/


























































































Автор: Попкович Г.С Кузьмин А.А.
Теги: водоснабжение очистка воды водопотребление отдельные виды строительства учебник канализация
Год: 1983



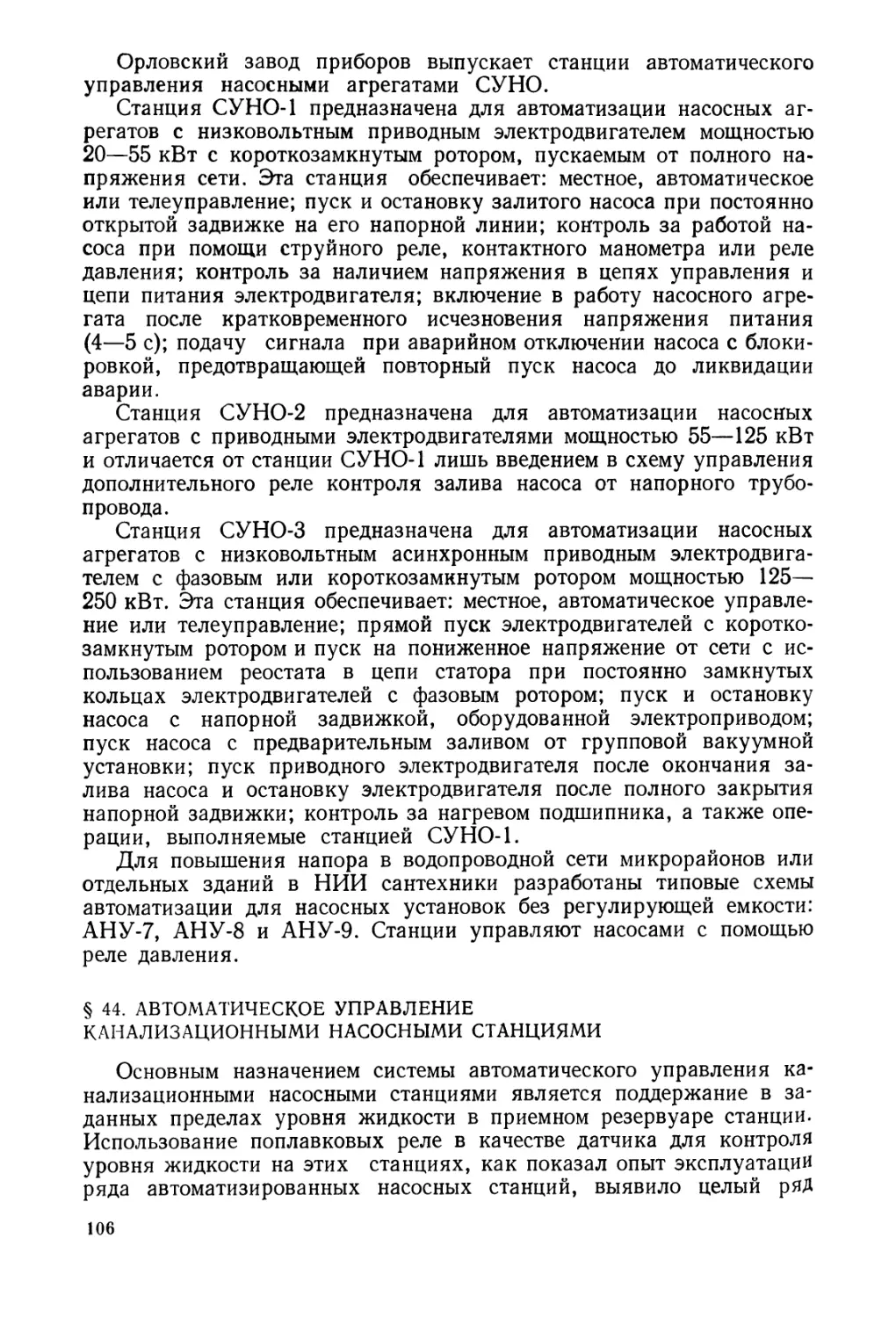
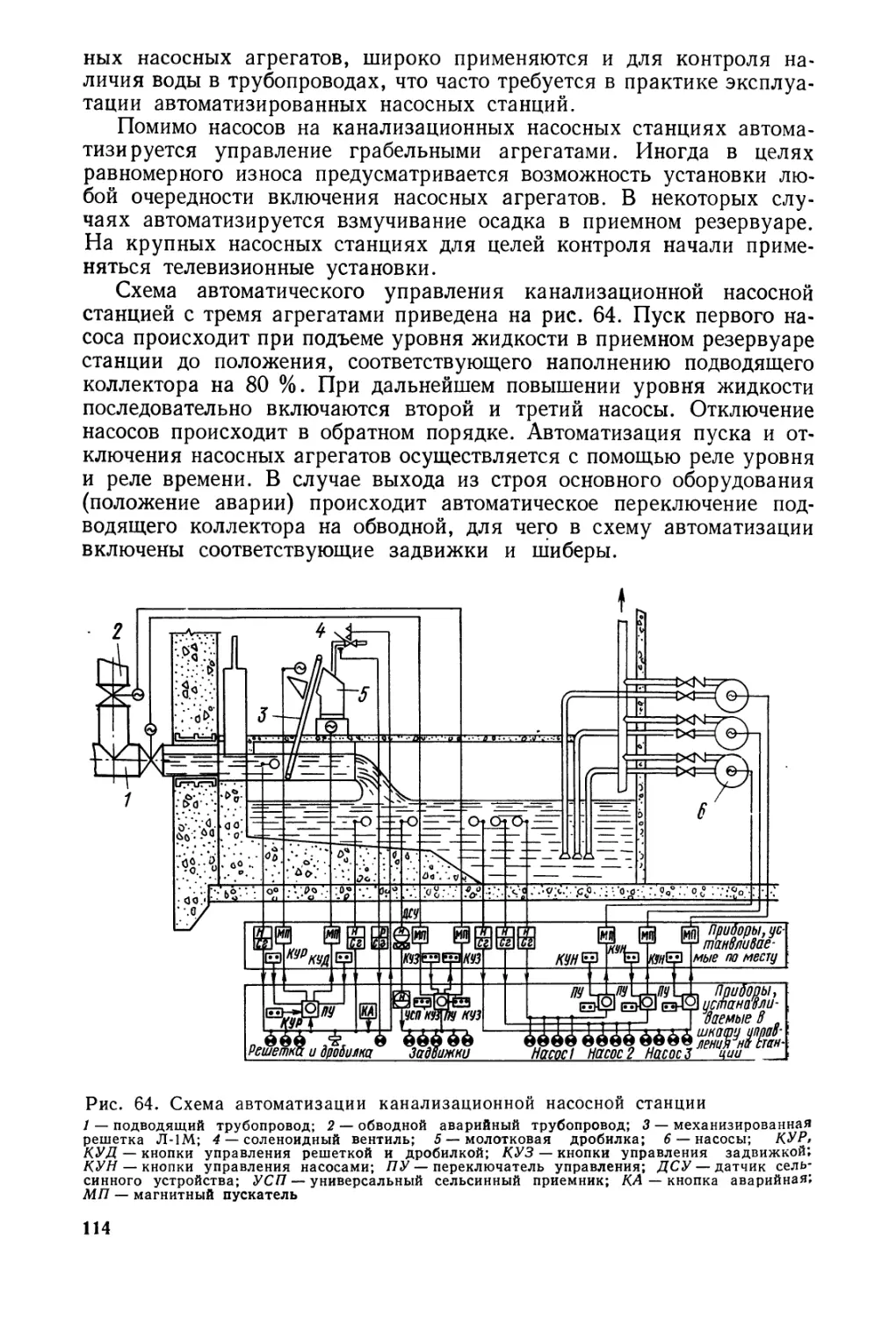
Текст
Москва
Стройиздат
1983
Г. С. Попкович, А. А. Кузьмин
АВТОМАТИЗАЦИЯ
СИСТЕМ
ВОДОСНАБЖЕНИЯ
И КАНАЛИЗАЦИИ
ИЗДАНИЕ 2-е, ПЕРЕРАБОТАННОЕ
И ДОПОЛНЕННОЕ
Допущено
Управлением кадров и учебных заведений Минжилкомхоза РСФСР
в качестве учебника для учащихся техникумов
по специальности М 1211
МОСКВА СТРОЙИЗДАТ 1983
ББК 38.761
П 57
УДК 628.1/.2 — 52(075.32)
Рецензент — канд. техн. наук В. В. Шимкович.
Попкович Г. С, Кузьмин А. А.
П57 Автоматизация систем водоснабжения и
канализации: Учебник для техникумов. — 2-е изд., пере-
раб. и доп. — М.: Стройиздат, 1983. — 151 с, ил.
Описаны методы и средства автоматизации водопроводных и
канализационных сооружений. Кратко изложены основы автоматики,
включая автоматизацию технологического контроля и автоматическое
регулирование, и телемеханики. Рассмотрены схемы автоматизации
водопроводных и канализационных сооружений и принципы их
построения. Освещены технико-экономические аспекты автоматизации
сооружений водоснабжения и канализации Изд 1-е вышло в 1970 г.
под загл.: Попкович Г.1 С. Основы автоматизации систем
водоснабжения и канализации. Материал обновлен в соответствии с новыми1
техническими решениями.
Для учащихся техникумов, обучающихся по специальности
«Водоснабжение, канализация и очистка промышленных и сточных вод».
1108з
047(01)—83 © Стройиздат, 1985
ПРЕДИС ЛОВИЕ
Автоматизация современных водопроводно-канализационных сооружений
требует совместных усилий как специалистов в области автоматизации, так
и инженерно-технических работников, проектирующих технологические
процессы и эксплуатирующих сооружения. Знание основ автоматизации и ее
современного уровня на водопроводно-канализационных сооружениях
способствует рациональному их проектированию, строительству в оптимальные
сроки и эффективной эксплуатации действующих сооружений. Учебными
планами подготовки техников по специальности «Водоснабжение, канализация
и очистка промышленных и сточных вод» предусмотрено изучение методов и
средств автоматизации. Настоящий учебник написан в соответствии с
программой курса «Автоматизация систем водоснабжения и канализации» для
указанной выше специальности.
Применение на практике изложенного в данном учебнике материала
позволит, в конечном счете, оптимизировать работу водопроводно-канализационных
сооружений, снизить стоимость их эксплуатации при одновременном
сокращении численности обслуживающего персонала и повышении культуры
производства.
При подготовке второго издания настоящего учебника (первое издание
вышло в 1970 г.), на основе новой программы курса исключено описание
морально устаревших средств автоматизации и рассмотрены современные
конструкции, прошедшие успешную апробацию на практике в производственных
условиях.
Авторы признательны рецензенту канд. техн. наук В. В. Шимковичу за
ценные замечания и советы при подготовке рукописи.
Авторы с благодарностью примут все пожелания читателей, направленные
«а улучшение учебника.
1* Зак. 496
ВВЕДЕНИЕ
Программой экономического и социального развития нашей страны,
принятой XXVI съездом КПСС, предусматривается дальнейшее широкое внедрение
автоматизации производственных процессов. На съезде КПСС отмечалось, что
поистине революционные возможности открывают создание и внедрение
миниатюрных электронных управляющих машин, промышленных роботов. Они
должны получить самое широкое применение.
Под автоматизацией производственных процессов вообще понимается
совокупность технических средств и методов, освобождающих человека в
определенной степени или полностью от непосредственного выполнения функций
контроля за этими процессами и управления ими.
Производственный процесс совершенствуется в три основные стадии:
механизация этого процесса, заключающаяся в замене во всех его звеньях ручного
труда машинным; введение в процесс непрерывности (поточности);
автоматизация процесса.
Таким образом, автоматизация является высшей формой организации про-"
изводственного процесса в целом, при этом совокупность технических средств,
используемых для автоматизации процесса, совместно с механизмами,
посредством которых он реализуется, называемых объектом управления, образуют
систему управления. Система управления включает в себя систему контроля,
задачей которой является получение информации об изменении параметров
производственного процесса, т. е. об изменении состояния объекта управления.
Автоматизация производственных процессов развивается по пути
автоматизации одного или нескольких отдельных процессов (частичная автоматизация)
к комплексной автоматизации производственных процессов, при которой
обеспечивается автоматическое управление процессами в нормальном режиме,
но с частичным участием дежурного персонала в режимах пуска и остановки
производственных процессов и в аварийном режиме. Конечной формой
автоматизации служит полная автоматизация производства, для которой характерно
автоматическое управление процессами в эксплуатационном режиме без
непосредственного участия дежурного персонала.
Любая форма автоматизации процесса начинается с автоматического
контроля за различными параметрами производственного процесса, осуществляемого
с помощью измерительных приборов. Контролируемые параметры в
зависимости от физической природы процесса могут быть весьма различны. Обычно
это температура, давление, расход жидкости, энергии, газа или другой среды,
сила тока, напряжение, содержание отдельных компонентов в контролируемой
среде.
Внедрение автоматического контроля позволит перейти к автоматическому
управлению ходом процесса в объекте управления, что связано с решением
трех основных задач:
управления протеканием процесса (пуск и отключение механизмов);
управления направлением процесса (вперед — назад, нагревание —
охлаждение, наполнение — опорожнение);
управления режимом процесса как совокупностью его качественных и
количественных параметров, при этом качественные и количественные параметры
зависят друг от друга. Например, положения уровня жидкости в сосуде
(качественный параметр) зависят от притока жидкости (количественного параметра),
т. е. качественным параметром можно управлять (регулировать) путем
изменения количественного параметра.
Автоматическое управление производственным процессом сопровождается
технологической сигнализацией и автоматической защитой. Технологическая
сигнализация бывает командная, контрольная, предупредительная и аварийная
с подачей сигналов. Командная сигнализация служит для передачи типовых
управляющих сигналов от одного поста управления к другому или к объекту
управления. Контрольная сигнализация извещает персонал, например, о
включении в работу или остановке отдельных механизмов, о положении запорных
органов на различных коммуникациях. Предупредительная сигнализация слу-
жит для извещения персонала о возникновении опасных изменений
эксплуатационного режима, грозящих при дальнейшем их развитии аварией.
Аварийная сигнализация информирует персонал о происшедшем аварийном
отключении оборудования.
Автоматическая защита предохраняет от аварий механизмы при
недопустимых отклонениях параметров производственного процесса или с помощью
автоматической блокировки предохраняет механизмы от неправильных
операций дежурного персонала (вследствие невнимательности, неправильно понятой
команды или ошибочных действий при аварии). Различают блокировки запретно-
разрешающую и аварийную. Запретно-разрешающая блокировка устраняет
возможность неправильных или несвоевременных включений и отключений
механизмов, а также несоблюдение установленной технологическими
требованиями очередности пуска и остановки различных механизмов. Аварийная
блокировка предназначена для автоматического последовательного отключения
механизмов, расположенных по ходу производственного процесса, до
механизма, подвергшегося аварийному отключению.
Наряду с автоматическим управлением существуют другие виды
управления.
Дистанционное управление — ручное управление на расстоянии
регулирующими и запорными органами или отдельными механизмами, осуществляемое
с помощью гидравлических, пневматических или электрических приводов.
Наибольшее распространение получило дистанционное управление, основанное
на использовании электроприводов. В этом случае электродвигатель или
электромагнит монтируют, например, на регулирующем органе, а аппарат
управления ими располагают на некотором расстоянии от него (до 100 м) в пункте,
удобном для дежурного персонала. Дистанционное управление применяется
-либо самостоятельно (при частичной автоматизации), либо параллельно с
автоматическим управлением. При дистанционном управлении каждый
управляющий сигнал требует отдельного канала (линии) связи.
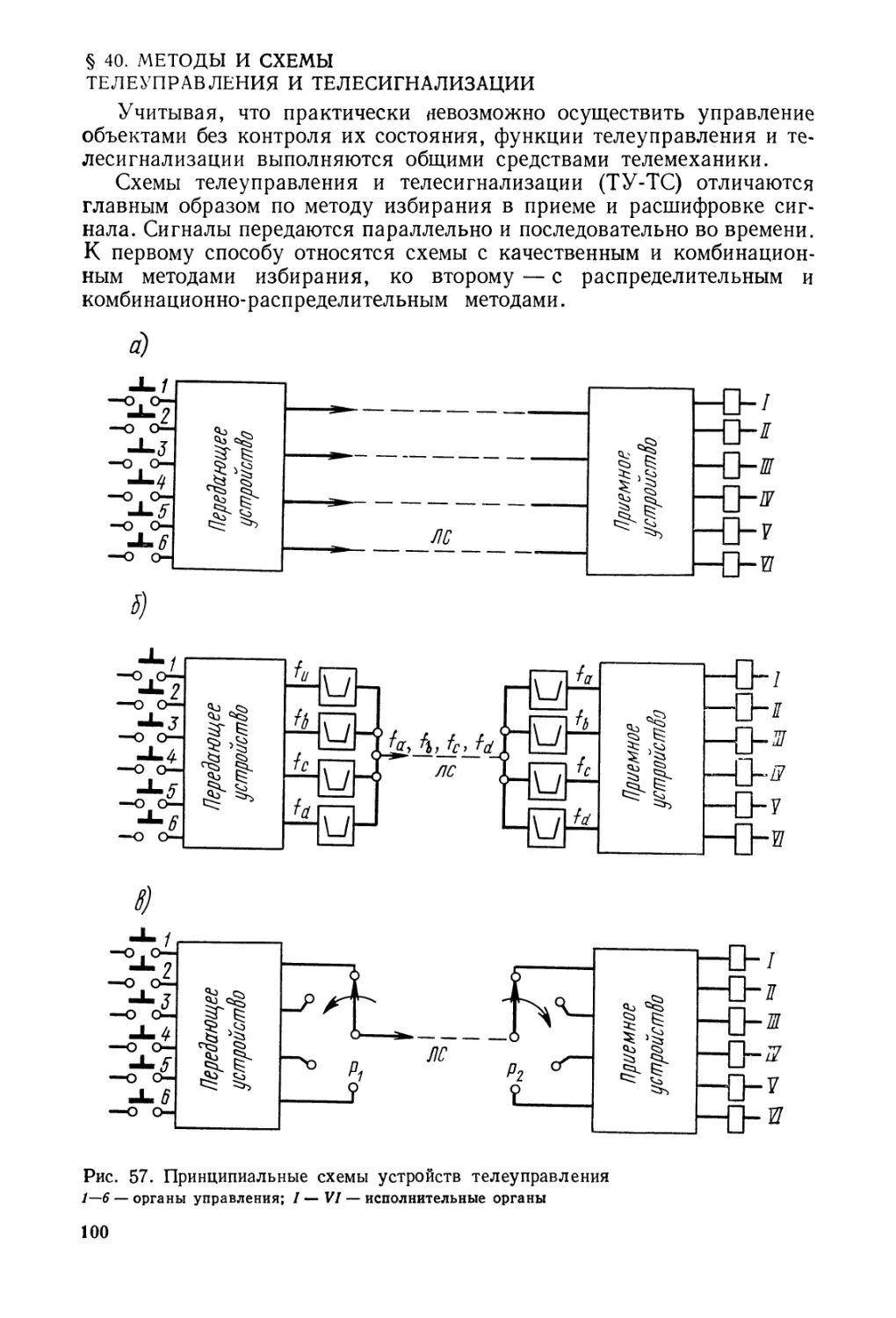
Телеуправление, являясь более сложной формой дистанционного
управления, представляет собой управление на расстоянии (от одного до нескольких
сотен километров) различными органами или механизмами, осуществляемое
из пункта управления с помощью телемеханических устройств, позволяющих
передавать большое число различных управляющих сигналов одновременно
или в разное время по одной линии связи или по небольшому числу их.
Телеуправление применяется обычно в комплексе с телеизмерением и
телесигнализацией параметров процесса.
Дистанционное управление и телеуправление позволяют реализовать
диспетчеризацию водоснабжения и канализации, что необходимо для четкой
координации и взаимной увязки режимов работы отдельных многочисленных
сооружений в соответствии с изменением нагрузок во времени.
В СССР достигнуты большие результаты в области автоматизации водопро-
водно-канализационных сооружений, изложению теоретических и
практических аспектов которой и посвящен настоящий учебник.
РАЗДЕЛ I. ОБЩИЕ
СВЕДЕНИЯ ОБ АВТОМАТИЗАЦИИ
ВОДОСНАБЖЕНИЯ И КАНАЛИЗАЦИИ
ГЛАВА I. ВОДОПРОВОДНЫЕ И КАНАЛИЗАЦИОННЫЕ
СООРУЖЕНИЯ КАК ОБЪЕКТЫ АВТОМАТИЗАЦИИ
§ 1. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ СООРУЖЕНИЙ
Современные сооружения водоснабжения и канализации городов
и промышленных предприятий состоят из ряда сложных
производственных объектов. К ним относятся водоприемные сооружения,
станции очистки воды, сети водоснабжения и канализации, насосные
станции, в которых происходят различные механические, гидравлические,
физико-химические и биологические процессы. Оперативный
контроль за этими процессами затруднен их сложностью, быстротой
протекания и произвольными внешними воздействиями. Основное
требование, предъявляемое к работе сооружений водоснабжения и
канализации, является необходимость бесперебойной подачи потребляемой
воды и отвод сточной воды при значительных произвольных
колебаниях расхода во времени. Непрерывность работы сооружений в
условиях переменной нагрузки возможна при высокой их надежности
и быстром устранении повреждений отдельных составных частей
сооружений. Характерной особенностью сооружений является
также размещение их на значительных расстояниях друг от друга —
от нескольких сот метров до десятков километров. Вместе с тем
сооружения нуждаются в централизованном управлении из одного пункта.
Кроме того, строительство сооружений водоснабжения и кана -
лизации и их последующая эксплуатация должны быть экономи^еск и
оправданными. Высокие технико-экономические показатели эксплуа -
тации сооружений водоснабжения и канализации достигаются ли шь
при непрерывном изменении режима работы сооружений в строгом
соответствии с изменением качественного состава исходной воды и ее
расходом. Однако выполнение основного условия оптимальной
работы является весьма сложной задачей. Во-первых, сложность
возникает из-за трудности получать непрерывно точную информац ию
об изменениях в работе сооружений под влиянием внешних возму щаю-
щих воздействий на процессы, протекающие в этих сооружениях.
Во-вторых, достаточно сложно использовать поступающую
информацию для координации режима работы многочисленных взаимно
связанных между собой сооружений.
Несмотря на многочисленные произвольные внешние
воздействия, к сооружениям предъявляются строгие требования
бесперебойного водоснабжения и водоотведения. Даже при аварии на отдельных
сооружениях остальные не должны выключаться из работы.
Таким образом, особенности работы сооружений водоснабжения
и канализации указывают на то, что для оптимального управления
сооружениями необходимо не только наличие квалифицированного
эксплуатационного персонала, но и использование современных
средств автоматического контроля и управления.
§ 2. ОСОБЕННОСТИ АВТОМАТИЗАЦИИ СООРУЖЕНИЙ 1
Автоматизация водоснабжения и канализации позволяет
достигнуть высоких технико-экономических показателей и повысить
надежность бесперебойной работы сооружений. Однако для правильного
выбора методов и средств автоматизации весьма важен всесторонний
учет особенностей работы водопроводно-канализационных
сооружений. Практический опыт автоматизации этих сооружений
выявляет вместе с достигнутыми успехами и еще нерешенные задачи.
Успех автоматизации в значительной степени определяется
правильным выбором степени, объема и уровня автоматизации отдельных
сооружений. По степени автоматизации сооружений различают
объекты с дистанционным или автоматическим управлением. Объем
автоматизации определяется перечнем операций или процессов, управление
которыми осуществляется автоматически. Под уровнем
автоматизации понимают степень совершенства технических средств, с помощью
которых осуществляется автоматизация.
Степень автоматизации, ее объем и уровень выбираются для
каждого объекта с обоснованием технико-экономической эффективности
и возможности устранения тяжелых и вредных условий труда
дежурного персонала.
При автоматизации водопроводно-канализационных сооружений
желательно использовать серийно выпускаемые средства
общепромышленного назначения, входящие в состав Государственной
системы промышленных приборов и средств автоматизации (ГСП). Эта
система создает предпосылки для успешной автоматизации самых
разнообразных производственных процессов. Однако при этом следует
серьезно учитывать специфические условия среды, в которой будут
они находиться в процессе их работы. С особенно сложными
условиями для работы этих средств и приборов приходится сталкиваться при
автоматизации водопроводных и канализационных очистных
сооружений. Отрицательно сказываются здесь повышенная влажность и
коррозионность среды, большие перепады температур, разнообразие
по составу и концентрациям составляющих компонентов воды,
наличие в ней разнообразных взвешенных веществ и осадков. В силу
этого контроль ряда процессов на очистных сооружениях не может
быть выполнен средствами общепромышленного назначения. Для
этой цели разрабатываются и используются специальные приборы,
обладающие необходимой чувствительностью и достаточной
надежностью при работе в условиях конкретной среды тех или других
сооружений.
Следует также иметь в виду, что эффективное использование
приборов и средств автоматизации возможно лишь на сооружениях с
хорошо налаженной технологией.
Для правильного выбора степени и объема автоматизации большое
значение имеет выявление закономерностей протекания процессов в
сооружениях.
Общие указания по выбору степени и объема автоматизации
водопроводных и канализационных сооружений содержатся в
соответствующих разделах СНиП 11-31-74 и СНиП 11-32-74, в которых
предусмотрено, что на сооружениях должны быть автоматизированы:
основные технологические процессы, обеспечивающие нормальную
работу сооружений при заданном режиме;
все вспомогательные процессы, обеспечивающие работу отдельного
объекта или сооружения, без дежурного персонала;
установлены средства автоматизации и приборы:
для быстрой локализации аварий и оперативного переключения;
для регистрации и изменения технологического режима.
При проектировании автоматизации сооружений следует
руководствоваться также инструкцией Госстроя СССР СН 516-79
«Инструкция по проектированию автоматизации и диспетчеризации систем
водоснабжения», а также использовать «Основные положения по
автоматизации канализационных очистных сооружений»
(утверждены МЖКХ РСФСР 6 апреля 1971 г.).
ГЛАВА II. ОСНОВНЫЕ ЗАДАЧИ АВТОМАТИЗАЦИИ
СООРУЖЕНИЙ ВОДОСНАБЖЕНИЯ И КАНАЛИЗАЦИИ
§ 3. РОЛЬ АВТОМАТИЗАЦИИ В СОВЕРШЕНСТВОВАНИИ
РАБОТЫ СООРУЖЕНИЙ
Автоматизация позволяет серьезно улучшить работу сооружений.
С помощью использования правильно выбранных средств
автоматизации и приборов можно повысить все показатели работы сооружений
(производительность, качество продукции, бесперебойность работы,
экономичность).
На насосных станциях пуск и остановка насосов -производятся
автоматически в зависимости от уровня воды в приемном резервуаре,
от напора или расхода воды в магистральном водоводе или отдельных
участках водопроводной сети. Автоматизируются закрытие и
открытие задвижек, залив насосов, включение резервного насосного
агрегата вместо аварийно отключенного, автоматически сигнализируется
о работе всего оборудования насосных станций, а также широко
применяется их автоматическая защита.
На водопроводных и канализационных очистных сооружениях ряд
операций выполняется автоматически, например, подача и
дозирование реагентов, вращение лопастных мешалок, движение скребковых
механизмов в отстойниках, регулирование работы фильтров,
обеззараживание воды хлором и т. д.
При обработке питьевой воды автоматизация управления такими
процессами, как дозирование реагентов, перемешивание реагентов с
водой, регулирование скорости фильтрации, хлорирование, аммони-
зация и озонирование воды, совершенно необходима, так как при
ручном управлении требуемая точность выполнения этих процессов по
существу невозможна.
На очистных сооружениях сточных вод осуществляется,
например, автоматическое поддержание заданной температуры осадка в
метантенках, автоматический контроль за уровнем осадка в
отстойниках при его удалении. С помощью приборов контролируется приток
сточных вод на сооружения, расход воздуха, наличие в очищенной
воде растворенного кислорода. Внедрение автоматизации позволяет
сократить численность эксплуатационного персонала сооружений,
а автоматический контроль дает возможность получать
оперативную информацию об изменении параметров протекающих в
сооружениях процессов. Данные автоматического контроля персонал
может использовать для ручного управления или передавать в
систему управления, автоматически изменяющую режим работы
сооружений.
Автоматическое управление водопроводно-канализационными со
оружениями осуществляется с помощью различных по назначению-
сложности конструкции и принципу действия средств автоматизации,
состоящих из сочетания основных элементов, к которым относятся,
датчики, реле, преобразователи, усилители, исполнительные
механизмы и регулирующие органы, вычислительные устройства.
Работоспособность любой системы автоматического управления
зависит от оптимального выбора входящих в нее основных элементов
с учетом технологических требований автоматизируемых процессов.
§ 4. СОВРЕМЕННОЕ СОСТОЯНИЕ И ПЕРСПЕКТИВЫ
АВТОМАТИЗАЦИИ СООРУЖЕНИЙ
В СССР и за рубежом постоянно расширяется объем работ по
автоматизации водопроводно-канализационных сооружений. В
каждом проекте водоснабжения или канализации городов и
промышленных предприятий наряду с технологическими решениями
разрабатываются вопросы автоматизации сооружений. Наиболее широко
внедряется автоматизация на водопроводных сооружениях. Академия
коммунального хозяйства (АКХ) им. К. Д. Памфилова одна из первых
в нашей стране разработала и внедрила автоматизацию
водопроводных сооружений, выполнив еще в 1934—1935 гг. работы по переводу
Кинешемской водопроводной станции на автоматическое управление.
На водопроводных очистных сооружениях Москвы, Ленинграда и
Киева осуществляют автоматическое дозирование реагентов,
регулирование скорости фильтрации и промывку фильтров, контроль
параметров качественного состава воды. Широко внедряется
автоматизация на водопроводных станциях Уфы, Таллина, Горького и Риги.
Высокие технико-экономические показатели достигнуты благодаря
автоматическому управлению артезианским водоснабжением в
Калинине и Орле. Имеется также немало примеров успешной
автоматизации сооружений промышленного водоснабжения, в частности, Щекин-
ского ПО «Азот» и Воскресенского ПО «Минудобрения», Кириш-
ского нефтеперерабатывающего завода. Для ряда других городов
ведется разработка автоматизированных систем управления
водоснабжением.
Большая работа по автоматизации канализационных очистных
сооружений проведена на московских (Люблинской, Курьяновской и
9
Люберецкой) станциях аэрации. На этих станциях осуществлен
автоматический контроль целого ряда технологических параметров:
температуры осадка в метантенках, уровня осадка в отстойниках,
режима работы грабельных агрегатов приемных решеток. На сооружениях
очистки сточных вод промышленных предприятий, например
Саратовского химкомбината и автозавода в г. Тольятти, успешно
осуществляется автоматическое регулирование процесса нейтрализации
производственных стоков. Из зарубежного опыта наибольший интерес
представляет попытка французской фирмы «Омниум»
автоматизировать работу аэротенков и вторичных отстойников с помощью
аналогового вычислительного устройства.
Важной задачей для повышения эффективности автоматизации и
ее широкого внедрения на сооружениях водоснабжения и канализации
является разработка надежных и возможно простых по конструкции
измерительных приборов для контроля ряда технологических
параметров, а также замена длительных и трудоемких лабораторных
анализов оперативным и непрерывным контролем с помощью
автоматических приборов.
В этом направлении ведутся работы, например, во ВНИИ ВОДГЕО,
АКХ, научно-производственном объединении (НПО) «Аналитприбор».
Новые схемы автоматизации сооружений создаются в институтах Гип-
рокоммунводоканале, Союзводоканалпроекте, МосводоканалНИИ-
проекте и ЦНИИЭП инженерного оборудования городов.
В перспективе автоматизация явится основным средством создания
оптимального режима работы как отдельных сооружений, так и всего
комплекса объектов водоснабжения и канализации в целом.
Полностью автоматизированные сооружения в свою очередь обеспечат
выбор оптимального режима работы оборудования в зависимости от
качества исходной воды и требований, предъявляемых к качеству
очищенной воды ее потребителями.
В нашей стране достигнуты большие успехи в разработке теории и
практического использования систем автоматического управления. Это
создает благоприятные предпосылки для широкого внедрения
автоматизации на сооружениях водоснабжения и канализации.
РАЗДЕЛ II. ОСНОВНЫЕ ЭЛЕМЕНТЫ
АВТОМАТИКИ И
ТЕЛЕМЕХАНИКИ
ГЛАВА III. ДАТЧИКИ
§ 5. КЛАССИФИКАЦИЯ ДАТЧИКОВ
Средства автоматизации состоят из отдельных, связанных между
собой элементов, в которых происходят качественные или
количественные преобразования физического параметра производственного
10
процесса. Отдельные элементы осуществляют передачу
преобразованного параметра от предыдущего элемента к последующему.
Датчиком называют начальный элемент автоматической системы,
воспринимающий первично изменение того или иного физического
параметра и преобразующий эти изменения в изменения другого
параметра, удобного для передачи на расстояние и воздействия на
последующие элементы автоматической системы.
Датчик называют также измерительным, воспринимающим,
чувствительным или преобразовательным элементом. Измерительным
элементом датчик называют тогда, когда в качестве его используется
обычный измерительный прибор (термометр, дифманометр и т. п.).
Наибольшее распространение получили датчики, в которых
какие-либо неэлектрические параметры (уровень, температура, расход)
преобразуются в электрические (ток, напряжение), так как
последние легко измерить, усилить и передать на значительные
расстояния, а при необходимости преобразовать в другие параметры.
Датчики, в которых неэлектрические параметры преобразуются в
электрические, можно разделить на две группы: параметрические,
в которых изменение входной неэлектрической величины
преобразуется в изменение выходного параметра электрической цепи —
активное, индуктивное или емкостное сопротивление, и генераторные, в
которых аналогичное изменение неэлектрической величины
преобразуется в электродвижущую силу.
Наряду с описанными датчиками находят также все более
широкое применение пневматические датчики, которые преобразуют
изменение регулируемого параметра в выходной сигнал,
представляющий собой давление сжатого воздуха.
Основной характеристикой датчика является его чувствительность
S, т. е. отношение изменения величины выходного сигнала У к
изменению величины входного сигнала X датчика: S=Y/X.
§ 6. УСТРОЙСТВО ДАТЧИКОВ
Конструктивное устройство датчиков зависит от физической
природы измеряемого параметра и принципа, положенного в основу
измерения его отклонения.
Наиболее широко используют электрические датчики:
индуктивные, сопротивления, емкостные, термоэлектрические и
фотоэлектрические.
Индуктивные датчики (рис. 1, а), действие которых основано на
изменении индуктивного сопротивления катушки, преобразуют
линейное перемещение измерительного органа в электрическую
величину. Благодаря простоте своей конструкции их применяют при
измерении давления и расхода жидкостей и газов.
Индуктивный датчик состоит из подвижного сердечника и двух
симметричных катушек индуктивности. Сердечник жестко связан с
измерительным элементом. Когда сердечник располагается
посередине катушек, их индуктивность одинакова. При смещении сердечника
вверх или вниз соответственно изменяется индуктивность катушек.
Катушки обычно включаются в соседние плечи мостовой схемы.
и
ft
Рис. 1. Схемы электрических датчиков
а — индуктивный датчик с подвижным сердечником: / — сердечник, 2 — катушки
индуктивности; ИЭ — измерительный элемент; б — реостатный датчик сопротивления. / —
подвижная щетка; 2 — кольцевой реостат; емкостные датчики: в — линейного перемещения; г —
вращательного перемещения; д — термоэлектрический датчик: / — электроды; 2 —
изоляционные бусы, 3 — колпак; 4 — рабочий спай; е — фотоэлемент с внешним фотоэффектом. / —
стеклянная колба; 2 — фотокатод; 3 — поток электронов; 4 — цоколь; 5 — анод; 6 — источник
света
Датчики сопротивления применяются для преобразования
неэлектрических входных величин, когда их измерительный орган
совершает линейное или вращательное движение, а также в тех случаях,
когда сопротивление датчика может изменяться от изменения
параметров среды, в которой находится датчик.
Датчик сопротивления (реостатный) (рис. 1, б) применяется также
для преобразования неэлектрической входной величины в
электрическую в том случае, когда измерительный орган датчика фиксирует
изменение входной величины разной величиной угла вращения оси
прибора. Этот датчик, как и приведенный выше, широко применяется
для дистанционной передачи результатов измерений. Изменение
входной величины выражается изменением сопротивления обмотки
реостата датчика.
Емкостные датчики (рис. 1, в, г) основаны на преобразовании
неэлектрической входной величины (перемещение, усилие) в
изменение емкости конденсатора.
Термоэлектрические датчики основаны на прямом
преобразовании тепловой энергии в электрическую. В качестве таких датчиков
служат термопары (рис. 1, д), имеющие спай двух электродов из
разных металлов. При нагревании или охлаждении спая между
электродами возникает электродвижущая сила, пропорциональная
температуре.
Фотоэлектрические датчики основаны на использовании
воздействия изменений величины входного параметра на интенсивность
светового излучения. Источником светового излучения обычно являются
12
лампы накаливания. Иногда в качестве источника излучения
принимаются рентгеновские трубки или искусственные радиоактивные
вещества.
Приемниками световых излучений являются фотоэлементы с
внешним фотоэффектом (рис. 1, ё) (вакуумные и газонаполненные),
фотосопротивления, вентильные фотоэлементы и фотоумножители.
Приемниками радиоактивных излучений служат ионизационные камеры,
газоразрядные и сцинтилляционные счетчики.
Наряду с электрическими датчиками широко применяются
датчики, непосредственно воспринимающие изменения неэлектрических
входных величин (параметров). В качестве таких датчиков в схемах
автоматизации используются описанные далее измерительные приборы
давления, уровня, расхода, температуры и качественного состава
контролируемой среды.
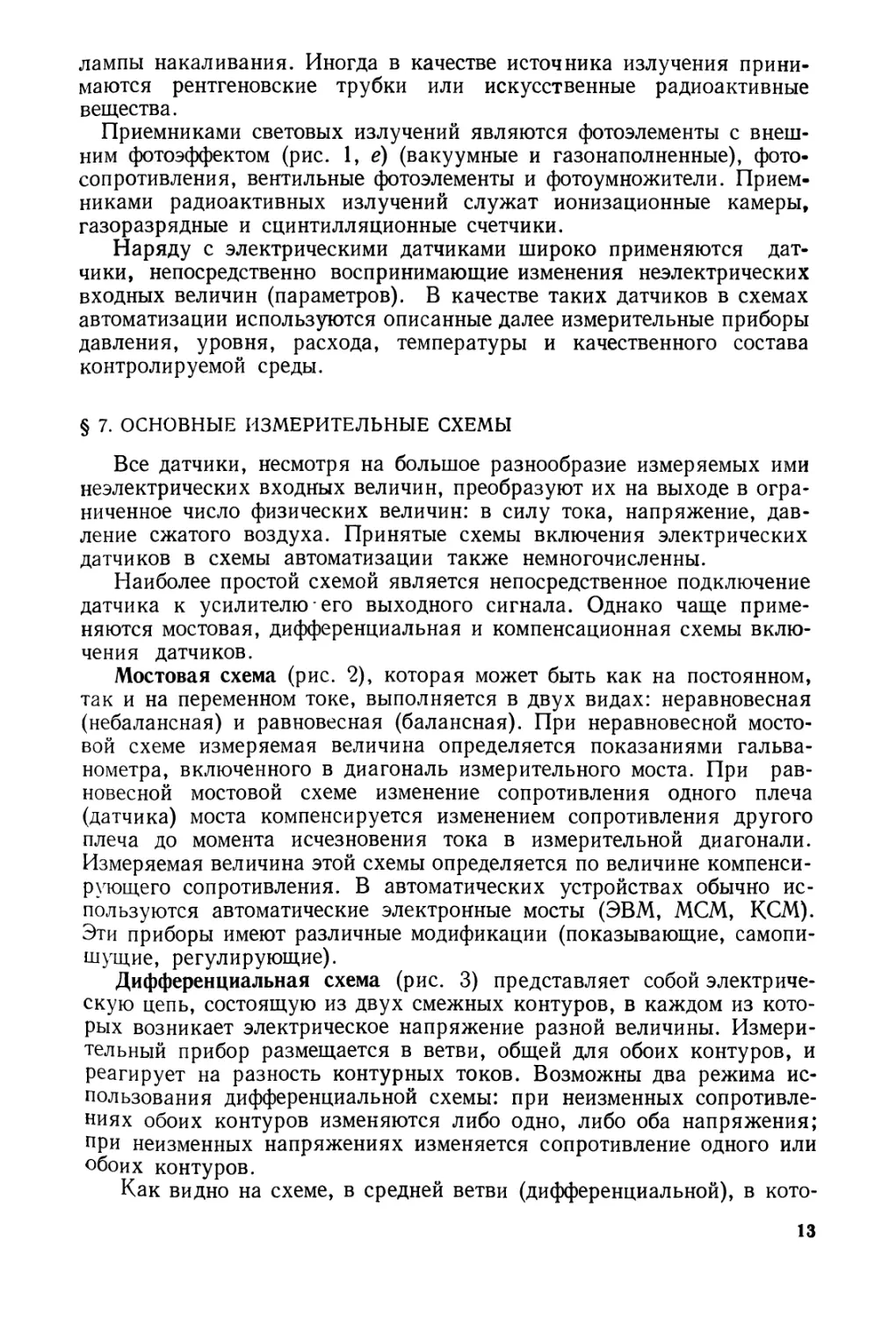
§ 7. ОСНОВНЫЕ ИЗМЕРИТЕЛЬНЫЕ СХЕМЫ
Все датчики, несмотря на большое разнообразие измеряемых ими
неэлектрических входных величин, преобразуют их на выходе в
ограниченное число физических величин: в силу тока, напряжение,
давление сжатого воздуха. Принятые схемы включения электрических
датчиков в схемы автоматизации также немногочисленны.
Наиболее простой схемой является непосредственное подключение
датчика к усилителю - его выходного сигнала. Однако чаще
применяются мостовая, дифференциальная и компенсационная схемы
включения датчиков.
Мостовая схема (рис. 2), которая может быть как на постоянном,
так и на переменном токе, выполняется в двух видах: неравновесная
(небалансная) и равновесная (балансная). При неравновесной
мостовой схеме измеряемая величина определяется показаниями
гальванометра, включенного в диагональ измерительного моста. При
равновесной мостовой схеме изменение сопротивления одного плеча
(датчика) моста компенсируется изменением сопротивления другого
плеча до момента исчезновения тока в измерительной диагонали.
Измеряемая величина этой схемы определяется по величине
компенсирующего сопротивления. В автоматических устройствах обычно
используются автоматические электронные мосты (ЭВМ, МСМ, КСМ).
Эти приборы имеют различные модификации (показывающие,
самопишущие, регулирующие).
Дифференциальная схема (рис. 3) представляет собой
электрическую цепь, состоящую из двух смежных контуров, в каждом из
которых возникает электрическое напряжение разной величины.
Измерительный прибор размещается в ветви, общей для обоих контуров, и
реагирует на разность контурных токов. Возможны два режима
использования дифференциальной схемы: при неизменных
сопротивлениях обоих контуров изменяются либо одно, либо оба напряжения;
при неизменных напряжениях изменяется сопротивление одного или
обоих контуров.
Как видно на схеме, в средней ветви (дифференциальной), в кото-
13
а)
К.У^А^^>
Рис. 2. Мостовые схемы включения датчика и общий вид автоматического
моста переменного тока
а — на постоянном токе; б — на переменном токе; Rit R2 — постоянные сопротивления плеч
моста; R — выходное сопротивление датчика; Ry —установочное сопротивление,
включенное в диагональ моста вместе с источником напряжения; Rr — сопротивление
гальванометра; (Увых — выходное напряжение моста; £7 — выходное напряжение
трансформатора; Ug —напряжение батареи; i — ток в гальванометре (выходной ток моста),
Rz — компенсирующее сопротивление
рую включен измерительный
прибор, протекает ток /q,
равный разности токов 1\ и Л.
