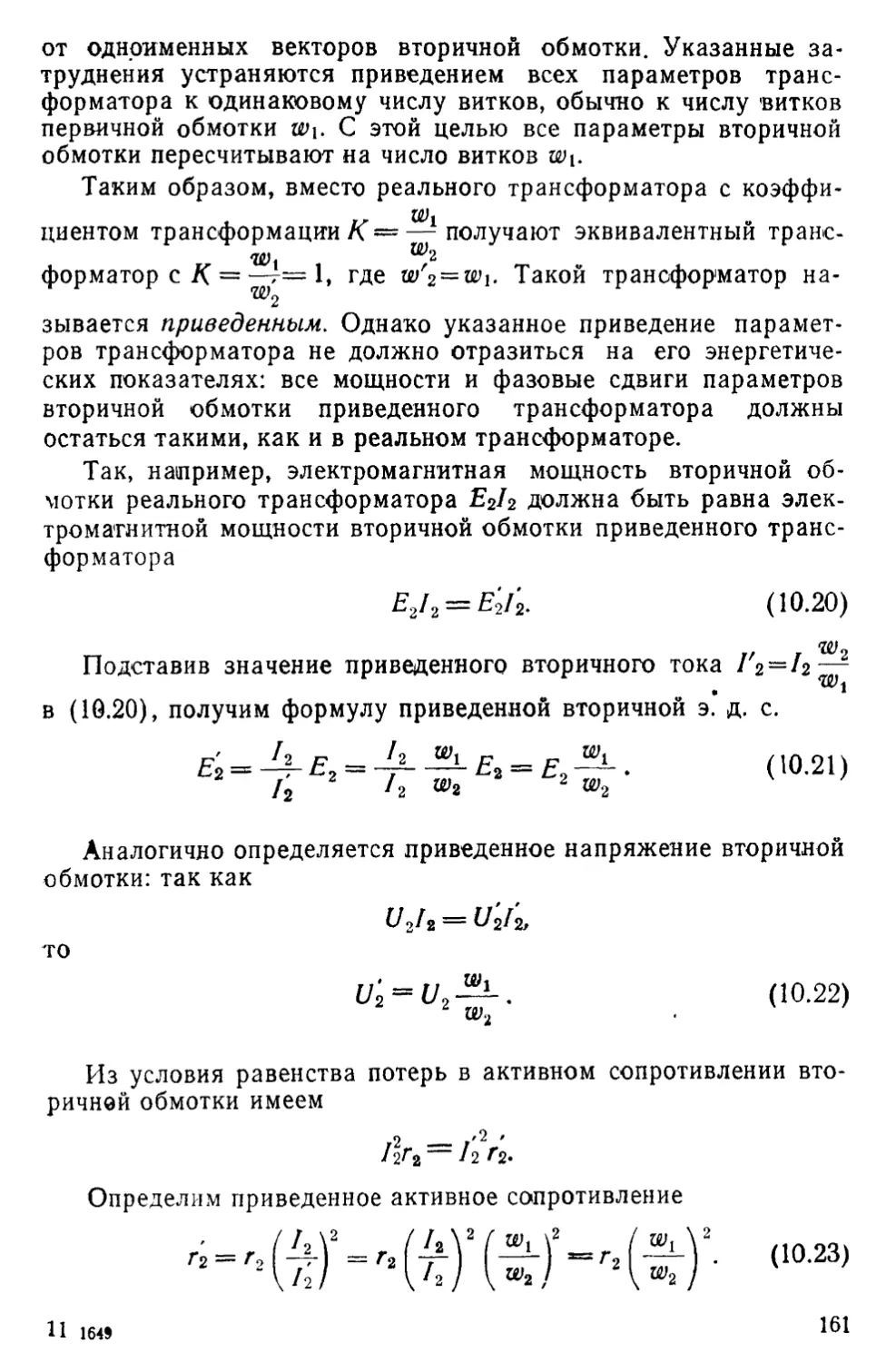
/













































































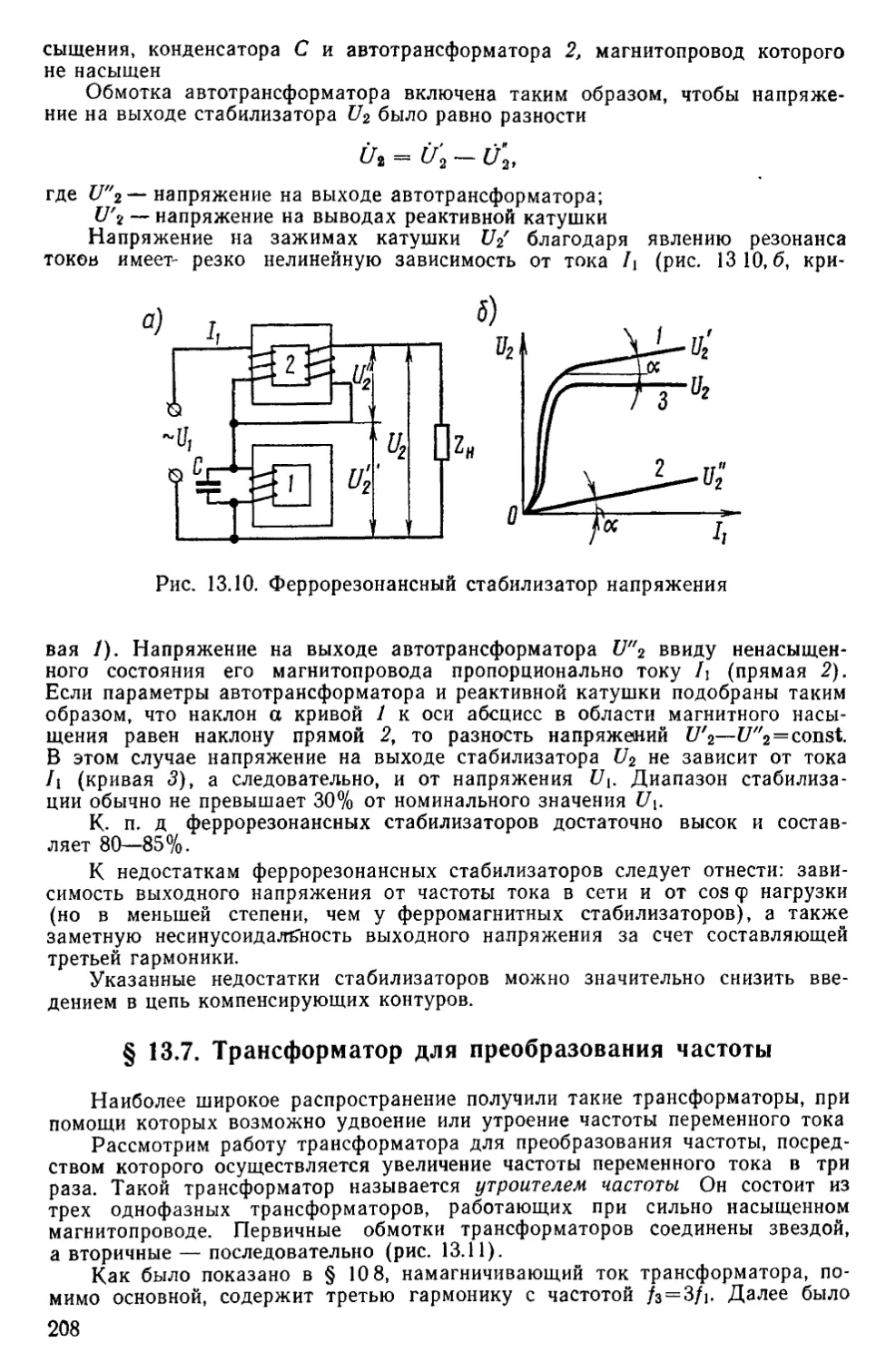
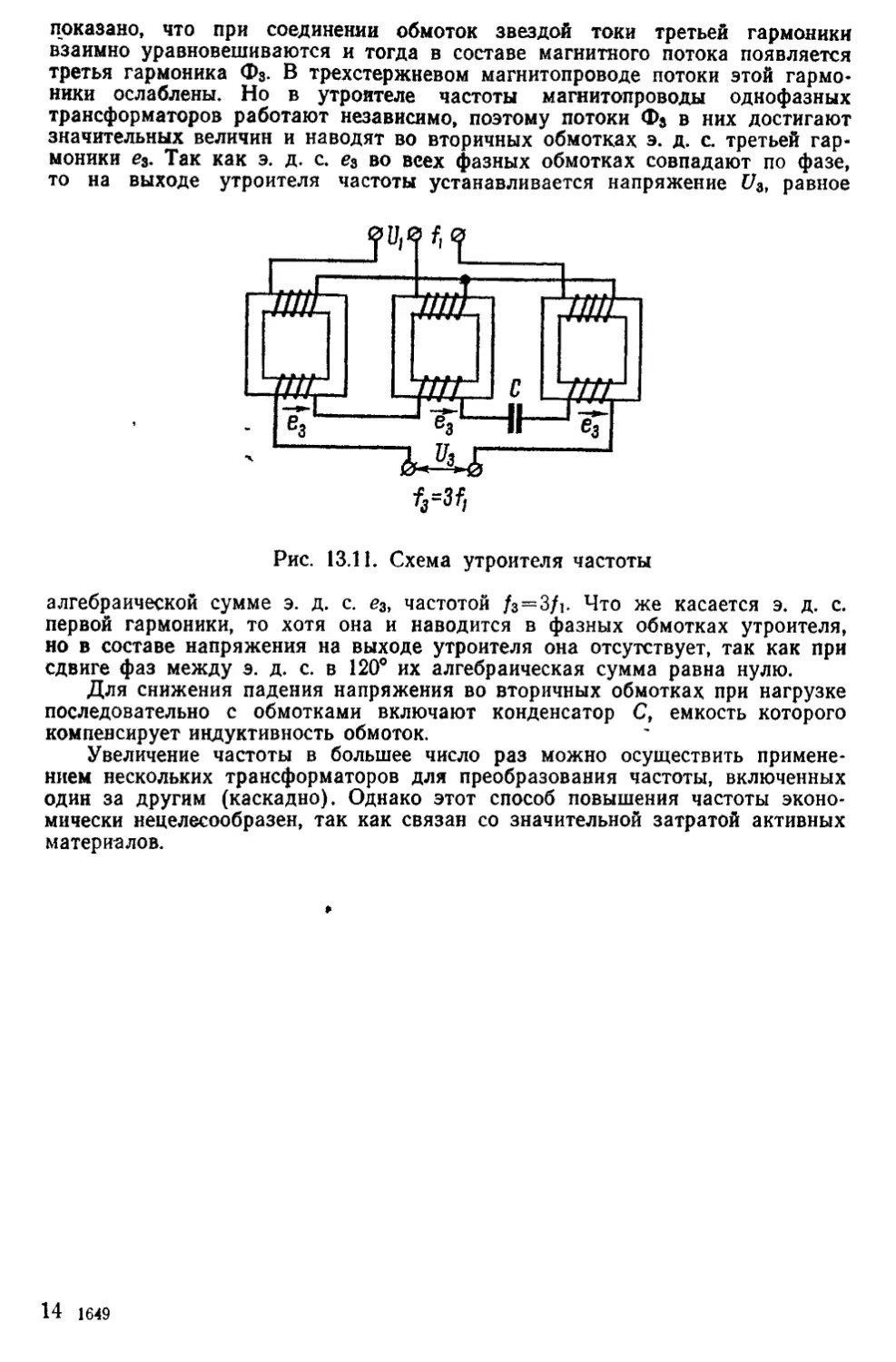











































































Автор: Кацман М.М.
Теги: общее машиностроение технология машиностроения электротехника двигатели электрические машины трансформаторы
Год: 1971



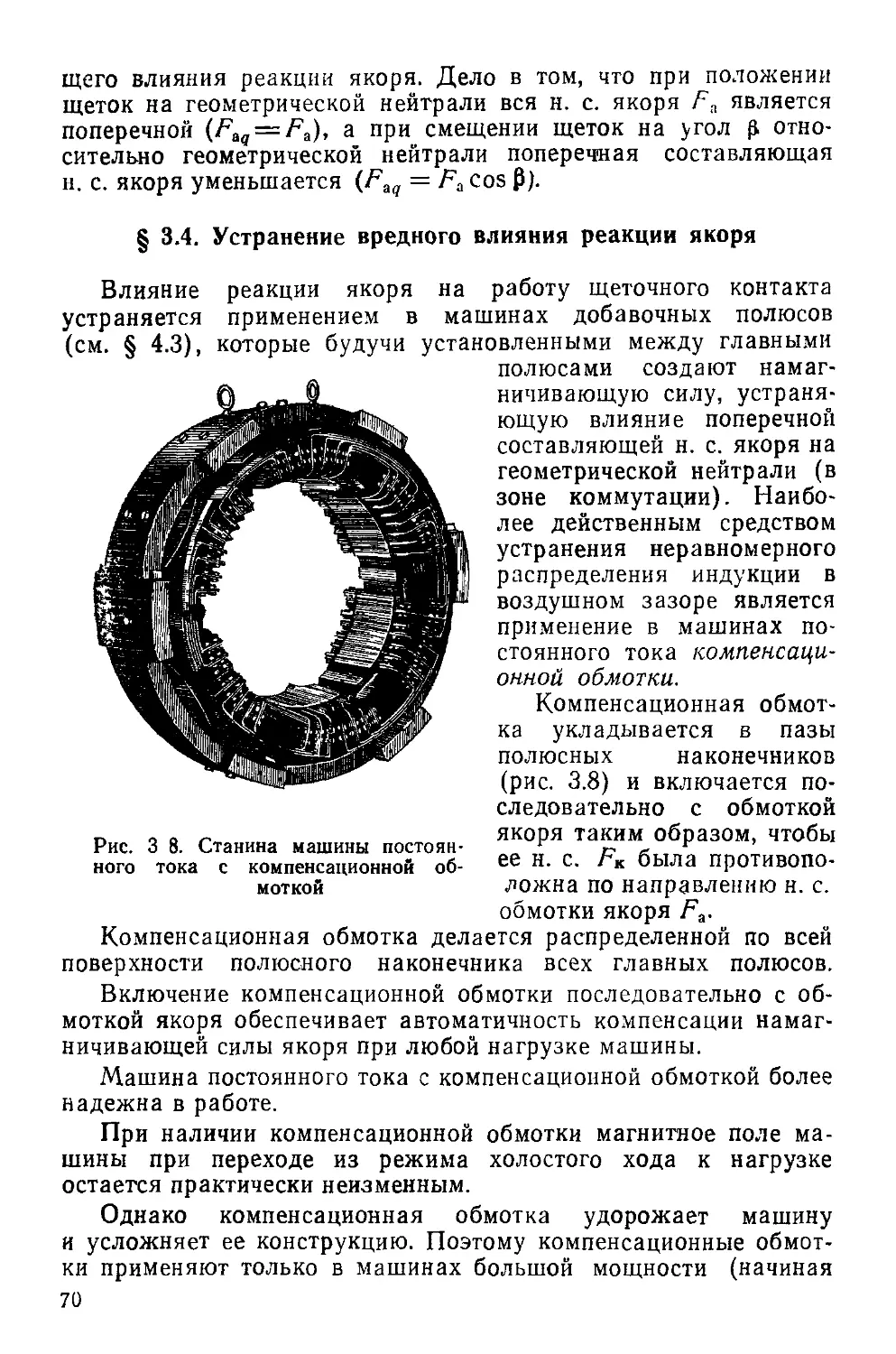
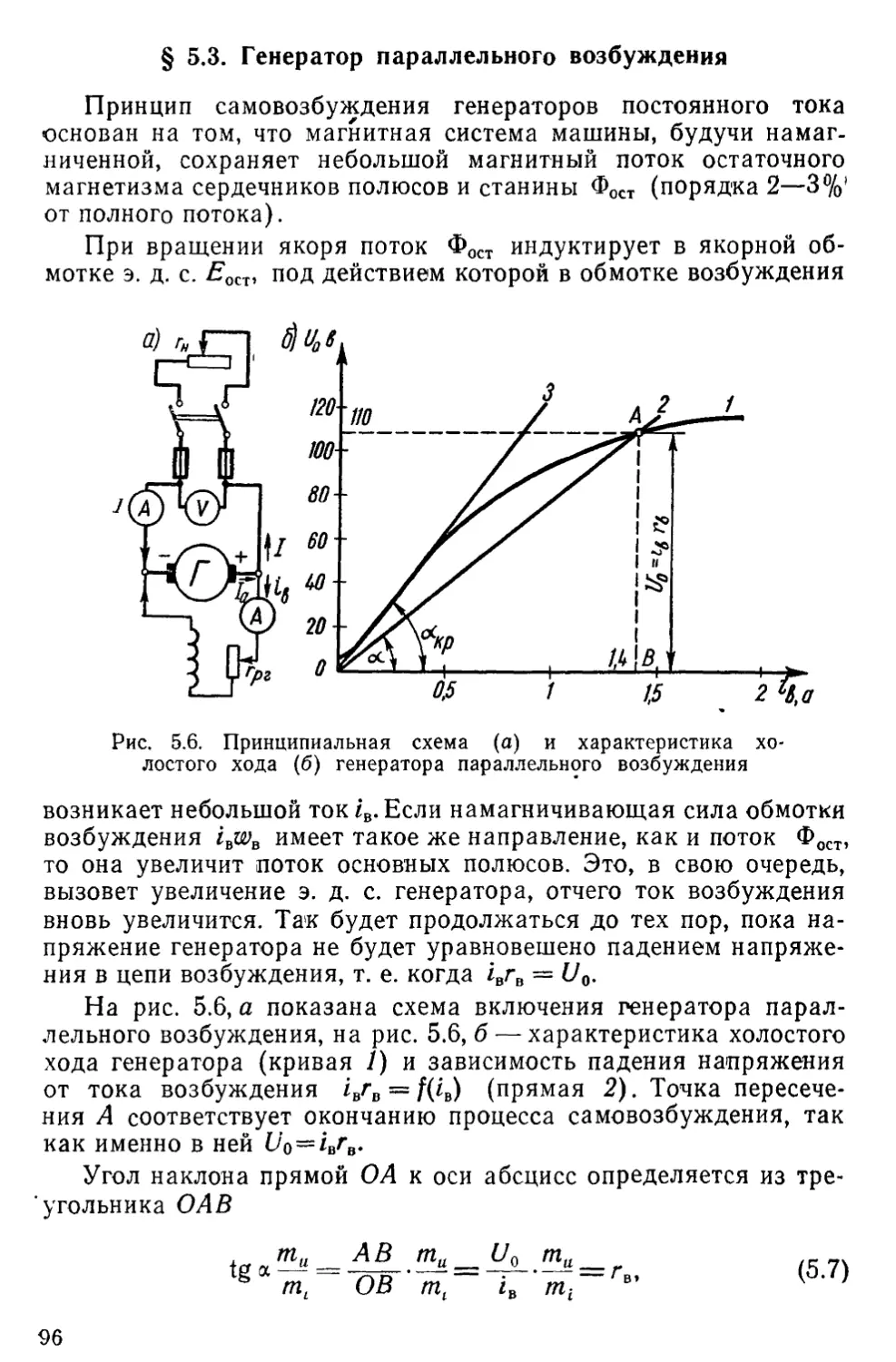
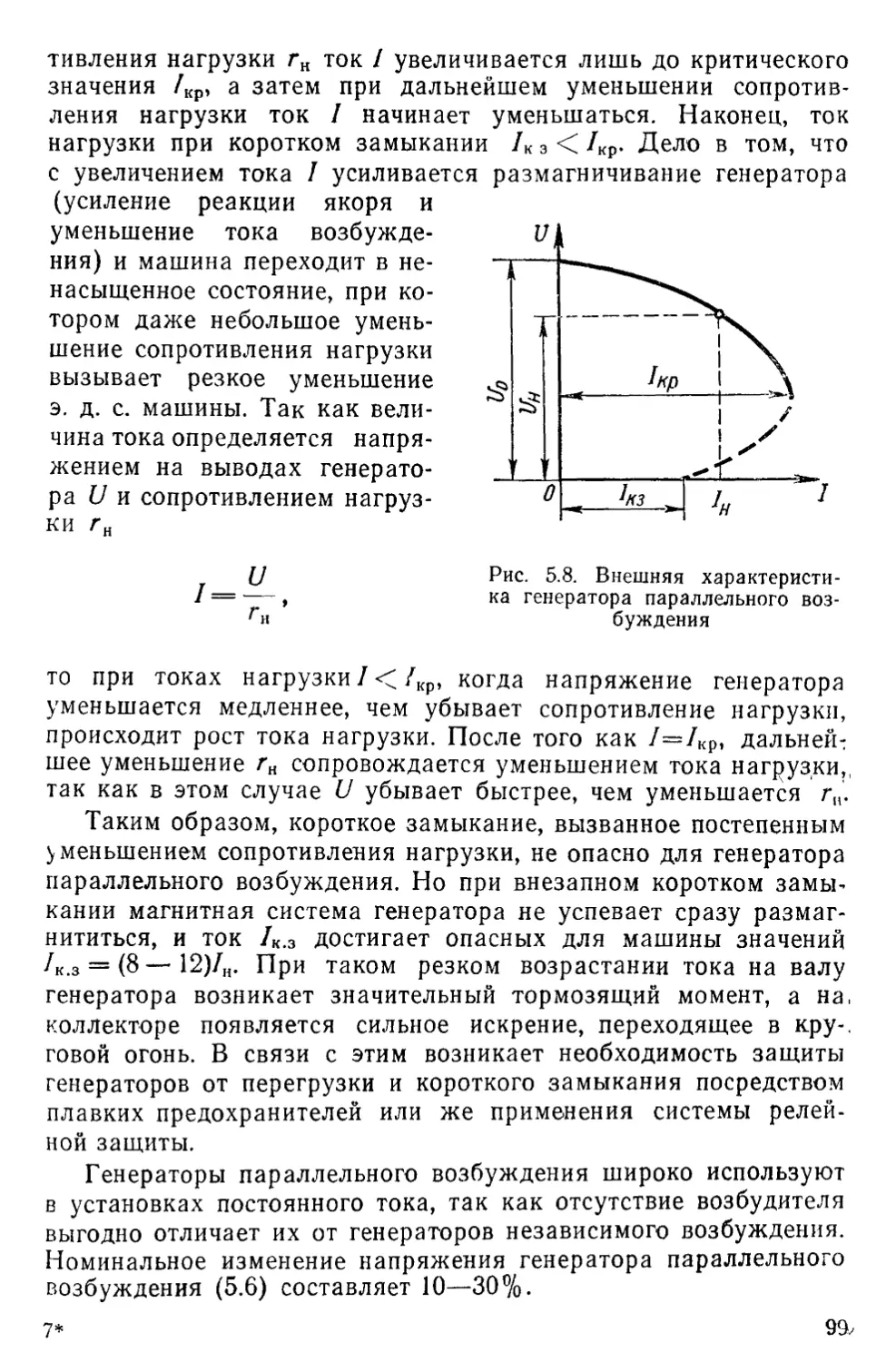
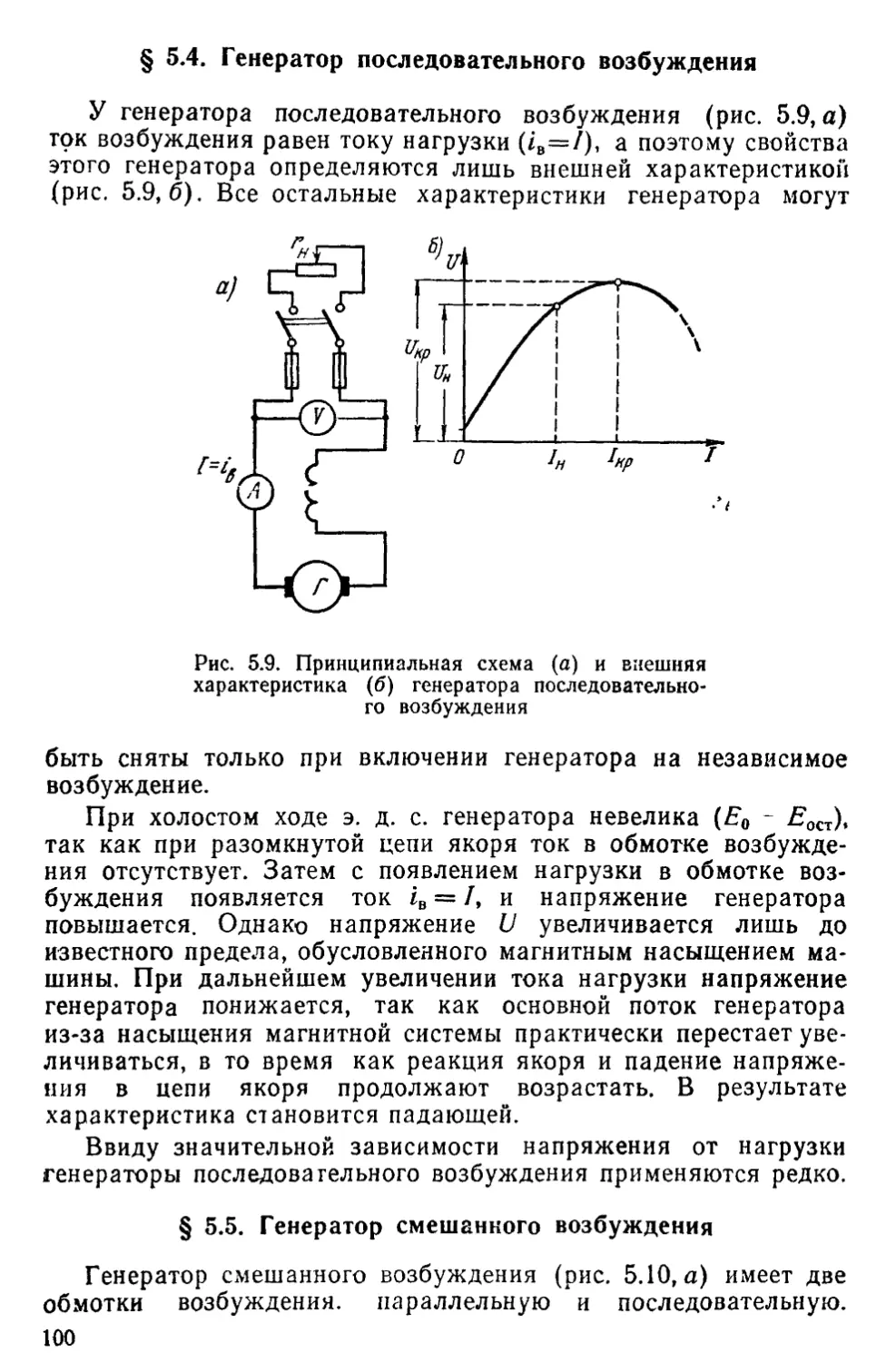
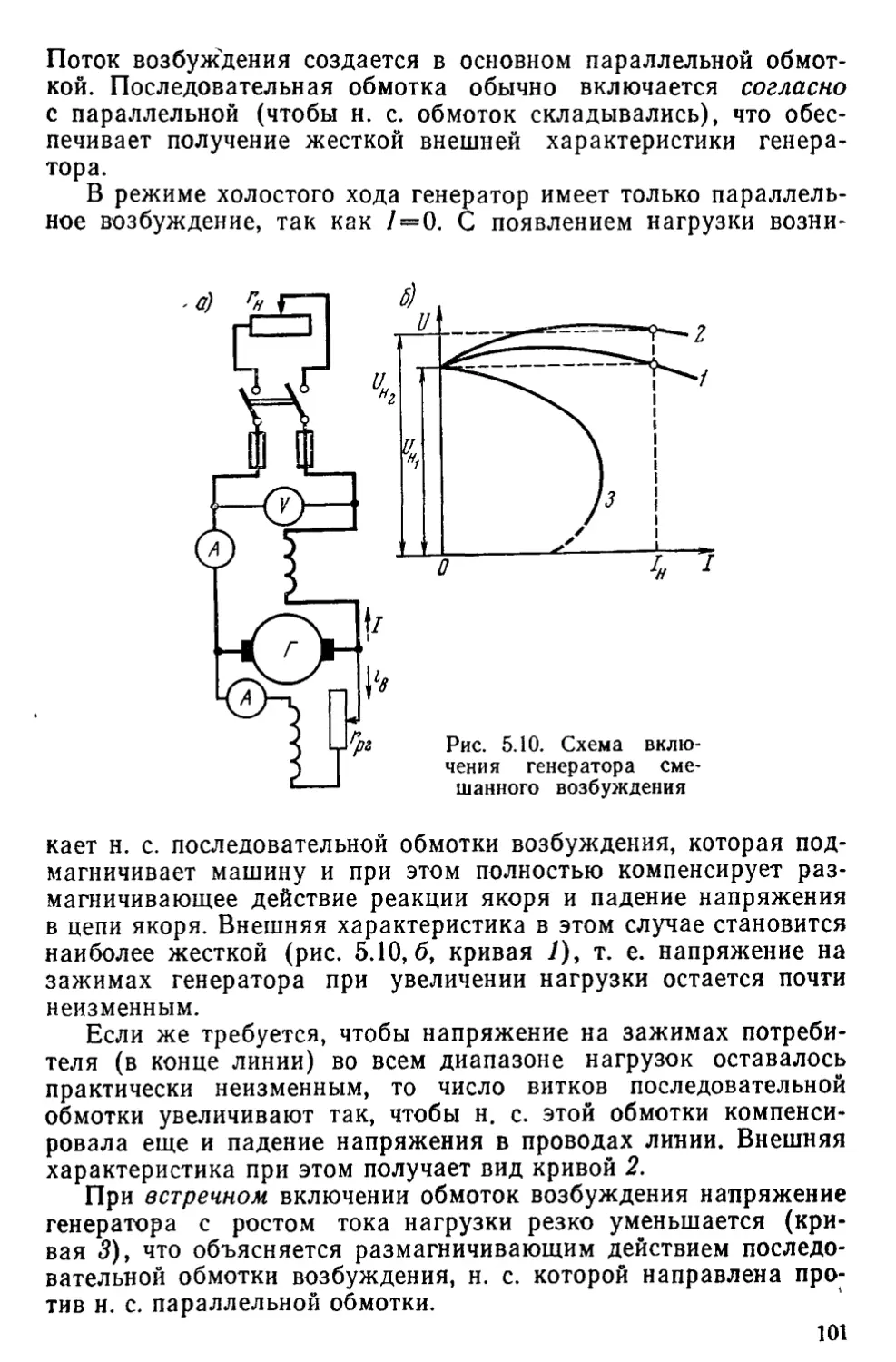
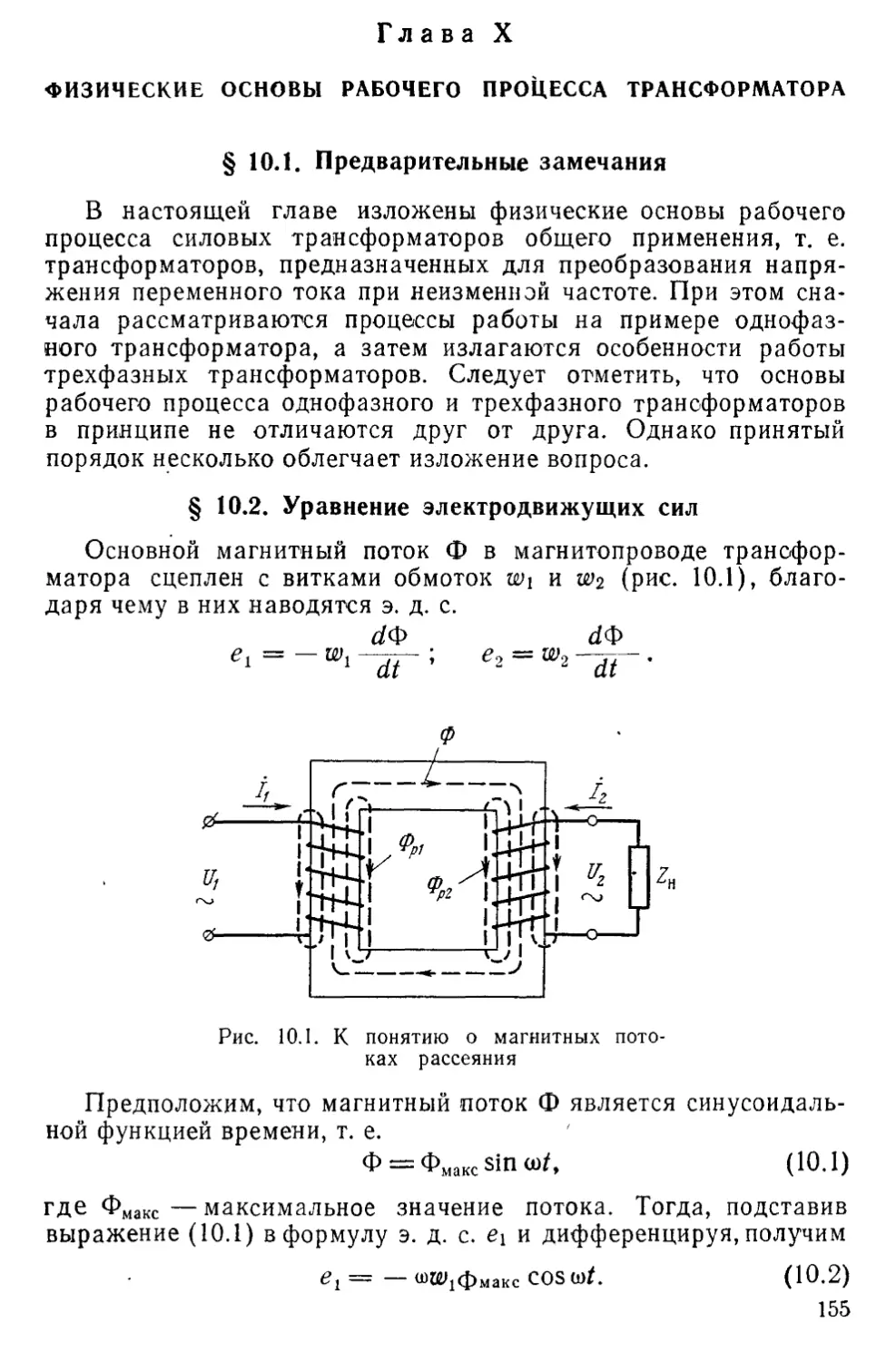
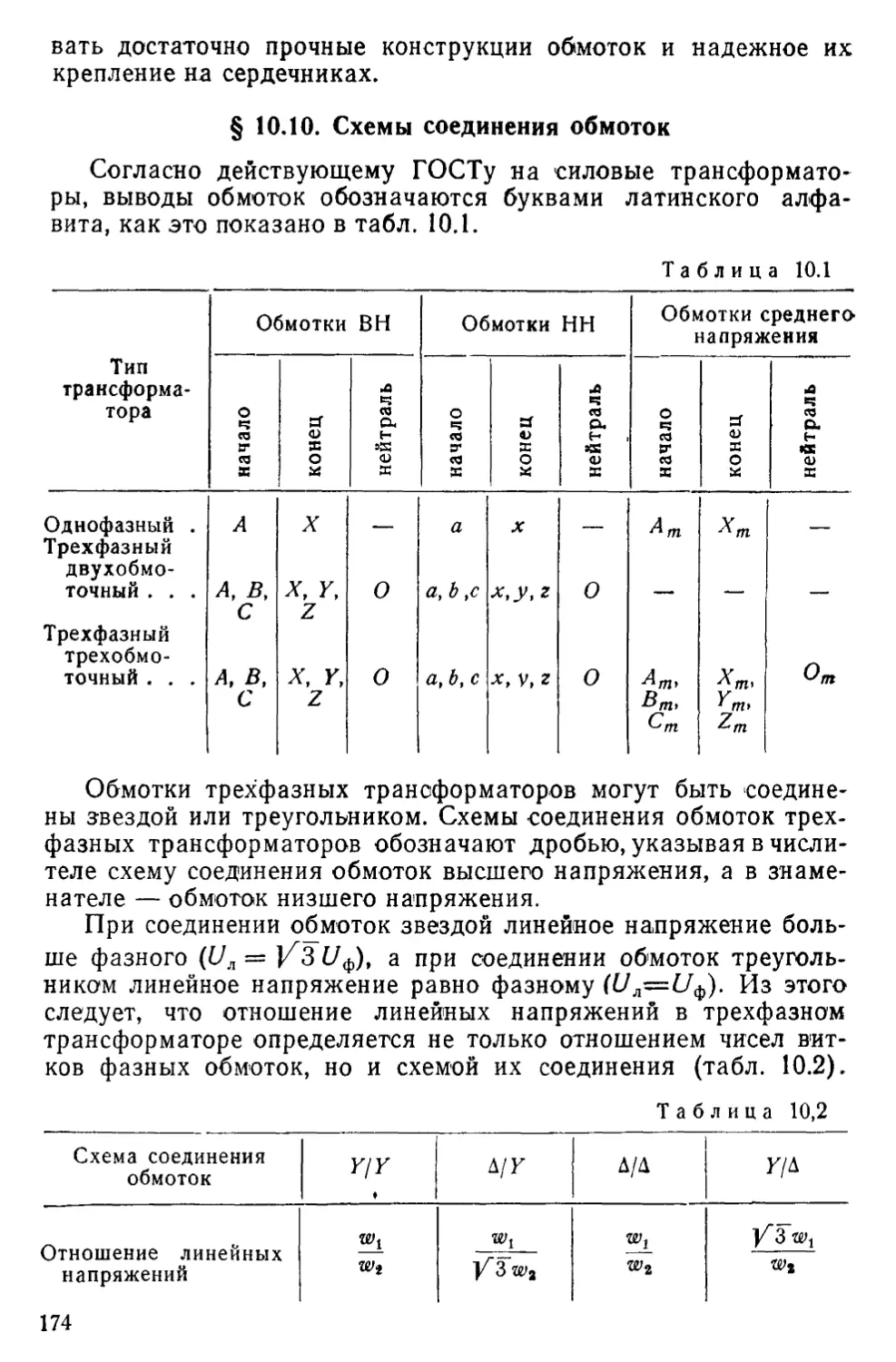
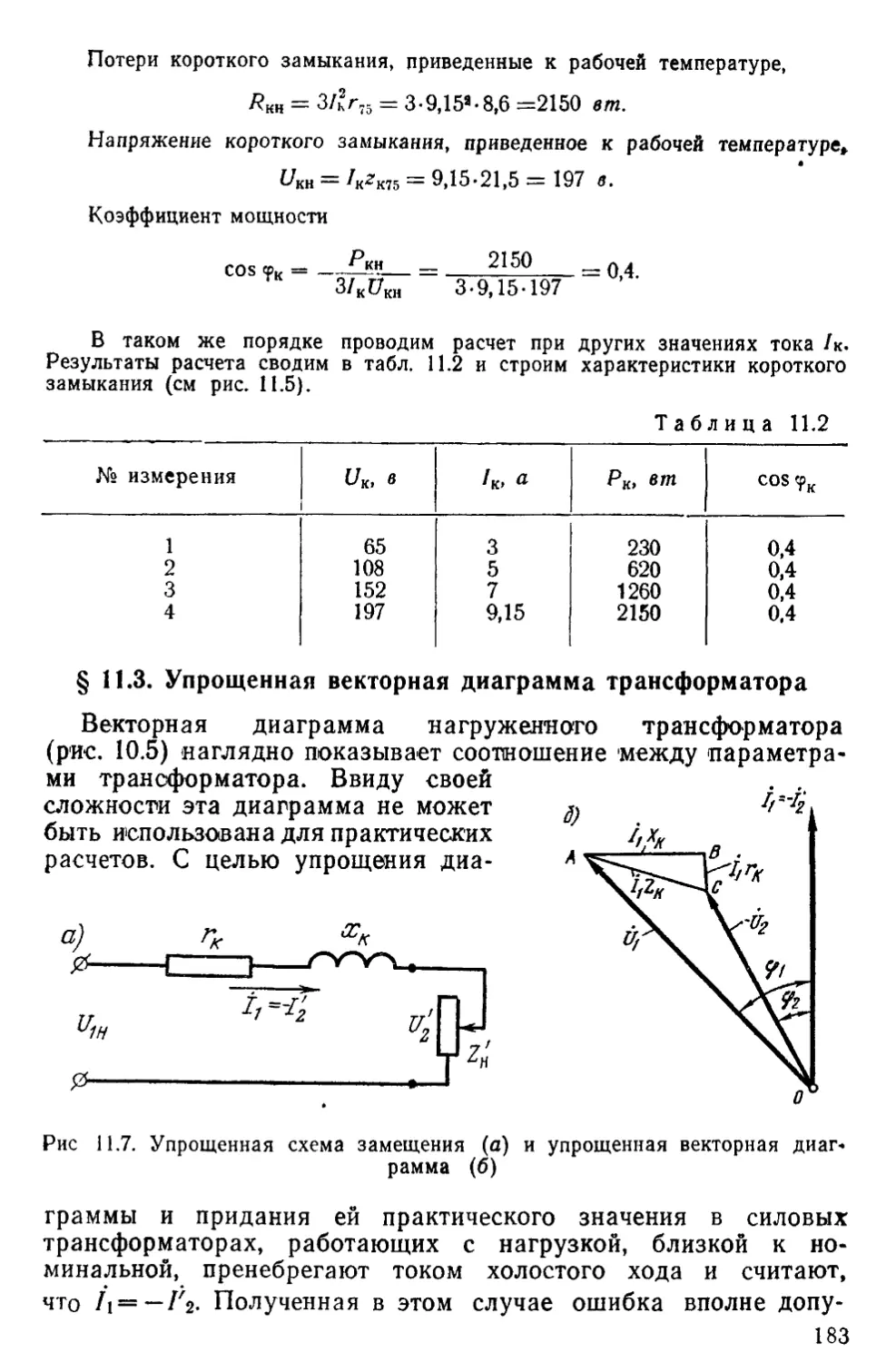
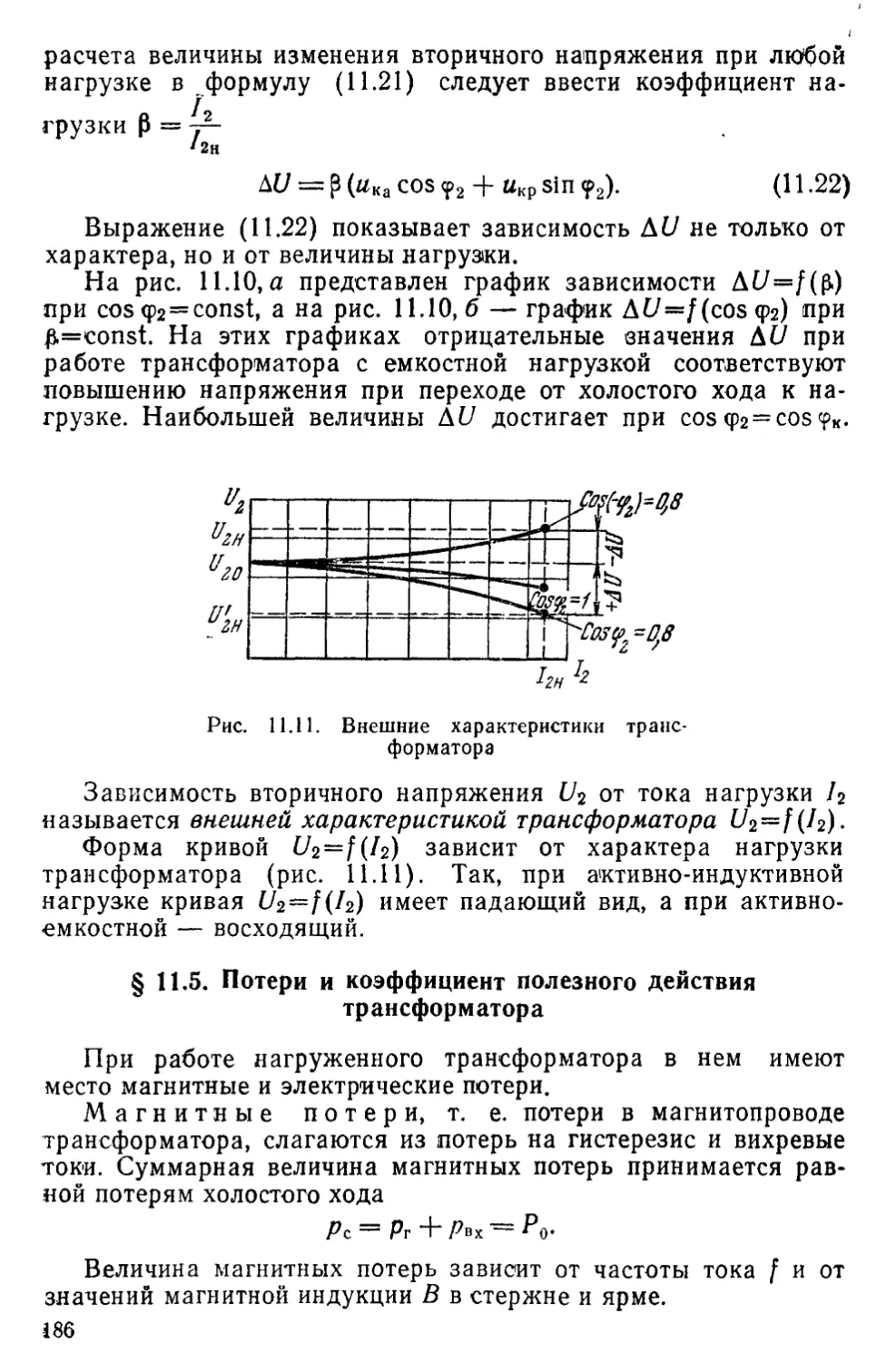
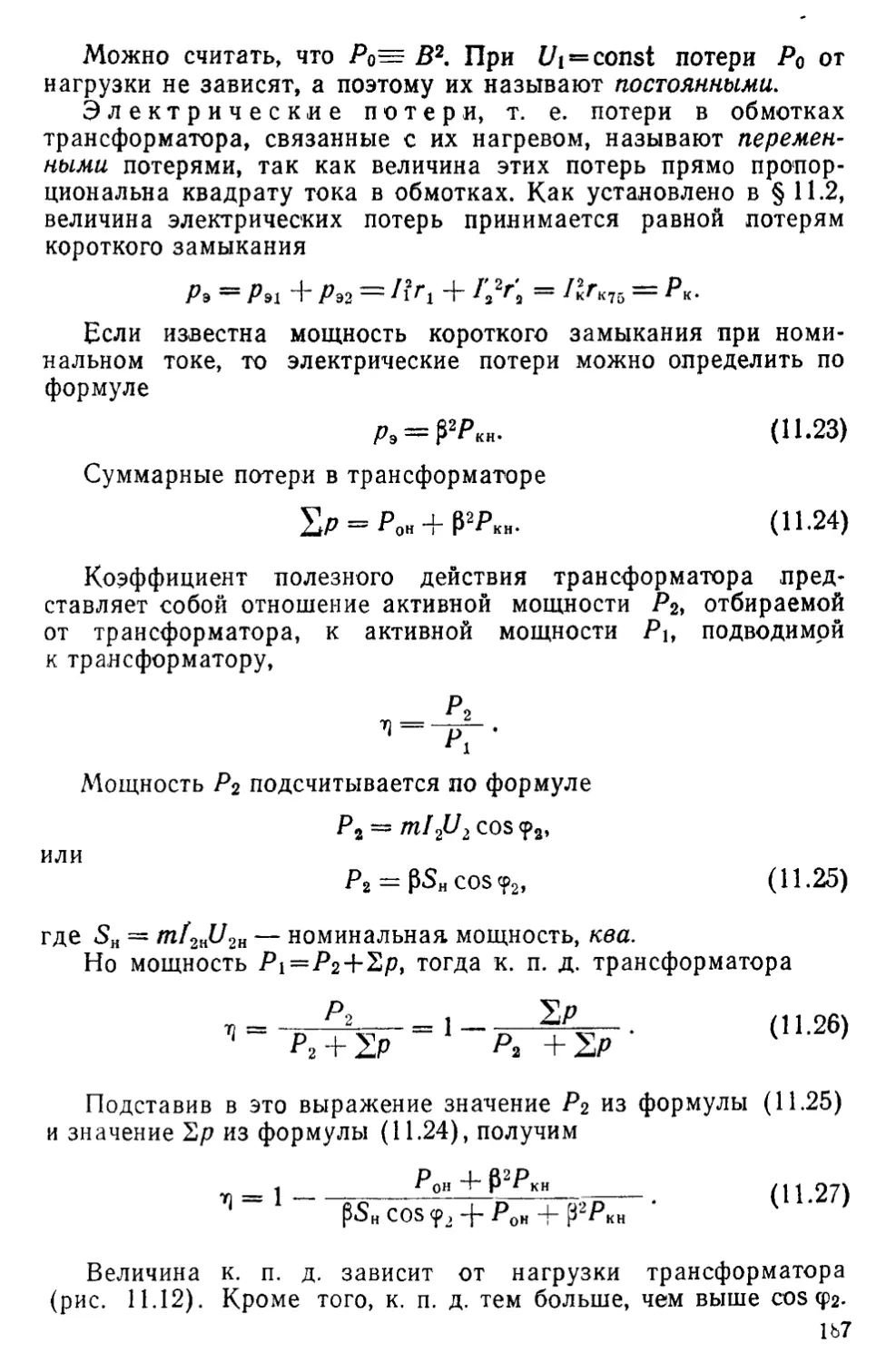
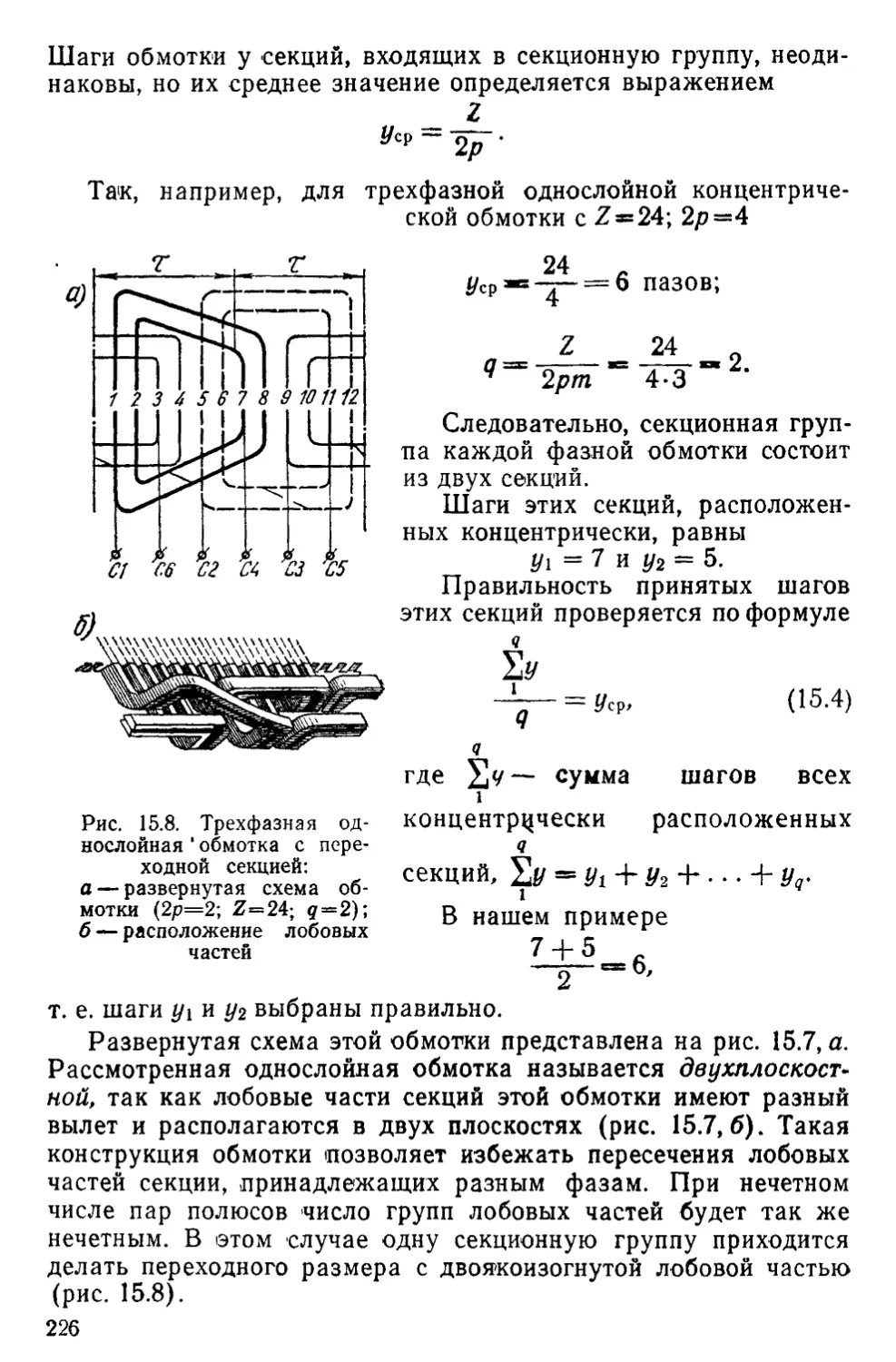
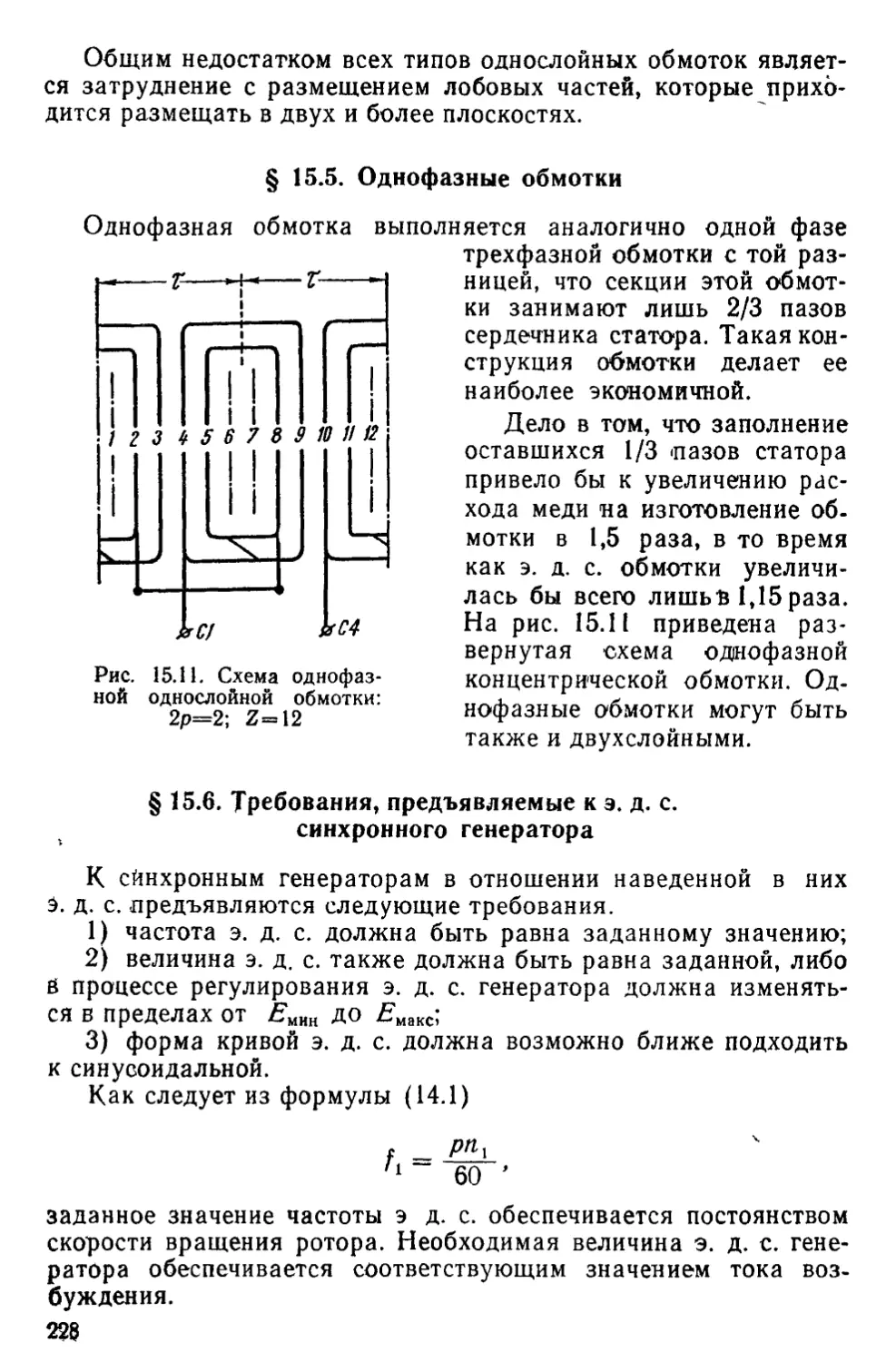
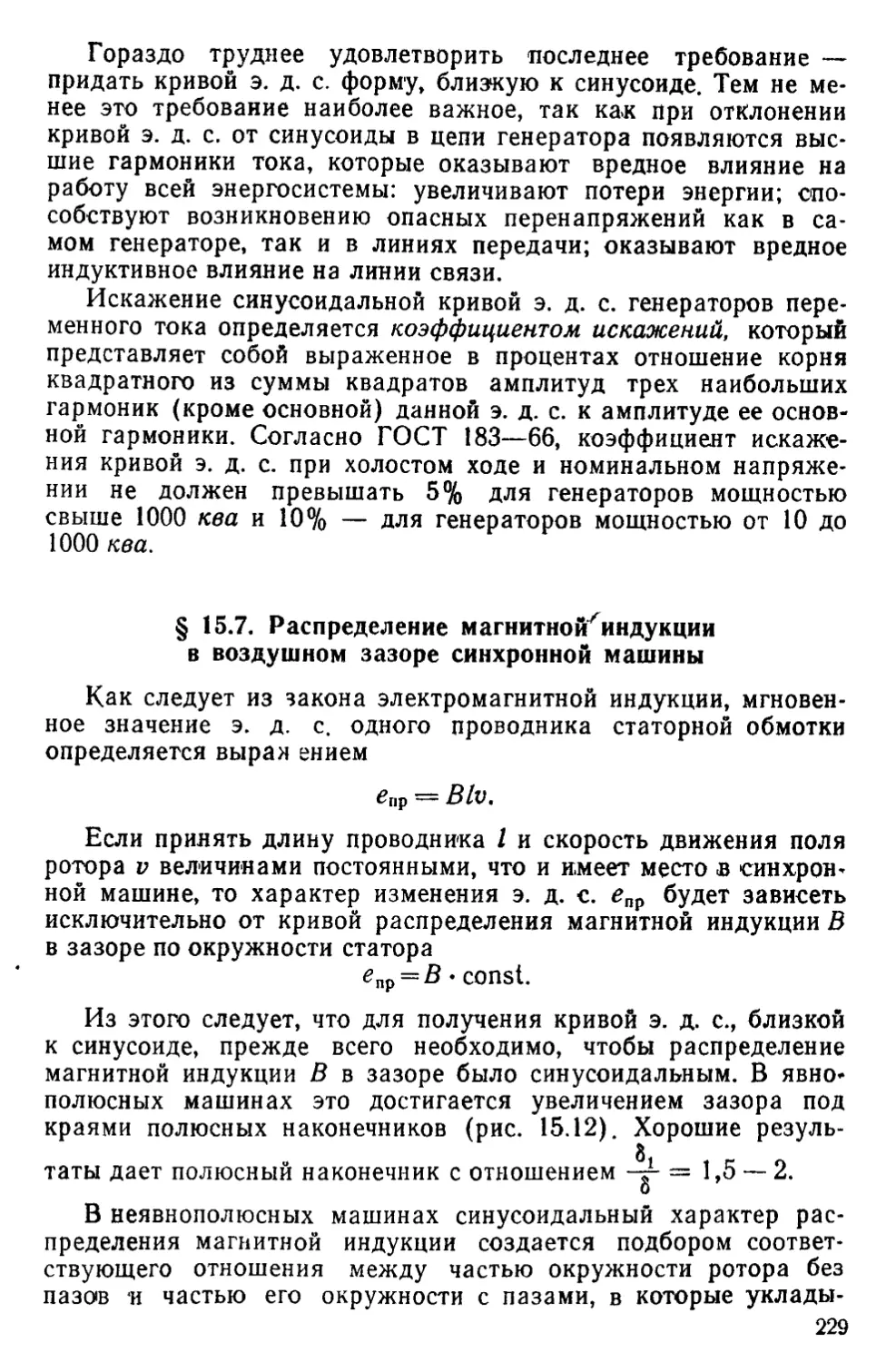
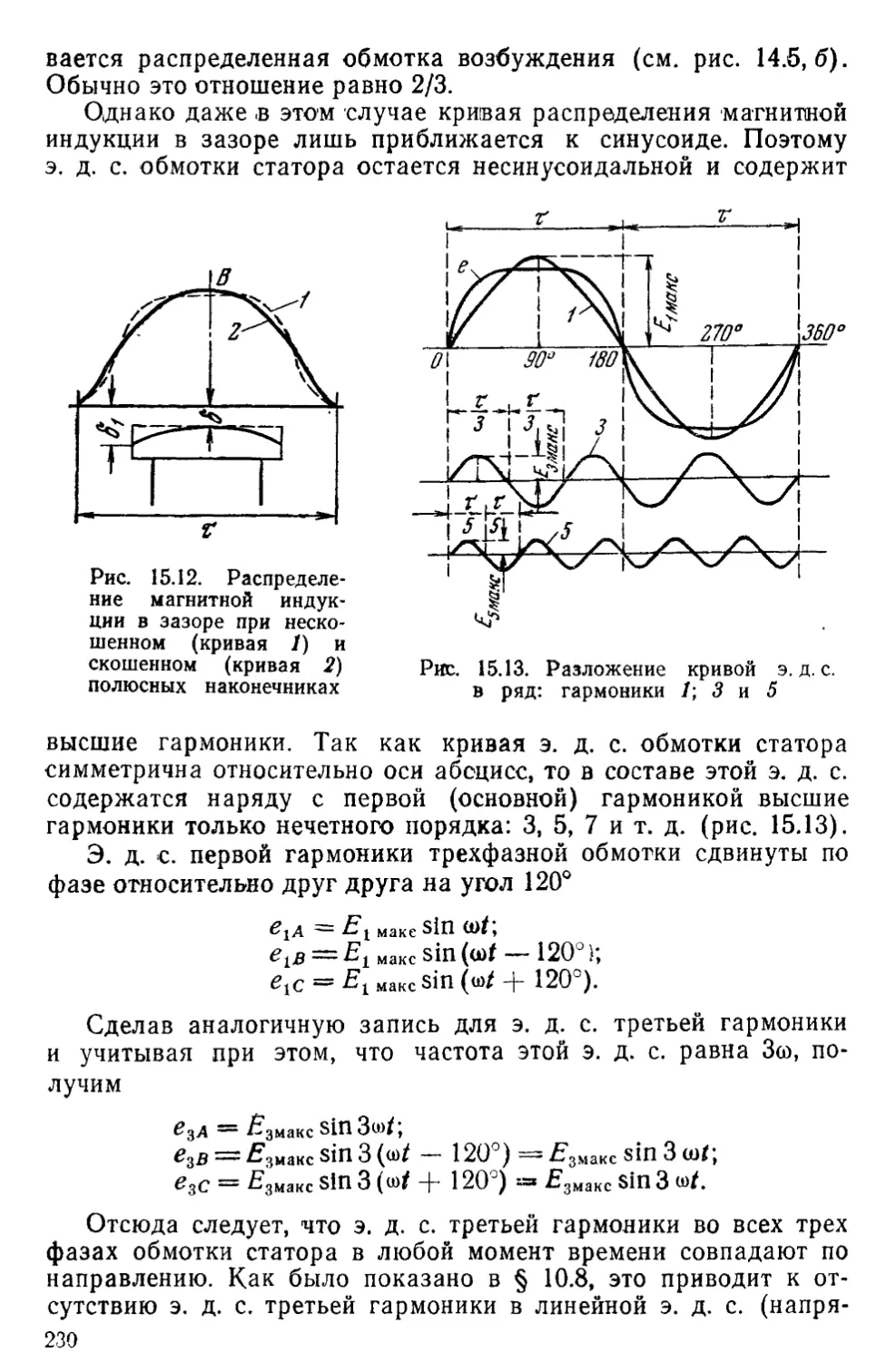
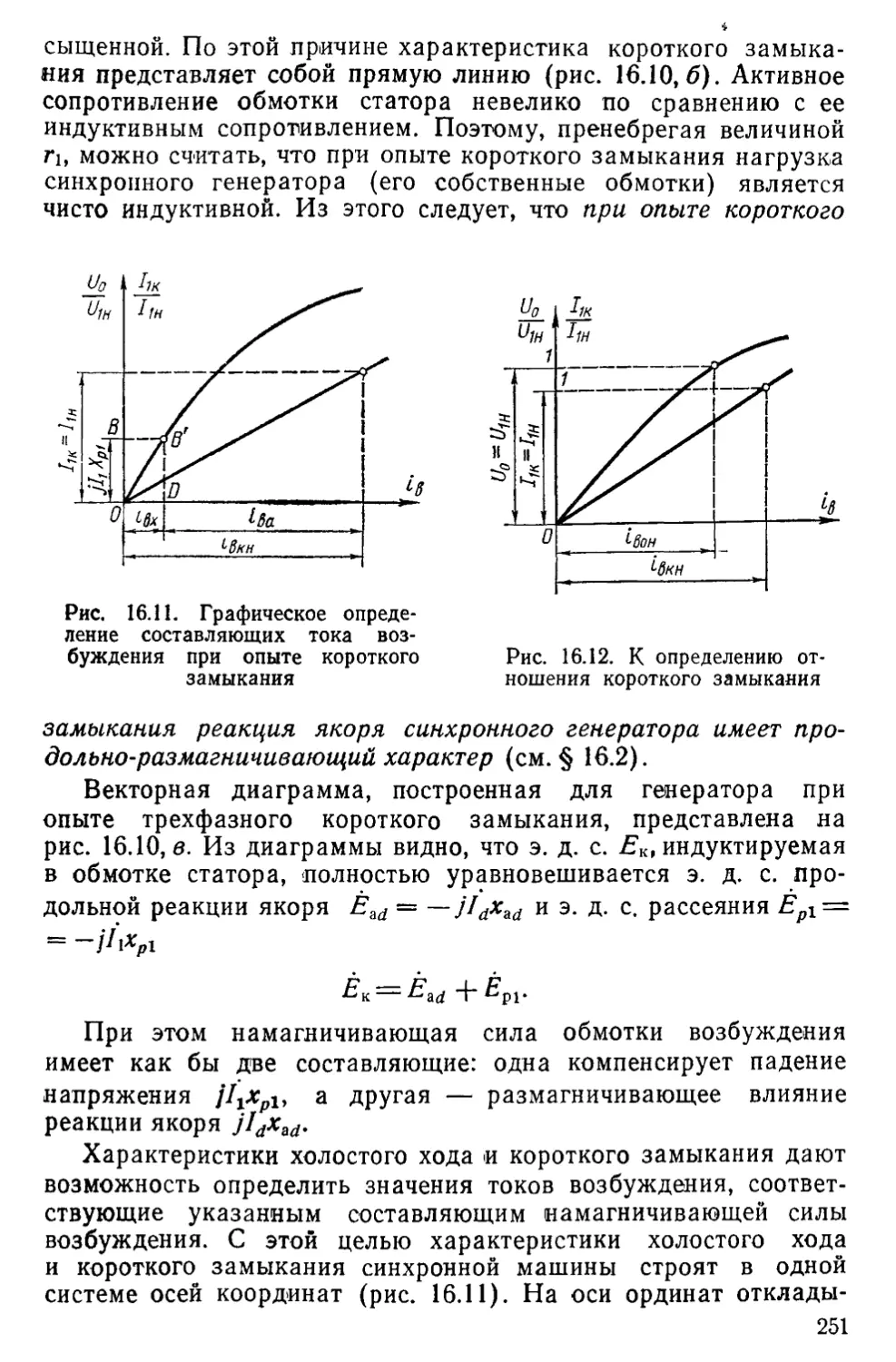
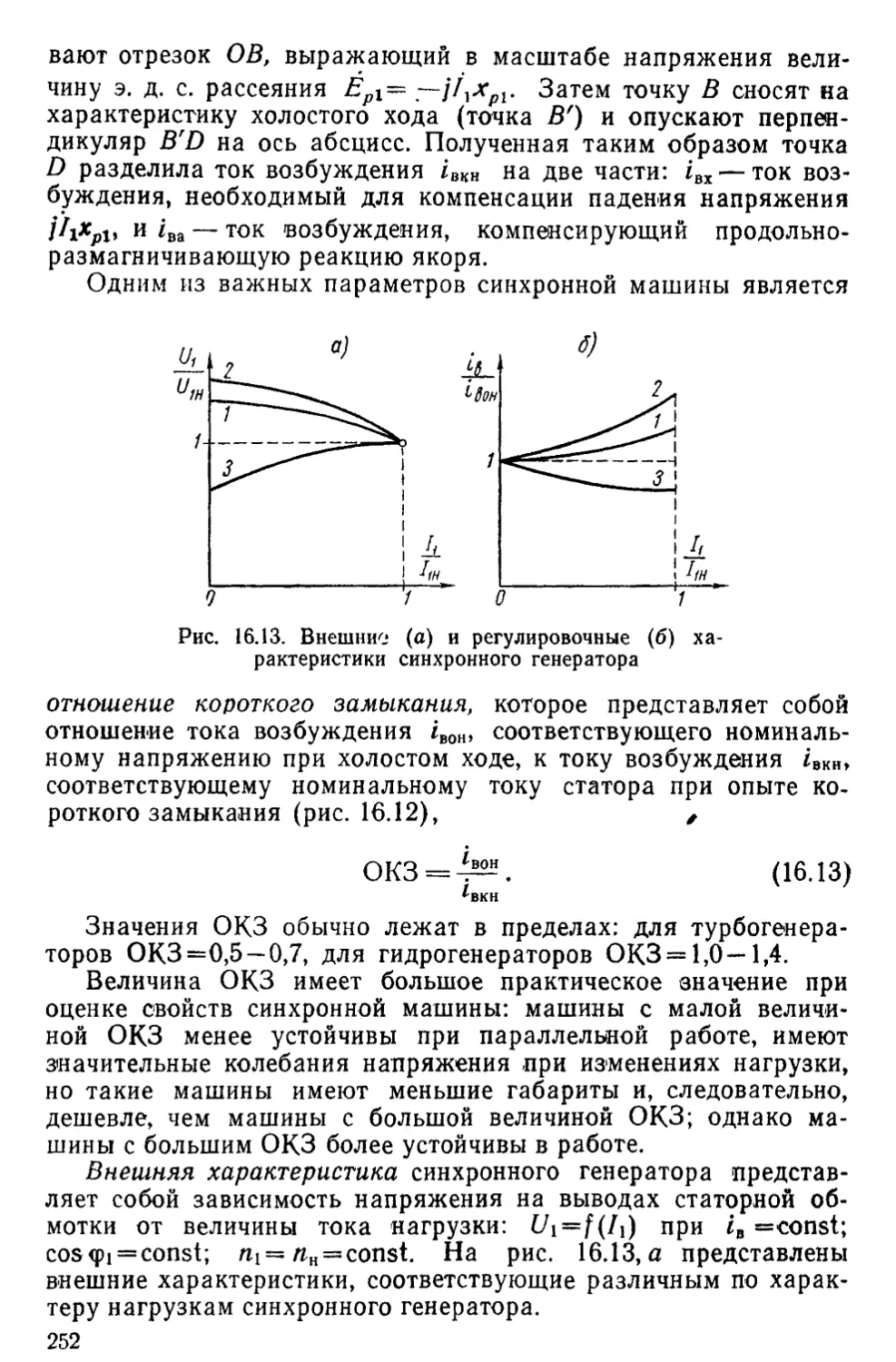
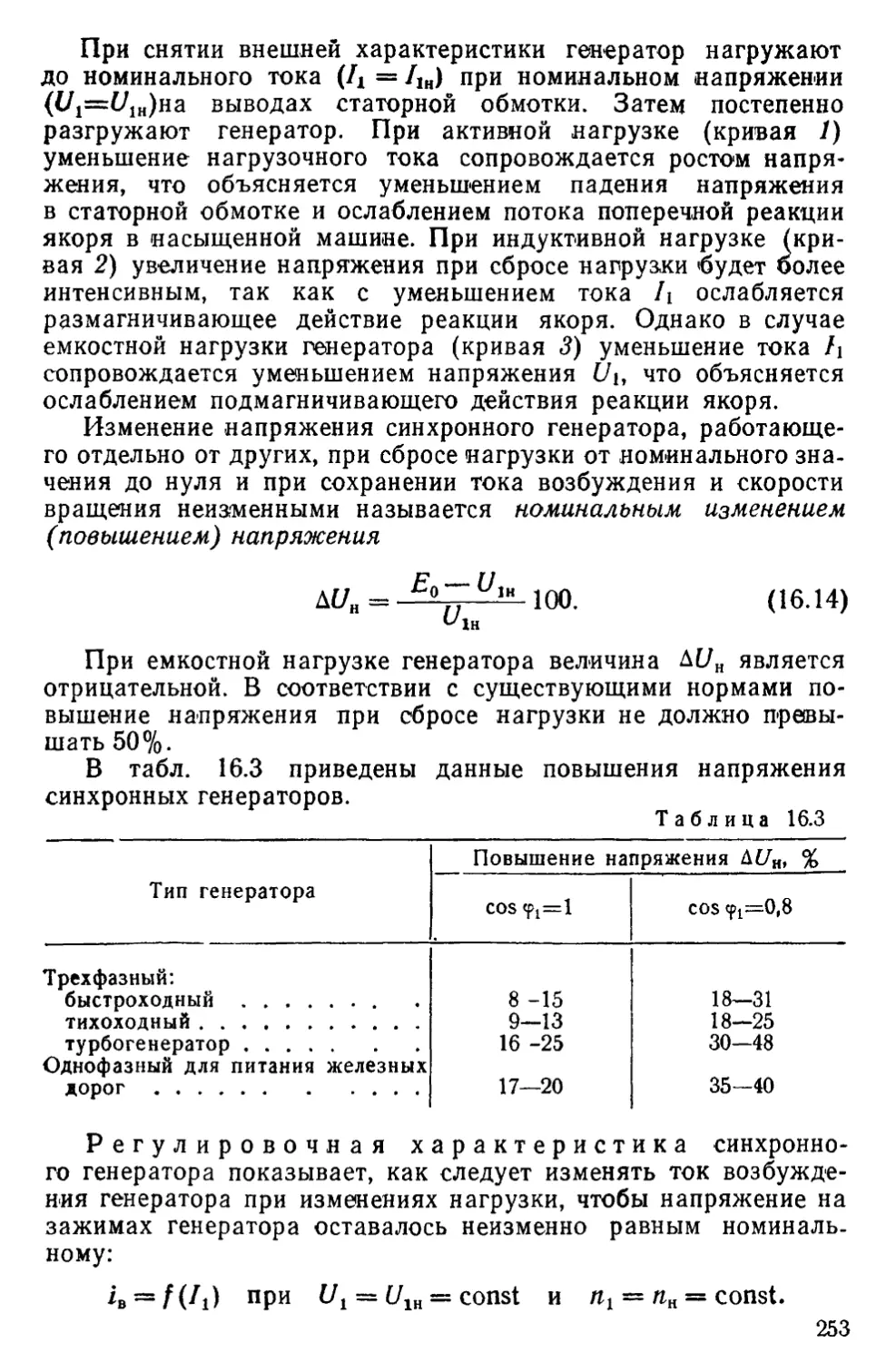
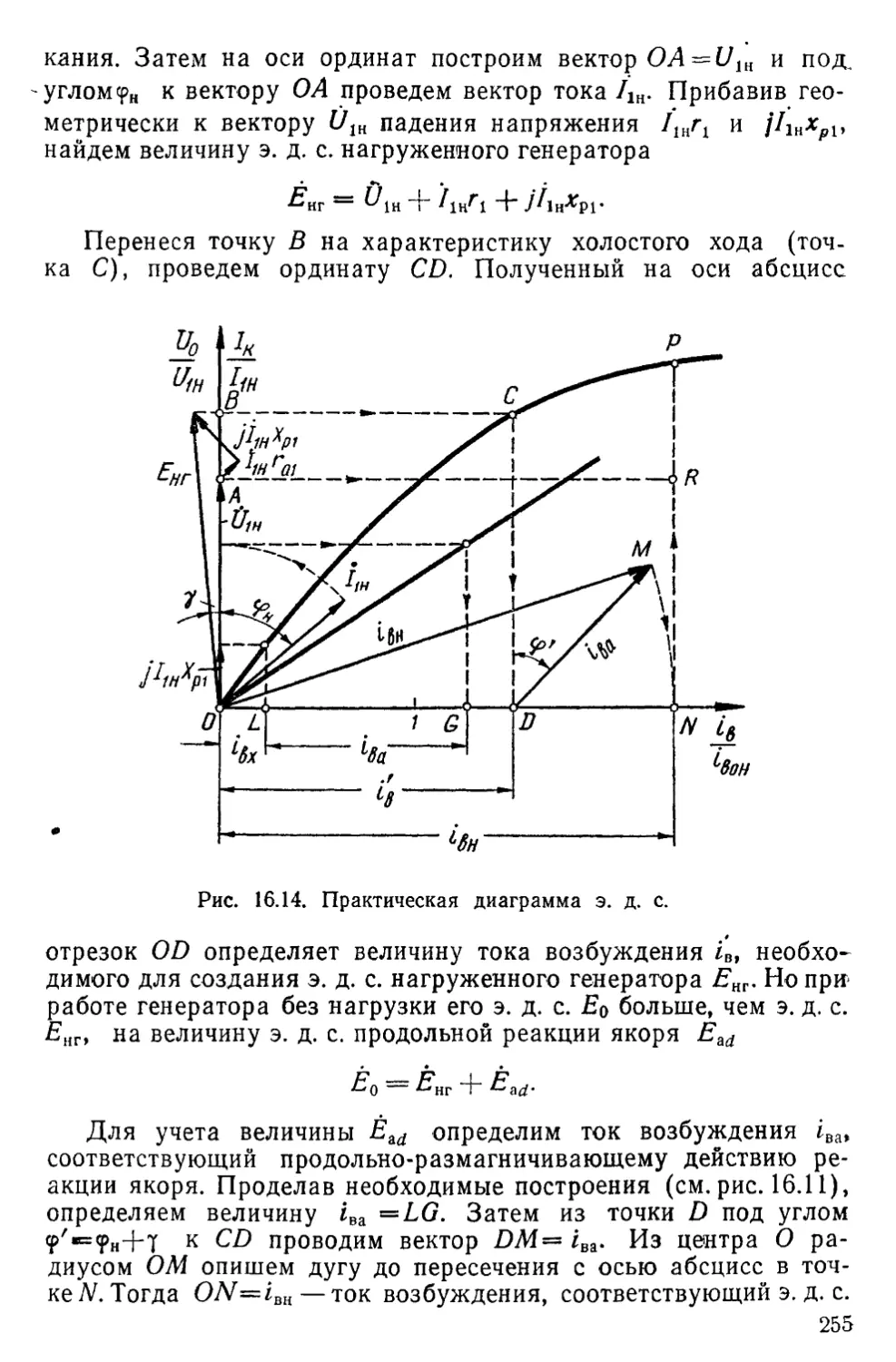
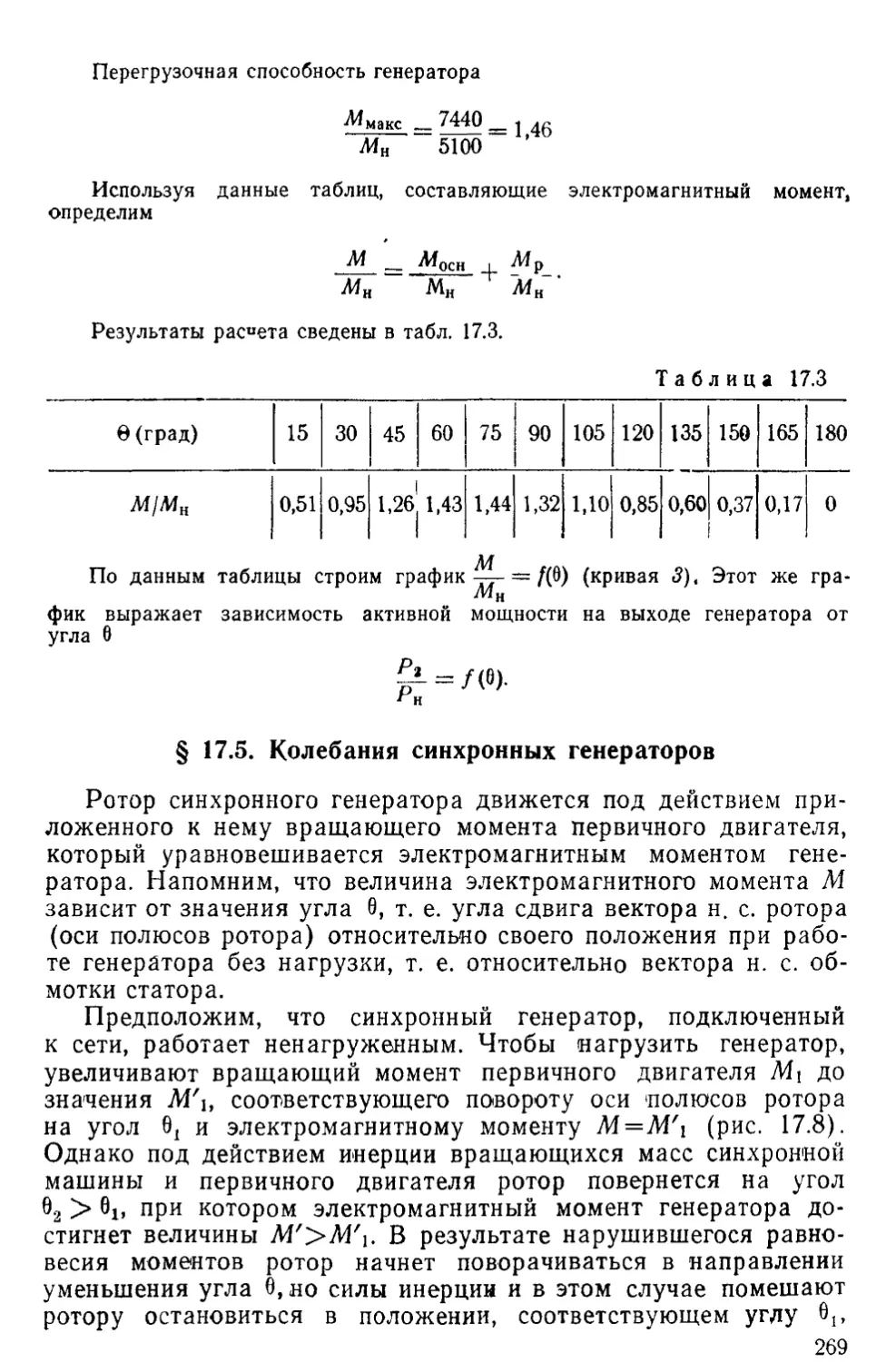
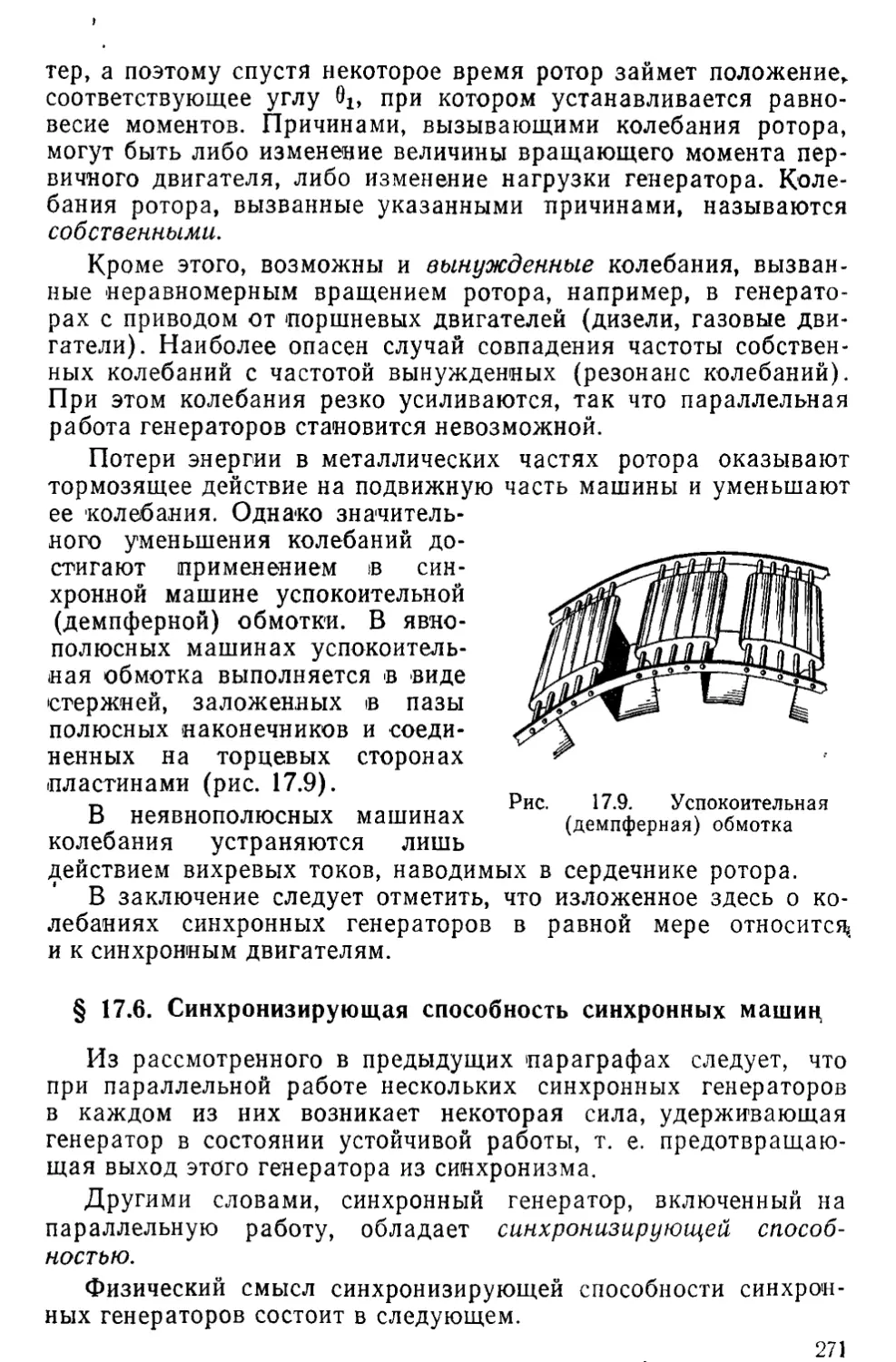
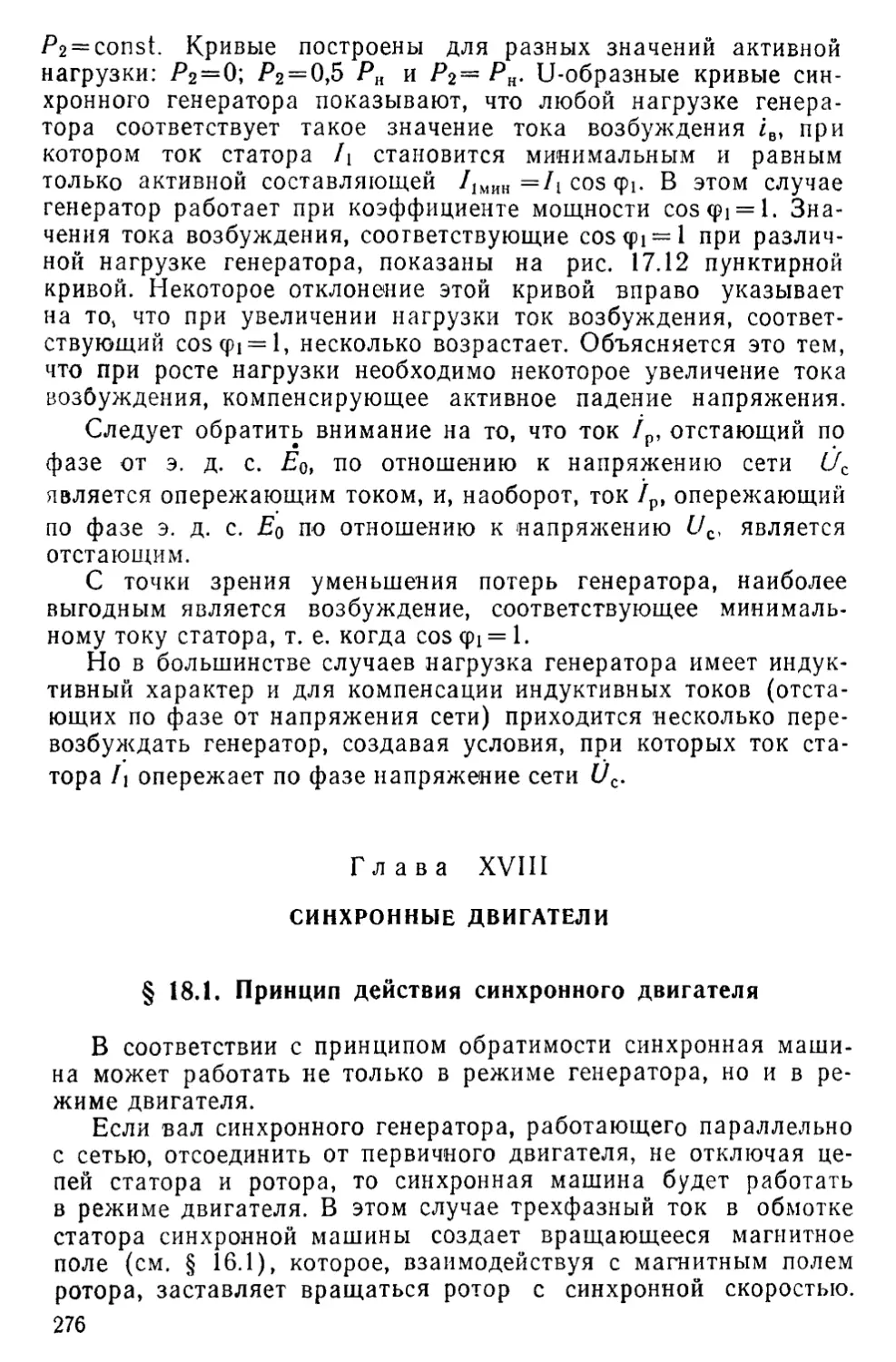
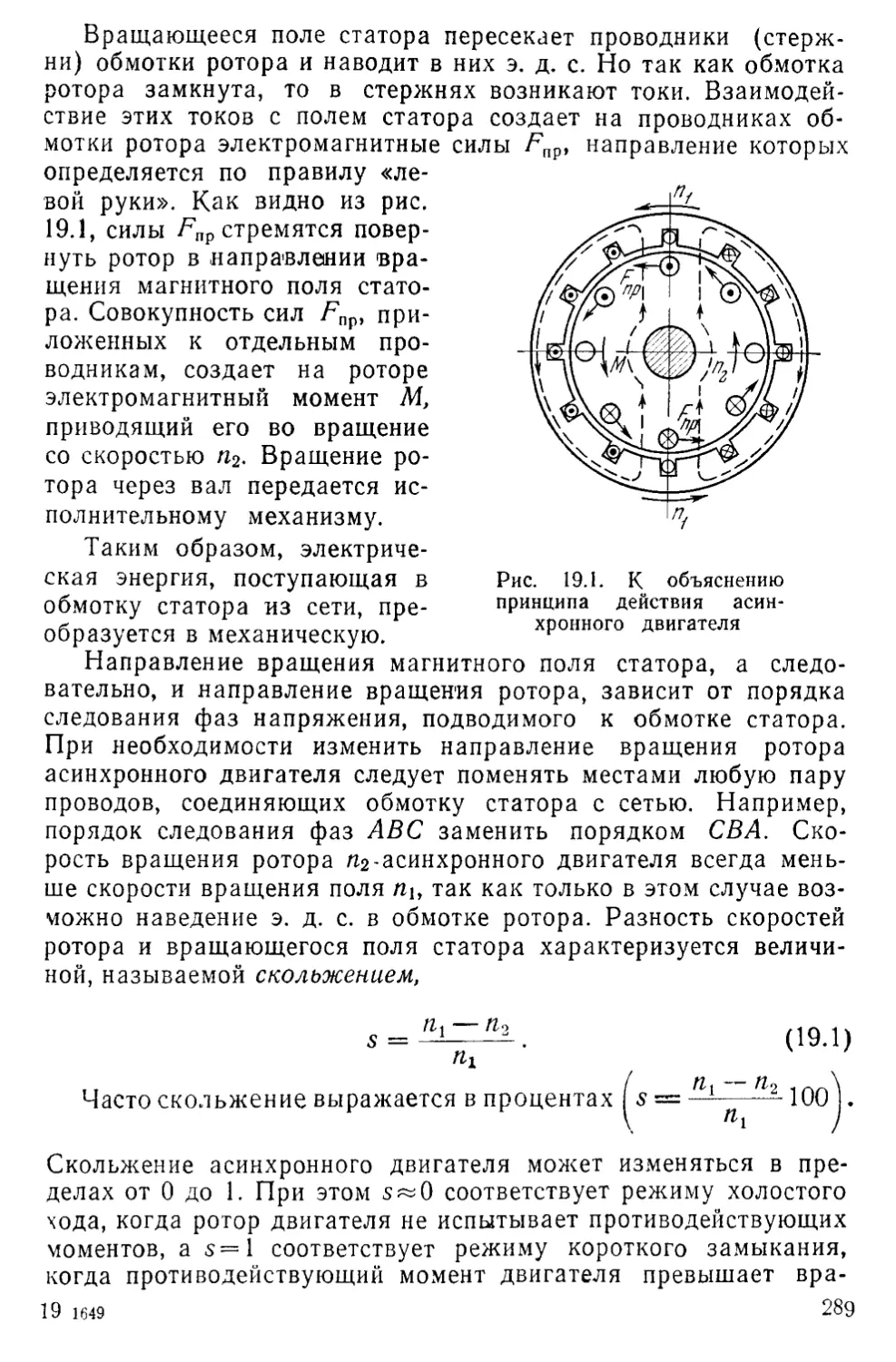
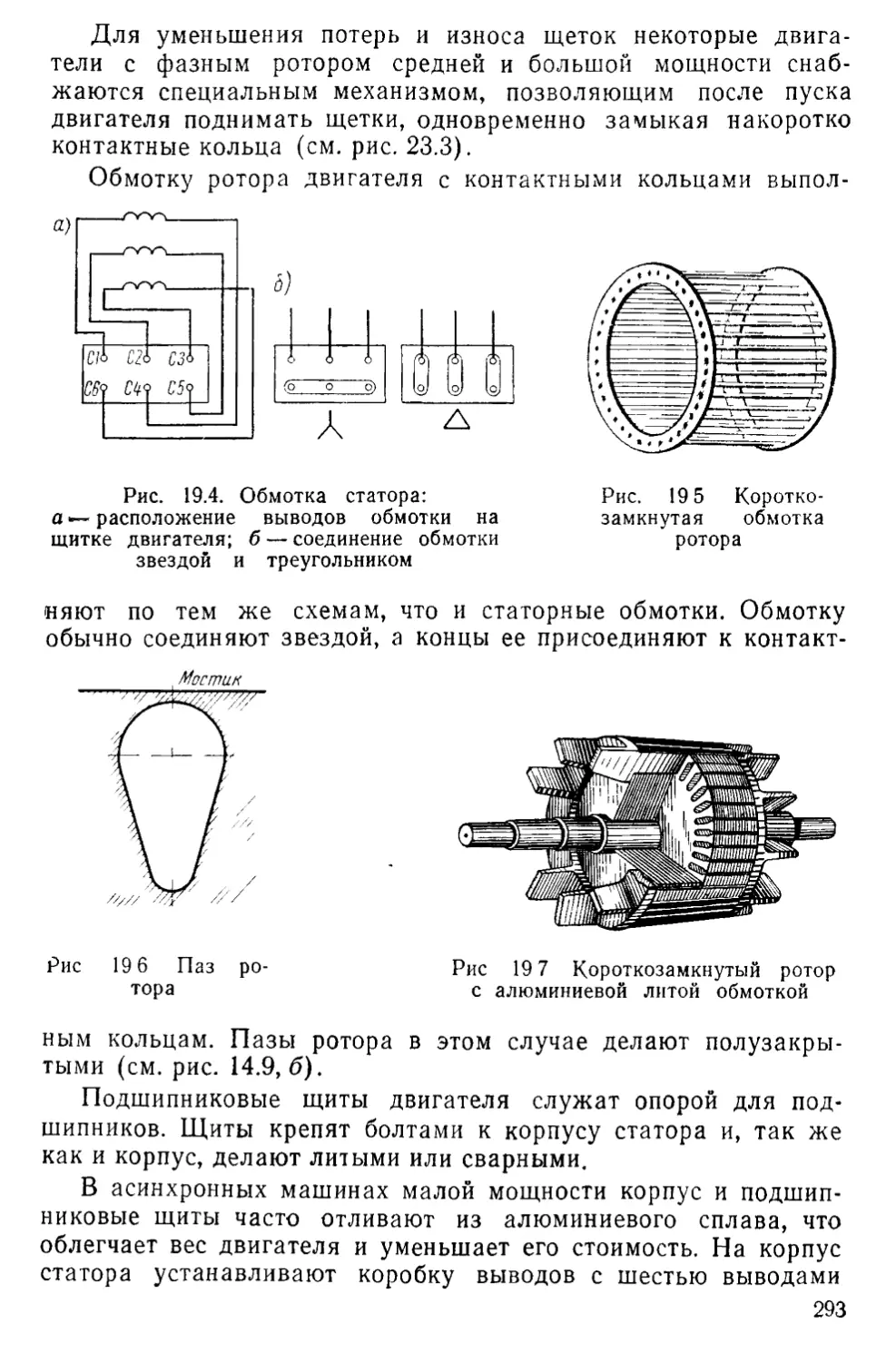
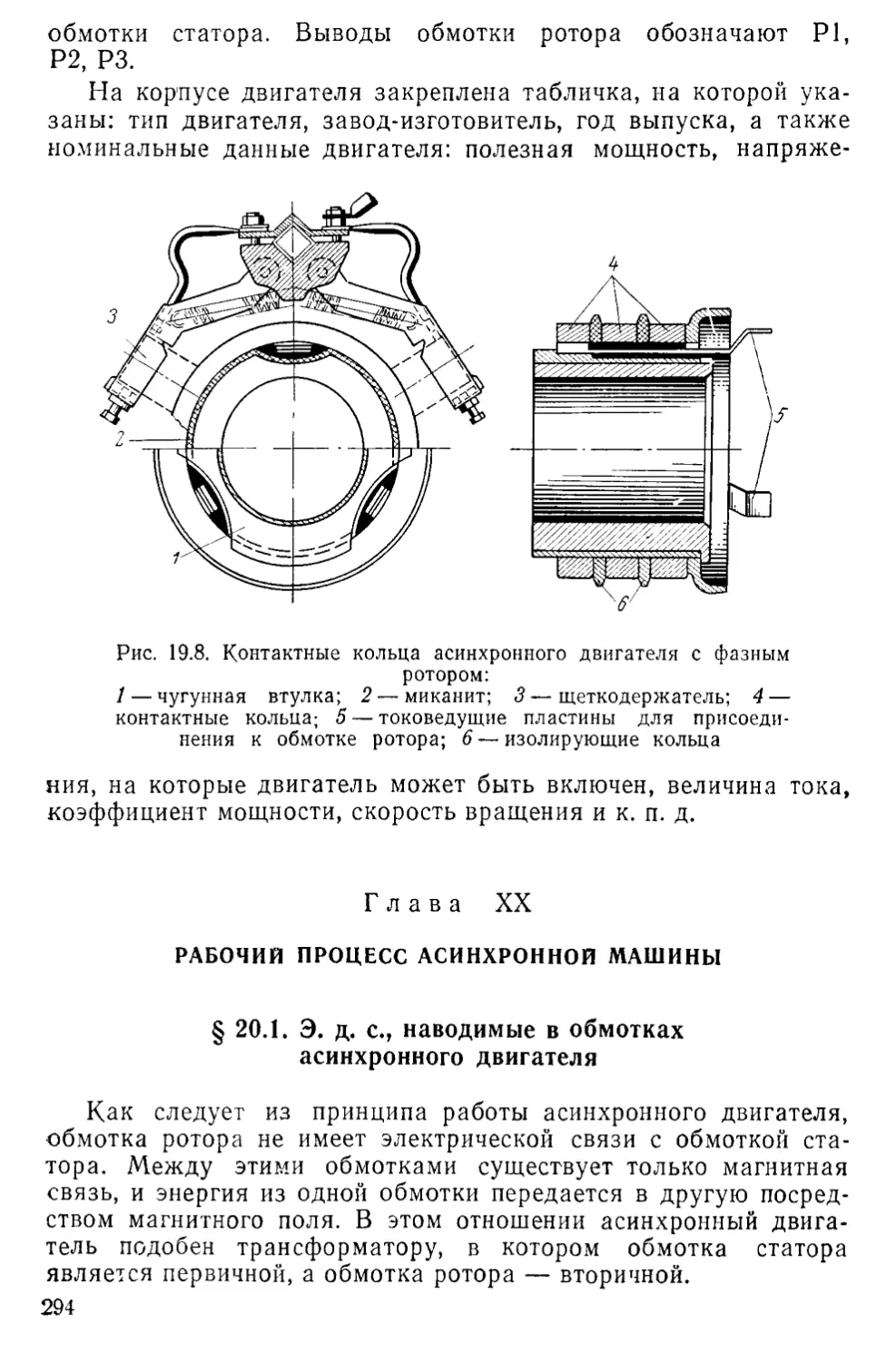
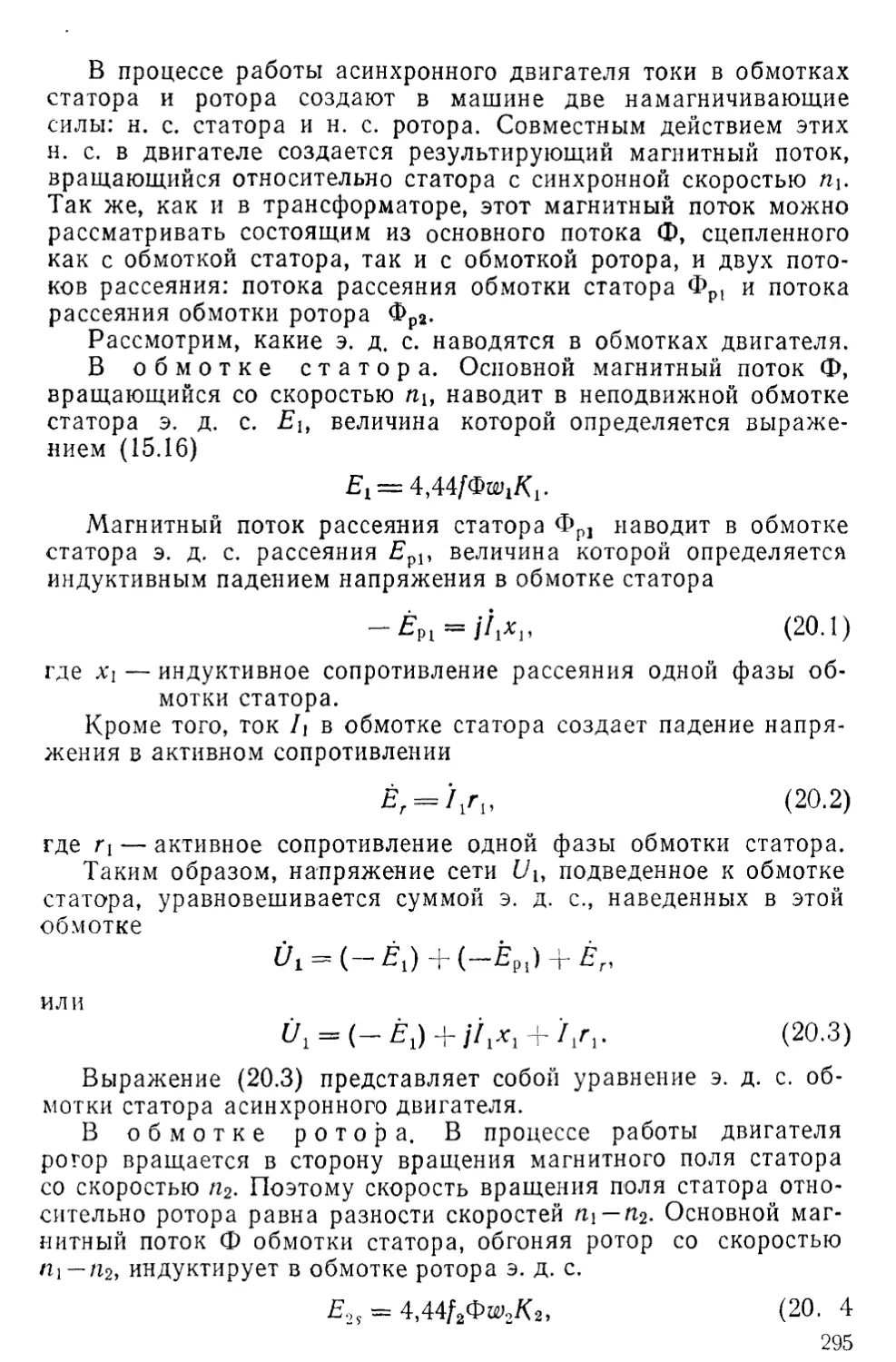
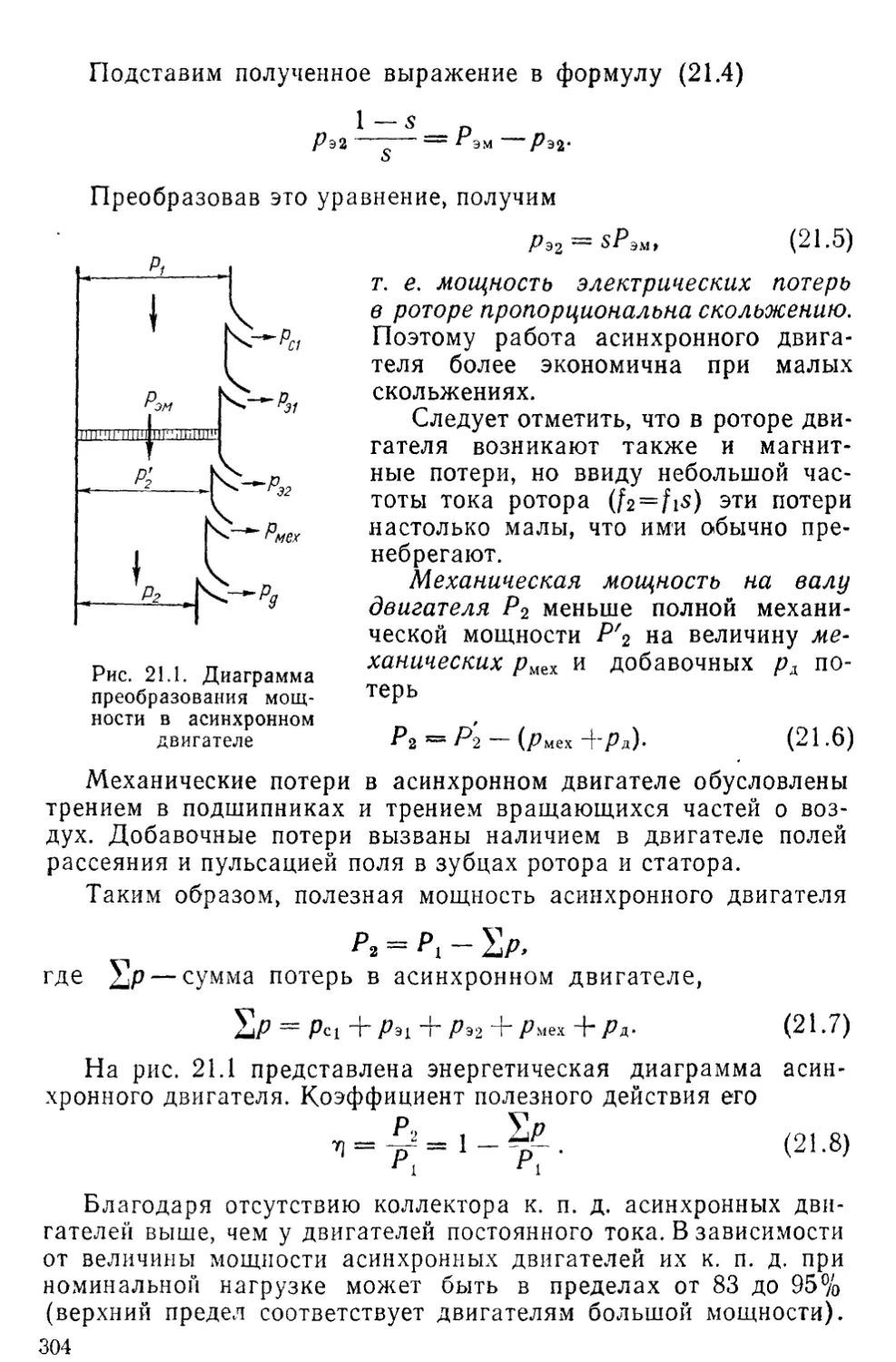
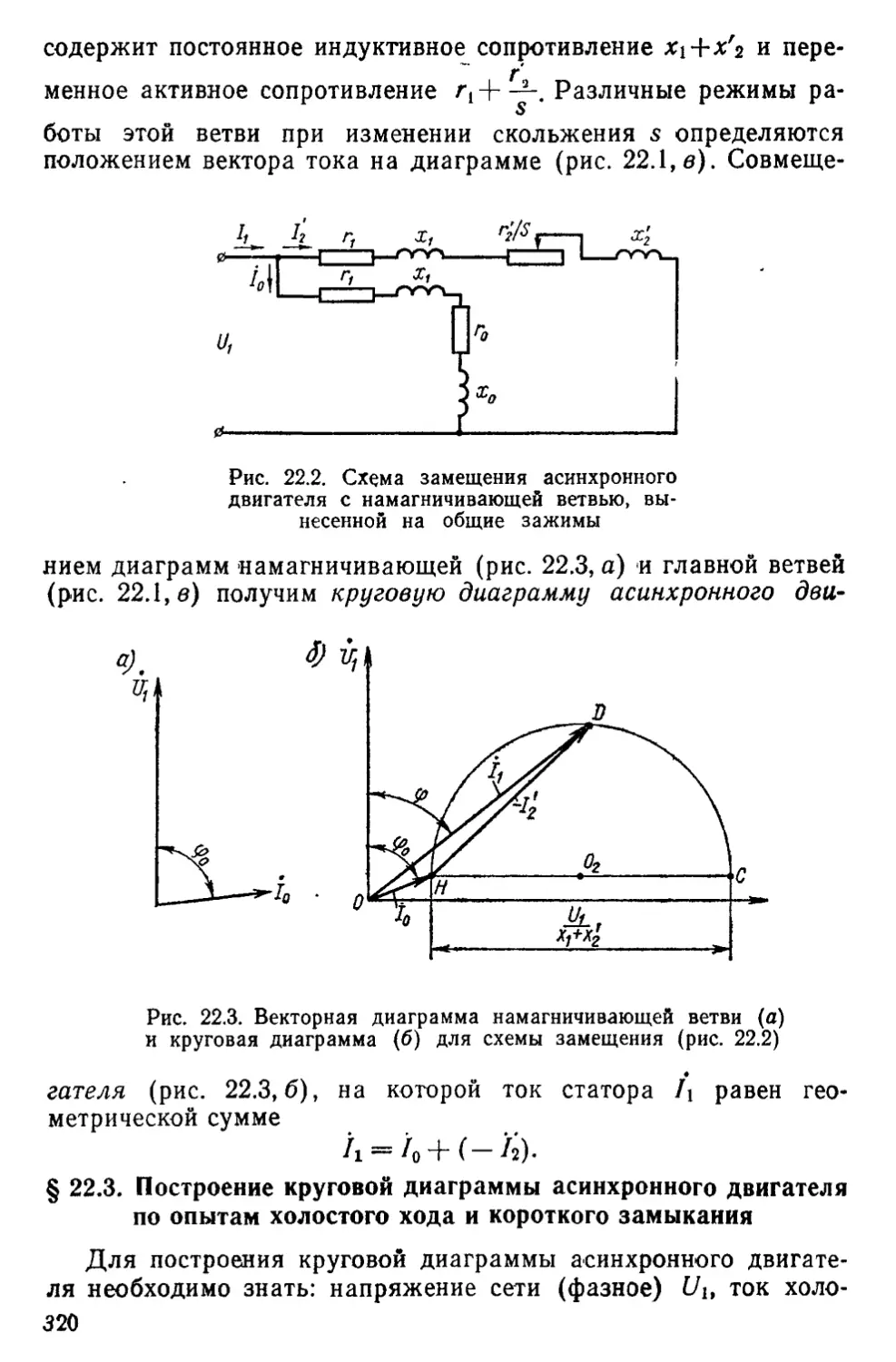
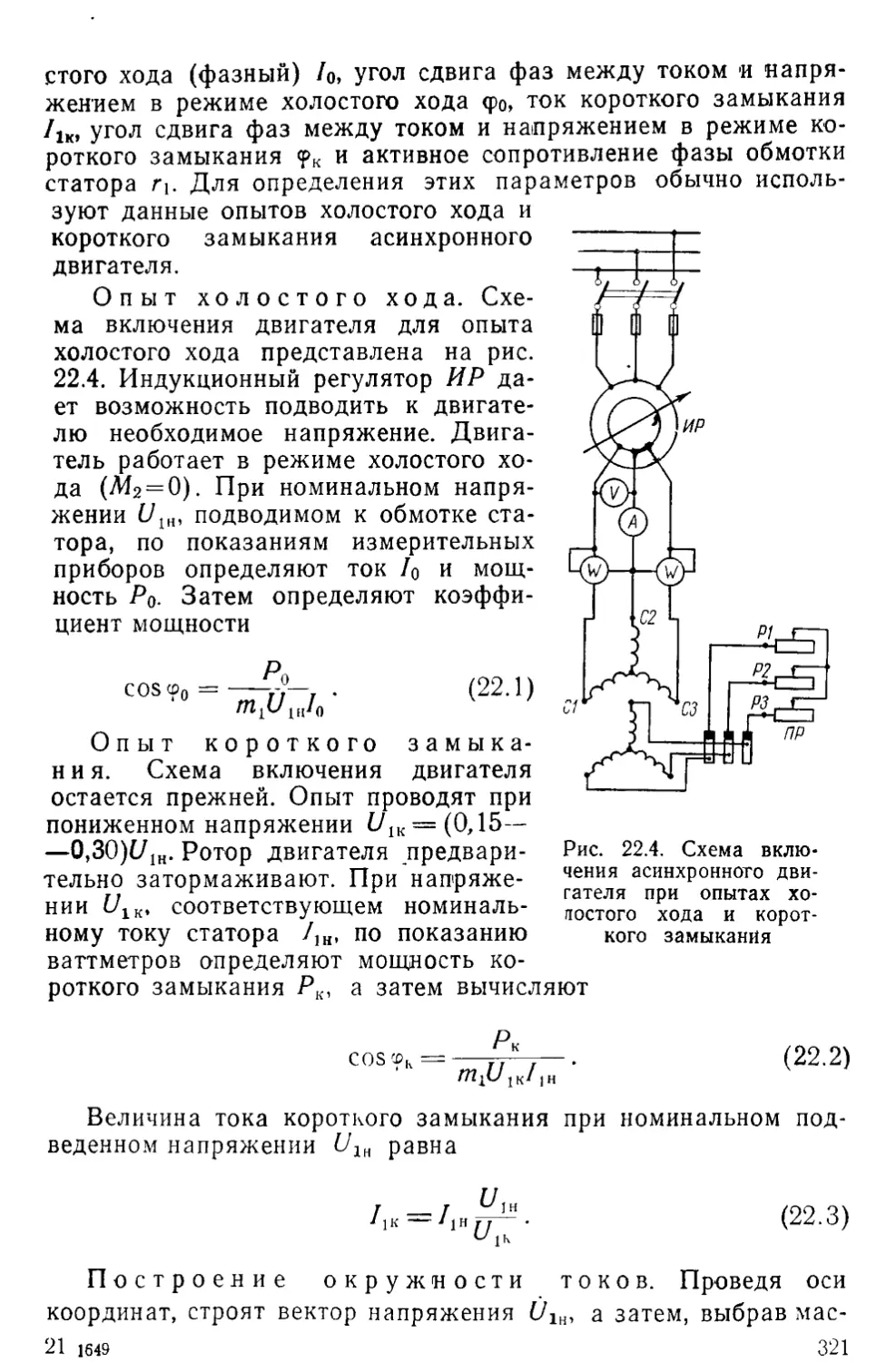
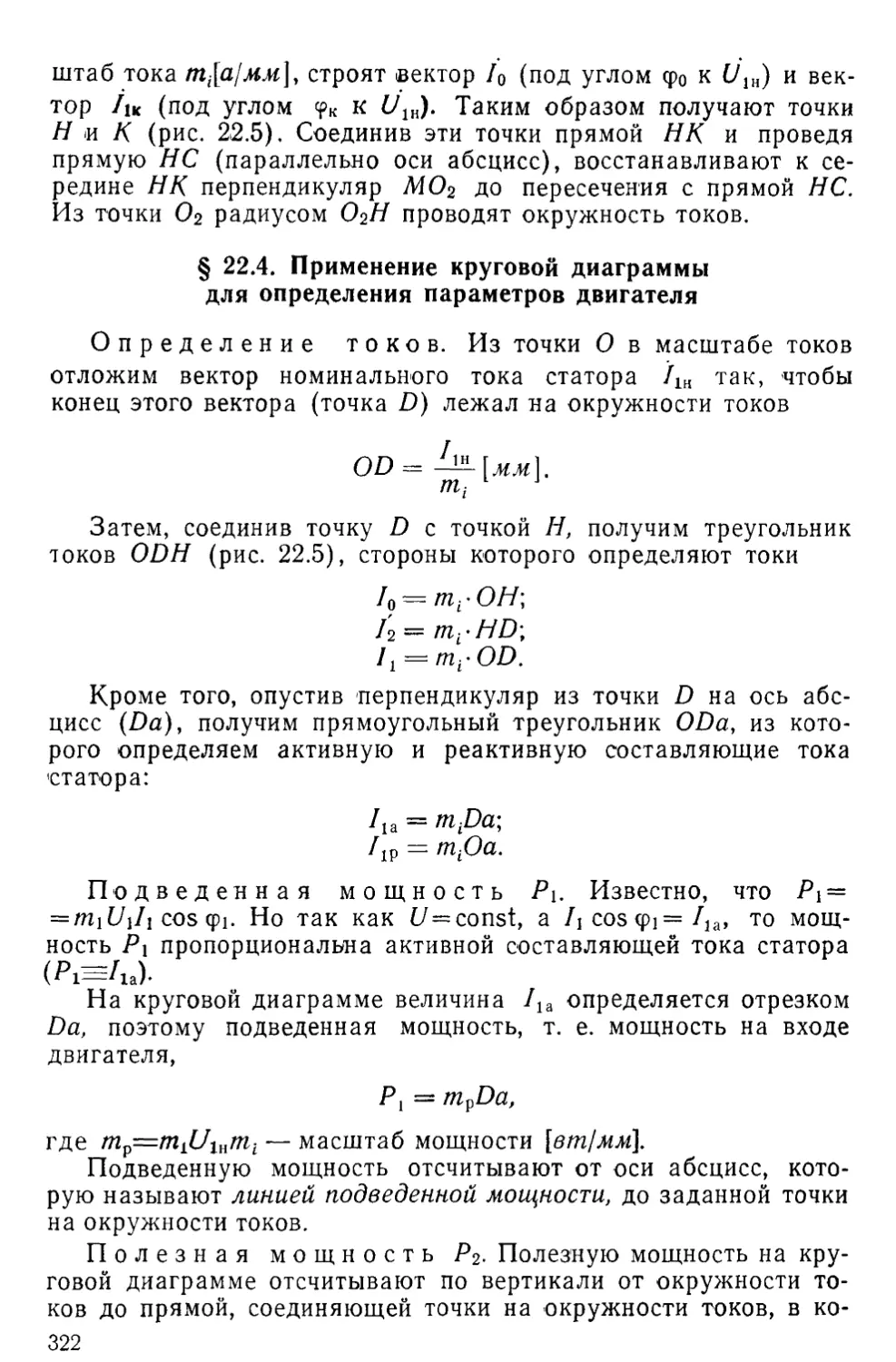
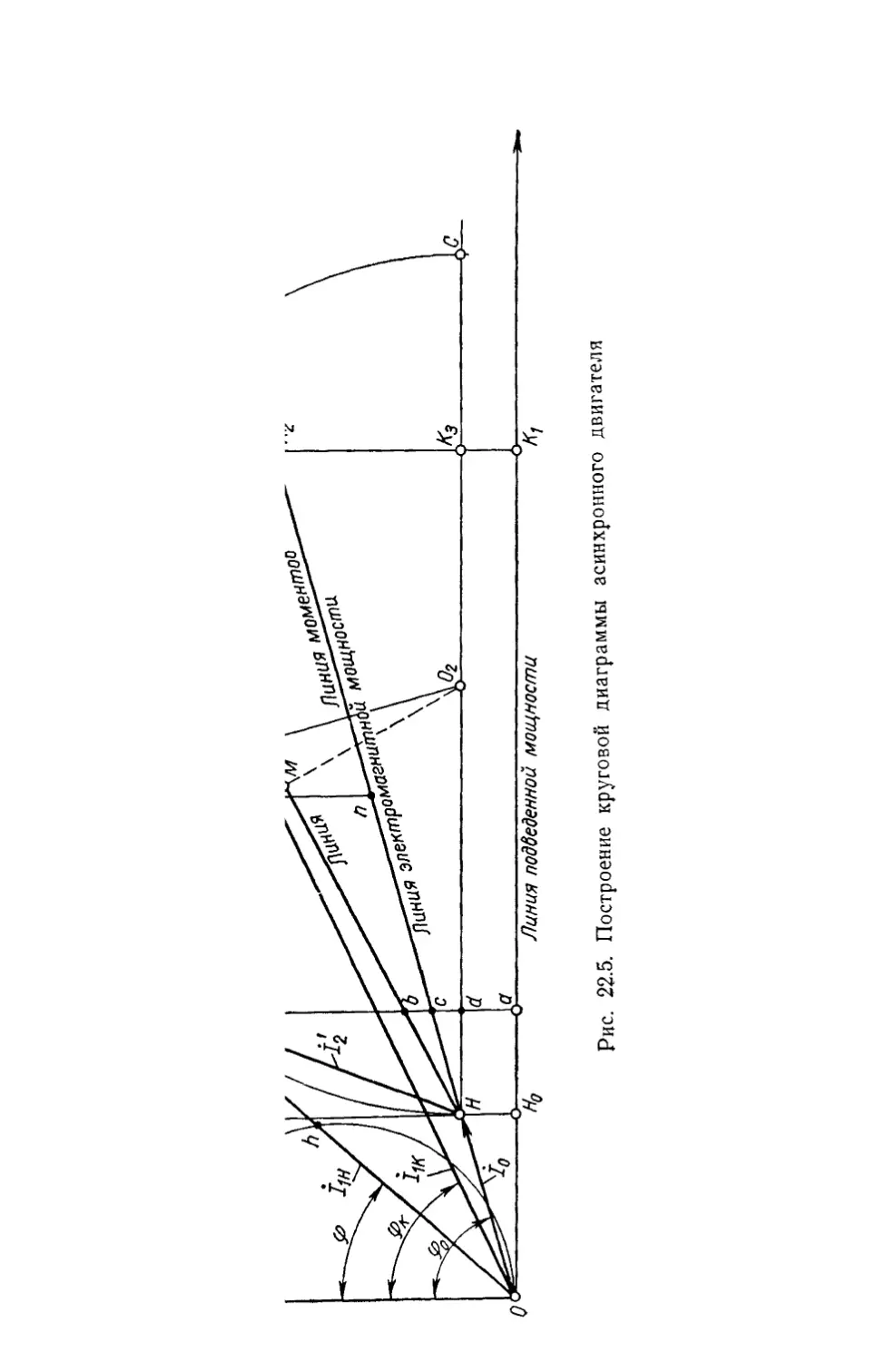
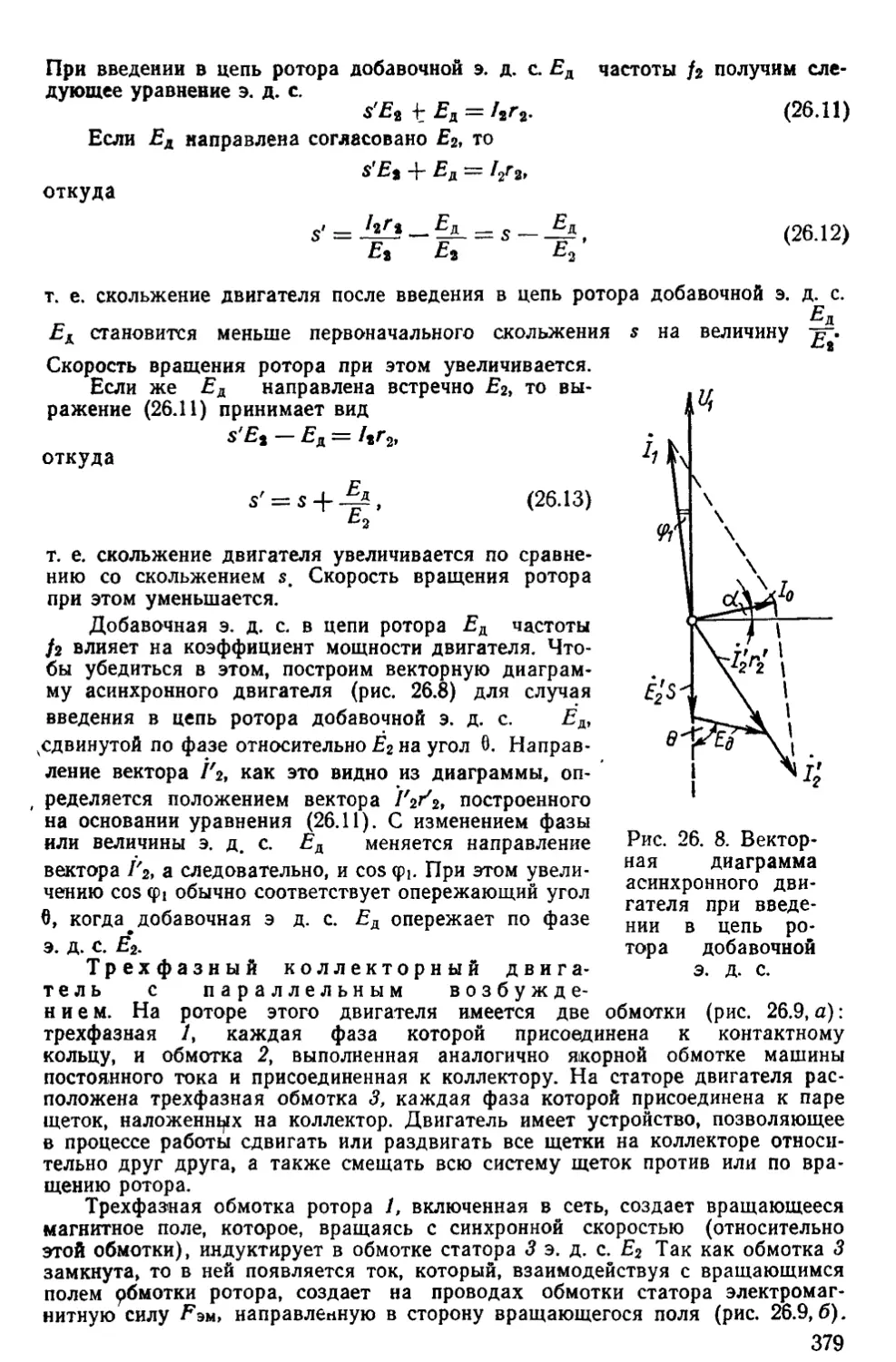
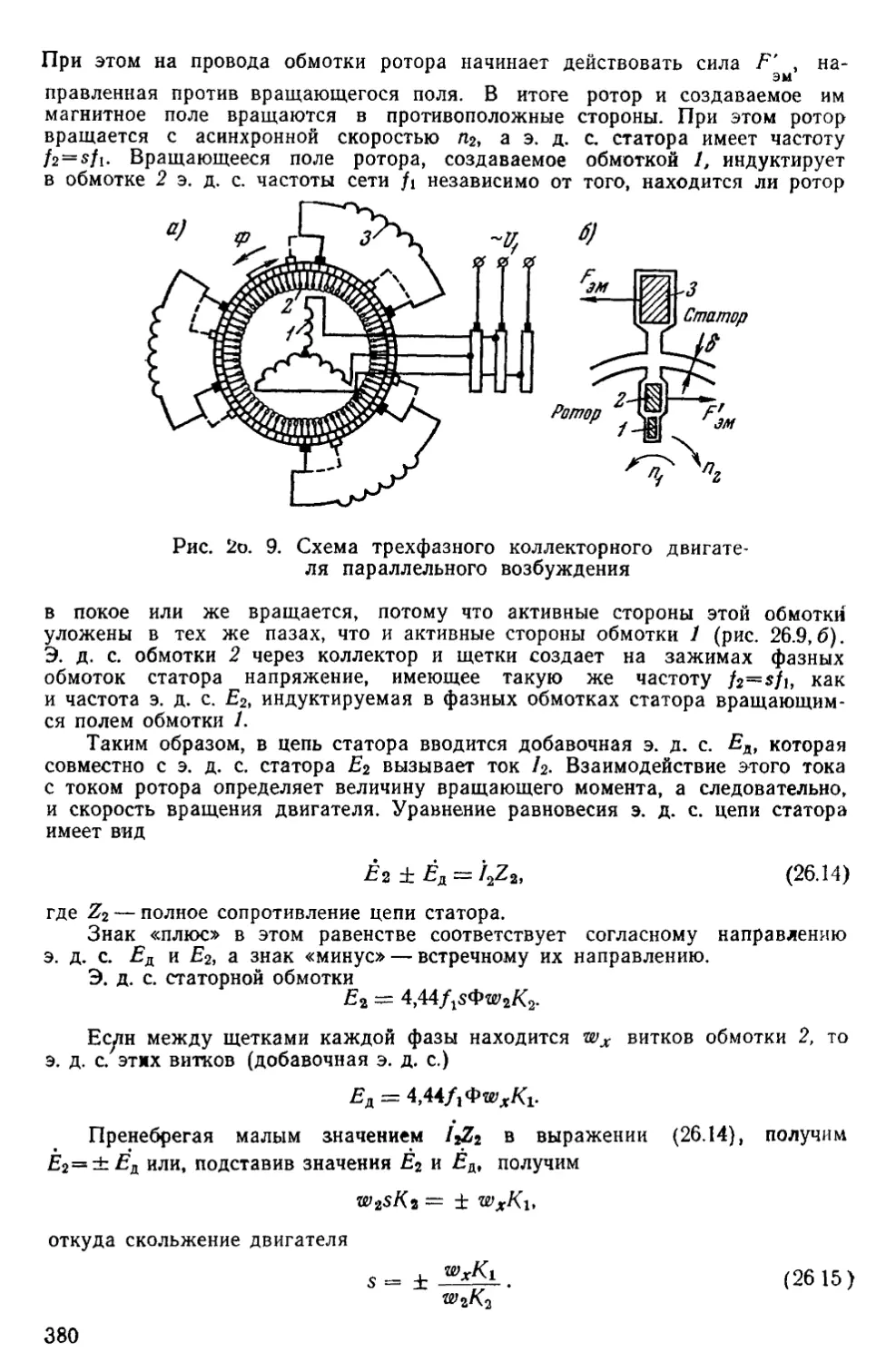
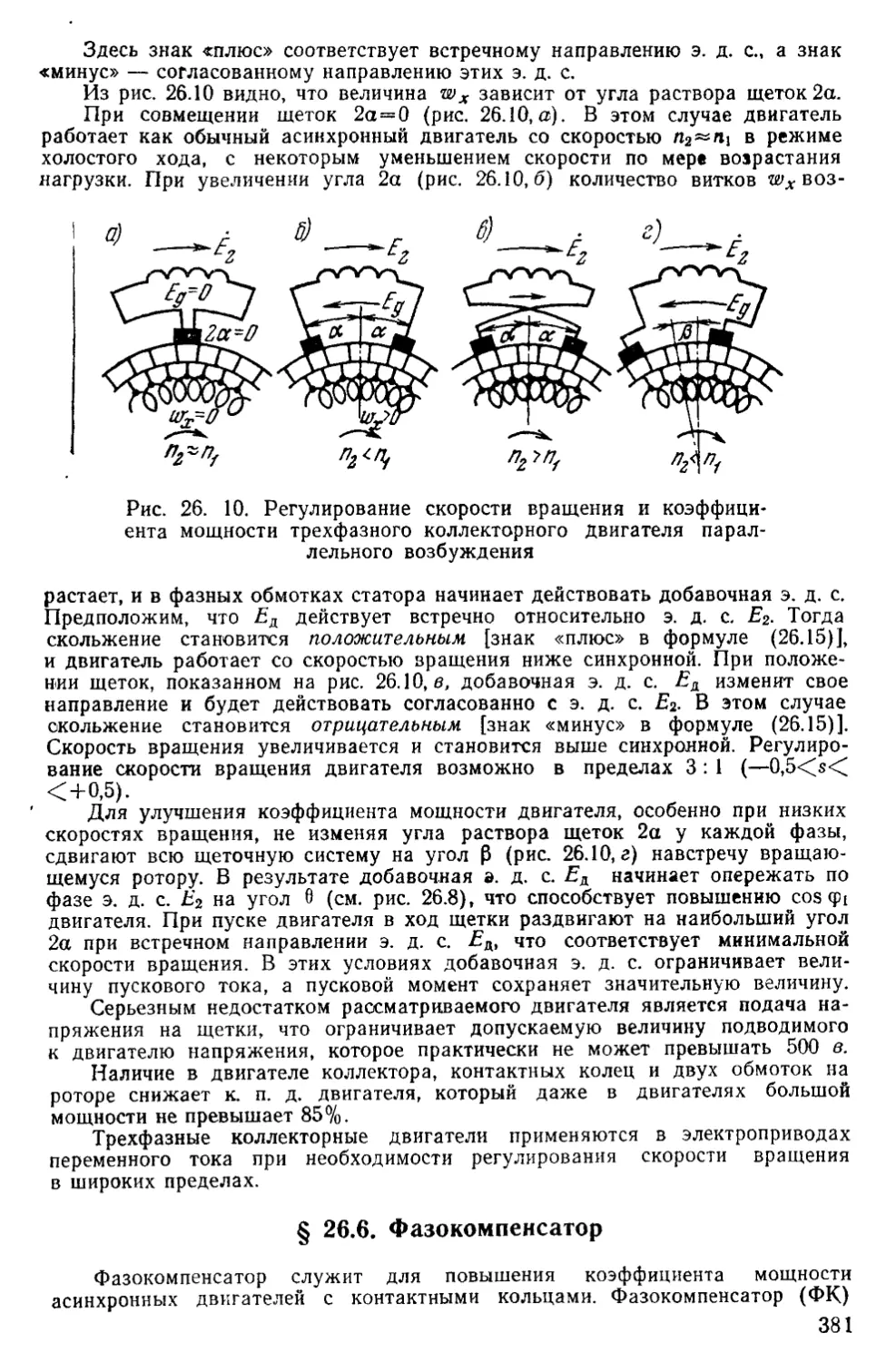
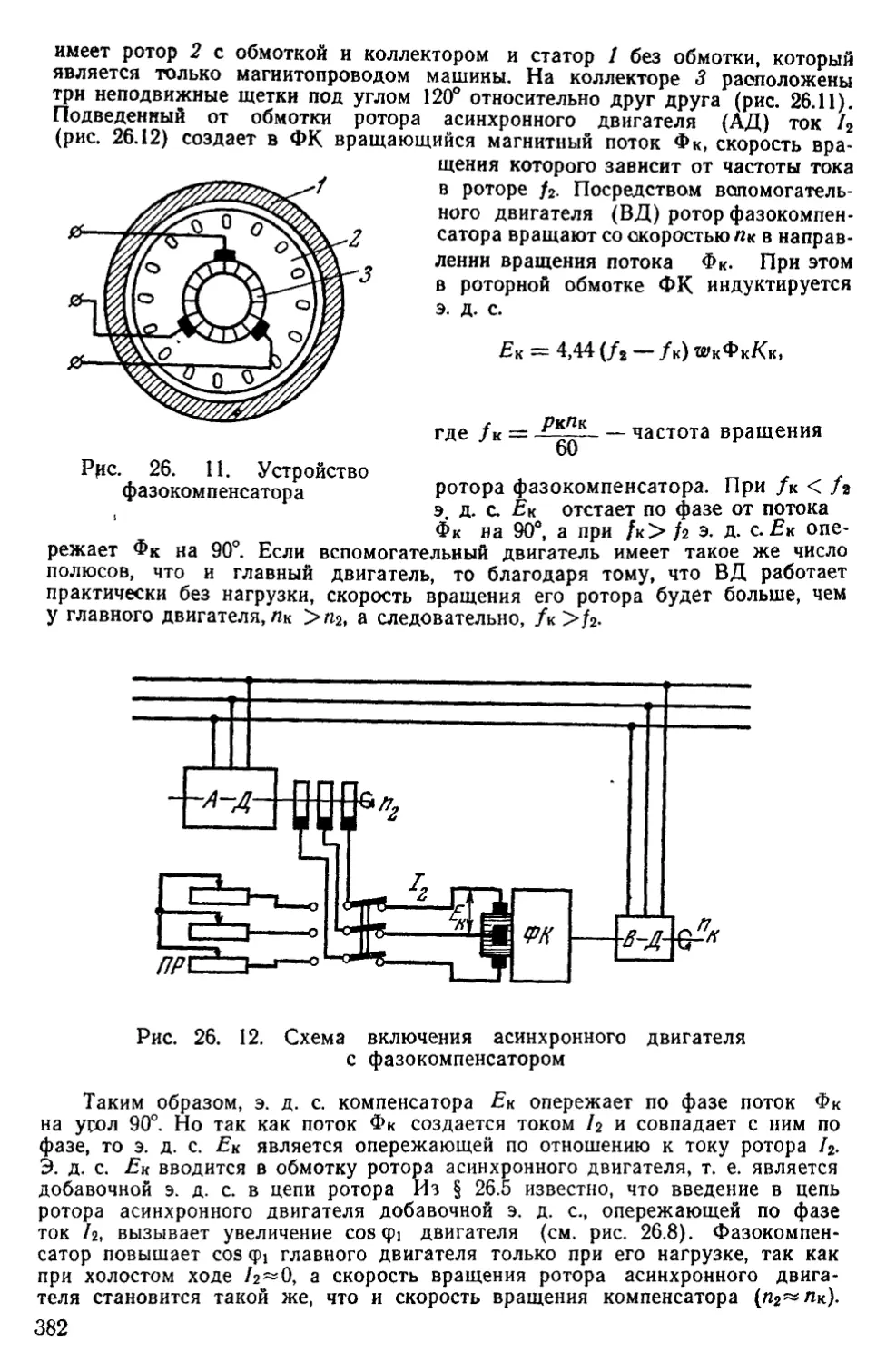
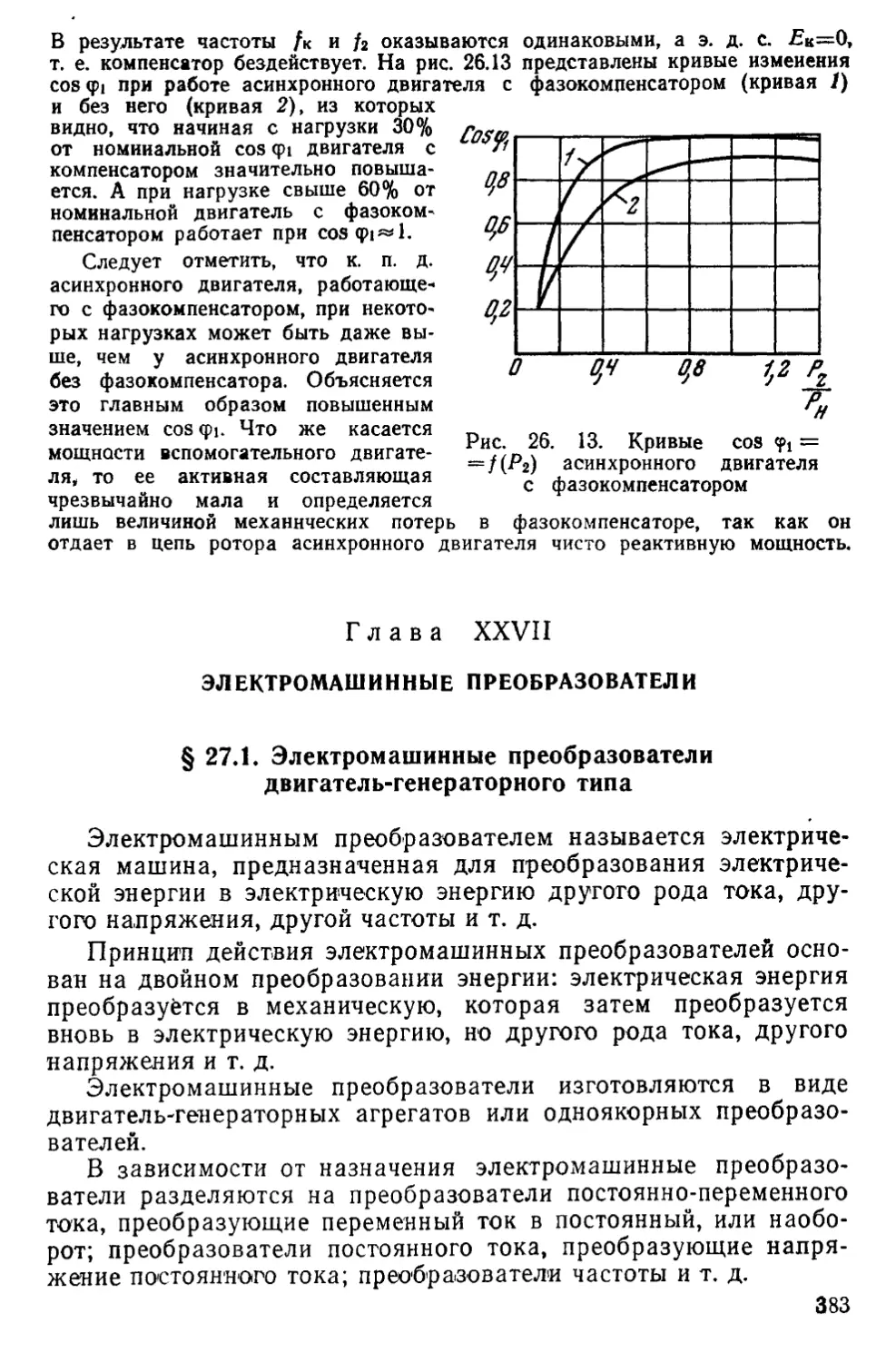
Текст
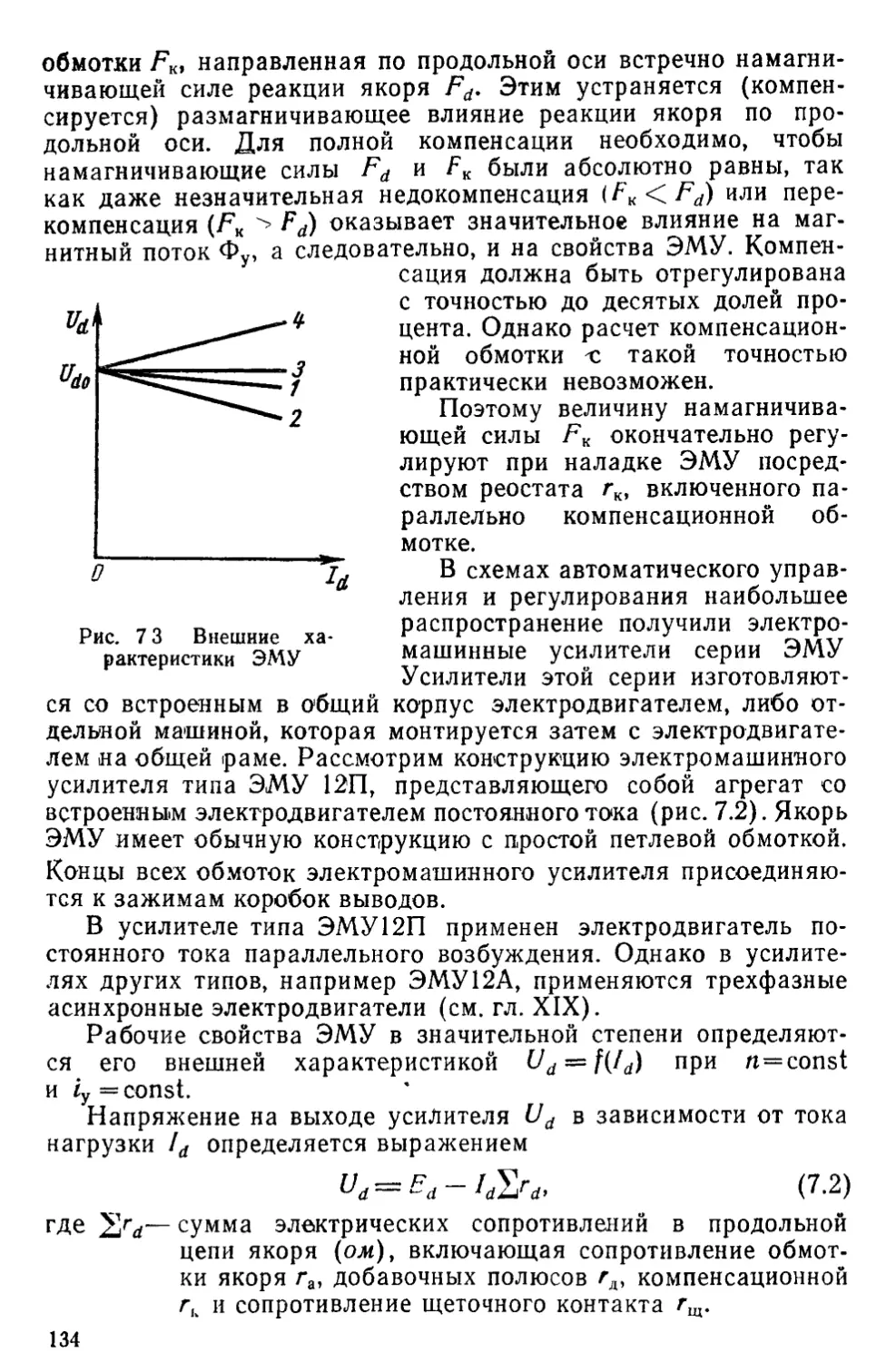
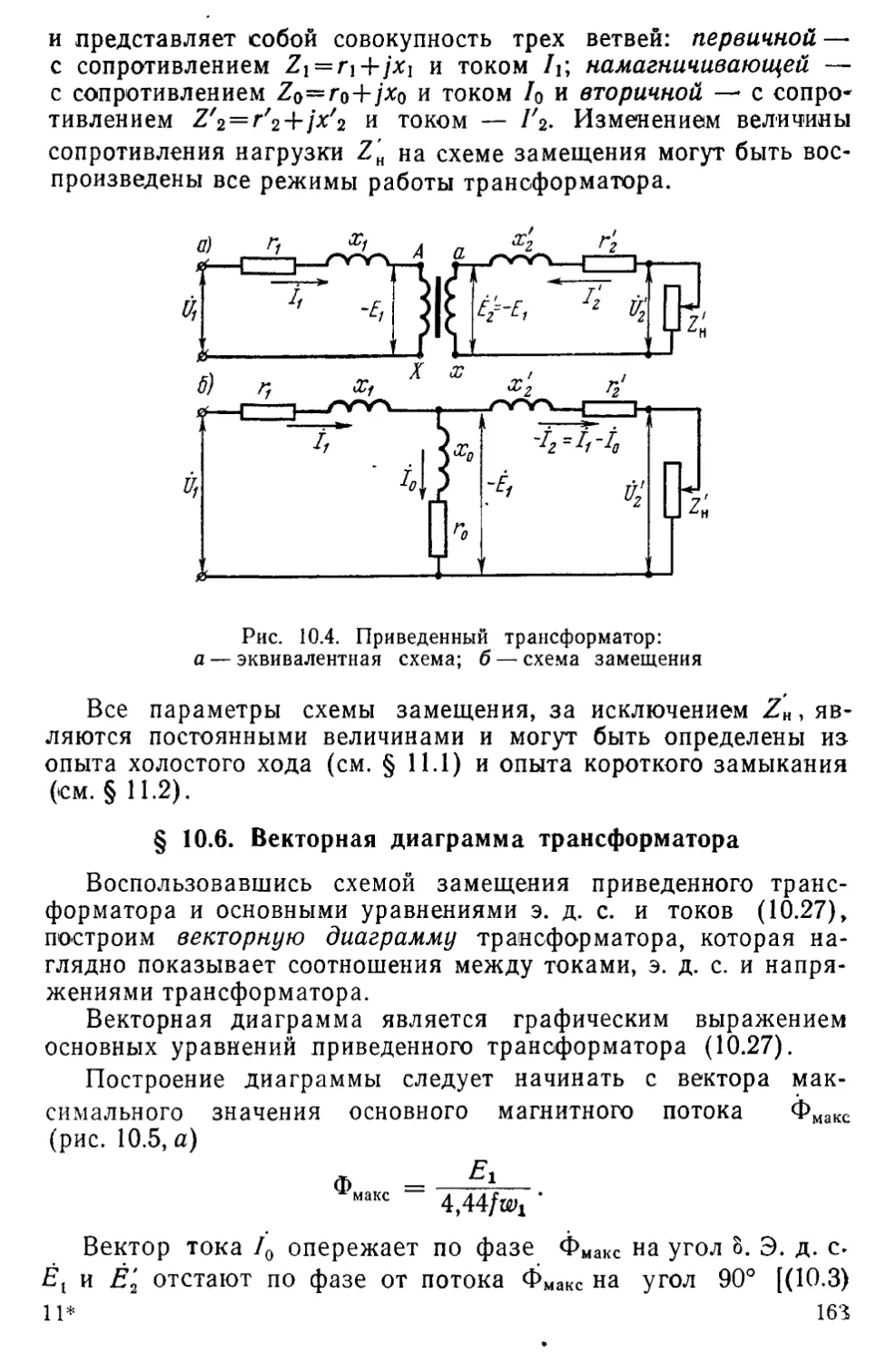
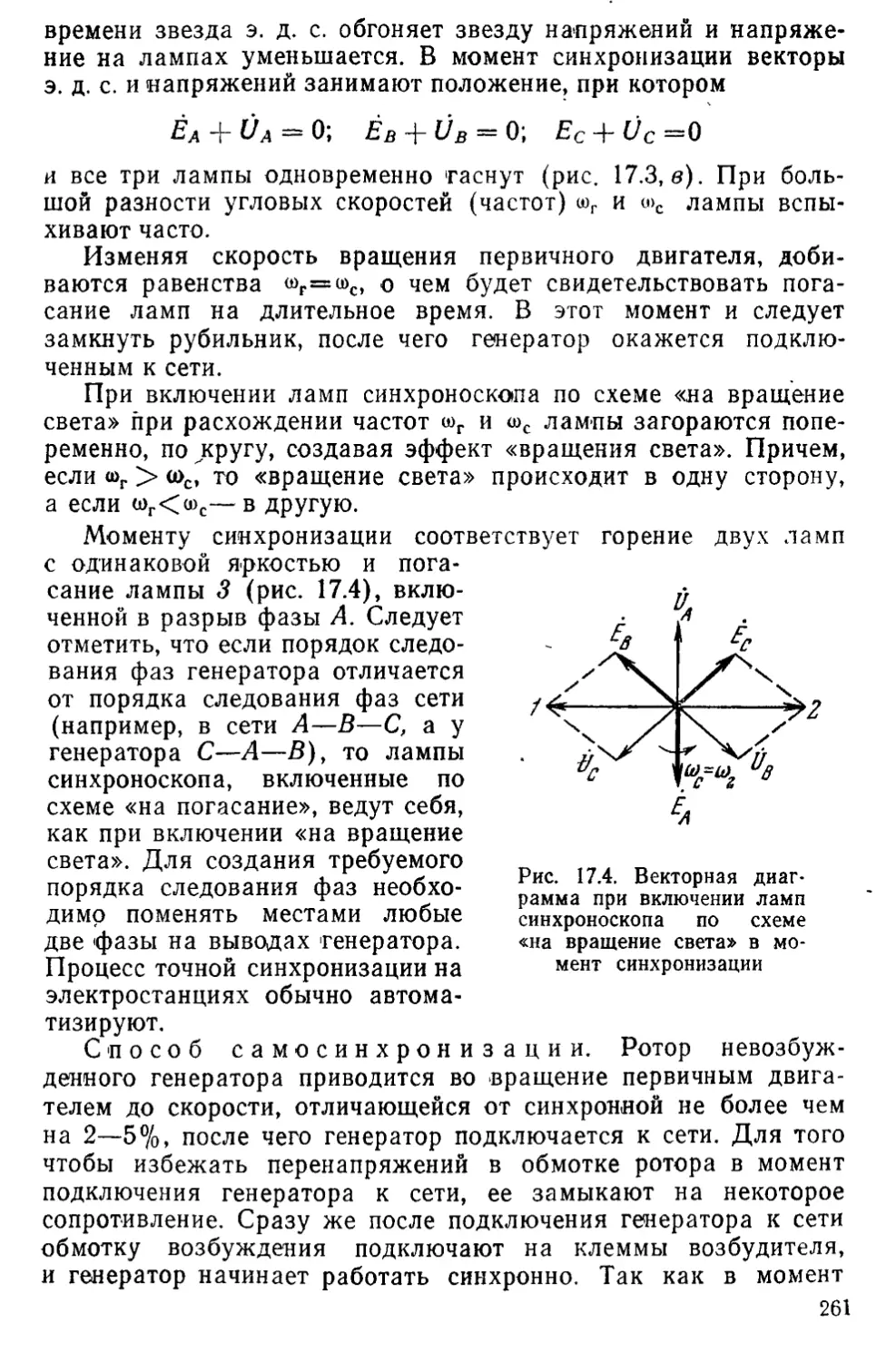
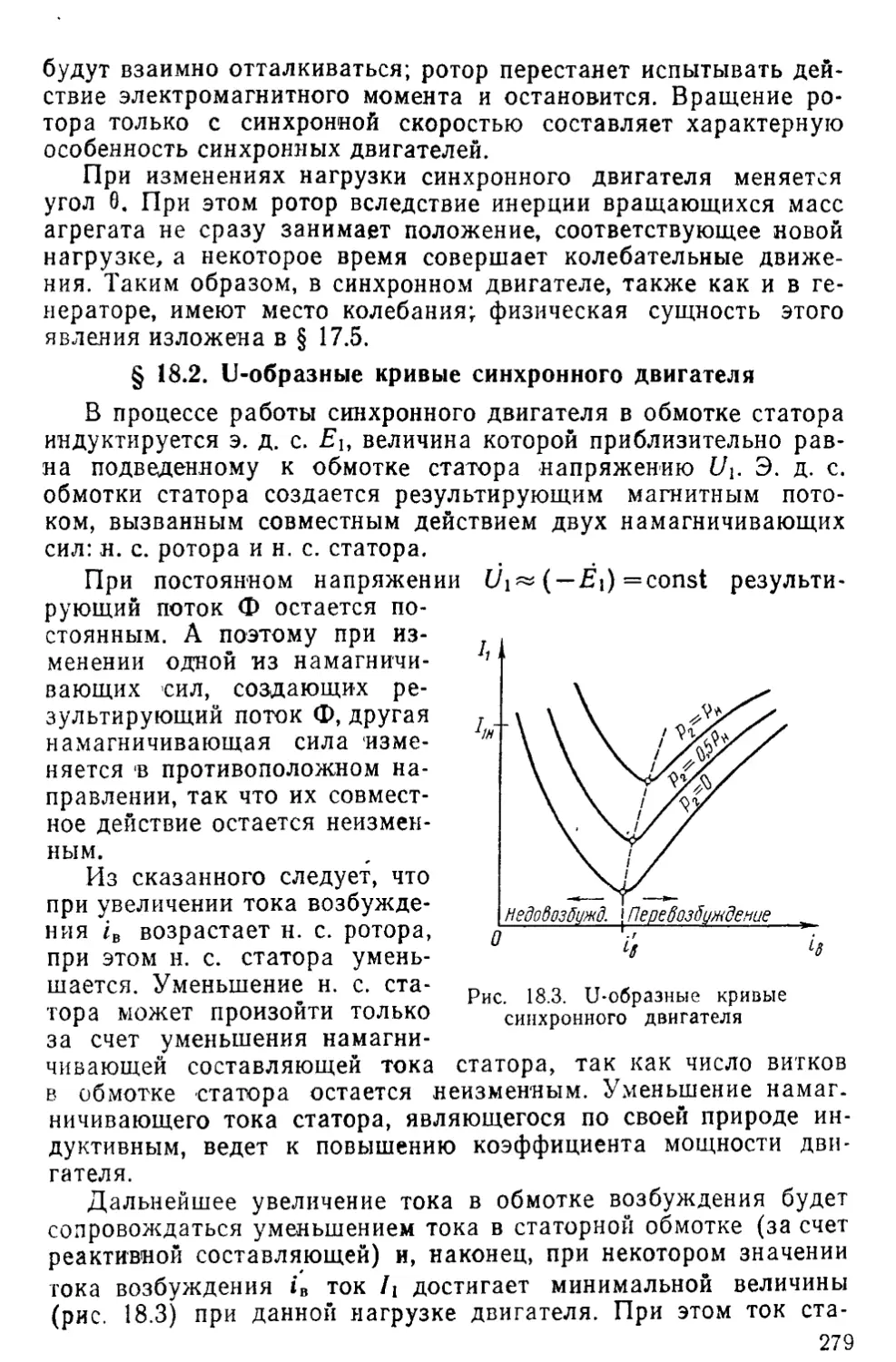
М. М. КАЦМАН
ЭЛЕКТРИЧЕСКИЕ
МАШИНЫ
И ТРАНСФОРМАТОРЫ
Издание третье
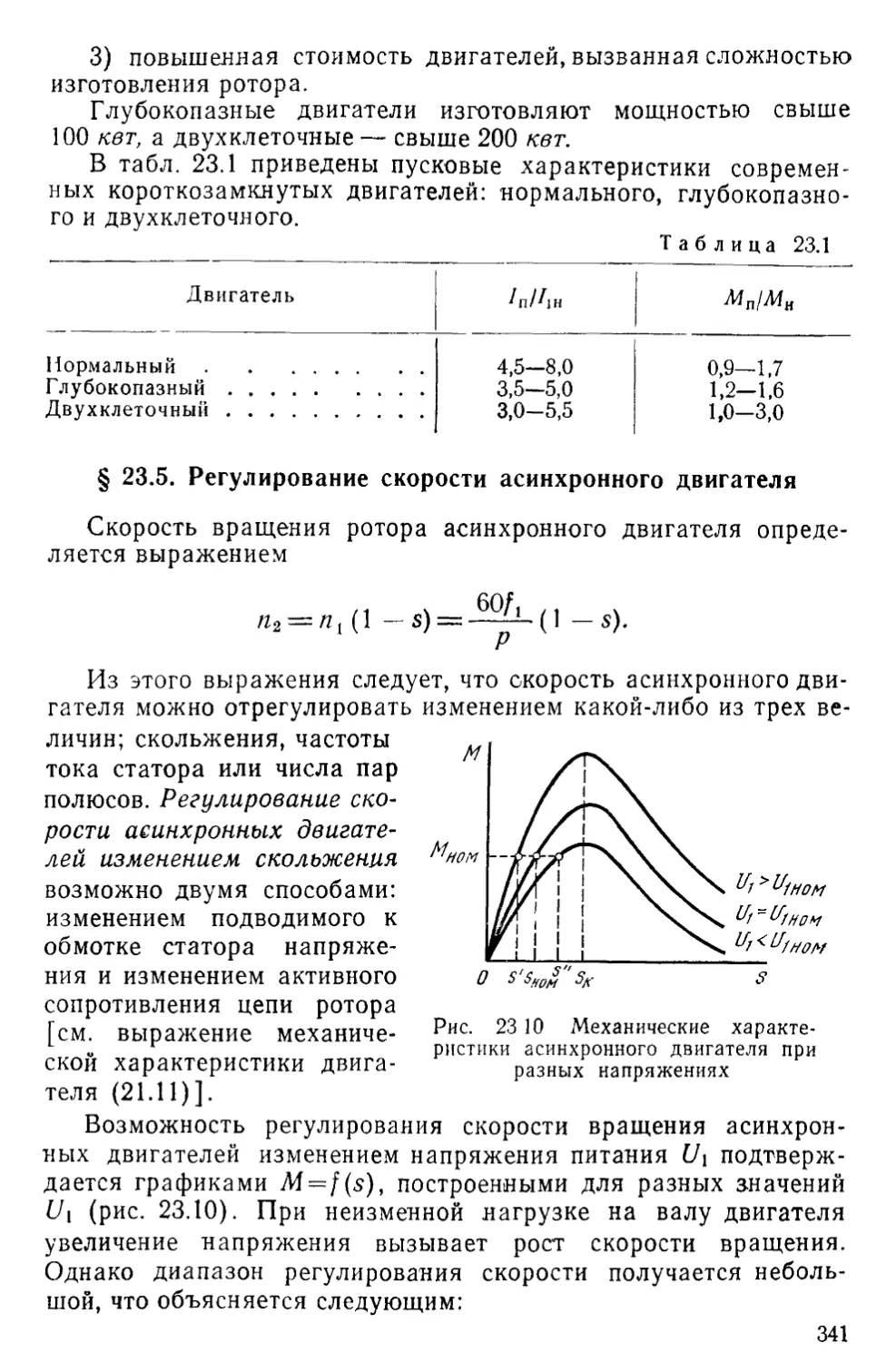
Допущено
Министерством высшего и среднего
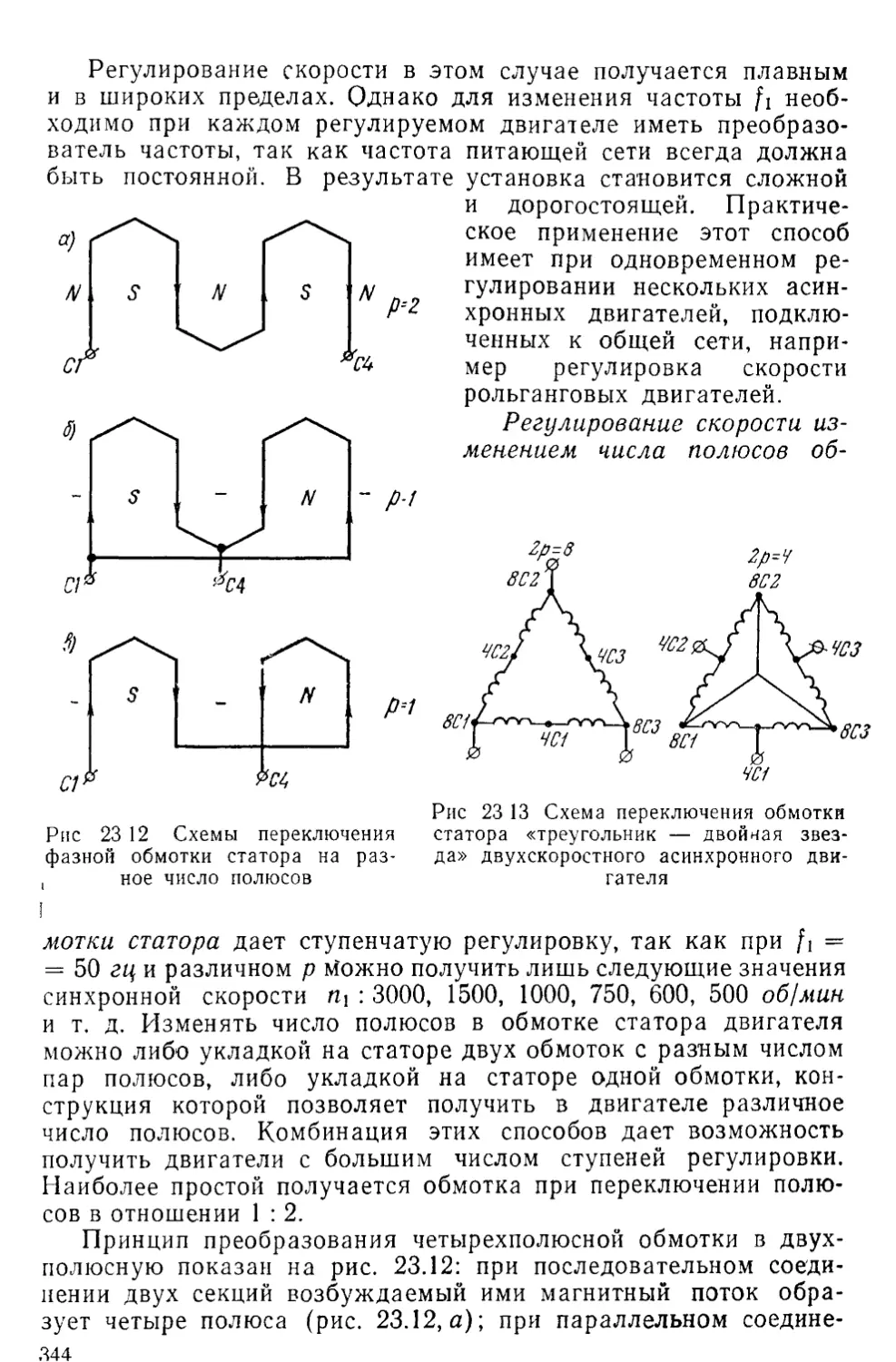
специального образования СССР
в качестве учебника для энергетических
и электротехнических специальностей техникумов
„ВЫСШАЯ ШКОЛА"
Москва—-1971
6П2.1 081
К12
УДК 621 313/314
Кацман М. М.
