на крыльях и перехода от плавания к движению
на крыльях.
Рассмотрим швартовные маневры теплохода «Метеор». При прива-
ле на расстоянии от причала 350—400 м обороты двигателя снижают
до минимальных, и судно от движения на крыльях переходит к режи-
му плавания. При сближении с причалом курс судна избирают нес-
колько выше носового плеча причала, останавливают двигатель со
стороны борта, противоположного причалу, и скорость хода снижает-
ся до 12—14 км/ч (рис. 96, положение /). За 20—30 м до подхода
к причалу останавливают второй двигатель и курс судна выравни-
вают параллельно причальной линии. Как только посадочные пролеты
судна и причала начинают совпадать, двигателю со стороны борта,
противоположного причалу, дают ход назад. После остановки судна,
117
работая двигателями на передний и задний ход, выравнивают про-
леты, подводят корму к причалу, подают швартовные тросы, и при-
вал заканчивается (положение 2).
Применяются два способа отвала: на переднем ходу и на заднем хо-
ду. При отвале на переднем ходу после отдачи швартовов с помощью
руля или движителей, работающих одновременно на передний и зад-
ний ход, судно разворачивают по отношению к причалу на угол 15—20°
(положение 3), затем останавливают движитель, работающий на задний
ход, и руль перекладывают в сторону причала. После отхода кормы
руль ставят в положение «прямо» и второму двигателю дают ход впе-
ред. Судно отходит от причала и выводится на судовой ход (положения
4 и 5).
Рис. 96. Схема привала и отвала па
переднем ходу теплохода «Метеор»
Рис. 97. Схема отвала на заднем хо-
ду .теплохода «Метеор»
Отвал на заднем ходу производится при отсутствии свободной для
маневрирования на переднем ходу акватории или после длитель-
ной стоянки, когда требуется очистить крыльевое устройство от пос-
торонних предметов (кустов, плавающей древесины и т. д.). После от-
дачи швартовных тросов (рис. 97, положение /) перекладывают руль
в сторону причала и, работая двигателями одновременно на передний
и задний ход, разворачивают теплоход под углом 20—25° к причаль-
ной линии (положение 2). Останавливают двигатель, работающий на
передний ход, и судно отходит от причала на заднем ходу. В поло-
жении 3 останавливают двигатель, работающий на задний ход, ста-
вят руль в положение «прямо», а затем обоим двигателям дают перед-
ний ход и выводят судно на судовой ход (положение 4). Обороты судов
на подводных крыльях чаще выполняются при ходе на корпусе при
минимально устойчивых оборотах главных двигателей на скорости
около 18—22 км/ч. Во время оборота руль перекладывается в сторону
поворота на 35°. Для уменьшения диаметра циркуляции двигателю о
с борта, в сторону которого делается поворот, дается задний ход. Обо-
роты при ходе на крыльях выполняются без уменьшения оборотов
двигателей. Руль в сторону поворота перекладывается в несколько
приемов, при этом максимальный угол перекладки руля на судах типа
«Ракета» не должен превышать 10—12°, «Метеор» — 20—25°.
Выход на крылья. Выход на крылья производят на прямолиней-
ном курсе. Периодически через 10—15 с увеличивают обороты двига-
118
телей на 10Э—150. В режиме .плавания в это время резко возрастает
сопротивление воды движению судна (рис. 98). Затем судно выходит
на носовое крыло, и сопротивление достигает наибольшего значения.
При дальнейшем увеличении скорости увеличивается подъемная сила
крыльев и корпус судна постепенно выходит из воды; сопротивление
уменьшается, и наступает режим движения на крыльях. Время вы-
хода на крылья составляет 1,5—3 мин. Судно за это время проходит
около 1,5 км. Выход на крылья становится невозможным при наличии
на крыльях посторонних предметов, сильном крене или дифференте,
погнутых лопастях винта или
погнутом гребном вале, недо-
статочной мощности двигате-
лей, затопленном в резуль-
тате пролома корпуса одном
отсеке или большой пере-
грузке судна.
Особенности расхождения.
Расхождение при встрече и
обгоне с обычными судами
производится по усмотрению
вахтенного начальника судна
на подводных крыльях. Рас-
хождение при встрече с дру-
гими скоростными судами Рис. 98. График изменения сопротивления
производится ТОЛЬКО левыми воды ПРИ выходе судна на крылья
бортами, а при обгонах обго-
няющее судно оставляет обгоняемое со стороны своего правого борта.
Обгоняемое судно должно снизить скорость и следовать на корпусе.
Отмашка с судна на подводных крыльях подается на расстоянии
не менее 2 км при встрече и 1 км — при обгоне. Эта отмашка должна бе-
зоговорочно приниматься судоводителями других судов, которые во
время расхождения не должны допускать резких отклонений от курса
и рыскливости своих судов. При движении судоводители судов на под-
водных крыльях не должны следовать в кильватер другим судам и
должны при расхождении выдерживать наибольший возможный интер-
вал между бортами.
Для обеспечения безопасного расхождения судоводитель должен
уметь быстро оценивать относительное перемещение судов, знать уг-
лы, поворот на которые делает расхождение безопасным.
Предположим, судно на подводных крыльях находится в точке А
(рис. 99) и движется со скоростью vif а встречное судно, курс которо-
го неизвестен, находится в точке В на расстоянии D и движется со
скоростью г2. Если учитывать наихудший возможный курс судна из
точки В, направленный перпендикулярно линии курса судна, нахо-
дящегося в точке А, то зона курсовых углов, при которых еще возмож-
но столкновение, лежит в пределах от 0 до а°.
Максимальный угол а ограничен касательной к окружности, ра-
диус которой равен расстоянию, проведенному судном из точки В до
момента встречи в точке М.
119
Из прямоугольного треугольника AM В найдем:
tgamax=^ = -^, (63)
Vit fl
где t — время движения.
Очевидно, если судно на подводных крыльях сделает поворот
вправо или влево от находящегося прямо по курсу судна в точке А
на угол, больший а, то столкновение судов невозможно. Безопасны-
ми максимальными углами отворота для судов на подводных крыль-
ях при расхождении с пассажирскими судами является угол, равный
25°, с грузовыми теплоходами — 20° и с толкаемыми составами — 15°.
Рис. 99. Определение
курсовых углов, при ко-
торых невозможно столк-
новение
В практике случаи движения судов под прямыми углами на-реке
на плесовом участке сравнительно редки, и курс встречного судна в этом
случае легко определить. Угол пересечения курсов обычно не превы-
шает 40—45°. Если курс встречного судна определен, т. е. установ-
лено, что оно движется не поперек курса теплохода на подводных кры-
льях, угол отворота определяется из решения косоугольного треуголь-
ника скоростей по формуле
sina= -°’7^2 , (64)
Рекомендуемый угол отворота от встречного судна при расхожде-
нии равен 10°.
Глава III
СУДОВОЖДЕНИЕ СПОСОБОМ ТОЛКАНИЯ
§ 23. ОБЩИЙ ОБЗОР
Способ толкания судов имеет большие преимущества по сравнению
с буксировкой на тросе.
В Советском Союзе впервые опыты толкания производились в трид-
цатых годах. Они были продолжены вскоре после окончания Великой
Отечественной войны. В 1946—1950 гг. объем перевозок способом тол-
кания уже достиг значительной цифры и применялся в Волжском, Кам-
ском, Московском, Иртышском и других бассейнах»
120
Такие новаторы-судоводители, как В.В. Пермяков, Л.В. Пушка-
рев, Г.М.Текучев и другие, совершенствовали способы учалки и мето-
ды проводки толкаемых составов. Толкачи с баржами учаливались
жестким, шарнирным либо полужестким способом..
Накопленный опыт по толканию судов в различных пароходствах
СССР вскрыл преимущества толкания перед буксировкой на тросе и
позволил перейти от экспериментов к внедрению толкания в практику
работы речного флота.
Рис. 100. Теплоход-толкач «Зеленодольск»
В навигацию 1952 г. способ толкания применялся уже в двадцати
пароходствах страны. Министерство речного флота РСФСР в навига-
ционных планах речных перевозок начало планировать задания
пароходствам по освоению части грузооборота в несамоходных су-
дах способом толкания.
Дальнейшее совершенствование способов толкания позволило зна-
чительно сократить штат команд несамоходных судов.
Были сконструированы сцепы с двумя упорами и амортизирую-
щим устройством в натяжном механизме вожжевого троса. Наряду
с усовершенствованием способов учалки толкаемых составов прово-
дились проектные и экспериментальные работы по улучшению управ-
ляемости толкаемых составов путем увеличения площади существую-
щих рулей на буксирах-толкачах (на 20—25%), постановки новых
рулей и установки поворотных насадок. Проводились оборудование
существующего флота для толкания и постройка специально предназ-
наченных для толкания новых судов (рис. 100) мощностью 4000, 2000,
1200, 800, 600 л. с., а также секционных барж.
121
Толкание судов по сравнению с буксировкой на тросе имеет следу-
ющие преимущества:
уменьшается сопротивление корпуса толкача в связи с работой его
в попутном потоке за баржей;
увеличивается упор движителей толкача (по тем же причинам);
уменьшается вихревое сопротивление баржи (барж);
уменьшается сопротивление баржи (барж) за счет отсутствия струи,
отбрасываемой движителем;
увеличивается устойчивость состава на курсе.
В результате этих преимуществ скорость движения толкаемого
состава по сравнению со. скоростью при буксировке увеличивается на
15—20%.
Рис. 101. Секционный состав
Эффект толкания в значительной степени зависит от веса толкае-
мого состава. При определении веса состава необходимо учитывать,
что эффективность толкания по сравнению с буксировкой выше при
работе на скоростях 10—14 км/ч и более.
Объем перевозок, выполняемых методом толкания, в настоящее
время составляет более 80% общего объема перевозок в несамоход-
ных судах.
Суда, предназначенные для толкания, оборудуются современной
навигационной аппаратурой и пультами управления машинами из
рубки толкача, что позволяет совместить профессии судоводителя и
механика.
Состав из нескольких судов (секций) называется секционным. Сек-
ция — несамоходное судно, обе оконечности которого заканчиваются
полным транцем.
Составы из судов, имеющих одну или обе оконечности транцевого
типа, с площадью транца, меньшей площади мидель-шпангоута, на-
зываются полусекционными. Первый секционный состав был построен
в России инж. Боярским в 1884 г.
В 1958 г. на р. Волге вступил в эксплуатацию трехсекционный сос-
тав грузоподъемностью 8600 т (рис. 101). Эксплуатация секционных
составов показала, что при перевозке массовых грузов — угля, соли,
нефти и т. д. — они являются более экономичным и перспективным
транспортным средством по сравнению с грузовыми самоходными
судами и баржевыми составами. Грузоподъемность секционных соста-
вов достигает в СССР 27000 т, а мощность толкачей — 4000 л. с.
122
В навигацию 1964 г. грузовой теплоход «Овруч» впервые на Волге
начал водить баржу грузоподъемностью 1800 т методом толкания. В
настоящее время этот почин получил широкое распространение на
всех реках страны. Большое количество грузовых теплоходов обо-
рудованы специальными сцепными устройствами, позволяющими
осуществлять толкание барж.
В нашей стране и за рубежом ведутся работы по созданию изгиба-
емых составов. На носовых упорах теплохода (рис. 102) устанавливает-
ся автосцепное устройство 1 с замками УДР-100, при помощи которого
производится сцепка с балкой 2,
поворачивающейся на оси 3.
С этой балкой связаны установ-
ленные на поворотных фунда-
ментах гидроцилиндры 4, кото-
рые выполняют функции сило-
вых средств для относительного
поворота счаленных судов. Мас-
ло под давлением в гидросисте-
му изгибающего устройства
подается станцией 5.
Изгибающее устройство поз-
воляет производить излом осе-
вой линии состава в пределах
до 20° на оба борта, на что затра-
чивается 105 с.
В навигацию 1968 г. изги-
Рис. 102. Схема изгибающего устрой-
ства состава конструкции НЙИВТа
баемые составы, сконструиро-
ванные под руководством В.Г. Павленко, успешно прошли испыта-
ния на р.Иртыше и других реках. В настоящее время в различных
речных бассейнах эти составы эксплуатируются.
Способность изгибаться улучшает маневренные качества составов
и позволяет водить крупногабаритные составы на крутых поворотах
реки. Такие составы особенно перспективны для использования на
свободных реках с малыми радиусами кривизны. Например, если для
проводки жесткого состава из шести барж на криволинейном участке
требуется минимальная ширина судового хода 100 м, то для проводки
на том же участке такого же, но изгибаемого состава — всего СО м.
Для изгиба состава требуется усилие 60—100 тс.
§ 24. ФОРМИРОВАНИЕ ТОЛКАЕМЫХ
СОСТАВОВ
Правила формирования. Суда для толкаемого состава должны
формироваться в соответствии с планом формирования, графиком
движения составов, требованиями Правил плавания и Правил тех-
нической эксплуатации, а также в соответствии с типовыми схемами,
устанавливаемыми пароходства^.
Длина состава при движении вниз должна быть в 3,5 раза, а при
движении вверх в 2 раза меньше радиусов кривизны судового хода.
123
Осадка судов формируемого состава с учетом запаса воды под дни-
щем должна соответствовать глубинам, установленным Правилами
плавания, а ширина и длина состава — габаритам пути.
Запрещается ставить в составы суда технически неисправные.
Движение пыжевых (учаленных бортами) составов в водохранилищах
допускается при ветре не более 5 баллов.
При формировании составов из разнотипных барж баржи, имею-
щие большие размеры и осадку, должны ставиться ближе к толкачу,
а баржи, имеющие меньшие размеры и осадку, — в голову состава.
При этом достигается лучшая обтекаемость состава, большая жест-
кость и надежность учалки и лучшая управляемость.
Баржи с большей парусностью для достижения лучшей управля-
емости при ветре нужно ставить ближе к толкачу. Ширина форми-
руемого состава должна быть больше ширины корпуса толкача или
равна ей.
а)
ezzt----П
EZZL . L________I
для движения вверх по реке и на водохранилище
Рис. 103. Типовые составы
Типовые составы для толкания вверх по реке и на водохрани-
лищах. Наиболее рациональными составами из одной, двух и трех
груженых барж являются составы, учаленные в кильватер. При
учалке в кильватер задние баржи используют попутный поток перед-
них, что снижает общее сопротивление состава. Удельное сопротив-
ление такого состава меньше, чем при толкании одиночных барж, на
15—25%.
Состав, учаленный в кильватер (рис. 103, а), устойчив на курсе
и хорошо управляется. При толкании состава из трех типовых барж,
оборудованных автосцепными устройствами, для улучшения управ-
ляемости состава и ускорения учалки на практике применяют схему
состава, при которой две баржи учаливают в кильватер, а третья ста-
новится под правым бортом второй баржи (рис. 103, б).
Эффективен способ толкания также при учалке состава из трех
барж в форме клина (рис. 103, в). Этот состав будет иметь лучшую
управляемость и устойчивость на курсе.
Составы из четырех и более барж учаливаются в два пыжа и в два
и более счала (рис. 103, а, б). На водохранилище состав при наличии
автосцепки учаливают в два пыжа и два счала.
При толкании составов из порожних барж основное внимание сле-
дует уделять повышению управляемости состава при ветре. Например,
пароходы типа «Бор» мощностью 600 л. с. могут толкать две баржи
грузоподъемностью 2800 и 1800 т в груженом состоянии на шлюзо-
ванной реке, учаленные в кильватер с помощью автосцепов, при
124
ветре до 7 баллов. Если баржи порожние, этот состав теряет управля-
емость уже при ветрах 4—5 баллов. Учаленный в два пыжа, такой сос-
тав может управляться при ветрах до 7 баллов. Поэтому при толкании
составов из порожних двух и трех барж следует применять пыжевые
составы с учалкой барж в два и три пыжа.
Типовые составы для толкания вниз по реке. Толкаемые составы
для движения вниз обычно формируются из одной баржи (рис. 104, а)
или из нескольких барж, учаленных пыжами. Эти составы меньше по
длине и имеют большее сопротивление воды движению по сравнению
с составами для движения вверх, но при этом они имеют лучшую уп-
Рис. 104. Типовые составы для толкания вниз по реке
равляемость. Толкач не должен входить далеко в промежутки между
баржами, так как это снижает управляемость состава.
При учалке с помощью автосцепов состав из двух барж учаливают
смещенным счалом (рис. 104, б). При этом толкач всегда закреплен
за баржу с левой стороны для более безопасного расхождения левыми
бортами. Поворотливость такого состава в правую сторону лучше, чем
в левую, так как при повороте создается дополнительный поворачи-
вающий момент вправо от несовмещения равнодействующей силы соп-
ротивления воды и силы упора движителей. При торможении скорос-
ти переднего хода работой движителей на задний ход состав уклоняет-
ся влево под действием поворачивающего момента, вызываемого не-
совпадением точек приложения инерционных сил и сил упора движи-
телей.
При симметричном составе из двух барж, учаленных пыжами
(рис. 104, е), поворачивающих моментов не возникает. Состав имеет
лучшую поворотливость и большую скорость.
При трех баржах состав учаливается в три пыжа (рис. 104, г).
Если размеры толкача по ширине близки к размерам барж или
если одна баржа груженая, а две порожние, состав учаливают в форме
смещенного клина (рис. 104, 5). Порожние баржи ставят по бортам
состава. При наличии трех груженых барж состав учаливают в два
пыжа и два счала. Кроме того, применяют следующие счалы: в форме
клина (рис. 104, е); в два пыжа и два счала (рис. 104, ж)\ смещенный
в два пыжа и два счала (рис. 104, з); из пяти барж (рис. 104, и).
125
При формировании составов следует избегать образования проме-
жутков между баржами, увеличивающих сопротивление и ухуд-
шающих поворотливость. Формирование состава обычно начинается
с головной баржи или барж первого счала.
Подводка барж к месту формирования может производиться рейдо-
выми судами буксировкой или толканием. Место для формирования
выбирают с учетом наличия свободной акватории для маневров. Рей-
довый буксировщик подводит баржи второго счала к носовому плечу
барж первого счала. Затем баржи второго счала на швартовных
тросах спускают под корму барж первого счала. Рейдовый толкач
подводит баржи непосредственно
к корме баржи переднего счала.
При большом тоннаже таким же
способом, как при проводке на
тросе, баржи подводят к носовой
части барж первого счала и затем
спускают на швартовных тросах.
Если состав имеет несколько
счалов, то с целью экономии вре-
мени и совмещения операций по
учалке можно производить фор-
мирование по частям. Например,
при кильватерном счале, пока
рейдовый буксировщик подводит
к головной барже вторую баржу
Рис. 105. Двухупорный тросовый сцеп
и производит их учалку, тран-
зитный толкач учаливается с третьей баржей, а затем подводит ее
к двум баржам, сформированным рейдовым буксировщиком.
Учалка толкаемых составов. В настоящее время широко применя-
ются два вида учалки толкаемых составов: с помощью двух упорных
тросовых сцепов и с помощью автосцепов.
Напряжения в вожжевых тросах как у толкача, так и у барж мо-
гут быть значительно снижены путем применения двухупорной тран-
цевой рамы. Ширина рамы между упорами 5—8 м (в зависимости от
ширины корпуса толкача).
Двухупорной рамой оборудуются носовая и кормовая части барж.
Для снижения динамических нагрузок в вожжевых тросах (кроме тал-
репов) в них ставят пружинные амортизаторы. Эти мероприятия повы-
сили прочность учалки до прочности корпусов барж, что позволило
применять толкание судов на крупных водохранилищах при высоте
волны до 1,6—1,8 м.
При двухупорном сцепе достигается большая жесткость и надеж-
ность учалки, отпадает потребность в упорных тросах и тех составах,
где толкач входит в промежуток между баржами.
Натяжение вожжевых тросов при талрепной учалке производится
сначала с одного борта, затем с другого при помощи вспомогательного
троса, шпиля толкача и талрепов.
На рис. 105 показана схема жесткого транцевого сцепного устрой-
ства с бортовыми тросами. Оно состоит из двух носовых вертикальных
126
упоров толкача /, кормового транцевого упора баржи 2, двух борто-
вых тросов (вожжевых) 3 с коушами, двух пар бортовых роликов 4,
двух откидных гаков 5, двух поперечных расчаливающих стропов и
коушами и скобами 6, тросоукорачивающих устройств (натяжных.стан-
ций) 7.
Все основные узлы сцепного устройства находятся на корме баржи.
В носовой оконечности толкача расположены только вертикальные
упоры и тросоукорачивающее устройство.
План
Рис. 106. Схема оборудования толкача
автосцепогч УДР-20
Более современным способом учалки, не требующим применения
физического труда, является учалка с помощью автосцепов.
Творческой группой НИИВТа и Обского пароходства под руковод-
ством Н. Ф. Сторожева разработан универсальный двухзамковый
речной автосцеп (УДР). Схемы универсального автосцепа УДР-20
изображены на рис. 106. Он состоит из обычного двухупорного сцепа.
С внутренней стороны упоров приварена коробчатая балка 1 так,
чтобы при ударах толкача о транец баржи упор, как кранец, предох-
ранял балку от повреждений. В пазах коробчатой балки, как в направ-
ляющих, свободно перемещается плита крючкообразного замка 2.
127
В верхнем положении замок удерживается на тросе <У, другой конец
которого наметан на барабане ручной .лебедки Чтобы замок при об-
рыве троса не выпадал, коробчатая балка / в нижней части имеет за-
глушку.
На барже располагается только круглая сцепная штанга приварен-
ная параллельно транцу баржи так, чтобы все удары при автосцепке
воспринимались не штангой, а существующей упорной конструкцией
транца баржи.
Боковой вид упояа
С левого борта
Рис. 107. Конструктивная схема упора и сбрасывающего устройства
Сбрасывающее устройство состоит из вертикальной балки /
(рис. 107), шарнирно соединенной со штоком 2.
Перемещение штока через тросик 3 передается собачке 6 храпового
колеса 5, установленных на упоре толкача 7. При автосцепке толкач
подходит к составу так, чтобы угол излома между ДП толкача и про-
дольной осью состава был меньше 4—5°. Если угол излома небольшой,
то балка /, упираясь в транец баржи, перемещает шток 2. Шток, свя-
занный тросиком 3 с собачкой 6, выводит последнюю из зацепления.
Барабан лебедки освобождается, замок 4 под действием собственного
веса начинает скользить по направляющим вниз до тех пор, пока не
сцепится со сцепной штангой. В такой же последовательности проис-
ходит замыкание второго замка.
Как видно из рис. 107, замок состоит из плиты и приваренного
к ней крюка, которые воспринимают всю действующую на замок силу,,
т. е. в конструкции замка нет подвижных нагруженных деталей. Сто-
порящая собачка предотвращает саморасцепку от действия случайных
сил.
Расцепка осуществляется путем одновременного поднятия замков
в верхнее положение с помощью'ручной лебедки. Лебедка позволяет
123
удерживать замки в любом положении, производить сцепку с любой
высоты, управлять движением замков поочередно и одновременно.
Трос подъема замка прикреплен за собачку, поэтому в процессе подъема
вамка вначале выходит из зацепления собачка, а потом замок. Для
облегчения отдачи замка под нагрузкой зев крючка имеет скосы. Все
детали замка, цепной штанги, коробчатой балки рассчитаны на 20 тс.
Озерный автосцеп 0-100. Автоматическое сцепное устройство
замка модели 0-130 для вождения судов толканием в условиях водо-
Рис. 108. Автосцеп 0-100
хранилищ разработано Горьковским ЦКБ. Конструктивная схема
озерного автосцепа показана на рис. 108.
Кормовое устройство на барже состоит из одного сцепного рельса 2,
расположенного в диаметральной плоскости баржи, и упорной гори-
зонтальной балки /, приваренной к транцу. Высота сцепного рельса
рассчитана на сцепку толкача как с груженой, так и порожней баржей,
с запасом на перемещение при качке.
Устройство на толкаче состоит из двух вертикальных упоров 4 и
носовой обносиой балки 5, имеющей в средней части вырез для входа
сцепного рельса баржи. Сцепной замок состоит из трех основных
узлов: головки замка, подвески замка и поперечных амортизаторов.
Каждый поперечный амортизатор двустороннего действия набран
из витых пружин 6 и имеет корпус 7, шток 5 и стаканы 8. Амортиза-
торы шарнирно закреплены с шатуном и фундаментом, расположенным
5 С. Б. Ольшамовский 12J
на палубе толкача. При отклонениях шатуна работают оба амортиза-
тора.
Описанный автосцеп относится к сцепам, обеспечивающим возмож-
ность перемещений толкача относительно баржи при всех видах кач-
ки — вертикальной, килевой и бортовой, а также при комбинации
этих видов качки.
Кинематика сцепа рассчитана на возможность поворота толкача на
необходимые углы при килевой и бортовой качках относительно своих
центральных осей (продольной и поперечной), т. е. осей, проходящих
через центр тяжести судна. Вертикальное перемещение толкача обес-
печивается наличием сцепного рельса на барже, по которому скользит
Рис. 109. Типы толкаемых составов, сформированных при помощи автосцепов УДР
и АВР:
а — кильватерный; б — пыжовой транцем вперед; в — пыжевой транцем назад; а — однобар*
жевый транцем назад; д — однобаржевый транцем вперед
сцепной замок. Для обеспечения свободного скольжения контактные
поверхности замка выполняются со сменными вкладышами из анти-
фрикционного металла и смазываются.
Угловое перемещение толкача при килевой качке обеспечивается
наличием поперечного горизонтального шарнира в сцепном замке
и продольного амортизатора.
При наличии вертикальных упоров на толкаче и в горизонтальной
упорной балке на корме баржи происходит отход от сцепного рельса
(при дифференте толкача на корму) или, наоборот, приближение замка
(при дифференте на нос).
Угловое перемещение толкача при бортовой качке обеспечивается
продольным горизонтальным шарниром в сцепном замке и попереч-
ным амортизатором с большим ходом.
Сцепной замок снабжен также вертикальным шарниром для обес-
печения равномерной передачи нагрузки на обе клешни и плотного
прилегания их к контактным поверхностям сцепного рельса. Описан-
ный сцеп установлен на судах проектов № 10, 574, 732 и баржах про-
ектов № 567/555, 461-Б.
За последнее время в Енисейском и других пароходствах стали
применяться бортовые автосцепы АБР (рис. 109).
130
§ 25. МАНЕВРЕННЫЕ КАЧЕСТВА
ТОЛКАЕМЫХ СОСТАВОВ
И СПОСОБЫ УПРАВЛЕНИЯ
Управляемость толкаемых составов зависит от их габаритов, фор-
мы оконечностей, качества движительно-рулевого комплекса и мощно-
сти толкача.
Устойчивость на курсе секционных и баржевых груженых киль-
ватерных составов вследствие значительного отношения их длины
к ширине выше, чем любого отдельного судна. Так, секционный состав
с толкачом мощностью 1200 л. с. удерживается на прямолинейном
курсе без перекладок насадок толкача до 10 мин и более, а двухсек-
ционный— 2—5 мин. Устойчивость составов на курсе тем меньше, че?л
меньше «подрез» носовой и кормовой оконечностей состава.
При ходе без состава толкачи с поворотными насадками имеют
меньшую устойчивость на курсе по сравнению с другими судами.
В табл. 23 приведены характеристики поворотливости толкачей-
буксиров при ходе без состава и с расчетным составом (т. е. с такими
составами, когда нагрузка на 1 л. с. толкача составляет 5—7 т грузо-
подъемности), Оц/Лс — отношение диаметра установившейся циркуля-
ции по центру тяжести к длине состава.
Таблица 23
Тип движительно-рулевого комплекса
Без состава С расчетным гос гавом
Неподви/кные насадки с рулями ... 2,5—3,0 3,0-3,5
Поворотные синхронно-управляемые насадки: толкачи мощностью 800 — 2000 л. с 2,0—2,5 2,5-3,0
» » 150 — 300 л. с 1,5—2,5 2,0—2,5
Поворотные раздельно-управляемые насадки (ра- бота винтами на передний и задний ход) 0,5—1,2 0,5—1,2
При перекладках насадок на борт на переднем ходу особен-
ностью циркуляционного движения толкаемых составов, как показано
в табл. 24, является уменьшение скорости на циркуляции приблизи-
тельно в 2 раза, возникновение больших углов дрейфа, достигающих
на корме судна 45—50°, и смещений кормы толкача, достигающих
60—75 м в сторону от первоначального курса.
Эффективным средством управления толкаемыми составами являет-
ся раздельная перекладка поворотных насадок кормовыми отверстия-
ми к диаметральной плоскости толкача с одновременной работой па
передний и задний ход. При данном маневре угловая скорость умень-
шается на 18% по сравнению с синхронной перекладкой насадок, но
Диаметр циркуляции снижается почти в 3 раза и становится равным
около одной длины состава.
5* 131
Таблица 24
Наименование толкача и тип состава
«Маршал Блюхер» с двумя составами
проекта № 1787 в два счала и два пы-
жа .................................
ОТ-2005 с четырьмя секциями проек-
та № 1581 в кильватер ..............
«Дунайский» с секционным составом
проекта № 1787 ...................
«Дунайский» с двумя баржами проек-
та № 461Б в кильватер...............
ОТА-855 с секционным составом про-
екта № 1787 ......................
18,3 7,2 30,0 44,0 608 2,47
15,5 7,2 26,0 46,0 750 2,70
16,4 6,1 31,0 49,0 594 2,51
15,8 7,6 30,0 44,0 602 2,80
14,3 7,2 24,0 39,5 698 3,10
Изменяя обороты винтов, в этом случае судоводитель имеет возмож-
ность разворачивать состав с одновременным передвижением вперед
или назад в зависимости от условий плавания. Этот режим работы на-
садок и двигателей удобен при привалах, отвалах, при сцепке с другой
баржей, при заходе в шлюзы и других маневрах. Испытания показали,
что рулевая сила во время работы на задний ход возрастает только
при перекладке насадок на 20Q. Дальнейшая перекладка эффекта не
дает.
На участках пути с небольшой кривизной целесообразно управлять
составом, перекладывая в сторону поворота одну насадку. Если состав
следует прямым курсом и его нужно повернуть влево, лучше пользр-
ваться правой насадкой, а если вправо — то левой. Это объясняется
тем, что насадка создает большую боковую силу при подтекании воды
со стороны борта, а не из-под корпуса толкача.
На реках, особенно при движении по течению в крутых изгибах
русла, эффективным способом управления толкаемым составом являет-
ся использование рулевых средств с одновременным принудительным
изгибанием состава с помощью из-
гибающего устройства на один и
тот же борт. При изгибании состава
на угол ф до 20° поворотливость,
как показано на рис. 110, возрас-
тает почти в 2 раза. Изгибаемый
состав хорошо управляется и на
заднем ходу. На поворотливость
большое влияние оказывает энерго-
вооруженность состава, характери-
зующаяся величиной мощности
толкача, приходящейся на едини-
цу грузоподъемности состава.
Рис. НО. Изменение относительного
диаметра циркуляции толкаемого со-
става в зависимости от угла изгиба
состава
132
Энерговооруженность существующих составов лежит в пределах
0,10—0,85 л.с./т. При меньшей энерговооруженности составы управ-
ляются неудовлетворительно, что необходимо учитывать при их фор-
мировании.
На управляемость порожних толкаемых составов значительно
влияет ветер. При бортовых ветрах силой более 5—6 баллов порожние
толкаемые составы теряют управляемость. Это объясняется тем, что
отношение их боковой надводной площади парусности к подводной
площади корпуса велико. Например, у составов разряда «О» отно-
шение надводной площади парусности к подводной 13 : 1, тогда как
даже у трехпалубного пассажирского теплохода это отношение 6:1.
Поэтому на порожний толкаемый состав ветер оказывает большее
влияние, чем на пассажирское судно.
Формируя порожние составы для толкания, следует стремиться
к уменьшению активной площади парусности за счет увеличения числа
пыжей в составе, а при толкании судов в водохранилищах, где движе-
ние пыжевых составов из-за ударов барж друг о друга при волнении
может вызвать их повреждения, следует применять балластировку
судов состава.
Длина пути, проходимого составом по инерции, увеличивается
с увеличением скорости и водоизмещение состава уменьшается с уве-
личением числа счалов состава.
В табл. 25 приведены инерционные характеристики некоторых гру-
женых толкаемых составов в спокойной воде.
Таблица 25
Тип состава Скорость V, км/ч f ОрМиЖ«»НИе
Путь 5, м Время 1, мин
Теплоход ОТ-2005 с двухпыжевым составом из четырех барж, Q= 12000 т 15,5 570 5,7
«Дунайский» с секционным составом, Q = = 7620 т 16,5 669 4,6
Теплоход «Харбин» с секционным составом, Q — 6260 т 17,0 692 4,6
Теплоход «Зеленодольск» с тремя баржами в кильватер Q = 7550 i 13,2 542 4,7
Теплоход ОТ-800 с тремя баржами в кильва- тер, Q = 7550 т 12,1 578 5,4
Теплоход «Шлюзовой» с одной баржей, Q= 1800 т . . . . ' 13,1 321 2,8
Для производства оборотов с толкаемым составом чрезвычайно
большое значение имеет знание судоводителями маневренности и уп-
равляемости толкаемого состава и действия отдельных факторов при
выполнении циркуляции.
Форма циркуляции на течении имеет вид эллипса, большая ось ко-
торого направлена вдоль реки (рис. 111). Отношение осей приблизи-
тельно равно 2. Циркуляция состава на водохранилище при отсуг-
133
ствии течения и ветра близка к окружности. Усилия, возникающие
в вожжевых тросах при циркуляции, имеют максимальное значение
в начале поворота. В дальнейшем они снижаются и остаются почти
неизменными.
ДЛя обеспечения безопасности плавания при расхождении с судами
и составами и при уклонении от препятствий большое значение имеет
способность толкаемого состава выполнять маневр, называемый
«змейкой».
134
На рис. 112 приведена схема движения при выполнении этого
маневра груженого толкаемого состава из двух барж общим водоиз-
мещением 8000 т при осадке 2,5 м и
мощности толкача 1700 л. с. (энер-
говооруженность 0,21 л.с./т). Ис-
пытания проводились на участке
р. Рейна с глубиной 4,5 м.
На рис. 113 показаны кривые:
1 — углов перекладки руля, град;
2 — курсовых углов, град; 3 — по-
перечного смещения, м (траектории
центра тяжести состава). По оси
ординат отложен общий для всех
трех линий масштаб времени в се-
кундах (клеточка равна 10 с).
Рис. 113 позволяет сделать ряд
важных выводов.
Поворот состава начинается
спустя 9—10 с после начала пере-
кладки руля. При осуществлении
маневра расхождения для измене-
ния курса на 10Q необходимо 40 с;
чтобы выйти на прямолинейный
курс после поворота на 10°, соста-
ву требуется 80 с; по истечении
2 мии он ложится на курс, парал-
лельный тому, что был до начала
поворота, но удаленный на 85 м от
Рис. 113. Кривые изменения углов пе-
рекладки руля, курсового угла и по-
перечного смещения состава
первоначального Для того чтобы снова лечь на первоначальный
курс, составу понадобится еще 80 с. Таким образом, маневр рас-
хождения или обхода препятствий указанным способом длится
3 мин 20 с.
§ 26. ОТВАЛ ТОЛКАЕМОГО
СОСТАВА
Подготовка. Момент постановки состава в конечном пункте на
якоря или бочки и уборки с толкача поданных на состав учалочных
средств считается окончанием рейса.
Техническая обработка толкача в порту должна производиться
по установленным нормам и в порядке, изложенном в типовых циклах
обработки толкачей данного типа.
После того как в порту закончится обработка толкача и подготовка
к новому рейсу, а состав будет сформирован, толкач подходит к корме
последних барж состава и производит учалку. Капитан толкача в это
время осматривает и проверяет баржи и их соответствие требованиям
Правил технической эксплуатации. Особое внимание при этом обра-
щается на прочность и исправность сцепов, талрепов, амортизаторов,
кнехтов.
135
При отсутствии или малом запасе резьбы в талрепах следует до
отправления в рейс перезарядить их.
Проверяя учалку барж между собой, капитан не должен допускать,
чтобы острые углы одной баржи упирались в незащищенные борта
других. Следует проверить наличие, исправность и готовность якорей
к отдаче, наличие и исправность сигнальных огней и рулевого устрой-
ства.
К окончанию учалки нуйсно убедиться в правильном расположении
отдельных барж состава и в точном совпадении диаметральной пло-
скости толкача с продольной осью кильватерного состава. У пыжевых
симметричных составов диаметральная плоскость толкача должна сов-
падать с направлением равнодействующей сил сопротивления воды
движению состава.
До отправления в рейс, сообразуясь с особенностями условий пла-
вания, капитан толкача через диспетчерский аппарат должен ознако-
миться с гидрометеорологической обстановкой на предстоящий рейс
и провести в связи с этим на составе подготовительные мероприятия
(подготовка якорных устройств, крепление палубных грузов, задрайка
горловин люков и бортовых иллюминаторов и т. д.).
Перед началом каждого рейса должны быть подготовлены:
откорректированные навигационные карты и лоцийные описания
всего района плавания предстоящего рейса;
местные правила плавания соответствующих бассейнов и обяза-
тельные постановления, если порт назначения является морским;
рекомендации судоводителям по обеспечению безопасного движе-
ния судов;
Извещения судоводителям в текущую навигацию, издаваемые бас-
сейновыми управлениями пути, путевые листы, описания огней и зна-
ков судоходной обстановки;
сведения о порядке и характере практикуемой в бассейнах информа-
ции о состоянии пути, погоде и судоходной обстановке, расписание
выхода на радиосвязь и частот, на которых ведут работу судовые
и береговые радиостанции бассейна;
перечень перекатов и узкостей, где запрещено расхождение судов,
и перечень участков (узкостей и колен), где необходимо обязательное
открытие радиосвязи по УКВ для оповещения о своем движении; пе-
речень диспетчерских пунктов, регулирующих движение судов по ра-
дио (выход в озеро, водохранилище, входы в каналы, шлюзы, порты).
После подбора всех навигационных материалов и пособий капитан
должен организовать их проработку со штурманским составом, во вре-
мя которой места, где запрещено расхождение судов или необходимо
выходить на радиосвязь, следует выделить карандашом на навигаци-
онной карте.
До отправления в рейс необходимо проверить исправность радио-
локатора, радиотелефона, радиостанции, эхолота, лага, компасов и
отрегулировать их, а также проверить исправность световых сигналов.
Во время хода сухогрузные толкаемые составы несут по одному белому огню
на флагштоке каждой передней баржи, а при кильватерном счале —на каждой
сарже (дуга освещения 225° и дальность видимости не менее 4 км); три белых то-
136
повых огня, расположенных в форме треугольника на мачте* белый гаковыя,
два зеленых гакабортных огня и бортовые отличительные огни — зеленый на
правой стороне состава и красный — на левой.
При толкании судов, груженных нефтегрузами 1-го класса, взрывчатыми
или отравляющими веществами, два нижних топовых огня в треугольнике и га-
кабортные огни на толкаче заменяются красными. Днем на мачте толкача и жна
каждой барже поднимают два красных флага.
При толкании судов, груженных нефтегрузами 2,3 и 4-го классов, верхний
топовый огонь в треугольнике и гаковый огонь па толкаче красного цвета. Днем
на мачте толкача и на каждой барже поднимают красный флаг.
Обороты толкаемого состава. Учитывая, что диаметр циркуляции
толкаемых составов сравнительно велик, судоводитель состава дол-
жен придавать особое значение выбору места оборота и направлению
поворота с учетом всех факторов, способствующих уменьшению диа-
метра циркуляции и безопасности учалочных средств.
Во всех случаях судоводитель должен во избежание обрыва учалоч-
ных тросов избегать резких значительных перекладок рулей. При
производстве оборота руль сначала перекладывают на 5 — 10°, а затем
уже, после натяжения вожжевых тросов, — плавно на борт. Это спо-
собствует сокращению радиуса циркуляции (в некоторых случаях на
величину до 20%).
До начала оборота скорость движения состава должна быть сни-
жена, что будет способствовать уменьшению напряжений в учалочных
тросах. При производстве оборотов в условиях ограниченных габари-
тов судового хода в качестве дополнительной меры должны быть при-
готовлены к отдаче якоря — для погашения инерции и безопасности
маневра.
Следует различать два наиболее типичных способа оборота толкае-
мого состава: на переднем ходу; с изменением хода.
В первом случае время маневра значительно меньше, ио требуются
несколько большие габариты судового хода. Второй способ применяет-
ся только при производстве оборота в узких местах.
Оборот при постоянном поступательном
движении вперед. Этот вид оборота по технике не отличается
от маневрирования при оборотах крупнотоннажных судов.
После снятия с носовых якорей или со швартовых для производства
оборота и движения вниз судоводитель дает малый или средний ход
вперед и отводит состав в зону слабых струй течения. Затем выравни-
вает состав параллельно струям течения и, убедившись в отсутствии
судов, могущих помешать маневру, перекладывает руль в сторону по-
ворота на 35—40° (рис. 114, положение /).
После поворота состава на 30—40° (положения //, III) его угло-
вая скорость начинает быстро расти, так как па носовую часть состава
в это время действуют более быстрые струи течения. Течение создает
снос состава и поворачивающий момент, направленный в сторону
поворота. Для уменьшения сноса и увеличения угловой скорости в этот
момент можно отдать кормовой якорь толкача, который поднимается
после разворота. В это время руль следует переложить на максималь-
но возможное число градусов (604-70).
Когда состав будет занимать положение, близкое к перпендикуляр-
137
ному по отношению к водному потоку, поступательное движение со-
става и поворачивающий момент от течения увеличиваются.
При приближении носовой части состава к берегу (положение V)
машине, находящейся с внутреннего борта по отношению к повороту,
нужно дать задний ход и увеличить обороты обеих машин. После пово-
рота на угол 130—140Q (положения VI, VII) машину, работающую на
задний ход, останавливают, а затем переводят на режим переднего
хода и состав выводят на нужный курс (положение VIII).
Рис. 114. Оборот с толкаемым составом при постоянном поступательном движении
Оборот с изменением хода. Этот способ оборота
(рис. 115) применяется тогда, когда оборот на переднем ходу из-за
малых габаритов судового хода по ширине выполнить невозможно.
В этом случае судоводитель должен знать возможности машин в отно-
шении гашения инерции состава на заднем ходу. Для производства
оборота нужно, чтобы акватория реки была свободной от подводных
препятствий и от судов на расстоянии, не меньшем четырех-пяти
длин состава от места начала оборота.
138
Оборот начинают делать так же, как в предыдущем случае, но после
разворота на угол около 45° машины останавливают и дают ход назад.
После приобретения составом небольшого поступательного движения
назад машины снова останавливают и дают ход вперед. Когда состав
Рис. 115. Схема оборота толкаемого состава при переменном поступательном дви-
жении
получит небольшое поступательное движение вперед, снова останав-
ливают машины и дают задний ход и такшм образом добиваются раз-
ворота состава на 180°.
§ 27. УПРАВЛЕНИЕ ТОЛКАЕМЫМИ
СОСТАВАМИ НА ПЛЕСОВЫХ
УЧАСТКАХ РЕКИ
Выбор наивыгоднейшего курса. Использование естественных осо-
бенностей речного русла путем выбора наивыгоднейшего курса яв-
ляется одним из важных источников повышения технической скорости
и увеличения провозной способности составов.
Для каждого состава на определенном участке реки при данном
уровне воды и скорости течения существуют определенные наивыгод-
нейшие глубины в направлении движения. При движении против
течения трасса с наивыгоднейшей глубиной расположена ближе к вы-
пуклому берегу. Наивыгоднейшая глубина во всех случаях превышает
осадку состава в 1,7 раза и более. Поэтому при движении по такой трас-
се обеспечивается хорошая управляемость состава и отсутствует
рыскливость от неровностей дна. Использование наивыгоднейших
глубин при движении против течения сокращает ходовое время состава
примерно на 20%.
Метод выбора курса по наивыгоднейшим глубинам теоретически
обоснован В. Г. Павленко.
Тиховоды обычно располагаются у выпуклых берегов. Поэтому
при переходе из одного тиховода в другой приходится пересекать
стрежневые струи потока и судовой ход. При определении экономиче-
ской целесообразности использования тиховодов, расположенных про-
тив яров правого берега, необходимо учитывать возможные потери
в скорости движения из-за ожидания прохода сверху идущих судов.
139
Как показывают расчеты, если интенсивность движения судов пре-
вышает 25—30 судов в сутки, использование тиховодов против яров
правого берега экономически нецелесообразно.
При проводке составов на широких плесовых участках следует из-
бирать курс по правой стороне судового хода.
Управление составами при движении вверх. Управление составами
при движении на плесовых участках рек затруднений не вызывает
и производится аналогично управлению одиночных судов.
Необходимо производить правильную заправку состава при захо-
де в тиховод и выходе из него; углы захода и выхода по возможности
должны быть минимальными (не больше 10Q по отношению к струям
течения). При больших углах захода и выхода будут большие потери
скорости.
Рис. 116. Проводка вверх толкаемого состава на плесовом участке с использова-
нием тиховодов
Если по условиям плавания приходится перевалйвать из тиховода
одного берега в тиховод другого (рис. 116) во избежание больших по-
терь скорости движения приходится вводить поправку к курсу на снос
от течения. Величина этой поправки в практике определяется опыт-
ным путем.
С уменьшением скорости движения состава величина сноса будет
увеличиваться, поэтому при прохождении мест со свальными течения-
ми судно должно идти с максимально возможной скоростью. Курс
избирается ближе к той кромке судового хода, откуда направлен свал
воды.
При использовании тиховодов, расположенных за выступами гор-
ных рынков, следует учитывать возможное нахождение ниже этих
рынков суводей, особенно во время паводков.
При движении составов следует использовать тиховоды ниже ух-
востья острова и вдоль него. При подходе к приверху острова следует
заблаговременно отвести состав от острова, чтобы он не попал в струи
воды, идущие в воложку. Нужно стремиться максимально исполь-
зовать ходовые воложки, сокращающие ходовое время.
140
Наибольшую сложность при проводке крупнотоннажных составив
представляют крутые повороты реки. До подхода к повороту, убедив-
шись в отсутствии встречных судов, необходимо уменьшить ход до ма-
лого и подвести состав ближе к вог-
нутому берегу на расстояние около
одной трети ширины русла (рис.