При наличии внешнего
воздействия входной величины
может изменяться э. д. с. Е на
АЕ (рис. 3,а), или
сопротивление R на AR (рис 3,6): в
результате появится ток /0>
служащий мерой входной
величины. По сравнению с
мостовой схемой
дифференциальная обладает большей
чувствительностью.
Компенсационная схема приведена на рис. 4. Принцип
компенсации заключается в том, что измеряемое падение напряжения датчика,
например, термопары, уравновешивают равным и противоположным
по знаку напряжением, создаваемым рабочим током, величина
которого может быть определена с высокой точностью.
Уравновешивающее падение напряжения, снимаемое с реохорда грубой настройки,
зависит от расстояния между движками а и б.
Положение датчиков в компенсационной схеме фиксируется по
шкалам реохордов грубой и точной настройки. Рабочий ток
поддерживается постоянным с помощью реостата в цепи батареи питания.
Момент компенсации устанавливается по отсутствию тока в
нулевом гальванометре. Измерение осуществляется практически без
потребления мощности от источника измеряемого напряжения, что
является одним из важнейших преимуществ схемы. Для контроля рабо-
R+AR
Рис. 3. Дифференциальные
измерительные схемы
а — с изменением э. д. с; б — с изменением
сопротивления
14
раб 1ра6 )
О #гр"в О RTMS /
I. Milillllllll IIIIIIIIIIIII
Рис. 4. Компенсационная измерительная схема и общий вид автоматического
потенциометра типа КСП
Тп —термопара; /?гр и RT — соответственно реохорды грубой и точной настройки; R —
реостат; Б — батарея питания; НГ — нулевой гальванометр; НЭ — нормальный элемент;
/?„^ —сопротивление элемента НЭ; FIi — переключатель (измерение рабочего тока); П2 —
переключатель (контроль рабочего тока);
—рабочий ток
чего тока в схему включается нормальный элемент с неизменным
напряжением и сопротивлением. Реохорды грубой и точной настройки
выполняют из калиброванной проволоки, чтобы сохранить прямую
пропорциональность между изменением ее длины и падением
напряжения. С помощью переключателей схема включается на
измерение или контроль рабочего тока. По описанной схеме устроены
ручные потенциометры. На производстве обычно используются серийно
выпускаемые автоматические потенциометры. Уравновешивание
схемы в них происходит автоматически.
В ряде случаев применяют релейные и выпрямительные схемы
включения датчиков. Для пер едачи показаний датчиков на расстояния
используют индуктивные, дифференциально-трансформаторные, ферро-
динамические и сельсин ные схемы.
ГЛАВА IV. РЕЛЕ, ПРЕОБРАЗОВАТЕЛИ
И УСИЛИТЕЛИ
§ 8. КЛАССИФИКАЦИЯ РЕЛЕ
В ряде случаев автоматическое управление процессом может
осуществляться путем скачкообразного изменения управляемой выходной
15
Рис. 5. Нейтральное электромагнитное
реле
1 — якорь; 2 — сердечник; 3 — штифт; 4 —
контакты; 5 —обмотка электромагнита; б —корпус; 7 —
возвратная пружина; 8 — воздушный зазор между
якорем и сердечником
величины при определенных
значениях управляющей
входной величины. Такое
прерывистое воздействие на
процесс называется
релейным управлением, а
используемые для этой цели
элементы называются реле.
Реле обычно состоит из
трех основных
органов:воспринимающего
(чувствительного), который
воспринимает управляющее
входное воздействие и
преобразует его в воздействие на
промежуточный орган;
промежуточного, который при
достижении управляющим
воздействием заданной
величины передает это
воздействие исполнительному
органу; исполнительного,
осуществляющего
скачкообразное изменение управляемой
входной величины.
У реле, предназначенных
для переключения
электрических цепей,
исполнительным органом служат
контакты. Существуют, однако,
и бесконтактные
(электронные, магнитные) реле.
Воспринимающие органы реле
могут реагировать на две
или более входные
величины. В этом случае действие
реле зависит от суммы или
разности входных величин.
Реле можно классифицировать по ряду признаков. В зависимости
от рода воспринимаемых физических величин реле делят на
электрические, тепловые, механические, оптические, уровня, скорости,
акустические и др. В свою очередь, электрические реле делят по принципу
действия на электромагнитные (нейтральные и поляризованные),
магнитоэлектрические, электродинамические, электронные, ионные,
индукционные, а по параметру, на который реагирует
воспринимающий орган, — на реле тока, напряжения, мощности, частоты, сдвига
фаз. Тепловые реле делят по принципу действия на реле с линейным
расширением (биметаллические реле) и реле с плавлением.
Механические реле делят по воспринимаемому параметру на реле силы,
перемещения, скорости, ускорения, частоты.
Рис. 6. Электромагнитное поляризованное
реле
/ — контакты; 2 — якорь; 3 — магнитопровод; 4 —
обмотки электромагнита; 5 — постоянный магнит
16
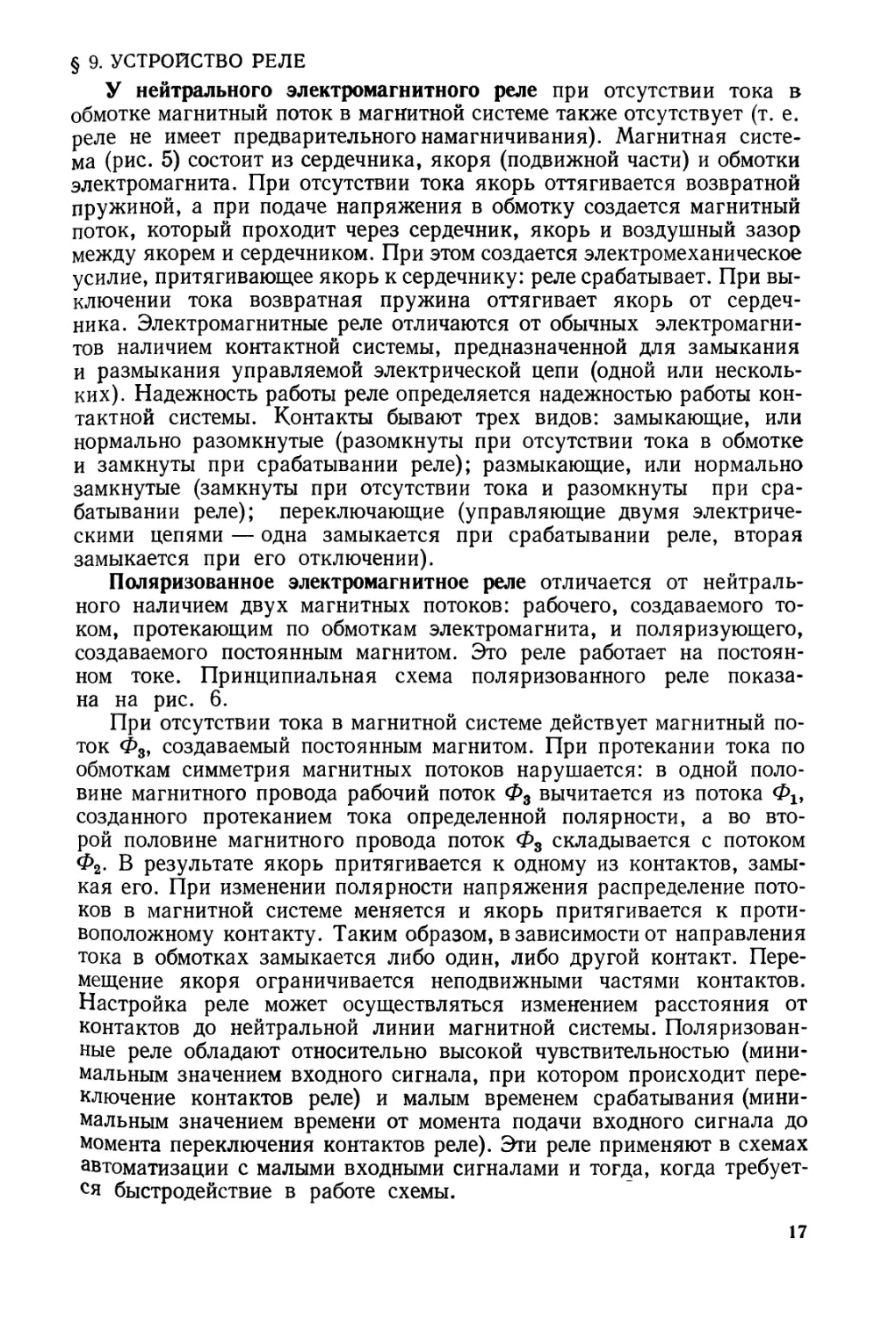
§ 9. УСТРОЙСТВО РЕЛЕ
У нейтрального электромагнитного реле при отсутствии тока в
обмотке магнитный поток в магнитной системе также отсутствует (т. е.
реле не имеет предварительного намагничивания). Магнитная
система (рис. 5) состоит из сердечника, якоря (подвижной части) и обмотки
электромагнита. При отсутствии тока якорь оттягивается возвратной
пружиной, а при подаче напряжения в обмотку создается магнитный
поток, который проходит через сердечник, якорь и воздушный зазор
между якорем и сердечником. При этом создается электромеханическое
усилие, притягивающее якорь к сердечнику: реле срабатывает. При
выключении тока возвратная пружина оттягивает якорь от
сердечника. Электромагнитные реле отличаются от обычных
электромагнитов наличием контактной системы, предназначенной для замыкания
и размыкания управляемой электрической цепи (одной или
нескольких). Надежность работы реле определяется надежностью работы
контактной системы. Контакты бывают трех видов: замыкающие, или
нормально разомкнутые (разомкнуты при отсутствии тока в обмотке
и замкнуты при срабатывании реле); размыкающие, или нормально
замкнутые (замкнуты при отсутствии тока и разомкнуты при
срабатывании реле); переключающие (управляющие двумя
электрическими цепями — одна замыкается при срабатывании реле, вторая
замыкается при его отключении).
Поляризованное электромагнитное реле отличается от
нейтрального наличием двух магнитных потоков: рабочего, создаваемого
током, протекающим по обмоткам электромагнита, и поляризующего,
создаваемого постоянным магнитом. Это реле работает на
постоянном токе. Принципиальная схема поляризованного реле
показана на рис. 6.
При отсутствии тока в магнитной системе действует магнитный
поток Ф3, создаваемый постоянным магнитом. При протекании тока по
обмоткам симметрия магнитных потоков нарушается: в одной
половине магнитного провода рабочий поток Ф3 вычитается из потока Ф1э
созданного протеканием тока определенной полярности, а во
второй половине магнитного провода поток Ф3 складывается с потоком
Ф2. В результате якорь притягивается к одному из контактов,
замыкая его. При изменении полярности напряжения распределение
потоков в магнитной системе меняется и якорь притягивается к
противоположному контакту. Таким образом, в зависимости от направления
тока в обмотках замыкается либо один, либо другой контакт.
Перемещение якоря ограничивается неподвижными частями контактов.
Настройка реле может осуществляться изменением расстояния от
контактов до нейтральной линии магнитной системы.
Поляризованные реле обладают относительно высокой чувствительностью
(минимальным значением входного сигнала, при котором происходит
переключение контактов реле) и малым временем срабатывания
(минимальным значением времени от момента подачи входного сигнала до
момента переключения контактов реле). Эти реле применяют в схемах
автоматизации с малыми входными сигналами и тогда, когда
требуется быстродействие в работе схемы.
17
0—cfc
Рис. 7. Моторное реле времени
Биметаллическим называют
тепловое реле, действие
которого основано на
использовании линейного
теплового расширения.
Воспринимающим органом этого реле
служит биметаллическая
пластинка или спиральная
пружина. Один конец пластинки
закрепляется неподвижно, а
второй —свободный снабжается
контактом. Биметаллическая
пластинка состоит из двух
слоев металла с различными
коэффициентами температурного линейного расширения и
разными модулями упругости. При нагреве металл расширяется, а
гак как целостность пластинки сохраняется, то она изгибается в
сторону металла, обладающего меньшим коэффициентом
температурного линейного расширения. В результате происходит
замыкание контактов. Биметаллические реле бывают двух типов:
термореле и электротермические реле.
Реле времени широко применяют в схемах автоматизации. Реле
времени имеют много разновидностей. Для кратковременной
выдержки времени используют схемные способы замедления срабатывания
электромагнитных реле. Для увеличения выдержки времени приме-
няют реле с механическим замедлением срабатывания, а также
моторные реле времени, принцип действия которых состоит в следующем
(рис. 7).
При замыкании ключа К синхронный мотор СД с редуктором
начинает вращаться. Одновременно возбуждается электромагнит ЭМ
и сцепляет шестерни Zx и Z2. На одной оси с шестерней Z1 закреплены
профильные шайбы (кулачки), одна из которых S показана на рис. 7.
Мотор начинает вращать профильные шайбы в направлении,
указанном стрелкой, натягивая при этом пружину F2. Как только уступ
выреза профильной шайбы S подойдет к выступу рычага С, рычаг под
действием пружины F2 повернется, разомкнув контакты /—2 в цепи
мотора СД и замкнув контакты 3—4 выходной цепи реле. Остальные
профильные шайбы на оси шестерни Zx должны быть установлены на
другие независимые выдержки времени и замыкать (или размыкать)
каждая свои контакты внешних цепей. При размыкании контактов
1—2 мотор СД останавливается, а все профильные шайбы остаются в
том положении, которого они достигли вплоть до размыкания ключа
К. При размыкании ключа К электромагнит ЭМ отпустит якорь и
пружина F2 расцепит шестерни Zx и Z2. Профильные шайбы под
действием пружины F2 повернутся назад до упора Л. При этом контакты
окажутся вновь в исходном положении и реле времени готово к
новому включению. Время срабатывания данного контакта
определяется положением шайб на оси шестерни Zv Заданное время
устанавливается с помощью шкалы, градуированной в минутах и секундах.
18
Промышленностью выпускаются командные приборы
программного управления, обеспечивающие различные выдержки времени при
переключении в нескольких цепях управления по заданной
программе. Для управления циклическими процессами используются
реле счета импульсов типа РСИ и счетно-шагового реле типа Е-526.
К реле относят иногда приборы контроля неэлектрических
величин, называя их, например, реле расхода, реле давления, реле уровня.
В последнее время наряду с контактными реле получают широкое
применение бесконтактные реле. На их основе созданы логические и
функциональные элементы. Логические элементы осуществляют
определенную логическую зависимость между входными и выходными
сигналами элемента. Функциональные элементы предназначены для
выполнения определенных функций: для гальванического разделения
цепей (согласующие элементы), сравнения величин двух
напряжений (нуль — органы), формирования дискретного сигнала
(мультивибраторы, триггеры) и т. д.
На основе логических и функциональных элементов создаются
самые разнообразные современные схемы автоматизации,
телемеханики, связи и счетно-вычислительных устройств. Логические и
функциональные элементы стандартизированы и унифицированы по
уровням питания, входным сигналам, нагрузкам и габаритам. Это
значительно упрощает процесс проектирования и технологию
изготовления различных средств автоматизации, а также облегчает их наладку
и обслуживание.
Для автоматизации производственных процессов разработана
унифицированная система логических элементов «Логика» взамен ранее
выпускавшихся логических элементов серий ЭЛМ-50, ЭЛМ-400, ЛТ,
УТ, ЭТ.
Система элементов «Логика» состоит из трех серий: транзисторных
элементов «Логика Т», магнитных элементов с частотой питания 400 Гц
«Логика МК» и магнитных реле с частотой питания 400 Гц «Логика
МР». Наиболее широко применяется первая серия логических
элементов.
В связи с быстрым развитием микроэлектроники начинают
применяться интегральные микросхемы, создаваемые на одном кристалле
или пластинке. К ним в первую очередь относится серия
полупроводниковых логических микросхем К155.
§ 10. УСТРОЙСТВО ПРЕОБРАЗОВАТЕЛЕЙ
И УСИЛИТЕЛЕЙ
Преобразователями часто называют датчики, в которых
измеряемая величина, воспринятая чувствительным элементом,
преобразуется в другую величину, удобную для передачи на расстояние и
необходимого усиления. Этим путем обычно преобразуются физические
величины в электрические. В связи с созданием Государственной
системы приборов (ГСП) в нашей стране проведена большая работа по
Унификации средств автоматизации. Унифицированы и сигналы, в
Которые преобразуются измеряемые величины. В системе ГСП приме-
19
няются следующие выходные сигналы приборов: электрический
постоянного тока и частотный, а также пневматический и гидравлический.
С целью повышения универсального использования датчиков и
приборов в схемах автоматизации были созданы и серийно выпускаются
специальные приборы-преобразователи. Они позволяют
преобразовывать один вид выходного сигнала в другой. С их помощью
сравнительно просто могут включаться в схемы автоматизации
электрические, пневматические и гидравлические элементы в различных
сочетаниях. Иногда такого рода преобразователи выполняют одновременно
функцию усиления сигналов.
Промышленность выпускает преобразователи, осуществляющие
умножение и деление (размножение) сигналов, а также согласующие
соотношение двух сигналов (например, поддержание подачи
реагентов в строго заданном соотношении, постоянным во времени или
переменным по требуемой программе).
Серийно выпускаются преобразователи: электропневматические,
пневмоэлектрические, электрогидравлические, гидроэлектрические,
электрические для преобразования напряжения в частоту тока,
механические для преобразования линейных и угловых перемещений в
электрический и пневматический сигналы.
Мощность сигналов, получаемых от чувствительных элементов
датчиков, в большинстве случаев недостаточна для непосредственного
перемещения регулирующего органа. Это обстоятельство приводит к
необходимости применения усилителей.
Величина коэффициента усиления по мощности, представляющего
отношение мощности на выходе усилителя к мощности на его входе,
в различных усилителях может колебаться в пределах 10-М О7.
По виду используемой вспомогательной энергии усилители
делятся на гидравлические, пневматические, электрические.
Гидравлические усилители бывают струйные, золотниковые или
дроссельные. Действие струйного гидравлического усилителя
(рис. 8, а) основано на том, что скоростной напор струи жидкости,
вытекающей из мундштука струйной трубки 4, вызывает при
отклонении ее от среднего положения изменение давления в приемных
соплах 2 усилителя. Струйная трубка вращается около полой цапфы
5, в которую насосом под давлением подается рабочая жидкость.
Диаметр выходного сечения мундштука трубки составляет 1,8—2 мм,
а отклонение мундштука от среднего положения 1,5—2 мм. На
струйную трубку действуют усилие Хвх от чувствительного элемента 3
и усилие от противодействующей пружины 6. При изменении
соотношения между этими усилиями струйная трубка отклоняется от
среднего положения и с противоположных сторон поршня
исполнительного механизма 1 возникают давления разной величины, вследствие
чего поршень начинает перемещаться на величину Хвых. Струйный
усилитель используется также и как пневматический усилитель.
Принцип действия золотниковых гидроусилителей состоит в
перемещении золотника под воздействием усилия ХВХ1 соответствующего
перераспределения давления рабочей жидкости в полостях исполни-
20
Рис. 8. Схемы действия усилителей
а — струйного гидравлического; б — пневматического
тельного гидроцилиндра и последующего передвижения его
поршня со штоком на величину Хвых.
Пневматический усилитель (рис. 8, б) представляет собой
механизм, в котором достаточно мощный поток энергии, предназначенный
для приведения в действие регулирующего органа, управляется тем
небольшим потоком энергии, который поступает в управляющий
элемент и изменяется там по величине. Основным элементом
пневматических усилителей является устройство типа «сопло — заслонка».
Сжатый воздух под давлением Рг поступает в междроссельную камеру 2
через дроссель постоянного сечения 1, определяющим проходное
сечение трубопровода для воздуха, и соответственно этому его расход и
давление. Давление сжатого воздуха Р в камере является командным;
через трубку 5 воздух поступает в камеру исполнительного
механизма 6. В междроссельной камере имеется еще одно отверстие — сопло 4,
через которое воздух поступает в атмосферу. Сопло прикрывается
заслонкой 3, которая может перемещаться к соплу и от него. Проходное
сечение сопла в 3 раза больше сечения отверстия дросселя. Например,
если диаметр сопла 0,5 мм, то диаметр дросселя 0,2 мм.
При постоянном сечении сопла расход через него зависит от
положения заслонки. Чем ближе заслонка расположена к соплу, тем
меньше сечение, через которое происходит истечение воздуха, и тем
меньше его расход. Таким образом, сопло и заслонку можно рассматривать
как дроссель переменного сечения.
Величина давления в междроссельной камере и, следовательно,
величина выходного (командного) давления Р зависит от расхода воз-
Духа через переменный дроссель, а его расход через сопло зависит от
положения заслонки. Отсюда следует, что, перемещая заслонку, с
Помощью входного усилия Хвх можно изменять давление сжатого
воздуха, поступающего к поршню 7 исполнительного механизма,
который перемещается на величину Хвых. Если заслонка полностью за-
21
крыла сопло, то командное давление Р будет равно давлению питания
Рг. Чем дальше будет отодвинута заслонка от сопла, тем меньше будет
командное давление Р и, наконец, оно может стать равным
атмосферному.
Поскольку усилие /, необходимое для перемещения заслонки,
значительно меньше усилия /\ развиваемого на штоке поршня, то
рассмотренное устройство является усилителем.
Усилители типа «сопло — заслонка» используются также как
гидроусилители.
Электрические усилители бывают электронные (ламповые или
полупроводниковые), электромашинные и магнитные. С устройством
и принципом действия этих усилителей учащиеся знакомятся в курсе
«Электротехника с основами электроники».
ГЛАВА V. ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ
И РЕГУЛИРУЮЩИЕ ОРГАНЫ
§ И. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ
И КЛАССИФИКАЦИЯ
Исполнительные механизмы автоматических устройств
предназначены для силового воздействия на конечное звено системы
автоматического управления — регулирующий или управляющий орган.
Регулирующие органы предназначены для непосредственного
воздействия на среду, поступающую в объект регулирования. Цель этого
воздействия — количественное или качественное изменение параметров
этой среды для поддержания заданного регулируемого параметра.
В качестве исполнительных механизмов применяют
электрические, гидравлические и пневматические механизмы.
Регулирующая способность исполнительных механизмов
характеризуется следующими основными показателями: время срабатывания,
коэффициент усиления по мощности, скорость на выходе, развиваемое
усилие на выходе, линейное или угловое перемещение на выходе.
Конструкции исполнительных механизмов различны: поршневые
(с поступательным или вращательным движением),
электромагнитные, мембранные, сильфонные, электромоторные и
комбинированные.
Исполнительные механизмы по характеру перемещения
регулирующего органа делят на две основные группы: механизмы с постоянной
скоростью и механизмы с пропорциональной скоростью (у последних
выходная величина — скорость приблизительно пропорциональна
входной величине, т. е. сигналу датчика). К первой группе относятся
в основном все электромоторные исполнительные механизмы
переменного тока. Ко второй группе относятся гидравлические и
пневматические исполнительные механизмы.
Основными характеристиками регулирующих органов являются
следующие параметры: величина перестановочного усилия,
необходимого для перемещения регулирующего органа; скорость его переме-
22
щения и зависимость изменения расхода среды от перемещения
регулирующего органа. В качестве регулирующих органов принимают
клапаны, вентили, шиберы, задвижки, заслонки, реостаты,
автотрансформаторы, питатели.
§ 12. УСТРОЙСТВО
ИСПОЛНИТЕЛЬНЫХ МЕХАНИЗМОВ
Система исполнительных устройств (СИУ) является составной
частью Государственной системы приборов (ГСП). Эти устройства
состоят из регулирующего органа и исполнительного механизма, который
оснащается дополнительными приборами (ручными дублерами,
позиционерами, сигнализаторами положения).
Системой СИУ предусматривается построение унифицированных
исполнительных устройств по блочно-модульному принципу, т. е.
создание всех исполнительных устройств системы из нескольких
унифицированных базовых блоков и узлов, что позволяет расширить их
номенклатуру без больших производственных затрат на внедрение.
Системой исполнительных устройств предусматривается
комплектование регулирующих органов исполнительными механизмами
следующих видов: пневматическими мембранными пружинными,
мембранными беспружинными, поршневыми, электрическими и механизмами
со смешанным видом энергии. В последнем случае на регулирующем
органе устанавливается пневматический механизм с
электропневматическим позиционером — электрический входной сигнал
преобразуется в пневматический выходной сигнал давления.
Основой для разработки пневматических исполнительных
механизмов, вошедших в СИУ, послужили выпускаемые промышленностью
механизмы типов МИМ и МИМП.
В качестве электрических исполнительных механизмов
используются исполнительные моторные механизмы малой мощности ДР
(для двухпозиционного регулирования) и ПР (для пропорционального
регулирования).
Электрический исполнительный механизм типа ПР состоит из
следующих узлов: двух асинхронных однофазных электродвигателей,
корпуса с редуктором, конечных выключателей, предельного
выключателя и реостата обратной связи.
Электродвигатели состоят из двух короткозамкнутых роторов,
установленных на одном валу, и двух статоров, закрепленных в
корпусе исполнительного механизма. Входной вал электродвигателей
вращается в двух направлениях в зависимости от того, обмотки
какого из статоров находятся под током.
Исполнительный механизм типа ПР (рис. 9) снабжен диском и
штоком, что позволяет воздействовать как на поворотный регулирующий
орган, так и на поступательный или одновременно на тот и другой.
Электродвигатели, редуктор и предельный выключатель помещены в
литой корпус. Шестерни редуктора сменные, что позволяет
регулировать скорость вращения выходного вала, т. е. поворачивать его на
180° за 10, 15, 22, 30, 45, 60, 75, 90, 105 и 120 с. Заводом-изготови-
23
Рис. 9. Исполнительный механизм
типа ПР
/ — диск; 2 — редуктор; 3 — корпус; 4 —
электродвигатели; 5 — предельный выключатель;
6 — шток; 7 — регулирующий орган
Рис. 10. Электромагнитный клапан
/ — вводное отверстие; 2 —обмотка; 3 —
шпиндель; 4 — седло клапана; 5 — корпус
телем исполнительные механизмы собираются с настройкой 30 с.
Минимальный вращающий момент на выходном валу 10 Н-м (при
настройке 30 с).
Кроме электромоторных существует много разновидностей
электромагнитных исполнительных механизмов.
Электромагнитный клапан, сочетающий в себе исполнительный
механизм с регулирующим органом, показан на рис. 10. При
протекании тока в обмотке якорь, соединенный со шпинделем, втягивается
и открывает полностью проходное отверстие. При выключении тока
клапан закрывается. Мощность, потребляемая обмоткой, составляет
15—25 Вт.
Гидравлические исполнительные механизмы, воспринимая разность
давлений рабочей жидкости, преобразуют ее в механическое
перемещение регулирующего органа. Эти механизмы выпускаются в двух
исполнениях для прямого и поворотного перемещения регулирующего
органа.
Пневматические исполнительные механизмы бывают
мембранными, сильфонными и поршневыми.
Мембранные исполнительные устройства, выпускаемые
промышленностью, объединяются с регулирующим органом — клапаном.
24
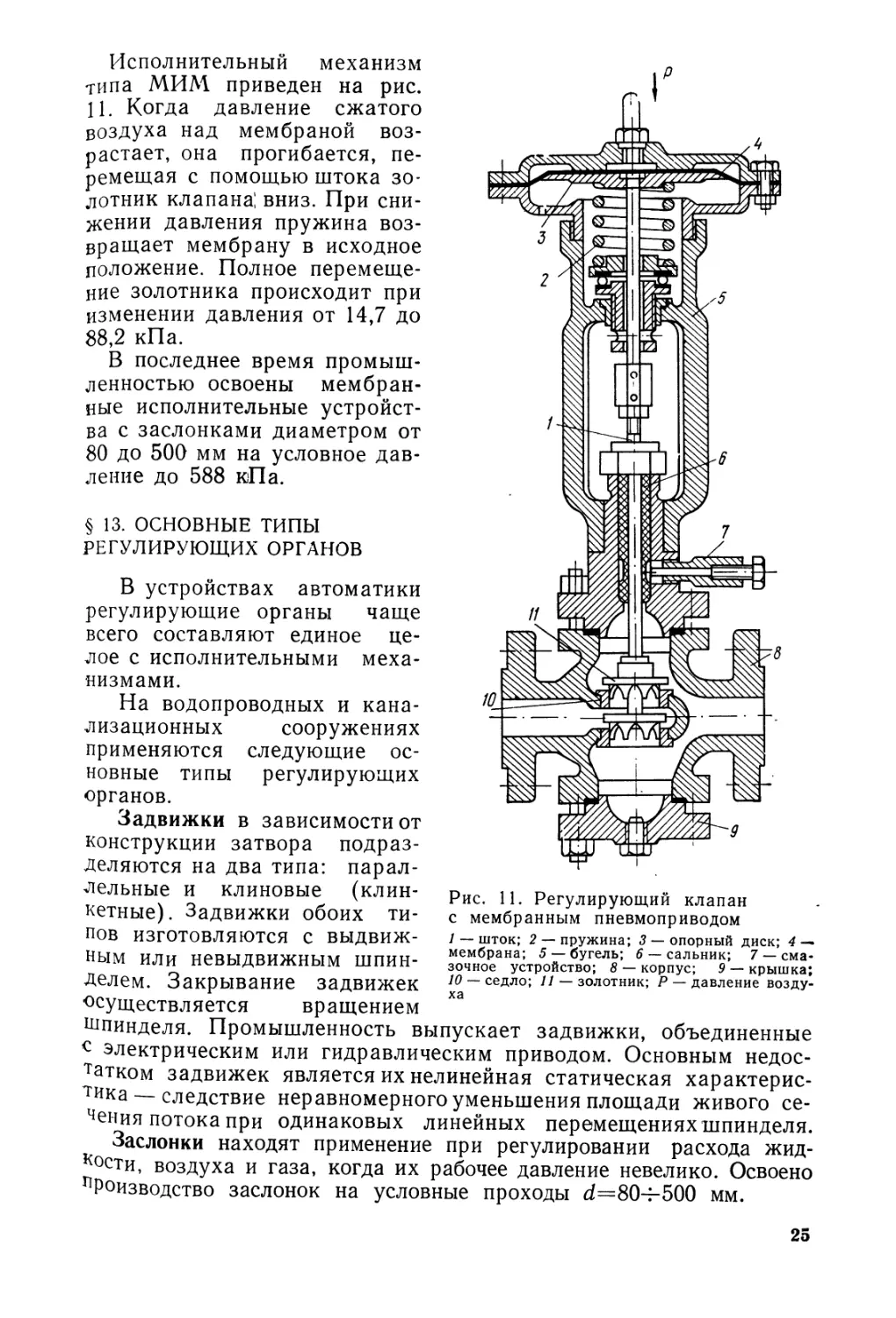
Исполнительный механизм
типа МИМ приведен на рис.
П. Когда давление сжатого
воздуха над мембраной
возрастает, она прогибается,
перемещая с помощью штока
золотник клапана; вниз. При
снижении давления пружина
возвращает мембрану в исходное
положение. Полное
перемещение золотника происходит при
изменении давления от 14,7 до
88,2 кПа.
В последнее время
промышленностью освоены
мембранные исполнительные
устройства с заслонками диаметром от
80 до 500 мм на условное
давление до 588 кПа.
§ 13. ОСНОВНЫЕ ТИПЫ
РЕГУЛИРУЮЩИХ ОРГАНОВ
В устройствах автоматики
регулирующие органы чаще
всего составляют единое
целое с исполнительными
механизмами.
На водопроводных и
канализационных сооружениях
применяются следующие
основные типы регулирующих
органов.
Задвижки в зависимости от
конструкции затвора
подразделяются на два типа:
параллельные и клиновые (клин-
кетные). Задвижки обоих
типов изготовляются с
выдвижным или невыдвижным
шпинделем. Закрывание задвижек
осуществляется вращением
шпинделя. Промышленность выпускает задвижки, объединенные
с электрическим или гидравлическим приводом. Основным
недостатком задвижек является их нелинейная статическая
характеристика—следствие неравномерного уменьшения площади живого се-
чения потока при одинаковых линейных перемещениях шпинделя.
Заслонки находят применение при регулировании расхода жид-
Кости, воздуха и газа, когда их рабочее давление невелико. Освоено
производство заслонок на условные проходы d=80-^500 мм.
Рис. 11. Регулирующий клапан
с мембранным пневмоприводом
/ — шток; 2 — пружина; 3 — опорный диск; 4 —
мембрана; 5 — бугель; 6 — сальник; 7 —
смазочное устройство; 8 — корпус; 9 — крышка;
10 — седло; // — золотник; Р — давление
воздуха
25
Шиберы используются для регулирования расхода жидкостей в
открытых каналах.
Заслонки и шиберы иногда называют соответственно затворами
дисковыми (поворотными) и затворами плоскими (щитовыми).
Клапаны применяются на водопроводных и канализационных
сооружениях для регулирования, например, расхода реагентов в виде
растворов и суспензий. Основным достоинством клапанов является
линейная или близкая к ней статическая характеристика.
Вентили, применяющиеся для регулирования расхода в трубах
небольшого диаметра (до 200 мм), бывают муфтовые, фланцевые и
цапковые.
Краны бывают пробковые, муфтовые и фланцевые, одноходовые и
многоходовые. Последние в схемах автоматизации используются как
гидропереключатели.
Методы расчета пропускной способности регулирующего органа
и других его характеристик изложены в ГОСТ 16443—70.
ГЛАВА VI. ВЫЧИСЛИТЕЛЬНЫЕ УСТРОЙСТВА
§ 14. ЦИФРОВЫЕ И АНАЛОГОВЫЕ
ВЫЧИСЛИТЕЛЬНЫЕ УСТРОЙСТВА
При управлении производственным процессом часто бывает
необходимо производить математические операции. При автоматическом
управлении эти операции должны выполняться автоматически на
различных вычислительных устройствах: аналоговых (или
моделирующих) непрерывного действия и цифровых дискретного действия.
В аналоговых вычислительных устройствах физические величины,
характеризующие протекание процесса, моделируются их
математическими аналогами. Так, гидравлические сопротивления
трубопроводов и арматуры моделируются сопротивлением электрических цепей.
В цифровых вычислительных устройствах математические
действия заменяются комбинированием состояний элементов устройства.
Математические величины, характеризующие протекание процесса,
делятся в цифровых устройствах на равные части, число которых и
выражает в цифровой форме значение искомой физической величины.
Использование для целей автоматического управления
отдельными объектами универсальных или комплексных вычислительных
устройств, рассчитанных на выполнение большого количества
разнообразных математических операций, нецелесообразно из-за их высокой
стоимости, сложности конструкции и больших габаритов. Более
целесообразно применение отдельных элементов этих устройств,
необходимых для выполнения тех математических и логических операций,
которые связаны непосредственно с работой данного объекта
автоматического управления.
К вычислительным счетно-решающим устройствам предъявляются
следующие основные требования: максимально возможная простота
функциональной схемы и конструкции, небольшие габариты, надеж-
26
ность и быстрота действия. Последние два требования особенно
важны для работы систем автоматического управления. Отказ
вычислительного устройства нарушает работу всей системы и в некоторых
случаях может быть причиной аварии, а недостаточная быстрота действия
приводит к чрезмерному запаздыванию процесса управления. Помимо
всего этого, элементы вычислительных устройств должны легко
вводиться в систему управления, т. е. обладать способностью оперировать
с величинами того же порядка, которые приняты в системе
автоматического управления.
Наряду с универсальными вычислительными устройствами
существуют более простые специализированные устройства для управления
отдельными технологическими процессами.
§ 15. ФУНКЦИИ
ВЫЧИСЛИТЕЛЬНЫХ УСТРОЙСТВ
Автоматические системы, включающие вычислительные устройства,
можно подразделить на три группы: информационные системы
автоматического контроля; командные разомкнутые системы
автоматического управления; замкнутые системы автоматического управления.
Информационные системы обрабатывают данные по большому
числу параметров сложных производственных процессов. Анализируя
эти данные, они могут служить советчиком для диспетчера,
управляющего процессами. Так, анализируя данные о расходах и напорах
воды в разветвленных водопроводных сетях, эти системы
подсказывают диспетчеру, в каком порядке следует включать насосы для
создания оптимального режима водоснабжения объекта. Однако, выдавая
информацию, эти системы не воздействуют на технологию процесса.
Более сложные командные системы автоматического управления
вырабатывают, формируют и осуществляют передачу команд по
управлению технологическим процессом.
Замкнутые системы автоматического управления содержат один
или несколько замкнутых контуров, осуществляющих управление
технологическими операциями в оптимальных пределах без участия
человека.
Примером использования вычислительных устройств для
автоматизации водопроводных и канализационных сооружений может
служить созданная в АКХ электроаналоговая машина МАВР. Наряду с
применением ее для расчета сложных водопроводных сетей она может
использоваться для автоматического выбора оптимального режима
работы насосных станций. Оптимальная комбинация включаемых
насосов для подачи воды в сеть под заданным напором при минимальном
расходе электроэнергии отыскивается анализом всех допустимых
вариантов. Машина в данном случае работает как советчик диспетчера.
Она может также использоваться для улучшения потокораспределения
и при анализе аварийных ситуаций на водопроводной сети.
В АКХ разработаны принципы оптимизации режима совместной
работы водопроводных отстойников и фильтров с помощью ЭЦВМ.
Ведутся работы по созданию автоматизированных систем управления
водоснабжением ряда городов нашей страны.
27
ГЛАВА VII. СХЕМЫ АВТОМАТИЗАЦИИ
И ИХ ПОСТРОЕНИЕ
§ 16. ТИПЫ СХЕМ
При проектировании используются общепринятые правила
составления схем автоматизации.
Единая система конструкторской документации (ЕСКД) в
качестве обязательного стандарта определяет четыре вида схем:
электрические, гидравлические, пневматические и кинематические.
Определены семь типов схем: структурные, функциональные, принципиальные
(полные), соединений (монтажные), подключений, общие,
расположения.
Структурная схема определяет основные функциональные части
устройства, их назначение и взаимосвязи.
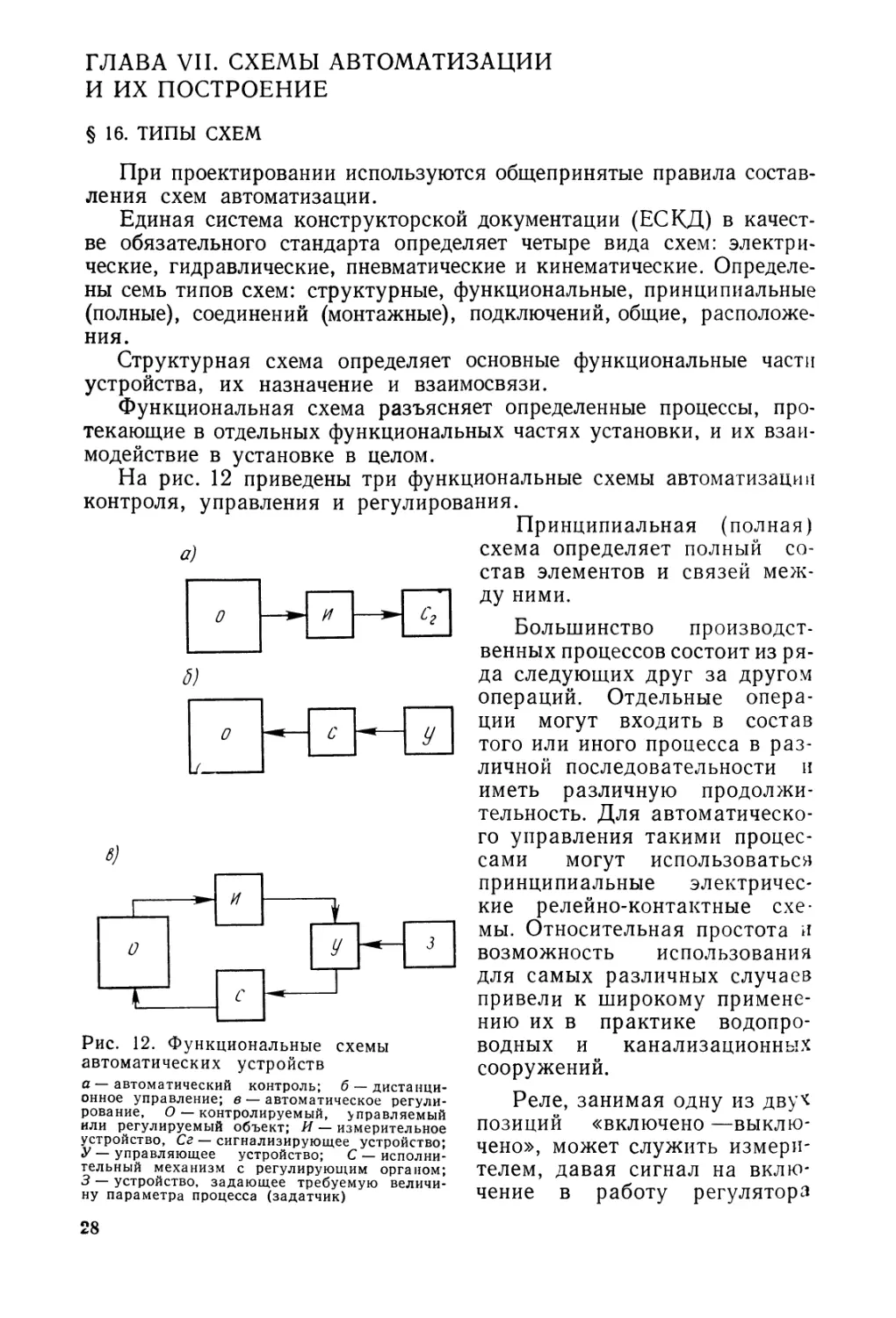
Функциональная схема разъясняет определенные процессы,
протекающие в отдельных функциональных частях установки, и их
взаимодействие в установке в целом.
На рис. 12 приведены три функциональные схемы автоматизации
контроля, управления и регулирования.
Принципиальная (полная)
схема определяет полный
состав элементов и связей
между ними.
Большинство
производственных процессов состоит из
ряда следующих друг за другом
операций. Отдельные
операции могут входить в состав
того или иного процесса в
различной последовательности и
иметь различную
продолжительность. Для
автоматического управления такими
процессами могут использоваться
принципиальные
электрические релейно-контактные
схемы. Относительная простота и
возможность использования
для самых различных случаев
привели к широкому
применению их в практике
водопроводных и канализационных
а)
0
и
с2
5)
О
1
с
У
6)
1
О
и
с
У
Рис. 12. Функциональные схемы
автоматических устройств
а — автоматический контроль; б —
дистанционное управление; в — автоматическое
регулирование, О — контролируемый, управляемый
или регулируемый объект; И — измерительное
устройство, Сг — сигнализирующее устройство;
У — управляющее устройство; С —
исполнительный механизм с регулирующим органом;
3 — устройство, задающее требуемую
величину параметра процесса (задатчик)
сооружении.
Реле, занимая одну из дву*
позиций «включено
—выключено», может служить
измерителем, давая сигнал на
включение в работу регулятора
28
при достижении, например, жидкостью нижнего уровня,
усилителем, срабатывая при малых токах, а своими контактами,,
включая элементы с большими токами, промежуточным элементом,
просто размножая входной сигнал. Несколько раз в различных
сочетаниях могут образовывать логические блоки.
Каждая релейно-контактная схема состоит из двух частей: 1)
схемы или цепи главного тока; 2) схемы управления или
вспомогательных цепей. Схему главного тока изображают жирными линиями; она
показывает способ включения электродвигателей. В цепи главного
тока располагаются контакты контакторов или магнитных пускателей
и органы элементов защиты. Схему управления изображают более
тонкими линиями.
§ 17. СХЕМЫ ВКЛЮЧЕНИЯ РЕЛЕ
Релейно-контактные схемы представляют собой сочетание ряда
вариантов включения реле (рис. 13) или контакторов.