К12
Электрические машины и трансформаторы
Учебник для техникумов для электротехнических и энергетиче-
ских специальностей М, «Высшая школа», 1971, 416 стр с илл.
В книге излагаются основные сведения по теории и эксплуата
цни электрических машин и трансформаторов общего применения,
а также специализированных машин, применяемых в устройствах
автоматики (исполнительные двигатели, тахогенераторы, сельсины
и электромашинные усилители).
Учебник предназначен для учащихся техникумов энергетических
и электротехнических специальностей, а также может быть исполь-
зован специалистами, желающими ознакомиться с вопросами теории
и эксплуатации электрических машин.
6П2.1.081
Рецензент профессор В. Е. Доценко
3-3-10
БЗ-41/5-7*
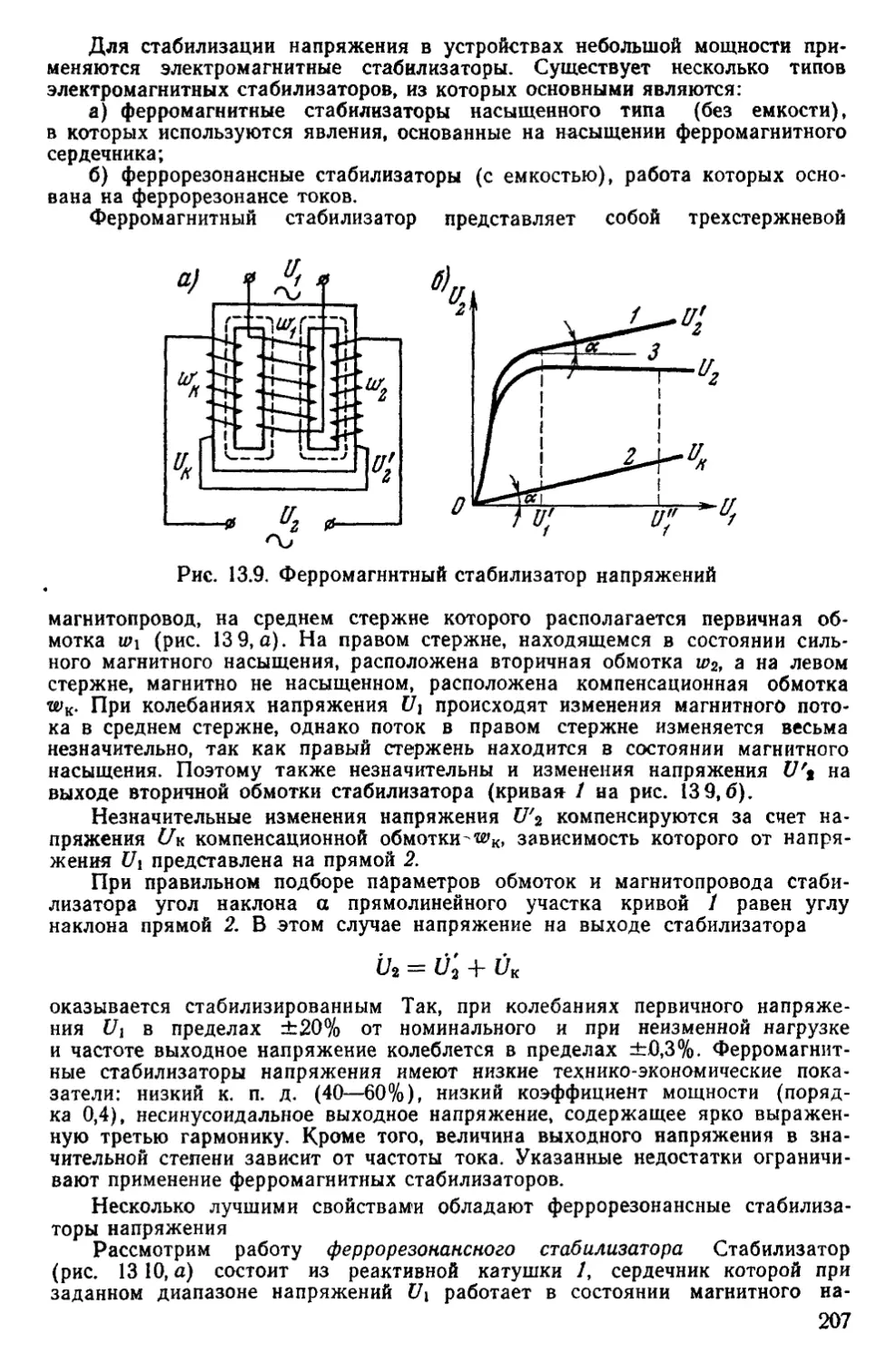
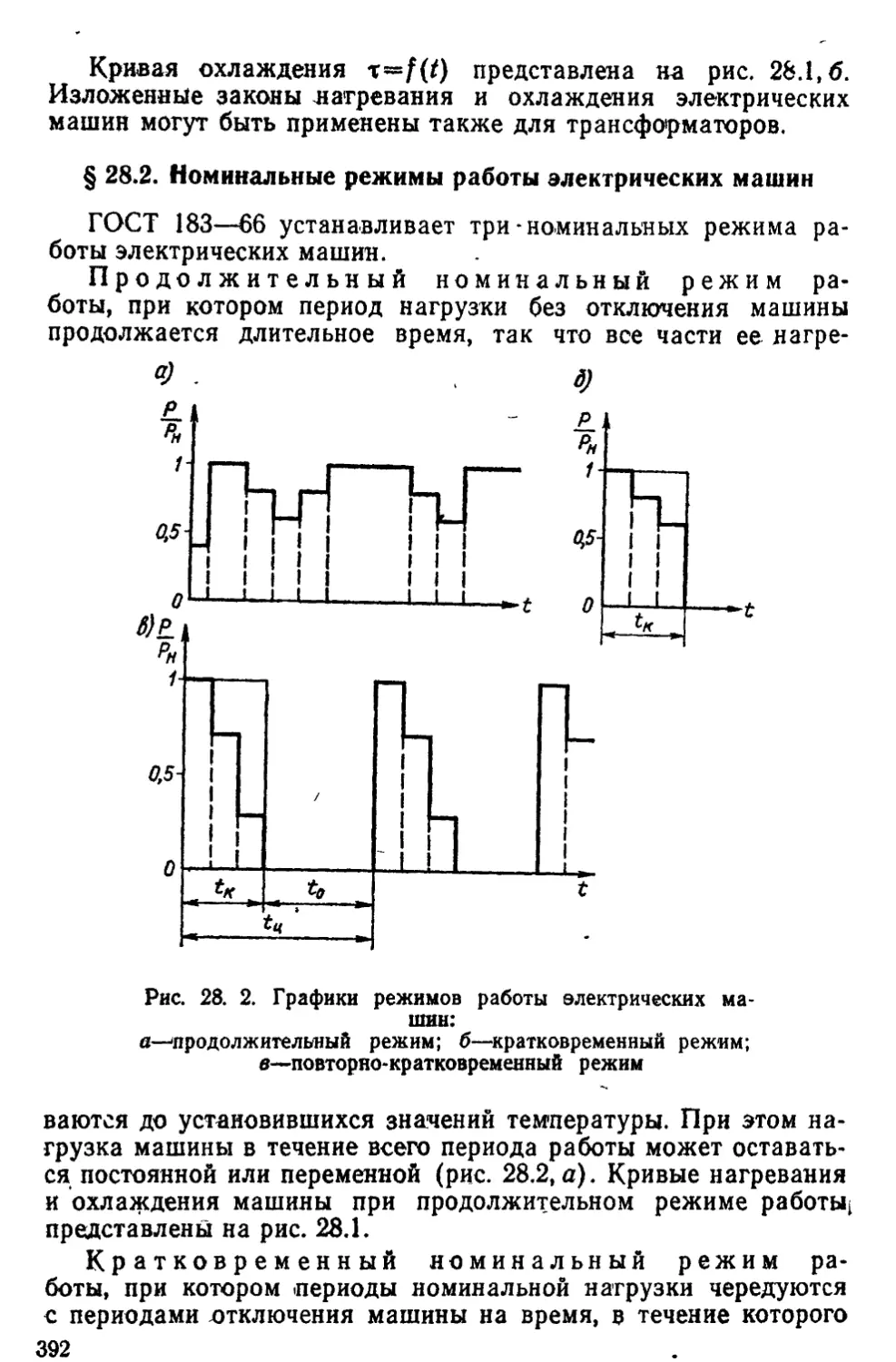
ПРЕДИСЛОВИЕ
Настоящая книга представляет собой учебник для учащихся
техникумов энергетических и электротехнических специаль-
ностей. Книга содержит основные сведения по устройству, прин-
ципу действия и физическим основам работы электрических
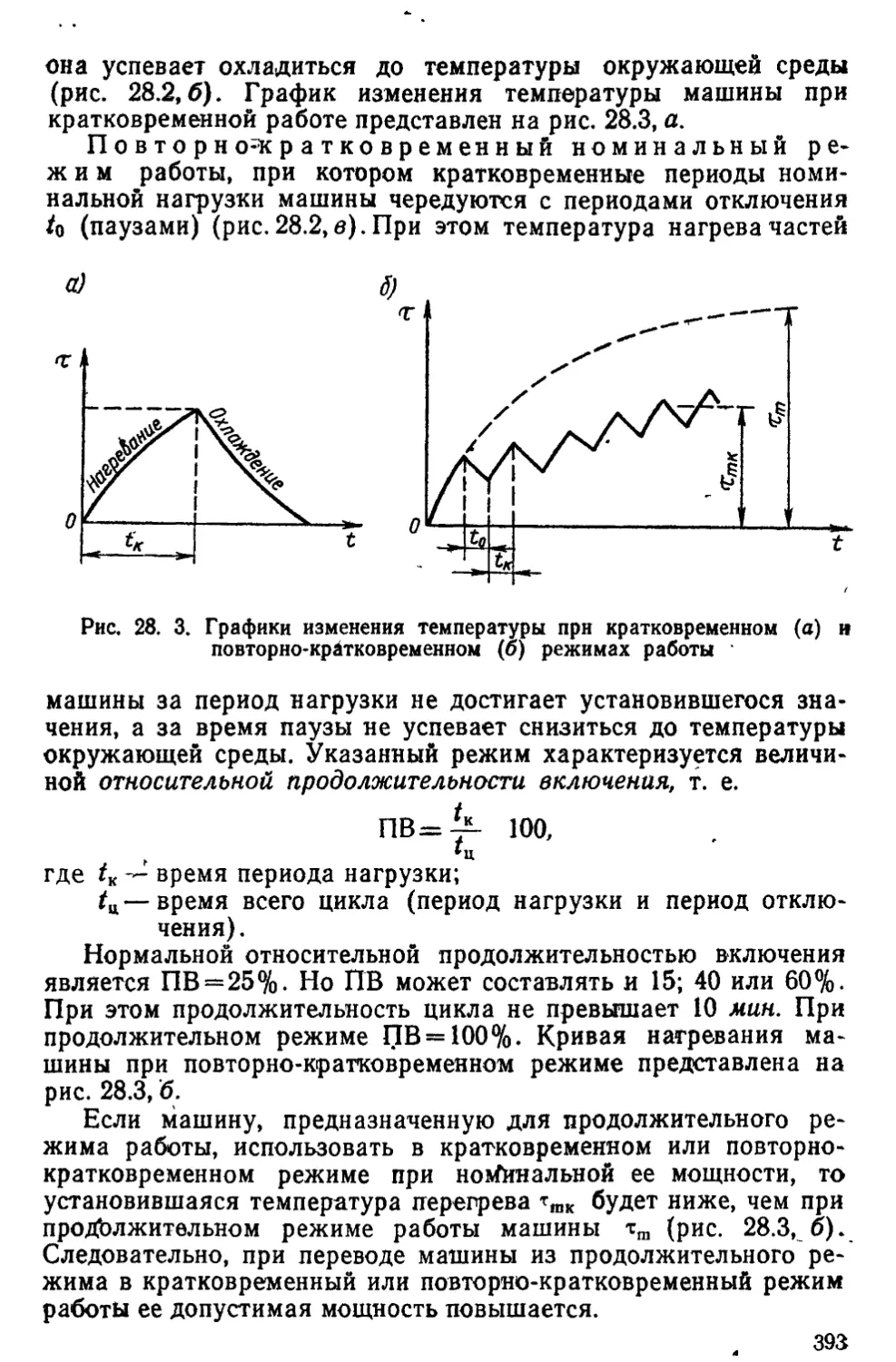
машин и трансформаторов. При этом, наряду с машинами обще-
го применения, являющимися основой современной энергетики
и электропривода, в книге имеются сведения по некоторым спе-
циализированным машинам, которые могут встретиться в прак-
тической деятельности будущего специалиста.
Учитывая назначение книги, автор стремился к наиболее
полному изложению физической сущности процессов, происхо-
дящих в электрических машинах и трансформаторах.
Книга содержит достаточное количество примеров решения
задач, построения диаграмм, графиков и т. п., что будет весьма
полезным для читателей, изучающих настоящий курс самостоя-
тельно Многочисленные отзывы читателей на предыдущие изда-
ния подтвердили целесообразность принятой методики изложе-
ния материала. В настоящем издании книга не подвергалась
значительной переработке.
Автор выражает признательность заведующему кафедрой
электрических машин МИИТ проф. В. Е. Доценко за полезные
замечания, способствовавшие, улучшению книги. Автор считает
также своим приятным долгом поблагодарить проф. Д. В. Све-
чарника и доц. Ф. М. Юферова за их ценные советы.
Автор будет признателен читателям, которые пришлют свои
критические замечания по адресу: Москва, К-51, Неглинная ул.,
д. 29/14, издательство «Высшая школа».
Автор
ВВЕДЕНИЕ
§ 1. Назначение и классификация электрических машин
Электрическая энергия является основным видом энергии,
используемым в народном хозяйстве. Электрические машины,
производящие электроэнергию и потребляющие ее, составляют
основное звено силовой электросистемы.
Возможность изготовления электрической машины мощ-
ностью от нескольких ватт до десятков и даже сотен меговатт
позволяет использовать ее в качестве основной рабочей машины
при электрификации промышленности, транспорта и сельского
хозяйства.
Как и все электромагнитные механизмы, электрическая
машина является преобразователем энергии. При производстве
электроэнергии на тепловых и атомных электростанциях тепло-
вую энергию, полученную при сжигании топлива или в резуль-
тате ядерных реакций, посредством паровой турбины преобра-
зуют в механическую энергию вращения, которая приводит
в действие электрическую машину — генератор. На гидравли-
ческих электростанциях для получения электроэнергии исполь-
зуют энергию воды, поднятой на определенный уровень. Вода,
проходя через гидротурбину, вращает колесо, вал которого
связан с валом генератора. В результате электромагнитных
процессов, происходящих в генераторе, механическая энергия
преобразуется в электрическую.
Значительная часть электрической энергии, потребляемой
различными отраслями хозяйства, преобразуется вновь в ме-
ханическую энергию, необходимую для приведения в действие
машин, механизмов, станков. Это преобразование осуществляется
при помощи электрических машин, называемых электрическими
двигателями.
Использование электрических машин в качестве генераторов
или двигателей является главным (прямым) их применением.
Но электрические машины имеют и другие назначения. Так,
потребление электроэнергии часто связано с преобразованием
рода электрического тока, например переменного тока в по-
стоянный, или же с преобразованием величины напряжения.
Такие преобразования осуществляются посредством электрома-
шинных преобразователей.
Электрические машины используют также и для усиления
мощности электрических сигналов. В этом случае электрическая
машина называется электромашинным усилителем.
5
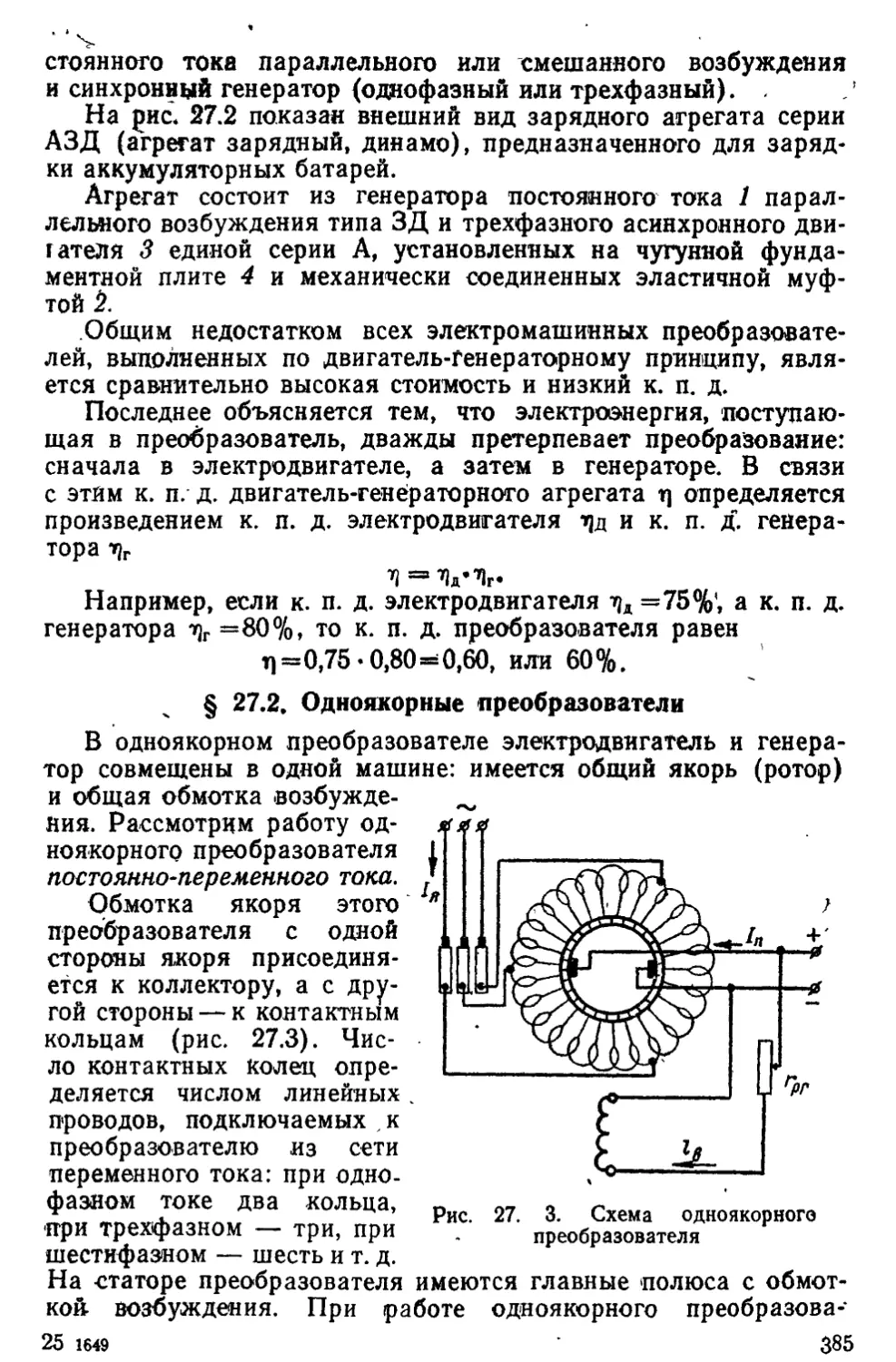
Электрическая машина, используемая для повышения коэф-
фициента мощности электрических установок, называется син-
хронным компенсатором.
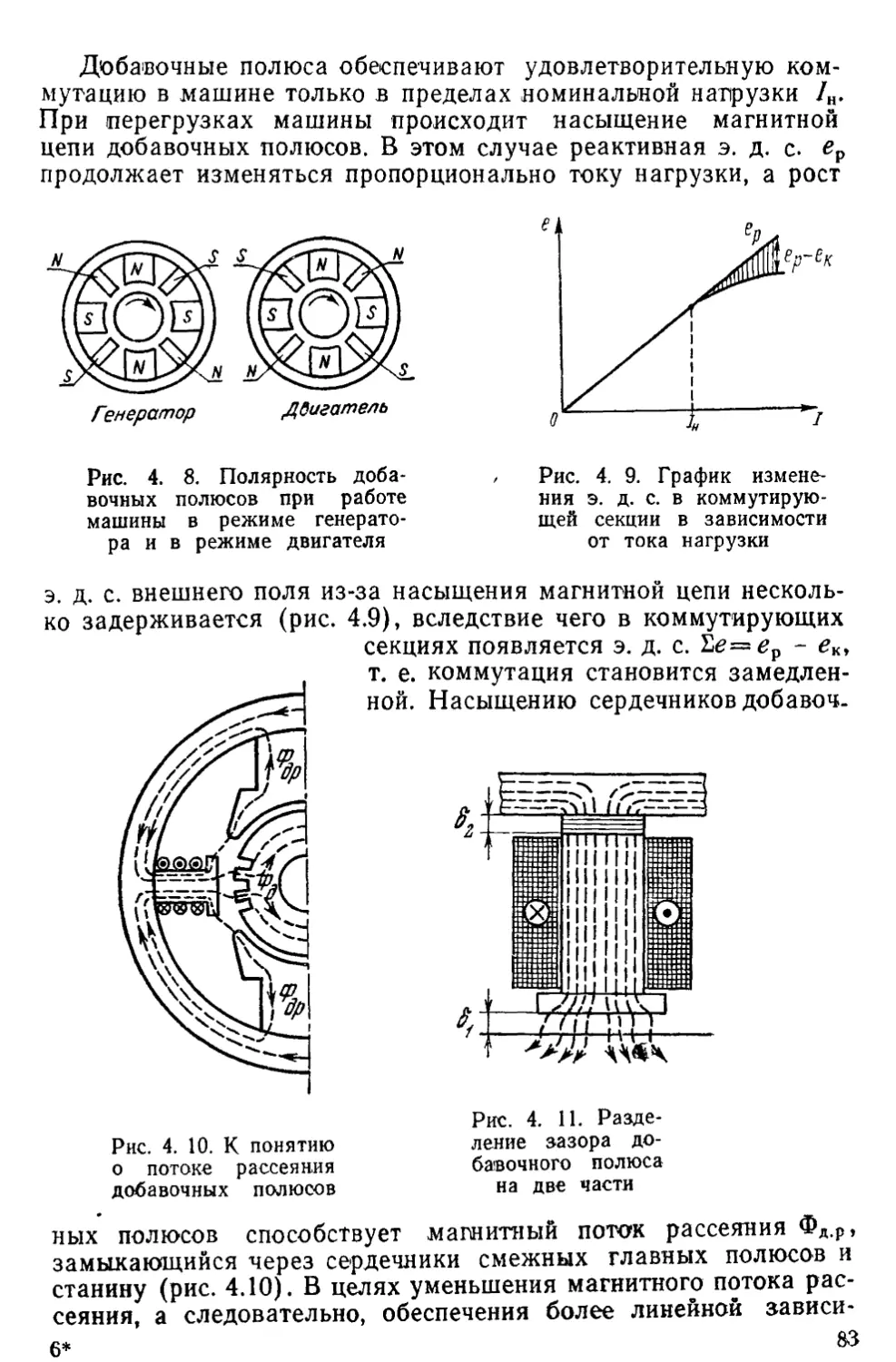
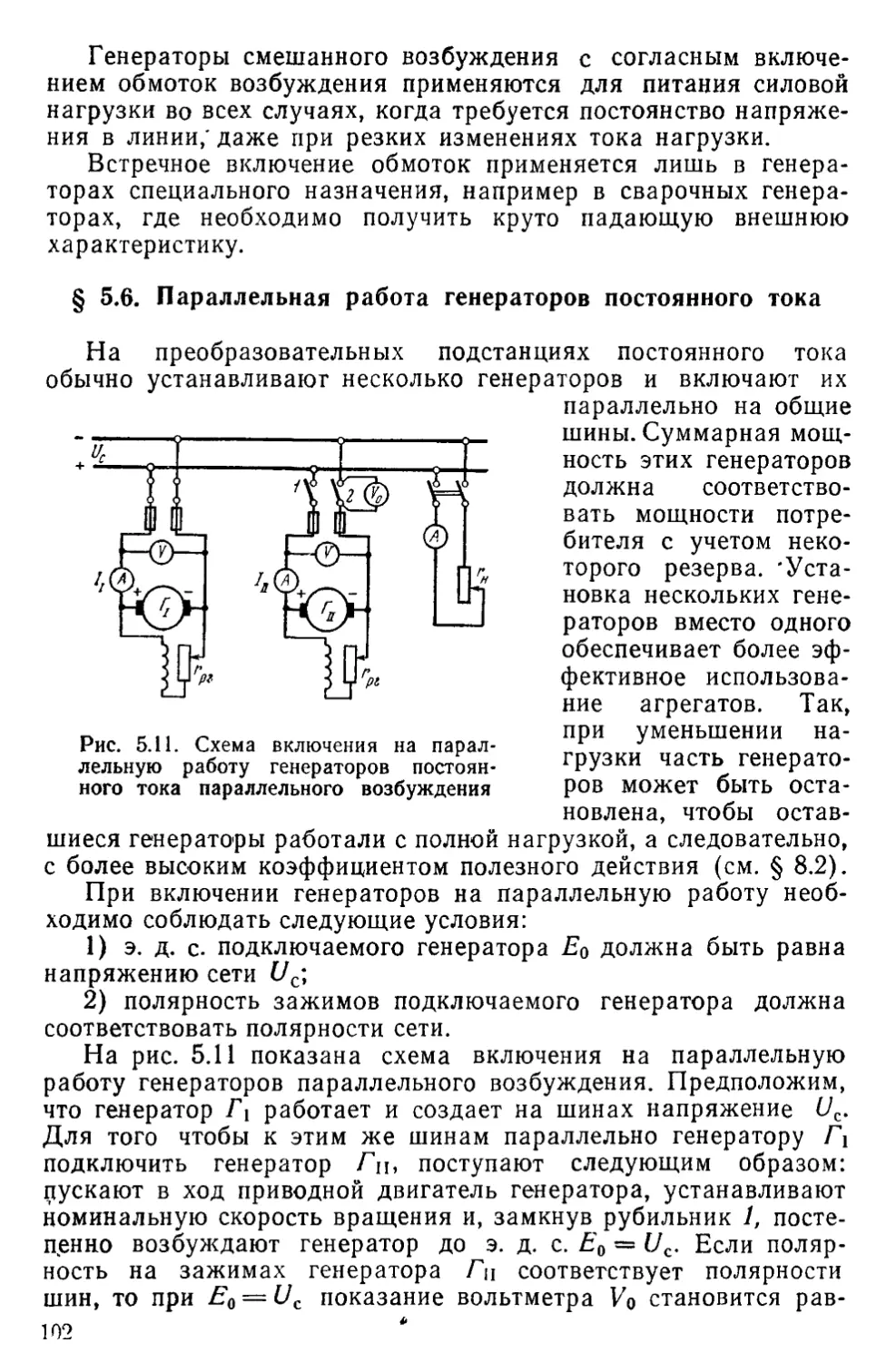
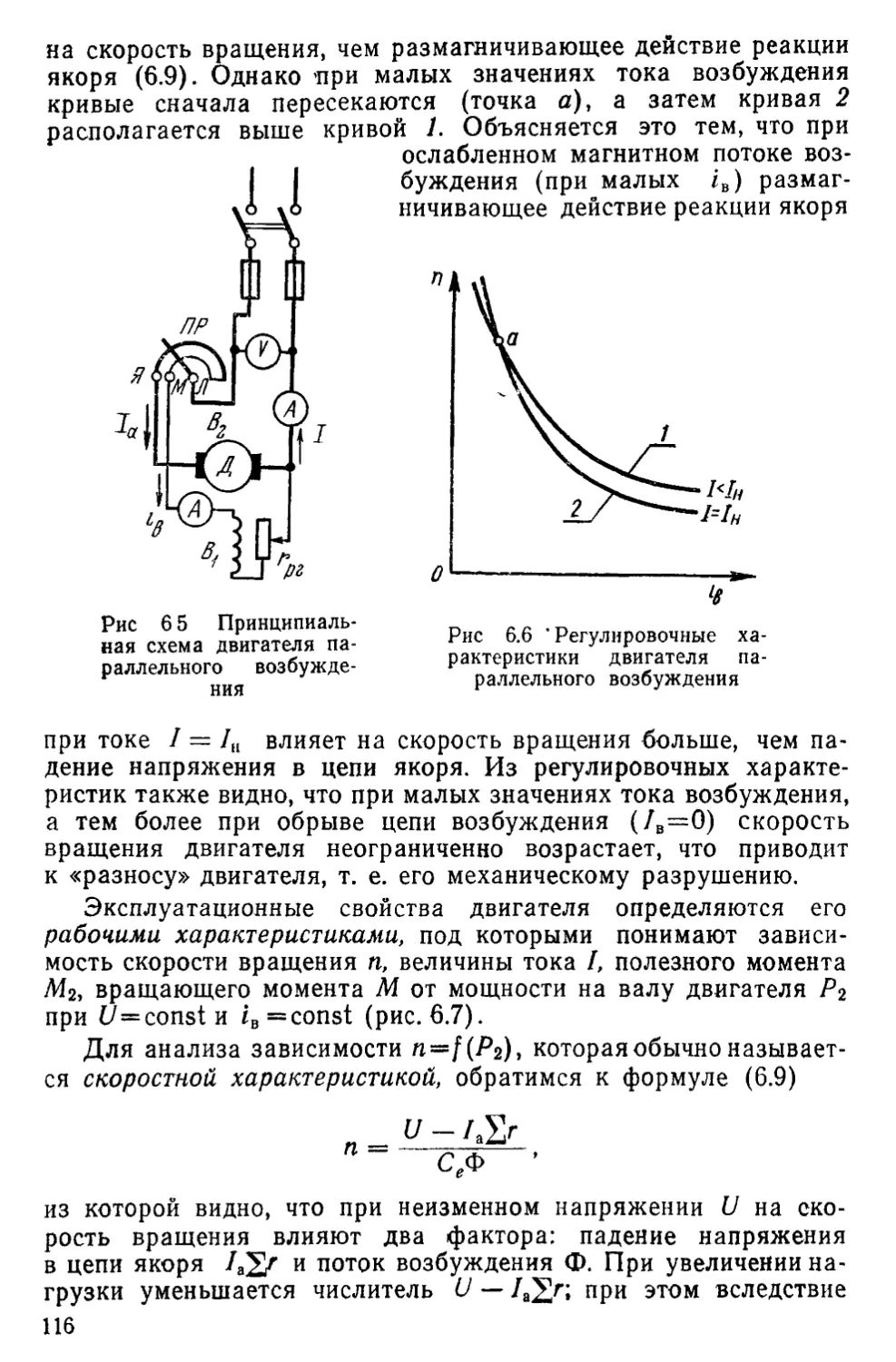
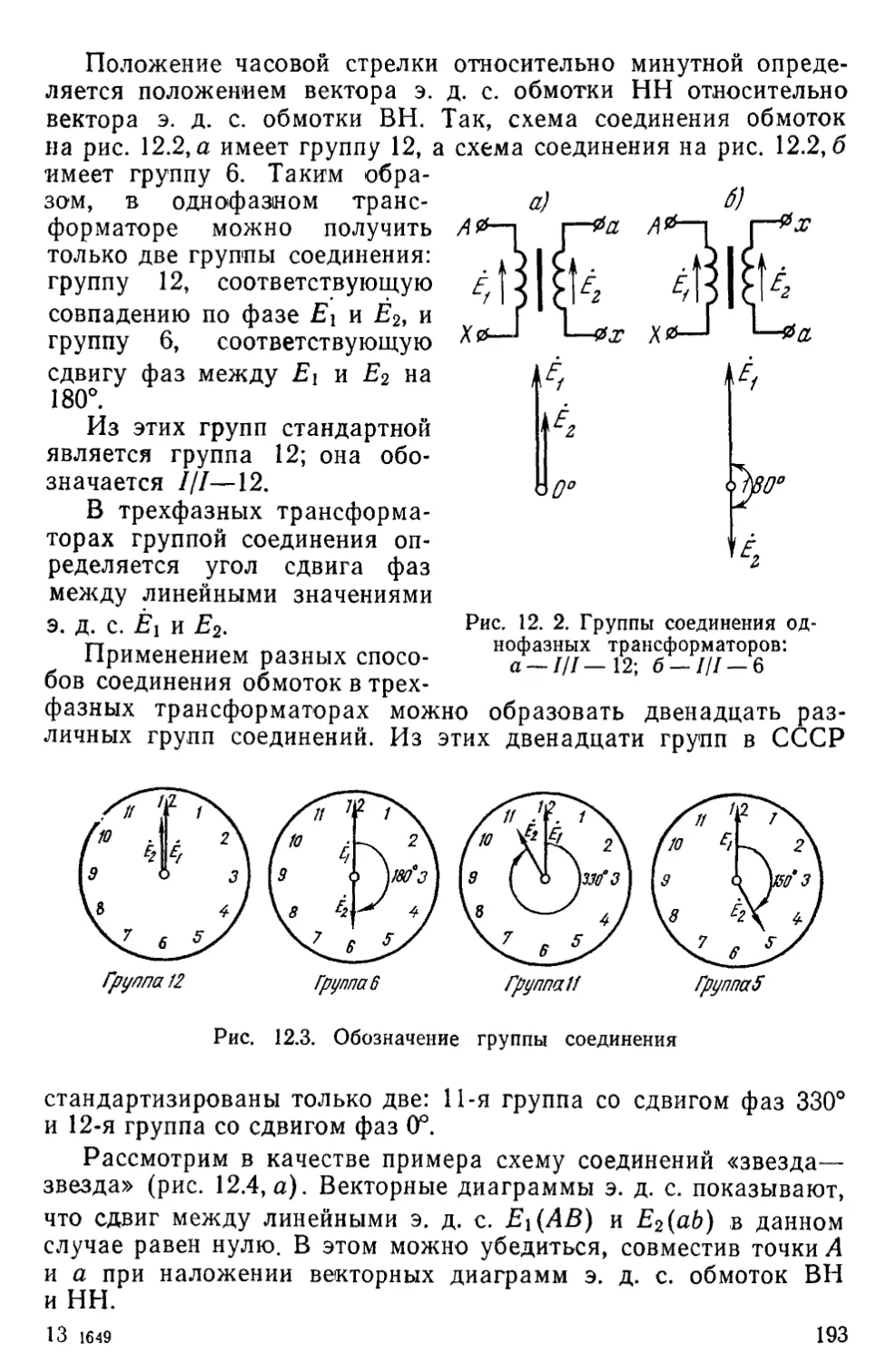
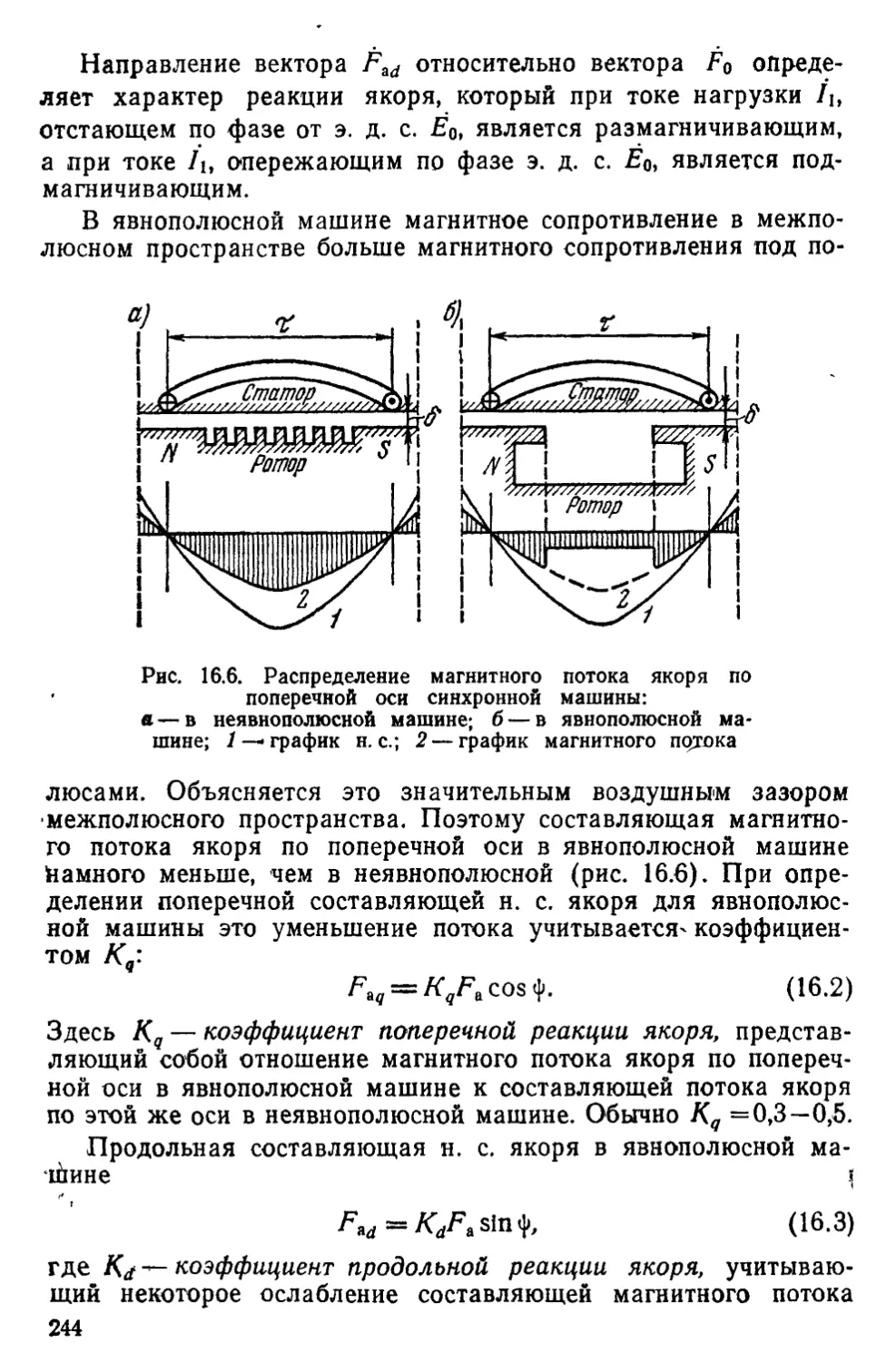
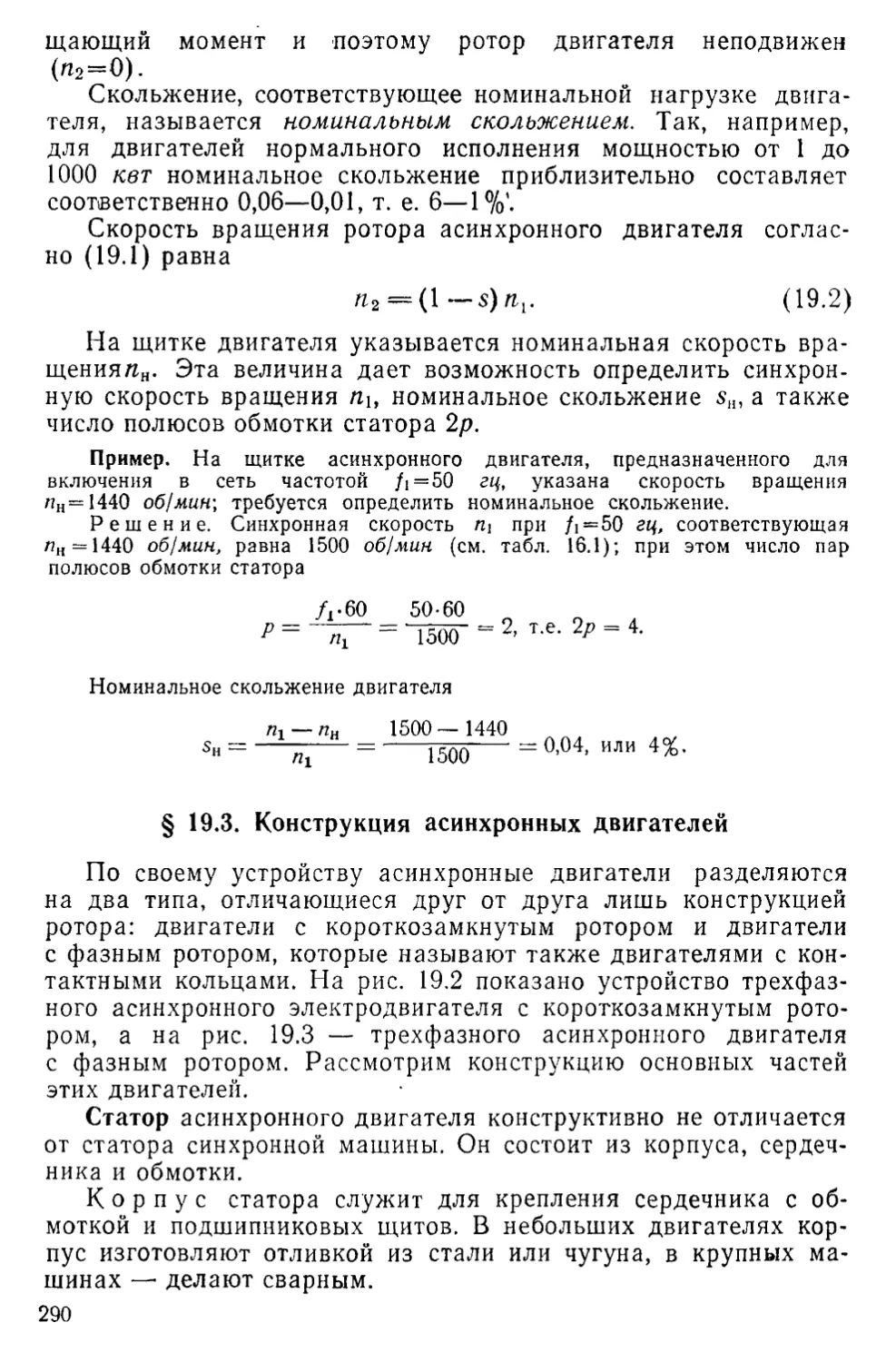
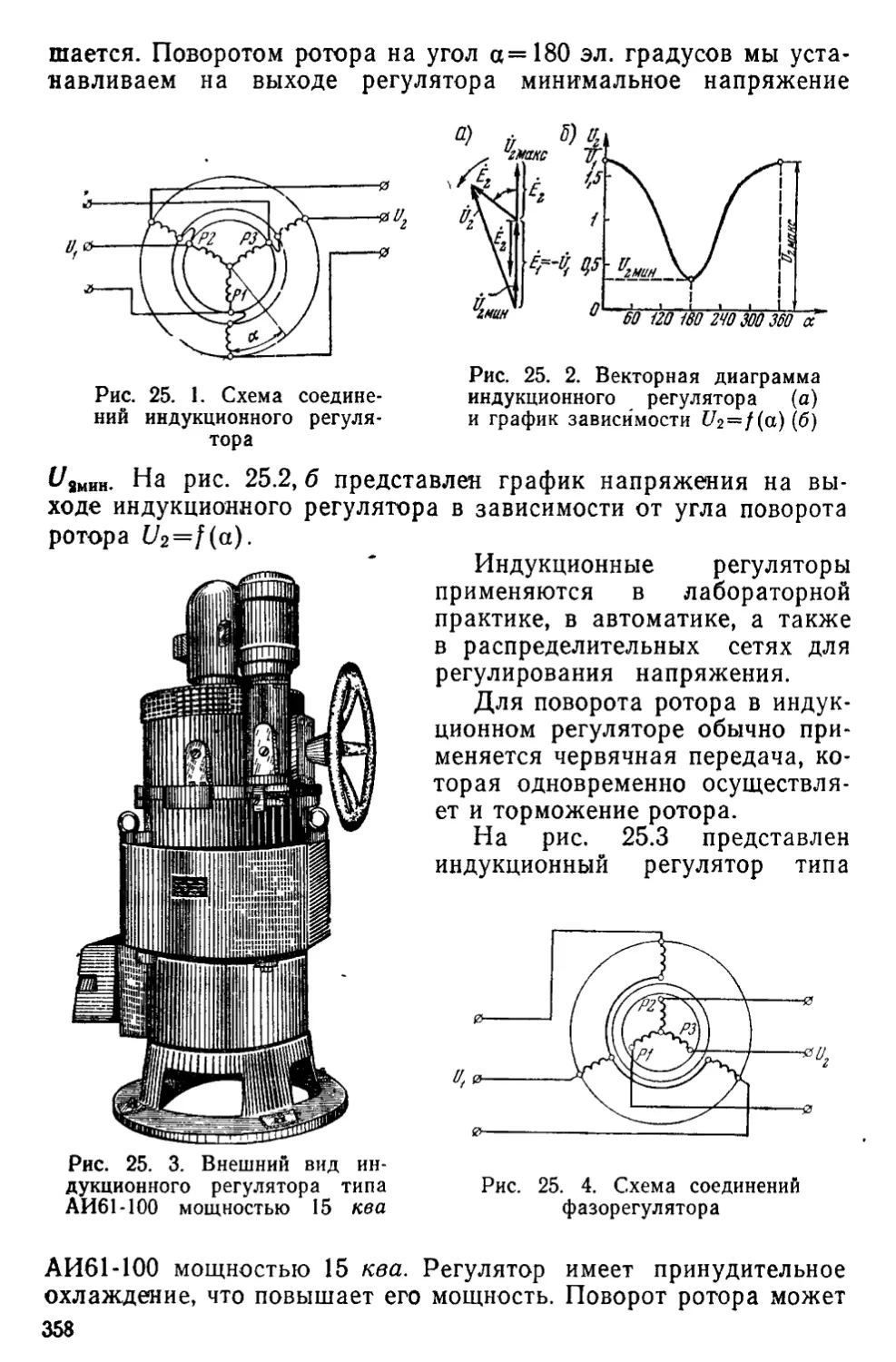
Рис. 1. Классификация электрических машин по принципу действия
Помимо деления по назначению, электрические машины
классифицируются по принципу действия. Согласно этой клас-
сификации электрические машины разделяются на коллекторные
и бесколлекторные (рис. 1), отличающиеся друг от друга как
принципом действия, так и конструкцией.
Коллекторные машины применяются, главным образом, для
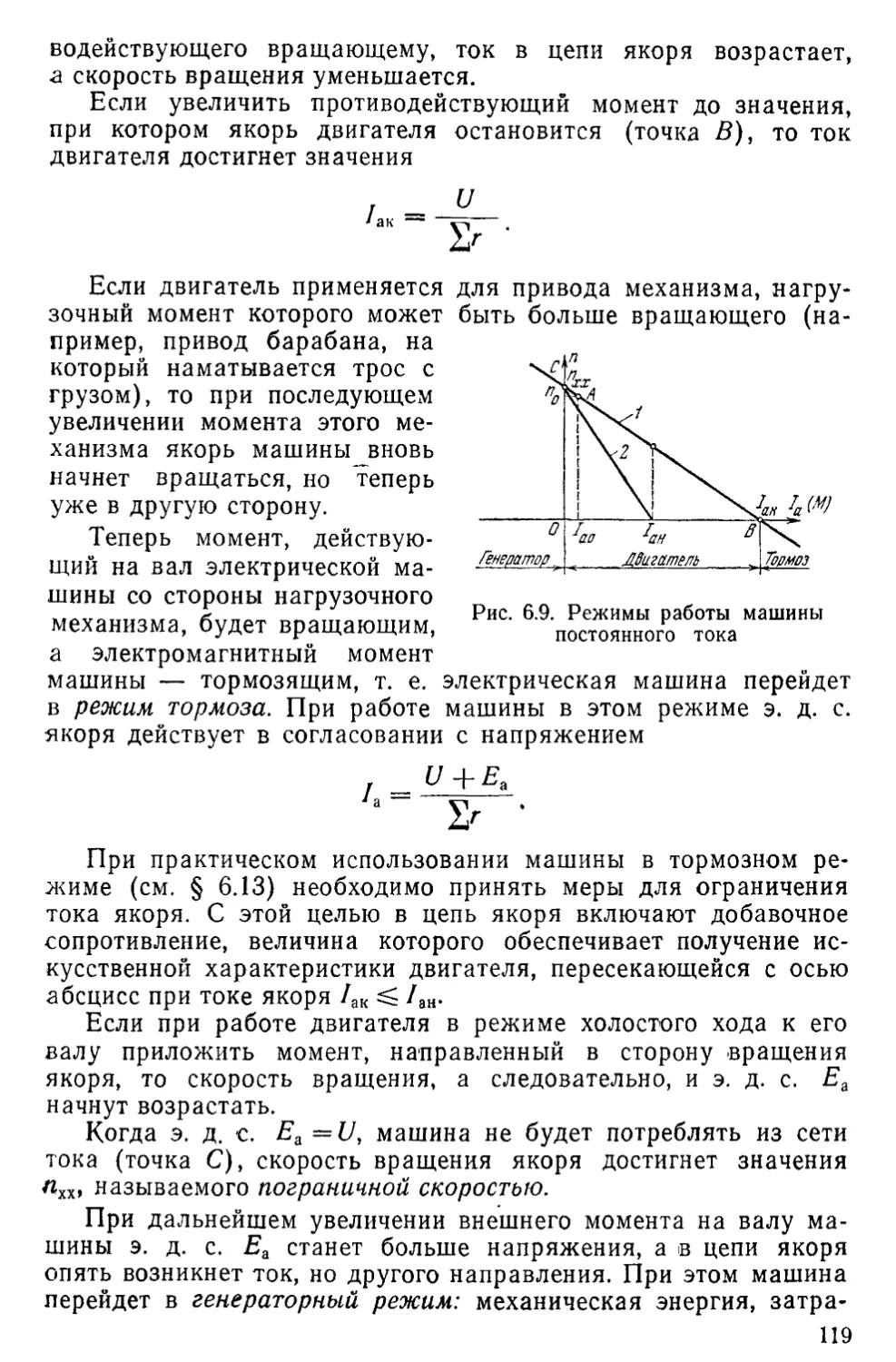
работы на постоянном токе. Лишь коллекторные машины не-
большой мощности делаются универсальными, применяемыми
для работы как на постоянном, так и на переменном токе.
Бесколлекторные машины разделяются на асинхронные и
синхронные и могут быть как многофазными, так и однофазными.
Широкое распространение электрических машин во всех
областях производственной деятельности привело к разработке
многочисленных конструктивных форм электрических машин,
соответствующих различным условиям работы и предъявляемым)
требованиям. Поэтому приведенная на рис. 1 классификация
электрических машин является приближенной и не отображает
всего многообразия типов электрических машин. Тем не менее
знакомство с этой классификацией является полезным, так как
она положена в основу изучения курса электрических машин.
Курс электрических машин, помимо собственно электриче-
ских машин, предусматривает изучение трансформаторов.
Трансформатор является статическим преобразователем
электроэнергии переменного тока. Возможность преобразования
напряжения переменного тока посредством трансформаторов
дает переменному току преимущества, благодаря которым он
6
получил значительное распространение. В настоящее время
нельзя представить себе электрическую установку переменного
тока без трансформаторов.
Отсутствие каких-либо вращающихся частей придает транс-
форматору конструктивную форму, существенно отличающую
его от электрической машины. Однако принцип работы транс-
форматоров, так же как и принцип работы электрических ма-
шин, основан на явлении электромагнитной индукции. Более
того, физические процессы работы электрических машин пере-
менного тока во многом аналогичны физическим процессам ра-
боты трансформаторов.
Поэтому изучение основ теории трансформаторов в нашем
курсе полезно еще и потому, что способствует более глубокому
пониманию вопросов электрических машин переменного тока.
§ 2. Преобразование энергии в электрических машинах
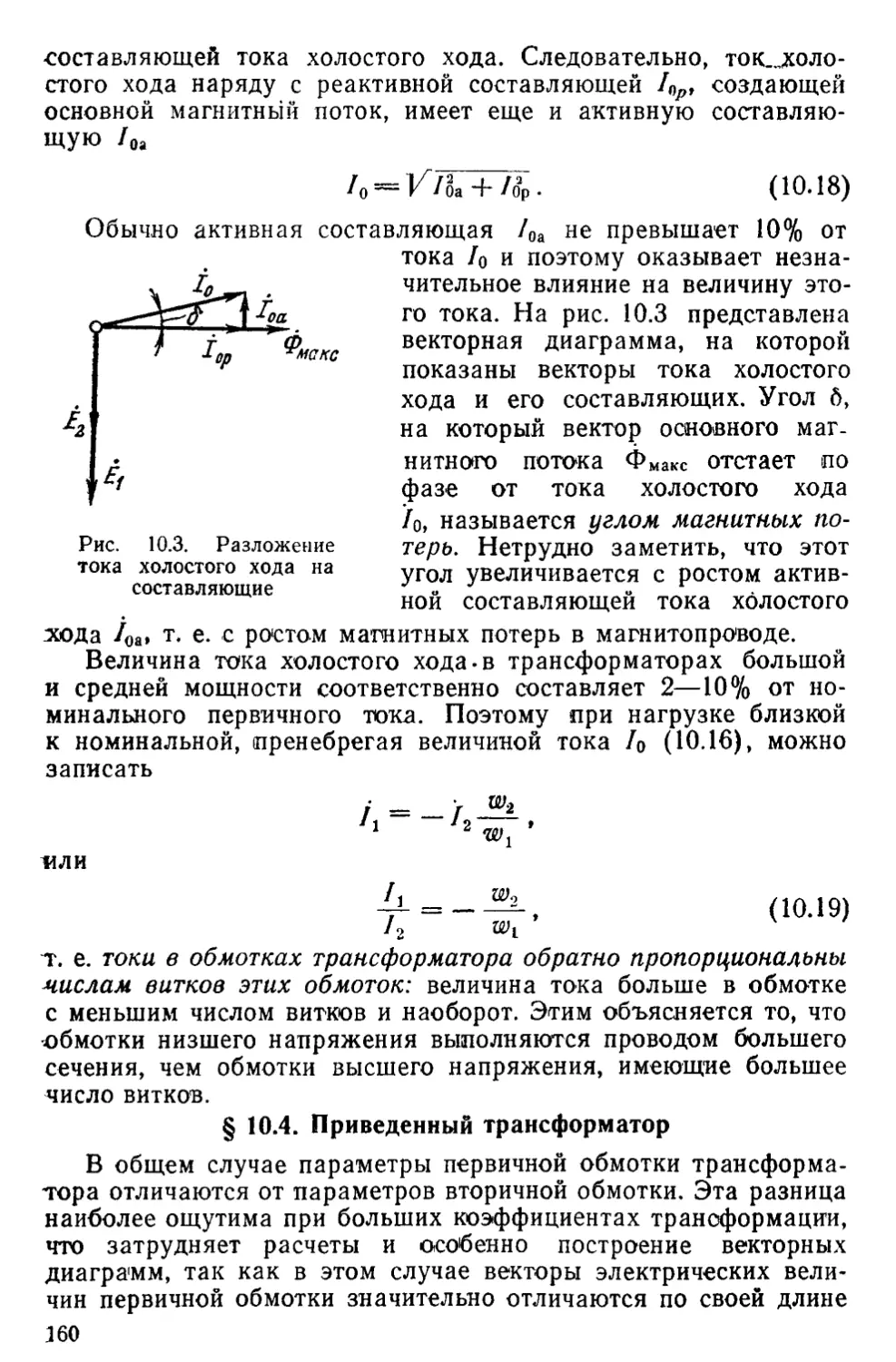
Изложение курса электрических машин основано на знаниях
законов электрических и магнитных явлений. Однако некоторые
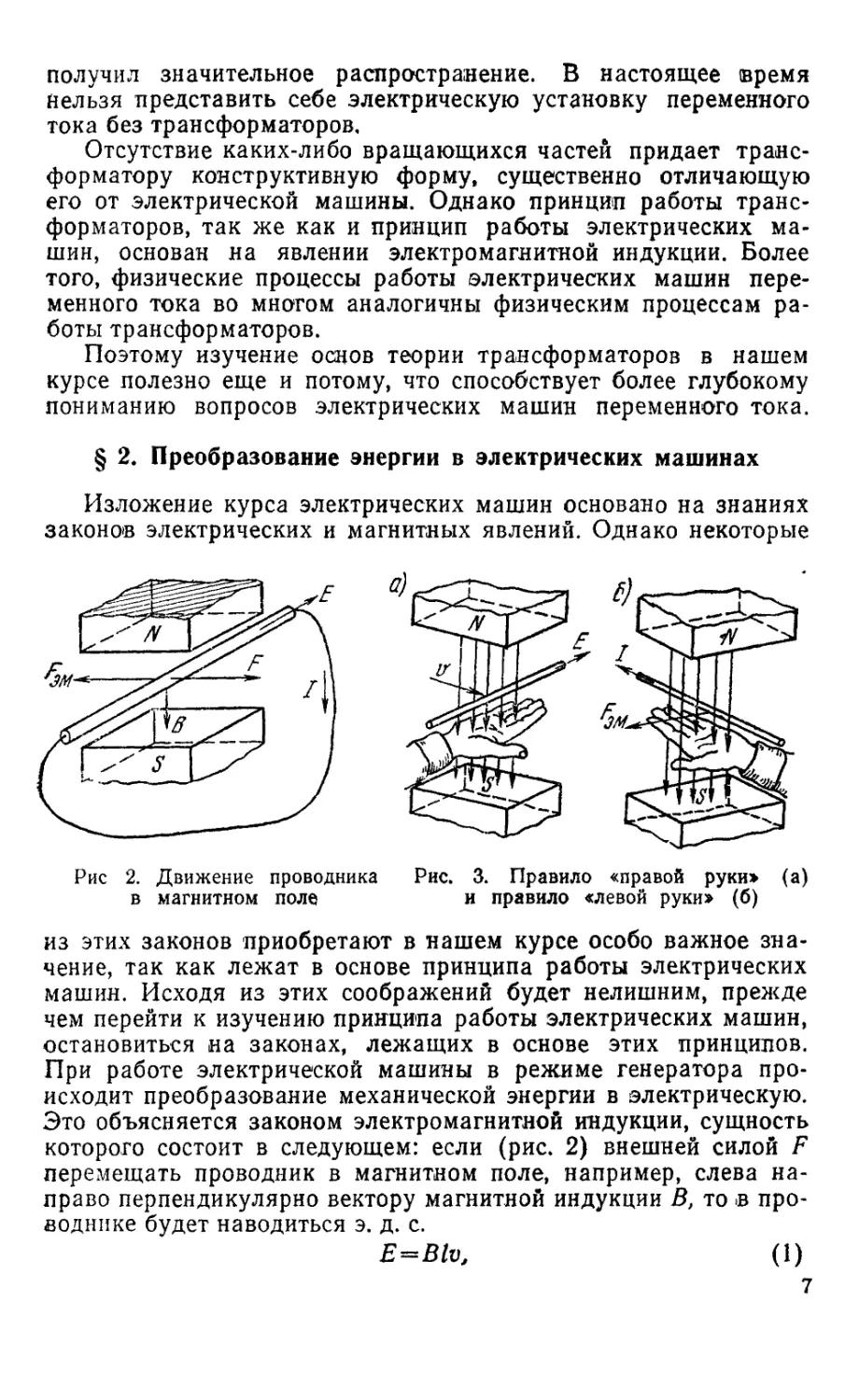
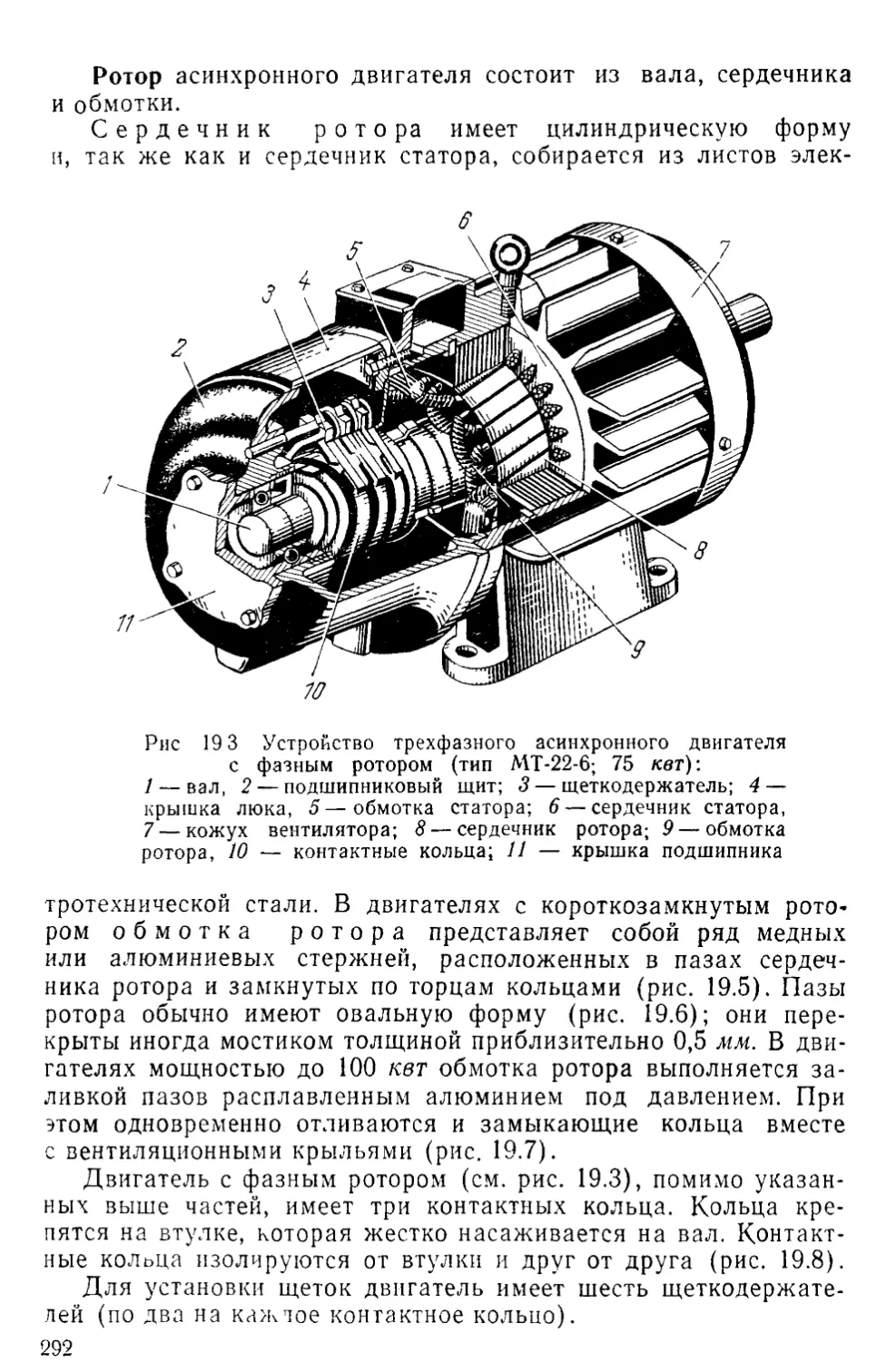
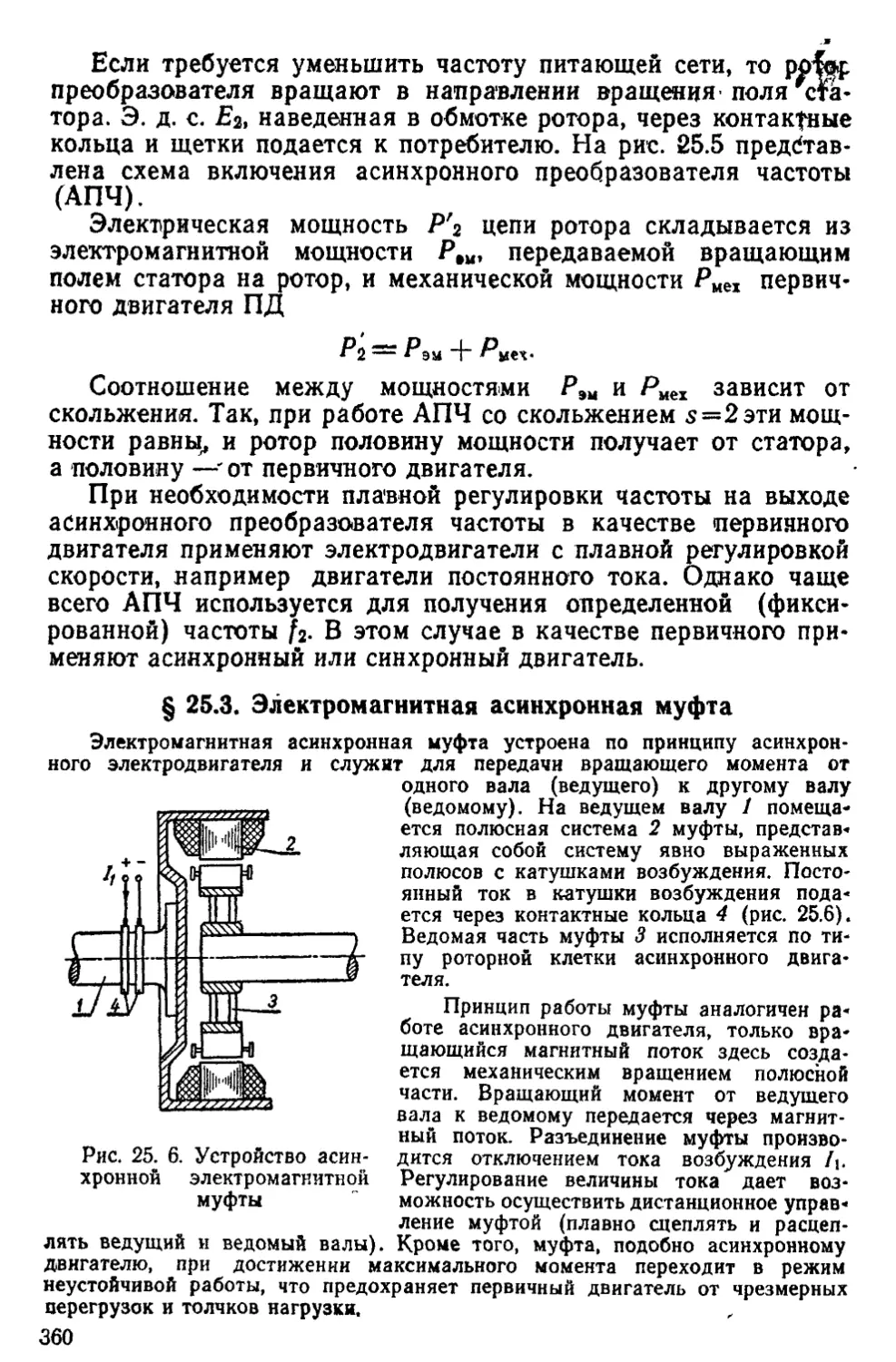
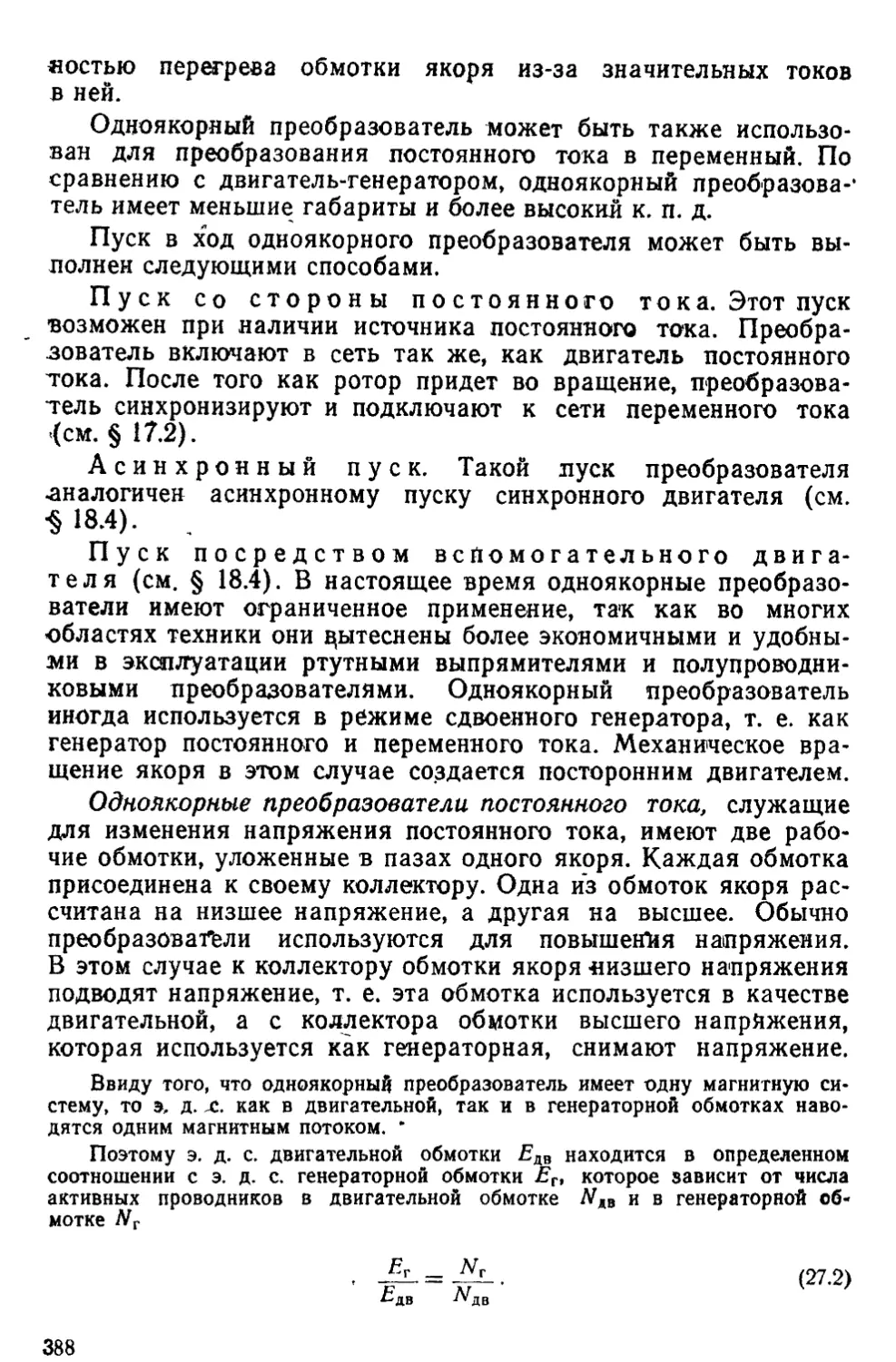
Рис. 3. Правило «правой руки» (а)
и правило «левой руки» (б)
Рис 2. Движение проводника
в магнитном поле
из этих законов приобретают в нашем курсе особо важное зна-
чение, так как лежат в основе принципа работы электрических
машин. Исходя из этих соображений будет нелишним, прежде
чем перейти к изучению принципа работы электрических машин,
остановиться на законах, лежащих в основе этих принципов.
При работе электрической машины в режиме генератора про-
исходит преобразование механической энергии в электрическую.
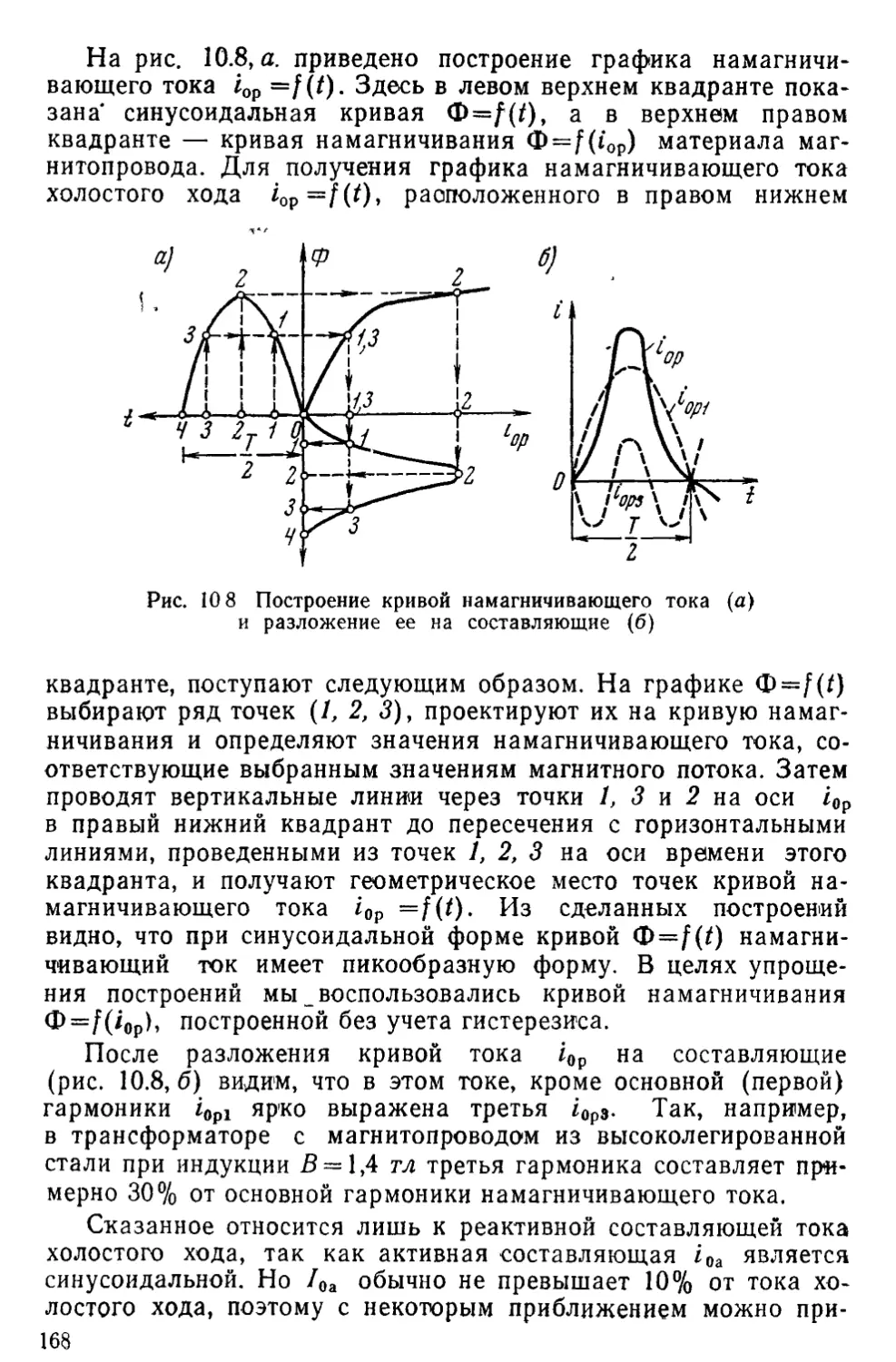
Это объясняется законом электромагнитной индукции, сущность
которого состоит в следующем: если (рис. 2) внешней силой F
перемещать проводник в магнитном поле, например, слева на-
право перпендикулярно вектору магнитной индукции В, то в про-
воднике будет наводиться э. д. с.
E—Blv, (1)
7
где Е—'Электродвижущая сила, индуктируемая в проводнике,в;
В — магнитная индукция, тл;
I — активная длина проводника, т. е. длина его части, на-
ходящейся в магнитном поле, м\
v — скорость движения проводника, м!сек.
Эта формула определяет лишь величину э. д. с. Для опреде-
ления направления э. д. с. следует воспользоваться правилом
«правой руки» (рис. 3, а). Применив это правило, определим
направление э. д. с. в проводнике («от нас»). Если концы про-
водника замкнуть на внешнее сопротивление (потребитель), то
под действием э. д. с. в проводнике возникает ток такого же
направления. Таким образом, проводник в магнитном поле
можно рассматривать в этом случае как элементарный гене-
ратор.
В результате взаимодействия тока I с магнитным полем
возникает электромагнитная сила F3M, действующая на проводник,
Лм = ВЦ. (2)
Направление силы F3U можно определить по правилу «левой
руки» (рис. 3,6). В рассматриваемом случае эта сила направ-
лена оправа налево, т. е. противоположно движению проводника.
Таким образом, в генераторе электромагнитная сила F3M яв-
ляется тормозящей по отношению к движущей силе F.
При равномерном движении проводника движущая сила
равна тормозящей электромагнитной силе, F=F3M. Умножим
обе части равенства на скорость движения проводника
Fv — F3Mv.
Подставив значение F3V из формулы (2), получим
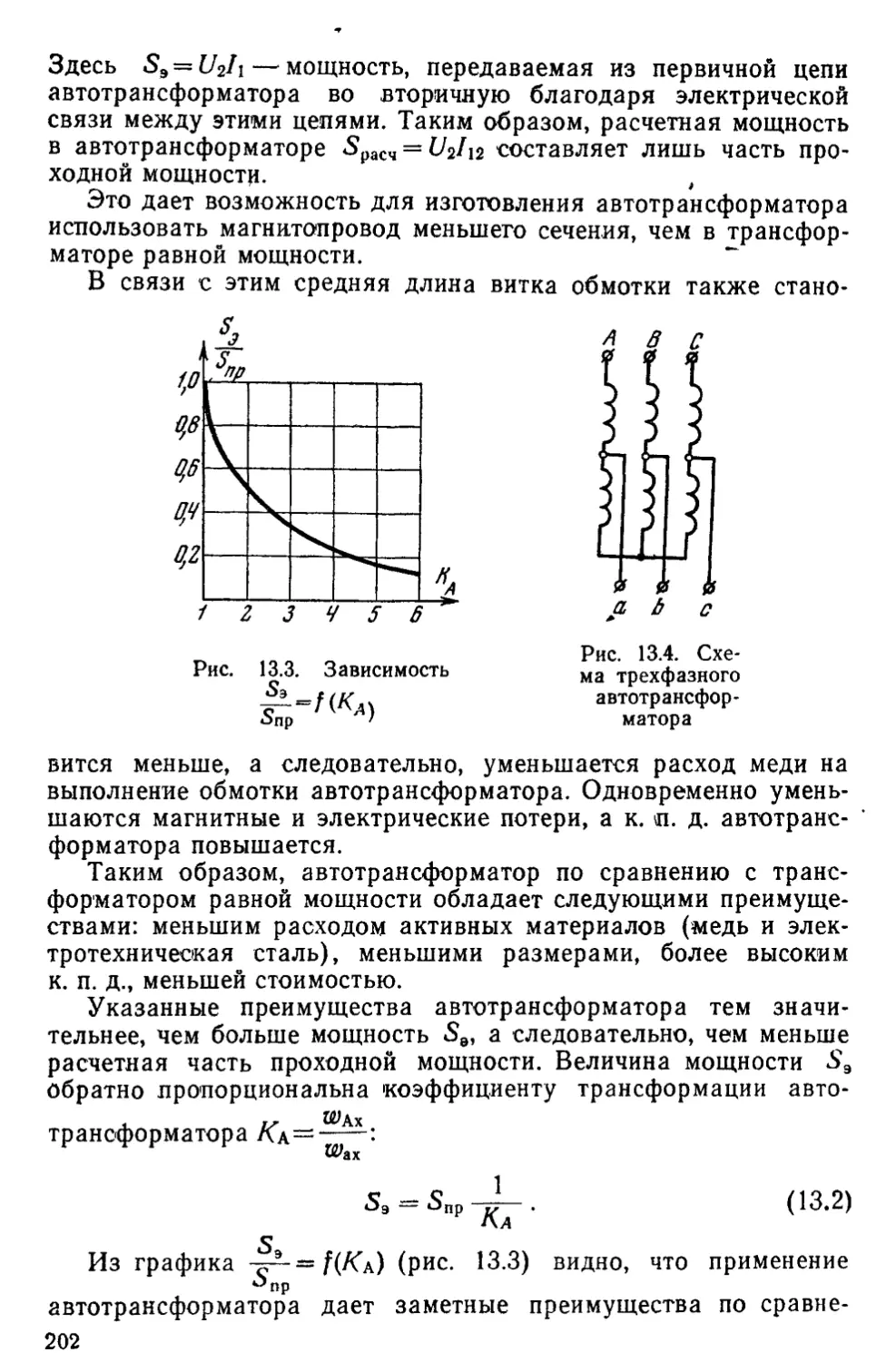
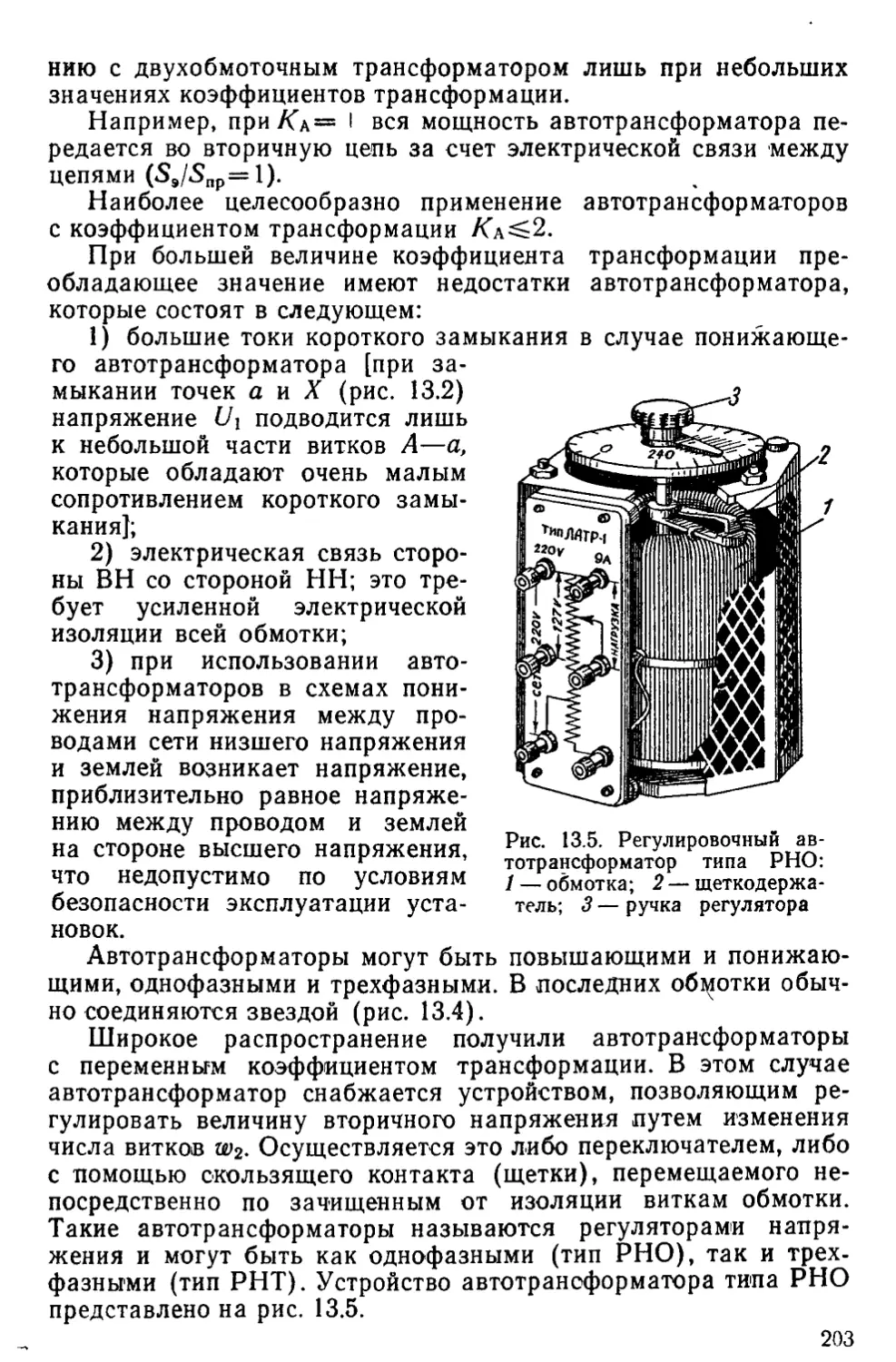
Fv — Bllv = El.
Левая часть равенства (Fv) определяет величину механиче-
ской мощности, затрачиваемой на перемещение проводника
в магнитном поле; правая же часть этого равенства (ЕГ) опре-
деляет величину электрической мощности, развиваемой в замк-
нутом контуре электрическим током /. Знак равенства между
этими частями показывает, что в генераторе механическая
мощность, затрачиваемая внешней силой, преобразуется в элек-
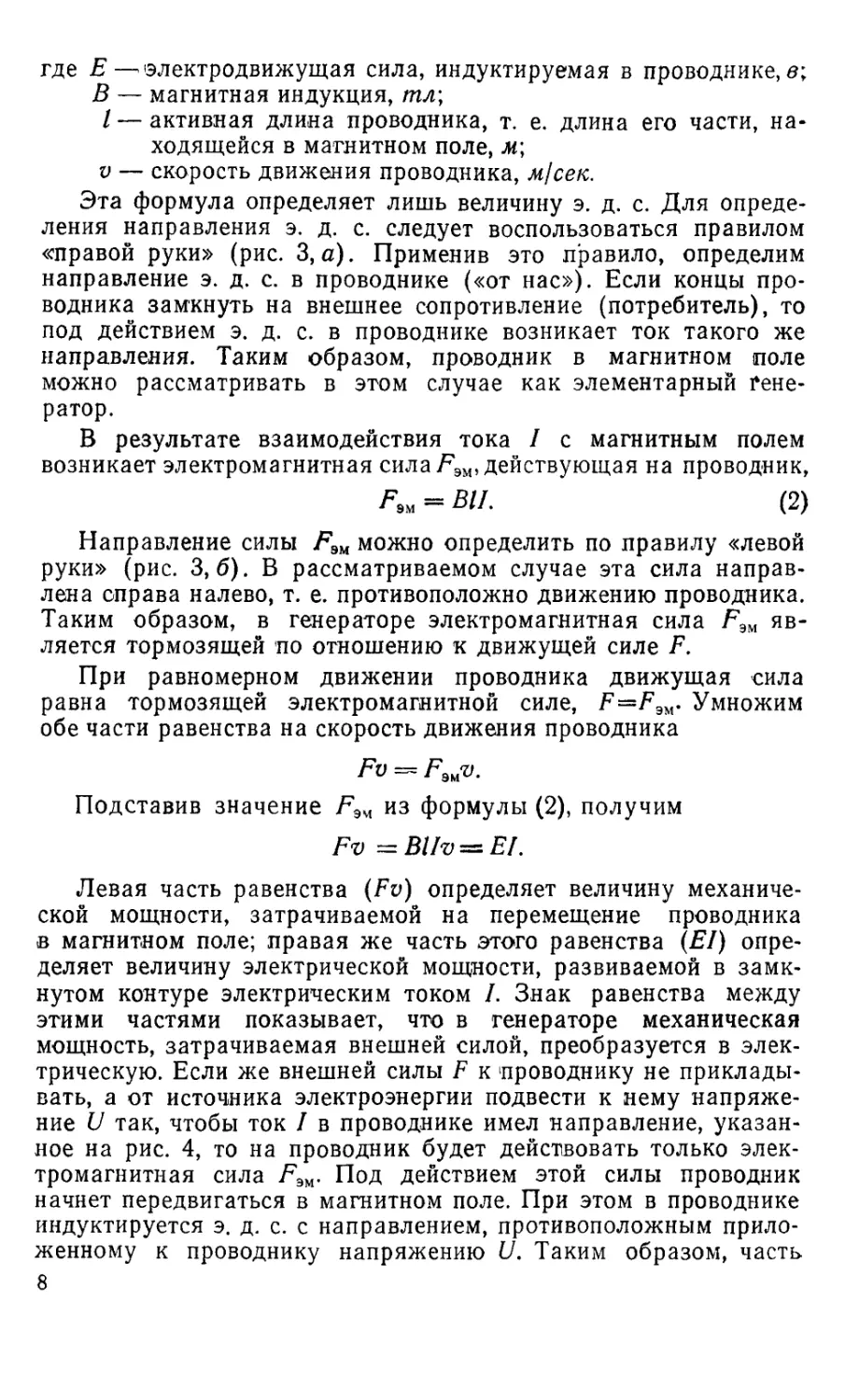
трическую. Если же внешней силы F к проводнику не приклады-
вать, а от источника электроэнергии подвести к нему напряже-
ние U так, чтобы ток / в проводнике имел направление, указан-
ное на рис. 4, то на проводник будет действовать только элек-
тромагнитная сила F3W. Под действием этой силы проводник
начнет передвигаться в магнитном поле. При этом в проводнике
индуктируется э. д. с. с направлением, противоположным прило-
женному к проводнику напряжению U. Таким образом, часть
8
этого напряжения уравновешивается электродвижущей силой Е,
наведенной в этом проводнике, а другая часть составляет паде-
ние напряжения в проводнике
U=E+Ir,
Рис. 4. Проводник с током
в магнитном поле,
в электрической машине мо-
где г — электрическое сопротивление проводника.
Умножим обе части равенства на ток /
UI=EI+Pr.
Подставляя вместо £ значениеэ.д. с. из формулы (1), получим
UI=BlvI+r-r
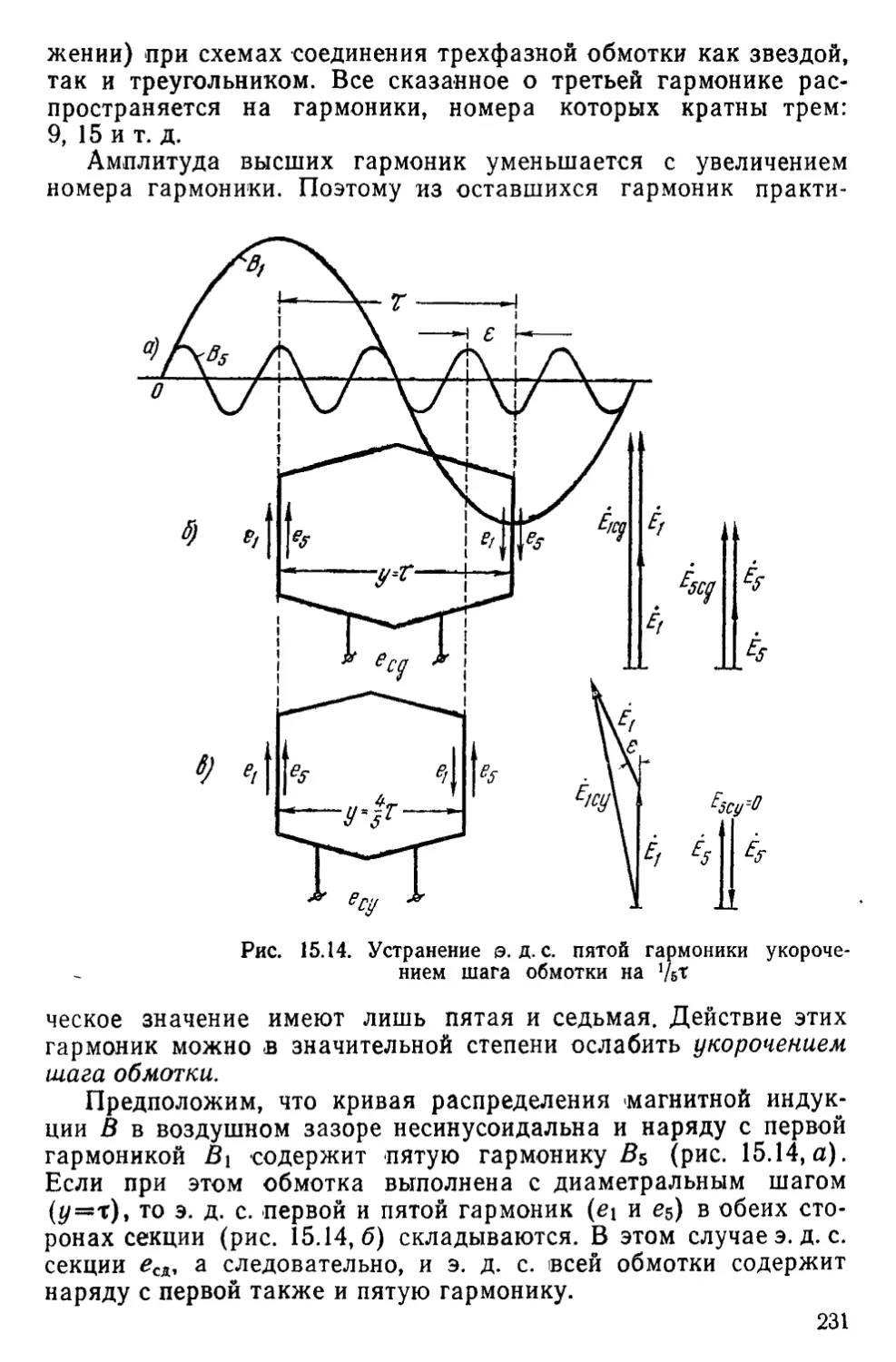
или, согласно формуле (2),
Из этого равенства следует, что электрическая мощность
(VI), поступающая в проводник, частично преобразуется в ме-
ханическую (£Эм^)> а частично
расходуется на покрытие элек-
трических потерь в проводнике
(12г). Следовательно, провод-
ник с током, помещенный в
магнитное поле, можно рас-
сматривать как элементарный
электродвигатель.
Указанные процессы преоб-
разования энергии дают воз-
можность сделать весьма важ-
ный вывод: необходимым усло-
вием работы электрической
машины является наличие про-
водников и магнитного поля.
При этом преобразование энергии
жет происходить в любом направлении, т. е. электрическая
машина может работать как в качестве генератора, так и в ка-
честве двигателя. Указанное свойство электрических машин
называется обратимостью.
§ 3. Исторические сведения о развитии электрических машин
и трансформаторов
За время своего развития электрические машины претерпели
большой и сложный путь совершенствования.
Возможность преобразования электрической энергии в меха-
ническую была впервые установлена М. Фарадеем, создавшим
в 1821 г. первую модель электрического двигателя, в которой
электрический ток, протекая по медному проводу, вызывал его
движение вокруг вертикально поставленного постоянного маг-
9
нита. Однако дальнейшие работы по созданию электродвигателя
в течение более чем десятилетнего периода не приносили удов-
летворительных результатов и лишь в 1834 г. русским акаде-
миком Б. С. Якоби была создана конструкция, послужившая
прототипом современного электродвигателя.
Возможность создания электрического генератора возникла
только после открытия М. Фарадеем в 1831 г. закона электро-
магнитной индукции. Используя это открытие, братья Пикси
в 1832 г. создали конструкцию первого электрического генера-
тора с вращающимися постоянными магнитами и с коммутато-
ром для выпрямления тока.
Первое время развитие электродвигателей и генераторов шло
независимо друг от друга.
В 1833 г. Ленцем был сформулирован принцип обратимости
электрических машин, а в 1838 г. этот принцип был практи-
чески осуществлен.
Дальнейшим этапом развития генераторов явилась замена
постоянных магнитов электромагнитами.
Начальный период развития электрических машин связан
главным образом с постоянным током. Объясняется это тем, что
потребителями электрической энергии являлись установки, рабо-
тающие исключительно на постоянном токе (дуговые лампы,
установки гальванопластики и т. п.). Применение электриче-
ского освещения в крупных городах потребовало повышения
мощности электрических генераторов и их дальнейшего усовер-
шенствования.
В 1867 г. В. Сименс применил принцип самовозбуждения
для генераторов последовательного возбуждения. В этом же
году Д. Максвелл впервые дал математическую теорию электри-
ческой машины с самовозбуждением, заложив тем самым основы
теории электрических машин.
В 1870 г. 3. Грамм построил машину с кольцевым якорем,
а в 1873 г. Ф. Гефнер-Алтенек и В. Сименс сконструировали
машину с «барабанным» якорем.
Развитие электрических железных дорог значительно увели-
чило спрос на электродвигатели и генераторы, что способствова-
ло их дальнейшему совершенствованию.
В 80-х годах прошлого столетия возникла необходимость
передавать электроэнергию на расстояние. В 1882 г. были
проведены опыты по передаче электроэнергии на постоянном
токе при повышенном напряжении. Однако высокое напряжение
в генераторах постоянного тока ухудшило работу коллектора,
что часто приводило к авариям. Все это усиливало интерес
электротехников того времени к переменному току. Большая
заслуга в развитии переменного тока принадлежит русскому
ученому П. Н. Яблочкову, который широко использовал пере-
менный ток для питания изобретенных им электрических све«
10
чей. В 1876 г. П. Н. Яблочков применил для питания этих
свечей трансформаторы с незамкнутым сердечником, положив
тем самым начало практическому использованию трансформа-
торов.
Трансформаторы с замкнутым сердечником, подобные совре-
менным трансформаторам, появились позднее, в 1884 г.
Началом практического применения переменного тока для
целей электропривода следует считать 1889 г., когда выдающий-
ся русский инженер М. О. Доливо-Добровольский предложил
для практического применения трехфазную систему переменного
тока и построил трехфазный асинхронный двигатель и трехфаз-
ный трансформатор.
Первая линия электропередачи трехфазного переменного тока
протяженностью 175 км при напряжении 15 тыс. в с примене-
нием трехфазных трансформаторов была сооружена Доливо-
Добровольским в 1891 г. Результаты испытаний этой линии под-
твердили возможность применения системы трехфазного тока
для передачи значительных количеств электроэнергии при
сравнительно высоком к. п. д. Прогрессивность системы трехфаз-
ного тока была настолько очевидной, что к началу текущего
столетия она получила всеобщее признание и стала быстро раз-
виваться.
К началу XX столетия были созданы все основные виды
электрических машин и разработаны основы их теории. Начи-
ная с этого времени быстрыми темпами происходит электрифи-
кация промышленности и транспорта. В связи с этим растут
мощности электростанций, создаются турбогенераторы — маши-
ны, непосредственно соединенные с паровой турбиной. Увеличи-
вается мощность генераторов и трансформаторов. Если в 1900 г.
мощность генератора не превышала 5 тыс. ква, то к 1920 г. были
построены турбогенераторы мощностью 60 тыс. ква, Применение
водородного охлаждения дало возможность в настоящее время
строить турбогенераторы мощностью более 500 тыс. ква.
§ 4. Отечественное электромашиностроение и перспективы
его развития '
В дореволюционной России имевшиеся отдельные заводы по
производству электрических машин принадлежали иностранным
фирмам. Только после Великой Октябрьской социалистической
революции появилось и начало развиваться отечественное
электромашиностроение. Электрификация народного хозяйства
Советского Союза первоначально осуществлялась по плану
ГОЭЛРО, разработанному в 1920 г. По этому плану за 10—15 лет
предполагалось построить 30 электростанций общей мощностью
1700 тыс. кет. План ГОЭЛРО был выполнен досрочно к 1 января
11
1931 г. По сравнению с 1913 г. мощность электростанций увели-
чилась в 3 раза, а выработка электроэнергии в 4 раза.
В дальнейшем советское электромашиностроение продолжа-
ло развиваться быстрыми темпами и к 1940 г. достигло уровня
наиболее передовых в промышленном отношении капиталисти-
ческих стран Европы и Америки.
После Великой Отечественной войны на наших электрома-
шиностроительных заводах были построены крупнейшие гидро-
генераторы, в том числе гидрогенераторы для Волжской ГЭС
мощностью 103 тыс. кет., гидрогенераторы мощностью 225 тыс.
кет. для Братской ГЭС и 500 тыс. кет для Красноярской ГЭС.
В 1946 г. построен первый турбогенератор мощностью
100 тыс. кет с водородным охлаждением, а в 1957 г. — мощ-
ностью 200 тыс. кет с форсированным водородным охлаждением
обмотки возбуждения. В настоящее время созданы турбогене-
раторы мощностью 500 тыс. кет.
Отечественное электромашиностроение также достигло зна-
чительных успехов по производству электродвигателей. Создано
несколько серий двигателей как общего применения, так и спе-
циализированных для работы в разных условиях.
Применение новых материалов, новых видов изоляции, высо-
костойких лаков способствует созданию электрических машин
более совершенных конструкций.
Значительные успехи достигнуты в области трансформаторо-
строения. Производство трансформаторов за последние годы
резко возросло, во много раз увеличилась их номенклатура,
в том числе освоен выпуск трансформаторов специального на-
значения с различными характеристиками, отвечающими самым
разнообразным нуждам промышленности, сельского хозяйства
и строительства. Резко возросли мощности трансформаторов
в одной единице. Например, освоен выпуск трехфазных транс-
форматоров мощностью 400 тыс. кет с высшим напряжением
330 кв.
Высокие темпы развития всех отраслей народного хозяйства
ставят перед электротехнической промышленностью задачи по
обеспечению опережающих темпов роста электроэнергетики.
В связи с этим ведется дальнейшая работа по увеличению мощ-
ности электростанций.
Мощность генераторов будет доведена до 800—1000 Мет
в единице с применением новых магнитных и электроизоляцион-
ных материалов, новых методов охлаждения.
Учитывая, что почти 75% вырабатываемой электроэнергии
потребляются электродвигателями, а количество ежегодно вы-
пускаемых в стране электродвигателей исчисляется миллионами,
большое внимание будет уделено проблемам создания экономич-
ных конструкций двигателей и увеличения срока их службы
в 1,5—2 раза.
12
Должны быть разработаны и внедрены в массовое производ-
ство новые серии асинхронных двигателей и машин постоянного
тока, обладающих высокими технико-экономическими показате-
лями с применением алюминиевых обмоток, новых марок элек-
тротехнических и конструкционных сталей, новых изоляционных
материалов и более интенсивных методов охлаждения.
Создание материально-технической базы коммунистического
общества, основанной на сплошной электрификации страны, по-
требует от рабочих и инженерно-технических работников элек-
тротехнической промышленности больших знаний я умения твор-
чески применять их на практике.
