/






















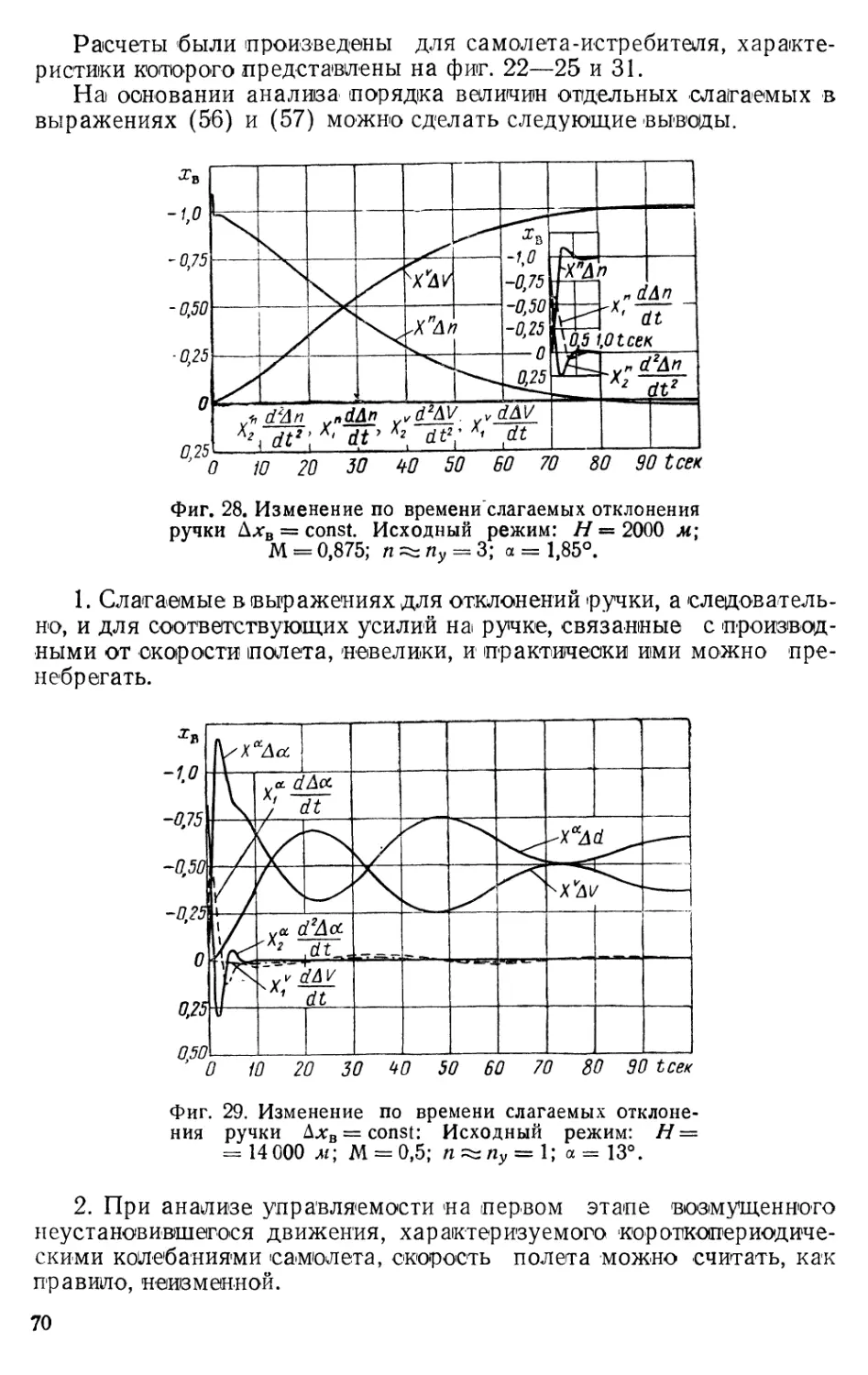
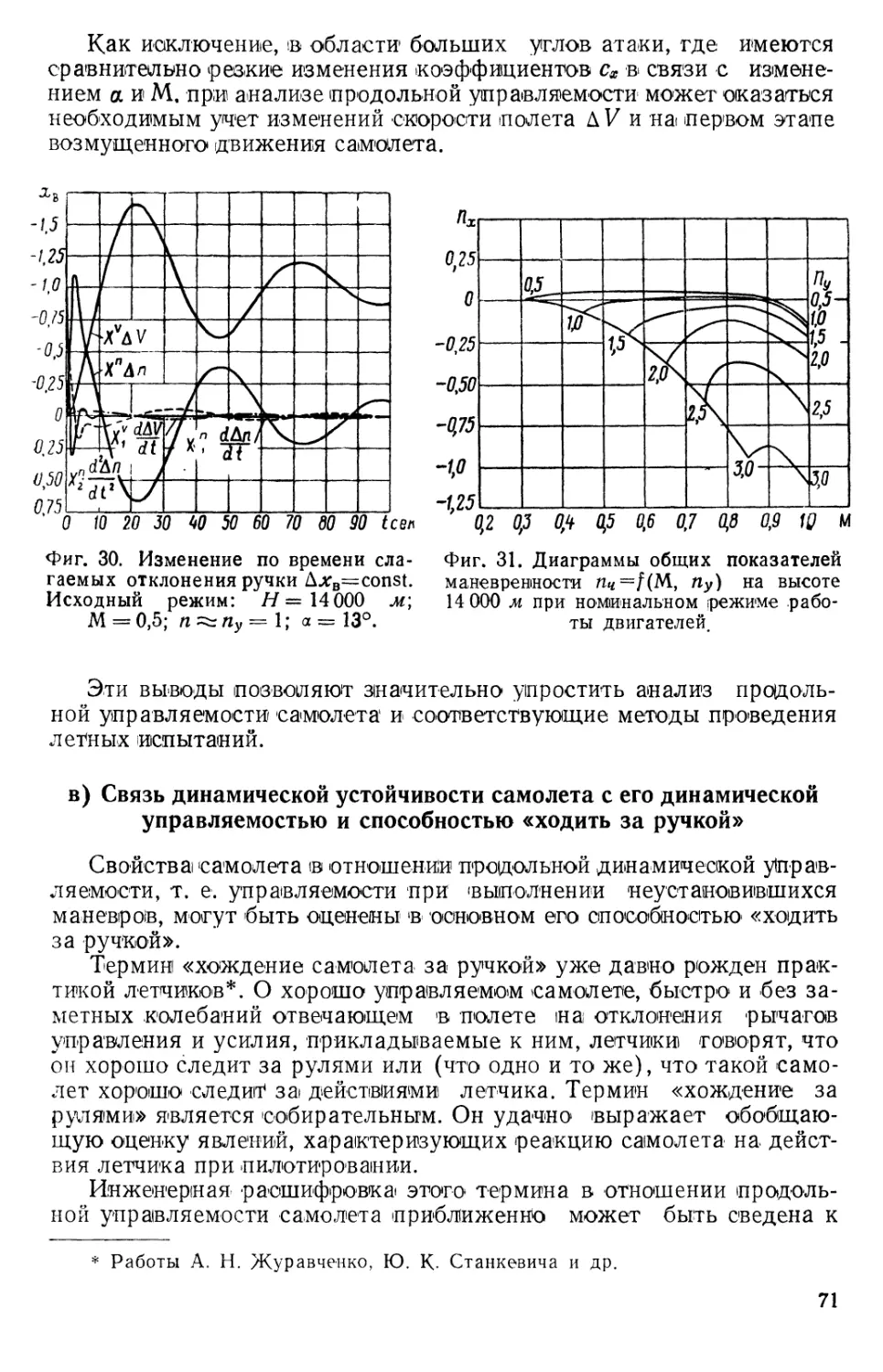
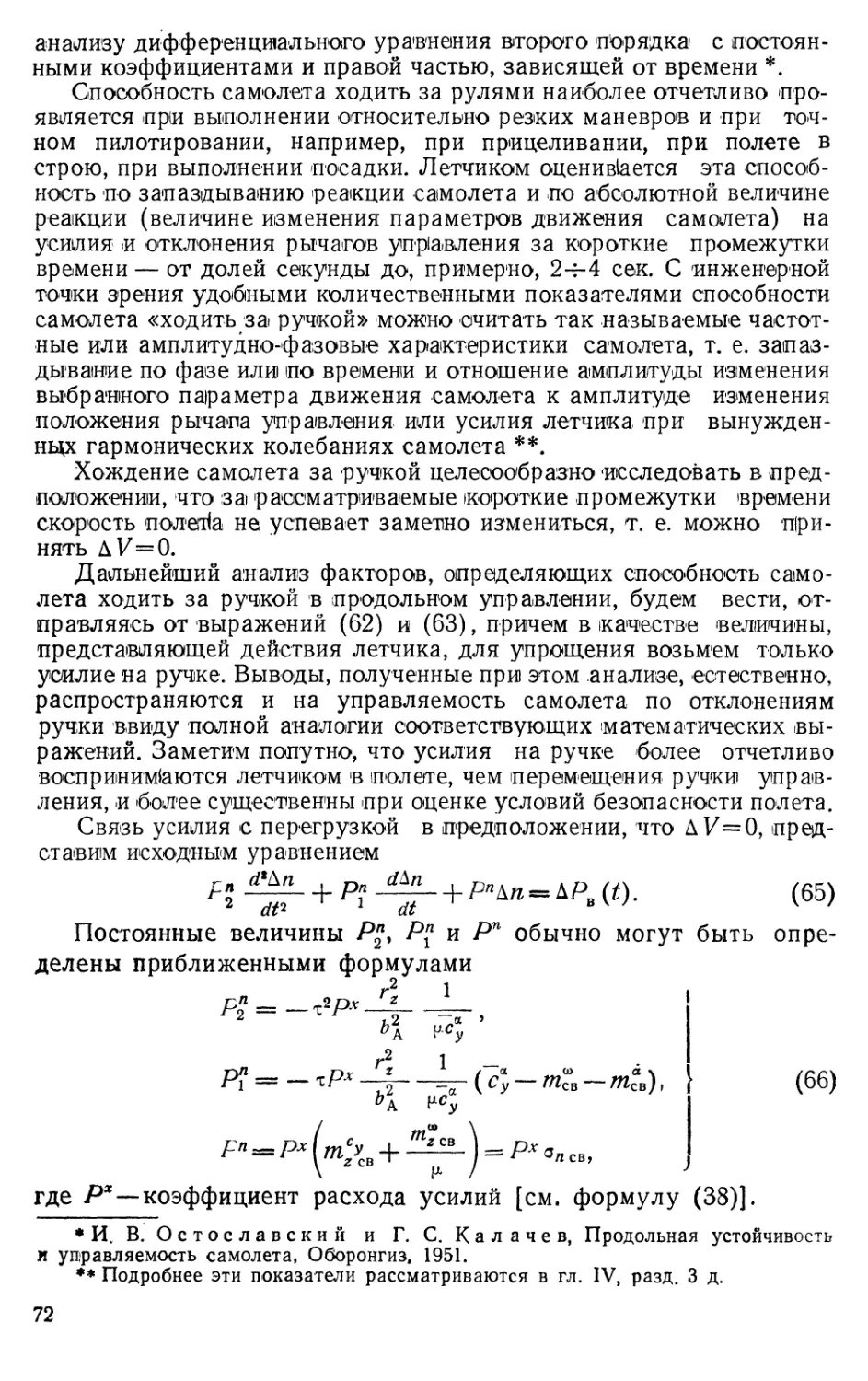
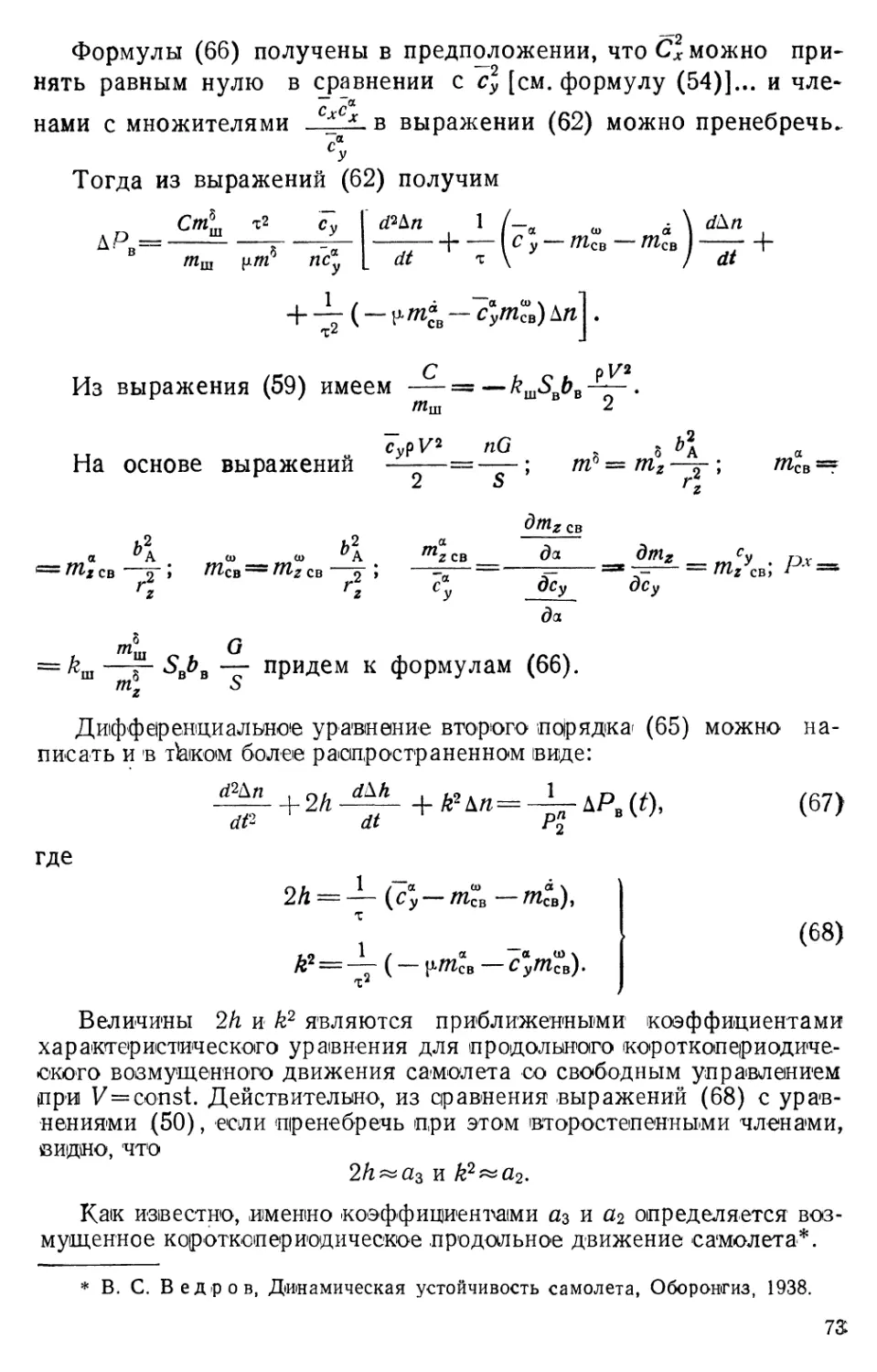























Текст
Г. С. КАЛАЧЕВ
ПОКАЗАТЕЛИ МАНЕВРЕННОСТИ,
УПРАВЛЯЕМОСТИ
И УСТОЙЧИВОСТИ САМОЛЕТОВ
О К Л РО М Г ИЗ 19 58
Г. С. КАЛАЧЕВ
ПОКАЗАТЕЛИ МАНЕВРЕННОСТИ,
УПРАВЛЯЕМОСТИ
И УСТОЙЧИВОСТИ САМОЛЕТОВ
ГОСУДАРСТВЕННОЕ
ИЗДАТЕЛЬСТВО ОБОРОННОЙ ПРОМЫШЛЕННОСТИ
Москва 1958
В работе дается обоснование систем показателей маневрен-
ности, управляемости и устойчивости самолетов, пригодных для
практического использования. Эти показатели позволяют про-
извести достаточно полную количественную оценку указанных
характеристик самолета как при его проектировании, так и при
летных испытаниях.. >
Книга рассчитана на авиационных инженеров, научных ра-
ботников, преподавателей, аспирантов и студентов авиацион-
ных вузов. <
Редактор С. Г. Бошенятов
Зав. редакцией инж. Е. В. Латынин
ВВЕДЕНИЕ
Как известно, характеристики устойчивости самолета в значи-
тельной мере определяют его управляемость, а характеристики
управляемости оказывают существенное влияние на реально исполь-
зуемые маневренные возможности самолета, обусловленные его
аэродинамикой (полярой), мощностью двигателей и прочностью
конструкции. Однако в специальной журнальной и учебной литера-
туре связь между устойчивостью, управляемостью и маневренностью
самолета рассматривается еще недостаточно полно и нередко по-
верхностно, а иногда эта связь и совсем не учитывается.
Другой, еще более существенный недостаток применяемых ме-
тодов анализа и оценки устойчивости, управляемости и маневрен-
ности самолета заключается в том, что обычно рассматриваются те
или иные совокупности частных показателей, не охватывающие
в целом движение самолета и его пилотирование при любом воз-
можном в полете маневре или эволюции. Так, например, для оценки
маневренности самолета применяются показатели, количественно
характеризующие лишь отдельные избранные фигуры или маневры
(виражи, разгоны и торможения по горизонтали, пикирования и
горки в вертикальной плоскости и т. п.). Между тем, движение
самолета в условиях реального воздушного боя не может быть
исчерпано набором «академических» маневров и фигур пилотажа.
Оценка характеристик устойчивости и управляемости самолета
в основном связывается с обеспечением равновесия и балансировки
самолета при различных режимах установившегося прямолинейного
или криволинейного полета. Однако, кроме этих режимов, важнейшее
значение имеют еще поведение самолета и его пилотирование
в процессе выполнения разнообразных неустановившихся движений,
далеко не охватываемых применяемыми частными показателями.
Поэтому не случайно при рассмотрении и оценке маневренности,
управляемости и устойчивости самолетов в последнее время все
чаще и чаще стали применять, наряду с частными, и некоторые
общие показатели, пригодные для характеристики отдельных
качеств самолета при любом маневре *.
♦Б. Т, Гор о щен ко, Динамика полета самолета, Оборонлиз, 1954.*
В. С. Пышно в, Динамические свойства самолета, Оборонгиз, 1951. И. В. Осто-
славский и Г. С. Калачев, Продольная устойчивость и управляемость
самолета, Оборонгиз, 1951.
3
К числу такого рода общих показателей маневренности можно
отнести кривые максимально возможных для данного самолета
перегрузок по нормали и касательной к траектории полета в зави-
симости от скорости и высоты полета. Общими, показателями
устойчивости и управляемости могут служить, в частности, периоды
и коэффициенты затухания собственных колебаний самолета, балан-
сировочные кривые отклонений рычагов управления рулями и уси-
лий, прикладываемых к ним летчиком в зависимости от тех или иных
параметров движения самолета.
Представляется целесообразным попытаться обобщить работы
по применению такого рода показателей для анализа маневренности,
управляемости и устойчивости самолета.
Главной задачей настоящей работы является обоснование
системы общих показателей маневренности, управляемости и устой-
чивости, позволяющей дать достаточно полную и общую характе-
ристику этих качеств самолета и, в случае необходимости, опреде-
лять любые частные их показатели как при установившихся, так и
при неустановившихся режимах полета.
Решение поставленной задачи потребовало рассмотрения и крат-
кого изложения вопросов общей теории маневренности, устойчивости!
и управляемости самолета, пилотируемого летчиком.
Вопросы устойчивости и управляемости самолета, пилотируемого
автопилотом или другими автоматическими устройствами, в данной
работе не рассматриваются.
В работе не рассматриваются способы расчета при проектирова-
нии самолета различных рекомендуемых для использования показа-
телей, поскольку эти расчеты можно выполнить известными метода-
ми, отправляясь от приводимых нами аналитических выражений.
Экспериментальным же методам определения рекомендуемых пока-
зателей (из летных испытаний) посвящена последняя глава.
В нашей работе мы не касались также выбора непосредственно
количественных величин всех рассматриваемых показателей устой-
чивости, управляемости и маневренности различных типов само-
летов. По большому числу показателей, которые мы рассматриваем,
количественные нормы и рекомендации можно найти как в выпусках
«Руководства для конструкторов», так и в других работах, обосно-
вание же количественных рекомендаций по впервые предлагаемым
нами показателям может служить темой специальной работы, вы-
ходящей за рамки поставленной здесь задачи.
Автор выражает глубокую признательность профессорам
И, В. Остославскому, В. С. Пышнову, члену-корреспонденту Акаде-
мии наук СССР А. И. Макаревскому и доктору технических наук
В. Н. Матвееву за просмотр первого варианта рукописи и ценные
советы и указания, использованные автором при окончательной
подготовке работы к печати.
ПРИНЯТЫЕ ОБОЗНАЧЕНИЯ
S— площадь крыла самолета;
I— размах крыла;
&а—длина средней аэродинамической хорды крыла (САХ);
SB—площадь руля высоты;
Ъв—хорда руля высоты;
5Э—площадь элеронов;
Ьэ—лорда элеронов;
Зн—площадь руля направления;
Ън—хорда руля направления;
£г,о— плечо горизонтального' оперения относительно центра тя-
жести самолета;
хв—линейное продольное отклонение ручки (или штурвала)
управления рулем высоты от ее нейтрального положения;
хэ—линейное поперечное отклонение ручки (или штурвала)
управления элеронами от ее нейтрального положения;
хн—линейное отклонение педалей управления рулем направле-
ния от их нейтрального положения;
хт—линейная координата центра тяжести: самолета от носка
САХ;
хт— относительное положение центра тяжести самолета в долях
или процентах длины САХ;
Xg, yg> zg—координаты центра тяжести самолета относительно непо-
движной земной системы осей координат, начало которой
располагается на уровне моря;
H=yg— высота полета самолета;
SB, &э> &н—углы отклонения соответственно руля высоты, элеронов и
руля направления от их нейтральных положений;
тв, тэ, тн—углы отклонения триммеров соответственно руля высоты,
1 d*°
~ 57,3 dx
элеронов и руля направления;
коэффициент передачи между углом отклонения рулевой
поверхности и линейным перемещением соответствующего
рычага управления;
^ш.в> ^ш.э, £ш.н—коэффициенты передачи соответственно для продольного,
поперечного и путевого управлений самолетом;
ос—'угол атаки самолета;
3 — угол скольжения самолета;
<р—угол между направлением тяги двигателей и продольной
осью самолета, к которой отнесены углы атаки;
ф, 0, f—три последовательных угла поворота при переходе от не-
подвижной земной системы осей координат к подвижной
скоростной системе осей координат;
ф—угол поворота проекции вектора скорости полета на гори-
зонтальную плоскость;
О—угол наклона траектории полета к горизонту;
7—угол крена скоростной системы осей координат;
5
Ф1, 7г—ТРИ последовательных угла поворота при переходе от не-
подвижной земной системы осей координат к подвижной,
жестко связанной с самолетом системе осей координат * *;
Ф1—угол рысканья;
fl—угол тангажа;
71—угол крена самолета;
аг.о—угол атаки горизонтального оперения;
е—угол скоса потока у горизонтального оперения;
5в.т> ^дв> Ап.щ, ^шасси—условные обозначения параметров, характеризующих соот-
ветственно положение воздушных тормозов, режим работы
двигателей, положения посадочных щитков и шасси;
G и т—вес и масса самолета;
lx, ly, Iz, Ixy— моменты инерции самолета относительно скоростных или
_____________ жестко связанных с самолетом осей координат;
rz = I/ “—радиус инерции самолета относительно поперечной оси;
. 1у , 1Ху
---/2~ ’ Гу==—/Г"’ 1ху————относительные моменты инерции самолета;
т — т — т
4
g—ускорение свободного падения тел в пустоте;
Р—сила тяги двигателей;
V—истинная скорость полета самолета;
Ипр—скорость полета по прибору;
М—число М полета;
q— скоростной напор;
X — cxSq—сила лобового сопротивления;
Y = CySq— подъемная сила;
Z = czSq—боковая аэродинамическая сила;
Р—результирующая аэродинамических сил, действующих на
__ самолет, и тяги двигателей;
Рх = cxSqt Ру == CySqt Rz = czSq— проекции результирующей аэродинамических
сил на оси скоростной системы координат;
R
п = — — перегрузка самолета;
Рх Ру Рг
пх = ~ * Пи = —— —слагаемые
О G G
системы координат;
перегрузки по осям скоростной
пхъ nyi> nzi—слагаемые перегрузки по жестко связанным с самолетом
осям координат;
Ру1 — Су^Я— проекция результирующей силы R на нормальную ось са-
молета Оу\;
<ох, о)у, —проекции вектора угловой скорости вращения на оси ско-
ростной системы координат;
Чгь шуь —проекции вектора угловой скорости вращения самолета на
оси жестко' связанной с самолетом системы координат;
MXt Му, Mz— моменты аэродинамических сил относительно скоростных
или жестко связанных с самолетом осей координат;
тх = — коэффициент аэродинамического момента относительно по-
oql
перечной оси самолета Охг,
* Индекс «1», указывающий, что величина параметра относится к жестко свя-
занной с самолетом системе осей координат, в тексте часто после соответствующих
оговорок отбрасывается.
6
My
ту—-^~7—коэффициент аэродинамического момента относительно иор-
Sql
мальной оси самолета Огл;
Mz
mz = •-— коэффициент аэродинамического момента относительно по-
Sql
перечной оси самолета Oz\,
Мш— шарнирный момент рулевой поверхности;
=------— коэффициент шарнирного момента рулевой поверхности
Spbpq
(Sp и bp—площадь и хорда руля);
р— плотность воздуха;
р— атмосферное давление;
7°—температура воздуха по абсолютной шкале;
7— период собственных колебаний самолета;
7В— период вынужденных колебаний;
2к
частота вынужденных колебаний;
7В
t— время;
2m
т = -с "— единица времени при приведении уравнений продольного
ро V
движения самолета к безразмерной форме;
т
т = т~— единица времени при приведении уравнений бокового дви-
ро V
жения самолета к безразмерной форме;
2m
у- = ——— коэффициент относительной плотности самолета при ана-
pS&A
лизе его продольной устойчивости и управляемости;
2m
у- = —-——коэффициент относительной) плотности самолета при анали-
ро/
зе его боковой устойчивости и управляемости;
е*. nvxt и т. п. — частные производные по параметру, указываемому
а дсу у дп>х
верхним индексом, например, с = — , пх = ----,
у да дУ
.2
т’ —w-
1 Л
п№=т
m
ь2 Ь2 . • ь2
м _А , = тшг —, та = т* —— и т. д. — условные
2 r2z z г2 г2
обозначения;
--й ту
т*у = —— ит. д. — условные обозначения;
/у
х= ——коэффициент расхода продольных отклонений ручки;
С/Ху
D V В » л «
Р' = ——коэффициент расхода продольных усилий на ручке;
UXj
лэ» хн— коэффициенты расхода линейных отклонений ручки (вбок)
и педалей;
Рг3 и Pzn—коэффициенты расхода усилий на ручке (поперечных) и на
педалях.
7
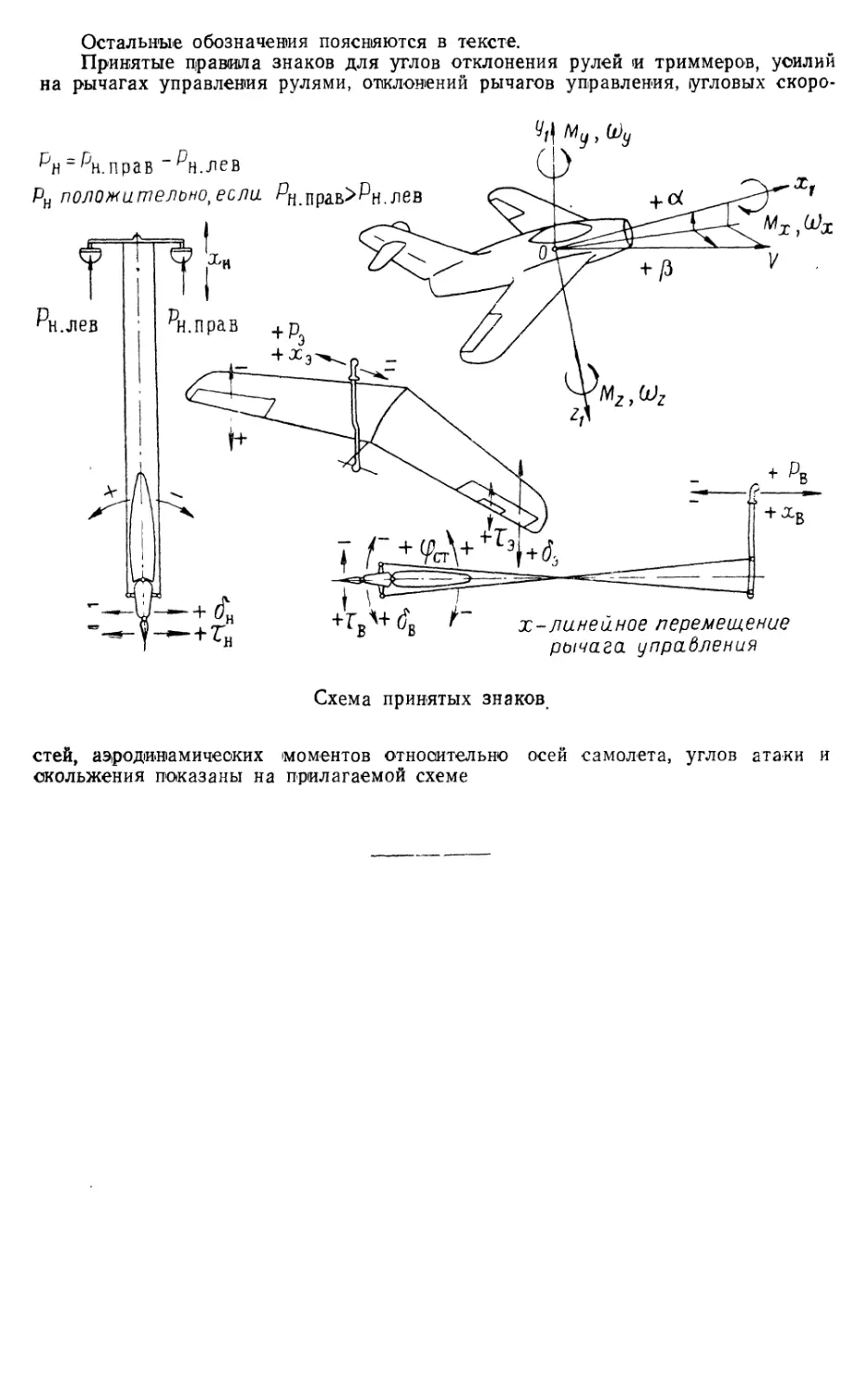
Остальные обозначения поясняются в тексте.
Принятые правила знаков для углов отклонения рулей и триммеров, усилий
на рычагах управления рулями, отклонений рычагов управления, угловых скоро-
Схема принятых знаков.
стей, аэродинамических
скольжения показаны на
моментов относительно
прилагаемой схеме
осей самолета, углов атаки и
I. МАНЕВРЕННОСТЬ САМОЛЕТА
1. ОСНОВНЫЕ ПОЛОЖЕНИЯ
Прежде всего необходимо условиться о содержании понятия «ма-
невренность самолета».
20—30 лет назад понятие маневренности самолета сводилось по
существу к его «поворотливости»; так, например, давалось опреде-
ление маневренности как «способности самолета совершать в опре-
деленный промежуток времени ту или иную эволюцию, предпискан-
ную самолету данного типа тактико-техническими требованиями» *.
Считали, что самолет обладает достаточной маневренностью, если
время и пространство, потребные для выполнения фигур высшего
пилотажа, малы.
Часто' неправильно противопоставлялись понятия скоростного
и маневренного истребителей: считали, что создание высокоскорост-
ного самолета обязательно связано с ухудшением его маневрен-
ности, поскольку повышение скоростей приводило к увеличению
радиусов и времени выполнения фигур пилотажа. Однако опыт
Великой Отечественной войны 1941 —1945 гг. опроверг это представ-
ление. Практика показала, что скоростной истребитель, обладая
большей скоростью, чем так называемый маневренный истребитель,
имеет перед ним весьма существенное преимущество, а именно,
инициативу нападения в воздушном бою. Благодаря этому преиму-
ществу скоростной истребитель, несмотря на относительно большее
время выполнения- и большие радиусы пространственных фигур,
обычно! выходил победителем из воздушного боя с более тихоход-
ным, но и более поворотливым истребителем.
В свете сказанного правильнее определение маневренности само-
лета «...как его способности к быстрому изменению- направления, вы-
соты или скорости полета». В ряде работ, где также указывалось,
что маневренность самолета зависит от его способности получать по
воле летчика тангенциальные и центростремительные ускорения.
В. Ф. Болотниковым и В. Н. Матвеевым в 1944—1946 гг. было
предложено расширить понятие маневренности, дополнительно
включив в него в качестве показателей максимальные и минималь-
ные скорости, а также максимальную скорость набора высоты
* Справочник авиаконструктора, т. I. ЦАГИ. 1937.
9
Vy max. В. H. Матвеевым указывалось при этом, что в качестве
показателей маневренности могут рассматриваться также угловые
скорости и угловые ускорения самолета.
В 1952 г. В. П. Туликовым и В. Я. Суховеевым было> предло-
жено в качестве основных показателей маневренности самолета
считать возможные для него перегрузки по нормали и касательной
к траектории полета. Это предложение по своей сути исходит из
идеи оценки маневренности самолета на основе возможных для
него тангенциальных и центростремительных ускорений.
Наконец, В. С. Пышновым была впервые предложена и разви-
та плодотворная идея об оценке маневренных свойств самолета по
общему уровню его энергии, складывающейся из потенциальной
(высота полета) и кинетической (скорость полета).
Цель маневров, совершаемых летчиком на самолете, заклю-
чается в том, чтобы возможно быстрее ставить свой самолет как
при нападении, так и при обороне в наиболее выгодное положение
в пространстве по отношению к самолету-противнику или к цели.
Исходя из сказанного, маневренность самолета в наиболее
общем случае можно было бы характеризовать теми положениями,
которые самолет может занимать в пространстве, быстротой сПиены
этих положений и возможной длительностью сохранения своего
положения в определенной области пространства. Математически
маневренность самолета в этом случае можно представить возмож-
ными величинами координат его центра тяжести xg, yg и Zg относи-
тельно связанной с землей системы осей, первыми производными
d Xg dу a dz а
——, и —характеризующими возможные скорости перемеще-
dt dt dt
d2Xg d-yg
ния самолета в пространстве, и вторыми производными-
^/2
и характеризующими быстроту изменения скорости полета и
ее направления. К частным показателям маневренности самолета
в этом случае можно отнести дальность и продолжительность поле-
та, потолок самолета, минимальные радиусы кривизны траектории
в различных плоскостях пространства, максимальную и минималь-
ную скорости полета, время набора и гашения скорости, максималь-
ную быстроту изменения направления полета, максимальную ско-
рость noi вертикали и др.
Хотя дальность и продолжительность полета на различных ре-
жимах в общем случае относятся к одним из показателей манев-
ренности самолета, но из-за специфичности этих показателей целе-
сообразно рассматривать их самостоятельно и соответственно этому
сузить понятие маневренности самолета.
Поэтому в дальнейшем изложении мы применяем понятие
маневренности самолета как его способности
быстро изменять свое положение в простран-
стве: скорость, высоту и направление полета.
Показатели маневренности связываются как с крайними значения-
10
ми скорости «и высоты, так и с возможной быстротой изменения
скорости по величине и направлению на различных высотах.
Из приведенного определения понятия маневренности следует,
что маневренные качества самолета связываются с возможными
движениями его центра тяжести.
Для большей четкости при анализе и оценке влияния управляе-
мости самолета и других факторов на маневренность будем в даль-
нейшем , различать: маневренность, допустимую по прочности кон-
струкции и аэродинамике (сх, су, са, тяга двигателей), и маневрен-
ность эксплуатационную.
Маневренность, допустимая по прочности конструкции и аэро-
динамике, определяется характеристиками движения самолета,
которые могут быть получены практически только расчетом, исходя
из возможных величин слагаемых результирующей аэродинамиче-
ской силы (коэффициенты сх, су и сф и тяги двигателей в пределах
перегрузок, скоростей и высот, разрешаемых для полета конструк-
тором самолета. При этом условно считается, что на самолете мож-
но мгновенно изменять угол атаки, угол скольжения, величину тяги
двигателей, угол крена, положения шасси, посадочных щитков и
аэродинамических тормозов.
Эксплуатационная маневренность самолета определяется харак-
теристиками движения самолета, взятыми с учетом его управляе-
мости и конечной скорости изменения величины тяги двигателей,
положений шасси, посадочных щитков и аэродинамических тор-
мозов.
Вследствие недостатков в управляемости, медленного выпуска
воздушных тормозов, медленного изменения тяги двигателей и дру-
гих параметров количественные показатели обоих видов маневрен-
ности (допустимой по прочности конструкции и аэродинамике и
эксплуатационной) могут существенно различаться. Поэтому поль-
зование этими двумя понятиями может быть вполне оправдано
с точки зрения оценки резервов маневренности рассматриваемого
самолета, которые могут быть использованы при улучшении управ-
ляемости, ослаблении тряски и др., например, путем увеличения
эффективности рулей и улучшения их аэродинамической компенса-
ции или путем применения гидроусилителей в системе управ-
ления рулями возможно расширить диапазон используемых лет-
чиком скоростей и перегрузок и увеличить быстроту их изменения
в полете.
Управляемость и устойчивость самолета влияют не только на
количественные показатели, но и на качественные характеристики
маневренности, другими словами, на точность пилотирования. По-
нятно, что действительные траектории полета будут отличаться от
теоретических или расчетных из-за дополнительных отклонений,
обусловливаемых самим процессом пилотирования. Например, если
траектория правильного установившегося виража в горизонтальной
плоскости теоретически представляется окружностью, то в действи-
тельности эта траектория будет иметь вид линии, «извивающейся»
около окружности. Частота и величина отклонений действительной
11
траектории от теоретической, характеризующие точность пилотиро-
вания, могут существенно изменяться с изменением характеристик
управляемости самолета.
Маневренные свойства самолета зависят от его веса, изменяюще-
гося в полете. С практической точки зрения целесообразно' относить
показатели маневренности (как это! делается и в данной работе)
к заданным постоянным величинам веса самолета.
Аэродинамические силы зависят не только! от величины и на-
правления векторов линейной и угловой скоростей самолета в рас-
сматриваемый момент времени, но и от их значений в предыдущие
моменты времени или, как говорят, от «предыстории движения».
Наличие такой зависимости обусловлено тем, что для установления
того или иного характера обтекания частей самолета воздухом тре-
буется определенное, хотя бы и очень малое время.
Так как влияние запаздывания аэродинамических явлений срав-
нительно невелико (не говоря уже о том, что оно недостаточно изу-
чено), при аэродинамическом расчете самолета им пренебрегают.
В данной работе также принято допущение, что результирующая
аэродинамических сил, приложенных к самолету, определяется
только значениями соответствующих параметров в рассматриваемый
момент времени и не зависит от предыстории движения. Зависи-
мость же аэродинамических моментов, действующих на самолет, от
предыстории движения учитывается в известной мере при рассмот-
рении управляемости самолета и влияния управляемости на манев-
ренность.
