/






Текст
ЦЕНТРАЛЬНАЯ СТАНЦИЯ ЮНЫХ ТЕХНИКОВ РСФСР
|/В|/ В.МАЦКЕВИЧ
КАК г
[ДЕЛАТЬ
S РОБОТ
ВЫПУСК II
23(329)
1970
ИЗДАТЕЛЬСТВО «МАЛЫШ»
Локация — метод обнаружения и определения местоположения различных
предметов при помощи отраженных от них сигналов. Некоторые животные
(дельфин, летучая мышь) используют звуколокацию уже многие сотни тыся-
челетий, а людям эта тайна природы стала известна совсем недавно. Создан-
ным людьми локационным приборам всего лишь около 50 лет. Разработанные
вначале для военных целей (для обнаружения самолетов противника), они сей-
час широко применяются в мирных условиях. С помощью звуколокаторов
обнаруживают, например, косяки рыбы. Радиолокаторы пассажирских самолетов
предупреждают пилотов об опасности столкновений в воздухе и помогают
обходить препятствия — горы, грозовые облака.
Роботу, передвигающемуся в помещении, также угрожает столкновение со
стенами и окружающими предметами.
Мы рекомендуем сделать для роботов не очень сложные, но достаточно
четко работающие светолокаторы обнаружения препятствий.
Сравнительно простой локатор для небольшой движущейся модели рабо-
тает на принципе приема света комнатного электроосвещения, отраженного от
окружающих предметов. Модель с таким светолокатором, использующим ком-
натное электроосвещение, будет обнаруживать и обходить препятствия только
там, где препятствия на пути робота освещены электролампами (сети 110 в или
220 в, 50 гц).
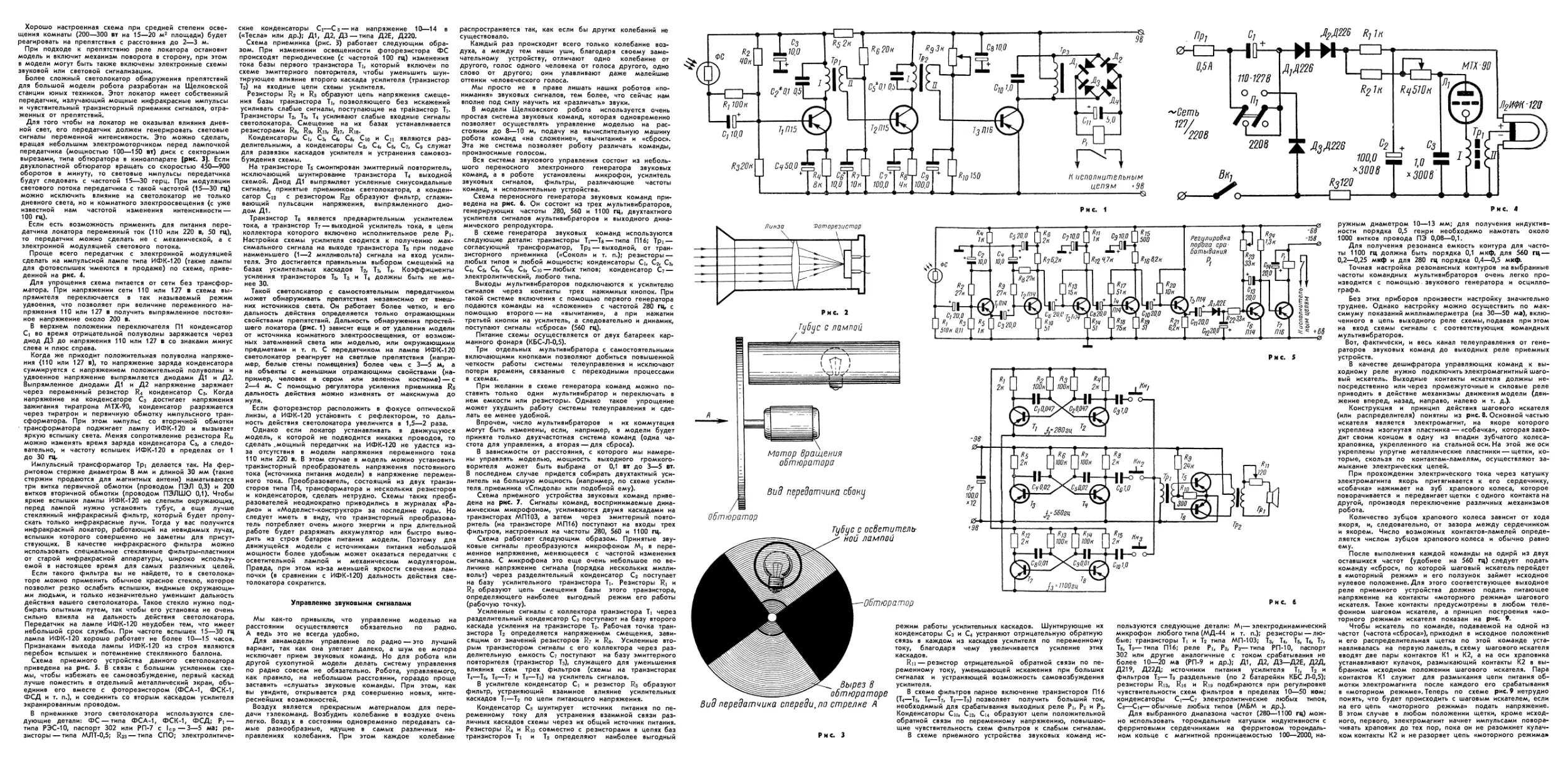
Принципиальная схема светолокатора приведена на рис. 1. Локатор пред-
ставляет собой высокочувствительный усилитель сигналов световых лучей пере-
менной интенсивности, реагирующий на световые колебания только определен-
ной частоты. В отличие от простейших усилителей постоянного тока, используе-
мых в схемах зрения моделей и подверженных влиянию дневного света, на
этот светолокатор не оказывает влияния даже яркий дневной свет.
В схеме светолокатора используются следующие детали: ФС—типа ФСК-1,
ФСА-1, ФСА-4 и т. д. Трансформаторы Tpi и Тр2 — согласующие, а Трз — вы-
ходной (вторичная обмотка не используется); трансформаторы от приемника
«Сокол» или другого транзисторного приемника; Pi — типа РП-10, паспорт № 302
или РП-7 с 1Ср = 2~3 ма; резисторы — любые; Д1-Д4— типа Д2Е, Д7Ж; элект-
ролитические конденсаторы на напряжение 10—15 в.
Светочувствительный фоторезистор локатора (типа ФСК-1, ФСА-1, ФСА-4
и проч.), воспринимающий отраженные лучи, может быть установлен в перед-
ней части модели в тубусе с линзой (рис. 2). Так как частота изменения интен-
сивности света электрических ламп равна удвоенной частоте переменного тока
осветительной сети (100 гц при работе от сети с частотой 50 гц), то в схеме
применены резонансные контуры, настроенные на 100 гц.
Они образованы индуктивностями первичных обмоток трансформаторов
Tpi и Трг и емкостями конденсаторов Сг и С5.
