/
























































































































































































Текст
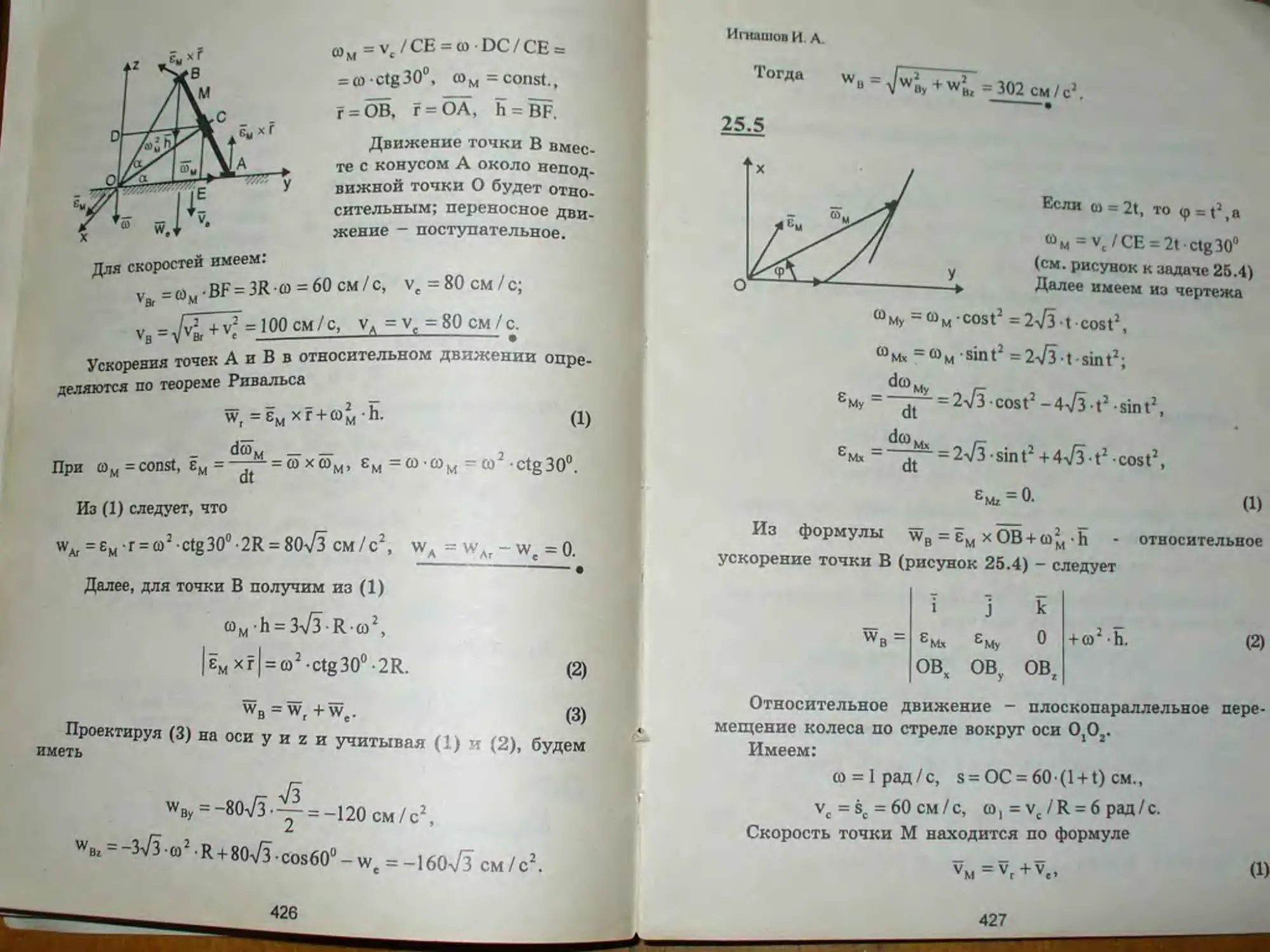
ВГ^,, ъ лвей покинуть пределы солнечной си< гемы. ,77ью облегчить поиск необходимой литературы в начале кдого параграфа указаны учебники и учебные пособия, в •орых можно найти ответ. - как решать любую задачу .кретного параграфа. Поэтому предлагаемое учебное юбие нельзя рассматривать с позиции элементарной аргалки, решению задач должно предшествовать ретнческое изучение материала по указанным в начале >аграфа литературным источникам (необязательно всем). В приводимых ниже решениях задач очевидные вык-(ки, как правило, опущены; например, в задачах статики гмание сконцентрировано на равновесии тела и правильной иси уравнений равновесия системы сил, действующих на сматриваемое тело. При этом решение системы ебраических уравнений трудностей вызвать не может, тому в конечном счете приводится лишь численный ответ, черкнутый жирной линией (, ). В статике и ки-атике внимание акцентировано на графической части евия, чем содержательней рисунок, тем яснее технология -ния. По нашему мнению, без четкого рисунка — чертежа 'ТЬ задачу по механике невозможно.
^е0РсвоТйел₽СЯ’ ЧТ° П°СОбИе бУДеТ П0Лезн° всем- в своей деятельности имеет отношение к механике.
Автор
Игнатов И. А.
Статика твердого тела
Глава 1
Плоская система сил
§ 1. Силы, действующие по одной прямой [4,2,1]
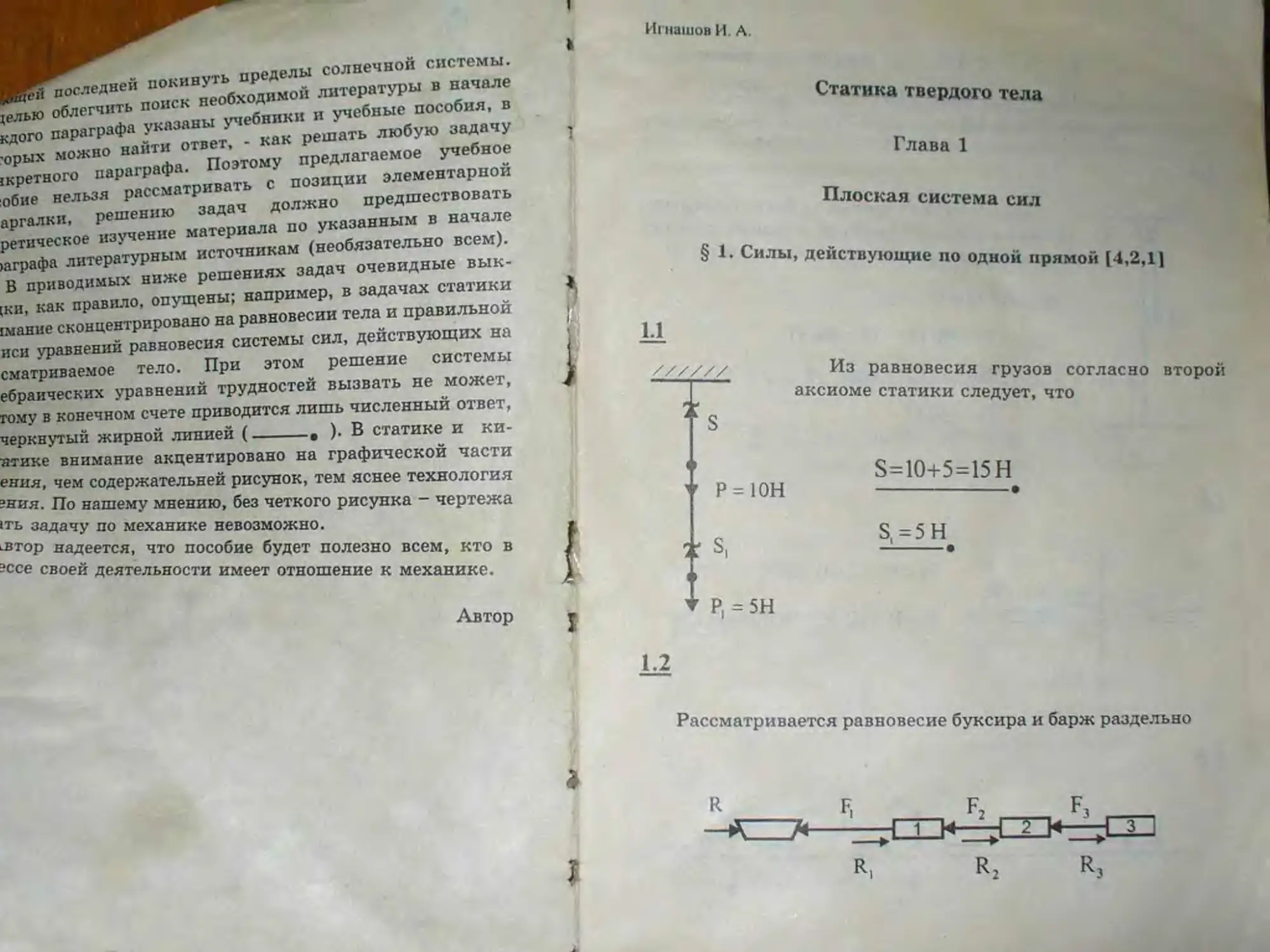
1.1
////// Из равновесия грузов согласно второй
аксиоме статики следует, что
S
" S=1O+5=15H
” Р = 10Н -------------•
,,s S'=5H.
': а, -------•
1 ’ Р, = 5Н
1.2
Рассматривается равновесие буксира и барж раздельно
R, R2 R,
F, = 18 - 6 = 12 кН. n, = 12/2 = 6; тросов;
F, = 12-6 = 6 кН, n2 = 6/2 = 3; троса;
Fj = 6 - 4 = 2 кН. n, = 2/2 = 1; трос;
13
При отсутствии трения на блоке А согласно третьему закону Ньютона в любом сечении правой ветви каната имеет место равенство
P-N-Q=0
При Р = 640Н, Q = 480H
N=160H если N = о
Q=640H
1.4
N = P = 12101kH, F=R=121(y.0,005=60 kll
6
Игнатов И. А.
Т - сила тяги электровоза.