Как уже указывалось, использование для характеристики манев-
ренности только частных ее показателей не позволяет проводить ана-
лиз и оценку качеств самолета с требуемой полнотой и общностью.
Применение в качестве общих показателей маневренности положе-
ний центра тяжести самолета — координат xg, yg, zg и их производ-
ных по времени, хотя и ближе всего подходило бы к принятому нами
определению понятия маневренности, однако потребовало бы
использования весьма громоздкого математического аппарата. По-
этому целесообразно в основу метода анализа и оценки маневрен-
ности положить такие общие ее показатели, которые были бы доста-
точно удобны на практике и позволили бы определить любые част-
ные показатели маневренности и кинематические характеристики
любого пространственного! движения самолета, возможного в экс-
плуатации.
В дальнейшем принимается следующая система общих показа-
телей маневренности самолета:
а) семейства кривых слагаемой перегрузки по касательной
к траектории координированного (без скольжения) полета в зави-
симости от скорости и высоты, величины слагаемой перегрузки по
нормали к траектории полета при крайних режимах работы двига-
телей, крайних положениях воздушных тормозов, посадочных щит-
ков и шасси;
б) кривые, характеризующие время накренения самолета на
различные углы в зависимости от скорости и высоты;
12
в) время открытия и время уборки воздушных тормозов, изме-
нения тяги двигателей, выпуска и уборки посадочных щитков и шас-
си, характеризующие быстроту изменения перегрузки по касатель-
ной к траектории полета;
г) кривые, характеризующие быстроту создания заданных вели-
чин перегрузки по нормали к траектории полета в зависимости от
скорости и высоты;
д) кривые максимально возможных величин перегрузки по жест-
ко связанной с самолетом боковой оси Ozx при заданных границах
усилий от элеронов и руля направления и соответствующие кривые
максимально возможных углов скольжения;
е) кривые, характеризующие быстроту создания боковой пере-
грузки. I
Под перегрузкой в направлении какой-либо оси координат пони-
мается отношение слагаемой результирующей всех аэродинамиче-
ских сил, приложенных в полете к самолету, и силы тяги двигате-
лей, к его весу.
Обоснование указанной системы общих показателей маневрен-
ности самолета приводится ниже (см. гл. I, разд. 3).
2. УРАВНЕНИЯ МАНЕВРЕННОСТИ
Для анализа и расчета движения центра тяжести самолета, т. е.
маневренности самолета, составим соответствующую систему урав-
нении движения.
При выводе уравнений движения
и различных соотношений для ана-
лиза маневренности, управляемости
и устойчивости самолета мы пользу-
емся в дальнейшем тремя правыми
системами прямоугольных осей коор-
динат: земной, скоростной и жестко
связанной с самолетом.
Начало земной системы осей
Oxgyszs может быть расположено в
любой точке на уровне моря; оси Oxg
и Ozg располагаются в горизонталь-
ной плоскости; ось Oyg вертикальна
и направлена вверх.
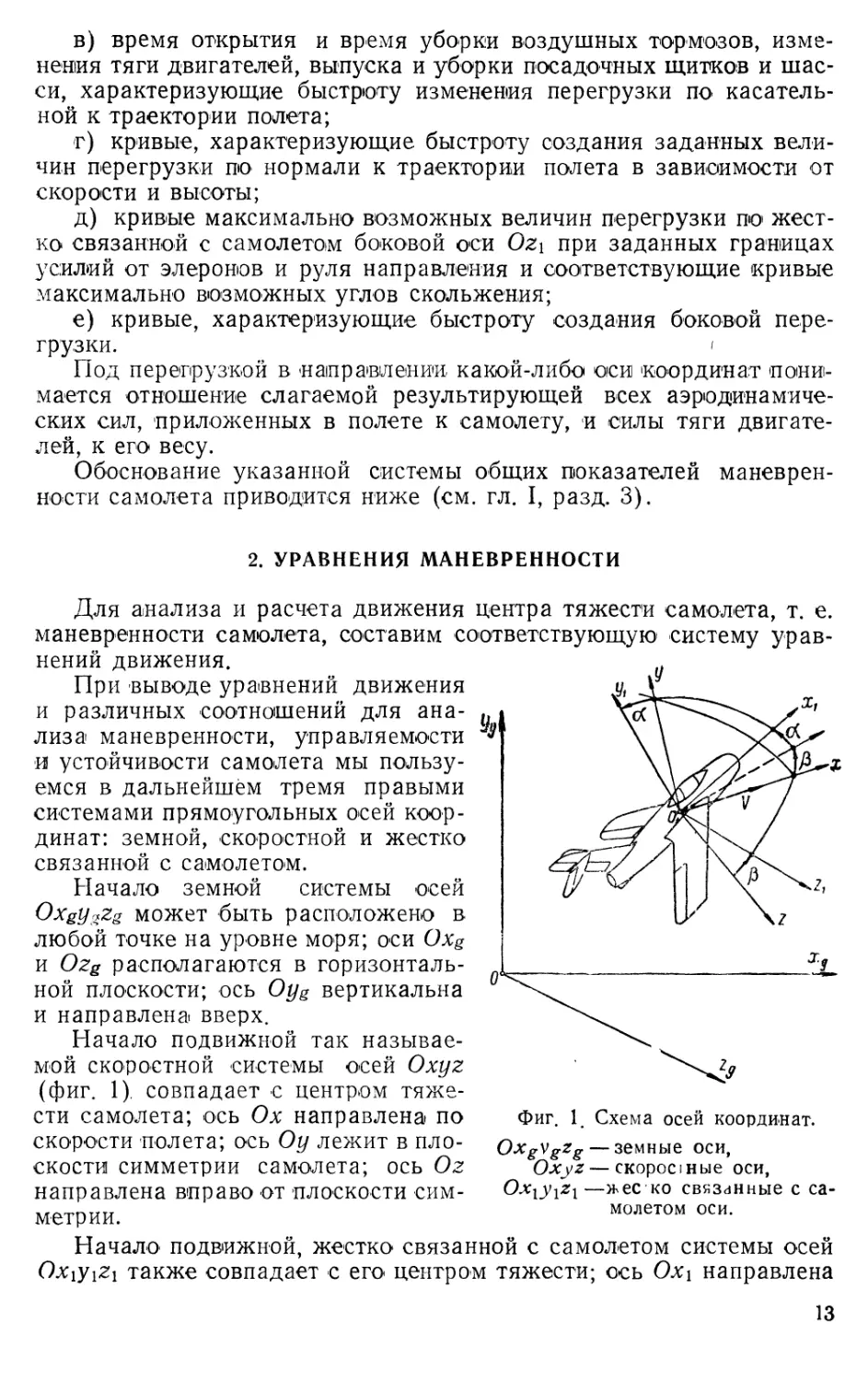
Начало подвижной так называе-
мой скоростной системы осей Oxyz
(фиг. 1). совпадает с центром тяже-
сти самолета; ось Ох направлена по
скорости полета; ось Оу лежит в пло-
скости симметрии самолета; ось Oz
направлена вправо от плоскости сим-
метрии.
Фиг. 1. Схема осей координат.
OxgVgZg — земные оси,
Oxyz — скорос1ные оси,
Oxly1zl—>ьес ко связанные с са-
молетом оси.
Начало подвижной, жестко связанной с самолетом системы осей
OxiyiZi также совпадает с его центром тяжести; ось Oxi направлена
13
вперед по продольной оси самолета, а ось Oyi — вверх от плоскости
крыльев; ось Oz^ перпендикулярна плоскости симметрии самолета.
Как известно, углы между осями земной и осями любой подвиж-
ной системы осей координат определяются с помощью трех углов
поворота при условии, что вначале направления соответствующих
осей совпадают. Если взять скоростную систему осей, то первый
поворот (фиг. 2) производится на угол ty, второй поворот — на
угол 9, называемый углом наклона траектории, а по-
следний поворот — на угол у, называемый в дальнейшем углом
крена скоростной системы осей координат (или сокращенно углом
крена).
Фиг. 2. Углы перехода от земных осей к скорост-
ным осям.
Угол крена у скоростной системы осей координат несколько от-
личается от угла крена yi системы осей координат, жестко связан-
ной с самолетом; это видно> из соотношения
cos 9 .
Sin у =---Sin У1,
cos 0
где $ — угол тангажа представляет собой угол наклона про-
дольной оси самолета к горизонту.
При анализе маневренности самолета удобно пользоваться сле-
дующими девятью простыми уравнениями:
а) три уравнения проекций на скоростные оси сил, приложен-
ных к самолету;
б) три уравнения связей между компонентами вектора угловой
скорости вращения скоростной системы координат и производными
от углов поворота ф, 9, у;
14
в) три, уравнения, связывающие компоненты вектора линейной
скорости самолета по земным и скоростным осям координат.
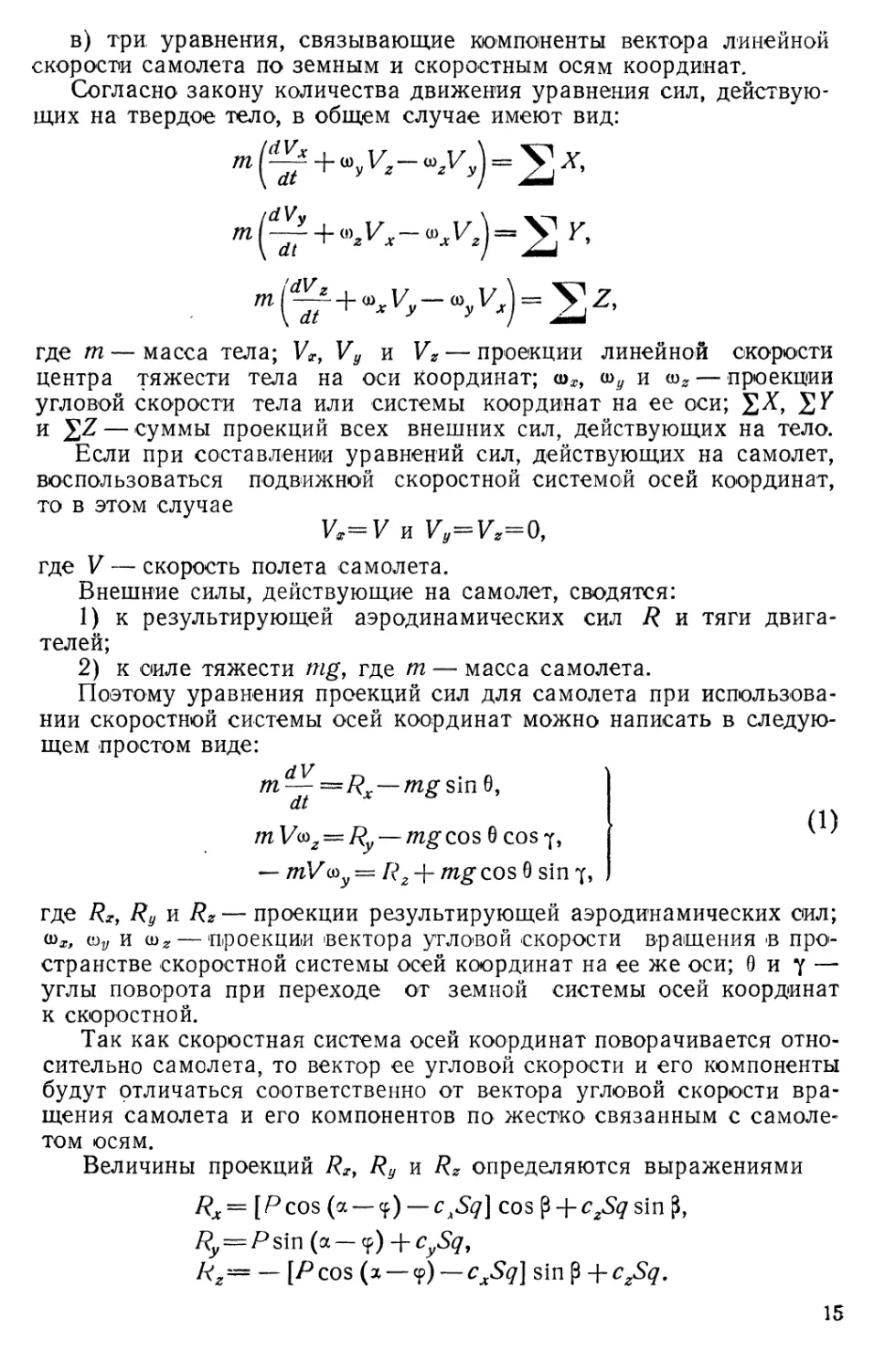
Согласно закону количества движения уравнения сил, действую-
щих на твердое тело, в общем случае имеют вид:
\ at ' /
где т — масса тела; К, Vy и Vz — проекции линейной скорости
центра тяжести тела на оси координат; а^, ыу и — проекции
угловой скорости тела или системы координат на ее оси;
и — суммы проекций всех внешних сил, действующих на тело.
Если при составлении уравнений сил, действующих на самолет,
воспользоваться подвижной скоростной системой осей координат,
то в этом случае
Vx=V и Vy=Vz=0,
где V — скорость полета самолета.
Внешние силы, действующие на самолет, сводятся:
1) к результирующей аэродинамических сил 7? и тяги двига-
телей;
2) к силе тяжести mg, где т — масса самолета.
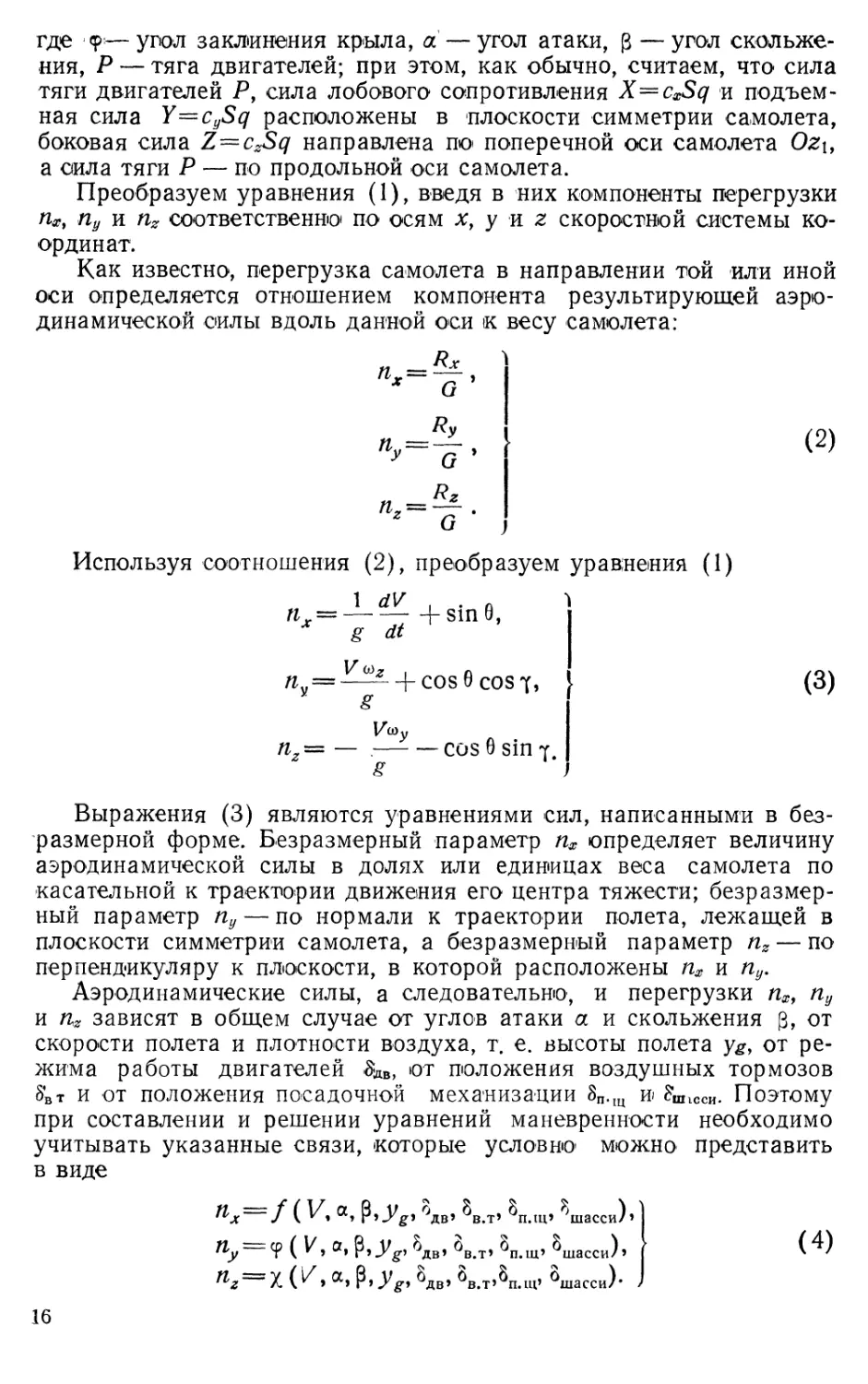
Поэтому уравнения проекций сил для самолета при использова-
нии скоростной системы осей координат можно написать в следую-
щем простом виде:
m — =RX — mg sin 9,
mV&2 — Ry— mg cos 0 cos 7, ' '
— mV&y = Rz + mgQQS 9 sin 7,
где Rx, Ry и Rz — проекции результирующей аэродинамических сил;
а>х, а>у и — проекции вектора угловой скорости вращения в про>-
странстве скоростной системы осей координат на ее же оси; 9 и у —
углы поворота при переходе от земной системы осей координат
к скоростной.
Так как скоростная система осей координат поворачивается отно-
сительно самолета, то вектор ее угловой скорости и его компоненты
будут отличаться соответственно от вектора угловой скорости вра-
щения самолета и его компонентов по жестко связанным с самоле-
том осям.
Величины проекций Rx, Ry и Rz определяются выражениями
[Pcos (а — ср) — cxSq] cos p + ^S^sin
Psin (а — <f) -\-cySq,
Кг= — [/’cos(x — <p) — cxSq] sm$+czSq.
15
где — угол заклинения крыла, а — угол атаки, g — угол скольже-
ния, Р — тяга двигателей; при этом, как обычно, считаем, что сила
тяги двигателей Р, сила лобового сопротивления X=cxSq и подъем-
ная сила Y==cySq расположены в плоскости симметрии самолета,
боковая сила Z=czSq направлена по поперечной оси самолета Ozi,
а сила тяги Р — по продольной оси самолета.
Преобразуем уравнения (1), введя в них компоненты перегрузки
nXf пу и п? соответственно* по осям х, у и z скоростной системы ко-
ординат.
Как известно, перегрузка самолета в направлении той или иной
оси определяется отношением компонента результирующей аэро-
динамической силы вдоль данной оси к весу самолета:
(2)
1
Используя соотношения (2), преобразуем уравнения (1)
\ dV । 1
n =—---------Ь sin 0,
g dt
n cos e cos
g
IZojy
nz— — .--------cos 9 sin 7.
Выражения (3) являются уравнениями сил, написанными в без-
размерной форме. Безразмерный параметр пх определяет величину
аэродинамической силы в долях или единицах веса самолета по
касательной к траектории движения его центра тяжести; безразмер-
ный параметр пу — по нормали к траектории полета, лежащей в
плоскости симметрии самолета, а безразмерный параметр п?— по
перпендикуляру к плоскости, в которой расположены пх и пу.
Аэродинамические силы, а следовательно, и перегрузки пх, пу
и п? зависят в общем случае от углов атаки а и скольжения 3, от
скорости полета и плотности воздуха, т. е. высоты полета у^, от ре-
жима работы двигателей &в, от положения воздушных тормозов
З’вт и от положения посадочной механизации 8П.Щ и ?Ш1Сси. Поэтому
при составлении и решении уравнений маневренности необходимо
учитывать указанные связи, которые условно' можно представить
в виде
P’-Vg’ °дв’ ^в.т» ^пдц’ ^шасси)»)
Пу P»-Vg’ ^дв» ^в.т» ^п.ш’ ^шасси)’
Пг = X ( аэ Р» Уg, ^дв» °шасси)* >
(4)
16
Практически эти связи обычно даются не аналитическими вы-
ражениями, а в виде совокупности графиков.
Перейдем к уравнениям связей между компонентами угловой
db dQ dy
скорости %, <»2 и векторами —, — и .
Вектор угловой скорости вращения скоростной системы коор-
динат можно представить как геометрическую сумму векторов-
rf<P
~dt'
ской
— и — (см. фиг. 2). По известным правилам аналитиче-
dt dt
геометрии, найдя косинусы углов между осями, по кото-
</Ф
направлены векторы —,
ординатной системы х, у и z, получим следующие три уравнения:
рым
dft dl
— и —, и осями скоростной KO-
rf/ dt
<оЛ = — + — sin 6,
л dt dt
rf0 . cfip fi
«>„=-----Sin Y + — COS 6 cos Y,
v dt dt 1
dQ dty л .
(ог=-----COS Y------— COS 6 sin 7.
2 dt ‘ dt ‘
Для расчета и анализа маневренности путем простых преобразо-
ваний представим эти связи в виде
rf<p wy cos 7 — cousin 7
1
cos О
dt
d0
— — WySin^ + ^COSf,
dt *
(®ycos T —w^sini) tg6.
(5)
Подобным же путем, определив косинусы углов между осями
земной и скоростной систем координат, получим последние три
уравнения, связывающие компоненты вектора линейной скорости
самолета:
d-^-—V cos Ф cos 6,
dt T
^ = Vsin6,
dt
— V sin ф cos 6.
(6)
17
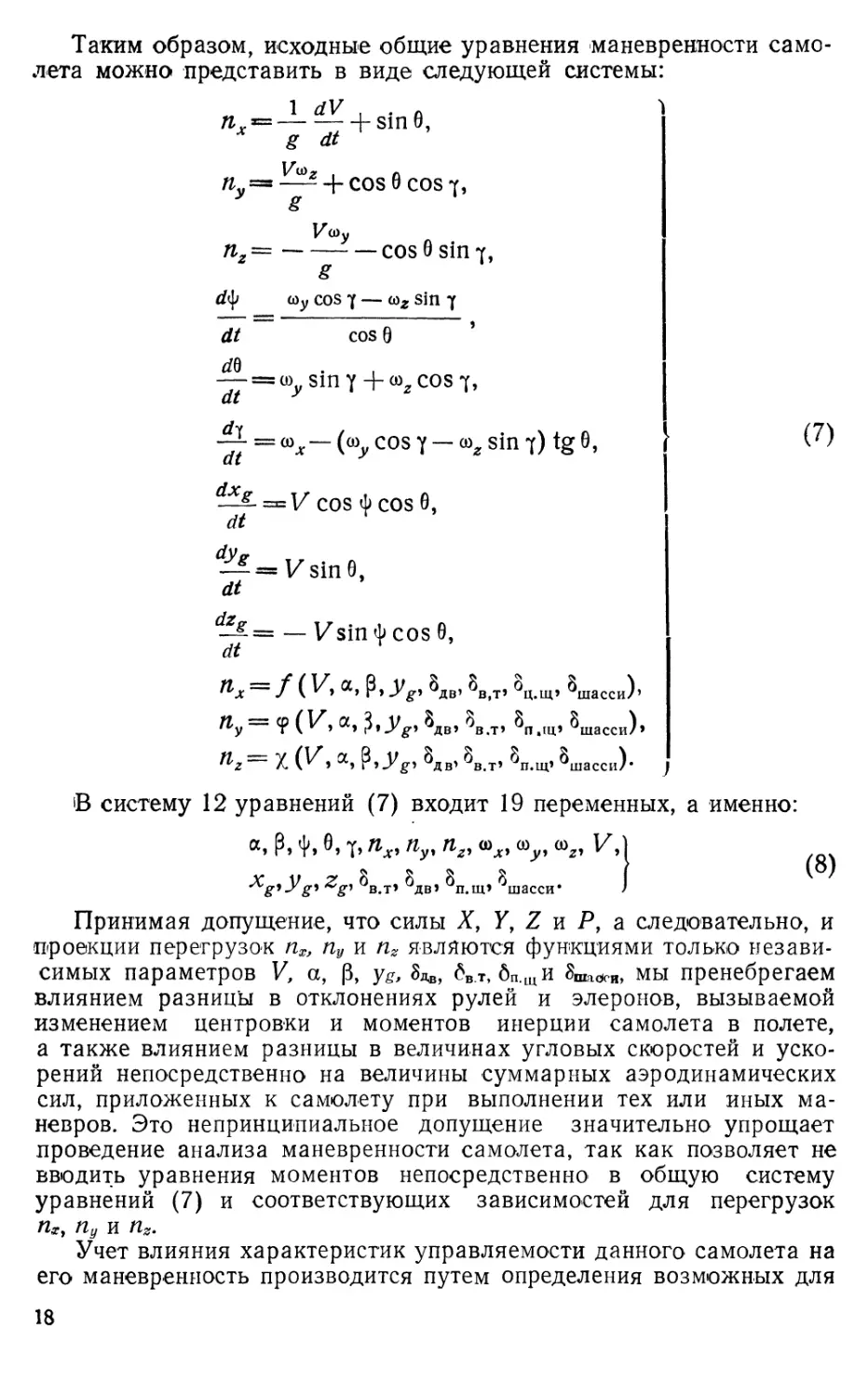
Таким образом, исходные общие уравнения маневренности само-
лета можно представить в виде следующей системы:
1 dV , . 0
=---------hsinO,
х g dt
Ю * . Л
П =------ -I- COS 6 COS 7,
y g
И CO у
n2 =----------cos 0 sin y,
g
dty (oy cos 7 — (az sin y
dt cos 0 ’
d§
— = 0) sin Y + ®z cos 7,
dt л
^=(Ox—(<Oj,cos у —®г sin 7) tg6, } (?)
= V cos Ф cos 9,
dt
— =Vsin9,
dt
—— У sin Ф cos 9,
dt T
^ = /(V,a,p,
У g' ^дв’ ^в,т’ °ц.щ’ ^шасси)’ I
"у = ? (^» a’ g) ^дв» ^в.т» ^П.[Ц» ^шасси)»
У (^» а» Уg' ^дв> ^в.т» ^п.щ» ^шасси)* J
В систему 12 уравнений (7) входит 19 переменных, а именно:
а, Р, ф, 0, у, пх. пу, п2. о)Л, (Оу, <о2, 1ZJ
х v s' 3 3 3 3 I
^g’-Tg’ ^g’ в.т’ дв> п.щ» шасси* '
Принимая допущение, что силы X, У, Z и Р, а следовательно, и
проекции перегрузок пх, пу и nz являются функциями только незави-
симых параметров V, a, р, yg, Здв, дв.т, бп.щи 8ша^и, мы пренебрегаем
влиянием разницы в отклонениях рулей и элеронов, вызываемой
изменением центровки и моментов инерции самолета в полете,
а также влиянием разницы в величинах угловых скоростей и уско-
рений непосредственно на величины суммарных аэродинамических
сил, приложенных к самолету при выполнении тех или иных ма-
невров. Это непринципиальное допущение значительно упрощает
проведение анализа маневренности самолета, так как позволяет не
вводить уравнения моментов непосредственно в общую систему
уравнений (7) и соответствующих зависимостей для перегрузок
пх, Пу И tlz.
Учет влияния характеристик управляемости данного самолета на
его маневренность производится путем определения возможных для
18
него максимальных величин перегрузок, а также использованием
показателей маневренности, характеризующих возможную быстроту
изменения по времени величин перегрузок и их направлений в про-
странстве (см. показатели маневренности б, г и е, указанные в гл. I,
разд. 1).
Допущение о том, что суммарные аэродинамические силы не за-
висят ют разницы в отклонениях рулей, а также от разницы в вели-
чинах угловых скоростей и угловых ускорений при различных
маневрах, представляется достаточно оправданным при анализе
маневренности самолетов обычной схемы с хвостовым оперением.
Влияние изменения в полете центровки самолета на его маневрен-
ность можно' учитывать путем определения изменений границ экс-
плуатационной маневренности из-за соответствующих изменений
управляемости самолета. Для самолетов типа «летающее крыло»
может оказаться необходимым учет влияния различия отклонений
рулей, производимых в полете, непосредственно на суммарные аэро-
динамические силы, приложенные к самолету такого типа.
При анализе и сравнении показателей маневренности различных
самолетов принято считать, что эти показатели соответствуют поле-
ту в стандартных атмосферных условиях при определенном постоян-
ном весе (G = const) каждого рассматриваемого самолета. Поэтому
если заданы скорость V и высота полета yg=H, то тем самым опре-
деляется и соответствующее число М, от величины которого суще-
ственно зависят аэродинамические силы, действующие на самолет,
в том числе и тяга двигателей.
Система общих уравнений маневренности (7) позволяет опреде-
лять траектории движения центра тяжести самолета при любом
интересующем нас маневре.
В систему уравнений (7) входит большее число переменных (8),
чем число самих уравнений, а именно: 19 переменных в 12 уравне-
ниях. Поэтому при определении движения самолета в конкретных
случаях следует выбрать заранее соответственно интересующему нас
маневру законы изменения по времени тех или иных переменных
в количестве, равном разности между числом всех переменных и
числом уравнений системы (7). Вместо законов изменения по вре-
мени отдельных переменных можно задать, конечно, соответствую-
щее число дополнительных связей между переменными. Например,
если нас интересуют характеристики движения самолета при выпол-
нении неустановившихся координированных (без скольжения) вира-
жей в горизонтальной плоскости с убранными воздушными тормо-
зами, убранными шасси и посадочными щитками, при работе двига-
телей на максимальном режиме и при заданном законе изменения
перегрузки со скоростью полета, то мы должны задать
yg = H= const,
8в.т=8п.щ=8ш = °-
8дв 8дв. max = COIlSt,
«г = 0,
19
при этом зависимости Я//=/(У, /) могут быть заданы соответствую-
щими графиками (как это обычно и бывает на практике).
Таким образом, в конкретных случаях анализа характеристик тех
или иных маневров самолета задача становится определенной и раз-
решимой.
Более подробно примеры проведения такого анализа изложены
в разд. 4 этой же главы.
Перейдем к обоснованию выбранной системы общих показателей
маневренности самолета.
3. ВЫБОР ОБЩИХ ПОКАЗАТЕЛЕЙ МАНЕВРЕННОСТИ
Перегрузки пх, пу и пх представляют собой величины аэродина-
мических сил самолета *, которыми управляет летчик в полете
с целью выполнения различных маневров. Так, например, отклоняя
руль высоты при координированном полете (без скольжения), лет-
чик изменяет величину и направление результирующей аэродинами-
ческой силы, расположенной в плоскости симметрии самолета.
Изменение величины подъемной силы, выражаемое в нашем случае
через изменение перегрузки пу, приводит к изменению' направления
полета. Изменяя режим работы двигателей или открывая и закры-
вая воздушные тормоза, летчик изменяет в основном величину
аэродинамической силы в направлении касательной к траектории
полета, что приводит к изменению скорости, т. е. к разгону или: тор-
можению самолета. Накреняя самолет, летчик поворачивает в про-
странстве вектор перегрузки, и это приводит к вращению в прост-
ранстве плоскости, в которой расположена траектория движения
самолета, и т. д.
Одни и те же величины располагаемых на данном самолете пере-
грузок пх, пу и nz могут быть применены летчиком для выполнения
самых различных маневров. Так, например, располагаемые вели-
чины пх летчик может использовать либо для быстрейшего набора
скорости, либо для быстрейшего набора высоты в прямолинейном
полете, а располагаемые величины пу — для выполнения криво-
линейных маневров в вертикальной, горизонтальной и любой другой
плоскости.
Очевидно, что чем в больших диапазонах и чем быстрее может
менять летчик по величине и направлению перегрузки пх, пу и nz,
тем лучше будет маневренность самолета.
Поэтому перегрузки пх, пу, nz и показатели, характеризующие
возможную быстроту их изменения по величине и направлению,
можно назвать общими показателями маневренно-
сти самолета.
Если известны количественные характеристики этих общих по-
казателей, то с помощью системы уравнений (7) можно определить
количественно все параметры движения центра тяжести самолета
для любого заданного или интересующего нас маневра.
* При этом единицей измерения величин этих сил является вес данного
самолета.
20
На основе приведенных соображений можно заключить, что
предложенная система общих показателей является удобной базой
для построения практических методов анализа и оценки маневрен-
ных свойств самолетов.
Изменение показателей пх, пу и по величине и направлению
в пространстве зависит от очень многих факторов: от скорости и
высоты полета, от углов атаки и скольжения, от положения воздуш-
ных тормозов, от скорости изменения величины тяги двигателей, от
быстроты создания крена и др.
Чтобы исчерпывающе охватить все многообразие возможных со-
четаний этих факторов, потребовалось бы слишком большое число
полетов, а также чрезвычайно большое количество расчетов.
Для построения достаточно! удобного для практического пользо-
вания метода анализа и оценки маневренности самолетов по общим
показателям целесообразно ввести некоторые допущения непринци-
пиального- характера, могущие упростить решение поставленной
задачи.
Эти допущения в рассматриваемом здесь методе можно свести
к следующим:
1. Величина аэродинамической боковой силы по1 жестко связан-
ной с самолетом оси Oz\ и быстрота ее изменения не зависят не-
посредственно от угла атаки, а зависят только от скорости и вы-
соты полета.
2. Быстрота создания крена и поворота самолета вокруг его нор-
мальной оси Оу\ зависит только- от скорости и высоты полета.
3. Боковая перегрузка nz\ по жестко связанной с самолетом
оси Oz\ прямо пропорциональна углу скольжения g при любых за-
данных значениях скорости и высоты полета.
4. Скольжение самолета не влияет на величину, направление и
быстроту изменения аэродинамических сил в плоскости симметрии
самолета.
Эти допущения позволяют построить систему общих показателей
маневренности, исходя из рассмотрения двух типов маневров са-
молета:
а) координированных маневров, выполняемых без
скольжения, т е. при
g^/2^^^0;
б) маневров со скольжением, выполняемых практи-
чески при единичной перегрузке по- нормали к траектории полета,
т. е. при
1.
Если для этих двух типов маневров определены соответствующие
общие показатели маневренности, то для маневров, выполняемых
с перегрузками пу^\ и на основании сделанных допущений
для подсчета перегрузок пх, пу и п?, будут применимы формулы
n^r=nXKcosp + n21 sin р,
Пу===Пук^
п2 = пл COS Р — пхк Sin р, .
(9)
21
где величины п*к и пу& соответствуют условиям координированного
движения самолета при одинаковых значениях числа М, высоты
полета, угла атаки (или пу) и при одном и том же режиме работы
двигателей, как и при движении самолета со скольжением; величи-
ны же nz\ и g определяются при том же значении числа М из сколь-
жений самолета, обычно выполняемых на режиме работы двигате-
лей, соответствующем условию горизонтального полета (n^=0) без
скольжения на данной высоте.
Определяющее значение для оценки маневренных качеств само-
лета имеют характеристики координированных ма-
невров.
Перейдем теперь к обоснованию практической системы общих
показателей маневренности самолета.
а) Семейство кривых пх=
Рассмотрим координированные маневры (3 = 0), выполняемые
при постоянном режиме работы двигателей, неизменных положе-
ниях воздушных тормозов, посадочных щитков и шасси. Примем, что
полет выполняется на какой-либо- высоте при определенном и по-
стоянном для всех маневров весе самолета; иными словами, рас-
смотрим маневры при условиях
//—const, 0 = const, р = 0, j (iq)
&дв = const, Звл. = const, опдц = const и ошасси = const. /
Для этого класса маневров получим
Rx Р / \ £ хЯ
п= — =— COS (а — ср)----
х G G
„ Ry Р • / \ сУд ( 00
— = — sm(a —ср)-----, v
у G G v A
S
nz-=0.
Допустим, чго можно пренебречь боковыми аэродинамическими
силами и некоторым изменением лобового сопротивления, вызывае-
мыми отклонениями руля направления при выполнении координиро-
ванных маневров.
Так как принято, что рассматриваются маневры в стандартных
атмосферных условиях, то для каждой высоты (//=const) сущест-
вует однозначная зависимость между скоростью полета V и чис-
ля лл У
лом М; как известно —, где а—скорость звука, которая при
а
принятых условиях является величиной постоянной.
Так как при постоянном положении рычагов управления работой
двигателей (^дв=const) и при Я const величина тяги двигателей Р
22
при стандартных атмосферных условиях зависит только от угла
атаки и скорости полета (числа М), то вместо (11) можно написать
пх=/1 (М, а),
«у=А(м,«).
Исключая отсюда угол атаки а, получим
Ий.=/(М, пу). (12)
Зависимость (12) для данного самолета при принятых условиях
(10) характеризует его маневренные свойства при любом выполняе-
мом маневре, т. е. является общей характеристикой маневренности.
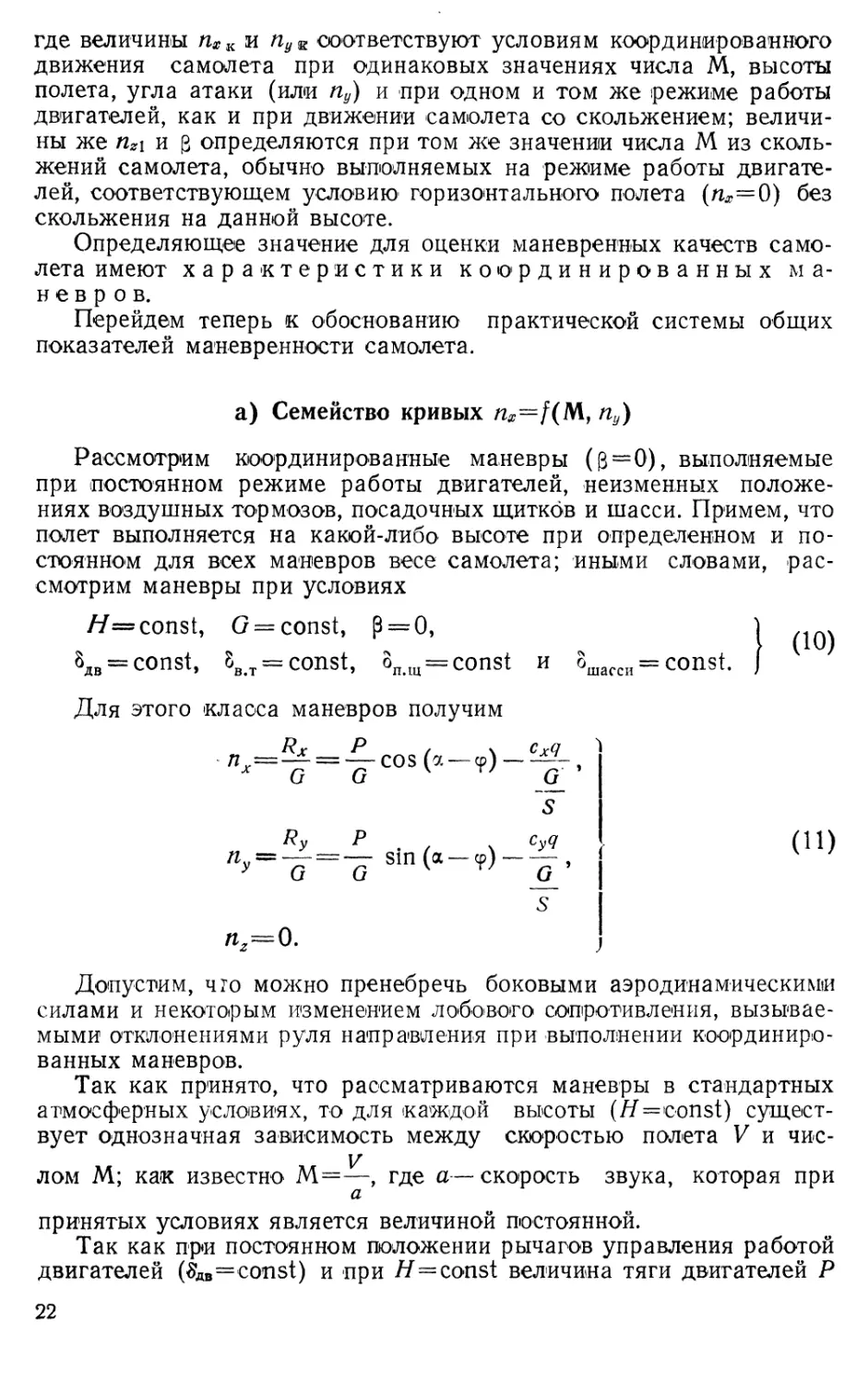
Фиг. 3. Пример диаграммы кривых nx=f(M) при
различных пу, характеризующей допустимую по
прочности и аэродинамике маневренность и экс-
плуатационную маневренность самолета. Высота
полета //=5000 м. Режим работы двигателей —
номинальный. Шасси, тормозные и посадочные
щитки убраны.