РАЗДЕЛ ПЕРВЫЙ
КОЛЛЕКТОРНЫЕ МАШИНЫ
постоянного ТОКА
Глава I
ПРИНЦИП действия и устройство коллекторных машин
постоянного ТОКА
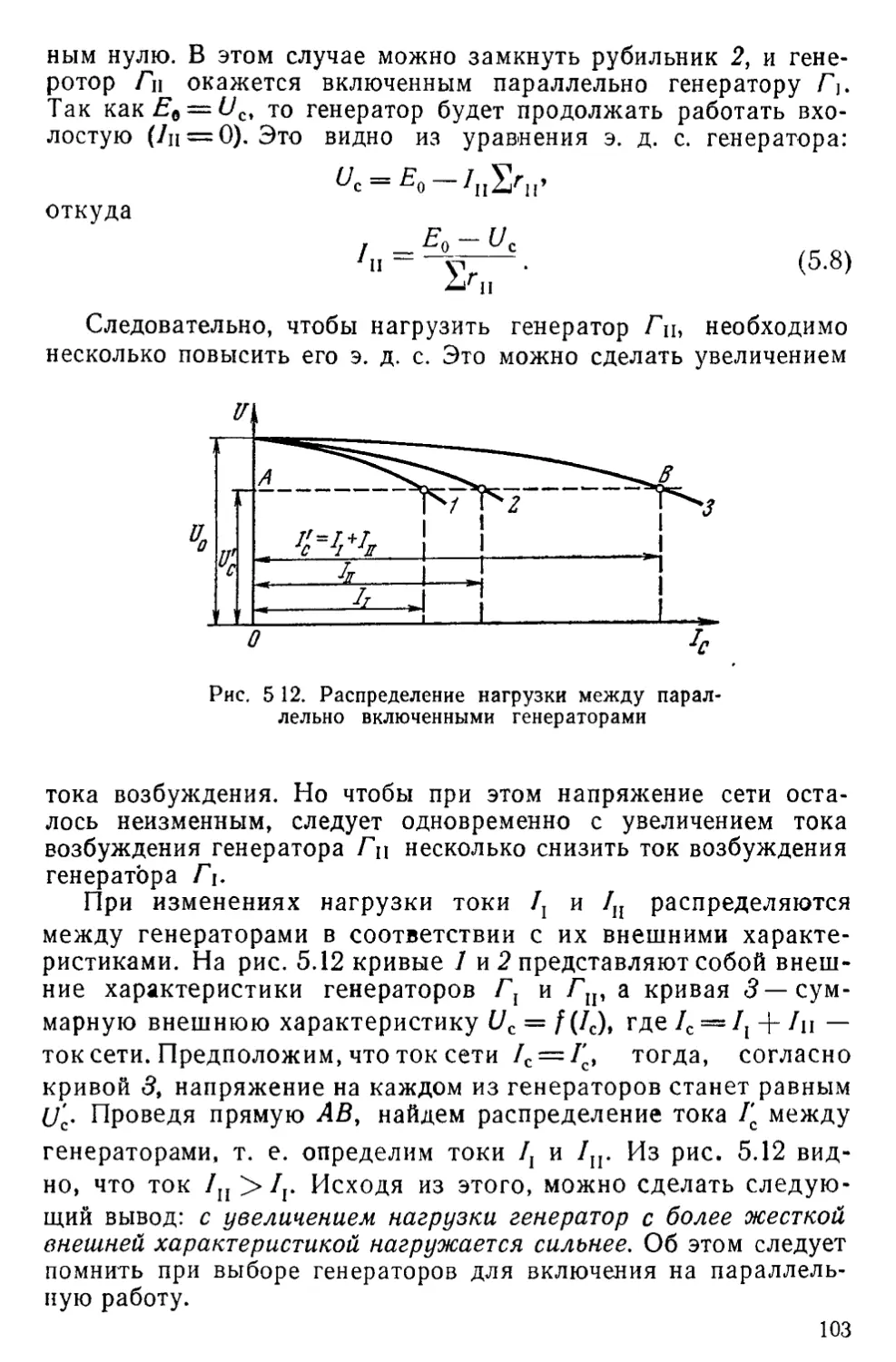
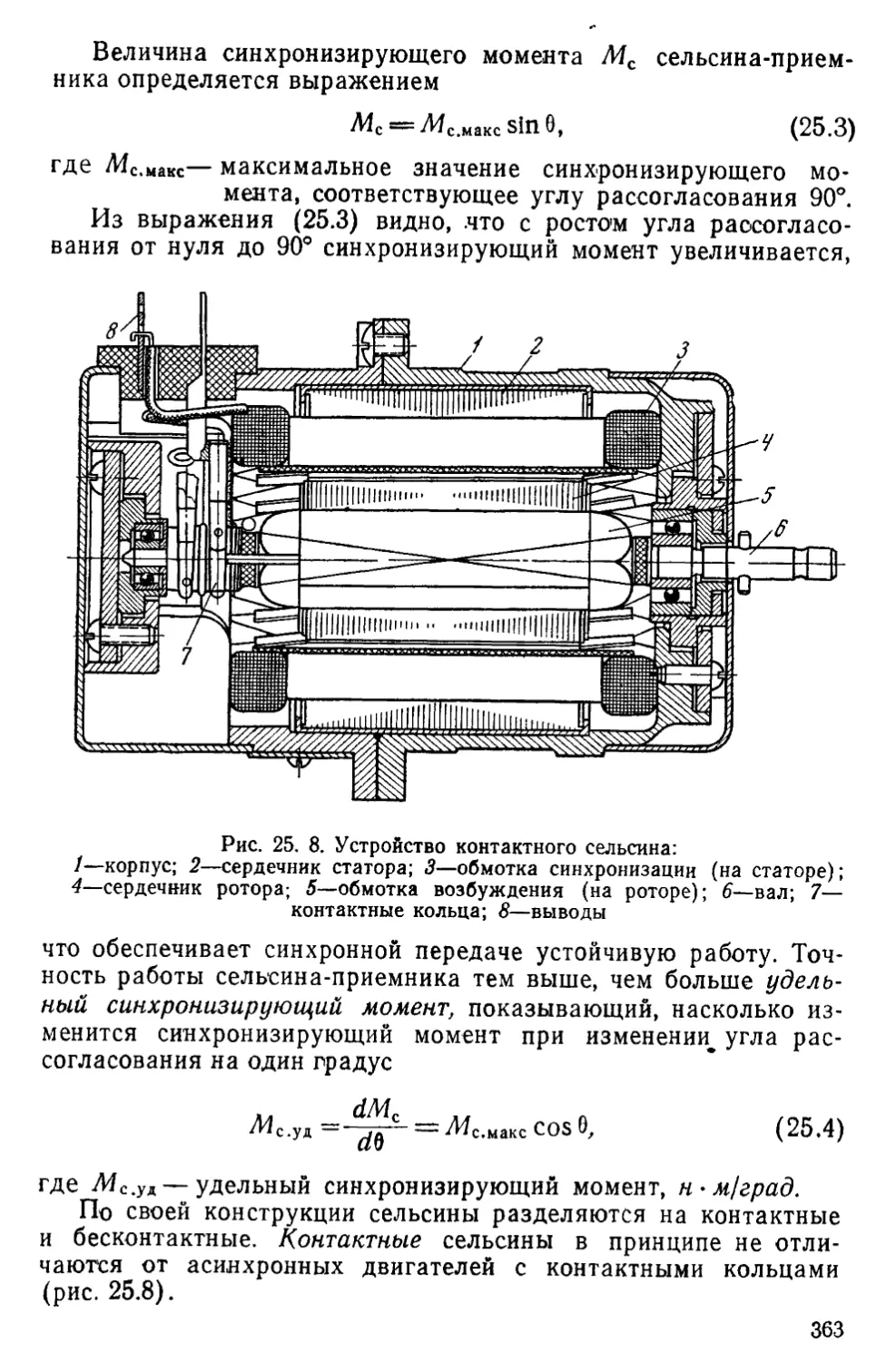
§ 1.1. Принцип действия генератора постоянного тока
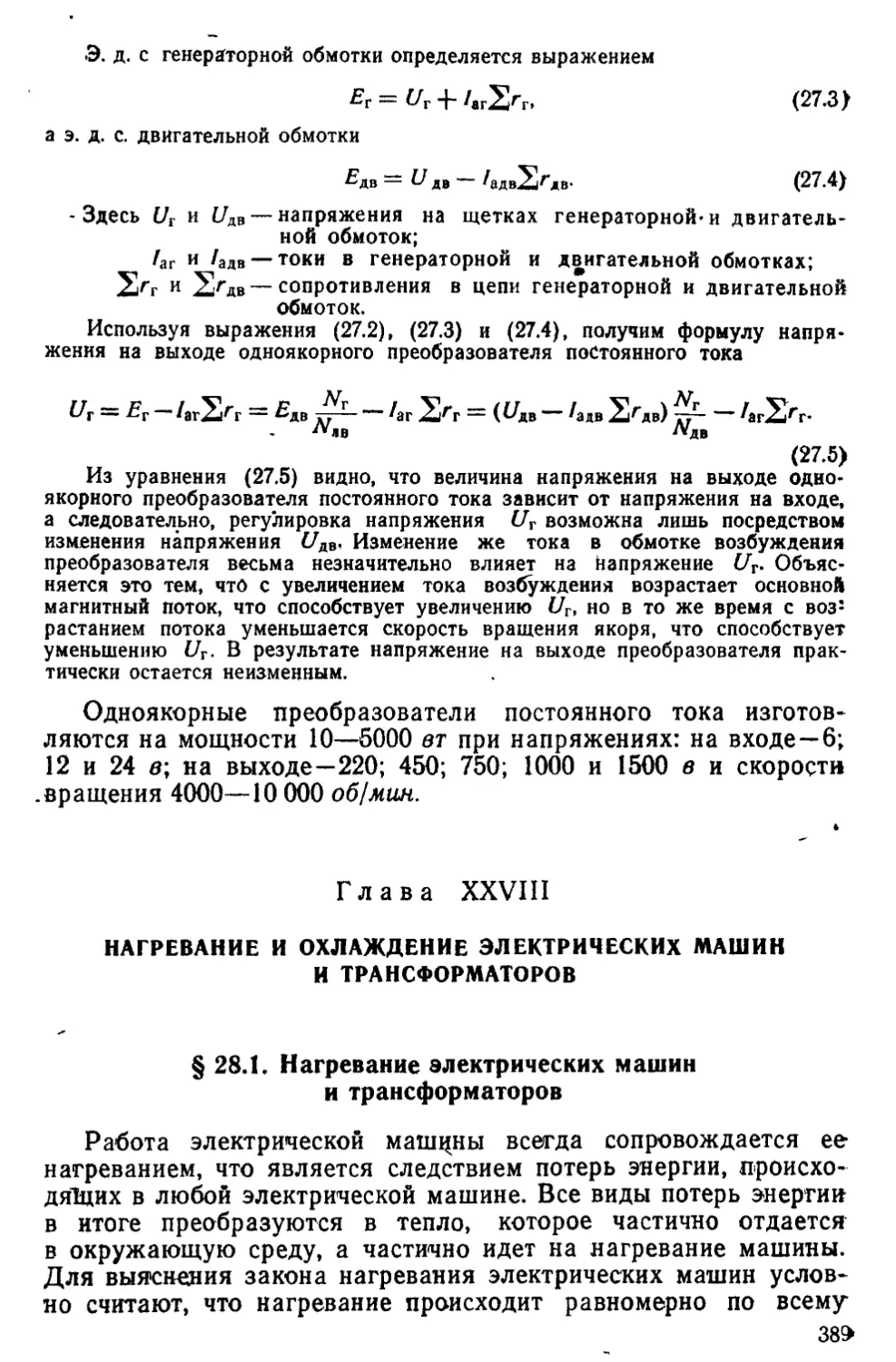
Основным типом машины постоянного тока является коллек-
торный тип. Рассмотрим процесс работы простейшей машины
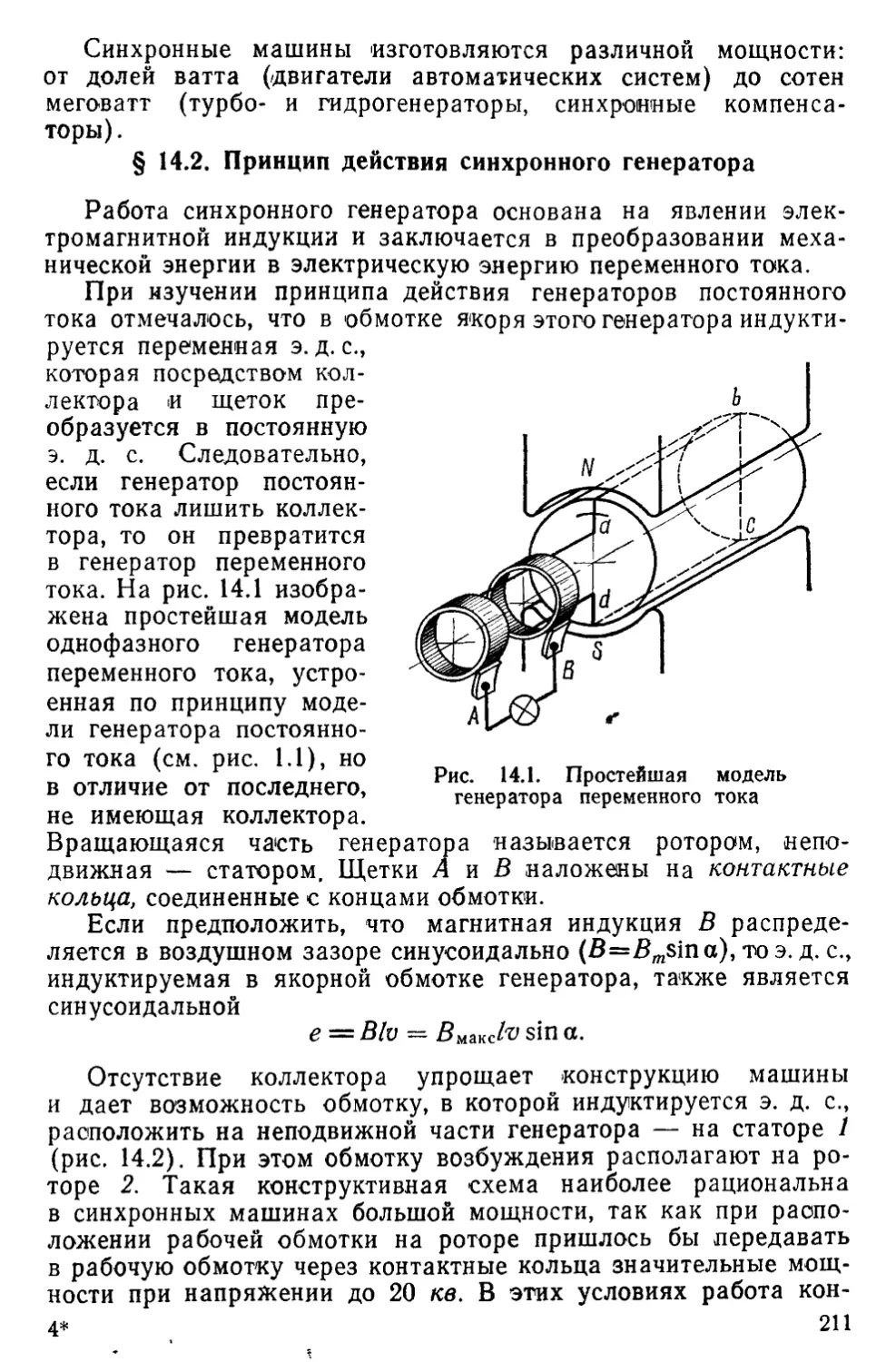
постоянного тока коллекторного типа (рис. 1.1) в режиме гене-
ратора. Между двумя полюсами постоянного магнита (N и S)
Рис. 1.1. Простейшая модель машины постоян-
ного тока
помещена вращающаяся часть машины — якорь. Для вращения
якоря используется механическая сила первичного двигателя,
например турбины или двигателя внутреннего сгорания. Якорь
машины сострит из стального цилиндра, на котором расположе-
на обмотка в виде витка abed, концы витка присоединены к двум
пластинам (полукольцам), закрепленным на валу и изолирован-
14
ным друг от друга. Эти пластины образуют важную часть
машины — коллектор. К щеткам А и В присоединена нагрузка
генератора. В процессе работы машины коллектор вращается
вместе с валом, а щетки А и В остаются неподвижными.
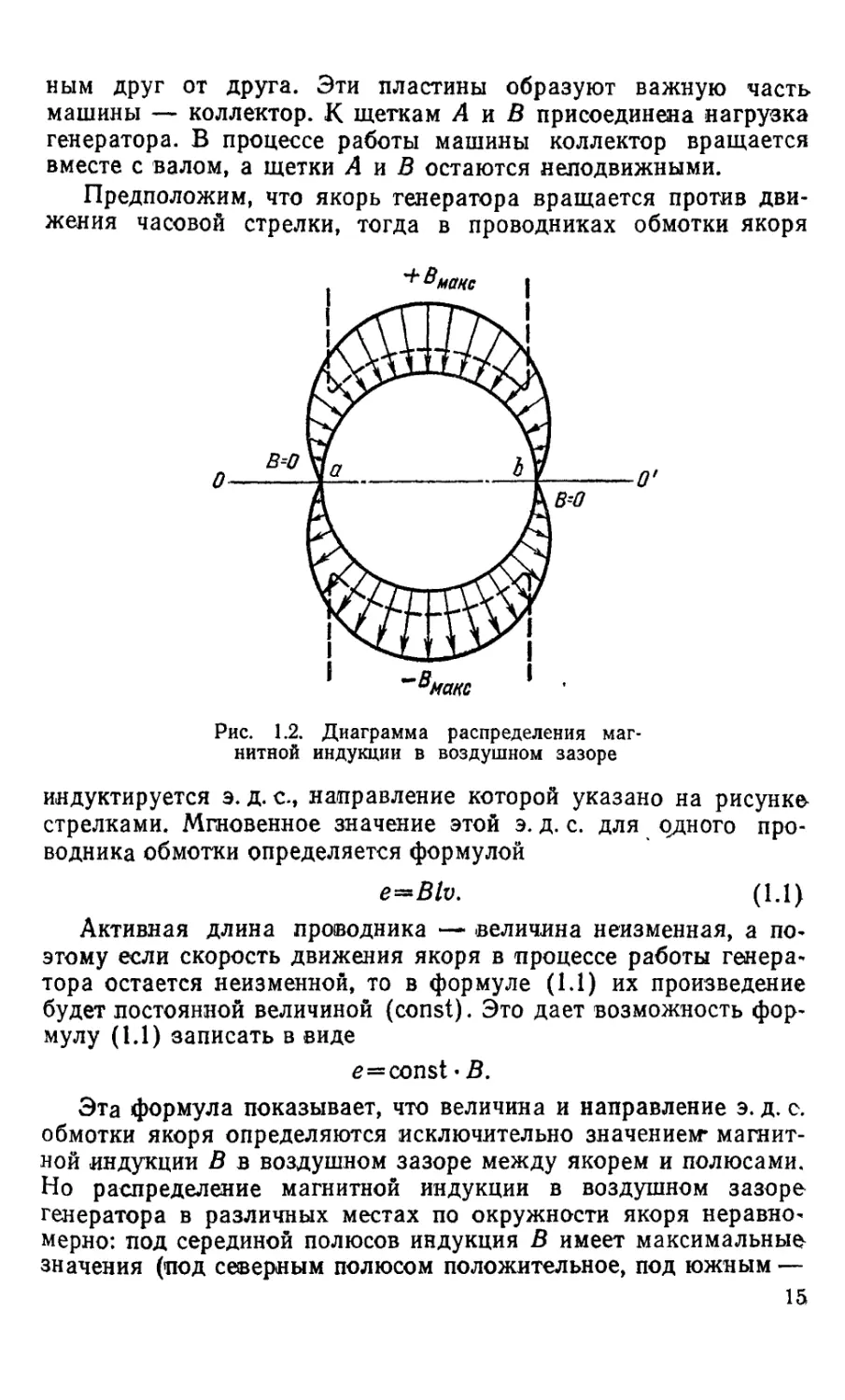
Предположим, что якорь генератора вращается против дви-
жения часовой стрелки, тогда в проводниках обмотки якоря
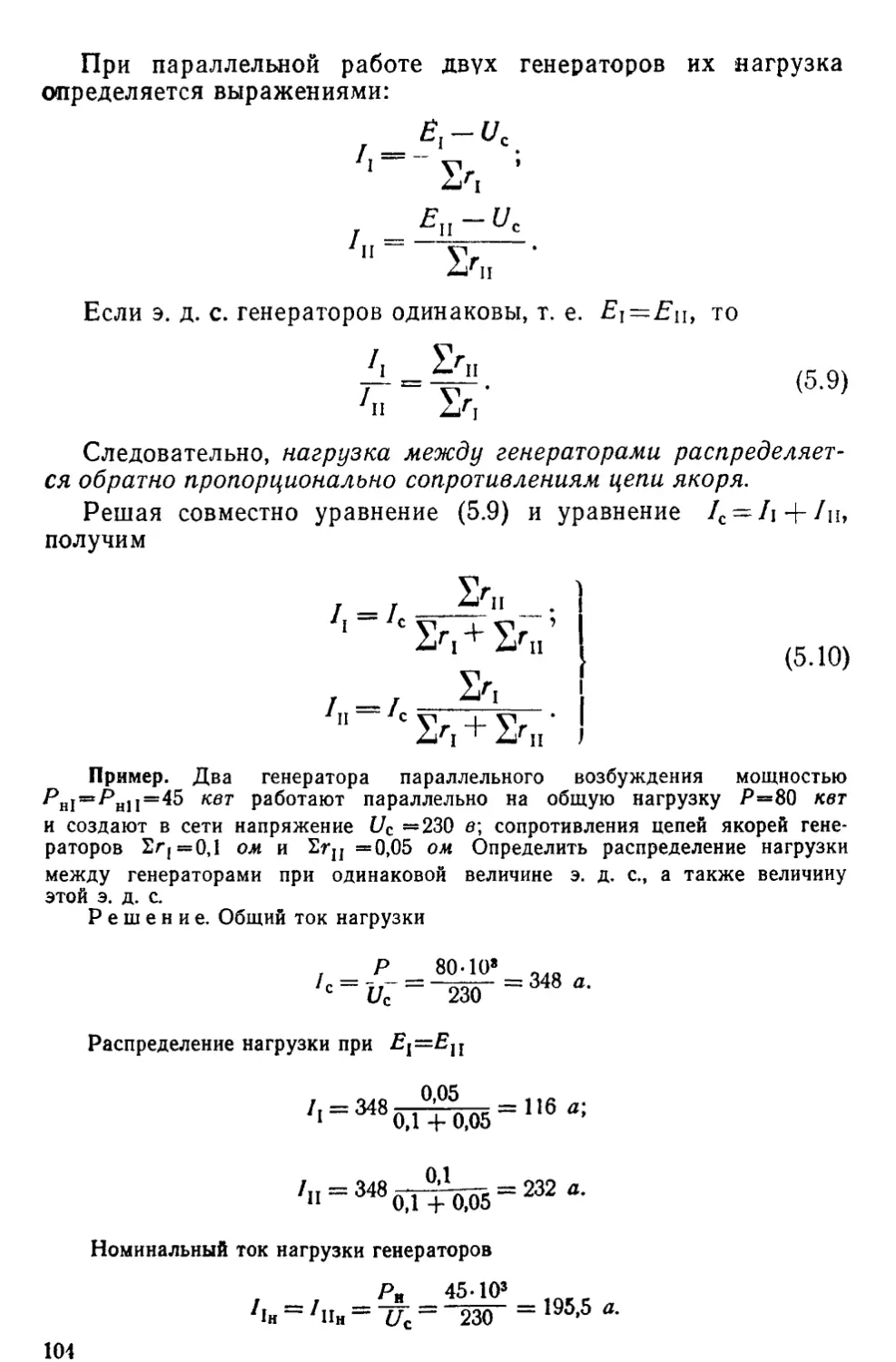
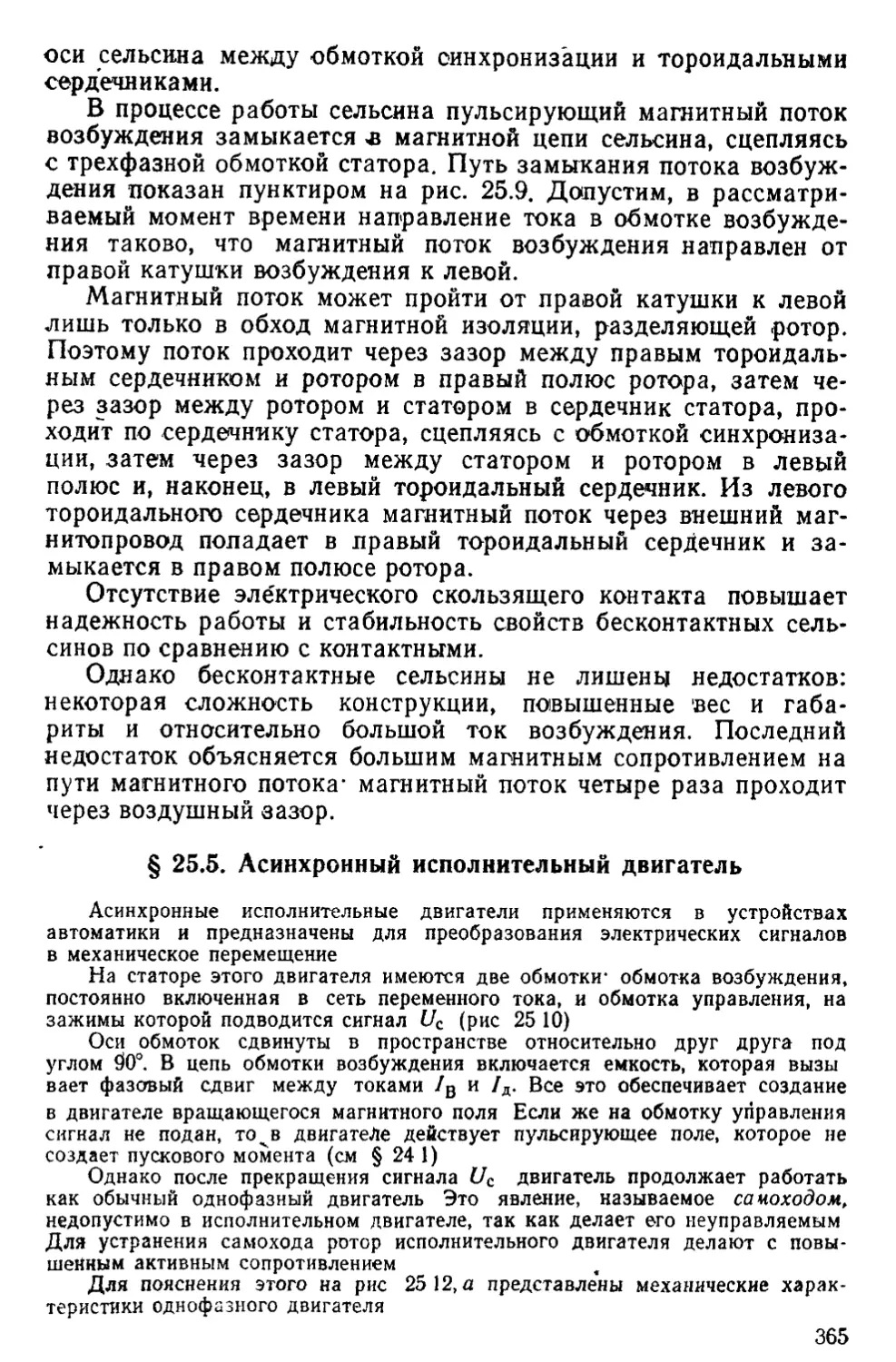
Рис. 1.2. Диаграмма распределения маг-
нитной индукции в воздушном зазоре
индуктируется э. д. с., направление которой указано на рисунке
стрелками. Мгновенное значение этой э. д. с. для одного про-
водника обмотки определяется формулой
(1.1)
Активная длина проводника — величина неизменная, а по-
этому если скорость движения якоря в процессе работы генера-
тора остается неизменной, то в формуле (1.1) их произведение
будет постоянной величиной (const). Это дает возможность фор-
мулу (1.1) записать в виде
е=const • В.
Эта формула показывает, что величина и направление э. д. с.
обмотки якоря определяются исключительно значением' магнит-
ной индукции В в воздушном зазоре между якорем и полюсами.
Но распределение магнитной индукции в воздушном зазоре
генератора в различных местах по окружности якоря неравно-
мерно: под серединой полюсов индукция В имеет максимальные
значения (под северным полюсом положительное, под южным —
15
отрицательное), ближе к краям полюсов индукция уменьшается
(рис. 1.2).
Линия 00' на рис. 1.2, разделяющая зоны магнитных полю-
сов и проходящая через центр якоря, называется геометрической
нейтралью. Магнитная индукция на геометрической нейтрали
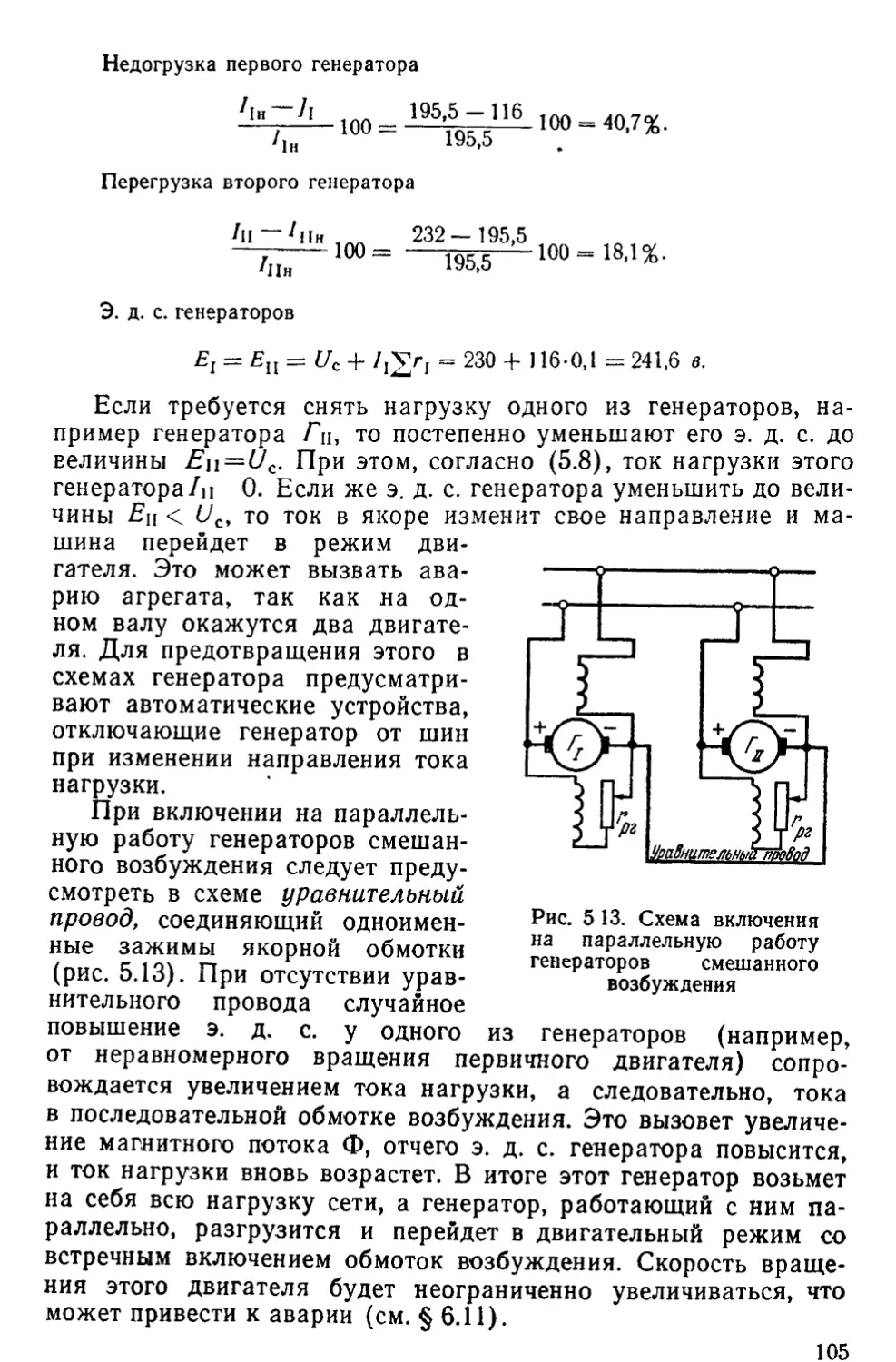
Рис. 1.3. К вопросу о принципе действия генератора
постоянного тока:
-----э. д. с. и ток в обмотке якоря; ... э. д. с.
и ток на щетках и во внешней цепи генератора
(точки а и Ь) равна нулю. В процессе работы генератора якорь
вращается и проводники его обмотки поочередно занимают
положения в магнитном поле с разными значениями магнитной
индукции, а поэтому в обмотке якоря ген.ератора наводится пере-
менная э. д. с. При этом график изменения э. д. с. в зависимости
от времени соответствует диаграмме распределения магнитной
индукции в воздушном зазоре. Так, например, при синусоидаль-
ном характере распределения магнитной индукции э. д. с.,
а следовательно, и ток в обмотке якоря также синусоидальны.
Если бы в машине не было коллектора, то ток (во внешней цепи
генератора был бы переменным. Но посредством коллектора
и щеток А и В переменный ток обмотки якоря преобразуется
в пульсирующий ток, т. е. ток, неизменный по направлению.
При изображенном на рис. 1.1 положении витка abed ток по
внешней цепи генератора направлен от щетки А к щетке В.
Руководствуясь тем, что во внешней части цепи ток направлен
от положительного зажима к отрицательному, определяем по-
лярность щеток: щетка А имеет полярность «плюс», а щетка
В — «минус».
16
После того как якорь повернется на 180°, направление тока
в витке изменится на обратное. Однако полярность щеток,
а следовательно, и направление тока во внешней части цепи
остаются неизменными. Объясняется это тем, что в тот момент,
когда ток в витке меняет свое направление, происходит смена
коллекторных пластин под
щетками. Таким образом,
под щетками А всегда на-
ходится пластина, соеди-
ненная с проводником,
расположенным под се-
верным полюсом, а под
щеткой В — пластина, со-
единенная с проводни-
ком, расположенным над
южным полюсом. В ре-
зультате полярность щеток
в процессе работы генерато-
ра остается неизменной, не-
зависимо от положения вит-
ка в магнитном поле. Благо-
даря этому электрический
ток во внешней цепи генера-
тора становится неизмен-
ным по направлению. Что
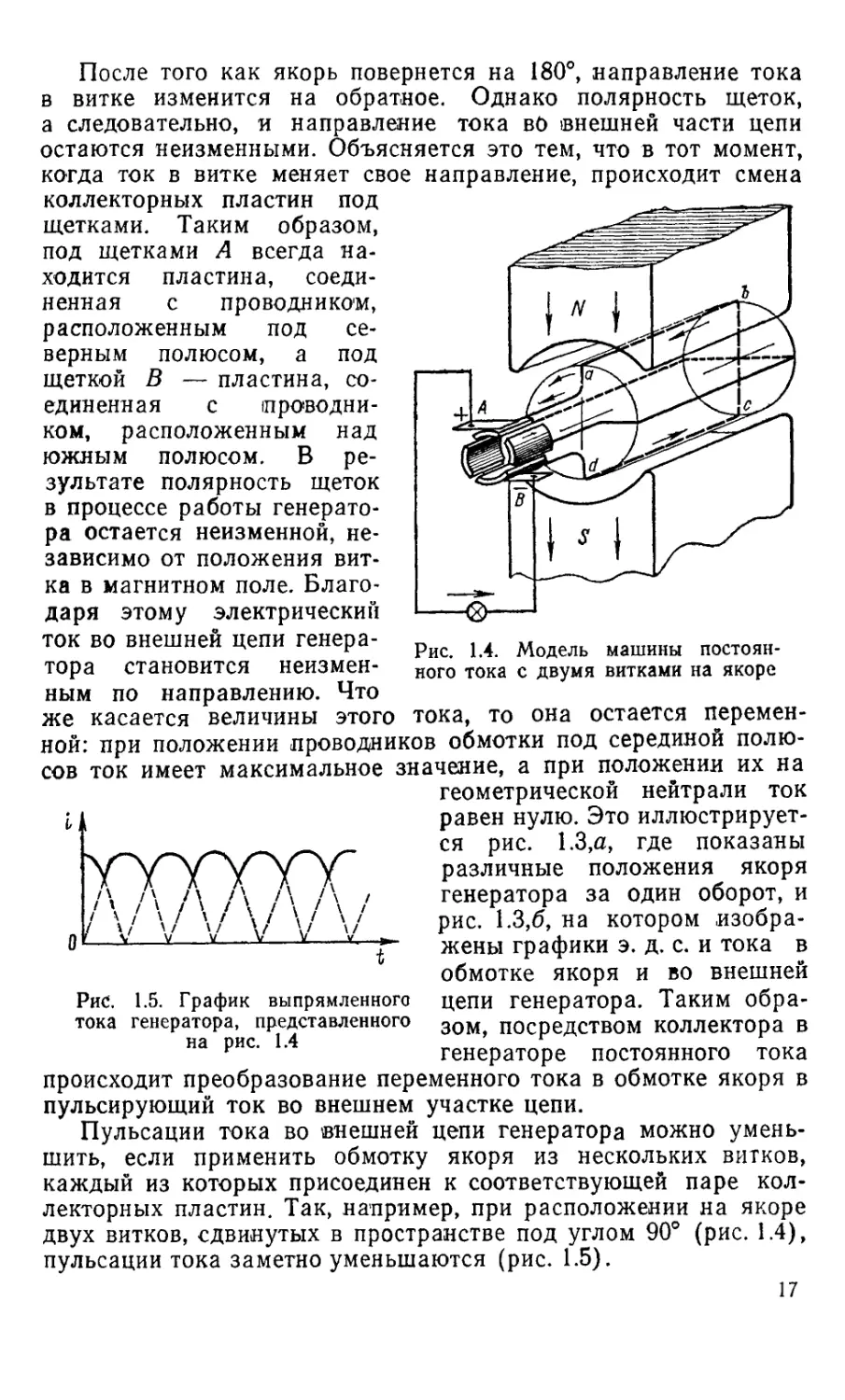
Рис. 1.4. Модель машины постоян-
ного тока с двумя витками на якоре
же касается величины этого
тока, то она остается перемен
ной: при положении проводников обмотки под серединой полю-
сов ток имеет максимальное значение, а при положении их на
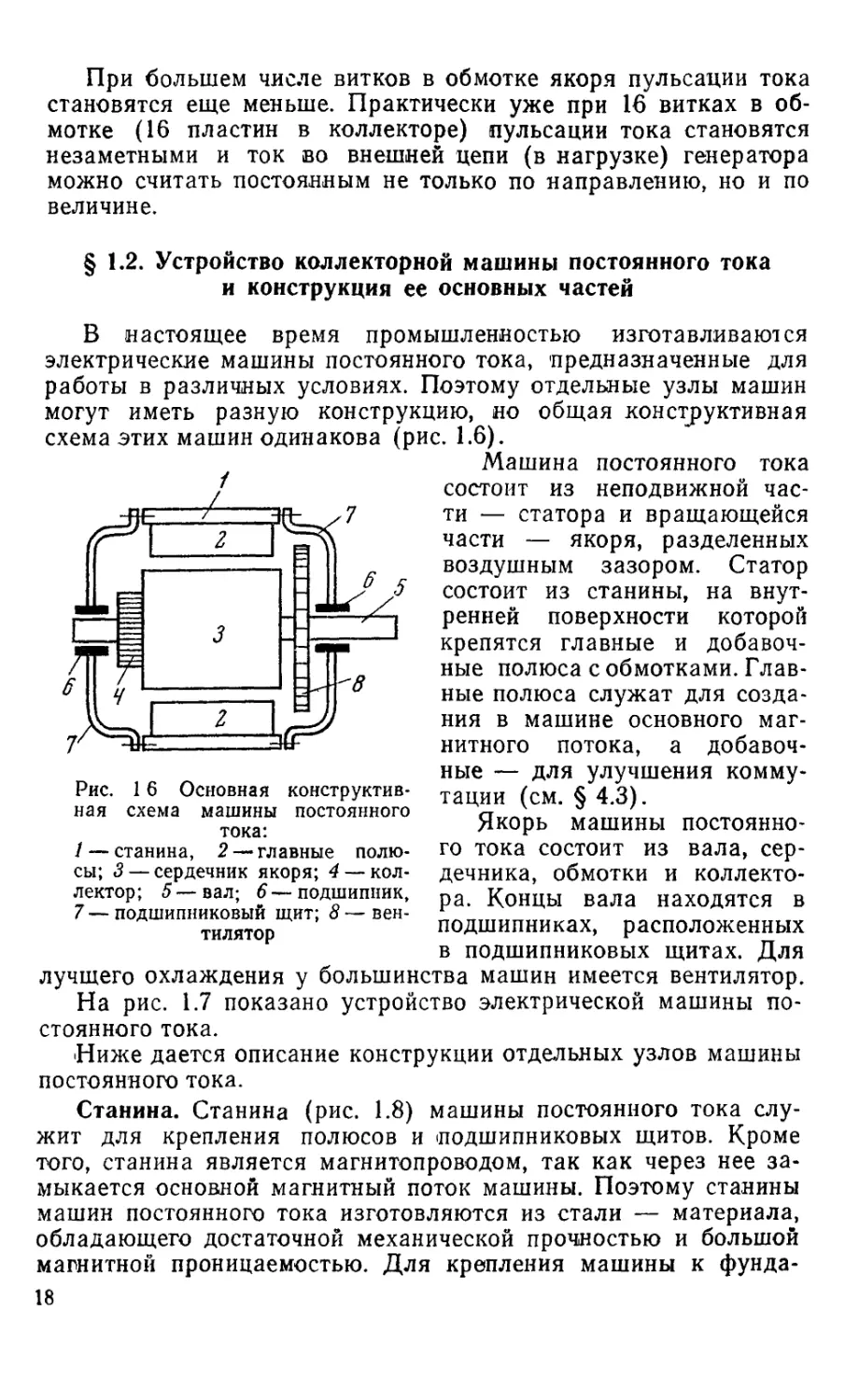
Рис. 1.5. График выпрямленного
тока генератора, представленного
на рис. 1.4
геометрической нейтрали ток
равен нулю. Это иллюстрирует-
ся рис. 1.3,а, где показаны
различные положения якоря
генератора за один оборот, и
рис. 1.3,6, на котором изобра-
жены графики э. д. с. и тока в
обмотке якоря и во внешней
цепи генератора. Таким обра-
зом, посредством коллектора в
генераторе постоянного тока
происходит преобразование переменного тока в обмотке якоря в
пульсирующий ток во внешнем участке цепи.
Пульсации тока во внешней цепи генератора можно умень-
шить, если применить обмотку якоря из нескольких витков,
каждый из которых присоединен к соответствующей паре кол-
лекторных пластин. Так, например, при расположении на якоре
двух витков, сдвинутых в пространстве под углом 90° (рис. 1.4),
пульсации тока заметно уменьшаются (рис. 1.5).
17
При большем числе витков в обмотке якоря пульсации тока
становятся еще меньше. Практически уже при 16 витках в об-
мотке (16 пластин в коллекторе) пульсации тока становятся
незаметными и ток во внешней цепи (в нагрузке) генератора
можно считать постоянным не только по направлению, но и по
величине.
Рис. 16 Основная конструктив-
ная схема машины постоянного
тока:
1 — станина, 2 — главные полю-
сы; 3 — сердечник якоря; 4 — кол-
лектор; 5 — вал; 6 — подшипник,
7 — подшипниковый щит; 8 — вен-
тилятор
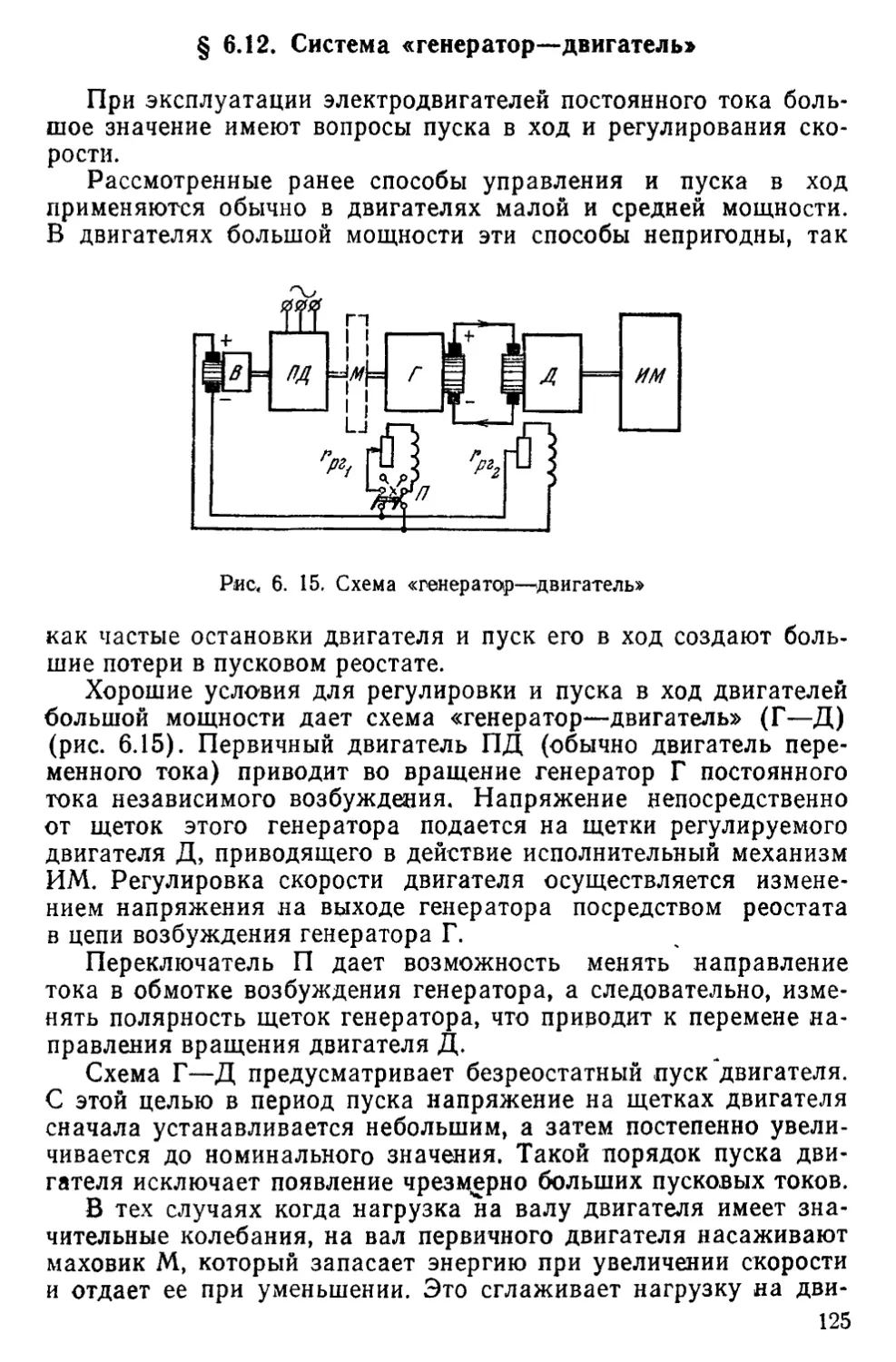
§ 1.2. Устройство коллекторной машины постоянного тока
и конструкция ее основных частей
В настоящее время промышленностью изготавливаются
электрические машины постоянного тока, предназначенные для
работы в различных условиях. Поэтому отдельные узлы машин
могут иметь разную конструкцию, но общая конструктивная
схема этих машин одинакова (рис. 1.6).
Машина постоянного тока
состоит из неподвижной час-
ти — статора и вращающейся
части — якоря, разделенных
воздушным зазором. Статор
состоит из станины, на внут-
ренней поверхности которой
крепятся главные и добавоч-
ные полюса с обмотками. Глав-
ные полюса служат для созда-
ния в машине основного маг-
нитного потока, а добавоч-
ные — для улучшения комму-
тации (см. § 4.3).
Якорь машины постоянно-
го тока состоит из вала, сер-
дечника, обмотки и коллекто-
ра. Концы вала находятся в
подшипниках, расположенных
в подшипниковых щитах. Для
лучшего охлаждения у большинства машин имеется вентилятор.
На рис. 1.7 показано устройство электрической машины по-
стоянного тока.
Ниже дается описание конструкции отдельных узлов машины
постоянного тока.
Станина. Станина (рис. 1.8) машины постоянного тока слу-
жит для крепления полюсов и подшипниковых щитов. Кроме
того, станина является магнитопроводом, так как через нее за-
мыкается основной магнитный поток машины. Поэтому станины
машин постоянного тока изготовляются из стали — материала,
обладающего достаточной механической прочностью и большой
магнитной проницаемостью. Для крепления машины к фунда-
18
менту станина имеет отлитые или приваренные лапы с отвер-
стиями для крепящих болтов. По окружности станины имеются
отверстия для крепления главных и добавочных полюсов. В верх-
ней части станина имеет подъемное кольцо (рым-болт), служа-
щее для подъема машины при ее сборке и монтаже.
Рис. 1 7 Устройство электрической машины постоянного
тока
1 — 1&ллектор, 2 — щетки; 3— сердечник якоря, 4—сердеч-
ник главного полюса; 5 — полюсная катушка; 6 — станина;
7 — подшипниковый щит, 8 — вентилятор, 9— обмотка якоря.
В машинах малой и средней мощности станина представляет
собой цельную конструкцию в виде стальной отливки или же
сваренную из листовой стали. В крупных машинах станины
делают разъемными, что облегчает их монтаж и транспорти-
ровку.
Главные полюса. Магнитное поле в машине постоянного тока
создается намагничивающей силой обмотки возбуждения, кото-
рая выполняется в виде полюсных катушек, надетых на сердеч-
ники главных полюсов (рис. 1.9). Со стороны, обращенной
к якорю, сердечник заканчивается йолюсцым наконечником,
посредством которого обеспечивается требуемое распределение
магнитного потока на поверхности якоря.
2* 19
Сердечники главных полюсов изготавливают в виде пакетов
стальных листов толщиной от 1 до 2 мм. Пакет прессуют и стя-
гивают шпильками. Такой конструкцией достигается уменьшение
вихревых токов в сердечнике полюса, возникновение которых
объясняется изменением (пуль-
сацией) магнитной индукции в
полюсных наконечниках при
Якорь
Рис. 1.9. Главный полюс:
/ — станина; 2 — полюсная ка-
Рис. 1.8. Станина машины постоян- тушка; 3— полюсный наконеч-
ного тока ник; 4 — сердечник полюса
вращении якоря, имеющего зубчатую поверхность.
Полюса крепятся к станине болтами или шпильками. Полюс-
ные катушки выполняются из медного провода, намотанного
7
Рис. 1.10. Добавочный полюс Рис. 1.11. Якорь без обмотки
на каркас из изолирующего материала. Иногда катушку делят
по высоте на несколько частей, между которыми оставляют вен-
тиляционные каналы. Такая конструкция обеспечивает лучшее
охлаждение катушки.
20
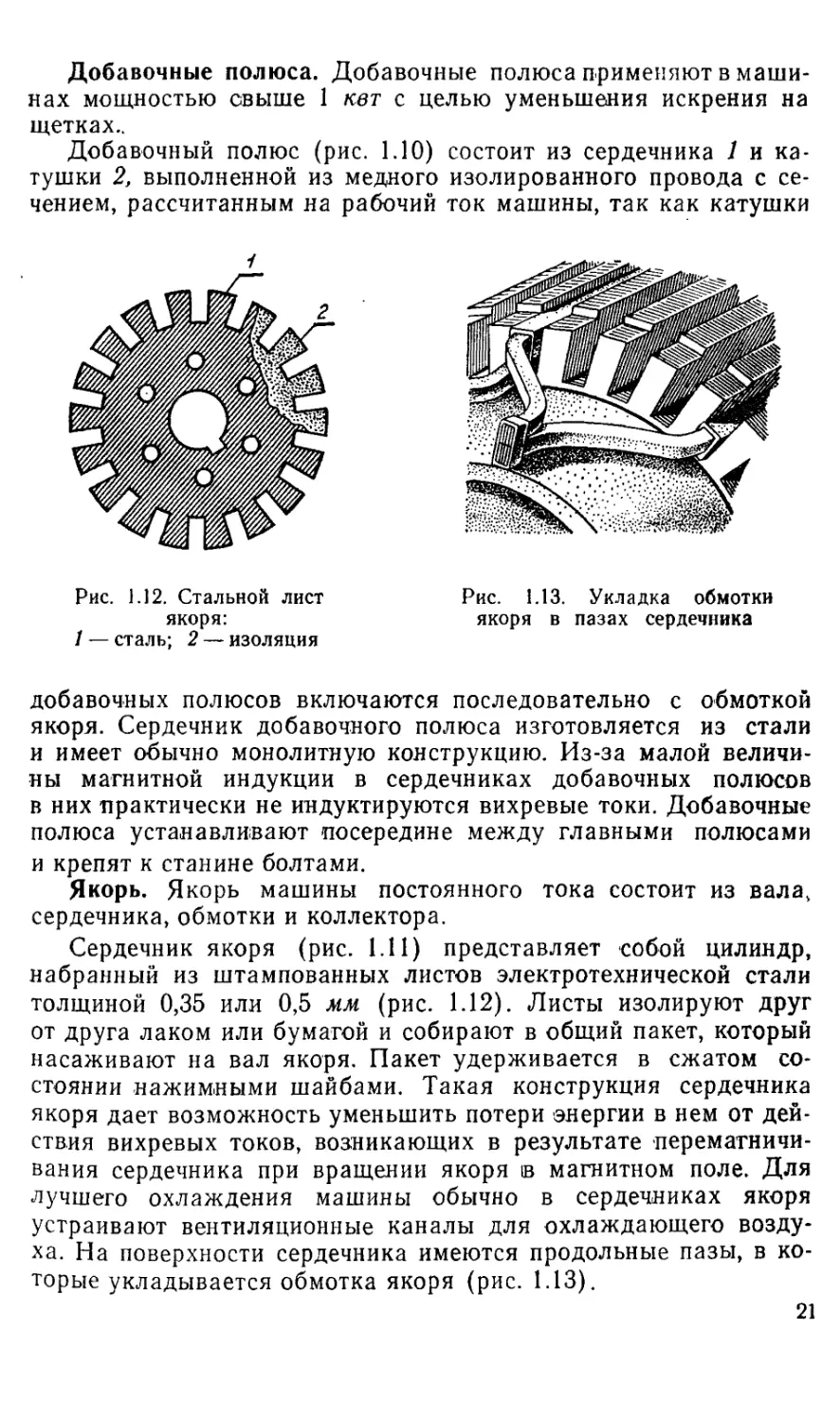
Добавочные полюса. Добавочные полюса применяют в маши-
нах мощностью свыше 1 кет с целью уменьшения искрения на
щетках..
Добавочный полюс (рис. 1.10) состоит из сердечника 1 и ка-
тушки 2, выполненной из медного изолированного провода с се-
чением, рассчитанным на рабочий ток машины, так как катушки
1
Рис. 1.12. Стальной лист
якоря:
/ — сталь; 2 — изоляция
Рис. 1.13. Укладка обмотки
якоря в пазах сердечника
добавочных полюсов включаются последовательно с обмоткой
якоря. Сердечник добавочного полюса изготовляется из стали
и имеет обычно монолитную конструкцию. Из-за малой величи-
ны магнитной индукции в сердечниках добавочных полюсов
в них практически не индуктируются вихревые токи. Добавочные
полюса устанавливают посередине между главными полюсами
и крепят к станине болтами.
Якорь. Якорь машины постоянного тока состоит из вала,
сердечника, обмотки и коллектора.
Сердечник якоря (рис. l.ll) представляет собой цилиндр,
набранный из штампованных листов электротехнической стали
толщиной 0,35 или 0,5 мм (рис. 1.12). Листы изолируют друг
от друга лаком или бумагой и собирают в общий пакет, который
насаживают на вал якоря. Пакет удерживается в сжатом со-
стоянии нажимными шайбами. Такая конструкция сердечника
якоря дает возможность уменьшить потери энергии в нем от дей-
ствия вихревых токов, возникающих в результате перемагничи-
вания сердечника при вращении якоря ib магнитном поле. Для
лучшего охлаждения машины обычно в сердечниках якоря
устраивают вентиляционные каналы для охлаждающего возду-
ха. На поверхности сердечника имеются продольные пазы, в ко-
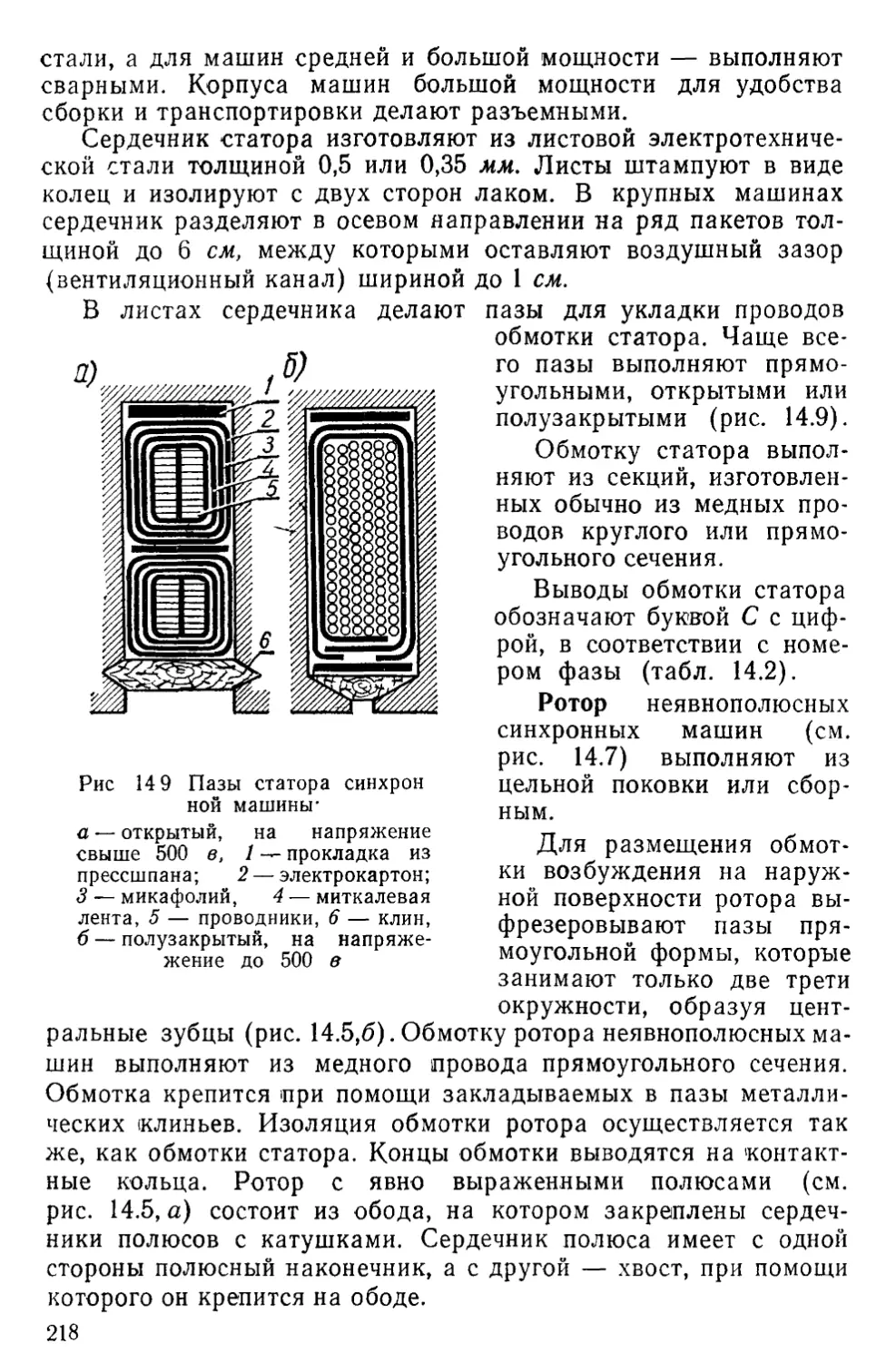
торые укладывается обмотка якоря (рис. 1.13).
21
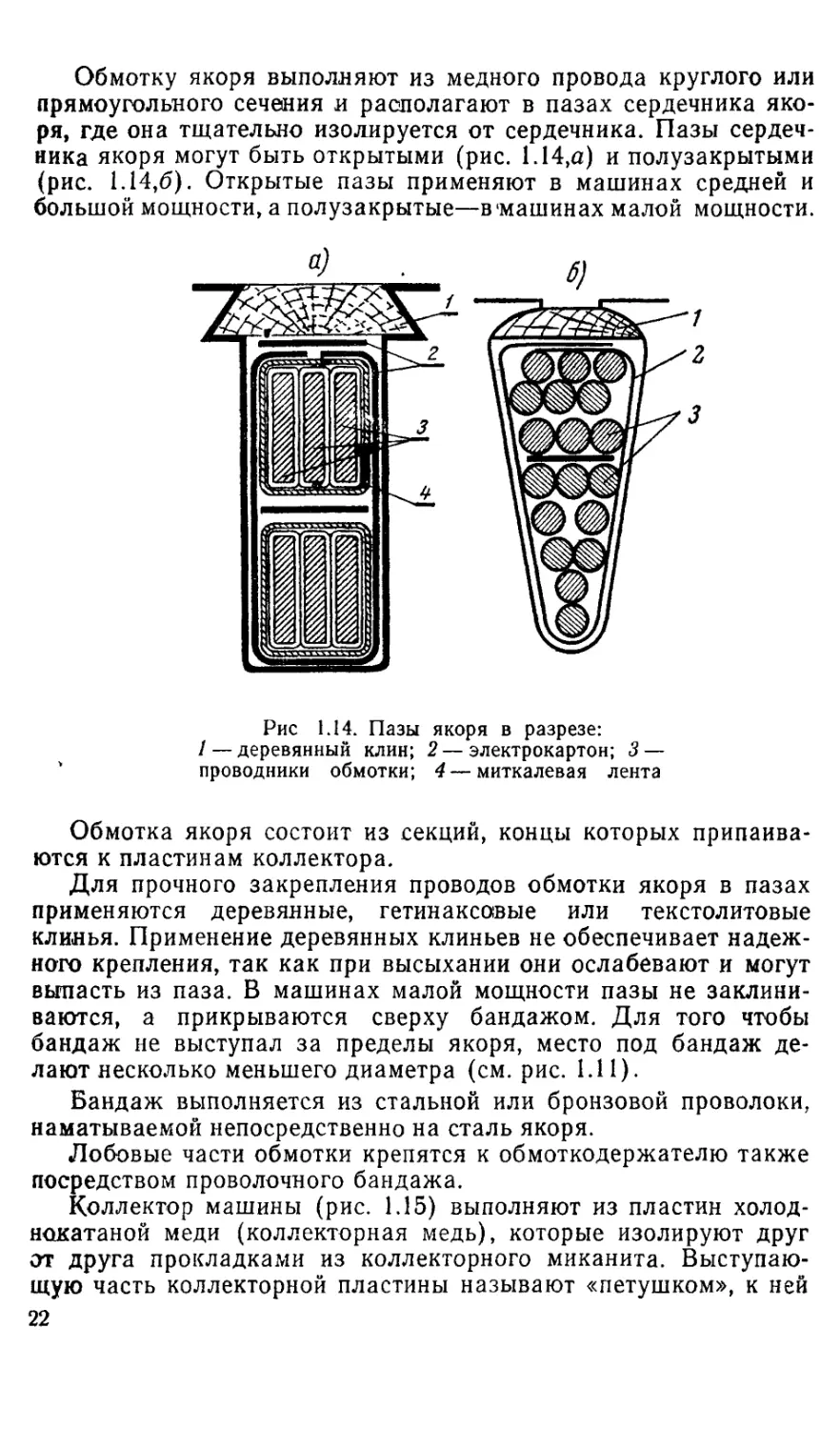
Обмотку якоря выполняют из медного провода круглого или
прямоугольного сечения и располагают в пазах сердечника яко-
ря, где она тщательно изолируется от сердечника. Пазы сердеч-
ника якоря могут быть открытыми (рис. 1.14,а) и полузакрытыми
(рис. 1.14,6). Открытые пазы применяют в машинах средней и
большой мощности, а полузакрытые—в‘машинах малой мощности.
Рис 1.14. Пазы якоря в разрезе:
1 — деревянный клин; 2 — электрокартон; 3 —
проводники обмотки; 4—миткалевая лента
Обмотка якоря состоит из секций, концы которых припаива-
ются к пластинам коллектора.
Для прочного закрепления проводов обмотки якоря в пазах
применяются деревянные, гетинаксовые или текстолитовые
клинья. Применение деревянных клиньев не обеспечивает надеж-
ного крепления, так как при высыхании они ослабевают и могут
выпасть из паза. В машинах малой мощности пазы не заклини-
ваются, а прикрываются сверху бандажом. Для того чтобы
бандаж не выступал за пределы якоря, место под бандаж де-
лают несколько меньшего диаметра (см. рис. 1.11).
Бандаж выполняется из стальной или бронзовой проволоки,
наматываемой непосредственно на сталь якоря.
Лобовые части обмотки крепятся к обмоткодержателю также
посредством проволочного бандажа.
Коллектор машины (рис. 1.15) выполняют из пластин холод-
нокатаной меди (коллекторная медь), которые изолируют друг
от друга прокладками из коллекторного миканита. Выступаю-
щую часть коллекторной пластины называют «петушком», к ней
22
припаивают провода обмотки якоря. Нижние края пластины
имеют форму «ласточкиного хвоста». После сборки коллектора
эти края оказываются зажатыми между двумя нажимными шай-
бами, изолированными от коллекторных пластин миканитовыми
конусами и цилиндрами.
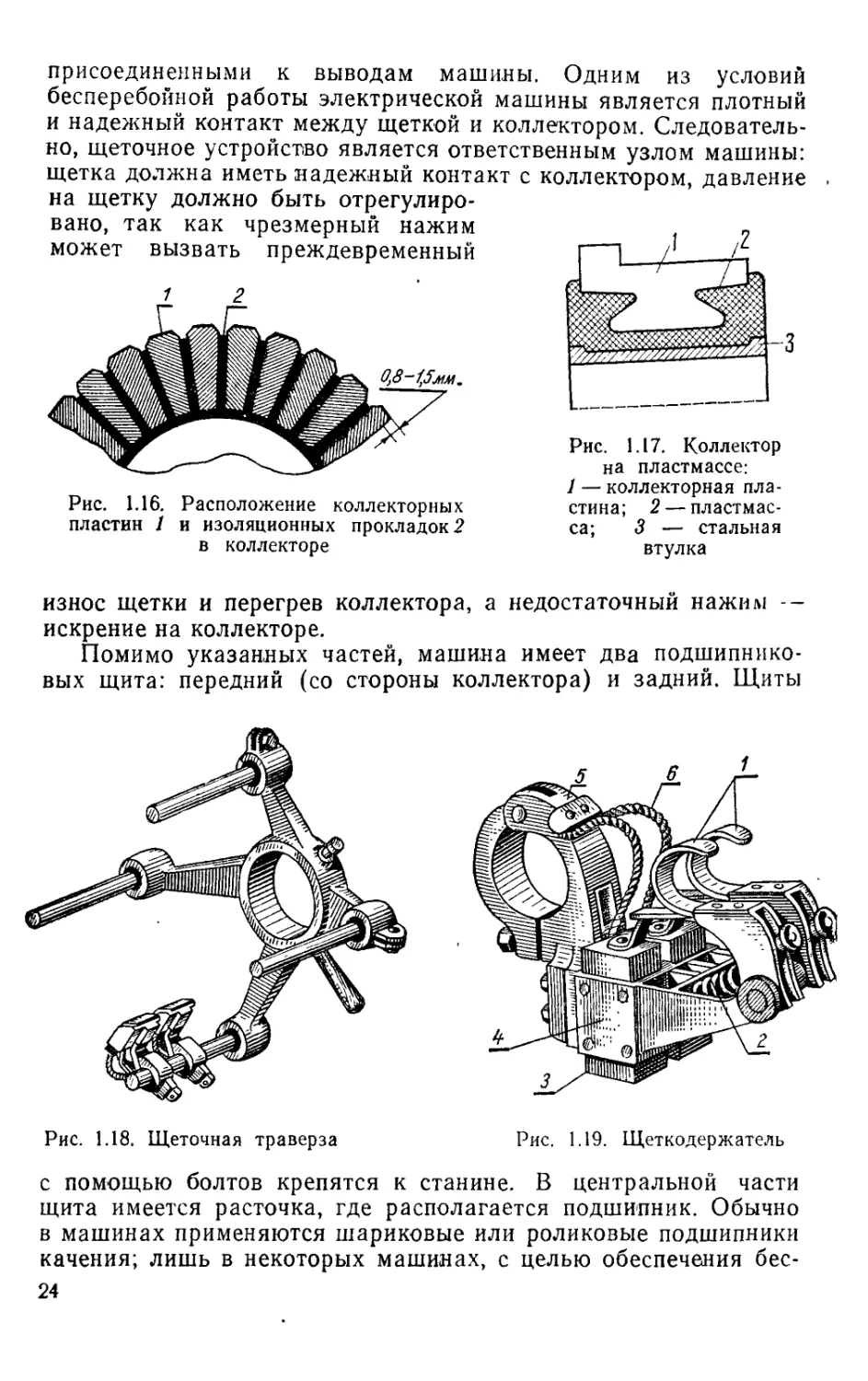
Чтобы миканитовые про-
кладки при срабатывании
пластин коллектора не
выступали над пластина-
ми, что вызвало бы виб-
рацию щеток, искрение
и преждевременный износ
щеток, между коллектор-
ными пластинами фрезе-
руют пазы (дорожки)
на глубину до 1,5 мм
(рис. 1.16).
Колл екто р ы электри-
ческих машин малой
мощности часто выполня-
ются путем запрессовки
медных пластин в пласт-
массу (рис. 1.17). Пласт-
масса в этом случае явля-
Рис 1.15. Устройство коллектора*
/ — корпус коллектора; 2 —стяжной
болт; 3 — нажимное кольцо; 4 —
изоляция (миканит); 5—«петушок»;
6 — «ласточкин хвост»; 7 — пластины
ется скрепляющим и изо-
лирующим материалом.
Такая конструкция кол-
лектора проста в изготов-
лении, но может приме-
няться лишь при скорости вращения до 10 000 об!мин.
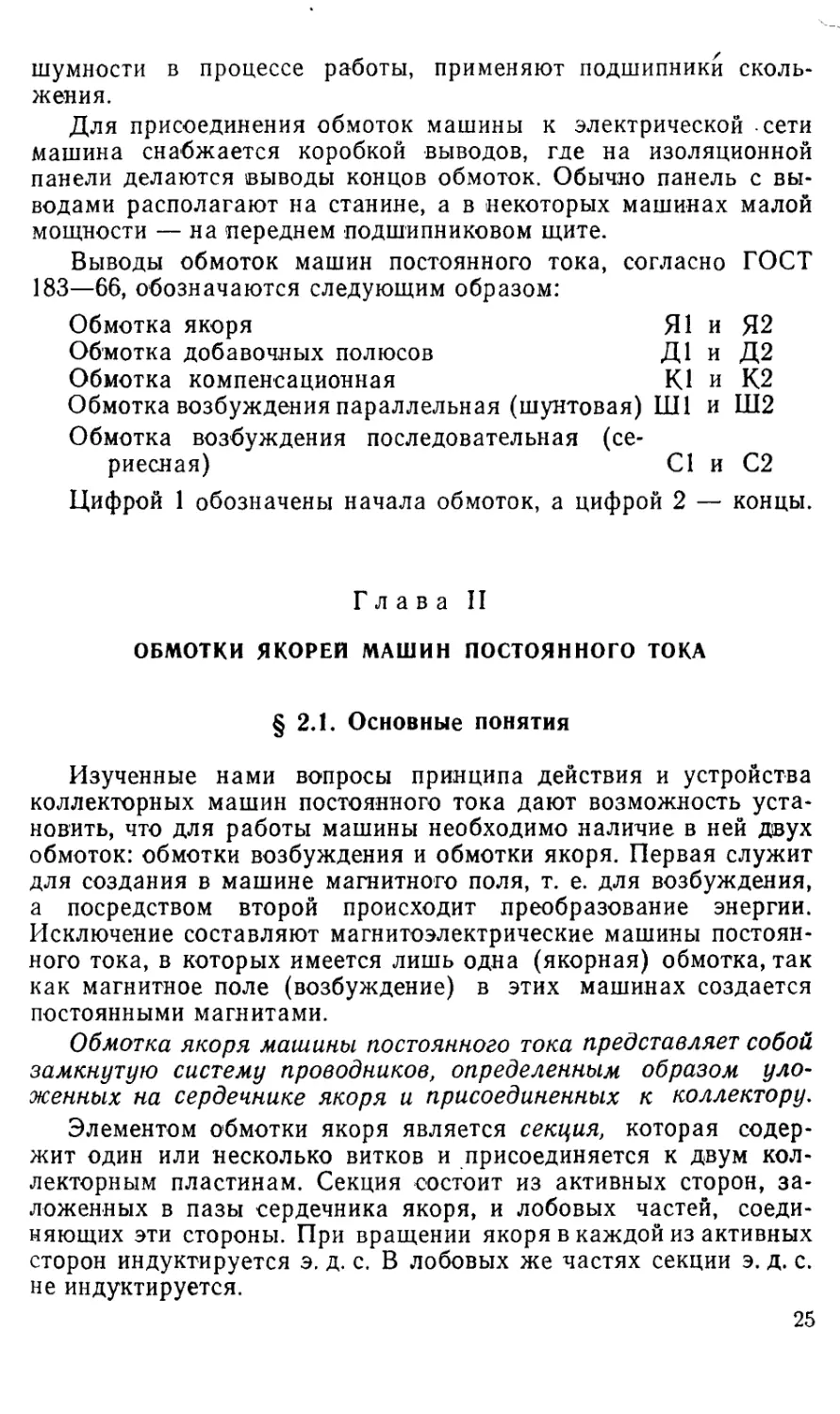
Щеточное устройство. Для получения электрического кон
такта с поверхностью коллектора в машине постоянного тока
имеются щетки. Для установки щеток в машине служит щеточ-
ное устройство, которое состоит из щеточной траверзы (рис. 1.18),
пальцев, щеткодержателей (рис. 1.19).
Щеточная траверза обычно крепится к подшипниковому щиту
и только в машинах большой мощности она крепится к станине.
Между щеточной траверзой и пальцами имеется изоляция. На
каждый палец устанавливают комплект щеткодержателей. Число
пальцев обычно равно числу главных полюсов в машине. Щетко-
держатель (рис. 1.19) состоит из обоймы 4, в которую помещают
щетку 3, курка представляющего собой откидную деталь,
передающую давление пружины 2 на щетку. Крепление щетко-
держателя на пальце осуществляется посредством зажимай. Для
присоединения элементов электрической цепи машины к щетке
последняя снабжается гибким тросиком 6. Все щеткодержатели
одной полярности соединяют между собой сборными шинами,
23
присоединенными к выводам машины. Одним из условий
бесперебойной работы электрической машины является плотный
и надежный контакт между щеткой и коллектором. Следователь-
но, щеточное устройство является ответственным узлом машины:
щетка должна иметь надежный контакт с коллектором, давление
на щетку должно быть отрегулиро-
вано, так как чрезмерный нажим
может вызвать преждевременный
Рис. 1.17. Коллектор
на пластмассе:
1 — коллекторная пла-
стина; 2 — пластмас-
са; 3 — стальная
Рис. 1.16. Расположение коллекторных
пластин 1 и изоляционных прокладок?
в коллекторе
втулка
износ щетки и перегрев коллектора, а недостаточный нажим —
искрение на коллекторе.
Помимо указанных частей, машина имеет два подшипнико-
вых щита: передний (со стороны коллектора) и задний. Щиты
Рис. 1.19. Щеткодержатель
с помощью болтов крепятся к станине. В центральной части
щита имеется расточка, где располагается подшипник. Обычно
в машинах применяются шариковые или роликовые подшипники
качения; лишь в некоторых машинах, с целью обеспечения бес-
24
шумности в процессе работы, применяют подшипники сколь-
жения.
Для присоединения обмоток машины к электрической сети
машина снабжается коробкой выводов, где на изоляционной
панели делаются выводы концов обмоток. Обычно панель с вы-
водами располагают на станине, а в некоторых машинах малой
мощности — на переднем подшипниковом щите.
Выводы обмоток машин постоянного тока, согласно ГОСТ
183—66, обозначаются следующим образом:
Обмотка якоря Я1 и Я2
Обмотка добавочных полюсов Д1 и Д2
Обмотка компенсационная К1 и К2
Обмотка возбуждения параллельная (шунтовая) Ш1 и Ш2
Обмотка возбуждения последовательная (се-
риесная) С1 и С2
Цифрой 1 обозначены начала обмоток, а цифрой 2 — концы.
Глава II
ОБМОТКИ ЯКОРЕЙ МАШИН ПОСТОЯННОГО ТОКА
§ 2.1. Основные понятия
Изученные нами вопросы принципа действия и устройства
коллекторных машин постоянного тока дают возможность уста-
новить, что для работы машины необходимо наличие в ней двух
обмоток: обмотки возбуждения и обмотки якоря. Первая служит
для создания в машине магнитного поля, т. е. для возбуждения,
а посредством второй происходит преобразование энергии.
Исключение составляют магнитоэлектрические машины постоян-
ного тока, в которых имеется лишь одна (якорная) обмотка, так
как магнитное поле (возбуждение) в этих машинах создается
постоянными магнитами.
Обмотка якоря машины постоянного тока представляет собой
замкнутую систему проводников, определенным образом уло-
женных на сердечнике якоря и присоединенных к коллектору.
Элементом обмотки якоря является секция, которая содер-
жит один или несколько витков и присоединяется к двум кол-
лекторным пластинам. Секция состоит из активных сторон, за-
ложенных в пазы сердечника якоря, и лобовых частей, соеди-
няющих эти стороны. При вращении якоря в каждой из активных
сторон индуктируется э. д. с. В лобовых же частях секции э. д. с.
не индуктируется.
25
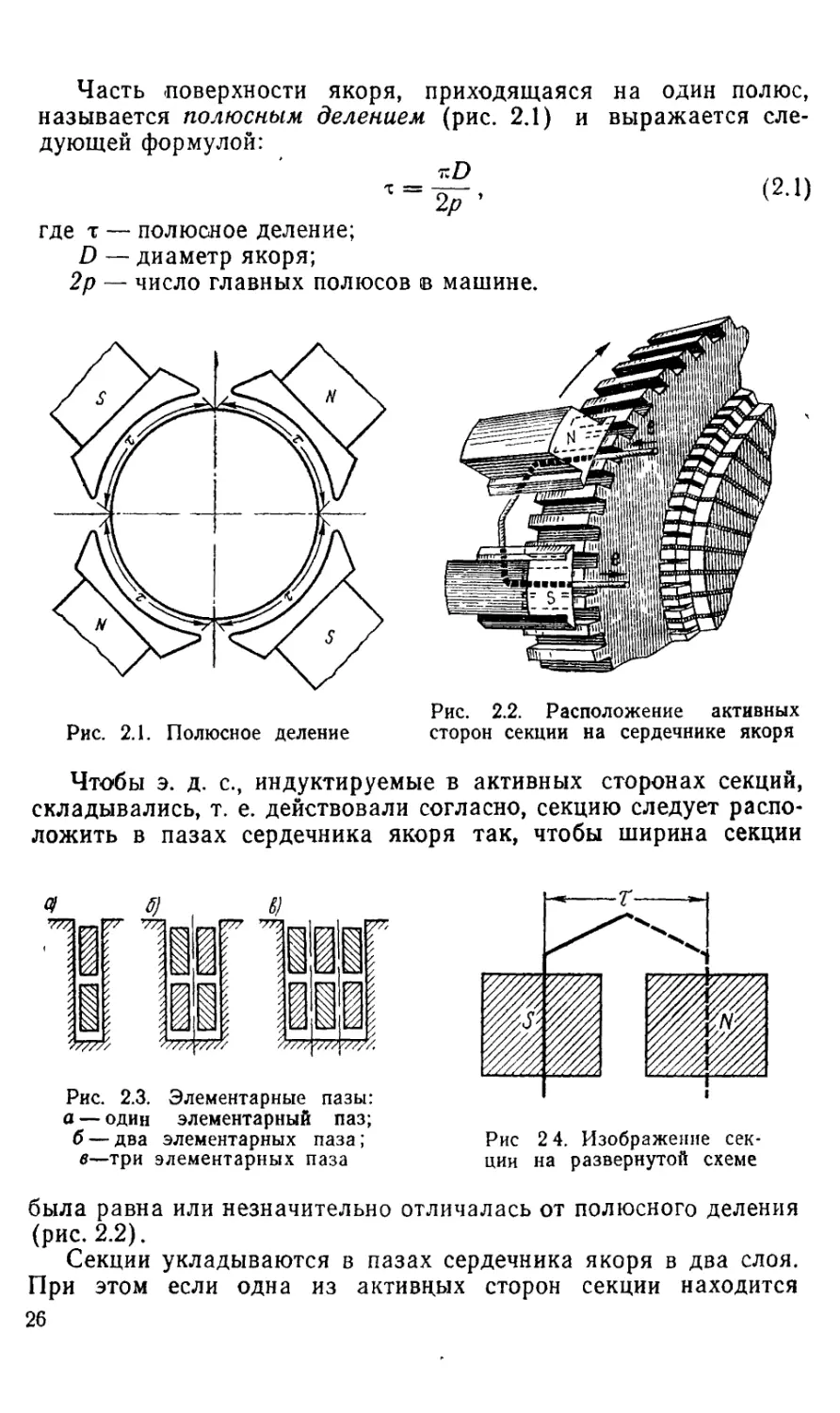
Часть поверхности якоря, приходящаяся на один полюс,
называется полюсным делением (рис. 2.1) и выражается сле-
дующей формулой:
т.Р
2р ’
(2.1)
где т — полюсное деление;
D — диаметр якоря;
2р — число главных полюсов в машине.
Рис. 2.1. Полюсное деление
Рис. 2.2. Расположение активных
сторон секции на сердечнике якоря
Чтобы э. д. с., индуктируемые в активных сторонах секций,
складывались, т. е. действовали согласно, секцию следует распо-
ложить в пазах сердечника якоря так, чтобы ширина секции
Рис. 2.3. Элементарные пазы:
а — один элементарный паз;
б — два элементарных паза;
в—три элементарных паза
Рис 2 4. Изображение сек-
ции на развернутой схеме
была равна или незначительно отличалась от полюсного деления
(рис. 2.2).
Секции укладываются в пазах сердечника якоря в два слоя.
При этом если одна из активных сторон секции находится
26
в нижней части одного паза, то ее другая сторона находится
в верхней части другого паза (см. рис. 1.13). Верхняя сторона
одной секции и нижняя сторона другой, уложенные в одном
пазу, образуют элементарный паз (Z3). В реальном пазу может
быть и более двух активных сторон, например четыре, шесть,
восемь и т. д. В этом случае реальный паз состоит из нескольких
элементарных пазов (рис. 2.3).
Так как секция имеет две активные стороны, то каждой
секции соответствует один элементарный паз. Концы секции
присоединяются к коллекторным пластинам, при этом к каждой
пластине присоединяется начало одной секции и конец другой,
т. е. на каждую секцию приходится одна коллекторная пластина.
Таким образом, для якорной обмотки можно записать следую-
щее равенство:
s = z3 = K,
где S — число секций в обмотке якоря;
Z9 — число элементарных пазов;
К — число коллекторных пластин.
Для более удобного и наглядного изображения схем якорных
обмоток цилиндрическую поверхность якоря вместе с обмоткой
условно развертывают на плоскости и все соединения провод-
ников изображают прямыми линиями на плоскости чертежа
(рис. 2.4.). Выполненная в таком виде схема обмотки называется
развернутой.
В зависимости от формы секций и от способа присоединения
их к коллектору различают следующие типы якорных обмоток:
простая петлевая, сложная петлевая, простая волновая, сложная
волновая и комбинированная.
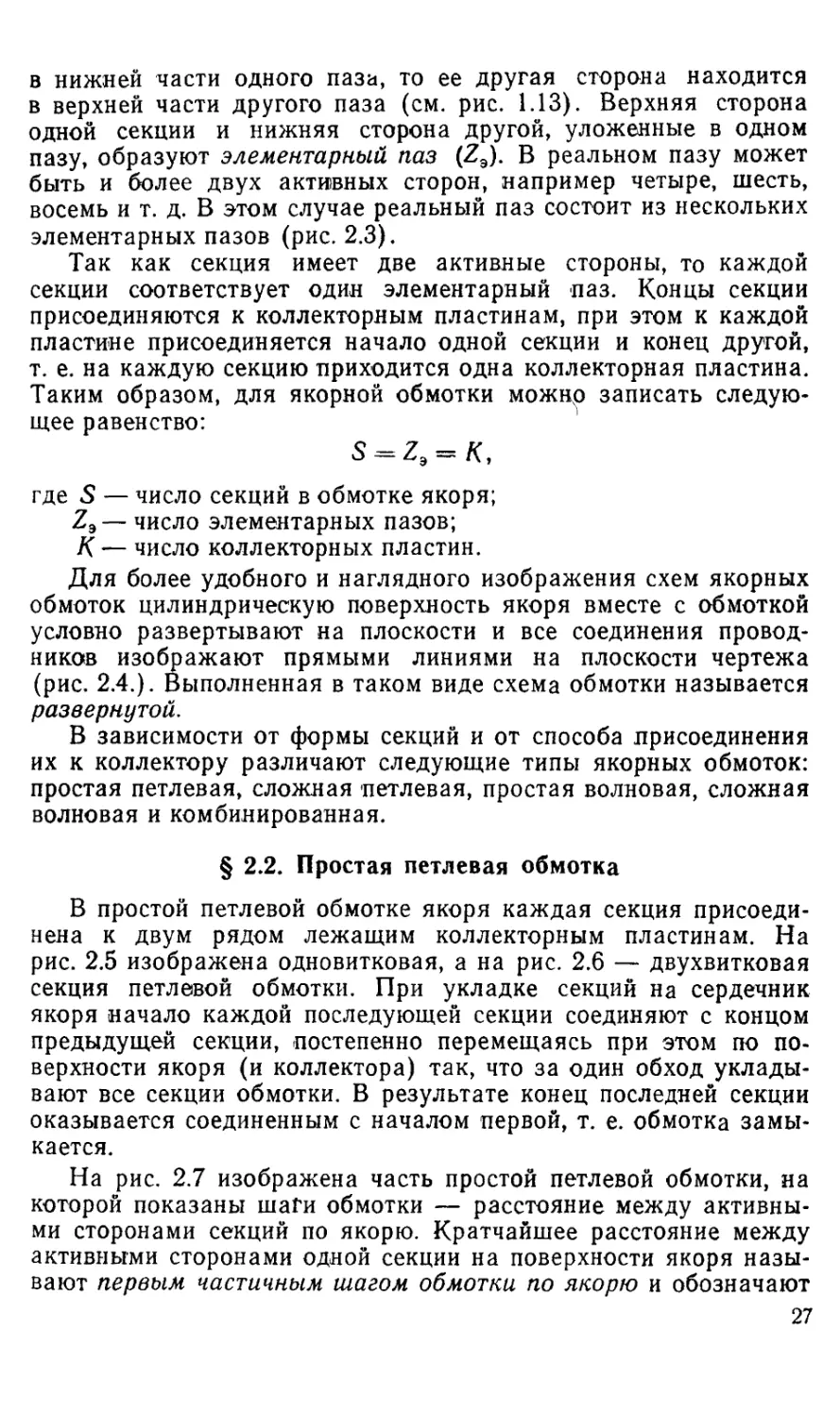
§ 2.2. Простая петлевая обмотка
В простой петлевой обмотке якоря каждая секция присоеди-
нена к двум рядом лежащим коллекторным пластинам. На
рис. 2.5 изображена одновитковая, а на рис. 2.6 — двухвитковая
секция петлевой обмотки. При укладке секций на сердечник
якоря начало каждой последующей секции соединяют с концом
предыдущей секции, постепенно перемещаясь при этом по по-
верхности якоря (и коллектора) так, что за один обход уклады-
вают все секции обмотки. В результате конец последней секции
оказывается соединенным с началом первой, т. е. обмотка замы-
кается.
На рис. 2.7 изображена часть простой петлевой обмотки, на
которой показаны шаги обмотки — расстояние между активны-
ми сторонами секций по якорю. Кратчайшее расстояние между
активными сторонами одной секции на поверхности якоря назы-
вают первым частичным шагом обмотки по якорю и обозначают
27
через у\. Это расстояние измеряется в элементарных пазах и, как
было указано ранее, должно быть равным или незначительно
отличаться от полюсного деления.
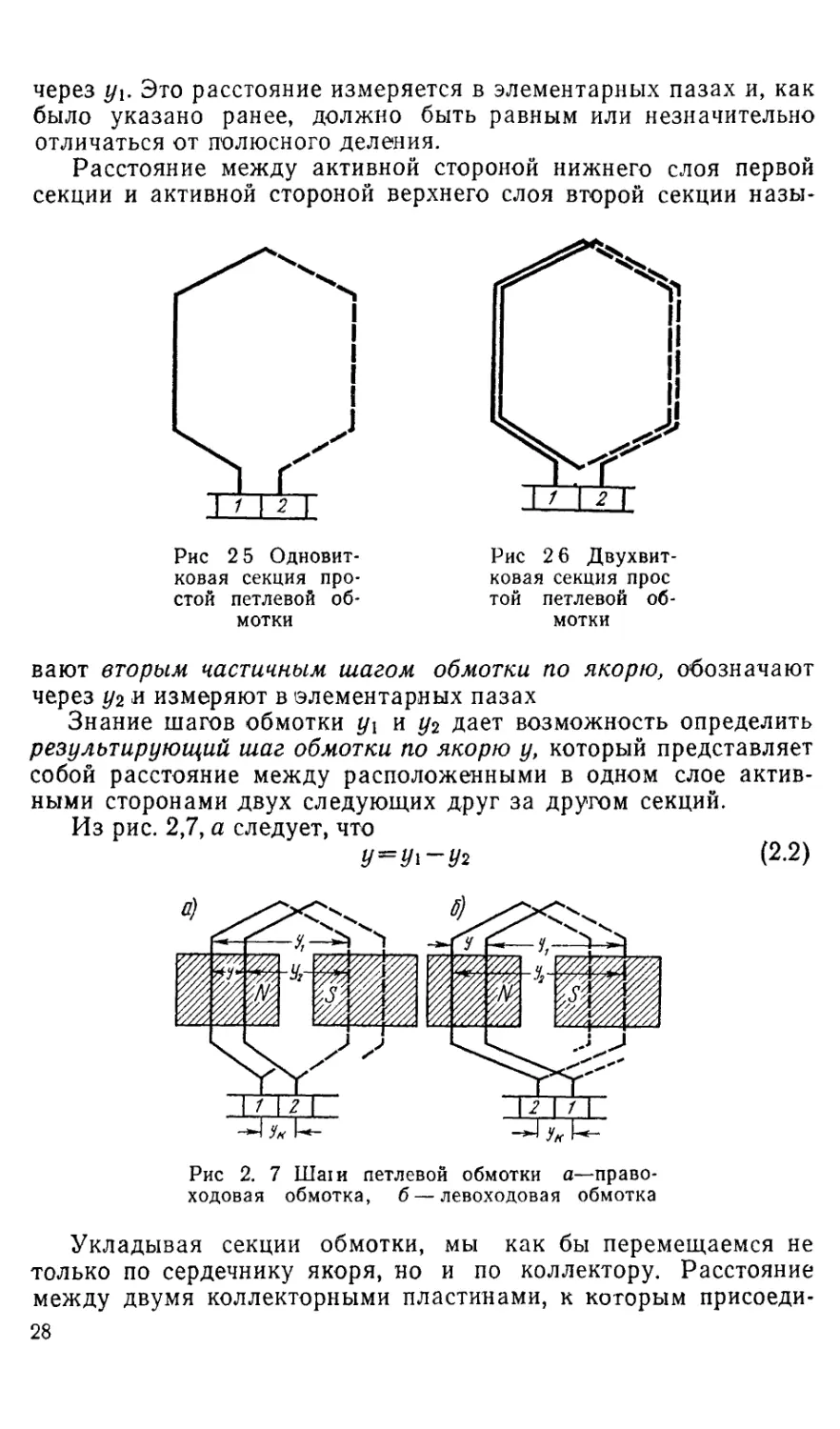
Расстояние между активной стороной нижнего слоя первой
секции и активной стороной верхнего слоя второй секции назы-
Рис 2 5 Одновит-
ковая секция про-
стой петлевой об-
мотки
Рис 2 6 Двухвит-
ковая секция прос
той петлевой об-
мотки
вают вторым частичным шагом обмотки по якорю, обозначают
через у2 и измеряют в элементарных пазах
Знание шагов обмотки у\ и у% дает возможность определить
результирующий шаг обмотки по якорю у, который представляет
собой расстояние между расположенными в одном слое актив-
ными сторонами двух следующих друг за другом секций.
Из рис. 2,7, а следует, что
У=У1~У2 (2.2)
Рис 2. 7 Шати петлевой обмотки а—право-
ходовая обмотка, б — левоходовая обмотка
Укладывая секции обмотки, мы как бы перемещаемся не
только по сердечнику якоря, но и по коллектору. Расстояние
между двумя коллекторными пластинами, к которым присоеди-
28
йены начало и конец одной секции, называется шагом обмотки
по коллектору и обозначается через ук.
Шаги обмотки по якорю измеряются элементарными пазами,
а шаг по коллектору —коллекторными делениями (пластинами).
Обмотка, часть которой показана на рис. 2 7, а, называется
правоходовой, так как укладка секций этой обмотки происходит
слева направо по якорю, в отличие от левоходовой (рис. 2.7,6),
в которой укладка секций обмотки по якорю идет справа налево.
Как следует из определения, начало и конец каждой секции
простой петлевой обмотки присоединяется к рядом лежащим
коллекторным пластинам, следовательно,
У =^к = ±1.
В этом выражении знак «плюс» соответствует правоходовой
обмотке, а знак «минус» — левоходовой.
Для определения всех шагов простой петлевой обмотки до-
статочно рассчитать первый частичный шаг по якорю
Vi = -^ + е, (2.3)
где е — величина, меньшая единицы, вычитая или суммируя ко-
торую можно получить шаг у\, выраженный целым числом.
На основании формулы (2.2) определяем второй частичный
шаг обмотки
У2^У\+9=Ух + \-
Чтобы лучше разобраться в вопросах построения схем якор-
ных обмоток, рассмотрим пример построения развернутой схемы
простой петлевой обмотки
Пример. Выполнить развернутую схему простой петлевой обмотки якоря
для четырехполюсной (2р=4) машины постоянного тока Обмотка правоходо-
вая, секции одновитковые Сердечник якоря имеет Z=12 пазов, при этом
в каждом пазу расположено по две активные стороны, т е Z==Z3.
Решение Определяем шаги обмотки
первый частичный шаг по якорю
z*_ _Л_Ч
Ух~2р + £ ~ 4 “ 3’
второй частичный шаг по якорю
у2 = У1 — у = 3 — 1^2
Прежде чем приступить к выполнению схемы, необходимо
отметить следующее:
1. Все пазы сердечника якоря и секции обмотки нумеруют-
ся. При этом номер секции определяется номером паза, в верх-
ней части которого находится одна из ее активных сторон.
2. Активные стороны верхнего слоя изображают на схеме
сплошными линиями, а стороны нижнего слоя — пунктирными
так, что одна половина секции, относящаяся к верхнему слою,
29
показывается на схеме сплошной линией, а другая, относящаяся
к нижнему слою, — пунктирной.
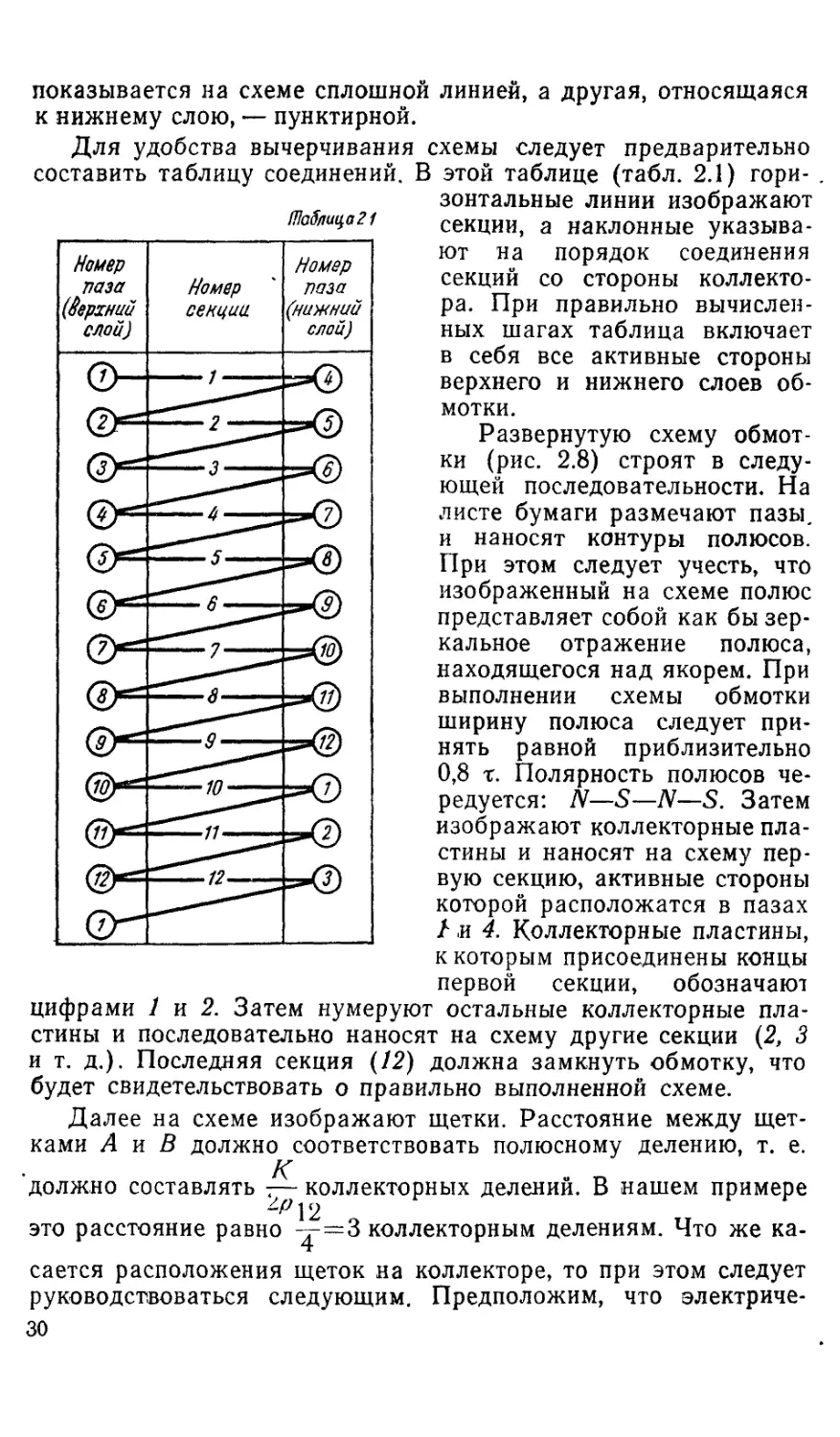
Для удобства вычерчивания схемы следует предварительно
составить таблицу соединений. В этой таблице (табл. 2.1) гори-
зонтальные линии изображают
секции, а наклонные указыва-
ют на порядок соединения
секций со стороны коллекто-
ра. При правильно вычислен-
ных шагах таблица включает
в себя все активные стороны
верхнего и нижнего слоев об-
мотки.
Развернутую схему обмот-
ки (рис. 2.8) строят в следу-
ющей последовательности. На
листе бумаги размечают пазы,
и наносят контуры полюсов.
При этом следует учесть, что
изображенный на схеме полюс
представляет собой как бы зер-
кальное отражение полюса,
находящегося над якорем. При
выполнении схемы обмотки
ширину полюса следует при-
нять равной приблизительно
0,8 т. Полярность полюсов че-
редуется: N—S—N—S. Затем
изображают коллекторные пла-
стины и наносят на схему пер-
вую секцию, активные стороны
которой расположатся в пазах
/ и 4. Коллекторные пластины,
к которым присоединены концы
первой секции, обозначают
цифрами 1 и 2. Затем нумеруют остальные коллекторные пла-
стины и последовательно наносят на схему другие секции (2, 3
и т. д.). Последняя секция (12) должна замкнуть обмотку, что
будет свидетельствовать о правильно выполненной схеме.
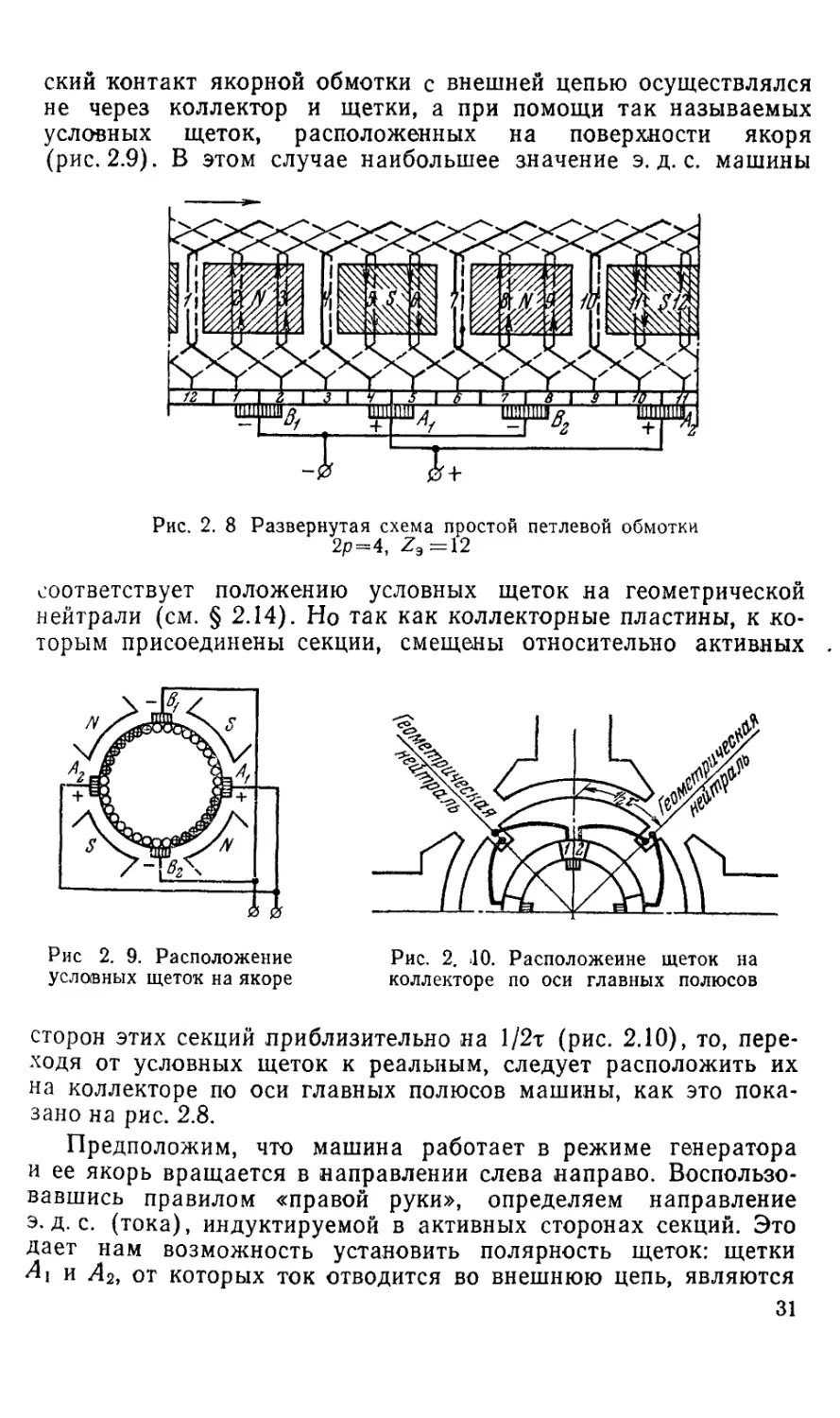
Далее на схеме изображают щетки. Расстояние между щет-
ками А и В должно соответствовать полюсному делению, т. е.
К <• п
должно составлять -— коллекторных делении. В нашем примере
-Р12
это расстояние равно 3 коллекторным делениям. Что же ка-
сается расположения щеток на коллекторе, то при этом следует
руководствоваться следующим. Предположим, что электриче-
30
ский контакт якорной обмотки с внешней цепью осуществлялся
не через коллектор и щетки, а при помощи так называемых
условных щеток, расположенных на поверхности якоря
(рис. 2.9). В этом случае наибольшее значение э. д. с. машины
Рис. 2. 8 Развернутая схема простой петлевой обмотки
2р=4, Z3=12
соответствует положению условных щеток на геометрической
нейтрали (см. § 2.14). Но так как коллекторные пластины, к ко-
торым присоединены секции, смещены относительно активных
Рис 2. 9. Расположение
условных щеток на якоре
Рис. 2. *10. Расположение щеток на
коллекторе по оси главных полюсов
сторон этих секций приблизительно на 1/2т (рис. 2.10), то, пере-
ходя от условных щеток к реальным, следует расположить их
на коллекторе по оси главных полюсов машины, как это пока-
зано на рис. 2.8.
Предположим, что машина работает в режиме генератора
и ее якорь вращается в направлении слева направо. Воспользо-
вавшись правилом «правой руки», определяем направление
э. д. с. (тока), индуктируемой в активных сторонах секций. Это
дает нам возможность установить полярность щеток: щетки
и Л 2, от которых ток отводится во внешнюю цепь, являются
31
положительными, а щетки Bi и В2 — отрицательными. Щетки
одинаковой полярности соединяют параллельно и подключают
к соответствующим выводам машины.
§ 2.3. Параллельные ветви обмотки якоря
При внимательном рассмотрении схемы простой петлевой
обмотки нетрудно заметить, что данная обмотка состоит из четы-
рех участков, каждый из которых образует параллельную ветвь
обмотки и представляет несколько последовательно соединенных
секций с одинаковым направлением тока. Распределение секций
Рис. 2. 11. Электрическая схема обмотки, изображенной
на рис. 2. 8
в параллельных ветвях показано на электрической схеме обмот-
ки (рис. 2.11). Эта схема выполняется на основании развернутой
схемы (см. рис. 2.8) в следующем порядке. На листе бумаги
изображают щетки и имеющие с ними контакт коллекторные
пластины. При этом щетки положительной полярности распола-
гают против щеток отрицательной полярности. Затем присту-
пают к обходу секций обмотки, начиная с первой секции. Далее
идут секции 2 и 3, которые образуют одну параллельную ветвь,
в то время как первая секция оказывается замкнутой накоротко
щеткой В{. Таким же образом обходят всю обмотку. В резуль-
тате получаем электрическую схему обмотки с четырьмя парал-
лельными ветвями. При этом каждая параллельная ветвь содер-
жит две последовательно включенные секции.
32
Э. д. с. секций в пределах каждой параллельной ветви скла-
дываются. Так как все ветви соединены параллельно, то э. д. с.
всей обмотки якоря определяется величиной э. д. с. одной парал-
лельной ветви, тогда как величина тока якорной обмотки равна
сумме токов всех ветвей обмотки,
/а = 2aia,
где /а— величина тока якорной обмотки;
it— величина тока одной параллельной ветви;
2а — число параллельных ветвей обмотки.
Рассматриваемая обмотка якоря содержит четыре парал-
лельные ветви, т. е. столько же, сколько основных полюсов в ма-
шине. Это совпадение не случайно, так как в простой петлевой
обмотке число параллельных ветвей всегда равно числу главных
полюсов машины
2а=2р.
Количество параллельных ветвей в обмотке якоря определяет
основные рабочие параметры машины, а именно: напряжение
и величину тока.
Пример. Шестиполюсная машина постоянного тока имеет простую петле-
вую Обмотку якоря, состоящую на 36 секций. Определить э. д. с, и величину
тока машины, если в каждой секции обмотки индуктируется э. д. с., дейст-
вующее значение которой составляет 10 в, а площадь поперечного сечения
провода одной активной стороны секций рассчитана на величину тока не
более 15 а.
Решение. Число параллельных ветвей в обмотке
2а=2р=6,
при этом каждая параллельная ветвь содержит
= 4г = 6 секций.
2а 6
Тогда э. д. с. одной параллельной ветви, а следовательно, и э. д. с. машины
« 6* 10 » 60 в,
а допустимый ток машины
/аВя6.15«90а.
Если машина при прочих неизменных условиях имела бы восемь полю-
сов, то ее э. д. с. уменьшилась до 40 в, а ток увеличился до 120 а.
§ 2,4. Сложная петлевая обмотка
В простой петлевой обмотке число параллельных ветвей рав-
но числу главных полюсов машины. Поэтому при желании полу-
чить обмотку с большим числом параллельных ветвей, например,
как это требуется в низковольтных машинах, пришлось бы
делать машину многополюсной. Это неблагоприятно отразилось
бы на ее размерах и стоимости. Следовательно, при необходи-
мости получить обмотку с большим числом параллельных ветвей
3 1649 33
применяют сложную петлевую обмотку. Такая обмотка обычно
представляет собой несколько простых петлевых обмоток, уло-
женных на один якорь. Число параллельных ветвей в сложной
петлевой обмотке
2а=2рт,
где т — коэффициент кратности, определяющий число простых
петлевых обмоток, из которых составлена сложная об-
мотка.
Ширина щеток в машине со сложной петлевой обмоткой при-
нимается такой, чтобы каждая щетка одновременно перекрыва-
ла не менее т коллекторных пластин,
Рис. 2. 1'2. Располо-
жение секций слож-
ной петлевой обмотки
т. е. столько пластин, сколько простых
обмоток содержится в сложной. В этом
случае простые обмотки оказываются
присоединенными параллельно друг с
другом. На рис. 2.12 показана часть
сложной петлевой обмотки, состоящей
из двух простых (т = 2). Для того
чтобы щетка соединяла параллельно
эти обмотки, пришлось секционные
стороны и коллекторные пластины од-
ной обмотки раздвинуть и разместить
между ними секционные стороны и
коллекторные пластины другой обмот-
ки. Поэтому шаг обмотки по кол-
лектору и результирующий шаг по якорю сложной обмотки, по
сравнению с этими же параметрами простой петлевой обмотки,
увеличился в т раз
Первый частичный
известной формуле
ук = у — т.
шаг обмотки по якорю подсчитывается по
Z, -
Рассмотрим порядок построения развернутой схемы слож-
ной петлевой обмотки на примере.
Пример. Четырехполюсная машина постоянного тока имеет на якоре
сложную петлевую обмотку, состоящую из 5=16 секций. Выполнить развер-
нутую схему обмотки при коэффициенте кратности т.=2.
Решение. Определяем шаги обмотки
У = Ук = т = 2;
Уа = У1 - У = 4 — 2 = 2.
34
Рис 2. 13. Развернутая схема сложной петлевой обмотки:
2/7=4; Z3=16; тп = 2
3*
Составляем таблицу соединений (табл 2.2), а затем приступаем к вы-
полнению схемы обмотки. Прежде всего располагаем все секции одной
простой обмотки (секции с нечетными номерами. 1, 3, 5 и т. д.) Концы этих
секций присоединяем к нечетным пластинам коллектора (рис. 2 13). Далее
располагаем на якоре секции другой простой обмотки (секции с четными
номерами. 2, 4, 6 н т. д) Расстановку щеток и определение их полярности
производят в той же последовательности, что и в случае простой петлевой
обмотки. Ширину щеток при этом принимают равной удвоенному коллектор-
ному делению. Число параллельных ветвей обмотки
2а=2рт=4-2=8.
§ 2.5. Простая волновая обмотка
Простая волновая обмотка получается при последовательном
соединении секций, находящихся под разными парами полюсов
(рис. 2.14). Концы секций волновой обмотки присоединены
Рис. 2. 14. Схемы простой волновой обмотки-
а—левоходовая; б—правоходовая
к коллекторным пластинам, удаленным друг от друга на рас-
стояние шага обмотки по коллектору ук =у. За один обход по
якорю укладывается столько секций, сколько пар полюсов имеет
машина, при этом конец последней по обходу секции присоеди-
няют к коллекторной пластине, расположенной рядом с исходной
Простая волновая обмотка называется левоходовой, если
конец последней по обходу секции присоединяется к коллектор-
ной пластине, расположенной влево от исходной (рис. 2.14, а).
Если же эта пластина расположена вправо от исходной, то об-
мотка называется правоходовой (рис. 2.14,6). Секции волновой
обмотки могут быть одновитковыми и многовитковыми.
Так как шаг обмотки по коллектору ук охватывает простран-,
ство по длине окружности коллектора, соответствующее одной
36
паре полюсов, то, сделав один обход по коллектору, мы как бы
перемещаемся на число коллекторных делений, равное yj>,
и переходим к пластине, расположенной рядом с исходной. На
основании сказанного можно записать
укр =• К + I,
откуда шаг обмотки по коллектору, а следовательно, и резуль-
тирующий шаг по якорю равны, т. е.
(2.4)
Знак «минус» соответству-
ет левоходовой обмотке, а
«плюс» — правоходовой.
Выполнение правоходовой
обмотки связано с дополни-
тельным расходом меди из-за
перекрещивания лобовых час-
тей секций, поэтому она почти
не имеет практического приме-
нения.
Первый частичный шаг об-
мотки по якорю определяется
по формуле (2.3), а второй шаг
У2=У-Уь
Рассмотрим пример постро-
ения схемы простой волновой
обмотки.
Пример. Четырехполюсная маши-
на постоянного тока имеет простую
волновую обмотку якоря, состоящую
из 5=13 секций. Построить развер-
нутую схему этой обмотки, а также
выполнить ее электрическую схему.
Решение. Определяем шаги
обмотки
Таблица 2.3
уа = у—У1 = 6 — 3 = 3.
Составляем таблицу соединений (табл. 2.3) и приступаем
к выполнению развернутой схемы. При первом обходе по якорю
укладываем секции 1 и 7 (рис. 2.15). Затем делаем второй обход,
третий и т. д., пока не будут уложены все тринадцать секций
37
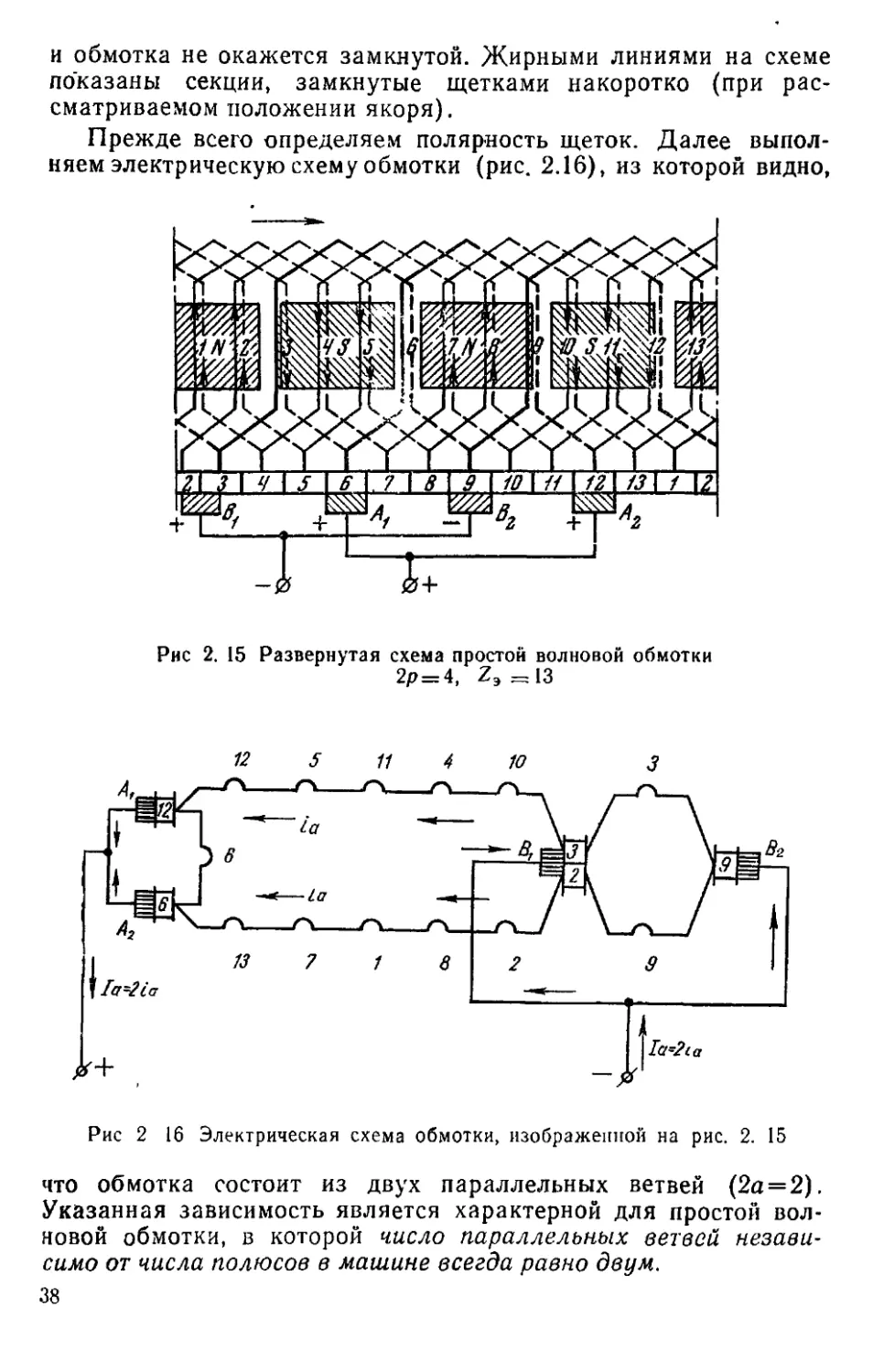
и обмотка не окажется замкнутой. Жирными линиями на схеме
показаны секции, замкнутые щетками накоротко (при рас-
сматриваемом положении якоря).
Прежде всего определяем полярность щеток. Далее выпол-
няем электрическую схему обмотки (рис. 2.16), из которой видно,
Рис 2. 15 Развернутая схема простой волновой обмотки
2р=4, =13
Рис 2
16 Электрическая схема обмотки, изображенной на рис. 2. 15
что обмотка состоит из двух параллельных ветвей (2а = 2).
Указанная зависимость является характерной для простой вол-
новой обмотки, в которой число параллельных ветвей незави-
симо от числа полюсов в машине всегда равно двум.
38
Из приведенных схем простой волновой обмотки видно, что
секции каждой параллельной ветви равномерно распределены
под всеми полюсами машины. Следует также отметить, что в та-
кой обмотке можно было бы ограничиться применением только
двух щеток, например В2 и Л2. Однако в этом случае наруши-
лась бы симметрия обмотки, так как число секций в параллель-
ных ветвях становится неодинаковым: в одной ветви семь сек-
ций, а в другой шесть. Поэтому в машине обычно устанавливают
столько щеток, сколько главных полюсов, тем более, что это
позволяет уменьшить величину тока, приходящегося на каждую
щетку, и уменьшить размеры коллектора.
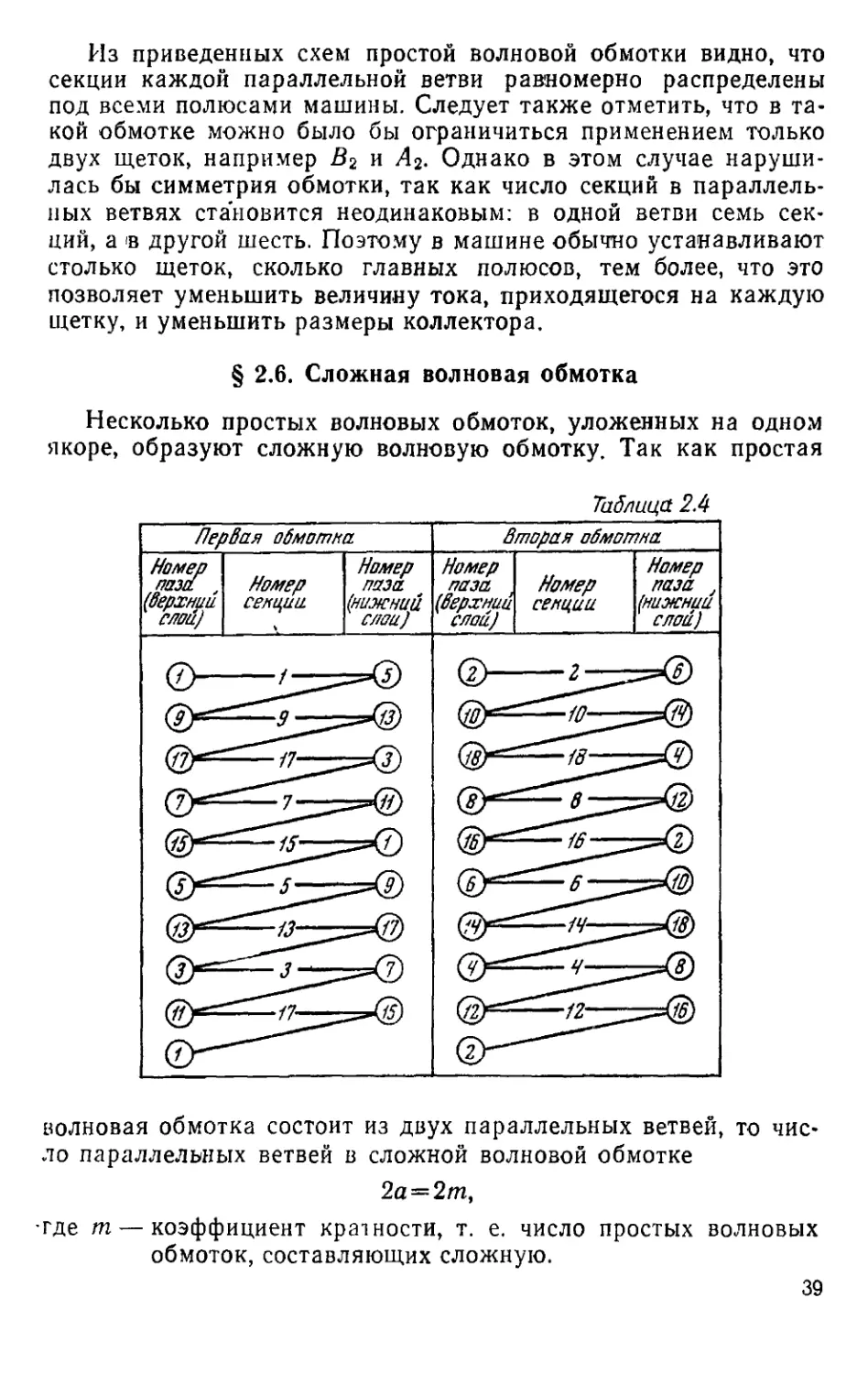
§ 2.6. Сложная волновая обмотка
Несколько простых волновых обмоток, уложенных на одном
якоре, образуют сложную волновую обмотку. Так как простая
волновая обмотка состоит из двух параллельных ветвей, то чис-
ло параллельных ветвей в сложной волновой обмотке
2а==2ш,
где т — коэффициент кратности, т. е. число простых волновых
обмоток, составляющих сложную.
39
Сложная волновая обмотка рассчитывается так же, как
и простая. Но при определении шага обмотки по коллектору сле-
дует пользоваться формулой
К -Т т
Ук=-------—
(2-5)
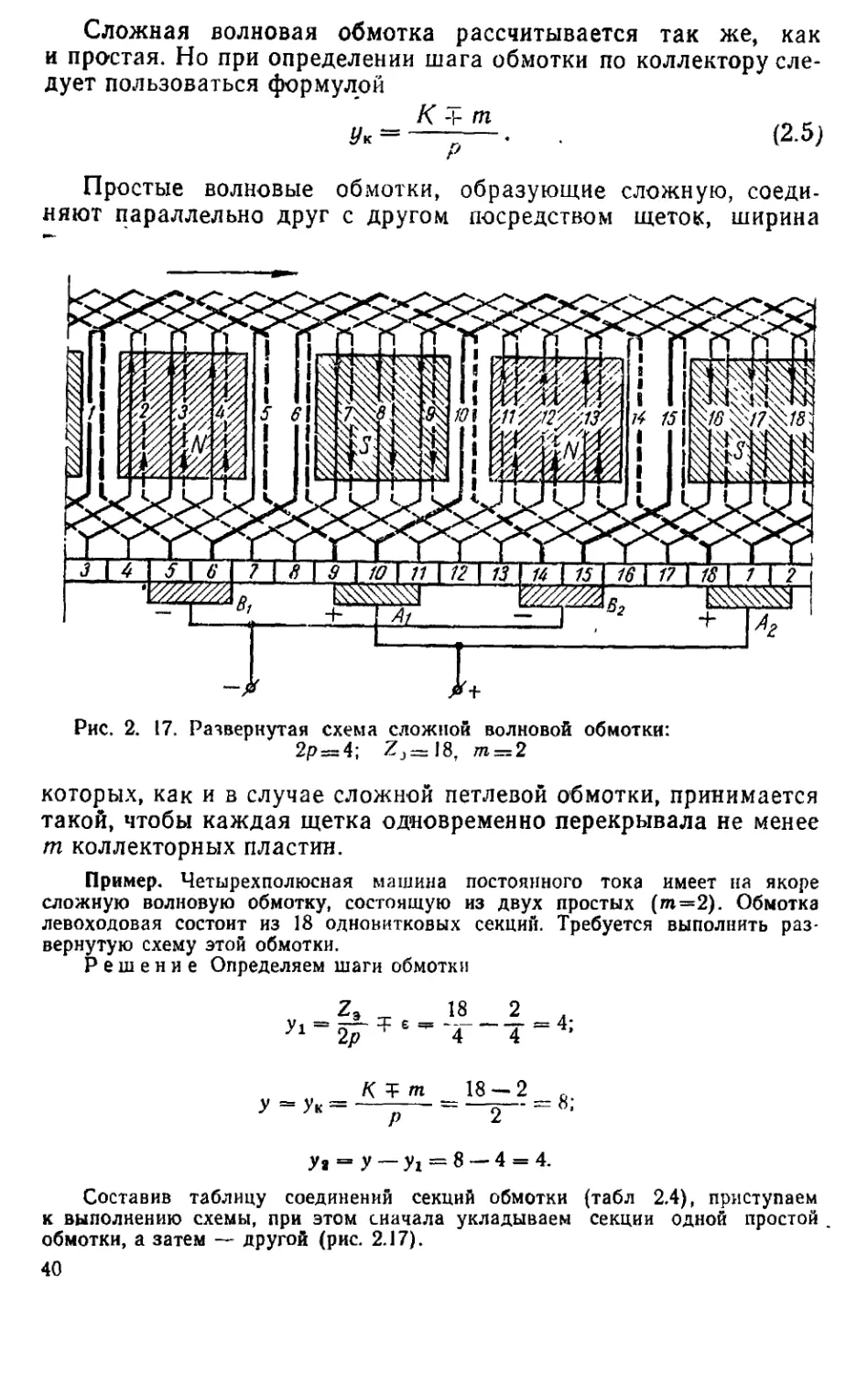
Простые волновые обмотки, образующие сложную, соеди-
няют параллельно друг с другом посредством щеток, ширина
Рис. 2. 17. Развернутая схема сложной волновой обмотки:
2р = 4; Zj=18, тп==2
которых, как и в случае сложной петлевой обмотки, принимается
такой, чтобы каждая щетка одновременно перекрывала не менее
т коллекторных пластин.
Пример. Четырехполюсная машина постоянного тока имеет на якоре
сложную волновую обмотку, состоящую из двух простых (т=2). Обмотка
левоходовая состоит из 18 одновитковых секций. Требуется выполнить раз-
вернутую схему этой обмотки.
Решение Определяем шаги обмотки
У1
4 4
КТт 18-2 й.
у-ук = _—= —- = 8,
У я = У — У1 = 8 — 4 = 4.
Составив таблицу соединений секций обмотки (табл 2.4), приступаем
к выполнению схемы, при этом сначала укладываем секции одной простой .
обмотки, а затем — другой (рис. 2.17).
40
Число параллельных ветвей в обмотке
2а=2т=4.
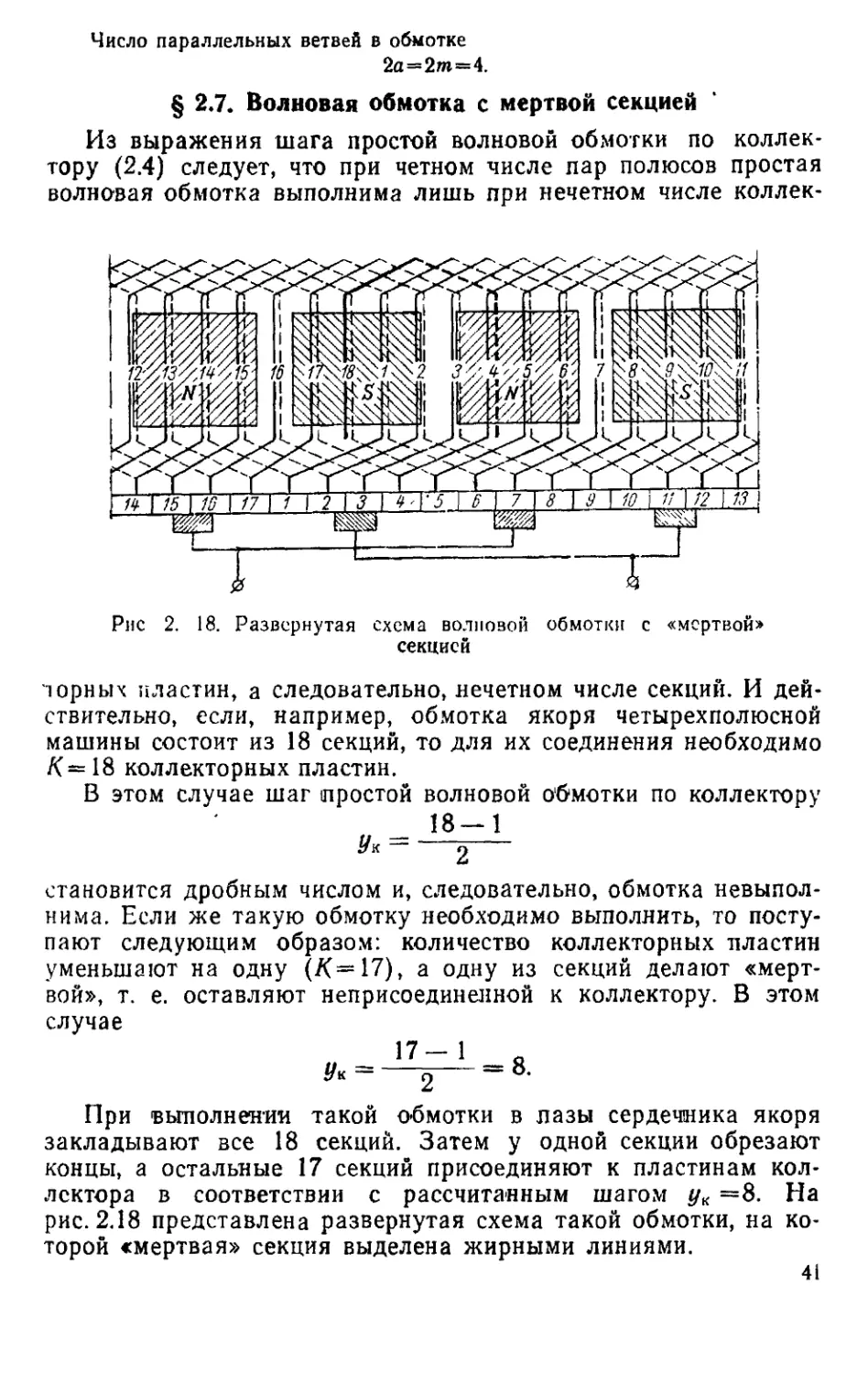
§ 2.7. Волновая обмотка с мертвой секцией
Из выражения шага простой волновой обмотки по коллек-
тору (2.4) следует, что при четном числе пар полюсов простая
волновая обмотка выполнима лишь при нечетном числе коллек-
Рнс 2. 18. Развернутая схема волновой обмотки с «мертвой»
секцией
торных пластин, а следовательно, нечетном числе секций. И дей-
ствительно, если, например, обмотка якоря четырехполюсной
машины состоит из 18 секций, то для их соединения необходимо
/<=18 коллекторных пластин.
В этом случае шаг простой волновой обмотки по коллектору
становится дробным числом и, следовательно, обмотка невыпол-
нима. Если же такую обмотку необходимо выполнить, то посту-
пают следующим образом: количество коллекторных пластин
уменьшают на одну (К—17), а одну из секций делают «мерт-
вой», т. е. оставляют неприсоединенной к коллектору. В этом
случае
При выполнении такой обмотки в пазы сердечника якоря
закладывают все 18 секций. Затем у одной секции обрезают
концы, а остальные 17 секций присоединяют к пластинам кол-
лектора в соответствии с рассчитанным шагом //к =8. На
рис. 2.18 представлена развернутая схема такой обмотки, на ко-
торой «мертвая» секция выделена жирными линиями.
41
§ 2.8. Искусственно замкнутая волновая обмотка
Искусственно замкнутая волновая обмотка выполняется
в том случае, если в машине для обеспечения ей необходимых
параметров необходимо применить волновую обмотку, а число
пазов якоря и количество пластин коллектора делают эту об-
мотку невыполнимой.
Например, если якорь четырехполюсной машины имеет число
пазов Z=12, а коллектор состоит соответственно из /(=12 пла-
стин, то простая волновая обмотка невыполнима, так как
12 — 1 , , .
ук ——-------- =# ц. ч. (целому числу).
Простая волновая обмотка выполнима, если она состоит из
13 секций и коллектор содержит соответственно 13 пластин:
13-1 .
Ук — —2-----~ 6’
Но якорь имеет лишь 12 пазов, а коллектор 12 пластин, что
позволяет разместить на сердечнике и присоединить к коллек-
тору 12 секций. Вот
Рис. 2. 19. Развернутая схема искусствен-
но замкнутой волновой обмотки: 2р=4;
5 = 12; Л=12; у1==3; ук=6; ^к=5
<в этом случае и при-
меняют искусственно
замкнутую волновую
обмотку из 12 секций,
а недостающую трина-
дцатую секцию и кол-
лекторную пластину за-
меняют проводником,
которым замыкают об-
мотку.
При расчете шагов
искусственно замкну-
той волновой обмотки
исходят из того, что
сердечник якоря имеет
на один паз больше,
а коллектор на одну
пластину больше по сравнению с их действительным числом.
Следовательно, в нашем примере при расчете шагов обмотки
следует принять Z=13 и /(=13. Тогда шаги обмотки равны:
13
Ух = ~ - 0,25 = 3;
У к =
13—1
2
= 6.
42
При выполнении схемы этой обмотки (рис. 2.19) следует
помнить, что при каждом обходе, когда укладывается р секций,
шаги этих секций по коллектору чередуются: шаг одной секции
делается полным (z/K), а шаг другой укорачивается на одно кол-
лекторное деление
В нашем примере Ук =6 —1»5.
При следующем обходе шаги секций опять чередуются. После
укладки последней секции ее конец проводником соединяют
с началом первой секции.
§ 2.9. Условия симметрии обмотки
Обмотка якоря называется симметричной, если ее параллель-
ные ветви обладают одинаковыми электрическими свойствами,
т. е. имеют одинаковые электрические сопротивления и в них
индуктируются одинаковые по величине э. д. с.
В несимметричной обмотке ток якоря в параллельных ветвях
распределяется неравномерно, что влечет за собой перегрузку
одних ветвей и недогрузку других. В результате возрастают
электрические потери в обмотке якоря, а полезная мощность
машины уменьшается.
Обмотка якоря становится симметричной лишь при соблюде-
нии определенных условий, называемых условиями симметрии.
Первое совершенно очевидное условие заключается в том,
чтобы каждая пара параллельных ветвей обмотки состояла из
одинакового числа секций.
Это условие может быть выполнено лишь в том случае, если
на каждую пару параллельных ветвей обмотки приходится це-
лое число секций,
е
-=ц. ч. (2.6)
Нетрудно убедиться, что при несоблюдении этого условия^
электрическое сопротивление параллельных ветвей, а также их
э. д. с. стали бы неодинаковыми. Это привело бы к неравномер-
ному распределению тока в параллельных ветвях со всеми не-
желательными последствиями.
Далее необходимо, чтобы секции каждой пары параллельных
ветвей занимали на якоре одинаковое число пазов, т. е.
7
- = Ц. ч., (2.7)
где Z — число реальных пазов на якоре.
43
И, наконец, согласно последнему условию симметрии, каждая
пара параллельных ветвей обмотки должна занимать одинако-
вое положение относительно системы полюсов, что может быть
соблюдено при условии
— ~ ц. ч.' (2.8)
а
Для сложной петлевой обмотки 2а = 2рт или а=рт. Под-
ставляя это в (2.8), получаем
2р 2р 2
_ — Вц1 ч
а ptn т
Отсюда следует, что сложная петлевая обмотка может быть
симметричной только при т = 2.
§ 2.10. Уравнительные соединения
Однако даже при соблюдении всех условий симметрии э. д. с.
параллельных ветвей обмотки якоря в многополюсных машинах
могут оказаться неодинаковыми. Причиной этого является
магнитная несимметрия, в результате которой магнитные потоки
одноименных полюсов неодинаковы. Происходит это из-за де-
фектов, возникающих при изготовлении электрической машины:
наличие раковин в отливке станины, некачественная сборка
полюсов, неправильная центровка якоря, т. е. его перекос, отчего
воздушный зазор под полюсами становится неодинаковым.
Влияние магнитной несимметрии на работу машины зависит
от типа обмотки якоря.
В волновых обмотках секции каждой параллельной ветви
равномерно распределены под всеми полюсами машины, поэто-
му магнитная несимметрия здесь не влечет за собой неравенства
э. д. с. в параллельных ветвях, так как она одинаково влияет на
все параллельные ветви обмотки.
В петлевых же обмотках секции каждой параллельной ветви
располагаются под одной парой полюсов, а поэтому в резуль-
тате магнитной несимметрии э. д. с. параллельных ветвей стано-
вятся неодинаковыми, что приводит к появлению уравнительных
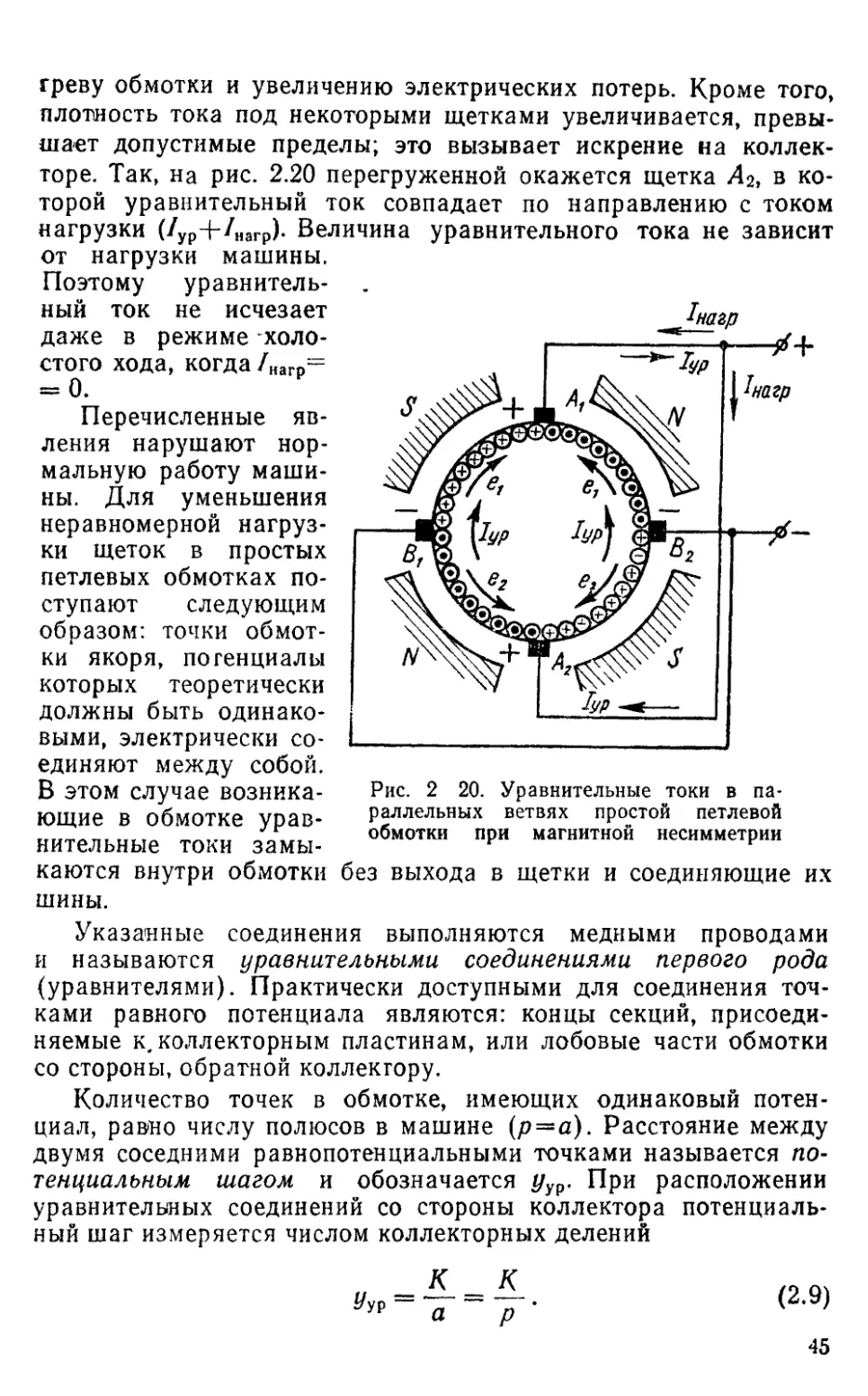
токов. Например, при неравенстве э. д. с. в\ и е2 (рис. 2.20) по-
тенциалы щеток Ai и А2 неодинаковы, а так как указанные
щетки соединены проводом, то в обмотке появится уравнитель-
ный ток /ур. Если ei>e2, то ток /ур во внешней части цепи на-
правлен от щетки 41 к щетке Л2.
