/
































































































































































































































































































































































































































Автор: Шрейнера Р.Т. Поляков В.Н.
Теги: электротехника инженерия электрооборудование электрические двигатели издательство екатеринбург
ISBN: 5-321-00942-2
Год: 2006




Текст
Поляков Владимир Николаевич - доцент
Уральского государственного технического
университета - УПИ, (г. Екатеринбург),
канд. техн. наук. Окончил в 1969 г.
Уральский политехнический институт. В
1977 г. защитил в УПИ кандидатскую
диссертацию по теме «Оптимизация
стационарных режимов асинхронных
машин в системах с вентильными
преобразователями частоты».
Шрейнер Рудольф Теодорович -
профессор Российского государствен-
ного профессионально-педагогического
университета, (г. Екатеринбург), доктор
техн. наук. Окончил в 1960 г. Уральский
политехнический институт. В 1991 г.
защитил в МЭИ докторскую диссертацию
по теме «Асинхронные электроприводы с
полупроводниковыми преобразователями
частоты».
Федеральное агентство по образованию
ГОУ ВПО «Уральский государственный технический университет-УПИ»
ГОУ ВПО «Российский государственный профессионально-
педагогический университет»
В.Н. Поляков Р.Т. Шрейнер
ЭКСТРЕМАЛЬНОЕ УПРАВЛЕНИЕ
ЭЛЕКТРИЧЕСКИМИ ДВИГАТЕЛЯМИ
Под общей редакцией
д-ра техн, наук, проф. Р.Т. Шрейнера
Екатеринбург
2006
УДК 621.313.13/. 17
ББК31.261.2
П54
Рецензенты:
д-р техн, наук, профессор А.А. Ефимов (Санкт-Петербургский
государственный университет аэрокосмического приборостроения);
канд. техн, наук, ст. науч. сотр. С.В. Житов (ЗАО “Уралтехмаркет”)
Поляков В.Н.
П 54 Экстремальное управление электрическими двигателями /
В.Н. Поляков, Р.Т. Шрейнер; под общей ред. д-ра техн, наук,
проф. Р.Т. Шрейнера. Екатеринбург: УГТУ-УПИ, 2006. 420 с.
ISBN 5-321-00942-2
Излагаются вопросы экстремального управления различными типами
электрических двигателей. Приводятся математические модели
электрических машин как объектов управления. Даются обобщенные
постановки задач экстремального управления электрическими
двигателями. Рассматриваются характеристики электрических двигателей
как объектов экстремального управления и вычислительные аспекты
решения задач оптимизации на условный и безусловный экстремумы.
Дается решение задач экстремального управления по минимуму потерь
мощности и токов для обобщенной машины переменного тока,
асинхронизированного двигателя, асинхронного двигателя с
короткозамкнутым ротором, синхронного и вентильного двигателей с
электромагнитным возбуждением.
Книга предназначена специалистам в области электромеханики и
автоматизированного электропривода и может быть полезной аспирантам
и студентам, обучающимся по направлению подготовки инженеров и
магистров соответствующих специальностей.
Библиогр. 145 назв. Рис. 210. Табл. 4.
ISBN 5-321-00942-2
© ГОУ ВПО «Уральский государственный
технический университет-УПИ», 2006
© ГОУ ВПО «Российский государственный
профессионально-педагогический
университет», 2006
© В.Н. Поляков, Р.Т. Шрейнер, 2006
ПРЕДИСЛОВИЕ
Электрические двигатели являются основой построения
электроприводов, . нашедших самое широкое применение в
промышленности, транспорте и сельском хозяйстве. На их основе
создаются высокопроизводительные машины и агрегаты, осуществляется
рациональное управление и комплексная автоматизация технологических
процессов. О роли электропривода в общественном производстве
свидетельствует доля потребляемой им электрической энергии, которая
составляет более 60 % от общего объема ее производства.
Одной из главных тенденций развития современного электропривода
является использование его в целях сбережения энергетических ресурсов.
В этой связи расширяется область применения регулируемого
электропривода не только в сферах высоких технологий, но и там, где до
настоящего времени традиционно использовался простой нерегулируемый
электропривод с асинхронным двигателем с короткозамкнутым ротором.
При этом важной становится задача повышения энергетической
эффективности регулируемого электропривода [34, 36].
Публикуемые в печати материалы свидетельствуют о том, что
проблема энергетической эффективности электропривода в последние
годы решается одновременно за счет совершенствования существующих и
разработки новых типов электродвигателей [5, 6, 65, 99] и
полупроводниковых преобразователей с повышенными энергетическими
характеристиками [22,39, 84, 109].
Отечественной электромашиностроительной отраслью освоено
несколько серий асинхронных двигателей общего применения (RA, АИ,
5А, 6А), имеющих более высокие КПД и коэффициент мощности. Причем
в массовых сериях асинхронных двигателей общего применения
увеличивается доля модификаций и двигателей специального назначения с
повышенными энергетическими характеристиками. Например,
разработаны специальные двигатели для частотно-регулируемого
электропривода, допускающие работу в режимах S1-S8. Применяются
синхронные двигатели с постоянными магнитами, имеющие более высокие
технико-экономические показатели в сравнении с асинхронными
двигателями.
Основным фактором повышения энергетической эффективности
преобразователей является использование полностью управляемых
полупроводниковых приборов силовой электроники (MOSFET, IGBT,
IEGT, GTO, IGCT).
В преобразователях частоты на полностью управляемых силовых
полупроводниковых приборах применяется режим широтно-импульсной
модуляции (ШИМ) выходного напряжения, способствующий улучшению
гармонического состава токов двигателей. Однако преобразователи с
3
ШИМ имеют сравнительно высокие коммутационные потери в
полупроводниковых приборах, связанные с коммутацией последних при
ненулевых мгновенных значениях токов и напряжений. Эти потери
возрастают с увеличением несущей частоты ШИМ, что ограничивает
предельную частоту коммутации. Уменьшение падения напряжения
предполагается достигнуть за счет применения биполярного транзистора с
изолированным затвором IEGT, который объединяет преимущества IGBT
по малой мощности управления, малым коммутационным потерям и
широкой области безопасной работы с преимуществами GTO по низкому
прямому падению напряжения.
Одним из способов снижения коммутационных потерь является
использование коммутации силовых ключей инвертора в нуле тока или
напряжения (принцип “мягкой ” коммутации) [141].
Определенные резервы повышения энергетических показателей
электроприводов имеются за счет применения ШИМ напряжения либо
тока силовых преобразователей с оптимальной частотой коммутации и
синтеза закона ШИМ на основе энергетического критерия,
обеспечивающего минимум дополнительных коммутационных потерь в
двигателе и потерь на коммутацию силовых ключей в преобразовате-
ле [33]. В последние годы разработаны ШИМ, основанные на векторном
подходе [32, 143] и прогнозирующем релейно-векторном управлении
преобразователями [126]. Для оптимальных векторных ШИМ характерно
существенное снижение коммутационных потерь.
Для повышения эффективности управления электроприводом
предлагаются также разнообразные схемные решения построения силовой
части преобразователей. С увеличением мощности электропривода растет
отрицательное влияние силового преобразователя на первичную сеть,
обусловленное высшими гармоническими составляющими первичного
тока. Наиболее эффективное решение этой проблемы заключается в
использовании на входе управляемого выпрямителя на полностью
управляемых ключах [28, 123], который благодаря ШИМ обеспечивает
коэффициент мощности, равный единице. Кроме того, такой управляемый
выпрямитель позволяет возвращать энергию в сеть при торможении
двигателя.
Представляет практический интерес разработка преобразователей
частоты с непосредственной связью на полностью управляемых силовых
полупроводниковых приборах, дающих возможность иметь на входе
коэффициент мощности, равный единице [46].
В области микропроцессорных средств управления также
наблюдаются значительные успехи [33, 41]. Если в первых промышленных
электроприводах использовались 16-разрядные контроллеры, то в
последние годы осуществлен переход на 32-разрядные процессорные
контроллеры, которые существенно превосходят по точности вычислений
4
и составу периферийных устройств, что позволяет решать практические
задачи повышенной сложности (идентификации параметров силовой
части, оценки переменных состояния, адаптивного и оптимального
управления).
Вместе с тем, несмотря на значительный прогресс в области силовой
электроники и микропроцессорных средств управления, в регулируемых
электроприводах сравнительно мало используются их возможности для
реализации энергосберегающих алгоритмов управления режимами
электроприводов. Во многих случаях реализуются законы управления
электрическими двигателями, которые не полностью отвечают
требованиям задачи энергосбережения. Поэтому одним из важных
направлений в теории и практике регулируемого электропривода остается
разработка электроприводов универсального применения, которые
обеспечивали бы технологические процессы при минимальных
энергетических затратах. В современных условиях это направление в
развитии регулируемого электропривода создает проблему разработки
научно обоснованных методов выбора энергосберегающих законов
управления и реализации их средствами микропроцессорной техники. В
свою очередь это требует решения следующих вопросов:
• глубокого и всестороннего изучения оптимальных режимов
электромеханических систем с различными типами двигателей и
полупроводниковых преобразователей;
• обобщения результатов анализа оптимальных режимов в целях
выбора из их числа наиболее эффективных и приемлемых для
универсального применения;
• обоснования структур систем управления электроприводами для
более полной реализации оптимальных режимов;
• разработки методов синтеза оптимальных законов управления и
анализа процессов в электроприводах с энергосберегающими
алгоритмами управления.
Вопросам оптимального управления электроприводами посвящено
большое число публикаций [10—13, 16, 19, 48, 49, 54—57, 60-64, 66-69, 72,
73, 76, 77, 83, 85, 86, 92, 93, 95-98, 103, 110, 114, 116, 119, 121, 128, 130-
135 и др.]. Задачи оптимизации их режимов рассматривались в различных
аспектах в зависимости от степени развития теории оптимального
управления, электрических машин, преобразовательной техники и средств
автоматического управления. В многочисленных работах детально и на
высоком уровне исследованы отдельные стороны проблемы оптимизации
электрических приводов. Благодаря этому подготовлена база для
последующего обобщения и выбора методологии исследования
оптимальных режимов электромеханических систем с различными типами
двигателей и полупроводниковых преобразователей. Все очевиднее
становится подход, базирующийся на представлении электромеханической
5
системы как объекта экстремального управления, использовании
проблемно-ориентированных моделей и методов решения экстремальных
задач с учетом их многокритериального характера и ограничений. В плане
практической реализации оптимальных режимов интерес представляют
вопросы, связанные с разработкой общих принципов построения систем
экстремального управления электроприводами в условиях неполной
информации о параметрах и ограниченного числа доступных для
измерения переменных состояния электромеханической системы.
В книге впервые в систематизированном виде излагаются результаты
комплексного исследования режимов электрических двигателей как
объектов экстремального управления в целях использования их при
построении высокоэффективных (в смысле энергетических критериев
качества) регулируемых электроприводов с различными типами
электродвигателей и полупроводниковых преобразователей. Выбор
электрических двигателей в качестве объектов исследования обусловлен
тем, что индивидуальные свойства двигателей и режимы управления ими
оказывают определяющее влияние на энергетику электроприводов в целом
при выполнении технологических задач.
Содержание книги раскрывается в десяти главах.
В первой главе дается обоснование исходных математических
моделей основных типов электрических двигателей как элементов систем
управления электроприводами. Этот вопрос решается на единой
методологической основе построения математических моделей
многофазных электрических машин переменного и постоянного тока при
питании обмоток от автономных источников напряжения [70, 124]. Особое
внимание при математическом моделировании электрических двигателей
уделяется учету эффекта насыщения магнитной цепи как фактора,
имеющего принципиальное значение для решения экстремальных задач
управления. Рассматриваются математические модели обобщенной
машины переменного тока, асинхронных двигателей с короткозамкнутым
ротором, неявнополюсных и явнополюсных синхронных двигателей с
электромагнитным возбуждением, вентильных двигателей, а также
двигателей постоянного тока.
Во второй главе дается теоретическое обобщение постановок задач
экстремального управления электромеханическими. системами.
Обосновывается возможность применения экстремального управления
электрическими двигателями. Постановки задач излагаются в рамках
единого методологического подхода независимо от типов электрических
двигателей и силовых источников питания. Описываются основные этапы
этого подхода. Формулируется комплексная задача оптимизации
установившихся режимов электропривода. Показаны особенности задач
оптимизации. Приводится классификация основных типов электрических
двигателей по числу степеней свободы и размерности вектора управлений.
6
Обсуждаются условия существования решения задач экстремального
управления.
В третьей главе рассматриваются характеристики электрических
двигателей как объектов экстремального управления. Описывается
обобщенная проблемно-ориентированная модель электрической машины
для задач оптимизации, к которой приводятся исходные модели основных
типов электрических двигателей. Предлагаются различные варианты
рациональных проблемно-ориентированных моделей электрических
двигателей, пригодных для решения практических задач оптимального
управления. Показано, что все основные типы электрических машин
обладают экстремальными характеристиками по многим показателям
качества как в двигательном, так и в генераторном режимах работы.
Дается анализ экстремальных характеристик обобщенной машины
переменного тока и основных типов электрических двигателей.
В четвертой главе на основе результатов анализа характеристик
формулируются общие свойства электрических двигателей как объектов
экстремального управления, использующиеся в дальнейшем для
обоснования численных методов решения конкретных задач оптимизации.
Рассматриваются вычислительные аспекты решения задач экстремального
управления электрическими двигателями в классе проблемно-
ориентированных моделей. Дается обзор задач оптимизации
установившихся режимов электрических двигателей и классификация
типов экстремальных задач. Для каждого типа экстремальной задачи
осуществляется выбор численного метода ее решения. Особое внимание
уделяется проблеме определения начального приближения и параметров,
от которых зависит эффективность методов поиска экстремума в условиях
изменения скорости и нагрузки на валу двигателя. В заключение
рассмотрены типичные для электрических двигателей критерии качества и
ограничения.
В последующих шести главах приводится решение задач
экстремального управления электрическими двигателями. В пятой главе
рассматривается экстремальное управление обобщенной машиной
переменного тока, в шестой главе - асинхронизированными двигателями, в
седьмой главе - асинхронными двигателями с короткозамкнутым ротором,
в восьмой и девятой главах - синхронными двигателями с
электромагнитным возбуждением и, наконец, в десятой главе -
экстремальное управление вентильными двигателями.
В этих главах дается решение задач оптимизации по минимуму
потерь либо тока в открытой области управлений и задач оптимизации по
этим критериям при ограничениях на главный магнитный поток, на
потребляемую реактивную мощность, либо при одновременном
ограничении главного магнитного потока и реактивной мощности. Для
асинхронного двигателя рассматривается также задача экстремального
7
управления по максимуму момента при ограничении напряжения и тока
силового преобразователя.
В книге отражены результаты научных работ, выполненных
авторами в Уральском государственном техническом университете - УПИ
и Российском государственном профессионально-педагогическом
университете.
Авторы выражают признательность рецензентам - проф., д-ру техн,
наук А.А Ефимову и канд. техн, наук С.В. Житову за полезные замечания
по рукописи.
Авторы признательны ООО «ПФ Тяжпромэлектропривод-2», ЗАО
«Тяжпромэлектромет» и Инженерно-производственному предприятию
«Автоматизированные Системы и Комплексы» за помощь в издании
книги.
Книга адресована специалистам в области электромеханики и
автоматизированного электропривода и может быть полезной аспирантам
и студентам, обучающимся по направлению подготовки инженеров и
магистров соответствующих специальностей.
8
Глава 1
МАТЕМАТИЧЕСКИЕ МОДЕЛИ
ЭЛЕКТРИЧЕСКИХ МАШИН
КАК ОБЪЕКТОВ УПРАВЛЕНИЯ
1.1. Метод описания математических моделей электрических машин
как объектов управления
Разработка математических моделей электрических машин является
одним из важных этапов процесса создания систем экстремального
управления. Для прикладных задач управления математические модели
электрических машин должны удовлетворять следующим основным
требованиям:
1) отражать все существенные факторы, влияющие на решение
экстремальной задачи. К ним относятся явнополюсность, насыщение,
влияние вихревых токов, электромагнитные и электромеханические
переходные процессы в электрических машинах. Необходимость учета
этих факторов связана с тем, что оптимизация режимов работы
электрических машин объективно достигается за счет рационального
использования их активных частей, в том числе работы в зоне насыщения
главной магнитной цепи. Оптимальные динамические режимы
характеризуются быстрыми изменениями во времени как энергии
электромагнитных полей, так и кинетической энергии ротора и
сопряженных с ним элементов рабочей машины;
2) учитывать эффекты, обусловленные автономным питанием обмоток
электрической машины. В системах регулируемого электропривода
двигатели получают питание от полупроводниковых преобразователей
частоты с несинусоидальной формой выходного напряжения. Причем в
практике используются электрические схемы соединения многофазных
машин как без нейтрального провода, так и с раздельным питанием
фазных обмоток. В последнем случае в фазных обмотках могут
9
присутствовать токи нулевой последовательности, влияющие на
энергетику и нагрев электрической машины;
3) иметь обобщенный характер, т.е. описывать совокупность явлений в
электрической машине при одних и тех же допущениях. В связи со
сложностью описания электрических машин как объектов управления
должна существовать возможность преобразования исходной модели
машины к различным вариантам, удобным с точки зрения решения задач
экстремального управления (поиск алгоритмов оптимального управления,
исследования чувствительности оптимальных законов управления к
параметрическим возмущениям, идентификации параметров и оценки
переменных состояния электрических машин);
4) отражать свойства электрических машин как объектов управления в
компактной форме записи уравнений, предусматривать переход от
уравнений к графическому изображению моделей в виде структурных
схем, наглядно отражающих особенности электрических машин как
объектов управления, и быть максимально адаптированными к
использованию программных систем и пакетов для автоматизации
математических расчетов с визуально-ориентированными средствами
анализа.
Перечисленным требованиям в большей степени отвечает метод
описания математических моделей неявнополюсных машин переменного
тока с насыщенной главной магнитной цепью [124, 131]. В данной работе
этот метод используется также для описания явнополюсных машин
постоянного и переменного тока, что позволяет создать базу исходных
математических моделей электрических машин для решения задач
экстремального управления на единой методологической основе. При этом
процедура вывода уравнений включает следующие основные этапы.
Описание модели идеализированной электрической машины. На
данном этапе формируются основные допущения, определяющие уровень
идеализации электрической машины как объекта моделирования и
вводятся базовые положения, определяющие структуру ее математической
модели. Для характеристики пространственного положения обмоток
машины вводится начальная система отсчета, позволяющая задать
исходные положения фиксированных относительно статора и ротора
систем координат, используемых для математического описания модели
машины векторно-матричными уравнениями.
Введение систем координат. Векторное представление
переменных. Системы координат вводятся в целях корректной записи
уравнений и их переменных с учетом пространственного положения
обмоток машины. Уравнения двухфазных машин переменного тока и
10
машин постоянного тока записываются в двухмерных прямоугольных
системах координат, фиксированных относительно статора и ротора:
O,Gr ) = Шо,
/df
где О - точка начала координат;
Gv, Gr - ортонормированные базисы двухмерного линейного
векторного пространства R2,
Уравнения трехфазных машин переменного тока записываются в
фиксированных относительно статора и ротора трехмерных
прямоугольных системах координат:
О, Fj ) = О asbsc.;
/df s s
где О - точка начала координат;
Fj, Fr - ортонормированные
векторного пространства R ,
= O arbrc.
/df
базисы трехмерного линейного
Использование понятия базиса векторного пространства дает
возможность представлять переменные машины в двух взаимно
дополняющих формах записи: в форме двухмерных (трехмерных)
11
геометрических радиусов-векторов и в форме алгебраических векторов-
столбцов, элементами которых являются координаты этих радиусов-
векторов в различных базисах векторного пространства.
Составление уравнений электрического равновесия цепей
статора и ротора. На основании второго закона Кирхгофа и закона
Фарадея составляются уравнения электрического равновесия для каждой
обмотки идеализированной модели электрической машины. Для
произвольной г-й обмотки уравнение напряжений имеет вид
»i ii+pWi,
где и, i и - напряжение, ток и полное потокосцепление обмотки;
г - активное сопротивление обмотки;
хх d
р - оператор дифференцирования по времени, р = —.
dt
Введение систем координат, фиксированных относительно статора и
ротора, позволяет записывать уравнения электромагнитных контуров
электрической машины в векторно-матричной форме.
Определение магнитодвижущих сил. Анализ намагничивающих
сил и магнитных потоков, вызванных действием электрических токов в
обмотках машины, является одним из важных этапов рассматриваемого
метода. На этом этапе формулируются исходные положения и допущения,
определяющие корректность учета насыщения магнитной цепи машины.
При определении магнитодвижущих сил (МДС) принимаются
нижеследующие базовые положения. Каждая обмотка электрической
машины создает распределенную вдоль воздушного зазора
пространственную волну МДС. Амплитуда этой волны в любой момент
времени пропорциональна мгновенному значению электрического тока в
обмотке. Начальная фаза волны определяется пространственным
положением магнитной оси данной обмотки. Форма волны МДС зависит в
общем случае от способа соединения и размещения проводников обмотки
в пазах магнитопровода. При изменении силы электрического тока
обмотки во времени соответственно изменяется и амплитуда мгновенной
пространственной волны МДС. В этих условиях волна МДС представляет
собой нестационарную функцию времени, для которой используют
следующую форму записи [124]:
(1-1)
12
где (р - угловая координата, отсчитываемая вдоль воздушного зазора
от фиксированной точки на статоре в направлении
положительного отсчета углов;
z2- (/) - временная функция изменения тока обмотки;
пространственная обмоточная функция.
Стационарная пространственная обмоточная функция Qi((p) в
формуле (1.1) полностью определяется конструкцией и параметрами
обмотки и не зависит от величины протекающего по ней тока. Умножение
этой стационарной пространственной функции на функцию времени Z- (?)
позволяет описать изменение пространственной волны МДС во времени
при произвольном характере изменения тока обмотки. Введение понятия
пространственной обмоточной функции является важным элементом
корректного математического описания нестационарных динамических
процессов в электрических машинах.
Периодическая пространственная обмоточная функция
рассматриваемой обмотки является несинусоидальной. При
конструировании обмоток машин нормального исполнения принимаются
специальные меры для подавления высших пространственных гармоник
МДС.
В результате совместного действия обмоток машины формируется
результирующая пространственная волна МДС. Распределение этой волны
вдоль воздушного зазора для каждого момента времени описывается
функцией
/wtoO=SZ(4M), С-2)
i
где i - число обмоток электрической машины.
Вследствие несинусоидалыюсти распределения МДС отдельных
обмоток результирующая волна МДС является также несинусоидальной.
Как отмечалось, при конструировании электрических машин
предпринимаются специальные меры для уменьшения высших
пространственных гармоник МДС. Поэтому при построении их
математических моделей в качестве первого приближения вводят
допущение об отсутствии пространственных гармоник МДС.
В случае пренебрежения высшими пространственными гармониками
обмоточных функций выражения (1.1) и (1.2) приобретают вид
fi 0,0 = кcos(<p -(р^, (1.3)
13
где q( max - амплитуда основной гармоники пространственной
обмоточной функции;
(pi - начальная фаза основной гармоники пространственной
обмоточной функции;
fm max ~ амплитуда основной гармоники результирующей МДС;
(рт - начальная фаза основной гармоники результирующей МДС,
имеющая смысл угловой координаты магнитной оси
воображаемой обмотки, эквивалентной действию всех
обмоток машины.
В тех случаях, когда уравнения модели электрической машины
записывают в векторно-матричной форме, основную гармонику
пространственно-временной волны МДС обмотки представляют через
алгебраические векторы, составленные из мгновенных значений токов и
обмоточных функций. Покажем такую возможность на примере
двухфазной машины переменного тока с приведенными параметрами
обмотки ротора к числу витков обмотки статора.
В соответствии с (1.3) основные гармоники обмоточных функций
двухфазной машины имеют вид
~ ?s.max СО8(ф —ф5г);
Qr.i ~Яг.тах COS((9 — (prj),
/=1,2.
Здесь (р - угловая координата, отсчитываемая вдоль воздушного зазора от
фиксированной точки на статоре в направлении чередования фаз обмотки
статора;
(ps i - начальные фазы, определяющие положение продольных
магнитных осей фазных обмоток статора относительно фиксированной
точки на статоре;
(pr i - начальные фазы, определяющие положение продольных
магнитных осей фазных обмоток ротора относительно; фиксированной
точки на роторе;
?s.max и ?г max ~ амплитудные значения основных гармоник
обмоточных функций обмоток статора и ротора;
i - номер фазы обмотки.
Для характеристики основных пространственных гармоник МДС
обмоток статора и ротора введем в системе отсчета, фиксированной
относительно статора, обмоточные вектор-функции распределения:
14
Q?(₽)==
at
qs.i(<p)
QsM
?5.max
'cos^-^i)
_cos(<p-<ps.2)
(1-5)
Q?
(<P,0) =
df
2rlO>0)
Яг.2^)
Яг.max
~СО&((р-(ргЛ-в)
cosftp - 49,. 2 - 0)
(1.6)
где 0 - угол поворота ротора, т.е. угловой интервал между
фиксированными точками на статоре и роторе. Фиксированные точки на
статоре и роторе выбираются так, чтобы (ps \=(рг \ =0.
Составим из мгновенных значений фазных токов статора и ротора
алгебраические векторы
rGs
(0 =
df
«5.1(0
«5.2(0
(1-7)
jG,
Выражения (1.5)-(1.7) позволяют определить пространственно-
временные функции распределения результирующих намагничивающих
сил двухфазных обмоток статора и ротора в виде скалярных произведений
введенных векторов:
/Xp,0 = I^(0’Q?s(p);
Л(^0,/)=Са).аЭ(^0).
Результирующая МДС всех обмоток по главному пути машины
определяется формулой
fm (Р> 0 = fs (<Р, 0 + fr (Р> 0 •
При произвольно заданной системе фазных токов в электрических
машинах с числом фаз z>2 результирующая МДС определяется через
намагничивающие токи обмоток.
В дальнейшем будем использовать упрощенное обозначение
пространственных волн МДС без указания в явном виде аргументов в и t.
Функция fm (<р) определяет результирующую волну распределения
МДС вдоль воздушного зазора. По результирующей магнитодвижущей
силе fm (р) затем рассчитывается мгновенная магнитная индукция Ьт (ср)
15
в воздушном зазоре с учетом насыщения участков магнитопровода
электрической машины. В силу эффекта насыщения мгновенная магнитная
индукция Ьт((р) является несинусоидальной функцией. В дальнейшем
используется основная гармоника мгновенной магнитной индукции.
Определение потокосцеплении обмоток. По своему физическому
смыслу потокосцепление представляет количественную интегральную
меру сцепления всех витков обмотки с распределенным в пространстве
магнитным потоком. Магнитный поток распределен в активном
пространстве машины неравномерно. Количественной мерой плотности
магнитного потока в различных точках активного пространства служит
магнитная индукция. Поэтому в общем случае потокосцепление
определяется интегрированием магнитной индукции в пределах площади,
ограниченной замкнутыми пространственными контурами витков
обмотки. При определении потокосцеплений обмоток принимаются
следующие допущения.
Полное потокосцепление каждой обмотки машины определяется
в виде суммы главного потокосцепления т и потокосцепления
рассеяния ст:
V'i=4'i.m+V'i.v-
Мгновенное значение главного потокосцепления т определяется
путем интегрирования основной гармоники мгновенной функции
пространственного распределения магнитной индукции Ьт((р), которая
строится по известной геометрии машины и характеристикам отдельных
участков магнитной цепи с учетом основной гармоники мгновенной
результирующей функции распределения МДС fm (ср).
Результатом интегрирования Ьт((р) является главное
потокосцепление
Wi.m=Vm ^(<Pm~<PiY
i
Здесь у/т - величина, пропорциональная амплитуде основной гармоники
кривой Ьт (ф);
- угловая координата магнитной оси обмотки.
При учете насыщения машины по главному магнитному пути
амплитуда основной гармоники магнитной индукции, а следовательно, и
величина \рт становятся нелинейными функциями от амплитуды
16
результирующей намагничивающей силы fm (тока намагничивания),
а в явнополюсной машине, кроме того, зависят от угла смещения между
основными пространственными гармониками магнитной индукции и
результирующей МДС в воздушном зазоре.
В общем, мгновенное значение главного потокосцепления, являясь
интегральной оценкой магнитного поля, представляет собой сложную
нелинейную зависимость от мгновенных значений обмоточных функций и
намагничивающих токов обмоток машины.
Способ определения потокосцеплений рассеяния обмоток
предполагает пренебрежимо малое влияние насыщения магнитной цепи по
путям замыкания потоков рассеяния.
Потокосцепления рассеяния обмоток двухфазных машин
переменного тока, а также машин постоянного тока представляются
величинами, пропорциональными токам в этих обмотках:
где - индуктивность рассеяния обмотки.
Для трехфазных машин переменного тока поток рассеяния
разделяется на две составляющие:
Первая составляющая 1//°о пропорциональна току гг-, а вторая -
намагничивающему току ii m обмотки, т.е.
=1? /.• w™ = 71”
г 1.0 4г.о П’ rz.o 4г.о‘г.т>
70 itn
где lia и lia - постоянные индуктивности, соответствующие потокам
Определение электромагнитного момента. Существует несколько
приемов вывода уравнения электромагнитного момента [40, 100, 101, 124].
Один из них позволяет определить электромагнитный момент машины на
основании анализа уравнения энергетического баланса. Общая схема
вывода уравнения электромагнитного момента выглядит следующим
образом.
17
Для идеализированной машины уравнение энергетического баланса
имеет вид
^=^п+/,мех+ДРэл.
где р^ - суммарная мгновенная мощность источников питания обмоток;
Ръ - производная энергии магнитных полей машины;
Дмех ~ механическая мощность;
Арэл- суммарная мощность электрических потерь в обмотках машины.
Для получения электромагнитного момента с помощью уравнений
электрического равновесия напряжений левую часть уравнения
энергетического баланса выражают через токи и потокосцепления
машины. После этого, сопоставляя правую и левую части полученного
уравнения, выделяют механическую мощность Дмех. Поделив полученное
выражение механической мощности на угловую скорость ротора,
получают выражение электромагнитного момента через токи и
потокосцепления машины.
Преобразование координат. Преобразование координат является
важным этапом построения математической модели электрической
машины, позволяющим привести уравнения модели к виду, наиболее
удобному для анализа режимов ее работы и решения конкретных задач
управления.
Преобразование координат осуществляется с помощью матриц
перехода. Обычно переменные уравнений статора и ротора приводятся к
единой прямоугольной системе координат. Наиболее общей является
система координат, которая вращается с произвольной угловой скоростью
(Фк). Для переменных статора и ротора двухфазных машин переменного
тока, а также машин постоянного тока, для которых обмотки якоря могут
быть приведены к эквивалентной двухфазной обмотке, вводится
двухмерная прямоугольная система координат
О, G/; \ — Оху,
/ df
где О - точка начала координат;
Gh - ортонормированный базис двухмерного линейного векторного
2
пространства R , =
18
Переход к системе координат Оху осуществляется с помощью
матриц
cos#„ sin#„
А , = к •
5 -sin# cos#
. К KJ
^rh
cos(#K - #)
-sin(#K -#)
sin(#K - #)
cos(#K - #)
где #K - параметр преобразования;
О - угол поворота ротора.
Формулы преобразования координат на примере напряжений
обмоток статора и ротора представляют вид
гае U?-
dfLMsz>J dfLMr&.
алгебраические векторы непреобразованных (фазных) величин;
U =
5df
usx
usy
ur =
df
^rx
Ury
алгебраические векторы преобразованных к системе координат Оху
напряжений статора и ротора.
Обратный переход осуществляется с помощью матриц
А"1, - А^г.- А"1 -- АГг.
Ash Ash’ Arh Arh>
где Г - знак транспонирования.
В этом случае формулы обратного преобразования координат имеют
вид
ufs=AX; и^=А‘Диг.
19
Для переменных статора и ротора трехфазных машин переменного
тока вводится трехмерная прямоугольная система координат
=>\
О, Н ) = Oxyz,
/df
где О - точка начала координат;
Н - ортонормированный базис трехмерного линейного векторного
пространства, Н —
df
Переход к системе координат Oxyz
осуществляется с помощью
матриц
cos<9K cos(0K-A) cos(0K+A)
- sin 0K - sin(<9K - A) - sin(0K - A)
1 1 1
72 72 72
cos(0K - 0) . cos(0K - 0 - A)
- sin(0K - 0) - sin((9K - 0 - A)
cos(0K - 0 + A)
- sin(<9K - 0 + A)
1
72
где A = 2tc / 3.
Формулы преобразования координат на примере напряжений
обмоток статора и ротора трехфазной машины записываются по аналогии с
формулами для двухфазных машин:
U =АД1^; U
20
где
ufJ =
df
Usa
^sb ’
_mjc_
ufr =
df
urb
urc
алгебраические векторы непреобразованных (фазных) величин;
алгебраические векторы преобразованных к системе координат Oxyz
напряжений статора и ротора.
Переход к фазным величинам осуществляется с помощью обратных
матриц
а;>=-аГ; а;>=-а,г.
5 2 2
Тогда формулы обратного преобразования координат трехфазных
машин принимают следующий вид:
Ufs =A‘1US; ufr=A'1Ur.
Приведение переменных и параметров модели к числу витков
базовой обмотки. При составлении уравнений моделей реальных машин в
них будут присутствовать переменные (напряжения, токи и
потокосцепления) и параметры (активные сопротивления и
индуктивности), которые в общем случае могут значительно различаться
но величине в связи с неравным числом витков обмоток статора и ротора.
Это может вызвать неудобства при расчетах, сопоставлении и анализе
результатов моделирования. Для избежания затруднений в подобных
случаях более предпочтительными оказываются уравнения, в которых все
переменные и параметры приведены к числу витков некоторой базовой
обмотки [18, 137]. Для произвольной i-й обмотки, которая приводится к
числу витков базовой обмотки, математические соотношения между
приведенными и реальными величинами напряжений, токов и
потокосцеплений записываются следующим образом:
21
ui = ke.i ui ;
*г=^ку;
^i=ke.iVi,
где U?, Ц и i//^ - напряжение, ток и потокосцепление реальной обмотки;
w;, it и у/г- - напряжение, ток и потокосцепление приведенной
обмотки;
кеЛ - коэффициент трансформации, определяемый
отношением эффективных чисел витков базовой
обмотки и приводимой обмотки.
Приведенные активные сопротивления и индуктивности рассеяния
обмоток определяются по формулам
?i =
1 -К-Л
Ь ГТ ГХ'0 1*4.
где и lia - активное сопротивление и индуктивность рассеяния
приведенной обмотки;
и - активное сопротивление и индуктивность рассеяния
реальной обмотки.
В дальнейшем будем полагать, что переменные и параметры обмоток
приведены к базовой обмотке, расположенной на неподвижной части
(статоре) электрической машины.
Приведение уравнений модели к системе относительных единиц.
Представление моделей электрических машин в относительных единицах
дает следующие важные преимущества. Результаты исследования на
моделях с использованием относительных единиц имеют большую степень
общности в сравнении с результатами исследования, полученными на
моделях с использованием физической системы единиц. .Объясняется это
тем, что при изменении мощности электрических машин относительные
значения их параметров и относительные характеристики изменяются в
гораздо меньшей степени, чем абсолютные значения параметров и
характеристики. В таком случае появляется возможность с определенной
степенью приближения обобщать и распространять результаты,
полученные для одной конкретной машины, на отрезок или на серию
близких по свойствам машин. Кроме того, переход к относительным
единицам вносит элемент рационального масштабирования уравнений
22
модели, приводя их к виду, удобному как для математического
моделирования, так и для синтеза экстремальных законов управления.
Запись уравнений модели в относительных единицах позволяет
оперировать с безразмерными величинами, диапазон численных значений
которых, как правило, значительно меньше, чем в исходной системе
уравнений. Это способствует повышению точности решения задач
экстремального управления.
При переходе к уравнениям модели машины в относительных
единицах используется формула
(1-8)
где у - значение переменной в системе относительных единиц;
Y - значение переменной (параметра) в исходной системе единиц;
Yq - базисное значение, выраженное в той же исходной системе
единиц.
В дальнейшем для описания моделей электрических машин будем
использовать частично-относительные уравнения [124], в которых текущее
время представляется в физической системе единиц. Это дает возможность
изображать динамику процессов электрических машин в реальном
масштабе времени. При переходе к частично-относительным уравнениям в
качестве основных базисных величин принимаются:
- значение угловой частоты напряжения статора в номинальном
режиме, = £2S ном = 2nfs ном;
Mq - значение электромагнитного момента двигателя в номинальном
режиме, Мб = Мном;
[q. - амплитудное значение номинального фазного тока статора,
/б ^2Is ном.
Производными базисными величинами частично-относительной
системы единиц являются:
Pq - электромагнитная мощность, Pq = £2qMq / zp, где zp - число пар
полюсов;
Иб - энергия, й^б = Pq / »
П TI Pq
Uq- напряжение, Uq =-------;
3 Iq
23
“б
J T
Lg- индуктивность, Lg =---;
Лэ
u
Zq - сопротивление, Zg ~ Rg = Xg — ——;
Q^g - скорость ротора, = Q61 zp.
Относительные значения переменных и параметров моделей
электрических машин определяются по формуле (1.8):
напряжение u = U/Ug
электрический ток i = IHg
потокосцепление (/ = ¥z/¥z6
индуктивность l=LIL&
сопротивления r = RIRg, x = X/Rg, z-ZIRg
мощности p = PIPg, q = Q/P&, s = S/Pg
мощность потерь bp = tM>/Pg
энергия w = W/W6
энергия потерь &w = b.WIWg
угловая частота вращения
системы координат ®K =^K^6
угловая электрическая частота
вращения ротора a> = Q/Q6
угловая механическая частота
вращения ротора
электромагнитный момент m-M / Mg
момент статического сопротивления
механизма тс =МС/ Mg.
1.2. Математические модели машин переменного тока
Машины переменного тока, к которым относятся асинхронные и
синхронные двигатели, широко применяются в системах регулируемого
электропривода. Свойства и особенности конструктивного исполнения
машин переменного тока определяют целесообразную область их
применения.
24
Математическому моделированию процессов машин переменного
тока посвящена обширная литература. Вопросы математического
моделирования насыщенных симметричных машин переменного тока
рассматриваются в [30, 31, 102, 104, 105, 123, 125, 131, 136]. Модели
несимметричных насыщенных машин переменного тока представлены в
работах [124, 125, 129].
1.2.1. Модель обобщенной машины переменного тока
Под обобщенной машиной переменного тока (ОМПТ) понимается
двухфазная (трехфазная) неявнополюсная электрическая машина при
независимом питании статорной и роторной обмоток от регулируемых по
частоте и амплитуде автономных источников.
Интерес к ОМПТ вызван тем, что она служит удобной моделью для
исследования оптимальных процессов реальных асинхронизированных
двигателей, которые имеют наибольшие возможности в отношении
оптимизации режимов, если управление ведется одновременно по цепям
обмоток статора и ротора [15, 79, 113].
Рассмотрим симметричную неявнополюсную двухфазную машину
при питании обмоток статора и ротора от источников переменного
напряжения. Электрическая схема модели идеализированной машины
приведена на рис. 1.1. Фазы статора (S') и ротора (г) имеют одинаковое
число витков: wsl = ws2 = ws и wrl = wr2 = wr. Число витков обмотки
ротора приведено к числу витков обмотки статора.
Рис. 1.1. Схема модели двухфазной обобщенной машины
переменного тока
25
Будем полагать, что напряжения, приложенные к обмоткам статора
wja, usp и ротора urj, urq независимы друг от друга и изменяются во
времени по произвольному закону. Токи фаз статора isa и isp создают в
зазоре машины волны МДС. При математическом описании основных
пространственных гармоник МДС методом изображающих векторов
пространственные векторы магнитодвижущих сил направлены по двум
взаимно ортогональным осям О а и 0(3. Аналогично пространственные
векторы МДС от токов обмоток ротора irli и irq действуют по
ортогональным осям Od и Oq.
Ротор вращается с угловой скоростью CD, которая считается
положительной при вращении ротора против направления движения
часовой стрелки. Угол 0 отсчитывается от точки, лежащей на
неподвижной относительно статора оси Оа.
Исходные уравнения электромагнитных контуров и уравнения
электромеханического преобразования двухфазной машины записываются
в двух ортонормированиях базисах Gs и Gr, задающих фиксированные
относительно статора и ротора системы координат Oafl и Odq. Ниже эти
уравнения приводятся в частично-относительной системе единиц.
Уравнения электрического равновесия напряжений цепей статора и
ротора машины:
(1.9)
V? = Тбр^ + R&I& , (1.10)
Rff=rJE; R^=rrE - матрицы активных сопротивлений обмоток
статора и ротора, Е - единичная матрица;
26
Тд - временная константа.
В уравнениях (1.9) и (1.10) полные потокосцепления обмоток статора
и ротора
vt/Gs _ \t/Gs , \r/Gs.
TSCT >
xi/Gr _ xrjGr , mGr
rr *rm “r rr<r •
Здесь
xuGs _ Vsam
‘sir, ~
^[Vsbrn.
Xi/Gr _ Vram
*-rm ~
AiWrbm_
векторы потокосцеплений фазных обмоток статора и ротора с главным
нолем;
wGs _ ^saa
S° dfL^a.
»Gr
ra df
Vraa
Vrba.
векторы потокосцеплений рассеяния фазных обмоток статора и ротора.
Векторы главных потокосцеплений 'Р^ и 'Р^ связаны
нелинейными зависимостями с обмоточными вектор-функциями
QGs r\Gs i rGs rGr
j и векторами фазных токов машины:
4'S=F,(I?,Q,&,I?-,Q®); (1.11)
=Fr(I?r,Q?’,I?,Q?'), (1.12)
где Fs и Fr - нелинейные вектор-функции.
Векторы потокосцеплений рассеяния фазных обмоток статора и
ротора на основании принятых допущений линейно зависят от токов этих
обмоток:
\xjGs _ т Gs jGs . mGr _ т Gr -rGr
XS<T — *-'5СГ15СГ ’ xrcr ~~
где
LGs _ j u>. т Gr
= ZrcrE - матрицы индуктивностей рассеяния
обмоток статора и ротора.
27
Уравнение электромагнитного момента двухфазной асинхронной
машины запишем в виде скалярного произведения вектора главных
потокосцеплений и вектора токов обмотки статора:
m = . (1.13)
Для построения полной математической модели двухфазной машины
как электромеханического преобразователя энергии систему уравнений
(1.9)—(1.13) дополним уравнением движения ротора. При постоянстве
приведенного к ротору суммарного момента инерции элементов
кинематической передачи и рабочего органа механизма уравнение
движения в частично-относительной системе единиц имеет следующий
вид:
т-тс =Tjpa>, (1.14)
где тс- приведенный к валу машины момент статического
сопротивления;
Tj - временная константа, характеризующая инерцию движущихся
элементов механической системы.
Таким образом, электромагнитные процессы в симметричной
неявнополюсной двухфазной машине переменного тока при двустороннем
питании обмоток описываются системой уравнений (1.9)-(1.12).
Особенностью этой системы является то, что для записи уравнений
электромагнитных контуров обмоток статора и ротора используются
различные базисы. В этом случае главные потокосцепления обмоток
статора (1.11) и ротора (1.12) при учете насыщения машины явно зависят
от обмоточных функций распределения, усложняя решение уравнений
электрической машины.
Известный путь упрощения модели [40, 44, 91, 101,124, 140] состоит
в переходе к уравнениям в системе координат Оху, вращающейся с
произвольной угловой скоростью вращения й)к (в базисе )•
Преобразование переменных исходных уравнений осуществляется с
помощью матриц А^ и Аг^ по правилам векторной алгебры [53].
Введем в рассмотрение алгебраические векторы, компонентами
которых являются напряжения, токи и потокосцепления обмоток статора
и ротора
28
а также составляющие результирующего вектора намагничивающих токов
и вектора главных потокосцеплений
_ ^тх
df 1ту
Vmx
^\уту
¥
х г
преобразованные к произвольно ориентированной вращающейся системе
координат Оху.
Тогда в системе координат Оху будем иметь следующую модель
двухфазной обобщенной машины переменного тока:
и,=Тбр^ + й>кВ^+НЛ;
иг = тбРчг + (®к - + ял;
ч^ч^+цл;
Ш _ Ш I Т Г .
1 г -1 т ’
k=is+i,;
m = B4>I,;
= Tjpa> .
Здесь преобразованные матрицы активных сопротивлений и
индуктивностей рассеяния обмоток статора и ротора
= =f5E; Rr = A^R^" АД =ггЕ;
L5<t = AjaLj^aJ, =/5<тЕ; Lrcr = АгйЬ%аД =ZrcrE.
Кроме того, в преобразованные уравнения входят постоянный
матричный коэффициент
о
и временные константы
где J - суммарный приведенный к валу электрической машины момент
инерции механической системы.
Заметим, что в уравнениях (1.15) величина рассматривается как
базисная константа, необходимая для описания электромагнитных связей и
явлений в реальном времени, так как здесь напряжения, потокосцепления и
другие переменные, характеризующие электромагнитные процессы в
машине, определяются в относительных единицах [124].
Временная константа Tj расценивается как базисная механическая
постоянная времени. Величина Tj численно равна времени разгона
электромеханической системы от состояния покоя до базисной скорости
при условии, что электрический двигатель обеспечивает в процессе
разгона постоянный по величине динамический момент, равный базисно-
му [127].
Насыщение главной магнитной цепи обобщенной машины в системе
уравнений (1.15) учитывается нелинейным оператором Fm, который
связывает вектор главных потокосцеплений с вектором результирующих
намагничивающих токов.
На рис. 1.2 приведена структурная схема насыщенной двухфазной
обобщенной машины переменного тока, построенная по уравнениям (1.15).
Схема дает наглядное представление о взаимосвязи между переменными,
раскрывая структурные свойства модели объекта. Модель
электромагнитных контуров машины представляет двухканальную
многосвязную нелинейную подсистему. Входными воздействиями каналов
являются двухмерные векторы преобразованных к системе координат Оху
напряжений, приложенных к обмоткам статора и ротора. Выходными
переменными этой подсистемы являются преобразованные векторы токов
и потокосцеплений машины. Связующим элементом каналов является
главное потокосцепление, которое в свою очередь нелинейно зависит от
суммы намагничивающих составляющих токов статора и ротора.
Инерционные свойства электромагнитных контуров машины
отображаются в структуре модели двухмерными интегрирующими
30
звеньями в каждом из ее каналов. Эти звенья охвачены отрицательными в
общем случае нелинейными обратными связями. Степень действия этих
связей зависит от значений переменных й)к и /Зк. Падения напряжения на
активных сопротивлениях обмоток учитываются внутренними обратными
Связями по токам статора и ротора. В структуре модели электромагнитных
контуров имеется два вида нелинейностей: функциональная нелинейная
зависимость, учитывающая насыщение главного магнитного пути;
нелинейности типа перемножения переменных, учитывающие влияние
скорости ротора на электромагнитные процессы.
Rs
Рис. 1.2. Структурная схема модели насыщенной двухфазной обобщенной
машины переменного тока
Векторы преобразованных токов статора и главных потокосцеплений,
являющиеся выходными переменными модели электромагнитных
контуров, поступают на нелинейное звено электромагнитного момента,
реализующее математическую операцию скалярного умножения
Алгебраических векторов.
Наконец, завершает преобразование входных воздействий одномерное
интегрирующее звено механического движения, которое учитывает
свойства механической части объекта и влияние на нее внешнего
возмущения - момента статической нахрузки.
Модель представлена во вращающейся системе координат. Угловая
скорость вращения системы координат хук может быть постоянной или
произвольно изменяющейся величиной. В конечном итоге величина а>к и
31
закон ее изменения выбирается исходя из соображений удобства анализа
преобразованных переменных и решения задач управления на этапе
рациональной ориентации системы координат.
Двухфазная обобщенная машина переменного тока по свойствам
математической модели относится к классу двухмерных многосвязных
нелинейных объектов управления со сложной внутренней структурой
связей между переменными, наличием динамических звеньев и внешнего
возмущающего воздействия.
Модель трехфазной обобщенной машины переменного тока
Трехфазные машины переменного тока обладают свойством
избыточности, которое выражается в том, что намагничивающая сила
любой из фазных обмоток может быть нейтрализована совместным
действием других обмоток при определенном соотношении фазных токов.
Поэтому в наиболее общем случае питания фазных обмоток от
автономных источников в токах статора и ротора могут иметь место
нейтральные составляющие, не участвующие в создании главного
магнитного поля машины. В связи с этим в теории несимметричных
машин переменного тока [124] вводятся понятия полных,
намагничивающих и нейтральных токов обмоток статора и ротора, а также
результирующего намагничивающего тока как результат действия всех
обмоток с учетом функций пространственного распределения
магнитодвижущих сил. При учете свойства избыточности корректное
математическое описание и геометрическая интерпретация моделей
несимметричных трехфазных машин базируется на представлении
переменных как трехмерных геометрических радиусов-векторов,
изображающих напряжения, токи и потокосцепления обмоток в
трехмерном векторном пространстве. Координаты этих радиусов-векторов
в различных базисах векторного пространства служат компонентами
алгебраических векторов-столбцов при записи уравнений трехфазных
машин. Преобразование координат на основе такого подхода ведется с
помощью прямоугольных декартовых систем координат, которые задаются
в трехмерном аффинном пространстве соответствующими ортого-
нальными базисами.
Таким образом, математические модели трехфазных машин,
учитывающие факторы несимметричности, составляют класс моделей,
имеющих более высокую размерность базисов векторного пространства.
Эта особенность отличает математические модели трехфазных машин от
двухфазных машин переменного тока.
Рассмотрим идеализированную трехфазную насыщенную
неявнополюсную машину переменного тока с раздельным питанием
обмоток статора и ротора от автономных источников линейно-
32
независимых напряжений. Уравнения такой машины [124], записанные во
вращающейся с произвольной угловой скоростью а>к трехмерной
декартовой системе координат Oxyz, имеют следующий вид:
U. = Т6рЧ. + ба.ВЧ' + RД.;
О U JT а Л О О а *
иг = ТбрЧг + (<ук - <У)ВЧ\ + ИДГ ;
W — W . т т .
х г ~~ m “ ^га*-г ’
Iw=C(Ij+IJ;
m=вт^ • ij;
m -mc = Tjpa>.
Здесь
представляют собой трехмерные алгебраические векторы напряжений Uy,
токов I •, полных потокосцеплений Ч j обмоток статора (J = 5 ) и ротора
(у =г), а также результирующих намагничивающих токов и главных
потокосцеплений (у =т).
Преобразованные матрицы активных сопротивлений и
индуктивностей рассеяния обмоток статора и ротора:
R5 =diag[z-. rs rj; Rr = diag[rr rr rr];
FSCf — diag [ZJcr ls<J Zjq-], — diag [Zrcr. lra Zrcr.],
33
где fj и lja, 1°а- активные сопротивления и индуктивности рассеяния
обмоток статора (у = 5) и ротора (j = г).
Постоянные матричные коэффициенты определяются выражениями
На рис. 1.3 приведена структурная схема трехфазной обобщенной
машины переменного тока, построенная по уравнениям (1.16).
Рис. 1.3. Структурная схема трехфазной обобщенной машины
переменного тока
Отмеченная ранее особенность, отличающая трехфазную машину от
двухфазной машины переменного тока, в структурной схеме модели
отражается трехмерными воздействиями на входе двухканальной
многосвязной нелинейной подсистемы электромагнитных контуров.
Входными воздействиями каналов здесь являются трехмерные векторы
преобразованных фазных напряжений, приложенных к обмоткам статора г
ротора. Выходными переменными электромагнитных контуров являютс?
векторы преобразованных фазных токов и потокосцеплений машины. Ощ
имеют такую же размерность, что и векторы входных воздействие
подсистемы электромагнитных контуров. Связующей переменной канало:
34
по-прежнему является главное потокосцепление, которое в трехфазной
машине при учете насыщения по главному магнитному пути нелинейно
зависит от суммы намагничивающих токов статора и ротора. Выделение
намагничивающих токов осуществляется в модели трехфазной машины
звеньями с матричным коэффициентом преобразования С. Присутствие
Звеньев с матричным коэффициентом В позволяет, кроме того, учесть
взаимное влияние каналов составляющих электродвижущих сил ненулевой
последовательности, наводящихся в обмотках полями статора и ротора.
Наконец, инерционные свойства электромагнитных контуров трехфазной
машины отображаются в структуре модели трехмерными
интегрирующими звеньями в каждом из ее каналов.
Таким образом, трехфазная обобщенная машина переменного тока
ври двустороннем питании от автономных источников линейно-
независимых напряжений по свойствам математической модели относится
К классу трехмерных многосвязных нелинейных объектов управления.
Математическая модель такой машины обобщает случаи математических
моделей трехфазных асинхронизированных и асинхронных машин с
различными вариантами схем питания обмоток. При отсутствии в
напряжениях источников питания обмоток статора и ротора составляющих
нулевой последовательности уравнения (1.16) сводятся к уравнениям
(1.15) модели двухфазной обобщенной машины переменного тока.
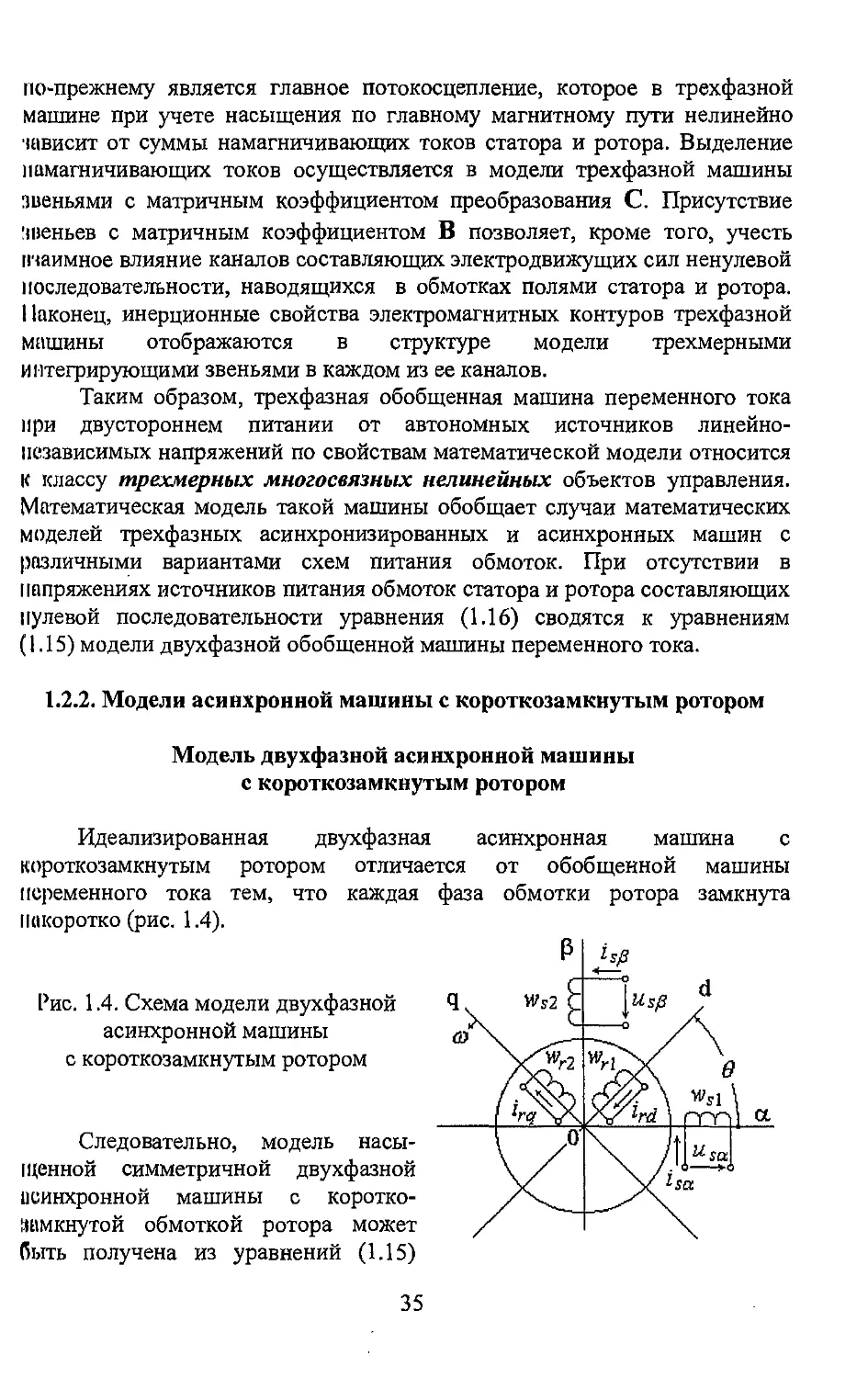
1.2.2. Модели асинхронной машины с короткозамкнутым ротором
Модель двухфазной асинхронной машины
с короткозамкнутым ротором
Идеализированная двухфазная асинхронная машина с
короткозамкнутым ротором отличается от обобщенной машины
переменного тока тем, что каждая
накоротко (рис. 1.4).
Рис. 1.4. Схема модели двухфазной
асинхронной машины
с короткозамкнутым ротором
Следовательно, модель насы-
щенной симметричной двухфазной
асинхронной машины с коротко-
замкнутой обмоткой ротора может
быть получена из уравнений (1.15)
фаза обмотки ротора замкнута
Р isp
35
обобщенной машины переменного тока, если принять в них вектор
преобразованных напряжений ротора Ur = 0 . В этом случае система
уравнений принимает вид
Us = T6p^s + + R I ;
О = г + (<рк - + RrIr ;
Ш _ Ш цТ I .
1 S ~ 1 7И Т ’
ф _ W J.T т .
г — х m ^rv*-r >
Vm=FmIm-, (1-17)
= ^5 Ь ’
m-mc=Tjp(t).
Уравнениям (1.17) соответствует структурная схема модели
двухфазной асинхронной машины с короткозамкнутым ротором,
приведенная на рис. 1.5.
Рис. 1.5. Структурная схема модели двухфазной асинхронной машины
с короткозамкнутым ротором
Модели асинхронной машины с короткозамкнутым ротором как
объекту управления во многом присущи структурные свойства модели
машины переменного тока при двустороннем питании. В то же врем*
модель асинхронной машины с короткозамкнутым ротором имеез
36
существенное отличие, которое состоит в том, что входным воздействием
подсистемы электромагнитных контуров является вектор преобразованных
напряжений статора. Поэтому асинхронная машина с короткозамкнутым
ротором имеет ограниченную возможность управления энергетическими
режимами в сравнении с машиной переменного тока при двустороннем
питании.
Модель трехфазной асинхронной машины
с короткозамкнутым ротором
При построении модели насыщенной трехфазной асинхронной
машины с короткозамкнутой обмоткой ротора и питанием обмоток статора
от автономных источников линейно-независимых напряжений используют
уравнения (1.16), принимая в них Ur=0. Кроме того, учитывают то
обстоятельство, что в соответствии с принятым допущением о
синусоидальности распределения намагничивающих сил фазных обмоток
вдоль воздушного зазора трехфазная симметричная электрическая машина
как трансформатор ЭДС является идеальном фильтром по отношению к
составляющим нулевой последовательности. Данные составляющие в
системах токов и потокосцеплений фазных обмоток статора (ротора) могут
иметь место только при наличии составляющих нулевой
последовательности в системе напряжений источника питания статора
(ротора). Поэтому при закороченной обмотке ротора обеспечивается
отсутствие составляющих нулевой последовательности в системе фазных
токов и потокосцеплений обмоток ротора даже при наличии их в цепях
обмоток статора. При отсутствии составляющих нулевой
последовательности в токах ротора уравнение намагничивающего тока
изменяется:
I»=CI,+Ir
С учетом вышеизложенного уравнения трехфазной насыщенной
асинхронной машины с короткозамкнутым ротором при раздельном
питании обмоток статора от автономных источников линейно-
пезависимых напряжений принимают следующий вид:
0 = Тбр'Рг+(й?к-й?)ВЧ'г+ИДг;
Ш _ Ш J.T т .
± г -1 т *-^га1г >
37
=CIj + Ir;
m-mc = Tjpa> ,
(1-18)
На рис. 1.6 приведена структурная схема трехфазной асинхронной
машины с короткозамкнутым ротором.
Рис. 1.6. Структурная схема трехфазной асинхронной машины
с короткозамкнутым ротором
Приведенные уравнения и структурная схема модели трехфазной
асинхронной машины с короткозамкнутым ротором при питании обмотки
статора от автономных источников линейно-независимых напряжений
отражают основные свойства машины как объекта управления. Являясь
трехмерным многосвязным нелинейным объектом управления,
трехфазная асинхронная машина с короткозамкнутым ротором имеет один
канал воздействия на ее режимы работы. Одноканальный характер
воздействия ограничивает возможности формирования энергетически
оптимальных режимов асинхронной машины с короткозамкнутым ротором
(напомним, что трехфазная машина при двустороннем питании имеет два
трехмерных канала воздействия). Кроме того, сложность математической
модели ставит задачу поиска способов рациональной ориентации системы-
координат, выбора состава и количества регулируемых координат в целях,
упрощения и повышения эффективности управления статическими и
38
динамическими режимами работы асинхронной машины с
короткозамкнутым ротором.
В заключение отметим, что математическая модель асинхронной
машины с короткозамкнутым ротором, описываемая системой уравнений
(1.18), обобщает случаи математических моделей трехфазных
асинхронных машин с короткозамкнутым ротором при питании обмотки
статора от источников с линейно-зависимыми напряжениями. При
отсутствии в напряжениях источников питания обмотки статора
составляющих нулевой последовательности уравнения (1.18) приводятся к
уравнениям (1.17) модели двухфазной асинхронной машины с
короткозамкнутым ротором.
1.2.3. Модели синхронной машины с продольно-поперечным
электромагнитным возбуждением
Синхронные машины могут иметь различную конструкцию [1,4, 16,
18, 20, 40, 43, 44, 50]. Основная форма исполнения синхронной машины
характеризуется размещением обмотки якоря на статоре и обмотки
возбуждения на роторе. Обмотка якоря питается от источника переменного
тока. В связи с этим статор (якорь) выполняется шихтованным в целях
уменьшения вихревых токов, возникающих в его сердечнике. Обмотка
якоря размещена в пазах. К обмотке возбуждения подводится постоянный
ток. По конструктивному типу ротора (индуктора) синхронные машины
делятся на явно- и неявнополюсные. Индуктор явнополюсной синхронной
машины имеет выступающие полюсы, на которых в виде катушек
размещена обмотка возбуждения. В неявнополюсных синхронных
машинах обмотка возбуждения укладывается в пазах на части окружности
индуктора. Таким образом, обмотка возбуждения неявнополюсной
Машины является распределенной, как и обмотка якоря. Ось симметрии
обмотки возбуждения, по которой направлена ее магнитодвижущая сила,
называется продольной осью машины. Ось, образующая с продольной
осью угол, равный 90 электрическим градусам, называется поперечной
осью.
Кроме обмоток якоря и возбуждения, в синхронных машинах
нередко используют так называемую успокоительную обмотку
(демпферную клетку). Она располагается в полюсных башмаках и
замкнута накоротко. Успокоительная обмотка выполняется подобно
короткозамкнутой клетке асинхронного двигателя, но при этом между
полюсами стержни отсутствуют. Наконец, для компенсации реакции якоря
в ряде случаев предусматривается обтекаемая постоянным током
поперечная обмотка возбуждения.
Другой формой исполнения синхронной машины является
обращенная конструкция, при которой индуктор неподвижен, а якорь
39
вращается. Такие машины перспективны для высокодинамичных
электроприводов [16].
На практике широкое применение получили синхронные машины с
продольным электромагнитным возбуждением (некомпенсированные
синхронные машины) и синхронные машины с постоянными магнитами.
Перспективными являются также синхронные машины с продольно-
поперечным электромагнитным возбуждением.
Общей теории синхронных машин посвящены работы [1, 20, 40, 43,
44, 50, 51, 87, 91, 100, 101]. Вопросы управления рассматриваются в
работе [16].
Модель двухфазной синхронной машины с продольно-поперечным
электромагнитным возбуждением и полной демпферной клеткой
При описании синхронной машины можно исходить из модели
обобщенной машины переменного тока. Если запитать каждую из фаз
обмотки ротора постоянным током от отдельных источников, то получим
модель неявнополюсной двухфазной синхронной машины с продольно-
поперечным возбуждением. Независимое задание токов в каждой фазе
обмотки ротора дает возможность изменять как величину, так и
пространственное положение созданного ими магнитного потока. Этот
вариант модели соответствует синхронным машинам нормальной
конструкции.
Менее распространенной является синхронная машина обращенной
конструкции, в которой обмотка возбуждения размещена на статоре, а
обмотка переменного тока - на роторе. Модель синхронной машины
обращенной конструкции может быть получена также на основе модели
обобщенной машины переменного тока. Известно [1, 44, 87, 101], что
модели синхронных машин этих двух исполнений эквивалентны, так как
только относительное движение статора и ротора играет роль в процессе
электромеханического преобразования энергии. В дальнейшем
рассматриваются модели синхронной машины нормальной конструкции.
Электрическая схема модели двухфазной синхронной машины с
продольно-поперечным электромагнитным возбуждением приведена на
рис. 1.7. На статоре размещена симметричная обмотка переменного тока
(обмотка якоря) с числом витков в каждой фазе Wyj = ws2 = wr •
На вращающемся индукторе по продольной оси (Od ) расположена
основная обмотка возбуждения с числами витков Wyp Дополнительная
обмотка с числом витков Wyj размещена по поперечной оси (Oq)
индуктора. Действие демпферной клетки моделируется
короткозамкнутыми обмотками, размещенными по взаимно
40
ортогональным осям индуктора Od и Oq. Эти обмотки в общем случае
имеют неравное число витков ( wcf & Wc2). В дальнейшем будем
рассматривать модели синхронной машины с приведенными обмотками. В
качестве базовой всегда принимается обмотка статора.
Рис. 1.7. Схема модели двухфазной синхронной машины
с продольно-поперечным электромагнитным возбуждением
и полной демпферной клеткой
Считая обмотки индуктора двухосными, исходные уравнения
электромагнитных контуров и уравнения электромеханического
Преобразования синхронной машины можно записать подобно
обобщенной машине переменного тока в двух ортонормированных базисах
> =>
Gj и Gr-
Дифференциальные уравнения напряжений обмоток индуктора и
якоря машины:
Vf = T6p^f + Rflf ; (1.19)
0 = T6p^r+R^; (1.20)
U? =ТбрЧ^ +R?I? , (1.21)
41
где
df ufd Ufq. TGr > V df df Vfd yfq_
UGr = ucd • IGr — icd xuGr 9 X C — ~WccL 7
df Ucq_ df Icq df Уcq
usa , tGs 5 ^5’ ^sa — W sa
df _usp_ df }sP _ df WSp_
представляют собой алгебраические векторы напряжений, токов и полных
потокосцеплений продольно-поперечной обмотки возбуждения,
демпферной обмотки и обмотки якоря;
RGr, RGr и R^5 - матрицы активных сопротивлений соответственно
обмотки возбуждения, демпферной обмотки и обмотки якоря,
R^=diag[r/rf rfq\, RGr =diag[rcrf rcJ; R5Gs=r5E.
В уравнениях (1.19)—(1.21) полные потокосцепления обмоток
индуктора и якоря определяются в виде суммы главных потокосцеплений
и потокосцеплений рассеяния:
xsjGr _ xifGr , xifGr (1.22)
— шСт’ 1 . * c cm ca} (1.23)
_ wGy . шбЬ * 5 x sm T x scr • (1.24)
Векторы главных потокосцеплений обмоток синхронной машины
mGr _ ^fmd
x fin
V cmd
df Wcmq
V^sma
df \ysmp_
• vpGr —
’ т си
, \rfGs _
’ х sm
нелинейно зависят от обмоточных вектор-функций распределения ,
(£s, qFs и векторов токов IGr, IGr, IG5 , В общем виде главные
потокосцепления
42
Tg =F/(I^,Q^sIcGr,QcGMJ&>Qfi) ; (1.25)
4^ =Fc(C,QG\I^,Q^,lf\QfO ; (1.26)
=F/I^QgM^QgM^Q^), (1.27)
где Fy, Fc и F5 - нелинейные вектор-функции.
Векторы потокосцеплений рассеяния обмоток индуктора и якоря на
основании принятых допущений линейно зависят от токов этих обмоток:
njGr _ Vfod У — 1 Gr -rGr (1.28)
wGr _ Т ест Weed — 1 Gr fGr г ~ ^CCF^CCF j (1-29)
df У соц _
Х5СТ ~ Уsera т Gs -rGs (1-30)
df Узар_
LGr т Gr т Gs _______ м
р ьс и Ц - матрицы индуктивностей рассеяния соответственно
обмотки возбуждения, демпферной обмотки и обмотки якоря,
=diag[Zycrrf lfaq\- LGr=diag[ZccrrfZccr9]; L^=ZicrE.
Уравнение электромагнитного момента двухфазной синхронной
Машины запишем в виде скалярного произведения вектора главных
потокосцеплений и вектора токов IGi обмотки якоря:
m = ^Gs »В1&
rn * sm
(1.31)
Уравнение механического движения ротора при постоянстве
приведенного к валу синхронной машины момента инерции механической
системы имеет вид, аналогичный (1.14).
Решение системы уравнений модели синхронной машины
(1.19)-(1.31) сопряжено с трудностями, вызванными общими причинами,
Которые были отмечены при составлении модели обобщенной машины
Переменного тока. Дальнейшее упрощение модели синхронной машины
достигается преобразованием исходных уравнений к фиксированной
43
=>
относительно индуктора системе координат Odq (к базису Gr).
Преобразование переменных осуществляется по правилам векторной
алгебры с помощью матриц А5Й и .
В результате координатных преобразований получаем следующую
модель насыщенной двухфазной синхронной машины:
0 = Т6рТ^ + К^;
= Т5рЧ°г + + Rf;
\ijGr _ mGr т Gr -tGr . х/ -Tw + L/cr1/ ,
mGr _ mGr i^Gr-tGr . xc — xm "t"-,-JccT1c ’ xnGr _ mGr _t Gr [Gr . xs x m > xi/Gr _ TjiGr-rGr . jGr ^.vGr ,-rGr , rGr . +ic +ls ’ (1-32)
т = ВТ^.1Г;
m-mc = Tjpa>.
Алгебраические векторы преобразованных к базису Gr
напряжений, токов и потокосцеплений обмоток якоря и индуктора
TTGr _ UJ<i
J dfK
XjjGr _
(J = f,c,r).
Векторы результирующих намагничивающих токов и главных
потокосцеплений
Gr _ # Gr _ Vmd
m m '
Матрицы преобразованных активных сопротивлений и
индуктивностей рассеяния обмотки якоря
R^ = ajAr? а;1* = г5Е ; С = AsftL% а;1, = /5£Те .
44
Насыщение главной магнитной цепи синхронной машины в
уравнениях учитывается нелинейным оператором .
Уравнениям (1.32) соответствует приведенная на рис. 1.8
структурная схема модели насыщенной двухфазной синхронной машины с
продольно-поперечным возбуждением и полной демпферной клеткой.
Рис. 1.8. Структурная схема модели насыщенной двухфазной
синхронной машины с продольно-поперечным возбуждением
и полной демпферной клеткой
Структурная схема (рис. 1.8) характеризуют моделируемую
синхронную машину как сложную многомерную многосвязную
динамическую систему, имеющую в своем составе нелинейные звенья и
Внутренние связи. Входными воздействиями каналов подсистемы
электромагнитных контуров являются двухмерные векторы напряжений,
приложенных к продольно-поперечной обмотке возбуждения и фазным
обмоткам якоря. Выходными переменными являются векторы токов и
потокосцеплений обмоток машины. Как и в модели обобщенной машины
переменного тока, связующим элементом каналов преобразования
входных воздействий является главное потокосцепление, которое в
насыщенной синхронной машине нелинейно зависит от суммы токов всех
обмоток индуктора и якоря. Инерционные свойства электромагнитных
Контуров машины отображаются в структуре модели двухмерными
Интегрирующими звеньями. Влияние падения напряжения на активных
сопротивлениях обмоток учитываются внутренними обратными связями
ПО токам. В структуре модели электромагнитных контуров имеются
Нелинейности, аналогичные двум типам нелинейностей модели
45
асинхронной машины. Звено электромагнитного момента вносит
дополнительную нелинейность в модель синхронной машины.
Таким образом, в структурном отношении модели обобщенной
машины переменного тока и синхронной машины с продольно-
поперечным электромагнитным возбуждением и полной демпферной
клеткой имеют много общих свойств, что позволяет применять для них
единые подходы к анализу режимов и синтезу алгоритмов управления.
Вместе с тем отметим весьма важное отличие модели синхронной
машины от модели обобщенной машины переменного тока. У синхронных
машин существует явно выраженная естественная система отсчета, всегда
связанная с продольной и поперечной осями индуктора. В этой системе
отсчета уравнения машины имеют наиболее простой вид. Таким образом,
выбор базиса для записи уравнений модели синхронной машины вполне
однозначен. Для синхронной машины нормальной конструкции таким
=>
базисом является фиксированный относительно индуктора базис Gr .
Обобщенная машина переменного тока, а также асинхронная машина,
которые относятся к неявнополюсным машинам, не имеют явно
выраженной естественной системы отсчета, какой обладают синхронные
машины. Поэтому модели обобщенной и асинхронной машин
представлены во вращающейся с произвольной скоростью 69К системе
координат Оху. Закон изменения скорости <УК, как отмечалось ранее,
выбирается исходя из соображений удобства анализа преобразованных
переменных и решения конкретных задач управления.
В синхронных машинах обращенной конструкции обмотка якоря
располагается на роторе, а продольно-поперечная обмотка возбуждения и
демпферная обмотка - на статоре. В этом случае составленные в базисах
=> =>
Gr и Gs уравнения синхронной машины приводятся к фиксированному
относительно статора ортонормированному базису Gs. При сравнении
моделей синхронных машин нормальной и обращенной конструкций
оказывается, что вид уравнений сохраняется и лишь взаимно
перемещаются индексы базисов, переменных, а также параметров обмотки
якоря. ;
Таким образом, принципиальным отличием моделей синхронных
машин двух форм исполнений является запись уравнений в различных
базисах векторного пространства. Это дает возможность в каждом случае
иметь максимально упрощенные для практического использования
уравнения моделей синхронной машины.
Описанная модель представляет собой наиболее общий случай
двухфазной синхронной машины нормальной конструкции. Из общих
46
уравнений можно получить модели двухфазных синхронных машин с
различным сочетанием обмоток:
• с продольно-поперечным возбуждением при отсутствии демпферной
клетки;
• с продольным возбуждением и демпферной клеткой;
• с продольным возбуждением при отсутствии демпферной клетки.
Рассмотрим типичные модели синхронных машин нормального
Исполнения.
Модель двухфазной синхронной машины с продольно- поперечным
электромагнитным возбуждением без демпферной клетки
Синхронные машины с продольно-поперечным возбуждением без
Демпферной клетки имеют на роторе две обмотки возбуждения, сдвинутые
Относительно друг друга на половину полюсного деления. Как было
Отмечено, независимое задание токов этих обмоток позволяет изменять не
Только величину, но и пространственное положение относительно ротора
Созданного ими магнитного потока. Схема идеализированной модели
Такой машины приведена на рис. 1.9. Здесь обмотка индуктора имеет
двухосную обмотку возбуждения с числом витков Wyi и Wy2-
Рис. 1.9. Схема модели двухфазной синхронной машины
с продольно-поперечным электромагнитным возбуждением
без демпферной клетки
Исключив из модели общего вида (1.32) уравнения и переменные,
относящиеся к демпферной обмотке, получим модель двухфазной
47
синхронной машины с продольно-поперечным электромагнитным
возбуждением: U?r = Тбр^г + + R?rI?' U/Gr _ ,\Gr rGr . = 4^ +L^C ; (1.33) \xjGr __ vGrrGr . ~~Fm ’ vGr vGr . tGt . =lf +15 > m-mc - Tjpco.
На рис. 1.10 приведена структурная. схема модели двухфазной
синхронной машины с продольно-поперечным электромагнитным
возбуждением.
Рис. 1.10. Структурная схема модели двухфазной синхронной машины
с продольно-поперечным электромагнитным возбуждением
без демпферной клетки
Отметим структурное сходство моделей синхронной машины с
продольно-поперечным электромагнитным возбуждением и обобщенной
машины переменного тока. Общим свойством для них является наличие
48
двух каналов воздействия, влияющих на режимы электрических машин.
Канал управления со стороны обмоток возбуждения синхронной машины
позволяет влиять как на величину, так и на пространственное положение
вектора магнитного потока, давая возможность формирования
оптимальных статических и динамических режимов.