Благодаря настройке резонансных контуров на 100 гц, достигается высокая
помехоустойчивость схемы, что исключает ее срабатывание от случайных све-
товых вспышек или световых колебаний с частотой, отличающейся от 100 гц.
Схема с резонансными контурами усиливает лишь небольшую часть собствен-
ных шумов, обычно ограничивающих чувствительность подобных устройств.
Это объясняется тем, что в такой схеме с ее входа на выход проходят не
все шумы, возникающие в первом каскаде усилителя, а только их небольшая
часть, лежащая в области выбранной частоты резонанса (у нас эта частота
100 гц).
Поэтому от такой схемы можно сравнительно легко добиться надежного
срабатывания выходного реле при подаче на ее вход напряжения всего в 5—
10 мв. Если правильно настроить контуры на резонансную частоту (100 гц), то
коэффициент усиления каждого каскада увеличится более чем в три раза.
Так как индуктивность первичных обмоток различных согласующих транс-
форматоров для транзисторных приемников обычно находится в пределах 1—2
генри, то емкость конденсаторов С2 и С5 для резонанса контуров на частоте
100 гц должна быть порядка 0,1—0,5 мкф. Если нет измерительных приборов,
с помощью которых обычно производят настройку контуров (звуковой генера-
тор, осциллограф и др.), то их настройку на частоту 100 гц можно произвести
по световым сигналам электроосвещения, добиваясь подбором конденсаторов
максимальной чувствительности схемы (срабатывания на наибольшем удалении
от освещенных предметов или от минимального светового сигнала).
При необходимости чувствительность схемы можно повысить включением
еще одного каскада усиления, подобного первым двум каскадам. Регулировка
чувствительности схемы и, следовательно, дальности обнаружения препятствий
осуществляется резистором R9.
Хорошо настроенная схема при средней степени осве-
щения комнаты (200—300 вт на 15—20 м2 площади) будет
реагировать на препятствия с расстояния до 2—3 м.
При подходе к препятствию реле локатора остановит
модель и включит механизм поворота в сторону, при этом
в модели могут быть также включены электронные схемы
звуковой или световой сигнализации.
Более сложный светолокатор обнаружения препятствий
для большой модели робота разработан на Щелковской
станции юных техников. Этот локатор имеет собственный
передатчик, излучающий мощные инфракрасные импульсы
и чувствительный транзисторный приемник сигналов, отра-
женных от препятствий.
Для того чтобы на локатор не оказывал влияния днев-
ной свет, его передатчик должен генерировать световые
сигналы переменной интенсивности. Это можно сделать,
вращая небольшим электромоторчиком перед лампочкой
передатчика (мощностью 100—150 вт) диск с секторными
вырезами, типа обтюратора в киноаппарате (рис. 3). Если
двухлопастной обтюратор вращать со скоростью 450—900
оборотов в минуту, то световые импульсы передатчика
будут следовать с частотой 15—30 герц. При модуляции
светового потока передатчика с такой частотой (15—30 гц)
можно исключить влияние на светолокатор не только
дневного света, но и комнатного электроосвещения (с уже
известной нам частотой изменения интенсивности —
100 гц).
Если есть возможность применить для питания пере-
датчика локатора переменный ток (110 или 220 в, 50 гц),
то передатчик можно сделать не с механической, а с
электронной модуляцией светового потока.
Проще всего передатчик с электронной модуляцией
сделать на импульсной лампе типа ИФК-120 (такие лампы
для фотовспышек -имеются в продаже) по схеме, приве-
денной на рис. 4.
Для упрощения схема питается от сети без трансфор-
матора. При напряжении сети 110 или 127 в схема вы-
прямителя переключается в так называемый режим
удвоения, что позволяет при величине переменного на-
пряжения 110 или 127 в получить выпрямленное постоян-
ное напряжение около 200 в.
В верхнем положении переключателя П1 конденсатор
Ci во время отрицательной полуволны заряжается через
диод ДЗ до напряжения 110 или 127 в со знаками минус
слева и плюс справа.
Когда же приходит положительная полуволна напряже-
ния (110 или 127 в), то напряжение заряда конденсатора
суммируется с напряжением положительной полуволны и
удвоенное напряжение выпрямляется диодами Д1 и Д2.
Выпрямленное диодами Д1 и Д2 напряжение заряжает
через переменный резистор R4 конденсатор Сз. Когда
напряжение на конденсаторе Сз достигает напряжения
зажигания тиратрона МТХ-90, конденсатор разряжается
через тиратрон и первичную обмотку импульсного тран-
сформатора. При этом импульс со вторичной обмотки
трансформатора поджигает лампу ИФК-120 и вызывает
яркую вспышку света. Меняя сопротивление резистора R4,
можно изменять время заряда конденсатора Сз, а следо-
вательно, и частоту вспышек ИФК-120 в пределах от 1
до 30 гц.
Импульсный трансформатор Tpi делается так. На фер-
ритовом стержне диаметром 8 мм и длиной 30 мм (такие
стержни продаются для магнитных антенн) наматываются
три витка первичной обмотки (проводом ПЭЛ 0,3) и 200
витков вторичной обмотки (проводом ПЭЛШО 0,1). Чтобы
яркие вспышки лампы ИФК-120 не слепили окружающих,
перед лампой нужно установить тубус, а еще лучше
стеклянный инфракрасный фильтр, который будет пропу-
скать только инфракрасные лучи. Тогда у вас получится
инфракрасный локатор, работающий на невидимых лучах,
вспышки которого совершенно не заметны для присут-
ствующих. В качестве инфракрасного фильтра можно
использовать специальные стеклянные фильтры-пластинки
от старой инфракрасной аппаратуры, широко использу-
емой в настоящее время для самых различных целей.
Если такого фильтра вы не найдете, то в светолока-
торе можно применить обычное красное стекло, которое
позволит резко ослабить вспышки, видимые окружающи-
ми людьми, и только незначительно уменьшит дальность
действия вашего светолокатора. Такое стекло нужно под-
бирать опытным путем, так чтобы его установка не очень
сильно влияла на дальность действия светолокатора.
Передатчик на лампе ИФК-120 неудобен тем, что имеет
небольшой срок службы. При частоте вспышек 15—30 гц
лампа ИФК-120 хорошо работает не более 10—15 часов.
Признаками выхода лампы ИФК-120 из строя являются
перебои вспышек и потемнение стеклянного баллона.
Схема приемного устройства данного светолокатора
приведена на рис. 5. В связи с большим усилением схе-
мы, чтобы избежать ее самовозбуждение, первый каскад
лучше поместить в отдельный металлический экран, объ-
единив его вместе с фоторезистором (ФСА-1, ФСК-1,
ФСД и т. п.), и соединить со вторым каскадом усилителя
экранированным проводом.
В приемнике этого светолокатора используются сле-
дующие детали: ФС — типа ФСА-1, ФСК-1, ФСД; Pi —
типа РЭС-10, паспорт 302 или РП-7 с 1Ср—3—5 ма; ре-
зисторы— типа МЛТ-0,5; R23 — типа СПО; электролитиче-
ские конденсаторы Ci—Сз — на напряжение 10—14 в
(«Тесла» или др.); Д1, Д2, ДЗ — типа Д2Е, Д220.