Рассматривается равновесие электровоза и последующих объектов состава за вычетом одного, начиная с электровоза. Тогда сила стяжки между вагонами, считая от головы состава, будет представлена выражениями:
Т = R = 5400 • 0,005 = 27 кН,
Т, = R, = 5000 0,005 = 25 кН, Т2 = R2 = 4500 0,005 = 22,5 кН,
TIO = R,„= 500 0,005 = 2,5 кН,
§ 2, Силы, линии действия которых пересекаются в одной точке [4,2,1,71
Записывается сумма проекций сил на оси координат
F, + F2cos60°-FJcos60°-- F4 - F5cos60°+F6cos60°= F
F2sin60°+FjSn 60° -- F, sin 60°-F6 sin 60° = F,
Подставив сюда числовые данные, получим
7
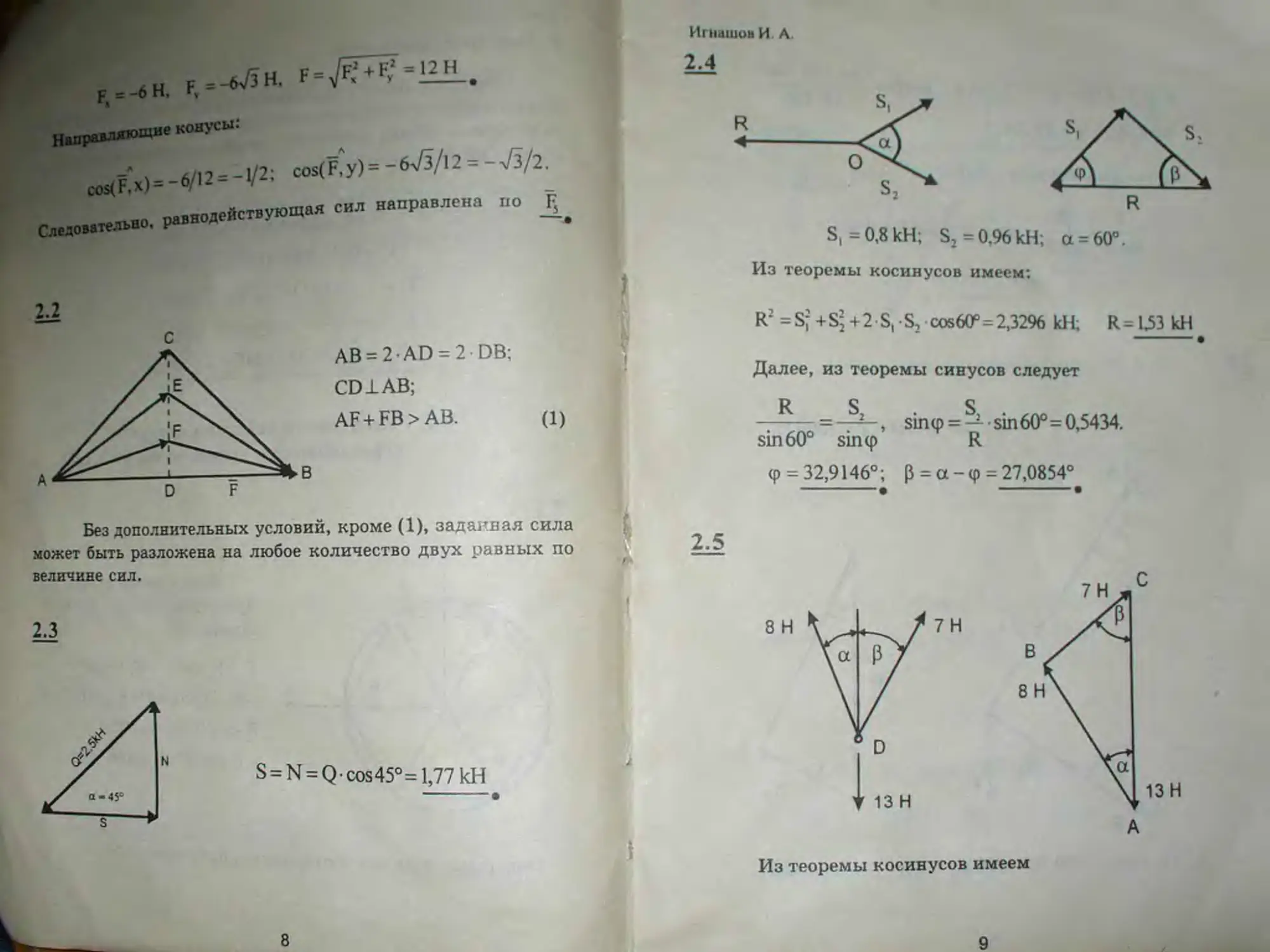
F* t= -6 H,
F =_дЛн. =Lr2L
Направляющие кояусы:
мЫ-МУ-Ч* «Лу)--675/12^ '-’Л-
AB = 2 AD = 2 DB:
CD1AB;
AF+ FB > AB.
Без дополнительных условий, кроме (1), заданная сила может быть разложена на любое количество двух равных по величине сил.
2.3
S = N = Qcos45°=1,77 кН
(1)
8
Игнатов И. А.
R2=S;+S=+2 S,-S, cos 6(У = 2,3296 кН; R=L53kH ---------------------------------------------•
Далее, из теоремы синусов следует
—-—=~_, sin<p=— sin60°=0,5434.
sin 60° sinip R
<p = 32,9146°; p = a - <p = 27,0854° -----------, --------------
2.5
A
Из теоремы косинусов имеем
9
2.6
49 + 169-64
7! + 132_2-713 c0SP’ cos0= 14 13
= 0,8462; £12^2042;
Из теоремы синусов следует
_7_ = JL, sina = ^sin₽ = °-4663;
sin a sin P
a = 27,7957“ __________
a=30°,P = 60°,P = 1000H.
Ипшшов И. А.
2.7
QV
Рассматривается равновесие узлов В, F, N.
а)
-S, cos45°+S2cos45°=Qi S, sina-Q = 0.
Откуда: S, = S2 = 707 H.
6)
-S1-S2cosp = 0,-S2sinp-Q = 0. Откуда: Sj=-1154H, S,=577H
в)
S,+S; cosa = 0, S, sina-Q = 0.
Откуда: S2=U54H, S, = -577 H
..р
Рассматривается равновесие узла В. i;.sina-i; sina = O. i;.cosa+T1cosa-P = 0.
Откуда: Т = "П = 7,5 кН *
2.9
cos a = 1,2/1,5 = 0,8;
sin a = 0,6.
Рассматривается равновесие узла С.
cosa = 0, -S2-sina-P = 0.
Откуда:
Si = -500 Н, S, = 400 Н.
12
Игнатов И. А
2.10
а = 60°, 0 = 135°, Р = 20Н.
Рассматривается равновесие узла В.
- Т cos 45°+ТА • cos 60° = 0, Тс • sin 45°+ТЛ sin 60°-Р = 0.
Откуда: Тс = 10,35 Н; Тд = 14,64 Н
2.11
лУ
а = 135°, р = 15°, Р = 2 кН.
Рассматривая равновесие узла В.
- Т cos45°-Q • sin 15° = 0, -Tsin45°-Qcosl5°-P = 0.
Откуда: Т = 1,04 кН; Q=—2,83 кН. -------------------------------
2.12
BC = BD = 11,65 м; АВ = 6,1 м; Р = 500 кН
tga = 11,65/ 6,1 = 1,9098;
cosa = 0,4639; sin a = 0,8859.
Рассматривается равновесие узла А.
-S,sna+SjSina=Q,
-S| CCsa-S cosa-P=Q
Откуда: S, -S, -539 кН.
13
' у в аВ-1.ае = ве = 7(|/2); + у=
N?> *° cos“’ Хё•sin“ ЛЕ
Е ' Рассматривается равновесие узла Е. р у> Р ,
2Qcosa = P. ^ + у^12<)’
PI
Откуда:
2.14
sinP = 0.6; Q = 20H, Р = 25 Н. Т = Р. Рассматривается равновесие узла В.
Q sinp-T sina = 0, Q-cosp+T-coso Р = 0.
Откуда: since = 0,8; Р = 1 =15 Н.
2.15
(Рисунок к задаче 2.14)
01=45°, р=6(Г, Q = 100H.
Рассматривается равновесие узла В.
Q sinP-T sina=0, Q cosP+T cosa-P = 0 T = 122H, P = 137 H.
14
Игнатов И. А.
2.16
Рассматривается равновесие узла А. -Р cos30“-Q, cos30°-Q, сое60“ =0, - Р cos60° + Q, coe60° -Q, «м30° - Р = 0.
Решая эту систему уравнений, получим:
Q =0, Q=-34,6kH. ------------------•
2.17
Последовательно рассматривается равновесие правого и среднего цилиндров.
NsinP-Tsina=0, -Ncosp+T-cosa-P = 0;
2 N ccsp-Q=0.
2 Р
Откуда: tgP=(— + 1) tga.
15
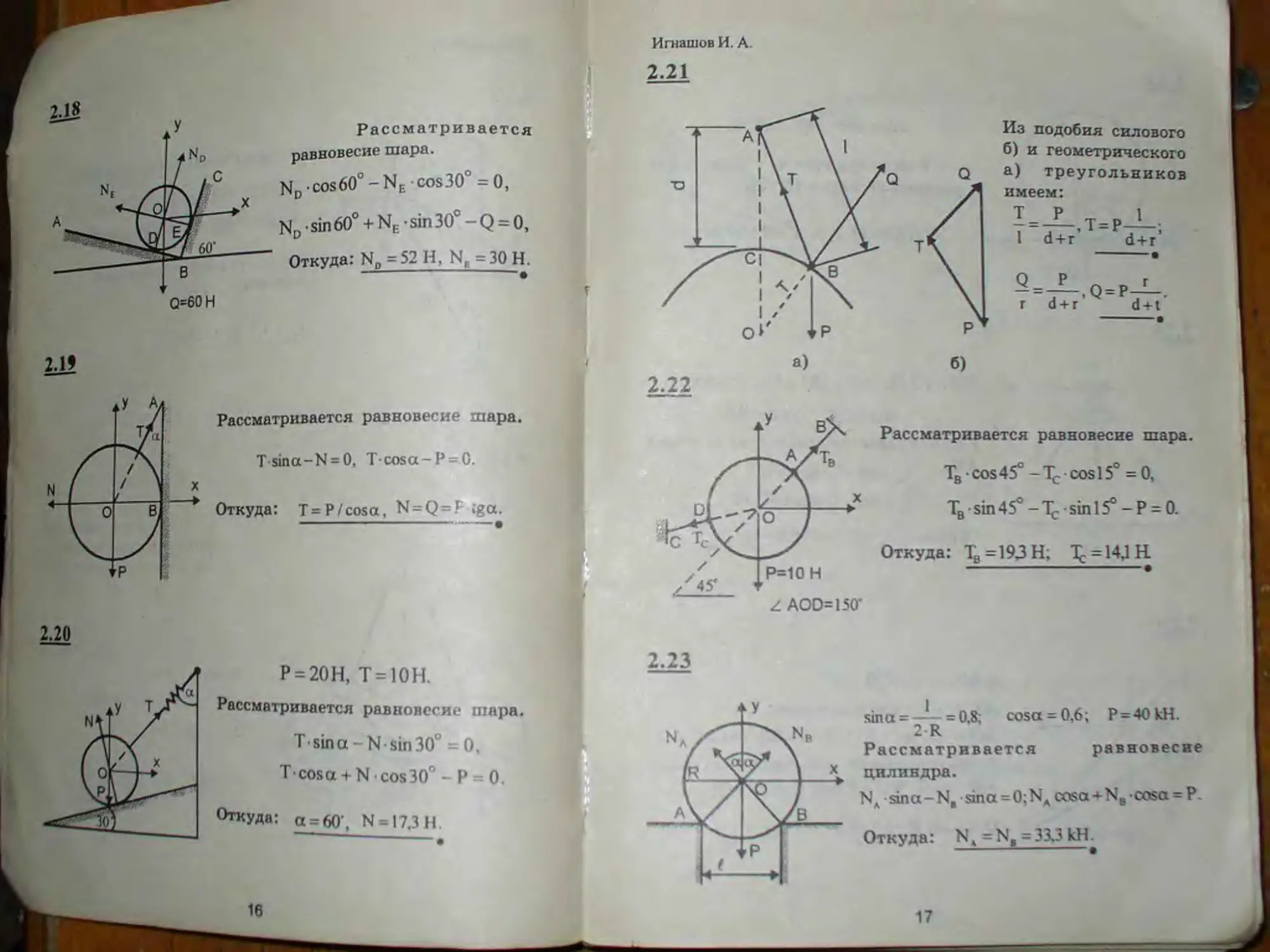
Q=60H
Рассматривается равновесие шара.
ND-cos60 — Necos30 =0,
ND sin 60° + NE sin 30° - Q = О, Откуда: N„ =52 H, N, = 30 H. --------------" - •
2.1»
Рассматривается равновесие шара.
Tsina-N = 0, T-cosa-P = 0.
Откуда: T=P/cosa, N-Q ! iga. -----------------------------•
2.20
P = 20H, T = 10H.
Рассматривается равновесие шара.
T sina-N sin30“ -- О,
T cosa+ N cos30° - P 0
Откуда: a = 60', NH7.3H
16
Игнатов И. А.
Рассматривается равновесие шара. TB cos45°-Тс cos 15° = О, TBsin45°-Tcsinl5°-P = 0.
Откуда: Тв=193Н; 1^=14ДН -------------------------•
2.23
sina = — =0,8: cosa = 0,6; P = 40kH.