Модель трехфазной синхронной машины с продольно- поперечным
электромагнитным возбуждением и демпферной клеткой
При раздельном питании фаз обмотки переменного тока от
автономных источников линейно-независимых напряжений уравнения
синхронной машины имеют наиболее простой вид в трехмерной
декартовой системе координат Odql, фиксированной относительно
индуктора:
и?r = T&p4Gr + r + Rfqf'-;
U^'=7’6p'P^+R^I^;
О = T&p4Gcr + RcGr Ic& ;
±T т@г .
X5 X7M ’
=^+L%I^ ;
; (1.34)
щбт _ трбт-гбт .
хти гти *m 5
IGr _. rGr . 'fGr
m +1/ +*c J
m = W¥Gr.IGr-
m-mc= Tjpco .
Здесь векторы преобразованных напряжений, токов,
потокосцеплений обмоток статора и индуктора представляют собой
трехмерные алгебраические векторы. Они имеют следующий вид.
Векторы преобразованных напряжений, токов и полных
потокосцеплений обмотки якоря:
U
49
Векторы преобразованных напряжений, токов и полных
потокосцеплений обмотки возбуждения:
U
Gr _
? df
Ufd
Ufq
О
о
Векторы преобразованных напряжений, токов и полных
потокосцеплений демпферной обмотки:
с ~~
df
Vcq
о
Векторы преобразованных
токов и главных потокосцеплений:
результирующих намагничивающих
^md
lmq »
xGr _
т df
xuGr _
m df
Vmd
Vmq
Wml
В системе уравнений (1.34) преобразованные матрицы параметров
обмоток якоря и индуктора определяются выражениями
Rfr=diag[r, rs rj; = diag[ZJff lsa Z^];
RGf = diag \rfd rfq 0]; L% = diag [Zfda Ifqa 0] ;
R^r = diag [rcd rcq 0]; L& = diag [Zct/ff lcqcy 0] ,
где rs и lsa, l°a - активное сопротивление и индуктивности рассеяния
обмотки якоря;
rfd ’ rfq и fda- ’ fqa- ~ активные сопротивления и индуктивности
рассеяния обмотки возбуждения;
rcd’ rcq п ^cda-’ hqcr ~ активные сопротивления и индуктивности
рассеяния демпферной обмотки.
50
Постоянные матричные коэффициенты определяются выражениями
О -1 О’
В= 1
о о
о о
О
На рис. 1.11 приведена структурная схема модели трехфазной
синхронной машины с продольно-поперечным электромагнитным
Возбуждением и демпферной клеткой.
Рис. 1.11. Структурная схема модели трехфазной синхронной машины
с продольно-поперечным электромагнитным возбуждением и
демпферной клеткой
Трехмерный характер векторных переменных подсистемы
электромагнитных контуров является главным отличием модели
трехфазной синхронной машины при раздельном питании фазных обмоток
якоря от автономных источников линейно-независимых напряжений при
сравнении ее с моделью двухфазной синхронной машины.
Присутствующие в схеме звенья с матричными коэффициентами С и В в
канале преобразования управляющих воздействий со стороны обмотки
переменного тока выделяют составляющие ненулевой последовательности.
Вместе с тем заметим отсутствие указанных звеньев в трехмерном канале
преобразования управляющих воздействий со стороны обмоток индуктора.
Данная особенность отличает модель трехфазной синхронной машины от
модели обобщенной машины переменного тока при питании обмоток от
автономных источников линейно-независимых напряжений.
51
1.2.4. Модели синхронной машины с продольным
электромагнитным возбуждением
Модель двухфазной синхронной машины с продольным
электромагнитным возбуждением без демпферной клетки
Рассмотрим двухфазную синхронную машину нормальной формы
исполнения, имеющую одну обмотку возбуждения по продольной оси
индуктора и симметричную двухфазную обмотку якоря (рис. 1.12).
Рис. 1.12. Схема модели двухфазной
синхронной машины с продольным
электромагнитным возбуждением без
демпферной клетки
Основой для описания электро-
магнитных и электромеханических
процессов служат преобразованные
векторно-матричные уравнения
(1.33), вид которых полностью
сохраняется для синхронной машины с продольным электромагнитным
возбуждением:
U?r = Тбр^г + + R?rI?r ;
xjjGr _ xxjGr , т Gr rGr .
~ m + Llfcrlf ’
ujGr _ ypGr -^Gr jGr ,
T j x m "r ‘-'so-1 s ’
mGr _ рСгтбт .
•tGr _ тбг . vGr .
“*/ +1s >
m-mc =Tjpa).
(1.35)
52
Однако при использовании этих уравнений необходимо учитывать
одноосный характер обмотки возбуждения. В связи с этим алгебраические
векторы преобразованных к базису Gr напряжений, токов и
потокосцеплений обмотки возбуждения имеют нулевые значения
компонент по поперечной оси индуктора:
Gr _
? d"f
ufd
О
rGr _ lfd
7 df 0
xj/Gr = Vfd
f df 0
Изменяются также выражения матриц активных сопротивлений и
индуктивностей рассеяния, входящие в уравнения цепи возбуждения:
R^=7M; L%=Z/aM,
1 О
О 0 ’
где М - постоянная вещественная матрица, М —
На рис. 1.13 приведена структурная схема модели двухфазной
синхронной машины с продольным электромагнитным возбуждением.
Рис. 1.13. Структурная схема модели двухфазной синхронной машины
с продольным электромагнитным возбуждением без демпферной клетки
53
Как видно из схемы, оставаясь в структурном отношении сложной
двухканальной многосвязной динамической системой, синхронная машина
с продольным электромагнитным возбуждением как объект управления
имеет реально меньше каналов воздействия. Объясняется это наличием
одноосной обмотки возбуждения. В структурной схеме модели для
отражения этого отличительного фактора электромагнитная цепь обмотки
возбуждения представлена в виде одномерной подсистемы. Входным
воздействием для нее является внешнее напряжение, прикладываемое к
обмотке возбуждения, а выходной переменной - ток возбуждения,
участвующий в формировании результирующего намагничивающего тока.
Для связи переменных одномерной подсистемы возбуждения с
векторными переменными электромагнитных цепей якоря в схеме
предусмотрены дополнительные звенья, выполняющие операции
скалярного умножения векторов и умножения скаляра на вектор:
где d - алгебраический вектор, d = [ 1 О ]Л
Модель трехфазной синхронной машины с продольным
электромагнитным возбуждением без демпферной клетки
Модель трехфазной синхронной машины с продольным
электромагнитным возбуждением при питании обмотки переменного тока
от автономных источников линейно-независимых напряжений
описывается следующей системой уравнений:
ufr=тъРч°г+;
U^=T6pT^+R^I^;
\xjGr _ yrjGr j Gr -[Gr .
X5 X7M ~t“L,SCr1-S 9
; (1.36)
xw Lm 5
IGr f-vcGr . -rGr .
m -C15 +V ’
m-mc = Tjpa> .
54
В системе уравнений (1.36)
uSd isd ufd
ufr = 15 df usq • = ’ 15 df lsq ; u? = 7 df 0 rGr _ ’ it 0
Usl . Jsl. 0 0
Wsd V// imd Vmd
df V sq . mGr _ ’ d"f 0 • = ’ m df hnq mGr _ 5 * m df Vmq
Vsl. 0 jml . У ml.
представляют собой трехмерные алгебраические векторы напряжений,
токов, полных потокосцеплений обмоток якоря (j = S~) и индуктора
(у = f), а также результирующих намагничивающих токов и главных
потокосцеплений (j = т).
Преобразованные матрицы активных сопротивлений и
индуктивностей рассеяния обмоток якоря и индуктора
Rfr = diag[r5 rs rs ]; LJ. = diag [ZJO. lsa l°S(X ];
Rz =diag[zy 0 0]; Lya = diag\lf(T 0 0],
где rs, Гу и lsa, l°a, lfa - активные сопротивления и индуктивности
рассеяния обмоток якоря и индуктора трехфазной машины.
Постоянные матричные коэффициенты
На рис. 1.14 приведена структурная схема модели трехфазной
синхронной машины с продольным электромагнитным возбуждением без
демпферной клетки. Она приведена к виду, отражающему скалярный
характер формирования основной составляющей главного магнитного
потока машины.
55
Рис. 1.14. Структурная схема модели трехфазной синхронной машины
с продольным электромагнитным возбуждением без демпферной клетки
По аналогии с моделью двухфазной синхронной машины в схеме
предусмотрены дополнительные звенья, выполняющие операции
скалярного умножения векторов и умножения скаляра на вектор. Однако
здесь эти операции производятся с учетом трехмерного характера
векторных переменных подсистемы электромагнитных контуров:
-а.
где d - трехмерный алгебраический вектор, d = [ 1 1 0 ]Т.
df
В заключение отметим, что приведенные модели трехфазных
синхронных машин при питании фазных обмоток якоря от автономных
источников линейно-независимых напряжений обобщают случаи не только
моделей трехфазных синхронных машин с другими схемами питания
фазных обмоток якоря, но и модели двухфазных синхронных машин. При
питании обмотки якоря от источника линейно-зависимых напряжений все
рассмотренные модели трехфазных синхронных машин сводятся к
моделям двухфазных синхронных машин.
Общий вид уравнений приведенных моделей сохраняется также для
неявнополюсных синхронных машин. Принципиальное отличие моделей
явнополюсной и неявнополюсной машин состоит в описании нелинейного
17
оператора связи гт между векторами составляющих главных
56
« vrrGr ___ _________________ vGr
Потокосцеплении 'rm и результирующих намагничивающих токов lm ,
учитывающего насыщение машины по главному магнитному пути.
Операторы связи для явнополюсных и неявнополюсных машин
рассматриваются в пункте 1.5.
1.3. Математические модели машин постоянного тока
1.3.1. Общие уравнения машины постоянного тока
В рамках принятых общих допущений рассмотрим
идеализированную явнополюсную электрическую машину постоянного
тока, в которой многофазная обмотка якоря заменяется эквивалентной по
действию двухфазной обмоткой, а коллекторное устройство формирует в
обмотке якоря токи, изменяющиеся по гармоническому закону в функции
угла поворота якоря.
Использование в модели машины двухфазной обмотки якоря с
идеализированным коллекторным устройством основано на возможности
приведения многофазной симметричной обмотки к эквивалентной
двухфазной обмотке [44] и замене реального коллектора устройством с
непрерывным преобразованием тока внешней цепи якоря [101].
На рис. 1.15 приведена схема модели машины постоянного тока.
Рис. 1.15. Схема модели обобщенной машины постоянного тока
57
Неподвижный индуктор имеет четыре обмотки с числом витков иуг-
(z = l,4). К обмоткам приложены напряжения Муг- от автономных
источников постоянного тока. Токи обмоток индуктора iу г- создают МДС.
Размещение четырех обмоток на индукторе позволяет создавать модели
двигателей постоянного тока, имеющих обмотку добавочных полюсов и
компенсационную обмотку, а также учитывать влияние вихревых токов, ,
возникающих в массивных частях магнитопровода. *
Якорь вращается относительно индуктора с угловой скоростью СО. |
Обмотки фаз якоря waj (j = 1,2) соединены с коллекторным устройством. |
и обтекаются токами iaj. Изображающие векторы МДС, созданные токами j
фазных обмоток якоря, направлены по двум неподвижным относительно
якоря ортогональным осям Od и Oq. |
В отличие от обмоток индуктора напряжения uaj и токи iaj фазных \
обмоток якоря представляют собой переменные величины, являющиеся
результатом преобразований коллекторным устройством (КУ) постоянного
напряжения иа и тока ia внешней цепи якоря. Эти преобразования
осуществляются в функции электрического угла поворота якоря 0.
Математически угол 0 определяется как угол поворота оси якоря Od
относительно оси индуктора Оа в направлении, принятом за .
положительное направление вращения якоря. Напряжения и токи фазных
обмоток зависят также от угла смещения щеток у относительно
геометрической нейтрали.
Для записи исходных уравнений и изображения переменных <
машины постоянного тока с учетом пространственного положения ;
обмоток индуктора и якоря введем две системы координат:
(O,Gs) = Oa/3 ; (O,Gr ) = Odq.
\ /df \ /df
Орты а и Р базиса
направлениями продольной Оа
Gj совместим с положительными
и поперечной 0/3 осями индуктора.
Базис Gr получим путем поворота базиса Gj на угол 0:
Gr=A(0Gj,
58
где
А(#) =
cos# sin#
-sin# cos#
матрица перехода от базиса Gj к базису Gr.
Обратное преобразование базисов выполняется по формуле
G5=A'1(#)G
где
А4(#) =
cos# -sin#
sin# cos#
матрица перехода от базиса Gr к базису G$.
Орты базисов Gs и Gr задают в двухмерном пространстве R2
направления осей систем координат, одна из которых (Осф )
фиксирована относительно индуктора, а другая (Odq} - относительно
якоря.
Покажем возможность изображения переменных машины
постоянного тока во введенных системах координат на примерах токов
обмотки якоря и одной из обмоток индуктора (рис. 1.16).
Рис. 1.16. Изображающие векторы
токов обмоток якоря и возбуждения
В системе координат токи
координаты точки Ia(zai,za2)>
якоря можно рассматривать как
которые в то же время являются
59
координатами ее радиуса-вектора I а. Разложим I а по векторам базиса
Gr:
la = ial d + ia2 q. (1.37)
Формула (1.37) показывает, что фазные токи обмотки якоря
являются координатами вектора 1а в базисе Gr, и дает представление
этого вектора в виде суммы двух взаимно ортогональных геометрических
векторов:
I al = z'ai d; I а2 = Za2 Q >
длины которых определяются мгновенными значениями фазных токов.
Таким же образом можно построить и разложить радиусы-векторы
других переменных (напряжений, потокосцеплений) обмотки якоря.
Для изображения переменных, относящихся к индуктору, также
вводятся радиусы-векторы. В связи с одноосностью обмоток индуктора эти
векторы в неподвижной системе координат Оа/3 будут направлены по
соответствующим координатным осям О а и 0/3. Например, рассматривая
формально одноосную обмотку w/j двухосной, можно построить в
системе координат Оа/3 точку Iyj (z,0) и ее радиус-вектор I /1,
который будет направлен по координатной оси О а (см. рис. 1.16).
Рассматривая вектор I /1 как элемент линейного пространства R2 с
базисом Gs, этот вектор можно представить в виде линейной комбинации
вектора z'yi ОС и нулевого вектора 0 Р :
1/1 =ifX ос+0 3.
Таким образом, геометрические векторы дают представление о
переменных с учетом пространственного положения обмоток машины
постоянного тока, что весьма важно с позиции определения
результирующей магнитодвижущей силы обмоток. Вместе с тем при
аналитических исследованиях предпочтительнее использовать не сами
геометрические векторы, а их координаты разложения. Рассматривая
60
радиусы-векторы как элементы векторного пространства, каждому из них
можно поставить во взаимно однозначное соответствие столбец
(алгебраический вектор) его координат. Например, геометрическим
векторам линейного пространства I а и 1/1 соответствуют
алгебраические векторы-столбцы
,Ga _ Zal
dfLZa2j
df 0
элементами которых являются упорядоченные наборы координат
разложения геометрических векторов в базисах Gr и G j.
Введение алгебраических векторов позволяет записать общие
уравнения машины постоянного тока в компактной векторно-матричной
форме.
Уравнения электромагнитных контуров: •
Up=RpIp+PYp; (1.38)
Up = Rplp + рЧ? , (1.39)
где
TTGr _ ual
dfLMa2J
zal
dfLz’fl2.
.
’ T a
<4^2 J
a
a
алгебраические векторы-столбцы напряжений, токов и потокосцеплений
обмоток якоря, составленные из координат разложения радиусов-векторов
по базису Gr;
=
df
ufi
О
jQs _
fi df о ’ fi df о
z = 1,2;
61
алгебраические векторы-столбцы напряжений, токов и потокосцеплений
обмоток индуктора, составленные из координат разложения радиусов-
векторов по базису Gr;
- матрица активных сопротивлений обмоток фаз якоря;
df
R^=rf.-M, / = 1,2;
J df 7
= r N, z = 3,4
7 df 7
матрицы активных сопротивлений
обмоток индуктора,
где Е = diagfl 1] - единичная матрица;
М =
’1 О
О О
Го о'
- постоянные вещественные матрицы.
N =
О 1
Систему уравнений (1.38) и (1.39) дополним уравнениями токов и
напряжений коллекторного устройства, которые найдем из следующих
рассуждений.
При электромеханическом преобразовании энергии в электрических
машинах поля неподвижных и вращающихся обмоток должны быть
взаимно неподвижны [43]. В машине постоянного тока по обмоткам
индуктора протекают постоянные токи, которые совместно создают
результирующую магнитодвижущую силу /у, неподвижную
относительно индуктора. В то же время токи в обмотках якоря
представляют собой переменные величины, изменяющиеся в функции уг-
ла 0. Они создают бегущую относительно якоря волну магнитодвижущей
силы fa, угловая скорость которой равна по абсолютной величине и
противоположна по знаку угловой скорости вращения якоря. В связи с
этим результирующая МДС якоря также неподвижна в пространстве.
На рис. 1.17 изображен вектор результирующей МДС якоря F а при
произвольном угле / сдвига щеток с геометрической нейтрали. Разложим
вектор Ед по векторам базиса Ga
62
Fa fad d + faq Q •
Координаты вектора Fa определяются из рис. 1.17:
fad =|Ffl|cOS(/-0); f^ = |Fa | sitt(/- 0),
-> _> 1
где |Fa| - длина радиуса-вектора, |Fa| = (fad + faq)2
Рис. 1.17. Разложение вектора МДС
=>
обмоток якоря по векторам базиса Ga
Используя правило обратного соответствия между гармонической
функцией и радиусом-вектором точки [70], получим
falM = fadCOS(<P-0)‘,
fa2^ <Р) = faq ^((р ” 0 ” Л / 2).
С другой стороны, функции распределения МДС обмоток якоря
fa\(*> <р)=cos(<p - 0); ,, л,'
/а2 V’ <Р) = *Лтах COS(p - 0 - П / 2).
Сравнивая выражения (1.42) и (1.43), заключаем, что
63
ia\ = tfm’ax |Ffl | cos(/'" = \ia | cos(/ ~ #) J
ia2 = <7max |F« | sin(/ - 0) = \ia | sin(/' - 0).
Выразив угол у' через угол сдвига щеток у, получим окончательно
следующие эквивалентные выражения для токов обмоток якоря:
ial = *asin(/-0);
z’fl2 =4cOS(/-0).
Связь между напряжением внешней цепи иа и напряжениями wal и 1
иа2 фазных обмоток якоря устанавливается с помощью уравнения баланса ]
мощности на входе и выходе коллекторного устройства: J
“Л =^а1+иа21а2. I
Подставляя в это уравнение вместо токов га1 и za2 соответствующие |
выражения из (1.42), получим
иа = ualsin(y-0>)-ua2cos(y-0). (1.43)
Соотношения (1.42) и (1.43) являются уравнениями коллекторного
устройства модели идеализированной электрической машины постоянного
тока. Эти уравнения отражают основные особенности работы
механического коллектора реальной электрической машины, который
вследствие конечного числа секций обмотки якоря и соответственно
коллекторных пластин представляет собой дискретное устройство.
В дальнейшем для гармонических функций, входящих в уравнения
(1.44) и (1.45), введем обозначения
0fll(0) = sin(/-0); </>a2(0') = -cos(y-0) (1.44)
и будем называть их фазными коммутационными функциями
коллекторного устройства.
В векторной форме уравнения коллекторного устройства имеют
следующий вид:
64
Фа№
Фа2^\
е=/,,Ф®(в);
где Ф?(0) - вектор фазных коммутационных функций коллекторного
устройства, определяемый формулами (1.44), (0) =
df
Векторы полных потокосцеплений обмоток якоря и индуктора
находятся суммированием главных потокосцеплений и потокосцеплений
рассеяния:
xrjGr _ VaX
* а _ , г
dfL^2j
(1-45)
Yfi
_xrjGs ,\rfGs
fmi+^ fo
(1-46)
__ шб? . шб/'.
* ат "т* * асу5
xuGs _
fldf[yfi_
Векторы главных потокосцеплений обмоток машины постоянного
тока
vpGr Vam\ . vpG-, _ fmi
dfL^2J df[y>d
нелинейно зависят от обмоточных вектор-функций распределения Qyf,
6 и векторов токов 1^, г . В символической форме записи
=ад?,о?),
где Fp и Fa - нелинейные вектор-функции.
Согласно (1.45) и (1.46) для определения полных потокосцеплений
обмоток необходимо учесть потоки рассеяния. Введем векторы
потокосцеплений рассеяния обмоток якоря
65
и индуктора
Gr _
аа df
Vai
_Va2_
Z = 1,2;
z = 3,4.
Пренебрегая насыщением по путям рассеяния, уравнения
потокосцеплений рассеяния запишем в векторно-матричной форме:
’Gr _ j Gr-rGr.
аа ^аа^аа’
XtfGs _ т Gs -jGs
* f ia ~ ia*-f ia •
Здесь
- матрица индуктивностей рассеяния фазных обмоток якоря,
Gr
'ас
- матрица индуктивностей рассеяния обмоток индуктора,
L%- = (i = 1,2), = /;ZN (z = 3,4).
Уравнение электромагнитного момента запишем в следующей
форме:
и=¥й;.м?-. ал?)
Раскрывая в (1.47) векторы токов и потокосцеплений, приходим к
следующему выражению электромагнитного момента:
т = М|ia cos(<pm + %-?). (1.48)
Для пояснения геометрического смысла формулы (1.48) на рис. 1.18
приведена векторная диаграмма с изображением радиусов-векторов токов
1а и главных потокосцеплений Ч'ат- Координаты разложения этих
66
векторов по базису Gr составляют алгебраические векторы 1а и Чат,
входящие в формулу электромагнитного момента.
Рис. 1.18. К пояснению геометрического смысла уравнения
электромагнитного момента машины постоянного тока
Теперь воспользуемся геометрическим подходом к определению
скалярного произведения двух радиусов-векторов. По определению,
скалярное произведение двух радиусов-векторов равно произведению их
модулей на косинус угла между ними [23]. На основании этого
определения уравнение электромагнитного момента можно записать в
следующем виде:
w = |BIa||TflW|cosyw,
(1-49)
где |В1а | и |Тат | - модули векторов;
- угол между векторами В1а и Чат.
При подстановке в уравнение (1.49) |BIa| = |za|, |Ч/отг| = ||\Е/пг|| и
Vm =2п — (<рт + %-/') получим выражение (1.48).
Таким образом, электромагнитный момент машины постоянного тока
при произвольной степени компенсации реакции якоря и сдвиге щеток с
геометрической нейтрали зависит как от величины модулей радиусов-
векторов токов и главных потокосцеплений обмоток якоря, так и от угла
67
между ними. Из уравнения (1.49) следует, что максимальному значению
электромагнитного момента по абсолютной величине соответствует
случай, когда вектор токов 1а ортогонален вектору главных
потокосцеплений ат Это условие выполняется в компенсированном
двигателе при установке щеток на геометрической нейтрали.
1.3.2. Уравнения обобщенной модели машины постоянного тока
в неподвижной системе координат
Модель машины постоянного тока в системе координат Осф,
фиксированной относительно статора, является одним из возможных
вариантов. В этой модели все переменные представляют собой координаты
радиусов-векторов в базисе Gs. Модель в системе координат О ар дает
следующие преимущества:
• уравнения машины имеют наиболее простой вид;
• напряжения и токи внешней цепи якоря и обмоток индуктора по
своему физическому смыслу совпадают с соответствующими
переменными реальной машины.
=>
Уравнения машины в базисе Gj получаются путем преобразования
уравнений, относящихся к обмоткам якоря и коллекторному устройству.
При этом уравнения обмоток индуктора остаются в прежнем виде, так как
они в исходных уравнениях записаны в неподвижной относительно
индуктора системе координат. Необходимые преобразования
осуществляются по известным правилам [53] с помощью матриц А($) и
А-1(0). В результате получаем математическую модель насыщенной
машины постоянного тока общего вида:
Т& =i <bGs •
= ТбРЧ? + a BT^S + R?I^;
U^=T6^+R^.; г=М;
\rjGs _ \rjGs । xijGs ,
* a ” * m T
Ч^- = МЧ^ + 4> g i; i = 1,2; (1.50)
68
4'$=NT^+4'g/; z = 3,4;
______т Gs tC/S ,
Tt2G “ ^аа^-а >
4'%=LjiI^; i = l4;
\j/Gs _TjiGs-rGs ,
4
tGs v»tGs rT^5.
lm ~ 2Afi+la ’
i=l
и = Ч-®.В1?;
m-mc=Tj pct);
co = T5p0.
=>
Здесь алгебраические векторы преобразованных к базису G5
коммутационных функций, напряжений и токов обмотки якоря
соответственно:
ф& _ Фаа
а К\_Фар
jjGs _ Uaa
а ^\иар
jGs _ 1аа
° <х\}ар
Векторы полных потокосцеплений и потокосцеплений рассеяния
обмотки якоря:
wGs _^аа
* а
dfL^J
y^Gs = ^ааа
ас
^аар
Векторы результирующих
потокосцеплений:
намагничивающих токов и главных
tGs 1т«
lfn яг i
^Gs _ Ута
*т .е
dfL^m^J
Матрицы преобразованных активных сопротивлений и
индуктивностей рассеяния обмотки якоря:
R? = A R°r А-1 - raE; L% = AL% А'1 = ZflcrE.
69
Система уравнений (1.50) описывает процессы в машине
постоянного тока для случая питания ее обмоток от автономных
источников. Она характеризует машину постоянного тока как
многосвязный многомерный нелинейный объект управления.
На рис. 1.19 приведена схема обобщенной модели машины
постоянного тока, которая представлена в виде блоков решения уравнений:
автономных источников питания 1 и 3-6, коллекторного устройства 2,
уравнений электромагнитных контуров 7 и уравнений связи 8, а также
уравнений электромагнитного момента 9 и механического движения 10.
Рис.1.19. Блок-схема обобщенной модели машины постоянного тока
Такая модель дает полное представление о процессах, протекающих
в машине при произвольном характере изменения внешних воздействий.
Ввиду универсальности обобщенной модели ее можно использовать в
качестве основы при построении математических моделей двигателей с
различными схемами соединения обмоток. При этом практический интерес
для задач управления представляют модели следующих типов машин
постоянного тока:
• двигателя с последовательным соединением обмоток якоря,
компенсационной и добавочных полюсов с произвольной степенью
компенсации и возможностью сдвига щеток с геометрической
нейтрали;
• некомпенсированного двигателя с изменяемым углом сдвига
щеток;
• компенсированного двигателя;
• вентильной машины постоянного тока.
70
1.3.3. Модели коллекторной машины постоянного тока
с произвольной степенью компенсации реакции якоря
и сдвигом щеток с геометрической нейтрали
Машины постоянного тока имеют неподвижный индуктор и
вращающийся якорь с коллектором. Индуктор состоит из станины, к
внутренней поверхности которой крепятся главные и добавочные полюсы.
Станина служит основанием для крепления неподвижных частей и
одновременно является элементом магнитопровода. Главные и добавочные
полюсы состоят из сердечников и катушек обмоток. Сердечники главных
полюсов изготовляют массивными или набирают из электротехнической
стали. Сердечники добавочных полюсов, как правило, массивные. Обмотка
возбуждения и обмотка добавочных полюсов конструктивно выполняются
в виде сосредоточенных катушек. Кроме обмоток возбуждения и
добавочных полюсов, в целях компенсации реакции якоря, машина может
иметь распределенную компенсационную обмотку, которая укладывается
в пазы сердечников главных полюсов.
Якорь коллекторной машины постоянного тока изготовляется из
листов электротехнической стали. В пазы на внешней поверхности якоря
укладывается обмотка якоря, секции которой соединяются с коллектором.
Для подвода тока к коллектору применяется щеточный аппарат с
траверсой, на которой укреплены щеточные пальцы. Траверса крепится к
неподвижной части и допускает поворот на некоторый угол вокруг оси
вала для регулирования положения щеток на коллекторе.
В конструктивном отношении машина постоянного тока
симметрична. Различают продольную и поперечную оси симметрии -
линии, проходящие соответственно посередине главных полюсов и
межполюсного пространства. Поперечная ось называется геометрической
нейтралью машины.
Схема модели идеализированной коллекторной машины
постоянного тока приведена на рис. 1.20. По продольной оси а индуктора
расположена обмотка возбуждения (ОВ), имеющая число витков wB. К
обмотке возбуждения приложено напряжение иъ, создающее в ней ток zB.
Для учета влияния короткозамкнутых секций якоря и возникающих в
массивных частях магнитопровода вихревых токов по продольной оси
индуктора размещена короткозамкнутая фиктивная обмотка (ОВТ). Число
витков короткозамкнутой фиктивной обмотки wBT. При изменении
магнитного потока в обмотке ОВТ индуктируется ток zBT.
71
Рис. 1.20. Схема модели коллекторной машины постоянного тока
с обмотками компенсационной и добавочных полюсов
при произвольном сдвиге щеток с геометрической нейтрали
Компенсационная обмотка (ОК) и обмотка добавочных полюсов
(ОДП), имеющие соответственно числа витков wK и , расположены по
поперечной оси [} индуктора. Обмотки ОК и ОДП включены
последовательно с внешней цепью якоря.
На роторе, вращающемся со скоростью а>, размещена симметричная
двухфазная обмотка. Число витков обмоток якоря wsi = wa2 = wa.
Обмотка ротора подключена к идеальному коллекторному устройству,
формирующему в ней токи и z'a2. Внешними воздействиями
коллекторного устройства являются входной ток z‘a , угол поворота ротора
О и угол сдвига щеток с геометрической нейтрали /. Эти величины
определят амплитуду, угловую частоту и начальную фазу токов обмотки
якоря.
При построении модели коллекторной машины в качестве основы
можно использовать уравнения общего вида (1.50). Подробный вывод
уравнений коллекторной машины постоянного тока дается в работе [70]. В
связи с этим остановимся только на особенностях исходных положений и
72
конечных уравнениях, характерных для модели коллекторной машины.
Эти особенности заключаются в следующем.
1. Обмотки индуктора одноосные, поэтому алгебраические векторы,
составленные из мгновенных значений напряжений, токов и полных
потокосцеплений одноосных обмоток индуктора, имеют по одной из осей
нулевые компоненты:
и^ = J
7 df о
j df 0
(j=B, ВТ );
r 0
\T/Cr5 _
7 dfly7
(J=K, ДП).
Матрицы активных сопротивлений и индуктивностей рассеяния
обмоток индуктора имеют следующий вид:
R^=r7M; L%=ZJM, (j = b,bt);
Ry2 * * s=r7N; L%=ZjN, (у = к,дп),
где
О
О
- матричные константы.
2. Векторы преобразованных напряжений, токов и потокосцеплений
обмотки якоря приводятся с помощью матрицы преобразования А(#2)
при подстановке = у к системе координат Оху, ориентированной по
оси щеток:
^ЯХ
"df
_ияу_
= A(Z)U?;
_ гях
df[^
^ях
Тя
df^y_
= A(Z>??;
Vmx
= А(г)¥®’.
U
I
Я
х т
73
Обратное преобразование координат осуществляется с помощью
матрицы А'1 (у).
Пространственное положение оси щеток определяется углом у,
отсчитываемого от продольной оси индуктора, и совпадает с
пространственным положением вектора коммутационной функции
коллекторного устройства. Угол сдвига щеток у при выводе уравнений
рассматривается как конструктивный, не зависящий от времени параметр
машины.
Матрицы активных сопротивлений и индуктивностей рассеяния
обмотки якоря:
Кя = diag [гя гя ]т; ЬЯ£У = diag [Zf Zf ]т.
3. В уравнения электрических связей входят напряжения и токи не
только компенсационной обмотки, но и обмотки добавочных полюсов. В
этом случае уравнения электрических связей в векторно-матричной форме
для коллекторной машины имеют следующий вид:
иш=мия+8(*,.Х1+^».и^);
Т — Z-’1 - Z-"1 4TGs
гя ~ л'е.когк л'е.дпогдп>
где ке к и ке дп
- коэффициенты трансформации, определяемые
отношением эффективных чисел витков обмотки
возбуждения и обмотками якоря,
компенсационной и добавочных полюсов;
1
о
О
1
S =
- матрица соединений обмоток ОК и ОДП с внешней
цепью якоря.
4. Обобщенный вектор полных потокосцеплений и обобщенные
матрицы активных сопротивлений и индуктивностей рассеяния машины
определяются выражениями
ш _ш WGs -I- ir u/G’y
1 яд 1 я к 1 к т "-е. дп 1 дп > >
Ляц
>яц °'
О гя
= Ra +S(A/KR? +^otR^)S'1;
74
^ЯПСГ
1а о
1яц v
0 1Я.
где гщ и - эквивалентные активное сопротивление и индуктивность
рассеяния якорной цепи машины.
С учетом этих особенностей полная математическая модель
коллекторной машины постоянного тока с произвольной степенью
компенсации реакции якоря и произвольным сдвигом щеток с
геометрической нейтрали описывается следующей системой векторно-
матричных уравнений:
ияц=ТбрТяц+й>ВГТя+Вяц1я;
UbGs=T6^s+RbGsIbGs;
0 = T6pT^+R^I^;
Ш — Ш I J T .
1 яц 1 яцт х-'яца±я >
TbGs=MY^+L^IbGs;
u/Gte — i T 1&s •
=[A(r)+a,SNJV®’;
I? =I?+I*+[A-,(Z) + aKS-1]I,;
m-mc = Tj pa>;
O) = T6p0,
(1-51)
где ак- коэффициент, характеризующий степень компенсации поперечной
реакции якоря коллекторной машины постоянного тока;
В =
"о
1
-1
- матричная константа.
75
Условиями полной компенсации поперечной реакции якоря
являются у =0 и ак = 1. При ак < 1 имеем модель недокомпенсированной,
а при ак > 1 - перекомпенсированной коллекторной машины постоянного
тока.
На рис. 1.21 приведена структурная схема модели машины
постоянного тока независимого возбуждения, предусматривающая
возможности сдвига щеток с геометрической нейтрали и изменения
степени компенсации реакции якоря.
Рис. 1.21. Структурная схема коллекторной машины постоянного тока
при сдвиге щеток с геометрической нейтрали и произвольной степени
компенсации реакции якоря
Здесь схема решения уравнений электрических связей представлена
в векторном варианте изображения переменных, а в схемах
76
электромагнитных контуров фигурируют скалярные переменные. Для
преобразования скалярных переменных в векторные переменные в схеме
предусмотрены блоки, выполняющие операцию умножения скаляра на
вектор. Компоненты векторов главных потокосцеплений обмоток
вычисляются как скалярные произведения векторов главных
потокосцеплений и соответствующих вещественных векторов, в качестве
которых используются ортогональные векторы
х =
df
1
0_
Для задания угла у в схеме предусмотрен дополнительный вход,
который можно использовать при исследовании влияния сдвига щеток с
геометрической нейтрали машины постоянного тока.
Приведенные уравнения и структурная схема характеризуют
коллекторную машину постоянного тока как сложную нелинейную
динамическую систему с управляющими воздействиями и внешним
возмущением. Учет сдвига щеток с геометрической нейтрали, насыщения,
явнополюсности, влияния неполной компенсации реакции якоря и
вихревых токов позволяет использовать эту модель для изучения свойств
машины как объекта управления при влиянии перечисленных факторов на
процессы в системах автоматического управления.
1.3.4. Модель некомпенсированной машины постоянного тока
Особенностью конструкции некомпенсированной машины
постоянного тока является отсутствие компенсационной обмотки, а в
некоторых случаях - добавочных полюсов. Поэтому поле поперечной
реакции якоря в такой машине не компенсируется, что отличает ее от
компенсированной машины постоянного тока.
Для построения математической модели некомпенсированной
машины без обмоток ОК и ОДП воспользуемся системой уравнений (1.51).
Исключив из нее уравнения обмоток ОК и ОДП, получим
ия=ГбЛ+ц>ВГ^я+Кя1я;
0=гбР^вт +RbtIbt;
Ш — Ш -L.T т .
х я х ят ^-^яо^я’
Тя„=А0-)та;
77
— ]VIVI/Gk । T T &s •
tbt xvlTm "г -L/bto'-1bt 9
yrfGs_-pGsyGs,
*m ~' rm *-m 5
I® = I? +IS+A’1 (/)!,;
т = 'Ряп1*В1я;
m-mc =Tj pa);
G) = T§p0.
(1-52)
Структурная схема некомпенсированной машины приведена на
рис. 1.22.
Рис. 1.22. Структурная схема некомпенсированной машины
постоянного тока независимого возбуждения
78
Система уравнений (1-52) описывает процессы в
некомпенсированной машине постоянного тока при произвольном угле
сдвига щеток с геометрической нейтрали, а также учитывает насыщение
машины по главному пути, явнополюсность и влияние вихревых токов.
Структурная схема модели характеризует некомпенсированную
машину постоянного тока как сложную нелинейную динамическую
систему.
1.3.5. Модель компенсированной машины постоянного тока
В компенсированной машине независимого возбуждения
компенсационная обмотка совместно с обмоткой добавочных полюсов
полностью компенсирует поперечную реакцию якоря и щетки
установлены на геометрической нейтрали. При этих условиях в системе
уравнений (1.51) необходимо принять <2К=1 и / = 0. В результате
получим систему уравнений модели компенсированной машины:
ияц - ТбР^яц*я + Мя ’
и?' =T6/>T?+R?I?;
0 = T6?T®+R®I®;
W _W j_ т т .
X ЯЦ X ЯЦ?И ^Х-'ЯЦСГХЯ’
W _W j_ т т .
x я x ят ~ ^ястхя ’
T?=MT?+Lg,I?;
__ IVppGs 4. T Gs tGs ,
TBT ” "1” L/BTCTABT ’
w __ w __ vr/Gs.
1 яцти ТЯт 5
\tjGs __ -r^GsjGs,
tGs _tGs - tGs .
— ab abt 9
= Т »BI
1 ЯТИ ШЯ’
m-mc - Tj pa)\
O) = T6p0.
(1-53)
Рассмотрим особенности модели компенсированной машины
постоянного тока.
79
Во-первых, при / =0 напряжения, токи и потокосцепления обмоток
фаз якоря приводятся к неподвижной системе координат О ар, оси
которой совмещены с продольной и поперечной осями машины.
Во-вторых, изменяется связь между векторами главных
потокосцеплений и результирующих намагничивающих токов
Как следует из системы уравнений (1.53), вектор намагничивающих токов
tGs _ tGs - tGs
lm ~~ Ав +1вт •
Компонентами этого вектора в неподвижном базисе Gs являются
1та — гв *" гвт >
imp = 0.
С другой стороны,
Gs
т
COSCPm
(1-54)
где
Ct * Р
C0S^=rai; sm^=rai;
Il ImS| = (zma + ^)^-
Подставив значения ima и imp в формулу (1.54), получим
0 при ima>&,
7С при zma<0.
Следовательно, вектор результирующих намагничивающих токов
направлен по продольной оси машины:
80
tGs
lm
гта
О
т.е. норма вектора im —ima-
Теперь найдем вектор главных потокосцеплений . в
компенсированной машине постоянного тока при / = 1 ось симметрии
основной гармоники функции распределения магнитной индукции в зазоре
не зависит от токов якоря и совпадает с угловой координатой магнитной
оси обмотки возбуждения. В таком случае вектор главных
потокосцеплений имеет нулевую компоненту по оси 0(3:
W та
О
mGs __
т т
Следовательно, норма вектора главных потокосцеплений
| || {^та + Wmft] ¥та Ут-
Полученные выражения имеют следующий геометрический смысл.
Радиус-вектор намагничивающих токов I т компенсированной машины
направлен по продольной оси Оа. Поэтому, несмотря на явнополюсность,
вектор главных потокосцеплений 4хт коллинеарен вектору I т Что
касается норм (модулей) данных векторов, то они связаны нелинейной
скалярной функцией одной переменной. Эта функция представляет собой
характеристику намагничивания машины по главному магнитному пути:
Vm=Wm(imY
Следовательно, оператор F^5, задающий закон соответствия меящу
векторами 4х™ и 1т> осуществляет над вектором I т преобразование
типа нелинейного растяжения (сжатия) без изменения его направления.
В-третьих, полные потокосцепления обмоток ОК и ОДП равны
потокосцеплениям рассеяния. В векторной форме
81
mGs _ mGs . w/Gi _vt/Gj
TK TKCT ’ ТДП X ДПO”
Иными словами, потокосцепления этих обмоток с главным потоком равны
нулю, что объясняется ортогональностью вектора 'Р™ по отношению к
магнитным осям обмоток ОК и ОДП.
1.4. Математические модели вентильных машин
Вентильная машина (ВМ) состоит из двух частей: электрической
машины переменного тока, по конструкции аналогичной синхронной
машине, и вентильного коммутатора (ВК). На статоре машины обычно
располагается трехфазная обмотка переменного тока, питаемая от
вентильного коммутатора. Очередность включения вентилей коммутатора
определяется датчиком положения ротора. Обмотка возбуждения либо
постоянные магниты размещаются на роторе. Вентильные машины
различаются по типу вентильного коммутатора, конструктивному
исполнению машины и способу построения системы управления.
Несмотря на многообразие возможных конструктивных решений, ВМ по
принципу действия и своим электромеханическим характеристикам близки
к распространенным коллекторным машинам постоянного тока [45].
В данной работе уравнения вентильной машины получены на основе
общего метода описания насыщенной машины постоянного тока.
1.4.1. Модель вентильной машины с компенсационной
и демпферной обмотками
На практике для снижения влияния поперечной реакции якоря в
машинах постоянного тока применяется компенсационная обмотка. Схема
соединений электрических цепей вентильной машины приведена на
рис. 1.23. Компенсационная обмотка (ОК) с числом витков WK
расположена по поперечной оси машины. Она включена последовательно
во внешнюю цепь питания вентильного коммутатора. Демпферная обмотка
(ОД) размещена по продольной а и поперечной /? осям машины. Число
витков ОД по продольной и поперечной осям Wcl и Wc2.
При сравнении схем электрических цепей моделей вентильной и
коллекторной машин (см. рис. 1.15 и 1.23) выявляется следующая
аналогия:
• на статоре и роторе машин размещены одинаковые по действию
обмотки;
82
• обмотки роторов питаются от источника тока, роль которого в
коллекторной машине выполняет коллекторное устройство, а в
вентильной машине - вентильный коммутатор;
• преобразование токов внешних цепей источников питания
осуществляются в функции угла поворота ротора в;
• угол di в вентильной машине эквивалентен по действию углу /
коллекторной машины постоянного тока, так как в итоге эти углы
определяют начальный сдвиг фазных токов обмотки якоря.
Рис. 1.23. Схема соединений электрических цепей модели вентильной
машины с компенсационной и демпферной обмотками
Вместе с тем конструктивные особенности коллекторной и
вентильной машин обуславливают различную трактовку углов / и 0г-. В
коллекторной машине постоянного тока угол /, определяющий
пространственное положение оси щеток относительно геометрической
нейтрали, является конструктивным параметром, так как / невозможно
изменять во время работы машины. В вентильной машине постоянного
тока угол di представляет собой электрический параметр, который можно
изменять в процессе формирования режимов.
83
Что касается других обмоток коллекторной и вентильной машин
постоянного тока, то, как следует из приведенного описания, их
назначение и действие во многом совпадают.
Таким образом, аналогия принципов действия и схем электрических
соединений обмоток позволяет при построении модели вентильной
машины в качестве основы использовать уравнения обобщенной машины
постоянного тока.
Электрическая схема соединений дает возможность записать
соотношения между напряжениями и токами источника питания, входной
цепи вентильного коммутатора и компенсационной обмотки:
Wrf =^а +uvK;
(1.55)
(1.56)
где и - напряжение и ток источника питания;
иа и С ~ напряжение и ток на входе коммутатора;
и* и i* - напряжение и ток компенсационной обмотки.
В соотношениях (1.55) и (1.56) индексом “V” обозначены
неприведенные (реальные) величины.
Основой для описания модели вентильной машины служат
преобразованные к неподвижному базису Gs уравнения (1.50)
обобщенной машины постоянного тока, которые с учетом принятых в
схеме обозначений приводятся к следующему виду:
TGj ~i fbGs-
и = UGs»<I>Gs-
u a v а вк >
и? = + R®I«’;
Uy’ = T^p'V’f + Ry’Iy’; (1.37)
U?=T6p¥?+R?I?;
U? =ТбрЧ'? +R?I®;
xrjGs _ \vfGs । т Gs fGs,
“ * т ?
T^=M¥Gs+L%I^5;
Т? =№? +L®I?;
84
yv/Gs __ n/G« . т Gs -rGs,
~~ ’’"±Jccr1c >
™Gs____-pGs-j-Gs t
iGs iGs . -rGs ,tGs . tGs t
4n =1a +1/ +1k + 1c >
m-mc - Tj pa>.
Отметим особенности использования уравнений (1.57) при
построении модели вентильной машины:
1) в схеме питания машины, приведенной на рис. 1.23, в
соединенных последовательно обмотках якоря и компенсационной
обмотке текут реальные (неприведенные) токи этих обмоток. В то же
время в уравнениях математической модели переменные и параметры
обмоток приведены к числу витков обмотки возбуждения;
2) для учета электрической связи между обмотками, выраженной
соотношениями (1.55) и (1.56), уравнения обмоток фаз якоря и
вентильного коммутатора должны быть преобразованы к системе
координат, ориентированной по вектору коммутационной функции
вентильного коммутатора Фвк [45, 70];
3) демпферная обмотка должна быть короткозамкнутой. Этому
условию соответствует равенство нулю напряжений на зажимах обмотки.
Запишем математические соотношения между приведенными к
обмотке ОВ и реальными величинами напряжений и токов обмоток:
Щ =кеЛи?;
(1-58)
где i - индекс обмотки, i = a, f, к, с ;
ке- коэффициент трансформации, определяемый как отношение
эффективного числа витков обмотки возбуждения к
эффективному числу витков приводимых обмоток (якоря,
компенсационной и демпферной обмоток).
Введем ортонормированный базис
85
где X и у - орты базиса. Базис Gz получим путем преобразования
фиксированного относительно индуктора базиса Gs:
G?=A(^)GS,
где di - угол, характеризующий пространственное положение вектора
коммутационной функции вентильного коммутатора, отсчитываемый от
точки, лежащей на продольной оси. Угол является аналогом угла у
смещения щеток с геометрической нейтрали коллекторной машины
постоянного тока;
А(«;) =
sin 0t
cos0t
-cos0z
sin0z
- матрица перехода от неподвижного
базиса Gs к ориентированному базису Gz- .
Формула обратного преобразования базисов:
Gs = A-1(^)G/,
где А-1(0г) =
sin#z- сеяв;
-cos 0; sin ft
- матрица перехода от
базиса Gi к
неподвижному базису Gs .
С помощью базиса G; зададим направления осей системы
координат, ориентированной по вектору коммутационных функций
вентильного коммутатора:
О, Gz-) = Oxy.
/df
Таким образом, будем иметь систему координат, фиксированную
относительно индуктора и смещенную по отношению к системе координат
О ар на угол пространственного положения 0i вектора коммутационных
функций вентильного коммутатора.
86
В ориентированной системе координат Оху векторы
коммутационных функций, напряжений, токов и потокосцеплений фазных
обмоток якоря определяются с помощью матрицы А(#г-):
ф = вк df Фх _Фу_ = А(0()ф£; df ^ax -U^y. = A(S,)U?; (1.59)
Z 71 . ах = A((O?; — Уax = А(й,)Т?; (1.60)
df Z аУ- df Уау_
ф = ™df У тх Уту = А(ег)Ч'?; ф = aa df У°ах Уау = A(«,)^- (1-61)
Используя формулы (1.59)-(1.61), получим относящиеся к
вентильному коммутатору и обмотке якоря уравнения:
I =i Ф
иа ~ • Фвк ;
ue=T6PTe+®BrTe+Reie; С-62)
ф =ф +ф
а х ат х аст’
W =1 I
аа
Здесь
Rfl=A(^.)R^A-1(^) = raE;
Laff=A(^^4J-
матрицы преобразованных к базису G/
индуктивностей обмотки якоря.
Формулы (1.55), (1.56) и (1.58)
учитывающие схему питания вентильной
уравнения электрических связей обмоток:
активных сопротивлений и
дают возможность записать
машины векторно-матричные
Urf=MUe+^KSU^; (1.63)
Ia=^KSI^.
(1-64)
87
Здесь , la - алгебраические векторы напряжения и тока внешней
цепи якоря, U =
ud
О
S - матрица соединений компенсационной обмотки с внешней
цепью якоря, S =
О 1
1 О
М - вещественная матрица, М =
1 О
О О
Совместное рассмотрение уравнений (1.62) и уравнений
электрических связей (1.63) и (1.64) позволяет исключить зависимые |
переменные и ввести ряд обобщающих переменных и параметров |
вентильной машины. В этих целях вводятся обобщенный вектор полных •
потокосцеплений и обобщенные матрицы активных сопротивлений и \
индуктивностей рассеяния машины: \
Гу 0 1 ->
d = Ra+k2eKSR
LO rflJ
= } = Ъа„+к2ек
j cio v, к
У ^ae_
= Ra+klKSR°sS-x-,
Эквивалентный вектор полных потокосцеплений представим в виде
суммы двух слагаемых:
^d=^dm+^da,
где dm - эквивалентный вектор главных потокосцеплений,
ш _ W dm х
* dm ~ ’
\V dmx_
X^da- эквивалентный вектор потокосцеплений рассеяния,
W _ Wd<xx
de
88
Уравнение главных потокосцеплений dm отнесем к уравнениям
электромагнитных связей цепей якоря и возбуждения, которые будут
рассмотрены позднее.
Потокосцепление рассеяния 'Р^о. определяется через токи якоря и
индуктивности рассеяния обмоток:
В окончательном виде имеем следующие уравнения главной цепи
вентильной машины:
Urf = T6p4d + («,. + со) ЬТЧа + RrfIa;
'5'в=Ч'вт+Ч'во; (1.65)
des ~ ^dcs^a >
W = I Т
acs ^atscr
Уравнения цепи возбуждения машины записываются в следующей
форме:
=7’6pT^+R^I^;
O = 76p^+R^; (1.66)
+L%I^;
_ nyGs j Gs yC?s
T c T m '^ccr^c ’
где
U?‘f = Uf ;
} dfL°
if=lf
J df|_O
f df 0
алгебраические векторы напряжений, токов и полных потокосцеплений
обмотки возбуждения;
у Gs____ ^cl
. ^/Gs____ V^cl
dfLZc2j С df_Wc2.
89
алгебраические векторы токов и полных потокосцеплений демпферной
обмотки;
xpGs _ Vma
т м\утр_
вектор главных потокосцеплений модели вентильной машины постоянного
тока.
В уравнениях цепи возбуждения фигурируют также матрицы
активных сопротивлений и индуктивности рассеяния обмоток ОВ и ОД:
R/5 = diag\rf 0]; RcGs = diag[rcl rc2] ;
L% =diag[Z; 0]; = diag [Z^ ZCCT2],
где Гу и Zy - активное сопротивление и индуктивность рассеяния обмотки
возбуждения;
гл> гс2 и 1с2 ~ активные сопротивления и индуктивности
рассеяния демпферной обмотки;
Уравнения (1.65) и (1.66) решаются вместе с уравнениями связей
электромагнитных контуров, которые при последовательном соединении
компенсационной обмотки с внешней цепью якоря приводятся к удобной
при моделировании системе уравнений:
* т ~ >
Ч'^=[А(«,) + «^]Ч>2’;
= А(0,)Ч^;
Ч'/«=МЧ'?;
cm т >
где ак - коэффициент, характеризующий степень компенсации поперечной
реакции якоря;
90
'О
О
N - вещественная матрица, N =
о
1
Заметим, что условию полной компенсации поперечной реакции
якоря соответствуют равенства =0 и <ZK = 1. При «к < 1 получаем
модель недокомпенсированной, а при ак> 1 - перекомпенсированной
машины.
Полная математическая модель вентильной машины постоянного
тока с компенсационной обмоткой при произвольной степени компенсации
реакции якоря описывается следующей системой векторно-матричных
уравнений:
urf = T6p4d +(»+«,) + RrfIa;
W _ W . I T .
Л а Л am
+L^I^;
wGj __ । Gs xGs.
*c Tm “ri-'c<71c ’
(1.67)
\rjGs_t^Gs-tGs ,
=1у5+1^+[A’1(^z) + aKS’1]Ifl;
m = ^am*^a>
m-mc= Tj pa>;
o) = T5p0; a^TQpOi.
На рис. 1.24 приведена структурная схема вентильной машины.
Здесь по аналогии с моделью коллекторной машины постоянного тока
схема решения уравнений связи представлена в векторном изображении
переменных, а в схемах электромагнитных контуров присутствуют
скалярные переменные. Для согласования векторных и скалярных
91
переменных в схеме предусмотрены блоки, выполняющие операцию
скалярного умножения ортонормированных векторов
и соответствующих векторов главных потокосцеплений.
Рис. 1.24. Структурная схема модели вентильной машины
с компенсационной и полной демпферной обмотками
92
Для задания угла 6*; в схеме предусмотрен дополнительный вход,
который можно использовать для оптимизации режимов работы
вентильной машины постоянного тока.
Приведенные уравнения и структурная схема характеризуют
вентильную машину как сложную нелинейную динамическую систему с
управляющими воздействиями и внешним возмущением. Учет в этой
модели таких важных факторов, как независимое задание начальной фазы
тока якоря, насыщение, явнополюсность, влияние продольной и
поперечной реакции якоря, а также действие демпферных обмоток
определяет ее основную область рационального применения - изучение
свойств машины как объекта управления и влияния перечисленных
факторов на процессы в системах автоматического управления.
Несмотря на существенное сходство моделей вентильной и
коллекторной машин постоянного тока, еще раз подчеркнем их различие и
особенности моделирования процессов. В коллекторной машине
постоянного тока угол сдвига щеток с геометрической нейтрали по своему
физическому смыслу является конструктивным параметром. Угол у
задается перед началом моделирования и остается постоянным при
изучении динамики процессов. Для отражения возможности задания угла
у в структурной схеме модели коллекторной машины предусмотрен
специальный вход.
В вентильной машине постоянного тока, как отмечалось, угол
представляет собой атрибут электрической переменной (начальная фаза
тока якоря). Целенаправленное изменение угла во времени позволяет
влиять на динамику и энергетику процессов вентильной машины.
1.4.2. Модель некомпенсированной вентильной машины
Рассмотрим идеализированную некомпенсированную вентильную
машину постоянного тока без демпферных обмоток (рис. 1.25).
Неподвижный индуктор машины имеет обмотку возбуждения с
числом витков иу. К зажимам обмотки возбуждения приложено
напряжение и у, создающее в ней ток z’y. На роторе, вращающемся со
скоростью СО, размещена симметричная двухфазная обмотка.
Число витков фазных обмоток якоря wa\ = wa2 = wa Обмотка
ротора подключена к идеальному коммутатору тока, формирующему в ней
токи iai и ia2. Внешними воздействиями коммутатора являются входной
ток ia, угол поворота ротора 0 и начальная фаза определяющие
93
амплитуду, угловую частоту и начальный сдвиг фазных токов обмотки
якоря.
Рис. 1.25. Схема модели
некомпенсированной вентильной
машины постоянного тока
Математическая модель неком-
пенсированной вентильной машины
постоянного тока является частным
случаем рассмотренной выше модели.
При отсутствии компенсационной и
демпферной обмоток идеализированная
вентильная машина постоянного тока
описывается следующей системой векторно-матричных уравнений:
I = i Ф
ха 1а^*вк>
иа ~ * ®вк >
Va = T6pvPa +(® + ®г.)ВгТа +RaIfl;
Ш - Ш 1 т т .
Л а lamT >
(1.68)
u/Gs — pGs-rGs,
W=4/am«BIa;
т-тс = Tjpa>.
а) = ТърО-, cOi^T^pOi.
В уравнениях (1.68) преобразованные переменные
электромагнитных цепей вентильной машины
94
ф
^вк
df \Фу
Vox
T
* a.
df[yeyJ
va
иах
df [May
Vmx
df|y«y.
>
I.
an
_ lax
df }ay_
& [Vac у _
т
•* m
Vaax
определяются выражениями (1.59)—(1.61).
Матрицы преобразованных активных сопротивлений и
индуктивностей рассеяния обмотки якоря
R„=A(S,)R?A-1(^) = r„M;
L„ = А(<?,)Ь?егА-1И) = им.
Переменные цепи возбуждения некомпенсированной вентильной
машины постоянного тока записываются в неподвижной системе
координат Осф:
хч 1л
u?s =
1 df о
_ 1
f df О
\jjGs — 'f
f df О
f° df 0
активных сопротивлений и индуктивностей рассеяния
Матрицы
обмотки возбуждения
R.f =rzM;
L%=(fCTM.
Кроме того, в уравнения (1.66) вентильной машины входят матрицы
прямого и обратного преобразования координат
А(в,) =
Sin#; -COS#;-
cos#,- sin#,
А-'(ед=
Sin#; COS#;-
— COS#; ЭМ#;-
и постоянные матричные коэффициенты
О -1
М =
1 О
1 0‘
.0 °.
95
На рис. 1.26 приведена структурная схема некомпенсированной
вентильной машины постоянного тока.
Отметим наиболее важные особенности математической модели
некомпенсированной вентильной машины постоянного тока. Благодаря
преобразованию уравнений вентильного коммутатора к системе
координат, ориентированной по вектору тока якоря, а также записи
уравнений обмотки возбуждения в фиксированной относительно
индуктора системе координат, напряжения иа, Uj- и токи ia, iу модели
соответствуют напряжениям и токам реальной машины.
Рис. 1.26. Структурная схема некомпенсированной вентильной машины
постоянного тока без демпферных обмоток
Входными воздействиями модели, определяющими режимы
машины, являются ток ia, начальная фаза , прикладываемое к обмотке
возбуждения напряжение Uj- и момент статического сопротивления тс.
При векторном представлении переменных величина ia определяет длину,
а угол et- пространственное положение вектора тока якоря в неподвижной
96
относительно индуктора системе координат Оа/3. В общем случае эти
воздействия являются переменными во времени величинами. Заметим, что
напряжение иа на входе вентильного коммутатора в математической
модели представляет собой переменную, зависимую от режима работы
машины.
К одной из основных выходных переменных относится скорость СО.
В случае необходимости контроля и повышения качества управления
режимами машины могут использоваться переменные, выделяемые в
различных точках структурной схемы.
Важным свойством модели некомпенсированной вентильной
машины как объекта управления является возможность учета насыщения и
явнополюсности магнитной системы. В структурной схеме модели эти
факторы отражены обобщенно с помощью нелинейного звена с
оператором преобразования .
1.5. Особенности учета насыщения магнитной цепи в математических
моделях электрических машин как объектов управления
Экстремальное управление электрическими машинами,
работающими с переменной нагрузкой и скоростью, сопровождается
изменением основного магнитного потока в широких пределах,
включающих зону насыщения главной магнитной цепи. Поэтому задачи
экстремального управления необходимо решать с учетом нелинейности,
вносимой насыщением магнитной цепи электрической машины.
1.5.1. Основные допущения
Как было показано, насыщение машин по главному пути
проявляется в нелинейной связи между векторами результирующих
IGi « it/ Gi
т и главных потокосцеплении , которая в
общем виде определяется нелинейным оператором :
_ -pGi-jGi
* т ~ гт ’
где i - индекс базиса векторного пространства, в котором записываются
уравнения модели машины. В модели насыщенной машины структура
оператора F^‘ зависит от метода учета насыщения машины. Остановимся
подробнее на методах учета насыщения в моделях электрических машин.
97
Известны [4, 9, 24, 25, 30, 31, 88, 89, 102, 145] различные методы,
позволяющие учесть нелинейные свойства насыщенных электрических
машин. Наиболее точные из них основаны на использовании теории
электромагнитного поля. В самом общем виде задача состоит в
определении индукции магнитного поля по заданному пространственному
распределению плотности тока в обмотках машины. Решение этой задачи
•имеет различную степень идеализации. В инженерных задачах расчет
электромагнитных полей ведется численными методами. К наиболее
распространенным численным методам относятся метод конечных
элементов [24, 91, 145] и метод конечных разностей [9, 25, 89]., Для
установившихся и переходных режимов работы электрических машин
широко применяется метод зубцовых контуров [102].
Перечисленные методы позволяют выполнять самые разнообразные
расчеты электромагнитных полей в электрических машинах. С помощью
этих методов можно учесть влияние насыщения магнитной цепи с
минимальным количеством допущений. Однако при достаточно полном
учете электромагнитных явлений в машине методы расчета магнитного
поля весьма сложны и трудоемки. Поэтому применение их оправдано при
разработке новых типов электрических машин, а также в тех случаях,
когда требуется уточнение параметров и характеристик машины в связи с
существенными электромагнитными нагрузками. Вместе с тем при
умеренных электромагнитных нагрузках для промышленных типов
электрических машин постоянного и переменного тока оказываются
приемлемыми методы расчета магнитного поля, которые учитывают лишь
главные явления в электрической машине. Эти методы основаны на
следующих общих для машин постоянного и переменного тока
допущениях [4, 56, 104, 106, 108,125, 131, 136]:
1) единое магнитное поле в электрической машине условно разделяется
на две не зависимых друг от друга составляющих: главное магнитное поле
и поля рассеяния. Главное магнитное поле образуется совместным
действием всех обмоток статора и ротора. Оно сцеплено со всеми
обмотками. Магнитное поле рассеяния сцеплено только с собственной
обмоткой. Такому делению магнитного поля соответствует деление
полного потокосцепления на главное потокосцепление и потокосцепления
рассеяния, последние считаются связанными линейной зависимостью с
токами обмоток через постоянные по величине индуктивности рассеяния;
2) электромагнитное поле в электрической машине считается
плоскопараллельным. В плоскопараллельном электромагнитном поле
вектор индукции магнитного поля лежит в плоскости поперечного сечения
машины, а векторный потенциал и вектор плотности тока направлены
параллельно оси вала;
3) неравномерный зазор, обусловленный зубчатой поверхностью
сердечников, приводят к эквивалентному равномерному воздушному
98
зазору через коэффициент воздушного зазора, который определяют на
основе решения уравнений электромагнитного поля с учетом переменной
по длине полюсного деления величины воздушного зазора;
4) предполагается, что обмоточные функции фазных обмоток статора и
ротора асинхронных машин, а также фазных обмоток якоря синхронных
машин и вентильных машин постоянного тока распределены вдоль
воздушного зазора по синусоидальному закону;
5) пренебрегается высшими гармониками в кривой пространственного
распределения магнитной индукции в зазоре.
При этих допущениях магнитное поле в воздушном зазоре может
быть рассчитано методом локальных характеристик намагничивания [4,
56, 70, 106,107, 137].
1.5.2. Учет насыщения главной магнитной цепи в моделях
явнополюсных машин
Рассмотрим применение метода локальных характеристик
намагничивания для расчета магнитного поля модели насыщенной
явнополюсной машины, уравнения которой записаны в фиксированном
относительно индуктора базисе Gs.
Магнитное поле машины в любой точке воздушного зазора с
координатой (р определяется результирующей магнитодвижущей силой
fm, создаваемой токами всех обмоток, и магнитной проводимостью ,
зависящей от геометрических размеров участков магнитной цепи:
h —Л f
Результирующая магнитодвижущая сила является функцией времени
t и угловой координаты (р:
(1.69)
где 1^ (/) - вектор результирующих намагничивающих токов;
Q?(^) - обмоточная вектор-функция распределения МДС в базисе
Gs;
(р - угловая координата, отсчитываемая вдоль воздушного зазора
от фиксированной точки на статоре в направлении
положительного отсчета углов.
99
В соответствии с допущением о синусоидальном характере
распределения обмоточных функций вдоль воздушного зазора вектор-
функция
Qm (^) ^тах
COS(p
sin<p
где ?тах - амплитуда основных гармоник обмоточных функций
электрической машины.
Магнитная проводимость Лт не зависит от времени и представляет
периодическую функцию угловой координаты:
(1.70)
С учетом (1.69) . и (1.70) пространственно-временная функция
распределения магнитной индукции в зазоре
bm =bmM=^n((p)fmM- О-71)
При фиксированном значении времени t функция (1.71) описывает
пространственную волну магнитной индукции в воздушном зазоре:
Ьт = Ьт (<р) = bm [fm (<р), 4, (<р)].
Зная Ът(<р), можно определить составляющие вектора главных
потокосцеплений в фиксированный момент времени t. Для этого
используется разложение кривой в тригонометрический ряд Фурье.
Известно [4], что пространственная волна явнополюсной
насыщенной машины представляет собой кососимметричную кривую.
Коэффициенты ряда Фурье кососимметричной кривой численно равны
значениям амплитуд магнитной индукции в зазоре по продольной {Оа) и
поперечной (О/?) осям машины. Амплитуды основных гармоник
продольной Ьта и поперечной Ьтр составляющих магнитной индукции
определяются следующими выражениями:
2 л
bma =-\bm(fp)cos<pd<p-,
я0
100
2 я
7t0
Компоненты вектора главных потокосцеплений
пропорциональны Ьта и Ьтр\
где Ci - конструктивная постоянная, представляющая собой суммарную
эффективную площадь сцепления витков базовой обмотки с главным
магнитным потоком [124].
С учетом зависимости функции распределения магнитной индукции
от t и (р Оператор Fm выражается следующими уравнениями:
coscp
sm.(p
ьт(<р,^=ьтит{(рДхт^
2 71
о-72)
71 о
2я
bmp (t)=-jbm(<p,t)sm(pd<p-,
л 0
Уравнения (1.72) характеризуют общий подход к учету насыщения
явнополюсной машины. В плане практического использования этих
101
уравнений результирующую магнитодвижущую силу fm(<p,t} для
каждого мгновения времени целесообразно представить в виде суммы
падений магнитных напряжений в стали и воздушном зазоре
fM-.
fM = fc(<P) + fs(<P)
Магнитная индукция bm((p) связана с пространственной волной
падения магнитного напряжения fc {(р) нелинейной зависимостью
Ьщ (Ф) ~ bm \fc (<р)]
В то же время индукция Ьт ((р) может быть выражена через магнитную
проводимость воздушного зазора Ду (<р) и падение магнитного
напряжения fs ((р):
Ьт О) = h (<P)fs (<?)
Дальнейшее упрощение процедуры расчета достигается за счет
дискретизации пространственной функции распределения магнитной
индукции по угловой координате (р. Для этого полюсное деление машины
вдоль воздушного зазора разбивается на п равных частей (контуров
интегрирования), по которым проходят элементарные потоки из индуктора
в якорь. По этой причине рассматриваемый метод называют методом
локальных характеристик намагничивания. Для каждого контура
интегрирования, задаваясь различными значениями магнитной индукции в
воздушном зазоре, на основе закона полного тока рассчитывают
магнитную цепь:
где <Pj - дискретная угловая координата;
77г(<рг) - напряженность магнитного поля в точке (pt;
dl - элемент замкнутого контура.
Интеграл правой части обычно разбивается на отдельные участки,
имеющие конечную длину. Такими участками являются воздушный зазор,
зубцовая зона статора и ротора, ярмо статора и ротора. Результирующая
магнитодвижущая сила im{<pi) уравновешивается суммой падений
102
магнитных напряжений в названных участках. В результате расчета
получают характеристики
bA<Pi) = bmiUc,<Pi), i = l,n,
которые представляют собой локальные кривые намагничивания
нелинейных участков магнитопровода для z'-ro контура интегрирования
(рис. 1.27).
Рис. 1.27. Локальные характеристики намагничивания
При учете насыщения машины методом усредненной
характеристики намагничивания магнитную индукцию в зазоре усредняют
по числу п :
1 "
Ьт ср ~ ^Libm
ni=x
Таким образом, в результате дискретизации вместо непрерывной
пространственной функции распределения магнитной индукции Ьт((р)
имеем дискретную функцию В этом случае нелинейный оператор
F^s представляет собой следующую систему уравнений:
Qm (^z) #max
cos<pz
sin (Pi
103
fm(<Pi) = fc(<Pi) + fs(<Pi) ;
bm (^i) (1-73)
fs^SPi) A'sifPi'fomit/Pi) >
bma =- /^(^)созэд;
ni=\
2 n
bmpifPi^- Rwfe)sin^;
”i=l
Здесь дискретная угловая координата эд принимает значения 0, — ,...,
п
(«-!)-•
п
Блок-схема алгоритма расчета вектора главных потокосцеплений
приведена на рис. 1.28. Для каждого фиксированного момента
времени в блоке 1 вычисляется функция распределения магнитодвижущих
сил по известным значениям составляющих вектора
намагничивающих токов 1^ и вектор-функции распределения. Вектор-
функция определяется в блоке 2 для дискретных значений угловой
координаты эд. В блоке 3 рассчитывается функция распределения
магнитной индукции йт(эд). В этих целях в блок 3 задаются значения
функции распределения МДС /ш(эд) и функции падения магнитного
напряжения в зазоре а также угловая координата ф/. Функция
распределения /Дэд) определяется в блоке 4. Вектор потокосцеплений
вычисляется в блоке 5 по данным расчета функции йт(эд ).
104
Рис. 1.28. Блок-схема алгоритма расчета вектора
главных потокосцеплений
На рис. 1.29 представлена развернутая структурная схема блоков 3
и 4. Приведенная вычислительная схема практически реализуется на
ЦВМ.
Рис. 1.29. Блок-схема расчета функции распределения
магнитной индукции
Учет насыщения методом локальных кривых намагничивания
требует больших затрат машинного времени, так как значения решетчатой
функции Ьт{(р^ вычисляются итерационным методом. Причем для
определения амплитуд основных гармоник поперечной и продольной
составляющих пространственной волны магнитной индукции расчет
функции bm (epi) повторяется для каждого дискретного момента времени,
для которого требуется определение вектора .
Затраты времени можно сократить, если использовать представление
амплитуды
105
и фазы
. ^тр
% = ™^>-г^-<рт
®та
•основной гармоники Ьт(<р) в виде функций двух переменных
В т\ ~ Вт (?т ’ Фт )’
X ~ Х^т’Фт )’
которые получают путем аппроксимации табличных функций,
предварительно рассчитанных методом локальных характеристик
намагничивания.
На рис. 1.30-1.32 приведены графики функций распределения
результирующей магнитодвижущей силы и магнитной индукции
Ьт((р) Для заданного произвольного состояния радиуса-вектора
намагничивающих токов 1т .
Рис. 1.30. Функции распределения магнитодвижущей силы и
магнитной индукции в воздушном зазоре ненасыщенной машины:
а - без учета явнополюсности; б - с учетом явнополюсности
Отметим некоторые особенности процессов в явнополюсных
машинах. Для ненасыщенной машины без учета явнополюсности при
106
синусоидальной форме fm((p) функция Ът((р) имеет синусоидальный
характер (см. рис. 1.30, а). При этом гармонические функции fm((p) и
6т(<р) совпадают по фазе. Таким образом, векторы 1т и *¥т являются
коллинеарными векторами.
При учете явнополюсности ненасыщенной машины функция
Ьт((р) имеет несинусоидальный характер (см. рис. 1.30, б). Основная
гармоника функции Ьт(<р) смещается относительно гармонической
функции на угол %. Векторы 1т и становятся
неколлинеарными.
Рис. 1.31. Функции распределения магнитодвижущей силы и
магнитной индукции в воздушном зазоре насыщенной машины
без учета явнополюсности
Рис. 1.32. Функции распределения магнитодвижущей силы и
магнитной индукции в воздушном зазоре явнополюсной
насыщенной машины
107
При увеличении намагничивающих токов машина насыщается.
Кривые Ьт (ср) уплощаются. В модели, не учитывающей явнополюсность
машины, основная гармоника функции Ьт ((р) совпадает по фазе с fm {(р)
(см. рис. 1.31).
При учете явнополюсности основная гармоника йт1(«р) также
смещается по фазе относительно fm((p) (см. рис. 1.32) и, кроме того,
уменьшается ее амплитуда.
Таким образом, в явнополюсной машине независимо от степени
насыщения радиусы-векторы результирующих намагничивающих токов
1т и главных потокосцеплений у/т в общем случае сдвинуты
относительно друг друга на дополнительный угол %. При этом в
зависимости от пространственного положения 1т радиус-вектор
смещается относительно вектора 1т в направлении зоны с наибольшей
магнитной проводимостью.
Приведенные графики позволяют выявить наиболее общие
закономерности изменения функции распределения магнитной индукции в
зазоре и взаимное пространственное положение векторов при
произвольном состоянии вектора результирующих намагничивающих
токов 1т . В каждом конкретном случае картина поля в зазоре будет
меняться в зависимости от режима работы двигателя.
В заключение отметим, что метод локальных характеристик
намагничивания сравнительно прост и может использоваться для расчета
магнитного поля как явнополюсных машин постоянного и переменного
тока, так и неявнополюсных машин переменного тока при учете
несинусоидального характера обмоточных функций пространственного
распределения магнитодвижущих сил в воздушном зазоре.
1.5.3. Учет насыщения главной магнитной цепи в моделях
неявнополюсных машин
В симметричных неявнополюсных машинах переменного тока
радиус-вектор главных потокосцеплений совпадает по направлению с
радиусом-вектором результирующих намагничивающих токов 1т . Любое
приращение вектора токов 1т вызывает приращение вектора
108
потокосцеплений xVm без изменения его направления, при условии
неизменности пространственного положения вектора 1т , т.е. векторы 1т
и - коллинеарные. Данное обстоятельство существенно упрощает
математическую модель нелинейного оператора связи между векторами
главных потокосцеплений и результирующих намагничивающих токов,
так как в этом случае вместо локальных характеристик намагничивания
можно пользоваться одной нормальной характеристикой намагничивания
электрической машины:
(1-74)
Здесь 1т и \ут являются скалярными величинами, определяемыми через
составляющие алгебраических векторов результирующих
намагничивающих токов и главных потокосцеплений.
Покажем возможность такого подхода, привлекая для доказательства
понятие дифференциальной индуктивности нелинейной магнитной цепи.
Пусть уравнение связи между векторами составляющих главных
потокосцеплений и результирующих намагничивающих токов записаны в
базисе Н , вращающемся с произвольной угловой скоростью. В
насыщенных машинах каждая из составляющих вектора xVm зависит от
компонент вектора намагничивающих токов 1т . Найдем производную от
вектора по переменной 1т :
'дутх '
с№ т dim* ^ту
дЦ/ту
oi-mx oimy
Элементами Якобиана являются дифференциальные индуктивности,
представляющие собой частные производные составляющих вектора
главных потокосцеплений по намагничивающим токам и г’ [1051:
'11л illy L J
109
c°s2 »т + — sin2 ит;
^1тх гт
,д д^ту dlj/m .2 ,Vm 2
Z^=4^^ = ^-Sm Um+ C0S
,Д ^Vmx d^my_(dll/}
Lm о- о-
Glmy ™тх
m_Vjn
dim гт
SlIWm COSUm,
d^m „ Vm
и
dim im
величины, имеющие смысл радиальной и
тангенциальной индуктивностей;
1.2 .2
7 = ./7Z 4- Г
m у mx lmy ’ .
/22
Ц/т = у'^тх +Х^ту ~ модули радиусов-векторов результирующих
намагничивающих токов и главных потоко-
сцеплений;
ит - угол между радиусом-вектором результирующих
намагничивающих токов (главных потоко-
сцеплений) и положительным направлением оси
Ох.
Из выражений тангенциальной индуктивности
1 =4™.
•'ПЧ
модулей радиус-векторов главных потокосцеплений и результирующих
намагничивающих токов, а также с учетом нелинейной связи между
модулями (1.74) заключаем, что для неявнополюсных электрических
машин оператор Fm задается переменной тангенциальной
дифференциальной индуктивностью, определяемой по нормальной кривой
намагничивания [131]:
7 _ V т _ 7 (• ч
1т ~ ~ 1т \1т)-
110
Тогда уравнение связи между алгебраическими векторами и 1т
принимает следующий вид:
^т(Ап)1т’
где im - модуль (норма) вектора результирующих намагничивающих
токов, выраженная через скалярное произведение,
В том случае, когда функция (1.74) имеет обратную функцию
~ Кп G/т ) >
то существует обратный оператор [ГтГ1, позволяющий найти вектор
результирующих намагничивающих токов по известному вектору главных
потокосцеплений:
I/п ~~^т
где у/т - норма вектора главных потокосцеплений, выраженная через
скалярное произведение, у/т = • *¥ т .
Тогда оператор преобразования представляется выражением
Vm
В заключение заметим, что тангенциальная индуктивность 1т не
зависит от выбора базиса. При допущении о линейности характеристики
главного магнитного пути коэффициент Zm=const и представляет собой
постоянный коэффициент взаимной индукции обмоток статора и ротора.
111
Глава 2
ОБОБЩЕННЫЕ ПОСТАНОВКИ ЗАДАЧ
ЭКСТРЕМАЛЬНОГО УПРАВЛЕНИЯ
ЭЛЕКТРИЧЕСКИМИ ДВИГАТЕЛЯМИ
Под экстремальным управлением понимается такое управление, при
котором обеспечивается минимум или максимум некоторого показателя
качества, характеризующего режим работы электрического двигателя
(электропривода).
Возможность применения экстремального управления
электрическими двигателями имеет следующее обоснование.
1. Большинство типов электрических двигателей по своему принципу
действия и исполнению имеют несколько входов, позволяющих
целенаправленно изменять их режимы работы.
2. Электрические двигатели как объекты управления обладают
экстремальными характеристиками. Известны показатели качества, к
экстремуму которых надо стремиться. Причем изменения скорости и
момента нагрузки на валу электрических двигателей вызывают
перемещение экстремальных точек, т.е. экстремальные характеристики
“дрейфуют”.