117). Когда корма толкача прибли-
зится к началу поворота, рули
(насадки) перекладываются на борт
в сторону поворота и увеличива-
ются обороты двигателей до пол-
ного хода. Поворот нужно выпол-
нять таким образом, чтобы носовая
часть состава на середине поворота
ВОЗМОЖНО ближе подошла К выпук- Рис. 117. Схема проводки толкаемого
лому берегу-мысу. При выходе из состава на крутом повороте реки про-
поворота под действием течения тив течения
состав обычно сносит в сторону
вогнутого берега.
Управление составами при движении по течению. При движении
на плесовых участках с небольшой кривизной судового хода курс
избирается по линии стрежневых струй течения. Проводка составов
Рис. 118. Управление толкаемым составом на плесовохм участке при движении по
течению
в данном случае не вызывает затруднений, и управление составами осу-
ществляется обычными методами. При движении по прямолинейному
участку курс обычно избирается ближе к середине реки, а при движе-
нии по криволинейному участку — ближе к вогнутому берегу, с не-
большим углом дрейфа. При оптимальном угле перекладки руля состав
141
должен двигаться параллельно вогнутому берегу в зоне стрежневых
струй (рис. 118).
Значительно усложняется процесс управления крупнотоннажными
толкаемыми составами при прохождении крутых колен и поворотов.
Центробежная сила и снос от течения создают перемещение состава в
сторону вогнутого берега, при
м возникает угроза навала на берег.
При подходе к крутому поворо-
ту судоводитель должен убедиться
в отсутствии встречных судов, до
начала поворота снизить скорость
хода до малого и подвести состав
возможно ближе к выпуклому бе-
регу (рис. 119). При подходе к
середине поворота работой двига-
телей на задний ход останавлива-
~ 11Л ,z ют состав, а затем, включив двига-
Рис. 119. Управление толкаемым со- ’ _
ставом на крутом повороте реки при тель СО СТОрОНЫ борта, противо-
движении по течению положного повороту, на полный
передний ход разворачивают со-
став в сторону поворота.
После того как разворот состава будет произведен настолько, что
можно двигаться по прямой, рули на толкаче начинают плавно пере-
кладывать в сторону, противоположную повороту, и второму двига-
телю дают полный передний ход.
§ 28. ДВИЖЕНИЕ ТОЛКАЕМЫХ
СОСТАВОВ ЧЕРЕЗ ПЕРЕКАТЫ
Общие положения. Наибольшую сложность представляет провод-
ка толкаемых составов через перекаты. Ошибки в управлении составом
и недоучет внешних факторов приводят к следующим результатам:
при движении вверх — к скольжению состава вдоль подвалья
с выходом в затонскую часть переката или к выходу состава за линию
судового хода при движении по корыту переката (под действием сваль-
ных течений, из-за рыскливости);
при движении вниз — к раскату кормовой части состава при за-
ходе на перекат в сторону приверха нижних песков с угрозой посадки
на мель или к раскату кормовой части состава при выходе из переката
с угрозой удара о нижний яр.
Ниже рекомендуются меры, направленные к устранению этих опас-
ных явлений при прохождении перекатов.
Движение через перекат против течения. При толкании составов
через перекаты против течения наибольшую сложность представляет
заход толкаемого состава на подвалье переката.
Различают три характерных положения подвалья относительно
струй течения и нижнего яра:
1) подвалье удалено от нижнего яра на расстояние, достаточное для
разворота состава параллельно струям течения на перекате;
2) подвалье находится от нижнего яра на расстоянии, недостаточ-
ном для предварительного разворота состава;
142
8) подвалье и струи течения на перекате образуют угол менее 60°.
Если подвалье переката достаточно удалено от нижнего яра, при
приближении к перекату судоводитель отводит состав от выпуклого
берега ближе к яру и некоторое время идет вдоль него (рис. 120) на
Рис. 120. Управление толкаемым составом при движении через перекат с широкой
плесовой лощиной
расстоянии, исключающем навал состава от раската кормы при выходе
на створную линию. При приближении к створной линии начинают
разворачивать состав так, чтобы при подходе к подвалью или нижней
паре бакенов он был направлен па-
раллельно струям течения и двигал-
ся прямолинейно. В этом случае за-
рыскивание состава при входе на
подвалье не происходит. Приблизи-
тельно до середины корыта, или
несколько выше, состав идет прямо-
линейным курсом, а затем начина-
ют направлять его ближе к верх-
ним пескам, учитывая свал в сто-
рону приверха нижних песков.
Если состав будет продолжать дви-
жение по створной линии до верхне-
го яра, может произойти посадка на
мель на приверх нижних песков.
Скорость хода при заправке на пе-
Рис. 121. Заправка состава на перекат
с узкой нижней плесовой лощиной
рекат тяжелых составов и прохож-
дении переката не должна снижаться, так как снижение скорости
ухудшает управляемость. После выхода с переката состав продолжает
движение по тиховоду вдоль верхних песков переката.
Если расстояние от подвалья переката до нижнего яра не позво-
ляет заблаговременно развернуть состав, при подходе к подвалыэ
переката на максимальной скорости состав отводится к середине русла
реки (рис. 121). У перекатов с выпуклым подвальем, расположениы.ч
близко к яру, струи воды на подвалье направлены веерообразно. До
подхода к подвалью начинают поворот.
Проводка состава по корыту переката и выход из переката не 6т*
личаются от обычных. На мелководных перекатах рыскливость соста-
ва тем больше, чем больше скорость состава.
Рис. 122. Управление составом при движении через мелководный перекат
Рис. 123. Управление составом при движении через перекат по течению
Мелководные перекаты часто располагаются у ухвостья острова.
При подходе к перекату (рис. 122, положение /) скорость снижается
до малого или среднего и состав направляют на подвалье переката по
направлению главных струй течения. Придав составу угловую ско-
рость в сторону поворота (положение 2), увеличивают ход, и состав
входит на подвалье (положение <3).
144
При зарыскивании состава вдоль подвалья, дав второй машине
уод назад, останавливают состав и задним ходом входят в нижнюю
плесовую лощину, а затем повторяют заход на перекат (положения
Д 2', 3').
Глубоководные перекаты проходят на полном ходу.
При подходе к перекату сверху нужно вести состав вдоль верхних
песков (рис. 123, положение /). Поворот производят с наибольшим ра-
диусом до захода в корыто переката. При подходе к подвалью повора-
чивают состав в направлении нижней части подвалья (положение 2).
При выходе с подвалья (положение 3) перекладывают руль в сторону,
противоположную повороту, и выводят состав на курс вдоль яра.
§ 29. УПРАВЛЕНИЕ СОСТАВОМ
ПРИ ДВИЖЕНИИ ПОД МОСТЫ
Управление толкаемыми составами при движении под мосты про-
изводится с соблюдением тех же мер предосторожности и рекоменда-
ций, что и при проводке одиночных судов.
Особенностью проводки является больший снос состава под дейст-
вием свальных течений. Курс состава при подходе к мосту избирается
по середине пролета параллельно струям течения. Проводка осущест-
вляется на среднем или полном ходу.
Наибольшую сложность представляет проводка порожнего состава
при бортовом ветре. Судоводителю в этом случае необходимо знать
ветровой! угол дрейфа 0В и ориентировочные углы перекладки руля (на-
садок), обеспечивающие составу прямолинейное движение при подходе
к пролету моста. Эти сведения судоводители получают на основании
натурных наблюдений за составом до подхода к мосту на участках
пути, где судовой ход имеет то же направление, что и при движении
под мост. Для волжских составов можно использовать «Справочник ха-
рактеристик управляемости при ветре», разработанный под руковод-
ством Л. М. Рыжова.
В табл. 26 приведены сведения из Справочника для теплохода
«Зеленодольск» мощностью 1200 л. с. с порожней баржей типа «Колы-
ма» грузоподъемностью И 750 т при скорости движения 4 м/с. Длина
состава 212 м.
Использование данных Справочника рассмотрим на примере про-
водки состава теплохода «Зеленодольск» с порожней баржей «Колыма»
при бортовом северо-западном ветре со скоростью 7 баллов (13 м/с)
в пролет моста шириной 150 м. Как показано на рис. 124, направ-
ление ветра с направлением пути составляет 135°. Из Справочника
(см. табл. 26) находим, что при движении полным ходом при ветре
7 баллов при ав = 135° угол ветрового дрейфа р будет равен 26° и для
удержания состава на прямом курсе потребуется угол перекладки на-
садок около 20°. Все порожние составы уваливаются по ветру, насад-
ки будут переложены влево.
Как видно из рис. 124, судоводитель, взяв поправку на ветер
в 26°, при подходе к мосту ведет состав (на полном ходу) возможно
ближе к наветренной границе судового хода. На расстоянии ст mccts
11?
Таблица 26
Скорость истинного ветра vB, м/с (баллы) Направление кажущегося ветра «к, град Угол между направлением ветра и линией пути ав> град Угол пере- кладки насадок ан, град Угол др е й фа 3. град Скорость кажущегося ветра м/в
5 24 16 14 19,5
30 82 37 38 17,2
16(8) 60 116 37 40 15,2
90 135 26 32 13,8
120 152 16 23 12,9
150 168 8 14 12,3
5 22 12 12 16,6
30 77 28 31 14,7
13(7) 60 ПО 28 32 13,0
90 135 20 26 11,3
* 120 151 12 19 10,2
150 167 6 11 9,4
5 20 8 9 13,6
30 73 19 23 12,1
60 109 19 24 10,4
10(b) 90 132 13 19 9,0
120 151 8 14 7,3
150 167 4 8 6,5
около половины длины состава перекладкой насадок отводят носовую
часть баржи от левого устоя, состав получает небольшой дрейф в сто-
рону оси пролета, а кормовая часть состава удаляется от правого
устоя моста. После прохода толкачом пролета моста состав выводят
на нужный курс. Скорость ветра в 7 баллов для данного моста и сос-
тава следует считать предельно допустимой. Так как при увеличении
Рис. 124. Проводка толкаемого состава под мост при бортовом ветре
146
скорости ветра на 1 балл (3 м/с) и изменении его направления севернее
на 19°, когда ав = 116°, потребуется перекладывать насадки на 37°.
У данного толкача максимальный угол перекладки насадок 33°. Это
вначит, что состав потеряет управляемость.
§ 30. МАНЕВРОВЫЕ РАБОТЫ
С СОСТАВАМИ В ПУТИ
И КОНЕЧНОМ ПУНКТЕ
Для переформирования состав ставится на якоря. Требования к вы-
бору места якорной стоянки и управлению составом при постановке
на якоря аналогичны тем, которые предъявляются к месту якорной
стоянки и управлению одиночными судами.
Процесс переформирования составов рассмотрим на примере полу-
секционного состава из двух секций.
Кильватерный состав из пыжевого (рис. 125, а) формируется путем
разворота полусекций на швартовном тросе. К полусекции, стоящей на
Рис. 125. Схема разворота полусекции при формировании составов:
а — кильватерного из пыжевого; б — пыжевого из кильватерного
якоре, подводится другая (положение /). Кормовые части соединяют-
ся швартовным тросом. При свободном развороте полусекции на тече-
нии ст швартовный трос не должен задевать конструкций. Толкач
расцепляется с полусекцией, и она, увлекаемая течением, на швартов-
ном тросе начинает разворачиваться (положение II). После выравни-
вания транцев секция по инерции будет продолжать поворачиваться
(положение III), отчего создается угроза удара транцами и обрыва
швартовного троса. При скорости течения 3—4 км/ч порожняя и гру-
женая полусекции разворачиваются спокойно и ударов не происходит.
После разворота производится учалка состава (положения IV и V).
Все описанное справедливо для разворота полусекций, соединяе-
мых автосцепом АБР.
Пыжевый состав из кильватерного формируется путем разворота
состава толкачом и последующей отдачи якорей с кормовой полусек-
ции (рис. 125, б, положения I — III). После разворота поднимают
якорь и кормовая полусекция подводится к другой для бортовой
автосцепки (положение IV).
Характерным видом маневров является процесс сцепки толкача
с составом.
При всех типах автосцепов сцепка толкачей может производиться
с баржами, стоящими у причала, на якорях или свободно плавающими.
147
При подходе на самом малом ходу гасят инерцию и выравнивают ДП
толкача "и состава. При однозамковых автосцепах после захода сцеп*
чиого рельса в выемки замка следует прибавить обороты двигателям,
главно нажимать замком на сцепной рельс. При автосцепах, имеющих
глубокую кормовую выемку, процесс, наведения толкача для сцепки
упрощается. При двухзамковых автосцепах УДР в случае зацепления
только одного замка следует принять меры против разворота толкача и
с помощью рулей и винтов осуществить сцепку вторым замком. При
ветре процесс сцепки осложняется.
Рис. 126 Сцепка толкача с баржей Рис. 127. Сцепка толкача с баржей
при низовом ветре при бортовом ветре
На рис. 126 показана схема сцепки с порожней баржей при сильном
низовом ветре. Толкач подходит к корме баржи против ветра и подает
по течению носовой швартов (см. рис. 126, положения 1—3), затем ра-
ботой движителей на передний и задний ход выравнивает состав по
направлению ветра и течения (положение 4), пока сцепной рельс и
выемки замка не окажутся на одной линии. Подбирают с помощью
брашпиля швартов, сцепной рельс заходит в выемку, увеличивают обо-
роты машины, работающей на передний ход, и происходит сцепка.
При сильном бортовом ветре, как показано на рис. 127, толкач
подходит к барже по течению (положения /, 2) и подает носовой швар-
тов. Работая двигателями на передний и задний ход, разворачивают
толкач и отводят корму баржи от берега (положение 3). В положении 4
производят сцепку, как описано выше.
Глава IV
УПРАВЛЕНИЕ БУКСИРНЫМИ СОСТАВАМИ
§ 31. УПРАВЛЯЕМОСТЬ СОСТАВОВ
Удельный взс буксирных перевозок в общем объеме перевозок
речного транспорта с каждым годом сокращается и в настоящее время
не превышает 10—15%. Все большее значение приобретает метод
толкания.
Основным преимуществом буксировки и толкания судов перед
148
транспортировкой грузов в самоходных судах является разделение
Тяги и тоннажа (буксировщика или толкача и барж).
Различают следующие способы буксировки судов.
' Буксировка и а д л и н н о м тросе применяется на
Крупных реках, озерах и водохранилищах. Длина буксирного троса
превышает протяженность реактивного потока от движителей буксиров-
щика, а при волнении обеспечивает равномерное натяжение троса без
резких рывков. Общая длина состава достигает 700—1000 м и более.
Буксировка на коротком тросе производится при
длине буксирного троса значительно меньше длины реактивного по-
тока от движителя. Способ применяется в основном на реках при дви-
жении по течению, а также на реках с малыми габаритами пути при
движении против течения.
Буксировка за кормой вплотную применяется
в битых льдах. Форштевень буксируемого судна подводится вплотную
к буксировщику для того, чтобы в случае остановки буксируемое
судно не ударило в корму буксировщика.
Буксировка «в р а с ч а л к у» применяется на крупных
реках. Баржи с помощью рулей выводятся из зоны действия реактив-
ного потока движителей. Основной недостаток способа заключается
в необходимости постоянного управления рулями барж.
Буксировка многократной тягой применяется
при ведении составов вверх на участках рек с быстрыми скоростями
течения, а также при проводке составов по крупным озерам и водохра-
нилищам в шторм для более быстрого вывода состава из зоны.крупного
волнения.
Буксировка под бортом («лагом») применяется
грузовыми теплоходами при вождении несамоходных судов или бук-
сировке барж на короткое расстояние (например, при формировании
составов).
Комбинированный способ — буксировка на тросе
в сочетании с буксировкой под бортом или толканием применяется
при буксировке крупных плавучих сооружений, имеющих большую
парусность, например доков, крупных дебаркадеров и т. п. Цель при-,
менения способа — улучшение управляемости и маневренности состава4
и увеличение скорости буксировки. Способ наиболее эффективен при
проводке через шлюзы, под мостами и т. д.
Буксировка на нескольких буксирных тро-
сах, как правило, применяется в случаях, когда буксировщиком яв-
ляется судно, не предназначенное специально для буксировки (грузо-
вое или грузо-пассажирское). Ввиду плохой управляемости такого
состава на крутых поворотах приходится прибегать к регулированию
длины буксирных тросов, поданных с того или иного борта.
Буксировка береговой или туерной тягой
применяется при буксировке составов на короткие расстояния в особо4
затруднительных для плавания местах (пороги, шлюзы).
Рассмотрим влияние места расположения буксирного кнехта на
управляемость. Допустим, что кнехт смещен от центра тяжести в корму
На расстояние а. На прямолинейном курсе* упор движителя F& урав-
149
новешивается силой сопротивления корпуса буксировщика 7? и силой
тяги на гаке F, и поворачивающих моментов не создается. При откло-
нении пера руля буксировщик развернется на какой-то угол а
(рис. 128), тогда сила передаваемая на буксирный трос, станет
меньше. Эта сила имеет плечо а' = a sin а.
Рис. 129. Схема сил, соз-
дающих поворот состава
Рис. 128. Влияние места
расположения буксирного
кнехта на управляемость
буксировщика
Рис. 130. Влияние длины
буксирного троса на по-
воротливость состава
Поворачивающий момент буксирного троса Л4б от пары сил F# и
Fe направлен в сторону, противоположную поворачивающему мо-
менту руля Л4р. Наибольшая величина момента УИб будет при отклоне-
нии буксирного троса от диаметральной плоскости буксировщика на
угол около 45°.
Чем больше смещение кнехта с гаком к корме, тем хуже поворот-
ливость.
Точка закрепления буксирного троса находится значительно вы-
ше центра давления воды, поэтому сила F'3 создает и кренящий момент,
который при рывках может привести к опрокидыванию буксировщи-
ка (особенно винтового). Величина этого момента
УИСТ = F2z cos a sin а, (65)
где г — возвышение гака над центром давления воды.
Для повышения поворотливости буксирный трос смещают от ДП.
Вследствие несовпадения точек приложения сил Fd и F3 образуется
поворачивающий момент, направленный в сторону поворота.
150
В штилевую погоду при буксировке составов иа водохранилищах
для увеличения скорости за счет уменьшения рыскливости буксиров-
щика буксирный трос закрепляют на кормовой арке.
При буксировке порожних барж на коротком тросе влияние арок на
управляемость буксировщика незначительно. При буксировке судов
на длинном тросе во время поворота на арках возникают силы трения,
которые ухудшают управляемость буксировщика.
Управление составом осуществляется в основном буксирным тро-
сом. Иногда используют и рули барж.
При отклонении буксирного троса от оси состава па угол Р сила
тяги F2 будет создавать поступательное движение и поворачивающий
момент (рис. 129)
sin р, (GG)
где L — длина состава.
Если в эту же сторону, куда уклонился буксировщик, отклонить
и рули барж состава, то общий поворачивающий момент, воздействую-
щий на состав,
Моб = Мб + Мр = 3- L (Fe sin р + Р cos a). (G7)
Два одинаковых буксировщика А и Б при перекладке руля на угол
а за одинаковый промежуток времени отклоняются на одно и то же
расстояние I от оси состава (рис. 130), но поворачивающий момент со-
става буксировщика А будет больше, чем буксировщика 5. Чем длин-
нее буксирный трос, тем хуже поворотливость состава.
Отклонение буксирного троса от диаметральной плоскости букси-
ровщика уменьшает поворачивающий момент состава.
Укорочение буксирного троса оказывается полезным только до
определенных пределов (30—40 м у малых и 40—60 м у крупных су-
дов). При очень коротком буксирном тросе струя от движителей букси-
ровщика вызывает рыскливость состава, уменьшается скорость дви-
жения.
§ 32. ФОРМИРОВАНИЕ
БУКСИРУЕМЫХ СОСТАВОВ
Общие положения. При формировании состава должны быть обес-
печены: наилучшая управляемость; наименьшее удельное сопротивле-
ние; допустимые габариты для определенных условий плавания и
мощности буксировщика.
Подбор судов для состава должен производиться в соответствии
с планом формирования, графиком движения и Правилами техничес-
кой эксплуатации. Запрещается ставить в состав суда технически не-
исправные, без сигнальных принадлежностей, снастей, противопожар-
ных и противоаварийных средств; суда с взрывчатыми, огнеопасными
грузами и нефтепродуктами l-ro класса — в другие составы. Суда соста-
ва должны быть правильно загружены, не иметь крена и дифферента.
151
Нужно стремиться к уменьшению промежутков между баржами
и наиболее полному использованию попутного потока. Груженые,
тяжелые и прочные суда ставят ближе к буксировщику, порожние
и легкие — в последние счалы.
Суда с большой парусностью (дебаркадеры, брандвахты, доки)
ставят в первый счал или в середину состава. Хорошие результаты
дает постановка к судам с большой парусностью груженой баржи.
При буксировке составов из судов и плотов суда ставят впереди плота.
Баржи, которые должны быть отчалены в пути следования, нужно ста-
вить в последнем счале или по бортам состава.
Формирование состава осуществляется рейдовыми судами и в ис-
ключительных случаях — судами транзитного флота, использовать
которые на рейдовых работах неэкономично. Если рейд не оборудован
специальными приспособлениями для стоянки состава (бочками, свай-
ными кустами, палами, «матками»), то формирование состава осущест-
вляется при стоянке барж на якорях. Требования, относящиеся к вы-
бору места якорной стоянки, соблюдаются при выборе места для фор-
мирования состава.
Нужно выбрать место с таким расчетом, чтобы как можно меньше
пересекать судовой ход и производить обороты с формируемыми суда-
ми. Необходимо предусмотреть наличие безопасного выхода состава
после формирования на судовой ход.
Формы буксируемых составов на реках. При буксировке против
течения наиболее целесообразной формой состава является кильватер-
ная (рис. 131), в которой задние баржи идут в попутном потоке перед-
них. На р. Печоре буксируют в кильватер до пяти барж.
CZZ5^€HZ>-+-
Рис. 131. Схемы составов
для буксировки против
течения:
а, б, в — кильватерные; г —
клин; д — «бочонок»; е —•
«безмен»
Состав устойчив на курсе и хорошо управляется. Высокие ходовые
качества наблюдаются в том случае, когда головное судно имеет боль-
шие размеры (длину, ширину, осадку), второе — несколько меньшие
размеры, а третье — еще меньшие и т. д. Однотипные суда ставятся
в составе так, чтобы их осадки уменьшались от первого счала к послед-
нему. Два судна с равными размерами и осадкой, как правило, не фор-
мируются, так как состав имеет большую рыскливость, псэтому их
буксируют, счалив бортами. Если из трех барж две имеют одинаковые
152
размеры, а третья — значительно меньшие, то первые две баржи ста-
вят рядом, сзади них — меньшую баржу. Расстояние между судами
должно быть наименьшим.
Для буксировки на реках с мелководными перекатами применяют-
ся составы формы «безмен» и «бочонок», а также «клин». При незначи-
тельном увеличении сопротивления воды обеспечивается лучшая управ-
ляемость. Состав «бочонок» имеет несколько лучшую управляемость
по сравнению с составом «безмен», но и большее сопротивление.
Рис. 132. Типовые формы составов для буксировки по течению:
а — в два пыжа; б —в два пыжа и два счала; в —в три пыжа; г — в три пыжа и два счала
Если в числе барж состава две баржи имеют примерно равные га-
бариты и они меньше остальных барж состава, то применяется форма
состава «безмен», при которой эти баржи ставятся в последний счал.
При буксировке по течению суда состава обычно ставят пыжами
(рис. 132). Числом пыжей в составе называют количество барж в одном
ряду, а количество рядов — числом счалов. В таком составе умень-
шается парусность и достигается лучшая управляемость. В первом
счале должны стоять баржи больших размеров, во втором — меньших
и в третьем — еще меньших. Счалов больше чем в три пыжа обычно не
бывает. На р. Неве максимальное число пыжей первого счала дости-
гает пяти, а общее число барж — двенадцать. На р. Енисее судоводи-
тели буксируют девять барж в три пыжа и три счала. Общий тоннаж
состава достигает 17 000 т.
Если имеются три баржи одинаковых размеров, то при ограничен-
ных радиусах кривизны и больших скоростях течения применяется
счал в три пыжа. При низких горизонтах воды в этом случае применяют
состав в два пыжа и два счала.
Если в составе три баржи, одна из которых имеет значительно мень-
шие габариты по сравнению с двумя другими, то ее ставят в последний
счал.
При буксировке пяти и более барж в составе применяется форма
в два и три счала в зависимости от количества барж.
Длина буксирного троса. В. В. Звонков предложил эмпирическую
формулу для определения наивыгоднейшей длины буксирного троса
= (68)
где а — коэффициент (а = 32---33);
Ni — мощность буксировщика.
153
Из формулы следует, что наивыгоднейшая длина буксирного тро-
са зависит только от мощности буксировщика, но имеются и другие
факторы, к которым можно отнести тип и число движителей буксиров-
щика, скорость движения состава, устойчивость на курсе, площадь
погруженной части мидель-шпангоута головной баржи, габариты
пути и др.
ЦНИИЭВТом предложена более точная формула для определения
наивыгоднейшей длины буксирного троса
= (68а)
где А — постоянная буксировщика (значение А можно взять из таб-
лицы);
k — опытный коэффициент (k — 8-4-10);
— площадь погруженной части мидель-шпангоута головной
баржи, м2;
и — скорость состава в спокойной воде, м/с.
Приведенная формула отражает качественную сторону явлений,
оказывающих влияние на выбор наивыгоднейшей длины буксирного
троса.
Величины наивыгоднейшей длины буксирного троса для ряда бук-
сировщиков приведены в табл. 27.
Таблица 27
Тип буксировщика л. с А k Погружен- ная пло- щадь миделя, м2 и, м/с Наивыгоднейшая длина буксира, м
по фор- муле ЦНИИЭВТа по форму- ле Звон- кова
Колесный пароход . . 1200 17,6 8 72 2,2 344 340
То же 600 11,7 10 80 2,2 270 270
» Двухвинтовой тепло- 400 9,3 10 45 2,2 210 236
ход 600 9,3 10 60 2,2 220 240
То же ’ Одновинтовой тепло- 400 9,2 10 45 2,2 170 236
ход 140 4,6 10 20 2,2 75 166
Формулой проф. Звонкова можно пользоваться при подборе длины
буксирного троса для колесных буксировщиков, в остальных случа-
ях — формулой ЦНИИЭВТа.
При прочих равных условиях длина буксира при движении по те-
чению должна быть в 2—3 раза меньше рекомендуемой для движения
против течения.
Формирование буксируемых составов. Процесс формирования бук-
сируемых составов включает ряд операций (маневров):
отводку барж от причалов или съемку их с якорей;
обороты с подвижными баржами;
постановку барж друг к другу (сборку состава);
постановку барж на якоря, швартовные бочки и т. д.
154
Рассмотрим процесс сборки состава. Подводку барж малого и сред-
него тоннажа в штилевую погоду лучше производить «под плечом»
буксировщика, а в остальных случаях следует прибегать к буксиров-
ке на коротком тросе.
Процесс сборки составов, предназначенных для движения вверх,
начинается с головного счала. Головную баржу ставят на якоря. Затем
буксировщик начинает подводить вторую баржу. Скорость подхода
нужно рассчитать таким образом, чтобы баржа остановилась на тра-
верзе кормовой части баржи, стоящей на якоре.
Не следует сразу подводить баржу вплотную к
первой, особенно если они груженые, так как не-
большая ошибка в определении инерции может
привести к сильному удару. Буксирный трос не
должен иметь большой слабины с тем, чтобы при
возникновении потребности буксировщик мог
быстро «набить» его.
Если подводимая баржа остановлена на та-
ком расстоянии, что подать швартовный трос не
представляется возможным, поступают следую-
щим образом. Буксировщик набивает буксирный
трос и отклоняется на 10—15° по отношению к
течению в сторону стоящей на якоре баржи
(рис. 133, положение /), а затем выравнивается.
Баржа разворачивается под углом к течению
(положение 2), буксировщик прибавляет оборо-
ты машин настолько, чтобы не иметь движения
вперед. Баржа под действием течения сближает-
ся со стоящей на якоре баржей (положения 3 и
4). Маневр можно проделать один-два раза. После
Рис. 133. Подводка
барж при сборке со-
става
подачи швартовного конца буксировщик ослаб-
ляет буксирный трос. При сильном течении
буксировщик должен периодически работать
машинами вперед, чтобы избежать навала барж
друг на друга.
Учалка буксируемых составов. Различают два вида учалки соста-
вов — гибкую и жесткую. При гибкой учалке (рис. 134) отдельные
счалы барж имеют возможность перемещаться одна относительно
другой под углом к диаметральной плоскости счалов, что позволяет
вписывать большой по длине состав в сравнительно крутые изгибы
судового хода. Гибкая учалка является основной.
При жесткой учалке (рис. 135) состав представляет собой как бы
одно целое. Жесткая учалка применяется на реках с большими габа-
ритами пути и на водохранилищах при буксировке барж разных раз-
меров. Она предотвращает повреждение автосцепных устройств.
В качестве учалочных средств применяются стальные, раститель-
ные, манильские, пеньковые и капроновые тросы. Прочность учалочных
средств должна соответствовать мощности буксировщика.
Учалка барж в составе зависит от принятого вида учалки и конст-,
рукции буксирных устройств на баржах.
155
При кильватерном составе и всех других однопыжевых составах
буксировщик соединяется с составом одним буксирным Просом, кото-
рый на буксировщике крепят за буксирный гак или за барабан бук-
сирной лебедки. На барже буксир закрепляют на носовых буксирных
кнехтах. Вторую баржу с первой крепят двумя тросами-бухтами или
с помощью автосцепа.
Рис. 134. Гибкая учалка составов в Северном бассейне
При пыжевых составах буксировщик соединяется с составом с по-
мощью одного буксирного троса и двух бухт, которые крепятся на
крайних баржах первого счала, так же как буксирный трос при одно-
пыжевом счале. Буксирный трос соединяется с бухтами с помощью
соединительной скобы.
Рис. 135. Жесткая учалка типовых составов в Камском бассейне
Буксируемые составы для движения по водохранилищам и озерам.
Движение составов по озерам и водохранилищам должно осуществлять-
ся строго по графику, с учетом метеорологических условий и прогно-
зов погоды. Все суда должны иметь разрешение Речного Регистра
РСФСР на право плавания в озерных условиях. Для плавания в этих
условиях составы формируются в кильватер. Все требования, касаю-
щиеся формирования кильватерных составов и их сборки, остаются
такими же, как и для плавания на реках.
На водохранилищах можно при штилевой погоде и ветре не более
4—5 баллов, когда высота волны не превышает 1—1,2 м, буксировать
суда, учаленные пыжами. При учалке в кильватер между баржами
имеются достаточные расстояния для того, чтобы предотвратить удары
барж друг о друга и обрыв бухт. Длина тросов между буксируемыми
судами зависит в основном от размеров волн, грузоподъемности судов,
прочности буксирных устройств и составляет не менее 30—100 м. Дли-
на буксирного троса должна быть не менее 150—250 м. Составы из од-
156
ной и двух барж в кильватер на Ладожском озере можно буксировать
при ветре до 7 баллов.
Движение буксируемого состава во время ветра происходит с уг-
лом дрейфа, состав занимает большую ширину судоходной трассы,
что может послужить причиной выхода состава за кромку судового
хода или столкновения судов.
Допускаемая ширина судового хода, которую занимает состав при
дрейфе, определяется исходя из общей ширины судоходной трассы за
вычетом возможной ширины встречных составов, величины их дрейфа,
встречными составами и плаву-
а также расстояния между
чей обстановкой. Ширина судо-
вого хода, занимаемая составом
при дрейфе, определяется по
формуле
Н = к£с, (69)
где к — коэффициент дрейфа;
L — длина состава.
Коэффициент к определяется
по номограмме (рис. 136), со-
ставленной в ЦНИИЭВТе, в за-
висимости от силы бортового
ветра и скорости движения. Если
в конце состава размещены ма-
лозагруженные или порожние
суда, то ширина при дрейфе
Рис. 136. Номограмма для определения
коэффициента дрейфа к
увеличивается на 20%.
Формирование состава из судов технического флота. В состав вхо-
дят дноуглубительный снаряд, камне- или карчеподъемницы, две-три
шаланды или плавучий грунтопровод, брандвахта, топливная баржа,
лодки-завозни или мотоботы и разъездные лодки.
Дноуглубительный состав вследствие тупых обводов земснаряда
имеет худшую управляемость по сравнению с составом из барж.
Буксировку судов технического флота осуществляют в связи с пе-
ременой места работы или с открытием или закрытием навигации.
Дноуглубительный состав должен быть сформирован с соблюдением
следующих требований:
1) ширина и длина состава не должны превышать допустимых на
данном участке пути;
2) в голове состава должны стоять земснаряд или другие прочные
суда с большой осадкой;
3) для буксировки против течения состав формируют в один-два
пыжа в счале, для буксировки по течению — в два-три пыжа в счале;
4) счалы между собой соединяют гибко, а суда в счалах —
жестко.
При буксировке против течения на большое расстояние многочер-
паковый снаряд до начала формирования состава разворачивают ра-
мой по течению для уменьшения сопротивления. За снарядом ставят
брандвахту и груитоотвозную шаланду. К земснаряду, в промежутке
157
между земснарядом и брандвахтой, устанавливают завозню, необхо-
димую для сообщения с земснарядом при несении вахты. Далее уста-
навливают еще две шаланды и последними — топливную баржу и лод-
ки (рис. 137).
Течение
100-200М-
Рис. 137. Учалка многочерпакового снаряда при буксировке против течения *
На короткое расстояние земснаряд буксируют рамой против тече-
ния и под его бортом ставят шаланду. При буксировке дноуглубитель-
ного состава по течению в первый счал ставят земснаряд, а по его бор-
там — брандвахту и шаланду, во втором счале — остальные суда.
Течение
Рис. 138. Учалка рефулерного снаряда
Если земснаряд рефулерный, то при буксировке, как правило, ре-
фулеры от снаряда не отсоединяют и земснаряд не разворачивают.
На рис. 138 показана схема учалки рефулерного дноуглубительного
состава.
§ 33. ОТВАЛ БУКСИРУЕМОГО
СОСТАВА
Подготовка. Подготовка судов к рейсу будет успешной, если вы-
полнение каждой операции по обработке судна в порту продумано и
подготовлено, если осуществляется оперативное руководство диспет-
черским аппаратом и лицами, ответственными за обслуживание и обра-
ботку флота в порту.
Все операции по обработке производят по нормам и в порядке,
изложенных в типовых циклах обработки судов в данном порту.
Капитан буксировщика должен правильно организовать и расста-
вить членов экипажа, до подхода к порту он должен сообщить диспет-
черу, какое количество требуется топлива, смазки, материалов, запас-
ных частей, какие специалисты и какой квалификации нужны для ре-
монта. В настоящее время в крупных портах производится комплекс-
ное обслуживание судов.
Каждый раз, исходя из сложившихся условий, капитан буксиров-
щика совместно с командным составом должен продумать вопрос о со-
158
крашении и совмещении отдельных операций по обработке судна
в порту.
Подход буксировщика к составу. При подходе к составу транзит-
ный буксировщик швартуется к носовой части баржи головного счала
или проходит выше первого счала, встает на якорь и, потравливая
якорную цепь, швартуется кормой к носовым частям барж. При
пыжевых составах обычно швартуют корму буксировщика в середине
пыжей состава. Если есть ветер, то при швартовке целесообразнее
отдавать носовой якорь и швартоваться с наветренной стороны со-
става.
После швартовки проверяется надежность и правильность учалки,
техническое состояние судов в соответствии с требованиями Речного
Регистра РСФСР, Правил технической эксплуатации и Правил плава-
ния, осадка судов, количество барж в составе.
Во время совместной стоянки нескольких судов зажигают по одному белому
огню на носу каждой передней и корме каждой задней баржи. Баржи, стоящие
с ходовой стороны при групповой стоянке или при стоянке в одиночку, а также
во всех случаях на ходу несут следующие сигнальные огни; суда длиной до 50 м —
один белый огонь, более 50 м — по одному белому огню на носу и на корме.
При буксировке состава длиной более 50 м из нескольких судов зажигают
по одному белому огню на носу каждого переднего и на корме каждого заднего
судна. Огни на баржах должны быть видимы по горизонту на 360° и располагаться
на высоте не менее 2 м от палубы или палубного груза.
Несамоходные суда, груженные нефтегрузами 1-го класса, а также взрыв-
чатыми и отравляющими веществами, независимо от их длины и количества су-
дов в составе, несут два вертикально расположенных огня на мачте и по одному
белому огню на носовом и кормовом флагштоках. Днем они поднимают на мачте
два красных квадратных флага размером 1 м2.
Суда, груженные огнеопасными грузами 2, 3 и 4-го классов, независимо от
их длины и количества судов в составе, на мачте поднимают один красный огонь
и по одному белому огню на носу и корме баржи. Днем на мачте подни-
мается красный квадратный флаг.
Буксировщик во время движения с составом, кроме бортовых отличитель-
ных, гакового и гакабортных огней, несет на передней мачте:
два белых топовых огня, расположенных вертикально, если состав сухо-
грузный;
один белый и выше него два красных огня, если состав гружен нефтегрузами
1-го класса, взрывчатыми или отравляющими веществами; днем па этой мачте
поднимают два красных квадратных флага;
один белый и выше него один красный огонь, если это состав с нефтегруза-
ми 2, 3 и 4-го классов. Днем буксировщик несет на передней мачте красный квад-
ратный флаг.
При проверке соответствия габаритов состава габаритам пути не-
обходимо руководствоваться установленными правилами.
У сухогрузных барж при глубине до 1,5 м минимальный запас во-
ды под днищем должен быть 5 см при песчаном грунте, при глубине
1,5—3 м — 10 см, при глубине более 3 м — 15 см. При каменистом
грунте, а также при прохождении шлюзов эти запасы в каждом случае
должны быть больше на 5 см, а при движении в каналах — на 10 см.
У судов, перевозящих нефтегрузы 1-го класса и взрывчатые веще-
ства, минимальные запасы под днищем должны быть на песчаных
грунтах при глубине более 3 м — 20 см. При каменистом грунте эти
запасы увеличиваются на 5 см.
159
При несоответствии состава вышеперечисленным требованиям
состав не принимается к буксировке.
После осмотра составляется 'акт о приеме состава к буксировке.
Выход на буксир и съемка состава с якоря или со швартовых. Этот
маневр при несоблюдении установленных правил со стороны вахтен-
ного начальника наиболее опасен для палубной команды.
Рис. 139 Маневрирование при отвале состава от берега на шлюзованной реке
Буксировщик выходит на буксир и начинает отводить от берега
первый и затем второй счалы (рис. 139).
После отхода от берега первых счалов буксировщик изменяет курс
и идет параллельно берегу. Когда от берега отойдут все баржи состава,
Рис. 140. Оборот с буксирным соста-
вом
буксировщик увеличивает скорость
хода и выходит на судовой ход.
При встречно-навальном ветре
буксировщик выходит на буксир
против ветра и идет этим курсом,
пока весь состав не отойдет от бере-
га. При навальном и попутно-на-
вальном ветрах применяется такой
же маневр, как и при отсутствии
ветра, но выполняется он на боль-
шей скорости. При отвальных вет-
рах отход облегчается, так как ве-
тер сносит состав от берега.
При производстве оборотов сна-
чала выбирают место оборота и
сравнивают габариты судового хо-
да с диаметром циркуляции соста-
ва. Направление оборота выбирают
с учетом ветра и течения.
160
Не останавливаясь на факторах, способствующих уменьшению
диаметра циркуляции при выполнении маневра и влияющих на выбор
направления оборота, рассмотрим особенности оборота с буксирным
составом (рис. 140). До захода на оборот нужно придать составу
некоторую скорость; при ходе по течению скорость уменьшают до
малого.
После начала оборота, когда угол между буксирным тросом и
диаметральной плоскостью состава будет около 45°, увеличивают ход
и перекладывают руль таким образом, чтобы угловые скорости состава
и буксировщика были равны. Угол отклонения буксирного троса от
диаметральной плоскости буксировщика должен быть незначитель-
ным, а поворачивающий момент—наибольшим. На составах большой
ширины бухта, в сторону которой делается оборот, от сильного про-
висания может касаться дна реки, задеть грунт и порваться, поэтому
нельзя допускать большого угла отклонения буксирного троса от
диаметральной плоскости состава. В конце оборота состав приобре-
тает большую угловую скорость, и когда буксировщик выходит на
прямолинейный курс, разворот состава продолжается. Бухта, натя-
нутая во время оборота, начинает слабеть, а противоположная —
натягиваться. У широких составов рывок, связанный с перенесением
тяговой нагрузки с одной бухты на другую, может привести к обры-
ву бухт. Для предотвращения этого после разворота состава на угол
140—150° уменьшают ход. Скорость можно прибавить, когда обе бух-
ты будут натянуты.
§ 34. УПРАВЛЕНИЕ СОСТАВОМ
НА ПЛЕСОВЫХ УЧАСТКАХ РЕКИ
Выбор курса. При движении вверх состав ведут по тиховодам у вы-
пуклого берега вдоль песков (рис. 141) вниз по линии быстрых струй
течения. Следует избегать выбора курса в местах с неправильными те-
чениями (суводями, майданами и т. д.).
Рис. 141. Управление составом при использовании тиховодов:
— выход из тиховода левого берега; 2 — вход в тиховод правого берега; 3 — движение по
тиховоду правого берега
С. Б. Ольшамовский
161
Рис. 142. Управление составом при
прохождении крутого колена и гибкой
учалке барж
При крутом заходе в тиховод (см. рис. 141) головная баржа приб-
лижается к пескам. Если в этот момент она оказывается ниже подвод-
ной заструги, то развернуть ее затруднительно.
При движении вниз на прямолинейных участках нужно вести состав
посередине русла. При движении на криволинейных участках с боль-
шими радиусами кривизны буксировщик должен идти по кромке стерж-
ня, обращенной к выпуклому бере-
гу, тогда состав будет идти по са-
мому стержню.
Движение по крутым поворо-
там реки. Опыт работы буксирно-
‘ го флота на реках Уфе, Белой и
других показывает, что буксиров-
ка судов в кильватер или пыжами
при гибкой учалке вниз по тече-
нию на малых реках наиболее це-
лесообразна.
Гибкость состава достигается
за счет промежутков между счала-
ми. При буксировке состава отме-
чается хорошая управляемость и
устойчивость на курсе.
При подходе к криволинейному
участку скорость хода не снижают.
До подхода к закруглению состав,
идущий еще по прямолинейному
берегу и выравнивают параллельно
ему (рис. 142). При подходе к криволинейному участку буксировщик
идет параллельно выпуклому берегу на всем протяжении крутого коле-
на, на возможно близком расстоянии от него. Для нейтрализации дрей-
фа барж последнего счала используют цепи-волокуши, которые обеспе-
чивают полную остановку состава без оборота на ряде рек.
участку, отводят к выпуклому
§ 35. ПРОХОЖДЕНИЕ
ЗАТРУДНИТЕЛЬНЫХ УЧАСТКОВ
РЕКИ
Движение через перекаты против течения. Для безаварийной про-
водки состава через перекат судоводитель должен знать общую конфи-
гурацию переката, габариты судового хода, положение и форму под-
валья переката и заструг, скорость и направление течения, располо-
жение знаков судоходной обстановки, характер грунта. До подхода
к нижним створам переката выводят состав из тиховода выпуклого
берега и идут параллельно яру приблизительно по середине русла реки
(рис. 143). В это время ход уменьшают до среднего Q Тем, чтобы умень-
шить рыскливость и иметь запас мощности буксировщика для созда-
ния большего поворачивающего момента.
При подходе головной баржи к линии створов буксировщик начи-
нает уклонение в сторону створной линии. В процессе поворота букси-
162
ровщик идет, периодически меняя курс. После небольшого поворота
выдерживают прямолинейный курс, пока угол между диаметральной
плоскостью баржи и буксирным тросом не уменьшится, а затем снова
продолжают поворот и т. д. (см. рис. 143, положения /, 2, 3). При таком
способе поворота весь состав принимает форму дуги, обтекаемой струя-
ми течения.
Во время крутых поворотов не следует опасаться навала последней
баржи состава на нижние пески, так как бортовое давление воды на
состав исключает это.
При подходе головной баржи к подвалью она должна быть постав-
лена параллельно струям течения под углом, близким к прямому по
отношению к подвалью переката.
При запаздывании с поворотом на створную линию головная бар-
жа при подходе к подвалью занимает положение, указанное на рис. 144,
состав принимает вид змейки и может встать на мель.
При запаздывании в отводе состава из тиховода выпуклого берега
головная баржа, входя на подвалье, не успевает развернуться парал-
лельно струям течения. Со стороны борта, обращенного к подвалью,
создается сильное давление воды, и баржа зарыскивает вдоль подвалья
(см. рис. 144).
После входа головной баржи на перекат буксировщик должен при-
держиваться створной линии и прямолинейного курса.
При избрании курса на перекате следует учитывать, что свал воды
обычно направлен от верхних песков в сторону нижних более глубо-
ководных.
При выходе из переката головной баржи нужно начать плавное
уклонение со створной линии, управляя составом, как при заправке
на перекат. При резких поворотах буксировщика головная баржа под
6* 163
действием стрежневых струй и большого давления воды на борт, в
сторону которого делается поворот, будет зарыскивать к верхнему
яру, что вызывает уменьшение скорости движения.
Движение через перекат по течению. При движении по течению
на крутых поворотах переката от центробежных сил и сноса от течения
создается угроза навала состава сначала на приверх нижних песков,
а затем на верхнюю часть нижнего яра.
При подходе у створной линии снижают скорость хода и отводят
состав к выпуклому берегу. Поворот производят так, чтобы выход на
створную линию был примерно на середине корыта переката или немно-
го выше него (рис. 145). Это дает возможность уменьшить центробеж-
ную силу за счет увеличения радиуса циркуляции. Выйдя на створ-
ную линию, буксировщик непродолжительное время придерживается
створа и при подходе к подвалыо начинает плавный поворот в ниж-
нюю плесовую лощину. Когда состав выйдет с переката, скорость
хода увеличивают.
После окончания поворота ход увеличивают и отводят состав от
нижнего яра переката.
Проход района расположения полузапруд. При движении против
течения, когда головная баржа будет подходить к полузапруде, дейст-
вием струй течения нос баржи разворачивается в сторону полузапруды
(рис. 146, положение /); буксировщик должен заранее отклониться
к противоположному от полузапруды берегу с тем, чтобы поворачи-
164
вающий момент от буксирного троса уравновешивал поворачивающий
момент от струй течения.