В схеме повторителя (см. рис. 13, а) при замыкании контактов
кнопки «Вкл.» замыкается цепь питания катушки реле Р и оно
срабатывает, при размыкании контактов кнопки реле Р обесточивается, т. е.
реле Р «повторяет» положение ключа (кнопки).
В схеме самоблокировки, или памяти (см. рис. 13, б) при
замыкании контактов кнопки «Вкл.» замыкается цепь питания катушки реле
Р и оно срабатывает, шунтируя своими замыкающими контактами
кнопку «Вкл.». Таким образом, при размыкании контактов кнопки
«Вкл.» катушка реле остается замкнутой через свои замыкающие
контакты. Реле заблокировалось в замкнутом состоянии, оно как бы
запомнило кратковременный импульс, полученный при замыкании
контактов кнопки «Вкл.», включенных последовательно с катушкой реле.
Схема взаимной блокировки предохраняет от одновременного
срабатывания двух или нескольких реле. Для взаимной блокировки двух
реле (см. рис. 13, в) в цепь питания катушки реле Рг включается
последовательно размыкающий контакт реле Р2. Реле Рх не может
сработать при замыкании контактов /Сь если включено реле Р2} так как
размыкающий контакт реле Р2 включен в цепь питания катушки реле
Р±\ при замыкании контакта К2 не может сработать реле P2i так к^к
размыкающие контакты включенного реле Рг находятся в цепи
питания катушки реле Р2-
Схемы последовательной блокировки реле обеспечивают строго
определенный порядок включения или отключения, нарушение которого
может вызвать аварию механизма. Для обеспечения последовательной
блокировки включения реле в цепь питания его катушки должны
быть включены в замыкающие контакты тех реле, которые должны
сработать раньше него. Например, реле Р2 (см. рис. 13, г) сработает лишь
после замыкания контакта реле Р1ч а реле Р3 — только после
замыкания контакта реле Р2. Для обеспечения последовательной блокировки
отключения реле параллельно контакту, его отключающему, должны
быть включены контакты тех реле, которые отключаются раньше.
Например, реле Р2 (см. рис. 13, д) не отключится при размыкании
Контакта К2 до тех пор, пока включено реле Рг.
29
Л1Л2ЛЗ
РТ,
/I
Рис. 14. Схема дистанционного управления
асинхронным электродвигателем
с короткозамкнутым ротором
Иногда бывает необходимо включать и
отключать реле из разных мест. В каждом
из этих мест устанавливаются кнопки
замыкания и размыкания. Все кнопки с
замыкающими контактами включаются
между собой параллельно, а( кнопки с
размыкающими контактами — последовательно.
Электромагнитные реле широко
применяются в схемах автоматического
управления электродвигателями. В качестве
примера рассмотрим одну из таких релейных
схем.
Пуск и остановка асинхронного корот-
козамкнутого электродвигателя при
включении на полное напряжение сети
осуществляется дистанционно магнитным
пускателем (рис. 14). Для пуска
электродвигателя Д нажимают кнопку «Пуск», замыкая цепь: фаза сети —
контакты кнопок «Стоп» и «Пуск» — катушка магнитного пускателя Л —
размыкающие контакты тепловых реле РТг и РТ2 — фаза сети.
Включение в сеть катушки магнитного пускателя Л вызывает
замыкание трех главных контактов .пускателя, подключающих обмотк}
электродвигателя на три фазы сети. Одновременно замыкается по
схеме памяти блок-контакт пускателя, который шунтирует кнопку «Пуск»-
Для отключения электродвигателя достаточно нажать кнопку «Стоп>
и цепь питания катушки магнитного пускателя разомкнётся. Вслу
чае перегрузки электродвигателя цепь питания магнитного пускателе
будет разомкнута размыкающими контактами тепловых реле Pf]
и РГ2. Эти контакты выполняются с ручным возвратом в замкнуто1
состояние, чтобы при быстром охлаждении биметаллической пружин^
каждого реле вновь не замкнулась цепь питания катушки магнитног
Щ р
\Ki П
м
«г
ПП
J
Р
1
Рис. 13. Схемы
включения реле
30
4 Ov 6 v 6
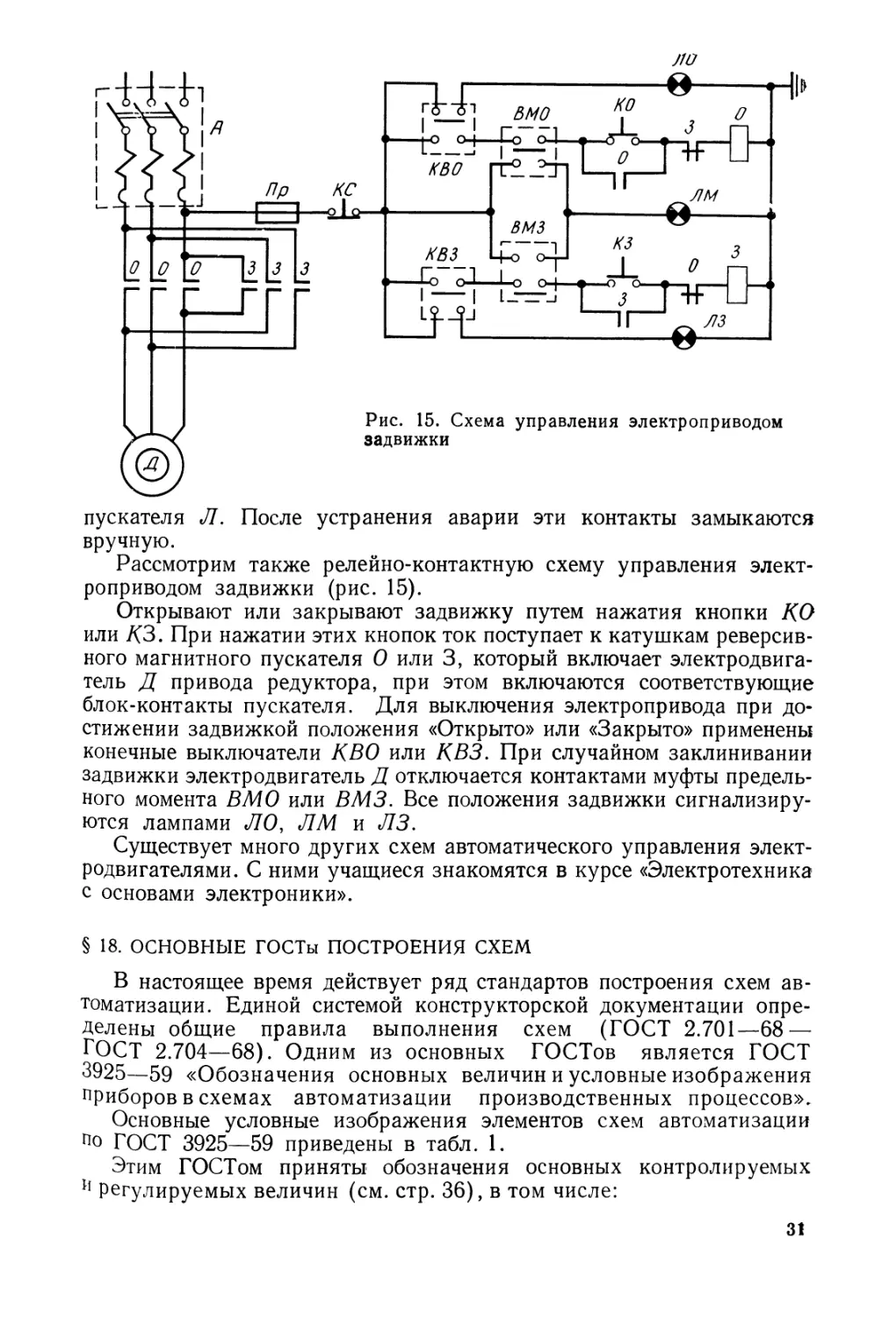
Рис. 15. Схема управления электроприводом
задвижки
пускателя Л. После устранения аварии эти контакты замыкаются
вручную.
Рассмотрим также релейно-контактную схему управления
электроприводом задвижки (рис. 15).
Открывают или закрывают задвижку путем нажатия кнопки КО
или КЗ. При нажатии этих кнопок ток поступает к катушкам
реверсивного магнитного пускателя О или 3, который включает
электродвигатель Д привода редуктора, при этом включаются соответствующие
блок-контакты пускателя. Для выключения электропривода при
достижении задвижкой положения «Открыто» или «Закрыто» применены
конечные выключатели КВО или КВЗ. При случайном заклинивании
задвижки электродвигатель Д отключается контактами муфты
предельного момента ВМО или ВМЗ. Все положения задвижки
сигнализируются лампами ЛО, ЛМ и ЛЗ.
Существует много других схем автоматического управления
электродвигателями. С ними учащиеся знакомятся в курсе «Электротехника
с основами электроники».
§ 18. ОСНОВНЫЕ ГОСТы ПОСТРОЕНИЯ СХЕМ
В настоящее время действует ряд стандартов построения схем
автоматизации. Единой системой конструкторской документации
определены общие правила выполнения схем (ГОСТ 2.701—68 —
ГОСТ 2.704—68). Одним из основных ГОСТов является ГОСТ
3925—59 «Обозначения основных величин и условные изображения
приборов в схемах автоматизации производственных процессов».
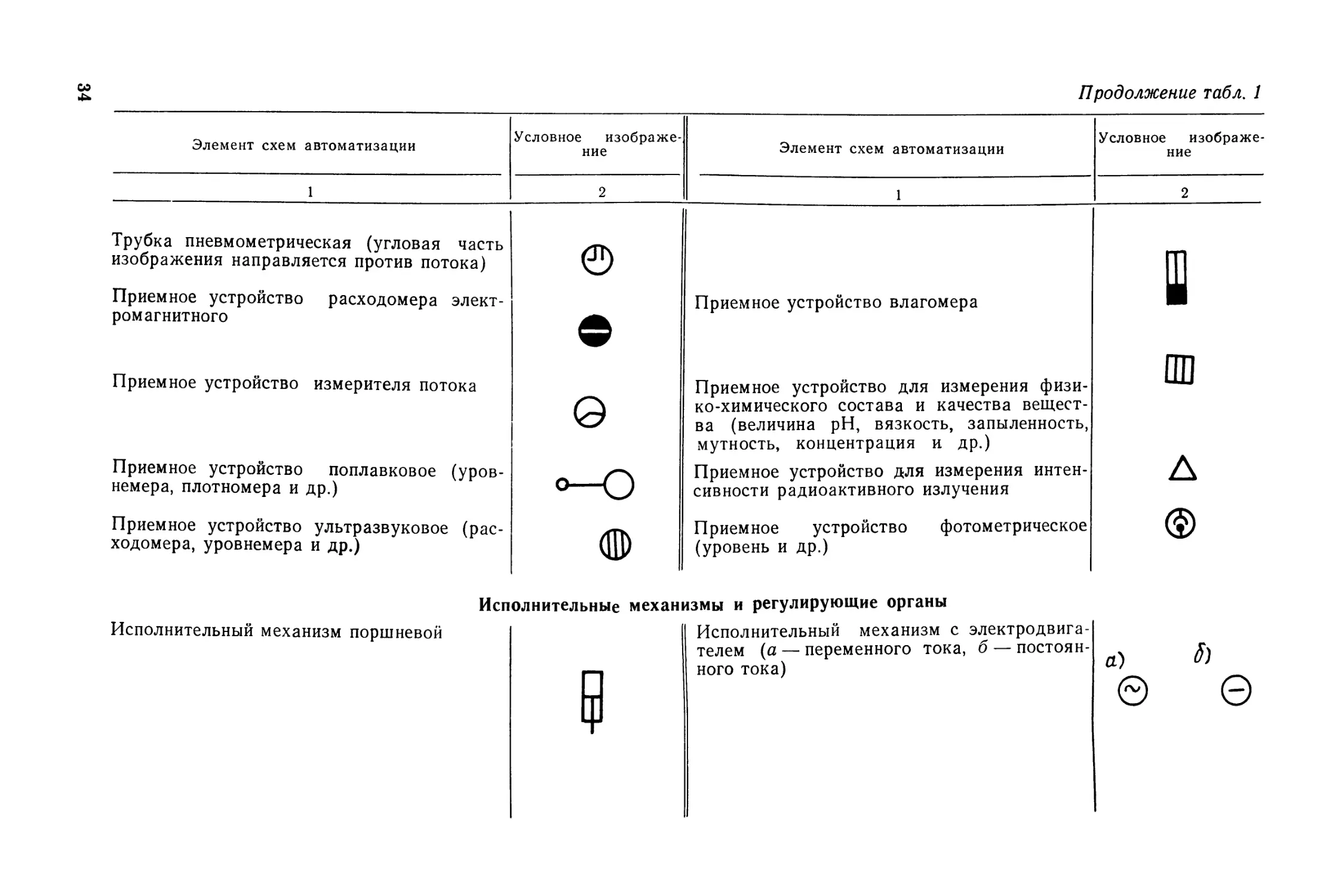
Основные условные изображения элементов схем автоматизации
по ГОСТ 3925—59 приведены в табл. 1.
Этим ГОСТом приняты обозначения основных контролируемых
и регулируемых величин (см. стр. 36), в том числе:
31
со
го
Таблица 1
Элемент схем автоматизации
1
Условное
изображение
2
Элемент схем автоматизации
1
Условное изображе
ние
2
Прибор измерительный, основное
изображение
Прибор регулирующий (сигнализирующий),
основное изображение
Прибор измерительный и регулирующий
(сигнализирующий) в одном корпусе,
основное изображение
Электрическая
Гидравлическая
Термометр расширения стеклянный
Термометр расширения, стеклянный
электроконтактный
Измерительные и регулирующие приборы
е
Прибор измерительный, допускаемое изоб
ражение
Прибор регулирующий (сигнализирующий),
допускаемое изображение
Прибор измерительный и регулирующий
(сигнализирующий) в одном корпусе,
допускаемое изображение
Виды передач дистанционного воздействия
Пневматическая
Механическая
Приемные устройства
Термопара одинарная
1
Термопара двойная
СШ
Термометр сопротивления одинарный
Термометр сопротивления двойной
Термометр сопротивления поверхностный
Термометр сопротивления многозонный
(изображения концов зонных термометров
сопротивления показываются у мест
измерения)
Отборное устройство давления, уровня,
состава газов и жидкостей
Счетчик жидкости, газа
Расходомер постоянного перепада
Сужающее устройство для измерения
расхода по перепаду (острие изображения
направляется против потока)
Термопара поверхностна*
Термопара скоростная
Термопара многозонная (изображения
концов зонных термопар показываются у мест
измерения)
Термометр дилатометрический или
биметаллический
Термобаллон манометрического
термометра
Приемное устройство радиоактивное (рас
ходомера, уровнемера и др.)
Приемное устройство ультракоротковолно
вое (уровнемера и др.)
Приемное устройство емкостное (уровнеме
ра, толщиномера и др.)
Приемное устройство динамометрическое
(тензометрическое и др.)
о
8
8
ч
Продолжение табл. 1
Элемент схем автоматизации
Условное изображе
ние
Элемент схем автоматизации
Условное
изображение
Трубка пневмометрическая (угловая часть
изображения направляется против потока)
Приемное устройство расходомера
электромагнитного
Приемное устройство измерителя потока
Приемное устройство поплавковое
(уровнемера, плотномера и др.)
Приемное устройство ультразвуковое
(расходомера, уровнемера и др.)
е
0
о-О
Приемное устройство влагомера
Приемное устройство для измерения
физико-химического состава и качества
вещества (величина рН, вязкость, запыленность,
мутность, концентрация и др.)
Приемное устройство для измерения
интенсивности радиоактивного излучения
Приемное устройство фотометрическое
(уровень и др.)
Исполнительный механизм поршневой
Исполнительные механизмы и регулирующие органы
Исполнительный механизм с
электродвигателем (а — переменного тока, б —
постоянного тока)
а)
№
Л
5)
•? Исполнительный механизм электромагнит-
w ный (соленоидный)
Исполнительный механизм мембранный
Сосуд разделительный или уравнительный
Сосуд конденсационный
Переключатель для электрических цепей
измерения
Клапан регулирующий проходной
Клапан регулирующий трехходовой
Заслонка регулирующая
Дополнительные устройства
Ф
Переключатель для газовых (воздушных)
линий
Панель дистанционного управления для
пневматического или гидравлического
регулирования
температура
давление
расход
уровень
вязкость
— t
— Р
— G
— Н
— |ы
влажность
доза радиоактивного
излучения
мутность, цветность
концентрация
— т
— D
— Ф
— С
— я
— С
— и
— Сг
— Им
-Пр
— Ус
— С л
статический
астатический
изодромный
дифференцирующий
позиционный
задающий
программный
дозирующий
— С
- Ас
— Из
— ДФ
— Пз
- 3d
— Пг
— Дз
Вместо обозначения С допускается вписывать в условное
изображение прибора химическую формулу измеряемого или регулируемого
вещества.
Обозначения функциональных признаков приборов на схемах
приняты следующие:
показывающий
самопишущий
интегрирующий
сигнализирующий
измеряющий
преобразовывающий
усиливающий
следящий
Над горизонтальной чертой внутри изображения (круга,
квадрата) прибора вписывается буквенное обозначение контролируемой
или регулируемой величины, а под чертой — буквенное обозначение
функций, выполняемых прибором..
В случае нанесения ряда буквенных обозначений внутри
изображения прибора допускается заменять круг двумя полуокружностями,
соединенными прямыми линиями, а квадрат — прямоугольником.
РАЗДЕЛ III. АВТОМАТИЗАЦИЯ
ТЕХНОЛОГИЧЕСКОГО КОНТРОЛЯ
ГЛАВА VIII. ОСНОВЫ ИЗМЕРИТЕЛЬНОЙ ТЕХНИКИ
§ 19. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ
Во всяком технологическом процессе имеются величины,
характеризующие этот процесс, так называемые параметры процесса.
Наблюдают за этими параметрами обычно с помощью автоматических
измерительных приборов местного или дистанционного действия.
Измерение какого-либо параметра характеризуется рядом
показателей, из которых основными являются точность, чувствительность
и инерционность. Отклонение измеренного значения А
контролируемой величины от действительного Ао называется погрешностью
измерения. Погрешность измерения выражают абсолютной Д или
относительной е величиной. Величина погрешности может иметь
положительное или отрицательное значение: а = л —Лу; е = Д/Л0.
Допустимой погрешностью называется наибольшая погрешность
измерения, предусмотренная ГОСТом (класс точности прибора).
36
Различают также основную и дополнительную погрешность.
Основной погрешностью считают допустимую погрешность,
соответствующую нормальным условиям эксплуатации, а дополнительная
погрешность возникает при нарушении этих условий.
Чувствительность 5 измерения (прибора) представляет собой
отношение линейного или углового перемещения ДУ указателя
(стрелки, пера) к изменению контролируемой величины АХ,
вызвавшей это перемещение S=A«WAX.
Наименьшее изменение значения величины АХ, способное
вызвать изменение величины АУ, называется порогом чувствительности
измерительного прибора.
Погрешности измерений в зависимости от характера их
источника подразделяются на систематические и случайные.
Систематические погрешности вызываются условиями измерения»
являющимися постоянными или изменяющимися по определенному
закону; их природа и характер известны.
Случайные погрешности явно искажают результаты измерений
а потому не могут быть учтены и возникают без какой-либо
определенной закономерности.
При выборе необходимой точности измерений следует учитывать
требования технологического производственного процесса. Не
следует завышать точность, так как достижение высокой точности
иногда приводит к неоправданному усложнению методов и приборов
контроля. С точки зрения производства часто более ценным является
простой, надежный и долговечный, хотя и менее точный прибор.
§ 20. КЛАССИФИКАЦИЯ
ИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ
Измерительные приборы, применяемые в водопроводной и
канализационной технике, предназначены для измерения давления и
разрежения положения уровня жидкости, расхода жидкостей и газов,
температуры, состава газа и жидкости, концентрации водородных
ионов и электропроводности жидкостей, цветности и мутности и
других параметров.
По своему устройству измерительные приборы могут быть
показывающие, самопишущие, суммирующие и сигнализирующие.
Показывающие приборы дают возможность судить о той или другой
величине параметра по положению стрелки на шкале прибора.
Самопишущими приборами ведется автоматическая непрерывная запись
изменения той или другой величины. Суммирующие приборы (счетчики)
автоматически суммируют значения этой величины за какой-либо
промежуток времени. Приборами с сигнализирующим устройством
при достижении контролируемой величиной заданного значения
подаются дежурному персоналу световые или звуковые сигналы.
Имеются приборы, которые выполняют одновременно несколько
перечисленных функций.
Измерительные приборы по классу точности бывают образцовые,
контрольные и технические. Образцовые приборы применяют для
37
точной тариро вки по ним серийных приборов в процессе их
изготовления. Контрольные приборы служат для проверки используемых
серийных приборов в процессе их эксплуатации и после ремонта.
Техническими называются серийные приборы, постоянно
используемые для практических измерений. Класс точности промышленных
приборов обычно 0,5; 1; 1,5; 2,5; 5, т. е. наибольшая допустимая
погрешность измерения составляет 0,5; 1; 1,5; 2,5; 5 % диапазона
измерения.
Измерительные приборы могут быть с дистанционной передачей
показаний и без нее.
В последнее время в нашей стране разработана Государственная
система приборов (ГСП), в рамках которой начат выпуск датчиков,
преобразователей, приборов, исполнительных механизмов и других
средств и устройств автоматизации с унифицированными входными
и выходными сигналами. Конструкции устройств, входящих в ГСП,
также унифицированы. Введение такой системы способствует
широкому внедрению средств автоматизации и сокращению неоправданного
увеличения их номенклатуры.
Государственная система приборов состоит из трех ветвей:
электрической: токовой (выходной сигнал — постоянный ток 0—5
и 0—20 мА), частотной (выходной сигнал — частота тока 1500—
2500 Гц); пневматической (выходной сигнал — давление сжатого
воздуха 20—100 кПа); гидравлической.
ГЛАВА IX. ИЗМЕРЕНИЕ ДАВЛЕНИЯ И УРОВНЯ
§ 21. УСТРОЙСТВО МАНОМЕТРОВ
И ВАКУУММЕТРОВ
Измерение давления дает количественную оценку состояния
участвующим в технологическом процессе газам, парам и жидкостям,
являясь одним из факторов этого процесса, определяющим его
результат и скорость.
Приборы, служащие для измерения давления выше атмосферного,
называются манометрами, а для измерения давления ниже
атмосферного — вакуумметрами. Для измерения малых давлений применяют
микроманометры, а для измерения малых разрежений —
микровакуумметры. Микроманометры и микровакуумметры называют
также тягомерами или напоромерами.
Для одновременного измерения давления и разрежения
используют мановакуумметры и микромановакуумметры.
Приборы для измерения давления и разрежения в зависимости
от устройства подразделяются на следующие группы:
жидкостные — измеряемое давление определяется давлением
столба жидкости соответствующей высоты;
пружинные — давление измеряется силой упругой деформации
элементов различного вида;
поршневые — измеряемое давление определяется силой, действу-
38
б)
Рис. 16. Манометр с многовитковой трубчатой пружиной
а — принципиальная схема; б — общий вид
Рис. 17. Силъфонный манометр
а — общий вид сильфонного манометра системы ГСП
типа МС-Э: / — измерительный блок; 2 — унифицированный
преобразователь; б — схема манометра МСС
ющей на площадь поршня; эти приборы
применяют главным образом для
проверки и градуировки пружинных
манометров;
электрические — давление
определяется по изменению электрических
величин (емкости, сопротивления, силы
тока).
В водопроводной и канализационной технике поршневые и
электрические манометры не получили применения.
Жидкостные манометры измеряют не только избыточное давление,
39
но и разницу двух давлений, т. е. являются дифференциальными
манометрами, описание их приводится далее.
Пружинные манометры бывают трубчатые (одновитковые и много-
витковые) и мембранные с пластинчатой или сильфонной (гармонико-
вой) мембраной.
Рассмотрим устройство манометра с многовитковой пружиной
(рис. 16). Такие манометры применяют главным образом как
самопишущие приборы, иногда с дистанционной передачей показаний.
Чувствительным элементом в манометре является многовитковая
пружина 2, которая представляет собой полую трубку из пяти—семи
витков. Пружина 2 одним концом А неподвижно закреплена в
корпусе прибора и через капиллярную трубку / соединяется с
контролируемой средой. Второй свободный конец Б пружины 2 наглухо
закрыт и через втулку 3 соединен с осью 4.
Многовитковая трубчатая пружина 2 длиннее одновитковой,
поэтому ее свободный конец Б при том жедавлении перемещается
значительно больше. Под действием давления Р пружина 2,
раскручиваясь, поворачивает ось 4 и сидящий на ней рычаг 5 с кареткой 6.
Поворот рычага 5 и каретки 6 передается через тягу 7 поводку 8 и
мостику Р. С мостиком 9 жестко связан держатель пера 10. С
изменением давления перо 10 движется по диаграммной бумаге и
записывает величину давления Р. Диаграммную бумагу перемещает
часовой механизм или электрический* синхронный двигатель.
Измеряемое давление у сильфонного манометра (рис. 17, б)
подводится к штуцеру прибора и через капилляр 1 передается в полость
сильфонного узла 2, т. е. измеряемое давление подведено снаружи
сильфона 3. Для увеличения противодействующего усилия сильфон 3
снабжается дополнительной пружиной 4. Под влиянием измеряемого
давления сильфон 3, преодолевая усилие пружины 4, сжимается.
Шток 5 перемещается и через передаточный механизм воздействует
на рычаг 6 с установленным на нем пером для записи показаний на
дисковой диаграмме.
В Государственной системе приборов предусмотрены трубчатые
манометры МП-П (с пневмовыходом), МП-3 (с электрическим
токовым выходом) и МП-Ч (с электрическим частотным выходом); силь-
фонные манометры МС-П (с пневмовыходом), МС-Э (с электрическим
токовым выходом) и МС-Ч (с электрическим частотным выходом);
вакуумметры ВС-П и ВС-Ч и мановакуумметры МВС-П, МВС-Ч
с аналогичными выходами.
Промышленностью выпускаются самопишущие манометры,
вакуумметры и мановакуумметры с электрическим контактным выходом
и пневматическим регулятором типов МСС, ВСС, МВСС, 04-МСС,
04-ВСС и др.
§ 22. УСТРОЙСТВО ДИФМАНОМЕТРОВ
Дифференциальные манометры применяют для измерения
расхода жидкостей и газов, используя метод переменного перепада
давления. Однако их можно использовать и для измерения давления, так
40
Рис. 18. Принципиальные
схемы дифманометров
г
Pi
как они могут фиксировать избыточное давление как разницу между
абсолютным и атмосферным давлением. Иногда дифманометры
используют и для измерения уровня жидкостей. Дифманометры бывают
жидкостные (поплавковые, кольцевые и колокольные) и пружин-
ные (мембранные и сильфонные).
В одном из колен поплавкового дифманометра (рис. 18, а) с
индукционной дистанционной передачей показаний помещен поплавокт
связанный с сердечником катушки. При равенстве давлений Рг it
Я2 уровни рабочей жидкости в обоих коленах занимают одинаковое
положение. При различных значениях давлений Рх и Р2 уровень
жидкости в одном колене опускается, а в другом поднимается. Так
как разность давлений АР = Рг—Р2 уравновешивается весом столба
жидкости /г, то
Л Р = hy,
где у — удельный вес рабочей жидкости.
При различных сечениях колен разность давлений выражается
так:
гДе S] и S2 — площади сечений колен.
+S1/S2).
41
Кольцевой дифманометр, называемый кольцевыми весами (рис. 18,6),
представляет собой заполненную примерно наполовину рабочей
жидкостью кольцевую камеру, которая вращается вокруг опоры О.
В камере подвешивается груз G, позволяющий изменять пределы
измерений. Кольцевая камера разделена глухой перегородкой на две
полости. Разность давлений в полостях АР=Рг—Р2 вызывает
перемещение рабочей жидкости в кольцевой камере и создает вращающий
момент Мв, который поворачивает кольцо до тех пор, пока его не
уравновесит груз G.
Вращающий момент Мъ равен:
где 5 — сечение кольца; R — средний радиус кольца.
Тормозной момент Мт, появляющийся при отклонении груза G:
Мт = Geslna,
где G — вес груза; е — его эксцентриситет; а — угол вращения.
Система приходит в равновесие при равенстве вращающего МЕ
и тормозного Мт моментов, откуда
SR
sina = — Д Р,
ие
т. е. синус угла поворота а пропорционален перепаду давлений ДР и
не зависит от удельного веса рабочей жидкости у. Для передачи этого
выражения на равномерную шкалу прибор снабжается
выравнивающим лекалом.
В колокольном дифманомепгре (рис. 18, в) перемещение ,
подвешенного на пружине 2 колокола 3, вызванное действием разности
давлений Рх и Я2, передается сердечнику 4 индукционной катушки.
Винт 1 служит для установки нулевого положения колокола 3.
Пределы измерений могут изменяться сменой пружины 2.
В мембранном дифманомепгре (рис. 18, а) под действием разности
давлений Р1 и Р2 происходит перемещение мягкой мембраны,
которое передается на сердечник индукционной катушки. Пределы
измерений давления изменяются заменой пружины и мембраны.
В сильфонном дифманометре ЭДД-16 (рис. 18, д) под действием
разности давлений Рг и Р2 происходит перемещение сильфона 2,
которое передается уравновешивающей пружине 3 и плоской
пружине 1. На плоскую пружину 1 наклеены четыре тензодатчика,
соединенные в мостовую электрическую схему.
Описанные принципиальные схемы дифманометров используются
отечественной промышленностью при серийном изготовлении целого
ряда приборов. Ниже рассмотрены некоторые из этих приборов.
Разность давлений, подводимых к соответствующим трубкам в
поплавковом дифманометре (рис. 19), ведет к перемещению
поплавка, которое передается перу или показывающей стрелке с помощью
рычагов. Для поднятия пера служит арретир. Круговая
картограмма приводится во вращение часовым механизмом или
электродвигателем.
42
Рис. 19. Поплавковый дифманометр
а — показывающее устройство; б — самопишущее устройство; 1 — поплавковый сосуд; 2 —
поплавок, 3 — сменный сосуд; 4 — уравнительный вентиль; 5 — трубка подвода давления;
6 — ось; 7 — сальниковая муфта; 8 — сектор; 9 — поводковый рычаг; 10 — мостик пера;
11 — перо; 12 — арретир; 13 — часовой механизм; 14 — картограмма; 15 — подшкальник
Устройство колокольного дифманометра ДКФМ изображено на
рис. 20. Чувствительным элементом прибора является колокол 7,
частично погруженный в масло. Колокол подвешен к рычагу 6,
расположенному в бачке 2. При перемещении колокола / поворачива-
43
Рис. 20. Колокольный дифма-
нометр
а — типа ДКФМ; б — типа ДКО-Э
Рис. 21. Схема ферродинами-
ческой передачи изменений
перепада давления с
колокольного дифманометра ДКФМ на
вторичный прибор КСФ2 и
общий вид прибора КСФ2
44
ется сектор 7, жестко связанный с рычагом в. Усилие колокола 1
\ равновешивается пружиной 3. Сектор 7 сцеплен с шестерней 5,
сидящей на оси рамки 4 ферродинамического датчика. Винт,
воздействующий на пружину, служит для установки нулевого
положения колокола. Выпускается несколько типов этого прибора на
различные перепады давления.
Колокольный дифманометр ДКФМ работает в комплекте со
вторичным прибором КСФ2 или КСФЗ. На рис. 21 показана схема фер-
родинамической передачи результатов измерения на вторичный
прибор КСФ2. Рамка 1 первичного прибора дифманометра механически
связана с колоколом посредством зубчатой передачи Я/7, а рамка 2
вторичного прибора связана с выходной осью асинхронного
конденсаторного двигателя ML С помощью кулачка этот двигатель
осуществляет передвижение стрелки и пишущего пера прибора КСФ2.
Переменное напряжение Д£, усиленное электронным усилителем,
приводит во вращение реверсивный двигатель М2 и рамку 2. Двигатель
М2 равномерно передвигает бумажную ленту записи измерений.
В мембранном дифманометре типа ДМ (рис. 22, а) чувствительным
элементом является блок из двух коробчатых мембран, помещенных
Рис. 22. Общий вид дифманометров
а —мембранный типа ДМ; б — силь-
фонный типа ДС-Э
45
в отдельные камеры. Под воздействием наружного давления
волнистые стенки каждой мембранной коробки сближаются и раздвигаются
под воздействием внутреннего давления воды, которая заполняет
коробку. Внутренние полости коробок сообщаются между собой через
отверстие в перегородке. Мембранный блок заливают
дистиллированной водой через ниппель, который после заполнения заваривают.
Если сдавить одну из коробок, вода вытесняется в другую и ее
стенки расходятся. К центру верхней мембраны, расположенной в
минусовой камере дифманометра, жестко прикреплен шток со стальным
сердечником, перемещающимся внутри
дифференциально-трансформаторной катушки. Этот дифманометр обычно использовался в
комплекте со вторичным прибором типа ЭПИД.
Вместо прибора ЭПИД в системе ГСП выпускаются вторичные
приборы типа КСД. Эти приборы унифицированы с приборами КСФ
и выпускаются в нормальном, малогабаритном и миниатюрном
исполнении по размерам корпуса. Они могут осуществлять сигнализацию,
дистанционную передачу показаний и позиционное регулирование
или служить задатчиком для электрических пропорциональных и
изодромных регулирующих устройств.
Общий вид сильфонного дифманометра типа ДС-Э
унифицированной системы ГСП показан на рис. 22, б. Он состоит из двух блоков:
электросилового преобразователя 1 и измерительного блока 2.
Отечественной промышленностью выпускаются также
мембранные и сильфонные дифманометры (типов ДМ-П, ДС-ПВ и ДС-ПУ),
имеющие пневматический выходной сигнал и работающие в
комплекте со вторичными приборами ПВУ-29.
§ 23. УСТРОЙСТВО УРОВНЕМЕРОВ
Измерение положения уровня жидкости на водопроводных и
канализационных сооружениях имеет большое значение, так как
позволяет поддерживать в случае необходимости постоянство уровня и
определять количество жидкости в баках и резервуарах. Приборы
для измерения положения уровня жидкости — уровнемеры — можно
разделить на две основные группы: приборы широкого диапазона
измерений (до нескольких метров) и приборы узкого диапазона
измерений (±100—200 мм).
На конструкцию уровнемеров существенное влияние оказывает
их размещение по высоте относительно места измерения положения
уровня. Различают уровнемеры, расположенные ниже измеряемого
уровня и выше.
По функциональному признаку уровнемеры могут быть
показывающими, регистрирующими и сигнализирующими. В свою очередь,
каждый из этих приборов может быть с показанием результатов по
месту измерения или с дистанционной их передачей.
Уровнемеры можно разделить по способу измерений на три
основные группы: поплавковые; гидростатические; электрические.
Промышленность выпускает большое число уровнемеров для
различных условий измерения. Рассмотрим кратко основные типы уров-
46
немеров, применяемых на водопроводных и канализационных
сооружениях.
Поплавковые уровнемеры благодаря простоте их устройства
получили широкое распространение. Основным элементом этих
уровнемеров является поплавок, плавающий на поверхности жидкости.
Уровнемером РП-1065 может осуществляться непрерывный
контроль за изменением уровня жидкости в открытом резервуаре с
сигнализацией заданных предельных положений уровня. Сигнализация
предельных положений уровня воды в открытых резервуарах
осуществляется поплавковым механическим реле РМ-51.
В закрытых резервуарах для контроля уровня жидкости
используется поплавковое реле уровня СУ-1 и СУ-3 с ходом поплавка до
150 мм.
Для непрерывного измерения практически любых измерений
уровня жидкости в открытых резервуарах выпускается также
поплавковое сельсинное устройство. Устройство состоит из датчиков ДСУ-1
и приемника УСП-1 или УСП-2. Путем комбинации этих приборов
можно измерять уровень, разность уровней, два уровня и давление,
создаваемое их разностью.
Гидростатические уровнемеры осуществляют косвенное измерение
уровня воды в зависимости от изменения статического давления
столба воды. Существует ряд конструкций таких уровнемеров
мембранного и сильфонного типа. В качестве таких уровнемеров могут
использоваться также дифманометры, если дифманометр можно
расположить ниже отметки измеряемого уровня. В этом случае плюсовой
сосуд дифманометра присоединяется к днищу закрытого резервуара,
в котором измеряется уровень жидкости. К минусовому сосуду
дифманометра присоединяется уравнительный сосуд, располагаемый
таким образом, чтобы уровень жидкости в нем соответствовал
максимальному уровню жидкости в резервуаре. В этом случае дифманометр
будет измерять перепад или разность уровней в резервуаре и
уравнительном сосуде.
При измерении уровня в открытом резервуаре уравнительный
сосуд устанавливается на отметке минимального уровня, а верхняя
часть сосуда сообщается с атмосферой. Кроме того,
предусматриваются сливные краны. Если уравнительный сосуд подключается к
плюсовой стороне дифманометра, то прибор показывает снижение
уровня жидкости относительно отметки максимального уровня. Если
уравнительный сосуд подключается к минусовой стороне
дифманометра, то прибор показывает повышение уровня относительно отметки
минимального уровня.
Колокольный и пневмометрический уровнемеры могут
использоваться для измерения уровня в резервуарах, расположенных ниже
мест установки уровнемера.
Схема измерений с помощью колокола, погруженного в резервуар
и соединенного тонкой трубкой с измерительным
прибором-манометром, градуированным в единицах измерения уровня, показана на
рис. 23, а. При измерениях в агрессивной жидкости нижняя часть
колокола может закрываться гибкой мембраной. Подъем уровня жид-
47
~/>°и
АН
Рис. 23. Гидростатические уровнемеры
а — колокольный; б — пневмометрический, / —
колокол, 2 — соединительная трубка; 3 —
манометр; 4 — редуктор
Рис. 24. Электрический электродный
сигнализатор уровня ЭРСУ-2
кости внутри колокола или прогиб мембраны изменяет объем воздуха,
заключенного в колоколе и соединительной трубке, и создает
повышенное давление, которое измеряется манометром.
Схема пневмометрического уровнемера показана на рис. 23,6.
Соединительную трубку погружают в емкость почти до самого дна.
Через эту трубку непрерывно продувают сжатый воздух с постоянным
давлением и расходом, что обеспечивается редуктором. Давление
воздуха, поступающего в трубку, должно превышать давление,
создаваемое столбом жидкости при наивысшем положении уровня
жидкости над отверстием трубки. В противном случае при повышении
уровня жидкости сжатый воздух не выйдет из полости трубки.
При измерении уровня жидкости данным методом действует
строгая закономерность: давление воздуха Р у конца трубки равно
длине погруженной части трубки Я, умноженной на удельный вес
жидкости. Давление Я, создаваемое в полости трубки, измеряется
манометром, шкала которого градуирована в единицах уровня.
Понижение уровня жидкости приводит к снижению давления в трубке из-за
уменьшения аэродинамического сопротивления столба жидкости.
Значительную группу приборов, действия чувствительных
элементов которых основаны на преобразовании различных
электрических свойств воды в соответствующую величину ее уровня,
составляют электрические уровнемеры.
Электродный сигнализатор уровня ЭРСУ-2 (рис. 24) выпускается
рязанским заводом «Теплоприбор» и предназначен для сигнализации
двух-трех значений уровня.
К каждому отдельному электроду подключается реле постоянного
тока, которое служит для контроля одного уровня: реле Р1 для
нижнего, реле Р2 для верхнего и реле Р3 для аварийного. Аварийный
уровень может быть выше отметки АВ или ниже отметки Л Я
контролируемого диапазона. Если аварийный уровень принят ниже конт-
48
полируемого, то переключатель В
устанавливается в положение 1, если
выше — в положение 2.
Лампы Ли Л2 и «#з — это световая
сигнализация контролируемых
уровней. Когда горизонт воды лежит ниже
отметки уровня У2, то цепи реле Рх и
рг разомкнуты и через размыкающий
контакт Рх включена красная лампа
JI{. Когда горизонт находится между
контролируемыми уровнями, то
замкнута цепь реле Рх и через
замыкающий контакт Рх и размыкающий
контакт Р2 включена зеленая лампа Л2.
При повышении уровня до верхней
контролируемой отметки Ух
включается желтая лампа Лз. Аварийные
уровни контролируются электродами
5а.
Когда стенки резервуара не могут
быть использованы в качестве
заземляющего электрода, то устанавливают
дополнительный электрод,
подсоединив его к зажиму Э релейного блока.
Реле Р\+Р3 питаются постоянным
током от обмотки трансформатора Гр
через выпрямитель Дх—Д4 с
конденсатором С, выполняющим роль
фильтра; световая сигнализация питается
переменным током непосредственно от
отдельной обмотки трансформатора
Тр.
Датчик сигнализатора уровня
ЭРСУ-2 (рис. 25) представляет
собой металлический электрод 10,
электрически изолированный от рис 25 СИП1али3атора
штуцера 8 трубкой 9 и от головки уровня ЭРСУ-2
корпуса 7 шайбой 6.
Выпускаются электроды определенной длины L, но при необходимости
длину можно увеличить, нарастив стержень 12 с помощью переходной
втулки //. Корпус датчика закрыт крышкой 5 с прокладкой ,?, при
5том крышка привинчивается четырьмя винтами 4. Пружина /
обеспечивает надежное уплотнение между изоляцией электрода 10 и
внутренней стенкой штуцера. 8. Провода вводятся через штуцер 2
с сальниковым уплотнением.
Уровень осадка в канализационных отстойниках измеряют
фотоэлектрическими уровнями л . § 48).
Выпускаются также электродные сигнализаторы уровня ЭСУ-1М
и ЭСУ-2М, основанные на измерении емкости электрода,
изменяющейся в зависимости от уровня воды.
12
49
ГЛАВА X. ИЗМЕРЕНИЕ РАСХОДА
§ 24. МЕТОДЫ ИЗМЕРЕНИЯ
Приборы, измеряющие расход жидкостей и газов, называются
расходомерами. Их можно разделить на два класса: расходомеры,
измеряющие количество жидкости, пара или газа косвенным путем —
измерения величин, являющихся функцией количества среды,
которая протекает через трубопровод, например, перепада давления,
скорости, уровня; расходомеры, измеряющие количество жидкости,
пара или газа, протекающих через трубопровод непосредственным
измерением их объема или веса.
В свою очередь, каждый класс подразделяется на группы
приборов, отличающихся как по принципу действия, так и в
конструктивном отношении. Расходомеры, например, измеряющие расход по
методу перепада давления, подразделяются на расходомеры с
переменным перепадом давления, состоящие из сужающего устройства
и дифференциального манометра, и расходомеры с постоянным
перепадом давления — ротаметры.
Измерение расхода методом переменного перепада давления в
сужающих устройствах (диафрагмах, соплах, расходомерных трубах)
для большинства случаев является единственно приемлемым. Этот
способ ввиду достаточной точности измерения расхода жидкости и
газов и удобства при эксплуатации получил наибольшее
распространение.
Принцип действия таких расходомеров основан на измерении
перепада давления, создаваемого каким-либо сужающим устройством,
установленным в трубопроводе на пути движения вещества (рис. 26).
При протекании вещества по трубопроводу 1 через сужающее
устройство 2, вследствие перехода части потенциальной энергии
давления в кинетическую, средняя скорость потока в суженном
сечении // повышается. Вследствие этого статическое давление Р,
в этом сечении становится меньше, чем давление Р1 перед
сужающим устройством в сечении /. После прохода сечения // поток
снова начинает расширяться, за
/ iL ft ,j, полняя трубопровод, и в
сечении /// заполняет его целиком
Перепад давления в сечениях
/ и //, измеренный {/-образным
манометром 3
(дифференциальным), зависит от расхода
протекающего вещества и
может служить мерой расхода
Однако использование этой
зависимости связано с
определенными неудобствами, та*
как между перепадом
давления и расходом вещества с)"
ществует квадратичная
зависимость.
