/






Текст
ВИСЯЧИЕ
СИСТЕМЫ
ПОВЫШЕННОЙ
Н. М. Кирсанов ЖЕСТКОСТИ
МОСКВА
СТРОЙИЗДАТ
1973
УДК 624.072.327
Научный редактор инж. К. М. Дорожкина
Кирсанов Н. М. Висячие системы
повышенной жесткости. Л1., Стройиздат, 1973, 116 с.
В книге излагаются компоновка и канонический
способ расчета висячих комбинированных систем с
учетом геометрической нелинейности на ЭЦВМ.
Приведены формулы линейного расчета, осуществление
которого возможно с помощью настольных клавишных
машин.
Большое внимание уделено способам увеличения
жесткости висячих систем и экономичным проектным
решениям нового вида конструкций —
большепролетных покрытий промышленных зданий с
подвесным крановым оборудованием.
Кинга предназначена для
инженеров-проектировщиков, научных работников и студентов старших
курсов строительных специальностей.
Табл. 4, илл. 48, список лит.: 72 назв.
© Стройиздат, 1973 г.
0325-526
К 047<01)-73 86~?J
П Р ЕДИ СЛОВ И Е
За последнее время в Советском Союзе построено немало
общественных зданий с висячими и вантовьши покрытиями различных
конструктивных схем; среди них — сетчатые седловидные
покрытия, однопояспые цилиндрического очертания, двухпоясные типа
«велосипедное колесо» и др. Применение висячих покрытий
открывает широкие возможности для создания сооружений
разнообразных форм, несущие элементы которых экономичны по затрате
металла, индустриальны в изготовлении и монтаже.
Высокие строительные и эксплуатационные качества
пространственных вантовых систем и висячих оболочек проявились
также при использовании их для производственных зданий без
кранового оборудования. К^таким сооружениям относятся гараж в
Красноярске, шламбассейн в Еманжелинске.
Однако по технологическим соображениям на производствах,
размещающихся в большепролетных зданиях, нередко требуется
устройство подвесного транспорта — таковы самолетостроительные
заводы, ангары-мастерские, универсальные цехи, предназначенные
для выпуска крупногабаритной продукции, склады. Обсуждаются
возможности возведения большепролетных покрытий также для
зданий металлургического цикла с легким подвесным крановым
оборудованием, как, например, трубопрокатные цехи, волочильное
производство.
Этим требованиям отвечают комбинированные висячие системы,
которые состоят из вантовых ферм, передающих усилия на пилоны
и анкеры, и из элементов, работающих на изгиб под действием
местной нагрузки и таким образом распределяющих нагрузку между
узлами.
Примером использования комбинированных висячих
конструкций для каркаса промышленного здания может служить покрытие
бумажной фабрики в Маитуе (Италия) пролетом 163 м и шириной
30 м (арх. П. Нерви). Для обеспечении свободной планировки
технологического процесса основные несущие элементы типа висячего
моста расположены в продольном направлении. При высоте балки
жесткости 1,5 м прогибы покрытия от расчетной снеговой нагрузки
100 кгс/м2 составили 1/ш0 пролета,
В г. Эверетт (США) ваптовые конструкции рассматривались как
варианты каркаса самолетосборочного цеха пролетом 91 м,
площадью 240 тыс. ж2 с подвесными кранами грузоподъемностью 27 т.
Представляет интерес проект универсального промышленного зда-
3
ния с вантовым покрытием и подвесными кранами до 5 т. Шаг
колонн принят здесь 24 и 48 м, балки жесткости железобетонные,
разрезные, пролетом 12 м подвешены к вантам диаметром 47—52 мм.
Монтаж покрытия должен проводиться на нулевой отметке и подъем
осуществляться гидравлическими домкратами с последующим
закреплением тросов па несущих колоннах, Крыша предусмотрена
плоская. Расход металла 25,6 кг/ж2, приведенная толщина бетона
14,5 см, стоимость снижена на 20% по сравнению с конструкциями
покрытия по фермам.
В 1970 г. во Франкфурте-на-Майпе (ФРГ) сдан в эксплуатацию
ангар пролетом 270 м для ремонта самолетов. Основная
поперечная конструкция ангара состоит из двухпролетных нитей (2 X
X 135 м) со стрелами 1/,2 пролета, опирающихся в середине
покрытия на продольную разделительную балку пролетом 100 м. Здание
оборудовано подвесными кранами грузоподъемностью 7,5 т.
Отмечается, что предельный прогиб конструкции от кранового
оборудования принят 150 мм на 10 м длины (3/6е(,).
В СССР большой опыт возведения комбинированных висячих
конструкций накоплен при строительстве висячих мостов малых
и средних пролетов. В последние десятилетия этот опыт обогатился
сооружением большого числа воздушных переходов газопроводов,
которые в ряде случаев используются для местного автомобильного
сообщения. Строят также большепролетные пешеходные мосты,
по которым предусматривается движение одиночных легковых
автомашин.
Для перечисленных сооружений существенное значение имеет
временная сосредоточенная нагрузка, которая, как известно,
вызывает большие местные прогибы висячей конструкции. Поэтому при
выборе основной схемы сооружения необходимо обращать особое
внимание на способы обеспечения его жесткости при любом
положении временной нагрузки в пролете.
В предлагаемой работе рассматриваются вопросы компоновки
и нелинейного расчета висячих комбинированных конструкций,
осуществляемых в виде гибкой нити с балкой жесткости или в виде
схем, в которых применены различные меры, направленные на
повышение жесткости висячей конструкции, включая
использование Байтовых ферм. Все эти конструкции, отличающиеся от
обычной схемы «пить —- балка», носят название «висячие системы
повышенной жесткости».
ГЛАВА I
ПРОЕКТИРОВАНИЕ И ВОЗВЕДЕНИЕ ВИСЯЧИХ
и байтовых конструкций
ПОВЫШЕННОЙ ЖЕСТКОСТИ
1. Деформативность висячих систем
и способы обеспечения их жесткости
Прогибы комбинированных висячих конструкций при действии
па них временных нагрузок определяются дополнительными
провесами, главным образом гибкой нити или вантовой фермы.
Характер перемещений несущих элементов висячих конструкций можно
проследить, рассматривая уравнение перемещений гибкой нити,
приведенное в работах [30, 49]. Из этого уравнения следует, что
дополнительные провесы висячих систем зависят от двух причин:
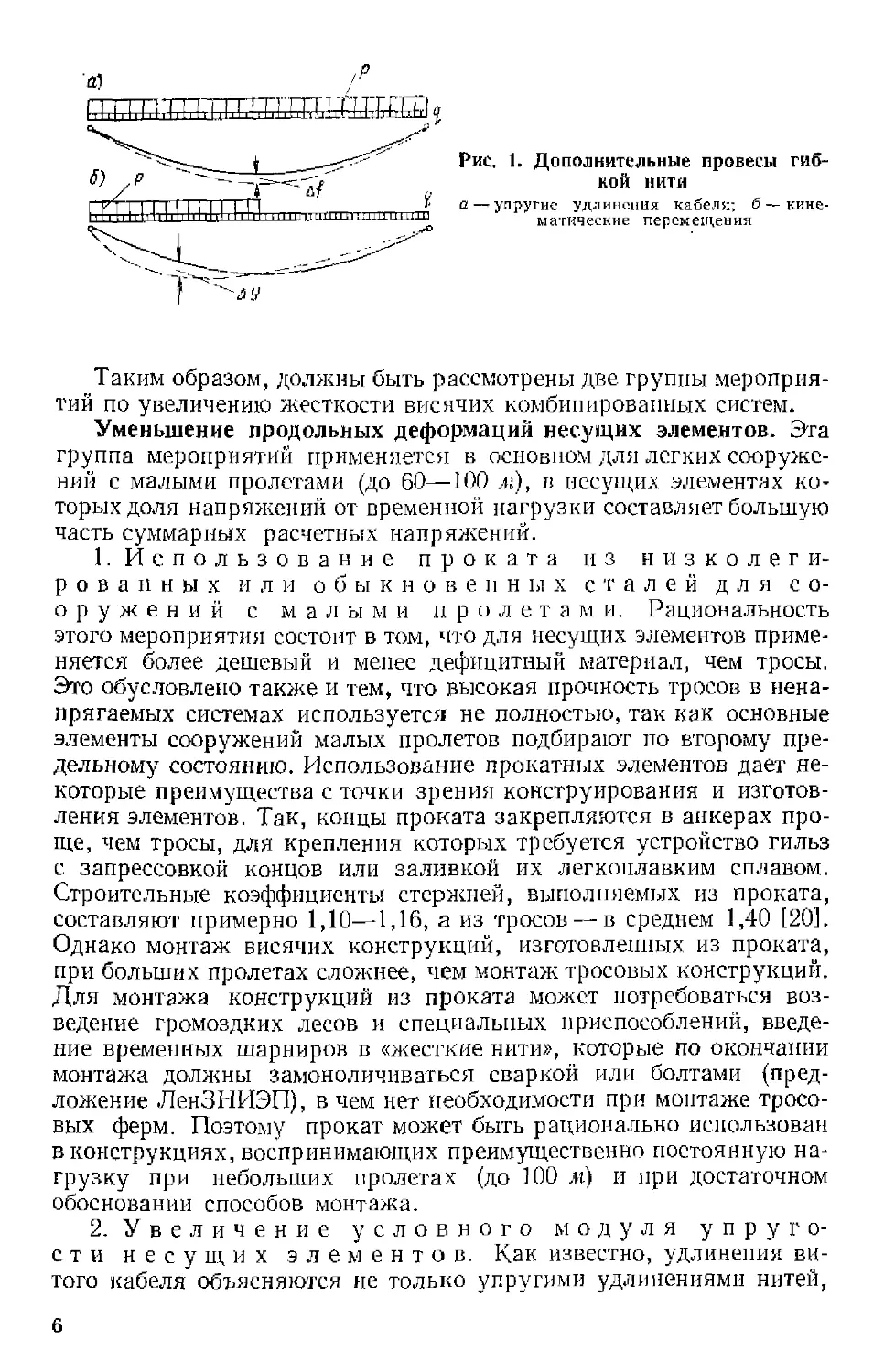
а) от упругих удлинений растянутых элементов, достигая
наибольших значений в середине пролета при загружении временной
нагрузкой всего пролета; при таком загружении приращение
распора максимально (рис. 1, а);
б) от кинематических перемещений, которые не зависят от
упругих свойств нити и являются следствием изменения формы
равновесия. Такие перемещения проявляются в наибольшей степени при
действии местной нагрузки, вызывающей s-образные прогибы
(рис. 1,6). В комбинированных конструкциях благодаря элементу
жесткости кинематические перемещения уменьшаются по
сравнению с перемещениями конструкций, состоящих лишь из гибких
нитей.
В общем случае загруження системы временной нагрузкой
прогибы являются следствием обеих причин — упругих удлинений и
кинематических перемещений; однако для каждой конструкции
может быть отмечено преобладающее значение либо первой, либо
второй причины. Какая из этих двух причин имеет большее значение,
можно выяснить сопоставлением прогибов в середине пролета (при
загружении всего пролета) с прогибами в его четверти под
действием нагрузки, расположенной па половине пролета. В
соответствии с результатами такого анализа могут быть приняты меры,
направленные па уменьшение упругих удлинений или
кинематических перемещений либо на обеспечение общей жесткости
конструкции.
5
Рис. 1. Дополнительные провесы
гибкой нити
а — упругие удлинения кабеля; б —
кинематические перемещения
Таким образом, должны быть рассмотрены две группы
мероприятий по увеличению жесткости висячих комбинированных систем.
Уменьшение продольных деформаций несущих элементов. Эта
группа мероприятий применяется в основном для легких
сооружений с малыми пролетами (до 60—100 м), и несущих элементах
которых доля напряжений от временной нагрузки составляет большую
часть суммарных расчетных напряжений.
1. Использование проката из
низколегированных или обыкновенных сталей для
сооружений с малыми пролетами. Рациональность
этого мероприятия состоит в том, что для несущих элементов
применяется более дешевый и менее дефицитный материал, чем тросы.
Это обусловлено также и тем, что высокая прочность тросов в нена-
прягаемых системах используется не полностью, так как основные
элементы сооружений малых пролетов подбирают по второму
предельному состоянию. Использование прокатных элементов дает
некоторые преимущества с точки зрения конструирования и
изготовления элементов. Так, концы проката закрепляются в анкерах
проще, чем тросы, для крепления которых требуется устройство гильз
с запрессовкой концов или заливкой их легкоплавким сплавом.
Строительные коэффициенты стержней, выполняемых из проката,
составляют примерно 1,10—1,16, а из тросов — в среднем 1,40 [20].
Однако монтаж висячих конструкций, изготовленных из проката,
при больших пролетах сложнее, чем монтаж тросовых конструкций.
Для монтажа конструкций из проката может потребоваться
возведение громоздких лесов и специальных приспособлений,
введение временных шарниров в «жесткие нити», которые по окончании
монтажа должны замоноличиваться сваркой или болтами
(предложение ЛенЗНИЭП), в чем нет необходимости при монтаже
тросовых ферм. Поэтому прокат может быть рационально использован
в конструкциях, воспринимающих преимущественно постоянную
нагрузку при небольших пролетах (до 100 м) и при достаточном
обосновании способов монтажа.
2. Увеличение условного модуля
упругости несущих элементов. Как известно, удлинения
витого кабеля объясняются не только упругими удлинениями нитей,
6
из которых состоит трос, но они зависят и от перемещения нитей
в витом тросе, от «рыхлых» деформаций в результате натяжения
тросов. Чтобы уменьшить эти побочные причины удлинения тросового
элемента, рекомендуется:
а) использовать пряди (пучки), состоящие из параллельных
высокопрочных проволок, вместо витых кабелей;
б) производить обтяжку тросов перед монтажом. Обтяжкой
снимаются рыхлые деформации, па 20—30% увеличивается
условный модуль упругости канатов. По данным некоторых
исследователей, полученный модуль канатов может уменьшиться в
результате последующих транспортных и монтажных операций с канатом
118, 19]. Однако обтяжка необходима не только для снятия рыхлых
деформаций. Она служит также проверкой концевых закреплений
тросовых элементов.
3. Применение предварительно
напряженных железобетонных обойм для тросовых
элементов, использование предварительно
напряженных железобетонных элементов в
качестве растянутых стержней 120], — эти приемы используются
для уменьшения удлинения несущих элементов, но они усложняют
изготовление и монтаж сооружения, увеличивают его вес.
Существенное повышение жесткости может быть достигнуто, если создается
предварительное напряжение (обжатие) железобетонного настила,
расположенного непосредственно на несущих элементах тросовых
ферм комбинированной конструкции. В этом случае жесткость
может быть увеличена в 3—4 раза по сравнению с жесткостью обычной
Байтовой схемы [21, 29].
4. Увеличение стрелы провеса несущих
нитей до V7—Vs пролета. Как известно, с увеличением стрелы
провеса уменьшаются распоры от нагрузок, а следовательно,
несущий элемент меньше удлиняется. С другой стороны, при
увеличении стрелы возрастают прогибы вследствие кинематических
перемещений при загружении. части пролета. Поэтому при компоновке
сооружения должен быть установлен такой наибольший провес
несущих элементов, которым гарантируется жесткость данной
конструкции как при загружении всего пролета, так и при всех
возможных местных воздействиях. Таким образом, с точки зрения
увеличения общей жесткости выгодно применять различные висячие
системы повышенной жесткости, т. е. усиленные вантами, с
треугольной решеткой, двухкабельные и другие менее чувствительные к
местным нагрузкам, чем обычная система (пить с балкой и
вертикальными подвесками). В них могут быть большие стрелы провеса, чем
в простейшей схеме, и поэтому они будут экономичны по затратам
материалов на устройство анкеров.
Уменьшение кинематических перемещений комбинированной
системы, возникающих при загружении части пролета,
1. Увеличение жесткости элемента,
работающего на изгиб (балки жесткости, арки и т. п.).
7
Увеличение сечения балки — это наименее экономичный способ
повышения жесткости комбинированной системы. Он может быть
оправдан в тех случаях, когда конструкция должна воспринимать
большие сосредоточенные нагрузки. При этом рационально
использовать сквозные фермы в качестве элемента, работающего на
изгиб, омоноличивать балки с настилом, включать в состав
комбинированной системы перекрестные фермы, а также другие
пространственные конструкции (ростверки балок, оболочки складчатого
типа и т. п.). В многопролетпых схемах типа «балка — нить» для
уменьшения прогибов от местных нагрузок предпочтительнее
применять неразрезпые балки, чем разрезные.
2. Уменьше и и е к и и с м этических п е р е м е-
щений нити как составной части
комбинированной системы без изменения ее
расчетной с х е м ы. Гибкая пить, загруженная постоянной нагрузкой,
стремится при местных воздействиях временной нагрузки
сохранить свое первоначальное равновесие. Стабилизация будет тем
надежнее, чем больше распор от постоянной нагрузки. Поэтому для
уменьшения кинематических перемещений возможны следующие
способы увеличения распоров от постоянных нагрузок;
а) уменьшение стрелы провеса в пределах, которые
экономически оправданы с точки зрения расхода материалов на анкерные
устройства и на растянутые несущие элементы;
б) использование железобетонных настилов и балок для
пролетного строения комбинированной системы;
в) введение арочного (обратного) предварительно напряженного
пояса илн напрягающих вант, воздействие которых па основной
несущий кабель в известной степени может рассматриваться как
постоянная нагрузка [35].
Эти мероприятия, как и увеличение жесткости балки, нельзя
признать самыми рациональными: они связаны с дополнительным
расходом материалов как на висячие, так и на анкерные элементы.
Главный же их недостаток тот, что при больших затратах средств
они мало снижают кинематические перемещения.
3. И з м е и е п ц е расчетной схемы н и т и, в к л
точение дополнительных элементов — ват,
Принципиально иным радикальным способом уменьшения
кинематических перемещении является наложение на гибкий элемент
дополнительных связей, препятствующих горизонтальным перемещениям
нити вдоль пролета. Рассматривая уравнение равновесия гибкой
нити, записанное с. учетом вертикальных и горизонтальных
перемещений, можно заметить, что эти перемещения связаны между
собой. Поэтому включение в висячую ферму дополнительных связей,
ограничивающих горизонтальные перемещения гибкой нити,
способствует уменьшению вертикальных кинематических перемещений
пролетного строения при местных статических нагрузках и
повышает стабилизацию системы при динамических воздействиях.
8
9
Подтверждением последнего вывода может служить анализ
разрушения Такомского моста: после того как оборвались наклонные
ванты, усиливающие береговые пролеты, а затем и раскосы,
соединяющие кабель с балкой в среднем пролете, резко изменилась форма
колебаний моста — она стала с одним узлом в середине вместо восьми
узлов, понизилась частота и увеличилась амплитуда колебаний.
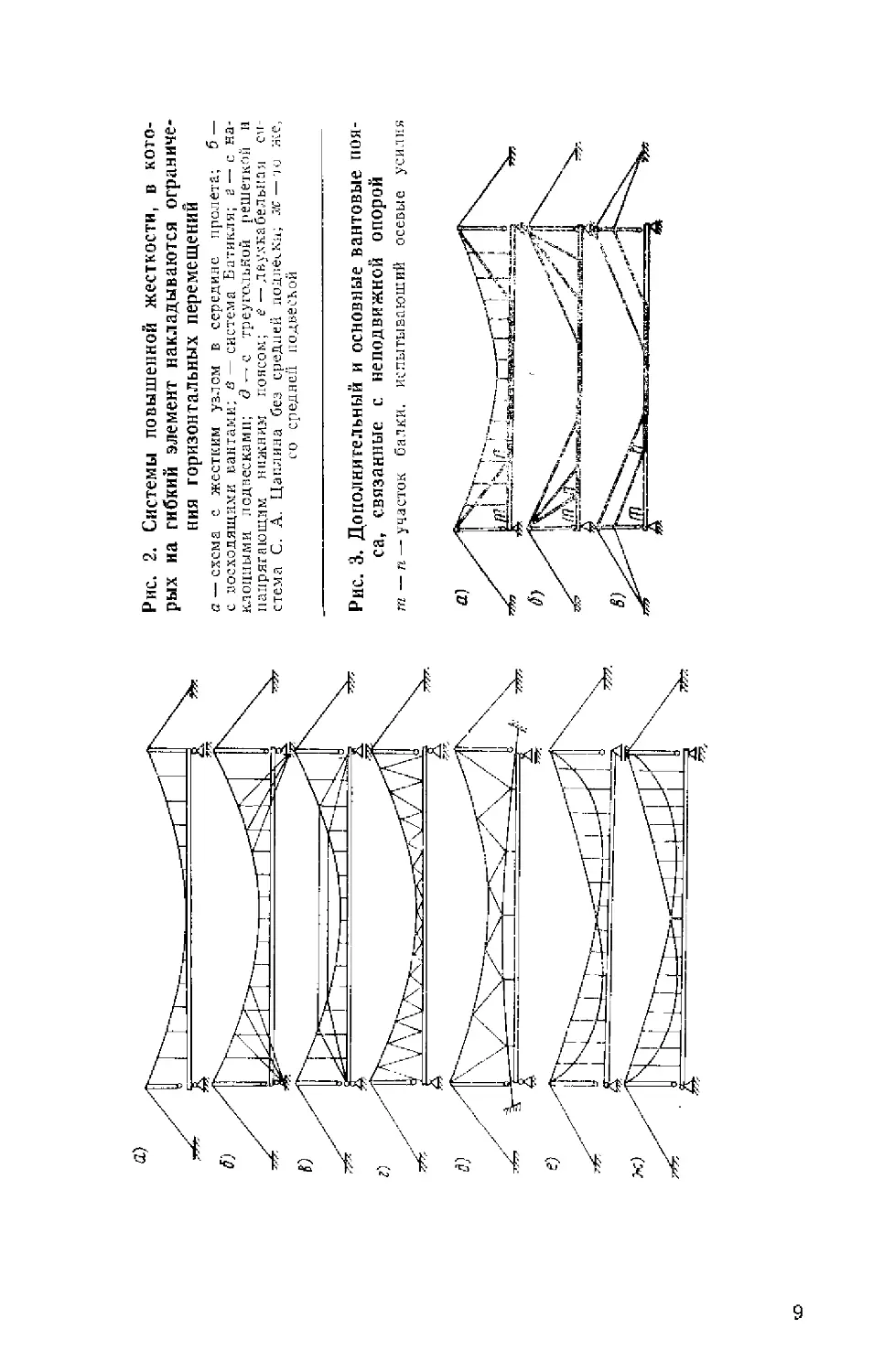
Связями, ограничивающими свободные перемещения кабеля вдоль
пролета, могут быть: узел прикрепления кабеля к балке в середине
пролета (рис. 2, а), пучки восходящих вант (рис. 2, б),
горизонтальные вантовые элементы (ферма Батикля [53J, рис. 2, в), замена
вертикальных подвесок наклонными (рис. 2, г, мост через р. Северен,
Англия) или треугольной решеткой ( рис. 2, д).
В этих схемах принцип наложения связей очевиден — узлы
кабеля соединяются прямолинейными элементами с неподвижными
опорами или накладываются ограничения на горизонтальные
смещения узлов, как, например, в двухкабельных схемах С. А. Цапли-
на, в которых взаимные горизонтальные перемещения между
поясами ограничены в середине пролета (рис. 2, е, ж). В схемах
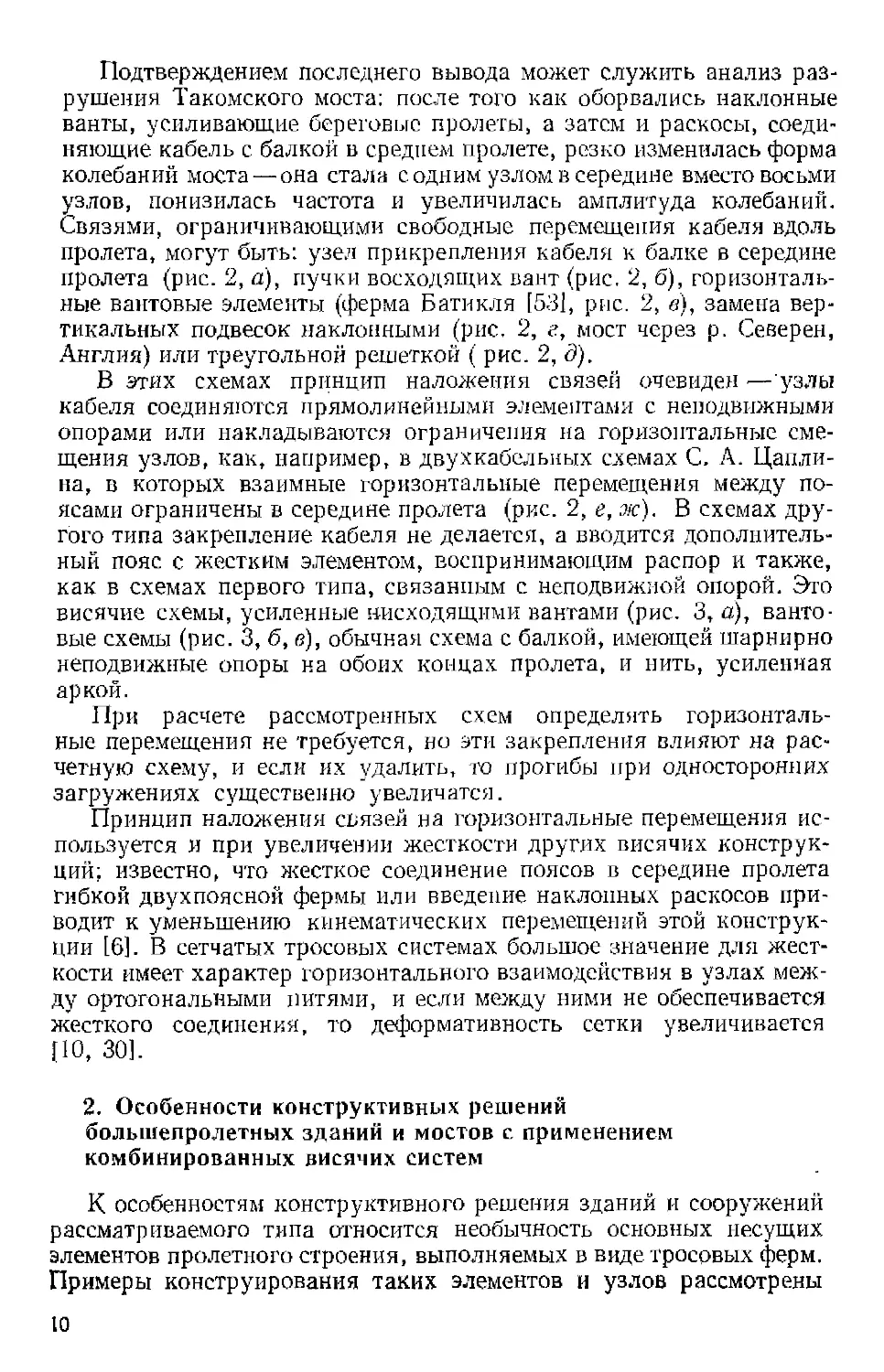
другого типа закрепление кабеля не делается, а вводится
дополнительный пояс с жестким элементом, воспринимающим распор и также,
как в схемах первого типа, связанным с неподвижной опорой. Это
висячие схемы, усиленные нисходящими вантами (рис. 3, а),
Байтовые схемы (рис. 3, б, е), обычная схема с балкой, имеющей шарнирно
неподвижные опоры на обоих концах пролета, и нить, усиленная
аркой.
При расчете рассмотренных схем определять
горизонтальные перемещения не требуется, но эти закрепления влияют на
расчетную схему, и если их удалить, то прогибы при односторонних
загружениях существенно увеличатся.
Принцип наложения связей на горизонтальные перемещения
используется и при увеличении жесткости других висячих
конструкций; известно, что жесткое соединение поясов в середине пролета
гибкой двухпоясной фермы или введение наклонных раскосов
приводит к уменьшению кинематических перемещений этой
конструкции [6]. В сетчатых тросовых системах большое значение для
жесткости имеет характер горизонтального взаимодействия в узлах
между ортогональными нитями, и если между ними не обеспечивается
жесткого соединения, то деформативность сетки увеличивается
[10, 30].
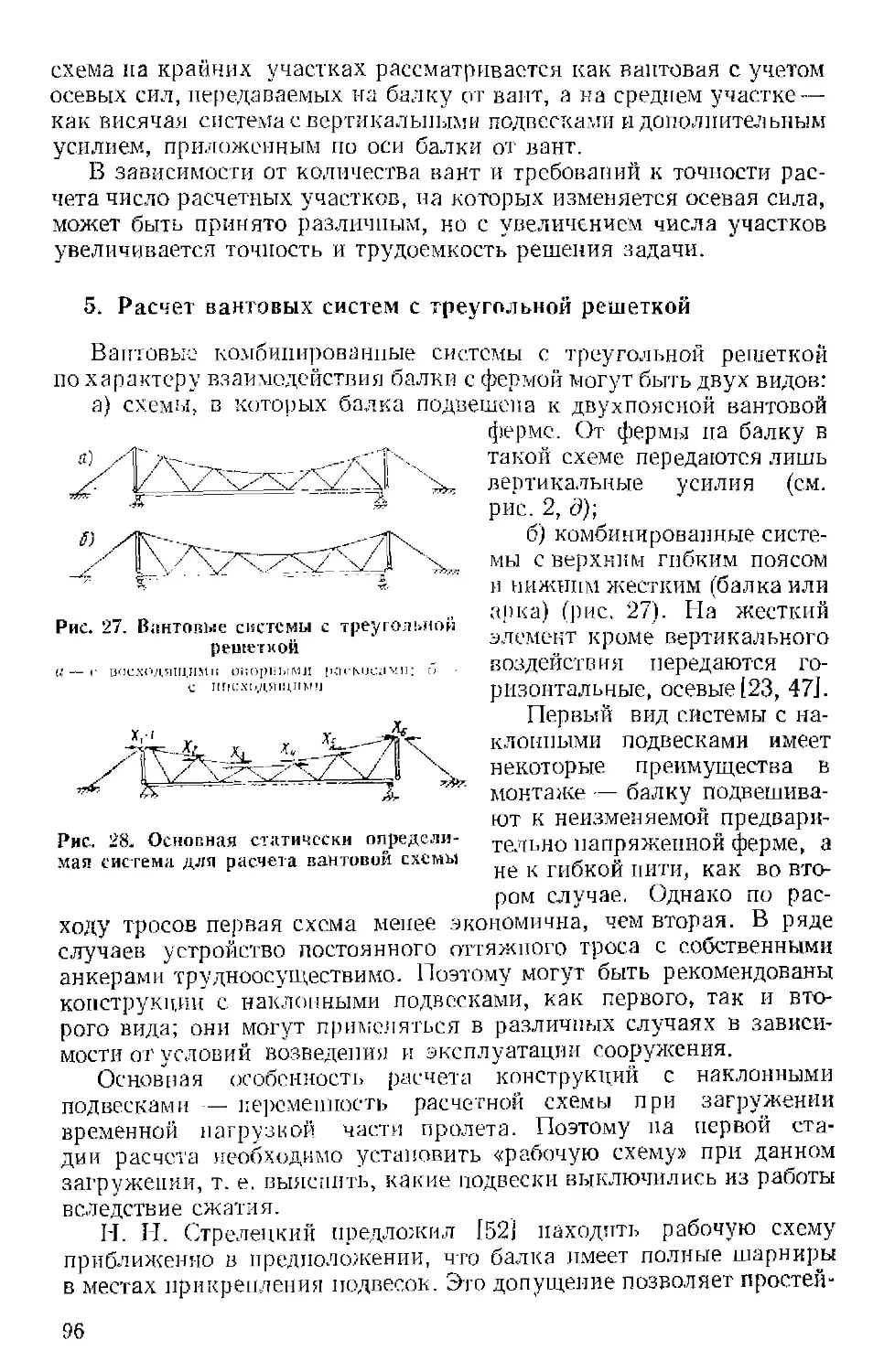
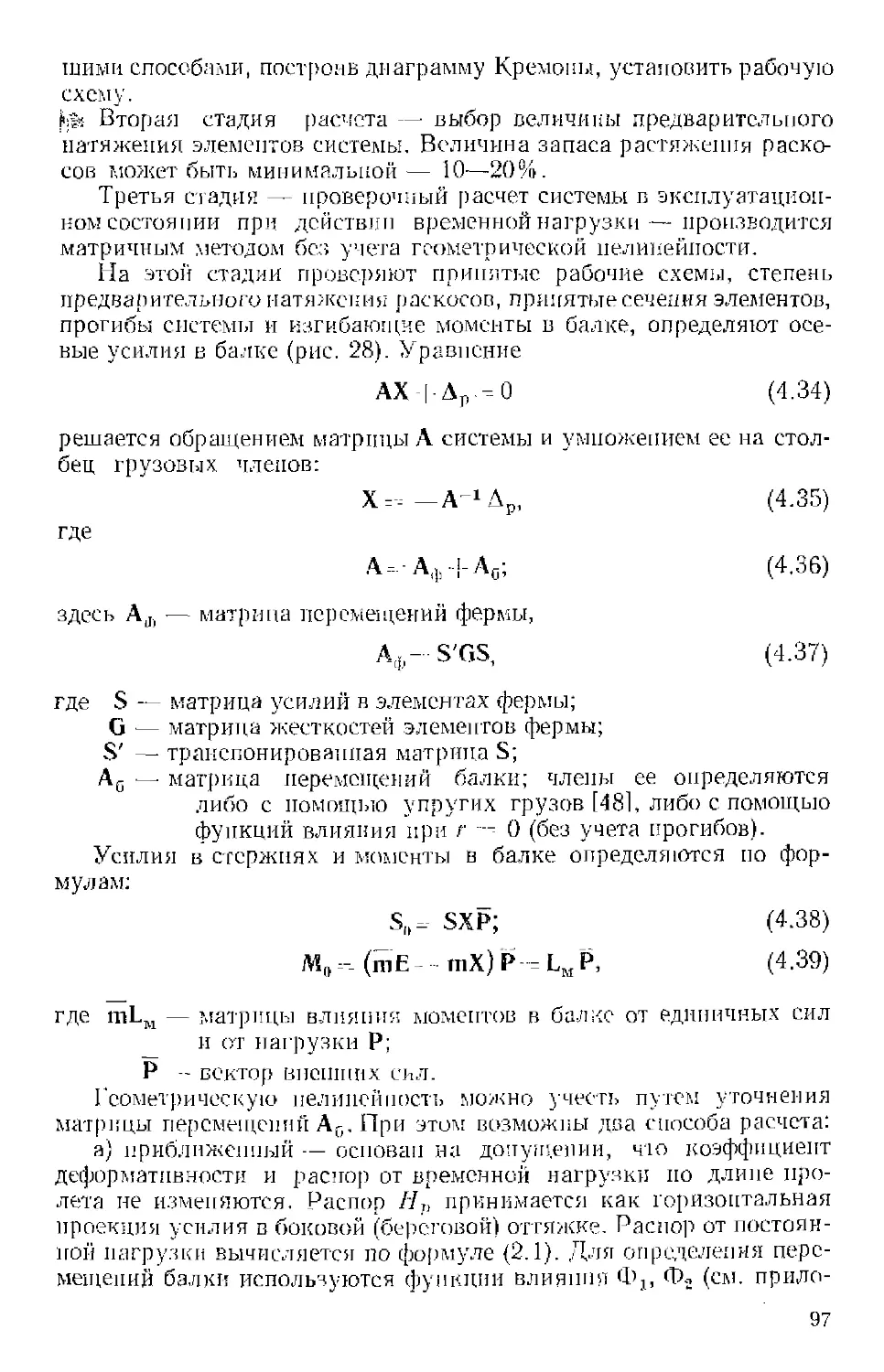
2. Особенности конструктивных решений
большепролетных зданий и мостов с применением
комбинированных висячих систем
К особенностям конструктивного решения зданий и сооружений
рассматриваемого типа относится необычность основных несущих
элементов пролетного строения, выполняемых в виде тросовых ферм.
Примеры конструирования таких элементов и узлов рассмотрены
10
в работах 114, 21, 34, 53]. Специфические требования
предъявляются также и к другим частям сооружения.
Анкерные устройства. Как известно, в висячих мостах стоимость
анкерных опор и пилонов составляет 50—70% стоимости всего
сооружения. Такие же соотношения стоимостей частей сооружения
могут быть приняты и для комбинированных висячих покрытий
промзданий. Поэтому для обоснования применения висячей системы
в качестве несущей конструкции покрытия требуется изучить
возможность рационального осуществления внешних анкерных
устройств, например возможность передавать распор от висячего
пролетного строения на жесткий каркас вспомогательных зданий,
если они возведены или одновременно возводятся рядом с
большепролетным цехом. Следует также рассмотреть варианты
безраспорных висячих систем с передачей распора на балку жесткости [33].
В мостовых сооружениях наиболее экономично применять
висячие схемы на плотных грунтах или скальных породах.
В зданиях с висячими покрытиями возможны следующие схемы
анкерных устройств.
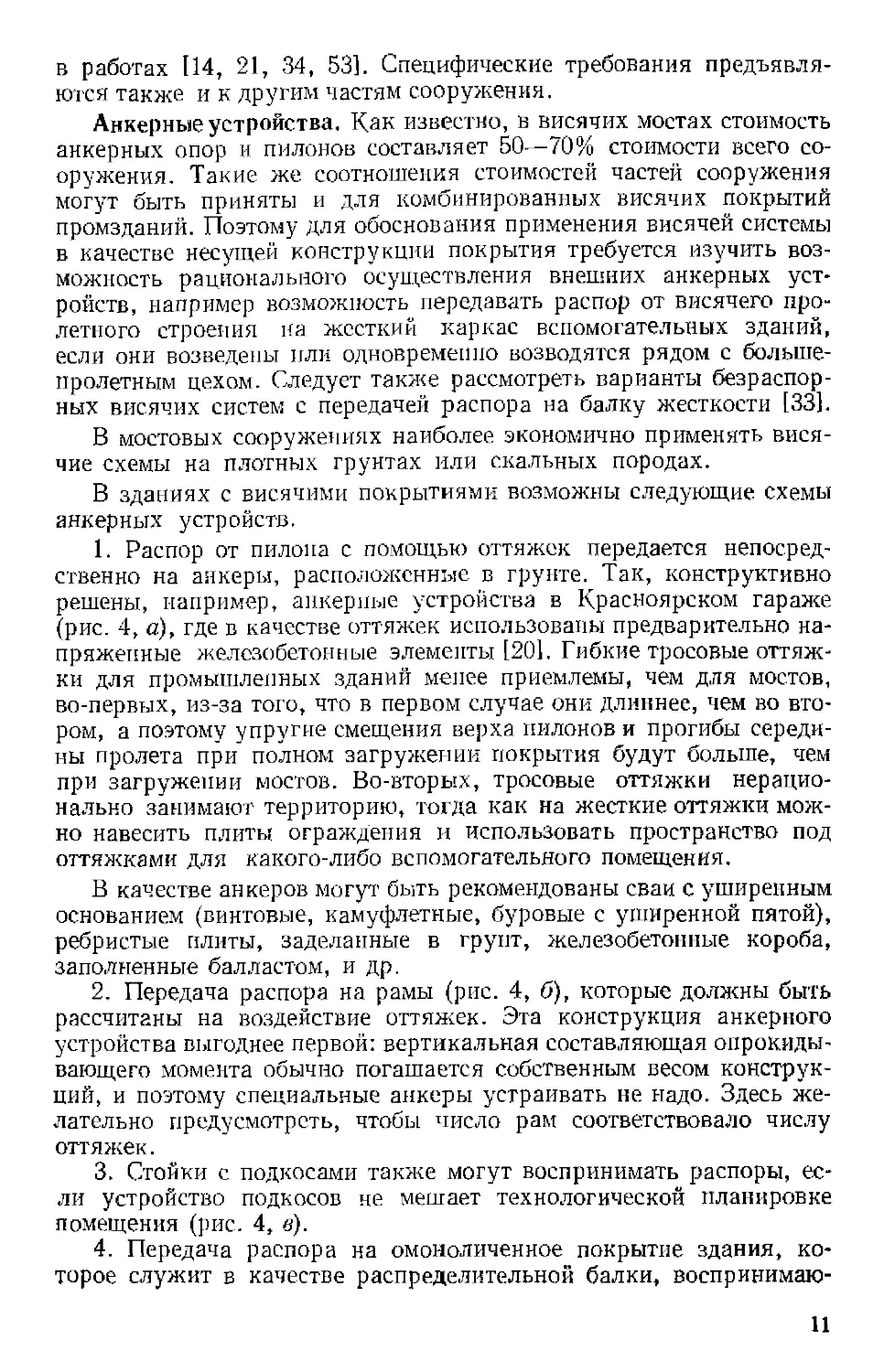
1. Распор от пилона с помощью оттяжек передается
непосредственно на анкеры, расположенные в грунте. Так, конструктивно
решены, например, анкерные устройства в Красноярском гараже
(рис. 4, а), где в качестве оттяжек использованы предварительно
напряженные железобетонные элементы [20]. Гибкие тросовые
оттяжки для промышленных зданий менее приемлемы, чем для мостов,
во-первых, из-за того, что в первом случае они длиннее, чем во
втором, а поэтому упругие смещения верха пилонов и прогибы
середины пролета при полном загружении покрытия будут больше, чем
при загружепии мостов. Во-вторых, тросовые оттяжки
нерационально занимают территорию, тогда как на жесткие оттяжки
можно навесить плиты ограждения и использовать пространство под
оттяжками для какого-либо вспомогательного помещения.