2 R
Рассматривается равновесие цилиндра.
Na sina-N, sina=0;NA cosa+Ne casa = P.
Откуда: NA =Ng = 33,3 kH.
17
lli
AB=VR-BO’=30cm.
Рассматривается предельное равновесие катка (N-0).
p.BO = Q AB, Р = 11,54 кН.
2J5
ДВ = 1,2 Н; АО = ВО= I м, Р = 160 Н. sina = 0,6; cosa=0,8.
Рассматривается равновесие стержня АВ' TAsina-1^sina=0,
-l^-ccsa-T0-cosa+P=O.
Откуда: Т, =Т, =80/0,8 = 100 Н.
2.26
/ABC = ZACB = 30°.
АЕ = BE ; следовательно,
BD = DC и -R BD + P BE cos30° =0
Рассматривается равновесие стержня
АВ. -R BD + P BE cos30° = 0
Откуда: R=10 Н.
18
Игнатов И. А.
2.27
Рассматривается равновеси стержня АВ.
АК - ВК , BE - СЕ.
- R АВ cos45° + Р ~ cos45° = 0;
Откуда: R—25 Н.
R AC-R AC tga=0, а = 26,565°, ₽= 18,435°.
АС _ АВ sin0 sina’
АС=АВ-^=1.41м.
Tcosa-P = 0, Т= P/cosa = 56 Н
2.28
ВК = ВС = а.
tg a = 0,5; a = 26,565°; p=18,435°.
Рассматривается равновесие AB.
-R„ AB + P-4r c°s45° = 0.
в 2
Откуда: R„=31,5h. --------------•
Ra sinp-RB cos45° =0.
Откуда: RA=70,4H.
19
lga = l/3. a = 18,4349o;
В = 26,565°. AD = V10m
Рассматривается равновесие балки АВ. ,.3+Ro.sin4S,-2=0> R„=10.6_SI. cosa4-Rc-cos45°=0,Rx = ~7'9 У
В обоих вариантах рассматривается равновесие балки АВ a) tga = 0,5; a = 26,565°.
R„4-Psin45°-2 = 0, R,=0,71kH;
Ra cosa-p.coS45° = 0,RA=l,58kH. ---------------------------— •
6> AK1 = AC2+KC!+2ACKCcoS45°, AK = V10
20
Игнатов И. Л.
КС ЛК
s'na sin45°
sin a = 0,3162; a = 18,4349°
RB sin450 4-P 5014^ 2=0, RB = 1 кН;
RAcosa-Pcos45°-RB Cos4$“ = 0, RA=2J4kH.
2.31
В обоих вариантах рассматривается равновесие балки АВ
F sin60° 3-R -2 = 0, R =39 кН. с _£_____е
АК2 =ВК2+АВ2-2 ВК АВ cos60°, AK = V7.
—=-^-, sina = 0,6547; a = 40,8934°. sin a sin 60°
Fcos60°-RA cosa = 0, RA=19,8kH.
6)
R 2-Fsin60°-3 = 0, c
Rt = 39 кН, ---------•
Ra = 19,8 кН.
21
Рассматривается равновесие рамы ABCD.
Rd 2а-Р а=о, rd = р/2;
К.=«+Р2=Р^,
22
2.36
Последовательно рассматривается равновесие узлов А, В, С, D. Например,
23
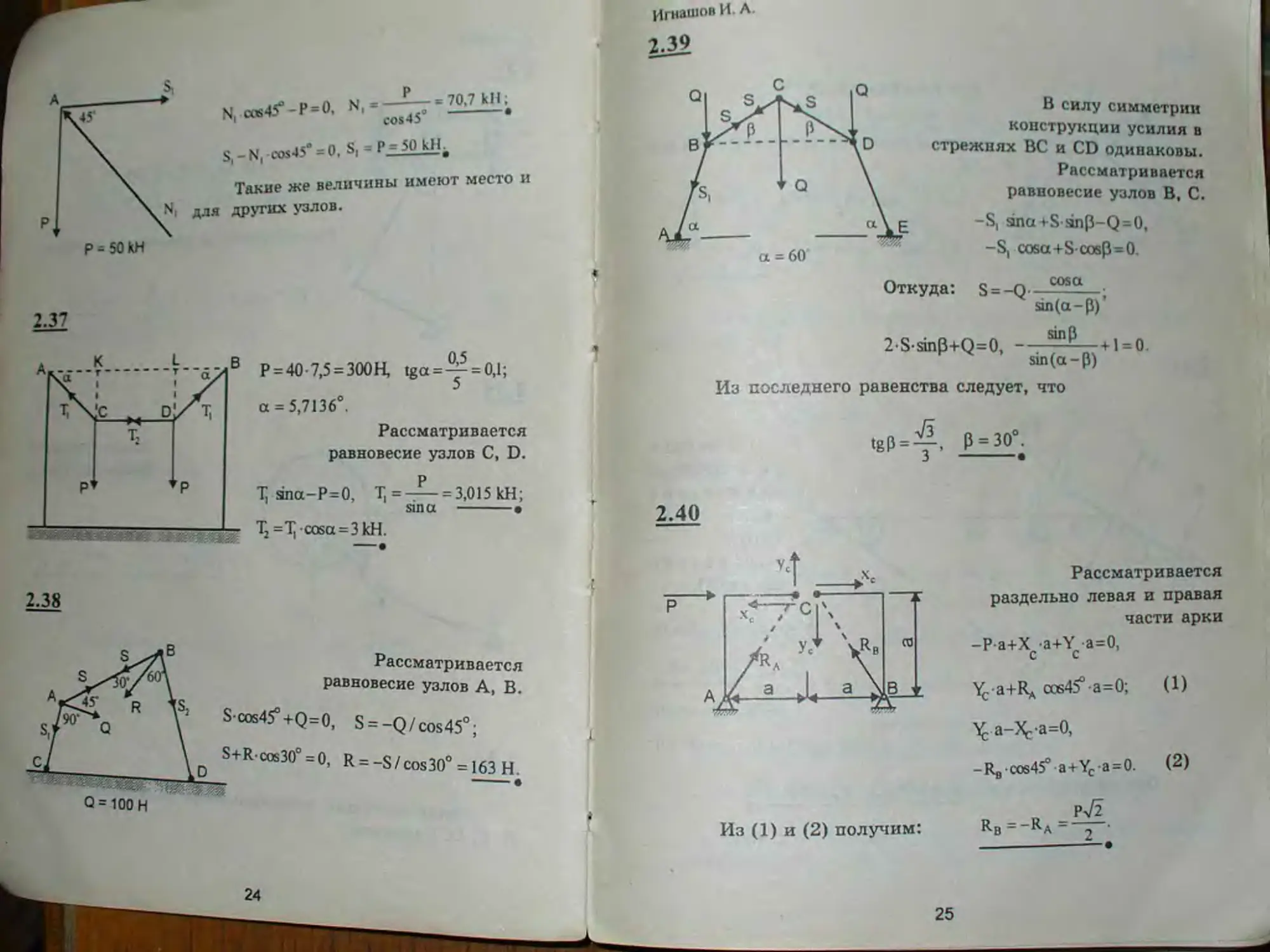
N, а»45“-Р = 0.
S,-N, «»45" = 0. S^PxSOkHi, Такие же величины имеют место и других узлов.
2.37
Р = 4О-7,5 = ЗООН, tga=y=0,l; a = 5,7136°.
Рассматривается равновесие узлов С, D.
TJ sna-P=0, Т,= — = 3,015кН; sin а ---------------------•
T2=i;-cosa = 3kH.
2.38
Q = 1OOH
Игнатов И. А.
2.39
а = 60
В силу симметрии конструкции усилия в стрежнях ВС и CD одинаковы. Рассматривается равновесие узлов В, С.
-S, япо+S anp-Q=0, -S, cosa+S cosp=0.
Откуда: s = -Q—cosa sin(a-P)
2SsinP+Q=0,------—+ M
sin(a-P)
Из последнего равенства следует, что
tgp=Y, р = зо<‘.
2.40
Рассматривается раздельно левая и правая части арки
-Р-а+Х а+Y а=0, с с
^•а+Кд cos45° a=0; (1)
\.а-Х:-а=0,
-Re cos45° a+Yc а = 0. (2)
Из (1) и (2) получим:
25
ill
AD=DB-BE=AB/2, tg|3 = O5; cosP = 2/V5 Рассматривается равновесие балки
АВ.
-Рcosot+R. АВ = 0, Rc=l>'"^_:
•JiO RAcosp-Pcosa=0, R4 = P-—.
a -
Сначала рассматривается равновесие D балки AB, затем равновесие балки CD.
N-AB/2 - P-AB = О,
N = 2P, RA = P;
NDK-Rt.3.a=0, N cos60’-Ro cos30° = 0. Откуда следует, 4T0 R,M-P/^, R^-P/./i
26
Игнашоп И. А.
2J3
Рассматривается раздельно равновесие частей арки ДР BEF, CFG. DG.
- X,+ Ra cos45°+P=0, Xe-Xf=0, yE+RAcos45‘=0; -УЕ-УР + К0 =0, (1)
УЕа-Ура=0;
XF-XG=°, Xo-RD cos45°=0,
V F + ya + Rc = 0, Уоа-Ура=0; -V0+RD cos45° = 0. (2)
Из уравнений (1) и (2) следует, что
XE = XF=X0=X, yE=yF=y0=y;
кроме того, -XG = Уо; следовательно, Y = X.
Из первой пары (1) имеем:
У Е +ХЕ = Р, тогда X=Y-P/2i (3)
Подставляя (3) в (1) и (2), получим
Ra =-рЛ/2, Rb = P, Rc = -p. Rq = P^/2-
Знак (-) говорит о том, что направление реакции противоположно изображенному на рисунке.
27
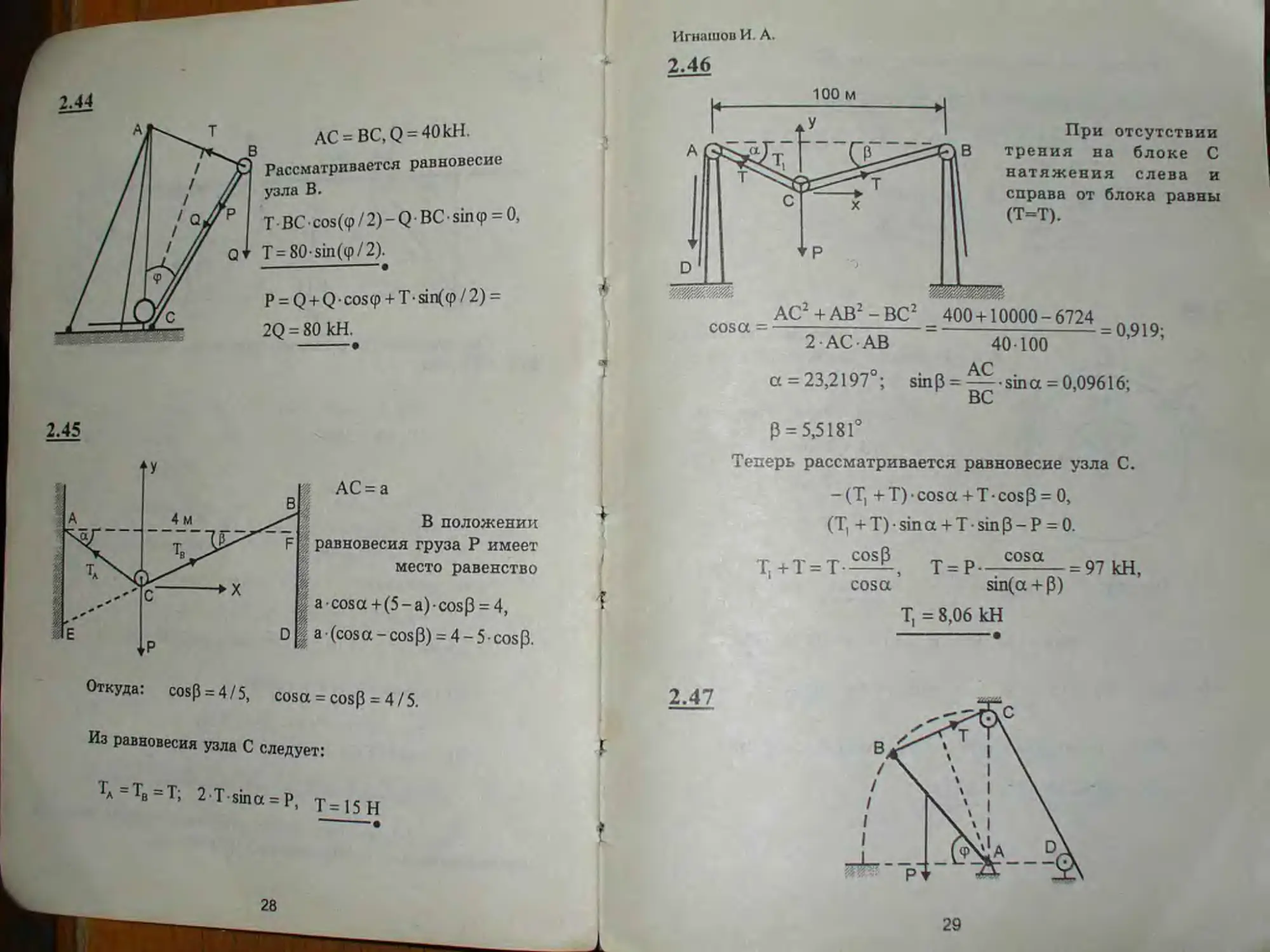
2.44
AC=BC,Q = 40kH.