■IIP
Ргтттт
Рис. 26. Принцип действия
расходомера с переменным перепадом давления
50
Метод постоянного перепада давления, применяемый при
измерении расхода вещества, основан на том, что в качестве величины,
пропорциональной изменению расхода, принимается не перепад
давлений, а переменная площадь проходного отверстия сужающего
органа. Расходомеры с постоянным перепадом давления, основанные на
этом принципе, дают линейную зависимость между расходом
вещества и площадью проходного отверстия.
Метод переменного уровня широко применяется для контроля
расхода жидкости в открытых каналах. Для этой цели в каналах
устраиваются суженные лотки или водосливы. Колебания уровня
жидкости в лотке или на водосливе прямо
пропорциональны расходу жидкости. Измерение производится чувствительными
уровнемерами, градуированными в единицах расхода.
Метод измерения количества жидкости основан на принципе
непосредственного измерения объема жидкости или скорости потока
жидкости в трубопроводе. Для этого применяются расходомеры-
счетчики. Соответственно счетчики бывают двух типов: объемные и
скоростные.
Объемными счетчиками измеряют объемы жидкости с помощью
поршневых, дисковых или ротационных устройств. В зависимости
от применяемого уплотнения объемные счетчики делят на две группы:
с сальниковым и жидкостным уплотнением. Приборы с сальниковым
уплотнением из-за наличия сил трения в трущихся частях
характеризуются меньшей точностью измерений. На водопроводных и
канализационных сооружениях объемные счетчики применения не
получили.
Скоростными счетчиками измеряют скорости потока в
трубопроводе с помощью крыльчатой или спиральной вертушки,
устанавливаемой в потоке жидкости. Ось вертушки связана с системой зубчатых
шестерен счетчика, шкала которого градуируется в объемных
единицах. Частота вращения вертушки прямо пропорциональна скорости
движения жидкости, а следовательно, и ее расходу. Расходомеры
с крыльчатой вертушкой используются для измерения малых
расходов воды и устанавливаются главным образом на линиях
хозяйственно-бытового водоснабжения. Расходомеры со спиральной
вертушкой (турбинные) изготовляются калибром от 50 до 300 мм и имеют
пропускную способность от 4-Ю"3 до 0,16 м3/с
Существуют и другие методы измерения расхода, основанные на
использовании, например, ультразвуковых колебаний и магнитных
свойств жидкости.
§ 25. УСТРОЙСТВО РАСХОДОМЕРОВ
Расходомеры в производственной практике в зависимости от
характера среды называют водомерами, паромерами, газомерами и т. д.
Расходомеры в зависимости от типа показывают или величину
мгновенного расхода в каждый данный момент (м3/с, кг/ч), или
количество жидкости (газа) как сумму мгновенных расходов за любой
промежуток времени (м3, кг). Имеются также приборы,
показывающие и записывающие одновременно обе указанные величины.
51
Объем воздуха и газов можно измерять при их фактических
параметрах (температуре и давлении) или при приведении их
параметров к нормальным условиям по температуре и давлению. В
последнем случае допустимо сравнивать результаты измерений,
полученные на различных объектах.
Расход жидкости измеряют методом переменного перепада
давления расходомерами, состоящими из трех элементов:
сужающего устройства, устанавливаемого внутри трубопровода
и создающего перепад давления, величина которого зависит от
расхода жидкости;
соединительных линий, передающих перепад давления^
сужающего устройства измерительному прибору (дифманометру);
дифманометра, измеряющего перепад давления, создаваемый
сужающим устройством (в случае дистанционной передачи показаний
необходим также и вторичный прибор).
В качестве дроссельных или сужающих устройств (рис. 27) для
измерения расхода вещества наибольшее распространение получили
диафрагмы.
Нормальная диафрагма представляет собой плоский диск,
имеющий круглое концентрическое отверстие истечения с острой
прямоугольной кромкой со стороны входа и коническим расширением со
стороны выхода потока. Применяются две разновидности нормальной
а)
$0,022
$ О, Q3D
Рис.-27. Сужающие устройства
е _ нормальная диафрагма; б — нормальное сопло
52
диафрагмы. В одном случае для отбора давления устраивают
кольцевую камеру, в другом для этой цели просверливают отверстия
Имеется ряд специальных конструкций диафрагмы, к числу'ко-
торых относятся концевые, устанавливаемые на конце трубопровода
(при входе или выходе); сегментные, применяемые для измерения
расхода загрязненных жидкостей и газа; прямоугольные,
используемые для измерения расхода вещества в прямоугольных
трубопроводах. J *J F
Если необходимо уменьшить безвозвратную потерю давления,
создаваемую диафрагмой, вместо нее применяют сопло или tdv6v
Вентури. F<y y
Благодяря своему профилю, приближающемуся к естественной
форме струи, трубы Вентури создают наименьшую безвозвратную
по17 18 19 20 15 21 17 18 20 19 15
ис. 28. Схема измерения расхода с помощью поплавкового дифманометра и
сУжающего устройства F
в^тилиТ уоТавни?екнь7йС^Л°; 3~К°НУС: *~ патрубки отбора давления; 5 - запорные
кятл ' ~~ УРавнительный вентиль; 7 — сменный сосуд дифманометра- 8 — сеодечник- 9 —
катушка индукционного моста; /0-пружина; //-отверстие для Наливания ртути 12 -
^оплавковый сосуд дифманометра; 13 - поплавок; 14 -отверстие для спуска ртути- 15
7ЛИТ°^1е ТЬДа; 163убчаТЫ* ilcr°P! /7бДЛ^К ?^ S =
79Тт^ ,ТДа; 163убчаТЫ* ilcr°P! /7-балансиров^ные ?р^ы; /S =
' ^рычаги;я2°-тяги'' 21 ~ сердечники вторичных приборов; Тр - трансфор-
*7иДВУ£ПОЛЮСНЫЙ выключатель; Я - предохранитель; Дх - датчик с ходом сер-
1пг Д2~датчиАк с 2°Д°М сердечника вверх; ВПП - вторичный прибор показы-
; ЛЯС —вторичный прибор самопишущий им иу»«ы
53
терю давления — в пределах 10—20 % перепада давления вместо
40—80 % при диафрагмах. Увеличивая за этот счет перепад давления,
можно значительно повысить точность измерений. Однако
существенным недостатком труб Вентури является их громоздкость,
усложняющая монтаж и эксплуатацию. Иногда вместо диафрагм и
сопл в качестве сужающих устройств применяют местные
сопротивления, имеющиеся на трубопроводе, чаще всего колена
трубопроводов.
Для измерения перепада давления, вызванного диафрагмой,
соплом или трубой Вентури, применяют различные конструкции
описанных в § 22 дифманометров (рис. 28).
Тот или другой тип дифманометра следует выбирать в строгом
соответствии с местными условиями измерений, т. е. с учетом всех
особенностей и требований, предъявляемых технологическим
процессом к измерению расхода.
Дифманометры-расходомеры изготовляются на различные
предельные значения перепада давления, при этом
дифманометры-расходомеры типа «кольцевые весы» имеют равномерную шкалу, а все
остальные типы дифманометров — неравномерную.
Шкалу следует выбирать таким образом, чтобы основная часть
измерений укладывалась в ближайшую к верхнему пределу треть
шкалы. В этом случае будет достигнута наиболее высокая точность
измерений, так как начальные 30—35 % шкалы прибора считаются
обычно нерабочей зоной из-за малой точности измерений.
Расходомеры постоянного перепада давления (ротаметры)
особенно часто применяют для измерения расхода агрессивных
жидкостей (растворов хлора, аммиака, коагулянта).
Промышленность выпускает стеклянные ротаметры типа PC с
пределом измерения 0,7-10~7—0,8-10~3 м3/с, а также ротаметры,
имеющие устройства для передачи показаний на расстояние. Эти
устройства могут быть пневматические (ротаметр типа РПД) или
электрические с дифференциально-трансформаторной системой
передачи (ротаметр типа РЭ) на вторичный прибор типа ЭПИД или КСД.
Ротаметр РПД состоит из ротаметрической части и
пневматического датчика, который соединяется со вторичным прибором.
Укрепленные на сердечнике поплавка магниты образуют магнитную муфту,
с помощью которой передвижение поплавка воздействует на узел
«сопло—заслонка» датчика. Д
Ротаметр типа РЭ (старое обозначение РЭД) (рис. 29)
представляет собой стальной корпус 1, внутри которого имеются камера 2
и коническая труба 3, установленная расширением вверх. В
верхнюю часть корпуса впаяна направляющая трубка 5. Другой коней
трубки 5 имеет глухую пробку 7, предназначенную для ее очистки.
На трубку насажена индукционная катушка 8, которая закрыта
кожухом 9. В верхнюю часть кожуха 9 ввернута регулировочная гай-
ка б, вращением которой производят перемещение индукционной
катушки 8 при тарировке ротаметра. Внутри конической трубки
расположен поплавок 4 со стержнем 12. Стержень пропущен через
упорную шайбу 11 и направляющую трубку. На верхнем е
54
стержня 12 закреплен плунжер
10. Поток жидкости через
входной штуцер поступает в
камеру и далее через упорную
шайбу в коническую трубу. Под
действием напора жидкости
дисковой поплавок
перемещается вверх и увлекает за собой
плунжер индукционного
датчика. Перемещение плунжера
приводит к разбалансу диф-
ференционально -
трансформаторной схемы и на вторичный
прибор поступает сигнал,
пропорциональный измеряемому
расходу. Величина хода
поплавка ограничена упорной
шайбой.
Ротаметр градуируется по
расходу воды. При измерении
расхода другой жидкости
необходимо произвести пересчет
шкалы вторичного прибора.
Выпускается несколько
моделей ротаметра типа РЭ с
диаметром условного прохода 70,
40, 20 и 8 1мм на расходы от
0,7.10-5до0,4.10-2м3/с.
Для контроля за расходом
жидкости по методу
переменного уровня обычно применяют
нормализованный лоток Вен-'
тури, расход жидкости через
который измеряется с помощью
Рис. 29. Схема ротаметра типа РЭ
0-
Рис. 30. Схемы измерения расхода в лотке Вентури
а —с пневматическим контролем уровня; б —с гидравлическим контролем уровня; / —
лоток; 2 — измерительная камера; 3 — помещение для приборов; 4 — дифманометр; 5 — пьезо-
тРубка; 6 — отстойный сосуд; 7 — уравнительный сосуд
55
Рис. 31. Принципиальная схема
электромагнитного расходомера
/ — трубопровод, 2 — электромагнит, 3 —
источник питания; 4 — электроды, 5 —
усилитель, 6 — вторичный прибор, 7 — линии связи
,г
5 6
5
\
\
/
5
/
6
/
|
Рис. 32. Конструкция парциального
водомера на колене трубопровода
/ — крыльчатый водомер, 2 — муфта; 3 —
контргайка, 4 — верхняя трубка шунта; 5 —
накидная гайка, 6 — штуцер, 7 — пробковые
краны, 8 — верхняя седелка; 9 — стяжные
болты, 10 — нижняя седелка; 11 — нижняя
трубка шунта
диф|манометров, как показано на рис. 30. Иногда применяют
щелевые расходомеры переменного уровня.
Электромагнитные (индукционные) расходомеры, выпускаемые
серийно, широко применяются для измерения расхода осадка сточных
вод, не создавая при этом в трубопроводе дополнительной потери
напора и не требуя прямых участков трубопровода достаточной
длины. Действие этих расходомеров основано на измерении
пропорциональной расходу электродвижущей силы, индуктированной в
потоке электропроводной жидкости под действием магнитного поля.
На рис. 31 показана принципиальная схема электромагнитного
расходомера. Трубопровод, по которому протекает проводящая
жидкость, расположен между полюсами электромагнита
перпендикулярно направлению силовых линий магнитного поля. Под действием
магнитного поля ионы, находящиеся в жидкости, перемещаются к
измерительным электродам и отдают им свои заряды, создавая тем
самым э. д. с, пропорциональную скорости течения жидкости. Э. д.с.
увеличенная усилителем, воздействует на вторичный измерительный
прибор.
Датчики расходомеров выпускают на условные проходы от 10 до
500 мм и расходы от 0,8• 10~4 до 1,1 м3/с Освоен также выпуск
датчиков на условный проход до 1000 мм.
Существенный интерес представляют также новые
унифицированные расходомеры типа «Сатурн», применяемые для измерения
расхода осадков и суспензий. Их используют в электронной агрегатно-
унифицированной системе (ЭАУС), а также с машинами
централизованного контроля и регулирования типа «Марс», «Зенит» или с
потенциометрами. В комплект расходомера входят преобразователь ПИРС-5
и датчики типа ДРШС. Работа датчика основана на принципе
увлечения закрученным потоком свободно плавающего шара. Скорость
56
вращения шара, пропорциональная расходу жидкости, фиксируется
бесконтактным узлом съема выходного сигнала, который затем
усиливается, формируется и преобразуется. Приборы могут
применяться без дополнительной тарировки для измерения расхода
загрязненной среды.
Парциальные расходомеры позволяют измерять большие расходы
жидкости сравнительно простыми средствами.
Действие парциальных расходомеров в отличие от
рассмотренных ранее основано на измерении не всего расхода, а лишь части его.
На рис. 32 представлена схема парциального водомера,
являющегося комбинацией скоростного крыльчатого водомера и колена
трубопровода, выполняющего функцию сужающего органа. Расход воды q
через ответвление трубопровода (шунт) пропорционален величине
основного потока Q. Поэтому количество воды, протекающей по
трубопроводу, можно определить путем умножения показаний
скоростного водомера на постоянный коэффициент. Колено создает
перепад давления, необходимый для преодоления сопротивления
ответвления. Диаметр обводной трубки шунта и перепад давления
подбирают таким образом, чтобы через обводную трубку протекало
около 1 % всей массы воды. Для отключения водомера на обводной
трубке устанавливают пробковые краны.
Парциальные расходомеры тарируют после установки на месте
измерений при пяти — восьми различных расходах.
ГЛАВА XI. ИЗМЕРЕНИЕ ТЕМПЕРАТУРЫ
§ 26. КЛАССИФИКАЦИЯ
И УСТРОЙСТВО ТЕРМОМЕТРОВ
Приборы для измерения температуры, выпускаемые
промышленностью, можно классифицировать, согласно табл. 2.
Термометры расширения бывают жидкостные, дилатометрические
и биметаллические. Жидкостные стеклянные термометры применяют
при визуальных контрольных измерениях. Ртутные термометры
используют для автоматического контроля с впаянными электродами.
Дилатометрические и биметаллические термометры используют как
чувствительные элементы в схемах автоматического регулирования.
Манометрические термометры выпускают показывающими,
самопишущими и сигнализирующими. Манометрические термометры
бывают газонаполненные, паровые и жидкостные. Газовые термометры
заполняют азотом; паровые — низкокипящей жидкостью, над кото-
Рой находятся ее насыщенные пары; жидкостные — ртутью,
ксилолом или метиловым спиртом. В этих термометрах использовано
свойство жидкости, газа или пара изменять свое давление в замкну-
^м сосуде при нагревании или при охлаждении.
Рассмотрим устройство показывающего манометрического термо-
Метра (рис. 33, а). Прибор состоит из термобаллона У, изготовленно-
г° из латуни в виде цилиндра диаметром 22 мм и длиной 225 и 435 мм,
57
Таблица 2
Группа приборов
Термометры расширения
Манометрические
термометры
Термометры
сопротивления
Термоэлектрические
пирометры
Физическое явление,
положенное в основу действия прибора
Расширение тел при
нагревании
Изменение давления в
замкнутой системе при
нагревании заполненной жидкостью
или газом тепловоспринима-
ющей части термометра
Изменение электрического
сопротивления проводника
при изменении его
температуры
Возникновение
электродвижущей силы при
нагревании спая двух различных
термоэлектродов
Предел измерения темпе
ратуры, °С
от
—70
— 160
—200
—50
ДО
+750
+ 1О0О
+650
+ 1600
медной капиллярной трубки 2 длиной до 60 м в гибкой оболочке
диаметром около 8 мм и трубчатой пружины <?, служащей
манометрическим устройством. Пружина 3 соединена системой рычагов
со стрелкой 4. При нагревании термобаллона / давление в системе
повышается, пружина 3 изгибается и поворачивается с помощью
системы рычагов и тяг ось прибора со стрелкой 4, которая
перемещается по шкале на угол, соответствующий изменению температуры.
В манометрическом сигнализирующем термометре типа ТС
(рис. 33, б) термобаллон соединен капиллярной трубкой 8 с много-
витковой трубчатой пружиной 6. С осью измерительной стрелки /
жестко связана контактная щеточка 4, скользящая по двум секторам
3 с контактами. Один сектор связан с желтым 2/а другой — с
красным 7 передвижным указателем, которые заранее устанавливают
на определенную отметку шкалы. При совмещении измерительной
стрелки 1 с указателем 2 или 7 соответствующий контакт
замыкается. При повышении температуры вначале замыкается контакт,
соответствующий желтому указателю 2, затем контакт, соответствующий
красному указателю 7, причем первый контакт остается замкнутым.
Передвижные указатели 2 и 7, связанные с контактами,
устанавливают в любой точке шкалы при помощи установочных винтов 5.
Общий вид бесшкального манометрического термометра типа
ТДЖ-Э с унифицированным электросиловым преобразователем
системы ГСП показан на рис. 33, в. Термобаллон / капиллярной
трубкой 2 соединен с измерительным блоком 3.
Термометрами сопротивления (рис. 34) температура может
измеряться с передачей показаний на значительное расстояние от места
измерений. В этих термометрах использовано свойство металлов
увеличивать электрическое сопротивление при нагревании и
наоборот.
58
Рис. 33. Манометрические
термометры
а — показывающий; б — сигнализирующий;
з — типа ТДЖ-Э
В комплект аппаратуры, применяемой с термометром
сопротивления, входят кроме самого термометра как чувствительного элемента
также измерительный прибор, источник тока, соединительные прово-
Да и переключатель (в случае присоединения нескольких
термометров к одному измерительному прибору).
Термометры сопротивления чаще всего изготовляют из тонкой
Платиновой проволоки диаметром 0,015—0,07 мм (термометры типа
*СП). Вместо платиновой проволоки может быть применена медная
^малированная проволока диаметром 0,1 мм (термометры типа ТСМ).
Платиновые термометры позволяют измерять температуру от —20
59
6)
л-Ц
X
X
Рис. 34. Термометр
сопротивления
а — общий вид; б —
схема; 1 — каркас;
2 — медная или
платиновая проволока;
3 — колодка; 4 —
зажимы (клеммы); 5 —
защитный кожух
до + 650°С, медные от — 50 до
+ 150°С. Диаметр термометра
сопротивления равен обычно 3—
5 мм, общая длина 400—700 мм.
Термометр погружается в
измеряемую среду на( 150—400 мм.
Применяют также
полупроводниковые электрические
термометры сопротивления
(термосопротивления) — термисторы.
Термисторы изготовляют в виде
цилиндров, дисков, шайб и
бусинок. Они обладают высокой
чувствительностью и при включении
в соответствующую
измерительную схему реагируют на сотые
доли градуса (°С). При
использовании термисторов из-за их
высокого сопротивления на
результаты измерений мало влияют
колебания сопротивления
соединительных проводов.
Недостатком выпускаемых термисторов
является нестабильность их
характеристик.
Измерение температуры
термометрами сопротивлений, т. е.
измерение сопротивления
датчика, осуществляется двумя
способами: мостовыми схемами и с
помощью стрелочных
омметров — логометров.
Наиболее распространены ло-
Рис. 35. Логометр ЛПР—53
а — схема измерений; б — общий вид лого-
60
гОметры (рис. 35), принцип действия которых основан на
взаимодействии магнитных полей двух скрещенных рамок подвижной
системы с постоянным магнитным полем. Рамки, на которых
намотаны катушки гх и г2, расположены таким образом, что их
вращающие моменты М{ и М2 направлены навстречу друг другу, а под-
вижная система при этом поворачивается в сторону большего по
величине момента. Такое устройство обеспечивает нормальную
работу прибора при колебаниях напряжения питания до ±20%.
Для питания логометра служит батарея Е. В схему входят
компенсационные сопротивления г3 и г4.
Термометр сопротивления rt с логометром может соединяться
по двух- или трехпроводной схеме. При двухпроводной схеме с
изменением температуры окружающей среды изменяется и
сопротивление соединительных проводов, что вносит дополнительную
случайную погрешность. Для компенсации этой погрешности
подключается третий провод и источник питания Е подключается не к точке Л,
а к точке В (как показано на рис. 35,а пунктирной линией). При
такой трехпроводной схеме сопротивления проводов 1 и 2
оказываются подключенными к различным плечам измерительной схемы
и взаимно компенсируются.
Автоматические мосты, применяемые в комплекте с термометрами
сопротивления, бывают уравновешенные и неуравновешенные, на
постоянном и переменном токе. Промышленность выпускает целый
ряд автоматических мостов в обычном, малогабаритном и
миниатюрном исполнении.
Термоэлектрические пирометры основаны на явлении
возникновения электродвижущей силы в спае двух проводников или
сплавов, составляющих термопару. В качестве вторичных приборов
используют милливольтметры или потенциометры.
§ 27. ОБЛАСТИ ПРИМЕНЕНИЯ
ТЕРМОМЕТРОВ
Жидкостные стеклянные термометры расширения применяют при
контрольных измерениях. Электроконтактные ртутные термометры;
используют в схемах автоматизации различных производственных
процессов. Дилатометрические и биметаллические термометры
расширения также используют как чувствительные элементы в
системах автоматического регулирования.
Манометрические и электрические термометры сопротивления
применяют на водопроводных и канализационных сооружениях для
технологических измерений температуры. Этими термометрами,
например, автоматически контролируется температура сбраживания
осадка в метантенках.
Термометры сопротивления позволяют измерять температуру в
т°чках, расположенных практически на любом расстоянии от
вторично измерительного прибора. Используя же термисторы, можно-
точность измерения температуры повысить, понизить влияние на
т°чность измерений колебаний сопротивления соединительных про-
в°Дов.
С помощью термоэлектрических J пирометров контролируют
температуру, главным образом, в пределах 300—1300 °С. Для
измерения температур выше 1600 °С применяют оптические и радиационные
пирометры.
ГЛАВА XII. ИЗМЕРЕНИЕ
КАЧЕСТВЕННЫХ ПАРАМЕТРОВ ПИТЬЕВЫХ
И СТОЧНЫХ ВОД
§ 28. ОСНОВНЫЕ ПАРАМЕТРЫ КАЧЕСТВА ВОДЫ
Эксплуатация водопроводных и канализационных сооружений
невозможна без контроля качественных параметров природных и
сточных вод на разных этапах их очистки, подачи потребителям или
выпуска в водоем. Наиболее успешно такой контроль может
осуществляться автоматическими приборами либо в виде сигнализации
предельных значений величин параметров, либо путем регистрации этих
величин непрерывно или периодически.
В системах водоснабжения наиболее важное значение имеет
автоматический контроль мутности, цветности воды, ее солесодержания,
величины рН, количества остаточного хлора в воде.
На сооружениях очистки сточных вод к числу наиболее важных
качественных параметров, измеряемых с помощью приборов,
относятся величины рН, температура воды, мутность и цветность воды,
содержание растворенного кислорода в воде, влажность осадков,
биохимическая (ВПК) и химическая (ХПК) потребности в кислороде.
Особенно велико значение применения автоматических
анализаторов качества воды для ее санитарно-гигиенической оценки.
При очистке природных и сточных вод используют различные
химические реагенты (сернокислый алюминий, хлорное железо,
синтетические флокулянты, известь, фосфаты, активированный уголь,
биогенные добавки, соединения фтора, газообразный хлор и аммиак).
Весьма важно точно дозировать вводимые реагенты и
контролировать их воздействие на качество воды. Наибольшей точности можно
достичь с помощью автоматических устройств и приборов.
Большое число качественных параметров природных и сточных
вод определяется в современных условиях только лабораторным
химическим анализом. К таким параметрам относятся содержание в
сточных водах соединений азота, фосфора и калия, наличие
соединений железа, кальция и запахов в природной воде. Лабораторные
анализы длительны по времени, трудоемки, недостаточно точны и
характеризуются субъективными ошибками. Результаты этих
анализов ввиду большого запаздывания не могут быть использованы для
оперативного и особенно автоматического управления процессами.
В настоящее время разработаны приборы для автомат
тического измерения ряда качественных параметров, которые могу1'
быть использованы для автоматического управления и
интенсификации технологических процессов водоснабжения и канализаций-
62
§ 29. УСТРОЙСТВО ПРИБОРОВ
КОНТРОЛЯ КАЧЕСТВА ВОДЫ
Для контроля качественных параметров воды используется ряд
приборов общепромышленного назначения. К числу таких приборов
относятся различные конструкции плотномеров, солемеров, рН-мет-
ров, концентратомеров, фотоколориметров. Кроме них разработаны
приборы контроля отдельных параметров воды, предназначенные
специально для водопроводных и канализационных сооружений,
рассмотрим устройство некоторых из этих приборов.
Измерение содержания нефтепродуктов качественно
характеризует работу таких очистных сооружений, как нефтеловушки, песчаные
фильтры, аэротенки и отстойники. Кроме того, данный параметр
отражает уровень эксплуатации всего комплекса очистных сооружений
и механизмов в целом, являясь главным критерием оптимизации
технологических процессов очистки нефтесодержащих сточных вод.
Сложность измерения этого параметра обусловила создание в
настоящее время лишь приборов лабораторного типа. Следовательно,
очистные сооружения нефтесодержащих сточных вод эксплуатируются
пока на основе только периодически получаемой информации об
изменении содержания нефти и нефтепродуктов.
Лабораторный ультрафиолетовый анализатор ЛУА-65ПС.
Анализатор ЛУА-65ПС предназначен для экспрессного определения
суммарного содержания нефтепродуктов в сточной воде, сбрасываемой
после очистных сооружений и технологических установок
нефтеперерабатывающих заводов. В комплект прибора входят: фотометр —
ультрафиолетовый анализатор ЛУА-65ПС, пробоподготовительная
система (экскаватор), стабилизатор напряжения сети С-0,28.
Действие прибора основано на экстракционно-фотометрическом
методе спектрального анализа. С помощью прибора контролируется
изменение интегрального пропускания ультрафиолетового
излучения в области спектра 250—400 нм, в которой излучение
поглощается нефтепродуктами, содержащимися в воде. Цри работе прибора
фазометрический метод позволяет получить отношение двух
сигналов (интенсивностей двух световых лучей) электрическим
способом. Оптическая схема прибора двухлучевая с одним
фотоприемником. Источником ультрафиолетового излучения служит
газоразрядная лампа СВД-120А, работающая в облегченном режиме, с
большим сроком службы.
Прерывание световых лучей в оптической схеме происходит со
сдвигом по времени — фазе на определенный угол дисковым
обтюратором, вращаемым электродвигателем. Кроме того, в оптическом
блоке имеется фотогенератор, в котором тем же диском обтюратора
генерируется относительно неизменное по фазе опорное напряжение.
В измерительном оптическом канале установлена автоматически дози-
РУющая кювета, в которую заливается анализируемая проба. На
выводе электронной фазоизмерительной схемы прибора включен ре-
гистрирующий прибор М-93 со шкалой 0-100 мкА.
Искомая концентрация нефтепродукта (в миллиграммах на литр)
63
определяется по показаниям регистрирующего прибора и градуиро-
вочному графику, составленному для конкретного продукта. Пробо-
подготовительная система (ПС) предназначена для экстрагирования
(извлечения) нефтепродукта, находящегося в воде в виде эмульсии,
растворителем — деароматизированным изооктаном или н-октаном.
Прибор имеет три шкалы с разной градуировкой. Диапазоны шкал
определяются удельным коэффициентом поглощения
контролируемого продукта. Разные заводы выпускают неодинаковые диапазоны
шкал и толщину измерительной кюветы в пределах 1 -f- 20 мм. Для
экстрагирования нефтепродуктов из воды растворителем в пробопод-
готовительную систему заливают 2-10~5 м3 пробы воды и 2-10~5 м3
растворителя и перемешивают в течение 300 с, после чего экстракт
отделяется от воды и его заливают в кювету для измерения.
Соотношение объемов воды и растворителя при экстракции 1:1.
Полнота экстракции нефтепродуктов из воды не менее 90 %.
Техническая характеристика анализатора ЛУА-65ПС
Порог чувствительности по концентрации, кг/'м3 . 2,5 • 101-9
Пределы измерений прибора, кг/м3 2,5-10!~9-^1 • 10~в
Воспроизводимость показаний, % от измеряемой
концентрации гЫО
Сходимость результатов измерений со
спектрофотометром СФ-4А, % ±li5
Продолжительность одного измерения с учетом
времени экстракции, с не более 600
Питание от сети переменного тока:
напряжением, В . . . . * 2*20
частотой, Гц 50
Потребляемая мощность, Вт:
прибора ЛУА-6& 170
пробоподготовительной системы (ПС) .... 60
Габариты, мм:
прибора ЛУА-66 560X400X5)00
пробоподготовительной системы (ПС) .... 290'Х 146X365
Вес, кг:
прибора ЛУА-65 ... 50
пробоподготовительной системы (ПС) .... 8,7
Автоматический анализатор фенола ФСВ-65В. Анализатор
<PCB-65B предназначен для непрерывного контроля содержания
фенола в условно чистых сточных водах с установок селективной
очистки масляных блоков нефтеперерабатывающих заводов.
Комплект прибора состоит из пробоотборной системы, блока
подготовки пробы для автоматического дозирования заданных
объемов сточной воды, реактивов и смешивания их в определенной
последовательности, датчика автоматического фотоабсорбциометра
АКН-65В, блока управления и регистрирующего вторичного
прибора—электронного потенциометра КСП.
Действие прибора основано на изменении окраски пробы в
зависимости от концентрации фенола в сточной воде при обработке
ее реактивами. Изменение окраски пробы записывается автомати-
*64
ческим фотоабсорбциометром на диаграмме. Шкала прибора
градуируется по контрольным стеклам, соответствующим известной
концентрации фенола. Реактивы заливают в пробоподготовитель-
ную систему не чаще трех раз в неделю.
Датчик прибора (автоматический фотоабсорбциометр АКН-65В
со специальными кюветами) вместе с пробоподготовительной
системой имеет взрывобезопасное исполнение.
Техническая характеристика анализатора ФСВ-65В
Пределы измерения, кг/м3 ОД-10~9; 04-50 • 101-9
Продолжительность цикла, с 240'0!-г-360*0
Погрешность комплекта, % от предела
измерений ,±16
Порог чувствительности, % от предела
измерений 5
Воспроизводимость показаний, % от
предела измерений ±5
Стабильность работы при постоянных
режимах, % от предела измерений .... '±5
Питание от сети переменного тока:
напряжением, В 220
частотой, Гц . . 5Q
Потребляемая мощность, Вт До 2|5О
Концентрация активного ила в сточных водах характеризует
работу аэротенков и вторичных отстойников. Этот параметр также,
как и содержание нефтепродуктов, контролируют приборами
лабораторного типа, которые, однако, могут быть использованы и в
производственных условиях.
Измеритель оптической плотности типа РОП. Работа прибора
основана на зависимости оптической плотности анализируемой иловой
смеси от концентрации активного ила. Измеритель представляет
собой двухканальный автоматический компенсационный фотометр с
одним приемником излучения; он предназначен для непрерывного
контроля и регистрации оптической плотности различных
биологических суспензий, и в том числе смеси активного ила и сточной
воды в спектральном диапазоне длин волн 700—1200 нм.
В комплект прибора входят (рис. 36):
датчик оптической плотности, являющийся первичным
фотоэлектрическим прибором с одним приемником. Датчик работает в
модулированном двухлучевом потоке лучистой энергии,
автоматически компенсируя разность интенсивностей световых потоков с
помощью кругового оптического клина;
набор измерительных проточных кювет для следующих толщин
просвечиваемого слоя, мм: 0,5; 1; 2; 4; 8;
вторичный электронный блок, включающий в себя блок
преобразования электрических сигналов (БОП), поступающих с датчика
оптической плотности, и источники питания ИП-8 и СН-1;
соединительный кабель, который позвол яет устанавливать
датчик оптической плотности на расстоянии не более 8 м от вторичного)
электронного блока.
Прибор обеспечивает непрерывное измерение концентрации, зктив--
3(0,5) Зак. 496 65»
Рис 36. Измеритель оптической плотности иловой смеси РОП
ного ила в сточной воде, постоянно подаваемой насосом в
измерительную кювету из лабораторной установки или аэротенка. Два
модулированных световых потока проходят через измерительную и
контрольную кюветы и фокусируются специальной линзой на
приемнике излучения. При равенстве световых потоков результирующий
световой поток вызывает постоянный ток фона приемника излучения.
При изменении светового потока, вызванного увеличением или
уменьшением концентрации активного ила в сточной воде, прошедшей
через рабочую кювету, пропорционально изменяется фототок
приемника излучения, регистрируемый вторичным прибором КСП-4.
Техническая характеристика измерителя типа РОП
Диапазон измерения оптической плотности, ед.
опт. плотности 0—2
Относительная приведенная погрешность
прибора, % Не более ±2,5
Время отработки всей шкалы прибора, с ... Не более 40
Параметры выходных сигналов:
на регистрацию, мВ О1—50
на регулирование, В 0—10'
Продолжительность непрерывной работы прибора,
с Не менее 36-105
Питание от сети переменного тока:
напряжением, В 220
частотой, Гц .... г. . 50
Габариты, мм:
датчика оптической плотности 240.Х Ю0Х 1*&0-
вторичного электронного блока 360X160X320
Автоматический нефелометр ЛАН-1. Прибор создан на основе
измерителя типа РОП. Автоматический нефелометр предназначен
для непрерывного контроля и регистрации оптической плотности
биологической суспензии, в том числе иловой смеси, одновременно
в шести различных установках или точках очистных сооружений.
Прибор (рис. 37) состоит из следующих основных элементов:
механизм перемещения 2, служащий для передвижения датчика
оптической плотности 1 от одной кюветы к другой и для прокачива-
66
К1 К2 КЗ
К5 Кб
— -в -э-Q-s в-о-
ния насосами Н1-Н6
анализируемой жидкости через
измерительные кюветы К1-К6;
регистрирующий
многоточечный потенциометр 6 типа
КСП, предназначен для
записи показаний на диаграммной
ленте по шести каналам и для
синхронизации работы
механизма перемещения датчика
оптической плотности;
электронная стойка с
измерителем оптической плотности
4 и источником питания 5,
преобразует электрические
сигналы, поступающие от
датчика оптической
плотности /, И Обеспечивает управле- рис 37. Структурная схема автоматиче
ние механизмом перемещения 2 Ского нефелометра ЛАН-1
посредством
синхронизирующего устройства 3.
Содержание растворенного ;
кислорода характеризует эф- !
фективность аэрационного ре- \
жима сооружений. |
Наиболее эффективным и I
целесообразным методом изме- |
рения концентрации кислорода I
в сточных водах является по- !
лярографический метод.
Метод основан на применении
твердых электродов и
полимерных селективно
действующих по отношению к
кислороду мембран, предназначенных
для защиты
электрохимических систем от
неблагоприятного воздействия
контролируемой среды. Полимерные
мембраны, обладая высокой
проницаемостью для
кислорода, практически непроницаемы
Для других веществ,
растворенных в сточной жидкости, и
Для воды. Таким образом,
Мембраны исключают
загрязнение электродов труднораст-
£оримыми Образованиями И рис< 38. Анализатор растворенного
предотвращают влияние коле- кислорода АКВА-С
3*(0,5) Зак. 496 67
Техническая характеристика нефелометра ЛАН-1
Количество точек измерения 6
Диапазон измерения, ед. опт. плотности . . . 0,2—2,0
Погрешность измерения от диапазона измерения
оптической плотности, %....-....... ±1
Дискретность измерения оптической плотности по
каждому каналу, с Не более 180
Продолжительность непрерывной работы прибора,
с Не менее 2.52-103
Питание от сети переменного тока:
напряжением,, В 220
частотой, Гц 50
Потребляемая мощность, Вт 220
Габариты, мм:
электронной стойки .„,..*.. 6*26X456X1240
датчика оптической плотности 240X10ОХ1&0
механизма перемещения 560X540
баний электропроводности и рН сточной воды на процесс
измерения, а также позволяют измерять концентрацию
растворенного кислорода в электролите с относительно постоянным физико-
химическим составом.
В настоящее время создана серия автоматических анализаторов
кислорода полевого, лабораторного и производственного назначения.
Наиболее характерным представителем этой серии является
анализатор типа АКВА-С, представленный на рис. 38.
Автоматический анализатор растворенного кислорода АКВА-С.
Анализатор АКВА-С состоит из измерительного устройства
(датчика ) с соединительным кабелем длиной 10 м, преобразователя
в корпусе, предназначенного для наружной установки и имеющего
внутренний обогрев и самопишущий ^миллиамперметр КСУ2-003.
Преобразователь снабжен показывающим микроамперметром и
сигнальной лампой «Обогрев включен». Анализатор АКВА-С имеет
ручную компенсацию остаточного тока и автоматическую компенсацию
влияния температуры анализируемой среды на выходной ток
электрохимической ячейки датчика и на растворимость кислорода.
Температура среды контролируется мостовой схемой, размещенной
в^корпусе датчика. Выходные сигналы датчика, пропорциональные
содержанию растворенного кислорода и температуре воды, поступают
на вход преобразователя, в котором усиливаются и корректируются
с учетом зависимости тока ячейки и растворимости кислорода от
температуры до получения выходного сигнала 0-5 мА. Анализатор АКВА-
С применяют в системах автоматического контроля за кислородным
режимом сточных и природных вод и для регулирования процессов
очистки.
Принцип действия анализатора АКВА-С и других анализаторов
растворенного кислорода подобного типа показан на рис. 39.
Датчик полярографического анализатора растворенного кислорода
выполнен в виде электродной пары, представляющей собой катод 1
из литой платины сферической формы и анод 8 — в виде полого
свинцового цилиндра, погруженной в жидкий электролит 7 и закрытой
полимерной мембраной 10. Катод / навинчивается на корпус 3 из
68
оргстекла, на котором закрепляется также с
помощью гайки 2 мембрана 10. Анод 8 крепится
на цилиндрическом стержне 9 из оргстекла.
Датчик устанавливается в сосуде с помощью шлифа
5 или непосредственно погружается в сточную
воду на специальной конструкции.' Датчик к
электронному усилителю подключается
соединительным кабелем 4, токоотводящие провода к
которому от, катода / и анода 8 подводятся в
специальных каналах 6.
Молекулярный кислород избирательно
диффундирует из сточной воды через мембрану 10 к
катоду / на фоне остальных составляющих воды
и электровосстанавливается в результате
электрохимической реакции с образованием
гидроокиси свинца. На выходе датчика генерируется
выходной токовый сигнал., линейно зависящий
от содержания растворенного кислорода в воде.
Анод 8 служит для обеспечения
соответствующего потенциала катода 1, достаточного для
электровосстановления кислорода, а электролит
7 — для обеспечения электролитической связи
между анодом и катодом.
Материал полимерной мембраны
представляет фторопластовая или; полиэтиленовая пленка
толщиной, от 5- 10~в до 80 • 10~в м.
Анализаторы растворенного кислорода
позволяют также существенно повысить
производительность труда в аналитических
лабораториях при массовых анализах на кислород в отобранных пробах и
реализовать электрохимический метод определения ВПК сточных
и природных вод.
Этот метод реализуется двояко. Во-первых, оставив в основном
всю процедуру определения ВПК методом разбавления без изменений,
исключают важнейший элемент анализа — процесс периодического
определения концентрации растворенного кислорода методом Винкле-
Техническая характеристика анализатора АКВА-С
Диапазон измерения, кг/м3 0—15-Ш~9
Погрешность измерения от диапазона измерения,
% ±5
60
Рис. 39.;
Конструкция датчика анаг
лизатора
растворенного кислорода
Время переходного процесса, с
2692 -10*
220
50
150
Время непрерывной работы, с
Питание от сети переменного тока:
напряжением, В .......
частотой, Гц .......
Потребляемая мощность, Вт . .
Габариты, мм:
преобразователя ............ 428X32©X2i32
датчика 1158X56
Масса, кг:
преобразователя ....*.. 1(7
датчика .... 3
3 Зак. 496
69
pa, этот метод заменяют другим, более совершенным, например
полярографическим; в этом случае число колб с пробами испытуемой и
разбавляющей воды остается прежнее.
Во-вторых, сохранив лишь общепринятую методику подготовки
проб испытуемой и разбавляющей воды, уменьшают число колб до
одной для каждого вида пробы, обеспечивая при этом непрерывный
автоматический контроль процесса биохимического потребления
кислорода в каждой колбе.
Электрохимический определитель БПК ЭХО-1. В этом приборе
реализуется первый способ определения БПК с использованием
полярографического анализатора кислорода, датчик которого представлен
на рис. 39. Датчик анализатора устанавливают в обычной колбе БПК
с полной герметизацией анализируемой пробы. Для этого корпус
датчика снабжают стеклянным шлифом (рис. 40, а). Это обеспечивает
герметичную установку датчика в горле колбы БПК.
Установка ЭХО-1, общий вид которого показан на рис. 40, б,
состоит из технологического блока /, представленного термостатом 2
с отделениями 3, 4 для размещения колб с пробами испытуемой и
разбавляющей воды, соответственно, измерительного блока 5,
обеспечивающего визуальный контроль содержания растворенного
кислорода, и электронного многоточечного потенциометра 6 типа КСП.
Данная установка позволяет однократно определять содержание
растворенного кислорода поочередно в колбах в термостатируемых условиях
с отсчетом значений измеряемого параметра как по шкале
измерительного блока, так и по ленте электронного потенциометра.
Электрохимический определитель БПК ЭХО-2. Основным
элементом установки ЭХО-2 для автоматического определения БПК при
непрерывном контроле содержания растворенного кислорода служит
а)
Рис. 40. Электрохимический определитель БПК ЭХО-
а — датчик со стектянным шлифом; б—общий вид
7в
Техническая характеристика установки ЭХО-1
Диапазон измерения БПК, кг/м3 Неограничен*
Погрешность измерения БПК, % ±5
Питание от сети переменного тока:
напряжением, В 220
частотой, Гц 50
сосуд из оргстекла вместимостью 1 л, предназначенный для
размещения анализируемой пробы (рис.41). Установка включает два
подобных сосуда: один— для испытуемой воды, другой — для
разбавляющей. Оба сосуда оборудованы независимыми системами
автоматического контроля содержания растворенного кислорода. Сосуд с
анализируемыми пробами и датчиками на кислород устанавливаются в
термостат. Для периодического отбора проб контроля биохимического
процесса на содержание нитритов сосуды оборудованы шприцами.
Методика определения БПК сточных вод посредством
полярографических анализаторов кислорода включает следующие основные
операции:
подготовку проб сточной воды для проведения анализа БПК;
калибровку полярографических анализаторов растворенного
кислорода;
расчет значения БПК.
Подготовку проб сточной воды для анализа БПК с использованием
полярографических анализаторов кислорода производят стандартным
методом разбавления. Калибровка анализаторов возможна с помощью
растворов с известным содержанием кислорода. Если через
анализируемый раствор пропускать газовую смесь, например, О2— N2 с
известным процентным содержанием кислорода, то можно рассчитать
количество кислорода, растворенного в данной жидкости.
При непрерывном измерении концентрации растворенного
кислорода анализатором пробы с испытуемой и разбавляющей водой
разливают в соответствующие сосуды и помещают в термостат при20°С.
Так же, как и в предыдущем случае, предварительно
определяются исходные содержания растворенного кислорода и нитритов-
в анализируемых пробах. В процессе анализа одним шприцем
периодически отбирают небольшие пробы для определения концентрации
нитритов. Чтобы избежать образования газовой фазы в сосуде и
уменьшения содержания растворенного кислорода из-за его диффузии из.
пробы, одновременно вторым шприцем добавляют идентичное
количество дистиллированной воды. Величину БПК (кг/м3) рассчитывают
по формуле, принятой в известном методе разбавления.