В качестве анкеров могут быть рекомендованы сваи с уширенным
основанием (винтовые, камуфлетные, буровые с уширенной пятой),
ребристые плиты, заделанные в грунт, железобетонные короба,
заполненные балластом, и др.
2. Передача распора на рамы (рис. 4, б), которые должны быть
рассчитаны на воздействие оттяжек. Эта конструкция анкерного
устройства выгоднее первой: вертикальная составляющая
опрокидывающего момента обычно погашается собственным весом
конструкций, и поэтому специальные анкеры устраивать не надо. Здесь
желательно предусмотреть, чтобы число рам соответствовало числу
оттяжек.
3. Стойки с подкосами также могут воспринимать распоры,
если устройство подкосов не мешает технологической планировке
помещения (рис. 4, в).
4. Передача распора на омоноличенное покрытие здания,
которое служит в качестве распределительной балки, воспринимаю-
11
щей усилия от оттяжек и передающей эти усилия на торцевые стены
или подкосы (рис. 4, г).
5. Внешне безраспорные конструкции могут быть осуществлены
с передачей распора от кабеля на балку жесткости и на другие
элементы покрытия. Экономичность таких систем в каждом отдельном
случае должна быть изучена, так как сжатие, которое передается
на балку, заставляет проектировщика развивать сечение и прини-
Рис. 4. Схемы анкерных конструкций
а — передача распоры на анкер, расположенный в грунте (гараж и Красноярске);
6 — рамы (гараж е ГДР); с — подкосы; с—омоноличенное перекрытие и стены
мать меры по обеспечению се устойчивости. Основное преимущество
безраспорпых систем с точки зрения увеличения жесткости
покрытия — сокращение длины оттяжек, а следовательно, уменьшение
упругих удлинений кабеля и прогибов в середине пролета по
сравнению со схемами, в которых оттяжки закреплены в анкерах,
расположенных на уровне пола.
Схемы связей в висячих комбинированных покрытиях
промышленных зданий. Кроме обычных связей, применяемых в каркасах
зданий, в металлических конструкциях комбинированного
покрытия должны быть предусмотрены следующие связи.
I. Связи по верхним и нижним поясам сквозных балок
жесткости для обеспечения устойчивости как верхнего, так и нижнего по-
12
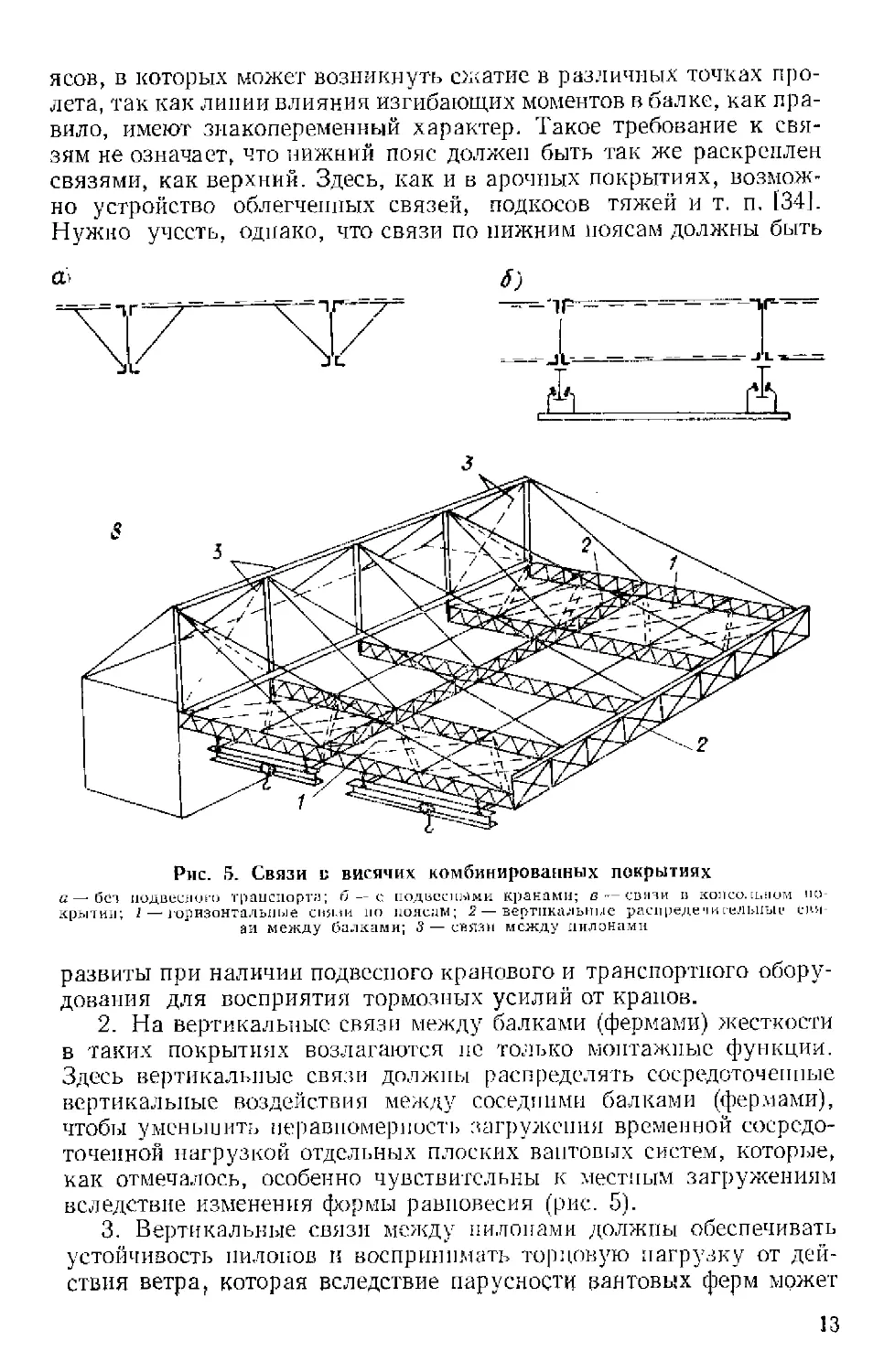
ясов, в которых может возникнуть сжатие в различных точках
пролета, так как линии влияния изгибающих моментов в балке, как
правило, имеют знакопеременный характер. Такое требование к
связям не означает, что нижний пояс должен быть так же раскреплен
связями, как верхний. Здесь, как и в арочных покрытиях,
возможно устройство облегченных связей, подкосов тяжей и т. п. [34].
Нужно учесть, однако, что связи по нижним поясам должны быть
а> 6)
Рис. 5. Связи и висячих комбинированных покрытиях
а — бег подвалит транспорт;!; б — с подвесными кранами; с — евнчи и копсолыюм
покрытии; / — горизонтальные сняли по поясам; 2 —вертикальные распредели гелыплс сии-
ан между балками; 3 — связи между пилонами
развиты при наличии подвесного кранового и транспортного
оборудования для восприятия тормозных усилий от крапов.
2. На вертикальные связи между балками (фермами) жесткости
в таких покрытиях возлагаются не только монтажные функции.
Здесь вертикальные связи должны распределять сосредоточенные
вертикальные воздействия между соседними балками (фермами),
чтобы уменьшить неравномерность загружепнн временной
сосредоточенной нагрузкой отдельных плоских Байтовых систем, которые,
как отмечалось, особенно чувствительны к местным загружениям
вследствие изменения формы равновесия (рис. 5).
3. Вертикальные связи между пилонами должны обеспечивать
устойчивость пилонов и воспринимать торцовую нагрузку от
действия ветра, которая вследствие парусности вантовых ферм может
13
достигать больших значений. Эти связи могут выполняться из
тросов, но должны иметь жесткие распорки или раскосы (см. рис. 5).
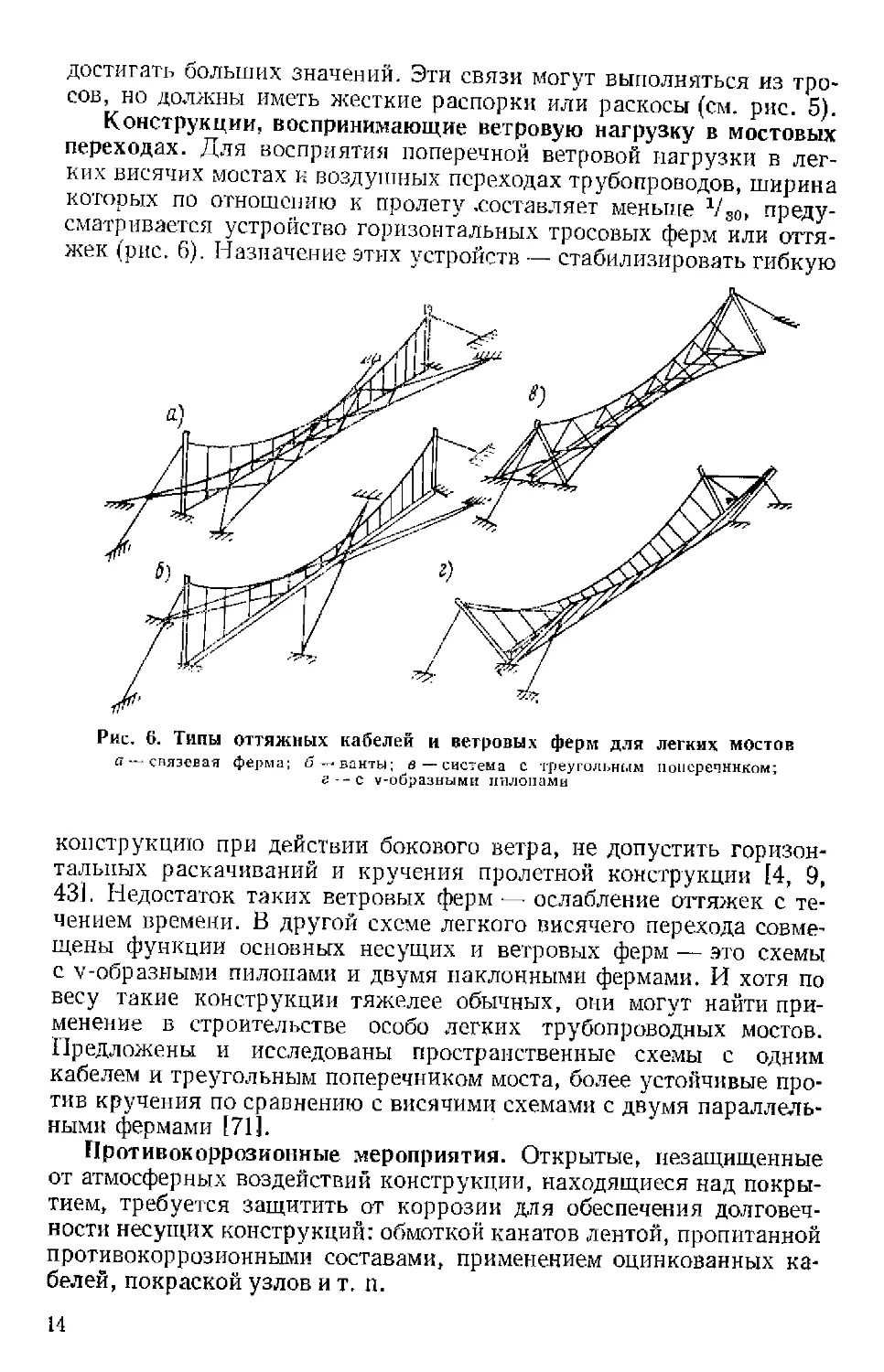
Конструкции, воспринимающие ветровую нагрузку в мостовых
переходах. Для восприятия поперечной ветровой нагрузки в
легких висячих мостах к воздушных переходах трубопроводов, ширина
которых по отношению к пролету .составляет меньше V30,
предусматривается устройство горизонтальных тросовых ферм или
оттяжек (рис. 6). Назначение этих устройств — стабилизировать гибкую
Рис. 6. Типы оттяжных кабелей и ветровых ферм для легких мостов
а — снязевая ферма; б — ванты; в — система с треугольным поперечником;
г — с v-образными пилонами
конструкцию при действии бокового ветра, не допустить
горизонтальных раскачиваний и кручения пролетной конструкции [4, 9,
43]. Недостаток таких ветровых ферм — ослабление оттяжек с
течением времени. В другой схеме легкого висячего перехода
совмещены функции основных несущих и ветровых ферм — это схемы
с v-образными пилонами и двумя наклонными фермами. И хотя по
весу такие конструкции тяжелее обычных, они могут найти
применение в строительстве особо легких трубопроводных мостов.
Предложены и исследованы пространственные схемы с одним
кабелем и треугольным поперечником моста, более устойчивые
против кручения по сравнению с висячими схемами с двумя
параллельными фермами [71].
Противокоррозионные мероприятия. Открытые, незащищенные
от атмосферных воздействий конструкции, находящиеся над
покрытием, требуется защитить от коррозии для обеспечения
долговечности несущих конструкций: обмоткой канатов лентой, пропитанной
противокоррозионными составами, применением оцинкованных
кабелей, покраской узлов и т. п.
14
Конструктивное решение узлов должно быть таким, чтобы на них
не задерживались влага и пыль.
Опыт длительной эксплуатации висячих и ваптовых мостов
показывает, что сохранность тросовых конструкций может быть надежно
обеспечена обычными способами предупреждения коррозии,
которые применяются к другим металлическим конструкциям.
Снеговая нагрузка на вантовые покрытия. Отметим, что на
покрытиях с открытыми Байтовыми конструкциями снег может
задерживаться в большем количестве, чем на обычных кровлях. Поэтому
при компоновке несущих конструкций необходимо обратить
внимание на правильный выбор шага ферм и схемы их решетки, чтобы
обеспечить хорошую продуваемость верхнего строения покрытия. Здесь
следует избегать устройства сложных фонарей и не допускать
перепадов высот, способствующих образованию снежных мешков.
Многолетние наблюдения за покрытиями, в которых ванты
расположены снаружи с большим тагом, показали, что на них не
наблюдаются снеговые скопления, которые превышали бы расчетные
нагрузки.
3. Особенности проектирования комбинированных
висячих и вантовых систем
Расчет и конструирование комбинированных висячих систем
каркасов промышленных и гражданских зданий и сооружений,
а также мостовых переходов ведется по двум предельным
состояниям.
Расчетные характеристики материалов могут быть приняты по
нормативам, разработанным для обычных и предварительно
напряженных металлических и железобетонных конструкций.
Расчетные сопротивления стальных канатов определяются по
формуле (СНиП П-В.3-62*):
Як=*о'П'«1/?пр> (1.1)
где Ruv — предельные напряжения, определенные по разрывному
усилию каната в целом, которое приводится в ГОСТе
или заводском сертификате;
ka— коэффициент однородности (k0 -■- 0,8);
mj — коэффициент условий работы материала в конструкции,
принимается тг — 0,8;
т — коэффициент условий работы элемента конструкции
или сооружения, который должен устанавливаться
инструкцией по проектированию висячих элементов
сооружений.
В. И. Киреенко предлагает принимать этот коэффициент равным
0,75 [18].
Кроме этого, может быть введен поправочный коэффициент для
учета работы концевых креплений каната. Так, для машинной за-
15
плетки, для заливки и клиновой запрессовки концов каната в
муфтах этот коэффициент может быть принят равным единице. При
закреплении концов с помощью жимков, серег и других элементов,
работающих на трении, должен быть введен понижающий
коэффициент 0,75—0,85.
Для несущих конструкций принимаются канаты с жестким
(металлическим) сердечником. Модуль упругости канатов после
предварительной вытяжки может быть принят 1,4 -^ 1,5 • 105 кгс/смй и
без вытяжки — 1,2 -f- 1,3 • I0G кгс/слг*.
Следует отметить, что расчетный модуль упругости канатов,
принятый на основе лабораторных испытаний коротких образцов,
как правило, не совпадает с модулем упругости элементов в деле.
Это обстоятельство предопределяет расхождения между
результатами испытаний построенного сооружения и расчетами его на
жесткость. Чтобы максимально приблизить расчетный модуль упругости
к действительному, можно принять его па основе испытаний
сооружения при загружелии временной нагрузкой всего пролета. При
этом расчетная схема сооружения наиболее определенна (при
стрелках V8—1/10 пролета приближается к линейной) и на результаты
практически не влияют какие-либо неточности работы балки, так
как при таком загружении балка принимает на себя лишь 10—15%
временной нагрузки.
Предельные расчетные прогибы вантовых комбинированных
покрытий на стадии окончания монтажа балок должны приниматься
^гюо — 1/5оо пролета. В дальнейшем после установки вертикальных
распределяющих связей и омополичивания настила, судя по
экспериментальным исследованиям бескрановых висячих покрытий,
жесткость конструкций должна увеличиться в 3—4 раза 121].
Для конструкций, изгиб которых происходит но двум полуволнам,
нормируется «амплитуда» прогибов — сумма прогиба под грузом и
подъем незагруженной части пролета. Для мостов и воздушных
переходов трубопроводов нормативные прогибы от действия
временной нагрузки предусматриваются соответствующими
ведомственными инструкциями, по они также не должны превышать указанных
пределов. Исключение может составить нормирование прогибов для
проезда больших одиночных грузов при ограниченных скоростях
движения. Например, для временных мостов па лесовозных
дорогах можно, по-видимому, допустить амплитуду прогибов в
пределах Vjoo пролета моста [31].
В связи с расчетом комбинированных висячих конструкций по
нелинейной схеме возникает вопрос, по какому предельному
состоянию определять расчетные характеристики, зависящие от
соотношения нагрузок? Известно также, что на результаты нелинейного
расчета влияет соотношение постоянных и временных нагрузок,
которое при одном и том же загружении различно для первого и
второго расчетных предельных состояний, так как коэффициенты
перегрузок не одинаковы для этих нагрузок. Подходя к расчету
строго, нелинейный расчет для одного загружения следует проводить
16
дважды — по нормативным и расчетным нагрузкам. Это
увеличивает трудоемкость расчета, особенно статически неопределимых
систем, лишние неизвестные которых пришлось бы определять как
для первого, так и для второго предельных состояний. Однако,
имея в виду, что учет нелинейности — это уточнение расчетной
схемы и в висячих системах он обнаруживает излишние запасы
в сооружении, можно ограничиться одним расчетом статически
неопределимой системы, при меньшем значении характеристик,
вычисленных по нормативным нагрузкам. Дальнейшее определение
усилий для расчета прочности выполняется с учетом коэффициента
перегрузки, а определение прогибов — по нормативным
нагрузкам. Таким образом, при данном расчете по первому предельному
состоянию в сооружении остается некоторый невыявлепный запас
прочности (менее 5%), который тем меньше, чем меньше отношение
постоянных и времепных нагрузок. Определение прогибов, которое
при проектировании висячих конструкций часто является
решающим в выборе того или иного варианта, при данном расчете будет
выполнено наиболее точно.
4. Приближенные расчеты при компоновке схемы
висячей конструкции и при назначении размеров
элементов сооружения
К задачам компоновки висячей комбинированной конструкции
относятся: выбор схемы сооружения и материалов, из которых оно
должно быть изготовлено, установление генеральных размеров
конструкции, предварительное назначение площадей и формы
сечений элементов. Эти вопросы обоснованно могут быть решены лишь
для конкретных географических и эксплуатационных условий на-
основе детального экономического анализа подобных
конструктивных решений, оценки способов монтажа и надежности эксплуатации
возведенных сооружений данного типа [54J. Учитывая, что пока не
накоплено достаточного опыта проектирования и возведения
висячих конструкций, выскажем общие рекомендации по выбору
компоновочных параметров, которые в процессе расчета должны быть
уточнены. Предлагаемые здесь ориентировочные расчеты основаны на
самых приближенных предпосылках, позволяющих получить
формулы, в которых легко проследить физический смысл расчета и
сознательно оцепить его результаты с количественной стороны.
Несмотря на приближенность, этими формулами удобно пользоваться па
первых шагах ознакомления с методикой проектирования новых
конструкций, а также для отладки программ расчета с помощью
ЭЦВМ.
Параметры, полученные при эскизном проектировании,
используют для основного расчета, выполняемого с помощью
вычислительных машин, чтобы, определив ординаты и площади линий
влияния, выбрать наиболее невыгодные положения временной
нагрузки. При этих положениях нагрузки производится окончательный
17
расчет сооружения с применением итерационных методов для учета
геометрической нелинейности.
Выберем и рассчитаем следующие параметры.
1. Стрела первоначального провеса
несущего кабеля. Стрела провеса кабеля — один из основных
параметров, определяющих экономичность висячей конструкции и ее
эксплуатационные качества.
Первым условием выбора оптимальной стрелы примем
экономичность всего сооружения. 13 качестве общего правила положим, что
при оптимальной стреле стоимость пролетного строения (кабеля,
балки, подвесок) равна стоимости анкерных устройств {анкеров,
пилонов, боковых оттяжек).
Для предварительного назначения стрелы могут быть
рекомендованы пределы / — (V, -=- 1/8) / — для конструкций малых и
средних пролетов (до 150м) и/ ■-■■- (У9 ч- 71а) / — для / > 150.«для
плотных или скальных грунтов, а также при использовании в качестве
анкеров ранее возведенных сооружений (в случае применения
висячих конструкций для покрытий промышленных зданий).
В качестве второго критерия выбора стрелы кабеля рассмотрим
условие полного использования материала кабеля как по
прочности, так и по жесткости.
Выведем формулу приближенных значений прогибов в
предположении, что при загружении всего пролета временной нагрузкой
балка не воспринимает на себя нагрузки. Запишем условие
деформаций кабеля как гибкой нити 1161:
i + ±.IL = l + ±.n..-Jb=!b-, (1.2)
3 I SI EKFKl v '
гДе fo> /i — начальная и конечная стрелы провеса кабеля;
Н0, #i — распоры в кабеле в начальной стадии (от постоянной
нагрузки) и суммарный распор от постоянной и
временной нагрузок.
Считаем приращение распора за счет временной нагрузки рп
с избытком:
о" Р
Н,~Н0-^. (1.3)
о/о
Пренебрегая относительным увеличением стрелы провеса
кабеля Д/// выше первой степени, получим
I 128' EKFK ' Р ' ■ { '
где Ек FK — продольная жесткость кабеля;
L0 — так называемая приведенная длина кабеля (см. гл. III),
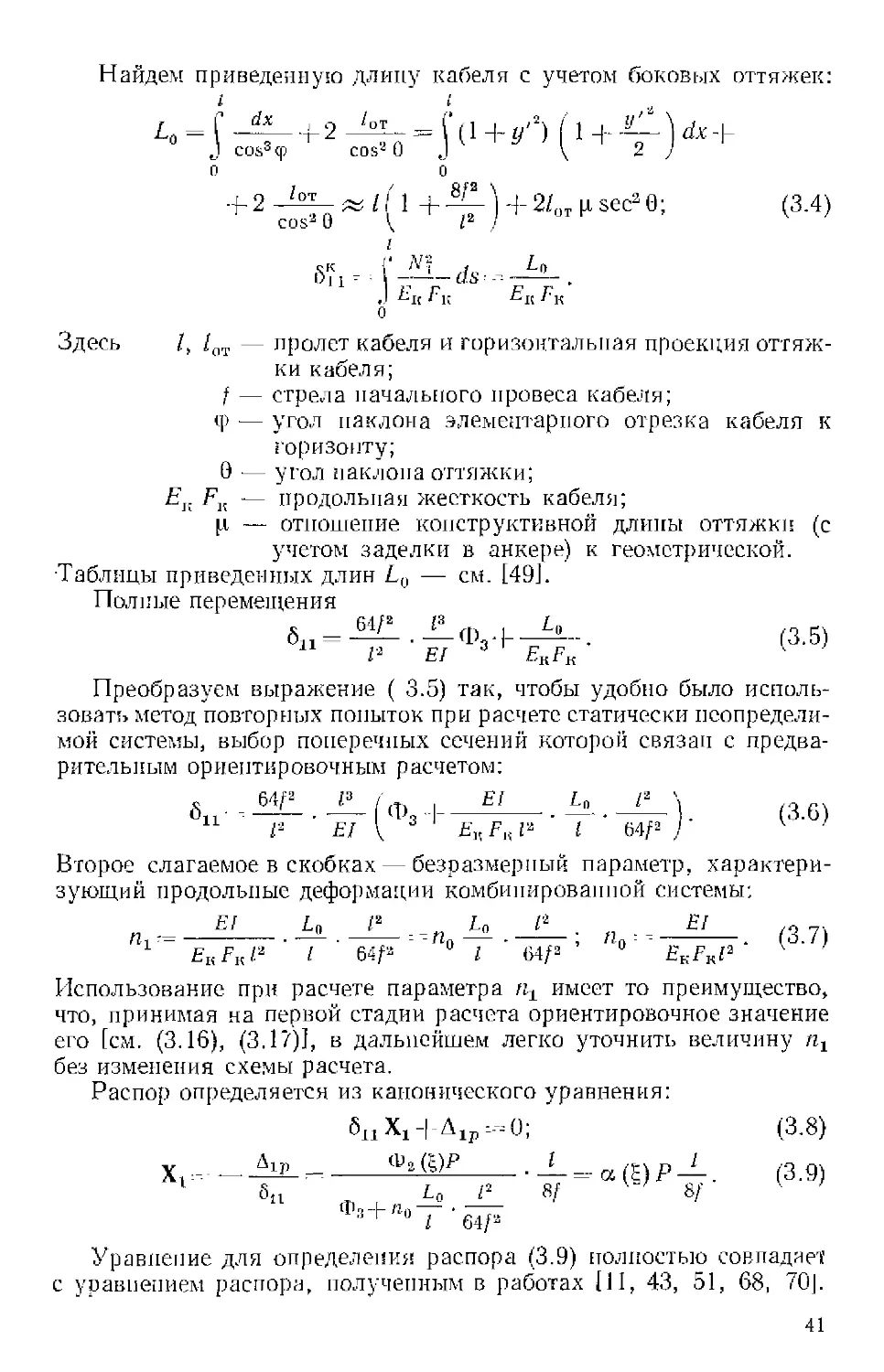
А>='(1+8^) + 2/0Т5ес2е, (1.5)
18
где /от — горизонтальная проекция боковой оттяжки,
соединяющей вершину пилона с анкером;
0 — угол наклона оттяжки к горизонту.
В формуле (1.4) нагрузка на кабель принята с избытком
приблизительно на 10%, так как не учтена работа балки. С избытком также
принята линейная зависимость прогибов от нагрузки, что, в общем,
должно дать некоторое завышенное значение прогибов,
вычисленных по формуле (1.4) по сравнению с фактическим.
Приближенно определим прогибы балки комбинированной
системы в четверти пролета при загружении временной нагрузкой
половины пролета — от опоры до середины балки. Положим для
упрощения, что кабель нерастяжим, поэтому в нем распор от временной
нагрузки составит Нр ■- - ^г ■ шг-, а равномерную нагрузку от под-
I В/о
весок, направленную вверх, в расчете па единицу длины балки
вычислим по формуле
z=tfB^—-£. (1.6)
Просуммируем действие па балку двух нагрузок — внешней
временной на половине пролета ри и усилий от подвесок по всему
пролету //72. Получим на левой половине пролета нагрузку рч/2,
направленную вниз, а на правой — такой же величины,
направленную вверх. Прогиб в четверти пролета в этом случае может быть
найден как прогиб в середине балки с пролетом 1/2. Таким образом,
найдем
-i=—*- Л?-ш (1.7)
/ 384-32 EIt
Эта формула даст заниженные результаты для конструкций
малых пролетов, так как не учитываются упругие удлинения кабеля,
а для систем больших пролетов (/ > 300 м) по этой формуле получим
увеличенные прогибы, так как здесь не учитывается геометрическая
нелинейность системы.
Подбор сечения кабеля по прочности выполним по
приближенной формуле в предположении, что вся временная нагрузка
передается на кабель:
F^-—»—-. М±Р)П{ + Щ. (1.8)
Здесь нагрузки р, q принимаются расчетными, т. е. с учетом
коэффициентов перегрузки. ц>0 — угол наклона кабеля к горизонту вблизи
пилона определяется из уравнения провисания кабеля:
у=^ (/_*). (1.9)
19
Отсюда:
^.,tgqW^4i°; (1.10)
dx I
i , f. . 16/»" , . m
COS (p[i
J/ 1 + ^-^1-1-^. (1.11)
Приравнивая площади сечений кабеля из (1.4) и (1.8), получим
/о 1 * р" Як
3 д/ p + q Ек
(1.12)
nil
Например, для отношения нагрузок^ = 0,3 и для предельного
А/ 1 „'
дополнительного провеса — - - ^ , найдем:
а) для кабеля
f_ J_ 500-3 8000 1_,
( ~ 3 3-1,3+10-1,1 ' 1,6-10° ~ 6 '
б) для стали 15ХСНД
J_ _ J_ 500-3 2900 1_
I ~ 3 3-1,3+10-1,1 '2,1-10* ~ 22 '
Следовательно, при обычных стрелах / ^ ^ (V8 ч- 1/10) / несущий
элемент, выполненный из кабеля, требуется рассчитывать по
условиям жесткости (прочность его не будет использована полиостью),
а несущий элемент из прокатной стали должен рассчитываться по
прочности.
Формулу (1-12) можно применить к рациональному выбору
марки материала, из которого предполагается выполнить гибкий
элемент комбинированной конструкции, если считать, что заданы
стрела провеса, предельные прогибы и соотношения постоянных и
временных нагрузок.
2. Длины оттяжек, соединяющих вер щи ну
пилона с анкером, и соотношения между
размерами пролетов, высота пилона. Если
проектировщик не связан заданными размерами боковых оттяжек,
то они могут быть приняты из следующих условий:
а) чтобы использовать один непрерывный кабель для несущего
элемента в пролете и для оттяжки, принимают равенство сечений
основного кабеля и оттяжки; для этого углы наклона кабеля к
горизонту вблизи пилона со стороны пролета и оттяжки должны быть
равны. Из уравнения (1.10) и геометрической схемы оттяжки
определим горизонтальную проекцию ее:
Высота пилона обычной однокабелыюй системы принимается
йп - 1,10 / или hn - f -|- 1,5 -т- 2 м. Округленно можно считать
/ • / = 1 ■ 4-
20
б) при изменении сечения кабеля па пилоне угол наклона
оттяжки может быть принят из условия минимальной стоимости оттяжки
и пилона [60], что соответствует 0 ■- 30 -f- 40";
в) для конструкций, в середине пролета которых заведомо будут
большие прогибы, может быть рекомендовано уменьшение длины
оттяжек (0 ■= 45 -=- 50°). При использовании комбинированных
висячих схем для зданий с подвесным крановым оборудованием
необходимо принимать меры к увеличению жесткости оттяжек:
дополнительно увеличивать их селение пли использовать в качестве
удерживающих элементов предварительно напряженные
железобетонные стержни [20], рекомендуется передавать усилия на соседние
жесткие каркасы, что должно способствовать уменьшению длины
и увеличению жесткости оттяжек.
3. Требуемая жесткость (£/) б а л к и и е е
высота. Балка в комбинированной висячей системе играет роль
распределительного элемента, воспринимающего местные
сосредоточенные временные нагрузки и передающего их через подвески на кабель
равномерно. Кроме этого, балка уменьшает общие кинематические
перемещения пролетной конструкции призагружении части пролета.
Требуемая жесткость балки может быть найдена из условия,
что прогиб в четверти пролета (при наибольших кинематических
перемещениях) будет равен предельным (допустимым) прогибам
системы.
Из приближенной формулы (7) найдем
EI=- -^J-.J-. (1.14)
384-32 !±у
Здесь ~ — заданный предельный прогиб.
Для выбора высоты балки (или фермы) жесткости примем
условие, чтобы момент инерции ее соответствовал требованиям
жесткости, а момент сопротивления принимался из расчета на прочность
при загружении временной нагрузкой половины пролета. Расчетная
формула этой, как принято называть, минимальной высоты балки
по условиям жесткости, может быть выведена из известного
соотношения j ----- ™ . Сюда необходимо подставить величину требуемого
момента инерции из расчета по второму предельному состоянию, а
величину момента сопротивления принять из расчета па прочность.
Таким образом, получим
4?.. ,.\..±. A.J-, (1.15)
/ kc, Ay E rtp
где k§ — коэффициент, который зависит от характера временной
нагрузки и величины пролета. По нашим расчетам: k% =
33-^ 19 для конструкций больших пролетов; /г0— 20 -ь- 11
для малых пролетов. Первые цифры соответствуют
сосредоточенным нагрузкам, вторые — распределенным;
Яр — коэффициент перегрузки временной нагрузки,
21
Высоты балок, подсчитанные по формуле (1.15), сравнительно
и ближе соответствуют сквозным фермам,
велики \hG = { ; )/
|. [во 30/ .
чем балкам. В настоящее время в мостостроении широко
используются сталебетонные балки, высота которых принимается в 2 —
2,5 раза меньше, чем высота стальных балок, вычисленная по
формуле (1.15). В ряде случаев по архитектурным, производственным
и другим соображениям уменьшают высоту балки по сравнению
с полученной по формуле (1.15), но при этом для удовлетворения
требованиям жесткости уменьшается расчетное сопротивление при
подборе сечения балки по прочности.
4. Выбор материалов для пролетных
конструкций и подсчет веса элементов. На
стоимость сооружения в целом существенное влияние оказывает
характер материала и конструктивного решения вспомогательных
элементов— поперечных балок, настилов, связей. Основное требование
в выборе материалов и конструкций этих элементов — уменьшение
веса, которое может в некоторых случаях привести к удорожанию
вспомогательных элементов, но уменьшит стоимость всего
сооружения, так как легкие висячие конструкции имеют меньший объем
анкеров и пилонов, меньшие сечения кабеля, подвесок и проще узлы
сопряжения элементов, чем в конструкциях с тяжелыми настилами.
Для этой цели в висячих конструкциях должны применяться
элементы из алюминиевых сплавов и из вь:сокопрочпых сталей,
сквозные облегченные фермы, легкие бетоны и другие эффективные
материалы и конструкции. Подсчет собственного веса пролетного
строения для первоначального расчета несущих элементов должен
выполняться по приближенным формулам, в которых вес
вспомогательных конструкций может быть связан с весом основных несущих
элементов — кабеля, балки жесткости.
Вес единицы длины балки с учетом веса связей
g6^UVo^-^^. (Мб)
р 0.35 ftf, R
где W, p, hc — требуемый момент сопротивления, ядровое
расстояние и высота сечения балки;
70, "фо — объемный вес и конструктивный коэффициент;
i|3(5 --; 1,3 ч- 1,4 для двутавровых и коробчатых балок;
1,2 — коэффициент, учитывающий вес связей.
В формуле (1.16) не учитывается работа балок на действие
боковых ветровых нагрузок. Для пролетных строений мостов
увеличение сечения за счет этих нагрузок достигает 50%; мы можем
подсчитать его по фактическим осевым усилиям от изгибающих
моментов при действии боковых сил, рассматривая балки как пояса
ветровой фермы. Для увеличения боковой жесткости пролетного
строения моста необходимо обеспечивать совместную работу настила
с балками, омоноличивать настил, развивать горизонтальные связи
22
и принимать расстояние между балками в поперечном направлении
не менее Vs0 пролета.
Вес пастила определяется в зависимости от его конструкции и
примененных материалов. Для автомобильных мостов вес
железобетонного настила составляет 100 — 200 кг/.и3 при расстоянии
между балками жесткости соответственно 8—18 м. Вес металлического
настила может быть взят в 2—2,5 раза меньше.
Вес единицы длины кабеля с учетом узлов и подвесок
вычисляется по принятой площади FK или F„ 1см. формулы (1.4) н (1.8)1 и по
геометрической длине LT:
J?k=- -~^Yo^K, 0.17)
где
Lr='(H-Y-y)-r-2/0Tsece;
в — угол наклона оття..:;,ч к горизонту;
ipK — 1,25 -4- 1,35 —конструктивный коэффициент кабеля с учетом
веса узлов и подвесок соответственно для и полетов 300—
100 м.
5. К о м п о и о в к а систем повышенной
жесткости. Применение различных мероприятий по увеличению
жесткости висячих комбинированных систем направлено главным
образом на уменьшение кинематических перемещений — прогибов в
четверти пролета при загружении временной нагрузкой половины
пролета. Эти прогибы в системах повышенной жесткости, как
правило, в 1,5—2 раза меньше прогибов середины пролета. Таким
образом, расчетным загружением сложных висячих и вантовых
систем, определяющим наибольшее сечение кабеля по жесткости,
является загружение временной нагрузкой всего пролета. При этом
висячая ферма независимо от схемы решетки получаст почти такие
же усилия в основном кабеле, как и обычная схема с
вертикальными подвесками. Поэтому в первом приближении сечение кабеля
и размеры анкеров любой системы могут быть приняты из расчета
обычной схемы. Момент инерции балки системы повышенной
жесткости для расчета статически неопределимой конструкции па
стадии начального приближения принимается по формулам (1.14) и
(I.I5), выведенным для одпокабельпой схемы, и вводится
коэффициент 0,3—0,5 в зависимости от схемы и жесткости висячей фермы.
В дальнейшем сечения уточняются на каждой стадии
нелинейного итерационного расчета. Высота пилонов, а следовательно, и
длины оттяжек различных схем повышенной жесткости должны
приниматься в соответствии со схемой висячей фермы: двухкабсльные
фермы —hn — (1,2 -f- 1,3) /; системы с треугольной решеткой —
ha = (1,3 -f- 1,4) /; схема с прикреплением кабеля к балке в
середине пролета —- Лп = /; радиально-вантовые схемы без кабеля —
йп^ 0,15 /.
23
ГЛАВА II
ВОПРОСЫ РАСЧЕТА КОМБИНИРОВАННЫХ
ВИСЯЧИХ СИСТЕМ
С УЧЕТОМ ГЕОМЕТРИЧЕСКОЙ НЕЛИНЕЙНОСТИ
1. Два способа расчета
висячих комбинированных систем
с учетом геометрической нелинейности
Существует два способа учета изменения геометрической схемы
висячей комбинированной конструкции при действии временной
нагрузки:
1) уравнение равновесия элемента конструкции записывается
в дифференциальной форме; расчет сводится к решению
дифференциального уравнения и к использованию дифференциальных
зависимостей между расчетными факторами — прогибом, углом
поворота сечения, изгибающим моментом в балке, поперечной силой;
2) уравнения равновесия выражаются системой
конечно-разностных уравнений, учитывающих нелинейность перемещений и
записываемых в матричной форме.