Рассматривается равновесие узла В.
TBCcoS(<p/2)-QBCsinq> = 0,
Т = 8O-sin(cp /2).
-------------
р = Q + Q-coscp + T-sin(cp / 2) =
2Q = 80 кН. ---------•
2.45
АС = а
В положении равновесия груза Р имеет место равенство
acosa+(5-a)cosP = 4, a (cosa-cosP) = 4-5 cosP.
Откуда: coSp = 4/5, cosa = cosp = 4/5.
Из равновесия узла С следует:
Т*=ТВ=Т; 2 T sina = P, т=15н
26
Игнатов И. А.
2.46
При отсутствии трения на блоке С натяжения слева и справа от блока равны (Т=Т).
cos a =----------
2 AC АВ
АС2 + АВ2 - ВС2 _ 400-ь 10000- 6724 _ 0 9)9.
40 100 " ’ ’
а = 23,2197°; sinp = — sina = 0,09616;
ВС
p = 5,5181°
Теперь рассматривается равновесие узла С.
-(Т, + T)cosa +Tcosp = 0,
(Т, + Т) sin a + Т sin р - Р = 0.
т+т = т.£^₽, Т = Р._2^3_ = 97кН, cosa sin(a + р)
Т, = 8,06 кН
2.47
29
Рассмотри веется равновесие рамы Л1
Т АВСОМ45°-Ф/2)=Р АВ'2 СО5Ф.
Р яп(?0*-ф)_- в сп(45° - ф/2)
2 cos(45° - Ф ' 2)
г =70,7 н пр"ф = °’
Т„ = О при Ф = 90°
2.48
Рассматривается равновесие дуги АСВ вместе с грузами Р, и Рг.
Р, R sin<P| -Р2 R sinip, = 0,
АВ = R • (<р, +ф2);
sincp, -2-51пфг =0,
2 = ф, +ф.
Откуда: tgq,, = -^1- = 0,5741;
2 +cos 2 -------•
ф; =J9,86°; 2рад = 114,59°; <р, = 114,59°—29,86° = 84,73°
-N, МВФ, +N: явф2 = о, N, coscp, +N2 .coS(p2 - Р, - Р; = 0.
Решая последнюю систему уравнений, получим 4=0.092 14; N2=1,73h.
30
И г на шов И. А.
В положении равновесия кольца Л момент сил относительно точки О равен нулю.
Р R sin ф - Q • R созф /2 = 0.
_ Ф Q
Откуда: sin— = —— <1, ф = я.
2.50
L = АВ = 2 R созф.
В положении равновесия кольца В момент сил относительно точки О равен нулю.
Т R sin9-P L sin9 = 0,
Т-2 Р созф =0.
к • 1
Откуда: cos(p =------------<1.
? 2 (k R-l Р)
2.51
о
31
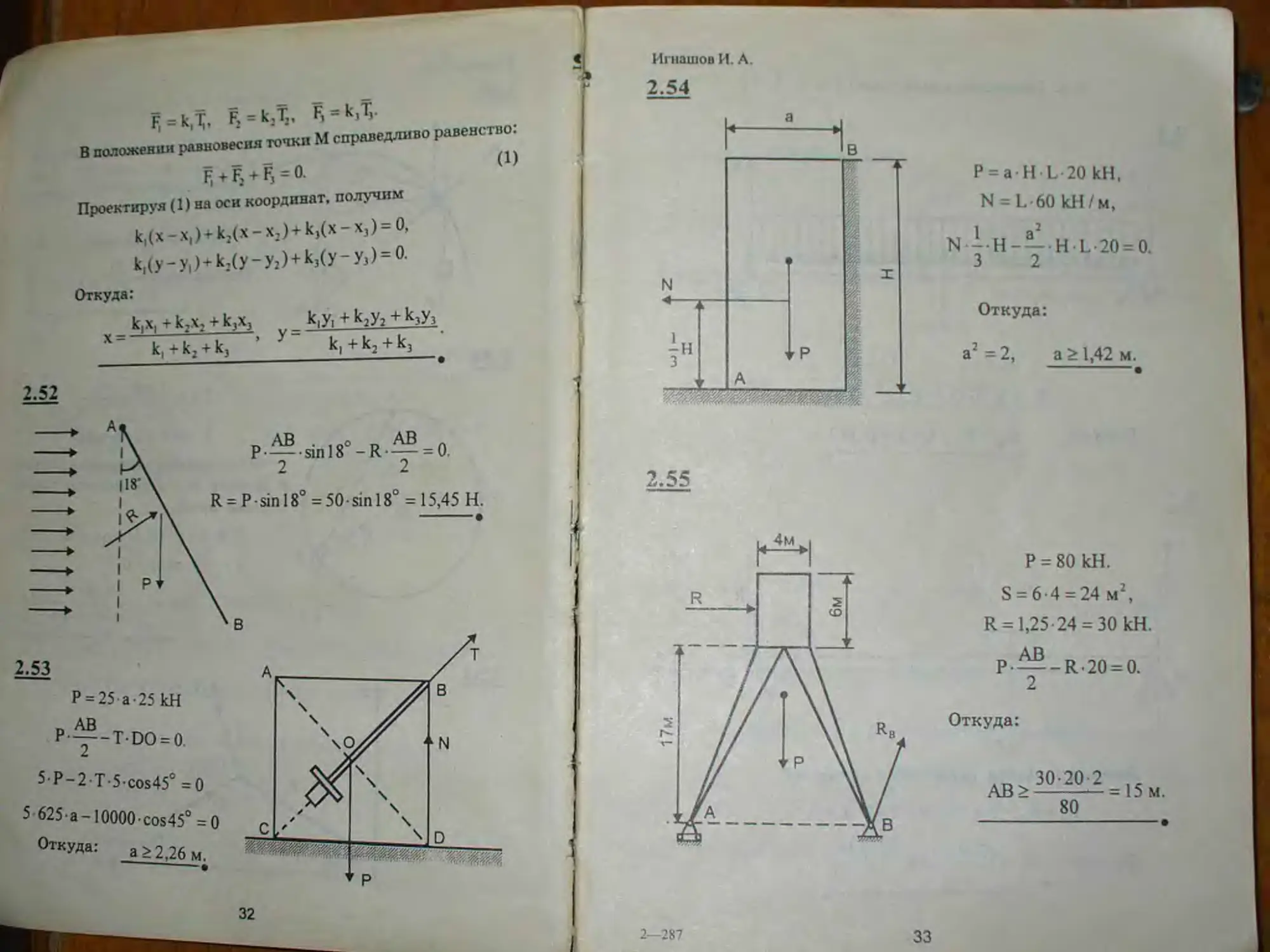
^ = кД, Vk.T,, Е-кЛ
В положении равновесия «ЯКИ М справедливо равенство:
f, + f2 + f, = o. (1)
Проектируя (1) на оси координат, получим k,(x-x1)+k2(x-x2)+k,(x-x2) = 0, k,(y-yl)*k2(y-y2)+kJ(y-y)) = 0-
Откуда:
k,x,+k2x2 + k2x, к,у,+к2у2 + к]у1 Х= k,+kj + kj ’ У k.+kj + k, --------------------------------------•
2.52
Игнатов И. А.
2.54
Р = а Н L 20 кН,
N = L 60 кН/м,
1 а2
N —Н-— Н L-20=D.
3 2
Откуда:
а2 = 2, а > 1,42 м.
2.55
Р = 80 кН.
S = 6-4 = 24 м!, R = 1,25-24 = 30 кН.
Р—-R20 = 0.
2
Откуда:
АВ>
30-20 2
80
= 15 м.
2-287
33
§3,п.Р—
Откуда:
АВ = I Q = Р1-
Rt + R, = Q, R: 1-Q1/2 = O.
R,=R, = Q/2 = pl/2
Рассматривается равновесие балки АВ
R, + R,-P = 0, R:l-p.x = 0.
Откуда: R2 = p.x> р -р *~х
34
Ишашов И Л.
3.3
3 4
Q
АВ = 1 м, АЕ - 1 /4 м, АК = 0,5м, Р = 12011, Q = 20 Н.
в х Рассматривается
* равновесие стержня АВ
Tc+Td-P-Q = O, Td1-Q 0,5-Р 0,25 = 0.
Откуда: Тс = 40 Н, Тс = 100 Н.
Рассматривается равновесие балки АВ
Ya+Yb=3, YB-4-1(1 + х)-2х = 0.
Откуда: YB = 1 кН, х = 1 м.
Рассматривается равновесие вала АВ Y*=Yb
2Уд-10 = 0,
Y, 300 - Р, -205 - Р, • 95 - Р, (300 - х)
Откуда: YA = YB=5kH, х = 139см.
3.6
АС/АВ=п
Усматривается равновесие крана АВ
Откуда Р' Р = °’ Y“ ЛВ’Р АВ/2^1>, ЛС-0. ^куда получаем:
Y.
'ь - 10 (3+4п) кН,
Ya - 10 (7 - 4п) кН.
36
Игнатов И. А.
3.7
F
Р
АВ = Юм, АС = 2 м, АЕ = Зм, AF = 5m, DF = 3m,
Q = 3 кН, Р = 8 кН, Р, =2 кН.
Рассматривается равновесие балки АВ
RC + RD+Q-P-P, =0, RD-5-P,-3-P 1-Q 2 = 0.
Откуда имеем: RD =4 кН, Rc = 3 кН
3.8
АС = х/2, AD = (x-20) см;
Р = 150 Н,
Q = 500 Н,
Р, = 100 Н.
Рассматривается равновесие балки АВ
Р х-Р, х/2-Q (х-20) = 0.
Откуда:
X = 25 см. ---------•
37
20
Пусть ME—х, тогда
15.x+10(1-x)+(2-x)-10(3-x) = 0
20 (2+x)-20-(1 + x)-Откуда: x = 0.5 м;
следовательно. ^^М^^редина-АВ-
В
5н Пусть ЕС=х, тогда
2 (2-х) + 3 (1-х) + 6 (0,5-х)-4 х-5 (1 + х) = 0.
Откуда получим: х = 0,25 м; АЕ = 1,75 м
3.11
₽,l Р,
38
Игнатов И. А.
AD = 120cm, АС = 160 см, АЕ = 180см, AF = 200 см;
Р, = 160 Н. Р2 = 240 Н, Р = 320 Н
Рассматривается равновесие балки АВ.