Схема приемника (рис. 5) работает следующим обра-
зом. При изменении освещенности фоторезистора ФС
происходят периодические (с частотой 100 гц) изменения
тока базы первого транзистора Ti, который включен по
схеме эмиттерного повторителя, чтобы уменьшить шун-
тирующее влияние второго каскада усилителя (транзистор
Т2) на входные цепи схемы усилителя.
Резисторы R2 и R3 образуют цепь напряжения смеще-
ния базы транзистора Ti, позволяющего без искажений
усиливать слабые сигналы, поступающие на транзистор Ть
Транзисторы Тг, Тз, Т4 усиливают слабые входные сигналы
светолокатора. Смещение на их базах устанавливается
резисторами R8, Rg, R13, Ri7, Rie-
Конденсаторы Ci, Сз, Сб, С8, Сю и Си являются раз-
делительными, а конденсаторы С2, С4, С5, С7, С9 служат
для развязки каскадов усилителя и устранения самовоз-
буждения схемы.
На транзисторе Т5 смонтирован эмиттерный повторитель,
исключающий шунтирование транзистора Т4 выходной
схемой. Диод Д1 выпрямляет усиленные синусоидальные
сигналы, принятые приемником светолокатора, а конден-
сатор Сю с резистором R22 образуют фильтр, сглажи-
вающий пульсации напряжения, выпрямленного дио-
дом Д1.
Транзистор Те является предварительным усилителем
тока, а транзистор Т7 — выходной усилитель тока, в цепи
коллектора которого включено исполнительное реле Pi.
Настройка схемы усилителя сводится к получению мак-
симального сигнала на выходе транзистора Т5 при подаче
наименьшего (1—2 милливольта) сигнала на вход усили-
теля. Это достигается правильным выбором смещений на
базах усилительных каскадов Т2, Тз, Т4. Коэффициенты
усиления транзисторов Тг, Тз и Т4 должны быть не ме-
нее 30.
Такой светолокатор с самостоятельным передатчиком
может обнаруживать препятствия независимо от внеш-
них источников света. Он работает более четко, и его
дальность действия определяется только отражающими
свойствами препятствий. Дальность обнаружения простей-
шего локатора (рис. 1) зависит еще и от удаления модели
от источника комнатного электроосвещения, от возмож-
ных затемнений света или моделью, или окружающими
предметами и т. п. С передатчиком на лампе ИФК-120
светолокатор реагирует на светлые препятствия (напри-
мер, белые стены помещения) более чем с 3—5 м, а
на объекты с меньшими отражающими свойствами (на-
пример, человек в сером или зеленом костюме) — с
2—4 м. С помощью регулятора усиления приемника Rs
дальность действия можно изменять от максимума до
нуля.
Если фоторезистор расположить в фокусе оптической
линзы, а ИФК-120 установить с рефлектором, то даль-
ность действия светолокатора увеличится в 1,5—2 раза.
Однако если локатор устанавливать в движущуюся
модель, к которой не подводится никаких проводов, то
сделать „мощный передатчик на ИФК-120 не удастся из-
за отсутствия в модели напряжения переменного тока
110 или 220 в. В этом случае в модель можно установить
транзисторный преобразователь напряжения постоянного
тока (источника питания модели) в напряжение перемен-
ного тока. Преобразователь, состоящий из двух транзи-
сторов типа П4, трансформатора и нескольких резисторов
и конденсаторов, сделать нетрудно. Схемы таких преоб-
разователей неоднократно приводились в журналах «Ра-
дио» и «Моделист-конструктор» за последние годы. Но
следует иметь в виду, что транзисторный преобразова-
тель потребляет очень много энергии и при длительной
работе будет разряжать аккумулятор или быстро выво-
дить из строя батареи питания модели. Поэтому для
движущейся модели с источниками питания небольшой
мощности более удобным может оказаться передатчик с
осветительной лампой и механическим модулятором.
Правда, при этом из-за меньшей яркости свечения лам-
почки (в сравнении с ИФК-120) дальность действия све-
толокатора сократится.
Управление звуковыми сигналами
Мы как-то привыкли, что управление моделью на
расстоянии осуществляется обязательно по радио.
А ведь это не всегда удобно.
Для авиамодели управление по радио — это лучший
вариант, так как она улетает далеко, а шум ее мотора
исключает прием звуковых команд. Но для робота или
другой сухопутной модели делать систему управления
по радио совсем не обязательно. Робота, управляемого,
как правило, на небольшом расстоянии, гораздо проще
заставить «слушать» звуковые команды. При этом, как
вы увидите, открывается ряд совершенно новых, инте-
реснейших возможностей.
Воздух является прекрасным материалом для пере-
дачи тэлекоманд. Возбудить колебание в воздухе очень
легко. Воздух в состоянии одновременно передавать са-
мые разнообразные, идущие в самых различных на-
правлениях колебания. При этом каждое колебание
распространяется так, как если бы других колебаний не
существовало.
Каждый раз происходит всего только колебание воз-
духа, а между тем наши уши, благодаря своему заме-
чательному устройству, отличают одно колебание от
другого, голос одного человека от голоса другого, одно
слово от другого; они улавливают даже малейшие
оттенки человеческого голоса.
Мы просто не в праве лишать наших роботов «по-
нимания» звуковых сигналов, тем более, что сейчас нам
вполне под силу научить их «различать» звуки.
В модели Щелковского робота используется очень
простая система звуковых команд, которая одновременно
позволяет осуществлять управление моделью на рас-
стоянии до 8—10 м, подачу на вычислительную машину
робота команд «на сложение», «вычитание» и «сброс».
Эта же система позволяет роботу различать команды,
произносимые голосом.
Вся система звукового управления состоит из неболь-
шого переносного электронного генератора звуковых
команд, а в роботе установлены микрофон, усилитель
звуковых сигналов, фильтры, различающие частоты
команд, и исполнительные устройства.