При неравенстве э. д. с. во всех четырех ветвях обмотки яко-
ря уравнительные токи появятся также и в цепи щеток и В2.
Уравнительные токи, складываясь с током нагрузки, вызывают
неравномерную нагрузку параллельных ветвей, что ведет к пере-
44
греву обмотки и увеличению электрических потерь. Кроме того,
плотность тока под некоторыми щетками увеличивается, превы-
шает допустимые пределы; это вызывает искрение на коллек-
торе. Так, на рис. 2.20 перегруженной окажется щетка Аз, в ко-
торой уравнительный ток совпадает по направлению с током
нагрузки (/ур+/нагр). Величина уравнительного тока не зависит
от нагрузки машины.
Поэтому уравнитель-
ный ток не исчезает
даже в режиме холо-
стого хода, когда/нагр=
= 0.
Перечисленные яв-
ления нарушают нор-
мальную работу маши-
ны. Для уменьшения
неравномерной нагруз-
ки щеток в простых
петлевых обмотках по-
ступают следующим
образом: точки обмот-
ки якоря, потенциалы
которых теоретически
должны быть одинако-
выми, электрически со-
единяют между собой.
В этом случае возника-
ющие в обмотке урав-
нительные токи замы-
Рис. 2 20. Уравнительные токи в па-
раллельных ветвях простой петлевой
обмотки при магнитной несимметрии
каются внутри обмотки без выхода в щетки и соединяющие их
шины.
Указанные соединения выполняются медными проводами
и называются уравнительными соединениями первого рода
(уравнителями). Практически доступными для соединения точ-
ками равного потенциала являются: концы секций, присоеди-
няемые к, коллекторным пластинам, или лобовые части обмотки
со стороны, обратной коллектору.
Количество точек в обмотке, имеющих одинаковый потен-
циал, равно числу полюсов в машине (р=а). Расстояние между
двумя соседними равнопотенциальными точками называется по-
тенциальным шагом и обозначается уур. При расположении
уравнительных соединений со стороны коллектора потенциаль-
ный шаг измеряется числом коллекторных делений
К _
уур - а -
К
Р '
(2.9)
45
Полное число уравнительных соединений первого рода, кото-
рое можно применить в обмотке, равно
N = *-
/Vyp а
(2.10)
Однако такое количество уравнительных соединений приме-
няют только в машинах большой мощности, например в элек-
тродвигателях прокатных станов.
В целях экономии меди и упрощения конструкции машины
обычно применяют неполное число уравнителей. Например,
а—
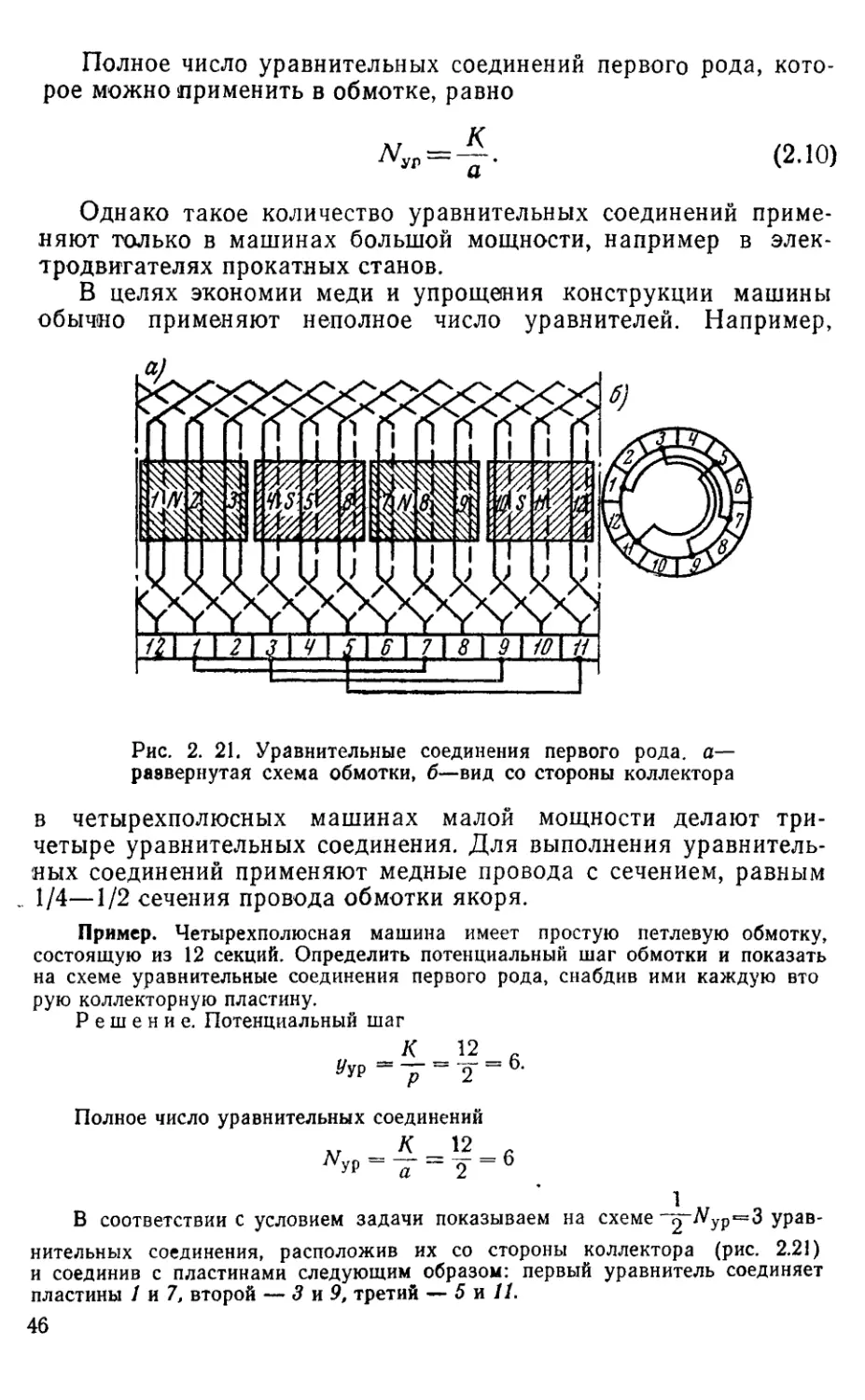
Рис. 2. 21. Уравнительные соединения первого рода,
развернутая схема обмотки, б—вид со стороны коллектора
в четырехполюсных машинах малой мощности делают три-
четыре уравнительных соединения. Для выполнения уравнитель-
ных соединений применяют медные провода с сечением, равным
„ 1/4—1/2 сечения провода обмотки якоря.
Пример. Четырехполюсная машина имеет простую петлевую обмотку,
состоящую из 12 секций. Определить потенциальный шаг обмотки и показать
на схеме уравнительные соединения первого рода, снабдив ими каждую вто
рую коллекторную пластину.
Решение. Потенциальный шаг
К 12 R
Уур - у - г" ~ 6‘
Полное число уравнительных соединений
к _ 12 А
- а ~ 2 “ 6
В соответствии с условием задачи показываем на схемеурав-
нительных соединения, расположив их со стороны коллектора (рис. 2.21)
и соединив с пластинами следующим образом: первый уравнитель соединяет
пластины 1 и 7, второй — 3 и 9, третий — 5 и 11.
46
В сложных петлевых и волновых обмотках простые обмотки,
образующие сложную, соединены параллельно. Их параллельное
включение осуществляется на коллекторе через щеточный кон-
такт. Однако обеспечить одинаковый контакт щеток на коллек-
торе с каждой простой обмоткой практически невозможно,
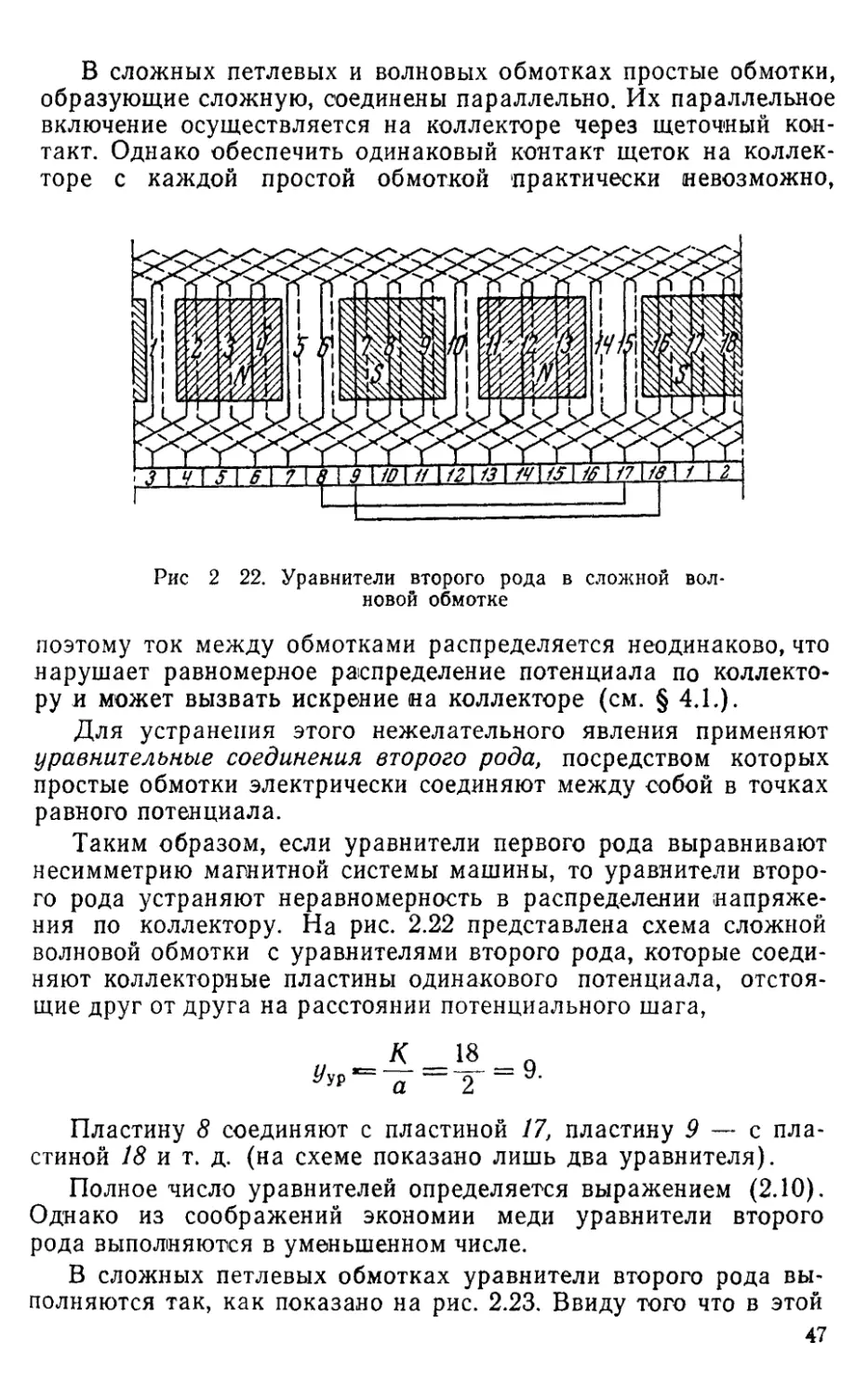
Рис 2 22. Уравнители второго рода в сложной вол-
новой обмотке
поэтому ток между обмотками распределяется неодинаково, что
нарушает равномерное распределение потенциала по коллекто-
ру и может вызвать искрение на коллекторе (см. § 4Д.).
Для устранения этого нежелательного явления применяют
уравнительные соединения второго рода, посредством которых
простые обмотки электрически соединяют между собой в точках
равного потенциала.
Таким образом, если уравнители первого рода выравнивают
несимметрию магнитной системы машины, то уравнители второ-
го рода устраняют неравномерность в распределении напряже-
ния по коллектору. На рис. 2.22 представлена схема сложной
волновой обмотки с уравнителями второго рода, которые соеди-
няют коллекторные пластины одинакового потенциала, отстоя-
щие друг от друга на расстоянии потенциального шага,
у ЛЛ
Уу₽ а 2 У’
Пластину 8 соединяют с пластиной 17, пластину 9 — с пла-
стиной 18 и т. д. (на схеме показано лишь два уравнителя).
Полное число уравнителей определяется выражением (2.10).
Однако из соображений экономии меди уравнители второго
рода выполняются в уменьшенном числе.
В сложных петлевых обмотках уравнители второго рода вы-
полняются так, как показано на рис. 2.23. Ввиду того что в этой
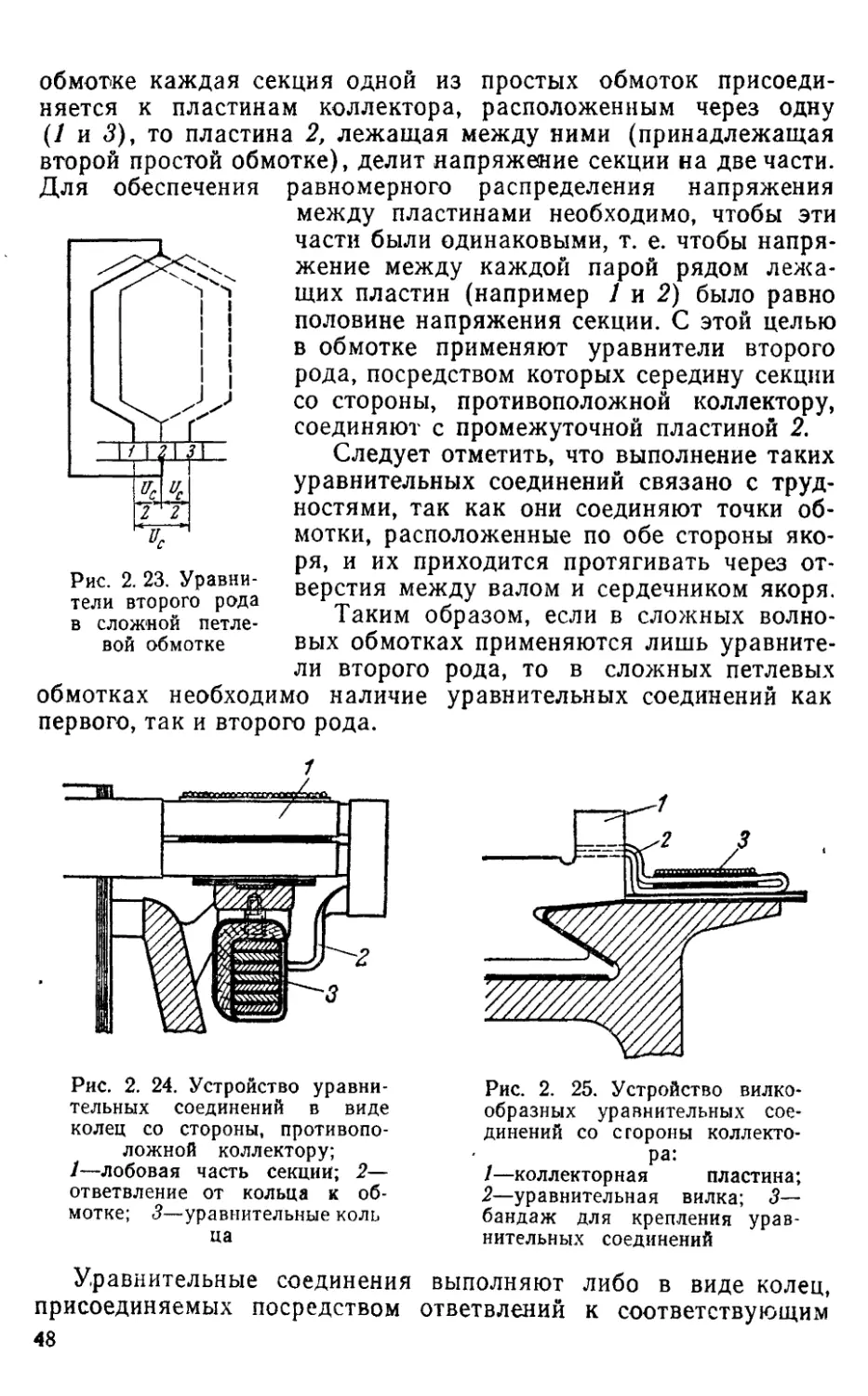
47
обмотке каждая секция одной из простых обмоток присоеди-
няется к пластинам коллектора, расположенным через одну
(/ и 3), то пластина 2, лежащая между ними (принадлежащая
второй простой обмотке), делит напряжение секции на две части.
Для обеспечения равномерного распределения напряжения
между пластинами необходимо, чтобы эти
Рис. 2. 23. Уравни-
тели второго рода
в сложной петле-
вой обмотке
части были одинаковыми, т. е. чтобы напря-
жение между каждой парой рядом лежа-
щих пластин (например 1 и 2) было равно
половине напряжения секции. С этой целью
в обмотке применяют уравнители второго
рода, посредством которых середину секции
со стороны, противоположной коллектору,
соединяют с промежуточной пластиной 2.
Следует отметить, что выполнение таких
уравнительных соединений связано с труд-
ностями, так как они соединяют точки об-
мотки, расположенные по обе стороны яко-
ли второго
обмотках необходимо наличие
ря, и их приходится протягивать через от-
верстия между валом и сердечником якоря.
Таким образом, если в сложных волно-
вых обмотках применяются лишь уравните-
рода, то в сложных петлевых
уравнительных соединений как
первого, так и второго рода.
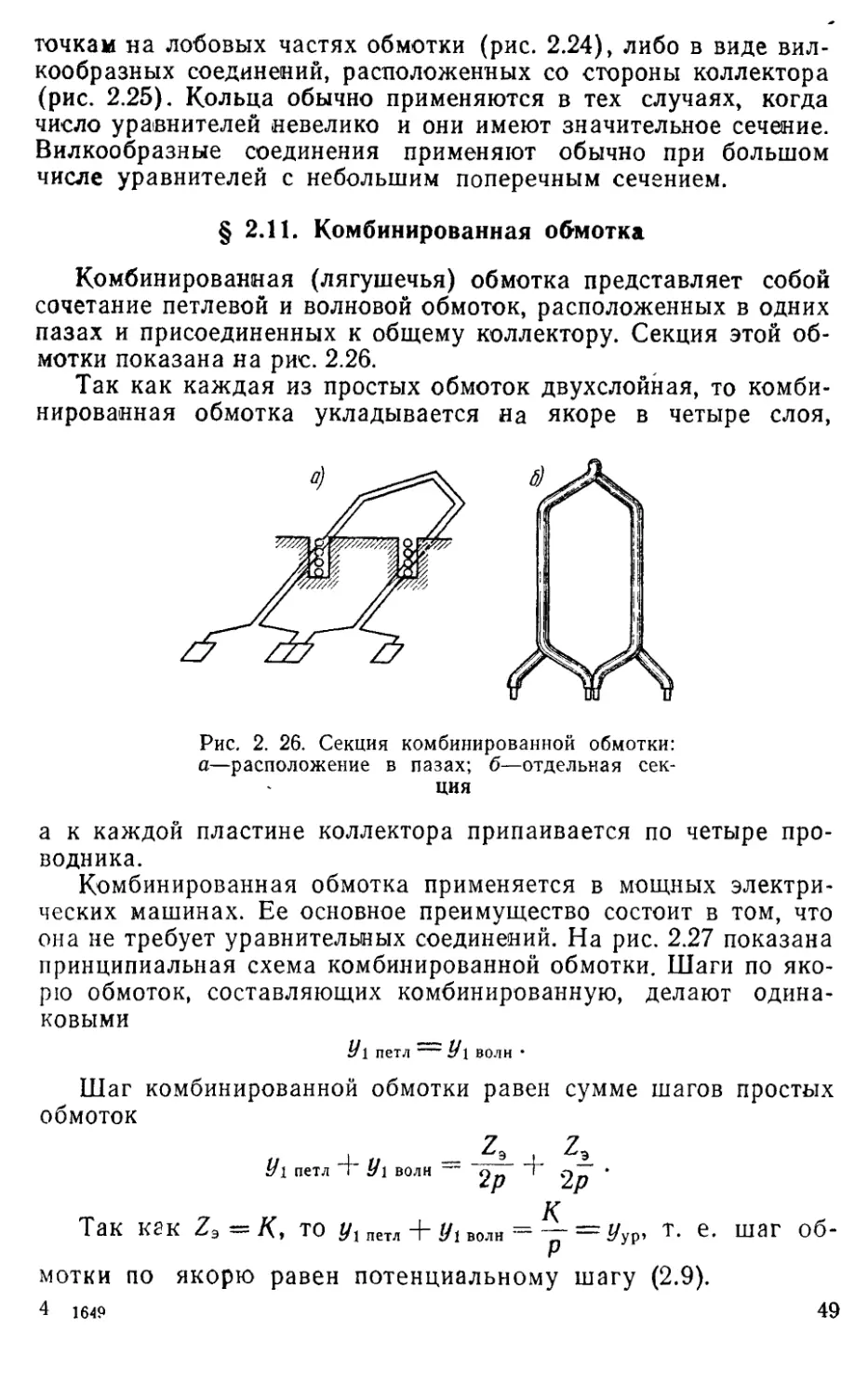
Рис. 2. 24. Устройство уравни-
тельных соединений в виде
колец со стороны, противопо-
ложной коллектору;
1—лобовая часть секции; 2—
ответвление от кольца к об-
мотке; 3—уравнительные коль
ца
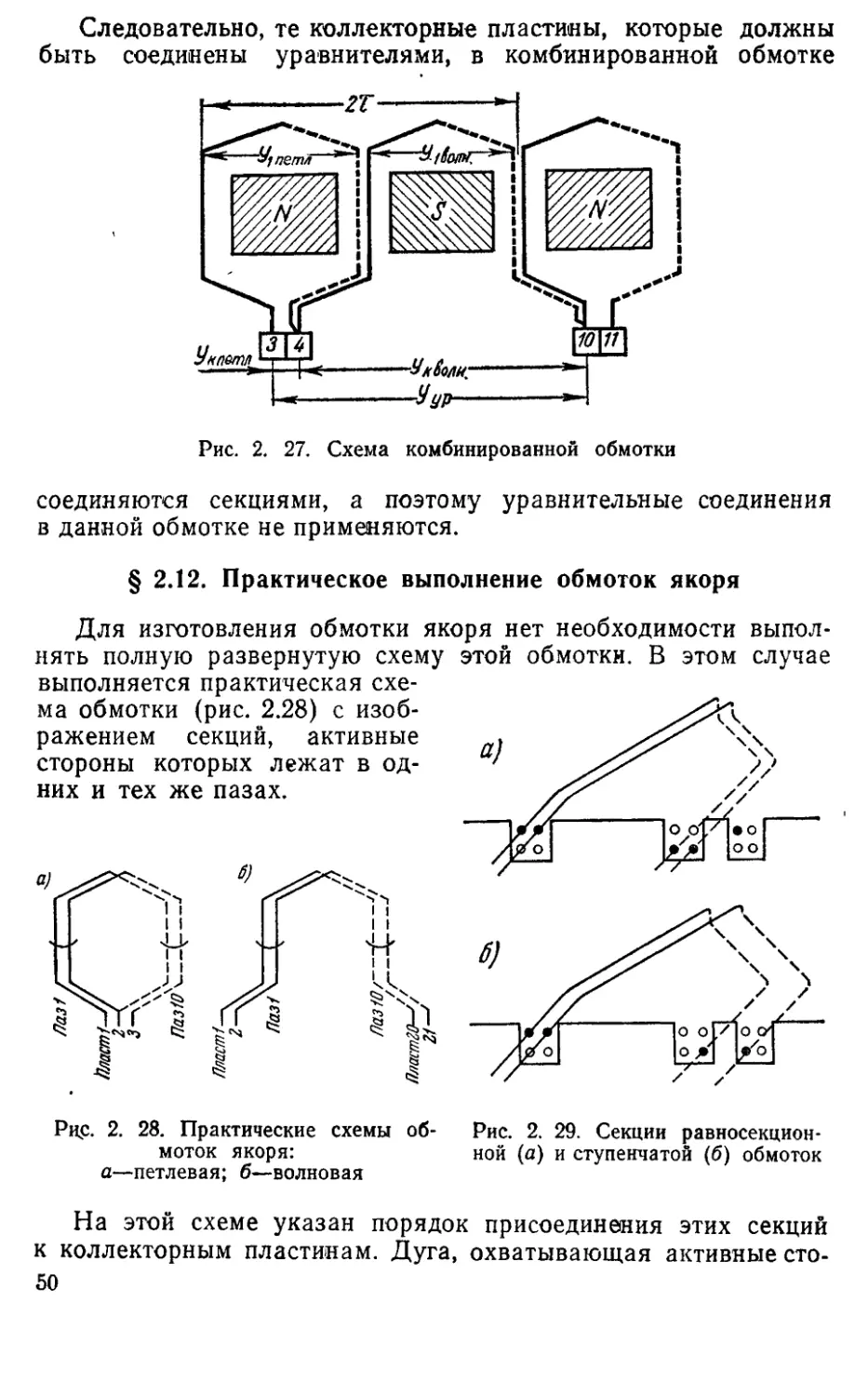
Рис. 2. 25. Устройство вилко-
образных уравнительных сое-
динений со стороны коллекто-
ра:
/—коллекторная пластина;
2—уравнительная вилка; 3—
бандаж для крепления урав-
нительных соединений
Уравнительные соединения выполняют либо в виде колец,
присоединяемых посредством ответвлений к соответствующим
48
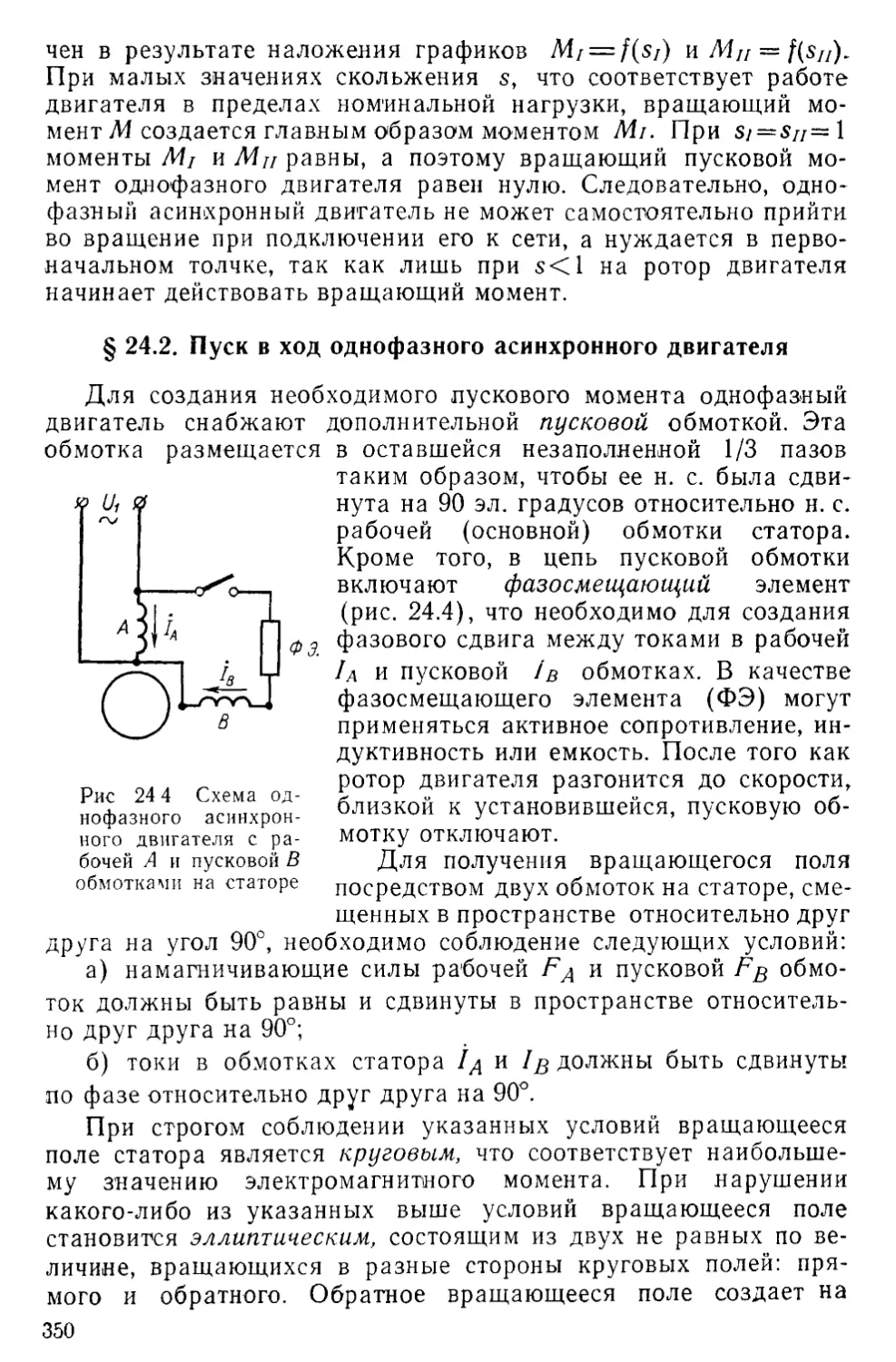
точкам на лобовых частях обмотки (рис. 2.24), либо в виде вил-
кообразных соединений, расположенных со стороны коллектора
(рис. 2.25). Кольца обычно применяются в тех случаях, когда
число уравнителей невелико и они имеют значительное сечение.
Вилкообразные соединения применяют обычно при большом
числе уравнителей с небольшим поперечным сечением.
§ 2.11. Комбинированная обмотка
Комбинированная (лягушечья) обмотка представляет собой
сочетание петлевой и волновой обмоток, расположенных в одних
пазах и присоединенных к общему коллектору. Секция этой об-
мотки показана на рис. 2.26.
Так как каждая из простых обмоток двухслойная, то комби-
нированная обмотка укладывается на якоре в четыре слоя,
Рис. 2. 26. Секция комбинированной обмотки:
а—расположение в пазах; б—отдельная сек-
ция
а к каждой пластине коллектора припаивается по четыре про-
водника.
Комбинированная обмотка применяется в мощных электри-
ческих машинах. Ее основное преимущество состоит в том, что
она не требует уравнительных соединений. На рис. 2.27 показана
принципиальная схема комбинированной обмотки. Шаги по яко-
рю обмоток, составляющих комбинированную, делают одина-
ковыми
У\ петл :=::: У\ волн •
Шаг комбинированной обмотки равен сумме шагов простых
обмоток
Z9 Z3
УI петл + У1 ВОЛН 2р +
2)7 *
Так как 2э==Х, то г/1 „етл + волн = у = г/ур. т. е. шаг об-
мотки по якорю равен потенциальному шагу (2.9).
4 1649
49
Следовательно, те коллекторные пластины, которые должны
быть соединены уравнителями, в комбинированной обмотке
соединяются секциями, а поэтому уравнительные соединения
в данной обмотке не применяются.
§ 2.12. Практическое выполнение обмоток якоря
Для изготовления обмотки якоря нет необходимости выпол-
нять полную развернутую схему этой обмотки. В этом случае
выполняется практическая схе-
ма обмотки (рис. 2.28) с изоб-
ражением секций, активные
стороны которых лежат в од-
них и тех же пазах.
Рис. 2. 29. Секции равносекцион-
ной (а) и ступенчатой (б) обмоток
Рцс. 2. 28. Практические схемы об-
моток якоря:
а—петлевая; б—волновая
На этой схеме указан порядок присоединения этих секций
к коллекторным пластинам. Дуга, охватывающая активные сто-
50
роны, указывает на то, что эти секции можно изолировать
вместе, т. е. соединить в одну катушку. Номера пластин и сек-
ций, указанные на схеме, определяют шаги обмотки по якорю
и по коллектору. По этим схемам изготавливают секции или
катушки, которые затем укладывают в пазы сердечника якоря
и соединяют с пластинами коллектора.
Рис. 2. 30. Двухвитковые «жесткие» секции:
а—петлевая; б—волновая
Для уравнительных соединений схем не вычерчивают, а дают
таблицы этих соединений.
До настоящего времени, рассматривая схемы якорных обмо-
ток, мы имели в виду обмотки, все секции которых одинакового
размера. Такие обмотки называются равносекционными. Равно-
секционные обмотки удобны в изготовлении, особенно если пазы
сердечника якоря открыты. В этом случае секции, лежащие
в одних и тех же пазах, изолируются вместе в единую катушку,
а затем укладываются в пазы. Но возможна и другая конструк-
ция обмотки — ступенчатая, в которой секции имеют разную
ширину. Если несколько секций ступенчатой обмотки одними
активными сторонами располагаются в одном пазу, то другие
активные стороны этих секций располагаются в разных пазах
(рис. 2.29).
Ступенчатые обмотки сложны в изготовлении и применяются
в электрических машинах большой мощности, обеспечивая луч-
шие условия работы щеточного контакта (см, § 4.3).
Как указывалось, секции обмоток якоря выполняются из
медных проводов круглого или прямоугольного сечения.
Если количество витков в секции невелико, то она изготав-
ливается из провода прямоугольного сечения. Таким «жестким»
секциям заранее придается окончательная форма (рис. 2.30),
после чего они укладываются в пазы сердечника якоря. Однако
применение обмоток из «жестких» секций характерно для машин
с открытыми пазами на якоре. В случае же полузакрытых пазов
секции прямоугольного сечения выполняются в виде пол у секций,
(рис. 2.31).
4* 5L
При этом укладка полусекций в паз делается с боковой (тор-
цовой) стороны паза. С этой целью заранее формуется лишь
одна сторона полусекции, а вторая сторона формуется после
укладки в паз, непосредственно на якоре, после чего полусекции
соединяются между собой хомутиками (см. рис. 1.13). При полу-
закрытых пазах в машинах малой мощности обмотка выпол-
няется из провода круглого сечения. Секции таких обмоток
Рис. 2. 31 Полусекции волновой (а) и петле-
вой (б) обмоток
обычно содержат большое число витков и изготавливаются до
укладки в пазы, но предварительно не покрываются изоляцией,
чтобы их можно было заложить в пазы по одному-два провод-
ника через щели на поверхности сердечника я1<оря. В соответ-
ствии со способом укладки эти обмотки называются всыпными.
Обмотки якоря малых двухполюсных машин делаются ручными,
т. е. без предварительной заготовки секций.
§ 2.13. Электродвижущая сила обмотки якоря
Величина э. д. с., индуктируемой в проводнике обмотки яко-
ря, определяется формулой (1.1)
e~Blv.
Магнитная индукция В в воздушном зазоре между полюсны-
ми наконечниками и поверхностью якоря в различных точках
по окружности якоря имеет неодинаковые значения. Обычно
в машинах постоянного тока ее распределение по поверхности
якоря определяется кривой ABCD, форма которой близка к тра-
пецеидальной (рис. 2.32). Площадь, ограниченная этой кривой
и осью абсцисс, пропорциональна магнитному потоку в воздуш-
ном зазоре под одним полюсом. Так как значения индукции В
в пределах полюсного деления т различны, то для определения
э. д. с. удобно воспользоваться средним значением магнитной
индукции, приняв его равным высоте прямоугольника AB'C'D
с основанием т, площадь которого равна площади фигуры
ABCD. Тогда среднее значение э. д. с., индуктируемой в одном
проводнике, уложенном на поверхности якоря, равно
^ср
52
Обмотка якоря состоит из N проводников, однако э. д. с. об-
мотки определяется величиной э. д. с. лишь одной параллельной
N
ветви, которая содержит последовательно соединенных про-
водников.
Рис. 2. 32. Распределение магнитной индук-
ции в зазоре машины постоянного тока
Поэтому э. д. с. обмотки якоря
— ^ср ’ (2.11)
где v — окружная скорость вращающегося якоря, м!сек\
itDn
I — длина якоря, м;
п — скорость вращения якоря, об!мин\
D — диаметр якоря, м.
Длину окружности якоря nD можно выразить следующим
образом:
л£>=т2р,
тогда
60 '
Подставив это выражение в (2.11), получим
р п / х2РП JL
60 2а ’
53
Произведение lx есть площадь, которую пронизывает магнит-
ный поток одного полюса (рис. 2.33), поэтому
BqA = Ф,
где Ф — магнитный поток в воздушном зазоре под одним по-
люсом.
Следовательно, э. д. с. обмотки якоря
Рис. 2. 33. К выводу формулы
э. д. с. обмотки якоря
~ PN Ял
£а~ 60а Фп’
n PN
Величина для данной
оиа
является
(2-12)
машины
ной
постоян-
pN
60а •
(2.13)
Окончательно
£а =
(2.14)
е
Здесь э. д. с. Е, выражена в вольтах, а магнитный поток Ф —
в веберах (вб).
Пример. Генератор постоянного тока представляет собой четырехполюс-
ную машину с простой волновой обмоткой якоря, состоящей из 133 двухвит-
ковых секций.
Определить э. д. с. генератора, если скорость вращения якоря
=4600 об!мин, а магнитный поток Ф=ВД • 10~3 вб.
Решение. Так как секции обмотки якоря двухвитковые (o>s — 2), то*
каждая из них содержит четыре проводника.
Общее число проводников в обмотке якоря
ЛГ - <2wsS\
при ws = 2 и S =х 133 получим
= 2-2.133 =532.
Обмотка простая волновая, следовательно, 2а=2. Тогда э. д. с. генера-
тора (2.12) равна
Еа = 8>Т •10-3 11600 = 230 в-
оОа 60‘1
§ 2.14. Влияние ширины секций обмотки якоря
и положения щеток на величину э. д. с. машины
Скорость вращения якоря в генераторах обычно поддержи-
вается постоянной, поэтому величина э. д. с. генератора (2.14)
изменяется при любых изменениях полезного магнитного пото-
ка, т. е. магнитного потока, сцепленного с секциями обмотки
якоря.
54
На рис. 2.34, а показана часть поверхности якоря и одна сек-
ция обмотки с полным шагом, у которой первый частичный шаг
по якорю равен полюсному делению (yi—t).
В этом случае магнитный поток полюса является полезным,
так как полностью сцепляется секцией, а поэтому э. д. с. секции
с полным шагом имеет наибольшее значение.
Если же первый частичный
шаг по якорю сделать меньше
полюсного деления (yi<r), то
секция будет сцеплена лишь
с частью потока полюса (рис.
2.34, б). Поэтому в секциях
с укороченным шагом, при про-
Рис. 2. 34. Влияние шага обмот-
ки на величину э. д. с.:
а—полный шаг; б—укороченный
шаг; в—удлиненный шаг
Рис. 2. 35. Уменьшение э. д. с.
машины при сдвиге щеток
с нейтрали
чих неизменных условиях, э. д. с. меньше, чем в секциях с пол-
ным шагом.
Э. д. с. якоря также уменьшится, если обмотка якоря выпол-
нена из секций с удлиненным шагом (^1>т), так как в этом слу-
чае секцию пронизывают магнитные потоки противоположных
направлений, и поэтому часть полезного потока одной пары по-
люсов идет на компенсацию размагничивающего действия по-
тока другой пары полюсов (рис. 2.34,в), отчего э. д. с. секции
становится меньше.
Практическое применение имеют секции с полным или уко-
роченным шагом. Секции с удлиненным шагом в обмотках не
применяются, так как их выполнение связано с дополнительным
расходом меди.
На величину э. д. с. обмотки якоря влияет также положение
щеток на коллекторе. Для выяснения этого воспользуемся поня-
тием об условных щетках (см. § 2.2). На рис. 2.32 условные
щетки поставлены на геометрической нейтрали, т. е. на границах
полюсного деления. Поэтому э. д. с. всех проводников якорной
обмотки, входящих в параллельную ветвь, имеют одинаковое
55
направление. В результате э. д. с. параллельной ветви, а следо-
вательно, и э. д. с. обмотки при положении условных щеток на
геометрической нейтрали определяются суммой э. д. с. всех сек-
ций параллельной ветви.
Если же условные щетки сместить с нейтрали (рис. 2.35), то
в параллельную ветвь оказываются включенными проводники
обмотки якоря с различным направлением э. д. с. В этом случае
величина э. д. с. параллельной ветви определяется суммой э. д. с.
лишь части секций, включенных в параллельную ветвь, что ведет
к уменьшению э. д. с. машины постоянного тока. Таким образом,
наибольшее значение э. д. с. имеет место при положении услов-
ных щеток на геометрической нейтрали.
Как было показано в § 2.2, такому положению условных
щеток на якоре соответствует положение реальных щеток на
коллекторе против середины основных полюсов (см. рис. 2.10).
§ 2.15. Выбор типа обмотки якоря
Применение в машине постоянного тока того или иного типа
якорной обмотки определяется требованиями как технического,
так и экономического характера. Выбранный тип обмотки дол-
жен обеспечивать получение в машине необходимой э. д. с. при
определенной величине тока. При этом следует стремиться
к минимальному числу уравнительных соединений.
Требования экономического характера при выборе типа об-
мотки сводятся к возможно лучшему использованию пазов
сердечника якоря, что определяется коэффициентом заполнения
где SM — площадь сечения меди всех уложенных в один паз
проводников;
Sn — площадь сечения одного паза.
Если в пазу уложено большое число проводников, то значи-
тельная часть площади паза будет занята изоляцией этих про-
водников. Поэтому выбранный тип обмотки якоря должен содер-
жать возможно меньшее количество проводников.
Преобразуя формулу э. д. с. обмотки якоря (2.12), получим
?/=60а-4г-- (2.15)
рФп
Отсюда следует, что при заданных значениях Еа, р, Ф и п
число проводников N в обмотке прямо пропорционально числу
пар параллельных ветвей. Поэтому при выборе типа обмотки
следует отдавать предпочтение обмоткам с минимальным числом
56
параллельных ветвей. Исходя из этих соображений, наиболее
желательной является простая волновая обмотка (а=1), тем
более, что она не требует уравнительных соединений. Условиями,
ограничивающими применение этой обмотки, являются:
а) допустимая величина тока в параллельной ветви, которая
не должна превышать 350 а в машинах без компенсационной
обмотки и 500 а —в машинах с компенсационной обмоткой
(см. § 3.4);
б) предельно допустимое напряжение между двумя смежны-
ми коллекторными пластинами не должно превышать 25—28 в
в машинах большой мощности, 30—35 в — в машинах средней
мощности и 50—60 в — в машинах малой мощности. Превыше-
ние указанных пределов может вызвать в машине возникновение
«кругового огня» — явления, опасного для машины (см. § 4.4)
Если простую волновую обмотку применить невозможно, пе-
реходят к другому типу обмотки, с большим числом параллель-
ных ветвей, например к сложной волновой.
Исходя из соображений целесообразности применения, раз-
личные типы якорных обмоток можно расположить в следующем
порядке:
1) простая волновая; 2) сложная волновая; 3) простая пет-
левая; 4) сложная петлевая; 5) комбинированная.
В табл. 2.5 указаны области применения различных типов
якорных обмоток.
Таблица 2.5
Тип обмотки 1 Основная область применения
Простая волновая Машины мощностью до 50 кет при напряже- нии от 110 до 230 в Машины мощностью от 50 до 500 кет при на- пряжении от 440 в и выше
Сложная волновая Машины мощностью от 50 до 500 кет напря- жением от 440 до 600 в
Простая петлевая Машины мощностью от 50 до 500 кет при на- пряжении от НО до 230 в Машины мощностью свыше 500 кет при на- пряжении от 440 до 600 в
Сложная петлевая Машины мощностью до 500 кет при напряже- нии до 24 в Машины мощностью свыше 500 кет при на- пряжении до 230 в
Комбинированная Машины мощностью свыше 500 кет при на- пряжении свыше 600 в
57
§ 2.16. Пересчет якорных обмоток машин постоянного тока
На практике иногда возникает необходимость машину постоянного тока
использовать для работы при напряжении, не соответствующем ее паспорт-
ным данным. Например, от генератора, который, согласно паспортным дан-
ным вырабатывает э. д. с. 115 в, требуется получить э. д. с. 230 в.
В соответствии с формулой э. д. с. обмотки якоря (2.12) увеличение
э. д. с. в два раза в данной машине можно получить либо увеличением ско-
рости вращения, либо увеличением магнитного потока возбуждения. Однако
увеличение скорости вращения машины в два раза недопустимо по условиям
ее механической прочности, а увеличить магнитный поток машины также
невозможно, так как машина работает в условиях магнитного насыщения
(см. § 3.2). Кроме этого, увеличение э. д. с. машины со 115 до 230 в может
оказаться недопустимым из-за слишком большого напряжения на соседних
коллекторных пластинах, которое не должно превышать значений, указанных
в § 2.15. Таким образом, остается только один способ — -изменить обмотку
якоря машины. Все необходимые изменения в обмотке, т. е. ее перемотку,
делают на основании пересчета.
Обозначим э. д. с. обмоткн, число активных проводников и число пар
параллельных ветвей до перемотки соответственно через £i, и As и через
Е2, N2h А2 — те же величины после перемотки.
В соответствии с принятыми обозначениями можно написать следующие
выражения для э. д. с. машины до н после перемотки
Разделим Е2 на £i
Е, . _ Ntai
Et “ A\at •
Из полученного выражения определяем новое число N2 активных про-
водников обмотки при э. д. с. Ег и неизменных скорости вращения и маг-
нитном потоке возбуждения
Nt=Eg_N (2.16)
Так как число пазов на сердечнике якоря при перемотке не может быть
Nt
изменено, то важно определить новое число проводников в пазу якоря
которое должно быть целым и четным. Последнее условие необходимо для
того, чтобы обмотку можно было выполнить двухслойной. Кроме того, для
сохранения конструкции коллектора необходимо, чтобы число секций после
пересчета обмотки осталось прежним.
Для уяснения изложенного рассмотрим примеры пересчета якорных
обмоток.
Пример. Генератор постоянного тока с номинальным напряжением 230 в
требуется пересчитать иа напряжение 460 в. Данные обмоткн якоря: 2р=6;
Z=100; а=2; обмотка сложная волновая; число коллекторных пластин
К=200.
Решение. Чтобы увеличить э. д. с. машины в два раза, следует либо
увеличить число проводников обмотки якоря в два раза, либо уменьшить
число пар параллельных ветвей в два раза, оставив, число проводников об-
58
моткн Ni прежним. В нашем примере число пар параллельных ветвей а=2.
Это число можно уменьшить в два раза, если перейти к простой волновой
обмотке с а=1. Проверим, будет ли в этом случае шаг по коллектору равен
целому числу, так как только при этом условии простая волновая обмотка
выполнима
т. е. обмотка выполнима.
Напряжение между соседними коллекторными пластинами
£4 — 2р =• -2QQ- 6 = 13,8 в,
что не превышает допустимых значений (см. § 2.15). Так как мощность ма-
шины остается неизменной, то после перемотки номинальный ток якорной
обмотки уменьшается в два раза. Но число параллельных ветвей после пе-
ремотки также уменьшается в два раза, а поэтому величина тока парал-
лельной ветви остается неизменной. Из этого следует, что площадь сечения
проводников обмотки якоря при переходе от сложной волновой обмотки
к простой волновой не меняется Изменение типа обмотки в рассматриваемом
случае осуществляется перепайкой секционных концов иа коллекторе машины.
Пример. Двигатель, работающий прн напряжении 220 в, требуется пе-
ресчитать на напряжение ПО в. Данные обмотки якоря 2р=2; Z=29; число
витков в секции® =4; ai—1; число проводников в пазе 16, обмотка про-
*2
стая волновая; число коллекторных пластин К=58.
Решение. Число проводников в обмотке якоря до пересчета
ЛГ1 = 2юе К =2-4-58 = 464.
«2
Число пар параллельных ветвей обмотки прн пересчете оставим прежним
(a2—ai=l). Тогда новое число проводников получим по формуле (2.16)
1V2=.|»5?A\= "11-464 = 232,
2 Е^. 220-1
а число проводников в пазу
Так как ai=a2, а напряжение уменьшено вдвое, то величина тока в па-
раллельной ветви возрастает в два раза. Чтобы плотность тока в провод-
никах обмотки осталась прежней, увеличим сечение провода в два раза.
Этого можно достигнуть, если каждую секцию обмотки якоря выполнить из
провода прежнего сечеиия, но сложенного вдвое. Тогда число проводников
в -пазу будет 8-2=16, т. е. столько же, сколько было до перемотки.
Из этого следует, что новая обмотка беспрепятственно укладывается в пазы
якоря. Определим число витков в секции пересчитанной обмотки
— _ 7
N» Z £ 8-29
ws2~2S ~ 2S “ 2-58“2’
где S — количество секций в обмотке; 5=К=58.
59
Глава III
МАГНИТНАЯ СИСТЕМА МАШИН ПОСТОЯННОГО ТОКА
§ 3.1. Магнитная цепь машины постоянного тока
Намагничивающая сила обмотки возбуждения машины по-
стоянного тока создает магнитный поток, который замыкается
через участки машины, образующие ее магнитную цепь. Участ-
ками магнитной цепи являются: станина, сердечники полюсов
(включая полюсные наконечники), сердечник якоря и воздуш-
ный зазор между полюсными наконечниками и якорем.
На рис. 3.1 изображены магнитные системы машин постоян-
ного тока с разным числом главных полюсов. Во всех случаях
Рнс. 3. 1. Магнитные системы машин постоянного тока:
а —двухполюсная; б—четырехполюсная; в—шестипо-
люсная
магнитная система представляет собой разветвленную сим-
метричную цепь. Магнитный поток каждого полюса разделяется
на две равные части и направляется к двум соседним полюсам.
Каждая часть потока проходит последовательно по участкам
магнитной цепи машины, составляющим ее расчетную часть. На
рис. 3.2 показана расчетная часть магнитной цепи четырехпо-
чюсной машины, на которой видны все ее участки, а именно:
воздушный зазор б, зубцовый слой h3, сердечник якоря La,
сердечники полюсов hn и станина La.
Величина магнитного потока прямо пропорциональна намаг-
ничивающей силе F и обратно пропорциональна сумме магнит-
ных сопротивлений 2гм всех участков магнитной цепи
Ф = -Х-- (3.1)
2-гм
60
Величина основного (полезного) магнитного потока в зазоре,
необходимая для наведения в обмотке якоря требуемой э. д. с.,
определяется выражением (2.12)
рЫ п
(3.2;
Величина намагничивающей силы (н. с.), необходимая для
создания в магнитной цепи требуемого магнитного потока, опре-
деляется расчетом магнитной цепи. Так как расчетная часть
Рис 3. 2. Расчетная часть магнитной цепи
машины постоянного тока
магнитной цепи машины состоит из пяти участков, отличающих-
ся как размерами, так и свойствами материалов, из которых они
изготовлены, то для каждого участка магнитной цепи рассчиты-
вают величину магнитного напряжения: F& — воздушного зазо-
ра; F3 — зубцового слоя; Ка—сердечника якоря; Fa— сердеч-
ников пары полюсов; Гя— ярма (станины).
Сложив магнитные напряжения всех участков магнитной
цепи, получают величину н. с. обмотки возбуждения
Fo = Fs + Fs +- Fa + Fn + Кя. (3.3)
Расчетная часть магнитной цепи включает два полюса, по-
этому рассчитываемое значение намагничивающей силы Fo пред-
ставляет собой н. с. обмотки возбуждения машины одной пары
полюсов. Кроме того, следует отметить, что расчет магнитной
цепи машины ведется для режима холостого хода, т. е. для ра-
боты машины без нагрузки. Поэтому намагничивающая сила Ко
создает магнитный поток Ф, обеспечивающий наведение в об-
мотке якоря заданной э. д. с. Еа лишь в режиме холостого хода.
Впоследствии будет показано, что для получения в машине за-
данной э. д. с. при нагрузке потребуется несколько большая
намагничивающая сила (см. § 3.4).
61
Магнитное напряжение воздушного зазора определяется по
формуле
= (3.4)
Но
где В8 — максимальная магнитная индукция в зазоре машины,
тл;
& — величина зазора, м;
Кг — коэффициент зазора, учитывающий увеличение магнит-
ного сопротивления зазора вследствие зубчатости по-
верхности якоря (Кг > 1);
цо — магнитная проницаемость воздуха
ц0 = 4-гсЮ—7 гн1м.
Магнитное напряжение остальных участков магнитной цепи,
выполненных из стали, определяется по формуле
Здесь Нх— напряженность магнитного поля; она зависит от
магнитной индукции и определяется по кривым на-
магничивания;
1Х — длина участка магнитной цепи.
Значение магнитной индукции в различных участках цепи
определяется по формуле
где Фх — магнитный поток на участке;
Sx — площадь поперечного сечения участка.
В соответствии с рис. 3.2 намагничивающая сила
/>2^1 2H3h3 + H3La + 2Haha + HxLa. (3.5)
Ho
Если полюсные наконечники имеют пазы для компенсацион-
ной обмотки (см. § 3.4), то к указанным пяти участкам магнит-
ной цепи добавляют еще один — зубцовый слой полюсного на-
конечника.
Значения намагничивающих сил на разных участках магнит-
ной цепи различны и зависят от магнитного сопротивления этих
участков.
Наибольшим магнитным сопротивлением обладает зазор.
Поэтому значительная часть результирующей намагничивающей
силы Го затрачивается на преодоление магнитного сопротив-
ления зазора. Что касается магнитного сопротивления других
62
участков магнитной цепи, выполненных из стали, то их магнит-
ное сопротивление зависит от степени магнитного насыщения
стали. В условиях наибольшего магнитного насыщения находит-
ся зубцовый слой, поэтому его магнитное сопротивление больше,
чем других участков магнитной цепи, выполненных из стали.
В табл. 3.1 в качестве примера приведены результаты рас-
чета магнитной цепи генератора постоянного тока мощностью
500 кет, напряжением 460 в. Магнитная цепь этого генератора
содержит 2р=8 полюсов.
Расчет магнитной цепи выполнен для четырех значений по-
лезного магнитного потока Ф, равных 0,5Фо; 075Фо; Фо и 1,1Ф0.
Здесь Фо — магнитный поток, соответствующий номинальному
значению э. д. с. генератора в режиме холостого хода.
Таблица 3.1
Наименование участ- 0,5 Фо 0,75 Фо | 1Л Фо
ков магнитной цепи Значения намагничивающих сил, а
Воздушный зазор, Fs . 4750 7120 9500 10450
Зубцовый слой, F3 . . 43 635 3350 7858
Сердечник якоря, F3 . 73 140 395 625
Сердечники пвлюсов, Fn 115 265 510 1050
Станина (ярмо), Ля 234 360 610 750
Намагничивающая сила на пару полюсов, Ао 5065 8520 14365 20825
Намагничивающая сила обмотки возбуждения на пару по-
люсов Го определяет количество витков в полюсной катушке
обмотки возбуждения
(3.6)
где iB— величина тока в обмотке возбуждения, а.
Величина тока в обмотке возбуждения, включенной парал-
лельно обмотке якоря, в машинах мощностью от 10 до 1000 кет
принимается равной соответственно от 3,5 до 1% от номиналь-
ного тока машины, а в машинах мощностью от 1 до 10 кет ток
возбуждения принимается равным от 7 до 3,5%.
В последовательной обмотке возбуждения ток равен току
в обмотке якоря.
Пример. Определить число витков в полюсной катушке генератора по-
стоянного тока параллельного возбуждения, если н. с. Fo= 14365 а, мощность
генератора Рн =500 кет при напряжении UH =460 в.
63
Решение Номинальный ток генератора
Р„ 500•10»
1/н= 460
= 1080 а.
Принимаем ток возбуждения равным 1 % от /н
i„ = 0,01 • 1080 = 10,8 а.
Число витков в полюсной катушке возбуждения (3 6)
^ = -5г = 2тЙг = 670 в™
§ 3.2. Характеристика намагничивания машины
Как известно, ферромагнитные материалы обладают свой-
ством магнитного насыщения. Поэтому зависимость между маг-
нитным потоком машины и намагничивающей силой нелинейна,
т. е. поток увеличивается не пропор-
ционально росту намагничивающей
силы обмотки возбуждения. Это под-
тверждается графически выражен-
ной зависимостью O = f(F), пост-
роенной по данным табл. 3.1 и на-
зываемой характеристикой намагни-
чивания машины (рис. 3.3). В на-
чальной части характеристика пря-
молинейна. Объясняется это тем,
что при сравнительно небольших
значениях магнитного потока, когда
магнитная цепь не насыщена, намаг-
ничивающая сила возбуждения оп-
ределяется лишь величиной н. с. за-
зора Fs, так как магнитное сопро-
тивление стальных элементов маг-
нитной цепи весьма незначительно.
(3.4), н. с. Fs пропорциональна маг-
нитной индукции Bi, а следовательно, пропорциональна магнит-
ному потоку. Поэтому касательная к кривой намагничивания
через начало координат представляет собой зависимость маг-
нитного напряжения зазора Fs от полезного магнитного
потока Ф.
При увеличении н. с. возбуждения до значений, превышаю-
щих F', наступает магнитное насыщение стальных элементов
цепи и зависимость Ф=/(/7) становится нелинейной. Раньше
чем на других участках происходит насыщение зубцового слоя
якоря. Поэтому намагничивающая сила F3 на этом участке
64
с увеличением магнитного потока растет интенсивнее, чем на
остальных участках магнитной цепи.
Если касательную к начальной части характеристики намаг-
ничивания продолжить до горизонтальной прямой, проведенной
Ф ,
через точку ф- =1 на оси ординат, то отрезок ас укажет на
величину н. с. возбуждения Fo, а отрезок ab — на величину н. е.
зазора Pt. Отношение этих н. с. называется коэффициентом
насыщения
<37>
По величине Др. можно судить о степени насыщения магнит-
ной цепи машины. Обычно машина работает при насыщенной
магнитной системе, т. е. при Дц>1. Для машин нормального
исполнения Дц = 1,25—1,75.
Коэффициент насыщения генератора, характеристика намаг-
ничивания которого представлена на рис. 3.3, равен
Как следует из (2.14), при неизменной скорости вращения
э. д. с. машины постоянного тока Ел пропорциональна магнит-
ному потоку Ф, а намагничивающая сила возбуждения пропор-
циональна току возбуждения /в
Pq = 2iBwB.
Поэтому характеристика намагничивания Ф=/(Е) является
также выражением зависимости э. д. с. машины от тока воз-
буждения Ea=f(iB) и называется характеристикой холостого
хода машины (см. § 5.2).
§ 3.3. Реакция якоря
При работе машины постоянного тока в режиме холостого
хода ток в обмотке якоря практически отсутствует и в магнитной
цепи машины действует лишь одна намагничивающая сила об-
мотки возбуждения Ёо- Магнитное поле машины в этом случае
является симметричным относительно оси полюсов (рис. 3.4, а)*,
а график распределения магнитной индукции в воздушном
зазоре представляет собой кривую, близкую к трапецеидальной
(рис. 3.4,6). Если же машину нагрузить, то в обмотке якоря
• В целях упрощения реакция якоря рассматривается на двухполюсной
машине с условными щетками.
5 1649 65
появится ток, который создаст намагничивающую силу якоря Fa.
Допустим, что н. с. возбуждения равна нулю и в машине дей-
ствует лишь н. с. якоря. Тогда магнитное поле, созданное этой
н. с., будет иметь вид, представленный на рис. 3.5, а.
Из этого рисунка видно, что н. с. обмотки якоря направлена
по линии щеток (в данном случае по геометрической нейтрали).
Рис. 3. 4. Магнитное поле машины в режиме холостого хо-
да:
а — магнитное поле машины; б — распределение индукции
в зазоре
Следует обратить внимание, что хотя якорь вращается, но
пространственное направление н. с. обмотки якоря остается
Рис. 3. 5. Магнитное поле реакции якоря (а) и распределение
индукции в зазоре (б)
неизменным, так как зависит исключительно от положения
щеток.
Наибольшее значение н. с. обмотки якоря имеет на линии
щеток (кривая 1 на рис. 3.5, б), а по оси полюсов эта н. с. равна
нулю. Однако распределение магнитной индукции в зазоре от
магнитного потока якоря совпадает с распределением н. с. лишь
в пределах полюсных наконечников. В межполюсном простран-
66
стве магнитная индукция резко уменьшается (кривая 2 на
рис. 3.5,6). Объясняется это увеличением магнитного сопротив-
ления потоку якоря в межполюсном пространстве. Величина
намагничивающей силы обмотки якоря определяется числом
Рис. 3. 6. Результирующее магнитное поле (а) и распреде-
ление индукции в зазоре (б)
проводников в обмотке якоря на полюсном делении т и вели-
чиной тока в этих проводниках
/\ = -^гат, (3.8)
N
где число проводников обмотки на единицу длины окруж-
ности якоря;
1а— ~ — ток в проводниках обмотки якоря, равный току парал-
* дельной ветви.
М •
Обозначив га = Д, получим следующее выражение н. с.
якоря:
Fa = Az. (3.9)
Здесь А — линейная нагрузка якоря, представляющая собой
часть намагничивающей силы якоря, приходящуюся на 1 см
длины окружности якоря. Значение линейной нагрузки может
быть от 65 до 700 а) см, в зависимости от мощности машины.
Таким образом, в нагруженной машине постоянного тока
действуют две намагничивающие силы: н. с. возбуждения Fo
и н. с. обмотки якоря Fa.
Влияние намагничивающей силы обмотки якоря на магнит-
ное поле машины называется реакцией якоря. Реакция якоря
5* G7
искажает основное магнитное поле, делая его несимметричным
относительно оси полюсов машины.
На рис. 3.6, а показано распределение линий результирую-
щего поля машины, работающей в режиме генератора при вра-
щении якоря по часовой стрелке. Такое распределение линий
магнитного поля соответствует также и двигателю, но при вра-
щении якоря против часовой стрелки.
Если предположить, что магнитная система машины не на-
сыщена, то реакция якоря лишь искажает результирующий
магнитный поток, не изменяя его величины. Край полюса и на-
ходящийся под ним зубцовый слой сердечника якоря, где на-
правление н. с. якоря совпадает с направлением н. с. основных
полюсов, подмагничиваются; другой край полюса и зубцовый
слой, где и. с. якоря направлена встречно н. с. основных полю-
сов, размагничиваются. При этом результирующий магнитный
поток как бы поворачивается относительно оси основных полю-
сов на некоторый угол, а физическая нейтраль тт' (линия,
проходящая через точки на якоре, в которых индукция равна
нулю) смещается относительно геометрической нейтрали пп' на
угол а (рис. 3.6, а). Чем больше нагрузка машины, тем сильнее
искажение результирующего поля, а следовательно, тем больше
угол смещения физической нейтрали. При работе машины в ре-
жиме генератора физическая нейтраль смещается по направле-
нию вращения якоря, а при работе двигателем — против вра-
щения якоря.
Искажение результирующего поля машины неблагоприятно
сказывается на ее рабочих свойствах. Во-первых, сдвиг физи-
ческой нейтрали относительно геометрической приводит к более
тяжелым условиям работы щеточного контакта и может слу-
жить причиной искрообразования на коллекторе (см. § 4.2).
Во-вторых, искажение результирующего поля машины вле-
чет за собой перераспределение магнитной индукции в воздуш-
ном зазоре. На рис. 3.6,6 показан график распределения маг-
нитной индукции результирующего поля в воздушном зазоре,
полученный совмещением кривых (см. рис. 3.4,6 и 3.5,6). Из
этого графика следует, что магнитная индукция в воздушном за-
зоре машины распределяется несимметрично, резко увеличи-
ваясь под подмагниченными краями полюсов. В результате
мгновенные значения э. д. с. секций обмотки якоря в моменты
попадания их активных сторон в зоны максимальных значений
индукции (под подмагниченные края полюсных наконечников)
повышаются. Это приводит к росту напряжения между смежны-
ми коллекторными пластинами UK. При значительных перегруз-
ках машины напряжение UK превзойдет допустимые значения
(см. § 2.15) и миканитовая прокладка может быть перекрыта
электрической дугой. Имеющиеся на коллекторе частицы гра-
фита и металлическая пыль способствуют развитию электриче-
68
Рис. 3. 7. Разложение в. с.
обмотки якоря на состав-
ляющие
ской дуги. В результате чего работа электрической машины
может быть нарушена.
Таковы последствия реакции якоря в машине с ненасыщен-
ной магнитной системой. Если же магнитная система машины
насыщена, что имеет место у большинства электрических машин,
то подмагничивание одного края по-
люсного наконечника и находящего-
ся под ним зубцового слоя сердеч-
ника якоря происходит в меньшей
степени, чем размагничивание дру-
гого края и находящегося под ним
зубцового слоя якоря.
Это благоприятно сказывается
на распределении индукции в зазо-
ре, которое становится более равно-
мерным, так как максимальное зна-
чение индукции уменьшается на ве-
личину участка 1 (рис. 3.6, б). Одна-
ко величина результирующего пото-
ка при этом уменьшается. Другими
словами, реакция якоря в машине с
насыщенной магнитной системой
размагничивает машину. В резуль-
тате ухудшаются рабочие свойства машины: у генераторов сни-
жается э. д. с., у двигателей уменьшается вращающий момент.
Размагничивающее влияние реакции якоря усиливается при
смещении щеток с геометрической нейтрали. Объясняется это
тем, что вместе со щетками смещается и вектор намагничиваю-
щей силы якоря (рис. 3.7). При этом намагничивающая сила
якоря Fa, помимо поперечной составляющей Faq = Facos 0, при-
обретает еще и продольную составляющую Fid = F.t sin р., на-
правленную по оси полюсов. Если машина работает в режиме
генератора, то при смещении щеток в направлении вращения
якоря продольная составляющая н. с. якоря Fad действует
встречно н. с. возбуждения Fo, что ведет к ослаблению основ-
ного магнитного потока машины; при смещении щеток против
вращения якоря продольная составляющая Fad действует со-
гласованно с Fo, что ведет к некоторому увеличению основного
магнитного потока машины.
Если же машина работает в режиме двигателя, то при сме-
щении щеток по направлению вращения якоря продольная
составляющая н. с. якоря Fsd действует согласованно с н. с. Fo,
а при смещении щеток против вращения якоря Fad действует
встречно с н. с. Fo и размагничивает машину.
Вместе с тем следует указать, что смещение щеток с гео-
метрической нейтрали сопровождается ослаблением искажаю-
69
щего влияния реакции якоря. Дело в том, что при положении
щеток на геометрической нейтрали вся н. с. якоря является
поперечной (F&q — FA), а при смещении щеток на угол £ отно-
сительно геометрической нейтрали поперечная составляющая
н. с. якоря уменьшается (F.iq = FA cos ₽).
§ 3.4. Устранение вредного влияния реакции якоря
Влияние реакции якоря на работу щеточного контакта
устраняется применением в машинах добавочных полюсов
(см. § 4.3), которые будучи установленными между главными
полюсами создают намаг-
ничивающую силу, устраня-
ющую влияние поперечной
составляющей н. с. якоря на
геометрической нейтрали (в
зоне коммутации). Наибо-
лее действенным средством
устранения неравномерного
распределения индукции в
воздушном зазоре является
применение в машинах по-
стоянного тока компенсаци-
онной обмотки.
Компенсационная обмот-
ка укладывается в пазы
полюсных наконечников
(рис. 3.8) и включается по-
следовательно с обмоткой
Рис. 3 8. Станина машины постоян- ЯК0РЯ ТаКИМ обРазом- чтобы
ного тока с компенсационной об- ее н- с- была противопо-
моткой ложна по направлению н. с.
обмотки якоря F&.
Компенсационная обмотка делается распределенной по всей
поверхности полюсного наконечника всех главных полюсов.
Включение компенсационной обмотки последовательно с об-
моткой якоря обеспечивает автоматичность компенсации намаг-
ничивающей силы якоря при любой нагрузке машины.
Машина постоянного тока с компенсационной обмоткой более
надежна в работе.
При наличии компенсационной обмотки магнитное поле ма-
шины при переходе из режима холостого хода к нагрузке
остается практически неизменным.
Однако компенсационная обмотка удорожает машину
и усложняет ее конструкцию. Поэтому компенсационные обмот-
ки применяют только в машинах большой мощности (начиная
70
с 150 кет), работающих с резкими колебаниями нагрузки, на-
пример в электродвигателях прокатных станов.
Размагничивающее влияние реакции якоря на машину ком-
пенсируется увеличением намагничивающей силы обмотки воз-
буждения. Опыт показывает, что для компенсации размагничи-
вающего влияния реакции якоря необходимо увеличить намаг-
ничивающую силу возбуждения в режиме холостого хода Fo
(см. § 3.1) на 15—30%. Это достигается увеличением числа
витков в полюсных катушках по сравнению с их значением,
рассчитанным по (3 6),
< = ^(1,15 — 1,3).
Глава IV
КОММУТАЦИЯ в МАШИНАХ ПОСТОЯННОГО ТОКА
§ 4.1. Причины, вызывающие искрение на коллекторе
При работе машины постоянного тока щетки и коллектор
образуют скользящий контакт. Площадь контакта ще'Гок выби-
рается по величине рабочего тока машины, приходящегося на
одну щетку, и по допустимому значению плотности тока для
выбранной марки щеток.
Если по какой-либо причине щетка прилегает к коллектору
не всей поверхностью, а лишь частью ее, то возникают чрезмер-
ные местные плотности тока, которые приводят к появлению
искрения на коллекторе. Причиной возникновения чрезмерной
плотности тока может быть также увеличение тока в щетке.
Причины, вызывающие искрение на коллекторе, разделяются
на механические, потенциальные и коммутационные.
К механическим причинам относятся: слабое давление щеток
на коллектор, неправильная конфигурация или негладкая по-
верхность коллектора, загрязнение поверхности коллектора, вы-
ступание изоляции над коллекторными пластинами, неплотное
закрепление траверзы, пальцев или щеткодержателей, а также
другие недостатки, возникшие в процессе эксплуатации машины.
При указанных неисправностях в отдельные моменты времени
нарушается контакт щетки с коллектором, что приводит
к искрению.
Потенциальные причины искрения появляются при возник-
новении напряжения между соседними коллекторными пласти-
нами, превышающего допустимые пределы (§ 2.15). В этом слу-
чае искрение наиболее опасно, так как оно может сопровождать-
ся появлением на коллекторе электрических дуг.
71
Коммутационные причины искрения вызываются физически-
ми процессами, происходящими в машине при переходе секций
обмотки якоря из одной параллельной ветви в другую.
Иногда искрение вызывается действием целого комплекса
причин.
Выяснение причин искрения следует начинать с механиче-
ских, так как они обычно обнаруживаются внешним осмотром
Таблица 4.1
Степень искрения (класс ком- мутации) Характеристика степени искрения Состояние коллектора н щеток
1 Отсутствие искрения (темная коммутация) Отсутствие почернения на коллекторе н иагара на щетках
4 Слабое точечное искрение под небольшой частью щет- ки
1 т Слабое искрение под боль- шой частью щетки Появление следов почерне- ния на коллекторе, легко устраняемых протиранием поверхности коллектора бензином, а также следов нагара на щетках
2 Искренне под всем краем щетки. Допускается только при кратковременных толч- ках нагрузки и перегрузки Появление следов почернения на коллекторе, не устра- няемых протиранием по- верхности коллектора бен- зином, а также следов нагара на щетках
3 Значительное искрение под всем краем щетки с нали- чием вылетающих искр. До- пускается только для мо- ментов прямого (без рео- статных ступеней) включе- ния или реверсирования ма- шин, если при этом коллек- тор н щетки остаются в состоянии, пригодном для дальнейшей работы Значительное почернение на коллекторе, не устраняемое протиранием поверхности коллектора бензином, а так- же подгар и разрушение щеток
Примечание, При номинальном режиме работы машины искрение’
не должно превышать степень 1 у .
72
коллектора и щеточного аппарата. Наибольшие трудности в об-
наружении и устранении представляют коммутационные причи-
ны искрения. Значительное влияние на работу щеточного кон-
такта имеет состояние поверхности коллектора. При длительной
работе машины медь коллектора покрывается тонкой теплостой-
кой оксидной пленкой повышенной твердости. Иногда эта пленка
приобретает темно-коричневую окраску («политура коллек-
тора»), Такое состояние поверхности коллектора способствует
безыскровой работе щеточного контакта.
При выпуске готовой машины с завода в ней настраивается
так называемая темная коммутация, обеспечивающая полное
отсутствие искрения на коллекторе. Однако в процессе эксплуа-
тации машины, по мере износа коллектора и щеток, возможно
появление небольшого искрения, которое не опасно для машины.
Но в некоторых случаях искрение может быть значительным,
опасным для машины, и тогда необходимо машину остановить
для выяснения и устранения причин искрения. Искрение оце-
нивается по степеням. Установлено пять степеней искрения.
Характеристика каждой степени искрения определена ГОСТ
183—66 (табл. 4.1).
Значительное искрение ведет к подгоранию щеток и к появ-
лению почернения на коллекторе, что способствует дальнейшему
усилению искрения. Кроме того, искрение создает помехи радио-
приему, что необходимо учитывать при работе машин постоян-
ного тока вблизи радиоустройств.
§ 4.2. Физическая сущность коммутации
и ее влияние на работу машины
При вращении якоря машины постоянного тока коллектор-
ные пластины поочередно вступают в соприкосновение со щет-
ками. При этом переход щетки с одной пластины на другую
сопровождается переключением секции обмотки из одной-парал-
лельной ветви в другую и изменением тока в этой секции.
Процесс изменения тока в секциях при переключении их из
одной параллельной ветви в другую называется коммутацией.
Секция, в которой происходит коммутация, называется комму-
тирующей секцией, а время, в течение которого происходит
процесс коммутации, называется периодом коммутации Тк. Ве-
личина периода коммутации определяется отрезком времени,
начиная с момента, когда коллекторная пластина вступает в со-
прикосновение со щеткой, и кончая моментом, когда пластина
полностью выходит из соприкосновения с этой щеткой
_ 60 />щ
Кп Ьк ’
(4.1)
73
где К — число коллекторных пластин;
п — скорость вращения якоря;
Ьщ — ширина щетки;
Ьк — расстояние между серединами соседних коллекторных
пластин (коллекторное деление).
Рассмотрим процесс коммутации при условии, что щетки рас-
положены на геометрической нейтрали и что в коммутирующей
секции в течение всего периода коммутации не индуктируются
Направление вращенья
Рис 4 1 Изменение направления тока в коммутирующей сек-
ции
электродвижущие силы. Кроме того, ширину щетки примем
равной коллекторному делению (£щ = £к). В начальный момент
коммутации (рис. 4.1, а) контактная поверхность щетки касает-
ся только пластины /, а секция 1 (коммутирующая секция)
относится к левой параллельной ветви обмотки и ток в ней 1 =
2'
Затем пластина 1 постепенно сбегает со щетки и на смену ей
набегает пластина 2. В результате коммутирующая секция ока-
зывается замкнутой щеткой и ток в ней постепенно уменьшается.
Объясняется это тем, что токи й и i2 в пластинах 1 и 2 обратно
пропорциональны переходным сопротивлениям гЩ] (между щет-
кой и сбегающей пластиной /) и гЩ2 (между щеткой и набегаю-
щей пластиной 2)
^2 ' izij
что же касается тока в коммутирующей секции i, то он равен
разности токов й и i2.
По мере того как пластина 1 теряет контакт со щеткой, воз-
растает величина гш и поэтому уменьшается ток й-
74
нулю, так как ii = i2 или G — i2 = 0.
Рис. 4. 2. Графики изменения тока
в коммутирующей секции
Одновременно щетка переходит на пластину 2, при этом со-
противление лщг уменьшается и ток i2 увеличивается. Когда же
контактная поверхность щетки равномерно перекрывает обе кол-
лекторные пластиныгЩ1 =Гщ2 (рис. 4.1, б), ток в коммутирующей
секции становится равным
В конце процесса комму-
тации щетка полностью
переходит на пластину 2
(рис. 4.1, в), а ток в ком-
мутирующей секции i
вновь достигает величи-
ны у. Однако по направ-
лению этот ток противо-
положен току в начале
коммутации, а сама ком-
мутирующая секция те-
перь оказалась в правой
параллельной ветви об-
мотки якоря.
Таким образом, за пе-
риод коммутации ток в
коммутирующей секции
изменяется от +i до —i,
а график изменения тока
представляет собой пря-
мую линию (рис. 4.2, а).
Такую коммутацию назы-
вают прямолинейной, или
идеальной.
Прямолинейная комму-
тация является наиболее
желательным видом коммутации, так как она не вызывает в ма-
шине никаких вредных последствий. Плотность тока под щеткой
в течение всего периода коммутации остается неизменной. Объ-
ясняется это тем, что при прямолинейной коммутации величина
тока в контакте «щетка — коллекторная пластина» изменяется
пропорционально изменению площади этого контакта.
Однако в реальных условиях работы машин постоянного
тока процесс коммутации протекает значительно сложнее. Дело
в том, что период коммутации обычно весьма мал и приблизи-
тельно составляет 10-4—10~5 сек. При таком быстром изменении
тока в коммутирующей секции возникает значительная э. д. с.
самоиндукции:
(4.2)
75
где Ls — индуктивность секции,
i — ток в коммутирующей секции.
Обычно в каждом пазу якоря находятся несколько активных
сторон (не менее двух), принадлежащих разным секциям. При
этом все эти секции одновременно находятся в состоянии ком-
мутации будучи замкнутыми разными щетками (рис. 4.3). При
этом следует учесть, что обычно ширина щетки больше коллек-
торного деления (дщ > Ьк) и каждая щетка замыкает одновре-
менно несколько секций.
Так как активные стороны коммутирующих секций лежат
в одних пазах, то изменяющийся магнитный поток каждой из
этих сторон наводит в других э. д. с. взаимоиндукции
= (4.3)
где Ms — взаимная индуктивность одновременно коммутирую-
щих секций.
Обе э. д. с. создают в коммутирующей секции результирую-
щую э. д. с.
ер ~ eL + ем>
которая препятствует изменению тока в коммутирующей секции
и поэтому называется реактивной. Кроме того, под влиянием
реакции якоря магнитная индукция в зоне коммутации (на гео-
метрической нейтрали) приобретает некоторое значение Вк
(см. рис. 3.6,6), под действием которой в коммутирующей сек-
ции наводится э. д. с. внешнего поля
eK = BK2lwsv, (4.4)
где / — длина активных сторон секции;
v — линейная скорость движения секции;
ws — число витков в секции.
Таким образом, в коммутирующей секции наводятся э. д. с.
2? = еР + ек-
Если машина не имеет добавочных полюсов, то э. д. с. ер и ек
направлены согласованно и создают в коммутирующей секции
добавочный ток коммутации 1К такого же направления, что
и рабочий ток этой секции i в начальный период коммутации
(рис. 4.1, а). Такое взаимодействие токов 1К и i приводит к тому,
что изменение тока в коммутирующей секции задерживается.
Замедляющее действие тока коммутации объясняется тем,
что этот ток создается, главным образом, реактивной э. д. с.,
которая, как известно, своим действием препятствует изменению
тока в электрической цепи. Поэтому в момент равномерного
76
перекрытия щеткой пластин 1 и 2 ток в коммутирующей секции
не достигает нулевого значения, как это происходит при иде-
альной коммутации. Ток в коммутирующей секции достигает
нулевого значения во втором полуперйоде коммутации, т. е.
коммутация становится криволинейной замедленной.
График такой коммутации пред-
ставлен на рис. 4.2, б.
Рис. 4. 3. К понятию об э. д. с. вза-
имоиндукции
Рис. 4. 4. Распределение плот-
ности тока в контакте щетки
при замедленной коммутации
Добавочный ток коммутации 2К, замыкаясь в коммутирующей
секции, проходит через щеточный контакт (рис. 4.4). Это при-
водит к тому, что плотность тока под набегающим краем щетки
уменьшается, а под сбегающим — увеличивается, достигая
к концу периода коммутации значительной величины.
При значительных нагрузках машины плотность тока под
сбегающим краем щетки может достигнуть недопустимо боль-
ших значений, вызвать перегрев щетки и явится причиной
искрения.
Однако опыт показывает, что искрение на коллекторе возни-
кает и при небольших нагрузках. Это свидетельствует о том, что
главной причиной искрения на коллекторе является не увеличе-
ние плотности тока под щеткой, а процесс размыкания щеткой
цепи короткозамкнутой коммутирующей секций при выходе
сбегающей пластины коллектора из-под щетки. В момент раз-
мыкания коммутирующей секции с добавочным током комму-
тации гк накопленная в ней энергия магнитного поля
затрачивается на создание электрической дуги между сбегаю-
щим краем щетки и сбегающей коллекторной пластиной.
77
С увеличением нагрузки возрастает величина тока в секциях
и усиливается реакция якоря. А это, как видно из выражений
(4.2), (4.3) и (4.4), способствует росту Xе — еР + ек, увеличению
тока zK, а следовательно, ведет к усилению искрения.
§ 4.3. Способы улучшения коммутации
Итак, основной причиной неудовлетворительной коммутации
в машинах постоянного тока является добавочный ток комму-
тации
i =
К S'k ‘
Здесь Ггк—сумма электрических сопротивлений добавочному
току коммутации zK: сопротивление секции, сопротивление мест
пайки в петушках, сопротивление переходного контакта между
коллекторными пластинами и щеткой и, наконец, сопротивление
щетки. Однако наибольшую величину имеют сопротивление
щетки и сопротивление переходного контакта (гщ). Поэтому
с некоторым приближением можно записать
Из этой формулы следует, что уменьшить ток /к, а следова-
тельно, улучшить коммутацию можно либо увеличением сопро-
тивления гщ, либо уменьшением величины суммарной э. д. с,
Ze в коммутирующей секции. Величина сопротивления гщ за-
висит от технических данных щеток, применяемых в машине
(табл. 4.2).
С точки зрения получения удовлетворительной коммутации
целесообразнее применять твердые щетки (угольно-графитные,
графитные и электрографитированные), так как они обеспечи-
вают наибольшую величину переходного сопротивления.
Однако допускаемая плотность тока твердых щеток невели-
ка, а поэтому их применение в машинах постоянного тока ведет
к необходимости увеличения площади щеточного контакта, что
требует увеличения площади коллектора за счет его длины. Это
привело бы к увеличению габаритов машины и дополнительному
расходу меди. Поэтому щетки с большим сопротивлением при-
меняют только в машинах с относительно высоким напряже-
нием, а следовательно, с небольшим током.
Обычно в машинах постоянного тока общего применения
используют графитные щетки, в машинах с тяжелыми усло-
виями коммутации — угольнографитные или электрографити-
рованные, а в машинах пониженного напряжения (до 30 в) —
медно- или бронзографитные.
78
Группа щеток Мар- ка Номи- нальная плот- ность тока, а(смг Макси- мальная окруж- ная ско- рость, м/сек
Т2, Тб 6 10
Угольно- графитные УГ2 8 15
УГ4 7 12
П 7 12
Г2 8 15
Графитные ГЗ 10—11 25
Гб 9 18
Г8 11 25
Г58 9 25
Таблица 42
Технические характеристики щеток
Удель- ное на- жатие, г/см 2 Удельное электросо- противле- ние, ом-мм2/м Твер- дость по Шору Переходное па- дение напряже- ния на пару ще- ток при номи- нальном токе и ук = 15 м/сек, в Коэффици- ент трения при VK = =15 м/сек Износ за 50 ч работы при VK = =15 м/сек не более, мм
200 -250 40—60 45—58 2 ±0,5 0,30 0,1
200—250 18—30 40-60 2 ±0,4 0,25 0,3
200—250 26—38 45-65 2,1 ±0,5 0,25 0,3
200-250 30—46 35-50 2,2±0,5 0,3 0,2
200-250 25—37 40—50 1,7 ±0,5 0,25 0,15
200—250 10-20 30-40 1,9 ±0,4 0,25 0,20
200—250 26—42 35—50 2,2 ±0,6 0,25 0,20
200—300 10—20 20—40 1,9±0,4 0,25 0,15
175—200 20-30 35—50 — 0,25 —
Продолжение табл. 4^>
Группа щеток Мар- ка Номи- нальная плот- ность тока, а/см2 Макси- мальная окруж- ная ско- рость, м/сек Удель- ное на- жатие, г/см2 Удельное электро- сопротив- ление, ом • мм2/м Твер- дость по Шо- РУ Переходное падение напря- жения на па- ру щеток при номинальном токе и VK = = 15 м/сек, в Коэффици- ент трения при 1/к = = 15 м/сек 1 Износ за 50 ч работы при VK = = 15 м/сек не более, мм
ЭГ2 10 25 200—250 20—30 46—60 2,75 ±0,6 0,2 од
ЭГ4 12 40 150-200 10—16 20-30 2+0,4 0,2 0,25
Электрогра- фитированные ЭГ6 9 — 200—250 30-46 47—63 2,5 ±0,6 0,25 0,15
ЭГ8 10 40 200-400 40—50 42—55 2,4 ±0,5 0,25 0,15
ЭГ10 9 — 200-250 40-56 50-70 2,4 ±0,6 0,25 0,15
ЭГ14 10—11 40 200-400 26—38 40-60 2,5 ±0,5 0,25 0,5
ЭГ83 9 45 175—220 36-65 15—32 — 0,25 —
Ml 15 25 150—200 2—6 26—38 1,5 ±0,5 0,25 0,18
М3 12 20 150-200 7-12 30-40 1,8 ±0,4 0,25 0,15
Мб 15 25 150—200 2-6 26-35 1,5 ±0,5 0,20 0,15
М16 12—14 25 150-200 0,5—1,5 20—30 0,9 ±0,3 0,25 0,20
Меднографит- ные М20 12 20 150-200 5—13 24—36 14 ±0,4 0,26 0,20
М22 11—14 25 150—200 1-4 20-30 1,2 +0.3 0,20 0,20
М24 20 15 175—200 0,1-0,3 — 0,5 ±0,2 0,25 0,70
МГ 20 20 180-230 0,05—0,15 — 0,2 ±0,1 0,20 0,80
МГ2 20 20 200-250 0,15-0,35 — 0,5 ±0,2 0,20 0,40
мгз 15 20 200 —250 0,3—1,3 22-32 1,1 ±0,5 0,20 0,30
МГ4 18 20 200-250 0,3—1,3 18—30 1 ±0,4 0,20 0,50
Бронзогра- фитные | БГ 20 20 170—220 0,5-0,9 0,3±0,1 0,25 0,25
Уменьшить суммарную э. д. с. Ъе в коммутирующей секции
возможно несколькими способами.
Напомним, что Ее = eL + ем + ек = ер ек-
Существенное значение для коммутации имеет ширина щет-
ки. Чем шире щетка, тем больше число коллекторных пластин
перекрывает она одновременно, а следовательно, тем больше
секций одновременно коммутируется, что вызывает повышение
э. д. с. взаимоиндукции ем Однако слишком узкие щетки неже-
лательны по условиям их механической прочности, а также
и потому, что для создания необходимой площади контактной
поверхности в узкой щетке пришлось бы увеличить ее длину,
что привело бы к необходимости увеличения длины коллектора.
Целесообразно применять щетки шириной в два-три коллектор-
ных деления.
Заметное влияние на величину реактивной э. д. с. оказывает
тип обмотки якоря. Так, если обмотку якоря выполнить с уко-
роченным шагом (#1<т), то активные стороны одновременно
коммутирующих секций окажутся в разных пазах (рис. 4.5),
что будет способствовать уменьшению э. д. с. взаимоиндукции.
Таким образом, применение обмоток якоря с укороченным ша-
гом и ступенчатых (см. рис. 2.29) улучшает коммутацию.
Величина реактивной э. д. с. может быть ослаблена уменьше-
нием индуктивности секций Ls. Это может быть достигнуто
уменьшением числа витков секции (2^=^), а также выполне-
нием пазов якоря открытыми и неглубокими. Однако осуще-
ствление всех этих мероприятий привело бы к созданию гро-
моздких неэкономичных машин. Поэтому при проектировании
электрических машин выбор указанных выще параметров свя-
зывают не столько со стремлением уменьшить реактивную э. д. с.,
сколько с желанием получить компактную и экономичную ма-
шину. Что же касается величины реактивной э. д. с. в коммути-
рующих секциях, то она может быть значительно уменьшена
или даже полностью устранена, если создать в зоне коммутации
магнитную индукцию такой величины и знака, чтобы в комму-
тирующих секциях индуктировалась э. д. с. внешнего поля ек,
равная по величине и противоположно направленная реактив-
ной э. д. с. ер. В этом случае суммарная э. д. с. в коммути-
рующей секции будет равна нулю и коммутация станет
прямолинейной (идеальной). Для создания требуемой магнит-
ной индукции в зоне коммутации в машинах мощностью свыше
1 кет применяют добавочные полюса, располагая их между
главными полюсами (рис. 4.6).
Обычно н. с. добавочных полюсов FA = (1,15—1,30) F^ т. е.
на 15—30% больше н. с. якоря. Если величину намагничивающей
силы добавочных полюсов сделать больше указанной, то ек ста-
новится больше ер и в коммутирующей секции появляется ток
6 1649 81
коммутации /к, направленный противоположно рабочему току
секции i в начальный период коммутации (рис. 4.1, а).
В этом случае коммутация становится криволинейной ускорен-
Рис. 4. 5. Влияние укоро-
чения шага обмотки на
величину реактивной э. д. с.
Рис. 4 6. Схема включения
обмотки добавочных полю-
сов
ной, так как ток в коммутирующей секции достигает нулевого
значения за время, меньшее Тк/2 (см. рис. 4.2, в). При этом
плотность тока под щеткой
Рис. 4. 7. Распределение
плотности тока в контакте
распределяется неравномерно, воз-
растая под набегающим краем и
уменьшаясь под сбегающим
(рис. 4.7). При значительно уско-
ренной коммутации возможно ис-
крение под набегающим краем
щеток.
Для обеспечения компенсации
реактивной э. д. с. при различных
нагрузках машины обмотку доба-
вочных полюсов включают после-
довательно с обмоткой якоря
(рис. 4.6). В этом случае намаг-
ничивающая сила F& с измене-
нием нагрузки машины изменяет-
ся пропорционально току якоря /а>
а следовательно, пропорциональ-
но намагничивающей силе яко-
ря Ft.
щетки при ускоренной ком-
мутации
Полярность добавочного по-
люса в генераторе должна быть
такой же, как и у следующего по
направлению вращения главного полюса, а в двигателе — как
у предшествующего полюса (рис. 4.8).
82
Добавочные полюса обеспечивают удовлетворительную ком-
мутацию в машине только в пределах номинальной нагрузки /н.
При перегрузках машины происходит насыщение магнитной
цепи добавочных полюсов. В этом случае реактивная э. д. с. ер
продолжает изменяться пропорционально току нагрузки, а рост
Генератор Двигатель
Рис. 4. 8. Полярность доба-
вочных полюсов при работе
машины в режиме генерато-
ра и в режиме двигателя
Рис. 4. 9. График измене-
ния э. д. с. в коммутирую-
щей секции в зависимости
от тока нагрузки
э. д. с. внешнего поля из-за насыщения магнитной цепи несколь-
ко задерживается (рис. 4.9), вследствие чего в коммутирующих
секциях появляется э. д. с. - ек,
Рис. 4. 10. К понятию
о потоке рассеяния
добавочных полюсов
т. е. коммутация становится замедлен-
ной. Насыщению сердечников добавоч-
Рис. 4. 11. Разде-
ление зазора до-
бавочного полюса
на две части
ных полюсов способствует магнитный поток рассеяния ФД.Р,
замыкающийся через сердечники смежных главных полюсов и
станину (рис. 4.10). В целях уменьшения магнитного потока рас-
сеяния, а следовательно, обеспечения более линейной зависи-
6* 83
мости потока добавочных полюсов от тока нагрузки, воздушный
зазор разделяют на два: один—между сердечником полюса и яко-
рем дь а другой — между сердечником полюса и станиной б2
(рис. 4.11). В этом случае зазор между добавочным полюсом и
станиной ограничит поток рассеяния Флр.
Зазор &2 создается посредством
Рис. 4. 12. Сдвиг щеток с геометри-
ческой нейтрали
пакета прокладок из немаг-
нитного материала, за-
кладываемого между ста-
ниной и сердечником до-
бавочного полюса.
Обычно в машине ус-
танавливают столько же
добавочных полюсов, ско-
лько и главных. Исклю-
чение составляют не-
которые машины спе-
циального назначения,
в которых из кон-
структивных соображе-
ний число добавочных
полюсов уменьшают в два
раза.
Электрические машины
мощностью до 1 кет вы-
полняются без добавоч-
ных полюсов.
В этих машинах магнитная индукция в зоне коммутации,
необходимая для наведения э. д. с. внешнего поля eKi компенси-
рующей реактивную э. д. с., создается смещением щеток с гео-
метрической нейтрали пп' на угол р. по направлению вращения
якоря в генераторах или против вращения якоря в двигателях.
Щетки следует смещать за физическую нейтраль mm' (₽<>а)
так, чтобы индукция в зоне коммутации имела такое направле-
ние и величину, при которых в коммутирующих секциях индук-
тировалась э. д. с. внешнего поля, достаточная для компенсации
реактивной э. д. с. (рис. 4.12). Однако для полной компенсации
реактивной э. д^р. при различных нагрузках машины пришлось
бы каждый раз менять положение щеток, так как положение
физической нейтрали изменяется в зависимости от нагрузки.
Поэтому обычно щетки устанавливают в определенное (фикси-
рованное) положение, при котором полная компенсация реак-
тивной э. д. с. соответствует некоторой средней нагрузке при
продолжительном режиме работы машины.
Следует также напомнить, что при смещении щеток с гео-
метрической нейтрали усиливается размагничивающее действие
реакции якоря (см. рис. 3.7).
84
Для машин, работающих с изменением направления враще-
ния (с реверсом), смещение щеток с геометрической нейтрали
недопустимо, так как направление смещения физической ней-
трали меняется с изменением направления вращения. Поэтому
в таких машинах щетки устанавливают на геометрической ней-
трали.
§ 4.4. Круговой огонь по коллектору
При значительных перегрузках или внезапном коротком за-
мыкании машины постоянного тока коммутация приобретает
резко замедленный характер. В этом случае между сбегающей
коллекторной пластиной и сбегающим краем щетки возникает
электрическая дуга. Так как коллектор вращается, то эта дуга
механически растягивается (рис. 4.13).
Наряду с этим перегрузка машины сопровождается увеличе-
нием реакции якоря, под действием которой распределение ин-
дукции в воздушном зазоре машины становится неравномерным
(см. рис. 3.6,6). В результате напряжение между соседними
коллекторными пластинами увеличивается, превышая допусти-
мые пределы (см. § 2.15). Это, с одной стороны, может привести
к возникновению электрических дуг между смежными пласти-
нами, а с другой стороны, появление высокого потенциала на
некоторых пластинах вызывает резкое повышение напряжения
между щеткой и коллекторными пластинами по мере их удале-
ния от сбегающего края щетки. Все это создает условия для
возникновения электрической дуги между щеткой и коллектор-
ными пластинами.
Таким образом, в условиях значительной перегрузки в ма-
шине постоянного тока появляются коммутационные и потен-
циальные причины для возникновения электрической дуги на
коллекторе. При этом электрические дуги, вызванные коммута-
ционными причинами, сливаются с дугами, вызванными потен-
циальными причинами, образуя вокруг коллектора мощную
дугу, которая может перекинуться также и на корпус машины.
Описанное явление называется круговым огнем по коллектору.
Круговой огонь очень опасен, так как он может привести к тя-
желой аварии машины. Добавочные полюса и компенсационная
обмотка хотя и ослабляют опасность возникновения кругового
огня, но полностью ее не устраняют. Поэтому для защиты якор-
ной обмотки от повреждения дугой в случае возникновения кру-
гового огня в электрических машинах, работающих в условиях
частых перегрузок, между коллектором и обмоткой устанавли-
вают изолирующий экран. В машинах применяют также воз-
душное дутье, сдувающее дугу в сторону подшипника, защищен-
ного теплостойкой изоляционной перегородкой. Чтобы создать
85
препятствие на пути распространения электрической дуги,
между щетками разной полярности устанавливают барьеры из
изоляционного материала (рис. 4.14). Наибольшая опасность
появления кругового огня возникает при коротком замыкании
машины. Поэтому очень важно своевременно разомкнуть цепь
Рис. 4. 13. Растяже-
ние электрической ду-
ги при вращении кол-
лектора
+
Рис. 4. 14. Рас-
положение барье-
ров между щетка-
ми
машины еще до того, пока ток короткого замыкания достигнет
опасного значения. С этой целью в цепь якоря включают быстро-
действующие автоматические выключатели.
§ 4.5. Проверка и настройка коммутации
Ввиду большой сложности процессов, сопутствующих ком-
мутацию, оказывается практически невозможным точно рассчи-
тать требуемую намагничивающую силу и величину зазора до-
бавочных полюсов. Поэтому данные расчета впоследствии при-
ходится корректировать при экспериментальной наладке ком-
мутации. В практике электромашиностроения любая вновь рас-
считываемая машина требует опытной проверки коммутации
и настройки добавочных полюсов на устойчивую безыскровую
работу машины.
Из применяемых методов опытной настройки коммутации
наибольшее распространение получил метод «подпитки», разра-
ботанный В. Г. Касьяновым. Сущность этого метода состоит
в том, что обмотку добавочных полюсов (Д) испытуемой маши-
ны «подпитывают» от вспомогательного генератора постоянного
тока (ВГ) «подпиточным» током ±Д/ (рис. 4.15) так, что еум-
марный ток в цепи добавочных полюсов становится равным
/а ±Д/. Сначала испытуемая машина работает в режиме холо-
стого хода (/а =0), при этом в обмотке добавочных полюсов
создают ток + Д/ такой величины, при которой на коллекторе
начинается искрение, что соответствует ускоренной коммутации.
Затем переключателем меняют направление «подпиточного»
тока на —А/ и делают коммутацию замедленной. Величину тока
86
— Д/ доводят до значения, вызывающего искрение на коллек-
торе. Затем генератор нагружают, «подпитывают» добавочные
полюса сначала в одном направлении (+Д/), а затем в другом
( —Д7) и доводят машину до такой же степени искрения.
Проведя такие опыты при различных нагрузках машины,
строят кривые «подпитки» +Д/=/(/) и — Д/=/(7), ограни-
чивающие безыскровую зону, т. е. зону токов ±Д/, в пределах
которой коммутация сохраня-
ется безыскровой (рис. 4.16).
Чем шире эта зона, тем устой-
чивее коммутация машины. С
увеличением нагрузки устойчи-
вость коммутации снижается.
При правильно рассчитан-
ных добавочных полюсах кри-
вые +A/=f(/) и
располагаются симметрично
Рис. 4. 16. Кривые «подпитки»
Рис. 4. 15. Схема включения ма- при коммутациях:
шины для снятия кривых «под- а—линейной; б — замедленной;
питки» в—ускоренной
относительно оси нагрузки и пересекаются на ней в точке N
(рис. 4.16, а).
При слабом потоке Фд добавочных полюсов (что соответст-
вует замедленной коммутации) точка N располагается выше
оси (рис. 4.16,6), а при сильном потоке Фд (что соответствует
ускоренной коммутации) точка N располагается ниже оси
(рис. 4.16, в). Как в первом, так и во втором случаях комму-
тация в машине становится неустойчивой потому, как это видно
из кривых (рис. 4.16, б и в), что при номинальном токе нагрузки
(/ —/н) даже малые значения «подпиточного» тока +Д/ или
87
—Л/ способны нарушить удовлетворительную коммутацию ма-
шины.
Установив с помощью кривых «подпитки» характер комму-
тации, приступают к регулированию добавочных полюсов: при
замедленной коммутации (рис. 4.16, б) поток Фд следует уве-
личить, а при ускоренной (рис. 4.16, в) — уменьшить.
Регулировка величины магнитного потока добавочных полю-
сов осуществляется изменением зазора S2 (см. рис. 4.11) посред-
ством прокладок из магнитного материала, заполняющих
зазор
Например, для увеличения потока добавочных полюсов
часть немагнитных прокладок заменяют прокладками из маг-
нитного материала. Результат каждого изменения зазора про-
веряют снятием кривых «подпитки».
Если требуется значительно изменить величину добавочного
потока, а регулировка зазора не дает желаемых результатов,
то приходится изменять число витков в обмотке добавочных
полюсов. Поле добавочных полюсов должно быть таким, чтобы
при нормальной нагрузке машины коммутация была несколько
ускоренной. Это обеспечит удовлетворительную коммутацию при
возможном насыщении добавочных полюсов в случае перегруз-
ки машины.
Глава V
ГЕНЕРАТОРЫ ПОСТОЯННОГО ТОКА
§ 5.1. Основные понятия
Как было установлено, для работы электрической машины
необходимо наличие в ней магнитного потока, возбуждающего
машину. В зависимости от способа создания этого магнитного
потока электрические машины разделяются на машины с элек-
тромагнитным возбуждением и машины с возбуждением по-
стоянными магнитами (магнитоэлектрические).
В машинах с электромагнитным возбуждением магнитный
поток создается посредством обмотки возбуждения, которая
может включаться по различным схемам. В зависимости от схе-
мы включения обмотки возбуждения генераторы постоянного
тока с электромагнитным возбуждением разделяются на гене-
раторы независимого возбуждения, в которых обмотка воз-
буждения получает питание от постороннего источника энергии
постоянного тока (рис. 5.1, а), и генераторы с самовозбужде-
нием, в которых питание обмотки возбуждения осуществляется
от самого генератора.
88
Генераторы с самовозбуждением в свою очередь, подразде-
ляются на:
а) генераторы параллельного возбуждения (шунтовые)^
у которых обмотка возбуждения присоединена к зажимам об-
мотки якоря параллельно нагрузке (рис. 5.1, б);
б) генераторы последовательного возбуждения (сериесные) >
Рис. 5. 1. Принципиальные схемы генераторов постоянного тока
у которых обмотка возбуждения присоединена последовательно
к обмотке якоря (рис. 5.1,в);
в) генераторы смешанного возбуждения (компаундные)^
имеющие две обмотки возбуждения: одну — включенную парал-
лельно, а другую — последовательно (рис. 5.1, г).
Генераторы с возбуждением постоянными магнитами не
имеют обмотки возбуждения (рис. 5.1,6), так как их главные
полюсы изготовляются в виде постоянных магнитов.
В процессе работы генератора постоянного тока в его якор-
ной обмотке индуктируется э. д. с. Еа. При подключении к ге-
нератору нагрузки в цепи якоря возникает ток, а на выводах
генератора устанавливается напряжение
U = Ea-fa^r. (5.1>
Здесь представляет собой сумму сопротивлений всех
участков цепи якоря. В общем виде это сопротивление
^Г“~га + Гд + Гк + Гс + Гщ»
(5.2)
т. е. оно состоит из сопротивлений: обмотки якоря га, обмотки
добавочных полюсов гд, компенсационной обмотки гк, последо-
вательной обмотки возбуждения гс и переходного щеточ-
ного контакта гщ. При отсутствии в машине какой-либо
из указанных обмоток в формулу (5.2) не входят соответству-
ющие слагаемые.
89*
Якорь генератора приводится во вращение первичным двига-
телем, который создает на валу генератора вращающий момент
Afi. Если генератор работает в режиме холостого хода (/а = 0),
то для вращения его якоря нужен сравнительно небольшой
момент, называемый моментом холостого
Рис. 5. 2. К поня-
тию об электро-
магнитном моменте
хода Mq. Этот момент затрачивается на
преодоление трения в подшипниках, тре-
ния щеток о коллектор, трения вращаю-
щихся частей о воздух.
При работе нагруженного генератора
в проводах обмотки якоря появляется ток
ia— 7—. В результате взаимодействия
этого тока с основным магнитным полем
машины на каждый проводник обмотки
якоря действует электромагнитная сила
(рис. 5.2)
^эм ==
где Вср — среднее значение магнитной ин-
генератора дукции в зазоре;
I — длина якоря.
Определив по правилу «левой руки» направление этих сил,
убеждаемся, что создаваемый ими электромагнитный момент М
направлен против вращающего момента первичного двига-
теля Л4ь
Величину электромагнитного момента М можно представить
выражением
M = F3ii~N = Bcolia~N,
где N — количество активных проводников в обмотке якоря.
Имея в виду, что ia = , irD = 2рт, а полезный магнит-
ный поток возбуждения Ф = BQpF (рис. 2.33), получим
М == В^1 = (5-3)
или М = СмФ/а, (5.4)
„ PN
тде С\, = -f-----величина, постоянная для данной машины.
х^а
Поток Ф выражается в веберах (вб), а момент М — в нью-
тоно-метрах (н-ле).
*90
Таким образом, при неизменной скорости вращения
(п= const) вращающий момент первичного двигателя Mi урав-
новешивается суммой противодействующих моментов: моментом
холостого хода Мо и электромагнитным моментом М
Mt=M0+M. (5.5)
Полученное выражение представляет собой уравнение мо-
ментов для генератора при п=const.
Режим работы электрической машины, для которого машина
предназначена и при котором она должна нормально работать
в течение всего срока службы, называется номинальным режи-
мом работы. Этот режим характеризуется номинальными вели-
чинами: номинальная мощность Рн; номинальное напряжение
UH, номинальный ток /„ и номинальная скорость вращения лн.
Номинальная мощность генератора постоянного тока пред-
ставляет собой полезную электрическую мощность на выводах
машины, выраженную в ваттах, киловаттах или меговаттах.
Помимо указанных величин, номинальными называются
и другие величины, если они соответствуют номинальному ре-
жим} работы машины.
Эксплуатационные свойства генераторов определяются гра-
фически выраженными зависимостями, называемыми характе-
ристиками.
Так как генераторы обычно работают при неизменной ско-
рости вращения, то все характеристики строятся при условии
n = const. Основными характеристиками генераторов являются:
1. Характеристика холостого хода — зависи-
мость напряжения на выходе генератора в режиме холостого
хода 1/о от тока возбуждения гв.
£/0 = /(*») при / = 0и п = const.
2. Нагрузочная характеристика — зависимость
напряжения на выходе генератора U при работе с нагрузкой
(/ =# 0) от тока возбуждения
U — f (iB) при / #= 0 и п = const.
3. Внешняя характеристика — зависимость напря-
жения на выходе генератора U от тока нагрузки /
U = f (/) при грг = const и л = const.
4. Регулировочная характеристика — зависи-
мость тока возбуждения iB от тока нагрузки I при неизменном
напряжении на выходе генератора
iB — f(I) при U = const и п =const.
91
§ 5.2. Генератор независимого возбуждения
Схема включения генератора независимого возбуждения по-
казана на рис. 5.3, а. Реостат грг, включенный в цепь возбужде-
ния, дает возможность регулировать ток 4 в обмотке возбужде-
ния, а следовательно, и величину основного магнитного потока
-и0\
Рис. 5. 3 Принципиальная схема (а) и характеристика
холостого хода (б) генератора независимого возбужде-
ния
машины. Обмотка возбуждения питается от источника энергии
постоянного тока: аккумулятора, выпрямителя или же другого
генератора постоянного тока, называемого в этом случае
возбудителем.
Характеристика холостого хода. При снятии характеристики
^o = f(4) генератор работает в режиме холостого хода (/ = 0).
Установив номинальную скорость вращения и поддерживая ее
неизменной в течение всего опыта, постепенно увеличивают ток
в обмотке возбуждения /в от нуля до значения 4- 4 — Оа, при
котором напряжение холостого хода 1,15L/H. В этом случае
получают данные для построения кривой 1 (рис. 5.3,6). Умень-
шив ток возбуждения до значения 1В = 0 и изменив его направ-
ление, постепенно увеличивают ток в цепи возбуждения от 4 = 0
до —iB=Ob. Полученная таким образом кривая 2, называемая
нисходящей ветвью характеристики, располагается в первом
квадранте выше кривой 1. Объясняется это тем, что в процессе
снятия кривой 1 произошло увеличение магнитного потока оста-
точного намагничивания. Далее опыт проводят в обратном на-
правлении, т. е. уменьшают ток возбуждения от — iB = ОЬ до
4=0» а затем увеличивают его до значения + 4 = Оа. В ре-
92
зультате получают кривую 3, называемую восходящей ветвью
характеристики холостого хода. Нисходящая и восходящая вет-
ви характеристики холостого хода образуют гистерезисную
петлю. Проведя между крйвыми 2 и 3 среднюю линию 4, полу-
чим расчетную характеристику холостого хода.
Прямолинейная часть характеристики холостого хода соот-
ветствует ненасыщенной маг-
нитной системе машины. При
дальнейшем увеличении тока
iB сталь машины насыщается,
и характеристика приобретает
криволинейный характер. За-
висимость Uq = повторя-
ет в другом масштабе харак-
теристику намагничивания (см.
§ 3.2) и дает возможность су-
дить о магнитных свойствах
машины.
Рис. 5. 4. Нагрузочная ха-
рактеристика генератора не'
зависимого возбуждения
Нагрузочная характеристи-
ка генератора. Эта характери-
стика выражает зависимость
напряжения U на выводах генератора от тока возбуждения zB
при неизменных токе нагрузки, например номинальном, и ско-
рости вращения.
При указанных условиях напряжение на выводах генератора
меньше э. д. с. (5.1). Поэтому нагрузочная характеристика
(кривая /) располагается ниже характеристики холостого хода
(кривая 2) (рис. 5.4). Если от точки а, соответствующей номи-
нальному напряжению Un, отложить вверх отрезок aby равный
/а1г, и провести горизонтально отрезок Ьс до пересечения с ха-
рактеристикой холостого хода, а затем соединить точки а и с,
то получим треугольник abc, называемый реактивным треуголь-
ником.
Так, при работе генератора в режиме холостого хода при
токе возбуждения zB1 напряжение на выводах равно U$ = de\
с подключением нагрузки (при неизменном токе возбуждения)
напряжение генератора снизится до значения U}{=ae. Таким
образом, отрезок da выражает величину напряжения AU=UQ — Uh
при zB= zBp Уменьшение напряжения на выводах генератора
в этом случае произошло в результате двух причин: падения
напряжения в цепи якоря (5.1) и размагничивающего влияния
реакции якоря. Измерив величину сопротивления цепи якоря Ег
и подсчитав падение напряжения Ц-r, можно определить э. д. с.
генератора при заданном токе нагрузки
E = U + f£r-
93
На рнс. 5.4 эта э. д. с. представлена отрезком be. Э. д. с. ге-
нератора при нагрузке меньше, чем в режиме холостого хода
(be<de), что объясняется размагничивающим влиянием реакции
якоря. Для количественной оценки этого влияния из точки b
проводим отрезок Ьс, параллельный оси абсцисс, до пересечения
с характеристикой холостого хода. Полученный таким образом
Рис. 5.5. Внешняя (а) и регулировочная (б) ха-
рактеристики генератора независимого возбуждения
отрезок cf представляет собой э. д. с. генератора при нагрузке;
в режиме холостого хода для создания этой э. д. с. необходим
ток возбуждения *В2<4Р Следовательно, отрезок fe, равный раз-
ности токов возбуждения (гВ1 —/В2), представляет собой величи-
ну тока возбуждения, компенсирующего размагничивающее
влияние реакции якоря.
Стороны реактивного треугольника определяют факторы, вы-
зывающие уменьшение напряжения генератора при его нагрузке:
сторона ab — падение напряжения в цепи якоря, а сторона Ьс —
размагничивающее влияние реакции якоря. Реактивный треуголь-
ник а'Ь'с' построен для другого значения тока возбуждения
Сторона а'Ь' треугольника осталась неизменной (a'b'—ab), что
объясняется неизменностью тока нагрузки, но сторона Ь'с' умень-
шилась (b'c'<bc), так как при меньшем токе возбуждения
уменьшилась степень насыщения магнитной цепи генератора,
а следовательно, и уменьшилось размагничивающее действие
реакции якоря.
Внешняя характеристика генератора. Эта характеристика'
представляет собой зависимость напряжения U на выводах ге-
нератора от тока нагрузки /. При снятии данных для построения
внешней характеристики генератор приводят во вращение с номи-
нальной скоростью и нагружают его до номинального тока при
номинальном напряжении. Затем постепенно уменьшают нагруз-
ку вплоть до холостого хода (/=0) и снимают показания при-
боров.
Сопротивление цепи возбуждения грг и скорость вращения
в течение опыта поддерживают неизменными.
94
На рис. 5.5, а представлена внешняя характеристика гене-
ратора независимого возбуждения, из которой видно, что пр»
увеличении тока нагрузки / напряжение на выводах генератора
понижается, что объясняется размагничивающим влиянием реак-
ции якоря и падением напряжения в цепи якоря.
Наклон внешней характеристики к оси абсцисс (жесткость
внешней характеристики) оценивается номинальным изменением
напряжения генератора при сбросе нагрузки
= ио~ и« 100 (5.6)
V и
Обычно для генераторов независимого возбуждения Д(/н =
= 5-10%.
Регулировочная характеристика генератора. Характеристика
iB =f(f) показывает, как следует менять величину тока в цепи
возбуждения, чтобы при изменениях нагрузки генератора на-
пряжение на его выводах оставалось неизменным, равным номи-
нальному. При этом скорость вращения сохраняется постоянной
(п = const).
При работе генератора без нагрузки в цепи возбуждения
устанавливают ток iBQ, при котором напряжение на выводах
генератора становится равным номинальному. Затем постепенно
увеличивают нагрузку генератора, одновременно увеличивая то^
возбуждения таким образом, чтобы напряжение генератора во
всем диапазоне нагрузок оставалось равным номинальному. Так
получают восходящую ветвь характеристики (кривая 1,
рис. 5.5, б). Постепенно уменьшая нагрузку генератора до хо-
лостого хода и регулируя соответствующим образом ток воз-
буждения, получают нисходящую ветвь характеристики (кри-
вая 2, рис. 5.5, б).
Нисходящая ветвь регулировочной характеристики распола-
гается ниже восходящей, что объясняется влиянием возросшего,
остаточного намагничивания магнитной цепи машины в процессе,
снятия восходящей ветви.
Среднюю кривую 3, проведенную между восходящей и нисхо-
дящей ветвями, называют практической регулировочной харак-
теристикой генератора.
Основным недостатком генераторов независимого возбужде-
ния является необходимость в постороннем источнике энергии,
постоянного тока — возбудителе. Однако возможность регулиро-
вания напряжения в широких пределах, а также сравнительно
жесткая внешняя характеристика этого генератора являются его
достоинствами.
95
§ 5.3. Генератор параллельного возбуждения
Принцип самовозбуждения генераторов постоянного тока
основан на том, что магнитная система машины, будучи намаг-
ниченной, сохраняет небольшой магнитный поток остаточного
магнетизма сердечников полюсов и станины Фост (порядка 2—3%'
от полного потока).
При вращении якоря поток Фост индуктирует в якорной об-
мотке э. д. с. fOcT< под действием которой в обмотке возбуждения
Рис. 5.6. Принципиальная схема (а) и характеристика хо-
лостого хода (б) генератора параллельного возбуждения
возникает небольшой ток/в. Если намагничивающая сила обмотки
возбуждения iBwB имеет такое же направление, как и поток Фост,
то она увеличит поток основных полюсов. Это, в свою очередь,
вызовет увеличение э. д. с. генератора, отчего ток возбуждения
вновь увеличится. Так будет продолжаться до тех пор, пока на-
пряжение генератора не будет уравновешено падением напряже-
ния в цепи возбуждения, т. е. когда iBrB = Uo.
На рис. 5.6, а показана схема включения генератора парал-
лельного возбуждения, на рис. 5.6, б — характеристика холостого
хода генератора (кривая 1) и зависимость падения напряжения
от тока возбуждения (прямая 2). Точка пересече-
ния А соответствует окончанию процесса самовозбуждения, так
как именно в ней l/o=zBrB.
Угол наклона прямой ОА к оси абсцисс определяется из тре-
угольника ОАВ
ё ml OB ' т~ 1В
т~'в'
(5.7)
96
Рис. 5.7. Характе-
ристика самовоз-
буждения
где — масштаб тока (по оси абсцисс), а!см\ —масштаб
напряжения (по оси ординат), в/см.
Из выражения (5.7) следует, что угол наклона прямой
Ve — f(4) к оси абсцисс прямо пропорционален сопротивлению
цепи возбуждения. Однако при некотором значении сопротивле-
ния реостата грг сопротивление гв достигает величины, при
которой зависимость 4fB=/(4) становится касательной к прямо-
линейной части характеристики холосто-
го хода (прямая 5). В этих условиях ге-
нератор не самовозбуждается. Сопротив-
ление цепи возбуждения, при котором
прекращается самовозбуждение генера-
тора, называется критическим (гв.кр).
Следует еще отметить, что самовоз-
буждение генератора возможно лишь при
скорости вращения, превышающей неко-
торое значение, называемое критическим
(Лкр). Это условие вытекает из характе-
ристики самовозбуждения генератора
(рис. 5.7), представляющей собой зави-
симость напряжения генератора в режи-
ме холостого хода ог скорости вращения
сопротивлении цепи возбуждения
при неизменном
(п) при rB = const.
Анализ характеристики самовозбуждения показывает, что
при малых скоростях вращения (п < якр) увеличение скорости
вращения сопровождается незначительным увеличением напря-
жения. Объясняется это тем, что при п < пкр процесс самовоз-
буждения еще не наступил и появление напряжения Uo обус-
ловлено лишь остаточным намагничиванием магнитной цепи
генератора. Процесс самовозбуждения начинается прил>пкр.
В этом случае увеличение скорости вращения сопровождается
резким ростом напряжения Uq.
Однако при скорости, близкой к номинальной, рост напря-
жения несколько замедляется, что объясняется магнитным насы-
щением генератора. Величина критической скорости вращения
зависит от сопротивления цепи возбуждения и с ростом послед-
него увеличивается.
Таким образом, самовозбуждение генераторов постоянного
тока возможно при соблюдении следующих условий:
а) магнитная система машины должна обладать остаточным
магнетизмом;
б) присоединение обмотки возбуждения должно быть таким,
чтобы магнитный поток этой обмотки совпадал по направлению
с потоком остаточного магнетизма Фост;
7 1649 97
в) сопротивление цепи возбуждения должно быть меньше
критического;
г) скорость вращения якоря должна быть больше критиче-
ской.
Пример. Генератор параллельного возбуждения имеет следующую харак-
теристику холостого хода: при /в> равном 0; 0,5; 1; 1,5; 2а, UQ соответственно
равно 5; 60; 95; 112; 118 в. Сопротивление обмотки возбуждения гов =50 ом.
Определить э. д. с. генератора при грг =28 ом, а также определить, при каком
значении грг сопротивление цепи возбуждения становится критическим.
Решение. Принимаем масштаб тока =0,2 а/см и масштаб напря-
жения ти=20 в/см, затем по данным примера строим характеристику хо-
лостого хода. В соответствии с (5.7)
а ~ arctg гв,
тогда, с учетом принятых масштабов, получим
а = arctg гв — = arctg (50 + 28) = arctg 0,78,
а - 38°.
Из точки 0 проведем прямую под углом а=38° к оси абсцисс и найдем
величину э, д. с. при грг=28 ом
= = в.
Для определения критического сопротивления гв кр из точки 0 проводим
касательную к характеристике холостого хода, при этом угол наклона акр
получается равным 52°. Тогда
гв.кр = ‘г акР ~ - tg 52’ = 128 ом.
Следовательно,
Грг кр = гв.кр - ГОВ = 128 - 50 = 78 ом.
Так как генератор параллельного возбуждения самовозбуж-
дается лишь в одном направлении, то и характеристика холосто-
го хода этого генератора может быть снята только для одного
квадранта осей координат.
Нагрузочная и регулировочная характеристики генератора
параллельного возбуждения практически не отличаются от соот-
ветствующих характеристик генератора независимого возбуж-
дения.
Внешняя характеристика генератора параллельного возбуж-
дения (рис. 5.8) менее жесткая, чем у генератора независимого
возбуждения. Объясняется это тем, что в генераторе параллель-
ного возбуждения, помимо причин, вызывающих уменьшение
напряжения в генераторе независимого возбуждения (реакция
якоря и падение напряжения в цепи якоря), действует еще
и третья причина — уменьшение тока возбуждения, вызванное
снижением напряжения от действия первых двух причин. Этим
же объясняется и то, что при постепенном уменьшении сопро-
98
тивления нагрузки гн ток 1 увеличивается лишь до критического
значения /кр, а затем при дальнейшем уменьшении сопротив-
ления нагрузки ток I начинает уменьшаться. Наконец, ток
нагрузки при коротком замыкании /к 3 < /кр. Дело в том, что
с увеличением тока I усиливается размагничивание генератора
(усиление реакции якоря и
уменьшение тока возбужде-
ния) и машина переходит в не-
насыщенное состояние, при ко-
тором даже небольшое умень-
шение сопротивления нагрузки
вызывает резкое уменьшение
э. д. с. машины. Так как вели-
чина тока определяется напря-
жением на выводах генерато-
ра U и сопротивлением нагруз-
ки гн
Рис. 5.8. Внешняя характеристи-
ка генератора параллельного воз-
буждения
Гп
то при токах нагрузки/</кр, когда напряжение генератора
уменьшается медленнее, чем убывает сопротивление нагрузки,
происходит рост тока нагрузки. После того как 1=1К^ дальней:
шее уменьшение гн сопровождается уменьшением тока нагрузки,
так как в этом случае U убывает быстрее, чем уменьшается гн.
Таким образом, короткое замыкание, вызванное постепенным
уменьшением сопротивления нагрузки, не опасно для генератора
параллельного возбуждения. Но при внезапном коротком замы-
кании магнитная система генератора не успевает сразу размаг-
нититься, и ток /к.з достигает опасных для машины значений
Л.з = (8—12)/н. При таком резком возрастании тока на валу
генератора возникает значительный тормозящий момент, а на
коллекторе появляется сильное искрение, переходящее в кру-
говой огонь. В связи с этим возникает необходимость защиты
генераторов от перегрузки и короткого замыкания посредством
плавких предохранителей или же применения системы релей-
ной защиты.
Генераторы параллельного возбуждения широко используют
в установках постоянного тока, так как отсутствие возбудителя
выгодно отличает их от генераторов независимого возбуждения.
Номинальное изменение напряжения генератора параллельного
возбуждения (5.6) составляет 10—30%.
7*
99
§ 5.4. Генератор последовательного возбуждения
У генератора последовательного возбуждения (рис. 5.9, а)
ток возбуждения равен току нагрузки а поэтому свойства
этого генератора определяются лишь внешней характеристикой
(рис. 5.9,6). Все остальные характеристики генератора могут
Рис. 5.9. Принципиальная схема (а) и внешняя
характеристика (б) генератора последовательно-
го возбуждения
быть сняты только при включении генератора на независимое
возбуждение.
При холостом ходе э. д. с. генератора невелика (Ео - Ео„),
так как при разомкнутой цепи якоря ток в обмотке возбужде-
ния отсутствует. Затем с появлением нагрузки в обмотке воз-
буждения появляется ток iB = /, и напряжение генератора
повышается. Однако напряжение U увеличивается лишь до
известного предела, обусловленного магнитным насыщением ма-
шины. При дальнейшем увеличении тока нагрузки напряжение
генератора понижается, так как основной поток генератора
из-за насыщения магнитной системы практически перестает уве-
личиваться, в то время как реакция якоря и падение напряже-
ния в цепи якоря продолжают возрастать. В результате
характеристика становится падающей.
Ввиду значительной зависимости напряжения от нагрузки
генераторы последовательного возбуждения применяются редко.
§ 5.5. Генератор смешанного возбуждения
Генератор смешанного возбуждения (рис. 5.10, а) имеет две
обмотки возбуждения, параллельную и последовательную.
100
Поток возбуждения создается в основном параллельной обмот-
кой. Последовательная обмотка обычно включается согласно
с параллельной (чтобы н. с. обмоток складывались), что обес-
печивает получение жесткой внешней характеристики генера-
тора.
В режиме холостого хода генератор имеет только параллель-
ное возбуждение, так как 1=0. С появлением нагрузки возни-
кает н. с. последовательной обмотки возбуждения, которая под-
магничивает машину и при этом полностью компенсирует раз-
магничивающее действие реакции якоря и падение напряжения
в цепи якоря. Внешняя характеристика в этом случае становится
наиболее жесткой (рис. 5.10,6, кривая /), т. е. напряжение на
зажимах генератора при увеличении нагрузки остается почти
неизменным.
Если же требуется, чтобы напряжение на зажимах потреби-
теля (в конце линии) во всем диапазоне нагрузок оставалось
практически неизменным, то число витков последовательной
обмотки увеличивают так, чтобы н. с. этой обмотки компенси-
ровала еще и падение напряжения в проводах линии. Внешняя
характеристика при этом получает вид кривой 2.
При встречном включении обмоток возбуждения напряжение
генератора с ростом тока нагрузки резко уменьшается (кри-
вая 5), что объясняется размагничивающим действием последо-
вательной обмотки возбуждения, н. с. которой направлена прос-
тив н. с. параллельной обмотки.
101
Генераторы смешанного возбуждения с согласным включе-
нием обмоток возбуждения применяются для питания силовой
нагрузки во всех случаях, когда требуется постоянство напряже-
ния в линии; даже при резких изменениях тока нагрузки.
Встречное включение обмоток применяется лишь в генера-
торах специального назначения, например в сварочных генера-
торах, где необходимо получить круто падающую внешнюю
характеристику.
§ 5.6. Параллельная работа генераторов постоянного тока
На преобразовательных подстанциях постоянного тока
обычно устанавливают несколько генераторов и включают их
Рис. 5.11. Схема включения на парал-
лельную работу генераторов постоян-
ного тока параллельного возбуждения
параллельно на общие
шины. Суммарная мощ-
ность этих генераторов
должна соответство-
вать мощности потре-
бителя с учетом неко-
торого резерва. 'Уста-
новка нескольких гене-
раторов вместо одного
обеспечивает более эф-
фективное использова-
ние агрегатов. Так,
при уменьшении на-
грузки часть генерато-
ров может быть оста-
новлена, чтобы остав-
шиеся генераторы работали с полной нагрузкой, а следовательно,
с более высоким коэффициентом полезного действия (см. § 8.2).
При включении генераторов на параллельную работу необ-
ходимо соблюдать следующие условия:
1) э. д. с. подключаемого генератора Eq должна быть равна
напряжению сети t/c;
2) полярность зажимов подключаемого генератора должна
соответствовать полярности сети.
На рис. 5.11 показана схема включения на параллельную
работу генераторов параллельного возбуждения. Предположим,
что генератор Г{ работает и создает на шинах напряжение Uc.
Для того чтобы к этим же шинам параллельно генератору Гi
подключить генератор Гп, поступают следующим образом:
цускают в ход приводной двигатель генератора, устанавливают
номинальную скорость вращения и, замкнув рубильник 1, посте-
пенно возбуждают генератор до э. д. с. EQ = (7С. Если поляр-
ность на зажимах генератора Гц соответствует полярности
шин, то при E0 — Uc показание вольтметра становится рав-
102
ным нулю. В этом случае можно замкнуть рубильник 2, и гене-
ротор Гп окажется включенным параллельно генератору Г}.
Так как/Го — Uc, то генератор будет продолжать работать вхо-
лостую (/п = 0). Это видно из уравнения э. д. с. генератора:
<4 =
откуда
'“=W (5.8)
Следовательно, чтобы нагрузить генератор Гц,
несколько повысить его э. д. с. Это можно сделать
необходимо
увеличением
Рис. 5 12. Распределение нагрузки между парал-
лельно включенными генераторами
тока возбуждения. Но чтобы при этом напряжение сети оста-
лось неизменным, следует одновременно с увеличением тока
возбуждения генератора Гп несколько снизить ток возбуждения
генератора Гь
При изменениях нагрузки токи и /н распределяются
между генераторами в соответствии с их внешними характе-
ристиками. На рис. 5.12 кривые 1 и 2 представляют собой внеш-
ние характеристики генераторов и Г1р а кривая 3—сум-
марную внешнюю характеристику Uc — f (/с), где /с — + Ai —
ток сети. Предположим, что ток сети = тогда, согласно
кривой 3, напряжение на каждом из генераторов станет равным
(j'c. Проведя прямую АВ, найдем распределение тока Гс между
генераторами, т. е. определим токи и /п. Из рис. 5.12 вид-
но, что ток /п > 1Г Исходя из этого, можно сделать следую-
щий вывод: с увеличением нагрузки генератор с более жесткой
внешней характеристикой нагружается сильнее. Об этом следует
помнить при выборе генераторов для включения на параллель-
ную работу.
103
При параллельной работе двух генераторов их нагрузка
определяется выражениями:
' ” Sr ’
г _
и •
Если э. д. с. генераторов одинаковы, т. е. Ej=En, то
А У-Ги
А. =
(5.9)
Следовательно, нагрузка между генераторами распределяет-
ся обратно пропорционально сопротивлениям цепи якоря.
Решая совместно уравнение (5.9) и уравнение /с —А + Ль
получим
(5.10)
Пример. Два генератора параллельного возбуждения мощностью
Рн1==Рн11=45 кет работают параллельно на общую нагрузку Р=80 кет
и создают в сети напряжение 17с =230 е\ сопротивления цепей якорей гене*
раторов 2Г| — 0,1 ом и =0,05 ом Определить распределение нагрузки
между генераторами при одинаковой величине э. д. с., а также величину
этой э. д. с.
Решение. Общий ток нагрузки
/c~Vc
80-10*
230
= 348 а.
Распределение нагрузки при £1=ЕП
Л
= 348
0,05
0,1 + 0,05
= 116 а;
'“’«отда"232 »-
Номинальный ток нагрузки генераторов
/> 45-103
Ли — Лтн = ~йс = 230 = 195,5 а-
104
Недогрузка первого генератора
100 = 195’5~116 100 = 40,7%.
Лн 195,5
Перегрузка второго генератора
711 /|1н 100 =
Ч1н
232— 195,5
195,5
100= 18,1%.
Э. д. с. генераторов
Е, = = Uc + == 230 4- 116-0,1 = 241,6 в.
Если требуется снять нагрузку одного из генераторов, на-
пример генератора Гц, то постепенно уменьшают его э. д. с. до
величины En=Uc, При этом, согласно (5.8), ток нагрузки этого
генератора/п 0. Если же э. д. с. генератора уменьшить до вели-
чины £ц < Uc> то ток в якоре изменит свое направление и ма-
шина перейдет в режим дви-
гателя. Это может вызвать ава-
рию агрегата, так как на од-
ном валу окажутся два двигате-
ля. Для предотвращения этого в
схемах генератора предусматри-
вают автоматические устройства,
отключающие генератор от шин
при изменении направления тока
нагрузки.
При включении на параллель-
ную работу генераторов смешан-
ного возбуждения следует преду-
смотреть в схеме уравнительный
провод, соединяющий одноимен-
ные зажимы якорной обмотки
(рис. 5.13). При отсутствии урав-
нительного провода случайное
Рис. 5 13. Схема включения
на параллельную работу
генераторов смешанного
возбуждения
повышение э. д. с. у одного из генераторов (например,
от неравномерного вращения первичного двигателя) сопро-
вождается увеличением тока нагрузки, а следовательно, тока
в последовательной обмотке возбуждения. Это вызовет увеличе-
ние магнитного потока Ф, отчего э. д. с. генератора повысится,
и ток нагрузки вновь возрастет. В итоге этот генератор возьмет
на себя всю нагрузку сети, а генератор, работающий с ним па-
раллельно, разгрузится и перейдет в двигательный режим со
встречным включением обмоток возбуждения. Скорость враще-
ния этого двигателя будет неограниченно увеличиваться, что
может привести к аварии (см. § 6.11).
105
Кроме того, резкий бросок нагрузки одного генератора мо-
жет вызвать уменьшение скорости вращения первичного двига-
теля этого генератора, а следовательно, уменьшение э. д. с. этого
генератора. В итоге произойдет переход всей нагрузки на другой
генератор и перевод первого генератора в двигательный режим.
Затем процесс повторится на втором генераторе и т. д., т. е. на-
ступит колебательный процесс перехода нагрузки с одного
генератора на другой и обратно.
При наличии уравнительного провода последовательные об-
мотки обоих генераторов оказываются соединенными парал-
лельно. Поэтому при увеличении тока нагрузки одного из гене-
раторов токи в последовательных обмотках обоих генераторов
увеличиваются в одинаковой степени, и перераспределения на-
грузки между генераторами не происходит.
Глава VI
ЭЛЕКТРОДВИГАТЕЛИ ПОСТОЯННОГО ТОКА
§ 6.1. Основные понятия
Электрические машины обладают свойством обратимости,
т. е. они могут работать как в режиме генератора, так и в режи-
ме двигателя. Поэтому если машину постоянного тока подклю-
чить к источнику энергии постоянного тока, то в обмотке воз-
буждения и в обмотке якоря машины появятся токи. Взаимодей-
ствие тока якоря с полем возбуждения создает на валу якоря
электромагнитный момент М. Однако теперь этот момент
является не тормозящим, как это имело место в генераторе,
а вращающим моментом (рис. 6.1). Под действием электромаг-
нитного момента якорь машины начнет вращаться, т. е. машина
будет работать в режиме электродвигателя, потребляя из сети
электрическую энергию и преобразуя ее в механическую.
В процессе работы двигателя его якорь вращается в магнит-
ном поле. В обмотке якоря индуктируется э. д. с. Еа, направле-
ние которой можно определить по правилу «правой руки». По
своей природе эта э. д. с. ничем не отличается от э. д. с., наводи-
мой в якорной обмотке генератора. В двигателе же она направ-
лена против тока /а и поэтому называется противоэлектродви-
жущей силой (противо-э. д. с.) якоря (рис. 6.2).
Для двигателя, работающего с постоянной скоростью враще-
ния, можно составить уравнение э. д. с.
(7 = fa + /aSr.
(6.1)
106
Из этого уравнения следует, что подведенное к двигателю
напряжение уравновешивается противо-э. д. с. якорной обмотки
и падением напряжения в цепи якоря. На основании (6.1) можно
получить формулу для определения тока якоря
, _ U~E*
Рис. 6.1. Машина параллельного воз-
буждения в режиме генератора (а) и в
режиме двигателя (б)
Рис. 6.2. Направление
противо-э. д. с. в двига-
теле
Умножив обе части уравнения (6.1) на ток якоря 7а, получим
уравнение мощности
t//a = £-aZa + /aSr. (6.3)
Здесь иц — мощность в цепи обмотки якоря;
/аЕг — мощность электрических потерь в цепи якоря.
Что же касается выражения £а/а, то для выяснения его сущ-
ности проделаем следующее преобразование:
г г pN zb I pH zb60o>
Е*л ~ 60a ф/г/а ~ ьоаф 2rt /a’
или
^а/а “ 2яа Ф/а<°
pN
Но согласно (5.3) -£— Ф/а =" (И, тогда
£Л==Моз = Рэм, (6.4)
2к/г
где о) = -эд-угловая скорость вращения якоря;
РЭм — электромагнитная мощность двигателя.
107
Следовательно, выражение EJa представляет собой электро-
магнитную мощность двигателя, численно равную той части
мощности на входе двигателя, которая в процессе его работы
преобразуется в механическую мощность, необходимую для вра-
щения якоря.
Преобразовав выражение (6.3) с учетом (6.4), получим
UI, = Мы + /а2£г.
Анализ этого уравнения показывает, что с увеличением на-
грузки на вал ’двигателя, т. е. с увеличением электромагнитного
момента М возрастает мощность в цепи обмотки якоря (7/а,
т. е. мощность на входе двигателя.