Удобным приемом для практического проведения анализа и оцен-
ки маневренности самолета является построение семейства кривых
^=/(М) при различных значениях перегрузки пу как параметра.
В качестве типовых примеров на фиг. 3 и 4 приведены такого рода
диаграммы.
Фиг. 3 характеризует маневренность самолета при полете с пол-
ной тягой (полным газом) двигателя на высоте 5000 м при убран-
ных шасси, воздушных тормозах и посадочных щитках.
Кривые tia=f (М) в области ABCDE характеризуют маневрен-
ность, допустимую по прочности конструкции и аэродинамике. Гра-
23
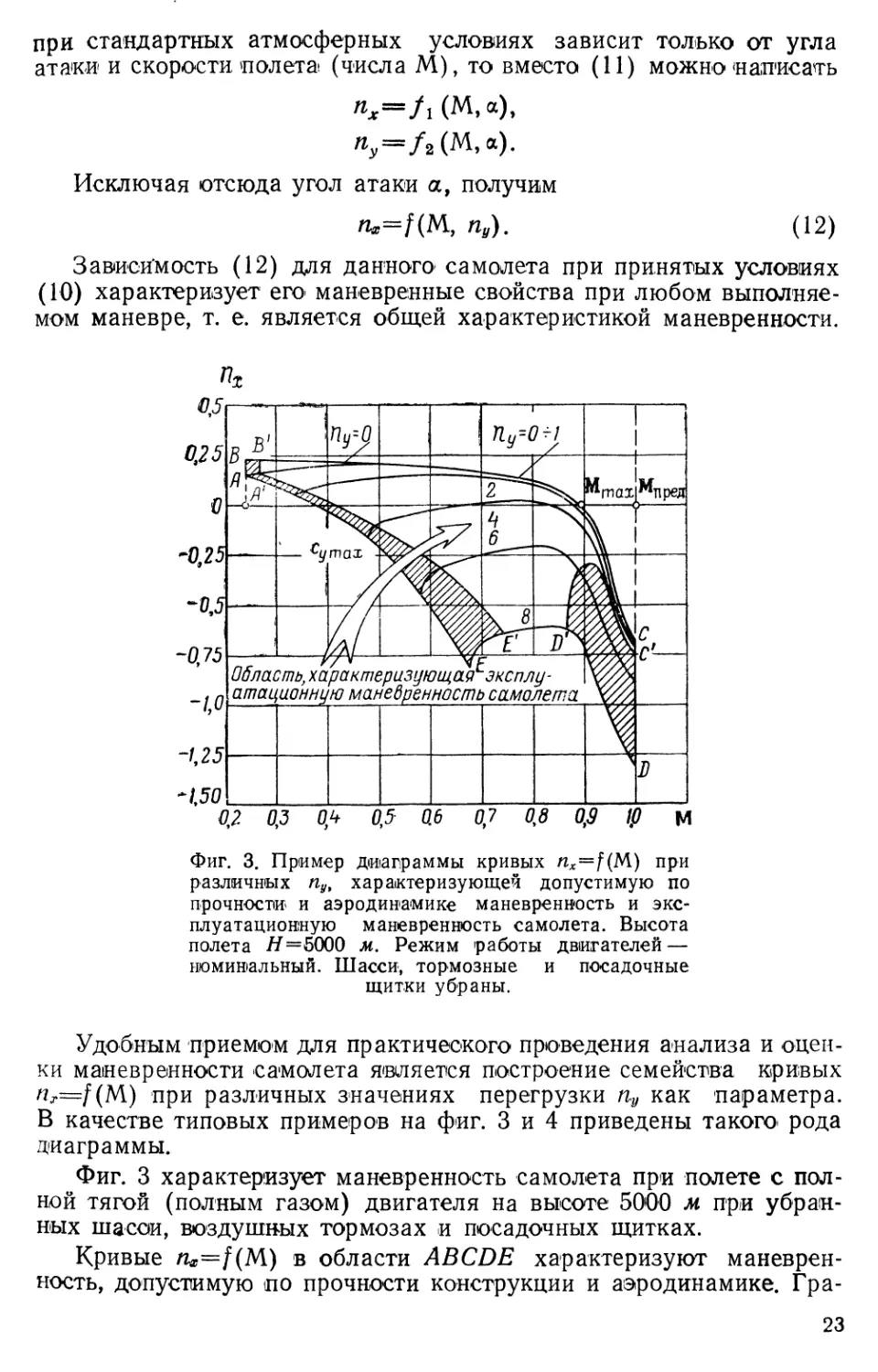
Фиг. 4. Пример диаграммы, характеризующей
допустимую по прочности и аэродинамике ма-
невренность и эксплуатационную маневрен-
ность самолета. Высота полета //=5000 м.
Двигатели работают на режиме холостого
хода. Воздушные тормоза открыты. Шасси »и
посадочные щитки убраны.
ница АВ соответствует минимальной скорости полета при пу= 1 и
^хпах. Граница CD определяется предельно допустимым для рас-
сматриваемого самолета числом МПРеД на данной высоте. Граница АЕ
определяется предельно возможными значениями перегрузок
пу=/(М) и пх== ч(М), соответствующими выходу самолета на ^тах.
Граница ED соответствует максимальной эксплуатационной пере-
грузке пэ max — 8. Наконец, граница ВС определяется кривой nx=f (М)
при ^=0; в области чисел М^>0,5 кривые соответствую-
щие величинам %=0 и
пу=\, во взятом примере
практически сливаются в
одну кривую.
Кривые na?=f(M) в об-
ласти A'B'CC'D'E' (см.
фиг. 3) характеризуют
экспл у ат ацион ну ю м а н ев -
ренность самолета, реаль-
но реализуемую летчиком
в полете. Как видно из
фиг. 3 и 4, эксплуатацион-
ная маневренность само-
лета меньше маневренно-
сти, допустимой по проч-
ности конструкции и аэро-
дин ам ике. 3 аштр ихов а н -
ная область АВВ' А' Е'Е
характеризует потери в
м ан ев р енных св ойств а х,
например, из-за возникно-
вения неприемлемой для
летчика тряски при выхо-
де самолета на большие
значения или появле-
ния неустойчивости само-
лета. Наконец, область
D'C'D (см. фиг. 3) характеризует потери в маневренности при боль-
ших скоростях полета, например, из-за чрезмерно больших усилий на
ручке, требуемых для создания перегрузки, или недостаточной эффек-
тивности продольного управления самолетом.
На фиг. 4 представлен, аналогично фиг. 3, пример диаграммы,
характеризующей маневренность самолета при полете на той же вы-
соте 5000 м с двигателями, работающими на режиме холостого хода
(малого газа) при полностью открытых воздушных тормозах. Такого
же рода диаграммы могут быть построены для характеристики ма-
невренных качеств самолета в полете с выпущенными шасси и
посадочными щитками.
Построение диаграмм типа представленных на фиг. 3 и 4 позво-
ляет количественно оценить потери или определить еще неиспользо-
ванные резервы маневренности самолета из-за его недостаточной
24
управляемости и устойчивости или вследствие других явлений, на-
пример, тряски конструкции.
Так как при данной скорости или при данном числе М аэроди-
намические силы, действующие на самолет, и в том числе тяга
двигателей, меняются с высотой полета, то для составления полной
характеристики маневренности самолета диаграммы типа представ-
ленных на фиг. 3 и 4 должны быть построены для нескольких (двух-
четырех) высот H=const. Имея общие показатели маневренности
для ряда высот, можно, используя методы интерполяции и экстра-
поляции характеристик, выполнить необходимые количественные
расчеты любого интересующего нас маневра, связанного с измене-
нием высоты.
б) Семейство кривых /7 =/(М)
Существенным общим показателем маневренности самолета
является максимальная быстрота, с которой летчик может изменить
угол крена на различные заданные величины. Очевидно', что чем
меньше минимальное потребное время /7 перевода самолета из
одного угла крена в другой, тем лучше маневренность самолета.
Чем меньше величины /7, тем быстрее самолет вводится в вираж и
выводится из виража, тем быстрее он сможет сделать боевой раз-
ворот, переворот через крыло- и т. д.
Именно величину /7 удобно' принять в качестве одного из общих
показателей маневренности самолета. Действительно, в систему (7)
общих уравнений маневренности в качестве параметра, характери-
зующего поперечное движение самолета, входит угол крена у.
Изменение угла крена, а не угловая скорость накренения самолета
представляет в конечном итоге интерес для летчика при выполне-
нии маневров.
Уравнение так называемого' идеального движения крена в пред-
положении постоянства скорости и высоты полета и отсутствия
скольжения (|3 = 0), как известно', можно- написать приближенно
в виде
1х^-мтг —=M4max; (13)
х dt* dt 9
здесь через обозначен максимальный угол отклонения элеро-
нов, возможный в полете с учетом особенностей размещения летчика
в кабине данного самолета.
Как следует из уравнения (13), при координированном движе-
нии изменение угла крена при отклонении элеронов 3*э зависит от
момента инерции самолета /#, от демпфирующего аэродинамиче-
ского момента, определяемого- производной = и эффек-
тивности поперечного управления, определяемой производной
. Естественно, чем больше момент инерции, чем больше
демпфирующий момент и чем меньше эффективность поперечного
управления, тем медленнее изменяется во времени угол крена при
25
прочих равных условиях. Среди этих прочих условий важнейшее
значение имеет величина усилий, которые необходимо, приложить
летчику к ручке управления для отклонения элеронов, если летчик,
вследствие затяжеленного поперечного управления, не имеет воз-
можности отклонить элероны полностью при выполнении маневра.
В этом случае при анализе поперечной маневренности самолета
вместо уравнения (13) надо исходить из уравнения, ему подобного,
но ввести в правую его часть характеристики поперечной управляе-
мости самолета по усилиям, например, из уравнения
z = ^Рэтах; (14)
* dt dP3 s raax v '
здесь через P3 max обозначено максимальное поперечное усилие, ко-
торое может приложить в полете летчик к ручке управления; при
этом, ради простоты, предположили,
что при const и 7f=const усилия
на ручке Рэ и угол отклонения элеро-
нов &э связаны линейной зависимо-
стью, и производная —— = const. О
других случаях более 'сложных зави-
симостей Рэ=/(£э) см- в гл- Ш, по-
священной боковой управляемости
самолета.
Кривая Y=f(O при изменении
угла крена от начального значения
у 1 до конечного у 2 будет иметь, при-
мерно, вид, представленный на
Фиг. 5. Характерная кривая изме-
нения угла ифена по времени.
фиг. 5. Неустановившиеся участки
движения Оа и Ьс (см. фиг. 5) будут тем продолжительнее, чем боль-
ше момент инерции самолета J?. Участок установившегося движения
крена ab, соответствующий практически постоянной по величине
угловой скорости вращения самолета, будет тем продолжительнее,
чем меньше момент инерции Л и чем больше величина демпфирую-
щего аэродинамического момента (производная Л4“х). Наклон кри-
вой от оси абсцисс на участке практически установившегося
вращения ^const), как это следует из уравнений (13) и (14), в
рассматриваемом упрощенном случае будет определяться одним из
следующих двух соотношений:
max
(15)
Отсюда видно, что величина наклона кривой будет тем
больше, а следовательно, продолжительность перевода самолета от
26
заданного угла 71 к заданному углу у2 будет тем меньше, чем боль-
ше эффективность поперечного управления, чем меньше демпфи-
рующий аэродинамический момент и чем легче поперечное
, „ dPB 1 \
управление (чем меньше величина производной—- —----\,
dP3 /
Заметим, что на практике для более быстрого накренения само-
лета летчики нередко используют скольжение, создаваемое соответ-
ствующим отклонением руля направления одновременно с отклоне-
нием элеронов. Тогда в дополнение к моменту от элеронов создается
и момент крена (/VPp), обусловливаемый наличием у самолета по-
перечной статической устойчивости. Опыт показывает, что при
использовании эффекта поперечной устойчивости быстрота измене-
ния крена самолета может быть существенно увеличена.
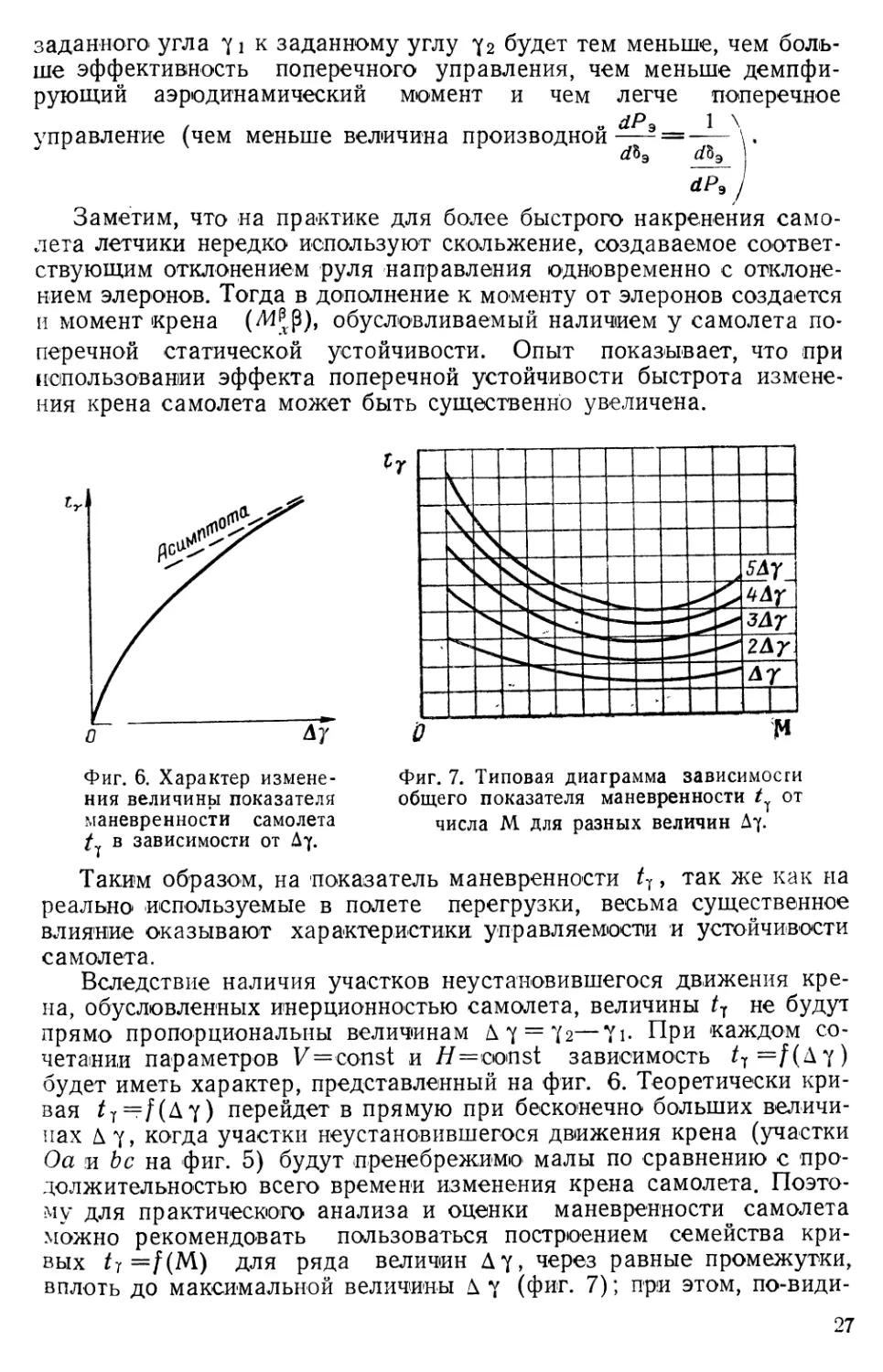
Фиг. 6. Характер измене-
ния величины показателя
маневренности самолета
t в зависимости от Д?.
Фиг. 7. Типовая диаграмма зависимости
общего показателя маневренности от
числа М для разных величин Д-р
Таким образом, на показатель маневренности /т, так же как на
реально используемые в полете перегрузки, весьма существенное
влияние оказывают характеристики управляемости и устойчивости
самолета.
Вследствие наличия участков неустановившегося движения кре-
на, обусловленных инерционностью самолета, величины не будут
прямо пропорциональны величинам Д у = у2—Yi- При каждом со-
четании параметров V=const и /7=const зависимость ^=/(Ду)
будет иметь характер, представленный на фиг. 6. Теоретически кри-
вая /т=/(Ду) перейдет в прямую при бесконечно больших величи-
нах Ду, когда участки неустановившегося движения крена (участки
Оа и Ьс на фиг. 5) будут пренебрежимо малы по сравнению с про-
должительностью всего времени изменения крена самолета. Поэто-
му для практического анализа и оценки маневренности самолета
можно рекомендовать пользоваться построением семейства кри-
вых t7 =f(М) для ряда величин Ду, через равные промежутки,
вплоть до максимальной величины Д у (фиг. 7); при этом, по-види-
27
мому, можно принять допущение, что величины не зависят ют
угла атаки или перегрузки пу, а также от режима работы двигате-
лей, за исключением особых случаев.
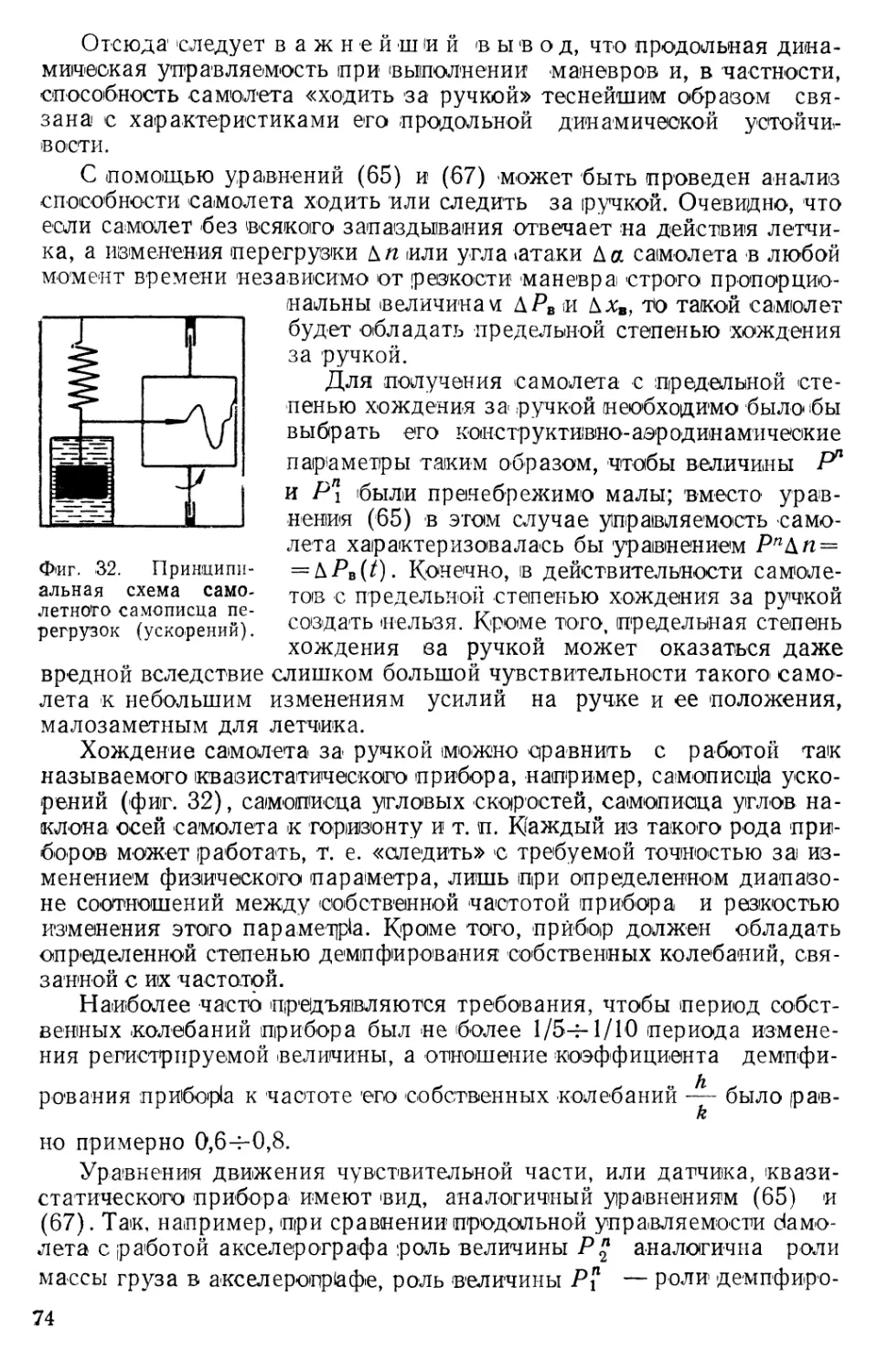
в) Показатели /В!Т, 4в, ^п.щ и ^сси
Величинами 4т, 4В, 4.щ и ^иссИ условно' обозначены соответствен-
но промежутки времени выпуска или уборки воздушных (аэродина-
мических) тормозов, возрастания или уменьшения тяги двигателей,
выпуска или уборки посадочных щитков, выпуска или уборки шасси.
Эти показатели или им эквивалентные входят в систему общих по-
д Р
казателей маневренности самолета. Наряду с отношениями ——
G
и величины 4в и 4Т в значительной мере определяют так
G
называемую приемистость самолета в отношении набора или гаше-
ния скорости; здесь через ДРтах обозначена максимальная величина
изменения тяги двигателей при данных V и Н, а через дХв.ттах —
максимальная величина изменения силы лобового сопротивления
при открытии или уборке воздушных тормозов при данных V и Н.
Величины /плц и /ш1ссИ являются одними из характеристик взлет-
ного и посадочного маневров самолета.
Очевидно, что в общем случае величины /вТ, 4В и /п#щ, строго
говоря, являются нелинейными функциями соответственно парамет-
рам #в.т, &дв и £плц. Однако; почти во- всех практических случаях
анализа и оценки маневренности самолетов можно; по-видимому,
считать указанные функции линейными и вместо семейств кривых
характеризовать самолет на данной высоте по каждому показателю
двумя кривыми, например, (4л)въп=Л (М) и (4.т)Уб = /2(М); здесь
(4,т) вып означает время выпуска воздушных тормозов из убранного
полностью положения в крайнее выпущенное, а (4.т)Уб — соответ-
ствующее время при уборке воздушных тормозов.
Не исключена возможность, что* в ряде случаев вместо' каждой из
указанных кривых можно- пользоваться одним числом, определяю-
щим с достаточной степенью точности время выпуска или уборки не-
зависимо от скорости и высоты полета.
г) Показатель /,^=/(М)
Маневренные качества самолета характеризуются не только
перегрузками пх и пу, но- и тем минимальным временем, за которое
летчик может создать определенные величины перегрузок. Быстрота
изменения перегрузок пх по- касательной к траектории полета при
выпуске и уборке воздушных тормозов или изменении тяги двига-
телей характеризуется рассмотренными выше показателями 4.т и 4в-
Быстрота изменения кривизны траектории полета зависит не только
от возможных для данного- самолета перегрузок по нормали к траек-
тории полета пу или (что обычно практически равнозначно) величин
28
результирующей перегрузки п, но- и от величины показателя tny —
промежутка времени, необходимого для изменения величины пере-
грузки. Учет величины tn может оказаться существенным при ана-
лизе резких маневров входа в пикирование -и выхода из него, горки,
ввода в разворот и т. п.
Связь изменения перегрузки Д/г с изменением усилия летчика на
ручке управления обычно- можно представить -следующим дифферен-
циальным уравнением (вывод этого уравнения см. в гл. II):
+ 2Л — + k4n = Д ДРВ.
dt- dt
(16)
Аналогичного вида уравнение может быть написано- и для связи
с Д#в— углом отклонения рулевых поверхностей продольного
управления.
В уравнении (16) коэффициенты 2h, k2 и А
являются постоянными величинами, завися-
щими от момента инерции самолета относи-
тельно его поперечной оси, от демпфирующе-
го‘ продольного момента, от моментов стати-
ческой устойчивости, от эффективности руля
высоты или стабилизатора и от легкости про-
дольного- управления. Мы не приводим здесь
подробного анализа влияния всех перечислен-
ных факторов на быстроту изменения пере-
грузки п и характер зависимости Ди=/(/),
Фиг. 8. Типовая диаграм-
ма показателя маневрен-
ности 6гу=/(М) и пу^=
=/(М)
так как этот вопрос рассматривается в
гл. II; укажем лишь, что различные са-
молеты могут (и иногда существенно) от-
личаться друг от друга по величинам
показателя маневренности
При практическом проведении анализа и оценке маневренности
самолета для каждой высоты полета вполне достаточно, по-видимо-
му, ограничиться одной или двумя кривыми tny=f (М), из которых
(фиг. 8) одна кривая дает время вывода самолета с nv=l на
максимально получаемую в реальных условиях полета перегрузку
nvmax’ а другая — время вывода самолета на перегрузку
l + nv
"max
tl,, —
у 2
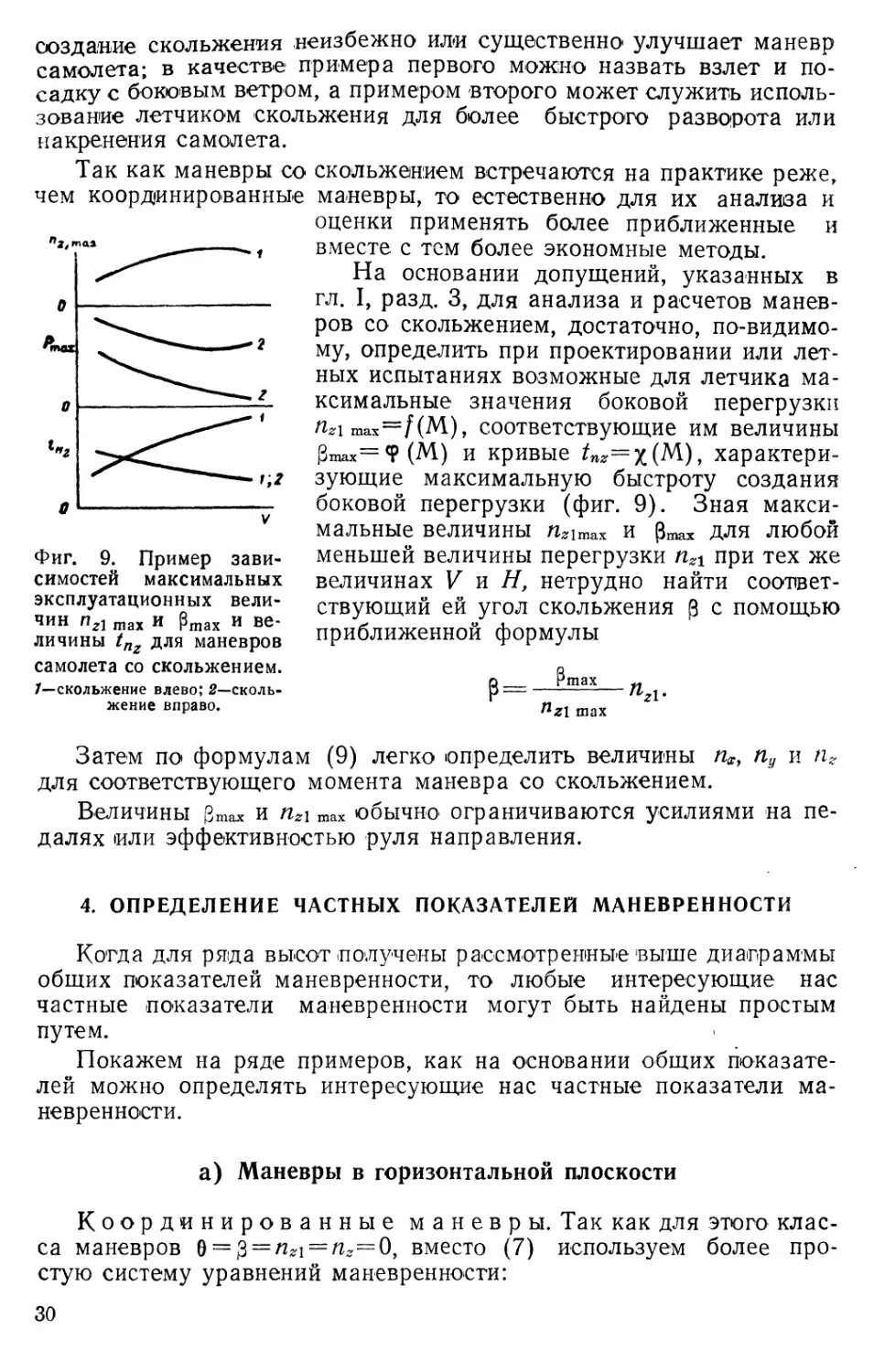
д) Показатели max — /(М),
₽шах = ?(М) и ^=х(М)
Маневры и режимы полета с использованием скольжения реже
применяются летчиками на практике по сравнению с координирован-
ными маневрами (3=0). Однако^ можно назвать ряд случаев, когда
29
создание скольжения неизбежно или существенно улучшает маневр
самолета; в качестве примера первого можно назвать взлет и по-
садку с боковым ветром, а примером второго может служить исполь-
зование летчиком скольжения для более быстрого разворота или
иакренения самолета.
Так как маневры со скольжением встречаются на практике реже,
чем координированные
Фиг. 9. Пример зави-
симостей максимальных
эксплуатационных вели-
чин г?21 тах и ₽тах и ве-
личины tnz для маневров
маневры, то естественно для их анализа и
оценки применять более приближенные и
вместе с тем более экономные методы.
На основании допущений, указанных в
гл. I, разд. 3, для анализа и расчетов манев-
ров со скольжением, достаточно, по-видимо-
му, определить при проектировании или лет-
ных испытаниях возможные для летчика ма-
ксимальные значения боковой перегрузки
^imax=f(M), соответствующие им величины
gmaX=z<P(M) и кривые /п^^хСМ), характери-
зующие максимальную быстроту создания
боковой перегрузки (фиг. 9). Зная макси-
мальные величины Наглах И (Jmax для любой
меньшей величины перегрузки nzl при тех же
величинах V и Н, нетрудно найти соответ-
ствующий ей угол скольжения 3 с помощью
приближенной формулы
самолета со скольжением.
7—скольжение влево; 2—сколь-
жение вправо.
Ртах
^21 max
Затем по формулам (9) легко определить величины пх, пу и п~
для соответствующего момента маневра со скольжением.
Величины gmax и nz\ maX обычно ограничиваются усилиями на пе-
далях или эффективностью руля направления.
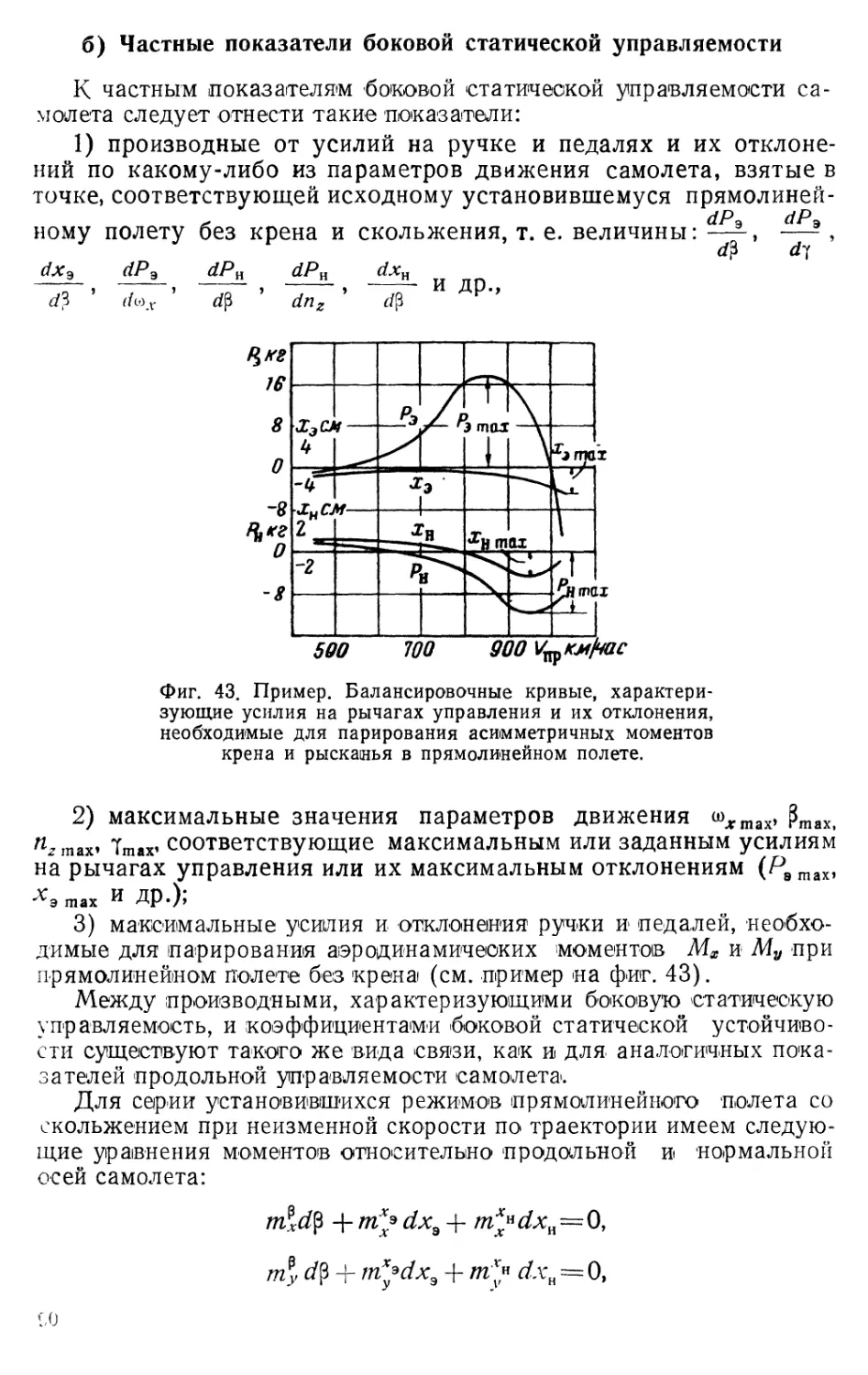
4. ОПРЕДЕЛЕНИЕ ЧАСТНЫХ ПОКАЗАТЕЛЕЙ МАНЕВРЕННОСТИ
Когда для ряда высот получены рассмотренные выше диаграммы
общих показателей маневренности, то любые интересующие нас
частные показатели маневренности могут быть найдены простым
путем.
Покажем на ряде примеров, как на основании общих показате-
лей можно определять интересующие нас частные показатели ма-
невренности.
а) Маневры в горизонтальной плоскости
Координированные маневры. Так как для этого клас-
са маневров 0 = 3 = 0, вместо (7) используем более про-
стую систему уравнений маневренности:
30
1 dV
n =-------,
X g dt
V(A
^== — + cos?,
g
O =---------sin ?,
g
-J- = a)v COS ? — co Sin ?
dt y z I
O=coysin y + co^COS y,
di
—— = 0) .
dt
= V cos Ф,
dt
^=0,
dt
d—g= — V sin ф.
dt
(17>
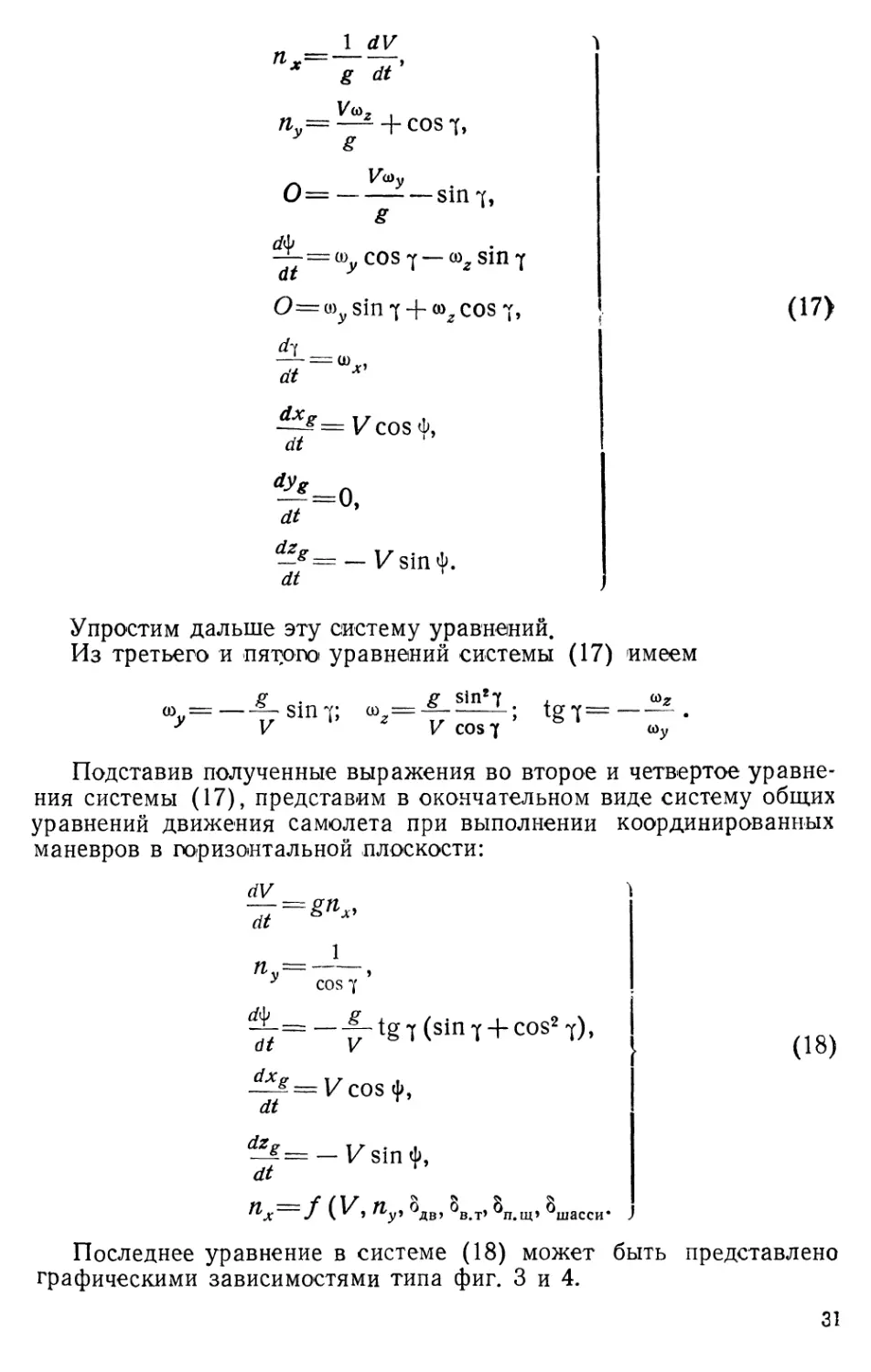
Упростим дальше эту систему уравнений.