Ya + Yc - р| - Ъ = 0, Yc • 200 - Р; 180 - Р, 120 = 0.
Откуда: Y = 790 Н, УЛ =-70 Н
3.12
ВС = 4 м, АВ = 0,5 м, CD = 2 м, Р = 40 кН, Q = 5 кН.
Рассматривается равновесие балки ВС
Y4-YB-P-Q = 0, Р 4 + Q-2-Y4 0,5 = 0.
Откуда: уд = 340 кН YB=295 kH.
3.13
а = 0,75 м; Р = 1,2кН.
Рассматривается равновесие балки АВ
УА-Р = 0, М-Ра = 0.
Откуда: Y. = 1,2 кН, М = 0,9 кН м ----------------------------------•
39
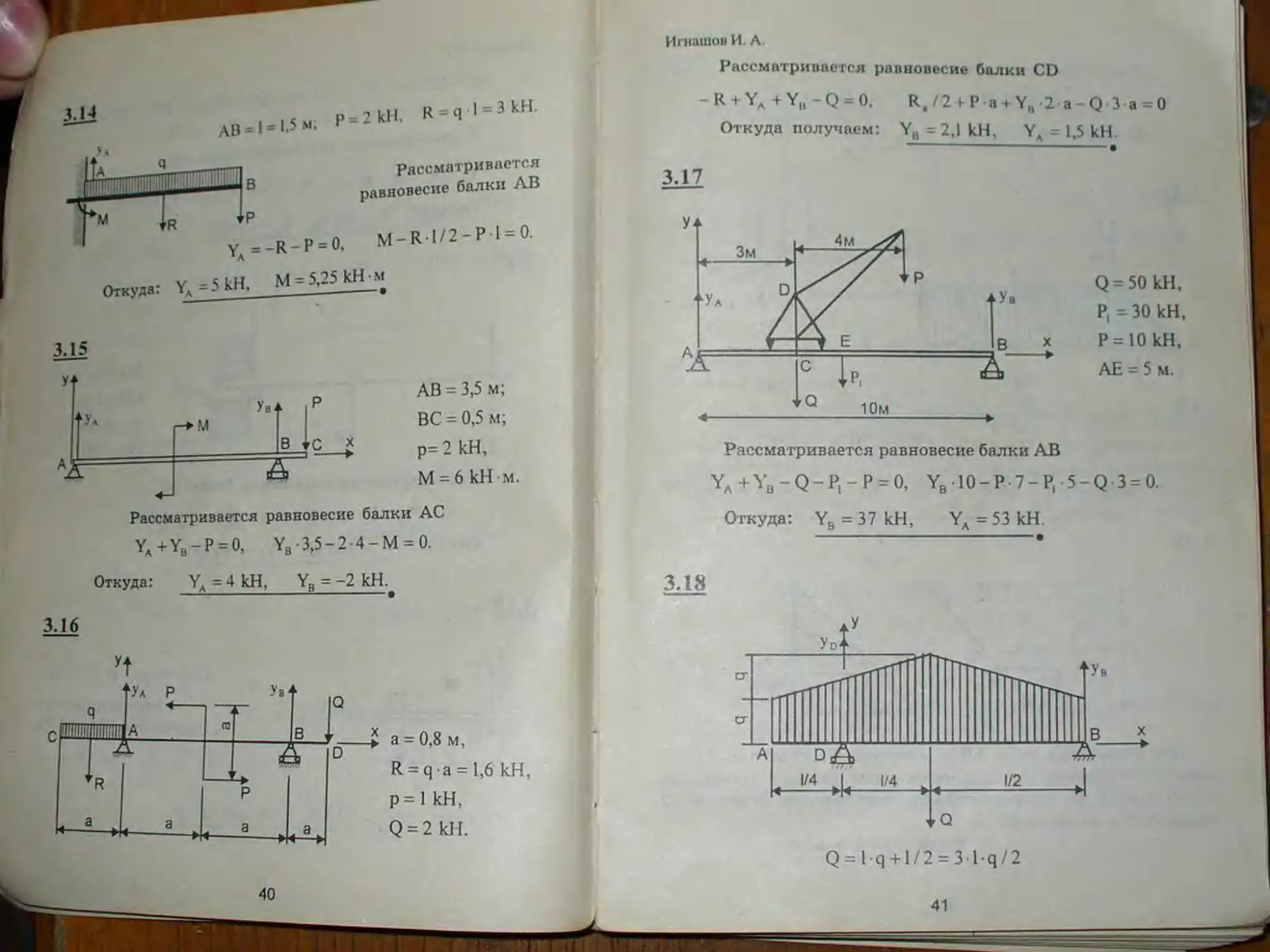
ави = |.5«; Р-2кН' R = 4 ’ = 3kH
Рассматривается равновесие балки АВ
. _ R-P=0, M-R I/2-P 1 = 0.
.. v -5 кН М = 5,25 кН м
Откуда- УЛ -э мь ______________
У|
АВ = 3,5 м;
ВС = 0,5 м; р=2 кН, М = 6 кН -м.
Рассматривается равновесие балки АС
Ya+Y„-P = 0, Yb-3,5-2-4 - М = 0.
Откуда: YA =4 кН, Y0 - -2 кН.
3.16
yt
а = 0,8 м,
R = qa = l,6kH,
р = 1 кН,
Q = 2 кН.
40
Игнатов И. А.
Рассматривается равновесие балки CD
-R + Ya +Y„-Q = 0, R./2eP a + Y„ 2 a-Q 3 a = 0
Откуда получаем: YB = 2,1 kH. YA = 1,5 kH
3.17
Q = 50kH, P, =30 kH, P = 10kH, AE = 5 M.
Рассматривается равновесие балки AB
YA+Ya-Q-P,-P = 0, YB10-P-7-P,-5-Q 3 = 0.
Откуда: YB = 37 kH, YA = 53 kH.
41
в4=0 y„+y.-Q = 0' y’
— 0.5ql; Yq~‘L.
Откуда:
Ус
q
С____*
P = q b, Q = q-a/2, DB = a/3.
Рассматривается равновесие балки AC
Y + Yc - Q - P = 0> Ycb-Pb/2 + Qa/3-0
v 4 <1 h —) H Ya = — (3 a + 3 b + —) H.
Откуда: Yc=- (3 b-y) H, is 6 ' b
3.20
A HA
Для равновесия щита AB необходимо и достаточно, ” тобы равнодействующая сил давления воды на щит проходила через точку О; следовательно, последняя отстоит от поверхности воды на 2Н/3.
Тогда H = 3 h sina ----------------•
42
Игнаши» И. А.
CD = 50 см,
СВ = 7 см,
Р,=10Н,
S = k <(О,ОЗ)2 м2,
100 л (О.ОЗ)2 1100 = 3110 н.
Рассматривается равновесие рычага CD Q 7-Р, 20-Р 50 = 0.
Р - 430 Н
3.22
Пусть Р - вес плиты, длина которой равна 21.
Рассматривается предельное равновесие
выше лежащей части плит, начиная с первой.
Очевидно, что хх= 1. Далее
-Р х2+Р(1-х2) = 0, х2 =1/2;
-Р(х2+х3) + Р(1-х2-х3) + Р(1-х3) = 0,
х3 = 1/3.
Легко видеть, что х4=1/4, и так далее.
Таким образом, предельные длины выступающих частей, начиная с верхней, образуют ряд:
111
2’3’4’
(11 = 1,2, п
)
43
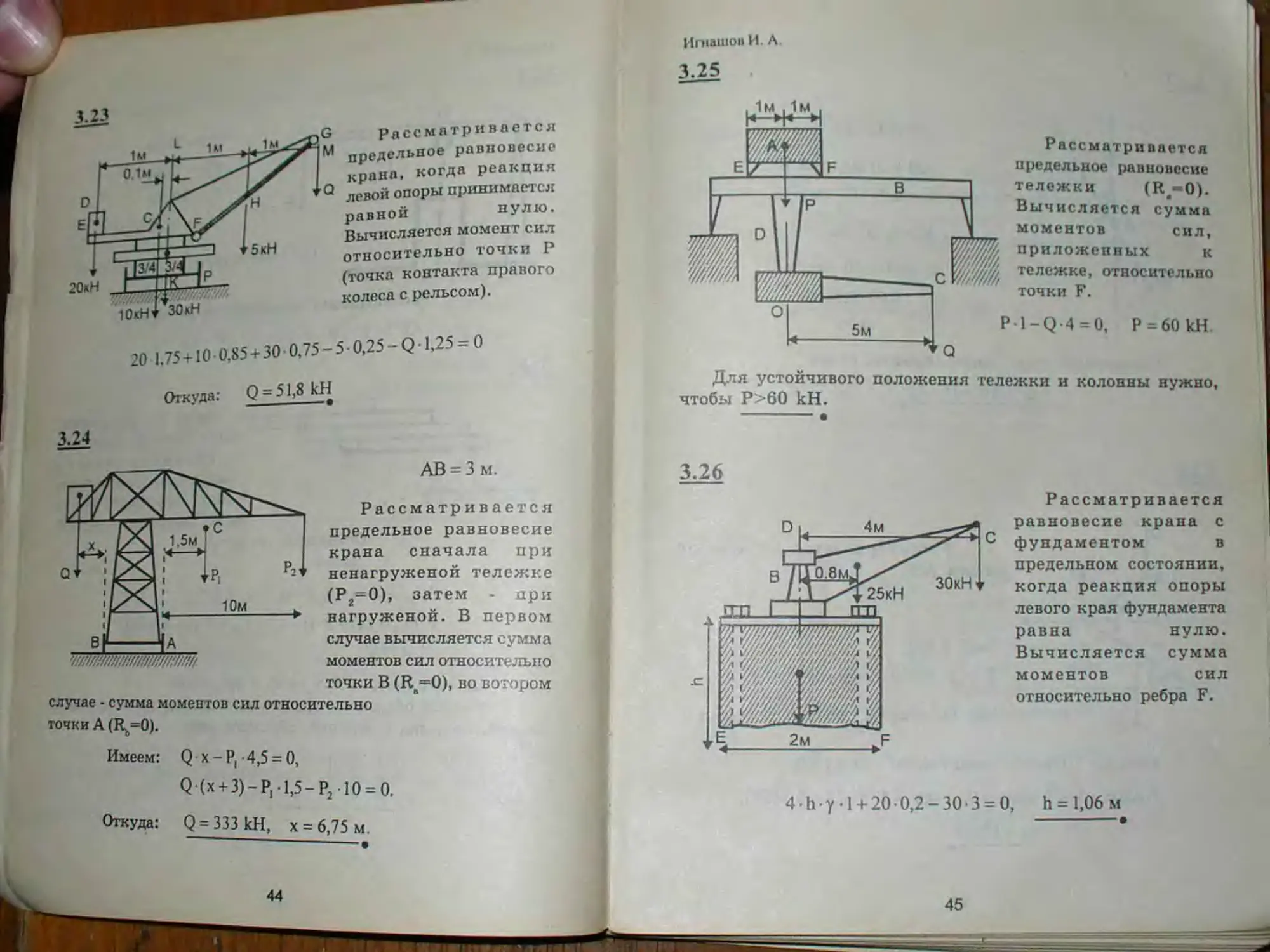
рассматривается предельное равновесие крана, когда реакция левой опоры принимается разной нулю.
Вычисляется момент сил относительно точки Р (точка контакта правого колеса с рельсом).
20 1.75+Ю 0,85 + 30 0,75 - 5 • 0,25 - Q • 1,25 = 0
Откуда: Q - 51.8 кН
3.24
АВ = 3 м.
Рассматривается предельное равновесие крана сначала при ненагруженой тележке (Р2=0), затем - при нагруженой. В первом случае вычисляется сумма моментов сил относительно
точки В (Rn=0), во вотором случае - сумма моментов сил относительно
точки А (1^=0).
Имеем: Q х-Р, -4,5 = 0, Q (x + 3)-P, 1,5-Р2 10 = 0.