Но так как напряжение, подводимое к двигателю, поддержи-
вается неизменным (U=const), то увеличение нагрузки двига-
теля сопровождается ростом тока в обмотке якоря /а.
В зависимости от способа возбуждения двигатели постоян-
ного тока, так же как и генераторы, разделяются на двигатели
с возбуждением от постоянных магнитов (магнитоэлектриче-
ские) и с электромагнитным возбуждением. Последние, в соот-
ветствии со схемой включения обмотки возбуждения относи-
тельно обмотки якоря, подразделяются на двигатели параллель-
ного (шунтовые), последовательного (сериесные) и смешанного
(компаундные) возбуждения. Принципиальные схемы этих дви-
гателей не отличаются от схем генераторов, приведенных на
рис. 5.1, б, в, г, д.
§ 6.2. Уравнение равновесия моментов
Электромагнитный момент М приводит якорь двигателя во
вращение, которое через вал передается исполнительному меха-
низму. При этом на вал двигателя действуют следующие
моменты:
1) вращающий (электромагнитный) момент М\
2) момент холостого хода Л40, обусловленный механическими
(включая вентиляционные) и магнитными потерями в двигателе.
Величина момента MQ не зависит от нагрузки и в двигателях
нормального исполнения она не превышает 2—6% от номиналь-
ного значения вращающего момента ( Ин);
3) полезный момент М2г т. е. противодействующий момент
механизма, приводимого в действие данным двигателем. Напри-
мер, если двигатель вращает барабан диаметром Z), на который
наматывается трос с грузом F, то полезный момент
108
4) динамический момент Мл, возникающий при всяком изме-
нении скорости двигателя в связи с инерцией вращающихся -
частей двигателя и приводимого им в действие механизма,
где J — момент инерции всех вращающихся частей агрегата,
приведенный к валу двигателя и отнесенный к угловой
скорости вращения со.
Обычно моменты Л)о и М2 рассматривают совместно как
сумму
МО + М2=МСТ,
где Л4СТ—статический момент сопротивления вращению вала
двигателя.
В общем случае уравнение моментов двигателя
М = Л40 4“ М2 ±Л4Д,
или
М = Л4СТ ± ЛТД. (6.5)
Знак «плюс» или «минус» у динамического момента определяет-
ся характером изменения скорости: при увеличении скорости Мд
складывается с моментом Л4СТ (знак «плюс»), а при уменьшении
скорости М действует против момента Мст (знак «минус»).
При неизменной скорости вращения якоря = 0j динами-
ческий момент Мд = 0, тогда уравнение моментов двигателя
Л1 = Мо + м2 = Мст, (6.6)
т. е. при установившемся режиме работы вращающий момент
двигателя и статический момент сопротивления на его валу
взаимно уравновешиваются. Величина вращающего момента
двигателя может быть определена выражением (5.4).
Кроме того, вращающий момент двигателя пропорционален
электромагнитной мощности, а поэтому
Л4 = = = 9,55-^-. (6.7)
ш 2теп 2к п п '
~6(Г
Величина полезного момента двигателя М2 пропорциональна
полезной мощности двигателя, что дает возможность получить
выражение полезного момента, аналогичное выражению (6.7)
Р2
9,55-4, (6.8)
109
где Р%— полезная мощность двигателя (мощность на валу), ет;
Л12 — полезный момент, н • м\
п — скорость вращения, об)мин.
§ 6.3. Скорость вращения двигателя
В соответствии с формулой э. д. с. Еа — СеФп, скорость вра-
щения двигателя определяется выражением
Подставив значение Еа из формулы (6.1), получим
т. е. скорость вращения электродвигателя прямо пропорциональ-
на напряжению и обратно пропорциональна магнитному потоку
возбуждения. Физически это объясняется тем, что увеличение
напряжения U или уменьшения потока Ф вызывает увеличение
разности (U — Еа), что, в свою очередь, ведет к увеличению
тока /а (6.2). Вследствие этого, возросший ток повышает вра-
щающий момент (5.4), и если при этом нагрузочный момент
остается неизменным, то скорость вращения двигателя увеличи-
вается.
Из формулы (6.9) следует, что регулировать скорость враще-
ния двигателя можно либо изменением напряжения (/, либо
изменением магнитного потока возбуждения Ф.
Направление вращения якоря определяется направлением
магнитного потока возбуждения Ф и направлением тока в об-
мотке якоря. Поэтому, изменив направление какой-либо из ука-
занных величин, можно изменить направление вращения якоря.
Следует иметь в виду, что переключение общих зажимов схемы
у рубильника не дает изменения направления вращения якоря,
так как при этом одновременно изменяется направление тока
и в обмотке якоря и в обмотке возбуждения.
§ 6.4. Условия устойчивой работы двигателей
При исследовании работы двигателей постоянного тока боль-
шое значение имеет зависимость скорости вращения двигателя
от вращающего момента Л1 = Л1о+Л12. Эта зависимость графи-
чески выражается механической характеристикой n—f(M) дви-
гателя при U = const и трг — const.
Преобразовав выражение (6.9)
и I&r
п~ СеФ СеФ
по
и подставив сюда значение тока
' = М
а СМФ
из выражения
(5.4), получим
U Л4^г
СеФ ~ СеСмФ2 •
(б.Ю)
Из равенства (6.10) видно, что на механические характе-
ристики двигателя существенно влияет способ возбуждения.
Поэтому в дальнейшем будут рассмотрены механические харак-
теристики для каждого типа двигателя постоянного тока.
Рис. 6.3. К понятию об устойчивой работе двигателя
Двигатель работает устойчиво и вращается с постоянной
скоростью, если развиваемый им вращающий момент равен про-
тиводействующему моменту
Л4 = Л4СТ. (6.11)
Однако устойчивая работа двигателя возможна лишь при
соблюдении определенных условий. Для иллюстрации сказан-
ного рассмотрим графики изменения моментов Л1=/(п)
и A4CI=f(n), показанные на рис. 6.3, а. Точка пересечения кри-
вых соответствует устойчивой работе двигателя (Л/ — Л1С7). При
случайном изменении скорости вращения, например от п до п',
равенство (6.11) нарушится и противодействующий момент Л4СТ
станет больше вращающего момента М'. Это приведет к умень-
шению скорости до значения п, при котором Л1=Л1СТ.
Аналогично, при случайном снижении скорости вращения п,
например до значения п", вращающий момент М" становится
больше противодействующего момента Л4СТ и якорь двигателя
получает ускорение, возвращающее его к исходной скорости вра-
щения. Таким образом, при действии возмущающих факторов
работа двигателя остается устойчивой.
111
Если же характеристики M=f{n) и =f(n) имеют вид
кривых, показанных на рис. 6.3,6, работа электродвигателя
становится неустойчивой. Действительно, при случайном изме-
нении скорости от п до п' избыточный вращающий момент М'
вызовет дальнейшее увеличение скорости. Если же произойдет
изменение скорости от п до п", то избыточный противодействую-
щий момент вызовет дальнейшее уменьшение скорости. Другими
словами, работа двигателя будет неустойчивой.
В общем случае условие устойчивой работы двигателя фор-
мулируется следующим образом: при возрастании скорости
вращения прирост вращающего момента должен быть меньше
прироста противодействующего момента
_dM dM^
dn dn '
Обычно для выполнения этого условия необходимо, чтобы
увеличение скорости вращения двигателя сопровождалось умень-
шением вращающего момента (рис. 6.3, а).
§ 6.5. Пуск двигателя в ход
Величина тока якоря двигателя определяется формулой (6.2)
I U~E>
Если принять U и неизменными, то ток /а зависит от
величины противо-э.д.с. Еа. Наибольшей величины ток /а
достигает при пуске двигателя в ход. В начальный момент пуска
якорь двигателя неподвижен (п=0) и в его обмотке не индук-
тируется э. д. с. (Еа = 0). Поэтому при непосредственном под-
ключении двигателя к сети в его обмотке якоря возникает пус-
ковой ток
U
А = (6.13)
Обычно сопротивление 2Г невелико, поэтому величина пус-
кового тока достигает недопустимо больших значений, в 10—15
раз превышающих номинальный ток двигателя.
Пример. При номинальной нагрузке двигателя постоянного тока мощ-
ность на его зажимах Р1н = 10 кет. Двс^тель работает от сети напряже-
нием £7=110 в и имеет сопротивление цепи якоря 2г=0,08 ом. Определить
величину пускового тока 1а при непосредственном включении двигателя
в сеть и сравнить его с номинальным током.
Решение. По формуле (6.13)
/а=— = Дг = 1375 а>
а 1г 0,08
112
так как номинальный ток двигателя
развивается чрезмерно
Рис. 6.4. Схема включения
пускового реостата
следовательно, пусковой ток в —gp а 15 раз превышает номинальный ток
двигателя.
Такой большой пусковой ток весьма опасен для двигателя.
Во-первых, он может вызвать в машине круговой огонь, а во-вто-
рых, при таком токе в двигателе
шой пусковой момент, который
оказывает ударное действие на
вращающиеся части двигателя и
может механически их разру-
шить. И, наконец, этот ток вызы-
вает резкое падение напряжения
в сети, что неблагоприятно отра-
жается на работе других потреби-
телей, включенных в эту сеть.
Поэтому пуск в ход непосред-
ственным подключением двигате-
ля в сеть применяется лишь для
двигателей малой мощности
(приблизительно до 0,5 кет).
В этих двигателях благодаря по-
вышенному сопротивлению об-
мотки якоря и небольшим вра-
щающимся массам величина
пускового тока лишь в 3—5 раз превышает номинальный, что не
представляет опасности для двигателя. Что же касается двига-
телей большей мощности, то при их пуске ® ход для ограничения
величины пускового тока применяют пусковые реостаты ПР,
включаемые последовательно в цепь якоря (рис. 6.4).
В начальный момент пуска сопротивление реостата делают
наибольшим гпмакс. В этом случае величина пускового тока
п
и
п макс
(6.14)
По мере нарастания скорости якоря противо-э. д. с. увеличи-
вается, а ток якоря уменьшается. Поэтому сопротивление рео-
стата следует уменьшить, чтобы в конце пуска оно было пол-
ностью выведено (^ = 0). В противном случае на нагрев рео-
стата будет затрачиваться значительная энергия, поступающая
в двигатель из сети, и полезная мощность двигателя будет на-
много снижена. Кроме того, длительный ток в сопротивлениях
реостата приведет к их перегреву и даже к перегоранию
(см. § 6.6).
8 1649 113
Сопротивление пускового реостата выбирается обычно таким,
чтобы пусковой ток превышал номинальный не более чем
в два-три раза.
Пример. Для двигателя предыдущего примера (Р1Н —10 квт\ £7=110 в;
5г=0,08 ом) определить сопротивление пускового реостата при условии,
чтобы кратность пускового тока Л~=2,5
/ 7н
Решение =2,5, поэтому/п=/н-2,5=9 b 2,5 = 227,5 а. Из формулы
(6 14) определяем сопротивление пускового реостата
г п макс ~ — — Sr — — 0,08 = 0,4 ом.
I n ,5
Так как вращающий момент двигателя М прямо пропорцио-
нален потоку Ф (5.4), то при пуске в ход двигателей параллель-
ного и смешанного возбуждения для облегчения пуска сопро-
тивления реостата в цепи возбуждения грг следует полностью*
вывести (грг = 0.) Поток возбуждения Ф в этом случае получает
наибольшее значение и двигатель развивает необходимый вра-
щающий момент при меньшем токе якоря.
Для пуска в ход двигателей большой мощности применять
пусковые реостаты нецелесообразно, так как это вызвало бы
значительные потери энергии. Кроме того, пусковые реостаты
были бы в этом случае чрезмерно громоздкими. Поэтому в дви-
гателях большой мощности применяют безреостатный пуск
путем понижения напряжения. Примерами этого являются:
пуск тяговых двигателей электровоза переключением их с по-
следовательного соединения при пуске на параллельное при
нормальной работе или пуск двигателей в схеме «генератор—
двигатель» (§ 6.10).
§ 6.6. Пусковые реостаты
Для пуска в ход двигателей постоянного тока применяют ме-
таллические реостаты с воздушным или масляным охлаждением.
Реостаты бывают двух-, трех- и четырехзажимные. Рассмотрим
конструкцию трехзажимного реостата и порядок операций при
реостатном пуске двигателя параллельного возбуждения (см.
рис. 6.4).
Реостат имеет шесть контактов: холостой (0), четыре про-
межуточных и рабочий 3. Медная дуга 1 соединена с зажимом
М, к которому подключена обмотка возбуждения. Благодаря
этой дуге ток возбуждения не зависит от сопротивления рео-
стата, так как обмотка возбуждения оказывается включенной
на полное напряжение сети. Рычаг 2 электрически соединен
с дугой 1. В зависимости от положения рычага последний
соединяется с тем или иным контактом. Перед пуском рычаг
должен находиться на холостом контакте (0).
114
Чтобы пустить двигатель в ход, включают рубильник
и рычаг реостата переводят на первый промежуточный контакт.
При этом двигатель возбуждается, а в цепи якоря появляется
пусковой ток /п, величина которого ограничена всеми четырьмя
секциями сопротивления гп. По мере увеличения скорости вра-
щения якоря пусковой ток уменьшается, и рычаг реостата пере-
водят на второй, третий контакт и т. д., пока он не окажется
на рабочем контакте 3, При этом сопротивления реостата будут
выведены (гп = 0).
С целью облегчения конструкции пусковые реостаты делают
на небольшое число ступеней, а сопротивления секций рассчи-
тывают на кратковременный ток. Поэтому рычаг реостата не
следует долго задерживать на промежуточных контактах, так
как в противном случае сопротивления реостата перегреваются
и могут перегореть.
При отключении двигателя от сети необходимо, чтобы цепь
возбуждения не размыкалась, так как в этом случае запас
электромагнитной энергии обмотки возбуждения вызывает э. д. с.
самоиндукции, которая создает электрическую дугу на размы-
кающихся контактах и может вызвать пробой изоляции обмотки
возбуждения. Чтобы избежать этого, первый рабочий контакт
пускового реостата электрически соединяют с дугой 1, благодаря
чему при переводе рычага на холостой контакт 0 цепь возбуж-
дения оказывается замкнутой на сопротивление реостата и энер-
гия магнитного поля, запасенная в обмотке возбуждения, рас-
ходуется в сопротивлении гп на его нагрев.
Для пуска двигателей последовательного возбуждения при-
меняются двухзажимные пусковые реостаты, отличающиеся от
трехзажимных отсутствием медной дуги 1 и наличием только
двух зажимов: Л и Я.
§ 6. 7. Двигатель параллельного возбуждения
Схема включения в сеть двигателя параллельного возбужде-
ния показана на рис. 6.5.
Реостат в цепи возбуждения грг служит для регулирования
скорости вращения двигателя. Так, при уменьшении сопротив-
ления реостата увеличивается ток в обмотке возбуждения /в,
а следовательно, возрастает поток Ф, что вызовет уменьшение
скорости (6.9). При увеличении грг скорость вращения двига-
теля увеличивается. Зависимость скорости вращения от вели-
чины тока возбуждения выражается регулировочной характе-
ристикой двигателя n = при 1 = const и(7 = const.
На рис. 6.6 представлены две регулировочные характеристи-
ки двигателя, снятые при различных значениях тока якоря.
Кривая 2 располагается ниже кривой 1, так как при токе / = /н
падение напряжения в цепи якоря оказывает большое влияние
8* Н5
на скорость вращения, чем размагничивающее действие реакции
якоря (6.9). Однако при малых значениях тока возбуждения
кривые сначала пересекаются (точка а), а затем кривая 2
располагается выше кривой /. Объясняется это тем, что при
ослабленном магнитном потоке воз-
i| буждения (при малых 2В) размаг-
%о ничивающее действие реакции якоря
Рис 6 5 Принципиаль-
ная схема двигателя па-
раллельного возбужде-
ния
Рис 6.6 ’Регулировочные ха-
рактеристики двигателя па-
раллельного возбуждения
при токе I — /н влияет на скорость вращения больше, чем па-
дение напряжения в цепи якоря. Из регулировочных характе-
ристик также видно, что при малых значениях тока возбуждения,
а тем более при обрыве цепи возбуждения (/в=0) скорость
вращения двигателя неограниченно возрастает, что приводит
к «разносу» двигателя, т. е. его механическому разрушению.
Эксплуатационные свойства двигателя определяются его
рабочими характеристиками, под которыми понимают зависи-
мость скорости вращения п, величины тока I, полезного момента
/И2, вращающего момента М от мощности на валу двигателя Р2
при t/=constH /в = const (рис. 6.7).
Для анализа зависимости которая обычно называет-
ся скоростной характеристикой, обратимся к формуле (6.9)
„ =
с,ф
из которой видно, что при неизменном напряжении U на ско-
рость вращения влияют два фактора: падение напряжения
в цепи якоря /а2/ и поток возбуждения Ф, При увеличении на-
грузки уменьшается числитель U — Ц^г; при этом вследствие
116
реакции якоря также уменьшается знаменатель Ф. Обычно
ослабление потока, вызванное реакцией якоря, невелико, и пер-
вый фактор влияет на скорость вращения сильнее, чем второй.
В итоге скорость вращения двигателя с ростом нагрузки умень-
шается. Если же реакция
якоря в двигателе сопрово-
ждается более значитель-
ным ослаблением потока Ф,
то скорость вращения с уве-
личением нагрузки будет
возрастать, как это показа-
но пунктирной кривой на
рис. 6.7. Однако такая зави-
симость = является
нежелательной, так как она
обычно не удовлетворяет ус-
ловию устойчивой работы
двигателя (6.12).
Чтобы обеспечить ско-
ростной характеристике фор-
му падающей кривой, в не-
Рис 6 7 Рабочие характеристики
двигателя параллельного возбуж-
дения
которых двигателях параллельного возбуждения применяют
легкую (с небольшим числом витков) последовательную обмот-
ку возбуждения, которая называется стабилизирующей обмоткой.
При включении этой обмотки согласованно с параллельной
обмоткой возбуждения ее н. с. компенсирует размагничивающее
действие реакции якоря так, что поток Ф во всем диапазоне
нагрузок остается практически неизменным.
Изменение скорости вращения двигателя при переходе от
номинальной нагрузки к холостому ходу, выраженное в про-
центах, называется номинальным изменением скорости
Дпн =...п* п« юо,
«н
(6.15)
где п0 — скорость вращения двигателя в режиме холостого хода.
Обычно для двигателей параллельного возбуждения Дин =
= 2—8%, поэтому скоростную характеристику двигателя парал-
лельного возбуждения называют жесткой.
Зависимость полезного момента М2 от нагрузки установлена
формулой (6.8). При n=const график М2=/(Р2) имел бы вид
прямой. Однако с увеличением нагрузки скорость двигателя
снижается, а поэтому зависимость M2=f(P2) имеет вид кривой.
Согласно выражению (6.6), при п = const вращающий момент
двигателя М=Мо+Мг. Так как рабочие характеристики двига-
теля строятся при условии /в= const, что обеспечивает постоян-
117
ство магнитных потерь в двигателе, то момент холостого хода
Л4о=const. Поэтому график зависимости M = f(P2) проходит
параллельно кривой M2=f(P2). Если принять поток Ф = const, то
график M2=f(P2) является в то же время выражением зависи-
мости f=f(P2J, так как М = СиФ1а‘
Механическая характеристика
двигателя n=f(M) определяется
уравнением (6.10)
Рис. 6 8 Механические
характеристики двигате-
ля параллельного воз-
буждения:
/ — естественная; 2 —
искусственная
и М^г
п~ СеФ СеСмФ2
Если пренебречь реакцией якоря,
то (так как = const) можно при-
нять Ф = const. Тогда механиче-
ская характеристика двигателя па-
раллельного возбуждения представ-
ляет прямую линию, несколько на-
клоненную к оси абсцисс (рис. 6.8).
Угол наклона механической харак-
теристики тем больше, чем больше
величина сопротивления, включен-
ного в цепь якоря. Механическая
характеристика двигателя при отсутствии дополнительного со-
противления в цепи якоря называется естественной. Механиче-
ская характеристика при включении дополнительного сопротив-
ления в цепи якоря СЕГ+Гд) называется искусственной.
Устойчивость скорости вращения, возможность плавной регу-
лировки скорости в широких пределах — все это обеспечило
двигателям параллельного возбуждения широкое применение.
§ 6.8. Режимы работы машины постоянного тока
В двигателях параллельного возбуждения при неизменном
токе в обмотке возбуждения (zB= const) магнитный поток из-
меняется при нагрузке весьма незначительно. Поэтому с неко-
торым приближением можно принять Ф = const. В этом случае
электромагнитный момент (5.4) пропорционален току в цепи
якоря и механическая характеристика n=f(M) может быть
представлена зависимостью (рис. 6.9). Если эту харак-
теристику продолжить в обе стороны за пределы осей координат,
то можно показать, что электрическая машина в зависимости
ют величины и знака внешнего момента, действующего на ее вал
со стороны связанного с ним механизма, может работать в трех
режимах: двигательном, тормозном и генераторном.
При работе двигателя без нагрузки ток в цепи якоря /а0
небольшой. Поэтому скорость вращения n = nQ (точка А). Затем
с появлением на валу двигателя нагрузочного момента, проти-
118
недействующего вращающему, ток в цепи якоря возрастает,
а скорость вращения уменьшается.
Если увеличить противодействующий момент до значения,
при котором якорь двигателя остановится (точка В), то ток
двигателя достигнет значения
ак —
и
Zr •
Если двигатель применяется
зочный момент которого может
пример, привод барабана, на
который наматывается трос с
грузом), то при последующем
увеличении момента этого ме-
ханизма якорь машины вновь
начнет вращаться, но теперь
уже в другую сторону.
Теперь момент, действую-
щий на вал электрической ма-
для привода механизма, нагру-
быть больше вращающего (на-
Рис. 6.9. Режимы работы машины
постоянного тока
электрическая машина перейдет
машины в этом режиме э. д. с.
шины со стороны нагрузочного
механизма, будет вращающим,
а электромагнитный момент
машины — тормозящим, т. е.
в режим тормоза. При работе
якоря действует в согласовании с напряжением
U+Ea
При практическом использовании машины в тормозном ре-
жиме (см. § 6.13) необходимо принять меры для ограничения
тока якоря. С этой целью в цепь якоря включают добавочное
сопротивление, величина которого обеспечивает получение ис-
кусственной характеристики двигателя, пересекающейся с осью
абсцисс при токе якоря /ак =5 /ан.
Если при работе двигателя в режиме холостого хода к его
валу приложить момент, направленный в сторону вращения
якоря, то скорость вращения, а следовательно, и э. д. с. Еа
начнут возрастать.
Когда э. д. с. Е3 = U, машина не будет потреблять из сети
тока (точка С), скорость вращения якоря достигнет значения
лхх, называемого пограничной скоростью.
При дальнейшем увеличении внешнего момента на валу ма-
шины э. д. с. Е3 станет больше напряжения, а в цепи якоря
опять возникнет ток, но другого направления. При этом машина
перейдет в генераторный режим: механическая энергия, затра-
119
чиваемая на вращение якоря, будет преобразовываться в элек-
трическую и поступать в сеть.
Перевод двигателя в генераторный режим используется для
торможения двигателя, так как в генераторном режиме электро-
магнитный момент является тормозящим (рекуперативное тор-
можение) .
§ 6.9. Двигатель последовательного возбуждения
В этом двигателе обмотка возбуждения включена последо-
вательно в цепь якоря (рис. 6.10, а), а поэтому магнитный поток
Ф в нем зависит от тока нагрузки /а.
При небольших нагрузках магнитная система машины иейа-
сыщена и зависимость магнитного потока от тока нагрузки
прямо пропорциональна
Ф = К/а.
В этом случае выражение электромагнитного момента (5.4)
можно записать
Л4 = СмК/а/а = сЛ (6.16)
Формула скорости вращения (6.9) примет вид
1 сд/а - сец
(6.17)
В этих выражениях К — коэффициент пропорциональности.
Таким образом, вращающий момент двигателя при ненасы-
щенном состоянии магнитной системы пропорционален квадрату
тока, а скорость вращения обратно пропорциональна току на-
грузки.
На рис. 6.10, б представлены рабочие характеристики
М = f(Iи n = fjb) двигателя последовательного возбуждения.
При больших нагрузках наступает насыщение магнитной систе-
мы двигателя. В этом случае магнитный поток при’возрастании
нагрузки практически не изменяется и характеристики двигателя
приобретают почти прямолинейный характер.
Скоростная характеристика двигателя последовательного
возбуждения показывает, что скорость вращения двигателя рез-
ко меняется при изменениях нагрузки. Такую скоростную харак-
теристику принято называть мягкой.
При уменьшении нагрузки двигателя последовательного воз-
буждения ' скорость вращения резко увеличивается и при на-
грузке меньше 25% от номинальной может достигнуть опасных
для двигателя значений («разнос»). Поэтому работа двигателя
120
последовательного возбуждения или его пуск при нагрузке на
валу меньше 25% от номинальной недопустима.
Для более надежной работы вал двигателя последовательно-
го возбуждения должен быть жестко соединен с рабочим меха-
Рис. 6.10. Принципиальная схема (а) и рабо-
чие характеристики (б) двигателя последова-
тельного возбуждения
низмом посредством муфты или зубчатой передачи. Применение
ременной передачи недопустимо, так как при обрыве или сбросе
ремня может произойти «разнос» двигателя. Учитывая возмож-
ность работы двигателя на повышен-
ных Скоростях вращения, двигатели
последовательного возбуждения, со-
гласно ГОСТ 183—66, подвергаются
испытанию в течение 2 мин на превы-
шение скорости вращения на 20%
сверх максимальной указанной на за-
водском щитке, но не меньше чем на
50% сверх номинальной.
Механические характеристики дви-
гателя последовательного возбужде-
ния п = f (М) представлены на
Рис. 6.11. Механические
характеристики двигате-
ля последовательного
возбуждения:
1 — естественная; 2 —
искусственная
рис. 6.11. Резко падающие кривые ме-
ханических характеристик обеспечива-
ют двигателю последовательного воз-
буждения устойчивую работу при лю-
бой механической нагрузке. Свойство
этих двигателей развивать большой вращающий момент, про-
порциональный квадрату тока нагрузки, имеет важное значение,
особенно в тяжелых условиях пуска и при перегрузках, так как
при постепенном увеличении нагрузки двигателя мощность на
входе двигателя растет медленнее, чем его вращающий момент.
121
Эта особенность двигателя последовательного возбуждения
является одной из причин их широкого применения в качестве
тяговых двигателей на транспорте, а также в качестве крано-
вых двигателей в подъемных устройствах.
Номинальное изменение скорости двигателя последователь-
ного возбуждения определяется по формуле
Дпн = ~ "н юо, (6.18)
/ZH
где /Д{о,25] — скорость вращения при нагрузке двигателя, состав-
ляющей 25% от номинальной.
§ 6.10. Регулирование скорости вращения двигателей
последовательного возбуждения
+
б)
Рис 612 Регулирование скорости
вращения двигателей последователь-
ного возбуждения
а — реостатом в цепи якоря, б — из
менением схемы включения, в — из-
менением тока возбуждения; г —
секционированием обмотки возбуж-
дения
Регулирование скорости вращения двигателей последова-
тельного возбуждения возможно двумя способами: изменением
напряжения U, и изменением
магнитного потока обмотки
возбуждения.
В первом случае после-
довательно в цепь якоря
включают регулировочный
реостат /?рг (рис. 6.12,а). С
увеличением сопротивления
этого реостата уменьшается
напряжение на входе двига-
теля и уменьшается его ско-
рость вращения. Этот метод
регулирования применяется
главным образом в двигате-
лях небольшой мощности. В
случае значительной мощно-
сти двигателя этот способ
является неэкономичным из-
за больших потерь энергии в
7?рг. Кроме того, реостат /?рг,
рассчитываемый на рабочий
ток двигателя, получается
громоздким и дорогостоя-
щим.
При совместной работе
нескольких однотипных дви-
гателей регулировка скорости осуществляется изменением схемы
их включения относительно друг друга (рис. 6.12,6). Так, при
параллельном включении двигателей каждый из них оказы-
122
вается под полным напряжением сети, а при последовательном
включении двух двигателей на каждый двигатель приходится
половина напряжения сети.
При одновременной работе большего числа двигателей воз-
можно большее количество вариантов их включения. Такой
способ регулирования применяется в электровозах, где установ-
лено несколько однотипных тяговых двигателей.
Регулирование скорости двигателя за счет магнитного потока
возможно осуществить тремя вариантами: шунтированием
обмотки возбуждения реостатом грг, секционированием обмотки
возбуждения и шунтированием обмотки якоря реостатом гш.
Включение реостата грг, шунтирующего обмотку возбуждения
(рис. 6.12, в), а также уменьшение сопротивления этого реостата
ведет к уменьшению тока возбуждения = /а—/рг, а следова-
тельно, к росту скорости.
Этот способ экономичнее предыдущего (рис. 6.12, а) и при-
меняется чаще. Для оценки этого способа регулирования введе-
но понятие о коэффициенте регулирования
Лрг = 100%.
Ла
Обычно сопротивление реостата грг принимается таким,
чтобы Крг>50%.
При секционировании обмотки возбуждения (рис. 6.12, г)
отключение части витков обмотки сопровождается ростом ско-
рости вращения.
При шунтировании обмотки якоря реостатом гш (рис. 6.12,/?)
увеличивается ток возбуждения /в = Л + Лш что вызывает
уменьшение скорости вращения.
Этот способ регулирования, хотя и обеспечивает глубокую
регулировку, является очень неэкономичным и применяется
весьма редко.
§ 6.11. Двигатель смешанного возбуждения
Двигатель смешанного возбуждения имеет две обмотки воз-
буждения: параллельную и последовательную (рис. 6.13). Ско-
рость вращения этого двигателя определяется выражением
СДФ1±Ф2)-
(6.19)
Здесь Ф] и Ф2 — потоки параллельной и последовательной об-
моток возбуждения.
Знак «плюс» соответствует согласованному включению обмо-
ток возбуждения (н. с. обмоток складываются). В этом случае
с увеличением нагрузки общий магнитный поток увеличив"ается
123
(за счет потока последовательной обмотки Фа), что ведет
к уменьшению скорости вращения двигателя. При встречном
включении обмоток поток Фг при увеличении нагрузки размаг-
ничивает машину (знак «минус»), что, наоборот, увеличивает
скорость вращения.
Работа двигателя при этом становится неустойчивой, так как
Рис. 6.13. Схема
включения двига-
теля смешанного
возбуждения
с увеличением нагрузки скорость вращения
неограниченно растет. Однако при небольшом
числе витков последовательной обмотки с уве-
личением нагрузки скорость вращения не воз-
Рис 6.14. Рабочие (а) и механические (б) характе-
ристики двигателя смешанного возбуждения
растет и во всем диапазоне нагрузок она остается практически
неизменной.
На рис. 6.14, а показаны рабочие характеристики двигателя
смешанного возбуждения при согласованном включении обмо-
ток возбуждения. Механические характеристики двигателя сме-
шанного возбуждения в отличие от механических характе-
ристик двигателя последовательного возбуждения имеют менее
резкий падающий вид (рис. 6.14, б).
Двигатель смешанного возбуждения имеет ряд преимуществ
по сравнению с двигателем последовательного возбуждения.
Этот двигатель может работать вхолостую, так как поток парал-
лельной обмотки Ф1 ограничивает скорость вращения двигателя
в режиме холостого хода и устраняет опасность «разноса». Ре-
гулировка скорости вращения осуществляется реостатом грг
в цепи параллельной обмотки возбуждения.
Однако наличие двух обмоток возбуждения делает двигатель
смешанного возбуждения более дорогостоящим по сравнению
с двигателями предыдущих типов, что несколько ограничивает
его применение.
124
§ 6.12. Система «генератор—двигатель»
При эксплуатации электродвигателей постоянного тока боль-
шое значение имеют вопросы пуска в ход и регулирования ско-
рости.
Рассмотренные ранее способы управления и пуска в ход
применяются обычно в двигателях малой и средней мощности.
В двигателях большой мощности эти способы непригодны, так
Рис, 6. 15. Схема «генератор—двигатель»
как частые остановки двигателя и пуск его в ход создают боль-
шие потери в пусковом реостате.
Хорошие условия для регулировки и пуска в ход двигателей
большой мощности дает схема «генератор—двигатель» (Г—Д)
(рис. 6.15). Первичный двигатель ПД (обычно двигатель пере-
менного тока) приводит во вращение генератор Г постоянного
тока независимого возбуждения. Напряжение непосредственно
от щеток этого генератора подается на щетки регулируемого
двигателя Д, приводящего в действие исполнительный механизм
ИМ. Регулировка скорости двигателя осуществляется измене-
нием напряжения на выходе генератора посредством реостата
в цепи возбуждения генератора Г.
Переключатель П дает возможность менять направление
тока в обмотке возбуждения генератора, а следовательно, изме-
нять полярность щеток генератора, что приводит к перемене на-
правления вращения двигателя Д.
Схема Г—Д предусматривает безреостатный пуск двигателя.
С этой целью в период пуска напряжение на щетках двигателя
сначала устанавливается небольшим, а затем постепенно увели-
чивается до номинального значения. Такой порядок пуска дви-
гателя исключает появление чрезмерно больших пусковых токов.
В тех случаях когда нагрузка на валу двигателя имеет зна-
чительные колебания, на вал первичного двигателя насаживают
маховик М, который запасает энергию при увеличении скорости
и отдает ее при уменьшении. Это сглаживает нагрузку на дви-
125
гатель и уменьшает колебания скорости. Такая система назы-
вается «генератор—двигатель—маховик» (Г—Д—М). Система
Г—Д—М применяется в электроприводах шахтных подъемни-
ков и прокатных станов, где интенсивная нагрузка двигателя
чередуется с работой вхолостую,
§ 6. 13. Торможение двигателей постоянного тока
При необходимости быстрой остановки или уменьшения ско-
рости вращения двигателя осуществляют торможение двигателя.
Торможение может выполняться или посредством механиче-
ских тормозов или с использованием электромагнитного момен-
та электрической машины. В последнем случае торможение на-
зывается электрическим.
Электрическое торможение может быть трех видов: рекупе-
ративное, динамическое и противовключением.
Рекуперативное торможение является наиболее
экономичным, так как оно основано на переводе двигателя в ге-
нераторный режим с отдачей энергии в сеть.
Если внешний момент на валу двигателя становится вра-
щающим, то скорость вращения становится больше пограничной
скорости пхх (см. рис. 6.9). При этом э. д. с. Ег начинает пре-
вышать напряжение сети U. В этом случае ток якоря /а изме-
няет свое направление и машина переходит в генераторный
режим (см. § 6.8). Электромагнитный момент машины также
меняет свое направление и становится тормозящим по отноше-
нию к внешнему моменту, действующему на вал машины. Вели-
чина тормозного момента регулируется током возбуждения.
Рекуперативное торможение возможно лишь при параллель-
ном возбуждении. В двигателе последовательного возбуждения
рекуперативное торможение невозможно. Объясняется это тем,
что при последовательном возбуждении машины, при ее работе
в генераторном режиме, напряжение на выводах в значительной
степени зависит от тока нагрузки (см. рис. 5.9) и поэтому вся-
кое случайное увеличение тока нагрузки приводит к росту
напряжения на выводах машины, а следовательно, к дальней-
шему росту тока нагрузки. При случайном уменьшении тока
нагрузки напряжение на выводах машины уменьшается и маши-
на из генераторного режима переходит в двигательный. Рекупе-
ративное торможение двигателей последовательного возбужде-
ния возможно при переводе двигателя на независимое возбужде-
ние, когда обмотка возбуждения подключается к специальному
генератору (возбудителю).
Динамическое торможение основано на том, что
обмотка якоря двигателя отключается от сети и замыкается на
нагрузочное сопротивление 7?н (рис. 6.16, а). При этом механи-
ческая энергия вращающихся масс преобразуется в электриче-
126
скую энергию, которая, в свою очередь, расходуется на нагрев
сопротивления и других элементов цепи якоря. Ток якоря
при динамическом торможении меняет свое направление, а со-
здаваемый им электромагнитный момент оказывает на вращаю-
щие части тормозящее действие. Интенсивность динамического
торможения регулируется величиной тока возбуждения.
Рис. 616. Схемы динамического торможения
двигателей параллельного (а) и последователь-
ного (б) возбуждения
При динамическом торможении двигателей последователь*
ного возбуждения, во избежание размагничивания машины^
необходимо переключать обмотку возбуждения (рис. 6.16,6),
с тем чтобы направление тока в ней при переходе на динамиче-
ское торможение осталось неизменным.
Торможение противовключением применяется
при необходимости интенсивного торможения. Сущность его
состоит в том, что путем изменения направления тока в обмотке
возбуждения либо в обмотке якоря меняют направление элек-
тромагнитного момента двигателя, который становится тормо-
зящим. Обычно торможение противовключением предшествует
изменению направления вращения двигателя (реверсированию).
§ 6.14. Использование двигателя постоянного тока
в режиме генератора
При эксплуатации электрических машин иногда возникает
необходимость машину, предназначенную для работы в качестве
двигателя, использовать для работы в качестве генератора.
Э. д. с. ^дв, индуктируемая в обмотке якоря электродвигателя,
меньше напряжения U на величину падения напряжения в цепи
якоря Но при использовании машины в качестве генера-
127
тора мы должны получить от нее э. д. с. £ген больше напряже-
ния U на величину Таким образом,
EM=*U~l£r-
^ген = У + /а2У.
Как видно из формулы, э. д. с. обмотки якоря
Р pN
60а ф"’
при неизменном потоке возбуждения величина э. д. с. машины
(при работе в режиме генератора) может быть увеличена лишь
за счет скорости вращения. При этом необходимое увеличение
скорости вращения определяется из отношения
^ген Егея
П-ьв Елв
Однако опыт эксплуатации машин показывает, что для нор-
мальной работы двигателя в режиме генератора при Ф = const
следует скорость вращения машины увеличить еще на 5—10%.
Тогда
ПГен - Пдв (t05 - 1,10). (6.20)
13 ДВ
Пример. Определить, с какой скоростью следует вращать якорь машины
при работе ее в качестве генератора (/7ген—230 в), если при работе в режиме
двигателя она имела следующие данные: лдв =950 об/минъ =220 в,
/н =55 ai iB —2а Падение напряжения в цепи якоря 1йЪг = 5,5 в
Решение Определим э д с машины в режиме двигателя и в режиме
генератора
£дв = U — /аЕг = 220 - 5,5 = 214,5 в,
£ген = U 4- = 230 + 5,5 = 235,5 в
По формуле (6 20) получим
пген = 950 -^5 1,075 = 1120 об/мин.
Теперь выясним, как же изменится мощность машины при переводе ее
из режима двигателя в режим генератора. Во избежание перегрева обмотки
якоря, величина тока в цепи якоря машины должна оставаться неизменной
по сравнению с током якоря при работе машины в качестве двигателя,
который равен
Л — — 1В
При работе машины в качестве генератора ток в обмотку возбуждения
поступает из цепи якоря Поэтому ток на выходе генератора равен
^ген = /а гв
128
или
ген — (^дв 4) — I» — ^дв
Тогда полезная мощность машины при переводе ее в режим генератора
^2ген — ^ген’^ген = бген О дв 2<в)*
Для рассматриваемого примера полезная мощность генератора
^2ген = 230(55 — 2-2) =11,7 кет.
Глава VII
ОСНОВНЫЕ ТИПЫ МАШИН ПОСТОЯННОГО ТОКА
ОБЩЕГО ПРИМЕНЕНИЯ И СПЕЦИАЛИЗИРОВАННЫЕ МАШИНЫ
ПОСТОЯННОГО ТОКА
§ 7.1. Основные понятия
Электромашиностроительной промышленностью изготов-
ляются машины постоянного тока в диапазоне мощностей от
нескольких ватт до нескольких тысяч киловатт, предназначен-
ные для работы в различных условиях
В зависимости от требований, которые предъявляются к элек-
трическим машинам постоянного тока, последние разделяются
на маЬины общего применения и специализированные Машино#
общего применения называется электрическая машина, удовле-
творяющая комплексу требований, общему для большинства
случаев применения, не включающему специфичные требования,
характерные лишь для отдельных областей применения электри-
ческих машин. Специализированной называется машина, выпол-
ненная с учетом специфических требований, характерных лишь
для отдельных областей применения электрических машин.
Электрические машины как общего применения, так и спе-
циализированные, широко используемые в промышленности, из-
готовляются сериями
Серия машин представляет собой ряд электрических машин
возрастающей мощности, имеющих однотипную конструкцию и
удовлетворяющих общему комплексу требований
Наиболее распространенными машинами постоянного тока
общего применения являются машины единой серии П. Электри-
ческие машины этой серии мощностью от 0,3 до 200 кет вклю-
чают в себя электродвигатели на напряжение 110 и 220 в при
скоростях вращения 3000, 1500, 1000, 750, 600 об/мин и генера-
торы на напряжение 115 и 230 в при скоростях вращения 2850
и 1450 об/мин.
Электродвигатели серии П предназначены для работы в про-
мышленных приводах, требующих широкого и плавного регули-
9 1649 129
рования скорости вращения, а генераторы — для питания элек-
трических цепей постоянного тока»
Специализированные электрические машины проектируются
в соответствии с требованиями какой-либо определенной отрасли
промышленности, для работы в которой они предназначены.
Поэтому существует очень много разновидностей специализи-
рованных электрических машин постоянного тока. В данной
главе рассматриваются лишь наиболее распространенные типы
таких машин.
§ 7. 2. Краново-металлургические и тяговые двигатели
Для привода механизмов, работающих при значительных пе-
регрузках и частых реверсах, применяются двигатели постоян-
ного тока серии МП. Эти двигатели используются в электропри-
воде краново-подъемных и металлургических устройств.
Тяговые электродвигатели предназначены для приведения
в движение подвижного состава электрифицированного транс-
порта.
По сравнению с машинами стационарного типа условия ра-
боты тяговых двигателей намного тяжелее: работа происходит
в условиях частого пуска в ход, сопровождается значительными
изменениями напряжения, двигатель подвержен динамическим
воздействиям, вызывающим вибрации щеток и щеткодержа-
телей и т. д.
Исходя из этого, тяговые двигатели отличаются особо проч-
ной конструкцией, тщательно настроенной коммутацией, спе-
циальной конструкцией щеткодержателей и т. п.
Тяговые электродвигатели выполняются с последовательным
или смешанным возбуждением с преобладающей последователь-
ной обмоткой. Напомним, что двигатели последовательного воз-
буждения лучше других работают в тяжелых условиях эксплуа-
тации (см. § 6.9).
§ 7.3. Электромашинный усилитель
Электромашинным усилителем (ЭМУ) называется электриче-
ская машина, работающая в режиме генератора и предназна-
ченная для усиления электрических сигналов. Электромашин-
ные усилители применяются в системах автоматики.
Простейшим ЭМУ является генератор постоянного тока
независимого возбуждения (см. рис. 5.3,а). Так как напряже-
ние на выходе генератора зависит от тока возбуждения (см.
рис. 5.3,6), то, изменяя ток возбуждения, можно управлять на-
пряжением на выходе генератора.
130
Рис. 7.1. Схема ЭМУ по-
перечного поля
Следовательно, сравнительно небольшой мощностью в цепи
обмотки возбуждения можно управлять значительной мощ-
ностью в цепи якоря.
Но ЭМУ, выполненные по принципу генератора независимого
возбуждения, не нашли широкого
применения, так как они не могут
обеспечить достаточно большого
коэффициента усиления по мощ-
ности (не более 80—100), пред-
ставляющего собой отношение
мощности на выходе усилителя к
мощности на входе.
Наибольшее распространение
в автоматике получили электро-
машинные усилители поперечного
поля.
В отличие от обычного генера-
тора постоянного тока в электро-
машинном усилителе поперечного
поля основным рабочим потоком
является магнитный поток, со-
здаваемый током обмотки яко-
ря, — поперечный поток реакции
якоря.
На коллекторе ЭМУ установ-
лено два комплекта щеток. Один
комплект щеток qiq2 (рис. 7.1)
расположен по поперечной оси
главных полюсов, т. е. на геомет-
рической нейтрали; а другой комплект щеток d\dz располжен по
продольной оси главных полюсов. Щетки q^qz замкнуты накорот-
ко, а к щеткам подключена рабочая цепь ЭМУ.
Помимо обмотки якоря, усилитель имеет одну или несколько
обмоток управления (уи у2), компенсационную обмотку К и об-
мотку добавочных полюсов Д. Якорь усилителя приводится во
вращение посредством электродвигателя.
Если к одной из обмоток управления подвести напряже-
ние (7у, то в этой обмотке появится ток управления zy, ко-
торый создаст намагничивающую силу обмотки управления
Fy — iyWy. Эта сила, в свою очередь, создаст магнитный по-
ток Фу, который наведет в цепи щеток qrq2 э. д. с. Eq. По
величине эта э. д с. невелика, но так как щетки qiq2 замк-
нуты накоротко, то э. д. с. Eq создает значительный ток Iq.
Ток в обмотке якоря Iq создает намагничивающую силу Fq
и магнитный поток Ф^, который направлен по поперечной оси
главных полюсов, т. е. по геометрической нейтрали, и не-
9* 131
подвижен в пространстве. В обмотке якоря, вращающейся в
неподвижном потоке Ф^, наводится э. д. с. Ed, снимаемая с
продольных щетик dxd2.
При подключении нагрузки гн к выходным зажимам ЭМУ
э. д. с. Ed создает в цепи щеток d^d2 рабочий ток Id.
Таким образом, небольшая мощность обмотки управления
проходит две ступени усиления: сначала эта мощность усили-
вается на ступени «цепь управления — поперечная цепь», а за-
тем на ступени «поперечная цепь — продольная (рабочая)
цепь».
Усиление мощности на каждой ступени характеризуется
коэффициентом усиления. Коэффициент усиления на ступени
«цепь управления — поперечная цепь» определяется отношением
мощности в поперечной цепи Pq = EqIq к мощности управления
Ру —
Коэффициент усиления на ступени «поперечная цепь — про-
дольная (рабочая) цепь» также определяется отношением мощ-
ностей в этих цепях
г я
где Pd=UdId—мощность в рабочей цепи усилителя, т. е.
в цепи щеток d\d2.
Общий коэффициент усиления ЭМУ равен произведению
коэффициентов усиления
<71>
г у 1 q г У
Коэффициент усиления ЭМУ может достигать 2000—20 000.
Следует запомнить, что мощность на выходе ЭМУ (Pd) пред-
ставляет собой преобразованную механическую мощность при-
водного электродвигателя. Но величина этой мощности, которая
может достигать 20 кет и более, управляется посредством не-
большой мощности управления, величина которой обычно со-
ставляет от 0,1—1,0 вт.
Наличие нескольких обмоток управления позволяет воздей-
ствовать на выходную мощность ЭМУ несколькими сигналами
одновременно, используя прямые и обратные связи.
Как уже отмечалось, в ЭМУ имеется обмотка добавочных
полюсов Д и компенсационная обмотка Л.
Обмотка добавочных полюсов служит для улучшения комму-
тации на продольных щетках (<М2).
132
Что же касается компенсационной обмотки, то она предна-
значена для устранения размагничивающего влияния реакции
по продольной оси.
Дело в том, что ток рабочей цепи ЭМУ (ток нагрузки) Id
создает намагничивающую силу якоря по продольной оси Fd,
направленную навстречу намагничивающей силе обмотки управ-
ления ^у.Эта сила намного меньше намагничивающей силы Fd.
Рис. 7.2. Общий вид (разрез) уси-
лителя типа ЭМУ12П:
/ — щит подшипниковый передний;
2 — коллектор усилителя; 3 — якорь
усилителя; 4 — статор' усилителя;
5 — коробка зажимов усилителя; 6 —
конпенсационная обмотка и обмотка
добавочных полюсов; 7 — якорь
электродвигателя; 8 — сердечник
главного полюса электродвигателя;
9 — сердечник добавочного полюса
электродвигателя; 10 — коробка за-
жимов электродвигателя; 11— кол-
лектор электродвигателя; 12—щит
подшипниковый задний; 13—щет-
кодержатель усилителя; 14 — компенсационная обмотка усилителя; 15 — об-
мотка управления; 16 — обмотка главного полюса электродвигателя; 17 — об-
мотка добавочного полюса электродвигателя
Поэтому даже при небольшой нагрузке усилителя размагничи-
вающее влияние реакции якоря по продольной оси настолько
велико, что усилитель размагничивается и напряжение на его
выводах падает до нуля.
Для устранения этого нежелательного явления на статоре
ЭМУ располагают компенсационную обмотку, включенную по-
следовательно в рабочую цепь якоря. С появлением тока в рабо-
чей цепи Id возникает намагничивающая сила компенсационной
133
обмотки FK, направленная по продольной оси встречно намагни-
чивающей силе реакции якоря Fd. Этим устраняется (компен-
сируется) размагничивающее влияние реакции якоря по про-
дольной оси. Для полной компенсации необходимо, чтобы
намагничивающие силы Fd и FK были абсолютно равны, так
как даже незначительная недокомпенсация (FK<Fd) или пере-
компенсация (FK >> Fd) оказывает значительное влияние на маг-
нитный поток Фу, а следовательно, и на свойства ЭМУ. Компен-
сация должна быть отрегулирована
с точностью до десятых долей про-
цента. Однако расчет компенсацион-
ной обмотки с такой точностью
практически невозможен.
Поэтому величину намагничива-
ющей силы FK окончательно регу-
лируют при наладке ЭМУ посред-
ством реостата гк, включенного па-
раллельно компенсационной об-
мотке.
В схемах автоматического управ-
ления и регулирования наибольшее
Рис 7 3 Внешние ха- распространение получили электро-
рактеристики ЭМУ машинные усилители серии ЭМУ
Усилители этой серии изготовляют-
ся со встроенным в общий корпус электродвигателем, либо от-
дельной машиной, которая монтируется затем с электродвигате-
лем на общей раме. Рассмотрим конструкцию электромашинного
усилителя типа ЭМУ 12П, представляющего собой агрегат со
встроенным электродвигателем постоянного тока (рис. 7.2). Якорь
ЭМУ имеет обычную конструкцию с простой петлевой обмоткой.
Концы всех обмоток электромашинного усилителя присоединяю-
тся к зажимам коробок выводов.
В усилителе типа ЭМУ12П применен электродвигатель по-
стоянного тока параллельного возбуждения. Однако в усилите-
лях других типов, например ЭМУ12А, применяются трехфазные
асинхронные электродвигатели (см. гл. XIX).
Рабочие свойства ЭМУ в значительной степени определяют-
ся его внешней характеристикой U d == f(/J при n=const
и iy — const.
Напряжение на выходе усилителя Ud в зависимости от тока
нагрузки /d определяется выражением
(7.2)
где ^d— сумма электрических сопротивлений в продольной
цепи якоря (о;и), включающая сопротивление обмот-
ки якоря га> добавочных полюсов гд, компенсационной
гк и сопротивление щеточного контакта гщ.
134
Ввиду того что магнитная цепь усилителя ненасыщена, на-
пряжение Ud является линейной функцией тока нагрузки Id,
т. е внешняя характеристика ЭМУ представляет собой практи-
чески прямую линию (рис. 7.3).
Угол наклона внешней характеристики к оси абсцисс (жест-
кость характеристики) зависит от степени компенсации реакции
якоря. При полной компенсации намагничивающая сила компен-
сационной обмотки FK равна намагничивающей силе реакции
якоря по продольной оси Fd. В этом случае внешняя характе-
ристика получается достаточно жесткой (кривая /), так как
уменьшение напряжения Ud при увеличении тока нагрузки Id
происходит лишь за счет увеличения падения напряжения
в цепи якоря по продольной оси
При недокомпенсации FK<_Fd внешняя характеристика по-
лучается менее жесткой (кривая 2). Объясняется это тем, что
при недокомпенсации намагничивающая сила Fd, возрастая
с увеличением тока Id, значительно ослабляет магнитный поток
обмотки управления, что ведет к заметному уменьшению напря-
жения на выходе ЭМУ.
Если в усилителе настроить небольшую перекомпенсацию
(FK>Fd), так чтобы намагничивающая сила FK полностью
скомпенсировала не только реакцию якоря по продольной оси
(Fd), но и падение напряжения IdZfd* то внешняя характе-
ристика усилителя становится абсолютно жесткой и распола-
гается параллельно оси абсцисс (кривая 3).
В этом случае напряжение на выходе ЭМУ остается неиз-
менным во всем диапазоне изменения нагрузки.
При значительной перекомпенсации внешняя характеристика
(кривая 4) приобретает «восходящий характер, так как намагни-
чивающая сила Ак не только компенсирует Fd, но и создает
дополнительный продольный поток, который, накладываясь на
магнитный поток управления, вызывает увеличение э. д с. Ed.
Работа усилителя с перекомпенсацией становится неустой-
чивой, так как возникает опасность произвольного самовозбуж-
дения ЭМУ, при котором увеличение напряжения на выходе
усилителя вызывает рост тока нагрузки, что ведет к дальней-
шему увеличению напряжения и т. д., т е. происходит неограни-
ченное увеличение тока нагрузки.
Обычно в усилителе настраивают небольшую недокомпенса-
цию, при которой увеличение напряжения Ud при уменьшении
тока Id от номинального до нуля составляло бы 12—20%.
В отличие от обычного генератора постоянного тока ЭМУ
поперечного поля обладает весьма малой инерционностью, т. е
он обладает свойством быстро реагировать на все изменения
напряжения на обмотке управления.
Постоянная времени электрической цепи т, характеризующая
скорость переходных процессов, прямо пропорциональна индук-
135
тивности этой цепи L и обратно пропорциональна ее активному
сопротивлению R:
L
~~ R •
Поэтому в целях повышения быстродействия ЭМУ его обмот-
ку управления выполняют с большим активным сопротивлением
при небольшой индуктивности. Это достигается тем, что часть
обмотки выполняется бифилярно.
Повышению быстродействия ЭМУ способствует также не-
большая индуктивность обмотки якоря в цепи поперечных ще-
ток qxq2.
Рассмотрим некоторые примеры применения ЭМУ в схемах автоматиче-
ского регулирования.
На рис. 7.4 приведена схема автоматического регулирования на пряже-
возбуждения посредством ЭМУ, имеющего две
ния в генераторе независимого
обмотки управления: одна обмотка
подключена к аккумуляторной бата-
рее и создает неизменную н. с. Fi, а
другая включена на напряжение уп-
равляемого генератора и создает н. с.
F2, направленную встречно н. с.
Рис. 7.5. Схема автоматиче-
ского регулирования скорости
вращения двигателя постоян-
ного тока посредством ЭМУ
Рис. 7.4. Схема включе-
ния ЭМУ для стабили-
зации напряжения на
выходе генератора по-
стоянного тока
Таким образом, результирующая н. с. управления равна
При понижении напряжения генератора н. с. F2 уменьшается, а резуль-
тирующая н. с. Fy увеличивается, что вызывает увеличение тока возбужде-
ния генератора до такой величины, при которой напряжение генератора до-
стигает установленного значения.
ЭМУ можно также использовать для автоматической стабилизации
скорости вращения двигателя постоянного тока (рис. 7.5). С этой целью
ЭМУ включают последовательно с обмоткой возбуждения двигателя. Одна
из обмоток управления включена в сеть с постоянно действующим напря-
жением и создает н. с. Fi=const, а другая подключается к тахогенератору
136
ТГ (см. § 7.4), напряжение на выходе которого пропорционально скорости
вращения двигателя. Таким образом, величина н. с. этой обмотки управления
зависит от скорости вращения двигателя. Установившейся скорости вра-
щений двигателя соответствует разность н. с.
Если же скорость вращения двигателя увеличится, то н. с. регулирую-
щей обмотки управления F2 также увеличится, а результирующая н. с. Fy
уменьшится. Это уменьшит напряжение на щетках difa усилителя. Поскольку
ЭМУ включен встречно к напряжению обмотки возбуждения двигателя,
снижение напряжения на щетках увеличит ток возбуждения двигателя.
В итоге скорость вращения двигателя снизится до установленного значения.
Если же скорость двигателя уменьшится, то процессы в системе пойдут
в противоположном направлении, и скорость вращения опять будет восста-
новлена. Точность регулирования при этом получается достаточной.
§ 7.4. Тахогенераторы постоянного тока
Тахогенераторы постоянного тока служат для измерения скорости вра-
щения по величине выходного напряжения, а также для получения электри-
ческих сигналов, пропорциональных скорости вращения вала в схемах авто-
матического контроля и регулирования.
Тахогенератор постоянного тока представляет собой генератор малой
мощности с электромагнитным
независимым возбуждением
(рис. 7.6,а) или с возбужде-
нием постоянными магнитами.
Ввиду того что при по-
стоянной величине тока воз-
буждения *в = const, магнит-
ный поток Ф практически не
зависит от нагрузки, выходная
э. д. с. тахогенератора £Вых
прямо пропорциональна скоро-
сти вращения п
Елы^СеФп = С'еп, (7.3)
где
Се = СеФ = const.
Полученное выражение
(7.3) справедливо и для тахо-
генератора с возбуждением по-
стоянными магнитами, где
Ф = const.
Рис. 7.6. Тахогенератор постоянного то-
ка независимого возбуждения:
а — принципиальная схема; б — выход-
ная характеристика
Для измерения скорости вращения тахогенератором вал последнего
механически соединяют с валом механизма, скорость вращения которого
требуется измерить. На выводы тахогенератора подключают измерительный
п^бор со шкалой, градуированной в единицах скорости вращения (об!мин).
Наибольшая измеряемая скорость вращения тахогенератора постоянного
тока составляет приблизительно 10 000 об!мин.
Точность работы тахогенератора определяется его выходной характе-
ристикой, представляющей собой зависимость выходного напряжения от ско-
137
рости вращения Г7ВЫХ =/(п) при неизменной величине сопротивления нагруз-
ки. Наиболее точная работа тахогенератора соответствует прямолинейной
выходной характеристике (рис. 7.6, б, прямая /).
Но практически выходная характеристика тахогенератора не прямо-
линейна (рис. 7.6, б, кривая 2).
Основными причинами нарушения линейной зависимости £/вых=7(л)
являются реакция якоря и падение напряжения в щеточном контакте. Откло-
нение выходных характеристик от прямолинейной в современных тахогене-
раторах постоянного тока невелико и составляет 0,5—3%. Применение изме-
Рис. 7.7. Конструкция тахогенератора типа ТГП-2:
1 — корпус с полюсами; 2 — якорь; 3 — подшипник; 4 — вал; 5 — кожух;
6 — коллектор; 7 — подшипниковый щит; 8— щетки; Р —постоянный магнит
рительных приборов с большим внутренним сопротивлением гп уменьшает
нелинейность выходной характеристики.
Другим важным показателем свойств тахогенератора является крутизна
выходной характеристики, которая представляет собой отношение прира-
щения выходного напряжения к приращению скорости вращения
е _ А^вых
Ал
(7.4)
где е — крутизна выходной характеристики, в/(об/мин);
А ^вых — приращение выходного напряжения, в;
&п — приращение скорости вращения, об/мин.
В процессе работы тахогенераторов крутизна выходной характеристики
может изменяться, что снижает их точность.
Происходит это, главным образом, под действием колебаний темпера-
туры обмотки возбуждения и переходного падения напряжения в щеточном
контакте.
Для ослабления температурного влияния магнитная система тахогене-
ратора при независимом возбуждении делается сильно насыщенной. В этом
случае изменения сопротивления обмотки возбуждения, вызванные колеба-
ниями температуры, хотя и сопровождаются изменениями величины тока
возбуждения, но магнитный поток изменяется весьма незначительно
138
В настоящее время отечественной электропромышленностью изготавли-
ваются тахогенераторы нескольких серий (СЛ; ТД; ТГ), в том числе тахо-
генераторы с возбуждением постоянными магнитами (ТГП). Конструкция
такого тахогенератора представлена на рис. 7.7.
В конструктивном отношении этот тахогенератор отличается от машины
с электромагнитным возбуждением лишь устройствохм магнитной системы,
включающей в себя постоянный магнит. Следует отметить, что магнитные
системы машин с возбуждением от постоянных магнитов отличаются боль-
шим разнообразием (рис. 7.8). Объясняется это тем, что постоянным магни-
там гораздо легче придавать различные конструктивные формы, чем элек-
тромагнитам.
Магнитная система с радиальным расположением магнитов (рис. 7.8, а)
получена путем замены электромагнитов постоянными магнитами, которые
Рис. 7.8. Разновидности магнитных систем с постоян-
ными магнитами:
а — радиальные магниты; б — скобообразные магниты;
в — кольцевой магнит; г — торцовый магнит
припаиваются к станине. Такая конструкция наиболее целесообразна в мно-
гополюсных машинах (2р>2). При 2р=2 остается неиспользованным боль-
шое пространство между полюсами, которое при электромагнитном возбуж-
дении заполняется обмоткой возбуждения. Указанный недостаток отсутствует
в машинах со скобообразными магнитами (рис. 7.8,6). Обычно такая
конструкция используется в двухполюсных машинах. Недостаток этой кон-
струкции — ее сложность. Наиболее простую конструкцию магнитной системе
обеспечивает кольцевой магнит (рис. 7.8, в), получивший в двухполюсных
машинах наибольшее распространение. Площадки у полюсов облегчают
конструкцию, так как материал в этой части магнита практически не исполь-
зуется.
Магнитная система с торцовым магнитом (рис. 7.8, г) обеспечивает
машине минимальный диаметр, но при этом возрастает ее длина.
В качестве материалов для постоянных магнитов применяются магнито-
твердые материалы, обладающие широкой петлей гистерезиса. Наибольшее
распространение для возбуждения электрических машин в настоящее время
имеют сплавы на основе железо—никель—алюминий, являющиеся лучшими
по своим свойствам и экономичности.
139
§ 7.5. Двигатели постоянного тока с печатной обмоткой якоря
Двигатели постоянного тока с печатной обмоткой якоря отличаются от
машин постоянного тока обычной конструкции тем, что якорь этих двига-
телей имеет форму диска, на торцовые поверхности которого печатным спо-
собом нанесена обмотка якоря. Такая конструкция якоря привела к видо-
изменению и других узлов машины. Кроме того, двигатели с печатной
обмоткой мощностью до 200 вт не имеют отдельного коллектора. На рис. 7,9
Рис. 7.9. Конструкция двигателя постоянного тока с печатной обмоткой:
1 — диск якоря; 2—вал; 3— втулка; 4 — обмотка якоря (печатная); 5 —
щеткодержатель со щеткой; 6—постоянные магниты; 7—полюсные нако-
нечники; 8 — стальное кольцо
показана конструкция двигателя с печатной обмоткой якоря. Принцип работы
этого двигателя такой же, что и двигателей с цилиндрическим якорем. При
включении двигателя в сеть ток в обмотке якоря взаимодействует с магнит-
ным полем возбуждения постоянных магнитов, расположенных на статоре
двигателя и обращенных своими полюсными наконечниками к одной стороне
пластмассового диска якоря.
С другой стороны диска расположено кольцо из ферромагнитного мате-
риала. Это кольцо выполняет те же функции, что и сердечник якоря в дви-
гателях обычной конструкции, т. е. является элементом магнитной системы
машины, через который замыкается основной магнитный поток. В двигателях
с печатной обмоткой применяется также и электромагнитное возбуждение.
В этом случае каждый сердечник полюса снабжается полюсной катушкой
возбуждения.
Обмотка якоря, т. е. ее медное изображение, наносится на обе стороны
диска методом травления медной фольги. Для этого обе стороны диска
покрываются медной фольгой требуемой толщины. Затем на поверхность
фольги фотохимическим способом наносится изображение обмотки якоря
в виде защищающего проводники покрытия.
После травления диска раствором хлорного железа устраняется незащи-
щенная часть фольги, а оставшаяся часть фольги образует обмотку якоря.
Соединение частей обмотки, расположенных на противоположных сторонах
диска, осуществляется через отверстия в диске.
Так как секции печатной обмотки одновитковые, а количество секций
в обмотке ограничено площадью поверхности диска, то двигатели с печатной
обмоткой выполняются обычно на низкое напряжение сети.
С целью увеличения мощности двигателя в некоторых конструкциях
140
применяется многодисковое исполнение ротора. В этом случае двигатель
представляет собой совокупность нескольких самостоятельных машин с пе-
чатной обмоткой ротора, собранных в одной магнитной системе, но с несколь-
кими дисковыми роторами, укрепленными на общем валу. В двигателях
такой конструкции мощность может быть доведена до 20 кет.
Наибольшее применение двигатели с печатной обмоткой якоря полу-
чили в автоматике, где они используются в качестве исполнительных дви-
гателей.
Исполнительные двигатели предназначены для преобразования электри-
ческих сигналов в механическое перемещение. К таким двигателям предъяв-
ляется требование малоинерционности. т. е. быстроты воспроизведения
электрического сигнала. Двигатели постоянного тока обычной конструкции
не удовлетворяют этому требованию, так как их якорь включает в себя
сердечник, что значительно повышает момент инерции якоря. В двигателях
с печатной обмоткой якорь не имеет сердечника, что и обеспечивает двига-
телю необходимое быстродействие.
Кроме того, двигатели с печатной обмоткой обладают и другими досто-
инствами. Во-первых, более спокойной коммутацией, чем в двигателях
обычной конструкции, которая практически не сопровождается искрением.
Объясняется это тем, что одновитковые секции обмотки якоря обладают
незначительной индуктивностью, а поэтому реактивная э. д. с., наводимая
в коммутирующих секциях, незначительна по величине. Кроме того, одно-
витковая конструкция секций обмотки способствует ослаблению реакции
якоря, что также благоприятно влияет на процесс коммутации.
Следует также отметить, что конструкция ротора двигателя с печатной
обмоткой способствует снижению уровня шумов, возникающих в процессе
работы электрической машины.
Источниками шумов в машине являются механические и магнитные
колебания. В машинах постоянного тока обычной конструкции эти причины
возникают из-за недостаточно точной балансировки якоря и пульсации
магнитной индукции в зубцовом слое якоря. Но в двигателях с печатной
обмоткой небалансность якоря не вызывает значительных механических
колебаний машины ввиду облегченной конструкции якоря, а пульсации маг-
нитной индукции исключены, так как якорь имеет немагнитную конструкцию.
Наряду с достоинствами двигатели с печатной обмоткой имеют некото-
рые недостатки.
Во-первых, более низкий, чем в двигателях обычной конструкции, к. п. д.
Объясняется это повышенной величиной немагнитного промежутка, который
вкладывается из толщины диска якоря, удвоенной толщины медной фольги
и воздушных зазоров между поверхностями диска и полюсными наконечни-
ками с одной стороны и стальным кольцом с другой стороны диска. Значи-
тельная величина немагнитного промежутка создает большое магнитное
сопротивление потоку возбуждения, что ведет к необходимости увеличения
мощности системы возбуждения. При электромагнитном возбуждении это
приводит к росту электрических потерь в обмотке возбуждения, а следова-
тельно, к снижению к. п. д. машины (см. § 8.1).
Во-вторых, ограниченная долговечность двигателя с печатной обмоткой
якоря без отдельного коллектора. В этих двигателях происходит износ
печатных проводников обмотки якоря за счет истирания их коммутирующи-
ми щетками. Благодаря этому двигатели с печатной обмоткой, имеющие
отдельный коллектор, более долговечны.
Глава VIII
ПОТЕРИ И КОЭФФИЦИЕНТ ПОЛЕЗНОГО ДЕЙСТВИЯ МАШИН
ПОСТОЯННОГО ТОКА
§ 8.1. Виды потерь
В процессе работы электрической машины в ней происходит
преобразование одного вида энергии в другой. При этом часть
энергии, поступающей в машину, рассеивается в отдельных ее
участках, превращаясь в тепло.
В электрической машине существуют три вида потерь: маг-
нитные (потери в стали), электрические (потери в меди) и меха-
нические. Расчет величины каждого вида потерь приводится
ниже.
Магнитные потери вызываются перемагничиванием
участков магнитной цепи машины. Они складываются из потерь
от гистерезиса и потерь от вихревых токов
Рс=Рг+Р**- (8.1)
В процессе работы машины перемагничиваются только
сердечник якоря и зубцовый слой.
Величина магнитных потерь в значительной степени зависит
от значения магнитной индукции и частоты перемагничивания
сердечника якоря f, т. е. скорости вращения, так как
f = Рп
1 60 '
Величина магнитных потерь не зависит от нагрузки машины
и при п = const их можно считать постоянными.
Электрические потери в машине обусловлены на-
гревом обмоток и щеточного контакта. Потери в цепи парал-
лельной обмотки возбуждения
Рэз — (8.2)
Здесь UB — напряжение на зажимах обмотки возбуждения.
Потери в обмотках цепи якоря
Ры — ALz75- (8-3)
Здесь Sr 75 — сопротивление обмоток в цепи якоря, приведенное
к температуре 75°С,
»75 = 2'-1П+*(75°-6J], (8.4)
где Sri — сопротивление обмоток в цепи якоря при температуре
окружающей среды 0ь
142
a — температурный коэффициент, для меди a=0,004 IIград.
Электрические потери имеют место также и в контакте щеток
рщ-(8.5)
Здесь Д(/щ— переходное падение напряжения на щетках, при-
нимается в соответствии с маркой щеток по
табл. 4.2.
Как видно из формул (8.3) и (8.5), величина электрических
потерь в цепи якоря и в щеточном контакте зависит от нагрузки
машины, и поэтому эти потери называют переменными.
Механические потери в машине /?мех складывают-
ся из потерь на трение в подшипниках рп, трение щеток о коллек-
тор рк и потерь на вентиляцию рв:
Рмех = Рп + Рк + Рв.
Все эти потери для данной машины зависят лишь от скорости
вращения якоря, а поэтому при n=const их можно считать
постоянными.
Сумма магнитных и механических потерь составляет потери
холостого хода
Pq — Pc “F Рмех*
(8.6)
Если машина работает в качестве двигателя в режиме хо-
лостого хода, то электрическая мощность на входе машины
= Р о + ^в^в,
Рис. 8.1. Диаграмма пре-
образования мощности в
машине постоянного то-
ка
откуда потери холостого хода
Р q = Р ю UBiB. (8.7)
Таким образом, потери холосто-
го хода могут быть определены экс-
периментально.
Кроме перечисленных потерь, в
машинах постоянного тока имеется
ряд трудно учитываемых потерь,
которые складываются из потерь от
вихревых токов в меди обмоток, по-
терь в уравнительных соединениях,
потерь в стали якоря из-за неравно-
мерного распределения индукции
при нагрузке, потерь в полюсных
наконечниках, обусловленных пульсацией основного потока
вследствие зубчатости якоря и др. Добавочные потери состав-
ляют хотя и небольшую, но не поддающуюся точному учету
величину. Поэтому, согласно ГОСТ 183—66, в машинах без ком-
пенсационной обмотки величину добавочных потерь принимают
143
равной 1% от полезной мощности для генераторов или 1% от
подводимой мощности для двигателей. В машинах с компенса-
ционной обмоткой величина добавочных потерь принимается
равной 0,5%.
Все виды потерь в машине постоянного тока представлены
на диаграмме преобразования мощности (рис. 8.1).
§ 8.2. Коэффициент полезного действия
Коэффициент полезного действия машины постоянного тока
представляет собой отношение полезной мощности Рц к полной
мощности Pi
Определив суммарную мощность вышеперечисленных потерь
Хр = Рс ~Г Рмех + Рэв + Рал + Рт 1“Рд> (8.8)
можно подсчитать к. п. д. машины по одной из следующих фор
мул: для генератора
= w+&> •
для двигателя
„ _ А_ -! S/L
Ъ ~ - иI ~ 1 U1 -
(8.9)
(8.10)
Обычно к. п. д. машин постоянного тока составляет 0,75—0,92
нои к.
п. д. достигает максимального значения.
для машин мощностью до
100 кет и 0,93—0,97 для машин
мощностью свыше 100 кет.
Указанные значения к. п. д. со-
ответствуют номинальной на-
грузке машины. С изменением
нагрузки машины изменяется
ее к. п. д. Эта зависимость вы-
ражается графиком
(рис. 8.2). В режиме холостого
хода к. п. д. машины равен
нулю, так как Р2=0. При уве-
личении нагрузки к. п. д. уве-
личивается сначала быстро,
а затем медленнее; при на-
грузке 0,75—0,85 от номиналь-
Дальнейшее уве-
личение нагрузки сопровождается уменьшением к. п. д., так как
при этом рост электрических потерь, пропорциональных квадра-
ту тока, начинает превышать прирост полезной мощности.
144
Пример. Электродвигатель постоянного тока параллельного возбуждения
имеет следующие данные: напряжение 77=220 в, потребляемый ток /н=63,5 а,
ток возбуждения /в = 1,5 а, сопротивление обмоток в цепи якоря Ей =0,20ом,
в машине применены щетки ЭГ4. Построить график т] =/(/), если потери
холостого хода составляют PQ — рс + рмех “506 вт
Решение. Для получения данных графика рассчитаем потери
при различных значениях тока нагрузки.
Потери при номинальной нагрузке:
электрические потери в цепи возбуждения
Рэъ = = 220 • 1,5 — 330 вт;
электрические потери в обмотках цепи якоря
Рэа ~ /анЬг75,
где /вн = /н — 4 = 63,5 — 1,5 = 62 а;
= ЕГ1 [1 + а (75° — 61)] - 0,2 [1 + 0,004 (75* — 20°)] = 0,245 ом,
тогда
рэа = 62**0,245 = 940 вт;
электрические потери в контакте щеток; для щеток ЭГ4 Л(7Щ = 2 в
(см. табл. 4 2)
рщ — А/Ущ/’ан = 2-62 = 124 вт;
добавочные потери
рл = 0,01 JHU = 0,0b63,5-220 = 140 вт;
суммарная мощность потерь при номинальной нагрузке
= 506 + 330 + 940 + 124 + 140 = 2040 вт = 2,04 кет;
к. п. д. двигателя при номинальной нагрузке
Подсчитаем потери и к. п. д. двигателя при значениях тока нагрузки
0,25; 0,5; 0,75 и 1,25 от /н- Результаты расчета приведены в табл. 8.1.
Таблица 8.1
/ /н 7, а Ро. 6т Рэв, ew Рэа» ™ Рщ* вт Рд* вт 1р, вт %
0,25 15,9 506 330 62 28,8 35 962 72,5
0,50 31,8 506 330 270 60,6 70 1237 83,5
0,75 47,7 506 330 563 92,4 105 1596 85,0
1 63,5 506 330 900 124,0 140 2040 85,5
1,25 79,5 506 330 1545 156,0 170 2712 84,5
Далее строим график ц =/(/). Так как при работе двигателя без на-
грузки ток в его цепи не равен нулю, а составляет величину /0, то график
начинается от точки, сдвинутой вправо от начала координат на ве-
личину '0//н.
Ток холостого хода
7 = 10 = Ро Рэв g— 506 4~ 330 __ о q
° и и 220 ’ ’
тогда отношение /0//н =3,8/63,5=0,06. График т1=/(7) представлен на
рис. 8.2.
10 1649 ^45
РАЗДЕЛ ВТОРОЙ
ТРАНСФОРМАТОРЫ
Глава IX
ПРИНЦИП ДЕЙСТВИЯ и УСТРОЙСТВО ТРАНСФОРМАТОРОВ
§ 9.1. Основные понятия
Трансформатором называется статический электромагнит'
ный аппарат, предназначенный для преобразования одной (пер
вичной) системы переменного тока в другую (вторичную) систе-
му переменного тока, имеющую другие характеристики.
Рис. 9.1. Схема электроснабжения от районной электростанции
Наибольшее применение трансформаторы получили для пре-
образования напряжения в системах передачи электроэнергии
от электростанций к промышленным предприятиям (рис. 9.1).
Известно, что передача электроэнергии на дальние расстоя-
ния осуществляется при высоком напряжении, благодаря чему
значительно уменьшаются потери энергии в линии.
Но так как напряжение непосредственно на выходе электри-
ческих генераторов обычно не превышает 20 кв, то в начале
линии электропередачи устанавливают повышающие трансфор-
маторы, которые повышают напряжение переменного тока до
146
нужной величины. Это напряжение должно быть тем выше, чем
больше протяженность линии электропередачи и больше пере-
даваемая мощность. Например, для передачи мощности порядка
103 Мет на расстояние 1000 км необходимо напряжение около
500 кв.
В местах распределения электроэнергии между потребителя-
ми устанавливают понижающие трансформаторы, которые пони-
жают напряжение до требуемой величины, например до 6 кв
и, наконец, в местах потребления электроэнергии напряжение
еще раз снижается посредством понижающих трансформаторов
до 127, 220 или 380 в и подается непосредственно к электро-
приемникам предприятий и в жилые помещения.
Помимо этого основного применения, трансформаторы ис-
пользуются в различных электроустройствах (нагревательных,
сварочных и т. п.), в устройствах радио, связи, автоматики ит. д.
В зависимости от назначения трансформаторы разделяются
на силовые общего применения и специализированные. Силовые
трансформаторы общего применения используются в системах
передачи и распределения электроэнергии в качестве повышаю-
щих или понижающих.
К специализированным трансформаторам относятся: силовые
специального назначения (печные, выпрямительные, сварочные,
радиотрансформаторы), автотрансформаторы, измерительные
и испытательные трансформаторы, трансформаторы для пре-
образования частоты и т. д.
Трансформаторы разделяются на однофазные и многофаз-
ные, из последних наибольшее применение имеют трехфазные
трансформаторы.
Кроме того, трансформатор может быть двухобмоточным,
если он имеет две обмотки, или многообмоточным, если он имеет
более двух обмоток на каждую фазу.
В зависимости от способа охлаждения трансформаторы раз-
деляются на масляные, погруженные в масло, и сухие, охлаж-
даемые воздухом.
Однако, несмотря на большое разнообразие типов трансфор-
маторов, принцип действия и физические процессы в них, по
существу, одни и те же. Поэтому работу трансформатора сле-
дует рассматривать на основном типе трансформатора, за кото-
рый принят двухобмоточный силовой трансформатор.
§ 9.2. Принцип действия трансформатора
Рассмотрим принцип действия трансформатора на примере
однофазного двухобмоточного трансформатора, конструктивная
схема которого представлена на рис. 9.2. Этот трансформатор
состоит из матнитопровода и двух расположенных на нем обмо-
ток. Одна из обмоток подключается к источнику переменного
1Л7
тока Г на напряжение Ui, эта обмотка называется первичной
К другой обмотке подключают потребитель гн, она называется
вторичной.
Действие трансформатора основано на явлении электромаг-
нитной индукции При подключении первичной обмотки к источ-
Рис 9 2 Однофазный двухобмоточный трансформатор
а — конструктивная схема, б — принципиальная схема
нику переменного тока в витках этой обмотки протекает пере-
менный ток 11, который создает в магнитопроводе переменный
магнитный поток Ф. Замыкаясь в мапнитопроводе, этот поток
сцепляется с обеими обмотками и индуктирует в них э. д с/
в первичной обмотке
г1 = — a>i
dt '
во вторичной обмотке
е, = — w2
йф
ИГ
(9-1)
(9.2)
где ®| и ®2 — число витков в первичной и вторичной обмотках
трансформатора.
При подключении нагрузки zH к выводам вторичной обмотки
трансформатора под действием э. д. с. ег в цепи этой обмотки
создается ток При этом на выводах вторичной обмотки уста-
навливается напряжение U2.
В повышающих трансформаторах U2>Ui, а в понижаю-
щих — U2<Ui.
Из формул (9.1) и (9.2) следует, что э. д с et и е2 могут
отличаться друг от друга из-за числа витков в обмотках. По-
этому, применяя обмотки с требуемым соотношением витков,
можно изготовить трансформатор на любое отношение напря-
жений.
Обмотка трансформатора, подключенная к сети с более вы-
соким напряжением, называется обмоткой высшего напряжения
1 ла
(ВН); обмотка, присоединенная к сети меньшего напряжения,
называется обмоткой низшего напряжения (НН).
Трансформаторы обладают свойством обратимости, один
и тот же трансформатор может быть использован как повышаю-
щий или понижающий Но обычно трансформатор имеет опре-
деленное назначение, либо он является повышающим, либо
понижающим
§ 9.3. Конструкция трансформаторов
На рис 9 3 показано устройство трехфазного силового транс-
форматора Основными частями трансформатора являются его
магнитопровод и об-
мотки. Магнитопровод
трансформатора вы-
полняется из листо-
вой электротехнической
стали при толщине ли-
стов 0,35 или 0,5 мм
Перед сборкой листы
с двух сторон изолиру-
ются лаком Такая кон-
струкция магнитопро-
вода дает возможность
в значительной степени
ослабить в нем вихре-
вые токи Часть магни-
топровода, на которой
располагаются обмот-
ки, называется стерж-
нем (рис. 9.4) Стерж-
ни соединяются между
собой ярмом
В зависимости от
6 7
Рис 9 3 Конструкция трехфазного транс-
форматора типа ТМ 320/6 (мощность
320 ква, напряжение 6 кв)
1 — термометр, 2— ввод обмотки ВН;
3 — ввод обмотки НН, 4—пробка для
залива масла, 5 — маслоуказатель, 6 —
пробка для заливки масла, 7 — расши-
ритель, 8 — магнитопровод, 9 — обмот-
ка НН, 10—обмотка ВН, 11—пробка
для спуска масла, 12 — бак для масла
конструкции магнито-
провода трансформато-
ры разделяются на два
типа: стержневой и
броневой. Наибольшее
распространение полу-
чил стержневой тип
трансформатора (рис.
9.4).
Трансформаторы броневого типа имеют разветвленный маг-
нитопровод (рис 9 5) с одним стержнем и ярмами, частично(
149
прикрывающими («бронирующими») обмотки. В трехфазных
трансформаторах применяют трехстержневой магнитопровод
Конструкция такого магнитопровода представлена на рис 9 6,
здесь три вертикально расположенных стержня связаны между
собой двумя ярмами
В трансформаторах большой мощности применяют броне-
Рис. 9 4. Магнитопровод однофаз-
ного трансформатора стержневого
типа
стержневую конструкцию
магнитопровода (рис.9 7),
которая, хотя и требует
несколько повышенного
расхода электротехниче-
ской стали, но позволяет
уменьшить высоту маг-
нитопровода (Нес < Нс),
а следовательно, умень-
шить и высоту трансфор-
матора. Это имеет боль-
шое значение при его пе-
ревозке в собранном (виде
По способу соединения
стержней с ярмами раз-
личают магнитопроводы
стыковые (рис 9 8, а) и
шихтованные (рис 9 8,6)
В стыковых магнитопро-
водах стержни и ярма
собираются раздельно,
Рис 9 5 Магнитопровод однофаз-
ного трансформатора броневого
типа
Рис 9 6 Стержневой магнитопро
вод трехфазного трансформатора
а затем соединяются посредством крепежных частей.
Такая конструкция магнитопровода облегчает посадку обмоток
на стержни, так как для этого достаточно снять только верхнее
ярмо. Но при шихтовой сборке магнитопровода, когда листы
150
(полосы) собираются «внахлестку», воздушный зазор в месте
стыка стержней и ярем может быть сделан минимальным, что
значительно снизит магнитное сопротивление магнитопровода
Кроме того, механическая прочность шихтованного магнитопрп-
Рис 9 7 Магнитопроводы бронестержневого трансформатора
а — однофазного; б — трехфазного
вода намного выше, чем у стыкового. Все это привело к тому,
что шихтованные магнитопроводы получили в Советском Союзе
основное применение Листы магнитопровода стягиваются по-
Рис 9 8 Сборки магнитопроводов
а — стыковая, б — шихтованная
средством шпилек 1 и накладок 2, изолированных от листов
изоляционными шайбами 3 и трубками 4 (рис. 9.9).
Форма поперечного сечения стержней зависит от мощности
трансформатора (рис 9 10) в небольших трансформаторах при-
меняются стержни прямоугольного сечения, в трансформаторах
средней и большой мощности применяются стержни ступенча-
того сечения с числом ступеней, возрастающим с увеличением
мощности трансформатора. Ступенчатое сечение стержней обес-
печивает лучшее использование площади внутри обмотки, так
как периметр ступенчатого стержня приближается к окруж-
ности.
151
В трансформаторах большой мощности для улучшения теп-
лоотдачи между пакетами стали магнитопровода устраивают
вентиляционные каналы (рис. 9.11).
Обмотки трансформаторов выполняют из проводов круглого
и прямоугольного сечения, изолиро-
ванных хлопчатобумажной пряжей или
кабельной бумагой.
Рис. 9.9 Изоляция
шпильки, стягивающей
листы магнитопровода
Рис 910 Формы сечения стержней
а — прямоугольная, б — ступенчатая
По взаимному расположению обмоток высшего и низшего
напряжений и по способу их размещения на стержнях разли-
чают обмотки концентрические и дис-
ковые (чередующиеся).
Концентрические обмотки выполня-
ют в виде цилиндров (рис. 9.12) и раз-
мещают на стержнях концентрически:
ближе к стержню — обмотка НН, тре-
бующая меньшей электрической изоля-
Рис. 9.12 Цилиндри-
ческая двухслойная
обмотка НН
Рис 9 11 Стержни с вентиляционными
каналами*
а — каналы, параллельные плоскости
листа, б — каналы, перпендикулярные
плоскости листа
ции от стержня, затем идет слой изоляции из картона или бу-
маги и обмотка ВН (см. рис. 9.4).
В дисковых обмотках дискообразные катушки НН и ВН
размещаются на стержнях в чередующемся порядке. Дисковые
152
обмотки в сравнении с концентрическими более трудоемки в из-
готовлении и механически менее прочны. Поэтому преимуще-
ственное распространение в трансформаторах получили кон-
центрические обмотки.
В масляных трансформаторах магнитопровод с обмотками
Рис. 9 13. Радиаторный бак с дутьевым
охлаждением:
1 — двойной трубчатый радиатор, 2 —
вентилятор
помещен в бак, наполненный трансформаторным маслом, ко-
торое, омывая обмотки и магнитопровод, отбирает от них тепло
и через стенки бака и трубы радиатора отдает в окружающую
среду. Кроме того, наличие масла обеспечивает более надежную
работу высоковольтных трансформаторов, так как электриче-
ская прочность масла намного выше, чем воздуха.
153
Для увеличения охлаждаемой поверхности бака применяют
трубчатые баки. Дальнейшее усиление охлаждения достигается
применением радиаторных баков с дутьевым охлаждением ра-
диаторов (рис. 9.13). Для компенсации объема масла при изме-
нении температуры, а также для защиты масла трансформатора
от окисления и увлажнения при контакте с воздухом в транс-
форматорах мощностью свыше 50 ква при напряжении свыше
6 кв применяется расширитель. Расширитель представляет собой
цилиндрический сосуд, установленный на крышке бака и сооб-
щающийся с ним. Колебания уровня масла с изменением его
температуры происходит не в баке, который всегда заполнен
маслом, а в расширителе, сообщающемся с атмосферой.
В процессе работы трансформаторов не исключена возмож-
ность возникновения в них явлений, сопровождающихся бурным
выделением газов, что ведет к значительному увеличению дав-
ления внутри бака. Поэтому во избежание повреждения баков
трансформаторы мощностью 1000 ква и выше снабжаются вы-
хлопной трубой, которая устанавливается на крышке бака. Ниж-
ним концом труба сообщается с баком, а ее верхний конец за-
канчивается фланцем, на котором укреплен стеклянный диск.
При давлении, превышающем безопасное для бака, стеклянный
диск лопается и газы выходят наружу.
Трансформаторы средней и большой мощности снабжаются
газовым реле. При возникновении в трансформаторе значитель-
ных повреждений, сопровождаемых обильным выделением газов
(например, при коротком замыкании между витками обмоток),
газовое реле срабатывает и замыкает контакты цепи управления
выключателя. В результате трансформатор отключается от сети.
Вывод концов обмоток из бака осуществляется посредством
выводных изоляторов, которые чаще всего выполняются из фар-
фора и монтируются на крышке бака.
На трансформаторах имеется табличка, где указано сле-
дующее:
1) номинальная мощность трансформатора в киловольт-
амперах;
2) линейные напряжения в вольтах или киловольтах;
3) линейные токи при номинальной мощности;
4) частота;
5) число фаз;
6) схема и группа соединения обмоток;
7) напряжение короткого замыкания;
8) способ охлаждения;
9) режим работы: длительный и кратковременный.
На табличке также указаны: завод-изготовитель, вес транс-
форматора, заводской номер.
154
Глава X
ФИЗИЧЕСКИЕ ОСНОВЫ РАБОЧЕГО ПРОЦЕССА ТРАНСФОРМАТОРА
§ 10.1. Предварительные замечания
В настоящей главе изложены физические основы рабочего
процесса силовых трансформаторов общего применения, т. е.
трансформаторов, предназначенных для преобразования напря-
жения переменного тока при неизменной частоте. При этом сна-
чала рассматриваются процессы работы на примере однофаз-
ного трансформатора, а затем излагаются особенности работы
трехфазных трансформаторов. Следует отметить, что основы
рабочего процесса однофазного и трехфазного трансформаторов
в принципе не отличаются друг от друга. Однако принятый
порядок несколько облегчает изложение вопроса.
§ 10.2. Уравнение электродвижущих сил
Основной магнитный поток Ф в магнитопроводе трансфор-
матора сцеплен с витками обмоток wi и (рис. 10.1), благо-
даря чему в них наводятся э. д. с.
t/Ф
Wi dt ; в2~™2 dt ’
Рис. 10.1. К понятию о магнитных пото-
ках рассеяния
Предположим, что магнитный поток Ф является синусоидаль-
ной функцией времени, т. е.
Ф = Фмакс SIH <»t, (10.1)
где ФмаКс — максимальное значение потока. Тогда, подставив
выражение (10.1) в формулу э. д. с. ei и дифференцируя, получим
ег = — шО^фмакс cos ю/. (Ю.2)
155
Но так как
то
По аналогии
1 ‘ I 2 71
COS(O/ = — sin I (Of---~
\ £
<?! = Ш^Фмакс Sin (to/ —
e-> = <1>а>2Фмакс Sin I ш1 —
(10.3)
(Ю.4)
Из полученных формул (10.3) и (10.4) следует, что э. д. с.
ei и е2 отстают по фазе от потока Ф на угол Максимальное
значение э. д. с. <?i равно
•^1 макс — «иК^Фмакс. (10.5)
Разделив величину ^макснаКЗ и подставив <*> = 2-тг/, по-
лучим формулу действующего значения э. д. с. ег
El = gl.^c = = 4,44^/Фмакс, (Ю.6)
где Фмакс выражено в веберах, a Et — в вольтах.
Аналогично для вторичной э. д. с.
Е2 = 4,44йУ2/Фмакс. (10.7)
Отношение э. д. с. обмотки высшего напряжения к э. д. с.
обмотки низшего напряжения называется коэффициентом транс-
формации
Подставив вместо э. д. с. Е\ и Е2 их значения по формулам
(10.6) и (10.7), получим
К = -^-= (10.8)
Е2 w2
Токи А и /2 в обмотках трансформатора, помимо основного
потока Ф, создают магнитные потоки рассеяния Фрх и Фр2.
Каждый из этих потоков сцеплен лишь с витками собствен-
ной обмотки и индуктирует в ней э. д. с. рассеяния: в первич-
ной обмотке £р1, а во вторичной —грг- Действующие значения
этих э. д. с. пропорциональны соответствующим токам в Об-
мотках:
^pi —
£р2 = ^2/*2>
(10,9)
156
где и х2 — индуктивные сопротивления рассеяния первичной
и вторичной обмоток, ом.
Знаки минус в выражениях (10.9) свидетельствуют о реак-
тивном характере э. д. с. рассеяния.
Таким образом, в каждой обмотке трансформатора индукти-
руется основная э. д. с. и э. д. с. рассеяния.
Рассмотрим действие этих э. д. с. в обмотках трансформа-
тора.
В первичной обмотке э. д. с. £*1 представляет собой
э. д. с. самоиндукции, а поэтому она направлена против пер-
вичного напряжения т. е. находится с ним в противофазе.
В связи с этим уравнение э. д. с. для первичной обмотки имеет
вид
<Л=(- ^) + (-
ИЛИ
+ + (10.10)
Произведение Цгг представляет собой активное падение на-
пряжения в первичной обмотке.
Выражение (10.10) является уравнением равновесия э. д. с.,
согласно которому напряжение Ut уравновешивается суммой
противодействующих э. д. с.
Обычно напряжения Iijxx и 1\Г\ невелики, а поэтому, с не-
которым приближением, можно считать, что подведенное
к трансформатору напряжение Vi уравновешивается э. д. с. £i,
Во вторичной обмотке ток h замкнутой цепи зави-
сит от величины э. д. с. £2, которая в значительной части идет
на создание напряжения на выводах вторичной обмотки
0а = /А.
Оставшаяся часть э. д. с. £2 идет на компенсацию э. д. с.
рассеяния и активного падения напряжения во вторичной об-
мотке /2^2- Таким образом, уравнение э. д. с. для вторичной цепи
Ё2 — Uг 4* (— £Рз) + А/2*
или
(10.11)
§ 10.3. Уравнение намагничивающих сил
Предположим, что трансформатор находится в режиме хо-
лостого хода (рис. 10.2, а), т. е. к зажимам его первичной об-
мотки подведено напряжение Ui, а вторичная обмотка разомк-
нута (Z2=0).
157
Ток /о в первичной обмотке при этих условиях называется
током холостого хода. Намагничивающая сила, созданная этим
током /о^ь наводит в магнитопроводе трансформатора основной
магнитный поток, максимальное значение которого определяет-
ся выражением
Фмакс = (10.12)
Км
где —магнитное сопротивление магнитопровода.
При замыкании вторичной обмотки на нагрузку ZH
(рис. 10.2, б) в ней возникает ток 12. При этом ток в первичной
обмотке увеличивается до значения
Рис. 10.2. Однофазный трансформатор в режиме хо-
лостого хода (а) и в режиме нагрузки (б)
Теперь поток Фмакс создается действием двух н. с.: /iWi и /2гг2
Фмакс = . (10.13)
Дм
Но величину потока Фмакс можно также определить ИЗ
выражения (10.6)
ф — ___
Фмакс — 444Wif
или, принимая во внимание, что йг = (— jEj), получим
(10-14)
Из выражения (10.14) следует, что основной поток Фмакс не
зависит от нагрузки трансформатора, так как напряжение U\
во всем диапазоне нагрузки трансформатора остается неизмен-
ным. Этот вывод дает право приравнять выражения (10.12)
и (10.13)
AeL/2" = + j/2", (10Д5)
Км Км
или
/qWy = + /2ш2.
158
Здесь IqW\—намагничивающая сила, необходимая для со-
здания в магнитопроводе трансформатора
основного магнитного потока.
Выражение (10.15) представляет собой уравнение намагни-
чивающих сил трансформатора. Из этого уравнения следует, что
сумма намагничивающих сил первичной 1\W\ и вторичной /2^2
обмоток равна постоянной величине — намагничивающей силе
холостого хода 1^.
Разделив обе части равенства на Wi, получим
J 1 J _т
1 2 °’
ИЛИ
л + = (юлб>
где /Z2 = hwzlwx — вторичный ток, приведенный к числу витков
первичной обмотки, т. е. ток, который в обмотке с числом вит-
ков W\ создает такую же н. с., что и ток /2 во вторичной об-
мотке (/Z2Wi=/2^2)-
Из (10.16) получаем выражение
Л = Л> + (-ЛЛ (Ю.17>
называемое уравнением токов трансформатора. Из этого урав-
нения следует, что первичный ток /1 можно рассматривать как
сумму двух составляющих: одна из них (/0) создает основной
магнитный поток, а другая (—/'2) компенсирует размагничи-
вающее действие вторичного тока.
Физически это объясняется следующим.
Так как э. д. с. вторичной обмотки £2 представляет собой
э. д. с. взаимоиндукции, то ток /2, созданный этой э. д. с. при
подключении нагрузки, в соответствии с правилом Ленца, ока-
зывает размагничивающее влияние на магнитопровод трансфор-
матора. Другими словами, ток /2 создает н. с. /2w2, направлен-
ную встречно н. с. первичной обмотки /о^ь
Но так как основной магнитный поток в магнитопроводе
остается практически неизменным, то размагничивающее дей-
ствие вторичного тока вызывает увеличение первичного тока до
значения превышающего ток Iq на величину (—Г2), необхо-
димую для компенсации размагничивающего действия вторич-
ного ТОКа /оШ1 = Л^1+/2^2 = /о^1+ (’“//2)йУ1+/2^2 = /о^1.
Таким образом, любое изменение величины тока во вторич-
ной цепи трансформатора сопровождается . соответствующим
изменением первичного тока.
Вследствие перемагничивания стали в магнитопроводе транс-
форматора возникают магнитные потери энергии от гистерезиса
и вихревых токов. Мощность этих потерь эквивалентна активной
159
Рис. 10.3. Разложение
тока холостого хода на
составляющие
составляющей тока холостого хода. Следовательно, ток.._холо-
стого хода наряду с реактивной составляющей 1Пр, создающей
основной магнитный поток, имеет еще и активную составляю-
щую /Оа
/0==K/ga + /o2p. (10.18)
Обычно активная составляющая /Оа не превышает 10% от
тока /0 и поэтому оказывает незна-
чительное влияние на величину это-
го тока. На рис. 10.3 представлена
векторная диаграмма, на которой
показаны векторы тока холостого
хода и его составляющих. Угол 6,
на который вектор основного маг-
нитного потока Фмакс отстает по
фазе от тока холостого хода
/о, называется углом магнитных по-
терь. Нетрудно заметить, что этот
угол увеличивается с ростом актив-
ной составляющей тока холостого
хода /Оа» т. е. с ростом магнитных потерь в магнитопроводе.
Величина тока холостого хода-в трансформаторах большой
и средней мощности соответственно составляет 2—10% от но-
минального первичного тока. Поэтому при нагрузке близкой
к номинальной, пренебрегая величиной тока /0 (10.16), можно
записать
1
w2
TS)r *
или
= (10.19)
/2 ИУ1
т. е. токи в обмотках трансформатора обратно пропорциональны
числам витков этих обмоток: величина тока больше в обмотке
с меньшим числом витков и наоборот. Этим объясняется то, что
обмотки низшего напряжения выполняются проводом большего
сечения, чем обмотки высшего напряжения, имеющие большее
число витков.
§ 10.4. Приведенный трансформатор
В общем случае параметры первичной обмотки трансформа-
тора отличаются от параметров вторичной обмотки. Эта разница
наиболее ощутима при больших коэффициентах трансформации,
что затрудняет расчеты и особенно построение векторных
диаграмм, так как в этом случае векторы электрических вели-
чин первичной обмотки значительно отличаются по своей длине
160
от одноименных векторов вторичной обмотки. Указанные за-
труднения устраняются приведением всех параметров транс-
форматора к одинаковому числу витков, обычно к числу витков
первичной обмотки W\. С этой целью все параметры вторичной
обмотки пересчитывают на число витков wi.
Таким образом, вместо реального трансформатора с коэффи-
. „ и>1
циентом трансформации К — — получают эквивалентный транс-
1£>t ^2
форматор с К. = —= 1, где w'2 = wi. Такой трансформатор на-
ге»2
зывается приведенным. Однако указанное приведение парамет-
ров трансформатора не должно отразиться на его энергетиче-
ских показателях: все мощности и фазовые сдвиги параметров
вторичной обмотки приведенного трансформатора должны
остаться такими, как и в реальном трансформаторе.
Так, например, электромагнитная мощность вторичной об-
мотки реального трансформатора Е212 должна быть равна элек-
тромагнитной мощности вторичной обмотки приведенного транс-
форматора
Е2/2 = Е212. (10.20)
Подставив значение приведенного вторичного тока ' 2=Л^
в (10.20), получим формулу приведенной вторичной э.’ д. с.
£2 = Af=A^£2 = £®l. (10.21)
/2 2 /2 2
Аналогично определяется приведенное напряжение вторичной
обмотки: так как
i/2/2=c/;4
то
U2 = U2^L. (10.22)
i W2
Из условия равенства потерь в активном сопротивлении вто-
ричной обмотки имеем
/‘Z2 А ^2-
Определим приведенное активное сопротивление
И 1649
161
Приведенное индуктивное сопротивление рассеяния вторич-
ной обмотки определяется из условия равенства реактивных
мощностей
/2^2 === /2^2»
откуда
х* = Х2(-|г)2- <10-24>
Приведенное полное сопротивление вторичной обмотки транс-
форматора
(r2 + jx2) = Z2 . (10.25)
Приведенное полное сопротивление нагрузки, подключенной
на выводы вторичной обмотки, определим по аналогии с Z'2
(10.25)
z;=zHf-^-). (ю.26)
\ /
Уравнения э. д. с. и токов для приведенного трансформатора
имеют вид
I?! = (— Ё1) 4- = (— Ёг) + /JxY + Iir\\ ]
1/; = £2-Лг2 = ^-/2/Х2-/2Г2; ) <ю.27>
Л = /о + (-А). I
§ 10.5. Электрическая схема замещения трансформатора
Еще одним средством, облегчающим исследование электро-
магнитных процессов и расчет трансформаторов, является при-
менение электрической схемы замещения приведенного транс-
форматора, в которой магнитная связь между цепями заменена
электрической.
На рис. 10.4, а представлена эквивалентная схема приведен-
ного трансформатора, на которой сопротивления г и х условно
вынесены из соответствующих обмоток и включены последова-
тельно им. Как было установлено (§ 10.4), в приведенном транс-
форматоре К—1, а поэтому первичная и вторичная э. д. с. в этом
трансформаторе равны (Е^Е'г). Поэтому точки А и а, а также
точки X и х на приведенном трансформаторе имеют одинаковые
потенциалы, что позволяет электрически соединить указанные
точки, получив Т-образную схему замещения приведенного
трансформатора (рис. 10.4,6). Эта схема удовлетворяет уравне-
ниям э. д. с. и токов приведенного трансформатора (10.27)
162
и представляет собой совокупность трех ветвей: первичной —
с сопротивлением Zx = r\+jx\ и током Л; намагничивающей —
с сопротивлением Zo=ro+/Xo и током /о и вторичной — с сопро*
тивлением Z'2 = r'2+jx'2 и током — Г2. Изменением величины
сопротивления нагрузки ZH на схеме замещения могут быть вос-
произведены все режимы работы трансформатора.
а)
Ц
б)
Я/4 А Г9
X х
I
к
h-irK
Рис. 10.4. Приведенный трансформатор:
а — эквивалентная схема; б — схема замещения
Все параметры схемы замещения, за исключением ZH, яв-
ляются постоянными величинами и могут быть определены из
опыта холостого хода (см. § 11.1) и опыта короткого замыкания
(см. § 11.2).
§ 10.6. Векторная диаграмма трансформатора
Воспользовавшись схемой замещения приведенного транс-
форматора и основными уравнениями э. д. с. и токов (10.27),
построим векторную диаграмму трансформатора, которая на-
глядно показывает соотношения между токами, э. д. с. и напря-
жениями трансформатора.
Векторная диаграмма является графическим выражением
основных уравнений приведенного трансформатора (10.27).
Построение диаграммы следует начинать с вектора мак-
симального значения основного магнитного потока Фмаке
(рис. 10.5, а)
*макс 4)44/да1 •
Вектор тока /0 опережает по фазе Фмакс на угол 8. Э. д. с-
Д и Д отстают по фазе от потока Фмакс на угол 90° [(10.3)
11* 163
и (10.4)]. Далее строим вектор Л. Для определения угла
сдвига фаз между Ё2 и /2 следует знать характер нагрузки.
Предположим, что нагрузка трансформатора активно-индуктив-
ная. Тогда вектор Д отстает по фазе от Ё'2 на угол ф2
. . Х2 + хн
ф2 = arctg---.
f2 + fa
Для построения вектора вторичного напряжения U2 необ-
ходимо из вектора э. д. с. Е'2 вычесть векторы падений на-
Рис. 10.5. Векторные диаграммы трансформатора при актив-
но-индуктивной (а) и активно-емкостной (б) нагрузках
пряжения ji2x'2 и I2r2. С этой целью из конца вектора Ё2
опускаем перпендикуляр на направление /2 и откладываем на
нем вектор — jl'2x2. Затем проводим прямую, параллельную /2
и на ней откладываем вектор — / гг2. Построив вектор — l2Z2,
получаем треугольник внутренних падений напряжения во вто-
ричной цепи. Затем из точки О проводим вектор U’2 = Ё2 — hZ2,
который опережает Г2 на угол <р2 = arctg .
Гн
161
Вектор первичного тока строим как векторную сумму
/1=/о+(— /'2). Вектор —/'2 проводим из конца вектора 10,
противоположно вектору /'г. Для построения вектора U\ вос-
пользуемся уравнением
= + + Vi-
К вектору —Ei, опережающему ФМакс на 90°, прибавляем
векторы внутренних падений напряжения первичной обмотки:
вектор 1\Г\, параллельный току 7Ь и вектор jliXi, опережающий
вектор тока 1\ на угол 90°. Соединив точку О с концом вектора
/jZi, получим вектор Ui, который опережает по фазе Л на
угол фь
Иногда векторную диаграмму трансформатора строят с целью
определения э. д. с. обмоток.
В этом случае заданными являются параметры вторичной
обмотки: 0,; /2 и cosip2. Зная , определяют U2 и Д*
а затем строят векторы этих величин под фазовым углом фг
друг к другу. Вектор э. д. с. ЕГ2=Ё\ получают геометрическим
сложением вектора напряжения t/'2 с падениями напряжения
во вторичной обмотке
Ё? = U2 + jhx2 -{• /2Г2.
В случае активно-емкостной нагрузки векторная диаграмма
трансформатора имеет вид, показанный на рис. 10,5, б. Порядок
построения диаграммы остается прежним, но вид ее несколько
изменяется. Ток Г2 в этом случае опережает по фазе э. д. с. Ё'2
на угол ф2
ф2 = arctg -- , . (10.28)
/*2 + Гн
При значительной емкостной нагрузке трансформатора паде-
ние напряжения в емкостной составляющей сопротивления
нагрузки и индуктивное падение напряжения рассеяния во вто-
ричной обмотке частично компенсируют друг друга. В резуль-
тате напряжение может оказаться больше, чем э. д. с. Е'%.
Кроме того, реактивная (опережающая) составляющая вторич-
ного тока
/2р = /2 sin ф2
совпадает по фазе с реактивной составляющей тока холостого
хода /ор, т. е. оказывает на магнитопровод трансформатора под-
магничивающее действие (рис. 10.5,6).
165
Это ведет к уменьшению первичного тока 1\ по сравнению
с его величиной при активно-индуктивной нагрузке, когда со-
ставляющая /'ар оказывает размагничивающее влияние (см.
рис. 10.5, а).
§ 10.7. Трехфазный трансформатор
Трансформирование трехфазной системы напряжений можно
осуществить тремя однофазными трансформаторами, соединен-
ными в трансформаторную группу (рис. 10.6,а). Однако отно-
сительная громоздкость, боль-
шой вес и повышенная стои-
мость являются недостатками
трансформаторной группы. По-
этому она применяется только
в установках большой мощно-
сти с целью уменьшения веса
и габаритов единицы оборудо-
вания, что важно при его
монтаже и транспортировке.
В установках мощностью
примерно до 60 000 ква обыч-
но применяются трехфазные
трансформаторы (рис. 10.6,6),
у которых обмотки расположе-
ны на трех стержнях, объеди-
ненных в общий магнитопро-
вод двумя ярмами. Но по-
лученный таким образом маг-
нитопровод является несиммет-
ричным.
Рис. 10.6. Трансформаторная
группа (а) и трехфазный
трансформатор (б)
Магнитное сопротивление
потоку средней фазы Фв меньше магнитного сопротивления по-
токам крайних фаз Фд и Фс (рис. 10.7, а).
Так как к первичным обмоткам трехфазного трансформатора
подводится симметричная система напряжений (7д, Ub п U с, то
в магнитопроводе трансформатора возникают магнитные потоки
Фд, Фв и Фс, образующие также симметричную систему
(рис. 11.7,6). Однако вследствие магнитной несимметрии маг-
нитопровода, намагничивающие токи отдельных фазных обмоток
не равны: намагничивающие токи крайних фаз (/од и 1ос) боль-
ше тока средней фазы (/ов). Кроме того, токи крайних фаз 10а
и 1ос оказываются сдвинутыми по фазе относительно соответ-
ствующих потоков Фд и Фс на угол а. Таким образом, при
симметричной системе трехфазного напряжения, подведенного
к трансформатору, токи холостого хода образуют несимметрич-
ную систему (рис. 10.7, в).
166
Для уменьшения магнитной несимметрии трехстержневого
магнитопровода, т. е. уменьшения магнитного сопротивления
потокам крайних фаз, сечение ярем делают на 10—15% больше
сечения стержней, что уменьшает их магнитное сопротивление.
Рис. 10.7. Трехстержневой магнитопровод и векторные
диаграммы:
а — трехстержневой магнитопровод; б — магнитные
потоки, образующие симметричную систему; в — токи
холостого хода, образующие несимметричную систему
Несимметрия токов холостого хода трехстержневого транс-
форматора практически не отражается на работе трансформа-
тора, так как даже при небольшой нагрузке различие в вели-
чинах токов /д, /в и /с практически не проявляется.
Рассмотренные выше уравнения э. д. с., намагничивающих
сил и токов, а также схема замещения и векторные диаграммы
могут быть использованы для исследования работы каждой
фазы трехфазного трансформатора.
Обмотки фаз трехфазного трансформатора можно соединять
либо звездой, либо треугольником.
Например, на рис. 10.6, б они соединены звездой. Более
подробно вопрос соединения обмоток рассматривается в § 12.2.
§ 10.8. Явления, возникающие при намагничивании
трансформаторов
Допустим, что к первичной обмотке трансформатора подве-
дено синусоидальное напряжение. При этом поток в магнитопро-
воде также будет синусоидальным
Ф — Фмакс S1H Cl)/.
Однако вследствие магнитного насыщения магнитный поток
трансформатора не пропорционален намагничивающему току.
Поэтому при синусоидальном потоке Ф намагничивающий ток
/ор является несинусоидальным. Для определения формы кривой
тока воспользуемся кривой намагничивания магнито-
провода и графиком изменения потока Ф=/(/).
167
На рис. 10.8, а. приведено построение графика намагничи-
вающего тока zop Здесь в левом верхнем квадранте пока-
зана синусоидальная кривая Ф=/(/), а в верхнем правом
квадранте — кривая намагничивания <D=f(top) материала маг-
нитопровода. Для получения графика намагничивающего тока
холостого хода /ор=/(0> расположенного в правом нижнем
Рис. 10 8 Построение кривой намагничивающего тока (а)
и разложение ее на составляющие (б)
квадранте, поступают следующим образом. На графике
выбирают ряд точек (/, 2, 3), проектируют их на кривую намаг-
ничивания и определяют значения намагничивающего тока, со-
ответствующие выбранным значениям магнитного потока. Затем
проводят вертикальные линии через точки 1, 3 и 2 на оси zOp
в правый нижний квадрант до пересечения с горизонтальными
линиями, проведенными из точек 1, 2, 3 на оси времени этого
квадранта, и получают геометрическое место точек кривой на-
магничивающего тока zOp Из сделанных построений
видно, что при синусоидальной форме кривой Ф=7(/) намагни-
чивающий ток имеет пикообразную форму. В целях упроще-
ния построений мы воспользовались кривой намагничивания
Ф=/(;Ор), построенной без учета гистерезиса.
После разложения кривой тока /Ор на составляющие
(рис. 10.8,6) видим, что в этом токе, кроме основной (первой)
гармоники гОр1 ярко выражена третья /Орэ- Так, например,
в трансформаторе с магнитопроводом из высоколегированной
стали при индукции В = 1,4 тл третья гармоника составляет при-
мерно 30% от основной гармоники намагничивающего тока.
Сказанное относится лишь к реактивной составляющей тока
холостого хода, так как активная составляющая zOa является
синусоидальной. Но /Оа обычно не превышает 10% от тока хо-
лостого хода, поэтому с некоторым приближением можно при-
168
нять, что кривая тока холостого хода не отличается от кривой
<ор=/(0. представленной на рис. 10.8,6.
В общем случае э. д. с. и токи трехфазной обмотки несинусо-
идальны и, помимо основной (первой) гармоники, содержат
высшие гармонические, из которых наибольшее значение имеет
третья гармоника, частота которой f3 = 3fi. Для э. д. с. третьей
гармоники можно записать уравнения
еАз = £3макс Sin 3<йГ, ]
евз = Д3макс Sin 3 (о)/ — 120°) = ^змакс sin3W; | (10.29)
есз = £8макс51пЗН 4-120 ) — Д3макс sin Зо>/. I
st, что э. д. с. третьей гармоники
дют по фазе.
гармоники на работу трехфазного
Рис. 10 9. Направление токов
(э. д с.) третьей гармоники в об-
мотках трансформатора при сое-
динениях звездой (а) и треуголь-
ником (б)
Из этих уравнений следу
во всех фазах равны и совпа;
Влияние э. д. с. третьей
трансформатора зависит от
схемы соединения его обмо-
ток.
Если первичные обмотки
трехфазного трансформато-
ра соединены звездой, то
фазные э. д. с. третьей гар-
моники не создают линейной
э. д, с. третьей гармоники.
Объясняется это тем, что
при соединении звездой ли-
нейные э. д. с. равны раз-
ности соответствующих фаз-
ных э. д. с. А так как фаз-
ные э. д. с. третьей гармони-
ки во всех фазах совпадают
по направлению и в любой момент времени направлены к нуле-
вой точке или от нее (рис. 10.9, а), то разность любой пары
этих э. д. с. равна нулю. Так как третьи гармоники отсутствуют
в линейной э. д. с., то их нет и в линейном напряжении, а сле-
довательно, их нет в линейном (и фазном) токе. Отсутствие
третьей гармоники в кривой тока холостого хода искажает кри-
вую магнитного потока. Магнитный поток в магнитопроводе ста-
новится несинусоидальным (рис. 10.10) и содержит третью гар-
монику Ф3.
Потоки третьей гармоники не могут замыкаться в магнито-
проводе, так как они совпадают по фазе, т. е. направлены
встречно Эти потоки замыкаются через воздух (масло) и метал-
лические стенки бака (рис. 10.11). Большое магнитное сопро-
тивление потоку Ф3 ослабляет его величину. Поэтому на прак-
тике поток Ф3 учитывают лишь с точки зрения потерь от вихре-
вых токов, индуктируемых этим потоком в стенках бака.
169
Так, например, при индукции в стержне магнитопровода порядка
1,4 тл потери в баке от вихревых токов составляют около 10%
от потерь в магнитопроводе, а при индукции 1,6 тл эти потери
возрастают до 50—65%. Что же касается влияния этого потока
на величину и форму э. д. с., индуктируемых в обмотках трех-
Рис. 10.10. Построение кривой маг-
нитного потока при синусоидаль-
ной форме намагничивающего то-
ка
фазного трансфор-
матора, то оно не
имеет практического
значения.
При соединении
первичных обмоток
трехфазного транс-
Рис. 10 11 Третьи
гармоники магнитно-
го потока в трех-
стержневом магнито
проводе
форматора треугольником э. д. с. третьей гармоники, действуя
согласно во всех трех фазных обмотках, создает ток третьей
гармоники в замкнутом контуре этих обмоток (см. рис. 10 9,6).
Но если в токе холостого хода имеется третья гармоника, то
форма кривой магнитного потока, а следовательно, и кривых
первичной и вторичной э. д. с., приближается к синусоиде.
§ 10.9. Переходные процессы в трансформаторах
До сего времени рассматривалась работа трансформаторов
в установившемся режиме, когда значения токов, напряжений,
э. д. с. и магнитных потоков остаются длительное время неиз-
менными.
При переходе трансформатора из одного установившегося
режима к другому возникают переходные процессы. Так как
каждый установившийся режим характеризуется определенным
значением энергии электромагнитных полей, то в течение пере-
ходного процесса происходит изменение энергии этих полей.
Это сопровождается возникновением в магнитопроводе транс-
170
форматора магнитного потока переходного процесса, а в обмот-
ках— появлением бросков тока и перенапряжений.
Наибольший практический интерес представляют переход-
ные процессы при включении трансформатора и при коротком
замыканий на зажимах вторичной обмотки.
Рис. 10.12. Графики переходных процессов в трансформаторе
а — при включении трансформатора, б—при внезапном коротком за
мыкании
При включении трансформатора в сеть ре-
зультирующий поток можно рассматривать как сумму трех со-
ставляющих
Ф“Фуст “Ь Фпер ± Фост»
где Фуст— магнитный поток установившийся;
Фпер— магнитный поток переходного процесса;
Фост— магнитный поток остаточного магнетизма, который
может быть направлен согласно с установившимся
потоком (знак «плюс») или встречно ему (знак
«минус»).
Магнитный поток переходного процесса является затухаю-
щим и постоянным по направлению.
Наиболее благоприятный случай включения трансформатора
в сеть будет при потоке остаточного магнетизма, направленном
встречно установившемуся потоку, и при мгновенном значении
первичного напряжения Ui=0. При этом магнитный поток уста-
новившийся Фуст будет максимальным, так как он отстает по
фазе от напряжения на угол приблизительно 90° (рис. 10.12,а).
Магнитный поток Ф достигает наибольшего значения приблизи-
тельно через половину периода после включения трансформа-
тора. Если магнитопровод трансформатора ненасыщен, то в мо-
мент включения трансформатора в первичной обмотке появится
171
намагничивающий ток, пропорциональный магнитному потоку.
Если же магнитопровод трансформатора насыщен, то при вклю-
чении трансформатора намагничивающий ток включения дости-
гает более значительного броска. Из построений, сделанных на
кривой намагничивания (рис. 10.13), видно, что при магнитном
потоке, превышающем в два раза уста-
новившееся значение (Ф = 2Фуст), на-
магничивающий ток включения дости-
гает величины во много раз превыша-
ющей установившегося значения тока
холостого хода (/1ВКл >/Ор)- При наи-
более неблагоприятных условиях ток
включения может в 6—8 раз превы-
сить номинальное значение первично-
го тока.
Рис. 10.14. Разрушение
обмоток трансформатора
при коротком замыка-
нии
Рис. 10.13. Определение величины тока
включения трансформатора по кривой
намагничивания
Так как длительность переходного процесса невелика и не
превосходит нескольких периодов, то ток включения не пред-
ставляет опасности непосредственно для трансформатора. Но
этот ток следует учитывать при регулировке аппаратуры защи-
ты, чтобы в момент включения трансформатора не произошло
его неправильное отключение от сети. Бросок тока включения
следует также учитывать при наличии в цепи первичной обмот-
ки трансформатора чувствительных измерительных приборов. Во
избежание поломки этих приборов нужно до включения транс-
форматора в сеть шунтировать их токовые обмотки.
Внезапное короткое замыкание на зажи-
мах вторичной обмотки трансформатора
возникает из-за различных неисправностей: механического по-
вреждения изоляции или ее электрического пробоя при перена-
пряжениях, ошибочных действий обслуживающего персонала
и т. п. Короткое замыкание — это аварийный режим и может
привести к разрушению трансформатора.
При внезапном коротком замыкании на зажимах вторичной
обмотки в трансформаторе возникает переходной процесс, кото-
рый сопровождается возникновением большого мгновенного
тока короткого замыкания iK. Этот ток можно рассматривать
172
как результирующий двух токов: установившегося тока корот-
кого замыкания iK уст и тока переходного процесса iK пер, по-
стоянного по направлению, но убывающего по экспоненциаль-
ному закону
/к = /к уст “Ь /к пер-
Наиболее неблагоприятные .условия короткого замыкания
могут быть в момент, когда мгновенное значение первичного на-
пряжения равно нулю (f/]=0). На рис. 10.12,6 построена кри-
вая тока короткого замыкания iK для этого условия. Ток внезап-
ного короткого замыкания (ударный ток) может достигать
двойного значения установившегося тока короткого замыкания
и в 20—40 раз превышать номинальное значение тока.
Переходный процесс при внезапном коротком замыкании
у трансформаторов малой мощности длится не более одного
периода, а у трансформаторов большой мощности — 6—7 пе-
риодов.
Затем трансформатор переходит в режим установившегося
короткого замыкания, при котором в обмотках протекают токи
/куст, величина которых хотя и меньше тока 1К при переходном
процессе, но все же во много раз превышает номинальное зна-
чение тока.
Через несколько секунд срабатывают защитные устройства,
отключающие трансформатор от сети. Но несмотря на кратко-
временность процесса короткого замыкания, он представляет
значительную опасность для обмоток трансформатора. Во-пер-
вых, чрезмерно большой ток короткого замыкания резко повы-
шает температуру обмотки, что может повредить ее изоляцию.
Во-вторых, резко увеличиваются электромагнитные силы в об-
мотках трансформатора.
Величина электромагнитной силы, действующей на витки
обмоток, определяется произведением магнитной индукции В на
величину тока i в витке обмотки
F—Bi,
где F — удельная электромагнитная сила, н/м.
Но с увеличением тока растет также и индукция, поэтому
сила растет пропорционально квадрату тока (F Так, если
ток в витке i =100 а и индукция В = 0,1 тл, то
F=0,l • 100 = 10 н/м.
Такая сила не вызывает заметных деформаций витков обмот-
ки. Но если при внезапном коротком замыкании бросок тока
достигнет значения 1К, превышающего номинальный ток в 30 раз,
то электромагнитная сила возрастет в 900 раз и станет равной
9000 н/л. Такая сила может вызвать значительные механиче-
ские разрушения в трансформаторе (рис. 10.14). Все это необхо-
димо учитывать при проектировании трансформаторов и созда-
173
вать достаточно прочные конструкции обмоток и надежное их
крепление на сердечниках.
§ 10.10. Схемы соединения обмоток
Согласно действующему ГОСТу на силовые трансформато-
ры, выводы обмоток обозначаются буквами латинского алфа-
вита, как это показано в табл. 10.1.
Таблица 10.1
Обмотки трехфазных трансформаторов могут быть соедине-
ны звездой или треугольником. Схемы соединения обмоток трех-
фазных трансформаторов обозначают дробью, указывая в числи-
теле схему соединения обмоток высшего напряжения, а в знаме-
нателе — обмоток низшего напряжения.
При соединении обмоток звездой линейное напряжение боль-
ше фазного (ил = КЗС/ф), а при соединении обмоток треуголь-
ником линейное напряжение равно фазному (ил=и$). Из этого
следует, что отношение линейных напряжений в трехфазном
трансформаторе определяется не только отношением чисел вит-
ков фазных обмоток, но и схемой их соединения (табл. 10.2).
Таблица 10,2
Схема соединения обмоток Y/Y * Д/Y : Д/Д У/Д
Отношение линейных напряжений Wi Wi Уз wa /Зак, Wi
174
Глава XI
РАБОЧИЕ СВОЙСТВА ТРАНСФОРМАТОРОВ
§ 11.1. Режим холостого хода
Холостым ходом называют режим работы трансформатора
при разомкнутой вторичной обмотке (zH = co, /2=0). В этом слу-
чае уравнения э. д. с. и токов (10.27) принимают вид
J 4- / q/Xj + /(/•,;
^20 =
Л — Л)
Так как п<}лезная мощность при работе трансформатора вхо-
лостую равна нулю, мощность на входе трансформатора в ре-
жиме холостого хода Ро расходуется на магнитные потери в маг-
Рис. 11.1. Схема замещения (а) и
векторная диаграмма (б) трансфор-
матора в режиме холостого хода
нитопроводе рс и электрические потери в меди одной лишь
первичной обмотки Однако ввиду небольшой величины
тока /0, который обычно не превышает 2—10%' от /1Н, электри-
ческими потерями можно пренебречь и считать, что вся
мощность холостого хода представляет собой мощность магнит-
ных потерь в стали магнитопровода. Поэтому магнитные потери
в трансформаторе принято называть потерями холостого хода
(см. § 11.5).
На рис. 11.1, а и б представлены схема замещения и вектор-
ная диаграмма трансформатора в режиме холостого хода.
При исследовании свойств трансформаторов или же при их
испытаниях проводят опыт холостого хода, в результате кото-
рого определяют некоторые параметры трансформатора.
17S
Опыт проводится по схеме рис. 11.2. Комплект измеритель-
ных приборов, включенных в схему, дает возможность измерить
напряжения Ui и U^, ток 10 и мощность Ро.
Напряжение к первичной обмотке подводят через регулятор
напряжения PH, посредством которого напряжение на входе
Рис. 11.2. Схема опыта холостого хода:
д—однофазный трансформатор; б —трехфазный трансформатор
-трансформатора постепенно повышают до значения f7i“l,l (/1Н.
Лри этом снимают показания приборов, а затем строят харак-
;хода трехфазного трансформатора
(100 ква, 6300/220 в)
-теристики холостого хода, которые представляют собой зависи-
мость тока /о, мощности Ро и коэффициента мощности cos <р0 от
первичного напряжения t?i (рис. 11.3). В случае трехфазного
,176
трансформатора характеристики холостого хода строят по сред-
ним (фазным) значениям тока и напряжения для трех фаз
/ __ Л>а + Л>в + Л>с . /1 1 о\
'о----------g ’
U1^~u + U^b + IJ1c . (11.3)
о
Коэффициент мощности определяют по формулам: для однофаз-
ного трансформатора
COS?0 = Z^77’ (1L4)
для трехфазного трансформатора
Ро Ра Ро /11 с \
cos ?0 - at/j/o WT’
где Ui и 10— фазные значения напряжения и тока;
Р'о и Р"о — показания однофазных ваттметров.
По данным опыта холостого хода можно определить следую-
щие величины:
1) коэффициент трансформации
^20 &2
2) ток холостого хода при £/iH, который обычно выражают
в процентах от номинального первичного тока
3) потери холостого хода Ро.
В трехфазном трансформаторе токи холостого хода в фазах
неодинаковы и образуют несимметричную систему, поэтому
мощность Ро следует измерять двумя ваттметрами по схеме
(рис. 11.2, б);
4) параметры ветви намагничивания схемы замещения (см.
рис. 11.1)
~ = ^1Н
^0 г »
0 (11 7)
г0 = г0 cos<p0; U1UJ
Xo^Vzi — r§. /
12 1649
177
Пример. На рис. 11.3 приведены характеристики холостого хода трех-
фазного трансформатора 100 ква, 6300/220 в, при соединении обмоток
звездой. Определить параметры ветви намагничивания zQ, xq и г0 и ток Д
при Ut = (Дн-
Решение. Полное сопротивление ветви намагничивания
2о = ^- = = 6,2 ом,
Jq
активное сопротивление ветви намагничивания
r0 = z0 cos <Ро = 6,2-0,OS = 0,49 ом,
индуктивное сопротивление ветви намагничивания
X, =У z% — rl = /б,2»-0,49« = 6,18 ом,
Ток холостого хода (в процентах)
i = А юо = --9^:100 = 7,i
° /1Н 264
где
ha —
SH _ 100-10’
3t71H 3-127
= 264 а.
§ 11.2. Опыт короткого замыкания
Короткое замыкание трансформатора представляет такой
режим, когда вторичная обмотка замкнута накоротко (гн=0).
При этом вторичное напряжение U2 равно нулю. '
Рис. 11.4. Схемы опыта короткого замыкания;
а — однофазный трансформатор; б — трехфазный трансформатор
В условиях эксплуатации, когда к трансформатору подведе-
но номинальное напряжение U1H, короткое замыкание является
аварийным режимом и представляет большую опасность для
трансформатора.
Практическое значение имеет опыт короткого замыкания,
при котором вторичную обмотку трансформатора замыкают
накоротко (рис. 11.4), а к первичной обмотке подводят пони-
женное напряжение, постепенно повышая его посредством ре-
гулятора напряжения до некоторого значения UK, при котором
токи короткого замыкания в обмотках трансформатора стано-
178
вятся равными номинальным токам: /1к = /1н и /2к = /2н, В этом
случае снимают показания приборов и строят характеристики
короткого замыкания: cos<?K и РК = Д[/К) (рис. 11.5).
В случае трехфазного трансформатора значения фазных напря-
Рис. 11.5. Характеристики короткого замыка
ния трехфазного трансформатора (100 к,ва,
6300/220 в)
жений и токов будут средними для трех фаз
UK = + . (118>
Г Ка~УКв-УКс /1 1
Лк =--------2-------. (11 .У)
По этим значениям измеренных величин определяют cos
__ Р К Р К РК
c°s<pK- . (11.10)
Напряжение, при котором токи в обмотках короткозамкну-
того трансформатора равны номинальным, называется номи-
нальным напряжением короткого замыкания и обычно выра-
жается в процентах от Uw
ЮО.
1Н
(11.11)
12*
179
Согласно ГОСТ 401—41» напряжение короткого замыкания
приводится к рабочей температуре 75°С. Для силовых трансфор-
маторов ик составляет 5—10% от номинального первичного на-
пряжения.
Как следует из выражения (10.14) магнитный поток в магни-
топроводе трансформатора пропорционален первичному напря-
жению (7ь Но так как это напряжение при опыте короткого за-
мыкания составляет не более 10% от 1ЛН> то такую же неболь-
шую величину составляет магнит-
ный поток. Для создания такого маг-
нитного потока требуется настолько
малый намагничивающий ток, что
величиной его можно пренебречь.
Рис. 11.6. Схема замещения (а) и векторная диаграмма (б) трансформатора
в режиме короткого замыкания
В этом случае уравнение токов (10.17) принимает вид
Лк= - Лк, (11.12)
а схема замещения трансформатора для опыта короткого замы-
кания не ^содержит ветви намагничивания (рис. 11.6, а). Для
этой схемы замещения можно записать уравнение э. д. с.
0к ~ Цк (G + + /Лк (*i + ^2), (11.13)
или
Ок = Л Л /Ак^к = ЛА, (Н*14)
где ZK — сопротивление трансформатора при опыте короткого
замыкания
2к = Гк4"/^к» (11.15)
Здесь гк и хк— активное и -индуктивное сопротивления
трансформатора при опыте короткого замыкания.
Воспользовавшись уравнениями токов (11.12) и э. д. с.
(11.13) для опыта короткого замыкания построим вектор-
180
ную диаграмму трансформатора при коротком замыкании
(рис. 11.6, б). Построение диаграммы начнем с вектора UK = /iKZK.
Затем под углом <рк к вектору UK проводим вектор тока
/1к=—/2'к. Построив векторы падений напряжения в первичной
обмотке
и Ц1кх{
и во вторичной обмотке
— ЛкЛ И —/72кХ2,
получим прямоугольный треугольник АОВ, который называется
треугольником короткого замыкания. Стороны этого треуголь-
ника равны
ОВ = ЛКГ j + I2кТ* 2 = ЛКГ к = (7ка’,
В А = + ^2к]^2 = ^2к]^к ^кр>
о А = /1к7к = 1/к.
Здесь t/Ka и t/Kp—активная и реактивная составляющие напря-
жения короткого замыкания
(11.16)
Параметры схемы замещения при опыте короткого замыка-
ния определяются по формулам:
2
&К --- J ,
Лк
rK = zK coscpK;
хк = V zi — r2K.
(11.17)
Полученные значения сопротивлений приводят к рабочей
температуре 75°
fK75-rK235 4-6/ (11.18)
Zk75 = VГк75 + X* . (11.19)
где О, — температура обмоток во время опыта.
Так как при опыте короткого замыкания основной поток
Фмакс составляет всего лишь несколько процентов по сравнению
с его значением при номинальном первичном напряжении, то
величиной магнитных потерь, вызванных этим потоком, можно
пренебречь. Следовательно, можно считать, что мощность Рк,
потребляемая трансформатором при опыте короткого замыка-
181
ния, идет полностью на покрытие электрических потерь в обмот-
ках трансформатора
Л ~ ^Кг1 + /?кг2 = ^1к(г1 + fi) = ^1кгК75'
Пример. Результаты измерений величин при опыте короткого замыкания
трехфазного трансформатора 100 ква, 6300/220 в приведены в табл. 11.L
Таблица 11.1
№ измере- ния U л, в кА* UkB’ в UkC’ 6 1кА' а ZkB’ а {кС а Р , вт К
1 64 63 62 2,9 3,0 3,1 190
2 105 105 103 5,1 5,0 5,0 513
3 147 146 145 7,2 7,0 7,2 1040
4 191 189 190 9,2 9,2 9,1 1780
Требуется построить характеристики короткого замыкания
/к, Рк и cos<pK = /(^K).
Примечания 1 Напряжение проводилось со стороны обмоток ВН,
2 Обмотки соединены звездой (Y/Y).
3 В таблице указаны фазные значения токов и напряжений,
4. Измерение № 4 соответствует номинальному току.
5. Температура нагрева обмоток при опыте составляет 20°С.
Решение. Ниже приведен расчет величин, соответствующих номиналь-
ному току /к = Ли (измерение № 4).
Средние для трех фаз значения напряжения UK (11.8) и тока /к (П-9)
191 + 189+1?0=190 в<
= 9)2+_9’2 = 9,15 а.
3
Параметры схемы замещения при опыте короткого замыкания
UK 190 „
г-" /7 <П5 - 20'8
так как Рк = 31%rh, то гк
Рк 1780
“3.9Д52
О/к
= 7,1 ом,
хк = Vг2к — гк = V20,8- - 7,1» = 19,6 ом.
Полученные значения гк и zK приводим к рабочей температуре 75°С
~Гк
310
235 + Ох
310
235 4- 20°
= 8,6
ом,
ZK75 = V7к75 + Хк = V8,6» + 19,6» = 21,5 ом.
182
Потери короткого замыкания, приведенные к рабочей температуре,
/?кн = з№г75 = 3-9,15’-8,6 =2150 вт.
Напряжение короткого замыкания, приведенное к рабочей температуре»
i/кн = Лс^*к75 = 9,15-21,5 = 197 в»
Коэффициент мощности
? КН_
3/к^КН
cos <рк ==
2150
3-9,15-197
В таком же порядке проводим расчет при других значениях тока /к.
Результаты расчета сводим в табл. 11.2 и строим характеристики короткого
замыкания (см рис. 11.5).
Таблица 11.2
№ измерения 17к, в Лс> а Рк, вт cos
1 65 3 230 0,4
2 108 5 620 0,4
3 152 7 1260 0,4
4 197 9,15 2150 0.4
§ 11.3. Упрощенная векторная диаграмма трансформатора
Векторная диаграмма нагруженного трансформатора
(рис. 10.5) наглядно показывает соотношение -между параметра-
ми трансформатора. Ввиду своей
сложности эта диаграмма не может
быть использована для практических
расчетов. С целью упрощения диа-
Рис 11.7. Упрощенная схема замещения (а) и упрощенная векторная диаг-
рамма (б)
граммы и придания ей практического значения в силовых
трансформаторах, работающих с нагрузкой, близкой к но-
минальной, пренебрегают током холостого хода и считают,
что ZV Полученная в этом случае ошибка вполне допу-
183
стима, так как ток /о по сравнению с токами 1\ и /'2 невелик
(см. § 11.1).
При сделанном допущении схема замещения трансформато-
ра приобретает упрощенный вид, так как не имеет ветви намаг-
ничивания и состоит только из после-
довательных участков rK = + г' и
хк = xt + х'2 (рис. 11.7, а).
Соответственно упрощенной схеме
замещения построена и упрощенная
векторная диаграмма (рис. 11.7,6), в
которой прямоугольный треугольник
АВС представляет собой треугольник
короткого замыкания:
BC = l\r*, CA = i1ZK- AB = itxK.
Упрощенная векторная диаграмма
Рис. 11.8. Построение строится по заданным {Д; Л и cos <р2==
упрощенной векторной
диаграммы трансформа- = и параметрам треугольника ко-
тора
роткого замыкания t/K; t/Ka; t/Kp.
Порядок построения диаграммы следующий (рис. 11.8). Из
точки О радиусом OA = Ui проводим окружность Up, затем из
точки О проводим луч — U'2 под углом <р2 к оси ординат.
Треугольник короткого замыкания пристраиваем к оси
абсцисс (треугольник ОА'С'). Затем сторону этого треугольника
А'С' переносим параллельно самой себе так, чтобы один ее ко-
нец касался окружности Ut (точка А), а другой — луча — U'2
(точка С). Тогда, проведя ОА, получаем вектор Ut, а отрезок
ОС дает вектор — U'2. После чего к стороне треугольника АС
пристраиваем другие его стороны СВ и ВА.
§ 11.4. Изменение вторичного напряжения
При изменениях нагрузки трансформатора его вторичное на-
пряжение U'2 не остается неизменным. В этом можно убедиться,
воспользовавшись упрощенной схемой замещения трансформа-
тора (см. рис. 11.7), из которой следует
U2 = U\h— i1ZK.