3. В настоящее время существуют быстродействующие регулируемые
по напряжению (току) и частоте силовые источники питания
электрических двигателей, позволяющие при соответствующих
алгоритмах управления быстро отслеживать влияние возмущений на
экстремальные характеристики.
Техническая литература, посвященная проблеме экстремального
управления двигателями (электроприводами), достаточно обширна. Она
охватывает исследования по двум важнейшим направлениям: оптимизации
установившихся и переходных процессов. Каждое из этих направлений
имеет свое самостоятельное прикладное значение, что объясняется
наличием двух существенно различающихся групп электроприводов. Для
112
первой группы электроприводов превалирующими являются статические
режимы, а для второй - динамические режимы работы. Практическая
значимость этих направлений состоит в том, что задачи оптимизации
статических и динамических режимов являются составляющими общей
оптимизационной задачи для электроприводов с чередующимися
динамическими режимами и установившимися движениями.
В зависимости от уровня развития теории оптимального управления,
теории электрических машин и преобразовательной техники, а также
средств управления электроприводами задачи экстремального управления
рассматривались в различных аспектах, для которых характерно решение
задач оптимизации для отдельных типов электрических двигателей.
Результаты этих работ служат основой дальнейшего обобщения и выбора
методологии исследования электромеханических систем как объектов
экстремального управления.
В этой главе даются обобщенные постановки задач оптимизации
электроприводов, относящихся к первой группе. Постановки задач
излагаются в. рамках единого методологического подхода независимо от
типов электрических двигателей и силовых источников питания.
Основными этапами этого подхода являются:
• формализация технологической задачи;
• формулировка задачи оптимизации как наилучшего решения
технологической задачи;
• представление объекта управления как системы, состояние которой
определяется минимальным числом независимых координат
(степеней свободы);
• разработка проблемно-ориентированных моделей электрических
двигателей, приводящих экстремальные задачи к минимальной
размерности по управлению;
• анализ свойств электрических двигателей как объектов
экстремального управления;
• поиск законов экстремального управления режимами электрических
двигателей и анализ их эффективности.
Данный подход является результатом обобщения и развитием [67,
68, 73, 77, 78,103, 118-121,130].
2.1. Формализация технологической задачи
Современные технологические процессы, как правило, требуют
регулирования скорости и характеризуются изменением момента
статического сопротивления рабочего органа производственного
механизма. В каждом конкретном случае существует некоторая
технологическая задача, для решения которой предназначен
производственный механизм, управляемый электроприводом. Часто такая
ИЗ
задача состоит в обеспечении заданного значения скорости ос при
некотором значении момента статического сопротивления тс
производственного механизма. В других случаях технологическая задача
заключается в обеспечении заданного момента (усилия, натяжения) при
некотором, не зависящим от данного электропривода значении скорости. В
общем случае заданное по параметрам <УС либо тс состояние
производственного механизма можно характеризовать вектором
Хс ~ (Wc,®c).
В декартовой системе ординат (рис. 2.1) этому вектору соответствует
точка с координатами тс и Ос. В процессе функционирования механизма
координаты вектора Хс могут с течением времени принимать различные
значения. Им будет соответствовать множество точек плоскости
Мс xQc = {(mc,®c)| тс еМс,®с gQc },
где Мс и Qc- соответственно множества предписанных технологическим
процессом значений шс и fflc.
Рис. 2.1. Область состояний
производственного механизма
Вследствие ограниченной мощности и
нагрузочной способности элементов
кинематической цепи механизма для каждого технологического агрегата
существует область допустимых состояний по Хс, которую обозначим как
QXc. Эта область может быть задана в виде прямого декартового
произведения
Qxc -Qmc xQqc
114
ограниченных подмножеств
Qmc ={wc|inf тис iS тис £ sup тис };
Qqc ={®с I inf a>c <.G)C ^sup®0 }.
(2-1)
(2.2)
По физическому смыслу точные верхние и нижние грани
подмножеств Qmc и Qflc представляют собой предельно допустимые
значения соответствующих координат вектора Хс.
При проектировании электропривода технологическая задача
обычно задается приведенными к валу электрического двигателя
нагрузочной диаграммой и тахограммой механизма:
fmz
Лис = Qqc )»
(23)
(2.4)
где Т, Qh F - соответственно область определения, область значений и
график функции f. В (2.3) и (2.4) область определения
T = {f.tQ<t<tK},
где tQ и /к - время начала и конца анализируемого технологического
процесса.
Области значений Qmc и Qqc функций fm и задаются
интервальными ограничениями (2.1) и (2.2).
Графики функций
Лис = {(*,тс) е Тх QMc :/mc (0 = mc};
Fa>c = {{t,(Oc}eTxQnc '.f^ (f) = (OC}.
Таким образом, при заданных графиках Fm^ и каждому
моменту времени в ограниченной области QX(, ставится в соответствие
точка с координатами тс и а)с.
115
2.2. Обобщенная модель силовой части электропривода |
Функционирование производственного механизма в заданной ।
области состояний Qxc обеспечивается электроприводом, силовыми |
элементами которого являются электрический двигатель и управляемый
силовой преобразователь. На рис. 2.2 приведена схема обобщенной модели !
силовой части электропривода. ‘
Рис. 2.2. Обобщенная модель силовой части электропривода
как объекта управления
Для модели электрического двигателя независимо от ее структуры
функциональную связь между входными воздействиями и выходами
можно записать в следующей форме:
Y = F(U,mc,C),
(2.5)
где ¥ - вектор состояния выходов модели, позволяющих количественно
оценить основные характеристики электрического двигателя,
F - оператор преобразования, учитывающий специфику модели
электрического двигателя как объекта управления;
U - вектор состояния управляемых входов, U = (щ,..., ип );
тс - воздействие, характеризующее влияние механизма;
С - вектор параметров модели, С = (с15...,ст).
Например, для асинхронного двигателя с короткозамкнутым
ротором, процессы в котором описываются системой уравнений (1.16),
управляемыми входами являются составляющие вектора напряжений
статора usx и usy. При ориентации системы координат по вектору
напряжений обмотки статора Us управляемые входы принимают вид
116
Wj = ws и w2 = , где us и (Os - соответственно модуль и угловая частота
вектора Uj.
Компонентами вектора состояния выходов могут служить
электромагнитный момент т, скорость ротора О, электрические и
электромагнитные характеристики двигателя.
Вектор параметров модели будет иметь своими компонентами
активные сопротивления rs и гг, индуктивности рассеяния lsa и 1га, а
также коэффициент взаимоиндукции 1т. При учете насыщения магнитной
цепи двигателя в вектор параметров включаются коэффициенты
аналитической функции, аппроксимирующей кривую намагничивания.
Модель силового преобразователя как элемента управления
электрическим двигателем представим обобщенным уравнением
U = Fn(U ,Е,СП), (2.6)
где Fn - оператор модели силового преобразователя;
*
U - вектор задающих воздействий на входе модели преобразователя,
U* =(«i,.
Е - вектор возмущающих факторов, Е = (qС/);
Сп - вектор параметров, Сп = (сп],...,сПр).
Уравнение (2.6) выражает зависимость вектора состояния U от
задающего воздействия U , возмущающих факторов Е и параметров Сп
силового преобразователя. Возмущающими факторами для
преобразователя являются изменения вектора токов нагрузки 1н, вектора
напряжений UceTH питающей сети (см. рис. 2.2), а также внутренние
параметрические возмущения.
В современных полупроводниковых преобразователях
предусматриваются меры по снижению влияния внешних и внутренних
возмущений, что позволяет во многих практических случаях вместо (2.6)
пользоваться упрощенной моделью преобразователя в виде системы
линейных уравнений
мг=^пгиг*> Z=l,«,
где kni- коэффициент пропорциональности.
117
В дальнейшем, не снижая общности постановок экстремальных
задач, будем считать £п,-=1. При этом условии по-прежнему сохраняется
возможность учета ограничений ресурсов силового преобразователя по
состоянию выходов, так как U = U . В то же время это условие позволяет
отделить на этапе постановок экстремальных задач информационные
процессы от энергетических процессов преобразователя и пользоваться
отдельно взятым уравнением (2.5).
По физическим соображениям ограничим значения координат
вектора U областью допустимых управлений
Qu -Qui xQu2 х —xQu„>
(2.7)
где
Qu, = { ui | inf ui - ui - SUP Щ }> i = l,n.
Таким образом, введение области Qu позволяет формально учесть
ограничение по напряжению силового преобразователя.
2.3. Условия выполнения технологической задачи
электроприводом
Для формулировки необходимых и достаточных условий
выполнения электроприводом технологической задачи из состава
компонент вектора состояния выходов Y электрического двигателя
сформируем вектор
Х = (т,®),
где т и со - соответственно электромагнитный момент и скорость.
Для электрического двигателя как элемента ограниченной мощности
также существует область допустимых состояний по X:
Qx -Qm xQq>
где
Qm = {т | inf w < т < sup т };
Qq = {со | inf co < co < sup }
118
представляют собой подмножества, ограниченные предельно
допустимыми значениями координат вектора X.
Тогда для всех Хс G Qx^ необходимое и достаточное условия
выполнения электроприводом технологической задачи формулируются
следующим образом:
Qx^Qxj (2-8)
Х = ХС. (2.9)
Для всех Хс £ QXc введенные выше ограничения объективно требуют
трансформации технологической задачи (2.9) в соответствии с условием
XgQXc. (2.10)
Более детальная ее формулировка может быть сделана с учетом
конкретных особенностей технологического процесса. Например, если в
процессе выполнения задачи стабилизации скорости условие (2.10)
нарушается вследствие аварийного стопорения механизма, то тогда
технологическую задачу можно сформулировать следующим образом:
X = (т = supmc; а> = 0).
В дальнейшем основное внимание будет уделено исследованию условий
выполнения технологической задачи (2.8) и (2.9). Очевидно, что первое
условие должно быть обеспечено соответствующим выбором
электрического двигателя, а второе - воздействием на электрическую
машину с помощью силового преобразователя путем изменения
управляемых воздействий Uy, w2,..., ип.
Учет силового преобразователя дает нам дополнительное условие
решения технологической задачи с помощью электропривода: U е Qjj ,
где область допустимых управлений Qu определяется в соответствии
с (2.7).
119
2.4. Постановка задач экстремального управления
электроприводом
Для установившихся режимов работы электропривода справедливо
следующее уравнение связи векторов U и X:
Ди,х)=о,
(2.11)
где f - скалярная функция.
Анализ уравнения (2.11) различных типов электрических двигателей
показывает, что для каждого управления U G Qy существует множество
{ X], Х2,..., X#,... } значений вектора X, удовлетворяющих уравне-
нию (2.11). С другой стороны, для каждого XgQx существует
множество управлений { Uj, U2,..., Щ,... }, также удовлетворяющих
уравнению (2.11). Для экономной записи этих высказываний
воспользуемся кванторами существования (3) и всеобщности (V). Тогда
VUgQu3{x|/(U,X) = 0} ;
(2-12)
VXgQx3{u| /(U,X) = 0).
(2.13)
Обратим внимание на высказывание (2.13). Из него следует, что одна
и та же технологическая задача (2.9) имеет в открытой области управлений
множество решений. Если в этом множестве присутствуют элементы,
принадлежащие к подмножеству допустимых управлений Q^, то тогда
при решении технологической задачи мы имеем принципиальную
возможность варьирования управлением U.
Каждое решение, т.е. управление U G Qjj и обеспечивающее
Х = ХС, будем оценивать совокупностью { W], w2,..., } показателей
качества (загрузкой элементов силовой части электропривода по току,
напряжению, потерями энергии, КПД, потребляемой мощностью и др.). В
общем случае показатели качества w, (z = \,к ) силовой части являются
функциями координат векторов U и X:
= w;(U, X), Z = \,к , (2.14)
где векторы U и X связаны уравнением (2.11).
120
Эти функции мы будем рассматривать как компоненты вектор-функции
качества
W(U,X) = (w1,w2,...,wJ. (2.15)
Из их числа всегда можно выделить в качестве основной какую-либо одну
оценку Wj (U,X). По физическим, конструктивным либо технико-
экономическим соображениям на значения компонентов вектора W
также могут быть наложены ограничения. В наиболее общем случае для
каждого из компонентов задается область допустимых значений
Qw. = {w;-1 inf yvt < щ < Slip }, i = l,k.
Вектор-функция должна удовлетворять условию
W(U,X)eQw = QW1xQW2X ...xQWa. (2.16)
Веденные функции качества и ограничения позволяют дать
следующую исходную формулировку общей детерминированной
многокритериальной задачи оптимизации установившихся режимов
электропривода:
wz(U,X = Xc)->min(max) , UeDjj, Хс gQx , i = l,k , (2.17)
и
где ____
Du = {U е Qu | /(U, X) = 0, wt (U, X) e Qw., X = Xc, z = \,k }.
Здесь 14) (U, X) имеют смысл частных критериев качества. При этом
предполагается, что из полного списка одна часть критериев
оптимальности минимизируется, а другая его часть - максимизируется на
множестве допустимых управлений Du .
Несмотря на значимость постановки многокритериальной задачи
оптимизации, в практических ситуациях ее сводят к решению
однокритериальной экстремальной задачи с ограничениями.
Рассмотрим две наиболее важные постановки задач экстремального
управления электроприводом, базирующиеся на методе главного критерия.
Суть метода главного критерия состоит в том, что в качестве целевой
функции выбирается один из частных критериев, наиболее полно
отражающий цель оптимизации. Остальные частные критерии
121
оптимальности учитываются с помощью введенных для них ограничений,
определяющих множество допустимых управлений.
Первая постановка задачи экстремального управления. Среди
допустимых управлений U G Dy электропривода, описывающегося
уравнением (2.11) и по эффективности функционирования
характеризующегося числом к оценок качества (2.14), среди которых
существует основная оценка = WZ(U, X), найти управление U°(X),
обеспечивающее работу привода в заданной технологическим режимом
точке X = Хс G Qxc с достижением нижней (верхней) грани
основной оценки и при соблюдении заданных ограничений по другим
к — \ оценкам либо по всем к оценкам.
Для последнего, наиболее общего условия сформулированная задача
может быть представлена в следующей форме записи:
U?(X) = arginf(sup)W/(U, X = Xc),UeDu, Хс eQx, (2.18)
и с
где ___
Du={UeQu|/(U,X) = O,W/(U,X)eQwpX = Xc,/ = l^}:
В дальнейшем U° будем называть оптимальным управлением по
частному критерию.
Приведенную постановку задачи поясним на следующем примере.
Рассмотрим частотно-регулируемый электропривод с коротко-
замкнутым асинхронным двигателем, схема модели силовой части
которого приведена на рис. 2.3.
Рис. 2.3. Схема модели силовой части асинхронного электропривода
при частотном способе регулирования скорости
Асинхронный двигатель (АД) получает питание от преобразователя
частоты (ПЧ). Частота G>s и амплитуда us напряжения на зажимах
* *
обмотки статора линейно зависят от управляющих воздействий 6)s и us
122
на входе ПЧ. Коэффициенты пропорциональности равны единице. Тогда
вектор управлений U = (a>s ,us).
Допустимая область управлений
Qu=QnsxQus>
где
Qn5 = | inf a>s <G)S <.swpa>s };
Qu5 = {«s Iinf us ^us ^supws }.
Уравнение связи (2.11) при этом примет вид
f{a)s,us,m,(o) = Q. (2.19)
Заметим, что (2.19) представляет собой уравнение статической
механической характеристики АД в неявной форме. С учетом выражения
этой характеристики при переменной частоте [121] и принятых нами
обозначений получаем
[(&2 + с 2 «у 2)(й?5 - й?)2 + 2rsrrd)s (tys - <у) + (J2 + е2<у2) г2] т -
“ Гг?ном Os - = 0. (2.20)
Здесь b, С, d, е и £ном - постоянные коэффициенты, характеризующие
параметры АД.
Из анализа уравнения (2.20) для АД справедливы высказывания
(2.12) и (2.13). При этом из высказывания (2.12) следует, что каждому
фиксированному управлению U; gQjj, например U = U| (рис. 2.4, а),
соответствует множество {XB(U])} пар Х„ = (тп,й)п),
удовлетворяющих уравнению (2.19). Элементы этого множества образуют
(рис. 2.4, б) механическую характеристику АД при данном управле-
нии Uj. Из множества {XB(Uj)} можно выделить ограниченное
подмножество
[x’(V1)}={X„(V1)}nQx,
элементы которого принадлежат к области допустимых состояний Qx-
Каждый элемент этого подмножества отображается с учетом координат
123
вектора Uj в определенную точку W„ = W |ui5 XB(Uj) | пространства
критериев. Эта точка либо попадает в допустимую область Qw, либо
находится за ее пределами.
Рис. 2.4. Геометрическая интерпретация задачи
Например, если в качестве критерия оптимальности принять
мощность потерь двигателя w;- = Ap(Ui,X), то каждой из точек
механической характеристики АД (как следует из рис. 2.4, б, их перебор
лучше осуществлять по переменной (О) будет соответствовать при векторе
управлений и = ц определенное значение потерь. Соответствующая
зависимость потерь Др от скорости СО показана на рис. 2.4, в. Видно, что
функция мощности потерь имеет минимум. Однако точка минимума этой
функции не представляет практического интереса ни для решения
124
технологической задачи вообще, ни для наилучшего ее решения в
частности. Действительно, при векторе U = Uj минимум потерь
существует в режиме идеального холостого хода АД (й) = (Osy , т = 0), в
котором электропривод не несет полезной нагрузки. Задавая любые
другие фиксированные управления U G , мы придем к аналогичному
результату, противоречащему условию (2.9) выполнения технологической
задачи. Итак, вариация управлением при использовании высказывания
(2.12) не дает нам алгоритмов оптимального управления.
Более конструктивным в этом аспекте является высказывание (2.13),
отправной точкой которого является именно условие выполнения
технологической задачи. Действительно, каждому фиксированному
состоянию X = Хс (рис. 2.4, г) оно ставит в соответствие множество
{ U„ (Xci) } пар U„ = , usn ), т.е. управлений, удовлетворяющих
уравнению объекта.
Предположим, что из множества {U„(Xci)} можно выделить
непустое подмножество
{u;(Xcl)}={U,(Xd)}nQu,
элементы которого принадлежат к множеству допустимых управле-
ний Qu- Каждый элемент этого подмножества также отображается с
учетом координат вектора Хе в определенную точку пространства
критериев. Следовательно, мы можем организовать поиск решения
оптимальной задачи на основе процедуры перебора возможных решений
технологической задачи, определяемых элементами подмножества
|и„(Хс1)|. Оказывается (рис. 2.4, д), что перебор возможных решений
лучше осуществлять по переменной a>s, а не us. В результате
наблюдения за поведением функции качества может быть найдено
наилучшее решение, удовлетворяющее всем введенным ограничениям.
Например, как следует из графика (рис. 2.4, е), точка минимума функции
мощности потерь определяет наилучшее решение - управление
ul/xcl)=HX)-
Таким образом, управление U^, является оптимальным в смысле
минимизации потерь при функционировании электропривода в точке
X = Хс и при соблюдении наложенных ограничений. Для других точек
125
X, равно как и для других критериев оптимальности, координаты вектора
оптимального управления U°(X) принимают другие значения.
Следовательно, задача оптимального управления по выбранному частному
критерию заключается в отыскании закона соответствия координат
вектора U° координатам вектора X = Хс, то есть закона оптимального
управления U° = U” (X = Хе ).
Постановка задачи (2.18) не охватывает в явном виде всего
многообразия технологических и оптимизационных задач организации
функционирования электроприводов на различных этапах
технологических процессов. Среди них важное практическое значение
имеют задачи экстремального управления, преследующие цель наиболее
полного использования реально ограниченных энергетических ресурсов
привода при его работе в форсированных режимах. Здесь под
форсированными режимами имеются в виду, прежде всего, такие режимы,
которые требуют предельную перегрузку по моменту или работу на
повышенных скоростях. Функцией качества в этом случае служит
механическая мощность двигателя />мех=?и<У. При организации
экстремального управления приводом в этих режимах важно учитывать
реально существующие ограничения - предельно допустимые значения
токов и напряжений, которые могут быть подведены к двигателю от
преобразователя. В некоторых случаях должны быть ограничены потери в
двигателе и преобразователе, а также ряд других координат системы. В
этой связи задача формулируется следующим образом.
Вторая постановка задачи экстремального управления. Для
каждого предписанного технологическим процессом значения
выходной координаты у = й) (или у — т) найти оптимальное
управление U°, которое обеспечивает достижение верхней (для
тормозных режимов - нижней) грани механической мощности
двигателя />мех = тю при соблюдении заданных ограничений-.
U°(y) = argsup(inf)pMex(U,y), UeDy, (2.21)
и
Dy - {U е Qy |/(U, X) = 0, wf(U, X) е Qw., X = Хс, i = ЦТ}.
Подчеркнем, что в качестве заданной здесь имеет смысл
рассматривать лишь одну из компонент вектора X - либо скорость
(у = <У), либо момент (у = /и). Поскольку /?мех = тсо, в первом случае
целью управления является получение максимального момента, а
следовательно, и максимальной перегрузочной способности привода по
126
моменту при заданной скорости. Во втором случае цель управления
заключается в получении максимальной скорости, а следовательно, и
производительности механизма при заданных значениях его момента
статического сопротивления.
Соответствующие этим случаям решения имеют следующий вид:
U0 (<w) = arg sup (inf) т, U е Dv, (2.22)
и
.U°(/«):=argsup(inf)<w, UgDjj. (2.23)
и
Каждая из задач (2.18) и (2.21) имеет как свое самостоятельное
практическое значение, так и может являться составляющей более общей
задачи экстремального управления, обеспечивающей наиболее полное
использование энергетических ресурсов и оптимизацию режимов силовой
части электропривода. Сформулируем эту задачу в следующем виде.
Постановка комплексной задачи оптимизации режимов
электропривода. Пусть силовая часть электропривода описывается
уравнением (2.11) и по эффективности функционирования
характеризуется числом к оценок качества (2.14), среди которых
существует основная, например минимизируемая, оценка
wi = WZ(U, X). Найти оптимальное управление U°(X), которое при
ограничении одной или нескольких оценок качества обеспечивает в
двигательном режиме верхнюю (в генераторном режиме - нижнюю)
грань механической мощности, а при снятии ограничений доставляет
нижнюю грань основной оценки качества.
Результаты решения задачи комплексной оптимизации режимов
частотно-регулируемого асинхронного электропривода приведены в
работах [68, 93].
2.5. Особенности задач экстремального управления
Ввиду нелинейного характера функций качества и ограничений, а
также необходимости учета насыщения магнитной цепи электрических
машин возникает потребность в применении численных методов решения
задач экстремального управления. Поэтому оправдан поиск возможности
преобразования исходных математических моделей электрических
двигателей и постановок задач экстремального управления к виду,
упрощающему применение численных процедур. Рассмотрим в связи с
этим некоторые особенности задач экстремального управления
электрическими двигателями.
127
Снижение размерности и выбор состава вектора управлений
Одной из особенностей исходных задач оптимизации режимов
электрических двигателей является возможность снижения размерности
варьируемого вектора управлений, доставляющего экстремум функций
качества.
Другая особенность задач оптимизации режимов электрических
двигателей состоит в том, что объективно существует несколько
неравноценных по эффективности вариантов математических моделей
электрических двигателей как объектов экстремального управления. В
этой связи определяющая роль при решении задачи оптимизации
отводится рациональному выбору состава вектора управлений.
Обсудим эти особенности на ранее приведенном примере частотно-
регулируемого электропривода с короткозамкнутым асинхронным
двигателем.
Изложенная в примере процедура поиска наилучшего решения
предполагает варьирование управлением U. Однако следует заметить, что
при этом компоненты 0)s и us вектора U нельзя рассматривать
независимыми переменными. Они связаны между собой уравнением
объекта (2.20), в котором компоненты вектора X зафиксированы по
условию (2.9) решения технологической задачи. Таким образом, из
четырех величин (бУ5, us, т и О), фигурирующих в (2.20), в качестве
независимых могут рассматриваться лишь три величины. При решении
задачи экстремального управления выбор состава этой тройки имеет
принципиальное значение и, как показывает анализ, не является вполне
однозначным. Для выяснения вопроса, связанного с этим
обстоятельством, рассмотрим понятие о степенях свободы системы.
Напомним [127], что степенями свободы системы называют
совокупность величин, обладающих следующими свойствами:
во-первых, в пределах данной совокупности величин каждый из ее
компонент рассматривается как величина, не зависящая от других, что
позволяет свободно варьировать данными величинами для упорядоченного
исследования свойств объекта в области всех его возможных режимов;
во-вторых, зафиксировав все компоненты данной совокупности
величин, можно однозначно определить состояние системы, т.е. значения
всех других физических величин, характеризующих ее состояние. При
задании большего числа величин окажется, что их уже нельзя считать
независимыми друг от друга и, следовательно, ими нельзя будет свободно
варьировать при исследовании режимов работы объекта. Если же
попытаться задать меньшее число величин в сравнении с числом степеней
свободы, то их будет недостаточно для полного определения состояния
объекта.
128
Анализ уравнения (2.20) показывает, что данный объект
представляет собой систему с тремя степенями свободы. Однако из числа
входящих в это уравнение четырех величин (й)5, us, т и СО) не каждая
тройка удовлетворяет свойствам, определяющим понятие степеней
свободы системы. Приведем несколько примеров в подтверждение этого
вывода.
Пример 1. Рассмотрим одномерную по управлению задачу
оптимизации режимов короткозамкнутого АД по минимуму тока стато-
ра [133]. В качестве тройки независимых величин возьмем сочетание
{us,m, со), где us - модуль вектора напряжений статора U5,
/ ? 2~
us = -dusX +usy . Будем полагать, что момент т и скорость со заданы
условиями технологической задачи, а варьируемой координатой является
напряжение us. Сформулируем задачу оптимизации на безусловный
экстремум:
is(us, т,со)-> min,
us
Г2
где is - модуль вектора токов статора Is, is = J/J* + i^y .
(2.24)
Для обсуждения задачи (2.24) обратимся к системе уравнений (1.16).
Приняв в (1.16) оператор дифференцирования Д=0, после преобразований
получим следующую модель АД как объекта экстремального управления:
1 Г, ,, , ч2 Р
~ 72~ га) т >
'г
(Os=(O + p-
7 - V™ .
2 (Гг »2 Р 1
V т — ,д + т
<Р Гг)
(2.25)
(2.26)
(2.27)
(2.28)
(2.29)
Коэффициенты b, с, d и е в (2.26) зависят от насыщения
двигателя по главному магнитному пути и рассчитываются по следующим
формулам:
129
rs О ^гс^т ) > £ ^гсу "I" >
— rs^m > 6 — 1 + lsalm .
Таким образом, система уравнений (2.25)-(2.29) позволяет решать
задачу (2.24) с учетом насыщения асинхронного двигателя по главному
магнитному пути.
Постановка задачи экстремального управления в виде (2.24) имеет
существенные недостатки, обусловленные выбором состава независимых
величин (us, т, со). Эти недостатки заключаются в следующем.
Как видно из (2.25), для расчета тока статора при заданном т
необходимо знать абсолютное скольжение [3 и параметр 1т, зависящий от
магнитного состояния двигателя, т.е. координат 1//т и im рабочей точки
кривой намагничивания. При решении задачи (2.24) в модели (2.25)-(2.29)
эффект насыщения учитывается зависимостью параметра 1т от модуля
1//т вектора главных потокосцеплений с помощью уравнения (2.28). Для
определения (3 и 1т используются уравнения (2.26)-(2.29). Система
(2.26)-(2.29) нелинейная и при заданных значениях т, CD и us не может
быть разрешена аналитически ни относительно /3, ни относительно 1т.
Значения ft и 1т могут быть найдены только численным методом с
помощью итерационной процедуры. Как известно, применение численных
методов решения систем нелинейных уравнений требует изучения вопроса
сходимости итерационных алгоритмов и, кроме того, приводит к
увеличению общего времени решения задачи экстремального управления.
Другой недостаток состоит в том, что при выборе в качестве
внутренней переменной для организации итерационного процесса как 1//т,
так и /3 решение системы (2.26)-(2.29) оказывается неоднозначным.
Действительно, если в качестве внутренней переменной взять величину
\)/т, то согласно уравнению (2.29) при заданных т и будем иметь два
значения /3. Для разрешения неоднозначности требуется дополнительное
исследование корней нелинейной системы уравнений.
Таким образом, как видно из этого примера, в самом
неблагоприятном случае могут сочетаться одновременно неоднозначность
решения с необходимостью применения итерационной процедуры для
определения магнитного состояния насыщенного двигателя.
130
Пример 2. Выберем в качестве тройки независимых величин
сочетание , т, а>). Будем полагать, что момент т и скорость ю по-
прежнему заданы условиями технологической задачи, т.е. являются
известными величинами, а главное потокосцепление 1//т - варьируемая
координата.
Прежде всего заметим, что при сочетании (i//m, т, а>) ток статора не
зависит от скорости. Задача управления по минимуму тока статора на
безусловный экстремум формулируется в следующем виде:
z5(^w,w)->min. (2.30)
Vm
Уравнения модели АД с короткозамкнутым ротором для решения
задачи (2.30) имеют вид
1 Гг , ч2 р
Чп\-Р Гг\
(2.31)
(2.32)
(2.33)
Система уравнений (2.31)-(2.33) позволяет решать экстремальную
задачу (2.30) с учетом насыщения АД по главному магнитному пути. При
этом отпадает необходимость в итерационной процедуре расчета
магнитного состояния двигателя, так как варьируемое управление
является одной из координат точки кривой намагничивания.
Дальнейший анализ уравнений (2.31)-(2.33) показывает, что
абсолютное скольжение Д в выражении тока статора является зависимой
величиной и связано с т и l/fm уравнением
£2-
2 2
lram 1га
(2.34)
Таким образом, для определения скольжения Д необходимо решить
квадратное уравнение (2.34) при заданных значениях 1//т и т. Уравнение
имеет два корня независимо от режима работы АД.
131
На рис. 2.5 представлены графики функции
рассчитанные при фиксированных значениях момента. На графиках
введены следующие обозначения: т;-д - значение момента для
двигательного и mir - значение момента для генераторного режимов, где
i = 1,4. В качестве примера дано решение уравнения (2.34) при моментах
щ2д и т2г.
тъ\ т2т\тзт'
Рис. 2.5. К вопросу неоднозначности решения задачи
экстремального управления
Следовательно, сочетание (l//m, т, со) не отвечает понятию степени
свободы системы. Для разрешения неоднозначности требуется
исследование корней уравнения (2.34) и области определения функции
что создает трудности при поиске минимального значения то-
ка is. Область, в которой находится решение, принадлежит полуотрезку
+°°<^<72M4
Абсолютное скольжение определяется по формуле
132
Пример 3. Рассмотрим теперь один из возможных рациональных
подходов к решению задачи управления по минимуму тока статора. Если в
качестве тройки независимых величин выбрать сочетание {/3,т,со), то
экстремальная задача
is(J3,m) —> min,
как следует из анализа (2.31)-(2.33), решается однозначно. Причем
магнитное состояние насыщенного АД в этом случае можно определить,
не прибегая к использованию итерационной процедуры. В такой
постановке задача управления по минимуму тока статора АД с
короткозамкнутым ротором была решена в работах [56, 133].
Таким образом, в рассмотренном примере рациональной
варьируемой координатой является абсолютное скольжение /3, а тройка
(т, СО, /3) - степенями свободы системы, описываемой уравнениями
(2.31 >-(2.33).
В заключение заметим, что (/3,т,со) не является единственной
тройкой независимых величин, удовлетворяющей определению степени
свободы АД. Существуют другие сочетания, например (cos,us, СО) и
, т, со), также однозначно определяющие состояние системы ПЧ-АД
как объекта экстремального управления [78]. Это утверждение
справедливо не только по отношению к току is, но и по отношению к
другим составляющим вектор-функции качества (2.15).
2.6. Примеры преобразования математических моделей и постановок
экстремальных задач к минимальной размерности по управлению
Рассмотрим преобразование модели силовой части и постановок
задач экстремального управления частотно-регулируемого асинхронного
электропривода.
Из двух последних сочетаний, т.е. (cos,us, со) и (cos, т,со), второе
сочетание независимых переменных оказывается более
предпочтительным, так как т и со связаны условиями технологической
задачи и поэтому могут рассматриваться как заданные величины.
Следовательно, поиск оптимального управления может быть осуществлен
варьированием лишь одной компонентой (6У5) управляющего вектора
U = (6?5,Wj). Его вторая компонента (w5), которая по физическому
смыслу не может принимать отрицательные значения, однозначно
133
определяется из уравнения (2.20). В этом случае показатели качества (2.15)
могут быть представлены функциями от a>s и X:
Wj- = WffcOg, X), i -\,к .
При решении задач анализа и синтеза экстремального управления
удобно в качестве управляющего воздействия вместо угловой частоты a>s
использовать абсолютное скольжение двигателя ft = a>s - й), так как при
заданном значении СУ величина /3 однозначно определяет G)s.
Таким образом, после проведенных преобразований математическая
модель системы ГГЧ-АД как объекта экстремального управления
принимает следующий вид:
W = W(&X). (2.35)
Поскольку вектор X всегда задан условиями технологической
задачи, то в математической модели (2.35) он рассматривается как
входное воздействие, определяющее основную цель функционирования
электропривода. Варьируемым управляющим воздействием является
абсолютное скольжение /3. В качестве выходных переменных
рассматриваются компоненты вектора качества W.
В состав W целесообразно включить не только компоненты вектора
качества (2.15), но и вектора реального управления U = (a>s,us\ так как
^ = £У5(ДХ),ц5=М5(ДХ):
WGS,X) = (^,w2,...,wbfflJ,»,). (2.36)
Это не противоречит физическому смыслу задач оптимизации,
например минимизации напряжения us на зажимах статора АД. Дня учета
ограничений на реальное управление соответствующим образом увеличим
размерность входящего в формулу (2.16) выражения области допустимых
состояний объекта
Qw — Qivjх Qw2 х •••х Qwj х х •
134
Тогда решение оптимальной задачи по любому частному критерию и)
(z = l,2,...,£ + 2)
#=Д°(Х = ХС)
с учетом всех наложенных ограничений должно удовлетворять условию
W(/?°,X)eQw.
(2.37)
При отсутствии ограничений по какому-либо частному критерию И)
для соответствующей области Qw. вводятся подвижные границы, такие,
что
w/(^°,X)eQw..
На рис. 2.6 приведены модели АД до преобразований (а) и после
преобразований (б), иллюстрирующие их принципиальное различие.
а б
Рис. 2.6. К сравнению моделей АД с короткозамкнутым ротором
для решения задач экстремального управления:
а - до преобразований; б - после преобразований
Таким образом, модель (2.36) позволяет находить для заданной .
технологической задачи наилучшее решение путем варьирования вместо
векторного управляющего воздействия U скалярным управляющим
воздействием (3. Преобразование задачи. (2.17) в одномерную по
управлению значительно облегчает упорядоченный перебор возможных
вариантов решения и выбор из них оптимального Д° = Д° (X = Хс).
Теперь задача экстремального управления асинхронным
электроприводом в первой ее постановке формулируется следующим
135
образом: Среди всех возможных управлений (3 объекта, поведение
которого описывается вектор-функцией качества (2.36), найти такое
управление, которое обеспечивает при заданном X = Хс и соблюдении
ограничений (2.37) достижение нижней (или верхней) грани основной
оценки Wi(/3,X)’.
Р? (X) = arg inf (sup) Wt (J3, X = Xc ), p e Q.p, (2.38)
P
где
Щ = {£|W(AX = Xc) eQw, xc e QXc}.
По результатам решения задачи (2.38) легко находятся координаты
вектора реального управления:
U?(X) = (a>5(/?°,X), w5(/?°,X)).
В рамках преобразованной модели асинхронного электропривода к
виду (2.35) вторая постановка задачи экстремального управления
формулируется теперь следующим образом [103, 131]: Для каждого
предписанного технологическим процессом значения выходной
координаты у^=т либо у^—О) найти оптимальное управление
Р°(У{), которое обеспечивает достижение верхней (для тормозных
режимов - нижней) грани механической мощности двигателя
Рм.ех ~та> при соблюдении заданных ограничений:
р° ) = arg sup (inf) рмех (J3, yt), (2.39)
P^Qp
Q^ = {/?|W(AX)eQw}.
Напомним, что в качестве заданной величины здесь имеет смысл
рассматривать лишь одну из компонент вектора X - либо скорость
(у2 = <*)), либо момент (у^-т'у Соответствующие этим случаям
решения для преобразованной задачи принимают следующий вид:
>0<’(fl?)=arg sup (inf) т; (2.40)
Р^р
136
/3°{m) = axg sup (inf) co,
P^Q/з
(2.41)
где Qp ~ допустимое множество управлений.
Различие исходной и преобразованной моделей для решения второй
постановки задачи экстремального управления АД показано на рис. 2.7.
Рис. 2.7. К сравнению моделей АД с короткозамкнутым ротором
для решения задач экстремального управления:
а - до преобразований; б - после преобразований
Как видно из рис. 2.6 и 2.7, преобразованные модели отличаются от
исходных моделей меньшей размерностью вектора варьируемых
управлений.
2.7. Классификация математических моделей основных типов
электрических двигателей по числу степеней свободы
и размерности вектора управлений
В общем случае число степеней свободы равно числу независимых
внешних воздействий модели электрического двигателя. Если из списка
внешних воздействий исключить координаты, заданные по условию
технологической задачи (Х = ХС), то оставшиеся внешние воздействия
могут рассматриваться независимыми варьируемыми переменными при
постановке и решении задач экстремального управления. Независимые
варьируемые воздействия в дальнейшем также будем называть
варьируемыми координатами. Они составляют варьируемый вектор
управлений. Размерность вектора управлений (число варьируемых
координат) зависит от схемы питания обмоток и способа регулирования
скорости.
137
Таблица 2.1
Классификация математических моделей основных типов
электрических двигателей как объектов экстремального управления
Тип электрического двигателя Число степеней свободы Схема питания обмоток и способ регулирования скорости электрического двигателя Размерность варьируемого вектора
Асинхронный двигатель при двустороннем питании 5 Автономное питание обмоток статора и ротора от преобразователей частоты. Частотный способ регулирования угловой скорости 3
Жесткое подключение обмотки статора к сети. Частотный способ регулирования угловой скорости со стороны обмотки ротора 1
Жесткое подключение обмотки ротора к сети. Частотный способ регулирования угловой скорости со стороны обмотки статора 1
Асинхронный двигатель с короткозамкнутым ротором 3' Питание обмотки статора от преобразователя частоты. Частотный способ регулирования скорости вращения 1
Синхронный двигатель с продольно- поперечным электромагнитным возбуждением 5 Питание обмотки переменного тока от преобразователя частоты, обмоток возбуждения - от автономных управляемых источников постоянного тока. Частотный способ регулирования скорости вращения 3
Синхронный двигатель с продольным электромагнитным возбуждением 4 Питание обмотки переменного тока от преобразователя частоты, а обмотки возбуждения - от управляемого источника постоянного тока. Частотный способ регулирования скорости вращения 2
Синхронный двигатель с постоянными магнитами 3 Питание обмотки переменного тока от преобразователя частоты. Частотный способ регулирования скорости вращения 1
Вентильный двигатель постоянного тока с электромагнитным возбуждением 4 Питание обмотки переменного тока от преобразователя частоты, а обмотки возбуждения - от управляемого источника постоянного тока. Частотный способ регулирования скорости вращения 2
Вентильный двигатель постоянного тока с постоянными магнитами 3 Питание обмотки переменного тока от преобразователя частоты. Частотный способ регулирования скорости вращения 1
Двигатель постоянного тока независимого возбуждения 3 Питание обмоток якоря и независимой обмотки возбуждения от автономных управляемых источников постоянного тока. Регулирование скорости путем изменения напряжения якоря 1
Таблица 2.1 отображает классификацию математических моделей
основных типов электрических двигателей как объектов экстремального
управления по числу степеней свободы и размерности варьируемого
вектора управлений.
138
Как видно, наибольшее число степеней свободы имеют модели
асинхронного двигателя при двустороннем питании и синхронного
двигателя с продольно-поперечным электромагнитным возбуждением.
Максимальное число варьируемых координат равно трем.
Синхронные двигатели и вентильные двигатели постоянного тока с
продольной обмоткой возбуждения имеют четыре степени свободы.
Размерность варьируемого вектора в этом случае уменьшается на единицу
в сравнении с синхронными двигателями с продольно-поперечным
электромагнитным возбуждением.
Тремя степенями свободы обладает асинхронный двигатель с
короткозамкнутым ротором. Данному признаку отвечают также
синхронные двигатели, вентильные двигатели постоянного тока с
постоянными магнитами и коллекторные двигатели постоянного тока
независимого возбуждения. Число варьируемых координат в моделях этих
двигателей снижается до единицы.
Классификация моделей основных типов электрических двигателей
по числу степеней свободы и размерности варьируемого вектора
управлений отражает возможности каждого двигателя с точки зрения
формирования оптимальных энергетических режимов электропривода при
выполнении заданной технологической задачи.
Следует заметить, что приведенная классификация характеризует
свойства только электрических двигателей как объектов экстремального
управления и не учитывает особенности силовых источников питания
(силовых преобразователей), которые могут иметь дополнительные каналы
управления энергетическими режимами электропривода. К таким
источникам питания, например, относятся двухзвенные преобразователи
частоты с активными выпрямителями на входе и преобразователи частоты
с непосредственной связью на полностью управляемых
полупроводниковых ключах [28,124].
В общем случае задачи экстремального управления электроприводом
должны решаться с помощью функций качества не только электрического
двигателя, но и силового преобразователя. Поэтому при постановке задачи
экстремального управления электроприводом наряду с функциями
качества электрического двигателя могут привлекаться сетевые функции
качества (ток, активная, реактивная и полная мощность, потребляемые из
питающей сети силовыми преобразователями, и др.). Использование
двухзвенных преобразователей частоты с активными выпрямителями и
преобразователей частоты с непосредственной связью на полностью
управляемых ключевых элементах увеличивает число степеней свободы
силовой части, позволяя целенаправленно влиять на сетевые показатели
качества электропривода.
Дополнительные возможности управления энергетическими
режимами электроприводов появляются также в ряде схем соединения
139
обмоток двигателей с источниками питания. Так, при питании трехфазных
машин переменного тока от источников линейно независимых напряжений
появляется независимая дополнительная координата, с помощью которой
можно влиять на нейтральные составляющие намагничивающих токов,
оптимизируя их величину по критерию электрических потерь [124, 125,
129].
2.8. Условия существования решения задачи
экстремального управления
Остановимся еще на одном важном вопросе - условиях
разрешимости экстремальной задачи. Рассмотрим некоторые особенности
задач оптимизации режимов электроприводов в рамках первой постановки
с учетом ограничений на координаты системы.
Для существования оптимального решения необходимо, чтобы
множество допустимых (удовлетворяющих введенным ограничениям)
решений не было пустым. Обратимся снова к математической модели
асинхронного двигателя (2.35). Пусть для каждой из входящих в (2.36)
функций wz(/?, X) задана область допустимых значений в виде
ограничений подмножеств
Q W( (Р, X) = {/3, X) I inf < Wj {/3, X) > sup wz-}. (2.42)
Тогда область состояний объекта характеризуется замкнутым
ограниченным множеством (2.42). То обстоятельство, что нам удалось в
рассматриваемом примере преобразовать задачу к одномерной по
управлению, позволяет получить весьма простое и вместе с тем строгое ее
решение. Действительно, варьируя управлением /3, можно для каждого
X — Хс найти такие подмножества управлений
Q J' (X) = {/?| м^З, X) 6 Q w.}, (2.43)
на которых поочередно (i = 1,2,..., j) удовлетворяются ограничения на
соответствующие координаты wz- системы. Тогда множество допустимых
управлений Q р, удовлетворяющих всем введенным ограничениям (2.42),
находится как результат пересечения подмножеств (2.43):
Q^(X) = AqJ(X). (2.44)
f=l
140
Формулы (2.43) и (2.44) позволяют сделать вывод о принципиальной
выполнимости технологической задачи при наличии ограничений.
Очевидно, что технологическая задача X = Хс принципиально
невыполнима, если хотя бы одно из подмножеств (2.43) в результате
проверки оказалось пустым.
Если Qy?(X = Xc) представляет единичное множество, то
технологическая задача выполнима, однако возможность выбора
наилучшего решения отсутствует.
Лишь в том случае, если Qy? (X = Хс ) не пусто и число допустимых
управлений больше единицы, существует возможность выполнения
технологической задачи при выборе наилучшего значения управляющего
воздействия.
В качестве иллюстрации условия разрешимости рассмотрим
следующую экстремальную задачу [120]: найти нижнюю грань функции
мощности потерь двигателя Др(/7,Х) для X = (тяом, <УНОМ) при
ограничениях по критерию is (/3, X) < /5Д и одной из координат вектора
управления us {/3, X) < , где гзд и М5Д - предельно-допустимые
значения выходного тока и напряжения преобразователя частоты.
На рис. 2.8 представлены возможные ситуации, соответствующие
различным значениям iSR и г/5Д. Отрезок ab на числовой оси 0/3
(рис. 2.8, а), являясь результатом пересечения подмножеств
Q*g(X) = {/?| 0 < Zy(/7,X) < гзд} и О“ЧХ) = {^|0<МДДХ)^Мзд},
определяет подмножество допустимых управлений
Q^(X) = Q^(X)nQ^(X).
Среди этих допустимых управлений существует наилучшее
управление /3^р, обеспечивающее при заданном векторе X минимум
мощности потерь в двигателе.
Если введенные ограничения таковы (рис. 2.8, б), что точка
глобального экстремума функции качества Др(/?,Х) не принадлежит к
множеству допустимых управлений Q р, то тогда в качестве наилучшего
следует выбирать управление /3^, лежащее на ближайшей к глобальному
экстремуму границе Q р.
141
Рис. 2.8. Условия разрешимости и варианты решений
экстремальной задачи с ограничениями
На рис. 2.8, в изображен третий вариант задания уровней
ограничений, при которых область пересечения подмножеств QZ^(X) и
(X) вырождается в точку ”а”. Здесь технологическая задача имеет
единственное решение, отвечающее нижней грани функции качества.
142
Рис. 2.8, г иллюстрирует четвертую возможную ситуацию, когда при
пересечении подмножеств (X) и (X) пусто. Такие ограничения
не позволяют организовать функционирование привода в заданной точке
X, т.е. исключают возможность выполнения технологической задачи как
таковой.
Приведенная в примере процедура определения множества
допустимых управлений и принятия оптимальных решений может быть
распространена на случай с произвольным числом заданных состояний по
вектору X и ограничений по компонентам вектора показателей
качества W.
На основе рассмотренной выше процедуры определения множества
допустимых управлений Qy? могут быть найдены также оптимальные
управления Р°(Уг)-> обеспечивающие достижение верхней (для
тормозных режимов - нижней) грани механической мощности двигателя
/’мех = та) (вторая постановка задачи экстремального управления). В
этом случае для каждого предписанного значения уг (й) либо т)
осуществляется перебор вариантов по вектору X, различающихся
произвольно задаваемыми значениями максимизируемой координаты
(соответственно т либо со). Для каждого из этих вариантов находится
удовлетворяющее всем введенным ограничениям множество допустимых
управлений Q р.
Если Qр оказывается пустым, то данное значение компоненты уг-
вектора X не реализуемо в связи с введенными ограничениями.
Если же множество Q р оказывается не пусто и число допустимых
управлений больше единицы, то это означает, что ресурсы привода по
максимизации координаты yt использованы не полностью. Поэтому
имеется возможность ее увеличения. Оптимальным является такой вариант
X, для которого область допустимых управлений вырождается в точку.
Соответствующее значение /7^ (ft)) g (X) либо /3^(т) gQ^(X) и
является оптимальным решением задачи в данной постановке. Управления
/3°т (со) и /7° (т) в то же время определяют точные верхнюю и нижнюю
грани координат т и со соответственно. Варьирование предписанными
значениями координаты у2- с выполнением указанной процедуры
позволяет найти законы оптимального управления (2.40) и (2.41), а также
граничные функции sup (inf) т — f (со) и sup (inf) СО = f (т),
характеризующие предельные возможности электропривода.
143
Глава 3
ХАРАКТЕРИСТИКИ ЭЛЕКТРИЧЕСКИХ ДВИГАТЕЛЕЙ
КАК ОБЪЕКТОВ
ЭКСТРЕМАЛЬНОГО УПРАВЛЕНИЯ
3.1. Обобщенная проблемно-ориентированная модель
электрического двигателя для задач оптимизации
В первой главе приведены модели основных типов электрических
машин как объектов управления, в которых управляющими воздействиями
служат преобразованные к вращающимся либо неподвижным системам
координат реальные напряжения на зажимах обмоток. В дальнейшем такие
модели будем называть исходными. Эти модели пригодны для анализа
динамических свойств электрических двигателей при различных законах
изменения напряжений, в том числе формируемых силовыми
преобразователями. Частными случаями динамических моделей являются
модели установившегося движения.
Исходные модели обладают рядом особенностей, препятствующих
их прямому использованию в задачах оптимизации. Суть этих
особенностей состоит в том, что фигурирующие в уравнениях общего вида
(2.11) реальные электрические воздействия (напряжения), в общем случае
допускающие независимую вариацию, в задачах оптимизации оказываются
связанными между собой введенными условиями технологической зада-
чи (2.8) и (2.9). Использование реальных воздействий усложняет решение
задач оптимизации, поскольку они не могут рассматриваться в качестве
независимых варьируемых переменных. Поэтому выбор варьируемых
воздействий требует дополнительного анализа, что выполняется с
привлечением понятия степеней свободы системы. В связи с этим
предпочтителен переход к проблемно-ориентированным моделям, в
которых взамен вектора реальных воздействий U принимается новый
144
вектор V меньшей размерности. Вектор V обладает тем свойством, что
его компоненты допускают независимые вариации, не нарушающие
условия технологической задачи (2.8) и (2.9), а вместе с ними -
однозначно определяют состояние системы, характеризуемое выбранными
оценками качества. Рассмотрим один из возможных подходов к
построению таких моделей.
В самом общем виде проблемно-ориентированная модель
электрического двигателя как объекта экстремального управления
представляет собой вектор-функцию качества W = (, W2,.. ., ),
аргументами которой являются вектор варьируемых управлений
V = (y\,V2,.--,Vg) размерности q и вектор состояния Х = (ти,б)),
заданный условиями технологической задачи, т.е.
W = W(V,X). (3.1)
Следует заметить, что во многих практических случаях запись
показателей качества wz- (z’=l,..., к) в виде аналитических зависимостей
от векторов V и X встречает серьезные трудности. Так, например, для
насыщенных асинхронных и синхронных двигателей операторы моделей
описываются нелинейными системами уравнений, которые сводятся к
аналитической зависимости (3.1) при существенных допущениях или при
грубой аппроксимации кривой намагничивания [16, 45, 55,121].
Учитывая сложный нелинейный характер уравнений насыщенных
машин, более удобным и универсальным в плане разработки проблемно-
ориентированных моделей может оказаться подход, базирующийся на
представлении (3.1) двумя, в общем случае, векторными функциями:
Q = Q(V,X); (3.2)
W = W(q), (3.3)
где Q - промежуточный вектор состояния модели, Q = (<7i,<72=---,(7z)-
Предполагается, что область значений функции (3.2) содержится в области
определения функции (3.3).
Уравнение (3.2) является проблемно-ориентированной моделью
установившего движения электрического двигателя. Для уравнения (3.2)
характерно то, что при заданной величине X = Хс состояние модели по
выходу Q однозначно определяется вектором управлений V. В свою
очередь показатель качества W становится функцией от Q. На рис. 3.1
приведена схема обобщенной проблемно-ориентированной модели
электрического двигателя как объекта экстремального управления.
145
X
Рис. 3.1. Схема обобщенной проблемно-ориентированной
модели электрического двигателя для задач оптимизации
Разбиение модели (3.1) на составные части (3.2) и (3.3) позволяет
получить следующие преимущества:
1) процессы построения моделей Q=Q(V, X) и W = W(Q)
становятся независимыми друг от друга и менее трудоемкими;
2) систематизируется процесс формирования состава внешних
воздействий модели (3.2). Так, сначала определяется минимальное число и
предварительный состав независимых воздействий, влияющих на режимы
машины. Затем назначается состав вектора управлений V. Наконец, на
заключительном этапе выполняется проверка внешних воздействий по
условию однозначности решения задачи экстремального управления;
3) раскрывается значение ориентации системы координат при
разработке модели электрического двигателя как объекта экстремального
управления. При рациональном выборе опорного вектора упрощаются
операторы моделей (3.2), алгоритмы численного расчета характеристик и
синтеза оптимальных законов управления для насыщенных электрических
двигателей;
4) сохраняется возможность использования изображающих векторов
(векторных диаграмм) при геометрической интерпретации оптимальных
режимов насыщенных электрических двигателей.
Ниже рассматриваются конкретные приложения данного подхода к
построению проблемно-ориентированных моделей основных типов
электрических двигателей.
3.2. Обобщенная машина переменного тока как объект
экстремального управления
3.2.1. Уравнения установившегося режима обобщенной
машины переменного тока
Основой для построения проблемно-ориентированных моделей
двигателей служат уравнения установившегося движения. Исходная
модель обобщенной машины переменного тока, описывающая
установившиеся режимы, может быть получена из общей системы
уравнений динамики (1.15). Примем в ней оператор дифференцирования
146
p = Q и скорость вращения системы координат 0)к = СОs, где C0s = const
- угловая частота напряжения статора. В результате получим
US=®SBTS+RJS; Ur /ЖЧ'. КЛ;
ш _ ш I г т • V - V + L Т •
T,=FWIW; IW=L+I,; (3.4)
щ = В'Рот»1?; т-тс-, co = cos-l3.
Уравнения (3.4) представляют собой исходную модель обобщенной
машины переменного тока. В общем случае как объект управления такая
машина имеет пять независимых входных воздействий. Действительно,
пусть фазные обмотки машины питаются от источников напряжений,
представляющих собой периодические функции
usa ~ s + ^нач) > usb ~ s + ^гнач) »
Wra =Ur COS(0r + ^-цач) ’ ^rb ~~ Ur sin($r + ^-Haq),
где Usw.Ur - амплитуды фазных напряжений;
0S и 0г ~ переменные фазы, изменяющиеся по линейному
закону во времени;
^нач и ^гнач ~ постоянные начальные фазы.
Для использования модели (3.4) дополним ее уравнениями прямого
преобразования координат
Us = A/0K)Uf'; Ur = Ar(0K -0r)U?' ,
где Ufs
двухмерные алгебраические векторы фазных
напряжений, =
usa
ura
hU^ =
Тогда независимыми внешними воздействиями модели двигателя с
учетом уравнения прямого преобразования координат являются
амплитуды (Us и Us), переменные фазы (9S и 0г) и момент статического
сопротивления тс.
Заметим далее, что фигурирующие в модели параметры
преобразования координат 0К и 0Г , а также начальные фазы 05аач и
147
0таач являются в общем случае свободными независимыми переменными.
Однако их присутствие в модели не увеличивает числа независимых
воздействий в том смысле, что они не влияют на скалярные величины
(момент, мощности, потери и др.), с помощью которых оценивается
эффективность режимов электрических машин.
Закон изменения 0К и 0г выбирается с учетом характера решаемой
задачи. В частности, для установившихся режимов, подбирая величины
^к=бМ + ^к.нач и ~ + @гна.ч’ можно исключить периодически
изменяющиеся переменные. Так, при исследовании режимов двигателя
целесообразно синхронизировать скорость 0)к и начальную фазу $кнач с
частотой и начальной фазой одного из периодически изменяющихся по
частоте внешних воздействий. В этом случае 0)к приобретает смысл
угловой частоты этого воздействия. Если периодически изменяющееся
внешнее воздействие является независимым, то его угловая частота
становится одним из компонентов, а модуль вектора - другим
компонентом совокупности независимых внешних воздействий модели
двигателя. Например, приняв в качестве независимого внешнего
воздействия угловую частоту 0)s напряжения статора и задав Q)K =Q)S,
#кнач = ^нач > т-е- = as t + ^гнач > получаем после умножения вектора
на матрицу прямого преобразования координат А5 составляющие
вектора напряжений UJ; одна из которых usx =us—Us, а другая -
изу =0- Т° же самое относится и к цепи ротора. При независимом
задании угловой частоты напряжения ротора С0г при условии, что
(Ук = (OS, эта частота приобретает смысл частоты скольжения ротора /3
(абсолютного скольжения вектора напряжения Ur). В то же время
алгебраический вектор Ur, который является результатом преобразования
вектора с помощью матрицы Аг, через свои компоненты определяет
модуль иг = (и^х + и^у^12 ~Ur, а соотношение между составляющими
этого вектора несет информацию о начальной его фазе.
Наконец, покажем формальный подход к определению числа
независимых внешних воздействий. Он основан на анализе суммарных
чисел скалярных уравнений (ису) и скалярных переменных (исп),
полученных в результате перехода от векторно-матричной к скалярной
форме записи уравнений путем разложения по компонентам
148
алгебраических векторов. В этом случае число независимых внешних
воздействий модели
п = пс.п ~ пс.у (3-5)
В соответствии с особенностями конструктивного исполнения
двигателей при питании обмоток статора и ротора от автономных
источников вопросы построения проблемно-ориентированных моделей
могут рассматриваться при следующих условиях:
• при управлении машиной по цепям обмоток статора и ротора;
• при управлении машиной только по цепи обмотки ротора с
жестким подключением обмотки статора к сети с напряжением
Uj = const и частотой G)s = const;
• при управлении машиной только по цепи обмотки статора с
жестким подключением обмотки ротора к сети с напряжением
Ur = const и частотой cor = const.
3.2.2. Модели обобщенной машины переменного тока
для задач оптимизации
Предполагается, что обмотки статора и ротора ОМПТ получают
питание от автономных преобразователей частоты с синусоидальными
напряжениями на выходе, амплитуду и частоту которых можно
регулировать независимо друг от друга для обеспечения требуемого
режима. К валу ОМПТ приложена статическая нагрузка, создаваемая
сторонними силами.
Модель ОМПТ при управлении по цепям обмоток статора и ротора
описывается векторно-матричными уравнениями (3.4) и, как было
показано, ее состояние определяется пятью независимыми внешними
величинами. Вычитая из этого числа независимых внешних величин число
компонентов вектора X, получаем размерность вектора управлений q=3.
Перейдем к обоснованию состава вектора управлений V проблемно-
ориентированной модели ОМПТ. В состав компонентов вектора V можно
включить либо три независимых скалярных величины, либо одну
скалярную и одну векторную величины.
При обсуждении первого варианта заметим, что из числа скалярных
величин: т, О), Q)s, fl и mz, фигурирующих в системе уравнений (3.4),
момент т и скорость <У заданы условиями технологической задачи (2.9),
а момент статического сопротивления тс связан с т уравнением
установившегося движения т = тс. Из оставшихся скалярных величин
Ct)s и р в состав вектора V возможно включить только одну из них (<У5
149
либо /?), так как другая переменная (/? либо <У5) становится зависимой в
силу уравнения G) = G)s — ft Таким образом, при формировании
недостающих двух составляющих вектора V приходится объединять либо
компоненты различных алгебраических векторов, либо брать компоненты
одного вектора. В этой связи целесообразен вариант, предполагающий
включение в состав вектора V одной скалярной и одной векторной
величин. В качестве скалярной величины удобно использовать абсолютное
скольжение fl (либо частоту cos ), а в качестве векторной величины - один
из алгебраических векторов, характеризующих режим установившегося
движения.
Следующим этапом построения модели является проверка условия
однозначности решения экстремальной задачи при выбранной
совокупности внешних воздействий. Поскольку вопрос однозначности
имеет принципиальное значение при разработке моделей для задач
экстремального управления, рассмотрим его на нескольких примерах.
Пример 1. Пусть в качестве независимых воздействий ОМПТ
выбрано сочетание </?,Ur,X). Запишем уравнения (3.4) в системе
координат, ориентированной по вектору 4ZS. Учитывая условия
ориентации системы координат Vsy~^> после исключения
промежуточных переменных получим уравнения составляющих вектора
главных потокосцеплений
Vmx = К + lsarr 1мта); (3.6)
Vту ~ s • (3-7)
В выражении составляющей у/тх коэффициент ks зависит от
насыщения машины:
/ 2 2
где у/т - модуль вектора главных потокосцеплений, у/т = + Vmy •
Потокосцепления 1]/^ и у/ту задают точку на кривой намагничивания
— т ) •
В выражениях (3.6) и (3.7) напряжение игх и момент т -
независимые воздействия, а модуль вектора потокосцеплений статора
Vs ~ \Vsx + Vsy ) является решением квадратного уравнения
150
k 1 4-1
^s^so *га
Vr ГЛ РЪ)
2
Кг +
Ury Ujy A
!~--~ Vs +—о =0-
“ л/' /*?
(3.8)
Этот пример показывает, что сочетание (/?, Ur,X) не отвечает
условию однозначности решения задачи экстремального управления, так
как уравнение (3.8) имеет два корня. Причем ввиду того, что коэффициент
ks в (3.8) зависит от насыщения двигателя, корни уравнения могут быть
найдены только при совместном решении системы уравнений (3.6)-(3.8) с
помощью итерационной процедуры.
Пример 2. Пусть в качестве независимых воздействий ОМПТ
выбрано сочетание 5,Х), т.е. вместо вектора напряжений Ur
обмотки ротора введен вектор напряжений обмотки статора U5. При
ориентации системы координат по вектору составляющие и у/ту
находятся из выражений
тх Vз ^з<тгз изх’> (3-9)
^ту=~Цат^- (3-10)
Модуль вектора потокосцеплений статора y/s в (3.9) и (3.10) является
решением квадратного уравнения
^2- —^+ —= 0. , (3.11)
®3
Особенностью этого примера является то, что при определении
корней уравнения (3.11) отпадает необходимость в совместном решении
численным методом системы (3.9)-(3.11). Вместе с тем решение задачи
остается неоднозначным.
Пример 3. Пусть в качестве независимых воздействий ОМПТ
выбрано сочетание (/?,1Г,Х). При ориентации системы координат по
вектору Ts составляющие и \]/ту рассчитываются по выражениям
Vmy = к^пйгу,
(3.12)
(3-13)
151
где
(3-14)
Vs + ks\}m = O.
Согласно (3.14), потокосцепление Iff s однозначно определяется
независимыми воздействиями т и ijy. Поэтому сочетание (Д,1Г,Х)
отвечает условию определения степеней свободы. Однако следует
заметить, что в выражение (3.14), так же как и в (3.12) и (3.13), входит
коэффициент ks, зависящий от насыщения магнитной цепи машины. Для
определения магнитного состояния при данном сочетании приходится
решать итерационным методом систему нелинейных уравнений
Vтх ~ dm ^s<r) ^т^го^гх ~^rym ’
У^ ту ~ (4n + I'scr') ^гу>
1т =У'т1тЧУ'тУ>
У^т=(^+^у)1/2’
что не нарушает однозначности решения задачи оптимизации.
Пример 4. Пусть в качестве независимых воздействий ОМПТ
принято сочетание (Д15,Х), т.е. вместо вектора токов ротора 1г в
состав независимых воздействий вводится вектор токов статора 15.
Система координат ориентирована по вектору 4zs. В этом случае модуль
вектора потокосцеплений обмотки статора определяется однозначно и
расчет составляющих у/щх и У7ту ведется без использования
итерационной процедуры:
(3-15)
У^ту ~ ~К<Аву’ (3.16)
где
^s+z"1w = 0. (3.17)
Приведенные примеры позволяют сделать следующие общие
выводы, которые можно использовать при построении проблемно-
ориентированных моделей ОМПТ.
152
1. Критерием однозначности решения экстремальной задачи
является наличие одного корня уравнения модуля опорного вектора.
2. Магнитное состояние машины определяется без использования
итерационной процедуры в том случае, когда в уравнениях модуля
опорного вектора и составляющих главных потокосцеплений отсутствуют
коэффициенты, зависящие от насыщения главной магнитной цепи
машины.
3. Введение в состав независимых воздействий вектора главных
потокосцеплений '¥т гарантирует однозначность решения экстремальной
задачи при ориентации системы координат по любому опорному вектору,
принадлежащему множеству I s, I r,Uj,Ur}. При этом
магнитное состояние машины определяется без использования
итерационной процедуры.
В табл. 3.1 приведены варианты возможных сочетаний независимых
воздействий в моделях ОМПТ с указанием характера решения задач
экстремального управления.
Таблица 3.1
Характер решения задачи экстремального управления
при различных сочетаниях независимых воздействий
Сочетание Ориентирующий вектор
независимых внешних воздействий S Ьо «а ф 1—( ф 1—1 Us Ur
о О о О о о
<А^,х> О ОИ О ОИ о ОИ
<А^г,х> о ОИ ОИ О ОИ О
<Д15,х> о о ОИ ОИ о ОИ
<Д1г,х> о ОИ о ОИ ОИ о
<Ди5,х> н н ни н ни ни
<ди„х> н ни н НИ н ни
В табл. 3.1 приняты следующие обозначения: О - однозначное
решение экстремальной задачи; ОИ - однозначное решение экстремальной
задачи с обращением к итерационной процедуре определения магнитного
состояния машины; НИ - неоднозначное решение экстремальной задачи с
153
обращением к итерационной процедуре определения магнитного
состояния машины.
Сочетания систематизированы по составу независимых варьируемых
воздействий и опорному вектору. В качестве скалярной варьируемой
переменной в этих вариантах принято абсолютное скольжение ротора.
Из представленных вариантов наибольший практический интерес
имеют модели (ДЧ^,Х) и (/3,ls,X). Они позволяют получать
однозначное решение экстремальных задач без обращения к итерационной
процедуре расчета магнитного состояния. Рассмотрим эти модели более
подробно.
Модель ( Р, Тд,, X). В этом варианте независимыми воздействиями
являются момент т, скорость СО, абсолютное скольжение /? и вектор
главных потокосцеплений у¥т. Модель машины записывается в системе
координат, ориентированной по вектору 'Pj. При выполнении условий
ориентации системы координат (y/sx = y/s', l//sy = 0) из исходной системы
уравнений (3.4) получим
Т. ={-1,ат1ч'ту 0]г;
Ь’Л
lai (3-18)
W _Ш I т т .
и5=(гу+/?)в^+кл;
Ur=;6BTr+RrIr
На рис. 3.2 изображена модель обобщенной машины переменного
тока, соответствующая уравнениям (3.18).
Рис. 3.2. Модель ОМПТ
при сочетании внешних
воздействий (P,Wm,X)
В системе уравнений (3.18)
варьируемый вектор хРт задается
составляющими и Ц/ту в
154
системе координат, ориентированной по радиусу-вектору 'Ps- В то же
время составляющие и у/ту могут быть заданы через модуль у/т и
аргумент варьируемого вектора 4х :
У
т
к\Уту
~Ут cosi^
Ут sin vVm
Угол отсчитывается от положительной полуоси Ох, совпадающей по
направлению с опорным вектором 'Ps, и характеризует положение
вектора 'Em относительно опорного вектора.
При питании двигателя от управляемого источника тока полезен
другой вариант проблемно-ориентированной модели.
Модель (Д15,Х). В этом варианте независимыми воздействиями
являются момент пг, скорость (О, абсолютное скольжение /3 и вектор
токов статора . В качестве опорного вектора при записи уравнений по-
прежнему используется 'Ps- При условии ориентации системы координат
(i/ix = Уз> Узу ~ 0) после преобразований (3.4) будем иметь
^s=[-m/isy Of;
ш =Ф —Т I •
xs ^scr^s’
1, (3.19)
w _ w । т т .
xm ~
U^ + ^BT.+RX;
Ur=j8B4;+RrIr.
На рис. 3.3 изображена модель обобщенной машины переменного
тока, соответствующая уравнениям (3.19).
155
X
Us
Уравнения
двигателя
(3.19)
Ur
Рис. 3.3. Модель ОМПТ
при сочетании внешних
воздействий ( /3,1 s, X)
В системе уравнений (3.19)
варьируемый вектор 15 может быть
задан его составляющими isx и z'^ в системе координат, ориентированной
по вектору Ч7.?, либо модулем is и аргументом ц- изображающего
вектора Is:
4 совц;
z_ sin Vj
d ls
Угол отсчитывается от положительной полуоси Ox, совпадающей по
направлению с опорным вектором Ч7.?, и характеризует положение
вектора I s относительно опорного вектора.
В заключение подчеркнем, что полученные уравнения составляют
одну из групп уравнений обобщенной машины переменного тока как
объекта экстремального управления, которые в общем виде представлены
функцией Q(v,x). С помощью этих уравнений определяются
компоненты вектора состояний Q, необходимые для расчета показателей
качества. Компонентами Q согласно приведенным уравнениям являются
алгебраические векторы преобразованных напряжений (Us и Ur), токов
(Is и 1г) и потокосцеплений (Ч7^ и Ч7,.) обмоток статора и ротора, а
также результирующих намагничивающих токов 1т и главных
потокосцеплений Ч7 т. Выбор варьируемого вектора зависит от
конкретных условий задачи оптимизации. Например, при питании обмотки
статора машины от источника тока может оказаться более
предпочтительной модель (3.19).
3.2.3. Функции качества обобщенной машины переменного тока
Особенностью электрических машин как объектов оптимизации
является то, что их режимы работы характеризуются не одним, а
156
некоторой совокупностью показателей качества. Поэтому в исходной
формулировке задачи экстремального управления и в разработке
проблемно-ориентированных моделей принят векторный критерий
качества W. В конкретном случае из этого множества показателей может
быть отдано предпочтение какому-либо одному показателю, наиболее
полно с практической точки зрения отражающему цели оптимизации.
Остальные частные критерии оптимальности учитываются с помощью
введения ограничений, определяющих допустимое множество управлений
(см. гл. 2).
На практике для оценки режимов электрических двигателей
применяются следующие показатели качества:
1) энергетические показатели, характеризующие режимы работы
электрического двигателя как потребителя электрической энергии. К ним
относятся активная (/?), реактивная (<?) и полная (s) мощности,
потребляемые от силового преобразователя;
2) показатели, характеризующие результат электромеханического
преобразования подводимой энергии. К ним относятся механическая
мощность рмех = то и ее составляющие — момент т и скорость О',
3) показатели, характеризующие загрузку элементов электрических и
магнитных цепей двигателя, а также использование по току и напряжению
силовых источников питания - амплитудные либо действующие значения
напряжений, токов и потокосцеплений обмоток;
4) показатели, являющиеся мерой эффективности и экономичности
преобразования энергии двигателем. К ним относятся мощность потерь
Ар в элементах двигателя, коэффициенты мощности и полезного
действия.
Для количественной оценки каждой из этих групп показателей
качества характерно использование определенных типов переменных
модели Q(v,x) и способов их вычисления.
Для удобства дальнейшего анализа режимов ОМПТ объединим
перечисленные выше показатели качества в две группы. В первую группу
включим показатели электрической и магнитной природы,
характеризующие загрузку активных материалов конструкции машины в
процессе электромеханического преобразования, а также использование по
току и напряжению силовых источников питания. Показатели этой группы
определяются в виде скалярных квадратов алгебраических векторов:
и52=и^.и5;
h — >
zz2 = Ur»Ur;
z’,. — Ir • Ir,
</2=Tr.Tr;
(3.20)
157
(У =Т • i =1 .1
rm т т ’ т т *-т
Ко второй группе отнесем показатели качества, которые с разных
точек зрения характеризуют энергетические процессы преобразования в
машине: механическую мощность (/?мех); активную (Pj), реактивную
(<7у) и полную (Sj) мощности, потребляемые со стороны обмоток статора
(7 = 5) и ротора (7 = г); активную суммарную мощность (р);
электрическую мощность потерь в меди обмотках (Дрму ) и мощность
потерь в стали (Арсу); коэффициент мощности по основным гармоникам
токов и напряжений (cos^?y) и механический коэффициент полезного
действия (?7мех). Часть показателей данной группы вычисляются через
скалярные произведения алгебраических векторов. Показатели качества
второй группы записываются в виде следующих выражений:
Рмех =та>> Ps ~~ > ^=sgn(<y + ^)Us.BIj; p = Us • Is + Ur • Ir; = .Ir; <7r = sgn(/?)Ur • BIr;
Ss = ush > cos <ps =p Л-1; (3-21)
— Uyir j cos (pr = prs?; АРмг ~ rr^r * h ’
Арм=АрМ5+АрМг; Рмех = map'1.
На рис. 3.4 изображена модель функций качества обобщенной
машины переменного тока, соответствующая уравнениям (3.20) и (3.21).
—
о Функции »2 ls .
качества •
Ur. X (3.20) и (3.21) *
W
Рис. 3.4. Модель функций
качества ОМПТ
Важно заметить, что
скалярные показатели качества (3.20) и (3.21) обладают свойством
инвариантности по отношению к ориентации системы координат,
выбранной для записи уравнений (3.2). Поэтому при необходимости состав
показателей качества (3.20) и (3.21) можно корректировать применительно
158
к решению конкретной задачи экстремального управления, не меняя
варианта модели Q(V,X).
3.2.4. Анализ функций качества обобщенной
машины переменного тока
Рассмотрим характеристики обобщенной машины переменного тока
как объекта экстремального управления. В качестве примера возьмем
модель, приведенную на рис. 3.5.
т со
Ur Уравнения Функции
У>я . двигателя качества
р . (3.18) Ur. (3.20) н (3.21) *7мех
Рис. 3.5. Математическая модель ОМПТ как объекта
экстремального управления
Независимыми внешними воздействиями модели (3.18) являются
векторы V = ,/?) и Х=(/И, <У). Полагаем, что момент ТП и
скорость СО заданы условиями технологического процесса, а скольжение
Р, модуль 1//т и аргумент вектора Ч7™ - варьируемые управления.
Расчет и анализ характеристик W; =W;(V, X) будем производить
при изменении одного из компонентов вектора V = ([/т5Ц^т,/?) и
условии, что другие компоненты этого вектора, а также компоненты
вектора Х=(/и, со) фиксированы.
На рис. 3.6 и 3.7 представлены характеристики двигателя
переменного тока с фазным ротором мощностью 1000 кВт [ИЗ]. В
принятой системе относительных единиц двигатель имеет следующие
параметры: rs - rr =0,0116, lstJ - lra =0,093. В базовом режиме
двигателя б?б=0,75, т5=1, /?б=0,25, ^стб=1,11, im6 =0,354 и
Lfy б=Н),073 эл. радиан.
Показатели качества, рассчитанные при фиксированных значениях
со, т, Р и цст, равных их значениям в базовом режиме, и изменении
приведены на рис. 3.6. Результаты расчета тех же показателей
159
качества, но при изменении у/т и фиксированных значениях со = со§,
т ~ -тб > Р — $5 и Ц//т ~ ~^тб представлены на рис. 3.7.
а - при т = тб; б - при т = —т§
Рис. 3.7. Зависимости показателей качества ОМПТ от у/т:
а-прит = тб; =-^m6;
б-прит = -т5;
160
Как видно, зависимости показателей качества как от аргумента ,
так и от модуля у/т вектора главных потокосцеплений имеют
экстремальный характер. Изменение момента нагрузки и скорости
двигателя относительно базовых значений приводит к смещению
экстремумов. При этом экстремальный характер зависимостей показателей
качества от варьируемых управлений качественно сохраняется.
Вместе с тем заметим, что при общем экстремальном характере
зависимостей их аналитические свойства изменяется. Так, например, при
сравнении графиков токов статора is и ротора ir, приведенных на рис. 3.6
и 3.7, видно, что функции и обладают свойством
выпуклости в исследуемом диапазоне изменения 1//т. В то же время
функции is ) и ir ) можно считать выпуклыми только в
окрестности точек экстремумов. Нельзя не заметить также высокую
чувствительность токов статора и ротора к изменению пространственного
положения вектора главных потокосцеплений.
Свойства двигателя при изменении абсолютного скольжения /3
вектора Ts иллюстрируются зависимостями, приведенными на рис. 3.8.
Как видно, изменение только /3
влияет на реактивные (qs и qr),
следовательно, и полные (ss и sr)
мощности, а также напряжения
обмоток статора us и ротора иг. При
этом показатели качества, зависящие
от величины (3, изменяются линейно.
Рис. 3.8. Зависимости показателей
качества ОМПТ от /?
Таким образом, обобщенная машина переменного тока как объект
оптимизации обладает экстремальными характеристиками по многим
показателям не только в двигательном, но и в генераторном режиме
работы. Приведенные характеристики позволяют выявить свойства
функций качества, необходимые для обоснования метода решения задачи
экстремального управления. Видно, что функции качества обобщенной
машины переменного тока являются унимодальными, т.е. имеют один
экстремум. Они непрерывны и дифференцируемы. Отметим также
161
чувствительность большинства показателей качества к изменению
управлений \j/m ,ит и /3. Важным выводом является то, что изменение т
и 6) влияет на поведение экстремальных характеристик. При этом
координаты точек экстремумов смещаются, а оптимальные значения
управлений в общем случае не совпадают и существенно отличаются от
своих базовых значений.
3.3. Асиихронизированный синхронный двигатель
как объект экстремального управления
3.3.1. Модели асинхроиизированного синхронного двигателя
для задач оптимизации
В этом случае обмотка статора асинхронного двигателя жестко
подключается к питающей сети, а в цепь ротора вводится источник
регулируемой ЭДС, с помощью которого энергия скольжения либо
возвращается в сеть, либо используется для совершения полезной работы.
Схемы асинхронного электропривода с включением в цепь ротора
источников преобразования энергии получили название каскадных
схем [38]. Рассмотрим асиихронизированный синхронный двигатель
(АСД) с преобразователем частоты в цепи ротора.
Управление асинхронным двигателем со стороны ротора налагает на
модуль us и угловую частоту O)s вектора напряжений обмотки статора
постоянные условия: us = const и a)s = const.