На траверзе полузапруды нос головной баржи будет разворачивать-
ся от полузапруды, и создается угроза навала на полузапруДу средней
части состава. К этому моменту буксировщику нужно уклониться
в сторону полузапруды (положение 2).
Рис. 146. Управление составам,в районе расположения полузапруд
165
При правильном учете течения можно добиться прямолинейного
движения состава (положение 3) и обеспечить безопасность плавания.
Движение под мост. Различают несколько способов проводки соста-
вов под мосты: на коротком буксирном тросе; с применением тормоз-
ных средств; с помощью вспомогательного буксировщика; по частям;
спуск кормой вниз.
Основным является первый способ, а выбор других способов зави-
сит от местных условий плавания.
Наиболее безопасным способом проводки состава подмоет при дви-
жении по течению и отсутствии ветра является спуск состава кормой
вниз, однако он занимает много времени. Этот способ применяется в осо-
бо сложных случаях, при наличии свальных течений или больших
габаритах состава.
При подходе к верхней паре направляющих бакенов делают оборот
(рис. 147, положения 1, 2) так, чтобы к концу маневра состав вышел
к створной линии ходового пролета моста. Затем скорость хода сни-
жают до самого малого с таким расчетом, чтобы состав получил снос по
течению (положения 5, 4).
Если при этом состав уклоняется от середины ходовой полосы и
создается угроза навала на один из устоев моста (положение 5),
увеличивают обороты машин, гасят инерцию и одновременно укло-
няются буксировщиком к противоположной стороне ходовой полосы.
Затем снова снижают обороты машин настолько, чтобы состав получил
движение по течению. Таким образом добиваются постановки состава
в струи течения, идущие в пролет моста, и спускают состав под мост
(положение 6, 7). После прохода моста и нижней пары направляющих
бакенов (положение 8) увеличивают обороты машин, уклоняются
к одной из сторон судового хода, делают оборот и продолжают рейс.
Обязательным условием применения данного способа является на-
личие у буксировщика такой мощности, которой было бы достаточно,
чтобы вести состав против течения.
Проводка состава кормой по течению в более сложных условиях,
например при свальном течении и боковом ветре, может производить-
ся и с помощью вспомогательного судна меньшей мощности, чем основ-
ной буксировщик. Вспомогательное судно подходит к корме послед-
него счала и подает буксирный трос на него, а затем «выходит на бук-
сир», направляя кормы барж в пролет моста. В основном же принцип
управления остается прежним.
Проводка состава под мост при боковом ветре. Проводка состава
под мост при отсутствии или очень слабом течении в штилевую погоду
не представляет затруднений. Выдерживая прямолинейный курс,
буксировщик ведет состав по створной линии, как и при ровном те-
чении.
При боковых ветрах занимаемая составом ширина ходовой полосы
может быть больше, чем ширина судоходного пролета моста. Практика
работы судоводителей Московского речного пароходства показывает,
что в таких случаях можно безаварийно проводить составы под мост,
если применять так называемый принцип раската состава на ветер,
сущность которого состоит в ступенчатом изменении курса буксировши-
166
Рис. 147. Управление составом при движении под мост кормой по течению
Jn ! 1 д_1 11.1 I I I 1 1 1L1 I I lLLUI II 11J I I |’ц I | I UL1-! I I I LLLU । I < ! I Т I 1Нн'?ГГ> t ГлУГ*! LL
ка во время уклонения под ветер. Когда буксировщик изменяет курс,
за ним быстро разворачивается первый счал барж. С выходом букси-
ровщика на прямолинейный курс на последних счалах создается силь-
ное бортовое давление воды, которое и компенсирует давление ветра.
При подходе к мосту буксировщик начинает отводить состав на
ветер до тех пор, пока последний счал не пересечет створную линию
мостовых створов. Затем на расстоянии около 200 м от моста букси-
ровщик начинает уклоняться в сторону наветренного устоя, при этом
его курс состоит из последовательно меняющихся прямолинейных
и криволинейных курсов (рис. 148). Изменение курса производится
всегда под ветер. В результате создаваемого бортоворб давления воды
удается почти полностью компенсировать ветровой^ дрейф последних
счалов. Приближаясь к пролету моста, буксировщик идет прямолиней-
ным курсом ближе к наветренному устою. При прохождении первым
счалом пролета моста состав будет-иметь угол дрейфа значительно
меньший, чем угол дрейфа состава в рл^чае, если бы он шел все время
прямолинейным курсом. Однако, есл4 буксировщик после прохода мос-
та будет идти прямолинейным курсом, to угол дрейфа состава от ветра
быстро начнет увеличиваться i/задййй/сзал может навалиться на под-
ветренный устой. Поэтому посда про^р^а пролета моста первым счалом
нужно снова начать раскат со^4ва^н^ ветер, чтобы исключить навал
последнего счала на устой. J ?
Выполняя этот манейр, необходим^ учитывать, что при определен-
ных скоростях движения и скорости -ветра возможно не только прек-
ращение дрейфа последних барж от ветра, но и создание дрейфа на
ветер, при котором может произойти навал барж последнего счала на
наветренный устой моста. Чтобы быть уверенным в том, что не произой-
дет движения состава на ветер, с)тёдует до подхода к мосту на ближай-
шем участке реки при бортовом ветре применить вышеописанный сту-
пенчатый курс и проследить за поведением последнего счала барж
(т. е. не идет ли он на ветер).
Во время проводки под мост после каждого перехода на прямоли-
нейный курс следует также наблюдать за положением состава, и если
168
обнаруживается дрейф на ветер, нужно идти прямолинейным курсом,
ориентируясь на середину от створной линии до наветренного устоя.
При большой длине состава из порожних барж и при боковых вет-
рах большой силы нужно производить проводку состава по частям.
§ 36. МАНЕВРОВЫЕ РАБОТЫ
С БУКСИРНЫМ СОСТАВОМ
Постановка на якорь При выборе места якорной стоянки следует
обращать особое внимание на наличие слабых скоростей течения и
грунта, обеспечивающего большую держащую силу якорей. Состав
обычно удерживается якорями одной первой баржи, а при пыжевых
составах — якорями барж первого счала. Кратковременная стоянка
осуществляется на якорях буксировщика.
При подходе к месту остановки ход уменьшают до малого. Состав
ведут параллельно струям течения. Ослабляют буксирный трос, ра-
ботая двигателями периодически. После остановки состава, как толь-
ко он начинает сплывать назад, отдают якорь.
Во время стравливания якорной цепи до полной остановки состава
нужно следить, чтобы буксирный трос не был натянут, так как может
возникнуть дрейф состава на якорях. После того как состав будет пос-
тавлен на якоря, отдается якорь с буксировщика.
Ходовой буксирный трос обычно выбирают с помощью буксирной
лебедки. Буксирный трос, закрепленный на гаке буксировщика, иногда
отдают на буек. Трос вытягивают в направлении диаметральной плос-
кости головной баржи. К огону буксира крепят буйреп буйка, буек
кладут на краю борта, а буксирный трос сваливают на борт. Здесь
перекладывают руль на буксировщике на тот борт, в сторону которого
положен буек, останавливают машину и по команде открывают гак.
Прием буксира на гак производится следующим образом. При под-
ходе к головной барже буксировщик выходит на линию ее диаметраль-
ной плоскости, выше положенных якорей, и малым ходом идет вперед.
Проходя мимо буйка на расстоянии 5—8 м, останавливаются, когда
кормовая часть буксировщика будет на траверзе буйка. С помощью
якорь-кошки поднимают буек на борт буксировщика, а затем коуш
буксирного троса закладывают в гак. После отсоединения буйрепа
буксировщик выходит на буксир.
Подводка барж к причалу. В порту прибытия составы обычно ста-
вят на якоря на рейде. Расформировывают состав и разводят баржи
по причалам рейдовые буксировщики, а иногда и транзитные букси-
ровщики.
Баржи подводят к причалу на коротком буксирном тросе или «под
плечом», двигаясь малым ходом под углом 10—15р к причальной линии.
Курс избирается по ориентиру, лежащему выше места остановки. На
расстоянии 150—200 м от места остановки буксировщик ослабляет
буксирный трос, и баржа движется по инерции. Курс буксировщика
изменяют в сторону от причала. При приближении к причалу кратко-
временной работой машин на передний ход баржу разворачивают па-
раллельно причальной линии, чтобы она остановилась от последней
f 169
на расстоянии 5—10 м. После остановки на крупнотоннажных баржах
отдают носовой якорь с борта, противоположного причалу. С носа бар-
жи на причал подают швартов, с помощью которого баржа подводится
к причалу. Буксировщик отдает буксирный трос и швартуется к барже.
Отходить от баржи можно, убедившись в безопасности ее стоянки.
При подводке баржи «под плечом» маневр привала выполняется ана-
логично. Более точная остановка баржи у причала достигается гаше-
нием инерции баржи движителями буксировщика.
Глава V
БУКСИРОВКА ПЛОТОВ
§ 37. ВИДЫ ПЛОТОВ И СПОСОБЫ
- УПРАВЛЕНИЯ ИМИ
Сплоточные единицы. Плоты состоят из сплоточных единиц. Спло-
точной единицей называется группа бревен, расположенных в опреде-
ленном порядке и прочно скрепленных между собой. Для крепления
применяется сплоточный такелаж (отожженная проволока, цепи, тро-
сы), прислужный лес (деревянные клинья, ромжины или поворины —
тонкие бревна), вица (скрученные молодые и тонкие стволы ивы, бе-
резы, черемухи или ели с диаметром у корня 3—6 см) и др.
Для размещения тормозного и станового такелажа ранее исполь-
зовались плитки-подъемники Зайцева. В последние годы начали при-
менять металлические понтоны, оборудованные лебедками типа
ГИЛМ-4 и жилыми помещениями для вахты. Тормозной и становой
такелаж подвешен на кормовых и носовых кран-балках понтона.
Плотом называется состав из одной или нескольких сплоточных
единиц, установленных в определенном порядке, прочно скрепленных
между собой, оснащенных сигналами и средствами управления в соот-
ветствии с Правилами сплава и Правилами плавания.
Плот является однорейсовой транспортной единицей. По усло-
виям буксировки плоты подразделяются на речные, озерные и морские.
Речные плоты. Для буксировки по рекам вниз по течению приме-
няют секционные плоты ЦНИИлесосплава в оплотнике, секционные
плоты без оплотника, плоты лежневые и плоты в ошлаговке. Наи-
большее распространение в Северо-Западном бассейне получили плоты
в оплотнике. Для буксировки по рекам вверх против течения приме-
няют плоты типа «ерш» и плоты сигарообразной формы, составленные
из пучков различных размеров.
Плоты, в оплотнике (рис. 149) формируют из секций одинаковых
размеров длиной от 50 до 100 м и шириной от 9 до 27 м. В зависимости
от габаритов водного пути определяют габариты плота и число секций
в нем. Обычно по ширине устанавливают от двух до четырех секций,
а по длине — от двух до восьми.
170
Секции плота составляются из пучков, имеющих одинаковую ши-
рину и осадку. Пучки устанавливаются продольными осями по длине
секции, образуя в ней поперечные и продольные ряды. Поперечные
ряды составляют из пучков одинаковой длины.
На головной и хвостовой секциях плота бортовые лежни заделы-
ваются на пучках, расположенных во втором ряду от торцов плота.
Рис. 149. Секция речного плота в оплотнике:
/ — лучок, 2 — оплогная цепь; 3 — пучковая обвязка; 4—продольный оплотник; 5 — попереч-
ный оплотник
Рис. 150. Пучковый плот ЦНИИлесосплава без оплотника:
/ — секция плота; 2 — продольный лежень; 3 — торцевой счал; 4 — внутренний счал; 5 —
борткомплект; 6 *- пучок; 7 — пластинчатый сжим; а —спаренный сжим
171
Концы лежней с коушами остаются свободными для присоединения
к ним ветвей буксирного троса, подаваемого с буксирного судна при
отправке плота в рейс.
Секционные плоты ЦНИИлесосплава без оплотника применяются
в Амурском, Ангаро-Енисейском и других бассейнах. На рис. 150
приведена конструкция плота, буксируемого по р. Амуру. Секции
плотов формируют из пучков длиной от 3 до 7 м, головная и хвостовая
части в секции заканчиваются двумя поперечными линейками пучков.
Рис. 151. Пластинчатый сжим
для соединения лежня (2)
борткомплектами (/) в местах
их пересечения
На каждый пучок, образующий периметр плота, накладывается по два
тросовых бортовых комплекта. По верху бортовых и поперечных пуч-
ков прокладывают лежни, которые утягиваются лебедкой и прикреп-
ляются к бортокомплектам пластин-
чатыми сжимами (рис. 151).
Плоты для озер и водохранилищ.
Сплав леса в озерных плотах приме-
няется по озерам Онежскому, Ладож-
скому, Ильмень, Байкалу и другим,
а также по крупным водохранилищам
европейской части СССР. Объемы пе-
ревозки леса в озерных плотах будут
возрастать.
Габариты озерных плотов устанав-
ливают исходя из габаритов водных
путей.
Скорость буксировки обычно принимается равной около 1 м/с
(3,6 км/ч или 86,4 км/сут). Габариты секций плота определяются
габаритами шлюзов.
Ширину озерных плотов обычно устанавливают в пределах от 18
до 27 м, а длину от 240 до 480 м. Ширина плотов на водохранилищах
Волго-Камского каскада достигает 54 м, а в отдельных случаях 81 м.
Осадку плотов устанавливают в соответствии с габаритами водных
путей — от 1,5 до 2,5 м. После завершения строительства всех гидро-
узлов Единой глубоководной европейской магистрали осадка плотов
будет увеличена до 3,2 м.
Оптимальные габариты плотов с учетом условий плавания и мощ-
ности буксирного флота выбирают на основе технико-экономических
расчетов.
В каждом бассейне габариты плотов, способы их крепления и проч-
ностные размеры такелажа определяются техническими условиями
(правилами) сплотки, формирования и оснастки плотов. Ниже приво-
дится описание плотов, буксируемых по Онежскому и Ладожскому
озерам и в Волжско-Камском бассейне.
Озерные плоты ЦНИИлесосплава в оплотнике формируют из не-
скольких секций, размещаемых по две секции по ширине и от четырех
до восьми секций по длине.
Счаленные между собой секции для буксировки по Онежскому и
Ладожскому озерам заключаются со всех сторон в двухбревенный
оплотник из бревен, соединяемых оплотными цепями. Концы двух-
бревенного оплотника соединяются в головной части плота, образуя
172
треугольник, обращенный вершиной к буксировщику. Последние
звенья двухбревенного оплотника в вершине треугольника обра-
зуют четырехбревенное звено, за которое закрепляется буксирный
трос. От середины головы плота продольный однобревенный оплотник
обеих смежных секций удлиняется до вершины треугольника, где
закрепляется за оплотные цепи контурного двухбревенного оплотника.
Бортовой однобревенный оплотник соединяется с двухбревенным
контурным оплотником борткомплектами и счалами» Для увеличения
прочности плота в голове его на первых двух рядах пучков и в хвосте
на последнем ряде делают дополнительное поперечное крепление из
бревен-брустверов.
Рис. 152. Секция озерного плота:
/ — бруствер; 2 — роликовый комплект; 3 — брустверный комплект; 4 — рычаг; 5 — лежень;
6 — борткомплект; / «—пластинчатый сжим; 8 — продольный оплотник; 9 — поперечный оплот-
ник; 10 — анкер; 11 — счал-восьмерка
Описанные плоты габаритами 18 X 340 м могут буксироваться на
указанных озерах при ветре до 4 баллов. В настоящее время прово-
дится буксировка на Волго-Балтийском водном пути имени В. И. Ле-
нина плотов без ©плотников с бортовыми лежнями, прокладываемыми
по бортовым пучкам, скрепленным с борткомплектами. Габариты
секций этих плотов, идущих на Волгу, 13,5 X 120 м, габариты шлю-
зуемых плотов 13,5 X 240 м и габариты буксируемых плотов 27x240
или 27 х 480 м. Габариты секций плотов без оплотника, идущих на
Ленинград, 18 X 85 м, габариты шлюзуемых плотов 18 X 170 м, и
габариты буксируемых плотов 18 X 340 м. Эти плоты могут букси-
роваться при волне 5—б баллов.
Озерные плоты Камлесосплава формируют из секций габаритами
27 х 120 м с осадкой 1,8 — 2,5 м. Из двух секций формируют шлю-
зуемый плот габаритами 27 х 240 м. Буксируемый плот может состоять
из одного или нескольких шлюзуемых плотов. В местном сплаве
(до устья Камы) буксируемый плот составляют из четырех шлюзуемых
плотов, а в транзитном сплаве (от устья Камы по Волге) — шести
шлюзуемых плотов.
Секция плота (рис. 152) имеет основное крепление в виде продоль-
ного и поперечного однобревенного оплотника, соединенного цепями
диаметром не менее 12 мм. Поперечный оплотник устанавливается через
каждый ряд пучков и соединяется с продольным с помощью цепей за
цепи или за бревно продольного оплотника.
173
По внешнему борту секции каждый пучок жрепят к продольному
оплотнику двумя бортовыми комплектами, а по внутреннему борту —
одним бортовым комплектом. Бортовые комплекты накладывают с ох-
ватом оплотника в полтора оборота.
Поперечные счалы секции накладывают с охватом каждого пучка
восьмеркой. Перед соединением концов бортовые комплекты и попе-
речные счалы утягивают лебедкой. х
Продольное крепление секции состоит из бортовых лежней с коу-
шами на концах. Лежни прокладывают по пучкам. Один конец лежня
закрепляют в голове секции шлаговкой углового пучка при помощи
комплекта роликов и сжима и за анкер из четырех бревен. Второй ко-
нец бортового лежня закрепляют в хвостовой части секции охватом за
анкер из четырех бревен, установленный между последним и предпо-
следним рядами секции. По длине секции лежни прикрепляют к борт-
комплектам пластинчатыми сжимами.
~750м
"500М
Рис. 153. Плот из сигарообразных единиц для оз. Байкал
Шлюзуемый плот составляют из двух секций. По концевым рядам
пучков каждого шлюзуемого плота прокладывают брустверы, которые
крепят к каждому пучку тросовыми комплектами и рычагами. На пло-
тах, буксируемых на короткие расстояния в местном сплаве, уклады-
вают в голове и хвосте шлюзуемого плота по одному брустверу,
а при буксировке на большие расстояния в местном и транзитном
сплаве — по два бруствера на головном и хвостовом рядах пучков.
При формировании буксируемого плота свободные концы продоль-
ных лежней и секционных поперечных счалов соединяют замками-
скобами.
Для повышения прочности и волноустойчивости транзитного пло-
та внешние борты секций обносят пучками из хлыстов.
Лежневая линейка из длинных пучков присоединяется к сорти-
ментной секции в голове и хвосте шлюзуемого плота двумя шлагами
через ролики лежнем диаметром 26 мм и по длине шлюзуемого пло-
та поперечными счалами диаметром 21 мм и борткомплектами (в ко-
личестве двух-трех штук на каждый хлыстовой пучок) с охватом оп-
лотника в полтора оборота. Общая ширина буксируемого плота с уче-
том двух внегабаритных линеек из хлыстовых плотов составляет 94 м.
Общий объем такого плота при осадке 2 м составляет 6 X 5500 + 2 X
X 500 = 34 000 м3 леса.
Морские плоты. Транспорт леса по морям и по оз. Байкал осущест-
вляют в морских сигарообразных плотах, сплоченных из сортимент-
ного леса или из хлыстов (рис. 153).
Буксируемые по оз. Байкал сигарообразные плоты из сортимент-
ного леса имеют длину 52, ширину 7,25, осадку 2,5 м. Буксируемый
174
плот формируют из 8—10 сигар. Из хлыстов сплачивают на оз. Байкал
сигарообразные плоты длиной 65, шириной 10, осадкой 3 м; объем си-
гары, сплоченной из хлыстовых пачек, 800 м3. Буксируемый плот фор-
мируют из 6—10 сигар.
Для буксировки по Охотскому и Японскому морям сплачивают
сигары длиной 104, шириной 12, осадкой до 3,5 м, объем таких сигар
2500 м3. Буксируемый плот состоит из 1—2 сигар. Креплением сигаро-
образных плотов служат поперечные обвязки из троса диаметром 18 мм
с талрепами и продольные лежни (3—5 шт.), закрепляемые за торцо-
вые щиты и поперечные обвязки.
Способы управления плотами. При буксировке в ручных условиях
управление плотами осуществляется буксировщиком с использова-
нием дополнительных вспомогательных средств — лотов, цепей-во-
локуш, якорей или вспомогательных судов.
На реках СССР сложились следующие способы управления плотами.
На речных участках Волги, Камы и их притоках, реках Обь-Иртыш-
ского бассейна, Лепе и верхнем Амуре плотами управляют с помощью
буксировщика, на который с плота подают два буксирных троса (бух-
ты), и тормозных средств — лотов и цепей-волокуш, а на затрудни-
тельных участках — с помощью вспомогательного буксировщика. На
Ангаре и Енисее плоты буксируют на одном буксирном тросе с исполь-
зованием цепей-волокуш, а при прохождении порогов используют
вспомогательные буксировщики.
На реках Северо-Западного бассейна Печоре, Северной Двине,
Вычегде с плота подаются два буксирных троса и буксировка осущест-
вляется без тормозных средств; на затруднительных участках исполь-
зуются вспомогательные буксировщики. На реках Днепровского бас-
сейна для управления плотом используют рысковые якоря, завозимые
на моторных лодках.
§ 38. ОТВАЛ ПЛОТОВОГО СОСТАВА
Прием плота к буксировке. На реках буксировщик обычно швар-
туется против течения к передней части плота, а если плот широкий, —
то к его торцовой части. На шлюзованных реках, водохранилищах
или в канале буксировщик подходит к передней части плота кормой,
предварительно отдав носовой якорь. Капитан и 3-й штурман присту-
пают к приемке плота, 1-й и 2-й штурманы с матросами — к подаче на
плот бухг и их заделке.
При приемке плота проверяются: соответствие количества сплоточ-
ных единиц в плоту количеству, указанному в спецификации и ведо-
мости; техническое состояние сплоточных единиц и крепления плота;
количество и исправность якорей и лотов, соответствие их веса куба-
туре плота; устройства для подъема якорей и лотов; количество плото-
вой команды; габариты плота; количество сигнальных средств на пло-
ту — фонарей, манишек (соответственно установленному Правилами
плавания для плотов данных габаритов).
На плоту длиной до 120 м во время движения и на стоянке поднимаются
три белых огня: один на середине плота и по одному на его голове и хвосте; дли-
175
ной более 120 м —пять белых огней: один на середине плота, два на крайних уг-
лах хвостовой части и два на крайних углах головной части плота. На плотах
шириной до 10 м независимо от длины поднимают три белых огня.
Существуют три способа заделки буксирного троса на плоту: за
бортовые лежни плота с помощью двух бухт, скрепленных скобами;
за три ветви буксирного троса, заделываемые за бортовые и средний
лежни плота; с помощью спаренных блоков.
От способа заделки буксирного троса на плоту зависит форма голов-
ной части плота во время буксировки (рис. 154), величина сопротивле-
ния воды и скорость движения. Проведенные В. И. Кузьминым
натурные испытания показали, что скорость движения плота на водо-
хранилище при заделке буксирного троса с использованием спаренных
--------Форма плота до буксировки --------------Лежни ---------*— Буксирный. трос
Рис. 154. Форма головной части плота при различных способах заделки буксирного
троса:
/ — за три ветви буксирного троса; II — с применением спаренных блоков; 111 — за бортовые
лежни плота
блоков при прочих равных условиях на 6% выше, чем при буксировке
затри ветви буксирного троса, и на 11% выше, чем при буксировке
за бортовые лежни.
При буксировке со спаренными блоками передняя часть плота ста-
новится более прочной и выдерживает большие нагрузки от волн.
Устройство спаренных блоков состоит из двух подвижных блоков
с обоймами, навешенными на проушину. В круглое отверстие проуши-
ны вставляются две соединительные скобы (рис. 155).
Две ветви буксирного троса (бухты) закладывают в обоймы блока,
концы крепят с коушами бортовых лежней плота с помощью соедини-
тельных скоб. Внутренние лежни плота также с помощью соединитель-
ных скоб крепят к проушине.
При заделке буксирного троса на плоту с помощью двух скоб бухты
крепят за продольные лежни, а при их отсутствии — за два-три верх-
них бревна бортовых сплоточных единиц. Для облегчения выравнива-
ния бухт на них накладывают марки.
Бухты прокладывают вдоль плота на пятый или шестой пучок и за-
тем их закрепляют. От конструкции плота зависит и способ крепления
176
буксирного троса на плоту. На лежневых плотах буксирный трос кре-
пят с помощью зажимов и скобы, как показано на рис. 156.
Если бортовые пучки ошлагованы лежнем, то огон или петля бухты
продевается под второй шлаг сплоточной единицы (считая от передней
части плота) и удерживается с помощью ромжины. Затем бухту бук-
сирного троса в трех-четырех местах крепят к лежню с помощью дере-
Рис. 155. Спаренные блоки для учалки плотов:
7 — блок; 2 —• щековина; 3 — накладка; 4 — ось; 5 — болт; 6 оседержатель; 7 — планка ще-
ковины; 8 —шплинт; Р —проушина
вянного клина. Кроме того, на передней части плота буксирный трос
крепят цепным хомутом или скобой к крепежным тросам, чтобы он не
скользил поперек плота.
После проверки плота составляется акт (установленного пароход-
ством образца) о приеме его к буксировке. В акте указываются дефек-
ты, подлежащие устранению.
Отвал буксировщика с плотом. Способ отвала зависит от применяе-
мого способа буксировки.
Сначала поднимаются лоты и якоря. С буксировщика отдаются
швартовные тросы, поданные на плот. Под действием течения букси-
ровщик начинает сплывать и натягивает буксир. Если удержать бук-
177
сировщик под углом к течению не удается, натягивают заранее при-
готовленную вожжевую стрежневой стороны.
Удерживая буксировщик под углом к течению, постепенно увели-
чивают ход машины. В это время заканчивается подъем якорей, и плот
начинает двигаться по течению. Его отводят в сторону судового хода до
тех пор, пока весь плот не отойдет от берега. Буксировщик разворачи-
вается по течению и ложится на
нужный курс.
При буксировке плотов без тор-
мозного железа отвал в рейс про-
изводится следующим образом.
Отдаются швартовные тросы плота,
и буксировщик выходит на буксир
под углом к диаметральной плос-
кости плота, составляющим 30 —
40° (рис. 157, положение /). Выхо-
дить под большим углом не реко-
Рис. 156. Крепление буксира на леж-
невом плоту:
1 — сжимы; 2 — лежень; 3 — соединитель-
ная скоба; 4 —бухт 1 буксирного троса;
5 — пучок
мендуется, так как во время отвала в бортовом продольном лежне с
береговой стороны возникают сильные напряжения, могущие при-
вести к обрыву лежня или повреждению сплоточных единиц. При
меньшем угле выхода на буксир плот, не удалившись от берега, мо-
жет получить значительное движение и задеть за выступы берега.
После выхода на буксир буксировщик постепенно уклоняется на
большой угол по отношению к берегу и тянет плот почти поперек русла
Рис. 157. Отвал буксировщика в рейс с плотом при отсутствии течения
реки до тех пор, пока не отойдет от берега на расстояние, равнре 2/3
плота (положение //). Затем буксировщик изменяет курс в сторону,
у которой находится плот (положение ///). Передняя часть плота в это
время удерживается буксирным тросом, а средняя и задняя части по
инерции продолжают отходить от берега.
В дальнейшем буксировщик продолжает идти прямолинейным кур-
сом вдоль берега. С береговой стороны плот начинает испытывать дав-
ление воды, под действием которого быстро удаляется от берега и
выравнивается вдоль него. В это время ход машин буксировщика уве-
личивается до полного, и он начинает выходить на судовой ход (поло-
178
жение IV). Если буксировка плота предусматривается на длинном тро-
се, то в этот момент можно приступить к вытравливанию ходового бук-
сира до нужной длины. Отводить плот на длинном ходовом буксире
от берега нецелесообразно, так как маневр будет продолжаться более
длительно, кроме того, требуется большая акватория для маневриро-
вания.
При отвале с плотом в рейс в неблагоприятных условиях (впереди
плота имеется на небольшом расстоянии препятствие или дует наваль-
ный ветер) прибегают к помощи вспомогательного буксировщика, ко-
торый швартуется к задней части плота и затем работой машин на пе-
редний или задний ход оказывает помощь основному буксировщику.
§ 39. УПРАВЛЕНИЕ ПЛОТОВЫМ
СОСТАВОМ ПРИ ДВИЖЕНИИ
Движение на плесовых участках рек. Управление плотом на пря-
молинейных участках при отсутствии бокового ветра не представляет
затруднений. Буксировщик ведет плот по местам с наибольшими ско-
ростями течения.
При подходе к криволинейному участку нужно до входа в закруг-
ление начать отводить плот ближе к выпуклому берегу и затем идти
вдоль песков выпуклого берега, плавно огибая его и не заводя перед-
нюю часть плота в тиховод (рис. 158). При крутом повороте судового
хода отдают лот со стороны вогнутого берега.
Рис. 158. Проводка плота на плесовом участке
Практика показывает, что скорость движения плота с отданными
лотами падает примерно в следующих пределах: при отдаче одного
дота — на 15—25%, двух лотов — на 25—35%, трех лотов — на 35—
55%, поэтому вместо лотов целесообразно использовать на сложных
участках рек вспомогательный буксировщик.
179
При прохождении криволинейных участков неправильное управле-
ние порождает два характерных опасных момента. Под действием при-
жимных течений и центробежных сил возникает дрейф задней части
плота в сторону вогнутого берега, который может вызвать навал плота
на нижнее плечо яра.
Второй опасный момент возникает в результате недоучета разно-
стей в скоростях течения у выпуклого берега и в районе стрежня.
Это приводит к развороту плота и навалу на вогнутый берег.
Особую опасность вызывают местные тиховоды за высокими песка-
ми, рынками гор, затонами и у песков выпуклого берега.
Особенности управления при расхождении. При буксировке плота
по течению только на реках выбор курса, если нужно расходиться со
встречными судами, предоставляется судоводителю плотовода. Сторо-
на расхождения плотового состава со встречными судами и составами
выбирается с учетом направления дрейфа задней части плота. Встреч-
ные суда и составы обычно пропускают со стороны, противоположной
направлению дрейфа задней части плота. Например, при движении
по криволинейному участку реки с направлением течения в сторону
правого берега расхождение производят левыми бортами, и наоборот.
На таких же участках при отсутствии течения плот движется вдоль
выпуклого берега, так как из-за малой скорости движения плотовода
возможен навал задней части плота на выпуклый берег и исключается,
при отсутствии ветра, возможность навала на вогнутый берег. Поэтому
на криволинейном участке пути с отсутствующим течением (шлюзован-
ная река, канал) судоводители плотоводов пропускают встречные суда
со стороны вогнутого берега яра. На шлюзованных реках и водохра-
нилищах плотосоставы при встречах и обгонах оставляют с подвет-
ренной стороны.
Особенности управления при прохождении островов. При подходе к
острову нужно заранее завести плот в струи течения, идущие в ходовой
рукав. Плотовод должен идти вдоль берега, образующего ходовой ру-
кав. Необходимо учитывать, что свал воды обычно направлен на при-
верх острова. Курс выбирается ближе к коренному берегу. Плотовод
должен идти полным ходом. После прохода траверза приверха острова
следует изменить курс в сторону острова, так как обычно в этом месте
свальное течение направлено в сторону коренного берега.
Величина этого свального течения в основном зависит от формы при-
верха острова, положения последнего по отношению к струям течения
и скоростей течения реки. При острой вытянутой форме приверха ос-
трова с затопленной частью наблюдается небольшой свал воды. При^
тупой яйцеобразной форме приверха наблюдается интенсивный свал
воды на коротком расстоянии. Чем больше скорости течения реки и
угол между струями течения и расположением острова, тем больше
этот свал воды от отраженных струй.
При проводке плота через рукав, примыкающий к яру выше при-
верха острова, плотовод подводит плот возможно ближе к яру (рис. 159,
положение /). После входа в рукав идут по середине его, а затем в сто-
рону острова (положение 2). Плотовод идет ближе к острову до тех пор,
пока задняя часть плота не пройдет зону действия свального течения.
180
При проводке плота через другой рукав плот отводят ближе к пес-
кам и идут вдоль них до перевала (положение /'), затем поворачивают
в рукав, следуя возможно дальше от приверха острова. Свал воды на
приверх острова в этом случае обычно бывает больше, чем в первом.
После прохода приверха острова плотовод поворачивает в сторону
острова и затем идет вдоль него, удерживая плот от навала на яр (по-
ложение 2').
Проводка плота через перекат. В результате действия свальных
течений плоты сильно уклоняются от оси судового хода, поэтому ши-
рина требующейся для их проводки трассы превышает ширину плотов
в среднем в 1,5—2 раза, а в некоторых случаях до 3 раз и более.
Расхождения судов с плотами на перекатах следует избегать.
Наибольшее внимание при проводке плотов через перекаты сле-
дует уделять направлению свальных течений.
Рассмотрим проводку плота через перекат со свальным течением
(рис. 160) с помощью вспомогательного буксировщика.
При заправке на перекат необходимо начать отвод плота к верхним
пескам. Затем плот направляют вдоль верхних песков (положение /).
Плотовод при входе на перекат держится возможно ближе к верхним
пескам.
Для предотвращения сноса задней части плота вспомогательный
буксировщик по указанию капитана плотовода дает двигателям перед-
ний ход.
При движении по корыту переката плотовод удерживается по сере-
дине судового хода (положение 2), пока задняя часть плота не пройдет
зону свального течения, а затем изменяет курс в сторону и начинает
отводить переднюю часть плота ближе к нижним пескам, максимально
приближаясь к ним на выходе с подвалья переката. Скорость хода при
движении через перекат не снижается. На середине переката (положе-
ние 3) вспомогательный буксировщик дает ход назад и удерживает
181
заднюю часть плота от сноса в сторону нижнего яра. В положении 4
двигатели останавливают. После выхода с переката судоводитель пло-
товода избирает курс по линии стрежневых струй течения.
верхних песков
Проводка плотов по водохранилищам. Перед выходом в водохра-
нилище (озеро) судоводитель должен иметь прогноз погоды и информа-
цию о путевых условиях. При движении по водохранилищу необхо-
димо по УКВ радиостанции принимать прогнозы погоды каждый час.
С получением прогноза о штормовом ветре необходимо сообщить
капитану, который принимает решение о выборе убежища или укры-
тия, куда следует заводить плот. О принятых решениях следует со-
общить в диспетчерский центр, который руководит движением плотов
на данном участке и может своевременно оказать действенную помощь,
выслав дополнительную тягу, ре-
монтные бригады или аварийно-
спасательное судно.
Если прогноз не оправдался и
внезапно наступила штормовая по-
года, иногда приходится осуществ-
лять движение при неблагоприят-
ных ветро-волновых условиях.
Наибольшее разрушительное воз-
действие на плот оказывает бортовое волнение и ветер. При этом
углы дрейфа плота достигают 30—40°. Скорость движения уменьшает-
ся. Буксировщик, став лагом к ветру, может потерять управляе-
мость. Буксирный трос при таком двйженир! становится как бы тра-
лом и на мелководных участках может задеть за грунт, поэтому его
длину надо уменьшить до 150—200 м. Наиболее благоприятными для
движения плотов являются попутные ветры и волнение.
На некоторых участках направления скорости ветра и бега волы
182
Рис. 161. Ограждение плота теплохо-
дами при сильном ветре и волнении
могут не совпадать, отличаясь на 40—50°. В этом случае при выборе
трассы движения необходимо принимать во внимание направление бега
волн и не заводить плот на участки с крупным волнением. При дви-
жении следует избирать курс ближе к наветренной кромке судового
хода и не удаляться от ходового берега. Разрушение плота от волнения
по ходу и на стоянке можно предотвратить путем ограждения его гру-
жеными составами из барж или гружеными грузовыми теплоходами
(рис. 161). Суда ставятся с таким расчетом, чтобы струи воды от движи-
телей одного теплохода, погашая волнение, доходили до следующего
судна. Первое прибывшее для оказания помощи судно ставится в пе-
редней части плота с наветренной стороны. Швартовы крепятся за
бортовые лежни второй линейки от борта.
§ 40. МАНЕВРОВЫЕ РАБОТЫ
С ПЛОТОВЫМ СОСТАВОМ В ПУТИ
И В КОНЕЧНОМ ПУНКТЕ
Остановку плота производят: в конечных пунктах для его сдачи;
в пути следования — при отсутствии видимости, сильном штормо-
вом ветре, если плоту угрожает повреждение и потеря древесины,
при неисправности плотовода или плота.
В меженный период навигации плоты ставят на ровные приглубые
пески с минимальной скоростью течения. Постановка плота на твердом
грунте может привести к утере якорей.
Следует избегать выбора места якорной стоянки плота выше привер-
хов островов, гидросооружений и других препятствий.
Рис. 162. Остановка плота
Тормозной путь плота при его остановке зависит от многих фак-
торов: глубины, скорости течения, вида грунта, ветра, габаритов
плота, конструкции и веса якорей и лотов.
Учитывая сложность маневра постановки плота на якорь, капитан
буксировщика-плотовода обязан лично управлять плотоводом.
При приближении к месту остановки (рис. 162, положение /) ход
уменьшают до малого. Не допуская больших отклонений относительно
183
течения, направляют плот к выбранному месту. Вахтенные матросы
плотовода готовятся к разъединению арочного буксирного троса с бух-
тами. Затем двигатели плотовода останавливают и отдают арочный
замок. Плотовая команда выбирает бухты буксирных тросов на плот.
Буксировщик, сделав оборот, швартуется носовой частью к зад-
ней части плота с речной стороны (положение 2). Как только нос бук-
сировщика коснется борта плота, нужно дать ход вперед и переложить
руль в сторону, противоположную борту, испытывающему большое
давление воды.
Работая машинами на передний ход, буксировщик поджимает зад-
нюю часть плота к берегу на допустимое глубинами расстояние (поло-
жение 3). Для предотвращения посадки плота на мель с его борта,
обращенного к берегу, нужно измерять глубину.
В это же время, чтобы уменьшить скорость движения плота, от-
дают все лоты и, когда скорость уменьшится, отдают плотовые якоря
(положение 4). Если якоря отдают в момент, когда плотовые цепи на-
ходятся под углом к оси плота, якорные и лотовые цепи могут запу-
таться. Якоря нужно отдавать одновременно, чтобы избежать обрыва
якорных канатов. Якорные цепи вытравливают немного.
В первое время якоря действуют как тормозное средство; затем
производится (один или два раза) травление якорных цепей, и плот ос-
танавливается. Чтобы он не отклонился в сторону судового хода под
воздействием боковых ветров, на берег подают швартовные тросы. За-
тем буксировщик подходит к передней части плота для уборки с него
буксирных тросов.
Сдача плота оформляется актом установленного пароходством
образца.
Глава VI
ДВИЖЕНИЕ СУДОВ
И СОСТАВОВ ПО КАНАЛАМ
§ 41. ПРАВИЛА ДВИЖЕНИЯ
По условиям плавания каналы можно разделить на следующие
характерные участки:
с подводными прорезями и естественными берегами;
с естественным ложем и берегами (водохранилища, канала);
с искусственным ложем и берегами.
Участки канала с подводными прорезями наиболее неблагоприятны
из-за рыскливости судов, плохой защищенности от ветров, наличия
опасностей в виде банкетов из каменной наброски, где устанавливают
береговые огни.
На участках с естественным ложем и берегами условия плавания
такие же, как на участках крупных шлюзованных рек, и судовой ход
184
обставлен щелевыми створами и буями, берега низкие, течения практи-
чески отсутствуют. Затруднения возникают при подходе к подводным
прорезям, так как ширина судового хода от нескольких сотен метров
уменьшается до 60—80 м.
Участки с искусственным ложем и берегами имеют очень слабые
скорости течения, которые учитываются только при остановке составов
в канале.
Большое влияние на суда и составы оказывает ветер, особенно если
канал проходит в насыпи или не защищен береговой раститель-
ностью.
Ширина канала с односторонним движением должна в 2 раза пре-
вышать ширину расчетного судна или состава на уровне днища.
Общий запас по ширине канала (расстояние между бортами судов или
составов плюс расстояние между судами и откосами канала) при двух-
путном движении не должен быть менее 0,3 совокупной ширины рас-
ходящихся судов и составов. Радиусы кривизны должны превышать
не менее чем в 3 раза длину судна. На криволинейных участках у вы-
пуклого берега делается уширение.
Наименование берегов каналов (правый, левый) и направление
«вниз» — «вверх» устанавливаются местными правилами плавания.
На канале имени Москвы, например, направление вниз считается
от р. Волги к г. Москве, на Волго-Балтийском канале — от устья
р. Вытегры в сторону г. Череповца (р. Волга), на Волго-Донском
канале имени Ленина — от р. Волги к р. Дону.
Максимальные скорости движения судов на искусственной части
каналов устанавливаются местными правилами плавания по согласова-
нию с Министерством речного флота РСФСР.
В подходных каналах к шлюзам гидроузлов скорость не должна
превышать 10 км/ч. '
В искусственной части канала остановка судов производится в ис-
ключительных случаях, при этом суда должны быть учалены двумя
швартовными тросами, закрепленными на берегу и подаваемыми с
носа и кормы судна.
К плаванию по каналу допускаются судоводители, знающие мест-
ные правила плавания, трассу и судоходную обстановку канала.
Суда, входящие в канал, должны иметь фекальные цистерны или
ящики, которые при входе в канал проверяются, пломбируются пред-
ставителем санитарной инспекции, после чего выдается санитарное
свидетельство на право движения по каналу.
Во время движения по каналу запрещается выбрасывать за борт
судна шлак, отработанные масла, различный мусор и другие не-
чистоты.
Буксируемые на тросе составы учаливаются в кильватер. Форми-
рование составов в форме пыжей сокращает длину состава, улучшает
управляемость и уменьшает активную площадь парусности, при этом
наиболее полно используются камеры шлюзов. Учалка таких составов
во всех случаях должна быть гибкой.
Общие правила формирования составов остаются такими же, как
и для формирования на реках.
185
§ 42. ОСОБЕННОСТИ УПРАВЛЕНИЯ
ПРИ ДВИЖЕНИИ ПО КАНАЛАМ
При движении судов на каналах увеличивается сопротивление воды
и уменьшается скорость хода (рис. 163); увеличиваются динамическая
просадка и дифферент на корму; возрастают волнообразование и
рыскливость судна; возникают силы присасывания и отталкивания
при движении вблизи берегового от-
Рис. 163. Кривые изменения скоро-
стей движения в зависимости от
числа оборотов главных двигате-
телей:
— —— для канала;--------— для глу-
бокой воды; 1 для теплохода грузо-
подъемностью 5000 т; 2 — для тепло-
хода грузоподъемностью 2700 т; 3 —•
для теплохода грузоподъемностью
2000 т
коса канала, в результате чего суд-
но стремится развернуться в сторону
оси канала; более интенсивно, чем
на глубокой воде, проявляются гидро-
динамические силы при встречах и
обгонах судов, а также при прохожде-
нии движущегося судна мимо судна,
стоящего у откоса или стенки канала;
происходит интенсивный размыв ло-
жа и откоса канала потоком от дви-
жителей.
Причинами возникновения пере-
численных явлений служит измене-
ние поля скоростей, гидродинамичес-
ких давлений и уровней свободной
поверхности воды вокруг движуще-
гося судна.
Сопротивление воды с наступле-
нием определенной скорости начинает
резко возрастать, при этом на кривой
сопротивления образуется почти вер-
тикальная линия (так называемая
«стенка»). Скорость, при которой воз-
никает это явление, принято называть
критической скоростью.
Величина этой скорости зависит
от ряда факторов, основным из ко-
торых является стесненность живого сечения канала корпусом судна,
характеризуемая коэффициентом стесненности
k =
где SK — площадь смоченного миделя, м2;
— площадь живого сечения канала, м2.
Движение водоизмещающих судов происходит в области докрити-
ческих скоростей хода. Приращение осадки судна при движении на
канале можно определить по формуле В. К. Шанчуровой
Вк ср V
где В — ширина судна, м;
Т — осадка судна, м;
(70)
186
v — скорость судна, м/с;
Вкср — средняя ширина канала, м;
h — глубина канала, м.
При движении по каналу имени Москвы приращение осадки у су-
дов типа «Волго-Дон» может достигать 0,87 м, «Большая Волга» —
0,61 м.
Для каждого типа судна существует определенная допустимая
скорость движения, превышать которую не следует. Значения этих
скоростей устанавливаются Министерством речного флота РСФСР.
Максимально достижимые скорости движения в искусственных
частях каналов составляют около 50—70% от скорости движения
на глубокой воде. Эти скорости по условиям гидравлических явлений
(интенсивное волнообразование, резкое возрастание скоростей обте-
кания и др.) близки к критическим.
Для оценки условий движения во время встреч и обгонов в канале
имеют значение скорости при работе главных двигателей на минималь-
но устойчивом режиме. Эти скорости для основных типов грузовых
теплоходов приведены в табл. 28.
Таблица 28
Тип судна, осадка Г, м Скорости, км/ч, движения при работе машин на минимально устойчивом режиме в канале (искусственной его части)
имени Мое. вы Волго-Дон- ском судо- ходном имени В. И. Ленина Волго- Балтийском
«Волго-Дон», 2000 л. с.: 7 = 3,2 7,0 5,7 5,7
7 = 3,05 7,3 6,4 6,4
7 = 2,85 7,8 7,1 7,1
« Волге-Балт», 1000 л. с., 7 = 3,20 . . 8,3 7,0 7,0
«Шестая пятилетка», 1000 л. с., 7 = 2,8 8,5 8,2 8,2
Если судно движется по середине канала, то скорости обтекания
обоих бортов его одинаковы и движение устойчиво. Если же судно идет
ближе к одному из берегов, скорость обтекания борта, обращенного
к берегу, увеличивается, а давление воды уменьшается. Поэтому корма
судна будет смещаться в сторону берега, а нос зарыскивать к середине
канала. С уменьшением скорости движения рыскливость уменьшается.
На рис. 164 показаны гидродинамические силы и моменты, дейст-
вующие на судно при движении не по оси канала. Здесь Ри — сила,
действующая на носовую часть судна. В зависимости от глубины и
ширины канала и положения судна по отношению откоса эта сила
может иметь направление или в сторону откоса канала, к которому
приблизилось судно, или в противоположную сторону; — сила,
действующая на кормовую часть корпуса судна; Pr — равнодейст-
вующая гидродинамических сил присасывания, приложенная в ц. т.