Величина изменения вторичного напряжения трансформато-
ра при переходе от холостого хода до номинальной нагрузки
является важнейшей характеристикой трансформатора и опре-
деляется выражением
Д ин = ^1н ~ 100. (11.20)
*Лн
184
Для определения величины At/H воспользуемся упрощенной
векторной диаграммой трансформатора, сделав на ней следую-
щее дополнительное построение (рис. 11.9). Из точки А опустим
перпендикуляр AD на продолжение вектора U'z- Будем считать,
что отрезок BD представляет собой разность 01и — 02
Ula'—U2 = BD=BF + FD,
где
BF = t/KaCOS<p2;
FD = UKp sin <р2,
тогда
Цн — 0'2 = 0Ki cos <р2 + UKp sin <р2.
Изменение вторичного напря-
жения
Д(/н = U]"~Ui 100 «
b'lH
_ М<а COS <?2 + £7кр Sin ?2
Обозначим
формулы
100 = &кр>
тогда формула ДС/Н принимает вид
Д£/и = uKa cos <р2 + uKpsin<f>2. (11.21)
Рис. 11.10. Зависимость &Uh от нагрузки (а) и от коэф-
фициента мощности (б)
Формула (11.21) дает возможность определить АЛ7 лишь при
номинальной нагрузке трансформатора. При необходимости
185
расчета величины изменения вторичного напряжения при любой
нагрузке в формулу (11.21) следует ввести коэффициент на-
о А
грузки р =у-
'2н
Д1/ = Р («Ка COS <р2 + uKp sin ?2). (11.22)
Выражение (11.22) показывает зависимость не только от
характера, но и от величины нагрузки.
На рис. 11.10, а представлен график зависимости Д1/=/(р.)
при cos <p2=const, а на рис. 11.10, б — график A£7=/(cos фг) при
p.=const. На этих графиках отрицательные значения АС/ при
работе трансформатора с емкостной нагрузкой соответствуют
повышению напряжения при переходе от холостого хода к на-
грузке. Наибольшей величины AU достигает при cos <p2=cos <f>K.
Рис. 11.11. Внешние характеристики транс-
форматора
Зависимость вторичного напряжения U2 от тока нагрузки /2
называется внешней характеристикой трансформатора
Форма кривой (72=f(/2) зависит от характера нагрузки
трансформатора (рис. 11.11). Так, при активно-индуктивной
нагрузке кривая U2—f(l2) имеет падающий вид, а при активно-
емкостной — восходящий.
§ 11.5. Потери и коэффициент полезного действия
трансформатора
При работе нагруженного трансформатора в нем имеют
место магнитные и электрические потери.
Магнитные потери, т. е. потери в магнитопроводе
трансформатора, слагаются из потерь на гистерезис и вихревые
токи. Суммарная величина магнитных потерь принимается рав-
ной потерям холостого хода
Ре = Рг + Рвх = Р0-
Величина магнитных потерь зависит от частоты тока f и от
значений магнитной индукции В в стержне и ярме.
186
Можно считать, что Ро= В2. При 1^=const потери Ро от
нагрузки не зависят, а поэтому их называют постоянными.
Электрические потери, т. е. потери в обмотках
трансформатора, связанные с их нагревом, называют перемен-
ными потерями, так как величина этих потерь прямо пропор-
циональна квадрату тока в обмотках. Как установлено в § 11.2,
величина электрических потерь принимается равной потерям
короткого замыкания
Рэ = Рэ1 + Рэ2 = + ЛХ = ;кГк75 = Р*.
Если известна мощность короткого замыкания при номи-
нальном токе, то электрические потери можно определить по
формуле
Ро -- КН
(11.23)
Суммарные потери в трансформаторе
JjP — Рон Н" Р2Ркн
(11.24)
Коэффициент полезного действия трансформатора пред-
ставляет собой отношение активной мощности Р2> отбираемой
от трансформатора, к активной мощности Pt, подводимой
к трансформатору,
4
Мощность Р2 подсчитывается по формуле
Рг = ml2U2 cos <р2,
или
Р2 = pSH cos <р2, (11.25)
где SH = mf2HU2H — номинальная мощность, ква.
Но мощность Р^Рг+Яр, тогда к. п. д. трансформатора
7] = ______________ = J___________2Р------
1 Р2 + 2Р Л + SP
(11.26)
Подставив в это выражение значение Р2 из формулы (11.25)
и значение Sp из формулы (11.24), получим
< Рон 4~ Р2Ркн /11 971
71 “ ~ PSH COS ?2 + Рон + Р2?кн ' { ’
Величина к. п. д. зависит от нагрузки трансформатора
(рис. 11.12). Кроме того, к. п. д. тем больше, чем выше cos <р2.
1Ь7
Максимальное значение к. п. д. соответствует такой нагрузке,
при которой магнитные потери равны электрическим
Рон = 0'2Л<н.
Отсюда значение коэффициента нагрузки, соответствующее
максимальному к. п. д., равно
p/=0fe- (1L28)
Обычно к. п. д. имеет максимальное значение при р/=0,5 —0,6.
Рис. 11.12. Зависимость т] =/(₽)
при coscp2=l и COS(p2 = 0,8
Благодаря отсутствию в трансформаторе вращающихся
частей его к. п. д. выше, чем у электрических машин. В транс-
форматорах большой мощности к. п. д. достигает 98—99%*.
Пример. Определить к. п. д. и построить график Л=/(Р) трехфазного
трансформатора 100 ква, 3600/220 в, если потери холостого хода (рис. 11.3)
РОН=605 вт, а потери короткого замыкания (рис. 11.5) Ркн =2150 вт. Расчет
произвести для значения cos фа=0,8 и cos ф2=1.
Решение. Для построения графика Л=/(Р) следует вычислить к. п. д.
при значениях коэффициента нагрузки р = 1/4; 2/4; 3/4; 4/4. Результаты
расчета сведены в табл. 11.3, где показаны также величины потерь РОн и
График т|=/(Р) ПРИ созф2 = 0,8 и созф2==1 представлен на рис. 11.12.
Таблица 11.3
в= — Ро», вт р«Ркн, вт Гр, вт К. п. д„ % Примечание
cos <р2 = 0,8 COS Ф2 = 1
605 134 739 96,5 97,0 Р'=1/605 = н У 2150 =0,53
2/4 605 540 1145 97,3 97,8
3/4 605 1210 1815 97,1 97,6
4/4 605 2150 2755 96,6 97,3
188
Кроме к. п. д. трансформатора по мощности, имеется к. п. д.
трансформатора по энергии, который представляет собой отно-
шение энергии 1^2, отданной трансформатором в течение года,
к энергии 1Г|, полученной им от питающей сети за это же время,
_ Ж,
~ >7 •
К. п. д. по энергии характеризует эффективность эксплуата-
ции трансформатора.
§ 11.6. Регулирование напряжения трансформаторов
Обмотки высшего напряжения понижающих трансформаторов снабжают-
ся регулировочными ответвлениями, с помощью которых можно получить
коэффициент трансформации, несколько отличающийся от номинального.
Необходимость в этом объясняется тем, что напряжения в разных точках
линии электропередачи, куда могут быть включены понижающие трансфор-
Рис. 11.13. Схемы обмоток трехфазных
трансформаторов с регулировочными от-
ветвлениями
маторы, отличаются друг от друга и, как правило, отличаются от номиналь-
ного первичного напряжения. Кроме того, напряжение в любом месте линии
может изменяться из-за колебаний нагрузки. Но так как напряжение на
зажимах вторичной обмотки трансформатора во всех случаях должно быть
равно номинальному или незначительно отличаться от него, то возможность
изменения коэффициента трансформации становится необходимой.
Регулировочные ответвления делаются в каждой фазе либо вблизи ну-
левой точки, либо посередине обмотки.
В первом случае на каждой фазе делают по три ответвления
(рис. 11.13,а), при этом среднее ответвление соответствует номинальному
коэффициенту трансформации, а два других — коэффициентам трансфор-
мации, отличающимся от номинального на ±,5%.
Во втором случае обмотку разделяют на две части и делают шесть от-
ветвлений (рис. 11.13, б).
Это дает возможность, кроме номинального коэффициента трансформа-
ции, получить еще четыре дополнительных значения, отличающихся от номи-
нального на +5%; + 2,5%; —2,5%; —5%. В табл. 11.4 показан порядок
189
соединения регулировочных ответвлений обмоток ВН трехфазных пони-
жающих трансформаторов для схемы обмоток, представленных на рис. 11.13,6.
Соединение ответвлений осуществляется посредством переключателя. На
каждую фазу устанавливают отдельный переключатель. Для получения пяти
ступеней коэффициента трансформации (см. табл. 11.4) применяются переклю-
Таблица 11.4
Коэффициент
трансформации
Соединение ответвлений
Номинальный Кн
Ан+2,5%
Кн4~5 %
/Сн—2,5 %
2^2 Z3
Zi-72
^5 ^6
чатели с шестью металлическими стержнями. Стержни попарно соединяются
контактными кольцами (рис. 11.14). Вал,
Контактное кольцо
вращающий контактные кольца,
связан штангой с рукояткой на
крышке бака. Переключение с
одной ступени коэффициента
трансформации на другую
можно производить только прн
полном отключении трансфор-
матора от сети как со стороны
ВН, так и со стороны НН,
Широкое применение полу-
чило регулирование напряже-
ния трансформаторов под на-
грузкой
Принцип этого регулиро-
вания также основан на изме-
нении коэффициента трансфор-
мации посредством регулиро-
вочных ответвлений. Однако
переключение с одного ответ-
вления на другое осуществля-
ется без разрыва цепи рабо-
чего тока. С этой целью обмот-
ка каждой фазы снабжается
специальным переключающим
устройством, состоящим из ре-
актора Р, двух контакторов Ki
и К2 и переключателя с двумя подвижными контактами П[ и П2 (рис. 11.15,а).
Рис.
11.14. Схема работы переклю-
чателя ответвлений
В рабочем положении оба подвижных контакта переключателя нахо-
дятся на одном ответвлении, контакторы К\ и Кг замкнуты и рабочий ток
направлен параллельно по двум половинам обмотки реактора. Ерли воз-
никла необходимость переключиться с одного ответвления на другое, на-
пример с Xi на Лз, то происходит следующее. Разомкнутся контакты кон-
тактора Ki (положение 1 на рис. 11.15,6), подвижной контакт переклю-
чателя обесточенной ветви переводится на другое ответвление и контакты
контактора Ki вновь замыкаются (положение 2). В этом положении часть
обмотки между ответвлениями Xi и Х2 оказывается замкнутой. Однако ток
190
в цепи переключающего устройства не достигает большого значения, так как
он ограничивается сопротивлением реактора Р.
В таком же порядке осуществляется перевод подвижного контакта Къ
с ответвления Xi на ответвление Х3 (положения 3 и 4)t после чего процесс
Рис. 11.15. Последовательность переключения контактов под
нагрузкой
переключения заканчивается. Регулирование напряжения под нагрузкой
обычно автоматизируется и осуществляется дистанционно (со щита управ-
ления).
Глава XII
ПАРАЛЛЕЛЬНАЯ РАБОТА ТРАНСФОРМАТОРОВ
§ 12.1, Предварительные замечания
Трансформирование напряжения на станциях и подстанциях
обычно производится не одним трансформатором, а нескольки-
ми, работающими раздельно или параллельно.
Параллельной работой двух или нескольких трансформато-
ров называется их совместная работа при включении первичных
обмоток на общую первичную сеть и вторичных — на общую,
вторичную сеть (рис. 12.1).
Применение нескольких параллельно включенных трансфор-
маторов вместо одного трансформатора суммарной мощности
необходимо для обеспечения бесперебойного энергоснабжения
191-
в случае аварии в каком-либо трансформаторе или отключения
его для ремонта. Далее, это целесообразно при работе подстан-
ции с переменным графиком нагрузки, например, когда мощ-
ность нагрузки значительно меняется
Рис. 12.1. Включение трансформатора на
параллельную работу
в различные часы суток.
В этом случае при умень-
шении мощности нагруз-
ки можно отключить один
или несколько трансфор-
маторов для того, чтобы
нагрузка трансформато-
ров, оставшихся включен-
ными, была близка к но-
минальной. В итоге экс-
плуатационные показате-
ли работы трансформато-
ров (к. п. д. и соэсрг) бу-
дут достаточно высокими.
Включение трансфор-
маторов на параллельную
работу возможно лишь
при соблюдении определенных условий. Большое значение при
этом имеет группа соединения обмоток, понятие о, которых при-
водится ниже.
§ 12.2. Схемы соединения обмоток
До сих пор мы считали, что при построении векторных диа-
грамм э. д. с. Ei и £2 совпадают по фазе. Но это соответствует
действительности лишь при условии намотки первичной и вто-
ричной катушек в одном направлении и одноименной марки-
ровке выводов этих катушек, как показано на рис. 12.2, а.
Если же в трансформаторе изменить направление намотки
катушки низшего напряжения или же переставить обозначения
ее выводов, то э. д. с. Е2 окажется сдвинутой по фазе относи-
тельно э. д. с. Ei на 180° (рис. 12.2, б).
Сдвиг фаз между э. д. с. Ei и £2 принято выражать группой
соединений. Но так как этот сдвиг фаз может изменяться от 0
до 360°, а кратность сдвига составляет 33°, то для обозначения
группы соединений выбирается ряд чисел от 1 до 12, в котором
каждая единица соответствует углу сдвига в 33°.
В основу такого обозначения положено сравнение относи-
тельного положения векторов Ei и Е2 с положением минутной
и часовой стрелок часов. При этом вектор э. д. с. обмотки выс-
шего напряжения мыслится минутной стрелкой, установленной
на цифре 12, а вектор э. д. с. обмотки низшего напряжения
мыслится часовой стрелкой (рис. 12.3).
192
Положение часовой стрелки относительно минутной опреде-
ляется положением вектора э. д. с, обмотки НН относительно
вектора э. д. с. обмотки ВН. 1
на рис. 12.2, а имеет группу 12, а
имеет группу 6. Таким обра-
зом, в однофазном транс-
форматоре можно получить
только две группы соединения:
группу 12, соответствующую
совпадению по фазе Ei и Е2, и
группу 6, соответствующую
'ак, схема соединения обмоток
схема соединения на рис. 12.2,6
сдвигу фаз между Ei и Е2 на
180°.
Из этих групп стандартной
является группа 12; она обо-
значается I/I—12.
В трехфазных трансформа-
торах группой соединения оп-
ределяется угол сдвига фаз
между линейными значениями
Рис. 12. 2. Группы соединения од-
нофазных трансформаторов:
а — 1Ц — 12; б —/// — 6
Э. Д. С. Ё1 И Е2.
Применением разных спосо-
бов соединения обмоток в трех-
фазных трансформаторах можно образовать двенадцать раз-
личных групп соединений. Из этих двенадцати групп в СССР
Рис. 12.3. Обозначение группы соединения
стандартизированы только две: 11-я группа со сдвигом фаз 330°
и 12-я группа со сдвигом фаз 0°.
Рассмотрим в качестве примера схему соединений «звезда—
звезда» (рис. 12.4, а). Векторные диаграммы э. д. с. показывают,
что сдвиг между линейными э. д. с. Е\{АВ) и Е2(аЬ) в данном
случае равен нулю. В этом можно убедиться, совместив точки А
и а при наложении векторных диаграмм э. д. с. обмоток ВН
и НН.
13 1649 193
Рис. 12.4. Группы соединения трехфазных трансформаторов:
а —У/У—12; б — У/У —6; в —У/Д —11; г—У/Д —5
Следовательно, при указанных схемах соединения обмоток
имеет место группа 12; обозначение ее Y/Y—12. Если же поме-
нять местами начала и концы фазных обмоток низшего напря-
жения (рис. 12, б), то, совместив точки Айа векторных диа-
Схемы соединения одмоток
ВН
НН
Диаграммы
Оектород
ВН \ НН
Условные
обозначения
О а Ь с
Рис. 12.5. Схемы соединения обмоток и группы
соединения, предусмотренные ГОСТом
грамм линейных э. д. с., видим, что трансформатор стал при-
надлежать группе 6; обозначение ее Y/Y — 6.
Рассмотрим возможные группы при
«звезда—треугольник». При соединении
на рис. 12.4,в, имеет место группа 11;
обозначается Y/Д — 11.
Если же поменять местами начала и
концы фазных обмоток НН (рис. 12.4, г),
то трансформатор будет относиться к
группе 5; обозначается Y/Д —5.
Схемы соединения обмоток трехфаз-
ного трансформатора, предусмотренные
ГОСТ 401—41, приведены на рис. 12.5.
Иногда возникает необходимость проверить
группу соединения трансформатора. В этом слу-
чае трансформатор подключают в сеть с симмет-
ричным трехфазным напряжением соединяют два
одноименных зажима, например А—а (рис. 12.6),
и измеряют напряжения UB-B (между зажи-
мами в—В) и Uс—с (между зажимами с—С).
Указанные напряжения должны быть одинаковы
и соответствовать значениям, приведенным в
табл. 12.1. Затем измеряют напряжение Uc—B
соединении обмоток
обмоток, показанном
Рис. 12.6. Схема
включения трансфор-,
матора при опреде-
лении группы соеди-.
нений
13*
195^
(между зажимами с—В) и сравнивают его с напряжением Ue-в. Напряже-
ние Uс-В может быть равно (р), больше (б) или меньше (м) напряжения
Ue-B. На основании этих измерений по табл. 12 1 определяют группу соеди-
нения. Если же результаты измерений не соответствуют ни одному из случаев,
предусмотренных таблицей, то это указывает на то, что маркировка зажи-
мов обмоток выполнена неправильно.
Таблица 12.1
Группа
соединений
Напряжение
12
1
2
3
4
5
6
7
8
9
10
И
К-1
К№-/ЗХ+1
|<K3-K+ 1
Кк* + /зк+Т
К + 1
Ук2 + узк +1
|/ № + К + 1
/кчИ
у к* - К + 1
+ 3
б
б
б
б
р
м
м
м
м
р
Примечания: 1. К — отношение высшего линейного напряжения
к низшему.
2. При Ue_B = Uc_c - К - 1 или Ue_B = Uc_c =
= К 4- 1 напряжение UC~B можно не измерять.
§ 12.3 . Включение трансформаторов на параллельную работу
Трансформаторы могут быть включены на параллельную
работу только при соблюдении следующих условий:
1. При одинаковом первичном напряжении вторичные напря-
жения должны быть равны; другими словами, трансформаторы
должны иметь одинаковые коэффициенты трансформации
Ki = Ku =Кш = .. •
При несоблюдении этого условия, даже при холостом ходе,
между параллельно включенными трансформаторами возникает
106
уравнительный ток /ур, обусловленный разностью вторичных
напряжений Д(7,
I - W
Ур ZKl + ZK„ ’
где ZKl и Zkii—внутренние сопротивления трансформаторов.
При нагрузке трансформаторов уравнительный ток наклады-
вается на нагрузочный ток. При этом трансформатор с более
высоким вторичным напряжением холостого хода (с меньшим
коэффициентом трансформации) оказывается перегруженным,
а трансформатор равной мощности, но с большим коэффициен-
том трансформации будет недогружен. Так как перегрузка
трансформаторов недопустима, то придется снизить общую на-
грузку. При значительной разнице коэффициентов трансформа-
ции нормальная работа трансформаторов становится практи-
чески невозможной. Однако ГОСТ 401—41 допускает включение
на параллельную работу трансформаторов с различными коэф-
фициентами трансформации, если разница коэффициентов
трансформации не превышает ±0,5% от их среднего значения,
АК = 100 ± 0,5 %,
К
где I — среднее геометрическое значение коэффи-
циентов трансформации.
2. Т рансформаторы должны принадлежать к одной группе
соединений. При несоблюдении этого условия вторичные линей-
ные э. д. с. трансформаторов окажутся сдвинутыми по фазе
относительно друг друга, и в цепи трансформаторов появится
разностная э. д. с., под действием которой возникнет значитель-
ный уравнительный ток.
3. Трансформаторы должны иметь одинаковые напряжения
короткого замыкания
UK1 = UkII = UkIII = . . . .
Если же при соблюдении прочих условий два или несколько
трансформаторов с различными напряжениями короткого замы-
кания включены параллельно, то нагрузка Si и 5ц между
трансформаторами распределяется обратно пропорционально
напряжениям короткого замыкания
S{ ^kII ShI /19 1\
т. e. трансформаторы нагружаются непропорционально их номи-
нальным мощностям, что ведет к перегрузке одного трансфор-
197
матора (с меньшим и.к) и недогрузке другого. Чтобы не до-
пустить перегрузки трансформатора, необходимо снизить общую
нагрузку. Таким образом, неравенство напряжений короткого
замыкания не допускает полного использования параллельно
работающих трансформаторов по мощности.
Учитывая, что практически не всегда можно подобрать транс-
форматоры с одинаковыми на-
пряжениями короткого замы-
кания, ГОСТ 401—41 допус-
Рис. 12 7. Схема включения вольт-
метров для проверки чередования
фаз трехфазного трансформатора
кает разницу напряжении ко-
роткого замыкания не более
чем на ±10% от их среднего
арифметического значения.
Разница в напряжениях ко-
роткого замыкания трансфор-
маторов тем больше, чем боль-
ше эти трансформаторы отли-
чаются друг от друга по мощ-
ности. Поэтому ГОСТ 401—41
рекомендует, чтобы отношение
номинальных мощностей транс-
форматоров, включенных па-
раллельно, было не более чем
3:1.
Помимо соблюдения указанных трех условий, необходимо
перед включением трансформаторов на параллельную работу
проверить порядок чередования фаз, который должен быть оди-
наковым у всех трансформаторов. При соблюдении этого усло-
вия показания вольтметров и Vs равны нулю (рис. 12.7).
На параллельную работу могут быть включены трансформа-
торы разной мощности, но их общая нагрузка не должна пре-
вышать суммарной номинальной мощности этих трансформа-
торов.
Распределение нагрузки между параллельно работающими
трансформаторами определяется следующим образом:
— е ^нх,
«кх2-^-
(12.2)
где <$х — нагрузка одного из параллельно работающих транс-
форматоров, ква;
S — общая нагрузка всей параллельной группы, ква;
«кх—напряжение короткого замыкания данного трансфор-
матора, %;
198
SHX — номинальная мощность данного трансформатора, ква.
У = «н1£+ 5„п1+ (12.3)
“J Ukx ^к! UkII ^кШ
Пример. Три трехфазных трансформатора с одинаковыми группами
соединения включены параллельно (рис. 12 1) на общую нагрузку 5000 ква
Трансформаторы имеют следующие данные *S'hI=1000 ква, ад «6,5%,
5нП = 1800 ква, ад! «6,65%, 5нШ“2200 ква, адп=6,3%, Определить нагрузку
каждого трансформатора.
Решение. По формуле (12 3)
У SHX _ 1000 1800 , 2200 _ 775
ukx 6,5 + 6,65 + 6,3
По формуле (12.2) определим нагрузку каждого трансформатора
5'=6^5,0<Ю-995 '“;
5"=«Й^-5’8ТО= 1755"“.
51П _ 2200 « 2250 ква,
111 6,3-775
т. е. третий трансформатор оказался перегруженным на
2250 — 2200 .100 2,3 %.
2200
Для устранения перегрузки этого трансформатора следует снизить внеш-
нюю нагрузку на 2,3%, т. е. уменьшить до
S’ = s - JL 2,3 = 5000 — 2,3 - 4885 ква,
100 100
Следовательно, суммарная номинальная мощность трансформаторов будет
использована лишь на 97,7%
Глава ХШ
СПЕЦИАЛИЗИРОВАННЫЕ ТРАНСФОРМАТОРЫ
§ 13.1. Трехобмоточный трансформатор
В трехобмоточном трансформаторе имеются три электри-
чески не связанные друг с другом обмотки, из которых одна яв-
ляется первичной, а две другие — вторичными (рис. 13.1).
199
и создает в
Принцип работы трехобмоточного трансформатора по суще-
ству не отличается от принципа работы обычного двухобмоточ-
ного трансформатора.
Первичная обмотка этого трансформатора является намагни-
магнитопроводе магнитный поток, кото-
рый пронизывает две вторичные об-
мотки и наводит в них э. д. с. £2 и £3.
Пренебрегая величиной тока холо-
стого хода, можно записать уравнение
токов трехобмоточного трансформа-
тора
Рис. 13.1. Однофазный
трехобмоточный транс-
форматор
из которого следует, что пер-
вичный ток трехобмоточного транс-
форматора равен не арифметической,
а геометрической сумме приведенных
вторичных токов. Учитывая это равен-
ство, а также и то, что нагрузка на
вторичные обмотки достигает номи-
нального значения не одновременно, первичная обмотка трехоб-
моточного трансформатора рассчитывается на такую мощность,
которая должна быть меньше суммы номинальных мощностей
обеих вторичных обмоток.
Целесообразность применения трехобмоточных трансформа-
торов объясняется еще и тем, что один трехобмоточный транс-
форматор фактически заменяет два двухобмоточных трансфор-
матора.
Наличие магнитной связи между вторичными обмотками
трехобмоточного трансформатора ведет к их взаимному влия-
нию. Так, при изменении тока /2 меняется не только напряже-
ние Uz, но и напряжение С/3.
Согласно ГОСТ 401—41 обмотки трехфазных трехобмоточ-
ных трансформаторов могут соединяться Уо/Уо/А—12—11 или
Уо/А/Д—11 —11, а однофазных ///// —12—12.
Выводы обмоток обозначаются, как показано в табл. 10.1.
За номинальную мощность трехобмоточного трансформатора
принимается мощность наиболее мощной его обмотки, т. е. мощ-
ность первичной обмотки.
Трехобмоточные трансформаторы (однофазные и трехфаз-
ные) устанавливают на трансформаторных подстанциях.
По такому же принципу устроены многообмоточные транс-
форматоры малой мощности, применяемые в устройствах радио,
связи и автоматики.
200
§ 13.2. Автотрансформатор
Автотрансформатор имеет всего лишь одну обмотку, часть
витков которой является общей для первичной и вторичной
цепей. На рис. 13.2 представлена схема понижающего авто-
трансформатора, где общей частью обмотки является участок
аХ, ток в котором /12. Учитывая, что токи /1 и /2 находятся
в противофазе, получим следующее выражение тока Л2
/12 = /2-Л. (13.1)
Отсюда следует, что вели-
чина тока в обшей части об-
мотки равна разности токов
/1 и /2.
Если коэффициент транс-
формации автотрансформатора
немногим больше единицы, то
токи /1 и /2 мало отличаются
друг от друга, а их разность
/2—/1 составляет небольшую
величину. Это позволяет вы-
полнить часть аХ обмотки
автотрансформатора из прово-
Рис. 13.2. Принципиальная схема
однофазного автотрансформатора
да меньшего сечения. Если пренебречь потерями в авто-
трансформаторе, то можно принять, что мощность на входе
Si=IiUi и мощность на выходе S2 = /2(/2 приблизительно равны.
Эта мощность Si^S2 называется проходной мощностью 5пр.
Кроме того, различают еще расчетную мощность SpaC4, пред-
ставляющую собой мощность, передаваемую из первичной во
вторичную цепь магнитным полем. Расчетной эту мощность на-
зывают потому, что размеры и вес трансформатора зависят от
величины этой мощности. В трансформаторе вся проходная
мощность является расчетной, так как между обмотками транс-
форматора существует исключительно лишь магнитная связь.
Но в автотрансформаторе между первичной и вторичной це-
пями, помимо магнитной связи, существует еще и электрическая
связь. А поэтому расчетная мощность составляет лишь часть
проходной мощности, а другая часть этой мощности переносится
из первичной во вторичную цепь за счет электрической связи
между цепями, без участия магнитного поля.
В подтверждение этого разложим проходную мощность авто-
трансформатора 5пр= /2(72 на составляющие.
Воспользуемся для этого выражением (13.1), из которого
следует /2=71+/12. Подставив это в формулу проходной мощ-
ности, получим
Snp = 2 — ^2 (Л + Л2)------- ^2^12 — ^расч-
201
Здесь Sa — CVi — мощность, передаваемая из первичной цепи
автотрансформатора во вторичную благодаря электрической
связи между этими цепями. Таким образом, расчетная мощность
в автотрансформаторе 5paC4 = t/2/i2 составляет лишь часть про-
ходной мощностц.
Это дает возможность для изготовления автотрансформатора
использовать магнитопровод меньшего сечения, чем в трансфор-
маторе равной мощности. ~
В связи с этим средняя длина витка обмотки также стано-
Рис. 134. Схе-
ма трехфазного
автотрансфор-
матора
вится меньше, а следовательно, уменьшается расход меди на
выполнение обмотки автотрансформатора. Одновременно умень-
шаются магнитные и электрические потери, а к. п. д. автотранс-
форматора повышается.
Таким образом, автотрансформатор по сравнению с транс-
форматором равной мощности обладает следующими преимуще-
ствами: меньшим расходом активных материалов (медь и элек-
тротехническая сталь), меньшими размерами, более высоким
к. п. д., меньшей стоимостью.
Указанные преимущества автотрансформатора тем значи-
тельнее, чем больше мощность S&, а следовательно, чем меньше
расчетная часть проходной мощности. Величина мощности 5Э
обратно пропорциональна коэффициенту трансформации авто-
. is
трансформатора дА=:-^—:
Ss = Snp-J- • (13.2)
Лд
Из графика (рис. 13.3) видно, что применение
автотрансформатора дает заметные преимущества по сравне-
202
Рис. 13.5. Регулировочный ав-
тотрансформатор типа РНО:
1 — обмотка; 2 — щеткодержа-
тель; 3 — ручка регулятора
нию с двухобмоточным трансформатором лишь при небольших
значениях коэффициентов трансформации.
Например, пpи^A^= । вся мощность автотрансформатора пе-
редается во вторичную цепь за счет электрической связи между
цепями (S9/Snp= 1).
Наиболее целесообразно применение автотрансформаторов
с коэффициентом трансформации /Са^2.
При большей величине коэффициента трансформации пре-
обладающее значение имеют недостатки автотрансформатора,
которые состоят в следующем:
1) большие токи короткого замыкания в случае понижающе-
го автотрансформатора [при за-
мыкании точек а и X (рис. 13.2)
напряжение Ux подводится лишь
к небольшой части витков А—а,
которые обладают очень малым
сопротивлением короткого замы-
кания);
2) электрическая связь сторо-
ны ВН со стороной НН; это тре-
бует усиленной электрической
изоляции всей обмотки;
3) при использовании авто-
трансформаторов в схемах пони-
жения напряжения между про-
водами сети низшего напряжения
и землей возникает напряжение,
приблизительно равное напряже-
нию между проводом и землей
на стороне высшего напряжения,
что недопустимо по условиям
безопасности эксплуатации уста-
новок.
Автотрансформаторы могут быть повышающими и понижаю-
щими, однофазными и трехфазными. В последних обмотки обыч-
но соединяются звездой (рис. 13.4).
Широкое распространение получили автотрансформаторы
с переменным коэффициентом трансформации. В этом случае
автотрансформатор снабжается устройством, позволяющим ре-
гулировать величину вторичного напряжения путем изменения
числа витков Осуществляется это либо переключателем, либо
с помощью скользящего контакта (щетки), перемещаемого не-
посредственно по зачищенным от изоляции виткам обмотки.
Такие автотрансформаторы называются регуляторами напря-
жения и могут быть как однофазными (тип РНО), так и трех-
фазными (тип РНТ). Устройство автотрансформатора типа РНО
представлено на рис. 13.5.
203
§ 13.3. Трансформатор для электродуговой сварки
Трансформатор для электродуговой сварки представляет собой однофаз-
ный понижающий трансформатор, преобразующий напряжение сети 220 или
380 в в напряжение 60—70 в, необходимое для устойчивого горения электри-
ческой дуги. Ввиду того, что сопротивление электрической дуги весьма мало,
сварочный трансформатор работает в режиме, близком к короткому замы-
канию. Поэтому для ограничения величины тока во вторичную цепь транс-
Рис. 13.6. Схема включения (а) и внешние характеристики (б)
трансформатора для электродуговой сварки.
форматора последовательно включают реактивную катушку РК с раздвиж-
ным сердечником (рис. 13.6, а). Наличие в схеме этой катушки влияет на
форму внешней характеристики трансформатора, делая ее более крутопадаю-
щей (рис. 13.6, б). Изменяя величину воздушного зазора д в магнитной цепи
реактивной катушки, можно очень плавно менять величину индуктивного
сопротивления катушки. При этом меняется угол наклона внешней харак-
теристики, а следовательно, и величина тока: минимальному зазору соответ-
ствует наименьший ток (кривая /), а максимальному зазору — наибольший
ток (кривая 2).
§ 13.4. Измерительные трансформаторы напряжения и тока
Измерительные трансформаторы применяются для расширения пределов
измерения электроизмерительных приборов в цепях переменного тока и обес-
печения безопасности обслуживания последних в сетях высокого напряжения.
Кроме того, измерительные трансформаторы используются для включения
приборов релейной защиты.
Измерительный трансформатор напряжения применяется при измерениях
в сетях переменного тока напряжением свыше 220 в. Трансформатор напря-
жения представляет собой понижающий трансформатор (рис. 13.7, а) с таким
отношением витков в первичной и во вторичной обмотках, чтобы при номи-
нальном первичном напряжении вторичное напряжение составляло 100 в.
Во вторичную цепь трансформатора напряжения включаются вольтметры,
частотомеры и обмотки напряжения ваттметров, счетчиков энергии и фазо-
метров. Так как электрическое сопротивление этих приборов велико (порядка
тысяч ом), то трансформатор напряжения обычно работает в режиме, близ-
ком к режиму холостого хода. Это дает возможность пренебречь падением
напряжения в обмотках и принять
U— £гн>
204
а так как EY = — Ег, то напряжение в первичной обмотке
иг = U» = KHVt.
(13.3)
Здесь Кн — коэффициент трансформации трансформатора напряжения.
Измерительные трансформаторы изготавливаются однофазными и трех-
фазными на первичное напряжение от 380 до 400 000 в. В трехфазных изме-
рительных трансформаторах напряжения применяется группа соединения 12.
При напряжении до 3000 в
трансформаторы напряжения де- .
лаются сухими.
При напряжениях более 3000 в
трансформаторы напряжения де-
лаются масляными, что необходи-
мо для большей электрической
прочности изоляции обмоток.
В целях безопасности один из
выводов вторичной обмотки и ко-
жух трансформатора напряжения
заземляются.
Измерительный трансформатор
тока применяется для включения
амперметров и обмоток тока
Рис. 13.7. Схемы измерительных
трансформаторов напряжения (а)
и тока (б)
ваттметров, счетчиков энергии и
фазометров.
Первичная обмотка трансфор-
матора тока выполняется из про-
вода большого сечения и включается в сеть последовательно (рис. 13.7,6).
Количество витков в обмотках трансформатора выбирается таким, чтобы при
номинальном токе в первичной обмотке ток во вторичной цепи был 5 а.
Так как электрическое сопротивление приборов, включаемых во вторич-
ную цепь, незначительно, то режим работы трансформатора тока близок
к режиму короткого замыкания, при котором магнитный поток в магнито-
проводе (§ 11.2) настолько мал, что им можно пренебречь. Тогда, по аналогии
с уравнением токов (11.2), для опыта короткого замыкания можно записать
следующее равенство для трансформатора тока
71 — — 7 2 — — 7 2,
откуда
4 = КЛ
где Кт— коэффициент трансформации трансформатора тока.
При включении трансформатора тока в сеть заземляются кожух и один
вывод вторичной обмотки.
Если во время работы трансформатора тока разомкнуть его вторичную
обмотку, то ток в ней станет равен нулю, а первичный ток останется преж-
ним. При этом он будет полностью намагничивающим и вызовет значительное
увеличение магнитного потока. Магнитные потери возрастут пропорционально
квадрату потока, что приведет к перегреву магнитопровода, опасному для
целости изоляции. В итоге это может привести электрическую линию к ко-
роткому замыканию на землю. Кроме того, э. д. с. вторичной обмотки воз-
растет пропорционально магнитному потоку и достигнет значений, опасных
для обслуживающего персонала. Поэтому размыкание вторичной цепи транс-
205
форматора тока при наличии тока в первичной обмотке является недопусти
мым. При необходимости отключить прибор нужно зажимы вторичной об’
мотки трансформатора тока предварительно замкнуть накоротко
§ 13.5. Трансформатор для преобразования числа фаз
переменного тока
В процессе преобразования переменного тока в постоянный, а также при
питании электропечных установок и в ряде других случаев возникает необ-
ходимость в преобразовании числа фаз переменного тока. На рис. 13.8, а при-
ведена схема трансформатора, посредством которого трехфазная система
Рис. 13.8. Трансформаторы для преобразования трехфазной системы
в шестифазную (а) и двенадцатифазную (б)
преобразуется в шестифазную. На первичной стороне этого трансформатора
имеются три фазные обмотки, соединенные в трехфазную звезду, а на вторич-
ной стороне — шесть фазных обмоток, соединенных в шестифазную звезду;
Имеются также трансформаторы для преобразования трехфазной системы
в двенадцатифазную. Схема соединения обмоток такого трансформатора при-
ведена на рис. 13 8, б.
§ 13.6. Стабилизатор напряжения
Стабилизаторы напряжения применяются в случае необходимости под-
держивать неизменным напряжение в цепях различных электротехнических,
устройств.
206
Для стабилизации напряжения в устройствах небольшой мощности при-
меняются электромагнитные стабилизаторы. Существует несколько типов
электромагнитных стабилизаторов, из которых основными являются:
а) ферромагнитные стабилизаторы насыщенного типа (без емкости),
в которых используются явления, основанные на насыщении ферромагнитного
сердечника;
б) феррорезонансные стабилизаторы (с емкостью), работа которых осно-
вана на феррорезонансе токов.
Ферромагнитный стабилизатор представляет собой трехстержневой
Рис. 13.9. Ферромагнитный стабилизатор напряжений
магнитопровод, на среднем стержне которого располагается первичная об-
мотка w\ (рис. 13 9, а). На правом стержне, находящемся в состоянии силь-
ного магнитного насыщения, расположена вторичная обмотка ш2, а на левом
стержне, магнитно не насыщенном, расположена компенсационная обмотка
wK. При колебаниях напряжения U\ происходят изменения магнитного пото-
ка в среднем стержне, однако поток в правом стержне изменяется весьма
незначительно, так как правый стержень находится в состоянии магнитного
насыщения. Поэтому также незначительны и изменения напряжения V\ на
выходе вторичной обмотки стабилизатора (кривая 1 на рис. 13 9,6).
Незначительные изменения напряжения U'2 компенсируются за счет на-
пряжения Uk компенсационной обмотки^к, зависимость которого от напря-
жения Ui представлена на прямой 2.
При правильном подборе параметров обмоток и магнитопровода стаби-
лизатора угол наклона а прямолинейного участка кривой / равен углу
наклона прямой 2. В этом случае напряжение на выходе стабилизатора
и2 = й'2 + йк
оказывается стабилизированным Так, при колебаниях первичного напряже-
ния Ui в пределах ±20% от номинального и при неизменной нагрузке
и частоте выходное напряжение колеблется в пределах ±0,3%. Ферромагнит-
ные стабилизаторы напряжения имеют низкие технико-экономические пока-
затели: низкий к. п. д. (40—60%), низкий коэффициент мощности (поряд-
ка 0,4), несинусоидальное выходное напряжение, содержащее ярко выражен-
ную третью гармонику. Кроме того, величина выходного напряжения в зна-
чительной степени зависит от частоты тока. Указанные недостатки ограничи-
вают применение ферромагнитных стабилизаторов.
Несколько лучшими свойствами обладают феррорезонансные стабилиза-
торы напряжения
Рассмотрим работу ферро резонансного стабилизатора Стабилизатор
(рис. 1310, а) состоит из реактивной катушки /, сердечник которой при
заданном диапазоне напряжений Ui работает в состоянии магнитного на-
207
сыщения, конденсатора С и автотрансформатора 2, магнитопровод которого
не насыщен
Обмотка автотрансформатора включена таким образом, чтобы напряже-
ние на выходе стабилизатора U2 было равно разности
U* = U2 - U'2t
где U"2 — напряжение на выходе автотрансформатора;
U'2 — напряжение на выводах реактивной катушки
Напряжение на зажимах катушки U2 благодаря явлению резонанса
токов имеет- резко нелинейную зависимость от тока /1 (рис. 13 10,6, кри-
Рис. 13.10. Феррорезонансный стабилизатор напряжения
вая /). Напряжение на выходе автотрансформатора U"2 ввиду ненасыщен-
ного состояния его магнитопровода пропорционально току /1 (прямая 2).
Если параметры автотрансформатора и реактивной катушки подобраны таким
образом, что наклон а кривой 1 к оси абсцисс в области магнитного насы-
щения равен наклону прямой 2, то разность напряжений U'2—U"2=const.
В этом случае напряжение на выходе стабилизатора U2 не зависит от тока
/1 (кривая <3), а следовательно, и от напряжения U\. Диапазон стабилиза-
ции обычно не превышает 30% от номинального значения U\.
К. п. д феррорезонансных стабилизаторов достаточно высок и состав-
ляет 80—85%.
К недостаткам феррорезонансных стабилизаторов следует отнести: зави-
симость выходного напряжения от частоты тока в сети и от cos (р нагрузки
(но в меньшей степени, чем у ферромагнитных стабилизаторов), а также
заметную несинусоидаль'ность выходного напряжения за счет составляющей
третьей гармоники.
Указанные недостатки стабилизаторов можно значительно снизить вве-
дением в цепь компенсирующих контуров.
§ 13.7. Трансформатор для преобразования частоты
Наиболее широкое распространение получили такие трансформаторы, при
помощи которых возможно удвоение или утроение частоты переменного тока
Рассмотрим работу трансформатора для преобразования частоты, посред-
ством которого осуществляется увеличение частоты переменного тока в три
раза. Такой трансформатор называется утроителем частоты Он состоит из
трех однофазных трансформаторов, работающих при сильно насыщенном
магнитопроводе. Первичные обмотки трансформаторов соединены звездой,
а вторичные — последовательно (рис. 13.11).
Как было показано в § 10 8, намагничивающий ток трансформатора, по-
мимо основной, содержит третью гармонику с частотой /з = 3/ь Далее было
208
показано, что при соединении обмоток звездой токи третьей гармоники
взаимно уравновешиваются и тогда в составе магнитного потока появляется
третья гармоника Фз. В трехстержневом магнитопроводе потоки этой гармо-
ники ослаблены. Но в утроителе частоты магнитопроводы однофазных
трансформаторов работают независимо, поэтому потоки Ф$ в них достигают
значительных величин и наводят во вторичных обмотках э. д. с. третьей гар-
моники eg. Так как э. д. с. е3 во всех фазных обмотках совпадают по фазе,
то на выходе утроителя частоты устанавливается напряжение U$, равное
Рис. 13.1 L Схема утроителя частоты
алгебраической сумме э. д. с. е3, частотой /З=3/ь Что же касается э. д. с.
первой гармоники, то хотя она и наводится в фазных обмотках утроителя,
но в составе напряжения на выходе утроителя она отсутствует, так как при
сдвиге фаз между э. д. с. в 120° их алгебраическая сумма равна нулю.
Для снижения падения напряжения во вторичных обмотках при нагрузке
последовательно с обмотками включают конденсатор С, емкость которого
компенсирует индуктивность обмоток.
Увеличение частоты в большее число раз можно осуществить примене-
нием нескольких трансформаторов для преобразования частоты, включенных
один за другим (каскадно). Однако этот способ повышения частоты эконо-
мически нецелесообразен, так как связан со значительной затратой активных
материалов.
14 1649
РАЗДЕЛ ТРЕТИЙ
СИНХРОННЫЕ МАШИНЫ
Г л а в а XIV
ПРИНЦИП ДЕЙСТВИЯ и конструкция
СИНХРОННЫХ ГЕНЕРАТОРОВ
§ 14.1. Основные понятия
Синхронной называется бесколлекторная машина перемен-
ного тока, в которой скорость вращения ротора щ находится
в строго постоянном отношении к частоте fi сети переменного
тока,
где р — число пар полюсов машины.
Применение синхронных машин весьма широко и много-
образно. Синхронная машина обратима и может работать как
в режиме генератора, так и в режиме двигателя.
Синхронный генератор является основным типом генератора
переменного тока, применяемым в процессе производства элек-
троэнергии.
Синхронные двигатели в отличие от Двигателей других типов
имеют строго постоянную скорость вращения при данной часто-
те (14.1), не зависящую от нагрузки.
Другой отличительной особенностью синхронных двигателей
является возможность регулировки их коэффициента мощности.
Последнее свойство наиболее важно в электроприводе большой
мощности, так как дает возможность повысить коэффициент по-
лезного-действия. Синхронные двигатели малой мощности при-
меняются в системах автоматики, где используется главным
образом их свойство постоянной скорости вращения.
Синхронные машины имеют еще одно весьма важное приме-
нение — в качестве синхронного компенсатора, дающего воз-
можность улучшать коэффициент мощности в электрической
системе.
210
Синхронные машины изготовляются различной мощности:
от долей ватта (двигатели автоматических систем) до сотен
меговатт (турбо- и гидрогенераторы, синхронные компенса-
торы) .
§ 14.2. Принцип действия синхронного генератора
Рис. 14.1. Простейшая модель
генератора переменного тока
Работа синхронного генератора основана на явлении элек-
тромагнитной индукции и заключается в преобразовании меха-
нической энергии в электрическую энергию переменного тока.
При изучении принципа действия генераторов постоянного
тока отмечалось, что в обмотке якоря этого генератора индукти-
руется переменная э. д. с.,
которая посредством кол-
лектора и щеток пре-
образуется в постоянную
э. д. с. Следовательно,
если генератор постоян-
ного тока лишить коллек-
тора, то он превратится
в генератор переменного
тока. На рис. 14.1 изобра-
жена простейшая модель
однофазного генератора
переменного тока, устро-
енная по принципу моде-
ли генератора постоянно-
го тока (см. рис. 1.1), но
в отличие от последнего,
не имеющая коллектора.
Вращающаяся часть генератора называется ротором, непо-
движная — статором. Щетки А и В наложены на контактные
кольца, соединенные с концами обмотки.
Если предположить, что магнитная индукция В распреде-
ляется в воздушном зазоре синусоидально (B=Bmsina),TO3. д. с.,
индуктируемая в якорной обмотке генератора, также является
синусоидальной
е = Blv 5макс/^ sin а.
Отсутствие коллектора упрощает конструкцию машины
и дает возможность обмотку, в которой индуктируется э. д. с.,
расположить на неподвижной части генератора — на статоре 1
(рис. 14.2). При этом обмотку возбуждения располагают на ро-
торе 2. Такая конструктивная схема наиболее рациональна
в синхронных машинах большой мощности, так как при распо-
ложении рабочей обмотки на роторе пришлось бы передавать
в рабочую обмотку через контактные кольца значительные мощ-
ности при напряжении до 20 кв. В этих условиях работа кон-
4* 211
Cl С2 СЗ
Рис. 14.2. Электромагнитная схема
трехфазного синхронного генератора
тактных колец и щеток стала бы весьма ненадежной, а потери
энергии в щеточном контакте — значительны.
При расположении рабочей обмотки на статоре выводы этой
обмотки присоединяются непосредственно к электрической сети.
Конечно, и в этом случае машина не избавляется от контактных
колец и щеток, необходимых
для соединения обмотки воз-
буждения с возбудителем. Но
так как величина тока возбуж-
дения в десятки раз меньше
рабочего (переменного) тока,
а напряжение не превышает
450 в, то щеточный контакт
работает более надежно, а по-
тери энергии в нем невелики.
Исходя из перечисленных
соображений синхронные ма-
шины, как правило, выполняют
с рабочей обмоткой, распола-
гаемой на статоре.
Обмотка статора, трехфазно-
ного синхронного генератора
состоит из трех однофазных обмоток, смещенных в пространстве
под углом 120 эл. градусов относительно друг друга (см.
рис. 14.2) и соединенных звездой или треугольником. На роторе
расположена обмотка возбуждения, при /подключении которой
к источнику постоянного тока (возбудителю) возникает магнит-
ное поле возбуждения: Посредством первичного двигателя ротор
генератора приводят во вращение со скоростью ti\. При этом
магнитное поле ротора также вращается и индуктирует в трех-
фазной обмотке статора э. д. с. ЕА, Ев, Ес, которые будучи
одинаковыми по величине и сдвинутыми по фазе относительно
друг друга на 1/3 периода (120 эл. градусов) образуют трехфаз- -
ную симметричную систему э. д. с.
Большинство синхронных генераторов проектируется на про-
мышленную частоту 50 гц. Для получения э. д. с. такой частоты
необходима скорость вращения ротора (14.1)
50-60 3000
п, =--------=------.
В табл. 14.1 приведены синхронные скорости для ряда зна-
чений р при fi = 50 гц.
Таблица 14.1 .
р 1 2 3 4 5 6
пг (об/мин) 3000 1500 1000 750 600 500
212
§ 14.3. Возбуждение синхронных машин
В синхронных машинах применяются два способа возбужде-
ния: электромагнитное и возбуждение постоянными магнитами.
При электромагнитном возбуждении основной магнитный
поток создается посредством обмотки возбуждения.
Рис. 14.3. Электромагнитное возбуждение синхронных
машин:
а — независимое; б — самовозбуждение
В зависимости от способа питания обмотки возбуждения по-
стоянным током синхронные машины разделяются на машины
независимого возбуждения и машины с самовозбуждением.
При независимом возбуждении
для питания обмотки возбуждения
используется генератор постоянного
тока, называемый возбудителем
(рис. 14.3,а).
Реостаты rt и г2 предназначены
для регулирования величины тока
возбуждения синхронной машины.
4 Мощность возбудителя составляет
от 2 до 5% мощности синхронной
машины при напряжении до 450 в.
Возбудитель обычно монтируют сов-
местно с синхронной машиной и он
является ее неотъемлемой частью.
При этом возбудитель располагают
либо по оси машины, тогда якорь Рис 144 Расположение
возбудителя закрепляют на высту- возбудителя на корпу-
пающем конце вала (рис. 14.8), ли- се синхронной машины
бо его устанавливают на корпусе
машины и тогда вращение якоря возбудителя осуществляют от
вала синхронной машины посредством клиноременной передачи
(рис. 14.4).
При самовозбуждении питание обмотки возбуждения осуще-
ствляется от синхронного генератора с применением выпрями-
213
теля (см. рис. 14.3, б). Самовозбуждение применяется в синхрон-
ных машинах малой и средней мощности.
При возбуждении синхронных машин постоянными магнита-
ми последние обычно располагаются на роторе. Этот способ воз-
буждения дает возможность получить машину без контактных
колец. Отсутствие в такой машине обмотки возбуждения умень-
шает электрические потери, а следовательно, повышает к. п. д.
Но вместе с тем возбуждение от постоянных магнитов услож-
няет регулировку параметров машины, например регулировку
э. д. с. генератора.
Синхронные машины с постоянными магнитами обычно вы-
полняются на малые мощности.
§ 14.4. Типы синхронных машин и их конструкция
В силовых установках переменного тока в качестве первич-
ных двигателей синхронных генераторов применяют паровые
или гидравлические турбины и
Рис. 14.5. Конструкция ро-
торов синхронных машин:
а — ротор с явно выражен-
ными полюсами; б — ротор
с неявно выраженными по-
люсами; 1 — сердечник по-
люса; 2— полюсный нако-
нечник; 3-—полюсная ка-
тушка; 4 — обод ротора.
двигатели внутреннего сгорания
(дизели). В первом случае син-
хронные генераторы называют
гидрогенераторами и турбогене-
раторами, а во втором случае —
дизельгенераторами. Все эти ти-
пы синхронных генераторов кон-
структивно отличаются друг от
Друга.
Так как гидравлическая тур-
бина работает при сравнительно
небольшой скорости вращения
(60—500 об!мин), то для полу-
чения переменного тока промыш-
ленной частоты в гидрогенерато-
ре применяют ротор с большим
числом полюсов. Поэтому роторы
гидрогенераторов имеют конст-
рукцию с явно выраженными
полюсами (явно1полюсную), при
которой каждый полюс выпол-
няется в виде отдельного узла,
состоящего из сердечника и по-
люсной катушки. Все полюса за-
крепляются на ободе (рис. 14.5, а).
Гидрогенераторы, как прави-
ло, выполняются с вертикальным
расположением вала (рис. 14.6).
214
Паровая турбина работает при большой скорости вращения,
поэтому турбогенераторы являются быстроходными синхронны-
ми машинами и их роторы, как правило, выполняются двухпо-
люсными («1 = 3000 об/мин).
В процессе работы машины на ротор действуют центробеж-
ные силы, величина которых пропорциональна квадрату окруж-
Рис. 14.6. Гидрогенератор Куйбышевской ГЭС, мощность 105 тыс. кет,
напряжение 13,8 кв-.
1 — возбудитель; 2 — корпус статора; 3 — сердечник статора; 4 — полюс
ротора; 5 — спицы ротора; 6—втулка ротора; 7 — грузонесущая крестовина
ной скорости. Поэтому при таких больших скоростях вращения,
какие имеют место в турбогенераторах, явнополюсная конструк-
ция ротора непригодна по условиям механической прочности.
В этом случае применяют неявнополюсный ротор, имеющий вид
удлиненного стального цилиндра с профрезерованными на по-
верхности продольными пазами для обмотки возбуждения
(рис. 14.5, б).
215
2 даус.
/—возбудитель; 2 — кориус, дения; 5„ротор
Турбогенераторы (рис. 14.7) и дизельгенераторы выпол-
няются с горизонтальным расположением вала. Дизельгенера-
торы рассчитываются на скорость вращения 600—1500 об]мин
и выполняются с явнополюсным ротором (рис. 14.8).
Ниже приводится описание конструкции основных частей
синхронных машин.
Рис. 14.8. Синхронный генератор:
1 — корпус статора; 2— сердечник статора; 3 — полюса ротора; 4 — вал;
5 — возбудитель; 6 — контактные кольца; 7 — подшипниковый щит; 8 —
коробка выводов
. Статор является неподвижной частью синхронной машины
и состоит из корпуса и сердечника, в пазах которого распола-
гается обмотка (рис. 14.8).
Для машин малой мощности корпусы отливают из чугуна или
Таблица 14.2
Фаза Обозначение выводов
начало конец
Первая С1 С4
Вторая С2 С5
Третья СЗ С6
217
стали, а для машин средней и большой мощности — выполняют
сварными. Корпуса машин большой мощности для удобства
сборки и транспортировки делают разъемными.
Сердечник статора изготовляют из листовой электротехниче-
ской стали толщиной 0,5 или 0,35 мм. Листы штампуют в виде
колец и изолируют с двух сторон лаком. В крупных машинах
сердечник разделяют в осевом направлении на ряд пакетов тол-
щиной до 6 см, между которыми оставляют воздушный зазор
(вентиляционный канал) шириной до 1 см.
В листах сердечника делают
пазы для укладки проводов
обмотки статора. Чаще все-
го пазы выполняют прямо-
угольными, открытыми или
полузакрытыми (рис. 14.9).
Обмотку статора выпол-
няют из секций, изготовлен-
ных обычно из медных про-
водов круглого или прямо-
угольного сечения.
Выводы обмотки статора
обозначают буквой С с циф-
рой, в соответствии с номе-
ром фазы (табл. 14.2).
Ротор неявнополюсных
синхронных машин (см.
рис. 14.7) выполняют из
цельной поковки или сбор-
ным.
Для размещения обмот-
ки возбуждения на наруж-
ной поверхности ротора вы-
фрезеровывают пазы пря-
моугольной формы, которые
занимают только две трети
окружности, образуя цент-
Рис 14 9 Пазы статора синхрон
ной машины*
а — открытый, на напряжение
свыше 500 в, 1 — прокладка из
прессшпана; 2— электрокартон;
3 — микафолий, 4 — миткалевая
лента, 5 — проводники, 6 — клин,
б — полузакрытый, на напряже-
жение до 500 в
ральные зубцы (рис. 14.5,6). Обмотку ротора неявнополюсных ма-
шин выполняют из медного провода прямоугольного сечения.
Обмотка крепится при помощи закладываемых в пазы металли-
ческих клиньев. Изоляция обмотки ротора осуществляется так
же, как обмотки статора. Концы обмотки выводятся на контакт-
ные кольца. Ротор с явно выраженными полюсами (см.
рис. 14.5, а) состоит из обода, на котором закреплены сердеч-
ники полюсов с катушками. Сердечник полюса имеет с одной
стороны полюсный наконечник, а с другой — хвост, при помощи
которого он крепится на ободе.
218
Глава XV
ОБМОТКИ СТАТОРОВ МАШИН ПЕРЕМЕННОГО ТОКА
И Э. Д. С. СИНХРОННОГО ГЕНЕРАТОРА
§ 15.1. Основные понятия
Обмотка статора машины переменного тока представляет
собой систему проводов, определенным образом уложенных
в пазах сердечника статора. Обмотки
статора машин переменного тока имеют
много общего с обмотками якоря машин
постоянного тока. Но между ними есть и
существенная разница — обмотки пере-
менного тока являются незамкнутыми.
Элементом обмотки статора является
секция, которая может быть одно- или
многовитковой. Секция состоит из актив-
ных сторон и лобовых частей. Расстоя-
ние между активными сторонами секции
называется шагом обмотки у.
Шаг называется диаметральным или
полным, если он равен полюсному деле-
нию (у = х= и укороченным,
если он меньше полюсного деления (у<т)
(рис. 15.1). Применяемые в настоящее
время обмотки статора классифицируют-
ся следующим образом:
1) по числу фаз — однофазные и мно-
гофазные (главным образом трехфаз-
ные) ;
2) по способу укладки секций в па-
зы — однослойные, когда сторона секции
М-----------Т -----------«Н
I <
Рис. 151. Секции с
полным и укорочен-
ным шагом
занимает весь паз, и двухслойные, когда в одном пазу лежат две
стороны различных секций (по аналогии с обмоткой якоря ма-
шины постоянного тока);
3) в зависимости от размеров секций — обмотки с полным
и обмотки с укороченным шагом.
§ 15.2. Трехфазная двухслойная обмотка
Простейшая трехфазная обмотка может быть выполнена
тремя секциями, оси которых сдвинуты по окружности статора
2Х
на 1/3 двойного полюсного деления-^-. Каждая секция в этом
О
219
случае представляет собой фазную обмотку (рис. 15.2). Обычно
фазная обмотка состоит не из одной, а из нескольких секций,
занимающих q пазов в пределах каждого полюсного деления.
Таким образом, для образования трехфазной обмотки зубцовый
Рис. 15.2. Простейшая трехфазная обмотка:
а — расположение секций в сердечнике статора; б — разверну'
тая схема
слой сердечника статора в пределах каждого полюсного деле-
ния необходимо разделить ....
на
Рис. 15.3. Развернутая поверхность
статора (одно полюсное деление):
(д=2; 51=4)
три зоны по q пазов в каждой.
Порядок чередования таких
зон под каждым полюсом
должен быть одинаковым.
Секции, уложенные в пазы
одинаковых зон, образуют
фазные обмотки.
Для определения величи-
ны q, представляющей со-
бой число пазов, приходя-
щихся на полюс и фазу, сле-
дует пользоваться формулой
7
с5-1»
где т — число фаз; для трехфазной обмотки т=3.
Угол сдвига между осями фазных обмоток в трехфазной об-
мотке составляет 120 эл. градусов. Однако для построения схемы
обмотки удобнее этот сдвиг выразить в пазах. Вся окружность
статора составляет ЗбОр эл. градусов, поэтому угол между
соседними пазами
ЗбОр
Z
а =
(15.2)
220
Тогда сдвиг между фазными обмотками, выраженный в па-
зах, равен (рис. 15.3)
120
а
(15.3)
Рассмотрим на примере порядок построения развернутой
схемы двухслойной обмотки статора.
Пример. Выполнить разверну-
тую схему обмотки статора трех-
фазной машины (т—3), если
2р=2, Z=12, обмотка двухслой-
ная, шаг —>,полный.
Решение. По заданным
mt 2р и Z определяем: шаг
Z 12
обмотки у = — = — — 6 пазов;
ZJP &
число пазов на полюс и фазу
Z 12
Ч = = “ 2 паза: угол
сдвига между соседними пазами
360/> 360-1 оя
а — ——1- = — = 30 эл. гра-
Z 12 к
дусов; сдвиг между фазными об-
мотками X = .12в. = 1??. =4 паза.
а 30
На развернутой поверх-
ности статора размечаем па-
зы (Z = 12) и полюсные де-
ления (2р = 2), а затем на-
носим верхние (сплошные
линии) и нижние (пунктир-
ные линии) стороны секций
(рис. 15.4, а)..
Размечаем зоны по q=2
паза для всех фаз (рис.
15.4,а); при этом расстоя-
ние между зоной какой-либо
фазы в одном полюсном
делении и зоной этой же
фазы в другом полюсном де-
лении должно быть равно
шагу обмотки у = 6 пазов.
Далее отмечаем расстояние
между началами фазных об-
моток Л=4 паза.
а)
6)
0 0 0 0 0 0
С$ С1 С6 PZ Ы сз
Рис. 15.4 Порядок построения
развернутой схемы трехфазной
двухслойной обмотки:
2=12; 2р=2; у=6
Соединяем верхние стороны секций 1 и 2 с их нижними сто-
ронами (пазы 7 и 8) и получаем первую секционную группу
221
первой фазы; затем соединяем верхние стороны секций 7 и 8
с их нижними сторонами (пазы 1 и 2) и получаем вторую сек-
ционную группу первой фазы. Секции в группах, а также груп-
пы секций между собой соединяем последовательно (рис. 15.4, б)
и получаем фазную обмотку первой фазы.
Начало первой секционной группы Hi присоединяем к выво-
ду С1, а начало второй секционной группы Н2— к выводу С4.
Приступаем к соединению активных сторон секций второй
фазы: секций 5 и 6 (первая секционная группа) и секций 11 и 12
(вторая секционная группа); проделав то же самое с секциями
третьей фазы и соединив секционные группы так же, как это
сделано в первой фазе, получаем фазные обмотки второй
(С2—С5) и третьей (СЗ—‘06) фаз (рис. 15.4, в).
Двухслойные обмотки имеют преимущественное распростра-
нение в машинах переменного тока, что объясняется рядом
достоинств двухслойных обмоток, из которых главным является
возможность любого укорочения шага обмотки, что дает, в свою
очередь, возможность максимально приблизить форму кривой
э. д. с. к синусоиде (см. § 15.8).
Но наряду с этим двухслойные обмотки не лишены недостат-
ков, к которым прежде всего следует отнести некоторые затруд-
нения при укладке секций обмотки, трудность ремонта обмотки
при повреждении изоляции нижнего слоя, а также невозмож-
ность выполнить разъемный статор без нарушения обмотки
в местах разъема.
§ 15.3. Способы соединения секционных групп
обмоток статора
Секционной группой называется ряд последовательно соеди-
ненных между собой секций, которые лежат в соседних пазах
и принадлежат одной фазной обмотке. Каждая секционная груп-
па имеет q последовательно соединенных секций. Количество сек-
ционных групп в фазной обмотке равно числу полюсов. Следова-
тельно, общее количество секционных групп А в двухслойной об-
мотке
А = 2рт.
Секционные группы каждой фазы статорной обмотки могут
соединяться последовательно или параллельно, что влияет на
число параллельных ветвей в обмотке.
На рис. 15.4, б показано последовательное соединение двух
секционных групп. Из него видно, что для последовательного
соединения двух секционных групп фазы необходимо нижний
конец первой секционной группы соединить с нижним концом
второй секционной группы, а верхние концы вывести к зажимам
фазной обмотки (С1—С4). При таком соединении секционных
222
Рис. 15.5. Способы соединения катушечных групп:
а — последовательное; б — параллельное; в — последова-
тельно- п а р аллельное.
Рис. 15.6. Развернутая
схема трехфазной двухслойной
ченным шагом:
2=24; 2р=4; у~5
обмотки с укоро
групп э. д. с. фазной обмотки представляет собой сумму э. д. с.
всех секционных групп.
На рис. 15.5, а показано последовательное соединение четырех
секционных групп. Здесь вторая и третья секционные группы
соединены верхними концами. Третья и четвертая секционные
группы — нижними концами, а к выводам фазной обмотки при-
соединены верхние концы первой и четвертой секционных групп.
При последовательном соединении секционных групп каждая фаз-
цая обмотка, независимо от числа полюсов машины, содержит
одну параллельную ветвь (2а—1).
Двухслойная обмотка в каждой фазе имеет 2р секционных
групп, поэтому, соединив все секционные группы параллельно,
мы получим обмотку, состоящую из 2р параллельных ветвей
(2а=2р).
На рис. 15.5, б показано параллельное соединение четырех
секционных групп. Чтобы соединить все секционные группы
параллельно, следует к одному выводу обмотки (С1) подклю-
чить верхние концы нечетных секционных групп (I и III) и ниж-
ние концы четных секционных групп (II и IV). Оставшиеся кон-
цы секционных групп присоединяют к другому выводу фазной
обмотки (С4). Такой порядок присоединения групп объясняется
следующим: э. д. с. рядом лежащих секционных групп одной
.фазной обмотки сдвинуты по фазе друг относительно друга на
180°, так как эти секционные группы расположены под разно-
именными полюсами. Поэтому, чтобы э. д. с. рядом лежащих
секционных групп фазной обмотки совпадали по фазе, прихо-
дится их присоединять, меняя концы.
Если половину секционных групп каждой фазной обмотки
.соединить последовательно в одну ветвь, а затем полученные
ветви соединить параллельно, то получим обмотку с двумя па-
раллельными ветвями (2а=2). Для того чтобы э. д. с. парал-
лельных ветвей были одинаковы, в каждую параллельную ветвь
включают секционные группы через одну. Таким образом,
в одной параллельной ветви оказываются все четные секцион-
ные группы, а в другой — все нечетные (рис. 15.5, в).
Пример. Выполнить развернутую схему трехфазной двухслойной обмотки
.с укороченным шагом (у = ут^при следующих данных: 2р=4, 2=24, соеди-
нение секционных групп последовательное.
Решение. Число пазов на полюс и фазу составляет
q = = _?!. = 2 паза.
4 2рт 4-3
Сдвиг между соседними пазами
а = 360 р= 360-2 = 30°
Z 24
-224
Сдвиг между фазами (в пазах)
. 120 120 л
=4 паза,
a
Шаг обмотки при укорочении на 1/5
4 Z 4 24
у = ~ь • V = т = 5 пазов-
На рис. 15.6 представлена развернутая схема этой обмотки,
порядок построения которой такой же, что и в предыдущем
примере.
§ 15.4. Трехфазные однослойные обмотки статоров
В однослойных обмотках каждая сторона секции полностью
заполняет паз сердечника статора.
Рис. 15.7. Трехфазная однослойная обмотка с располо-
жением лобовых частей в двух плоскостях:
а — развернутая схема обмотки (2р=4; 2=12; д=2);
б — расположение лобовых частей
Однослойные обмотки статоров разделяются на концентриче-
ские и шаблонные.
В концентрической обмотке секции каждой секционной груп-
пы имеют разную ширину и располагаются концентрически.
15 1649 225
Шаги обмотки у секций, входящих в секционную группу, неоди-
наковы, но их среднее значение определяется выражением
_ г
Уср~2^-
Так, например, для трехфазной однослойной концентриче-
ской обмотки с Z=24; 2р=4
1/срж5-|— = 6 пазов;
Z 24 _
2рт в 4-3 ”
Следовательно, секционная груп-
па каждой фазной обмотки состоит
из двух секций.
Шаги этих секций, расположен-
ных концентрически, равны
yi = 7 и у2 = 5.
Правильность принятых шагов
этих секций проверяется по формуле
«
Уу
-~- = УсР, (15.4)
<7
где Sv— сумма шагов всех
Рис. 15.8. Трехфазная од- концентрически расположенных
нослойная ' обмотка с пере- q
ходной секцией: секций, Уу « у, + у2 + . . . + уа.
а — развернутая схема об- i
мотки (2р=2; z=24; 9=2); в нашем примере
б — расположение лобовых v. г
частей 7 + 5 _
2 в6'
т. е. шаги у\ и у2 выбраны правильно.
Развернутая схема этой обмотки представлена на рис. 15.7, а.
Рассмотренная однослойная обмотка называется двухплоскост-
ной, так как лобовые части секций этой обмотки имеют разный
вылет и располагаются в двух плоскостях (рис. 15.7,6). Такая
конструкция обмотки (позволяет избежать пересечения лобовых
частей секции, принадлежащих разным фазам. При нечетном
числе пар полюсов число групп лобовых частей будет так же
нечетным. В этом случае одну секционную группу приходится
делать переходного размера с двоякоиэогнутой лобовой частью
(рис. 15.8).
226
На рис. 15.9 показана схема однослойной трехфазной обмот-
ки для машины с разъемным статором. Такая конструкция об-
мотки позволяет разобрать статор на две части (по линии раз-
реза)^, не повредив ни одну из секций. Лобовые части секций
в этой обмотке расположены в трех плоскостях.
Применение различных по размеру секций, образующих сек-
обмотка машины с разъемным ста-
тором: ционные группы, ведет
а — схема обмотки (2р=4; 2=12; / , *
д = 1); б — расположение лобовых к Т0МУ> чт0 секционные
частей группы концентрических
обмоток обладают раз-
ными -сопротивлениями. Это следует учитывать при определении
размеров секций секционных групп, образующих фазную обмот-
ку. Необходимо чтобы все фазные обмотки имели одинаковое
сопротивление, а поэтому все фазные обмотки должны содер-
жать одинаковое число различных по размерам секционных
групп.
Существенным недостатком концентрических обмоток яв-
ляется наличие в них секций различных размеров, что услож-
няет изготовление обмотки. От этого недостатка избавлены
шаблонные однослойные обмотки. Все секции этих обмоток
имеют одинаковые размеры и могут изготавливаться на общем
шаблоне. Кроме того, все секции таких обмоток имеют одинако-
вые сопротивления, а лобовые части получаются короче, чем
в концентрических обмотках, что уменьшает расход меди.
В качестве примера рассмотрим простую шаблонную обмот-
ку двухполюсной машины с тремя секциями в секционной груп-
пе. Развернутая схема этой обмотки представлена на рис. 15.10.
Трапецеидальная форма секций несколько облегчает располо-
жение лобовых частей обмотки.
15*
227
Общим недостатком всех типов однослойных обмоток являет-
ся затруднение с размещением лобовых частей, которые прихо-
дится размещать в двух и более плоскостях.
§ 15.5. Однофазные обмотки
Однофазная обмотка выполняется аналогично одной фазе
трехфазной обмотки с той раз-
ницей, что секции этой обмот-
ки занимают лишь 2/3 пазов
сердечника статора. Такая кон-
струкция обмотки делает ее
наиболее экономичной.
Рис. 15.11. Схема однофаз-
ной однослойной обмотки:
2р=2; Z=12
Дело в том, что заполнение
оставшихся 1/3 пазов статора
привело бы к увеличению рас-
хода меди на изготовление об-
мотки в 1,5 раза, в то время
как э. д. с. обмотки увеличи-
лась бы всего лишь в 1,15 раза.
На рис. 15.11 приведена раз-
вернутая схема однофазной
концентрической обмотки. Од-
нофазные обмотки могут быть
также и двухслойными.
§ 15.6. Требования, предъявляемые к э. д. с.
синхронного генератора
К сйнхронным генераторам в отношении наведенной в них
Э. д. с. предъявляются следующие требования.
1) частота э. д. с. должна быть равна заданному значению;
2) величина э. д, с. также должна быть равна заданной, либо
б процессе регулирования э. д. с. генератора должна изменять-
ся в пределах от £MHH до £макс;
3) форма кривой э. д. с. должна возможно ближе подходить
к синусоидальной.
Как следует из формулы (14.1)
f -
Г1~ 60 '
заданное значение частоты э д. с. обеспечивается постоянством
скорости вращения ротора. Необходимая величина э. д. с. гене-
ратора обеспечивается соответствующим значением тока воз-
буждения.
228
Гораздо труднее удовлетворить последнее требование —
придать кривой э. д. с. форму, близкую к синусоиде. Тем не ме-
нее это требование наиболее важное, так как при отклонении
кривой э. д. с. от синусоиды в цепи генератора появляются выс-
шие гармоники тока, которые оказывают вредное влияние на
работу всей энергосистемы: увеличивают потери энергии; спо-
собствуют возникновению опасных перенапряжений как в са-
мом генераторе, так и в линиях передачи; оказывают вредное
индуктивное влияние на линии связи.
Искажение синусоидальной кривой э. д. с. генераторов пере-
менного тока определяется коэффициентом искажений, который
представляет собой выраженное в процентах отношение корня
квадратного из суммы квадратов амплитуд трех наибольших
гармоник (кроме основной) данной э. д. с. к амплитуде ее основ-
ной гармоники. Согласно ГОСТ 183—66, коэффициент искаже-
ния кривой э. д. с. при холостом ходе и номинальном напряже-
нии не должен превышать 5% для генераторов мощностью
свыше 1000 ква и 10% — для генераторов мощностью от 10 до
1000 ква.
§ 15.7. Распределение магнитнойЛшдукции
в воздушном зазоре синхронной машины
Как следует из закона электромагнитной индукции, мгновен-
ное значение э. д. с. одного проводника статорной обмотки
определяется вырая ением
<?пр = Blv.
Если принять длину проводника I и скорость движения поля
ротора v величинами постоянными, что и имеет место в синхрон-
ной машине, то характер изменения э. д. с. £пр будет зависеть
исключительно от кривой распределения магнитной индукции В
в зазоре по окружности статора
еПр = В • const.
Из этого следует, что для получения кривой э. д. с., близкой
к синусоиде, прежде всего необходимо, чтобы распределение
магнитной индукции В в зазоре было синусоидальным. В явно-
полюсных машинах это достигается увеличением зазора под
краями полюсных наконечников (рис. 15.12). Хорошие резуль-
таты дает полюсный наконечник с отношением -у- = 1,5 — 2.
В неявнополюсных машинах синусоидальный характер рас-
пределения магнитной индукции создается подбором соответ-
ствующего отношения между частью окружности ротора без
пазо1в и частью его окружности с пазами, в которые уклады-
229
вается распределенная обмотка возбуждения (см. рис. 14.6,5).
Обычно это отношение равно 2/3.
Однако даже .в этом случае кривая распределения магнитной
индукции в зазоре лишь приближается к синусоиде. Поэтому
э. д. с. обмотки статора остается несинусоидальной и содержит
Рис. 15.12. Распределе-
ние магнитной индук-
ции в зазоре при неско-
шенном (кривая 1) и
скошенном (кривая 2)
полюсных наконечниках
Рис. 15.13. Разложение кривой э. д. с.
в ряд: гармоники /; 3 и 5
высшие гармоники. Так как кривая э. д. с. обмотки статора
симметрична относительно оси абсцисс, то в составе этой э. д. с.
содержатся наряду с первой (основной) гармоникой высшие
гармоники только нечетного порядка: 3, 5, 7 и т. д. (рис. 15.13).
Э. д. с. первой гармоники трехфазной обмотки сдвинуты по
фазе относительно друг друга на угол 120°
= Е 1 маке Sill (О/,
€ \В ~~ Е*£ макс SIH (d)f —— 120
г1С == макс Sin (W + 120°).
Сделав аналогичную запись для э. д. с. третьей гармоники
и учитывая при этом, что частота этой э. д. с. равна 3<х>, по-
лучим
^зА == ^*змакс Sin 3^/,
е3в — £3макс Sin 3 (о)/ — 120°) = ^макс sin 3 otf;
#зС = ^змакс Sin 3 (<otf -|~ 120°) 1=3 £дмакс Sin 3 .
Отсюда следует, что э. д. с. третьей гармоники во всех трех
фазах обмотки статора в любой момент времени совпадают по
направлению. Как было показано в § 10.8, это приводит к от-
сутствию э. д. с. третьей гармоники в линейной э. д. с. (напря-
230
жении) при схемах соединения трехфазной обмотки как звездой,
так и треугольником. Все сказанное о третьей гармонике рас-
пространяется на гармоники, номера которых кратны трем:
9, 15 и т. д.
Амплитуда высших гармоник уменьшается с увеличением
номера гармоники. Поэтому из оставшихся гармоник практи-
Рис. 15.14. Устранение э. Д. с. пятой гармоники укороче-
нием шага обмотки на ‘Дт
ческое значение имеют лишь пятая и седьмая. Действие этих
гармоник можно в значительной степени ослабить укорочением
шага обмотки.
Предположим, что кривая распределения магнитной индук-
ции В в воздушном зазоре несинусоидальна и наряду с первой
гармоникой Bi содержит пятую гармонику В$ (рис. 15.14, а).
Если при этом обмотка выполнена с диаметральным шагом
(t/=t), то э. д. с. первой и пятой гармоник (ei и e$) в обеих сто-
ронах секции (рис. 15.14,6) складываются. В этом случаеэ. д. с.
секции еСд. а следовательно, и э. д. с. всей обмотки содержит
наряду с первой также и пятую гармонику.
231
Если же шаг секции укоротить на 1/5т (у » то э. д. с.
пятой гармоники е$ в активных сторонах секции будут действо-
вать встречно и взаимно уничтожаться (рис. 15.14, в), тогда
в секции останется только э. д. с. первой гармоники и э. д. с.
секции £су станет практически синусоидальной.
Аналогично при укорочении шага на 1/7т (у = уничто-
жается э. д. с. седьмой гармоники.
Обычно шаг секции принимают равным 0,8—0,86т. Этим
достигается ослабление э. д. с. как пятой, так и седьмой гармо-
ник. Из построений, проведенных на рис. 15.14, видно, что уко-
рочение шага секции на е связано с ослаблением не только выс-
ших гармоник, но и основной гармоники. Так, при у=т э. д. с.
первой гармоники равна арифметической сумме э. д. с. е\, наво-
димых в обеих сторонах секции (рис. 15.14,6). Однако при уко-
рочении шага э. д. с. ei в сторонах секции перестают совпадать
по фазе и арифметическая сумма этих э. д. с. заменяется гео-
метрической суммой (рис. 15.14,в). Таким образом, при равных
условиях э. д. с. секции с диаметральным шагом Есд больше
э. д. с. секции с укороченным шагом Есу.
р
Отношение представляет собой коэффициент укорочения
£сд
шага обмотки
Р
= (15.5)
^СД
Для первой гармоники
Ку1 = sin 90°. (15.6)
В общем случае для э. д. с. любой гармоники коэффициент
укорочения равен
Ку. = sin v 90°, (15.7)
т
где v — номер гармоники.
Пример. Определить коэффициенты укорочения шага обмотки для э. д. с.
4
первой, пятой и седьмой гармоник, если шаг обмотки
Решение. По формуле (15.7) имеем
К у1 = sin 4- 90° = 0,951;
5
К = Sin 5 4-90° = 0;
О
Ку, = sin 7 4- 90° = 0,573.
5
232
Следовательно, э. д. с. Е{ обмотки с укороченным шагом составляет
95% от э. д. с, которая имела бы место в обмотке с диаметральным шагом.
Но, применив укорочение шага обмотки, мы полностью избавились от э. д. с.
пятой гармоники и почти наполовину уменьшили э. д. с. седьмой гармоники.
В табл. 15.1 даны значения коэффициентов укорочения в за-
висимости от шага обмотки для разных гармоник
Таблица 15.1
у/т Коэффициент укорочения
для первой гармоники для пятой гармоники для седьмой 1 гармоники
4/5 0,951 ' 0,000 0,573
4/7 0,975 1 0,423 0,000
1 1,000 1 1,000 I 1,000
§ 15.8. Электродвижущая сила фазной обмотки статора
Э. д. с. фазной обмотки Ei представляет собой сумму э. д. с.
всех секций, составляющих фазную обмотку.
Как уже отмечалось, фазная обмотка состоит из секционных
групп, каждая из которых состоит, в свою очередь, из q секций,
расположенных под одной парой полюсов (см. рис. 15.4,6).
Из этого следует, что все группы состоят из одинакового числа
секций, находящихся в одинаковых магнитных условиях. Поэто-
му при последовательном соединении секционных групп в фаз-
ной обмотке ее э. д. с. равна
Е,^Ег2р, (15.8)
где Ег — э. д. с. одной секционной группы.
Если бы все секции секционной группы были сосредоточены
в двух пазах, то э. д. с. совладали по фазе, а э. д. с. всей сек-
ционной группы была равна арифметической сумме э. д. с.
секций Ес, образующих группу (рис. 15.15, а),
Ёг = Ёд.
Но практическое применение имеют распределенные обмотки
статоров, у которых активные стороны секций каждой секцион-
ной группы занимают q>l пазов под каждым полюсом.
Поэтому э. д. с., наводимые в секциях секционной группы,
оказываются сдвинутыми по фазе относительно друг друга на
угол сдвига между соседними пазами а (15.2).
Предположим, что секционная группа состоит из двух секций
(рис. 15.15,6), распределенных в четырех пазах. Построив век-
торы э. д. с. секций ЕС1 и Ёсд и сложив их геометрически, опре-
делим э. д. с. секционной группы. В общем случае, когда сек-
233
ционная группа состоит из q секций, э. д. с. группы равна гео-
метрической сумме
£г=££с. (15.9)
1
Как видно из векторных диаграмм, представленных на
рис. 15.15, а и б, э. д. с. Ег в случае сосредоточенной обмотки
больше, чем при распределенной обмотке. Отношение этих э. д. с.
называется коэффициентом распределения обмотки
q
Отсюда э. д. с. секционной группы для распределенной об-
мотки равна
Е г = EtqKp.
Величина коэффициента распределения обмотки для первой
гармоники
. 180°
sin ----
Л₽1 =------(15.Ю)
’sln2^
Так как угол сдвига между соседними пазами для v-той
гармоники в v раз больше а, то коэффициент распределения
для любой высшей гармоники равен
180°v
sin -=—
<15ll>
q sin ----
2tnq
где tn — число фаз обмотки.
В табл. 15.2 даны значения коэффициента распределения
трехфазной обмотки для различных гармоник.
Таблица 15.2
Q Коэффициент распределения
для первой гармоники для пятой гармоники для седьмой гармоники
к 1,000 1,000 1,000
2 0,966 0,259 0,259
3 0,960 0,217 0,178
4 0,959 0,204 0,157
5 0,958 0,200 0,149
6 0,957 0,197 0.145
8 0,956 0,191 0,136
234
Из таблицы видно, что увеличение q вызывает сравнительно
небольшое уменьшение коэффициента распределения для основ-
ной гармоники и значительное уменьшение его для высших гар-
моник.
В процессе работы синхронной машины вращающееся поле
ротора движется относительно любого активного проводника
обмотки статора с линейной скоростью
v =^1 = ^h=:2T^ (15Л2)
где D—диаметр расточки статора;
т — полюсное деление, равное
kD
т = V
При этом в проводнике обмотки статора наводится э. д. с.,
максимальное значение которой
^пр.макс ~~ ВМакс(° в Вмак<У2т/,,
где Вмакс — максимальное значение магнитной индукции в за-
зоре.
Если принять распределение магнитной индукции в зазоре
синусоидальным, то среднее значение магнитной индукции
2
Вер — *^"ВМакС"
Заменив максимальное значение индукции средним, получим
выражение максимального значения э. д. с. проводника
Впр.макс— ~
где Ф = Вср(т— основной магнитный поток ротора.
Переходя к действующему значению, получим
= (,5.13)
Для секции обмотки с диаметральным шагом (y=t) и чис-
лом витков ws получим выражение действующего значения
э. д. с.
Вс = 2Enp^j — .j/-— 1^5»
или
£с = 4,44Ф/1ш5. (15-14)
235
Если же секция выполнена с укороченным шагом, то в фор-
мулу (15.14) следует ввести коэффициент укорочения /СуЪ учи-
тывающий уменьшение э. д. с. первой гармоники при укорочении
шага секции,
5су = 4,44АФи>ЛУг (15.15)
Для определения э. д. с. всей обмотки в формуле (15.15)
необходимо э. д. с. одной секции умножить на число после-
довательно соединенных секций. При последовательном соеди-
Рис. 15.15. К понятию о коэффициенте распределения
нении секционных групп (§ 15.3) число последовательно соеди-
ненных секций в фазной обмотке равно 2pq. Следовательно,
э. д. с. фазной обмотки
или
Ех = 4,44/1Ф^2/7^у^р1.
Обозначим ws2pq через Wi (число последовательно соединен-
ных витков в фазной обмотке), a Лу1ХР1 —через (обмоточ-
ный коэффициент обмотки для первой гармоники). Тогда фор-
мула э. д. с. фазной обмотки примет вид
(15.16)
Пример. Определить э. д. с. одной фазы трехфазного синхронного гене-
ратора (имеется в виду основная гармоника э. д. с.), схема статорной об-
мотки которого представлена на рис. 15.6 и имеет следующие данные:
2=24, 2р=4, у=5. Секционные группы соединены последовательно. Секции
трехвитковые w5=3. Частота /1=50 гц. Магнитный поток возбуждения
Ф=4,74* 10-2 8б. '
Решение. Число пазов на полюс и фазу
п Z _ 24 9
а =-----—-----— 2.
2рт 4-3
236
Полюсное деление
,= .£ = 24 = 6.
2р 4
Относительный шаг обмотки
У- = А = о,83.
т 6
Коэффициент укорочения обмотки (15.6)
Kyi = Sin 0,83-90° = 0,960.
Коэффициент распределения обмотки (15.10)
180°
sin —--
2-3
~ ‘ 180° ” 0>966.
2sln273^2
Обмоточный коэффициент
Ki - 0,960-0,966 = 0,928.
Число последовательно соединенных витков в фазной обмотке
= 2pqws = 4 • 2 • 3 = 24.
Э. д. с. фазной обмотки (15.16)
Ех = 4,44-50-4,74- 10~2-24-0,928 = 230 в.
При соединении обмоток генератора звездой линейная э. д. с. составляет
Ел = Ех У"3 = 230 уТ = 400 в.
Глава XVI
РЕАКЦИЯ ЯКОРЯ И ХАРАКТЕРИСТИКИ
СИНХРОННОГО ГЕНЕРАТОРА
§ 16.1. Магнитное поле обмотки статора
При симметричной нагрузке трехфазного генератора токи
в его фазных обмотках одинаковы по величине и сдвинуты по
фазе относительно друг друга на 120 эл. градусов. Ток каждой
фазной обмотки создает намагничивающую силу. Совокупное
действие намагничивающих сил трех фазных токов создает ре-
зультирующую н. с. трехфазной обмотки, вектор которой вра-
щается относительно статора в ту же сторону и с такой же ско-
ростью, что и ротор синхронной машины.
237
Рис. 16.1. Трехфазная обмотка (а)
и график трехфазного тока (б)
Принцип образования этой вращающейся намагничивающей
силы рассмотрим на простейшей трехфазной обмотке, каждая
фаза которой состоит из одного витка (рис. 16.1,а). Обмотка
эта является двухполюсной, поскольку стороны витка каждой
фазы расположены по диа-
метру статора. Фазовые об-
мотки соединены звездой.
Предположим, что на-
магничивающая сила обмот-
ки возбуждения равна нулю,
а ток в обмотке статора со-
здается за счет э. д. с. по-
стороннего источника энер-
гии трехфазного тока. Изме-
нение тока в фазных обмот-
ках показано графически в
виде трех синусоид, сдвину-
тых по фазе относительно
друг друга на 120 эл. градусов (рис. 16.1,6).
Рассмотрим изменения магнитного потока, создаваемого на-
магничивающей силой трехфазной обмотки в течение одного пе-
Рис. 16.2. Принцип получения вращающегося
магнитного поля
риода. С этой целью приведем ряд построений вектора магнит-
ного потока статорной обмотки, соответствующего различным
моментам времени.
В положении О (рис. 16.1,6) ток в фазе А равен нулю,
в фазе В имеет отрицательное направление, а в фазе С — поло-
жительное. Указанные направления тока отмечаем на рис. 16.2, а.
Затем определяем направление магнитного потока внутри
статора (поток направлен вертикально вниз). В положении 1
238
Рис. 16.3. Магнитное
поле статора синхрон-
ной машины
(рис. 16.1, б) ток в фазе С равен нулю, в фазе А — имеет поло-
жительное направление, а в фазе В — по-прежнему остался
отрицательным.
Сделав построения, как и для положения О, видим, что маг-
нитное поле внутри статора по сравнению с положением О по-
вернулось на 60° (1/Зт) в направ-
лении движения часовой стрелки
(рис. 16.2, б),
Проведя аналогичные построения
для положений 2, 3, 4, 5 и 6
(рис. 16.1,6), видим, 'что магнит-
ный поток внутри статора каж-
дый раз при переходе от одного
положения к следующему пово-
рачивается на 60° и за один период
переменного тока делает один обо-
рот (рис. 16.2, в, г, д, е). Если часто-
та тока в обмотке статора fi=50e^,
то магнитное поле статора враща-
ется со скоростью 50 об/сек. В об-
щем случае скорость вращающего-
ся поля статора пст прямо пропорциональна частоте тока
и обратно пропорциональна числу пар полюсов обмотки статора
Дст =
А60
р
Сравнение полученного выражения с формулой (14.1) пока-
зывает, что намагничивающая сила обмотки статора вращается
с той же скоростью, что и ротор машины (пст=п,). Из этого
следует, что намагничивающая сила обмотки статора и намагни-
чивающая сила обмотки возбуждения неподвижны друг относи-
тельно друга.
В табл. 16.1 приведены значения синхронных скоростей для
разного значения числа полюсов в обмотке статора 2р и про-
мышленной частоты /1 = 50 гц.
Т а б л и ц а 16.1
2р 2 4 6 8 10 12
об/мин 3000 1500 1000 750 600 500
На рис. 16.3 изображена картина магнитного поля, создан-
ного н. с. обмотки статора, где видно, что н. с. обмотки статора
создает два магнитных потока: поток якоря Фа, который про-
239
ходит по сердечнику статора и замыкается через сердечник ро-
тора, и поток рассеяния Фрь который охватывает проводники
обмотки статора и замыкается в воздушном зазоре машины, не
проникая в сердечник ротора.
§ 16.2. Реакция якоря
В процессе работы нагруженного синхронного генератора
в нем действуют две намагничивающие силы:
а) н. с. обмотки возбуждения
где х---число витков в полюсной катушке возбуждения;
zp
/в — ток в обмотке возбуждения;
б) н. с. обмотки статора (якоря)
Л = 0,45/71! (16.1)
где /П] — число фаз обмотки;
Ki — обмоточный коэффициент (см. § 15.8).
Намагничивающая сила обмотки возбуждения Fo создает
магнитное поле возбуждения. Но при подключении нагрузки на-
магничивающие силы Fq и Fa взаимодействуют и создают ре-
зультирующее магнитное поле, отличающееся от поля обмотки
возбуждения. Этот процесс воздействия н. с. обмотки статора Fa
на н. с. обмотки возбуждения Fq называется реакцией якоря.
Реакция якоря оказывает влияние на рабочие свойства синх-
ронной машины, так как изменение магнитного поля в машине
сопровождается изменением э. д. с., наведенной в обмотке ста-
тора, а следовательно, изменением и ряда других величин, свя-
занных с этой э. д. с. В принципе реакция якоря синхронных
машин аналогична реакции якоря в машинах постоянного тока
(см. § 3.3).
Однако, если в машинах постоянного тока влияние реакции
якоря на рабочие свойства машины зависит исключительно от
величины нагрузки, то в синхронных машинах это влияние оп-
ределяется еще и характером нагрузки. Синхронные генераторы,
как правило, работают на смешанную нагрузку (активно-индук-
тивную или активно-емкостную). Но для выяснения вопроса
о влиянии реакции якоря на работу синхронной машины целесо-
образно рассмотреть случаи работы генератора при нагрузках
предельного характера, а именно: активной, индуктивной и ем-
костной. Воспользуемся для этого векторными диаграммами на-
240
магничивающих сил. При построении этих диаграмм следует
иметь в виду, что вектор э. д. с. Ео, индуктируемой магнитным
потоком обмотки возбуждения в обмотке статора, отстает по
фазе от вектора этого потока (а следовательно, и вектора
н. с. Fo) на 90°.
Что же касается вектора тока в обмотке статора />, то он
может занимать по отношению к вектору Ёо различные поло-
жения, определяемые углом ф, в зависимости от вида нагрузки.
Активная нагрузка (ф=0). На рис. 16.4, а представ-
лены статор и ротор двухполюсного генератора. На статоре по-
казана часть фазной обмотки. Ротор явнополюсный, вращается
против движения часовой стрелки. В рассматриваемый момент
времени ротор занимает вертикальное положение, что соответ-
ствует максимуму э. д. с. Ео в фазной обмотке. Так как ток при
активной нагрузке совпадает по фазе с э. д. с., то указанное
положение ротора соответствует также и максимуму тока. По-
строив линии магнитной индукции поля возбуждения (ротора)
и линии магнитной индукции поля обмотки статора, видим, что
н. с. обмотки статора Ёа направлена перпендикулярно н. с. воз-
буждения Ёо. Этот вывод также подтверждается векторной диа-
граммой, построенной для этого же случая. Порядок построения
этой диаграммы следующий: в соответствии с положением рото-
ра генератора проводим вектор н. с. возбуждения Ео; под углом
90° к этому вектору в сторону отставания проводим вектор э. д. с.
Ёо, наведенной магнитным полем возбуждения в обмотке ста-
тора; при подключении чисто активной нагрузки ток в обмотке
статора Л совпадает по фазе с э. д. с. Ёо, а поэтому вектор
н. с. Ёа, создаваемой этим током, сдвинут в пространстве отно-
сительно вектора Ёо на 90°.
Такое взаимодействие н. с. Еа и Fo аналогично реакции якоря
в генераторе постоянного тока при расположении щеток на гео-
метрической нейтрали: магнитное поле машины ослабляется под
набегающим краем полюса и усиливается под сбегающим краем
полюса. Вследствие насыщения магнитной цепи результирующее
магнитное поле машины несколько ослабляется.
Индуктивная нагрузка (ф=90°). При чисто ин-
дуктивной нагрузке генератора ток статора Ц отстает по фазе от
э. д. с. Ёо на 90°. Поэтому он достигает максимального значе-
ния лишь после поворота ротора вперед на 90° относительно
его положения, соответствующего максимуму э. д. с. Ео (рис.
16.4,6). При этом и. с. якоря Ёа действует по оси полюсов ро-
тора встречно н. с. возбуждения Ёо. В этом мы также убежда-
емся, построив векторную диаграмму. Такое действие н. с. якоря
Fa ослабляет поле машины. Следовательно, реакция якоря
16 1649 241
в синхронном генераторе при чисто индуктивной нагрузке ока-
зывает продольно-размагничивающее действие.
Емкостная нагрузка (ф = —90°). Так как ток Ц при
емкостной нагрузке опережает по фазе э. д. с. Eq на 90°, то
своего наибольшего значения он достигает раньше, чем э. д. с.»
Рве. 16.4. Реакция якоря синхронного генера-
тора при активной (а), индуктивной (б)
и емкостной (в) нагрузках
т. е, когда ротор займет положение, показанное на рис. 16.4, в.
Намагничивающая сила якоря Fa, так же как и в предыдущем
случае, действует по оси полюсов, но теперь уже согласно с н. с.
242
возбуждения Fo- При этом происходит усиление магнитного
поля возбуждения. Таким образом, при чисто емкостной на-
грузке синхронного генератора реакция якоря оказывает про-
дольно-намагничивающее действие.
Смешанная нагрузка. При смешанной нагрузке
синхронного генератора ток статора Л сдвинут по фазе относи-
Рис. 16.5. Реакция якоря при смешанной на-
грузке:
а — активно-индуктивная нагрузка; б — ак-
тивно-емкостная нагрузка
тельно э. д. с. Ео на угол ф, значения которого находятся в пре-
делах 0<ф<±90°. Для выяснения вопроса о влиянии реакции
якоря при смешанной нагрузке воспользуемся диаграммами
н. с., представленными на рис. 16.5.
При активно-индуктивной нагрузке (рис. 16.5, а) вектор Fa
отстает от вектора Ео на угол 0<ф<90°. Разложим вектор Fa
на две составляющие: продольную составляющую н. с. якоря
Fad = Fa sin ф и поперечную составляющую н. с. якоря Faq =
= Гасозф. Такое же разложение н. с. якоря Fa на составляю-
щие можно сделать в случае активно-емкостной нагрузки (рис.
16.5,6). Поперечная составляющая н. с. якоря Faq пропорцио-
нальна активной составляющей тока нагрузки
Iq = I^O3^,
а продольная составляющая н. с. якоря Fad пропорциональна
реактивной составляющей тока нагрузки
Zd = /1sin<p.
При этом, если реактивная составляющая тока нагрузки Id
отстает по фазе от э. д. с. Ёо (нагрузка активно-индуктивная),
то н. с. Fad размагничивает генератор, если же реактивная
составляющая fd опережает по фазе э. д. с. Ео (нагрузка
активно-емкостная), то н. с. Fad подмагничивает генератор.
16* 243
Направление вектора Fad относительно вектора Fo опреде-
ляет характер реакции якоря, который при токе нагрузки 1\,
отстающем по фазе от э. д. с. £о, является размагничивающим,
а при токе Ц, опережающим по фазе э. д. с. Eq, является под-
магничивающим.
В явнополюсной машине магнитное сопротивление в межпо-
люсном пространстве больше магнитного сопротивления под по-
Рис. 16.6. Распределение магнитного потока якоря по
' поперечной оси синхронной машины:
в—в неявнополюсной машине; б — в явнополюсной ма-
шине; 1 — график н. с.; 2 — график магнитного потока
люсами. Объясняется это значительным воздушным зазором
межполюсного пространства. Поэтому составляющая магнитно-
го потока якоря по поперечной оси в явнополюсной машине
Намного меньше, чем в неявнополюсной (рис. 16.6). При опре-
делении поперечной составляющей н. с. якоря для явнополюс-
ной машины это уменьшение потока учитывается' коэффициен-
том К9.
Kg = KqFacos^. (16.2)
Здесь Kq — коэффициент поперечной реакции якоря, представ-
ляющий собой отношение магнитного потока якоря по попереч-
ной оси в явнополюсной машине к составляющей потока якоря
по этой же оси в неявнополюсной машине. Обычно Кд =0,3—0,5.
Продольная составляющая н. с. якоря в явнополюсной ма-
тйине !
(16.3)
где K<f коэффициент продольной реакции якоря, учитываю-
щий некоторое ослабление составляющей магнитного потока
244
якоря по продольной оси в явнополюсной машине вследствие
неравномерности воздушного зазора. Обычно Kd=0,8—0,95.
§ 16.3. Уравнение э. д. с. синхронного генератора
Напряжение на выводах генератора, работающего с нагруз-
кой, отличается от напряжения этого генератора в режиме хо-
лостого хода. Это объясняется влиянием ряда причин: реакции
якоря, магнитного потока рассеяния, падением напряжения
в активном сопротивлении обмотки статора.
Как было установлено (см. § 16.2), при работе нагруженной
синхронной машины в ней действует несколько намагничи-
вающих сил, которые, взаимодействуя, создают результирующий
магнитный поток. Однако при учете факторов, влияющих на на-
пряжение синхронного генератора, условно исходят из предпо-
ложения независимого действия всех намагничивающих сил
генератора, т. е. предполагается, что каждая из намагничиваю-
щих сил создает собственный магнитный поток.
Но следует отметить, что такое представление не соответ-
ствует физической сущности явлений, так как в одной магнит-
ной системе возникает лишь один магнитный поток — результи-
рующий. Но в данном случае предположение независимости
магнитных потоков дает возможность понять влияние всех фак-
торов на работу синхронной машины.
Итак, выясним каковы же влияния намагничивающих сил,
действующих в явнополюсном синхронном генераторе, на работу
последнего.
1. Намагничивающая сила обмотки возбуждения Fo создает
магнитный поток возбуждения Фо, который индуктирует в об-
мотке статора основную э. д. с. генератора Eq.
2. Составляющая намагничивающей силы обмотки якоря по
продольной оси Ead создает составляющую магнитного потока
реакции якоря по продольной оси Фа<г. Этот магнитный поток
индуктирует в обмотке статора э. д. с. Ead, называемую э. д. с.
реакции якоря по продольной оси,
Ead = -j/dxad, (16.4)
где xad — индуктивное сопротивление обмотки статора, эквива-
лентное реакции якоря по продольной оси.
Величина xad показывает, какова степень влияния реакции
якоря по продольной оси на работу генератора.
Так, в синхронных машинах при насыщенной магнитной
системе магнитный поток реакции якоря по продольной оси Фа</
меньше, чем при ненасыщенной. Объясняется это тем, что поток
Фа(, почти полностью проходит через сталь, магнитное сопро-
тивление которой возрастет при магнитном насыщении. Из
245
этого следует, что величина xad зависит от степени магнитного
насыщения машины: с увеличением степени магнитного насыще-
ния xad уменьшается.
3. Составляющая намагничивающей силы обмотки якоря по
поперечной оси Faa создает составляющую магнитного потока
реакции якоря по поперечной оси Фа?, который индуктирует
в обмотке статора э. д. с. реакции якоря по поперечной оси,
==- Нqxaq, (16.5)
где ха?—индуктивное сопротивление обмотки статора, эквива-
лентное реакции якоря по поперечной оси.
Величина xaq не зависит от степени магнитного насыщения
машины, так как при явнополюсном роторе магнитный поток Фа?
проходит через значительный воздушный зазор межполюсного
пространства.
4. Магнитный поток рассеяния обмотки статора (см.
рис. 16.3) индуктирует в обмотке статора э. д. с. рассеяния Ер1
ЁР1‘^ /А^рр (16.6)
где хР1—индуктивное сопротивление рассеяния обмотки ста-
тора.
5. Ток в фазной обмотке статора 1\ создает активное паде-
ние напряжения
^=/Л, (16.7)
где Г] — активное сопротивление фазной обмотки статора.
Ввиду малой величины активного сопротивления rt актив-
ное падение напряжения невелико и даже при номинальном
токе статора обычно меньше 1%' от номинального напряжения
на выводах генератора 6\н.
Геометрическая сумма всех перечисленных выше величин
дает значение напряжения на выводах синхронного генера-
тора Ui
U, = Ёо + Ead + Ёaq + £р| - Ur{. , (16.8)
Полученное выражение представляет собой уравнение э. д. с.
явнополюсного синхронного генератора.
В неявнополюсных машинах индуктивные сопротивления xad
и xaq приблизительно равны, так как воздушный зазор в этих
машинах по окружности статора одинаков. Это дает возмож-
ность при построении векторных диаграмм для неявнополюсно-
го генератора реакцию якоря рассматривать не отдельно по
продольной и поперечной составляющим, а учитывать ее по пол-
ной намагничивающей силе Еа и соответствующей э. д. с.
£а = -/7Л. (16.9)
246
Здесь ха — индуктивное сопротивление обмотки статора,
обусловленное реакцией якоря.
Кроме того, поскольку поток якоря Фа и поток рассеяния
Фр1 создаются одним током, то индуктивное сопротивление
реакции якоря ха и индуктивное сопротивление рассеяния хр1
целесообразно рассматривать как сумму
•*с=*а + *рр (16.10)
где хс — синхронное сопротивление неявнополюсной машины.
В этом случае э. д. с. реакции якоря и э. д. с. рассеяния учи-
тываются совместно
1^а 4“ ( УМр1) 3=5 Ё„ (16.11)
тогда уравнение э. д. с. для неявнополюсного синхронного гене-
ратора принимает вид
= £0 + £с — (16.12)
§ 16.4. Векторные диаграммы синхронного генератора
Воспользовавшись уравнением э. д. с. (16.8), построим век-
торную диаграмму явнополюсного синхронного генератора, ра-
ботающего на активно-индуктивную нагрузку (ток /1 отстает
по фазе от э. д. с. Ёо). Векторная диаграмма строится на осно-
вании следующих данных:
1) э. д. с. генератора в режиме холостого хода Ё$\
2) величины тока нагрузки Л и его угла сдвига ф1 относи-
тельно Э. Д. с. Eq\
3) продольного x&d и поперечного xaQ индуктивных сопро-
тивлений реакции якоря;
4) активного сопротивления фазной обмотки статора
При симметричной нагрузке генератора диаграмма строится
лишь для одной фазы.
Рассмотрим порядок построения векторной диаграммы
(рис. 16.7, а). В произвольном направлении откладываем вектор
э. д. с. £о и под углом ф к нему вектор тока Ц. Последний раз-
ложим на составляющие: реактивную Id = Л sin ф1 и активную
/^=/1С05ф1. Далее, из конца вектора Е$ откладываем векторы
э. д. с.
Ё&ц == jjqXaqi
— fl 1*р1>
247
Рис. 16.7. Векторные диаграммы явно-
полюсного генератора:
а — при активно-индуктивной нагрузке;
б — при активно-емкостной нагрузке
Соединив конец вектора Urt с точкой О, получим напряже-
ние Ui, величина которого равна геометрической сумме векто-
ров э. д. с. (16.8).
Прн построении векторной диаграммы генератора, работаю-
щего на активно-емкостную нагрузку (ток Л опережает по фазе
э. д. с. Ёо), вектор тока Л откладывают влево от вектора э. д. с.
(рис. 16.7, б), а направление вектора Ёяа устанавливают соглас-
но с направлением векто-
ра э. д. с. Ёо, так как при
емкостном характере на-
грузки реакция якоря
имеет подмагничиваю-
щий характер. В осталь-
ном порядок построе-
ния диаграммы остается
прежним.
Векторную диаграмму
синхронного неявнопо-
люсного генератора стро-
ят на основании уравне-
ния (16.12), при этом век-
тор Ео откладывают под
углом ф] к вектору токаЛ
(рис. 16.8). Следует отме-
тить, что построенные век-
торные диаграммы не
учитывают насыщения
магнитной цепи, а поэто-
му они отражают лишь
качественную сторону яв-
лений. Но тем не менее
эти диаграммы дают воз-
можность сделать сле-
дующие выводы:
а) основным факто-
ром, влияющим на изме-
нение напряжения нагру-
женного генератора, яв-
ляется продольная со-
ставляющая магнитного
потока якоря, создающая
э. д. с. Ead;
б) при работе генера-
тора на активно-индуктивную нагрузку, т. е. с током Л, отстаю-
щим по фазе от э. д. с. Ео, напряжение на выводах обмотки
248
Рис. 16.8. Векторные диаграммы неяв-
нополюсного генератора:
а — при активно-индуктивной нагрузке;
б — при активно-емкостной нагрузке.
статора V\ с увеличением нагрузки уменьшается, что объясня-
ется размагничивающим влиянием реакции якоря. При работе
генератора на активно-емкостную нагрузку (с током Л, опере-
жающим по фазе э. д. с. Ео), напряжение Ui с увеличением на-
грузки повышается, что объясняется 1подмагничивающим влия-
нием реакции якоря.
§ 16.5. Характеристики синхронного генератора
Свойства синхронного генератора определяются характе-
ристиками холостого хода, короткого замыкания и внешними.
Характеристика холостого хода синхронного
генератора представляет собой график зависимости напряжения
Рис. 16.9. Опыт холостого хода синхронного
генератора:
а — схема опыта; б — нормальная характе-
ристика холостого хода
Uq в режиме холостого хода генератора от тока возбуждения
1В при неизменной скорости вращения ротора: U0=f (iB) при
/1=0 и n = const. Схема включения синхронного генератора для
снятия характеристики холостого хода приведена на рис. 16.9, а.
Обычно снимают восходящую и нисходящую ветвь характе-
ристики, которые вследствие гистерезисных свойств магнитной
цепи не совпадают.
Характеристика холостого хода, а также другие характе-
ристики синхронных генераторов удобнее строить в относитель-
ных единицах. При этом по осям графика откладывают не абсо-
лютные значения величин, а их отношения к номинальным зна-
чениям: по оси ординат ур-, по оси абсцисс .
Таким образом, за единицу на оси напряжений принимают
напряжение холостого хода, равное номинальному U0=Uih> а за
249
единицу на оси токов возбуждения принимают ток возбуждения
i>0H, соответствующий напряжению Uo = 171н. Обычно характе-
ристики холостого хода синхронных машин, выраженные в отно-
сительных единицах, мало отличаются друг от друга и соответ-
ствуют некоторой средней характеристике, называемой нормаль-
ной характеристикой холостого хода (рис. 16.9,6), данные
которой приведены в табл. 16.2.
Таблица 16.2
*во/*вон 0,5 1,0 1,5 2,0 2,5 3,0 3,5
0,58 1,0 1,21 1,33 1,40 1,46 1,51
Характеристику короткого замыкания
Лк== f(iB) можно получить при опыте короткого замыкания, ко-
Рис. 16.10. Опыт короткого замыкания:
а — схема опыта; б — характеристика
короткого замыкания; в — векторная ди-
аграмма.
торый проводится в следующем порядке: выводы статорной об-
мотки замыкают накоротко (рис. 16.10, а) и приводят ротор
машины во вращение с номинальной скоростью. Затем возбуж-
дают машину, постепенно увеличивая ток возбуждения от нуля
до значения, при котором ток короткого замыкания превышает
номинальный рабочий ток статорной обмотки не более чем на
25% (Лк= 1 >25/1н). Так как в этом случае э. д. с. обмотки ста-
тора составляет величину в несколько раз меньшую, чем в рабо-
чем режиме генератора и, следовательно, основной магнитный
поток весьма мал, то магнитная цепь машины оказывается нена-
250
сыщенной. По этой причине характеристика короткого замыка-
ния представляет собой прямую линию (рис. 16.10, б). Активное
сопротивление обмотки статора невелико по сравнению с ее
индуктивным сопротивлением. Поэтому, пренебрегая величиной
И, можно считать, что при опыте короткого замыкания нагрузка
синхронного генератора (его собственные обмотки) является
чисто индуктивной. Из этого следует, что при опыте короткого
Рис. 16.11. Графическое опреде-
ление составляющих тока воз-
буждения при опыте короткого
замыкания
Рис. 16.12. К определению от-
ношения короткого замыкания
замыкания реакция якоря синхронного генератора имеет про-
дольно-размагничивающий характер (см. § 16.2).
Векторная диаграмма, построенная для генератора при
опыте трехфазного короткого замыкания, представлена на
рис. 16.10,в. Из диаграммы видно, что э. д. с. Ек, индуктируемая
в обмотке статора, полностью уравновешивается э. д. с. про-
дольной реакции якоря Eid = — jldx3d и э- Д- с- рассеяния Ёр1 =
= -ihxpl
Ёк = Ead + Яр1.
При этом намагничивающая сила обмотки возбуждения
имеет как бы две составляющие: одна компенсирует падение
напряжения j!iXpi, а другая — размагничивающее влияние
реакции якоря jldxad.
Характеристики холостого хода и короткого замыкания дают
возможность определить значения токов возбуждения, соответ-
ствующие указанным составляющим намагничивающей силы
возбуждения. С этой целью характеристики холостого хода
и короткого замыкания синхронной машины строят в одной
системе осей координат (рис. 16.11). На оси ординат отклады-
251
вают отрезок ОВ, выражающий в масштабе напряжения вели-
чину э. д. с. рассеяния Epi — ~]1ухр1. Затем точку В сносят на
характеристику холостого хода (точка В') и опускают перпен-
дикуляр B'D на ось абсцисс. Полученная таким образом точка
D разделила ток возбуждения 1ВКВ на две части: гвх— ток воз-
буждения, необходимый для компенсации падения напряжения
и 4а — ток возбуждения, компенсирующий продольно-
размагничивающую реакцию якоря.
Одним из важных параметров синхронной машины является
Рис. 16.13. Внешние (а) и регулировочные (б) ха-
рактеристики синхронного генератора
отношение короткого замыкания, которое представляет собой
отношение тока возбуждения гвон, соответствующего номиналь-
ному напряжению при холостом ходе, к току возбуждения iBKH,
соответствующему номинальному току статора при опыте ко-
роткого замыкания (рис. 16.12), х
ОКЗ = 4^. (16.13)
^вкн
Значения ОКЗ обычно лежат в пределах: для турбогенера-
торов ОКЗ=0,5 — 0,7, для гидрогенераторов ОКЗ = 1,0 —1,4.
Величина ОКЗ имеет большое практическое значение при
оценке свойств синхронной машины: машины с малой величи-
ной ОКЗ менее устойчивы при параллельной работе, имеют
значительные колебания напряжения при изменениях нагрузки,
но такие машины имеют меньшие габариты и, следовательно,
дешевле, чем машины с большой величиной ОКЗ; однако ма-
шины с большим ОКЗ более устойчивы в работе.
Внешняя характеристика синхронного генератора представ-
ляет собой зависимость напряжения на выводах статорной об-
мотки от величины тока нагрузки: tA=f(/i) при iB =const;
cos<pi = const; nI=nH = const. На рис. 16.13,а представлены
внешние характеристики, соответствующие различным по харак-
теру нагрузкам синхронного генератора.
252
При снятии внешней характеристики генератор нагружают
до номинального тока (Л = Лн) при номинальном напряжении
((/1=1/1н)на выводах статорной обмотки. Затем постепенно
разгружают генератор. При активной нагрузке (кривая /)
уменьшение нагрузочного тока сопровождается ростом напря-
жения, что объясняется уменьшением падения напряжения
в статорной обмотке и ослаблением потока поперечной реакции
якоря в насыщенной машине. При индуктивной нагрузке (кри-
вая 2) увеличение напряжения при сбросе нагрузки будет более
интенсивным, так как с уменьшением тока /1 ослабляется
размагничивающее действие реакции якоря. Однако в случае
емкостной нагрузки генератора (кривая 3) уменьшение тока h
сопровождается уменьшением напряжения IJi, что объясняется
ослаблением подмагничивающего действия реакции якоря.
Изменение напряжения синхронного генератора, работающе-
го отдельно от других, при сбросе нагрузки от номинального зна-
чения до нуля и при сохранении тока возбуждения и скорости
вращения неизменными называется номинальным изменением
(повышением) напряжения
р __п
Д[/Н = --°-1н -100. (16.14)
При емкостной нагрузке генератора величина АС7Н является
отрицательной. В соответствии с существующими нормами по-
вышение напряжения при сбросе нагрузки не должно превы-
шать 50%.
В табл. 16.3 приведены данные повышения напряжения
синхронных генераторов.
Таблица 16.3
Тип генератора Повышение напряжения ДС7Н, %
cos <р!=1 cos cpt=Of8
Трехфазный: быстроходный 8 -15 18—31
тихоходный 9—13 18—25
турбогенератор 16 -25 30—48
Однофазный для питания железных дорог 17—20 35-40
Регулировочная характеристика синхронно-
го генератора показывает, как следует изменять ток возбужде-
ния генератора при изменениях нагрузки, чтобы напряжение на
зажимах генератора оставалось неизменно равным номиналь-
ному:
2В = /(Л) ПРИ = const и «! = nH = const.
253
На рис. 16.13, б представлены регулировочные характеристи-
ки синхронного генератора. При активной нагрузке увеличение
тока нагрузки Ц сопровождается уменьшением напряжения U\.
Поэтому для поддержания напряжения неизменным по мере
увеличения тока нагрузки 1\ следует повышать ток возбуждения
(кривая /). Индуктивный характер нагрузки вызывает более
резкое понижение напряжения U\ (см. рис. 16.13, а, кривая 2),
поэтому ток возбуждения, необходимый для поддержания
^i=^ih. следует повышать в большей степени (кривая 2). При
емкостном же характере нагрузки увеличение нагрузки сопро-
вождается ростом напряжения Ui, поэтому для поддержания
U!=UlH ток возбуждения следует уменьшать (кривая 3).
Ток в обмотке возбуждения синхронного генератора регули-
руется либо изменением сопротивления регулировочного рео-
стата Г] (см. рис. 14.3, а) в цепи возбуждения генератора
(непосредственное регулирование), либо изменением напряже-
ния на зажимах возбудителя, что достигается регулировкой ве-
личины тока возбуждения возбудителя посредством регулиро-
вочного реостата г2 (косвенное регулирование). Второй способ
регулирования тока возбуждения является экономически более
выгодным и технически более удобным. Так как ток возбужде-
ния возбудителя намного меньше тока возбуждения синхронного
генератора, то для косвенного регулирования требуются рео-
статы меньших размеров, чем при непосредственном регулиро-
вании. Потери энергии в цепи возбуждения при этом умень-
шаются.
Возможен также смешанный способ регулирования, при ко-
тором реостатами и и г2 осуществляется соответственно тонкая
и грубая регулировка тока. Однако при часто меняющейся на-
грузке регулировка напряжения вручную с помощью реостатов
в цепи возбуждения становится невозможной. Поэтому в прак-
тике эксплуатации синхронных генераторов применяют автома-
тическое регулирование напряжения.
§ 16.6. Практическая диаграмма э. д. с. синхронного генератора
Повышение напряжения синхронного генератора при сбросе
нагрузки можно определить графически, путем построения прак-
тической диаграммы э. д. с.
Предположим, что синхронный генератор работал в режиме
номинальной нагрузки, а затем нагрузка была полностью сбро-
шена, но скорость вращения и ток возбуждения при этом оста-
лись неизменными. Напряжение генератора после сброса на-
грузки возросло на величину &Un. Для определения этой вели-
чины проделаем следующее (рис. 16.14): в одних осях коорди-
нат построим характеристики холостого хода и короткого замы-
254
калия. Затем на оси ординат построим вектор ОА =Ula и под.
- углом <рн к вектору ОА проведем вектор тока/1Н. Прибавив гео-
метрически к вектору U1H падения напряжения /1нгх и /Лнхр1,
найдем величину э. д. с. нагруженного генератора
Ёцг ~ О1и 4* 71H/"i 4*
Перенеся точку В на характеристику холостого хода (точ-
ка С), проведем ординату CD. Полученный на оси абсцисс
Рис. 16.14. Практическая диаграмма э. д. с.
отрезок OD определяет величину тока возбуждения 4, необхо-
димого для создания э. д. с. нагруженного генератора Еиг. Но при
работе генератора без нагрузки его э. д. с. Ей больше, чем э. д. с.
£нг, на величину э. д. с. продольной реакции якоря Ead
Ёо = £нг 4“ Дай-
Для учета величины Ead определим ток возбуждения tBa,
соответствующий продольно-размагничивающему действию ре-
акции якоря. Проделав необходимые построения (см.рис. 16.11),
определяем величину tBa =LG. Затем из точки D под углом
Т'"=?н4-Т к проводим вектор DM= iM. Из центра О ра-
диусом ОМ опишем дугу до пересечения с осью абсцисс в точ-
ке N. Тогда ON—lWil—ток возбуждения, соответствующий э. д. с.
255
E0—NP. Проведя из точки А параллельно оси абсцисс линию
AR, получим
NP — NR
NR
100 =
100.
U 1н
Пример. Построить практическую диаграмму э. д. с. для синхронного
генератора и определить повышение напряжения при сбросе нагрузки. Гене-
ратор имеет следующие данные: Рн =500 кет, UlH =230 в, cos <рн = 0,8,
дун =
Рис. 16.15. Определение ДС7Н
П5=0,0015 ом, Xpi=0,04 ом, ОКЗ = 1,4, характеристика холостого хода нор-
мальная (табл. 16.2).
Решение. Для построения характеристики короткого замыкания
прежде всего определим ток возбуждения zBKH, соответствующий номиналь-
ному току нагрузки. Из выражения (16.13)
4kh_ _ _1 _ _ 1 _ о 715
^вон ОКЗ 1,4
Затем определим номинальный ток и падения напряжения
/1Н =_____р» — = _5onJ93 = 910 а;
тп U1H cos <рн 3 • 230 • 0,8
/^75=-910-0,0015 = 1,37 б;
/71нхр1 ~ 910-0,04 == J36 в.
Выразим полученные величины в относительных единицах
_ 137 _ 0 00б;
(Ли 230
Л1Н_^Р1 _ _ /0156
1/,н 230
256
0,156
Так как индуктивное падение напряжения в -q-q^ —26 раз превышает
активное, то величиной активного падения напряжения можно пренебречь*
Угол сдвига фаз между напряжением Z71H и током /1Н
<рн = arccos 0,8 = 37°.
Произведя построения в указанном выше порядке, получим практическую
диаграмму э. д. с. (рис. 16.15), из которой определяем величину повышения
напряжения
дин = -P~.NR 100 = 2^ 100 = 28%.
i\ 1
§ 16.7, Потери и коэффициент полезного действия
синхронных машин
Преобразование энергии в синхронной машине связано с по-
терями энергии, которые классифицируются следующим обра-
зом.
1. Механические потери рмех — потери на трение в подшип-
никах; трение о воздух или другой газ, охлаждающий машину,
например водород; трение щеток о контактные кольца.
2. Магнитные потери в сердечнике статора рс слагаются из
потерь гистерезиса и вихревых токов.
3. Электрические потери, обусловленные нагревом статорной
обмотки
р3 =
где Г75 — активное сопротивление фазы статорной обмотки при
рабочей температуре 75°С;
mi — число фаз;
/1 — фазный ток статора.
4. Потери на возбуждение рв, к которым, помимо потерь
в обмотке возбуждения iBUB, относятся потери в самом возбу-
дителе, если он работает от общего с синхронной машиной
первичного двигателя.
5. Добавочные потерирд, которые слагаются из потерь в по-
верхностном слое ротора, вызванных пульсациями поля вслед-
ствие зубчатости внутренней поверхности статора, а также из
потерь, вызванных полями рассеяния статора.
Механические потери, магнитные потери в стали статора и
потери на возбуждение составляют потери холостого хода
7^0 =/?мех “Ь Рс.~\~Рв' (16.15)
Величина этих потерь не зависит от нагрузки машины.
Сумма всех потерь
YiP = /’мех +- Pc + Рэ + Рв + Рд-
17 1649
257
Коэффициент полезного действия синхронной машины
Данная формула может быть преобразована в вид, удобный
для подсчета к. п. д. синхронного генератора,
Рис. 16.16. Зависимость
т1=/(Рг) синхронной
машины
^r=i- -D--4 . (16.16)
Л + LP
где Рг — полезная мощность генера-
тора, вт;
Рг = milJJi cosf-p (16.17)
К. п. д. синхронного двигателя
удобно подсчитать по формуле
Ъ=1-------(16.18)
где Р\ — мощность на входе двигателя, вт\
Pi== cos ?р (16.19)
Приведенные формулы к. п. д. синхронной машины показы-
вают, что величина к. п. д. зависит не только от величины на-
грузки машины, но и от значения коэффициента мощности. Эта
зависимость выражена графически на рис. 16.16.
В синхронных машинах небольшой и средней мощности (до
100 ква) к. п. д. обычно равен 85—90%; у мощных синхронных
машин к. п. д. достигает 96—99%'.
Глава XVII
ПАРАЛЛЕЛЬНАЯ РАБОТА СИНХРОННЫХ ГЕНЕРАТОРОВ
§ 17.1. Условия включения синхронных генераторов
на параллельную работу
На электрических станциях обычно устанавливают несколь-
ко синхронных генераторов, включаемых параллельно для
совместной работы (рис. 17.1). Наличие нескольких генерато-
ров вместо одного суммарной мощности дает преимущества,
объясняемые теми же соображениями, которые были изложены
применительно к параллельной работе генераторов постоянного
тока (см. § 5.6) и трансформаторов (см. § 12.3).
258
При включении синхронного генератора в сеть на параллель-
ную работу необходимо соблюдать следующие условия:
1) э. д. с. генератора Ео в момент подключения его к сети
должна быть равна и противоположна по фазе напряжению сети
(£0=- (7С);
2) частота э. д. с. генератора fr должна быть равна частоте
переменного напряжения в сети /с;
3) порядок следования фаз на выводах генератора должен
быть таким же, что и на зажимах сети.
к нагрузке
Рис. 17.1. Схема включения синхронных
генераторов на параллельную работу (Гь...,
Г4—синхронные генераторы; ПДЬ ПД4—
приводные двигатели)
Приведение генератора в состояние, удовлетворяющее всем
указанным условиям, называется синхронизацией. Несоблюде-
ние любого из условий синхронизации приводит к появлению
в обмотке статора больших уравнительных токов, чрезмерная
величина которых может явиться причиной аварии.
§ 17.2. Способы включения генераторов
на параллельную работу
Включить генератор в сеть с параллельно работающими ге-
нераторами можно или способом точной синхронизации, или
способом самосинхронизации.
Способ точной синхронизации. Сущность этого
способа состоит в том, что, прежде чем включить генератор
в сеть, его приводят в состояние, удовлетворяющее всем пере-
численным в § 17.1 условиям. Момент соблюдения этих усло-
вий, т. е. момент синхронизации, определяется прибором, назы-
ваемым синхроноскопом. По своей конструкции синхроноскопы
разделяются на стрелочные и ламповые. Рассмотрим процесс
синхронизации генератора с применением лампового синхроно-
скопа.
Ламповый синхроноскоп состоит из трех ламп, расположен-
ных в вершинах равностороннего треугольника. Лампы могут
17* 259
включаться либо по схеме «на погасание» (рис. 17.2, а), либо
по схеме «на вращение света» (рис. 17.2, б).
При включении ламп по схеме «на погасание» момент син-
хронизации соответствует одновременному погасанию всех ламп.
Рис. 17.2. Включение ламп синхроноскопа:
а — по схеме «на погасание», б — по схе-
ме «на вращение света»
Это видно из построений, приведенных на рис. 17.3. Предполо-
жим, что звезда э. д. с. генератора £'в’» £с вращается
с угловой скоростью о)г, превышающей угловую скорость вра-
щения «)с звезды напряжений сети Ос- В этом случае
Рис. 17.3. Векторные диаграммы напряжения и э. д с при
включении ламп синхроноскопа «на погасание»
напряжение на лампах определяется геометрической суммой
£а+^а‘> £в + ^в; Ec-\tUc (рис. 17.3, а). В момент совпадения
векторов звезды э. д. с. с векторами звезды напряжений эта
сумма достигает наибольшей величины (рис. 17.3,6), при этом
лампы горят с наибольшим накалом. В последующие моменты
ОДП
времени звезда э. д. с. обгоняет звезду напряжений и напряже-
ние на лампах уменьшается. В момент синхронизации векторы
э. д. с. и напряжений занимают положение, при котором
ЁА + Uа - 0; Ёв + VB = 0; Ес + Uc =0
и все три лампы одновременно гаснут (рис. 17.3, в). При боль-
шой разности угловых скоростей (частот) юг и а>с лампы вспы-
хивают часто.
Изменяя скорость вращения первичного двигателя, доби-
ваются равенства о чем будет свидетельствовать пога-
сание ламп на длительное время. В этот момент и следует
замкнуть рубильник, после чего генератор окажется подклю-
ченным к сети.
При включении ламп синхроноскопа по схеме «на вращение
света» при расхождении частот юг и о>с лампы загораются попе-
ременно, подругу, создавая эффект «вращения света». Причем,
если > <ос, то «вращение света» происходит в одну сторону,
а если о>г<(ос—в другую.
Моменту синхронизации соответствует горение двух ламп
с одинаковой яркостью и пога-
сание лампы 3 (рис. 17.4), вклю-
ченной в разрыв фазы А. Следует
отметить, что если порядок следо-
вания фаз генератора отличается
от порядка следования фаз сети
(например, в сети А—В—С, а у
генератора С—А—В), то лампы
синхроноскопа, включенные по
схеме «на погасание», ведут себя,
как при включении «на вращение
света». Для создания требуемого
порядка следования фаз необхо-
димо поменять местами любые
две фазы на выводах генератора.
Процесс точной синхронизации на
электростанциях обычно автома-
тизируют.
Способ самосинхрониз
денного генератора приводится во вращение первичным двига-
телем до скорости, отличающейся от синхронной не более чем
на 2—5%, после чего генератор подключается к сети. Для того
чтобы избежать перенапряжений в обмотке ротора в момент
подключения генератора к сети, ее замыкают на некоторое
сопротивление. Сразу же после подключения генератора к сети
обмотку возбуждения подключают на клеммы возбудителя,
и генератор начинает работать синхронно. Так как в момент
261
17.4. Векторная
диаг-
Рис.
рамма при включении ламп
синхроноскопа по схеме
«на вращение света» в мо-
мент
синхронизации
и и.
а
Н
подключения генератора к сети его э. д. с. равна нулю (генера-
тор не возбужден), то под действием напряжения сети в обмотке
статора наблюдается резкий бросок тока, превышающий номи-
нальное значение тока генератора. Одновременно на валу ро-
тора появляются механические усилия. Но, как показывает
опыт, они не опасны для генератора. В течение 1—7 сек после
момента подключения генератора ток в обмотке статора спадает
до номинального значения.
Способ самосинхронизации (грубой синхронизации) очень
удобен в условиях частых включений, так как требует немного
времени и легко автоматизируется.
§ 17.3. Нагрузка генератора,
включенного на параллельную работу
Обычно совместно на одну сеть работают несколько синхрон-
ных генераторов и мощность любого из них намного меньше
суммарной мощности всех остальных генераторов.
Рис 17 5. Векторные диаграммы
параллельно работающего генера-
тора:
а — при работе без нагрузки, б-~
при работе с нагрузкой
Рис. 17 6. К понятию об электро-
магнитном моменте синхронного ге-
нератора
Будем считать, что синхронный генератор подключается на
параллельную работу с другими генераторами, суммарная мощ-
ность которых настолько велика по сравнению с мощностью
подключаемого генератора, что при любых изменениях пара-
метров этого генератора напряжение сети и ее частота /с
остаются неизменными.
После включения генератора в сеть, при соблюдении всех
условий синхронизации, его э. д. с. £о равна по величине и про-
тивоположна по направлению напряжению сети (рис. 17.5, а),
поэтому ток в цепи генератора равен нулю, т. е. генератор рабо-
тает без нагрузки. Механическая мощность первичного двига-
262
теля Pj в этом случае полностью затрачивается на покрытие
потерь холостого хода (16.15)
Р{ ==Рмех Рс 4* Рв ~ Р<)'
Если же увеличить вращающий момент первичного двигате-
ля, то ротор машины, получив некоторое ускорение, сместится
относительно своего первоначального положения на угол 6
в сторону вращения. На такой же угол 9 окажется сдвинутым
вектор э. д. с. генератора Eq относительно своего первоначаль-
ного положения. Под действием результирующей э. д. с. ДЁ,
равной геометрической сумме э. д. с. Ёо и напряжения Ёс, в цепи
генератора появится ток Ц (рис. 17.5, б).
Пренебрегая активным сопротивлением обмотки статора
ввиду его незначительной величины будем считать, что обмотка
статора обладает чисто индуктивным сопротивлением и ток /i
отстает по фазе от э. д. с. ЛЁ на 90°. В таких условиях генератор
отдает в сеть активную мощность Pz = miUiIi coscpi, а напряже-
ние сети Uc уравновешивается напряжением генератора U\.
Ток в проводниках обмотки статора взаимодействует с маг-
нитным потоком ротора. В результате этого взаимодействия на
каждый проводник обмотки статора действует сила Еэм, которая
создает на полюсах ротора равную по величине и противопо-
ложную по направлению силу Еэ„ (рис. 17.6): Еэм = (— Еэм).
Совокупность сил Еэм от всех проводников обмотки статора
создает на роторе электромагнитный момент М, направленный
против вращения ротора, т. е. против вращающего момента пер-
вичного двигателя М\.
Таким образом, с появлением в цепи статора тока Zi генера-
тор получает электрическую нагрузку, а первичный двигатель —
механическую нагрузку. Теперь механическая мощность Pi пер-
вичного двигателя частично расходуется на покрытие потерь
холостого хода генератора (16.15), а частично преобразуется
в электромагнитную мощность Р9М генератора, представляю-
щую собой активную мощность в цепи статора,
Р1 = Р<) 4" Рэм,
где Рэм—1 электромагнитная мощность генератора.
Следовательно, мощность на выходе синхронного генератора
Рг (активная нагрузка) при его параллельной работе регули-
руется изменением вращающего момента первичного двигателя,
так как
Рг = Рэм —
263
§ 17.4. Угловые характеристики асинхронного генератора
Электромагнитная мощность неявнополюсного синхронного
генератора при параллельной работе
рэм = Sin0; (17.1)
хс
здесь 6 — угол между векторами н. с. ротора и статора.
При работе без нагрузки векторы этих н. с., вращаясь с оди-
наковой (синхронной) скоростью, совпадают по направлению.
Но с появлением нагрузки генератора, т. е. с возникновением
электромагнитного момента на роторе, вектор н. с. ротора, про-
должая вращаться с прежней скоростью, смещается относитель-
но вектора н. с. статора на угол 6 направлении вращения
(см. § 17.3).
Если пренебречь мощностью электрических потерь в обмотке
статора, т. е. если принять г\ =0, то активную мощность на вы-
ходе генератора Р2 можно приравнять к электромагнитной мощ-
ности и воспользоваться выражением (17.1) для определения
величины
Р2~Рэм=^1£^51пО.
лс
Это же относится и к явнополюсной синхронной машине
р2 ~ Рэм = sine 4-^1 ( J------------L") sin 20, (17.2)
2 xd 2 \xq xd )
где xq — xaq + хр1 — синхронное индуктивное сопротивление
явнополюсной машины по поперечной оси;
xd = хаа + *pi — синхронное индуктивное сопротивление
явнополюсной машины по продольной оси.
Разделив выражения (17.1) и (17.2) на синхронную угловую
скорость
получим выражения электромагнитных моментов:
неявнополюсной синхронной машины
М = -Р™ = sin0; (17.3)
Wj WjX,.
явнополюсной синхронной машины
Я = — ™1U.lE° sin е + ( ----Ц sin 20, (17.4)
ш, ^xd 2», xj
где М — электромагнитный момент, н • м.
264
Анализ выражения (17.4) показывает, что электромагнитный
момент явнополюсной синхронной машины имеет две состав-
ляющие: одна из них Л40сн представляет собой основную состав-
ляющую электромагнитного момента
.. т,и.Е0 . а
7И0СН = —L—1 - — sm 9,
а другая — реактивную составляющую момента
м -2^(1
р~ 2о>1 \хч
Основная составляющая Л40СН
(17.5)
(17.6)
Рис. 17.7. Угловая характеристика элект-
ромагнитного момента и активной мощ-
ности синхронного генератора
-----sin 26.
Xd /
момента явнополюсной син-
хронной машины зависит от напряжения сети U\ и от э. д. с. £о,
т. е. от возбуждения
машины. Реактивная
составляющая Мр не
зависит от возбужде-
ния машины и дей-
ствует даже в не-
возбужденной машине
(£,о=О). Подробнее фи-
зическая сущность ре-
активного момента бу-
дет изложена в § 18.6.
При увеличении на-
грузки на синхронный
генератор, т. е. с уве-
личением тока /1, про-
исходит увеличение уг-
ла рассогласования О
между вектором н. с. ротора и вектором н. с. статора. С ростом
этого угла изменяются как активная мощность на выходе гене-
ратора, так и его электромагнитный момент. Зависимость этих
величин от угла 0 выражается угловыми характеристиками син-
хронной машины.
Рассмотрим угловые характеристики мощности Pi=f (6)
и 'момента M=f (6) явнополюсной синхронной машины
(рис. 17.7).
Указанные характеристики построены при условии (7i=const
и £o=const. Из выражений (17.3) и (17.4) видно, что основная
составляющая момента и соответствующая ей составляющая
электромагнитной мощности изменяются пропорционально си-
нусу угла 6 (кривая 7), а реактивная составляющая момента
и соответствующая ей составляющая электромагнитной мощ-
ности изменяются пропорционально синусу 26 (кривая 2). Гра-
фик зависимости момента М и мощности Р% (кривая 3) полу-
265.
чается в результате наложения кривой 2 на кривую 1 и сложе-
ния значений моментов и мощностей по ординатам.
Как следует из угловой характеристики (кривая 3), при
увеличении нагрузки синхронной машины до значений, при ко-
торых угол е^9кр, синхронная машина работает устойчиво,
так как рост нагрузки (увеличение угла 9) сопровождается
увеличением электромагнитного момента.
В этом случае любой установившейся нагрузке соответствует
равенство вращающего момента первичного двигателя ЛЬ
и суммы противодействующих моментов
М\ =М+Л1о,
где Mq —- момент холостого хода синхронной машины.
В результате скорость вращения ротора остается неизменной,
равной синхронной скорости.
При нагрузке, соответствующей углу 0 > 0кр, электромагнит-
ный момент М уменьшается, что ведет к нарушению равенства
моментов. При этом избыточная (неуравновешенная) часть вра-
щающего момента первичного двигателя вызывает увеличение
скорости вращения ротора, что ведет к нарушению условий
синхронизации (машина выходит из синхронизма).
Электромагнитный момент, соответствующий критическому
значению угла (9кр), является максимальным Л1Макс.
Для явнополюсных синхронных машин 9Кр='(60—80) эл. гра-
дусов.
Угол 6кр можно определить по формуле
COS 9кр = Кр2 +0,5-0. (17.7)
Здесь 0 определяется выражением
—,5°-----г- (17.8)
4U . I
У неявнополюсных синхронных машин угловая характеристи-
ка представляет собой синусоиду, а поэтому величина угла
6Кр =90°.
Отношение максимального электромагнитного момента /Имакс
к номинальному Ма называется перегрузочной способностью
синхронной машины
4^ = 1,4-3.