Технические характеристики определителя ЭХО-2 аналогичны
техническим характеристикам определителя ЭХО-1. Следует отметить,
что при использовании установки ЭХО-2 для автоматического
определения БПК с непрерывным контролем содержания растворенного
кислорода можно применять несложные вычислительные устройства
Для расчета величин БПК по известному уравнению с фиксацией
получаемых результатов через заданные промежутки времени. Это
исключает субъективные ошибки при расчетах и дает возможность
полностью автоматизировать процесс определения данного технологи-
3* Зак 496 71
12
Рис. 41. Электрохимический
определитель БПК ЭХО-2
Рис. 42. Структурная схема респирометра
ОБПК
ческого параметра. Скорость биохимического потребления кислорода
отражает динамику окисления органических веществ в сточных водах.
Автоматический респирометр типа ОБПК. Прибор (рис. 42)
состоит из сосуда /, оборудованного компенсационной колбой 3,
соединенной с tZ-образным регулятором давления 15 и демпфирующим
манометром 4, и электролизером 11. Фотоэлектрический сигнализатор
уровня 14 подключен к электронному усилителю 8У последовательно
связанному с блоком исполнительных реле 7, электрочасами 5,
вторичным регистрирующим прибором 6 и блоком питания 10.
Проба анализируемой сточной воды в смеси с активным илом
размещается в сосуде /, в котором устанавливается емкость 13 с
раствором щелочи, предназначенной для удаления СО2, выделяющейся при
анализе. Окислительный процесс органических веществ,
содержащихся в анализируемой пробе, сопровождается потреблением
растворенного кислорода и последующей диффузией последнего из газовой
фазы в жидкость. Изменение давления газовой фазы в сосуде
автоматически контролируется регулятором, отклонение уровня
жидкости в одном из колен которого фиксируется
сигнализатором. Это ведет к включению усилителя, блока реле, электрочасов,
вторичного прибора и блока питания. В результате работы
электролизера и подачи в сосуд кислорода, выделяющегося на аноде в процессе
разложения электролита, давление газовой фазы повышается и при
значении, равном первоначальной величине давления в сосуде и
компенсационной колбе, электролизер автоматически отключается,
прекращая подачу кислорода в сосуд. По мере дальнейшего потребления
72
кислорода цикл действия прибора повторяется вплоть до полного
окисления органических веществ в анализируемой пробе.
Изменения атмосферного давления ведут к равным изменениям
уровней электролита и манометрической жидкости в соответствующих
коленах электролизера и демпфирующего манометра. Это
обусловливает равные колебания давления газовой фазы в сосуде / и
компенсационной колбе, в которой (/-образный регулятор занимает
симметричное положение по отношению к электролизеру 11У с одной стороны,
а с другой стороны — к демпфирующему манометру. В результате
уровни в обоих коленах регулятора изменяются лишь вследствие
окислительного процесса, т. е. полностью исключается влияние колебаний
атмосферного давления на результаты измерения. При этом объем
газовой фазы в колбе равен объему газовой фазы в сосуде с учетом
длины газовых линий 9. Удельные веса электролита и жидкости в
манометре принимаются равными с целью достижения одинаковой
степени изменения их уровней при колебаниях атмосферного давления.
В колбу 3 помещается немного анализируемой жидкости, чтобы
создать давление водяных паров, равное давлению этих паров в сосуде.
Ток электролизера регулируется посредством блока питания.
Контроль времени электролиза обеспечивается электрочасами; проба
непрерывно перемешивается магнитной мешалкой 12. Сосуд и колба
устанавливаются в водяном термостате 2.
Техническая характеристика респирометра ОБПК
Ток в цепи генератора О2, мА 3000.
Производительность генератора О2, кг/л в ч . . 870-Ш~6
Температурный режим технологических блоков, °С 20
Питание от сети переменного тока:
напряжением, В . . „ 3X220
частотой, Гц 5|0
Потребляемая мощность, Вт 600!
Габариты, мм 1200X900Х2О0С
Общий вес, кг Ш
Количество потребленного в ходе анализа кислорода и скорость
его потребления автоматически рассчитываются исходя из показаний
электросчетчика 9 контроля времени электролиза и миллиамперметра
электролизера 5, а также по кривой, регистрируемой вторичным
прибором 10 и отражающей динамику процесса окисления органических
веществ.
Измерение концентрации органических веществ в сточных водах
по органическому углероду непосредственно, т. е. наряду с
методиками косвенного определения этого параметра по значениям БПКи
скорости биохимического потребления кислорода, наиболее полно
характеризует уровень эксплуатации всего узла сооружений
биохимических очистных сооружений сточных вод.
Анализатор суммарного органического углерода У-101. Данный
прибор состоит из трех основных узлов: технологический блок,
инфракрасный анализатор на СО2 и регистрирующий потенциометр
(рис. 43). Анализируемую пробу объемом 20-10~12 м3 впрыскивают с
помощью щелевой направляющей иглы 4 в трубку каталитического
сгорания 7. Трубку, имеющую пропитанный окисью кобальта асбес-
73
Рис. 43. Структурная схема анализатора
суммарного органического углерода У-101
товый наполнитель, устанавливают в электрическую печь с рабочей
температурой 950 °С. Одновременно в трубку 7 подается воздух,
предварительно прошедший окислительную трубку 6, заполненную^ окисью
кобальта и установленную также в печи с температурой 950 °С.
Воздух подается в трубку 7 воздуходувкой 11 блока подготовки 9 через
^скруббер 8 и систему стабилизации давления. Последняя состоит из
регулятора 1, расходомера 3 и показывающего манометра 2.
В окислительной трубке 6 летучие органические вещества воздуха
превращаются в СО2 и поглощаются в скруббере раствором щелочи.
Очищенный воздух через управляющий клапан 5 вместе с
анализируемой пробой попадает в трубку 7, где происходит испарение воды и
окисление органических веществ до СО2. Поток воздуха выносит
водяные пары и СО2 из трубки 7 в конденсатор 17, в котором пары
конденсируются, а СО2 через регулирующий двухканальный селекторный
клапан 18 и фильтр 14 поступает на вход инфракрасного анализатора
16. Показания анализатора регистрируются потенциометром 13.
Содержание СО2 прямо пропорционально суммарному содержанию
углерода, т. е. сумме концентраций органического углерода
и^неорганического углерода, а также двуокиси углерода, растворенной в
анализируемой пробе. Чтобы выделить из полученных результатов показатель
содержания СО2, зависящий только от концентрации органического
углерода, параллельно проводится второй цикл измерения, в котором
такая же анализируемая проба впрыскивается вместе с очищенным
воздухом в другую трубку каталитического сгорания 19, заполненную
кварцевой стружкой и пропитанной 85 %-ным раствором фосфорной
кислоты. Трубка 19 смонтирована в электрической печи с рабочей
температурой 150 °С. Эта температура недостаточна для окисления
органических веществ. В то же время обработанный кислотой
кварцевый наполнитель, уменьшая рН пробы до 2 и менее, освобождает
весь неорганический углерод в виде СО2. Жидкая фаза пробы испа-
74
ряется и смесь образовавшихся водяных паров и СО2 струей
очищенного воздуха выносится в соответствующий, конденсатор 17, где
происходит конденсация паров, а затем дальнейшая подача СО2
через клапан 18 и фильтр 14 к инфракрасному анализатору 16.
Разность показаний потенциометра 13 при первом и втором анализе
дает суммарную концентрацию органического углерода в
анализируемой пробе.
Выпуски 15 и 12 служат соответственно для сброса газовой фазы в
атмосферу и конденсата в канализацию. Линия 10 является
всасывающим патрубком воздуходувки 11.
Техническая характеристика анализатора У-101
Диапазон измерения, кг/м3 От 0 до Ы0~5
Основная погрешность от диапазона измерения, % ±4
Температура окружающей среды, °С От +5 до +35
Потребление воздуха, см3/мин Не более 300
Время одного анализа, мин li2<0—240
Питание от сети переменного тока:
напряжением, В 220
частотой, Гц . 50
Потребляемая мощность, Вт 1(500'
Контроль за концентрацией хлора и его производных имеет важное
значение для управления процессом обеззараживания питьевых и
сточных вод.
Автоматический анализатор хлора АПК-0Ш. Анализатор
содержит электрохимический преобразователь 2 (рис. 44),
оборудованный блоком дозирования реагентов 3 и блоком пробоподготовки /,
соединенными через преобразователь 2 с нормирующим узлом 23 и
балансным преобразователем 28, узлом термокоррекции 24 и блоком
согласования 25, снабженным источником питания 26, и с
регистрирующим прибором 30. Преобразователь 28 образован мостовой схемой
29 и нуль-органом 27.
Электрохимический преобразователь 2 снабжен перепускным
клапаном 5, седло 9 которого разделяет камеру перелива 7 и камеру
смешивания 11. Камера 7 гидравлически связана со сливной камерой 12,
оборудованной инжектором 14 с горловиной 13, чувствительным
элементом 17 и обводной трубкой 18. В камере // установлен штуцер
подачи реагентов /5, а в камере 12 — штуцер слива 10. Элемент 17
образован катодом 19 и анодом 16 Блок дозирования реагентов 3
снабжен емкостями для реагентов, микродозаторами 5 и смесителем 4.
Блок пробоподготовки / имеет входной регулятор давления 34 с
манометром 33, фильтром 32 из металлической сетки, регулятором
Динамической дозировки 20, сливным бачком 22 и редуктором 21,
образованным последовательно включенными выходными
регуляторами давления 31.
Анализируемая сточная или природная вода подается насосом из
очистного сооружения через входной регулятор давления 34, при этом
по манометру 33 устанавливается требуемое давление подаваемой воды.
В фильтре 32 удаляются взвешенные вещества и различные нераство-
Ренные примеси с периодической сменой фильтрующего патрона. Ре-
75
дуктором 21
стабилизируется давление воды
после прохождения
фильтра 32, которая
поступает далее через
инжектор 14 в камеру //.
Одновременно с
анализируемой водой в камеру
11 поступают
соответствующие реагенты из
смесителя 4 блока 3, Отсюда
большая часть воды
проходит через трубку 18 к
чувствительному
элементу 17, а меньшая часть —
через клапан 8,
поддерживающий постоянное
давление воды в камере
У/, в камеры 7 и 12.
Вместе с водой,
циркулирующей через элемент
/7, движется также
абразивный песок,
предварительно внесенный в
камеру 16 и очищающий в
процессе движения
электродную поверхность
катода 19 и анода 16.
Вода из камеры 12
поступает в бачок 22,
который связан с
регулятором 20, обеспечивающим
общую стабилизацию
гидродинамического
режима в устройстве и
отбор проб для
химико-аналитических определений.
В чувствительном элементе 17 в результате электрохимических
реакций возникает выходной сигнал, пропорциональный содержанию
хлора в анализируемой воде. Выходной сигнал узлом 23 приводится
к нормированному значению, корректируется с учетом температуры
анализируемой воды узлом 24 и преобразуется блоком 25, мостовой
схемой 29 и нуль-органом 27 для подачи к регистрирующему прибору
30.
Техническая характеристика анализатора АПК-01М
1
1
!
1
U
1
29
27
Г
25
26
Рис. 44. Структурная схема анализатора
хлора АПК-01М
Диапазон измерения, кг/м3
Погрешность измерения,
рения . . .
Расход измеряемой среды, л/ч
от диапазона
измены О"9
0Ч-3-1О-9
±4
20
76
Расход реагентов, мл/сут
Температура измеряемой среды, СС . . .
Температура окружающего воздуха, °С . .
Относительная влажность окружающего воздуха,
Питание от сети переменного тока
напряжением, В
частотой, Гц ... . . . . .
Габариты, мм
Масса, кг
300
14—{-25 (меняется
сезонно)
3
60^92
220
50
4001X480X290
50
Существенный интерес представляет опыт Восточной водопровод-
ной станции Москвы по автоматическому контролю качественных па-
раметров питьевой воды. На станции измеряются и передаются на ее
центральный диспетчерский пункт следующие показатели: остаточный
хлор в воде после предварительного хлорирования в начале и конце
ковша; остаточный хлор, цветность и мутность в фильтрованной
воде; остаточный хлор после вторичного хлорирования и аммонизации в
четырех контактных резервуарах; остаточный хлор, цветность и
мутность воды, поступающей в город.
При составлении проекта автоматизации станции предполагалась
установка приборов для контроля указанных параметров воды в
каждом водоводе. Однако практическое осуществление проекта в таком
/ 234
Ш
Рис. 45. Схема централизованного
контроля мутности, цветности и
остаточного хлора в восьми водоводах
ГП — гидропереключатель; РД — реверсивный
электродвигатель, Н — насос; М —
электродвигатель; АМН — анализатор мутности и
цветности воды; АОХ — анализатор
остаточного хлора; Т — терморегулятор; Б —
переливной бачок-воздухоотделитель, Щ — диспет
черский щит со вторичными приборами; 1—
8 — водоводы фильтрованной воды
виде затруднялось сложностью эксплуатации многих приборов.
Выход был найден в организации системы централизованного контроля,
которая позволяет использовать один прибор для поочередного ана~
лиза проб воды, отобранных в нескольких точках. На рис. 45
показана схема устройства системы централизованного контроля мутности,.
Цветности и остаточного хлора воды в восьми водоводах.
77
РАЗДЕЛ IV. АВТОМАТИЧЕСКОЕ
РЕГУЛИРОВАНИЕ
ГЛАВА XIII. СИСТЕМЫ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
-§ 30. СТРУКТУРА СИСТЕМ РЕГУЛИРОВАНИЯ
Системы автоматического регулирования (САР) обеспечивают
поддержание без участия персонала на постоянном уровне (или изменение
по заданной программе) величин, определяющих нормальное
протекание технологического процесса.
Например, системы автоматического регулирования, применяемые
на скорых фильтрах, поддерживают постоянную величину скорости
фильтрования воды независимо от изменения сопротивления слоя
загрузки фильтра вследствие его загрязнения, а системы
автоматического регулирования, применяемые на метантенках, поддерживают в
.заданных пределах температуру сбраживаемого осадка независимо от
периодической загрузки и выгрузки осадка из метантенков.
Объект, в котором протекает автоматически регулируемый
технологический процесс, называется объектом регулирования, а
параметры процесса, подлежащие регулированию, называются
регулируемыми параметрами.
Системы автоматического регулирования могут применяться для
изменения одного параметра в зависимости от изменения других
параметров или их соотношений, а также для уменьшения величины и
скорости отклонения регулируемого параметра от заданного значения
лри нарушении необходимого равновесия в ходе технологического
процесса.
В систему автоматического регулирования входит объект
регулирования и комплекс устройств автоматического регулятора (рис. 46).
В комплекс устройств всегда входят чувствительный (измерительный)
элемент, управляющее устройство, исполнительный механизм и
регулирующий орган. Кроме того, в этот комплекс может входить
задающее устройство, дополнительно воздействующее на управляющее
устройство в зависимости от изменений в объекте регулирования или от
внешних возмущений, а также усилительное устройство.
В сложных автоматических регуляторах все или некоторые из
указанных элементов могут в свою очередь состоять из нескольких узлов
и отдельных аппаратов, соединенных между собой в общую цепь,
каждое звено которой получает от предыдущего звена некоторый импульс,
преобразует его и передает следующему звену. Импульс, получаемый
звеном, называется входом, или величиной на входе. Импульс,
передаваемый звеном, называется выходом, или величиной на выходе.
В целом для автоматического регулятора величиной на входе является
значение регулируемого параметра, а величиной на выходе —
положение (или характер движения) регулирующего органа.
78
Регулирующий
орган
♦
Исполнитель
ный механизм
1
внешнее 1
Рпзмущение \
\
Объект регу \
лирования \
\
Задающее
устройство
1 *
Усилительное
устройство
\
1
ЩстВитель
\
Управляющее]
устройство 1
Рис. 46. Функциональная схема
системы автоматического регулирования
Входной импульс объекта
регулирования — равнодейст-
вующая всех внешних сил,
воздействующих на объект,
включая воздействие на его
регулирующий рабочий орган со
стороны автоматического
регулятора через исполнительный
механизм, а выходной импульс
объекта — величина
регулируемого параметра.
Замена одного заданного
значения регулируемого
параметра другим называется
управляющим воздействием. Изменение нерегулируемых величин,
влияющих на регулируемый параметр, называется возмущающим
воздействием. Управляющее и возмущающее воздействия
являются причиной возникновения в системе регулирования переходного
процесса. Время, в течение которого регулируемый параметр
принимает заданное значение после отклонения, возникшего под
влиянием управляющего или возмущающего воздействия, называется
переходным периодом.
Величина, скорость и ускорение изменения регулируемого
параметра зависят от свойств объекта регулирования, т. е. от возможной
для данного объекта величины и скорости нарушения равновесия.
Свойства объекта регулирования и технологические требования к
качеству регулирования определяют выбор типа и устройства
автоматического регулятора. Выбранный для конкретных условий регулятор
должен поддерживать в определенных пределах величину
регулируемого параметра и продолжительность ее отклонения, т. е.
обеспечивать устойчивое регулирование. Устойчивым является регулирование,
при котором система после возникновения возмущения вновь входит
в установившееся состояние с величиной регулируемого параметра,
находящейся в заданных пределах.
Существуют технологические процессы, в которых поддержание
постоянной величины регулируемого параметра или заданного ее
изменения не дает необходимого результата. В таких случаях
применяются самонастраивающиеся системы регулирования, изменяющие свои
параметры или даже структуру в зависимости от возникающих
возмущений. Следует, однако, иметь в виду, что во всех случаях
желательно обходиться наиболее простой схемой и конструкцией
регулятора, характеризующейся меньшей стоимостью и большей
надежностью в эксплуатации.
§31. ОСНОВНЫЕ СВОЙСТВА
ОБЪЕКТОВ РЕГУЛИРОВАНИЯ
При решении вопросов, связанных с введением автоматического
Регулирования, необходимо в первую очередь детально ознакомиться
79
со свойствами объекта регулирования. Следует помнить, что
проявляемое в ряде случаев стремление улучшить работу технологически не-
налаженного объекта введением автоматического регулирования
совершенно недопустимо.
Понятие «объект регулирования» может включать сооружения или
технологические установки в целом и отдельные процессы,
протекающие в том или другом сооружении или установке.
Основными свойствами объекта регулирования являются емкость
объекта, самовыравнивание, время разгона и постоянные времени
объекта, запаздывание.
Емкость объекта — это способность объекта регулирования
накапливать энергию, поддерживать уровень жидкости, давление газа,
количество тепла, влажность среды, концентрацию растворов и
другие параметры, по которым осуществляется автоматическое
регулирование. В общем виде емкостью или аккумулирующей способностью
объекта называют степень накопления (запас) вещества или энергии.
Чем меньше емкость объекта, тем быстрее изменяется величина
регулируемого параметра при нарушении равновесия, например, между
притоком и расходом рабочей среды. Большая емкость объекта
уменьшает скорость изменения величины регулируемого параметра и этим
упрощает задачу автоматического регулирования. Емкость объекта
по данному регулируемому параметру равна произведению величины
регулируемого параметра на коэффициент емкости. Коэффициентом
емкости объекта называют количество вещества (энергии), которое
необходимо подвести к объекту или отвести от него для изменения
величины регулируемого параметра на соответствующую единицу
измерения. Для случая регулирования уровня жидкости в сосуде
коэффициент емкости характеризуется величиной площади поперечного
сечения сосуда, так как количество жидкости в сосуде равно
произведению глубины на площадь поперечного сечения.
Различают одно- и многоемкостные объекты, емкость на стороне
подачи и на стороне потребления. Некоторые объекты обладают столь
малой емкостью, что практически их считают безъемкостными.
Самовыравнивание — это такое свойство объектов
регулирования, в силу которого при изменении нагрузки объекта (притока или
расхода) величина регулируемого параметра стремится без участия
регулятора к новому установившемуся значению, соответствующему
измененной нагрузке. Способность объектов к самовыравниванию
выражается степенью самовыравнивания. Степень самовыравнивания А
может быть определена как отношение увеличения или уменьшения
нагрузки ДУ в процентах от ее величины при заданном значении
регулируемого параметра к увеличению или уменьшению величины
регулируемого параметра Д# в процентах его заданного значения:
Большая степень самовыравнивания способствует более быстрой
стабилизации регулируемой величины и этим облегчает процесс
регулирования. Некоторые объекты благодаря большей степени
самовыравнивания вообще не нуждаются в автоматическом регулировании. ДрУ
80
гие же практически совсем не обладают способностью к
самовыравниванию.
Примером объекта с большей степенью самовыравнивания служит
сосуд (резервуар), в который вода поступает свободным потоком над
уровнем, а сток воды из сосуда производится свободным сливом.
В этом случае уровень воды в сосуде (регулируемый параметр)
стремится к новому установившемуся значению, соответствующему
изменению стока воды (нагрузке). Если этот сток воды из сосуда
производится насосом, то имеет место объект без самовыравнивания.
Время разгона объекта характеризует инерционные свойства
объекта регулирования и тесно связано с его емкостью и
самовыравниванием. Временем разгона называется промежуток времени,
необходимый для изменения величины регулируемого параметра в объекте от
нуля до заданного его значения при подводе к объекту вещества (энергии)
в количестве, соответствующем полной нагрузке.
Постоянная времени объекта без самовыравнивания равна
времени его разгона, а объекта с самовыравниванием — времени уменьшения
отклонения регулируемого параметра от заданного значения в 2,71
раза.
Запаздывание характеризуется временем отставания изменения
величины регулируемого параметра от момента нарушения равновесия
между притоком и расходом вещества (энергии) в объекте
регулирования. Различают переходное, или емкостное, запаздывание в
многоемкостных объектах, возникающее из-за наличия тепловых,
гидравлических или других сопротивлений между емкостями объекта, и
передаточное, или чистое, запаздывание, возникающее при прохождении
потоком вещества (энергии) расстояния от объекта до места установки
регулирующего органа САР. Сумму переходного и передаточного
запаздываний называют полным запаздыванием. Чем больше время
полного запаздывания, тем труднее регулировать процесс. Иногда
большое запаздывание делает невозможным введение автоматического
регулирования. Следует, однако, иметь в виду, что при медленно
протекающих процессах емкостное запаздывание благодаря медленному
изменению величины регулируемого параметра, возникшему при
нарушении равновесия между притоком и расходом, может
благоприятствовать процессу регулирования.
При введении автоматического регулирования необходимо оценить
статические и динамические характеристики объектов. Емкость
объекта и степень его самовыравнивания являются статическими
характеристиками. Переходные процессы, возникающие в объекте
регулирования при нарушении равновесия, выражаются динамическими
характеристиками.
При введении автоматического регулирования основной задачей
является получение динамических характеристик объектов.
Динамические характеристики сравнительно простых объектов
регулирования можно получить в форме дифференциальных уравнений. Однако
Для большинства объектов регулирования статические и динамические
характеристики удается получить лишь экспериментальным путем.
Для этого с помощью измерительных приборов снимают временные
81
или частотные характеристики автоматизируемого объекта,
отражающие характер изменения величины регулируемого параметра при
разных значениях нагрузки объекта, например, при разном нарушении
равновесия между притоком и расходом вещества (энергии).
Временные характеристики дают представление о времени разгона, а также
о переходном и передаточном запаздывании в объектах
регулирования. Частотные характеристики выражают изменения амплитуд и фаз
в зависимости от частоты при переходных процессах в объектах.
Наиболее полно динамические особенности объектов регулирования
выражаются комплексной функцией частоты — амплитудно-фазовой
характеристикой.
§ 32. УСТОЙЧИВОСТЬ СИСТЕМ РЕГУЛИРОВАНИЯ
Сущность регулирования состоит в устранении колебаний
величины регулируемого параметра относительно заданного его значения.
Системы регулирования по характеру своей работы являются
колебательными. При правильном выборе элементов система приводит к
снижению или устранению указанных колебаний, а при неправильном
выборе — к недопустимому их увеличению. Для правильного выбора
элементов и оценки любой системы регулирования весьма важно иметь
точные данные о ее устойчивости.
Режим работы САР называется установившимся, если
регулируемые параметры и все действующие в системе сигналы не изменяются
во времени. Зависимости, характеризующие состояние САР и ее
элементов при установившемся режиме, называются статическими
характеристиками .
Установившийся режим может нарушаться различными
возмущениями. Основным возмущением является изменение нагрузки. При
появлении возмущения величина регулируемого параметра
отклоняется от заданного значения, вследствие чего начинает работать
регулятор, восстанавливая в САР установившийся режим. Способность
возвращаться к установившемуся режиму и восстанавливать
заданное значение регулируемого параметра называется устойчивостью
САР. Если после внесения возмущения установившийся режим не
наступает, а величина отклонения регулируемого параметра от
заданного значения недопустимо возрастает, значит, САР не обладает
устойчивостью.
Процесс, протекающий в САР с момента внесения возмущения
до момента восстановления установившегося режима, называется
-переходным процессом.
Переходный процесс может протекать различно (рис. 47). В
наиболее благоприятном случае величина регулируемого параметра после
отклонения возвращается регулятором к заданному значению
постепенно и без колебаний. Переходный процесс такого вида называется
апериодическим сходящимся. В другом случае величина параметра
принимает заданное значение лишь после ряда постепенно
уменьшающихся или затухающих колебаний. Переходный процесс такого
вида называется колебательным затухающим. Иногда величина пЗ'
82
г)
о
3)
х
t
/ТГ
w }
s
t
X
АГ2-,
4 i
Ж /I
\ /
-|1|^_-УШ/__\1/_
t о
Рис. 47. Переходные процессы в
системах автоматического
регулирования
а — апериодический сходящийся, б —
апериодический расходящийся; в —
колебательный затухающий; г — колебательный
гармонический; д — колебательный
расходящийся, Xi — начальное установившееся
значение; Х2 — переходное значение; Х3 —
конечное установившееся значение
регулируемой величины
раметра после отклонения продолжает колебаться относительно
заданного значения длительное время, причем величина амплитуды
колебаний сохраняется постоянной. Переходный процесс такого вида
называется колебательным гармоническим (консервативным). Если же
величина параметра после отклонения продолжает колебаться, но
величина амплитуды этих колебаний с течением времени
увеличивается, то такой переходный процесс называется колебательным
расходящимся. И, наконец, если разность между заданным и фактическим
значениями регулируемого параметра с течением времени
увеличивается, то мы имеем апериодический расходящийся переходный
процесс.
Переходные процессы, соответствующие кривым, приведенным на
рис. 47, б и д, совершенно неприемлемы. Что же касается
переходного процесса, соответствующего кривой, приведенной на рис. 47, г,
если амплитуда колебаний не слишком велика, то САР с таким
переходным процессом может быть применена для автоматического
регулирования.
Для анализа устойчивости систем автоматического регулирования
пользуются критериями устойчивости. Критерии, позволяющие
проверить устойчивость системы с помощью алгебраических вычислений с
коэффициентами характеристического уравнения системы, не
прибегая к графическим построениям, называются алгебраическими
критериями. К критериям этого вида относятся критерии Рауса, Гурвица,
и Вышнеградского.
83
$ 33. КАЧЕСТВО И НАДЕЖНОСТЬ
РЕГУЛИРОВАНИЯ
Качество процессов регулирования оценивается по тому, насколько
близко к заданному значению поддерживается
величина,регулируемого параметра. Чем больше величина отклонения параметра от
заданного значения, тем, следовательно, хуже работает регулятор и тем
хуже протекает процесс регулирования.
В нормальных условиях, когда нет резких и больших колебаний
нагрузки, качество регулирования может быть оценено по
максимальной величине отклонения регулируемого параметра от заданного
значения. В некоторых случаях это отклонение настолько велико, что
применение регулятора данного типа делается невозможным.
Качество процесса регулирования оценивается также по
продолжительности переходного периода, частоте колебаний и степени их
затухания. Чем скорее величина регулируемого параметра после
отклонения возвращается к заданному значению, тем лучше протекает
процесс регулирования.
Кроме того, качество процесса регулирования характеризуется
остаточным или статическим отклонением регулируемого параметра,
когда величина параметра, отклонившись от заданного значения,
больше не возвращается к нему. Величина остаточного отклонения
выражается в единицах измерения регулируемого параметра (или в
процентах шкалы) и равна разности между заданным и фактическим
значениями параметра тогда, когда он примет новое стабильное
значение.
Наряду с качеством регулирования большое внимание уделяется
надежности систем регулирования. Под надежностью систем
понимается свойство системы безотказно работать в течение определенного
периода времени в заданных условиях эксплуатации при определенном
профилактическом обслуживании.
ГЛАВА XIV. АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ
§ 34. КЛАССИФИКАЦИЯ РЕГУЛЯТОРОВ
Регуляторы классифицируют по ряду признаков.
По роду энергии, используемой для приведения их в действие,
регуляторы подразделяют на пневматические, гидравлические,
электрические и комбинированные (электропневматические,
электрогидравлические).
По назначению различают регуляторы расхода, давления,
температуры и др., соотношения этих параметров.
По способу действия автоматические регуляторы делят на две
группы: непосредственного (прямого) действия, в которых усилие,
необходимое для перемещения регулирующего органа, создается
чувствительным элементом (измерителем); непрямого (косвенного) действия,
работающего с использованием энергии от постороннего источника для
перемещения регулирующего органа.
84
По характеру изменения скорости регулирующего воздействия
различают регуляторы, обеспечивающие постоянную или переменную
скорость перемещения регулирующего органа.
По характеру действия различают регуляторы прерывного и
непрерывного действия. К первым относятся позиционные
регуляторы (импульсные и релейные), ко вторым — интегральные
(астатические — И-регуляторы), пропорциональные (статические —
П-регуляторы) и изодромные. Импульсные регуляторы бывают
одно-, двух- и трехимпульсные. Двух- и трехимпульсные
регуляторы учитывают наряду с изменением величины регулируемого
параметра изменения величины одного или двух других параметров.
Для осуществления регулирования в соответствии заранее
заданным изменением по времени технологического режима объекта
регулирования применяются программные регуляторы.
Позиционными называют такие регуляторы, у которых
регулирующий орган может занимать два или три определенных положения
(позиции). У двухпозиционных регуляторов регулирующий орган
может занимать только два положения, например, полностью открытое
или полностью закрытое. Перестановка регулирующего органа с
одного положения на другое происходит почти мгновенно. Двухпози-
ционный регулятор из-за его ограниченных возможностей применяют
лишь для объектов с большим коэффициентом емкости и
незначительным запаздыванием. У трехпозиционных регуляторов
регулирующий орган может занимать три положения: полностью открытое,
среднее (нормальное) и полностью закрытое.
Интегральными (астатическими) называют регуляторы, у
которых при отклонении регулируемого параметра от заданного значения
регулирующий орган перемещается в одном направлении (в пределах
рабочего хода) до тех пор, пока регулируемый параметр снова не
примет заданного значения. Изменение направления действия
регулирующего органа произойдет только тогда, когда параметр, изменяясь,
перейдет через заданное значение.
Примером астатического регулятора с постоянной скоростью
перемещения регулирующего органа может служить контактный термометр.
При отклонении температуры среды от заданього значения он
включает электродвигатель, который обеспечивает работу вентиля на паро-
прсводе до тех пор, пока температура не примет заданного значения.
Пропорциональными (статическими) называют также
регуляторы, у которых величина перемещения регулирующего органа
пропорциональна отклонению регулируемого параметра. Это значит, что
каждому значению регулируемого параметра соответствует
определенное положение регулирующего органа. Величина перемещения
регулирующего органа при отклонении регулируемого параметра на
1 % может быть установлена заранее. Для этого пропорциональные
регуляторы снабжают устройством, называемым механизмом
пропорциональности. С помощью этого механизма может быть установлен
соответствующий предел пропорциональности — участок шкалы
регулятора в процентах от всей шкалы, на котором изменение регули-
85
руемого параметра вызывает перемещение регулирующего органа из
одного крайнего положения в другое.
В пропорциональных регуляторах имеется механизм настройки
предела пропорциональности (зоны регулирования). Настраивают
регулятор вручную, следовательно, без вмешательства человека зона
регулирования не может изменяться. Чем больше зона регулирования,
тем на меньшую величину перемещается регулирующий орган при
одном и том же изменении параметра. При регулировании объектов с
большим коэффициентом емкости и без запаздывания надо
пользоваться малым пределом пропорциональности. По мере уменьшения
коэффициента емкости и возрастания запаздывания предел
пропорциональности следует увеличивать.
Изодромные регуляторы обладают одновременно свойствами
пропорциональных и интегральных регуляторов. У изодромных
регуляторов регулирующий орган сначала принимает положение,
зависящее от величины отклонения регулируемого параметра, т. е. действует
как пропорциональный регулятор, а затем совершает дополнительное
перемещение, необходимое для ликвидации возникшего отклонения
от заданного значения, т. е. действует как астатический регулятор.
Пропорциональное действие в регуляторах практически происходит
мгновенно, изодромное — замедленно.
§ 35. УСТРОЙСТВО РЕГУЛЯТОРОВ
В состав автоматических регуляторов обычно входят следующие
элементы: чувствительный элемент (диафрагма, сопло, термопара и
др.); измерительный элемент (дифманометр, гальванометр и др.),
определяющий величину изменения регулируемого параметра;
управляющее или командное устройство (струйная трубка, мост
сопротивлений, сопло с заслонкой и др.), управляющее исполнительным
механизмом в соответствии с изменениями регулируемого параметра;
усилитель (электромагнитное реле, электронный усилитель,
распределительный золотник и др.), создающий необходимое усиление
сигнала для воздействия на исполнительный механизм путем
использования вспомогательной энергии (электрической, гидравлической);
исполнительный механизм (электропривод, мембрана, цилиндр с
поршнем и др.), перемещающий регулирующий орган; регулирующий
орган (задвижки, клапан, реостат и др.), непосредственно
осуществляющий количественное и качественное изменение потока вещества или
энергии (газа, воды, пара, электрической энергии).
Регулятор в зависимости от конструкции и назначения может
состоять из всех или только из части перечисленных элементов.
Например, может отсутствовать усилительный элемент. Вместе с тем в схему
регулятора может дополнительно входить задающее устройство,
корректирующее величину регулирующего воздействия по заданной
программе или в зависимости от изменения внешнего возмущения.
Промышленностью выпускается большое количество
автоматических регуляторов разнообразной конструкции прямого и непрямого
действия. Регуляторы прямого действия, осуществляющие регулиро-
86
рание путем использования
энергии, получаемой от
регулируемой среды, имеют
весьма ограниченную
область применения. Эти
регуляторы не способны к
переходу на дистанционное
управление регулирующим
органом, не способны
развивать значительных усилий,
а также не могут
производить сложного
регулирующего воздействия. Более
широко применяются
регуляторы непрямого действия,
использующие энергию от
постороннего источника.
Они делятся на
пневматические, гидравлические,
электрические и комбиниро-
Рис. 48. Регулятор давления прямого
действия колокольного типа
ванные (электрогидравлические и электропневматические).
В специальной литературе приводится подробное описание
различных типов регуляторов. Поэтому здесь рассматриваются только
отдельные характерные примеры устройства регуляторов.
Принцип работы регулятора прямого действия рассмотрим на
примере колокольного регулятора давления (рис. 48). В сосуде /,
заполненном минеральным маслом или водой, плавает колокол 2. Гибким
тросом 5, перекинутым через шкив 6, колокол связан с дроссельной
заслонкой 7 и грузом 5, который уравновешивает подвижную систему
регулятора. Под колокол 2 подведена импульсная трубка 3, второй
конец которой помещен в трубопровод в зону регулируемого давления.
Если регулируемое давление в трубопроводе повысится по сравнению
с заданным, то давление под'колоколом также повысится. Сила, дей-
к им
,Ь 5
ПА?
^ Масло
8
Слив
49. Гидравлические регуляторы давления
^ч Масло
'Слив
в — пропорционально-интеграль-
87
ствующая на колокол вверх, увеличится, колокол поднимется и
через шкив прикроет заслонку на трубопроводе. При этом давление
в трубопроводе после заслонки станет понижаться. Когда давление в
трубопроводе достигнет заданного значения, силы, действующие на
колокол, уравновесятся, колокол 2 прекратит свое перемещение и
заслонка остановится в новом положении, которое будет
соответствовать изменившимся условиям. При этом давление в трубопроводе
в зоне ввода трубки будет равно заданному.
Если давление в трубопроводе начнет падать, то колокол опустится
и заслонка приоткроется. Настраивают регулятор вентилем 4,
который установлен на импульсной трубке.
Гидравлические регуляторы. Перестановка регулирующих
органов в САР с гидравлическими регуляторами производится путем
использования энергии давления жидкости. Эти регуляторы отличаются
высокой чувствительностью, простотой устройства и значительной
величиной перестановочных усилий (рис. 49). Основной их частью в
большинстве случаев является струйное реле, преобразующее малые по
величине импульсы в значительные перестановочные усилия,
необходимые для перемещения регулирующего органа. Иногда для этой цели
применяют устройство в виде сопла и заслонки или в виде золотника.
В гидравлическом астатическом И-регуляторе давления со
струйной трубкой (рис. 49, а) регулируемое давление Р от датчика по
трубке 6 подводится к мембранному измерительному устройству 5.
Мембрана 7 толкателем 1 связана со струйной трубкой 2. При изменении
давления мембрана 7 с толкателем перемещает трубку к одному из сопл,
создавая разность давления в соплах 3 и рабочих полостях цилиндра 4
привода исполнительного механизма ИМ, перемещающего
регулирующий орган. Перемещение струйной трубкой в этом регуляторе зависит
только от изменения регулируемого давления Р.
Отличие пропорционального гидравлического П-регулятора
давления (рис. 49, б) от И-регулятора заключается в наличии у
П-регулятора жесткой обратной связи между струйной трубкой и поршнем
исполнительного механизма. В этом регуляторе перемещение
струйной трубки зависит от изменения регулируемого давления Р и
перемещения регулирующего органа.
Более широко применяются пропорционально-интегральные или
изодромные гидравлические ПИ-регуляторы (рис. 49, в).
В ПИ-регуляторах в отличие от П-регуляторов вместо жесткой
обратной связи имеется гибкая обратная связь, функции которой
выполняет устройство, состоящее из цилиндра 3 с поршнем 5,
пружины 6 и линии перетока с регулируемым дросселем 4.
При отклонении струйной трубки 9, например влево, вызванном
изменением регулируемого давления Р, увеличивается давление
жидкости в нижней полости цилиндра 7, соединенной трубкой с левым
соплом в корпусе струйной трубки. Поршень 8 перемещается вверх.
В результате движения поршня 8 увеличивается давление в верхней
полости цилиндра 7 и в полости А цилиндра 3, что приводит к
перемещению поршня 5 влево, так как давление в полости Б цилиндра 3
меньше. Поршень 5 через рычаг 2 обратной связи и пружину / воздей-
88
ствует на струйную трубку в направлении, противоположном
действию мембраны, перемещая трубку вправо. Движение поршня 8
при этом не прекращается. С движением поршня 5 влево пружина
разжимается и затем вновь начинает сжиматься. Поршень 5 при
сжатии пружины будет перемещаться вправо, выталкивая жидкость из
полости А в полость Б через дроссель 4 и приводя к выравниванию
давлений в обеих полостях, перемещению струйной трубки влево
и возвращению ее в положение, которое она занимала до изменения
регулируемого давления Р.
Разработаны и внедряются агрегатные унифицированные системы
(АУС) с гидравлическими регуляторами. В состав гидравлической
АУС входят регулирующие блоки, интегрирующая приставка, за-
датчик, преобразующие и измерительные блоки, исполнительные
механизмы и измерительные приборы.
На основе элементов гидравлической АУС создана гидравлическая
регулирующая колонка (блок) ГРК-1. Основной регулирующий блок
гидравлической АУС аналогичен по конструкции и принципу действия
описанному далее регулирующему блоку 4РБ-32А пневматической
АУС.
Пневматические регуляторы. Перестановка регулирующих
органов в САР с пневматическими регуляторами производится энергией
сжатого воздуха. Эти регуляторы применяют для регулирования
различных параметров — температуры, расхода, давления, уровня и др.
В качестве управляющего элемента в пневматических регуляторах
применяют сопло, прикрываемое заслонкой или шариком. Сжатый
воздух в систему «сопло-заслонка» подается через дроссель
постоянного сечения.
Схема пневматического пропорционального П-регулятора давления
типа РД представлена на рис. 50. В качестве измерительного элемента
регулятора используется мощная одновитковая трубчатая пружина
9. Пневматическая система состоит из постоянного дросселя 4 и
переменного дросселя, включающего в себя сопло 5 и заслонку 7.
Свободный конец трубчатой пружины соединен шарнирно с одним концом
заслонки, которая может поворачиваться вокруг штифта 8 как вокруг
оси. Заслонка прижимается к штифту пружиной. Воздух от
компрессора, очищенный в фильтре 1, под постоянным давлением,
поддерживаемым редуктором 2, поступает через дроссель в камеру 6. Из
сопла воздух поступает в атмосферу, а из междроссельной камеры
направляется к приводу регулирующего органа. Для измерения давления
воздуха в линии питания и на выходе из камеры 6 служат два
малогабаритных манометра 3. При изменении регулируемого давления Р
перемещается свободный конец трубчатой пружины и поворачивается
заслонка относительно штифта. Заслонка или приближается к соплу,
или удаляется от него, изменяя давление воздуха в междроссельной
камере. Это изменение пропорционально изменению регулируемого
Давления.
Пневматические регуляторы объединены в агрегатную
унифицированную систему (ПАУС). На ее базе создавались другие
агрегатные унифицированные системы регулирования, в том числе гидравли-
4 Зак. 496 89
ческая (ГАУС) и электри*
ческая (ЭАУС). В послед,
ние годы внедряется
универсальная система
элементов промышленной
пневматической автоматики
(УСЭППА).
Конструктивные
особенности и принцип действия
элементов
унифицированных агрегатных систем
рассмотрим на примере
регулирующего блока 4РБ-32А
(рис. 51). Блоки систем
АУС выполнены в виде
цилиндров, представляющих собой набор шайб, отделенных друг от
друга гибкими мембранами из резинового полотна и стянутых вместе
резьбовыми шпильками. В шайбах имеются отверстия диаметром 4 мм.
Внутренние полости шайб вместе с мембранами образуют камеры
блоков. Регулирующий блок состоит из следующих секций: усилительное
реле (камеры Л, Б> В, Г); элементы сравнения и обратной связи (ка-
Рис. 50. Пневматический
ный регулятор давления
пропорциональа)
Давление к Вынлю- f{ f{
чающему реле
Выход
Давление от
задатчика
Давление от
датчика
Давление
литания
Рис. 51. Регулирующий блок 4РБ-32А агрегатной унифицированной системы
(АУС)
а — схема; б — общий вид
90
меры Д, Еу Ж, /С); изодромное устройство (камеры Л, М, Я); за
датчик (камеры О, /7).
Сжатый воздух после редуктора подводится в камеру Л; если
между стержнем 2 и шариком 1 есть зазор, то воздух через канал стержня
поступает в камеру В, соединенную с атмосферой. Когда же стержень
коснется шарика и отожмет его вниз, то сжатый воздух поступит
в камеру Б и далее — на регулирующий клапан. В камеру Е
поступает сжатый воздух от измерительного блока (датчика), а в камеру
Д — от задающего устройства; при неравенстве давлений в камерах
Я и Ж стержень 5 меняет свое положение относительно сопла 4.
Предположим, что измеряемая величина стала меньше заданной,
тогда стержень прикроет сопло и в камере Г начнет возрастать
давление. Так как камеры Д и Г отделены жесткой перегородкой, возросшее
давление вызовет прогиб вниз мембраны 3 и перемещение полого
стержня 2, который отожмет шарик. При этом уменьшится выход воздуха
в атмосферу через канал стержня в камеру В и увеличится приток
воздуха в камеру Б, а оттуда — на регулирующий клапан и в камеры
обратной связи Д и /С.
Соотношение давления в камерах Д и К определяет обратное
перемещение стержня к соплу, т. е. имеем обратную связь. Камеры Б и Д
сообщаются и давления в них равны. В камеру К воздух непрерывно
поступает из камеры Б через регулируемый дроссель 6 и выходит из
камеры К через постоянный дроссель 9 и сопло 8 в камеру Му
сообщающуюся с атмосферой. Сечение дросселей 6 и 9 подобрано так, что,
когда дроссель 6 открыт полностью, давление в камере Л почти равно
давлению в камере Д. Эффект обратной связи незначителен и блок
работает с малым пределом пропорциональности. Когда закрывается
дроссель 5, то разность давления в камерах Л и К возрастает и
увеличивается эффект обратной связи. Пределы пропорциональности
могут настраиваться дросселем б от 10 до 250 %.