судна; R — сила сопротивления воды; Ру — рулевая сила; ЛД1, —
187
упоры винтов; Л1к — момент корпусных сил; МРу — момент руле-
вой силы.
Движение на большой скорости по каналу с резким односторонним
уширением вызывает зарыскивание судна в сторону уширения.
На прямолинейном участке канала ведут судно по оси канала.
В темное время курс избирается на прицельный знак, а по расстоя-
нию между огнями двух пар береговых знаков — перспективно-
прицельных створов, расположен-
ных на противоположных берегах
канала, определяют положение оси
канала и вносят соответствующие
поправки (рис. 165).
По количеству видимых путевых
огней, стоящих на криволинейном
участке канала, можно определить
заранее сторону поворота. Напри-
мер, если при движении вниз на
левом берегу огней зеленого цвета
видно больше, чем на правом
Рис. 164. Схема сил, действующих на
судно при движении его у откоса
канала
красных, то поворачивают вправо. До приближения к путевым
огням судно отводят ближе к выпуклому берегу канала.
При буксировке на тросе, а также и при толкании необходимо в кон-
це прямолинейного участка начать плавно отводить состав к выпукло-
му берегу и проходить криволинейный участок, придерживаясь этого
берега (рис. 166). Скорость хода не снижается. В конце криволиней-
ного участка состав снова начинают отводить к середине канала.
/ — прицельный знак; 2 — путевые огни; 3—береговые
огни перспективно-прицельных створов
На прямолинейном участке плот ведут по оси канала. При подхо-
де к закруглению плотовод следует прямолинейным курсом до тех
пор, пока судно не приблизится к вогнутому берегу, насколько поз-
воляют глубины (рис. 167).
При буксировке барж на каналах длина буксирного троса в шти-
левую погоду принимается в среднем 50—60 м, при буксировке пло-
тов 70—80 м.
188
iuuuuuyuj^yyijyj
1,1,1,1,1,1, Mil il I Ы.1,Ы.ЬШ»Ы1ЬЬ>,
Рис. 166. Проводка состава на криволиней- '
ном участке канала
§ 43. ВСТРЕЧА И ОБГОН НА
КАНАЛАХ
Расхождение и обгон судов и составов на каналах значительно
сложнее, чем на свободной реке. Кроме гидродинамических сил, воз-
никающих при сближении судов, на суда действуют гидродинамиче-
ские силы, появляющиеся в результате приближения судов к откосу
во время уклонения с оси канала. Скорость движения по каналу огра-
ничена.
Сумма моментов гидродинамических сил, воздействующих на кор-
пус при расхождении или обгоне судов на больших скоростях, может
оказаться больше момента руля, и судно потеряет управляемость.
Снижение скорости осуществляется на расстоянии не менее 1,5—
2 км. Для улучшения управляемости к моменту расхождения за 200—
300 м до встречи обороты судового движителя увеличиваются, чтобы
увеличить рулевую силу. Как правило, расхождение двухвинтовых
судов в момент следования вблизи бровки канала осуществляется на
одном двигателе со стрежневого борта.
В момент, когда форштевни встречающихся судов оказываются
на траверзе, суда стараются отрыскнуть друг от друга, но в этот же
момент, будучи отклоненными от оси канала, суда стремятся отрыск-
нуть и от откоса носовой частью. Далее, когда форштевень судна по-
равняется с миделем встречного судна, начинают действовать силы,
стремящиеся сблизить суда. Зарыск в сторону встречного судна уси-
ливается отрыскиванием от откоса канала. Такие явления наблюда-
ются у судов, пока мидель одного не поравняется с кормой другого.
С этого момента следует начать выход судна на ось канала.
Расхождение судов в канале запрещается производить в районе
расположения аварийных заградительных ворот и паромных переправ.
Следует избегать встреч на криволинейных участках канала.
Расхождение толкаемых составов и крупнотоннажных судов в ка-
налах сопровождается одними и теми же явлениями.
При расхождении буксируемых составов снижают скорость хода
до малого. Не следует резко изменять режим работы машин, так как
при провисании буксирного троса состав начинает уклоняться в одну
сторону.
После обмена сигналами на расхождение на расстоянии между
судами 200—300 м уклоняются от оси канала в соответствии с данны-
ми сигналами «Отмашка» и при подходе к траверзу друг друга выхо-
дят на параллельные курсы на расстоянии от откоса, приблизитель-
но равном г/з ширины канала (рис. 168, а).
При резком уклонении от оси канала носовая часть баржи первого
счала близко подходит к откосу. В этот момент не рекомендуется про-
изводить изменение направления движения барж первого счала изме-
нением курса буксировщика в сторону оси канала, так как в после-
дующем это может привести к сближению барж вплотную со встреч-
ным составом. Для выравнивания барж переднего счала вдоль берега
канала рекомендуется кратковременно увеличивать обороты главных
двигателей.
190
В дальнейшем расхождение составов происходит на прямолинейных
курсах (рис. 168, б).
После прохода переднего счала барж одного состава траверза барж
последнего счала другого состава (рис. 168, в) буксировщик изменяет
курс в сторону оси канала. Выйдя на ось канала,увеличивают скорость.
Обгон наиболее целесообразно производить на участках водохра-
нилищ.
В искусственной части канала обгон одиночных судов одиночными
судами или обгон однотипных составов может производиться лишь
в исключительных случаях (например, при получении права на перво-
очередное шлюзование и т. п.).
Ь)
Г11111111ТП П' Г1111111111 ЧТТЧ Ч11Ч1111Г1т IЧ11' 111111ГЧ111111111111Т1111111111111 ’ I' 1111
саххс>сюос<х>х>оск>=сх2осюоосюскххххх»оаххх>оооооссстеасхроа^^
Рис. 168. Расхождение составов в канале
Величины гидродинамических сил присасывания судов при обгоне
значительно больше, чем при расхождении. Максимальный гидроди-
намический момент на корпусе судна для случая обгона почти в 4 ра-
за больше, чем для случая встречи; он наблюдается в момент, когда ми-
дель обгоняющего судна находится на траверзе кормы обгоняемого.
Пос обгоняющего судна стремится повернуться в сторону обгоняемого.
Поперечные гидродинамические силы возрастают на малых глу-
бинах.
Скорость потока между корпусами движущихся судов намного
превышает скорость потока с внешних бортов, а поэтому давление воды
191
на корпус со стороны внешних бортов значительно больше, чем между
судами (рис. 169).
Особенно опасен случай обгона судов на скоростях, близких к кри-
тическим (и >0,7 Ygh), когда при полном сбрасывании оборотов обго-
няющее судно продолжает двигаться со скоростью обгоняемого.
Когда обгоняющее судно А (рис. 170, а) войдет в кормовую зону
повышенного давления обгоняемого судна В, то нос первого будет от-
клоняться влево.
И,
+ — г ~
I л
Рис. 169. Силы, действующие на судно
в момент обгона (pi>p2, так как
ч fi<^)
Рис. 170. Обгон одного судна другим
в канале (сплошной линией показа-
на эпюра гидродинамических сил
с правого борта, пунктиром — с ле-
вого)
В положении, показанном на рис. 170, б, нос обгоняющего судна А
будет стремиться повернуться в зону пониженного давления обгоняе-
мого судна В. Если при этом суда идут близко к берегам канала, то нос
каждого из них под влиянием действия берега будет стремиться от-
клониться от него.
В положении на рис. 170, в носовые части обгоняющего и обгоняе-
мого судов, находящихся на траверзе друг друга, отталкиваются.
В промежутке между судами образуется зона пониженного давле-
ния (по сравнению с давлением на внешних бортах), что приводит
к сближению судов.
Когда обгоняющее судно А своим миделем будет в районе носо-
вой части обгоняемого судна В (рис. 170, а), нос последнего будет
стремиться повернуться в зону пониженного давления судна А. Это-
му способствует то, что носовая часть обгоняемого судна будет испы-
192
тывать отталкивающее действие берега. Когда кормовая волна судна
А подойдет к носу обгоняемого, последнее будет стремиться повер-
нуться к берегу.
Если размеры судов при обгоне будут разные, то большее судно
будет оказывать большее влияние на меньшее. При расхождении и
обгоне в каналах необходимо особенно внимательно следить за курсом
судна, быстро выправляя его с помощью рулей.
§ 44. ШЛЮЗОВАНИЕ СУДОВ
И СОСТАВОВ
Сигналы на шлюзах. Пропуск судов через шлюзы регулируется по радио
и с помощью семафорной или светофорной сигнализации. Кроме того, на шлю-
зах устанавливаются знаки «Стоп», указывающие предел возможного подхода
судов к шлюзам, а также границы стоянки судов в камерах шлюзов (рис. 171).
На шлюзах, не имеющих светофорной сигнализации, ворота шлюзов осве-
щаются: в закрытом состоянии — двумя красными горизонтально расположен-
ными огнями, устанавливаемыми на сомкнутых створках ворот; в открытом со-
стоянии — правая (по течению) створка — красным, левая — белым огнем.
Рис. 171. Схема расположения семафоров и стоповых огней на однокамерном
шлюзе:
/» 6,— стоповые огни на причальных стенках при двустороннем движении; 2, 5 — стоповые
огни на причальных стенках при одностороннем движении; 3, 4 — стоповые огни в камере
шлюза; 7 — светофоры подхода к причалам; 8 — светофоры подхода к палам; 9 — входные
светофоры; 10 — выходные светофоры
Остальное освещение шлюза не должно ухудшать видимость установлен-
ных Правилами плавания сигнальных огней.
С момента подхода судов к дальнему светофору шлюза вахтенные начальники
паротеплоходов выполняют распоряжения вахтенного начальника шлюза.
Правила движения через шлюзы. На подходе к шлюзу вахтенный
начальник судна при наличии радиосвязи должен получить от вахтен-
ного начальника шлюза информацию о порядке шлюзования, о стоя-
щих и движущихся судах.
На расстоянии 1 км от шлюза на траверзе знака «Сигнал» подается
один продолжительный звуковой сигнал.
До входа в шлюз на всех судах и плотах должны быть подняты тор-
мозные средства (лоты, якоря, цепи-волокуши), на буксируемых сос-
тавах — выравнены бухты и устранены перекосы во взаимном поло-
жении судов. На судах не должно быть выступающих за борт предме-
тов. Для осуществления в случае необходимости экстренной остановки
судна в камере шлюза должны быть приготовлены швартовные тросы.
При одновременном подходе к шлюзу нескольких судов и составов
вахтенным начальником шлюза устанавливается очередность захода
судов в камеру с учетом требований «Правил плавания по внутренним
судоходным путям РСФСР» и диспетчера движения.
7 С. Б. Ольшамовский 193
Одновременный выход судов и составов из обеих параллельных
камер шлюза в один и тот же бьеф запрещается.
Наличие на светофоре дальнего действия огня зеленого цвета означает, что
судну разрешается подойти к причальному палу шлюза для ошварторйи, не про-
ходя дальнего стопового огня и ориентируясь на сигнал светофора промежуточ-
ного действия.
Красный огонь на светофоре дальнего действия запрещает судну проход это-
го светофора.
Наличие на светофоре промежуточного действия огня зеленого цвета означа-
ет, что судну разрешается двигаться к ближним причальным устройствам шлю-
за для ошвартовки, не проходя ближнего стопового огня и ориентируясь на сиг-
нал светофора ближнего действия.
Красный огонь на светофоре промежуточного действия запрещает проход
этого светофора.
Наличие на светофоре ближнего действия огня зеленого цвета означает, что
шлюз подготовлен и судну разрешается вход в него.
Красный огонь на этом светофоре показывает, что шлюз занят и вход в не-
го запрещен.
К шлюзованию на р. Волге и р. Каме допускаются плоты длиной
не более 260 м и шириной не более 28 м, на Волго-Донском судоходном
канале имени Ленина — длиной до 120 м, шириной 15 м и с осадкой
до 2,5 м.
Шлюзование судов с нефтегрузами 1-го класса, а также взрывча-
тыми, отравляющими веществами и легковоспламеняющимися гру-
зами (хлопок и др.) одновременно с другими судами и плотами запре-
щается.
Шлюзование пассажирских судов не должно производиться сов-
местно с судами, груженными нефтегрузами 1-го и 2-го классов.
Все суда и составы должны иметь следующие запасы по ширине
со стороны каждого борта судна: в шлюзах шириной до 10 м — 0,2 м;
до 18 м — 0,4 м; свыше 18 м — 0,5 м.
Длина судов и составов при прохождении шлюзов должна быть
меньше полезной длины камеры в шлюзах длиной до 50 м на 1 м, от 51
до 100 м — на 2 м, от 101 до 150 м — на 4 м, от 151 до 210 м — на 6 м
и при длине свыше 210 м — на 10 м.
Минимальные запасы воды под днищем у камерных и железо-
бетонных шлюзов должны быть при глубине заложения короля до
2,5 м — 25 см, свыше 2,5 м — 40 см.
Управление судами при проходе через шлюзы. При подходе к шлю-
зу необходимо проверить рулевое устройство и ДАУ. Судно или сос-
тав может входить в камеру шлюза и выходить из нее лишь при нали-
чии разрешительных сигналов. Управление судном должен осуществ-
лять капитан или 1-й штурман.
Ёсё члены экипажа шлюзующихся судов и плотов, несущие вахту,
обязаны находиться на своих местах. Главные и вспомогательные дви-
гатели судов должны быть готовы к немедленному действию.
Если ось подходного канала совпадает с осью шлюза и направляю-
щие палы симметричны, то при отсутствии ветра курс судна избирается
по середине камеры шлюза. Если шлюз имеет длинную направляю-
щую стенку (причальные палы), то при движении вдоль нее возникают
силы присасывания, и нос судна отрыскивает в сторону короткой на-
194
правляющей стенки. Поэтому при входе в шлюз судно ведут под
углом 5—10° к длинной причальной стенке и при приближении носа
к входным воротам разворачивают судно параллельно стенкам ка-
меры шлюза. На расстоянии 700—800 м от камеры шлюза останавли-
вают двигатель со стороны борта, обращенного к причальной стенке,
и движение осуществляют на одном двигателе при минимально устой-
чивом режиме. На траверзе ворот шлюза остановленному двигателю
дают малый задний ход и в дальнейшем осуществляют движение при
одновременной работе двигателей на передний и задний ход. В прак-
тике имелись случаи, когда эти рекомендации не выполнялись, судно
заводилось в шлюз на повышенной скорости и обоих двигателях,
работающих на передний ход. Из-за отказов ДАУ двигатели на задний
ход в камере шлюза не запускались, и судно, не погасив инерции, на-
носило повреждение воротам шлюза. Во время ремонта ворот шлюза
транзитное движение судов по каналу невозможно. Поэтому такие
повреждения наносят крупный материальный ущерб речному транс-
порту и недопустимы.
Регулируя обороты машин одновременно работающих движителей
на передний и задний ход, судно останавливают в камере шлюза у стен-
ки, указанной вахтенным начальником шлюза.
В камере шлюза судно удерживается носовым и кормовым швар-
товными тросами.
Затруднение при проходе шлюзов вызывают бортовые ветры, преи-
мущественно со стороны верхних бьефов. Безопасность маневров при за-
ходе судна в шлюз во время бортового ветра в основном зависит от выб-
ранной судоводителем скорости движения и точности захода судна
в камеру шлюза. Скорость захода судна в шлюз при наличии бортового
ветра судоводителем выбирается с таким расчетом, чтобы избежать
возможности удара о палы или стенку камеры и погасить инерцию
после входа в камеру.
В зависимости от скорости бортовых ветров, длины и конструкции
причальных палов, а также длины и ширины камеры практикой судо-
вождения выработаны три способа захода судна в шлюз: с предвари-
тельным привалом к причальной стенке; прямой заход в камеру шлю-
за; с предварительным выравниванием судна перед входом в камеру.
Заход с предварительным привалом к причальным палам имеет
преимущество в том отношении, что он обеспечивает минимальную
скорость при входе судна в шлюз и поэтому является наиболее безо-
пасным.
Заход с предварительным привалом к причальной стенке приме-
няют при бортовых навальных ветрах. Привал к стенке — наиболее
сложная часть маневра. Рассмотрим его выполнение при шлюзовании
толкаемого состава, состоящего из порожней баржи. Место подхода
к свободной от судов стенке должно быть возможно дальше от камеры
шлюза. Состав движется на самом малом ходу с углом дрейфа 0 (по-
ложение 1 на рис. 172), уменьшая который с помощью насадок (ру-
лей), создают небольшой дрейф в сторону причальной стенки, как по-
казано на рис. 172. При приближении кормы состава к стенке на ко-
роткое время увеличивают обороты двигателей, и насадки переклады-
195
вают на борт в сторону стенки. Дрейф уменьшается, и корма касается
стенки. Носовая часть состава начинает стремительно сближаться
со стенкой (положения 2, 3 на рис. 172). Для предотвращения удара
насадки перекладывают на наветренный борт. После сближения
со стенкой борта баржи (положение 4) состав заводят в шлюз.
Прямой заход в камеру шлюза применим при ветрах любого на*
правления. Если ширина камеры шлюза больше ширины судна
на 10—15 м, этот способ является
Рис. 172. Схема подхода порожнего
состава к причальной стенке шлюза
ОСНОВНЫМ.
Определенной 4 скорости движе-
ния судна при бортовом ветре со-
ответствует определенный угол
дрейфа. Допускаемый угол дрейфа
при прямом заходе в камеру шлю-
за зависит от ее ширины, ширины
и длины корпуса судна. Эта зави-
симость выражается формулой
sin ср = Вш-(В+а2} , (71)
где ср — допускаемый угол дрейфа;
Вш — ширина камеры шлюза;
В — ширина корпуса судна;
а2 — запас между бортом судна
и стенкой камеры;
— длина цилиндрической
части судна.
Установив допускаемый угол
дрейфа, можно определить соответ-
ствующую ему допускаемую ско-
рость движения судна по формуле
= 1 /^в^в.)2 -% , 72
V Су
где с—аэродинамический коэффи-
циент (с = 1,0 4- 1,2);
рв — массовая плотность воздуха;
kB — коэффициент, учитывающий изменение ветра с высотой
(йв = 0,6 4- 0,8);
ав — скорость ветра;
Sn — площадь боковой парусности судна;
Су — гидродинамический коэффициент (Су = 0,055 4- 0,060);
р — массовая плотность воды;
Sy — погруженная плотность диаметрального батокса.
В табл. 29 приведены рассчитанные по формуле (72) скорости за-
хода грузовых судов в шлюзы волжских гидроузлов при скорости бор-
тового ветра на высоте рубки 15 м/с в сравнении с данными, получен-
ными автором по натурным испытаниям в 1973 г.
196
Таблица 29
Теплоход Скорость, км/ч
по расчету фактическая
«Волгонефть» 8,7 7,8
«Волго-Дон» 8,5 9,0
«Шестая пятилетка» 8,9 9,0
Тормозной путь и время остановки судна в камере шлюза при работе
одной машины на задний ход приведен в табл. 30.
Таблица 30
Теплоход гс, М Тормозной путь /, м Время остановки Z, с
«Волго-Дон» 2,60 53 48
«Рязань» 3,05 53 48
«Чапаевск» 2,80 41 70
При наличии судов в камере шлюза следует применять способ за-
хода «с раскатом», т. е. с предварительным выравниванием судна вдоль
камеры. При ветрах бортового направления со стороны палов он осу-
ществляется следующим образом.
Следуя серединой подходного канала, на расстоянии около 200 м
от камеры нос судна направляют на угол подветренных палов и удер-
живают судно в этом направлении до тех пор, пока носовая оконеч-
ность начнет подходить к причальной линии; при этом угол дрейфа
несколько возрастет. Нос судна выйдет на траверз закругления на-
правляющих палов и под воздействием отраженной волны начнет ук-
лоняться в противоположную сторону. В этот момент с помощью пе-
рекладки руля в сторону направляющих палов судно выравнивают, и
оно встает параллельно стенке камеры шлюза.
Как показали испытания, применение этого способа захода в ка-
меру шлюза является безопасным.
При шлюзовании желательно швартоваться к наветренной стенке
камеры. Заходя в камеру шлюза, следует учитывать явление отраже-
ния ветра от стенки камеры.
В зависимости от скорости бортового ветра могут быть применены
два способа выхода в верхний бьеф: от подветренной стенки и с пред-
варительным привалом кормы судна к наветренной стенке.
После отдачи швартовных тросов следует сразу же на короткое
время дать полный ход всем машинам. В этом случае судно к моменту
выхода из шлюза успевает развить скорость хода. Благодаря этому
обеспечивается необходимая управляемость и выход становится
безопасным.
При сильных ветрах следует сначала отдать кормовой швартов-
ный трос, а затем, после отхода кормы к наветренной стенке камеры, —
носовой и кратковременно пустить машины на полный ход.
197
Проводка составов через шлюзы. Готовиться к шлюзованию сле-
дует в период формирования состава; капитан должен проверить
соответствие габаритов состава габаритам шлюза.
Сообразуясь с направлением господствующих ветров, с подвет-
ренной стороны следует поставить баржи более прочной конструкции.
Учалка барж при буксировке на тросе должна быть гибкой.
При подходе к шлюзу длина буксирного троса должна быть сокра-
щена до 40—50 м. Необходимо подготовить к подаче швартовные тросы
и мягкие кранцы.
Рис. 173. Схема захода в камеру шлюза при отсутствии ветра:
/ — знак «Стоп» в камере шлюза и на палах; 2 — светофор ближнего действия; 3 — светофор
дальнего действия
При подходе буксировщик уменьшает ход до малого, идет в шлюз
серединой канала. Заправку состава надо производить, ориентируясь
на причальные палы (рис. 173).
Если в момент подхода первого счала к голове камеры шлюза про-
исходит зарыскивание барж, то на правильный курс их возвращают
перекладкой руля на буксировщике (в ту же сторону, куда отклонился
состав) и затем увеличивают обороты двигателей.
При подходе первого счала к камере шлюза натяжение буксирного
троса должно быть минимальным, но трос не должен иметь слабины и
провисать.
Как только баржи первого счала пройдут входные ворота, буксир-
ный трос должен быть ослаблен; дальнейшее движение состава про-
исходит по инерции. После прохода середины камеры шлюза букси-
ровщик швартуется кормой к баржам головного счала, на одну из
барж подается кормовой швартовный конец. Если скорость состава
велика, торможение производят, работая двигателем на задний ход.
Торможение можно производить и с помощью швартовных тросов сос-
тава, поданных на швартовные крюки или тумбы шлюза.
После остановки состава с буксировщика на шлюз подают носовой
швартовный трос. Буксируемый состав удерживается двумя шварто-
вами, поданными с носовых кнехтов баржи первого счала и кормовых
кнехтов баржи последнего счала. После окончания швартовки вах-
тенный начальник буксировщика сообщает вахтенному начальнику
шлюза о готовности состава к шлюзованию. Во время шлюзования
вахтенный начальник должен безотлучно находиться на мостике,
поддерживая главную машину в полной готовности к действию и на-
блюдая за положением и состоянием швартовных тросов.
198
При системе наполнения через верхние ворота в момент открытия
ватворов образуется сильный поток воды, идущий вдоль камеры шлю-
за. Если имеется слабина в швартовных тросах, состав быстро приоб-
ретает скорость движения и в результате рывков может произойти
обрыв тросов.
После наполнения камеры шлюза более чем наполовину состав полу-
чает небольшое движение вперед. Чтобы исключить возможность вы-
хода буксировщика за линию стоповых огней или удара о верхние
выходные ворота шлюза, нужно выбрать слабину и прочно закрепить
кормовой швартовный трос на составе.
После открытия выходных ворот шлюза и получения разрешения
на выход вахтенный начальник подает сигнал отдачи швартовны^
концов и выходит на буксир. Перед отводом состава от стенки камеры
нужно придать составу некоторую скорость. Резкие перекладки руля
сразу же после выхода на буксир могут вызвать сильный боковой дрейф
буксировщика и удар о стенку камеры.
Выход из шлюза производят малым ходом. Как только первый счал
выйдет из камеры, буксировщик уклоняется к середине подходного
канала. После выхода из камеры шлюза барж последнего счала ход
прибавляют до полного.
Судно с плотом при входе в камеру идет по ее оси. Буксировщик
на малом ходу идет до ее конца (короля или нижних ворот) и останав-
ливает главные двигатели. Затем на заднем ходу подходит к плоту,
и с буксировщика подают кормовой швартов, с помощью которого
заводят плот. Учалка плота в камере шлюза производится за два троса,
подаваемых с передней и задней частей плота.
Рис. 174. Схема захода в шлюз буксирного состава при навальном ветре
Заход в шлюз при боковых ветрах. При навальном на причальную
стенку ветре буксировщик уклоняется к наветренной бровке канала
(рис. 174) и снижает скорость хода до малого. Угол дрейфа состава
увеличивается, и последний счал барж приваливает к стенке. От тре-
ния о стенку скорость состава резко уменьшается и все счалы начинают
быстро подходить к ней. Для предотвращения удара буксировщик крат-
ковременно увеличивает ход и, придерживаясь наветренной стороны,
заводит состав в камеру шлюза.
При отвальном от стенки ветре уменьшают ход буксировщика
до среднего, сближаются с причальной стенкой на расстояние 5—10 м
и идут вдоль нее.
За 40—80 м до ворот шлюза, на буксировщике перекладывают руль
в подветренную сторону и придают составу «раскат» на ветер (рис. 176)
и на короткое время увеличивают ход. Когда первый счал развернется
параллельно причальной стенке, на последующих счалах возникает
сильное бортовое давление воды, создается дрейф к стенке.
Рис. 175. Схема захода в шлюз буксирного состава при отвальном ветре
Этот маневр следует применять только тогда, когда судоводитель
уверен, что дрейф последнего счала на ветер возможен. При больших
скоростях ветра этот маневр применять нельзя. Для безопасной заправ-
ки состава в камеру шлюза используют вспомогательный буксировщик,
который швартуется к корме последнего счала. В этом случае торможе-
ние состава в камере шлюза осуществляет вспомогательный буксиров-
щик.
Глава VII
УПРАВЛЕНИЕ СУДАМИ И СОСТАВАМИ
НА ВОДОХРАНИЛИЩАХ, ОЗЕРАХ
И В ПРИБРЕЖНО-МОРСКИХ РАЙОНАХ
®
§ 45. УСЛОВИЯ ПЛАВАНИЯ
По условиям плавания водохранилище можно разделить на три
участка: речной, озерно-речной и озерный.
На речном участке пойменные берега находятся в незатопленном
состоянии. Судовой ход обычно проходит по середине русла. Опас-
ность для плавания представляют затопленные осередки и острова,
высыпки и крупные песчаные побочни. Судоводители ориентируются
по естественным и искусственным береговым ориентирам и по знакам
обстановки. Речной участок наиболее благоприятен для плавания су-
дов.
Озерно-речной участок характеризуется затопленными пойменны-
ми берегами. Ширина здесь достигает 10 км и более, судовой ход про-
ходит по затопленному руслу, а берегами являются кряжи. Основны-
ми (иногда и единственными) ориентирами служат знаки судоходной
обстановки.
Большую опасность для плавания представляют затопленные пой-
менные берега на изгибах русла.
200
На линии горизонта при затопленной пойме судоводитель одновре-
менно видит несколько красных и белых огней. Для того чтобы опоз-
нать огни, нужно знать порядковый номер знака судоходной обста-
новки и его расположение в отношении других знаков.
Как следует из рис. 176, ориентироваться по знакам обстановки
обычным способом на показанном участке невозможно—белые огни
буев находятся и слева и справа от линии
курса, а красные также видны с правой
и левой сторон. Яркость и видимость
огней, более удаленных, иногда бывают
лучше, чем буев, расположенных ближе.
Не зная расположения знаков, судо-
водитель может избрать курс между
буями № 27 и 28. Подобные ошибки
встречаются в практике. Наибольший
процент посадок на мель в настоящее
время падает на участки водохранилищ
с затопленным руслом.
Значительную помощь при плавании
на тгкэм участке может оказать радио-
локатор. Путем сравнения видимого и
радиолокационного изображений можно
легко определить правильный курс.
Если затопленное русло реки распо-
ложено вдоль одного из кряжей, то ори-
ентировка затруднений не вызывает.
На озерном участке водохранилища
Расположение огней на горизонте
№23 №28 § S/V77 №78
& красный огонь'ч'ггЗ]] \
о белый огонь- U I
Рис. 176. Ориентировка на озер-
но-речном участке водохрани-
лища
судовой ход проходит над затопленной
поймой. Большую часть судового хода составляют прямолинейные
трассы протяженностью до 10 км и более. Эти трассы ограждаются
осевыми буями.
Трассы водохранилищ обставляют щелевыми створами с большой
дальностью действия. При пониженной метеорологической видимости
дальность действия створов уменьшается. В первом рейсе нужно опре-
делить компасный курс трасс и проставить его на карте, указав и вре-
мя движения. Хорошими естественными ориентирами являются
рынки гор.
В водохранилищах имеются основные и дополнительные трас-
сы, последние обычно сокращают путь и хорошо защищены от ветров.
Глубины на дополнительных трассах меньше, чем на основных.
Чтобы определить глубину, надо снять с навигационной карты
наименьшую глубину на трассе Hi и установить по путевому листу
отметку уровня воды в водохранилище в данное время. Минимальная
глубина на трассе может быть определена по формуле
Нф = Н. + (ФПУ — НПУ), (73)
где ФПУ — отметка уровня воды во время рейса;
И ПУ — отметка нормального подпорного уровня для данного
водохранилища.
201
Высота волны на крупных водохранилищах достигает 3,5 м. Сила
ветра оценивается по двенадцатибалльной шкале Бофорта (табл, 31).
Таблица 31
Ветер, баллы Бофорта Скорость ветра, м/с Характер ветра Ветер, баллы Бофорта Скорость ветра, м/с Характер ветра
0 1 0,0—0,6 0,6—1,7 Щтиль Тихий 8 15,3-18,2 Очень креп- кий
2 1,8—3,3 Легкий 9 18,3—21,5 Шторм
3 3,4-5,2 Слабый 10 21,6—25,1 Сильный шгорм
4 5,3—7,4 Умеренный
5 7,5—9,8 Свежий 11 25,2-29,0 Жестокий
6 9,9—12,4 Сильный 12 Свыше 29,0 шторм
7 12,5—15,4 Крепкий Ураган
Волнение оценивается по девятибалльной шкале (табл. 32).
Таблица 32
Волнение, баллы Высота волн, м Характеристика волнения Волнение, баллы Высота волн, м Характеристика волнения
0 0 Волнение 5 2,0-3,5 Сильное
отсутствует 6 3,5—6,0
1 До 0,25 Очень слабое 7 6,0—8,5 Очень сильное
2 0,25—0,75 Слабое 8 8,5-11,0
3 0,75—1,25 Умеренное 9 11,0 и более Исключитель-
4 1,25—2,0 Значительное ное
Извещение о штормах судоводители получают по радио.
В навигационных картах приводятся графики высоты волн на судо-
ходных трассах в зависимости от скорости и направления ветра.
В открытой части озер и в прибрежно-морских районах движение
судов производится по рекомендованным курсам.
На Онежском и Ладожском озерах применяется кардинальная
система расстановки плавучих знаков (морская), а подходные фарва-
теры к открытой части озера обставлены знаками судоходной обста-
новки внутренних водных путей.
На внутренних судоходных путях, где действует судоходная (реч-
ная) обстановка, действуют «Правила плавания по внутренним судо-
ходным путям РСФСР» и «Местные правила плавания».
На судоходных путях, где действуют кардинальная (исключая озе-
ра), латеральная (морская) и осевая (морская) системы ограждения,
действуют «Правила для предупреждения столкновений судов в море»,
обязательны постановления начальников морских портов и специ-
202
альные инструкции и положения о режиме плавания речных судов,
согласованные между министерствами морского флота СССР и речного
флота РСФСР. Этими документами должны руководствоваться судо-
водители, выходящие в прибрежные морские районы. Границы внут-
ренних судоходных путей и их разряды указываются в документах
Речного Регистра РСФСР и «Местных правилах плавания» отдельных
бассейнов.
Подробное навигационное описание морей, озер содержится в ло-
циях, издаваемых Гидрографическим управлением Министерства обо-
роны СССР. Лоции для водохранилищ и озер издаются Министерством
речного флота РСФСР. Навигационные изменения на судоходных
путях публикуются для сведения судоводителей в «Извещениях мо-
реплавателям» (прибрежно-морские районы), в «Извещениях судо-
водителям по единой глубоководной системе европейской части СССР»,
в путевых и информационных листках бассейновых управлений пути.
Кроме того, эти изменения передаются по радио.
По мере накопления изменений в прибрежно-морских районах
они издаются под названием «Дополнения к лоции».
§ 46. ПОДГОТОВКА К ПЛАВАНИЮ
Суда, выходящие в озера, водохранилища и прибрежно-морские
районы, должны иметь следующие документы: судовое свидетельство,
удостоверение Речного Регистра РСФСР на годность к плаванию, акт
освидетельствования судовой радиостанции и разрешение на право ее
эксплуатации, акт об испытаниях спасательных средств, санитарное
свидетельство, свидетельство пожарной охраны, судовую роль и штат-
ное расписание, судовой вахтенный журнал, скрепленный печатью
судовладельца, машинный вахтенный журнал, книгу осмотроц судна,
расписание общесудовых тревог, таблицу девиации магнитного
компаса (только для судов, выходящих в озера и прибрежно-морские
районы).
Оборудование и снабжение судов, выходящих в прибрежно-морские
районы, должны соответствовать нормам Речного Регистра РСФСР
для судов разряда «О», а аварийное снабжение, звуковые и световые
средства—удовлетворять Правилам Регистра СССР и «Международ-
ным правилам для предупреждения столкновений судов в море»
(МППСС-72).
Перед выходом в озеро или водохранилище капитан должен пред-
явить судно для осмотра диспетчеру, который разрешает движение
судов в озере или водохранилище. Перед выходом в прибрежно-мор-
ской район или по прибытии с моря все суда МРФ РСФСР в морских
портах должны подвергаться осмотру дежурного инспектора порт-
надзора. Портнадзор должен быть уведомлен об осмотре заранее.
Разрешение на выход в море и регистрацию прихода с моря судна
производит инспектор портнадзора после предъявления капитаном
(шкипером) всех судовых документов, включая сведения об осадке суд-
на, роде и количестве груза, а также дипломы комсостава.
203
Необходимо учитывать изменение осадки при переходе из пресной
воды в морскую или наоборот (при переходе судна из моря в реку
осадка увеличивается).
Изменение осадки АТ (в см) при переходе из морской воды в прес-
ную можно определить по формуле
дг== 0,026 D
п
(74)
где 0,026 — коэффициент (разность между удельным весом соленой
и пресной воды);
D — весовое водоизмещение судна при заданной осадке, т;
п — число тонн, изменяющих осадку на 1 см.
Перед отходом в море (озеро) необходимо проверить исправность
всех навигационных приборов, закрыть и законвертовать все люки лю-
ковыми крышками, получить прогноз погоды.
Составы из барж для проводки в озерах и прибрежно-морских райо-
нах формируются в кильватер. При этом между баржами должны быть
промежутки в 25—30 м. Буксировка в прибрежно-морских районах
осуществляется на длинном буксирном тросе. Размеры буксирного
троса для буксировщика при буксировке в прибрежно-морских районах
и озерах можно определить с помощью табл. 33.
Таблица 33
Мощность буксирую- щего суд- на, л. с. Тяговое "‘усилие буксира на швар- товах, тс Диаметр буксирного троса, мм Минимальное разрывное усилие троса, тс Длина троса, м Запас прочности троса (отношение разрывного усилия к тяговому усилию на швартовах)
3000 39,0 61,5—66,0 122,2—140,0 700 3,1—3,6
2000 26,0 57,0—61,5 105,2—122,2 700 4,0—4,7
1500 19,5 53,0—57,0 90,0—105,2 600 4,6—5,4
1200 15,6 48,5—53,0 75,1—90,0 600 4,8—5,6
1000 12,5 43,5—48,5 62,5-75,1 500 5,0—6,0
800 10,0 39,0—43,5 50,5—62,5 500 5,1—6,3
500 6,2 32,5—34,5 35,2—40,0 450 5,7—6,5
350 4,2 28,0—30,0 26,4—30,6 300 6,3—7,3
200 2,4 24,0—26,0 19,0—22,5 150 7,9—9,4
При буксировке на коротком тросе возникают резкие рывки на вол-
не, поэтому чем длиннее трос, тем «мягче» буксировка. При чрезмерно
длинном тросе последний может задевать за грунт, отчего уменьшает-
ся скорость движения.
Наиболее целесообразна длина буксирного троса, кратная длине
волны. При этом буксировщик и буксируемое судно одновременно всхо-
дят на волну, а рывки троса уменьшаются. Исходя из опыта морских
буксировок рекомендуется следующая длина буксирного троса в за-
висимости от размеров буксируемых судов и силы ветра (табл. 34).
204
Таблица 34
Буксируемое судно Длина стального буксирного троса, м (диаметр 40 мм), при волнении
Грузоподъемность, г Водоизмещение, т до 3 баллов | до 6 баллов
250 450 170—180 300—350
500 800 200—220 400—450
1000 1700 250—270 500—550
2000 и более 4500 и более 300 и более 650 и более
Буксирный трос в результате больших напряжений может вызвать
повреждение кнехтов на буксируемом судне, поэтому применяется
заделка буксирного троса с помощью браги. Брага представляет собой
стальной трос диаметром 36—39 мм, имеющий на концах огоны для
заделки буксирного троса. Известно много различных вариантов креп-
ления браги. Например, брага обносится вокруг корпуса буксируемого
судна и подвешивается на серьгах к огонам, на ее концах крепится
буксирный трос с помощью скобы. Иногда брага обносится вокруг не-
скольких предметов, прочно соединенных с корпусом судна (двух или
трех пар кнехтов, комингсов, люков и кнехтов и т. д.). На видном
месте возле браги или буксирного троса необходимо иметь два острых
топора на случай аварийной отдачи буксира (известно, что даже тол-
стый стальной трос при сильном натяжении перерубается одним ударом
топора). Рубить трос лучше в месте, где он лежит на опоре.
§ 47. ПЛАВАНИЕ НА ОЗЕРАХ,
ВОДОХРАНИЛИЩАХ
И В ПРИБРЕЖНО-МОРСКИХ
РАЙОНАХ
Правила движения судов. При движении по судоходным трассахМ
или фарватерам судоводители должны избирать курс ближе к правой
по ходу стороне судового хода, а на участках с осевой обстановкой осе-
вые буи оставлять только с левого борта. Расхождение должно осу-
ществляться левыми бортами. На водохранилище при одновременном
подходе судов (или составов) к месту пересечения трасс судно, иду-
щее по дополнительной трассе, должно остановиться и пропустить
судно, идущее по основной трассе.
Расхождение судов в прибрежно-морских районах осуществляет-
ся согласно требованиям МППСС-72, а в районе морских портов —
также и требований, изложенных в обязательных постановлениях
начальников морских портов.
Порядок движения и расхождения судов на озерах устанавливает-
ся местными правилами плавания. На Ладожском и Онежском озерах
в местах применения кардинальной системы навигационного ограж-
дения установлен следующий порядок расхождения судов:
1) когда два судна с механическими двигателями идут прямо или
почти прямо друг на друга так, что возникает опасность столкновения
205
то каждое из них на расстоянии не менее 2 км должно изменить свой
курс вправо так, чтобы разойтись левыми бортами. В этом случае оба
расходящихся судна должны подать звуковые и зрительные сигналы
в соответствии с требованиями «Правил плавания по внутренним судо-
ходным путям РСФСР», не ожидая подачи сигнала со встречного
судна;
2) когда суда с механическими двигателями идут пересекающи-
мися курсами таким образом, что возникает опасность столкновения,
судно, которое видит другое судно на своей правой стороне (справа
по ходу), должно уступить ему дорогу.
Для этого оно изменяет свой курс так, чтобы пройти у другого суд-
на по корме, либо уменьшает ход, останавливается или дает задний
ход. Другое судно обязано идти прежним курсом и с той же скоростью.
Судно, которое уступает дорогу другому судну, не должно пересекать
его курс по носу;
3) каждое судно, подходящее к другому с направления, большего
чем 22°,5 (2 румба) позади траверза (т. е. находящееся относительно
догоняемого судна в таком положении, что ночью с него невозможно
видеть бортовые огни), или когда обгоняющее судно не может досто-
верно установить, находится ли оно впереди или позади указанного
направления (2 румба позади траверза) относительно другого судна, —
оно должно считать себя обгоняющим и уступать дорогу другому
судну;
4) судно, обгоняющее другое судно, при всех условиях уступает
дорогу обгоняемому судну. Обгоняемое судно должно идти прежним
курсом и с той же скоростью;
5) когда суда находятся на виду друг у друга, то судно, изменяя
свой курс, указывает об этом следующими звуковыми сигналами:
одним продолжительным «Я изменяю свой курс вправо»; двумя
короткими «Я изменяю свой курс влево».
Суда, буксирующие составы, при следовании в тумане в проме-
жутки времени не более 2 мин дают один продолжительный и два ко-
ротких звуковых сигнала; во всех остальных случаях звуковые сигна-
лы подаются согласно «Правилам плавания по внутренним судоход-
ным путям РСФСР»;
6) одиночные самоходные суда уступают дорогу парусным судам
и составам; парусные суда уступают дорогу составам. При расхож-
дении и обгоне суда и составы в открытой части озера должны иметь
интервал между бортами не менее 500 м.
Все суда, плавающие в Ладожском и Онежском озерах, несут сигнальные ог-
ни согласно «Правилам плавания по внутренним судоходным путям РСФСР».
На судах, буксирующих плоты по Ладожскому и Онежскому озерам, белый га-
ковый огонь заменяется зеленым, а плоты сигнальных огней не несут. Судно,
занятое буксировкой плотов по озерам, при приближении других судов или со-
ставов в ночное время освещает свой плот прожектором.
Ветровой дрейф и ширина судового хода. Движение буксируемого
состава во время ветра происходит под некоторым углом к избранному
курсу в результате ветрового дрейфа, поэтому состав с буксировщиком
занимает большую часть ширины судоходной трассы.
206
При плавании на водохранилищах требующаяся ширина судового
хода для расхождения буксируемого плотосостава и толкаемого сос-
тава может быть определена по формуле
^СХ = ^3 (^ПЛ “Ь ^с)’ (75)
Здесь k3 — коэффициент запаса (й3 = 1,3);
^пл> Ьо — ширина судового хода, занимаемая при движении соответ-
ственно плотосоставом и грузовым составом. Каждая
из них определяется с учетом дрейфа от ветров и сноса
течением по формуле
&пл(с> = /51Чр+у cosp, (76)
где I и В — соответственно длина и ширина плота или состава;
0 — угол дрейфа, определяемый по приближенной формуле
Р = k2 arc sin —— . (77)
Здесь k2 — коэффициент (k2 = 1,15-=- 1,20);
kY — коэффициент (fa = 0,025);
w — скорость ветра, м/с;
ит — поперечная составляющая скорости течения, м/с;
v — скорость движения состава в спокойной воде при отсут-
ствии ветра, м/с.
§ 48. ПЛАВАНИЕ В ШТОРМОВУЮ
ПОГОДУ
Подготовка к шторму Под штормовой погодой понимают такие
метеорологические условия, когда ветер и волнение представляют опас-
ность для плавания судов и составов. После получения штормового
предупреждения весь экипаж и пассажиров оповещают о надвига-
ющемся шторме, усиливают наблюдение за гидрометеорологической
обстановкой и осуществляют регулярный прием по радио прогнозов
погоды, проверяют радиосвязь, внутрисудовую связь и сигнализацию,
оценивают ожидаемую волну и степень опасности для судна или состава.
Капитан должен принять решение о курсе и скорости судна или
состава или об уходе в порт-убежище, о постановке на якорь под укры-
тием берега. Если скорость ветра превышает скорость, установленную
Речным Регистром РСФСР для данного судна или состава, капитан
должен прекратить рейс и направить судно или состав в ближайший
порт-убежище.
Подготовка судна и состава для плавания в шторм сводится к обе-
спечению водонепроницаемости корпуса судна, повышению мореход-
ности, обеспечению безопасности экипажа и пассажиров, сохранности
грузов, запасов, палубных механизмов и устройств, к проверкам и
дополнительному креплению всех предметов и грузов, которые могут
сдвинуться или упасть при качке и ударах волн.
207
Необходимо проверить исправность действия водосточных отвер-
стий на палубе, шпигатов, портов, все водонепроницаемые переборки,
трюмы, люки, клинкеты и иллюминаторы нужно плотно задраить.
Особенно тщательно проверяют и задраивают трюмные закрытия и
люковые крышки. Приводят в состояние готовности и опробовают
вес водоотливные средства. С палубы следует убрать предметы, пре-
пятствующие стоку воды, и переместить палубные грузы ближе к се-
редине корпуса. В холодную погоду для уменьшения обледенения
судна во время шторма следует очистить корпус и надстройки ото льда
и снега. Для повышения остойчивости и улучшения управляемости
па порожних судах производят добалластировку, устраняют также
крен судна.
При буксировке составов во избежание обрывов следует удлинить,
насколько позволяют глубины судоходной трассы, буксирный трос.
Длина его должна быть кратной длине волны. Если невозможно удли-
нить эти тросы, их следует утяжелить, прикрепив в средних частях
какие-либо металлические предметы (вспомогательный якорь и т. п.).
При буксировке плотов-сигар плоты разрушаются меньше, если
снизить скорость хода и избрать курс, при котором уменьшается киле-
вая качка.
На толкаемом составе для уменьшения нагрузок от ударов волн
нужно немного ослабить вожжевые тросы.
Испытания, проведенные автором, показали, что при толкании
состава, состоящего из двух рядов барж, прочность учалки всего сос-
тава может быть значительно увеличена, если баржи с наветренного
борта будут касаться жестко учаленного второго ряда барж в одной
точке.
Штормование судов. Штормование судов — особый вид маневри-
рования, выполняемого с целью исключить или уменьшить опасное
воздействие на судно ветра и волнения.
Основные способы штормования — маневрирование носом против
волны и ветра, носом по ветру, лагом к волне и ветру, в дрейфе без хо-
да, на якоре. Выбор способа зависит от характера ветрового волнения,
размеров и обводов корпуса судна, расположения навигационных опас-
ностей и габаритов пути.