Первый способ, предложенный Ж. Мсланом, Ф. Блейхом,
С. П. Тимошенко, основан на общих законах строительной
механики упругих систем и методе последовательных приближений при
решении линейных задач [67, 68, 70].
До последнего времени с помощью этого способа был
разработан расчет однолролетных и трехпролетных висячих мостов лишь
обычной системы, для раскрытия статической неопределимости
которых составлялось уравнение Лаграпжа. Сложность этого способа
расчета значительно возрастает с увеличением статической
неопределимости системы. Поэтому в предлагаемой работе в пределах
обычных допущений дастся более общий регулярный способ расчета
с применением ЭЦВМ.
Отладка программ для расчета по этой методике не представляет
затруднений, так как в частном случае без учета прогибов
(нелинейности) предложенный способ расчета превращается в обычный
расчет по методу сил с определением перемещений по Верещагину.
Предлагается также использовать при расчете так называемые
условные линии влияния. Условность их состоит в том, что с
помощью таких линий влияния допускается отыскивать невыгодное
положение грузов, передвигая их в пролете, но сохраняя в
некоторых пределах интенсивность нагрузки (величины грузов) так,
чтобы значение коэффициента деформатывности в процессе
расчета не изменялось более чем на 10—15%.
Наглядность расчета по линиям влияния, простота контроля
промежуточных результатов, возможность использования для рас-
24
чета малых вычислительных машин (типа МИР, «Hanpii») открывают
широкие перспективы для внедрения нелинейного расчета в
практику проектирования и исследования комбинированных висячих
систем повышенной жесткости.
Недостатки способа — некоторая приближенность расчета при
конечном числе подвесок по длине пролета (менее 5) и усложнение
расчета систем с переменной жесткостью или переменной осевой
силой в балке, что естественно и при любом способе расчета требует
применения машин с увеличенным объемом оперативной памяти по
сравнению с малыми ЭЦВМ.
Второй способ, развитый в отечественной литературе В. А.
Смирновым [49], основан на применении численных методов решения
уравнений, использовании при расчете машин большой мощности.
Искомые результаты с помощью второго способа могут быть
получены с любой заданной точностью. Способ особенно эффективен при
расчете систем с переменной жесткостью при больших заданных
деформациях системы.
В этой книге рассматривается расчет с учетом геометрической
нелинейности по первому способу.
2. Дифференциальное уравнение висячей системы
с балкой жесткости
В основу расчета комбинированной системы, состоящей из нити
и балки, положим следующие предпосылки:
а) несущие элементы системы выполнены из упругого материала.
Удлинения вертикальных подвесок и горизонтальные перемещения
кабеля при загружении временной нагрузкой не учитываются как
величины второго порядка малости по сравнению с вертикальными
перемещениями пролетной конструкции, которые, в свою очередь,
малы по сравнению с основными размерами сооружения;
б) сечения балки и других элементов конечной жесткости
постоянны на длине рассматриваемого участка пролета;
в) узлы прикрепления подвесок к поясам расположены на
параболах, которыми описывается очертание поясов. Число подвесок
таково, что их воздействие па балку соответствует равномерно
распределенной нагрузке.
Рассмотрим вывод дифференциального уравнения для однока-
бельной системы, в которой собственный вес пролетной конструкции
передается на основной кабель. Балка жесткости воспринимает
усилия лишь от временной нагрузки.
Монтаж кабеля и подвешивание к нему шарнирпо сочлененных
элементов балки со всей постоянной равномерно распределенной
нагрузкой q вызывает распор:
25
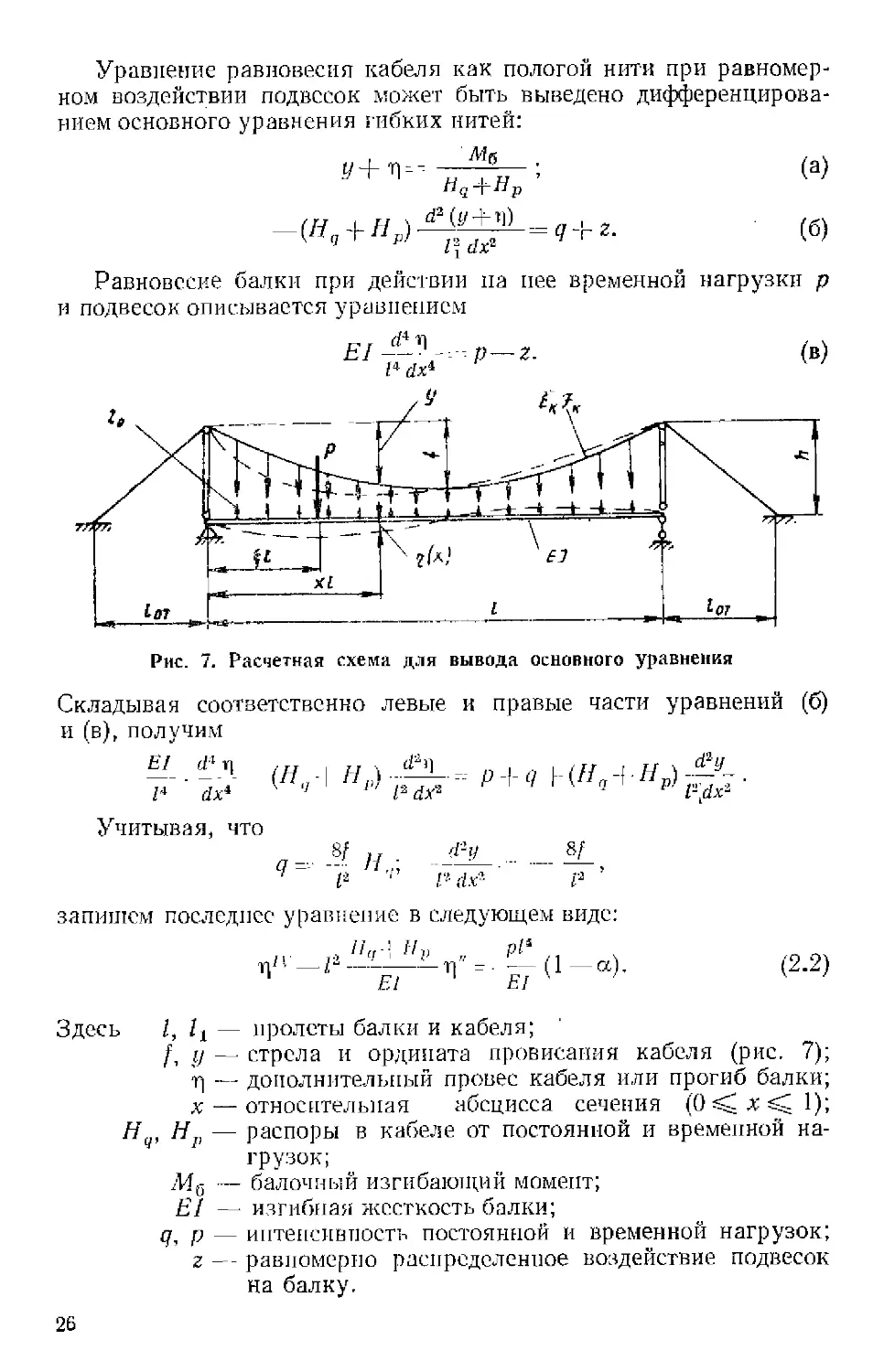
Уравнение равновесия кабеля как пологой нити при равномер
ном воздействии подвесок может быть выведено дифференцирова
нием основного уравнения гибких нитей:
y+f\-
v ч pl l\dx? ч
Равновесие балки при действии па нее временной нагрузки р
(а)
(б)
El
и подвесок описывается уравнением
7* dx* ' ''
.У
г,
,р
(в)
Рис. 7. Расчетная схема для вывода основного уравнения
Складывая соответственно левые и правые части уравнений (б)
и (в), получим
^.d-4 (H-\ Hp)-^~=p + q
nihil dx* y '' р; l2dx* q
р> Fdx*
Учитывая, что
а =■-• --'■ II,,;
i ti -р
V1 rf.v2
8^_
i2
запишем последнее уравнение в следующем виде:
-г\" =
цп'^1
ЩЛ "v
El
EI V
(2.2)
Здесь
/, /x — пролеты балки и кабеля;
f, у — стрела и ордината провисания кабеля (рис. 7)
■л — дополнительный провес кабеля или прогиб балки
х — относительная абсцисса сечения (0^д;^1)
Н Нр — распоры в кабеле от постоянной и временной
нагрузок;
Мб — балочный изгибающий момент;
El — изгмбная жесткость балки;
q, р — ипте[1спвтюсть постоянной и временной нагрузок;
z — равномерно распределенное воздействие подвесок
на балку.
26
Коэффициент, стоящий перед вторым членом в левой части
уравнения (2.2), обозначим г2. В теории расчета висячих мостов г
называется коэффициентом деформативиости:
г--- I
Гна±н
V ^Р1- <2-3>
В уравнении (2.2) а —- это коэффициент, с помощью которого
определяется распор от временной нагрузки:
При загружении временной нагрузкой всего пролета
коэффициент а соответствует коэффициенту распределения нагрузки между
кабелем и балкой (по терминологии II. С. Стрелецкого [53]).
Коэффициент распределения может рассматриваться как одна из
основных характеристик комбинированной системы при анализе прогибов
и напряженного состояния конструкции под нагрузкой.
3. Применение метода начальных параметров
к решению основного уравнения
внешнераспорных комбинированных систем
Уравнение (2.2) — нелинейное, так как распор, возникающий
в кабеле от действия временной нагрузки и входящий в выражение
коэффициента деформативиости, зависит от прогибов, которые,
в свою очередь, зависят от положения и величины временной па-
грузки.
Ж- Мелан впервые предложил линеаризовать уравнение висячих
мостов путем полного пренебрежения в левой части уравнения
величиной распора от временной нагрузки [67]. Но такое допущение
может быть принято лишь для систем с большим собственным весом,
в которых распор от постоянных нагрузок во много раз превосходит
распор от временной нагрузки.
Применим к расчету легких комбинированных висячих систем
метод последовательных приближений и принцип ступенчатой
линеаризации— на каждой стадии расчета распор в кабеле от временной
нагрузки будем считать постоянным, известным из предыдущей
стадии расчета (в качестве первого приближения примем расчет по
отвердевшей схеме или в некоторый запас коэффициент
деформативиости вычислим без учета распора от временной нагрузки). Такая
линеаризация позволяет, не отказываясь от нелинейности задачи,
использовать законы и методы строительной механики линейно-
деформируемых систем для расчета данных конструкций на
поперечные воздействия.
На каждой стадии приближения расчет будет сводиться к
проверке правильности принятых параметров, зависящих от распоров
27
(в вантовых схемах, кроме этого, от продольных сил в балке), и к
уточнению параметров расчета па следующей стадии приближения.
Решение линеаризованного дифференциального уравнения
равновесия внешнераспорных комбинированных систем (2.2) будем
искать с помощью метода начальных параметров, предложенного
акад. А. Н. Крыловым для расчета балки на упругом основании и
развитым для широкого класса задач строительной механики
отечественными учеными [8, 22, 24, 25, 27, 40, 42, 48, 57J.
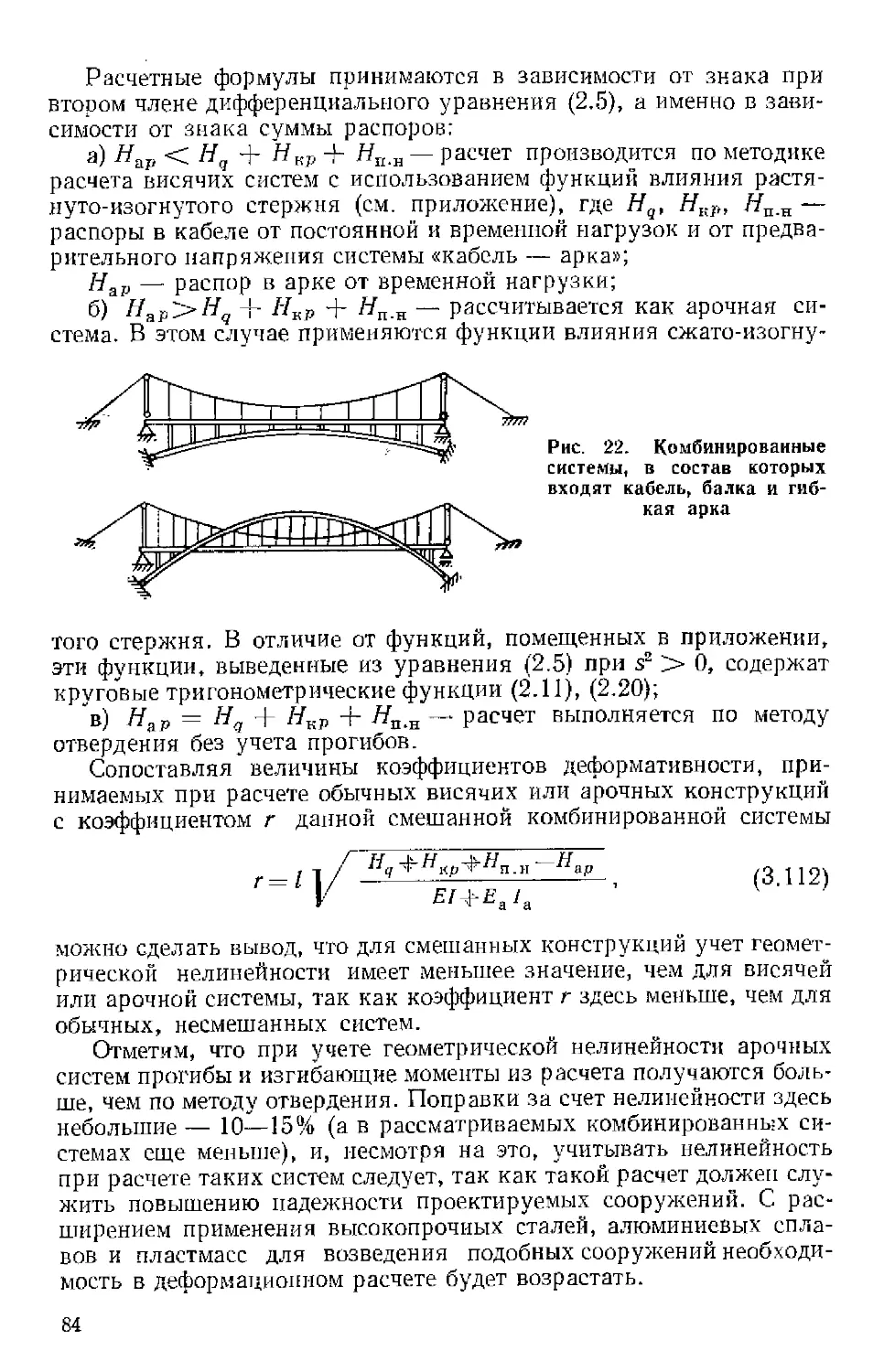
Запишем уравнение (2,2) в общем виде для висячих и арочных
систем:
i)'v(x)±si'4"(x)---Q. (2.5)
Общий интеграл однородного уравнения (2.5) зависит от знака
перед коэффициентом sa.
1. При s2< 0 уравнение (2.5) соответствует уравнению
равновесия висячих и ваптовых комбинированных систем. Положим
s -- г. Общее решение однородного уравнения (2.5) в этом случае
запишется так:
т] (х) = С1 х - J- Са '- С, sh rx ■ |- Ci ch гх, (г)
где Су ~ С\ — постоянные интегрирования.
2. При s2 > 0 уравнение (2,5) будет однородной частью
уравнения равновесия комбинированных систем, в состав которых
кроме балки и кабеля входит гибкая арка (см. рис. 22).
Условие s2 > 0 выполняется в том случае, если распор в арке
больше распора в кабелях и вантах и устойчивость арки, безусловно,
обеспечена [401. Обозначим s - и.
Решение уравнения (2.5) при этом записывается в виде
многочлена
tj (х) -- С1 х ,'- С2 -f С.л sin их + Ci cos их. (д)
3. Уравнение (2.5) при s --- 0 соответствует уравнению изгиба
простой балки, оно принимается для приближенного расчета
комбинированных висячих систем без учета прогибов по методу
отвердения (г =-■ 0) или арочных (и -■■ 0), Для систем, в состав которых
входят кабель, балка и гибкая арка, этот случай наблюдается при
равенстве распоров в кабеле и арке:
н (*)--■ Ci-i-Qx |-C;1xa -\-САх*. (e)
Произвольные постоянные С) — С4 определяются путем
использования дифференциальных зависимостей:
Ф(хЬ ^-; iW(i)=^''Wf. (2-6)
где ф(а') — угол поворота сечения;
Mix) — изгибающий момент в балке в сечении х.
Для получения решения в виде симметричной матрицы
вычислим, по терминологии Н. В. Корноухова, «основную» поперечную
28
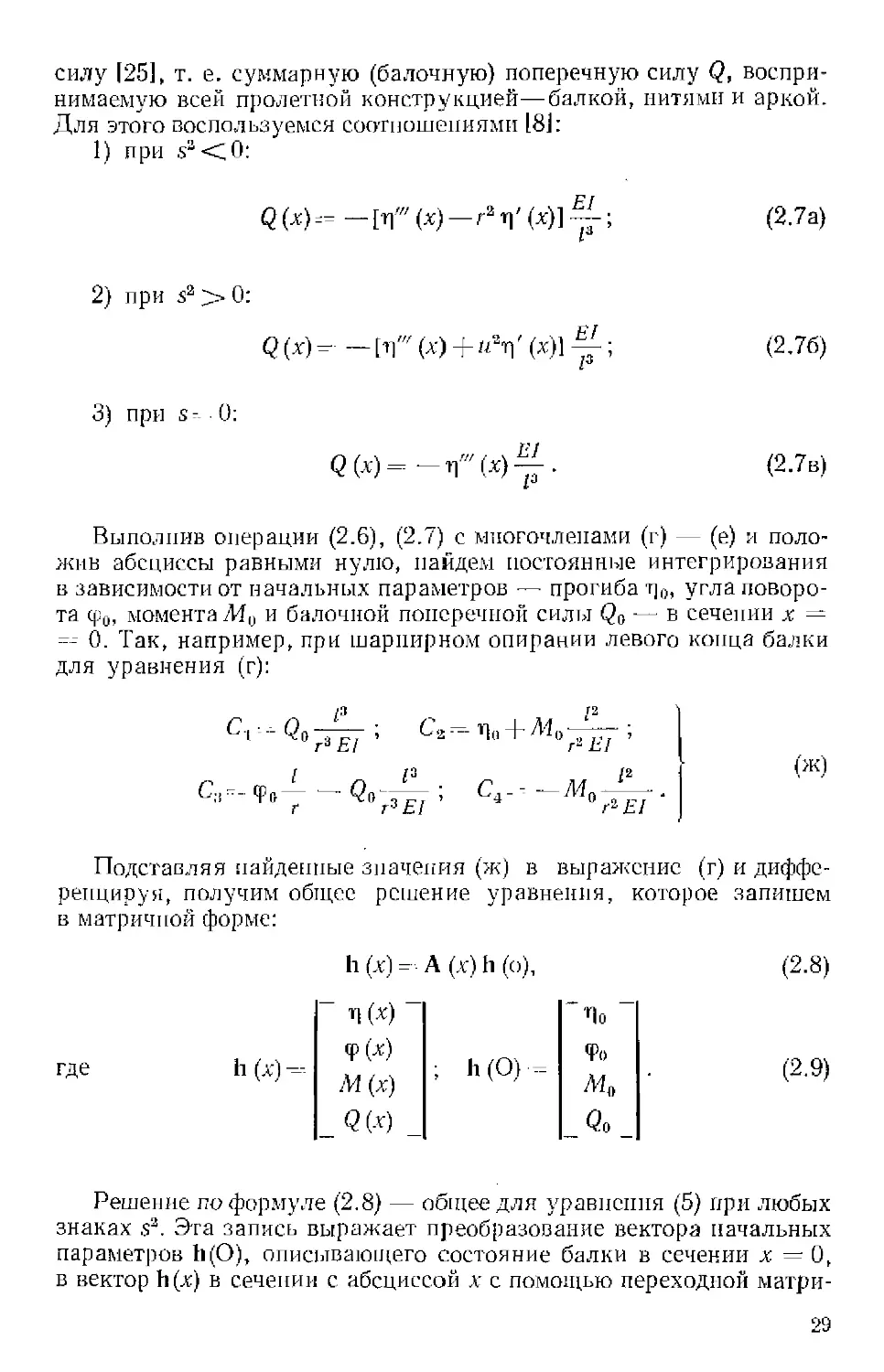
силу [25], т. е. суммарную (балочную) поперечную силу Q,
воспринимаемую всей пролетной конструкцией—балкой, нитями и аркой.
Для этого воспользуемся соотношениями 18]:
1) при s3<C0:
Q(x)= -Ы" (x)-r*i\' (х)]
EI
(2.7а)
2) при sa>0:
Q(X)=--[j]'"(x) + u*4'(x)]^;
lJ
(2.76)
3) при s- 0:
Q(.x)=~r\"'(x)^.
(2.7в)
Выполнив операции (2.6), (2.7) с многочленами (г) — (е) и
положив абсциссы равными нулю, найдем постоянные интегрирования
в зависимости от начальных параметров — прогиба т]0, угла
поворота ф0, момента М„ и балочной поперечной силы Qa — в сечении х =
=- 0. Так, например, при шарнирном опирании левого конца балки
для уравнения (г):
C,-Q0
г* El
Са=Ло + Л10
г*Е1
г г3 El r%tl
(Ж)
Подставляя пайдеппые значения (ж) в выражение (г) и
дифференцируя, получим общее решение уравнения, которое запишем
в матричной форме:
где
h(x)----
h (*)=■■
~ Ц(х)~
ф(*)
М(х)
_Q(x) _
A(*)h(o),
; h(0) =
~Чо ~
Фо
М0
„<2°_
(2.8)
(2.9)
Решение по формуле (2.8) — общее для уравнения (5) при любых
знаках s3. Эта запись выражает преобразование вектора начальных
параметров li(O), описывающего состояние балки в сечении х — 0,
в вектор h(x) в сечении с абсциссой х с помощью переходной матри-
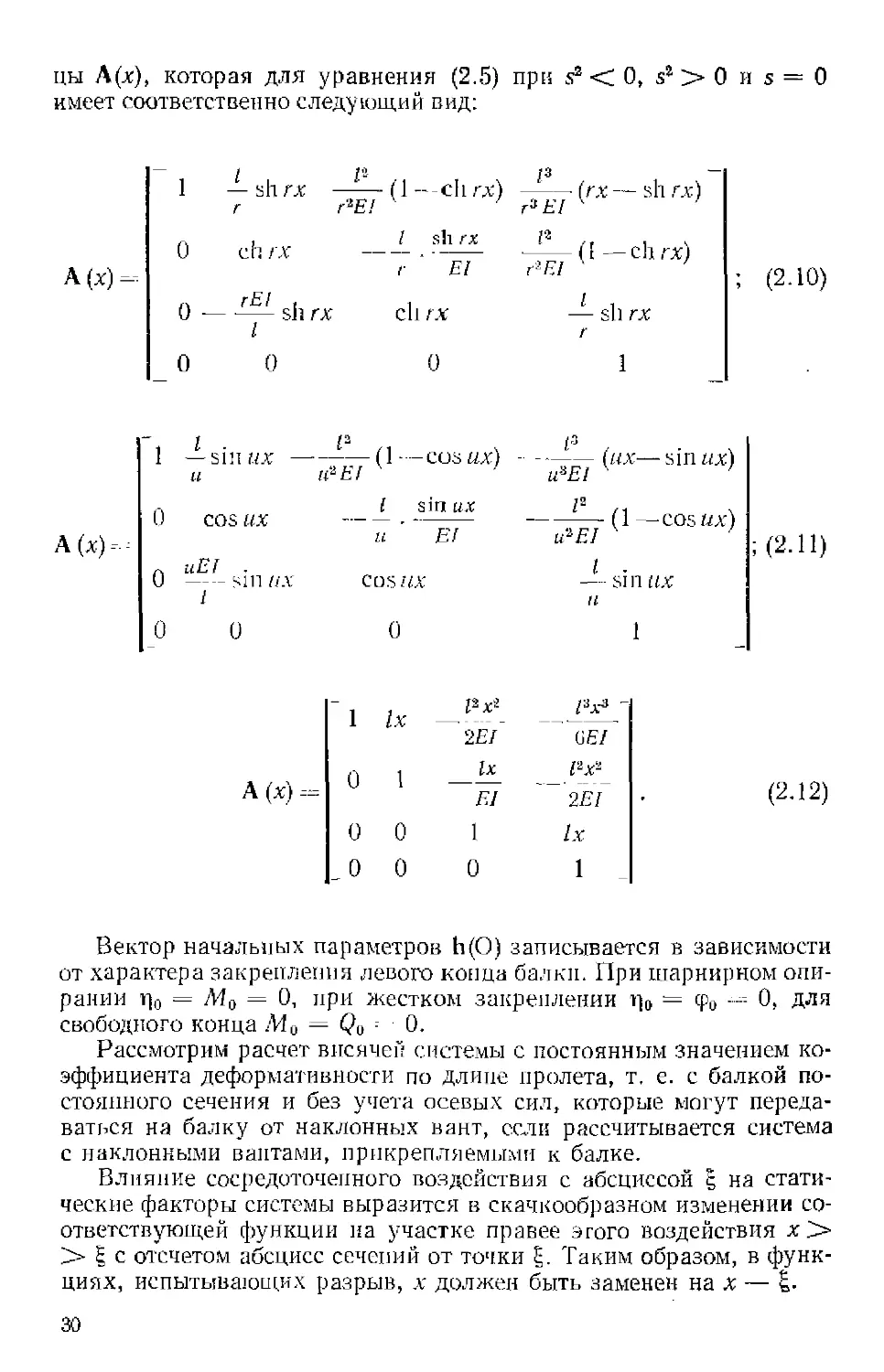
29
цы А(х), которая для уравнения (2.5) при s2 < 0, s* > 0 и s = О
имеет соответственно следующий вид:
А(х) =
— ahrx —— (1 - - cl 1 rx) - (rx — sh rx)
r r'2E! r'J EI
ch rx
rEI ,
sh rx
I
0
I sh rx
r EI
cli rx
0
г2Я/
(I — choc)
sh rx
1
; (2.10)
A(jc) =
1 —sin их
«
0 cos их
Л uEI .
0 sin //.v
0
0
ФЕ1
(1 —синих)
I sin их
и
EI
cos их
0
/3
u*£7
/2
ua£/
(«x—siru«)
■ (1 —cos их)
— smttx
и
;(2.11)
A (x) ,=
1 Ix
0 1
0 0
0 0
Px*
2£/
Ix
EI
1
0
lx
1
(2-12)
Вектор начальных параметров h(0) записывается в зависимости
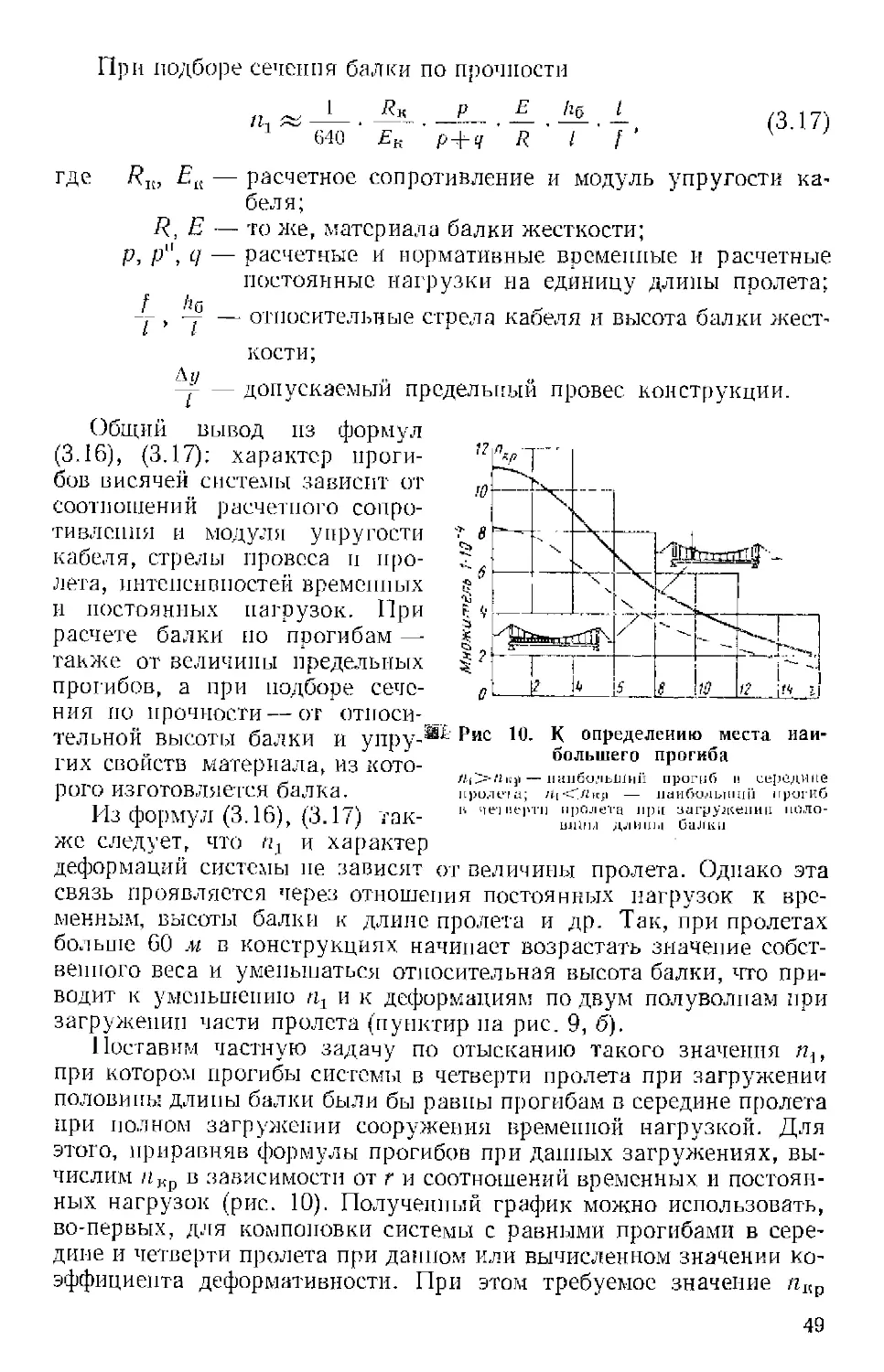
от характера закрепления левого конца балки. При шарнирном опи-
рании т|0 = М0 = 0, при жестком закреплении % = ср0 -= 0, для
свободного конца М0 = Q0 = 0.
Рассмотрим расчет висячей системы с постоянным значением
коэффициента деформативности по длине пролета, т. е. с балкой
постоянного сечения и без учета осевых сил, которые могут
передаваться на балку от наклонных вант, если рассчитывается система
с наклонными вантами, прикрепляемыми к балке.
Влияние сосредоточенного воздействия с абсциссой £ на
статические факторы системы выразится в скачкообразном изменении
соответствующей функции на участке правее эгого воздействия х>
> 1 с отсчетом абсцисс сечений от точки £. Таким образом, в
функциях, испытывающих разрыв, х должен быть заменен на х — £.
30
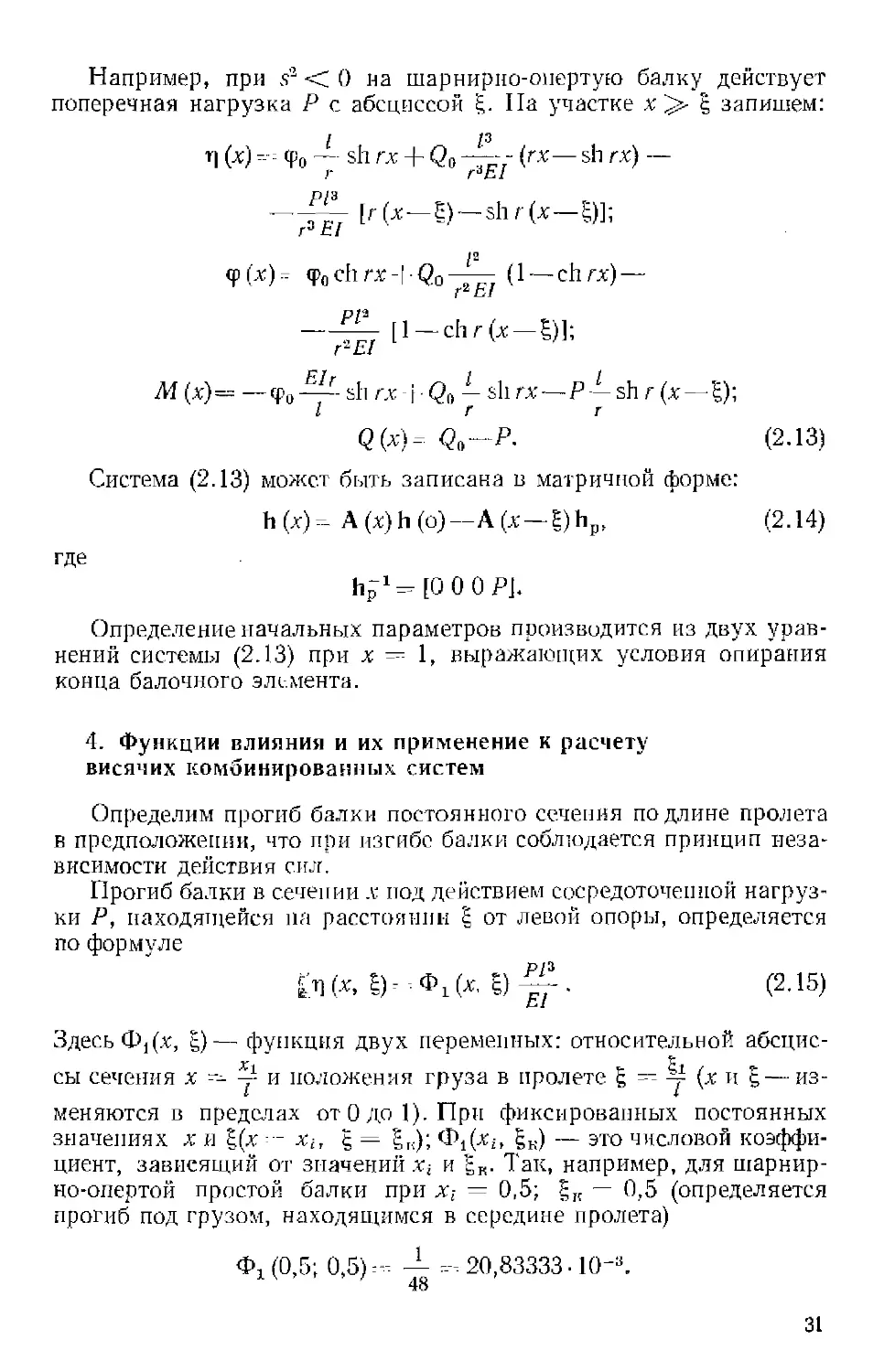
Например, при я'2 < 0 на шарнирно-опертую балку действует
поперечная нагрузка Р с абсциссой £. Па участке х ^> 5 запишем:
ц (х) ----- % — sh rx + Q0 —г - (г*— sh rx) —
г г6Е1
—r£rt'-(*-g)-shr(x-|)];
Н с/
Ф(я) = ф0сЬгх-|^0—— (1 —chrx) —
г2 Ы
—£1[1-сМ*-|)];
Л1(лс)= —<р0—--sh rx-\-Qa — shrx — P — shr(x—£);
I г т
Q(x)= Qa-P. (2.13)
Система (2.13) может быть записана в матричной форме:
h(jc)=. A(*)h(o) —А (я — |)hp, (2.14)
где
hp^fOOOPJ.
Определение начальных параметров производится из двух
уравнений системы (2.13) при х — 1, выражающих условия опирания
конца балочного элемента.
4. Функции влияния и их применение к расчету
висячих комбинированных систем
Определим прогиб балки постоянного селения подлине пролета
в предположении, что при изгибе балки соблюдается принцип
независимости действия сил.
Прогиб балки в сечении х под действием сосредоточенной
нагрузки Р, находящейся на расстоянии £ от левой опоры, определяется
по формуле
El
Ых,1):-ФЛх-®~- С2-15)
Здесь Ф](х, |)— функция двух переменных: относительной
абсциссы сечения х -- у и положения груза в пролете £ — -у (х и
£—изменяются в пределах отОдо]). При фиксированных постоянных
значениях х и Цх ■-- xit £ = 1и); Ф^, £к) — это числовой
коэффициент, зависящий от значений xt и 1к. Так, например, для шарнир-
но-опертой простой балки при хг = 0,5; £„ — 0,5 (определяется
прогиб под грузом, находящимся в середине пролета)
Ф, (0,5; 0,5) ----- — г.- 20,83333. Ю-3.
и ' 48
31
Величина этого коэффициента для произвольных я и £ при
различных способах опирания простой балки может быть определена
с помощью интеграла Мора путем перемножения по правилу
Верещагина эпюр изгибающих моментов от единичных сил, приложенных
в сечениях х и £.
В общем случае, если рассматривать jc и | как независимые
переменные, то функция Ф4(х, £) будет представлять собой функцию
влияния, характеризующую прогиб «единичной» балки (1—1,
Е1 — 1) в сечении х, вызванный поперечной силой Р = 1,
приложенной в точке |. Если в этой формуле зафиксировать сечение х
и изменять положение | силы, то функция Ф4 с учетом множителя
I3
р-. будет соответствовать уравнению линии влияния прогибов в
сечении х.
Вычисление Ф, при постоянном положении груза % и переменном
х даст ЭЕнору прогибов по длине балки от данного груза I с уче-
/3 \
том р-Л. При постоянных х и £Ф( становится числовым
коэффициентом в формуле прогиба (2.15).
Функция влияния Ф, обладает следующими свойствами:
1) симметрией относительно хи|: ФДх, £) = Oi(l, х), что
соответствует теореме Бетти о взаимности перемещений б^- = 6^-;
2) непрерывностью по длине балки вместе с двумя первыми
производными;
3) разрывом третьей производной в точке X — £ на величину
скачка, равную единице;
4) удовлетворяет однородному дифференциальному уравнению
оси изогнутой балки.