Изодромное устройство работает следующим образом: если нет
равенства давления воздуха, поступающего от измерительного блока
и задатчика, воздух из линии обратной связи через регулируемый
дроссель 10 поступает в глухую камеру М и прижимает мембрану 7 к
соплу 8. Это приводит к повышению давления в камерах Л и /С, что
вызывает приближение стержня 5jl соплу 4, т. е. имеем действие,
противоположное действию обратной связи. Настройка дросселя 10 может
изменять время изодрома от б с до бесконечности.
Камера П соединяется линией 12 с выключающим реле. При
автоматическом регулировании сопло 13 всегда полностью открыто, так
как давление в камере П равно атмосферному и мембрана 11 поднята
Давлением в камере О. При переходе на ручное управление в камеру
П подается сжатый воздух. Мембрана перекрывает сопло, к
выключающему реле воздух от регулятора не поступает и регулятор
отключается.
Принципы АУС были положены в основу создания малогабаритной
системы УСЭППА. Эта система состоит из небольшого числа
элементов (рис. 52), выпускаемых в виде законченных изделий: пневмосо-
противлений, пневмореле, пневмоусилителей и других аналогов
4* Зак. 496 91
электроаппаратуры. При помощи таких пневматических элементов
можно строить схемы комплексной автоматизации и устройств
телемеханики, а также схемы непрерывных и дискретных управляющих
устройств. Все элементы сделаны из обычных для пневмоавтоматики
Рис. 52. Унифицированная система элементов промышленной
пневмоавтоматики (УСЭППА)
а — отдельные элементы системы; б — регулирующее устройство
Рис. 53. Вторичные приборы агрегатных унифицированных систем
а —прибор ЭРЛ-29В системы АУС; / — стрелка контроля регулируемого параметра; 2 —
стрелка задатчика; 3 — рукоятка задатчика; 4 — переключатель видов управления: ручное
управление — автоматическое управление; 5 — стрелка положения исполнительного
механизма; б —прибор ПВ10-1Э системы «Старт»
92
деталей: резиновых мембран, сопл-заслонок, камер и др. Элементы
УСЭППА отличаются конструктивной простотой, малыми размерами
и высокой надежностью.
На базе элементов УСЭППА построена система приборов «Старт».
Приборы этой системы собраны из тех или других элементов УСЭППА.
Вторичные приборы системы «Старт» имеют несколько разновидностей.
Так, например, многошкальный прибор ПВ 10-1Э (рис. 53)
предназначен для непрерывной записи величины регулируемого параметра,
показания положения контрольной точки (величины задания
регулятору) и величины давления воздуха в линии к исполнительному
механизму. В прибор встроена кнопочная станция управления,
обеспечивающая возможность ручного управления и перехода на
автоматическое управление с использованием встроенного задатчика. Станция
управления позволяет также перейти на автоматическое
регулирование от специального задатчика.
Разработана новая отрасль пневмогидроавтоматики — струйная
техника, приборы которой строятся на так называемых струйных
элементах, не имеющих в отличие от описанных выше систем приборов
механических подвижных частей. Рабочей средой в приборах
струйной техники могут служить как воздух или газы (эта отрасль
струйной техники называется пневмоникой — по аналогии с электроникой),
так и жидкости. Преимущества приборов струйной техники состоят
в надежности эксплуатации, быстродействия и низкой стоимости.
Электрические регуляторы. Достоинство электрических
регуляторов состоит в простоте и удобстве использования электроэнергии и
в отсутствии ограничения расстояния между регулятором и
исполнительным механизмом.
Промышленность выпускает большое число электрических
регуляторов, различающихся по принципу действия. Среди них
значительное место занимают электронные регуляторы, автоматические мосты
и потенциометры. Эти приборы позволяют осуществить двух- или
трехпозиционное регулирование с помощью контактных устройств,
а также время-импульсное регулирование с использованием
прерывателя СИП-01.
Для непрерывного регулирования используются изодромные
регуляторы (ИР-130, ЭР, ИРМ-240, РУ4-16А, РУ4-26, РПИБ-Ш, БР-П),
пропорциональный регулятор ПР-220 и др.
Выпускаются бесконтактные электрические регуляторы (БР-П,
РПИБ, РУ-4), в которых с помощью магнитных усилителей
осуществляется непрерывная связь с электродвигателем исполнительного
механизма. Заводом «Энергоприбор» освоены бесконтактные регуляторы
типа ТЭР, которые управляют исполнительным механизмом типа ИМ-2.
Разработаны и получают внедрение электрические агрегатные
унифицированные системы УСАКР и ЭАУС-У.
Универсальная электронная агрегатная унифицированная система
автоматического регулирования и контроля ЭАУС-У представляет
собой группу приборов, с помощью которых могут быть решены мно-
гие задачи автоматического регулирования и контроля
технологических процессов. В систему входят первичные приборы, преобразова-
93
тели и вторичные приборы. К первичным приборам относятся датчики
с унифицированным выходом постоянного тока 0,5—5 мА (манометры,
дифманометры и расходомеры). Преобразователи преобразуют в
постоянный ток 0,5—5 мА выходные сигналы других датчиков (термопар,
термометров сопротивления, пневматических датчиков, датчиков
неременного тока — индукционных, трансформаторных, ферродинами-
ческих). Вторичные приборы системы делятся на две группы:
контрольные приборы (указатели, регистраторы, сигнализаторы,
интеграторы, а также устройства централизованного контроля) и
автоматические регуляторы. Регулирование в системе может осуществляться
при воздействии на один исполнительный механизм сигналов от
нескольких датчиков. Система сочетается с современными
вычислительными машинами.
Комбинированные регуляторы. В практике автоматического
регулирования технологических процессов находят применение также
комбинированные регуляторы. В этих регуляторах используются
одновременно электрическая энергия и сжатый воздух
(электропневматические регуляторы), электрическая энергия и давление рабочей
жидкости (электрогидравлические регуляторы).
В электропневматическом регуляторе типа ЭРПР-2 используются
электронная схема измерения и усиления сигнала и пневматическое
регулирующее устройство. Регулятор пригоден для регулирования
любых параметров, преобразованных в перемещение сердечника диф-
ференциально^рансформаторной схемы.
Электрогидравлический регулятор типа РЭГ работает в комплексе
с ферродинамическими измерительными приборами,
дистанционными датчиками и гидравлическим регулирующим устройством.
Регуляторы РЭГ могут применяться для регулирования расхода,
давления и соотношения двух величин.
§ 36. ОСОБЕННОСТИ РЕГУЛЯТОРОВ
Пневматические регуляторы компактны, относительно устойчивы
к низким температурам, взрыво- и пожаробезопасны. Однако они
требуют иногда громоздких исполнительных механизмов. Сложность
их устройства может снижать эксплуатационную надежность систем
автоматического регулирования.
Гидравлические регуляторы более надежны в эксплуатационных
условиях ввиду простоты и доступности в обслуживании отдельных
узлов и работе их с исполнительными механизмами, обладающими
малыми скоростями. К недостаткам гидравлических регуляторов относятся
ограничение расстояния между регулятором и исполнительным
механизмом. Этого недостатка нет у электрических регуляторов.
Комбинированные регуляторы позволяют объединить в ряде
случаев достоинства и устранить некоторые недостатки отдельных типов
регуляторов.
При выборе регуляторов основными показателями являются:
конструктивные — сложность, подверженность коррозии, взры-
во- и пожаробезопасность;
94
эксплуатационные — надежность и долговечность, точность,
дальность и быстрота действия, возможность получения больших усилий,
обеспечение плавности хода исполнительных органов;
экономические — стоимость, расход энергии и эксплуатационные
расходы, коэффициент полезного действия.
При выборе типа регулятора следует всесторонне учитывать
статические и динамические свойства объекта регулирования.
Двухпозиционные регуляторы применяют в объектах без
значительного запаздывания, обладающих большой емкостью, и при постоянной
или мало изменяющейся нагрузке.
Пропорциональные регуляторы могут применяться в объектах с
меньшей емкостью, с небольшим запаздыванием и при малых
изменениях нагрузки. Для пропорциональных регуляторов увеличение
емкости объекта благоприятно влияет на качество регулирования,
однако при этом следует уменьшить пределы пропорциональности.
При наличии большего запаздывания надо увеличить пределы
пропорциональности. Чем больше скорость перемещения регулирующего
органа, тем выше устойчивость САР и достигается более высокое
качество процесса регулирования. Чем меньше предел
пропорциональности, тем больше амплитуда затухающих колебаний и больше
время переходного процесса, но остаточное отклонение
регулируемого параметра становится меньше.
Астатические регуляторы можно применять только в объектах о
самовыравниванием, обладающих как малой, так и большой емкостью,
с небольшим запаздыванием и при медленных изменениях нагрузки.
РАЗДЕЛ V. ОСНОВЫ ТЕЛЕМЕХАНИКИ
ГЛАВА XV. СИСТЕМЫ ТЕЛЕМЕХАНИКИ
§ 37. ФУНКЦИИ И СТРУКТУРА
СИСТЕМ ТЕЛЕМЕХАНИКИ
Дистанционное управление механизмами осуществляется на
расстоянии десятков или сотен метров. Так, например, с помощью
магнитного пускателя включается приводной электродвигатель насоса.
С увеличением расстояния переходят к использованию средств
телемеханики, позволяющих по малому числу линий связи передавать
большое число команд.
Телемеханика — это область техники, охватывающая теорию и
практику устройств передачи информации и управления на
расстоянии. В ряде случаев телемеханические системы дополняют системы
Дистанционного и автоматического управления и совместно решают
общую задачу контроля и управления производственными объектами.
Системы телемеханики выполняют следующие функции:
телеизмерение (ТИ), телеуправление (ТУ), телесигнализацию (ТС).
95
Телеизмерение осуществляется с помощью систем ближнего
действия (на расстояниях до 15 км) и систем дальнего действия (на
расстояниях до сотен километров). В системах ближнего действия,
основанных на методе интенсивности, контролируемая величина
преобразуется в соответствующее значение силы тока или напряжения,
передаваемое по линии связи. В системах дальнего действия
контролируемая величина передается в виде импульсов постоянного тока или
изменяющейся частоты переменного тока.
Телеуправление и телесигнализация осуществляются
многоканальными системами ближнего действия или системами дальнего
действия с малым числом каналов связи.
В системах телеуправления и телесигнализации используются
одинаковые способы передачи сигналов и, как правило, одни и те же
устройства, при этом сигналы управления и известительные сигналы
зашифровываются на диспетчерском пункте при помощи
специальных шифраторов и поступают в передатчик, который посылает в
линию связи импульсы электрического тока определенного вида (код).
Эти импульсы на приемном пункте воспринимаются специальным
приемным устройством и расшифровываются дешифратором, который
передает полученный сигнал в схему управления тем или иным механизмом.
Обязательным условием реализации телеуправления или
телесигнализации является использование для передачи сигналов качественно
отличных признаков тока, т. е. импульсы определенного вида
воспринимаются только соответственно построенными приемными реле.
В системах телеуправления и телесигнализации используются
следующие качественные признаки импульсов тока: полярность тока,
амплитуда тока, продолжительность импульса тока, частота
переменного тока.
§ 38. ОБЛАСТИ ПРИМЕНЕНИЯ СИСТЕМ ТЕЛЕМЕХАНИКИ
В системах водоснабжения и канализации системы телеизмерения
применяют для передачи значений параметров, характеризующих
технологический режим работы, на соответствующий диспетчерский пункт.
К таким параметрам относятся: расходы воды, подаваемой
насосными станциями или отдельными насосными агрегатами, расходы воды,
подаваемой по водоводам и магистральным сетям; давление,
развиваемое отдельными насосными агрегатами и станциями в целом;
давление в основных точках сети, характеризующее ее состояние;
уровень воды в резервуарах, определяющий запас воды и режим
работы станций; сила тока в цепях приводных электродвигателей,
характеризующая нагрузку насосов; напряжение в электрической сети,
определяющее режим работы электрооборудования и др.
Системы телеуправления используют для пуска и остановки на
расстоянии (из диспетчерского пункта) насосных агрегатов,
включения и отключения соответствующих коммутационных устройств
электросети, закрытия, открытия и регулирования степени открытия
задвижек, включения и отключения воздуходувок, дробилок и др.
Возможность осуществления этих операций на расстоянии позволяет
диспетчеру без помощи дежурного персонала сооружений быстро вводить
96
Е действие или выводить из работы соответствующие агрегаты, когда
этого требует технологический режим работы в условиях нормальной
эксплуатации. Кроме того, в аварийных ситуациях средства
телеуправления позволяют диспетчеру быстро производить необходимые
переключения с целью локализации аварии.
Телесигнализация используется для автоматической передачи из-
вестительных сигналов о состоянии насосных агрегатов, задвижек,
фильтров, дробилок и других агрегатов сооружений. На
мнемонической схеме, воспроизведенной на щите диспетчерского пункта,
непрерывно указывается состояние оборудования и сооружений в целом,
а также любое изменение положения агрегатов или величин
параметров как в процессе нормальной эксплуатации, так и при авариях.
Это позволяет диспетчеру свободно ориентироваться при
производстве оперативных переключений, особенно во время аварий, не прибегая
к телефонным переговорам с персоналом станций.
ГЛАВА XVI. УСТРОЙСТВО СИСТЕМ ТЕЛЕМЕХАНИКИ
§ 39. МЕТОДЫ И СХЕМЫ ТЕЛЕИЗМЕРЕНИЯ
Сущность телеизмерения состоит в том, что измеряемая величина
преобразуется до ее передачи в другую величину, удобную для
передачи без искажений на расстояние. На диспетчерском пункте
происходит процесс обратного преобразования полученного сигнала в
измеряемую величину. Поэтому отличие одного метода телеизмерения
от другого и состоит, главным образом, в способе преобразования
сигналов при их передаче.
В системах ближнего действия для передачи сигналов на небольшие
расстояния применяется метод интенсивности, при котором измеряемая
величина передается путем изменения интенсивности тока или
напряжения в канале связи. Для уменьшения потери энергии в линии
передача сигналов осуществляется с малыми значениями силы тока и
напряжения. Передачу удобнее вести на постоянном токе, так как
в этом случае не будут сказываться на уровне сигнала такие
параметры линии, как индуктивность и емкость проводов.
В системах дальнего действия используются методы импульсной
и частотной передачи сигнала, при которых измеряемая величина
преобразуется в импульсы постоянного тока или в переменный ток
меняющейся частоты. Благодаря этому изменения сигнала, вносимые каналом
связи, не искажают существенно величины измеряемого параметра.
Для увеличения количества передаваемых сигналов
электрического тока применяют несколько способов их модуляции (рис. 54).
Выбор того или другого способа модуляции сигнала производят с учетом
степени сложности преобразования сигнала и условий передачи его
на расстояние.
Рассмотрим в качестве примера две схемы телеизмерения (ТИ)
ближнего и дальнего действия.
Телеизмерительная схема интенсивности тока ближнего действия
с реостатным датчиком Д (рис. 55) основана на использовании переме-
97
Модуляция
сигнала
Типы
сигналов
ТокоЗые
LMUH
AS то регул г-
Ампои-
шудная
Потенцизметри
ческие
Логометричес-
кие
(дЗухпроЫные)
1111 ■' 1 л.
/TVfi I' 11 г т ?
'+/
1мамс
"макс
Г'мс
'мак,
Частотные
/ПУ /П\
Частотная
- /
'мин
f макс
Частотно-
импульсные
f мин
импульсные
Временная
Фаго-
импульсные
I ^ T
Лого-
иипульсные
11
Mil
шпини
trn
icp
*макс
Числовая
Число -
импульсные
+1 +4
H'+5-5*0i
402
+201 N=+201-101=100
fUl t
-5
ШГШГ
-51 -52
ШГ
-tot
Kodo-
импульсные
- 0 0 0 0 0
1 ЖТТ\
О МО О
1 2 4 8 16 3? t 2 4 8 16 32 t 2 ^ 8 16 32
Рис 54. Диаграмма способов модуляции сигналов телеизмерения
щения ползунка П реостата R измерительным прибором И
одновременно со стрелкой на угол аи. Изменения тока в линии связи ЛС,
пропорциональные измеряемой величине, фиксируются вторичным
прибором ВП. Для снижения влияния изменения сопротивления
линии связи ЛС включается балластное сопротивление /?б,
значительно превышающее сопротивление проводов. Кроме того, в качестве
вторичного прибора вместо обычного гальванометра применяют лого-
метр. Показания логометра, имеющего две поворотные рамки в
измерительной схеме, зависят от отношения токов в его рамках, а не не-
98
Рис 55. Схема телеизмерения с реостат- рис. 56. Время-импульсная схема
ным датчиком телеизмерения
посредственно от величины тока. Однако при использовании логометра
в качестве канала связи необходима трехпроводная линия.
Ввиду того что для передвижения ползунка П реостата R
необходимо относительно большое усилие, то эта схема чаще применяется
при телеизмерении расхода, давления или уровня, так как
измерительные приборы, контролирующие данные параметры, развивают
значительные вращающие моменты.
Время-импульсные схемы телеизмерения дальнего действия
основаны на посылке сигналов в виде импульсов определенной
продолжительности или на использовании пауз разной продолжительности
между двумя импульсами (рис. 56).
Передающее устройство ПУ представляет собой синхронный
двигатель /, на вал 2 которого насажены два медных полукольца 3,
изолированных между собой и от вала. К полукольцам 3 прикасаются две
металлические или графитовые щетки: одна из них 4 неподвижна,
а другая 5 имеет кинематическую связь с измерительным прибором ИЭ.
К щеткам подключается линией связи ЛС реле Р приемного устройства
УП> использующего миллиамперметр ПП магнитоэлектрической
системы.
В процессе работы синхронный двигатель непрерывно вращается
с постоянной скоростью. Когда щетка 5 находится в одной плоскости
с щеткой 4 (как показано на рис. 56), вращающиеся полукольца 3
не могут замкнуть цепь питания линии связи ЛС от сети с
напряжением Ux; линия связи обесточена. С отклонением измеряемого параметра
щетка 5 перемещается по полукольцу 3 к щетке 4. В связи с этим
в линию связи ЛС посылаются импульсы продолжительностью,
пропорциональной степени перемещения щетки 5 или величине
измеряемого параметра.
В приемном устройстве УП реле Р при замыкании своих
контактов К посылает к прибору ПП импульсы тока напряжением U2 такой
же продолжительности, как и импульсы в линии связи ЛС. Шкала
прибора, измеряющего среднее значение импульсов тока,
градуируется в единицах измеряемой величины.
Сопротивление R устройства УП ограничивает ток в цепи
миллиамперметра ПП, а конденсатор С является фильтром.
Существует много других схем телеизмерения на основе
показанных на рис. 54 способов модуляции сигнала.
99
§ 40. МЕТОДЫ И СХЕМЫ
ТЕЛЕУПРАВЛЕНИЯ И ТЕЛЕСИГНАЛИЗАЦИИ
Учитывая, что практически невозможно осуществить управление
объектами без контроля их состояния, функции телеуправления и
телесигнализации выполняются общими средствами телемеханики.
Схемы телеуправления и телесигнализации (ТУ-ТС) отличаются
главным образом по методу избирания в приеме и расшифровке
сигнала. Сигналы передаются параллельно и последовательно во времени.
К первому способу относятся схемы с качественным и
комбинационным методами избирания, ко второму — с распределительным и
комбинационно-распределительным методами.
а)
лс
Рис. 57. Принципиальные схемы устройств телеуправления
1—6 — органы управления; / — VI — исполнительные органы
100
В зависимости от принятых методов избирания различают
многопроводные и малопроводные схемы ТУ-ТС. Кроме того, по виду
раздельной передачи сигналов или принятому методу избирания и
устройству линий связи эти схемы можно разделить на три группы.
Многопроводные схемы ТУ-ТС с разделением сигналов (рис. 57, а)
обычно применяют при сравнительно небольших расстояниях между
диспетчерским пунктом и объектом управления.
При наличии п самостоятельных проводов (кроме общего провода
питания) при многопроводной линии связи можно передать сигналы
где К — число импульсных признаков; обычно /С=2-т-4.
В многопроводных схемах все импульсы могут передаваться
одновременно, так как для каждого импульса используется отдельный
канал (провод). Для разделения импульсов управления и
сигнализации применяется амплитудный признак, при котором ток импульса
управления в несколько раз превышает ток импульса сигнализации.
Малопроводные схемы ТУ-ТС с частотным разделением сигналов
(рис. 57, б) передают различные сигналы по одной линии связи (ЛС)
за счет использования импульсов тока разной частоты /а .., fd. В
передающей части этих схем имеется генератор синусоидальных
колебаний разной частоты, а в приемной части сигналы разделяются с
помощью полосовых фильтров. Иногда для увеличения числа
передаваемых сигналов вводят передачу каждого сигнала на двух частотах с
соответствующей их комбинацией.
Малопроводные схемы ТУ-ТС с временным разделением сигналов
(рис. 57, в) передают различные сигналы по одной линии связи в виде
поочередной посылки импульсов тока с помощью распределителей.
В качестве распределителей Рг и Р2 используются переключатели,
приводимые в действие электродвигателями, электромагнитные шаговые
реле и катодные переключатели. Два синхронно работающих
распределителя Рг и Р2 одновременно подключают линию связи к
соответствующим передающему и приемному устройствам схемы.
§ 41. ПРОМЫШЛЕННЫЕ СИСТЕМЫ ТЕЛЕМЕХАНИКИ
В настоящее время промышленность выпускает целый ряд
унифицированных систем телемеханики для различных объектов.
В водопроводно-канализационной практике получили применение
телемеханические системы БТЦ, выпускаемые Орловским заводом
приборов и основанные на распределительном методе избирания.
Завод «Электропульт» (Ленинград) выпускает несколько
модификаций системы типа УТБ. Время-импульсная система УТБ-55 может
быть использована при различном расположении объектов
(последовательном, радиальном) по отношению к диспетчерскому пункту.
Этим же заводом выпускается бесконтактная система типа ТМЭ-1
с временным разделением сигналов. Различными модификациями
этой системы могут обслуживаться 5—40 объектов управления,
14—40 объектов сигнализации и 6— 28 объектов измерения.
Основными блоками аппаратуры системы являются распределители на
101
магнитных элементах,
которые поочередно синхронно и
синфазно подключают к
линии связи электрические
схемы на диспетчерском пункте
управления и
контролируемых пунктах. Защита от
исполнения' ложных команд,
введенная в систему,
обеспечивает ее высокую надеж-
Рис. 58. Схема телеуровнемера ТУ-З-АКХ ность.
Система типа ЧТП
выпускается для телемеханизации размещенных по большой площади
скважин. Она позволяет передавать с диспетчерского пункта
управления на отдельные скважины несколько команд управления;
получать аварийные сигналы и сигналы, подтверждающие
выполнение команд; осуществлять телеизмерение по вызову и
двустороннюю телефонную связь с каждой скважиной. Система основана на
частотном избирании контролируемого пункта путем одноимпульсной
посылки с диспетчерского пункта управления напряжения
фиксированной частоты, индивидуальной для каждого контролируемого пункта
(скважины). Система ЧТП рассчитана на подключение к
диспетчерскому пункту управления до восьми, кустов контролируемых пунктов.
К каждому кусту в свою очередь может подключаться до 24 скважин.
Для управления ирригационными сооружениями создана система
типа ТЧР-61. Она позволяет осуществлять многопозиционное
телеуправление, циклическое или по вызову телеизмерение,
телесигнализацию и двустороннюю телефонную связь на расстоянии до 75 км
при подключении к общей линии связи до 50 контролируемых пунктов.
В этой системе используется двухчастотный код с последовательной
посылкой импульсов каждой из частот для выбора контролируемого
пункта. Многопозиционное телеуправление осуществляется частотно-
импульсным методом передачи сигналов.
Кроме указанных выше выпускаются и другие системы
телемеханики (УТМ, БЧСИ, БТФ, ТРТ) общепромышленного и специального
назначения.
Заводом «Коммунальник» выпускается разработанная в АКХ
система телеизмерения уровня воды в резервуарах и открытых
водоемах типа ТУ-З-АКХ (рис. 58). Система основана на использовании
метода интенсивности напряжения. В систему входят: реостатный
датчик Rn с чувствительным элементом ЧЭ, состоящим из сильфона
и цилиндрической пружины; электрический блок питания, состоящий
из трансформатора, выпрямителя В и регулируемого сопротивления
Яд; вторичный прибор ВПУ показывающий или самопишущий со
шкалой в м вод. ст. На линии связи установлено балластное
сопротивление Rq.
Действие датчика Ru основано на измерении перемещения
чувствительного элемента ЧЭ и преобразовании его в электрическую вели-
102
чину. Телеуровнемер может быть установлен непосредственно в
резервуаре. При замене вторичного измерительного прибора ВП
регулятором система может управлять насосными агрегатами.
РАЗДЕЛ VI. АВТОМАТИЗАЦИЯ ВОДОПРОВОДНО-
КАНАЛИЗАЦИОННЫХ СООРУЖЕНИЙ
ГЛАВА XVII. АВТОМАТИЗАЦИЯ
НАСОСНЫХ СТАНЦИЙ
§ 42. ОСНОВНЫЕ СХЕМЫ АВТОМАТИЗАЦИИ
Насосные станции по оборудованию и протекающим в них
технологическим процессам сравнительно легко поддаются автоматизации.
На насосных станциях процессы, связанные с пуском, остановкой
и контролем за состоянием насосно-силового оборудования,
осуществляются в строго установленной последовательности автоматически,
без постоянного участия человека.
Операции, которые выполняются на насосных станциях
автоматически, следующие: пуск и остановка агрегатов с возможной
выдержкой времени как перед пуском после получения импульса управления,
так и между отдельными операциями; включение одного или
нескольких насосных агрегатов в установленной последовательности, причем
это включение может быть произведено на полное напряжение сети
(прямой пуск) или на пониженное напряжение с последующим
включением на полное напряжение после установленной выдержки
времени (ступенчатый пуск); создание и поддержание необходимого
разрежения во всасывающем трубопроводе и насосе перед пуском, если
он не находится под заливом; открытие и закрытие задвижек на
трубопроводах в определенном порядке при пуске и остановке насосов;
контроль за выполнением установленного режима при пуске, работе
и остановке насосов, отключение работающего насоса при нарушении
режима его работы и включение резервного насоса; передача сигналов
о работе насосных агрегатов и аварийных ситуациях на диспетчерский
пункт; защита насосных агрегатов при перегреве подшипников,
вследствие работы насоса без залива, при перегрузке приводного
электродвигателя и т. п.; отопление и вентиляция станций, а также их
охрана от проникания посторонних лиц; включение и отключение
дренажных насосов.
Наряду с этим на насосных станциях может производиться
автоматическое регулирование напора и производительности насосных
агрегатов. Оно осуществляется либо на входе воды в насос или на
выходе из него путем дросселирования задвижками на
соответствующих трубопроводах, либо изменением скорости вращения насоса.
Осуществляется контроль за давлением воды во всасывающей
и напорной линиях насосов, температурой подшипников и сальни-
103
ков, наличием напряжения на вводных шинах насосной станции и
на шинах щита автоматического управления, а также защита
насосных агрегатов от короткого замыкания, перегрузки и т. п. При
появлении перечисленных недопустимых отклонений срабатывает
реле защиты, выключая агрегаты из работы. Последующее
включение агрегатов в работу возможно лишь после устранения неполадок.
Сигналы на включение и остановку насосных агрегатов при
автоматическом управлении подаются с помощью реле уровня, например,
Регулирование
подачи
насосоВ
Автоматическое
управление
насосной станцией
Управление
пожарными
насосами
Управление
дренажными
насосами
Управление
отоплением и
Вентиляцией
Автоматическая
сигнализация
Управление
электродвигателями
насосоВ
Автомати w «
ческая Ь Управление
защита ) \ заливом
насосов
напорной
задвижкой
Рабочего
состояния
агрегатов
Технологе
ческая
Электрооборудовании
По уровню В
резервуаре
По давлению
в сети
По расхода
Ъды у
От реле
времени
Основных
параметров
при
коротком
замыкании
Технологических
Давление в
вакуум -
котле
Электрических
Силы тока
электродвигателей
Напряжения
в сети
При перегруз
ке
электродвигателей
При падении
напряжения
Уровня Воды по
жарного запаса
Расхода
ды
хм
?аВление
напорных
При пере
греВе под
шипни -
коВ на
сособ
Вакуум-
насоса
Вакуум -
котла
При
заклинивании задвижки
- Байпаса
Уровня воды В
резервуаре
или скважине
Максимальным
токовым реле
Муттой
предельного
момента
Рис. 59. Схема автоматизации управления насосной станцией
104
установленного над баком водонапорного сооружения или резервуара,
или реле давления, установленного в характерных точках сети.
Полученный от реле сигнал обеспечивает необходимые переключения в
схемах управления и сигнализации, вследствие чего включаются
насосные агрегаты в определенной последовательности.
На рис. 59 в виде схемы показаны основные процессы,
автоматизируемые на насосных станциях, даны возможные варианты
автоматического включения насосов и осуществления их залива перед
пуском в работу.
Наиболее широко применяются гидромеханические схемы,
автоматический пуск насоса в которых осуществляется либо без
предварительного (перед пуском) залива корпуса центробежного насоса,
либо с предварительным заливом насоса от напорного патрубка,
либо с предварительным заливом насоса с помощью вакуум-установки,
Каждая схема может быть реализована при открытой или
закрытой напорной задвижке. Таким образом, могут быть применены шесть
гидромеханических схем пуска насосов.
Пуск насосов с открытой напорной задвижкой наиболее легко
осуществим при следующих условиях: при малой производительности
насосов, имеющих резерв мощности приводного электродвигателя,
достаточный для компенсации перегрузки, которая возникает при
пуске с открытой задвижкой; при работе насосов на напорные
трубопроводы небольшой протяженности; при установке на напорном
трубопроводе противоударных устройств. Пуск насосов с открытой за-
движкой упрощает и удешевляет систему автоматического управления,
§ 43. АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ
НАСОСАМИ ВОДОСНАБЖЕНИЯ
Серийный выпуск типовых станций автоматического управления
насосами в значительной мере облегчает проектирование,
комплектацию необходимого оборудования, монтаж и эксплуатацию насосных
станций.
Харьковский электромеханический завод выпускает около 20
модификаций унифицированных станций автоматического управления
типа ПЭХ, предназначенных для автоматизации насосных агрегатов
с различными типами электродвигателей (низковольтными и
высоковольтными, асинхронными с короткозамкнутым ротором и
синхронными с глухоподключенным возбудителем), для автоматизации
артезианских насосов, вакуум-насосов и насосов общего назначения.
Кроме того, данный завод выпускает блоки выбора очередности
пуска и резервирования насосов ПЭХ-9011-00А2, предназначенные
Для автоматизации насосных станций, состоящих из четырех
агрегатов. Станциями ПЭХ автоматизируется пуск насосов с открытой
напорной задвижкой. Релейно-контактной схемой станции ПЭХ
обеспечивается как пуск и остановка насоса, так и необходимые виды за-
1Циты и аварийного отключения. С помощью универсального
переключателя станция включается на ручное или автоматическое
управление.
105
Орловский завод приборов выпускает станции автоматического
управления насосными агрегатами СУНО.
Станция СУНО-1 предназначена для автоматизации насосных
агрегатов с низковольтным приводным электродвигателем мощностью
20—55 кВт с короткозамкнутым ротором, пускаемым от полного
напряжения сети. Эта станция обеспечивает: местное, автоматическое
или телеуправление; пуск и остановку залитого насоса при постоянно
открытой задвижке на его напорной линии; контроль за работой
насоса при помощи струйного реле, контактного манометра или реле
давления; контроль за наличием напряжения в цепях управления и
цепи питания электродвигателя; включение в работу насосного
агрегата после кратковременного исчезновения напряжения питания
(4—5 с); подачу сигнала при аварийном отключении насоса с
блокировкой, предотвращающей повторный пуск насоса до ликвидации
аварии.
Станция СУНО-2 предназначена для автоматизации насосных
агрегатов с приводными электродвигателями мощностью 55—125 кВт
и отличается от станции СУНО-1 лишь введением в схему управления
дополнительного реле контроля залива насоса от напорного
трубопровода.
Станция СУНО-3 предназначена для автоматизации насосных
агрегатов с низковольтным асинхронным приводным
электродвигателем с фазовым или короткозамкнутым ротором мощностью 125—
250 кВт. Эта станция обеспечивает: местное, автоматическое
управление или телеуправление; прямой пуск электродвигателей с коротко-
замкнутым ротором и пуск на пониженное напряжение от сети с
использованием реостата в цепи статора при постоянно замкнутых
кольцах электродвигателей с фазовым ротором; пуск и остановку
насоса с напорной задвижкой, оборудованной электроприводом;
пуск насоса с предварительным заливом от групповой вакуумной
установки; пуск приводного электродвигателя после окончания
залива насоса и остановку электродвигателя после полного закрытия
напорной задвижки; контроль за нагревом подшипника, а также
операции, выполняемые станцией СУНО-1.
Для повышения напора в водопроводной сети микрорайонов или
отдельных зданий в НИИ сантехники разработаны типовые схемы
автоматизации для насосных установок без регулирующей емкости:
АНУ-7, АНУ-8 и АНУ-9. Станции управляют насосами с помощью
реле давления.
§ 44. АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ
КАНАЛИЗАЦИОННЫМИ НАСОСНЫМИ СТАНЦИЯМИ
Основным назначением системы автоматического управления
канализационными насосными станциями является поддержание в
заданных пределах уровня жидкости в приемном резервуаре станции.
Использование поплавковых реле в качестве датчика для контроля
уровня жидкости на этих станциях, как показал опыт эксплуатации
ряда автоматизированных насосных станций, выявило целый ряд
106
I
if
К
у
t
1
1
UiL
If
т
Л 9
Рис. 60. Электродные датчики уровня
а — со стержневыми электродами; б — с кольцевыми
электродами
недостатков датчика этого типа
(заиливалась труба, в которой передвигался
поплавок, ненадежно работали ртутные контакты,
повреждались механические связи). В
настоящее время на канализационных
насосных станциях внедряются электродные
датчики уровня жидкости, например
ЭРСУ-2 (см. § 23) и др.
Конструкции электродных датчиков.
Датчики электродных сигнализаторов
уровня жидкостей, принцип действия которых
основан на электроконтактном методе
измерения, по конструктивному, выполнению и
способу установки на контролируемой
емкости, а также в зависимости от агрессивности измеряемой среды
имеют много различных вариантов исполнения. Ниже приведено
описание некоторых применяемых конструкций датчиков, широко
используемых при автоматизации насосных станций.
Датчик со стержневыми электродами (рис. 60, а) представляет
собой стальную наружную защитную трубу 11 диаметром 80 мм
с расположенными внутри нее четырьмя электродами 2 диаметром
6 мм, изготовленными из нержавеющей стали, меди или латуни.
Электроды с одной стороны укреплены на изоляторах 4, которые
установлены на наружной шайбе 6 из органического стекла. Для устра-
107
нения касания электродов друг с другом со стороны незакрепленных
концов смонтированы две внутренние изоляционные шайбы 9 из
органического стекла. Внутренние шайбы расположены в верхней и
нижней частях электродов и закрепляются винтами 10. Шайбы 9 имеют
дополнительные отверстия, которые обеспечивают быстрое вытекание
воды из внутреннего пространства трубы датчика при опускании
уровня жидкости.
Труба является защитной, предохраняет электроды от
механических повреждений и случайного прикосновения персонала. Она
выполняет роль нулевого электрода, поэтому надежно заземляется;
труба с нижнего торца закрывается днищем 12 с отверстиями для
прохода воды.
При использовании датчика для загрязненных вод на защитную
трубу надевают предохранительную металлическую сетку (на
рис. 60, а не показана).
К электродам с помощью резьбовых соединений 5 присоединяют
контактные провода для подключения их к аппаратуре
автоматического управления и регулирования. Труба сверху имеет фланец 8,
который служит основанием для крышки 7, изготовляемый из
стальной трубы диаметром 90 мм. Крышка защищает верхнюю часть
электродов с присоединенными к ним проводами и имеет с фланцем 8
разъемное соединение, выполненное с помощью трех уголков и
винтов 3. Длину электродов определяют в зависимости от требуемой
высоты контролируемых уровней и места установки датчика, при этом
длина трубы принята такой, что конец более длинного электрода
находится на расстоянии 200 мм от днища. При длине электродов
до 1500 мм достаточна одна внутренняя изоляционная шайба.
Конструкция датчика дает возможность регулировать длину электродов
в диапазоне до 200 мм; в этом случае крышка выполняется высотой
до 300 мм. Датчик устанавливается на стене резервуара с помощью
стальных штырей 1 диаметром 20 мм или на перекрытии резервуара
через трубу и имеющийся на ней фланец (установка на перекрытии
на рис. 60, а не показана).
Описанный датчик позволяет контролировать до четырех уровней
жидкости (соответственно количеству имеющихся электродов); если
необходима сигнализация о меньшем числе уровней, то оставшиеся
электроды становятся резервными или их демонтируют, что не влияет
на конструкцию датчика.
Датчик с кольцевыми электродами (рис. 60, б) отличается компакт-
ностью и возможностью контроля большего числа уровней. В
наружную защитную трубу 8 диаметром 40 мм вставлен изоляционный
стержень 9 из органического стекла или эбонита, закрепленный при
помощи втулки 5. На стержень устанавливают плоские бронзовые
кольца 10 высотой 10 мм, которые служат электродами датчика.
Электроды закрепляют на стержне винтами 2, входящими в канавку
прямоугольного сечения, которая проходит по образующей стержня на
всей его длине. Защитная труба снизу закрывается кольцом —
направляющей 12, причем через круглое отверстие в кольце проходит
стержень, а сверху труба защищена крышкой 4. Крышка посредством
108
четырех ребер соединяется с фигурной втулкой б, которая служит
для закрепления верхнего конца стержня. Во избежание изгиба
стержня в среднюю часть его вставляется шпилька 11, предотвращающая
смещение стержня с осевой линии защитной трубы и закрепляется
двумя шплинтами 1. Крышка имеет фланец прямоугольной формы,
к которому присоединяется угловой штепсельный герметический
разъем 5. С помощью разъема провода подключаются к электродам
датчика. Для установки датчика уровней на стенке резервуара к
наружной трубе приваривают два стальных крюка 7, а на стенке
резервуара устанавливают два кронштейна в виде скобы. Внедрены и
разработаны также варианты установки датчика на металлических,
железобетонных и деревянных резервуарах.
Конструкция датчика позволяет устанавливать длину
изоляционного стержня и наружной защитной трубы, а также число колец-
электродов в зависимости от условий применения. Преимущество
датчика заключается в том, что с увеличением числа электродов нет
необходимости увеличивать диаметр наружной трубы. Для контроля
любой отметки уровней жидкости электроды регулируются простым
способом — кольца смещаются вдоль оси изоляционного стержня
до требуемой высоты уровня и закрепляются на стержне винтом.
Датчик не занимает большого объема резервуара, так как диаметр
наружной трубы сравнительно невелик.
Существует целый ряд других конструктивных решений датчиков
электродных сигнализаторов уровня.
Схемы включения электродных датчиков. В большинстве случаев
в приборах автоматического измерения и контроля уровня сточной
воды датчики непосредственно подключаются к релейным блокам.
В этом случае схемы автоматизации с применением электродных
сигнализаторов характеризуются различными величинами
напряжения, подаваемого на электроды.
Преимуществом ранее описанной схемы (см. рис. 24) является
простота и незначительная величина напряжения, подаваемого на
электроды. Однако описанная схема не всегда может обеспечить
надежную работу датчика при относительно низкой величине
напряжения питания, которая возникает при резком повышении
сопротивления цепи электродов вследствие их коррозии и загрязнения. В
некоторых случаях из-за низкой электропроводности контролируемой
жидкости постепенно увеличивается сопротивление цепи: электрод —
вода — корпус защитной трубы. Увеличение сопротивления вызывает
недопустимую потерю напряжения в цепях промежуточных реле
схемы управления. Указанный недостаток при увеличении
напряжения, подаваемого на электроды, до 220 В переменного тока не
оказывает существенного влияния на работу датчика.
Следовательно, применение схемы включения электродных
сигнализаторов на напряжение 12—48 В постоянного тока целесообразно
при относительно чистой и неагрессивной контролируемой жидкости.
В соответствии с требованиями техники безопасности применять
высокое напряжение (£/пит«220 В) в схемах включения электродных
сигнализаторов без специальных защитных устройств запрещено.
109
Устойчивая и безопасная работа электродных сигнализаторов
уровня жидкостей с различными величинами электропроводности
достигается с помощью следующих усилительных устройств:
электронных ламп и полупроводниковых триодов (транзисторов),
обладающих высоким коэффициентом усиления и имеющих весьма низкие
потенциалы входных цепей.
Усилители, применяемые для электродных датчиков, весьма
разнообразны. Они разработаны на основе электронных ламп,
магнитных сердечников и полупроводниковых приборов. Однако
ограниченный срок службы вакуумных электронных ламп (несколько сотен
часов), неспособность выдерживать тряску, удары, перегрузки
заставляют использовать усилители, построенные на
полупроводниковых триодах. Транзисторы имеют существенные преимущества по
сравнению с электронными лампами: неограниченный срок службы,
высокая механическая прочность, большой КПД, отсутствие
потребления мощности на накал, меньшие габариты и вес, работа при
низких напряжениях питания и др.
Схемы усилителей с использованием полупроводниковых триодов
оказались более надежными, экономичными и достаточно простыми.
Усилители выполняются одно- и многокаскадными.
Многокаскадные дают значительно большее усиление, чем однокаскадные, и
применяются при значительной интенсивности загрязнения электродов.
Однако в электродных датчиках многокаскадные усилители
практически применяют мало. Принцип действия многокаскадных усилителей
основан на усилении постоянного тока при соприкосновении
электродов с контролируемой жидкостью. При большом коэффициенте
усиления в схеме усилителя увеличиваются собственные шумы
полупроводниковых триодов и неустойчивость работы усилителя. Значительным
недостатком усилителей постоянного тока является изменение
напряжения на выходе усилителя при постоянном и даже нулевом
входном сигнале — так называемый дрейф нуля. Это вызывается
тепловыми шумами и зависимостью параметров транзисторов от изменения
температуры окружающей среды. В подобных усилителях выходной
ток изменяется на ±100 % при изменении температуры на ±20 °С.
Этот недостаток можно устранить несколькими способами
температурной компенсации и стабилизацией работы усилителей постоянного
тока: введением отрицательной обратной связи, правильным выбором
чередования схем включения транзисторов в каскадах усилителя,
введением пассивных элементов с температурно-зависимым
сопротивлением и применением в усилителе триодов с различными типами
проводимости. Стабилизация связана с индивидуальным подбором
образцов приборов или компенсирующих сопротивлений, что значительно
осложняет эксплуатацию многокаскадных усилителей постоянного
тока. Электродный датчик с таким усилителем работает нечетко,
а его выходные реле, управляющие работой насосных агрегатов,
часто «залипают». Хорошие результаты получены при использовании
различных ключевых схем на транзисторах, которые оказались
достаточно простыми и устойчиво работающими.
На рис. 61 приведена одна из схем с использованием работы по-
по
лупроводниковых триодов в
«ключевом» режиме —
транзистор находится или в состоянии
насыщения (напряжение между
коллектором и базой или
эмиттером примерно равно нулю),
или в состоянии отсечки (ток
коллектора равен нулю), а
переход из одного состояния в другое
осуществляется достаточно
быстро. Схема обеспечивает
возможность контроля верхнего и
нижнего уровней жидкости в
резервуаре и позволяет создавать
разнообразные варианты схем
автоматического двухпозицион-
пого регулирования работы
насосных агрегатов.