Из третьего и пятого уравнений системы (17) имеем
я . g sin2? , wz
=—— sm?; —-----------------L; tg? =------
y V ‘ 2 V cos? s ‘ <oy
Подставив полученные выражения во второе и четвертое уравне-
ния системы (17), представим в окончательном виде систему общих
уравнений движения самолета при выполнении координированных
маневров в горизонтальной плоскости:
dV 1 dt 1 Пу = , у cos ? — у- tg 7 (sin 7 + cos2 7), -^= Vcos Ф, dt т d^-= — V sin ф, dt r (18)
f (^» °дв> °в.т’ ^п.щ» ^шасси*
Последнее уравнение в системе (18) может быть представлено
графическими зависимостями типа фиг. 3 и 4.
31
В систему шести уравнений (18) входят в общем случае пере-
менные ,
Y» Ф> Xg' Zgi \в’ ^в.т> ^п.щ’ ^шасси* G^)
В случае выполнения маневров с неизменными величинами пара-
метров <U, Зв т, Sn щ и Опасен для количественного определения харак-
теристик маневра с помощью системы (18) достаточно задаться
законом изменения по времени одного из семи первых параметров
(19) и начальными условиями или режимом полета, с которого
начинается маневр. При этом, конечно, начальные значения пара-
метров должны удовлетворять системе уравнений (18).
Фиг. 10. Примеры использования диаграмм nv=f(M, пу) при
анализе характеристик маневренности самолета.
Установившиеся виражи. Каждому установившемуся
режиму прямолинейного и криволинейного движения самолета со-
ответствуют постоянные значения параметров
К Y, Здв, $в.тА.щ и йи*ссИ. (20)
Кроме того, из первого уравнения (17) или (18) следует, что
установившимся виражам в горизонтальной плоскости соответствуют
значения
п^=0. (21)
На основании условия (21) из диаграмм типа представленной на
фиг. 3 по точкам пересечения кривых n^=f(M) при пу>1 с осью
абсцисс находим величины пу и М, соответствующие режимам уста-
новившихся виражей (фиг. 10). С помощью этих значений пу и М
в случае необходимости может быть построена кривая n^=f(M),
соответствующая режимам установившихся виражей.
32
Скорость полета, угол крена, радиус виража и время поворота
самолета на 360р при каждом режиме установившегося виража мо-
гут быть найдены по известным формулам:
И-Ма,
1
COS Y —----,
Лу
т ___ 2кУ _
вир~
Эти формулы легко получить из уравнений (17) и условий (2'0)
и (21).
Если кривые при пу>\ нигде не пересекают ось
абсцисс, как, например, при полете с двигателями, работающими на
малом газе (см. фиг. 4), или при полете с полной тягой выше так
называемого теоретического потолка самолета, то значит самолет в
таких условиях не имеет режимов установившегося виража.
Максимальная скорость г о р -и з о !н т а л ь н о> г о по-
лета Кпах. Установившийся режим полета с Утах по горизонтали
является частным случаем установившегося виража с бесконечным
радиусом и бесконечным временем виража при пу—\ и у=О. 'Вели-
чина Утах весьма просто определяется (см. фиг. 3) по* точке пере-
сечения кривой п^=/(М) при пу^=\ с осью абсцисс.
Неустан о вившиеся виражи. Изменения характери-
стик движения самолета при выполнении виражей такого рода могут
быть определены с помощью уравнений (18).
Неустановившиеся виражи в горизонтальной плоскости, в про-
тивоположность установившимся виражам, могут выполняться и
при работе двигателей на малом газе и выше теоретического потол-
ка при условии, что* начальная скорость больше минимальной
скорости, соответствующей Су max*
Законы изменения перегрузки или угла крена у по времени мо-
гут быть выбраны при анализе и расчетах маневренности любыми,
лишь бы они не выходили за границы возможных в полете пугпа^=
tny и Такие же условия должны быть выполнены,
разумеется, и для начального момента маневра.
Если начальный момент движения самолета соответствует пе-
регрузке то его последующее движение в неустановившемся
горизонтальном вираже будет происходить с возрастанием ста-
рости У до тех пор, пока перегрузка nv не станет равной нулю;
если при этом летчик будет увеличивать перегрузку пу, то момент,
соответствующий пх=0, наступит быстрее; если же летчик будет
Уменьшать или сохранять перегрузку пу по величине такой же, как
и в начальный момент движения, то момент /2^=0 теоретически
будет достигнут только в бесконечно большое время.
33
Неуста повившиеся виражи в горизонтальной плоскости при по-
лете с малым газом или выше теоретического потолка с режимом
работы двигателей на полном газе (пх всюду меньше нуля) будут
происходить всегда с торможением самолета.
Частным случаем неустановившихся виражей являются виражи
в горизонтальной плоскости с постоянной величиной перегрузки пу,
а следовательно, и с постоянной величиной угла крена у.
Прямолинейные разгоны и торможения с а -м о-
лета являются частным случаем неустановившихся виражей
в горизонтальной плоскости. Для определения характеристик движе-
ния самолета по времени при разгонах и торможениях по горизон-
тальной прямой из зависимостей (18) потребуются только первая и
последняя, т. е.
dV
dt
(23)
Пх f i^ny ’ °дв» °в.’т» ^шасси) При 1.
Изменение числа М, а значит и скорости полета по, времени в
случае постоянных по времени параметров п^, Здв, Зв.т Зплл и
удобно на практике определять с помощью графического интегри-
рования уравнения
м,
а Г б/М
g J
(24)
м0 г
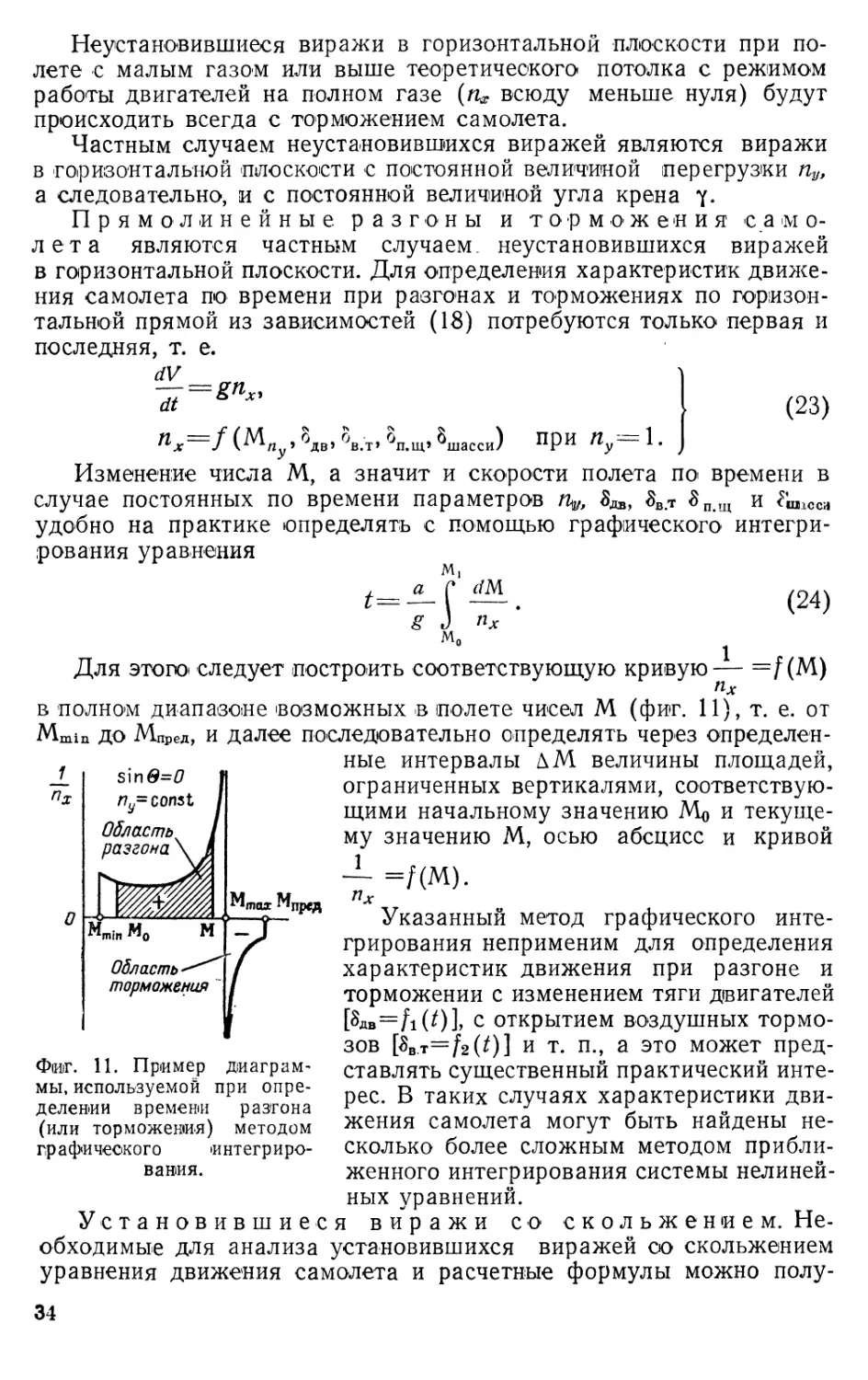
Для этого следует построить соответствующую кривую— =f (М)
пх
в полном диапазоне возможных в полете чисел М (фиг. И), т. е. от
Mmin до Мпред, и далее последовательно определять через определен-
Ф|И1Г. 11. Пример диаграм-
мы, используемой при опре-
делении времени разгона
(или торможения) методом
графического интегриро-
вания.
ные интервалы ДМ величины площадей,
ограниченных вертикалями, соответствую-
щими начальному значению Мо и текуще-
му значению М, осью абсцисс и кривой
Указанный метод графического инте-
грирования неприменим для определения
характеристик движения при разгоне и
торможении с изменением тяги двигателей
[Здв=А(ОЬ с открытием воздушных тормо-
зов [Зв.т=/2(0] и т. п-> а это может пред-
ставлять существенный практический инте-
рес. В таких случаях характеристики дви-
жения самолета могут быть найдены не-
сколько более сложным методом прибли-
женного интегрирования системы нелиней-
ных уравнений.
Установившиеся виражи со с к о л ь ж е н и е м. Не-
обходимые для анализа установившихся виражей со скольжением
уравнения движения самолета и расчетные формулы можно полу-
34
(25)
чить, отправляясь от общих уравнений маневренности (7) с учетом
условий V=const, у = const, 9=0 и Тогда будем иметь
nv=—- + cos 7,
g
V
=---------Sin v
g
с/ф
— = CD = CD cos 7 — co„ Sin 7,
dt
O = <oy sin 7 4- a>2 COS 7,
dt *
dx СГ • Г .
—«=y cos Ф,
dt T
— l/sin<p.
dt j
Так как мы рассматриваем установившиеся виражи в горизон-
тальной плоскости (0=0; y=const), вектор угловой скорости вра-
щения скоростной системы координат со будет направлен по верти-
с/ф о —
кали, и поэтому со = —Заметим, что вектор <о при положительном
dt
вращении системы (см. фиг. 2) направлен снизу вверх.
Из третьего и четвертого уравнений системы (25) следует
С0у = (0 cos у,
сог= —со sin 7.
Подставив эти выражения в первые два уравнения системы (25),
получим
(26)
ny~------sm 7 + cos 7,
y s
Г(0
n2=------cos Y— sm7’
Найдем зависимости sin у и cos у от перегрузок пу и п2\ для это-
го первое из уравнений (26) умножим на cos у, а второе — на sin у
и после сложения получим
n/7cos у—n^sin у = 1.
Подставив в последнее уравнение cos 7 = )^ 1 — sin2 7, а затем
sin 7 =]/1 — cos2 7, найдем
sin 7
cos 7 =
у/ 4 +
4+4
V п2у + п2г— 1
Пу + п2
(27)
35
Нетрудно убедиться в том, что для правых виражей (у >0) перед
корнями надо брать знак плюс, а для левых (у <0) знак минус.
В окончательном виде для правых установившихся виражей бу-
дем иметь
— пг + пу у п2 4-и2 — J
sin у =----------J—%-------------
Пу + пД/ п2 + п2 — 1
cos 1=--------2-4------
а для левых гаражей
— Пг — Пу У n2 +ni — 1
sm-( —----------------------
«у + «г
Пу—п2У п2+п2 — 1
cos ----—22——
(28)
(29)
Найдем теперь зависимость о от перегрузок nv и nz. Из уравне-
ний (26) имеем
“= — sin -[ + пг COS f).
После подстановки выражений для sin у и cos у из (27) полу-
чим:
со = ]/ п2 + п? — 1.
1 у У z
Учитывая, что радиус виража /?вИр= — и время поворота само-
со
лета на 360° в установившемся вираже Гвпр= —, найдем:
'вир g
, __ 2nV
вир“
(30)
При nz = 0 получим из формулы (28) — (30) приведенные ранее
формулы (22) для случая установившихся виражей без скольжения.
Имея диаграммы общих показателей маневренности /г^=/(М)
типа приведенных на фиг. 3, max ф(М) И |Зтах = Х(М) (см. фиг. 9),
нетрудно с помощью выражений (9), (28), (29) и (30) провести
анализ и расчеты характеристик установившихся виражей со сколь-
жением. Сделаем несколько общих замечаний по этому вопросу.
Как следует из формулы (30), абсолютные величины радиуса и
времени виража со скольжением не зависят от знака т. е. при
одинаковых абсолютных величинах tiz у виражей как с внутренним,
36
так и с внешним скольжением радиус и время виража будут соот-
ветственно одинаковы, несмотря на то, что углы крена у при этом
будут различными по величине [см. формулы (28) и (29)].
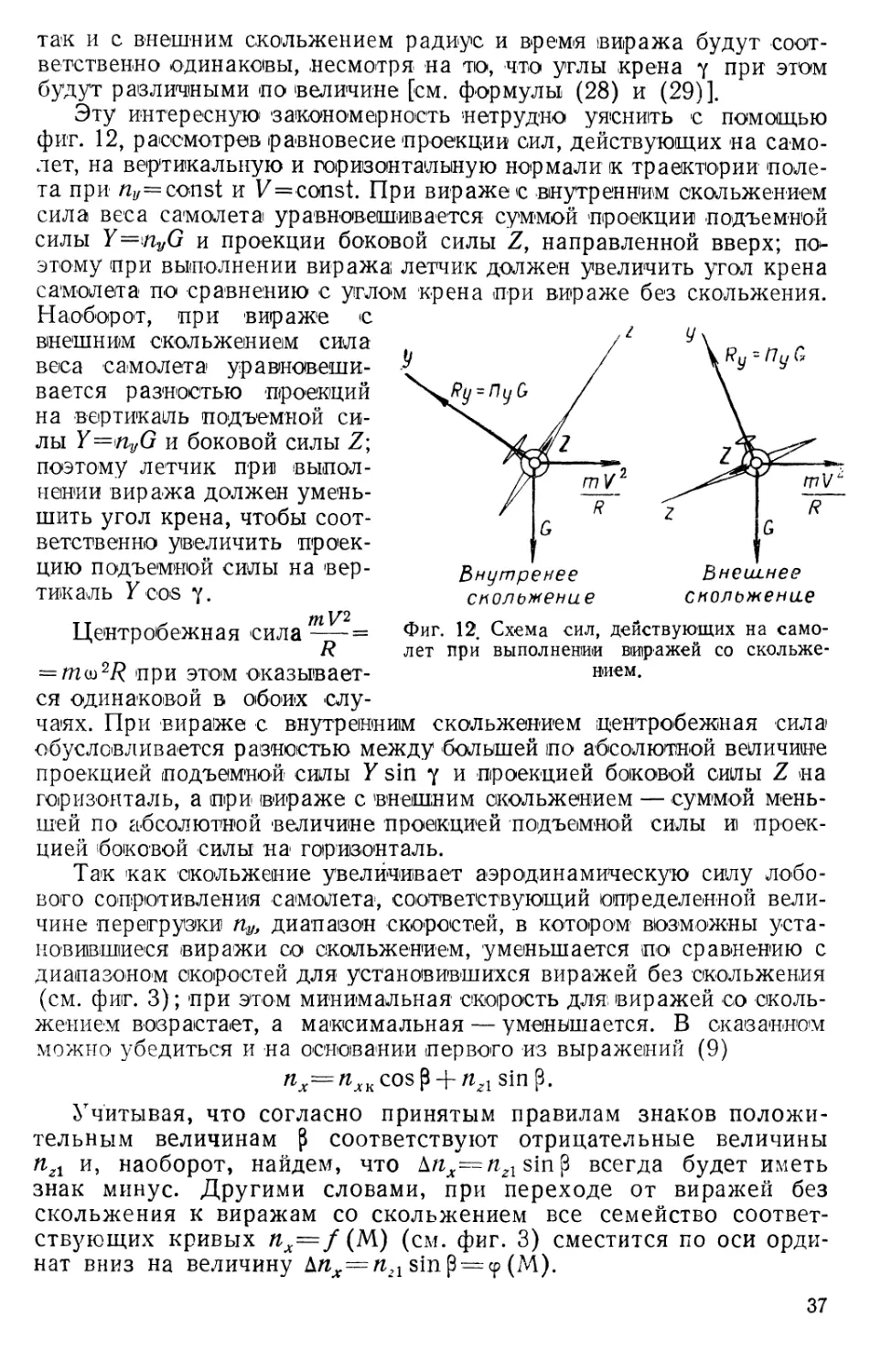
Эту интересную! закономерность нетрудно уяснить с помощью
фиг. 12, рассмотрев равновесие проекции сил, действующих на само-
лет, на вертикальную и горизонтальную нормали к траектории поле-
та при пу=const и V=const. При вираже с внутренним скольжением
сила веса самолета уравновешивается суммой проекции подъемной
силы Y=nyG и проекции боковой силы Z, направленной вверх;
этому при выполнении виража; летчик должен увеличить угол крена
самолета по сравнению с углом крена при вираже без
Наоборот, при вираже с
внешним скольжением сила
веса самолета уравновеши-
вается разностью проекций
на вертикаль подъемной си-
лы Y=ntJG и боковой силы Z;
поэтому летчик при выпол-
нении виража должен умень-
шить угол крена, чтобы соот-
ветственно увеличить проек-
цию подъемной силы на вер-
тикаль Y cos у.
скольжения.
скольжение
скольжение
Центробежная сила =
= m&2R при этом оказывает-
ся одинаковой в обоих слу-
Фиг. 12 Схема сил, действующих на само-
лет при выполнении виражей со скольже-
нием.
чаях. При вираже с внутренним скольжением центробежная сила
обусловливается разностью между большей по абсолютной величине
проекцией подъемной силы У sin у и проекцией боковой силы Z на
горизонталь, а при вираже с внешним скольжением — суммой мень-
шей по абсолютной величине проекцией подъемной силы и проек-
цией боковой силы на горизонталь.
Так как скольжение увеличивает аэродинамическую силу лобо-
вого сопротивления самолета, соответствующий определенной вели-
чине перегрузки пУ) диапазон скоростей, в котором1 возможны уста-
нови1вш1иеся виражи со скольжением, уменьшается по сравнению с
диапазоном скоростей для установившихся виражей без скольжения
(см. фиг. 3); при этом минимальная скорость для виражей со сколь-
жением возрастает, а максимальная — уменьшается. В сказанном
можно убедиться и на основании первого из выражений (9)
nx=nXKcos^ + п21 sin р.
Учитывая, что согласно принятым правилам знаков положи-
тельным величинам соответствуют отрицательные величины
п21 и, наоборот, найдем, что ^nx=nzl sin р всегда будет иметь
знак минус. Другими словами, при переходе от виражей без
скольжения к виражам со скольжением все семейство соответ-
ствующих кривых ял=/(М) (см. фиг. 3) сместится по оси орди-
нат вниз на величину &пх=п21 sin р = <р (М).
37
Величина изменения скорости А V при переходе от виражей с
п^ = 0 к виражам с nz ф 0, соответствующая одному и тому же зна-
чению перегрузки пу, приближенно может быть подсчитана по фор-
муле
ДУ=аДМ=а — «гр = ^, (31)
dnx dnx
~dM
где производная определяет наклон кривой пЛ.=/(М) при
dM.
$ = п2=0, соответствующей взятому значению перегрузки пу при
^х=пхк=0- Таким образом, чем круче наклон кривой nx=f (/М)
и чем меньше величина угла скольжения соответствующая дан-
ной боковой перегрузке п2, тем меньше будет изменение скоро-
сти полета при переходе от виража с р=0 к виражу с ₽^0.
Влияние скольжения на время и радиус виража нельзя оценить
непосредственно по выражениям (30), поскольку при пу=const и
п? 5^0 возрастают одновременно и числители и знаменатели в этих
выражениях. Расчеты показывают, что обычно скольжение весьма
существенно увеличивает радиус и время виража. Лишь при выпол-
нении виражей с перегрузками, пу, незначительно превышающими
единицу, и то в малой области скоростей, где производные
dM
имеют очень большие величины, скольжение приводит к уменьше-
нию R и Т.
Как иллюстрирует фиг. 3, это обычно может случиться лишь в
области больших величин коэффициента подъемной силы су, т. е. при
больших углах атаки.
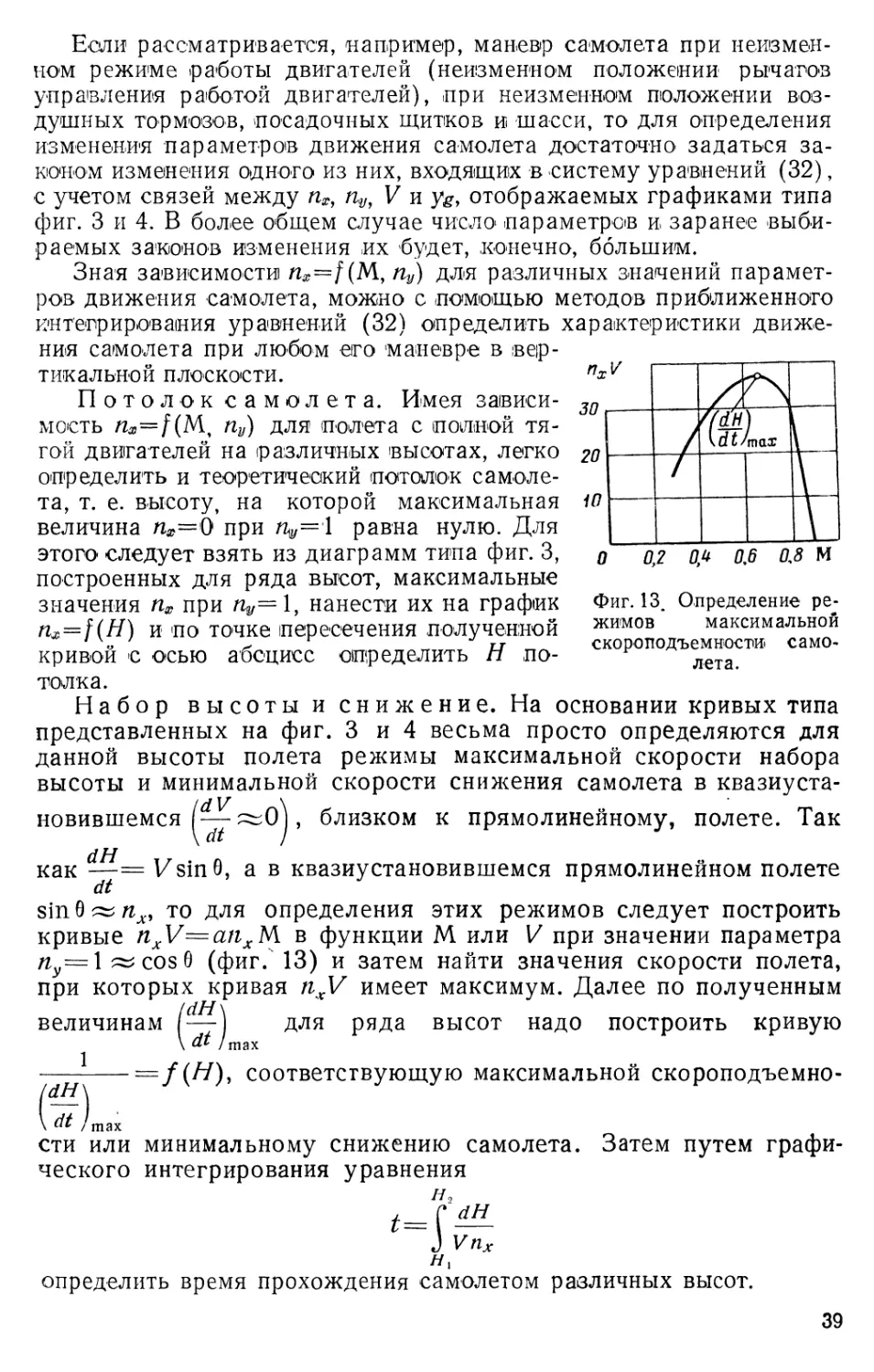
б) Маневры в вертикальной плоскости
Рассмотрим в вертикальной плоскости только координированные
(3=^=0) маневры»
При координированных маневрах в фиксированной вертикальной
плоскости, которую будем считать 'Совпадающей с плоскостью сим-
метрии самолета, параметры движения
(d#= у =0.
Уравнения движения для анализа и расчета таких вертикальных
маневров удобно написать в виде
. д\ 'I sine), а> = — = —(« —COS в), dt V v у ’ ^L=yCose, dt ^£ = Vsine, dt j (32)
38
Если рассматривается, например, маневр самолета при неизмен-
ном режиме работы двигателей (неизменном положении рычагов
управления работой двигателей), при неизменном положении воз-
душных тормозов, посадочных щитков и шасси, то для определения
изменения параметров движения самолета достаточно' задаться за-
коном изменения одного из них, входящих в систему уравнений (32),
с учетом связей между п?, riyt V и у^, отображаемых графиками типа
фиг. 3 и 4. В более общем случае число параметров и заранее выби-
раемых законов изменения их будет, конечно, большим.
Зная зависимости nx=f (М, Пу) для различных значений парамет-
ров движения самолета, можно с помощью методов приближенного
интегрирования уравнений (32) определить характеристики движе-
ния самолета при любом его маневре в вер-
тикальной плоскости.
Потолок самолета. Имея зависи-
мость na=f(M, Пу) для полета с полной тя-
гой двигателей на различных высотах, легко
определить и теоретический потолок самоле-
та, т. е. высоту, на которой максимальная
величина при Пу= 1 равна нулю. Для
этого следует взять из диаграмм типа фиг. 3,
построенных для ряда высот, максимальные
значения пх при %=1, нанести их на график
и по точке пересечения полученной
кривой с осью абсцисс определить Н по-
Фиг. 13. Определение ре-
жимов максимальной
скороподъемности само-
толка.
Набор высоты и снижение. На основании кривых типа
представленных на фиг. 3 и 4 весьма просто определяются для
данной высоты полета режимы максимальной скорости набора
высоты и минимальной скорости снижения самолета в квазиуста-
новившемся I— ~oV близком к прямолинейному, полете. Так
как — = VsinQ, а в квазиустановившемся прямолинейном полете
dt
sin 0 то для определения этих режимов следует построить
кривые nxV==anxM в функции М или V при значении параметра
cos 0 (фиг. 13) и затем найти значения скорости полета,
при которых кривая nxV имеет максимум. Далее по полученным
ldH\
величинам — для ряда высот надо построить кривую
\ dt /щах
------соответствующую максимальной скороподъемно-
сти или минимальному снижению самолета. Затем путем графи-
ческого интегрирования уравнения
н,
t=i—
J Vnx
определить время прохождения самолетом различных высот.
39
На практике могут встретиться самолеты, у которых при наи-
быстрейшем наборе высоты будет происходить заметное изменение
скорости (— /(А В этом случае диаграмма нанвыгоднейшего на-
бора высоты должна определяться несколько более слож-
ным способом по сравнению с описанным выше.
Прямолинейные пикирования самолета. Чис-
ла М, соответствующие квазиустановившимся пикированиям с угла-
ми 0, определяются точками пересечения кривых nx=f(N[) при пу=
= cos 0 (фиг. 3 и 4) с прямыми n^sin 0 =const.
На основании кривых na.=f(M) (фиг. 4) легко оценить, в част-
ности, возможность выполнения длительных отвесных пикирований;
если отрицательные значения пх в области допустимых для данного
самолета чисел М при ^=0 равны или превышают —1, то такого
рода! пикирования возможны. Точки пересечения кривых n^=f(M)
при 0 с линией Mtf=sin 9= — 1 определяют значения чисел М на
каждой высоте, соответствующие режимам отвесных пикирований.
в) Общий случай пространственного маневра
В общем случае при выполнении пространственного маневра
углы 0, у, перегрузки пх, пу, nz, режим работы двигателей Здв, поло-
жения воздушных тормозов Зв.г, посадочных щитков &п-ш шасси &шлс<и
могут изменяться во времени.
Для определения параметров движения самолета при любом
маневре имеем следующие уравнения:
dV t
— = g(n Ж-81П«,
dt
= cos у — п2 sin 7 — cos 9),
dty g ny sin 7+ nz cos 7
dt V cos 0
^^- = V cos Ф cos 0,
nt.
} (33)
dt
d~^= — V cos 6 sin Ф,
dt
f (^y’ ^в.т’ ^п.щ» ^шасси)>
(^»-Уgt Р> ^у’ ^дв’ ^в.т’ ^п.щ’ ^шасси)»
М^,
а
40
Зависимости пх и nz от 'высоты, перегрузки и других .параметров
могут быть представлены графически.
В систему десяти уравнений (33) входят семнадцать перемен-
ных *:
V, Р, 0, ф, 7, М, а. пу, п2,
У g"1 g"> °Дв* ^в.т» °п.щ» °шасси'
Таким образом, число переменных превышает число уравнений.
Поэтому недостающие семь связей надо выбрать либо заранее, либо
в процессе расчета.
Естественно, что при задании недостающих зависимостей необ-
ходимо учитывать характеристики управляемости данного самолета.
Например, перегрузка пу самолета не может при маневре меняться
мгновенно и -ее максимальная величина может быть также ограни-
чена, в частности, слишком большими усилиями на ручке управле-
ния, требующимися для ее создания.
Нелинейное изменение перегрузки, угла крена и других парамет-
ров по времени, которое наблюдается в действительности, может
быть с целью упрощения расчетов
заменено линейным, как это схема-
тически показано на фиг. 14. Заме-
тим попутно, что при проведении
расчетов для нахождения интересую-
щих нас значений пу и nz нередко
при ходится по л ьзов аться м етод а м и
интерполяции! и экстраполяции раз-
личных зависимостей.
На фиг. 15 в качестве примера
приведены результаты расчета ус-
ловно в ыб р энного п р остр анств енно -
го маневра, начавшегося пикирова-
нием с последующим разворотом
чившегося выполнением полупетли.
За начальный момент движения
/о=0 был принят квазиустановившийся
О
Принятое при.
расчете изменение
действительное
изменение
Фиг. 14.
тое при
метров
t
Действительное и приня-
расчете изменения пара-
движения самолета по
времени.
самолета на 180° и закон-
самолета типа МиГ-15 при
режим пикирования
|( —) =0| на высоте /7о = 75ОО м, с полностью открытыми воз-
IA dt /о J
душными тормозами (8вт)0=1 и на холостом режиме работы дви-
гателей (^дз)о = О. Начальные значения угла пикирования 90=—-
— 75° и числа Мо = О,94.
Было принято, что весь маневр—координированный при убран-
ных посадочных щитках, закрылках и шасси, т. е.
Р °п.щ ^в.т ^шасси 0.
* Величины бдв, SB.T, 5П.Щ и ошасси обозначают изменения тяги двигателей,
тормозящей силы от воздушных тормозов, посадочных щитков и шасси в до-
лях от их максимальных величин при данных значениях скорости и высоты по-
лета, перегрузок пу и nz.
41
Кроме того, предполагалось, что в момент /о = О летчик начал
уборку воздушных тормозов, перевел рычаг газа в положение, соот-
ветствующее режиму работы двигателей на номинальной мощности,
и затем начал создавать перегрузку для вывода самолета из пикиро-
вания. Условно было принято, что изменение тяти двигателей и убор-
Фиг. 15. Результаты расчета пространственного координирован-
ного маневра самолета (пример).
ка воздушных тормозов произошли за две секунды, т. е. ik моменту
/ = 2 сек., а перегрузка Пу увеличилась до четырехкратной за 1 сек.
{tny = \ сек.). Величина перегрузки пу при М>0,9 была ограничена
большими шарнирными моментами руля высоты (см. фиг. 3 и 4),
причем, исходили из условия, что летчик прикладывает к ручке уси-
лие в 30 кг. При М<0,9 предполагалось, что летчик выполняет ма-
42
невр с перегрузкой пу=& до момента выхода самолета на большие су,
соответствующие началу предсрывной тряски, на режиме которой
заканчивался маневр; при этом, вследствие уменьшения скорости в
конце маневра, перегрузка пу постепенно уменьшалась.
Примерно, в момент 0=0 на 18-й секунде предполагалось, что
летчик перевел самолет в крен для выполнения разворота на 180°,
а затем набирал высоту с у=0, выполняя полупетлю. Расчет* был
закончен верхней точкой полуп-етли (0 = 180°).
Расчет выполнялся методом численного интегрирования системы
уравнений (33). Величины перегрузки пх для каждого момента вре-
мени определяли путем интерполяции между кривыми ^=f(M, п^),
построенными для трех высот (// = 7500, 5000 и 2500 м) и двух
комбинаций параметров 6вТ и 3Дв, а именно:
1) sB.T=i; 8дв=0;
2) 83.т = 0; §дв=1.
В заключение этой главы, посвященной показателям маневрен-
ности, отметим следующее.
В рабочие формулы и уравнения, используемые для определения
траектории центра тяжести самолета и величин частных показателей
маневренности, не входят слагаемые вектора угловой скорости по
осям координат, а входят лишь слагаемые вектора перегрузки и
угол крена.
Отсюда следует в ывод, что принятая нами система общих по-
казателей маневренности, связанная с количественными характери-
стиками возможных для данного самолета перегрузок пх, Пу, п? и
угла крена у, включая сюда и возможную быстроту изменения их во
времени, достаточна для анализа и расчета любого маневра само-
лета.
Очевидно также, что при этом нет нужды применять непосред-
ственно угловые скорости cdи <в качестве общих показателей
маневренности самолета.
Наконец, следует отметить, что построение семейств кривых типа
представленных на фиг. 3, 4, 7, 8, 9 и определение с их помощью
различных частных показателей маневренности самолета по- суще-
ству дают простой метод аэродинамического расчета, позволяющий
достаточно полно представить летные данные вновь проектируемого
самолета.
II. ПРОДОЛЬНАЯ УПРАВЛЯЕМОСТЬ И УСТОЙЧИВОСТЬ
САМОЛЕТА
1. ОСНОВНЫЕ ПОЛОЖЕНИЯ
Понятие управляемости самолета связывается с его реакцией на
действия летчика в полете.
В дальнейшем управляемость самолета будем характеризовать
соотношениями или зависимостями между отклонениями рычагов
управления и усилиями, прикладываемыми к ним летчиком, с одной
стороны, и изменениями параметров движения самолета, с другой.
К случаю, когда рассматриваются соотношения между отклоне-
ниями рычагов управления и параметрами движения самолета, бу-
дем применять понятие об управляемости по отклонениям рычагов
управления. Аналогичным образом определяется и понятие управ-
ляемости самолета по усилиям на рычагах управления.
Из сказанного становится ясной простая структура большинства
частных показателей или критериев управляемости самолета, при-
меняемых для ее анализа и количественной оценки. Эта структура
обычно представляется в следующем виде:
величина, характеризующая
действия летчика
показатель управляемости=----------------------------
величина, характеризующая
реакцию (движение) самолета на
действия летчика
Так, например, к такому виду может быть приведен' известный
показатель продольной управляемости самолета — градиент усилий
на ручке от руля высоты (стабилизатора) по перегрузке
рп —-
dn
где dPn — прирост усилий на ручке, a dn — соответствующий при-
рост перегрузки, взятые при условиях установившихся начального
и конечного режимов полета с I/=const.
Аналогичным образом расшифровываются и такие показатели
управляемости самолета, как: A'^=—= pn~dIjL
э d^x dn 1 dn
И др.
Здесь обозначены: через dxQ — линейное перемещение ручки
или штурвала управления; через dn~d[^-\~ изменение гради-
44
ента нарастания или уменьшения перегрузки по времени; через
/^ — изменение усилия на ручке при отклонении летчиком поверх-
ностей поперечного управления (элеронов) и через —угловая
скорость накренения самолета.
Очевидно, что для анализа »и оценки управляемости самолета не-
правильно брать углы отклонения рулевых поверхностей в качестве
величины, характеризующей действия летчика. Действительно, лет-
чик ощущает (непосредственно' отклонения рычагов и усилия, при-
кладываемые к ним при пилотировании, а не углы отклонения руле-
вых поверхностей. Если на одном и том же самолете изменить пере-
даточное отношение между отклонениями ручки и руля, то оценка
летчиком управляемости самолета изменится, несмотря на то, что
углы отклонения самого руля, необходимые для выполнения одного
и того же маневра, останутся прежними.
При рассмотрении обширного и сложного комплекса вопросов
управляемости самолета с целью большей четкости формулировок
целесообразно разделить их на две области.
Первая область охватывает вопросы балансировки самолета в
различных установившихся режимах полета. Эту область вопросов
кратко назовем условным понятием «статическая управляе-
мость самолет а». Таким образом, статическая управляемость
характеризуется усилиями на рычагах управления и отклонениями
рычагов, необходимыми для осуществления балансировки самолета
в различных установившихся режимах полета.
Вторая область вопросов управляемости связана с пилотирова-
нием самолета при выполнении различных неустановившихся дви-
жений, в частности, в процессе перевода самолета из одного устано-
вившегося режима полета в другой. Эту область вопросов кратко
назовем условным понятием «дина м и ч еск ая управляе-
мость самолета». Таким образом, динамическая управляе-
мость характеризуется усилиями и отклонениями рычагов управле-
ния, необходимыми для выполнения неустановившегося движения
(маневров) самолета, в процессе которого величины и знаки пара-
метров движения изменяются во времени.