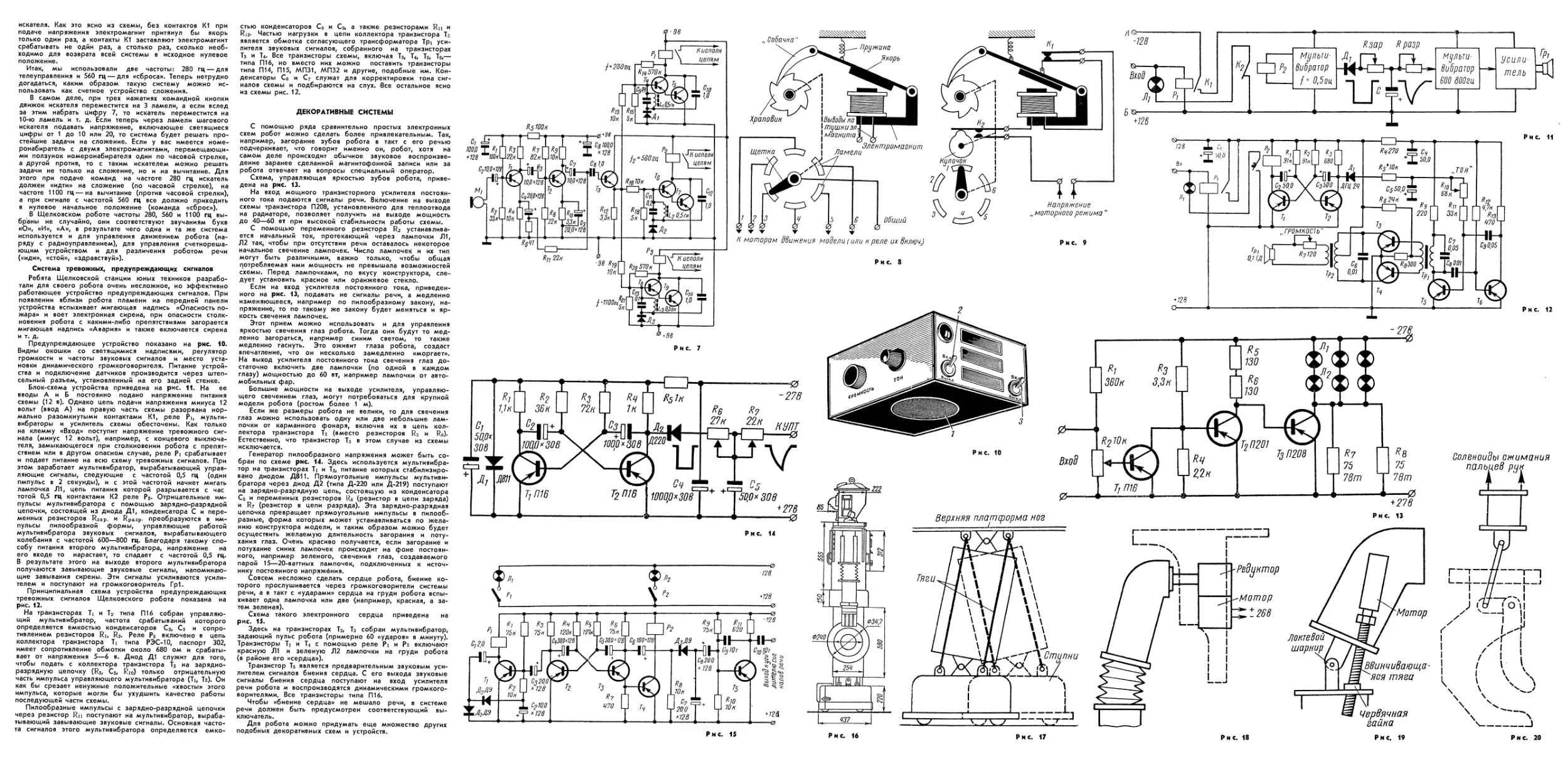
Схема переносного генератора звуковых команд при-
ведена на рис. 6. Он состоит из трех мультивибраторов,
генерирующих частоты 280, 560 и 1100 гц, двухтактного
усилителя сигналов мультивибраторов и выходного дина-
мического репродуктора.
В схеме генератора звуковых команд используются
следующие детали: транзисторы Ti—Т8 — типа П16; Tpi —
согласующий трансформатор, Тр2—выходной, от тран-
зисторного приемника («Сокол» и т. п.); резисторы —
любых типов и любой мощности; конденсаторы Ci, C2l Сз,
С4, С5, Се, С8, Сд, Сю — любых типов; конденсатор С7 —
электролитический, любого типа.
Выходы мультивибраторов подключаются к усилителю
сигналов через контакты трех нажимных кнопок. При
такой системе включения с помощью первого генератора
подаются команды на «сложение» с частотой 280 гц, с
помощью второго — на «вычитание», а при нажатии
третьей кнопки на усилитель, а следовательно и динамик,
поступают сигналы «сброса» (560 гц).
Питание схемы осуществляется от двух батареек кар-
манного фонаря (КБС-Л-0,5).
Три отдельных мультивибратора с самостоятельными
включающими кнопками позволяют добиться повышенной
четкости работы системы телеуправления и исключают
потери времени, связанные с переходными процессами
в схемах.
При желании в схеме генератора команд можно по-
ставить только один мультивибратор и переключать в
нем емкости или резисторы. Однако такое упрощение
может ухудшить работу системы телеуправления и сде-
лать ее менее удобной.
Впрочем, число мультивибраторов и их коммутация
могут быть изменены, если, например, в модели будет
принята только двухчастотная система команд (одна ча-
стота для управления, а вторая — для сброса).
В зависимости от расстояния, с которого мы намере-
ны управлять моделью, мощность выходного громкого-
ворителя может быть выбрана от 0,1 вт до 3—5 вт.
В последнем случае придется собирать двухтактный уси-
литель на большую мощность (например, по схеме усили-
теля_приемника «Спидола» или подобной ему).
Схема приемного устройства звуковых команд приве-
дена на рис. 7. Сигналы команд, воспринимаемые дина-
мическим микрофоном, усиливаются двумя каскадами на
транзисторах МП103, а затем через эмиттерный повто-
ритель (на транзисторе МП16) поступают на входы трех
фильтров, настроенных на частоты 280, 560 и 1100 гц.
Схема работает следующим образом. Принятые зву-
ковые сигналы преобразуются микрофоном в пере-
менное напряжение, меняющееся с частотой изменения
сигнала. С микрофона это еще очень небольшое по ве-
личине напряжение сигнала (порядка нескольких милли-
вольт) через разделительный конденсатор С2 поступает
на базу усилительного транзистора Ть Резисторы Ri и
R2 образуют цепь смещения базы этого транзистора,
определяющего наиболее выгодный режим его работы
(рабочую точку).
Усиленные сигналы с коллектора транзистора Ti через
разделительный конденсатор Сз поступают на базу второго
каскада усиления на транзисторе Тг. Рабочая точка тран-
зистора Т2 определяется напряжением смещения, зави-
сящим от значений резисторов R7 и R8. Усиленные вто-
рым транзистором сигналы с его коллектора через раз-
делительную емкость С? поступают на базу эмиттерного
повторителя (транзистор Тз), служащего для уменьшения
влияния схем трех фильтров (схемы на транзисторах
Т4—Т5, Тб—Т7 и Т8—T9) на усилитель сигналов.
В усилителе конденсатор Ci и резистор R5 образуют
фильтр, устраняющий взаимное влияние усилительных
каскадов Ti—Т2 по цепи питающего напряжения.
Конденсатор С8 шунтирует источник питания по пе-
ременному току для устранения взаимной связи раз-
личных каскадов схемы через их общий источник питания.