Пример. Рассчитать данные и построить угловые характеристики
р2=/(0) и трехфазного явнополюсного синхронного
ценного на параллельную работу с сетью напряжением иг=
266
генератора, вклю*
6300
—в.
/3
Данные генератора следующие:
номинальная мощность Рн =400 квт\
номинальный ток статора /1Н =46 а;
частота тока /1=50 гц\
скорость вращения ni = 750 об]мин. _
Ток холостого хода, соответствующий номинальному напряжению,
6300
1Н= :
в режиме холостого хода /ВОн =77 а\
при номинальной нагрузке /вн =155 а,
Параметры обмотки статора:
синхронное индуктивное сопротивление по поперечной оси
xq — 60 ом;
синхронное индуктивное сопротивление по продольной оси
xd = 100 ом.
Число последовательно соединенных витков в фазе u?i=310.
Обмоточный коэффициент /<1=0,902.
Решение. По выражению (17.5) определим максимальное значение
основной составляющей электромагнитного момента. Предварительно то
относительному значению тока возбуждения ^5- = 2,01 и нормальной
*вон 77
характеристике холостого хода (см. рис. 16.9) определим э. д. с. генератора
в режиме холостого хода £0, соответствующую току возбуждения /вн),
Ео = 1,33(Лн = 1,33 = 4850 в.
О
Угловая скорость =78,5 1/сек.
Номинальное значение электромагнитного момента
<±>1 /о,Э
Приняв б =90°, определим максимальное значение основной составляю-
щей электромагнитного момента
^осн.макс “ 78,5-100 “ 6740 н-л/
или в относительных единицах
^осн.макс___6740 = 1 32.
Л1Н ЗТО()
Задавшись рядом значений угла 0, определим соответствующие значения
лИосн в относительных единицах
2^осн __^осн макс sin 6 = 1,32 sin б.
Мн
267
Результаты расчета сведены в табл. 17.1.
Таблица 171
0 (град) 15 30 45 60 75 90 105 120 135 150 165)180 1
^ОСн/^Ин 0,34 0,66 0,93 1,14 1,27 1,32 1,27 1,14*0,93 0,66 0.34I 0
По данным таблицы строим график 9СН = ДО) (рис. 17.7, кривая 1).
Подставив в формулу (17.6) 0 =45°, определяем максимальное значение
реактивной составляющей момента
Л/6300\
r W)
р макс — 2*78,5
60 100J
= 1710 н-м
или в относительных единицах
MQ макс 1710 Л ™
—р “aKS... = г,Tin — 0,33.
AfH 5100
Рассчитываем значения реактивной составляющей электромагнитного
момента в относительных единицах
Мр = ^р.макс sin 20 — 0,33 sin 20.
/Ин /Ин
Результаты расчета сведены в табл. 17.2
Таблица 17.2
9 (град) 15 30 45 60 75 90 105 120 135 150 165 180
Мр/.МН 0,17 0,29 0,33 0,29 0,17 0 —0,17 । —0,29 -0,33 -0,29 -0,17 0
По данным таблицы строим график —2- — /(0) (кривая 2).
Л4Н
Определим критическое значение угла 0кр (17.7) и (17 8)
_ _____4850 _
6300/100 0,505,
4ТПбо-1)
COS 0кр = /б^052 + 0,5 — 0,505 = 0,381,
откуда вкр = 67,5°.
Максимальное значение электромагнитного момента
^макс = ^осн.макс ®кр + ^р.макс s*n ^0Кр
=6740 sin 67,5° 4-1710 sin 2-67,5° = 6230 + 1210 = 7440 и-.и.
268
Перегрузочная способность генератора
Ммакс __ 7440 = 1 46
Мн 5100
Используя данные таблиц, составляющие электромагнитный момент,
определим
М Мосн . Л4 р
мн мн f w
Результаты расиета сведены в табл. 17.3.
По данным таблицы строим график=/(6) (кривая 3)t Этот же гра-
Мн
фик выражает зависимость активной мощности на выходе генератора от
угла 6
^ = /(8)-
* н
§ 17.5. Колебания синхронных генераторов
Ротор синхронного генератора движется под действием при-
ложенного к нему вращающего момента первичного двигателя,
который уравновешивается электромагнитным моментом гене-
ратора. Напомним, что величина электромагнитного момента М
зависит от значения угла 9, т. е. угла сдвига вектора н. с. ротора
(оси полюсов ротора) относительно своего положения при рабо-
те генератора без нагрузки, т. е. относительно вектора н. с. об-
мотки статора.
Предположим, что синхронный генератор, подключенный
к сети, работает ненагруженным. Чтобы нагрузить генератор,
увеличивают вращающий момент первичного двигателя Mi до
значения ЛГЬ соответствующего повороту оси полюсов ротора
на угол 91 и электромагнитному моменту М=М\ (рис. 17.8).
Однако под действием инерции вращающихся масс синхронной
машины и первичного двигателя ротор повернется на угол
02 > 0Х, при котором электромагнитный момент генератора до-
стигнет величины М'>М\. В результате нарушившегося равно-
весия моментов ротор начнет поворачиваться в направлении
уменьшения угла 0, но силы инерции и в этом случае помешают
ротору остановиться в положении, соответствующем углу
269
и переведут его в положение, соответствующее значению угла 93,
при котором электромагнитный момент генератора М" окажется
меньше вращающего момента М\. Поэтому ротор не остановит-
ся в положении 03, а будет поворачиваться в направлении уве-
личения угла 9.
Таким образом, ротор синхронного генератора будет совер-
шать колебательные движения (качания) около среднего поло-
жения соответствующего равновесию вращающего и электро-
магнитного моментов. Если бы колебания ротора не сопровожда-
лись потерями энергии, то они продолжались неопределенно
долго, т. е. были бы незатухающими. Однако в реальных усло-
виях колебания ротора вызывают потери энергии, из которых
М
Рис. 17.8. К понятию о колебаниях синхронной машины.
наибольшее значение имеют магнитные потери, обусловленные
возникновением "вихревых токов в сердечнике ротора. Объяс-
няется это тем, что при отсутствии колебаний скорость враще-
ния ротора постоянна и равна скорости вращения поля статора.
Однако при возникновении колебаний ротора скорость вращения
последнего становится неравномерной, т. е. происходит его
движение относительно магнитного поля статора, что и ведет
к возникновению в сердечнике ротора вихревых токов. Взаимо-
действие этих токов с магнитным полем статора оказывает на
ротор «успокаивающее» действие, уменьшающее его колебания.
Следовательно, колебания ротора имеют затухающий харак-
270
тер, а поэтому спустя некоторое время ротор займет положение^
соответствующее углу при котором устанавливается равно-
весие моментов. Причинами, вызывающими колебания ротора,
могут быть либо изменение величины вращающего момента пер-
вичного двигателя, либо изменение нагрузки генератора. Коле-
бания ротора, вызванные указанными причинами, называются
собственными.
Кроме этого, возможны и вынужденные колебания, вызван-
ные неравномерным вращением ротора, например, в генерато-
рах с приводом от поршневых двигателей (дизели, газовые дви-
гатели). Наиболее опасен случай совпадения частоты собствен-
ных колебаний с частотой вынужденных (резонанс колебаний).
При этом колебания резко усиливаются, так что параллельная
работа генераторов становится невозможной.
Потери энергии в металлических частях ротора оказывают
тормозящее действие на подвижную часть машины и уменьшают
ее колебания. Однако значитель-
ного уменьшения колебаний до-
стигают применением в син-
хронной машине успокоительной
(демпферной) обмотки. В явно-
полюсных машинах успокоитель-
ная обмотка выполняется <в виде
стержней, заложенных в пазы
полюсных наконечников и соеди-
ненных на торцевых сторонах
пластинами (рис. 17.9).
В неявнополюсных машинах
колебания устраняются лишь
действием вихревых токов, наводимых в сердечнике ротора.
В заключение следует отметить, что изложенное здесь о ко-
лебаниях синхронных генераторов в равной мере относится,
и к синхронным двигателям.
Рис. 17.9. Успокоительная
(демпферная) обмотка
§ 17.6. Синхронизирующая способность синхронных машиц
Из рассмотренного в предыдущих параграфах следует, что
при параллельной работе нескольких синхронных генераторов
в каждом из них возникает некоторая сила, удерживающая
генератор в состоянии устойчивой работы, т. е. предотвращаю-
щая выход этого генератора из синхронизма.
Другими словами, синхронный генератор, включенный на
параллельную работу, обладает синхронизирующей способ-
ностью.
Физический смысл синхронизирующей способности синхрон-
ных генераторов состоит в следующем.
271
В процессе работы синхронного генератора в нем действуют
два вращающихся магнитных поля: поле статора и поле ротора.
Оба поля вращаются с синхронной скоростью и создают в ма-
шине результирующее вращающееся магнитное поле. Так как
обмотки статоров всех генераторов, включенных на параллель-
Рис. 17.10. К понятию о синхронизи-
рующей способности синхронной маши-
ны.
ную работу, электрически связаны между собой, то также свя-
занными оказываются и результирующие магнитные поля всех
генераторов, которые вращаются с синхронной скоростью
Результирующее магнитное поле машины замыкается через
сердечник ротора. Поэтому электрическая связь между обмот-
ками статоров параллельно работающих машин в конечном
итоге переходит в магнитную связь роторов этих машин. Маг-
нитная связь роторов аналогична эластичной механической
связи, которая позволяет роторам смещаться относительно друг
друга в пределах угла О
0 <6 <90 эл. градусов,
продолжая вращаться с синхронной скоростью. Лишь при сме-
щении ротора какой-либо из параллельно работающих машин
на угол 6, выходящий за указанные пределы, связь ротора этой
машины с роторами других машин нарушается и машина выхо-
дит из синхронизма.
Для количественной’ оценки синхронизирующей способности
синхронной машины вводят понятия удельной синхронизирую-
щей мощности Pt и удельного синхронизирующего момента тс.
Удельная синхронизирующая мощность определяется отноше-
272
нием приращения мощности ДРГ к соответствующему прира-
щению угла Д9 (рис. 17.10).
ДРГ
Рс~ ДО ’
ИЛИ
°с~ dti ’ 07.9)
Удельный синхронизирующий момент
= (17.10)
Величины р z и тс тем больше, чем круче подъем угловой
характеристики на участке, соответствующем изменению угла
ДО. В неустойчивой области угловой характеристики величины
рс и тс отрицательны.
Поэтому условие устойчивой работы синхронной машины
можно выразить
рс > 0 или /ис > 0.
При изменениях нагрузки синхронного генератора нарушает-
ся равенство между мощностью первичного двигателя и мощ-
ностью генератора. Возникающий >при этом небаланс мощностей
ДР представляет собой синхронизирующую мощность
dP = рсД9.
Синхронизирующей мощности соответствует синхронизирую-
щий момент ДМ
ДР
ДМ = — = тсД9.
Этот момент обусловлен разностью электромагнитного мо-
мента генератора и вращающего момента первичного двигателя
и оказывает на ротор генератора действие, предотвращающее
выход машины из синхронизма.
Используя выражения (17.1), (17.2), (17.3) и (17.4), получим
формулы удельной синхронизирующей мощности и удельного
синхронизирующего момента:
для неявнополюсной синхронной машины
dPr „
',' = 4ir“-VJcos’;
dM mdJ.EQ
/Пс = -77Г = — COS 9’»
18 1649
273
для явнополюсной машины
dPr m,U,E0 2 / 1 1 \ по
рс = = —1 1 ° cos0 4- m,U\ ------------ cos26;
dO xd 1 xd )
dM m-JJ-JzQ „ m-iUi [ 1 1 \ no
mc =» -Jr- = 1 cos 6 4-...1------------- cos 26.
d9 ^xd xdJ
На основании полученных выражений можно построить
график зависимостей рс=/(6) и /пс=»/(9).
Из этого графика (рис. 17.10) видно, чго наибольшей син-
хронизирующей способностью синхронная машина обладает при
6 =0. С ростом 0 синхронизирующая способность машины сни-
жается и при 0 = 9кр она совершенно исчезает (рс = 0; /пс~0).
Синхронизирующей способностью обладают не только син-
хронные генераторы, но и синхронные двигатели.
§ 17.7. U-образные кривые синхронного генератора
Ранее мы рассматривали параллельную работу синхронного
генератора при неизменном токе возбуждения. Что же про-
изойдет в синхронном генераторе, если после подключения его
к сети для параллельной работы изменить ток в его обмотке
возбуждения, оставив неизменным вращающий момент первич-
ного двигателя? Предположим, что генератор после подключе-
ния на сеть работает без нагрузки и его э. д. с. £о уравновеши-
вает напряжение сети (7С. Если при этом увеличить ток в обмот-
ке возбуждения, т. е. перевозбудить машину, то э. д. с. £0 увели-
чится до значения £'о и в цепи генератора появится избыточная
э. д. с. Д£ = £о — Uc (рис. 17.11, а), вектор которой совпадает
по направлению с вектором э. д. с. £о. Ток /ь вызванный э. д. с.
Д£, будет отставать от нее по фазе на 90° (поскольку ri^O).
По отношению к э. д. с. £о этот ток также будет отстающим
(индуктивным). С увеличением перевозбуждения величина реак-
тивного тока увеличится.
Если же после того, как генератор подключен к сети, умень-
шить ток возбуждения, т. е. недовозбудить машину, то э. д. с.
£о уменьшится до значения £о и в цепи генератора опять
будет действовать избыточная э. д. с. Д£=[7С~ £о< Теперь век-
тор этой э. д. с. будет совпадать по направлению с вектором
напряжения сети Uc (рис. 17.11,6), а поэтому ток /ь вызван-
ный этой э. д. с. и отстающий от нее по фазе на 90°, будет опере-
жающим (емкостным) по отношению к э. д. с. генератора £&.
Показанное на диаграммах рис. 17.11 можно объяснить сле-
дующим.
274
При перевозбуждении генератора увеличивается н. с. воз-
буждения Ло ~ Это сопровождается появлением в обмотке
статора реактивного тока /р, который по отношению к э. д. с,
является отстающим (индуктивным). Вызванная этим током
продольно-размагничивающая реакция якоря компенсирует
избыточную н. с. возбуждения так, что э. д. с. генератора остает-
а)
Рис. 17.12. U-образные кривые
синхронного генератора
Рис. 17.11. Векторные ди-
аграммы э д. с. синхрон-
ного генератора при парал-
лельной работе
ся неизменной. Такой же процесс происходит и при недовозбуж-
дении генератора, с той лишь разницей, что в обмотке появляет-
ся опережающий (емкостный) ток /р, а вызванная этим током
продольно-намагничивающая реакция якоря компенсирует недо-
стающую н. с. возбуждения.
Если при всех изменениях тока возбуждения вращающий
момент первичного двигателя остается неизменным, то также
неизменной останется активная мощность генератора
Рг = cos cpj = const.
Из этого выражения следует, что при ТЛ —const активная
составляющая тока статора Ц cos <pi = const.
Таким образом, степень возбуждения синхронного генера-
тора влияет только на реактивную составляющую тока статора.
Что же касается активной составляющей тока 7u=Acos(pj,
то она остается неизменной.
Зависимость тока статора /1 от тока в обмотке возбуждения
/в при неизменной активной нагрузке генератора выражается
графически U-образной кривой. Такое название объясняется
внешним сходством этой кривой с латинской буквой U, На
рис. 17.12 представлены U-образные кривые 7i=f (zB) при
18* 275
P2 = const. Кривые построены для разных значений активной
нагрузки: Р2 = 0; Р2 = 0,5 Рн и Р2= Рц< U-образные кривые син-
хронного генератора показывают, что любой нагрузке генера-
тора соответствует такое значение тока возбуждения /в, при
котором ток статора Ц становится минимальным и равным
только активной составляющей 71мин = Ц cos фь В этом случае
генератор работает при коэффициенте мощности cos <pi = 1. Зна-
чения тока возбуждения, соответствующие costpi — 1 при различ-
ной нагрузке генератора, показаны на рис. 17.12 пунктирной
кривой. Некоторое отклонение этой кривой вправо указывает
на то, что при увеличении нагрузки ток возбуждения, соответ-
ствующий cos ф1 = 1, несколько возрастает. Объясняется это тем,
что при росте нагрузки необходимо некоторое увеличение тока
возбуждения, компенсирующее активное падение напряжения.
Следует обратить внимание на то, что ток /р, отстающий по
фазе от э. д. с. Ео, по отношению к напряжению сети Uz
является опережающим током, и, наоборот, ток /р, опережающий
по фазе э. д. с. Eq по отношению к напряжению Uc> является
отстающим.
С точки зрения уменьшения потерь генератора, наиболее
выгодным является возбуждение, соответствующее минималь-
ному току статора, т. е. когда cos <pi = 1.
Но в большинстве случаев нагрузка генератора имеет индук-
тивный характер и для компенсации индуктивных токов (отста-
ющих по фазе от напряжения сети) приходится несколько пере-
возбуждать генератор, создавая условия, при которых ток ста-
тора /1 опережает по фазе напряжение сети t/c.
Глава XVIII
СИНХРОННЫЕ ДВИГАТЕЛИ
§ 18.1. Принцип действия синхронного двигателя
В соответствии с принципом обратимости синхронная маши-
на может работать не только в режиме генератора, но и в ре-
жиме двигателя.
Если вал синхронного генератора, работающего параллельно
с сетью, отсоединить от первичного двигателя, не отключая це-
пей статора и ротора, то синхронная машина будет работать
в режиме двигателя. В этом случае трехфазный ток в обмотке
статора синхронной машины создает вращающееся магнитное
поле (см. § 16.1), которое, взаимодействуя с магнитным полем
ротора, заставляет вращаться ротор с синхронной скоростью.
276
Для уяснения принципа работы синхронного двигателя об-
ратимся к его модели (рис. 18.1), состоящей из внешней и внут-
ренней магнитных систем с явно выраженными полюсами, раз-
деленных зазором. Обе системы могут вращаться относительно
Рис. 18.1. Модель синхронного двигателя
общей оси, при этом внутренняя система (ротор) расположена
на валу.
Если к внешней магнитной системе приложить вращающий
момент Л1, то она начнет вращаться и создаст вращающееся
поле, аналогичное вращающемуся магнитному полю обмотки
статора при подключении ее к сети трехфазного тока. Благо-
даря магнитной связи между разноименными полюсами магнит-
ных систем вращение внешней системы полюсов передается
внутренней системе. В результате ротор начинает вращаться
в ту же сторону, что и поле внешней системы. Если пренебречь
трением, то можно считать, что в режиме холостого хода мо-
мент, противодействующий вращению, равен нулю. Тогда по-
люсы магнитных систем, вращаясь в одну сторону с одинаковой
скоростью, располагаются соосно друг относительно друга
(рис. 18.1, а). Если же к'валу приложить тормозящее усилие
в виде противодействующего момента М2, то внутренняя систе-
ма полюсов сместится относительно внешней системы на угол О
(рис. 18.1,6), значение которого определяется величиной про-
тиводействующего момента.
В синхронном двигателе, в отличие от рассматриваемой мо-
дели, вращающееся поле создается не вращением магнитной
системы, а трехфазным током в обмотке статора. При этом
мощность, развиваемая на валу двигателя, компенсируется мощ-
ностью, поступающей из сети.
Таким образом, в синхронном двигателе (так же, как и в ге-
нераторе) взаимодействием тока статора с магнитным полем
ротора создается электромагнитный момент (см. рис. 17.3), но
в отличие от генератора этот момент в двигателе является вра-
щающим.
Величина электромагнитного момента синхронного двигателя
определяется выражениями (17.3) и (17.4).
277
При изменениях нагрузки на валу синхронного двигателя
происходят изменения угла 0 между вектором н. с. ротора и век-
тором н. с. обмотки статора, что сопровождается соответствую-
щим изменением электромагнитного вращающего момента. Но
Рис. 18.2. Угловая характеристика
электромагнитного момента и мощ-
ности синхронного двигателя
если в синхронном генераторе увеличение нагрузки сопро-
вождается увеличением угла 0 в направлении вращения ротора,
* т. е. вектор н. с. ротора
(ось полюсов ротора) ге-
нератора опережает век-
тор н. с. статора, то в дви-
гателе увеличение нагруз-
ки на вал сопровождает-
ся увеличением угла 9 в
направлении, противопо-
ложном вращению ротора
(сравните рис. 17.6 и
18.1,6).
Зависимость электро-
магнитного момента син-
хронного двигателя М от
угла 6 (угловая характе-
ристика) аналогична угло-
вой характеристике синхронного генератора, включенного на па-
раллельную работу, но располагается в третьем квадранте
системы координат (рис. 18.2, кривая 5), т. е. эта зависимость
выражается отрицательными значениями момента М и угла 9.
Таким образом, угловая характеристика синхронной машины
представляет собой две полуволны: положительную, соответ-
ствующую генераторному режиму работы (см. рис. 17.7), и отри-
цательную, соответствующую двигательному режиму (рис. 18.2).
Область устойчивой работы синхронного двигателя ограничи-
вается значениями угла 0, величина которого должна быть
меньше критического 9Кр.
Понятия о перегрузочной способности, удельной синхронизи-
рующей мощности и удельном синхронизирующем моменте, вы-
веденные для генераторного режима, применимы и для двига-
тельного режима синхронной машины.
Следует отметить, что ротор синхронного двигателя может
вращаться только со скоростью, равной скорости вращения
/х60
поля статора, т. е. с синхронной скоростью п — ~. Чтобы
убедиться в этом, обратимся опять к модели синхронного двига-
теля (рис. 18.1). Предположим, что ротор двигателя при вра-
щении отстает от внешней системы полюсов. Тогда в какой-то
момент времени полюса ротора расположатся против одноимен-
ных полюсов внешней системы. В этом случае нарушится маг-
нитная связь между магнитными системами, так как их полюса
278
будут взаимно отталкиваться; ротор перестанет испытывать дей-
ствие электромагнитного момента и остановится. Вращение ро-
тора только с синхронной скоростью составляет характерную
особенность синхронных двигателей.
При изменениях нагрузки синхронного двигателя меняется
угол 0. При этом ротор вследствие инерции вращающихся масс
агрегата не сразу занимает положение, соответствующее новой
нагрузке, а некоторое время совершает колебательные движе-
ния. Таким образом, в синхронном двигателе, также как и в ге-
нераторе, имеют место колебания; физическая сущность этого
явления изложена в § 17.5.
§ 18.2. U-образные кривые синхронного двигателя
В процессе работы синхронного двигателя в обмотке статора
индуктируется э. д. с. Ei, величина которой приблизительно рав-
на подведенному к обмотке статора напряжению U\. Э. д. с.
обмотки статора создается результирующим магнитным пото-
ком, вызванным совместным действием двух намагничивающих
сил: я. с. ротора и н. с. статора.
При постоянном напряжении
рующий поток Ф остается по-
стоянным. А поэтому при из-
менении одной из намагничи-
вающих сил, создающих ре-
зультирующий поток Ф, другая
намагничивающая сила изме-
няется в противоположном на-
правлении, так что их совмест-
ное действие остается неизмен-
ным.
Из сказанного следует, что
при увеличении тока возбужде-
ния /в возрастает н. с. ротора,
при этом н. с. статора умень-
шается. Уменьшение н. с. ста-
тора может произойти только
за счет уменьшения намагни-
(—Ei) = const результи-
Рис. 18.3. U-образные кривые
синхронного двигателя
чивающей составляющей тока статора, так как число витков
в обмотке статора остается неизменным. Уменьшение намаг-
ничивающего тока статора, являющегося по своей природе ин-
дуктивным, ведет к повышению коэффициента мощности дви-
гателя.
Дальнейшее увеличение тока в обмотке возбуждения будет
сопровождаться уменьшением тока в статорной обмотке (за счет
реактивной составляющей) и, наконец, при некотором значении
тока возбуждения iB ток Ц достигает минимальной величины
(рис. 18.3) при данной нагрузке двигателя. При этоги ток ста-
279
тора становится чисто активным, а коэффициент мощности
cos<pi = l. Увеличение тока возбуждения сверх величины т. е.
перевозбуждение двигателя, вызовет увеличение тока но те-
перь этот ток будет опережающим (емкостным) по отношению
к напряжению (Л. Таким образом, при недовозбуждении син-
хронный двигатель работает с отстающим током, а при пере-
возбуждении — с опережающим. Зависимость тока статора от
тока возбуждения /в для синхронного двигателя представлена
U-образными кривыми (рис. 18.3). Ток возбуждения 1Ъ соот-
ветствует работе синхронного двигателя при коэффициенте
мощности cos(p[ = l. При перевозбуждении двигателя (/в > 4)
в цепи статора появляется опережающий ток; иначе говоря,
включение в сеть перевозбужденного синхронного двигателя
эквивалентно включению в эту сеть некоторой емкости. Указан-
ная особенность синхронных двигателей является их ценным
качеством, которое используется для повышения коэффициента
мощности электрических установок. Обычно синхронные двига-
тели работают при коэффициенте мощности, равном единице,
так как при этом двигатель имеет минимальные потери и наи-
больший к. п. д.
§ 18.3. Рабочие характеристики синхронного двигателя
Рабочие характеристики синхронного двигателя представ-
ляют собой зависимость скорости вращения ротора п2, тока
в обмотке статора Л. мощности на входе двигателя Р^ полез-
ного момента М2 и коэффициента мощности cos <pi от полезной
мощности двигателя Р2 (рис. 18.4).
Скорость вращения ротора п2 всегда равна синхронной ско-
/160 < г/пч
рости =—— , а поэтому график n2=^f(P2) имеет вид прямой,
параллельной оси абсцисс. Полезный момент на валу
ного двигателя находится в следующей зависимости
ности Р2
синхрон-
от мощ-
условии
Л42 = ---.
0)1
Так как рабочие характеристики снимаются при
<oi = const, то график M2=f(P2) имеет вид прямой, 'выходящей
из начала координат.
Мощность на входе двигателя
С увеличением нагрузки Р2 увеличиваются также и потери
Яр, поэтому мощность Pi растет несколько быстрее мощности
280
Р2, и график Т?1=/(/?2) имеет несколько криволинейный вид.
Кривая cos <pi=f (А) зависит от характера возбуждения двига-
теля в режиме холостого хода. Если при холостом ходе cos q>i = lt
io при увеличении нагрузки он уменьшается (см. рис. 18.3).
Величина тока в обмотке
статора двигателя равна
1 m[U1 cos?!
Из этого выражения видно,
что ток /1 с увеличением на-
грузки Р2 растет быстрее, чем
мощность вследствие умень-
шения cos<pb
Рис. 18.4. Рабочие характеристи-
ки синхронного двигателя
Так как ротор синхронного
двигателя вращается в ту же
сторону, что и поле статора, то
направление вращения ротора
определяется порядком следо-
вания фаз в обмотке статора и порядком расположения фазных
обмоток статора. Для изменения направления вращения трех-
фазного синхронного двигателя необходимо переключить два ли-
нейных провода, подведенных из сети к обмоткам статора.
§ 18.4. Пуск в ход синхронных двигателей
Пуск в ход синхронного двигателя непосредственным вклю-
чением в сеть невозможен, так как ротор из-за своей значитель-
ной инерции не может быть сразу увлечен вращающимся полем
статора, скорость которого устанавливается мгновенно. В ре-
зультате магнитная связь между статором и ротором не возни-
кает. Для пуска синхронного двигателя приходится применять
специальные способы, сущность которых состоит в предвари-
тельном приведении ротора во вращение до синхронной или
близкой к ней скорости, при которой между статором и ротором
устанавливается магнитная связь.
Практическое применение имеют два способа пуска в ход
синхронных двигателей: пуск посредством вспомогательного
двигателя и асинхронный пуск.
Пуск в ход синхронного двигателя посред-
ством вспомогательного двигателя. Процесс
пуска при этом протекает аналогично процессу включения син-
хронного генератора на параллельную работу. Ротор возбужден-
ного двигателя приводится во вращение до синхронной скорости
281
и с помощью синхронизирующего устройства подключается
к сети. Затем вспомогательный двигатель отключают. Обычно
мощность пускового двигателя составляет 5—15% от мощности,
синхронного двигателя. Это позволяет пускать в ход синхронный
двигатель только без нагрузки или при малой нагрузке на валу.
Рис. 18.5. Схема асин-
хронного пуска синхрон-
ного двигателя
Применение пускового двигателя мощ-
ностью, достаточной для пуска синх-
ронного двигателя под нагрузкой, не-
целесообразно, так как при этом уста-
новка получается громоздкой и неэко-
номичной.
В качестве пускового (вспомога-
тельного) двигателя обычно применя-
ют асинхронный двигатель с фазным
ротором с числом полюсов на два
меньше, чем число полюсов синхрон-
ного двигателя. Это делается для того,
чтобы можно было ротор синхронного
двигателя привести во вращение со
скоростью, близкой к синхронной. Для
регулировки скорости вращения в цепь
ротора асинхронного двигателя вклю-
чают регулировочный реостат (см.
§ 23.5). В настоящее время описанный
способ пуска применяется лишь для
мощных синхронных компенсаторов.
Асинхронный пуск син-
хронных двигателей. Этот спо-
соб возможен при наличии в полюсных
наконечниках ротора пусковой обмот-
ки, аналогичной успокоительной об-
мотке синхронного генератора (см.
рис. 17.9). Схема включения двигате-
ля при этом способе пуска приведена
на рис. 18.5. Невозбужденный синхрон-
ный двигатель подключается к сети трехфазного тока. Вращаю-
щееся магнитное поле статора при этом индуктирует в пусковой
обмотке ротора э. д. с., которая создает в замкнутых стержнях
обмотки токи. Взаимодействием этих токов с полем статора со-
здается момент, приводящий ротор двигателя во вращение *.
При достижении скорости вращения ротора, составляющей при-
мерно 95% синхронной скорости, подается питание в обмотку
возбуждения, и двигатель начинает работать синхронно. В этом
случае пусковая обмотка не влияет на работу двигателя, так
как в ее стержнях э. д. с. не наводятся.
♦ Принцип создания электромагнитного вращающего момента асинхрон-
ных двигателей подробно изложен в 5 19.2.
282
В процессе асинхронного пуска обмотку возбуждения остав-
лять разомкнутой нельзя, так как магнитный поток статора, пе-
ресекающий ее в начальный период пуска с синхронной ско-
ростью, индуктирует в ней э. д. с. Вследствие большого числа
витков обмотки возбуждения эта э. д. с. достигает 3000—4000 в
и более, что представляет опасность как для целости самой об-
мотки, так и для обслуживающего персонала» Для предотвра-
щения этого обмотку возбуждения на период разгона ротора
замыкают на активное сопротивление Гь примерно в десять раз
большее сопротивления обмотки возбуждения. Переключение за-
жимов И1 и И2 обмотки возбуждения с сопротивления на
клеммы возбудителя осуществляется посредством переключа-
теля П (рис. 18.5).
Непосредственное подключение синхронных двигателей
к сети переменного тока применяется только при достаточной
мощности сети, способной выдерживать большие пусковые токи,
достигающие пяти-, семикратного значения по сравнению с но-
минальным значением тока двигателя. При недостаточной мощ-
ности сети для ограничения пусковых токов применяют пуск дви-
гателя при пониженном напряжении: автотрансформаторный
или реакторный пуск (см. § 23.3).
§ 18.5. Синхронный компенсатор
Синхронный компенсатор представляет собой синхронный
двигатель, работающий без нагрузки. Из изложенного в § 18.2
следует, что при работе синхронного двигателя с перевозбужде-
нием в цепи статорной обмотки появляется ток опережаю-
щий по фазе напряжение сети Uc. На рис. 18.6, а показана век-
торная диаграмма напряжения сети Uc и тока Iz в цепи потре-
бителя Z, при этом ток 12 отстает по фазе от напряжения Uc
на угол <р2, т. е. реактивная составляющая тока 1г является
индуктивной. После включения параллельно потребителю Z син-
хронного компенсатора, работающего с перевозбуждением и по-
этому создающего в цепи ток/к, опережающий по фазе напря-
жение Ucy в сети появится ток
Z +
Фазовый сдвиг этого тока относительно напряжения
будет намного меньше^ (Рис- 18.6, б). Кроме того, величина
тока /с станет меньше (/с < /7). В этом можно убедиться ис-
ходя из следующих соображений. Синхронный компенсатор
работает без нагрузки, а поэтому его активная мощность не-
велика, так как она расходуется только на покрытие потерь
в компенсаторе. Пренебрегая величиной этих потерь, можно
283
приравнять мощность в сети до подключения компенсатора
Pz == V3 cos?z с мощностью сети после подключения ком-
пенсатора Рс = "КЗ 1CUC cos <рс. Так как cos<pc > cos<pz, a Pz~
— Рс, то Iz < Iz* В результате генераторы электростанции
и линия разгружаются, а потери энергии уменьшаются. Син-
Рис. 18.6. Применение синхронного компенсатора для по-
вышения коэффициента мощности
хронные компенсаторы могут работать не только в режиме пере-
возбуждения, но и в режиме недовозбуждения и генерировать
ь сеть отстающий по фазе относительно напряжения реактивный
ток. Обычно регулирование возбуждения синхронных компенса-
торов автоматизируются. Мощность синхронного компенсатора
определяется величиной реактивной мощности, которую он дол-
жен компенсировать. Рассмотрим это на примере.
Пример. Полная мощность потребителя 5 = 1500 ква при созф=0,70
(sin ф = 0,70). Определить мощность синхронного компенсатора, необходи-
мого для повышения коэффициента мощности в сети до cos cpz=0,95
(sin ср'=0,31). Определить также величину тока нагрузки в сети до
и после компенсации, если напряжение сети =6,3 кв.
Решение. До включения синхронного компенсатора реактивная мощ-
ность сети составляла
Q = S sin ср — 1500-0,70 = 1050 квар,
а величина тока нагрузки в сети
S 1500
/с ~ /3’(УС ” 1.73-6,3 ~ 138 а>
активная составляющая которого
/са = /с cos ср — 138-0,70 = 97 а.
После компенсации реактивная мощность уменьшилась до величины
Q' — S sin ср' ~ 1500-0,31 = 450 квар.
Таким образом, для повышения коэффициента мощности установки от
совф=0,70 до созф' = 0,95 требуется включить синхронный компенсатор
284
с реактивной мощностью Qk -=1050—450 = 600 квар. При этом активная со-
ставляющая тока не изменится (/са=97 а), а реактивная составляющая тока
Qr 450
ср-/ЗУс~ 1.73-6,3 ~42Я-
Следовательно, ток в линии после компенсации
7с = //са + /ср = У~97> + 422 = 104 а.
Обычно cos <р увеличивают до 0,92—0,95, так как экономия,
получаемая от повышения costp до 1, не окупает увеличиваю-
щихся расходов. Так, если бы в рассматриваемом примере по-
желали повысить cos q/ до 1, то пришлось бы применить компен-
сатор мощностью 1050 квар, т. е. почти в два раза больше, чем
при cos q/= 0,95.
Синхронные компенсаторы применяются также для стабили-
зации напряжения в сети.
Синхронный компенсатор в процессе работы не несет меха-
нической нагрузки, т. е. работает вхолостую. Это дает возмож-
ность изготовлять синхронные компенсаторы облегченной кон-
струкции, что снижает их стоимость по сравнению с синхронны-
ми двигателями.
Пуск в ход синхронных компенсаторов осуществляется теми
же способами, что и пуск синхронных двигателей (см. § 18.4).
Однако отсутствие нагрузки на валу компенсатора облегчает
процесс пуска (пусковые токи уменьшаются, а время разгона
ротора сокращается). Синхронные компенсаторы не имеют вы-
ступающего конца вала, поэтому их корпус (станина) может
быть легко герметизирован, что очень важно при использовании
в них водородного охлаждения (см. § 28.5).
§ 18.6. Реактивный синхронный двигатель
Ротор реактивного двигателя в отличие от обычных синхрон-
ных двигателей с явнополюсным ротором не имеет обмотки воз-
буждения.
Для выяснения принципа действия реактивного двигателя
обратимся к выражению электромагнитного момента явноло-
люсной машины (17.4)
л/ = sin О -L- J---------------1Л Sin 29 = Л'/0С11 + Мр,
2W1 \Xq Xd /
из которого следует, что если машину лишить возбуждения
(£0 = 0), то первое слагаемое, представляющее основную состав-
ляющую электромагнитного момента, становится равным нулю.
Тогда на ротор такого невозбужденного двигателя будет дей-
285
ствовать лишь реактивная составляющая электромагнитного
момента (17.6)
Следовательно, возможно осуществить синхронный двигатель
без обмотки возбуждения при условии, что xq<xd, т. е. если
ротор имеет явновыраженные полюса.
Таким двигателем является реактив-
ный синхронный двигатель. Вращение
ротора реактивного двигателя можно
объяснить физически (рис. 18.7): при
включении обмотки статора в сеть со-
здается вращающееся магнитное поле,
которое намагничивает ротор. При
этом ротор стремится занять положе-
ние в поле статора, соответствующее
минимальному магнитному сопротив-
лению. А так как поле статора враща-
Рис. 18.7. Реактивный ется> то с такой же скоростью начинает
синхронный двигатель вращаться и ротор двигателя.
Из выражения реактивного момен-
та видно, что величина вращающего момента реактивного дви-
гателя пропорциональна квадрату напряжения, подведенного
к двигателю, т. е. Мр == что имеет большое значение при ко-
лебаниях напряжений в сети.
Мощность реактивного синхронного двигателя определяется
выражением
(18.1)
которое получается из выражения мощности синхронной явно-
полюсной машины (17.2), если в ней принять EQ=0.
Из этого следует, что мощность реактивного двигателя мень-
ше мощности синхронного двигателя таких же габаритов, но
с обмоткой возбуждения.
Электромагнитный момент реактивного двигателя пропор-
ционален синусу двойного угла 0. Угловая характеристика этого
двигателя представлена кривой 2 на рис. 18.2.
Максимальное значение момента реактивного двигателя со-
ответствует углу 6|(р =45°, а по своей величине оно в несколько
раз меньше максимального момента двигателя с обмоткой воз-
буждения.
« К недостаткам реактивных двигателей следует также от-
нести низкий коэффициент мощности, величина которого за-
286
висит от конструкции ротора, т. е. от величины отношения xd/xr
Так, например, при xd/xq=4 наибольшее значение коэффи-
циента мощности coscpi составляет 0,6, а при xd/xq~5 cos<pi =
“0,67. Учитывая все особенности реактивных синхронных дви-
гателей, применять их в приводах средней, а тем более большой
мощности экономически нецелесообразно. Обычно эти двигатели
изготовляются на небольшие мощности (десятки ватт) и при-
меняются в автоматике.
Для возможности самостоятельного пуска в ход реактивные
двигатели снабжаются пусковой клеткой на роторе (см.
рис. 17.9), позволяющей осуществлять асинхронный пуск.
Наряду с трехфазными применяются однофазные реактив-
ные двигатели. Обмотка статора такого двигателя делается
однофазной и включается в однофазную сеть переменного токе
по таким же схемам, что и однофазные асинхронные двигатели
(см. гл. XXIV).
Достоинство реактивных синхронных двигателей состоит
в том, что они просты по конструкции, надежны в работе (от-
сутствие скользящих контактов) и удобны в эксплуатации, так
как для их включения не требуется постоянного напряжения.
В то же время реактивные синхронные двигатели обладают
важным свойством синхронных машин — их ротор вращается
с постоянной скоростью, независимо от нагрузки на валу.
РАЗДЕЛ ЧЕТВЕРТЫЙ
АСИНХРОННЫЕ МАШИНЫ
Глава XIX
ПРИНЦИП ДЕЙСТВИЯ и КОНСТРУКЦИЯ ТРЕХФАЗНОГО
АСИНХРОННОГО ДВИГАТЕЛЯ
§ 19.1. Предварительные замечания
Работа асинхронных машин основана на взаимодействии
вращающегося магнитного поля статора с токами в обмотке
ротора.
В отличие от синхронных машин скорость вращения ротора
асинхронной машины зависит не только от частоты приложен-
ного напряжения, но и от величины нагрузки (противодействую-
щего момента на валу).
Асинхронная машина обладает свойством обратимости и мо-
жет работать как в режиме генератора, так и в режиме двига-
теля. Однако наибольшее практическое применение получили
асинхронные двигатели. Выгодно отличаясь от других электро-
двигателей простотой конструкции и надежностью в работе,
асинхронные двигатели в настоящее время являются основным
типом электродвигателя, применяемым для привода различных
механизмов в промышленности, на строительстве, в сельском
хозяйстве.
§ 19.2. Принцип действия
трехфазного асинхронного двигателя
Неподвижная часть асинхронного двигателя — статор имеет
трехфазную обмотку, при включении которой в сеть возникает
вращающееся магнитное поле (см. § 16.1). Скорость вращения
этого поля
В расточке статора расположена вращающаяся часть двига-
теля — ротор, который состоит из вала, сердечника и обмотки
(рис. 19.1). Обмотка ротора состоит из стержней, уложенных
в пазы сердечника и замкнутых с двух сторон кольцами.
288
Вращающееся поле статора пересекает проводники (стерж-
ни) обмотки ротора и наводит в них э. д. с. Но так как обмотка
ротора замкнута, то в стержнях возникают токи. Взаимодей-
ствие этих токов с полем статс
мотки ротора электромагнитные
определяется по правилу «ле-
вой руки». Как видно из рис.
19.1, силы Fnp стремятся повер-
нуть ротор в направлении вра-
щения магнитного поля стато-
ра. Совокупность сил Fnp, при-
ложенных к отдельным про-
водникам, создает на роторе
электромагнитный момент М,
приводящий его во вращение
со скоростью п2. Вращение ро-
тора через вал передается ис-
полнительному механизму.
Таким образом, электриче-
ра создает на проводниках об-
силы Fnp, направление которых
Рис. 19.1. К объяснению
принципа действия асин-
хронного двигателя
ская энергия, поступающая в
обмотку статора из сети, пре-
образуется в механическую.
Направление вращения магнитного поля статора, а следо-
вательно, и направление вращения ротора, зависит от порядка
следования фаз напряжения, подводимого к обмотке статора.
При необходимости изменить направление вращения ротора
асинхронного двигателя следует поменять местами любую пару
проводов, соединяющих обмотку статора с сетью. Например,
порядок следования фаз АВС заменить порядком СВА, Ско-
рость вращения ротора Пг-асинхронного двигателя всегда мень-
ше скорости вращения поля так как только в этом случае воз-
можно наведение э. д. с. в обмотке ротора. Разность скоростей
ротора и вращающегося поля статора характеризуется величи-
ной, называемой скольжением,
s = (19.1)
Часто скольжение выражается в процентах I 5 = —L—100 ).
\ ni )
Скольжение асинхронного двигателя может изменяться в пре-
делах от 0 до 1. При этом s — О соответствует режиму холостого
хода, когда ротор двигателя не испытывает противодействующих
моментов, а 5=1 соответствует режиму короткого замыкания,
когда противодействующий момент двигателя превышает вра-
19 1649 289
щающий момент и поэтому ротор двигателя неподвижен
(и2==0).
Скольжение, соответствующее номинальной нагрузке двига-
теля, называется номинальным скольжением. Так, например,
для двигателей нормального исполнения мощностью от 1 до
1000 кет номинальное скольжение приблизительно составляет
соответственно 0,06—0,01, т. е. 6—1%\
Скорость вращения ротора асинхронного двигателя соглас-
но (19.1) равна
ti2 = (1 — s)^. (19.2)
На щитке двигателя указывается номинальная скорость вра-
щениями. Эта величина дает возможность определить синхрон-
ную скорость вращения Mi, номинальное скольжение sH, а также
число полюсов обмотки статора 2р.
Пример. На щитке асинхронного двигателя, предназначенного для
включения в сеть частотой /1 = 50 гц, указана скорость вращения
z?H= 1440 об1м,ин\ требуется определить номинальное скольжение.
Решение. Синхронная скорость п\ при /1=50 гц, соответствующая
лн = 1440 об!мин, равна 1500 об!мин (см. табл. 16.1); при этом число пар
полюсов обмотки статора
/г 60 50-60
/’=“^“ = Т500' = 2’ т'е- 2^ = 4’
Номинальное скольжение двигателя
§ 19.3. Конструкция асинхронных двигателей
По своему устройству асинхронные двигатели разделяются
на два типа, отличающиеся друг от друга лишь конструкцией
ротора: двигатели с короткозамкнутым ротором и двигатели
с фазным ротором, которые называют также двигателями с кон-
тактными кольцами. На рис. 19.2 показано устройство трехфаз-
ного асинхронного электродвигателя с короткозамкнутым рото-
ром, а на рис. 19.3 — трехфазного асинхронного двигателя
с фазным ротором. Рассмотрим конструкцию основных частей
этих двигателей.
Статор асинхронного двигателя конструктивно не отличается
от статора синхронной машины. Он состоит из корпуса, сердеч-
ника и обмотки.
Корпус статора служит для крепления сердечника с об-
моткой и подшипниковых щитов. В небольших двигателях кор-
пус изготовляют отливкой из стали или чугуна, в крупных ма-
шинах — делают сварным.
290
Сердечник статора собирают из листов электротех-
нической стали толщиной 0,35 или 0,5 мм, которые до сборки
покрывают с обеих сторон изоляционным лаком, что ограничи-
вает величину вихревых токов в стали сердечника. На внутрен-
ние. 19.2. Устройство асинхронного двигателя
с короткозамкнутым ротором:
1 — корпус статора; 2 — коробка выводов;
3 — обмотка статора; 4 — сердечник статора;
5 — ротор; 6 — подшипниковый щит
ней поверхности сердечника имеются продольные пазы, в кото-
рых уложена обмотка статора.
Обмотки статора выполняют по тому же принципу,
что и обмотки синхронных машин (см. гл. XV). Обмотки могут
быть однослойные или двухслойные, с полным или укороченным
шагом. Чаще всего статорную обмотку делают двухслойной
с укороченным шагом. Концы обмотки выводят на зажимы ко-
робки выводов и обозначают в соответствии с табл. 14.2. Обмот-
ку статора асинхронного двигателя можно соединить звездой
или треугольником. Это дает возможность применять одни и те
же двигатели при двух различных напряжениях сети, находя-
щихся в отношении 1Z3, например 127/220 или 220/380 в. При
этом соединению обмотки звездой соответствует включение дви-
гателя на высшее напряжение. Так, если двигатель рассчитан
на напряжения 220/380 в, то при напряжении сети 380 в его ста-
торную обмотку следует соединить звездой, а при напряжении
сети 220 в — треугольником. В обоих случаях фазное напряже-
ние остается равным 220 в. Для упрощения указанных переклю-
чений зажимы обмоток статора располагают в определенном
порядке (рис. 19.4).
19* 291
Ротор асинхронного двигателя состоит из вала, сердечника
и обмотки.
Сердечник ротора имеет цилиндрическую форму
и, так же как и сердечник статора, собирается из листов элек-
Рис 19 3 Устройство трехфазного асинхронного двигателя
с фазным ротором (тип МТ-22-6; 75 кет):
1 — вал, 2— подшипниковый щит; 3— щеткодержатель; 4 —
крышка люка, 5—обмотка статора; 6 — сердечник статора,
7 — кожух вентилятора; 8 — сердечник ротора; 9 — обмотка
ротора, 10 — контактные кольца; И — крышка подшипника
тротехнической стали. В двигателях с короткозамкнутым рото*
ром обмотка ротора представляет собой ряд медных
или алюминиевых стержней, расположенных в пазах сердеч-
ника ротора и замкнутых по торцам кольцами (рис. 19.5). Пазы
ротора обычно имеют овальную форму (рис. 19.6); они пере-
крыты иногда мостиком толщиной приблизительно 0,5 мм. В дви-
гателях мощностью до 100 кет обмотка ротора выполняется за-
ливкой пазов расплавленным алюминием под давлением. При
этом одновременно отливаются и замыкающие кольца вместе
с вентиляционными крыльями (рис. 19.7).
Двигатель с фазным ротором (см. рис. 19.3), помимо указан-
ных выше частей, имеет три контактных кольца. Кольца кре-
пятся на втулке, которая жестко насаживается на вал. Контакт-
ные кольца изолируются от втулки и друг от друга (рис. 19.8).
Для установки щеток двигатель имеет шесть щеткодержате-
лей (по два на кажлое контактное кольцо).
292
Для уменьшения потерь и износа щеток некоторые двига-
тели с фазным ротором средней и большой мощности снаб-
жаются специальным механизмом, позволяющим после пуска
двигателя поднимать щетки, одновременно замыкая накоротко
контактные кольца (см. рис. 23.3).
Обмотку ротора двигателя с контактными кольцами выпол-
Рис. 19.4. Обмотка статора:
а —« расположение выводов обмотки на
щитке двигателя; б — соединение обмотки
звездой и треугольником
Рис. 19 5 Коротко-
замкнутая обмотка
ротора
няют по тем же схемам, что и статорные обмотки. Обмотку
обычно соединяют звездой, а концы ее присоединяют к контакт-
Рис 19 6 Паз ро-
тора
Рис 19 7 Короткозамкнутый ротор
с алюминиевой литой обмоткой
ным кольцам. Пазы ротора в этом случае делают полузакры-
тыми (см. рис. 14.9,6).
Подшипниковые щиты двигателя служат опорой для под-
шипников. Щиты крепят болтами к корпусу статора и, так же
как и корпус, делают литыми или сварными.
В асинхронных машинах малой мощности корпус и подшип-
никовые щиты часто отливают из алюминиевого сплава, что
облегчает вес двигателя и уменьшает его стоимость. На корпус
статора устанавливают коробку выводов с шестью выводами
293
обмотки статора. Выводы обмотки ротора обозначают Р1,
Р2, РЗ.
На корпусе двигателя закреплена табличка, на которой ука-
заны: тип двигателя, завод-изготовитель, год выпуска, а также
номинальные данные двигателя: полезная мощность, напряже-
Рис. 19.8. Контактные кольца асинхронного двигателя с фазным
ротором:
1 — чугунная втулка; 2— миканит; 3—щеткодержатель; 4 —
контактные кольца; 5 — токоведущие пластины для присоеди-
нения к обмотке ротора; 6 — изолирующие кольца
ния, на которые двигатель может быть включен, величина тока,
коэффициент мощности, скорость вращения и к. п. д.
Глава XX
РАБОЧИЙ ПРОЦЕСС АСИНХРОННОЙ МАШИНЫ
§ 20.1. Э. д. с., наводимые в обмотках
асинхронного двигателя
Как следует из принципа работы асинхронного двигателя,
обмотка ротора не имеет электрической связи с обмоткой ста-
тора. Между этими обмотками существует только магнитная
связь, и энергия из одной обмотки передается в другую посред-
ством магнитного поля. В этом отношении асинхронный двига-
тель подобен трансформатору, в котором обмотка статора
является первичной, а обмотка ротора — вторичной.
294
В процессе работы асинхронного двигателя токи в обмотках
статора и ротора создают в машине две намагничивающие
силы: н. с. статора и н. с. ротора. Совместным действием этих
н. с. в двигателе создается результирующий магнитный поток,
вращающийся относительно статора с синхронной скоростью п\.
Так же, как и в трансформаторе, этот магнитный поток можно
рассматривать состоящим из основного потока Ф, сцепленного
как с обмоткой статора, так и с обмоткой ротора, и двух пото-
ков рассеяния: потока рассеяния обмотки статора Фр1 и потока
рассеяния обмотки ротора Фр2.
Рассмотрим, какие э. д. с. наводятся в обмотках двигателя.
В обмотке статора. Основной магнитный поток Ф,
вращающийся со скоростью гц, наводит в неподвижной обмотке
статора э. д. с. £j, величина которой определяется выраже-
нием (15.16)
Ех = 4,44/00/^.
Магнитный поток рассеяния статора Фр1 наводит в обмотке
статора э. д. с. рассеяния величина которой определяется
индуктивным падением напряжения в обмотке статора
~ (20-1)
где Xi — индуктивное сопротивление рассеяния одной фазы об-
мотки статора.
Кроме того, ток /1 в обмотке статора создает падение напря-
жения в активном сопротивлении
4 = >/р (20.2)
где и — активное сопротивление одной фазы обмотки статора.
Таким образом, напряжение сети Ui, подведенное к обмотке
статора, уравновешивается суммой э. д. с., наведенных в этой
обмотке
i/1 = (-£1)+(-£pl) + /?r,
ИЛИ
С, = (-£,) 4-/7^ + //,. (20.3)
Выражение (20.3) представляет собой уравнение э. д. с. об-
мотки статора асинхронного двигателя.
В обмотке ротора. В процессе работы двигателя
рогор вращается в сторону вращения магнитного поля статора
со скоростью п2. Поэтому скорость вращения поля статора отно-
сительно ротора равна разности скоростей п^ — п2. Основной маг-
нитный поток Ф обмотки статора, обгоняя ротор со скоростью
Hi— п2, индуктирует в обмотке ротора э. д. с.
= 4,44/2Фа>2К2, (20. 4
295
где К2— обмоточный коэффициент обмотки ротора;
w2 — число последовательно соединенных витков одной
фазы обмотки ротора;
f2 — частота э. д. с. E2s.
Частота f2 определяется скоростью вращения магнитного
поля статора относительно ротора rt{ — п2 и числом пар полюсов
обмотки статора
(20.5)
(20.6)
_ р(п1 — п2)
'2 60
Преобразуя выражение (20.5), получим
г .. . Р(п1~ ni) Р-П1
'2 60 ' 60 ’
т. е. частота э. д. с. в обмотке ротора пропорциональна сколь-
жению.
Для большинства асинхронных двигателей эта частота не-
велика и при /1 = 50 гц она не превышает нескольких герц. Так,
при скольжении $=0,05 и /1 = 50 гц частота э. д. с. в обмотке
ротора равна /2=0,05 • 5=2,5 гц.
Подставив выражение (20.6) в формулу (20.4), получим
Е2, = 4,44/1$Фш2^ = E2s. (20.7)
Здесь £2 представляет собой э. д. с., наведенную в обмотке ро-
тора при скольжении $=1, т. е. при неподвижном роторе.
Поток рассеяния ротора Фр2 индуктирует в обмотке ротора
э. д. с. рассеяния Ер2, величина которой определяется индуктив-
ным падением напряжения в этой обмотке,
£p2 = -772sx2, (20.8)
где х2— индуктивное сопротивление рассеяния обмотки при не-
подвижном роторе ($=1).
Так как в процессе работы двигателя обмотка ротора замк-
нута накоротко, то сумма э. д. с. в цепи ротора равна нулю, т. е.
$Ё2 — ji2sx2 — 12r2 — 0, (20.9)
где г2 — активное сопротивление цепи ротора.
Разделив все члены равенства (20.9) на $, получим уравне-
ние э. д. с. для цепи обмотки ротора
jl 2х2 /« — О'
о
(20.10)
296
§ 20.2. Уравнения намагничивающих сил и токов
асинхронного двигателя
Основной магнитный поток Ф в асинхронном двигателе
создается совместным действием намагничивающих сил обмо-
ток статора /д и ротора F2
ф __ ^1 + ^2 _ Л)
“ 7?м ’
где /?м — магнитное сопротивление магнитной системы дви-
гателя потоку Ф;
Е0—Е1-^Р2 —результирующая н. с. асинхронного двигателя,
численно равная н. с. обмотки статора в режиме
холостого хода.
Величина этой н. с. определяется выражением аналогич-
ным (16.1)
77о = О,45т1^А-1, (20.11)
где /о — ток холостого хода, т. е. ток в обмотке статора в ре-
жиме холостого хода.
Намагничивающие силы обмоток статора и ротора в режиме
нагруженного двигателя
= (20.12)
F2 = 0,45/п2 Кг, (20.13)
р
где т2 — число фаз в обмотке ротора;
К2 — обмоточный коэффициент обмотки ротора.
При изменениях нагрузки на валу двигателя меняются токи
1\ и /2 в обмотках, что вызывает соответствующие изменения
намагничивающих сил обмоток статора и ротора. Но основной
магнитный поток Ф при этом сохраняется неизменным. Дело
в том, что напряжение, подведенное к обмотке статора, неизмен-
но ({>1 = const) и почти полностью уравновешивается э. д. с.
обмотки статора (20.3)
Но, поскольку э. д. с. Ei пропорциональна основному пото-
ку Ф (15.16), то последний при изменениях нагрузки остается
неизменным. Этим и объясняется то, что, несмотря на измене-
ния н. с. Fi и F2, результирующая н. с. Fo остается неизменной,
Fo = Д + Ё2 = const.
297
Подставив вместо Fo, Ft и F-> их значения по (20.11), (20.12) и
(20.13), получим 0,45/Wj = 0,45/Wj + 0,45m2
Разделив это равенство на /nj —получим уравнение токов
асинхронного двигателя
(2014)
п m2w2K2 . . „
Величина = представляет собой ток ротора,
приведенный к обмотке статора.
Преобразовав уравнение (20.14), получим выражение тока
статора
Л = 70 + (- А), (20.15)
из которого следует, что ток статора асинхронного двигателя
имеет две составляющие: /0—'намагничивающую и — А—со-
ставляющую, которая компенсирует размагничивающее дей-
ствие тока ротора.
Следовательно, ток ротора Г2 оказывает на магнитную си-
стему двигателя такое же размагничивающее влияние, как и ток
вторичной обмотки трансформатора (см. § 10.3). Этим объяс-
няется то, что любое изменение нагрузки на валу двигателя
сопровождается соответствующим изменением тока в обмотке
статора /ь Дело в том, что изменение нагрузки на валу двига-
теля вызывает изменение скольжения s. Это, в свою очередь,
влияет на э. д. с. обмотки ротора (20.7), а следовательно, и на
величину тока ротора /2- Но так как ток /2 оказывает размагни-
чивающее влияние на магнитную цепь двигателя, то его изме-
нения вызывают соответствующие изменения тока в цепи стато-
ра /1 за счет составляющей — Г2. Так, например, в режиме хо-
лостого хода, когда нагрузка на валу двигателя отсутствует
и s^0, ток А ~0.
В этом случае ток в обмотке статора Если же ротор
затормозить, не отключая обмотки статора от сети (режим ко-
роткого замыкания), то скольжение 5 = 1иэ. д. с. обмотки рото-
ра E2s достигает своего наибольшего значения Е2. Также наи-
большего значения достигает ток Г2, а следовательно, и ток
в обмотке статора Л.
§ 20.3. Приведение параметров обмотки ротора
к обмотке статора
Для того чтобы векторы величин обмоток статора и ротора
можно было изобразить на одной векторной диаграмме, как это
298
мы делали для трансформаторов, параметры обмотки ротора
необходимо привести к обмотке статора. При этом обмотку ро-
тора с числом фаз т2, обмоточным коэффициентом Kz и числом
витков фазы w2 заменяют обмоткой с ть /G и Шь При такой
замене энергетический баланс в роторе должен остаться неиз-
менным, т. е. у приведенного ротора мощности и углы фазовых
сдвигов векторов должны остаться такими же, что и до приве-
дения.
Таким образом, приведение параметров обмотки ротора
к обмотке статора аналогично приведению параметров вторич-
ной обмотки трансформатора к первичной (см. § 10.4).
Пересчет реальных параметров обмотки ротора на приведен-
ные ведется по следующим формулам.
Приведенная э. д. с. ротора при s = 1
Е2 = Е2Ке.
(2Э.16)
напряже-
„ Er K{w{ ,, <
где 1\е = —• = — коэффициент трансформации
^2 А 2^2
ния в асинхронной машине при непод-
вижном роторе (s = l).
Приведенный ток ротора
/2- /2 д,
(20.17)
.. m.w.Ki т, ,
где KL^= —1—~17" = ~л~^е — коэффициент трансформации то-
ка в асинхронной машине.
В отличие от трансформаторов в асинхронных двигателях
коэффициент трансформации по напряжению Ке и по току Kt
не равны, так как в общ.ем случае число фаз в обмотке ста-
тора mt и в обмотке ротора «г неодинаковы; лишь в двигателях
с фазным ротором, у которых т\=Ш2, эти коэффициенты равны.
Активное и индуктивное приведенные сопротивления обмотки
ротора
Г2 = ггКЛ; (20.18)
Л2 = х2ад. (20.19)
Следует обратить внимание на некоторую специфику опреде-
ления числа фаз т2 и числа витков w2 в короткозамкнутой
обмотке ротора (см. рис. 19.5).
Каждый стержень этой обмотки можно рассматривать как
фазную обмотку. Поэтому число витков одной фазы обмотки
ротора принимается равным
1
®2=2-;
299
обмоточный коэффициент обмотки ротора Л2= 1, а число фаз т2
принимается равным числу стержней
§ 20.4. Векторная диаграмма асинхронного двигателя
Для асинхронного двигателя, как и для трансформатора,
может быть построена векторная диаграмма токов и э. д. с. Диа-
грамма строится на основании уравнений э. д. с. (20.3), (20.10)
и токов (20.15). Для
удобства построения за-
пишем эти уравнения еще
раз, при этом уравнение
э. д. с. для цепи ротора
запишем в приведенном
виде
Рис. 20.1. Векторная диаграмма
асинхронного двигателя
<Л = (- Л) + уМ1Н-Лгр
0 = Ёц — jhx2 —/2>
Л = + (— Ё)-
Величина -Г~- может
быть представлена в виде
Г 2 Л> r'2S _ -
•-—--------- 1 2 --
S S S
= г2 4- , (20.20)
тогда уравнение э. д. с. для цепи ротора принимает вид
0 = Ё2 — jI2X2 — 2 — /2^2------ . (20.21)
5
Угол сдвига фаз между э. д. с. £2 и током ротора /2 оп-
ределяется по формуле
ф2 = arctg — .
Г2
(20.22)
Так как векторная диаграмма асинхронного двигателя
строится по уравнениям э. д. с. и токов, аналогичным уравне-
300
ниям трансформатора, то порядок построения этой диаграммы
такой же, что и векторной диаграммы трансформатора
(см. § 10.6).
На рис. 20.1 представлена векторная диаграмма асинхрон-
ного двигателя. От векторной диаграммы трансформатора
(см. рис. 10.5) она отличается лишь тем, что сумма падений
напряжения в обмотке ротора (во вторичной обмотке) уравно-
вешивается э. д. с. Е'2 обмотки ротора при П2=0. Объясняется
это тем, что обмотка ротора замкнута накоротко, а не на нагруз-
ку, как это имеет место во вторичной обмотке трансформатора.
, 1 —s
Однако, если падение напряжения ОА— -------- рассматривать
5
. ,1—S
как напряжение на некоторой нагрузке г3-----, подключенной
на зажимы обмотки ротора, то векторную диаграмму асинхрон-
ного двигателя можно рассматривать как векторную диаграмму
трансформатора, на зажимы вторичной обмотки которого вклю-
, 1—S тл
чено переменное сопротивление/^—-^—. Иначе говоря, асинхрон-
ный двигатель в электрическом отношении подобен трансфор-
матору, работающему на активную нагрузку,
Мощность вторичной обмотки такого трансформатора
(20.23)
представляет собой полную механическую мощность, развивае-
мую асинхронным двигателем.
§ 20.5. Схема замещения асинхронного двигателя
Уравнениям э. д. с. и токов, а также векторной диаграмме
асинхронного двигателя (рис. 20.1) соответствует электрическая
схема (рис. 20.2, а), которая называется схемой замещения
асинхронного двигателя.
Таким образом, асинхронная машина с электромагнитной
связью статорной и роторной цепей заменена эквивалентной
V л , 1 — S
электрической схемой. Активное сопротивление можно
рассматривать как внешнее сопротивление, включенное в об-
мотку неподвижного ротора. В этом случае асинхронная маши-
на работает как трансформатор, имеющий активную нагрузку.
301
Сопротивление r\--- является единственным переменным па-
раметром схемы.
Величина этого сопротивления определяется скольжением,
а следовательно, механической нагрузкой на валу асинхронного
двигателя. Так, например, если нагрузочный момент на валу
двигателя Л12 = 0, то скольжение $ — 0. При этом величина
, 1 —s .
г2 ---=со,что соответствует работе двигателя в режиме холо-
стого хода. Если же нагрузочный момент на валу двигателя
Рис. 20.2. Схема замещения асинхронного двигателя
превышает его вращающий момент, то ротор двигателя останав-
।
ливается (s=l). При этом величина г\ —= 0, что соответ-
ствует режиму короткого замыкания асинхронного двигателя.
Полученная схема замещения асинхронного двигателя может
быть преобразована в более простой вид. С этой целью намаг-
ничивающий контур Zo = ro + Mo выносят на общие зажимы.
Чтобы при этом намагничивающий ток /о не изменил своей вели-
чины, последовательно включают сопротивления и и Xi
(рис. 20.2,6). В полученной схеме замещения сопротивления
контуров статора и ротора соединены последовательно; они
образуют рабочий контур, параллельно которому включен на-
магничивающий контур. Величина тока в рабочем контуре
/ / 1 _ е\2
г (п+ /•;+/;—— +(х1+х'2)2’
* \ о /
302
или, используя выражение (20.20),
4 » ____-Ул___________
1/ г 1 + +(Xl+*2)2
(20.24)
где U\ — фазное напряжение, подводимое к обмотке статора.
Глава XXI
ЭЛЕКТРОМАГНИТНЫЙ МОМЕНТ И РАБОЧИЕ ХАРАКТЕРИСТИКИ
АСИНХРОННОГО ДВИГАТЕЛЯ
§ 21.1. Потери и к. п. д. асинхронного двигателя
Преобразование энергии в асинхронном двигателе, как
и в других электрических машинах, связано с потерями энергии.
Эти потери делятся на механические, магнитные и электриче-
ские.
Из сети в обмотку статора поступает мощность Р{. Часть
этой мощности расходуется на покрытие магнитных потерь
в сердечнике статора рс1, а также в обмотке статора на покры-
тие электрических потерь, обусловленных нагревом обмотки,
(21.1)
Оставшаяся часть мощности при помощи магнитного потока
передается на ротор и поэтому называется электромагнитной
мощностью
P™ = Pi - (Ai+Ai)- (21.2)
Часть электромагнитной мощности затрачивается на покры-
тие электрических потерь в обмотке ротора
Рэ2 (21.3)
Остальная часть электромагнитной мощности преобразуется
в механическую мощность двигателя, называемую полной меха-
нической мощностью
р; = рэм-рЭ2. (21.4)
Воспользовавшись формулой (21.3), можно записать следую-
щее выражение полной механической мощности:
г>' ,'2'1—5 1—5
Р2 = mJ2 Г<2 —— = Рэ2 —— .
5 5
303
Подставим полученное выражение в формулу (21.4)
1 — з _
Рэ2 ~ — 'эм Рэ2-
Л
Преобразовав это уравнение, получим
Рис. 21.1. Диаграмма
преобразования мощ-
ности в асинхронном
двигателе
= (21.5)
т. е. мощность электрических потерь
в роторе пропорциональна скольжению.
Поэтому работа асинхронного двига-
теля более экономична при малых
скольжениях.
Следует отметить, что в роторе дви-
гателя возникают также и магнит-
ные потери, но ввиду небольшой час-
тоты тока ротора эти потери
настолько малы, что ими обычно пре-
небрегают.
Механическая мощность на валу
двигателя Р% меньше полной механи-
ческой мощности Р'ъ на величину ме-
ханических /?мех и добавочных рл по-
терь
Р2 «== Р'2 ~ (/W +Рд). (21.6)
Механические потери в асинхронном двигателе обусловлены
трением в подшипниках и трением вращающихся частей о воз-
дух. Добавочные потери вызваны наличием в двигателе полей
рассеяния и пульсацией поля в зубцах ротора и статора.
Таким образом, полезная мощность асинхронного двигателя
P^pt-Zp,
где — сумма потерь в асинхронном двигателе,
5р = Рс1+Рэ1 + Рэ2+Рмех+Рд. (21.7)
На рис. 21.1 представлена энергетическая диаграмма асин-
хронного двигателя. Коэффициент полезного действия его
(21.8)
Благодаря отсутствию коллектора к. п. д. асинхронных дви-
гателей выше, чем у двигателей постоянного тока. В зависимости
от величины мощности асинхронных двигателей их к. п. д. при
номинальной нагрузке может быть в пределах от 83 до 95%
(верхний предел соответствует двигателям большой мощности).
304
Пример. Трехфазный асинхронный двигатель при номинальной нагрузке
на валу потребляет мощность Pi = 10 кет, при напряжении 380 в имеет сле-
дующие данные: sH s 4%, cos <рн == 0,8, рмех = 3%, Pci — 3,3% и рл « 0,5%
от мощности Pi, Г75—0,28 ом, обмотка статора соединена звездой. Опреде-
лить к. п. д. двигателя при номинальной нагрузке.
Решение. Ток в фазной обмотке статора
________________ЛЮ’_____________ 10-Ю3
'1Н-_______________ 3-220-0,8 “ 19 °’
электрические потери в обмотке статора
р& = т11$нг1Ъ = 3-193»0,28 300 вт\
магнитные потери в сердечнике статора
рс1 = 0,033- 10 000 = 330 вт\
электромагнитная мощность двигателя
Рэм Pi “ (Pci ”Ь Psi) = Ю 000 (330 4" 300) = 9370 e/wj
электрические потери в роторе
Рэ2 *=* $нЛм — 0,04*9370 = 375 вт\
механические потери
рмех = 0,03-10000 *= 300 вт\
добавочные потери
/?д = 0,00540 000 = 50 em;
сумма потерь
= 330 + 300 + 375 + 300 + 50 = 1355 вт =1,355 кет.
К. п. д. двигателя
У.р 1,355
т)н = 1 —р~ — 1 — —jo- = 0,865 или 86,5%.
§ 21.2. Электромагнитный момент асинхронного двигателя
Электромагнитный момент асинхронного двигателя создает-
ся взаимодействием тока в обмотке ротора с вращающимся маг-
нитным полем. Электромагнитный момент М пропорционален
электромагнитной мощности \
М = ^~, (21.9)
2и«<
где (», =* - gg — угловая скорость вращения магнитного по-
ля статора.
20 1б« 305
, то
(21.10)
f 60
Так как синхронная скорость ni = ~—
_ 2*7,60 _ 2*/,
Wl — 60р — р
Подставив в выражение (21.9) значение электромагнитной
мощности по формуле (21.5), получим
= Рэ2 2^2
CO,S U),S
т. е. электромагнитный момент асинхронного двигателя пропор-
ционален мощности электрических потерь в обмотке ротора.
Подставляя в формулу (21.10) значение тока Г2 по формуле
(20.24), а также значение ол = —получим
(21.11)
Если в знаменатель этого выражения подставить 9,81, то
получим выражение момента в кГм.
Выражение момента (21.11) дает возможность построить гра-
фик зависимости электромагнитного момента двигателя от
скольжения называемого механической характеристи-
кой двигателя (рис. 21.2). При построении механической харак-
теристики двигателя исходят из положения, что все величины,
входящие в формулу (21.11), за исключением скольжения $,
являются постоянными, так как величины Ш\, Г\, r2. Xi и х'2 за-
даются конструкцией двигателя, а /1 и U\ являются неизмен-
ными параметрами сети, питающей двигатель.
В момент пуска двигателя в ход п2 = 0 и $==1. Развиваемый
при этом пусковой момент
Мл -------------.
2*Л [(G + Л>)2 + (*! + х2)2]
mj>U\r2
(21.12)
Под действием момента 7ИП ротор двигателя приводится во
вращение, при этом скольжение уменьшается, а момент увели-
чивается. При скольжении sK момент достигает максимального
значения. Величину критического скольжения sK, соответствую-
щую максимальному моменту, можно найти, взяв производную
от выражения момента (21.11) по s и приравняв ее нулю,
ds
306
Отсюда получаем искомое значение
4- (xt + х2)2
(21.13)
Здесь знак «плюс» соответствует работе асинхронной маши-
ны в режиме двигателя.
Пренебрегая величиной сопротивления гь которое обычно
не превышает 10—12°/о‘ от
(xi+x'2), получим более
простое (выражение крити-
ческого скольжения
Xj + х'2
(21.14)
Подставив значение кри-
тического скольжения по
(21.13) в выражение (21.11),
получим формулу макси-
Рис. 21.2. Механическая характери-
стика асинхронного двигателя
мального электромагнитного
момента асинхронного дви-
гателя
44 Макс
__________________________________
Wj k + V А + (х, + Х2)2]
(21.15)
Вернемся к анализу механической характеристики 44 = f(s).
После достижения моментом значения /Имакс скорость вращения
ротора продолжает увеличиваться, а момент начинает умень-
шаться. Так будет продолжаться до тех пор, пока электромаг-
нитный момент не станет равным сумме противодействующих
моментов
44 = 44 ~ 44ст,
где А4о — момент холостого хода;
442— полезный нагрузочный момент, т. е. момент на валу
двигателя.
Допустим, что противодействующий момент на валу М2 соот-
ветствует номинальной нагрузке двигателя.
В этом случае установившийся режим работы двигателя
определится точкой на механической характеристике с коорди-
натами Л4=/14н и s=sH, где Л1Н и sH — номинальные значения
электромагнитного момента и скольжения.
Из анализа механической характеристики также следует, что
устойчивая работа асинхронного двигателя возможна при сколь-
жениях з<зк, т. е..на участке ОА механической характеристики.
Дело в том, что на этом участке изменение нагрузки на валу
двигателя сопровождается соответствующим изменением элек-
тромагнитного момента. Так, например, если двигатель работал
в номинальном режиме (Л4Н; sH) и произошло увеличение нагру-
зочного момента М2 на валу двигателя, то равенство моментов
нарушится
Л1Н Мз
и скорость вращения ротора начнет убывать (скольжение будет
увеличиваться). Но это приведет к росту электромагнитного
момента. Момент М будет увеличиваться до тех пор, пока он
не станет равным сумме противодействующих моментов. После
чего режим работы двигателя опять станет установившимся,
хотя и будет соответствовать другим значениям момента и сколь-
жения (точка В на рис. 21.2). При уменьшении нагрузочного
момента на валу относительно его номинального значения Ми
Ма > Мо + Мг
скорость ротора начнет увеличиваться (скольжение умень-
шаться) .
Это вызовет уменьшения электромагнитного момента до зна-
чения, равного сумме противодействующих моментов, и устой-
чивый режим работы двигателя будет восстановлен, но уже при
других значениях момента и скольжения (точка С).
Работа асинхронного двигателя становится неустойчивой при
скольжениях s>sK. Так, если электромагнитный момент дви-
гателя М-Ммико а скольжение з=зЛ, то даже незначительное
увеличение нагрузочного момента Af2 вызовет увеличение s,
а следовательно, уменьшение электромагнитного момента. Это
приведет к дальнейшему увеличению скольжения и т. д.
Так будет продолжаться до тех пор, пока скольжение 'з
не станет равным единице, т. е. пока ротор двигателя не остано-
вится.
Таким образом, при достижении электромагнитного момента
максимального значения наступает предел устойчивой работы
двигателя. Следовательно, для устойчивой работы асинхронного
двигателя необходимо, чтобы номинальный момент был меньше
максимального. В этом случае двигатель будет работать устой-
чиво не только при номинальной нагрузке, но будет способен
выдерживать некоторые перегрузки, что необходимо для надеж-
ной работы двигателя в электроприводе. Другими словами, дви-
гатель должен обладать перегрузочной способностью, которая
определяется отношением максимального момента Л7матс к номи-
ОАО
нальному AfH. Для асинхронных двигателей общего применения
^=1,7-2,5.
Следует также обратить внимание на то, что работа двига-
теля при скольжениях s<sK, т. е. на рабочем участке механиче-
ской характеристики, является наиболее экономичной, так как
она соответствует малым значениям
но, и меньшим значениям электри-
ческих потерь в обмотке ротора
эм»
Иногда электромагнитный мо-
мент выражают н относительных
единицах, как отношение заданного
значения момента М к его номи-
нальному значению Л4Н.
В этом случае механическая ха-
рактеристика представляет собой
М „ ч
зависимость а номиналь-
ное значение момента на ней опре-
деляется единицей на оси ординат
(рис. 21.3).
скольжения, а следователь-
Рис 21 3 К примеру
Пример. Трехфазный асинхронный двигатель работает от сети напряже-
нием t?i = 220 в при частоте /1=50 гц. Скорость вращения ротора при но-
минальной нагрузке лн=720 об/мин (синхронная скорость Л1=750 об/мин)»
Обмотки двигателя имеют следующие данные: и=0,13 ом, Xi=0,50 ом\
г* =0,15 ом, д/2=0,46 ом. Требуется построить механическую характеристику
двигателя
Решение. Номинальное скольжение
sa = ~ ”2. = 75-°~-— = 0,04.
лх'
750
Число полюсов в обмотке статора 2р=8. Номинальное значение элек-
тромагнитного момента (21.11)
3-4-2202°^
0,04
2-3,14’50 f 0,13 + 0^ + (0,5 + 0,46)2 1 0,04 /
= 443 н-м.
Критическое значение скольжения (21 14)
0,15
0,50 + 0,46
= 0,16
Максимальное значение электромагнитного момента (21 15)
____ ___________________________________
макс - 4-3,14-50 [0,13» + /0,13»—(0,5 + 0,46)3] - Н М
309
Перегрузочная способность двигателя
Ммакс __845____ । QQ
"Л4Н 443 ’ '
Начальный пусковой момент (21.12)
3‘4'2202'0,15
Мп~ 2-3,14-50 [(0.13+ 0,15)» +(0,5 + 0,46)’] -277 н'м'
Так как полученных данных недостаточно для построения механической
характеристики, то дополнительно рассчитываем ряд значений электромаг-
нитного момента по формуле (21.11), задаваясь скольжениями: 0,02; 0,08;
0,2; 0,5.
Результаты расчета сводим в табл. 21.1 и строим механическую харак-
теристику в относительных единицах (рис. 21.3).
Таблица 21.1
s 0 0,02 | 0,04 0,08 0,16 0,2 0,5 1
М, Н’М 0 236 430 648 845 785 | 463 277
м Л1н 0 0,55 1 1,47 1,90 1,83 1,07 0,645
§ 21.3. Влияние напряжения сети и активного сопротивления
обмотки ротора на механическую характеристику
асинхронного двигателя
Из выражений (21.11), (21.12) и (21.15) видно, что электро-
магнитный момент асинхронного двигателя, а также его пуско-
вое и максимальное значения пропорциональны квадрату на-
пряжения U\, подводимого к обмотке статора
В то же время, анализ выражения (21.13) показывает, что
величина критического скольжения не зависит от напряжения
Это дает нам возможность построить механические характери-
стики M=f(s) для разных значений напряжения (Л (рис. 21.4),
из которых следует, что колебания напряжения (Л относительно
его номинального значения сопровождаются не только измене-
ниями максимального и пускового моментов, но и изменениями
скорости вращения.
Для выяснения этого на оси ординат семейства механических
характеристик M=f(s) (рис. 21.4) отмечаем некоторое значение
нагрузочного момента Л4нагр и проводим прямую, параллельную
оси абсцисс. Точки пересечения этой прямой с характеристиками
ЗЮ
определяют скольжения, соответствующие неизменной нагрузке
на валу, но разным напряжениям С уменьшением напряже-
ния скольжение увеличивается (скорость вращения умень-
шается). Влияние напряжения U\ на величину максимального
момента приводит к тому, что возможные колебания напряже-
ния сети t/i вызывают за-
метные изменения пере-
грузочной способности
асинхронного двигателя.
Так, например, если
напряжение U\ понизи-
лось по сравнению с но-
минальным (71н на 30%,
т. е. станет равным [7Х=
= 0,7(71н, то максимальный
момент двигателя умень-
шится до значения
7ИМакс 0,72Л4макс ===
= 0,497ИМакс,
Рис. 21.4. Влияние напряжения на
вид механической характеристики
асинхронного двигателя
т. е. уменьшится более
чем вдвое.
Насколько же умень-
шится перегрузочная спо-
собность двигателя? Если,
например, при номинальном напряжении
2, то при пони-
макс
7ЙГ
жении напряжения на 30% — ^-к- = Q’^J^MaKC _ 9 49.2 = о,98,
т. е. двигатель не будет в состоянии нести даже номинальную
нагрузку.
Как следует из формулы (21.15), величина максимального
момента двигателя не зависит от активного сопротивления г'2*
Что же касается критического скольжения $к, то, как это видно
из формулы (21.13), оно пропорционально сопротивлению г'2.
Таким образом, если в асинхронном двигателе постепенно уве-
личивать активное сопротивление цепи ротора, то величина мак-
симального момента будет оставаться неизменной, а критиче-
ское скольжение увеличится (рис. 21.5). При этом пусковой мо-
мент двигателя 7ИП с увеличением сопротивления г'2 до некото-
рого значения, увеличивается.
На рис. 21.5 это сопротивление г2ш, при котором пусковой
момент равен максимальному. При дальнейшем увеличении со-
противления rf2 пусковой момент уменьшается.
311
Анализ графиков приведенных на рис. 21.5, также
показывает, что изменения сопротивления г'2 сопровождаются
изменениями скорости вращения: с увеличением сопротивления
Рис. 21 5. Влияние активного сопротивления об-
мотки ротора на механическую характеристику
асинхронного двигателя: r2I < г2Н < r2in <r2iV
г'г при неизменном нагрузочном моменте Мнагр скорость враще-
ния уменьшается (точки 1, 2, 3 и 4 на рис. 21.5).
§ 21.4. Рабочие характеристики асинхронного двигателя
Рабочие характеристики асинхронного двигателя представ-
ляют собой зависимости скорости вращения п2, коэффициента
полезного действия т|, полезного момента М2, коэффициента
мощности cos <pi и величины тока Ц от полезной мощности Р2
при [7i=const и fi = const.
На рис. 22.6 представлены рабочие характеристики асинхрон-
ного двигателя. Рассмотрим некоторые из них.
Скоростная характеристика n2=f(P2). Из фор-
мулы скольжения (19.1) следует, что n2 = ni(l—s). Но в то же
время, согласно (21.5)
Рэ2
Р эм
(21.16)
т. е. скольжение двигателя, а следовательно, его скорость вра-
щения определяется отношением электрических потерь в роторе
к электромагнитной мощности Рэм.
Пренебрегая потерями холостого хода, можно принять, что
при работе двигателя без нагрузки р3) «*0, поэтому $«0
и п2я*П1. По мере увеличения нагрузки отношение (21.16) ра-
312
стет, достигая значений 0,01—0,06 при номинальной нагрузке.
В соответствии с этим зависимость «2=/(^2) представляет собой
кривую, слабо наклоненную к оси абсцисс.
Однако при увеличении активного сопротивления ротора г'2
угол наклона этой кривой увеличивается, т. е. изменения ско-
рости вращения ротора «2 при колебаниях нагрузки Р2 возра-
Рис. 216. Рабочие характеристики асин-
хронного двигателя
стают. Объясняется это тем, что с увеличением г’2 электриче-
ские потери в роторе /?92увеличиваются (21.3).
Зависимость M2=f(P2). Зависимость полезного момен-
та на валу двигателя от мощности Р2 определяется выражением
= (21.17)
(02
ИЛИ
М2 = 0,975 [кГм],
где Р2 — полезная мощность двигателя, вт.
Из этих выражений следует, что если бы п2 — const, то гра-
фик M2—f(P2) имел вид прямой. Но в асинхронном двигателе
с увеличением Р2 скорость вращения уменьшается, а поэтому
полезный момент М2 с увеличением нагрузки возрастет несколь-
ко быстрее, чем Р2, и, следовательно, график M2=f(P2) имеет
криволинейный вид.
Зависимость cos<pi=f(P2). В связи с тем, что в асин-
хронном двигателе ток статора 1\ имеет реактивную (индуктив-
ную) составляющую, необходимую для создания магнитного
поля статора, коэффициент мощности асинхронных двигателей
меньше единицы. Наименьшее значение коэффициента мощности
313
соответствует режиму холостого хода. Объясняется это тем, что
величина тока холостого хода /0 при любой нагрузке остается
практически неизменной. При малых нагрузках двигателя, когда
приведенный ток ротора Г 2 невелик, ток статора /1=/0+ (~^2)
является в значительной части реактивным и поэтому он сдви-
нут по фазе относительно напряжения U\ на угол <pb который
лишь немногим меньше 90° (рис. 21.7). Коэффициент мощности
Рис. 21.7. Векторная
диаграмма асинхронного
двигателя при неболь-
шой нагрузке
Рис. 21.8. Зависимость коэф-
фициента мощности от нагруз-
ки при соединении обмотки
статора звездой (кривая 1)
и треугольником (кривая 2)
асинхронных двигателей в режиме холостого хода обычно не
превышает 0,2. При увеличении нагрузки на вал двигателя
растет активная составляющая тока В этом случае коэффи-
циент мощности возрастет, достигая наибольшей величины
(0,80—0,90) при нагрузке, близкой к номинальной.
Дальнейшее увеличение нагрузки сопровождается уменьше-
нием cosq>i, что объясняется увеличением индуктивного сопро-
тивления ротора (x2s) за счет увеличения скольжения. В целях
повышения коэффициента мощности асинхронных двигателей
чрезвычайно важно, чтобы двигатель работал всегда или, по
крайней мере, значительную часть времени с номинальной на-
грузкой. Это можно обеспечить лишь при правильном выборе
мощности двигателей. Если же двигатель значительную часть
времени работает недогруженным, то для повышения cos <pi це-
лесообразно подводимое к двигателю напряжение Ui уменьшить.
В двигателях, работающих при соединении обмотки статора
треугольником, это можно сделать, переключив обмотки статора
с треугольника на звезду, что вызовет уменьшение фазного
напряжения в]/3 раз. При этом магнитный поток статора, а сле-
довательно,_и намагничивающий ток статора уменьшаются при-
мерно в /3 раз. Кроме того, активная составляющая тока
статора несколько увеличивается. Все это способствует повы-
314
шению коэффициента мощности двигателя. На рис. 21.8 пред-
ставлены графики зависимости cos (pi асинхронного двигателя
от нагрузки при соединении обмоток статора звездой (кривая 1)
и треугольником (кривая 2).
Рабочие характеристики двигателей малой мощности можно
снять методом непосредственной нагрузки с помощью какого-
либо тормоза, позволяющего измерить создаваемый им нагру-
зочный момент. Для двигателей средней и большой мощности
рабочие характеристики определяют посредством круговой диа-
граммы, построенной для данного двигателя по его расчетным
или опытным данным (см. гл. XXII).
§ 21.5. Генераторный и тормозной режимы
асинхронной машины
Если ротор асинхронной машины, включенной в сеть с на-
пряжением i/i, вращать посредством первичного двигателя в на-
правлении вращающегося поля статора, но со скоростью «2>^ь
то движение ротора относительно поля статора изменится (по
сравнению с двигательным режимом этой машины), так как
ротор будет обгонять поле статора.
При этом скольжение станет отрицательным, а направление
э. д. с. наведенной в обмотке статора, а следовательно, и на-
правление тока /1 изменятся на противоположное. В резуль-
тате электромагнитный момент на роторе также изменит
направление и из вращающего (в двигательном режиме)
превратится в противодействующий (по отношению к вра-
щающему моменту первичного двигателя). В этих условиях
асинхронная машина из двигательного перейдет в генераторный
режим, преобразуя механическую энергию первичного двигателя
в электрическую.
При генераторном режиме асинхронной машины скольжение
может изменяться в диапазоне
— оо < 5 < О,
при этом частота э. д. с. асинхронного генератора остается не-
изменной, так как она определяется скоростью вращения поля
статора, т. е. остается такой же, что и частота тока в сети, на
которую включен асинхронный генератор.
Ввиду того, что в генераторном режиме асинхронной машины
условия создания вращающегося поля статора такие же, что
и в двигательном режиме (и в том и в другом режимах обмотка
статора включена в сеть с напряжением (Л), и потребляет из
сети намагничивающий ток /о, то асинхронная машина в гене-
раторном режиме обладает особыми свойствами: она потреб-
ляет реактивную энергию из сети, необходимую для создания
вращающегося поля статора, но отдает в сеть активную энер-
315
гию, получаемую в результате преобразования механической
энергии первичного двигателя. Следует обратить внимание, что
работа асинхронных генераторов возможна лишь при их сов-
местной работе с синхронными генераторами, которые в этом
случае необходимы как источники реактивной энергии.
В отличие от синхронных асинхронные генераторы не под-
вержены опасностям выпадения из синхронизма. Однако асин-
хронные генераторы не получили широкого распространения,
что объясняется рядом их недостатков по сравнению с синхрон-
ными генераторами.
Одним из существенных недостатков асинхронных генерато-
ров является значительная реактивная мощность, потребляемая
ими из сети. Величина этой мощности пропорциональна намаг-
ничивающему току /о и может достигать 25—45% от номиналь-
ной мощности машины.
Из этого следует, что для работы 3—4 асинхронных генера-
торов необходимо использовать один синхронный генератор та-
кой же мощности, что и мощность одного асинхронного генера-
тора.
Если же асинхронные генераторы работают параллельно на
общую сеть с несколькими синхронными генераторами, то боль-
шая величина реактивной мощности возбуждения асинхронных
генераторов значительно понизит коэффициент мощности всей
электрической сети.
Асинхронный генератор может работать и в автономных
условиях, т. е. без включения в общую сеть. Но в этом случае
для получения реактивной мощности, необходимой для намаг-
ничивания генератора, используется батарея конденсаторов,
включенных параллельно нагрузке на выводы генератора.
Непременным условием такой работы асинхронных генера-
торов является наличие остаточного намагничивания стали ро-
тора, что необходимо для процесса самовозбуждения генера-
тора. Небольшая э. д. с. Ео„, наведенная в обмотке статора,
создает в цепи конденсаторов (рис. 21.9), а следовательно,
и в обмотке статора небольшой реактивный ток, усиливающий
остаточный поток Фост. В дальнейшем процесс самовозбужде-
ния развивается, как и в генераторе постоянного тока парал-
лельного возбуждения (см. § 5.3). Изменением емкости конден-
саторов можно изменять величину намагничивающего тока,
а следовательно, и величину напряжения генераторов.
Из-за чрезмерной громоздкости и высокой стоимости кон-
денсаторных батарей асинхронные генераторы с самовозбужде-
нием не получили распространения. Асинхронные генераторы
применяются лишь на электростанциях вспомогательного значе-
ния малой мощности, например в ветросиловых установках.
Тормозной режим асинхронной машины применяется при не-
обходимости быстрой остановки ротора двигателя. Этот режим
316
создается противовключением двигателя. Для этого необходимо
изменить направление вращения магнитного поля статора.
С этой целью достаточно переключить любую пару проводов,
соединяющих обмотку статора с сетью, т. е. изменить порядок
следования фаз на зажимах статора (рис. 21.10).
В первый момент после переключения соединительных прово-
дов силы инерции вращающихся частей двигателя и исполни-
с
в
А
Рис. 21.10. Схема переклю-
чения фаз для изменения
направления вращающегося
поля статора
Рис. 21.9. Схема
асинхронного генера-
тора с самовозбуж-
дением
тельного механизма продолжают вращать ротор в прежнем на-
правлении, а вращающееся поле статора начинает вращаться
в противоположном направлении. В этих условиях скольжение
асинхронной машины становится больше единицы
а электрические потери в цепи ротора больше элек-
тромагнитной мощности.
Таким образом, электромагнитная мощность машины в тор-
мозном режиме составляет лишь часть электрических потерь
в роторе. Другая часть этих потерь покрывается за счет меха-
нической мощности вращающихся по инерции частей двигателя
и исполнительного механизма.
Электромагнитный момент при этом имеет то же направле-
ние, что и направление поля статора, т. е. направление против
вращения ротора и является тормозящим по отношению к мо-
менту, вращающему ротор. К недостаткам этого способа тормо-
жения следует отнести: значительные потери энергии, вызван-
ные нагревом роторной обмотки, а также большие броски тока
317
в момент переключения проводов обмотки статора. В двигателях
с контактными кольцами для ограничения броска тока при тор-
можении противовключением в цепь ротора включают сопро-
тивление. Кроме того, при торможении двигателя указанным
способом необходимо отключить его от сети в момент останов-
ки, так как в противном случае произойдет реверсирование,
Рис. 21.11. Режимы работы асинхронной машины
т. е. ротор двигателя начнет вращаться в противоположном на-
правлении.
Таким образом, возможны три режима работы асинхронной
машины: двигательный, генераторный и тормозной. Каждому
из указанных режимов соответствует определенный диапазон
изменения скольжения: в двигательном режиме скольжение
может изменяться от нуля (n2=ni) до единицы (п2=0), в гене-
раторном — от нуля до — со, а в тормозном — от единицы
до -Тео(рис. 21.11).
Глава XXII
КРУГОВАЯ ДИАГРАММА АСИНХРОННОГО ДВИГАТЕЛЯ
§ 22.1. Основные понятия
Рассмотрим электрическую цепь переменного тока, состав-
ленную из последовательно соединенных активного г и индук-
тивного х сопротивлений (рис. 22.1,а). Электрический ток I
в этой цепи вызывает падение напряжения на ее участках, так
что напряжение U имеет две составляющие: активную Ua =Ir
ч индуктивную Ui ~1х. Изобразив эти напряжения векторами,
получим треугольник напряжений АВС (рис.- 22.1,6), в котором
Разделив каждую сторону треугольника АВС
на х, получим треугольник HDC, в котором катет HD изобра-
жает вектор тока / (рис. 22.1, в). Под углом <p=arctg~ к век-
тору тока I в положительном направлении оси ординат прове-
дем вектор напряжения U. Если изменить величину активного
Рис. 22.1. Построение круговой диаграммы для неразветвленной электриче-
ской цепи переменного тока
сопротивления г, то изменится величина тока в цепи, а катеты
треугольника займут новое положение HD[ и £>1С. Но гипоте-
нуза треугольника U/х останется неизменной. Таким образом,
новый режим работы электрической цепи будет определен на
диаграмме положением точки Dj. Если же активное сопротив-
ление цепи изменять в широких пределах (от нуля до беско-
нечности), то вектор тока / будет занимать различные положе-
ния на диаграмме, описывая своим концом (точка D) окруж-
ность диаметром f//x = const. При г=0 (нагрузка чисто индук-
тивная) точка D совместится с точкой С.
При г= со ток 7 = 0, а поэтому точка D совместится с точ-
кой Н. При любом промежуточном значении сопротивления
конец вектора тока / занимает различные положения на окруж-
ности HDC, которая называется окружностью токов.
§ 22.2. Круговая диаграмма
Схема замещения асинхронного двигателя, показанная на
рис. 22.2, содержит две ветви: намагничивающую ветвь с токохМ
/о и главную (рабочую) с током —/'г- Обе ветви работают как
бы независимо друг от друга. Параметры намагничивающей
ветви, содержащей постоянные сопротивления, определяются
диаграммой, представленной на рис. 22.3, а. Главная ветвь схе-
мы замещения, подобно электрической схеме рис. 22.1, а,
319
содержит постоянное индуктивное сопротивление Xi+x'j и пере-
Г
менное активное сопротивление г( + Различные режимы ра-
боты этой ветви при изменении скольжения s определяются
положением вектора тока на диаграмме (рис. 22.1, в). Совмеще-
Рис. 22.2. Схема замещения асинхронного
двигателя с намагничивающей ветвью, вы-
несенной на общие зажимы
нием диаграмм намагничивающей (рис. 22.3, а) и главной ветвей
(рис. 22.1, в) получим круговую диаграмму асинхронного два-
Рис. 22.3. Векторная диаграмма намагничивающей ветви (а)
и круговая диаграмма (б) для схемы замещения (рис. 22.2)
гателя (рис. 22.3,6), на которой ток статора 1\ равен гео-
метрической сумме
Л = /о+(-А).
§ 22.3. Построение круговой диаграммы асинхронного двигателя
по опытам холостого хода и короткого замыкания
Для построения круговой диаграммы асинхронного двигате-
ля необходимо знать: напряжение сети (фазное) Ui, ток холо-
320
стого хода (фазный) /0, угол сдвига фаз между током -и напря-
жением в режиме холостого хода <ро, ток короткого замыкания
/1«, угол сдвига фаз между током и напряжением в режиме ко-
роткого замыкания <рк и активное сопротивление фазы обмотки
статора Гь Для определения этих параметров обычно исполь-
зуют данные опытов холостого хода и
короткого замыкания асинхронного
двигателя.
Опыт холостого хода. Схе-
ма включения двигателя для опыта
холостого хода представлена на рис.
22.4. Индукционный регулятор ИР да-
ет возможность подводить к двигате-
лю необходимое напряжение. Двига-
тель работает в режиме холостого хо-
да (Л12 = 0). При номинальном напря-
жении (71н, подводимом к обмотке ста-
тора, по показаниям измерительных
приборов определяют ток /0 и мощ-
ность Ро. Затем определяют коэффи-
циент мощности
<221)
Опыт короткого замыка-
ния. Схема включения двигателя
остается прежней. Опыт проводят при
пониженном напряжении t/1K = (0,15—
—0,30)(/1н. Ротор двигателя предвари-
тельно затормаживают. При напряже-
нии U1K, соответствующем номиналь-
ному току статора /щ, по показанию
Рис. 22.4. Схема вклю-
чения асинхронного дви-
гателя при опытах хо-
лостого хода и корот-
кого замыкания
ваттметров определяют мощность ко-
роткого замыкания Рк, а затем вычисляют
Рк
cos?k
1кЛ н
(22.2)
Величина тока короткого замыкания при номинальном под-
веденном напряжении t71H равна
U
и.
(22.3)
Построение окружности токов. Проведя оси
координат, строят вектор напряжения (71н, а затем, выбрав мас-
21 1649 321
штаб тока /п;[а/лг.и], строят сектор /0 (под углом <р0 к С/1Н) и век-
тор /щ (под углом <рк к £/1н). Таким образом получают точки
Н и К (рис. 22.5). Соединив эти точки прямой НК и проведя
прямую НС (параллельно оси абсцисс), восстанавливают к се-
редине НК перпендикуляр МО2 до пересечения с прямой НС.
Из точки О2 радиусом О2Н проводят окружность токов.
§ 22.4. Применение круговой диаграммы
для определения параметров двигателя
Определение токов. Из точки О в масштабе токов
отложим вектор номинального тока статора /1н так, чтобы
конец этого вектора (точка D) лежал на окружности токов
OD = ZbJ- [з/лг].
ni[ J
Затем, соединив точку D с точкой Н, получим треугольник
токов ODH (рис. 22.5), стороны которого определяют токи
/р= mLOH\
К2 = теНО-,
1 j = m^OD.
Кроме того, опустив перпендикуляр из точки D на ось абс-
цисс (Da), получим прямоугольный треугольник ODa, из кото-
рого определяем активную и реактивную составляющие тока
'статора:
Л а = mfla-,
/1Р = mfia.
Подведенная мощность Р\. Известно, что Р\ —
= mi(7j/i cos фь Но так как U—const, а Ц cos ф]= /1а, то мощ-
ность Р\ пропорциональна активной составляющей тока статора
(Р1-Ла).
На круговой диаграмме величина /1а определяется отрезком
Da, поэтому подведенная мощность, т. е. мощность на входе
двигателя,
Р{ = m$Da,
где — масштаб мощности [вт/мм].
Подведенную мощность отсчитывают от оси абсцисс, кото-
рую называют линией подведенной мощности, до заданной точки
на окружности токов.
Полезная мощность Р2. Полезную мощность на кру-
говой диаграмме отсчитывают по вертикали от окружности то-
ков до прямой, соединяющей точки на окружности токов, в ко-
322
Рис. 22.5. Построение круговой диаграммы асинхронного двигателя
шении —
Г1
торых полезная мощность равна нулю. Одной из таких точек
является точка холостого хода Н, другой — точка короткого
замыкания Д. Таким образом, линия НК является линией полез-
ной мощности. Для заданной точки на окружности токов
Р2 = m? Db.
Электромагнитная мощность и электромаг-
нитный момент. Величина электромагнитной мощности на
круговой диаграмме определяется положением линии электро-
магнитной мощности. Для построения этой линии необходимо
провести прямую через точки на окружности токов, в которых
электромагнитная мощность (т. е. мощность, передаваемая вра-
щающимся полем со статора на ротор) равна нулю. Такими
точками являются Н и Т. Первая точка соответствует скольже-
нию $~0, а вторая соответствует s=± оо. Но если точка Н мо-
жет быть получена по данным опыта холостого хода, то точку Т
экспериментально получить нельзя. Поэтому линию электромаг-
нитной мощности строим по точкам Н и Дг, причем точка Кг
определяется путем деления отрезка ДД3 на две части в отно-
ДД3 _ гк
К2К3 гг ’
Рк ,, ,
---2 активное сопротивление одной фазы дви-
гателя при опыте короткого замыкания;
Г!*—активное сопротивление одной фазы об-
мотки статора.
Для заданной точки D на окружности токов электромагнит-
ная мощность равна
Рэм ” тп^ТУс.
Электромагнитный момент двигателя
М = Рэм = 30Рэм = 30/КрРс
пп1 т.п{
или
М = mMDc,
где /им — масштаб моментов,
Здесь гк =
или
— 0,975-- [кГм мм\.
Линию НТ называют также линией моментов.
Коэффициент мощности. Для определения коэф-
фициента мощности cos ф1 на оси ординат строят полуокруж-
324
йость произвольного диаметра. Тогда для заданной
окружности токов имеем
точки D на
полуокруж-
диаграмме
Oh
cos?* = Of '
Для удобства расчетов целесообразно диаметр
ности принять равным 100 мм. В этом случае
Oh
cos?i = 706-
Скольжение. Скольжение s на круговой
определяется по шкале скольжения, для построения которой
в точке Но на оси абсцисс восстанавливают перпендикуляр HoQ>
проходящий через Н. Затем из точки Q параллельно линии
электромагнитной мощности проводят прямую QE до пересече-
ния с продолжением линии полезной мощности. Отрезок QE
делят на сто равных частей и получают шкалу скольжений. Для
заданной точки D на окружности токов скольжение определяет-
ся продолжением линии HD до пересечения со шкалой сколь-
жения в точке S. Соответствующая этой точке цифра на шкале
скольжений выражает величину скольжения в процентах.
К. п. д. двигателя. Известно, что
71 ?!
На круговой диаграмме P2 = Db-mp, Pl = Da-mp, тогда
Db
^ = ~Da‘
Определение к. п. д. двигателя указанным способом дает зна-
чительную ошибку, так как при этом не учитываются добавоч-
ные потери. Исходя из этого к. п. д. двигателя целесообразнее
определять по формуле
, Ер 1 Ер
где Yp = Рмех + Pcj + Рэ1 + Рэ2 + рд определяется расчетным
путем.
Сумма механических и магнитных потерь в стали статора
Рмех “F Pci =: Eq ТП^оГр
где Ро и /о — мощность и ток холостого хода;
Г1 — активное сопротивление фазной обмотки статора.
<• Электрические потери в меди статора (21.1)
Рэ1 =
325
Здесь 7i — берется <по круговой диаграмме;
г75 — активное сопротивление фазной обмотки статора,
приведенное к температуре 75°С (8.4).
Электрические потери в обмотке ротора (21.5)
Рэ2 “ ^Рэм.
Добавочные потери p;V согласно ГОСТ 183—66, при работе
в номинальном режиме составляют 0,5% от подводимой к дви-
гателю мощности
Ан = 0,005Рр (22.4)
Принято считать, что добавочные потери пропорциональны
квадрату тока 7Ь Тогда величина добавочных потерь при нено-
минальном режиме
/ j \2
Рд = Рдн 71- • (22 5)
Перегрузочная способность двигателя, Для
определения максимального момента двигателя следует из точ-
ки О2 опустить перпендикуляр на линию электромагнитной мощ-
ности и продолжить его до пересечения с окружностью токов
(точка q). Из точки q проведем прямую, параллельную оси
ординат, до пересечения с линией электромагнитной мощности
(точка п). Тогда отрезок qn в масштабе моментов определит
величину максимального момента
Ммакс = qn-тм.
Если точка D на окружности токов соответствует номиналь-
ному режиму работы, то перегрузочная способность двигателя
7ИМдКС __ qfi
Начальный пусковой момент. Начальный пус-
ковой момент двигателя определяется положением на окруж-
ности токов точки, соответствующей скольжению s=l. Такой
точкой является точка К.
Тогда начальный пусковой момент
Мп = ККъГП*.
Построение рабочих характеристик. Задаваясь
(1 2 3
4 *’ 4~’ 4’
/1Н, и отметив на окружности токов точки D{, D2, D3
и т. д., определяют данные, необходимые для построения рабочих
характеристик двигателя (см. § 22.4).
326
1. L1
4’4/
Пример. Построить круговую диаграмму трехфазного асинхронного дви-
гателя. Данные двигателя. PiH=100 кет, fi=50 гц> [7зн=220 в, Ли = 190 а,
2р«*4. Данные опытов холостого хода и короткого замыкания приведены
в табл. 22 1.
Таблица 22.1
Холостой ход Короткое замыкание
Uv в а Ро, кет cos Лн> а Рк, кет cos ?к Гк, ОМ
220 ' 55 6,5 0,2 58 190 9,5 0,3 0,08
Активное сопротивление обмотки статора г3 = 0,035 ом Используя кру-
говую диаграмму, определить полезную мощность Р2, подведенную мощ-
ность Pi, коэффициент мощности cos фь вращающий момент М, скорость
вращения тг2 и к. п. д. двигателя, соответствующие току статора /1 = 0,75Х
ХЛн-143 а.
Решение. По данным cos (р0 и cos <рк определяем углы <р0 и
= arccos 0,2 = 78°,
?к — arccos 0,3 = 72°.
Ток короткого замыкания, приведенный к номинальному напряжению,
Лк = Ли = 1902J2 = 720 а.
С/1К Оо
Выбираем масштаб тока
mi = 8,5 а/мм,
тогда масштаб мощности
/Ир = = 3*220-8,5 = 5500 вт[мм = 5,5 квт/мм
и масштаб момента
ЗО/Ип 30*5500 о - ,
тм =------L — ----------= 33 н-м мм.
4 к»! 3,14-1500
Определяем длину векторов
ОН = -Ь- = = 6,5 мм,
т t 8,5
ОК - A'L — 7?9 = 85 мм.
mi 8,5
Построив вектор /0 под углом (р0 и вектор /1к под углом ?к к оси
ординат, находим положение точек И и К (рис. 22.6). Затем проводим окруж-
ность токов и, измерив отрезок АКз, определяем положение точки Кг. через
которую проводим линию электромагнитной мощности,
КгК3 = КК3 о. = 29 °'03- = 12,7 мм.
гк 0,08
327
Далее строим полуокружность для определения cos <pi и шкалу сколь-
жения. Для определения величин, ^ебуемых по условию задачи, из точки О
откладываем отрезок OD длиной = 16,8 мм. Затем способами, изло-
женными в настоящем параграфе, определяем значения интересующих нас
величин.
Полезная мощность
= Db nip — 12-5,5 = 66 кет.
Рис. 22.6. Круговая диаграмма (к примеру)
Подведенная мощность
Pi = Da trip ~ 15-5,5= 82,5 кет.
Коэффициент мощности
COS = ^ = 28 = 0,87.
т Of 32
Электромагнитный момент
М = De тм = 13 - 33 = 430 н • м.
Скорость вращения
/?2 = П\ (1 — sj = 1500 (1 — 0,033) = 1450 об [мин.
Сумма механических и магнитных потерь
/?мех + Рсг — Ро — т1Цг\ = 6500 — 3-552-0,035 =6180 вт.
Электрические потери в меди статора
рэх =. = 3-1432-0,043 = 2600 вт,
где г75 = 0,035 [1 + 0,004 (75° — 20°)] = 0,043 ом.
Электрические потери в обмотке ротора
Рэг = $Рэм = 0,033-71 500 = 2350 вт,
где РЭм — De тр — 13-5,5 = 71,5 кет.
328
Добавочные потери
At = Рдн f Д У - 500 (= 280 вт,
V1H /
где рДн = 0,005 Р1Н = 0,005 • 100 000 — 500 вт.
Сумма потерь
S/7 = Рмех + Pci "Ь Рэ1 + Рэъ + Рл = 6180 + 2600 + 2350 -}-
4- 280 = 11 410 вт = 11,41 кет.
К.п.д. двигателя при = 143 а
= 1
_ 11,41
Р2 + %Р 66+11,41
Глава XXIII
ПУСК В ХОД И РЕГУЛИРОВАНИЕ СКОРОСТИ ВРАЩЕНИЯ
АСИНХРОННЫХ ДВИГАТЕЛЕЙ
§ 23.1. Пусковые свойства двигателя
Пусковые свойства асинхронного двигателя оцениваются его
пусковыми характеристиками:
а) величиной пускового тока /п или его кратностью /П/Лнг
б) величиной пускового момента Мп или его кратностью
Мп/<;
в) продолжительностью и плавностью пуска двигателя в ход;
г) сложностью пусковой операции;
д) экономичностью пусковой операции (стоимость и надеж-
ность пусковой аппаратуры).
В начальный момент пуска скольжение 5=1, поэтому, пре-
небрегая током холостого хода, величину пускового тока 1п
можно определить из формулы (20.24), подставив в нее значе-
ние 5=1,
vn = . /------——'— — IZO. 1 г
(Г1 + Г 2)2 + (*1 + ^2)"
Из выражения (23.1), а также выражения пускового момен-
та (21.12) следует, что улучшить пусковые свойства двигателя
можно путем увеличения активного сопротивления цепи ротора
г'2мтак как в этом случае уменьшается пусковой ток и увеличи-
вается пусковой момент. В то же время напряжение U\ по-раз-
ному влияет на пусковые характеристики: с уменьшением
329
пусковой ток уменьшается, что благоприятно влияет на пуско-
вые свойства двигателя, но одновременно это вызывает умень-
шение пускового момента. Возможность применения того или
иного способа улучшения пусковых характеристик определяется
условиями эксплуатации двигателя и требованиями, которые
к нему предъявляются.
§ 23.2. Пуск в ход двигателя с контактными кольцами
В двигателях с контактными кольцами возможно включение
в цепь ротора пускового реостата Гд, увеличив тем самым
активное сопротивление цепи ротора. При этом удается не толь-
ко снизить величину пускового тока (23.1), но и увеличить
Рис. 23.1. Зависимость пускового момен-
та от активного сопротивления в цепи
ротора
пусковой момент двигателя. Подставив в формулу пускового
момента (21.12) вместо г'% общее активное сопротивление цепи
ротора R'z^r'z+r^ и задаваясь разными значениями Гд, полу-
чим зависимость пускового момента от активного сопротивления
цепи ротора Mn = f(rz2 + rz) (рис. 23.1). Наибольший пусковой
момент двигателя соответствует активному сопротивлению цепи
ротора г'2 + гд. = х2.
При выборе пускового сопротивления гд исходят из вели-
чины нагрузочного момента. Так, при значительном нагрузочном
моменте величина должна быть такой, чтобы обеспечить наи-
большую величину пускового момента. При малых нагрузочных
моментах, когда величина пускового момента не имеет решаю-
щего значения для пуска, оказывается целесообразным величину
сопротивления гд выбирать несколько больше той, которая со-
ответствует наибольшему пусковому моменту. В этом случае
пусковой момент становится несколько меньше наибольшего, но
зато величина пускового тока значительно уменьшается.
330
На рис. 23.2, а показана схема включения пускового реостата
ПР в цепь двигателя с контактными кольцами.
Рис. 23.2. Схема включения пускового реостата (а) и построение гра-
фика пускового момента (б) асинхронного двигателя с контактными
кольцами
Ступени пускового реостата переключаются таким образом,
чтобы ток ротора в процессе пуска двигателя в ход оставался
приблизительно неизменным, а среднее значение пускового мо-
мента было близко к наибольшему.
331
Устройство
для замыка-
Рис. 23 3
механизма
ния колец асинхронно-
го двигателя
На рис. 23.2, б представлен график изменения пускового
момента двигателя при четырех ступенях пускового реостата.
Так, в начальный момент пуска (первая ступень) пусковой мо-
мент Л1П равен ОЛ. По мере разгона двигателя его момент
уменьшается по кривой 1. Как только величина момента станет
равной Л4П.МИН> рычаг реостата передвигают на вторую ступень,
соответствующую меньшему сопротивлению реостата. В этом
случае зависимость M=f(s) выражается кривой 2, и пусковой
момент двигателя увеличивается до значения Л/п макс. Так же
переключают рычаг реостата на третью, а затем и на четвертую
ступень, при которой процесс пуска заканчивается, и вращаю-
щий момент достигает значения, равного противодействующему
моменту Мст.
Таким образом, в течение всего процесса пуска величина
пускового момента остается приблизительно неизменной, равной
среднему значению Л4п.Ср. При этом пусковой ток имеет сравни-
тельно небольшое значение, превышая
номинальный ток двигателя лишь в
полтора-два раза.
Пусковые реостаты изготавливают-
ся из металлической проволоки или
ленты, намотанных в виде спирали,
или же из чугунного литья. Они могут
иметь воздушное или масляное охлаж-
дение. В последних спирали помеще-
ны в бак, наполненный маслом.
Следует иметь в виду, что пуско-
вые реостаты рассчитаны на кратко-
временное протекание тока, а поэтому
рычаг реостата нельзя долго задер-
живать на промежуточных ступенях,
так как сопротивления реостата могут
перегореть. После того как процесс
пуска окончен и сопротивления реоста-
та отключены, двигатель работает с ко-
роткозамкнутой обмоткой ротора. Для
предотвращения износа щеток, а так-
же уменьшения потерь на трение, асин-
хронные двигатели с контактными
кольцами часто снабжаются специальным механизмом, который
по окончании процесса пуска позволяет поднять щетки, предва-
рительно замкнув накоротко кольца. Замыкание колец двигателя
производится поворотом рукоятки, укрепленной на одном из под-
шипниковых щитов двигателя (рис.23.3). Этой же рукояткой под-
нимаются щетки. Однако применение указанного механизма
усложняет конструкцию двигателя. Поэтому он применяется
только в двигателях средней и большой мощности. Двигатели
332
Рис. 23 4. Схема непо-
средственного включения
в сеть асинхронного дви-
гателя с короткозамкну-
тым ротором
малой мощности обычно работают с постоянно прилегающими
щетками.
В заключение отметим, что в асинхронных двигателях с кон-
тактными кольцами обеспечивается наиболее благоприятное
соотношение между пусковым моментом и пусковым током: зна-
чительный пусковой момент при небольшом пусковом токе, что
наиболее >важно при пуске в ход двигателя со значительной на-
грузкой на валу. Однако следует помнить и о некоторых недо-
статках пусковых свойств этих двигателей: сложность, продол-
жительность и неэкономичность пусковой операции.
§ 23.3. Пуск в ход двигателя с короткозамкнутым ротором
Пуск непосредственным включением в сеть
(рис. 23.4). Этот способ пуска отличается от других своей про-
стотой. Однако в момент подключения
двигателя к сети в цепи статора воз-
никает большой пусковой ток, в пять—
семь раз превышающий номинальный
ток двигателя. При малой инерцион-
ности исполнительного механизма ско-
рость двигателя очень быстро возрас-
тает до установленного значения, и ток
спадает, достигая величины, соответ-
ствующей нагрузке двигателя. В этих
условиях большой пусковой ток не
представляет опасности для двигателя,
поскольку он быстро спадает и не мо-
жет вызвать перегрева обмоток ма-
шин. Но значительный бросок тока в
цепи двигателя влияет на питающую
сеть и при недостаточной мощности
последней это влияние может выра-
зиться в заметных колебаниях напря-
жения сети. Однако при современных
мощных энергетических системах и се-
тях двигатели с короткозамкнутым ро-
тором, как правило, запускаются непо-
средственным включением в сеть на
полное напряжение.
При необходимости уменьшения пускового тока применяют
какой-либо из способов пуска при пониженном напряжении.
Пуск в ход при пониженном напряжении. В со-
ответствии с выражением (23.1) пусковой ток двигателя пропор-
ционален напряжению поэтому уменьшение напряжения Ui
сопровождается соответствующим уменьшением пускового тока.
333
Имеется несколько способов понижения напряжения (Л в мо-
мент пуска.
Для асинхронных двигателей, работающих при соединении
обмотки статора треугольником, т. е. у которых фазное напря-
Рис. 23.5. Схемы пуска
в ход асинхронного дви-
гателя при понижении
напряжения:
а — переключением об-
мотки статора со звезды
на треугольник; б — по-
средством реакторов;
в — посредством авто-
трансформатора
жение равно напряжению сети, может быть применен пуск в ход
переключением обмотки статора со звезды на треугольник
(рис. 23.5, а). В момент подключения двигателя к сети переклю-
чатель устанавливают в положение «звезда», при котором об-
334
мотка статора оказывается соединенной звездой. В этом случае
фазное напряжение на статоре понижается в 1^3 раз. Во столь-
ко же уменьшается и ток в фазных обмотках двигателя. Кроме
того, при соединении обмоток звездой линейный ток равен фаз-
ному, в то время как при соединении треугольником он больше
фазного в ]/3 раз. Следовательно, применение способа пуска
в ход переключением статорной обмотки со звезды на треуголь-
ник дает уменьшение пускового (линейного) тока в три раза по
сравнению с пусковым током при непосредственном подключе-
нии двигателя к сети. После того как ротор двигателя разгонит-
ся до скорости, близкой к номинальной, переключатель быстро
переводят в положение «треугольник». Возникший при этом бро-
сок тока обычно невелик и не влияет на работу сети. Однако
описанный способ пуска имеет серьезный недостаток. Дело
в том, что уменьшение фазного напряжения в ]/3 раз при пуске
влечет за собой уменьшение пускового момента в (К 3)2 = 3 раза,
так как, согласно выражению (21.12), пусковой момент двига-
теля прямо пропорционален квадрату напряжения. Такое зна-
чительное уменьшение пускового момента ограничивает приме-
нение этого способа пуска для двигателей, включаемых под
нагрузкой на валу.
Снижение напряжения U\ при пуске в ход асинхронного
двигателя может быть достигнуто также с помощью реакторов
или автотрансформатора. Схема пуска асинхронного двигателя
посредством реакторов (реактивных сопротивлений) представ-
лена на рис. 23.5, б. Порядок включения следующий. При
разомкнутом рубильнике 2 включают рубильник 1. Ток из сети
поступает в обмотку статора через реакторы Р, в которых про-
исходит падение напряжения /7ххр (здесь хр—индуктивное со-
противление реактора). В'результате на выводы статорной об-
мотки двигателя подводится пониженное напряжение =
= t/i— jl\xp. После того как ротор двигателя разгонится и пус-
ковой ток спадет, включают рубильник 2, и двигатель оказы-
вается под полным напряжением сети (71н.
Недостаток этого способа пуска состоит в том, что уменьше-
ние напряжения в U\IU 1Н раз сопровождается уменьшением
начального пускового момента Л4П двигателя в (С7^/€71н)а раз.
Необходимое сопротивление реактора определяется по формуле
Хр = {/1н(у~7<р)-, (23.2)
Ар* п
где (/1Н — номинальное (фазное) напряжение статорной об-
мотки;
К = /п//п—отношение пускового тока статора /п при пуске
двигателя через реактор к пусковому току двига-
335
теля 1„ при пуске непосредственным включением
в сеть; обычно /Ср=0,65.
Пример. Определить сопротивление реактивных катушек для реакторного
пуска трехфазного асинхронного двигателя с короткозамкнутым ротором мощ-
ностью 64 кет, работающего от сети напряжением 380 в при соединении об-
моток статора звездой; кратность пускового тока — 5,5; коэффициент
АО *1н
мощности 0,8.
Решение Номинальное фазное напряжение
и1н = 380 = 220 в.
Кз
Номинальный ток статора
/1Н = -65'10!1 = 123 а.
3-220-0,8
Начальный пусковой ток двигателя
7Н = 5,5-123 = 675 а.
Сопротивление реактора (24.2) при АГр = 0,65
^p=aQ(^6JL = 0,175 ом.
р 0,65-675
При автотрансформаторном пуске (рис. 23.5, в) вначале за-
мыкают рубильник 1, соединяющий звездой обмотки автотранс-
форматора. Затем замыкают рубильник 2, и двигатель оказы-
вается включенным на пониженное напряжение U\. При этом
пусковой ток двигателя, измеренный на выходе автотрансфор-
матора, уменьшается в К& раз, где Ка—коэффициент транс-
формации автотрансформатора. Что же касается тока, измерен-
ного на входе автотрансформатора, то он уменьшается в раз
по сравнению с пусковым током при непосредственном включе-
нии двигателя в сеть. Дело в том, что в понижающем автотранс-
форматоре первичный ток в Кл раз меньше вторичного, а по-
этому уменьшение пускового тока при автотрансформаторном
пуске составляет = Ki раз. Так, например, если крат-
ность пускового тока двигателя при его непосредственном вклю-
чении в сеть равна у1-=6, а напряжение сети 380 в, то при авто-
Лн
трансформаторном пуске с понижением напряжения до 220 в
кратность пускового тока составит
/п = 6 _
7J / 380V
220 J
После того как ротор двигателя придет во вращение, рубиль-
ник 1 размыкают, и автотрансформатор превращается в реак-
тивную катушку. При этом напряжение на выводах статорной
обмотки несколько повышается. Включением рубильника 3 на
336
зажимы двигателя подается полное напряжение сети (/1н. Таким
образом, автотрансформаторный пуск происходит тремя ступе-
нями: на первой ступени к двигателю подводят напряжение,
равное 50—70% от номинального; на второй ступени, где транс-
форматор служит реактором, напряжение составляет 70—80%
от номинального. Так как применение автотрансформатора дает
уменьшение пускового тока в /<а2раз
J =х п
" Ха ’
то мощность, на которую должен быть рассчитан пусковой авто-
трансформатор,
Sa = 3t/1H/n4,
Ла
где t/1H — номинальное (фазное) напряжение статорной об-
мотки;
/л—пусковой ток двигателя при пуске непосредственным
включением в сеть.
Пример. Определить мощность автотрансформатора для пуска в ход
асинхронного двигателя при понижении напряжения сети с 380 до 220 в,
Данные двигателя: номинальный ток двигателя Лн^70 а, кратность пуско-
вого тока /п/Лн^б, обмотка статора соединена звездой.
Решение. Пусковой ток при непосредственном включении двигателя
в сеть
/п = Ан-6 = 70-6 = 420 а.
Коэффициент трансформации автотрансформатора
Мощность пускового автотрансформатора
= "4 = 3-220-4'204=92 500 ва = 92,5 ква.
Автотрансформаторный способ пуска, как и другие способы
пуска асинхронных двигателей, основанные на уменьшении
подводимого напряжения, сопровождается уменьшением пуско-
вого момента, так как величина последнего прямо пропорцио-
нальна квадрату напряжения. С точки зрения пусковых токов
и пусковых моментов, автотрансформаторный способ пуска вы-
годнее реакторного, так как при одинаковом уменьшении напря-
жения пусковой ток при реакторном способе пуска уменьшается
22 1649 337
в гт— раз, а при автотрансформаторном способе пуска —
( U' V U
в I ту-I раз. Но сложность пусковой операции и высокая стой-
\ *Ан/
мость аппаратуры несколько ограничивают применение авто-
трансформаторного способа пуска асинхронных двигателей.
§ 23.4. Короткозамкнутые асинхронные двигатели
с улучшенными пусковыми характеристиками
Неудовлетворительные пусковые свойства асинхронного дви-
гателя с короткозамкнутым ротором обычного типа привели
к необходимости создания короткозамкнутого двигателя с улуч-
Рис 23.6. Глубокий паз ротора (а)
и распределение плотности пускового
тока в стержне (б)
кольцам. Размеры паза имеют
шенными пусковыми свой-
ствами: большим пусковым
моментом при малом пуско-
вом токе. Одним из таких
двигателей является двига-
тель с глубоким пазом. От
нормального короткозамкну-
того двигателя глубокопаз-
ный двигатель отличает-
ся только конструкцией ро-
тора. Пазы ротора этого
двигателя представляют со-
бой глубокие щели, в кото-
рые вложены стержни ро-
торной обмотки в виде уз-
ких медных полос. С обеих
сторон стержни приварены
к замыкающим медным
приблизительное соотношение
= 9 - 10,
где hn — высота паза;
ЬП — ширина паза.
В момент включения двигателя, когда частота тока в роторе
имеет наибольшую величину = индуктивное сопротивление
нижней части стержня значительно больше, чем верхней части.
Объясняется это тем, что нижняя часть стержня сцеплена с боль-
шим числом линий магнитной индукции потока рассеяния
(рис. 23.6, а). На рис. 23.6,6 показана кривая распределения
плотности пускового тока в стержне ротора глубокопазного дви-
гателя. Из этой кривой следует, что почти весь ток ротора про-
текает по верхней части стержня, поперечное сечение которой
338
намного меньше поперечного сечения всего стержня. Это равно-
ценно увеличению активного сопротивления обмотки, что огра-
ничивает величину тока в роторе и способствует росту пускового
момента двигателя (см. § 23.2).
Таким образом, глубокопазный двигатель обладает повы-
шенным пусковым моментом при меньшей величине пускового
Рис. 23 7. Ротор двухклеточного двигателя
тока. По мере увеличения скорости вращения ротора частота
тока в роторе f2 постепенно уменьшается. В связи с этим умень-
шается и индуктивное сопротивление обмотки. Распределение
Рис. 23.8. Паз сердеч-
ника ротора двухкле-
точного двигателя
Рис 23.9. Механическая характери-
стика двухклеточного двигателя
тока в стержне ротора становится более равномерным, что ведет
к уменьшению активного сопротивления обмотки ротора. При
работе двигателя в номинальном режиме, когда f2 < fi, процесс
вытеснения тока практически прекращается, и двигатель рабо-
тает как обычный короткозамкнутый.
Стремление получить двигатель с еще лучшими пусковыми
свойствами привело к созданию двухклеточного асинхронного
22* 339
двигателя. Ротор двухклеточного двигателя имеет две коротко-
замкнутые обмотки (клетки). Верхняя клетка 1 ротора является
пусковой, а нижняя 2— рабочей (рис. 23.7). Стержни пусковой
клетки 1 выполняют из латуни или бронзы, что обеспечивает
им повышенное активное сопротивление. Индуктивное сопротив-
ление этой клетки невелико, так как она расположена ближе
к поверхности ротора, да к тому же с двух сторон имеет щели
(рис. 23.8). Стержни рабочей клетки 2 выполняют из меди. По
сравнению со стержнями пусковой клетки они имеют большее
сечение. Все это обеспечивает стержням рабочей клетки малое
активное сопротивление. Что же касается индуктивного сопро-
тивления стержней рабочей клетки, то оно больше индуктив-
ного сопротивления стержней пусковой клетки, особенно
в период пуска в ход, когда частота тока в роторе сравнительно
велика.
В момент пуска двигателя в ход ток ротора проходит
в основном по верхней (пусковой) клетке, обладающей малым
индуктивным сопротивлением. Повышенное активное сопротив-
ление этой клетки обеспечивает двигателю значительный пуско-
вой момент при пониженной величине пускового тока. По мере
увеличения скорости вращения частота тока ротора уменьшает-
ся. Соответственно уменьшается индуктивное сопротивление ра-
бочей клетки двигателя и увеличивается ток в ней. Одновременно
уменьшается ток в пусковой обмотке двигателя. В связи с этим
происходит перераспределение вращающего момента между
пусковой и рабочей клетками двигателя. Обе обмотки ротора
создают направленные в одну сторону вращающие моменты. Так
как активные сопротивления обмоток неодинаковы, то зависи-
мость M=f(s) каждой обмотки изобразится разными кривыми
(рис. 23.9). Максимальный момент пусковой клетки 7ИП.К вслед-
ствие ее повышенного активного сопротивления смещен в сто-
рону больших скольжений. Вращающий момент двухклеточного
двигателя равен сумме моментов обеих клеток
М == ТИп.к 4“ ^4р.к,
где Л4п,к и AfpK—вращающие моменты, созданные соответ-
ственно пусковой и рабочей клетками.
Кривая результирующего момента M = f(s) имеет два макси-
мума. Двигатели с двойной клеткой позволяют получить не-
сколько лучшие пусковые характеристики по сравнению с глу-
бокопазными двигателями.
Обеспечивая хорошие пусковые характеристики, глубокопаз-
ные и двухклеточные двигатели имеют ряд недостатков:
1) пониженный coscpi вследствие дополнительной индуктив-
ности в роторе;
2) пониженный к. п. д. вследствие повышенного активного
сопротивления ротора;
340
3) повышенная стоимость двигателей, вызванная сложностью
изготовления ротора.
Глубокопазные двигатели изготовляют мощностью свыше
100 кет, а двухклеточные — свыше 200 кет.
В табл. 23.1 приведены пусковые характеристики современ-
ных короткозамкнутых двигателей: нормального, глубокопазно-
го и двухклеточного.
Таблица 23.1
Двигатель ^п/Лн тИп/А1и
Нормальный 4,5—8,0 0,9—1,7
Глубокопазный 3,5—5,0 1,2—1,6
Двухклеточный 3,0-5,5 1,0-3,0
§ 23.5. Регулирование скорости асинхронного двигателя
Скорость вращения ротора асинхронного двигателя опреде-
ляется выражением
«2 = «1 (1 -S) = -^y~(l -«)•
Из этого выражения следует, что скорость асинхронного дви-
гателя можно отрегулировать изменением какой-либо из трех ве-
личин; скольжения, частоты
тока статора или числа пар
полюсов. Регулирование ско-
рости асинхронных двигате-
лей изменением скольжения
возможно двумя способами:
изменением подводимого к
обмотке статора напряже-
ния и изменением активного
сопротивления цепи ротора
[см. выражение механиче-
ской характеристики двига-
теля (21.11)].
Рис. 23 10 Механические характе-
ристики асинхронного двигателя при
разных напряжениях
Возможность регулирования скорости вращения асинхрон-
ных двигателей изменением напряжения питания U\ подтверж-
дается графиками построенными для разных значений
U[ (рис. 23.10). При неизменной нагрузке на валу двигателя
увеличение напряжения вызывает рост скорости вращения.
Однако диапазон регулирования скорости получается неболь-
шой, что объясняется следующим:
341
а) узкой зоной устойчивой работы двигателя, ограниченной
величиной критического скольжения,
б) недопустимостью значительного отклонения напряжения
от номинального значения, так как с повышением сверх но-
минального значения возникает опасность чрезмерного перегре-
ва двигателя, вызванного увеличением электрических и магнит-
Рис 23 11 Влияние сопротивления цепи ро
тора на колебания скорости вращения
асинхронного двигателя
ных потерь, а при значительном уменьшении U\ сильно умень-
шается перегрузочная способность двигателя (см. § 21.2).
Изменение подводимого к двигателю напряжения осуще-
ствляется либо посредством регулировочного автотрансформато-
ра, либо посредством реакторов, включаемых в разрыв цепи
статора. Из-за узкого диапазона регулировки и неэкономич-
ности (необходимость дополнительных устройств), рассматри-
ваемый способ регулирования скорости не получил широкого
распространения.
Регулирование скорости вращения асинхронных двигателей
изменением скольжения за счет активного сопротивления цепи
ротора возможно лишь в двигателях с контактными кольцами.
Механические характеристики асинхронного двигателя, по-
строенные для различных значений активного сопротивления
цепи ротора (см. рис. 21.5), показывают, что с увеличением
активного сопротивления цепи ротора возрастает величина
скольжения, соответствующая заданному нагрузочному момен-
ту. Скорость вращения двигателя при этом уменьшается. Зави-
симость скольжения (скорости вращения) от активного сопро-
тивления цепи ротора выражается формулой, полученной пре-
образованием выражения (21 10),
(23.3)
342
Практически изменение величины активного сопротивления
цепи ротора достигается введением регулировочного реостата,
подобного пусковому реостату, но рассчитанного на длительный
режим работы. Схема включения этого реостата не отличается
от схемы, представленной на рис. 23.2, а.
Регулирование скорости вращения изменением скольжения
происходит только в нагруженном двигателе. В режиме холо-
стого хода изменение активного сопротивления цепи ротора
почти не влияет на скорость вращения.
Согласно выражению (21.5) электрические потери в цепи
ротора пропорциональны скольжению
Рэ2 ~ эм«
Отсюда следует, что увеличение скольжения двигателя сопро-
вождается ростом электрических потерь в цепи ротора, а следо-
вательно, и снижением к. п д. двигателя. Так, например, если
при М2 = const увеличить скольжение двигателя от 0,02 до 0,5,
что соответствует уменьшению скорости вращения приблизи-
тельно вдвое, то потери в цепи ротора составят половину всей
электромагнитной мощности двигателя. Это свидетельствует
о неэкономичности данного способа регулирования.
Кроме того, рост потерь в цепи ротора при уменьшении ско-
рости вращения у двигателя с самовентиляцией сопровождается
ухудшением условий охлаждения, так как с уменьшением ско-
рости вращения ротора уменьшается количество охлаждающего
воздуха, проходящего через машину (см. § 28.4).
Рассматриваемый способ регулирования имеет еще и тот не-
достаток, что участок механической характеристики, соответ-
ствующий устойчивой работе двигателя, при введении в цепь
ротора сопротивления гд становится более пологим. А поэтому
колебания нагрузки (Мст) сильно влияют на скорость вращения
двигателя. Сказанное иллюстрируется рис. 23 11, из которого
видно, что если нагрузочный момент двигателя изменится на
величину А/Ист =МСТ—А1СТ, то изменение скорости вращения при
выведенном регулировочном реостате (гд =0) составит Ап'2,
а при введенном реостате Лп"2. В последнем случае изменение
скорости значительно больше.
Однако, несмотря на указанные недостатки, регулирование
скорости введением в цепь ротора активного сопротивления
широко применяется в двигателях с контактными кольцами,
так как наряду с плавностью регулирования он обеспечивает
улучшение пусковых свойств двигателя.
Регулирование скорости асинхронных двигателей изменением
частоты h основано на изменении скорости вращения поля ста-
тора
343
Регулирование скорости в этом случае получается плавным
и в широких пределах. Однако для изменения частоты fi необ-
ходимо при каждом регулируемом двигателе иметь преобразо-
ватель частоты, так как частота питающей сети всегда должна
быть постоянной. В результате установка становится сложной
Рис 23 12 Схемы переключения
фазной обмотки статора на раз-
ное число полюсов
и дорогостоящей. Практиче-
ское применение этот способ
имеет при одновременном ре-
гулировании нескольких асин-
хронных двигателей, подклю-
ченных к общей сети, напри-
мер регулировка скорости
рольганговых двигателей.
Регулирование скорости из-
менением числа полюсов об-
Рис 23 13 Схема переключения обмотки
статора «треугольник — двойная звез-
да» двухскоростного асинхронного дви-
гателя
мотки статора дает ступенчатую регулировку, так как при fi =
= 50 гц и различном р можно получить лишь следующие значения
синхронной скорости П1 : 3000, 1500, 1000, 750, 600, 500 об!мин
и т. д. Изменять число полюсов в обмотке статора двигателя
можно либо укладкой на статоре двух обмоток с разным числом
пар полюсов, либо укладкой на статоре одной обмотки, кон-
струкция которой позволяет получить в двигателе различное
число полюсов. Комбинация этих способов дает возможность
получить двигатели с большим числом ступеней регулировки.
Наиболее простой получается обмотка при переключении полю-
сов в отношении 1 : 2.
Принцип преобразования четырехполюсной обмотки в двух-
полюсную показан на рис. 23.12: при последовательном соеди-
нении двух секций возбуждаемый ими магнитный поток обра-
зует четыре полюса (рис. 23.12, а); при параллельном соедине-
344
нии этих же секций получаем двухполюсную обмотку (рис.
23.12,6). Переключение обмотки на два полюса может быть
осуществлено и при сохранении последовательного соединения
секций (рис. 23.12, в). На рис. 23.13 представлена одна из воз-
можных схем переключения статорной обмотки с 2р — 8 на
2р = 4, что соответствует изменению синхронной скорости с 750
до 1500 об!мин. Если на статоре расположить две подобные
обмотки, то получим четырехскоростной двигатель. Выводы сек-
ционированных статорных обмоток, позволяющие переключать
число полюсов, обозначаются так же, как и выводы обычных
статорных обмоток, но с дополнительными цифрами, указываю-
щими на число полюсов данной секции, как это показано
в табл. 23.2.
Многоскоростные двигатели выпускают на две, три и четыре
скорости вращения. При этом статор двигателя может иметь
одну или две обмотки. Например, асинхронный электродвига-
тель серии Т, типа Т—42/8—6—4—2 имеет на статоре одну
обмотку, допускающую переключение на 8, 6, 4 и 2 полюса.
При частоте 50 гц такое переключение соответствует синхрон-
ным скоростям вращения: 750, 1000, 1500, 3000 об!мин.
Таблица 23 2
Для двух полюсов Для четырех полюсов Для шести полюсов Для восьми полюсов
2С1 4С1 6С1 8С1
2С2 4С2 6С2 8С2
2СЗ 4СЗ 6СЗ 8СЗ
Обмотка статора этого двигателя имеет 21 вывод. Регулиро-
вание скорости вращения изменением числа полюсов статорной
обмотки применяется главным образом в двигателях с коротко-
замкнутым ротором. Это объясняется тем, что число полюсов
короткозамкнутого ротора всегда равно числу полюсов обмотки
статора. Поэтому для изменения скорости двигателя достаточно
ограничиться переключением статорной обмотки. В случае же
двигателей с фазным ротором наряду с переключением обмотки
статора необходимо соответствующим образом переключить
и обмотку ротора.