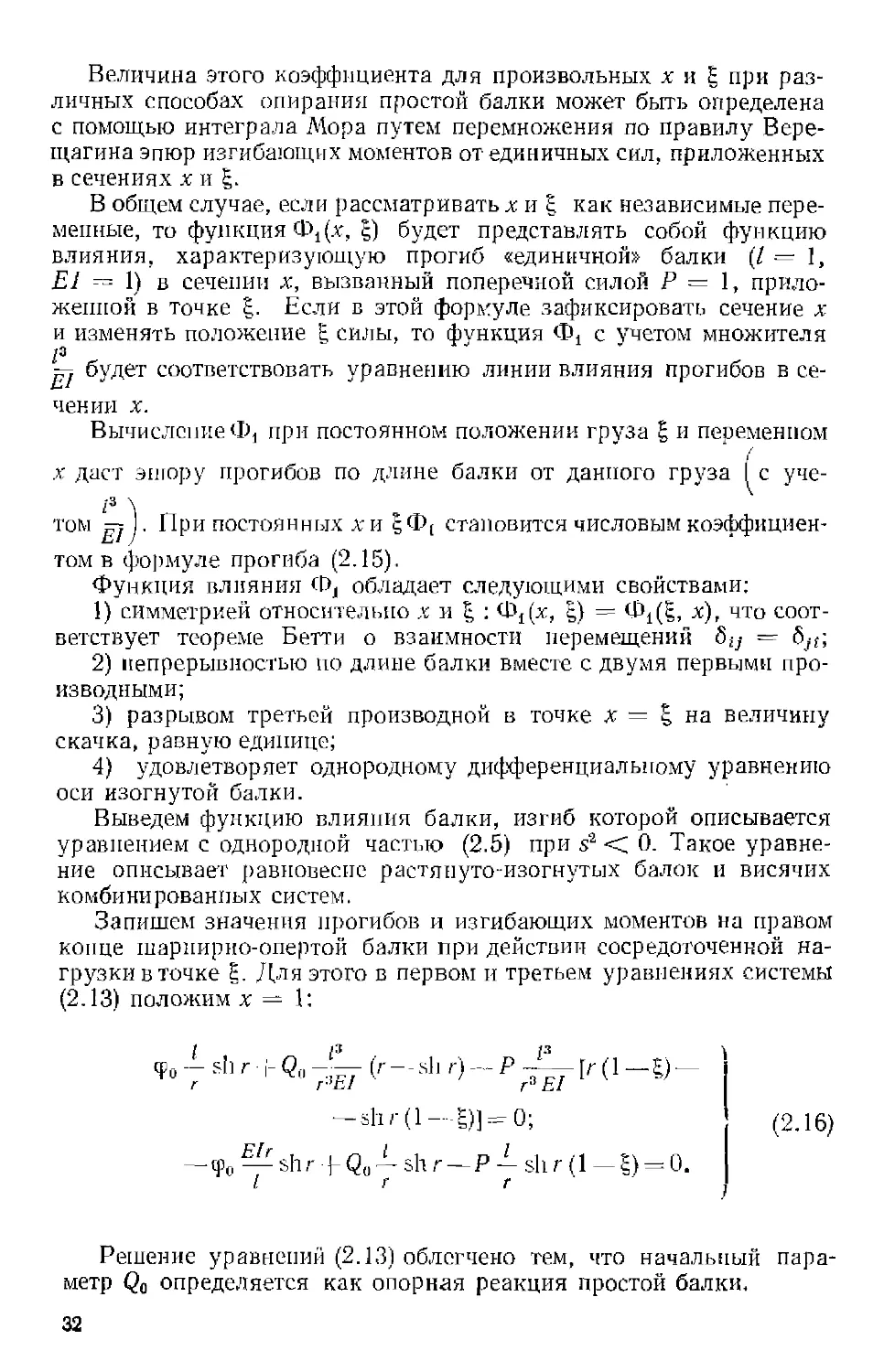
Выведем функцию влияния балки, изгиб которой описывается
уравнением с однородной частью (2.5) при s2 <C 0. Такое
уравнение описывает равновесие растянуто-изогнутых балок и висячих
комбинированных систем.
Запишем значения прогибов и изгибающих моментов на правом
конце шарнирио-опертой балки при действии сосредоточенной
нагрузки в точке |. Для этого в первом и третьем уравнениях системы
(2.13) положим х = 1:
^0±5hr-i-Q0-!~(r-^r)~P-f—[r(\-l)~ *
г г-'Ы Н El
-sh/-(l—1)] = 0;
-Фо—sh/--fQ0 —shr —P-shr(l —£) = 0.
I г г
(2.16)
Решение уравнений (2.13) облегчено тем, что начальный
параметр Q0 определяется как опорная реакция простой балки.
32
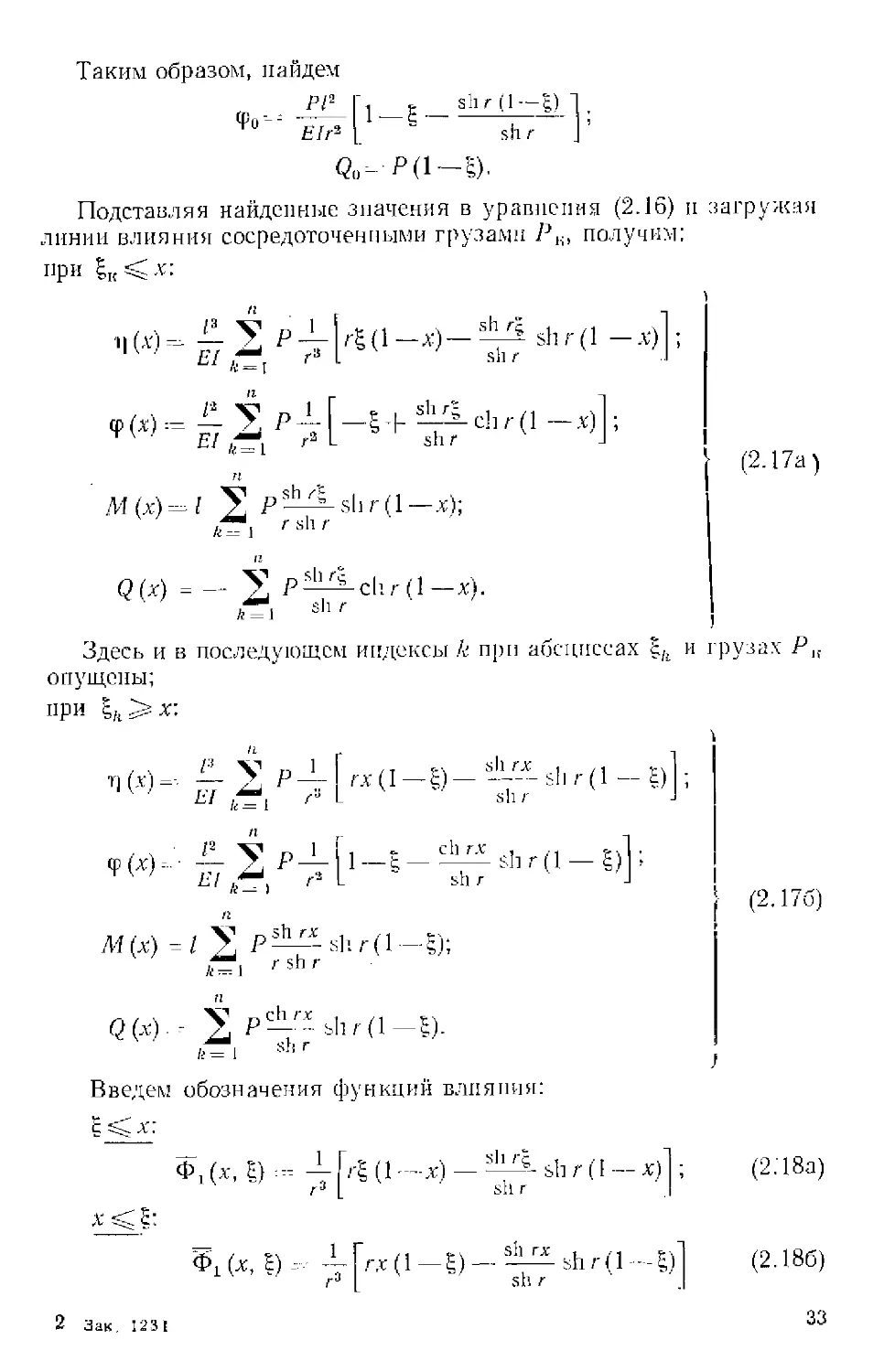
Таким образом, найдем
Р12
Фо-;
Elr"-
l-i-
ah г (1 — 1)
sn г
Qo--P(l-I).
Подставляя найденные значения в уравнения (2.16) п загружая
линии влияния сосредоточенными грузами Рк, получим;
при Ък^х:
Ц(х)=-^ 2 P-L\rU\-x)-*±$ shr(l -л-)
£/ ,~ Н L sh r
ш /«=1 г
-£+s-^-chr(l-x)
sh r
М(х)-^1 У, ps*L±5\ir(l—x)
■ЛИ «- -Ь ,-
| (2.17а)
k= 1
г sh r
Q(X) = - 2р^-с1!г(1-х)
h r
Здесь и в последующем индексы к при абсциссах tk и грузах f „.
опущены;
при ^>х:
rx(I—D— ----slir(l-E)
sli л
ch rx
/г
V n sh rx
k—\
sh r
slir(l — I)
t /<
ММ--/У P^f*shr(l-£);
■^ rshr
ft = I sh r
Введем обозначения функций влияния:
£ < х:
Ф1{хЛ).,.±\г1(1--х) shr
(2.176)
sh r
- sh г (1 — х)
jc < Е:
2 Зак, 1231
Ф\ (л, Е) --
'^(l_|)-sJL^shr(b-|)'
sh /-
(2.18а)
(2.186)
33
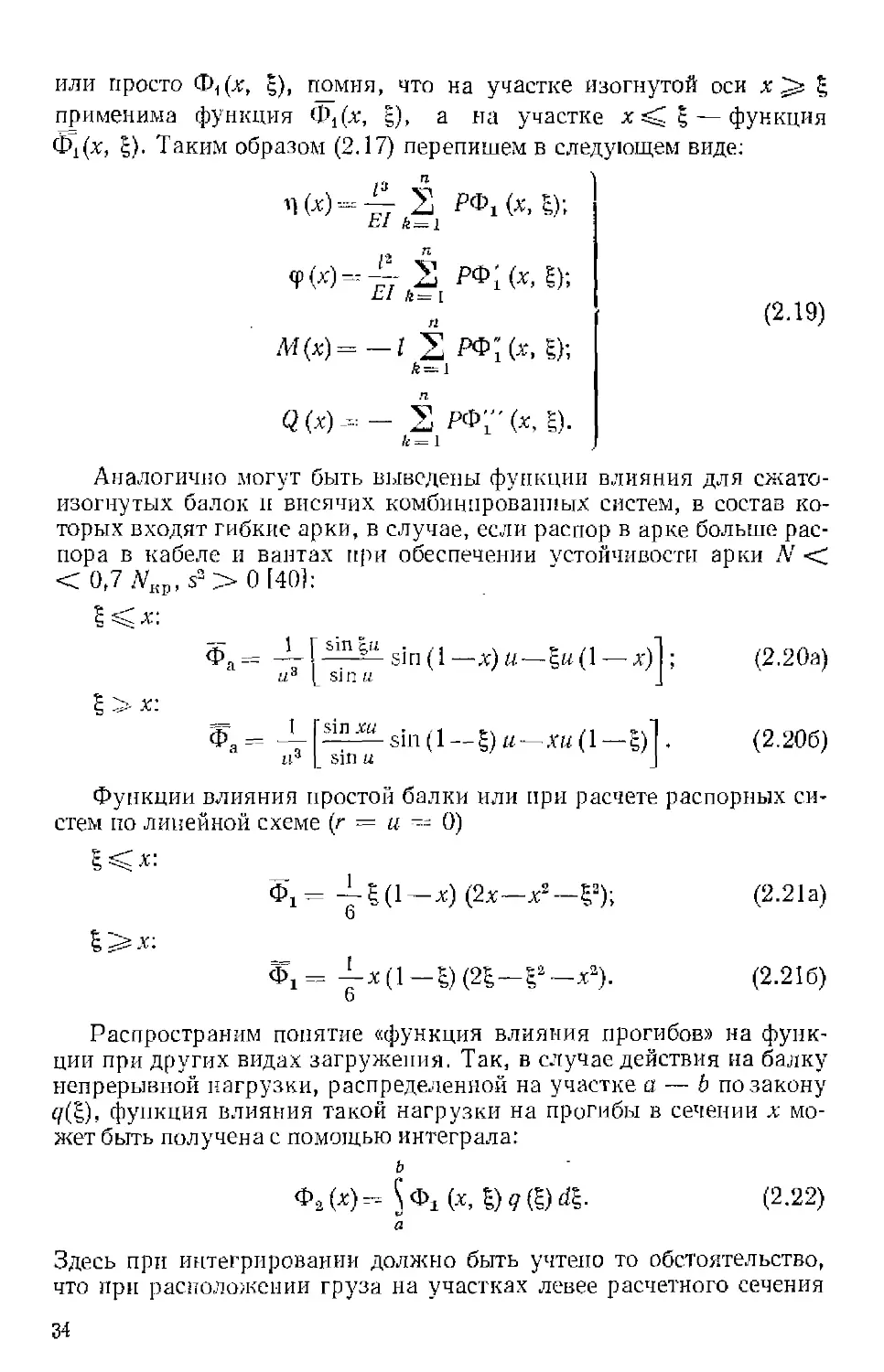
или просто <Di(jf, 1), помня, что на участке изогнутой оси х ^ 1
применима функция Ф^х, |), а на участке х ^ 1— функция
U>i(x, 1). Таким образом (2.17) перепишем в следующем виде:
Ц(х)^~ S РФЛхЛУ,
Е/ k — i
tl k— i
M(x)=-lS РФ'Л*. i);
jfe= i
Qto-
21 рф Г (*.!)■
4=i
(2.19)
Аналогично могут быть выведены функции влияния для сжато-
изогнутых балок IE висячих комбинированных систем, в состав
которых входят гибкие арки, в случае, если распор в арке больше
распора в кабеле и вантах при обеспечении устойчивости арки N <1
<0,7tfKp,sa>0[40]:
l^x:
Фа = —|"-^J^-sin(l— x)u — £и(1 — х)\,
а3 \_ sin и \
(2.20а)
Ф =
sin хи
sin и
s\n(l—t)u — xu(l—l)
(2.206)
Функции влияния простой балки или при расчете распорных
систем по линейной схеме (г = и ~ 0)
,<*:
1>х:
Ot= ~1(1-х)(2х~х^-1^
6
Фх
-л (1-1) (21-1*-яа).
(2.21а)
(2.216)
Распространим понятие «функция влияния прогибов» на
функции при других видах загружепия. Так, в случае действия на балку
непрерывной нагрузки, распределенной на участке а — Ь по закону
q(%), функция влияния такой нагрузки на прогибы в сечении х
может быть получена с помощью интеграла:
ь
ФЛх)~-\<$>ЛхЛ)я®<11. (2.22)
Здесь при интегрировании должно быть учтено то обстоятельство,
что при расположении груза на участках левее расчетного сечения
34
(I ^ x) и правее (I > x) функция влияния описывается
симметричными уравнениями Ф) и Ф4. Например, в случае а< х< Ь для
получения интеграла на участке от а до х воспользуемся функцией
O'i, а на участке от х до 6 — функцией Ф^.
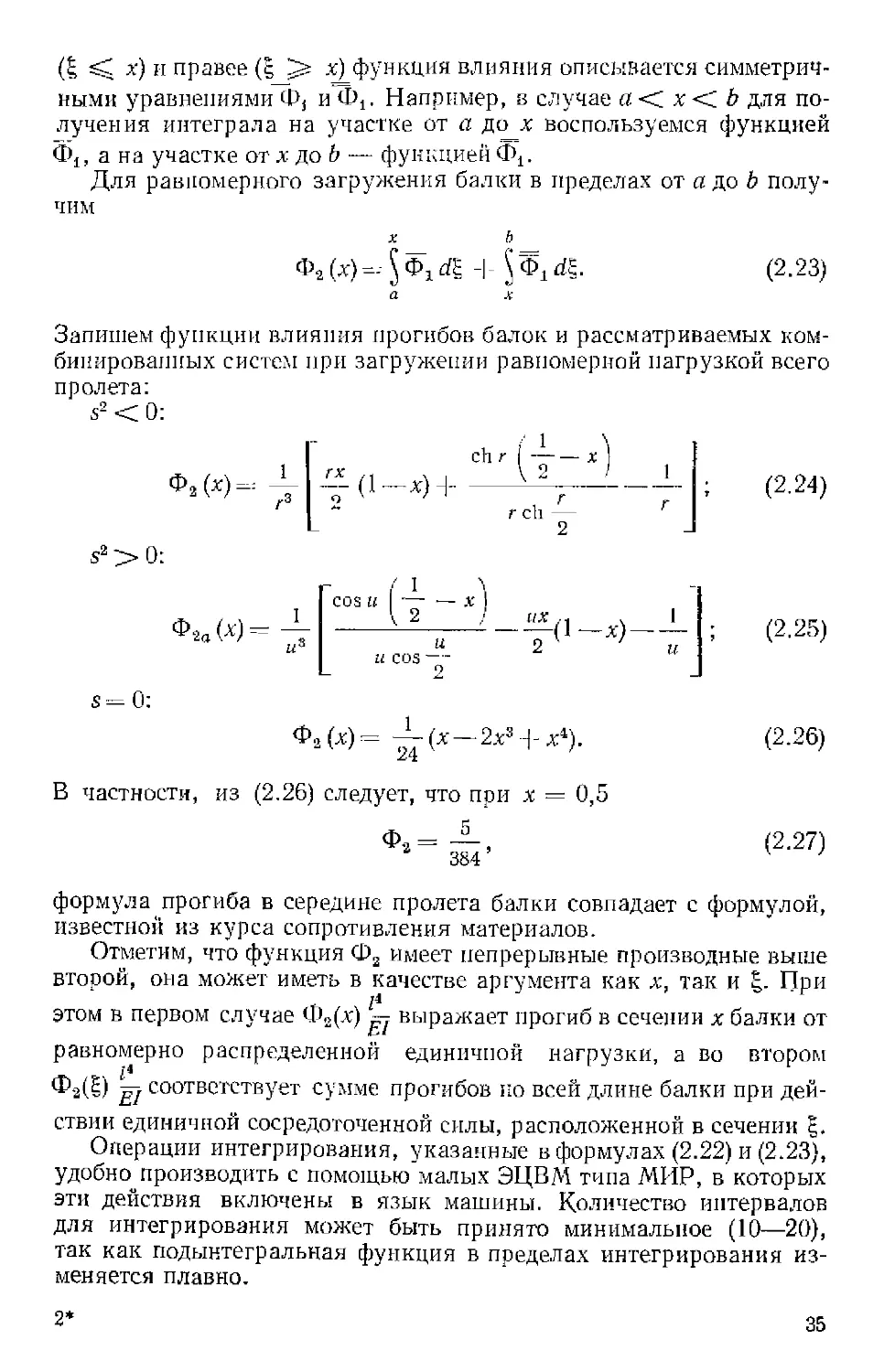
Для равномерного загружения балки в пределах от а до Ь
получим
х Ь
фа (^) =.- J Фх dl -I- J ^ d|. (2.23)
Запишем функции влияния прогибов балок и рассматриваемых
комбинированных систем при загружепии равномерной нагрузкой всего
пролета:
s2<0:
Ф2 (х)
s2>0:
ch r [ — — х
г ch —
Фа«(*) =
2 ;
ил; ,, , I
2 и
(2.24)
(2.25)
Фа(л;)= ~(х — 2х3-1 я1).
В частности, из (2.26) следует, что при х = 0,5
_5_
384'
Ф,
(2.26)
(2.27)
формула прогиба в середине пролета балки совпадает с формулой,
известной из курса сопротивления материалов.
Отметим, что функция Фа имеет непрерывные производные выше
второй, она может иметь в качестве аргумента как х, так и £. При
этом в первом случае Ф2(х) =j выражает прогиб в сечении х балки от
равномерно распределенной единичной нагрузки, а во втором
Фа(£) й/ соответствует сумме прогибов но всей длине балки при
действии единичной сосредоточенной силы, расположенной в сечении %,
Операции интегрирования, указанные в формулах (2.22) и (2.23),
удобно производить с помощью малых ЭЦВМ типа МИР, в которых
эти действия включены в язык машины. Количество интервалов
для интегрирования может быть принято минимальное (10—20),
так как подынтегральная функция в пределах интегрирования
изменяется плавно.
2*
35
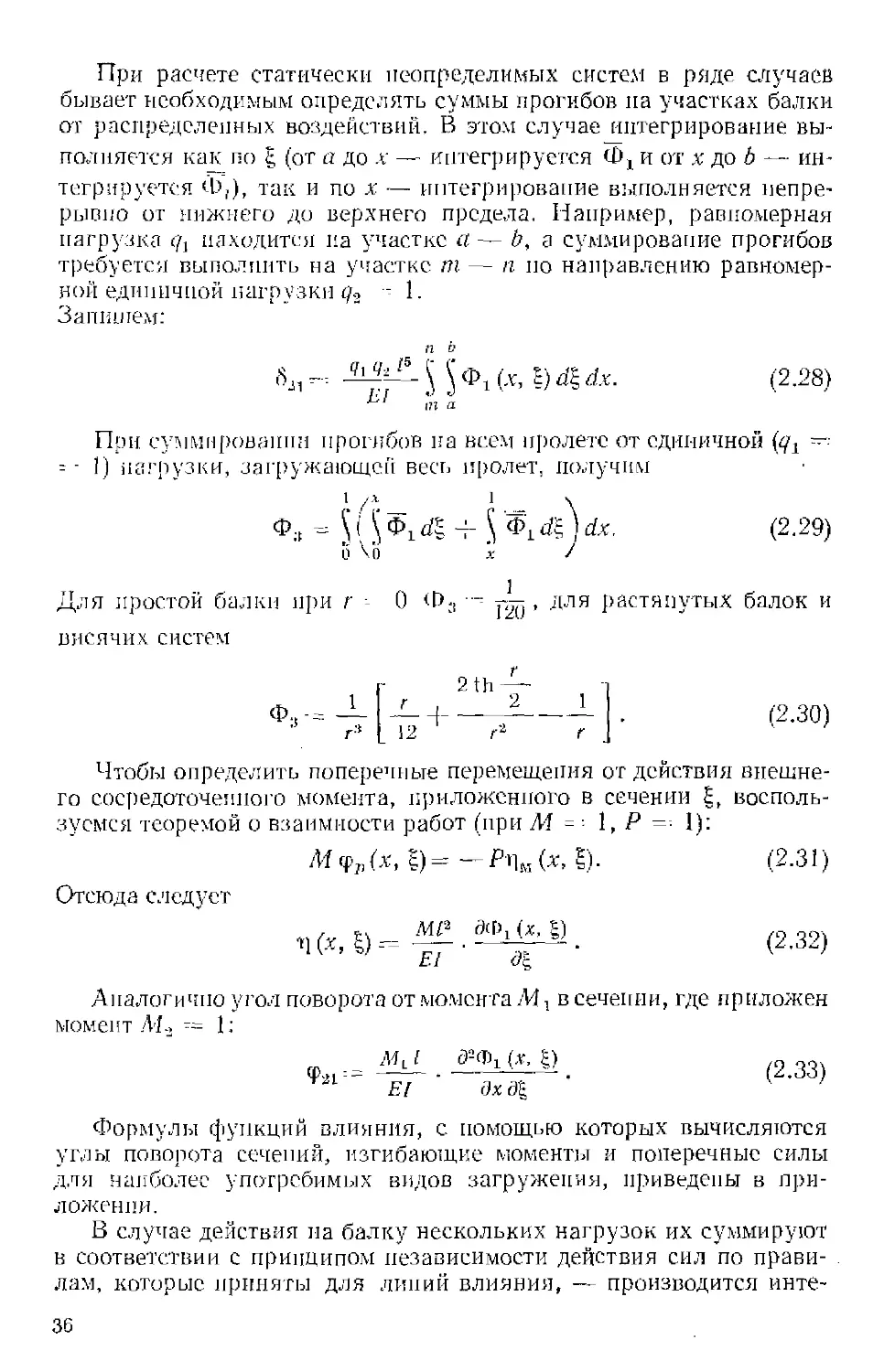
При расчете статически неопределимых систем в ряде случаев
бывает необходимым определять суммы прогибов па участках балки
от распределенных воздействий, В этом случае интегрирование
выполняется как по £ (от а до х — интегрируется Ф, и от х до h —
интегрируется Ф,), так и по л; — интегрирование выполняется
непрерывно от нижнего до верхнего предела. Например, равномерная
нагрузка qx находится па участке а — Ь, а суммирование прогибов
требуется выполнить на участке т — п по направлению
равномерной единичной нагрузки q2 ~- 1.
Запишем:
п b
К- -^-$$Фг(*Л)<!и<.
(2.28)
При суммировании прогибов на всем пролете от единичной (д1 —
1) нагрузки, загружающей весь пролет, получим
Ф:« - \ ( \ *i dl ~ \ Ф; dl) dx. (2.29)
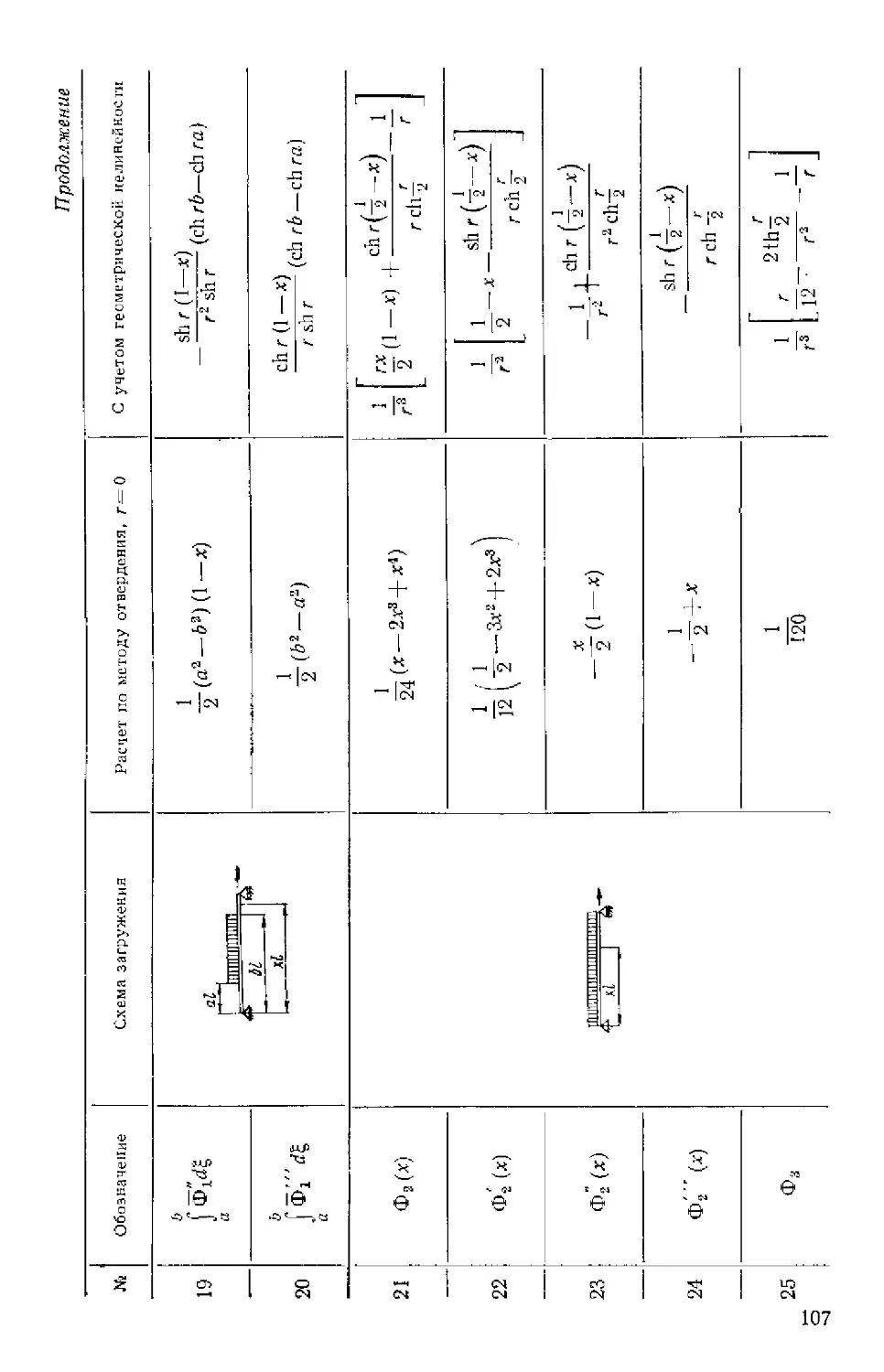
Для простой балки при г - О Ф3 - г™ > Для растянутых балок и
висячих систем
г
Ф;|
1
2 th
12
+
2
(2.30)
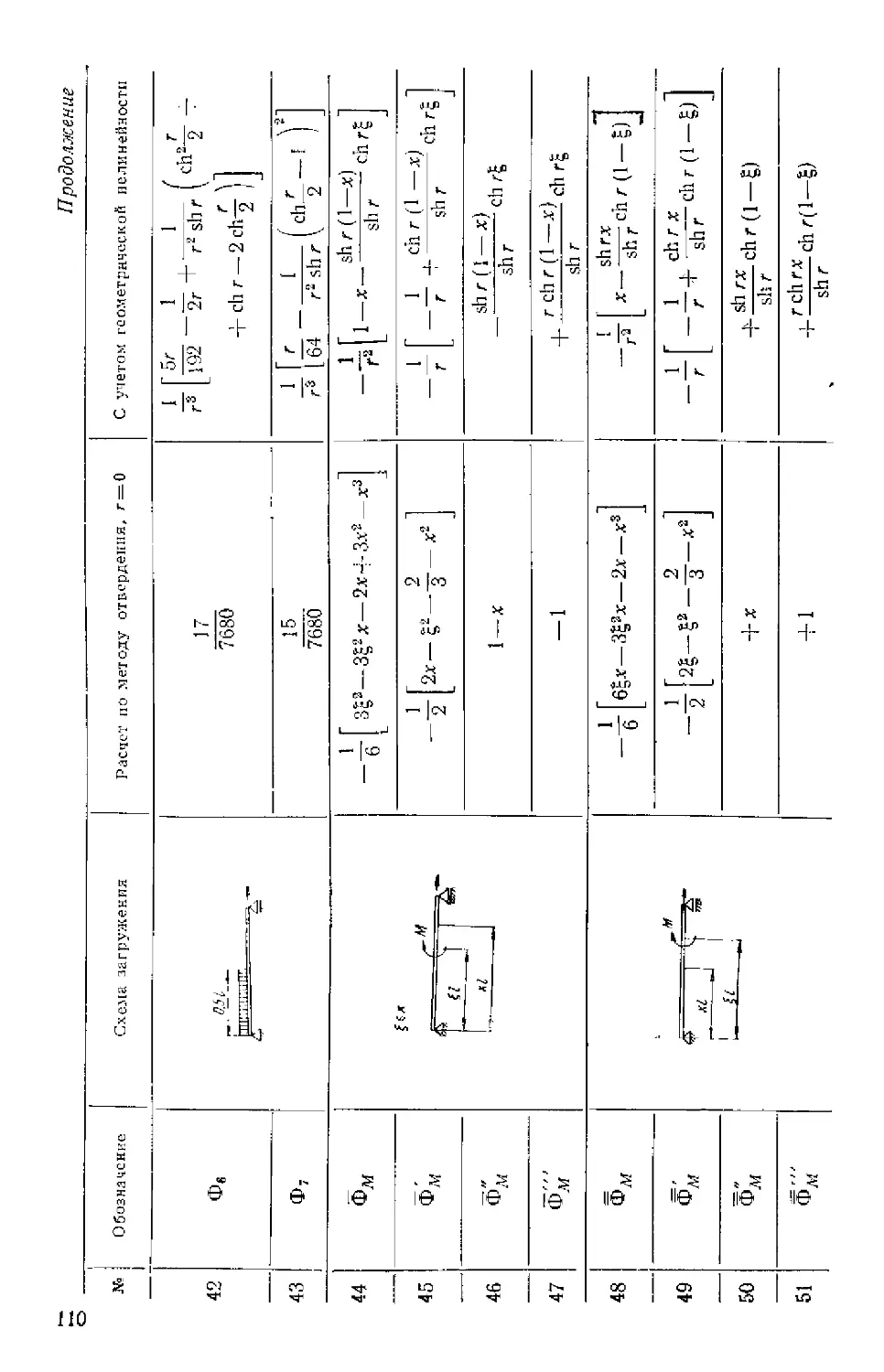
Чтобы определить поперечные перемещения от действия
внешнего сосредоточенного момента, приложенного в сечении £,
воспользуемся теоремой о взаимности работ (при М = ■■ 1, Р =■ 1):
ЛГфр(а;,|)=-Рли(*.5). (2.31)
Отсюда следует
•n (х, t) — . ————
K ' b/ EI dt
(2.32)
Диалогично угол поворота от момента М, в сечении, где приложен
момент М., -= 1:
ФЯ|
MLI Э-Ф! (х, I)
El
дхд%
(2.33)
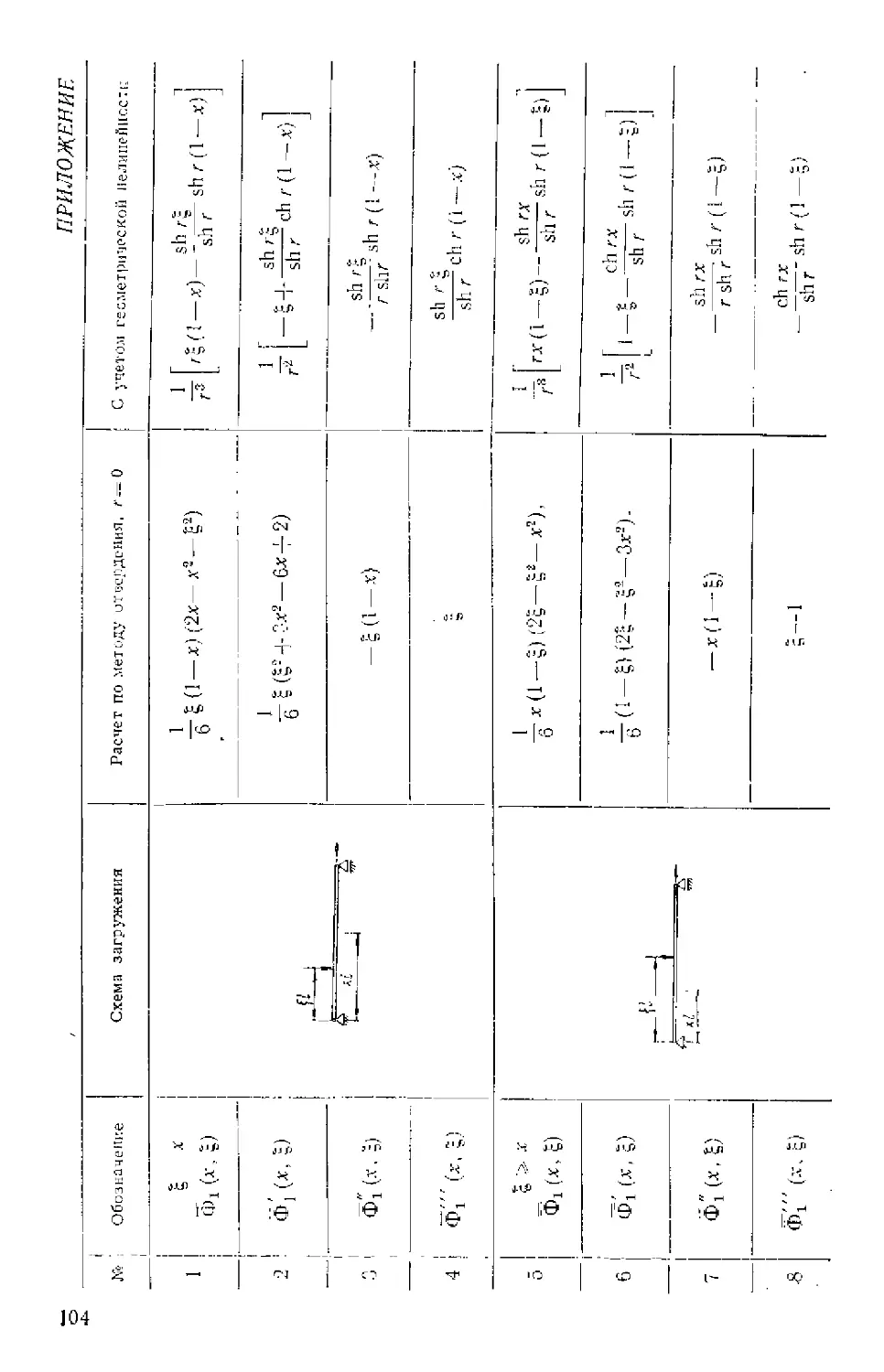
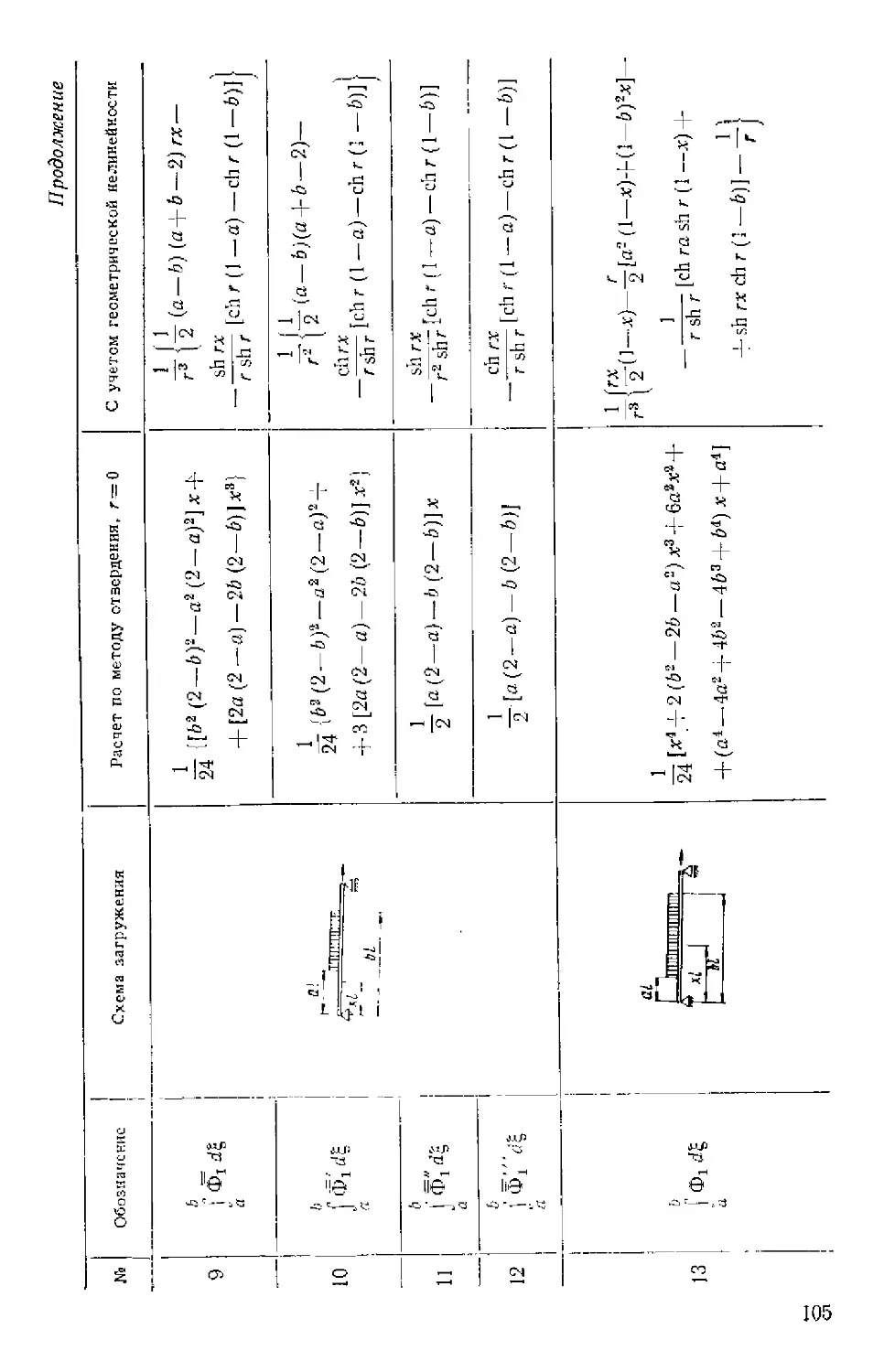
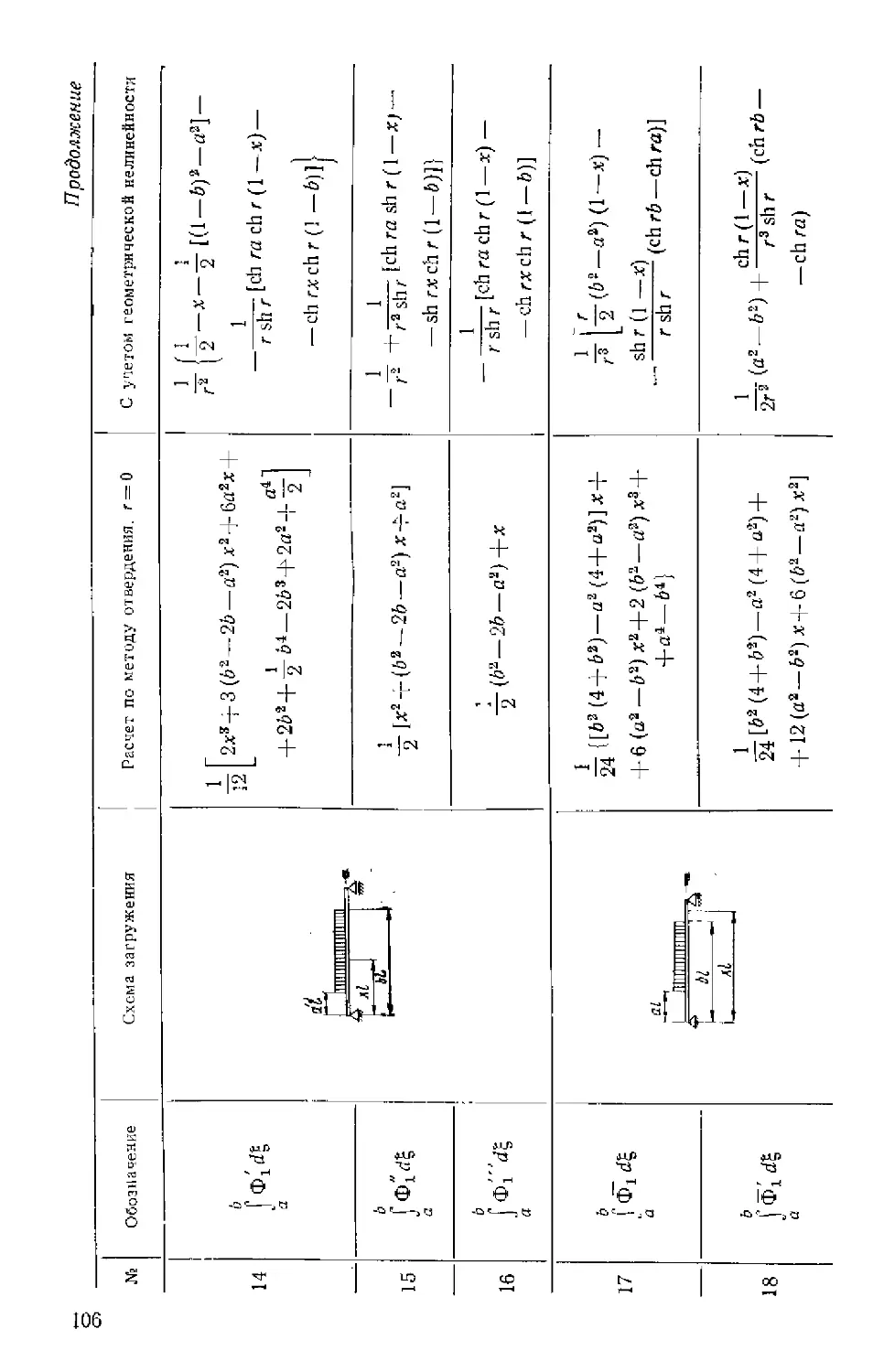
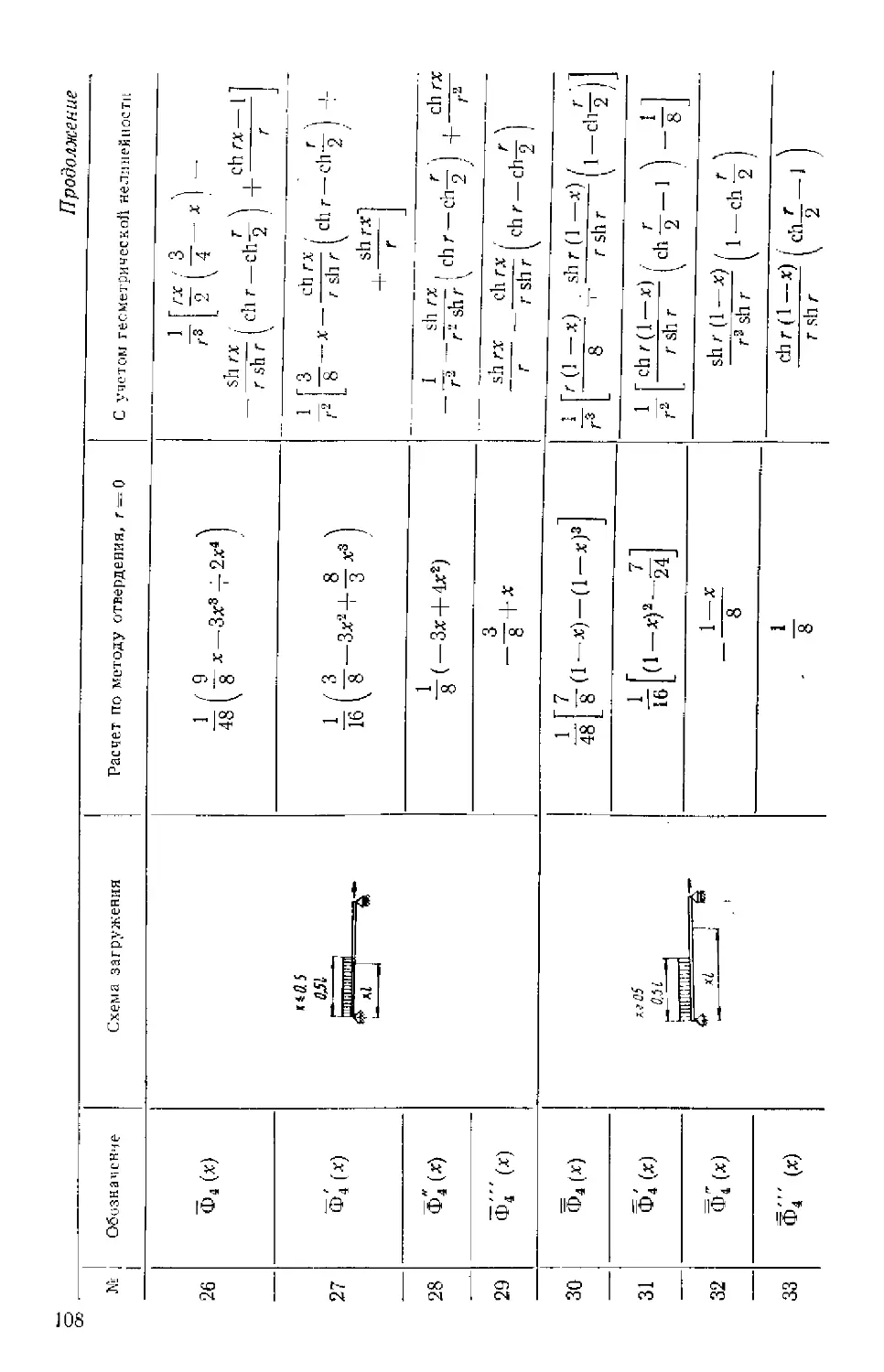
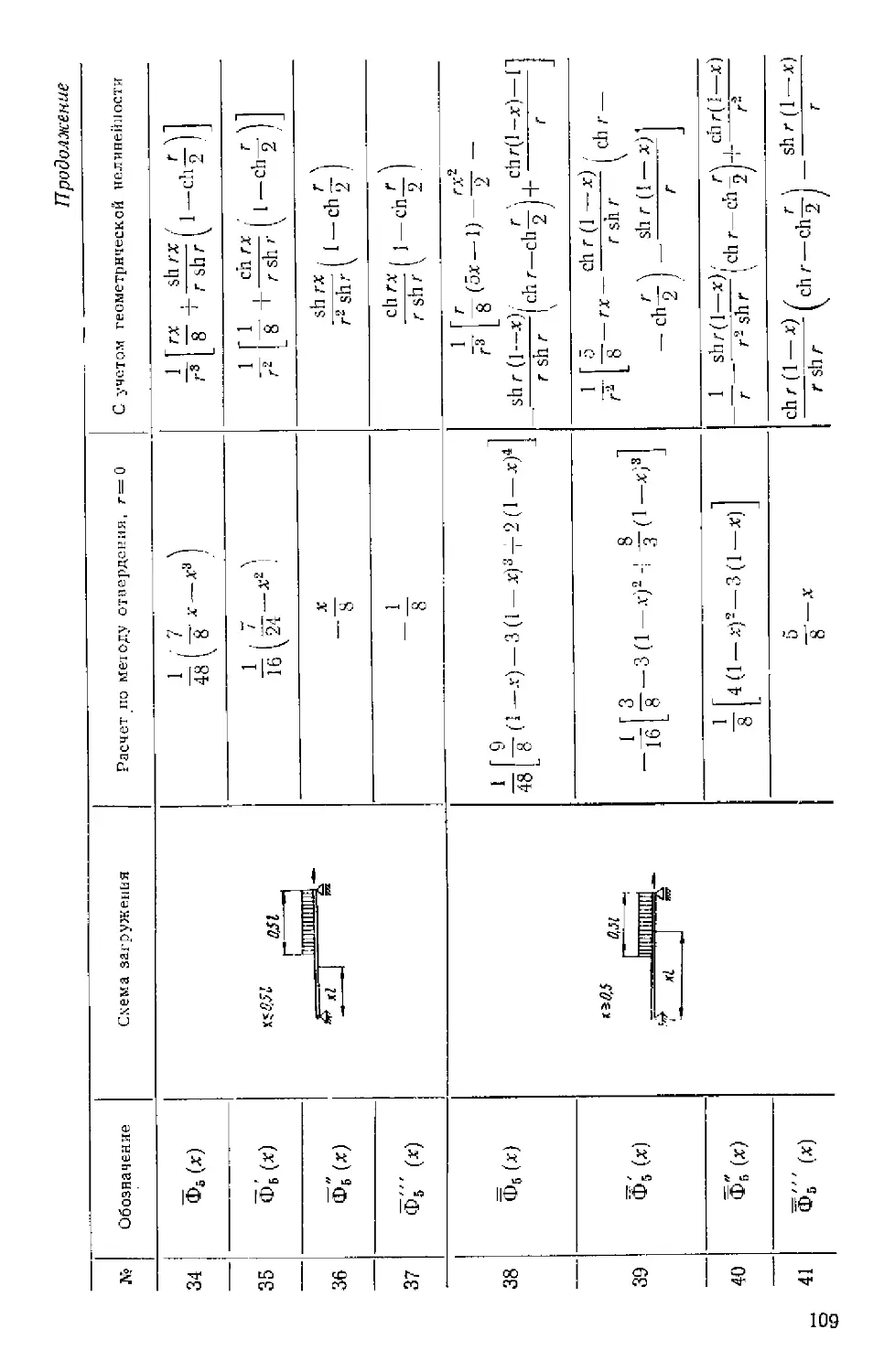
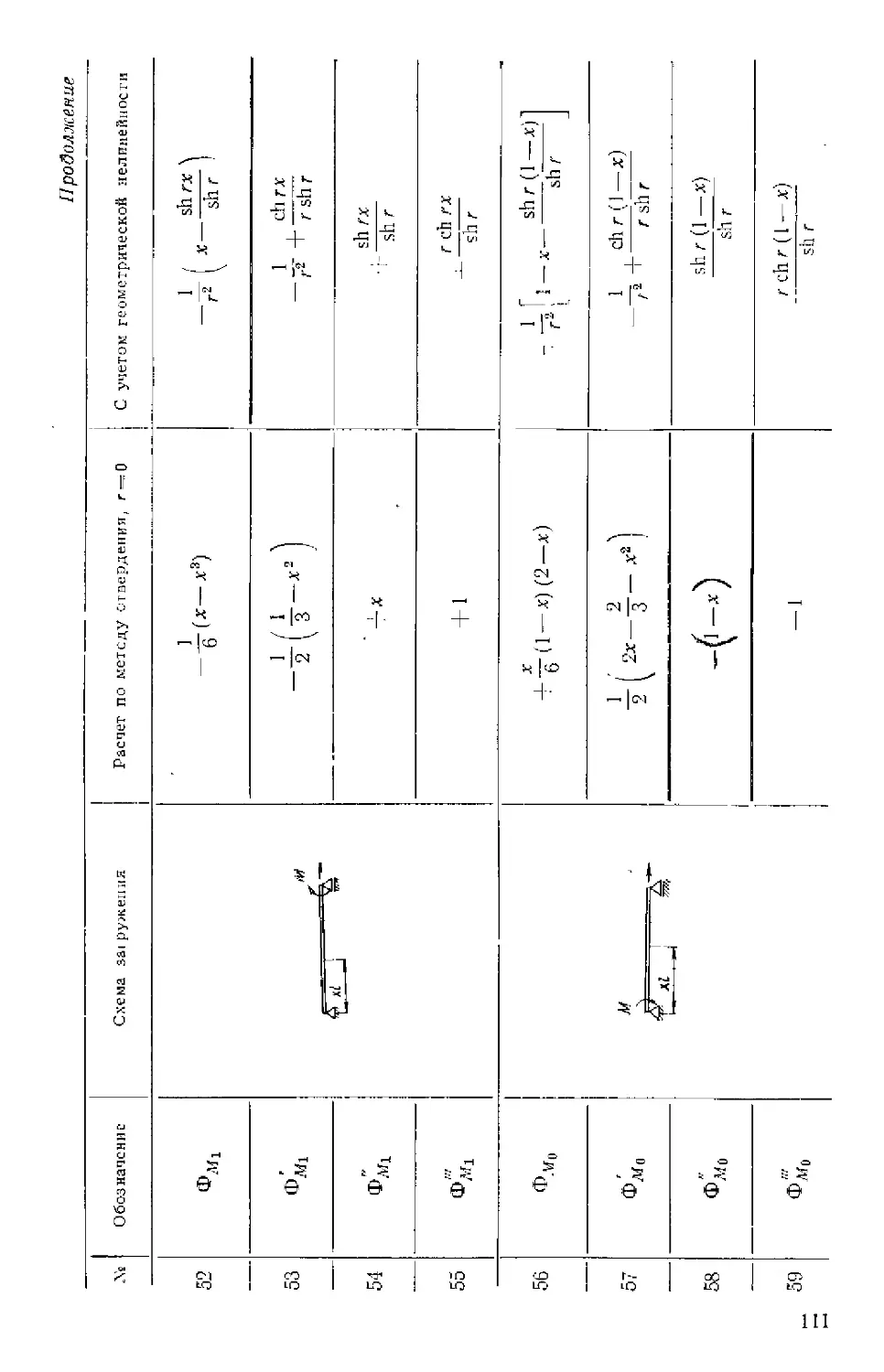
Формулы функций влияния, с помощью которых вычисляются
углы поворота сечений, изгибающие моменты и поперечные силы
для наиболее употребимых видов загружепия, приведены в
приложении.
В случае действия па балку нескольких нагрузок их суммируют
в соответствии с принципом независимости действия сил по
правилам, которые приняты для линий влияния, — производится инте-
36
грировапие функций от распределенных воздействий и сложение
функций влияния от сосредоточенных сил. Справедливость
принципа наложения соблюдается для нелинейных задач постольку,
поскольку при этих операциях сохраняется постоянство (или, точнее,
допустимо малое изменение) распора, а следовательно, принимается
постоянное значение коэффициента деформативпости (такое малое
его изменение, которое практически не влияет па результаты
расчета).
Единая форма записи функций влияния как для расчета по
методу отвердения (г 0), так и с учетом геометрической нелинейности
(г ф 0) удобна при откладке программ машинного расчета.
Известно, что на отработку программ при освоении новых методов или при
расчете конструкций новых видов затрачивается много времени.
В данном случае могут быть использованы хорошо известные и
легко контролируемые методы строительной механики
линейно-деформируемых систем, по все операции должны быть записаны с помощью
функций влияния при г -- 0 (приложение, графа 4).
После отладки программ па стадии линейного расчета методика
переписывается для г ф 0 в одноименных функциях влияния,
взятых из графы 5 приложения. Возможен обратный переход:
раскладывая функции влияния при г Ф 0 в ряд Тейлора и удерживая
первые члены разложения, получим при г —• 0 функции влияния
линейного расчета.
Впервые функции влияния в рассмотренном здесь виде были
предложены акад. А. И. Крыловым для динамического расчета балок
1271, затем в такой же записи они были использованы А. А.
Белоусом для расчета арочных комбинированных систем'с учетом
геометрической нелинейности [3]. Для расчета висячих мостов функции
влияния применялись С. Аснлундом [62J, С. А. Степкшшм [51J,
И. С. Дуровым 111J и В. Г. Беликовым [2J. Функции влияния были
применены нами для расчета статически неопределимых систем с
одной и тремя лишними связями1.
5. К расчету статически неопределимых висячих
и вантовых систем с учетом геометрической
нелинейности
Принятая линеаризация дифференциального уравнения
равновесия висячей системы путем установления постоянного распора
на каждой стадии расчета статически неопределимой системы
позволяет использовать законы и методы строительной механики
линейно-деформируемых систем для расчета па поперечные воздействия
нелинейных систем, к которым относятся вантовые внешнерасиор-
ные конструкции. Таким образом, к расчету многократно
статически неопределимых висячих систем могут быть применены при-
1 Н. М. Кирсанов. Расчет двухкабельных висячих систем по
деформированной схеме. В сб. трудов ЦПИИСК. Стройиздат, J 964.
37
вычные для проектировщиков методы, основанные на составлении
системы канонических уравнений, использовании линий влияния
для подвижных нагрузок, применены известные методы
оптимального проектирования и т. п. На каждой стадии последовательных
приближений уточняется лишь основной параметр уравнения —
коэффициент деформативности, и так как сходимость решений
быстрая, для получения практически повторяемых результатов
достаточно двух-трех приближений.
Способ расчета статически неопределимой системы выбирается
по тем же соображениям, что и при расчете но методу отвердения.
Отличие в этих расчетах состоит в том, что при определении
единичных перемещений балки нельзя воспользоваться способом
Верещагина, так как эпюры изгибающих моментов от единичных
воздействий криволинейны. Поэтому используются формулы стандартных
функций, зависящих от коэффициента деформативности, абсцисс
сечения и единичного груза (см. приложение).
Слагаемые перемещения б/,-, зависящие от продольных
удлинений кабелей и вант, определяются в основной части расчета в
предположении линейной деформации системы. Однако при
необходимости они могут быть уточнены с помощью теории гибких нитей.
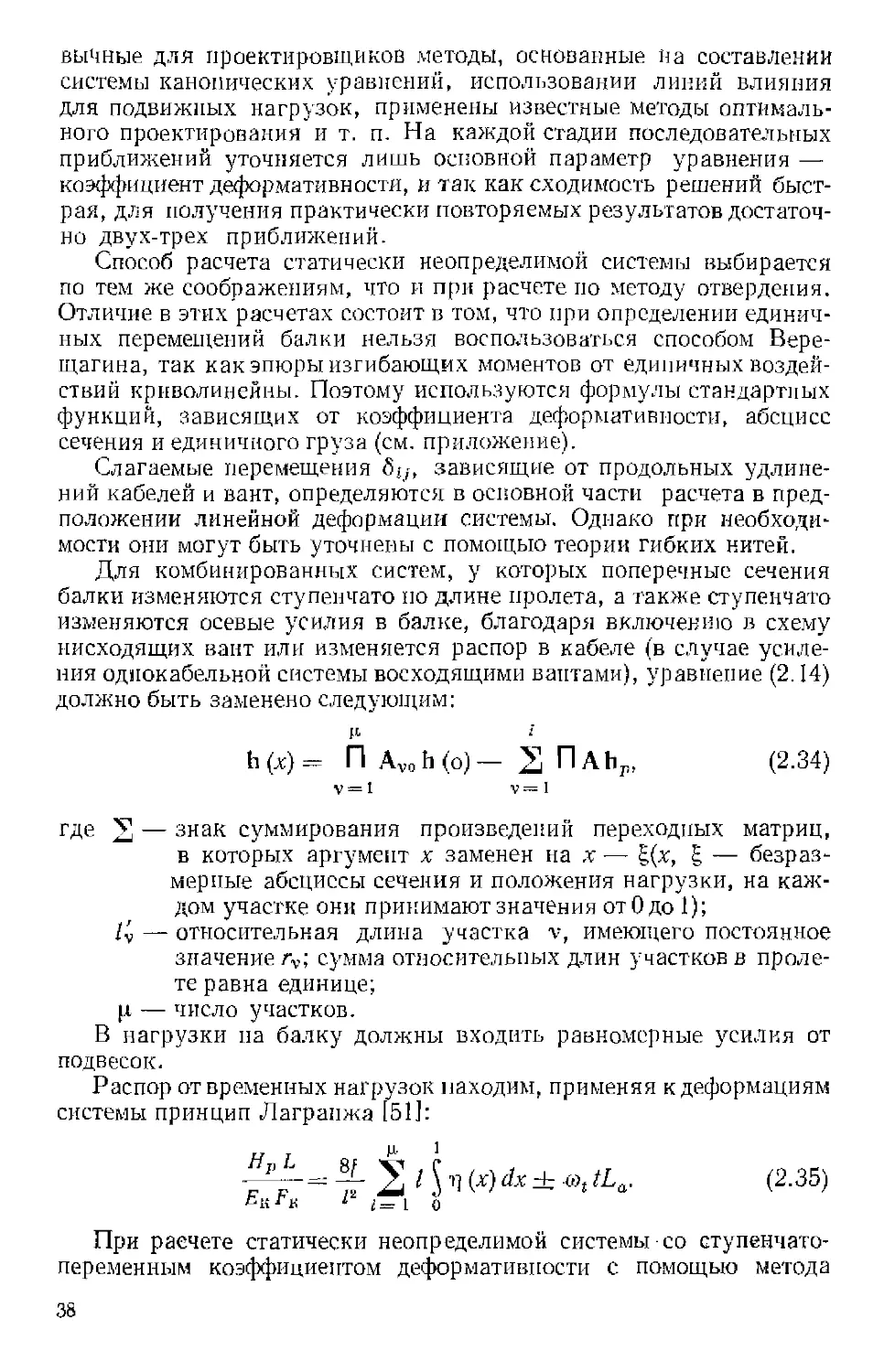
Для комбинированных систем, у которых поперечные сечения
балки изменяются ступенчато по длине пролета, а также ступенчато
изменяются осевые усилия в балке, благодаря включению в схему
нисходящих вант или изменяется распор в кабеле (в случае
усиления одпокабельной системы восходящими вантами), уравнение (2.14)
должно быть заменено следующим:
ji i
h(x) = П Av„h(o)— 2 ПАЬР, (2.34)
v=1 v=I
где 2 — знак суммирования произведений переходных матриц,
в которых аргумент х заменен на х — 1(х, £ —
безразмерные абсциссы сечения и положения нагрузки, на
каждом участке они принимают значения от 0 до 1);
/v — относительная длина участка v, имеющего постоянное
значение rv; сумма относительных длин участков в
пролете равна единице;
\i — число участков.
В нагрузки на балку должны входить равномерные усилия от
подвесок.
Распор от временных нагрузок находим, применяя к деформациям
системы принцип Лагранжа [51]:
Т~= V 2 1 Ь (*)dx ± Ч tL«- (2-35)
При расчете статически неопределимой системы со ступенчато-
переменным коэффициентом деформативности с помощью метода
38
сил перемещения балки от единичной силы определяются по формуле
(2.34), Перемещения Д1р в заданном сечении находим
интегрированием уравнения (34) по х — как сумму перемещений от
сосредоточенной силы по длине пролета или как прогиб в сечении х от
распределенной нагрузки.
Сумма перемещений от равномерно распределенной нагрузки по
всему пролету вычисляется двойным интегрированием уравнения
(2.34) по х и I.
При интегрировании уравнения изогнутой оси балки со
ступенчато-переменным по длине пролета коэффициентом деформатив-
ности необходимо предварительно определить прогибы на границах
участков.
В остальном расчет статически неопределимых висячих систем
производится также, как рассмотрено выше.
ГЛАВА 111
РАСЧЕТ ВИСЯЧИХ СИСТЕМ
С ВЕРТИКАЛЬНЫМИ ПОДВЕСКАМИ
1. Однопродетная схема: балка с кабелем
Определение распора, прогибов и
изгибающих моментов. Предположим, что геометрические
характеристики схемы — пролет, стрела провеса кабеля, длины и
углы наклона оттяжек — заданы. Известны также размеры сечений