Резисторы R4 и Rio совместно с резисторами в цепях баз
транзисторов Ti и Т2 определяют наиболее выгодный
Рис. 1
Тубус с лампой
Мотор вращения
обтюратора
Вид передатчика сбоку
Обтюратор
Пр1 С}
0,5Л
~0еть
127/
7220в
110-1278
°C
7 И Н л t
L
МТХ-90
2208
R21k
RySWn
С2
Сз
вК]
г о
♦
*3008
R3I2O
р Ю '
*3008
ЛоИФК-Ш
Рис. 4
С520,0
шшЮ,0
89
27k
K2
100k
1с2 Сч
10,0
R-jq 8.2 к
Лл/7
С31,0
Т/ Jf280гц Тг
8l5
500
-98
0-4
8,
2k
сю2о.о
Rl9 r21
51 6t2n
83
ЮОк
РегцлороВка _L JL
порога ера- г*1
РптыЯпннЯ 4-1 Чг
порога
батывания
P<
R24
1.3k
---0
-60
15В
---0
r23
33k
ди
r2D
Юк
pi
R0
2k
Тубус с осветитель-
ной лампой
Обтюратор
Вырез в
_______________ обтюраторе
Вид передатчика спереди, по стрелке А
Рис. 3
82
100.0
*12
<96
Ъ™. ME
Bl3
20.0
№0.0 --• - Тб
j + П1Ч
тв
+55
-----0
Рис. 5
r5
2к
41
Су 0.02
r8
2k
r7
100k
т3
бр 560гц
R6
00к
ri2
2к
С80.01
Rm
100к
R13
ЮОк
р3ююогц Т8
CgO.Ol
Rii
120
о’5 Н"3
2к ?
ГР1
Рис. 6
режим работы усилительных каскадов. Шунтирующие их
конденсаторы С3 и С4 устраняют отрицательную обратную
связь в каждом из каскадов усилителя по переменному
току, благодаря чему увеличивается усиление этих
каскадов.
Ru — резистор отрицательной обратной связи по пе-
ременному току, уменьшающей искажения при больших
сигналах и устраняющей возможность самовозбуждения
усилителя.
В схеме фильтров парное включение транзисторов П16
(Т4—Тб, Тб—Т7, Т8—T9) позволяет получить больший ток,
необходимый для срабатывания выходных реле Pi, Р2 и Р3.
Конденсаторы Сю, Ci2, Ci4 образуют цепи положительной
обратной связи по переменному напряжению, повышаю-
щие чувствительность схем фильтров к слабым сигналам.
В схеме приемного устройства звуковых команд ис-
пользуются следующие детали: Mi— электродинамический
микрофон любого типа (МД-44 и т. п.); резисторы — лю-
бые; транзисторы Ti и Тг типа МП-103; Тз, Т4, Тб, Те, Т7,
Т8, T9—типа П16; реле Pi, Р2, Рз—типа РП-10, паспорт
302 или другие аналогичные с током срабатывания не
более 10—20 ма (РП-9 и др.); Д1, Д2, ДЗ—Д2Е, Д2Д,
Д219, Д22Д; источники питания усилителя Ti, Т2 и
фильтров Тз—Тэ раздельные (по 2 батарейки КБС Л-0,5);
резисторы R13, Rie и Rig подбираются при регулировке
чувствительности схем фильтров в пределах 10—50 ком;
конденсаторы Ci—С7 электролитические любых типов,
С8—Си— обычные любых типов (МБМ и др.).
Для выбранного диапазона частот (280—1100 гц) мож-
но использовать тороидальные катушки индуктивности с
ферритовыми сердечниками на ферритовом тороидаль-
ном кольце с магнитной проницаемостью 100—2000, на-
ружным диаметром 10—13 мм; для получения индуктив-
ности порядка 0,5 генри необходимо намотать около
1000 витков провода ПЭ 0,08—0,1.
Для получения резонанса емкость контура для часто-
ты 1100 гц должна быть порядка 0,1 мкф, для 560 гц —
0,2—0,25 мкф и для 280 гц порядка 0,4—0,5 мкф.
Точная настройка резонансных контуров на выбранные
частоты командных мультивибраторов очень легко про-
изводится с помощью. звукового генератора и осцилло-
графа.
Без этих приборов произвести настройку значительно
труднее. Однако настройку можно осуществить по мак-
симуму показаний миллиамперметра (на 30—50 ма), вклю-
ченного в цепь выходного реле схемы, подавая при этом
на вход схемы сигналы с соответствующих командных
мультивибраторов.
Вот, фактически, и весь канал телеуправления от гене-
раторов звуковых команд до выходных реле приемных
устройств.
В качестве дешифратора управляющих команд к вы-
ходному реле нужно подключить электромагнитный шаго-
вый искатель. Выходные контакты искателя должны не-
посредственно или через промежуточные и силовые реле
приводить в действие механизмы движения модели (дви-
жение вперед, назад, направо, налево и т. д.).
Конструкция и принцип действия шагового искателя
(или распределителя) понятны из рис. 8. Основной частью
искателя является электромагнит, на якоре которого
укреплена изогнутая пластинка — «собачка», которая захо-
дит своим концом в одну из впадин зубчатого колеса-
храповика, укрепленного на стальной оси. На этой же оси
укреплены упругие металлические пластинки — щетки, ко-
торые, скользя по контактам-ламелям, осуществляют за-
мыкание электрических цепей.
При прохождении электрического тока через катушку
электромагнита якорь притягивается к его сердечнику,
«собачка» нажимает на зуб . храпового колеса, которое
поворачивается и передвигает щетки с одного контакта на
другой, производя переключение различных механизмов
робота.
Количество зубцов храпового колеса зависит от хода
якоря, и, следовательно, от зазора между сердечником
и якорем. Число возможных контактов-ламелей опреде-
ляется числом зубцов храпового колеса и обычно равно
ему.
После выполнения каждой команды на однрй из двух
оставшихся частот (удобнее на 560 гц) следует подать
команду «сброс», по которой шаговый искатель перейдет
в «моторный режим» и его ползунок займет исходное
нулевое положение. Для этого соответствующее выходное
реле приемного устройства должно подать питающее
напряжение на контакты «моторного режима» шагового
искателя. Такие контакты предусмотрены в любом теле-
фонном шаговом искателе, а принцип построения «мо-
торного режима» искателя показан на рис. 9.
Чтобы искатель по команде, подаваемой на одной из
частот (частота «сброса»), приходил в исходное положение
и его распределительная щетка по этой команде уста-
навливалась на первую ламель, в схему шагового искателя
вводят две пары контактов К1 и К2, а на оси храповика
устанавливают кулачок, размыкающий контакты К2 в вы-
бранном исходном положении шагового искателя. Пара
контактов К1 служит для размыкания цепи питания об-
мотки электромагнита после каждого его срабатывания
в «моторном режиме». Теперь по схеме рис. 9 нетрудно
понять, что будет происходить с шаговым искателем, если
на его цепь «моторного режима» подать напряжение.
В этом случае в любом положении щетки, кроме исход-
ного, первого, электромагнит начнет импульсами повора-
чивать храповик до тех пор, пока он не разомкнет кулач-
ком контакты К2 и не разорвет цепь «моторного режима»
искателя. Как это ясно из схемы, без контактов К1 при
подаче напряжения электромагнит притянул бы якорь
только один раз, а контакты К1 заставляют электромагнит
срабатывать не один раз, а столько раз, сколько необ-
ходимо для возврата всей системы в исходное нулевое
положение.
Итак, мы использовали две частоты: 280 гц — для
телеуправления и 560 гц—для «сброса». Теперь нетрудно
догадаться, каким образом такую систему можно ис-
пользовать как счетное устройство сложения.