Указанное деление управляемости аналогично условному деле-
нию устойчивости самолета на статическую устойчивость и динами-
ческую устойчивость. Хотя последние термины и нельзя назвать
вполне удачными, однако они прочно вошли в практику и теорию
устойчивости самолета. Применение условных понятий статической
и динамической управляемости самолета позволяет установить про-
стую связь характеристик управляемости с соответствующими ха-
рактеристиками устойчивости самолета и тем самым существенно'
упростить изложение вопросов.
Использование статических и динамических характеристик
управляемости позволяет во многих случаях при рассмотрении пове-
дения и движения самолета использовать его подобие движению
простых механических систем (примеры см. ниже). Заметим, что
понятие «статическая управляемость самолета» уже применяется
45
отдельными авторами (см., например, работы В. С. Пышн-ова и
Э. Б. Микиртумова).
В дальнейшем при рассмотрении -поведения и управляемости са-
молета считаем, что полет происходит в спокойных атмосферных
условиях. В качестве причин или возмущений, воздействующих на
движение самолета, примем только отклонения рулей, изменение
режима работы двигателей, изменение положения воздушных тор-
мозов и т. п., т. е. будем рассматривать возмущения, связанные
только с действиями летчика.
Возможность такого ограничения в большей мере оправдывается
многолетним опытом летных испытаний и массовой эксплуатации
самолетов, показавших, что хорошо управляемый самолет в спокой-
ном воздухе хорошо управляется и при наличии атмосферных воз-
мущений и меньше реагирует на болтанку по сравнению с самоле-
том, плохо управляемым.
В существующих нормах и рекомендациях конструкторам по ко-
личественным границам характеристик устойчивости и управляемо-
сти самолета обычно нет показателей, непосредственно связанных с
полетом в болтанку. Поэтому и в программах летных испытаний на
устойчивость и управляемость редко отводятся специальные полеты
на обследование поведения самолета в болтанку. Такие полеты
обычно выполняются лишь при исследовании и проверке прочности
конструкции самолета.
Устойчивость и управляемость самолета тесно связаны друг с
другом. Для обеспечения хорошей управляемости самолета не вся-
кий вид устойчивости обязателен, и наличие некоторых видов устой-
чивости еще не всегда обеспечивает хорошие летные качества само-
лета. Например, самолет может быть неустойчивым в отношении так
называемого длиннопериодического продольного движения при
'большом его периоде, а также медленно развивающегося спираль-
ного движения, но вместе с тем может иметь отличную оценку лет-
чиков в отношении пилотажных качеств. Самолет может быть устой-
чив в отношении так называемых боковых -колебаний, но если эти
колебания затухают недостаточно быстро, а также если амплитуда
колебаний самолета по крену во много раз превышает амплитуду
колебаний по рысканью, то самолет получит плохую оценку летчи-
ков. Самолет, вполне устойчивый в отношении так называемых про-
дольных короткопериодических колебаний, но имеющий по тем или
иным причинам недостаточный градиент изменения усилий на ручке
dP \
по перегрузке (малая величина Рп = получит оценку летчиков,.
как недостаточно устойчивый и неприятный в пилотировании.
Анализ приведенных фактов позволяет сделать вывод, что нельзя
оценивать значимость характеристик устойчивости самолета в воз-
духе, забывая о летчике, осуществляющем пилотирование самолета.
Представления о двух характерных для практики случаев пило-
тирования — полета с закрепленными рулями и полета со свободны-
ми рулями являются по существу условными.
46
На самом деле, даже когда пошет происходит на определенном
режиме, например по заданному курсу (без использования автопи-
лота), летчик, держа руки и ноги на рычагах управления рулями,
обычно представляет последним некоторую ограниченную свободу и
время от времени активно вмешивается в управление для исправле-
ния движения самолета в желательном направлении. При каждом
лаком вмешательстве летчик, естественно, не может установить рули
в положение, точно отвечающее желаемому режиму полета. Чем луч-
ше показатели устойчивости самолета, тем реже приходится летчику
вмешиваться в управление при прочих равных условиях, среди кото-
рых весьма важную роль играет величина трения в проводке управ-
ления рулями.
Чем больше трение в проводке, тем хуже самоцентрируемость ру-
лей в полете, обусловливаемая их шарнирными моментами или спе-
циальными загрузочными механизмами, устанавливаемыми в систе-
му управления при использовании для отклонения рулевых поверх-
ностей гидроусилителей (бустеров).
Чем больше трение в управлении, тем больше затрудняется дози-
ровка отклонений рулей летчиком, тем меньше становится так назы-
ваемая точность пилотирования и тем больше возрастает утомляе-
мость летчика в полете.
По своему вредному влиянию трение в проводке может су-
щественно превышать эффект неустойчивости самолета в длиннопе-
риодическом продольном или спиральном боковом движении са-
молета.
В отношении оценки устойчивости полет самолета нельзя уподоб-
лять полету летающего снаряда, управляемого автопилотом, или по-
лету летающей модели самолета с жестко закрепленными рулями,,
для которых отсутствие неустойчивости всех видов является обычно
обязательным условием.
В целом качества, обеспечивающиеся у летающего снаряда ус-
тойчивостью с работающим автопилотом, у самолета (с летчиком)
обеспечиваются его управляемостью.
В отношении вмешательства в управление летчика можно было-
бы уподобить гипотетическому автопилоту, способному в полете из-
менять свои передаточные числа, обладающему изменяющейся, в за-
висимости от внешней обстановки, избирательной способностью реа-
гировать на отклонения параметров движения самолета от желае-
мых или заданных и способному даже менять знак той или иной
реакции.
При анализе управляемости устойчивость самолета следует рас-
сматривать как характеристику динамической системы, на движение
которой воздействует летчик. При этом устойчивость должна оцени-
ваться прежде всего не по тому признаку, вернется или не вернется
самолет в исходный режим полета по истечении хотя бы и очень
длительного отрезка времени, а по тому, как протекает возмущен-
ное движение самолета и как реагирует самолет на то или иное от-
клонение рулей в течение сравнительно короткого промежутка вре-
мени — порядка нескольких секунд или даже долей секунды.
47
При математическом анализе динамической устойчивости и уп-
равляемости самолета обычно рассматриваются так называемые ма-
лые отклонения его от того или иного режима прямолинейного поле-
та, который считается установившимся. При этом делаются обычные
допущения о применимости гипотезы стационарности обтекания, при
которой плотность, температура и давление воздуха остаются посто-
янными, несмотря на изменение высоты при возмущенном движении
самолета.
Указанные допущения о неизменности параметров атмосферы
приемлемы для тех случаев, когда рассматриваемым движениям са-
молета соответствуют отрезки времени, измеряемые в секундах, и не-
большие изменения высоты полета. Но эти допущения не позволяют
достаточно точно1 представить движение самолета за более длитель-
ные отрезки времени, особенно при резких изменениях высоты по-
лета.
Как известно, метод малых возмущений в простой форме отобра-
жает аналитически поведение самолета и его управляемость практи-
чески при любых отклонениях от исходного режима, если только не
выходить при этом из областей углов атаки, углов скольжения, углов
отклонения рулей и угловых скоростей, для которых действительны
линейные зависимости от них коэффициентов аэродинамических сил
и моментов, усилий на ручке и т. п. В ряде случаев, однако, метод
малых возмущений неприменим, как, например, при рассмотрении
затягивания в пикирование, выхода самолета на критические углы
атаки при наличии «ложки» в продольной устойчивости и др.
Метод анализа и соответствующие критерии для оценки управ-
ляемости самолета остаются в основном теми же как для самолетов
с обычной системой управления рулями, так и для самолетов, снаб-
женных гидроусилителями. Применение гидроусилителей обычно со-
провождается постановкой в систему управления так называемых
автоматов усилий, часто с нелинейными характеристиками; это- в об-
щем несколько усложняет анализ устойчивости и управляемости са-
молетов с гидроусилителями в управлении по сравнению с самоле-
тами без гидроусилителей.
2. СТАТИЧЕСКАЯ ПРОДОЛЬНАЯ УПРАВЛЯЕМОСТЬ САМОЛЕТА
а) Общие показатели продольной статической управляемости
Понятие продольной управляемости самолета связывается с воз-
действиями летчика на рычаги управления, необходимыми для изме-
нения моментов аэродинамических сил относительно поперечной оси
самолета Ozx при выполнении в полете различных маневров и режи-
мов движения.
В соответствии со сказанным в предыдущем разделе, продольная
статическая управляемость характеризуется кривыми величин про-
дольных усилий Рв на ручке (штурвале) и ее отклонений хв, необхо-
димых для осуществления балансировки самолета при различных
видах установившихся режимов полета. Эти кривые принято назы-
48
вать бала-нейро.в очными кривыми. По балансировочным
кривым (фиг. 16—20) определяют изменение усилий на ручке и ее
положения в зависимости от изменения одного из параметров, харак-
Фиг. 16. Схематический пример семейства ба-
лансировочных кривых, характеризующих про-
дольную статическую управляемость самолета.
теризующих данный вид или данную серию установившихся режи-
мов движения самолета. За такие параметры обычно принимают чис-
ло М, скорость полета по прибору 7ПР, перегрузку пу или коэффици-
ент Су.
При анализе и оценке продольной ста-
тической устойчивости самолета прихо-
дится учитывать влияние, на балансиро-
вочные кривые внешних геометрических
форм самолета, его веса G центровки хт,
режима работы двигателей и др., т. е.
влияние параметров
С/, at. -j 8ЛВ. Зп.щ, ^шгсси-
Естественно, что для полной характе-
ристики статической управляемости само-
лета при всех возможных сочетаниях этих
параметров потребовалось бы огромное
Фиг. 17. Схематический при-
мер балансировочных кри-
вых, характеризующих про-
дольную статическую управ-
ляемость при полете со
скольжением.
практически ненужное количество соот-
ветствующих балансировочных кривых. Для практического* анализа
и оценки продольной статической управляемости современного само-
лета обычно вполне достаточно определить балансировочные кривые,
соответствующие:
49
крайним режимам работы двигателей (режим малого газа или
холостого хода, номинальный или полный газ и форсажный режим);
крайним положениям воздушных тормозов, посадочных щитков
и шасси (убрано и полностью выпущено);
двум кр айним эксплуатационным
Фиг 18. Балансировоч-
ные кривые хв—т (М) и
^B=f(M) при двух раз-
личных центровках са-
молета.
Фиг. 19. Балансировочные
кривые хв и Рв в зависи-
мости от перегрузки при
двух центровках самолета.
двум-трем возможным в эксплуатации положениям триммера
на руле высоты;
одному среднему или двум крайним эксплуатационным весам
самолета (если диапазон изменения G велик);
Фиг. 20. Изменение показате-
лей статической управляемости
самолета по усилиям при изме-
нении режима работы двигате-
лей, при выпуске воздушных
тормозов и посадочных щит-
ков.
полета на два класса:
двум, трем или четырем высотам
Н=const (в зависимости от величины
потолка самолета).
Однако, далеко не для всех возмож-
ных комбинаций из указанных крайних
значений параметров требуется опреде-
лять балансировочные кривые. Напри-
мер, нет необходимости находить ба-
лансировочные кривые с выпущенными
воздушными тормозами при всех ре-
жимах работы двигателей; достаточно
иметь балансировочные кривые при од-
ной центровке самолета и при одном
режиме работы двигателей. Переход к
другим условиям полета обычно может
быть сделан просто, путем сложения
соответствующих изменений усилий и
положения ручки управления. Заметим,
что нередко в дополнение к положениям
ручки управления целесообразно определять и изменение углов от-
клонения рулевых поверхностей, например, при анализе влияния на
управляемость упругих деформаций проводки управления.
При анализе продольной статической управляемости самолета
целесообразно разделить рассматриваемые установившиеся режимы
50
а) установившиеся режимы 'координированного полета при
В = ^ = /^i = 0;
б) установившиеся режимы со скольжением при
пу^п^^п= 1.
Примем, что в пределах рассматриваемых участков движения са-
молета плотность и температура воздуха остаются постоянными.
Тогда установившиеся режимы координированного полета в общем
случае будут установившимися спиралями, частным же случаем их
будет установившийся прямолинейный полет, т. е. спираль с ради-
усом /? = оо.
Нетрудно заключить, что достаточно знать или задать две вели-
чины V или М и Пу, чтобы при взятых величинах Н, G, <^т, Здв и др.
определить величины всех остальных параметров установившегося
координированного движения самолета. Действительно, зная М и
Пу по диаграммам типа представленных на фиг. 3 и 4, нетрудно най-
ти соответствующую величину перегрузки пх, а затем с помощью
формул
пх~ sin 6,
cos 9
cos 7
dty V
dt R
£
—— sin у,
v 1
u>2 = y)zi = — (ny — cos 9 cos 7) = cos 9 sin2 7,
(34)
a>,= —— sin 9 sin г
Л I/ »
определить соответствующие величины всех остальных параметров
движения.
Формулы (34) легко получить из системы общих уравнений ма-
невренности (7), если положить в них
= й 0.
dt dt dt г
Таким образом, при заданных постоянных величинах Я, G, хт, тв,
§дв и т. д. параметры установившегося движения самолета (спира-
ли) , а следовательно, и усилия на ручке Рв и ее отклонения хв будут
функциями только двух величин М и Пу или V и пу, т. е.
РВ=/(М, Пу) ихв=?(М, Пу).
Чтобы охарактеризовать статическую управляемость самолета в
координированном полете, достаточно, например, построить балан-
сировочные кривые PB=:f(M) и л:в=<р(М), соответствующие сериям
установившихся спиралей при различных постоянных величинах пе-
регрузки Пу, как параметре серии (фиг. 16). Естественно, для полной
51
Фиг. 21. Характеристики
загрузочного механизма.
Ломаные линии 1, 2 и 3 от-
вечают соответственно ней-
тральному и крайним поло-
жениям механизма трим-
мерного эффекта.
оценки и анализа управляемости самолета каждая балансировочная
кривая должна быть определена во воем диапазоне скоростей, воз-
можном в полете при данном щ,.
Анализ и оценку статической управляемости можно производить
и по семейству балансировочных кривых PB=f(riy) ихв=ф(^)
(см. фиг. 19) при различных величинах числа М, как параметра.
Очевидно, чт'о, имея одно из двух указанных семейств балансировоч-
ных кривых, легко построить и второе семейство кривых.
Для характеристики продольной статической устойчивости само-
лета в установившемся полете со скольжением могут быть исполь-
зованы балансировочные кривые
Л=/(«4 ихв=<р(ие)
при различных величинах скорости (числа
М), как параметра семейства (см.
фиг. 17).
Если самолет имеет бустерное управ-
ление и в аварийном случае рассчитан на
ручное управление, то балансировочные
кривые Рв и хв должны быть определены
при полетах как с работающими бустера-
ми, так и с отключенными. Так как по-
следний случай является аварийным, то
количество необходимых балансировочных
кривых и частных показателей статической
управляемости самолета с отключенными
бустерами может быть сокращено.
Заметим, что для большей наглядности характеристик управляе-
мости балансировочные кривые Рв и хв целесообразно строить не
только в функции числа М, но и в функции индикаторной или прибор-
ной скорости полета.
У самолетов, снабженных бустерами, в систему управления вклю-
чаются различного рода механизмы, например, пружины, загружаю-
щие ручку управления часто по нелинейному закону. В этом случае,
кроме указанных выше балансировочных кривых, при анализе и
оценке управляемости самолета полезно иметь характеристики за-
грузочного механизма по ходу ручки или углу отклонения рулевой
поверхности (фиг. 21).
Наличие указанных балансировочных кривых позволяет с доста-
точной для целей практики точностью определять величины усилий и
отклонений ручки при любых установившихся режимах полета в ди-
апазоне возможных при эксплуатации. Поэтому эти балансиро-
вочные кривые можно назвать общими показа-
телями продольной статической управляемости
самолета.
б) Частные показатели продольной статической управляемости
По балансировочным кривым могут быть определены величины
различных частных показателей, или критериев, статической про-
дольной управляемости самолета, как, например:
52
Pv min и Ру max’- крайние усилия на ручке соответственно в обла-
сти минимальных и максимальных скоростей итолета при неизменном
положении триммера на руле высоты, соответствующем балансиров-
ке самолета (Рв=0) на заданной скорости при определенной цент-
ровке самолета;
dP
Рп~ —- —градиент усилий при переходе от установившегося
dn
режима прямолинейного полета к установившемуся криволинейному
полету с (перегрузкой п= 1 +dn;
&Р№ — изменение усилий на ручке, необходимое для балансиров-
ки самолета при изменении режима двигателей на заданной скорости
с неизменным положением триммера руля.
Заметим, что оценка продольной статической управляе-
мости самолета только с помощью одних производных Рн,
— ^vmin и ДР- недостаточна. Эти критерии могут характе-
ризовать управляемость самолета для всего эксплуатационного
диапазона перегрузок лишь при линейных зависимостях Рв —
хв = ср(п) и т. д. Для современной практики характерным является
наличие нелинейных зависимостей или „ложек" в характеристи-
ках продольной статической устойчивости и управляемости.
Поэтому, например, кроме величин Рп и Хп, необходимо норми-
ровать и величины Pnmax и xnmax, соответствующие выходу само-
лета на предельные перегрузки.
dP dP
Градиенты и др., строго говоря, характеризуют ста-
тическую управляемость самолета в общем случае лишь при
малых изменениях установившихся режимов полета.
Как известно, частные показатели статической продольной управ-
ляемости Рп, Xn,Pv и Xv непосредственно связаны с коэффициента-
ми статической устойчивости самолета. Приведем простую и удоб-
ную, в- частности, при обработке! результатов летных испытаний и их
анализе форму этих зависим остей:
Хп = х*
Pn = Px°nw
Xv— ^Хв — хха 1
2 dV V
(35)
Здесь через ап и о у обозначены коэффициенты статической ус-
тойчивости по1 перегрузке и по скорости полета:
dmz [ dmz
дсу ды21 \dcy /V^-const’
j dm2 /д M \
дсу dM \dCy ,'/z_-const •
(36)
53
В случае, когда исходным установившимся режимом
горизонтальный полет, выражения для оп и sv могут быть
ставлены известными формулами
О)
= —>
н
г -М ;
— -==-т.
z 2су '
где
/пм=^;
z дМ
является
пред-
(37)
плотности самолета.
„ dmz м dmz
mcv = -=Л; т<* = —=^~\
дсу
— —ЬАаг1
-----------------------»
ZL у
р = -^-—коэффициент относительной
Р$в.а
Подобными же формулами определяются и коэффициенты устой-
чивости о и св, оу св при освобожденном управлении.
дР дх
Величины Рх= —= и Xх— —, называемые коэффициентом
дхТ дхТ
расхода усилий и коэффициентом расхода руч-
к и, весьмд просто определяются из балансировочных кривых при
различных центровках и неизменном положении триммера на руле
высоты. С физической стороны коэффициенты Рх и Xх представляют
собой величины усилия и отклонения ручки, которые потребовались
бы для уравновешивания момента, равного произведению силы веса
самолета на плечо, равное длине САХ; при этом условно' считается,
что коэффициент продольного момента самолета и коэффициент
шарнирного момента руля высоты являются линейными функция-
ми Зв независимо от величины отклонения руля, потребного для урав-
новешивания этого момента.
Зависимость коэффициентов Pz и Xх от конструктивно-аэродина-
мических параметров при отсутствии гидроусилителей в управлении
может быть выражена формулами
Рх=к
mz
G
F’
(38)
1
57,3
ку
1 <®в
где k^ =---------передаточное отношение от руля к ручке управ-
57,3 йхъ
ления, — коэффициент шарнирного момента руля высоты,
/п®—коэффициент эффективности руля, 5В и Ьв~ площадь и
хорда руля, --—удельная нагрузка на крыло,
- _ Р sin (я —у)
У У + Sq
54
При наличии необратимых гидроусилителей и простейшем авто-
мате усилий в виде пружин, создающих усилия, пропорциональные
отклонениям руля или ручки, величина Рх будет пропорциональна
величине Xх. Если автомат усилий нагружает ручку пропорциональ-
но Дхв и q (скоростной напор), то коэффициент Рх может быть пред-
ставлен формулой
где k — постоянная величина, а тх = т\—в.
2 2 dx*
Заметим, что величины коэффициентов mczy, mczy , ал, опсв, аи,
оГсв, а следовательно, и величины показателей управляемости Р1,
Хп, Pv, Xv являются линейными функциями параметра лт, ха-
рактеризующего положение центра тяжести самолета относи-
тельно САХ.
На основании приведенных выражений можно заключить, что
формально все требования к количественным величинам и знакам
показателей статической управляемости самолета могут быть удо-
влетворены при любых величинах коэффициентов статической устой-
чивости и даже при статической неустойчивости самолета путем со-
ответствующего подбора величин и знаков кш, /п8ш, тьг и к.
Однако, необходимость статической устойчивости становится сра-
зу же очевидной, как только перейдем к рассмотрению действий
летчика при возвращении самолета к исходному установившемуся
режиму после случайного отклонения от него. Рассмотрение этих
действий летчика относится уже к области динамической управляе-
мости самолета.
Удовлетворение соответствующих требований к статической уп-
равляемости является необходимым и весьма существенным, но еще
далеко недостаточным условием хорошей управляемости самолета
в целом.
3. ПРОДОЛЬНАЯ ДИНАМИЧЕСКАЯ УПРАВЛЯЕМОСТЬ САМОЛЕТА
Как уже указывалось выше, самолет является определенной ди-
намической системой, на движение которой воздействует летчик в
процессе выполнения тех или иных полетных заданий. Поэтому ана-
лиз управляемости при неустановившемся движении самолета целе-
сообразно' начать с рассмотрения тех показателей, которые опреде-
ляют самолет, как динамическую систему. Этими показателями
могут служить величины, характеризующие так называемое собст-
венное возмущенное движение самолета, вызванное какой-то внеш-
ней причиной.
Математически собственное возмущенное движение самолета^
характеризуется корнями соответствующего характеристического
уравнения, а физически — периодами собственных колебаний и ко-
эффициентами затухания возмущенного движения. Так, например,
если рассматривать продольное движение самолета в вертикальной
плоскости, то приближенно, в пределах применимости метода малых
55
возмущений, самолет, как динамическая система, представляется
характеристическим уравнением 4-й степени, имеющим обычно одну
пару больших по абсолютной величине корней и одну пару малых
корней. Такое возмущенное движение обычно и рассматривается в
курсах динамической устойчивости самолета.
При анализе продольной динамической управляемости мы возь-
мем более общий случай возможных движений самолета и будем
рассматривать пилотирование самолета при выполнении координи-
рованных (3 = 0) неустановивинихся движений самолета в любой
плоскости пространства, а не только в вертикальной плоскости. При
этом для получения хотя бы приближенных, но достаточно пригод-
ных для практического использования результатов сделаем ряд
обычных допущений, как, например, возможность применения мето-
да малых возмущений, постоянство плотности и температуры воз-
духа при изменении высоты в таком возмущенном движении и др.
а) Характеристика самолета как динамической системы
Рассмотрим продольную управляемость при выполнении прост-
ранственных координированных маневров (3 = 0) с постоянным уг-
лом крена (у = const). Независимым переменным, изменением кото-
рото определяется изменение параметров движения самолета при
такого рода маневрах, является угол отклонения руля высоты; откло-
нения руля направления и элеронов будут функциями отклонения
руля высоты, определяемой условиями сохранения 3 = 0 и у = const.
Общие уравнения сил, приложенных к самолету bi условиях ука-
занного координированного движения, представим в форме системы
(7), приближенно положив* п^ = 0:
1 dV , . Q
П =-------Р sin 0,
х g dt'
V , л
nv— —- + cos 9 cos у,
y g
IZ coy
q~-------p cos 9 siny;
g
при этом пренебрегаем боковой силой Дгр.н,
кальном оперении при отклонении руля направления.
Уравнение продольных моментов, приложенных к самолету, на-
пишем в упрощенном виде
Id^l=M2,
z dt г
(40)
•возникающей на верти-
(41)
где со,я — угловая скорость вращения самолета относительно жестко
связанной с ним оси Огь-
Iz — момент инерции самолета относительно этой же оси;
Mz — момент аэродинамических сил, в том числе и тяги двига-
телей, относительно той же оси Ozx.
Из системы уравнений (7) используем
= cos-( + <« Sin-r. (42)
fit J
56
Наконец, так как при координированном движении самолета
оси Oz и Oz\ скоростной и жестко связанной с самолетом систем
осей координат совпадают, соответствующие угловые скорости вра-
щения о*— скоростной системы координат и — самолета или,
что то же самое, жестко связанной с самолетом системы координат,
„da
будут отличаться одна от другой на величину — ,т. е.
dt
—“^7- (43)
dt
При установившемся режиме полета — = 0 и
Считая, как обычно, в пределах рассматриваемого небольшого
участка управляемого движения самолета; плотность, температуру и
давление воздуха постоянными, придем к заключению, что в систему
шести уравнений (40) — (43) при у = const вводят шесть перемен-
ных Gt, V0,
Уменьшим число уравнений до четырех, исключив переменные
(Оя и Для этого из третьего и второго уравнений системы (40) по-
лучим
= —— cos 9 sin у.
У у ‘
(«у —COS 0 COS •[).
(44>
Напишем в окончательном виде упрощенную систему общих
уравнений движения самолета:
----£(nx—sin9) = 0,
at
——— (flvcosy — cos 9) = 0,
dt V v y ‘ 7
—+ — (nv — cos 9 cosy) — (*>2i=0,
dt v v y 17 zl
(45)
d^zi Mz q
dt Iz
В качестве независимых переменных в эту систему входят пара-
метры V, а, 9, аы.
Допустимость тех упрощений, которые были сделаны при состав-
лении системы уравнений (45), можно обосновать следующим.
Как известно, в общем случае уравнения моментов, действующих
на самолет, могут быть написаны в виде
ifcor / dbit, \
/, — 4- (/- / ) <о», + /,v (<о_<ог-= М„
х dt 4 2 yI у 2 V х 2 dt !
<7a)v / d^x\
/уИГ + ('/л~~Iz} <°Л ~1ху \у ‘"л+=Му'
(46)
Л (Л - Jл) «>,<% + ЛУ (*'<2У - «И =
По этим уравнениям можно подсчитать -величины отклонений эле-
ронов и руля направления, потребные для выдерживания у = const и
3 = 0, а также отклонения руля высоты ДЗВ, расходуемые на
преодоление моментов, определяемых двумя последними членами
левой части третьего уравнения системы (46). При этих подсчетах
величины и определяются с помощью выражений (44), а вели-
чина о)^ — по формуле
&х= cos 7 “ sin l) tg (47)
следующей непосредственно из уравнений (7) при —=0.
dt
Дифференцируя выражения (44) и (47), получим производные
й<*х d^y du>z
и в функции пу, V, 9, у и их производных по вре-
мени.
Расчеты показывают, что даже в области малых скоростей поле-
та при выполнении координированных маневров с у = const вели-
чины Д8В, Д8Э и Д^н измеряются долями -градуса. Это подтверждает
целесообразность упрощений, сделанных при составлении уравне-
ний (45) для анализа продольной управляемости самолета. Конечно,
если бы рассматривалась устойчивость движения самолета при не-
вмешательстве летчика в управление и больших отрезках времени,
то указанные упрощения вводить было бы нельзя.
В общем случае уравнения системы (45) являются нелинейными.
В пределах применимости малых отклонений система (45) преобра-
зовывается в систему линейных дифференциальных уравнений с по-
стоянными коэффициентами:
— g (п* Д V + Ла — cos ОДО) — О,
dt
--ДУ + (я^Д V + я® Да + COS у sin 9Д0) — Да>г1=О,
(nvy cos ^Д V+ л® cos уДа 4- sin 6Д0)—О,
- 4- (MW+ М* Да + 2И “ — + М“Да>г11=-L /ИМВ.
dt Iг\гг<ltгЛ|lгг^
Здесь в постоянные коэффициенты при переменных ДV, Ьа,
Дб и д«)г1 входят величины, соответствующие исходному режиму
„ da dV
установившегося криволинейного полета, для которого — = =
dt dt
dft d^z-, л
= —— при этом для частных производных использо-
at at
ван обычно применяемый вид обозначений, например,
п* \ — и т. д.
да 2 да
58
Чтобы получить характеристики самолета как динамической си-
стемы, требуемые для анализа его продольной управляемости, надо
определить так называемое собственное возмущенное движение са-
молета, которое будет отображаться системой уравнений (48), но
при всех правых частях их, равных нулю. Характеристическое урав-
нение будет
№ Q
(49)
Коэффициенты характеристического уравнения (49) представим
з виде:
а, =— [сл — тш — т* — (1+2^) с J,
о2=Н- [ —— Су /п“+(1+2й1) сх 4-т“) 4-
4- 2(^k1cx 4~ k%c у — k^c х Су 4- k2cy Су) —
— (2/г2с2 4- ~с~с\ 4- с~с}) sin2 7],
“ { 2 Сх 4- k2Cy ktCх Су 4“ Л2Су С х)
— 2 (k^CyCx — klcxcay) тй — (\ -\-2kl)cx^ma- —
—~Сх М 4- [2k2c2y (тш 4- тп“) 4- (сх Су 4- су Сх) та‘ —
— 2сх (k2~су Сх — kxcx сау) 4- ~су (схслх4- су~сау cos27)] sin2 7},
n0—— { —+ k2c2y) \>-та 4- (схСх + с Су) M[imM4-
4- [2k2 Су рта — су Су М. fimM — Cy (сх сх 4-
4- Су cos2 7) mw + 2cx (k2cvCx — k1cx с у) /п“] sin2 у}.
Здесь применены обозначения;
м &A 6А
= тк = т^
Z ***• Z 1 Z
Г 9 Г А Г 2
- ь\
ть — т* -х- ;
2 „4
Пх G
Р COS (а —<р)
(51)
пу G
59
Коэффициент mz определяется формулой
(^г)аэр Ру р
т? =-----------,
2 sqbk
где ур — плечо тяги двигателей Р относительно центра тяжести са-
молета.
При выводе формул (48) —(51) производные тГх и nvx были
приняты в следующем виде:
^^пх^ д Гсх?8У*\ У
х да да \ 2G / ~g
nv=^- = jL(_£-±Sil)= — (2c-pSV + pSV2
x dV dV\ 2G / 2mg\ х r <ЭМ dV/
_2cx / V c«\_2£1Cx
1*1 n“ I----------- >
\ a 2cx) xg
где a — скорость звука.
Для производных /г“ и пУу выполнялись аналогичные преобра-
зования.
Уравнения возмущенного движения нами не приводились к обыч-
но применяемой безразмерной форме. Поэтому коэффициенты харак-
теристического уравнения (49) имеют размерности: а31/сек; а2 1/сек2;
1/сек3; я0 1/сек4.
Принятая форма уравнений движения нам представляется бо-
лее удобной, чем безразмерная форма, при анализе физической кар-
тины влияния различных факторов (скорости и высоты полета,
удельной нагрузки на крыло и др.) на управляемость самолета.
Таким образом, для анализа продольной управляемости самолета
в случае криволинейного пространственного движения его при при-
нятых допущениях мы получили характеристическое уравнение чет-
вертой степени, так же как и для случая, когда в качестве исходного
режима взят установившийся прямолинейный полет, а неустановив-
шееся движение самолета происходит только в вертикальной плос-
кости.
Выражения для коэффициентов характеристического уравнения,
соответствующие движению самолета в вертикальной плоскости, яв-
ляются частным случаем выражений (50) при у =0.
Как при исходном прямолинейном, так и при исходном криволи-
нейном режимах полета самолета имеет место разделение корней по
абсолютной величине на пару больших и пару малых корней.
В качестве примера в табл. 1 приведены результаты расчетов
коэффициентов и корней характеристического уравнения для услов-
но выбранного самолета (фиг. 22—25).
60
Таблица 1
Коэффициенты и корни характеристического уравнения четвертой
степени для исходных режимов криволинейного горизонтального
полета самолета на высоте 2000 м
Параметры и корни Режимы
1 __ 2 1 3
Значения параметров при ис- ходнохм установившемся ре- жиме полета М СУ 2/72 pSV 0,362 3 0,928 3,8 0,5 4,4 0,713 2,75 0,875 3 0,159 1,57
Коэффициенты характеристи- ческого уравнения ZZ1 ао 4,17 9,0 0,169 0,1032 6,24 19,82 1,30 0,159 13,82 138,3 10,25 0,302
Большие корни Хь.,=-2,078= '±2,13/ XJ(,=-3,088± '±3,14z Х112=—6,873± ±9,49z
Малые корни Х3,4=—0,0068± ±0,1076/ Х3>4=—-0,0323± ±0,0844/ ~ Х3, А=—0,0372-1- * ±0,0286i
В соответствии с принятым разделением корней характеристике
ского уравнения1 рассматриваемое собственное вовмущенно-e движе
ние самолета (при условии, что
летчик сохраняет 3^0 и y^const)
складывается из сравнительно бы-
стропротекающего и быстрозату-
хающего движения (короткоперио-
дическое движение) и сравнитель-
но медленно протекающего движе-
ния с малым по абсолютной вели-
чине демпфированием (длиннопе-
риодическое или фугоидное движе-
ние) .
В продольном движении, ха-
рактеризуемом системой четырех
дифференциальных уравнений пер.
Фиг. 22. Диаграммы общих показа-
телей маневренности /zx=f(M, пу)
на высоте 2000 м при номинальном
режиме работы двигателей.
вого порядка каждое и характери-
стическим уравнением четвертого
порядка, самолет можно считать
эквивалентным динамической си-
стеме, обладающей двумя степеня-
ми свободы. В качестве примера на фиг. 26 приведена система такого
рода, которая по характеру своего возмущенного движения в верти-
61
Фиг. 24. Пример. Кривые
cx=f(a,M) при номиналь-
ной тяге двигателей на вы-
соте 2000 м.
Фцг 23. Пример. Кривые Cy=f(a,M) при номинальной
тяге двигателей на высоте 2000 м.
калькой плоскости будет довольно близка к рассматриваемому про-
дольному возмущенному движению самолета, если
и А,_
т2 щ т2 щ
Здесь через ki, k2 и hi, h2 обозначены соответственно коэффици-
енты жесткости пружин и коэффициенты демпфирования движения
масс т1 и т2.
ма с Двумя степенями сво-
боды.
либо внешней причиной, будет совершать колебания со значительно
меньшим периодом и со значительно большим затуханием по сравне-
нию с периодом и затуханием колебаний массы т2.
б) Связь отклонений ручки и усилий на ней с параметрами
движения самолета
Сначала выведем аналитические выражения, характеризующие
связь между углом отклонения руля высоты и изменениями угла ата-
ки и скорости полета самолета, рассматривая такие отклонения са-
молета от исходного режима криволинейного установившегося поле-
та при R = 0 и у =const, в пределах которых применим метод малых
возмущений.
Используя первое и второе уравнения системы (48) для исклю-
чения переменных ДО и Д «м и учитывая при этом, что для устано-
вившихся режимов полета
COS 0 = ^008 ч
63
и
шг1 = а)г = у- Пу sin2 7,
найдем
1 dW 2k^x ДИ 7“ >
д0=--------------+ —------------+ =-„- 'Да,
g dt cosycy И с“ cos 7
1 dW /2^17лс“ + 2Asc с“ —Су sin?7 \ ДИ
Д(0 -----------------р —-----i----------------*----- -----+
2 V dt \ гсу J V
dba cvc“ + слс“
-|---------к у ~------- Да.
dt ъсу
(52)
Подставив ив (52) выражения для О, Ш,иих производных в
третье и четвертое уравнения системы (48), получим
±^.._Л(1+2*,)?ДТ--- +
г да т 1' М
+ A- (2k& + 2k2c2y cos2 т) ДП —i- +
+ -у (<\Cv 4- сусу COS2 у) Да = 0,
(Г-^ol 1 — . cxcar \ dba
~^~ + — (с°у-т”>-т*-----------=-Ч——+
dt- т Су / dt
Г/ НИ \ ~сх 1 сРДИ
-|---— ита — СуЩт-------—— шт Да------------— — -------
\ ‘ 5 Су / Су V dt-
1 /_ 2^724-2^2C2 ~сх \ 1 «ГДИ
-----с,, sin2 г---------=----------—— I---------
Т \ у ' Су Су / И dt
1 Г [ 2^<с^. 4~ 2Лз”с^ — \ "I 1
------ Мрт11 +1--------=------- — су sin2 7 I /п® — Д V =
L \ Су / J и
1 - о
= —[1/п°Д5в,
(53)
j
где
Уравнения (53) связывают отклонение руля высоты с изменения-
ми угла атаки и скорости полета. Если задать определенный закон
отклонения руля высоты по времени , то решив систе-
му (53), можно найти изменение по времени параметров продольно-
го движения самолета AV, Аа и далее ДО и Д-ш^ь Равным образом
можно задать закон изменения одного из параметров движения са-
64
молета и, далее, решив систему уравнений (48) или (53), найти
необходимое для осуществления этого движения отклонение руля
высоты Д3в=/(О-
При анализе управляемости и методов летных испытаний самоле-
тов существенно оценить величины отклонений руля высоты, а также
усилий, прикладываемых к ручке летчиком для создания или пари-
рования моментов, обусловливаемых изменением отдельных пара-
4 д TZ d\a ~
метров движения самолета Да, Д V, - и др. Этот анализ будет
dt
в дальнейшем проводиться на базе уравнений (53).
В качестве критериев для анализа и оценки управляемости само-
лета следует применять, как уже указывалось ранее, зависимости
между отклонениями ручки, пропорциональными отклонениям руля
высоты, между усилиями на ручке и изменениями скорости полета и
перегрузки. Определим уравнения, связывающие дхв с изменения-
миД V и Дп.
Для координированного движения самолета
причем __
Отсюда получим
Да = Д —(54)
п. V
где _ _
& 2
7жс;+"суё“
причем здесь значения сх, су, ki, k2 и т. д. соответствуют исходному
режиму установившегося полета.
Заменив на основании (54) в уравнении (5о) Да, —— и ,
получим А ГлРДп 1 п ' с№ ' т 1 / + ТД У-тЛ—сУтШ~ + — ( — т'° — т . 1 ( п . Магл + _ и/п«4 Т- \ В . слс* \ dbn та-\- Л -1- 77“ \ 1 в [/ 7Х \ «РАУ — — 1 + —— 1—- h Су / J V L\ Всу / dt2 сх । CySin’f \ d\V . та} тш + i- —— + ’ Всу В / dt ^__cysi£1 \ V1 (55) В / J dxQ т2 в>
65
о
где —- — передаточное отношение между линеиными отклоне-
dx^
ниями ручки и углами отклонения руля высоты.
Уравнения (53) и (55) позволяют определить отклонения ручки,
требуемые для уравновешивания моментов, связанных с изменением
параметров Да, ДК Дя, --- и т. д. на различных участках управ-
dt
ляемого движения самолета. Эти уравнения, принимая для упроще-
ния =const, т. е. проводку управления абсолютно жесткой,
dxQ
можно написать в виде
= + — + + X\^+XvbV (56)
в 2 di* 1 dt 2 dt* 1 dt
И
Дхв = X" + X" + АлД/г + X% 4- X* — + Xv ДV, (57)
B 2 dP 1 dt 2 dt* 1 dt ' V 7
где X*, Л2У, X", X%, X* и т. д. — постоянные величины.
Определим аналитическую связь усилий на ручке с параметрами
движения самолета.