кабеля и балки, а также модули упругости материалов, из которых они
изготовлены. В главе I нами рассмотрены компоновочные расчеты
висячих комбинированных конструкций. С помощью этих расчетов
все недостающие параметры схемы в первом приближении должны
быть выбраны.
Результатом уточненного расчета должно быть определение
прогибов системы, распоров в кабеле, изгибающих моментов и
поперечных сил в балке при действии подвижных временных нагрузок.
Основная расчетная характеристика системы г определяется по
формуле (2.3) приближенно для каждого загружения пролета
временной нагрузкой, так как при каждом загружении изменяется
распор от временной нагрузки. Если отношение постоянной нагрузки
к временной таково, что изменение коэффициента г при новых загру-
жениях составляет не более 10—15%, то можно пользоваться
постоянным значением коэффициента деформативности независимо от
изменения временной нагрузки.
Уточненный расчет начнем с определения распора в кабеле
с учетом геометрической нелинейности. Воспользуемся методом
39
последовательных приближений с линеаризацией расчетного
уравнения на отдельных этапах приближения.
Для определения лишних неизвестных системы применим метод
сил. Основная статически определимая система показана на рис. 8.
Определим единичные перемещения с помощью функций влия-
пня. От единичного распора, равного X ^- 1 =-• -|-j- , благодаря пара»
болическому очертанию кабеля создается равномерное натяжение
подвесок, которое передается на балку как равномерно
распределенная нагрузка:
К.
z„ =
(3.1)
Рис. 8. Основная система для расчета оцнопролетной схемы
Перемещения концов кабеля в разрезе Д, от силы Р =■ 1,
приложенной к балке, могут быть в соответствии со взаимностью
перемещений определены как перемещения по направлению Р = 1 от
единичного распора. От распора X ---■ 1 па балку передается
распределенная нагрузкаzu. Следовательно, для определения перемещения
Aj„ — Alf, требуется найти прогиб под грузом Р = 1 от
равномерной нагрузки г0, что может быть выполнено с помощью функции Ф3
1см. формулу (2.23)J, где абсцисса сечения заменена абсциссой гру-
за £):
Д1р =
г^.^Ф1{хЛ)с1х--
I EI V ;
(3.2)
Перемещения балки б'п выразим как перемещения от
равномерной нагрузки гь по направлению такой же нагрузки г„ - 1,
расположенной на всем пролете. Таким образом, б", может быть найдено
интегрированием Ди, по всему пролету:
i
dE =
EI
Фа^=
64 Р
EI
(3.3)
Фя — см. формулу (2.30). Перемещения от удлинения кабеля с>т
найдем, учитывая переменность усилия в кабеле по длине пролета
и изменение угла наклона кабеля к горизонту.
40
Найдем приведенную длину кабеля с учетом боковых оттяжек:
^=i~+2-^-J{i+y't)(i+j^)dx.]-
J cosJcp cos*10 J \ 2 J
о о
+ 2 -^- « /f 1 + -*£-) -f 2/0T u.secaG; (3.4)
0
Здесь /, /0T — пролет кабеля и горизонтальная проекция
оттяжки кабеля;
f — стрела начального провеса кабеля;
Ф — угол наклона элементарного отрезка кабеля к
горизонту;
О — угол наклона оттяжки;
Ек FK — продольная жесткость кабеля;
yi — отношение конструктивной длины оттяжки (с
учетом заделки в анкере) к геометрической.
Таблицы приведенных длин L0 — см. [49].
Полные перемещения
6п = —•—Ф3Ч——-. (3.5)
1 I* EI 3 EKFK y
Преобразуем выражение ( 3.5) так, чтобы удобно было
использовать метод повторных попыток при расчете статически
неопределимой системы, выбор поперечных сечений которой связан с
предварительным ориентировочным расчетом:
8„.-.WL.JL((t> . El L» t
11 '■' EI { 3 £„Л<ги " I ' 64/2
)• (3-6)
Второе слагаемое в скобках — безразмерный параметр,
характеризующий продольные деформации комбинированной системы:
n -= . _l . ----n0—. ; nn--- . (3.7)
EKFKt2 I Mf* I MP EKFKl2 V ;
Использование при расчете параметра ях имеет то преимущество,
что, принимая на первой стадии расчета ориентировочное значение
его [см. (3.16), (З.Г/)1, в дальнейшем легко уточнить величину пх
без изменения схемы расчета.
Распор определяется из канонического уравнения:
бцХН-Д^-О; (3.8)
Xi:-.~A^- *Ш- ..±=a(l)P-L. (3.9)
!Г °1 64/а
Уравнение для определения распора (3.9) полностью совпадает;
с уравнением распора, полученным в работах [11, 43, 51, 68, 70J.
41
с помощью энергетического метода в предположении малых
перемещений, т. е. для случаев, когда при выводе уравнений можно
пренебречь величиной т)'а по сравнению с единицей [44, 61].
Для определения прогибов, углов поворота, изгибающих
моментов и поперечных сил в балке просуммируем воздействие на
балку внешних нагрузок [см. (2.19)] и равномерно распределенное
воздействие подвесок, направленное вверх:
/3
Ъ(х)=-^2Р\ФЛхЛ)'
•а{1)Фг{х)];
к=1
(3.10)
ф(*)=■£- 2 W<*. £)-«(£)фП*)];
М(х)--.-1 2 Р [Ф;' (х, I) - а (I) Ф;»];
Q (*)= ~ 2 Р\Ф:(х, D-aaWWl
А = 1
Здесь Фг— функция влияния сосредоточенной силы [см. (2.18)].
Расчетная формула этой функции принимается в зависимости от
соотношения между х и %. Так, ггри g ^ х принимается Ф\, а при х ^
^ Ъ, расчет производится по Фг. При действии равномерно
распределенных нагрузок функции Ф^х, £) нФ2(|) [в формуле а, см. (3.9)1
интегрируются по £ в пределах расположения нагрузки.
Производные, указанные в (3.10), взяты по х. Формулы этих и других
функций см. в приложении для соответствующего вида нагрузки при
г Ф 0 (графа 5).
Учтем дополнительные факторы, которые могут быть введены
в расчетные формулы перемещений метода сил: изменение
температуры по сравнению с температурой монтажа t, податливость
анкеров va, деформацию пилонов:
6?,
EF«
: сэ( tLt
'v&Hp-
hn
tge=-p-; tgq.0=
4/
I
(tg6-|-tg<pe);
(3.11)
где
hnt En Fu — высота и продольная жесткость пилона;
6, <р0 — углы наклона оттяжки и кабеля к горизонту
вблизи пилона;
со, — коэффициент линейного температурного
расширения кабеля;
L, — приведенная длина кабеля при расчете на
температурные деформации;
-1
dx
СОв'ф
2/от sec2 9 =
I
(l +
\6_
3
+ 2/OTseca9. (3.12)
42
Знак минус в формуле (3.11) принимается при повышении
температуры и при сближении анкеров.
В случае расчета системы на действие одного лишь
температурного перепада расчетные формулы (3.10) будут иметь следующий вид
М (х) =-- -Ш. щ{х). Q (Х) = -^ Ф1'(х).
(3.13)
Формула для определения Ht, как это следует из решения
канонического уравнения, имеет следующий вид:
Ht^~^tEKFK^-.-r-f—. (3.14)
Подобным же образом выполняется расчет и на смещение
анкеров.
Пример расчета однопролвтной висячей системы с учетом
геометрической нелинейности. Требуется определить прогибы и изгибающие моменты в
середине и четверти пролета балки однокабельной висячей системы при
действии временной нагрузки.
Дано; пролет I = 120 м, горизонтальная проекция оттяжки /от = 30 м,
I
коэффициент ц — 1,2 [см. (3.4)], стрела провисания кабеля f — д, предельный
&у 1
прогиб — = ш
Нагрузки: постоянная нормативная </н — 3 т/м, расчетная q — 3,3 т/м,
временная нормативная ра — 0,6 т/м, расчетная р = 0,84 т/м, одиночный
груз (нормативный) Ра = 10 т, расчетный груз Р — 12 т, расчетный
температурный перепад 20°, жесткость кабеля EKFK = 1,564 • 10й т, балки EI =
= 3,11 . I05 тиг.
1. Определение расчетных параметров системы по формулам (3.4), (3.6),
(3.7):
I0 = 12oj"l+— + 2-0,25-1,2 (l + — ])= 120-1,8173 = 218,07 л»;
3,ll-105
и„=—~ -=1,381-10-*;
1,564-105-1202
9г
n1=l,381-10-J-l,817 =-0,3176-Ю-3.
64
2, Определение коэффициента деформатнвности при загружении
временной распределенной нагрузкой всего пролета и при расположении
одиночного груза в середине пролета [формулы (2.1), (2,3), (2.4)1;
а) по нормативным нагрузкам определим сумму распоров:
„ , р" I2 Рц1 3.120-9 0,6-120-9 10.9
Hq-Ьаг—— +я2-—- = - + + —- = 508,5 т. (а)
В первом приближении здесь принято aL—-1, а2~2 (при r-^Ои EKFR—
=^ оо);
Полученным значением коэффициента дсформативности воспользуемся
для определения уточненного распора по формуле (3.9) и для вычисления г
во втором приближении. В формуле (3.9) функция Ф2(|) для равномерно
распределенной нагрузки по всему пролету должна быть заменена интегралом
1
|сы. (2.30)]; J 'l^rfg ■ Ф:!, а для одиночного груза Ф3(Е;) определяется по фор-
о
муле (2.24), при этом х заменяется па Ъ, --- 0,5.
При ручном счете с помощью клавишных машин для вычисления
величин, н которые входят гиперболические функции, рекомендуется пользоваться
справочником Г>. И. Сегала и К. Л. Сеиепдяева «Пятизначные математические
таблицы» (1961). Вычисления значительно облегчаются применением машин
МИР, «Напри», где гиперболические функции входят в оперативный язык
машины. Необходимая разрядность 6 при расчете висячих систем, в которых
результат вычисляется как малая разность больших чисел.
Итак, по формулам (3.9а), (2,3) вычислим второе приближение:
2,4675.Ю-з
а, =-. =, 0,8880;
(0,3176 |-2,4S75)-i0-a
3,8215-Ю-3
а., ■-= — _ [, 3722;
2,7751 -10-^
7.Н=405-1-0,8860-81 -■[-■ 1,3722-11,25 =--492,2 т;
,„ -. / 492,2
V 3,11-ios
При вычислениях с помощью клавишных машин достаточно принять
точность в определении г — две значащие цифры после запятой, так как
сохранение большего числа знаков практически не влияет па точность
получаемых результатов.
Второе уточнение распоров и коэффициента деформативности, которое
выполняется по тем же формулам, как и первое уточнение, но при г = 4,77,
дает
2// = 405 + 0,8882.81+ 1,3760-11,25 = 492,43 т;
, Г 492,43
г= 120 1/ ■ =4,77.
С помощью машины МИР получены следующие значения расчетных
величин (по стадиям приближения):
я, — 0,885863: 0,888245; 0,888213,,.
а,- 1,372152- 1,375995; 1.375945; 1,376940...
г'- 4,85227; 4,7738(5; 4,77496; 4,77495,,,
Последние значения не менялись при повторных циклах расчета. Таким
образом, из приведенного примера следует, что при инженерных расчетах
достаточно одпого-днух приближений при определении расчетного
коэффициента дефор млтинности;
б) проделаем то же по расчетным нагрузкам;
2tf = 445,5+ 113,4 + 27 = 585,9 т;
/585,9
=5,2085.
3,11-Ю5
44
Первое уточнение распоров и г (при г ~- 5,21
2,229- \0-3
2,5374-Ю"3
0,87529;
■ 3,40-Ш"3
ее, = . — 1.3542
3,5374-10"3
•£#■=445,54-0,87529-113,4+1,3542-13,5---563 т;
/—
. , 563
г = 120 |/ ----5,10.
х> 3,11-Ю5
V
Второе уточнение дает «, -- 0,8784, ай — 1,35947, г —- 5,1058.
Дальнейшие уточнения — г — 5,1078; 5,10775.
3. Определение коэффициента деформативности при загружелни
временной распределенной нагрузкой половины пролета (от опоры до середины)
и при расположении одиночного груза в четверти пролета;
а) но нормативным нагрузкам;
в первом приближении (при г — 0) принимаем at -- 0,5; сс3 -- 1, 1.Н =
-- 456,75 т, г~ 4,СО. Затем, уточняя я, — 0,44662, «а -- 0,99777, получим
ги ■-—■ 4,5768, а в дальнейшем гп — 4,57695;
6} по расчетным нагрузкам;
2Я--445,5 -1-56,7 +13,5-=515,7 щ;
сц-0,442943, сс3 = 0,989853, г = 4,85478, а затем
аг-^0,442940, а2^0,989838, г=4,85509.
4. Определение прогибов и изгибающих моментов в середине пролета
при гн = 4,7749, г ■--- 5,10775.
Преобразуем формулы (3.10) для равномерной нагрузки,
распределенной по всему пролету, Проинтегрировав функции <£>i (х, |) и Ф2 (£) по £ от
0 до 1, получим:
■П(0,5)=-^Фа(1-а); Л*(О,5) = -р/»Ф;(1-°0- (3.15)
0 6.120*
1ь(0,5) = — 3,90925-Ю"3 (1— 0,88821) = 0,175л;
' у 3,11.10»
10.1203
«2 (0,5)== (6,44904. Ю-3—3,90925-Ю-3-1,37594) = 0,059 ж.
'2V ' 3,1 МО»
Полный прогиб составляет 0,175 + 0,059 -- 0,234 м или 1/ы2 пролета;
Л4, (0,5)-0,84-1202.32,4036-10-8(1— 0,8784) =-47,68 тм;
7И2 (0,5) = 12.120 (96,7142-10-а —32,4036-Ю-3-1,35937) = 75,84 тм;
М (0,5) = 47,68 + 75,84-123,52 тм.
При вычислении функции Ф" и коэффициентов а для изгибающих
моментов здесь использован коэффициент деформатишюсти г - -■ 5,11 (г — 5,1077),
найденный по расчетным нагрузкам. Если эти функции найти для г - 4,77
(г -■- 4,7749), который вычислен по нормативным нагрузкам, то получим
М (0,5) —; 125,70 тм, или увеличение запаса прочности по сравнению с
расчетом по уточненному коэффициенту деформативности 1,76% , что можно было
допустить для инженерной задачи и для упрощения расчета определять
функции влияния для прогибов и изгибающих моментов по единому коэффициенту
гн (без учета коэффициентов перегрузки).
45
5. Определение прогибов и изгибающих моментов в четверти пролета:
0.6-1204
ih (0,25)= ГТ (1,75921-Ю"3—2,98768-Ш^3-0,44294) = 1,70 м;
3,11-105
10-1203
lis (0,25)=- ——- (4,2690'Ю-3 —2,98768-10-3-0,9S844) = 0,07 м.
Полный прогиб J,70 -1 0,07 = 1,77 м, или 1/в80 пролета.