В самом деле, при трех нажатиях командной кнопки
движок искателя переместится на 3 ламели, а если вслед
за этим набрать цифру 7, то искатель переместится на
10-ю ламель и т. д. Если теперь через ламели шагового
искателя подавать напряжение, включающее светящиеся
цифры от 1 до 10 или 20, то система будет решать про-
стейшие задачи на сложение. Если у вас имеется номе-
ронабиратель с двумя электромагнитами, перемещающи-
ми ползунок номеронабирателя один по часовой стрелке,
а другой против, то с таким искателем можно решать
задачи не только на сложение, но и на вычитание. Для
этого при подаче команд на частоте 280 гц искатель
должен «идти» на сложение (по часовой стрелке), на
частоте 1100 гц—на вычитание (против часовой стрелки),
а при сигнале с частотой 560 гц все должно приходить
в нулевое начальное положение (команда «сброс»),
В Щелковском роботе частоты 280, 560 и 1100 гц вы-
браны не случайно, они соответствуют звучаниям букв
«О», «И», «А», в результате чего одна и та же система
используется и для управления движением робота (на-
ряду с радиоуправлением), для управления счетнореша-
ющим устройством и для различения роботом речи
(«иди», «стой», «здравствуй»).
Система тревожных, предупреждающих сигналов
Ребята Щелковской станции юных техников разрабо-
тали для своего робота очень несложное, но эффективно
работающее устройство предупреждающих сигналов. При
появлении вблизи робота пламени на передней панели
устройства вспыхивает мигающая надпись «Опасность по-
жара» и воет электронная сирена, при опасности столк-
новения робота с какими-либо препятствиями загорается
мигающая надпись «Авария» и также включается сирена
и т. д.
Предупреждающее устройство показано на рис. 10.
Видны окошки со светящимися надписями, регулятор
громкости и частоты звуковых сигналов и место уста-
новки динамического громкоговорителя. Питание устрой-
ства и подключение датчиков производится через штеп-
сельный разъем, установленный на его задней стенке.
Блок-схема устройства приведена на рис. 11. На ее
вводы А и Б постоянно подано напряжение питания
схемы (12 в). Однако цепь подачи напряжения минуса 12
вольт (ввод А) на правую часть схемы разорвана нор-
мально разомкнутыми контактами К1, реле Pi, мульти-
вибраторы и усилитель схемы обесточены. Как только
на клемму «Вход» поступит напряжение тревожного сиг-
нала (минус 12 вольт), например, с концевого выключа-
теля, замыкающегося при столкновении робота с препят-
ствием или в другом опасном случае, реле Pi срабатывает
и подает питание на всю схему тревожных сигналов. При
этом заработает мультивибратор, вырабатывающий управ-
ляющие сигналы, следующие с частотой 0,5 гц (один
пмпульс в 2 секунды), и с этой частотой начнет мигать
лампочка Л1, цепь питания которой разрывается с час
тотой 0,5 гц контактами К2 реле Р2. Отрицательные им-
пульсы мультивибратора с помощью зарядно-разрядной
цепочки, состоящей из диода Д1, конденсатора С и пере-
менных резисторов R3ap. и Ёразр- преобразуются в им-
пульсы пилообразной формы, управляющие работой
мультивибратора звуковых сигналов, вырабатывающего
колебания с частотой 600—800 гц. Благодаря такому спо-
собу питания второго мультивибратора, напряжение на
его входе то нарастает, то спадает с частотой 0,5 гц.
В результате этого на выходе второго мультивибратора
получаются завывающие звуковые сигналы, напоминаю-
щие завывания сирены. Эти сигналы усиливаются усили-
телем и поступают на громкоговоритель Гр1.
Принципиальная схема устройства предупреждающих
тревожных сигналов Щелковского робота показана на
рис. 12.
На транзисторах Ti и Т2 типа П16 собран управляю-
щий мультивибратор, частота срабатываний которого
определяется емкостью конденсаторов С2, Сз и сопро-
тивлением резисторов Ri, R2. Реле Рз включено в цепь
коллектора транзистора Ti типа РЭС-10, паспорт 302,
имеет сопротивление обмотки около 680 ом и срабаты-
вает от напряжения 5—6 в. Диод Д1 служит для того,
чтобы подать с коллектора транзистора Т2 на зарядно-
разрядную цепочку (R5, С5, Rio) только отрицательную
часть импульса управляющего мультивибратора (Ь, Тг). Он
как бы срезает ненужные положительные «хвосты» этого
импульса, которые могли бы ухудшить качество работы
последующей части схемы.
Пилообразные импульсы с зарядно-разрядной цепочки
через резистор Rn поступают на мультивибратор, выраба-
тывающий завывающие звуковые сигналы. Основная часто-
та сигналов этого мультивибратора определяется емко-
стью конденсаторов Cs и Сэ, а также резисторами Rn и
R12- Частью нагрузки в цепи коллектора транзистора Тб
является обмотка согласующего трансформатора Tpi уси-
лителя звуковых сигналов, собранного на транзисторах
Тз и Т4. Все транзисторы схемы, включая Тз, Т4, Тб, Тб,—
типа П16, но вместо них можно поставить транзисторы
типа П14, П15, МП31, МП32 и другие, подобные им. Кон-
денсаторы Сб и С7 служат для корректировки тона сиг-
налов схемы и подбираются на слух. Все остальное ясно
из схемы рис. 12.
ДЕКОРАТИВНЫЕ СИСТЕМЫ
С помощью ряда сравнительно простых электронных
схем робот можно сделать более привлекательным. Так,
например, загорание зубов робота в такт с его речью
подчеркивает, что говорит именно он, робот, хотя на
самом деле происходит обычное звуковое воспроизве-
дение заранее сделанной магнитофонной записи или за
робота отвечает на вопросы специальный оператор.
Схема, управляющая яркостью зубов робота, приве-
дена на рис. 13.
На вход мощного транзисторного усилителя постоян-
ного тока подаются сигналы речи. Включение на выходе
схемы транзистора П208, установленного для теплоотвода
на радиаторе, позволяет получить на выходе мощность
до 40—60 вт при высокой стабильности работы схемы.
С помощью переменного резистора R2 устанавлива-
ется начальный ток, протекающий через лампочки Л1,
Л2 так, чтобы при отсутствии речи оставалось некоторое
начальное свечение лампочек. Число лампочек и их тип
могут быть различными, важно только, чтобы общая
потребляемая ими мощность не превышала возможностей
схемы. Перед лампочками, по вкусу конструктора, сле-
дует установить красное или оранжевое стекло.
Если на вход усилителя постоянного тока, приведен-
ного на рис. 13, подавать не сигналы речи, а медленно
изменяющееся, например по пилообразному закону, на-
пряжение, то по такому же закону будет меняться и яр-
кость свечения лампочек.
Этот прием можно использовать и для управления
яркостью свечения глаз робота. Тогда они будут то мед-
ленно загораться, например синим светом, то также
медленно гаснуть. Это оживит глаза робота, создаст
впечатление, что он несколько замедленно «моргает».
На выход усилителя постоянного тока свечения глаз до-
статочно включить две лампочки (по одной в каждом
глазу) мощностью до 60 вт, например лампочки от авто-
мобильных фар.