Анализ различных вариантов моделей АСД показывает, что при
решении задач экстремального управления целесообразно иметь в составе
независимых внешних воздействий скорость (О, момент т, модуль us и
частоту iaos вектора напряжений. Такие модели удобны тем, что т и CD
заданы условиями технологической задачи, a us и CDS определены
напряжением и частотой питающей сети, т.е. являются известными
величинами. Следовательно, число управляющих воздействий
уменьшается с трех до единицы (д = 1). При выборе единственного
варьируемого воздействия можно использовать аргумент (либо модуль)
векторов потокосцеплений, токов или напряжений. Причем важно
отметить следующее обстоятельство: ввиду того, что us и C0s входят в
состав внешних воздействий, то модули (либо аргументы) этих векторов
становятся зависимыми величинами и их вычисление связано с решением
квадратного либо биквадратного уравнений. Эта особенность в свою
очередь порождает проблему неоднозначности задач оптимизации
режимов АСД при управлении по цепи ротора.
162
В табл. 3.2 представлены варианты сочетаний, где в качестве
варьируемых управлений приняты аргументы векторов главных
потокосцеплений (Ц^), полных потокосцеплений ), токов (Ц- ) и
напряжений (vu . ) обмоток статора (j = S ) и ротора (j = г).
Таблица 3.2
Модели АСД при управлении по цепи ротора
и характер решения экстремальной задачи
Сочетание независимых внешних воздействий Ориентирующий вектор
5s L-3 1г и. Ur
н ни н ни н ни
{pVs,us,O)s,X} Н ни н ни н ни
{vVr,us,(os,X) НИ ни ни ни ни ни
<Pis,us,a)s,X} н н ни ни н ни
<oir,us,6)s,X) ни ни ни ни ни ни
(uUs,us,6)s,X) н н ни н ни ни
{vUr,us,a>s,X} ни ни ни ни ни ни
Для отображения характера решения экстремальной задачи в
таблице приняты следующие обозначения: Н - неоднозначное решение
экстремальной задачи без обращения к итерационной процедуре
определения магнитного состояния машины; НИ - неоднозначное решение
экстремальной задачи с обращением к итерационной процедуре
определения магнитного состояния машины.
Очевидно, что при решении задач экстремального управления
следует отдавать предпочтение тем вариантам, при которых не требуется
обращения к итерационной процедуре. В теории и практике управления
АСД находит применение принцип ориентации систем координат по
вектору напряжений Us либо по вектору полных потокосцеплений Ts
обмотки статора [38, 90]. Как видно из табл. 3.2, в каждом из этих случаев
существует три варианта, удовлетворяющих этому условию. Приведем
примеры построения проблемно-ориентированных моделей АСД, не
требующих применения итерационных процедур.
163
Рассмотрим модели АСД в ориентированных по векторам Us и Tj
системах координат с сочетанием входных воздействий ,us,d)s,X.).
В этих моделях варьируемым управлением является аргумент ,
определяющий сдвиг вектора Тт относительно опорного вектора (Uy
либо Ту).
Модель {ify ,us,cos,'X.) в ориентированной по вектору Uy
системе координат. При условии ориентации системы координат
б)к = d)s, usx =us и usy = 0 из уравнений установившегося режима (3.4)
найдем составляющие вектора напряжений статора:
usx ~us I
cosum)
rs
^sy — ® ’
(3.22)
где эквивалентное сопротивление
Уравнение (3.22) выражает связь между величинами, входящими в
состав независимых внешних воздействий. Как видно, при выборе в
качестве варьируемого управления аргумента модуль у/т вектора
Тт становится зависимой величиной и наоборот. Потокосцепление ут
определяется при заданных значениях ТП, us,cos и путем решения
квадратного уравнения связи
Г)
ау/т +Ьу/т + с = 0,
(3.23)
где
a = G)s'i
164
b = b(vlffm) = us(sinv4,m +a)sl-^cosuv/my,
rs
( r)2/2 A
c = c(m)=m rs+—-s—— .
I rs J
Уравнение (3.23) имеет два действительных корня. Дополнительное
исследование корней уравнения (3.23) показывает, что из физического
смысла задачи следует взять
Vm = Vm (т> Цут) = (2fl) 1 (~Ь + л/б2-4ас), (3.24)
где
бГ2„ :ш,, Ь2-4ас>0
,и rm uVm т I
В результате определяется вектор главных потокосцеплений
т
Vmx
df [У ту
а затем вектор токов статора
^sin<vm
(3.25)
I5 =Y53[(E-^B)Us.-^.(B + ^E)]Tm (3.26)
Г Г ’
rs rs
где Xs э - матрица эквивалентных проводимостей, У5 э = r's^Е.
Остальные уравнения модели записываются в следующем виде:
W _Ш I Т.
Л т s >
I =F"1'P
иг=(б>5-б>)втг+кл-
(3.27)
165
Таким образом, модель АСД в ориентированной системе координат
по вектору Uj описывается системой уравнений (3.24) - (3.27).
Модель (^т ,us,d)s,X) в ориентированной по вектору Tj
системе координат. При условии ориентации системЬ! координат
бУк=б)у, ysx=Vs и Vsy = О из уравнений режима (3.4) найдем
составляющие вектора полных потокосцеплений
7 w
VSX=VS=-^—^ (3-28)
V ту
=0-
Исключив из (3.28) с помощью уравнений
usx ~ rshx>
usy ~ ^Wsx + rs^sx>
i$x ~~^,4fmy —IscrVmx’
isy ~ ~^stjVmy
составляющую y/sx, получим биквадратное уравнение
ays* + bi/s2 +c = 0, (3.29)
где
a = a^m ) = Sin2 °Vm 5
b = Ъ(т, и^т) = [2rsm(rs cos+ lsa<os sin ) -
C = C(m) = + l^aG)2s )m2.
Решением уравнения (3.29), удовлетворяющим физическому смыслу
задачи управления АСД, является
166
Vm = <М^Ци) = [(2а) 1(-6-л/б2-4ас)]1/2,
(3.30)
где
meQm; 1>„еГ2„ : щ„ \Ь2 -4ас>0
т т uVm I Vm I
В результате получаем вектор главных потокосцеплений:
ф =
х т
м\уту
y/msin^m
(3.31)
Уравнения напряжений, токов и полных потокосцеплений АСД для
этого случая принимают следующий вид:
Т, 0]г;
1.=Л:
Ш _ Ш I Т I .
Л г Л т ~ ^го-^г ’
U5 — + R Л с >
□ □ □ О о '
Ur =(б>5 -б^ВЧ7,. +RzIr.
(3.32)
Таким образом, модель АСД в ориентированной системе координат
по вектору Ts описывается системой уравнений (3.30)-(3.32).
На рис. 3.9 изображена схема, обобщающая варианты моделей с
сочетанием входных воздействий , us, a>s, X).
Уравнения Is
АСД =
(3.30)... (3.32) иг
Рис. 3.9. Модель АСД при
сочетании входных воздействий
V=l>%
167
3.3.2. Характеристики асинхронизированного синхронного двигателя
На рис. 3.10 изображена схема модели, используемая при расчете
характеристик АСД как объекта оптимизации. На рис. 3.11 приведены
зависимости показателей качества w;- от угла 1)^, рассчитанные при
фиксированных значениях (О, т, us и cos для двигателя мощностью
1000 кВт. Расчеты выполнены при значениях б) = б>б=0,75, т = т§=\,
~ М$б~ 1>16 И d)s — СОsq~ 1.
Рис. 3.10. Схема модели АСД как объекта
экстремального управления
Рис. 3.11. Зависимости показателей качества АСД от угла :
а - при т = т5; б - при т = -тиб
Как видно, АСД обладает экстремальными характеристиками.
Сравнение экстремальных характеристик АСД и ОМПТ показывает более
высокую чувствительность экстремальных характеристик к изменению
168
электрической машины с жестким подключением обмотки статора к
сети и управлением по цепи ротора. Существенно отличаются значения
, при которых функции качества имеют экстремумы. Заметим также,
что экстремумы токов и суммарных электрических потерь в АСД смещены
вправо, а напряжение и реактивная мощность ротора - наоборот - влево от
точки . В то же время для АСД экстремумы тех же функций качества
достигаются при диаметрально противоположных условиях.
В генераторном режиме (б) графики токов статора и ротора
практически являются зеркальным отражением соответствующих
графиков токов АСД, работающего в двигательном режиме.
В общем экстремальные характеристики АСД при управлении по
цепи ротора качественно совпадают с экстремальными характеристиками
ОМПТ.
3.4. Асинхронный двигатель с короткозамкнутым ротором
как объект экстремального управления
3.4.1. Модели асинхронного двигателя с короткозамкнутым ротором
для задач оптимизации
Рассмотрим асинхронный двигатель (АД) с короткозамкнутым
ротором, процессы в котором описываются системой уравнений (1.16).
Примем в ней оператор р = 0 и скорость вращения системы координат
й)к = (Ds. В результате получим исходные уравнения для построения
проблемно-ориентированных моделей АД с короткозамкнутым ротором:
U. =6kBTs+RsI •
ш _ш ।т т .
*5 т т SC1! ’
'Pr='Pw+LwIr; (3.33)
a> = a>s-p-, m = mc.
Наличие короткозамкнутой обмотки ротора, что отражается в
уравнениях электромагнитных контуров системы (3.33) присутствием
нулевого вектора, снижает возможности АД в плане оптимизации ее
169
режимов. Отсутствие возможности управления АД со стороны обмотки
ротора сокращает число независимых внешних воздействий до и =3 и
размерность вектора управлений до #=1. Анализ системы уравнений
(3.33) показывает возможность использования в качестве варьируемого
воздействия V = (v) следующих скалярных величин: скольжения (/?),
. частоты (<У5), а также модулей векторов главных потокосцеплений (^те),
полных потокосцеплений («$ и токов (is и ir) и напряжения (ws). В
главе 2 было показано, что при сочетаниях (ДХ) и (<У5,Х) задача
экстремального управления имеет однозначное решение. Причем расчет
магнитного состояния АД ведется без использования инерационной
процедуры. Этим же условиям удовлетворяют модели (ysr, X) и {ir, X).
Оставшиеся четыре варианта требуют разрешения неоднозначности задачи
экстремального управления.
При решении конкретных задач оптимизации АД с
короткозамкнутым ротором наибольшую практическую ценность имеют
модели {/3, X), (iyr, X) и (ir, X).
Следует заметить, что в моделях АД как объектов оптимизации
важная роль отводится уравнениям, записанным в системе координат,
ориентированной по вектору потокосцеплений ротора. В этом случае
модель машины имеет наиболее простой вид. При условии ориентации
у/гх = у/г; = 0, уравнения модели (/3, X) принимают следующий вид:
Ir=sgn(m)[0 (r^m/3')l,2f ;
BTr = -/?-1RrIr ;
Тт = Wr -LrCTIr ; (3.34)
I =F hP
±т т * т 9
I.s ~ >
W _ W I Г Т •
х s т ’
В этой модели варьируемым управляющим воздействием является
абсолютное скольжение /3. При решении экстремальных задач без
ограничений областью изменения скольжения служит множество
действительных чисел за исключением /?=0. Для перехода к моделям
(i/sr,X) и (гг,Х) в системе уравнений (3.34) нужно /3 заменить
выражениями (3 = гг\р~2т и /3 = rrm Ч2 соответственно.
170
Модель (^Г,Х) примечательна тем, что в ее уравнениях
исключается деление на ноль при т=0. В связи с этим такая модель
полезна при расчете характеристик, включая точку т—0. Действительно,
после подстановки вместо /3 выражения /3 = ггу/г 2т и последующего
преобразования уравнений токов и потокосцеплений ротора получим
/3 = ггу~2т;
1Г = -иг[О
Тте=Тг-Ьго1г; 3.35)
*з 1т лг ’
W _ W _i_T т .
х х т ' >
и5=((У + /?)ВТ5+КЛ.
В то же время, как видно из (3.35), при исследовании режимов АД должна
быть исключена точка ^г=0.
Модель (z'r,X) удобна для расчета характеристик в системах
управления с заданием тока ротора [138].
3.4.2. Функции качества и характеристики асинхронного двигателя
с короткозамкнутым ротором
Показатели качества АД с короткозамкнутым ротором записываются
по аналогии с (3.20)-(3.21) машины двойного питания и, учитывая
особенность схемы соединения обмотки ротора, могут принимать
следующий вид:
w2=U5«U5;
ir =Ip «1Г>
^r2-Tr.Tr;
Ps ~ Us
APltS ~ * -G >
is Is*Is’
z2 =1 «I •
m m
Рмех (3-36)
4s=sgn(ft)JU5.BI5;
cosp5 =ps/ss-
&Рмг ~ГДг
171
АРм +АРмг;
Рмех Рмех /Ps •
При исследовании характеристик удобно пользоваться моделью
{/3, X). Для этого случая схема модели АД с короткозамкнутым ротором
как объекта экстремального управления изображена на рис. 3.12.
ml а>\
д Уравнения АД Is . Функции
с к.з. ротором качества
(3.34) Ur. (3.36)
Рис. 3.12. Схема модели АД с короткозамкнутым ротором
как объекта экстремального управления
На рис. 3.13 представлены зависимости тока статора is, активной
ps, реактивной qs и полной ss мощностей, а также cos (ps асинхронного
двигателя от абсолютного скольжения /3. Они рассчитаны для двигателя
мощностью 4,5 кВт при фиксированных относительных значениях O)=(Oq,
т=т§ - для двигательного режима (а) и cd=(Oq, т = —т^ - для
генераторного режима (6). Исследование характеристик в генераторном
режиме АД представляет интерес для электромеханических систем с
рекуперируемыми преобразователями частоты, так как в них возможна
отдача электрической энергии в сеть. Варьирование скольжения при
заданных технологических параметрах (О и т позволяет выявить условия
минимизации потерь, тока статора, напряжения, достижения максимума
коэффициента мощности и другие условия. Как видно, показатели
качества АД имеют экстремальный характер.
В частности, из рис. 3.13 видно, что при базовой нагрузке
экстремумы тока статора и активной мощности достигаются при
существенно меньших значениях скольжения (Д°</?д) и главном
потокосцеплении, превышающем базовое значение (^° >^тед). Реально
для этого необходимо некоторое повышение питающего напряжения в
сравнении с его базовым значением (м° > usq).
Заметим также, что в области номинального скольжения при
увеличении напряжения статора us потребление тока статора is и
активной мощности ps уменьшаются.
172
а б
Рис. 3.13. Зависимости показателей качества от скольжения /3
для АД мощностью 4,5 кВт:
а - при т=-т^; б-прит=т^
При изменении момента т и скорости (У в широких пределах
экстремальные характеристики показателей качества смещаются. При этом
значения координат точек экстремумов могут существенно отличаться от
координат базового режима. В заключение отметим, что свойства АД с
короткозамкнутым ротором как объекта экстремального управления
изучены достаточно полно [66, 78, 131]. Алгоритм расчета экстремальных
характеристик на цифровой модели с учетом насыщения асинхронного
двигателя приведен в работе [124].
3.5. Синхронные двигатели как объекты экстремального управления
3.5.1. Уравнения установившегося режима синхронного двигателя
с продольно-поперечным электромагнитным возбуждением
Рассмотрим двухфазный синхронный двигатель (СД) нормального
исполнения с двумя ортогонально размещенными на индукторе обмотками
возбуждения. Для описания процессов в двигателе используем уравне-
ния (1.33). Примем в этих уравнениях р = 0. В результате получим
173
ufr = (d&¥fr + Rfrlfr ; tty = Rflf ;
+ T^=T^+L%I^; (3.37)
rr/Gr_-rrGr'tGr . jGr_-jGr . тбУ ,
--^w Lm > lm “h +1/ >
m = BT^r • lfr; m = mc; a>-a>..
ffl й ' U 7 О
При построении проблемно-ориентированных моделей СД с
продольно-поперечным электромагнитным возбуждением будем полагать,
что обмотки двигателя питаются от автономных управляемых источников.
Для определения числа независимых внешних воздействий воспользуемся
формулой (3.5). Развернем по компонентам двухмерных алгебраических
векторов систему уравнений (3.37). В результате найдем ису =14 и
пс п = 19. По формуле (3.5) в итоге получим п =5. Аналогичный результат
следует из структурной схемы двухфазного СД, приведенной на рис. 1.10.
Вычитая из п число компонентов вектора X, находим размерность
вектора управлений #=3. Заметим, что такое же число независимых
внешних воздействий и размерность вектора управлений имеет двигатель
переменного тока при управлении по цепям статора и ротора.
3.5.2. Модели синхронного двигателя с продольно-поперечным
электромагнитным возбуждением для задач оптимизации
При построении моделей СД как объекта оптимизации возникают
общие с асинхронным двигателем переменного тока проблемы. Они
связаны с тем, что при q~3 и многочисленных векторных величинах,
характеризующих состояние модели, трудно отдать предпочтение какому-
либо одному составу вектора управлений. К тому же в уравнениях (3.37),
кроме момента т и скорости G), отсутствуют в явном виде скалярные
величины, которые можно использовать в качестве составляющих вектора
управлений. Таким образом, состав вектора управлений проблемно-
ориентированной модели СД формируется из компонентов разных
векторов. В связи с наличием большого числа векторов остановимся далее
на моделях, обеспечивающих однозначное решение задачи экстремального
управления, в которых варьируемыми величинами служат вектор главных
потокосцеплений (либо вектор намагничивающих токов 1^г) и
аргумент одного из радиусов-векторов полных потокосцеплений (либо
токов) обмоток якоря или индуктора. Таким образом, будем иметь
следующие варианты сочетаний компонентов вектора управлений: для
неявнополюсных СД - ( Vj, , X) и явнополюсных СД - (l)j, , X),
174
где j — индекс аргумента соответствующего радиуса-вектора,
j . Важно заметить, что такие модели удобны при анализе
оптимальных режимов насыщенных синхронных машин.
Теперь поясним подход, позволяющий составить уравнения
проблемно-ориентированной модели СД. Рассмотрим пример построения
модели Здесь - аргумент радиуса-вектора полных
потокосцеплений обмотки якоря, т.е. угол, определяющий положение
вектора полных потокосцеплений *Ps относительно положительной
полуоси Od системы координат Odq. Возьмем в качестве исходного
уравнение электромагнитного момента в базисе Gr, записанное через
составляющие векторов главных и ymq) и полных и i//Sq)
потокосцеплений обмотки якоря:
™ kV'mdV'sq - V'mqV'sd ) •
Выразим составляющие потокосцеплений Ц/тс[, Vsci к WSq
через модули и y/s) и аргументы (Цуи и ) векторов и *Р$:
т = ФУтУз (sin cos ~ cos vVs sin . (3.38)
Из уравнения момента (3.38) находим неизвестную величину модуля
вектора полных потокосцеплений обмотки якоря:
г 5 1$<Т . , , •
^sinOv,
В результате определяется вектор полных потокосцеплений обмотки якоря
'Р^г — cos y/s sin ]T. Имея векторы 'P^r и KP^r, теперь
можно последовательно выразить векторы преобразованных
IGr т Gr т Gr
т , токов якоря и индуктора 1 у s вектор
полных потокосцеплений обмотки индуктора 'Ру^, а также векторы
напряжений обмоток якоря индуктора Uyr. Таким образом, при
175
сочетании получим модель, уравнения которой имеют
следующий вид:
sin(l^ - )]4;
'J'f''=^[cosi^j sini^s]T ;
тСг _riT^r-i-lwGr.
(3.39)
TGr _ -tGr yGr .
lf -1s »
xr/Gr _ xr/Gr ,jGrjGr .
+Lfa1f >
U^=«BT^+R^;
Модели, в которых вместо варьируемого вектора 'Р^ используется
-у Gr
вектор результирующих намагничивающих токов 1т , отличаются от
(3.39) тем, что в них вместо уравнения намагничивающих токов
=[F^]-1T^ будет присутствовать уравнение главных
потокосцеплений обмоток .
Важно заметить, что в рассматриваемых моделях насыщенных
явнополюсных СД с сочетанием вектора управлений ,Х)
методика расчета магнитного состояния предполагает использование
итерационной процедуры (см. гл. 1). Вместе с тем при учете насыщения
неявнополюсных СД как в моделях типа ,Х), так и в моделях
типа (Uy,I^,X) не требуется обращения к итерационной процедуре
определения магнитного состояния.
3.5.3. Функции качества синхронного двигателя
с продольно-поперечным электромагнитным возбуждением
Количественной оценкой характеристик оптимизируемых режимов
СД могут служить показатели, аналогичные по содержательному смыслу и
форме записи выражениям (3.20) и (3.21) асинхронной машины при
двустороннем питании. Действительно, синхронные двигатели с
продольно-поперечным электромагнитным возбуждением отличаются от
176
асинхронных двигателей при двустороннем питании тем, что их обмотки
возбуждения подключаются к источникам постоянного напряжения.
Поэтому уравнения СД могут быть получены как частные случаи из
уравнений обобщенного двигателя переменного тока, если принять в них
частоту напряжений ротора равной нулю. Отличие моделей СД состоит в
том, что в связи с питанием обмоток возбуждения от источников
постоянного напряжения объективно существует явно выраженная
платформа отсчета (продольная ось машины). Благодаря этому наиболее
удобный для исследований вид уравнений СД имеет в фиксированном
относительно индуктора базисе Gr. Представление переменных в базисе
==>
Gr в целом сохраняет форму записи показателей качества СД и не влияет
на конечный результат вычислений. Особенность состоит лишь в том, что
в показателях качества СД отсутствует одна из энергетических
характеристик - реактивная мощность, потребляемая со стороны обмоток
возбуждения, так как питание их осуществляется от источников
постоянного напряжения.
Итак, первую группу составим из показателей качества,
характеризующих загрузку активных материалов конструкции двигателя и
использование по току и напряжению силовых источников питания в
процессе электромеханического преобразования. Их запишем в виде
==>
скалярных квадратов алгебраических векторов в базисе Gr:
u}=U^.U^r;
(3.40)
.,z2 _ xijGr хт/Gr. 2 __ -qjGr vr/Gr.
./z2 — VuGr xt/Gr , j2
rm * m * m ’ lm ~ lm lm
Вторая группа, как отмечалось ранее, включает показатели качества,
характеризующие режимы работы СД как потребителя электрической
энергии и результат электромеханического преобразования подводимой
энергии, а также показатели, являющиеся мерой эффективности и
экономичности преобразования энергии электрическим двигателем. Для
синхронного двигателя с продольно-поперечным электромагнитным
возбуждением эти показатели принимают следующий вид:
177
^=sgn(^)U?-.BI^; (3.41)
Ъ = ush ’ COS^Ty — PsjSs ;
Apms =rsifr-isGr;
Дрм/ =7rfMI^.MI^ + 79NI^.NI^;
APm=APms +ДРм/> 7мех ~ Рмех /^Ps + Pf) •
Напомним, что фигурирующие в выражении Дрму вещественные
матрицы
3.5.4. Диализ характеристик синхронного двигателя
с продольно-поперечным электромагнитным возбуждением
На рис. 3.14 изображена схема математической модели СД как
объекта экстремального управления. В этой модели момент тп и скорость
й) заданы условиям технологического процесса. Варьируемыми
управлениями, с помощью которых производится оптимизация режимов
СД, являются модуль \}/т и аргумент ' вектора главных
потокосцеплений 'Рот, а также аргумент вектора полных
потокосцеплений обмотки якоря 'Pi. Таким образом, в данном примере
для исследования характеристик СД используется модель с вектором
управлений V = (, 'Р^г ).
Рис. 3.14. Математическая модель СД с продольно-поперечным
электромагнитным возбуждением для задач оптимизации
178
На рис. 3.15 и 3.16 приведены характеристики неявнополюсного СД
мощностью 116 кВт с базовыми данными и параметрами, приведенными в
работе [16]. В принятой системе относительных единиц двигатель имеет
следующие значения параметров: rs =0,024, lsa =0,075, iyd =0,035,
=0,025, lsda =0,175, lSqa =0,075 и lm =2,08. В базовом режиме
тб = 1, £Об = 1, i) 6=Q,^m6=\w.v,j/s6 - 0,075 эл. радиан.
Вначале варьировался угол , определяющий положение вектора
относительно оси Od. Расчеты электрических и электромагнитных
характеристик (рис, 3.15, а) выполнены при фиксированных значениях О),
т, \f/m и , равных их значениям в базовом режиме СД (а> = 1, т = 1,
\]/т = 1 и =0). Как видно, показатели качества имеют экстремумы.
Значения угла , доставляющие экстремумы функций качества, в общем
случае не совпадают. В окрестности точек экстремумов функции качества
и их производные непрерывны по переменной (исключением является
(/у). Левые ветви графиков относительно экстремальной точки восходят
значительно круче правых ветвей. При этом свойство выпуклости
выполняется лишь в сравнительно узкой области изменения варьируемой
координаты .
Результаты расчетов энергетических характеристик СД,
выполненные при тех же условиях, представлены на рис. 3.15, б. Как
видно, все они имеют явно выраженный экстремальный характер.
Заметим также, что в базовом режиме энергетические показатели СД
с продольно-поперечным электромагнитным возбуждением достаточно
близки к своим оптимальным значениям.
Обратим внимание на особое поведение функции реактивной
мощности qs, потребляемой из сети со стороны статора. В базовом
режиме наблюдается незначительное потребление реактивной мощности.
Точка, в которой мощность qs=0, несколько смещена относительно
координаты При дальнейшем увеличении реактивная
мощность принимает отрицательное значение с экстремумом функции при
значении угла , существенно превышающем .
При другом фиксированном значении модуля 1[/т вектора и
варьировании свободной координатой 1)^ экстремальные характеристики
179
смещаются. При этом изменяются значения функций в экстремальных
точках.
Рис. 3.15. Зависимости показателей качества от V,,,
rs
неявнополюсного СД с продольно-поперечным возбуждением
Уменьшение основного потока (главного потокосцепления)
приводит к смещению экстремальных точек в область углов >^5б-
Заметно увеличиваются значения многих функций качества в
экстремальных точках.
Важно отметить, что смещение экстремумов, вызванное
уменьшением потока, приводит к увеличению потребления при значении
не только токов обмоток, но и активной, реактивной и полной
мощностей. Возрастают также потери в СД, что свидетельствует о
чувствительности функций качества к изменению потока.
Характер поведения функций качества при изменении потока
выявляют исследования зависимостей показателей при постоянстве
Оу,т = = и ваРьиРовании Ч'т в широких пределах. Такие
зависимости приведены на рис. 3.16. Как видно, они имеют явно
выраженные экстремумы.
С практической точки зрения важны результаты исследования
свойств СД как объекта экстремального управления при изменении
момента т и скорости со. Анализ электрических, электромагнитных
(рис. 3.16, а) и энергетических характеристик (рис. 3.16, б) показывает
смещение экстремальных точек при изменении т w. со. При этом
180
экстремальный характер поведения функций качества сохраняется.
Изменение со влияет только на напряжение якоря и энергетические
характеристики СД.
а б
Рис. 3.16. Зависимости показателей качества от модуля у/т
неявнополюсного СД с продольно-поперечным возбуждением
Таким образом, варьирование координатами <//w, и при
заданных технологическим процессом моменте т и скорости со позволяет
выявить наличие и условия достижения экстремумов функций качества СД
с продольно-поперечным электромагнитным возбуждением.
Анализируя свойства экстремальных характеристик, нельзя не
заметить аналогию свойств неявнополюсного СД с продольно-
поперечным электромагнитным возбуждением и ОМПТ, работающей в
синхронном режиме.
3.5.5. Модели синхронного двигателя с продольным
электромагнитным возбуждением для задач оптимизации
Данный тип синхронного двигателя имеет одну обмотку
возбуждения. Поэтому для моделей СД с продольным электромагнитным
возбуждением число независимых воздействий и =4 и размерность
вектора управлений q =2. Таким образом, отсутствие поперечной обмотки
возбуждения снижает возможности СД как объекта управления.
Анализ различных представлений проблемно-ориентированных
моделей СД показывает практическую целесообразность использования в
181
оптимизационных задачах модели в которой вектор
управлений V = (if/m, Ц? ). В этом случае задача экстремального
управления для неявнополюсных СД решается однозначно. Причем
магнитное состояние машины задается непосредственно составляющими
вектора управлений.
При наличии аппроксимирующей функции для кривой
намагничивания im = im (l//m) аналогичный эффект для неявнополюсных
СД дает модель (1^Г,Х), где вектор управлений имеет своими
компонентами модуль im и аргумент l)im вектора намагничивающих
токов Iт.
Использование других вариантов моделей не создает того
положительного эффекта (с точки зрения вычислительных затрат), какой
можно получить в случае применения моделей и X). Так,
например, модели (УР^Х) и (1^Г,Х) хотя и обеспечивают однозначное
решение экстремальной задачи, однако требуют обращения к
итерационной процедуре при определении магнитного состояния
двигателя. Модель (U^r,X) требует разрешения неоднозначности и
обращения к итерационной процедуре при определении магнитного
состояния двигателя.
Для насыщенных явнополюсных СД выбор модели для решения
С'г
задач оптимизации приводит в варианту (1^ , X).
Рассмотрим примеры моделей СД с продольным электромагнитным
возбуждением, представляющих наибольший практический интерес.
Модель (Ч^Г,Х). В этом варианте система уравнений СД
записывается в следующем виде:
= ['"/«'», Of;
_ тг(?Г -rGr
(3.42)
xyGr _ xyGr , ж Gr -rGr
uf = R^I^ .
182
В системе уравнений (3.42) варьируемая векторная величина
задается составляющими вектора главных потокосцеплений y/md и в
системе координат, вращающейся с угловой скоростью индуктора. При
расчете характеристик составляющие Vmd и Ч'тд представляются в виде
зависимостей от модуля <//w и аргумента вектора :
п/Gr _ ^md
т tt\ymq
Угол отсчитывается от продольной оси вращающейся системы
координат Odq и характеризует в ней пространственное положение
vr/Gr
вектора .
Модель (1®Г,Х). В этой модели для поиска оптимального режима
используется вектор результирующих намагничивающих токов 1 т .
Система уравнений СД записывается в следующем виде:
~ гт >
1°' Of;
jGr vGr jGr.
Ъ ~1т ’
w/Gr _ mGr ,rGr -rGr .
T« Tm "r >
mGr _ w/Gr ,T Gr TGr
V ~ Ъй + Lfalf >
(3.43)
Варьируемая векторная величина
IGr =
m df
imd
lmq
183
может задаваться составляющими imj и imq или модулем im и аргументом
радиуса-вектора . Угол Vim характеризует положение вектора
в системе координат Odq.
3.5.6. Анализ характеристик синхронного двигателя с продольным
электромагнитным возбуждением
Показатели качества СД с продольным электромагнитным
возбуждением имеют такой же состав и форму представления, что и
показатели качества (3.41) и (3.42) синхронного двигателя с продольно-
поперечным возбуждением. Исключением является лишь выражение
суммарной электрической мощности потерь tbp^f , которое для СД с
продольным электромагнитным возбуждением имеет вид
ДРм/ = rf^f
На рис. 3.17 изображена схема модели Варьируемыми
входами модели являются модуль у/т и аргумент Vm вектора главных
потокосцеплений.
т
Ут ? Уравнения ж ж Функции Us г i2 *s х
Vur СД м качества СД
(3.42) ^Умех
Рис. 3.17. Математическая модель СД с продольным электромагнитным
возбуждением как объекта экстремального управления
С помощью этой модели произведен расчет характеристик
неявнополюсного СД мощностью 116 кВт, базовый режим которого задан
следующими параметрами: mg=l; d)g=l; usg =1,027; isg =1;
VS6 =1>°0; Vm6 =1; ir6 =1Л1; =1,097; =1,125 эл.рад.
На рис. 3.18 приведены зависимости показателей качества от угла
рассчитанные при фиксированных значениях a> = a>g, т — тб,
Vm =Vm6-
184
Рис. 3.18. Зависимости показателей качества от для СД
гт
с продольным электромагнитным возбуждением
Как видно, токи якоря is и индуктора iу, напряжение индуктора иу
(рис. 3.18, а), активные мощности ps, pj- и р, полная мощность SJ5
потребляемая со стороны якоря, а также электрические потери ЛрМ1У,
&Рм/ и (Рис- 3.18, б) представляют собой характеристики с весьма
пологими экстремумами. Эти же функции качества являются выпуклыми и
непрерывными. В то же время напряжение статора us, полные
потокосцепления обмоток якоря ips и индуктора (^у, а также реактивная
мощность СД обладают остро выраженными экстремумами. Их нельзя
отнести к классу выпуклых функций, хотя сами они непрерывны в
исследуемом диапазоне изменения переменной о... .
г т
Изменение момента нагрузки СД с продольным электромагнитным
возбуждением смещает экстремальные характеристики преимущественно в
вертикальном направлении: вниз либо вверх относительно положения
характеристик при моменте т = тб.
Рассмотрим теперь влияние изменения модуля у/т на показатели
качества СД с продольным электромагнитным возбуждением
(рис. 3.19, а и б). Характеристики рассчитаны при фиксированных
185
значениях скорости со, момента т и угла , равных их значениям в
базовом режиме.
Рис. 3.19. Зависимости показателей качества от модуля у/т для СД
с продольным электромагнитным возбуждением
Как видно, функции качества при изменении у/т имеют явно
выраженный экстремальный характер. По своим аналитическим свойствам
они относятся к выпуклым унимодальным функциям с непрерывными
производными по \ут.
3.6. Вентильные двигатели как объекты экстремального управления
3.6.1. Модели вентильного двигателя при произвольной степени
компенсации реакции якоря
Уравнения установившегося режима вентильного двигателя (ВД)
составляются по уравнениям динамики (1.65). Приняв в этих уравнениях
/>=0, получим исходную модель вентильной машины:
и(,=иВ2Ч+НД,;
U9 =R?SI^;
W _ W , Т 1 .
1 а 1 ат ‘ ^аа1а >
186
Y^=MY^+L%I^; (3.44)
Ч-„=АИ)*®;
\yGs _ -r^GsjGso
* m ~^m »
+[A'1(0I) + aKS'1]Ifl;
m^am ’BL: m = mc.
Число независимых внешних воздействий модели ВД найдем из
структурной схемы, приведенной на рис. 1.21. Реальным воздействиям
двигателя в этой схеме соответствуют напряжение внешней цепи якоря
ud, напряжение обмотки возбуждения Му, угол характеризующий
положение вектора коммутационной функции вентильного коммутатора в
неподвижной системе координат Оа/3, и момент статического
сопротивления тс. Таким образом, ВД постоянного тока имеет и =4 и
9=2.
Анализ возможных вариантов моделей показывает, что в связи с
присутствием в уравнениях (3.44) тригонометрических функций от #г-
наиболее удобной для задач оптимизации насыщенных неявнополюсных
ВМ является модель (0г, ц/т В этой модели в состав вектора
управлений V входят аргумент вектора тока якоря и модуль у/т
—>
вектора главных потокосцеплений , т.е. вектор V = (0j, Ц/т ).
Обратим внимание на особенность модели ( , X). При
использовании модуля у/т в качестве одной из составляющих вектора
управлений V аргумент вектора становится зависимой
величиной от т, 0j и у/т:
(cos6>- -ак)т + А(0г-• NI^ - 0. (3.45)
В уравнении (3.45) вектор главных потокосцеплений
wGs = V та
т
К\Ут0
Vm costVm
Vm sintVm
187
При заданных величинах т, 0^, у/т и ак искомым решением
уравнения (3.45) является аргумент . Уравнение (3.45) разрешается
относительно . В результате определяются составляющие у/та и
вектора . Зная , нетрудно найти другие векторные
величины:
1« = 1т/Ч'ату 0]т;
%=A(l?()4'®+L„Ia; (3.46)
=МТ°-' +L%I^;
ий=®В!Ч + НД,;
ttG.s_и Gs-rGs
Uy -Ку 1у
Таким образом, проблемно-ориентированная модель насыщенного
неявнополюсного ВД с произвольной степенью компенсации реакции
якоря описывается уравнениями (3.45) и (3.46). На рис. 3.20 изображена
схема модели ( 0i, у/т, .
Рис. 3.20. Схема модели
неявнополюсного ВД
В составе независимых
управляющих воздействий модели
насыщенных явнополюсных ВД
вместо модуля вектора главных потокосцеплений у/т принимается модуль
вектора намагничивающих токов im. Уравнение связи в этом случае
записывается следующим образом:
(cos^. - ак)т + A(0i)F^I^ • NI^ = 0. (3.47)
Здесь вектор результирующих намагничивающих токов
188
rGs _
m df
lma
imp
COS V;
fft Lm
Уравнение (3.47) решается также численным методом с помощью
итерационной процедуры при заданных значениях т, 0;- и im. Искомой
величиной является угол Ц- , который отсчитывается от положительной
полуоси Оа системы координат Оа/3 и характеризует в ней положение
г,
вектора 1т .
В результате решения уравнения (3.47) при заданных значениях т,
и Ц/т находим величину . Таким образом становятся известными
компоненты вектора намагничивающих токов. Далее с помощью
оператора определяются вектор результирующих намагничивающих
токов и другие величины:
\jjGs_^Gs-rGs ,
I» of;
I^=I®-[A-1(«j) + aiS-1]Ia;
(3.48)
vf = MT®+L%I^;
U°S=R/T®.
На рис. 3.21 изображена схема модели Она учитывает
насыщение явнополюсного ВД по главному магнитному пути и позволяет
исследовать режимы при различ-
ной степени компенсации реакции
якоря.
Рис. 3.21 . Схема модели
явнополюсного ВМ
т со
189
Модель (0f,zw,X) может использоваться не только для
явнополюсных, но и для неявнополюсных ВД постоянного тока. Однако
для неявнополюсных двигателей, имеющих равномерный воздушный
зазор, более предпочтительна модель .
3.6.2. Функции качества вентильного двигателя с произвольной
степенью компенсации реакции якоря
Следуя принятому подходу формирования показателей качества
электрических машин в виде скаляров, инвариантных к преобразованию
систем координат, выделим показатели, характеризующие загрузку
элементов ВД и источников питания обмоток. К этой группе показателей
отнесем напряжение и ток ia внешней цепи якоря, напряжение и j, ток
z'y и потокосцепление i/у обмотки возбуждения и другие. В целях
упрощения выражений показатели качества записываются через
=> =>
соответствующие векторы в базисах Gz и Gs. Например, напряжение
и ток ia внешней цепи якоря целесообразно выразить через переменные в
базисе Gz, а напряжение Му и ток z'y обмотки возбуждения проще
=>
вычислять через векторы в базисе Gj.
Учитывая конструктивные особенности и принятые обозначения для
переменных и параметров обмоток ВД, представим первую группу
показателей качества в виде скалярных квадратов следующих векторов:
ud • U,, i2 = I .1
Wy =UyS»UyS; •2 _vGs tGs t lf~lf ’ (3.49)
Y m x m x m > •2 _jGs tG$ bn ““ *m 9 •
Ко второй группе отнесем энергетические показатели. Практический
интерес представляют потребляемая от источников постоянного тока
суммарная мощность р с ее составляющими и />у, суммарная
мощность электрических потерь Дрм в обмотках, мощность
электрических потерь в обмотках якоря Дрма и возбуждения &puf> а
190
также механическая мощность Дмех и механический коэффициент
полезного действия 7/мех вентильного двигателя:
Рмех=^; p = Urf.Ia+U^.I^;
pd=Vd.Ia-, (3.50)
&Р„а =rd1a^a, *PMf =71/ *1?;
А^м = ^Рма ’ ^мех = Рмех Ip •
На рис. 3.22 изображена схема модели функций качества. В нее
входят выражения (3.49) и (3.50).
Рис. 3.22. Схема модели функций
качества ВД
Функции
качества
ВД
(3.49) и (3.50)
u2d
и
W
Вектор Q входных переменных модели представляет собой
=> =>
величины, записанные в базисах G/ и Gj.
3.6.3. Характеристики вентильного двигателя с произвольной
степенью компенсации реакции якоря
На рис. 3.23 представлена схема модели ВД как объекта
экстремального управления. Входами модели являются момент т,
скорость to, модуль вектора главных потокосцеплений у/т и аргумент ф
вектора токов внешней цепи якоря. В этой модели т и скорость to
рассматриваются как величины, заданные условиями технологической
задачи, а потокосцепление ц/т и угол - как варьируемые управления.
Рис. 3.23. Модель ВД для задач оптимизации
191
В качестве примера рассмотрим характеристики СД мощностью
116 кВт при питании по схеме вентильной машины. Вначале угол 0i был
принят равным нулю. Варьируемой переменной являлось потокосцепление
цгт. Расчеты выполнены для двух фиксированных значений момента
(т - 0,5mg и ) при а> = и ак = 1. Этим условиям соответствуют
характеристики, приведенные на рис. 3.24.
Как видно, при заданных значениях т и со с увеличением
потокосцепления у/т напряжения Uj и Uy, а также ток возбуждения iу
растут (3.24, а). При этом ток якоря ia уменьшается. Такая закономерность
изменения /у и ia обусловливает наличие экстремума результирующего
. Г-i гг
тока i-Jia + if, суммарных активной мощности р и электрических
потерь Дрм.
Обратим внимание на то, что при потоках l/m < WmS активные
мощности и потери слабо критичны к изменению \]/т, т.е. большим
приращениям главного потока соответствуют малые приращения величин
р и Дрм (рис. 24, б). В области, где цгт > кривые этих показателей
качества изменяются более интенсивно. С увеличением потокосцепления
\]/т активная мощность р и суммарные электрические потери Дрм
начинают быстро возрастать. Вызвано это тем, что для обеспечения
192
заданных моментов в насыщенной машине требуются большие токи и,
следовательно, напряжение обмотки возбуждения. Следствием этого
является резкое увеличение потребления активной мощности и
возрастание электрических потерь.
Влияние коэффициента ак, характеризующего степень компенсации
реакции якоря, иллюстрируется кривыми, приведенными на рис. 3.25.
Расчеты выполнены для случая перекомпенсированной машины (ак>1).
Как видно, перекомпенсация машины начинает проявляться при потоках
\ут < Утб’ и чем меньше поток, тем больше влияние этого фактора. Ток
якоря при уменьшении возрастает, а ток возбуждения - уменьшается.
При этом ток якоря увеличивается быстрее, чем снижается ток
возбуждения.
Интересно отметить то, что ВД при перекомпенсации ведет себя как
элемент нагрузки, обладающий специфическим свойством, состоящим в
том, что увеличение тока в фиксированной точке сопровождается
одновременно уменьшением напряжения якоря ud (рис. 3.25, а).
Влияние фактора перекомпенсации проявляется также в повышении
чувствительности результирующего тока i и электрических потерь Дрм к
изменению потокосцепления (рис. 3.25, б). Экстремумы этих функций
качества по мере увеличения коэффициента ак становятся более острыми.
Особенно это заметно при больших моментах ВМ.
193
Следует также отметить, что с увеличением ак область определения
функций качества по переменной ц/т сужается, так как в
перекомпенсированном двигателе (при ак > 1) для развития одного и того
же момента необходим больший поток. Выводы, сделанные для
перекомпенсированного двигателя, справедливы также для
недокомпенсированного ВД (при ак < 1).
Рассмотрим теперь характеристики компенсированного ВД (ак = 1).
Зафиксируем потокосцепление и будем варьировать углом 0^
На рис. 3.26 приведены зависимости показателей качества от угла 0г для
фиксированных значений т = тб и (О = а>б. Как видно, в
базовом режиме (£?гб=0) ток внешней цепи ia имеет локальный
минимум, а напряжение на зажимах - локальный максимум
(рис. 3.26, а). Поворот изображающего вектора токов I а относительно
базового состояния (0^ — 0) в направлении отрицательного отсчета угла
0i приводит к увеличению ia при одновременном уменьшении
напряжения внешней цепи и^. Напряжение Wy и ток г'у продольной
обмотки возбуждения в этом случае увеличиваются.
Рис. 3.26. Зависимости показателей качества от 0;-
для компенсированного ВД
194
Если вектор токов I а смещать в направлении положительного
отсчета угла относительно базовой точки, то вначале ток внешней цепи
увеличивается, а напряжение уменьшается. Одновременно
уменьшаются напряжение Uj- и ток iу продольной обмотки возбуждения.
При достижении Wy и z'y значений, равных нулю, ток внешней цепи
принимает максимальное значение, а напряжение - минимальное значение.
Дальнейшее увеличение угла 0i ведет снова к уменьшению тока ia и
увеличению напряжения . При этом Wy и ток ij- продольной обмотки
возбуждения меняют свой знак, увеличиваясь по абсолютной величине.
Изображающий вектор главных потокосцеплений Ч?®5 ПрИ
изменении пространственного положения вектора I а смещается
относительно оси Оа. Причем угол >0 независимо от знака 0Z.
Объясняется это следующей причиной. В базовом режиме ВД вектор
I а совмещен с осью 0/3, т.е. угол (/ =0, и реакция якоря полностью
компенсируется поперечной обмоткой. При 0i 0 появляются продольная
и поперечная реакции якоря. Действие продольной реакции якоря зависит
от направления смещения вектора I а При 0Z < 0 продольная реакция
якоря оказывает размагничивающее действие и для создания заданного
момента требуется увеличение тока возбуждения. Если <9z->0, то
продольная реакция якоря способствует увеличению главного магнитного
потока. Теперь для того же момента потребуется меньший ток
возбуждения. Этим объясняется непрерывное увеличение тока iу
продольной обмотки возбуждения при di < 0 и его уменьшение при
0Z > 0. В точке локального максимума тока ia продольная
результирующая магнитодвижущая сила обусловлена только продольной
реакцией. В дальнейшем же продольная реакция становится настолько
большой, что вызывает необходимость изменения знака тока возбуждения.
Поперечная реакция якоря в отличие от продольной реакции не
меняет своего направления как при 0;- < 0, так и при 0Z- > 0. Двигатель по
поперечной оси оказывается перекомпенсированным. Поэтому
результирующая магнитодвижущая сила и коллинеарное с ней главное
195
потокосцепление смещаются относительно продольной оси на угол
'V.>0'
Следует заметить, что рассматриваемые характеристики слабо
критичны к углу 0i в значительном диапазоне его изменения.
Изменение момента нагрузки не оказывает принципиального
влияния на характер поведения исследуемых зависимостей. Однако точка
локального максимума тока ia (минимума напряжения ), совпадающая
с точкой z’y=O , по мере уменьшения т смещается в область больших
значений и, наоборот, абсцисса экстремальной точки уменьшается с
увеличением т.
Общий характер зависимостей энергетических показателей от угла
0it рассчитанных для фиксированных значений Vm=VmQ, т = т6 и
6W = tOg, иллюстрируется графиками, приведенными на рис. 3.26, б. Как
видно, они имеют явно выраженные минимумы. Причем координаты
экстремальных точек соответствуют локальному минимуму тока ia, т.е.
режиму ВД, когда продольная результирующая магнитодвижущая сила
обеспечивается за счет одной лишь продольной реакции якоря. Видно, что
этот режим с точки зрения энергетической эффективности превосходит
базовый режим работы ВД.
Исследование влияния момента нагрузки на свойства экстремальных
характеристик показывает, что при изменении т экстремумы функций
качества смещаются. Чувствительность функций качества повышается с
увеличением т. При этом функции качества принимают все более ярко
выраженный экстремальный характер, а область определения по
варьируемой координате 0Z непрерывно сужается.
3.6.4. Модель и характеристики некомпенсированного
вентильного двигателя
Отсутствие компенсационной обмотки не изменяет состава внешних
воздействий и размерности вектора управлений проблемно-
ориентированной модели явно- и неявнополюсных ВД. Поэтому основой
построения модели для задач оптимизации некомпенсированного ВД
служат уравнения (3.47)-(3.50). В этих уравнениях следует исключить
параметры компенсационной обмотки и принять ак=0. Так, модель
(^z, , Х^> неявнополюсного некомпенсированного двигателя имеет
следующий вид:
196
\xjGs _ p'Gs'tGs' .
* m ““ lm 9
I« Of ;
i^=e-A-’(«,.)ia;
Ч-а=А(в,)^+Ь0(,1а; (3.51)
u„=®Br4-„+R„ia;
Uj?s=R^Iy.
Магнитное состояние двигателя в этом случае определяется
решением уравнения связи
mcosq + A(0z)F^ .Nl£J = 0. (3.52)
При отсутствии компенсационной обмотки в (3.49) и (3.50)
изменяются только те выражения показателей качества, в которые входят
параметры компенсационной обмотки. К ним относятся напряжение якоря
иа, активная ра и суммарная р мощности, потребляемые от
преобразователей, а также электрические потери в обмотке якоря Арма и
суммарные электрические потери двигателя Др м :
u^=Ua.Ua; pa=Ua»Ia;
p = Ua-Ia+U^.I^; (3.53)
Ар ма — > ДРм “ Арма + ДРм/ •
Рассмотрим характеристики некомпенсированного ВД (рис. 3.27).
Расчет выполнен для СД мощностью 116 кВт. При расчетах варьировались
координаты у/т и 0;-. При этом момент и скорость были приняты равными
их значениям в базовом режиме (ти^=1, а)б =1).
Как видно, при увеличении \ут практически все показатели
качества имеют монотонно растущий характер. Исключение составляют
ток ia и напряжение иа внешней цепи (рис. 3.27, а). Ток ia достигает
минимума при потоке, несколько превышающем величину . В этой же
197
точке напряжение иа принимает максимальную величину. Однако следует
заметить, что ток и напряжение внешней цепи якоря не критичны в
окрестности точки экстремума к изменению координаты \рт .
Рис. 3.27. Зависимости показателей качества от Ц/т при ак =0
для некомпенсированного ВД
Важно заметить, что варьируемая координата у/ т ограничена по
минимуму условием обеспечения заданного момента. Именно в этой
граничной точке все энергетические показатели принимают минимальные
значения, монотонно возрастая в дальнейшем по мере увеличения
Ут (Рис- 3-27= б)-
Характеристики, иллюстрирующие влияние изменения управления
0-, приведены на рис. 3.28. Расчеты показывают, что область определения
функций качества по ограничена сверху величиной —1,1 рад.
Поэтому изменение угла 6} в этом численном эксперименте
осуществлялось в полуоткрытом интервале - я/2 < 0Z < —1,1. Здесь
отсчет угла производится от точки, лежащей на отрицательной полуоси
0/3 неподвижной системы координат Осф. В этом случае вектор 1а
поворачивается по ходу часовой стрелки относительно своего базового
положения (0zg =-1,123 рад).
198
Рис. 3.28. Зависимости показателей качества от 0t при ак =0
для некомпенсированного ВД
Приведенные зависимости свидетельствуют о том, что при заданных
условиях {a> = a>Q, т = тб и поворот вектора 1а ведет к
ухудшению практически всех характеристик ВД. Как видно из графиков,
нижние грани показателей качества (исключение составляет только wa)
обеспечиваются на границе области определения 0i (см. рис. 3.28, а и б).
Приведенные характеристики соответствуют фиксированным
базовым значениям момента и скорости. Изменение момента оказывает
влияние на обе группы показателей качества. От величины скорости
зависят напряжение иа, механическая мощность Дмех> активная
мощность, потребляемые якорем ра, суммарные активная мощность р и
потери Др, а также коэффициент полезного действия Т]мех. Картина
поведения зависимостей при этом качественно сохраняется. Однако
количественно варьируемые координаты, доставляющие наилучшие с
точки зрения выбранных критериев оценки режимов ВД, в широком
диапазоне изменений момента и скорости могут существенно отличаться.
Заметим, что в некомпенсированном ВД энергетически выгодные
режимы характеризуются достижением нижней (верхней) грани
соответствующих показателей. Вентильный двигатель с компенсационной
обмоткой имеет энергетические показатели с явно выращенными
экстремумами.
199
3.7. Коллекторные двигатели постоянного тока как объекты
экстремального управления
3.7.1. Модель обобщенного коллекторного двигателя постоянного тока
для задач экстремального управления
Рассмотрим исходные уравнения установившегося режима
коллекторного двигателя постоянного тока (Д1П) с произвольной
степенью компенсации реакции якоря и сдвигом щеток. Эти уравнения с
точностью до обозначений переменных и параметров обмоток совпадают с
уравнениями (3.44) вентильного двигателя:
ищ=йВГЧ-я+К„1я;
U^=R?I?;
Ч-Я=А(?-)Ч'®+Ь„1Я;
(3.54)
mGs __ е
1^ =IB& + [A"1(/) + aKS"1]IH;
m = A(/)^.BI^; т = тй.
Несмотря на структурное сходство исходных уравнений
коллекторного Д1П и ВД, напомним их отличительную особенность в
трактовке углов у и 0j. В вентильном двигателе угол 0г- является
электрическим параметром, который можно изменять в процессе
функционирования ВД. Поэтому в математической модели ВД как объекта
экстремального управления угол 0г- рассматривается независимой
варьируемой координатой.
В коллекторном ДПТ угол у характеризует сдвиг щеток с
геометрической нейтрали. Двигатели постоянного тока нормального
исполнения не имеют устройств, позволяющих изменять угол сдвига
щеток в процессе работы. По этой причине коллекторные ДПТ
нормального исполнения имеют число степеней свободы на единицу
меньше в сравнении с ВД.
В качестве управляющего воздействия проблемно-ориентированной
модели явнополюсного коллекторного ДШ при заданных условиями
технологической задачи момента т и скорости (У принимается модуль
200
вектора результирующих намагничивающих токов im. В этом случае
уравнения (3.54) приводятся к следующему виду:
xrjGs _ -pGsTGs.
1Я яту ЭД ’
I? =1® -[A-’W+o.S-1]!,; (3.55)
Ч’,=А0')Ч’®+ЬяД,;
4>®=MW®+L®I®;
U„=®BT4',+R„I,;
U®=R®I®.
При сдвиге щеток с геометрической нейтрали (Z Ф 0), произвольной
степени компенсации реакции якоря (ак ^1) и явнополюсности расчет
магнитного состояния Д11Г определяется решением нелинейного
уравнения связи
(cosZ-aK)m + A(Z)F^ .Nl£s =0. (3.56)
В уравнении (3.56) вектор результирующих намагничивающих токов
»Gs _ гта
Jr >
<K[Jm0
im cost»,
т ltn
Уравнение (3.56) решается с привлечением итерационной процедуры
при заданных значениях т, im, у и ак. Искомой величиной является
угол Ц .
3.7.2. Функции качества коллекторного двигателя постоянного тока
По своему составу и виду функции качества коллекторного ДПТ
аналогичны функциям качества ВД постоянного тока. С учетом
обозначений, традиционно принятых для переменных и параметров
коллекторных двигателей постоянного тока, напряжения, токи и
потокосцепления обмоток записываются в следующем виде:
201
ияи ~ ияц • ияц;
..2 _TT^fr * ТТ^5 .
wB — UB • UB ,
^я=^я’^я;
J/z2 __ \rjGs \rjGs ,
rm x m 9 * m ’
i2 =1 «I •
ХЯ ХЯ’
•2 _ jGs -rGs,
zb ~ хв • xb 9
..z2 __ \xjGs \nGs ,
г в хв * xb ’
•2 _tG$ tGs
xm e
(3.57)
Для оценки энергетики коллекторного ДПТ вводятся механическая
мощность pMSX, активная мощность ря, потребляемая (отдаваемая)
якорем, активная мощность обмотки возбуждения рв, активная суммарная
мощность р, электрические потери мощности якорной цепи АРм.яц и
цепи возбуждения Дрмв, а также механический коэффициент полезного
действия ?7мех:
Рмех
Ря ~ ^яц • 1Я)
АРм.яц “ ГпДя * 1Я ’
Ар м ~ ДРм.яц АРм.в ’
p = U„.I,+U?.I?;
pB=U?.I?; (3.S8)
До =rIGs.IGs-
Чгм.В 'ВХВ ХВ 9
Рмех ~ Рмех / Р •
Расчет показателей качества (3.57) и (3.58) позволяет найти условия
оптимального использования активных материалов конструкции
коллекторного ДПТ, потребления электрической энергии от силовых
источников питания и сделать заключение относительно эффективности и
экономичности преобразования энергии при регулировании скорости и
изменении момента нагрузки.
3.7.3. Модель некомпенсированного двигателя постоянного тока
для задач оптимизации
Примем в уравнениях (3.55)-(3.58) коэффициент CZK = 0 и
скорректируем параметры с учетом отсутствия компенсационной обмотки.
В этом случае будем иметь уравнения модели некомпенсированного
коллекторного Д1ГГ как объекта экстремального управления:
mGs____-T^Gs-rGs w
~ т ~ гт 1т >
of;
202
вектора результирующих намагничивающих токов im. В этом случае
уравнения (3.54) приводятся к следующему виду:
vt/Gs _ -pGsyGs,
!я =[w/^y 0]г;
1В5 =1^5-[А-1(/) + ак8-1]1я; (3.55)
¥Я=А(/)Т^+ЬЯСТ1Я;
ияц=й)ВГЧ'я+Кяц1я;
Uf5=RfJlfJ.
При сдвиге щеток с геометрической нейтрали (у 0), произвольной
степени компенсации реакции якоря (<ZK 1) и явнополюсности расчет
магнитного состояния ДШ определяется решением нелинейного
уравнения связи
(cos/-aK)m + A(/)F^ .Nl£5 =0. (3.56)
В уравнении (3.56) вектор результирующих намагничивающих токов
»Gs _ гта
im COSL>;
т
Уравнение (3.56) решается с привлечением итерационной процедуры
при заданных значениях т, im, у и сск. Искомой величиной является
угол ц. .
3.7.2. Функции качества коллекторного двигателя постоянного тока
По своему составу и виду функции качества коллекторного ДПТ
аналогичны функциям качества ВД постоянного тока. С учетом
обозначений, традиционно принятых для переменных и параметров
коллекторных двигателей постоянного тока, напряжения, токи и
потокосцепления обмоток записываются в следующем виде:
201
ияц ~ ^яц *Uau;
w2=Uf5.Uf5;
у./1 _ в \rjGs .
г т х т * т >
z2 = I • I •
ЛЯ АЯ’
•2 _ yGs тС?$,
*ъ ~~ *в * Ав >
^ypGs.ypGs.
•2 _ tGs tGs
1т "" *т * •
(3.57)
Для оценки энергетики коллекторного ДПТ вводятся механическая
мощность />мех> активная мощность ря, потребляемая (отдаваемая)
якорем, активная мощность обмотки возбуждения рв, активная суммарная
мощность р, электрические потери мощности якорной цепи Дрмяц и
цепи возбуждения Дрмв, а также механический коэффициент полезного
действия 77мех:
р = иш .1, +U? .1?;
Р.=ищ-1«; pB=UBGl.I,Gl; (3.58)
АРм.яц ~ *яцЦ * Ц ’ АРм.в = *вЦ * Ц >
А? м ~ АРм.яц + АРм.в ’ Рмех = Рмех / Р
Расчет показателей качества (3.57) и (3.58) позволяет найти условия
оптимального использования активных материалов конструкции
коллекторного ДПТ, потребления электрической энергии от силовых
источников питания и сделать заключение относительно эффективности и
экономичности преобразования энергии при регулировании скорости и
изменении момента нагрузки.
3.7.3. Модель некомпенсированного двигателя постоянного тока
для задач оптимизации
Примем в уравнениях (3.55)-(3.58) коэффициент ССК = 0 и
скорректируем параметры с учетом отсутствия компенсационной обмотки.
В этом случае будем иметь уравнения модели некомпенсированного
коллекторного ДПТ как объекта экстремального управления:
ц/Gs__pGsyGs,
~ \.m/Vяту ЭД >
202
I^5 =I^5 - А-1(/)1я; (3.59)
Тя=А(/)Ч^+Ьяст1я;
Ч^МЧ^+Ь^;
ия=шВГ^я + Кя1я;
ufJ=Rf5lf\
В некомпенсированном ДПТ при у Ф 0 магнитное состояние
рассчитывается с помощью нелинейного уравнения
т cos у + A(/)F^JI^ . NI^5 = 0. (3.60)
При решении (3.60) фиксируются величины т, im и у. Искомой
величиной здесь по-прежнему является угол у. .
1т
3.7.4. Модель компенсированного двигателя постоянного тока
для задач оптимизации
Модель компенсированного ДПТ получим при подстановке в (3.55) и
(3.56) значений у = 0 и CZK=1. При этих условиях уравнение (3.56)
принимает вид
BF^.NI^=0. (3.61)
Векторы напряжений, токов и потокосцеплений определяются с
помощью выражений
vt/Gs _ pGsyGs,
1Я ~ 0] >
!?=!«; (3.62)
Ч'я=В^+Ьяа1я;
¥?=М^+1®1В&;
ия = в) ВГТЯ + ия1я;
203
Развернем в уравнениях (3.61) и (3.62) переменные по компонентам
алгебраических векторов. В результате получим модель
компенсированного ДПТ в скалярной форме записи, которую можно
преобразовать к следующему виду:
мяц = ед + гяцг'я >
мв = гвг'в >
ед=(0^т> (3-63)
гв ~ гт >
~ т )
В модели варьируемой координатой является модуль
вектора главных потокосцеплений Ц/т.
Выбор в качестве варьируемой координаты главного
потокосцепления \//т дает преимущество при аналитическом
представлении характеристики намагничивания вида im = im (l//m)
алгебраическим полиномом [124].
Из анализа (3.62) следует, что для компенсированного ДПТ число
степеней свободы сохраняется и равно трем. При этом важно заметить, что
здесь возможны варианты моделей, в которых при определении
магнитного состояния не требуется обращения к итерационной процедуре.
При использовании модели (3.62) функции качества ДПТ удобно
выразить через скалярные величины. В частности, основные
энергетические показатели ДШ в скалярной форме записи примут
следующий вид:
Рмех , р — + wBz'B;
Ря=и^я, PB=uBiB; (3.64)
АРм.яц ~ гяд^я > ДРм.в ~ Vb ’
ДР м ~ АРм.яц *" АРм.в» Рмех ~ Рмех / Р •
Ниже приводятся характеристики компенсированного коллекторного
двигателя постоянного тока.
204
3.7.5. Характеристики компенсированного двигателя
постоянного тока
На рис. 3.29 изображена схема модели коллекторного ДПТ как
объекта экстремального управления. В общем случае она описывается
уравнениями (3.55) - (3.58).
Рис. 3.29. Схема модели компенсированного
двигателя постоянного тока как объекта оптимизации
Входами модели являются момент тп, скорость СО и модуль вектора
результирующих намагничивающих токов im. Последнее воздействие
является варьируемой координатой. Такая модель позволяет решать задачи
оптимизации режимов коллекторного ДШ с учетом явнополюсности,
произвольной степени компенсации реакции якоря и сдвига щеток
относительно геометрической нейтрали, а также насыщения машины по
главному магнитному пути.
Для моделей (z'm,X) некомпенсированных ДПТ, описываемых
уравнениями (3.59)-(3.60), внешними воздействиями по-прежнему
являются момент т, скорость со и ток намагничивания im. Это же
сочетание величин, как видно из уравнений (3.62), можно использовать в
модели компенсированного двигателя.
Заметим, что компенсированный двигатель, получивший широкое
применение на практике, имеет наиболее простую модель и
альтернативные варианты. Примером может служить модель (^/т,Х),
которая представлена в скалярной форме записи уравнениями (3.63) и
показателями качества (3.64).
Остановимся на свойствах коллекторного двигателя постоянного
тока как объекта экстремального управления. Сходство моделей ДПТ и
ВД постоянного тока обусловливает качественное совпадение их
характеристик. Отличие состоит лишь в том, что исследование режимов
коллекторного ДПТ нормального исполнения производится при
фиксированной величине угла сдвига щеток с геометрической, нейтрали
(у = const).
205
Одной из важных энергетических характеристик коллекторных ДПТ
являются потери электрической мощности Дрм, представляющие собой
сумму электрических потерь в обмотках цепи якоря Дрмяц и обмотке
возбуждения Дрмв. При фиксированном моменте нагрузки изменение
главного потока (потокосцепления 1//т) приводит к перераспределению
токов якоря и возбуждения. Например, при увеличении \]/т ток
возбуждения увеличивается, а ток якоря, наоборот, снижается. В свою
очередь это вызывает увеличение Дрмв и уменьшение Дрмяц. При таком
характере поведения Дрм и Дрмв суммарные электрические потери
мощности Дрм имеют экстремум. В качестве иллюстрации на рис. 3.30
приведены зависимости Др м и ее составляющих Дрмяц и Дрмв от
потокосцепления \)/т для компенсированного ДПТ мощностью 1000 кВт.
Зависимости рассчитаны для идеального случая (/=0 и CZK=1) при трех
фиксированных значениях момента: т = 0.5/иб, тб и 1,5 тб. Видно, что
по мере увеличения момента экстремальные характеристики смещаются,
становясь более острыми. Координаты точек экстремумов при различных
т не совпадают.
Рис. 3.30. Характеристики
компенсированного ДПТ
мощностью 1000 кВт
Коллекторные ДПТ обладают
06 0 0 1 12 % экстремальными характеристиками не
только по электрическим потерям
Др м. Имеют экстремумы полные потери мощности, суммарная мощность,
потребляемая машиной, и ее коэффициент полезного действия.
206
Глава 4
ВЫЧИСЛИТЕЛЬНЫЕ АСПЕКТЫ
РЕШЕНИЯ ЗАДАЧ
ЭКСТРЕМАЛЬНОГО УПРАВЛЕНИЯ
ЭЛЕКТРИЧЕСКИМИ ДВИГАТЕЛЯМИ
4.1. Общие положения и типы задач оптимизации
режимов электрических двигателей
По приведенным выше результатам исследования проблемно-
ориентированных моделей можно дать общее формальное определение
свойств электрических двигателей (ЭД) как объектов экстремального
управления.
1. При любом векторе состояния X, принадлежащем допустимой
области
Qx = { X | -од < т <+оо, —оо <<у <+оо
область определения Qy функций качества wz-(V, X), где i = l,k,
представляет собой объединение двух выпуклых подмножеств Руда и
Qvren > т,е‘
Qv = Qv.HB UQvreH’
где Рудв и QvreH~ подмножества, первое из которых включает решение
задачи оптимизации для двигательного режима, а второе - для
генераторного режима работы ЭД. На подмножествах Оуда и QvreH
функции качества непрерывны и дифференцируемы. Они относятся к
207
сложным нелинейным функциям, частные производные которых в
большинстве случаев определяются разностными методами.
2. На каждом из подмножеств QyaB и QyreH основные функции
качества (напряжения и токи обмоток, активная, реактивная и полная
мощности, суммарные потери мощности, коэффициенты мощности и
полезного действия) имеют при заданном X е Qx локальный экстремум.
3. Значения компонент векторов V;°(X) (г = 1,Л), доставляющих
экстремумы функциям w;(V,X), при различных X не совпадают. Это
свойство функций качества характеризует изменчивость свойств ЭД как
объекта экстремального управления. Экстремальные характеристики ЭД
дрейфуют при изменении момента нагрузки и регулировании скорости.
При этом изменяются не только экстремальные значения функций
качества Wj и вектора , но и вид экстремальных характеристик.
4. Для функции качества w;(V, X), имеющей экстремум в области
допустимых управлений Qy, всегда можно выделить некоторую
выпуклую подобласть, включающую точку экстремума V®, в которой
функция качества является строго выпуклой функцией.
5. Постановка задачи экстремального управления ЭД в классе
проблемно-ориентированных моделей формулируется следующим
образом.
Заданы: функции качестваw;(V, X), i-l,k; вектор X е Qx; область
допустимых управлений Qу варьируемого вектора управлений V.
Найти: управление Nf 6 Qy, минимизирующее (либо
максимизирующее) функцию качества wf(V,X).
В общем случае постановка задачи экстремального управления ЭД
записывается в следующем виде:
и/г (V, X = Хс)-»min (max)=> N? (x), i = 1, k, (4.1)
VsQv
где Qy - область допустимых значений вектора управлений;
У(Х) -решение задачи оптимизации, т.е. wz(y®, xj=min(max).
Напомним, что требование принадлежности управления V
допустимому множеству Qy следует из условий ограничения на ресурсы
элементов электрического двигателя и силового преобразователя.
208
Допустимое множество Qy задается системой соответствующих равенств
и неравенств:
Qv:
gi(V,X) = 0)i = l,...,p<q,
' hj(V,X)^Q, j =
где gj(V,Х)и Ay(V,X) - заданные, как правило, сложные нелинейные
функции от V и X.
В связи с тем, что функции качества и ограничений в общем случае
представляют собой сложные нелинейные функции, для поиска решения
экстремальной задачи (4,1) при изменении момента т и скорости й) в
широких пределах предпочтительны численные методы оптимизации.
Выбор метода оптимизации зависит от признаков задачи (4.1) и
свойств функций качества. Различия задач оптимизации режимов ЭМ
могут быть выявлены на основе известных [82] признаков классификации
задач экстремального управления: общего числа минимизируемых и
максимизируемых функций качества, принадлежности решения V;°(X)
границе Qy допустимой области Qy, числа локальных экстремумов в
области Qy и размерности q вектора управлений V.
По первому признаку выделим однокритериальные и
многокритериальные задачи оптимизации режимов работы ЭД.
Однокритериальные задачи оптимизации рассматриваются с точки
зрения приближения к экстремуму одного показателя качества. Выбор
критерия оптимизации зависит от типа ЭД и способа регулирования
скорости. Например, в электроприводах с АСД критерием качества служит
реактивная мощность статора либо реактивные составляющие тока статора
или ротора [59, 113]. Кроме этих критериев, для оптимизации режимов
работы АСД используются мощность суммарных потерь, коэффициент
полезного действия или коэффициент мощности по основным гармоникам
напряжений и токов статора в зависимости от области применения
электропривода. В тех случаях, когда важно уменьшить установленную
мощность возбудителя, критерием оптимизации служит ток ротора.
В электроприводах с синхронными двигателями ставится задача
оптимизации режимов по минимуму мощности эквивалентных потерь,
включающих электромагнитные потери в двигателе с приближенным
учетом потерь в преобразователе частоты и возбудителе [15, 95, 96].
Мощность суммарных эквивалентных потерь используется также в задачах
оптимизации режимов электроприводов с короткозамкнутыми
асинхронными двигателями [55, 56, 85], вентильными [42, 45, 142] и
коллекторными двигателями постоянного тока [13]. В [56, 133]
209
рассматривается задача оптимизации режимов АД с короткозамкнутым
ротором по минимуму тока статора.
В многокритериальных задачах оптимизации режимов ЭД
привлекают несколько показателей качества. В основе постановок
многокритериальных задач оптимизации лежит формирование аддитивных
[120, 131] либо мультипликативных критериев свертки [54]. С
практической точки зрения многокритериальные задачи оптимизации
привлекательны тем, что позволяют при синтезе управления учесть не
один, а несколько частных критериев качества. Для электромеханических
систем с ЭД при питании от автономных силовых преобразователей
многокритериальные задачи оптимизации имеют актуальное значение.
Вместе с тем отметим трудность их решения, которая связана с
недостатком информации о мере вклада частных критериев качества при
формировании глобального критерия.
По второму признаку различают безусловные и условные задачи
оптимизации. Пусть Qy - граница допустимой области Qy. В
безусловных задачах оптимизации управление V® (X) £ Qy.
В задачах условной оптимизации управление V®(X) находится на
границе допустимой области управлений, т.е. V®(X) G Qy.
Однокритериальная задача оптимизации на условный экстремум
решалась для частотно-регулируемого асинхронного электропривода в
работах [77, 93, 103, 128], в которых критерием качества служит
электромагнитный момент асинхронного двигателя, а ограничениями -
напряжение и ток преобразователя частоты.
По третьему признаку задачи оптимизации ЭД относятся
исключительно к локальным или одноэкстремальным задачам
оптимизации.
Наконец, по четвертому признаку различают однопараметрические
(одномерные по управлению) и многопараметрические (многомерные по
управлению) задачи оптимизации. В одномерных задачах оптимизации
число варьируемых координат равно единице (q = 1). Задачи оптимизации
режимов АД с короткозамкнутым ротором и коллекторных ДПТ относятся
к однопараметрическим задачам оптимизации. Для всех остальных
двигателей в общем случае характерны многопараметрические задачи
оптимизации, так как число варьируемых управлений в их моделях больше
единицы (q > 1).
210
4.2. Методы решения задач экстремального управления
электрическими двигателями
4.2.1. Выбор методов решения задач оптимизации при отсутствии
ограничений на управляющие воздействия
Однопараметрическая задача оптимизации
Задача локального поиска экстремума скалярной функции качества
w(y, X), заданной на открытом множестве управлений, записывается в
виде
w(v, X = Хс) -> min (max) => v° (X), Хс е QXo. (4.2)
V
Из многочисленных эффективных методов поиска решения
одномерных задач оптимизации [14, 80, 81] рассмотрим градиентный
метод, который применяется для строго выпуклых функций. Для
одномерной задачи рекуррентное выражение перехода от п -го
приближения к п + 1-му приближению получает следующий вид:
v„+i=v„+Av„. (4.3)
В выражении (4.3) длина рабочего шага
= -ап ^w^Vn> X), Qf„>0, (4.4)
dv
dwn(yn,X) ( ч
где. ——------- - производные функции w(v, X) по управлению v;
dv
ап - числовой множитель, величина которого определяет
скорость сходимости и устойчивость итерационного процесса. С помощью
числового множителя а управляют эффективностью метода.
Для оценки производных функции качества используют разностные
схемы аппроксимации: правую, левую или центральную разностные
производные. Первые две схемы требуют меньших затрат по сравнению с
третьей схемой оценки (затраты выражаются количеством вычислений
критерия качества), но позволяют получить решение менее точно, чем при
центральной разностной производной.
211
Формула первой центральной разностной производной функции
w(v, X) имеет следующий вид:
= g-l[w(v + g, X) - W(v - g, X)], (4.5)
dv
где g - шаг сетки (g > 0), на которой аппроксимируется производная.
При постановке многокритериальных задач экстремального
управления, в которых критерий качества
W(v, X) = [W1 (v, X), w2 (v, X),..., wk (v, X)],
требуется осуществить поиск экстремумов к скалярных функций
качества. Задача многокритериальной оптимизации записывается в виде
wz(v,X = Xc)->nun(max), XceQx , (г = 1,Л) (4.6)
v °
или в векторной форме
W(v,Х = ХС)—>min(max), ХсбПх .
v с
Поиск экстремумов отдельных функций (4.6) осуществляется также
градиентным методом.
Остановимся теперь на проблеме выбора начального приближения
(vH) и множителя а, от которых существенно зависит эффективность
градиентного метода.
Напомним, что в общем случае задача оптимизации режимов ЭД
решается не для одной точки X = Хс, а для некоторого множества точек
области
Qx = Qm xQq>
где QM и Qq представляют собой подмножества, ограниченные
предельно-допустимыми значениями координат вектора X, т.е.
Qm = { «^ | inf т<т<$ирт } и Qq = {<у| inf а> < а> < sup а>}.
Поскольу при изменении X экстремальные характеристики дрейфуют, то
для уменьшения времени поиска экстремума функции w; (v,X) величину
vH разумно поставить в зависимость от изменения вектора X.
Анализ одномерных задач оптимизации режимов ЭД показывает, что
при разработке алгоритмов поиска экстремума функции качества
212
w;(v,X), где XeQx, целесообразно руководствоваться следующими
соображениями.
На подмножествах QM и Qq задаются сетки
{т0 <...<т„ = supra},
{а>0 = inf со < ct>i <... < сок = sup cd}
с равномерным шагом по каждой из переменных = и
Дй) = й)г+1 - й)г).
По узлам сеток составляются упорядоченные дискретные
подмножества состояний вектора X:
Qx0 ={Х00 =(т0,а}0), Х10 =(т1,а}0),..., Хп0 =(тп,<у0)};
Qxj = {Xoi = (wo’60!)’ Хц = Хй1 = (тп,а\)}-,
Qxt = {Хо* = (т0,сок), Xlk = ,сокХпк = (тп,ак)}.
Как видно, в каждом из подмножеств элементы располагаются в
порядке возрастания величины момента, а скорость при этом остается
постоянной, т.е. для некоторого подмножества Qx. выполняется условие
X/+lj >Хгу, где (1-1,п), так как шг+1>шг-. В то же время
подмножества Qx0> Qxr •••> Qx* отличаются порядком изменения
скорости. При этом справедливо условие Хгу+1 >Хгу, где (j = l,&), так
как (Dj+y > CDj.
Решение задачи осуществляется последовательно: начинается с
поиска оптимального управления на подмножестве Qx0 и заканчивается
на подмножестве QX(l • При этом на каждом подмножестве вначале
определяется оптимальное управление при X = ХОу, а завершается при
х=х„7.
Процесс решения задачи целесообразно осуществлять в два этапа. На
первом этапе методом сканирования отделяют точку экстремума, т.е.
определяют отрезок, внутри которого находится решение v°. Одна из
границ этого отрезка служит начальным приближением vH. Причем в
213
качестве начального приближения лучше всего брать то граничное
значение, которое приходится на выпуклую ветвь экстремальной
характеристики. На рис. 4.1 эта ветвь расположена слева от точки
минимума, а координата точки начального приближения обозначена
У^тнО-
Рис. 4.1. К вопросу выбора начальных условий
На втором этапе с помощью метода касательной уточняется
значение координаты оптимального управления для каждого X с
предварительно заданной точностью (£). При практическом решении
задачи критерием окончания процесса поиска методами касательной могут
служить следующие условия: |v„+1 - v„ | < £, |w(v„+i, X) - w(v„, Х)| < £ и
X)/ dv\ < £. Возможны также сочетания различных критериев.