Откуда: Q = 333 кН, х = 6,75 м
44
Игнатов И. А
3.25
Рассмотри пается предельное равновесие тележки (R.-0). Вычисляется сумма моментов сил, приложенных к тележке, относительно точки F.
Q
Pl-Q4 = 0. P = 60kH
Для устойчивого положения тележки и колонны нужно, чтобы Р>60 кН.
3.26
Рассматривается равновесие крана с фундаментом в
предельном состоянии, когда реакция опоры левого края фундамента равна нулю.
Вычисляется сумма моментов сил
относительно ребра F.
4hy-l + 20 0,2-30-3 = 0, h = 1,06 м
45
F = 0,02 mH;
F
Суммарный
дВ=|Осм. <p-30 к = 0,05 мН см,
М = ка
F sin30° 10-ка°=0, 0,02 0,5 10
rf ° — —~~~~~~~~ ~
а " 0,05
угол, таким образом, будет а°= 30°+2°= 32°
3.28
Рассматривается равновесие рычага АВС,
Т-3 Р = 0, 2P-2AB/2cosa + PAB/2-
cos(60° +a)-T AB cos(60° s a) = 0;
4 cosa-5 (cos60° cosa + sin60° sina)= 0, 3cosa-5-s/3 sin a = 0, tga = 3/5-Л = 0,34641,
a = 19°06'
Игнатов И. А.
АС = СВ = а, ОС = Ь;
Q = 2pb, Q, = 4ра
Рассматривается равновесие стержней; вычисляется сумма моментов сил, приложенных к стержням, относительно точки О.
Р, (acosa + b sinal + Q, b sina +
Q b sin a „
-----------P; (а -cosa-b sina) = 0.
„ . а P, - P.
Откуда: tga =-*-1-.
b P, +P2 + p-(4 a + b)
3.30
Рассматривается равновесие моста и двух брусьев CD с двумя противовесами Р. Вычисляется сумма моментов сил относительно оси, проходящей через опоры Е.
30-2,5 + 2-4(5-4)-2-р(8-5) = 0,
Р = 13,83 кН. ------------•
47
Игнаи*ов И. А.
0/2*
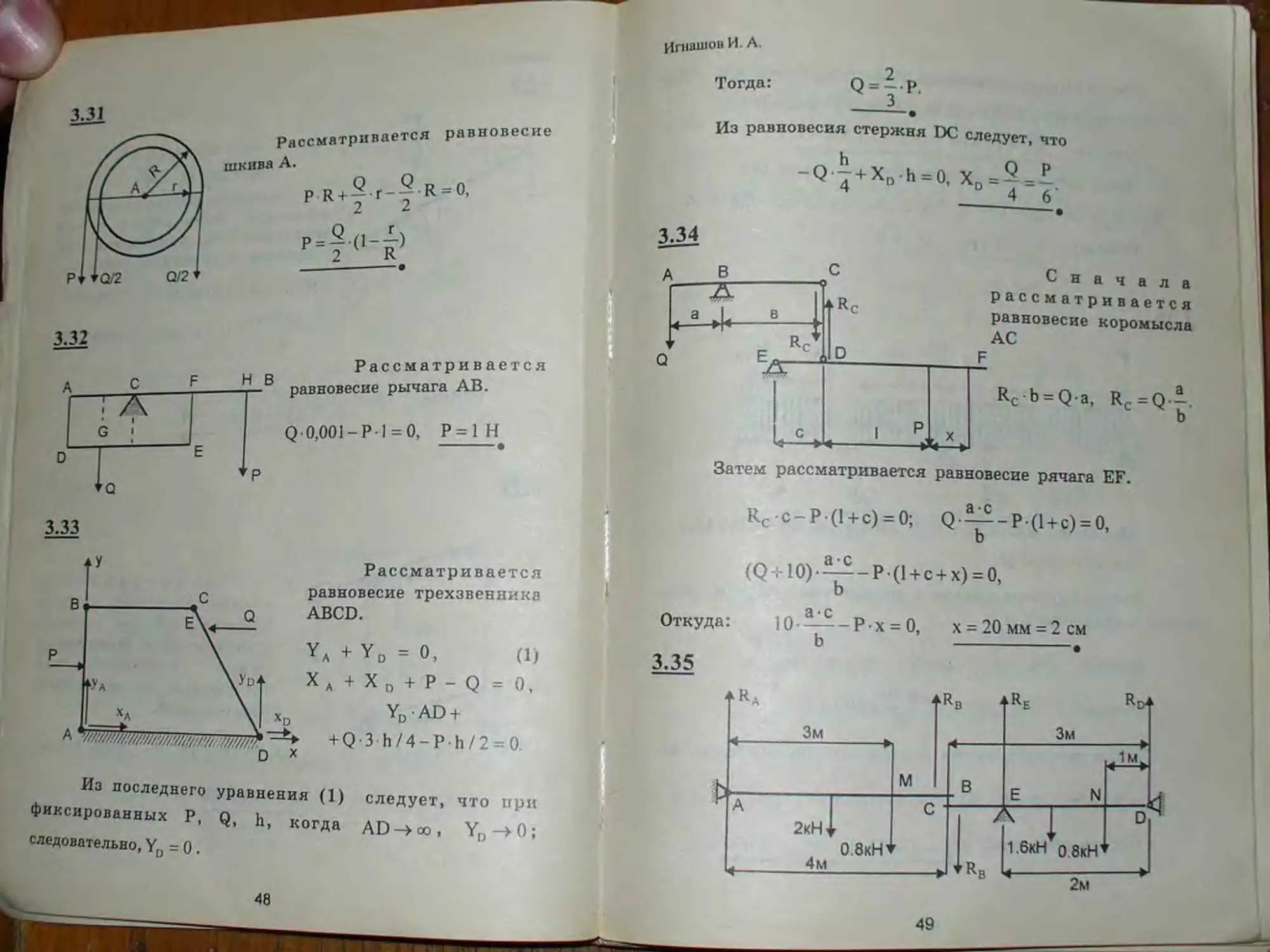
р R + j Г-j R-0, P.S-O-j.
Рассматривается равновесие шкива А.
132
Рассматривается равновесие рычага АВ.
Q0,001-P 1 = 0, Р = 1 Н
2
Тогда: Q = —.р
-----
Из равновесия стержня DC следует, что
-Q ^+XD.h = O, XDXl.
_____4 6
Сначала рассматривается равновесие коромысла АС
Rcb = Qa, R =Q.l b
Затем рассматривается равновесие рячага EF.
Откуда:
3.35
Из последнего уравнения (1) фиксированных Р, Q, h, когда следовательно, YD = 0.
Rc с-Р (1+с) = 0; Q.5_£_p.(1 + C) = o> ь
(Q ;-10)~-Р(1 + с+х) = 0, О
10 —
следует, что при
AD -> со , YD —> 0;
-Рх = 0,
х = 20 мм = 2 см
Зм
1 6кН 0 8кН
2м
2кН
О.ВкН 4м_______
48
49
„ртся рмвояесяе балки АВ
Скачал» |М«»*тр“ 22-0
_ +R -г-м=л к,,-’-0'8 3
‘ \ = 1,6кН^И^.
Откуда' ^Z^^^e“K-,CD
Затем рассматр .2+1,6-1,5 + 0,8 1 = 0.
Re + R0-1.6-ft8-'.« = °- 16 3-RE 2+ •
Откуда: R -4 кН. Ru
АВ = 50м, BC = CD = 20m; P = q (a + b) = 4200 кН, Q = q b = 1200 кН
Сначала рассматривается равновесие участка г-л/га между шарнирами С и D.
Имеем: Nc + Nd-Q = 0, NDb-Q-| = 0.
Откуда: Nc =ND = 3^ = 600 кН.
Затем рассматривается равновесие участка моста АС.
Na+Nb-Nc-P = 0, NB a-Nc (a + b)-P (a + b)/2- 0. Откуда получаем: Nb = 378() N = 1020 kf]
Игнатов И. А.
Сначала рассматривается расновесие участка моста СА “В° R* ₽= Ю 20 = 200 кН.
Л| Ra+Rc-P = 0> RA.a_p.aZ2=0
L------------1д Откуда: RA = Rc = Юр
-Р
♦RB Rr>4 Р,= 40 20 = 800 кН.
|______а_____I rb+Rd-P|=0, RDa-P,a/2 = 0.
В ] ° °ТКУДа: Ro = RB = 400 кН.
Jp,
Затем рассматривается равновесие участка моста АВ
IIIIIIIIIIIIIHIIIIIIIIIIIIIIIIIll
Е р ..
Ra IQi q
в
’Rb
Q. --60 15 = 975 кН, Q2 = 15-45 = 675 кН.
Кв т Rh КА + RE - Q| - Q2 = 0,
R, 50-Qj-57,5-RB 65-Q, 17,5 +RA-15 = 0.
Откуда: Rh = 1607,5 кН; R„ = 542,5 кН
51
138
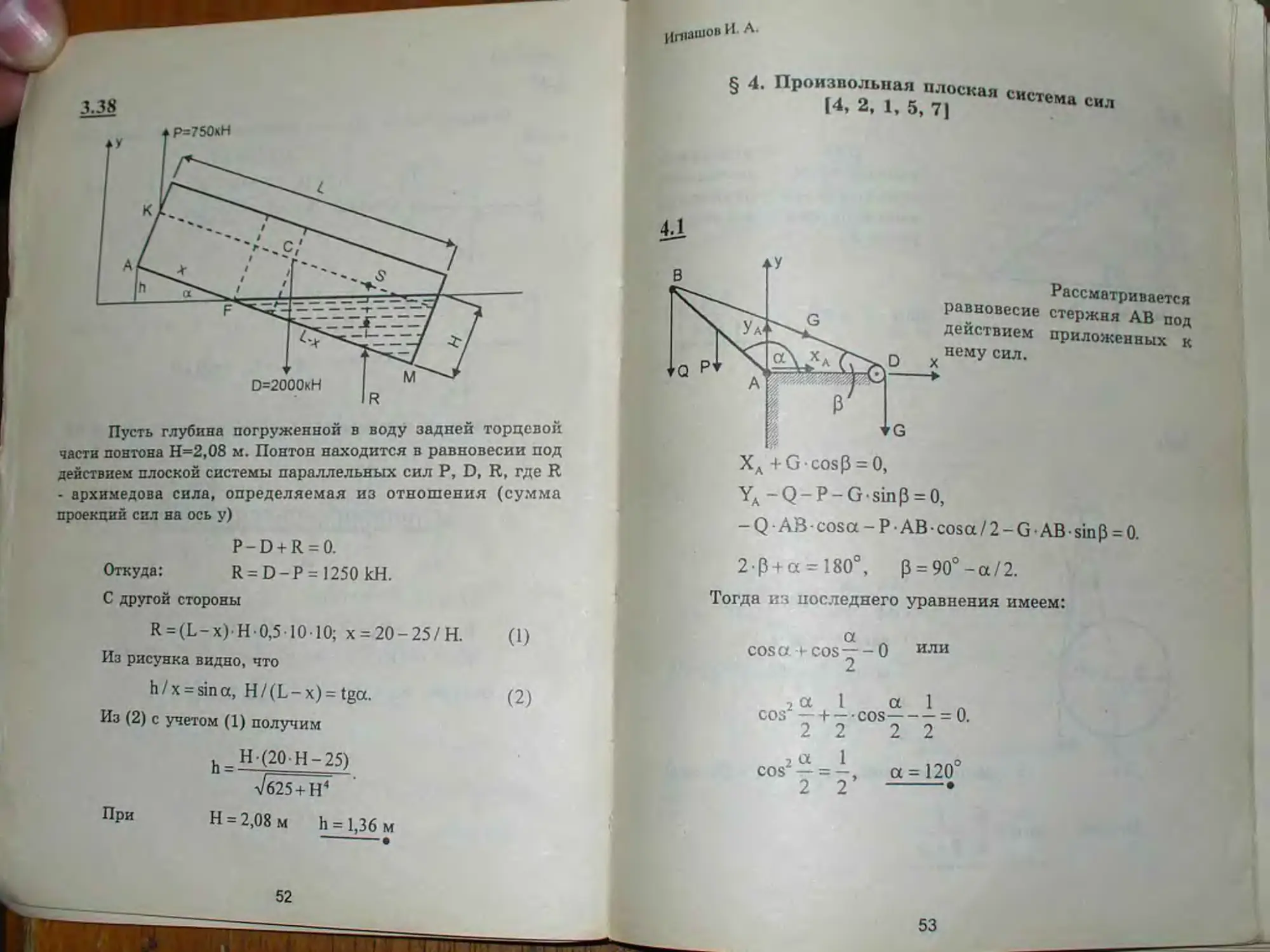
Р=750«Н
Пусть глубина погруженной в воду задней торцевой части понтона Н=2,08 м. Понтон находится в равновесии под действием плоской системы параллельных сил Р, D, R, где R - архимедова сила, определяемая из отношения (сумма проекций сил на ось у)
P-D + R = 0.