Главной опасностью для судов и составов являются качка и ее
вредные последствия. Качка приобретает наиболее неблагоприятный
характер в условиях резонанса, когда колебания масс воды совпадают
с собственными колебаниями судна.
Штормование носом против волны рекомендуется применять, если
длина судна превышает длину_волны в 2—3 раза. При этом не следует
иметь большую скорость хода.
Штормование носом по волне рекомендуется производить судам,
имеющим дифферент на нос, судам малозагруженным и в балласте,
с большой парусностью и малой мощностью машин, судам, у которых
центр парусности смещен к носу. Скорость хода подбирается с учетом
достижения наименьшей качки.
К штормованию судна в положении лагом к волне прибегают в тех
случаях, когда движение против волны или по волне не может быть
208
применимо по условиям плавания. Судно в этом случае испытывает
сильную бортовую качку, и данный способ следует применять лишь
в исключительных случаях. Для судов с большой парусностью такой
способ не может быть применим при сильном шквальном ветре.
При активном дрейфе применяются плавучие якоря, которые обе-
спечивают постановку судна в наиболее выгодное в отношении ветра и
волн положение. Дрейфе применением плавучих якорей особенно бла-
гоприятен для небольших судов, катеров и шлюпок. К его помощи
могут прибегать суда, потерпевшие аварию, не имеющие хода или ли-
шенные способности управляться. Благодаря сопротивлению воды
якорь уменьшает рыскание судна и удерживает нос или корму против
ветра и волны. (Изготовляют плавучий якорь из имеющихся на судне
материалов — бревен, досок, брезента, парусины и т. д.) Плавучий
якорь вытравливается за борт с носа или кормы на прочном тросе дли-
ной не менее полутора-двух длин волны.
Штормование на якоре применяется во всех случаях, когда по усло-
виям плавания дрейф судна недопустим. Желательна отдача обоих
носовых якорей. Судно должно удерживаться носом против ветра.
Для уменьшения нагрузок на якорную цепь и рыскливости судна ма-
шинам дают малый ход вперед и рулевому задают определенный ком-
пасный курс, при этом судно не должно двигаться в сторону якорей.
Если обнаружено, что судно дрейфует, потравливают якорь-
цепи и увеличивают обороты машин. К штормованию судов на откры-
той (незащищенной) якорной стоянке следует прибегать как к вынуж-
денной мере, например когда на волне судно потеряло управляемость,
встает лагом к волне, ложится на борт.
Масляная пленка на воде задерживает волнообразование, гасит
опрокидывающиеся гребни волн (так как энергия ветра передается
не волне, а затрачивается на преодоление сил трения, возникающих
между молекулами масла на поверхности моря).
Штормовое плавание. Штормовым плаванием, в отличие от штбрмо-
вания, считается плавание судов в условиях сильного ветра и волнения
с целью продолжения рейса. Оно производится в тех случаях, когда
штормование не является обязательным.
Уменьшение опасного воздействия волн на судно в штормовых ус-
ловиях достигается выбором наиболее благоприятного курса по отно-
шению к волне и скорости на основании расчетов с тем, чтобы не до-
пустить резонансной качки и ослабить динамические нагрузки на кор-
пус судна.
Наиболее опасными являются близрезонансные режимы качки;
они наблюдаются при:
1,3> — > 0,7—для бортовой качки; *
V
1,3> — > 0,7—для килевой качки,
т'
Здесь i — кажущийся период волны;
209
7\ — период собственных продольных колебаний судна (пери-
од килевой качки);
Т2 — период бортовой качки.
Кажущийся период волн (в с) может быть определен путем замера
секундомером промежутка времени между двумя последовательными
гребнями волн. Он может быть также вычислен по формуле
/_________ Ь____________ (78)
“ 1,25 УГ± 0,61 о cos а *
где % — длина волны, м;
v — скорость хода судна, уз; при этом плюс (+) для случая дви-
жения навстречу волне, минус (—) для случая движения
по волне;
а — угол между ДП судна и направлением бега волн (курсовой
угол бега волны).
Периоды килевой и бортовой качки могут быть измерены по натур-
ным наблюдениям или вычислены по таким формулам:
7,-^УТ;
Т — k В—
(79)
В этих формулах:
Т — осадка судна, м;
В — ширина судна, м;
h — поперечная метацентрическая
Рис. 177. Универсальная штормовая диа-
грамма
высота;
kY — коэффициент = 3,04-
4-4,0; меньшее значение
для груженых судов,
большее — для порож-
них);
k2 — коэффициент (/?2=0,7б4-
4- 0,87; следует брать
среднее значение k2 =
= 0,81).
Соответствующим выбором
курса и скорости хода можно
избежать опасного явления
резонанса и значительно
уменьшить качку.
Решение этой задачи для
условий плавания на глубо-
кой воде приводится с по-
мощью универсальной штор-
мовой диаграммы, предложен-
ной Ю. В. Ремезом (рис. 177).
С помощью известной длины
волны X, отложенной по вер-
тикальной оси (в центре),
210
определяют точки пересечения горизонтали, соответствующей данной
длине волны, с кривыми т; последние соответствуют периодам киле-
вой 7\ или бортовой Т2 качки. Проекции этих точек на горизонталь-
ную ось покажут значения величины = v sin а, при которых у
судна наблюдается резонансная качка. Найденные величины, равные
0,7 и 1,3 от и Т2, покажут граничные значения, между которыми
заключена зона неблагоприятных режимов килевой и бортовой качки.
Курс и скорость хода судна выбираются с таким расчетом, чтобы
значения не находились в резонансной зоне.
Пример. Определим резонансную зону для танкера проекта № 558
грузоподъемностью 5000 т при плавании в прибрежно-морском районе во время
шторма при волне с X = 60 м. Танкер имеет ширину В = 16,5 м, поперечную ме-
тацентрическую высоту h = 4 м, осадку Т = 2 м.
Период килевой качки танкера
Ti = ft, Ут = 3,5 У Г» 5 с.
Период бортовой качки
В 16,5
= —=0.8,—=6,7а;7с.
Значения =v sin а, при которых танкер попадает в зону резонанса, оп-
ределяем по универсальной диаграмме. Для этого из точки Д на вертикальной
оси (X = 60 м) проводим горизонталь до пересечения с кривыми т = 5 с и т =
= 7 с (см. рис. 177). Затем, опустив из точек пересечения перпендикуляры на
горизонтальную ось диаграммы, определяем два значения ух, равные +5 и —2.
Это значит, что если танкер будет двигаться при а = 90°, скорости в резонанс-
ной зоне будут следующими:
Vi 5
v = —--- = - — =5 уз = 9,4 км/ч
sin a sin 90
при килевой качке и движении против волны или ветра;
Vi 2
с = ----= —— = —2 уз= —3,8 км/ч
sin а 1
при бортовой качке и движении по волне или по ветру.
Так как уравнение и1 = v sin а имеет два неизвестных v и а, то
оно допускает множество решений, т. е. позволяет судоводителю в за-
висимости от конкретных условий для избежания резонанса изменять
или скорость v, или курс судна в отношении бега волн а.
Учитывая большие динамические нагрузки, возникающие при пла-
вании в штормовых условиях, которые могут привести к появлению
трещин в корпусе, а также возможность поступления воды через раз-
битые иллюминаторы и другие незадраенные отверстия, необходимо
постоянно вести наблюдения за водотечностью корпуса судна.
Повороты во время шторма. Каждому повороту должна предшест-
вовать тщательная оценка воздействия на судно ветра и волн в про-
цессе маневра. Перед поворотом устанавливается периодичность чере-
дования групп больших и малых волн с тем, чтобы момент поворота,
когда судно встанет лагом к волне, совпадал с моментом прохождения
малых волн. При выборе направления поворота следует учитывать,
211
что поворот под ветер менее опасен, чем поворот на ветер, если аква-
тория для его выполнения практически не ограничена.
Перекладка руля в сторону поворота начинается в момент, когда
к судну будут подходить большие волны. Эти волны создают допол-
нительный момент, способствующий повороту судна.
Вторая часть поворота, т. е. вывод судна из положения лагом к вол-
не, выполняется как можно быстрее. Если после поворота судно испы-
тывает сильную качку, то более благоприятный режим качки дости-
гается последовательным изменением скоро-
сти и курса.
При повороте на ветер или на волну, если
период собственных поперечных колебаний Т2
был больше кажущегося периода волны ть
первая половина поворота должна выполнять-
ся на малом ходу, а вторая — как можно
быстрее. При обратных соотношениях Т2 и
первую половину следует выполнять на
среднем или полном ходу, вторую как можно
быстрее.
Для уменьшения силы ударов волн при
поворотах необходимо придерживаться из-
ложенных выше рекомендаций.
Постановка на якорь. Необходимость по-
становки на якорь в штормовых условиях мо-
жет возникнуть из-за технического состояния
главных машин, рулевого устройства и т. п.
Постановке на якорь должна предшество-
Рис. 178. Постановка на
два якоря в шторм
вать тщательная оценка безопасности места якорной стоянки. При
нахождении вблизи других судов необходимо предварительно опре-
делить величину их рыскания на якорях. Подходить к месту якор-
ной стоянки нужно против ветра. Постановку лучше производить
на два якоря.
К месту отдачи якорей судно следует малым ходом (рис. 178, по-
ложение /). При подходе к этому месту дается задний ход. Когда судно
получит движение назад, стопорится машина, отдается якорь (поло-
жение 5) и вытравливаются 2—3 смычки якорь-цепи. Затем руль пере-
кладывают на борт, противоположный тому, с которого отдан якорь,
и дают ход вперед (положение 4). После перемещения вперёд на рас-
стояние около. 50—60 м снова дают ход назад. В момент, когда судно
получит перемещение назад, отдают второй якорь (положение 5) и
стопорят машины. Якорь-цепь второго якоря медленно травят на 2—3
смычки, выравнивают натяжение обеих якорь-цепей и затем берут на
стопоры (положения 6 и 7).
На больших глубинах якоря отдают после вытравливания якорь-
цепи с помощью брашпиля.
Оказание помощи другим судам. Наиболее ответственной и сложной
частью маневрирования при оказании помощи другим судам является
принятие на буксир судна, которому оказывается помощь. В штормо-
вую погоду часто нельзя передать буксирный трос при помощи бро-
212
сательных концов и не предоставляется возможным спустить шлюпку.
Если ветер и волнение очень сильны, а с подветренной стороны судна,
которому оказывается помощь, имеется значительное глубоководное
пространство, лучше подождать с подачей буксирного троса до улуч-
шения обстановки, в то же время наблюдая за сигналами и находясь
в постоянной готовности, оказать экстренную помощь.
Если помощь оказывается буксируемым судам из-за обрыва одной
или нескольких барж, соединенных между собой промежуточными бук-
сирами, то прежде всего с головной баржи нужно отдать якорь (так как
под влиянием сопротивления и тяжести соединительных буксирных
тросов баржи могут сблизиться и нанести друг другу большие повреж-
дения).
Если принято решение о немедленной подаче буксира, то к дрей-
фующим груженым и низкобортным судам во избежание навала не сле-
дует подходить с наветренной стороны. К судну, имеющему высокий
борт и малую осадку, или к порожним судам опасно подходить с под-
ветренной стороны. Не рекомендуется подходить с подветренной сто-
роны к судам, дрейфующим вблизи отмелей.
При невозможности подать буксирный трос с помощью бросатель-
ного конца его подают с помощью проводника и прикрепленных к не-
му деревянных предметов или остропленных бочек. Судно, подающее
буксир, буксирует стравленный в воду проводник, свободный конец
которого удерживается на плаву за счет прикрепленных к нему дере-
вянных предметов. Затем судно совершает циркуляцию вокруг дрей-
фующего судна. Маневрирование производят таким образом, чтобы
свободный конец проводника подошел к борту судна, которому ока-
зывает помощь, после чего с помощью проводника подается буксир-
ный трос.
Глава VIII
УПРАВЛЕНИЕ СУДАМИ ПРИ ПЛАВАНИИ
В ЛЕДОВЫХ УСЛОВИЯХ
§ 49. ПЛАВАНИЕ ВЕСНОЙ
Плавание транспортных судов, имеющих ледовое подкрепление,
разрешается в весенних льдах разрушенностью свыше 2 баллов.
В более тяжелых льдах эти суда должны проводиться ледоколами.
Перед выходом обязательно проверяют состояние корпуса, винтов
и рулевого устройства, водоотливных средств, навигационных прибо-
ров, аварийных материалов. Необходимо получить информацию о ле-
довой обстановке. Опасны для судов весенние подвижки льда, ледо-
ход, сжатия и торошения льда, которые лучше переждать в затоне,
за выступом берега или островом. При отсутствии укрытий нужно
подойти к берегу и, переложив рули (рис. 179), дать машинам ход
213
вперед. Если зажатое льдом судно начнет двигаться вместе со льдом,
нужно с помощью балласта увеличить осадку и создать дифферент
на нос. В случае посадки на мель это обеспечит менее опасную стоянку
форштевнем против наплывающего льда и облегчит съемку с мели.
При попадании в зону сжатия льдов нужно откачать балласт и умень-
шить осадку, с тем чтобы лед более свободно мог уходить под корпус, и
вывести судно из этой зоны, углубившись на 50—100 м в неподвижный
или неразрушающийся сплошной
лед.
На рис. 180 приведена ледо-
проходимость сплошных льдов не-
которыми судами и ледоколом
«Дон» (определены по натурным
испытаниям В. А. Трониным и
Ю. А. Сандаковым).
Толщина льда на реках и водо-
хранилищах средних широт со-
ставляет 0,7 — 0,8 м, реках Сиби-
ри — 1,2 м, поэтому продвижение
возможно только при работе набе-
гами. После заклинивания и оста-
новки судна во льду оно отходит
назад для разбега в канале, запол-
ненном битым льдом, и затем нано-
сит удар форштевнем о кромку
целого льда. Продвижение осу-
ществляется за счет кинетической
энергии, накопленной при разбе-
ге, и упора движителей. Так рабо-
тают весной ледоколы в течение 3—10 сут при прокладывании кана-
лов для транспортных судов во льдах водохранилищ.
На рис. 181 показаны зависимость скорости продвижения ледоко-
ла «Дон» упр от толщины льда при оптимальном режиме работы, когда
длина разбега /раз составляет 140—170 м. Для ускорения прокладки
каналов применяется парная работа двух ледоколов или ледокола и
буксировщика, которые ставятся в кильватер один за другим вплотную.
Как показано на рис. 181, ледопроходимость в этом случае значитель-
но повышается. Проложенный канал бывает заполнен битым льдом
сплоченностью 9—10 баллов. В табл. 35 приведена скорость движения
теплоходов типа «Волго-Дон» и «Шестая пятилетка» в весенних би-
тых льдах.
Движение в битых льдах судов транспортного флота является ха-
рактерной особенностью ледового плавания. Груженые суда обладают
лучшей ледопроходимостью, чем порожние.
Суда, идущие в одном направлении или в одни и те же притоки,
объединяются в караваны. Проводку каравана возглавляет капитан-
наставник или капитан ледокола. Единое руководство позволит регу-
лировать движение, определять режим работы главных двигателей
каждого судна, сохранять заданный интервал, не допускать отстава-
214
Таблица 35
Разрушенность ледяного покрова, баллы Скорости движения, км/ч, теплоходов типа <Волго-Дон» (I) и <Шестая пятилетка» (II) в весенних битых льдах при их толщине, м
0,2 0,3 0,4 0,5
1 1 " 1 1 И 1 1 11 1 1 11
Битый лед сплоченностью 9—10 баллов
2—3 13 6,5 9 4,5 5,5 2,5 3 0
3—4 14 10 10,5 6,5 7,5 4,0 4 2
4-5 14,5 14 12,5 10,5 10,5 7,5 7,5 5
Битый лед сплоченностью 8 —£ 1 баллов
2-3 I 1 15 9 13 6,5 11,5 5 9 3
3-4 1 17 11,5 16 10,5 14 8 11,5 5
4-5 | 19 - 18,5 — 18 — 17,6
ния и задержки судов с меньшей ледопроходимостью. За ледоколом
ставят наиболее мощное судно с прочным корпусом, затем суда малой
мощности. Последующие суда расставляют по мере увеличения их
мощности. Суда, оборудованные винтовыми насадками, предпочтитель-
Рис. 180. Ледопроходимость речных
судов:
Глр—скорость судна; h — толщина льда
Рис. 181. Зависимость скорости про-
движения ледокольных судов сПр от
толщины льда h:
—----— ледокол проекта № 16;----состав
из двух ледоколов;------состав из ледо-
кола и теплохода 4-800
нее ставить к голове колонны. Судоводители должны строго выдержи-
вать интервалы движения, не покидать назначенных мест, поддержи-
вать постоянную радиосвязь.
Нельзя назначать слишком плотный строй каравана. Это может
вызвать столкновение судов. В табл. 36 приведены величины пути
торможения судов в битых льдах разрушенностью от 1 до 5 баллов,
определенные В. А. Трониным.
Если судно затирается льдом и его скорость резко уменьшается,
оно подает сигнал «Предупреждение». Идущее сзади судно, двигаясь
215
Та блица 36
Путь торможения, м, при толщине льда, м
Тип судна ° 1 °-2 1 | о,з 0,4 0,5
«Волге-Дон» 600 350 200 70 0
400 300 200 100
«Шестая пятилетка» 520 250 120 50 0
300 200 90 50
в редком льду, должно переложить руль в сторону того борта, где лед
имеет меньшую прочность, чтобы выйти из кильватерного следа впе-
реди идущего судна, и затем дать полный ход назад.
При плавании во льдах обход участков с тяжелой ледовой обста-
новкой обычно экономит время и является более безопасным.
При приближении к кромке льда, во избежание пролома корпуса,
нужно уменьшить ход. Входить в лед нужно после тщательного
его обследования, определения направления ветра и течения. Курс
судна следует выбирать ближе к выпуклому берегу при движении
на реках с течением и ближе к наветренной стороне судового хода
при движении на шлюзованной реке, водохранилище или озере. От-
дельно плавающие льдины целесообразно обходить. Входить в кромку
льда нужно под углом, близким к прямому. При заходе в кромку
льда на большой скорости под острым углом можно прорезать обшивку
корпуса.
Винты при движении и маневрировании во льдах большей частью
повреждаются в случаях, когда судно находится в движении при засто-
поренном винте. Поэтому реверс машин при движении во льду нужно
производить быстро.
Во время маневрирования во льдах во избежание поломки рулей,
винтов и проломов корпуса необходимо придерживаться определенных
правил.
1. При пуске движителей на задний ход руль нужно ставить в по-
ложение «прямо» до момента, пока судно получит передний ход после
нового реверса.
2. Если столкновение со льдом неизбежно, то удар следует при-
нимать форштевнем.
3. Делая повороты в тяжелых льдах, нужно воздерживаться
от крутых поворотов, не допускать ударов кормой о лед.
4. При движении в сплошном льду не рекомендуется прибегать
к частым перекладкам руля.
5. После остановки судна и машин во льду нужно предварительно
освободить корму от обломков льда, поработав машинами малым хо-
дом, и только после этого можно дать полный ход и перекладывать руль.
Если после работы движителей на полный задний ход судно оста-
ется неподвижным, нужно раскачать его при помощи руля. Остаю-
щееся неподвижным судно при невозможности получить постороннюю
помощь для освобождения от заклинивания может быть освобождено
216
применением ледового якоря, который завозится с кормы и заклады-
вается в лунку, проделанную во льду. Набивая якорный трос браш-
пилем и работая двигателями на задний ход, освобождают судно от зак-
линивания. Иногда применяют околку льда вокруг судна.
§ 50. ПЛАВАНИЕ В ОСЕННЕЕ
ВРЕМЯ
Самостоятельное плавание транспортных судов разрешается в осен-
них льдах толщиной до 0,25 м. При наступлении осеннего ледохода
организуются караваны судов для прохождения участков пути с тя-
желой ледовой обстановкой. Для подготовки плавания во льдах на су-
дах проводятся такие же мероприятия, как и при плавании во время
весеннего ледохода.
Осенний лед обладает большой прочностью. Крепость льда зависит
от температуры воздуха. Например, при температуре воздуха —9° С
лед (в пресных водах) достигает прочности кирпича.
Рис. 182. Схемы буксирных составов, проводимых на Камском водохранилище:
I — 1-й состав; // — 2-й состав; III — грузовые теплоходы, имеющие на буксире одно-два
судна
Снежный покров на льду значительно затрудняет продвижение
судов.
Резкие колебания уровня воды являются одним из важных условий
ледового плавания. На реках во время ледохода в штилевую погоду
движение льда происходит обычно по стрежневой части реки. Вблизи
берегов с прижимным течением часто нагромождаются торосы. На во-
дохранилищах движение льда происходит в основном под действием
ветра. Лед скапливается на отдельных участках водохранилища.
Период плавания во льдах характеризуется большим количеством
осадков, частыми туманами и темными ночами, поэтому большую по-
мощь в это время может оказать судоводителю радиолокатор.
Буксировка является наиболее распространенным видом провод-
ки судов во льдах. Буксировку осуществляет ледокол или ледокольное
судно. Толкание судов в ледовых условиях затруднительно. Впереди
баржи, а также между баржой и толкачом скапливаются обломки
льда, тормозящие, а нередко останавливающие движение. Буксиров-
217
ка осуществляется в особо тяжелых условиях, за кормой вплотную,
в менее тяжелых льдах на коротком буксирном тросе (длиной 1,5 4-
4- 15 м), при плавании в разреженных льдах —на тросе длиной 30—
ГО м. Состав формируют в кильватер с промежутками между судами
2—5 м (рис. 182, I, III). Первое судно должно иметь наибольшую
Рис. 183. Проводка колесных судов в тяжелых ледовых условиях
прочность и ширину. Колесные пароходы проводят под прикрытием
спаренных барж или грузовых теплоходов (см. рис. 182, II), а при про-
водке в тяжелых ледовых условиях — при учалке «углом» (рис. 183).
Иногда, в связи с продолжительной штормовой погодой в период,
предшествующий ледовым явлениям, происходит задержка плотов,
которые приходится буксировать во льдах. В головной части плота
Рис. 184. Схема буксировки плота в сложных ледовых условиях:
/-ледокол-буксировщик; 2 — вспомогательные буксировщики; 3 — продольные лежни; 4-*
ленты из хлыстовых пучков; 5 — секции из пучков сортиментных бревен; 6 — поперечные
лежни
устанавливают угольник из хлыстовых пучков. Ледокол осуществляет
буксировку на тросе длиной 40—50 м. В передней части плота ставятся
вспомогательные буксировщики. В более сложных ледовых условиях
переднюю часть плота защищают двумя ледокольными буксировщи-
ками, а по бортам плота ставят четыре буксировщика (рис. 184).
При работе всех буксировщиков одновременно обеспечивается доста-
точная тяга и минимальное ледовое сопротивление. Обе схемы реко-
мендуются и для буксировки плота по водохранилищам в штормовую
погоду.
218
§ 51. СТОЯНКА СУДОВ ВО ВРЕМЯ
ЛЕДОСТАВА '
Суда становятся на зимний отстой, как правило, на акваториях
судоремонтных заводов, ремонтно-эксплуатационных баз (РЭБ).
В редких случаях суда зимуют в случайных пунктах на плесе. Тогда
выбирают защищенные от ледохода места — в устьях небольших рек,
за рынком гор и т. д.
Перед расстановкой судов на зимовку составляют план расстановки
судов в затоне. План согласовывается с судоходной инспекцией и ор-
ганами пожарной охраны.
При составлении плана учитывается объем и характер предстоящих
ремонтных работ и расположение цехов судоремонтного завода
(с целью приблизить суда к цехам, на которые планируется больший
объем ремонтных работ).
Расстановкой судов на зимний отстой руководит караванный ка-
питан, назначаемый из числа наиболее опытных капитанов. Суда уста-
навливают в линии из однотипных судов. Одно буксирное судно или
толкач назначается дежурным.
Груженые суда ставят ближе к берегу. Суда, перевозящие огнео-
пасные грузы, ставят в отдельные затоны, при постановке же в общий
затон их ставят возможно дальше от судов, перевозивших сухогрузы,
и пассажирских судов.
Поставленные на зимовку суда швартуют к берегу на расстоянии
от него, обеспечивающем безопасность стоянки с учетом колебаний
уровня воды в затоне.
До постановки в затон на судне производится зачистка корпуса.
Наиболее ценный инвентарь сдается для хранения на склад ре-
монтно-эксплуатационной базы.
До консервации машин производят испытание пожарной магист-
рали и удаляют воду из шлангов и насосов.
После зачистки РЭБ принимает судно для ремонта, о чем состав-
ляется акт. Проживание команд на судне и разведение огня с этого
момента запрещаются. В дальнейшем для проведения ремонтных
работ с применением огня (сварка, резка металла и т. д.) необходимо
получить письменное разрешение от администрации РЭБа и пожарной
охраны.
Администрация РЭБа совместно с караванным капитаном и пред-
ставителем ВОХРа устанавливают правила противопожарной безо-
пасности и доводят их до сведения экипажей судов.
На зимующем караване судов устанавливается круглосуточное
дежурство.
Если затон не защищен естественным высоким берегом или рын-
ком гор, устраивают специальные ледозащитные устройства или до
начала ледохода с помощью ледоколов суда из затона переводят в бли-
жайшее укрытие.
Одним из способов защиты от ледохода мест постоянных зимовок
флота является устройство ледорезов. Иногда для защиты судов
от ледохода устраивают ледовую дамбу.
219
Глава IX
УПРАВЛЕНИЕ СУДАМИ И СОСТАВАМИ
В ОСОБЫХ СЛУЧАЯХ
§ 52. БУКСИРОВКА
ГРУЗО-ПАССАЖИРСКИМИ
И ГРУЗОВЫМИ СУДАМИ ДРУГИХ
СУДОВ
Буксировку грузо-пассажирскими и грузовыми судами осущест-
вляют: за кормой на тросе; под бортом (лагом); толканием.
Буксировка грузо-пассажирскими судами — редкое исключение.
Она может производиться при наличии у капитана специального
разрешения.
________ Буксирный трос на грузо-пасса-
С Z) жирские суда крепится с помощью
двух бухт. Бухты пропускаются
®__________________________ через порты или кормовые шлюзы
CZ ) и соединяются с буксирным тро-
сом с помощью скобы (рис. 185, а).
6)__________________________Буксировка может производить-
) ся и с помощью двух тросов (схе-
мы на рис. 185, б, в).
Рис. 185. Способы крепления буксир- Буксировка за кормой на тро-
ного троса на грузо-пассажирском се Г.рузОВЫМИ Судами прОИЗВОДИТ-
сУдне ся чаще. В Северо-Западном па-
роходстве грузовые теплоходы
типа «Ленинград» при движении против течения буксируют по два
лихтера, учаленных в кильватер (рис. 186).
Буксирный гак грузового теплохода находится на корме, по-
этому при больших нагрузках на буксирный трос поворотливость
грузового теплохода будет резко ухудшаться.
Рис. 186. Состав из двух лихтеров, буксируемый грузовым теплоходом
Буксировка грузовыми теплоходами за кормой на тросе возможна
на судоходных путях с большими радиусами кривизны и большой
шириной судового хода. На шлюзованных реках более безопасной
является буксировка под бортом.
При движении в порожнем состоянии толкаемый состав из грузо-
вого теплохода и баржи-приставки плохо управляется во время силь-
ного ветра. В этом случае порожняя баржа-приставка ставится под
правым бортом грузового теплохода (рис. 187, а).
220
Буксировка грузовыми теплоходами барж-приставок в кильва-
тер (рис. 187, б), а также пассажирскими теплоходами пригород-
ных линий барж-веранд методом толкания за последние годы широко
применяется во всех бассейнах. Для толкания носовая часть грузо-
вых и пассажирских теплоходов подкрепляется и оборудуется двухупор-
ным тросовым сцепом или автосцепами. В отдельных случаях грузовые
теплоходы на Волге и других реках буксируют по две баржи методом
толкания, одна из которых ставится в кильватер, а другая — с пра-
вого борта теплохода (рис. ------------\
18?, е). 0. СрД)
При толкании барж-приста- 7 S' г
вок в груженом состоянии наи- Х :——----------------
большая скорость достигается
тогда, когда осадка у баржи и V >
теплохода одинакова. 4-------— ' ——
Рис. 187. Схемы составов для грузо-
вых теплоходов
При буксировке за кормой на
тросе суда несут световые сигналы,
установленные для буксирных судов.
При буксировке под бортом на мачте
поднимаются три вертикально рас-
положенных топовых огня — два бе-
лых и между ними зеленый, кроме
того, отличительные огни и гака-
бортные.
На судне, которое буксируют, в этом случае поднимают два белых огня на
мачте с дугою освещения 360° и со стороны внешнего борта. При буксировке под
бортом судов с нефтегрузами 2, 3 и 4-го классов на буксирующем судне топовый
зеленый огонь заменяется красным и буксируемое судно на мачте несет красный
огонь.
В случае буксировки под бортом на переднем ходу сила упора
движителей и равнодействующая сил сопротивления воды движению
состава образуют поворачивающий момент, направленный в сторону
буксируемого судна, поэтому диаметр циркуляции состава меньше
в сторону борта, с которого находится несамоходное судно.
При гашении скорости переднего хода работой движителей на
задний ход состав уклоняется в сторону свободного борта буксиров-
щика.
В начале движения состав уклоняется в сторону борта, с которого
находится буксируемое судно, и лишь после достижения определенной
скорости начинает слушаться руля и уклоняться в желаемую сто-
рону.
При толкании грузовыми теплоходами барж-приставок увеличи-
вается непросматриваемая зона впереди состава, ухудшается пово-
ротливость. Все это осложняет маневрирование.
Заход на перекат производится по общим правилам, а выход с пе-
реката, подвалье которого расположено близко к яру, имеет свои осо-
бенности. Сначала состав малым ходом идет по линии створа (рис. 188,
положение /). Затем руль перекладывается влево на 10—15° (положе-
ние 2). При подходе к нижнему поворотному бакену ход прибав-
ляют до полного, а руль перекладывают влево на 15—25° (положе-
ние 3).
221
Рис. 188. Схема прохождения груже-
ным теплоходом с баржей-приставкой
переката
После того как половина состава пройдет поворотный бакен, руль
перекладывают в сторону яра. В таком положении состав следует до
тех пор, пока не встанет параллельно яру. В положении 3 наблюдает-
ся наибольший свал состава в
сторону яра; поэтому выбирают
ориентир С, на который должен
быть направлен состав. На
участке С — В навал также воз-
можен; поэтому в положении 4
выбирают ориентир В и по
нему ведут состав.
При движении по течению
рекомендуется выполнять обо-
рот в сторону наименьших ско-
ростей течения с отдачей носо-
вого якоря.
На выполнение оборота за-
трачивается около 25—30 мин,
за это время состав сносит по течению. При наличии сильного вет-
ра оборот надо делать с помощью вспомогательного буксира.
§ 53. БУКСИРОВКА ДВОЙНОЙ
ТЯГОЙ
Для более быстрого прохождения участков с опасным ветровым
волнением или участков с большими скоростями течения при провод-
ке составов во льдах применяется буксировка двойной тягой.
Со вспомогательного буксировщика буксирный трос подается на
основной через якорный клюз или клюзы в фальшборте и закрепляет-
ся на носовых швартовных кнехтах. При оказании помощи в буксиров-
ке на короткое расстояние и при отсутствии ветрового волнения вспо-
могательный буксировщик швартуется к борту коренного или к борту
головной баржи состава.
Если буксировщики идут в кильватер, то в темное время суток передний из
них несет топовые огни, установленные для буксирных судов в зависимости от
рода груза в буксируемом составе, бортовые, гаковый и гакабортные огни, уста-
новленные для самоходных судов. На втором буксировщике несутся такие же
огни, как и на переднем, за исключением бортовых огней, которые выключа-
ются.
Второй буксировщик во время расхождения с судами никаких сигналов не
подает. Управляет движением состава, подает звуковые и зрительные сигналы
и несет Ответственность за безопасность плавания вахтенный начальник впереди
идущего буксировщика.
При оказании помощи во время съемки с мели каждый из буксировщиков
несет самостоятельно положенные сигнальные огни. Ответственность за управ-
ление срстаром при этсм возлагается на липо, руководящее операцией по ока-
занию помощи.
Если вспомогательный буксировщик при рказании помрщи пришвартовался
к борту основного, то каждый буксировщик несет самостоятельно положенный
огни, за исключением внутренних бортовых огней, которые выключаются. От-
ветственность за безопасность движения, подачу звуковых и световых сигналов
возлагается на судно, с которого нодан на состав буксирный трос.
222
Если вспомогательный буксировщик пришвартовался к составу, то он несег
на мачте один белый топовый огонь, один белый огонь на краю капитанского мо-
стика с ходовой стороны, а также гаковый и гакабортные огни.
Вспомогательный паротеплоход, работающий у плота в помощь буксиров-
щику, несет те же огни, что и плотовод.
При вождении составов двойной тягой одновременно на буксире и способом
толкания (допускается как исключение) по местным правилам Волжского бассей-
на состав несет следующие сигнальные огни: буксировщик —сигнальные огни,
предусмотренные для буксирных судов в зависимости от рода груза в баржах
состава; паротеплоход-толкач — один белый клотиковый на мачте и один белый
гаковый (бортовые и гакабортные огни выключаются); буксируемые баржи —
обычные сигналы, как при движении на буксире. Управляет движением со-
става и несет ответственность за обеспечение безопасности плавания вахтенный
начальник головного буксировщика.
§ 54. ПОДХОД К БОРТУ
МАЛОМЕРНЫХ СУДОВ,
ПОЛЬЗОВАНИЕ ШЛЮПКОЙ
Для вызова шлюпки (лодки) с берега, судна, с обстановочного
поста, а также при обращении к другому судну с просьбой подойти
к своему борту подаются один .продолжительный, один короткий
и один продолжительный звуковые сигналы.
Вахтенный начальник судна для приема шлюпки должен получить
разрешение капитана, предупредить вахтенного механика. Не сле-
дует производить прием шлюпки в штормовую погоду, при расхожде-
нии судов и на затруднительных участках пути.
До приема шлюпки следует уменьшить ход до самого малого и ид-
ти, не меняя курса. На колесных грузо-пассажирских судах шлюпка
принимается к корме в районе штормтрапа, на винтовых судах —
к средней части судна, на колесных буксирных судах — к носовой
части. В месте приема подготавливаются бросательный линь, закреп-
ленный на кнехтах, и отпорный крюк или багор.
Сблизившись с судном, шлюпка начинает постепенно уклоняться
в сторону судна. С судна на шлюпку подается бросательный конец,
который крепится на шлюпке за носовую банку шлюпочным узлом.
Для предотвращения удара шлюпки о борт судна отпорным крюком
удерживают нос шлюпки. Затем со шлюпки на судно подают фалинь
и в шлюпку спускают штормтрап.
После того как шлюпку прочно закрепят, приступают к высадке
пассажиров или выгрузке груза. При этом развивать большую ско-
рость хода нельзя, так как шлюпку может залить водой.
После высадки и посадки людей, как только команда шлюпки зай-
мет свои места, отдается фалинь. С помощью отпорного крюка отво-
дят нос шлюпки от борта судна (в это время баковый гребец удержи-
вает конец, поданный с судна). Отпорным крюком отталкивают нос
•шлюпки, баковый гребец освобождает конец, и гребцы начинают
грести. После удаления шлюпки судно увеличивает скорость движения.
Уметь управлять шлюпкой обязаны все судоводители.
Общие правила пользования шлюпкой следующие:
никогда не следует стоять в шлюпке и сидеть на ее борту, нельзя
перегружать шлюпку;
223
при выгребании против зыби и волн следует облегчить нос шлюпки,
а при движении по ветру — корму;
при плавании на фарватере запрещается пересекать курсы судов
и двигаться вблизи них;
при движении под парусами не следует крепить шкоты парусов
намертво;
‘во избежание опрокидывания не следует курс шлюпки’ избирать
вдоль гребней волн;
при плавании в темное время суток на шлюпке должен иметься бе-
лый огонь.
Спасательные шлюпки должны быть укомплектованы постоянной
группой гребцов; наиболее сильных и опытных назначают загребными.
Во время гребли все гребцы сидят в шлюпке лицом к корме и рав-
няются по загребным. Заносить весло и проводить его в воде надо на
вытянутых руках, лопасть весла опускать в воду не более чем на 2/3
ее длины. При заносе лопасть должна быть горизонтальна к поверх-
ности воды. При опускании в воду и выходе из воды лопасть развора-
чивают на угол около 60° к поверхности воды.
Действия гребцов должны выполняться только по команде стар-
шины шлюпки. По команде «Отваливай» баковый гребец отпорным
крюком отталкивает нос шлюпки; по команде «Весла» гребцы вставляют
уключины, а в них — весла и удерживают их перпендикулярно борту;
по команде «На воду» начинают грести; при необходимости увеличить
скорость шлюпки подается команда «Навались» — в этом случае
гребцы делают более сильные рывки веслами.
Команда «Суши весла» подается, чтобы гребцы перестали грести
и держали весла параллельно поверхности воды. По команде «Весла
в воду» гребцы опускают весла в воду на треть длины лопасти, чтобы
резко затормозить ход шлюпки. Команда «Табань» подается в тех
случаях, когда шлюпке необходимо сообщить движение назад. По
этой команде все гребцы начинают грести в обратную сторону.
Если требуется сделать крутой поворот влево, командуют «Суши
левая» или «В воду левая». При развороте на месте подают команду
«Правая навались —левая табань», или наоборот. По окончании разво-
рота, если шлюпка должна следовать вперед, командуют «Обе на воду».
При снятии с мели или отходе от берега подается команда «Вес-
ла на угол». По этой команде гребцы упираются рукояткой весла
в дно реки, толкая шлюпку в нужном направлении.
Парусные и парусно-моторные суда при движении только под парусами
несут бортовые отличительные сигнальные огни, расположенные под нижней
шкаториной паруса, и гаковый белый огонь. При работающих двигателях
эти суда несут сигналы, установленные для судов с механическими двигателями.
На стоянке парусно-моторные .суда несут такие же сигнальные огни, как само-
ходные, а парусные — как несамоходные суда.
Катера, шлюпки и лодки с подвесными и стационарными моторами мощ-
ностью до 25 л. с., гребные лодки и шлюпки при движении в пределах судового
хода несут белый огонь, видимый по горизонту на 360°. При мощности мотора
более 25 л. с. катера и лодки несут сигналы, установленные для судов с механи-
ческим двигателем.
224
§ 55. УПРАВЛЕНИЕ СУДАМИ
ПРИ СНЯТИИ С МЕЛИ
Причины и предупреждение посадки судов на мель. Причинами
посадки судов на мель обычно являются:
нарушения Правил плавания, правил технической эксплуатации
и Устава службы на судах;
недостаточное знание судоводителями района плавания и особен-
ностей маневрирования судами;
недостатки в расположении знаков судоходной обстановки;
нарушения трудовой дисциплины;
метеорологическая обстановка — туманы, сильные ветры.
Посадки судов на мель — один из основных видов аварий на реч-
ном транспорте. Эти аварии особенно опасны при спаде паводков,
так как могут привести к обсушке судна.
Повышение теоретических знаний судоводителей и работников,
связанных с обслуживанием флота и пути, а также укрепление трудо-
вой дисциплины способствуют уменьшению количества аварий. Боль-
шую пользу в деле предупреждения аварий приносит разбор и изу-
чение аварийности в бассейне данной реки.
При появлении угрозы посадки на мель судоводитель должен:
дать полный ход назад, если опасность обнаружена на расстоя-
нии, превышающем путь торможения;
остановить двигатели, если налицо опасность повреждения дви-
жителей;
дать полный ход вперед, если судно идет задним ходом и ему гро-
зит опасность посадки на мель кормой.
Перекладка руля в сторону от грозящей опасности во многих слу-
чаях предотвращает посадку судна на мель.
Отдача кормовых якорей при переднем ходе всегда будет способ-
ствовать уменьшению вероятности посадки на мель.
После посадки на мель капитан объявляет аврал. Первый штур-
ман проверяет корпус судна, замеряет уровень воды, принимает меры
к отысканию и заделке пролома корпуса. Второй штурман произво-
дит промер глубин вокруг судна и определяет возможность работы
движителями. Третий штурман производит расчет потребной силы для
съемки с мели и ведет постоянную запись в вахтенном журнале о всех
проводимых мероприятиях.
При посадке на мель в озере, крупном водохранилище или на
морском рейде нужно запросить ближайшую метеорологическую стан-
цию о прогнозе погоды. Следует сообщить диспетчеру о времени
и месте посадки, о характере и размерах требующейся помощи.
После промеров глубин устанавливают направление съемки и
возможности подхода других судов к борту сидящего на мели судна.
Способы снятия судна с мели. Чтобы определить, сможет ли суд-
но сойти с мели, необходимо установить величину потери осадки:
ДТ = Т'р-Т''р, (80)
где Т'р — средняя осадка до посадки на мель, м;
• Тер — средняя осадка после посадки на мель, м.
8 С. Б. Ольшамовский 225
Средняя осадка определяется по формуле
’ _ Т'н + ^ср. п. б + Лф. л. б + Т'к
СР“ л
(81)
где Тн — осадка носа, м;
7Ср.п.б — осадка в районе миделя по правому борту, м;
Тср.л.б — осадка в районе миделя по. левому борту, м;
Тк — осадка кормы, м.
При проломе корпуса и заполнении отсека водой осадка (в м>
увеличивается на
где V — объем воды в затопленном отсеке, м3;
S — площадь грузовой ватерлинии до затопления отсека, м2;
AS — площадь уровня воды в затопленном отсеке, м2;
k — коэффициент, зависящий от наличия в отсеке груза (k =
= 0,6 4- 0,95).
Общая потеря осадки
ДТобщ = АТ + ДГ. (83)
Сила давления на грунт
Р = ДГобщ <7,
где q — число тонн, изменяющих осадку на 1 см;
* = Fo- (84>
Необходимое усилие для съемки с мели
Я = k'P, (85)
где k' — коэффициент трения о грунт корпуса судна. Значения коэф-
фициента k' следующие:
Жидкая глина.......................................... 0,18—0,22
Мягкая глина............................................ 0,23—0,30
Глина с песком........................................ 0,30—0,32
Песок .................................................. 0,35—0,38
Галька ................................................ 0,38—0,42
Каменистая плита ..................................... 0,30—0,42
Каменный булыжник..................................... 0,42—0,50
Силу упора движителей F на переднем ходу можно определить по
паспорту, диспетчерскому справочнику или по приближенной формуле
F = , (86)
5ис
где Nt — мощность двигателей;
vc — скорость судна при полном ходе.
Сила упора на заднем ходу F3.x принимается на 20—30% меньше.
226
Судно сойдет с мели, если F3>x > Судно не сойдет с мели, если
Льх < R- Необходимое дополнительное усилие
Рд = Я ^з.х-
Если Fn равно или меньше суммарного усилия, которое может со-
здать шпиль или брашпиль, а кренование и дифферентовку провести
почему-либо невозможно, судно с помощью своих средств сняться
с мели не может.
Потребная дополнительная мощность
(п)=^д 5уСр» (87)
где уср — средняя скорость буксирного судна.
При возможности применять дифферентование, заранее зная рас-
стояние, на которое будет переноситься груз, можно определить коли-
чество груза, которое нужно переместить.
Момент изменения дифферента на 1 см
или (88)
В последних формулах D—водоизмещение судна; Но — большая
метацентрическая высота; L — длина судна.
Дифферент (в град) от перемещения груза весом Р на расстояние I
Pl
а= — .
т
Задавшись величиной дифферента, можно определить количество
груза, которое надо перенести.
Различают следующие способы снятия судна с мели.
С помощью главной машины. Способ применяется
сразу же после выяснения возможности работать движителями. При
посадке на переднем ходу двигателям дается полный ход назад в тече-
ние 5—10 мин. Затем их останавливают и спустя 4—5 мин снова повто-
ряют этот прием. Если корпус судна начинает дрожать, то движите-
лями работают до снятия с мели. По поставленной вертикально на грунт
наметке определяют, движется судно или стоит на месте.
Длительная беспрерывная работа на задний ход не рекомендуется
из-за размыва грунта в районе кормы и отложения его по бортам
в середине и носовой части судна, что усложняет снятие с мели.
С помощью главной машины и руля. На двух-
винтовых судах работают движителями на передний и задний ход
и перекладывают руль с борта на борт. На колесных и одновинтовых
судах дают полный ход вперед и перекладывают руль с борта на борт.
После этого дают полный ход назад и также перекладывают руль, пов-
торяя эти действия несколько рйз.
8* 227
Если при раскачивании корма судна отклоняется в ту или иную сторо-
ну, то нужно продолжать маневры до полного снятия с мели.
' С помощью завезенного якоря. При завозке
якоря необходимо, чтобы все гребцы шлюпки умели плавать' и были
в спасательных нагрудниках.
Якорь завозят с той части судна, которая не сидит на мели. На-
правление завозки якоря определяют с учетом действующего на судно
ветра или течения.
Обычно используют запасной якорь и реже носовые якоря.
При недостаточной грузоподъемности одной шлюпки используют
две, между которыми подвешивают якорь. После закрепления якоря
на шлюпке в нее укладывают шлагами трос с таким расчетом, чтобы
можно было его легко травить.
Отдача якоря производится по команде с судна.
Ходовой конец троса, к которому прикреплен якорь, выбирается
шпилем или брашпилем. Для увеличения натяжения троса можно хо-
довой конец оборудовать талями.
Для снятия небольших судов с мели можно дополнительно исполь-
зовать съемную свайку или производить кренование и дифферен-
тов ку.
С помощью кренования и дифферентовки.
Дифферентовка производится перекачиванием жидкого топлива из
носовой цистерны в кормовую или наоборот, а также перекачиванием
воды в балластных отсеках.
При снятии судна с мели можно использовать все средства и условия,
облегчающие съемку.
Когда судовые волны проходящего судна подойдут к судну, стоя-
щему на мели, оно раскачивается, и если в этот момент дать машине
полный ход, судно может сойти с мели.
При посадке на вязкий грунт, например ил, корпус судна приса-
сывается и снятие с мели становится затруднительным. Если несколько
раз провести вдавливание корпуса судна в грунт путем накачивания
воды в отсек и быстрого откачивания из него, снять судно с мели будет
легче.