Важно заметить, что при достаточно малом шаге Д/и начальное
приближение определяется только для ХОу. Для каждого последующего
состояния вектора X начальным приближением служит оптимальное
управление при его предыдущем состоянии. Например, для Х]у начальное
приближение принимается равным оптимальному значению
управляющего воздействия при ХОу и так далее. Так, при поиске
минимума функции при фиксированном значении т = т^
(рис. 4.1) в качестве начального приближения можно принять
о
потокосцепление = у/то> а при моменте т — m2 ~ потокосцепление
Wmu2 = WmV
214
Как отмечалось, числовой множитель а также влияет на
эффективность градиентного метода. Проведенные исследования
эффективности метода на задачах оптимизации режимов ЭД показали, что
при а — const удается решать задачи градиентным методом только при
небольших диапазонах изменения момента нагрузки и скорости. В
большинстве случаев требуется вводить коррекцию ап в зависимости
от X. Опишем способ регулировки шага а, который используется в
дальнейшем при решении одномерных задач оптимизации режимов ЭД
градиентным методом.
Выбираются некоторые константы сгнач>0 и 0<Л<1. Для сг=сгнач
проверяется выполнение условия
rt/w(v„ + Av„, XL Tdv{vn, XL
sgn[ ” —-g-------'] = sgn[—4^-^], (4.7)
dv dv
где
av =_a
мнач
Если оно выполняется, то полагается Qf„=QfHa4. Если нет, то
производится дробление шага, т.е. принимается си=Л01нач и вновь
проверяется выполнение условия (4.7). Процесс дробления, т.е. умножения
текущего значения а на А, продолжается до тех пор, пока условие (4.7) не
окажется выполненным. Первое значение а, при котором условие (4.7)
выполняется, принимается за ап.
В результате решения задачи (4.2) получаем семейство оптимальных
управлений:
v° = v° (щ, а> = const), j = 1, к
или в компактном виде
v°=v;(x), ;=й. (4.8)
Управления (4.8) доставляют экстремумы функциям качества при
изменении момента и различных фиксированных значениях скорости ЭД:
w(v°,X) = min.
Таким образом, при решении одномерной задачи оптимизации (4.1)
выделяются следующие этапы:
215
1) формирование исходных данных: задание области Qx и параметров
сетки;
2) исследование в открытой области управления v характера поведения
функции качества w(v,X), где X G Qx;
3) определение начального приближения vH методом сканирования;
4) поиск экстремума функции w(v,X) градиентным методом в целях
определения оптимального управления v° - v° (X);
5) расчет характеристик ЭД при оптимальном управлении, т.е.
W/(v°,X),(i = U),wXeQx.
Одним из наиболее сложных этапов является поиск экстремума
функции качества. Укрупненное описание алгоритма, реализующего
градиентный метод с регулировкой шага, сводится к следующей
последовательности действий:
1) введем исходные данные: коэффициенты функций качества,
параметры метода поиска экстремума (точность £, базу g,), начальное
значение коэффициента синач и Л, а также начальное приближение
управления vH;
2) введем численное значение компонент т и G) вектора X = (т, &)),
для которого следует найти оптимальный закон управления;
3) вычислим первую разностную производную 6?w(v, X)/ dv функции
w(v,X) по формуле (4,5);
4) проверим условие окончания поиска экстремума \dw(y, X)/rfv| < £.
Если это условие выполняется, то перейдем к шагу 11;
5) присвоим значение синач переменному коэффициенту а;
6) вычислим управление v по формуле (4.3);
7) определим знак первой производной от функции качества при новом
значении управления v;
8) проверим условие (4.7). При выполнении этого условия перейдем к
шагу 9. В противном случае скорректируем коэффициент а: аа;
9) вычислим по формуле (4.3) при скорректированном коэффициенте
а управление у;
10) определим sgn[<7w(v, X)/ dv\ при скорректированном управлении
у и возвратимся к шагу 8 для проверки условия (4.7);
И) выведем значения координат точки экстремума функции качества,
О о
т.е. v и w ;
12) вычислим значения функций качества w; (v, X), (г = 1,Л) при
v = V0.
216
Как отмечалось, числовой множитель а также влияет на
эффективность градиентного метода. Проведенные исследования
эффективности метода на задачах оптимизации режимов ЭД показали, что
при а = const удается решать задачи градиентным методом только при
небольших диапазонах изменения момента нагрузки и скорости. В
большинстве случаев требуется вводить коррекцию ап в зависимости
от X. Опишем способ регулировки шага а, который используется в
дальнейшем при решении одномерных задач оптимизации режимов ЭД
градиентным методом.
Выбираются некоторые константы ®нач>0 и 0<Л<1. Для а=(/нач
проверяется выполнение условия
гdw(vn + Дv„, Х1 г dw(vn, Xk . я „
sgn[—v = sgn[—4^—4, (4.7)
dv dv
где
4v
Livn “нач ,
dv
Если оно выполняется, то полагается (Z?7=(ZHa4. Если нет, то
производится дробление шага, т.е. принимается (Х=Я(/нач и вновь
проверяется выполнение условия (4.7). Процесс дробления, т.е. умножения
текущего значения а на Л, продолжается до тех пор, пока условие (4.7) не
окажется выполненным. Первое значение а, при котором условие (4.7)
выполняется, принимается за ап.
В результате решения задачи (4.2) получаем семейство оптимальных
управлений:
v° = v° (т, а> = const), j к
или в компактном виде
v°=v°(X), / = (4.8)
Управления (4.8) доставляют экстремумы функциям качества при
изменении момента и различных фиксированных значениях скорости ЭД:
w(v°,X) = min.
Таким образом, при решении одномерной задачи оптимизации (4.1)
выделяются следующие этапы:
215
1) формирование исходных данных: задание области Qx и параметров
сетки;
2) исследование в открытой области управления V характера поведения
функции качества w(v,X), где X е Qx;
3) определение начального приближения vH методом сканирования;
4) поиск экстремума функции w(v, X) градиентным методом в целях
определения оптимального управления v° = v° (X);
5) расчет характеристик ЭД при оптимальном управлении, т.е.
W/(v°,X),(z = U ),wXeQx.
Одним из наиболее сложных этапов является поиск экстремума
функции качества. Укрупненное описание алгоритма, реализующего
градиентный метод с регулировкой шага, сводится к следующей
последовательности действий:
1) введем исходные данные: коэффициенты функций качества,
параметры метода поиска экстремума (точность Е, базу g,), начальное
значение коэффициента анач и Л, а также начальное приближение
управления VH;
2) введем численное значение компонент т и а> вектора X = (т, (о),
для которого следует найти оптимальный закон управления;
3) вычислим первую разностную производную <7w(v, X)/ dv функции
w(v,X) по формуле (4.5);
4) проверим условие окончания поиска экстремума |<7w(v, X)/dv\ <£.
Если это условие выполняется, то перейдем к шагу 11;
5) присвоим значение анач переменному коэффициенту а;
6) вычислим управление v по формуле (4.3);
7) определим знак первой производной от функции качества при новом
значении управления V;
8) проверим условие (4.7). При выполнении этого условия перейдем к
шагу 9. В противном случае скорректируем коэффициент а: й=Ай;
9) вычислим по формуле (4.3) при скорректированном коэффициенте
а управление v;
10) определим sgn[tZw(v, X)/ dv] при скорректированном управлении
v и возвратимся к шагу 8 для проверки условия (4.7);
11) выведем значения координат точки экстремума функции качества,
о о
т.е. v и W ;
12) вычислим значения функций качества wz(v, X), при
V = v°.
216
Многомерная задача оптимизации
Многомерная оптимизация заключается в поиске экстремума
функции качества многих переменных. Задача локального поиска
экстремума скалярной функции w(V, X), заданной на открытом
множестве управлений, записывается в следующем виде:
w(v, X = Хс) -» min (max) => V° (х), (4.9)
V
где V- варьируемый вектор управлений, V = (vl,V2»—>v?).
Как было показано в предыдущей главе, задачи оптимизации
режимов основных типов ЭД относятся к задачам сравнительно невысокой
размерности по управлению, так как q < 3.
Из алгоритмов локального поиска, пригодных для решения
многомерных задач экстремального управления ЭД, выбор остановлен на
симплекс-методах Нелдера-Мида [111]. Являясь одними из лучших
прямых методов минимизации функций нескольких переменных, не
требующих вычислений производных функции, симплекс-методы
Нелдера-Мида реализованы в интегрированном пакете математического
моделирования MATLAB. Метод эффективен для решения многомерных
задач оптимизации, для которых характерна “овражная” ситуация. Данные
обстоятельства были приняты во внимание при выборе метода.
Симплекс-методы также предполагают задание начальной точки
вектора управлений VH. Поскольку общих правил выбора VH не
существует, то можно руководствоваться соображениями, изложенными
при обсуждении одномерной задачи оптимизации.
При решении задач многомерной оптимизации ЭД в начале имеет
смысл провести исследования функций качества. Для этого привлекается
q -мерная система координат (О, V), где О - точка начала координат, а
V-[vi,v2 ,...,V9]r ~ ортонормированный базис векторного
пространства Rq. Вектору V = (y\,V2,—,Vq) в (/-мерной системе
координат ставится в соответствие точка с координатами, численно
равными VpV2>—,Vq. Свойства скалярной функции w(V,X) в этой
системе координат характеризуются линиями равного уровня
w(v,X) = Wj = const, X = XC,
217
которые дают наглядное представление о ее рельефе, наличии и
расположении точки экстремума в области допустимых управлений.
Изменяя только одну из q координат и оставляя оставшиеся q~\
координаты неизменными, можно построить зависимость показателя
качества как функции одной переменной Vj, i G [1, q]. Характер поведения
функции при изменении одной из q координат позволяет выявить
экстремальные свойства ЭД и чувствительность показателя качества по
отношению к данной изменяемой переменной. Исследование функции
качества по всем направлениям варьируемых управлений дает
возможность выявить среди них существенные и несущественные
управления.
Полученная по результатам исследований информация позволяет
подобрать подходящее начальное приближение вектора управлений и
организовать поиск экстремума в нужном направлении.
4.2.2. Выбор метода решения задач оптимизации
с ограничением управляющих воздействий
Особенностью задач условной оптимизации является то, что в
зависимости от типа ограничений решение Nf (X) может находиться как
внутри, так и на границе Qv допустимой области Qv.
Из методов решения задач оптимизации с ограничениями
рассмотрим метод штрафных функций. Основные достоинства этого
метода заключаются в его простоте и эффективности при нелинейных
функциях качества и ограничениях как в форме равенств, так и нера-
венств [81]. При методе штрафных функций задача оптимизации при
ограничениях приближенно сводится к задаче без ограничений. В этих
целях для минимизации функции качества w(V, X) при ограничениях
g;(V,X), г = 1,...,/? и gy (V,X), J = 1,...,и вводится вспомогательная
функция следующего вида:
w(V, X) = w(V, Х)+yg (V, X, а) + (V, X, Ь), (4.10)
где ц/g(V,Х,а) и ^Й(У, Х,Ь) - неотрицательные функции штрафа, в
которых а = ар) и b = (1\,...,Ьп) представляют собой векторы
весовых коэффициентов.
Функции штрафа строятся так, чтобы вспомогательная функция
w(V, X) совпадала с заданной минимизируемой функцией w(V, X)
218
внутри области Qv и быстро возрастала вне данной области. Этому
условию, например, отвечают следующие функции:
Р о
^ё(У,Х,а) = ^а^(У,Х); (4.11)
^(V,X,b)= £&/7.(V,X)[l + signA7(V,X)], (4.12)
7=1
где at и bj ~ достаточно большие положительные весовые коэффициенты,
называемые коэффициентами штрафов.
Задача теперь состоит в минимизации функции w(V, X) в открытой
области управлений:
w(V, X) -> min, X 6 <2Х.
(4.13)
Известно [81], что в общем случае решение исходной задачи при
ограничениях совпадает с решением вспомогательной задачи без
ограничений только при а —> оо и Ь —> оо. Вместе с тем подбором
значений а и Ь можно получить решение экстремальной задачи с
приемлемой для практики точностью.
В последующих главах приводятся примеры наиболее важных для
практики задач оптимизации режимов электрических двигателей.
4.3. Выбор критериев оптимизации и ограничений
Выбор критериев оптимизации и ограничений определяется
мощностью и областью применения электрической машины. Для ЭД
одним из типичных критериев качества по энергетическим соображениям
и надежности является мощность потерь.
Выявление оптимального режима управления по минимуму потерь
ЭД имеет значение в следующих случаях:
• при обеспечении минимума потерь для ограничения нагрева
двигателя и расширения области допустимых по нагреву моментов
нагрузки;
• для повышения коэффициента полезного действия электрических
двигателей при регулировании скорости и изменении момента
нагрузки в широких диапазонах;
219
• при обосновании варианта управления, близкого к оптимальному,
когда в качестве эталона используется закон управления по
минимуму потерь.
Целью оптимизации режимов в этих случаях является повышение
энергетических показателей и обеспечение надежной работы ЭД.
В электрической машине различают следующие основные виды
потерь [137]:
• потери в меди обмоток статора и ротора ( Дрм);
• потери в стали статора и ротора (Арс);
• механические потери (Армех ), зависящие от скорости;
• добавочные потери (Дрд), пропорциональные квадрату основной
гармоники тока статора.
Суммарные потери электрического двигателя
Др = ДрМ + АРс + ДРмех + ДРд
являются функцией от вектора управлений V и вектора состояний X, т.е.
Др = Др(¥,Х).
При регулировании скорости вниз от основной в области
номинальных нагрузок и перегрузок в ряде случаев в качестве критерия
оптимальности может быть использована свертка модулей векторов токов
статора (is) и ротора (zr)
i = klis+k2ir,
где кх и к2 - постоянные весовые коэффициенты.
Частными критериями оптимальности могут служить ток статора is
и ток ротора ir. Выбор в качестве критериев оптимизации минимума
токов i, is и ir позволяет получить близкие к оптимальному по минимуму
потерь Др режимы ЭД при сравнительно простых, не зависящих от
скорости законах управления.
Оптимальные законы управления по минимуму потерь и минимуму
тока не всегда могут быть реализованы в системах автоматического
управления электроприводами ввиду ограниченной мощности силового
220
преобразователя. При оптимальных законах управления, полученных
путем решения задач безусловной оптимизации, требуется определенный
запас по напряжению силового преобразователя для обеспечения
необходимого магнитного потока машины. Величина запаса по
напряжению силового преобразователя при работе двигателя в
установившемся режиме не столь значительна. Однако в динамических
режимах может потребоваться более значительная форсировка
напряжения, которая в общем случае зависит от закона регулирования
потока и темпов изменения скорости и момента нагрузки. Известно [16,
131, 139], что реализация статических законов оптимального управления в
электроприводах, работающих в динамических режимах с высокими
темпами изменения момента сопряжена со значительными форсировками
напряжения. Эти форсировки объективно необходимы для преодоления
электромагнитной инерции цепей ЭД. Для уменьшения динамических
форсировок рекомендуют использовать законы управления с постоянством
магнитного потока или законы управления, предусматривающие
ограничение потока снизу [16, 61, 90, 131 ].
Таким образом, практический смысл имеют задачи, в которых при
минимизации потерь (тока) накладываются ограничения на магнитный
поток двигателя.
Другой класс практических задач оптимизации связан с
обеспечением минимума потерь (тока) при ограничении реактивной
мощности, потребляемой от силового преобразователя или питающей сети.
Кроме того, в электроприводах с мощными асинхронными и
синхронными двигателями целесообразными являются режимы,
обеспечивающие максимальное использование габаритной мощности
приводного двигателя и силового преобразователя, что приводит к
необходимости дополнительно ограничивать потребление реактивной
мощности от силового преобразователя [90].
Важной практической задачей в области регулируемых
электроприводов является задача обеспечения максимальной
перегрузочной способности и диапазона регулирования скорости при
ограниченных ресурсах силового преобразователя по напряжению и току.
Таким образом, ориентируясь на практическую целесообразность,
определим для дальнейшего решения следующий круг типичных задач
экстремального управления электрическими двигателями:
1) задачи управления по минимуму потерь (тока) в открытой области
управлений (задачи безусловной оптимизации Др —> min);
2) задачи управления по минимуму потерь (тока) при постоянстве
главного магнитного потока (Др —> min при у/т = const);
221
3) задачи управления по минимуму потерь (тока) при ограничении
реактивной мощности, потребляемой от силового преобразователя
или от сети (Др —> min при qs,qr - const);
4) задачи управления по минимуму потерь (тока) при постоянстве
главного магнитного потока и ограничении реактивной мощности,
потребляемой от силового преобразователя или от сети (Др —> min
при i//m - const и qs,qr - const);
5) задачи экстремального управления по максимуму момента при
ограничении напряжения и тока силового преобразователя
(т —>тах);
6) задачи комплексной оптимизации, сочетающие решение задач
экстремального управления по минимуму потерь (тока) с задачей
управления по максимуму момента при ограничении напряжения и
тока силового преобразователя.
222
Глава 5
ЭКСТРЕМАЛЬНОЕ УПРАВЛЕНИЕ
ОБОБЩЕННОЙ МАШИНОЙ
ПЕРЕМЕННОГО ТОКА
5.1. Режимы управления обобщенной машины
переменного тока по минимуму потерь энергии
Известные работы в этой области отличаются уровнем идеализации
математической модели и выбором критерия оптимизации режимов
ОМПТ. В [79] рассматриваются принципы построения систем
автоматического управления, а в [15] описывается структура системы
автоматического управления, позволяющая минимизировать затраты на
возбуждение машины. Отмечается целесообразность использования при
наличии ударной нагрузки режима управления при постоянстве главного
потокосцепления, а в целях минимизации потерь в меди и стали либо
минимизации реактивной мощности предлагается управлять потоком в
зазоре машины в функции момента.
В данной главе рассматриваются вопросы оптимизации режимов
ОМПТ в рамках изложенного подхода с учетом насыщения машины по
главному магнитному пути. Расширен также круг задач в отношении
критериев оптимизации и учета ограничений.
5.1.1. Задача минимизации потерь энергии без ограничений
Постановка задачи. Рассмотрим обобщенную машину переменного
тока, обмотки статора и ротора которой питаются от идеализированных
автономных преобразователей частоты с раздельным регулированием
амплитуды и частоты выходного напряжения.
223
При частотном способе регулирования скорости ОМПТ основными
являются потери в меди и стали Дрсу статора (j = s) и ротора
(7 = г), а также механические Армех и добавочные Дрд потери. Учет
Армех в задаче оптимизации не влияет на ее решение, так как скорость в
проблемно-ориентированных моделях представляет собой не зависящую
от управляющего воздействия V величину. Потери Ард зависят от
вектора управлений V. Однако при нагрузках, не превышающих
номинальную нагрузку, добавочные потери составляют небольшую долю
от суммарных потерь в машине, а при перегрузках основную роль играют
потери в меди обмоток. Поэтому в дальнейшем при решении задач
оптимизации по минимуму потерь будут исследоваться электромагнитные
потери
Др = ДРш + ДРмг + Дрм + ДРсг • (5-1)
Для решения задач оптимизации ОМПТ выберем проблемно-
ориентированную модель, в которой независимыми воздействиями
являются абсолютное скольжение /3, вектор главных потокосцеплений
у¥т и заданный по условиям технологической задачи вектор X:
О]7;
Is=Li(4-,-4-„);
Ф =Ф 4-Т I
г т г&г’
Ur=/?BTr+RrIr
(5-2)
где составляющие вектора главных потокосцеплений
Т
А т
^[Уту_
Vm cos%„
V тх
задаются модулем l[fm и аргументом .
224
При использовании модели (5.2) электромагнитные потери (5.1)
представляют собой функцию от независимых воздействий (3, и X:
Др(А^И5х)= ZApm7(tw,«2)+ ЕДрсу(АТт,х).
j~S,r j-S,r
Здесь потери Дрму и ДРс/ определяются следующими
выражениями:
Арш w) = kMSi% (Tw, т);
АрмгС*'™>т) = k^ir {^т,тУ,
bPcs = kcsI® + ^Р’3 Vm5
4Рсг(А^И) = АСгИ1’3^и.
где is, ir и y/m - модули векторов токов статора, ротора и модуль вектора
главных потокосцеплений;
ЛМ5, ккг, kzs и ксг - постоянные коэффициенты, характеризующие
удельный вес потерь в меди и стали ОМПТ по отношению к
электромагнитной мощности в базовом режиме.
Модули is, ir и Ц/т связаны с (5.2) выражениями i% = • Is ,
/2 = Ir • Ir и . Тогда задача минимизации потерь Ар на
безусловный экстремум (Ap-»min) принимает следующую
формулировку:
Ap(V, Х = ХС)—> min =>V°(X), ХсеПс. (5.3)
v=(№)
Свойства функции качества Ap(V, Х). Введем трехмерную
систему координат (?V]V2V3 для изображения допустимого пространства
управлений. В соответствии с обозначениями компонент вектора
V = (J3,y/m,i)Vm) примем vj = fl, у2 = у/т, у3 = vVm .
Изменяя только один компонент вектора V и оставляя два других
компонента неизменными, рассчитаем зависимость показателя качества
как функции одной переменной. В этом случае получим представление о
свойствах функции Ap(V, X) при изменении каждого компонента в
отдельности.
225
На рис. 5.1-5.3 приведены зависимости потерь двигателя мощностью
1000 кВт при изменении /3, 1[/т и для фиксированных значений X.
Потери отнесены к величине потерь в базовом режиме.
Изменение /3 оказывает влияние лишь на потери в стали ротора
двигателя (рис. 5.1). Как видно, функция потерь имеет слабо выраженный
минимум, который смещается при
изменении скорости и сохраняет свое
положение по управлению /3 при
различных т.
Рис.5.1. Зависимость потерь от /3 при
фиксированных значениях т и О):
-----------
-----------й)=0,6й)б
При изменении модуля и аргумента вектора главных
потокосцеплений потери Др имеют ярко выраженные экстремумы.
При изменении \//т (рис. 5.2, а) с увеличением т точка с
оптимальной координатой смещается в область насыщения.
Характеристики становятся более острыми. Потери увеличиваются.
Наблюдается также увеличение чувствительности потерь к изменению у/т
и т.
При прежних условиях и уменьшении скорости потери начинают
заметно уменьшаться при моментах т>т§, т.е. чувствительность потерь к
изменению (О возрастает с увеличением т. При этом характеристики
смещаются практически вертикально вниз.
При изменении только (рис. 5.2, б) потери также имеют
экстремум. С увеличением т координата оптимальной точки,
доставляющая экстремум функции Др(У, X), смещается. Причем |t>°m |
увеличивается. Экстремумы становятся более тупыми.
226
Уменьшение (О в диапазоне 0,6 й)б < (О <>(О§ приводит к
незначительному изменению Др. С уменьшением скорости потери
уменьшаются. В целом характеристики смещаются практически
вертикально вниз.
Рис. 5.2. Зависимости потерь от модуля \//т (а) и аргумента (б):
---------------------<у=щб;------------й)=0,6<у6
Результаты исследования Ap(V, X) по отдельным варьируемым
управлениям показывают, что в практических случаях задачу оптимизации
можно свести к меньшей размерности по управлению. Такие режимы
будут рассмотрены в дальнейшем.
Для обоснования метода поиска законов оптимального управления
проведены исследования поверхностей и линий равного уровня функции
Др(У, X) при различных X для двигательного и генераторного режимов
ОМПТ. Поскольку построение многомерных поверхностей в пространстве
трех измерений затруднительно, в дальнейшем ограничимся
рассмотрением двухмерной поверхности.
На рис. 5.3 изображен трехмерный контурный график функции
Др(Д у/т, , X) при фиксированных значениях Р ~ Ръ и
X = Хб = (щб,<Уб).
227
Рис. 5.3. Поверхность
функции Др(^и,р^т)
Контурный график
представляет собой располо-
женные в пространстве линии
равного уровня, полученные
при расслоении поверхности
&р(у/т, ) секущими плоскостями, расположенными параллельно
плоскости варьируемых управлений (<//т, ). Как видно, поверхность
Др(у/т, ) имеет явно выраженный “овражный” характер. Линии
равного уровня \р(у/т, ) = const представляют собой семейство
вытянутых замкнутых линий, подобных эллипсам. Овражный характер
поверхности сохраняется при изменении момента и скорости.
Таким образом, задача минимизации потерь Ьр на безусловный
экстремум относится по существу к овражным оптимизационным
задачам. Известно [112], что поиск экстремума в овражной ситуации
приводит к вычислительным трудностям и требует обращения к
специальным методам, ориентированным на решение подобного рода
оптимизационных задач. К числу таких методов относится
модифицированный симплексный метод Нелдера-Мида.
Законы оптимального управления. Для решения задачи
использовался метод Нелдера-Мида, интегрированный в пакете
математического моделирования MATLAB. На рис. 5.4 приведена схема
модели для поиска оптимального управления.
Рис. 5.4. Модель поиска оптимального управления
228
Решение (Ap°,V°) экстремальной задачи (5.3) приведено на
рис. 5.5 в виде зависимостей компонент (3°, и 1?°^ вектора V0 и
потерь Ар ° от т для двух фиксированных значений СО.
Рис. 5.5. Решение задачи оптимизации режимов ОМПТ
по минимуму потерь:
----------СО=СО§-,-----------CO=QfiCO§
Оптимальное управление V°(X), обеспечивающее минимум
электромагнитных потерь, обладает следующими основными свойствами:
1) вектор-функция V°(X) является существенно нелинейной
функцией, значения компонентов которой изменяются в широких
пределах;
2) функция симметрична относительно оси ординат,
разделяющей характеристики двигательного и генераторного режимов. В
каждом из этих режимов функция ^°(т, при фиксированных
значениях со является положительной неубывающей нелинейной
функцией: )<Ч/т(т2У если |ml|<|w2[* При |^j|—>0
у/^(т,со) —>0 не зависимо от скорости. Изменение т оказывает более
ощутимое влияние на величину чем изменение СО. При
фиксированном т с увеличением СО значение возрастает;
229
3) зависимость (т, со) симметрична относительно начала
координат. В двигательном и генераторном режимах (т, б>)
принимает значения разных знаков. При фиксированном значении СО и
т = то=О функция (т,со) имеет разрыв первого рода. В точке т0
функция (т, со) не определена. При переходе из двигательного
V О
режима в генераторный режим значение и^т изменяется скачком.
Односторонние пределы (ти0 + 0, со) <0 и 12°^ (т0 - 0, со) >0 равны
по абсолютной величине и противоположны по знаку. При т>0 функция
и°т(т,со) монотонно убывает, а при т<0 — монотонно возрастает.
Изменение со также влияет на оптимальное значение . При
г т
фиксированном т с увеличением СО абсолютное значение и^т
увеличивается;
4) компонент /3 вектора V при оптимальном управлении не зависит от
момента. Зависимость /3°{со) в оптимальном режиме представляет
линейную функцию от СО.
Характеристики при управлении Др -> min. Электромагнитные
потери ОМПТ и их составляющие при управлении
Др -» min представляют собой монотонно возрастающие при увеличении
т и СО зависимости (рис. 5.6). При т = 0 (в режиме идеального хода)
потери Др =0. Превалирующее влияние на потери оказывает т и в
меньшей степени - СО.
Рис. 5.6. Зависимости электромагнитных
потерь и их составляющих
при управлении Др -» min:
------------со=со5;
------------со=0,6со5
230
Оптимальное управление обеспечивает снижение потерь Др по
отношению к потерям в базовом режиме на 7 %.
Электромагнитные потери, потери в меди (Дрму) и стали (Дрсу)
статора (J = s) и ротора (J = r) уменьшаются при снижении скорости.
Так, например, если при скорости (О=а>5 потери Др=0,93Дрб, то при
й)=0,6®5 они составили 0,7 Дрб, т.е. электромагнитные потери снизились
на 30 %.
Распределение потерь в элементах машины характеризуется
следующими данными. Потери ДрМ5 и Дри в оптимальном режиме при
скорости а>=а>5 уменьшились соответственно на 16 и 45 % . В то же время
на 2 % возросли потери &рмг и в 3,3 раза увеличились потери Дрсг по
отношению к их базовым значениям. Потери в меди Дрш=Дрмг и потери
в стали &pcs=&pcr, что объясняется равенством параметров обмоток
статора и ротора. При значении =0,6 со^ потери в меди и стали статора
уменьшились по отношению к базовым значениям на 27 и 66 %
соответственно. Потери в меди ротора снизились на 11 %, а потери в стали
ротора при данной скорости превышают базовое значение в 2 раза.
Зависимости напряжений us^(т,со) и токов is^(m,co) обмоток
статора и ротора при управлении Др -> min приведены на рис. 5.7, а.
Рис. 5.7. Характеристики ОМПТ при оптимальном по минимуму
потерь управлении:
---------co=g>q\-----------а>=0,ба>б
231
Для машины с одинаковыми параметрами обмоток статора и ротора
напряжения и токи этих обмоток становятся равными и представляют
собой монотонно возрастающие функции от т и СО. В точке идеального
холостого хода токи и напряжения равны нулю. При т=т5 и co=COq
напряжение статора us меньше значения напряжения в базовом режиме на
38 %, а напряжение ротора иг возросло до значения напряжения us и
превысило свое базовое значение в 2,5 раза. В то же время ток статора is
снизился на 8,6 %, а ток ротора ir увеличился на 1 %.
Изменение момента нагрузки оказывает более существенное влияние
на электрические характеристики, чем изменение скорости. Токи в
обмотках практически изменяются линейно от т и только в области
достаточно малых значений моментов линейная зависимость нарушается.
Заметим также, что изменение знака т не влияет на характер
зависимостей us^(m,co) и токов is(ry(m,co). Электрические
характеристики в генераторном режиме аналогичны характеристикам в
двигательном режиме машины.
На рис. 5.7, б приведены зависимости активных ps^(m,co) и
реактивных q^ (т, со) мощностей при управлении Др = min. При
равенстве параметров обмоток статора и ротора потребляемые
(отдаваемые) мощности ps и рг равномерно распределяются по цепям
статора и ротора. Также равномерно распределяется потребление
реактивных мощностей qs и qr- Важно отметить, что в генераторном
режиме ps и рг отрицательны по знаку, т.е. они отдаются источнику
питания. В то же время qs и qr при управлении Др = min потребляются
статором и ротором как в двигательном, так и в генераторном режимах (qs
и qr положительны по знаку). Однако потребление реактивной мощности
при оптимальном управлении сравнительно невелико. При т=т§ и
CO—COq суммарное потребление реактивной мощности от силовых ;
преобразователей снизилось на 39 % по сравнению с базовым режимом.
На рис. 5.8 представлены угловые характеристики при значении ;
СО-СО^и векторная диаграмма, соответствующая оптимальному режиму
при т = тб и со — C0q.
Пространственное положение результирующих векторов при ;
управлении Др -> min характеризуется их аргументами, которые J
отсчитываются от точки, лежащей на положительной полуоси Ох |
S
i
прямоугольной системы координат Оху, ориентированной по вектору
полных потокосцеплений обмотки статора.
Угол 1Л° между результирующими векторами главных
т т
потокосцеплений и полных потокосцеплений обмоток статора, как было
показано раньше, растет при увеличении момента, что обусловлено ростом
токов и потокосцеплений рассеяния. Векторы токов и потокосцеплений не
ортогональны. Аргументы <71 /2, где j = s,m,г.
Рис. 5.8. Угловые характеристики (а) и векторная диаграмма (б)
ОМПТ при управлении по минимуму потерь
Для управления Др -> min характерно то, что при переходе из
двигательного в генераторный режим и обратно значения аргументов
результирующих векторов потокосцеплений и токов обмоток статора и
ротора изменяются скачком при одновременном изменении их знака, т.е. в
этом случае результирующие векторы скачкообразно меняют свое
пространственное положение.
5.1.2. Задача минимизации потерь энергии при постоянном потоке
В задаче минимизации потерь без ограничений (Др -> min) главный
магнитный поток изменяется в широких пределах. В этой связи реализация
оптимального режима в электроприводах с интенсивно изменяющейся
нагрузкой вызывает затруднение. При резком увеличении нагрузки для
предотвращения падения скорости необходимо обеспечить быстрое
увеличение потока, что выполняется путем форсировки напряжения.
233
Поскольку реальный запас по напряжению силовых преобразователей
всегда ограничен по технико-экономическим соображениям, то режим
минимальных потерь с переменным потоком может оказаться
нереализуемым. В такой ситуации целесообразен переход к режиму с
минимизацией потерь при постоянном потоке (Др -> min при yr — const).
Постановка задачи. Задана функция качества Ap(V, X), где вектор
X = Хс G £1с. Найти управление V® 6 Qv, минимизирующее потери
Ap(V, X). Область допустимых управлений ограничена условием
* *
у/т гДе Wm ~ заданное значение модуля вектора главных
потокосцеплений.
При v = (ATm) сформулированная задача принимает следующий
вид:
Др(у, X = Хс)-> min => V°(x), Хс еQc, (5.4)
VeQy
где
Q v = {у: V = ( Д ), , vVm), рт = ут}.
Таким образом, задача оптимизации режимов ОМПТ по минимуму
потерь при постоянном потоке является двухмерной задачей
экстремального управления, так как компонент у/т вектора V
представляет собой постоянную величину.
Свойства функции качества Ap(V, X) при постоянстве потока.
Для изображения пространства управлений введем двухмерную систему
координат Ov^ • Принимаем V] = /? и v2 = , т.е. варьируемыми
переменными в этой задаче являются скольжение /? и аргумент
вектора главных потокосцеплений.
Для иллюстрации свойств функции качества Др(У, X) при
постоянстве потока ограничимся построением поверхности и линий
равного уровня этой функции только для двигательного режима ОМПТ,
зафиксировав X = Хд = (щб,б9б) и приняв ^m=Vm5- На рис. 5.9
изображен трехмерный контурный график функции Др(Д О^т ). Видно,
что варьируемые переменные /? и по-разному влияют на поведение
234
функции качества. Варьирование приводит к более значительному
изменению показателя качества. Это свойство дает основание отнести
функцию Ap(V, X) при постоянстве \рт к хорошо организованной
функции [81], для которой является несущественной, а /3 -
существенной варьируемыми переменными. По направлению
существенного управления (J3) функция качества изменяется с
интенсивностью значительно меньшей, чем вдоль направления несущест-
венного управления ),
определяя тем самым
овражный характер поведе-
ния функции Др(Д и^т ).
Рис. 5.9. Поверхность
функции Др(У, X)
при = ртб
Законы оптимального управления по минимуму потерь при
= const. Учитывая свойства поверхности &p(J3, Vym ), решение
задачи (5.4) можно найти классическим методом либо одним из известных
поисковых методов (например, методом Нелдера-Мида).
Законы оптимального управления классическим методом находятся
путем решения уравнений
a0 ’ диг.
и при rs Ф гг имеют следующий вид:
о . (, r,+k^rr т
иут =-arctg Z5(7 / г , (5.5)
I Г5+Гг ^тГ)
0°(а>) = ~а), (5.6)
235
где ks - постоянный коэффициент, ks = lm /(lm + lsa-)-
При rs = rr закон управления (5.5) упрощается:
VVm =“arctg
-----
1(1 + ^ )(^m)
(5-7)
В диапазоне изменения нагрузок -1,5 Wg < т <+1,5/Ид можно
пользоваться приближенными аналитическими выражениями
„о rs+ks\ т
ии/т Чет , / *
Гз+Гг (&тУ
О 2/SCT
Vw =-------у * Vт
(\ + к^т)2
при rs ^rr',
при rs = rr.
Решение задачи (5.4) в виде зависимостей компонент вектора
v°(x) от т для двух фиксированных значений to приведены на
рис. 5.10. Оптимальное управление V°(x), обеспечивающее минимум
электромагнитных потерь при ysm = const, обладает следующими
свойствами:
1) компонент у/т вектора управлений ограничен и равен заданному
*
значению модуля вектора главных потокосцеплений (^т=^т)- Два
других компонента изменяются в зависимости от т или to;
2) составляющая вектора управлений является непрерывной
функцией от т. Функция (/и) симметрична относительно начала
координат. В двигательном и генераторном режимах 12°^ (т) принимает
значения разных знаков. В точке т=0 функция (т) равна нулю. При
/и>0 функция (w,to) монотонно убывает, а при т<0 возрастает;
3) составляющая вектора управлений /3° не зависит от момента и
представляет собой непрерывную линейную функцию от скорости. Закон
/?°(ty) аналогичен закону изменения скольжения при управлении по
минимуму суммарных потерь при переменном потоке.
236
Рис. 5.10. Решение задачи
оптимизации
Др -> min при \//т = const:
-----------а>=а^;
------------ a>=0,6ct)Q
Характеристики ОМПТ в
режиме управления по
минимуму потерь при
I/ = const. Особенностью
г т
оптимального режима при постоянстве потока является то, что потери в
стали статора и ротора не зависят от т. Они определяются
а
потокосцеплением у/т = ут и скоростью й):
j=s, г
Абсолютное скольжение /3° при to = 0 равно нулю. При этом
условии потери Дрс =0. С увеличением скорости потери Др>с растут.
Потери в меди статора Дрм5 и ротора Дрмг в данном режиме
являются монотонно возрастающими
функциями момента.
Рис. 5.11. Зависимости суммарных потерь и
их составляющих в режиме
Др -> min при у/ = const:
------------to=to6;
------------to=0,6to6
237
Электромагнитные потери Др отражают характер поведения их
составляющих. Потери Др зависят как от момента, так и от скорости
(рис. 5.10 и 5.11). Превалирующее влияние на величину Др в области
малых значений т оказывают потери в стали. В частности, в точке
идеального холостого хода Др = Дрс. При перегрузках основную долю
суммарных потерь составляют потери в меди, зависящие, как было
отмечено, только от момента.
В целом оптимальное управление по минимуму потерь при
постоянстве потока обеспечивает снижение потерь Др по отношению к
потерям в базовом режиме на 7 %.
Отличительной особенностью данного режима является то, что при
малых значениях момента в этом режиме потери Др существенно больше,
чем в режиме управления Др —> min.
Рис. 5.12. Характеристики ОМПТ
в режиме Др —> min при у = const:
------------(D=g>q;
------------to=0,6to6
Напряжения обмоток статора us и
ротора иг мало зависят от момента и
при заданном потоке в основном
определяются скоростью (рис. 5.12).
Напряжение us составляет 62 % от usg,
а напряжение ротора иг увеличилось в
2,5 раза. Токи статора is и ротора ir не
зависят от скорости и равны между собой. Ток статора в оптимальном
режиме уменьшился на 8 % и несколько увеличился ток ротора (на 1,5 %).
При т = 0 напряжения и токи обмоток отличны от нуля, что необходимо
для обеспечения условия постоянства потока в режиме идеального
холостого хода.
Зависимости ps^(m,a)) качественно ведут себя так же, как в
режиме Др -> min при переменном потоке. Реактивные мощности qs и qr
незначительно зависят от момента, возрастая при увеличении момента и
скорости. Характерно потребление qs и qr в двигательном и
генераторном режимах, а также на границе перехода при т = 0. По
238
отношению к базовому режиму потребление qs уменьшилось в 3,3 раза. В
то же время qr уменьшилась всего на 1,3 %.
На рис. 5.13 представлены угловые характеристики (а) при (О — (Oq и
векторная диаграмма (б) для двигателя мощностью 1000 кВт при
значениях т = т5 и 6У = 6О6. Графики угловых характеристик и
диаграмма соответствуют \]/т = 1//т§.
Рис.5.13. Зависимости аргументов результирующих векторов
от момента (а) и векторная диаграмма (б) ОМПТ в режиме
Ар —> min при у/т = const
Отметим следующие особенности угловых характеристик:
1) аргументы результирующих векторов главных потокосцеплений
, полных потокосцеплений обмотки ротора 0°?, токов статора Ц° и
ротора не зависят от скорости и представляют собой непрерывные
функции от т;
2) при переходе из двигательного в генераторный режим и обратно
ОООО
значения аргументов и изменяются непрерывно. При
этом их знаки меняются на противоположные;
3) при переходе из двигательного в генераторный режим и обратно
аргумент результирующего вектора напряжений обмотки ротора
п О
изменяется скачком. При этом знак аргумента изменяется на
противоположный.
239
5.1.3. Задача минимизации потерь энергии с ограничением
реактивной мощности
Постановка задачи. Задача минимизации электромагнитных потерь
при ограничении реактивной мощности (Др-> min при qs,4r = const) в
.общем случае имеет следующую формулировку:
Др(у, X = Хс ) —> min => V0 (X), Хс е Ос, (5.8)
VeQv
где область допустимых управлений
Qv = {V: qs = (V,X) = qs, qr = (V,X) = qr,V = (Д'?,)}.
* *
Здесь qs и qr - заданные значения реактивной мощности статора и
ротора, определяющие уровни ограничения.
Следует заметить, что наличие двух ограничений типа равенств
снижает размерность задачи (5.8) до q = 1. Однако использование этой
особенности задач математического программирования для уменьшения
числа варьируемых управлений реально не представляется возможным
ввиду нелинейного характера функций качества и ограничений. В этой
связи решение задачи оптимизации (5.8) осуществляется численно
методом штрафных функций. В этих целях для минимизации функции
качества Др(У,Х) при ограничениях qs(V,X)~ qs и qr(y,X) = qr
вводится вспомогательная функция
Ap(V, X) - Ap(V, Х)+^g(V, Х,а)
с функцией штрафа
^(У,Х,а) = аД^(У,Х)-^]2+аг[9г(У,Х)-^]2,
где as и аг - положительные весовые коэффициенты.
Таким образом, задача (5.8) с ограничениями преобразуется к задаче
математического программирования без ограничений
Ap(V, X = Xc)->min =>V°(X), Хс gQc. (5.9)
v
240
Рассмотрим решение задачи (5.9) при условии qs=qr=O, т.е.
режим минимальных потерь ОМПТ обеспечивается без потребления
реактивной мощности (qs - 0 и qr = 0) от силовых преобразователей.
Поиск V°(X) ведется симплексным методом Нелдера-Мида.
Законы управления по минимуму потерь при qs - qr = 0. В этом
режиме модуль и аргумент Оут вектора главных потокосцеплений
зависят от т и й), качественно повторяя характер изменения законов
управления Др—» min (рис. 5.14). Различие выявляется при
количественной оценке и . В режиме минимальных потерь при
qs = qr = 0 модуль вектора
главных потокосцеплений
становится меньше, а аргумент,
наоборот, увеличивается по
абсолютному значению.
Рис. 5.14. Решение задачи
управления Др -> min
при qs,qr~ const:
-----------а>=а>5;
-----------60=0,6 (Oq
Более существенное отличие состоит в том, что в режиме
Др = min пр и qs>qr = consZ составляющая вектора управлений /?°=0.
Характеристики ОМПТ в режиме управления по минимуму
потерь при qs = qr = 0. На рис. 5.14 приведены зависимости Др°(ги,бо)
в режиме Др = min при qs,qr = 0. Как видно, превалирующее влияние на
потери оказывает момент и в меньшей степени - скорость. В режиме
идеального холостого хода Др =0.
Отметим ряд особенностей данного режима, связанных с характером
изменения составляющих электромагнитных потерь (рис. 5.15):
1) отсутствие потерь в стали ротора, так как абсолютное скольжение
равно нулю;
2) потери в меди ротора больше потерь в меди статора, т.е.
241
3) ввиду увеличения Дрмг электромагнитные потери в этом режиме
больше, чем в режимах Ар —> min и Др —» min при ф т = V
Напряжения статора us
Рис. 5.15. Зависимости составляющих
электромагнитных потерь в режиме
Ар -» min при qs,qr =0:
-------------6О=6О6;
-------------£0=0,6600
В режиме управления Ар —> min
при qs>qr =0 электромагнитные потери
возросли по отношению к потерям в
базовом режиме на 6 %.
и ротора иг существенно отличаются по
величине (рис. 5.16). Для обеспечения данного режима требуется более
высокое напряжение источника питания обмотки статора (на 14,6 %
больше по отношению к базовому режиму), а напряжение на обмотке
ротора, наоборот, снижено. При этом обмотка ротора должна быть
запитана от регулируемого источника постоянного тока. Напряжение на
обмотке ротора составило 4,4 % от напряжения ротора в базовом режиме.
Рис. 5.16. Характеристики ОМПТ в режиме управления
Ар -» min при qs,qr =0:
----------a>=a>Q-,-------------60=0,6 a>Q
242
Изменение соотношения между напряжениями обмоток статора и
ротора приводит к перераспределению их токов. Ток статора при более
высоком напряжении уменьшился. В то же время ток в обмотке ротора
увеличился. Причем оба тока становятся зависимыми от т и to.
Уменьшение to ведет к некоторому снижению токов. Однако по
сравнению с режимом Ар = min токи статора и ротора в этом режиме
больше. Так, при т=т$ и to=tOg токи статора и ротора превышают токи
в режиме Ар = min соответственно на 3,4 и 11,7 %. По отношению к
базовому режиму ток статора уменьшился на 5,5 %, а ток ротора возрос на
8,2 %.
Отметим еще одну особенность режима Ар —»min при
qs-Qr = const. В генераторном режиме ОМПТ потребляет активную
мощность со стороны ротора, тогда как со стороны статора в генераторном
режиме активная мощность отдается в источник питания. Однако
потребление активной мощности со стороны ротора незначительное.
Результаты анализа угловых характеристик и векторных диаграмм
показывает определенное качественное сходство данного режима с
оптимальным управлением Ар -> min. Сходство режимов заключается в
том, что при переходе через точку т = 0 пространственное положение
результирующих векторов потокосцеплений и токов изменяется скачком.
Рис.5.17. Угловые характеристики (я) и векторная диаграмма (б)
ОМПТ в режиме Ар —> min при 4s,Qr — О
Различие сравниваемых режимов состоит в количественных
характеристиках, что иллюстрируется приведенными на рис, 5.17
зависимостями аргументов результирующих векторов от т и векторной
243
диаграммой. Важно отметить, что в режиме Др —> min при Qs,Qr =0
векторы Uj и I s, а также Ur и Ь коллинеарны. Вектор токов статора
I s ортогонален вектору полных потокосцеплений статора 4?$.
5.1.4. Задача минимизации потерь энергии при постоянном
потоке и ограничении реактивной мощности
Постановка задачи. Найти нижнюю грань электромагнитных
потерь при наличии ограничений на главный магнитный поток и
реактивную мощность:
Ap(V, Х = Хс)-> inf =>V°(X), vnc,
(5.10)
VeQv
где область допустимых управлений
Qv :
qs(N,X) = qs, qr(V,X) — q*.
Как видно, задача (5.10) включает одновременно условия
ограничения двух предыдущих задач (5.4) и (5.8). Особенность этой задачи
состоит в том, что ввиду наличия трех ограничений здесь отсутствует
свобода в выборе оптимального в смысле минимума суммарных потерь
управления. Вместе с тем сформулированная задача математического
программирования позволяет найти поисковыми методами условный
экстремум функции Ap(V, X) и то единственное управление, которое
отвечает предписанным ограничениям на поток и реактивные мощности.
При практическом решении задачи ввиду того, что на одну из
составляющих вектора управлений V накладывается ограничение типа
*
равенства ((/m=(/m)> исходная трехмерная задача (5.10) сводится к
двухмерной задаче с ограничениями qs (V, X) - qs, qr (V,X) = qr.
Законы оптимального управления при у/т = const и
qs,qr= const. Рассмотрим частный случай задачи (5.10), в которой
ограничения определяются условиями ц/т = \]/тб и qs = qr = 0. После
преобразования (5.10) к задаче оптимизации без ограничений поиск
244
v°(x) осуществлялся симплексным методом Нелдера-Мида. Данная
задача имеет также аналитическое решение.
Вектор управлений V0 характеризуется следующими законами
изменения своих компонент:
1) оптимальное скольжение /7° =0;
*
2) модуль вектора главных потокосцеплений ysm = у/т;
3) аргумент вектора главных потокосцеплений при равенстве
параметров обмоток статора и ротора
г т
Таким образом, в этой задаче законы управления сочетают свойства
*
законов управлений по минимуму потерь при ysm — y/mg и минимуму
* *
потерь при qs ,qr = 0.
*
Характеристики АСД в режиме управления при у/т = y/mQ и
qs ~Qr -0- На рис. 5.18 приведены графики функции Ap(V, X) для
двигательного режима, рассчитанные при двух фиксированных значениях
скорости.
Рис. 5.18. Зависимости электромагнитных 1 4
потерь и их составляющих в режиме: 1 2
Ар -> min при = у/тб и qs,qr =0: ,
------------й)=й)б;-------------о.8
---------------------------------G)=0,6o)q 0.6
0.4
Поведение кривых свидетельствует о
качественной аналогии данного режима с 02
режимом управления по минимуму потерь о
при постоянстве потока (см. рис. 5.11).
Однако количественная оценка показывает рост электромагнитных потерь
в этом режиме за счет увеличения потерь в стали статора, несмотря на то,
что потери в стали ротора сведены к нулю. Видно, что потери в стали
статора оказывают доминирующее влияние на электромагнитные потери в
области рабочих нагрузок. Потери АрС5 растут с увеличением ® и не
245
зависят от т. Увеличиваются также потери в меди ротора, которые в
данном случае превышают потери в меди статора, что следует расценивать
как недостаток режима. Отвод тепла от ротора, обусловленного потерями,
затруднен в электрических машинах.
На рис. 5.19 приведены зависимости напряжений и токов обмоток
для двигательного и генераторного режимов. Напряжение статора us
является функцией от т и б). Однако при заданном потоке us в основном
определяется скоростью. При изменении т в широком диапазоне
напряжение us изменяется незначительно. Напряжение обмотки ротора иг
мало по сравнению с напряжением статора и не зависит от скорости.
Токи статора is и ротора гг не зависят от скорости и определяются
величиной момента. Ток статора является практически линейной функцией
от т и равен нулю при т =0. Ток ротора больше тока статора. В режиме
идеального холостого хода ток ротора не равен нулю, тем самым
обеспечивается нужный магнитный поток машины.
Основное потребление активной мощности в двигательном режиме
идет со стороны статора. Потребление активной мощности со стороны
ротора мало. При переходе в генераторный режим активная мощность
статора отдается источнику питания. В то же время со стороны ротора по-
прежнему наблюдается потребление активной мощности.
Рис. 5.19. Характеристики ОМПТ
в режиме Др -> min при \]/*т =
и q ,q =0:
---------со=а>§,----------б)=0,6б)б
На рис. 5.20 приведены угловые
характеристики (а) и векторная
диаграмма (б) ОМПТ. Векторная
диаграмма соответствует двигательному
режиму при фиксированных значениях
момента т = и скорости о = .
Как видно, зависимости (7и),
y т 4 '
Uty (rri), t>° (т) и 1>°г (т) являются непрерывными функциями от т.
Переход из двигательного в генераторный режим сопровождается плавным
изменением аргументов. Кривые этих функций проходят через начало
координат. В двигательном режиме аргументы результирующих векторов
246
'Em, Уr, Ur и Ir принимают отрицательные значения, а в
генераторном режиме — положительные. Векторы Us и I $, а также Ur и
I г коллинеарны.
Зависимость аргумента вектора напряжений статора
представляет собой непрерывную функцию от т. При т = 0 аргумент
= +л / 2, т.е. векторы Us и Ts ортогональны. С появлением нагрузки
условие ортогональности сохраняется. Независимо от знака момента
U°s > 0. В двигательном режиме < Л / 2, а в генераторном режиме
>л/2. Векторы Is и Ts ортогональны. Функция ц° (т)
непрерывна при |w| > О и претерпевает разрыв при т = т0 - 0.
Односторонние пределы этой функции ц° (w0 + 0) =+ п / 2 и
(Wq — 0)=— л/2. Таким образом, при переходе из двигательного в
генераторный режим результирующий вектор токов статора скачкообразно
изменяет свое положение на л эл. рад. С появлением нагрузки в
двигательном режиме ц* = ии^. В генераторном режиме =ии —п.
Рис. 5.20. Угловые характеристики (а) и векторная диаграмма (б) ОМПТ в
*
режиме Ар -> min при \]/т = и Qs,qr =0:
247
Таким образом, результирующие векторы напряжений и токов
статора в двигательном режиме совпадают по направлению, а в
генераторном режиме противоположны по направлению.
5.1.5. Сравнительная оценка законов управления
по минимуму потерь энергии
В свете задач энергосбережения практический интерес представляет
оценка эффективности режимов работы ОМПТ по отношению к
оптимальному по минимуму потерь режиму управления.
Для сравнительной оценки режимов введем меру эффективности
законов управления
(5.1»
Ap(V°,X)
Здесь Др(У,Х) - значение потерь при управлении, эффективность
которого исследуется; Др(У°,Х) - минимальное значение потерь в
электрической машине, т.е.
Др(У°,Х) = ппп Др(У,Х).
По степени приближения Др к нулю мера (5.11) позволяет оценить
эффективность различных законов управления по отношению к
оптимальному режиму Др -> min в каждой точке X = (т, со) допустимой
области Qx.
На рис. 5.21 приведены зависимости потерь Др (те, 69) (а) и меры
эффективности Др (те, 69) (б) для двигателя мощностью 1000 кВт. Кривые
построены для двух значений скорости (69=<Уд - сплошная линия и
69=0,6 <Уд - штриховая линия) и соответствуют решению следующих задач
оптимизации: 1 - (5.10), 2 - (5.4), 3 - (5.8) и 4 - (5.3).
Видно, что оптимальное по Др -> min управление обеспечивает
наименьшую величину электромагнитных потерь ОМПТ (кривая 4).
Управление Др -> min при qs — qr = 0 обеспечивает режим,
близкий к режиму Др = min при т<1 (кривая 3).
Управление ОМПТ по закону Др = min при l/sm = 1/стб (кривая 2)
доставляет примерно тот же эффект при моментах т>1.
248
Рис. 5.21. К оценке эффективности законов управления:
а — электромагнитные потери; б - мера эффективности
Для управления Др -> min при у/т - у/т5 и qs = qr = О
характерно значительное превышение потерь по отношению к минимально
возможным потерям при Др -> min независимо от величины т и а>
(кривая 1). Как видно, tip изменяется в широких пределах. Наибольшие
значения Др принимает при т <1.
Таким образом, tip позволяет оценить эффективность различных
законов управления ОМПТ по отношению к оптимальному по Др -> min
управлению и дает возможность выявить область рационального их
использования. Результаты исследований показывают преимущество
закона управления Др -> min и целесообразность его использования в
системах автоматического управления электроприводами в тех случаях,
когда скорость и момент нагрузки ОМПТ по условиям технологического
процесса изменяются в широких пределах. Близким к этому режиму в
области перегрузок является режим управлений при минимуме потерь при
постоянстве у/т = . При ограничении реактивных мощностей, т.е.
=Яг ~ 0, потери ОМПТ значительно возрастают (кривая 1).
5.2. Задачи минимизации токов обобщенной машины
5.2.1. Постановки задач
Рассмотренные режимы оптимального управления трудно
реализовать на практике ввиду сложности получения информации об
249
истинной величине показателя качества и формирования управляющих
воздействий. Более доступными с точки зрения измерений в реальных
системах управления электроприводов являются токи обмоток, которые
могут использоваться непосредственно в качестве критериев оптимизации
либо косвенно участвовать при составлении более сложных критериев
качества. Типичным примером в этом случае может быть свертка модулей
векторов токов статора и ротора
i = kfa + k2ir
или непосредственно ток статора либо ток ротора.
При постоянстве главного потока критериями оптимизации могут
служить ток статора или ток ротора, а при ограничении на реактивную
мощность или одновременно на поток и реактивную мощность - ток
ротора.
Далее ограничимся рассмотрением задач оптимизации по минимуму
свертки токов i в следующих постановках.
1. Задача оптимизации по минимуму тока на безусловный
экстремум. Найти управление V°(X), минимизирующее свертку токов
i в открытой области управлений:
z(Tw, »2 = wc)->min =>T°(w), wcgQ (5.12)
Заметим, что в этой постановке задача (5.12) сведена к двухмерной
задаче оптимизации, так как свертка i не зависит от абсолютного
скольжения. Таким образом, в состав варьируемых воздействий
включаются оба компонента вектора главных потокосцеплений
2. Задача оптимизации по минимуму тока при qs,qr = const. Найти
управление v°(x) eQv, минимизирующее сверку токов i . Область
допустимых управлений Qv ограничена условиями qs-qs и qr =qr.
Задача записывается в следующей формулировке:
i(V, Х = Хс)-> min =>V°(x), Хс eQc, (5.13)
VeQv
где область допустимых управлений
250
Qv={V:^=(V,X) = ^, gr=(V,X) = ^V = (A4%)}.
3. Задача оптимизации по минимуму тока при у/т = const. Найти
управление, минимизирующее свертку токов i , полагая, что на модуль
вектора главных потокосцеплений накладывается ограничение типа
И<
\}/т = Ут В этом случае задача сводится к одномерной задаче
оптимизации без ограничений:
z'Km ’ т = wc)-> min => и°т (w), тс е QWc. (5.14)
Аналогичную постановку имеют задачи управления по минимуму
тока статора is и минимуму тока ротора ir.
4. Задача оптимизации по минимуму тока при у/т = const и
qs,qr = const. Найти оптимальное управление V°(X), обеспечивающее
нижнюю грань свертки токов i, где область допустимых управлений Qv
* * *
ограничена условиями l//m = Ц/т, qs- qs и qr -qr. Задача записывается
аналогично (5.10):
z(V,X = Xc)-> inf =>V°(X), XcgQc, (5.15)
VeQv
где область допустимых управлений
_ _ V — (/?, )> Ут~Ут>
Qv
[qsCV,X) = qs, qr(V ,Х) = qr.
Приведем решение задач (5.12)—(5.15) и характеристики ОМПТ.
5.2.2. Законы управления по минимуму тока
Решения (V°,z°(X)) задач (5.12)—(5.15) представлены на
рис. 5.22 и 5.23. Минимизировалась свертка токов z' = ^iZs+^2zr при
^=^=0,5. Общим для всех задач является нелинейный характер решений,
не зависящих от скорости.
251
Рис. 5.22. Решение задачи оптимизации на безусловный минимум
свертки токов z=0,5(z^ + zr)
Как видно, зависимости модуля (т) и аргумента и°т (т)
вектора главных потокосцеплений для режимов управления i —> min и
i —> min при qs,qr =0 существенно нелинейные. В этих режимах
о о
потокосцепление 1//т изменяется в широких пределах, а аргумент и^т
претерпевает разрыв в точке (т =0,60). При т >0,25wg потокосцепление
превышает потокосцепление в базовом режиме.
Рис. 5.23. Решение задачи оптимизации по минимуму
свертки токов i=0,5(is + z'r) при у/м
Абсолютное скольжение в режиме z —> min представляет собой
свободную варьируемую переменную, которую можно использовать для
252
оптимизации показателей качества, зависящих от скольжения
(напряжений, потерь в стали и т.п.).
В режимах управления i —> min при у/т = , а также при
у/т = Ч^тб и Qs’Qr = 0 аргумент вектора главных потокосцеплений
изменяется по закону
2/iCT
»ут = -arctg
1 * т
t(l + V)(^)2
При более общем условии А&2) закон управления (т)
описывается выражением
и
о
V'm
= -arctg lsa
k
+ ks 1k2 m
kl+k2 (Wmf
Абсолютное скольжение в режиме i —> min при i//m = у/т5
представляет собой также свободную варьируемую переменную. В
частности, задавая (3° =0, получаем режим i —> min при постоянстве
у/т = Ч/тб и Qs’Qr =0,т.е. решение задачи (5.15).
Заметим, что законы управления, полученные при решении задачи
(5.15), полностью совпадают с законами управления по минимуму
электромагнитных потерь при тех же ограничениях. Для пояснения
справедливости данного вывода на рис. 5.24 приведены графики функций
качества i(y/m, и^т , т), is (у/т, , т)
и ir (у/т, , т) и реактивной
мощности qs (l//m, и^т рассчи-
танные при постоянстве потока
1//т = Утб для фиксированных значений
момента т = те и скорости а> = 0)5.
Рис. 5.24. К пояснению эквивалентности
задач оптимизации (5.10) и (5.15)
253
Как видно, условный минимум каждого из показателей качества i,
is и ir при ограничении qs = 0 соответствует значению управляющего
воздействия . Ограничение qr = 0 в этих задачах обеспечивается за
счет скольжения, оптимальное значение которого равно нулю. Таким
образом, при наличии ограничений на поток и реактивную мощность
непременным условием является выполнение ограничений. В таком случае
независимо от критерия оптимизации (Ар, z, is или ir) задачи
экстремального управления будут иметь одно и то же решение. Видно
также, что различие в режимах оптимизации будет проявляться в том
случае, когда снимаются ограничения. Так, например, при снятии
ограничения на мощность qs режим минимума тока ir будет
сопровождаться потреблением реактивной мощности со стороны статора.
Значение тока is в этом случае отличается от минимально возможного
значения.
При минимуме i реактивная мощность qs и ток is уменьшаются.
Если варьируемые управляющие воздействия не стеснены ограничениями
на поток и реактивную мощность, то решение задачи отвечает
глобальному минимуму свертки i как функции переменных у/т и .
Для частного случая при т = т§ решение задачи представлено
на рис. 5.25.
Рис. 5.25. К иллюстрации наличия минимума
функции i(y/m, , ni) при т = т§
254
Рассмотрим характеристики при различных законах экстремального
управления, использующих свертку токов i (рис. 5.26 и 5.27). Сравнение
этих характеристик позволяет выявить следующие особенности режимов.
В режиме управления г —> min токи is и ir близки к минимальным
значениям (рис. 5.26, а), что благоприятно отражается на потерях ДрМ5 и
Дрмг. Токи is и ir равны между собой и не зависят от скорости. В
достаточно широком диапазоне изменения момента сохраняется
линейность токов статора и ротора от т.
В режиме управления i —> min напряжение us снижено, а иг,
наоборот, завышено по отношению к базовому режиму и в сравнении с
напряжениями при других законах экстремального управления (рис. 26, б).
Заметим также, что напряжение us, активная ps и реактивная qs
мощности статора являются функциями от V и X. При определении этих
характеристик следует знать: V = ((У°, 12°^ , /3) и X = (т, а>). Первые
две составляющие и вектора V находятся решением задачи
(5.12), а третья составляющая — /3 - остается свободной варьируемой
координатой управления. Таким образом, изменяя /3, можно
дополнительно влиять на характеристики us, psuqs.
Аналогичным свойством обладает режим i min по отношению к
напряжению иг, активной рг и реактивной qr мощностям цепи ротора.
Однако здесь иг, рг и qr не зависят от скорости.
На рис. 5.26 и 5.27 приведены зависимости напряжения us, и qs при
/7 = 0. В этом случае напряжение us несколько снизилось, а иг возросло
по сравнению с соответствующими базовыми значениями напряжений.
Для режима i min характерно возрастание потребления от силового
преобразователя реактивной мощности qs как в двигательном, так и
генераторном режиме. Потребление активной мощности рг по цепи
ротора незначительное, а реактивная мощность qr равна нулю. Активная
мощность ротора рг > 0 как в двигательном, так и генераторном режиме.
Характеристики ОМПТ в режимах управления i —> min без ограничений и
. . * *
I —> min при ограничениях qs-qs и qr = qr имеют качественное
сходство. Для этих двух режимов зависимости компонент (т),
255
C° (m) и в°(т) вектора управлений V°(m) и график минимизируемой
т т
функции качества z° (т) приведены на рис. 5.22.
Рис. 5.26. Зависимости напряжений и токов ОМПТ
в режимах управления по минимуму сверки токов
Заметим, что аналогичный характер имеют законы управления,
доставляющие минимум тока ротора. Как видно, минимум функций
качества г°(т) обеспечивается путем изменения в широких пределах
модуля и аргумента вектора главных потокосцеплений. В режиме
идеального холостого хода потокосцепление ^^(0)=0, а управление
(т) имеет разрыв. Оптимальное значение скольжения равно нулю
независимо от т и со. Видно, что при фиксированной нагрузке
о
потокосцепление у/т в этом режиме несколько снижено, а значение
аргумента для обеспечения той же нагрузки возросло в сравнении со
оо •
значениями \ут и в режиме i —> min.
Качественное сходство сравниваемых режимов экстремального
управления наблюдается также в характере изменения напряжений, токов
и других характеристик. Принципиальным выводом является то, что в
режимах оптимизации тока (г или zr) при qs — qr =0 токи is и ir
являются функциями одной переменной — момента нагрузки.
256
Рис. 5.27. Реактивная мощность
в режимах управления i min и
z—>min при у/т =
------------со=а>5;
------------<У=0,6<Уб
Количественная оценка харак-
теристик показывает, что для
реализации режима управления
i —> min при ограничении
qs = qr = 0 требуется более высокое
напряжение источника питания обмотки статора, а напряжение обмотки
ротора снижено. Такое распределение напряжений по обмоткам привело к
незначительному снижению тока статора и ощутимому увеличению тока
ротора.
В режиме, i —> min при у/т = const управление и°т представляет
собой симметричные относительно начала координат непрерывные
практически линейные функции от т, что создает предпосылки для
реализации оптимальных режимов. Решение задачи оптимизации по
минимуму г при постоянстве потока у/т = приведены на
рис. 5.23 и 5.26, б. Как видно, зависимости i°(m) и
являются нелинейными функциями от т. При т = 0 токи не равны нулю.
Заметим также, что в режиме идеального холостого хода поток создается
одновременно за счет токов статора и ротора. Вместе с тем при
минимизации тока статора поток в точке идеального холостого хода
обеспечивается только током ротора. Обратная картина наблюдается при
*
управлении по минимуму тока ротора, при котором условие у/т = у/т в
режиме идеального холостого хода обеспечивается за счет только тока
статора.
Напряжение статора в режиме i —> min при у/т — const, являясь, в
общем случае, функцией момента нагрузки и скорости, мало зависит от т
и в основном определяется О) (5.26, б). В этом режиме требуется более
высокое напряжение статора, чем в режиме z—>min, но меньшее в
сравнении с режимом i —> min при qs = qr = 0. Напряжение обмотки
ротора определяется скольжением и моментом нагрузки и не зависит от
скорости. При (3 =0 напряжение ротора существенно меньше напряжения
в базовом режиме. Абсолютное скольжение при минимизации i с
ограничением потока является свободной варьируемой переменной,
257
регулирование которой позволяет влиять на реактивные мощности, потери
в стали статора и ротора.
Режим управления i inf при постоянстве потока и ограничении
реактивной мощности качественно схож с режимом минимизации тока i
при постоянстве потока. Характеристики для этого режима представлены
на рис. 5.26, б.
5.2.3. Сравнительная оценка законов управления
по минимуму тока
Приведем сравнительную оценку режимов экстремального
управления по минимуму тока, взяв в качестве критерия электромагнитные
потери и их составляющие. Вначале заметим, что если функции
ограничения не зависят от абсолютного скольжения, то в этом случае
электромагнитные потери будут определяться не только законом
экстремального управления по минимуму тока, но и величиной
абсолютного скольжения, выбор которого можно производить исходя из
дополнительного критерия оптимизации. Такая ситуация имеет место при
законах экстремального управления по минимуму тока при отсутствии
ограничений на реактивные мощности. Рассмотрим в качестве примера
режим управления i —> min.
Как было отмечено раньше, оптимизация режимов ОМПТ по
минимуму i способствует уменьшению потерь в меди ДрМ5 и кр^г.
Потери в меди не зависят от скольжения. Однако, кроме потерь в меди
обмоток, электромагнитные потери включают потери в стали статора и
ротора. Потери в стали являются функциями от управлений и /?, а
также СО:
Д/ЧА^^ЧМ^-М1,3 + Wl1,3)(<)2; (5Л6)
В выражении (5.16) управление является решением задачи
оптимизации (5.12), в которой со задана условиями технологической
задачи, а /3 представляет свободное независимое воздействие.
Варьирование /3 приводит к изменению потерь в стали как одной из
составляющих электромагнитных потерь. Так, при /7 = 0 потери в стали
ротора Дрсгбудут отсутствовать. Однако потери в стали статора ДрС5
при больших значениях со существенно возрастают. Расчеты показывают
(рис. 5.28), что, несмотря на уменьшение потерь в меди и отсутствие
258
потерь в стали ротора, за счет увеличения потерь &pcs электромагнитные
потери Др при минимуме i и постоянстве /7 = 0 могут оказаться
недопустимо большими.
Рис. 5.28. Зависимости суммарных потерь и их составляющих
от момента для режима в режиме i —> min:
а-/7=0; б-/7° =-0,5«;
- й»=69б;-------------69=0,6 (Уб
Как было отмечено раньше, минимум потерь Дрс при
фиксированных значениях fl и со обеспечивается при условии
изменения абсолютного скольжения по линейному закону
/7° = -0,5m.
(5-17)
Регулируя /7 в соответствии с (5.17), получим снижение потерь в стали и в
целом электромагнитных потерь в машине (см. рис. 5.28,6).
Следует заметить, что численное решение задачи оптимизации
потерь Др на безусловный минимум показывает, что оптимальное
скольжение /7° соответствует закону (5.17). Кроме того, в случае
равенства параметров обмоток статора и ротора режим оптимального
управления по минимуму г при задании скольжения по закону (5.17)
аналогичен режиму оптимального управления по минимуму
электромагнитных потерь.
Аналогичная ситуация в отношении выбора закона регулирования /7
возникает при решении задачи экстремального управления i —> min при
259
const. На рис. 5.29, а приведены зависимости &р(т,а>) и их
составляющие для режима управления по минимуму i при постоянстве
потока =у/тб и условии /7 = 0. Как видно, потери в стали статора
ДрС5 существенно возросли и остаются постоянными при изменении
момента. Потери в стали ротора Дрсг=0. За счет увеличения bpcs
возросли потери Др. Регулируя /3 по закону (5.17), можно снизить
суммарные потери в стали и электромагнитные потери в целом
(рис. 5.29, б).
Рис. 5.29. Зависимости суммарных потерь и их составляющих
от т в режиме i —> min при у/т = :
а-/7=0; б-/7° =-0,5®;
- ®=®б;-----------®=0,6®б
Оптимизация режимов по минимуму токов is и гг при постоянстве
потока позволяет перераспределять потери в меди в пользу обмотки
статора или ротора. Так, например, при равенстве параметров обмоток
статора и ротора оптимизация режимов машины по минимуму тока статора
обеспечивает минимум потерь kp^is ПРИ некотором увеличении потерь
Дрмг. Наоборот, при оптимальном управлении по минимуму тока ротора
снижаются до минимума потери Дрмг и несколько увеличиваются по
отношению к минимально возможным потери ДрМ5. Относительное
возрастание потерь в меди в каждом случае зависит от величины момента.
260
При оптимизации режимов ОМПТ по минимуму свертки токов с
равными весовыми коэффициентами и Л2 потери в меди статора ДрМ5
и ротора равны Дрмг (рис. 5.29). Перераспределение потерь в заданной
пропорции можно обеспечить изменением весовых коэффициентов.
На рис. 5.30 приведены результаты расчета электромагнитных
потерь и их составляющих в режимах оптимизации по минимуму свертки
токов i (а) и минимуму тока ir (б) при скольжении (3 = 0.
Рис. 5.30. Зависимости суммарных потерь и их составляющих
в режимах управления по минимуму г (а) и минимуму ir (б)
при Qs ~Qr :
-----------CO^COq;------------й»=0,6й»б
Как видно, суммарные потери в этих режимах существенно
превышают минимально возможную величину. При сравнении этих
режимов с режимом минимизации потерь Др при qs = qr = 0 выявляется,
что в последнем случае потери несколько меньше.
Сравнительная оценка электромагнитных потерь и их составляющих
в режимах минимизации i и ir показывает некоторое предпочтение
режима минимума тока ir. Действительно, в этом режиме хотя и
незначительно, но все же меньше потери в меди ротора и значительно
уменьшаются потери в стали статора за счет уменьшения потока.
На рис. 5.31 приведены кривые электромагнитных потерь и меры
эффективности при оптимизации режимов по минимуму i без
ограничений (кривые 3), при наличии ограничения qs = qr = 0 (кривые 1),
261
с ограничениями у/т - и qs = qr = 0 (кривые 2), при ограничении
потока у/т — (кривые 4). Для сравнения представлены также кривые
электромагнитных потерь и меры эффективности при оптимизации
режимов по минимуму электромагнитных потерь Др без ограничений
(кривые 5). Результаты сравнения показывают преимущество режима
оптимального управления, по минимуму суммарных потерь и
необходимость введения канала управления скольжением в том случае,
когда момент и скорость изменяются в широких пределах.
Рис. 5.31. Сравнительная оценка законов оптимального управления:
а - СО=СО§’, б - <О=0,6й9б
Как видно, оценки эффективности tip изменяются в широких
пределах. Результаты исследований показывают преимущество закона
оптимального по минимуму потерь управления и целесообразность его
использования в системах автоматического управления электроприводами
в тех случаях, когда скорость и момент по условиям технологического
процесса изменяются в широких пределах. При моментах
0.75/Иб</и<1,25/Ид близким к оптимальному управлению по минимуму
Др является режим i = min при постоянстве потока Ц/т = l//mQ.
262
Глава 6
ЭКСТРЕМАЛЬНОЕ УПРАВЛЕНИЕ
АСИНХРОНИЗИРОВАННЫМ ДВИГАТЕЛЕМ
Асинхронный двигатель при управлении по цепи обмотки ротора,
получивший название асинхронизированного синхронного двигателя
(АСД), подключается со стороны статора непосредственно к сети
переменного тока или через согласующий трансформатор. Обмотка ротора
двигателя подсоединяется через контактные кольца к полупроводниковому
преобразователю частоты. По технико-экономическим оценкам
регулирование скорости в приводах с АСД производится в пределах
±(35^-50) % синхронной скорости [113].
Согласно литературным источникам [15, 79, 90, 113],
целесообразными для АСД являются режимы регулирования реактивной
мощности статора qs или реактивных составляющих тока статора и ротора
в зависимости от требований, предъявляемых к электроприводу. Эти
требования заключаются в обеспечении наибольшего КПД, коэффициента
мощности, выдачи максимальной реактивной мощности qs при
ограничении тока (напряжения) ротора и др. В ряде случаев ставится
задача минимизации установленной мощности преобразователя частоты
как наиболее дорогостоящей части электропривода. Показано, что
минимальная мощность преобразователя частоты соответствует
минимально возможному значению тока ротора. К рациональным режимам
относятся также такие режимы, при которых обеспечивается максимальное
использование габаритной мощности двигателя [90].
Таким образом, на практике при оптимизации режимов АСД
используются следующие критерии качества: суммарные потери Др либо
электрические потери Дрм в целях повышения КПД; ток ротора ir при
263
минимизации потерь в роторе или установленной мощности силового
преобразователя; реактивная мощность статора qs при генерировании ее в
питающую сеть либо при максимальном использовании габаритной
мощности машины. Обсудим эти режимы, рассматривая АСД как объект
экстремального управления.
6.1. Задача минимизации потерь энергии без ограничений
Постановка задачи. Рассмотрим асинхронный двигатель с фазным
ротором, обмотка которого питается от идеализированного
преобразователя частоты с раздельным регулированием амплитуды и
частоты выходного напряжения, а обмотка статора жестко подключена к
питающей сети. Электромагнитные потери при таком способе
регулирования скорости описываются выражением (5.1).
Для исследования режимов АСД как объекта экстремального
управления выберем модель (3.30)-(3.32) с сочетанием входных
воздействий ^,m,U,X^, где U = (u^,695) и Х = (/я,бО) - векторы
фиксированных величин (напряжения us, угловой частоты cos питающей
сети, момента т и скорости 60). Варьируемым воздействием в этой
модели является аргумент вектора главных потокосцеплений. Угол
отсчитывается от положительной полуоси Ох, системы координат
Оху, ориентированной по вектору полных потокосцеплений обмотки
статора.
При постоянстве U и фиксированном значении X
электромагнитные потери Др и их составляющие и Дрсу (j =s,r)
становятся зависимыми величинами от :
rm
Е Е Арс/(^ш»х)- (6Л)
j=S,r j=s,r
В выражении (6.1) составляющие потерь
Армз ’Х) ~ ’
ДРмг (^ш > X) = <Рут > т);
ДРс5 ’ X) ~ kcs®s &у/т > X),
ДРсг(^ш’X) — ^crl^S ~ ^ТлО^’Х).
264
Потери Др№ и Дрмг принимают минимальные значения при
минимумах токов is и ir соответственно. Причем оптимальные значения
не совпадают. Потери в стали Дрс = Д/>С5 + Дрсг монотонно
убывают с увеличением абсолютного значения О1//т. Электромагнитные
потери Др также имеют минимум. Характерно то, что за счет уменьшения
потерь ДРс с увеличением абсолютного значения минимум потерь
Др практически совпадает с минимумом потерь в меди ротора, т.е. с
минимумом тока ротора. Отметим также, что потери в меди обмоток
Дрм = ДрМ5 + Дрмг зависят только от те. В то же время суммарные
потери в стали Дрс зависят как от те, так и от а>. На электромагнитные
потери двигателя влияние скорости проявляется в области небольших
нагрузок при значениях а>, отличающихся от синхронной. При
номинальной нагрузке и перегрузках двигателя влияние скорости не столь
значительно. В подтверждение этих выводов на рис. 6.1 приведены
зависимости электромагнитных потерь и их составляющих от tfy при
фиксированных значениях те = теб (а) и те = 1,5тед (б). Для каждого
момента потери рассчитаны при двух значениях скорости: <o=O)q и 0,8 62g.
Рис. 6.1. Зависимости суммарных потерь и их составляющих от :
----------при 0)=б)5;---------при 62=0,8 62g
265
Угол и^т соответствует минимуму электромагнитных потерь. Как
видно, при обеспечивается практически минимальное значение
т т
потерь в меди ротора. Изменение скорости не оказывает заметного
влияния на аргумент . Подробнее режим управления по минимуму
потерь будет обсуждаться при решении экстремальной задачи.
Покажем теперь, как ведут себя функции реактивных (qs и qr) и
полных (ss и sr) мощностей статора и ротора.
Реактивные мощности определяются в виде скалярных произведений
векторов напряжений и ортогональных векторов токов обмоток статора и
ротора:
& = sgn(6>5 )U5 . BI5; qr = sgn(^)Ur • BIr.