Откуда: R = D-Р = 1250 кН.
С другой стороны
R = (L-x)H-0,5I010; х = 20-25/Н. (1)
Из рисунка видно, что
h/x = sina, H/(L-x)=tga. (2)
Из (2) с учетом (1) получим
При
h_H(20H-25) /б25 + Н4'
Н = 2,08 м h = 1,36 м
52
ИПЙ'и““И А'
§ 4. Произвольная плоская система сил
равновесие действием нему сил.
Рассматривается стержня АВ под приложенных к
Ya -Q-P-GsinP = 0,
-Q АВ cosa-P AB cosa/2-G AB sinP = 0.
2P + a = 180°, p = 90°-a/2.
Тогда из последнего уравнения имеем:
a cosa + cos—- О
2
или
cos2
1
+ —-cos----
2
2
= 0.
cos2
a
2
£
2’
a = 120° -------•
53
4J
определения T достаточно уравнением относительно
Р-Х т=—— isina
4.3.
МА а . , х , ----= — = sin(<p + а).
ОМ ь
Tsin<|>-Psma = О,
Tcosq> + Pcosa-P-Q = 0. а . . .
- = sm(<p + a).
Р (sin <р cosa + sin a • coscp) = (Р + Q) • sin ф.
а P
Откуда sin<p =-
b P + Q
54
j4n>aut0B И A u
Рассматривается равновесие рычага. Для нахождения угла <р достаточно уравнения i моментов относительно точки В.
Р, Р, • ABsin45°-Q h-Pj ВС sirup = 0,
sintp =
Р, ABsin45° -Q h
P2 ВС
= 0.7072;
Ф, =45°, ф2 = 135°.
4.5
Сначала рассматривается равновесие храпового колеса
х0 + хА = о,
-q+y0+ya = o,
QaT2 + XaT1=0;Xa=q|.
Затем - равновесие собачки АВ
хв-хА = о,
Yd-Ya=0,
Т, h
YA a + XA h = 0;YA = Q—а-
55
Тогда
4.6
Рассматривается равновесие балки АВ, имеем очевидные соотношения
ы =Pcosa, NB = Psina;
2-----------------------
NB ~ sin(a+0) - Na •— cos(a + 8) = О, cos(2 a + 0) = О, 0 = 90 - 2 a
4.7
Рассматривается равновесие балки
RB cos30°-T= 0, RHsin30°+Rc-P = 0, Р DC cos60°-RB ВС = 0.
56
цщ»1В0» И Л
решая систему уравнений, получим
Ru = l73H- RC=513H, т. 150 н
балГи^аТРИВаеТСЯ ₽а»н°—
Rc cos30°- Rhcos30° = О, R1>-Rccos30o + Ru.sin30"_ -Р = 0,
Rd-BD-R,. ВС-Р АВ-
cos 60°/2 = 0.
Решая эту систему уравнений, получим
Rc = RD = 300 H, R = 200 H.
--------
Рассматривается равновесие балки АВ.
Rc cos 30° + R D • cos 30° - RA cos45° = О, Rc cos 30° - R., cos30° + Ra cos45° - P = 0, P AB cos45°/2-Ra AB = 0.
Решая ту , истему уравнений, получим
RA = 35,4 Н, Rc = 89,4 Н, Rp = -60,6 Н
57
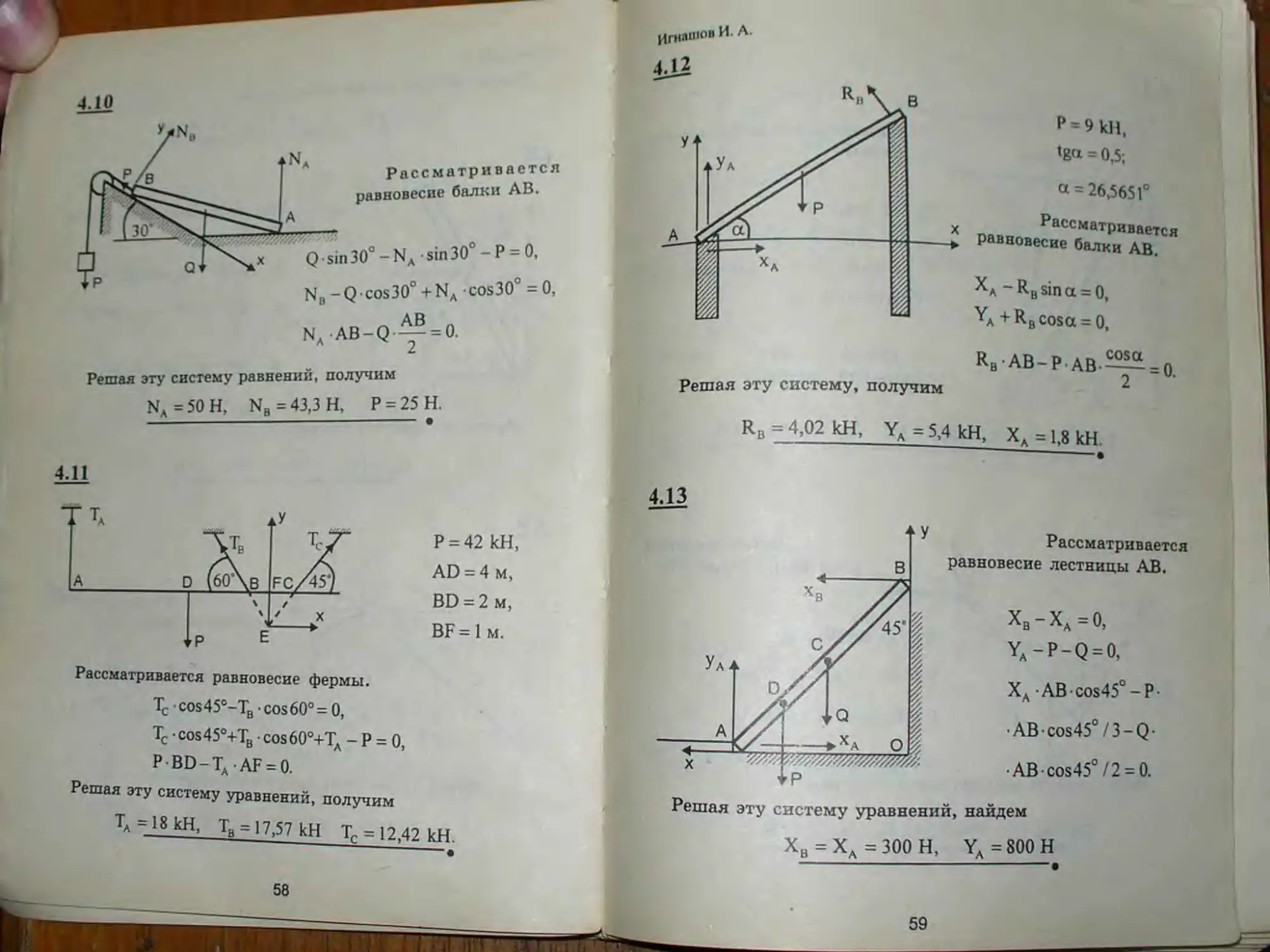
4.10
Рассматривается равновесие балки АВ.
Q sin30°-NAsin30°-P-0.
NB -Q cos30° +Na cos30° = 0, „ AB n
Na AB-Q — = 0.
Решая эту систему равнений, получим
Na =50Н, Nb=43,3H, Р = 25 Н.
Р = 42 кН, AD = 4 м, BD = 2 м, BF = 1m.
Рассматривается равновесие фермы.
Тс cos45°-TB cos60° = 0,
Тс • cos 45°+TB cos 60°+ТА - Р = 0, Р BD-Ta AF = 0.
Решая эту систему уравнений, получим
Т* ~_18кн. Та = 17,57 кН Тс = 12,42 кН.
58
ivm»№* и< A' 4J2
Решая эту систему, получим
₽ = 9кН, tga = 0,5;
“ = 26,5651°
Рассматривается Равновесие балки АВ.
ХА -RBsina = 0, YA+RBcosa = 0,
Rb-ab-pab~=o.
RB = 4,02kH, YA=5,4kH, XA=l,8kH --------------------------------•
4.13
Рассматривается равновесие лестницы АВ.
хв-хЛ=0,
ya-p-q=o,
XaABcos45°-P-ABcos45°/3-Q- АВ • cos45° /2 = 0.
Решая эту систему уравнений, найдем
XB = XA=300 H, Ya=800 H
59
Рассматривается равновесие лестницы.
Хд -Т cosP = 0, уд+T-sinP-P-Q = °'
Т АВ sin(p-a)-P AB cosa/2-
-Q AD cosa = 0.
Решая эту систему уравнений, получим
Т = 3,35кН. Хд =0,867 кН Уд =-0,0358 кН. _______________________________________•
4.15
У
Рассматривается равновесие балки АВ
х
ХА - G sin 30° = 0,
Ya + Gcos30°-P-Q = 0, Р AB cos45°/2+Q-
Q* 3 ABcos45°/4-G AB sin75 = 0.
ешая эту систему уравнений, получим
G = 146H, УЛ =173,5 Н, Ха=73Н
60
(<гяашов И
4J6
Рассматривается шлюпбалки. Равновесне
ХЛ + Ха = о,
Y*-Q=o, ~ХВ 1,8 — Q. 2,4 = 0.
Откуда имеем:
- -6,4 кН, Y. =4 8 км v . . ____________Л 4,8 Хд = 6,4 кН
З-ТЙЙЯ *
1,8м
4.17
Рассматривается равновесие крана.
XM+XN=0, yn-p-q=o, XM -5 + Q 5 + P 2 = 0.
Откуда получаем
XM=-38,8kH, XN=38kH, YN=50kH.