Многоскоростной асинхронный двигатель в зависимости
от вида нагрузки на валу может работать в одном из двух
режимах:
а) при переключении двигателя с одной скорости вращения
на другую вращающий момент М2 остается неизменным, а мощ-
ность изменяется пропорционально скорости вращения п2 (дви-
гатель постоянного момента)
б) при переключении двигателя с одной скорости на другую
мощность Р2 остается примерно неизменной, а момент М2 изме-
няется соответственно изменению скорости вращения (двигатель
постоянной мощности)
Тот или иной режим работы двигателя обеспечивается при-
менением различных схем соединения статорных обмоток.
Многоскоростные двигатели с переключением полюсов об-
мотки статора по сравнению с обычными двигателями имеют
некоторые недостатки, которые в основном сводятся к следую-
щим: а) большие габариты; б) высокая стоимость; в) наличие
громоздкого многоконтактного переключающего устройства.
Из изложенного следует, что все применяемые способы регу-
лирования скорости асинхронных двигателей обладают суще-
ственными недостатками. Этим, в частности, объясняется то об-
стоятельство, что в установках, где требуется плавное регули-
рование скорости в широких пределах, асинхронные двигатели,
несмотря на свои конструктивные преимущества, до настоящего
времени не вытеснили двигатели постоянного тока.
§ 23.6. Типы современных асинхронных двигателей
Как уже указывалось, асинхронные двигатели широко при-
меняются во многих отраслях народного хозяйства. Объясняет-
ся это их простой конструкцией, надежностью в работе
и удовлетворительными рабочими характеристиками. Общая
мощность выпускаемых в СССР асинхронных двигателей за год
составляет несколько миллионов киловатт.
Асинхронные двигатели общего применения выпускаются
промышленностью едиными сериями. Эти двигатели широко
используют во всех отраслях народного хозяйства.
Основными являются единые серии трехфазных асинхронных
двигателей, разделяющих весь диапазон мощностей на четыре
отрезка:
серия двигателей мощностью до 0,6 кет; от 0,6 до 100 кет;
от 100 до 1000 кет; свыше 1000 кет.
Серия трехфазных асинхронных двигателей мощностью до
0,6 кет обозначается АОЛ; серия включает двигатели с коротко-
замкнутым ротором трех габаритов (нулевой, первый и второй)
на синхронные скорости 3000 и 1500 об!мин с номинальными
напряжениями 127/220 и 220/380 в. Двигатели изготавливаются
в закрытом обдуваемом исполнении.
Единая серия трехфазных асинхронных двигателей мощ-
ностью от 0,6 до 100 кет обозначается А и АО, является про-
должением серии АОЛ и состоит из двигателей семи габаритов
346
(от третьего до девятого), различающихся размерами наруж-
ного диаметра сердечника статора. Серия состоит из двигателей
14 типоразмеров и имеет два конструктивных исполнения:
защищенное — А и закрытое обдуваемое — АО.
Помимо основного исполнения двигатели этой серии имеют
ряд модификаций:
АП и АОП — короткозамкнутые с повышенным начальным
пусковым моментом;
АС и АОС — короткозамкнутые с повышенным скольжением;
двигатели короткозамкнутые многоскоростные;
АОТ — короткозамкнутые с повышенным значением КПД
и cos <р;
АК — с контактными кольцами на роторе;
АВ — короткозамкнутые встраиваемые.
Двигатели выполняются на различные синхронные скорости
(3000, 1500, 1000 и 750 об/мин) и на номинальные напряжения
127/220; 220/380 и 500 в.
В настоящее время запущена в производство новая серия
А2 и АО2, отличающаяся от серии А и АО (более высокими
энергетическими и эксплуатационными показателями.
Двигатели мощностью от 100 до 1000 кет имеют обозначение:
А — короткозамкнутые;
АК — с контактными кольцами на роторе.
В этот отрезок шкалы мощностей входят двигатели 10—13-го
габаритов. Двигатели выполняются на синхронные скорости от
500 до 3000 об/мин и на напряжения до 6000 в.
Двигатели мощностью свыше 1000 кет обозначаются:
АН — короткозамкнутые;
АКН — с контактными кольцами на роторе.
Двигатели выполняются на синхронные скорости от 250 до
1000 об/мин и на номинальное напряжение 6000 в. Серия вклю-
чает также двигатели мощностью от 200 до 800 кет при синхрон-
ных скоростях от 250 до 750 об/мин.
В промышленности широко применяются специализирован-
ные серии асинхронных двигателей.
Серия МТ — крановые двигатели, выполняются с контакт-
ными кольцами для плавного регулирования скорости вращения
(см. рис. 19.3) мощностью от 2 до 160 кет при ПВ = 25°/о
(см. § 28.2).
Серия ВАО — взрывонепроницаемые двигатели мощностью,
до 100 кет.
Существует еще достаточное количество специализированных
серий асинхронных двигателей, каждая из которых предназна-
чена для использования в определенных условиях.
В силу прогресса науки и техники периодически создаются
новые, более совершенные серии электродвигателей, отвечающие
возросшим требованиям к электроприводу.
347
Глава XXIV
ОДНОФАЗНЫЕ АСИНХРОННЫЕ ДВИГАТЕЛИ
§ 24.1. Принцип действия однофазного
асинхронного двигателя
Статор однофазного асинхронного двигателя имеет одно-
фазную обмотку, которая занимает обычно 2/3 общего числа
пазов сердечника статора. Ротор двигателя делается коротко-
замкнутым.
При подключении двигателя к однофазной сети (рис. 24.1)
статорная обмотка создает не вращающийся, а пульсирующий
магнитный поток с амплитудой ±Фмакс- Этот
поток может быть разложен на два вращаю-
щихся в противоположные стороны потока Фу
и Ф/z, каждый из которых равен —с (рис.
Лбо
СО скоростью И] = .
что ротор двигателя вра-
С2
Рис. 24.1. Схе-
ма включения
однофазного
асинхронного
двигателя
24.2) и вращается
Предположим,
щается против движения часовой стрелки, т. е.
в направлении потока Фу (рис. 24.2). При
этом поток Фу будем называть прямым, а по-
ток Фуу обратным.
Тогда скольжение двигателя относительно
прямого потока Ф/ равно
п{ — п2
«1
а относительно обратного потока Ф//
«1 -( - п2) «, +п2
s II — --------= — -——
п{ пх
Потоки Ф/ и Фл наводят в обмотке ротора э. д. с. E'.j и Е\ц,
которые создают токи /2у, Г2ц. Известно, что частота тока в
обмотке ротора пропорциональна скольжению f2 = frs. Так
как Si<Sn, то ток Г2ц, наведенный обратным потоком Фн в
обмотке ротора, имеет частоту намного больше частоты тока
I’2i, наведенного в обмотке ротора прямым потоком ’ ~
например, для однофазного двигателя с /г1 = 1500
/г2 — 1450
Si =
Si/ =
o6jMUH и Д = 50 гц имеем
1500- 1450 _nm„
1500 - 0,0,3 ’
1500+ 1450 1 ПС
----1500---= Ь96:
f2/ = 0,033-50-= 1,8
Ф/. Так,
об/мин,
гц\
f2n = 1,96-50 = 98 гц.
348
Индуктивное сопротивление обмотки ротора току I211 во
много раз больше ее активного сопротивления. Поэтому ток hn
будет почти чисто реактивным, оказывающим сильное размаг-
ничивающее действие на обратное поле Фу/. В результате обрат-
ное поле двигателя будет значительно ослаблено.
Рис. 24 2. Разложение пульсирующего магнитного потока на два вра-
щающихся
Вращающий момент однофазного двигателя М создается
совместным действием моментов
М = Мт Н- МИ-
Здесь Мт — момент, вызванный взаимодействием прямого пото-
Рис. 24.3. Механические характеристики
однофазного асинхронного двигателя
ка Ф/ с током /2л а Мп — момент, вызванный взаимодействием
обратного потока Фуу с током hn.
На рис. 24.3 представлен график зависимости вращающего
момента М в функции скольжения . Этот график полу-
349
чен в результате наложения графиков Mi = f(sj) и М// = f(sny
При малых значениях скольжения $, что соответствует работе
двигателя в пределах номинальной нагрузки, вращающий мо-
мент М создается главным образом моментом Mi. При
моменты М/ иТИ/уравны, а поэтому вращающий пусковой мо-
мент однофазного двигателя равен нулю. Следовательно, одно-
фазный асинхронный двигатель не может самостоятельно прийти
во вращение при подключении его к сети, а нуждается в перво-
начальном толчке, так как лишь при s<l на ротор двигателя
начинает действовать вращающий момент.
§ 24.2. Пуск в ход однофазного асинхронного двигателя
Рис 24 4 Схема од-
нофазного асинхрон-
ного двигателя с ра-
бочей А и пусковой В
обмотками на статоре
Для создания необходимого пускового момента однофазный
двигатель снабжают дополнительной пусковой обмоткой. Эта
в оставшейся незаполненной 1/3 пазов
таким образом, чтобы ее н. с. была сдви-
нута на 90 эл. градусов относительно н. с.
рабочей (основной) обмотки статора.
Кроме того, в цепь пусковой обмотки
включают фазосмещающий элемент
(рис. 24.4), что необходимо для создания
фазового сдвига между токами в рабочей
1а и пусковой /в обмотках. В качестве
фазосмещающего элемента (ФЭ) могут
применяться активное сопротивление, ин-
дуктивность или емкость. После того как
ротор двигателя разгонится до скорости,
близкой к установившейся, пусковую об-
мотку отключают.
Для получения вращающегося поля
посредством двух обмоток на статоре, сме-
щенных в пространстве относительно друг
друга на угол 90°, необходимо соблюдение следующих условий:
а) намагничивающие силы рабочей Рл и пусковой F& обмо-
ток должны быть равны и сдвинуты в пространстве относитель-
но друг друга на 90°;
б) токи в обмотках статора /д и должны быть сдвинуты
по фазе относительно друг друга на 90°.
При строгом соблюдении указанных условий вращающееся
поле статора является круговым, что соответствует наибольше-
му значению электромагнитного момента. При нарушении
какого-либо из указанных выше условий вращающееся поле
становится эллиптическим, состоящим из двух не равных по ве-
личине, вращающихся в разные стороны круговых полей: пря-
мого и обратного. Обратное вращающееся поле создает на
350
роторе тормозной момент и ухудшает рабочие свойства дви-
гателя.
Из векторных диаграмм, приведенных на рис. 24.5, видно,
что активное сопротивление или индуктивность не обеспечивают
фазового сдвига ф между токами в обмотках статора 1д и 1в
в 90°. Лишь только емкость С в качестве фазосмещающего эле-
Рис 24 5. Сравнение свойств фазосмещающих элементов
а - - активное сопротивление, б — индуктивность; в — емкость, г — меха-
нические характеристики двигателя при различных фазосмещающих
элементах.
1 — активное сопротивление, 2 — емкость
мента обеспечивает ф = 90°. Величина этой емкости выбирается
такой, чтобы ток пусковой обмотки в момент пуска двигателя
(s=l) опережал по фазе напряжение Ui на дополняющий
угол <рА до 90°,
Ф = фл + фв = 90°.
Если при этом обе обмотки создают одинаковые намагничи-
вающие силы, то в момент включения двигателя в сеть в нем
будет создано круговое вращающееся поле и двигатель будет
развивать значительный начальный пусковой момент.
Таким образом, емкость является наилучшим фазосмещаю-
щим элементом и обеспечивает однофазному двигателю хоро-
шие пусковые свойства.
Но применение емкости в качестве фазосмещающего эле-
мента иногда ограничивается большими габаритами конденса-
торов, тем более, что для получения кругового вращающегося
поля при пуске электродвигателя в ход нужна значительная
емкость. Например, при мощности двигателя 200 вт необходима
емкость С = 30 мкф при рабочем напряжении порядка 300—500 в.
Исходя из этих соображений наибольшее распространение
получили однофазные асинхронные двигатели с активным сопро-
тивлением в качестве фазосмещающего элемента. Ввиду того,
что пусковая обмотка находится включенной непродолжитель-
351
ное время (только на время пуска двигателя в ход) ее выпол-
няют проводом меньшего сечения. Это обеспечивает пусковой
обмотке повышенное активное сопротивление. Кроме того, часть
пусковой обмотки иногда выполняют бифилярно, чем снижают
ее индуктивность. В итоге пусковая обмотка отличается от ра-
бочей большим активным сопротивлением и небольшой индук-
тивностью. И хотя угол сдвига фаз между токами I ди I % все же
меньше 90°, пусковые свойства этих двигателей оказываются
вполне удовлетворительными
= ЬО - 1,2; •-= 6,5 - 9.
4
Электродвигатели с повышенным активным сопротивлением
пусковой обмотки широко используются там, где не требуется
больших пусковых моментов.
В случае же необходимости получения большего пускового
момента в качестве фазосмещающего элемента применяют
емкость. Это дает возможность повысить пусковой момент до
значений
На рис. 24.5, г приведены механические характеристики одно-
фазного асинхронного двигателя при различных фазосмещаю-
щих элементах. Для большей наглядности значения момента М
даны в относительных единицах.
Как указывалось, по окончании процесса пуска цепь пуско-
вой обмотки следует отключить. Если этого не сделать, то пус-
ковая обмотка, выполненная проводом меньшего сечения и не
рассчитанная на продолжительный ток, будет перегреваться.
Отключение пусковой обмотки обычно автоматизируется
и осуществляется посредством реле.
§ 24.3. Асинхронные конденсаторные двигатели
Асинхронный конденсаторный двигатель имеет на статоре
две обмотки, занимающие одинаковое число пазов и сдвинутые
в пространстве относительно друг друга на угол 90°. Ротор дви-
гателя делается короткозамкнутым. Одна из обмоток статора,
называемая главной, включается непосредственно в однофазную
сеть, а другая, называемая вспомогательной, включается в эту
же сеть, но через конденсатор Ср, называемый рабочим конден-
сатором (рис. 24.6, а).
В отличие от рассмотренного ранее однофазного асинхрон-
ного двигателя в конденсаторном двигателе вспомогательная
352
обмотка после пуска не отключается и остается включенной
в течение всего процесса работы двигателя.
Емкость Ср в цепи вспомогательной обмотки создает сдвиг
по фазе между токами / д и /д.
Таким образом, если однофазный асинхронный двигатель по
окончании процесса пуска работает с пульсирующим магнитным
полем статора, то конденсаторный электродвигатель работает
с круговым вращающимся магнитным полем или близким к кру-
говому. Поэтому однофазные конденсаторные двигатели по
своим свойствам приближаются к трехфазным асинхронным
двигателям.
Величина емкости Ср, необходимая для получения кругового
вращающего поля, может быть определена выражением
c’ = w^10' <24'”
при этом отношение напряжений на главной и на вспо-
могательной t/g обмотках должно быть
Ua_ tg<p^ L ,
К-*1-
В этих выражениях:
<Рд —угол сдвига фаз между током 7д и напряжением £/д при
круговом поле;
К — коэффициент трансформации, представляющий собой
отношение эффективных чисел витков вспомогательной
и главной обмоток,
к _ wbKb
WaKa ’
где Кд и Кд—обмоточные коэффициенты обмоток статора (см.
§ 15.8).
Анализ выражения (24.1) показывает, что при заданных К
(/д
и -тт- емкость С„ обеспечивает получение кругового вращающе-
U В
гося поля лишь при одном, вполне определенном режиме работы
двигателя, так как при изменении режима работы меняются
/д и Таким образом, при отклонениях режима работы дви-
гателя от расчетного вращающееся поле становится эллипти-
ческим и рабочие свойства двигателя значительно ухудшаются.
Чаще всего конденсаторные двигатели рассчитываются так,
чтобы круговое вращающееся поле было при номинальной или
близкой к ней нагрузке.
23 1649 353
Конденсаторные двигатели имеют сравнительно высокий
к. п. д. (т] = 60—75%) и коэффициент мощности (cos<pi =
=0,8 — 0,95). Однако пусковые свойства двигателя неудовлетво-
рительны. Дело в том, что при пуске в ход магнитное поле дви-
гателя некруговое, так как круговое вращающееся поле соот-
Рис. 24. 6. Конденсаторный двигатель:
а— с рабочей емкостью; б—с рабочей и пусковой емкостями; в—механиче-
ские характеристики: 1 — при рабочей емкости; 2 — при рабочей и пусковой
емкости
ветствует лишь определенному значению нагрузки. Поэтому
пусковой момент конденсаторного двигателя обычно не^ превы-
шает 50% номинального. Исходя из этого конденсаторные дви-
гатели целесообразно применять лишь для привода механизмов
с легкими условиями пуска. Для повышения пускового момента
конденсаторного двигателя в схему включают два конденсатора,
как это показано на рис. 24.6, б.
Конденсатор Сп называют пусковым и включают его лишь
на время пуска. Величина емкости Сп выбирается из условия
получения наибольшего пускового момента. На рис. 24.6, в
представлены механические характеристики конденсаторного
двигателя.
После разгона ротора пусковую емкость следует отключить,
так как при небольших скольжениях возможен резонанс напря-
жений, в результате которого напряжение на зажимах конден-
сатора и в обмотках статора может превысить напряжение сети
в 2—3 раза.
Конденсаторные двигатели с рабочей и пусковой емкостью
применяются для привода механизмов с тяжелыми условиями
пуска.
§ 24.4. Универсальные асинхронные двигатели
В настоящее время широкое распространение получили уни-
версальные асинхронные двигатели. Такой двигатель представ-
354
ляет собой асинхронный двигатель небольшой мощности с ко-
роткозамкнутой обмоткой ротора и трехфазной обмоткой ста-
тора. Универсальным этот двигатель называют потому, что он
без каких-либо изменений в конструкции может быть использо-
ван как трехфазный, так и однофазный.
Таблица 24.1
Тип двигателя Чис- ло фаз Мощ- ность, вт Напря- жение, в Ско- 'рость враще- ния, об/мин Сила тока, а К. п. д. cos<?
УАД-54 3 9 127/220 1280 0,17 0,25 0,55
1 8 220 1300 0,16 0,25 0,88
УАД-64 3 20 127/220 1280 0,23 0,4 0,6
1 15х 220 1300 0,23 0,35 0,85
У А Д-74 3 30 127/220 1280 0,3 0,5 0,5
1 25 220 1300 0,3 0,45 0,85
При использовании универсального асинхронного двигателя
в качестве однофазного его обмотки статора соединяют по одной
из схем, приведенных на рис. 24.7, а, б.
Здесь, так же как и в конденсаторных двигателях, рабочая
Рис. 24. 7. Схемы соединения трехфазной об
мотки при включении в однофазную сеть
емкость рассчитывается на определенную мощность нагрузки,
например номинальную, поэтому при колебаниях нагрузки ра-
бочие свойства двигателя ухудшаются. Возможны случаи опас-
ной перегрузки или недогрузки двигателя, при которых обмотка
той или иной фазы выгорает.
При использовании универсального асинхронного двигателя
в однофазном режиме его мощность по сравнению с трехфазным
режимом снижается. В табл. 24.1 приведены паспортные данные
23* 355
яекоторых типов универсальных асинхронных двигателей серии
УАД. В однофазном режиме эти двигатели используются как
конденсаторные.
Аналогично универсальному асинхронному двигателю в ка-
честве однофазного можно использовать обычный трехфазный
асинхронный двигатель. Обмотка статора такого двигателя
в однофазном режиме может быть соединена по одной из схем,
яриведенных на рис. 24.7.
Величину рабочей емкости Ср в мкф при частоте тока 50 гц
можно определить-по одной из формул [Л—16]:
для схемы 24.7, а Ср = 2740 ^5-;
для схемы 24.7, б Ср = 2800“-; V 1Н (24.2)
ДЛЯ схемы 24.7, в • Ср = 4800/.1н . V 1Н
Если пуск двигателя осуществляется вхолостую или с не-
большой нагрузкой на валу, то пусковая емкость не требуется.
Если же двигатель пускается в ход со значительной нагрузкой
яа валу, то пусковая емкость Сп необходима.
Величина этой емкости принимается равной Сп=(2,5—3)СР.
В этом случае пусковой момент двигателя становится близким
к номинальному. При необходимости дальнейшего увеличения
пускового момента емкость Сп следует увеличить.
Так при Сп = (6 — 8)Ср пусковой момент приближается
к максимальному.
Следует помнить, что при использовании трехфазного двига-
теля в однофазном режиме с отключением одной из фазных об-
моток его мощность используется лишь на 60%, а при однофаз-
яом конденсаторном режиме — на 75—80%.
§ 24.5. Однофазный двигатель с экранированными полюсами
Для создания пускового вращающего момента в однофазных двигателях
малой мощности (5—25 вт) применяют конструкцию с явновыраженными
полюсами (рис. 24.8, а), на которых располагается однофазная обмотка. По-
люса / имеют расщепленную конструкцию, причем на одну из расщепленных
частей каждого полюса надет короткозамкнутый виток (экран) в виде мед-
ного кольца 2. Ротор двигателя имеет обычную короткозамкнутую конструк-
цию. При подключении обмотки статора к сети под действием создаваемого
ею пульсирующего магнитного потока в короткозамкнутом витке возникает
ток, который препятствует нарастанию потока в этой части полюса .
(рис. 24.8,6). В результате потоки в обеих частях каждого полюса оказы-
356
ваются сдвинутыми по фазе -относительно друг друга, что,' в свою очередь,
приводит к образованию в двигателе вращающегося магнитного поля. Для
улучшения пусковых и рабочих характеристик двигателя часто между полю*
сами помещают магнитные шунты в виде стальных пластинок.
Рис. 24. 8. Однофазный асинхронный двигатель
с экранированными полюсами
Однофазные двигатели с явновыраженными полюсами обычно приме*
няют в устройствах, не требующих больших пусковых моментов. Например,
они применяются в небольших вентиляторах, электропроигрывателях, и т. д.
Гла'ва XXV
СПЕЦИАЛИЗИРОВАННЫЕ АСИНХРОННЫЕ МАШИНЫ
§ 25.1. Индукционный регулятор и фазорегулятор
Индукционный регулятор представляет собой за-
торможенный асинхронный двигатель с контактными кольцами.
Им можно регулировать напряжение в широких пределах. Ста-
торная и роторная обмотки в индукционном регуляторе соедине-
ны электрически (рис. 25.1), но так, чтобы они могли быть сме-
щены относительно друг друга поворотом ротора. При подклю-
чении индукционного регулятора к сети вращающееся магнит-
ное поле наводит в обмотках'статора и ротора э. д. с. Е\ и Ej.
При совпадении осей обмоток э. д. с. Ei и Е2 совпадают по фазе
и на выходных зажимах регулятора устанавливается макси-
мальное напряжение UluaKC (рис. 25.2, а)'. При повороте ротора
ось обмотки поворачивается на некоторый угол а. На такой же
угол смещается и вектор Ё2. При этом напряжение на выходе
регулятора, равное геометрической сумме U2=Ei+E2, умеиь-
357
шается. Поворотом ротора на угол ц=180 эл. градусов мы уста-
навливаем на выходе регулятора минимальное напряжение
Рис. 25. 1. Схема соедине-
ний индукционного регуля-
тора
Рис. 25. 2. Векторная диаграмма
индукционного регулятора (а)
и график зависимости Uz—ffa) (6)
Г/амин. На рис. 25.2, б представлен график напряжения на вы-
ходе индукционного регулятора в зависимости от угла поворота
ротора (/2=/(а).
Рис. 25. 3. Внешний вид ин-
дукционного регулятора типа
АИ61-100 мощностью 15 ква
Индукционные регуляторы
применяются в лабораторной
практике, в автоматике, а также
в распределительных сетях для
регулирования напряжения.
Для поворота ротора в индук-
ционном регуляторе обычно при-
меняется червячная передача, ко-
торая одновременно осуществля-
ет и торможение ротора.
На рис. 25.3 представлен
индукционный регулятор типа
Рис. 25. 4. Схема соединений
фазорегулятора
АИ61-100 мощностью 15 ква. Регулятор имеет принудительное
охлаждение, что повышает его мощность. Поворот ротора может
358
осуществляться либо вручную маховиком, либо посредством
электродвигателя, позволяющего осуществить дистанционное
управление регулятором.
Фазорегулятор предназначен для изменения фазы вто-
ричного напряжения относительно первичного. При этом вели-
чина вторичного напряжения остается неизменной.
Фазорегулятор представляет собой асинхронную трехфазную
машину с контактными кольцами, заторможенную специальным
поворотным устройством (обычно червячной передачей). Напря-
жение подводится к обмотке статора и снимается с выводов
обмотки ротора.
В отличие от индукционного регулятора в фазорегуляторе об-
мотки статора и ротора электрически не соединены (рис. 25.4).
Изменение фазы вторичного напряжения осуществляется поворо-
том ротора относительно статора.
Фазорегуляторы применяются в автоматике и в измерительной
технике. Отечественной промышленностью изготовляются фазо-
регуляторы серии ФРО (фазорегулятор обдуваемый) мощ-
ностью 7,5 и 15 ква. Плавный поворот ротора в фазорегуляторах
ФРО осуществляется посредством электродвигателя, допускаю-
щего дистанционное управление фазорегулятором.
§ 25.2. Асинхронный преобразователь частоты
Как известно, частота тока в цепи ротора асинхронной ма-
шины зависит от скольжения, т. е. определяется разностью ско-
ростей вращающегося поля статора и ротора,
1.=^ = ^^/,-
Указанное свойство позволяет использовать асинхронную
машину в качестве преобра-
зователя частоты. В этом
случае обмотка статора под-
ключается к сети промыш-
ленной частоты /ь а ротор
посредством постороннего
двигателя приводится во
вращение против поля ста-
тора, т. е. в направлении,
противоположном его вра- рис 25 5 Схема соединений асин.
щению при работе машины хронного преобразователя частоты
в режиме двигателя. При
этом скольжение возрастет от единицы и выше, а частота тока
ротора /2 увеличивается по сравнению с частотой тока fi питаю-
щей сети.
359
Если требуется уменьшить частоту питающей сети, то po-fop
преобразователя вращают в направлении вращения'поля'ста-
тора. Э. д. с. Еа, наведенная в обмотке ротора, через контактные
кольца и щетки подается к потребителю. На рис. 25.5 представ-
лена схема включения асинхронного преобразователя частоты
Электрическая мощность Р'з цепи ротора складывается из
электромагнитной мощности Ptu, передаваемой вращающим
полем статора на ротор, и механической мощности Рме1 первич-
ного двигателя ПД
Pi — Р эм + Р до-
Соотношение между мощностями Рэы и Рме1 зависит от
скольжения. Так, при работе АПЧ со скольжением 5=2 эти мощ-
ности равны, и ротор половину мощности получает от статора,
а половину —' от первичного двигателя.
При необходимости плавной регулировки частоты на выходе
асинхронного преобразователя частоты в качестве первичного
двигателя применяют электродвигатели с плавной регулировкой
скорости, например двигатели постоянного тока. Однако чаще
всего АПЧ используется для получения определенной (фикси-
рованной) частоты [2. В этом случае в качестве первичного при-
меняют асинхронный или синхронный двигатель.
§ 25.3. Электромагнитная асинхронная муфта
Электромагнитная асинхронная муфта устроена по принципу асинхрон-
т для передачи вращающего момента от
одного вала (ведущего) к другому валу
(ведомому). На ведущем валу 1 помеща-
ется полюсная система 2 муфты, представ-
ляющая собой систему явно выраженных
полюсов с катушками возбуждения. Посто-
янный ток в катушки возбуждения пода-
ется через контактные кольца 4 (рис. 25.6).
Ведомая часть муфты 3 исполняется по ти-
пу роторной клетки асинхронного двига-
теля.
Принцип работы муфты аналогичен ра-
боте асинхронного двигателя, только вра-
щающийся магнитный поток здесь созда-
ется механическим вращением полюсной
части. Вращающий момент от ведущего
вала к ведомому передается через магнит-
ный поток. Разъединение муфты произво-
дится отключением тока возбуждения /ь
Регулирование величины тока дает воз-
можность осуществить дистанционное управ-
ление муфтой (плавно сцеплять и расцеп-
лять ведущий и ведомый валы). Кроме того, муфта, подобно асинхронному
двигателю, при достижении максимального момента переходит в режим
неустойчивой работы, что предохраняет первичный двигатель от чрезмерных
перегрузок и толчков нагрузки.
360
ного электродвигателя и
Рис. 25. 6. Устройство асин-
хронной электромагнитной
муфты
§ 25.4. Асинхронная машина в системе синхронной передачи
В устройствах автоматики иногда возникает необходимость
в одновременном (синхронном) вращении или повороте на опре-
деленный угол валов механизмов, находящихся на расстоянии
друг от. друга и механически между собой не связанных. Для
осуществления этого процесса применяют синхронную передачу,
Рис. 25. 7. Схема синхронной передачи
в которой механическая связь между валами механизмов заме-
нена электрической связью. Основными элементами такой син-
хронной передачи являются сельсины.
Сельсин представляет собой электрическую машину, имею-
щую две обмотки: однофазную, называемую обмоткой возбужде-
ния, и трехфазную, соединенную звездой, — обмотку синхрони-
зации. Одна из обмоток располагается на роторе, а другая —
на статоре.
Простейшая синхронная передача содержит два сельсина:
сельсин-датчик и сельсин-приемник (рис. 25.7). При включении
обмоток возбуждения сельсинов на напряжение U\ в каждом
сельсине 'создается пульсирующий магнитный поток Ф.
Этот поток наводит в обмотке синхронизации датчика э. д. с.
Ед. Поток Ф также наводит в обмотке синхронизации прием-
ника э. д. с. Еп. Э. д. с. £д и £„ в цепи синхронизации направ-
лены встречно друг другу. Если же ротор приемника занимает
положение относительно статора такое же, что и ротор датчика
относительно своего статора, то э. д. с. Ед и ЕП равны по вели-
чине. В этом случае сумма э. д. с. в цепи синхронизации равна
нулю и синхронная передача находится в состоянии равновесия.
Если ротор сельсина-датчика повернуть на некоторый угол ад,
то величина э. д. с. Ед в обмотке синхронизации изменится
и равенство э. д. с. Ед и Еп нарушится. При этом в цепи си-н-
361
хронизации будет действовать результирующая э. д. с.
Д£‘ = Д + £'п, (25.1)
которая создаст ток синхронизации
2д + Zn + Zn ’ .
где 2д, Zn и2л—сопротивления обмоток синхронизации датчи-
ка, приемника и линейных проводов.
Ток синхронизации датчика будет взаимодействовать с маг-
нитным потоком возбуждения и создаст на роторе датчика
электромагнитный момент, направленный встречно повороту ро-
тора датчика, т. е. являющийся противодействующим.
Этот момент преодолевается механизмом, поворачивающим
ротор датчика на заданный угол ад.
Ток синхронизации приемника также взаимодействует с маг-
нитным потоком возбуждения и создает электромагнитный мо-
мент, направленный в сторону поворота ротора датчика. Под
действием этого момента, называемого синхронизирующим, ро-
тор приемника поворачивается.
Но после того как он повернется на угол ал~ад и займет
такое же положение относительно статора, что и ротор датчика,
э. д. с.£п вновь станет равной э. д. с. £д, т. е. в системе вос-
становится равновесие.
Если ротор датчика вновь повернуть на некоторый угол, то
этот же угол поворота будет воспроизведен приемником. При
вращении ротора датчика с определенной скоростью ротор при-
емника также будет вращаться в ту же сторону и с такой же
скоростью.
Однако угол поворота, установленный ротором датчика, вос-
производится ротором приемника с некоторой ошибкой — рас-
согласованием. Дело в том, что для поворота ротора приемника
необходимо, чтобы синхронизирующий момент преодолел про-
тиводействующий момент, вызванный силами трения в подшип-
никах и на контактных кольцах, а иногда еще и полезной на-
грузкой на валу приемника. Ошибка в воспроизведении угла
поворота оценивается величиной, называемой углом рассогласо-
вания,
О = ад — ап. (25.2)
Ротор сельсина-приемника синхронно следует за ротором
датчика, но угол рассогласования между роторами еельсинов
всегда имеется и он тем больше, чем больше противодействую-
щий момент на валу сельсина-приемника.
Угол рассогласования обычно не превышает 2,5°, а у сельси-
нов высокой точности он не превышает 0,75°.
362
Величина синхронизирующего момента Afc сельсина-прием-
ника определяется выражением
Л1С = 714СвМакс sin 6, (25.3)
где Л1с,макс— максимальное значение синхронизирующего мо-
мента, соответствующее углу рассогласования 90°.
Из выражения (25.3) видно, что с ростом угла рассогласо-
вания от нуля до 90° синхронизирующий момент увеличивается,
Рис. 25. 8. Устройство контактного сельсина:
1—корпус; 2—сердечник статора; 3—обмотка синхронизации (на статоре);
4—сердечник ротора; 5—обмотка возбуждения (на роторе); 6—вал; 7—
контактные кольца; 8—выводы
что обеспечивает синхронной передаче устойчивую работу. Точ-
ность работы сельсина-приемника тем выше, чем больше удель-
ный синхронизирующий момент, показывающий, насколько из-
менится синхронизирующий момент при изменении* угла рас-
согласования на один градус
Л1суд=4^==2Ис-максС05°/ (25,4)
где Мс,уД — удельный синхронизирующий момент, н-м/град.
По своей конструкции сельсины разделяются на контактные
и бесконтактные. Контактные сельсины в принципе не отли-
чаются от асинхронных двигателей с контактными кольцами
(рис. 25.8).
363
В некоторых конструкциях статор или ротор сельсина делают
с явновыраженными полюсами. Такая конструкция дает воз-
можность несколько повысить величину синхронизирующего
момента.
Число контактных колец в сельсине зависит от того, где рас-
положена обмотка возбуждения. Если она расположена на ро-
Рис 25. 9. Конструктивная схема бесконтакт-
ного сельсина:
/—тороидальный сердечник; 2—катушка воз-
буждения; 3—сердечник с обмоткой синхро- ,
низации; 4—внешний магнитопровод; 5—ротор
торе, то сельсин имеет два контактных кольца, а если на ста-
торе — то три. Наличие контактных колец является основным
недостатком контактных сельсинов, так как делает работу сель-
сина ненадежной, а его параметры неустойчивыми. Наиболее
совершенными являются бесконтактные сельсины, разработан-
ные советскими учеными А. Г. Иосифьяном и Д. В. Сверчарни-
ком. Эти сельсины не имеют скользящих контактов, так как в них
обе обмотки расположены на статоре (рис. 25.9),
Ротор бесконтактного сельсина в принципе представляет собой
цилиндр из ферромагнитного материала, разделенный немагнит-
ной прослойкой на две магнитно-изолированные части —полюса.
Магнитной изоляцией является алюминий, который заливается
в ротор и является одновременно материалом, скрепляющим
части ротора.
С торцовых сторон сельсина расположены тороидальные
сердечники, выполненные из листовой электротехнической ста-
ли. Внутренняя поверхность этих сердечников располагается
над ротором, а к их внешней поверхности примыкают стержни
внешнего магнитопровода. Однофазная обмотка возбуждения
бесконтактного сельсина выполняется в виде двух дисковых ка-
тушек, расположенных с противоположных сторон статора по
364
оси сельсина между обмоткой синхронизации и тороидальными
сердечниками.
В процессе работы сельсина пульсирующий магнитный поток
возбуждения замыкается -в магнитной цепи сельсина, сцепляясь
с трехфазной обмоткой статора. Путь замыкания потока возбуж-
дения показан пунктиром на рис. 25.9. Допустим, в рассматри-
ваемый момент времени направление тока в обмотке возбужде-
ния таково, что магнитный поток возбуждения направлен от
правой катушки возбуждения к левой.
Магнитный поток может пройти от правой катушки к левой
лишь только в обход магнитной изоляции, разделяющей ротор.
Поэтому поток проходит через зазор между правым тороидаль-
ным сердечником и ротором в правый полюс ротора, затем че-
рез зазор между ротором и статором в сердечник статора, про-
ходит по сердечнику статора, сцепляясь с обмоткой синхрониза-
ции, затем через зазор между статором и ротором в левый
полюс и, наконец, в левый тороидальный сердечник. Из левого
тороидального сердечника магнитный поток через внешний маг-
нитопровод попадает в правый тороидальный сердечник и за-
мыкается в правом полюсе ротора.
Отсутствие электрического скользящего контакта повышает
надежность работы и стабильность свойств бесконтактных сель-
синов по сравнению с контактными.
Однако бесконтактные сельсины не лишены недостатков:
некоторая сложность конструкции, повышенные вес и габа-
риты и относительно большой ток возбуждения. Последний
недостаток объясняется большим магнитным сопротивлением на
пути магнитного потока- магнитный поток четыре раза проходит
через воздушный зазор.
§ 25.5. Асинхронный исполнительный двигатель
Асинхронные исполнительные двигатели применяются в устройствах
автоматики и предназначены для преобразования электрических сигналов
в механическое перемещение
На статоре этого двигателя имеются две обмотки* обмотка возбуждения»
постоянно включенная в сеть переменного тока, и обмотка управления, на
зажимы которой подводится сигнал Uz (рис 25 10)
Оси обмоток сдвинуты в пространстве относительно друг друга под
углом 00°. В цепь обмотки возбуждения включается емкость, которая вызы
вает фазовый сдвиг между токами /в и /д. Все это обеспечивает создание
в двигателе вращающегося магнитного поля Если же на обмотку управления
сигнал не подан, то^в двигателе действует пульсирующее поле, которое не
создает пускового момента (см § 24 1)
Однако после прекращения сигнала Uc двигатель продолжает работать
как обычный однофазный двигатель Это явление, называемое са походом,
недопустимо в исполнительном двигателе, так как делает его неуправляемым
Для устранения самохода ротор исполнительного двигателя делают с повы-
шенным активным сопротивлением
Для пояснения этого на рис 2512, а представлены механические харак-
теристики однофазного двигателя
365
При наличии сигнала Uc двигатель работает с вращающимся магнитным
полем и его механическая характеристика имеет вид кривой М1
Допустим двигатель работает в режиме, соответствующем точке А. После
прекращения сигнала Uc поле
статора становится пульсирующим
и механическая характеристика
двигателя приобретает вид кривой
М = f(s).
c
0 Ц
0 Up Q
l8
О.У.
Рис. 25. 10. Схема
включения асин-
хронного исполни-
тельного двигателя
Рис. 25. 11. Конструкция асинхрон-
ного двигателя с полым немагнит-
ным ротором:
/—внешний статор; 2—стакан рото-
ра; 3—внутренний статор; 4—об-
мотка статора; 5—вал; 6—втулка
для крепления стакана ротора
Новый режим работы двигателя определится точкой В, при этом элек-
тромагнитный момент двигателя
Рис. 25. 12. Устранение
самохода в асинхронном
исполнительном двига-
останется положительным и ротор двигателя
будет продолжать вращаться.
Если увеличить активное сопротивле^
ние ротора, то графикиAfz«/(s) и Mn=f(s)
изменятся: максимум момента сместится в
область больших скольжений (см. § 21.3).
Так же изменит свою форму и график ре-
зультирующего момента Al - f(s) (рис.
25.12, б). Теперь после прекращения сигнала
i/c, т. е. при переходе исполнительного дви-
гателя в однофазный режим, электромаг*
нитный момент становится отрицательным
(точка В) и оказывает на ротор двигателя
тормозящее действие, устраняя самоход.
К исполнительному двигателю предъ-
является также требование малоинерцион-
ности (быстродействия), т. е. чтобы с по-
дачей сигнала на обмотку управления ро-
тор двигателя как можно быстрее достигал
установленной скорости вращения. Для
удовлетворения этого требования ротор
исполнительного двигателя делается облег-
ченным: не имеет сердечника и обмотки.
Такой двигатель называется двигателем
с полым немагнитным ротором (рис. 25.11).
Вместо обмотки на роторе двигателя распо-
лагается тонкостенный алюминиевый стакан,
что обеспечивает двигателю, во-первых, по-
теле
вышенное активное сопротивление ротора,
366
'а следовательно, устранение самохода, и, во-вторых, малый момент инерции
ротора, т. е. малоинерционность.
Двигатель имеет два статора: внешний, с обмоткой, и внутренний, без
обмотки, входящий внутрь полого ротора. Внутренний статор необходим для
уменьшения магнитного сопротивления основному потоку.
В сравнении с асинхронными двигателями обычной конструкции двига-
тели с полым немагнитным ротором имеют повышенные габариты и более
низкий к. п. д. Объясняется это увеличенным воздушным зазором, который
в этих двигателях складывается из зазора между внешним статором и ста-
каном ротора, толщины стенки немагнитного стакана и зазора между стака-
ном ротора и внутренним статором.
Большой воздушный зазор' ведет к увеличению намагничивающего тока
и росту потерь.
§ 25.6. Гистерезисный двигатель
Гистерезисный двигатель имеет статор с трехфазной или однофазной об-
моткой и ротор, представляющий собой цилиндр без обмотки, выполненный
из магиитнотвердого материала (с широкой петлей гистерезиса). При под-
ключении обмотки ^татора к сети возникает вращающееся магнитное поле,
которое наводит в массивном
роторе вихревые токи. Взаи-
модействие этих токов с полем
статора создает на роторе вра-
щающий момент Af вх, величина
которого зависит от скольже-
ния (рис. 25.13, кривая /). Наи-
большего значения момент Л1ВХ
достигает при неподвижном
роторе (s « 1). По мере увели-
чения скорости (уменьшение
скольжения) момент AfBX
уменьшается. Величина враща-
ющего момента, вызванного
действием вихревых токов в
роторе, определяется выраже-
нием
Рис. 25. 13. Механические характе-
ристики гистерезисного двигателя
sP
°>1
где Рвх.к — потери на вихре-
вые токи в роторе
двигателя при $ — 1, т, е. в режиме короткого замыкания;
о)] — угловая синхронная скорость.
Но кроме вращающего момента Л4ВХ, на роторе гистерезисного двигателя
возникает так называемый гистерезисный момент, для выяснения природы
которого обратимся к модели гистерезисного двигателя (рис. 25.14). В отли-
чие от реального двигателя в рассматриваемой модели вращающееся поле
создается вращением пары магнитных полюсов /V—S. Ротор двигателя, нахо-
дясь в поле статора, намагничивается так, что северному магнитному полюсу
статора соответствует южный магнитный полюс ротора. Это видно
из рис. 25.14,а, где ротор показан (условно), состоящим из элементарных
магнитиков, ориентированных в соответствии с направлением внешнего поля.
Между элементарными магнитиками и маТнитом Ат—S возникает сила взаи-
модействия F, направленная по оси магнита N—S. При вращении внешнего
поля происходит перемагничивание ротора. При этом элементарные магни-
тики как бы поворачиваются вслед за внешним полем. Но так как ротор
367
выполнен из магнитнотвердого материала, то вследствие магнитного запазды-
вания ориентировка элементарных магнитиков несколько отстает от вращения
внешнего поля. Поэтому поле ротора оказывается повернутым относительно
внешнего поля на угол 0z(pHC. 25.14,6). В.этом случае силу взаимодействия
F каждого элементарного магнитика с внешним полем можно разложить на
составляющие: радиальную «= f’cos 0 и тангенциальную Ff=F sin 0. Со-
ставляющие Ft от всех элементарных магнитиков создают на роторе вра-
щающий гистерезисный момент Л1г. Величина момента зависит от величины
Рис. 25. 15. Петли
гистерезиса
Рис, 25» 14. Модель гистерезисного
двигателя
угла 0, который определяется материалом ротора: чем шире петля гистере-
зиса магнитного материала ротора, тем больше величина гистерезисного
момента. Например, применение магнитнотвердого материала типа викаллой
с петлей гистерезиса (кривая 1 на рис. 25.15) дает возможность получить
большой гистерезисный момент. Обычные стали имеют узкую петлю гистере-
зиса (рис. 25.15, кривая 2), а поэтому они не могут обеспечить значительного
гистерезисного момента. Величина гистерезисного момента* пропорцио-
нальна потерям от гистерезиса в роторе при s~l, т. е. при работе двигателя
^г.к
в режиме короткого замыкания А1Г=-^—.Так как гистерезисный момент не
зависит от скольжения, то график МГ =f(s) имеет вид прямой, параллельной
оси абсцисс (см. рис. 25.13, кривая 2).
Таким образом, вращающий момент гистерезисного двигателя можно рас-
сматривать как сумму двух моментов: момента от вихревых токов Л4ВХ
и гистерезисного момента МГ
Р
М =U4BX + Л4Г = 4- _EdL.
Механическая характеристика гистерезисного двигателя может
быть получена путем суммирования ординат идентичных точек графиков
<Мвх==/($) и Мг =/(«) (см. рис. 25.13, кривая 5). Вид этой характеристики
зависит от соотношения моментов AfBX и Л1г. Так, например, если гистерезис-
ный двигатель имеет шихтованный ротор (набранный из листов), то ввиду
небольшой величины вихревых токов момент Л4ВХ практически равен нулю.
При этом М«Мг, т. е. двигатель работает лишь под действием гистерезис-
,ного момента. Скорость вращения ротора такого двигателя равна синхрон-
ной. Двигатели с массивным роторош работают под действием гистерезисного
момента и момента от вихревых токов. Такие двигатели могут работать как
в синхронном, так и в асинхронном режимах. Однако работа двигателя
в асинхронном режиме весьма неэкономична, так как связана со значитель-
368
ными потерями на перемагничивание ротора, выполненного из магнитнотвер-
дого материала. Эти потери возрастают при увеличении скольжения (умень-
шении скорости). Поэтому гистерезисные двигатели обычно используют
в синхронном режиме. В асинхронном режиме — только при малых сколь-
жениях.
Рис. 25. 16. Рабочие характеристики гистерезисно-
го двигателя
(£/ih~127 в; /1 = 400 гц; «1 = 12 000 об/мин; ттг1 = 3)
Существенными преимуществами гистерезисных двигателей являются:
простота конструкции, надежность в эксплуатации, большой пусковой момент,
плавность входа в синхронизм, сравнительно высокий к. п. д. (до 60%)
и бесшумность в работе.
Рис. 25. 17. Сборный ротор гистере-
зисного двигателя:
1—втулка; 2—шихтованное кольцо
из магнитнотвердого материала; 3—
запорное кольцо; 4—вал
К недостаткам гистерезисного двигателя прежде всего следует отнести
низкий коэффициент мощности, который обычно не превышает 0,45, и нерав-
номерность вращения.
24 1649 369
На рис. 25.16 представлены рабочие характеристики гистерезисного дви-
гателя. В целях экономии дорогостоящего магнитнотвердого_ материала
роторы гистерезисных двигателей делают сборными. В таком роторе магнит-
нотвердый материал применяется в виде шихтованного кольца, насаженного
на втулку (рис. 25.17). Гистерезисные двигатели обычно изготовляются на
небольшую мощность (микродвигатели) и применяются в автоматике.
§ 25.7. Синхронизированный асинхронный двигатель
Синхронизированный асинхронный двигатель представляет собой комби-
нацию синхронного и асинхронного двигателей. Благодаря этому он имеет
хорошие пусковые свойства
асинхронного двигателя и вы-
сокий коэффициент мощности
синхронной машины. Конструк-
тивно синхронизированный дви-
гатель мало отличается от
асинхронного двигателя с кон-
тактными кольцами. Однако в
схеме двигателя имеется пере-
ключатель П, посредством ко-
торого обмотка ротора может
быть подключена либо к пус-
ковому реостату ПР, либо
к возбудителю В (рис. 25.18).
При пуске в ход пере-
ключатель ставят в положе-
ние /, и двигатель приходит во
вращение как асинхронный.
При достижении скорости вра-
щения, близкой к синхронной,
переключатель переводят в по-
ложение 2, благодаря чему
постоянный ток от возбудителя
проходит по обмотке ротора и
двигатель начинает работать
синхронно. При больших пере-
грузках синхронизированный
двигатель выходит из синхро-
низма, но продолжает рабо-
тать как асинхронный, так как
максимальный вращающий мо-
мент двигателя при его работе
в асинхронном режиме больше
Рис. 25. 18. Схема синхронизированно-
го двигателя с возбуждением
максимального вращающего
момента при работе в синхрон-
ном режиме. При уменьшении
нагрузки двигатель вновь на-
чинает работать синхронно.
Наличие возбудителя повышает стоимость синхронизированного двига-
теля. Поэтому двигатели с возбуждением изготавливаются мощностью свыше
60—70 кет. Синхронизированные двигатели малой мощности не имеют от-
дельного возбудителя. Для получения постоянного тока эти двигатели снаб-
жают специальной обмоткой с коллектором.
370
Глава XXVI
КОЛЛЕКТОРНЫЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА
§ 26.1. Основные понятия
Для работы двигателя постоянного тока необходим преобра-
зователь переменного тока в постоянный. Наличие такого пре-
образователя усложняет и удорожает установку, снижает ее на-
дежность. Но в то же время двигатели постоянного тока обла-
дают хорошими регулировочными свойствами, чего лишены
бесколлекторные двигатели переменного тока.
Стремление получить двигатель с хорошими регулировочны-
ми свойствами, но работающий от сети переменного тока при-
вело к созданию коллекторных двигателей переменного тока.
Эти двигатели могут быть однофазными и трехфазными. Они
допускают плавное и в широких пределах регулирование ско-
рости при сохранении высокого коэффициента мощности. Но
в то же время эти двигатели имеют тяжелые условия коммута-
ции, конструктивно сложнее и дороже бесколлекторных двига-
телей переменного тока. Указанные недостатки ограничивают
применение коллекторных двигателей переменного тока средней
и большой мощности.
Наибольшее распространение получили универсальные кол-
лекторные двигатели, работающие как от сети постоянного тока,
так и от сети переменного тока.
§ 26.2. Однофазный коллекторный двигатель
последовательного возбуждения
Коллекторный электродвигатель постоянного тока в принци-
пе может работать от сети переменного тока, так как в этом
случае изменение направления токов в обмотке якоря и в об-
мотке возбуждения происходит одновременно; также одновре-
менно меняются направления (знаки) тока якоря /а и магнит-
ного потока возбуждения Ф.
В итоге среднее значение электромагнитного момента за пе-
риод остается положительным
Мер = СМ (± Ф) ( ± /а) > 0.
Возможность работы коллекторного двигателя от сети пере-
менного тока иллюстрируется рис. 26.1, где показано, что при
переходе положительного полупериода переменного напряжения
к отрицательному направление электромагнитного момента со-
храняется неизменным.
371.
Однофазные коллекторные двигатели преимущественно
имеют последовательное возбуждение.
Применение параллельного возбуждения в данном случае
ограничивается тем, что значительная индуктивность парал-
лельной обмотки возбуждения,
которая отличается от последова-
тельной обмотки большим числом
витков, создает значительный
сдвиг фаз между током якоря /а
и током возбуждения /в на угол
ф (рис. 26.2, а). Среднее значение
электромагнитного момента в
Рис. 26. I. Одновременное из-
менение направления тока в
обмотке возбуждения и в об-
мотке якоря не влияет на
направление электромагнит-
ного момента
Рис. 26. 2. Схемы вклю«
чения и векторные диаг-
раммы коллекторных дви-
гателей параллельного (а)
и последовательного (б)
возбуждения при включе-
нии в сеть переменного то-
ка
этом случае определяется выражением, аналогичным выражению
(5.4), но учитывающим угол сдвига фаз между током якоря
и магнитным потоком,
Мпар - Л COS (ф +8), (26Я)
где Фмакс — максимальное значение магнитного потока;
ф — угол сдвига фаз между током якоря и током воз-
буждения;
5 — угол сдвига фаз между током возбуждения и маг-
нитным потоком, обусловленный наличием маг-
нитных потерь в машине.
В электродвигателе последовательного возбуждения ток
якоря /а и ток возбуждения /в совпадают по фазе ф = 0
(рис. 26.2, б).
372
Поэтому среднее значение электромагнитного вращающего
момента в двигателе последовательного возбуждения /Ипосл боль-
ше, чем в двигателе параллельного возбуждения:
УИпосл = См у^.с /а cos а. (26.2)
По своей конструкции однофазные коллекторные двигатели
отличаются от двигателей постоянного тока тем, что их станина
и главные полюса делаются шихтованными из листовой электро-
технической стали.
Это дает возможность сократить магнитные потери, которые
при работе двигателя от сети переменного тока повышаются,
так как переменный ток в обмотке возбуждения вызывает пере-
магничивание всей магнитной цепи машины, включая станину
и сердечники полюсов.
Основным недостатком однофазных коллекторных двигате-
лей являются тяжелые условия коммутации. Дело в том, что
в коммутирующих секциях помимо реактивной э. д. с. ер и э. д. с.
внешнего поля ек (см. § 4.2) наводится трансформаторная э. д. с.
ет, действующее значение которой
Ет =4,44 />5ФМакс,
где fi — частота переменного тока в обмотке возбуждения;
ws — число витков в секции.
Возникновение указанной э. д. с. объясняется тем, что пере-
менный ток в обмотке возбуждения создает переменный магнит-
ный поток, который пронизывает коммутирующие секции и на-
водит в них трансформаторную э. д. с.
Для уменьшения трансформаторной э. д. с. необходимо
уменьшить поток Фмакс, а чтобы мощность двигателя при этом
осталась прежней, увеличивают число полюсов в двигателе.
Применение в обмотке якоря двигателя одновитковых секций
также способствует ограничению величины э. д. с. £т. Но при
этом увеличивается количество пластин в коллекторе, а следо-
вательно, возрастают его размеры.
При помощи добавочных полюсов с обмоткой, включенной
последовательно в цепь якоря, в коммутирующих секциях со-
здают э. д. с. ек, частично компенсирующую э. д. с. ер и е7. Одна-
ко полной взаимной компенсации указанных э. д. с. можно до-
биться только при определенных значениях тока якоря и его ско-
рости вращения. При других режимах работы двигателя усло-
вия коммутации остаются тяжелыми. В момент пуска двигателя
в ход условия коммутации наиболее тяжелы, так как в этот
момент э. д. с. вращения равна нулю, а э. д. с. ер и е7 достигают
наибольших значений.
Регулировать скорость однофазного коллекторного двигате-
373
ля можно теми же способами, что и в двигателях постоянного
тока последовательного возбуждения. Наряду с этим принято
регулировать скорость вращения изменением подводимого
к двигателю напряжения посредством регулировочного транс-
форматора.
Изменение направления вращения однофазных коллектор-
Рис. 26. 3. Схе-
ма универсально-
го коллекторного
двигателя
ных двигателей осуществляется, так же
как и в двигателях постоянного тока,
переключением концов обмотки возбуж-
дения (либо концов обмотки якоря).
Однофазные коллекторные двигатели
малой мощности (до 150 вт) не имеют ни
компенсационной обмотки, ни добавоч-
ных полюсов, так как при малой мощ-
ности и при частоте питающего тока 50 гц
условия коммутации и без того получа-
ются удовлетворительными.
Эти двигатели могут работать как от
сети постоянного тока, так и от сети пе-
ременного тока, а поэтому их называют
универсальными коллекторными двигате-
лями.
В универсальном коллекторном двига-
теле стремятся получить примерно оди-
наковые скорости'вращения при номинальной нагрузке как при
постоянном, так и при переменном токе. Достигается это тем,
что обмотку возбуждения электродвигателя выполняют с ответ-
влениями: при работе двигателя от сети постоянного тока обмот-
ка возбуждения используется полностью, а при работе от сети
переменного тока включается лишь часть обмотки возбуждения
(рис. 26.3).
Кроме того, изменение числа витков возбуждения при работе
от сетей постоянного и переменного тока дает возможность не-
сколько сблизить характеристики двигателя при постоянном
и переменном токе. Расхождения в характеристиках объясняют-
ся тем, что при работе электродвигателя от сети переменного
тока на величину и фазу тока оказывают влияние индуктивные
сопротивления обмоток якоря и возбуждения. Однако уменьше-
ние числа витков обмотки возбуждения обеспечивает сближение
характеристик лишь при нагрузке, близкой к номинальной.
В табл. 26.1 приведены данные универсального коллектор-
ного двигателя типа У МТ -22. Устройство этого двигателя пред-
ставлено на рис. 26.4.
Величина тока статора Л универсальных двигателей при ра-
боте от сети переменного тока больше, чем при работе этого же
электродвигателя от сети постоянного тока, так как переменный
374
ток, помимо активной составляющей, имеет еще и реактивную
составляющую.
К. п. д универсальных двигателей при переменном токе ни-
же, чем при постоянном, что вызвано повышенными магнитными
Рис. 26. 4. Универсальный коллекторный двигатель
серии УМТ
потерями. Области применения универсальных коллекторных
двигателей достаточно широки: они применяются в автоматике,
Таблица 26.1
для привода различного электроинструмента, бытовых электро-
приборов и т. п.
§ 26.3. Репульсионный двигатель с двумя обмотками на статоре
В репульсионном двигателе электрическая связь между обмотками ста-
тора и якоря заменена трансформаторной связью. На статоре двигателя
имеется две обмотки (рис. 26.5): обмотка возбуждения В и компенсационная
375
Л
Рис. 26. 5. Репульсионный
двигатель с двумя обмотка-
ми на статоре
обмотка К. Обмотки сдвинуты в пространстве относительно друг друга на
угол 90° (на рис. 26.5 предполагается конструкция с р=1).
На коллекторе репульсионного двигателя имеются щетки, но онн замк-
нуты накоротко (на рис. 26.5 показаны условные щетки).
При включении двигателя в сеть пе-
ременного тока обе обмотки статора соз-
дадут пульсирующие магнитные потоки.
Для объяснения взаимодействия этих
потоков с обмоткой якоря условно изо-
бразим эту обмотку в виде катушки,
концы которой замкнуты щетками. При
этом ось щеток одновременно является
осью обмотки якоря.
Магнитный поток обмотки возбужде-
ния Фв направлен перпендикулярно оси
обмотки якоря, а поэтому не наводит
в обмотке якоря э. д. с. Магнитный поток
компенсационной обмотки Фк направлен
вдоль оси обмотки якооя и наводит
в этой обмотке э. д с. Е^ называемую
трансформаторной. Так как щетки дви-
гателя замкнуты, то э. д. с. Е? создаст
в обмотке якоря ток /а- В остальном ра-
бота репульсионного двигателя в прин-
ципе не отличается от работы однофаз-
ного коллекторного двигателя последовательного возбуждения: токи в актив-
ных проводниках обмотки якоря взаимодействуют с магнитным потоком
обмотки возбуждения Ф» и создают на якоре электромагнитный момент М,
величина которого, с некоторым приближением, равна
М (26.3)
Отсутствие электрической связи между обмотками статора и ротора
в репульсионном двигателе обеспечивает более надежную работу щеточного
контакта. Дело в том, что обмотка якоря двигателя может быть выполнена
на любое низкое напряжение, независимо от напряжения в питающей сети,
что значительно облегчает процесс коммутации
§ 26.4. Репульсионный двигатель с одной обмоткой на статоре
В отличие от предыдущего этот двигатель имеет одну статорную обмот-
ку, при этом короткозамкнутые щетки на якоре (рис. 26.6) могут поворачи-
ваться относительно статорной обмотки. Взаимное положение осей обмоток
статора и якоря определяется углом а. При а=0 обмотки статора и якоря
взаимно перпендикулярны (рис. 26.6, а). В этом случае трансформаторная
э. д. с. обмотки якоря равна нулю, соответственно чему ток якоря /а и вра-
щающий момент М равны нулю.
При а=90° обмотки статора и якоря располагаются по одной оси, при
этом в обмотке якоря индуктируется трансформаторная э. д. с. Однако якорь
будет оставаться неподвижным, так как взаимодействие тока в проводниках
обмотки якоря с потоком возбуждения не создает в данном случае вращаю-
щего момента (рис. 26 6,6). Указанное положение щеток называется поло-
жением короткого замыкания. Рабочий режим двигателя соответствует зна-
чениям 0<а<90°. В этом случае рассматриваемый репульсионный двигатель
с одной статорной обмоткой может быть приведен к репульсионному двига-
телю с двумя статорными обмотками: обмоткой возбуждения с числом витков
wB — Wi cos а
376
и компенсационной обмоткой с числом витков
wK = sin а.
При этом предполагается, что в каждой из обмоток ток равен 1\ Магнит-
ные потоки, создаваемые н. с. этих обмоток, соответственно равны
Рис. 26. 6. Репульсионный двигатель с
одной обмоткой на статоре
Фв=ф1сояа и Фк — (Disina. Величина электромагнитного момента рас-
сматриваемого двигателя с учетом выражения (26 3) равна
М ~ СмФв/а « COS а. (26.4)
Если магнитная система машины ненасыщена, то магнитный поток
обмотки статора Ф1 пропорционален н. с. этой обмотки
Фх = (26.5)
где К — коэффициент пропорциональности;
Ц — величина тока в обмотке статора.
Подставив выражение (26.5) в (26.4), получим
М cos а.
Токи в обмотке якоря и компенсационной обмотке статора, имеющих
трансформаторную связь, обратно пропорциональны числам витков этих
обмоток
h _ Wa________,
/а Wj Sin а
откуда
/а = /х . , (26.
wa
где wa— число витков в обмотке якоря.
377
Подставив выражение тока якоря (26.7) в формулу момента (26.6),
получим
Л4. & CMKh^ih — sin а COS а,
wa
или
где
Mi « C^/|Sin2a,
(26.8)
См — см
2wa
Рис 26.7. Графики М=/(а)
и /1=/(а) репульсионного дви-
гателя с одной обмоткой на
статоре
Таким образом, электромагнит-
ный момент репульсионного двига-
теля с одной обмоткой на статоре
пропорционален квадрату тока, по-
требляемого двигателем из сети.
Если при сдвиге щеток менять на-
пряжение Ui так, чтобы ток 1\ оста-
вался неизменным, то согласно выра-
жению (26.8) наибольший электромаг-
нитный момент будет соответство-
вать значению a=45°. Но двигатель
работает обычно при const, по-
этому поворот щеток сопровождается
изменением тока Л. В этом случае
наибольшее значение электромагнит-
ного момента соответствует a=70—
—80° (рис. 26.7).
Так как двигатель работает при изменяемом положении щеток на кол-
лекторе, то применение в нем добавочных полюсов с целью улучшения ком-
мутации невозможно.
§ 26.5. Трехфазный коллекторный двигатель
Регулирование скорости и cosqh асинхронного дви-
гателя введением в цепь ротора добавочной э. д. с.
Трехфазный коллекторный двигатель представляет собой трехфазный асин-
хронный двигатель с вращающимся магнитным полем, в фазный ротор кото-
рого вводится добавочная э. д. с частотой Поэтому, прежде чем
переходить к изучению работы трехфазного коллекторного двигателя, рас-
смотрим процессы, происходящие в нормальном асинхронном двигателе при
введении в цепь ротора добавочной э. д. с.
Из уравнения э. д. с. цепи ротора (20.9) имеем
sE2 = /2(г2 + jsx2), (26.9)
Скольжение асинхронного двигателя обычно очень мало, поэтому при
первом приближении, приняв sxg=0, получим
зЁ2 = /2^2,
откуда скольжение асинхронного двигателя при отсутствии в цепи ротора
добавочной э. д. с. (Ед=0)
$ = . (26.10)
378
s на величину
Рис. 26. 8. Вектор-
ная диаграмма
асинхронного дви-
гателя при введе-
нии в цепь ро-
тора добавочной
э. д. с.
эмотки (рис. 26.9, а):
При введении в цепь ротора добавочной э. д. с. Ед частоты /2 получим сле-
дующее уравнение э. д. с.
s'E* f £д = /2г2. (26.11)
Если Ел направлена согласовано Eg, то
$'ЕЭ + Ед — 12г2,
откуда
s' = 2«£» — = $ — J's, (26.12)
Ег Et Е2
т. е. скольжение двигателя после введения в цепь ротора добавочной э. д^ с.
Ед становится меньше первоначального скольжения
Скорость вращения ротора при этом увеличивается.
Если же Ед направлена встречно Ег, то вы-
ражение (26.11) принимает вид
s Е2 Ед == 2,
откуда
s' = s + ^, (26.13)
т. е. скольжение двигателя увеличивается по сравне-
нию со скольжением s. Скорость вращения ротора
при этом уменьшается.
Добавочная э. д. с. в цепи ротора Ед частоты
/2 влияет на коэффициент мощности двигателя. Что-
бы убедиться в этом, построим векторную диаграм-
му асинхронного двигателя (рис. 26.8) для случая
введения в цепь ротора добавочной э. д. с. Ед,
^двинутой по фазе относительно Е2 на угол 0. Направ-
ление вектора /'2, как это видно из диаграммы, оп-
ределяется положением вектора /'гг'г, построенного
на основании уравнения (26.11). С изменением фазы
или величины э. д, с. Ед меняется направление
вектора /'г, а следовательно, и cos (рь При этом увели-
чению cos <pi обычно соответствует опережающий угол
6, когда добавочная э д. с. Ед опережает по фазе
э. д. с. Е2.
Трехфазный коллекторный двига-
тель с параллельным возбужде-
нием. На роторе этого двигателя имеется две с
трехфазная /, каждая фаза которой присоединена к контактному
кольцу, и обмотка 2, выполненная аналогично якорной обмотке машины
постоянного тока и присоединенная к коллектору. На статоре двигателя рас-
положена трехфазная обмотка 3, каждая фаза которой присоединена к паре
щеток, наложенных на коллектор. Двигатель имеет устройство, позволяющее
в процессе работы сдвигать или раздвигать все щетки на коллекторе относи-
тельно друг друга, а также смещать всю систему щеток против или по вра-
щению ротора.
Трехфазная обмотка ротора 1, включенная в сеть, создает вращающееся
магнитное поле, которое, вращаясь с синхронной скоростью (относительно
этой обмотки), индуктирует в обмотке статора 3 э. д. с. Е2 Так как обмотка 3
замкнута, то в ней появляется ток, который, взаимодействуя с вращающимся
полем рбмотки ротора, создает на проводах обмотки статора электромаг-
нитную силу Еэм, направленную в сторону вращающегося поля (рис. 26.9,6).
379
При этом на провода обмотки ротора начинает действовать сила на-
правленная против вращающегося поля. В итоге ротор и создаваемое им
магнитное поле вращаются в противоположные стороны. При этом ротор
вращается с асинхронной скоростью л2, а э. д. с. статора имеет частоту
f2=sfa. Вращающееся поле ротора, создаваемое обмоткой 1, индуктирует
в обмотке 2 э. д. с. частоты сети fi независимо от того, находится ли ротор
Рис. 2о. 9. Схема трехфазного коллекторного двигате-
ля параллельного возбуждения
в покое или же вращается, потому что активные стороны этой обмотки
уложены в тех же пазах, что и активные стороны обмотки 1 (рис. 26.9,6).
Э. д. с. обмотки 2 через коллектор и щетки создает на зажимах фазных
обмоток статора напряжение, имеющее такую же частоту /2=^/1, как
и частота э. д. с. Е2, индуктируемая в фазных обмотках статора вращающим-
ся полем обмотки 1.
Таким образом, в цепь статора вводится добавочная э. д. с. Ед, которая
совместно с э. д. с. статора Е2 вызывает ток /2. Взаимодействие этого тока
с током ротора определяет величину вращающего момента, а следовательно,
и скорость вращения двигателя. Уравнение равновесия э. д. с. цепи статора
имеет вид
Ё2±Ёл = /2г2, (26.14)
где Z2— полное сопротивление цепи статора.
Знак «плюс» в этом равенстве соответствует согласному направлению
э. д. с. Ед и Е2, а знак «минус» — встречному их направлению.
Э. д. с. статорной обмотки
Е2 - 4,44/г«Ф w2K2.
Есутн между щетками каждой фазы находится Ч2)х витков обмотки 2, то
э. д. с. этих витков (добавочная э. д. с.)
= 4,44/^^.
Пренебрегая малым значением I^Z2 в выражении (26.14), получим
Ё2=±ЕД или, подставив значения Ё2 и Ед, получим
w2sK2 ~ ±
откуда скольжение двигателя
(2615)
380
Здесь знак «плюс» соответствует встречному направлению э. д. с., а знак
«минус» — согласованному направлению этих э. д. с.
Из рис. 26.10 видно, что величина зависит от угла раствора щеток 2а.
При совмещении щеток 2а=0 (рис. 26.10, а). В этом случае двигатель
работает как обычный асинхронный двигатель со скоростью в режиме
холостого хода, с некоторым уменьшением скорости по мере возрастания
нагрузки. При увеличении угла 2а (рис. 26.10,6) количество витков wx воз-
Рис. 26. 10. Регулирование скорости вращения и коэффици-
ента мощности трехфазного коллекторного двигателя парал-
лельного возбуждения
растает, и в фазных обмотках статора начинает действовать добавочная э. д. с.
Предположим, что £д действует встречно относительно э. д. с. Е2. Тогда
скольжение становится положительным [знак «плюс» в формуле (26.15)],
и двигатель работает со скоростью вращения ниже синхронной. При положе-
нии щеток, показанном на рис. 26.10, в, добавочная э. д. с. £д изменит свое
направление и будет действовать согласованно с э. д. с. Е2. В этом случае
скольжение становится отрицательным [знак «минус» в формуле (26.15)].
Скорость вращения увеличивается и становится выше синхронной. Регулиро-
вание скорости вращения двигателя возможно в пределах 3 : 1 (—0,5<s<
<+0,5).
Для улучшения коэффициента мощности двигателя, особенно при низких
скоростях вращения, не изменяя угла раствора щеток 2а у каждой фазы,
сдвигают всю щеточную систему на угол Р (рис. 26.10, г) навстречу вращаю-
щемуся ротору. В результате добавочная э. д. с. £д начинает опережать по
фазе э. д. с. Ь’2 на угол в (см. рис. 26.8), что способствует повышению cos qa
двигателя. При пуске двигателя в ход щетки раздвигают на наибольший угол
2а при встречном направлении э. д. с. £д, что соответствует минимальной
скорости вращения. В этих условиях добавочная э. д. с. ограничивает вели-
чину пускового тока, а пусковой момент сохраняет значительную величину.
Серьезным недостатком рассматриваемого двигателя является подача на-
пряжения на щетки, что ограничивает допускаемую величину подводимого
к двигателю напряжения, которое практически не может превышать 500 в.
Наличие в двигателе коллектора, контактных колец и двух обмоток на
роторе снижает к. п. д. двигателя, который даже в двигателях большой
мощности не превышает 85%.
Трехфазные коллекторные двигатели применяются в электроприводах
переменного тока при необходимости регулирования скорости вращения
в широких пределах.
§ 26.6. Фазокомпенсатор
Фазокомпенсатор служит для повышения коэффициента мощности
асинхронных двигателей с контактными кольцами. Фазокомпенсатор (ФК)
381
имеет ротор 2 с обмоткой и коллектором и статор 1 без обмотки, который
является только магиитопроводом машины. На коллекторе 3 расположены
три неподвижные щетки под углом 120° относительно друг друга (рис. 26.11).
Подведенный от обмотки ротора асинхронного двигателя (АД) ток /2
(рис. 26.12) создает в ФК вращающийся магнитный поток Фк, скорость вра-
щения которого зависит от частоты тока
в роторе /2. Посредством вспомогатель-
ного двигателя (ВД) ротор фазокомпен-
сатора вращают со скоростью/:» в направ-
лении вращения потока Фк. При этом
в роторной обмотке ФК индуктируется
э. д. с.
Ек = 4,44 (fz — /к) дакФкКк»
Рцс. 26. 11. Устройство
фазокомпенсатора
где /к = — частота вращения
60
ротора фазокомпенсатора. При /к < /а
э, д. с. Ек отстает по фазе от потока
Фк на 90°, а при /к> /2 э. д. с. Ек опе-
режает Фк на 90°. Если вспомогательный двигатель имеет такое же число
полюсов, что и главный двигатель, то благодаря тому, что ВД работает
практически без нагрузки, скорость вращения его ротора будет больше, чем
у главного двигателя, Лк >п2, а следовательно, /к >/2.
Рис. 26. 12. Схема включения асинхронного двигателя
с фазокомпенсатором
Таким образом, э. д. с. компенсатора Ек опережает по фазе поток Фк
на угол 90°. Но так как поток Фк создается током h и совпадает с ним по
фазе, то э. д. с. Ек является опережающей по отношению к току ротора /2.
Э. д. с. Ек вводится в обмотку ротора асинхронного двигателя, т. е. является
добавочной э. д. с. в цепи ротора Из § 26.5 известно, что введение в цепь
ротора асинхронного двигателя добавочной э. д. с., опережающей по фазе
ток /2, вызывает увеличение cos <pi двигателя (см. рис. 26.8). Фазокомпен-
сатор повышает cos <pi главного двигателя только при его нагрузке, так как
при холостом ходе /2^0, а скорость вращения ротора асинхронного двига-
теля становится такой же, что и скорость вращения компенсатора (п2«лк).
382
В результате частоты /к и /2 оказываются одинаковыми, а э. д. с. £к=0
т. е. компенсатор бездействует. На рис. 26.13 представлены кривые изменения
cos (pi при работе асинхронного двигателя с фазокомпенсатором (кривая /)
и оез него ^кривая Z), из которых
видно, что начиная с нагрузки 30%
от номинальной cos <pi двигателя с
компенсатором значительно повыша-
ется. А при нагрузке свыше 60% от
номинальной двигатель с фазоком-
пенсатором работает при cos q>i«l.
Следует отметить, что к. п. д.
асинхронного двигателя, работающе-
го с фазокомпенсатором, при некото-
рых нагрузках может быть даже вы-
ше, чем у асинхронного двигателя
без фазокомпенсатора. Объясняется
это главным образом повышенным
значением cos (pi. Что же касается
мощности вспомогательного двигате-
ля, то ее активная составляющая
чрезвычайно мала и определяется
лишь величиной механических потерь
отдает в цепь ротора асинхронного дв
Рис. 26. 13. Кривые cos 94 =
= /(Р2) асинхронного двигателя
с фазокомпенсатором
в фазокомпенсаторе, так как он
гателя чисто реактивную мощность.
Глава XXVII
ЭЛЕКТРОМАШ И ИНЫЕ ПРЕОБРАЗОВАТЕЛИ
§ 27.1. Электромашинные преобразователи
двигатель-генераторного типа
Электромашинным преобразователем называется электриче-
ская машина, предназначенная для преобразования электриче-
ской энергии в электрическую энергию другого рода тока, дру-
гого напряжения, другой частоты и т. д.
Принцип действия электромашинных преобразователей осно-
ван на двойном преобразовании энергии: электрическая энергия
преобразуется в механическую, которая затем преобразуется
вновь в электрическую энергию, но другого рода тока, другого
напряжения и т. д.
Электромашинные преобразователи изготовляются в виде
двигатель-генераторных агрегатов или одноякорных преобразо-
вателей.
В зависимости от назначения электромашинные преобразо-
ватели разделяются на преобразователи постоянно-переменного
тока, преобразующие переменный ток в постоянный, или наобо-
рот; преобразователи постоянного тока, преобразующие напря-
жение постоянного тока; преобразователи частоты и т. д.
383
Электромашинный преобразователь двигатель-генераторного
типа представляет собой агрегат, состоящий из двигателя и ге-
нератора, связанных механически. Иногда обе электрические
машины выполняются в общем корпусе.
Преобразователь, предназначенный для преобразования
трехфазного переменного тока в постоянный, состоит из трех-
Рис. 27. 1. Схема преобразователя дви
гатель-генераторного типа
фазного асинхронного или синхронного двигателя и генератора
постоянного тока (рис. 27.1). Синхронные двигатели приме-
няются в агрегатах большой мощности (порядка 100 кет
и выше).
Отсутствие электрической связи между двигателем и гене-
Рис. 27. 2. Двигатель-генератор для преобра-
зования переменного тока в постоянный
ратором позволяет получать на выходе преобразователя по-
стоянный ток любого напряжения, независимо от напряжения на
входе преобразователя.
В электромашинных преобразователях для преобразования
постоянного тока в переменный применен электродвигатель по-
384
стоянного тока параллельного или смешанного возбуждения
и синхронный генератор (однофазный или трехфазный). .
На рис. 27.2 показан внешний вид зарядного агрегата серии
АЗД (агрегат зарядный, динамо), предназначенного для заряд-
ки аккумуляторных батарей.
Агрегат состоит из генератора постоянного тока 1 парал-
лельного возбуждения типа ЗД и трехфазного асинхронного дви-
гателя 3 единой серии А, установленных на чугунной фунда-
ментной плите 4 и механически соединенных эластичной муф-
той 2.
Общим недостатком всех электромашинных преобразовате-
лей, выполненных по двигатель-Генераторному принципу, явля-
ется сравнительно высокая стоимость и низкий к. п. д.
Последнее объясняется тем, что электроэнергия, поступаю-
щая в преобразователь, дважды претерпевает преобразование:
сначала в электродвигателе, а затем в генераторе. В связи
с этим к. п. д. двигатель-генераторного агрегата t) определяется
произведением к. п. д. электродвигателя тщ и к. п. д. генера-
тора Т)г
7)=7|д’Ч|г.
Например, если к. п. д. электродвигателя тц =75%', а к. п. д.
генератора -»jr =80%, то к. п. д. преобразователя равен
П=0,75 • 0,80=0,60, или 60%.
#40
Рис. 27. 3. Схема одноякорного
преобразователя
§ 27.2. Одноякорные преобразователи
В одноякорном преобразователе электродвигатель и генера-
тор совмещены в одной машине: имеется общий якорь (ротор)
и общая обмотка возбужде-
ния. Рассмотрим работу од-
ноякорногр преобразователя
постоянно-переменного тока.
Обмотка якоря этого
преобразователя с одной
стороны якоря присоединя-
ется к коллектору, а с дру-
гой стороны — к контактным
кольцам (рис. 27.3). Чис-
ло контактных колец опре-
деляется числом линейных .
проводов, подключаемых к
преобразователю из сети
переменного тока: при одно-
фазном токе два кольца,
при трехфазном — три, при
шестифазном — шесть и т. д.
На статоре преобразователя имеются главные полюса с обмот-
кой возбуждения. При работе одноякорного преобразова-
ли 1649
385
теля для преобразования переменного тока в постоянный на
контактные, кольца подается напряжение из сети переменного
тока. Переменный ток в обмотке якоря создает вращающееся
магнитное поле. В результате якорь преобразователя приходит
во вращение. Таким образом, со стороны сети переменного тока
одноякорный преобразователь работает как синхронный элек-
тродвигатель. Одновременно в обмотке якоря наводится э. д. с.,
которая благодаря коллектору и щеткам создает на выходе
преобразователя постоянное напряжение. Следовательно, со
стороны коллектора преобразователь работает в режиме гене-
ратора постоянного тока параллельного возбуждения. Ввиду
электрической связи цепей постоянного и переменного
величина напряжения постоянного тока С/пост находится в
деленном соотношении с напряжением переменного тока
которое определяется выражением
тока
опре-
^пер>
(27-1)
где (/пер — фазное напряжение переменного тока;
fnocT — э. д. с. постоянного тока;
т— число контактных колец в преобразователе.
Для однофазного преобразователя (т = 2) 1/пер = 0,707 Еаосх.
Для тр^хфазного преобразователя (т = 3) 1/пер = 0,613Епохх.
Для шестифазного преобразователя (т = 6) U„<.p = 0,354 ДПОст.
Соотношение токов в одноякорном преобразователе
Г
1 пер -— т 1 пост,
где /,,ер— величина переменного (линейного) тока;
/пест— величина постоянного тока.
Пример. Определить, какое переменное напряжение и ток необходимо
подвести к кольцам шестифазного одноякорного преобразователя, чтобы
получить постоянный ток 600 а при напряжении 460 в.
Решение.
Une? = 0,354-5ПОСТ = 0,354-460 = 163 в;
/пер = ^Z- /поет - 600 = 282 а.
т 6
В одноякорном преобразователе сторона постоянного тока
электрически связана со стороной переменного тока, а поэтому
напряжение на выходе преобразователя можно регулировать
только изменением напряжения на его входе. Это осуществляет-
ся с помощью автотрансформатора, индукционного регулятора
386
или реактивных катушек, включенных между сетью переменного
тока и кольцами преобразователя.
Рассмотрим подробнее способ регулирования напряжения
реактивными катушками. В этом случае между кольцами
и сетью включаются реактивные катушки Р (рис. 27.4,а). По-
средством регулировочного реостата грг изменяют ток возбуж-
дения преобразователя. При этом, если преобразователь пере-
Рис. 27. 4. Схема (а) и векторные диаграммы (б) одноякор-
ного преобразователя при регулировании напряжения
возбужден, то в цепи якоря возникает индуктивный ток Г9 от-
стающий по фазе от напряжения t7c, если же преобразователь
недовозбужден, то в цепи якоря появляется емкостный ток /,
опережающий по фазе напряжение Uc,
Рассмотрим случай, когда преобразователь недовозбужден^
й ток в цепи якоря является индуктивным. При этом в реактив-
ных катушках наводится э. д. с. Ёк, которая отстает по фазе
от тока I на 90°. В этом случае напряжение на кольцах преобра-
зователя /
Uпер Uc Р>кг
где UK —напряжение сети;
Ёк — э. д. с. реактивной катушки.
Построив векторную диаграмму (рис. 27.4 6), видим, что при
недовозбуждении преобразователя, когда э. д. с. Ек отстает по
фазе от тока /, напряжение на кольцах t/nep, а следовательно,
и напряжение на стороне постоянного тока понижается.
При перевозбуждении преобразователя ток / опережает по
фазе напряжение йс (рис. 27.4, в). В этом случае напряжение
на входе преобразователя повышается. Этот способ дает воз-
можность регулировать напряжение на выходе преобразователя
в пределах ±10%. Указанное ограничение обусловлено опас-
25* 387
костью перегрева обмотки якоря из-за значительных токов
в ней.
Одноякорный преобразователь может быть также использо-
ван для преобразования постоянного тока в переменный. По
сравнению с двигатель-генератором, одноякорный преобразова-1
тель имеет меньшие габариты и более высокий к. п. д.
Пуск в ход одноякорного преобразователя может быть вы-
полнен следующими способами.
Пуск со стороны постоянного тока. Этот пуск
возможен при наличии источника постоянного тока. Преобра-
зователь включают в сеть так же, как двигатель постоянного
тока. После того как ротор придет во вращение, преобразова-
тель синхронизируют и подключают к сети переменного тока
'(см. § 17.2).
Асинхронный пуск. Такой пуск преобразователя
аналогичен асинхронному пуску синхронного двигателя (см.
§ 18.4). .
Пуск посредством вспомогательного двига-
теля (см. § 18.4). В настоящее время одноякорные преобразо-
ватели имеют ограниченное применение, так как во многих
областях техники они вытеснены более экономичными и удобны-
ми в эксплуатации ртутными выпрямителями и полупроводни-
ковыми преобразователями. Одноякорный преобразователь
иногда используется в режиме сдвоенного генератора, т. е. как
генератор постоянного и переменного тока. Механическое вра-
щение якоря в этом случае создается посторонним двигателем.
Одноякорные преобразователи постоянного тока, служащие
для изменения напряжения постоянного тока, имеют две рабо-
чие обмотки, уложенные в пазах одного якоря. Каждая обмотка
присоединена к своему коллектору. Одна из обмоток якоря рас-
считана на низшее напряжение, а другая на высшее. Обычно
преобразователи используются для повышения напряжения.
В этом случае к коллектору обмотки якоря «изшего напряжения
подводят напряжение, т. е. эта обмотка используется в качестве
двигательной, а с коллектора обмотки высшего напряжения,
которая используется как генераторная, снимают напряжение.
Ввиду того, что одноякорный преобразователь имеет одну магнитную си-
стему, то э. д. с. как в двигательной, так и в генераторной обмотках наво-
дятся одним магнитным потоком. ’
Поэтому э. д. с. двигательной обмотки £дв находится в определенном
соотношении с э. д. с. генераторной обмотки Ert которое зависит от числа
активных проводников в двигательной обмотке #дв и в генераторной об-
мотке ЛГг
, 2L = . (27.2)
£дв ЛГдв
388
Э. д. с генераторной обмотки определяется выражением
£r=t/r + /.rSrr> (27.3)
а э. д. с. двигательной обмотки
^ДВ — дв — 4дв2гдв- (27.4)
-Здесь Ur и (7ДВ — напряжения на щетках генераторной-и двигатель-
ной обмоток;
/аг и /адв —токи в генераторной и двигательной обмотках;
2Уг и 2гдв~ сопротивления в цепи генераторной и двигательной
обмоток.
Используя выражения (27.2), (27.3) и (27.4), получим формулу напря-
жения на выходе одноякорного преобразователя постоянного тока
£7г = 4irSrr — £дв .. г 7аг 2гг = (^7дв — 4дв 2Удв) — 7аг^гг.
Адв ЛГДВ
(27.5>
Из уравнения (27.5) видно, что величина напряжения на выходе одно-
якорного преобразователя постоянного тока зависит от напряжения на входе,
а следовательно, регулировка напряжения Uv возможна лишь посредством
изменения напряжения 67дв, Изменение же тока в обмотке возбуждения
преобразователя весьма незначительно влияет на Напряжение Ur. Объяс-
няется это тем, что с увеличением тока возбуждения возрастает основной
магнитный поток, что способствует увеличению Ur, но в то же время с воз:
растением потока уменьшается скорость вращения якоря, что способствует
уменьшению U?. В результате напряжение на выходе преобразователя прак-
тически остается неизменным.
Одноякорные преобразователи постоянного тока изготов-
ляются на мощности 10—5000 вт при напряжениях: на входе—6;
12 и 24 в; на выходе—220; 450; 750; 1000 и 1500 в и скорости
.вращения 4000—10 000 об/мин.
Глава XXVIII
НАГРЕВАНИЕ И ОХЛАЖДЕНИЕ ЭЛЕКТРИЧЕСКИХ МАШИН
И ТРАНСФОРМАТОРОВ
§ 28.1. Нагревание электрических машин
и трансформаторов
Работа электрической машцны всегда сопровождается ее
нагреванием, что является следствием потерь энергии, происхо-
дящих в любой электрической машине. Все виды потерь энергии
в итоге преобразуются в тепло, которое частично отдается
в окружающую среду, а частично идет на нагревание машины.
Для выяснения закона нагревания электрических машин услов-
но считают, что нагревание происходит равномерно по всему
38£
объему машины, а тепло одинаково рассеивается со всей ее
поверхности.
Напишем уравнение теплового баланса при указанных
условиях
Qdt = Gcdt + SKzdt, (28.1)
где Q — количество тепла, выделяющегося в машине в единицу
времени;
t — время; *
G — вес нагреваемой машины;
с — удельная теплоемкость, т. е. количество тепла в кило-
калориях, необходимое для нагревания 1 кг данного
вещества на ГС;
т—'превышение температуры машины над температурой
окружающей среды;
S— поверхность, с которой рассеивается тепло;
%—'коэффициент рассеяния, который представляет собой
количество тепла, рассеиваемое с 1 см2 поверхности
в 1 сек при превышении температуры на ГС.
В уравнении (28.1) Qdt—количество тепла, выделяемое
в машине за время dt; Gcdx— количество тепла, поглощаемое
частями машины и расходуемое на их нагревание; Sfctdt— ко-
личество тепла, рассеиваемое с поверхности машины в окру-
жающее пространство.
В начальный период работы машина имеет температуру,
практически не отличающуюся от температуры окружающей
среды (воздуха), т. е. т«=0, В этом случае S^xdt^O, а поэтому все
тепло, выделяемое в машине, идет на повышение температуры
ее частей. Затем количество тепла, рассеиваемое в окружающую
среду, увеличивается. И, наконец, через некоторое время маши-
на настолько нагреется, что все тепло, выделяющееся в машине
в единицу времени, будет рассеиваться в окружающую среду.
В этом случае дальнейшее повышение температуры машина
прекратится и наступит режим теплового равновесия, при кото-
ром все тепло, выделяемое в машине, рассеивается с ее поверх-
ности в окружающую среду
Qdt = SUmdt. (28.2)
Здесь хт — установившаяся температура перегрева машины,
т. е. наибольшая возможная температура машины, до которой
она может нагреться в данных условиях.
Из выражения (28.2) следует, что
’„=£• (28-3>
т. е. установившаяся температура перегрева машины не зависит
ст веса машины, а определяется количеством тепла, выделяемым
390
в машине в единицу времени, площадью охлаждаемой поверх-
ности и коэффициентом рассеяния.
Зависимость температуры перегрева машины т от времени
t выражается следующим равенством:
т = (28.4)
где в = 2,718 — основание натуральных логарифмов;
Т — постоянная нагревания; она показывает то вре-
мя, в течение которого данное тело нагрелось бы
до наибольшей установившейся температуры,
если бы не было рассеяния тепла.
Кривая нагревания т=/(0» построенная в соответствии с вы-
Рис. 28. 1. Кривые нагревания (а) и охлаждения (б) электри-
ческой машины
ражением (28.4), показывает, что электрическая машина дости-
гает установившейся,температуры перегрева лишь по истечении
длительного времени (рис. 28.1, а). Проведя касательную к кри-
вой x=f(t) в ее начальной части, получим отрезок, численно
равный постоянной нагревания Т. Если прекратится нагревание
машины, например, при отключении машины от сети, то урав-
нение теплового баланса примет вид
О = Gcd~. + SKxdt
или
- Gcd~ = SXxdt, (28.5)
т. е. излучение тепла с поверхности машины будет происходить
за счет тепла, накопленного в ней, а поэтому машина начнет
охлаждаться. Изменение температуры перегрева в процессе
охлаждения машины происходит согласно выражению
т = (28.6)
391
Кривая охлаждения представлена на рис. 28.1,6.
Изложенные законы нагревания и охлаждения электрических
машин могут быть применены также для трансформаторов.
§ 28.2. Номинальные режимы работы электрических машин
ГОСТ 183—66 устанавливает три-номинальных режима ра-
боты электрических машин.
Продолжительный номинальный режим ра-
боты, при котором период нагрузки без отключения машины
продолжается длительное время, так что все части ее нагре-
Рис. 28. 2. Графики режимов работы электрических ма-
шин:
а—-продолжительный режим; б—кратковременный режим;
в—повторно-кратковременный режим
ваются до установившихся значений температуры. При этом на-
грузка машины в течение всего периода работы может оставать-
ся постоянной или переменной (рис. 28.2, а). Кривые нагревания
и охлаждения машины при продолжительном режиме работы;
представлены на рис. 28.1.
Кратковременный номинальный режим ра-
боты, при котором периоды номинальной нагрузки чередуются
с периодами отключения машины на время, в течение которого
392
она успевает охладиться до температуры окружающей среды
(рис. 28.2,6). График изменения температуры машины при
кратковременной работе представлен на рис. 28.3, а.
Повторно-кратковременный номинальный ре-
жим работы, при котором кратковременные периоды номи-
нальной нагрузки машины чередуются с периодами отключения
/о (паузами) (рис. 28.2, в). При этом температура нагрева частей
Рис. 28. 3. Графики изменения температуры при кратковременном (а) и
повторно-кратковременном (б) режимах работы •
машины за период нагрузки не достигает установившегося зна-
чения, а за время паузы не успевает снизиться до температуры
окружающей среды. Указанный режим характеризуется величи-
ной относительной продолжительности включения, т. е.
ПВ=^- 100,
где tK — время периода нагрузки;
(ц—время всего цикла (период нагрузки и период отклю-
чения).
Нормальной относительной продолжительностью включения
является ПВ=25%. Но ПВ может составлять и 15; 40 или 60%.
При этом продолжительность цикла не превышает 10 мин. При
продолжительном режиме ПВ = 100%. Кривая нагревания ма-
шины при повторно-кратковременном режиме представлена на
рис. 28.3, б.
Если машину, предназначенную для продолжительного ре-
жима работы, использовать в кратковременном или повторно-
кратковременном режиме при номинальной ее мощности, то
установившаяся температура перегрева Т1ПК будет ниже, чем при
продолжительном режиме работы машины тга (рис. 28.3, б).
Следовательно, при переводе машины из продолжительного ре-
жима в кратковременный или повторно-кратковременный режим
работы ее допустимая мощность повышается.
393
§ 28.3. Предельные температуры перегрева частей
электрических машин и способы измерения температур
Наиболее чувствительной к перегреву машины является
электрическая изоляция обмоток. Под действием высоких тем-
ператур происходит тепловое старение изоляции, проявляющее-
ся в ухудшении ее изоляционных и механических свойств.
В зависимости от теплостойкости электроизоляционные ма-
териалы, применяемые в электрических машинах и трансформа-
торах, делятся на семь классов. Наибольшее распространение
в электромашиностроении имеют изоляционные материалы клас-
са А. К этому классу изоляции относятся: волокнистые электро-
изоляционные материалы как целлюлозы или шелка, пропитан-
ные или погруженные в жидкий диэлектрик, изоляция эмаль-
проводов, дерево, слоистые пластики.
Каждому классу изоляции соответствует допустимая пре-
дельная температура нагревания, при которой изоляция может
надежно работать в течение длительного времени. Для изоля-
ции класса А эта температура равна 105°С. При превышении
указанной температуры срок службы изоляции резко сокра-
щается. Так, например, срок службы изоляции класса А при
температуре 90°С составляет около 20 лет. При повышении тем-
пературы до 110°С этот срок уменьшается до 4 лет, а при 150°С
он сокращается до 1,5 месяца.
Сильный перегрев машины может отрицательно повлиять
и на другие ее элементы. Так, например, при значительном пере-
греве коллектор может потерять правильную геометрическую
форму, могут нарушиться пайки в «петушках» между обмоткой
якоря и коллектором, а также выйти из строя подшипники.
Превышение температуры данной части машины относи-
тельно окружающей среды определяется выражением
т=0 —0о,
где 0 — температура данной части машины;
0о — температура охлаждающей среды (воздуха, водорода,
воды и т. д.).
За основную охлаждающую среду ГОСТ 183—66 принимает
воздух с допускаемой предельной температурой 0о=35°С.
ГОСТ 183—66 устанавливает допускаемые превышения темпе-
ратур для обмоток, изолируемых материалами классов А и В,
а также других частей машины при температуре окружающего
воздуха +35°С в зависимости от метода измерения температуры.
Соблюдение этих пределов обеспечивает машине длительный
срок эксплуатации.
ГОСТ 183—66 предусматривает три метода измерения темпе-
ратур: метод термометра, метод сопротивления и метод зало-
женных термодетекторов.
394
Метод термометра основан на применении измерителей
температуры, которые соприкасаются с доступными поверх-
ностями частей машины. В качестве измерителей температуры
применяют ртутные или спиртовые термометры, незаложенные
термопары и незаложенные термометры сопротивления. Недо-
статок измерения температуры термометром состоит в том, что
он измеряет температуру только наружной поверхности данной
части машины или трансформатора. Если температуру изме-
рять в местах действия переменных магнитных полей, то ртут-
ные термометры применять не следует, так как в этих условиях
они дают неправильные показания.
Метод сопротивления состоит в измерении активного сопро-
тивления обмоток до и после их нагревания. Этот метод дает
среднюю температуру обмотки. Превышение температуры об-
мотки определяется из формулы
r2 = r, [1 Т а(9-90)],
откуда
где Г2 — активное сопротивление обмотки в нагретом состоянии;
Г1 — активное сопротивление обмотки в холодном состоянии
(при 0о=+35°С);
а — температурный коэффициент: для меди а = 0 ,004г/град.
Метод заложенных температурных детекторов основан на
закладке температурных детекторов при изготовлении машины
в такие ее точки, где ожидается наибольшая температура. В ка-
честве температурного детектора применяют термопары или
термометры сопротивления.
Процессы нагревания и охлаждения трансформаторов прин-
ципиально те же, что и в случае вращающихся машин. Наиболее
употребительным видом изоляции в масляных трансформаторах
является бумага, которая может длительно выдерживать в масле
температуру в пределах 95—105°С без существенного снижения
своих изоляционных свойств.
Согласно ГОСТ 401—41 превышения температуры частей
трансформатора при температуре окружающего воздуха +35°С
не должны превышать значений, указанных в табл. 28.1.
Таблица 28.1
Части трансформатора Наибольшее повышение температуры, град Метод измерения
Обмотка 70 Метод сопротивления
Сердечник (на поверхности) 75 Метод ^термометра
Масло (в верхних слоях) . . 60 То же
395
Таким образом, при расчете электрической машины или
трансформатора на заданную мощность следует выбирать удель-
ные нагрузки на медь и сталь такими, чтобы потери энергии,
а следовательно, и нагрев отдельных частей были бы в допус-
каемых пределах. Если же пойти по пути уменьшения удельных
нагрузок, то это приведет к увеличению размеров и стоимости
машины или трансформатора. Поэтому задачей при проектиро-
вании является нахождение оптимальных размеров машины или
трансформатора для заданной мощности. Применение тепло-
стойкой изоляции дает возможность увеличить удельные на-
грузки машины, а следовательно, уменьшить ее габариты.
§ 28.4. Вентиляция-электрических машин
Ка'к следует из уравнения теплового баланса (28.1), тепло,
выделяемое в электрической машине, лишь частично затрачи-
вается на ее нагревание. Другая часть этого тепла рассеивает-
ся с поверхности машины. Тепло рассеивается главным образом
путем конвекции — переносом тепла потоками воздуха. Если же
машину обдувать воздухом, то количество тепла, рассеиваемое
с поверхности машины, увеличится, что приведет к понижению
установившейся температуры частей машины, а следовательно,
к повышению ее мощности. Обдувание нагретых частей машины
воздухом или другой охлаждающей средой называется венти-
ляцией. При помощи вентиляции электрических машин повы-
шается использование активных материалов машины и тем са-
мым уменьшается ее вес.
Различают несколько способов охлаждения машины.
Естественное охлаждение, 'когда машина не
имеет на валу вентилятора; применяется в машинах мощностью
до 1 кет, а также в мощных тихоходных машинах открытого
исполнения.
Самовентиляция, когда охлаждение нагреваемых ча-
стей осуществляется вентилятором, расположенным на роторе
машины. Самовентиляция может быть внутренней и наружной.
В зависимости от характера работы вентилятора внутренняя са-'
мовентиляция, в свою очередь, разделяется на нагнетательную
и вытяжную. При вытяжной вентиляции холодный воздух попа-
дает непосредственно на охлаждаемые части машины (рис.
28.4, а), в то время как при нагнетательной вентиляции холод-
ный воздух, прежде чем попасть на охлаждаемые части маши-
ны, проходит через вентилятор А (рис. 28.4,6), где несколько
подогревается (на 3—7°С), что снижает эффект вентиляции. По-
этому вытяжная самовентиляция лучше нагнетательной.
.Для лучшего охлаждения воздухом нагретых частей маши-
ны в ее различных частях предусматривают вентиляционные ка-
налы для прохода воздуха. Обычно такие каналы делают
396
Рис. 28 4. Системы вентиляции:
а—вытяжная, б—нагнетательная
Рис. 28. б. Независимые системы вентиляции*
а — протяжная, б — замкнутая; 1 — вентилятор,
2 — электрическая машина, 3 — охладитель
в сердечниках ротора и статора. Каналы могут иметь направле-
ние, параллельное оси машины, или же радиальное направление
(перпендикулярно оси машины). В первом случае вентиляция
называется аксиальной (рис. 28.5, а), а во втором — радиальной
(рис.' 28.5, б). Радиальные вентиляционные каналы в сердечни-
ках статора и ротора получают путем деления общей длины
активной стали на пакеты по 40—80 мм шириной. Между паке-
тами оставляют промежутки по 10 мм каждый, которые и яв-
ляются радиальными вентиляционными каналами.
При наружной самовентиляции вентилятор вынесен на на-
ружный конец вала. Он обдувает внешнюю поверхность стани-
ны, которая в этом случае выполняется ребристой (см. рис.
19.3,6). Наружная самовентиляции применяется в тех случаях,
когда охлаждающий воздух содержит взрывоопасные или вред-
ные для изоляции машины примеси.
Независимая вентиляция применяется в маши-
нах большой мощности. В этом случае охлаждающая среда по-
дается в машину специальным устройством (вентилятором или
насосом).
Независимая вентиляция может быть протяжной или замкну-
той. При протяжной вентиляции через закрытую по своей конст-
рукции машину пропускают воздух, подаваемый извне, который
затем выбрасывается наружу (рис. 28.6,а). При поступлении
воздуха извне на входном отверстии, через которое подается
в машину воздух, устанавливают фильтр для очистки воздуха
от пыли.
При замкнутой системе вентиляции в машине циркулирует
одно и то же количество охлаждающего газа, который прохо-
дит через охладитель по замкнутому контуру (рис. 28.6, б). При
замкнутой системе вентиляции машина предохраняется от попа-
дания в нее пыли и, кроме того, от разрушительного действия
пожара, который может возникнуть при внутреннем коротком
замыкании. Объясняется это тем, что ограниченное количество
циркулирующего'в машине воздуха при возникновении пожара
быстро лишается кислорода и горение изоляции прекращается.
§ 28.5. Охлаждение водородом
При замкнутой системе вентиляции допускается применять
в качестве охлаждающей среды не только воздух, но и водород.
Особые свойства водорода обеспечивают водородному охлажде-
нию по сравнению с воздушным целый ряд преимуществ.
1. Водород в 14 раз легче воздуха, что снижает потери на
вентиляцию, а следовательно, повышает к. п. д. машины. Напри-
мер, в турбогенераторе мощностью 150 000 кет потери на вен-
тиляцию при воздушном охлаждении составляют 1000 кет, а при
водородном — всего лишь 140 кет.
398
Рис. 28. 7. Внутч
реннее охлажде-
ние обмотки во
дородом
обмоток маши-»
делают полыми
2. Благодаря повышенной теплопроводности водорода, кото-
рая в шесть-семь раз больше, чем у воздуха, он интенсивнее
охлаждает машину. Это дает возможность при данных габари-
тах изготовить машину мощностью на 20—25°/о больше, чем при
воздушном охлаждении. -
3. Водородное охлаждение исключает возникновение пожара
в машине, так как водород не поддерживает
горения.
4. Водородное охлаждение удлиняет срок
службы изоляции, так как при явлении коро-
ны благодаря отсутствию азота в машине не
образуются нитраты, разъедающие органиче-
ские составляющие изоляции. Для устранения
опасности взрыва, в случае образования
внутри машины гремучего газа, через нее
предварительно пропускают углекислый газ.
Затем машину заполняют водородом под дав-
лением выше атмосферного, что предупрежда-
ет попадание воздуха во внутрь машины. Во-
дородное охлаждение применяют в турбогене-
раторах и мощных синхронных компенсаторах.
Благодаря водородному охлаждению турбоге-
нераторов оказалось возможным довести их
мощность до 300 000 кет. Дальнейшее увели-
чение мощности турбогенераторов достигнуто
применением внутреннего охлаждения меди
иы. В этом случае проводники обмотки
(рис. 28.7). Мощность турбогенераторов с таким охлаждением
доведена до 500 000 кет. Эффективность водородного охлажде-
ния повышается с повышением давления водорода в машине,
Существуют машины с давлением водорода до 3—4' ат. В за-
ключение следует отметить, что водородное охлаждение услож-
няет и удорожает как самую машину, так и ее эксплуатацию.
Поэтому водородное охлаждение применяют только в машина^
большой мощности (свыше 20 000 кет).
§ 28.6. Охлаждение трансформаторов
Трансформаторы мощностью в несколько киловольтампер
строят сухими — с естественным воздушным охлаждением.
Поверхность магнитопровода и обмоток этих трансформаторов
вполне достаточна для отвода тепла в окружающий воздух, при
этом температура частей трансформатора не должна превышать
допустимых норм.
В трансформаторах средней и большой мощности естествен-
ное охлаждение становится недостаточным. Дело в том, что при
увеличении мощности трансформаторов потери в них растут
39ft
Рис. 28. 8. Превышение темпера-
туры масла по высоте бака
трансформатора
пропорционально кубу линейных размеров, в то время как по-
верхности охлаждения увеличиваются пропорциоенально квад-
рату линейных размеров. Это привело к необходимости приме-
нения более эффективного способа охлаждения — масляного
охлаждения. В этом случае магнитопровод вместе с обмотками
погружают в бак с трансформаторным маслом. Частицы масла,
соприкасаясь с обмотками
и магнитопроводом транс-
форматора, нагреваются и
поднимаются в верхнюю
часть бака. Их места зани-
мают более холодные части-
цы масла. Поднявшиеся
вверх частицы масла, сопри-
касаясь со стенками и крыш-
кой бака, отдают свое тепло,
охлаждаются и опускаются
в нижнюю часть бака. Та-
ким образом создается не-
прерывный циркулирующий
поток масла, отводящий теп-
ло от магнитопровода и об-
моток трансформатора к стенкам бака, откуда оно уходит
в окружающий воздух. Так как нагретые частицы масла всегда
устремляются в верхнюю часть бака, то превышение температуры
масла -по высоте бака неодинаково: оно больше в верхней части
Рис. 28. 9. Схема искуственного водомасля-
ного охлаждения трансформатора:
/—трансформатор; 2—масляный насос; 3—
охладитель; 4—воздухоохладитель; 5—фильтр
бака (рис. 28.8). Стержни магнитопровода для усиления охлаж-
дения имеют вентиляционные каналы (см. рис. 9.11).
В трансформаторах мощностью свыше 20—-30 ква баки снаб-
жают рядом вертикальных труб. В трансформаторах большой
мощности эти трубы объединяют в охладители-радиаторы, кото-
рые иногда снабжают дутьевым охлаждением (см. рис. 9.13).
В этом случае поток воздуха от вентиляторов обдувает бак
и радиаторы трансформатора, что усиливает отдачу тепла. При-
400
менение дутьевого охлаждения дает возможность увеличить
мощность трансформатора более чем на 30%.
В трансформаторах большой мощности применяют также
искусственное воздухомасляное или водомасляное охлаждение.
В этом случае посредством насоса нагретое масло отбирается из
верхней части бака, пропускается через охладитель, а затем
подается в нижнюю часть бака.
При воздухомасляном охлаждении охладитель обдувается
воздухом, а при водомасляном — омывается проточной водой.
На рис. 28.9 представлена принципиальная схема водомасля-
ного охлаждения. Искусственное водомасляное охлаждение
трансформаторов применяют обычно на гидростанциях, где
имеется достаточное количество проточной воды.
Следует отметить, что трансформаторное масло наряду с эф-
фективным охлаждением обеспечивает более надежную электри-
ческую изоляцию обмоток. Поэтому масляными делают все,
в том числе и маломощные трансформаторы, работающие при
высоком напряжении, например измерительные трансформато-
ры напряжения.
Глава XXIX
ИСПЫТАНИЕ ЭЛЕКТРИЧЕСКИХ МАШИН И ТРАНСФОРМАТОРОВ
§ 29.1. Испытание электрических машин
Перед выпуском с завода электрические машины подвергают испытаниям
с целью проверки качества и выяснения, в какой мере характеристики этих
машин соответствуют расчетным данным Испытания электрических машин
проводят также в процессе их эксплуатации и после текущего или капиталь
ного ремонта Испытания делят на несколько видов
Типовые испытания проводят с целью определения параметров
электрической машины нового типа, а также после существенных изменений
в конструкции электрической машины или же при изменении технологии
изготовления машины Программа типовых испытаний установлена ГОСТ
183—66
Приемо-сдаточные испытания проводят при приемке крупных
агрегатов на месте их установки
Контрольные испытания проводят при выпуске машин на за-
воде-изготовителе, а также после ремонта машины Контрольные испытания
являются основным видом испытаний электрической машины
Профилактические испытания проводят по графику пла-
ново-предупредительного ремонта Программа этих испытаний устанавли-
вается местными инструкциями в зависимости от режимов работы обору-
дования.
Ниже приводится программа контрольных испытаний электрических ма-
шин, предусмотренная ГОСТ 183—66
26 1649 401
А. Общее для всех машин
1. Измерение сопротивления изоляции обмоток от корпуса и между об-
мотками.
2. Измерение электрического сопротивления обмоток при постоянном
токе в практически холодном состоянии.
3. Испытание электрической прочности изоляции обмоток относительно
корпуса машины и между обмотками.
4. Испытание межвитковой изоляции.
Б. Для машин постоянного тока
1. Испытание при повышенной скорости вращения.
2. Проверка коммутации при кратковременной перегрузке по току (до-
пускается в режиме короткого замыкания).
3. Определение скорости вращения якоря в режиме ненагруженного
двигателя при номинальном напряжении и рабочем соединении обмоток.
В. Для синхронных машин
1. Испытание ротора при повышенной скорости вращения.
2. Определение характеристики холостого хода.
3. Определение характеристики установившегося короткого замыкания.
4. Испытание возбудителя (проводится по программе пунктов А и Б).
Г. Для асинхронных двигателей
1. Определение коэффициента трансформации (для двигателей с контакт-
ными кольцами).
2. Определение тока и потерь холостого хода (опыт холостого хода).
3. Определение тока и потерь короткого замыкания (опыт короткого за-
мыкания).
Ниже рассматривается порядок выполнения операций по программе
контрольных испытаний.
Измерение сопротивления изоляции обмоток от корпуса и между обмот-
ками обычно проводят мегомметром. Для машин, работающих при напря-
жении выше 500 в, следует применять мегомметр на напряжении не менее
1000 в. Для прочих машин допускается применение мегомметра на 500 в
Прежде всего измеряют сопротивление изоляции между всей обмоткой
и корпусом. Если сопротивление изоляции удовлетворительно, то на этом
испытание может быть закончено. Если же оно ниже нормы, то для обнару-
жения места с плохой изоляцией разъединяют все обмотки и измеряют сопро-
тивление изоляции каждой из них.
Измерение необходимо проводить в горячем и холодном состояниях
Сопротивление изоляции в холодном состоянии обычно выше, чем в горячем
Сопротивление изоляции машины при температуре, близкой к рабочей,
должно быть не ниже значения, получаемого по формуле
r — Uh______________
из 1000 + 0,01Р„ ’
где гиз — сопротивление изоляции, Мом;
UH — номинальное напряжение обмотки машины, в;
Рн — номинальная мощность машины, ква.
При измерении сопротивления изоляции между обмотками щупы при-
кладывают во всех сочетаниях к выводам отдельных обмоток.
Измерение сопротивления обмоток при постоянном токе можно произ-
водить либо посредством измерительного моста, либо методом амперметра —
402
измерительные приборы
Рис. 29. 1. Схе-
ма соединений
при испыта-
нии электриче-
ской прочности
изоляции
вольтметра. Измеренные величины сопротивлений должны быть приведены
к температуре 75°С.
Величины сопротивлений каждой фазы обмотки не должны отличаться
от заводских данных более чем на 2—3% и от их среднего значения более
чем на 4%. Одновременно с измерением сопротивления обмоток следует из-
мерять их температуру. Применяемые при этом
должны иметь класс точности не ниже 0,5.
Испытание электрической прочности изоляции
обмоток от корпуса и между обмотками проводят
при неподвижном состоянии машины, за исклю-
чением турбогенераторов, где ,это испытание про-
водят при вращении ротора с номинальной ско-
ростью. Если* машина подвергается испытаниям
на нагрев, то электрическая прочность изоляции
проверяется тотчас же после этого испытания,
т е. при температуре, близкой к рабочей температу-
ре машины. В противном случае испытание прово-
дят в практически холодном состоянии. Но в обо-
их случаях испытание прочности изоляции долж-
но предшествовать испытаниям при повышенной
скорости вращения, при кратковременной пере-
грузке по току и испытанию сопротивления изо-
ляции. Испытанию электрической прочности изо-
ляции обмоток относительно корпуса машины и
между обмотками подвергают поочередно каж-
дую электрически независимую цепь. При этом
один полюс источника испытательного напряже-
ния подключают к выводу испытуемой обмотки,
а другой к заземленному корпусу машины, с ко-
торым на время испытания данной обмотки элек-
трически соединяют остальные обмотки (рис.
29Д). Испытание электрической прочности изоля-
ции начинают с напряжения, не превышающего
1/3 испытательного напряжения. Затем повышают
его до полного значения ступенями; при этом
каждая ступень не должна превышать 5% испыта-
тельного напряжения. Время, необходимое для подъема испытательного напря-
жения от половинного до полного значения, должно быть не менее 10 сек.
Достигнув полного значения испытательного напряжения, выдерживают его
в течение 1 мин, затем плавно снижают до 1/3 значения начального состоя-
ния и отключают.
Величины испытательного напряжения для машин общего назначения
приведены в табл. 29.1. Испытуемое напряжение должно быть практически
синусоидальным с частотой 50 гц.
Испытание межвитковой изоляции обмоток проводят при вращающихся
машинах. Включают машину в сеть на пониженное напряжение. После того
как машина пришла во вращение, к ней подводят номинальное напряжение,
которое затем повышают постепенно на 30% и выдерживают в течение 5 мин.
Испытание изоляции витков обмотки якорей машин постоянного тока прово-
дят обязательно после испытания машины при повышенной скорости враще-
ния. В этом случае при повышении напряжения следует проверять напряже-
ние между соседними коллекторными пластинами, которое не должно пре-
вышать 24 в (во избежание возникновения кругового огня на коллекторе).
Для обмотки трехфазного асинхронного двигателя с контактными кольцами
напряжение повышают при неподвижном и разомкнутом роторе, а для дви-
гателей с короткозамкнутым ротором — при холостом ходе.
403
Испытания при повышенной скорости вращения преследуют цель выяв-
ления механической прочности машины. В-соответствии с ГОСТ 183—66 все
машины должны выдерживать испытания в течение 2 мин (без повреждений
Таблица 29.1
Электрическая машина или ее части Действующее значение испыта- тельного напряжения
Машины мощностью менее 1 ква (1 кет), а также все машины на номинальное напряжение не свы- ше 36 в 500 в плюс двойное номинальное напряжение
Машины мощностью от 1 ква (1 кет) до 3 ква (3 кет) включительно при номинальном напряжении свыше 36 в 1000 в плюс двойное номинальное напряжение
Машины мощностью более 3 ква (3 кет) при напряжении свыше 36 в 1000 в плюс двойное номинальное напряжение, но не менее 1500 в
и остаточных деформаций) при повышенной скорости вращения. Испытатель-
ная скорость вращения должна быть на 20% выше скорости, указанной на
щитке машины.
При испытаниях на кратковременную перегрузку по току проверяют ме-
ханическую прочность машины и исправность коммутации. Машина постоян-
Таблица 29.2
Мощность машины, кет Величина тока холостого хода, % (от номинального рабочего тока)
Ниже 0,5 До 95
От 0,5 до 2 70—60
. 2 , 10 50-40
.10 .100 40-30
Свыше 100 30-25
ного тока должна работать практически без искр (при неизменном положе-
нии щеток) в пределах нагрузки от холостого хода до номинальной. При
превышении нагрузки до 50% свыше номинальной машина должна работать
без опасного искрения и повреждений коллектора и щеток. При этом искре-
ние на коллекторе определяют по шкале искрения (см. табл. 4.1).
Исправность коммутации проверяют при температуре машины, близкой
к рабочей.
Определение коэффициента трансформации у двигателей с контактными
кольцами проводят при неподвижном роторе и разомкнутых контактных коль-
цах. Коэффициент трансформации определяют отношением напряжений
UJU2— обычно при номинальном значении напряжения
Величину тока и потерь холостого хода определяют при работе машины
в режиме холостого хода. Например, в трехфазных машинах ток измеряют
404
во всех трех фазах, при этом расхождение в значениях токов разных фаз
при номинальном напряжении не должно превышать 5%, а величина тока
холостого хода не должна превышать значений, приведенных в табл. 29.2.
Повышенное значение тока холостого хода свидетельствует о неисправностях
в обмотках машины или же об увеличенном воздушном зазоре между стато-
ром и ротором.
Потери холостого хода измеряют ваттметром. Подшипники машины
должны быть прогреты в течение 1—2 ч работы машины вхолостую.
Определение тока и потерь короткого замыкания проводят при включе-
нии машины для опыта короткого замыкания (см. § 22.3). Величину тока ко-
роткого замыкания определяют по формуле
/ — / Um
ЧК — ЧН - •
и*
Потери при коротком замыкании измеряются ваттметром. Если ротор
снабжен контактными кольцами, то их следует замкнуть накоротко.
§ 29.2. Испытание трансформаторов
Контрольные испытания трансформаторов проводят по следующей про-
грамме:
1. Определение коэффициента трансформации.
2. Проверка группы соединения.
3. Измерение электрического сопротивления обмоток.
Рис. 29.2. Схема измерения tg б:
1—повышающий трансформатор для пи-
тания моста высоким напряжением; 2—
измерительный мост для определения уг-
ла потерь; 3—обмотка испытуемого
трансформатора; 4—стенка бака
4. Испытание электрической прочности изоляции приложенным напря-
жением при повышенной частоте.
5. Испытание электрической прочности изоляции индуктированным на-
пряжением при повышенной частоте.
6. Измерение тока и потерь при холостом ходе (опыт холостого хода).
7. Измерение напряжения короткого замыкания и электрических потерь
в обмотках (опыт короткого замыкания).
8. Испытание прочности бака.
При типовых испытаниях трансформатора, помимо перечисленных выше
видов испытаний, проводят испытание на нагрев и проверяют качество
различной аппаратуры (переключатели, газовые реле и т. п ).
Измерение сопротивления изоляции обмоток рекомендуется проводить
мегомметром на напряжение 1000—2500 в в холодном и горячем состояниях
обмоток.
405
Для оценки степени увлажнения изоляции применяют метод определе-
ния tgd (рис. 29.2). tg б измеряется при помощи емкостного моста с напря-
жением до 10 кв. Состояние изоляции обмоток масляных трансформаторов
можно считать удовлетворительным, если при рабочем напряжении до 35 кв
включительно и /=50 гц
tgb<l
(29.1)
где 6 — температура обмоток при измерении. При рабочем напряжении
100 кв и выше значения tg6 примерно в 1,3 раза меньше указанной величины
Рис. 29. 3. Схема испытания изоляции транс-
форматора:
1—повышающий трансформатор; 2—шаровой
разрядник; 3—испытуемая обмотка; 4~ маг-
нитопровод; 5—бак
(29.1). Изоляцию считают неполноценной, если измеренные значения tg б
более чем в 1,5 раза превосходят указанные пределы. Испытание электри-
ческой прочности изоляции обмоток трансформатора проводятся в течение
1 мин повышенным напряжением номинальной частоты.
Таблица 29.3
Наибольшее рабочее напряжение, кв 3,5 6,9 11,5 17,5 40,5 121 169 242
Испытательное напряжение силовых трансформаторов, кв 18 25 35 | 45 85 230 320 460
Значения испытательного напряжения зависят от рабочего напряжения
трансформатора (табл. 29.3). Испытанию подвергают изоляцию каждой из
обмоток в нагретом состоянии. На время испытания обмотки трансформа-
тора замыкают накоротко и соединяют с заземленным баком. Напряжение
прикладывают между испытываемой обмоткой и баком (рис. 29.3). Испы-
туемое напряжение поднимается постепенно в течение 10 сек и поддержи-
вается 1 мин.
Результаты испытаний считают положительными, если не произошло
пробоя изоляции или перекрытий, отмечаемых приборами в виде роста ве-
личины тока и падения напряжения.
Затем проводят испытание изоляции наведенным напряжением. Цель
этого испытания состоит в том, чтобы установить, не произошло ли по-
вреждения изоляции обмотки при испытании изоляции приложенным напря-
406
жением. Испытание проводят следующим образом, К одной из обмоток
в течение одной минуты прикладывают двойное номинальное напряжение.
При этом остальные обмотки остаются разомкнутыми, т. е. испытание про*
ходит в режиме холостого хода. Но чтобы ток холостого хода не возрос до
недопустимых значений, частоту подводимого напряжения увеличивают
вдвое (/исп “ 2/п —100 гц). Для получения напряжения повышенной часто-
ты применяют специальные генераторы. При подведении к одной из обмоток
испытательного напряжения во всех остальных обмотках наводится э. д. с.
двойной частоты, равная двойному номинальному напряжению данной об-
мотки. Обычно напряжение подводят к одной из обмоток НН. Это дает
возможность провести испытание на пониженном напряжении. В течение
всего испытания намагничивающий ток обмотки должен иметь нормальную
для данного трансформатора величину. Увеличение тока сверх указанного
значения свидетельствует о наличии дефекта в изоляции обмотки.
Испытание межвитковой изоляции на электрическую прочность прово-
дят при холостом ходе трансформатора, подводя к нему напряжение
в 1,3 раза больше номинального при /=50 гц. Продолжительность испытания
1 мин. При проведении опытов холостого хода (см. § 11.1) и короткого за-
мыкания (см. § 11.2) измеренные значения тока и потерь холостого хода,
а также напряжения и потерь короткого замыкания, приведенные к темпе-
ратуре 75°С, сравнивают с данными каталога для данного типа трансфор-
матора. Результаты испытания считают удовлетворительными, если данные
измерений указанных величин отличаются от данных каталога не более чем
на ±10%.
ЛИТЕРАТУРА
1. Петров Г. Н. Электрические машины. Ч. I, ГЭИ, 1956.
2. Петров Г. Н. Электрические машины. Ч. II, ГЭИ, 1963.
3. Петров Г. Н Электрические машины. Ч. III. Изд-во «Энергия», 1969.
4. Костенко М. П. и Пиотровский JJ. М. Электрические ма-
шины. Ч. I, ГЭИ, 1957.
5. Костенко М. П. и Пиотровский Л. М. Электрические ма-
шины. Ч. II, ГЭИ, 1958.
6. Пиотровский Л. М. Электрические машины ГЭИ, 1958.
7. С е р г е е в П. С. Электрические машины. ГЭИ, 1955.
8 Проектирование электрических машин. Под ред. П. С. Сергеева.
ГЭИ, 1956.
9. П и о т р о в с к и й Л. М. и др. Испытание электрических машин.
ГЭИ. 1960.
10 Кацман М. М., Ю ф е р о в Ф. М. Электрические машины автома-
тических систем. Изд-во «Высшая школа», 1969.
11. Толвинский В. А. Электрические машины постоянного тока.
ГЭИ, 1956.
12. На ход кин М. Д. Электрические машины постоянного тока.
ВЗИИТ, 1960.
13. Зимин В. И. и др. Обмотки электрических машин. ГЭИ, 1961.
14. Бертин ов А. И. Электрические машины авиационной автома-
тики. Оборонгиз, 1961.
15. Сыромятников И. А. Режимы работы асинхронных и синхрон-
ных двигателей. ГЭИ, 1963.
16. Торопцев Н Д Применение трехфазного асинхронного двига-
теля в схеме однофазного включения с конденсатором. ГЭИ, 1963.
17. Завалишин Д. А. и др. Электрические машины малой мощности.
ГЭИ, 1963.
18. Казанский В. М. и ОсновичЛ. Д. Малоинерционные элек-
тродвигатели постоянного тока с печатной обмоткой якоря. Изд-во «Энер-
гия», 1965
19. Ривлин Л. Б. Электродвигатели и их Эксплуатация. ГЭИ, 1950.
ОГЛ АВЛ ЕНИ Е
Стрг
Предисловие . ........................................4
Введение .......................................................... 5
§ 1. Назначение и классификация электрических машин .... 5
§ 2. Преобразование энергии в электрических машинах.................7
§ 3. Исторические сведения о развитии электрических машин и транс-
форматоров ................................"........................9
§ 4. Отечественное электромашиностроение и перспективы его развития 11
Раздел первый
Коллекторные машины
Глава Г Принцип действия и устройство коллекторных машин по-
стоянного тока.....................................................14
§ 1.1. Принцип действия генератора постоянного тока................14
§ 1.2. Устройство коллекторной машины постоянного тока и конструк-
ция ее основных частей............................................18
Глава II. Обмотки якорей машины постоянного тока...................25
§2.1. Основные понятия.......................................... 25
§ 2.2. Простая петлевая обмотка ...................................27
§ 2.3. Параллельные ветви обмотки якоря............................32
§ 2.4. Сложная петлевая обмотка ...................................33
§ 2.5. Простая волновая обмотка....................................36
§ 2.6. Сложная волновая обмотка....................................39
§ 2.7. Волновая обмотка с мертвой секцией..........................41
§ 2.8. Искусственно замкнутая волновая обмотка.....................41
§ 2.9. Условия симметрии обмотки...................................43
§ 2.10. Уравнительные соединения ..................................44
§ 2.11. Комбинированная обмотка....................................49
§ 2.12. Практическое выполнение обмоток якоря......................50
§ 2.13. Электродвижущая сила обмотки якоря.........................52
§ 2.14. Влияние ширины секций обмотки якоря и положения щеток
на величину э. д. с. машины.......................................54
§ 2.15. Выбор типа обмотки якоря...................................56
§ 2.16. Пересчет якорных обмоток машин постоянного тока ... 58
Глава III. Магнитная система машин постоянного тока .... 69
§3.1. Магнитная цепь машины постоянного тока......................69
§ 3.2. Характеристика намагничивания машины........................64
§ 3.3. Реакция якоря...............................................65
§ 3.4. Устранение вредного влияния реакции якоря...................70
Глава IV. Коммутация в машинах постоянного тока....................71
§4.1. Причины, вызывающие искрение на коллекторе..................71
§ 4.2. Физическая сущность коммутации и ее влияние на работу машины 73
§ 4.3. Способы улучшения коммутации................................78
§ 4.4. Круговой огонь по коллектору ...............................85
§ 4.5. Проверка и настройка коммутации.............................86
409
Глава К Генераторы постоянного тока.......................... 88
§ 5.1. Основные понятия .............88
§ 5.2. Генератор независимого возбуждения ........ 92
§ 5.3. Генератор параллельного возбуждения ....... 96
§ 5.4. Генератор последовательного возбуждения . « . . . .100
§ 5.5, Генератор смешанного возбуждения ........ 100
§ 5.6. Параллельная работа генераторов постоянного тока . « . 102
Г лава VI. Электродвигатели постоянного тока . . . . 106
§6.1. Основные понятия .................................... 106
§ 6.2. Уравнение равновесия моментов ......... 108
§ 6.3. Скорость вращения двигателя .......... 110
§ 6.4. Условия устойчивой работы двигателей . , . . . . .ПО
§ 6.5. Пуск двигателя в ход ............ 112
§ 6.6. Пусковые реостаты 114
§ 6.7. Двигатель параллельного возбуждения * . . . . , *115
§ 6.8* Режимы работы машины постоянного тока . . . . . .118
§ 6.9. Двигатель последовательного возбуждения . 120
§ 6.10, Регулирование скорости вращения двигателей последователь-
ного возбуждения..................................... 122
§ 6.11. Двигатель смешанного возбуждения ........ 123
§ 6.12. Система «генератор—двигатель»....................... 125
§ 6.13. Торможение двигателей постоянного тока. ...... 126
§ 6.14. Использование двигателя постоянного тока в режиме генератора 127
Глава VII. Основные типы машин постоянного тока общего применения
и специализированные машины постоянного тока . . . 129
§ 7.1. Основные понятия..................................... 129
§ 7.2. Краново-металлургические и тяговые двигатели . . . . .130
§ 7.3. Электромашинный усилитель .......... 130
§ 7.4. Тахогенераторы постоянного тока...........* ... 137
§ 7.5. Двигатели постоянного тока с печатной обмоткой якоря . . 139
Глава VIII. Потери и коэффициент полезного действия машин постоян-
ного тока ...................................................142
§ 8.1. Виды потерь ......................................... 142
§ 8.2. Коэффициент полезного действия ......... 144
Раздел второй
Трансформаторы
Глава IX. Принцип действия и устройство трансформаторов , . . 146
§9.1. Основные понятия ........................................146
§ 9.2. Принцип действия трансформатора ..«.«••• 147
§ 9.3. Конструкция трансформаторов..............................149
Глава X. Физические основы рабочего процесса трансформатора . . 155
§ 10.1. Предварительные замечания .......... 155
§ 10.2. Уравнения электродвижущих сил ......... 155
§ 10.3. Уравнение намагничивающих сил...........................157
§ 10.4. Приведенный трансформатор .......... 160
410
§ 10.5. Электрическая схема замещения трансформатора . 162
§ 10.6. Векторная диаграмма трансформатора......................... 163
$ 10.7. Трехфазный трансформатор.....................................166
§ 10.8. Явления, возникающие при намагничивании трансформаторов 167
§ 10.9. Переходные процессы в трансформаторах ...... 170
§ 10.10. Схемы соединения обмоток....................................174
Глава XI. Рабочие свойства трансформаторов...........................175
$ 11.1. Режим холостого хода......................» , , 175
§ 11.2. Опыт короткого замыкания........................ * . . 178
$ 11.3. Упрощенная векторная диаграмма трансформатора » . в 183
§ 11.4. Изменение вторичного напряжения...............* 184
§ 11.5. Потери и коэффициент полезного действия трансформатора , .186
§ 11.6. Регулирование напряжения трансформаторов , . , 189
Г лава XII. Параллельная работа трансформаторов ...... 191
§ 12.1. Предварительные замечания.................................. 191
$ 12.2. Схемы соединения обмоток................................... 192
§ 12.3. Включение трансформаторов на параллельную работу . . . 196
Г лава XIII. Специализированные трансформаторы.......................199
$ 13.1. Трехобмоточный трансформатор « s . 199
§ 13.2. Автотрансформатор ........................................ 201
§ 13.3. Трансформатор для электродуговой сварки . . . , « 204
§ 13.4. Измерительные трансформаторы напряжения и тока . . . 204
§ 13.5. Трансформатор для преобразования числа фаз переменного тока 206
•§ 13.6. Стабилизатор напряжения .................................. 206
§ 13.7. Трансформатор для преобразования частоты ..... 208
Раздел третий
Синхронные машины
Глава XIV. Принцип действия и конструкция синхронных генераторов 210
§ 14.1. Основные .понятия............................. 210
§ 14.2. Принцип действия синхронного генератора...211
§ 14.3. Возбуждение синхронных машин...............................................213
§ 14.4. Типы синхронных машин и их конструкция ...... 214
Глава XV. Обмотки статоров машин переменного тока и э. д. с. син-
хронного генератора ........... 219
§ 15.1. Основные понятия. 219
§ 15.2. Трехфазная двухслойная обмотка........................., 219
§ 15.3. Способы соединения секционных групп обмоток статоров , . 222
§ 15.4. Трехфазные однослойные обмотки статоров ...... 225
§ 15.5. Однофазные обмотки...228
§ 15.6. Требования, предъявляемые к э. д. с. синхронного генератора 228
§ 15.7. Распределение магнитной индукции в воздушном зазоре син-
хронной машины................................................, 229
§ 15.8 Электродвижущая сила фазной обмотки статора .... 233
Глава XVI. Реакция якоря и характеристики синхронного генератора 237
§ 16.1. Магнитное поле обмотки статора.........................................................................237
§ 16.2. Реакция якоря..........................................................................................240
411
§ 16.3. Уравнение э. д. с. синхронного генератора.............245
§ 16.4. Векторные диаграммы синхронного генератора............247
§ 16.5. Характеристики синхронного генератора..................... 249
§ 16.6. Практическая диаграмма э. д. с. синхронного генератора . * 254
§ 16.7. Потери и коэффициент Полезного действия синхронных машин 257
Глава XVII. Параллельная работа синхронных генераторов . . . 258
§ 17.1. Условия включения синхронных генераторов на параллельную
работу............................................................258
§ 17.2. Способы включения генераторов на параллельную работу . . 259
§ 17.3. Нагрузка генератора, включенного на параллельную работу 262
§ 17.4. Угловые характеристики асинхронного генератора .... 264
§ 17.5. Колебания синхронных генераторов............................269
§ 17.6. Синхронизирующая способность синхронных машин . . . 271
§ 17.7. U образные кривые синхронного генератора...................274
Глава XVIII. Синхронные двигатели...................................276
§ 18.1. Принцип действия синхронного двигателя......................276
§ 18.2. U-образные кривые синхронного двигателя.....................279
§ 18.3. Рабочие характеристики синхронного двигателя .... 280
§ 18.4. Пуск в ход синхронных двигателей............................281
§ 18.5. Синхронный компенсатор................‘ ...... 283
§ 18.6. Реактивный синхронный двигатель.............................285
Раздел четвертый
Асинхронные машины
Глава XIX. Принцип действия и конструкция трехфазного асинхрон-
ного двигателя.........................................288
§ 19.1. Предварительные замечания.................................288
§ 19.2. Принцип действия трехфазного асинхронного двигателя . . . 288
§ 19.3. Конструкция асинхронных двигателей........................290
Глава XX. Рабочий процесс асинхронной машины.....................294
§ 20.1. Э. д. с., наводимые в обмотках асинхронного двигателя . . . 294
§ 20.2. Уравнения намагничивающих сил и токов асинхронного дви-
гателя ...........................................................297
§ 20.3. Приведение параметров обмотки ротора к обмотке статора . . 298
§ 20.4. Векторная диаграмма асинхронного двигателя..................300
§ 20.5. Схема замещения асинхронного двигателя......................301
Глава XXI. Электромагнитный момент и рабочие характеристики асин-
хронного двигателя................................................303
§ 21.1. Потери и к. п. д. асинхронного двигателя....................303
§ 21.2. Электромагнитный момент асинхронного двигателя .... 305
§ 21.3. Влияние напряжения сети и активного сопротивления обмотки 310
ротора на механическую характеристику асинхронного двигателя
§ 21.4. Рабочие характеристики асинхронного двигателя .... 312
§ 21.5. Генераторный и тормозной режимы асинхронной машины . . 315
412
Глава XXII. Круговая диаграмма асинхронного двигателя .... 318
.§ 22.1. Основные понятия.........................................318
§ 22.2. Круговая диаграмма........................................319
§ 22.3. Построение круговой диаграммы асинхронного двигателя по
опытам холостого хода и короткого замыкания.......................320
§ 22*4. Применение круговой диаграммы для определения параметров
двигателя.........................................................322
Глава XXIII. Пуск в ход и регулирование скорости вращения асин-
хронных двигателей................................................329
§ 23.1. Пусковые свойства двигателя................................329
§ 23.2. Пуск в ход двигателя с контактными кольцами................330
§ 23.3. Пуск в ход двигателя с короткозамкнутым ротором .... 333
§ 23.4. Короткозамкнутые асинхронные двигатели с улучшенными пуско-
выми характеристиками.............................................338
§ 23.5. Регулирование скорости асинхронного двигателя .... 341
§ 23.6. Типы современных асинхронных двигателей....................346
Г лава XXIV. Однофазные асинхронные двигатели......................348
§ 24.1. Принцип действия однофазного асинхронного двигателя . . 348
§ 24.2. Пуск в ход однофазного асинхронного двигателя .... 350
§ 24.3. Асинхронные конденсаторные двигатели.......................352
§ 24.4. Универсальные асинхронные двигатели........................354
§ 24.5. Однофазный двигатель с экранированными полюсами . . . 356
Глава XXV. Специализированные асинхронные машины...................357
§25.1. Индукционный регулятор и фазорегулятор.....................357
§ 25.2. Асинхронный преобразователь частоты........................359
§ 25.3. Электромагнитная асинхронная муфта.........................360
§ 25.4. Асинхронная машина в системе синхронной передачи . . 361
§ 25.5. Асинхронный исполнительный двигатель...................365
§ 25.6. Гистерезисный двигатель................................367
§ 25.7. Синхронизированный асинхронный двигатель...............370
Глава XXVI. Коллекторные машины переменного тока...................371
§ 26.1. Основные понятия.......................................371
§ 26.2. Однофазный коллекторный двигатель последовательного воз-
буждения .........................................................371
§ 26.3. Репульсионный двигатель с двумя обмотками на статоре . . 375
§ 26.4. Репульсионный двигатель с одной обмоткой на статоре . . 376
§ 26.5. Трехфазный .коллекторный двигатель.....................378
§ 26.6. Фазокомпенсатор........................................381
Глава XXVIГ Электромашинные преобразователи........................383
§ 27.1. Электромашинные преобразователи двигатель-генераторного
типа .............................................................383
§ 27.2. Одноякорные преобразователи................................385
Глава XXVIII. Нагревание и охлаждение электрических машин
и трансформаторов.................................................389
§ 28.1. Нагревание электрических машин и трансформаторов . . . 389
§ 28.2. Номинальные режимы работы электрических машин .... 392
413
§ 28.3. Предельные температуры перегрева частей электрических машин
и способы измерения температур . ............., 394
§ 28.4. Вентиляция электрических машин е ...... 395
§ 28.5. Охлаждение водородом . ,....................398
§ 28.6. Охлаждение трансформаторов , , , 39$
Глава XXIX, Испытание электрических машин и трансформаторов . . 401
§ 29.1. Испытание электрических машин • 401
§ 29.2. Испытание трансформаторов » .................405
Литература . . , . ....... 408
Марк Михайлович Кацман
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
И ТРАНСФОРМАТОРЫ
Редактор Г. И. Фуфаева
Художник В. 3. Казакевич
Технический редактор Э. М. Чижевский
Корректор Л. А. Егорова