Здесь функции Фг и Ф2 вычислены по формулам приложения при гн =
— 4,57695, х — 0,25 при £ — 0,25 для одиночного груза и при загружении
распределенной нагрузкой половины пролета от опоры до середины:
Mi (0,25)=0,84-1202 (24,03889-10-а — 28,8Н2• 10"1?■ 0,44294) = 136,39 тм;
ЛГ2 (0,25)^ 12-120 (93,8354-lO"3—28,8142-Ю-3-0,989838) = 94,05 тм.
Суммарный изгибающий момент в четверти пролета 230,44 тм. Для
упрощения расчета здесь функции влияния вычислялись по гн, но нагрузки для
определения изгибающих моментов приняты расчетные,
6. Прогибы и изгибающие моменты в середине пролета при повышении
температуры;
i/ "OS' _.
V 3,11-ю5
г = 120 1 / =4,32;
-- -0а
tfj= — 20-1,2- го-5-0,825-1,564- 10s—: : = — 3,05 т;
3,2174-Ю-3
405—3,05
— :— = 4,32;
3,11-Ю5
-, , 445,5—1,2-3,05
Г(=120 1/ : — = 4,52;
3,05-8 1203
Ш (0,6) = -^- . з,ц. ю» 4,5.10-^0,068 м;
3,05-8
Mt (0,5) = — 120-38- 10-э= 12 тм.
Здесь функция Ф2(0,5) определялась при г— 4,31, а функция Ф^(0,5) —
при г — 4,52.
Влияние компоновочных параметров на
распределение усилий в элементах и на
прогибы о д н о к а б е л ь н о й системы.
Предложенный здесь способ расчета с учетом геометрической нелинейности
позволяет в общем виде проанализировать влияние
компоновочных параметров на распределение усилий в элементах и на
прогибы пролетной конструкции. Результаты такого расчета могут быть
представлены в виде формул, а также графически с помощью
линий влияния, что облегчает изучение напряженного состояния
и деформаций сооружения при действии подвижных нагрузок.
Приведем основные выводы из этого анализа.
46
а) Для того чтобы проследить, какие факторы влияют на
величину дополнительных провесов кабеля в середине пролета,
преобразуем уравнение прогибов при загружении временной нагрузкой
всей длины балки:
л=_Р^фа(1_а)==-Р11_.А.__^._Ф*_. (з.15)
EI У EKFK I P-64 /н + Ф., V '
Здесь щ [см. (3.7)] как слагаемое в знаменателе последней дроби
составляет от 2 до 10% суммы в знаменателе. Аналогично может быть
выведено уравнение изгибающих моментов в середине пролета.
Таким образом, в первом приближении можно считать, что па
величину упругих прогибов и изгибающих моментов в середине
пролета решающее влияние оказывают длины кабеля и оттяжек,
площади их поперечного сечения и модуль упругости материала,
из которого они изготовлены. Вычисление дроби Ф2/Ф3 при
различных значениях г показало, что это выражение почти не зависит от г.
Поэтому можно считать, что прогибы в середине пролета не зависят
от коэффициента деформативности и от жесткости балки, что видно
из той же формулы (3.15). Последнее говорит о том, что для
уменьшения прогибов в середине пролета нерационально увеличивать
сечение балки.
б) Влияние соотношения постоянных и временных нагрузок на
прогибы и изгибающие моменты в середине пролета висячей
комбинированной конструкции такое же, что и для сооружений других
типов, — с увеличением расчетной постоянной нагрузки
уменьшается доля напряжений от временных нагрузок, и, следовательно, в
соответствии с законом Гука прогибы от временных воздействий
уменьшаются. Этот вывод относится только к проектируемым
конструкциям, в которых соотношение нагрузок учитывается при
подборе сечения кабеля. Если же рассматривать конструкцию с
заданным, неизменным сечением кабеля, то увеличение балластной
нагрузки не повлияет на уменьшение прогибов в середине пролета от
временной нагрузки: эти прогибы не зависят от величины
коэффициента деформативности, что было показано формулой (3.15).
в) При загружении временной нагрузкой части пролета
(например, половины) прогибы являются следствием главным образом
кинематических перемещений, которые пе зависят ни от
характеристик сечения кабеля, ни от его длины. Упругие удлинения кабеля
при частичном загружении пролета имеют второстепенное
значение.
Для уменьшения кинематических перемещений (прогибов в
четверти пролета) в обычных системах принято прежде всего
увеличивать жесткость балки. Однако линейной зависимости между этим
увеличением и уменьшением прогибов нет, жесткость системы
возрастает с некоторым отставанием от увеличения сечения балки.
Увеличение жесткости балки имеет и другие недостатки — оно
ведет к утяжелению конструкции, а следовательно, к увеличению
47
расхода материалов на кабель и анкеры, а также к повышению
трудовых затрат на изготовление и монтаж сооружения. Для
уменьшения s-образных прогибов можно также уменьшать стрелу провеса
кабеля пли увеличивать постоянную нагрузку. Но эти меры также
не решающие: их влияние сказывается лишь па увеличении
коэффициента деформативности и, следовательно, на увеличении поправок
за счет нелинейности.
Поэтому лучшими мероприятиями но уменьшению
кинематических перемещений следует признать использование висячих систем
повышенной жесткости. Отметим, что для оценки влияния
компоновочных параметров на напряженное состояние и деформации
системы нельзя пользоваться приближенным расчетом без учета
геометрической нелинейности, так как
можно сделать принципиальную
ошибку относительно значения ряда
компоновочных параметров, особенно
при больших г. Последнее несколько
затрудняет разработку практически
приемлемых простых методов
оптимального проектирования висячих
систем [7, 22, 50].
г) Огибающая эпюра прогибов
системы «нить — балка» может иметь
один из двух видов, показанных па
рис. 9. На схеме 9, а упругие
удлинения кабеля в системе имеют
преобладающее значение; на схеме 9,6—
кинематические прогибы (s-образный
изгиб) при местном загружепии
больше максимальных упругих
удлинений, которые наблюдаются при
загружепии всего пролета.
Характер деформаций системы по первой или второй схеме
выявляется с помощью обобщенного компоновочного параметра щ,
который связан с величиной продольных удлинений кабеля и изгиб-
ной жесткостью балки 1см, формулу (3.7)1. С увеличением п1
увеличиваются упругие удлинения кабеля и огибающая прогибов
принимает вид, показанный на рис, 9, а. С уменьшением nt увеличивается
значение кинематических перемещений, что соответствует эпюре
рис. 9, б. Таким образом возникает возможность компоновать
конструкцию с заданным характером деформаций и определенной
величиной наибольших прогибов путем соответствующего выбора
компоновочных параметров, входящих в я,. Для оценки этого
параметра преобразуем его с помощью приближенных формул главы I.
Получим при подборе сечения балки по прогибам:
Рис.
щих
9. Характер эпюр огибаю-
прогибов однокабельной
системы
f>a;ihori
М F.1 М
же[/ [коп
Kil6tVKJ\!;
КОП !! ЖСЧГКПМ
прогиб,г[ мри
1>;1С"[яж]1-
6 — с гиббон ба/ь
iwtGeueM; иупкпф —
неоиммет ршшом :vd
гр уж сгний
384•32
Rn
Р + Ч &У
(3.16)
48
При подборе сечения балки по прочности
(3.17)
где
Rm £к — расчетное сопротивление и модуль упругости ка-
R, Е
Р, Р", Я ■
f_ Ло
I ' I
/
беля;
■ то же, материала балки жесткости;
расчетные и нормативные временные и расчетные
постоянные нагрузки на единицу длины пролета;
- относительные стрела кабеля и высота балки
жесткости;
допускаемый предельный провес конструкции.
Рис 10. К определению места
наибольшего прогиба
Wi^>«ic]i — тшбо.чьитп прогиб к середине
прилета; ili-^.Якц — паибшилЕЦШ прогиб
в чепн-рщ пролета npi[ уагружепип
половины длины балки
Общий вывод из формул
(3.16), (3.17); характер
прогибов висячей системы зависит от
соотношений расчетного
сопротивления и модуля упругости
кабеля, стрелы провеса п
пролета, ннтепсиопостей временных
и постоянных нагрузок. При
расчете балки но прогибам —
также от величины предельных
прогибов, а при подборе
сечения по прочности — от относи-^
тельной высоты балки и упру-8
гих свойств материала, из
которого изготовляется балка.
Из формул (3.16), (3.17)
также следует, что пх и характер
деформаций системы не зависят от величины пролета. Однако эта
связь проявляется через отношения постоянных нагрузок к
временным, высоты балки к длине пролета и др. Так, при пролетах
больше 60 м в конструкциях начинает возрастать значение
собственного веса и уменьшаться относительная высота балки, что
приводит к уменьшению пх и к деформациям по двум полуволнам при
загружеиип части пролета (пунктир па рис. 9, б).
Поставим частную задачу по отысканию такого значения nit
при котором прогибы системы в четверти пролета при загружении
половины длины балки были бы равны прогибам в середине пролета
при полном загружении сооружения временной нагрузкой. Для
этого, приравняв формулы прогибов при данных загружениях,
вычислим пКр в зависимости от г и соотношений временных и
постоянных нагрузок (рис. 10). Полученный график можно использовать,
во-первых, для компоновки системы с равными прогибами в
середине и четверти пролета при данном или вычисленном значении
коэффициента деформативности. При этом требуемое значение пКр
49
50
Таблица 2
Таблица коэффициентов для вычисления ординат линий влияния
в сечении х=0,25
Показатель
Прогибы е
четверти
Пролета w
(0,25)
Изгибающие
моменты в
четверти
пролета т
(0,25)
Г
2
4
6
10
2
4
6
10
\ ъ
"' \
МО"'1
2-Ю-'1
3-10"*
5-Щ-4
1 -10—4
2-Ю-4
з- ю-*
5.Ю-3
1-10-*
2-10-1
3.10"4
5-10-*
ыо-"
2-Ю"1
з-ю-4
5.Ю-4
ыо-*
2-10-*
з- ю-*
5-10-*
1-10 — *
2-10-*
з- ю-*
5-10-*
1 ■ 10-*
2.10-*
3-10-*
5.10^"
МО"*
2-10-*
з- ю-*
5-10-*
0,125
+0,943
+ 1,007
+ 1,07(
+ 1,189
+0,755
+ 0,818
+0,877
+0,985
+0,573
+0,632
+0,686
+ 0,779
+0,334
+0,384
+0,424
+0,485
+339
+345
+352
+364
+259
+265
+272
+283
4 181
+ 187
+ 193
+203
-1-080
+086
+090
+097
0,250
4-1,391
+ !,51(
+ 1 ,623
+ 1,842
+ 1,130
-1-1,244
+ 1,351
+ 1,548
+0,876
+0,982
+ 1,079
+ 1,247
+0,540
+0,628
+0,699
+0,808
+792
+804
+816
+834
+679
+691
+702
+723
+566
+577
+587
+605
+406
+415
+423
+435
0,375
+0,900
+ 1,053
+ 1,201
-1-1,484
+0,728
+0,875
+ 1,013
+ 1,267
f0,564
+0,701
+0,825
+ 1,041
+0,355
+0,467
+0,558
+0,695
+ 194
+210
+225
+254
+ 136
+ 152
+166
+ 192
+084
+099
+ 112
+ 135
-\ 027
+039
+049
+064
0,500
4-0,005
-1-0,170
+ 0,330
+0,636
-( 0,021
+0,179
+0,328
+ 0,602
+0,039
1-0,186
+0,320
+0,551
+0,068
+0,188
4-0,285
+0,432
—188
-171
— 155
—124
— 164
„148
— 133
— 104
—135
-119
— 105
—081
—083
—070
—060
—044
0,625
—0,724
—0,571
—0,422
—0 .140
—0,540
—0,393
—0,255
—0,001
—0,363
—0,226
—0,102
+ 0,114
—0,139
—0,027
+ 0,063
+0,201
—366
—350
—335
—306
—286
—271
—256
—230
—207
—192
--■179
— 157
— 104
—092
—082
—067
0,750
—0,976
—0,858
—0,Н4
—0,526
—0,732
—0,619
—0,511
—0,315
—0,501
—0,395
—0,298
—0,130
—0,217
—0,129
—0,057
+0,509
—363
—351
—339
—317
—272
—26!
—250
—229
— 188
— 177
-166
--149
—088
—078
—070
—059
0,875
—0,681
—0,616
—0,554
—0,435
—0,513
—0,450
—0,391
—0,283
—0,354
—0,295
—0,241
—0,148
—0,160
-0,110
—0,070
—0,009
—221
—215
—209
—196
— !63
— 157
— 151
—139
— 111
— 104
—097
—089
—050
—045
—041
—034
51
по графику рис. 10 должно соответствовать коэффициенту ях
проектируемого сооружения, что достигается соответствующим выбором
геометрических параметров и прочностных характеристик
материалов [см. формулы (3.16), (3.17)1. Во-вторых, если все размеры
сооружения известны и материалы заданы, с помощью рис. 10 можно
определить место наибольшего прогиба системы, не прибегая к
расчету. Для этого определяют, в какой зоне— верхней или нижней —
располагается параметр nlt вычисленный для данной конструкции,
а следовательно, становится известным, где находится место
наибольшего прогиба. В соответствии с проведенным исследованием
может быть выбран способ усиления существующей конструкции или
если это проектируемое сооружение, производится рациональная
компоновка его.
Расчетные таблицы однопролетных комбинированных систем.
В табл. 1 и 2 приведены коэффициенты для определения ординат
линий влияния распора, прогибов и изгибающих моментов однока-
бельной висячей комбинированной системы с вертикальными
подвесками. Этими таблицами можно пользоваться при расчете
вариантов конструкций и при другом эскизном проектировании. Таблицы
построены в зависимости от параметров г(2.3) н п.^3.7), При
несовпадении этих параметров с расчетными допускается применение
линейной интерполяции. Ординаты линий влияния вычисляются по
формулам:
Н°в--а — ; ■п»=-ш — 10~3;
р 8[ ' El
M° = ml-\Q-\ (3.18)
где Нр — ордината линии влияния распора от временной
нагрузки;
rf, M" — ординаты линий влияния прогибов и изгибающих
моментов в сечениях 0,25 или 0,5 пролета;
a, w, m — числовые коэффициенты, приведенные в
таблицах для 7 положений единичного груза в
пролете.
При расчете конструкции на действие равномерно
распределенных временных нагрузок площадь влияния определяется в
предположении, что пролет равен единице. В этом случае показатель
степени при / в формуле (3.18) увеличивается па единицу.
2. Расчет многопролетных однокабельных систем
Многопролетные висячие системы, как известно, имеют
существенный недостаток—малую жесткость: загр ужение временной
нагрузкой одного пролета вызывает подъем незагруженных пролетов
и увеличение прогибов под грузом из-за перемещения кабеля из
соседних пролетов.
52
Для изоляции пролетов в таких схемах одно время предлагалось
соединять вершины пилонов специальным кабелем. Однако
провисание этого кабеля под действием собственного веса и при
повышении температуры не позволило устранить большие перемещения
вершин пилонов [53].
Рациональным способом повышения жесткости многопролетных
систем следует считать предложенное Н. С. Стрелецким устройство
постоянного натяжения соединительного кабеля с помощью
балансира 160]. В этом случае распор от временной нагрузки с любого
пролета передастся на соединительный кабель, связывающий пилоны,
Рис. 11. Основная система для расчета трехпролетной иеразрезной схемы
и пролеты изолируются друг от друга. При этом жесткость каждого
пролета в многопролетной системе почти не будет отличаться от
жесткости однопролетной схемы, а благодаря неразрезности балки
жесткость может быть даже и повышена. Наиболее распространены
схемы трехпролетные, на примере которых мы проследим расчет
неразрезных висячих систем.
Расчет трехпролетной схемы с
неразрезной балкой. Рассмотрим конструкцию, в которой боковые
пролеты подвешены к кабелю. Для расчета по методу сил примем
основную систему с шарнирами на опорах и разрезом кабеля в
среднем пролете (рис. 11). Запишем систему канонических уравнений:
«\А ' i- 6iA ■ Ь <5,3Х3 ■ |- Д,^=- 0; j
6иХг4 6а8Хя-1А3Х8-|-Д8„-0; (3.19)
(здесь, как и всюду 8ih ^ 8hi).
Определим единичные перемещения.
6П находятся так же, как и в однопролетной схеме, но
интегрирование выполняется по трем пролетам:
53
z\ Фза -1 ■ 2z\ Ф3
Ч
£2'2 I „ Lj.
(3.20)
Здесь Фз1, Ф32 — функции Фа для первого, второго и третьего
пролетов, вычисленные по формуле (2.30) соответственно при гх, г3,
/Hqi + Hpi
Eth
h\/ L-^P^-\ (3.21)
lt, Eit It, Hqi — соответственно пролет, жесткость балки и распор
от постоянной нагрузки в j'-том пролете. Распоры Hqi вычисляются
по формуле (2.1). Стрелы провеса кабелей в соседних пролетах
выбираются так, чтобы распоры от постоянных нагрузок взаимно
уравновешивались. Распоры от временной нагрузки вычисляются при
каждом расчетном положении временной нагрузки. В качестве
первого приближения можно использовать распоры, полученные из
расчета по методу отвердения, а также из расчета в предположении
шарнирного опирания балок;
LL — приведенная длина кабеля определяется аналогично (3.4)
путем интегрирования элементарных отрезков по всей длине
кабеля:
'■='• ('+-fM'+f+!•!)• <3-22>
где 1Ь /2 — длины пролетов—боковых и среднего;
/i. /2 — стрелы провеса кабеля боковых и
среднего пролетов;
hn — высота пилона;
п0 — коэффициент, вычисленный по
формуле (7) для среднего пролета;
&f Of
Zl = -fi; 2, = -~ — распределенное безразмерное воздействие
подвесок на балку от единичного усилия, приложенного в разрезе
кабеля основной системы, соответственно воздействие в боковых и
в среднем пролетах.
°2i ~ это углы поворота опорных сечений двух соседних балок
от равномерно распределенной нагрузки, которую создают подвески
по всей длине этих балок. Из формулы (2.24) следует, что прогибы
при равномерной нагрузке описываются функцией Ф2(х). Возьмем
первую производную от Ф2(х) по х и приравняем х = 0. Получим
Ф'^ = М~~1- ■ (3.23)
Таким образом;
^13 =
/3
1ъ
£й'2
(3.24)
54
Представим б22 как углы поворота опорных сечений двух соседних
балок от единичных моментов, приложенных на этих же опорах:
622:
Еъ1«
Фж2(0, 0) + А--^ф^1(1- 1)1. (3-25)
2'2 L '2
где Фл1г(0,0) означает, что взята первая производная моментной
функции во втором пролете (г = г2) и приняты х — 0 и § = 0
[формула (53) приложения]:
Флп(Ы) — то же, в первом пролете (г = rt) и х => 1, | = 1;
^23 ~ ^зг — угол поворота одного опорного сечения балки от
действия единичного момента на другой опоре той же балки;
623-^~Фж2(0,1). (3.26)
Фл12(0,1)—первая производная моментной функции во втором
пролете (г = г2) при х — 0 и % = 1 1см. формулу (53) приложения].
Формула свободного члена А1р выводится так же, как (3.2),
т. е. перемещение рассматривается как прогиб от равномерно
распределенной нагрузки подвесок zx в сечении с абсциссой £ в месте
приложения единичного груза (если вычисляется линия влияния
неизвестных). Если определяется перемещение от нескольких сил или
от распределенной нагрузки па участке а — Ь, то требуется
просуммировать перемещения или проинтегрировать их в пределах а — Ь:
Л^-^Ф*!^), (3'2?)
где Ф21 (E-j) — функция Ф2, взятая в первом пролете (г = л^;
Д2р — угол взаимного поворота сечений балки на левой
опоре (х = 0) от действия одиночного груза с
абсциссой £ или нескольких грузов;
Aap = —F7-®ii(0.£i), (3-28)
где Фп (0,^) — производная по х функции Фх в первом пролете (г =
= гг) при х = 0 и текущем значении £. В случае распределенной
нагрузки берется интеграл в пределах расположения нагрузки
[см. формулу (6) приложения].
Так же определяются перемещения:
ДЗР=—■~г ф!Л1>Ы (3-29)
где Ф[г(1, ?г) — функция Ф\ во втором пролете (г = г2),
вычисленная для правого сечения (х = 1) при
переменной абсциссе груза |2.
55
Таким образом, перемещения ,\1р зависят от того, в каком
пролете находится нагрузка:
а) груз Р находится в левом пролете:
Л -■ > /icD <? V
'ар
Pl\
btlL
= 0;
(3.30)
6) груз Р находится в среднем пролете:
Д = ^L. А фЧ(,(Е,);
1J1 pit "L \~~"
"ар
я2/.
(3.31)
в) груз Р находится в правом пролете:
Ai7) =
Азр -=
SJJ- JJ-(l) (l у Д =()■
^f ф;:,(о,у.
'•;)'з
(3.32)
Функции Ф[ и Ф2 — см. в приложении формулы (2), (6), (21).
Подставляя найденные перемещения в систему (3.19) и решая ее
относительно Xlf определяем распор, который необходим для
проверки по формулам (3.21) принятых коэффициентов деформатив-
ности при Я = X,.
Заметим, что вычисление перемещений можно упростить,
опуская общий множитель 1ЦЕ212, который входит во все члены
системы, за исключением формул (3.30) и (3.31), куда он может быть
введен (путем деления и умножении на 1УЕ21^).
Таким образом, расчет по определению лишних неизвестных
системы может быть проделан в общем виде независимо от абсолютных
значений пролетов, стрелок и жесткостей. Для расчета достаточно
знать соотношения этих параметров.
После того как уточнены коэффициенты деформативности,
определены распор и опорные моменты, переходим ко второй части
расчета— определению прогибов, изгибающих моментов и поперечных
сил балки, прикладывая к пей внешние и найденные внутренние
усилия.
56
а) Расчетное сечение в первом пролете
Нагрузка перемещается по пролетам
Нагрузка в нервом пролете (IjJ:
,t к
4 У^Фц^ЛЭ-МУх
(3.33)
хФа1^)-^(УФл1(^)1;
м)(11,У=-/12/'№п(%У-«1(Ух
]
Q, (XlJ U -- -2 P \Ф";г (хъ ij-a, (Ух
I
у<Ф;1(х1)-~-х,а1)Ф1т\(х1)}.
Нагрузка во втором пролете (£2)
4i (*i, У —rrJijPl-Vi (Ыфп (х,)-Х2 (|„) ФХп (*!>]. (3.34)
Запись уравнений для определения М(ху, |2) и Q(A'i> 1а) будет
отличаться от (3.34) тем, что вместо функции Ф21 и Ф,м i будут
записаны их вторые it третьи производные но х.
Нагрузка в третьем пролете (|а)
41 (хи У -- -^ j$P [-а, (Е3) Фя1 (Х1)-Х.2 (У Ф^, (%)). (3,35)
£i'i ]
б) Расчетное сечение во втором пролете
Нагрузка в первом пролете (!,)
-х((УФ,;,(ь)1.
Нагрузка во втором пролете (£.,)
Л (-тя, I.) ~j- [Ф,, (*я У-а, (У Ф,, (*,)-
-Х3 (У Ф^„ (*.) — *., (У ф£2 (xjj.
Нагрузка в третьем пролете (£,3)
(3.36)
(3.37)
ч 0"з, У:
Pll
EJ,.
{-а, (Еа) Ф2а (*,) —Хи (|,) U&2 (*а)--
-Х3(УФ^2(.?2)1. (3.38)
В формулах (3.33)—(3,38) Ф^О^-, §) функция Фх (пли сумма,
57
интеграл по £ в пределах расположения нагрузки) в г'-том пролете
(т. е. при г = г;), вычисленная для сечения х\ (см. приложение,
функцию Фх и ее интегралы):
Фц(хд — функция Ф2 в /-том пролете; (г = г,) — расчетное
сечение х = хи Флгг(А'г) —■ функция Фм в t'-том пролете (г = rt) в
случае, если момент находится на левой опоре (£ = 0), а расчетное
сечение — х = x-t. Для Флп(л:() принимается | = 1.
Производные берутся по л:, интегрирование производится по |.
Уравнения (3.33) — (3.38) выражают равновесие балки жесткости
под действием внешней нагрузки и равномерно распределенных
реактивных усилий в подвесках, а также опорных моментов
неразрезной балки. Для упрощения записи воздействие подвесок на
балку представлено здесь так:
г^Фа^га.— Фя^ссФя; (3.39)
При расчете на колебания температур или на горизонтальную
податливость анкеров принимается:
Mtl3 8f m . i
El ' t
0
fj^(U)^.
J (3.40)
Коэффициент деформативности на первой стадии вычисляется
так же, как в однопролетной схеме, а затем уточняется по
найденному распору Н{.
При расчете трехпролетной схемы с боковыми пролетами, не
подвешенными к кабелю (рис. 12, а), принимается /'1 = /'3 = 0, а
отношение длин пролетов рекомендуется брать 1:4:1.
В случае разрезной балки с подвесными пролетами (рис. 12, б)
принимается Х2 = Х3 ™ 0.
В табл. 3 приведены числовые коэффициенты для определения
ординат и площадей линий влияния распора, прогибов и
изгибающих моментов трехпролетной висячей системы с неразрезной балкой
(см. рис. 16) при соотношениях /t : /2 : 1д = 1 : 2 : 1:
EJ1 = Е2/2 = £,/„; h : к = 1 : 4; /2 : /3 = 1 : 8;
Расчетные формулы ординат см, (3-18), где / = /3, f~f2 как для сред-
58
него, так и для боковых пролетов. Ординаты линии влияния
опорного момента определяются по формуле
М1=т°1й. (3.41)
В табл. 3 индексы / при коэффициентах обозначают положение
расчетного сечения: 1 — в середине бокового пролета, 2 и 3 — в четверти
и в середине второго пролета — для сосредоточенных нагрузок под
грузом, а для распределенных в середине загружепия (1 — за-
гружение всего бокового пролета, 2 и 3 — половины и всего
среднего пролета).
а)
' ОЛИ ,т-
3ZZ1 L
rtft:
Рис. 12. Трехпролетные схемы
а — неразрезная балка в боковых пролетах ие подвешена к кабелю; б — разрезная
балка подвешена к кабелю
Расчетные формулы усилий и прогибов для распределенных
нагрузок р:
Н}-=А}^1; 4J = q№; Mj^jpll (3.42)
Таблица 3
Коэффициенты для расчета трехпролетиой системы
Одиночный груз
1
Пи
0,5-Ю-"
1 1-Ю-4
5-Ю-4
2
3
0,5.10-4
ью-"
5-Ю-4
0,5.10"*
1 -10 —4
5-10-4
aJ
—0,120
—0,114
—0,084
1,131
1,080
0,793
1,782
1,701
1,249
т.
1
436
432
411
142
178
380
—315
—259
—059
WJ
2,459
2,453
2,420
1,724
1,861
2,632
1,574
1,915
3,828
и .
J
1216
1214
1200
790
802
869
588
632
879
Распределенная нагрузка
Аз
—0,045
—0,042
—0,031
0,521
0,479
0,365
1,042
0,995
0,730
149
147
139
024
041
134
—107
—074
+ 111
Qi
0,792
0,791
0,784
0,595
0,658
1,013
0,800
0,999
2,118
Ь
308
307
305
151
157
187
055
081
226
59
3. Расчет систем, в которых кабель прикреплен
к балке в середине пролета
Одно и р о л е т и а я с х с м а, Жесткое прикрепление
кабеля к балке в середине пролета способствует уменьшению
горизонтальных перемещений кабеля вдоль пролета, что приводит к
уменьшению кинематических вертикальных перемещений кабеля при
несимметричном загруженни пролета временной нагрузкой. Таким
образом, этот способ повышения жесткости направлен на
уменьшение изгиба пролетной конструкции по двум полуволнам
и не влияет на уменьшение упругих удлинений кабеля, а следо-
оателыто, на прогибы в середине пролета. В данной схеме при загру-
жепин всего пролета прогибы п изгибающие моменты такие же, как
и в обычной, когда кабель к балке не прикрепляется.
Xllliri-^-L-^r-ггтТГч
Рие. 13. Основная система Для
^ ^ расчета конструкции, в которой
кабель прикренлен к балке в
середине пролета
С точки зрения расчета особенность данной схемы—постоянство
коэффициента деформативпости подлине пролета (если сечение
балки по длине не меняется). Это объясняется тем, что распор кабеля на
половине пролета, где балка имеет подвижное опирание (см.
правую опору на рис. 13), равен сумме распора и осевого усилия
в балке па другой половине.
Следовательно, коэффициент деформативпости может быть
вычислен как для левой, так и для правой половин пролета по
формуле
/
г=/[/ "-^', (3.43)
где Н — распор от постоянной нагрузки, определяемый как для
обычной системы;
Н,1р — распор от временной нагрузки на той половине пролета,
где балка имеет подвижное опирание.
Основная статически определимая система метода сил
показана па рис. 13, В системе канонических уравнений имеется два
неизвестных Xj и X». Очертание кабеля принимается по параболе
и выражается формулой
у.-. М-(1-х). (3.44)
Как следует из геометрической схемы, приведенная длина
кабеля здесь равна половине приведенной длины кабеля обычной одно-
пролетной схемы:
Ьпр-^. (3.45)
60
Ьгрузка от подвесок, действующая па балку от распоров Х1
1 и Х„
I:
8/
(3.46)
При определении перемещении Д1р в разрезе кабеля от единичной
силы Р с абсциссой | используем свойство взаимности перемещений
Л,л ■■= Дп1 и определим перемещения балки в точке с абсциссой £
от воздействия подвесок при XL =-- I.
Эта нагрузка, направленная вверх, равномерно распределена по
балке от опоры до середины пролета. Прогиб от такой нагрузки
найдем, интегрируя Фг(х, |) по х от 0 до 0,5. Напомним, что Ф^х, £) —
прогиб «единичной» балки в сечении х от силы Р — 1, находящейся
в точке пролета с абсциссой £:
V
1111*-
El
I —
~<\\(xul)dx]- j <\\(x,l)dx
Рассуждая аналогично:
г я/ 4 w
(3.47)
(3.48)
Функции Ф4 и Ф5 — см, формулы (26), (34) приложения.
Зная перемещение в разрезе кабеля от единичной силы Д1ГИ
определим перемещения там же от равномерной нагрузки подвесок
г0 па половине пролета, т. е.
ОН"-
£/
-l OdDdl
I2 EI
■ф„
(3.49)
Учитывая перемещения от удлинения кабеля
5';,----
запишем
«и-
64/=
£7
Ф,
2ЕК F!('
г2
El
Щ- 21 Еи FB I1
(3.50)
где^о — см. (3.4).
Побочные перемещения найдем, изменяя пределы
интегрирования:
б12
64/2
64/2
я7
ф„
(3.51)
Функции Фв и Ф7 — см. формулы (42), (43) приложения.
61
Из решения системы уравнений найдем распоры X, и Х2, Первая
итерационная часть расчета заканчивается после того, как
подстановка Х2 = НпР в г [см. (3.43)] практически не дает уточнения г.
Прогибы и усилия в балке определяются из рассмотрения
равновесия балки под действием внешних нагрузок и усилий от подвесок.
а) Нагрузка Р находится на левой половине балки:
р/з -_ —
П (х, I) --=-— [<t>i (х, 1)-*х (I) Ф. (*)-аа (£) Фь (х)\;
М (х, £) = -/>/ [Ф[ (хЛ)~*1 {Ь)Щ (х)~а2 (|) Ф; (*)];
Q(x, £)---=-Р[Ф;"(*. t)-^®^'(х)-а&)Ф'ъ'\х)1
(3.52)
Здесь а,(|) --. Х^г; а2(£) - Хг{\) z [см, (3.39)J.
б) Если нагрузка Р находится на правой половине балки, то в
формулах Д1Р и A2j, меняются Ф4 пФ5 наФ4 иФ., а расчетное
уравнение (3,52) остается тем же.
Функции Фх, Ф4 и Ф6 и их производные — см. приложение.
Усилие сдвига в среднем узле найдем как разность распоров
в левой и правой частях кабеля:
#о _ К ~аа) "дГ = ао jr. (3-53)
В приведенном расчете в качестве внешней нагрузки принят для
упрощения записи одиночный груз Р, расположенный в точке
пролета с абсциссой £,. В случае действия нескольких сосредоточенных
или распределенных нагрузок выполняется суммирование или
интегрирование воздействий так же, как это показано, например, при
расчете обычной трехпролетной схемы (3.27) — (3.38).
На рис. 14 приведены безразмерные коэффициенты для
вычисления ординат линий влияния распоров кабеля, прогибов и
изгибающих моментов в четверти пролета по формулам (3.18). Ординаты
линии влияния осевого усилия в балке вычисляются по формуле
о о g^
Коэффициенты аг для определения распора кабеля на второй
половине пролета симметричны относительно середины пролета
коэффициентам at. .Линии влияния прогибов и изгибающих моментов
в середине пролета определяются по коэффициентам обычной
системы.
Конструкции с жестким прикреплением кабеля к балке в
середине пролета следует рассматривать как простейшие системы
повышенной жесткости. Преимущества такого мероприятия по сравнению с
другими способами повышения жесткости—простота
конструктивного решения и сохранение такого же внешнего вида, какой имеют
обычные системы (что, по высказыванию авторов проекта Танкер-
С2
1 ЮЛ5)
MiO?S)
Рис. 14. Линии влияния систем с жестким узлом в середине пролета.
В таблице даиы коэффициенты для вычисления ординат линий
влияния по формулам (3.18) и (3.53). Учет нелинейности см. на рис. 29
\ 1
Л, N.
0,5. Ш-4
1.10-1
2-10-*
5-Ю-1
0,5-10-*
ыо-*
2.Ю-4
5-10-4
0 , 125
0,250
0,170 0,291
0,270 0,446
0,440 0,713
0,820 1,326
w (0
0,375
0,075
0,220
0,481
1,119
2 5}
0,500
—0,087
—0,001
+0,167
+0,649
0.750
+0,007
-0,025
—0,053
+0,019
а
1,62
1,53
1,40
1,14
2,53
2,41
2,22
1,85
2,49
2,36
2,21
1,93
1,55
1,54
1,53
1,47
—0,32
—0,21
—0,04
+ 0,25
0,125
055
084
131
223
т (0,25
0,250
392
434
503
641
0.375 0,500
— 103
—069
-013
+ 106
—206
—197
— 180
— 132
0,750
+033
+033
—041
-110
и„
—2,03
—1,87
— 1,61
-1,14
—2,85
—2,62
—2,26
—1,60
—2,03
-1,87
— 1,61
-1,14
0
0
0
0
+2,85
+2,62
+2,26
+ 1,60
63
вильского моста во Франции, явилось решающим фактором при
выборе этой системы для моста через р. Сену).
Основной недостаток систем с жестким средним узлом —
передача сжимающих усилий на балку. Для обеспечения устойчивости
элемента жесткости относительно вертикальной оси необходимо
предусматривать горизонтальные связи как по верхнему, так и по
нижнему поясу балки, объединять главные балки с настилом.
В системах с жестким узлом прогибы и изгибающие моменты
в четверти пролета на 30—40% меньше прогибов if моментов
обычных систем. Несмотря на появление осевой силы, требуемый момент
Рис. 15. Основная система для расчета трехпролетиой схемы со средним
жестким узлом
сопротивления балки этой схемы, как показывают расчеты, па
10—15% меньше, чем для балки простейшей висячей системы.
Расчет трехпролетиой системы с жестким
j з л о м в средне м пролет е. Для расчета перазрезпой
схемы методом сил на рис. 15 показана основная статически
определимая система. Расчетные формулы перемещений выводятся
аналогично формулам расчета обычной трехпролетиой схемы и одно-
пролетной схемы со средним жестким узлом:
fin-
B.J,
г1Ч>в*-\ г?Ф.
31
Е111
1
0 2
fil2 =
Е,1,
■Ф,
(3.54)
(3.55)
Ф31 — функция Ф3, определяемая по формуле (25) приложения для
г - г,;
Ф().3, Ф7а — функции Ф3 и Ф7, вычисленные при г =-■ г.2 по
формулам (42), (43) приложения;
L — см. формулу (3.22), гг = -8f-1-; г., = -.^ ; (3.55а)
'1 '2
<^зз> firf.! — см- формулы (3.25), (3.26), где индексы 2 и 3 следует
заменить соответственно па 3 и 4;
I2
23ф;а(0)-4-
I2
£Va
z,a>i,(0).
(3,56)
(3.57)
04
Грузовые перемещения запишем для одиночного груза, который
перемещается по трем пролетам:
а) груз Р находится в первом пролете:
^pz
-PZl0,(10-^-; Д3р=-РФ;1(1,^)-^-
Л2р^0; A4j)=0;
б) груз Р находится во втором пролете:
0,5:
13>0,5:
о<£,<:1
Д1р = -Ягаф,(1я)
it .
и
Лар- —Рг2Ф5(У
£э'з
Л1р=-Рг2Ф4(Ы
Яв'г
Яг2Ф5(У
;3
2
Д8„ = -РФ^(0,|я)
£%1ъ
-Чр-
-рф;2(1, у
Cs* 2
в) груз Р находится в третьем пролете:
Д2р=-РгзФ33(У
Aip = 0;
£3/3
Ч,=0; А4р=-РФ18(0, У
£з'з
(3.58)
(3.59)
(3.60)
(3.61)
(3.62)
(3.63)
(3.64)
Указанные здесь функции Ф и их производные см. в приложении.
Найденные из решения канонических уравнений распоры в
кабеле Хг = Н1Р, Х2 = Я2Р используют для проверки принятых
ранее коэффициентов деформативности—гг [см. 21, где Н1Р = Х,1
и л2(см. 43, где Н2Р = Х2). Итерации продолжаются до получения
устойчивых значений г. Для определения расчетных прогибов,
изгибающих моментов и поперечных сил рассматривается равновесие
балки под действием внешних нагрузок, усилий от подвесок и
опорных моментов Х3, Х4. Например, запишем уравнения прогибов в
первом (л:,) и во втором пролете (,г2) при перемещении одиночного
груза потрем пролетам (У У ls):
ч (%) --£4- [Фц (xlt 1г)-<У.г (У Фа1 (%)-*3 (У ®V(*i)l; (3.65)
-^- \-ai (У Фн fo)—X"8 (У Ф"ш (Xl)]; (3.66)
Л (*i)
Е111
3 Зак. 1231
65
66
При перемещении груза в третьем пролете положить в (3.66)
а(|3) и Х3(13) вместо а(У и Х3(У.
Р/а
-Хз^ФйП**)-*.^)^ (**)];
(3.67)
Л (*э)
Р/2
[Фх2 (Jca, У —Ф42 (*a) »! (|2) ■
-Ф5В (-v2) а, (У — Xs (У Ф&2 (х2)-Х4 (У Фй2 (ж*)] • (3.68)
При нахождении груза в третьем пролете для определения
прогиба ii(.y в (3.67) положить at(£3), а2(1з) к ^з(ёа), X4(g3) вместо тех
же функций, которые в (3.67) имеют н качестве аргумента \г.
Обозначения и;, Xt — см. (3,39).
Отметим также, что расчетный алгоритм трехпролетпой системы
с жестким узлом — общий по отношению ко всем ранее
рассмотренным алгоритмам, которые после преобразований могут быть
получены из общего.
Так, перемещения бХ1 и 6i2 для расчета трехпролетной
неразрезной схемы без среднего узла могут быть получены суммированием
перемещений схемы со средним узлом (эти перемещения
обозначены нулем):
612=623-1-624-J
Рис. 1В. Линии влияния трехпролетных неразрезных висячих систем с жестким
узлом в середине пролета (пунктирная линия) и обычной схемы без узла
(сплошная линия, см. табл. 3). В таблице к рис. 16 даиы коэффициенты
вычисления ординат линий влияния системы с жестким узлом но формулам
(3.IS), (3.41), (3.42):/=1 — загружеине бокового пролета сосредоточенной
силой в середине пролета или распределенной нагрузкой веего пролета;
/ = 2 — одиночный груз в четверти среднего пролета или распределенная
нагрузка на левой половине пролета, расчетное сечение в четверги пролета
Таблица к рис. 16
Одиночный груз
Распределенная нагрузка
/
1
2
"о
0,5-10-*
1 -10-J
5-Ю-1
0,5-10-1
ыо-*
5. ю-*
aJ
0,527
0,414
0,131
1,778
1,608
1.008
«?