Промывка грунта под корпусом судна может быть эффективной
на песчаных и илистых грунтах. *
Снятие с мели состава. После посадки на мель состава необходимо
вначале применять такие же действия, как и при снятии с мели само-
ходного судна. Если состав разворачивается течением и может быть
поставлен «взамет», т. е. поперек струй течения, нужно отдать якоря
с той части состава, которая не находится на мели.
При постановке на мель буксируемого состава в первое время нужно
попытаться снять его, периодически изменяя направление снятия.
Если целиком состав снять не удается, нужно разъединить его,
а затем не сидящие на мели секции или баржи отвести в безопасное
место.
Буксирный трос нужно закреплять на наиболее удаленной от мели
части баржи или секции.
Перечислим некоторые способы, облегчающие снятие барж с мели.
2 28
Подрезка грунта буксирным тросом бук-
сировщика. Буксирный трос обносится под корпусом сидящей
на мели баржи, а затем натягивается буксировщиком. Буксировщик
делает оборот или полуоборот вокруг стоящей на мели баржи, изме-
няя курс на 15—20° и следуя по прямой до момента прекращения по-
ступательного движения вперед. Способ эффективен на песчаных и
илистых грунтах.
Подмывка грунта движителями буксиров-
щика. Буксировщик швартуется к борту баржи со стороны мели,
а затем дает ход вперед, работая машинами в течение 1—2 ч с таким
расчетом, чтобы грунт, размываемый струей от движителей, относился
течением. Наиболее целесообразно использовать для этой цели мало-
мощные водометные суда, а при наличии поблизости земснаряда мож-
но использовать и его.
Паузка. Часть груза снимают и перегружают на другие баржи
или на специально используемое для этой цели судно.
Повышение уровня в.оды. Способ применяется на
реках или каналах при посадке на мель в нижних бьефах плотин.
На короткий промежуток времени увеличивают расход воды через
плотину, уровень воды повышается, и судно снимают с мели.
Если судно нужно снимать в направлении под прямым углом
к течению, то применяют два судна — более мощное снимает с мели,
а менее мощное удерживает его в нужном пложении.
Суда, сидящие на мели в пределах судового хода, в темное время суток не-
сут установленные для них стояночные огни. Кроме того, если проход для дру-
гих судов по судовому ходу возможен, стоящее на мели судно ограждается ог-
нем, поднимаемым на уровне огня бакена.
§ 56. СПАСЕНИЕ ЛЮДЕЙ НА ВОДЕ
Первый, увидевший упавшего за борт человека, должен бросить
утопающему спасательный круг и сообщить в рубку о случившемся.
Тревога «Человек за бортом» объявляется подачей трех коротких зву-
ковых сигналов.
На озере, водохранилище или в прибрежно-морском районе при
спасении упавшего за борт судно выполняет маневр «Человек за бор-
том». Обычно осуществляют поворот в сторону борта, с которого упал
человек (чтобы отвести от него корму), останавливают машины, спус-
кают спасательную шлюпку. За борт сбрасывают спасательные средства
и за упавшим в воду человеком устанавливают наблюдения с тента
или палубы. *
Отворот кормы и остановка движителей не всегда являются эффек-
тивными мерами, так как за время, пока человека заметят, сообщат
на мостик, дадут команду в машинное отделение и остановят двига-
тель, он окажется далеко за кормой.
На крупных судах при остановке можно потерять упавшего за
борт человека из виду. Поэтому рекомендуется описать полный оборот,
чтобы после этого подойти возможно ближе к месту падения человека
SB с. Б. Олывамовоий 229
(89)
за борт. Курс судна к месту падения человека следует рассчитывать
по формуле (рис. 189)
Кс = Ка ± 180е ± 60’.
где Ка — курс в момент падения человека за борт.
Формула (89) дает обычно ошибку не более 10—20°. Поэтому чело-
века нужно искать в носовом секторе 10—20° с обоих бортов.
При
подходе к месту падения человека нужно остановить судно
и спустить шлюпки, а ночью, кроме
того, в этом секторе освещают воду
прожектором.
Малым судам рекомендуется
после падения человека за борт
сразу же дать полный ход назад
до погашения инерции, одновре-
менно отворачивая от упавшего за
борт корму.
Поиск человека, упавшего за
борт, производится до тех пор,
пока не будут исчерпаны все воз-
можности.
Подходить близко к находяще-
муся в воде человеку не следует,
так как его можно ударить корпу-
сом, задеть винтом или отбросить
струей движителей. Шлюпку нуж-
но подводить кормой или носом, так
как при подъеме человека через
борт шлюпка может накрениться,
зачерпнуть воду и опрокинуться,
упавшему за борт с буксировщика человеку угрожает дви-
10-20
бор-
Зона поиска
цпаЬиаего за
борт
Рис. 189. Маневр «Человек за
том»;
Л1| — точка обнаружения человека за бор-
том; /И2 —
окончание
ворота на
начало разворота на 180°; /Из —
поворота на 180° и начало по-
60°; /И4 — окончание поворота
на 60°
Если
жущийся состав, следует резко изменить курс, отвести пыжи барж
состава от утопающего и струей от движителей снести последнего
в сторону от состава. Одновременно на составе принимают все необхо-
димые меры по спасению утопающего.
При падении человека с толкача или толкаемого состава маневри-
рование рулем и машинами производится так же, как и на одиночном
судне, и затем останавливают состав.
После подъема человека на борт ему оказывается медицинская по-
мощь.
На судах не реже одного раза в месяц проводятся учебные тревоги
«Человек за бортом».
Чтобы предупредить падение людей за борт, нельзя производить
забортные работы на ходу судна, нужно строго соблюдать правила
посадки и высадки пассажиров, правила поведения пассажиров на
судне, поддерживать в исправном состоянии леерное ограждение.
В местах большого скопления людей (на пляжах, переправах, гидрострой-
ках и т. д.) устанавливаются мачты темно-зеленого цвета высотой 8—10 м. При
несчастных случаях с людьми на этих мачтах поднимается днем шар красного
230
цвета диаметром 1 м, а ночью — два горизонтально расположенных огня крас-
ного цвета. Эти сигналы обязывают судоводителей проходящих мимо судов оста-
навливаться для оказания помощи в спасении людей.
При подходе к району, где на воде терпят бедствие люди, под-
готовляют: спасательные шлюпки и плоты, трапы, спасательные круги,
нагрудники, жилеты и другие средства спасения; помещения для раз-
мещения спасенных людей; одежду и постели; средства для оказания
медицинской помощи.
При большом количестве людей, находящихся в воде, спасатели
сбрасывают на воду индивидуальные спасательные средства, плоты,
доски, бревна и другие предметы, которые дают возможность держаться
на воде, а затем спускают на воду катера, шлюпки и подбирают на них
людей.
В первую очередь поднимают ослабевших и не имеющих индивиду-
альных спасательных средств.
Для помощи в подъеме людей из воды и с групповых спасательных
средств на спасателе выделяют наиболее ловких и сильных матросов,
которые должны иметь индивидуальные спасательные средства. Они
должны находиться на трапах у воды, помогать поднимающимся по
трапам людям и обвязывать тросами обессилевших.
Спасатель подходит к катеру, шлюпке, плоту и с помощью троса
(проводника) подтягивает их к борту для подъема людей. С помощью
проводников можно также подтягивать людей, находящихся в воде
и удерживающихся за плавающие предметы.
§ 57. УПРАВЛЕНИЕ СУДНОМ ПРИ
ПОЖАРЕ
Противопожарные мероприятия на судах Пожар на судне — боль-
шое бедствие. Экипаж должен в основном полагаться на свои силы,
так как в определенных условиях помощь со стороны может быть и не
оказана.
Организационно-технические противопожарные мероприятия на
судах имеют целью предотвратить возникновение пожара, вовремя об-
наружить его, ограничить распространение и обеспечить тушение.
Ответственность за противопожарную безопасность судна несет
капитан.
Старший штурман отвечает за противопожарное состояние судна,
состояние противопожарного оборудования и имущества.
Механик отвечает за противопожарное состояние машинно-котель-
ного отделения и хранилищ топлива и масла, помещений электростан-
ций, вспомогательных котлов и двигателей, а также и готовность к дей-
ствию пожарных насосов, противопожарных систем и устройств.
Второй штурман отвечает за соблюдение противопожарной безопас-
ности в грузовых помещениях, второй механик — в машинном и ко-
тел ь н ом отдел ен и я х.
Боцман отвечает за соблюдение противопожарной безопасности
в отведенных для хранения материалов и инвентаря судовых кладовых
и за сохранность противопожарного имущества.
8В* 231
Командный состав обязан знать, что представляет собой про
цесс горения, причины и особенности судовых пожаров, правила про
тивопожарной безопасности.
Капитан проверяет знания командного состава на контрольных за-
нятиях и на групповых упражнениях, отрабатывает действия команд-
ного состава по борьбе с пожарами.
Тушение пожара. Пожары чаще всего возникают в жилых и слу-
жебных помещениях, в грузовых трюмах и в машинно-котельном отде-
лении.
Чтобы не допустить пожара, необходимо строго выполнять правила
перевозки огнеопасных грузов, содержать в исправном состоянии элек-
тропроводку, топливную систему и молниеотводы, строго соблюдать
противопожарный режим.
Основными средствами тушения пожара являются химическая пе-
на, пар, углекислота и вода.
Техника тушения пожара включает локализацию и ликвидацию по-
жара. Под локализацией подразумевается устранение угрозы воспла-
менения горючих веществ, расположенных вблизи очага пожара, а так-
же пресечение распространения очага пожара.
Проведение локализации сочетается со спасением людей, если их
жизни угрожает опасность.
Для своевременного обнаружения пожара на судах имеется пожар-
ная сигнализация. При возникновении пожара в помещениях в рубке
на пульте пожарной сигнализации будут даны звуковой и световой
сигналы, указывающие место пожара.
Получив сигнал о пожаре, вахтенный начальник объявляет по-
жарную тревогу. Каждый член команды приступает к выполнению обя-
занностей, возложенных . на него расписанием «Пожарная тревога».
Капитан осуществляет командование судном и руководство экипажем
по борьбе с огнем.
Для уменьшения притока воздуха к месту пожара следует закрыть
окна, двери, люки и иллюминаторы, за исключением тех, которые ис-
пользуются для борьбы с огнем. Нужно уменьшить скорость хода и из-
менить курс судна так, чтобы место пожара находилось с подветренной
стороны. Если пожар возник в носовой части, нужно поставить судно
кормой против ветра.
При возникновении опасности для людей необходимо подвести суд-
но к берегу или мелкому месту. Пассажиров с судна следует эвакуи-
ровать.
Если поблизости находятся другие суда, нужно воспользоваться
их помощью для тушения пожара и эвакуации людей.
При возникновении на судне пожара во время стоянки у причала
или на рейде крупного порта нужно вызвать пожарное судно.
Если пожар возник на составе, необходимо, приступив к тушению
пожара, отделить горящую баржу.
Подходить к горячему судну нужно с наветренной стороны.
При невозможности крепления буксира на кнехтах к концу его
крепится якорь-кошка, и он забрасывается на горящеЛудно.
Если огнем охвачена большая часть несамоходного судна и огонь
232
слабо поддается тушению, баржу следует затопить, сделав пробоину
в бортовой обшивке корпуса.
Во всех случаях судовая команда должна продолжать тушение
пожара до последней возможности. Команда может покинуть судно по
разрешению капитана, когда все средства борьбы с огнем исчерпаны
и дальнейшее тушение пожара невозможно. При этом на пароходах га-
сят топки котлов, спускают пар и выключают насосы, питающие котел
водой.
§ 58. УПРАВЛЕНИЕ СУДНОМ
С ПОВРЕЖДЕННЫМ КОРПУСОМ
Виды повреждения корпуса. Назовем чаще всего встречающиеся
повреждения.
«Гофрирование» и проломы корпуса в районе носовой части чаще
всего происходят от столкновений и посадок на мель. При столкновении
судов проломы корпуса иногда могут быть большими — от днища до
палубы судна. При посадках на мель корпус в районе днища гофри-
руется, в случаях посадки на твердые грунты образуются вмятины
и проломы. Удары о причалы и стенки шлюзов обычно сопровож-
даются вмятинами, гофрированием и проломами корпуса в районе выше
ватерлиний. При плавании во льдах гофрирование наблюдается в райо-
не ватерлинии.
Гофрирование и проломы корпуса в районе кормовой части обыч-
но являются следствием ударов о грунт во время прохождения мелко-
водных участков. В этих случаях часто повреждаются, кроме того,
рули и винты.
Гофрирование и проломы корпуса по бортам чаще всего происхо-
дят от столкновений судов и навалов и располагаются обычно выше
ватерлинии. При этом возможно появление трещин, распространяю-
щихся ниже ватерлинии.
Устранение повреждений. После удара, навала или столкновения
вахтенный начальник должен остановить судно и осмотреть его кор-
пус. Если удар произошел в кормовой части, то прежде всего следует
проверить состояние рулей и движителей.
Если после удара судно с поворотными насадками потеряло управ-
ляемость и резко уклоняется в опасную сторону, нужно дать задний
ход.
При наличии раздельного управления насадками необходимо перей-
ти на управление неповрежденной насадкой и остановить машину,
работающую с неисправной насадкой. Если обнаружены пролом или
пробоина корпуса и вода поступает в трюм судна, следует объявить
«Водяную тревогу». Курс изменяют в сторону мелкого места и включают
в действие водоотливные средства.
Команда судна, согласно расписанию по «Водяной тревоге», при-
ступает к заделке пробоины.
Если после включения водоотливных средств уровень воды в кор-
пусе продолжает увеличиваться и судну угрожает затопление, нужно
принять все меры к постановке судна на мель.
233
При отсутствии угрозы затопления для заделки пробоины судно
ставят на якорь в местах с небольшими глубинами.
Для ликвидации течи силами экипажа каждое судно снабжают спе-
циальным инвентарем по нормам, устанавливаемым Речным Регистром
РСФСР.
Небольшие пробоины можно заделать деревянной пробкой, обмотан-
ной смоляной паклей или ветошью с суриком, или же с помощью дере-
вянного щита, прижатого к пробоине крючковыми болтами.
Пробоины крупных размеров в большинстве случаев можно заде-
лать только после постановки пластыря и осушения трюма.
Все суда, находящиеся поблизости от судна, которому требуется
помощь, должны немедленно оказать ее с использованием всех имею-
щихся средств.
Судно, терпящее бедствие и требующее помощи от другого судна или с бе-
рега, подает следующие сигналы:
а) самоходное —ряд продолжительных звуковых сигналов свистком, а при
невозможности подачи такого сигнала —частые удары в колокол; одновременно
производится частое мигание клотиковым огнем;
б) несамоходное —частые удары в колокол, а ночью частые проблески или
вертикальное перемещение вверх и вниз мачтового белого огня.
Кроме того, сигналами бедствия для всех судов служат:
днем — вертикальное перемещение вверх и вниз флага на мачте;
выстрел красной ракеты или сжигание фальшфейера с красными звездами
через каждые 2 мин;
радиосигнал SOS (...---...) по азбуке Морзе;
вызов аварийно-спасательного судна по установленному коду.
По поводу всякого аварийного случая капитан судна или ответ-
ственное лицо на плоту или другом плавучем сооружении должно со-
ставить акт в трех экземплярах со схематическими чертежами. Один
экземпляр акта передается в судрходную инспекцию ближайшего пунк-
та, второй — владельцу судна, плота или сооружения и третий остает-
ся на судне (плоту или сооружении). Для акта установлена определен-
ная форма, приводимая в «Правилах плавания по внутренним судо-
ходным путям РСФСР».
Глава X
ПЛАВАНИЕ С ПОМОЩЬЮ РАДИОЛОКАЦИОННОЙ
СТАНЦИИ
§ 59. ТИПЫ СУДОВЫХ
РАДИОЛОКАЦИОННЫХ СТАНЦИЙ
Тактико-технические данные радиолокационной станции (РЛС).
Радиолокатор предназначен для обнаружения надводных объектов,
определения места судна (ориентировки), элементов движения (курса,
скорости) обгоняемых встречных судов. Радиолокатор можно приме-
нять для определения маневровых качеств судна и для обнаружения
234
опасных метеорологических явлений (грозовых облаков, снежных
варядов, шквалов и т. д.).
Радиолокаторы разделяются на морские дальнего действия, мор-
ские ближнего действия и речные.
Морские РЛС дальнего действия имеют дальность действия более
60 миль, иногда 100 — 200 миль. К этому типу относится отечественная
РЛС «Океан». В станции применена система автоматического сопровож-
дения (слежения) выбранного судна, а также вычислительная машина,
решающая задачу расхождения. Станции этого типа работают в деци-
метровом диапазоне волн. Они в основном пригодны только для ра-
диолокационного метода судовождения.
Максимальная дальность действия морских РЛС ближнего дей-
ствия обычно составляет 25—30 миль. Они работают в сантиметровом
диапазоне волн (3,2 см). Эти РЛС пригодны как для радиолокационного,
так и для глазомерно-локационного метода судовождения. К числу
морских РЛС ближнего действия относятся «Донец», «Кивач», «Ло-
ция».
Речные РЛС имеют максимальную дальность действия 15—25 км.
Они работают, как правило, в диапазоне миллиметровых волн (8 мм)
и приспособлены в основном только для глазомерно-радиолокационно-
го метода судовождения. К отечественной речной РЛС можно отнести
радиолокатор типа ОЛП.
На судах, плавающих по рекам Западной Европы, широкое распро-
странение получили речные РЛС типа «Филлипс» (Голландия) и «Дек-
ка» (Англия).
Рассмотрим, что относится к основным тактическим данным РЛС.
1. Минимальная дальность действия — наименьшее расстояние
от антенны, ближе которого нельзя обнаружить объект.
2. Максимальная дальность обнаружения — наибольшее расстоя-
ние, при котором возможно обнаружение объектов.
3. Разрешающая способность по дальности — наименьшее расстоя-
ние в метрах между двумя объектами, находящимися вдоль линии из-
лучения, при котором эхо-сигналы объектов обнаруживаются раздель-
но.
4. Разрешающая способность по углу— наименьший угол в гра-
дусах между двумя объектами, находящимися на различных курсовых
углах, при которых объекты наблюдаются на экране РЛС раздельно.
5. Точность измерения расстояний определяется величиной ошиб-
ки, допускаемой при измерении расстояния до объекта.
6. Точность пеленгования определяется величиной ошибки при
измерении угловых величин на экране РЛС.
В табл. 37 приведены тактико-технические данные некоторых РЛС,
Сравнение РЛС типов ОЛП и «Филлипс» показывает, что отечест-
венная станция ОЛП удовлетворяет навигационным требованиям луч-
ших мировых речных радиолокаторов.
Особенностью речных РЛС являются большая разрешающая спо-
собность, сравнительно небольшая «мертвая зона» обнаружения объ-
ектов, большая частота выдаваемой информации (большая скорость
вращения антенны).
235
Таблица 87
Тактико-технические данные Тип РЛС
«Донец-2*| «Кивач-1> | ОЛП |« Филлип с» | Р-722.2
Длина волны, см 8,2 8,2 0,8 0,8 3,2
Импульсная мощность, кВт Длительность импульсов, 13 7 24 24 7
мкс Диаграмма направленности антенны, град: в горизонтальной плоско- 0,1—0,55 0,1—0,8 0,05 0,02 0,05—Q Л
сти 1,5 1,7 0,25 0,3 1,2
в вертикальной плоскости Частота вращения антенны, 22 25 2,7 17 20—25
об/мин Разрешающая способность: 14—16 17 36 40 24
по дальности, м 30 25 10 10 13
по углу, град 2—3 2 0,3 0,5 1,4
Точность пеленгования . . ± 1 ± 1 ±0,5 ±0,5 —
Шкалы дальности мили . . 0,5—1,5; 0,4; 0,8; 1,2, 4, 8 0,54; 0,3 0,5; 0,7;
Минимальная дальность дей- 3; 6; 12; 24 1,0; 4,0; 8,0; 16 (км) 0,8; 3,6; 5,4; 9; 10 3,6; 5
ствия, м Диаметр экрана индикатора, 35 35 10 10 20
мм 300 300 300 300 230
Индикаторы РЛС. Индикатор кругового обзора дает изображе-
ние (светоплан) окружающей надводной обстановки. Начало разверт-
ки в центре экрана совпадает с местом положения судна. Положение
диаметральной плоскости отмечается на экране светящейся радиаль-
ной линией отметки курса.
Для определения направлений на объекты служит неподвижная
шкала (азимутальный круг) и подвижная шкала (лимб), связанная
с гирокомпасом. Определение курсовых углов и пеленгов произво-
дится с помощью вращающейся в центре азимутального круга линей-
ки-визира. Изображение на индикаторе светоплана окружающей мест-
ности может быть ориентировано либо относительно ДП судна, либо
относительно меридиана. В первом случае направления на объекты
местности совпадают с направлениями на эти объекты на экране РЛС,
что удобно при глазомерно-радиолокационном методе судовож-
дения.
При повороте судна отметка курса остается неподвижной, а изоб-
ражение на экране смещается в сторону, обратную повороту,' на вели-
чину угла поворота. Так как старое изображение исчезает в течение
10—20 с, при поворотах происходит накладка одного изображения на
другое под углом друг к другу. В результате ориентировка затруд-
няется или становится невозможной.
У речных РЛС изображение на экране стабилизировано по ДП
судна.
236
Рис. 190. Схема движения судов:
аь а2 — курсовые углы буя; р — курсовой
угол судна В; 6, t2 — моменты наблюде-
ния отметок на экране РЛС
Если изображение ориентировано относительно компасного ме-
ридиана, то отметка курса проходит через нуль подвижной шкалы.
Курсовые углы отсчитываются по подвижной шкале, а пеленги — по
неподвижной. При повороте судна изображение (светоплан) на экра-
не остается неподвижным, а отметка курса перемещается на величину
угла поворота. Направления на объекты, наблюдаемые на местности,
не совпадают с видимыми направлениями на экране. Например, если
судно идет курсом 180°, то по отношению его носа изображение на
экране будет развернуто на 180°, отметка курса будет направлена
в сторону кормы (т. е. будет казаться, что судно движется как бы зад-
ним ходом). Этот вид ориентации изображения удобен при радиоло-
кационном методе судовождения.
У морских РЛС изображение
может быть стабилизировано и по
ДП судна, и по меридиану.
Известны РЛС («Аргус», «Гер-
мес» — Италия) со стабилизацией
изображения по системе ложного
меридиана. У них видимые направ-
ления на объекты на местности и
экране совпадают, но при поворо-
тах перемещается отметка курса,
поэтому «смазывания» изображе-
ния объектов на экране РЛС не
происходит.
Индикаторы подразделяются на
индикаторы относительного дви-
жения (ИОД) и истинного движе-
ния (ИИД).
При движении судна* на экране
ним (всегда в центре экрана); неподвижные объекты перемещаются
по экрану по направлению, противоположному движению судна (т. е.
их перемещение отображает истинное движение своего судна); переме-
щение подвижных объектов зависит от скоростей и курсов своего
и другого судна.
Определение истинного движения объектов требует геометри-
ческих построений.
Рассмотрим перемещение неподвижного (осевого буя) и подвиж-
ного (судна) объектов на экране ИОД, если судно А, с которого ведет-
ся наблюдение, движется по прямолинейной трассе с осевой обстанов-
кой со скоростью 10 км/ч курсом А/, оставляя осевой буй слева. Встреч-
ное судно движется перпендикулярно осевой трассе со скоростью
10 км/ч, выдерживая курс на тот же осевой буй. На рис. 190 показана
схема движения этих судов. На рис. 191 показана схема движения от-
меток на экране РЛС. Отметка буя и отметка судна В на экране РЛС
с ИОД указаны в те же моменты времени и /2, что и на рис. 190.
Перемещение отметки буя равно расстоянию, пройденному судном
А за промежуток времени между моментами t\ и. t2. Перемещение от-
метки судна В кажется происходящим под углом 0 = 45°, тогда как
237
ЙОД судно остается неподвиж-
фактически этот угол равен 90°. Это перемещение слагается, как пока-
зано на рис. 191, из перемещения тп, вызванного движением судна
Д, и перемещения пти вызванного движением судна В. Если за про-
межуток времени между моментами и /2 одно из судов А или В изме-
нит курс или скорость, то с помощью геометрических построений опре-
делить курс и скорость встречного судна невозможно.
Прямая, соединяющая точки т — 1щ (см. рис. 191), называется
линией относительного движения (ЛОД).
Рис. 191. Перемещение отметок буя и
судна В на экране РЛС с ИОД, уста-
новленной на судне А:
пт — перемещение отметки судна В от
перемещения судна А; птх — перемещение
отметки судна В от перемещения этого
судна; ттх — видимое перемещение от-
метки судна В
Рис. 192. Перемещение отметок судов
А и В на экране РЛС с ИИД, уста-
новленной на судне А\
аь а.2 — курсовые углы буя; 3 — курсовой
угол судна В
На индикаторе истинного движения (ИИД) отметка судна во вре-
мя движения перемещается в соответствии с курсом и скоростью сво-
его судна. Отметки неподвижных объектов не перемещаются. Отметки
движущихся объектов перемещаются в соответствии с их истинными
курсами и скоростями.
На рис. 192 показано перемещение отметок объектов на экране
РЛС и ИИД для схемы движения, приведенной на рис. 190.
Изображение движения судов при расхождении на экране РЛС
с ИЙД судоводителем воспринимается так, как будто он наблюдает
движение своего и встречного судов, находясь на неподвижном объ-
екте, например на берегу. Судоводитель является как бы не участни-
ком, а свидетелем движения. ИИД также дает искаженное представле-
ние ситуации движения.
В настоящее время имеются опытные образцы индикаторов с пе-
реносным движением (ИПД), которые позволяют психологически
воспринимать ситуацию движения отметок такой же, как и при непо-
средственном визуальном наблюдении.
У РЛС «Донец», ОЛП, Р-722-2 и других при установке на речных
судах изображение стабилизируется по ДП судна и движение других
объектов является относительным (ИОД). *
238
Изображение различных объектов на экране РЛС. Судоводитель
должен уметь опознавать судовой ход по его радиолокационному изоб-
ражению. Облучаемый объект на экране радиолокатора виден в виде
светлого пятна эхо-сигнала, отличающегося по величине, форме и
яркости.
На радиолокационное изображение объектов влияет их взаимное
расположение. Если передний объект выше и шире заднего, а объекты
расположены на одной прямой, второй объект будет затенен первым и
не будет просматриваться на экране.
На рис. 193 показано, что на экране РЛС просматриваются только
обращенные к судну склоны холмистого берега. Более низкие части
берега, расположенные за ними, попадают в зону радиолокационной
«тени».
Рис. 193. Радиолокационные «тени»
Значительное влияние на радиолокационное изображение оказы-
вает форма объектов. Низкие песчаные берега, косы, осередки, пля-
жи обнаруживаются только на небольшом расстоянии в виде тонкой
линии эхо-сигналов. Обрывистые берега дают яркое и четкое изобра-
жение, воспроизводящее форму и контуры берега, поэтому такие бере-
га являются надежными радиолокационными ориентирами. Практи-
чески почти всегда радиолокационное изображение береговой черты
состоит из множества эхо-сигналов, большая часть которых принад-
лежит объектам, удаленным от уреза воды на значительное расстоя-
ние.
На форму эхо-сигналов от судов сильно влияет ракурс наблюда-
емого судна. На шкалах среднего и крупного масштабов эхо-сигнал
круглый или в виде черты, вытянутой по дуге. Эхо-сигналы от пло-
товых и буксирных составов на небольших и средних расстояниях
обычно почти в точности повторяют очертание плота или состава. Щит
створного знака не дает отдельного эхо-сигнала.
Ровный берег, покрытый лесом, дает яркий эхо-сигнал. Изобра-
жение на экране РЛС населенных пунктов обычно не соответствует
полностью их изображению в плане, так как на экране хорошо видны
только ближайшие к реке стороны зданий.
239
Мосты через реки дают четкие и хорошо видимые эхо-сигналы
в виде сплошной полосы (рис. 194).
Волноломы, причальные стенки дают хорошо видимый узкий эхо-
сигнал в виде линии в соответствии с контурами волнолома или стен-
ки.
Сильные точечные сигналы наблюдаются от радиомачт, башен и
портальных кранов. Воздушные провода высоковольтных линий про-
сматриваются в виде нескольких отметок, которые могут быть приняты
за сигналы от объектов на воде.
Спокойная поверхность воды на реке или водохранилище не дает
эхо-сигналов. Волнение дает эхо-сигналы, беспорядочно располагаю-
щиеся на экране. Радиус зоны за-
свечивания экрана зависит от вы-
соты волн.
Кромки льда со стороны чистой
воды просматриваются на малых
расстояниях в виде сплошной ли-
нии. Молодой осенний лед с глад-
кой поверхностью не дает изобра-
жения на экране. Эхо-сигналы буев,
бакенов в начале обнаружения
имеют овальную форму, цытянутую
Рис. 194. Изображения участка водо-
хранилища и моста
вытянутую вдоль радиуса. Буи с
риваются на расстояниях до 8 -
перпендикулярно радиусу, затем
в средней части экрана приобре-
тают круглую форму, а ближе к
центру экрана — снова овальную,
пассивными отражателями просмат-
- 9 км, и эхо-сигналы от них более
растянуты в направлении, перпендикулярном радиусу.
Рис. 195. Помехи от множественных эхо-сигналов
Появившаяся на экране РЛС светлая точка или засвеченное про-
странство не обязательно должны соответствовать бую или участку
берега. Подобные сигналы могут возникнуть от помех, которые при-
нято называть ложными. Помехи возникают от различных гидромете-
240
орологических факторов, многократного отражения радиоволн, бо-
ковых лепестков, работы другого радиолокатора, от частей судна,
создающих теневые секторы.
Если вблизи РЛС находится объект с большой отражающей поверх-
ностью, часть электромагнитных волн попадает в приемник РЛС пос-
ле многократного отражения. Действительным будет эхо-сигнал, нахо-
дящийся на экране ближе к центру развертки (рис. 195).
Рис. 196. Вид помех от боковых лепестков
Помехи от боковых лепестков диаграммы направленности антен-
ны возникают при приеме отраженных сигналов от близко располо-
женного крупного объекта. В этом случае, как показано на рис. 196,
на экране появляется цепочка из светлых пятен, равноудаленных от
центра развертки.
При одновременной работе двух. РЛС на волне одной длины на эк-
ране могут возникнуть помехи в виде спиральных или круговых штри-
хов или точек (рис. 197). Эти по-
мехи характерны, и их легко
опознать.
При установке антенны РЛС
на уровне или ниже выступаю-
щих частей корпуса судна (ко-
лонок, труб, мачт и т. п.) в
пространстве за ними образуют-
ся радиолокационные тени и это
пространство не просматри-
вается.
Теневые секторы можно оп-
ределить путем наблюдения за
шлюпкой, двигающейся вокруг
стоящего на якоре судна, по ис-
чезновению эхо-сигналов на тех
или иных курсовых углах.
При движении прямолиней-
ным курсом нужно делать не-
Рис. 197. Помехи от работы другого
радиолокатора
241
большие повороты вправо или влево с тем, чтобы своевременно
обнаружить судно, которое находится в зоне теневого сектора.
Выступающие части судна могут создавать и другой вид помех.
Так, например, излучаемый антенной радиоимпульс, попадая на
выступающую часть судна (например, трубу, рис. 198), отражает*
ся от нее и идет в направлений ййблкййемого объекта; от объекта он,
в свою очередь, отражается и снова попадает на трубу, а затем на ан-
тенну. В результате на экране РЛС видны два эхо-сигнала от одного
объекта — истинный и ложный.
Ложные эхо-сигналы чаще наблюдаются в теневых секторах.
Большое значение для обеспечения безопасности плавания имеет
дальность видимости реальных объектов. В табл. 38 приведена сред-
няя дальность обнаружения наиболее важных объектов для РЛС
«Донец-2».
Таблица 38
Объекты Дальность обнаружения, мили (км)
Крупные пассажирские суда 8,0 (15)
Буксирные и толкаемые составы 7,0 (13)
Плоты 6,0 (11)
Катера 4,0 (7,5)
Буи морские средние 2,0 (3,7)
Буи озерные 1,5 (2,8)
Буи речные 1,4 (2,5)
Буи с отражателями 4 (7.5)
Бакены деревянные 1,0 (1,8)
Лодки 0,7 (1,3)
Плавающие бревна 0.3-0,5 (0.6)
Небольшие объекты на фоне крупных и поблизости от них не про-
сматриваются на экране РЛС. Не видны также и устои мостов.
Дальность обнаружения судов зависит от ракурса и типа судна.
При облучении с траверзных углов дальность обнаружения возрастает.
Волнение уменьшает дальность обнаружения буев, вех и лодок.
У речных РЛС по изображению отметки на индикаторе с помощью
механического визира можно определить курс встречного судна
с точностью до ± (3~-5)°, в то время как с помощью морских РЛС
ближнего действия курс встречного судна по отметке определить
очень трудно и эта точность исчисляется десятками градусов.
Пассивные и активные радиолокационные отражатели. Пассив*
ный радиолокационный отражатель (ПРЛО) представляет собой много-
гранную фигуру, обладающую способностью отражать падающую на
нее энергию в том направлении, откуда она послана. Наилучшей
отражающей способностью обладают пассивные отражатели угол-
кового типа, имеющие форму прямоугольного тетраэдра (сечение
полого куба по диагонали). Например, отражательс ребром0,5—1,0м
242
обладает такой же отражающей способностью, как судно водоиз-
мещением 3000—4000 т.
Установленные на берегу, на буях, вехах и т. п. ПР ДО значитель-
но увеличивают радиолокационную видимость объектов. Буи, обору-
дованные уголковыми отражателями с ребрами в 1 м, в штилевую по-
году обнаруживаются на расстоянии до 7—10 км; место по ним на-
дежно определяется на расстоянии до 5—7 км.
ПРЛО целесообразно ставить на низком берегу с илистой, песча-
ной или глинистой почвой, на заболоченных участках и песчаных ко-
сах. Эхо-сигналы от ПРЛО будут четко видны на фоне слабых отраже-
ний от берега такого типа.
Знак с ПРЛО вырисовывается на ИКО в виде яркой светящейся
точки диаметром 2—4 мм, выделяющейся на фоне слабых отражений
от других объектов.
Рис. 198. Помехи от выступающих частей судна
ПРЛО применяются для ограждения фарватеров. На экране ряд
буев с ПРЛО создает светящийся пунктир, по которому легко опоз-
нать фарватер. Для указания оси фарватера могут использоваться ра-
диолокационные створы, представляющие собой группу ПРЛО, за-
крытых экраном со щелью посередине. Если судно находится на оси,
то видна вся группа ПРЛО. При уклонении в сторону половина груп-
пы ПРЛО закрывается экраном.
В Швеции на створных ПРЛО передний отражатель делают полу-
прозрачным для электромагнитных волн, а задний — по типу обыч-
ного отражателя. Когда судно лежит на створе, отраженные сигна-
лы от переднего и заднего знаков за счет интерференции дают на
ИКО отличительную характеристику, свойственную определенному
створу.
По предложению М. М. Лескова в проливах, на подходах к пор-
там или заливам пассивные отражатели устанавливают парами, по
одному с каждой стороны фарватера, на равных расстояниях от его
оси. Если эхо-сигналы обоих ПРЛО находятся на одном и том же рас-
стоянии, судно идет по линии створа. Как только обнаружится, что
ПРЛО не находятся на одном расстоянии, нужно изменить курс в со-
ответствующую сторону.
243
Рис. 199. К выбору курса при
помощи двух радиолокацион-
ных маяков:
1 — отметка курса; 2 — отметка
маяка
повленных на одинаковом
Опыт установки ПРЛО по способу М. М. Лескова в порту Вентспилсе
показал, что плавание по фарватерам с их помощью может произво-
диться с высокой точностью.
Активный радиолокационный отражатель (АРЛО) представляет
собой радиолокационный маяк. При плавании на ватруднительныХ
участках реки использование РЛС будет более эффективным, если
применить радиолокационные маяки, которые позволяют определить
место и направление действия створных знаков, ось ходового проле-
та моста или камеры шлюза и т. п. Натурные испытания радиолокаци-
онных маяков, изготовленных ГИИВТом
и НИИВТом, показали, что точность
определения оси судового хода с по-
мощью двух маяков, установленных на
равных расстояниях от оси судового
хода и перпендикулярно ей,. достигает
± (24-4 м).
Радиолокационный маяк представ-
ляет собой малогабаритный передатчик,
излучающий в определенном направле-
нии радиоволны такой же частоты и
длины, что и передатчик РЛС. Сигналы
маяка принимаются приемником РЛС
в тот момент, когда антенна радиолока-
тора направлена на маяк. На экране
радиолокатора сигналы маяка видны в
виде сплошной линии, идущей от центра
экрана к краю в направлении на маяк.
Толщина этой линии в 2—3 раза больше
курсовой черты. При двух маяках, уста-
раестоянии от оси судового хода, судово-
дитель будет видеть две светлые полосы, идущие от центра развертки.
Курс избирается с таким расчетом, чтобы курсовая черта делила
угол между линиями от сигналов маяков пополам (рис. 199). Тогда
судно будет находиться на оси судового хода.
Радиолокационные карты и схемы. Изображение берега на экране
РЛС во многих случаях может значительно отличаться от его изобра-
жения на карте. Оно соответствует не урезу воды, а некоторой при-
поднятой части суши. Часть береговой черты может быть затенена и
отсутствовать на экране РЛС. Низкие песчаные берега могут также
отсутствовать на экране или быть сильно искажены.
Для того чтобы облегчить опознание местности и определение мес-
та судна, в СССР и за рубежом начали издавать специальные навига-
ционные карты с радиолокационной нагрузкой.
В 1957 г. произведена съемка и напечатана карта р. Енисея, пред-
ставляющая собой обычную навигационную карту с нанесенными
на ней характерными эхо-сигналами от берегов. Тогда же под руко-
водством П. Н. Шанчурова в ГИИВТе была создана карта р. Волги,
представляющая собою альбом фотосхем, снятых с экрана РЛС во
время движения судна по оси судового хода.
244
Американские радиолокационные карты имеют черный фон, на
котором белым цветом нанесены урез воды, ориентиры, глубины, пре-
пятствия и линия фарватера. На эту же основу люминесцентной крас-
кой, не видимой при дневном свете, нанесено радиолокационное изо-
бражение местности, сфотографированное с экрана РЛС. Если карту
облучать ультрафиолетовыми лучами, она начнет ярко светиться
в темноте. Судоводитель кладет карту около экрана и сличает оба изо-
бражения, опознавая местность и положение судна в отношении судо-
вого хода.
§ 60. РАДИОЛОКАЦИОННЫЕ
НАБЛЮДЕНИЯ И ИЗМЕРЕНИЯ
Точность решения навигационных задач определяется качеством
работы РЛС и навыками судоводителя.
РЛС считается выверенной и настроенной, если:
питающие станцию напряжения, токи магнетрона и кристаллов
смесителей приемника соответствуют установленным величинам;
изображение окружающих объектов на экране четкое и сочное.
В зависимости от условий плавания судна для радиолокационной
проводки нужно выбрать шкалу дальности РЛС. При плавании на пле-
совых участках крупных рек или на участках шлюзованной реки реко-(
мендуется пользоваться шкалой дальности «1» или «1,5 мили», на'
озерно-речных участках — шкалами «3» или «6 миль». В стесненных
условиях плавания, на рейдах, при подходе к шлюзам, перекатам, уз-
костям, при сближении с берегом и другими судами ориентировку
лучше производить на шкале дальности «0,5 мили».
При плавании в озерной части водохранилищ и крупных озерах
ориентиры могут быть удалены на большое расстояние, поэтому про-
странство просматривают на шкале «12 миль». Наиболее часто приме-
няется шкала дальности «3 мили».
У РЛС «Донец», «Кивач», ОЛП, Р-722-2 определение расстояний;
до объектов производится с помощью неподвижных колец дальности'
(НКД). Цена делений между двумя НКД на каждой из шкал для трех
станций приведена в табл. 39.
Ошибка в определении расстояний с помощью НКД из-за нели-
нейности масштаба по радиусу экрана и неточности определения поло-
жения отметки объекта между НКД обычно составляет ± (24-3)% от
шкалы дальности.
У РЛС «Лоция» расстояния до объектов определяют с помощью
подвижного кольца дальности (ПКД), для чего при помощи ручки,
регулирующей его радиус», изменяют радиус кольца до тех пор, пока
окружность ПКД не подойдет к отметке объекта. В этот момент по
стрелке и шкале дальномерного устройства снимают искомую величи-
ну расстояния. Ошибка в определении расстояния с помощью ПКД
не превышает ± (0,34-0,5)% от шкалы дальности.
Определение курсовых углов и пеленгов производится с помощью
специального визирного устройства. Нить визира с помощью ручки
поворачивается до тех пор, пока не станет над центром отметки объ-
245
Таблица 39
Тип РЛС Шкала дальности Число НКД Цена деления, мили (м)
Р-722-2 0,5 - (100)
0,75 - (250)
1,5 — (250)
3,0 — (500)
6,0 - (1000)
12,0 6 — (2000)
24,0 6 — (4000)
«Донец» 0,5—1,5 2-7 0,2 (370)
3 6 0,5 (925)
6 6 1,0 (1850)
12 6 2,0 (3700)
24 6 4,0 (7400)
«Кивач» 0,4 2 0,2 (370)
0,8 4 0,2 (370)
1,6 4 0,4 (740)
4,0 4 1,0 (1850)
8,0 4 2,0 (3700)
16 4 4,0 (7400)
24 6 4,0 (7400)
екта на экране РЛС. По неподвижной шкале лимба производят отсчет
курсовых углов от 0 до 360°. Ошибка в определении курсовых углов
составляет от ± (1 4-2°).
Для определения истинного пеленга (ИП) на объект нужно в мо-
мент определения курсового угла (КУ) заметить курс судна по ком-
пасу (КК)- Тогда
ИП = И К + КУ, (90)
где КУ—курсовой угол (в круговом счете).
Если сумма получается больше 360°, то из нее вычитают 360°. Ис-
тинный курс получают путем исправления компасного курса на вели-
чину склонения и девиации:
ИК = КК+ d + S, (91)
где d — склонение;
S — девиация компаса.
Если радиолокационное изображение стабилизировано относи-
тельно меридиана, то при пеленговании сразу получают компасный
пеленг (КП).
Для получения истинного пеленга его нужно исправить поправ-
кой компаса.
Ошибки при определении пеленгов с помощью РЛС составляют
от ± 1,4 до ± 2,2°.
Для определения скорости хода судна курс его выбирают на точеч-
ный ориентир. Когда отметка ориентира будет пересекать пятое коль-
цо дальности, замечают время по секундомеру. В момент, когда отмет-
246
ка буя будет на втором кольце, выключают секундомер. Скорость хо-
да (км/ч) рассчитывают по формуле
v=3,6^~, (92)
^об
где ДО — расстояние между кольцами дальности (цена кольца), м;
п — число колец, пройденных за время испытаний;
/Об — время показаний секундомера, с;
3,6 — коэффициент размерности.
Если имеется течение, измерения скорости производят при ходе
по течению, а затем — против течения. После сложения скоростей
и деления суммы пополам получают скорость судна на спокойной воде.
§ 61. ГЛАЗОМЕРНАЯ
РАДИОЛОКАЦИОННАЯ ПРОВОДКА
* СУДОВ
Плавание при неудовлетворительной видимости В условиях не-
удовлетворительной видимости, когда визуальный обзор затруднен,
основным методом судовождения при плавании на реках и водохрани-
лищах является глазомерно-радиолокационный метод, сущность ко-
торого состоит в глазомерной проводке судна по радиолокационному
изображению.
Судоводитель с наступлением визуальной видимости менее 1,5 км,
при подходе к области тумана или интенсивных осадков (ливень, сне-
гопад) должен уменьшить ход, включить радиолокатор, радиотеле-
фон и эхолот, вывести судно на правую (по ходу) сторону движения и
подавать сигнал «Иду в тумане» (три продолжительных сигнала), вклю-
чить ходовые огни, задраить люки, трюмы и иллюминаторы, выста-
вить впередсмотрящего и вызвать на мостик штурмана или капитана.
Судну не оборудованному радиолокатором, если визуальная ори-
ентировка невозможна, нужно остановиться.
При остановке двух- и трехвинтовых судов движители включают па
передний и задний ход с тем, чтобы не потерять управляемость, в эк-
стренных случаях обе машины пускают на полный ход назад.
Стоящее судно не должно мешать движению других судов. После
остановки нужно включить стояночные огни и подавать сигнал
«Стою в тумане» (два продолжительных сигнала через каждые
2—3 мин).
Движение судов при плохой видимости с помощью радиолокатора
запрещается:
если судно не имеет курсоуказателей и радиотелефонов;
буксирным составам и плотокараванам по течению на участках
реки шириной менее 400 м;
если судно имеет на борту груз 1-го класса, взрывчатые и отрав-
ляющие вещества;
на участках с шириной судового хода менее 80 м.
На участках с шириной судового хода от 80 до 200 м разреши "
только одностороннее движение судов. При ширине судового ходе >
лее 200 м разрешается двустороннее движение судов, а на каналах —
лишь при визуальной видимости хотя бы одного из берегов канала.
Для выполнения проводки судна с помощью РЛС необходимо иметь
откорректированную карту района плавания и (при наличии) радио-
локационные фотосхемы участка.
Карты и схемы должны быть расположены рядом с экраном РЛС и
ориентированы по ДП и ходу судна для облегчения их сравнений со
светопланом экрана РЛС.
После включения РЛС необходимо убедиться в исправной рабо-
те всех основных блоков станции, затем определить радиолокацион-
ные ориентиры на экране, направление
Рис. 200. Радиолокационное
изображение речного русла:
/ — отметка курса; 2 — отметка
плота; 3 — отметка буя
судового хода и положение отметки курса
в отношении радиолокационных ориенти-
ров и судового хода; после этого опреде-
ляют курс судна по компасу.
Судоводитель должен вести непрерыв-
ное наблюдение за правильностью движе-
ния судна, ориентируясь по конфигурации
берегов и расположению знаков плавучей
обстановки.
На рис. 200 приведено радиолокацион-
ное изображение речного русла с левым
по ходу судна ходовым берегом. На сере-
дине русла виден эхо-сигнал от буя. Опоз-
нав буй, судоводитель избирает курс на
расстоянии 1/9 части ширины русла между
берегами, ближе к правому берегу. В мо-
мент, когда курсовая черта окажется на
выбранном курсе (как показано на рис. 200),
судоводитель подает команду рулевому «Так держать». Рулевой
замечает по компасу курс и удерживает на нем судно до тех пор,
пока не последует команда о новом изменении курса.