Действие схемы заключается
в следующем: электроды
соединяются с минусовым выводом
источника питания и при
соприкосновении их с жидкостью
«открывают» предварительно
«запертые» транзисторы. Это
вызывает перераспределение
напряжения в схеме и выходные реле
контроля уровней срабатывают.
Для измерения каждого уровня
Рис. 61. Схема автоматического
контроля уровня жидкости в резервуаре
с использованием «ключевого» режима
работы транзисторов
жидкости требуются два транзистора, включенные по схеме с общим
эмиттером. Напряжение смещения на базу первого транзистора 7\
подается через сопротивление R2 и сопротивление перехода
электрод — жидкость. Если жидкость находится ниже электрода (3),
то напряжение смещения на базе транзистора Т и коллекторный ток
отсутствуют. В этом режиме нет падения напряжения на
сопротивлении R3, следовательно, «закрыт» выходной транзистор Т2.
В момент касания жидкостью электрода 13 на базе входного
транзистора 7\ появляется напряжение смещения. Транзистор Тг
«открывается», в цепи коллектора появляется ток, на эмиттерном
сопротивлении R3 возникает напряжение, которое «открывает» выходной
транзистор Т2. Включенное в его коллекторную цепь реле Рг
срабатывает и производит соответствующие переключения в схеме
управления насосными агрегатами. Цепи с транзисторами Т3 — Г4 и реле
Р2 работают аналогично и контролируют верхний уровень жидкости.
При необходимости измерять промежуточные уровни жидкости
добавляют такие цепи и электроды.
Переменным сопротивлением R± подбирается оптимальное
напряжение смещения на базе транзисторов Тг и Т3> которое предохраняет
их от перенапряжения. Переменные сопротивления R2f Rb дают
ill
возможность регулировать
чувствительность датчика в широких
пределах.
Следует отметить, что на многих
станциях насосные агрегаты
работают с предварительным заливом.
Надежность действия
оборудования вспомогательного процесса
залива насоса, особенно для
автоматизированного агрегата, имеет
существенное значение и
определяется правильным выбором датчика,
контролирующего залив.
Внедрены и успешно работают
электродные сигнализаторы
контроля залива, использующие элект-
рюконтактный метод.
Электродные датчики работают на лампах
и полупроводниковых триодах.
Так как залив контролируется
только одним значением уровня,
жидкости, то изготовление
электродных датчиков таких сигнализаторов не сложно.
Примером такой конструкции является однопредельный датчик,
устанавливаемый в верхней точке трубы, идущей к вакуум-насосу.
Для этого к трубе приваривают штуцер диаметром 25 мм, в который
ввинчивают цилиндрический изолятор из органического стекла,
фторопласта или эбонита. В изоляторе закрепляют электрод из
нержавеющей стали (для воды с повышенной температурой), к которому
подводят контактный провод, второй провод заземляют.
О наличии электропроводных жидкостей в трубопроводах
(контроль залива и т. п.) сигнализируют проходные датчики, вмонтиро-
Рис. 62. Проходной электродный
датчик залива насоса
Рис. 63. Схемы включения датчиков контроля залива насосов
а — усилитель — лампа-двойной триод с раздельными катодами- б — усилитель —
полупроводниковый триод
112
ванные в трубопровод (рис. 62). Датчик состоит из корпуса 4,
штуцеров 5, накидных гаек 3 и двух электродов 2 из нержавеющей стали.
Электроды закреплены внутри корпуса с помощью двух
текстолитовых трубок 1.
В качестве электродных датчиков применяют также
автомобильные свечи (используемые в двигателях внутреннего сгорания). Схема
включения электродного датчика контроля залива насоса с
применением электронной лампы приведена на рис. 63, а. Усилителем в схеме
используют лампу двойного триода с раздельными катодами.
При включении вакуумного насоса, обслуживающего насосный
агрегат, который работает с предварительным заливом, открывается
электромагнитный вентиль подачи воды. При заполнении корпуса
основного насосного агрегата водой цепь электродного датчика
замыкается и управляющий импульс поступает на сетку первого триода.
Когда уровень жидкости не касается электрода, электрическая цепь
(сопротивление /?3, включенное в цепь сетки левой половины лампы Л>
переход жидкость — электрод, обмотка трансформатора Тр)
разомкнута. Если отрицательное смещение на сетке увеличивается до нуля,
анодный ток возрастает и увеличивается напряжение на R±. В
результате увеличивается положительное напряжение на сетке правой
половины лампы Л и срабатывает реле Р. Если вода замыкает цепь
электрода, то по сопротивлению R3 пойдет ток, который создаст
отрицательное смещение на сетке первого триода. Анодный ток левой
половины лампы Л снижается, уменьшая ток анодной цепи правой
половины лампы Л, и реле Р возвращается в исходное положение.
Переключение контактов реле Р вызывает включение насосного
агрегата, отключение вакуумного насоса и закрытие электромагнитного
вентиля.
Сигнализатор контроля залива насоса (рис. 63, б) имеет одно-
каскадный усилитель с полупроводниковым триодом. Чтобы усилить
мощность, транзистор Т включается по схеме с общим эмиттером.
Для питания коллекторной и управляющей цепи эмиттер — база
применяют два выпрямителя Вх и В2> собранные по схеме однофазного
моста на полупроводниковых германиевых плоскостных диодах Д7Е.
Трансформатор Тр имеет три обмотки: одна подключается к
питающей цепи переменного тока, две другие служат для питания
выпрямителей. Когда жидкость не касается электрода, цепь эмиттер — база
отключена от схемы, а переход коллектор — база закрыт. В
коллекторной цепи с включенной в нее обмоткой электромагнитного реле Р
проходит ток малой величины, так как цепь обладает большим
обратным сопротивлением коллекторного перехода, поэтому ток в этой
цепи недостаточен для срабатывания реле Р.
В момент соприкосновения электрода с водой к эмиттеру подается
положительный потенциал, а к базе — отрицательный, переход
эмиттер — база открывается. В результате появляется ток в
управляющей цепи эмиттер — база, что значительно усиливает ток в
коллекторе с учетом коэффициента усиления по току транзистора 7\
При этом коллекторный ток приводит к срабатыванию реле Р.
Электродные датчики, используемые для контроля залива основ-
113
ных насосных агрегатов, широко применяются и для контроля
наличия воды в трубопроводах, что часто требуется в практике
эксплуатации автоматизированных насосных станций.
Помимо насосов на канализационных насосных станциях
автоматизируется управление грабельными агрегатами. Иногда в целях
равномерного износа предусматривается возможность установки
любой очередности включения насосных агрегатов. В некоторых
случаях автоматизируется взмучивание осадка в приемном резервуаре.
На крупных насосных станциях для целей контроля начали
применяться телевизионные установки.
Схема автоматического управления канализационной насосной
станцией с тремя агрегатами приведена на рис. 64. Пуск первого
насоса происходит при подъеме уровня жидкости в приемном резервуаре
станции до положения, соответствующего наполнению подводящего
коллектора на 80 %. При дальнейшем повышении уровня жидкости
последовательно включаются второй и третий насосы. Отключение
насосов происходит в обратном порядке. Автоматизация пуска и
отключения насосных агрегатов осуществляется с помощью реле уровня
и реле времени. В случае выхода из строя основного оборудования
(положение аварии) происходит автоматическое переключение
подводящего коллектора на обводной, для чего в схему автоматизации
включены соответствующие задвижки и шиберы.
'acoct Насос2 НасосЗ иии .
Рис. 64. Схема автоматизации канализационной насосной станции
/ — подводящий трубопровод; 2 — обводной аварийный трубопровод; 3 — механизированная
решетка Л-1М; 4 — соленоидный вентиль; 5 — молотковая дробилка; 6 — насосы; КУР»
КУД — кнопки управления решеткой и дробилкой; КУЗ — кнопки управления задвижкой;
КУН — кнопки управления насосами; ПУ — переключатель управления; ЦСУ — датчик сель-
синного устройства; УСП — универсальный сельсинный приемник; КА — кнопка аварийная;
МП — магнитный пускатель
114
Опыт работы по данной схеме канализационной насосной станции
в Ленинграде показал ее надежность и возможность использования
без постоянного дежурного персонала. Применение автоматизации
повысило производительность оборудования и его надежность,
уменьшило количество неполадок, исключило постоянное нахождение
персонала в неблагоприятных санитарных условиях.
Эксплуатационные расходы снизились на 15 %, а потребление электроэнергии —
на 9,3 %. Автоматизация канализационной насосной станции внесла
изменение в обычно применяемую технологическую схему задержки
и переработки отбросов: пуск и отключение грабельного агрегата
осуществляются синхронно с дробилкой в зависимости от степени
засорения приемной решетки.
ГЛАВА XVIII. АВТОМАТИЗАЦИЯ
ВОДОПРОВОДНЫХ СООРУЖЕНИЙ
§ 45. ОСНОВНЫЕ СХЕМЫ АВТОМАТИЗАЦИИ
Автоматизация артезианского водоснабжения. Во многих городах
с подземными источниками (Калинин, Подольск, Орел, Тула, Рязань,
Воронеж, Орехово-Зуево, Стерлитамак и др.) осуществлена
комплексная автоматизация систем водоснабжения.
Безбашенная система артезианского водоснабжения г. Калинина
с большим числом разбросанных по территории города артезианских
насосных станций в условиях подачи воды в единую городскую сеть
создавала особые эксплуатационные трудности. После внедрения
комплексной автоматизации все насосные станции были полностью
автоматизированы и связаны между собой единым диспетчерским
управлением из пункта, расположенного в помещении одной из
насосных станций. Телеуправление насосными станциями
осуществляется с использованием линий связи городской телефонной сети. В
функции комплексной автоматизации входит непрерывный контроль за
работой насосных станций и водопроводной сети и управление ими.
Своевременным пуском или остановкой автоматизированных
насосных станций поддерживается необходимое давление в сети для
нормального водоснабжения всех районов города. После аварийного
выключения той или другой станции обслуживаемый ею район
получает воду от других станций по закольцованной водопроводной сети.
Работающие станции при этом изменяют свою производительность
и напор, т. е. происходит самовыравнивание режима работы
насосных агрегатов.
Все насосные станции города условно разделены на две группы:
основные (базисные) и неосновные (пиковые). К основным (базисным)
относятся наиболее мощные станции, имеющие скважины с большим
удельным дебитом. Такие станции расположены во всех частях города
и обеспечивают номинальный водоразбор в ночное и дневное время.
Основные станции работают круглосуточно, поэтому на них
установлены устройства автоматического управления, осуществляющие
только защиту насосов и передающие диспетчеру сигналы аварии. К не-
115
основным (пиковым) станциям относятся станции, которые работают
в часы максимального водоразбора, а также во время ремонта
базисных станций. Эти станции также располагаются во всех частях города.
Автоматическим пуском и остановкой пиковых станций
регулируется давление на всех участках водопроводной сети города. Число
станций, работающих круглосуточно, составляет 60—80 %.
Следовательно, в течение суток необходимо останавливать и запускать не все
станции, а только 20—40 %. Пиковые станции имеют дублированное
управление: телеуправление из центрального диспетчерского пункта
(ЦДП) и автоматическое от контактных манометров, контролирующих
давление и размещенных в характерных точках сети.
Диспетчер, наблюдая за работой станций, основное внимание
уделяет сигналам о неисправности и авариях. Это позволяет одному
диспетчеру контролировать работу и руководить системой
артезианского водоснабжения, одновременно выполняя функции персонала
насосных станций и диспетчера водопроводной сети. Для систем
водоснабжения небольшой производительности такой метод управления
может быть принят как наиболее простой. В системах более сложных
целесообразно использовать метод, применяемый в Орле, Стерлита-
маке, Брянске, Орехово-Зуеве, Туле и др.
В системе водоснабжения Орла все насосные агрегаты,
работающие на резервуар, автоматически включаются в работу в зависимости
от уровня воды в нем, а все насосные станции, работающие на сеть,
имеют телеуправление из диспетчерского пункта. Это позволяет
диспетчеру координировать режим работы станций, что обеспечивает
наиболее экономичный режим работы системы водоснабжения. В
Орле применены типовые станции управления, выпускаемые серийно
промышленностью. Все насосы первого подъема включаются
электродными сигнализаторами, а отключаются ими же или реле
автоматической защиты. Телеуправление остальными насосными станциями
из диспетчерского пункта производится устройством типа БТЦ.
Диспетчер посылает приказы «включить» и «отключить» насосный агрегат,
производит телеизмерение по вызову и ведет телефонные переговоры
с водопотребителями. Все эти операции осуществляются по одной
телефонной линии связи. С каждой станции на диспетчерский пункт
передаются показания давления на выходе станций и уровня в
резервуарах, сигналы включенного и отключенного состояния каждого
насоса и другого оборудования, сигналы об аварии на станции.
Автоматизация водоснабжения с поверхностными источниками-
Достижение комплексной автоматизации в этом случае осложняется
необходимостью автоматизировать очистные сооружения. Здесь
правильнее говорить об автоматизированной водопроводной очистной
станции и о централизованном управлении из диспетчерского пункта
всей системой водоснабжения. При комплексной автоматизации
крупных водопроводных систем, получающих воду из поверхностных
источников, наиболее целесообразно размещать диспетчерский пункт
в здании очистных сооружений с телеуправлением станциями
первого и второго подъемов. В настоящее время имеется опыт
автоматизации таких систем в Москве, Ленинграде, Киеве, Уфе, Таллине и др-
116
В схему автоматики
фильтров
Смеситель Осветитель
ВодоВоды от НС1лодгИ-^и—i—н
1235
12 3 4
б1 t£X )ifSZiAijgr 4 10 11 * 12)5^Щ^Ш^^Ш2
5 67 8. 9 10 11 12 13 /4 15 16 17 18 if 20921 22 23
772823
24 25 26 27 28 29
В схему управления насосами лен^Мнасосом
Расход Йоды В ВодоВо-
дах с разложением
сигнала на дозаторы хлора,
изНести и коагулянта
Напор насосоВ
Рис. 65. Схема автоматизации водопроводных очистных сооружений
—ж — хлор; — и — известь; —к ■— коагулянт; —в — воздух; — п — промывная вода
Для общей характеристики объема и уровня автоматизации
современных водопроводных очистных сооружений на рис. 65
приведена одна из типовых схем автоматизации и технологического
контроля.
Проводятся также исследования методов оптимизации режимов
работы систем водоснабжения. Целью оптимизации является
снижение расхода электроэнергии при совместной работе насосных станций
и водопроводных сетей.
§ 46. АВТОМАТИЧЕСКОЕ ДОЗИРОВАНИЕ РЕАГЕНТОВ
Первым этапом процесса очистки воды является коагулирование.
Иногда одновременно с коагулированием устраняется излишняя
жесткость воды путем подщелачивания ее известью. В
обрабатываемую воду могут вводиться и другие реагенты (твердые, жидкие и
газообразные) для устранения излишнего количества солей железа,
марганца и кремния, а также для устранения привкусов и запахов.
В установках коагулирования воды автоматизируется управление
механизмами внутристанционного транспортирования, дробления и
дозирования реагентов. Дозируют реагенты в сухом виде или чаще
в виде водных растворов и суспензий. Мокрое транспортирование
и дозирование значительно упрощают автоматизацию реагентного
хозяйства. Механизация и автоматизация разгрузки и
внутристанционного транспортирования химических реагентов обеспечивают
бесперебойную и более точную подачу реагентов, упрощают
эксплуатацию сооружений, сокращают численность персонала,
устраняют пыль в рабочих помещениях, снижают потери реагента.
При использовании сухого коагулянта его можно дозировать
в сухом виде или после предварительного растворения в баках.
Дозаторы (иногда их называют питателями) сухого коагулянта бывают
объемные и скоростные. Объемные дозаторы отмеривают равные
порции коагулянта и регулируют число [порций, вводимых в воду
в единицу времени. Скоростные дозаторы подают измельченный
коагулянт непрерывным [потоком с заданной скоростью.
Сухое дозирование коагулянта не получило широкого внедрения;
на ,водопроводных очистных сооружениях обычно применяется
мокрое 'дозирование. В этом случае грубоизмельченный коагулянт
загружается в растворные баки, где получается раствор примерно
20 %-ной концентрации. Затем в расходных баках концентрация
раствора доводится примерно до 5 % ив таком виде он поступает
в дозирующее устройство.
Автоматическое (пропорциональное дозирование растворов и
суспензий в точном соответствии с количеством обрабатываемой |воды
основано на изменении [либо площади отверстия в дозаторе, через
которое поступает раствор, либо на изменении напора, под которым
вытекает раствор из дозатора, либо на объемном отмеривании или
на объемном вытеснении. Два последних способа применимы только
на сооружениях небольшой производительности, так как при
больших расходах воды дозирующие устройства, основанные на этих
способах, сложны и громоздки.
118
Подача Ьоды для
растЬорения
Рис. 66. Схема автоматизации загрузки, растворения и дозирования
коагулянта
На ряде водопроводных станций построены установки для
механизации и автоматизации загрузки, растворения и мокрого
дозирования коагулянта (рис. 66), в основу которых положен автоматический
дозатор системы В. Л. Чейшвили и И. Л. Крымского.
В установке принята периодическая загрузка баков сухим
коагулянтом. При колебаниях концентрации приготовляемого раствора
в определенных заданных пределах периодическая загрузка дает
наиболее рациональное решение. Действительно, одновременная
загрузка коагулянта в баки, емкость которых рассчитана на суточный
расход, требует громоздких баков и значительного расхода энергии
на перемешивание раствора. Непрерывная загрузка коагулянта
элеватором также неприемлема, так как производительность элеватора
не остается постоянной при различной крупности сухого коагулянта.
Даже небольшое несоответствие между производительностью элева-
119
тора и расходом коагулянта в растворенном состоянии приведет
либо к переполнению бака сухим коагулянтом, либо к чрезмерному
понижению концентрации раствора.
Коагулянт загружают в бункер / автосамосвалами. Далее
коагулянт элеватором 2 подается в камеру 3, имеющую дырчатое дно.
В эту же камеру для растворения коагулянта подается вода. Подача
воды [регулируется дроссельным клапаном 4 с поплавковым устрой-
ством. Раствор перемешивают сжатым воздухом, подаваемым от
воздуходувки 14 в сеть перфорированных труб, уложенных на дне бака 5.
В условиях периодической загрузки коагулянта в камеру
концентрация забираемого из бака раствора будет медленно повышаться или
понижаться в определенных заданных пределах. Контролируют
концентрацию раствора ареометром 9 с электрическим индукционным
датчиком 7. К датчику подключен вторичный прибор для измерения
и регистрации концентрации коагулянта и автоматического
урегулирования работы элеватора. Ареометр измеряет концентрацию
раствора /в баке 6.
Раствор'из бака забирается насосом // и подается через
регулирующий вентиль 10 с электроприводом в трубопровод, по которому
вместе с обрабатываемой исходной водой поступает в смеситель 13.
Перед ^регулирующим вентилем установлен тройник, через который
часть раствора непрерывно подается в бак, а из него по переливной
трубе отводится снова в камеру. Этим обеспечивается контроль
концентрации рабочего раствора коагулянта перед подачей его в
исходную воду. Ввод раствора коагулянта в трубопровод под напором
обеспечивает быстрое и полное перемешивание ,его с водой.
В состав дозатора входят равновесный электронный мост и датчик
электропроводности 12, включающий две измерительные и одну
компенсационную электролитические ячейки. К одной из измерительных
ячеек |подводится вода из трубопровода до введения в нее [раствора
коагулянта, а |к другой — вода после введения коагулянта.
Электропроводность воды, в которую введен коагулянт, больше
электропроводности !воды без коагулянта. Разность величин электропроводности
воды в электролитических ячейках можно принять как результат
введения коагулянта в исходную воду. Компенсационная ячейка
служит для устранения влияния изменений температуры воды на
результаты измерения.
Контактная система равновесного моста управляет работой
регулирующего вентиля и тем самым регулирует количество раствора
коагулянта, подаваемого в исходную воду. Все
контрольно-измерительные приборы и аппаратура управления размещаются в шкафу 8.
В данной установке не нужно постоянства концентрации раствора
коагулянта. Изменение его концентрации автоматически
компенсируется большим или меньшим открытием регулирующего вентиля.
Необходимо только, чтобы концентрация раствора была выше
некоторого предела, определяемого пропускной способностью
трубопровода для подачи раствора коагулянта в исходную воду.
Опыт эксплуатации описанного дозатора коагулянта показал, что
этот дозатор может использоваться лишь при очистке воды с невысо-
120
Рис. 67. Схема автоматизации приготовления и дозирования коагулянта типа
СДК
/ — релейный блок электродных сигнализаторов уровня; 2 — вторичный прибор концентра-
томера раствора коагулянта; 3 — вторичный прибор контроля дозы коагулянта; 4 —
вторичный прибор расходомера исходной воды; 5 — воздуходувка; 6 — датчик концентратомера
раствора коагулянта; 7 — задвижки с электроприводом; 8 — растворный бак; 9 — насос;
10 — расходный бак; // — щелевой фильтр; 12 — датчик расхода коагулянта типа РЭД; 13 —
исполнительный механизм типа ПР; 14 — редуктор; 15 — регулирующий клапан расхода
коагулянта; 16 — мерный бачок; 17 — трубопровод в смеситель; 18 — водовод; 19 — датчик
расхода исходной воды типа ДМ; 20 — диспетчерский пункт
ким солесодержанием. Это является его существенным
недостатком. К другим его недостаткам относится большое запаздывание в
процессе регулирования, нарушение работы электролитических
ячеек при отложении в них осадка, сложность принятой схемы
температурной компенсации.
Создана также другая система автоматического приготовления
раствора коагулянта и его дозирования, пропорционально расходу
воды, типа СДК (рис. 67).
Схемой приготовления коагулянта предусматривается
автоматический контроль за уровнем коагулянта в растворном и расходном
баках с помощью электродных датчиков. Концентрация коагулянта
в растворном баке контролируется с помощью датчика и вторичного
прибора — электронного моста. Схемой предусматривается
автоматическое включение воздуходувки и насоса перекачки коагулянта
из растворного бака в расходный.
В систему СДК входит пропорциональный дозатор раствора
коагулянта. В основу схемы дозатора положены вторичный прибор
расходомера исходной воды типа ДМ и вторичный прибор
расходомера раствора коагулянта. В качестве расходомера раствора
коагулянта использован индукционный ротаметр типа РЭД.
Регулирующим органом подачи раствора коагулянта служит клапан с линейной
расходной характеристикой, имеющий стандартный электропривод.
Система настраивается таким образом, чтобы при заданном соот-
5 Зак 496
121
ношении расходов исходной воды и раствора коагулянта суммарный
сигнал на входе исполнительного механизма клапана равнялся нулю.
При изменении расхода воды регулирующий клапан пропорционально
изменяет расход коагулянта.
Помимо рассмотренных систем существует целый ряд и других
систем для автоматизации приготовления и дозирования коагулянта.
Некоторые из упомянутых систем дозирования получили
практическое применение, а другие только начинают применяться. Однако
ни одна из существующих систем полностью не разрешает проблемы
дозирования коагулянта. Во всех случаях необходимое количество
коагулянта определяется предварительной пробной коагуляцией в
лабораторных условиях, результаты которой зависят от целого ряда
физико-химических свойств исходной воды. До настоящего времени
не удалось изыскать надежный единый показатель качества воды
и разработать метод его автоматического измерения.
Имеются также совмещенные устройства для одновременного
дозирования коагулянта и извести. Дозаторы коагулянта с
небольшими изменениями могут быть использованы и для дозирования
известкового молока. Существует ряд схем для автоматического
дозирования хлора и аммиака.
Дозу реагентов (известкового молока, раствора коагулянта и
каустического магнезита) можно регулировать также, изменяя частоту
вращения электродвигателей дозаторов с помощью электронного
регулятора. С изменением притока воды электронный регулятор
воздействует через колонку дистанционного управления на реостаты,
включенные в цепи возбуждения электродвигателей дозаторов, в
результате изменяется частота их вращения, а следовательно, и дозы
реагента. Один электронный регулятор управляет группой трех
дозаторов, обслуживающих один осветлитель.
§ 47. АВТОМАТИЗАЦИЯ СКОРЫХ ФИЛЬТРОВ
Автоматизация процесса фильтрования воды является вторым
важным этапом автоматизации водопроводных очистных сооружений.
Автоматизация фильтров позволяет достигнуть высокой степени
безаварийной работы, увеличить на 8—10 % производительность
фильтров и улучшить качество фильтруемой воды, снизить расход
промывной воды и электроэнергии. На фильтрах осуществляется
автоматическое регулирование скорости фильтрования и автоматическая
промывка фильтров.
Для достижения оптимального технологического режима работы
фильтров и контактных осветлителей необходимо непрерывно
регулировать скорость фильтрования. Поддержание заданной скорости
фильтрования может быть достигнуто лишь с помощью систем
автоматического регулирования.
Постоянная скорость фильтрования достигается увеличением
степени открытия задвижки на трубопроводе фильтрата по мере
увеличения сопротивления загрузки фильтра из-за накопления в ней
загрязнений. Когда задвижка открыта полностью, то фильтр автома-
122
тически выключается из работы для промывки. Импульсом для уве
личения степени открытия задвижки на трубопроводе фильтрата
служит изменение одного из двух следующих параметров: уровня воды
в фильтре (контролируется поплавковым устройством) или расхода
воды в трубопроводе фильтрата (контролируется с помощью
дросселирующего органа и дифманометра).
Известно много схем автоматического регулирования скорости
фильтрования. Простейшие представляют собой индивидуальные для
каждого отдельного фильтра поплавковые регуляторы прямого
действия, использующие в качестве импульса управления увеличение
уровня воды в фильтре. Поплавок, плавающий на поверхности воды в
фильтре, механически связан с дроссельной заслонкой,
установленной на трубопроводе отвода фильтрата. В начале работы фильтра
заслонка устанавливается в частично прикрытом положении,
соответствующем нормальному уровню воды на фильтре при
расчетной скорости фильтрования. По мере загрязнения фильтра
скорость фильтрования снижается и возрастает уровень воды на
фильтре. Всплывание поплавка при повышении уровня воды вызывает
увеличение степени открытия заслонки. При этом восстанавливается
заданная скорость фильтрования для данного неизменного притока
исходной воды на фильтр.
При изменении притока воды на фильтр вследствие увеличения
подачи насосами или отключения одного или нескольких фильтров
для промывки поплавковый регулятор автоматически устанавливает
большую скорость фильтрования.
Наряду с поддержанием постоянной скорости фильтрования часто
необходимо изменять ее в заданных пределах в зависимости от
поступления воды на очистные сооружения. Для этой цели разработана
схема автоматического регулирования режима работы фильтров (рис.
68). В канале, подающем воду на фильтры, устанавливается
уровнемер с электрическим датчиком. На трубопроводах отвода
фильтрата каждого фильтра устанавливают сужающее устройство с
электрическим датчиком, измеряющим скорость фильтрования и
регулятором степени открытия фильтратной задвижки. Датчик
уровнемера служит задатчиком для регулятора скорости фильтрования
всех фильтров. При нарушении равновесия между подачей воды от
насосов первого подъема и отводом отфильтрованной воды,
например, при отключении одного фильтра на промывку, уровень воды
в канале начнет увеличиваться. При этом датчик уровнемера
задает новую увеличенную скорость фильтрования всем остальным
фильтрам. Через некоторое время нарушенное равновесие
восстановится при новом значении уровня воды в канале. Так,
автоматически устанавливается скорость фильтрования, соответствующая
колебаниям притока воды от насосов первого подъема.
В схеме предусматривается аварийная сигнализация, когда
скорость фильтрования или уровень в канале выходит за установленные
пределы. На рис. 68 показаны только два фильтра, другие фильтры
присоединяются к схеме автоматического регулирования
аналогично.
5* Зак. 496 123
Рис. 68. Схема автоматического
регулирования режима работы
фильтров
/ — канал; 2 — трубопровод подачи воды
на фильтр; 3 — уровнемер; 4 —
трубопровод отвода промывной воды; 5 —
трубопровод фильтрата; 6 — задвижка на
трубопроводе фильтрата; 7 — сужающее устрой
ство; 8 — трубопровод подачи промывной
воды; 9 — измеритель скорости
фильтрования; 10 — регулятор скорости
фильтрования
Рис. 69. Гидроэлектрическая схема автоматического управления скорым
фильтром
ПР - поплавковый регулятор; ЩИ - щиток измерений; 1ГП — 4ГП — двухходовые
гидропереключатели; ПУ — пульт управления; 1К — 2К — краны четырехходовые; 1В — ЗВ — вентили;
Ф — фильтр; ЗК — гидропереключатель пятиходовой с электроприводом; № /—4 —
гидроприводы задвижек; р трубопровод к поплавковому регулятору; ф *
—трубопровод к фильтратной задвижке; — и трубопровод к щитку измерения
Для полной автоматизации фильтра кроме автоматического
регулирования скорости фильтрования автоматизируется промывка
фильтра. В качестве импульса для автоматического перевода
фильтра на промывку используются: предельное открытие фильтратнои
задвижки; увеличение сопротивления фильтрующего слоя до
заданного значения; достижение предельной мутности фильтрат^.
Продолжительность промывки может выдерживаться в заданных
пределах с помощью реле времени или определяется
автоматически по снижению мутности промывной воды с помощью
фотоэлектронного прибора.
124
Наибольшее распространение получают схемы, в которых фильтр
включается на промывку по сигналу о полном открытии фильтратной
задвижки и сигналу о достижении предельной потери напора на
фильтре и выключается с помощью реле времени.
В основе автоматического управления промывкой фильтра лежит
открытие или закрытие в определенной последовательности четырех
задвижек на трубопроводах: подачи исходной воды; отвода
фильтрата; подача промывной воды и отвода с фильтра промывной воды и
первого фильтрата в канализацию. В зависимости от принятого типа
привода задвижек схемы бывают электрические или гидравлические. Во
всех случаях в схемы вводится блокировка, исключающая
одновременный выход на промывку более одного или двух фильтров, и
передается необходимая сигнализация о работе фильтров на пульт
управления.
На рис. 69 приведена гидроэлектрическая схема автоматического
управления скорым фильтром для типового проекта водопроводной
очистной станции. При наполнении фильтра водой до заданного
уровня поплавковый регулятор подает импульс на открытие задвижки на
трубопроводе отвода фильтрата. По мере загрязнения фильтра
уровень воды на нем стремится к повышению из-за возрастающего
сопротивления протоку воды в загрузке фильтра. С целью поддержания
неизменным уровня воды на фильтре, а следовательно, и скорости
фильтрования поплавковый регулятор подает импульсы на постепенное
увеличение открытия фильтратной задвижки. При достижении полного
открытия этой задвижки конечный выключатель подает импульс в
электрическую часть схемы и фильтр переключается на промывку.
Промывка производится автоматически путем последовательного
открытия и закрытия задвижек с помощью гидропереключателей.
Длительность промывки выдерживается автоматически по времени,
заданному на основании лабораторных анализов. В схеме имеется
блокировка, исключающая вывод фильтра на промывку при
недостаточном уровне воды в промывных резервуарах или при неисправности
промывных насосов.
Наряду с автоматическим управлением схема позволяет
осуществлять ручное управление с пульта управления с помощью четырех-
ходовых кранов. Щиток измерений устанавливается у каждого
фильтра для местного периодического контроля.
Разработана также схема группового регулирования,
обеспечивающая поддержание заданной скорости фильтрования на шести
фильтрах с помощью одного комплекта аппаратуры. При этом
автоматизируется выбор очередности промывки фильтров и поддержание
заданной интенсивности промывки. Окончание процесса промывки
определяется автоматическим контролем мутности промывной воды
с помощью нефелометра.
Помимо скорых фильтров в системах промышленного
водоснабжения широко применяются осветлители и напорные фильтры для
умягчения и обессоливания воды.
Удаление шлама из осветлителей автоматизируется с помощью
фотодатчиков, сигнализирующих предельные (верхний и нижний)
125
уровни шлама. В некоторых случаях отдается предпочтение
дистанционному управлению выпуском шлама с пульта управления.
Существуют схемы автоматизации группы напорных фильтров
различного назначения: осветлительных, натрий-катионитных, водо-
род-катионитных и анионитных. Учитывая относительную
повторяемость регенерационных циклов, одна схема автоматического
управления используется для группы фильтров. По мере истощения того
или другого фильтра дежурный оператор вручную переключает его
на регенерацию. После этого включают блок автоматики, который
обеспечивает автоматическое выполнение операций по регенерации
фильтра. Последовательность выполнения операций и их длительность
обеспечиваются командным электропневматическим прибором. В
пределах одной операции последовательность закрытия и открытия
задвижек обеспечивается их конечными выключателями. Разработаны
также схемы автоматизации станций умягчения и обезжелезивания
воды, а также оборотных систем промышленного водоснабжения. В
этих системах автоматизируются насосные станции для
регулирования подачи охлажденной или нагретой воды, а также регулирования
добавки свежей воды. Автоматические устройства применяются в
установках стабилизации качественного состава оборотной воды.
ГЛАВА XIX. АВТОМАТИЗАЦИЯ-
КАНАЛИЗАЦИОННЫХ СООРУЖЕНИИ
§ 48. АВТОМАТИЗАЦИЯ СООРУЖЕНИЙ
МЕХАНИЧЕСКОЙ ОЧИСТКИ СТОЧНЫХ ВОД
Технология очистки сточных вод отличается сложностью и
разнообразием протекающих процессов: физических, химических и
биологических, взаимосвязи которых еще не вполне изучены. Основные
параметры этих процессов контролируют, как правило, лаборатории
путем периодического отбора проб сточной жидкости в различных
точках сооружений и проведения соответствующих анализов. Усилия
обслуживающего персонала очистных сооружений в настоящее
время сводятся главным образом к стабилизации существующих
технологических процессов.
Так как количество и состав сточных вод, поступающих на
очистные сооружения, постоянно меняются, стабилизация технологических
процессов экономически нецелесообразна. Технологический режим
сооружений необходимо корректировать применительно к
изменяющимся условиям. Эта задача наиболее успешно может быть
разрешена при использовании систем автоматического контроля и
управления процессами очистки сточных вод. Рассмотрим кратко
современный опыт автоматизации каждого из основных очистных сооружений.
Решетки§ Ввиду того, что по условиям технологии в помещении
решеток не требуется постоянного присутствия персонала, то более
целесообразно управлять механизмами решеток с пульта управления
сооружениями механической очистки.
126
Дистанционное управление работой грабель, ленточных
транспортеров и дробилок осуществляется с пульта управления с помощью
соответствующих кнопок («Пуск», «Остановка») для каждого
агрегата в отдельности. Одновременно с пуском агрегатов происходят
соответствующие изменения в положениях задвижек (открытие и
закрытие) на подводящих каналах к отдельным решеткам. В случае аварии
соответствующая задвижка автоматически закрывается и
включается запасной агрегат. Устраивается также управление с пульта
задвижками для регулирования расхода поступающих на решетки сточных
вод. Для этого перед каждой решеткой в канале устанавливают
указатели уровня, показания которых передаются на пульт.
Автоматической защитой агрегатов предусматривается
отключение отдельных агрегатов при длительном исчезновении напряжения
в сети, при перегреве подшипников приводных электродвигателей и
механизмов, при заклинивании грабель и др. Сигнализация о
действии защиты передается на пульт управления. На пульт поступают
также сигналы о недопустимом повышении уровня сточной жидкости
в подводящем канале, о степени открытия регулируемых задвижек и
их крайних положениях, о высоте уровня воды перед решетками и
после них, о поступлении кислых или щелочных вод. В последнем
случае перед решетками устанавливается рН-метр.
Существенное затруднение могут вызывать попадающие к
решеткам вместе со сточной жидкостью металлические предметы. Для их
удаления предусмотрена установка в каждом канале перед решеткой
электромагнитного устройства. При пониженном притоке сточных вод
или при небольшом количестве задерживаемых решетками загрязнений
целесообразно периодическое (через заданные промежутки времени)
включение механических грабель, транспортера и дробилки.
Разработана схема автоматизации механизмов грабельного
помещения, в которой автоматическое управление граблями, ленточными
транспортерами и дробилками осуществляется в зависимости от
степени засорения решеток. В схеме предусматривается возможность
перехода с автоматического на местное или дистанционное
управление каждым механизмом. Перепад уровней воды в канале до и после
решеток контролируется двумя дифференциальными реле давления,^
подключенными к воздушным колоколам. Продолжительность
работы грабель задается с помощью реле времени.
В качестве прибора, измеряющего перепад уровней, может быть
принят дифференциальный манометр с электроконтактным
устройством. Дифманометр контролирует перепад уровней путем измерения
разности давления продуваемого воздуха в двух трубках,
опущенных в воду до и после решетки. Воздух непрерывно продувается с
помощью водоструйных эжекторов. При достижении заданной
величины перепада уровней электроконтактное устройство дифманометра
включает в работу грабельный агрегат. Выключать грабли можно
также электроконтактным устройством или с помощью реле времени
Через заданный промежуток времени.
Песколовки. Регулирование нагрузки на отдельные песколовки
Позволяет автоматически поддерживать скорость потока жидкости в
127
них в заданных пределах. Такая схема осуществлена на основе
использования системы автоматического контроля уровня жидкости в
подводящих каналах как функции количества поступающих на
очистные сооружения сточных вод. В зависимости от импульсов
электроконтактного поплавкового уровнемера в схеме регулируется степень
открытия электрифицированных задвижек на подводящих каналах.
Автоматизация удаления песка из песколовок может
производиться двумя путями. В первом случае песок удаляется по мере
достижения им заданного уровня. Во втором случае песок удаляется через
определенные промежутки времени, выявленные на основе
эксплуатационного опыта. Продолжительность удаления песка или его
объем принимаются также на основе опыта эксплуатации песколовок.
Существенный интерес представляет автоматическое удаление песка
по мере достижения им заданного уровня. Однако отсутствие
надежной конструкции сигнализатора уровня песка делает возможным
управление данной технологической операцией лишь по времени.
При автоматизации работы песколовок целесообразно
предусмотреть передачу на пульт управления следующих сигналов: о состоянии
агрегатов для удаления песка (в работе, остановлен, авария); о
положении задвижек (открыта, закрыта); о повышении уровня песка
сверх допустимого предела.
Первичные отстойники. В первичных отстойниках подлежит
автоматизации процесс удаления из них осадка. В вертикальных и
горизонтальных отстойниках, а также в биокоагуляторах имеет место
самотечное удаление осадка под гидростатическим напором
находящейся в отстойнике жидкости. Автоматическое управление
отстойниками осуществляется с помощью задвижки, регулирующей выпуск
осадка в зависимости от его качества (влажности) и количества.
Однако поскольку пока нет прибора для замера влажности осадка, то
в настоящее время возможен автоматический выпуск осадка либо по
заданному времени, либо в зависимости от его уровня. Для этого в
первом случае необходимо знать экспериментально установленные
для данных отстойников и сточной жидкости продолжительность
накапливания осадка и его выпуска. В связи с тем, что точный график
откачки осадка в условиях колебания притока сточных вод и
количества взвешенных веществ составить весьма затруднительно, то
возможна передача в метантенки вместе с осадком части отстойной воды.
Более совершенным является автоматическое удаление осадка
путем измерения его уровня в отстойниках. В схеме используется
фотоэлектрический сигнализатор СУФ-42 (рис. 70), датчик которого
состоит из двух металлических корпусов 10, в одном из которых
помещается фотосопротивление Rly а в другом — лампа подсветки Лх.
В зависимости от изменения оптической плотности жидкой среды
между фотосопротивлением и лампой подсветки изменяется величина
тока, поступающего от датчика в схему блока сигнализатора с двух-
каскадным усилителем.
Первый каскад служит для согласования высокоомного
фоторезистора R2 ФСК-Г1 с низкоомным входом усилителя мощности,
нагрузкой которого служит реле Рг типа РМУГ. Схема питается от
128
а)
Рис. 70. Сигнализатор уровня осадка СУФ-42
а — конструкция датчика уровня осадка: / — кабель; 2 — чехол;
3 — сальниковый ввод; 4 — хомут; 5 — соединительная труба;
6 —крышки; 7 —прокладки; 8 — корпус; 9 — осветительная
лампа; 10 — фоторезистор; б — электрическая схема блока
сигнализатора
трансформатора Трг и однополупериодного выпрямителя,
состоящего из диода Дх и конденсатора Сг. Источник подсветки —
автомобильная осветительная лампа Лх типа А-26 питается от трансформатора
77?2. Для регулирования порога срабатывания прибора в схему входит
переменный резистор R3i а для регулирования предела
срабатывания путем изменения напряжения питания лампы Лг в схему
входит переменный/резистор Rb. Кнопка КНг служит для проверки
исправности лампы Лг. При нажатии кнопки КНг и исправности
лампы Лх загорается неоновая лампа Л4. С помощью реле Рх
происходит переключение зеленой лампы Л2 на красную Л3у когда
уровень осадка достигнет датчика.
Однако данный сигнализатор надежно контролирует лишь
верхний уровень осадка. После начала откачки осадка четкость
границы исчезает и поэтому окончание процесса откачки производится
по времени.
Следует отметить, что нет необходимости держать
фотоэлектрические датчики уровня все время под напряжением, так как это ведет
к быстрому износу приборов. Более целесообразно с заданными
интервалами времени подключать лампы подсветки фотоэлектрических
сигнализаторов отдельных отстойников к цепям управления только
на период замера уровня (не более 3 мин). Кроме того, при
количестве отстойников более двух можно использовать несколько
фотоэлектрических датчиков с одним блоком*, снабженным устройством
поочередного подключения датчиков к блоку. Сигнализатор уровня
осадка СУ-101, сконструированный подобным образом, обеспечивает
контроль в четырех, восьми и 12 отстойниках.
Для эффективной работы первичных отстойников и предотвращения
выноса взвешенных веществ имеет большое значение поддержание
одинаковой нагрузки на каждый отстойник или равномерное
распределение между отстойниками переменного общего притока сточных
вод на сооружения, что достигается автоматическим регулированием
положения соответствующих затворов и шиберов на подводящих
каналах.
Автоматизируется также работа насосов, откачивающих осадок
на метантенки, с учетом режима работы отстойников и уровня
осадка в приемном резервуаре насосной станции.
Предусматривается автоматический контроль за работой
механического оборудования отстойников и насосов с передачей информации
на пульт управления, а также местное и дистанционное виды
управления каждым механизмом в отдельности.
§ 49. АВТОМАТИЗАЦИЯ МЕТАНТЕНКОВ
И ВАКУУМ-ФИЛЬТРОВ
В метантенках автоматические системы применяются для
поддержания в заданных пределах температуры сбраживаемого осадка и его
перемешивания (рис. 71). Автоматизируются также
вентиляционные установки распределительных камер. Большое значение имеет
автоматизация контроля многочисленных параметров, характеризую-
130
тельные камеры ^
Приточная Вытям \
, \_r.--j
Резервуар
уплотненного активного ила
. г*ъ \ г-"--*
dm насосной стан
ции
на иловые площаоки
или 6 цел
7 18 2119 22 21 25 20 23 26 27 28293031
16 11 18 19 20 21 22 23 24 25 26 27 28 29 30 31
чбщий сигнд& аВарии На oiiuuu "сигнал аварии
На общий сигйЬл аварии
Рис. 71. Схема
автоматизации
метантенков
осадок;
- ил -
— активный ил;
— пар;
щих эффективную работу метантенков: расход сырого и сброженного
осадка, уровень осадка в метантенке, давление газа, расход газа,
температура осадка, величина рН и др.
При автоматическом управлении подогревом осадка в
метантенке помещается датчик — термометр сопротивления. В случае
снижения температуры больше заданного предела автоматически
включается насос перемешивания осадка и задвижка на его напорной линии.
Одновременно открывается электромагнитный вентиль или задвижка
на паропроводе и во всасывающий патрубок насоса подается пар для
подогрева осадка. Процесс перемешивания осадка идет
одновременно с подогревом до заданного предела. Термометр подает импульс,
вызывающий отключение паропровода, остановку насоса и закрытие
напорной задвижки. Схемой автоматизации предусматривается при
аварийном отключении насоса автоматическое включение
аналогичного насоса другого метантенка с соответствующим переключением
задвижек и подачей аварийного сигнала на пульт управления.