Усилие летчика на ручке управления в случае обычного небу стер -
него управления приближенно можно представить выражением
Рв= - ^пш5А^-Р5л-Рпр, (58)
1
где йш=----------коэффициент передачи от руля высоты к
57,3 dxQ
ручке,
тш — коэффициент шарнирного момента руля,
5В и 6В — площадь и хорда руля,
Рб — усилие на ручке, необходимое для преодоления весовой
несбалансированности проводки при п=1 (при стоянке
самолёта на земле),
Рпр — усилие на ручке от пружин в проводке управления, уста-
навливаемых иногда с целью изменения статической про-
дольной устойчивости самолета по скорости полета; при
этом считается, что величина РПР не зависит от положения
ручки х&
При установившемся режиме полета
= (59)
где
(60)
С= Рв0 + Р^о + Дф-
66
При малом отклонении самолета от исходного установившегося
режима полета изменение усилия на ручке ДРВ будет определяться
выражением
±РВ = — Д/Пш + AV-АДд. (61)
Здесь величины тш и V соответствуют исходному режиму уста-
новившегося полета, причем индекс «О», как обычно, при написании
формул отбрасывается.
Полагая mm=/(ar.o, М), получим
Д/пш=т^Даг 0 4- /И5ШД8В + /п“ ДМ.
Величину изменения угла атаки горизонтального оперения Даг.о
можно, как известно, выразить так:
Д«г.о = 1 ДМ
\ J
dz £г<0 б/Да
da V dt
^г.о
где s — угол скоса потока у оперения,
£г>0 — плечо горизонтального оперения относительно центра
тяжести самолета,
И2
Л =------коэффициент торможения потока у оперения.
и2
d^
Учитывая, что Д8В=—— Длв, и подставляя вместо Да, Д®г1,
----, ----- и Дл:в соответствующие функции от Л У, Дп и их
dt dt
производных на базе уравнения (61), получим в конечном итоге
для Дрв выражения, аналогичные по своей структуре выражениям
(55) и (57):
А
п
d-^n 1 /-а ш а сЛс“\ dkn
——Ч-------су — тсв — тсв + -=- —-
dt- т \ с* / dt
1 i a a to (O | .
— I — CylTlzB —— —2^— ITlсв I ДА£
\ Cy /
В
V
cx \ d*W
1 -------------
Bcy / dt-
cy sirP?\ d^ И
В / dt
1 / c
H----— -------+
т \ CB CB Bcy CB
, 1 / a । М^св Ъsin2 7 Ш \ Al/|
+ ~ I y ^ZcB 4 - - tHcB I bV •
T" \ /j a / j
и
ДРв = /?” р dS^ рп pv№V + pv
в 2 dt* 1 dt 2 dP 1
Т2
d^V
dt
(63)
±PvbV,
где P^, P^, Pn, Pv2, P^ и Pv—постоянные величины.
67
Из сравнения выражений (62) и (55) видно, что их левые
части отличаются одна от другой только тем, что на месте
коэффициентов т\ тл9 /пм в (55) стоят соответственно в (62)
коэффициенты /п(с°в, nft, т*в и коэффициенты же при Дхв и
дРв в правых частях выражений (55) и (62) отличаются лишь
^8в __
множителями и
С физической стороны разница в левых частях (55) и (62)
заключается лишь в том, что вместо производных устойчивости
в (55) при фиксированном (зажатом) положении руля высоты в
(62) входят производные устойчивости при фиксированном усилии
на ручке управления.
Заметим, что в практике обычно рассматривается частный случай
фиксированного усилия на ручке, а именно, усилия, равного нулю
(ft = 0), т. е. считается, что при исходном установившемся режиме
самолет сбалансирован по усилиям на ручке и может производить
полет с освобожденным управлением. Поэтому в формуле (62) при
величинах тш, тпа, т* и /им поставлен индекс «св».
Выражения (62) и (63) получены для случая ручного небустер-
ного управления рулем. Для случая обратимого бустерного управле-
ния эти выражения будут справедливы, но все коэффициенты шар-
нирных моментов будут входить с множителем £сбр—коэффициен-
том обратимости управления.
В случае необратимого бустерного управления структура выра-
жений (62) и (63) остается опять же прежней, причем принимается
допущение, что характеристики всей системы управления, включая
устройства, создающие так называемые «искусственные» усилия на
ручке, могут быть представлены линейными функциями изменений
параметров движения самолета и положения ручки управления. На-
пример, в случае загрузочных механизмов, создающих усилия на
ручке в зависимости от скоростного напора, положения ручки и пере-
грузки по закону
где к — постоянный коэффициент,
вместо выражения (61) будем иметь
Д Рв = 2k VxB A V+ ХУ2дхв - ft An. ( 64)
Если далее вывести развернутое выражение для Aft в функ-
ции ДУ и Д/г, использовав при этом формулу (55), то оно будет
аналогично выражению (62) с той лишь разницей, что в правой
части вместо множителя ----т- будет стоять множитель --------;
левые же части будут одинаковы, причем т1°в = тш и т*в = т,а9
так как усилия на ручке непосредственно уже не зависят в дан-
ном случае от угла атаки горизонтального оперения.
68
Конечно, для каждой принципиально различной схемы загру-
жения ручки при необратимом бустерном управлении формулы
для расчета величин т*3> т*, т”в и т“3 будут различными. Их
нетрудно вывести в случае необходимости, действуя способом,
аналогичным указанному выше при выводе выражений (62) и (63).
Наконец, и в случае, когда нельзя пренебрегать упругостью про-
водки управления рулем высоты, структура выражений для Дхв и
ДРВ остается прежней. В этом случае в формулах для постоянных
коэффициентов Хп9 Xv > X* и т. д. появятся добавочные члены, по-
скольку при упругой проводке
Дхв = Дхв.ж + Рв,
где ДХв-ж—отклонение ручки, соответствующее данному отклоне-
нию руля при абсолютно жесткой проводке, a k?# — коэффициент
упругости проводки.
Фиг. 27. Изменение по времени слагаемых от-
клонения ручки Дхв = const. Исходный режим:
Н = 2000 м\ М = 0,875; и пу = 3; а = 1,85°.
В заключение этого параграфа, в виде примеров, на фиг. 27—30
приведены изменения отдельных слагаемых уравнений (56) и (57)
в процессе неустановившегося движения самолета при мгновенном
отклонении ручки на постоянную величину Дхв=1 cM=const. При
этом в качестве исходных режимов взяты установившийся полет с
полной тягой двигателей при скорости, соответствующей значениям
параметров
Яо=2ООО.м, Мо = О,875, /г0 = 3; гу0 = 0,159, а0=1,85°,
и установившийся полет при сравнительно большом угле атаки с
полной тягой двигателей, соответствующей значениям параметров
//0—14000 м. М0 = О,5, n0=l; Jy0 = O,915, а0 = 13°.
69
Расчеты были произведены для самолета-истребителя, характе-
ристики которого представлены на фиг. 22—25 и 31.
На основании анализа порядка величин отдельных слагаемых в
выражениях (56) и (57) можно сделать следующие выводы.
Фиг. 28. Изменение по временислагаемых отклонения
ручки Дхв = const. Исходный режим: //= 2000 м;
М = 0,875; п пу = 3; а = 1,85°.
1. Слагаемые в выражениях для отклонений ручки, а 'следователь-
но, и для соответствующих усилий на ручке, связанные с производ-
ными от скорости полета, невелики, и практически ими можно пре-
небрегать.
Фиг. 29. Изменение по времени слагаемых отклоне-
ния ручки Дхв = const: Исходный режим: 77 =
= 14000 м; М = 0,5; п^пу = 1; а = 13°.
2. При анализе управляемости на первом этапе возмущенного
неустановившегося движения, характеризуемого короткопериодиче-
скими колебаниями самолета, скорость полета можно считать, как
правило, неизменной.
70
Как исключение, в области больших углов атаки, где имеются
сравнительно резкие изменения коэффициентов сх в связи с измене-
нием а и М. при анализе продольной управляемости может оказаться
необходимым учет изменений скорости полета A V и на первом этапе
возмущенного движения самолета.
Фиг. 30. Изменение по времени сла-
гаемых отклонения ручки AxB=const.
Исходный режим: Н— 14 000 м\
М = 0,5; п пу = 1; а = 13°.
Фиг. 31. Диаграммы общих показателей
маневренности пу) на высоте
14 000 м при номинальном режиме рабо-
ты двигателей.
Эти выводы позволяют значительно упростить анализ продоль-
ной управляемости самолета и соответствующие методы проведения
летных испытаний.
в) Связь динамической устойчивости самолета с его динамической
управляемостью и способностью «ходить за ручкой»
Свойства самолета в отношении продольной динамической управ-
ляемости, т. е. управляемости при выполнении неустановившихся
маневров, могут быть оценены в основном его способностью' «ходить
за ручкой».
Термин «хождение самолета за ручкой» уже давно рожден прак-
тикой летчиков*. О хорошо управляемом самолете, быстро и без за-
метных колебаний отвечающем в полете на отклонения рычагов
управления и усилия, прикладываемые к ним, летчики говорят, что
он хорошо следит за рулями или (что одно и то же), что такой само-
лет хорошо следит за действиями летчика. Термин «хождение за
рулями» является собирательным. Он удачно выражает обобщаю-
щую оценку явлений, характеризующих реакцию самолета на дейст-
вия летчика при пилотировании.
Инженерная расшифровка этого термина в отношении продоль-
ной управляемости самолета приближенно может быть сведена к
* Работы А. Н. Журавченко, Ю. К- Станкевича и др.
71
анализу дифференциального уравнения второго порядка с постоян-
ными коэффициентами и правой частью, зависящей от времени *.
Способность самолета ходить за рулями наиболее отчетливо про-
является при выполнении относительно резких маневров и при точ-
ном пилотировании, например, при прицеливании, при полете в
строю, при выполнении посадки. Летчиком оценивается эта способ-
ность по запаздыванию реакции самолета и по абсолютной величине
реакции (величине изменения параметров движения самолета) на
усилия и отклонения рычагов управления за короткие промежутки
времени — от долей секунды до, примерно, 24-4 сек. С инженерной
точки зрения удобными количественными показателями способности
самолета «ходить за ручкой» можно считать так называемые частот-
ные или амплитудно-фазовые характеристики самолета, т. е. запаз-
дывание по фазе или по времени и отношение амплитуды изменения
выбранного параметра движения самолета к амплитуде изменения
положения рычала управления или усилия летчика при вынужден-
ных гармонических колебаниях самолета **.
Хождение самолета за ручкой целесообразно исследовать в пред-
положении, что за рассматриваемые короткие промежутки времени
скорость полета не успевает заметно измениться, т. е. можно при-
нять ДУ=О.
Дальнейший анализ факторов, определяющих способность само-
лета ходить за ручкой в продольном управлении, будем вести, от-
правляясь от выражений (62) и (63), причем в качестве величины,
представляющей действия летчика, для упрощения возьмем только
усилие на ручке. Выводы, полученные при этом анализе, естественно,
распространяются и на управляемость самолета по отклонениям
ручки ввиду полной аналогии соответствующих математических вы-
ражений. Заметим попутно, что усилия на ручке более отчетливо
восприним1аются летчиком в полете, чем перемещения ручки управ-
ления, и более существенны при оценке условий безопасности полета.
Связь усилия с перегрузкой в предположении, что Д V=0, пред-
ставим исходным уравнением
+ рп^=*РВ«)-
Постоянные величины Р", Р" и Рп обычно могут быть
делены приближенными формулами
1 I
Р2Я = _^—
р 1
----------------—
ЬА 11Су
рп = рх +-------св,
где Рх—коэффициент расхода усилий [см. формулу (38)].
со а \
^св ) >
(65)
опре-
(66)
♦И. В. Остославский и Г. С. Калачев, Продольная устойчивость
и управляемость самолета, Оборонгиз, 1951.
♦♦ Подробнее эти показатели рассматриваются в гл. IV, разд. 3 д.
72
Формулы (66) получены в предположении, что Сх можно при-
нять равным нулю в сравнении с Су [см. формулу (54)]... и чле-
с с“
нами с множителями * — в выражении (62) можно пренебречь.
с«
СУ
Тогда из выражений (62) получим
Су
6 "а
тш у.т псу
d2kn
dt
1 / а со а 1
I У ^св ^2-св I ~~ "4“
Т \ / dt
+ Л ( — — СУОТ“в) ДП
Из
/гл\ С и о l. Р
выражения (59) имеем —= — ^шовЬв~-.
/77 Ш
На
основе выражений
7уР^2
2
пО . 6 b\ а
---; я? = тг —к-; mZ3
s л
1Ttz св
Ь2
Ш —— Ш V А-
fflcB-- Wlz СВ o' j
rz
mz св
Су
дтгсв
да dmz су
дсу дсу
да
Z
= £ш—r SBbв -Г придем к формулам (66).
/72 «
Дифференциальное уравнение второго порядка! (65) можно на-
писать и в траком более распространенном виде:
+ 2й + ^дп= ДРВ (0, (67)
at- at Гп
где
2А — — (Су — Шсв — ГПсв),
т
1 я 1 / а а со \
~ ( P'ZZZ’CB у^св)*
т2
(68)
Величины 2/г и k2 являются приближенными коэффициентами
характеристического уравнения для продольного короткой синодиче-
ского возмущенного движения самолета со свободным управлением
При V=const. Действительно', из сравнения выражений (68) с урав-
нениями (50), если пренебречь при этом второстепенными членами,
видно, что
2h^a3 и k2^a2.
Как известно, именно коэффициентами аз и «2 определяется воз-
мущенное короткопериодическое продольное движение самолета*.
* В. С. Ведро в, Динамическая устойчивость самолета, Оборонгиз, 1938.
7&
ф|иг. 32. Принципи-
альная схема само-
летного самописца пе-
регрузок (ускорений).
Отсюда 'следует важнейший вывод, что продольная дина-
мическая управляемость при выполнении маневров и, в частности,
способность самолета «ходить за ручкой» теснейшим образом свя-
зана с характеристиками его продольной динамической устойчи-
вости.
С помощью уравнений (65) и (67) может быть проведен анализ
способности самолета ходить или следить за ручкой. Очевидно, что
если самолет без всякого запаздывания отвечает на действия летчи-
ка, а изменения перегрузки Ьп или угла »атаки Да самолета в любой
момент времени независимо от резкости маневра строго пропорцио-
нальны величинам ДРВ и Дхв, т*о такой самолет
будет обладать предельной степенью хождения
за ручкой.
Для получения самолета с предельной сте-
пенью хождения за ручкой необходимо было бы
выбрать его конструктивно-аэродинамические
параметры таким образом, чтобы величины Р'1
и Р* были пренебрежимо малы; вместо' урав-
нения (65) в этом случае управляемость само-
лета характеризовалась бы уравнением Рп&п =
= кРв(Р). Конечно, в действительности самоле-
тов с предельной степенью хождения за ручкой
создать нельзя. Кроме того, предельная степень
хождения за ручкой может оказаться даже
вредной вследствие слишком большой чувствительности такого само-
лета к небольшим изменениям усилий на ручке и ее положения,
малозаметным для летчика.
Хождение самолета за ручкой можно сравнить с работой так
называемого квазистатического прибора, например, самописка уско-
рений (фиг. 32), самописца угловых скоростей, самописца углов на-
клона осей самолета к горизонту и т. п. Каждый из такого рода при-
боров может работать, т. е. «следить» с требуемой точностью за из-
менением физического параметра, лишь при определенном диапазо-
не соотношений между собственной частотой прибора и резкостью
изменения этого параметра. Кроме того, прибор должен обладать
определенной степенью демпфирования собственных колебаний, свя-
занной с их частотой.
Наиболее часто предъявляются требования, чтобы период собст-
венных колебаний прибора был не более 1/5-н 1/10 периода измене-
ния регистрируемой величины, а отношение коэффициента демпфи-
рования прибор(а к частоте его собственных колебаний — было рав-
k
но примерно 0,64-0,8.
Уравнения движения чувствительной части, или датчика, квази-
статического прибора имеют вид, аналогичный уравнениям (65) и
(67). Так, например, при сравнении продольной управляемости Само-
лета с работой акселерографа роль величины Р* аналогична роли
массы груза в акселерографе, роль величины Р\ — роли демпфиро-
74
вания в пр'иборе, роль /величины Рп— роли пружины прибора, роль
усилия на ручке — роли изменения перегрузки для прибора и, нако-
нец, изменению перегрузки при управлении самолетом соответствует
перемещение груза в приборе, регистрируемое на ленте.
г) Выбор общих показателей продольной динамической
управляемости самолета
Как следует из уравнений (65) и (67), продольная динамическая
управляемость самолета по усилиям может быть аналитически пол-
ностью (в пределах применимости сделанных выше допущений) оха-
рактеризована, если для каждого рассматриваемого режима полета
известны какие-либо три из следующих величин:
Р", Р", Рп, h, k, (69)
связанных между собой соотношениями
рп рп
2h=-±- и k2 =—; (70)
например, в качестве такой комбинации величин можно взять
Р” И Рп
ИЛИ
Рп, h и k,
где Рп — один из наиболее существенных частных показателей ста-
тической управляемости, а коэффициенты h и k характеризуют зату-
хание и частоту собственных короткопериодических колебаний само-
лета.
Очевидно, что семейства кривых Рп, Р%, Р* (фиг. 33) или кри-
вых h, k и Рп (фиг. 34) в функции скорости или числа М, построен-
ные для ряда постоянных значений параметров /7, хт, Зд®, и т. д.,
можно принять в качестве систем общих показателей продольной
динамической управляемости самолета. Однако с практической точ-
ки зрения эти системы не совсем удобны для пользования, так как
величины входящих в них показателей Р“, Pg, h и k меняются со
скоростью полета в очень больших диапазонах (фиг. 33 и 34).
Указанный недостаток устраняется, если в качестве практической
системы общих показателей продольной динамической управляемо-
сти самолета взять, например, совокупность величин частного пока-
зателя продольной статической управляемости Рп, показателя отно-
сительного демпфирования собственных продольных короткоперио-
дических колебаний т] и их безразмерного периода Т, т. е.
гтп h гтг*
Рп\ Т = — и . -
(71)
75
Из выражений (66) и (68) следует, что при постоянных
значениях параметров И, хт и др. и постоянных величинах,
производных от коэффициентов аэродинамических сил^и моментов
Су, т}, mz, и т. д.; показатели Fn, v] и Т будут так-
же постоянными по величине.
При использовании этих показателей для нормирования харак-
теристик? управляемости самолета допустимые диапазоны их изме-
нения будут существенно сужены по сравнению, например, с диапа-
зонами величин h и k. В предельном случае условно идеального в
этом отношении самолета его характеристики управляемости для
Фиг. 33. Изменение общих пока-
зателей продольной динамической
управляемости самолета Рп, Р” и
Р* в зависимости от скорости по-
лета при постоянных величинах
производных m2\ m™t tr?z, и др.
всего диапазона скоростей бу-
дут представлены тремя посто-
янными величинами Рп, %) и Т,
В действительности, вследствие
непостоянства указанных выше
Фиг. 34. Изменение об-
щих показателей продоль-
ной динамической управ»
ляемости самолета Рп, h
и k в зависимости от
скорости полета при по-
стоянных величинах про-
изводных mzym% и др.’
аэродинамических коэффициентов, ^частности, из-за влияния сжи-
маемости воздуха, величины Рп, т] и Т будут изменяться со- скоростью
полета (фиг. 35).
Величина раЬницы между действительными характеристиками
управляемости самолета и условно идеальными может служить ме-
рой для оценки совершенства самолета. __
Получив расчетом или из летных испытаний величины Рп, т) и Т
(о возможных методах проведения соответствующего летного экспе-
римента см. в гл. IV), весьма просто определить и величины h, k,
Р* и ^2*» йа|К эт0 ВИДНО и'3 формул (71) и (70).
Отсюда нетрудно сделать вывод, что, зная общие показатели
Рп, т) и Т, можно определить и любые частные показатели продоль-
ной динамической управляемости самолета в пределах применимо-
сти метода малых возмущений. Действительно, с помощью уравне-
ний (65) или (67), в которых известны все коэффициенты, задав или
76
выбра-в закоЦ изменения усилия на ручке ДРВ=/(О, можно найти
соответствующими методами отвечающее ему изменение перегрузки
Дп=ср(^). Далее, с помощью уравнения (54) находится Да = х (О»
а затем с помощью соответствующих диаграмм и уравнений манев-
ренности определяются в функции времени
изменения nXj пу и других параметров дви-
жения самолета.
Можно также задать закон изменения по
времени любого интересующего нас парамет-
ра движения самолета и затем найти требуе-
мое изменение усилия на ручке ДРВ = <р (/).
Имея зависимости ДРВ=/(О, Длг—<р(0»
A^=X(O» Да>^1 = Ф(0 и т. д., можно
определять и частные показатели динамиче-
ской управляемости, например, время выво-
да самолета на заданную перегрузку, время
получения определенной угловой скорости
тангажа и др.
Фиг. 35. Пример. Измене-
ние со скоростью полета
общих показателей про-
дольной динамической
д) Влияние различных факторов на
управляемость
Сделаем ряд общих замеачний по влия-
нию перегрузки, скорости и высоты полета,
размеров самолета, степени разноса масс по
продольной оси самолета и степени продоль-
ной статической устойчивости самолета на
его динамическую управляемость или способ-
управляемости самолета
Рп, и 7 =
k
2л:
= —при ПО-
ТТ k*—h2
стоянных величинах аэро-
динамических производ-
ных (пунктирные линии)
и для реального самолета
(сплошные линии).
ность «ходить за ручкой».
Анализ влияния этих факторов удобно вести с помощью развер-
нутых выражений для коэффициентов 2h, й2, Рп, Р* и Р*. На осно-
вании выражений (70), (68), (66) и (51) имеем
оь- pSZ 6А „«>
2/Z— I Су л ^z св
2т \ г2
psiz V j2a (
j- Wlz св
.2
<Г fftz св
А2
2т ЬА
h
т^Гс^,
G
~S
„ 2ft п
=------Р" =
тГсу
5Д
PS*A -а ц, \
— Ссв | .
2т /
г» L । а । Р*“*^А а а>
*->в^В св Н CylTlz СВ
о Ьа.
s V
г2 - . \
га to а I
2 Су ПЬ2 св Mz св /,
ЬА )
G_________
т^с; в в S PSV Ь2а
2m
1
V
(72)
77
Влияние перегрузки. Как! видно из формулы (72), вели-
чина перегрузки п при исходном установившемся режиме полета не
входит непосредственно в выражения для показателей, определяю-
щих управляемость самолета. Косвенно же величина п может влиять
на показатели управляемости лишь через соответствующее измене-
ние аэродинамических коэффициентов с*, и- др. Действитель-
но, при данной скорости полета K=const коэффициент подъемной
силы Су прямо пропорционален величине перегрузки п. От величины
же су зависят, вообще говоря, и величины производных /п2асв
и др., непосредственно входящих в выражения (72).
Из сказанного нетрудно сделать вывод, что в области ли-
нейных зависимостей ^=f(«), m^=o(a) и др. изменение перегруз-
ки в исходном режиме полета не будет сказываться на величинах
показателей управляемости самолета, характеризующих его способ-
ность ходить за ручкой.
В области нелинейных зависимостей Су от a, mz и от а,
от и от £в и а(Г.о перегрузка при исходном режиме будет уже
сказываться на способности самолета ходить за ручкой. Общих за-
ключений о характере этого влияния, справедливых для всех случаев,
нельзя сделать только на основании общего рассмотрения выраже-
ний (72). Для оценки указанного влияния обычно необходимо про-
ведение соответствующих количественных расчетов.
В частном, встречающемся на практике случае нелинейных зави-
симостей, связанных с уменьшением производных са. mz и т*
при выходе самолета на большие углы _атаки, можно сделать
общее заключение: уменьшение производных Су, т*, т™ и maz при-
водит к ухудшению способности самолета ходить за ручкой, т. е. к
ухудшению управляемости самолета. Действительно, с уменьшением
указанных производных будут уменьшаться демпфирование и часто-
та собственных короткопериодических колебаний, т. е. будет увели-
чиваться инертность самолета в управлении при увеличении! пере-
грузки в исходном режиме. При этом показатель Рп обычно умень-
шается, а показатель Р“ заметно возрастает по абсолютной вели-
чине.
При больших Су самолеты нередко имеют так называемую «лож-
ку» в протекании кривой m^=f(a), при этом величина может
стать положительной, а величина k2 — отрицательной. Самолет бу-
дет неустойчивым по перегрузке, т. е. в короткопериодическом дви-
жении. В этом случае при гармонических колебаниях руля не будет
установившихся вынужденных колебаний самого самолета. Поэтому
при &2<0 анализ продольной управляемости самолета можно осуще-
ствить путем расчета возрастающих со временем его отклонений от
исходного режима.
Влияние скорости. С уменьшением скорости полета ве-
^/71
личина т = -----возрастает. Если при этом абсолютные величины
78
аэродинамических производных, входящих в выражения (72), не’
увеличиваются, что обычно бывает на практике, то частота и демп-
фирование собственных короткопериодических колебаний уменьша-
ются. Показатель Рп при этих условиях не возрастает по 'абсолютной
величине, в то время как абсолютная величина показателя растет
и еще больше растет абсолютная величина показателя управляемо-
сти Pg с уменьшением скорости полета (см. фиг. 33). Все это
свидетельствует об ухудшении хождения само-
лета за ручкой с уменьшением скорости полета.
При переходе от дозвуковых к сверхзвуковым скоростям полета,
вследствие влияния сжимаемости воздуха на аэродинамику самоле-
та, величина k возрастает с увеличением скорости значительно резче,
чем в дозвуковой области. Это объясняется сопутствующим указан-
ному переходу смещением фокуса самолета назад, т. е. ростом сте-
пени статической продольной устойчивости самолета (т* и т* св),
что дополнительно увеличивает способность самолета ходить за руч-
кой при увеличении скоростей от дозвуковых к сверхзвуковым. При
этом обычно сильно* возрастает и величина показателя статической
управляемости самолета Рп, т. е. возрастают усилия на ручке, необ-
ходимые для сравнительно медленного изменения перегрузки. Не
исключено, что последнее обстоятельство в отдельных случаях мо-
жет привести к неверным отзывам летчиков, что, якобы, при переходе
самолета к сверхзвуковым скоростям полета он хуже ходит за
ручкой.
Напомним, что способность самолета ходить за ручкой определяется
при выполнении относительно резких маневров по> величинам запаз-
дывания и величинам соотношений между изменением усилий или
отклонений ручки и изменением параметров движения самолета (пе-
регрузки, угла атаки и т.п.) в статических и динамических условиях.
Влияние высоты. С ростом высоты полета при V= const
вследствие уменьшения плотности воздуха р демпфирование и часто-
та собственных колебаний самолета уменьшаются, величина показа-
теля Рп также уменьшается, величина же показателя Р“ растет и
особенно интенсивно растет величина показателя Р" [см. (72)], ха-
рактеризующего инертность самолета; при этом предполагается, что
аэродинамические производные та2, и т. д. при V-const с ростом
высоты не изменяются. Отсюда нетрудно заключить, что у в е л и ч е-
н и е высоты существенно ухудшает управляе-
мость самолета — его способность ходить за ручкой.
При больших высотах полета это ухудшение настолько значи-
тельно, что возникает необходимость в постановке на самолет спе-
циальных автоматических устройств, искусственно' увеличивающих
демпфирование самолета для обеспечения удовлетворительных ха-
рактеристик управляемости.
Влияние размеров самолета. При увеличении разме-
ров самолета и прочих равных условиях уменьшается коэффициент
_ 2т
С помощью выражений (72) нетрудно убедиться, что
79
возрастание размеров самолета ухудшает спо-
собность его ходить за 'ручкой вследствие уменьшения собственной
частоты короткопериодических колебаний и роста величины Рп.
Из выражений (72) нетрудно также заключить, что при прочих
равных условиях влияние роста размеров самолета на изменение
характеристик короткопериодичеокого движения и хождения за руч-
кой управления может быть полностью скомпенсировано соответ-
ствующим увеличением коэффициента ^“св, т. е. изменением стати-
ческой устойчивости самолета по перегрузке.
Если взять более близкий к практике случай, когда одновременно
с увеличением линейных размеров самолета растет и удельная на-
G *
грузка на крыло — , то ухудшение способности самолета будет еще
5
большим вследствие более сильного уменьшения частоты собствен-
ных колебаний самолета.
Влияние (разноса масс по фюзеляжу. Увеличение
разноса масс по фюзеляжу при одном и том же весе самолета будет
увеличивать момент инерции самолета относительно поперечной оси,
Ь2
т. е. будет уменьшать величину отношения—— . Вследствие этого
d
уменьшится коэффициент демпфирования h и понизится частота
собственных колебаний самолета. Показатель статической управляе-
мости Рп, соответствующий установившимся режимам полета, есте-
ственно, не зависит от момента инерции самолета. Показатели же
динамической управляемости Р* и Р* будут расти с увеличением
разноса масс, причем более интенсивным будет рост Р%.
Таким образом, увеличение разноса масс пофюзе-
ляжу ухудшает динамическую управляемость
самолета.
Влияние степени статической устойчивости
самолета по перегрузке. С точки зрения практической
возможности изменения управляемости наиболее существенным яв-
ляется влияние степени продольной статической устойчивости по
перегрузке на динамическую управляемость самолета. Влияние сте-
пени устойчивости, естественно, следует рассматривать при условии,
что величина обычно нормируемого критерия Рп остается постоян-
ной.
При изменении статической устойчивости вследствие увеличения
площади оперения увеличивается коэффициент к2, но в меньшей
мере растет коэффициент 2h, так как при этом возрастают коэффи-
циенты т“св и /л“св, а величина сл не меняется. Увеличение стати-
ческой устойчивости из-за смещения вперед центровки самолета без
изменения площади горизонтального оперения увеличивает только
k2, а коэффициент 2/г остается при этом практически неизменным.
Увеличение статической устойчивости при Pn-const может быть
осуществлено у самолетов без бустеров соответствующим увеличе-
нием аэродинамической компенсации руля высоты, т. е. уменьшением
ВО
производной Абсолютные величины слагаемых в выражениях
„ dkn d2^n
для усилии, связанные с производными- и —— , будут умень-
dt dt2
шаться; в этом нетрудно убедиться, обратившись к выраже-
ниям (72).
Таким образом, с увеличением статической
устойчивости хождение самолета за ручкой
улучшается, а сама величина усилий, требуе-
мых для выполнения маневров, уменьшается
(фиг. 36).
Увеличение способности самолета ходить за ручкой с ростом
Финг 36, Усилия Hia ручке, необходимые для вы-
полнения одного и того же маневра при различ-
ных степенях продольной статической устойчи-
вости с условием P^=const.
собственной частоты самолета. Так как с ростом устойчивости соб-
ственная частота короткопериодических колебаний самолета увели-
чивается, то одновременно растет и степень «слежения» самолета ва
изменением усилий на ручке, а также и ее отклонений.
В отношении динамической управляемости переход от самолета
с очень малой степенью статической устойчивости к самолету с очень
малой степенью статической неустойчивости не может быть охарак-
теризован как кризисное явление. Такой переход практически будет
незаметным для летчика. В подтверждение сказанного на фиг. 37
приведено изменение перегрузки по времени при мгновенном прило-
жении усилия на ручке кР3 = Рп для самолетов с различными степе-
нями статической устойчивости. На этой же фигуре показано изме-
нение перегрузки для самолета с очень малой статической неустой-
81
чивостью ( on сВ=0,001) при приложении к ручке такого же по вели-
чине и знаку усилия, как и для самолета, статически устойчивого, с
одинаковой абсолютной величиной опсв; при этом предполагалось,
что шарнирные моменты и эффективность руля высоты у последних
двух самолетов соответственно одинаковы.
Как видно из фиг. 37, изменение перегрузки по времени с точки
зрения практики можно считать одинаковым как при оп св =—0,001,
фиг. 37. Характер изменения пе-
регрузки = при различных
величинах коэффициента устойчи-
вости по перегрузке а л св и мгно-
венном отклонении руля высоты
= — Х1 = Sr ал. Коэффициент
dn
s х дов
расхода руля высоты = -— =
ОХу
Су
так и при <зп св=+0,001.
Отметим, что при расчетах и ана-
лизе продольной динамической уп-
равляемости самолета, в частности
влияния степени его статической
устойчивости,- в качестве показате-
лей берут иногда время срабатыва-
ния и относительную величину за-
броса перегрузки Д/гзаб при мгновен-
ном отклонении руля высоты на по-
стоянную величину.
Величина 4Р определяется как
абсцисса первой от оси ординат точ-
ки пересечения кривой с
прямой Дп = ДИу€т (фиг. 37), причем
считается, что момент начала дви-
жения соответствует t = Q. Вели-
чина
А“ ____ ДПуСТ
Л заб Ьп ’
а Пуст
где ДПтах — первая вершина кривой
Дп=/(/), а — конечное при-
ращение перегрузки, которое получает самолет (на_фиг. 37 Дяуст=1).
Найдем аналитические выражения для /ср и Дпзаб.
При условии k2>h2 решение уравнения
^L + 2/z—- +
df- 'dt
k2^n~a,
где a — постоянная величина,
можно представить в виде
АП =
k-
----e~ht cos (v£ —<р),
№ COS
где 7 и v определяются формулами
S Y V /1 - Yj2 T
здесь , a T — период собственных колебаний самолета.
82
Нетрудно вывести приближенные формулы для времени сраба-
тывания и заброса перегрузки:
t =-T-
с₽ 2к
/ тс \ 1
+ <р
Д/гзаб = е-^
Как видно из приведенных выражений, показатели /ср и Дп3н5
могут быть определены величинами параметров либо h и k, либо ч
и Т,
Использование величин Zcp
и Дизаб при летных испыта-
ниях в качестве показате-
лей динамической упр авля е-
мости самолета неудобно по
той причине, что практически
невозможно в полете мгновен-
но отклонить руль высоты и
выдерживать строго неизмен-
ным это отклонение в тече-
ние нескольких секунд. Кро-
ме того, на практике нередко
встречаются самолеты, у ко-
торых т. е. короткопе-
риодическое возмущенное дви-
жение самолета является апе-
риодическим. Для таких само-
летов показатели tCX) и Д/г3аб
не могут быть применены, в
то время как указанные выше
показатели хождения самоле-
та за ручкой — амплитудно-
фазовые характеристики —
вполне применимы и при
k2<h2.
В заключение этого парагра-
фа отметим, что при количест-
венном анализе влияния раз-
личных факторов на способ-
ность самолета ходить за руля-
ми удобно воспользоваться из-
вестными диаграммами ампли-
тудно-фазовых характеристик
(фиг. 38—40) для динамиче-
ских систем с одной степенью
Фиг. 38. Изменение амплитуды вынуж-
денных гармонических колебаний в зави-
(D
симости от параметра ф = при раз-
яг
h
личных величинах параметра Ч •
свободы, представляемых дифференциальными уравнениями, вто-
рого порядка с постоянными коэффициентами (см. гл. IV, разд. д).
83
Возрастание резкости манеброб
Уменьшение статической, устойчивости
Ф'иг. 39. Угол сдвига по фазе при вынужден-
ных колебаниях системы в зависимости от
(О
параметра ф = П'РИ различных величинах
h
параметра *0 =-£~ .
Возрастание резкости маневров. и
Уменьшение статической устойчивости
Фиг. 40. Коэффициент \=Пф) при ряде величин
*П =const.
е) Управляемость самолета и безопасность полета
Важнейшее значение в проблеме обеспечения безопасности по-
лета имеют продольная устойчивость и управляемость самолета.
В качестве характерных с этой точки зрения явлений можно назвать
затягивание самолета в пикирование, непроизвольное превышение
допустимых по прочности самолета величин числа М, скоростного
напора и перегрузок, а также непроизвольный переход сутах и срыв
самолета в штопор.
Склонность к непроизвольному затягиванию в пикирование в
опасной степени свойственна самолетам с прямыми крыльями и мо-
жет приводить к полной потере продольной управляемости самоле-
та *. Это явление обусловливается возникновением вследствие влия-
ния сжимаемости воздуха, больших аэродинамических моментов на
пикирование при относительно больших дозвуковых скоростях,
весьма значительными и резкими изменениями статической устойчи-
вости по перегрузке и усугубляется обычно сопутствующим этому
изменением шарнирных моментов руля высоты.
Возможность непроизвольного превышения допустимых по проч-
ности перегрузок, а также непроизвольного срыва в штопор (фиг. 41)
при пилотировании характеризуется наличием «ложки» в балансиро-
вочных кривых, т. е. появлением продольной статической неустой-
чивости или малой величиной критерия Рп для данного самолета.
Указанный случай потери управляемости усугубляется нередко
снижением эффективности руля высоты т\ при больших су и боль-
ших углах отклонения руля.
Непроизвольное превышение допустимых величин М и q воз-
можно в ряде случаев при выполнении истребителем переворотов
через крыло и пикирований под большими углами к горизонту, осо-
бенно, если летчик начинает переворот с большой начальной высоты
и при большой начальной скорости. В процессе выполнения перево-
рота траектория самолета представляет собой нисходящую полупет-
лю, на первой и большей части которой обычно интенсивно нара-
стает скорость полета. Для уменьшения интенсивного роста скоро-
сти при выполнении переворота летчик должен увеличивать пере-
грузку, т. е. уменьшить радиусы кривизны траектории. Это в ряде
случаев может оказаться непосильным для летчика вследствие уве-
личения устойчивости самолета по перегрузке, уменьшения эффек-
тивности руля высоты и возрастания его шарнирных моментов при
больших числах М.
Аналогичный случай может произойти и при неосторожном вы-
полнении неустановившегося крутого пикирования с нарастанием
скорости, если летчик запоздает с выводом самолета из пикирова-
ния. Несмотря на созданную летчиком при выводе из пикирования
большую перегрузку, самолет в первое время будет еще продолжать
увеличивать скорость, которая может превысить допустимые пре-
делы.
* И. В. Остославский и Г. С. Калачев, Продольная устойчивость
и управляемость самолета, Оборонгиз, 1951.
85
Количественные расчеты для анализа изменения параметров дви-
жения -в случаях, подобных указанным выше, обычно не могут ба-
зироваться на методе малых возмущений и потребуют применения
тех или иных методов приближенного интегрирования уравнений
движения. Метод малых возмущений неприменим здесь из-за слиш-
ком больших изменений скорости и высоты полета, а также вслед-
Фиг. 41. Записи приборов, характеризующие срыв само-
лета в штопор при наличии «ложки» в балансировочных
кривых продольной устойчивости.
ствие того, что самолет выходит в область нелинейных изменений
аэродинамических характеристик с углом атаки, углом отклонения
руля высоты и числом М.
Если ранее мы говорили, что анализ и оценка маневренности са-
молета должны производиться с тщательным учетом характеристик
ого управляемости, то теперь следует отметить, что оценка управ-
ляемости самолета с точки зрения обеспечения безопасности полета
должна производиться с учетом характеристик маневренности дан-
ного самолета. Так, например, если самолет снабжен достаточно
86
мощными воздушными тормозами, с помощью которых даже при
отвесном пикировании' скорость полета может быть уменьшена до
безопасных величин, то неприятные изменения в балансировке само-
лета по моментам, рост усилий для создания перегрузки и т. п. не
будут приводить к опасным положениям. Аналогично этому, если на
данной высоте nmax самолета меньше, чем допустимая по прочности
величина перегрузки мтэах, то нет оснований опасаться возможности
разрушения самолета из-за потери его управляемости при больших
углах атаки.
Заметим, что главную роль в обеспечении безопасности полета
играют характеристики усилий на рычагах управления рулями. При
слишком больших усилиях у летчика может не хватить физической
силы для требуемого отклонения рулей, сами же по себе отклонения
рычагов управления на самолете обычно всегда находятся в преде-
лах физических возможностей летчика.