На траверзе белого буя судоводитель должен опознать его номер
визуально, выбрать ориентиры и назначить новый курс для движе-
ния. В целях облегчения ориентировки до начала рейса нужно озна-
комиться с радиолокационным изображением участка и наметить ради-
олокационные ориентиры. Предварительная прокладка курса особен-
но важна при прохождении затруднительных участков.
На поворотах реки у РЛС с малой частотой информации происхо-
дит «смазывание» изображения на экране за счет наложения несколь-
ких изображений одно на другое. «Смазывание» бывает тем больше,
чем больше угловая скорость поворота и скорость движения судна.
Это явление может быть уменьшено, если до начала поворота снизить
скорость хода и поворот выполнять, продвигаясь по ломаной линии,
состоящей из последовательно изменяющихся (на 10-г15°) в сторону
поворота курсов. После каждого изменения курса нужно придать суд-
ну прямолинейное движение до восстановления четкого изображения,
а затем снова изменить курс. При крутых коротких поворотах во вре-
мя захода на перекат, вследствие недостаточности габаритов судового
248
хода, этот прием применять нельзя, поэтому судоводитель должен до
подхода к перекату определить точку с ориентиром на траверзе по-
ворота и угол поворота.
На рис. 201 показана фотосхема переката. Если судно идет снизу
вдоль яра, таким ориентиром будет нижний угловой белый буй, а
угол поворота на новый курс при входе на перекат, как это видно
из фотосхемы, будет равен примерно 60°. При подходе к траверзу пово-
ротного буя судоводитель командует рулевому поворот на новый
компасный курс.
Рулевой перекладывает руль на правый борт и выводит судно
на заданный курс. Во время такого поворота судоводитель теряет
на непродолжительный период времени ориентировку, но при выходе
Рис. 201. Радиолокационная фотосхема переката:
1 — яр; 2— красный буй; 3 — белый буй
на прямолинейный курс снова ее восстанавливает и вводит поправку
в направление движения судна. Точность проводки зависит от умения
рулевого выходить на заданный курс.
Перед входом на перекат необходимо убедиться в отсутствии су-
дов на перекате и подходах к нему. Если перекат занят, нужно оста-
новить судно и пропустить сверху идущее судно. Наиболее целесооб-
разным местом ожидания в рассматриваемом примере является мес-
то против яра ниже нижнего белого буя.
В канале контроль за правильностью движения по избранному
курсу осуществляется по курсовой отметке, которая должна нахо-
диться точно посередине между берегами. Один наблюдатель должен
вести постоянное визуальное наблюдение за траверзным расстоянием
между бортом судна и бровкой канала. При уменьшении этого расстоя-
ния вводится поправка к курсу. Такой способ проводки требует учас-
тия в управлении судном трех лиц. Движение по каналу при неудов-
летворительной видимости производится на малых скоростях хода.
Для повышения точности глазомерно-радиолокационного метода
судовождения как в нашей стране (на морском флоте), так и за рубежом
/ 249
Рис. 202. Картосличительная пристав-
ка к индикатору
широкое применение находят специальные картосличительные при-
ставки, являющиеся дополнительным блоком индикатора РЛС.
Они позволяют осуществлять оптическое наложение радиолокаци-
онного изображения на карту.
Над столом с картой 1 (рис. 202) расположен экран индикатора
РЛС 2. Между ними под углом 45Q установлено специальное проз-
рачное зеркало 3. Глаз наблюдателя одновременно видит карту через
полупрозрачное зеркало и изоб-
ражение экрана лежащими как
бы в одной плоскости. При сов-
мещении радиолокационного изоб-
ражения с картой по расстоянию
от начала развертки до линии
судового хода на карте судят о
правильности движения. Плавно
передвигая карту и все время
совмещая радиолокационное изоб-
ражение с картой, судоводитель
непрерывно получает информацию
о месте судна на судовом ходу и
правильности движения. На точ-
ность определения места судна с
помощью картосличительной при-
ставки будут влиять следующие
ошибки:
тк — ошибка контурной точки на карте (/пк ± 0,8 мм и более);
/пм — ошибка согласования масштабов карты и светоплана на
экране РЛС (/им ± 0,4 мм);
тс — ошибка совмещения изображений карты и светоплана
(тс = 0,8 мм);
тц — ошибка отметки центра изображения (/пц = ± 0,4 мм).
Общая ошибка (в мм)
Моб= ± + + 1,3. (93)
При масштабе карты или светоплана 1 : 25 000 Л40б = 32 м, а
при масштабе 1 : 50 000 Моб = 65 м.
На участке пути с двусторонним движением рекомендуется про-
ложить курс на карте по правой стороне судового хода и при провод-
ке совмещать центр развертки (место судна) с проложенной ли-
нией курса.
Широкое внедрение картосличительных приставок на речном фло-
те и дальнейшее совершенствование методов их использования позво-
лят повысить точность судовождения, сократить простои из-за тумана
и увеличить безопасность плавания.
\ Скорость движения при плавании с радиолокатором. Предельно
допускаемая скорость движения судов зависит от типа радиолокатора,
интенсивности движения судов, габаритов судна и пути. Наибольшие
ошибки, вызывающие отклонение судна от оси судового хода, будут
250
возникать на повороте из-за запаздывания радиолокационной инфор-
мации.
При подходе к криволинейному участку судно выходит в точку по-
ворота с определенной погрешностью, характеризующейся величиной
поперечной по отношению судового хода ошибки Aj. Эта ошибка при
глазомерном способе судовождения может быть принята равной
5—10 м, при глазомерно-радиолокационном методе — 10—20 м. Вре-
мя начала поворота будет запаздывать при глазомерном способе судо-
вождения на величину реакции судоводителя на ориентир. В резуль-
тате точка начала поворота судна будет определяться с продольной
по отношению судового хода погрешностью, величина которой про-
порциональна скорости и времени ориентировки /ор.
При глазомерно-радиолокационном способе судовождения
^ор ~ 4* “Ь ^к»
где /и — период смены информации на экране РЛС (/и = — k,
п — число оборотов антенны, для РЛС «Донец» п = 12 об/мин,
k — инерция электронно-лучевой трубки, k = 1,24-2,0 оборота
антенны);
/р — время реакции судоводителя на радиолокационный ориен-
тир (tB = 14-2 с);
/к — время передачи команды от штурмана к рулевому (/к = 1 с).
Допускаемое уклонение судна можно определить по формуле
«д=4^с.х-ДВ)--|, (94)
О Z
где ДВ — запас по ширине на точность метода судовождения, м;
В — ширина ходовой полосы, занимаемая судном, движущим-
ся с углом дрейфа 0О, м.
Величину В можно определить по формуле
В = В9 + L sin 0о,
где В — ширина судна, м;
Ь — длина судна, м;
0О — угол дрейфа у центра тяжести судна, град.
Величину 0О можно определить по приближенной формуле
(95)
(96)
где R — радиус циркуляции, равный в данном случае радиусу кри-
визны.
При определенных габаритах судового хода и методах судовожде-
ния существует определенная допускаемая скорость движения, кото-
рая может быть получена по формуле
цд= — [V(R — ад)2 — Rj cos2 а — Rt sin а], (97)
/ор
где Rj = R + До
а = 90° — угол поворота судового хода.
251
По этой формуле построен график, показывающий зависимость
предельно допустимой скорости движения из-за запаздывания радио-
локационной информации в зависимости от угла поворота и ширины
судового хода (рис. 203) для судна длиной 90 м при использовании
РЛС типа «Донец-2».
Рассмотрим определение предельно допустимой скорости движе-
ния на криволинейном участке по графику (см. рис. 203).
Пример. На криволинейном участке пути угол поворота судового хода
равен 60°, ширина 100 м. Из вертикальной оси ординат против цифры 60Q восста-
навливаем перпендикуляр до пересечения с кривой Вс,х = 100 м и получаем
точку п. Из этой точки опускаем пер-
Рис. 203. График для определения допу-
стимой скорости движения на криво-
линейном участке пути (а° — угол пово-
рота судового хода)
пендикуляр на горизонтальную ось
графика и по шкале масштаба опре-
деляем, что скорость движения не
должна превышать 13 км/ч. Из гра-
фика (см. рис. 203) видно, что при
габаритах судового хода менее 80 м
предельно допустимая скорость дви-
жения при поворотах на 60 — 90е
должна быть около 5 км/ч, т. е. рав-
на той скорости, при которой многие
суда теряют управляемость. Именно
этим объясняется, что с использо-
ванием морских РЛС в настоящее
время запрещается движение судов
при габаритах судового хода по ши-
рине, меньших 80 м.
Ограничение скорости движе-
ния из-за запаздывания радио-
локационной информации нужно
учитывать только при малых
габаритах судового хода — от
80 до 100 м и углах поворота
судового хода больших 30°.
При появлении на экране отметки встречного судна скорость дви-
жения должна быть такой, чтобы судно могло остановиться на поло-
вине расстояния визуальной дальности видимости.
Расхождение при глазомерно-радиолокационном методе судовожде-
ния. При управлении судном с помощью РЛС каждый впервые обна-
руженный в зоне обзора эхо-сигнал должен быть классифицирован
как движущееся или неподвижное судно. Направление движения суд-
на следует установить непрерывным наблюдением и за изменением
взаимного расстояния эхо-сигнала судна и какого-либо хорошо замет-
ного на экране эхо-сигнала береговой черты. Любую движущуюся в на-
правлении сближения отметку, расположенную впереди траверза сво-
его судна, следует рассматривать как встречное судно, с которым
необходимо осуществить расхождение.
При одновременном появлении на экране нескольких эхо-сигна-
лов нужно сосредоточить внимание прежде всего на ближних из них
и находящихся на острых курсовых углах. Обнаружив встречное суд-
но, следует установить с ним радиосвязь и согласовать свои дейст-
вия по расхождению. При этом нужно иметь в виду возможность оши-
252
бочной связи и ведения переговоров с каким-то другим, находящим-
ся поблизости, судном.
Расхождение при встрече должно производиться только левыми
бортами. Уклоняться с пути встречного судна следует таким образом,
чтобы его эхо-сигнал находился с левой стороны от курсовой черты,
расположенной в направлении судового хода. При приближении на
расстояние визуальной видимости нужно обменяться сигналами на
расхождение и усилить наблюдение за перемещением отметки встреч-
ного судна и визуальное наблюдение.
Рис. 204. Расхождение с толкаемым составом:
о — шкала 1,5 мили, 6 — шкала 1,0 мили; в — шкала 0,5 мили
На рис. 204 приведены три фотографии с экрана РЛС, показы-
вающие правильное положение отметки встречного состава относи-
тельно отметки курса.
При расхождении суда должны следовать прямолинейными кур-
сами. Нельзя допускать расхождения на криволинейных и извилис-
тых участках пути.
При приближении к траверзу встречного судна возможно появле-
ние на экране РЛС ложных эхо-сигналов из-за многократного отраже-
ния зондирующего импульса от расходящихся судов.
Обгон следует производить с особой осторожностью и только по-
сле согласования стороны обгона. Расхождение и обгон запрещается
производить с помощью РЛС, если ширина судового хода менее 200 м.
§ 62. НАВИГАЦИОННЫЙ МЕТОД
ИСПОЛЬЗОВАНИЯ СУДОВОЙ РЛС
Определение места судна по расстояниям до двух-трех ориентиров.
Радиолокатор применяется главным образом для определения места
судна по измеренным расстояниям. Изображение на экране РЛС при
навигационном методе следует стабилизировать с помощью гироком-
паса по меридиану.
253
Определение места судна по расстояниям производится следующим
образом.
Судоводитель в быстрой последовательности, пользуясь масштаб-
ной линейкой или ПКД, измеряет расстояния до двух или трех радио-
локационных ориентиров. Для повышения точности определения мес-
та судна сначала измеряют расстояния до ориентиров, расположен-
ных на траверзе или около него, а потом до ориентиров, расположен-
ных на острых курсовых углах. Затем, поставив ножку циркуля на
Рис. 205. Определение места судна по
трем измеренным расстояниям:
di, d2, d3 — измеренные расстояния; Di, D2,
Da — точки центров дуг; А — счисли мое ме-
сто судна; В — обсервованное место
каждую опознанную точку на кар-
те, делают засечку в районе пред-
полагаемого положения судна ра-
диусами, равными измеренным рас-
стояниям.
При определении по двум из-
меренным расстояниям место судна
определяется в точке пересече-
ния дуг, проведенных циркулем
(рис. 205, точка В). При определе-
нии места по трем измеренным рас-
стояниям может получиться тре-
угольник погрешности. В этом
случае место судна принимают в
центре треугольника. Полученную
таким образом обсервованную точ-
ку (точка В) соединяют волнистой
линией с точкой Д, определенной
по счислению (пройденному пути).
Дальнейшую прокладку курса ве-
дут от полученной обсервованной точки. Средняя квадратическая
ошибка определения места судна по двум радиолокационным рас-
стояниям определяется по формуле
М = ± — УеЗ. + е§2,
sin W
(98)
где w — угол пересечения линий положения;
Ed/, £d2 — средние квадратичные ошибки измерения расстоя-
ний.
Определение места судна по радиолокационному пеленгу и рас-
стоянию до ориентира. Способ применяется при наличии только од-
ного ориентира. Пеленг на ориентир определяют путем установки
визира над серединой отметки точечного ориентира. В момент опреде-
ления пеленга определяют и расстояние до ориентира. Затем на кар-
те прокладывают пеленг и на линии пеленга от ориентира откладывают
определенное расстояние (рис. 206).
В темное время суток можно использовать визуальный пеленг до
освещаемого навигационного знака и определенное с помощью РЛС
расстояние до него.
254
Среднеквадратическая ошибка определения места судна данным
способом находится по формуле
А,= ±/(йУ+-5’
(99)
— расстояние до ориентира;
— среднеквадратическая ошибка измерения пеленга;
ошибка измерения расстояния.
где d
8п
zd — среднеквадратическая
Описанные способы могут быть
применены и при плавании в озер-
ной части крупных водохранилищ.
На водохранилищах судовой ход
часто проходит вдоль одного из
берегов (обычно правого). Для
того чтобы исключить возможность
Рис. 206. Определение места судна по
пеленгу и расстоянию, измеренному
РЛС:
d — измеренное расстояние; А — счислимое
место судна; В — обсервованное место
приближения к берегу на опасное
расстояние во время тумана или
в темные ночи, на карте проводят
линию безопасности, ближе кото-
рой судно не должно подходить к
берегу. От объектов, наиболее удоб-
ных для определения расстояний г
помощи РЛС, измеряют рас-
стояния до линии безопасности и записывают их на карте. Путь судна
прокладывают параллельно этой линии.
При плавании измеряют траверзные расстояния до выбранных объ-
ектов и следят, чтобы они не становились меньше, чем расстояния
до линии безопасности.
§ 63. ПРОВОДКА СУДНА
С ПОМОЩЬЮ БЕРЕГОВОЙ РЛС
Береговые РЛС (БРЛС) занимают ведущее место в навигационном
обеспечении судов на подходах ко многим зарубежным портам. В ряде
портов СССР также установлены береговые РЛС (Ленинград, Жда-
нов, Ильичевск и др.).
В качестве береговых РЛС в нашей стране используются специаль-
но созданные РЛС типа «Раскат» и судовые РЛС типа «Океан». БРЛС
оборудуются средствами радиосвязи с судами, а выносные индикаторы
БРЛС снабжаются картосличительными приставками (типа «Паль-
ма»). Кроме того, на берегу имеются фоторегистратор и звукозаписы-
вающее устройство (магнитофон «Звук-1»), с помощью которых регист-
рируют движение судна.
При получении запроса о проводке судна на БРЛС «Раскат» пре-
дусмотрена следующая организация радиолокационного обслужи-
вания:
а) опознание цели (судна) одним из обычных методов (сличение
места судна с показанием электронного визира путем радиопеленго-
вания или по изменению заданных с БРЛС элементов движения);
255
б) подготовка трассы движения (состоит из радиолокационного
просмотра предлагаемого пути движения судна, оценки состояния
радиолокационной видимости, оповещения службы наблюдения и
связи);
в) установление характеристики судна, вида связи, оценка состо-
яния гидрометеофакторов;
г) согласование с диспетчерской службой номера причала для
швартовки и очередности движения
Рис. 207. Планшет для определения
места судна с помощью береговой
РЛС
Суда, нуждающиеся в помощи
судов.
По запросу судов оператор
БРЛС «Раскат» сообщает сле-
дующую информацию: местона-
хождение судна с выдачей по-
лярных (относительно любой
точки в зоне обзора) или геог-
рафических координат; курс
выхода в любую точку зоны
обслуживания БРЛС; боковые
смещения судна относительно
оси судового хода; положение
других судов, находящихся в
зоне обзора; смещение знаков
плавучего навигационного ог-
раждения с их штатных мест;
курс от любой точки акватории
к судовому ходу; курсы входа
в любую точку акватории пор-
та; направление дрейфа судна
при подвижке льда.
В периоды пониженной види-
мости БРЛС работает в режиме
круглосуточной готовности к вы-
даче навигационной информации.
БРЛС «Раскат» и находящиеся
в порту, дают заявку на проводку через оперативного дежурного
портового надзора. Суда, которые следуют в иорт и находятся в зоне
обслуживания станции, устанавливают непосредственную радиоте-
лефонную связь с БРЛС.
Процесс проводки осуществляется следующим образом. Судно вхо-
дит в зону действия береговой РЛС. Судоводитель сообщает оператору
РЛС по радиосвязи свою просьбу о проводке и данные, характеризу-
ющие судно (длина, ширина, осадка). Оператор береговой РЛС, об-
наружив на экране эхо-сигнал от судна, передает судну его местополо-
жение по отношению буев или других ориентиров, определяю-
щих судовой ход, а также пеленг на судно и расстояние до РЛС по это-
му пеленгу. Судоводитель для быстрого определения места нахожде-
ния должен иметь планшет с заранее нанесенными пеленгами и окруж-
ностями расстояний (рис. 207).
Например, судоводителю при заходе в аванпорт с входным створом
оператор сообщил: «Ваше место — сто десять, восемь тысяч пятьсот».
256
Первая цифра означает пеленг в градусах, вторая — расстояние
до РЛС в метрах (или кабельтовых). На планшете судоводитель
определяет точку на пересечении линии этого пеленга с окружностью,
соответствующей радиусу 8500 м. Как показано на рис. 207, судно
будет находиться в точке Л, несколько левее входного створа. После
этого судоводитель изменяет курс вправо и по новым координатам,
сообщенным оператором, снова корректирует курс и заходит в порт.
Опыт работы береговых РЛС показал, что возникают большие
затруднения при одновременном подходе к зоне действия станции не-
скольких судов. Оператору трудно определить отметку на экране, при-
надлежащую тому судну, которое должно быть проведено первым.
В таких случаях все суда сначала должны встать на якорь, и после ус-
тановления очередности проводки первое снимается с якоря и вы-
полняет какой-либо заранее обусловленный по радио маневр (поворот
влево или вправо). Опознав эхо-сигнал на экране РЛС проводимого
судна, оператор приступает к проводке.
§ 64. ИСПОЛЬЗОВАНИЕ РЛС ДЛЯ
ПРЕДУПРЕЖДЕНИЯ
СТОЛКНОВЕНИЙ СУДОВ
Оценка опасности столкновения. На крупных озерах (водохрани-
лищах) и в прибрежно-морских районах при обнаружении эхо-сиг-
нала движущегося судна необходимо определить курсовой угол на
встречное судно, величину и направление изменения пеленга на него,
ракурс встречного судна и расстояние кратчайшего сближения. Кур-
совой угол и направление изменения пеленга судоводитель непосред-
ственно наблюдает на экране РЛС, ракурс и расстояние кратчайшего
сближения, можно получить графическим построением.
Существуют два метода графических построений — истинная и от-
носительная прокладка. Наибольшее распространение получила отно-
сительная прокладка (рис. 208). Из произвольной точйи О проклады-
ваются полученные по наблюдениям пеленги эхо-сигналов встречно-
го судна /7j и П2 и расстояния до встречного судна d{ й d2. Через
полученные точки и В2 проводится прямая, представляющая со-
бой линию относительного движения (ЛОД). Кратчайшее сближение
будет равно длине перпендикуляра ОТ, опущенного из точки О на
линию относительного движения.
Величина относительной скорости определяется из выражения
где Д/ — промежуток времени между взятием пеленгов Z7j и П2.
Время кратчайшего сближения
'г _ в*т
257
Вектор пути встречного (обгоняемого) судна SB равен геометри-
ческой сумме векторов пути своего судна SH и относительного пе-
ремещения S0T:
5B=sH+s0T. (ЮО)
Рис. 208. Относительная прокладка
и треугольник скоростей
Для нахождения вектора пути встречного судна из точки В2 нуж-
но проложить истинный курс своего судна и на этой линии от точки
Вг отложить пройденное своим судном расстояние за время Л/; так
получим точку С (см. рис. 208),
отрезок В2 С будет вектором Sn.
Соединив точку Bi с точкой С,
получим вектор SB. Отрезок BtC
будет величиной пройденного за
время Д/ расстояния встречным
(обгоняемым) судном. Скорость
встречного судна ов определяют
по формуле
. (Ю1)
в дт
Угол между истинным мери-
дианом и линией вектора SB бу-
дет истинным курсом встречного
судна ИКЪ.
Если разделить обе части уравнения (100) на промежуток времени
между наблюдениями пеленгов Д/, то получим соотношение векторов
скоростей
^в = ^ + ц,т. (102)
где vH — вектор скорости своего судна.
Удобно принять промежуток времени Д/ за единицу, тогда отрез-
ки векторов скоростей при построении будут равны перемещениям су-
дов, а треугольник Bt В2С будет называться треугольником скорос-
тей.
Решение задач маневрирования при расхождении судов связано
с решением треугольников скоростей, поэтому этот треугольник име-
ет очень важное значение в теории и практике судовождения.
При появлении на экране эхо-сигналов нескольких судов однов-
ременно графическую прокладку нужно вести для тех судов, глазо-
мерное наблюдение за которыми показывает, что они опасны. Эта
глазомерная оценка производится по следу, остающемуся на экра-
не от отметки движущегося судна. Если след направлен к центру
экрана, то существует угроза опасного сближения судов; если след
направлен от центра экрана или линия продолжения следа проходит
далеко от центра экрана, то угрозы столкновения нет (при условии,
что суда не изменят курсы и скорости движения).
258
При опасности столкновения расстояние кратчайшего сближения,
определенное путем относительной прокладки, будет тем точнее, чем
больше сокращение дистанции до встречного судна за время между
наблюдениями. При оценке опасности столкновения следует прини-
мать во внимание ошибки, присущие радиолокационной информации.
На основании опыта многочисленных наблюдений можно сделать опре-
деленные выводы.
1. Если расстояние кратчайшего сближения более 2 миль, то уг-
розы столкновения нет.
Рис. 209. График для определения расстояния и время кратчайшего сближения
2. Если расстояние кратчайшего сближения немного превышает
1 милю, то встречное судно или пройдет очень близко, или произойдет
столкновение; необходимо предпринять маневр, направленный на
увеличение расстояния кратчайшего сближения.
3. Если расстояние кратчайшего сближения менее 1 мили, то
встречное судно может пройти даже с другого борта и необходимы
решительные меры для предотвращения опасного сближения судов.
Обстоятельства сближения судов можно оценить, не прибегая
к графической прокладке, с помощью графика (рис. 209). С его по-
мощью легко и быстро можно получить не только расстояние кратчай-
шего сближения судов dKP, но и время Т, за которое суда придут
в точку кратчайшего сближения. Для определения кратчайшего сбли-
жения судов и времени кратчайшего сближения определяют расстоя-
ния до встречного судна d2 и пеленги встречного судна ГЦ и /72,
а также замечают время взятия пеленгов и определения расстояний
ti и /2- Затем определяют величину Д/ и Д/7:
Д/ = _£irA , (103)
dj dg
Д/7 = ; (104)
дг
259
На горизонтальной оси графика (см. рис. 209) откладывают вели-
чину di и из полученной точки восстанавливают перпендикуляр вверх —
до пересечения с соответствующей кривой А/7 и вниз — до пересече-
ния с соответствующей кривой А/. Затем из полученных точек А и Б
(см. рис. 209) опускают перпендикуляры на вертикальные оси графи-
ка. По масштабу на верхней вертикальной оси определяют кратчай-
шее сближение нижней — время кратчайшего сближения Т,
Предупреждение столкновения судов. Основными причинами столк-
новений судов в тумане при использовании радиолокатора являются
неверная оценка обстановки, неправильное определение элементов
движения встречного судна и ошибочная расшифровка его маневра.
Рис. 210. Относительная прокладка с по-
мощью картосличительной приставки
Рис. 211. Маневренный планшет
Большие возможности для более простого и быстрого решения за-
дач по предупреждению столкновений судов имеют картосличитель-
ные приставки к РЛС («Пальма» и др.). Совместив радиолокационную
картину побережья с картой, судоводитель должен через равные про-
межутки времени отмечать местоположение на карте своего и других
судов. Соединив отметки на карте линией, судоводитель будет нагляд-
но видеть всю обстановку вблизи своего судна: сколько судов в рай-
оне плавания, их курсы и скорости. На рис. 210 показан участок кар-
ты с нанесенной обстановкой. Видя на карте обстановку в районе пла-
вания, судоводителю просто будет принять решение на расхождение,
а также на уклонение от столкновений.
Решение задач на предупреждение столкновений судов быстрее
и точнее можно производить с помощью картосличительных устройств.
Вместо карты в этих целях используется маневренный планшет, вы-
полняемый в масштабе около 1 : 200 000 (рис. 211). На нем имеются
окружности с интервалохМ расстояния в 5 кбт, а по внешней окруж-
260
Рис. 212. Расхождение на параллель-
ных курсах:
А, В — положения встречных судов; С, D —
перемещение отметки встречного судна на
экране РЛС
и^ с пентоом планшета и
ности нанесена шкала деления в градусах. Планшет устанавливается
вместо карты в картосличительное устройство и ориентируется по
странам света, его центр согласуется с центром развертки. Масштаб-
ные кольца РЛС должны быть согласованы с кругами маневренного
планшета (т. е. масштабы планшета и экрана РЛС должны совпадать).
Через промежутки времени, равные 1—2 мин, на планшете делают ка-
рандашом отметки положений эхо-сигналов встречного судна. Затем,
соединив их линией, получают ЛОД. Далее из центра планшета по
направлению радиуса, который совпадает на внешней шкале с циф-
рой компасного курса своего судна, откладывают его скорость ис
(в кабельтовых в минуту).
За единицу масштаба скорости для удобства построения треуголь-
ника скоростей принимают 5 кбт. С помощью параллельной линейки
из конца вектора скорости ис про-
водят линию, параллельную ЛОД.
Затем определяют относительную
скорость ир путем измерения цир-
кулем расстояния, на которое
переместилась отметка эхо-сигнала
встречного судна на планшете за
время наблюдений.
Отложив из конца вектора ис по
линии, параллельной ЛОД, ско-
рость ир, соединяют конец вектора
чают таким образом величину скорости движения встречного судна
ик в выбранном масштабе. Цифра на внешней окружности против
этого вектора будет указывать истинный курс встречного судна.
Пример. На рис. 211 указано решение подобной задачи по следующим
данным: курс своего судна К — 20°, скорость своего судна ос = 12 узлам =
= 2 кбт/мин; относительная скорость — 4 кбт/мин; курс встречного судна
Кк = 120°; скорость встречного судна vK = 3 кбт/мин = 18 узлам. •
Описанным маневренным планшетом можно пользоваться и при
отсутствии картосличительного устройства РЛС. Разница состоит
лишь в том, что ЛОД наносится не по засечкам отметки эхо-сигнала
встречного судна, а путем определения пеленгов и расстояний до отмет-
ки эхо-сигнала встречного судна через определенные промежутки
времени с последующим нанесением их на маневренный планшет.' На-
несение на планшет пеленгов и расстояний требует наличия у судо-
водителя помощника.
Быстрая оценка конкретной ситуации, наблюдаемой на экране РЛС,
позволяет принимать своевременные и правильные решения, направ-
ленные на предотвращение столкновения судов. Все случаи переме-
щения эхо-сигналов по ЛОД можно разделить на ряд групп.
1. ЛОД параллельна курсу нашего судна А (рис. 212). Отно-
сительная скорость иот равна сумме скоростей нашего судна ин
и наблюдаемого судна В (судна-цели) иц. Судно-цель следует на-
встречу.
Пеленг изменяется к норме. Суда разойдутся чисто левыми бор-
тами-
261
2. ЛОД перемещается по курсовой черте. Относительная скорость
иот + иц (Рис- 213), суда идут контркурсами, разрешается
менять курс только на правый борт.
3. ЛОД перемещается по курсовой черте, относительная скорость
иот = vh — уц- Обгоняющему судну лучше изменять курс вправо,
обгоняемому влево, возможно изменение курсов в обратной последо-
вательности.
Рис. 213. Расхождение на контркур-
сах:
А, В — положения встречных судов; С, D —
перемещение отметки встречного судна на
экране РЛС
Рис. 214. Расхождение на пересека-
ющихся курсах:
А, В — положения встречных судов; С, D —
перемещение отметки встречного судна на
экране РЛС
4. ЛОД отсутствует, иот = 0, vH = иц, ИКН =
Суда идут в одном направлении с одинаковыми скоростями. Изменение
скорости или курса одним из судов или обоими судами приводит к по-
явлению ЛОД.
5. ЛОД не параллельна курсу нашего судна и пересекает его под
острым углом.
Рис. 215. Схема движения судов А и Б встречно-пересекающимися курсами и пе-
ремещение их отметок на экранах РЛС:
1, 2 — перемещение отметки судна В на экране РЛС судна А; 3 — отметка курса судна Д;
< 5 — перемещение отметки судна А на экране РЛС судна Б\ 6 — курс судна Б
Судно А обнаруживает судно В с левого борта, судно В обнаружи-
вает судно А с правого борта (рис. 214). Обоим судам разрешается
поворот только вправо. Поворот судна влево приводит к типичному
«радиолокационному» столкновению.
На рис. 215, 216 показано расположение эхо-сигналов судов до и
после выполнения маневра поворота вправо для предотвращения су-
ществовавшей возможности столкновения судов.
262
Приведенные выше рекомендации можно свести к двум правилам
для предупреждения столкновений судов:
1) чтобы избежать столкновения со встречным судном, находящим-
ся впереди траверза, нужно изменять курс вправо;
Рис. 216. Схема движения судов Л и Б после маневров на расхождение и пере-
мещение их отметок на экранах РЛС:
1, 2 — перемещение отметки судна Б на экране РЛС судна А; 3 — отметка курса судна А;
4, 5 — перемещение отметки судна А на экране РЛС судна Б\ 6 — отметка курса судна Б
2) чтобы избежать столкновения с судном, следующим кормовым
курсовым углом, наше судно должно изменять курс в направ-
лении, противоположном направлению изменения курса другого
судна.
Необходимо учитывать, что когда оба судна одновременно повора-
чивают вправо, желаемого результата можно не достичь, если угол
изменения курса первого судна
вправо меньше угла изменения
курса другого судна вправо.
На рис. 217 приведена поляр-
ная диаграмма, показывающая слу-
чаи, когда маневрирование обоих
судов сводит на нет прилагаемые
усилия к предотвращению столк-
новения, поскольку относительный
курс встречного судна остается не-
изменным, несмотря на то, что оба
судна меняют свой курс. Условия,
когда изменение относительного
курса равно нулю (или 180°), на
диаграмме показаны в виде кри-
вых линий.
Первая цифра у кривой линии
означает величину изменения кур-
са нашим судном, вторая—встреч-
ным судном, а — курсовой пеленг
встречного судна, измеренный по
Рис. 217. Полярная диаграмма:
------ наше судно изменяет свой курс на
90°, другое — на 30°;----------наше
судно изменяет свой курс на 60°, другое —
на 30°; .....наше судно изменяет свой
курс на 30°, другое — па 90°
263
часовой стрелке от линии курса нашего судна; К — отношение ско-
ростей встречного и нашего судна.
Пользование номограммой поясним на примере.
Пример. Встречное судно, идущее со скоростью 12 км/ч, обнаружено
на курсовом угле а = 60°. Наше судно идет со скоростью 12 км/ч. Пеленг не ме-
няется. X = р- = 1. Определить, какое изменение курсов вправо обоими судами
снова приведет к постоянному относительному курсу.
По а = 60° и % = 1 на полярной диаграмме находим точку «т», которая ле-
жит на кривой, обозначенной 30—90°. о
Если наше судно сделает отворот вправо на 30°, а встречное на 90°, новый
относительный курс будет постоянным, и задача расхождения судов оказывает-
ся не решенной.
Глава XI
ОРГАНИЗАЦИЯ БЕЗОПАСНОСТИ СУДОХОДСТВА
И ПРАВИЛА ПЛАВАНИЯ
•
§ 65. ОРГАНИЗАЦИЯ ВАХТЕННОЙ
СЛУЖБЫ
Вахтенная служба (вахта) на судах — особый вид выполнения
служебных обязанностей, требующих повышенного внимания и непре-
рывного присутствия на посту или рабочем месте. Ответственность
за организацию вахтенной службы несет капитан, а непосредственное
руководство осуществляет вахтенный начальник. Распределение чле-
нов экипажа по вахтам и время смены вахт указываются в «Расписа-
нии вахт». Все члены судового экипажа при несении вахты должны
быть в установленной для них форме одежды. Вахтенный начальник
отвечает за обеспечение безаварийного плавания судна, безопас-
ность людей, за сохранность находящихся на судне грузов и имущест-
ва, за обеспечение надлежащего несения вахты.
Капитан является единоначальником и руководителем экипажа и
несет полную ответственность за работу, организацию судовождения
и безопасность плавания, сохранность судна, жизнь находящихся на
судне людей, сохранность перевозимого груза и имущества, за поли-
тико-моральное состояние экипажа, организацию службы на судне,
выполнение судового плана, техническое состояние и содержание
судна.
Важнейшее значение в обеспечении безопасности плавания имеет
четкая организация вахтенной службы в соответствии с требования-
ми «Устава службы на судах речного флота», «Устава о дисциплине
работников речного транспорта» и наставления по организации штур-
манской службы на судах.
При выполнении повседневных обязанностей штурманский состав
должен правильно и аккуратно заполнять и содержать вахтенный
журнал, путевой журнал, каталог навигационных карт и пособий,
журнал приема прогнозов погоды и путевой информации, журнал на-
264
личия и использования пиротехнических средств, таблицы маневрен-
ных характеристик судна (типового состава), таблицы девиации, тех-
нические паспорта и инструкцию по использованию электрорадионави-
гационных приборов, директивные документы по вопросам обеспече-
ния безопасности плавания.
Первый штурман обязан проводить корректуру карт и пособий, а
перед выходом в рейс проверять исправность всех навигационных
средств и приборов. В рейсе такая проверка должна производиться
ежедневно в период утренней вахты. В обязанности первого штурма-
на входит определение поправок приборов, составление заявок на ре-
монт и пополнение запасных частей навигационных приборов.
После получения план-приказа на рейс капитан должен: опреде-
лить меры по обеспечению безопасности плавания, совместно со штур-
манским составом провести разбор маршрута, установив особеннос-
ти пути, гидрометеорологической навигационной обстановки; произ-
вести, если плавание осуществляется с помощью навигационных при-
боров, предварительную прокладку курса; проверить состояние руле-
вых средств, световой и звуковой сигнализации, корпуса судна; про-
контролировать правильность расстановки и швартовки судов в соста-
ве, соответствие габаритов судна (состава) габаритам пути, пригод-
ность судна (состава) к плаванию в данном районе.
Перед каждой вахтой судоводитель должен изучить предстоящий
участок пути, установить наиболее затруднительные участки, озна-
комиться с путевой информацией и прогнозом погоды, проверить со-
стояние судна и его устройств, определить точное положение судна
на местности или координаты места судна.
На судах речного флота организация вахтенной службы и управ-
ления судном построена так, что в любых условиях обеспечивается
надежное и гибкое руководство всем экипажем судна.
Судоводители всех судов, независимо от их принадлежности, обя-
заны знать Правила плавания (общие и местные), спецлоцию, порядок
получения гидрометеорологической и путевой информации в районе
плавания судна. Если судоводитель не знает спецлоции, его судно
должно следовать в сопровождении лоцмана.
Судоводитель имеет право управлять судном лишь в том случае,
если у него имеется диплом судоводителя на право занимаемой
должности.
Капитан судна обязан:
до начала рейса информировать штурманов о навигационных изме-
нениям пути и иметь откорректированные карты;
проводить инструктаж шкиперов барж и плотокоманды, если пред-
стоит рейс с составом;
не допускать отправления в рейс технически неисправных или не
соответствующих габаритам пути судов и составов;
перед выходом в рейс в водохранилища, озера и прибрежно-морс-
кие районы предъявлять судовые документы диспетчеру и получать
разрешение на выход, а также рейсовый и общий прогноз погоды;
при получении штормового предупреждения во время движения
по водохранилищу или озеру с составом сообщать диспетчеру свое
9 С. Б. Ольшамопский
местонахождение, принять меры к безопасной проводке состава или
плота до ближайшего убежища, открыть постоянную радиовахту.
После прихода в убежище держать судно в состоянии готовности к
оказанию помощи людям, судам и плотам, терпящим бедствие;
обеспечить, чтобы на каждом выходящем в озере теплоходе был
запас топлива, достаточный для совершения планового рейса, и до-
бавочный запас не менее как на 12 ходовых часов;
систематически проверять девиацию магнитного компаса на судах,
выходящих в Ладожское, Онежское озера, озеро Байкал и в прибреж-
но-морские районы;
лично управлять судном при прохождении отдельных затруднитель-
ных участков (порогов, мостов, перекатов и т. д.) во время вахты вто-
рого и третьего штурманов или же по вызову первого штурмана;
при постановке несамоходных судов к причалам и на рейдах пре-
дупреждать шкиперов об опасных гидрометеорологических явлени-
ях, которые могут наблюдаться в данном районе, и о мерах, которые
следует при этом предпринимать;
если судну или составу грозит опасность затопления, применять
все меры к тому, чтобы освободить фарватер и отвести аварийное суд-
но (баржу) к одному из берегов или на мелкое место;
если судну грозит неминуемая гибель, после принятия всех мер
к спасению пассажиров разрешить судовому экипажу оставить
судно;
при гибели судна оставлять его последним;
составлять в трех экземплярах акт об аварийном случае со схема-
тическими чертежами происшествия и передавать его в судоходную
инспекцию ближайшего пункта, владельцу судна (пароходству,
РЭБу), а один экземпляр хранить на судне.
Вахтенный начальник самоходного судна обязан:
не допускать на пост управления посторонних лиц (кроме лиц,
контролирующих движение);
подавать сигнал-отмашку при расхождении и обгоне судов импуль-
сами света или флагом-отмашкой белого цвета только с края капитан-
ского мостика, а при его отсутствии — через боковое окно или дверь
штурманской рубки;
не допускать в положении обгоняемого судна на реках и каналах
одновременного обгона и расхождения судов при нахождении их на
траверзе друг друга;
записывать в вахтенный журнал время включения и выключения
ходовых и стояночных огней;
при наличии УКВ радиостанции использовать ее в качестве до-
полнительного средства к сигналам при расхождении и обгоне судов
в пределах их видимости, при прохождении шлюзов, акватории, пор-
тов, крутых колен и сложных участков, при ухудшении видимости
или в случае стоянки на якоре вблизи судового хода;
при обнаружении препятствий на судовом ходу, неисправных
навигационных знаков, полосы тумана предупредить об этом все
встречные суда, сообщить в ближайший диспетчерский пункт и сде-
лать запись в вахтенном журнале;
266
при повреждении знаков судоходной обстановки, утере на судовом
ходу якорей или предметов, угрожающих безопасности других судов,
сообщать обстановочной бригаде, посту и встречным судам, а также
принимать меры к немедленному подъему утонувших предметов или
ограждению их предостерегательными знаками;
оставлять буксируемые суда при швартовке к берегу или при пос-
тановке на якорь только после проверки надежности стоянки и безо-
пасности постановки.
При наступлении тумана или других явлений, ухудшающих види-
мость во время хода судна, вахтенный начальник должен принять
следующие меры;
доложить об этом капитану, предупредить старшего по вахте в ма-
шинно-котельном отделении, а также старшего механика судна;
включить радиолокатор и убедиться в его исправной работе, вклю-
чить радиостанцию и обеспечить несение радиовахты для связи со
встречными судами;
поставить впередсмотрящего;
задраить все горловины, лазы и двери в водонепроницаемых
переборках;
уменьшить ход судна;
запросить по радио диспетчера о наличии судов в данном районе;
сделать отметку в вахтенном журнале.
При несчастных случаях с людьми на воде или борту судна вахтен-
ный начальник обязан использовать все имеющиеся в его распоряже-
нии средства для их спасения.
§ 66. ТРЕБОВАНИЯ ПРАВИЛ
ПЛАВАНИЯ К СУДАМ И СОСТАВАМ
«Правила плавания по внутренним судоходным путям РСФСР»
являются основным документом, обеспечивающим безопасность судо-
ходства на внутренних судоходных путях. Правила устанавливают
единый для всех порядок движения судов и составов, определяют ха-
рактер взаимодействия между судами при любых наблюдающихся на
практике ситуациях (встречах и обгонах). Они устанавливают требо-
вания к навигационным знакам судоходной обстановки и судовым сиг-
налам, а также к габаритным ограничениям судов и составов. Содер-
жание Правил отражает организацию движения на внутренних вод-
ных путях, без знания которой невозможно осуществлять безаварий-
ное плавание.
«Правила плавания по внутренним судоходным путям РСФСР»
утверждаются министром речного флота РСФСР.
В дополнение к «Правилам плавания по внутренним судоходным
путям РСФСР» в бассейнах рек разрабатываются местные правила
плавания, отражающие особенности движения судов по этим бассей-
нам. Эти правила составляются работниками судоходной инспекции
бассейна, пароходств и бассейновых управлений пути и утверждаются
начальником судоходной инспекции бассейна.
9* 267
Правила плавания имеют силу закона, поэтому лица, нарушившие
их, в зависимости от тяжести последствий, вызванных нарушениями,
несут административную, материальную или уголовную ответствен-
ность в соответствии с законом.
Действие правил плавания распространяется на все суда, плавучие
сооружения и плоты (независимо от их принадлежности), плавающие
по внутренним судоходным путям РСФСР. Все судоводители госу-
дарственных учреждений, организаций и предприятий и отдельные
граждане, в ведении которых находятся плавучие средства, обязаны
точно выполнять Правила и требования судоходных инспекций.
Судоходная инспекция осуществляет постоянный контроль за вы-
полнением Правил плавания и безопасностью судоходства с широким
привлечением общественности, а также работников служб и групп по
безопасности движения в пароходствах.
Лучшие капитаны судов на общественных началах выполняют
функции судоходных инспекторов.
Суда, выходящие в прибрежно-морские районы, должны соблю-
дать Международные правила предупреждения столкновений судов
в море, обязательные постановления начальников морских портов
и согласованные между МинморфлоТом и Минречфлотом положения
о режиме плавания.
Технический надзор за всеми судами осуществляет Речной Регистр
РСФСР. Требования к техническому состоянию судов установлены
«Правилами технической эксплуатации речного флота» и «Правилами
Речного Регистра РСФСР».
Все самоходные суда должны иметь: судовое свидетельство, выда-
ваемое судоходной инспекцией, удостоверение на годность к плава-
нию или книги судовых документов, выдаваемые Речным Регистром
РСФСР, штатное расписание, список лиц судового экипажа.(судовую
роль), книгу осмотров судна, вахтенный журнал, расписание обще-
судовых тревог (пожарной, водяной, «Человек за бортом»), а при на-
личии радиостанции — радиожурнал.
На носовой части судов по обеим сторонам должен быть нанесен
номер или название судна с литером, присвоенным судну по реестру.
Габариты судов и составов должны соответствовать габаритам пу-
ти. Длина одиночных судов должна быть в 3 раза меньше нормирую-
щих радиусов кривизны судового хода. Длина состава, учаленного
жестким счалом, при следовании вниз должна быть в 3,5 раза, а при
следовании вверх в 2 раза меньше нормирующих радиусов закругле-
ний.
На судах, предназначенных к выходу в водохранилища, озера и
прибрежно-морские участки, грузы должны размещаться и крепить-
ся так, чтобы исключалась возможность их перемещений и не нару-
шалась остойчивость судна во время качки. Люки, иллюминаторы и
другие отверстия должны быть герметично задраены. Доступ к люкам,
трапам, противопожарным и водоотливным средствам, а также к спа-
сательному и противопожарному инвентарю должен быть свободным.
При любых условиях плавания формирование состава, а также за-
грузка судна палубными грузами должны быть выполнены таким обра-
268
зом, чтобы сохранилась свободная видимость по горизонту из руле-
вой рубки.
Все суда, являющиеся государственной собственностью и нахо-
дящиеся в ведении советских государственных учреждений, органи-
заций и предприятий, должны нести от восхода до захода солнца Го-
сударственный флаг СССР.
§ 67. ОРГАНИЗАЦИЯ ДВИЖЕНИЯ
СУДОВ
До 1963 г. движение судов (согласно старым правилам) организо-
вывалось по принципу экономического использования речного пото-
ка. В этом случае сверху идущие суда использовали для движения
стрежневые струи, а идущие снизу — тиховоды. При такой органи-
зации движения судов имелись существенные недостатки. К ним
можно отнести: наличие пересекающихся курсов встречных судов
на изгибах русла; зависимость выбора курса при расхождении от
субъективной оценки судоводителем поперечного распределения ско-
ростей течения в сечении реки. При интенсивном движении судов с
экономической точки зрения оказалось невыгодным иметь такую ор-
ганизацию движения, так как суда, идущие вверх, имели большие
простои из-за ожидания прохода судов, идущих по течению.
При подобной организации движения часто возникали ситуации,
когда судоводители, расходясь со встречным судном, не могли согла-
совать взаимовыгодные курсы. В результате почти половина всех
столкновений судов происходила при не согласованных отмашками
на расхождение курсах судов и составов.
Принятая с 1963 г в существующих Правилах организация дви-
жения судов по принципу двухрядного потока при расхождении ле-
выми бортами имеет ряд существенных преимуществ. К их числу от-
н ч?ятся более слабая связь и зависимость встречных потоков судов
друг от друга и упорядочение движения за счет расхождения только
левыми бортами.