Подогревать и перемешивать осадок можно автоматически с
помощью парового инжектора. Однако в этом случае удается достичь лишь
частичного перемешивания осадка и выравнивание его температуры
идет медленно. Поэтому при использовании парового инжектора
применяют дополнительное перемешивание с помощью гидроэлеваторов.
Включать гидроэлеваторы можно автоматически по заданному
графику, при этом предусматривается использование одного насоса для
поочередной ^работы нескольких гидроэлеваторов. При
использовании для перемешивания осадка мешалок включать и выключать их
можно также автоматически по времени.
Засорение трубопроводов, подающих сырой осадок из входной
распределительной камеры в метантенки и отводящих сброженный
осадок из метантенков в выпускную распределительную камеру,
вызывает переполнение соответствующих секций распределительных
камер, уровень осадка в которых контролируется сигнализаторами
уровня во взрывозащищенном исполнении.
Измерительные приборы размещаются либо по месту измерений,
либо на щите в камере управления метантенков или на диспетчерском
пункте. Для уменьшения числа используемы^ приборов некоторые
параметры контролируются на щитах управления лишь
сигнальными лампами, указывающими нормальные пределы измеряемых
величин и возникновение недопустимых отклонений. Дополнительно в
схему автоматизации включают измерение температуры осадка до
метантенков, температуры и давления метана, измерение концентрации
метана в выходящем газе, контроль засорения трубопроводов,
контроль за работой гидроэлеваторов перемешивания осадка и насосов
подачи осадка, вентиляторов камер.
В вакуум-фильтрах автоматические системы применяются для
дозирования вводимых в осадок реагентов по величине его удельного
сопротивления, управления вакуум-насосами, регулирования
нагрузки вакуум-фильтров, управления воздуходувками, а также для
технологического контроля за всеми процессами и работой оборудования
по обезвоживанию осадка.
132
Рассмотрим схему автоматизации процесса дозирования, согласно
которой обрабатываемый осадок, как показано на рис. 72,
поступает в лоток-смеситель 4, где смешивается с химическим реагентом,
поступающим из бачка 1. Расход химического реагента регулиру-
Рис. 72. Схема автоматического дозирования реагентов при обезвоживании
осадка на вакуум-фильтрах
а — технологическая схема; б — электрическая схема
133
ется вентилем 2 с электроприводом 3. Ддя установления дозы
химического реагента командоаппарат Д с контактом Кх
периодически включает электропривод 5 шиберного затвора 6. Последний
открывается и лоток 7 заполняется осадком. После этого замыкается
контакт К 2 командоаппарата Д, дающий импульс на закрытие
шиберного затвора и на открытие с помощью электромагнитного
привода 19 вентиля 18 на вакуумной линии. В воронке 8
устанавливается определенный уровень осадка, а его избыток сбрасывается в
канализацию. В этот момент начинается пробная фильтрация. Под
действием вакуума осадок фильтруется через фильтровальную ткань 9.
Фильтрат заполняет цилиндр 10. Под действием веса фильтрата
мембрана 17 прогибается, а сердечник 16 индукционной катушки 15
меняет свое положение. Через заданный промежуток времени
замыкается контакт /С3 и новое положение сердечника 16 индукционной
катушки 15 фиксируется измерительной схемой фотоэлектронного
регулятора (контакты Ф1 и Ф2). Замыканием контакта /С4 импульс от
фотоэлектронного регулятора передается на электропривод 3,
закрывая регулирующий вентиль 2 расхода реагента. Замыкание
контакта К5 обеспечивает открытие вентиля 13 с помощью привода 14
и сброс фильтрата в канализацию. Затем замыкается контакт /Св и
открывается вентиль подачи промывной воды 11 с помощью
соленоидного привода 12. При замыкании контакта /С7 вновь открывается
вентиль 13 для удаления оставшейся в цилиндре промывной воды в
канализацию. На этом цикл работы заканчивается. Если отклонение
величины удельного сопрЪтивления фильтрата не было устранено
увеличением (или уменьшением) дозы реагента, то регулирующий
вентиль снова получит импульс на открытие или на закрытие. Так будет
продолжаться до тех пор, пока положение регулирующего вентиля
не будет соответствовать заданной величине удельного сопротивления
фильтрата.
Чтобы система была устойчивой и не возникало собственных
колебаний, время на закрытие или открытие регулирующего вентиля,
определяемое временем замыкания контакта /С4> должно быть таким,
чтобы вызванное этой операцией изменение дозы реагента, а
следовательно, и удельного сопротивления фильтрата, было меньше
заданных пределов его изменения.
Применение описанной системы регулирования позволяет
сократить расход химических реагентов, стабилизировать процесс
подготовки осадков к механическому обезвоживанию и повысить
производительность вакуум-фильтров.
§ 50. автоматизация сооружении
биохимической очистки сточных вод
Основным вопросом автоматизации аэротенков является
разработка схемы автоматического поддержания в оптимальных пределах
соотношения между количеством поступающих в аэротенки сточных
вод и концентрацией органических загрязнений в них с количеством
вводимого в аэротенки воздуха и активного ила. Поддержание этого
134
соотношения в оптимальных пределах является основным условием
высокоэффективной работы аэротенков в санитарном и
технико-экономическом отношении. До решения этого основного вопроса
отдельные автоматические системы успешно используются для
равномерного распределения сточных вод между аэротенками, строгого
поддержания по заданной программе количеств вводимого в воду воздуха и
активного ила в разных точках каждого аэротенка, наиболее
экономичного регулирования турбовоздуходувных установок при их
совместной работе с воздухопроводами с учетом переменной потребности
в количестве вводимого воздуха, надежного контроля качественных
и количественных показателей работы аэротенков.
Успешно эксплуатируются системы автоматического управления
турбовоздуходувками с приводными электродвигателями мощностью
до 500 кВт каждая. Автоматически контролируется работа
турбовоздуходувок по ряду показателей и при их отклонении от нормы
выключается соответствующий агрегат с сигнализацией на пульт управления.
Полностью автоматизированы операции по подготовке
турбовоздуходувок к пуску в работу, по подаче воды для охлаждения масла, по
поддержанию уровня воды в охлаждающем резервуаре. В случае
выключения электроэнергии и остановки масляных насосов
автоматически включается подача масла из резервуара до полной остановки
турбовоздуходувок.
Система автоматического регулирования расхода подаваемого в
аэротенк воздуха характеризуется наличием измерителей скорости
потребления растворенного кислорода (рис. 73), концентрации
растворенного кислорода и расхода воздуха. В системе поддерживается
соотношение заданной величины между расходом подаваемого на аэра*
цию сточной воды воздуха и
скоростью потребления раствсг
ренного кислорода этой водой
в смеси с активным илом и с
учетом концентрации
растворенного кислорода в сточной
воде перед выходом ее из
аэротенка.
Для аэротенков с
механической аэрацией регулирование
кислородного режима сточной
воды достигается изменением
частоты вращения аэраторов и
глубины их погружения.
Оптимальное соотношение этих
параметров определяет
минимальные затраты
электроэнергии на аэрацию сточной
жидкости.
В биофильтрах с помощью
автоматических систем можно
обеспечить распределение и ре-
Рис. 73. Система автоматического
регулирования подачи воздуха в аэротенк
I — трубопровод сточной воды; 2 —
трубопровод возвратного ила; 3 — измеритель скорости
потребления кислорода; 4 — расходомер
воздуха; 5 — измеритель концентрации
растворенного кислорода; 6 — турбовоздуходувка; 7 —
регулирующий орган с исполнительным
механизмом; 8 — блок деления; 9 — устройство
динамической связи; 10 — регулятор
135
СО
Решетки
ЬиЮричные отстой- Контактные
Рис. 74. Схема
технологического контроля
канализационной
очистной
станции
- х — хлор; —
взвоз дух; — ил —
осадок и
активный ил; — ф—
зяйственно-фекальные стоки
гулирование подачи оточной жидкости на отдельные установки при
большом их числе. Возможно автоматическое регулирование
подачи сжатого воздуха в аэрофильтры в зависимости от величины
притока и состава сточной жидкости, а также цикличное
распределение по поверхности биофильтров поступающих сточных вод.
Автоматически управляются и электродвигатели вентиляторов и
вращающихся оросителей, 'контролируются расход и давление
воздуха, температура сточной жидкости.
Автоматические системы успешно используются во вторичных
отстойниках для контроля уровня активного ила и последующего его
удаления. Уровень ила контролируется сигнализатором типа СУФ-42
или СУ-101 (см. § 48) и только на его верхней отметке.
Разработаны также типовые схемы автоматизации
канализационных очистных сооружений разной производительности.
На рис. 74 приведена схема технологического контроля
канализационной очистной станции производительностью 60 тыс. м3/сут.
Схема предусматривает автоматизацию технологического контроля
основных процессов, протекающих на сооружениях станции.
Управление сооружениями осуществляется с диспетчерского щита
сооружений. В ряде случаев предусмотрено дублирование управления по
месту расположения объектов. На диспетчерский щит передаются
все аварийные сигналы, а также информация об изменениях
основных технологических параметров (рН, расходы сточных вод,
осадка, воздуха и хлора, мутность сточных вод, содержание
растворенного кислорода). Соответственно принятому объему и уровню
автоматизации предусмотрены на соответствующих трубопроводах
регулирующие органы с электрическим и электромагнитным приводом.
ГЛАВА XX. ДИСПЕТЧЕРИЗАЦИЯ СИСТЕМ
ВОДОСНАБЖЕНИЯ И КАНАЛИЗАЦИИ
§ 51. ОСНОВНЫЕ ЗАДАЧИ ДИСПЕТЧЕРСКОЙ СЛУЖБЫ
Для надежной и бесперебойной работы систем водоснабжения и
канализации с наилучшими технико-экономическими показателями
требуются четкая координация и взаимная увязка работы отдельных
ее элементов, что может быть достигнуто введением единого
централизованного управления и контроля. Централизованное управление
системой водоснабжения и канализации осуществляется
диспетчерской службой. Целью диспетчерской службы является установление
наиболее экономичного режима работы оборудования,
обеспечивающего бесперебойную работу водопровода или канализации в
увязке с графиком подачи или отведения воды. Для достижения
указанной цели диспетчерская служба решает следующие основные задачи:
согласование работы всех сооружений с работой сети;
санкционирование отключения оборудования и сети для производства ремонта;
руководство локализацией и ликвидацией аварий; надзор за средст-
137
вами автоматики, телемеханики и связи; оперативное изменение
графиков работы системы и составление технической отчетности.
Диспетчерская служба выявляет основные количественные и
качественные показатели работы системы водоснабжения или
канализации, координирует санитарный контроль за работой сооружений.
В обязанности диспетчера входит решение всех оперативных
вопросов, связанных с обеспечением надежности, бесперебойности и
экономичности работы сооружений, цехов или всей системы.
Развитие вычислительной техники и внедрение ее во все отрасли
народного хозяйства привело к созданию автоматизированных систем
управления (АСУ), представляющих собой системы управления с
применением современных автоматических средств обработки данных
и экономико-математических методов для решения основных задач
управления.
АСУ относится к классу организационно-экономических систем
и включает в себя отдельные подсистемы (части системы, выделенные
по определенному признаку, отвечающему конкретным целям и
задачам управления).
По функциональному признаку АСУ водопроводным и
канализационным хозяйством (АСУ ВКХ) может рассматриваться как
подсистема АСУ жилищно-коммунальным хозяйством города или
области. При этом предполагается, что такие задачи АСУ, как
обработка бухгалтерской и технико-эконрмической информации, плановые
расчеты, материально-техническое снабжение, ведутся на уровне АСУ
жилищно-коммунальным хозяйством, а АСУ ВКХ представляет
собой АСУ технологическим циклом, основные задачи которой
приведены выше.
Работа водопроводных и канализационных систем
характеризуется постоянно меняющимися нагрузками, сложностью
технологических процессов, территориальной разбросанностью сооружений и
необходимостью координирования их работы из одного центра.
Использование вычислительных машин с применением современных
математических методов управления позволяет значительно повысить
качество управления технологическими процессами и их
экономическую эффективность.
Первой в нашей стране автоматической системой управления (АСУ)
водоснабжением является система, создаваемая на столичном
водопроводе.
Московский водопровод в настоящее время ежесуточно
обрабатывает и подает потребителям свыше 4 млн. м3 воды. В состав
сооружений входят пять гидроузлов, четыре станции очистки воды, большое
число насосных станций, 4500 км водопроводных магистралей и
распределительных сетей, восемь районов эксплуатационного
обслуживания сетей. В перспективе столичная система водоснабжения
получит дальнейшее развитие. Обычное диспетчерское управление
таким сложным хозяйством без использования АСУ становится
неэффективным как в технологическом, так и в технико-экономиче
ском отношении. В целях снижения численности обслуживаюшег
персонала, быстрой переработки и оперативного использования о
138
ширной информации, оптимизации производственных процессов,
быстрой ликвидации аварийных ситуаций, сокращения расхода
реагентов и электроэнергии ведется разработка автоматизированной
системы управления (АСУ) столичным водоснабжением. Проектом
АСУ предусматривается использование агрегатной системы средств
вычислительной техники, специализированных
электронно-аналоговых машин (МАВР), устройство дистанционного ввода данных,
передачи информации посредством телемеханических систем,
аппаратуры телефонной и радиосвязи, телевидения.
Предварительными расчетами выявлена возможность достичь
после ввода в действие АСУ экономии электроэнергии около 30 млн.
кВт-ч в год. Общая годовая экономия от применения АСУ
ожидается в 2,5 млн. руб., что позволит окупить затраты по созданию АСУ
менее, чем в три года.
§ 52. СХЕМЫ ДИСПЕТЧЕРИЗАЦИИ
При выборе схемы диспетчерского управления следует
стремиться обеспечить оперативное управление и контроль, дать диспетчеру
надежную связь с контролируемыми объектами и выполнить эти
условия при минимуме капитальных затрат на диспетчеризацию и
эксплуатационных расходов на содержание диспетчерской службы.
В состав диспетчерской службы входят: оперативная группа
сменных диспетчеров; группа профилактического осмотра оборудования
сооружений; группа профилактического осмотра оборудования сети;
аварийная бригада; группа автоматики, телемеханики и связи.
Кроме указанных групп при диспетчерской службе создается
группа режима системы водоснабжения и канализации, обрабатывающая
исходные данные для управления ею. Наличие и штаты указанных
групп и бригад зависят от мощности и размеров системы, числа
сооружений и протяженности сети.
Возможны следующие варианты диспетчерской службы:
одноступенчатая, при которой один диспетчерский пункт оперативно
управляет работой всех сооружений, входящих в систему;
двухступенчатая, при которой центральный диспетчерский пункт координирует
работу местных диспетчерских пунктов, а местные диспетчерские
пункты управляют работой отдельных или группы сооружений;
трехступенчатая , при которой центральный диспетчерский пункт
координирует работу районных диспетчерских пунктов, районные
диспетчерские пункты ведают работой местных диспетчерских пунктов, а
местные диспетчерские пункты управляют работой отдельных или группы
сооружений.
Выбор варианта диспетчеризации в каждом конкретном случае
определяется схемой и масштабами систем водоснабжения и канализации.
Как правило, для систем водоснабжения и канализации применяют-
Ся одно- и двухступенчатые службы диспетчеризации.
Трехступенчатая служба диспетчеризации применяется лишь в исключительных
СлУчаях для особо крупных и сложных систем.
Схему одноступенчатой службы диспетчеризации применяют для
г°родских систем водоснабжения и канализации с малой (до 50 км)
139
протяженностью сети. В этом случае из диспетчерского пункта управ,
ляют работой головных сооружений и контролируют давление в сети
а также уровни воды в резервуаре. Как правило, в городах с подзем!
ным водозабором диспетчерские пункты располагают на насосной
станции, находящейся ближе к центру системы водоснабжения; а в
городах с открытым водозабором — на территории головных
сооружений.
Для городских систем водоснабжения и канализации с большой
протяженностью сети применяют схемы двухступенчатой диспетчер.
Главный
инженер
Главный диспетчер
идп
Группа ибто-
м а тик и,
телемеханики
и сбязи
Сменный диспетчер
Аварийная
бригада
Группы
профилактического
осмотра обору-
доЗания
сооружений и сети
Сменный диспетчер
тиная
дригада
Бригада
профилактических
мероприятии
Группы
профилактического осмотра обору доба-
ния сооружений и сети
Сменный диспетчер
Аварийная
бригада
бригада
профилактических
мероприятий
Группы профилактическо
20 осмотра оборудования
сооружений и сети
А
Рис. 75. Схема двухступенчатой
диспетчерской службы для системы
водоснабжения города
Рис. 76. Схема диспетчерской
службы для системы канализации города
№№ 1—3 — канализационные участки;
— телеуправление; —
телефонная сеть
РНС — районная насосная станция; ГНС —
главная насосная станция; ОС — очистные
сооружения; / — главный инженер; 2 —
сетевые трубопроводы; 3 — аварийный
выпуск; 4 — выпуск очищенных сточных вод
140
ской службы. При протяженности сети до 400 км организуются
центральный диспетчерский пункт (ЦДП) и местные диспетчерские
пункты (МДП) отдельных крупных сооружений. При протяженности
сети более 400 км, кроме того, организуются местные диспетчерские
пункты сети (МДПС). В схеме двухступенчатой службы
диспетчеризации для системы водоснабжения (рис. 75) центральный
диспетчерский пункт располагается либо в центре системы, либо на территории
головных сооружений. Из него осуществляется оперативное
управление работой местных диспетчерских пунктов, входящих в систему,
и зонных станций подкачки, а также контроль за давлением в сети
и за уровнями в резервуарах.
Местный диспетчерский пункт головных сооружений обычно
располагается на территории головных сооружений. Из него
управляют работой насосных станций первого и второго подъема и
очистных сооружений, а также контролируют уровень в резервуаре
чистой воды.
Местные диспетчерские пункты сети располагаются в
наиболее отдаленных районах города; из них управляют подачей воды в
зависимости от результатов контроля за давлением в сети данного
района.
В схему диспетчерской службы для системы канализации
крупного города (рис. 76) кроме центрального диспетчерского пункта (ЦДП)
входят три местных диспетчерских пункта районных насосных
станций и сети (МДПС), а также местный диспетчерский пункт главной
насосной станции и очистных сооружений (МДПОС).
Распределение между диспетчерскими пунктами контролируемых
параметров и объектов управления систем водоснабжения и
канализации зависит от размещения сооружений, их производительности,
количества агрегатов в каждой установке, протяженности
трубопроводов, площади, занимаемой распределительной сетью, от
организационной структуры системы, степени ее автоматизации и ряда
факторов местного значения.
Все оборудование системы должно быть точно распределено (с
точки зрения оперативного управления) между отдельными ступенями
диспетчерской службы и дежурным персоналом. В отдельных
случаях некоторые операции с оборудованием, входящим в круг
оперативной работы данного диспетчера, могут одновременно находиться в
ведении главного диспетчера данной системы.
При наличии центрального и местных диспетчерских пунктов
непосредственное управление объектами возлагается на местных
диспетчеров, а главный диспетчер осуществляет общее руководство
системой и контролирует работу местных диспетчерских пунктов.
Диспетчеризация должна сочетаться с максимально возможной
автоматизацией объектов и сооружений. Только в этом случае может
быть получен максимальный технологический и экономический эффект.
Следует предусматривать автоматизацию отдельных объектов,
обеспечивающую их работу без обслуживающего персонала.
Необходимость наличия обслуживающего персонала должна в каждом случае
обосновываться.
141
§ 53. ОБОРУДОВАНИЕ ДИСПЕТЧЕРСКИХ ПУНКТОВ
Диспетчерский пункт обычно состоит из следующих помещений*
операторской, где расположены щиты, пульты и стол диспетчера; ап-
паратной, где расположены блоки-шкафы реле, кабельные кроссы,
выпрямители, зарядно-разрядные щиты; аккумуляторной с
батареями для питания оборудования пункта постоянным током; контрольно-
ремонтной мастерской, где находится дежурный персонал,
обслуживающий оборудование; вспомогательных производственно-бытовых
помещений. По своим размерам помещения диспетчерского пункта
должны обеспечивать возможность размещения аппаратуры и
мебели с соблюдением проходов, необходимых для оперативной работы и
обслуживания аппаратуры.
Диспетчерская служба оснащается необходимыми техническими
средствами автоматического управления, телеуправления и
телесигнализации, телеизмерения и селекторной (избирательной)
телефонной связи.
На диспетчерском пункте (рис. 77) рабочая часть щитов и пульта
управления должна быть расположена так, чтобы все приборы были
видны диспетчеру с его рабочего места. Конструкция щитов и пульта
управления не должна создавать затруднений для монтажа
соединительных проводов и приборов, а также для замены их в дальнейшем
при необходимости.
На диспетчерском щите условными символами изображается
мнемоническая схема системы, контролируемой диспетчерским пунктом
(насосные станции, резервуары, распределительная сеть и т. д.).
На схеме получают отражение сигналы устройств телесигнализации,
отмечающие действительное состояние насосов, задвижек и другого
оборудования. В мнемонических схемах используются символы двух
видов: светящиеся (оптические), при которых состояние объекта
сигнализируется изменением цвета или интенсивности светового поля
табло; мимические, при которых состояние объекта сигнализируется
положением поворотного указателя. При использовании оптических
символов_ сигнал несоответствия отображается мигающим светом
сигнальных ламп.
Пульт управления имеет
одно или два рабочих места
(по числу дежурных в смене).
На вертикальной панели
пульта размещаются указательные
приборы телеизмерения. На
наклонной панели пульта под
небольшим углом
располагаются ключи управления и
сигнальные лампы. Диспетчерская
телефонная связь
осуществляется с помощью местных
коммутаторов. Релейная
аппаратура телемеханических
устройств монтируется в метал-
Рис. 77. Диспетчерский пункт
/ — панели щита; // — приборы
телеизмерения; /// — панели пульта; 1—6 — номера
панелей
142
лических шкафах, установленных в помещении аппаратной. В
верхней части шкафов располагаются реле, шаговые искатели, а
в нижней части — клеммники для присоединения кабелей внешних
связей.
Одним из важнейших элементов диспетчерского телеуправления
являются линии связи, соединяющие оборудование диспетчерского
пункта с управляемыми объектами. Линии связи могут быть воздуш»
ными или кабельными. Более надежны кабельные линии, так как они
в меньшей степени подвергаются внешним воздействиям. Поскольку
прокладка самостоятельных линий весьма дорога, то абонируются
выделенные пары телефонного кабеля. На территории головных
сооружений возможна как подвеска воздушных линий связи, так и
прокладка самостоятельных кабельных линий. Однако для связи с
объектами, работающими без постоянного дежурного персонала,
применяются более надежные кабельные линии связи.
Для радиоканалов связи используются средневолновый и
ультракоротковолновый диапазоны. В средневолновом диапазоне можно
использовать серийно выпускаемые приемо-передающие радиостанции
типа ЖР-3. В ультракоротковолновом диапазоне можно использовать
радиостанцию типа ЖР-4 или устройство радиотелесигнализации
СРП-1.
Целесообразно также использовать телевидение при
диспетчерском управлении. Для этой цели можно воспользоваться
промышленной телевизионной установкой ПТУ-103. Установка позволяет
наблюдать неподвижные и быстроперемещающиеся объекты при малой
освещенности.
В диспетчерских пунктах сложных систем устанавливается
большое число приборов контроля. При этом визуальное наблюдение
диспетчера за ними становится затруднительным. Поэтому в системах
управления крупными объектами получают применение машины
централизованного контроля, которые сокращают количество приборов
на щитах управления, повышают оперативность управления и конт-
троля. Разработан целый ряд типов машин централизованного
контроля, например, типа «Марс», которые могут контролировать расход,
давление, температуру и другие параметры одновременно в 100—300
точках. Поступающая от датчиков информация выдается в цифровом
виде или в виде сигналов на мнемонической схеме. Машина ведет
заданную периодическую регистрацию параметров и обеспечивает
обнаружение и сигнализацию отклонений отдельных параметров от
заданной величины. Выпускается также устройство контроля типа
«Румб», осуществляющее автоматическую регистрацию 40
параметров в виде цифровой записи и перфорированных карт, пригодных для
дальнейшей обработки на цифровых вычислительных машинах.
Существуют и другие типы машин централизованного контроля и
управления («Амур», «Сигнал», «Зенит», «Сокол»).
Широкое внедрение автоматизированных систем управления
{АСУ) с использованием электронно-вычислительных машин
создает благоприятные перспективы для коренного совершенствования
управления сложными комплексами водопроводных и канализационных
сооружений.
143
ГЛАВА XXI. ТЕХНИКО-ЭКОНОМИЧЕСКАЯ
ЭФФЕКТИВНОСТЬ АВТОМАТИЗАЦИИ СИСТЕМ
ВОДОСНАБЖЕНИЯ И КАНАЛИЗАЦИИ
§ 54. ОСНОВНЫЕ ТЕХНИКО-ЭКОНОМИЧЕСКИЕ
ПРЕИМУЩЕСТВА АВТОМАТИЗАЦИИ
Автоматизация водопроводных и канализационных сооружений
повышает надежность и бесперебойность их работы, улучшает
качество обработки воды. Это достигается за счет постоянного
разветвленного автоматического контроля за протеканием всех технологических
процессов. По результатам контроля автоматические системы могут
с большой быстротой изменять эти процессы, поддерживая их
качественные и количественные показатели в заданных пределах.
Автоматизация резко повышает производительность труда
обслуживающего персонала, позволяет значительно улучшить условия
труда, выполнять отдельные операции во вредных для человека условиях
без его непосредственного участия, повысить безопасность труда и
сократить производственные потери реагентов, топлива и
электроэнергии. Автоматизация создает возможности для интенсификации
технологических процессов и внедрения новых прогрессивных
методов их реализации, неосуществимых без автоматизации,
способствует улучшению организации производства, предотвращает
аварии, снижает их число, масштабы и облегчает ликвидацию
последствий аварий. Перечисленные преимущества автоматизации могут
иметь большое техническое и социальное значение.
Основным критерием в оценке внедрения автоматических систем
является также достигаемый при этом экономический эффект. Он
может оцениваться в показателях, имеющих натуральное или
стоимостное (денежное) выражение.
§ 55. ПОКАЗАТЕЛИ ЭКОНОМИЧЕСКОЙ
ЭФФЕКТИВНОСТИ АВТОМАТИЗАЦИИ
Экономическая эффективность автоматизации достигается, в
частности, за счет сокращения персонала. Значительная часть операций,
выполняемых вручную персоналом, обслуживающим сооружения,
при внедрении автоматизации может выполняться без участия
человека. Так, например, при автоматизации водоочистных станций
численность эксплуатационного персонала уменьшается в 1,5-т- 2 раза,
а при автоматизации насосных станций — персонал сокращается
полностью. С внедрением автоматизации сокращается количество
затрачиваемого физического труда человека, изменяются характер труда
и квалификация персонала. Однако эксплуатационные расходы
снижаются не только за счет уменьшения фонда заработной платы при
сокращении штатов, но и за счет повышения КПД установок, экономии
материалов и энергетических ресурсов. Внедрение автоматизации на
водоочистных станциях, как показала практика, позволяет
достигать экономии коагулянта до 40 % и извести до 20 %. Автомати-
144
зация насосных станций канала им. Москвы позволила снизить
расход электроэнергии на 35—40 %. Благодаря лучшей защите агрега-
Тов снижение затрат на текущий ремонт при этом достигает 20 %,
сокращается износ оборудования и увеличивается срок его службы
до 30 %. Автоматизация в ряде случаев создает возможность для
перевода установок на работу в часы льготного тарифа на
электроэнергию. Снижаются также расходы на отопление и вентиляцию.
Повышением производительности установок и соответствующего
уменьшения строительных объемов (регулирующие емкости
водонапорных сооружений и т. п.) сокращаются капитальные затраты.
Однако возникают дополнительные капитальные затраты на
приобретение и монтаж средств автоматизации, которое могут быть
быстро погашены за счет снижения других расходов.
Соотношение между сравнительным увеличением капитальных
вложений и получаемой годовой экономией в результате снижения
себестоимости продукции определяется показателем срока окупаемости
капитальных затрат. Этот показатель принят в качестве основного
критерия при оценке эффективности внедрения новой техники.
Срок окупаемости первоначальных капитальных затрат на
автоматизацию рассчитывается по формуле
КК
0
где То — срок окупаемости в годах; /С — первоначальные капиталовложения;
С — себестоимость единицы вырабатываемой продукции; О — величина годовой
продукции; индекс / относится к неавтоматизированным, а индекс 2 — к
автоматизированным объектам.
В качестве сводного показателя определяют коэффициент
эффективности капиталовложений на автоматизацию Е, определяемый в
% по формуле
Е = — 100.
То
Величина Е показывает, какая часть затрат на автоматизацию
окупается за 1 год.
В зависимости от степени автоматизации устанавливаются
следующие максимальные сроки окупаемости: при частичной автоматизации
и установке приборов на действующих агрегатах Г0=1ч- 1,5 года;
при автоматизации отдельных процессов и частичной замене
оборудования ro=2-f- 3 годам; при комплексной автоматизации
отдельных процессов без изменения технологической схемы Г0=4~ 5
голам; при комплексной автоматизации объекта, требующей
переоборудования и изменения технологической схемы, допускается
принимать Го=6 годам.
Практический опыт автоматизации целого ряда промышленных
предприятий показывает, что большинство затрат на эти цели
окупается в 2—4 года.
Широкое внедрение автоматизации базируется в основном на
факторах технологического процесса, однако экономические
предпосылки оказывают большое влияние на масштабы автоматизации. Следует
иметь в виду, что в современных условиях имеется техническая
возможность автоматизировать практически любой технологический
процесс, но экономически это не всегда бывает целесообразно.
СПИСОК ЛИТЕРАТУРЫ
Автоматические приборы, регуляторы; и вычислительные системы. Справочное
пособие. Под ред. Б. Д. Кошарского. — М., «Машиностроение», 1976, cj 485.
Боронихин А. С, Гризак Ю. С. Основы автоматизации производства и конт-
рольно-измерительные приборы на предприятиях промышленности строительных
материалов. Изд. 3-е. — М.,, Стройиздат, 1974, с. 312.
Бородин И. Ф., Кирилин' Н. И. Основы автоматики и автоматизации
производственных процессов. — М., «Колос», 1977, с. 328.
Казаков А. В., Кулаков Мм В., Мелюшев Ю. К. Основы автоматики и
автоматизации химических производств. — М., «Машиностроение», 1970, с. 375.
Киблицкий В. А; Системы управления с бесконтактными логическими
элементами.— М., «Энергия», 1976, с. 147.
Кузьмин А. А. Инструментальный контроль процессов очистки^ нефтесодержа-
щих сточных вод (тематич. обзор). — М., ЦНИИТЭнефтехим, 1973,' с. 99.
Лобачев П. В., Шевелев Ф. А. Расходомеры ■ для систем водоснабжения и
канализации. — М., Стройиздат, 1976, с. 304.
Меклер В. Я-, Раввин Л. С. Основы автоматизации санитарно-технических
устройств. — М., Стройиздат, 1974, с. 232.
Мясковский И. Г. Тепловой контроль и автоматизация тепловых процессов. —
М., «Машиностроение», 1978, с. 208.
Попкович Г. С. Основы автоматики и автоматизации водопроводно-канали-
зационных сооружений. Изд. 2-е. — М.,'«Высшая школа», 1975, с. 360.
Попкович Г. С. Автоматизация и диспетчеризация систем водоснабжения и
канализации. М., Стройиздат, 1978, с. 191.,
Попкович Г. С. Основы автоматизации систем водоснабжения и
канализации. — М., Стройиздат, 1970, с. 255.
Патеюк В. М., Кузьмин А. А. Управление процессами биологической очистки
сточных вод нефтеперерабатывающих и нефтехимических предприятий
(тематический обзор). —М., ЦНИИТЭнефтехим, 1978, с. 48.
Старостин В. А. Технологические измерения и контрольно-измерительные
приборы в промышленности строительных материалов. — М., Стройиздат, 1973,
с. 295.
Шимкович В. В. Приборы для автоматического контроля параметров
сточных вод на очистных сооружениях нефтеперерабатывающей и нефтехимической
промышленности (тематич. обзор). —М., ЦНИИТЭнефтехим, 1978, с 16.
ОГЛАВЛЕНИЕ
Стр.
Предисловие 3
Введение 4
раздел I. Общие сведения об автоматизации водоснабжения и канализации 6
Глава I. Водопроводные и канализационные сооружения как объекты
автоматизации ::::.., 6
§ 1. Основные характеристики сооружений ... 6
§ 2. Особенности автоматизации сооружений 7
Глава II. Основные задачи автоматизации сооружений водоснабжения и
канализации : : : : • 8
§ 3. Роль автоматизации в совершенствовании работы сооружений 8
§ 4. Современное состояние и перспективы автоматизации
сооружений 9
Раздел И. Основные элементу автоматики и телемеханики 10
Глава III. Датчики : 10
§ 5. Классификация датчиков 10
§ 6. Устройство датчиков 11
§ 7. Основные измерительные схемы 13
Глава IV. Реле, преобразователи и усилители 15
§ 8. Классификация реле 15
§ 9. Устройство реле 17
§ 10. Устройство преобразователей! и усилителей 19
Глава V. Исполнительные механизмы и регулирующие органы : : : . 22
§ 11. Основные характеристики и классификация 22
§ 12. Устройство исполнительных механизмов 23
§ 13. Основные типы регулирующих органов 25
Глава VI. Вычислительные устройства 26
§ 14. Цифровые и аналоговые вычислительные устройства ... 26
§ 15. Функции вычислительных устройств 27
Глава VII. Схемы автоматизации и их построение 28
§ 16. Типы схем 28
§ 17. Схемы включения реле 29
§ 18. Основные ГОСТы построения схем 31
Раздел III. Автоматизация технологического контроля 36
Глава VIII. Основы измерительной техники 36
§ 19. Основные, характеристики 36
§ 20. Классификация измерительных приборов 37
Глава IX. Измерение давления и уровня 38
§ 21. Устройство манометров и вакуумметров 38
§ 22. Устройство дифманометров 40
§ 23. Устройство уровнемеров 46
Глава X. Измерение расхода 50
§ 24 Методы измерения 50
§ 25. Устройство расходомеров 51
Глава XL Измерение температуры 57
147
Стр.
§ 26. Классификация и устройство термометров . 57
§ 27. Области применения термометров 61
Глава XII. Измерение качественных параметров питьевых и сточных вод 62
§ 28. Основные параметры качества воды 62
§ 29. Устройство приборов контроля качества воды 63
Раздел IV. Автоматическое регулирование 78
Глава XIII. Системы автоматического регулирования -78
§ 30. Структура систем регулирования 78
§ 31. Основные свойства объектов (регулирования 79
§ 32. Устойчивость систем регулирования 82
§ 33. Качество и надежность регулирования 84
Глава XIV. Автоматические регуляторы 84
§ 34. Классификация регуляторов 84
§ 35. Устройство регуляторов 86
§ 36. Особенности регуляторов 94
Раздел V. Основы телемеханики 95
Глава XV. Системы телемеханики 95
§ 37. Функции и структура систем телемеханики 95
§ 38. Области применения систем телемеханики 96
Глава XVI. Устройство систем телемеханики 97
§ 39. Методы и схемы телеизмерения 97
§ 40. Методы и схемы телеуправления и телесигнализации ... 100
§ 41. Промышленные системы телемеханики 101
Раздел VI. Автоматизация водопроводно-канализационных сооружений . 103
Глава XVII. Автоматизация насосных станций ЮЗ
§ 42. Основные схемы автоматизации 103
§ 43. Автоматическое управление насосами водоснабжения ... 105
§ 44. Автоматическое управление канализационными насосными
станциями 106
Глава XVIII. Автоматизация водопроводных сооружений 115
§ 45. Основные схемы автоматизации 115
§ 46. Автоматическое дозирование реагентов 11$
§ 47. Автоматизация скорых фильтров 122
Глава XIX. Автоматизация канализационных сооружений 126
§ 48. Автоматизация сооружений механической очистки сточных вод 126
§ 49. Автоматизация метантенков и вакуум-фильтров 130
§ 50. Автоматизация сооружений биохимической очистки сточных
вод 134
Глава XX. Диспетчеризация систем водоснабжения и канализации . 137
§ 51. Основные задачи диспетчерской службы 137
§ 52. Схемы диспетчеризации 139
§ 53. Оборудование диспетчерских пунктов 142
Глава XXI. Технико-экономическая эффективность автоматизации систем
водоснабжения и канализации 144
§ 54. Основные технико-экономические преимущества
автоматизации 144
§ 55. Показатели экономической эффективности автоматизации . 144
Списоклитературы 146
«ДОМ СТРОИТЕЛЬНОЙ КНИГИ»
ПРЕДЛАГАЕТ ВАШЕМУ ВНИМАНИЮ
СПРАВОЧНИК ПО СТРОИТЕЛЬСТВУ НА ВЕЧНО-
МЕРЗЛЫХ ГРУНТАХ,. ПОД. РЕД. Ю. Я. ВЕЛ ЛИ И ДР.
1977. Ц. 2 Р. 29 К.
В КНИГЕ СОДЕРЖАТСЯ СПРАВОЧНЫЕ ДАННЫЕ,
НЕОБХОДИМЫЕ ДЛЯ СТРОИТЕЛЬСТВА И
ПРОЕКТИРОВАНИЯ в районах вечномерзлых грунтов, рас-
СМАТРИВАЮТСЯ ОСОБЕННОСТИ ПЛАНИРОВКИ,
ЗАСТРОЙКИ И БЛАГОУСТРОЙСТВА НАСЕЛЕННЫХ МЕСТ
И ТЕРРИТОРИЙ ПРОМЫШЛЕННЫХ ПРЕДПРИЯТИИ.
ДАЮТСЯ РЕКОМЕНДАЦИИ ПО ВЫБОРУ ПРОЕКТНЫХ
РЕШЕНИЙ И ИХ РАСЧЕТНЫЕ ОБОСНОВАНИЯ.
ПРИВОДЯТСЯ ТАБЛИЦЫ, ГРАФИКИ, КАРТЫ И ПРИМЕРЫ
РАСЧЕТА, ОБЛЕГЧАЮЩИЕ ТРУД ПРОЕКТИРОВЩИКА.
СПРАВОЧНИК ПРЕДНАЗНАЧЕН ДЛЯ ИНЖЕНЕРНО-
ТЕХНИЧЕСКИХ РАБОТНИКОВ ПРОЕКТНЫХ И
СТРОИТЕЛЬНЫХ ОРГАНИЗАЦИЙ, ОБСЛУЖИВАЮЩИХ
РАЙОНЫ СЕВЕРА.
Заказы направлять по адресу: 195027 г. Ленинград,
Болыиеохтинский пр., д. 3, «Дом строительной книги».
УВАЖАЕМЫЙ ТОВАРИЩ!
ПРЕДЛАГАЕМ ВАШЕМУ ВНИМАНИЮ
СЛЕДУЮЩУЮ КНИГУ:
КЕНДИ АРПАД. РУКОВОДСТВО ПО МЕХАНИКЕ
ГРУНТОВ. Т. 4. ПРИМЕНЕНИЕ МЕХАНИКИ ГРУНТОВ В
ПРАКТИКЕ СТРОИТЕЛЬСТВА. ПЕР. С НЕМ. 1978.
2 Р. 30 К.
РАССМОТРЕНЫ РАЗЛИЧНЫЕ УСТРОЙСТВА
ОСНОВАНИЙ СООРУЖЕНИИ В СЛОЖНЫХ УСЛОВИЯХ,
ПРОЕКТНЫЕ РЕШЕНИЯ ЭТИХ УСТРОЙСТВ, ДАННЫЕ
ИССЛЕДОВАНИЙ ГРУНТОВ. ПРОАНАЛИЗИРОВАНЫ
ПРИЧИНЫ АВАРИИ, СВЯЗАННЫХ С ПОВЕДЕНИЕМ
ГРУНТОВ В ОСНОВАНИЯХ И ЗЕМЛЯНЫХ
СООРУЖЕНИЯХ. ПРИВЕДЕНЫ ПРИМЕРЫ РАЗРУШЕНИЯ
ОСНОВАНИЯ ЖЕЛЕЗНОДОРОЖНОЙ НАСЫПИ,
ОСНОВАНИЯ ПОД ШИРОКОЙ АВТОСТРАДОЙ, ПОДПОРНЫХ
СООРУЖЕНИЙ ОСАДКИ НАСЫПИ, ВОЗВЕДЕННОЙ
НА СЛАБОМ ГРУНТЕ, ОПОЛЗНЕВЫХ ЯВЛЕНИЙ И ДР.
КНИГА ПРЕДНАЗНАЧЕНА ДЛЯ
ИНЖЕНЕРНО-ТЕХНИЧЕСКИХ РАБОТНИКОВ ПРОЕКТНЫХ И
СТРОИТЕЛЬНЫХ ОРГАНИЗАЦИЙ.
Заказы направлять по адресу: 195027 г. Ленинград,
Болыиеохтинский пр., д. 3, «Дом строительной книги».
УВАЖАЕМЫЙ ТОВАРИЩ!
ПРЕДЛАГАЕМ ВАШЕМУ ВНИМАНИЮ КНИГУ:
КАЛИЦУН В. И. И ДР. ЛАБОРАТОРНЫЙ ПРАКТИКУМ
ПО КАНАЛИЗАЦИИ. УЧЕБ. ПОСОБИЕ ДЛЯ ВУЗОВ. 1978,
Ц. 25 КОП.
ИЗЛОЖЕНЫ НОВЫЕ МЕТОДИЧЕСКИЕ ПРИНЦИПЫ
И ПРОГРАММА ЛАБОРАТОРНЫХ ЗАНЯТИИ ПО
КОНТРОЛЮ, ОЦЕНКЕ И ИССЛЕДОВАНИЮ РАБОТЫ
СООРУЖЕНИИ СИСТЕМ КАНАЛИЗАЦИИ, ОСНОВНЫЕ
ПОНЯТИЯ ОЦЕНКИ ТОЧНОСТИ ИЗМЕРЕНИИ И
МАТЕМАТИЧЕСКОЙ ОБРАБОТКИ РЕЗУЛЬТАТОВ ОПЫТА.
ПИВЕДЕНЫ ДАННЫЕ ПО ОСНАЩЕНИЮ
ЛАБОРАТОРИЙ НЕОБХОДИМЫМ ОБОРУДОВАНИЕМ.
УЧЕБНОЕ ПОСОБИЕ ПРЕДНАЗНАЧЕНО ДЛЯ
СТУДЕНТОВ СТРОИТЕЛЬНЫХ ВУЗОВ.
Заказы направлять по адресу: 195027 г. Ленинград,
Болыиеохтинский пр., д. 3, «Дом строительной книги».
Геннадий Семенович Попкович, Анатолий Александрович Кузьмин
АВТОМАТИЗАЦИЯ
СИСТЕМ
ВОДОСНАБЖЕНИЯ
И КАНАЛИЗАЦИИ
Редакция инженерного оборудования
Зав. редакцией И. В. Соболева
Редактор К- Н. Долгова
Младший редактор А. А. Минаева
Внешнее оформление художника Н. А. Максимова
Технический редактор В. Д. Павлова
Корректор Г. Г. Морозовская
ИБ № 3183
Сдано в набор 09.11 82 Подписано в печать 16.03 83. Т-07404
Формат 60Х90'/]б Бумага тип № 2 Гарнитура «Литературная»
Печать высокая Усл. печ. л. 9,5 Фиэ. печ. 9,5 Усл. кр -отт 9,75
Уч -изд л. 10,33 Тираж 25.000 экз Изд. № A-III 9763
Заказ 496 Цена 30 к.
Стройиздат, 101, Москва, Каляевская, 23а
Подольский филиал ПО «Периодика> Союзполиграфпрома при Государственном
комитете СССР по делам издательств, полиграфии и книжной торговли
г. Подольск, ул. Кирова, д. 25