Эти выражения для удобства анализа запишем через модули и аргументы
результирующих векторов напряжений и токов:
qs = Sgn.(as)[usis sin(y„s - vis)];
<lr = sgn(/7)[nrzr sm(z^ - uir)].
Напряжения можно выразить через полные потокосцепления обмоток. В
этом случае
= sgn(®5)[®^5z5 cos(pis)];
qr = sga(j3)[/tyrir cos(^r - )].
Полные мощности записываются через произведение модулей
векторов напряжений и токов статора и ротора:
5 =ил-, sr=urir.
О О О г I 11
Анализ приведенных выражений позволяет сделать следующие
выводы:
1) реактивная qs и полная ss мощности статора при постоянстве U
являются функциями от и т;
2) если модули у/s Ф 0 и is 0, то при <75=0 результирующие векторы
полных потокосцеплений и токов статора ортогональные, а
результирующие векторы напряжений и токов статора коллинеарные;
266
3) при qs=0 модуль результирующего вектора токов статора принимает
минимальное значение. При этих условиях и us = const мощность 5,
имеет минимум;
4) реактивная qr и полная sr мощности, а также напряжение иг
обмотки ротора при постоянстве U зависят как от и т, так йот (У;
5) если модули \j/r =£ 0 и то при qr—^ результирующие
векторы полных потокосцеплений и токов ротора ортогональные, а
векторы напряжений и токов ротора коллинеарные. В этом случае
мощность sr принимает минимальное значение;
z-Ч О
6) оптимальные значения , доставляющие минимумы току 1Г и
мощности sr, в общем случае не совпадают;
7) при скольжении /3 = 0 минимумы тока ir, полной (активной)
мощности sr и напряжения ротора иг совпадают по варьируемому
воздействию . При этом реактивная мощность qr = 0. Кроме того,
при скольжении Д = 0 (a> = CDs) обеспечиваются наименьшие из
возможных значения тока ir, мощности sr и напряжения иг.
На рис. 6.2 приведены зависимости токов, реактивных и полных
мощностей статора и ротора, а также напряжения ротора от 12^ при
фиксированных значениях т-т^ (а) и т = 1,5?иб (б). Для каждого
момента расчеты выполнены при б>=й2б и 0,8 б>б. Угол соответствует
минимуму тока ротора. Отметим также, что минимум реактивной
мощности ротора при находится в области, в которой аргумент и^т
превышает по абсолютной величине значение .
г т
После предварительного анализа особенностей режимов рассмотрим
постановки задач экстремального управления АСД.
Задача оптимизации режимов АСД по минимуму потерь на
безусловный экстремум формулируется следующим образом:
,U, X = Хс)->min=> P7ffl°(x), U = U *, Хс g Qc, (6.2)
VVm
где U - вектор заданных величин (напряжения и частоты источника
питания обмотки статора), U = (us ,Q>S).
267
Рис. 6.3. Зависимости суммарных потерь АСД от
при различных значениях момента и скорости:
-----------при а> = су6;-------при су = О,8сУб
268
Как видно, с увеличением момента их чувствительность к
изменению V,,, снижается. При этом оптимальная точка ,
rm А rm
доставляющая минимум суммарных потерь, смещается. Влияние скорости
на вид экстремальных характеристик незначительное. Аналогичными
свойствами обладает функция потерь ОМПТ при постоянстве модуля
вектора главного потокосцепления и скольжения, когда изменяется
аргумент .
Как показали исследования эффективности различных численных
алгоритмов, при обосновании метода поиска оптимального решения
, Др0 следует учитывать чувствительность функции потерь к
изменению момента и ее локальные свойства в окрестности точки
минимума. При поиске минимума выпуклой функции при ее
чувствительности к величине т хорошо зарекомендовал себя градиентный
метод с регулировкой шага.
Решение задачи оптимизации режимов АСД по минимуму потерь
градиентным методом приведено на рис. 6.4. Нетрудно оценить
качественное сходство законов изменения О° и Др0 от момента и
гт
скорости для АСД и ОМПТ при управлении последней по минимуму
потерь при постоянстве потока. В обоих случаях зависимость аргумента
от т практически линейная. Функция (ш) симметрична
относительно начала координат и принимает в двигательном и
генераторном режимах значения разных знаков. В точке ти=0 функция
равна нулю. При тя>0 функция (т) убывает и, наоборот,
при т <0 возрастает.
Идентичны также по характеру поведения зависимости Др0 от
момента и скорости. В области небольших значений момента основное
влияние на электромагнитные потери оказывает изменение скорости. В
частности, при т = 0 оптимальная величина Др0 = Др°(<у) 0.
При перегрузках значительную долю электромагнитных потерь
составляют электрические потери в двигателе, которые не зависят от
скорости при данных законах оптимального управления. Поэтому в
области перегрузок доминирующим фактором влияния на оптимальное
значение суммарных потерь становится момент нагрузки.
Отмеченное сходство законов (т) и оптимальных зависимостей
Др0 (т. а>) объясняется тем, что при постоянстве U = (us, a>s ) в АСД при
269
формировании режима минимальных потерь модуль не зависит от
скорости и практически остается постоянным при значительном
изменении момента. Вместе с тем количественная оценка оптимальных
характеристик выявляет различие сравниваемых режимов. Потери ОМПТ в
режиме управления по минимуму потерь при постоянстве потока меньше.
Рис. 6.4. Решение \U^m ,&Pj
задачи экстремального
управления АСД
по минимуму потерь
(тока ротора):
------------ - при O)=O)q ;
------------при 62=0,8 62g
В подтверждение вывода
в табл. 6.1 приведены потери для двигателя мощностью 1000 кВт при двух
способах управления. В одном случае двигатель управляется
одновременно по цепям статора и ротора (ОМПТ). Оптимизация режима
двигателя осуществляется по минимуму потерь при постоянстве главного
магнитного потока. В другом случае двигатель управляется только по цепи
ротора при непосредственном подключении статора к сети (АСД). Режим
работы двигателя оптимизируется по минимуму потерь.
Таблица 6.1
Мощность потерь двигателя при различных схемах питания
обмоток и законах оптимального управления
Схема питания обмоток и режим оптимизации 4Й Суммарная мощность потерь АР
т=0,2 т=0,4 т=0,6 П2 = 0,8 т=1 т=1,2 т=1,4
Жесткое подключение 1,25 0,555 0,607 0,696 0,824 0,991 1,196 1,442
обмотки статора к сети. Питание ротора отПЧ. 1 0,485 0,537 0,627 0,755 0,922 1,128 1,374
Режим Др “min 0,75 0,556 0,607 0,696 0,824 0,991 1,196 1,442
Автономное питание обмоток статора и ротора 1,25 0,461 0,520 0,618 0,755 0,931 1,141 1,4
отПЧ. Режим Ар =min 1 0,355 0,414 0,511 0,648 0,824 1,039 1,294
При ^Jn=const 0,75 0,256 0,315 0,413 0,549 0,725 0,941 1,195
270
Количественная оценка Др показывает значительное превышение
потерь в АСД с жестким подключением статора к сети при небольших
значениях момента и скорости. Например, при моменте т = 0,2т^ и
скорости (О — О)5 это превышение составляет 20 %, а при том же моменте
и скорости О) - Ъ,6а>5 - более 200 %. С увеличением момента превышение
потерь в АСД над потерями ОМПТ снижается. Так, при моменте
т = 1,4тб и скорости (О — O>q превышение Др составляет около 3 %, а
при скорости (О — 0,6б>б - порядка 20 %.
Преимущество ОМПТ объясняется тем, что в этом случае
оптимизация режимов асинхронной машины по минимуму потерь
обеспечивается не только за счет изменения положения результирующего
вектора главных потокосцеплений, т.е. Vym, но также за счет изменения
абсолютного скольжения. В результате при заданной скорости изменяется
частота напряжения статора, что позволяет при постоянстве потока
снизить потери в стали статора.
При жестком подключении статора к сети и управлении машиной со
стороны ротора частота статора является постоянной величиной, не
зависящей от режима работы машины. Поэтому потери в стали статора
практически остаются постоянными. Потери в стали ротора зависят от
скольжения и изменяются от скорости. При CD — G)s абсолютное
скольжение Д =0. В этом случае потери в стали ротора исчезают. Далее с
увеличением или с уменьшением скорости относительно синхронной
скорости возникающие потери в стали ротора начинают расти. Таким
образом, одной из причин превышения потерь АСД являются потери в
стали, основную долю которых при моментах т < составляют потери
Др05 (рис. 6.5). Другой причиной, объясняющей превышение суммарных потерь в АСД, является увеличение потерь в меди, хотя и незначительное, при моментах т<т§. Рис. 6.5. Зависимости суммарных потерь и их составляющих в режиме Др -> min: при при б>=0,8 М Т’ ! 2 1.4 ; i 1.2 — 1 7 1 АР/> 0.8 - 0.6 J &PCS 0.4 — ; ' ; j" 02 Afi, -1 i 0 0.5 1 т
271
Остановимся на особенностях других характеристик АСД (рис. 6.6).
Напряжение обмотки статора us постоянное. Напряжение ротора иг
зависит от скорости и момента. Основное влияние на напряжение ротора
оказывает скорость и — незначительно — момент. Так, при скорости CD = (Oq
напряжение иг с увеличением момента уменьшается, а при G) = О,8сУб -
наоборот, увеличивается (рис. 6.6, а).
Токи статора is и ротора ir не зависят от скорости. С увеличением
т ток статора возрастает по нелинейному закону. При значении т = О
напряжение и ток обмотки ротора равны нулю. Поток двигателя в этом
случае обеспечивается за счет тока статора.
Активная мощность статора ps зависит в основном от момента
нагрузки (рис. 6.6, б). В двигательном режиме мощность ps >0
(потребляется из сети), а в генераторном режиме ps < 0 (отдается в сеть).
Активная мощность ротора рг определяется моментом нагрузки и
скоростью АСД. При скорости О) = а>5 и моментах т > 0 мощность рг
положительная (потребляется от силового преобразователя) и
отрицательная (отдается силовому преобразователю) при моментах т <0.
При скорости сУ=0,8сиб мощность рг всегда положительная. Если
скорость су = 0,6 су6 , то мощность рг при моментах т > 0 отрицательная
и, наоборот, положительная при т <0.
Рис. 6.6. Характеристики АСД в режиме &р —> min:
- при су=су6;--------------- при су=0,8су6
272
Реактивные мощности статора qs и ротора qr являются функциями
момента и скорости. Режим характеризуется потреблением мощности qs
из сети, которое снижается с увеличением момента. При этом зависимость
qs от т весьма слабая. При значении т =0 мощность qs ^0.
Реактивная мощность ротора qr при скорости (О Ф a>s в режиме
управления по минимуму потерь независимо от знака т всегда
положительна, т.е. потребляется от преобразователя. Причем с
увеличением абсолютной величины момента реактивная мощность ротора
увеличивается. В точке т = 0 и при скорости (О = G)s потребление
реактивной мощности со стороны ротора отсутствует.
На рис. 6.7 представлены угловые характеристики при О = (Dq и
векторная диаграмма для двигателя мощностью 1000 кВт при значениях
т = тб и а> = а>б.
Рис.6.7. Угловые характеристики (а) и векторная диаграмма (б)
АСД в режиме Др -> min
Отметим следующие особенности угловых характеристик:
1) изменение аргументов результирующих векторов главных
потокосцеплений , полных потокосцеплений обмотки ротора и°г,
о о
токов статора и ротора 1)^ связано только с изменением момента, т.е.
аргументы этих векторов не зависят от скорости и представляют собой
непрерывные функции от т;
273
2) при переходе из двигательного в генераторный режим значения
аргументов 1?°^ , U^r, и изменяются непрерывно;
3) при переходе из двигательного в генераторный режим аргумент
результирующего вектора напряжений и°? и токов обмотки ротора
изменяется скачкообразно с изменением знаков.
Интерес представляет сравнительная оценка эффективности
режимов АСД с режимами ОМПТ (рис. 6.8). Оптимизация режимов АСД и
ОМПТ осуществлялась по минимуму электромагнитных потерь (кривые 1
и 2 соответственно).
Рис. 6.8. Сравнительная оценка законов
оптимального управления:
-------------при б>=б>б;
---------------- цри (0=0,8
Приведенные зависимости электро-
магнитных потерь и меры эффективности
от момента рассчитаны для фикси-
рованных значений скорости (D — (Dq и
<У=0,8. Как видно, потери в АСД
существенно больше потерь в ОМПТ. Результаты расчетов
свидетельствует об эффективности управления машиной одновременно по
цепям статора и ротора с оптимизацией ее режимов по минимуму
суммарных потерь при переменном потоке. Ощутимо также преимущество
оптимизации режимов работы АСД по минимуму потерь.
6.2. Задача минимизации реактивной мощности обмотки статора
при ограничении тока ротора
Известно [111], что в АСД при неполных нагрузках представляется
возможным обеспечение режима генерирования в сеть реактивной
мощности qs. Однако режим генерирования qs связан с увеличением тока
ротора, который может превысить предельно допустимую величину. На
рис. 6.9 приведены характеристики, иллюстрирующие необходимость
контроля тока ротора в режиме генерирования реактивной мощности. На
рис. 6.9, а показаны характеристики, рассчитанные при моменте Ш = и
скорости G) — 0)6. Здесь предельно допустимое значение тока ротора
ггогр = zr6 принято равным минимально возможному значению. При токе
274
zr = zrorp реактивная мощность статора qs > 0. В этом случае реактивная
мощность потребляется из сети. Как видно, для того чтобы обеспечить
режим генерирования мощности qs при моменте т = , необходимо
увеличить значение угла и^т. При этом ток ротора становится больше
zr0Ip. С уменьшением нагрузки экстремальные характеристики смещаются
и при том же токе ir = irOrp потребление реактивной мощности qs
снижается, а при дальнейшем уменьшении нагрузки мощность qs
принимает отрицательное значение. Асинхронный двигатель начинает
Рис. 6.9. К вопросу ограничения тока ротора в режиме
генерирования реактивной мощности
На рис. 6.9, б приведены характеристики для момента т = 0,25 wig и
скорости со = . Теперь при токе ротора ir — irorp реактивная мощность
qs < 0. При этом обеспечивается максимальная отдача со стороны статора
реактивной мощности в сеть. Вместе с тем следует заметить, что в режиме
генерирования мощности qs одновременно со стороны ротора идет
потребление от преобразователя реактивной мощности qr. При этом с
увеличением нагрузки потребление мощности qr увеличивается.
275
Таким образом, можно сформулировать задачу экстремального
управления, обеспечивающую максимальную отдачу реактивной
мощности qs в питающую сеть:
9s(ify ,U, X = Хс) —> inf =><(Х),
U = U* Хс еПс,
(6.3)
где область допустимых управлений
= 'ir ~ zrorp)
Рассмотрим особенности задачи (6.3), которая предполагает
определение закона управления (X), доставляющего нижнюю грань
функции ,U, X), заданной на множестве допустимых управлений
Q„ . Из приведенного выше рис. 6.9, б видно, что нижняя грань
Vm
функции мощности qs обеспечивается при токе ротора ir = ir0Tp
Следовательно, решение исходной экстремальной задачи (6.3)
можно свести к решению задачи с ограничением типа равенства и далее,
применяя метод штрафных функций, - к экстремальной задаче без
ограничения. Однако полученная в соответствии с этим методом
вспомогательная функция имеет многоэкстремальный характер с весьма
острыми локальными экстремумами. Поиск глобального экстремума такой
многоэкстремальной функции существенно затруднен.
Возможен также другой подход к решению задачи (6.3), основанный
на использовании целевой функции вида
— IX-Ofym >Х) — ггогр] (6-4)
Функция (6.4) имеет два локальных минимума и один максимум.
Искомое решение v°m (X) отвечает локальному минимуму целевой
функции, который всегда расположен правее локального максимума этой
функции. Используя данное свойство целевой функции, можно найти
решение U°m (X), q° (Х)^ задачи экстремального управления, не
прибегая к специальным методам глобального поиска.
276
Анализ решения задачи минимизации реактивной мощности
статора при ограничении тока ротора
Решение задачи минимизации реактивной мощности при
ограничении тока ротора характеризуется следующими свойствами
(рис. 6.10):
1) закон управления, обеспечивающий нижнюю грань реактивной
мощности, потребляемой со стороны обмотки статора, представляет собой
непрерывную функцию от т, т.е. 17°^ = 17°^ (w);
2) при уменьшении момента абсолютное значение аргумента
результирующего вектора главных потокосцеплений уменьшается.
Зависимость (?и) практически линейная. В точке идеального
холостого хода (при т — 0) аргумент 17°^ = 0;
Рис. 6.10. Решение задачи
минимизации реактивной
мощности при ограничении
тока ротора
3) реактивная мощность q°
не зависит от о и является
нелинейной функцией от т. В
общем случае функция q°(ni)
при изменении момента может принимать положительные, равные нулю и
отрицательные значения. В последнем случае реактивная мощность qs
генерируется в сеть. С уменьшением момента генерируемая мощность
увеличивается, достигая максимума в точке идеального холостого хода.
На рис. 6.11 приведены характеристики двигателя мощностью
1000 кВт. Обратим внимание на следующие особенности характеристик. В
режиме генерирования реактивной мощности q° при фиксированной
скорости (О > С0о с уменьшением момента реактивная мощность qr,
потребляемая от управляемого преобразователя, увеличивается. При
скорости (О = СОо реактивная мощность qr=^> а с увеличением
277
(уменьшением) скорости относительно синхронной - возрастает, принимая
максимальное значение при т =0 (рис. 6.11, а).
Рис. 6.11. Характеристики АСД в режиме минимизации
реактивной мощности при ограничении тока ротора
Активная мощность ps зависит только от нагрузки на валу, а
мощность рг - от нагрузки на валу и скорости.
Ток статора is при этих же условиях уменьшается. В то же время ток
ротора ir остается постоянным и равным току Zrorp. Обеспечение условия
постоянства тока ротора при изменении скорости приводит к
необходимости регулирования напряжения на роторе. Поэтому
напряжение иг практически зависит только от скорости. Результирующий
намагничивающий ток im увеличивается. Все перечисленные токи
определяются моментом.
Электромагнитные потери Др в режиме генерирования мощности
qs увеличиваются (рис. 6.11, б). Основной причиной является увеличение
потерь в стали по мере уменьшения нагрузки (увеличение генерируемой
мощности qs). При увеличении qs увеличивается результирующий
намагничивающий ток im, а следовательно, зависящие от тока im потери в
стали статора ДрС5 и ротора Дрсг. Как видно, потери Др зависят также от
скорости. При скорости CO = G)0 потери Др минимальны (рис. 6.11, б -
штриховая линия). Увеличение (уменьшение) скорости относительно
278
синхронной приводит к увеличению электромагнитных потерь
исключительно за счет потерь в стали ротора (рис. 6.11, б — сплошная
линия). При значении скорости (О = Юо потери Дрсг=0, так как частота
напряжения обмотки ротора равна нулю. Изменение скорости
относительно Юо приводит к появлению потерь в стали &рсг, которые
начинают возрастать с увеличением абсолютного значения частоты
напряжения обмотки ротора.
Таким образом, режим генерирования реактивной мощности при
постоянстве тока ротора характеризуется увеличением потерь в двигателе,
что следует учитывать при выборе мощности и проверке двигателя на
нагрев.
6.3. Задача управления асинхронным двигателем при отсутствии
потребления реактивной мощности от источника питания
обмотки статора
Закон управления АСД, обеспечивающий отсутствие потребления
реактивной мощности обмотки статора (?s=0), относится к рациональным
законам управления, так как при нем максимально используется
габаритная мощность двигателя [90]. Рассмотрим закон управления при
qs =0 с позиции задачи экстремального управления.
Раньше было отмечено, что в режиме ^=0 модуль результирующего
вектора токов статора принимает минимальное значение. Следовательно,
задача управления АСД при отсутствии qs =0 может быть сведена к задаче
экстремального управления по минимуму тока статора в следующей ее
постановке:
Z;(^m,U, X = Хс)—> min=> ц^0(Х), U = U *, Xcefic. (6.5)
Исследование экстремальных характеристик is(p^m, X) при
различных фиксированных значениях X = Хс показывает изменение их
характера при различных нагрузках. Чем меньше момент, тем острее
экстремум функции тока , X) при варьировании управления .
С увеличением момента чувствительность тока статора к изменению и^т
снижается. При различных моментах оптимальные значения 12° ,
доставляющие минимум тока статора, не совпадают. Влияние скорости на
экстремальные характеристики отсутствует. В общем, функция
279
ПРИ моменте т = const относится к классу унимодальных
функций, обладающих свойством выпуклости в окрестности точки
минимума.
В дальнейшем поиск оптимального решения (о°т > z°
осуществлялся градиентным методом с регулировкой шага. Решение
задачи оптимизации режимов АСД по минимуму тока статора приведено
на рис. 6.12.
Рис. 6.12. Решение задачи
управления АСД по минимуму
тока статора:
--------- - при 69 = 69g;
------------- при (о = 0,8б>б
В областях изменения
момента 0 < т < 1,5/Ид и
О > т > - 1,5/Ид зависимости
гт
•О
и is от момента носят
практически линейный характер. Функция и^т (т) принимает в
двигательном и генераторном режимах значения разных знаков. В точке
ти=0 функция и°т (т) равна нулю. При /и>0 функция (те) убывает
и, наоборот, при ти<0 возрастает. Функция возрастает при
увеличении момента. При ти=0 ток статора равен нулю.
При управлении по минимуму тока статора модуль вектора
главных потокосцеплений изменяется незначительно, уменьшаясь в
двигательном режиме и увеличиваясь в генераторном режиме при
увеличении нагрузки. В этой связи при равных по абсолютной величине
моментах ток статора в двигательном режиме несколько больше, чем в
генераторном режиме. Отличаются также абсолютные значения аргумента
.о
вектора главных потокосцеплении.
При управлении по минимуму тока статора электромагнитные
потери возрастают по отношению к минимальным значениям. Зависимости
электромагнитных потерь от т и (О приведены на рис. 6.13. В области
небольших значений момента основное влияние на суммарные потери
280
оказывает изменение скорости. В частности, при т = 0 оптимальное
значение Др°(щ = 0, й>) А 0.
Рис. 6.13. Зависимости электромагнитных
потерь и их составляющих при управлении
АСД по минимуму тока статора:
-------------при co=coq ;
-------------при «=0,8б>б
Видно, что при перегрузках (т>1)
значительную долю потерь Др составляют
потери в меди двигателя, которые не зависят
от (О при управлении по минимуму тока
статора. Поэтому в области перегрузок
доминирующим фактором влияния на
электромагнитные потери
становится момент нагрузки двигателя.
Потери в стали статора и потери в меди ротора в режиме минимума
тока is возрастают. Потери в меди статора уменьшаются. В целом
электромагнитные потери увеличиваются в сравнении с потерями в
режиме минимума тока ir за счет потерь в стали статора и потерь в меди
ротора. Таким образом, управление АСД по минимуму потерь (тока
ротора) предпочтительнее управления по минимуму тока статора.
Анализ статических характеристик АСД в режиме минимума тока
статора (рис. 6.14, а) позволяет сделать следующие выводы. Токи статора и
ротора определяются только моментом на валу. В режиме идеального
холостого хода ток ротора не равен нулю.
Напряжение на роторе зависит как от нагрузки на валу, так и от
скорости. Основное влияние на напряжение ротора оказывает изменение
скорости.
Реактивная мощность ротора зависит от нагрузки на валу и скорости
(рис. 6.14, б). В двигательном и генераторном режимах реактивная
мощность ротора потребляется от силового преобразователя. При скорости
(О = (О0 реактивная мощность #г=0, а с увеличением (уменьшением)
скорости относительно С0о - возрастает с увеличением момента.
Активная мощность статора зависит только от т. В то же время
активная мощность ротора определяется как нагрузкой на валу, так и
скоростью. При скорости (О = со0 в двигательном и генераторном режимах
активная мощность ротора потребляется от силового преобразователя. При
281
скорости С0> С0о в двигательном режиме активная мощность ротора
потребляется от силового преобразователя, а в генераторном режиме
отдается силовому преобразователю. Если же скорость со < со0, то в
двигательном режиме активная мощность ротора отдается силовому
преобразователю, а в генераторном режиме она потребляется от силового
преобразователя.
Рис. 6.14 Статические характеристики АСД при управлении
по минимуму тока статора:
---------------при со=со6;---------при й>=0,8 coq
На рис. 6.15 представлены угловые характеристики при C0 = C0q и
векторная диаграмма двигателя мощностью 1000 кВт для значений
т = 7Ид И СО = COq .
Отметим следующие особенности угловых характеристик:
1) изменение аргументов результирующих векторов главных
потокосцеплений , полных потокосцеплений обмотки ротора ,
о о
токов статора и ротора Цу связано только с изменением момента, т.е.
аргументы этих векторов не зависят от скорости и представляют собой
непрерывные функции от т;
2) при переходе из двигательного в генераторный режим и обратно
ООО г-г
значения аргументов и uir изменяются непрерывно. При этом
знаки аргументов меняются на противоположные;
282
Рис.6.15. Угловые характеристики (а) и векторная диаграмма (б) АСД
при управлении по минимуму тока статора
3) при переходе из двигательного в генераторный режим и обратно
аргументы результирующих векторов напряжений U°r обмотки ротора и
токов ц° обмотки статора изменяются скачкообразно. При этом знаки
этих аргументов меняются на противоположные.
283
Глава 7
ЭКСТРЕМАЛЬНОЕ УПРАВЛЕНИЕ
АСИНХРОННЫМ ДВИГАТЕЛЕМ
С КОРОТКОЗАМКНУТЫМ РОТОРОМ
Асинхронные двигатели с короткозамкнутым ротором (АД) находят
широкое применение в регулируемых электроприводах самого различного
назначения. В этой связи вопросы оптимального управления режимами АД
являются особенно актуальными.
В качестве критериев оптимизации установившихся режимов АД с
короткозамкнутым ротором используется мощность потерь [48, 49, 55, 62,
85, 86] или ток статора [11, 12, 56, 63, 64, 133]. В последнем случае можно
получить более простые алгоритмы управления при сравнительно
небольшом превышении потерь по отношению к минимальным потерям
машины. В тех случаях, когда возникает проблема обеспечения
максимальной перегрузочной способности АД при ограничениях
напряжения и тока статора, ставится задача экстремального управления
электромагнитным моментом [93, 103, 116, 119, 131].
В последующих параграфах рассматриваются задачи экстремального
управления АД по минимуму потерь, минимуму тока статора и максимуму
электромагнитного момента при ограничениях выходного напряжения и
тока силового преобразователя. Приводятся характеристики АД при
оптимальных управлениях. Дается оценка эффективности режимов
экстремального управления в сравнении с режимами, которые
используются на практике в регулируемых асинхронных электроприводах.
7.1. Задача минимизации потерь энергии на безусловный экстремум
Постановка задачи. Рассмотрим асинхронный двигатель с
короткозамкнутым ротором при питании от идеализированного
284
преобразователя частоты с возможностью независимого изменения
амплитуды и частоты выходного напряжения. Оптимизацию режимов АД
будем производить по критерию электромагнитных потерь, включающих
потери в меди обмоток статора Арш и ротора Дрмг, обусловленные
первыми гармониками токов обмоток, и потери в стали статора и
ротора от гистерезиса и вихревых токов.
Для решения задачи экстремального управления выберем
проблемно-ориентированную модель с сочетанием входных величин
((/Г,Х), в которой варьируемым управляющим воздействием служит
модуль уг вектора потокосцепления ротора:
Р = rrys~2m
Ir =-и?[0 г;
Tm=Tr-LroIr; (7.1)
Ъ ~®r ’
w w i у Г •
x s x m ~ 3
us=(«+/7)BX+RA-
При использовании (7.1) электромагнитные потери АД представляют
собой функцию от у/г и X :
ДрОг, X) = £ Дрм/’ Or ’т) + X &pCj &г, X), j = S,r. (7.2)
j j
В выражении (7.2) потери в меди статора и ротора пропорциональны
квадрату токов обмоток i2 = Is • Is и г2 = Ir • Ir :
ДРш Or>w) = (Vr >m) >
&PMr= кмРг (Vr>mY
Потери в стали статора и ротора будем определять следующими
выражениями:
Арм Or >Х) = kcs [<У + Р (У г > И*)]1 ’3 Жт & г >т) J
285
&Pcr (Vr, m) = kcr [0(y/r, И1)]1'3 y/1 (!/sr, m),
где модуль вектора главных потокосцеплений связан с моделью (7.1)
выражением .
При фиксированном значении вектора X потери в меди Дрш и
стали Дры статора имеют экстремумы (минимумы) при изменении у/г.
Причем оптимальные значения у/г не совпадают. Потери в меди Дрмг и
стали Дрсг ротора монотонно убывают с увеличением у/г. В результате
электромагнитные потери Др имеют минимум. Заметим, что потери в
меди статора и ротора зависят только от т. В то же время потери в стали
статора определяются т и СО.
На рис. 7.1 приведены зависимости электромагнитных потерь и их
составляющих от у/г при фиксированных значениях т = (а) и
т = 0,2и1б (б). Для каждого момента потери рассчитаны при двух
значениях скорости: (О=СОд и й> = 0. Как видно, оптимальное значение
потокосцепления ус° зависит от т и СО, т.е. закон оптимального
Рис. 7.1. Зависимости суммарных потерь и их составляющих от у/г:
-----------------при СО=(Oq ;-------------при (0=0
Теперь сформулируем задачу экстремального управления на
безусловный экстремум:
286
Ap(i//r, X = XC)—>min =>yrr°(x), xc C7-3)
V'r
Здесь варьируемое управление
y/r ={y/r\Q<y/r <+oo}.
Решение задачи (7.3) методом градиента приведено на рис. 7.2 для
АД мощностью 7,5 кВт, где представлены зависимости модуля
результирующего вектора потокосцеплений ротора цс°(т,со) и
электромагнитных потерь Др0 (т,со) при фиксированных значениях
СО=СО§ и <у = 0. Здесь же приведены законы изменения модуля вектора
главных потокосцеплений ^°(/и,(») и абсолютного скольжения
Р° (т, со), рассчитанные при тех же условиях.
Рис. 7.2. Законы управления
АД в режиме минимума
потерь:
--------при СО =COq ;
--------при СО=0
Как видно, законы
управления имеют нели-
нейный характер. Потоко-
сцепление ротора изме-
няется в широких пределах. Существенное влияние на полный поток
ротора оказывают момент нагрузки и - в меньшей степени - скорость АД.
Причем в области малых нагрузок поток ротора изменяется значительно
сильнее, чем при больших нагрузках, что обусловлено насыщением
машины по главному магнитному пути. В этом случае значение потока
ротора , как правило, превышает значение потока в базовом режиме.
Эти выводы справедливы также в отношении главного потокосцепления
о о
у/т и полного потокосцепления статора y/s .
Влияние скорости на потоки y/s, у/т и \уг в режиме минимальных
потерь проявляется в меньшей степени. Уменьшение скорости приводит к
287
увеличению главного потока и, следовательно, полных потоков статора и
ротора. Увеличение потока в режиме минимальных потерь объясняется
перераспределением долей участия составляющих в образовании
электромагнитных потерь двигателя. Поскольку основную долю потерь в
АД составляют потери в меди, то их снижение при уменьшении скорости в
режиме минимальных потерь обеспечивается за счет увеличения потока.
В общем, оптимальные зависимости ^°(и1,(»), ^(и1,(») и
Лр0(т,Сд) представляют собой четные функции от т. Зависимость
Р°(т,а>) является нечетной функцией и претерпевает разрыв первого
рода при переходе из двигательного в генераторный режим.
На рис. 7.3 приведены зависимости
электромагнитных потерь и их
составляющих в режиме оптимального
управления для АД мощностью 7.5 кВт.
Рис. 7.3. Зависимости электромагнитных
потерь и их составляющих от момента
в режиме минимума потерь АД:
---------<у=<»6; — --------<®=0
Как видно, при фиксированном значении все составляющие
электромагнитных потерь с увеличением нагрузки растут. Потери в меди
статора ДрМ5 значительно превышают потери в меди ротора Дрмг, в
стали статора Apcs и ротора Дрсг. Потери в стали ротора Дрсг весьма
малы. В оптимальном режиме электромагнитные потери и их
составляющие зависят от момента нагрузки и скорости. С уменьшением
скорости потери ДрМ5 несколько возрастают. Другие составляющие
электромагнитных потерь снижаются. Наиболее чувствительны к
снижению скорости потери в стали статора. Так, при значениях т = т§=1
и a>=a>Q потери ApCJ = 0,154, а при том же моменте и скорости
<у=0- 0,002, т.е. снизились более чем в 70 раз. В то же время потери Ар
уменьшились в 1,15 раза.
На рис. 7.4 приведены зависимости напряжения статора us, токов
статора is и ротора ir, а также активной ps и реактивной qs мощностей,
потребляемых от преобразователя.
288
При оптимальном управлении напряжение статора us изменяется в
широких пределах. В двигательном режиме требуется более высокое
напряжение, чем в генераторном режиме. Причем в двигательном режиме
при оптимальном управлении напряжение us при скорости &>=С9д и
моментах т > И1д превышает базовое значение напряжения статора, что
следует учитывать при выборе преобразователя. Напряжение статора
зависит от нагрузки на валу и скорости АД.
Рис. 7.4. Характеристики АД при управлении по минимуму потерь:
------------------при со = й>д; --------при =0
Токи статора и ротора в общем случае определяются моментом
нагрузки и скоростью. При малых значениях т зависимость между токами
и моментом нелинейная. Основное влияние на токи оказывает момент.
Зависимость токов статора и ротора от СО незначительная. В режиме
идеального холостого хода токи is и ir равны нулю. При равных по
абсолютной величине моментах в двигательном и генераторном режимах
потребление тока is от преобразователя одинаковое. Также равны токи
ротора. Иными словами, функции is=is{m,(o) и ir=ir(m, со)
представляют собой четные функции от т и СО.
Активная ps и реактивная qs мощности при управлении по
минимуму потерь определяются моментами нагрузки на валу и скоростью.
В двигательном режиме мощность ps>® (потребляется от
преобразователя), а в генераторном - ps <0 (возвращается
289
преобразователю). Исключение составляет режим работы двигателя при
скорости со = 0, в котором мощность ps >0. Реактивная мощность qs > 0
как в двигательном, так и в генераторном режиме.
На рис. 7.5 изображены угловые характеристики и векторная
диаграмма для фиксированных значений т = И16 и CD = COq .
Рис. 7.5. Угловые характеристики (а) и векторная диаграмма (б)
АД в режиме минимума потерь
Угловые характеристики не зависят от скорости и являются
функциями от т. При переходе от двигательного режима к генераторному
режиму аргументы векторов (за исключением vUs) претерпевают разрыв.
7.2. Оценка эффективности режима минимальных потерь энергии
Практический интерес представляет сравнение режима управления
по минимуму полных потерь с режимами управлений, которые в
настоящее время реализуются в частотно-регулируемых асинхронных
электроприводах. К их числу относятся режим пропорционального
управления (us ICDS = const) и режимы управлений при постоянстве
модулей векторов главных потокосцеплений (Щт~ Const), а также
полных потокосцеплений обмоток статора ((/s = Const) и ротора
(i//r = const).
Мера эффективности режимов управления по потерям АД
определяется по формуле
290
Др(Х) = ^,^г»0=СОП8р^ Ap(^r,Ap=min»X)
W’^m^X)
где Др(^г,(.)=oonst,X) - потери в режимах uslcos= const и у/ j = const
(J = m,s,r);
Лр(^° A^min, X) ~ минимальное значение потерь при заданных т
и СО, т.е.
ДРО° Ap=min>X) = min Др(^,Х).
V'r
По степени приближения Др к нулю мера (7.4) позволяет оценить
эффективность различных режимов частотного управления в сравнении с
управлением по минимуму потерь АД.
Если области изменения момента нагрузки и скорости достаточно
широки, то графики функции у/г(т,со), обеспечивающие режимы
usl cos = const и у/ j = const (у = m,s,r), имеют общие точки с графиком
оптимальной функции ^°Ap=min(X)- ® общих точках соответствующие
оценки эффективности равны нулю, а при потокосцеплениях,
отличающихся от оптимальных значений, превышают минимальное
значение, т. е. Др(Х) = 0 при у/г = др=т;п; Др(Х)>0 при
, о
Vr Wr,Ap=mm •
Следовательно, функции Др(Х) в режимах us!cos = const и
у/j — Const имеют явно выраженный минимум. При потокосцеплении
Wr ^r,Ap=min меРа Др(Х) °-
На рис. 7.6 приведены графики зависимости оценок эффективности
АД типа 4А132М6 от угловой скорости для разных законов частотного
управления: 1 - us ICOS = us6 I COs5; 2 - y/s = (/s6; 3 - y/m = ^m6;
4 - y/r = y/r^. Как видно, при изменении т и со мера эффективности
изменяется в широких пределах. Значения Др(Х) сильно возрастают с
уменьшением т и СО, а также при моментах, превышающих значение
момента в базовом режиме АД. Вместе с тем для каждого закона
частотного управления существуют области изменения т и СО, в которых
электромагнитные потери АД равны минимально возможным или
незначительно отличаются от них. Однако эти области ограничены
291
сравнительно небольшим диапазоном изменения момента и скорости, что
свидетельствует о рациональности применения закона оптимального
управления по минимуму потерь. Например, расчеты режимов
us I cos =usq I (Osq, для двигателя мощностью 7,5 кВт
показывают, что при допуске в 10 % на превышение потерь (Лр(Х) <0,1)
допустимый диапазон изменения момента для ОО = 0,l<Og составляет
0,25 <т< 0,66 при законе управления us / 00s =usq I C0s5 и
0,25 < из <0,74 - при законе l//s = y/sQ. Для скорости 60 = 60g момент
двигателя не должен превышать т = mg.
Рис. 7.6. Зависимость меры эффективности АД типа 4А132М6
при 00 = OOq (а) и а> = 0,lOg (б)
Режимы управления при у/т = цотб и y/r = y/rQ имеют более
широкий диапазон изменения момента, удовлетворяющий уступке на
превышение потерь Д5(Х)<0,1 : при 00 = 0,160g диапазон по моменту
составляет 0,3 5 < т < 1,12, а для скорости 00 = 00^ момент ограничен
условием 0,45 < т < 1,45.
Сравнение различных законов частотного управления АД
показывает преимущества закона, оптимального по минимуму потерь
управления, и целесообразность его реализации в системах
автоматического управления электроприводами в тех случаях, когда
угловая скорость и момент двигателя изменяются в широких пределах.
292
7.3. Задача минимизации тока статора на безусловный экстремум
Как отмечалось, режим управления по минимуму тока статора
(zs -> min) имеет ряд достоинств, наиболее важными из которых являются
следующие:
• при управлении по минимуму тока статора полные потери близки к
минимальным потерям двигателя;
• законы управления, обеспечивающие минимум тока статора, проще в
реализации.
Предпосылкой управления асинхронным двигателем с
короткозамкнутым ротором по критерию is —> min является наличие
экстремума (минимума) потребляемого тока статора для каждого X G Qx.
При решении задачи управления по минимуму тока статора
остановимся вначале на вопросе, касающемся выбора проблемно-
ориентированной модели. Суть вопроса состоит в том, что выбор модели
оказывает влияние на свойства экстремальных характеристик и при
удачном ее выборе можно обеспечить некритичность к начальному
приближению и быструю сходимость итерационного процесса к точке
минимума тока.
Рис. 7.7. Экстремальные характеристики тока статора
В качестве иллюстрации на рис. 7.7 приведены экстремальные
характеристики тока статора АД мощностью 7,5 кВт, рассчитанные с
помощью моделей вида ( /7, X) и ( y/r, X). В первой модели варьируемым
воздействием является абсолютное скольжение (3 (а), а во второй -
293
потокосцепление ротора у/г (б). Кривые рассчитаны при различных
фиксированных значениях момента в интервале 0,25 wig < т < 2 mg.
Приведенные характеристики позволяют выявить свойства функций
качества is=is(J3,m) и is = is{y/r,m), определяющие выбор
итерационного метода поиска экстремума. Как видно, функция
' гs = is(J3,m), являясь унимодальной функцией, не обладает свойством
выпуклости в рассматриваемой области изменения варьируемой
переменной /7. При увеличении момента чувствительность функции к
изменению (3 несколько снижается. В то же время функция is - is (y/r, т)
по своим свойствам относится к классу выпуклых унимодальных функций.
При этом с увеличением момента чувствительность к варьируемой
переменной у/г, наоборот, возрастает.
При оценке общей трудоемкости решения задачи экстремального
управления предпочтительнее оказывается модель, в которой варьируемым
воздействием является потокосцепление у/г. В этом случае задача
оптимизации на безусловный экстремум формулируется в следующем
виде:
is(yr, Х = Хс)-> min =>^r°(X), XceQc> (7.5)
где область допустимых управлений
={(/г|0<^г <+оо}.
Решение задачи (7.5) методом градиента приведено на рис. 7.8.
Отметим важную особенность оптимального управления по минимуму
тока статора, отличающую его от режима управления по минимуму
о
потерь: оптимальные значения потокосцеплении статора i/ss и
ротора у/°, главного потокосцепления абсолютного скольжения
, а также токов статора и ротора i° определяются моментом
нагрузки и не зависят от скорости.
294
Рис. 7.8. Зависимости
потокосцеплений ,
, скольжения /3° и
тока is° при управлении
по минимуму тока статора
На рис. 7.8 приве-
дены зависимости пото-
косцеплений у/°(т) и у/т(.т)> тока и скольжения Как
видно, они имеют тот же характер, что и в режиме минимума потерь при
условии постоянства скорости. Вместе с тем для режима минимума тока
статора характерны увеличение магнитного потока при малых нагрузках и
некоторое снижение его при перегрузках по отношению к потоку в режиме
минимума потерь.
Напряжение us, активная ps и реактивная qs мощности статора в
режиме минимума тока статора также определяются моментом нагрузки на
валу и скоростью (рис. 7.9).
Рис. 7.9. Характеристики АД при управлении по минимуму
тока статора:
---------------при й> =®g;----------при й>=0
295
Видно, что для обеспечения режима минимального тока требуется
меньший запас по напряжению (рис. 7.9, а). Так, для двигателя мощностью
7,5 кВт при моменте т = l,5wjg напряжение статора в режиме минимума
потерь превышает напряжение в режиме минимума тока статора на 4 %.
Характер изменения активной ps и реактивной qs мощностей в
.режиме минимума тока статора иллюстрируется их зависимостями от
момента и скорости (рис. 7.9, б). В отличие от режима минимальных
потерь при минимуме тока статора наблюдается незначительное снижение
потребления реактивной мощности при средних нагрузках и перегрузках в
области высоких скоростей двигателя. При небольших нагрузках
потребление реактивной мощности в режиме минимума тока статора
увеличивается.
Управление по минимуму тока статора в целом не обеспечивает
минимума потерь в АД при его работе в
широкой области изменения момента
нагрузки и скорости, за исключением
случаев, когда совпадают значения потоков
для обоих видов оптимального управления.
Рис. 7.10. Зависимости электромагнитных
потерь и их составляющих при управлении
по минимуму тока статора:
--------при гу=гу6;--------при й>=0
В режиме минимума тока статора
снижаются потери в меди статора при незначительном увеличении потерь
в меди ротора (рис. 7.10). Потери в стали статора уменьшаются при
средних нагрузках и перегрузках и увеличиваются в области малых
нагрузок с повышением скорости.
Представляет интерес оценка эффективности управления по
минимуму тока статора по отношению к управлению по минимуму потерь.
Мера эффективности в этом случае определяется с помощью выражения
Лр(Х) =
=min’X) ^Р^г,1\р =min> X)
Ac=min ’ X)
о о
где ?/г>Др=ппп и ^г,г4=т1п_ потокосцепление ротора в режимах
управления по минимуму потерь и минимуму тока статора соответственно.
296
На рис. 7.11 приведены зависимости
потерь Др и меры эффективности Др от
момента для значений (O=(Oq и й>=0 при
оптимальных законах управления: 1 - по
минимуму потерь и 2 - по минимуму тока
статора.
Рис. 7.11. Зависимость оценок
эффективности управления
по минимуму тока статора:
-----------------------<®=о
Видно, что режим управления по минимуму тока статора близок к
режиму управления по минимуму потерь. Наибольшее отличие
наблюдается при высокой скорости в области малых нагрузок на валу. В
этой же области изменения момента при снижении скорости различие
между двумя режимами уменьшается. При средних нагрузках и
перегрузках наблюдается тенденция к дальнейшему сближению этих
режимов.
7.4. Экстремальное управление моментом асинхронного двигателя
при ограничении напряжении и тока статора
Для систем управления асинхронными электроприводами с
полупроводниковыми преобразователями частоты наиболее типичным
является вариант задания ограничений на ток (z5 <z‘5orp) и напряжение
(w5<wjorp) питания АД, которые лимитируются ограниченной
мощностью преобразователя. Рассмотрим пример решения задачи
максимизации перегрузочной способности привода по моменту при
данных ограничениях [103]:
тах{м(Д®)|гДД®)<^0П,; us(J3,®) <м50Гр}. (7.6)
Анализ ситуаций, возникающих в процессе решения задачи (7.6),
показывает, что в общем случае (т.е. при любой комбинации численных
значений zjorp > 0 и м$огр>0) в заданном диапазоне скоростей
0 < О) < й)тах существует не более трех зон, в которых условия
достижения максимума момента оказываются различными [103]. В первой
зоне, охватывающей сравнительно малые значения скоростей
297
О < G) < а\ (рис. 7.12), необходимыми условиями достижения максимума
момента являются
— (sorp> —4s огр- (7-7)
В этой зоне значение верхней грани момента (supWi) лимитируется
ограничением только на ток статора. Ограничение на напряжение
определяет лишь верхнюю грань зоны по условию
и°{(о = а\) = иЗОГ9.
Рис. 7.12. Решение задачи экстремального управления моментом
АД при ограничении тока и напряжения
Во второй зоне скоростей (t\ < (О < лимитирующими являются
оба ограничения:
£O) = 4orp; М5°О)=^огр- (7-9)
С ростом скорости значение функции sup т = f (to) уменьшается, а
функция (to) — возрастает.
298
В третьей зоне й>2 — ® — ®тах лимитирующим является только
ограничение на напряжение:
^°(®)=^0гр; £0)2Логр- (7-10)
Ограничение на ток определяет лишь нижнюю грань этой зоны по
условию
i°s{G) = (D2) = isorp. (7.11)
Данное принципиальное решение позволяет организовать
экстремальное управление АД в каждой из зон на основании более
простых процедур расчета. Рассмотрим этот вопрос подробнее
применительно к случаю 40Гр = const и м50Гр = const.
В первой зоне скоростей момент лимитируется ограничением по
току, а не по напряжению. Это означает, что для решения задачи надо
обеспечить средствами управления наилучшее соотношение между
моментом и током АД, полагая, что запас по напряжению преобразователя
частоты достаточен для реализации данного соотношения. Известно [56],
что наилучшее соотношение между моментом и током АД достигается при
управлении, минимизирующем ток статора при фиксированном моменте.
Поэтому закон управления по минимуму тока статора можно
рассматривать как закон, максимизирующий момент при фиксированном
токе. При использовании модели, в которой независимыми внешними
воздействиями является (J3, т, гу) , задача на максимум момента в первой
зоне сводится к задаче минимизации тока статора в следующей ее
постановке:
i° -is(P°,m,a>) = min is(P,m,a>), (7.12)
&p = {P\is (P, = is orp, us (P, m, a>) = us orp }.
Решение задачи (7.12) дает соответствующие значения Р° и т°.
Расчет функции и° (Р° ,т° ,со) ведется с помощью (3.34) при подстановке
Р = Р° ит =т° для фиксированной скорости со.
Верхняя граница первой зоны (а) = а\) определяется по условию
us (®) = us огр
Во второй зоне скоростей запас по напряжению преобразователя
частоты недостаточен для управления по минимуму тока. Здесь
299
оО о
взаимосвязь переменных р ат, доставляющих верхнюю грань
момента, определяется решением задачи экстремального управления в
следующей постановке:
z? = is(J3° ,т° ,со) = inf i(V,zy), (7.13)
где
= {^| ($ (V, 6У) = Zjогр> 4s(VjZy) ^ZZjorp}-
Решение задачи (7.13) для предписанных значений СО>а\ позволяет
найти управление /3° (zy) и граничную функцию sup т — f (й>) для
данной зоны скоростей. Обратим внимание на то, что расчет законов
управления в первой и во второй зонах скоростей следует проводить с
учетом нелинейности характеристики намагничивания АД.
В третьей зоне скоростей расчет характеристик двигателя
производится на основе исследования на экстремум функции m(J3, СО)
при условии us =ZZiSorp. Максимизация момента при ограничении
напряжения обеспечивает наилучшее соотношение между моментом и
напряжением АД, которое можно найти путем минимизации us при
фиксированном т, т.е. при решении задачи экстремального управления
zz° = us(J3° ,т,со) = min us(J3,m,co), (7.14)
где
={/3\is(j3,m,co)<iSOTp, us(j3,m,co) = uSOTp}.
Решение задачи (7.14) позволяет получить закон управления
/3°=j3°(c»,uSOTp)
оО о
и соотношение между р и т в виде зависимости
т° = f(j3°,c»,uS0Tp). (7.15)
Ток статора в этом случае является функцией от т°, /3° и СО.
Нижняя граница третьей зоны определяется из условия i°(co = СО^) =is огр
300
Характеризуя сформулированные условия достижения максимума
момента, необходимо отметить следующее. В литературе по частотному
управлению АД [8, 10, 85, 124] формула электромагнитного момента
обычно представляется (с учетом принятых нами обозначений) в виде
Л2 = /(/?,
P=(DS-(O.
Исследование на экстремум функции момента производится при
фиксированных значениях частоты (Os и амплитуды us напряжения. В
результате решения уравнения
дт
a>s =фикс
us =фикс
P~Pw£
= 0
находятся функции критического скольжения
Лр = Ap(®S.“J
(7.16)
и критического момента
(7-17)
Причем оценка перегрузочной способности АД производится по
значениям критического момента. В связи с этим возникает следующий
вопрос: совпадает ли при одном и том же значении us = wJ0rp
традиционная оценка (7.17) с оценкой (7.15). Если эти оценки не
совпадают, то какая из них более строго характеризует перегрузочную
способность АД при ограничении напряжения? Для ответа на этот вопрос
запишем формулы (7.16) и (7.17) в следующем виде:
Ркр Дср(^>М50Гр)1
(7.18)
т кр ткр (® ’ US огр ’ Ркр
(7.19)
так как (Os = ® + Р.
В геометрическом смысле (рис. 7.13) функция (7.19) представляет
собой совокупность критических точек семейства механических
301
характеристик АД, соответствующих различным фиксированным
значениям частоты = й^фикс- Оказывается, что объединяющая эти
точки критическая характеристика не совпадает с графиком граничной
функции (7.15). Рис. 7.13 дает достаточно ясное объяснение этому факту.
Действительно, на каждой из механических характеристик можно найти
точки, которые расположены за пределами области, ограниченной
критической характеристикой и осями системы координат. В отличие от
критической, граничная характеристика по отношению к семейству
механических характеристик является огибающей (касательной). Поэтому
критическая характеристика не может служить строгой оценкой
перегрузочной способности АД. В действительности предельные
возможности АД определяются граничной характеристикой (7.15). Это
утверждение справедливо не только для двигательного, но и для
генераторного режима АД.
Рис. 7.13. К сопоставлению оценок перегрузочной способности АД
при ограничении по напряжению
Итак, результат оценки перегрузочной способности АД на основе
традиционной оценки критических режимов даже в этом простом примере
уступает ее строгому решению. Сказанное служит подтверждением
корректности изложенных выше постановок задач и достоверности
результатов предложенных процедур их решения.
На основе изложенной методики было произведено параметрическое
исследование влияния уровней ограничений по току и напряжению на
законы управления и граничные характеристики АД при его работе в
двигательном и генераторном режимах. Соответствующие результаты
представлены графиками рис. 7.14 и 7.15.
302
Рис. 7.14. Законы управления АД при различных значениях
ограничений напряжения и тока статора (Т^ОМ=7,5 кВт):
1 ^5 огр 4s6’2 Чгогр Wiorp 1,4usq,
1 _ Zsorp ~~ls6’ 2 - (sorp ~2ls6> 3 — Zjorp — 3lsQ
303
Как следует из графиков, ограничение по напряжению приводит к
существенному снижению перегрузочной способности АД во второй и
третьей зонах по сравнению с первой. Поэтому для преодоления
значительных перегрузок в широком диапазоне скоростей объективно
необходим достаточно большой запас по напряжению.
Отметим, что изопериметрический характер задачи в ее обобщенной
постановке (2.39) позволяет использовать графики рис.7.14 и 7.15 как
результаты решения задач обеспечения не только максимальной
перегрузочной способности, но и максимальной производительности
электропривода.
На каждой из граничных характеристик существует, по крайней
мере, одна точка, в которой механическая мощность АД при управлении с
ограничениями на ток и напряжение достигает глобального экстремума.
Определение ее координат графическим (с помощью семейства кривых
постоянной мощности) либо численными методами не представляет
принципиальных затруднений. В результате мы получаем решение задачи
оптимизации режимов тех механизмов, производительность которых
зависит от мощности, развиваемой приводом.
Рис. 7.15. Граничные характеристики АД (7^ом =7,5 кВт):
1 4sorp—4s6>2 4sorp wjorp — l,4u5g;
1 ~ h огр — zs6> — is огр — 3 — iS0Tp — 3 isq
304
7.5. Эффективность экстремального управления моментом
асинхронного двигателя при ограничении
напряжения н тока статора
Практический интерес представляет сравнительная оценка
перегрузочной способности АД при экстремальном управлении моментом.
Из известных законов управления, используемых в частотно-регулируемых
асинхронных электроприводах, рассмотрим закон управления по минимуму
тока статора и закон управления, обеспечивающий постоянство полного
потокосцепления обмотки ротора при изменении скорости и момента
нагрузки. Как было отмечено раньше, закон управления по минимуму тока
статора при наличии запаса по напряжению и ограничении тока статора
обеспечивают такую же перегрузочную способность АД, что и
экстремальное управление моментом. В режиме постоянства
потокосцепления ротора перегрузочная способность АД при ограничении
тока статора несколько снижена по сравнению с перегрузочной
способностью двигателя при минимизации тока. Однако она остается
достаточно высокой, если запас по напряжению позволяет в этом режиме
компенсировать влияние падения напряжений на полном сопротивлении
обмотки статора и на индуктивном сопротивлении рассеяния обмотки
ротора. При фиксированном моменте нагрузки с увеличением скорости
напряжение в этих режимах растет, достигая предельного значения wJorp.
Зависимости скорости от момента, отвечающие условиям ограничения тока
и напряжения, являются граничными характеристиками, которые
характеризуют перегрузочную способность АД при данных законах
управления. Граничные характеристики определяют области допустимых
состояний АД в координатах «момент-скорость».
На рис. 7.16 приведены граничные характеристики АД мощностью
Рном =7,5 кВ7 ПРИ управлениях по минимуму тока статора и постоянстве
потокосцепления ротора. Расчеты граничных характеристик выполнены
при MJ0rp = usq к zJorp = 2isq. Как видно, области допустимых состояний
АД в режимах минимального тока статора и постоянства потокосцепления
ротора являются внутренними по отношению к области допустимых
состояний двигателя при экстремальном управлении моментом.
Выделенные серым цветом подобласти характеризуют эффект от
применения экстремального управления моментом АД.
Таким образом, наиболее полное использование АД по перегрузочной
способности обеспечивается при экстремальном управлении моментом. В
случае использования других законов управления появляются в пределах
максимально-достижимой области состояний подобласти,
характеризующие недоиспользование АД по перегрузочной способности.
305
Рис. 7.16. Граничные характеристики АД (^юМ=7,5 кВт) при управлениях
по минимуму тока статора (<я) и постоянстве потокосцепления ротора (б)
Так, при управлении is —> min (рис. 7.16, а) недоиспользованной
является подобласть, обозначенная . Она возникает вследствие
огр
ограничения напряжения статора. В режиме управления = const
(рис. 7.16, б) имеют место две подобласти. Подобласть Q,
5 ОГр
является
следствием ограничения тока, а подобласть ^Mjorp ~ напряжения статора.
В общем случае размеры &is огр и ^«sorp зависят от закона частотного
управления и значений z50rp и Wsorp. Например, при zJ0rp=2
перегрузочная способность АД по моменту в режиме управления
i//r = const на 15 % меньше, чем при экстремальном законе управления
моментом.
Область состояний АД в системе координат «момент-скорость»
можно расширить, используя способ регулирования скорости ослаблением
поля ротора (^г) при постоянстве ЭДС вращения (ег). По аналогии с
двигателем постоянного тока независимого возбуждения будем иметь
двухзонное регулирование скорости.
Особенностью двухзонного регулирования скорости АД является то,
что в первой зоне (|й?| < й9гр, где значение граничной скорости) могут
использоваться различные режимы управления асинхронным двигателем -
при у r - const, is —> min, Ар —> min и другие режимы. При этом
основной магнитный поток (^т) может изменяться в широких пределах
в зависимости от изменения момента нагрузки и скорости двигателя.
Электродвижущая сила ег в первой зоне в общем случае представляет
306
собой нелинейную функцию от G). Заметим, что в электроприводе
постоянного тока с двухзонным регулированием скорости ЭДС вращения
двигателя линейно зависит от скорости.
Во второй зоне (|<п| > <Угр) скорость АД регулируется путем
ослабления полного потока ротора при условии
= егтр = const. (7.20)
При этом величина потокосцепления ротора изменяется в соответствии с
условием
уг=кгТ^, (7.21)
И
где кг - коэффициент связи ротора, зависящий от насыщения машины,
~ 1^т 4-ст ) •
На границе зон значение ЭДС вращения, потокосцепление ротора и
скорость связаны соотношением
"гр = 7------•
к w
ггрг ггр
Особенность режима работы АД во второй зоне состоит в том, что
при фиксированной нагрузке с ростом скорости напряжение на статоре
увеличивается, а ток уменьшается. При значительном увеличении скорости
закон (7.20) может оказаться нереализуемым из-за необходимости
увеличения напряжения на обмотке статора, которое не может обеспечить
преобразователь частоты. Таким образом, при двухзонном регулировании
скорости в силу ограничения мощности преобразователя частоты также
существует граничная характеристика, определяющая область допустимых
состояний АД в системе координат «момент-скорость».
На рис. 7.17 приведены граничные характеристики АД при
двухзонном регулировании скорости. В первой зоне реализуется режим
работы двигателя при \уг -i//^ = const. Во второй зоне изменение
скорости ведется при условии er =еггр = const путем ослабления
полного потокосцепления ротора в соответствии с законом (7.21).
307
Значение еггр соответствует величине скорости <®гр, при которой в
двигательном режиме ток is = 4orp=2zs6 и напряжение us = wJOrp=Ms6-
В заданном диапазоне изменения скорости 0 < (У < tt»max граничная
характеристика supm=/(<y) имеет два участка. В первой зоне
(|<z>|<ct?rp) граничная характеристика отвечает условию 4 ~ 4 огр и
US < 4sorp> а во второй зоне (|<у| > - условию us = wJorp и is <isorp.
На границе зон (|<у| = ) ток is = is огр и напряжение иs = us огр.
Рис. 7.17. Характеристики АД в режиме двухзонного регулирования
скорости при ограничении тока и напряжения
Сравнение граничных характеристик АД при экстремальном
управлении моментом и двухзонном регулировании скорости (рис. 7.12
и 7.17) показывает следующее отличие. При двухзонном регулировании
скорости в двигательном режиме й)1д=бО2д=:<эгр> а в генераторном
режиме справедливо соотношение -G>2r >бОгр- Таким образом, при
двухзонном регулировании скорости отсутствует протяженная зона,
присущая экстремальному управлению моментом, в которой
одновременно выполняются условия is=iS0Tp и w5=w50rp- Здесь эта
зона скоростей вырождается в точку.
308
Эффективность экстремального управления моментом в сравнении с
режимом двухзонного регулирования скорости иллюстрируется
граничными характеристиками, которые приведены на рис. 7.18 и
соответствуют ограничениям г5Огр=2^б и м5огр=м$б-
Рис. 7.18. К сравнению граничных характеристик АД при экстремальном
управлении моментом и двухзонном регулировании скорости:
а~ ®гр — ®гр(^гб>lsогрогр)» ®гр = ®rp(^r6’^6>^sorp)
Для иллюстрации влияния еггр граничные характеристики при
двухзонном регулировании скорости рассчитаны для двух случаев. В
первом случае (рис. 7.18, а) значение еггр определялось исходя из
условий ^=^^6 и ®i-p = t»rp(^r6>z’sorp»Msorp)> а во втором случае
(рис. 7.18, б) - при =1//^ и ®п, = й?гр(^гб,/иб,м5оп,). Как видно из
графиков, с увеличением еггр область допустимых состояний при
двухзонном регулировании скорости уменьшается. Таким образом,
граничная характеристика при экстремальном управлении моментом
позволяет оценить в каждом конкретном случае эффективность варианта
выбранного закона двухзонного регулирования скорости.
309
Глава 8
ЭКСТРЕМАЛЬНОЕ УПРАВЛЕНИЕ
СИНХРОННЫМ ДВИГАТЕЛЕМ
С ПРОДОЛЬНО-ПОПЕРЕЧНЫМ
ЭЛЕКТРОМАГНИТНЫМ ВОЗБУЖДЕНИЕМ
8.1. Задачи минимизации потерь энергии без ограничений
Постановка задачи. В синхронных двигателях (СД), так же как и в
других электрических машинах, потери делятся на основные и добавоч-
ные [137]. К основным относятся потери в меди обмотки якоря tsp^, в
меди обмоток возбуждения > потери в стали якоря ApCJ и
механические потери Армех .
К добавочным относятся потери, вызванные полями рассеяния в
меди якорной обмотки и в массивных стальных частях, окружающих
лобовые части якорной обмотки, пульсационные потери в зубцах якоря и
поверхностные потери в стали якоря и индуктора. Пульсационные и
поверхностные потери в зубцах якоря возникают при наличии пазов на
индукторе, снабженном успокоительной обмоткой, а поверхностные
потери - в индукторе, представляющем массивную стальную поковку.
При наличии продольной и поперечной обмоток возбуждения
электромагнитные потери СД определяются следующим выражением:
(8Л)
J=s,f
где ApMj - потери в меди обмоток якоря (j - S ) и возбуждения (J = f У,
Apcs - потери в стали якоря.
310
Потери в меди обмоток пропорциональны квадратам их токов:
^Ptus ~ >
ДРм/ ~ kwfdfyd + k^fq^fq>
где is - модуль вектора токов обмотки якоря;
ifd^ ifq ~ токи продольной и поперечной обмоток возбуждения.
Потери в стали якоря равны сумме потерь на вихревые токи и
гистерезис. Они зависят от индукции в ярме и зубцах якоря, а также
основной частоты перемагничивания магнитопровода. Не разделяя потери
в стали на гистерезис и вихревые токи, по аналогии с выражением ДрС5
для асинхронных машин будем пользовать выражение
А 7 I I1»3 2
Vm-
Для решения задач оптимизации режимов СД с продольно-
поперечным возбуждением удобно пользоваться проблемно-
ориентированной моделью вида (ify которая описывается
уравнениями (3.39). В этой модели варьируемыми управлениями служат
аргумент вектора полных потокосцеплений обмотки якоря 'Ps,
модуль у/т и аргумент вектора главных потокосцеплений .
В результате функция качества (8.1) принимает вид
,Х) = £ Дрч,.(17п,Ч'®,Х) + Дрс,(и,,>Л®,Х).(8.2)
j=S,f
Для связи функции качества (8.2) с переменными уравнений (3.39)
токи обмоток is, ifd и ifq, а также потокосцепление записываются в
=>
виде скалярных квадратов алгебраических векторов в базисе Gr:
,2 _ rGr -rGr, 2 _ \rjGr . xifGr.
ls xs ’ rm *m »
i}d = • Mly"; i}q = NI^ • NIyr.
311
Тогда задача минимизации потерь на безусловный экстремум СД с
продольно-поперечным возбуждением принимает следующую
формулировку:
Др(¥, Х = Хс)-> min =>V°(X), XceQc. (8.3)
v=(^,^r)
Свойства функции качества Др(У, Х). Введем трехмерную
систему координат OV|V2V3 для изображения пространства управле-
ний СД. Компоненты вектора V = ) будем рассматривать
координатами точки в пространстве управлений: Vj = , v2 = Wm и
V3=^m-
На рис. 8.1 и 8.2 приведены зависимости потерь неявнополюсного
СД мощностью 116 кВт при изменении у/т и tfy для ряда
фиксированных значений X = (т, а>). Потери отнесены к величине
электромагнитных потерь в базовом режиме. Как видно, при изменении
каждого из варьируемых управлений ц?, у/т и электромагнитные
потери имеют ярко выраженный экстремум. С увеличением момента точка
экстремума ул ° (рис. 8.1, а) смещается в область насыщения, а
характеристики становятся более острыми. Потери увеличиваются.
Повышается также чувствительность потерь к изменению т.
При тех же условиях с уменьшением скорости СД потери
снижаются. Характеристики становятся менее острыми и смещаются
практически вертикально вниз.
При изменении аргумента и^т вектора главных потокосцеплений
(рис. 8.1, б) функция потерь имеет периодический характер. Влияние
о
момента нагрузки проявляется в смещении координаты Vym,
доставляющей минимум функции потерь. Видно, что существует момент
нагрузки (в данном примере т = тиб =1), при котором чувствительность
потерь к изменению минимальна.
Уменьшение скорости СД приводит к незначительному изменению
электромагнитных потерь. При этом характер зависимости
электромагнитных потерь от управления не меняется.
312
Рис. 8.1. Зависимости потерь от момента и скорости СД при изменении
модуля 1//т (а) и аргумента (б):
--------при --------при <У=0,25й>5
Изменение аргумента ц? вектора потокосцеплений обмотки якоря
оказывает существенное влияние на потери СД (рис. 8.2). Функция потерь
имеет ярко выраженный экстремальный характер. В этом случае
чувствительность потерь повышается с уменьшением момента.
Рис. 8.2. Зависимость потерь от
при фиксированных \рт и :
-------------при
-------------при (У=0,25(Уб
Для обоснования метода поиска
закона управления по минимуму потерь
исследованы характер поверхности и
линий равного уровня функции Др(У, X) при различных X в
двигательном и генераторном режимах работы СД. На рис. 8.3 изображен
трехмерный контурный график функции hp(Vym ,Тте,Х) при
фиксированных значениях и X — Xg = (w6,ta6).
313
Рис. 8.3. Поверхность функции hp(\pmit>ys )
Как видно, поверхность ) имеет явно выраженный
“овражный” характер. Линии равного уровня Aptly т, ) = const
представляют семейство вытянутых замкнутых линий. Овражный характер
поверхности сохраняется при изменении момента и скорости.
Законы оптимального управления. Решение {V 0 (X), Ар° }
экстремальной задачи (8.3) приведены на рис. 8.4.
Рис. 8.4. Законы управления СД
в режиме Др -> min:
------------при
------------при 60=0
Управление V°(X), обес-
печивающее минимум электро-
магнитных потерь СД с
продольно-поперечным возбуж-
дением, обладает следующими
свойствами:
1) вектор-функция V°(X) является существенно нелинейной
функцией, значения компонент которой изменяются в широких пределах;
2) функция (У) при фиксированных значениях скорости
симметрична относительно оси ординат, разделяющей характеристики
314
двигательного и генераторного режимов. В каждом из этих режимов
функция со) является положительной неубывающей нелинейной
функцией: )<^(щ2)>если \т2\- При fa| —> 0 независимо
от скорости 1//^(т,со) —>0. Изменение т оказывает более ощутимое
влияние на значение чем изменение со. При фиксированном т с
о
уменьшением СО значение у/т возрастает;
3) функции (т, со) и (т, со) при фиксированных значениях
скорости симметричны относительно начала координат, принимающие в
двигательном и генераторном режимах разные знаки. При переходе из
« s- о о
двигательного в генераторный режим значения управлений и
изменяются скачком с разрывом первого рода. Односторонние пределы
каждой из функций 1?°^ (т, со) и 19^ (щ, со) равны по абсолютной
величине и противоположны по знаку. Изменение т и со оказывает
влияние на оптимальные значения и и?, . При фиксированном
г т г s
моменте нагрузки с уменьшением СО абсолютные значения и
увеличиваются.
Характеристики СД при управлении по минимуму потерь.
Электромагнитные потери СД и их составляющие в режиме управления
Др -> min представляют собой монотонно
возрастающие при увеличении момента и
скорости зависимости (рис. 8.5).
Рис. 8.5. Электромагнитные потери и
их составляющие при управлении СД
в режиме Др -> min:
--------при СО=СО&,
--------при 0=0
точке
(т = 0).
Потери равны нулю в
идеального холостого хода
Превалирующее влияние на потери
оказывает момент и - в меньшей степени - скорость. Управление
Др -> min обеспечивает снижение потерь Др по сравнению с потерями в
315
базовом режиме на 16 %, а при т = т5 и 6У=О потери уменьшаются
на 25 %.
Снижение потерь Ар с уменьшением СО обеспечивается в основном
за счет потерь в стали якоря. В частности, при СО = 0 суммарные потери в
стали Дрсу=0. Потери в меди обмоток СД незначительно зависят от
скорости и преимущественно определяются моментом нагрузки. Потери в
меди якоря ApMS меньше суммарных потерь в меди обмоток возбуждения.
Потери в меди обмоток несколько снижаются при уменьшении скорости.
Заметим, что потери в меди якоря и суммарные потери в меди обмоток
возбуждения снижаются по отношению к потерям в базовом режиме
на 6 и 31 % соответственно. В то же время потери в стали якоря за счет
увеличения потока на 12 % увеличились на 30 %. Таким образом, потери
СД в оптимальном режиме перераспределяются так, что индуктор
оказывается в более благоприятном состоянии в сравнении с базовым
режимом.
Напряжение us и ток is обмотки якоря в режиме управления
Ар -» min изменяются в широких пределах (рис. 8.6, а) и представляют
собой монотонно возрастающие функции от т и СО. В режиме идеального
холостого хода напряжение us и ток is равны нулю. При базовых
значениях т и СО напряжение us в режиме оптимального управления
превышает напряжение в базовом режиме на 14 %, а ток is уменьшается
на 3 %. На напряжение якоря существенное влияние оказывает как момент
нагрузки, так и скорость СД. Ток якоря практически определяется только
моментом. Незначительное влияние скорости проявляется в области
небольших нагрузок (при т<0,5тб). В области средних и больших
нагрузок (при /и>0,5/и6) ток якоря изменяется практически линейно
от т.
Изменение знака момента нагрузки не влияет на характер
зависимостей напряжения и тока якоря. При равных по абсолютной
величине т и СО в двигательном режиме напряжение us превышает
напряжение якоря в генераторном режиме, а токи якоря оказываются
равными.
Таким образом, зависимость тока is от т при фиксированной
скорости представляет собой симметричную функцию относительно оси
ординат.
Зависимости активной ps и реактивной qs мощностей обмотки
якоря от момента нагрузки при фиксированной скорости неявнополюсногр
СД с продольно-поперечным возбуждением приведены на рис. 8.6, б.
316
Рис. 8.6. Характеристики СД с продольно-поперечным возбуждением
в режиме Др -> min :
-------при ;--------------при о=0
В генераторном режиме активная мощность якоря отдается
источнику питания (за исключением 0=0). В то же время реактивная
мощность потребляется как в двигательном, так и в генераторном
режимах. По отношению к базовому режиму потребление реактивной
мощности при оптимальном управлении возрастает в 10 раз и составляет
38 % от базового значения электромагнитной мощности СД.
Рис. 8.7. Характеристики СД
с продольно-поперечным
возбуждением в режиме
Ьр -> min:
-------при бУ=О6;
-------при Ю=0
Характеристики СД по цепям
обмоток возбуждения приведены
на рис. 8.7, где представлены
зависимости напряжений и
Uj-q, токов iyy и ijq, а также
потерь И Pj-q продольной и
поперечной обмоток возбуждения от момента нагрузки и скорости.
317
Обратим внимание на одно важное обстоятельство. В режиме
управления Ар —> min неявнополюсным СД в случае неравенства
приведенных активных сопротивлений обмоток возбуждения в создании
результирующей МДС (главного потокосцепления) принимает участие та
обмотка, которая имеет наименьшее активное сопротивление. Причем
переход из двигательного в генераторный режим может обеспечиваться
либо без изменения направления тока в этой обмотке возбуждения, либо
при смене его направления.
Приведенные на рис. 8.7 характеристики рассчитаны для СД с
соотношением активных сопротивлений обмоток возбуждения .
Именно поэтому в области рабочих нагрузок напряжение Ujd и ток i
продольной обмотки возбуждения практически равны нулю, а напряжение
Uj-ц и ток ij-g поперечной обмотки возбуждения, являясь нелинейными
функциями от т и СО, изменяются в широких пределах. Причем, как
видно, переход СД в генераторный режим происходит при смене знака
тока ijq.
Количественная оценка напряжения и тока поперечной обмотки
возбуждения в режиме Ар -> min показывает, что при значениях тп = тп§
и со = со5 напряжение и ток iуменьшились в сравнении с базовым
значением на 33 %.
Таким образом, режим управления Ар —> min позволяет
значительно снизить токи в обмотках возбуждения, что благоприятно (как
было показано выше) сказывается на мощности потерь цепи возбуждения.
При этом существенное влияние на характеристики цепи возбуждения
оказывает момент нагрузки.
Особенности режима Ар -> min отражают векторные диаграммы
(рис. 8.8), построенные для СД при значениях m — m^ и со — со^. Эти
диаграммы поясняют роль поперечной обмотки возбуждения и продольной
реакции якоря в создании результирующего намагничивающего тока
неявнополюсного СД с продольно-поперечным возбуждением при
соотношении параметров обмоток .
Из приведенных построений видно, что результирующий вектор
->
намагничивающих токов Im равен геометрической сумме его продольной
-> -> ->
1тс/ и поперечной составляющих. Составляющая Imd равна вектору
продольной реакции якоря Isc/ = isd d . В то же время составляющая
318
определяется суммированием векторов поперечной обмотки возбуждения
I q и поперечной реакции якоря = isq q .
Рис.8.8. Векторные диаграммы неявнополюсного СД
с продольно-поперечным возбуждением при управлении Др -> min
(соотношение параметров обмоток возбуждения > rj-q ):
а - двигательный режим; б - генераторный режим
Так, в двигательном режиме для СД мощностью 116 кВт поперечная
составляющая тока якоря i°q =0,686 is§, а ток поперечной обмотки
возбуждения ij^=4),965 Zsg. Продольная составляющая тока якоря
z°rf=0,686zj6. Ток ifo продольной обмотки возбуждения практически
равен нулю. В результате вектор намагничивающих токов (главных
потокосцеплений) смещен относительно продольной оси в направлении
отсчета отрицательных углов (рис. 8.8, а).
ТЛ *0
В генераторном режиме поперечная составляющая тока якоря lsq и
ток поперечной обмотки меняют свои направления на
противоположные по отношению к двигательному режиму. В этом случае
вектор намагничивающих токов (главных потокосцеплений) смещается
относительно продольной оси в сторону отсчета положительных углов
(рис. 8.8, б).
Полученные диаграммы существенно отличаются от векторных
диаграмм базового режима СД, приведенных на рис. 8.9. Эти различия
можно объяснить следующим образом. В неявнополюсной синхронной
машине с продольно-поперечным возбуждением исходя из геометрии
индуктора невозможно однозначно идентифицировать одну из обмоток
319
возбуждения как продольную, а другую - как поперечную. В практике
продольной называется та из обмоток возбуждения, которая используется
для создания основного потока, а поперечной считается другая обмотка,
предназначенная для компенсации поперечной реакции якоря. Реализация
этих функций обеспечивается соответствующими схемами питания
обмоток и не зависит от соотношения их параметров, которые в общем
случае могут быть различными [16].
Рис.8.9. Векторные диаграммы для базового режима
неявнополюсного СД с продольно-поперечным возбуждением
(при соотношении параметров обмоток возбуждения ):
а - двигательный режим; б - генераторный режим
Действительно, в базовом режиме СД (рис. 8.9) вектор
намагничивающих токов 1т (главных потокосцеплений ) совпадает
по направлению с продольной осью Od (ify. =0). При этом в
двигательном режиме продольная составляющая тока якоря iS(i =-0,025 ,
а поперечная составляющая iSq-isQ- За счет тока ifq~~iSq поперечной
обмотки возбуждения полностью компенсируется поперечная
—> —
составляющая тока якоря iSq. В таком случае вектор IOT?=IJ?+Iy9=0.
Главный поток создается током продольной обмотки возбуждения
z'yy=0,506lj6, который, кроме того, компенсирует размагничивающее
действие продольной реакции якоря isd. В генераторном режиме вектор
результирующих намагничивающих токов не меняет своего положения
(рис. 8.9, б). Поперечная реакция якоря также полностью компенсируется
током поперечной обмотки возбуждения, который меняет свое
направление в связи с изменением направления тока поперечной реакции
якоря.
320
В оптимальном режиме функции ортогонально размещенных
обмоток возбуждения априори неопределенны. Поэтому оказывается, что в
создании основного потока принимает участие та из обмоток, которая
обладает меньшим приведенным сопротивлением. В рассмотренном
примере Гу^ >rfq' Именно поэтому обмотки возбуждения в оптимальном
режиме СД с точки зрения участия в создании основного потока
поменялись ролями.