234
267
344
—060
+ 013
-1-313
W -
1,564
1,721
2,123
1,513
1,689
2,562
}
862
924
10Й2
689
719
835
Ai
0,150
0,110
0,033
0,715
0,656
0,430
<■
088
098
119
—036
—009
+ 113
й.
0,691
0,719
0,786
0,532
0,607
0,992
Ь
255
264
287
121
132
178
ЗВ Зак. 1231
67
Подобные операции можно использовать при отладке и проверке
программ. Кроме этого, для проверки программ линий влияния
можно воспользоваться таким приемом, как расчет при EKFK — оо.
При этом выявляются характерные нулевые точки линий влияния
и равенство площадей, ограниченных линиями влияния с
противоположными знаками. Линии влияния трехпролетпых систем с
жестким узлом в середине показаны па рис. 16.
Влияние компоновочных параметров трех-
про летной висячей системы на ее прогибы.
Исследования трехпролетных систем с вертикальными подвесками,
проведенные на ЭВМ, позволяют сделать выводы:
1) для выявления наибольших прогибов трехпролетной
конструкции следует принимать как полное или частичное (0,5—0,75 /) за-
гружепие среднего, так и полное нагружение бокового пролета.
При соотношениях длин пролетов 1:2:1 прогибы в
боковых пролетах, как правило, превосходят прогибы среднего
пролета [41J;
2) дополнительные провесы в боковом пролете прямо
пропорциональны относительной длине его и почти не зависят от стрел провеса
кабеля, его продольной жесткости и соотношения моментов
инерции балок в пролетах;
3) влияние кинематических перемещений кабеля при загруже-
нии одного среднего пролета таково, что прогибы середины этого
пролета в 2—3 раза больше прогибов однопролетной схемы, в
которой боковые оттяжки прямые.
Применение неразрезной балки в обычной схеме приводит к
уменьшению прогибов в четверти среднего пролета на 15—20%
и мало влияет на прогибы в боковом пролете. В трехпролетной
схеме с жестким средним узлом неразрезность балки дает уменьшение
прогибов в среднем пролете по сравнению со схемой с разрезной
балкой па 10—15%;
5) деформационный расчет трехпролетных схем имеет такое же
значение для уточнения прогибов и изгибающих моментов, как
и при расчете однопролетпых систем.
4. Системы с напрягающим кабелем
Монтаж предварительно напряженной системы с напрягающим
(арочным) кабелем (рис. 17) выполняется, как правило, в такой
последовательности: а) монтаж несущего пояса и предварительное
напряжение арочного кабеля; б) подвешивание балки и омоноличи-
вание монтажных стыков.
При этом очевидны удобства монтажа балки—она
подвешивается к неизменяемой стабилизированной системе тросов, и сама балка
не несет постоянной нагрузки (освобождена от собственного веса
и не испытывает усилий от предварительного натяжения
напрягающего пояса.
68
Другой способ монтажа возможен в случае усиления
существующей однокабельной системы: а) монтаж несущего кабеля и балки;
б) натяжение напрягающего кабеля.
На последней стадии монтажа усилия от напряжения нижнего
пояса следует рассматривать как внешнюю нагрузку па однока-
бельную систему, и расчет ее необходимо выполнять, как это
сделано нами в первом пункте
данной главы.
Рассмотрим расчет
системы в стадии
эксплуатации при условии, что
распор от временной нагрузки
не превосходит распора от
предварительного напря- Рис 17_ Основная система для расчета
движения в оттяжном кабеле поясной схемы
и последний tie
выключается из работы.
Нелинейный расчет с помощью метода сил начинаем с выбора
основной системы (см. рис, 17).
Запишем систему канонических уравнений:
б11Х1 + б12Хг-|-Д12,-0;|
621Х1-ЬбиХа + Дар=0.{ { '
Рассуждая так же, как и при выводе формулы (3.5), найдем:
ви;,Л.в-^(ф, + _«_.^.А_\.1 (3.71)
£1 l\\ ElFlll к 64/?/'
%=-Л1 = £-^Фз; (3.72)
в„ = Л.б*^/ф +_а_ М.^.Ц, (з.73)
Е[ ll \ EzF2l2 h It 64/1/
<v—f^©; А- = -г'1рф-®'
(3.74)
Здесь 1Ъ fu E^F^ — пролет, стрела провеса и продольная
жесткость несущего кабеля;
h-, /a, E^Fy. — то же, напрягающего кабеля;
L0> Ln — приведенные длины несущего кабеля и
напрягающего вычисляются по формуле
(3.4), причем LH вычисляется без учета
оттяжек, так как напрягающий кабель
закреплен непосредственно к анкерам;
/, El — пролет и жесткость балки;
Ф3, Ф2(£) — см. приложение, где х должен быть
заменен па £.
ЗВ*
69
Если действуют несколько сосредоточенных сил или
распределенных нагрузок, производится суммирование Ф2(|) либо
интегрирование этой функции в пределах расположения нагрузки.
Коэффициент деформативности для вычисления функций
влияния принимается с учетом всех распоров, которые возникают в
несущем и напрягающем кабелях;
-1 / Hq-rHiu.u~i-Hzn.-H.JrHLi>—Ihp .,, „.
r--t J/ - , (Л. /о)
где Hq, /"/j,,.,;, lijp — распоры от постоянной нагрузки 1см. (2.1)],
предварительного напряжения и временной
нагрузки в несущем кабеле;
^2и.н> Н*р — распоры от предварительного напряжения
н временной нагрузки в напрягающем
кабеле.
Зависимость между распорами в стадии предварительного
напряжения определяется из геометрических условий;
*Ь™=А.Ь.. (3.76)
"ап.н 1ч 11
В этой формуле один из распоров должен быть задан из
производственных или конструктивных соображений. Распорами от
временной нагрузки в (3,75) на первой стадии итерационного расчета
можно пренебречь либо определить их из предположения о
нерастяжимости кабеля. В дальнейшем учитывается, что Н1Р --- \1 и
Н2/, = Х2. После уточнения коэффициента г (методом
последовательного приближения) определяем
Ptl - Ph
и находим прогиоы
Л W=~{«&i(Jf. 1)-[а1(1) + аа(Ю1Фе(*)>- <3-77)
Уравнения изгибающих моментов и поперечных сил отличаются
от (3.77) тем, что в них функции Ol и Ф2 будут иметь
соответствующие производные по х (вторую и третью), а сомножитель перед
скобкой будет заменен па —Р1 и па —1.
Исследования показывают, что, включив дополнительный
напрягающий кабель в комбинированную схему, мы уменьшим в основном
прогибы в середине пролета, так как упругие удлинения несущего
кабеля уменьшатся благодаря разгрузке его напрягающим тросом.
На уменьшение же кинематических перемещений нижний пояс
влияет мало, Это уменьшение определяется предварительным
напряжением, которое равносильно приложению дополнительной
постоянной нагрузки.
70
Выше отмечалось, что добавление балластной нагрузки само по
себе не является радикальной мерой уменьшения кинематических
перемещений. Поэтому возрастание предварительного напряжения
увеличит коэффициент деформативносги н, следовательно,
уменьшит прогибы за счет нелинейности. Однако если расчет
производить без учета деформативпости (при г = 0), то это уменьшение не
будет выявлено. Конечно, прогибы и изгибающие моменты в
четверти пролета под грузом несколько уменьшаются в связи с
уменьшением упругих удлинений тросовых элементов, но оно, как правило,
невелико.
Для более рационального использования напрягающего кабеля
рекомендуется жестко прикрепить его к балке в середине пролета.
Таким образом, в этом узле будут резко уменьшены горизонтальные
перемещения нижнего кабеля; следовательно, здесь будут созданы
условия для изоляции одной половины пролета от другой, что
приведет к уменьшению s-образных прогибов.
Расчет таких систем произведем с помощью методики, применен- •
ной для рассмотренных выше схем. Основная система метода сил
показана на рис. 18, а.
По аналогии с расчетом схем, показанных на рис. 13 и 17,
определим перемещения:
5и = 4гФ"+Л; (3-78)
El fii FL
6.,г;=.б|.| = ^Фв + -— ; (3.79)
s = zlll ф_; ala=г-^. —. (3.80)
Грузовые члены в канонических уравнениях при действии
одиночной нагрузки Р(|):
0<|<1: A,P=-P*i<M£)£; (3.81)
EI
0<£<0,5: Д2р=-.~Р22Ф4(|)^; ЛЭр-=-PzaoV(£)" £ 5 (3.82)
0КК1: &2р.-, ~Pz2 Ф4(?) ^ ; Д3р = -Pz±Ф, (Ю ~ , (3.83)
где L0, La — приведенные длины несущего и напрягающего кабеля.
При этом LH вычисляется без учета оттяжек.
Zi-^1; z2 = ^, (3.84)
h 1%
где fx и /2 — стрелы провеса несущего кабеля и подъема
напрягающего;
1г и 12 — пролеты несущего и напрягающего кабелей;
Ф3 — Ф7 — функции влияния (см. приложение).
71
Коэффициент деформативности определяется по формуле
г = / Viflq + Я1П,.ГЬЯ2Ц.Н + Н1р-Н2р)/Е1. (3.85)
Обозначения распоров [см. (3.75)], где Н№ — распор от временной
нагрузки па той половине пролета, где балка имеет свободное опи-
рание. На первой стадии приближения Н1Р — Я2р = 0, затем Я1Р =
= Хх, Н,р = Х2. В формулах (3.81) — (3.83) функции Ф3, Ф4,
л!
6-J
1(0,25)
м(о,г$)
Сузлом//
Без узла
Рис. 18, К расчету двухпоясиой схемы с жестким узлом
а— основная система меюда сил; б — лияна влияния ггрогибов и изгибающих
моментов в четверти пролета
Ф6 принимаются по приложению с заменой х на |. В случае
распределенной нагрузки производится интегрирование функций Ф, по £,
а в случае нескольких сосредоточенных сил — суммирование
функций влияния, зависящих от %.
Прогибы конструкции под действием временных нагрузок могут
быть найдены как алгебраическая сумма прогибов балки под
действием внешних и внутренних сил 1см. (3.77)1:
р/З
Ti = g-f01(x, 1)-ау(1)Ф,{х)-
~а,(1)Ф4(х)-аза)Фь(х)]. (3.86)
Изгибающие моменты и поперечные силы вычисляются аналогично
с заменой функций влияния па их вторые и третьи производные,
а также множителя перед скобкой иа — Р1 и — 1.
72
Отметим, что прогибы и изгибающие моменты в сечениях, не
совпадающих с серединой пролета данной системы, на 15—20% меньше,
чем в конструкции без жесткого узла (см. рис. 18, б), однако балка
жесткости в данном случае испытывает сжатие, равное разности
распоров нижнего кабеля в соседних полу пролетах.
5. Расчет двухкабельных комбинированных систем
с учетом геометрической нелинейности
Применение двухкабельных систем для комбинированных
висячих конструкций—один из путей повышений жесткости
сооружения при действии местной временной нагрузки. Преимущество этих
систем перед однокабельными конструкциями, где кабель
прикреплен к балке в середине пролета, то, что в них не передается
продольное усилие на балку и опоры не воспринимают горизонтальных
усилий от пролетного строения. В расчетах тех и других систем много
общего.
Вывод дифференциального уравнения
равновесия балки
Постоянная нагрузка qx и q.2, передающаяся на кабели до
замыкания шарниров балки жесткости, вызывает в кабелях распоры,
определяемые из условия равновесия кабелей в середине пролета:
#!,+#»*= у. (a)
Дифференциальное уравнение равновесия элементарных
отрезков кабелей при действии временной нагрузки может быть записано
в следующем виде:
-{H2q + H,)^f^^q, + A. (б)
Изогнутая ось балки постоянного сечения по длине пролета при
действии на нее распределенной нагрузки описывается уравнением
Складывая левые и правые части уравнений (б) и (в), получим
El d*T| „ | „ N rf'(yi + n)
f dx*~{Hl(l + ttl) Pdx* ~
-(*,, + *.) !^±* = p-|-, (r)
73
или, учитывая из (а), что
Я= -Hi
-Нг„
l*dx*
запишем (г) в следующем виде:
где
Vv-'V-^(/>~P(7),
Иг.
Г -
Нг
lY(Hq + Hp)/EI; p.-^;
(3.87)
(3.88)
Здесь приняты те же обозначения, что и при выводе уравнения (2.2).
Индекс I соответствует параметрам верхнего кабеля, а индекс 2 —
нижнего.
Из (3.87) следует, что основное уравнение двухкабельных
комбинированных систем соответствует уравнению однокабельных схем
(2.2), а поэтому расчет с учетом дополнительных провесов как той,
так и другой системы может быть выполнен по единой методике.
Расчет двухкабельной системы без средней подвески
Основная система метода сил получена разрезом кабелей в
нижних точках (рис. 19, а). Полагая, что распоры кабелей на каждой
ступени итерационного процесса не зависят от деформаций, получим
Рис. 19. Основные расчетные системы
двухкабельной схемы
а — без средней подвески: б — со средней
подвеской
линейно-деформируемую систему относительно поперечных
нагрузок. Таким образом, можно записать систему канонических
уравнений:
SnXj + S^ + A^-O;!
S^+c^Xs + A^O.)
Единичные перемещения в системе (3.89) складываются из слагаемых
от изгиба и от продольных деформаций элементов фермы:
(3.89)
EF
EF
(3.90)
74
Вторые слагаемые перемещений обыкновенно во много раз
меньше первых; поэтому продольные удлинения кабелей мы будем
определять с помощью линейного расчета, изложенного С, А. Цап-
лнным в работе 159], сохраняя методику этого расчета для
получения сопоставимых результатов:
■(U\
v ObJbk.
Ег F2
-,'-i*l-
8Hi , 64 \ ,
*i ' 3fti/^
+ Ut) L* A+u.5 8ия + 64 \+2f/I LoT ;
*w*bSu* t'^)+^d^:
2 I,
tgcc2
tgaj
tga2
1ЦЯ1= 2 + 4 8<2'"-1^;
t„„ 2,4 8(2m-l)d.
ft ft3 ft2 J
J l /l i 2 i 8 ^
2 (l ^ Zk\)
2 4 . 8d 2 4 , 8d
ft hi ki I k k2 k2t
k=--—; ft1 =
2/
г
(3.91а)
(3.916)
(3.92а)
(3.926)
(3.93а)
(3.936)
(3.94а)
(3.946)
(3.95)
(3.96)
Здесь
/ — общая стрела кабелей фермы в среднем узле;
/х — стрела провеса нижнего кабеля;
/2 — то же, верхнего;
d — длина панели (расстояние между подвесками в продольном
направлении);
т — число панелей на полупролете.
Первые слагаемые в формулах (3.90) — это перемещения от
изгиба балки, деформация которой описывается уравнением (3.87).
Вначале проследим вывод формулы перемещений A1V от
единичной силы Р(£). Воспользуемся теоремой Бетти А1Т> = Ар1 и найдем
перемещения в направлении действия единичной силы от распора
в кабеле Хх = 1.
lpll '
' EI
Единичный распор вызывает воздействие подвесок
интенсивностью z° — на одной половине пролета балки, где кабель
расположен снизу, и г§ — на другой половине пролета, где данный кабель
переходит в верхний пояс.
Обозначим г, = г"/; г2 — z\l. Таким образом, для положения груза
слева от середины
~ \ _ 0.5 1 "
г1\ф1йх-\-2^ J Ф1йх + г% \фгйх ; (3.97а)
_ - 0 \ 0,5 J
®i(x> £); ®l(x> 5) — см. приложение;
z^Mz^(^ + ±.)., Z^M^) * {3.98а)
Рассуждая аналогично, получим для положения груза справа
от середины
z1 $ Ф~гйх-\-гг I Ф1 dx + z, 5 Ф\Л- . (3.976)
0 0,5 I J
Вследствие симметрии
Представим перемещения б° [ как сумму перемещений Д1р от
внешней распределенной нагрузки г1} на левой половине пролета и zl
на правой половине:
[ о,5 г 1 о,5
б?! - 62°2 « "^ L J Zl J Ф, ^ -|- ?1 J Ф\ £к +
L1 { 0 L 0 |
11рп
Я/
] ,0
0,5
г2 ^Ф^х d| + z2 ^ г1\ф1(1х-
0,5
0,5
ь 1
-f г, 5 Ф1^х-!-23^Ф1 d;c
0,5
dl
(3.99а)
Перемещения б12 могут быть представлены как сумма
перемещений А1Р от нагрузки z% на левой половине пролета и г] на правой:
0,5
0,5
6?2 -- S°i = -£ г., $ Zl $ Ф, rfx + гг S Фх rfx +
йг
1 ,0
0,5
+ г2 $/Мх di-J-Zj J zL $ Фгйх +
0,о
0,5
"и l
-Z.J ^ Oi^Jt + z2 5*1^
0,5
rfS
(3.996)
76
Прогибы и изгибающие моменты могут быть найдены расчетом
балки, подчиняющейся уравнению (3.87) и нагруженной внешними
воздействиями и усилиями от подвесок:
Ч(х, 1)=~[Фг{х, £)-ei(£)04M-fa(i)05(*)];L 1Лт
ы _ ^ (3.100)
М(х, 1)^-Р1[Ф'[{х, 1)-и1а)ФЦх)-и2(1) Ф;(х)}.\
При определении поперечной силы принимаются третьи
производные функций влияния. Здесь fi(£) и v2(%) — равномерно
распределенное воздействие подвесок на балку в левой и правой частях
пролета при положении груза Р — 1 в точке с абсциссой |,
отсчитываемой от опор к середине пролета:
*1
(3.101)
Функции Ф4 и Ф5 — приведены в приложении [формулы
(3.26)- (3.41)1; Х1 = ^;Х8 = ^.
Отметим, что расчет с учетом геометрической нелинейности
должен выполняться методом последовательных приближений, т. е.
на первой стадии система должна рассчитываться обычными
методами строительной механики [59], либо по нашим формулам, где при
вычислении функций влияния принимается г = 0 (см. приложение,
графа 4).
На основе этого расчета определяются площади сечений кабелей,
момент инерции балки жесткости и коэффициент деформативности г
[формула (3.88)].
Расчет по деформированной схеме ведется для определенной
величины и положения в пролете временной нагрузки, так как
распоры зависят от этих факторов.
Коэффициент деформативности существенно изменяется при
изменении величины временной нагрузки. Но изменение положения
груза влияет на г незначительно, и при соотношениях нагрузок
q : р > 0,5 -f- 1 можно пользоваться линиями влияния при
постоянном значении г.
Расчет двухкабельной системы со средней подвеской
С введением жесткого узла на пересечении кабелей и стойки,
соединяющей узел с балкой, увеличивается неизменяемость этой
системы при загружении части пролета временной нагрузкой.
Расчет такой трижды статически неопределимой системы выполняется
по той же методике, что и расчет системы без средней подвески, но
с учетом дополнительного неизвестного—усилия в средней подвеске
(см. рис. 19, б).
77
Поэтому воспользуемся ранее выведенными формулами и
дополним их недостающими;
V # з к
2Щ L*
(l
I- U-2 -
Е2 /■', \ ^ к,
■64)+2t/3
ic
i;^/(-:(u1.ft/a)t/3^r|l-|-^-¥-'-b^) +
^aFs
*2
3*1
-h2t/3t/3-
t/3 =
£0 F„cos2ft
1
Z;i----
(3.91b)
(3.91r)
(3.92b)
(3.986)
Для определения перемещений балки основной системы в
третьем состоянии представим воздействие висячей фермы на балку
в виде двух нагрузок — равномерно распределенной гя от подвесок
и единичной силы от средней подвески.
Тогда запишем:
i
-£rf[A*(z3)+M(l)]ad*-
EI J
о
Л
EI
^M*{z3)dx + 2^M(z;i)M(\)dx + \M*(l)dx
(3.102)
Первый интеграл данного разложения соответствует сумме
перемещений балки при действии равномерно распределенной нагрузки
2л по всему пролету.
Второй — перемещениям балки в направлении единичной силы,
приложенной в точке | = 0,5, от действия равномерно
распределенной нагрузки г3 по всему пролету.
Третий — это перемещения балки в сечении х = 0,5 от действия
единичной силы, приложенной в этой же точке.
Используя правила интегрирования, примененные нами при
расчете однокабельноп системы, найдем:
бзз = ■— [г3 Фл + 2г3 Ф.2 (0,5) + Ф, (0,5; 0,5)];
Перемещения 6]3 найдем, используя этот же прием:
г
$ [М (z3) + М(1)] [М (Zl) + M (za)] dx ■_-=
о
= [г1г3Ф,Н-2аг,Ф3 + г!.Ф2(0,5) + г1Ф3(0,5)]-^ (3.103)
6?з = -£ • г-Цр [г3 Ф3 + Ф3 (0,5)3. (3.99г)
(3.99а)
78
Грузовой член определится аналогично:
Р1*
Дпр= ~ [г8Фг(5) + Ф1(0,5; Ш- (3.97в)
с,!
Определение прогибов производится по формуле
п (х, I) г -. Р-1 \фх (х, |) - Х3 (I) Ф, (О,5,х) -
hi
где
-Ча®Ф4(*)-М!)Ф:Л*)1.
КШ-rf) , Г, , ХЛ 16(i-d) М*?2 Xa\
1 2tg«2 2
w, .(X1 + X3)tgry,H-X3 , Jfi-Jfa
(3.104)
(3.104a)
2 Ig oc2 ' 2
Xi = \ijPl\ Ф1(0,5; jc), Ф4(л;), Ф3(х) — см. приложение.
Для определения изгибающих моментов и поперечных сил
множитель перед скобкой в (3.104) заменяется соответственно на —Р1
и —Р, а функции влияния заменяются на вторые и третьи
производные этих функций по х.
Выводы из расчета двухкабельных систем
1. Прогибы двухкабельных систем — следствие главным
образом упругих удлинений кабеля и в меньшей степени
кинематических перемещений. Поэтому такие системы лучше могут
воспринимать сосредоточенные воздействия, чем однокабельные.
2. Как показывают исследования, эффективность нелинейного
расчета двухкабельных систем меньше, чем однокабельных, и
уменьшается с увеличением статической неопределимости системы. Так,
для систем со средней подвеской с учетом геометрической
нелинейности следует рассчитывать такие конструкции при г > 4.
3. Эффективность учета прогибов зависит и от характеристики
продольных деформаций кабеля па, увеличиваясь с увеличением п0,
т. е. в связи с применением для нитей высокопрочных материалов,
алюминиевых сплавов или пластмасс.
4. При расчете двухкабельных систем методом последовательных
приближений может быть учтено изменение геометрических пара-
79
Рис. 20. Характер линий влияния двухкабельной системы со средней
подвеской
а— рыспор в нижнем кабеле; б — усилие в средней подвеске; s—распор в верхнем ;ie-
вом кабеле; <?— прогиб в середине пролета; с?—изгибающие момент и среднем
сечении; е, ж — прогиб н момент в четверти пуотета
метров фермы при загружении ее временной нагрузкой—внесением
коррективов в стрелы провеса кабеля, что может дать поправки
в результаты расчета на 5—10%.
На рис. 20 показан характерный вид линий влияния усилий и
прогибов двухкабельных систем со средней подвеской1.
6. Расчет жестких нитей в составе
комбинированных систем
В комбинированных конструкциях жесткие нити можно
применять в качестве верхнего пояса системы с балкой жесткости либо
с гибкой аркой как основные несущие элементы, усиленные
параболическим оттяжным тросом или пучками вант (рис. 21) [12, 55].
Применение жестких нитей может быть обусловлено
конструктивными особенностями сооружения — использованием в качестве
1 Коэффициенты для вычисления ордипат линий влияния системы со
средней подвеской приведены в брошюре Н. М. Кирсанова «Расчет одиопро-
летных висячих мостом по линиям влияния». Дориздат, 1952, См, также
указанную выше статью автора в сб. трудов ЦНИИСК, 1964.
80
кабелем систем, S^^ZSS'SZT' ШаШ" с «^
покрытий <„p„Uep-riipажвСХp еГ|5)""Р°МНВЬ,Х №СЯ,"Х
элементы следует рассчитывать
как жесткие [13].
Различают два способа фор-
мообразования жестких нитей
1) нить изготовляют из шар-
нирно-соедипенпых дисков и
после передачи иа нее
постоянной нагрузки и
предварительного напряжения оттяжных
элементов шарниры замоноличива-
ют. 1 аким образом, от действия
постоянной нагрузки и
предварительного напряжения в
жесткой нити не возникает изгибпых
напряжений;
2) жесткую пить
изготовляют прямолинейной без
шарниров. При монтаже под
действием постоянной нагрузки нить
провисает и принимает заданное
очертание.
^^tj:s:^zkzt^ w—™ «^й ^
пых систем. К°НСТРУКЦИЮ или входящих в состав комбинирован-
-^пГ^^^Гн^вьГз1^' В К°Т°Р°Й
«ЯГ ^~SSU P™ -Р-яется
совп^теРГ^рГвнНенеие^аВДеНИе "^^ ПОЛОгай «легкой нити
(2-2), в которое НИ6М ВИСЯЧИХ Минированных конструкций
рис. 21. Комбинированные системы
с применением жестких нитей
оттяжным- ка6е.£и?Г- Гжс.У=?иЯ
Г = 1
V
£7
(3.105)
Где 1 — Длина пролета;
81
дли расчета, используя метод последовательных приближений для
определения распора от временной нагрузки, считаем, что элемент
не работает на изгиб и не удлиняется, т. е, распор находим по
формуле (2.1).
Затем определяем коэффициент деформативности для вычисления
функции влияния Ф я производим первое уточнение значения
распора от временной нагрузки:
■Ell
8/
Va7,' (ЗЛ06)
где
„ . <М!)
ii+Ф»
I (3.107)
Ф2(£), Ф3 — см. приложение; пу — см. (3.7).
Полученное уточненное значение Нр подставляется в формулу
(3.106), и цикл повторяется до получения заданной точности г
(дли достижения точности 1—2% достаточно двух приближений).
Затем по формулам главы II определяют прогибы, изгибающие
моменты и поперечные силы.
б) При расчете комбинированной системы, в состав которой
входят как жесткая нить, так и балка (см. рис. 21, б), методика расчета
сохраняется, но принимается
г.„=1\/ thzHjL , (3.108)
где £„/0 — изгнбная жесткость нити;
EI — жесткость балки.
Изгибающие моменты, найденные для всего пролетного
строения, распределяются между балкой и нитью прямо пропорционально
жеегкостям этих элементов.
в) Расчет сложных висячих систем, в которые входят жесткие
нити, выполняется по методикам, изложенным для
соответствующих систем с гибкими нитями, по учитывается изменение
коэффициента деформативности, введенное в формулу (3.108).
Расчет жесткой нити, изогнутой под действием
начальной нагрузки
а) Изгиб прямолинейного упругого элемента, неподвижно
закрепленного по концам, описывается дифференциальным уравнением
растянуто-изогнутого стержня, которое совпадает с уравнением
висячих комбинированных систем. Интегрирование этого
уравнения при шарнирном закреплении концов стержня и загружении его
82
равномерной нагрузкой по всему пролету приводит к формулам
(3.109)
Уо ^ iff Фг {Х)> Е/у° = рР Ф1 (*); ^
У0 =--};Фг (ХУ' Е1У'"« = РЩ (X),
гдеФ2 и ее производные по х — см. приложение.
■;Этнми формулами описывается начальное очертание оси, которое
принимает жесткая нить под действием равномерной постоянной
нагрузки. В случае сложной начальной нагрузки функции Ф2 в
формулах (3,109) заменяются суммами функций, которые соответствуют
характеру нагрузки.
Например, начальная нагрузка задана в виде равномерно
распределенных нагрузок qt по всему пролету, q2 — на участке от 0,25 /
до 0,75 / и сосредоточенный груз Q0 расположен в середине пролета.
■Функция Ф2 в этом случае будет заменена на сумму
0,75
<7i*3(*)-Hs J <^i(x)dx + Q0O1(0,5,x),
0,23
где интеграл и функции Ф1; Ф3 определяются по формулам
приложения.
Коэффициент деформативности, соответствующий начальным
нагрузкам, обозначим
га —
/i- <зл1о)
На первой стадии последовательного приближения распор
определим в предположении, что стержень имеет распор, равный
распору нерастяжимой гибкой нити:
#о = ^, (ЗЛИ)
/о
где ''М6 — балочный момент от начальной нагрузки;
/о — заданная стрела начального провеса.
■У-'* Затем, пользуясь уравнением (3.111), путем последовательных
приближений уточняем Н0, а следовательно, г0.
Распор от временной нагрузки может быть найден по формуле
{3.111), в которой функции Ф определяются в зависимости от
полного значения г (3.108).
7. К расчету систем, состоящих из кабеля,
балки и гибкой арки
Комбинированные конструкции, состоящие из балки и пологих
распорных элементов—кабеля и гибкой арки [661 (рис. 22), могут
быть рассчитаны с учетом геометрической нелинейности с помощью
рассмотренной здесь методики.
83
Расчетные формулы принимаются в зависимости от знака при
втором члене дифференциального уравнения (2.5), а именно в
зависимости от знака суммы распоров:
а) Нар < Hq + Нкр + #п.н — расчет производится по методике
расчета висячих систем с использованием функций влияния
растянуто-изогнутого стержня (см. приложение), где Hq, НкР, #пн —
распоры в кабеле от постоянной и временной нагрузок и от
предварительного напряжения системы «кабель — арка»;
НаР — распор в арке от временной нагрузки;
б) HaP>Hq + НкР + Яп.н — рассчитывается как арочная
система. В этом случае применяются функции влияния сжато-изогну-
Рис. 22. Комбинированные
системы, в состав которых
входят кабель, балка и
гибкая арка
того стержня. В отличие от функций, помещенных в приложении,
эти функции, выведенные из уравнения (2.5) при s2 > 0, содержат
круговые тригонометрические функции (2.11), (2.20);
в) ЯаР = Hq + НкР + #п.н — расчет выполняется по методу
отвердения без учета прогибов.
Сопоставляя величины коэффициентов деформативности,
принимаемых при расчете обычных висячих или арочных конструкций
с коэффициентом г данной смешанной комбинированной системы
г=1лГЬ+Н**+*™-н** , (ЗЛ12)
можно сделать вывод, что для смешанных конструкций учет
геометрической нелинейности имеет меньшее значение, чем для висячей
или арочной системы, так как коэффициент г здесь меньше, чем для
обычных, несмешанных систем.
Отметим, что при учете геометрической нелинейности арочных
систем прогибы и изгибающие моменты из расчета получаются
больше, чем по методу отвердения. Поправки за счет нелинейности здесь
небольшие — 10—15% (а в рассматриваемых комбинированных
системах еще меньше), и, несмотря на это, учитывать нелинейность
при расчете таких систем следует, так как такой расчет должен
служить повышению надежности проектируемых сооружений. С
расширением применения высокопрочных сталей, алюминиевых
сплавов и пластмасс для возведения подобных сооружений
необходимость в деформационном расчете будет возрастать.
84
ГЛАВА IV
РАСЧЕТ КОМБИНИРОВАННЫХ ВИСЯЧИХ СИСТЕМ,
УСИЛЕННЫХ ВАНТАМИ, И РАСЧЕТ БАЙТОВЫХ СХЕМ
1. Системы, усиленные нисходящими вантами
Включение радиальных вант (нисходящих или восходящих)
в висячую систему с вертикальными подвесками—один из наиболее
простых и эффективных способов уменьшения кинематических
перемещений системы (см. рис. 2, 3). Такие схемы могут быть применены
как для вновь возводимых сооружений, так и для увеличения
жесткости существующих конструкции. При этом в системе с
нисходящими лаптами достигается разгрузка основного кабеля на 15—20%,
так как часть временной нагрузки воспринимается дополнительным
несущим поясом, в который входят нисходящие ванты и средний
участок балки, Эга разгрузка способствует уменьшению продольных
удлинений основного кабеля, а следовательно, уменьшению
прогибов в середине пролета конструкции при загружепии конструкции
распределенной нагрузкой [32].
Особенности компоновки систем с нисходящими вантами
следующие. Нижние концы вапт рекомендуется прикреплять к балке на
расстоянии от опоры в пределах (0,15—0,35) /. При пролетах
сооружения до 150 .и число вант может быть небольшое—2—3 от каждого
пилона. Увеличение числа вант приводит к усложнению
конструкции верхних узлов прикрепления вапт, производства монтажа и
регулировки усилий во время возведения сооружения. Площадь
поперечного сечения вант определяется их прочностью и составляет
в зависимости от соотношения временной и постоянной нагрузок
0,05—0,2 площади сечения основного кабеля.
Для вновь проектируемых сооружений, в которых
предполагается использовать нисходящие ванты, рекомендуется принимать
такую высоту пилона, чтобы ванты не пересекали кабель, т. е.
расстояние между нижней точкой кабеля в середине пролета и верхом балки
должно составлять приблизительно -г- стрелы провеса кабеля.
Для приближенного расчета, который обычно делается при
выборе вариантов ила при компоновке системы, можно
воспользоваться правилом замены пучка вант одной вантой, площадь сечения
которой равна сумме площадей вапт, входящих в пучок,' а положение
совпадает с осью (равнодействующей) пучка. Исследования
показали, что прогибы и изгибающие моменты, найденные для такой
условной схемы в месте прикрепления равнодействующей ванты,
отличаются от точных значений не более чем на 10%.
При усилении существующих конструкций вантами должны
быть проверены анкеры па прочность при воздействии на пролет
4 Зак. 1231 85
сосредоточенных грузов, так как линии влияния усилии в анкере
для таких схем, в отличие от обычной системы, имеют
несимметричный характер и увеличенные ординаты в месте прикрепления вант
к балке. Отметим, что одновременное применение нескольких
мероприятий по уменьшению кинематических перемещений, например
прикрепление кабеля к балке в середине пролета и усиление вантами,
не дает ожидаемого эффекта. Наибольшая эффективность
достигается от одного и;? этих мероприятии: второе усиление уменьшает
прогибы лишь незначительно.
В основу расчета данной нелинейной статически неопределимой
системы кладутся тс же предпосылки, что и для рассмотренных
выше систем; применяется тот же итерационный метод и, кроме тогс5
Рис. 23. Основная система метода сил для расчета схемы с нисходящими
вантами
для упрощения расчета принимают, что коэффициент деформатив-
ности по длине пролета не изменяется. Это значит, что не
учитываются осевые силы, возникающие от воздействия вант на балку.
Расчетный распор для определения коэффициента деформативности
независимо от способа монтажа вант и от степени их натяжения
постоянной нагрузкой принимается равным горизонтальной
проекции усилия в оттяжке на уровне верха пилона. Предпосылка о
постоянстве распора по длине пролета существенно упрощает расчет,
так как позволяет воспользоваться методикой расчета систем с
постоянными характеристиками по длине пролета — использовать
функции влияния, выведенные выше. Как показали сопоставления
результатов, найденных по этой методике и по уточненной (с
учетом переменного коэффициента деформативности), они отличаются
здесь в допустимых пределах (до 2%).
Вторая расчетная предпосылка — о псвыключаемости вант при
данном загружении пролета временной нагрузкой. Невыключае-
мость вапт обеспечивается предварительным натяжением их во время
монтажа, т. е. передачей на ванты части постоянной нагрузки.
Если из расчета выяснится, что те или иные ванты выключаются, то
в последующих итерациях вносятся поправки в расчетную схему.
Выбор основной системы метода сил показан па рис. 23.
В качестве неизвестных приняты распор н вертикальные
составив
ляющие усилии в вантах, которые определяются пз системы
канонических уравнений:
2 6^Х;-4-Д-р-,0; t=.-0,l, ..., п, (4.1)
где п — число вант.
Перемещения в разрезе основного кабеля вычисляются в
соответствии с формулой (3.5);
hi ьк г,;
6ог — это перемещения балки в месте прикрепления вапты в
сечении dt от равномерно распределетпюго воздействия подвесок
и от удлинения оттяжного кабеля;
6о,— ^ФН4)-|--Г1ГГ1Г^7Г • <4-3>
Перемещения типа 6jy- — это прогибы балки в сечении dL от
действия единичной силы в разрезе ванты с абсциссой dj\ с учетом
удлинения оттяжки (если у этих вант имеется общая оттяжка)
Й, = -Ф,(4 d}) \ ^-T-fl ; (4.4)
" EI VV " *> /F„ Fn tg fr tg Py cosM) V
8« - - — <&i №, d,-) ■; - ■ ■ di -! l— • (4.5)
El " /?„ F„ sin* pi cos pf Ziof„tssPico.s!'0
Здесь Ф,(й!;, rf,-), i]>,(d;) — функции влияния (см. приложение),
в которых вместо х п с, принимаются dt и dy;
коэффициент деформативпости г — см. (2.3), где Н]} —
горизонтальная проекция усилия в боковой (береговой) оттяжке;
dt — относительное (деленное па пролет) расстояние от левой
опоры точки прикрепления к балке i — вапты; 0 < dt < 1. При
dt > 0,5 в формуле (4.5) вместо dt принимается 1 — d-t\
pi — угол наклона вапты к горизонту;
£BFH; Ey-FK\ E0F0—продольная жесткость вант, кабеля и
оттяжки;
L, [х, z — см. (3.4), (3.55а).
Грузовые члены системы уравнений (4.1) при действии одиночной
силы Р определяются по формулам:
'V--~**(i); <4-6)
д*„---~ф1(4. S)- <4-7)
Прогибы, изгибающие моменты и поперечные силы в балке
определяются из рассмотрения равновесия балки под действием нпеш-
4*
87
ней нагрузки, распределенных усилий от подвесок и
сосредоточенных воздействий от вант:
Mx)-~r[^(x, t)-a(i)<M*)->l<&i(</, x)Xia)]; (4.8)
hi
М(х)-.--Р1[Ф\(х, g)-a(|)(li;(*)-S^U< x)Xi(l)]; (4.9)
Q(x)-.- -Р\ф\-(Х, 1)-аа)ф-(х)-^Ф'Г(с1, x)Xi(l)l; (4.10)
В случае, большого числа вант и при использовании для расчета
ЭЦВМ удобно пользоваться матричной записью вычислительных
операций.
Представим систему канонических уравнений и ее решение в
матричной форме:
АХ-|Ар -0; (4.11)
X---A-'V= Lx; (4.12)
А--.Ап-|-А0. (4.13)
Матрицы осевых усилий в элементах системы, прогибов,
изгибающих моментов и поперечных сил могут быть записаны в
следующей форме:
S*. SL,p,.LsP; (4.14)
т|МуЕ-уЦ.)р=:Цр; (4.15)
М (mE—mLjp^ L,wp; (4-16)
Q (qE qL.)p-LQp. (4.17)
Здесь Ac, A0 — матрицы перемещений от продольных
удлинений стержней и от изгиба балки;
Ар — матрица перемещений от единичной внешней
нагрузки;
S — матрица усилий в Байтовых элементах;
L.. — матрица влияния усилий и Байтовых
элементах;
у, rn, q ■ - матрицы влияния прогибов, моментов и
поперечных сил в балке основной системы от
лишних неизвестных;
у, in, q — то же, от единичных сил;
L,b L,vf, Lq — матрицы влияния прогибов, изгибающих
моментов и поперечных сил.
На рис. 24 приведены коэффициенты для вычисления по
формулам (3.18) ординат линий влияния систем, усиленных нисходящими
/ 1
вантами при ' — --, п0 — 1 • 10~'*.