III. БОКОВАЯ УПРАВЛЯЕМОСТЬ И УСТОЙЧИВОСТЬ
САМОЛЕТА
1. ОСНОВНЫЕ ПОЛОЖЕНИЯ
При рассмотрении общей теории боковой управляемости самоле-
та мы будем основываться на тех же общих исходных положениях,
которые были изложены в гл. II. Эти положения касались пределов
применимости метода малых возмущений, деления управляемости
самолета на статическую и динамическую, взаимосвязи характери-
стик устойчивости и управляемости и т. д. Нет нужды повторять
их здесь.
Боковая управляемость рассматривается нами при обычном
предположении, что скорость полета и угол атаки не изменяются по
своим величинам во время бокового установившегося или неустано-
вившегося движения самолета.
Б оковую у пр авляемость будем хар актер изов'ать з ависимостя м и
поперечных отклонений ручки или линейных отклонений штурва-
ла хэ, линейных отклонений педалей хн и соответственно поперечных
усилий Р3 и разности усилий на правой и левой педалях Рн от пара-
метров бокового движения самолета. В качестве последних в даль-
нейшем рассматриваются слагаемые угловой скорости вращения
самолета аы, o>?/i по жестко связанным с ним осям, угол скольже-
ния 3, угол крена yi и слагаемая перегрузки по боковой оси само-
лета.
Ради упрощения аналитических выражений индекс «1» будем от-
брасывать, помня о сказанном здесь.
Подобно характеристикам продольной управляемости характе-
ристики боковой управляемости изменяются с высотой и скоростью
полета и изменением положения взлетно-посадочных устройств.
В известной мере характеристики боковой управляемости само-
лета зависят и от центровки самолета, и от режима работы двига-
телей, и от положения воздушных тормозов. Однако влияние этих
факторов невелико, и их обычно не рассматривают.
Целый ряд положений, рассмотренных в гл. II, посвященной
продольной управляемости, справедлив и для анализа боковой
управляемости, что позволяет вести последующее изложение более
сжато.
88
2. БОКОВАЯ СТАТИЧЕСКАЯ УПРАВЛЯЕМОСТЬ
а) Общие показатели боковой статической управляемости
Общими показателями боковой статической управляемости са-
молета можно считать следующие балансировочные кривые, опре-
деленные на ряде высот Я=con st:
а) хэ, Рэ, Хн, Рц для серий установившихся прямолинейных сколь-
жений или плоских разворотов при постоянных величинах скорости
полета V=const в зависимости от угла скольжения g или боковой пе-
регрузки nz,
б) х3 и Р9 в зависимости от угловой скорости накренения само-
лета для серии условно считаемых установившимися вращений
самолета при различных V=const;
в) хн, Ра, и Рэ в зависимости от угла
g или перегрузки nz в установившемся по-
лете с несимметричной тягой двигателей
при V=const;
г) Рн, хэ, Рэ в зависимости от скоро-
сти или числа М для серии установивших-
ся режимов прямолинейного полета без
крена (7 = 0) и разворота (n^=g = 0) при
неизменных положениях триммеров на
элеронах и руле направления;
д) ^Pr=f(V) —перепады усилий, со-
здаваемых триммерами на руле направле-
ния и элеронах, которые могут быть ис-
пользованы летчиком для балансировки
самолета при различных установившихся
ровочные кривые для уста-
новившихся скольжений при
V=const.
режимах полета, другими словами, доста-
точность эффективности триммеров.
Естественно, что для полной характе-
ристики боковой статической управляемо-
сти указанные балансировочные кривые должны быть построены для
всего диапазона возможных в полете установившихся режимов.
В практике летных испытаний балансировочные кривые (см.
пн. а и в и фиг. 42) нередко строят не по углу скольжения или пере-
грузке nz, ai по углу крена самолета при скольжениях. Такая замена
объясняется тем, что угол крена проще измерять в полете, чем угол
скольжения. Между углами А и у для каждого самолета существует
однозначная, близкая к линейной зависимость. Указанная замена
упрощает подготовку самолета к летным испытаниям, но вносит изве-
стную неточность при сравнении соответствующих характеристик
управляемости и маневренности самолетов. При анализе и сравнении
маневренности и управляемости самолетов в полете со скольжением,
например, при посадке непосредственный интерес представляют угол
скольжения g и боковая перегрузка nz, так как именно эти парамет-
ры характеризуют возможные изменения траектории движения
центра тяжести самолета
*89
б) Частные показатели боковой статической управляемости
К частным показателям -боковой статической управляемости са-
молета следует отнести такие показатели:
1) производные от усилий на ручке и педалях и их отклоне-
ний по какому-либо из параметров движения самолета, взятые в
точке, соответствующей исходному установившемуся прямолиней-
dP3 dP3
ному полету без крена и скольжения, т. е. величины: ,
Фиг. 43. Пример. Балансировочные кривые, характери-
зующие усилия на рычагах управления и их отклонения,
необходимые для парирования асимметричных моментов
крена и рысканья в прямолинейном полете.
2) максимальные значения параметров движения ^max, ?max,
n2max, Tmax’ соответствующие максимальным или заданным усилиям
на рычагах управления или их максимальным отклонениям (Psmax,
-*э max И др.);
3) максимальные усилия и отклонения ручки и педалей, необхо-
димые для парирования аэродинамических моментов и Му при
прямолинейном полете без крена (см. пример на фиг. 43).
Между производными, характеризующими боковую статическую
управляемость, и коэффициентами боковой статической устойчиво-
сти существуют такого же вида связи, как и для аналогичных пока-
зателей продольной управляемости самолета.
Для серии установившихся режимов прямолинейного полета со
скольжением при неизменной скорости по траектории имеем следую-
щие уравнения моментов относительно' продольной и нормальной
осей самолета:
+ пгххэ dx3 + tnxx*dxtt=Q,
ту d?> + mx*dx9 + тх« dxH = О,
со
где т\ и п$у — коэффициенты статической поперечной и статиче-
ской устойчивости пути; тххз и т*н— коэффициенты эффективности
поперечного и путевого управления; т*н, тх* — производные коэф-
фициентов моментов крена и рысканья, взятые по линейным откло-
нениям соответственно педалей и ручки.
Из этих двух уравнений получим
dx3
tn"
т?х
тХн тпХэ
х ____у_
тХн тХз
у х
г туэ т?х
dxH _
dfi тх^ тХз тх тХа
У 1 __ У X у
тХз тхи
X у
Осуществим переход от производных по g к производным
dx3 dx3 d$
dnz d$ dnz
Дифференцируя выражение п%0 = сг8д, получим
= и d$=-^-dnz.
dnz dcz dcz
d$ d$
Далее можно написать:
dxa _ m*x ~cy __z c,
dnz m*a dcz э x
d?
где
„ , cy dcz dcz dcz d^H
mz=-------x3=-----------—; ------=-----1-------.
x dcz mxx3 d$ dBH
d^
Аналогичным образом можно получить
dnz н у ’
где с tn Z . т9 J - тх vZ —— 7У
ту И dcz /ПХн
rfp У
(73)
по nz:
(74)
(75)
91
Усилие от элеронов на ручке определяется формулой
Ра = — kw т S3b q.
При /f=const и V=const имеем
Отсюда,
d?
И
dng
dx3
dP3
используя полученные ранее
dx^
выражения для —- ,
dn2
получим
dP3
---~ —Ьш sSabs4
dnz ш-э 8 37
СУ
dcz
d$
6 dh
— т 3 —
ш dx9
Далее, учитывая, что c^q—~
S
db3
dx3
тхъ
z
можем написать
dP3
dnz
«L г
т э
ш
dcz
d?
здесь т? —
представляет собой коэффициент статической
поперечной устойчивости самолета со свободным управлением,
т. е. т? „„ = -дтх св .
dtttx св
др •
Величина тсх^в является коэффициентом статической поперечной
устойчивости /п^.гсв, взятому не в виде производной по углу
скольжения, а в виде производной по коэффициенту боковой
аэродинамической силы. При этом принимается допущение, что
, т. е. пренебрегается величиной
Таким образом,
dcz
dnz
и аналогично этому
(76)
dPtt —р*тсг
dnz
о
т 3
и
т э
^4
s
1
m э
ш 8
т э
ш
92
где
^шэ^5э G
>2 _ Ш-=* Ш q » _М_
э § е>9 и9 $ ,
т э °
X
Рг
* н
—^щН 5Н&Н
т н
у
G
S
Величины Ргэ и Р* м о г у т быть названы соот-
ветственно' коэффициентом расхода попереч-
ных усилий на ручке или штурвале управления
и коэффициентом расхода усилий на педалях.
С физической стороны коэффициенты Рг3 и Р* можно интер-
претировать как величины усилий, которые потребовалось бы при-
ложить летчику к ручке (штурвалу) для уравновешивания с по-
мощью элеронов и руля направления моментов, равных по величине
произведению силы веса самолета на размах крыльев. При этом
условно предполагается, что' аэродинамические моменты самолета и
шарнирные моменты элеронов и руля направления прямо пропорци-
ональны их углам отклонения независимо от абсолютной величины
последних. Действительно, угол отклонения элеронов, необходимый
для уравновешивания указанного момента, определится из уравнения
G/=
а соответствующее усилие на ручке из уравнения
Рэ= -
Из этих уравнений получим
dx3 Су dx3 Су
9 db3 э db3
Аналогичным образом получаются и выражения для хгп и Р*.
Таким образом, если для анализа и оценки боковой статической
управляемости самолета при выполнении установившихся скольже-
ний взять в качестве показателе^ производные по перегрузке nz, то
можно установить полную аналогию их с показателями продольной
статической управляемости самолета по перегрузке Пу. Коэффициен-
ты статической поперечной и путевой устойчивости и ана-
логичны коэффициентам продольной статической устойчивости а» и
gmc. Коэффициенты x*, х*, Р*, подобны коэффициентам Xх,
Рх и др.
93
Переход от часто определяемых в полете производных
/У V dPa dXa dPti dXa
JE*-, , —— и —— к производным -------и т. д. элементар-
dy ^7 ^7 ^7 dnz
но прост.
Действительно, для прямолинейных установившихся скольжений
перегрузка п? по жестко связанной с самолетом боковой оси Oz}
определяется уравнением
п2= — cos & sin у.
Отсюда
dtiz— — cos & cos 7 ^7 + sin & sin 7 d§.
dx3 dP3
Так как производные и т- Д- определяются по
балансировочным кривым в точке 7=0, т. е. при начальном
режиме полета без крена и скольжения, при котором угол тан-
гажа самолета & относительно мал, то можно считать
cos & ~ cos 7= 1; sin 7=0.
Отсюда следует:
dn2= — d^=
d7°
57,3
т. е.
ахэ
dnz
dx3 o dx3
-57,3—t- и т. д.
dy d-f
Переход к производным no g от производных по nz или по у мо-
жет быть осуществлен с помощью формул
dp=dn, = - dy=----------------df.
dcz г dcz dcz
-- -- о7, о-------
dfi d$ dfi
3. БОКОВАЯ ДИНАМИЧЕСКАЯ УПРАВЛЯЕМОСТЬ
а) Характеристика самолета как динамической системы
При рассмотрении боковой динамической управляемости будем
пользоваться жестко связанной с самолетом системой осей коорди-
нат, считая, что эти оси совпадают с главными осями инерции
самолета.
Уравнения 'бокового управляемого движения самолета при ис-
пользовании метода малых возмущений могут быть написаны в
виде*
* В. С. В ед ров, Динамическая устойчивость самолета, Оборонпиз, 1938.
94
1^- Мшхх*х - = Мх/Ха + <нх„,
-^7^~^уУшу-^-^хв + М^хи,
— — o\sina —0) cosa----—4-----р = 0,
dt х у V V V
(77)
— — О) 4-tg&O) =0,
dt * ' & У
где через хэ и хк обозначены линейные отклонения ручки и педалей,
а через ых, g и у — отклонения параметров бокового движения
от их значений при исходном установившемся режиме прямолиней-
ного полета без крена и скольжения. Другими словами, при исходном
режиме полета
= Yo — Во=0-
Здесь, аналогично тому, как это было принято при рассмотрении
продольной управляемости самолета, приближенно будем считать,
что боковой силой от отклонения руля направления можно прене-
бречь.
Для определения характеристик самолета как динамической си-
стемы надо найти решения уравнений (77), полагая правые части их
равными нулю.
Характеристическое уравнение системы уравнения (77) при
Л'Э=ХМ=О будет
F(X) =Х4 + ПзХ3 + #2^2Н“Я1Х + Яо, (78)
где обозначены
1 / .3 \
«з=— —2—тхх — туу ;
1 0 В . СО СО 00 со .
а%= —----cos a — у-т/х sm a + тхтуу — тхУтух -j-
1 Г/ —3—“л ' -0—Ш
аг = — (утутх — \>тх т х) cos a —
хЗ I У
____ ______ л _ _ __
— — [л/Пл/«“у) sin a-(tn'xxmyy — т'хУтух')—
—— |vn£tgO)] ;
ао= у + /ra“*tg&) —
/^4 У х
А
95
(79)
m 2m
T —------ ; Ll=----- .
pSIZ pSZ
J
Уравнение (78) обычно имеет два вещественных корня и два
комплексных корня, взаимно сопряженных друг с другом. В соответ-
ствии с этим боковое возмущенное движение самолета, как известно,
складывается из двух апериодических движений и одного колеба-
тельного. Большому по абсолютной величине вещественному корню
соответствует быстро затухающее апериодическое движение крена,
а малому вещественному корню — спиральное апериодическое дви-
жение самолета. Паре комплексных корней соответствует боковое
колебательное движение. Период этих боковых колебаний близок
по своему порядку к периоду продольных короткой ер иод ических ко-
лебаний самолета, а затухание боковых колебаний в несколько раз
слабее затухания короткопериодических продольных колебаний.
Спиральное возмущенное движение по темпу своего развития
можно сравнить с продольным длиннопериодическим возмущенным
движением. В силу медленности своего развития влияние спирально-
го движения на управляемость самолета, как известно, обычно ока-
зывается несущественным. Характеристики же возмущенного дви-
жения крена и боковых колебаний играют в отношении боковой
динамической управляемости самолета важную роль. Кроме периода
и затухания боковых колебаний весьма существенное значение, так-
же имеет соотношение амплитуд движения крена и движения рыс-
канья.
Для количественной оценки этого соотношения принято при-
менять
у__
т. е. отношение амплитуды колебаний угловой скорости крена о^о
к амплитуде угловой скорости рысканья
Чем меньше величина х, тем лучше при прочих равных условиях
управляемость самолета. При малых х проще выполнять координи-
рованные маневры, так как самолет в этом случае не отвечает рез-
ким движением крена на неточности действий летчика рулем направ-
ления; другими словами, такой самолет не является строгим в отно-
шении «недодачи» или «передачи» ноги. При малых х поведение
самолета в неспокойной атмосфере также лучше и пилотирование
менее утомительно, чем в случае самолета с большой величиной х,
96
Для определения величины х может быть применена 'следующая
приближенная формула:
/ +(2C15+dl)?
Х=1/ --------^-5-----; (80)
у — (3$ -J- Cg) Ч Н~ (2^2£ +
L 'П J
где $ и *0 —вещественная часть и коэффициент при i пары ком-
плексных корней, характеризующих боковые колеба-
ния самолета, а коэффициенты d\ и т. д. определя-
ются выражениями
3 р _-
ci=/rexy; <^1=-—d2=^n?x—
С =_ra“x----*
х 2
Заметим, что величина х растет с увеличением коэффициента
и с уменьшением коэффициента rrft
б) Выбор общих показателей боковой динамической
управляемости самолета
Так же, как и в главе II, при выборе общих показателей боковой
динамической управляемости самолета целесообразно рассмотреть
свойства самолета ходить за рулями. Проанализируем при этом три
наиболее характерных случая пилотирования или три типа маневров:
1) движение крена, осуществляемое летчиком с помощью эле-
ронов;
2) координированные маневры, выполняемые летчиком при g = 0;
3) плоские неустановившиеся развороты, осуществляемые с по-
стоянным углом крена (y=const).
При этом каждый из типов маневров с целью упрощения будем
рассматривать независимо от других.
Изменение угла крена с помощью элеронов часто производится
летчиком для ознакомления с окружающей самолет обстановкой, для
энергичного1 ввода в разворот или вираж, для парирования бросков
болтанки и т. п.
Координированное выполнение маневров является обычным пра-
вилом пилотирования, прививаемым летчику с первых учебных по-
летов.
Плоские развороты с примерно постоянным углом крена приме-
няются на практике, например, при прицеливании или при выполне-
нии посадки с боковым ветром.
1) Движение крена. Рассмотрим так называемое идеаль-
ное движение крена, считая, что из всех параметров движения само-
97
лета изменяются только угол крена и угловая скорость Тогда
уравнение управляемого движения крена можно написать в виде
= (81)
х dt2 х dt х ъ \ > \ >
или в виде
+ (82)
dt* dt 9 v 7 v 7
где использованы обозначения
Постоянные коэффициенты Х\ и X] можно рассматривать как
частные производные функции x3=f{у, у) по угловой скорости и
угловому ускорению движения крена. По своему физическому смыс-
лу эти коэффициенты аналогичны коэффициентам X* и X", входя-
щим в уравнение (57) связи между продольным перемещением руч-
ки Дхв и изменением перегрузки Д и.
Подставляя ^-=^х в уравнение (81), получим, dt ^- + a^=bxa(t), (83) dt
где а= х— и & = —(84) 1х
Как следует из уравнения (83), управляемость самолета по от-
клонениям ручки при движении крена полностью определяется вели-
чинами а и Ь.
Взяв отношение --, получим
a Zm^pSVl* I т"*
— =--------------=----------(85)
b 2V т/
Величина — представляет собой уже известный нам частный по-
ь
казатель поперечной статической управляемости, характеризующий
величину отклонения ручки, необходимого для создания единицы
угловой скорости самолета в условно установившемся движении кре-
на. Действительно, если положить =0 и хэ =-const, то из урав-
dt
нения (83) следует:
; [(86)
^Х /уст d^X Ь
98
здесь через X** обозначен показатель статической поперечной
dx
управляемости, равный производной —
Семейства кривых X*x=f (М) и а = <р(М) или Ь = х(М)
(фиг. 44) при различных значениях высоты полета Н, как пара-
метра, могут служить одними из общих показателей боковой
динамической управляемости самолета.
Фиг. 44. Пример. Изменение общих по-
казателей боковой динамической управ-
ляемости самолета Х™х, а >и b в зависи-
мости от скорости и высоты полета при
наличии влияния сжимаемости воздуха
и упругих деформаций конструкции.
Известным неудобством в 'практической работе с общими показа-
телями, взятыми в виде размерных величин а, является зави-
симость их от скорости и высоты полета. В отношении практического
нормирования характеристик управляемости самолета, как уже ука-
зывалось, более удобно взять инвариантные по своей природе вели-
чины. Для движения крена такими безразмерными общими показа-
телями могут быть
__ т х ______
------—=—mZx*
ix Х
- la dx9 т“х
Хшх =--------= —=-----------.
» 2 V b du>x
(87)
99
Физически показатель Х$х можно интерпретировать как вели-
чину отклонения ручки вбок (в метрах), необходимую для изменения
на один радиан угла атаки концевого сечения крыла из-за наличия
угловой скорости крена:
На практике в качестве критерия поперечной управляемости са-
молета нередко принимают а°—величину изменения угла атаки
Фиг. 45. Пример. Изменение показателей
боковой динами ческой управляемости
самолета X “х и а в зависимости от ско-
рости и высоты полета при наличии и
отсутствии влияния упругих деформаций
и сжимаемости воздуха.
в градусах концевого сечения
крыла, приходящуюся на 1 см
хода ручки, т. е.
п 57,3 d(^x 0,573
к 100 dx3 Х^х '
Изменение общих показа-
телей а и Х™х в зависимости
от числа М и высоты будет
происходить (фиг. 45) уже
только за счет влияния сжи-
маемости воздуха и упругих де-
формаций конструкции (вклю-
чая и проводку управления)
на коэффициенты /п"ли/п^э-
Найдем теперь связь усилий от элеронов на ручке управления
с параметрами и, и при идеальном движении крена.
Как известно, считая, что шарнирный момент элеронов линейно
зависит от угла их отклонения и угла атаки крыла, можно написать:
А = ~ К.ЛЬзЯ (^1э8э + тщДа)-
Если производную относить к углу атаки концевого сече-
ния крыла и угол измерять в радианах, то
Подставляя в это выражение 83=/(a>x, <i>J из уравнения,
аналогичного (81), получим
/ . j . м”х i \
рз = - М AM I "V ~ mu? “л+"4 — «Л =»
' *Х X f
(I М^х \
—м*~шх)- (88)
М э М э /
100
Действительно, демпфирующий момент крена при освобожденном
управлении будет равен сумме демпфирующего момента при
зажатом управлении и дополнительного момента от отклонения осво-
божденных элеронов, связанного с наличием угловой скоро-
сти сид., т. е.
Величина Яэ.сВ определяется из уравнения равновесия шарнирных
моментов
™Х.СВ +тшу^«>Л = 0.
В итоге получим
М “= М > - 2И> —
ЛСВ х т\ х 2V
ш
Уравнение (88) представили в виде, аналогичном (83}:
+ = (89)
Для коэффициентов а\ и &i получим выражения
(90)
где Ргэ —уже известный нам (76) коэффициент расхода попереч-
ных усилий на ручке управления.
Известный критерий статической поперечной управляемости
dP3 . а1
—— равен отношению —, т. е.
du>x br
dP3 аг
du
pzj
Gl
(91)
Для практического использования целесообразно представить об-
щие показатели управляемости и в инвариантной форме. Для попе-
речной динамической управляемости по усилия-м такими показателя-
ми, как это следует из предыдущих выражений могут служить
(фиг. 46)
- -ог
<*1 = ^ =-------
1Х
dp3 Ргэ1х _т
т------= —-— тх
du>x Gl ЛСВ
(92)
101
Для случая необратимого бустерного управления элеронами с за-
грузочным механизмом на ручке в виде простой пружины, создаю-
щим усилия, пропорциональные отклонению ручки, т. е. при Р3=к • х9,
достаточно знать общие показатели управляемости по отклонениям
ручки, чтобы определить показа-
тели управляемости по усилиям на
ручке. В этом случае
а = ах,
dP3 dx3
dux d&x
Чем больше величины коэффи-
циентов а и а19 тем в большей ме-
ре, как это следует из уравнений
(83) и (89), самолет ходит за руч-
кой в поперечном управлении при
неустановившемся движении кре-
на, т. е. тем меньше изменяются с
резкостью маневра соотношения
между усилиями и отклонениями
ручки, с одной стороны, и измене-
ниями угловой скорости (1)^ с дру-
гой. Из развернутых выражений
для коэффициентов и а нетруд-
но видеть, что хождение с а-
Фиг. 46. Пример. Изменение показа-
ла dP3
телеи управляемости -, т- и
du>x d&x
aY в зависимости от скорости и высо-
ты полета,
молета за ручкой в поперечном управлении бу-
дет тем большим, чем больше коэффициент демпфирующего
момента крена, чем меньше относительный момент инерции само-
лета ix> чем больше скорость и чем меньше высота полета.
При этом следует учитывать, что для сохранения той же самой
эффективности поперечного управления (ш^.тах) с увеличением демп-
фирующих моментов крена потребуется увеличить и размеры эле-
ронов.
2) Координированные маневры. Рассмотрим коорди-
нированный маневр, выполняемый при 3 = 0. Для упрощения выкла-
док и рассуждений будем считать, что скорость полета по траектории
остается при этом неизменной.
С учетом принятых условий последние два уравнения систе-
мы (77) примут следующий вид:
o)xsin а + co^cos а =
СУ1 у
оо —(n tgO-^ .
х у ь л/
102
Из этих уравнений найдем
<о,—A + Вл,
х х dt *1’
ш =А *<-+в V,
у у dt уЬ
(93)
где
д ___________COS а______
х COSa + sinatgO ’
Q __ СУ1_____________________
х т cosa + sinatgO *
д ______________sin а_______
у COS a + sin a tg $ ’
£ = __ .
у т cos a + sin a tg О
(93а)
Подставив выражения (93) для «л. и в функции т и в
у dt
первые два уравнения системы (77) и решив их относительно
х3 и хн, получим
А-Ч = 4- сх — + cof;
88 dfl dt
Ал.=—~
н " dfl 1 dt 01
где применены обозначения
[лт^э (1 _ kik2) р.тх" (1 —
Аа = —-------------; л =---------у----------;
8 ^А^хК н z^AfyL
т Leos a \ zx / х 1Х У
+ (тху — туу>} tgal — ;
\ h / J К
С0 = ~ I —~ [ — тх У + + ту У +
т3 v cos a L ix Л
1
(94а)
+ (m“-r_ A w“A tg &1) — ;
k х 1 ix у ) s JJ К
==± [_£zi_ (] _ A tg &) + Jk
т I COS a \ Z v / У ly
10 3
— lm“y—k2 tgal-i-;
\ ly / J L*
)s a L y iy
\ l у / J) Jb
7<== 14-Ar, tg a;
lx
Z,=tga + A2 -r-;
ly
тхП mv3
=----F“ 5 ^2 = F” •
(94а)
Из уравнений (94) следует, что при выполнении координирован-
ных маневров связи боковых отклонений ручки и> педалей с углом
крена самолета характеризуются такого же рода дифференциальны-
ми уравнениями второго порядка, как и связь продольных отклоне-
ний ручки с перегрузкой п. Поэтому для анализа способности само-
лета ходить за элеронами и рулем направления при выполнении
координированных маневров можно воспользоваться теми же прие-
мами, которые уже были изложены в предыдущем разделе, посвя-
щенном продольной управляемости самолета (см. гл. II).
Несколько слов о каждой из связей, характеризуемых уравне-
ниями (94). Если подсчитать числовые величины коэффициентов с\
и Со для самолетов принятых в настоящее время схем, то, окажется,
что величина С\ примерно раз в десять больше величины с0- Для про-
дольного же управления соотношение аналогичных коэффициентов
было обратным, т. е. коэффициент k2 [см. уравнение (67) ] обычно
в 5—10 раз превышал коэффициент 2Л. Если собственная частота
продольных колебаний, определяемая величиной k, имеет порядок
1—0,5 гц, то собственная частота, определяемая Y £о, имеет поря-
док 0,1-т-0,05 гц. Заметим, что при этом берутся условные собст-
венные частоты без учета демпфирования. Так как демпфирование
(величина Ci) здесь относительно весьма велико, то в действительно-
сти собственное движение самолета, определяемое корнями характе-
ристического уравнения
X2 + Cik + ^o==O,
(95)
будет не колебательным, а апериодическим. При этом оказывается,
что один из корней уравнения (95) близок к величине а [см. уравне-
ние (83)], а другой корень весьма мал по абсолютной величине.
Пренебрегая слагаемым coY ввиду его малости, первое из урав-
нений (94) приближенно можно представить в виде [см. уравне-
ние (83)]
104
^f + a<»x = bxe(t).
Действительно, из (93а) и (94а) следует, что приближение
А*^1; k~\\ &i&2~0; С\^а;
М*э тХз$У21 р-т*9
Аэ^ь= х - х - х
V ^х
Уравнение (83) было получено ранее для описания движения
идеального крена.
На основании сказанного выше можно сделать заключение, что и
при координированных маневрах и при изолированном движении
идеального крена зависимости между углом крена у, угловой ско-
ростью сод. и величинами хэ и Р9 практически оказываются одинако-
выми.
Если рассмотреть связь отклонений педалей с углом крена при
выполнении координированных маневров, то окажется, что связь эта
по своему характеру довольно близка к связи хэ с у, Корни харак-
теристического уравнения
X2+d\k + dQ = О
обычно оказываются вещественными и отрицательными по знаку.
Величина коэффициента dQ также оказывается сравнительно малой
по сравнению с коэффициентом k2, определяющим частоту продоль-
ных короткопериодических колебаний.
Самолет в отношении хождения угла крена за отклонениями пе-
далей имеет худшие характеристики по сравнению с хождением угла
атаки или перегрузки за продольными отклонениями ручки.
Способность самолета следить креном за отклонениями педалей
при координированном маневре может быть улучшена путем увели-
чения коэффициента демпфирующего момента самолета т?у отно-
сительно оси Oz/i; коэффициент dQ линейно связан с mps соответ-
ствующая частота собственных колебаний самолета, характеризую-
щая управляемость пути при выполнении координированных манев-
ров, в основном и определяется именно величиной т^у.
Аналогичным образом можно было бы охарактеризовать и боко-
вую управляемость самолета по усилиям на ручке и педалях.
Если с помощью уравнения (94) подсчитать отклонения педалей,
а затем усилия на них при выполнении координированных маневров,
то они окажутся сравнительно малыми по сравнению с величинами
отклонений и усилий на педалях при выполнении маневров со сколь-
жением, например, плоских разворотов или прямолинейных скольже-
ний (это обстоятельство хорошо известно летчикам).
На основании всего сказанного выше можно сделать общий вы-
вод, что определение общих показателей боковой динамической уп-
равляемости самолета непосредственно из анализа пилотирования
при выполнении координированных маневров практически нецелесо-
образно, так как вытекающие отсюда требования к выбору конструк-
105
тивно-аеродинамических 'параметров перекрываются другими рас-
четными для управляемости случаями.
3) Плоские развороты. Движение в этом случае связано
с вращением самолета относительно его вертикальной оси и с изме-
нением угла скольжения. Будем считать, что возникающие при вы-
полнении плоских разворотов моменты крена летчик парирует с по-
мощью элеронов; таким образом, примем условие у =const.
Изменение и 3 при плоских разворотах определяется следую-
щими двумя уравнениями, полученными на основе системы (77):
d<*y ГПуУ ^у Q
-------------— 0J--------------r = —
dt T y T2 T2
Выразив
затем и
из второго уравнения через
о d$
£ и — и подставив
dt
du>v
—в первое уравнение, получим
dt
dt2 dt
(96)
(97)
a
-тг-^н,
где
Отметим, что при небольших значениях показателя х = ——==
(Оуо
= 1-4-1,5 (табл. 2) корни характеристического уравнения систе-
мы (96) с достаточным для целей практики приближением опреде-
ляют период и затухание боковых колебаний самолета.
Таблица 2
Сравнение приближенных и точных значений корней характеристического
_____уравнения (96) для бокового возмущенного движения самолета
Су Коэффициенты характери- стического уравнения Пока- затель X Точные корни Приближенные корни
аз 1 а2 1 _£1_J «0 ^3,4 1 ^3,4
0,1 4,68 9,05 25,82 0,0904 1,6 —0,326±2,51/ —0,278±2,61/
0,1 4,49 2,41 4,82 —0,0098 0,14 —0,151 ±1,06/ —0,156± 1,08/
0,8 1,32 0,529 0,746 —0,00532 3,96 0,00767 ±0,748/ —0,0584±0,612/
0,8 1,41 0,318 1,544 —0,0340 2,46 -0,0601 ±1,085/ - 0,1019± 1,035/
0,8 1,52 1,458 1,491 —0,0121 1,83 —0,122±1,07/ —0,159± 1,03/
0,8 1,81 3,160 2,912 -0,0429 1,19 - 0,312± 1,53/ -0,304± 1,55/
1С6
Отсюда следует, что при небольших величинах х можно пользо-
ваться упрощенной теорией боковых колебаний самолета, основан-
ной на рассмотрении уравнения моментов относительно' нормальной
оси самолета и уравнения сил по его боковой оси.
Возможность пользования упрощенной теорией боковых колеба-
ний прй небольших величинах показателя х можно обосновать тем,
что в этом случае движение крена является только пассивным след-
ствием движения рысканья. Возникающие при этом, вследствие на-
кренения самолета, углы скольжения невелики по сравнению с углами
скольжения, обусловливаемыми рысканьем. С увеличением амплиту-
Фиг. 47. Изменение <oz и пу
при даче руля высоты Упр=
= 670 км/час.
Фиг. 48. Изменение и
при даче руля направления.
ды движений крена растут и вызываемые накренением самолета
углы скольжения. Увеличение этих дополнительных изменений угла
скольжения и возрастание угловой скорости приводят к появле-
нию уже заметных приращений момента относительно оси Оу{.
Естественно, что эти дополнительные моменты сказываются в основ-
ном на коэффициенте затухания боковых колебаний и в пренебре-
жимо малой степени на их периоде.
Уравнение (97) полностью подобно уравнению (67). Следова-
тельно, хождение самолета за педалями при плоских разворотах мо-
жет рассматриваться и оцениваться с помощью таких же приемов,
как и хождение самолета за ручкой при продольном движении.
В качестве основных параметров для анализа и оценки динамиче-
ской путевой управляемости самолета могут быть взяты величины:
для управляемости по отклонениям педалей
h 77 2п dxH dxH
‘ k d$ dnz
107
для управляемости по усилиям
dPH
—- ИЛИ
статической путевой
dPa
•--- соответствуют
dnz J
2тс
dPn
dnz
управляемости
установившимся
и
h ~
**lcB £ » *CB “
Частные показатели
dx^ dP н djCn
——- или —-
d$ d$ dnz
плоским разворотам.
Вследствие существенно более слабого демпфирования боковых
колебаний по сравнению с короткопериодическими продольными
самолет значительно хуже ходит за рулем направления, чем за рулем
высоты. Для сравнения на фиг. 47 и 48 приведены полученные в по-
лете записи движения самолета при отклонениях (дачах) руля высо-
ты и руля направления.
Таким образом, общие показатели боковой динамической управ-
ляемости самолета практически устанавливаются из анализа пило- .
тирования при идеальном движении крена и плоских разворотов
самолета с добавлением показателя , характеризующего
соотношение амплитуд угловой скорости крена и угловой скорости
рысканья при собственных боковых колебаниях самолета.
IV. ЛЕТНЫЕ ИСПЫТАНИЯ САМОЛЕТОВ
НА МАНЕВРЕННОСТЬ, УПРАВЛЯЕМОСТЬ И УСТОЙЧИВОСТЬ
1. ОБЩИЕ ЗАМЕЧАНИЯ
Безусловным требованием к любой системе показателей тех или
иных качеств самолета, рассчитываемой на практическое примене-
ние, является возможность определения количественных величин
каждого входящего в систему показателя как при проектировании,
так и при летных испытаниях самолета.
Возможность расчета рассмотренных в данной работе общих и
частных показателей маневренности, управляемости и устойчивости
самолетов в процессе проектирования достаточно обоснована. Здесь
мы не рассматривали методы определения и расчета первичных ве-
личин и различных аэродинамических коэффициентов, входящих в
приведенные формулы, как, например, моментов инерции самолета,
его центровки, величины тяги двигателей в зависимости от скорое™
и высоты полета, коэффициентов сх, cv, т*, тсгу> т™ и т. д. Эти
величины могут быть определены известными и применяемыми на
практике методами выполнения соответствующих расчетов с исполь-
зованием результатов испытаний моделей самолета в аэродинамиче-
ских трубах и стендовых или летных испытаний двигателей.
Заметим, что определение принятых частных показателей манев-
ренности Vmax, скороподъемности, характеристик виражей, разгонов
и торможений путем построения диаграмм общих показателей типа-
представленных на фиг. 3 и 4 дает достаточно полный метод аэро-
динамического расчета и летных испытаний самолета.
На основании сказанного выше, в дальнейшем мы покажем лишь,
какими методами могут быть определены рассмотренные в данной
работе общие показатели маневренности, управляемости и устойчи-
вости самолетов при летных испытаниях. При этом мы не будем
вдаваться в детали техники проведения летных испытаний, не имею-
щие принципиального значения.
Способы определения частных показателей достаточно! очевидны
из изложенного выше.
При летных испытаниях существенным является вопрос о необ-
ходимости пересчета или приведения произведенных в полете изме-
рений к стандартным или другим условиям в отношении параметров
атмосферы и веса самолета по сравнению с имевшимися фактически.
Решение этого вопроса зависит от требуемой точности результатов
летных испытаний.
109
При испытаниях на управляемость можно считать достаточной
точность порядка 15—30% от нормируемых величин показателей уп-
равляемости. Эта сравнительно' малая степень требуемой точности
объясняется как имеющимся различием взглядов и привычек раз-
личных летчиков, так и физиологической невозможностью с большей
точностью воспринимать усилия и перемещения ручки, а также пере-
грузку, угловую скорость и т. д.
При определении количественных характеристик маневренности
желательно получить точность возможно большую—не менее 3—5%
от максимальной величины замеряемого показателя. Такую степень
точности имеют, например, испытания самолетов по существующим
методам на скороподъемность и взлетно-посадочные свойства*. Боль-
шая степень точности испытаний на маневренность требуется пото-
му, что' в боевых условиях преимущество одного' самолета над дру-
гим обычно определяется как малая разность больших величин.
Исходя из требуемой точности, можно считать необязательным
приведение ю стандартным условиям результатов летных испыта-
ний на управляемость и устойчивость, но совершенно обязатель-
ным — на маневренность. Поэтому в данной главе мы рассматриваем
лишь метод приведения результатов испытаний на маневренность.
Для определения из летных испытаний характеристик маневрен-
ности, управляемости и устойчивости одновременно, зн немногими
исключениями, могут быть использованы записи приборов при вы-
полнении самолетом одних и тех же маневров или движений, зада-
ваемых летчику (в полетных заданиях).
Самопишущая аппаратура, устанавливаемая на самолет при ис-
пытаниях на маневренность, управляемость и устойчивость, остается
также неизменной. Эта аппаратура состоит из тех или иных самопис-
цев и датчиков, с помощью которых могут быть зафиксированы изме-
нения во времени параметров, характеризующих как действия летчи-
ка при пилотировании, так и движение самолета. К числу первых
относят усилия летчика на рычагах управления, отклонения рычагов
управления, углы отклонения рулевых поверхностей (8Э, $в, 8Н, тэ, Sk?
и т. п.); к числу вторых — скорость полета, давление и температура
воздуха, слагаемые перегрузки и угловой скорости по трем осям са-
молета, угол атаки, угол скольжения и т. д. Мы не будем приводить
здесь более подробное описание самопишущей аппаратуры.
Для получения полной характеристики самолет в процессе лет-
ных испытаний нередко должен выводиться летчиком на крайние,
возможные при эксплуатации режимы полета или состояния движе-
ния. При выводе на такие крайние режимы и состояния не исключе-
на возможность непроизвольного срыва самолета или других случаев
потери управляемости. Поэтому перед проведением летных испыта-
ний для детального определения характеристик маневренности, уп-
равляемости и устойчивости самолета желательно проверить склон-
ность его к самопроизвольному увеличению углов атаки, к переходу
в штопор, а также поведение при предельно больших скоростных
* В С. Ведро в и М. А.-Тайц, Летные испытания самолетов, Оборон-
гиз, 1951.
110
напорах и числах М. При дальнейшем изложении предполагается,
что такого рода испытания самолета уже проведены.
Не будем останавливаться также на так называемой наземной
подготовке к проведению летных испытаний, заключающейся во
взвешивании и определении положения центра тяжести самолета; в
выборе, подготовке и установке на самолет приборной аппаратуры;
в измерении трения в проводке управления; в определении ее кине-
матических и массовых характеристик; в определении характеристик
загрузочных механизмов, создающих «искусственные» усилия на
рычагах управления, и др. Эти работы достаточно' известны и про-
сты по содержанию, хотя и требуют высокой тщательности их про-
ведения.