Большие мощности на выходе усилителя, управляю-
щего свечением глаз, могут потребоваться для крупной
модели робота (ростом более 1 м).
Если же размеры робота не велики, то для свечения
глаз можно использовать одну или две небольшие лам-
почки от карманного фонаря, включив их в цепь кол-
лектора транзистора Т2 (вместо резисторов R5 и R6).
Естественно, что транзистор Тз в этом случае из схемы
исключается.
Генератор пилообразного напряжения может быть со-
бран по схеме рис. 14. Здесь используется мультивибра-
тор на транзисторах Ti и Т2, питание которых стабилизиро-
вано диодом Д811. Прямоугольные импульсы мультиви-
братора через диод Д2 (типа Д-220 или Д-219) поступают
на зарядно-разрядную цепь, состоящую из конденсатора
С5 и переменных резисторов Re (резистор в цепи заряда)
и R7 (резистор в цепи разряда). Эта зарядно-разрядная
цепочка превращает прямоугольные импульсы в пилооб-
разные, форма которых может устанавливаться по жела-
нию конструктора модели, и таким образом можно будет
осуществить желаемую длительность загорания и поту-
хания глаз. Очень красиво получается, если загорание и
потухание синих лампочек происходит на фоне постоян-
ного, например зеленого, свечения глаз, создаваемого
парой 15—20-ваттных лампочек, подключенных к источ-
нику постоянного напряжения.
Совсем несложно сделать сердце робота, биение ко-
торого прослушивается через громкоговорители системы
речи, а в такт с «ударами» сердца на груди робота вспы-
хивает одна лампочка или две (например, красная, а за-
тем зеленая).
Схема такого электронного сердца приведена на
рис. 15.
Здесь на транзисторах Тг, Тз собран мультивибратор,
задающий пульс робота (примерно 60 «ударов» в минуту).
Транзисторы Ti и Т4 с помощью реле Pi и Рг включают
красную Л1 и зеленую Л2 лампочки на груди робота
(в районе его «сердца»).
Транзистор Т5 является предварительным звуковым уси-
лителем сигналов биения сердца. С его выхода звуковые
сигналы биения сердца поступают на вход усилителя
речи робота и воспроизводятся динамическими громкого-
ворителями. Все транзисторы типа П16.
Чтобы «биение сердца» не мешало речи, в системе
речи должен быть предусмотрен соответствующий вы-
ключатель.
Для робота можно придумать еще множество других
подобных декоративных схем и устройств.
р280гц
Rwb/UK
Киеполн
цепям
10
’iLjUprH
At
К5Ю0к
R13
Юк
100Д Т Г
*128 IOOkl.
СгЮ0*121
Рд\
Юк\
1 с>
С8,000
I *126
87 с8 1Д
10.0*128
♦
Ri
1,1 к
Сч20Д*12В
Т2
U °
Юз
126
/?/7 22к
R2
Звк
f2 = 560гц
«15
5к
Тв
R1s10k ь
Лк иеполн
\ цепям
Cj2
\о
1ЬрО,5гн
Дг
Пружина
Храповик
Общий
Рис. 9
Напряжение
„ моторного режима “
Электромагнит
Ламели
щетка
Выводы ко
тушки эл
магнита
К моторам движения модели (или к реле их включу
кулачок
-12В
О—
Вход
6»
+126
Г,
°-------!-----
17 в О,
О---f----
Рт
0
'96 ^9\ I R2o578k
Юж 1
РЗ
/-ПООгц^1
' 5к
Киеполн
цепям
Ю т
*9в
Рис. 7
Рис. 8
Ст
50,Ох
306
Л
Ж
72к
1000*308
Т/ПЮ
Л
Pi
0,20
Pi
75к
Д?.Д9
-к
2 ш^ДЭ
Т2
и S'
Юк^
1 с2юд
*128
Ry
1к
вб
27к
~27в
М
22н КУПТ
wop *30 в у1220
Ая
Т2П16 тр^зоо
ГуЮт
CiqIOi
Рис. 15
Св200
*128
Т5
Р/0
Юк
^12&
Н28
---0
---0
-128
—0
-128
ДзД°
КЗ
7Ьк
r7
470
Re
Юк
--- Мульти- Jlj
Р2 вибратор
--- f’- 0,5гц
Рзар Вразр
0 “
А
ДЩ24
Тз
Гр,
О.’ТД
680
91к
С3500
0? 500
ГРОМКОСТЬ
Тц
Rb24k
-I I------ "0
Р2
91к
R4270 — СН
<Г 50.0
Оф 10 к
мульти-
вибратор -*
Ш 800гц
Р]0
68 к
Рц
„ТОН
Pl2
Усили-
тель
Гр,
Рис. 11
>сте
50,0* ЗОв
+278
Рис. 14
* $
*128
О----
C3O.OS
’р,
Рис. 12
Св о 01
Л1
~27в
Л2
RplOK
Рис. 10
Вход
222
Верхняя платформа ноя
Тяги
+27 в
Рис. 13
Мотор
ФМ,7
437
Ri
ЗвОк
R3
3,3к
Ry
2,2к
Ф240
Рис. 16
Рис. 17
Т/П16
4
R5
130
Ro
130
То п 201
1 Т3П208
Мотор
t26B
Локтевой
шарнир
Рис. 18
R?