Для подтверждения приведенных соображений рассмотрим случай,
когда Гу/ < Гу?. Соответствующие векторные диаграммы для
двигательного и генераторного режимов при Др -> min приведены на
рис. 8.10.
d f df
а б
Рис.8.10. Векторные диаграммы неявнополюсного СД
с продольно-поперечным возбуждением при управлении Др -> min
(соотношение параметров обмоток возбуждения Гуу < Гу? ):
а — двигательный режим; б - генераторный режим
Как видно, все результирующие векторы поворачиваются в
двигательном режиме на угол +7t/ 2 эл. рад, а в генераторном режиме - на
угол - л/ 2 эл. рад. При этом сохраняются оптимальные значения модулей
результирующих векторов и функции качества. Теперь в создании
основного потока участвует ток iпродольной обмотки, так как теперь
она имеет наименьшее приведенное активное сопротивление. При этом ток
iу? поперечной обмотки практически равен нулю.
Заметим, что при соотношении активных сопротивлений обмоток
возбуждения Гуу < Гу? пространственное положение результирующих
векторов в базовом режиме СД не меняется.
321
В дальнейшем примеры расчетов характеристик оптимальных
режимов неявнополюсного СД с продольно-поперечным возбуждением
приведены для случая [16].
Рис. 8.11. Угловые характеристики СД
с продольно-поперечным
возбуждением в режиме Ар -> min
На рис. 8.11 представлены
угловые характеристики СД с
продольно-поперечным возбуждением.
Видно, что при увеличении момента |^т| уменьшается, т.е. вектор
главных потокосцеплений поворачивается в сторону продольной оси.
Векторы токов и потокосцеплений не ортогональны. Аргументы 1?°^
и
векторов главных и полных потокосцеплений обмоток индуктора
меньше л/2. При переходе из двигательного в генераторный режим
значения аргументов векторов тока якоря (Ц^), тока (ц° ) и
потокосцеплений обмоток индуктора Vy $
изменяются скачком со сменой
их знаков.
8.2. Задача минимизации потерь энергии при постоянном потоке
Постановка задачи. Целесообразность перехода к режиму работы
СД с минимизацией потерь при постоянном потоке (Ар->ттпри
^т= const) объясняется причинами, которые были отмечены при
анализе проблем, связанных с реализацией оптимального режима в
электроприводах с ОМПТ при интенсивно меняющейся нагрузке.
Изменение главного потокосцепления в широких пределах при Ар -> min
вызывает трудности создания форсировок потока в переходных режимах
электропривода.
322
Задача экстремального управления СД по минимуму Др при
постоянстве модуля вектора главных потокосцеплений формулируется
аналогично (5.4):
Др(У, X = Xc)-»min =>V°(X), ХсеПс, (8.4)
VeQv
где
Qv = {V: V = , Т®-), Ч& = )}.
Таким образом, задача оптимизации режимов СД при постоянстве
потока сводится к двухмерной задаче экстремального управления.
Свойства функции качества Др(У, X) в режиме Др -> min при
\рт ~ Ч^тб • В системе координат OvjV2v3 принимаем Vj — у/т = у/т,
v2 ~ и v3 = > т-е- варьируемыми переменными здесь являются
аргументы и векторов главных потокосцеплений и полных
потокосцеплений обмотки якоря.
На рис. 8.12 изображен трехмерный контурный график функции
потерь неявнополюсного СД при X = Xg = (mg, (Og ) и у/т = i//mg.
Рис. 8.12. Поверхность функции Ap(V, X) при у/т = const
Как видно, варьируемые переменные и по-разному влияют
на поведение функции качества. Изменение аргумента приводит к
более значительному изменению показателя качества, чем изменение .
323
Разная интенсивность изменения потерь вдоль направлений 1?^ и
обуславливает овражный характер поведения Лр(ц^, и^т ).
Законы управления по минимуму потерь при постоянстве
потока. Решение экстремальной задачи (8.4) приведено на рис. 8.13.
Рис. 8.13. Решение задачи
Ьр -4 min при ут = у/*т6 для
неявнополюсного СД
с продольно-поперечным
возбуждением:
------------при со=а)^->
------------при 0=0
Оптимальное управление
V0, обеспечивающее минимум электромагнитных потерь СД при
*
1//т = Ч^т > обладает следующими свойствами:
1) один из компонентов вектора управлений ((/от) постоянен и равен
заданному значению модуля вектора главных потокосцеплений. Другие
компоненты вектора управлений V°s и 1?°^ являются нелинейными
функциями от т;
2) функции (т) и (т) симметричны относительно начала
координат, имеющих в точке т=0 разрыв первого рода. При увеличении
|/и| абсолютные значения этих функций уменьшаются, что приводит к
повороту результирующих векторов главных и полных потокосцеплений в
направлении продольной оси Od;
3) потери Лр° являются монотонно возрастающей функцией от т
и (О. При моменте ти=О потери Др0 ^0.
Характеристики СД в режиме управления Др —> min при
\]/т ~ Ч^тб • При постоянстве потока потери в стали якоря не зависят от т
*
и определяются потокосцеплением 1//т = \j/m и скоростью СО:
324
^>cs =^Н1,3(^)2-
Отсюда следует, что при 0=0 потери в стали якоря Дрс =0 и с
увеличением скорости растут.
Потери в меди якоря ДрМ5 и индуктора Дрмг в данном режиме не
зависят от О и являются монотонно возрастающими функциями от т. В
данном примере потери ЛРМГ >&PMS-
Электромагнитные потери Др определяются моментом и скоростью
(рис. 8.14). Превалирующее влияние на величину Др в области малых
значений т и больших скоростей оказывают потери в стали якоря. При
перегрузках (т > 1) основную долю суммарных потерь составляют потери
в меди обмоток.
*
В целом режим управления Др = mm при у/т — обеспечивает
снижение Др по сравнению с потерями в базовом режиме. В
рассматриваемом примере потери снизились на 10 %. Отличительной
особенностью данного режима является то, что при малых значениях
момента в этом режиме Др существенно больше, чем в режиме
Др—> min. При моменте т=0 и скорости О=О6 потери
Др =0,15 Др(/и6, й?6 ).
Рис. 8.14. Электромагнитные потери СД и
их составляющие в режиме
Др-> min при =^*т5:
--------при со=соб;
--------при 0=0
Анализ характеристик СД выявляет
следующие их особенности. Напряжение
обмотки якоря us незначительно зависит
от момента нагрузки и при заданном потоке в основном определяется
скоростью. Ток якоря is не зависит от скорости и определяется моментом
нагрузки. При моменте т=т§ ток статора на 3 % превышает ток в режиме
325
управления Др -> min. При моменте т = 0 ток якоря не равен нулю и
составляет 0,25 isg.
Активная мощность якоря ps качественно ведет себя так же, как в
режиме Др = min (8.15, а). Реактивная мощность якоря qs незначительно
зависит от нагрузки, возрастая при увеличении т и СО. Характерно
потребление qs в двигательном и генераторном режимах, а также в
режиме идеального холостого хода. При скорости СО =0 мощность ^s=0.
Рис. 8.15. Характеристики неявнополюсного СД в режиме
*
управления Др -» min при \ffm = y/mQ:
---------------а)=а)б-,--------<0=0
Минимизация потерь при \[fm = const позволяет снизить
потребление реактивной мощности СД при базовой нагрузке на 30% по
отношению к величине qs в режиме Др -> min.
Рассматривая характеристики СД по цепи возбуждения (8.15, б)
следует заметить, что в режиме оптимального управления по минимуму
потерь при угт = const основная роль отводится поперечной обмотке
возбуждения (при rj-d>rfq), так как напряжение Uyd и ток ijd
продольной обмотки возбуждения практически равны нулю. Законы
изменения напряжения Uj-q и тока ijq поперечной обмотки существенно
326
нелинейные и выражают зависимость и ifq от т. При переходе из
двигательного в генераторный режим напряжение и ток поперечной
обмотки изменяются скачком при смене знака на противоположный.
Количественная оценка напряжения и тока поперечной обмотки
возбуждения показывает, что при моменте т = тп§ и скорости й) = ft)g
напряжение Uj-q и ток ijq на 6 % выше по отношению к их значениям в
режиме минимальных потерь при переменном потоке.
На рис. 8.16 представлены угловые характеристики (а) от т при
(О = (Oq и векторная диаграмма (б) неявнополюсного СД при т = т5 и
(У = 0)б.
-2 1----->------1------1-----------------
-1.5 -1 -0.5 0 0.5 1 т
Рис. 8.16. Угловые характеристики (а) и векторная диаграмма (б) СД
с продольно-поперечным возбуждением в режиме
. *
управления ар -» mm при у/т = у/тб
Сравнение векторных диаграмм, приведенных на рис. 8.8, а и 8.16, б
показывает, что положения результирующих векторов потокосцеплений в
системе координат Odq в режиме Др -> min при \рт = смещаются в
направлении продольной оси.
Отметим следующие особенности угловых характеристик:
1) изменение аргументов результирующих векторов потокосцеплений и
токов обмоток СД связано только с изменением момента и не зависят от
скорости;
2) при переходе из двигательного в генераторный режим значения
аргументов результирующих векторов изменяются скачком. При этом знак
аргументов результирующих векторов (за исключением знака аргументов
327
результирующих векторов напряжений и токов якоря) меняется на ;
противоположный. ,
8.3. Задача минимизации потерь энергии с ограничением j
реактивной мощности
Постановка задачи. Задача минимизации электромагнитных потерь
при ограничении реактивной мощности в общем случае имеет следующую
формулировку:
Ap(V, X = Хс) -> min => V0 (X), Хс е Qc, (8.5)
V6QV
где область допустимых управлений
Qv={V:^=(V,X) = ^, V = (^s,Tw)}.
*
Здесь qs - заданное определяющее уровень ограничения значение
реактивной мощности обмотки якоря.
Ввиду нелинейного характера функций качества и ограничений
решение задачи оптимизации (8.5) осуществляется методом штрафных
функций. В этих целях для минимизации функции качества Ap(V, X) при
Це
ограничениях qs (V, X) = qs вводится вспомогательная функция
Ap(V, X) = 4p(v, X)+yg (V, X, а),
где функция штрафа
^(V,X,a) = as[^(V,X)-^]2,
где as - положительный весовой коэффициент.
*
Таким образом, задача (8.5) с ограничением qs = qs преобразуется к
задаче математического программирования без ограничений
Ap(V, X = Xc)->min=>V°(X), XceQc. (8.6)
v
328
Рассмотрим решение задачи (8.6) при условии qs - 0. В этом случае
режим минимальных потерь СД обеспечивается без потребления
реактивной мощности (qs =0).
Законы оптимального управления по минимуму потерь при
qs = 0. В этом режиме модуль и аргумент вектора главных
потокосцеплений зависят от т и СО, качественно повторяя характер
изменения законов управления по минимуму потерь без ограничения qs
(рис. 8.17). Вместе с тем в режиме Др -> min при qs = 0 модуль вектора
главных потокосцеплений становится меньше, а аргумент увеличивается
по абсолютному значению. Так, при моменте т = и скорости со = COq
значения модуля и аргумента
составили 1,064^отб и
соответственно.
Рис. 8.17. Решение задачи
Др -» min при qs = 0
для неявнополюсного СД
с продольно-поперечным
возбуждением:
--------при GO=COq',
--------при со-0
Характеристики СД в режиме управления по минимуму потерь
при qs = 0. Зависимости электромагнитных потерь и их составляющих от
т и со приведены на рис. 8.18. Электромагнитные потери в этом режиме
снижаются по отношению к потерям в базовом режиме на 4,2 %, а при
т = ms и со = 0 потери уменьшаются на 30 %.
Отметим ряд особенностей данного режима, связанных с характером
изменения суммарных потерь и их составляющих:
1) потери в меди обмоток возбуждения Ap^f больше потерь в меди
обмотки якоря Дрм.?. С увеличением момента превышение ApMf по
отношению к потерям при СО = 0 увеличивается;
2) потери &Puf с уменьшением скорости уменьшаются и принимают
наименьшее значение при скорости 0=0. Вместе с этим потери bp^s
329
вначале уменьшаются, а в дальнейшем по мере снижения скорости
начинают возрастать в связи с увеличением тока якоря и при скорости
(О = 0 принимают максимальное значение;
3) потери и ^Pcs ПРИ постоянной нагрузке более чувствительны
к изменению скорости, чем потери ДрМ5;
4) ввиду увеличения потерь Ap^f в области высоких скоростей этот
режим в отношении Др менее благоприятен в сравнении с ранее
рассмотренными режимами оптимизации;
5) снижение потерь Др при уменьшением скорости обеспечивается за
счет потерь в меди обмоток возбуждения и потерь в стали якоря. В области
низких скоростей режим управления по минимуму потерь с ограничением
мощности qs становится более выгодным в сравнении с режимом
минимальных потерь при постоянстве потока.
Рис. 8.18. Электромагнитные потери СД и
их составляющие в режиме
Др -> min при qs = 0:
--------при а)-а>б;
--------при й?=0
При т = тб и (О =0 суммарные потери в сравнении с потерями при
(У = 1 снизились на 27 %, а потери hp^f - на 31 % . Потери в стали якоря
ДрС8=0. В то же время потери ДрМ5 увеличились на 6 %. Таким образом,
потери СД в режиме минимальных потерь при qs = 0 перераспределяются
так, что потери в индукторе становятся больше, чем потери в якоре. По
сравнению с базовым режимом оптимальное управление по минимуму
потерь при отсутствии потребления реактивной мощности (#s=0)
обеспечивает незначительное снижение суммарных потерь при высоких
значениях скорости. Однако по мере уменьшения скорости эффект от
оптимизации растет.
На рис. 8.19 представлены результаты расчета характеристик СД в
режиме Др -> min при qs = 0.
330
Сравнительная оценка характеристик показывает, что для
обеспечения данного режима требуется более высокое напряжение
источника питания обмотки якоря по сравнению с напряжением в базовом
режиме. В то же время напряжение обмоток возбуждения снижено. Так,
при моменте т — т§ и скорости СО = <У6 оптимальные значения
напряжений якоря и поперечной обмотки составили 1 ,058ms6 и 0,94Му9б
соответственно. Напряжение продольной обмотки практически равно
нулю.
Рис. 8.19. Характеристики неявнополюсного СД в режиме
Др -» min при qs = 0:
- (У=й)6;-----------й?=0
Изменение соотношения между напряжениями обмоток приводит к
перераспределению токов. Ток is меньше тока якоря в базовом режиме на
5,8 %. В то же время ток поперечной обмотки увеличился на 15 %. Причем
токи в обмотках СД зависят как от т, так и от СО. Уменьшение скорости
ведет к снижению тока в продольной обмотке возбуждения, а также тока
якоря в области малых нагрузок. В области средних и больших нагрузок
ток is вначале снижается, а затем при дальнейшем уменьшении скорости
начинает увеличиваться.
Анализ угловых характеристик и векторных диаграмм (рис. 8.20)
показывает определенное качественное сходство данного режима с
режимом Др -> min. При т = 0 аргументы результирующих векторов
претерпевают разрыв.
331
Рис.8.20. Угловые характеристики (а) и векторная диаграмма (б)
неявнополюсного СД в режиме управления Др -> min при qs = 0
Векторы Us и I s, а также U/ и I f коллинеарны. Вектор токов якоря
I s ортогонален вектору полных потокосцеплений обмотки якоря Ts
8.4. Задача минимизации потерь энергии с ограничением потока
и реактивной мощности
Постановка задачи. Задача минимизации электромагнитных потерь
при наличии ограничений на поток и реактивную мощность СД
(Ap->min при \//т, qs = cons?) в общем случае имеет следующую
формулировку:
Ap(V, X = Xc)->min =>V°(X), XceQc, (8.7)
VgQy
где область допустимых управлений
Qv
v = (i^s), ,
?s(V,X) = ?s-
332
Задача (8.7) аналогична задаче (5.10) и имеет одинаковые
*
особенности с точки зрения методов ее решения. При условии у/т = у/т
исходная задача (8.7) сводится к двухмерной задаче с ограничениями на
реактивную мощность обмотки якоря, а затем, применяя метод штрафных
функций, преобразуется к задаче оптимизации без ограничений.
Законы управления по минимуму потерь при у/т, qs = const.
Рассмотрим частный случай задачи (8.7), в которой ограничения
определяются условиями у/т - y/mg и qs = 0.
На рис. 8.21 представлены результаты решения симплексным
методом Нелдера-Мида экстремальной задачи для неявнополюсного СД
мощностью 116 кВт. Приведенные графики позволяют сделать следующие
выводы.
Один компонент вектора управлений V0 - модуль вектора главных
«О *
потокосцеплении i//m - =const3 а два других компонента - аргументы
векторов главных потокосцеплений (т, (О) и полных
потокосцеплений якоря (т, б?) - являются нелинейными
непрерывной функции от т и (О с разрывом при т = 0.
В этом случае законы управления сочетают свойства законов
управления по минимуму потерь при постоянстве потока и минимуму
потерь при ограничении реактивной мощности СД.
Рис. 8.21. Решение задачи
управления Ар -> min при
у/ = у/ , и q*s = 0
Т т г тб 1S
для неявнополюсного СД
с продольно-поперечным
возбуждением:
--------при <У=(У6;
--------при 60=0
Характеристики СД в режиме управления Др = min при
У/т=У/тб н 9s На рис. 8.22 приведены зависимости Др(У, X),
333
рассчитанные при фиксированных значениях скорости и <У=0. Как
видно, прослеживается качественная аналогия данного режима с режимом
управления А/? -> min при у/т = ys^ (см. рис. 8.14 и 8.22).
Представление о режиме управления Ар = min при у, - у/т^ и
qs = 0 дает картина перераспределения составляющих электромагнитных
потерь СД (рис. 8.22). В этом режиме потери в стали якоря &pcs
оказывают доминирующее влияние на электромагнитные потери в области
малых нагрузок (при т <0,25либ) и высоких скоростей. Потери ApCJ
растут с увеличением СО и не зависят от т.
В области номинальной нагрузки и перегрузках основное влияние
оказывают потери в меди обмотки якоря AjPMJ и обмоток возбуждения
которые зависят как от нагрузки на валу, так и от скорости. Причем
потери Ары/ в данном режиме превышают потери bp^s, что следует
расценивать как недостаток режима.
Рис. 8.22. Электромагнитные потери СД и
их составляющие в режиме управления
Ар->min при у/т = у/т5 и q* = 0:
-----------со=со5-,--------<и=0
При значениях т = и С0=(0^
электромагнитные потери в данном режиме
остаются практически такими же, как в базовом режиме, а при 0 = 0
потери соответствуют режиму Ар —> min при у/т = yfm§
На рис. 8.23 приведены зависимости напряжений и токов обмоток, а
также активных мощностей для двигательного и генераторного режимов.
Напряжение us является функцией от т и со, которое при заданном
потоке в основном определяется скоростью (рис. 8.23, а). При изменении
т напряжение us изменяется незначительно.
334
Рис. 8.23. Характеристики неявнополюсного СД с продольно-поперечным
возбуждением в режиме Др -> min при и q*s = 0:
--------при «У=«У6;--------при 69=0
Напряжение продольной обмотки возбуждения имало по
сравнению с напряжением поперечной обмотки возбуждения и
(рис. 8.23, б).
Токи обмотки якоря is и поперечной обмотки возбуждения в
области малых и средних нагрузок (при т < 0,5/и6) существенно зависят
от момента нагрузки и скорости двигателя. В точке идеального холостого
хода эти токи не равны нулю и определяются скоростью двигателя, а в
области перегрузок практически линейно зависят от т.
Основное потребление активной мощности в двигательном режиме
осуществляется от преобразователя, питающего обмотку якоря. При
переходе в генераторный режим активная мощность ps за вычетом потерь
отдается источнику питания.
Мощность потерь возбуждения зависит от момента и скорости. При
этом в области малых нагрузок превалирующее влияние оказывает
скорость, а при перегрузках - момент двигателя.
335
Рис. 8.24. Угловые характеристики (а) и векторная диаграмма (б)
неявнополюсного СД с продольно-поперечным возбуждением
в режиме Др -> min при ут - и q* = О
На рис. 8.24 приведены угловые характеристики и векторная
диаграмма неявнополюсного СД. Угловые характеристики иллюстрируют
положение в пространстве результирующих векторов СД при изменении
момента. Векторная диаграмма соответствует двигательному режиму СД
при фиксированных значений момента т = и скорости со = «Уд.
Как видно, зависимости и^т (т), (т), (т) и Цу (т),
являясь функциями от т, имеют разрывы при т = 0. Таким образом,
переход из двигательного в генераторный режим сопровождается
скачкообразным изменением аргументов. В двигательном режиме
аргументы результирующих векторов Ч'т, Ч'у, U/ и I/ принимают
отрицательные значения, а в генераторном режиме - положительные.
Векторы Uу и I/ коллинеарны.
Зависимость аргумента вектора напряжений якоря также
представляет собой функцию от т. Независимо от знака момента
нагрузки >0. Причем в двигательном режиме <л/2, а в
генераторном режиме > л / 2. При т = 0 функция (т) имеет
односторонние пределы: (т^ + 0) = 0 - для двигательного и
336
u°s (m0 — 0) = +7t/2 - для генераторного режимов. В то же время
функция и°(т) непрерывна и при щ = 0 аргумент ц°(0)=0. С
увеличением момента нагрузки абсолютное значение увеличивается.
Результирующие векторы напряжений и токов якоря в двигательном
режиме коллинеарны, а в генераторном режиме противонаправлены.
8.5. Эффективность законов управления по минимуму потерь энергии
На рис. 8.25 приведены зависимости суммарных потерь Др (а) и
меры эффективности (б) для неявнополюсного СД мощностью 116 кВт.
Кривые построены для двух фиксированных значений скорости «у=<у6 и
ю=0 и соответствуют решению следующих задач оптимизации:
1 - Др -» min при и q* = 0; 2 - bp -> min при q* -0;
3 - Др -> min при у = и 4 - Др -» min.
Рис. 8.25. К оценке эффективности законов оптимального управления
СД с продольно-поперечным возбуждением:
а -при б-при - £У=0
Как видно, оптимальное по минимуму Др управление при
отсутствии ограничений наиболее эффективно (кривая 4), так как мера
эффективности Др=0.
337
Управление по минимуму Др при у/т = обеспечивает режим,
близкий к режиму минимальных потерь при 0,25 т$ < т < 0,75
(кривая 3).
Управление по минимуму Др при qs = 0 доставляет примерно
такой же эффект при нагрузках zzz<0,25 zz?g и высокой скорости (кривая 2).
В области низких скоростей эффективность данного режима повышается, а
при скорости, равной нулю, оценка Др=0.
Для управления по минимуму Др при V/W=V/„16 и Qs
характерно значительное превышение потерь по отношению к минимально
возможным потерям независимо от величины момента и скорости
(кривая 1).
Как видно из графиков, оценки эффективности Ар изменяются в
широких пределах. Наибольшие значения Ар наблюдаются при высокой
скорости, когда СД работает в области малых нагрузок и больших
перегрузок.
Таким образом, результаты исследований показывают преимущество
закона оптимального управления по минимуму потерь и целесообразность
его использования в системах автоматического управления
электроприводами в тех случаях, когда скорость и момент СД по условиям
технологического процесса должны изменяться в широких пределах.
Близким к этому режиму в области средних нагрузок является режим
управлений по минимуму Др при у/т = . В ряде случаев может
оказаться целесообразным режим Др —> min при qs = 0.
8.6. Задача минимизации тока статора при постоянном потоке
Постановка задачи. Законы управления СД с продольно-
поперечным возбуждением по минимуму потерь представляют сложные
зависимости от момента нагрузки и скорости. В этой связи практический
интерес возникает к режимам экстремального управления СД, которые
реализуются при более простых законах управления, в частности, не
зависящих от скорости. К таким законам относятся, например, законы
управления по минимуму тока статора (якоря).
Рассмотрим задачу минимизации тока якоря СД при постоянстве
* .
потока у/т = у/т. Модуль is вектора токов якоря при использовании
модели вида ( , X) не зависит от скорости и является нелинейной
функцией от 'Р^ги т. Исследование функции is{vv ,т) при
338
*
фиксированном значении т и постоянстве модуля у/т — у/т показывает,
что ток статора зависит только от разности аргументов и и^т .
На рис. 8.26 изображен контурный график функции
при фиксированном значении т = и у/т — у/т. Как
видно, поверхность имеет овражный характер. Ток is не зависит от
аргумента .
0.072
Рис. 8.26. Поверхность и линии равного уровня функции
is (, т) при фиксированном m = тб и у/т = у/*т
Таким образом, задача оптимизации по минимуму тока якоря при
постоянстве потока сводится к одномерной задаче экстремального
управления, в которой поиск минимума тока is осуществляется
варьированием аргументом вектора полных потокосцеплений якоря
*
при фиксированном значении и^т = . Задача экстремального
управления по минимуму тока якоря в этом случае формулируется в
следующем виде:
w = wzc)-> min mc eQmc, (8.8)
где
Задача (8.8) имеет аналитическое решение:
339
(m) - arctg[/5Cr (^* ) 2 (8.9)
i°s(m) = (y*m)~1m. (8.Ю)
Характерно то, что управление (т) представляет собой
симметричную относительно начала координат непрерывную функцию
одной переменной - момента (рис. 8.27), что создает предпосылку для
практической реализации оптимального режима по минимуму тока якоря.
При Ц^т=0 в области изменения нагрузок -l,5mH0M </и<+1,5/«ном
оптимальный закон (ni) с высокой степенью точности можно
описывать линейной функцией от т:
~ ^scrin) WI-
Функция тока якоря i° (т) симметрична относительно оси ординат
(см. рис. 8.24). Ток якоря изменяется линейно от т и в точке идеального
холостого хода (т=0) равен нулю. Магнитный поток в этом случае
формируется током продольной обмотоки возбуждения.
Рис. 8.27. Решение задачи оптимизации
СД по минимуму тока якоря при
постоянстве потока
Оптимизация режима СД по
минимуму тока is при моменте т =
не дает существенного выигрыша по
сравнению с базовым режимом. Для
неявнополюсного двигателя мощностью
116 кВт токи в этих случаях оказались практически равными по величине.
Эффективность режима минимального тока якоря проявляется при малых
моментах нагрузки и больших перегрузках.
В режиме минимального тока статора при ограничении магнитного
потока напряжение us., прикладываемое к обмотке якоря, в основном
определяется скоростью СД и мало зависит от момента (рис. 8.28, а). Так,
например, при скорости со = O)q и увеличении момента в 1,5 раза по
340
отношению к базовому значению напряжение us увеличилось всего
на 10 %.
На рис. 8.28, а приведены зависимости активной ps и реактивной
qs мощностей. Заметим, что режим минимального тока якоря при
постоянстве потока характеризуется незначительным потреблением
мощности qs. В генераторном режиме ps возвращается в источник
питания обмотки якоря. На напряжение us, активную ps и реактивную qs
мощности якоря оказывает влияние не только момент нагрузки и скорость,
но также аргумент и^т вектора главных потокосцеплений. Также зависят
от электромагнитные потери. Общим положением для режима
i -» min является возможность изменения этих характеристик за счет
дополнительного воздействия на аргумент и... . Здесь видна определенная
Т ffl
аналогия СД с ОМПТ, в которой роль дополнительного воздействия
возлагалась на абсолютное скольжение. Для частного случая =0
характеристики приведены на рис. 8.28.
Рис. 8.28. Характеристики неявнополюсного СД с продольно-поперечным
возбуждением в режиме i -> min при у/*т и^т = 0
На рис. 8.28, б представлены характеристики СД по цепям
возбуждения. Напряжение и ток iпродольной обмотки
возбуждения постоянны:
341
ufd rfd^m^m’ (8-11)
i°fd=lmVm- (8-12)
В то же время напряжение и ток z‘y? поперечной обмотки
возбуждения изменяются в зависимости от нагрузки по линейному закону:
ufq=-rfd(V'm) (8.13)
=-(^)-1»г- (8-14)
Мощность потерь на возбуждение и ризменяется в
соответствии с законами изменения напряжений и токов этих обмоток.
Заметим, что ток продольной обмотки ija>0 как в двигательном, так и в
генераторном режиме. В то же время ток поперечной обмотки i^<0 в
двигательном режиме и iв генераторном режиме.
О свойствах режима управления по минимуму is при постоянстве
потока можно судить по характеристикам, представляющим собой
зависимости потерь Др и их составляющих от момента нагрузки и
скорости (рис. 8.29). Минимизация тока якоря благоприятно отражается на
потерях ДрМ5, которые принимают минимальное значение.
Электромагнитные потери в меди
обмоток возбуждения превышают
потери в меди обмотки якоря.
Рис. 8.29. Электрические потери СД и
их составляющие в режиме управления
по минимуму тока якоря:
---------------при
---------------при £У=0
Потери в стали якоря &pcs не зависят от момента нагрузки и
снижаются с уменьшением скорости. При скорости, равной нулю, потери в
стали ДрС5=0.
342
Дополнительное влияние на потери оказывает изменение аргумента
. За счет воздействия на и.,, можно дополнительно влиять на потери
тт гм 1
в меди обмоток возбуждения. В общем случае при Ф 0 токи обмоток
в оптимальном режиме определяются выражениями
i°fd = [tf cos + (vm )-2 m sin vVm ]; (8.15)
ifq =WmUm sintVm " (У'т )~2 m COS ]• (8.16)
Как видно, при фиксированном значении т токи продольной и
поперечной обмоток возбуждения зависят от аргумента . Поскольку
потери в меди этих обмоток пропорциональны квадратам токов, то,
изменяя и^т , можно влиять на перераспределение потерь на возбуждение.
В частности, принимая =0 из (8.15) и (8.16), получаем зависимости
(8.12) и (8.14). Следовательно, потери в меди ^p^ifd становятся
постоянными, a - пропорциональны квадрату момента.
Рис. 8.30. К оценке эффективности закона
управления по минимуму тока при
постоянстве потока:
-----------------при «у=«у6;
--------при «У=0
На рис. 8.30 приведены зависимости
потерь Др и меры Др эффективности для
неявнополюсного СД мощностью 116 кВт.
Кривые построены для двух фикси-
рованных значений скорости («У=«У6
и Ю=0) и соответствуют решению следующих задач оптимизации:
1 - Др -> min при , 2 - is -> min при .
Как видно, в режиме управления СД по минимуму Др при
постоянстве потокосцепления у/т = y/mQ (кривая 1) потери меньше в
сравнении с режимом управления по минимуму тока якоря при
постоянстве потока (кривая 2). Это различие тем больше, чем меньше
момент нагрузки и скорость. При увеличении момента и скорости
343
различие между этими двумя режимами уменьшается. В области
перегрузок зависимость оценок эффективности от скорости существенно
снижается. При моментах т > сравниваемые режимы управления
можно считать практически эквивалентными.
Рис.8.31. Угловые характеристики (а) и векторная диаграмма (б)
неявнополюсного СД с продольно-поперечным возбуждением
в режиме управления по минимуму тока якоря
На рис. 8.31 приведены угловые характеристики и векторная
диаграмма СД в режиме is —> min при yr = . Как видно, в этом
режиме результирующий вектор главных потокосцеплений направлен по
оси Od. Вектор токов якоря ортогонален вектору главных
потокосцеплений и незначительно отстает от вектора напряжений обмотки
якоря, т.е. реактивная мощность, потребляемая СД от источника питания,
невелика.
Сравнение угловых характеристик и векторных диаграмм СД в
режимах is —>min и Ар -> min при постоянстве главного
потокосцепления показывает, что в последнем случае вектор токов якоря
не ортогонален вектору главных потокосцеплений и значительно отстает
от вектора напряжений якоря (см. рис. 8.16 и рис. 8.31).
344
Глава 9
ЭКСТРЕМАЛЬНОЕ УПРАВЛЕНИЕ
СИНХРОННЫМ ДВИГАТЕЛЕМ
С ПРОДОЛЬНЫМ ЭЛЕКТРОМАГНИТНЫМ
ВОЗБУЖДЕНИЕМ
9.1. Задачи минимизации потерь энергии без ограничений
Постановка задачи. Электромагнитные потери СД с продольным
возбуждением
где Арш, Дрму и ApCJ - потери в меди обмотки статора (якоря),
продольной обмотки возбуждения и потери в стали статора.
Для решения оптимизационной задачи будем использовать
проблемно-ориентированную модель вида ('Р^Г,Х), описываемую
уравнениями (3.42). В этом случае потери Ар становятся функцией
компонент векторов и X:
Др(Т^,Х) = + (9.1)
J~S.f
где
ДРм$~^мА’ АРм/ = K/ifdifd'> &Pcs ~ ^cs|®| У^т-
345
Уравнения связи функции качества (9.1) с выходными переменными
модели (3.42) определяются в виде скалярных квадратов алгебраических
векторов в базисе Gr:
,-2 _т<7г т<7г, ...2 _ ™Gr xifGr. -2 _ длгтО т*<т(3г
ls ~ls *ls > Vm-^m •^m » lfd «IVlIy .
В задаче оптимизации варьируемыми управлениями являются
модуль 1//т и аргумент 1)^т вектора главных потокосцеплений 'Em.
Задача минимизации потерь на безусловный экстремум принимает
следующую формулировку:
Ap(V, Х = ХС)—> min =>V°(X), ХсеПс'.
(9.2)
Схема решения задачи экстремального управления СМ поисковым
методом приведена на рис. 9.1.
Рис. 9.1. Схема решения задачи экстремального управления
СД с продольным электромагнитным возбуждением
Свойства функции качества Лр('1/^г, X). Введем двухмерную
систему координат Ov^v2 для изображения пространства управлений СД с
продольным электромагнитным возбуждением. Обозначим координаты
управляющего вектора V = ) как v1=i/m,v2 = .
346
Исследование функции , X) по направлениям ~Wm и
v2 = Uy/m показывает наличие экстремумов по каждому из этих
направлений.
На рис. 9.2 изображен трехмерный контурный график функции
&р(\ут, Vym , X) при фиксированном значении X = Хб = (тб, б>б ).
Рис. 9.2. Поверхность функции Др('Р^г, X)
Как видно, поверхность Лр(///'т, ) имеет явно выраженный
экстремальный характер. Линии равного уровня bp(ysm, ) = const
функции качества (9.1) представляют собой семейство слабо вытянутых
замкнутых линий. При изменении момента нагрузки и скорости
координаты точки минимума Ар(у/т, ) смещаются в пространстве
управлений.
Законы управления по минимуму потерь. Решение Др0)
задачи экстремального управления по минимуму потерь приведено на
рис. 9.3 в виде зависимостей компонент и и^т вектора '¥&г от т при
фиксированных значениях (О.
Как видно, законы управления (т. б)) и и^т (т, а>) имеют
нелинейный характер. Функция (т, (О) симметрична относительно оси
ординат. В режиме идеального холостого хода оптимальное
потокосцепление равно нулю.
347
Рис. 9.3. Решение задачи
управления СД по минимуму
потерь:
--------при 03 =<Уд;
--------при 69=0
Зависимость
представляет собой существенно нелинейную функцию от т и аз.
Функция 13° (т, 63) симметрична относительно начала координат и
имеет разрыв при ТП = 0.
Модуль и аргумент и^т вектора главных потокосцеплений в
общем случае изменяются в широких пределах. При ти>0,5»2д машина по
главному магнитному пути насыщается. В базовой точке
значение модуля превышает значение у/т5 на 12,5 %.
Характеристики СД в режиме минимальных потерь.
Электромагнитные потери СД с продольным электромагнитным
возбуждением и их составляющие при оптимальном управлении
Рис. 9.4. Электромагнитные потери СД и
их составляющие в режиме Др -» min :
-------при оз =G3q ;
-------при 69=0
Оптимальное управление обеспечивает
снижение потерь Др по отношению к
потерям в базовом режиме на 14 %, а при
т = т$ и 69=0 потери уменьшаются
на 26 %.
Снижение потерь Др при уменьшении скорости обеспечивается в
основном за счет потерь в стали якоря. В частности, при оз =0 потери в
348
стали 4^=0. Потери в меди обмоток СД незначительно зависят от
скорости и главным образом определяются моментом нагрузки. Потери в
меди якоря tbpws меньше потерь в обмотке возбуждения Потери
Др№ и ^рмр снижаются при уменьшении скорости. В данном примере
Др№ и Дрму снижены по отношению к потерям в базовом режиме на
0,6 и 28 % соответственно. В то же время потери в стали за счет
увеличения потока на 12,5 % увеличились на 26,4 %.
Таким образом, потери СД в режиме Др -» min перераспределяются
так, что потери в меди якоря становятся меньше потерь в меди индуктора.
Напряжение us и ток is якоря при оптимальном управлении
изменяются в широких пределах (рис. 9.5, а) и представляют собой
монотонно возрастающие функции от т и а>. В режиме идеального
холостого хода напряжение и ток якоря равны нулю. При базовых
значениях т и О) напряжение us в режиме Др -»min превышает
напряжение в базовом режиме на 15 %, а ток is уменьшается на 0,3 %.
а б
Рис. 9.5. Характеристики СД с продольным возбуждением
в режиме Др -> min:
--------при <w=tWg;----------при <Р=0
На напряжение us существенное влияние оказывает как момент
нагрузки, так и скорость. Ток is практически определяется моментом СД.
Незначительное влияние а> проявляется в области небольших нагрузок
349
(при т <0,5 т$). В области средних и больших нагрузок (при т >0,5ти6)
ток is представляет собой практически линейную функцию от т.
Изменение знака т не влияет на характер зависимостей напряжения и
тока якоря. При равных по абсолютной величине т и со в двигательном
режиме напряжение якоря больше напряжения в генераторном режиме, а
токи якоря оказываются равными. Таким образам, зависимость is от т
при фиксированной со представляет собой симметричную функцию
относительно оси ординат.
Зависимости активной ps и реактивной qs мощностей обмотки
якоря от момента при фиксированных значениях скорости со=со$ и со=0
приведены на рис. 9.5, а. Как видно, режим Др -> min сопровождается
потреблением реактивной мощности обмоткой якоря как в двигательном,
так и в генераторном режимах. Причем по отношению к базовому режиму
потребление qs возросло в 7,5 раза. В генераторном режиме мощность ps
отдается источнику питания (за исключением режима при СО =0).
Характеристики СД по цепи возбуждения приведены на рис. 9.5, б.
Здесь представлены зависимости напряжения Uj#, тока ij# и активной
мощности руу обмотки возбуждения.
Важно отметить, что в режиме оптимального управления по
минимуму потерь обмотка возбуждения полностью компенсирует
продольную составляющую тока якоря isj и создает продольную
составляющую результирующего магнитного потока. Поперечная
составляющая тока якоря ist} совместно с результирующим продольным
током намагничивания создает поток машины.
Основное влияние на характеристики оказывает момент нагрузки.
При т = т$ и 00 = 00$ напряжение и& уменьшилось по отношению к
базовому значению на 15 %. Пропорционально уменьшился ток обмотки
возбуждения. Таким образом, потери в меди обмотки возбуждения
снижаются за счет уменьшения тока i$.
Особенности режима Др -> min отражает векторная диаграмма СД,
приведенная на рис. 9.6. Она построена в системе координат Odq при
базовых значениях момента и скорости. Вектор главных потокосцеплений
смещен относительно продольной оси в направлении положительных
углов на и=1,236 эл. рад. Поток в этом случае создается за счет
результирующей продольной составляющей намагничивающего тока и
поперечной составляющей тока якоря. Так, ток продольной обмотки
350
/^=0,94^, составляющая тока якоря по продольной оси z°^=-0,63z56, а
поперечная составляющая тока якоря z°9=O,72zJg.
Ц'.рад-
2
1
О
-1
-2
-3
-1.5 -1 -0.5 0 0.5 1 т
а
Рис.9.6. Угловые характеристики (а) и векторная диаграмма (б)
неявнополюсного СД с продольным возбуждением при Др -» min
Заметим, что в базовом режиме вектор главных потокосцеплений
также не совпадает по направлению с продольной осью Od
(Цр =1-125 эл. рад). Продольная составляющая тока якоря а
поперечная составляющая isq =0,43 isQ. Ток продольной обмотки
z/rf ~1 > 114б •
Таким образом, в режиме оптимального управления по минимуму
потерь векторная диаграмма СД несколько отличается от векторной
диаграммы двигателя, работающего в базовом режиме.
При увеличении момента абсолютное значение аргумента и°
вектора главных потокосцеплений увеличивается. В этом случае вектор
главных потокосцеплений поворачивается в сторону поперечной оси.
Векторы токов якоря и главных потокосцеплений не ортогональны.
Аргументы векторов главных потокосцеплений и полных
потокосцеплений обмотки якоря меньше я / 2, а аргумент вектора полных
потокосцеплений обмотки возбуждения равен нулю. При переходе из
двигательного в генераторный режим значения аргументов
результирующих \ векторов напряжений (Ц^), токов (Ц°) и полных
потокосцеплений ) обмотки якоря, а также главных потокосцеплений
351
(и^т) изменяются скачком со сменой их знаков. Такой характер
поведения этих аргументов является следствием того, что в обоих режимах
ток обмотки возбуждения имеет одинаковое направление.
9.2. Режим минимальных потерь энергии при постоянном потоке
Постановка задачи. Рассмотрим задачу экстремального управления
СД по минимуму Др при постоянстве модуля вектора главных
потокосцеплений (Др -> min при у/т = const). Пусть у/т = i//m, где
- заданное значение потокосцепления. Найдем управление V® eQy,
минимизирующее функцию качества Др(У, X), где вектор
X = XceQXc. Состав вектора управлений V определяется выбором
проблемно-ориентированной модели СД. Для решения этой
оптимизационной задачи будем также пользоваться моделью вида
('P^jX). В этом случае вектор V = (.Ут,о^т), а задача оптимизации
по минимуму Др при = const сводится к одномерной задаче
экстремального управления
Др(^т.^т>Х = Хс)->ппп =>uJm(X), ХсбПс. (9.3)
‘Vm
Решение задачи (9.3) может быть найдено аналитически или
численными методами поиска локального минимума функции одной
переменной.
Свойства функции качества Др(У, X) при у/т = const. В
системе координат Ov^v2 двухмерного пространства управлений
*
принимается Vj = ysm = ц/т и v2 ~ • Варьируемой величиной здесь
являются аргумент вектора главных потокосцеплений.
На рис. 9.7 приведены зависимости Др, рассчитанные при
*
постоянном потоке ц/т = у/т5 и изменении . Каждая кривая
соответствует фиксированным значениям момента и скорости. Как видно,
функция потерь имеет экстремум. При увеличении момента нагрузки
экстремум приобретает более острый характер. При фиксированном т и
изменении (О экстремум смещается в вертикальном направлении. Таким
352
~ о О
образом, положение оптимальной точка и^т не зависит от скорости.
Видно также, что оптимальное значение Др0 нечувствительно к
изменению скорости, а основное влияние оказывает момент нагрузки.
Рис. 9.7. Экстремальные характеристики неявнополюсного СД
с продольным электромагнитным возбуждением:
-----------------при (У=(Уд;--------при (У=0
Закон оптимального управления по минимуму потерь при
постоянстве потока. Решение задачи (9.3) приведено на
рис. 9.8. Оптимальное управление обеспечивающее минимум
электромагнитных потерь СД с продольным электромагнитным
возбуждением, обладает следующими свойствами.
Составляющая вектора управлении является нелинейной
функцией от т. Функция (т) симметрична относительно начала
координат. В двигательном и генераторном режимах и°т (т) принимает
значения разных знаков. В точке идеального холостого хода функция
(т) равна нулю. При увеличении |?и| функция и°т (т) стремится к
углу л/2, т.е. результирующий вектор главных потокосцеплений
поворачивается в направлении поперечной оси Oq.
353
Потери Др0 являются монотонно возрастающей функцией от т и. со.
При моменте нагрузки, равном нулю, потери Др0 э^О. Зависимость
электромагнитных потерь от момента более существенна, чем от скорости
двигателя.
Рис. 9.8. Решение задачи
управления по минимуму потерь
при у/т = const для СД с
продольным электромагнитным
возбуждением:
-------при <У=<Уб;
--------при 6У=О
Характеристики СД при оптимальном управлении по минимуму
потерь при постоянстве потока. В режиме Др -> min при у/т = const
потери в стали якоря не зависят от т и определяются потокосцеплением
*
ц/т ~ Ут и скоростью СО:
Дрм )2-
В частности, при <0=0 потери в стали якоря равны нулю и растут с
увеличением скорости. В силу этого свойства задача (9.4) эквивалентна
оптимизационной задаче по минимуму потерь в меди обмоток СД.
Потери в меди якоря ДрМ5 и индуктора Дрму в данном режиме не
зависят от скорости и монотонно возрастают при увеличении момента
нагрузки. Причем потери в меди индуктора превышают потери в
меди якоря Дрм,у.
В общем случае электромагнитные потери определяются моментом
и скоростью (рис. 9.8 и 9.9). Превалирующее влияние на величину Др в
области малых значений т и больших скоростей оказывают потери в
стали якоря. При перегрузках основную долю электромагнитных потерь
составляют потери в меди обмоток.
354
В целом оптимальное управление по минимуму потерь при
постоянстве потока обеспечивает некоторое снижение суммарных потерь
Др по отношению к потерям в базовом режиме. В рассматриваемом
примере электромагнитные потери снизились на 6,4 %. Отличительной
особенностью данного режима является то, что при малых значениях
момента в этом режиме потери Др существенно больше, чем в режиме
Др-> min. При значениях т-0 и со=со§ потери Ap=0,14Ap(»26s®6)-
Напомним, что в режиме минимальных потерь Др=0.
ДР;
1 4
Рис. 9.9. Зависимости электромагнитных
потерь СД и их составляющих в режиме 1.2
Др -> min при у/т =у/т&'. 1
--------при (0=(0б; о.В
------------------------------при (0=0 0 s
0.4
Анализ электрических характеристик о,2
СД выявляет следующие их особенности.
Напряжение обмотки якоря us мало о 0.6 1m
зависит от нагрузки и при заданном потоке в основном определяется
скоростью. Ток якоря is не зависит от скорости и определяется моментом
нагрузки. При значении т-т^ ток якоря на 4,3 % превышает ток в
режиме Др -> min и базовый ток на 4 %. При значении т — 0 ток якоря
не равен нулю и составляет 0,285 is6.
Зависимость активной мощности якоря ps от т и со качественно
ведет себя так же, как в режиме Др—>min (рис. 9.10, а). Реактивная
мощность qs незначительно зависит от нагрузки, возрастая при
увеличении момента и скорости. Для данного режима характерно
потребление qs в двигательном и генераторном режимах, а также в точке
идеального холостого хода. При значении со =0 мощность qs =0.
В режиме управления по минимуму потерь при у/т = const
потребление реактивной мощности qs обмоткой якоря при базовой
нагрузке снизилось на 37 % по отношению к величине qs в режиме
Др -> min, а по отношению к базовому режиму увеличилось в 4,7 раза.
Законы изменения напряжения и тока обмотки возбуждения
нелинейные (рис. 9.10, б). При переходе из двигательного в генераторный
355
режим напряжение и ток обмотки возбуждения изменяются непрерывно
без смены знаков.
Рис. 9.10. Характеристики СД в режиме Др -> min при у/т - i//mQ:
- при й)-а%;---------при <У=0
При значениях т — т^ и о = &)§ ток продольной обмотки
возбуждения превышает на 8,2 % ток в режиме Др —> min, а по
отношению к току продольной обмотки в базовом режиме снижается
на 15 %.
На рис. 9.11 представлены угловые характеристики при C0 = O)q и
векторная диаграмма неявнополюсного СД мощностью 196 кВт при
значениях т = и О — (Oq . Отсюда следует, что вектор главных
потокосцеплений смещен относительно продольной оси на угол
=1,38эл. рад.
Составляющие токов обмоток, участвующие в создании главного
магнитного потока, в режиме Др -> min при у/т = характеризуются
следующими соотношениями: ток продольной обмотки возбуждения
Zyj=l,019zs5, составляющая тока якоря по продольной оси =-0,93zj6, а
поперечная составляющая тока якоря =0,47 z’5g.
Таким образом, главный поток СД создается за счет
результирующего намагничивающего тока по продольной оси Od и
поперечной составляющей тока якоря.
356
Аргументы результирующих векторов V°s, и
изменяются непрерывно, возрастая при увеличении момента. При т = О
аргументы ц°, и равны нулю, а 1?°^=+71/2. Векторы
напряжений, токов и потокосцеплений обмотки возбуждения направлены
по продольной оси.
Рис.9.11. Угловые характеристики (а) и векторная диаграмма (б) СД
в режиме Ар —> min при у/т =
9.3. Задача минимизации потерь энергии с ограничением
реактивной мощности
Постановка задачи. При использовании модели вида
задача минимизации электромагнитных потерь при ограничении
реактивной мощности в общем случае имеет следующую формулировку:
Ар(^,Х = Хс)-> min =>[^(Х)]°, ХсеПс, (9.4)
где область допустимых управлений
।
От, ={Т? :?г =(Ч'®,Х) = ,;,
Здесь qs - заданное значение реактивной мощности статора (якоря),
определяющее уровень ограничения.
357
При ограничении qs = qs размерность задачи (9.4) снижается до
q = 1. Однако воспользоваться этим свойством в целях уменьшения числа
варьируемых управлений в данной задаче также не представляется
возможным ввиду нелинейного характера функции качества. В этой связи
решение задачи оптимизации (9.4) осуществляется методом штрафных
функций. В этих целях для минимизации функции качества Др('Р^г, X)
при ограничении qs (Ч^, X) = qs вводится вспомогательная функция
X) = Ар^, X) + ^(^,Х,а).
в которой
^С??,Х,а) = - ?s*]2,
где as - положительный весовой коэффициент.
*
Таким образом, задача (9.4) с ограничением qs = qs преобразуется к
задаче математического программирования без ограничения
Ap('P^,X = Xc)-»min=>['P^(X)]°, ХсеПс. (9.5)
xifGr
* т
Рассмотрим решение задачи (9.5) при условии qs = 0. В этом случае
нижняя грань Ар обеспечивается без потребления реактивной мощности
от источника питания обмотки якоря (qs =0).
На рис. 9.12, а приведены зависимости потерь Ар, реактивной
мощности якоря qs и график вспомогательной функции Ар при X = Xg,
у/т = Vzw6 и изменении Lfy . Видно, что минимум вспомогательной
функции Др('Р^г, X) обеспечивает qs = 0. При этом потери Ар не
являются минимальными.
Для обоснования метода поиска закона управления по минимуму
потерь при qs = 0 проведены исследования поверхностей и характера
линий равного уровня функции Ар(?¥& , X) при различных X для
двигательного и генераторного режимов неявнополюсного СД мощностью
116 кВт. На рис. 9.12, б изображены графики линий равного уровня при
фиксированном значении X = Xg = (»?g,(Og). Как видно, они имеют
358
специфический явно выраженный овражный характер, усложняющий
поиск точки минимума.
а б
Рис. 9.12. К вопросу учета ограничения qs~0 (а) и
линии равного уровня вспомогательной функции (б)
Законы оптимального управления по минимуму потерь при
qs = 0. В этом режиме модуль у/° и аргумент вектора главных
потокосцеплений зависят от момента и скорости, качественно повторяя
характер изменения законов управления по минимуму потерь без
ограничений (рис. 9.13). Вместе с тем в режиме минимальных потерь при
qs = 0 модуль вектора главных потокосцеплений становится меньше, а
аргумент увеличивается по абсолютному значению. Так, при моменте
т = W7g и скорости со = G)q оптимальные значения модуля и аргумента
составили соответственно
1,056^отб и =0,974 эл. рад.
Рис. 9.13. Решение задачи
управления по минимуму потерь
при qs = 0 для СД с продольным
электромагнитным возбуждением:
-------при (Э=(Об;
-------при (0=0
359
Характеристики СД в режиме минимальных потерь при qs =0.
В режиме Др-> min при qs = 0 при значениях т = и со = соб
наблюдается увеличение электромагнитных потерь по отношению к
потерям в базовом режиме на 2 %. Однако при т = и со = 0 потери
Др уменьшаются на 26 %.
Отметим ряд особенностей данного режима, связанных с характером
изменения суммарных потерь и их составляющих (рис. 9.14).
Потери в меди обмотки возбуждения больше потерь в меди
обмотки статора ДрМ15. С увеличением момента превышение по
отношению к потерям при СО =0 увеличивается.
Потери Дрмр с уменьшением скорости уменьшаются и принимают
наименьшее значение при скорости 0=0. Вместе с тем потери ДрМ5
вначале уменьшаются, а в дальнейшем, по мере снижения скорости,
начинают возрастать в связи с увеличением тока якоря и при скорости
0 = 0 принимают максимальное значение.
Потери &Puf и &Рс$ ПРИ постоянной нагрузке более
чувствительны к изменению скорости, чем потери ДрМ5.
Ввиду увеличения потерь в меди
обмотки возбуждения в области высоких
скоростей электромагнитные потери в этом
режиме больше, чем в режимах Ар -> min и
Др min при у/т = у/тЪ.
Рис. 9.14. Зависимости суммарных потерь
СД и их составляющих
в режиме Др -> min при qs = 0:
--------со—со^',---------со=0
Снижение потерь Др при
уменьшении скорости обеспечивается за счет потерь в меди обмотки
возбуждения и потерь в стали якоря. В области низких скоростей режим
управления по минимуму потерь с ограничением мощности qs становится
более выгодным в сравнении с режимом минимальных потерь при
постоянстве потока. В частности, при in = /Ид и со = 0 электромагнитные
потери в сравнении с базовой величиной снизились на 26 %. При этом
потери Дрмр увеличились на 7 %.
360
Потери в стали статора Дрсу=0. В то же время потери ApMS
уменьшились на 10 %. Таким образом, потери СД в режиме Ар -> min
при qs = 0 перераспределяются так, что потери в индукторе становятся
больше потерь в якоре. По сравнению с базовым режимом оптимальное
управление по минимуму потерь при отсутствии потребления реактивной
мощности обмоткой якоря обеспечивает незначительное снижение
электромагнитных потерь при высоких значениях скорости. Однако по
мере уменьшения скорости эффект от оптимизации растет.
На рис. 9.15 представлены результаты расчета характеристик
двигателя в режиме оптимального управления при отсутствии потребления
реактивной мощности.
Рис. 9.15. Характеристики СД в режиме Др -> min при qs - 0:
I --------а>=а>б;---------(0=0
Сравнительная оценка характеристик показывает, что для
обеспечения данного режима требуется более высокое напряжение
источника питания обмотки якоря по сравнению с напряжением в базовом
режиме, а напряжение на обмотке индуктора, наоборот, снижено.
Изменение соотношения между напряжениями обмоток приводит к
перераспределению токов. Ток якоря меньше тока в базовом режиме
на 5 %. В то же время ток обмотки возбуждения увеличился на 0,11 %.
Причем токи в обмотках СД зависят как от т, так и от ffl. Уменьшение
скорости ведет к снижению тока в обмотке возбуждения, а также тока
статора в области малых нагрузок. В области средних и больших нагрузок
361
ток якоря вначале снижается, а затем при дальнейшем уменьшении ;
скорости начинает увеличиваться.
Анализ угловых характеристик и векторных диаграмм показывает!
определенное качественное сходство данного режима с режимом ]
оптимального управления при отсутствии ограничений. Сходство режимов I
заключается в том, что в точке идеального холостого хода (т = 0)
зависимости аргументов результирующих векторов главных j
потокосцеплений, напряжений, токов, полных потокосцеплений обмотки *
якоря от т имеют разрыв, т.е. при переходе через точку идеального ;
холостого хода их пространственное положение изменяют скачком. '
Различие режимов состоит в количественных характеристиках, что
иллюстрируется приведенными на рис. 9.16 зависимостями аргументов
результирующих векторов (а) от т и векторной диаграммой (б). Отметим
коллинеарность векторов Us и Is, а также U/ и I/. Вектор токов
статора I s практически ортогонален вектору полных потокосцеплений
обмотки якоря .
Рис.9.16. Угловые характеристики (а) и векторная диаграмма (б) СД
в режиме Др -> min при qs — О
9.4. Эффективность законов управления по минимуму потерь энергии
Проведем оценку эффективности режимов работы СМ по
отношению к оптимальному по минимуму суммарных потерь закону
управления без ограничений.
362
На рис. 9.17 приведены зависимости суммарных потерь Др (а) и
оценок эффективности (б) для неявнополюсного СД мощностью 116 кВт.
Кривые построены для двух фиксированных значений скорости ((0=(0g и
69=0) и соответствуют решению следующих задач оптимизации: 1 - по
минимуму потерь при ограничении реактивной мощности (9.4), 2 - по
минимуму потерь при постоянстве потока (9.3) и 3 - по минимуму потерь
без ограничений (9.2).
Рис. 9.17. К оценке эффективности законов оптимального управления СД:
а-при (О=(Эб; б-при (0=0
Как видно, оптимальное по минимуму Др управление при
отсутствии ограничений обеспечивает наименьшую величину суммарных
потерь СД (кривая 3).
Управление СД по минимуму Др при постоянстве потокосцепления
l//m = обеспечивает режим, близкий к режиму минимальных потерь
при моментах 0,25 тб < т < 1 (кривая 2).
Управление СД при наличии ограничения на реактивную мощность
(^=0) доставляет примерно тот же эффект при малых нагрузках
»г<0,25/иб и высокой скорости. При низких скоростях эффективность
данного режима повышается, а при скорости, равной нулю, оценка Др=0
(кривая 1).
Как видно из графиков, оценки эффективности Др изменяются в
широких пределах. Наибольшие значения Ар имеют место при высокой
скорости и работе СД в области малых и больших нагрузок.
363
Таким образом, результаты исследований показывают преимущество
закона оптимального по минимуму потерь управления и целесообразность
его использования в электроприводах в тех случаях, когда скорость и
момент по условиям технологического процесса изменяются в широких
пределах. Близким к этому режиму в области средних нагрузок является
режим управлений по минимуму потерь при постоянстве у/т — ц/т§. В
ряде случаев может оказаться целесообразным режим минимальных
потерь при отсутствии потребления реактивной мощности qs.
9.5. Задача минимизации тока статора при постоянном потоке
Законы управления режимами СД с продольным электромагнитным
возбуждением по минимуму потерь представляют сложные зависимости
от момента нагрузки и скорости. В этой связи практический интерес
представляют режимы экстремального управления СД, которые
реализуются при более простых законах управления, в частности, не
зависящих от скорости. К таким законам относится закон управления по
минимуму тока статора (якоря).
Постановка задачи. Рассмотрим задачу минимизации тока якоря
СД при постоянстве главного магнитного потока. Ток якоря СД с
продольным возбуждением при использовании модели вида
является нелинейной функцией от момента т и компонент вектора
главных потокосцеплений \//т и . В общем случае ток
is = is , т) При постоянстве модуля вектора главных
* *
потокосцеплений у/т = где у/т - заданное значение
потокосцепления. Найдем управление V® eQv, минимизирующее ток
якоря z. = z. , т), где т = тс и тг е .
Задача минимизации тока якоря при постоянстве главного потока
СМ может быть записана в следующем виде:
w = wc)->min =>^и(»г), тс еП™с- (9-6)
VVm
Следовательно, задача оптимизации режимов СД по минимуму тока
якоря при постоянстве потока является одномерной задачей
экстремального управления, в которой поиск минимума тока якоря
осуществляется варьированием аргумента V,., вектора главных
г т
потокосцеплений.
364
Рис. 9.18. Решение задачи
оптимизации СД по минимуму
тока якоря при постоянстве
потока
Решение задачи (9.6)
представлено на рис. 9.18. Как
видно, в оптимальном режиме
и°т (т) - нелинейная, a i° (т) -
линейная функции от момента нагрузки. Управление (/и) является
симметричной относительно начала координат непрерывной функцией
одной переменной, что создает предпосылку для практической реализации
оптимального режима по минимуму тока якоря.
Функция тока якоря i° (т) симметрична относительно оси ординат.
Ток якоря, изменяясь линейно от т, в точке идеального холостого равен
нулю. Магнитный поток в этом случае формируется током продольной
обмотки возбуждения.
Оптимизация режима СД по минимуму тока is при моменте т =
не дает существенного выигрыша по отношению к базовому режиму. Для
СД мощностью 116 кВт токи в этих случаях оказались практически
равными по величине. Эффективность режима минимального тока якоря
проявляется при малых моментах нагрузки и больших перегрузках.
В режиме минимального тока якоря при постоянстве магнитного
потока напряжение us, прикладываемое к обмотке якоря, в основном
определяется скоростью СД и мало зависит от момента нагрузки
(рис.9.19, а). Так, например, при скорости (О — 0% и увеличении момента
нагрузки в 1,5 раза в сравнении с его базовым значением напряжение us
увеличилось всего на 4 % .
Анализ зависимости реактивной мощности qs от момента и
скорости показывает, что режим минимального тока якоря при
постоянстве потока характеризуется незначительным потреблением
реактивной мощности как в двигательном, так и в генераторном режимах.
365
Характеристики СД по цепи возбуждения показаны на рис. 9.19, б.
Заметим, что ток обмотки возбуждения как в двигательном, так и в
генераторном режимах.
Рис. 9.19. Характеристики СД по цепям статора (а) и возбуждения (б)
в режиме минимума тока якоря при постоянстве главного потока:
--------------------при 69=<Уб;--------при 69=0
О свойствах режима управления по минимуму is при постоянстве
потока можно судить по характеристикам, представляющим собой
зависимости электромагнитных потерь и их составляющих от момента
нагрузки и скорости (рис. 9.20, а). Минимизация тока якоря благоприятно
отражается на электрических потерях ДрМ5, которые принимают
минимальное значение. Суммарные потери в меди обмотки возбуждения
ApMf превышают потери в меди обмотки якоря.
Потери в стали якоря ApCiS не зависят от момента нагрузки и
снижаются с уменьшением скорости. При скорости, равной нулю, потери в
стали ДрС5=0.
Оценки эффективности для СД представлены на рис.9.20, б. Кривые
построены для двух фиксированных значений скорости и 69=0) и
соответствуют решению следующих задач оптимизации: 1 - по минимуму
потерь при постоянстве потока (9.3), 2 - по минимуму тока якоря при
постоянстве потока (9.6).
366
Рис. 9.20. Электромагнитные потери СД с их составляющими (а) и оценки
эффективности (б) в режиме минимума тока якоря
при постоянстве главного потока:
--------при а>=(о§;---------при (0=0
Как видно, в режиме управления СД по минимуму Др при
постоянстве потокосцепления 1//т = (кривая 1) потери меньше в
сравнении с режимом управления по минимуму тока якоря при
постоянстве потока (кривая 2). Это различие тем больше, чем меньше
момент нагрузки и скорость. При увеличении момента и скорости
различие между этими двумя режимами уменьшается. В области
перегрузок зависимость оценок эффективности от скорости существенно
снижается. При моментах т>т§ сравниваемые режимы управления
можно считать практически эквивалентными.
Угловые характеристики и векторная диаграмма СД в режиме
управления по минимуму тока якоря при постоянстве потока приведены на
рис. 9.21. Они показывают определенное качественное сходство данного
режима с режимом оптимального управления по минимуму потерь при
постоянстве потока.
Особенность векторной диаграммы СД в режиме минимума is при
Ц/т = const состоит в том, что результирующий вектор токов якоря
ортогонален вектору главных потокосцеплений. Вектор токов якоря
отстает от вектора напряжений якоря на незначительный угол,
подтверждая этим, что в данном режиме потребляемая от источника
питания обмотки якоря реактивная мощность невелика. Следует также
заметить, что в режиме is -> min при — const аргумент
367
результирующего вектора токов якоря в точке идеального холостого хода
претерпевает разрыв.
Рис.9.21. Угловые характеристики (а) и векторная диаграмма (б)
неявнополюсного СД в режиме минимума тока якоря
при постоянстве основного потока
В заключение этой главы отметим, что оптимальные режимы по
минимуму потерь неявнополюсного СД с продольным электромагнитным
возбуждением рассматривались в [91], а явнополюсного СД - в работах
[16,83,110].
368
Глава 10
ЭКСТРЕМАЛЬНОЕ УПРАВЛЕНИЕ
ВЕНТИЛЬНЫМИ ДВИГАТЕЛЯМИ
10.1. Задача управления по минимуму потерь энергии
компенсированным вентильным двигателем
Постановка задачи. Относительная мощность электромагнитных
потерь вентильного двигателя постоянного тока (ВД) записывается по
аналогии с выражениями электромагнитных потерь других типов
электрических машин:
ДР = &Рма + ДРса > (Ю.1)
где Д^мд - потери в меди обмотки якоря;
kpufa и ~ потери в меди продольной и поперечной обмоток;
&рса - потери в стали якоря.
По приведенным ранее соображениям в выражении функции
качества (10.1) не учитываются зависящие от скорости механические
потери Дрмех, включающие потери на трение в подшипниках, щеток о
контактные кольца и вентиляционные потери. Пренебрегаются также
добавочные потери.
В задачах оптимизации режимов насыщенных ВД по минимуму
потерь удобно пользоваться моделью вида Напомним, что в
состав вектора варьируемых воздействий V = этой модели
369
входят аргумент #г вектора токов якоря и модуль у/т вектора главных
потокосцеплений.
В этом случае уравнения установившегося режима ВД имеют
следующий вид;
(cos0f - ак)т + • NI^ = 0;
rGs _ rtiGs-i-l\ifGs.
'm tPm J * m ’
= \™/Vamy ЭД 1
Ув=АИ)Ч'®+Ь„1о; (10.2)
'Vf +I$I^;
Щ =»J B74<„ tiy,;
UGs nGsrGs
f ~Kflf
Электромагнитные потери ВД будут представлять собой функцию от
Р>
Ap(pMm’%) ~ ^ЛРм/СРМт’™)+^Рса(РМт> ^0’
j = a,fa,fp.
В выражении функции качества (10.3) составляющие
электромагнитных потерь
4?ма’'Ут’™) = ГЛ (Р
АРм/а (Q>'Ут> тУ ~ rfaifa (Pi>Vm> >
t&MfP (P = rffifl} (P
APca (P,V'm^= (P Mm’™)’
где ia - ток внешней цепи;
Zya и ij-p - токи продольной и поперечной обмоток возбуждения;
га - активное сопротивление обмотки якоря;
370
rfa и rfp ~ активные сопротивления продольной и поперечной обмоток
возбуждения;
кса — постоянный коэффициент, характеризующий удельный вес
потерь в стали якоря по отношению к электромагнитной
мощности в базовом режиме.
Учитывая последовательное включение поперечной обмотки
возбуждения во внешнюю цепь якоря, после подстановки в (10.3)
выражений составляющих электромагнитных потерь получим
9 .9 I |1 3 9
~ гсРа +rfaifa +^'са|<у| Vт> (Ю.4)
где rd - сумма активных сопротивлений обмотки якоря и поперечной
обмотки возбуждения, rd — га + .
Для связи функции качества (10.4) с выходными переменными
2 -2 2
проблемно-ориентированной модели величины 1а, г^а и
записываются в виде скалярных квадратов соответствующих
алгебраических векторов токов и главных потокосцеплений в базисах Н и
=>
G.s:
,-2 _ т । . -2 _ тугт Gs -rGs. 2 _ mGs mGs
га~1а*1а^ Vm~^m >
0 f
0 0
где N =
- вещественная матрица.
Задача минимизации потерь компенсированного ВД на безусловный
экстремум принимает следующую формулировку:
Ap(V, X = Хс)-> min => V°(X), Хс еПс.
(Ю.5)
Заметим, что постановка задачи (10.5) на безусловный экстремум
справедлива для ВД с вентильным коммутатором тока на полностью
управляемых ключах, обеспечивающих режим принудительной
коммутации.
Для вентильного двигателя, в котором коммутатор представляет
собой автономный инвертор тока на тиристорах с естественной
371
коммутацией, в постановке задачи должно быть учтено условие
естественной коммутации [16, 42,142, 144] с введением запаса по углу:
<p(ft ,Vm,X)>^r(0i,Vm/X)+8, (10.6)
где <р - угол между результирующими векторами напряжений и токов
якоря;
/ - угол коммутации инвертора;
8 - запас по углу.
Угол (р определяется через аргументы векторов напряжений ) и
токов ) якоря с помощью выражения
=1 0Ua (0г via (ft) |.
Запас по углу в первом приближении можно считать величиной
постоянной (8 = const) [16].
Постановка задачи оптимизации режимов ВД по минимуму потерь с
учетом условия (10.6) получает следующий вид:
Ap(V, Х = Хс)-> min =>V°(X), XceQc,
VeQy
где область допустимых управлений
Qv = {V: <p(N, X) > X) + 8, V = (ft, .
В дальнейшем приводятся решения задач оптимизации для ВД с
идеализированным коммутатором на полностью управляемых ключах.
Свойства функции качества Др(У, X). Введем двухмерную
систему координат OV]V2 Для изображения пространства управлений и
примем для нее = 0i и v2 = ipm.
Изменяя только одну из двух координат и оставляя другую
неизменной, можно построить зависимость Др как функции одной
переменной. В этом случае получим представление о свойствах функции
372
качества Др(У, X) по отдельным направлениям изменения переменных
^=^и v2=\jfm.
На рис. 10.1 приведены зависимости Др от 0г- и для
неявнополюсного синхронного двигателя мощностью 116 кВт,
работающего по схеме ВД. Синхронный двигатель имеет продольную и
поперечную обмотки возбуждения. Причем поперечная обмотка
возбуяодения соединена последовательно с внешней цепью якоря для
компенсации поперечной реакции. Расчеты характеристик выполнены при
условии ак =1 для ряда фиксированных значений X = (т, а>). Потери
отнесены к величине электромагнитных потерь в базовом режиме. Как
видно, при изменении 0, и у/т электромагнитные потери имеют ярко
выраженный экстремум.
При изменении угла (рис. 10.1, а) и постоянстве у/т с
увеличением момента точка минимума потерь смещается. Оптимальное
значение 0° уменьшается. Характеристики становятся более острыми и
чувствительными к изменению 0j.
При варьировании ц/т (рис. 10.1, б) и постоянстве 0г с увеличением
момента точка смещается в область насыщения. Характеристики
становятся острее с присущим увеличением чувствительности потерь к
изменению \j/m.
Рис. 10.1. Экстремальные характеристики ВД при ак=1:
---------------при (O=(Oq ;--------при 0=0
373
При тех же условиях со снижением скорости потери уменьшаются.
Характеристики становятся менее острыми и смещаются практически
вертикально вниз.
Уменьшение скорости в широких пределах приводит к
незначительному изменению электромагнитных потерь в окрестности
точки экстремума.
Для обоснования метода поиска законов управления по минимуму
потерь проведены исследования поверхностей и линий равного уровня
функции X) при различных X для двигательного и
генераторного режимов ВД. На рис. 10.2 изображен трехмерный
контурный график функции Др(0г-,^т,Х) при ак=1 и фиксированном
Х = Х6.
Рис. 10.2. Поверхность функции ,Vm)
Как видно, поверхность Др(#г-,^т) имеет явно выраженный
минимум. Линии равного уровня Др(0г, l//m ) = const функции качества
подобны окружностям. Характер поверхности сохраняется при изменении
момента и скорости.
Законы оптимального управления. Результаты решения
экстремальной задачи методом Нелдера-Мида приведены на рис. 10.3 в
виде зависимостей компонент вектора -V от т для фиксированных
значений скорости.
Оптимальное управление V°(X), обеспечивающее минимум
электромагнитных потерь синхронной машины в схеме ВД, обладает
следующими свойствами:
374
1) вектор-функция V°(X) является существенно нелинейной
функцией, компоненты которой изменяются в широких пределах;
Рис. 10.3. Законы управления ВД в
режиме Д/> —> min :
-------- - при co =COq;
---------- при 69=0
2) функция Of (т, со) при
СО = const симметрична отно-
сительно начала координат и имеет
разрыв первого рода при т = 0.
Односторонние пределы этой
функций равны по абсолютной
величине и противоположны по знаку. При т>0 функция $°(т, й>)
монотонно убывает, а при т<0 - монотонно возрастает. Изменение СО
также влияет на оптимальное значение Of. При фиксированном моменте с
увеличением скорости абсолютное значение Of уменьшается;
3) функция (т, со) при со = const симметрична относительно оси
ординат, разделяющей характеристики двигательного и генераторного
режимов. В каждом из этих режимов при фиксированных
значениях со является положительной неубывающей нелинейной
функцией: )<l^m(w2)> если |wl|<|w2|- При |^1|—>0
y/f(m,co) —>0 независимо от скорости. Изменение т оказывает более
ощутимое влияние на значение чем изменение СО. При
фиксированном моменте с уменьшением скорости значение y/f,
возрастает.
Характеристики при оптимальном управлении Ap-»min.
Электромагнитные потери ВД и их составляющие при оптимальном
управлении представляют собой монотонно возрастающие при увеличении
момента и скорости зависимости (рис. 10.4). Потери равны нулю в точке
375
идеального холостого хода. Превалирующее влияние на потери оказывает ,
момент и - в меньшей степени - скорость. Оптимальное управление
обеспечивает снижение Др по сравнению с потерями в базовом режиме на (
15 %, а при т - т5 и CD = 0 потери уменьшаются на 28 %.
1.4
1.2
ДА
0.3
0.6
/ ДАМ/
0.4
0.2
°0
0.5
- ДЛ .
т
Рис. 10.4. Зависимости электромагнитных
потерь и их составляющих от момента и
скорости в режиме Др -> min:
-------при CD ~CDq;
--------при <У=0
Снижение потерь Др при
уменьшении скорости обеспечивается в
основном за счет потерь в стали якоря. В
частности, при ей = 0 суммарные потери
в стали Др^а=0. Потери в меди обмоток
ВД практически не зависят от скорости и преимущественно определяются
моментом нагрузки. Потери в меди обмотки якоря Дрма меньше
суммарных потерь в меди обмоток возбуждения. Заметим, что потери в
меди обмотки якоря и суммарные потери в меди обмоток возбуждения
снизились по отношению к потерям в базовом режиме на 6,5 и 29 %
соответственно. В то же время потери в стали якоря за счет увеличения
потока на 12 % увеличились на 25 %. Таким образом, потери ВД в
оптимальном режиме перераспределяются так, что потери в якоре с учетом
потерь в стали больше потерь в обмотках возбуждения. Заметим также, что
потери в меди продольной обмотки возбуждения весьма малы.
Напряжение и ток ia внешней цепи якоря при оптимальном
управлении изменяются в широких пределах (рис. 10.5) и представляют
собой монотонно возрастающие функции от т и CD. В режиме идеального
холостого хода и ia равны нулю. При базовых значениях момента и
скорости в режиме Др -> min превышает базовое значение на 3 %, а
ia уменьшается на 3,2 %. На напряжение существенное влияние
оказывает как момент нагрузки, так и скорость ВД.
Ток ia практически определяется моментом. Незначительное
влияние скорости проявляется в области небольших нагрузок (при
т <0,5 mQ). В области средних и больших нагрузок (при т >О,5п7д) ток
ia практически линейно зависит от т. Изменение знака момента на валу
376
двигателя не влияет на вид характеристик внешней цепи якоря. При
равных по абсолютной величине моментах и скорости в двигательном
режиме требуется более высокое напряжение и^, чем в генераторном
режиме. В то же время зависимость тока ia от т при фиксированной
скорости представляет собой функцию, симметричную относительно
начала координат. Основное влияние на ток ia оказывает момент нагрузки.
Рис. 10.5. Характеристики ВД
в режиме Др -> min: 1
----------при <У=<Уд;
---------при 69=0 0 5
Заметим, что при оптимальном 0
управлении ток iпродольной
обмотки возбуждения сравнительно 0,5
мал. Главный поток ВД обеспечивается
преимущественно результирующим ’1
действием обмотки якоря и поперечной
обмотки возбуждения, по которым -1-5
протекает один и тот же ток. За счет
поворота вектора тока якоря создается продольная реакция, берущая на
себя роль продольной обмотки возбуждения.
Важно отметить, что ВД не потребляет от источников питания
реактивную мощность. Зависимости мощности ра внешней цепи якоря от
момента при фиксированной скорости приведены на рис. 10.5. Потери
мощности продольной обмотки возбуждения ввиду ее незначительного
тока практически отсутствуют.
Особенности оптимального режима ВД отражает векторная
диаграмма, приведенная на рис. 10.6. Она показывает положение
результирующих векторов в неподвижной относительно статора системе
координат Оа/3 при базовых значениях момента и скорости. Как видно, в
оптимальном режиме вектор тока якоря смещен относительно продольной
оси Оа в отрицательном направлении отсчета угла (0° =-0,785 эл. рад).
Поперечная реакция якоря перекомпенсирована поперечной обмоткой
возбуждения. Так, поперечная составляющая тока якоря i°p=-0,686iaQ, а
ток поперечной обмотки возбуждения (компенсационной обмотки)
377
/^5=0,968габ. Продольная составляющая тока якоря i°a=0,6856iaQ, а ток
продольной обмотки возбуждения практически равен нулю.
Рис. 10.6. Угловые характеристики (а) и векторная диаграмма (б) ВД
в режиме Др -» min
Для сравнения отметим, что в базовом режиме вектор главных
потокосцеплений совпадает по направлению с продольной осью Оа
(L>^m=0). Причем продольная составляющая тока якоря гаа=0, а
поперечная iap~^a&- счет тоКа ^fp=~^ap поперечной обмотки
возбуждения полностью компенсируется поперечная составляющая тока
статора iap. Поток в этом случае создается за счет тока ija продольной
обмотки возбуждения.
При увеличении момента нагрузки абсолютное значение аргумента
и°т вектора главных потокосцеплений уменьшается, т.е. вектор 'Pm
поворачивается в сторону продольной оси. Особенно это заметно при
уменьшении скорости двигателя. Векторы токов и потокосцеплений не
ортогональны. При переходе из двигательного в генераторный режим
значения аргументов результирующих векторов изменяются скачком.