Опыт проектировании рассмотренных здесь конструкций,
экспериментальные исследования па моделях и практика
использования нисходящих вант для усиления висячих мостов показывают,
что с помощью вапт прогибы в четверти пролета могут быть умепь-
88
Рис. 24. Линия влияния систем, усиленных нисходящими вантами
и, w, m ■ ■ коэффициенты для вычислении ординат липни влияния по формулам
(3.I8K Обозначения: —■-_ пк-тема 6im ьппг; —.■_.-■ • система с одной парой
u;iiit при I'Ti— 0.1 Frj dv^§,2 l\ ..—.* ro ла\ при ^,^0,3/; ~~ систс-
m;j о дпумн плр;ши вант при F,,--R,05 /-'K; (1< =0,- /; <k -0,3 /.
89
шены в 2—Зраза. Пролетное строение при таком усилении не
испытывает s-образного изгиба. Однако в ряде случаев при жестких
вантах возможно увеличение прогибов в середине пролета при
действии сосредоточенных грузов — ординаты линий прогибов в
середине пролета усиленной системы получают увеличение по сравнению
с неусиленной, хотя сумма ординат по пролету уменьшается.
Расчет усиленных схем с учетом геометрической нелинейности
следует производить при г > 4 и при FB: Fn <z 0,1.
2. Расчет систем, усиленных восходящими вантами
Для расчета с учетом геометрической нелинейности висячей
комбинированной системы, усиленной восходящими вантами, примем
следующие дополнительные расчетные предпосылки:
1) распор в кабеле не изменяется по длине пролета; поэтому
коэффициент деформативпости, вычисленный по формуле
г = 1^ЩЩБ1г (4Л8)
может быть принят постоянным по длине пролета;
2) систему рассчитывают в предположении, что восходящие
ванты при действии временной нагрузки не включаются и
рассматриваются как стержни, которые могут воспринимать сжатие. Это
допущение основывается на том, что предварительное напряжение
вант больше возможного сжатия в них. Если предварительное
напряжение не может обеспечить иевыключаемость каких-либо
элементов, расчетная схема изменяется после первого приближения
и выполняется дополнительный расчет, учитывающий выключение
элементов.
Кроме принятого здесь итерационного подхода, в настоящее
время развиваются методы расчета ваптовых систем с переменными
связями, основанные па применении математического
программирования [391; на представлении выключаемых стержней как элементов
с переменным модулем упругости, который при сжатии близок к
нулю [45]; на точной записи нелинейных уравнений равновесия
вапт, как гибких нитей, которые, рассуждая строго, и при больших
стрелах провеса tie выключаются из работы [37]. Все перечисленные
методы расчета систем с переменными связями требуют
использования для расчета ЭЦВМ большой мощности с обширной
оперативной памятью.
4 Что касается итерационного метода установления «рабочей
схемы» [52], то в подавляющем большинстве случаев он быстро
сходится, легко подвергается контролю и управлению на всех стадиях
приближения, а также вполне согласуется с принятым здесь
способом учета геометрической нелинейности. Основная система метода
сил показана на рис. 25.
90
В первом состоянии перемещения 600 определяются так же, как
в обычной, пеусиленной схеме:
боо—*»+—-• (4-19)
EI £K FK
Перед тем как выводить формулы единичных перемещений в
других состояниях, рассмотрим грузовые перемещения от силы Р,
приложенной к балке.
Рис. 25. Основная система для расчета схемы с восходящими вантами и
воздействия иа балку от неизвестных усилий
Из расчета обычной системы известно
Д
*ор-
а.£ф.(В.
(4.20)
В каждом состоянии основной системы, соответствующем
перемещениям ванты, от единичного горизонтального усилия,
приложенного к кабелю в месте ра.чреза ванты, возникает распределенное
воздействие подвесок па балку на участке от разреза ванты до
опоры с равномерной интенсивностью
1 I
■ cos р,
(4.21)
Следовательно, для определения перемещений типа Д;;), которые
в силу закона взаимности перемещений равны Api, проинтегрируем
перемещения балки в направлении силы Р от распределенной
нагрузки Z-, на участке 0 — dt и учтем перемещения от сосредоточенной
силы — вертикальной составляющей усилия в ванте в месте
прикрепления ее к кабелю, равной 1 sin р;:
д. =ЕИ
li' EI
z4 5 ф1(*. £)d* + <Mdi, ?) sin p,
(4.22)
Здесь Ф^х, |) принимается в зависимости от соотношения между х
и I [см. формулы (1), (5) приложения]. Для вант, расположенных
справа, пределы интегрирования принимаются от 1 — dt до 1.
91
Балочные перемещения типа 6§/ представим как сумму прогибов
балки на участке 0 — d\ от равномерной нагрузки г,
распределенной по всему пролету, и прогиб в направлении составляющей
усилия в ванте от той же нагрузки г:
8S, = zf^dg,-
EI
г \ <t>2(x)dx J-Фо (cfj)sinр4
(4.23)
Перемещения от удлинения оттяжки и кабеля на общем
участке 0 — dt
S«- --^r cosf3£— -^f jx (' 1 + 16 £-) ;
Lri I
EK FK
dx
■^o Fo
I* J
\(i-\ У )(l-\~y"}dx:
■W|^1-1-24 [~(l~df
(4.24)
(4.25)
Рассуждая аналогично (4,23), но меняя пределы
интегрирования, найдем с использованием формул приложения и (3.102):
-о I3
V*
■ z, j 5фг(А'- Ddxtg-l-O^di, dj)s'fip(Sinp^|-
о о
di
-z(sin pj $<J\(^ dj)dg-b2jSinps jd^S, df)rfg
(4.26)
Перемещения от удлинения оттяжки и кабеля па общем
участке 0 — dt — см. формулу (24) (d-t <: dj).
При С = / добавятся удлинения ванты:
Sb
^di „„1,г ft : 'от ,, / 1 i i К /
^И ' I." JjO ' О
fJb 1-|-16
£r
^U **И
(4.27)
Побочные взаимные перемещения в разрезах вант, расположенных
на противоположных концах пролета 6(J-, могут быть найдены по
формуле (4.26) при измененных пределах интегрирования:
d: 1
л 1й
г
ZjZj^ \ Ф1(х, l)dxdl-\^1(di, dj)sinp;sin|3j +
-+ г, sin Pj J ФА (gT 1 - ^-) dg - J-Zj- sin p, $ *i(&,d()dg .(4.28)
l—d.
92
Перемещения от удлинения кабеля и вант в последнем случае
отсутствуют, так как нет общей оттяжки.
Обозначения в (4.19) — (4.28) приняты такие же, как для'схем
с нисходящими вантами.
Прогибы балки могут быть определены из рассмотрения
равновесия балки
Ц(х, &)= —
Ф, (х, I)-аФ2(х) -2Хггг J Ф, (х, I) dt
(4.29)
Для определения изгибающих моментов и поперечных сил в
формуле (4.29) заменяется перный сомножитель соответственно на Pt
или "Р, а также вместо функций влияния Ф должны быть взяты
вторые и третьи производные функций по х. Изложенный здесь
расчет может быть записан в матричной форме, как это показано для
схемы с нисходящими вантами.
Сопоставляя два способа усиления висячих комбинированных
систем с помощью вант, следует отметить, чго но характеру линий
влияния оба способа почти одинаковы.
Недостаток схемы с восходящими вантами—выключение вант
при загружении всего пролета временной нагрузкой. Однако при
загружении части пролета восходящие ванты резко уменьшают
s-образный изгиб, устраняя подъем незагруженной части пролета.
Поэтому наиболее рационально применять такое усиление в
качестве стабилизации системы при действии местных нагрузок или же
аэродинамических воздействий как на время монтажа, так и на
время эксплуатации сооружения.
Преимущество систем с восходящими вантами—широкая
возможность предварительного напряжения конструкции независимо
от величины постоянной нагрузки. С увеличением натяжения вант
могут искажаться очертания основного кабеля—он из
параболического может становиться ломаным с прямыми или
криволинейными участками между точками прикрепления вант.
Предварительное напряжение как улучшение висячей конструкции проявляется
особенно во время монтажа — подвешивание балок к
стабилизированной системе тросов, регулировка усилий и длин в таких
условиях выполняется гораздо легче, чем в гибких, геометрически
изменяемых схемах.
3. Учет переменности коэффициента деформативности
по длине пролета в Байтовых системах
Уточнение, которое вносит в расчет переменность осевой силы
по длине пролета вследствие воздействия вант на балку, может быть
существенным, если нисходящие ванты предварительно напряжены
93
большой постоянной нагрузкой. То же относится и к восходящим
вантам. Для расчета пролет балки делят на участки с постоянными
значениями коэффициента деформативностн. При этом могут быть
учтены ступенчатые изменения сечения балки по длине пролета.
Для определения единичных перемещений балочного элемента,
изгиб которого на каждом участке описывается уравнением (2.2)
с постоянными коэффициентами, воспользуемся методом начальных
параметров в матричной форме,
Считая, что осевые силы найдены приближенными методами без
учета прогибов или в предположении постоянного коэффициента де-
формативности и вычислены коэффициенты деформатишюсти для
каждого участка, запишем общее решение уравнения равновесия
балки в следующей форме:
П Ал
л=«
ПА,
. х h (0) - 2 Па х К
Аь xA/(_i х ... xAj,
(4.30)
(4.31)
где h(0) — матрица-столбец начальных параметров, записываемая
в зависимости от характера закрепления левого конца балки:
Г 0 и
О
LQ0J
h(0):
ГО
О
Q0
Шарнирному
(a); h(0) =
(б); h (0) -
%
Фо
0
L0
(а),
(в). (4.32)
опиранию соответствует столбец (а), жесткому
закреплению — (б), для свободного конца— (в).
hp — матрица-столбец нагрузок и начальных отклонений от
прямолинейной оси балки.
Сосредоточенные воздействия
ГО
hp =
О
О
.Р.
(г);
(г)
■о-
0
м
О J
— поперечной
(Д)-
(4.33)
силе, (д) —
Формулы (4.33) соответствуют:
моменту.
Матрицы-столбцы распределенных воздействий получаются
интегрированием соответствующих функций влияния в пределах
расположения нагрузки.
Для вычисления единичных перемещений балки
комбинированной системы, рассчитываемой по методу сил, необходимо знать
начальные параметры, которые определяются из двух уравнений,
выражающих условия опирания правого конца балочного
элемента.
94
Перемещения от сосредоточенных воздействий определяются из
первого уравнения системы.
От распределенных воздействий подвесок перемещения
находятся путем интегрирования уравнения изгиба оси балки по участкам.
Для этого надо предварительно вычислить ординаты прогибов на
границах участков и в общем виде выразить уравнения прогибов
участков.
Удлинение вант, кабеля и оттяжек в перемещениях 8и- как в
коэффициентах канонических уравнений может быть найдено по тем
же формулам, что и для обычного способа расчета по методу
отвердения.
Для систем с восходящими вантами переменность распора в
кабеле может быть учтена по той же методике, как и для схем с
нисходящими вантами.
4. Системы с переменным коэффициентом деформативности
по длине пролета
Расчет однокабельной системы со
ступенчатым изменением сечения по длине балки.
Для таких конструкций используется методика расчета систем с
переменным коэффициентом деформативности, если принять, что
ванты отсутствуют (Е^в -= 0).
Рис. 26. Байтовые схемы
о — радиально-вантовая схема «п>-
чок»; 6 ~ «арфа»; в — нантово-
висячая система
Расчет рад и альн о-в актовых систем без
параболического кабеля (рис. 26, а, 6} [28]. Приняв
£/„ — 0, выполняют расчет способом, который дан в п. 2. В
отличие от висячих систем с кабелем, здесь в некоторых панелях балки
может возникнуть сжатие. Переходные матрицы на этих участках
содержат не гиперболические функции, а тригонометрические,
и составляются они по методике, изложенной в главе II для систем
с гибкими арками.
Расчет вантово-висячих систем. Висячие
комбинированные системы, в которых вблизи опор подвески заменены
радиальными нисходящими вантами, назовем вантово-висячими
(рис. 26, в). Расчет таких схем с учетом геометрической
нелинейности производится так же, как и расчет других систем с
переменным по длине пролета коэффициентом деформативности. Такая
05
схема па крайних участках рассматривается как в актовая с учетом
осевых сил, передаваемых на балку от вант, а на среднем участке —
как висячая система с вертикальными подвесками и дополнительным
усилием, приложенным по оси балки от вант.
В зависимости от количества вант и требований к точности
расчета число расчетных участков, на которых изменяется осевая сила,
может быть принято различным, но с увеличением числа участков
увеличивается точность и трудоемкость решения задачи.
5. Расчет вантовых систем с треугольной решеткой
Байтовые комбинированные системы с треугольной решеткой
по характеру взаимодействия балки с фермой могут быть двух видов:
а) схемы, в которых балка подвешена к двухпоясной вантовой
ферме. От фермы па балку в
такой схеме передаются лишь
вертикальные усилия (см.
рис. 2, д);
б) комбинированные
системы с верхним гибким поясом
и нижним жестким (балка или
арка) (рис. 27). На жесткий
элемент кроме вертикального
воздействия передаются
горизонтальные, осевые [23, 47].
Первый вид системы с
наклонными подвесками имеет
некоторые преимущества в
монтаже — балку
подвешивают к неизменяемой
предварительно напряженной ферме, а
не к гибкой нити, как во
втором случае. Однако по
расходу тросов первая схема менее экономична, чем вторая. В ряде
случаев устройство постоянного оттяжного троса с собственными
анкерами трудноосуществимо. Поэтому могут быть рекомендованы
конструкции с наклонными подвесками, как первого, так и
второго вида; они могут применяться в различных случаях в
зависимости от условий возведения и эксплуатации сооружения.
Основная особенность расчета конструкций с наклонными
подвесками — переменность расчетной схемы при загружении
временной нагрузкой части пролета. Поэтому па первой
стадии расчета необходимо установить «рабочую схему» при данном
загружении, т. е. выяснить, какие подвески выключились из работы
вследствие сжатия.
Н. Н. Стрелецкий предложил [52] находить рабочую схему
приближенно в предположении, что балка имеет полные шарниры
в местах прикрепления подвесок. Это допущение позволяет простей-
Рис. 27. Винтовые системы с треугольной
решеткой
и — г впеходяшпмп ui;opi]UMji [1агмк:;1М|]: и
С ШК:.Ч!>ДН1НПММ
Рис. 28. Оснопная статически
определимая система для расчета вантовой схемы
96
шими способами, построив диаграмму Кремоны, установить рабочую
схему.
hfi Вторая стадия расчета — выбор величины предварительного
натяжения элементов системы. Величина запаса растяжения
раскосов может быть минимальной — 10—20%.
Третья стадия — проверочный расчет системы в
эксплуатационном состоянии при действии временной нагрузки — производится
матричным методом без учета геометрической нелинейности.
На этой стадии проверяют принятые рабочие схемы, степень
предварительного натяжения раскосов, принятые сечения элементов,
прогибы системы и изгибающие моменты в балке, определяют
осевые усилия в балке (рис. 28). Уравнение
АХ -|- Др. -0 (4.34)
решается обращением матрицы А системы и умножением ее на
столбец грузовых членов:
Х=---—А^Др, (4.35)
где
А---Аф-!-А0; (4.36)
здесь АЛ — матрица перемещений фермы,
Аф-S'GS, (4.37)
где S — матрица усилий в элементах фермы;
G — матрица жесткостей элементов фермы;
S' — транспонированная матрица S;
AG — матрица перемещений балки; члены ее определяются
либо с помощью упругих грузов [481, либо с помощью
функций влияния при г —- 0 (без учета прогибов).
Усилия в стержнях и моменты в балке определяются по
формулам:
S„=, SXP; (4.38)
М„ =-. (mE- - mX) P ■= LM Р, (4.39)
где rnLM — матрицы влияния моментов в балке от единичных сил
и от нагрузки Р;
Р - вектор внешних сил.
Геометрическую нелинейность можно учесть путем уточнения
матрицы перемещений А0. При этом возможны два способа расчета:
а) приближенный — основан на допуш.епии, что коэффициент
деформатпвности и распор от временной нагрузки по длине
пролета не изменяются. Распор Н7, принимается как горизонтальная
проекция усилия в боковой (береговой) оттяжке. Распор от
постоянной нагрузки вычисляется по формуле (2.1). Для определения
перемещений балки используются функции влияния Фц, Фг (см. прило-
97
жение) и расчетные формулы, которые нами приведены для расчета
систем, усиленных вантами;
б) уточненный расчет производится с учетом ступенчатого
изменения коэффициента деформативпости по длине пролета. На
каждом участке принимается
, /я -:)-//„ -!-Л/.
здесь lv Eli — длина и жесткость t-того участка;
Ир., Ni — распор в кабеле и осевое усилие в балке от
временной нагрузки па t-том участке.
Сжатие в балке принимается в формуле (4.40) со знаком минус.
Эффективность учета геометрической нелинейности при расчете
висячих комбинированных систем с треугольной решеткой зависит от
величины коэффициента деформативпости. Следует учитывать
нелинейность при расчете конструкций, у которых г > 4.
Как показали исследования схем с треугольной решеткой [23,
47, 52], эти комбинированные системы наиболее жестки из всех
висячих конструкций и, как правило, не испытывают s-образного
изгиба балки. Однако при проектировании таких систем следует
учитывать некоторые их особенности: высота пилона здесь должна быть
больше, чем в схемах с вертикальными подвесками, так как между
кабелем и балкой в середине пролета должно быть расстояние (V4 —
1/Г)) /, обеспечивающее устройство раскосов фермы. Следствие
этого — удлинение оттяжек по сравнению с обычной схемой и
увеличение прогибов в середине пролета. Вторая особенность
рассматриваемых схем — сдвигающие усилия в узлах прикрепления подвесок
к кабелю. Для восприятия этих усилий рационально ввести так
называемый дистанционный кабель, который располагается
параллельно основному кабелю, и, прерываясь в каждом узле,
обеспечивает неподвижность узлов [211.
6. К сопоставлению систем повышенной жесткости
Экономическое сопоставление разнообразных висячих систем
может быть выполнено па основании тщательного изучения
экономики изготовления, монтажа, затрат материалов и особенностей
эксплуатации сооружения. В настоящее время достаточных
сведений по этим вопросам еще пет; поэтому при выборе вариантов
обычно сопоставляются расходы материалов па несущие конструкции,
а также величины прогибов при действии временной нагрузки как
показатель эксплуатационных качеств сооружения.
Анализируя расчет рассматриваемых здесь систем, можно
утверждать, что прогибы в середине пролета (упругие прогибы) почти
не зависят от схемы висячей фермы. Они являются следствием
Деформаций кабеля по закону Гука и зависят главным образом от
расчетных сопротивлений материала и стрелы провеса кабеля, от соот-
т
ношения нагрузок. Кинематические перемещения (прогибы в
четверти пролета) зависят в основном от схемы конструкции, В главе I
нами показано, что основное значение в уменьшении
кинематических перемещений имеет наложение связей, препятствующих
горизонтальным перемещениям кабеля вдоль пролета. Исследования
выявили решающее значение любой первой связи, наложенной на
гибкую нить (жесткого узла в середине пролета, соединяющего кабель
с балкой, ванты, раскоса). Последующее увеличение числа связей
приводит к незначительному уменьшению кинематических переме-
щенийШоэтому при выборе способов стабилизации системы «нить —
балка» следует придерживаться экономного использования средств
усиления,^не допуская излишнего дублирования элементов и ус-
ложнепия]узлов конструкции. С точки зрения увеличения жесткости
представленные здесь схемы почти равноценны; можно считать, что
их эффективность возрастает в той последовательности, которая
была принята нами при рассмотрении систем в книге.
'■Определяющими факторами при выборе той или иной схемы
должны быть детально изученные в каждом отдельном случае местные
условия изготовления и монтажа сооружения, эстетические и
эксплуатационные требования.
В отдельную группу могут быть выделены малоэффективные
способы уменьшения кинематических перемещений, которые хотя
и приводят к уменьшению s-образного изгиба, но применение их
связано с большими затратами средств. К ним относятся:
повышение жесткости балки, увеличение постоянной нагрузки, уменьшение
стрелы провеса кабеля по сравнению с оптимальной, введение
напрягающего (нижнего) пояса с вертикальными подвесками без жесткой
горизонтальной связи его с балкой. Не отвергая полностью эти
способы повышения жесткости, применять их следует при достаточном
экономическом обосновании вариантов.
В качестве критерия оптимальности компоновочных параметров
системы, особенно при определении стрелы провеса кабеля, может
быть принято условие равенства прогибов в середине пролета при
полном загружешш временной нагрузкой и в четверти при загру-
жепии половины пролета.
7, Эффективность расчета висячих комбинированных
систем по деформированной схеме
Прогибы внешнераспорных висячих конструкций в процессе на-
гружения приводят к существенным изменениям в распределении
внутренних усилий в системе и к изменениям расчетных
деформаций. Следовательно, расчет таких систем при г 5> 2 должен
производиться по деформированной схеме. Эффективность нелинейного
расчета может быть оценена сопоставлением результатов расчета
с учетом прогибов и по методу отвердения. Такое сопоставление нами
проделано для расчетных загружений пролета различных висячих
комбинированных конструкций независимо от длин пролетов и ве-
99
личин нагрузок. Основные характеристики, которые изменялись при
вычислении отношении прогибов и изгибающих
моментов—коэффициент деформативпости и характеристика продольных деформаций
а.) 6)
Рис. 20. Поправочные коэффициенты для приближенного учета геометрической
нелинейное!и висячих систем повышенной жесткости
а —к протОу н чегиерти пролета; 0 —к изгибающему моменту и четверти пролета;
в -■■ к прогибу is середине пролета; г--к инибающему моменту н середине пролета.
Обозначения: - ойичпал система, распределенная нагрузка; —- — -— то же, оди-
ночмш'! ipy.<: ■ — система с жестким средним узлом, распределено;!!! нагрузка;
— — -■ •- то же, однпочнпд груз; ■— днуякабсльнзя схема со средней иоднеской,
распределенная погрузка, то же, одиночный груз
п{. Для сложных систем принимались наиболее распространенные
значения компоновочных параметров. Результаты вычислений
представлены на рис. 29, где т может рассматриваться как поправочный
коэффициент к линейному расчету, учитывающий уменьшение про-
100
гибов (или изгибающих моментов) за счет деформативности
конструкции. Так, например, поправочный коэффициент для изгибающих
моментов нами вычислялся по формуле
mM„_^li£jb£L(|)*il£i_, (4.41)
ф1о(х,1) — ав (I) ^a o(Jt)
где функции, отмеченные нулем, найдены при г ~ 0.
По графикам коэффициентов т можно судить о том, как велики
поправки, которые вводятся в результаты за счет нелинейности
висячих комбинированных систем в зависимости от коэффициента
деформативности г.
Выразим коэффициент деформативности через компоновочные
параметры, которые определяются заданием или принимаются в
процессе проектирования сооружения. Используем для этой цели
расчет по методу отвердения и приближенные зависимости, принятые
на первой стадии компоновочных расчетов (см. гл. I). Формула
коэффициента деформативности в этом случае может быть представлена
в следующем виде:
а) при загружении всего пролета в случае, если балка
рассчитывается по прочности:
г=,4 ./Е^АХТ; (4,42)
V Р £ f Аб V
б) то же, при загружении половины пролета:
в) при загружении всего пролета в случае, если балка
рассчитывается по деформациям:
Г.-1С1/А^±ГХ!£; (4.44)
г) то же, при загружении половины пролета:
г =.- 16 1 /ЛГШ^ТГК . (4.45)
}\а формул (4.42)—(4.45) и рис. 29 следует, что эффективность
расчета по нелинейной схеме увеличивается:
а) при увеличении отношения - — постоянной нагрузки к
временной, т. е. расчет конструкций, имеющих железобетонный настил
или другую большую постоянную нагрузку, должен производиться
с учетом прогибов;
б) с уменьшением относительной стрелы провеса кабеля ///, т. е.
системы с пологими стрелами, необходимо также рассчитывать
с учетом геометрической нелинейности;
101
Рис. 30. Бумажная фабрика к Мантуе (Италия, арх. П. Нерви) [2GJ
']_ 36000_
гуу/Ы/Ж/ШШг- ^57/5%
у/АХЬ&
Рис. Z\, Проект вантового
покрытия лромздания
(СССР, [5])
в) Е1ри увеличении предельных (допустимых) прогибов Ау/1.
Как известно, увеличение прогибов связано с применением
высокопрочных материалов для несущих нитей;
г) при уменьшении высоты балки hzll — расчет с учетом
геометрической нелинейности сметем со сплошными балками будет
эффективнее, чем расчет висячих конструкций с элементом жесткости
в виде сквозных ферм;
д) с повышением прочности материала балки R или с
уменьшением его модуля упругости Е. Ил этого следует, что расширение
применения новых высокопрочных сталей, алюминия и пластмасс
для балок комбинированных конструкций должно сопровождаться
уточнением методов их расчета.
Как видно из формул (4.42) — (4.45), в выражение коэффициента
деформативности не входит величина пролета; однако влияние
пролета па коэффициент деформативности проявляется через другие
величины.
Как известно, с увеличением пролета возрастает отношение д/р.
Кроме этого, проектировщики по производственным и эстетическим
соображениям в сооружениях больших пролетов стремятся
уменьшить относительную стрелу провеса кабеля /// и высоту балки hjl.
102
Рис. 32. Проект чеха для ремонта самолетов. Передача распора на каркасы
вспомогательных цехов (проект инж. Д. М. Цицилпна)
/ — iniriiM- лопс.юбггоппие а I т pi гр -г: 2— дг.\ [-гпц^'Г^иг б;ьтзк;|
Рис. 33. Ангар для ремонта самолетов «Боииг-747» во Франкфурте-на-Майис
(ФРГ)
1 — koin j)i руз; 2 — нппрягаюш^я папта; 'S — ригель рамы пролетом 100 м
Все это приводит к увеличению коэффициента деформативности с
увеличением пролета, а следовательно, к увеличению эффективности
деформационного расчета.
Величина предельных прогибов связана с эксплуатационными
требованиями к конструкции. С этой точки зрения временные мосты
малых пролетов, для которых допускаются большие прогибы при
малой скорости передвижения грузов, необходимо рассчитывать
с учетом геометрической нелинейности.
Из графиков поправочных коэффициентов можно заметить, что
при расчете на местную нагрузку (загружение половины пролета
распределенной нагрузкой или загружепие одиночным грузом)
нелинейность имеет большее значение, чем при загружепии всего
пролета. Следовательно, геометрическая нелинейность связана с
кинематическими перемещениями. Если сооружение испытывает
небольшие кинематические перемещения, нелинейный расчет его не даст
больших поправок к расчету по линейной схеме. Последнее
подтверждается расчетом ваптовых схем, где наблюдаются в основном
упругие удлинения элементов.
Некоторые примеры применения комбинированных висячих
конструкций повышенной жесткости в зданиях и сооружениях
приведены на рис. 30—33.
103
]04
105
106
107
J 08
109
по
Ill
ЛИТЕРАТУРА
1. Б е л е н я Е. И. Предварительно напряженные металлические
несущие конструкции. Госстройиздат, 1963.
2. Б е л и к о в В. Г. Расчет однопролетной системы висячего моста с
кабелем, закрепленным в балке жесткости, по деформированной схеме.
«Известия вузов MB и ССО СССР», Серия «Строительство и архитектура», 1967,
№ 11.
3. Белоус А. А. О расчете гибкой арки с балкой жесткости. В сб.
трудов Киевского строительного института, вып. 3, Киев, 1936.
4. Болотин В. В. Динамическая устойчивость упругих систем.
Гостехтеоретиздат, 1956.
5. В а с и л ь е в Г. И., М е р л и ц а М. Д. Подвесное плоское
покрытие. Информационный листок. Трест Черноморскоргтехстрой, Одесса,
1964.
6. Ведеников Г.- С, Степанавичус А. К.
Приближенный способ определения перемещений плоских висячих систем.
«Строительная механика и расчет сооружений», 1967, № 3.
7. Виноградов А. И., Дорошенко О. П., Храповиц-
к и й И. С. Некоторые направления в теории оптимальных стержневых
систем. «Строительная механика и расчет сооружений», 1969, № 4.
8. В л а с о в В. 3. Тонкостенные пространственные системы.
Госстройиздат, 1958.
9. Гольде и блат И. И. К расчету висячих мостов и газопроводов
на ветровые и сейсмические нагрузки. В сб. «Сейсмостойкость промышленных
зданий и инженерных сооружений». Труды ЦНИИСК, вып. 18.
Госстройиздат, 1962.
10. Д м и т р и е в Л. Г., К а с и л о в А. В. Байтовые покрытия.
«БуД1вельник», 1968.
П.Дуров И. С. Деформационный расчет висячих мостов.
Диссертация на степень д-ра техн. наук. МАДИ, 1969.
12. Елисеев Ю. А. К статическому расчету предварительно
напряженных мембранных покрытий. «Строительная механика и расчет
сооружений», 1969, № 4.
13. И л л е н к о К. Н. О расчете нити с изгибной жесткостью.
«Строительная механика и расчет сооружений», 1966, № 6.
14. И л ь я с е в и ч С. А. Металлические коробчатые мосты.
«Транспорт», 1970.
15. Канаты стальные. ГОСТы. Изд-во стандартов, 1965.
16. К а ч у р и п В. К- Теория висячих систем. Госстройиздат, 1962.
17. К а ч у р и н В. К- и др. Проектирование висячих и вантовых
мостов. «Транспорт», 1971.
18. К и р е е и к о В. И. Байтовые мосты. «Буд!вельник», 1967.
19. К и р е е н к о В. И. и др. Висячие трубопроводные переходы. «Бу-
Д1вельник», 1968.
20. К и р с а н о в Н. М. Альбом конструкций висячих покрытий.
«Высшая школа», 1965.
21. Кирсанов Н. М. Висячие конструкции. Стройиздат, 1968.
22. Киселев В. А. Рациональные формы арок и подвесных систем.
Госстройиздат, 1953.
112
23. К о м о в Ю. К. Матричный алгоритм для расчета
комбинированной предварительно напряженной вантовой фермы. В сб. трудов Сибирского
автомобильно-дорожного института им. В. В. Куйбышева «Теоретические и
экспериментальные исследования мостов и сооружений», Омск, 1968.
24. Коренев Б. Г. Об изгибных колебаниях стержня переменного
сечения. В сб. «Исследования по динамике сооружений». Госстройиздат, 1957.
25. К о р н о у х о в Н. В. Прочность и устойчивость стержневых
систем. Стройиздат, 1949.
26. К о с е и к о И. С. Висячие конструкции покрытий. Зарубежный
опыт. Стройиздат, 1966.
27. Крылов А. Н. Вибрация судов. Собр. трудов, т. X. АН СССР,
1948.
28. К р ы л ь ц о в Е. И. Ваптовые мосты. Трансжелдориздат, 1935.
29. Кузнецов Э. Н. Вопросы теории висячих систем.
Диссертация на степень д-ра техн. наук. ЦНИИСК, 1967.
30. К У л ь б а х В. Р. В сб. трудов Таллинского политехнического
института. Серия А, № 269. «Строительные конструкции и строительная физика»,
Таллин, 1968.
31. К у ш н е р е в А. М. Проектирование и расчет висячих и вантовых
мостов. НИИЖТ, Новосибирск, 1969.
32. Мацели некий Р. Н. Статический расчет гибких висячих
конструкций, Госстройиздат, 1950.
33. Мелашвили Ю. К-, Размадзе А. Н. О динамической
устойчивости комбинированной вантовой фермы. В сб. трудов Грузинского
политехнического института им. В. И. Ленина, № 6 (104), Тбилиси, 1965.
34. Мельников Н. П. Развитие металлических конструкций.
Стройиздат, 1965.
35. Москалев Н. С. Расчет двухпоясных вантовых ферм. В сб.
«Стальные предварительно напряженные и тросовые конструкции».
Стройиздат, 1964.
36. Немчинов Б. К., Никифоров В. Ф.
Экспериментальные исследования некоторых типов висячих систем. В сб. «Материалы XXII
научно-технической конференции Воронежского инжнерно-строительного
института», Воронеж, 1967.
37. Никифоров В. Ф, К расчету нити с опорами в одном уровне на
действие сосредоточенных сил. «Строительная механика и расчет сооружений»,
1970, № 1.
38. Передерни Г. П. Курс мостов, ч. II. Висячие мосты. Госжел-
дориздат, 1933.
39. Перельмутер А. В. Основы расчета вантово-стержневых
систем. Стройиздат, 1969.
40. П и к о в с к и й А. А. Статика стержневых систем со сжатыми
элементами. Физматгиз, 1961.
41. П о п о в Г. Д. Облегченные конструкции в мостостроении. В сб.
трудов «Металлические конструкции. Работы школы профессора Н. С.
Стрелецкого». Стройиздат, 1966.
42. Рабинович И. М. Ваптовые фермы в мостостроении. В сб.
ЦНИУ НКПС, № 112, 1930.
43. Размадзе А. Н. Вопросы динамической устойчивости висячих
систем (на груз, языке), Тбилиси, 1961.
44. Р а й н у с Г. Э. Расчет многопролетных тросов и многопролетных
ферм из тросов. Стройиздат, 1968.
45. Резников Р. А. Решение задач строительной механики на ЭЦМ.
Стройиздат, 1970.
46. Сильницкий Ю. М. К расчету висячих мостов по
деформированной схеме. В сб. трудов ЛИИЖТ им. В. Н. Образцова, вып. 258.
«Вопросы эксплуатации и проектирования мостов», 1967.
47. Словим Э. Я- Особенности работы висячих однопролетных
решетчатых вантовых ферм. В сб.: «Материалы по металлическим конструкциям»,
вып. 11. Стройиздат, 1966.
113
48. Смирнов А. Ф. и др. Расчет сооружений с применением
вычислительных машин. Строниздлт, 1964.
49. Смирнов В. А. Висячие мосты больших пролетов. «Высшая
школа», 1970.
50. Соловьев С. Л. Решение обратной задачи строительной
механики для вантовых систем». В сб. трудов Воронежского
инженерно-строительного института № 13, вып. 1, Воронеж, 1967.
51. С т е п к и и С. А. Деформационный расчет па подвижную
нагрузку висячих мостов больших пролетов. В сб. трудов ЛИИЖТ, вып. 249,
«Исследования по строительной механике». Стройпздат, I960.
52. Стрелецкий Н. Н. Решетчатые комбинированные системы
мостов. Дориздат, 1953.
53. Стрелецки ii H. С. Курс мостов, ч. II. «Металлические
мосты». Гострапснздат, 1931.
54. Стрелецки ii II. С, Стрелецкий Д. Н.
Проектирование и изготовление экономичных металлических конструкций. Стройиздат,
1964.
55. Т а р т а к о в с к и й Г. А. Строительная механика трубопровода.
«Недра», 1967.
56. У и н г Ц. Строительство крупного цеха для сборки самолетов
Боипг-747. «Гражданское строительство» (пер. с англ.), 1968, № 9. ■
57. У м а п с к и й А. А. Строительная механика самолета. Оборонгиз,
1961.
58. X а з а п И. А. Стальные автодорожные мосты за рубежом. Авто-
траненздат, 1961.
59. Ц а п л и н С. А. Висячие мосты. Гострансиздат, 1937.
60. Ц а п л и н С. А. Висячие мосты. Дориздат, 1949.
61. Червяков А. В. К вопросу о влиянии растяжимости подвесок
па собственные частоты вертикальных колебаний висячих мостов. В сб.
научных трудов Всесоюзного научно-исследовательского института
транспортного строительства, вып. 22, 1967.
62. A s р 1 u n d, S. О. On the deflection theory of suspension bridges.
Stockholm, Generalstabe litogr. Anstalt, 1945.
63. A s p 1 u n d, S. O. Column-beams and suspension bridges analyzed
by Green's Matrix,. «Chalmers Tekniska Hogskolas Haundlfngar», 1958, № 204.
64. Baticle E. L'ameliorati on de la rigidite des ponts suspendus.
«Le Genie Civil», vol. 105, 1934, № 19.
65. В 1 e i с h F. The mathematical theory of vibration in suspension
bridges. Washington, 1950.
66. Krivoshein G. G. Simplified calculation of statically
indeterminate bridges. Prague, 1930.
67. M e 1 a n I. Handbuch den Ing.-Wissenschaften. Briickenbau, II.
Band, 5abt., 1925.
68. P u g s 1 e у A. The theory of suspension bridges. London, 1968.
69. Tcsir A. Pervy predaty potrubry most v. CSSP. «Inzenyrske stavby»,
1963, № 10.
70. T i m о s h e n k о S. P. Theory of suspension bridges. «Journal of
the Franklin Inst.», vol. 235, № 3, 4, 1943.
71. T s с h e in m e г и с g g F. Uber die Aerodynamik und Statik
von Monokabelhangebriicken. «Bauingenieur», 1969, 44, № 10.
72. H у e, P. Ilangekrananlage in der neiien Wartungshall der Deutschen
Lufthansa AG am Flughafen Frankfurt/Main. «Der Stahlbau», H. 1, 1971.
ОГЛАВЛЕНИЕ
Стр.
Предисловие 3
Глава!. Проектирование и возведение висячих и вантовых конструкций
повышенной жесткости 5
1. Деформативггость висячих систем и способы обеспечения
их жесткости 5
2. Особенности конструктивных решений
большепролетных зданий и мостов с применением комбинированных
висячих сип ем 10
3. Особенности проектирования комбинированных висячих
и вантовых систем 15
4. Приближенные расчеты при компоновке схемы висячей
конструкции и при назначении размеров элементов
сооружения 17
Глава II. Вопросы расчета комбинированных висячих систем с учетом
геометрической нелинейности 24
1. Два способа расчета висячих комбинированных систем
с учетом геометрической нелинейности 24
2. Дифференциальное уравнение висячей системы с балкой
жесткости 25
3. Применение метода начальных параметров к решению
основного уравнения впешпераспорных
комбинированных систем 27
4. Функции влияния и их применение к расчету висячих
комбинированных систем 31
5. К расчету статически неопределимых висячих и вантовых
систем с учетом геометрической нелинейности 37
Глава III. Расчет висячих систем с вертикальными подвесками 39
1. Одпопролстная схема: балка с. кабелем 39
2. Расчет многопролетных однокабельных систем 52
3. Расчет систем, в которых кабель прикреплен к балке в
середине пролета 60
4. Системы с напрягающим кабелем 68
5. Расчет двухкабельных комбинированных систем с
учетом геометрической нелинейности 73
6. Расчет жесткий нитей в составе комбинированных систем 80
7. К расчету систем, состоящих из кабеля, балки и гибкой
арки 83
Глава IV. Расчет комбинированных висячих систем, усиленных
вантами и расчет вантовых схем 85
1. Системы, усиленные нисходящими вантами 85
2. Расчет систем, усиленных восходящими вантами 90
3. Учет переменности коэффициента деформативности по
длине пролета в вантовых системах 93
115
4. Системы с переменным коэффициентом' деформативности
по длине пролета 95
5. Расчет вантовых систем с треугольной решеткой . , . . 96
6. К сопоставлению систем повышенной жесткости . . . . 98
7. Эффективность расчета висячих комбинированных систем
по деформированной схеме 99
Приложение 104
Литература 112
Николай Михайлович Кирсанов
ВИСЯЧИЕ СИСТЕМЫ ПОВЫШЕННОЙ ЖЕСТКОСТИ
# * *
Редактор издательства Б. Л. Бегак
Внешнее оформление художника Л. \\. Колесникова
Техническим редакчор Т. В. Кузнецова
Кпррекюры О. В. Стигнсепа , £. //. Кудрявцева
Сдано в набор 4/XI 1972 г. Подписано к печати 29/1II 1973 г.
Т-03492 Формат 60Х907ю Д- л- Бумага типографская № 2.
7,25 печ. л. (7,95 уч.-изд. л.)
Тираж 6000 экз. Изд. №-AVI —1974 Зак. № 1231. Цена 40 к.
Стройиэдат
Москва, К-31, Кузнецкий мост, 9
Московская типография № 4 Соктюлиграфпрома
при Государственном комитете Совета Министров СССР
по делам издательств, полиграфии и книжной торювли
Москва, И-41, Б. Переяславская, д, 46.