75
7вт
75
7вт
Ввинчивающа-
яся тяга
Червячная
гайка
Рис. 19
Соленоиды отнимания
пальцев рук
Рис. 20
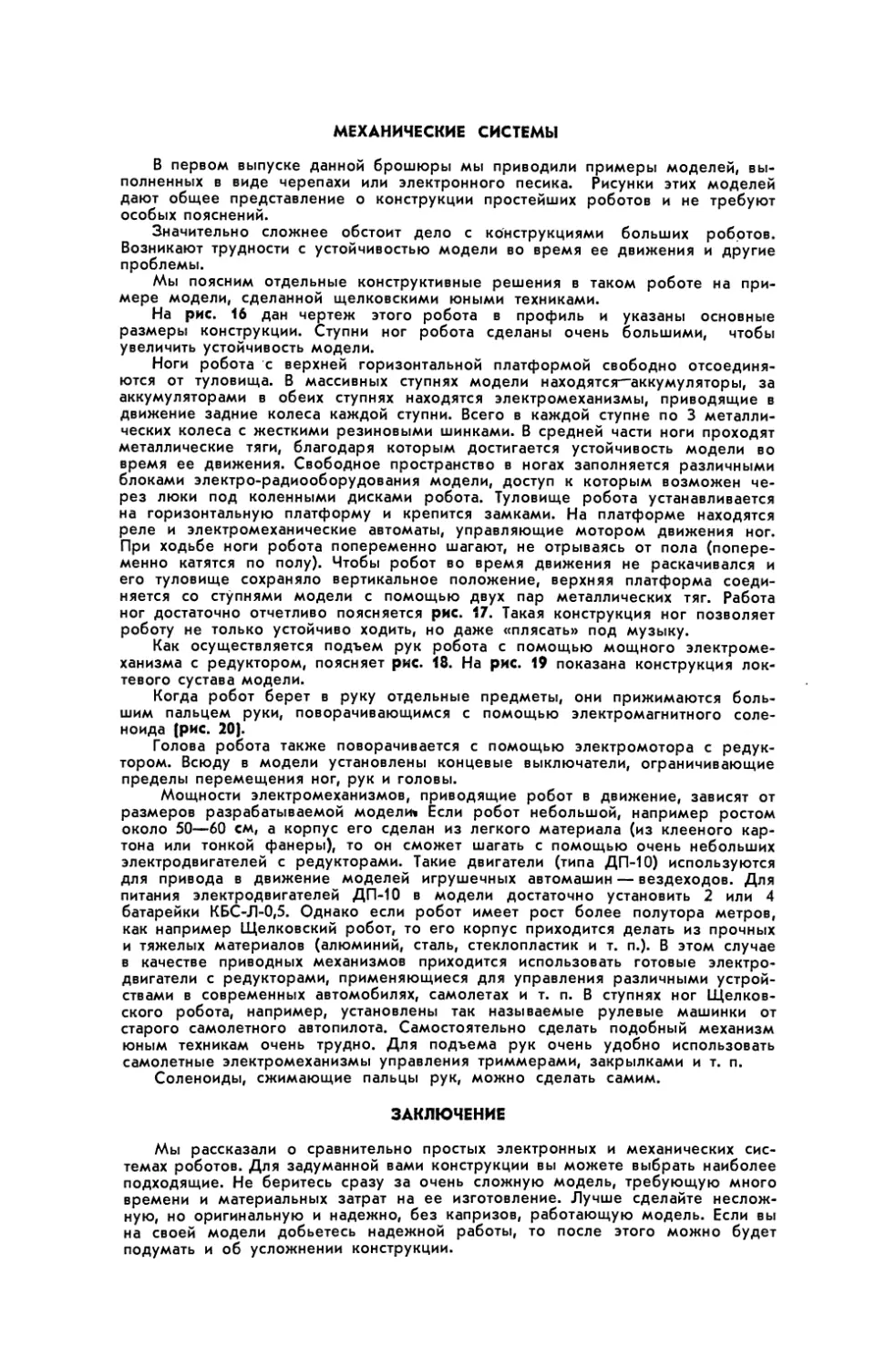
МЕХАНИЧЕСКИЕ СИСТЕМЫ
В первом выпуске данной брошюры мы приводили примеры моделей, вы-
полненных в виде черепахи или электронного песика. Рисунки этих моделей
дают общее представление о конструкции простейших роботов и не требуют
особых пояснений.
Значительно сложнее обстоит дело с конструкциями больших роботов.
Возникают трудности с устойчивостью модели во время ее движения и другие
проблемы.
Мы поясним отдельные конструктивные решения в таком роботе на при-
мере модели, сделанной щелковскими юными техниками.
На рис. 16 дан чертеж этого робота в профиль и указаны основные
размеры конструкции. Ступни ног робота сделаны очень большими, чтобы
увеличить устойчивость модели.
Ноги робота с верхней горизонтальной платформой свободно отсоединя-
ются от туловища. В массивных ступнях модели находятся^аккумуляторы, за
аккумуляторами в обеих ступнях находятся электромеханизмы, приводящие в
движение задние колеса каждой ступни. Всего в каждой ступне по 3 металли-
ческих колеса с жесткими резиновыми шинками. В средней части ноги проходят
металлические тяги, благодаря которым достигается устойчивость модели во
время ее движения. Свободное пространство в ногах заполняется различными
блоками электро-радиооборудования модели, доступ к которым возможен че-
рез люки под коленными дисками робота. Туловище робота устанавливается
на горизонтальную платформу и крепится замками. На платформе находятся
реле и электромеханические автоматы, управляющие мотором движения ног.
При ходьбе ноги робота попеременно шагают, не отрываясь от пола (попере-
менно катятся по полу). Чтобы робот во время движения не раскачивался и
его туловище сохраняло вертикальное положение, верхняя платформа соеди-
няется со ступнями модели с помощью двух пар металлических тяг. Работа
ног достаточно отчетливо поясняется рис. 17. Такая конструкция ног позволяет
роботу не только устойчиво ходить, но даже «плясать» под музыку.
Как осуществляется подъем рук робота с помощью мощного электроме-
ханизма с редуктором, поясняет рис. 18. На рис. 19 показана конструкция лок-
тевого сустава модели.
Когда робот берет в руку отдельные предметы, они прижимаются боль-
шим пальцем руки, поворачивающимся с помощью электромагнитного соле-
ноида (рис. 20).
Голова робота также поворачивается с помощью электромотора с редук-
тором. Всюду в модели установлены концевые выключатели, ограничивающие
пределы перемещения ног, рук и головы.
Мощности электромеханизмов, приводящие робот в движение, зависят от
размеров разрабатываемой модели» Если робот небольшой, например ростом
около 50—60 см, а корпус его сделан из легкого материала (из клееного кар-
тона или тонкой фанеры), то он сможет шагать с помощью очень небольших
электродвигателей с редукторами. Такие двигатели (типа ДП-10) используются
для привода в движение моделей игрушечных автомашин — вездеходов. Для
питания электродвигателей ДП-10 в модели достаточно установить 2 или 4
батарейки КБС-Л-0,5. Однако если робот имеет рост более полутора метров,
как например Щелковский робот, то его корпус приходится делать из прочных
и тяжелых материалов (алюминий, сталь, стеклопластик и т. п.). В этом случае
в качестве приводных механизмов приходится использовать готовые электро-
двигатели с редукторами, применяющиеся для управления различными устрой-
ствами в современных автомобилях, самолетах и т. п. В ступнях ног Щелков-
ского робота, например, установлены так называемые рулевые машинки от
старого самолетного автопилота. Самостоятельно сделать подобный механизм
юным техникам очень трудно. Для подъема рук очень удобно использовать
самолетные электромеханизмы управления триммерами, закрылками и т. п.
Соленоиды, сжимающие пальцы рук, можно сделать самим.
ЗАКЛЮЧЕНИЕ
Мы рассказали о сравнительно простых электронных и механических сис-
темах роботов. Для задуманной вами конструкции вы можете выбрать наиболее
подходящие. Не беритесь сразу за очень сложную модель, требующую много
времени и материальных затрат на ее изготовление. Лучше сделайте неслож-
ную, но оригинальную и надежно, без капризов, работающую модель. Если вы
на своей модели добьетесь надежной работы, то после этого можно будет
подумать и об усложнении конструкции.
8 к
печати
ою
Л70977
Изд. Х« 441
Московская типография 13
Главполиграфпрома Комитета по
при Совете Министров СССР.
Москва, ул. Баумана, Денисовский пер., д. 30.
1 шк
Художник Д. Хитрое
Научный редактор Б. Иванов
Редактор Е. Рыжова
Художественный редактор Г. Крюкова
Технический редактор И. Колодная
Корректор Н. Шадрина
Сдано в производство 28/IX — 70 г.
Подписано в печать 19/XI — 70 г.
Формат 70 X 1О8’/|в. Печ. л. 0,75.
Усл. печ. л. 1. Уч.-изд. л. 1,68.
Заказ 0249 Тираж 119 739
По оригиналам издательства
«Малыш»
Комитета по печати
при Совете Министров РСФСР