10.2. Управление по минимуму потерь энергии
при постоянном потоке
Рассмотрим задачу экстремального управления ВД по минимуму
потерь Др(У, X) при постоянстве модуля вектора главных
378
потокосцеплений \}/т -у/т, где у/т - заданное значение
потокосцепления. Найдем управление V® 6 Qy, минимизирующее потери
Ap(V,X), где вектор X е Qx. В этом случае задача оптимизации
режимов ВД по минимуму потерь сводится к одномерной задаче
экстремального управления при постоянстве потока:
4p(0l-,^*,X = Xc)-»inin =>0°(Х), ХсеПс. (10.7)
Свойства функции качества Др(У, X) при \]/т - const. В
системе координат Ov^ двухмерного пространства управлений
принимается = <?г- и V2 = у/т = ут, т.е. варьируемой переменной здесь
является аргумент 0, вектора токов якоря.
На рис. 10.1, а приведены зависимости Др, рассчитанные при
постоянном потоке у/т = и изменении 0,. Как видно, потери имеют
экстремум. При увеличении момента нагрузки экстремум приобретает
более острый характер. При фиксированном моменте и изменении
скорости экстремум смещается в вертикальном направлении. Таким
образом, положение оптимальной точки 0° не зависит от скорости.
Оптимальное значение Др ° определяется моментом и скоростью ВД.
Изменение момента приводит к более значительному влиянию на
величину показателя качества, чем изменение скорости.
Законы управления в режиме Др -> min при постоянстве
потока. Результаты решения экстремальной задачи (10.7) методом
градиента приведены на рис. 10.7. Оптимальное управление 0°,
обеспечивающее минимум электромагнитных потерь ВД, обладает
следующими свойствами: составляющая 0° является нелинейной
функцией от т; функция 0° (т) симметрична относительно начала
координат; в двигательном и генераторном режимах 0° (т) принимает
значения разных знаков; в точке идеального холостого хода функция
0° (т) имеет разрыв первого рода с односторонними пределами + д эл.
рад; при увеличении |т| функция 0f (m) стремится к =0, т.е.
379
результирующий вектор токов якоря поворачивается в направлении t
продольной оси Od.
Потери Др0 являются монотонно возрастающей функцией от т и а>.
При значении т=0 потери Ар° т^О. Зависимость Др0 от момента более ,
существенна, чем от скорости.
Рис. 10.7. Решение задачи
управления ВД по минимуму
потерь при фт = \)/тб:
----------
----------- ^,=0
Характеристики в режиме Др -»min при у/т = const.
Особенностью оптимального режима при постоянстве потока является то,
что потери в стали якоря не зависят от т и определяются
*
потокосцеплением у/т = у/т и скоростью О):
ЛРса =^И1,3(^)2-
Отсюда следует, что при й)=0 потери в стали якоря Дрса =0 и с
увеличением скорости растут.
Потери в меди обмотки якоря Дрма, продольной kp^fa и
поперечной обмоток возбуждения в режиме Др-»min при
Ц/т = ^тб не зависят от скорости и являются монотонно возрастающими
функциями от т. Причем потери в меди обмоток возбуждения
ДРм/>Д.Рма-
Электромагнитные потери определяются моментом и скоростью
(рис. 10.8). Превалирующее влияние на величину Др в области малых
значений т и больших скоростей оказывают потери в стали якоря. При
380
перегрузках основную долю электромагнитных потерь составляют потери
в меди обмоток.
Рис. 10.8. Зависимости электромагнитных 1 4
потерь ВД и их составляющих в режиме
. * 1.2
ДР -> mm при у/т = <//тб:
------- -<У=<Уб;-------------<У=0 1
0.8
В целом режим Др ->min при 0 Б
*
у/т ~ Ртб обеспечивает некоторое 04
снижение потерь Др по отношению к 2
потерям в базовом режиме. В
рассматриваемом примере потери снизились 0
на 8,2 %. При малых значениях момента в
этом режиме электромагнитные потери существенно больше, чем в режиме
min Др. В точке идеального холостого хода при скорости потери
Др =0,15 Др(тб, <Уб ).
Анализ электрических характеристик ВД выявляет следующие их
особенности: напряжение обмотки якоря незначительно зависит от
нагрузки и при заданном потоке в основном определяется скоростью; ток
внешней цепи якоря ia, наоборот, не зависит от скорости и определяется
моментом нагрузки. При моменте
т=т5 ток якоря на 6,3 % превышает
ток в режиме минимальных потерь при
переменном потоке и базовый ток якоря
на 2,8 %. При значении т = 0 ток
якоря не равен нулю и составляет
0,24 габ.
Рис. 10.9. Характеристики ВД
в режиме Др -> min при у/т = :
------- - (O=6)q;
---------- <у=0
Зависимость активной мощности статора ра от т и 0) качественно
ведет себя так же, как в режиме минимума потерь при переменном потоке.
381
Напряжение Uj-a и ток iуа продольной обмотки возбуждения
изменяются непрерывно по нелинейным законам от т. При переходе из
двигательного в генераторный режим ток ij-a не меняет своего знака.
Численная оценка величин напряжения и тока продольной обмотки
возбуждения показывает, что при моменте т = и скорости (О = 69g
напряжение Uj-д и ток iвесьма малы.
На рис. 10.10 представлены угловые характеристики при 0) = (0^ и .
векторная диаграмма ВД мощностью 116 кВт при значениях т = Wg и
й)-а>б.
Как видно, в оптимальном режиме вектор главных потокосцеплений
смещен относительно продольной оси в направлении положительных
углов (Ц^ =0,236). Поток создается за счет продольной составляющей
тока якоря и результирующей поперечной составляющей
намагничивающего тока, равной алгебраической сумме поперечной
составляющей тока якоря и тока компенсационной обмотки. Так, ток
продольной обмотки возбуждения практически равен нулю. Составляющая
тока якоря по продольной оси i°а =0,467 iaQ, а поперечная составляющая
тока якоря i°p=—0,916 iaQ. Ток поперечной обмотки возбуждения
(компенсационной обмотки) =1,025 iaQ.
Рис. 10.10. Угловые характеристики (а) и векторная диаграмма (б) ВД
в режиме Др -» min при у/т — \]/т§
382
Изменение аргументов результирующих векторов потокосцеплений
и токов обмоток ВД связано только с изменением момента, т.е. аргументы
этих векторов не зависят от скорости, представляя собой непрерывные
функции от тп, терпящие разрыв при переходе из двигательного в
генераторный режим.
Эффективность законов управления по минимуму потерь
Проведем оценку эффективности режимов работы ВД по отношению
к оптимальному по минимуму электромагнитных потерь закону
управления.
На рис. 10.11 приведены зависимости Др и оценок эффективности
для ВД мощностью 116 кВт. Кривые построены для двух фиксированных
значений скорости (<У=<Уб и 69=0) и соответствуют решению следующих
задач оптимизации: 1 - по минимуму потерь при постоянстве потока (10.7)
и 2 - по минимуму потерь при переменном потоке (10.5).
Как видно, оптимальное по минимуму Др управление при
отсутствии ограничений обеспечивает наименьшую величину
электромагнитных потерь (кривая 2).
Рис. 10.11. К оценке эффективности законов
оптимального управления ВД:
----------------- -при
-------------------- при 69=0
Управление машиной по минимуму
Др при постоянстве потокосцепления
\]/т ~У^тб (кривая 1) обеспечивает режим,
близкий к режиму минимальных потерь при
0,25т§<т< (кривая2).
Как видно из графиков, оценки эффективности Др изменяются в
широких пределах. Наибольшие значения Др имеют место при высокой
скорости, когда В Д работает при малых либо больших нагрузках.
Таким образом, результаты исследований показывают преимущество
режима управления Др -> min и целесообразность его использования в
электроприводах, когда скорость и момент нагрузки двигателя по
условиям технологического процесса изменяются в широких пределах.
383
10.3. Управление по минимуму потерь энергии
некомпенсированным вентильным двигателем
Постановка задачи. В некомпенсированном ВД постоянного тока
отсутствует поперечная обмотка возбуждения и относительная мощность
потерь определяется выражением
ДР = 4РМв+ДРм/а+ДРса-
По приведенным ранее соображениям в выражении функции
качества не учитываются зависящие от скорости механические потери
ДРмех-
Выразив составляющие электромагнитных потерь через токи
обмоток, получим
ДР = Г<£ + rfcfia + ha >
где квадраты скалярных величин
;2 _ Т »Т ;2 — tGs 2 _ mGs yrjGs
la~La**a> Vm-^m
В задачах оптимизации режимов некомпенсированных ВД по
минимуму потерь в дальнейшем используется модель с составом
независимых переменных , т, (О):
cos 0im + . NIJ = 0;
4<a = A(«,)4<J+L„IB; (10,8)
384
При введении вектора варьируемых управлений V = задача
минимизации потерь некомпенсированного ВД на безусловный экстремум
имеет формулировку, аналогичную (10.5).
Свойства функции качества &p(V, X). В двухмерном
пространстве управлений Ov^ для некомпенсированного ВД Vj = и
v2=^m-
Представление о свойствах функции Др(У, X) по отдельным
направлениям изменения переменных Vj = 0i и v2 = у/т дают
зависимости потерь Др от и Ц/т, приведенные на рис. 10.12 и 10.13.
Кривые рассчитаны для неявнополюсного СД мощностью 116 кВт,
работающего в схеме вентильной машины. Двигатель имеет обмотку
возбуждения, расположенную по продольной оси. Потери отнесены к
величине электромагнитных потерь в базовом режиме.
Рис. 10.12. Зависимость потерь ВД от 9i при постоянстве \ут
385
Рис. 10.13. Зависимость потерь от \]/т при постоянстве
Расчеты характеристик выполнены для скорости й?=й?д и ряда
фиксированных значений момента: 1 - при т= 0; 2 - при /и=0,01/и6;
3 - при т=0,17Mg; 4-9 - при /и=0,25/и6 до /и=1,5/и6 с шагом
Ати=0,25ти6.
Как видно, приведенные зависимости имеют специфический
характер, состоящий в том, что потери при постоянстве (либо у/т)
ограничены областью допустимых по перегрузочной способности
значений \ут (либо (?г). Граница допустимой области может быть
определена по критерию (f), выведенному из уравнения связи между
моментом т, аргументом вектора токов якоря и модулем \]/т вектора
главных потокосцеплений:
cose,m + A(e,.)4-“>.N[F“'r14'2' =0.
Этот критерий в скалярной форме записи имеет следующий вид:
\ 2wcos6»- ч
386
где iw(^w) - характеристика намагничивания по главному магнитному
пути машины. Область допустимых по перегрузочной способности
значений 1[/т (либо Q) определяется условием
-1 </(£».,/и) <+1.
Зависимости /т,тп) при Ч/т=у/тъ и (?г=(?гб для различных
фиксированных значений момента приведены на рис. 10.12 и 10.13
соответственно. Проецируя на графики функции потерь точки пересечения
кривых с линией f =-1, можно найти границу допустимой
области, представляющей собой геометрическое место точек, в которых
потери имеют минимальное значение.
Таким образом, задача оптимизации режимов некомпенсированного
ВД представляет собой задачу на условный минимум:
Ap(V, Х = Хс)-> inf =>V°(X), XceQc, (10.9)
VeOy
где область допустимых управлений
Следующий этап состоит в сведении задачи условной оптимизации к
задаче без ограничений с привлечением метода штрафных функций. Для
этого вводится вспомогательная функция следующего вида:
Др(У, X) = Ьр(У, X)+ysg (V, т, а). (10.10)
В выражении (10.10) функция штрафа
y/g (V, т, а) = а[|/(0г-, у/т, т)\ - £inf ]2,
где а - положительный весовой коэффициент;
^inf _ коэффициент, определяющий нижнюю грань функции потерь.
Таким образом, задача (10.9) с ограничением преобразуется к задаче
математического программирования без ограничения
387
Ap(V, Х = Хс)-> min =>V°(X), Хсейс. (10.11)
v=(^m)
На рис. 10.14 изображен трехмерный контурный график функции
X) при фиксированном значении X = (тиб, 0,5й>б ).
Рис. 10.14. Поверхность функции X)
Как видно, поверхность Др^,^, X) имеет явно выраженный
овражный характер, сохраняющийся при изменении момента и скорости.
Законы оптимального управления. Результаты решения
экстремальной задачи методом Нелдера-Мида приведены на рис. 10.15 в
виде зависимостей компонент вектора V0 от т при фиксированных
значениях скорости.
Рис. 10.15. Законы управления
некомпенсированного ВД в
режиме Др -> inf:
-------- -при <у=й)б;
----------- при (У=0
Оптимальное управление
v°(x), обеспечивающее мини-
388
мум потерь ВД, обладает следующими свойствами:
1) вектор-функция V°(x) является существенно нелинейной
функцией, значения компонент которой изменяются в широких пределах;
2) функция 0°(т,со) при фиксированных значениях скорости
симметрична относительно начала координат. В двигательном и
генераторном режимах она принимает значения разных знаков. При
переходе из двигательного в генераторный режим значение 0°(т,СО)
изменяется скачком. Односторонние пределы этой функций равны по
абсолютной величине и противоположны по знаку. При т>0 функция
0f(m,co) монотонно убывает, а при т<0 — монотонно возрастает.
Изменение со также влияет на оптимальное значение 0°. При
фиксированном моменте нагрузки со снижением скорости абсолютное
значение 0° уменьшается;
3) функция при фиксированных значениях скорости
симметрична относительно оси ординат, разделяющей характеристики
двигательного и генераторного режимов. В каждом из этих режимов
функция при СО - const является положительной
неубывающей нелинейной функцией: если
Н<Ы- ПРИ не зависимо от скорости.
Изменение т оказывает более ощутимое влияние на значение чем
изменение со. При фиксированном моменте с уменьшением скорости
о
значение \]/т возрастает.
Характеристики при оптимальном управлении.
Электромагнитные потери ВД и их составляющие при оптимальном
управлении представляют собой монотонно возрастающие при увеличении
момента и скорости зависимости (рис. 10.16). Потери равны нулю в точке
идеального холостого хода. Превалирующее влияние на потери оказывает
момент и - в меньшей степени - скорость. Оптимальное управление
обеспечивает снижение суммарных потерь Д/> по сравнению с потерями в
базовом режиме на 9,3 %, а при т - тб и со = 0 потери уменьшаются на
22,5 %.
Снижение потерь &р при уменьшении скорости обеспечивается в
основном за счет потерь в стали якоря. В частности, при со = 0 суммарные
389
потери в стали Дрса =0. Потери в меди обмоток ВД практически не зависят
от скорости и преимущественно определяются моментом нагрузки. Потери
в меди обмотки якоря &pKa меньше потерь в меди обмотки возбуждения.
Потери в меди обмоток практически не зависят от скорости. Заметим, что
потери в меди обмотки якоря и обмотки возбуждения снижаются по
.отношению к потерям в базовом режиме на 15,3 и 12 % соответственно. В
то же время потери в стали якоря за счет увеличения потока на 11,1 %
увеличились на 23,5 %. В оптимальном режиме происходит
перераспределение потерь так, что потери в якоре с учетом потерь в стали
превышают потери в обмотке возбуждения в области малых значений
моментов при больших скоростях. В области средних и больших нагрузок
потери в обмотке возбуждения превалируют над суммарными потерями в
якоре.
Рис. 10.16. Зависимости электро-
магнитных потерь ВД и их
составляющих от т и а> в режиме
Др -> inf:
--------при co=(Oq -,
--------при со=0
Напряжение и ток обмотки якоря
при оптимальном управлении изме-
няются в широких пределах (рис. 10.17) и
представляют собой монотонно
возрастающие функции от т и to. В
точке идеального холостого хода напряжение и ток якоря равны нулю. При
базовых значениях момента и скорости напряжение якоря в режиме
оптимального управления превышает напряжение в базовом режиме на
8,2 %, а ток уменьшается на 8 %.
На напряжение якоря существенное влияние оказывает как момент
нагрузки, так и скорость машины. Ток якоря практически определяется
моментом нагрузки. Незначительное влияние скорости на ток якоря
проявляется в области небольших нагрузок (при т<0,5т^). В области
средних и больших нагрузок (при /и>0,5/и6) ток якоря изменяется
линейно от т. Функция тока якоря при фиксированной скорости
симметрична относительно начала координат.
Ток продольной обмотки возбуждения if# представляет собой
нелинейную функцию от момента нагрузки. При переходе из
двигательного в генераторный режим ток i fd не меняет своего знака.
390
Рис. 10.17. Характеристики некомпен-
сированного ВД в режиме Др -»inf:
-------- - при й»=й»б;
---------- при й>=0
Особенности оптимального
режима отражает векторная диаграмма
ВД, приведенная на рис. 10.18. Она
показывает положение результирую- -. .-
F J r „ -1.5 -1 -0.5 0 0.5 1 т
щих векторов в неподвижной
относительно статора системе координат Осф при базовых значениях
момента и скорости.
а б
Рис.10.18. Угловые характеристики (а) и векторная диаграмма (б)
некомпенсированного ВД в режиме Др -»inf
Как видно, в оптимальном режиме вектор тока якоря смещен
относительно продольной оси О(Х. Поперечная реакция якоря не
компенсируется. Поперечная составляющая тока якоря z°^=-0,612z’a6.
Продольная составляющая тока якоря =-0,679 zag • Ток продольной
обмотки возбуждения ij-d = if = 1,04za6.
391
Для сравнения отметим, что в базовом режиме продольная
составляющая тока якоря ^«““0,9^6» а поперечная составляющая
1а0 =-0,433iaQ. Ток возбуждения z‘y =1,11/^.
Результирующий вектор главных потокосцеплений смещен
относительно продольной оси Оа в отрицательном направлении отсчета
углов (1>°^=-1,04 эл. рад). При уменьшении момента и скорости
абсолютное значение аргумента вектора главных потокосцеплений
уменьшается, т.е. вектор главных потокосцеплений поворачивается в
сторону продольной оси. При переходе из двигательного в генераторный
режим значения аргументов результирующих векторов напряжений, токов
и потокосцеплений обмотки якоря изменяются скачком.
10.4. Управление по минимуму потерь энергии при постоянном потоке
некомпенсированным вентильным двигателем
Задача экстремального управления некомпенсированным ВД по
*
минимуму потерь при постоянстве потокосцепления у/т ~ является
частным случаем задачи (10.11):
X = Xc)->inf => 0°(х), XceQc. (10.12)
Oi
Минимизируемая вспомогательная функция описывается
выражением (10.10), в котором модуль вектора главных потокосцеплений
*
является постоянной величиной (^w = у/т).
Свойства функции качества 2\p(V, X) при у/т = const. В
системе координат OviV2 двухмерного пространства управлений примем
*
Vj = df и v2 = у/т = у/т, т.е. варьируемой переменной здесь является
аргумент (9г вектора токов якоря.
На рис. 10.12, а приведены зависимости tsp, рассчитанные при
постоянном потоке у/ т = у/т§ и изменении для нескольких
фиксированных значений момента. Как видно, при увеличении момента
нагрузки угол Of, доставляющий нижнюю грань функции потерь,
существенно изменяется. При этом угол Of инвариантен по отношению к
скорости.
392
Законы оптимального управления в режиме Др —> inf при
\[/т - const. Результаты решения экстремальной задачи (10.12) методом
градиента с переменным шагом приведены на рис. 10.19.
Оптимальное управление 0°, обеспечивающее нижнюю грань
электромагнитных потерь некомпенсированного ВД, обладает
следующими свойствами: составляющая 0° является нелинейной
функцией от т; функция 0f (т) симметрична относительно начала
координат; в двигательном и генераторном режимах она принимает
значения разных знаков; в точке идеального холостого хода функция
0° (т) имеет разрыв с односторонними пределами ± л / 2 эл. рад.
Потери Др ° являются монотонно возрастающей функцией от т и со.
В точке ти=0 потери Др0 5*0. Зависимость Др0 от момента более
существенна, чем от скорости ВД.
Рис. 10.19. Решение задачи
управления некомпенсиро-
ванным ВД в режиме
Др -» inf при у/т = const:
-----------йг=й>6;
----------- со=0
Характеристики некомпенсированного ВД в режиме Др -> inf
прн i//m - const. В этом режиме потери в стали якоря не зависят от т и
определяются потокосцеплением у/т —у/т и скоростью СО. При й>=0
потери в стали якоря &рйа =0 и с увеличением скорости растут.
Электрические потери обмоток якоря Дрма и возбуждения в
данном режиме не зависят от скорости и являются монотонно
393
возрастающими функциями от тп. В режиме минимальных потерь при
постоянстве потока потери > &р№а-
Суммарные потери Др определяются моментом и скоростью
(рис. 10.19 и 10.20). Превалирующее влияние на величину Др в области
малых значений т и больших скоростей оказывают потери в стали
статора. При перегрузках основную долю суммарных потерь составляют
потери в меди обмоток.
В целом оптимальное управление по минимуму потерь при
постоянстве потока обеспечивает некоторое снижение суммарных потерь
Др по сравнению с потерями в базовом режиме. В рассматриваемом
примере потери снизились на 3,1 %. Отличительной особенностью данного
режима является то, что при малых значениях момента в этом режиме
суммарные потери существенно больше, чем в режиме минимальных
потерь с переменным, потоком. В точке идеального холостого хода при
скорости й»=й»6 потери Др=0,2 Др(/и6,йЭ6). Напомним, что в режиме
минимальных потерь с переменным потоком Др =0.
Рис. 10.20. Зависимости электромагнитных
потерь некомпенсированного ВД и их
составляющих в режиме Др —> inf
при у/т = const:
------- - й>=й»6;----------- й»=0
Анализ электрических характеристик некомпенсированного ВД
(рис. 10.21) выявляет следующие их особенности: напряжение обмотки
якоря Wj незначительно зависит от нагрузки и при заданном потоке в
основном определяется скоростью; ток внешней цепи якоря ia не зависит
от скорости и определяется моментом нагрузки. При моменте /и=/и6 ток
якоря на 6,8 % превышает ток в режиме минимальных потерь при
переменном потоке и на 1,6 % меньше базового тока. При моменте т = 0
ток якоря равен нулю.
394
Рис. 10.21. Характеристики некомпенсированного ВД
в режиме Др -> inf при у/т = const:
----------- - ---------- бУ=0,25<Уб
Зависимость мощности ра от т и й) качественно ведет себя так же,
как в режиме минимума потерь при переменном потоке.
Законы изменения напряжения Uj-a и тока iпродольной обмотки
нелинейные и представляют собой зависимости и?а и ij-a от т. При
переходе из двигательного в генераторный режим напряжение и ток
продольной обмотки возбуждения изменяются непрерывно без смены
знака.
Оценка напряжения и тока продольной обмотки возбуждения
показывает, что при моменте т = и скорости (О = напряжение иja
и ток z’ya на 31,6 % меньше в сравнении с их величинами в режиме
минимальных потерь при переменном потоке, а по отношению к току в
базовом режиме Iуменьшился на 2,8 %.
На рис. 10.22 представлены угловые характеристики от т при
й) = CDq и векторная диаграмма для ВД мощностью 116 кВт при значениях
т - т5 и G) = (О5.
395
Рис. 10.22. Угловые характеристики (а) и векторная диаграмма (б)
некомпенсированного ВД в режиме Др —> inf при l//m = const
Как видно, в оптимальном режиме вектор главных потокосцеплений
смещен относительно продольной оси в направлении отрицательного
отсчета углов. Поток создается за счет результирующей продольной
составляющей намагничивающего тока и поперечной составляющей тока
якоря. Так, ток обмотки возбуждения ij-a=1,08 z’^g, составляющая тока
якоря по продольной оси z£a=“0, 9/аб, а поперечная составляющая тока
якоря i=-0,45 iaQ.
Изменение аргументов результирующих векторов потокосцеплений
и токов обмоток ВД связано только с изменением момента, т.е. аргументы
этих векторов не зависят от скорости. В двигательном и генераторном
режимах они представляют собой непрерывные функции от т.
При переходе из двигательного в генераторный режим аргумент
результирующего вектора тока обмотки якоря изменяется скачком.
При этом знак аргумента Ц° меняется на противоположный. Аргументы
других результирующих векторов изменяются непрерывно и равны нулю в
режиме идеального холостого хода.
396
10.5. Эффективность законов управления
по минимуму потерь энергии
На рис. 10.23 приведены зависимости электромагнитных потерь Ар
и оценок эффективности для синхронного двигателя мощностью 116 кВт.
Кривые построены для двух фиксированных значений скорости ((0=(0б и
(0=0) и соответствуют решению следующих задач оптимизации: 1 - по
минимуму потерь при постоянстве потока (10.12) и 2 — по минимуму
потерь при переменном потоке (10.9).
Рис. 10. 23. К оценке эффективности
законов оптимального управления
некомпенсированным ВД:
------- —при CO—COq;
-------— при (0=0
Как видно, оптимальное по
• минимуму Ар управление при отсутствии
ограничений обеспечивает наименьшую
величину электромагнитных потерь ВД (кривая 2). Оценка эффективности
Ар=0.
Управление по минимуму Ар при постоянстве потокосцепления
(кривая 1) обеспечивает режим, близкий к режиму
минимальных потерь при 0,25 т^<т<т5 (кривая 2).
В общем случае оценки эффективности Ар изменяются в широких
пределах. Наибольшие значения Ар имеют место при высокой скорости,
когда ВД работает в области малых и больших нагрузок.
Таким образом, результаты исследований показывают преимущество
закона'оптимального по минимуму потерь управления. Целесообразность
его использования определяется диапазоном изменения скорости и
момента нагрузки в технологическом процессе. Режим управления по
минимуму потерь при у/т = близок к этому режиму в области
средних нагрузок.
В заключение отметим, что особенности режимов СД по схеме
вентильного двигателя с естественной коммутацией рассматриваются в
работе [16].
397
ЗАКЛЮЧЕНИЕ
Режимы работы электрических двигателей оказывают определяющее
влияние на энергетику электроприводов при выполнении ими
технологических задач. По результатам анализируемых задач оптимизации
электрических двигателей как объектов экстремального управления можно
сделать следующие выводы.
1. Ключевым моментом успешного решения экстремальных задач
является выбор математических моделей объекта оптимизации. Известные
в теории электрических машин математические модели неявнополюсных и
явнополюсных машин переменного и постоянного тока позволяют учесть
основные факторы, влияющие на достоверность решения задач
оптимизации их режимов работы. К ним относятся насыщение,
явнополюсность, влияние вихревых токов, особенности электромагнитных
и электромеханических переходных процессов в электрических машинах, а
также эффекты, обусловленные автономным питанием их обмоток. Однако
эти модели построены на основе различных подходов, используют
различные варианты математического аппарата и различные уровни
допущений. Это обстоятельство затрудняет сопоставительный анализ
различных типов электрических двигателей как объектов экстремального
управления. Поэтому для решения поставленных задач в книге был
произведен отбор исходных математических моделей основных типов
электрических машин, исходя из принципа единства подхода,
математического аппарата и уровня допущений. Дальнейшая адаптация
исходных моделей к непосредственному решению задач оптимизации
привела к целесообразности их трансформации в ряд проблемно-
ориентированных моделей.
2. Методологический подход к задачам экстремального управления
электрическими двигателями заключается в том, что задача оптимизации
рассматривается как решение заданной технологической задачи при
наилучшем режиме, удовлетворяющем выбранному критерию качества,
например энергетическому. В рамках этого подхода сформулированы две
обобщенные постановки задач оптимизации установившихся режимов
электропривода.
В первой постановке технологическая задача заключается в
обеспечении заданного значения скорости при заданном моменте нагрузки,
а целью оптимизации является обеспечение экстремума энергетического
показателя качества электромеханического преобразования.
Во второй постановке технологическая задача состоит в обеспечении
заданной скорости либо заданного электромагнитного момента двигателя.
Целью оптимизации в этой постановке является максимальное
использование ограниченных энергетических ресурсов привода для
получения его максимальной перегрузочной способности либо
производительности механизма.
398
3. В реальных условиях для формирования любого, в том числе и
оптимального, режима работа электродвигателя используются
управляющие воздействия в виде электрических напряжений, подводимых
к его обмоткам. Однако в задачах оптимизации эти реальные управляющие
воздействия не могут рассматриваться в качестве независимых
варьируемых величин в связи с необходимостью соблюдения условий
технологической задачи. Поэтому выбор свободно варьируемых
воздействий потребовал для каждого из этих типов электродвигателей
дополнительного анализа с привлечением понятия степени свободы
системы. Именно этим обусловлена необходимость преобразования
исходных моделей к проблемно-ориентированным для задач оптимизации.
В этих моделях взамен реальных управляющих воздействий вводится
новый вектор управлений со свободно варьируемыми компонентами, а
также формализуются показатели качества, являющиеся мерой
эффективности и экономичности электромеханического преобразования
энергии в двигателе. При этом оказывается, что условия технологической
задачи приводят к снижению размерности нового вектора в сравнении с
размерностью вектора реальных управляющих воздействий.
4. Разработанный ряд проблемно-ориентированных моделей
позволил создать классификацию различных типов электрических
двигателей как объектов экстремального управления по числу степеней
свободы и размерности варьируемого вектора управлений. Наибольшее
число степеней свободы (пять) имеют обобщенная машина переменного
тока и синхронный двигатель с продольно-поперечным электромагнитным
возбуждением. С учетом фиксированных условиями технологической
задачи двух координат максимальное число свободно варьируемых
воздействий в задачах оптимизации для данных машин равно трем.
Синхронные двигатели с продольной обмоткой возбуждения и вентильные
двигатели постоянного тока с электромагнитным возбуждением имеют
четыре степени свободы, из которых две могут использоваться в качестве
варьируемых воздействий для оптимизации их режимов. Тремя степенями
свободы и одним варьируемым воздействием обладают асинхронные
двигатели с короткозамкнутым ротором, синхронные и вентильные
двигатели с постоянными магнитами, а также коллекторные двигатели
постоянного тока независимого возбуждения. Классификация основных
типов электрических двигателей по числу степеней свободы и размерности
варьируемого вектора управлений отражает возможности каждого
двигателя с точки зрения формирования оптимальных энергетических
режимов электропривода при выполнении заданной технологической
задачи.
5. Для обоснования правомочности и целесообразности постановок
задач оптимизации режимов электрических двигателей выполнен анализ
функций качества, представляющих собой зависимости принятых оценок
качества от свободно варьируемых управляющих воздействий. По
399
результатам этого анализа установлены следующие общие свойства
электрических двигателей как объектов экстремального управления.
Функции качества по большинству оценок имеют экстремумы не только в
двигательном, но и в генераторном режимах. Подавляющее большинство
функций качества унимодальные, непрерывны и дифференцируемы.
Значения компонент векторов управлений, доставляющих экстремумы
функциям качества по различным оценкам, в общем случае не совпадают.
Кроме того, экстремальные характеристики “дрейфуют” при изменении
момента нагрузки и скорости. При этом изменяются не только
экстремальные значения функций качества, но и вид экстремальных
характеристик. Поверхности функций качества в большинстве случаев
имеют овражный характер.
6. Введение ограничений усложняет решение экстремальных задач.
Показатели качества и ограничения представляют собой сложные
нелинейные функции. В связи с этим для решения экстремальных задач
при изменении момента нагрузки и скорости двигателей в широких
пределах предпочтительны численные методы оптимизации. При этом
решение задач экстремального управления численными методами
целесообразно осуществлять в два этапа. На первом этапе методом
сканирования определяется область, внутри которой находится решение, а
на втором этапе осуществляется локальный поиск экстремума функции
качества.
7. Из алгоритмов локального поиска, пригодных для решения
многомерных задач экстремального управления электрическими
двигателями, хорошо зарекомендовали себя симплекс-методы Нелдера-
Мида, а для решения одномерных задач экстремального управления -
метод градиента с регулировкой шага. Из числа методов решения задач
оптимизации с ограничениями был выбран метод штрафных функций.
8. Решение экстремальных задач управления различными типами
электрических двигателей показывает следующее:
• наибольшими возможностями с точки зрения формирования
оптимальных режимов обладают обобщенная машина переменного тока и
синхронный двигатель с продольно-поперечным электромагнитным
возбуждением. Задачи оптимизации по минимуму потерь обобщенной
машины переменного тока, синхронных двигателей с электромагнитным
возбуждением и вентильных двигателей постоянного тока относятся, по
существу, к овражным оптимизационным задачам, которые требуют
обращения к специальным методам, например к симплексному методу
Нелдера-Мида;
• результаты исследования чувствительности функции мощности
потерь в двигателях к отдельным варьируемым управлениям показывают
их различную степень влияния на величину потерь. Это позволяет в ряде
практических случаев ограничиться варьированием лишь тех управлений,
400
которые оказывают наибольшее влияние, т.е. снизить размерность
варьируемого вектора;
• общее свойство законов экстремального управления состоит в
том, что они имеют нелинейный характер при изменении момента
нагрузки и скорости двигателя. Причем оптимальное значение основного
магнитного потока двигателя изменяется в широких пределах.
Инерционность изменения во времени основного магнитного потока
двигателя препятствует реализации законов управления, оптимизирующих
установившиеся режимы в тех электроприводах, для которых
превалирующими являются динамические режимы работы с быстрым
изменением электромагнитного момента двигателя;
• для двигателей с числом свободно варьируемых управляющих
воздействий, превышающим единицу, допустима постановка задач
оптимизации при введении дополнительных условий, например
обеспечение минимума мощности потерь при постоянстве главного
магнитного потока. Это позволяет расширить область использования
результатов решения задач оптимизации статических режимов и на
динамические режимы работы электроприводов;
• в самом общем случае закон экстремального управления должен
учитывать изменение скорости и момента электрического двигателя, что
создает определенные трудности в практической реализации. С этих
позиций представляют интерес более простые законы управления, дающие
близкие конечные результаты к идеальным законам управления. О
существовании таких законов свидетельствует тот факт, что экстремальное
управление асинхронным двигателем по минимуму тока статора
обеспечивает величину потерь двигателя, близких к минимально
достижимым, обеспечиваемым управлением по минимуму потерь. При
этом реализация управления по минимуму тока статора проще, чем по
минимуму потерь. Сравнительный анализ экстремальных управлений по
различным критериям позволяет в каждом конкретном применении
выбрать компромиссное решение, сочетающее энергетическую
эффективность и простоту реализации;
• решение задачи экстремального управления при ограничениях на
ток и напряжение статора показало, что наиболее полное использование
асинхронного двигателя с короткозамкнутым ротором по перегрузочной
способности обеспечивается при экстремальном управлении моментом. В
случае использования других законов управления в пределах
максимально-достижимой области состояний появляются подобласти,
характеризующие недоиспользование двигателя по перегрузочной
способности. Область состояний АД в системе координат «момент-
скорость» можно расширить, используя двухзонное управление скоростью,
ослаблением поля ротора при постоянстве ЭДС вращения двигателя.
401
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Адкинс В.А. Общая теория электрических машин: пер. с англ. / В.А. Адкинс М.; Л.:
Госэнергоиздат, 1960.272 с.
2. Алябьев М.И. К вопросу о классификации и выборе методов исследования
электрических машин / М.И. Алябьев // Электричество. 1959. №11. С. 1-6.
3. Асинхронизированный вентильный двигатель с ортогональным управлением /
И.П. Копылов, Ю.П. Сонин, И.В. Гуляев, А.А. Вострухин // Электротехника. 2002. №9.
С. 2-5.
4. Ахматов М.Г. Синхронные машины / М.Г. Ахматов. М.: Высш, шк., 1984. 135 с.
5. Беспалов В.Я. Перспективы создания отечественных электродвигателей нового
поколения для частотно-регулируемого электропривода / В.Я. Беспалов //
Автоматизированный электропривод в XXI веке: пути развития: тр. IV Международной
(XV Всероссийской) конф, по автоматизированному электроприводу (ЭАП-2004,
Магнитогорск, 14-17 сент. 2004 г.). Магнитогорск, 2004.4. 1. С. 24-31.
6. Беспалов В.Я. Электрические двигатели в XXI веке / В.Я. Беспалов // Тр. III
Международной (XIV Всероссийской) науч.-техн. конф, по автоматизированному
электроприводу “ЭАП-2001” / под ред. С.В. Хватова. Нижний Новгород: Вектор- ТиС,
2001. С. 17.
7. Ботвинник М.М. Управляемая машина переменного тока / М.М. Ботвинник,
Ю.Г. Шакарян. М.: Наука, 1969. 140 с.
8. Браславский И.Я. Энергосберегающий асинхронный электропривод: учеб, пособие
для студ. высш. учеб, заведений / И.Я. Браславский, З.Ш. Ишматов, В.Н. Поляков; под
ред. И.Я. Браславского. М.: Издательский центр «Академия», 2004. 256 с.
9. Брынский Е.А. Электромагнитные поля в электрических машинах / Е.А. Брынский,
Я.Б. Данилевич, В.И. Яковлев. Л.: Энергия, 1963. 220 с.
10. Булгаков А.А. Частное управление асинхронными электродвигателями /
А.А. Булгаков. 2-е изд., доп. М.; Наука, 1966. 297 с.
11. Вакуленко К.Н. Об оптимальном регулировании асинхронного двигателя /
К.Н. Вакуленко, Э.М. Агабабян // Электромашиностроение и электрооборудование.
Харьков: ХГУ, 1965. Вып. 1. С. 92-98.
12. Вакуленко К.Н. Определение оптимальных режимов автономной системы
переменного тока/К.Н. Вакуленко//Изв. вузов. Электромеханика. 1962. №8. С. 876-881.
13. Валдырев А.С. Повышение энергетических показателей электроприводов
постоянного тока продолжительного режима работы / А.С. Валдырев, Б.Н. Дралюк,
402
А.Е. Тикоцкий // Автоматизированный электропривод / под общ. ред. Н.Ф. Ильинского,
М.Г. Юнькова. М.: Энергоатомиздат, 1986. С. 226-11.
14. Васильев Ф.П. Численные методы решения экстремальных задач / Ф.П. Васильев.
М.: Наука, 1980. 518 с.
15. Вейнгер А.М. Автоматически регулируемый по скорости реверсивный
электропривод с асинхронизированным синхронным двигателем / А.М. Вейнгер,
И.М. Серый, А.А. Янко-Триницкий И Электротехническая промышленность. Сер.:
Электропривод. 1984. Вып.б (128). С. 4-7.
16. Вейнгер А.М. Регулируемый синхронный электропривод / А.М. Вейнгер. М.:
Энергоатомиздат, 1985. 224 с.
17. Веретенников Л.П. Классификация дифференциальных уравнений Горева-Парка /
Л.П. Веретенников//Электричество. 1959. №11. С. 13-20.
18. Вольдек А.И. Электрические машины: учебник для студентов высш. техн,
заведений / А.И. Вольдек. 3-е изд., перераб. Л.: Энергия, 1978. 832 с.
19. Гаращенко Ю.И. Об оптимальном законе частотного управления асинхронным
двигателем / Ю.И. Гаращенко // Труды Северо-Западного заочного политехнического
института. 1972. №19. С. 10-13.
20. Горев А.А. Переходные процессы синхронной машины / А.А. Горев. Л.; М.: Гос.
энергетическое изд-во, 1950. 551 с.
21. Гринберг Г.А. Избранные вопросы математической теории электрических и
магнитных явлений / Г.А. Гринберг. М.; Л.: Изд-во АН СССР,1948. 727 с.
22. Гуревич М.К. Перспективы применения запираемых силовых
полупроводниковых приборов в электроэнергетике / М.К. Гуревич, М.А. Козлова,
Ю.А. Шешнев // Электротехника. 2004. №10. С. 3-7.
23. Гусак А.А. Справочник по высшей математике / А.А. Гусак, Г.М. Гусак. Минск:
Навука i тэхшка, 1991. 480 с.
24. Демирчан К.С. Машинные расчеты электромагнитных полей / К.С. Демирчан,
В.Л. Чечурин. М.: Высш, шк., 1986. 240 с.
25. Домбровский В.В. Справочное пособие по расчету электромагнитных полей в
электрических машинах / В.В. Домбровский. Л.: Энергоатомиздат, 1983. 256 с.
26. Ермолин Н.П. Переходные процессы в машинах постоянного тока /
Н.П. Ермолин. Л.; М.: Гос. энергетическое изд-во, 1951. 190 с.
27. Ефименко Е.И. Новые методы исследования машин переменного тока и их
приложения / Е.И. Ефименко. М.: Энергоатомиздат, 1993.227 с.
403
28. Ефимов А.А. Активные преобразователи в регулируемых электроприводах
переменного тока / А.А. Ефимов, Р.Т. Шрейнер; под общ. ред. Р.Т. Шрейнера. Новоуральск:
НГТИ, 2001. 250 с.
29. Замкнутые системы частотного управления реверсивным электроприводом
переменного тока с независимым и связанным регулированием абсолютного скольжения /
В.А. Шубеико [и др.] // Тиристорный управляемый асинхронный электропривод.
Свердловск: УПИ, 1968. С. 263-269.
30. Иванов-Смоленский А.В. Электрические машины / А.В. Иванов-Смоленский. М.:
Энергия, 1980. 928 с.
31. Иванов-Смоленский А.В. Электромагнитные поля и процессы в электрических
машинах и их физическое моделирование / А.В. Иванов-Смоленский. М.: Энергия, 1969.
304 с.
32. Изосимов Д.Б. Алгоритмы векторно-импульсной модуляции трехфазного
автономного инвертора напряжения / Д.Б. Изосимов, С.В. Байда // Электротехника. 2004.
№5. С. 21-31.
33. Изосимов Д.Б. Алгоритмы и системы цифрового управления электроприводами
переменного тока/ Д.Б. Изосимов, В.Ф. Козаченко // Электротехника. 1999. №4. С. 41-51.
34. Ильинский Н.Ф. Научно-технические аспекты проблемы повышения
эффективности использования энергии в массовом электроприводе / Н.Ф. Ильинский,
Р.С. Сарбатов, В.Г. Безаев И Автоматизированный электропривод / под общ. ред.
Н.Ф. Ильинского, М.Г. Юнькова. М.: Энергоатомиздат, 1986. С. 11-18.
35. Ильинский Н.Ф. Перспективы применения вентильно-индукторного привода в
современных технологиях / Н.Ф. Ильинский // Электротехника. 1997. №2. С. 1-3 .
36. Ильинский Н.Ф. Проблемы теории и практики автоматизированного
электропривода / Н.Ф. Ильинский, М.Г. Юньков // Автоматизированный электропривод /
под общ. ред. Н.Ф. Ильинского, М.Г. Юнькова. М.: Энергоатомиздат, 1986. С. 5-11.
37. Казовский Е.Я. Переходные процессы в электрических машинах переменного тока
/ Е.Я. Казовский. М.: Изд-во АН СССР, 1962. 624 с.
38. Ключей В.И. Теория электропривода: учебник для вузов / В.И. Ключев. 2-е изд.,
перераб. и доп. М.: Энергоатомиздат, 2001. 704 с.
39. Ковалев В.Д. Элементная база силовой полупроводниковой электроники в
России. Состояние и перспективы развития / В.Д. Ковалев, Ю.А. Евсеев, А.М. Сурма //
Электротехника. 2005. №8. С.3-23.
40. Ковач К.П. Переходные процессы в машинах переменного тока: пер. с нем. /
К.П. Ковач, И. Рац. М.: Госэнергоиздат, 1963. 744 с.
404
41. Козаченко В.Ф. Микроконтроллерные системы управления электроприводами:
современное состояние и перспективы развития / В.Ф. Козаченко // Автоматизированный
электропривод в XXI веке: пути развития: тр. IV Международной (XV Всероссийской)
конф, по автоматизированному электроприводу (ЭАП-2004, Магнитогорск, 14-17 сент.
2004 г.). Магнитогорск, 2004. Ч. 1. С. 38-51.
42. Копылов И.П. Математическое моделирование асинхронных машин /
И.П. Копылов, Ф.Я. Мамедов, В.Я. Беспалов. М: Энергия, 1969. 96 с.
43. Копылов И.П. Математическое моделирование электрических машин /
И.П. Копылов. М.: Высш, шк., 1987.248 с.
44. Копылов И.П. Электромеханические преобразователи энергии / И.П. Копылов. М.:
Энергия, 1973. 400 с.
45. Копылов И.П. Электромеханическое преобразование энергии в вентильных
двигателях / И.П. Копылов, В.Л. Фрумин. М.: Энергоатомиздат, 1986. 168 с.
46. Корюков К.Н. Непосредственный преобразователь частоты с прогнозирующим
управлением: автореф. дис.... капд. техн, наук / К. Н. Корюков. СПб., 2005. 16 с.
47. Костенко М.П. Электрические машины. Специальная часть / М.П. Костенко. Л.:
Госэнергоиздат, 1949. 708 с.
48. Котриков К.П. О влиянии величины магнитного потока на нагрев асинхронного
двигателя при частотном управлении / К.П. Котриков // Изв. вузов. Энергетика. 1963. №9.
С. 30-39.
49. Котриков К.П. Потери при частотном регулировании асинхронных двигателей /
К.П. Котриков // Изв. вузов. Энергетика. 1969. №8. С. 39-43.
50. Лайбль Т. Теория синхронных машин при переходных процессах: пер. с нем. /
Т. Лайбль. М.; Л.: Госэнергоиздат, 1957.168 с.
51. Лайон В. Анализ переходных процессов в электрических машинах переменного
тока методом симметричных составляющих: пер. с англ. / В. Лайон. М.; Л.: Госэнергоиздат,
1958. 400 с.
52. Мартынов В.А. Математическая модель асинхронного конденсаторного двигателя
на основе метода зубцовых контуров / В.А. Мартынов, А.А. Лабутин // Электричество.
1998. №11. С. 37-43.
53. Математические основы теории автоматического регулирования / В.А. Иванов
[и др.]; под ред. Б.К. Чемоданова. М.: Высш, шк., 1971. 808 с.
54. Мещеряков Ю.Г. Повышение коэффициента мощности асинхронного двигателя с
регулируемой частотой / Ю.Г. Мещеряков // Изв. вузов. Энергетика. 1973. №1.
С.129-133.
405
55. Мищенко В.А. Оптимальный по минимуму потерь закон частотного управления ]
асинхронным двигателем / В.А. Мищенко, Р.Т. Шрейнер, В.А. Шубенко // Изв. вузов, i
Энергетика. 19б9.№8. С. 115-118.
56. Мищенко В.А. Оптимизация частотно-управляемого асинхронного i
электропривода по минимуму тока: автореф. дис. ... канд. техн, наук / В.А. Мищенко. >
Свердловск, 1969.17 с.
57. Мищенко В.А. Теория, способы и системы векторного и оптимального ,
векторного управления электроприводами переменного тока / В.А. Мищенко // Проблемы
автоматизированного электропривода: тр. III Международной (XIV Всероссийской) науч,-
техи. конф, по автоматизированному электроприводу, 12-14 сент. 2001 г. Нижний
Новгород: НГТУ, 2001. С. 39-42.
58. Оганян Р.В. Поле в воздушном зазоре явнополюсной синхронной машины при
насыщении магнигопровода/Р.В. Оганян//Электротехника. 1966. №8. С.9-12.
59. Онищенко Г.Б. Асинхронные вентильные каскады и двигатели двойного питания
/Г.Б. Онищенко, И.Л. Локтева. М.: Энергия, 1979. 200 с.
60. Оптимальное управление частотно-регулируемым синхронным электроприводом
мощных энергетических установок / В.С. Третьяков [и др.] // Вентильные
автоматизированные электроприводы и преобразователи с улучшенными
характеристиками: тез. докл. к Всесоюному иауч.-техн. совещанию. Л., 1978. С. 106-109.
61. Оптимальное частотное управление синхронным электроприводом /
В.С. Третьяков [и др.] // Электротехника. 1977. №6. С. 34-37.
62. Оптимальный закон частотного управления, обеспечивающий минимизацию
потерь в асинхронном двигателе / В.А. Барский [и др.] // Электроприводы переменного
тока: тр. XI науч.-техн. конф. ЭППТ-98 (24-26 февр. 1998 г.). Екатеринбург: УГТУ, 1998.
С. 108-112.
63. Панкратов В.В. Метод многокритериальной оптимизации алгоритмов векторного
управления асинхронными электроприводами / В.В. Панкратов, Е.А. Зима //
Электромеханика. 2002. №2. С. 44-49.
64. Панкратов В.В. Многокритериальная оптимизация систем векторного управления
асинхронными электроприводами / В.В. Панкратов, Е.А. Зима // Электричество. 2002. №4.
С. 40-46.
65. Перспективы разработки и производства стандартных асинхронных двигателей
на предприятиях группы компаний «ВЭМЗ» / А.Э. Кравчик [и др.] // Электротехника.
2005. №5. С. 3-8.
66. Поляков В.Н Экстремальные характеристики системы АД-ПЧ с ШИМ /
406
В.Н. Поляков, Р.Т. Шрейнер, А.А.Таран // Электромеханические системы и комплексы:
межвузовский сборник науч. тр. / под ред. А.С. Сарварова. Магнитогорск: МГТУ, 2000.
Вып. 5. С. 201-208.
67. Поляков В.Н. Алгоритм численного решения задачи экстремального управления
асинхронным электроприводом при ограничениях по току и напряжению / В.Н. Поляков,
А.А.Таран, Р.Т. Шрейнер // Электротехника. 2001. №11. С. 45-49.
68. Поляков В.Н. Алгоритмы численного решения задачи экстремального
управления асинхронным электроприводом при ограничениях по току и напряжению /
В.Н. Поляков, А.А.Таран, Р.Т. Шрейнер И Электроприводы переменного тока: тр. XII
науч.-техн. конф. Екатеринбург: УГТУ-УПИ, 2001. С. 121-124.
69. Поляков В.Н. Асинхронные машины как объекты экстремального управления /
В.Н. Поляков // Электротехника. 2004. №9. С. 46-50.
70. Поляков В.Н. Математические модели двигателей постоянного тока для задач
управления: учеб, пособие / В.Н. Поляков, Р.Т. Шрейнер; под общ. ред. Р.Т. Шрейнера.
Екатеринбург: УГТУ, 1999. 162 с.
71. Поляков В.Н. Математические модели машин двойного питания как объектов
экстремального управления / В.Н. Поляков, Р.Т. Шрейнер // Электроприводы переменного
.тока: тр. XII науч.-техн. конф. Екатеринбург: УГТУ-УПИ, 2001. С. 62-66.
72. Поляков В.Н. Обобщение задач оптимизации установившихся режимов
электрических двигателей/ В.Н. Поляков, Р.Т. Шрейнер И Электротехника. 2005. №9.
С. 18-22.
73. Поляков В.Н. Оптимизация установившихся режимов асинхронизированной
машины / В.Н. Поляков // Электротехнические системы и комплексы: межвузовский сб.
науч. тр. Магнитогорск: МГТУ, 2006. Вып.12. С. 130-138.
74. Поляков В.Н. Синхронная машина с электромагнитным продольным
возбуждением как объект экстремального управления / В.Н. Поляков //
Электротехнические системы и комплексы: межвузовский сб. науч. тр. Магнитогорск:
МГТУ, 2005. Вып.10. С. 93-100.
75. Поляков В.Н. Состояние теории и практики оптимального управления
стационарными режимами электроприводов переменного тока с полупроводниковыми
преобразователями / В.Н. Поляков // Проблемы автоматизированного электропривода: тр.
III Международной (XIV Всероссийской) науч.-техн. конф, по автоматизированному
электроприводу, 12-14 сент. 2001 г. Нижний Новгород: НГТУ, 2001. С. 68-69.
76. Поляков В.Н. Частотно-регулируемый электропривод с повышенной
перегрузочной способностью / В.Н. Поляков, А.А.Таран, Р.Т. Шрейнер И Автоматизация и
407
прогрессивные технологии: тр. Ш Межотраслевой науч.-техн. конф., 11-13 нояб. 2002 Г.
Новоуральск: НГТИ, 2002. С. 226-230.
77. Поляков В.Н. Экстремальное управление асинхронным электроприводом при
ограничении тока и напряжения / В.Н. Поляков, А.А.Таран, Р.Т. Шрейнер //
Электротехника, электромеханика и электротехнологии: материалы науч.-техн. конф, с
международным участием. Новосибирск: НГТУ, 2003. С. 276.
78. Поляков В.Н. Экстремальные характеристики электромеханических систем с
двухзвенными преобразователями частоты / В.Н. Поляков, Р.Т. Шрейнер, А.А.Таран И
Вестник УГТУ-УПИ. Электромеханика и управляемые электромеханические системы.
2000. С. 316-325.
79. Принципы построения систем управления обобщенной машиной переменного
тока / И.Л. Локтева [и др.] // Автоматизированный электропривод / под общей ред.
И.И. Петрова, М.М. Соколова, М.Г. Юнькова. М.: Энергия, 1980. 408 с.
80. Пшеничный Б.Н. Численные методы в экстремальных задачах / Б.Н. Пшеничный,
Ю. М. Данилин. М.: Наука, 1975. 319 с.
81. Растригин Л.А. Системы экстремального управления / Л.А. Растригин. М.: Наука,
1974. 632 с.
82. Растригин Л.А. Современные принципы управления сложными объектами /
Л.А. Растригин. М.: Сов. радио, 1980. 232 с.
83. Режимы частотно-управляемых синхронных двигателей / А.М. Вейнгер [и др.] //
Электротехника. 1980. № 5. С. 34-37.
84. Розанов Ю.К. Электропривод и силовая электроника / Ю.К. Розанов,
С.Н. Флоренцев // Электротехника. 1997. №11. С. 7-12.
85. Сандлер А.С. Автоматическое частное управление асинхронными двигателями /
А.С. Сандлер, Р.С. Сарбатов. М.: Энергия, 1974. 328 с.
86. Сандлер А.С. Частотное управление асинхронными двигателями / А.С. Сандлер,
Р.С. Сарбатов. М.: Энергия, 1966.144 с.
87. Сили С. Электромеханическое преобразование энергии: пер. с англ. / С. Сили. М.:
Энергия, 1968. 376 с.
88. Сильвестер П. Метод конечных элементов для радиоинженеров и инженеров
электриков / П. Сильвестер, Р. Феррари. М.: Мир, 1986. 229 с.
89. Сипайлов Г.А. Электрические машины: Специальный курс / Г.А. Сипайлов,
Е.В. Кононенко, К.А. Харьков. М.: Высщ. шк., 1987. 287 с.
408
90. Системы подчиненного регулирования электроприводов переменного тока с
вентильными преобразователями / О.В. Слежановский [и др.]. М.: Энергоатомиздат, 1983.
256 с.
91. Страхов С,В. Переходные процессы в электрических цепях, содержащих машины
переменного тока / С.В. Страхов. М.; Л.: Госэнергоиздат, 1960. 247 с.
92. Табачник А.М. О законе частотного управления асинхронным двигателем /
А.М. Табачник // Электроэнергетика и автоматика. Кишинев: Штиинца, 1973. Вып. 17.
С. 74-79.
93. Таран А. А. Оптимизация стационарных режимов асинхронных электроприводов
на базе преобразователей частоты с широтно-импульсной модуляцией: автореф. дис. ...
канд. техн, наук / А.А. Таран. Екатеринбург, 2006. 24 с.
94. Теоретические основы электротехники: учебник для вузов: в 3 ч. Ч. 2 и 3:
Нелинейные электрические цепи. Электромагнитное поле / Г.И.Атабеков, С.Д. Купалян,
А.Б. Тимофеев, С.С. Хухриков; под ред. Г.И. Атабекова. 4-е изд., перераб. М.: Энергия,
1979.432 с.
95. Третьяков В.С. Оптимальное управление электроприводом транспортных средств
/ В.С. Третьяков, А.М. Вейнгер, Р.Т. Шрейнер // Электрооборудование и
автоматизированный электропривод автомобилей и дорожно-строительных машии. М.:
Моск, автомобильно-дорож. ин-т, 1979. С. 45-54.
96. Третьяков В.С. Оптимальное частотное управление синхронно-реактивными
двигателями при питании от источника ограниченной мощности / В.С. Третьяков,
Р.Т. Шрейнер // Труды / Моск, автомобильно-дорож. ин-т. М.: Моск, автомобильно-
дорож. ии-т, 1974. Выл. 93. С.53-56.
97. Третьяков В.С. Оптимальное частотное управление синхронным
электроприводом по минимуму тока / В.С. Третьяков, Р.Т. Шрейнер // Алгоритмизация и
автоматизация технологических процессов и промышленных установок: межвузовский сб.
науч. тр. Куйбышев, 1974. Вып. 5.С. 105-109.
98. Третьяков В.С. Экстремальное частотное управление синхронным
электроприводом механизмов с медленно изменяющейся нагрузкой / В.С. Третьяков,
Р.Т. Шрейнер // Сб. науч. тр. / ВНИИцеммаш. Тольятти, 1974. Вып. 17. С. 97-101.
99. Трехфазные асинхронные двигатели специальных конструктивных исполнений
для комплектных частотно-регулируемых приводов / В.А. Васильченко [и др.] //
Электротехника. 2005. №5. С. 42-47.
100. Трещев И.И. Методы исследования электромагнитных процессов в машинах
переменного тока / И.И. Трещев. Л.: Энергия, 1969. 235 с.
409
101. Уайт Д.С. Электромеханическое преобразование энергии: пер. с англ. /
Д.С. Уайт, Г.Х. Вудсон. М.; Л.: Энергия, 1964. 528 с.
102. Универсальный метод расчета электромагнитных процессов в электрических
машинах / А.В.Иванов-Смоленский, Ю.В. Абрамкин, А.И. Власов, В.А. Кузнецов. М.:
Энергоатомиздат, 1986. 216 с.
103. Управление асинхронным частотным электроприводом при ограничениях /
Р.Т. Шрейнер [и др.] // Асинхронный тиристорный электропривод. Свердловск: УПИ,
1971. С. 101-104.
104. Фильц Р.В. Дифференциальные уравнения напряжений насыщенной асинхронной
машины / Р.В. Фильц // Вопросы теории и регулирования электрических машин: науч,
записки Львовского политехнического института. Львов, 1963. С. 22-32.
105. Фильц Р.В. Дифференциальные уравнения напряжений насыщенных
неявнополюсных машин переменного тока / Р.В. Фильц // Изв. вузов. Электромеханика.
1966. №11. С. 1195-1203.
106. Фильц Р.В. Основные положения магнитно-нелинейной теории явнополюсной
синхронной машины / Р.В. Фильц, Л.И. Глухивский // Изв. вузов. Электричество. 1970. №6.
С. 30-34.
107 Фильц Р.В. Основы магнитно-нелинейной теории обобщенной явнополюсной
синхронной машины в фазных координатах / Р.В. Фильц, Л.И. Глухивский // Изв. вузов.
Электромеханика. 1973. №1. С. 17-28.
108. Фильц Р.В. Уточненный алгоритм расчета параметров насыщенной
явнополюсной синхронной машины во вращающихся прямоугольных координатах /
Р.В. Фильц, Н.Н. Лябук, А.С. Барладян // Регулируемый электропривод
высокоинерционных механизмов. Кишинев: Штиинца, 1980. С. 102-119.
109. Флоренцев С.Н. Современные и перспективные приборы силовой электроники /
С.И. Флоренцев //Автоматизированный электропривод в XXI веке: пути развития: тр. IV
Международной (XV Всероссийской) конференции по автоматизированному
электроприводу (ЭАП-2004, Магнитогорск, 14-17 сент. 2004 г.). Магнитогорск, 2004. 4.1.
С 38-51.
110. Формирование целесообразных режимов частотно-управляемых синхронных
двигателей при двухзонном регулировании скорости / А.М. Вейнгер [и др.] //
Электротехническая промышленность. Сер.: Электропривод. 1984. Вып. 1. С. 6-9.
111. Химмельблау Д. Прикладное нелинейное программирование / Д. Химмельблау.
М.: Мир, 1975.534 с.
410
112. Черноруцкий И.Г. Методы оптимизации в теории управления: учеб, пособие /
И.Г. Черноруцкий. СПб.: Питер, 2004. 256 с.
113. Шакарян Ю.Г. Асинхронизированные синхронные машины / Ю.Г. Шакарян. М.:
Энергоатомиздат, 1984.192 с.
114. Шакарян Ю.Г. Исследование установившегося режима асинхронного двигателя
при одновременном регулировании со стороны статора и ротора / Ю.Г. Шакарян,
А.А. Даланян // Оптимизация режимов работы систем электроприводов: сб. науч. ст.
Красноярск: КПИ, 1982. С. 84-88.
115. Шрейнер Р.Т. Анализ и синтез МДС несимметричных многофазных обмоток
электрических машин переменного тока / Р.Т. Шрейнер // Вестник УГТУ-УПИ.
Электромеханика и управляемые электромеханические системы. 2000. С. 296-315.
116. Шрейнер Р.Т. Асинхронные электроприводы с полупроводниковыми
преобразователями частоты (математическое моделирование, оптимизация, структуры
систем управления): автореф. дис.... д-ра техн, наук / Р.Т. Шрейнер. М., 1990. 39 с.
117. Шрейнер Р.Т. Бесконтактный тиристорный асинхронный электропривод с
частотным управлением по минимуму тока / Р.Т. Шрейнер, В.Н. Поляков, А.С. Воробьев //
Асинхронный тиристорный электропривод. Свердловск: УПИ, 1971. С. 98-101.
118. Шрейнер Р.Т. Бесконтактный широкорегулируемый асинхронный
электропривод переменного тока / Р.Т. Шрейнер, В.Н. Поляков // Вентильный
электропривод переменного тока. Кишинев: Штиинца, 1981. №9. С. 3-8.
119. Шрейнер Р.Т. Задачи экстремального частотного управления асинхронными
электроприводами / Р.Т. Шрейнер // Асинхронный тиристорный электропривод.
Свердловск: УПИ, 1971. С. 92-96.
120. Шрейнер Р.Т. К вопросу оптимизации режимов частотно-регулируемых
электроприводов при заданном графике нагрузки / Р.Т. Шрейнер, В.Н. Поляков //
Регулируемый электропривод высокоинерционных механизмов. Кишинев: Штиинца,
1980. С. 119-129.
121. Шрейнер Р.Т. К выбору законов частотного управления асинхронными
электроприводами / Р.Т. Шрейнер, В.Н. Поляков // Электроэнергетика и автоматика.
Кишинев: Штиинца, 1975. Выв. 23. С. 3-17.
122. Шрейнер Р.Т. К расчету оптимального по минимуму потерь закона частотного
управления асинхронным электродвигателем / Р.Т. Шрейнер, В.Н. Поляков //
Асинхронный тиристорный электропривод. Свердловск: УПИ, 1971. С. 96-98.
123. Шрейнер Р.Т. Математическая модель машины переменного тока с
последовательным соединением обмоток статора и ротора / Р.Т. Шрейнер // Вестник
411
УГТУ. Современные проблемы энергетики, электромеханики и электротехнологии. 4.2
Электротехника и электротехнология. 1995. С. 204-209.
124. Шрейнер Р.Т. Математическое моделирование электроприводов переменного
тока с полупроводниковыми преобразователями частоты / Р.Т. Шрейнер. Екатеринбург;'
УрО РАН, 2000. 654 с. I
125. Шрейнер Р.Т. Оптимальное управление намагничивающими силами'
несимметричных многофазных обмоток машин переменного тока / Р.Т. Шрейнер // !
Профессионально-педагогическое образование: сб. науч, тр.: в 2 ч. Ч. 2: Исследования в
предметных и методических областях. Екатеринбург: Урал. гос. проф.-пед. ун-т, 1995. '
С. 82-91.
126. Шрейнер Р.Т. Прогнозирующее релейно-векторное управление активными
преобразователями частоты в системах электропривода переменного тока / Р.Т. Шрейнер
[и др.] // Электротехника. 2004. №10. С. 43-50.
127. Шрейнер Р.Т. Системы подчиненного регулирования электроприводов. Часть 1:
Электроприводы постоянного тока с подчиненным регулированием координат: учеб. '
пособие для вузов / Р.Т. Шрейнер. Екатеринбург: Урал. гос. проф.-пед. ун-т, 1997. 279 с.
128. Шрейнер Р.Т. Увеличение перегрузочной способности частотно-регулируемого
электропривода при ограничении мощности преобразователя / Р.Т. Шрейнер, А.А. Таран,
В.Н. Поляков // Проблемы автоматизированного электропривода; тр. III Международной
(XIV Всероссийской) науч.-техн. конф, по автоматизированному электроприводу, 12-14
сент. 2001 г. Нижний Новгород: НГТУ, 2001. С. 105-106.
129. Шрейнер Р.Т. Управление намагничивающими силами несимметричных
многофазных обмоток машин переменного тока / Р.Т. Шрейнер // Электроприводы
переменного тока: докл. X науч.-техн. конф. ЭППТ-95 (14-17 марта 1995 г.).
Екатеринбург: УГТУ, 1995. С. 128-131.
130. Шрейнер Р.Т. Экстремальное частотное управление асинхронными
электродвигателями / Р.Т. Шрейнер, В.Н. Поляков//Электротехника. 1973. №9. С. 10-13.
131. Шрейнер Р.Т. Оптимальное частотное управление асинхронными
электроприводами / Р.Т. Шрейнер, Ю.А. Дмитренко. Кишинев: Штиинца, 1982. 224 с.
132. Шубенко В.А. Оптимальное частотно-токовое управление асинхронным
электроприводом / В.А. Шубенко, Р.Т. Шрейнер, В.А. Мищенко // Изв. вузов. Горный
журнал. 1970. №1. С. 161-162.
133. Шубенко В.А. Оптимизация частотно-управляемого асинхронного
электропривода по минимуму тока / В.А. Шубенко, Р.Т. Шрейнер, В.А. Мищенко //
Электричество. 1970. №9. С. 23-26.
412
134. Шубенко В.А. Расчет характеристик асинхронного двигателя при одном
экстремальном частотном управлении / В.А. Шубенко, Р.Т. Шрейнер, В.Н. Поляков //
Труды/УПИ им. С.М. Кирова. Свердловск: УПИ, 1971. Вып. 192. С. 40-48.
135. Шубенко В: А. Частотно-управляемый асинхронный электропривод с
оптимальным регулированием скольжения / В.А. Шубенко, Р.Т. Шрейнер, В.А. Мищенко
// Изв. вузов. Электромеханика. 1970. №б. С. 676-681.
136. Шутько В.Ф. Уравнения динамики электрических машин и методы их решения:
учеб, пособие / В.Ф. Шутько. Екатеринбург: ИПК УГТУ, 1999. 155 с.
137. Электрические машины / Т.Н. Петров, Н.В. Горохов, Ф.А. Горяйнов,
М.В. Липковский, Е.В. Нитусов, П.С. Сергеев; под ред. Г.Н. Петрова. М.: Гос.
энергетическое изд-во, 1940.4.1. 663 с.
138. Энергосберегающий частотно-регулируемый электропривод трамвая “Спектр” /
В.К. Кривовяз [и др.] // Вестник УГТУ-УПИ. Электромеханика и электромагнитные
преобразователи энергии и управляемые электромеханические системы. 4.1: Общие
вопросы электрических машин и трансформаторов. Машино-вентильные системы.
Вопросы диагностики. 2003. №5 (25). С. 227-233.
139. Эпштнейн И.И. Автоматизированный электропривод переменного тока /
И.И. Эпштнейн. М.: Энергоиздат, 1982.192 с.
140. Янко-Триницкий А.А. Уравнения переходных процессов асинхронного двигателя
и их решения / А.А. Янко-Триницкий//Электричество. 1951. №3. С. 18-25.
141. Deepak D. Low-Stress Switching for Efficiency / D. Deepak // IEEE Spectrum. 1996.
December. P. 30-33.
142. Fukunda S.Y. Constant margin-cengle control of commutatorless motor using
microcomputer / S.Y. Fukunda, S. Sasoka// IEEE Trans. Ind. Appl. 1987. P. 855.
143. Holtz J. Pulsewidth modulation - a survey / J. Holtz // Proc. Of the PESC’92.
P.11-18.
144. Richter W. Microprocessor controlled inverter-fed synchronous motor drive I
W. Richter // IEEE. 2. Int. Conf. On Electrical Variable Speed Drives. London. 1979. P. 161.
145. Salon S.I. Finite elemeht analysis of electrical machines / S.I.Salon // Kluwer Academic
Publishers. Doston/London/Dordrecht. 1955. 247 p.
413
ОГЛАВЛЕНИЕ
Предисловие..............................................3
Глава 1. Математические модели электрических машин как
объектов управления......................................9
1.1. Метод описания математических моделей электрических машин
как объектов управления..................................9
1.2. Математические модели машин переменного тока.......24
1.2.1. Модель обобщенной машины переменного тока.....25
1.2.2. Модели асинхронной машины с короткозамкнутым
ротором..............................................35
1.2.3. Модели синхронной машины с продольно-поперечным
электромагнитным возбуждением........................39
1.2.4. Модели синхронной машины с продольным
электромагнитным возбуждением .......................52
1.3. Математические модели машин постоянного тока.......57
1.3.1. Общие уравнения машины постоянного тока.......57
1.3.2. Уравнения обобщенной модели машины постоянного
тока в неподвижной системе координат.................68
1.3.3. Модели коллекторной машины постоянного тока с
произвольной степенью компенсации реакции якоря и
сдвигом щеток с геометрической нейтрали..............71
1.3.4. Модель некомпенсированной машины постоянного тока .77
1.3.5. Модель компенсированной машины постоянного тока ... 79
1.4. Математические модели вентильных машин.............82
1.4.1. Модель вентильной машины с компенсационной и
демпферной обмотками.................................82
1.4.2. Модель некомпенсированной вентильной машины...93
1.5. Особенности учета насыщения магнитной цепи в математических
моделях электрических машин как объектов управления.....97
1.5.1. Основные допущения............................97
1.5.2. Учет насыщения главной магнитной цепи в моделях
явнополюсных машин...............................99
1.5.3. Учет насыщения главной магнитной цепи в моделях
неявнополюсных машин..................................108
414
Глава 2. Обобщенные постановки задач экстремального
управления электрическими двигателями....................112
2.1. Формализация технологической задачи................ 113
2.2. Обобщенная модель силовой части электропривода......116
2.3. Условия выполнения технологической задачи
электроприводом...................................... 118
2.4. Постановка задач экстремального управления
электроприводом.........................................120
2.5. Особенности задач экстремального управления.........127
2.6. Примеры преобразований математических моделей и постановок
задач к минимальной размерности по управлению...........133
2.7. Классификация математических моделей основных типов
электрических двигателей по числу степеней свободы и
размерности вектора управлений..........................137
2.8. Условия существования решения задачи экстремального
управления...............................................140
Глава 3. Характеристики электрических двигателей как объектов
экстремального управления.........................144
3.1. Обобщенная проблемно-ориентированная модель электрического
двигателя для задач оптимизации..........................144
3.2. Обобщенная машина переменного тока как объект
экстремального управления................................146
3.2.1. Уравнения установившегося режима обобщенной машины
переменного тока.................................146
3.2.2. Модели обобщенной машины переменного тока для задач
оптимизации...........................................149
3.2.3. Функции качества обобщенной машины переменного
тока..................................................156
3.2.4. Анализ функций качества обобщенной машины
переменного тока......................................159
3.3. Асинхронизированный синхронный двигатель как объект
экстремального управления................................162
3.3.1. Модели асинхронизированного синхронного двигателя
для задач оптимизации.................................162
3.3.2. Характеристики асинхронизированного синхронного
двигателя.............................................168
3.4. Асинхронный двигатель с короткозамкнутым ротором как объект
экстремального управления................................169
3.4.1. Модели асинхронного двигателя с короткозамкнутым
ротором для задач оптимизации....................169
415
3,4.2. Функции качества и характеристики асинхронного
двигателя с короткозамкнутым ротором..................171
3.5. Синхронные двигатели как объекты экстремального
управления...............................................173
3.5.1. Уравнения установившегося режима синхронного двигателя
с продольно-поперечным электромагнитным
возбуждением.........................................173
3.5.2. Модели синхронного двигателя с продольно-поперечным
электромагнитным возбуждением для задач
оптимизации..........................................174
3.5.3. Функции качества синхронного двигателя с продольно -
поперечным электромагнитным возбуждением.............. 176
3.5.4. Анализ характеристик синхронного двигателя с продольно-
поперечньгм электромагнитным возбуждением............. 178
3.5.5. Модели синхронного двигателя с продольным
электромагнитным возбуждением для задач
оптимизации..........................................181
3.5.6. Анализ характеристик синхронного двигателя с
продольным электромагнитным возбуждением..............184
3.6. Вентильные двигатели как объекты экстремального
управления................................................186
3.6.1. Модели вентильного двигателя при произвольной степени
компенсации реакции якоря.............................186
3.6.2. Функции качества вентильного двигателя с произвольной
степенью компенсации реакции якоря....................190
3.6.3. Характеристики вентильного двигателя с произвольной
степенью компенсации реакции якоря.................. 191
3.6.4. Модель и характеристики некомпенсированного
вентильного двигателя.................................196
3.7. Коллекторные двигатели постоянного тока как объекты
экстремального управления.................................200
3.7.1. Модель обобщенного коллекторного двигателя постоянного
тока для задач экстремального управления..............200
3.7.2. Функции качества коллекторного двигателя постоянного
тока..................................................201
3.7.3. Модель некомпенсированного двигателя постоянного тока
для задач оптимизации.................................202
3.7.4. Модель компенсированного двигателя постоянного тока
для задач оптимизации.................................203
3.7.5. Характеристики компенсированного двигателя постоянного
тока..................................................205
416
Глава 4. Вычислительные аспекты решения задач
экстремального управления электрическими
двигателями.....................................207
4.1. Общие положения и типы задач оптимизации режимов
электрических двигателей................................207
4.2. Методы решения задач экстремального управления
электрическими двигателями..............................211
4.2.1. Выбор методов решения задач оптимизации при отсутствии
ограничений на управляющие воздействия..............211
4.2.2. Выбор метода решения задач оптимизации с ограничением
управляющих воздействий.............................218
4.3. Выбор критериев оптимизации и ограничений.........219
Глава 5. Экстремальное управление обобщенной машиной
переменного тока................................223
5.1. Режимы управления обобщенной машины переменного тока
по минимуму потерь энергии..............................223
5.1.1. Задача минимизации потерь энергии без ограничений .. .223
5.1.2. Задача минимизации потерь энергии при
постоянном потоке..............................233
5.1.3. Задача минимизации потерь энергии с ограничением
реактивной мощности.................................240
5.1.4. Задача минимизации потерь энергии при постоянном
потоке и ограничении реактивной мощности............244
5.1.5. Сравнительная оценка законов управления по минимуму
потерь энергии......................................248
5.2. Задачи минимизации токов обобщенной машины........249
5.2.1. Постановки задач.............................249
5.2.2. Законы управления по минимуму тока...........251
5.2.3. Сравнительная оценка законов управления по минимуму
тока................................................258
Глава 6. Экстремальное управление асинхронизированным
двигателем......................................263
6.1. Задача минимизации потерь энергии без ограничений.264
6.2. Задача минимизации реактивной мощности обмотки статора при
ограничении тока ротора.................................274
6.3. Задача управления асинхронным двигателем при отсутствии
потребления реактивной мощности от источника питания
обмотки статора.........................................279
417
Глава 7. Экстремальное управление асинхронным двигателем
с короткозамкнутым ротором.............................284
7.1. Задача минимизации потерь энергии на безусловный
экстремум...............................................284
7.2. Оценка эффективности режима минимальных потерь
энергии.................................................290
7.3. Задача минимизации тока статора на безусловный экстремум.. 293
7.4. Экстремальное управление моментом асинхронного двигателя
при ограничении напряжения и тока статора..............297
7.5. Эффективность экстремального управления моментом
асинхронного двигателя при ограничении напряжения и тока
статора................................................305
Глава 8. Экстремальное управление синхронным двигателем
с продольно-поперечным электромагнитным
возбуждением...........................................310
8.1. Задачи минимизации потерь энергии без ограничений.....310
8.2. Задача минимизации потерь энергии при постоянном потоке...322
8.3. Задача минимизации потерь энергии с ограничением реактивной
мощности...............................................328
8.4. Задача минимизации потерь энергии с ограничением потока и
реактивной мощности.....................................332
8.5. Эффективность законов управления по минимуму потерь
энергии.................................................337
8.6. Задача минимизации тока статора при постоянном потоке.338
Глава 9. Экстремальное управление синхронным двигателем
с продольным электромагнитным возбуждением.......345
9.1. Задачи минимизации потерь энергии без ограничений.....345
9.2. Режим минимальных потерь энергии при постоянном потоке...352
9.3. Задача минимизации потерь энергии с ограничением реактивной
мощности..............................................357.
9.4. Эффективность законов управления по минимуму потерь...362
9.5. Задача минимизации тока статора при постоянном потоке.364
Глава 10. Экстремальное управление вентильными
двигателями............................................369
10.1. Задача управления по минимуму потерь энергии
418
компенсированным вентильным двигателем.............369
10.2. Управление по минимуму потерь энергии при постоянном
потоке.................................................378
10.3. Управление по минимуму потерь энергии некомпенсированным
вентильным двигателем..................................384
10.4. Управление по минимуму потерь энергии при постоянном
потоке некомпенсированным вентильным двигателем........392
10.5. Эффективность законов управления по минимуму потерь
энергии................................................397
Заключение............................................398
Библиографический список..............................402
419
Научное издание
Поляков Владимир Николаевич
Шрейнер Рудольф Теодорович
ЭКСТРЕМАЛЬНОЕ УПРАВЛЕНИЕ
ЭЛЕКТРИЧЕСКИМИ ДВИГАТЕЛЯМИ
Редактор JIJO, Козяйчева
ИД № 06263 от 12. 11.2001 г..
Подписано в печать 14. 11. 2006
Бумага типографская Офсетная печать
Уч.-изд. л. 23,6 Тираж 300 Заказ 247
Формат 60x84 1/16
Усл. печ. л. 24,43
Цена “С”
Редакционно-издательский отдел ГОУ ВПО УГТУ-УПИ
620002, Екатеринбург, ул. Мира, 19
ЗАО «Наука-сервис»
620002, Екатеринбург, ул. Мира, 19