Дальнейшее совершенствование организации движения судов идет
по направлению разделения встречных потоков судов. На водохрани-
лищах и шлюзованных реках это может быть достигнуто путем при-
менения двухпутной или осевой обстановки судового хода, комбини-
рованного навигационного ограждения, сочетания осевой и боковой
систем ограждения судового хода. При ширине судового хода от 300
до 600 м можно достигнуть разделения встречных потоков, одновремен-
но обозначая ось и границы судового хода, при ширине более 600 м
достаточно указывать только ось судового хода.
На крупных рейдах интенсивность движения достигает в отдель-
ные периоды 600 и более судов в сутки. Совершенствование организа-
ции движения на рейдах заключается в разгрузке транзитного судово-
го хода путем выделения специальных судовых ходов для пассажир-
ского флота пригородных линий, выделения специальных зон для пе-
ресечения транзитного судового хода этими судами, судами паромных
переправ, моторными и гребными лодками.
269
§ 68. ПРАВИЛА ДВИЖЕНИЯ
И РАСХОЖДЕНИЯ СУДОВ
Правилами плавания устанавливается следующий порядок дви-
жения по судовому ходу.
Движение судов и составов по судоходным трассам озер и водо-
хранилищ, а также на плесовых участках рек с габаритами судового
хода, обеспечивающими одновременно двустороннее движение судов,
осуществляется правой (по ходу) стороной от оси фарватера. Осевые
буи оставляются только с левого борта. Судам и составам пере-
секать судовой ход для подхода к причалам, рейдам и другим местам
стоянки разрешается при отсутствии на опасном расстоянии встречных
и обгоняющих судов. Аналогично производят и выход на судовой ход
от берега или мест стоянок.
Рис. 218. Порядок движения в районе притоков и затонов, установленный Прави-
лами плавания:
1 — судно, движущееся против течения по основной реке; 2 — судно, движущееся по течению
по основной реке; 3 — судно, выходящее из протоки, стоящее в ожидании прохода судна,
идущего по основной реке; 4 — судно, выходящее из затона, стоящее в ожидании прохода
судна, идущего по основной реке; 5 — ось судового хода; 6 — граница основного судового
хода
При движении мимо устьев притоков и мимо затонов суда, движу-
щиеся по основной реке, должны держаться ближе к противополож-
ной кромке судового хода.
На рис. 218 показана схема движения судов, принятая в Прави-
лах плавания.
Суда, выходящие с дополнительных трасс на водохранилищах
или из притоков и затонов, должны останавливаться и пропускать
суда, двигающиеся по основной трассе водохранилища или основной
реке. Эта остановка должна быть выполнена до выхода на основной
судовой ход.
Рассмотренный порядок движения на стыке основных и вспомога-
тельных судовых ходов осуществляется без обмена сигналами на рас-
хождение.
Сигнал отмашки снизу идущему судну подавать нельзя, так как
он может быть принят сверху идущим по основному судовому ходу
270
судном и судоводитель будет дезориентирован о направлении расхож-
дения.
Малогабаритные суда длиной до 30 м, гребные и моторные лод-
ки, спортивные яхты и моторные катера не должны мешать движе-
нию судов и обязаны заранее уходить с фарватера при приближении
крупных судов.
В практике судовождения имеются случаи, когда маломерные суда
и лодки осуществляют движение по фарватеру. Иногда из затонув
или притоков или дополнительных
трасс маломерные суда выходят
на судовой ход в то время, когда по
судовому ходу идут транспортные
суда. В подобных случаях нуж-
но руководствоваться указаниями
§ 75 «Правил плавания по внутрен-
ним судоходным путям РСФСР»,
согласно которому во всех случаях,
не предусмотренных Правилами,
судоводитель обязан принять все
меры, обеспечивающие безаварий-
ное плавание.
Одной из основных мер, направ-
ленных на предотвращение столк-
новения любых транспортных
средств, является взаимное согла-
сование курсов и действий.
Всем транспортным средствам,
за исключением скоростных судов,
движущихся в положении «на
крыльях» по одноименному судово-
му ходу любым курсом, нужно при
движении вверх подавать сигнал
«Отмашка» на расхождение (при
встрече и при обгоне). Но если,
вследствие особых обстоятельств
(судно не было обнаружено своевре-
Судовой ход
Рис. 219. Курсы встречных и обгоняе-
мых судов для судна Д, идущего
вверх:
1—4 и /—2'—4' — встречные суда; 5—8 и
5'—7'—8' — обгоняемые суда; т — п — сек-
тор возможного нахождения встречных и
обгоняемых судов, которым надо подавать
сигнал «.Отмашка»
менно, судно вышло из притока), согласованность во встрече судов
или обгоне не достигнута, а имеющееся расстояние меньше 1,5 км при
встрече или соответственно 500 и 300 м при обгоне, необходимо, при-
нимая меры к отвороту или гашению скорости движения, сразу прис-
тупить к подаче сигнала «Отмашка», действуя на основании § 75 Пра-
вил.
Встречным считается судно, которое идет на сближение с вашим
судном и находится впереди траверза или у которого ночью видны
топовые и отличительные огни (один или оба). На рис. 219 показаны
курсы встречных и обгоняемых судов для судна А.
Предположим, суда на шлюзованной реке движутся от одного бе-
рега к другому, как показано па рис. 220. В данном случае судно А
по отношению к судну Б является встречным снизу идущим судном,
поэтому судно А, в зависимости от местных условий и расстояния меж-
ду судами, должно или подавать отмашку влево и разойтись с судном
Б левыми бортами (положение /), или (в исключительных случаях)
остановиться и подать отмашку вправо (положение II).
На рис. 221 показана схема расхождения судов при встрече, когда
одно из судов движется вдоль судового хода, а другое пересекает судо-
вой ход под углом около 90°. В данном случае судно, которое находит-
ся ниже по течению, должно подать сигнал-отмашку на встречное рас-
хождение. Судно В находится в секторе подачи сигналов отмашки
судном Л. Судно А должно подать сигнал отмашки влево, и суда долж-
ны расходиться левыми бортами.
ГГГГГГП Ulin ГГТТП 111111 ТПП! 11 fl Г111 |ТПТ.
Рис. 220. Расхождение судов, двигающихся
перпендикулярно судовому ходу (tn — п —
сектор возможного нахождения судов, ко-
торым нужно подавать сигнал «Отмашка»)
Рис. 221. Расхождение судов, дви-
гающихся перпендикулярно и
вдоль судового хода (т — п — сек-
тор возможного нахождения судов,
которым нужно подавать сигнал
«Отмашка»)
В практике могут возникнуть сложные ситуации.
Рассмотрим наиболее часто встречающуюся на рейдах ситуацию
расхождения трех судов.
Предположим, одно из судов А вынуждено осуществлять движение
при переходе от одного причала к другому левой по ходу стороной
(рис. 222). В то же время по транзитному судовому ходу на расстоя-
нии более 1,5 км сверху идет судно В и, кроме того, перпендикулярно
судовому ходу в это время выходит работающий на переправе паром С,
идущий к причалу правого берега.
Правила требуют в данном случае следующего порядка расхож-
дения: судно А должно остановиться, затем подать отмашку вправо
судну В, а после выхода на транзитный судовой ход — и судну С.
Судно А должно стоять до тех пор, пока суда В и С окажутся ниже
судна А.
Суда В и С обязаны во всех случаях принять отмашку судна А
вправо. Кроме того, судно С при выходе на судовой ход обязано из-
272
уОсь судового хода
г>2>3>%5
Рис. 222. Схема группового расхож-
дения трех судов (а — угол пересе-
чения переправой оси судового хода)
менить курс влево, так как принятие отмашки означает изменение кур-
са влево. Учитывая необходимость судна С подойти к причалу право-
го берега, после поворота по направлению вниз (сообразуясь с об-
становкой) оно должно или двигаться малым ходом, или остановить-
ся для пропуска судна В. Тогда судно С по отношению судна В будет
обгоняемым.
При приближении к судну С на расстояние не ближе 500 м судно
В должно пойти на обгон. При этом судно С должно регулировать ско-
рость таким образом, чтобы при
обгоне на его траверзе не оказа-
лось судов В и А.
После обгона и прохода ниже
судна А судно С делает оборот за
кормой судов А и В.
Судно А после окончания рас-
хождения получает право осущест-
влять движение и подходит к при-
чалу.
Правила устанавливают огра-
ничения на движение судов.
При движении судов в одном
направлении с равными скоростя-
ми между ними должен соблюдать-
ся интервал не менее 500 м, при
движении плотов — не менее
2 км.
При одновременном подходе
судов к мостам, земснарядам, за-
градительным аварийным воротам
и паромным переправам на канале,
перекатам и другим участкам, где
расхождение судов невозможно,
снизу идущее судно должно оста-
новиться и пропустить судно, иду-
щее сверху.
Движение судов на участках,
где имеется светоотражающая навигационная обстановка, разреша-
ется только при наличии судовых прожекторов с силой света,
обеспечивающей удовлетворительную ориентировку по знакам об-
становки.
Проходя участки перекатов, колен или узкостей, где встречных
судов заблаговременно видеть нельзя, суда должны подавать следую-
щие сигналы: при приближении к такому участку пути — один про-
должительный звуковой сигнал, войдя на участок — два продолжи-
тельных звуковых сигнала. Если участок большой протяженности, эти
сигналы повторяются через каждые 2—3 мин.
Судно, идущее сверху или снизу, услышав такие сигналы,
обязано остановиться в безопасном месте и пропустить встречное
судно.
273
Дополнительно к звуковым сигналам разрешается подавать сиг-
налы судовым прожектором, луч которого направляется вертикаль-
но вверх.
Правилами плавания категорически запрещается:
расхождение и обгон судов при одновременном нахождении на
траверзе трех судов;
движение в кильватерной колонне судам на подводных крыльях;
движение судов на подводных крыльях в темное время суток в по-
ложении «на крыльях»; ’
движение судов, не имеющих радиолокационных станций, в тума-
не и при других неблагоприятных метеорологических условиях, ког-
да из-за отсутствия видимости ориентировка невозможна;
движение в тумане судов, управляемых с помощью РЛС, при от-
сутствии у судоводителей опыта радиолокационных проводок.
На участках водного пути, временно закрытых для плавания, или
в случаях скопления судов устанавливается следующая очередность
движения судов: пассажирские, грузо-пассажирские, танкеры и неф-
тесоставы с грузом 1-го класса, грузовые теплоходы, выполняющие
контейнерные перевозки и работающие по расписанию, спецобъек-
ты, грузовые сухогрузные суда, танкеры и нефтесоставы с грузом 2,
3 и 4-го классов, сухогрузные составы, плоты и флот ведомственных
организаций. Суда, идущие на ликвидацию аварий и установление
причин, вызвавших закрытие участка, пропускаются вне очереди.
Для повышения безопасности плавания за счет улучшения управ-
ляемости и энерговооруженности составов местными правилами ряда
бассейнов устанавливаются следующие минимально допустимые ско-
рости движения: на реках — 4 км/ч; на озерах и водохранилищах —
5 км/ч для составов без барж, для плотов — 2,5 км/ч.
Скорость движения водоизмещающих судов должна быть сниже-
на до малого хода, исключающего потерю управляемости, при дви-
жении мимо судов, стоящих у причалов, работающих земснарядов и
водолазных ботов. По мелководным участкам (перекатам), когда за-
пасы воды под днищем близки к установленным Правилами плавания,
движение также осуществляется на малых скоростях.
§ 69 СИГНАЛИЗАЦИЯ
Световые сигналы судов. Для обеспечения безопасности плавания
Правилами плавания на судах речного флота установлены определен-
ные виды световых и звуковых сигналов.
Плавание судов в темное время суток связано с наблюдением и ори-
ентировкой по световым сигналам и знакам.
С помощью световых сигналов на судах и составах судоводитель
определяет: вид движения (буксировка на тросе, толкание, одиночное
судно), род перевозимого груза (сухогрузное судно, нефтеналивное
с огнеопасными грузами), тип судна или состава, направление дви-
жения.
На основании этой информации судоводитель решает задачи о спо~
собе и месте расхождения со встречными или обгоняемыми судами.
274
Поэтому для предотвращения столкновения судов очень важно соблю-
дать требования Правил плавания о размещении, дальности види-
мости, дуге освещения и цвете световых сигналов. С другой стороны,
необходимо учитывать, что по световым сигналам судоводитель опре-
деляет направление движения встречного судна или состава с меньшей
точностью, чем в светлое время по силуэту судна.
Исследования показали, что ошибка в определении курса по свето-
вым сигналам достигает 20° и более. В темное время суток резко
уменьшается острота зрения (разрешающая способность глаза): днем
она составляет 1', в темную ночь 1—2°. Ночью менее точно определя-
ется и расстояние.
Для того чтобы правильно решать задачи на расхождение судов
и составов, необходимо знать не только все виды световых сигналов
судов, установленные Правилами плавания, но их видимое изображе-
ние в зависимости от курса встречного судна.
В табл. 40 показаны световые сигналы судов, установленные Пра-
вилами плавания, и дано их значение.
Звуковые сигналы судов. На речных судах для подачи звуковых
сигналов применяются паровые, пневматические, электрические и
ручные звукосигнальные средства (паровые свистки, воздушные тифо-
ны, электрические и ручные сирены, автосигналы «Победа»).
«Правила плавания по внутренним судоходным путям РСФСР» ус-
танавливают, что средства звуковой сигнализации (наряду с други-
ми сигнальными системами) предназначены для безаварийного пла-
вания судов. Для этого самоходные суда должны иметь возможность
подавать короткий звуковой сигнал длительностью около 1 с, продол-
жительный звуковой сигнал длительностью от 4 до 6 с и их раз-
личные сочетания с длительностью паузы между сигналами, примерно
равной 1 с.
Кроме того, при встречном движении суда должны обмениваться
звуковыми сигналами с расстояний не менее 1,5 км, а при обгоне, сле-
дуя сверху, — не ближе чем за 500 м, снизу — 300 м. Для судов на
подводных крыльях эти расстояния соответственно равны 2 и 1 км.
Наибольшая дальность слышимости наблюдается при ясной пого-
де утром, когда начинает светать, до восхода солнца.
При интенсивных осадках слышимость уменьшается на 30—40%.
При ветре силой в 3—4 балла слышимость с наветренной стороны
в 2 —3 раза меньше, чем с подветренной. При плотных туманах слы-
шимость также заметно уменьшается. При этом обычно неправильно
оценивается расстояние до источнике звука, так как делается это на
основе ранее накопленного опыта оценки расстояний в условиях
хорошей погоды, и результат получается всегда заниженный.
В условиях слабого тумана звуковые сигналы слышны достаточно
хорошо. Способствуют этому высокая влажность воздуха и сопутству-
ющие радиационным туманам температурные инверсии.
Известное влияние оказывает на слышимость и прибрежный
рельеф. Так, на прямом участке реки с высокими берегами дальность
слышимости звука наибольшая, при извилистом русле реки и на пово-
ротах она уменьшается.
275
Таблица 40
Световой сигнал Значение сигнала § Правил плавания
о® ® ф Грузовое судно (танкер), груженное нефтегрузами 2, 3 и 4-го классов (или с остатками от них), идет ВПРАВО 29
Пожарно-спасательное судно, следу- ющее на тушение пожара или оказа- ние помощи судну, терпящему бедст- вие, идет НА НАС 39
о о Одиночное самоходное судно при габаритной ширине более 5 м идет ОТ НАС * 25в
о Одиночное самоходное судно при габаритной ширине не более 5 м идет ОТ НАС 25в
© ® Грузо-пассажирское судно идет НА НАС 25
о® Грузовое сухогрузное судно (грузо- вой теплоход) идет НА НАС 26
о® Буксировщик-шаландер или само- ходная шаланда идет НА НАС 34
о о®® Грузовое судно (танкер), груженное нефтегрузами 1-го класса, взрывча- тыми или отравляющими веществами, идет ВЛЕВО 23
Самоходное сухогрузное судно дли- ной менее 30 и шириной менее 5 м на стоянке 36а
276
Продолжение табл. 40
Световой сигнал Значение сигнала § Правил плавания
О о Самоходное сухогрузное судно дли- ной более 30 и шириной более 5 м на стоянке КОРМОЙ НА НАС 36а
о Самоходное судно (танкер), гружен- ное нефтегрузами 1-го класса, взрыв- чатыми или отравляющими вещества- ми, на стоянке НОСОМ К НАМ 36б
о°о Грузо-пассажирское судно стоит на мели у правого берега КОРМОЙ К НАМ 41
Буксировщик при буксировке на тросе сухогрузного состава идет НА НАС 31а
® ° е Буксировщик при буксировке пло- тов или смешанного состава (суда и плоты) идет НА НАС 31г
© о@ © Буксировщик при буксировке на тросе судов, груженных нефтегрузами 2, 3 и 4-го классов или с остатками от них, идет НА НАС 31в
о® Буксировщик-шаландер независимо от способа буксировки идет ВПРАВО 34
о ® Буксировщик при буксировке на тросе судов, груженных нефтегрузами 1-го класса, взрывчатыми или отрав- ляющими веществами, идет ВЛЕВО 316
о § @ © Судно, буксирующее другое сухо- грузное судно под бортом, идет НА НАС. зз.
277
Продолжение табл. 40
Световой сигнал Значение сигнала § Правил плавания
©° °® Суда, счалившиеся бортами, букси- руют сухогрузный состав 326
© о ©О® Толкаемый состав из судов, гру- женных нефтегрузами 1-го класса, взрывчатыми или отравляющими ве- ществами, идет НА НАС 356
©°© Толкаемый состав из судов, гружен- ных нефтегрузами 1-го класса, взрыв- чатыми или отравляющими вещества- ми, идет ОТ НАС 356
© Толкаемый состав из судов, гружен- ных нефтегрузами 2, 3 и 4-го классов, идет ОТ НАС 356
@ о Толкаемый состав из сухогрузных судов идет ОТ НАС 35а
Q © Q. Толкаемый состав из судов, гру- женных нефтегрузами 2, 3 и 4-го клас- сов, идет НА НАС 35б
©о® Толкаемый состав из сухогрузных судов идет НА НАС 35
© ® © © @ © Дноуглубительный рефулерный сна- ряд при работе У ПРАВОГО БЕРЕГА 42а
© о о О QQ Дноуглубительный рефулерный сна- ряд при работе у ЛЕВОГО БЕРЕГА 42а
ф Дноочистительный снаряд, водолаз- ный бот, корчеподъемница при произ- водстве ПОДВОДНЫХ РАБОТ 426
278
в) стоянка судов у берега в интервалах между причалами и дебар-
кадерами;
г) стоянка судов с легковоспламеняющимися, взрывчатыми гру-
зами и отравляющими веществами у причалов и дебаркадеров без
согласования с ВОХРом и судоходной инспекцией;
д) стоянка на якорях на расстоянии менее 200 м от грузо-пассажир-
ских дебаркадеров и доков.
Стоянка в пути. Все суда и плоты в случаях необходимости оста-
навливаются вне фарватера на расстоянии не менее 100 м от створных
или перевальных знаков, чтобы не препятствовать свободному дви-
жению других судов. На перекатах, в коленах и в узких местах,
у мостов, у прижимных берегов на плесе и в местах, особо объявлен-
ных бассейновым управлением пути, останавливаться судам и плотам
воспрещается.
Суда и иные плавучие сооружения, стесняющие судоходство, могут
быть отведены по распоряжению инспектора судоходной инспекции
с этого места; равным образом могут быть отведены стоящие у приста-
ни суда, не занятые грузовыми операциями, препятствующие производ-
ству грузовых операций или движению.
Суда и плоты при стоянке на фарватере или поблизости от него,
у берегов, ошвартованные или стоящие на якоре, должны находиться
под постоянным наблюдением и охраной и нести установленные
Правилами плавания сигналы.
На каждом якоре должна быть сделана насечка с указанием его ве-
са и принадлежности.
Все отданные с судов, плотов четырехрогие и адмиралтейские яко-
ря и лоты должны иметь буйки, окрашенные белыми и красными по-
лосами. Длина буйрепа должна быть такой, чтобы буек после отдачи
всегда находился на поверхности воды (без излишнего запаса длины
буйрепа). Отдача указанных якорей и лотов без буйков запрещается.
Отданные в сторону стрежня якоря дебаркадеров, дноуглубитель-
ных снарядов, наплавных мостов и других сооружений не должны пред-
ставлять опасности для прохода судов.
Остановка судов в искусственной части канала запрещается. Все
суда при остановке у причальных стенок шлюзов швартуются за при-
чальные устройства двумя швартовными тросами. На других участках
канала, где стоянка разрешена, суда встают на носовой и кормовой
якоря. Во всех случаях должен быть обеспечен безопасный проход
другим судам и составам. Стоянка на якорях не должна производить-
ся на траверзе причальных стенок шлюзов и бетонных креплений бере-
гов канала.
Остановка судов у причальных линий в ожидании шлюзования
или освобождения однопутного участка не должна производиться
ближе знака «Стоп» или промежуточного светофора шлюза. При стоян-
ке плотов на каналах в ожидании шлюзования они должны быть зак-
реплены за береговые причальные устройства. Стоянка моток а герои,
гребных лодок и спортивных судов, ожидающих шлюзования, раз-
решается только у берега или за причальными тумбами подходных
каналов шлюзов.
283
В межшлюзовых бьефах плотин разрешается постановка в ожида-
нии шлюзования не более двух наливных судов и составов (один вверх
и один вниз) независимо от класса нефтепродуктов.
В аванпортах шлюзов плоты на выделенных для них рейдах швар-
туются (по длине) тремя тросами. До шлюзования плоты должны прой-
ти технический осмотр.
Любители-рыболовы на моторных и гребных лодках могут стано-
виться на якоря для ловли рыбы только вне судового хода, на дос-,
таточном расстоянии от знаков плавучей обстановки.
§ 71. МЕСТНЫЕ ПРАВИЛА
ПЛАВАНИЯ
Особенности движения и организации безопасности плавания
в речных бассейнах отражены в местных правилах плавания. Эти пра-
вила являются дополнением к «Правилам плавания по внутренним
судоходным путям РСФСР». В них указываются границы судоход-
ных путей бассейна и разделение их по условиям плавания на разря-
ды, условно обозначаемые буквами «М», «О», «Р», «Л» (согласно Пра-
вилам Речного Регистра РСФСР).
К разряду «М» относятся судоходные пути, где ветровая волна
достигает высоты 3 и длины 40 м (озера Ладожское, Онежское и Бай-
кал, губы Обская, Тазовская, залив Печорский и др.).
К разряду «О» относятся судоходные пути, где высота волны
достигает 2 и длина 20 м (водохранилища Рыбинское, Куйбышевское,
Саратовское, Волгоградское, Камское, Воткинское, Новосибирское,
Братское, низовья р. Лены от пристани Жиганск до бухты Тикси,
р. Енисей от Игарки до устья Порта и др.).
К разряду «Р» относятся судоходные пути, где волна достигает вы-
соты 1,2 и длины 125 м (озера Чудское, Ильмень, водохранилища
Горьковское, Иваньковское, Череповецкое, р. Дон; речные участки —
Волга, Енисей от Красноярска до Игарки, Иртыш ниже Омска, Лена,
Нева, Свирь и т. д.).
К разряду «Л» относятся судоходные пути с высотой волны мень-
ше 1,2 м (верховья рек: Волги — выше г. Калинина, Лены — выше
Красноярска, Иртыша — выше Омска; каналы, реки Ока, Москва,
Волхов и др.).
Местными правилами плавания устанавливаются требования к га-
баритам судов и составов исходя из габаритов судоходного пути, ми-
нимальные интервалы между бортами судов при расхождении, мини-
мальные запасы воды под днищем судов и плотов.
Правила содержат перечень участков судоходного пути, где движе-
ние регулируется семафорами, светофорами или с помощью радио-
связи. Большое внимание в правилах уделяется порядку движения
судов на рейдах, правилам стоянки судов у причалов и на якорях, мес-
там расположения рейдов. Правила устанавливают места пересечения
судового хода шлюпками и катерами. Они предопределяют обязаннос-
ти работников портов, пароходств, службы пути и других организа-
284
ций по обеспечению безопасности плавания судов, обязанности вах-
тенных начальников и капитанов.
Местные правила плавания некоторых бассейнов устанавливают
особые световые и звуковые сигналы судов и составов.
Выполнение требований Местных правил плавания является
обязательным, как и требований «Правил плавания по внутренним
судоходным путям РСФСР».
Глава XII
ТЕХНИКА БЕЗОПАСНОСТИ НА СУДАХ
§ 72. ОБЩИЕ ВОПРОСЫ.
БЕЗОПАСНОСТЬ ПРИ
ВЫПОЛНЕНИИ ПАЛУБНЫХ РАБОТ
Обеспечение здоровых и безопасных условий труда на судах воз-
лагается на командный состав. Чтобы обучить экипаж судна безопас-
ным приемам работы, проводятся вводный, на рабочем месте, повтор-
ный и внеплановый инструктажи.
К самостоятельному выполнению судовых работ и обслуживанию
механизмов допускаются лица, твердо знающие инструкции по технике
безопасности и обслуживанию порученных им механизмов. Проверку
знаний у прибывающих на судно лиц палубной команды производит
первый штурман, у лиц машинной команды — механик.
Каждый несчастный случай расследуется и учитывается в соответ-
ствии с «Инструкцией о порядке расследования и учета несчастных
случаев, связанных с производством, на судах морского и речного
флота».
Ответственность за несчастные случаи, происшедшие во время ра-
бот, несут лица, которые своими распоряжениями или действиями
нарушили правила техники безопасности, судовые инструкции или
не приняли должных мер, обеспечивающих безопасность работ.
При выполнении палубных работ члены экипажа обязаны поль-
зоваться спецодеждой, рукавицами, спецобувыо и предохранитель-
ными приспособлениями.
Рабочее место должно быть хорошо освещено, свободно от посторон-
них предметов, сухое и чистое. В штормовых условиях все работаю-
щие должны быть в спасательных жилетах и со спасательными кон-
цами.
При подготовке к швартовным операциям тросы должны быть раз-
несены по палубе.
Бросательный конец, подаваемый на причал или другое судно, пред-
варительно укладывают в две бухты небольшими шлагами и бросают
после предупредительного окрика «Берегись». Колышки на тросах
должны быть разогнаны.
285
При работе с ходовым концом троса нельзя находиться и держать
руки ближе 1 м от барабана, кнехта и т. п. Нельзя находиться на ли-
нии натяжения и вблизи сильно натянутых тросов или внутри шла-
гов троса.
При наложении дополнительных шлагов троса на барабан необ-
ходимо остановить шпиль или брашпиль.
При отдаче стопора запрещается находиться со стороны натяже-
ния троса. Швартовный трос должен крепиться на кнехт вначале
шлагом вокруг обеих тумб кнехта, а затем восьмерками.
Трапы и сходни должны иметь леерное ограждение. На трапе нель-
зя создавать встречные потоки и скопления людей. Со стороны палу-
бы у трапов должен быть спасательный круг и бросательный конец
длиной не менее 25 м.
Прежде чем приступить к грузовым работам, следует убедиться
в исправности устройств и механизмов, приспособлений, такелажа,
подготовить рабочее место.
Находиться на палубе или в трюме под грузовой стрелой, на пути
движения грузов опасно и поэтому запрещается. Забортные работы
между бортом и причалом или между бортами двух стоящих рядом
судов запрещены.
При очистке металлических конструкций от краски и ржавчины
ручными инструментами и при окраске нужно работать в защитных
очках. При использовании красок с применением едких веществ (свин-
ца и цинка) необходимо работать в противогазе с принудительной по-
дачей воздуха.
Перед отдачей якорей необходимо удалить с места отдачи якоря
посторонних лиц, проверить якорное устройство, разобщить звездоч-
ки брашпиля, убедиться в отсутствии людей в отсеке, где находится
цепной ящик, убедиться в отсутствии шлюпок или лодок вблизи но-
совой части судна.
При отдаче якоря нельзя находиться около якорной цепи и нак-
лоняться в сторону ленточного стопора. Наблюдая за положением якор-
ной цепи, нельзя наклоняться за фальшборт. При обмыве якорной
цепи с помощью шланга во время подъема якоря следует стоять сбоку
не ближе 1 м от цепи.
Забортными работами по очистке якоря должен руководить капи-
тан или 1-й штурман. Зажатую брашпилем якорную цепь нужно
освобождать только обратным ходом брашпиля или ударом лома по
цепи снизу.
В местах возможного нахождения людей все движущиеся части
рулевого устройства, части рулевой машины, штуртроса и валико-
вой проводки, румпельное устройство должны быть защищены съем-
ными катушками или щитами. Штурвальное колесо ручного привода
по концам ручек должно быть защищено ободом. Нельзя присло-
няться к штурвальному колесу, а при осмотре прикасаться к дви-
жущимся частям.
Все палубные работы должны производиться с обязательным вы-
полнением требований «Правил техники безопасности на судах реч-
ного флота при выполнении палубных работ».
286
§ 73. ТЕХНИКА БЕЗОПАСНОСТИ
ПРИ МАНЕВРАХ СУДОВ
При маневрах швартовки и сцепки судов возможны толчки, поэ-
тому не допускается нахождение членов команды у бортов, не имею-
щих ограждений, и выполнение работ на возвышенных участках (кры-
ше рубки и т. д.). При швартовных маневрах быстроходного судна
член экипажа, подающий швартов, должен держаться за леер и не под-
ходить близко к краю обносной площадки. Запрещается находиться
в непосредственной близости от сцепного замка. Особую осторожность
следует соблюдать при работе с автосцепами типа УДР. Случайное
падение замка может вызвать тяжелые травмы.
Запрещается пребывание членов команды вблизи сцепной балки
баржи.
В походном положении сцепные замки обязательно должны удер-
живаться держателем и дополнительно страховаться тросом лебедки.
При стоянках на якоре и у причалов сцепные замки должны быть опу-
щены в нижнее положение.
Не допускается выполнение каких-либо ремонтных работ авто-
сцепов во время движения состава.
Пружинные амортизаторы в автосцепах должны разбираться с при-
менением приспособлений, обеспечивающих установочную затяжку
пружин. Работа без приспособлений опасна, так как может вызвать
выстреливйййе деталей.
После расцепки судов все временно снятые ограждения должны
быть установлены на место.
Маневровые работы при снятии судна с мели должны производить-
ся под руководством капитана или шкипера.
В случае выполнения маневров, при которых случайно может воз-
никнуть опасное натяжение буксирного троса в направлении борта
судна, рекомендуется применять ограничительные устройства для
буксирного троса. Запрещается выход на буксир рывком. Во время
выхода на буксир вахтенный начальник должен удалить всех людей
из опасной зоны действия буксирного троса. Нельзя находиться на
линии натяжения, а также в углу поворота буксирного троса, прохо-
дящего через уши или клюзы. Во время движения судна нельзя под-
нимать ослабленный буксирный трос из-за борта на арки, при
подъеме работающие не должны находиться между бортом и поднима-
емым тросом.
При выборе буксирного троса вручную вахтенный начальник дол-
жен обеспечить самое медленное движение судна, со скоростью, не
превышающей скорость выбирания троса. Во время отдачи буксир-
ного троса нельзя, стоять под буксирными арками.
При выполнении работ, связанных со спуском шлюпок, вахтен-
ный начальник обязан лично руководить этими работами и назначить
старшего на шлюпке. Посадка людей в шлюпку должна осущест-
вляться с помощью штормтрапа.
Спуск в шлюпку якорей или груза с борта судна должен произво-
диться с помощью подъемных приспособлений, плавно, без рывков.
287
Находиться на шлюпке под спускаемым грузом запрещается. Якорь
на шлюпке должен быть закреплен надежным найтовом из раститель-
ного троса. При завозе якоря запрещается находиться между транце-
вой доской и якорем, между вымбовками (аншпугами), на которых
расположен якорь, а также внутри шлангов троса, уложенного в
шлюпке. Сбрасывать якорь надо штоком вперед. В шлюпке нельзя
стоять, сидеть на бортах, ходить по банкам и перемещаться без разре-
шения старшины, наваливаться всем корпусом на румпель, держать
руки на планшире при стоянке и швартовке.
Нельзя перегружать шлюпку и допускать скопление воды в ней.
Шлюпка может подходить к судну только с разрешения вахтенного
начальника и к указанному им месту.
СПИСОК ЛИТЕРАТУРЫ
А. А. Бекман. Пособие судоводителю озерного плавания, АТ, «Транс-
порт», 1966, 151 с.
Буксирные суда. Л., «Судостроение», 1974, 280 с. Авт.: Б. В. Богданов,
А. В. Слуцкий, М. Г. Шмаков, Д. X. Соркин, К. А. Васильев.
А. В. Васильев, В. И. Белоглазов. Управляемость винто-
вого судна. хМ., «Транспорт», 1966, 168 с.
А. В. Васильев, В. И. Белоглазов. Советы судоводителям.
М., «Транспорт», 1971, 322 с.
А. В. Горинов. Единая транспортная система СССР. М., «Знание»,
1968, 48 с.
К. В. Казанский, И. Г. Филиппов. Штормование судов.
М., «Транспорт», 1966, 112 с.
Л. И. Кустов и др. Водные пути и порты. М., «Транспорт», 1967,
376 с.
В. П. Миронов, Г. М. Т е к у ч е в. Судовождение способом тол-
кания. М., «Речной транспорт», 1956, 280 с.
С. Б. Оль шамовский. Вопросы судовождения на внутренних вод-
ных путях. Труды ГИИВТа. Вып. 41, М., «Транспорт», 1962, 42 с.
С. Б. О л ь ш а м*о в с к и й. Судовождение и правила плавания на внут-
ренних судоходных путях. М., «Транспорт», 1971, 336 с.
С. Б. Ольшамовский. Выбор скорости движения судна, управ-
ляемого с помощью радиолокатора. Труды ГИИВТа. Вып. 71. М., «Транспорт»,
1965, с. 58—69.
С. Б. Ольшамовский. Выбор безопасных скоростей движения
судов (составов) на крупных рейдах. Труды ГИИВТа. Вып. 90, М., «Транспорт»,
1968, с. 30—37.
С. Б. Ольшамовский. Влияние путевых условий на безопасность
плавания. Труды ГИИВТа. Вып. 102, 1969, с. 3—13.
С. Б. Ольшамовский. Управление буксирными судами при провод-
ке составов через шлюзы. «Речной транспорт», 1957, № 10, с. 15—16.
С. Б. Ольшамовский. Особенности управления трехвинтовыми
пассажирскими судами типа «Родина» при швартовных маневрах. «Речной транс-
порт», 1959, № 1, с. 51—52.
С. Б. Ольшамовский. Отвал от причала пассажирских судов при
навальном ветре. «Речной транспорт», 1959, № 11, с. 48—50.
С. Б. Ольшамовский. Управление судами на подводных крыльях
при расхождении. «Речной транспорт», 1960, № 5, с. 48—49.
С. Б. Ольшамовский. Особенности управляемости трехвиптовых
судов. «Речной транспорт», 1961, № 7, с. 47—48.
С. Б. Ольшамовский. Оптимальный маневр при угрозе столкнове-
ния судов. «Речной транспорт», 1965, № 9, с. 43—45.
С. Б. Ольшамовский, Д. К. Зем л яновский, И. А. Щ е п е-
тов. Организация безопасности плавания судов.М., «Транспорт», 1972, 216 с.
289
В. Г. Павленко. Элементы теории судовождения. Ч. I. М., «Речной
транспорт», 1962, 102 с.
В. Г. Павленко. Элементы теории судовождения. Ч. II. М., «Транс-
порт», 1964, 120 с.
В. Г. П а в л е н к о. Элементы теории судовождения. Ч. III. М., «Транс-
порт», 1971, 144 с.
«Правила плавания по внутренним судоходным путям РСФСР». М., «Транс-
порт», 1970, 96 с. (Министерство речного флота РСФСР).
В. Н. Родионов. Судовождение на внутренних водных путях. М.,
«Речной транспорт», 1958, 359 с.
Л. М . Рыжов. Управляемость толкаемых составов. М., «Транспорт»,
1969, 128 с.
Л. М. Рыжов, Н. Ф. С о л а р е в. Маневренность речных судов и
составов. М., «Транспорт», 1967, 144 с.
В. Ф, Саратов. Речное и озерное судовождение. М., «Речной транс-
порт», 1961, 226 с.
В. А. Т р о н и н, Л. В. Пушкарев. Управление речными судами
при плавании в ледовых условиях. М., «Транспорт», 1973, 112 с.
П. Н. Шанчуров и др. Управление судами и составами. М., «Транс-
порт», 1971, 352 с.
В. С. Удачин. Взаимодействие водного потока и движущегося судна.
М., Рекламбюро ММФ, 1968, 24 с.
А. П. Ю щ е н к о, М. М. Лесков. Навигация. М., «Транспорт»,
1972, 360 с.
F. Von D ieken. Uerhalten bei schlechtec Sicht auf einem Radarschiff,
«Hansa — Schiffoehrt — Schiffbau — Hafen», 1973, T. 110, № 13, c. 1235—1239.
К. H asega wa et, al, A Quantitative Analysis of Avoiding Action, «Jo-
urnal of Navigation» 1973, T. 26, N 3, c. 274—281.
I. В r i x. Dimensionylose Groben der Moendvrier eigenschoeften von Schif-
fen «Hansa —Schiffoehrt —Schiffbau —Hafen», 1972, T. 109, N 24, c. 2266—2269.
ОГЛАВЛЕНИЕ
Стр.
От автора.....................,.................................... 3
Глава I. Методы судовождения. Основы управляемости судов ... 5
§ 1. Современные методы судовождения................ 5
§ 2. Управляемость и рулевые устройства ............12
§ 3. Влияние руля на управляемость судна............15
§ 4. Влияние движителей на управляемость............19
§ 5. Поворотные насадки и управляемость.............25
§ 6. Подруливающее устройство и управляемость ... 32
§ 7. Поворотливость судов ..........................35
§ 8. Устойчивость на курсе и рыскливость судов . . 41
§9. Ходкость и инерционные характеристики судов . 42
§ 10. Маневренные качества судов на подводных
крыльях и на воздушной подушке...................... 48
§11. Влияние внешних факторов на управляемость и ма-
невренность судов....................................54
Глава II. Управление одиночными самоходными судами..........62
§ 12. Управление судами при производстве поворотов и
оборотов.............................................62
§ 13. Отвал судна....................................67
§ 14. Способы отвала при навальном ветре.............70
§ 15. Привал судна...................................76
§ 16. Постановка на якорь и съемка с якоря...........89
§ 17. Движение на плесовых участках рек .............95
§ 18. Встреча судов............................... 103
§ 19. Обгон судов.................................. 107
§ 20. Прохождение перекатов и мест с гидротехнически-
ми сооружениями......................................ПО
§ 21. Прохождение мимо работающих дноуглубительных
и дноочистительных снарядов....................116
. § 22. Особенности управления скоростными судами . .117
Глава III. Судовождение способом толкания.........................120
§ 23. Общий обзор...................................120
§ 24. Формирование толкаемых составов..............123
§ 25. Маневренные качества толкаемых составов и способы
управления.....................................13!
291
§ 26. Отвал толкаемого состава.....................135
§ 27. Управление толкаемыми составами на плесовых
участках реки..................................139
§ 28. Движение толкаемых составов через перекаты . . . 142
§ 29. Управление составом при движении под мосты . . 145
§ 30. Маневровые работы с составами в пути и конечном
пункте............................................147
Глава IV. Управление буксирными составами.............................148
§ 31. Управляемость составов............................148
§ 32. Формирование буксируемых составов.................151
§ 33. Отвал буксируемого состава........................158
§ 34. Управление составом на плесовых участках реки 161
§ 35. Прохождение затруднительных участков реки . . 162
§ 36. Маневровые работы с буксирным составом . ... 169
Глава V. Буксировка плотов............................................170
§ 37. Виды плотов и способы управления ими.........170
§ 38. Отвал плотового состава...........................175
§ 39. Управление плотовым составом при движении . . 179
§ 40. Маневровые работы с плотовым составом в пути
и в конечном пункте.....................................183
Глава VI. Движение судов и составов по каналам........................184
§ 41. Правила движения..................................184
§ 42. Особенности управления при движении по каналам 186
§ 43. Встреча и обгон на каналах........................190
§ 44. Шлюзование судов и составов.......................193
Глава VII. Управление судами и составами на водохранилищах,
озерах и в прибрежно-морских районах............................200
§ 45. Условия плавания..................................200
§ 46. Подготовка к плаванию.............................203
§ 47. Плавание на озерах, водохранилищах и в прибрежно-
морских районах...................................205
§ 48. Плавание в штормовую погоду....................207
Глава VIII. Управление судами при плавании в ледовых условиях 213
§ 49. Плавание весной...................................213
§ 50. Плавание в осеннее время..........................217
§ 51. Стоянка судов во время ледостава..................219
Глава IX. Управление судами и составами в особых случаях . . 220
§ 52. Буксировка грузо-пассажирскими и грузовыми
судами других судов ................................................. 220
§ 53. Буксировка двойной тягой ........................ 222
§ 54. Подход к борту маломерных судов, пользование
шлюпкой...........................................223
§ 55. Управление судами при снятии с мели..............225
§ 56. Спасение людей на воде............................229
§ 57. Управление судном при пожаре....................231
§ 58. Управление судном с поврежденным корпусом . . 233
Глава X. Плавание с помощью радиолокационной станции . . . 234
§ 59. Типы судовых радиолокационных станций . . . 234
§ 60. Радиолокационные наблюдения и измерения . . . 245
§ 61. Глазомерная радиолокационная проводка судов 247
292
§ 62. Навигационный метод использования судовой РЛС 253
§ 63. Проводка судна с помощью береговой РЛС . . . 255
§ 64. Использование РЛС для предупреждения стол-
кновений судов.......................................257
Глава XI; Организация безопасности судоходства и правила пла-
вания .........................................................264
§ 65. Организация вахтенной службы..................264
§ 66. Требования Правил плавания к судам и составам 267
§ 67. Организация движения судов....................269
§ 68. Правила движения и расхождения судов .... 270
§ 69. Сигнализация..................................274
§ 70. Стоянка судов.................................282
§ 71. Местные правила плавания......................284
Глава XII. Техника безопасности на судах.......................285
§ 72. Общие вопросы. Безопасность при выполнении па-
лубных работ.........................................285
§ 73. Техника безопасности при маневрах судов .... 287
Список литературы..................................................289
СЕРГЕЙ БОРИСОВИЧ ОЛЬШАМОВСКИИ
СУДОВОЖДЕНИЕ И ПРАВИЛА ПЛАВАНИЯ
ПО ВНУТРЕННИМ СУДОХОДНЫМ ПУТЯМ
Редактор Г, И. Лаговский
Обложка художника Г. П, Казаковцева
Технический редактор И. Б. Усанова
Корректор В. Т. Агеева
Сдано в набор 2/Х 1975 г. Подписано к печати 9/IV
1976 г. Бумага 60Х90’/1б, типографская № 2 Пе-
чатных листов 18,5 Учетно-изд. листов 20,96.
Тираж 35 000 экз, Т-08601 Изд. № 1-1-2/12 № 7568
Зак. тип. 504. Цена коп.
Издательство «ТРАНСПОРТ,
Москва, Басманный туп., 6а
Московская типография № 4 Союзполиграфпрома
при Государственном комитете Совета Министров
СССР по делам издательств, полиграфии и книж-
ной торговли,
г. Москва, И-41, Б, Переяславская ул., дом 46
ГОСУДАРСТВЕННЫЙ КОМИТЕТ СОВЕТА МИНИСТРОВ СССР
ПО ДЕЛАМ ИЗДАТЕЛЬСТВ, ПОЛИГРАФИИ И КНИЖНОЙ ТОРГОВЛИ
Издательство «ТРАНСПОРТ»
Имеются в продаже книги
Блидман А. Ф., Казанцев А. М. Технолог речного
порта. 1972. 136 с. 44 к.
Алфавит портов, пристаней и остановочных пунктов па*
роходств речного транспорта. 1971. 408 с. 1 р. 67 к.
Аристов Ю. К. Ремонт оборудования дноуглубитель-
ных снарядов. Учеб, пособие для институтов водного тран-
спорта. 1966. 208 с. 59 к.
Читатель найдет в этом учебном пособии для вузов основные сведе-
ния по организации и технологии ремонта специального оборудования
земснарядов различных видов: черпаковых, рефулерных устройств, ле-
бедок и др., а также о порядке сдачи их из ремонта в эксплуатацию.
Оно будет полезным как студентам вузов, так и практическим работни-
кам речного транспорта.
Дуброва Г. А. Методы расчета давления грунтов на
транспортные сооружения. 1969. 232 с. 83 к.
Иванов В. И. Элементы и схемы судовой электроавто-
матики. (Устройство и эксплуатация). 1973. 208 с. 76 к.
Клюев В. В., Бычков Л. Г. Надзорщик гидросо- ;
оружений. Учеб, пособие для подготовки квалифицированных !
рабочих речного транспорта. 1973. 128 с. 21 к. |
Марденский В. П. Топливная аппаратура судовых ।
дизелей. Изд. 2-е. 1973. 167 с. 70 к. |
।
Постнов А. В., Атлас В. А. Применение вычислитель-
ной техники на водном транспорте. Учеб, пособие для вузов
водного транспорта. 1965. 215 с. 64 к.
В этой книге освещены теоретические вопросы совершенствования
методов планирования и управления транспортным процессом на основе
применения современных средств вычислительной техники, приведены при-
меры решения отдельных задач. Часть задач изложена в порядке по-
становки.
Основные разделы пособия: Общие вопросы совершенствования ор-
ганизации транспортного процесса и управления им. Решение задач
организации транспортного процесса. Обоснование выбора технических
средств. Автоматизация процессов организации и управления на внут-
реннем водном транспорте.
Чиня ев И. А. Насосные установки танкеров и плавучих
нефтестанций. Учеб, пособие для ин-тов водного транспорта.
1967. 112 с. 45 к.
Ярустовский А. А. Механическое оборудование шлю-
зов. Учебник для учащихся речных училищ и техникумов.
1967. 224 с. 63 к.
Продажа производится:
отделениями издательства «Транспорт» при управлениях же-
лезных дорог, киоскерами, книгоношами на предприятиях,
центральным магазином «Транспортная книга» (107078,
Москва, Б-78, ул. Садово-Спасская, 21).
По желанию покупателей литература высылается по поч-
те наложенным платежом.