2. СОДЕРЖАНИЕ ЛЕТНОГО ЭКСПЕРИМЕНТА
Из рассмотрения выражений (3) и (2) нетрудно заключить, что
перегрузки пх, Пу и nz при данном весе самолета зависят лишь от
температуры и плотности воздуха (барометрической высоты полета),
числа М или скорости полета, углов атаки и скольжения, параметров
ЗдВ, Яв.т, Зп.щи йиаоси и не зависят от угла наклона траектории и поло-
жения осей самолета в пространстве. Другими словами, перегрузки
пх, пу и riz не зависят от вида выполняемого маневра в пределах при-
годности допущений, сделанных при выводе уравнений маневрен-
ности.
Независимость пх, пу и nz о Т вида. выполняемого
маневра! позволяет существенно упростить про-
ведение летных испытаний, так как для определения
семейств принятых общих показателей маневренности na?=f(M, Пу) и
^1 = 9(3, М) может быть использован весь комплекс измерений,
произведенных в процессе летного эксперимента на маневренность,
управляемость и устойчивость. Летчик часто может быть освобож-
ден от обязанности строго выдерживать различные установившиеся
режимы полета, так как частные показатели маневренности, как
было показано выше, определяются простым путем на основании се-
ток общих ее показателей. Например, для определения Vmax по гори-
зонтали летчику не нужно выдерживать в течение 3—5 мин. строго
горизонтальный полет, как это обычно делается, а достаточно с пе-
регрузкой Пу^\ при использовании снижения (с «прижимом») прой-
ти небольшой диапазон скоростей «вблизи» ожидаемой величи-
ны Vmax.
В табл. 3 кратко перечислены те маневры, которые могут быть
использованы одновременно как для определения рассмотренных в
предыдущих главах характеристик маневренности, так и характери-
стик управляемости и устойчивости самолета.
Объем летного эксперимента, т. е. число высот, скоростей полета,
центровок и число обследуемых сочетаний параметров Н, хт, 5ДВ, М,
SB.T и т. п., определяется в каждом конкретном случае в зависимости
от объема интересующих нас данных и требуемой точности результа-
тов летных испытаний.
Для самолетов с большим диапазоном изменения полетного веса
может потребоваться проведение испытаний с двумя весами.
111
Таблица 3
Содержание летного эксперимента
№ по пор. Наименование испытаний Условия проведения испытаний Определяемые характеристики
1 Дачи руля высоты при ffeO и различных величинах M^const С установившегося (лучше гори- зонтального) полета на одной доста- точно большой высоте Кривые Су]=/(я), необходимые для пере- счета перегрузок от связанных с самолетом осей к скоростным осям координат. Показатель ^у=/(М,иу)
2 Дачи руля высоты с полным га- зом и убранным газом при (teO и ряде величин M^sconst На нескольких высотах при крайних значениях параметров &в.т, &п.щ, Вшасси Кривые М, /7, nXt nyt сх и су в функции времени, используемые для построения диа- грамм nx=f(Mt пу) и Пу)
3 Разгоны и торможения само- лета как в прямолинейном, так и в криволинейном полете с различ- ными перегрузками. Спирали при ряде величин M=const и Несколько высот и несколько цен- тровок самолета* **. Крайн» е значения параметров бдв, бв.Т} бп.щ, 5шасси Балансировочные кривые в зависимости от скорости и перегрузки, характеризу- ющие статическую управляемость самолета. Коэффициенты статической продольной устойчивости.
Кривые М, //, nXi nyt сх. Су в функции времени, используемые для построения диаграмм nx=/(M, пу)
4 Пикирования с при крайних значениях &в.т и 5ДВ Несколько высот и центровок са- молета. Углы пикирования и длитель- ность выдерживания прямолинейных участков определяются условиями до- пустимых М и q Данные, используемые для построения балансировочных кривых и диаграмм Лх=/(М, пу) Проверка эксплуатационных границ ма- невренности
5 Прямолинейные скольжения, плоские развороты, дачи руля на- правления при Пу^Л и различных числах M=const Несколько высот. Любые 8ДВ и хт. Крайние значения бв.т, &п.щ и &шасси Балансировочные кривые для оценки управляемости самолета. Показатели манев- ренности самолета в отношении макси- мальных значенищшг! и £
6 Дачи элеронов, перекладывания из виража в вираж, бочки при раз- личных числах М=const Несколько высот. Любые одв и д'т. Рекомендуется и 8^0 Характеристики поперечной управляе- мости и маневренности самолета
7 Фигуры пилотажа: перевороты через крыло, петли, горки и др. Несколько высот и центровок са- молета Проверка эксплуатационных границ ма- невренности и то же, что указано в п. 3
8 Свободные боковые колебания самолета На нескольких высотах при нес- кольких скоростях как с зажатым, так и со свободным управлением. Любые &дв и дт Характеристики боковой динамической устойчивости. Показатель х= —
9 Вынужденные продольные, по- перечные и путевые колебания самолета при ряде чисел M^const Несколько высот и центровок са- молета Характеристики самолета как динамиче- ской системы при малых отклонениях от режима (характеристики хождения за рулями)
10 Выпуск и уборка воздушных тормозов, посадочной механизации дача и уборка газа при ряде чисел M^const Несколько высот при любой цент- ровке Показатели маневренности /вл, /дв, /пщ, ^шасси
* Для составления оценки по управляемости самолета при взлете и посадке производятся соответствующие записи
параметров движения самолета и пилотирования в ряде полетов и обязательно в полетах с различными центровками.
** Условие при дачах элеронов летчик может выполнять, отклоняя руль направления таким образом, чтобы
с5 держать в центре «шарик* указателя скольжения.
3. ПРОВЕДЕНИЕ ЛЕТНЫХ ИСПЫТАНИЙ И ИХ ОБРАБОТКА
Весь процесс обработки произведенных в палете измерений при
испытаниях устойчивости, управляемости и маневренности самолета
можно разделить на следующие стадии:
а) проверка исправности работы приборов и пригодности тари-
ровочных кривых по контрольным тарировочным точкам;
б) первичная расшифровка записей приборов и построение соот-
ветствующих кривых в функции времени;
в) введение поправок на месторасположение приборов, на упру-
гость проводки, на запаздывание передачи давления воздуха и т. п.;
г) пересчет перегрузок со связанных с самолетом осей на ско-
ростные оси координат;
д) приведение результатов испытаний к стандартным атмосфер-
ным условиям и постоянному весу самолета;
е) определение общих и частных показателей маневренности,
управляемости и устойчивости самолета.
Остановимся ниже лишь на части этих операций, требующих до-
полнительных пояснений.
а) Пересчет перегрузок с жестко связанных с самолетом осей
на скоростные оси
В главе I в качестве общих показателей маневренности самоле-
тов были выбраны наряду с другими слагаемые перегрузки пх и пу
Фиг. 49. к пересчету
перегрузок на другие
оси.
по осям скоростной системы координат.
В полете же приборами регистрируются пе-
регрузки и пу1 по жестко связанным с само-
летом осям.
Поэтому необходимо пересчитывать заме-
ренные в полете перегрузки nxi и на п® и 1%.
Пересчет производится по известным формулам
(фиг. 49)
пх = пХх Соза-Пу^ sin а,
пу = пУ1 cos а 4- nXl sin а,
(99)
где а — угол атаки по отношению к продольной оси Ох\ самописца
или датчика перегрузок, установленного на самолет. При этом пред-
полагается, что оси прибора и Оу\ расположены строго в плоско-
сти симметрии самолета. Некоторое несовпадение самих осей при-
бора с соответствующими осями самолета в его плоскости симметрии
допустимо и не приводит к искажению результатов.
Формулы (99) справедливы при 3 = 0, т. е. при координирован-
ных маневрах. Этому же условию отвечают и выбранные общие по-
казатели маневренности самолета —перегрузки пх и пу.
Для осуществления указанного пересчета перегрузок необходимо
знать для каждого интересующего нас момента маневра угол ата-
ки а. Известные способы непосредственной регистрации в полете
угла атаки недостаточно точны вследствие влияния обтекания пото-
114
ком воздуха самолета и монтажной установки на показаня датчика
углов атаки, располагаемого на конечном расстоянии от самолета.
Поэтому обычно приходится прибегать к косвенному методу опреде-
ления угла атаки. Этот метод заключается в следующем.
Для каждого интересующего нас момента по записанным в по-
лете величинам пу\, Я, V и М определяется величина коэффициента
нормальной силы самолета = а затем с помощью кривых
Cyi=f a, типа’представленных на фиг. 23 находится соответствующая
величина угла атаки.
Кривые Cyi=f(a) при различных числах М могут быть определе-
ны непосредственно из летных испытаний известным методом путем
выполнения так называемых дач руля высоты с установившихся
прямолинейных режимов полета. Интегрированием уравнений движе-
ния самолета с использованием произведенных при дачах руля вы-
соты записей nxi, uzi и начальных условий при исходном уста-
новившемся режиме полета определяют все остальные параметры
движения самолета, затем угол a=f(t) и соответствующие величи-
ны СуХ = <?(/)•
Для пересчета перегрузок могут быть также использованы и кри-
вые Су\=1{а), полученные на основании продувок модели самолета
в аэродинамических трубах. Только в этом случае с помощью экспе-
риментальных точек (сУ1, а), полученных из выполненных в. полете
установившихся режимов при различных числах М, необходимо
скорректировать возможный сдвиг кривых /(а) вдоль оси
абсцисс из-за несовпадения осей, по отношению к которым отсчиты-
вались углы атаки в полете и в трубе.
Как следует из формулы (99), точность определения перегруз-
ки пх в значительной мере зависит от точности определения угла ата-
ки а, так как перегрузка tiyi по своей абсолютной величине обычно
много больше абсолютной величины перегрузки п^.
б) Приведение результатов летных испытаний к стандартным
или принятым условиям
Как уже указывалось, количественные характеристики маневрен-
ности, управляемости и устойчивости самолета при данной скорости
полета зависят от давления и температуры воздуха и от веса само-
лета. Эти параметры изменяются не только от полета к полету, но
и в процессе выполнения одного и того же полета. Наиболее суще-
ственным оказывается влияние изменения атмосферных условий и
веса самолета на характеристики маневренности.
Приведение перегрузок пх> пу и nzi. Рассматриваемый
ниже метод приведения перегрузок пх, Пу и nz\ к стандартным усло-
виям не требует выполнения каких-либо специальных дополнитель-
ных полетов.
Этот метод заключается в. пересчете полученных в полете при
фактических условиях величин пх ф, пу ф и ф на величины пх <*,
пу ст, nz\ ст, соответствующие стандартным атмосферным условиям и
принятому весу самолета Go.
115
В качестве исходного положения при выводе рабочих формул
излагаемого метода приведения принимается, что подобные режимы
полета ® фактических и в стандартных условиях соответствуют оди-
наковым значениям угла атаки, угла скольжения и числа М, т. е.
М = const, а = const и 8= const.
В согласии с выражениями (2) и (3) величины общих показате-
лей маневренности пх и п,, для координированных маневров и nz\
для маневров со скольжением могут быть представлены формулами
„ _ Р COS (а — — CxSq
Гъ ~ -
х G
_ Psin(a — <f) + cySq
/Ь., —————————--------
у о
(100)
_ CzSq
G '
"л
Учитывая, что скорость распространения звука в воздухе а—
= ’|/Лх JL, скоростной напор q представим формулой
где р — атмосферное давление в кг/м2, р — плотность воздуха, *==
= —— отношение удельных теплоемкостей воздуха при постоянном
Су
давлении и постоянном объеме.
Далее можем написать
и 4 = — cos (a- ?) — - с Ж
р$ *
nv фSin (а-ср) + ^S№,
v РФ РФ 2
n21^ = ^c2SW,
РФ 2
raVCT-^- = — cos (а — ср) — сXSW,
Рсч Рст z
«у ст — sin (а- ср) + cyS М2,
Рст Рст
Рст
(101)
* См. сноску »а стр. 110.
116
При одинаковых а', 0 и М величины cv, сг и с2, пренебрегая влия-
нием числа Re, будут одинаковыми как в фактических, так и в стан-
дартных условиях. На основании этого из выражений (101) получим
я PCT I Z?CT / Рст
ILX СТ 1ЬХ ф Л- * Г' I
Ц) Рф <>0 \ Рст
„ ___п ^Ф Рст I Рст / ^Ст
ГЬу ^~ГЬу^ г -Т-
Go Р$ \ Рст
п = п _£si_
Г1,21 СТ ГЬ2\ ф г
Go
cos (а—-<р),
sin (а —ср),
(Ю2)
)
Из соотношений (102) следует, что приведение боковой перегруз-
ки к стандартным условиям осуществляется весьма просто по
найденным ив проведенных в полете записей величинам Пг\ ф, бф и рф
и по принятым для приведения в качестве стандартных значениям Go
и рст.
Для приведения показателей маневренности пх и Пу к стандарт-
ным условиям необходимо определить изменение тяги двигателей за
счет отклонения фактических условий полета от стандартных.
Общий случай приведения, когда температура наружного возду-
ха Гф на данной барометрической высоте, определяемой по давле-
нию рф с помощью таблиц стандартной атмосферы, отличается от
стандартной температуры Гст, а давление воздуха рф в рассматривае-
мый момент движения самолета отличается от давления воздуха рсто,
соответствующего взятой для приведения высоте ЯсТо = const, целе-
сообразно разделить на две ступени:
1) учет поправок на отклонение веса самолета и температуры от
стандартных при Рф=рст в каждый момент движения самолета;
2) учет поправок только на отклонение высоты полета Яф=ср (^)
или давления Рф=рст=/(0 от принятых для приведения 7/CTo=€onst
рсто=const при условии, что температура воздуха с высотой меняется
согласно законам стандартной атмосферы.
Полагая Рф=рст для первой ступени приведения к стандартным
условиям, получим формулы
. ДР j z \ ?
= + -7rL-cos(a-?),
Oq сго
Оф . ДРТ . z ч
«V ст = s ф ~ s,n (a - <р),
О()
п —п Оф
‘I'ZX СТ fbz\ Ф Z-» »
Go )
(103)
где дРт=Р|ст—— разница в величинах тяги, обусловливаемая
только разницей в температурах наружного воздуха дГ=Гст—Тф при
одном и том же атмосферном давлении.
Так как величину ДТ при условии рф=рст можно считать малой,
то указанное изменение тяги можно выразить так:
ДРТ = -^ДГ
т дТ
117
или
&Р= — Рст — =PyPQT&T, (104)
Т ЛГ р СТ Г ТСТ’ \ /
U 1 л QT 1
где
П дР Тст а 'Г дг
Рг =-----и Л Т ~------.
т дТ Рст Гст
Величину Рт принято называть показателем изменения тяги дви-
гателей с температурой.
Так как величина показателя Рт нужна лишь для подсчета попра-
вок, то при нахождении ее числовых значений для двигателей раз-
личных типов целесообразно воспользоваться простейшими прибли-
женными способами *.
Для второй ступени приведения, учитывая сказанное выше, по-
лучим формулы
«хстО = «хст 2£2L + ~-(—----— )cos(a-<р)> I
Рст ^0 \ Рето Рст / I
^сТо = «исТ^-4-^(^-—)sin(a-T), } (105)
Рст Gq \ Рето Рст / I
и — п I
nzl сто — ст • I
Рст )
Здесь индекс «стО» обозначает величины, соответствующие высо-
те HCT0=coinst, выбранной для приведения общих показателей ма-
невренности, а индекс «ст» — текущие стандартные значения вели-
чин, соответствующие различным моментам движения при различ-
ных маневрах самолета.
Величины отношения тяги двигателей к давлению воздуха в
условиях стандартной атмосферы можно, определять по соответству-
ющим кривым, построенным на основании данных аэродинамиче-
ского расчета испытываемого самолета.
Для характеристик маневренности самолета, соответствующих
режиму работы двигателей на холостом ходу, при приведении их к
стандартным условиям, поправки, связанные с изменением величи-
ны тяги из-за атмосферных условий, по-видимому, можно, не учиты-
вать. В этом случае абсолютные значения тяги двигателей невелики,
и их изменения с высотой и температурой воздуха приближенно
можно принять равными нулю.
О приведении показателей маневренности
£Пу> ^в.тЛп.ш? /"шасси к стандартным условиям. Одним из
важнейших общих показателей маневренности самолета является
время изменения заданной величины угла крена самолета ZY (см.
фиг. 7). Изложим следующий приближенный метод приведения вели-
чин /у к стандартным условиям.
Примем допущение, что на всем диапазоне возможных в полете
угловых скоростей крена, отклонений элеронов и усилий на ручке
* См. сноску н>а стр. ПО.
118
существуют линейные зависимости, позволяющие использовать ме-
тод малых возмущений. Движение идеального крена, которое обыч-
но' и кладется в основу определения показателя характеризуется
уравнениями (83) и (89). При выводе формул приведения / надо
исходить из уравнения (83) в том случае, когда максимальные угло-
вые скорости крена ограничиваются предельным отклонением ручки,
а из уравнения (89) —в случае, когда о^тах ограничивают усилия
на ручке при отклонении элеронов.
Зная величины * а, Ь, а\ и входящие в уравнения (83) и (89),
и найдя решения этих уравнений при заданных законах изменения
по времени хэ(/) и Рэ (/), можно найти , а затем Y = J Mxdt—
= 9 (О и tr Естественно, что выбираемые законы изменения Рэ(0
и хэ(1) должны согласовываться с общими физиологическими воз-
можностями летчика и характеристиками системы поперечного
управления данного самолета.
Если имеется метод приведения коэффициентов а, Ьг а,\ и Ьх к
стандартным условиям, то с помощью решения уравнений (83) и
(89) может быть построен практический метод приведения к стан-
дартным условиям величин показателя
При выводе формул приведения для коэффициентов а, Ь, ах и Ь\
примем, как и ранее, что, подобные движения самолета1 в фактиче-
ских и стандартных условиях соответствуют
М —const, a=const и 6 = const.
Тогда для коэффициента а в фактических и стандартных усло-
виях на основании формулы (84) можно написать
(Мшх\ m^xSPq^ -у^>5/2/?фМ
=1 —х— I = ---------=-----------==— ,
Ф \ Л- /ф 2Иф/х 2-20,05/тф/х
— 7n^S/2/2CTM
^СТ“ “ 2-20,05 VT~l^ ’
где использованы зависимости Е=М азв и агъ=20,05 VГ; — мо-
мент инерции самолета при заданном постоянном весе самолета Go
и заданном постоянном распределении загрузки; Ц— фактический
момент инерции; азв—скорость распространения звука.
Отсюда получим
«ст=«Ф7^ —1/(106)
Лго Рф г Лгг
Формулу приведения для коэффициента b получим исходя из
(85):
ь =2V тхэ а = 2-20,05 /ГМ тх3 а
* О способах определения этих величин из летных испытаний см. ниже.
119
Отсюда найдем
&ст = &ф^]/^. (107)
аФ V Тф
Из сравнения выражений (87) и (90) нетрудно заключить, что
формула приведения для коэффициента а\ будет такой же, как и
для коэффициента а, т. е.
~ [/~ • (108)
РФ V Т<л
Из формул (106) и (108), кроме того, следует:
«1сТ = «1ф--. (109)
&ф
Подставляя в формулу (90) для коэффициента Ь\ развернутое
выражение (76) для коэффициента расхода поперечных усилий на
ручке Р*, получим
GISmh
bY =--------------
kin
и далее
Ь^ = Ь1ф-^-. (110)
JXQ
На основе изложенных выше соображений может быть построен
и метод приведения к стандартным условиям показателя быстроты
создания нормальной перегрузки Так как порядок величин
tny обычно составляет 1—2 сек., поправки в Ц, из-за отклонения фак-
тических условий от стандартных не будут превышать 0,1-^-0,2 сек.;
поэтому, по-видимому, нет практической необходимости прибегать к
приведению величин tn
Ввиду меньшей требуемой точности в- определении показателей
маневренности /в.т, /п>щ и /шасси по сравнению с п^, пу и /7 приведение
их величин к стандартным условиям представляется ненужным.
в) Об определении диаграмм общих показателей маневренности
^=/(М, пу)
Для построения диаграмм na?=f(M) при n2/=const сначала,
по-видимому, будет целесообразно построить кривые ny=f{nx)
для ряда постоянных значений М = const. Эти кривые могут
быть названы полярами перегрузок. Отдельные экспериментальные
точки для построения этих поляр, как уже говорилось выше, могут
быть взяты из результатов обработки любого маневра, выполненного
при одинаковых величинах параметров 6ДВ, 6В.Т и др. Для каждого
маневра необходимо определить приведенные к одной стандартной
высоте и к одному постоянному весу самолета величины nx=f (/) и
Т (0 и нанести их на диаграмму типа представленной на фиг. 50.
120
Для каждого выбранного значения М = const из ряда графиков
типа фиг. 50 определяются величины пх и пи и затем по эксперимен-
тальным точкам проводятся кривые ny=f(nx) (фиг. 51).
Фиг. 50. Пример. Изменение по времени при-
веденных к стандартным условиям показате-
лей маневренности самолета пх и пу и числа М
для одного из маневров.
Отправляясь от поляр типа представленных на фиг. 51, нетрудно
получить более удобные для оценки маневренности самолета кривые
^=/(М.) при различных значениях пи=const.
Фиг. 51. Поляры перегрузок ny=f(nxy} при раз-
личных числах М. Высота полета //=5000 м
(холостой ход с открытыми воздушными тормо-
зами).
С целью повышения точности результатов обработки летных
испытаний на маневренность может оказаться целесообразным по-
строение поляр безразмерных коэффициентов cy=f(cx) (фиг. 52).
121
Эти поляры в области малых и средних чисел М получаются весьма
близкими по характеру и почти эквидистантно сдвинутыми отно-
сительно друг друга, что позволяет в значительной мере корректи-
ровать течение кривых, соответствующих различным значе-
Фиг. 52. Поляры обобщенных коэффициен-
тов си—f(cx) при различных числах М.
Имея кривые c&=f (с&) при различных числах M=const, нетрудно
получить пересчетом кривые при постоянных значениях
пу = const.
г) Об определении показателей статической управляемости
и статической устойчивости самолета
Строго говоря, для определения каждого показателя1 из различ-
ных балансировочных кривых, характеризующих статическую управ-
ляемость самолета, необходимо выполнить в полете соответствую-
щий ряд или серию установившихся режимов полета. Замеренные
при каждом режиме величины отклонений рычагов, управления (не-
посредственно или с помощью измерения углов отклонения рулевых
поверхностей с последующим пересчетом на отклонения рычагов),
усилий летчика на рычагах и параметров движения самолета опре-
делят отдельные экспериментальные точки, по которым и строятся
балансировочные кривые. Так, например, для построения баланси-
ровочных кривых хв, Рв, хэ, Рэ, хн, Рн в функции скорости при пере-
грузке п=1 и Y = g = O на данной высоте необходимо' выполнить
10—15 установившихся режимов прямолинейного полета без крена
и скольжения. Однако во многих случаях с достаточной для прак-
тики точностью балансировочные кривые статической управляемо-
сти могут быть определены и из неуст ан овившихся движений само-
лета, например, из разгонов и торможений при Пу=const или из не-
установившихся скольжений без разворота с плавным изменением
угла крена самолета. При достаточно медленном темпе изменения
параметров движения самолета искажения в балансировочных кри-
вых оказываются во многих случаях пренебрежимо малыми, как в
122
этом легко убедиться на примере продольного движения с помощью
расчетов по формулам (55) и (62) (см. фиг. 29). В случае необхо-
димости по тем же формулам могут быть введены поправки на не-
установившееся движение самолета.
При требовании! большей точности результатов летного экспери-
мента введение поправок может* быть осуществлено методом после-
довательных приближений. Вначале более грубо определяют стати-
ческие и динамические (см. ниже) характеристики управляемости,
а затем, используя полученные по первому кругу данные для под-
счета поправок во втором приближении находят интересующие нас
характеристики.
Как следует из выражений (35), (74), (75) и (76), величины
соответствующих коэффициентов статической устойчивости самоле-
та могут быть определены по балансировочным кривым статической
управляемости, если известны величины коэффициентов расхода
ручки Xх. х* и педалей и коэффициентов расхода усилий Рх, Р%
и Для продольного управления величины Xх и Рх определяются,
как известно, из балансировочных кривых при двух или более цен-
тровках самолета. Получение балансировочных кривых при несколь-
ких центровках самолета образно можно' назвать «взвешиванием»
продольного управления, т. е. определением величин потребных от-
клонений ручки и изменений усилий на них, необходимых для урав-
новешивания продольного момента А. Такого же рода взве-
шивание для поперечного и путевого управлений самолета может
быть осуществлено по балансировочным кривым, соответствующим
двум различным величинам моментов внешних сил относительно
продольной и нормальной осей самолета. Для создания момента от-
носительно продольной оси может быть использована несимметрич-
ная загрузка крыльев самолета *, а для создания моментов относи-
тельно нормальной оси — например, парашюты на крыле само-
лета.
д) Определение показателей динамической управляемости
и динамической устойчивости самолета
Ранее было показано, что приближенно, в пределах применимо-
сти метода малых возмущений, динамическую управляемость само-
лета можно охарактеризовать дифференциальными уравнениями с
постоянными коэффициентами типа
х + 2hx + k2x = cf (t)
y + ay = b^{t),
где можно принять, что |f (/) |max = | ср (Z) |max= 1.
Уравнения второго порядка характеризуют продольную и путе-
вую управляемость, а уравнения первого порядка — поперечную
управляемость самолета.
♦ См. сноску на стр. ПО.
(111)
123
Величины переменных х и у представляют собой те или иные
интересующие нас параметры движения самолета (перегрузка, угол
атаки, угол скольжения, угловая скорость крена и т. п.), а функции
f(t) и (Z) —отклонения рычагов управления и усилия, приклады-
ваемые к ним летчиком.
Для установившихся режимов полета
П0=^т=1 И <Р (/) = <рст= 1
и уравнения (111) принимают вид
й2хст=е,
ау„=Ь,
откуда
*сТ=-^- и Лт=7- (П2)
л?2 а
Таким образом, если получены количественные характеристики
статической управляемости! самолета, то достаточно определить ве-
личины коэффициентов 2h, k2 или а, чтобы количественно охаракте-
ризовать динамическую управляемость самолета; при летных испы-
таниях это может быть осуществлено, например, путем выполнения
в полете с фиксацией самописцами вынужденных колебаний само-
лета поочередно относительно каждой из трех его осей.
Положим, что летчик непосредственно сам или с помощью спе-
циального автомата, установленного на самолете, прикладывает к
ручке усилия' и отклоняет ее по гармоническому закону. Тогда пер-
вое из уравнений (111) можно представить в виде
х + 2hx + k2x = c sin (113)
Как известно, общее решение уравнения (ИЗ) может быть пред-
ставлено в виде
х—+ c2e^f + %0 sin (<*)£—у), (114)
где Xi и Х2 являются корнями характеристического' уравнения
X2 + 2h'k + k2=0, а С\ и с2— постоянные величины, определяемые на-
чальными условиями движения самолета.
Обычно по прошествии нескольких секунд после начала такого
рода колебаний так называемое собственное движение самолета, ха-
рактеризуемое в уравнении (114) выражением Ci + с2е^> полно-
стью затухает, и после этого изменение параметра движения опре-
деляется выражением
х=х0 sin (си/—у). (115)
Величина хо характеризует амплитуду изменения параметра дви-
жения самолета при вынужденных колебаниях, а величина у —
сдвиг по фазе или запаздывание между изменением усилия на ры-
чаге управления (или его отклонением) и изменением параметра
движения.
124
Величины xQ и 7 не зависят от начальных условий и определя-
ются формулами
с
.......... ............... ....
0 z (*2 — “2)2 + 4Л2“>2
(116)
tgf
2Ло>
Z?2 --ш2
Допустим в предельном случае, что изменение усилия на ручке
происходит весьма медленно, как бы в статических условиях. Этому
случаю будет отвечать со^О; тогда из (116) получим
С J. ГК
Хст = — И tgT = O.
Для практической оценки динамических свойств самолета в отно-
шении управляемости примем отношение —--ст— = Х, откуда
х0
k?
Таким образом, X характеризует отношение величины изменения
параметра движения самолета в статических условиях к величине
его изменения в динамических условиях при одной и той же вели-
чине изменения усилия на рычаге управления или его отклонения
(c=const). Можно коэффициент X представлять и как показатель
возрастания усилий на ручке, требующихся для создания такого же
изменения параметра движения самолета при вынужденных колеба-
ниях самолета, как и в статических условиях.
Практически при летных испытаниях, поскольку часто не удается
осуществить одинаковой амплитуду отклонений руля при колебаниях
с различными частотами, т. е. трудно выдержать условие с—const,
величина X определяется с помощью формулы
с
с
Л'ст
где знаменатель —— представляет собой величину соответствующего
Хст
показателя статической управляемости самолета; например, при
определении характеристик продольной динамической управляемо-
сти самолета по усилиям на ручке величина X определяется с по-
мощью формулы
/АРв \
\ ДИ /4О=#0
125
Величина коэффициента X является одним из двух показателей
способности самолета ходить за ручкой.
Величина другого показателя хождения -самолета за ручкой —
сдвига перегрузки по фазе может быть подсчитана по величине за-
паздывания реакции самолета по времени (фиг. 53) М:
где Т3 — период вынужденных колебаний.
Когда определены X и у, нетрудно найти и величины 2h и k2 с
помощью формул
2^____ sin т __________ 2л:Х sin т
1—X cos 7 Гв(1 — Xcosf) ’
___ 0)2 ___ 4л2
1 — X cos 7 (1 — X cos 7)
(118)
При выводе формул для определения характеристик поперечной
динамической управляемости методом вынужденных колебаний бу-
дем исходить из уравнения
y + ay = b sin ш t. (119)
Решением этого уравнения при начальных условиях (/ = 0; у = 0)
будет
b CD
у= JL-fL
СО"
Л2
ь_
а
sin —7),
где
, СО
а
По прошествии некоторого' промежутка времени движение само-
лета будет состоять только из вынужденных колебаний; для них,
учитывая уравнение (112), можно написать
у —--------ст sin (^-—7).
(120)
Отсюда, поскольку для поперечного движения у^о^, получим
(121)
Что V а'
На основании выражений (120) и (121) для определения'пока-
зателя поперечной динамической управляемости а при летных испы-
таниях можно' воспользоваться любой из следующих двух формул:
2л
а =----- или
rBtg 7
2л 1
а —-----?==
Тв ZX---1 ’
(122)
126
т. е. величина а может определяться как по сдвигу фазы, так и по
коэффициенту X.
Практически величина X для поперечной управляемости по уси-
лиям на ручке и ее отклонениям находится соответственно с по-
мощью формул
или X
С целью повышения точности определения коэффициентов 2h,
k2 и а следует находить их как средние величины из обработки запи-
сей вынужденных колебаний с несколькими различными периода-
ми (Тв).
Фиг. 53. К определению пока-
зателей динамической управ-
ляемости самолета по записям
вынужденных колебаний.
Фиг. 54. Пример. Показатели X и у про-
дольной динамической управляемости само-
лета по усилиям на ручке, полученные
обработкой вынужденных колебаний, выпол-
ненных летчиком вручную.
В качестве примера на фиг. 54 приведены кривые Х=/(ГВ) и
у = сг(Гв), полученные обработкой вынужденных продольных коле-
баний самолета при V=const, выполненных летчиком вручную без
помощи какого-либо автоматического устройства.
Заметим, что за рубежом уделяется очень большое внимание
определению динамических характеристик управляемости и устойчи-
вости самолета из летных испытаний.
Для этой цели применяются различные методы, и по этому во-
просу имеется обширная литература *.
* W. Milliken, Dynamic stability and Control research, Third Anglo-Ame-
rican-Aeronautical Conference, 1951.
J. Carpentier, Etude harjmonique des avions, Bull. Assoc. Tech. Maritime
Aeron. Paris, N 51, 1952.
J. M. Eggleston and CW. Mathews, Application of several methods
for determining transfer functions and frequency response of aircraft from flight
data, Report NACA N 1204, 1954.
ЗАКЛЮЧЕНИЕ
Теория и рекомендуемые в настоящей работе системы показа-
телей маневренности, управляемости и устойчивости самолета позво-
ляют в первом приближении обозреть в целом и практически оце-
нить всю цепь характеристик этих важнейших и тесно связанных
между собой свойств самолета.
Предложенные показатели можно достаточно просто определить
как при проектировании, так и при летных испытаниях самолета.
Определение системы общих показателей маневренности в виде
семейств возможных для проектируемого самолета перегрузок и
возможной быстроты их изменения по величине и направлению яв-
ляется достаточно полным методом аэродинамического расчета.
Использованная в нашей работе теория и вытекающие из нее ме-
тоды расчета базируются на ряде обычно принимаемых допущений
и являются в большой мере приближенными. Поэтому необходимо
отметить актуальность дальнейшей разработки теории, практических
методов расчета и летных испытаний, более точно учитывающих
условия и явления, происходящие в полете.
Рекомендуемые системы показателей устойчивости hi управляе-
мости самолета включают в себя и ряд показателей, уже применяе-
мых на практике, причем наиболее существенным дополнением
к ним являются показатели, характеризующие так называемую
динамическую управляемость самолета.
Всесторонний анализ и учет динамических свойств самолета яв-
ляется особенно* необходимым и в настоящее время в связи с созда-
нием самолетов необычных аэродинамических компоновок и в связи
с интенсивным ростом скоростей и высот полета, т. е. появлением
ряда существенно новых факторов, влияющих на поведение самоле-
та в воздухе и его пилотирование.
ЛИТЕРАТУРА
1. Вед ров В. С., Динамическая устойчивость самолета, Оборонгиз, 1938.
2. Ведро в В. С. и Т а й ц М. А.. Летные испытания самолетов, Оборон-
гиз, 1951.
3. В е т ч и н к и н В. П., Динамика самолета, Госмашметиздат, 1933.
4. Гор още нко Б. Т.» Динамика полета самолета, Оборонгиз, 1954.
5. Жуковский Н. Е., Элементарная теория устойчивости аэропланов,
Собрание сочинений, т. 7, 1950.
6. Журавченко А. Н., О мере продольной статической устойчивости са-
молета, Труды ЦАГИ, № 94, 1931.
7. Калачев Г. С., О мере продольной динамической устойчивости самоле-
та, Труды ЦАГИ № 365, 1938.
8. Миль М. Л., Общие требования к управляемости самолета и критерии
эффективности управления, «Техника воздушного Флота», № 8, 1940.
9. Миль М. Л., Критерии управляемости самолета, «Техника воздушного
флота» № 7—8, 1943.
10. ОстославскийИ. В. и Калачев Г. С., Продольная устойчивость
и управляемость самолета, Оборонгиз, 1951.
11. Пышнов В. С., Аэродинамика самолета, Оборонгиз, 1943.
12. Пышно в В. С., Динамические свойства самолета, Оборонгиз, 1951.
13. Справочник авиаконструктора, т. I, ЦАГИ, 1937.
14. Carpentier J., Etude harmonique des avions, Bull, Assoc. Tech. Mari-
time Aeron., Paris, N 51 1952.
15. Eggleston J. M. and Mathews C W., Application of several
methods for determining transfer functions and frequency response of aircraft from
flight data, Report NACA N 1204, 1954.
16. Mi 11 iken W., Dynamic stability and control research, Third Anglo-Ame-
rican-Aeronautical Conference, 1951.
СОДЕРЖАНИЕ
Стр.
Введение ............................................................ 3
Принятые обозначения................................................. 5
I. Маневренность самолета........................................... 9
1. Основные положения .............................................. 9
2. Уравнения маневренности........................................ 13
3. Выбор общих показателей маневренности! ......................... 20
а) Семейство кривых пх = /(М, пу)...............•............... 22
б) Семейство кривых /у = /(М)............................... 25
в) Показатели /в.т, ^дв> ^п,щ и ^шасси.................• • . 23
г) Показатель ......................... .... 28
д) Показатели пг1 тах=/(М), ₽гаах = у (М) и х(М) .... 29
4. Определение частных показателей маневренности................... 30
а) Маневры в горизонтальной плоскости........................... 30
б) Маневры в вертикальной плоскости ........................... 38
в) Общий случай пространственного маневра....................... 40
II. Продольная управляемость и устойчивость самолета .................. 44
1. Основные положения.............................................. 44
2. Статическая продольная управляемость самолета.................. 48
а) Общие показатели продольной статической управляемости ... 48
б) Частные показатели продольной статической управляемости ... 52
3. Продольная динамическая управляемость самолета ................. 55
а) Характеристика самолета как динамической системы............. 56
б) Связь отклонений ручки и усилий на ней с параметрами движе-
ния самолета.................................................... 63
в) Связь динамической устойчивости самолета с его динамической
управляемостью и способностью «ходить за ручкой» ............... 71
г) Выбор общих показателей продольной динамической управляе-
мости самолета.................................................. 75
д) Влияние различных факторов на управляемость.................. 77
е) Управляемость самолета и безопасность полета............ 85
III. Боковая управляемость и-устойчивость самолета ......... 88
1. Основные положения ..................................... 88
2. Боковая статическая управляемость . . 89
а) Общие показатели боковой статической управляемости........... 89
б) Частные показатели боковой статической управляемости .... 90
3. Боковая динамическая управляемость . ........................... 94
а) Характеристика самолета как динамической системы ............ 94
б) Выбор общих показателей боковой динамической управляемости
самолета .....................................................
V. Летные испытания самолетов на маневренность, управляемость и
устойчивость ... .......................................... 109
130
Стр.
1. Общие замечания............................................... 109
2. Содержание летного эксперимента ............................... 111
3. Проведение летных испытаний -и их обработка . . .......... 114
а) Пересчет перегрузок с жестко связанных с самолетом осей на
скоростные оси.................................................. 114
б) Приведение результатов летных испытаний к стандартным ил 4
принятым условиям ......................................... 115
в) Об определении диаграмм общих показателей маневренности
пу)............................................................. 120
г) Об определении показателей статической управляемости и стати-
ческой устойчивости самолета . . . . ........................ 122
д) Определение показателей динамической управляемости и дина-
мической устойчивости самолета.................................. 123
Заключение . . .......................................,............... 128
Литература . . ....................................................... 129
Григорий Семенович Калачев
ПОКАЗАТЕЛИ МАНЕВРЕННОСТИ, УПРАВЛЯЕМОСТИ
И УСТОЙЧИВОСТИ САМОЛЕТОВ
Издательский редактор П. Б. Морозова Техн, редактор Н. А. Пухликова
Г32870 Подписано в печать 18/ХП 1957 г. Уч.-изд. л. 7,61
Формат бумаги 60х92Цб. 4,13 бум. л.—8,25 печ. л.
Цена 6 р. 80 к. Тираж 4150 экз. Заказ 424/8736
Типография Оборонгиза
Замеченные опечатки
Стр. Строка Напечатано Должно быть По чьей вине
7 10 снизу у &пх * дУ х дУ авт.
53 17 сверху Для совместной Для современной авт.
57 И снизу (пу cos 0 cos 7) (пу — cos 0 cos 7) авт.
58 3 сверху а также для отклонения руля высоты Д&в и расходуемые а также отклонения руля высоты А&в, расходуемые авт.
65 формула (54) и . Дп = А — п авт.
73 5 сверху АРВ = ред.
82 подпись к фиг. 37 . . по перегрузке ал и мгновенном отклоне- нии руля высоты . . . ... по перегрузке ал св и мгновенном приложе- нии усилия ДРВ == Рп. авт.
91 1 сверху ГП?Х тип.
Заказ 424/8736.