61
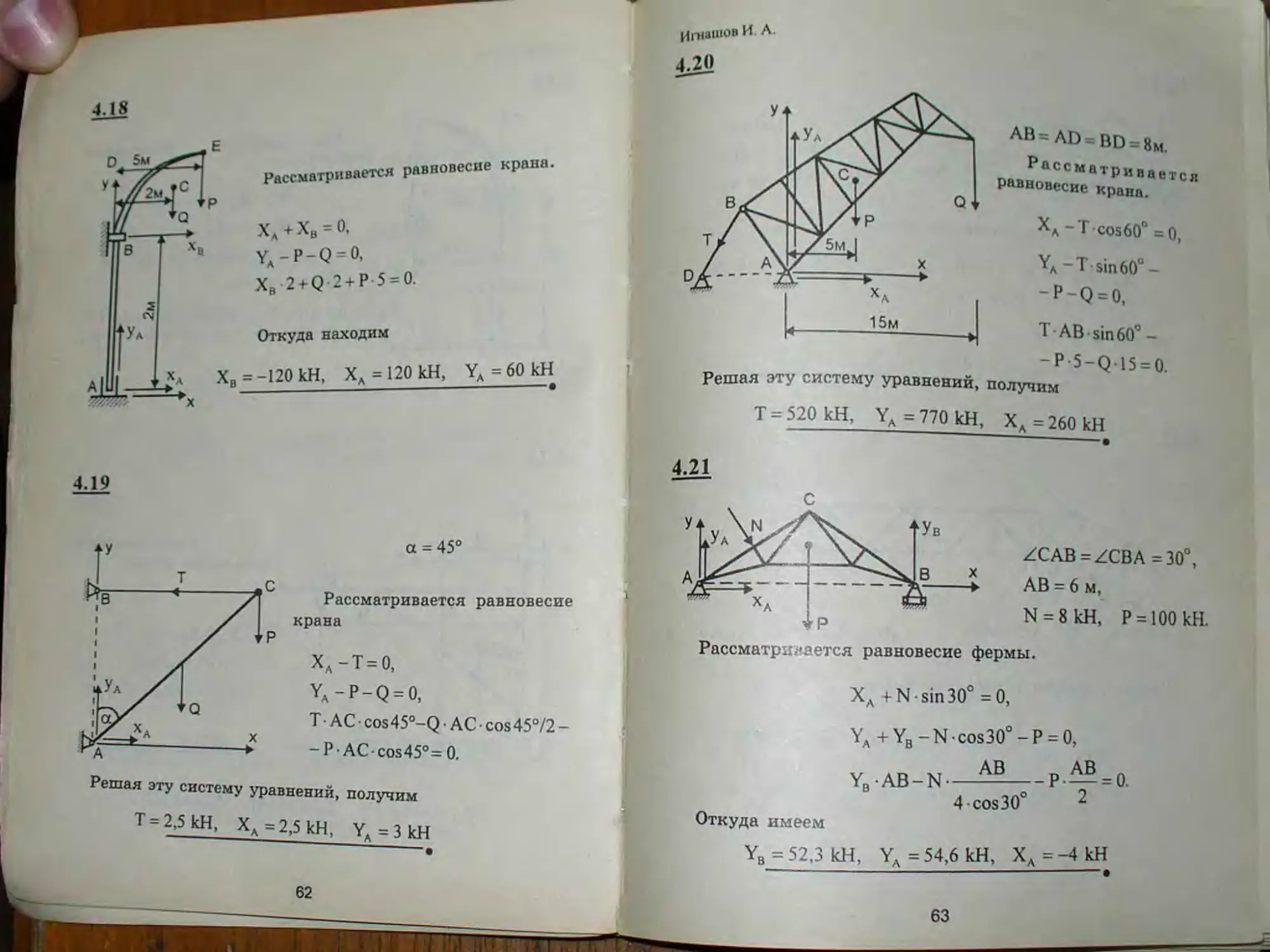
4Л8
рассматривается равновесие крана.
хд+хв = о,
YA-P-Q = 0, Х„ 2 + Q-2 + P 5 = 0.
Откуда находим
= -120 кН, ХА = 120 кН, Ул = 60 кН
4.19
а = 45°
Рассматривается равновесие крана
Хд-Т=0,
YA-P-Q = o,
Т AC cos45°-Q • АС • cos 45°/2 -
- Р AC cos45°= 0.
Решая эту систему уравнений, получим
Т = 2,5 кН, Хд-2,5кН, YA = 3 кН
62
Ненашев И
АВ= AD = BD = 8M. Рассматриваете равновесие крапа.
Хл -Т cos60° =0, Y*-Tsin60°--P-Q = O, Т АВ sin60°-
-Р 5-Q15 = 0. получим
Решая эту систему уравнений,
Т = 520 кН. YA= 770 kH, Хл=260 кН
Ув
Рассматривается равновесие фермы.
ZC АВ = ZCB А = 30°,
АВ = 6 м,
N = 8kH, Р = 100кН.
ХА +Nsin30° = 0,
Ya + YB-N cos30°-Р = 0,
Yb AB-N----—-----Р -^ = 0.
4 cos30°
Откуда имеем
YB = 52.3 кН, Уд = 54,6 кН, Хл = -4 кН
63
Рассматривается равновесие фермы.
X4+Rb sin3O°-F = 0, Ya+R„cos30°-P = 0,
Ya• 20+F-4-P-10 = 0.
Откуда получим
уА =46 kH, Re=62,4kH, ХЛ=-11,2кН
4.23
Рассматривается равновесие фермы.
, EN 1,5
8““дН ~45 °’3333; “ = *8.435°; 2 а = 36,87°;
Р = 45°+а = 63,435°; у =45°-а.
64
Игнаши в И. Л.
RB cosp - RA cosy = О,
R„ cosp - RA cosy + Rl - G - 0;
RA ABcosat Ru 9-G3-O
Решая эту систему уравнений, получим
АВ cosa cosp „ , G cosp АВ cos a n d ‘ ~' Z Z~------) — Cj J — — --------
Sin2-a sin 2 a
RD = 15kH
Момент массива плотины относительно ребра В.
Прямоугольное сечение:
М, =Y, h y кН м;
3—287
65
Треугольное
сечение:
М, =Г| ЬукН м-с учетом коэффициента устойчивости имеем:
м, = 2 М,, а = 2.75 м;
М, =2 МР b = 3,37 м.
4.25
Рассматривается равновесие балки АВ.
ХА-4-cos60°= О,
Ya + YB-4sin60°= 0.
YB • 3 - 4 • sin 60°-5 -6 = 0.
Откуда: Хд =2 kH, YB = 7,77kH, YB = -4,32 кН
4,26
Рассматривается равновесие балки.
66
Игнатов И. А.
Ya -6cos45° = О,
ХА - 6 cos45°-8 + Хв - R = О, X 5 - Хв - 4 + 8-3 + 6 cos45° 2 = О.
Откуда получаем:
Уд-4,24 кН, Х„ = 15,6 кН, ХА = 2,64 кН
4.27
Решая эту систему, находим
Рассматривается равновесие балки АВ.
ХА-2cos60° = О,
УА -2 sin 60°= О, М + Мо - 2 sin 60° 2 = 0.
ХЛ = 1 кН, УА =1,7 кН, М = 0,46кНм.
4.28
Мо = 2 кН, R = q-3 = 4,5kH.
Рассматривается равновесие балки АВ.
67
Решая эту систему .......
v о яч кН Y = 1»б7 кН М=5,39 кН м. ХА-2.83 кН.___л—------.
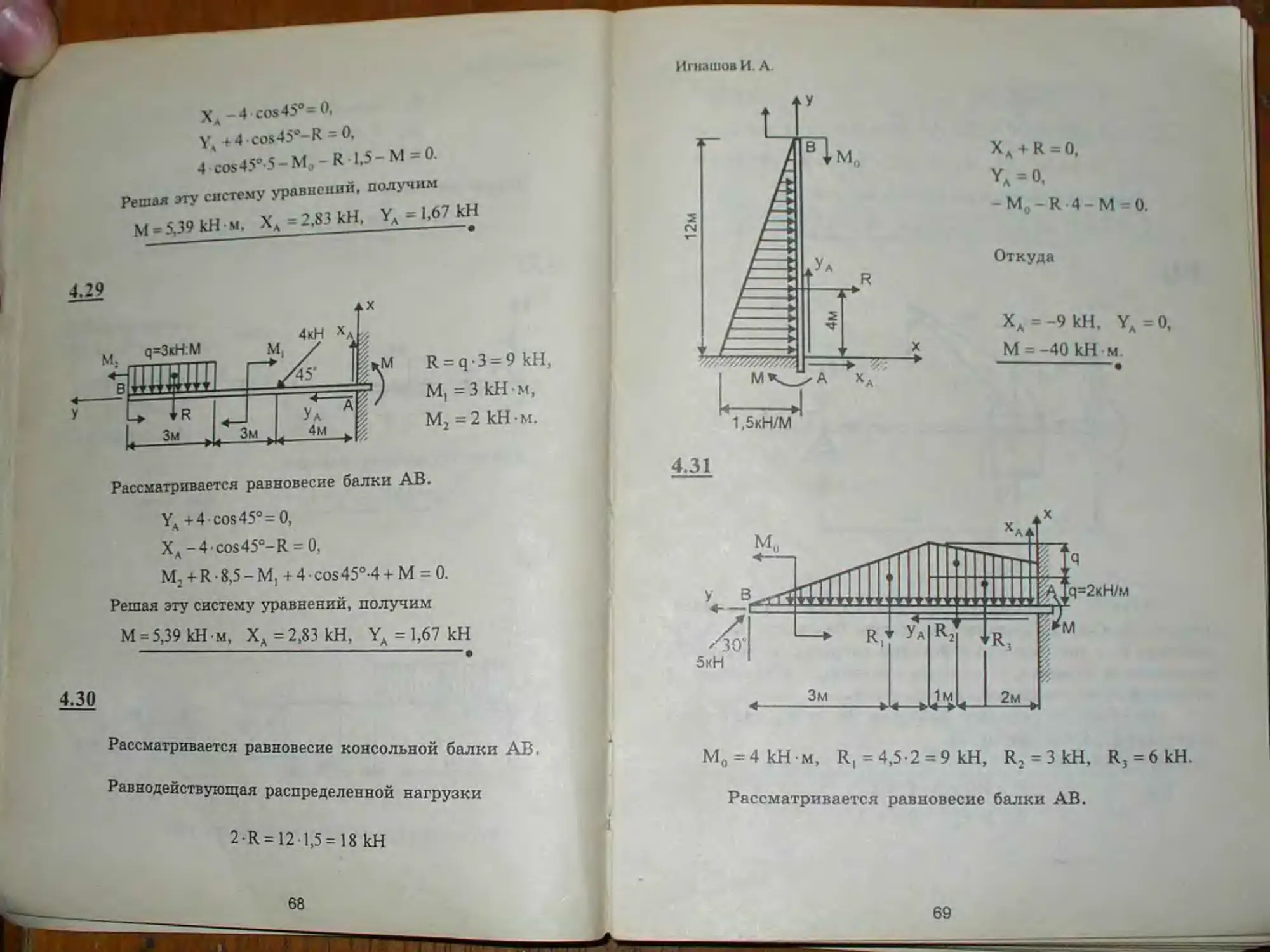
4.29
R = q-3 = 9 кН, М| = 3 кН*м, Мг =2 кН м.
Рассматривается равновесие балки АВ.
Ya + 4cos45°=0,
ХА -4cos45°-R = 0.
N^ + R-S.S-M, + 4cos45°4 + M = 0.
Решая эту систему уравнений, получим
М = 5,39 кН м, Хл=2,83кН, YA = 1,67 кН
4.30
Рассматривается равновесие консольной балки АВ
Равнодействующая распределенной нагрузки
2-R = 12 1,5 = 18 кН
68
Игнатов И. А.
12м
xa + r=o, ул = о,
-M„-R 4-М =
Откуда
Хл = -9 кН, Ул М = -40кН м
4.31
М„=4кН-м, R, =4,5'2 = 9 кН, R, = 3 кН, R
6 кН.
Рассматривается равновесие балки АВ.
69
YA -5-sin30° - 0,
XA +5 cos30° - R|
-5 cos30° 7,5+M
-r2-r, = o.
o + R, 4,5 + R!-2 + Rj1.5-M = 0.
Решм,гу«с«му рвений, получим M = 27кНм, Уд=25кН, Хд-13,7 кН
Задача относится к категории статически неопределимых, но решение возможно, благодаря наличию шарнира С, в котором под действием нагрузок не возникает реактивного момента, и система уравнений равновесия, в конечном счете, оказывается замкнутой.
Сначала определим реакции R, и К2, для чег > рассмотрим равновесие крана.
Ri+R2-Q-P = O, R2-2-Ql-p.5 = o.
70
Игнатов И. А
Откуда: R,=50kH, R, = 10 кН
Теперь рассмотрим равновесие частей балки АВ, АС и СВ.
Ч Г . г ч
ХА + хс = о, ya+yc-r, = o, Yc 4-R,3-M = 0; (1)
Хс = 0,
Ro-Yc-R, = 0,
Yc-8+R2-7 = 0. (2)
Из (1) и (2) имеем
350
Xc = XA=0, Yc=-— кН, с А с g •
RB=6,25kH, YA= 53,75 кН, М = -205 кНм. ---------------------—-----------'Ж
71
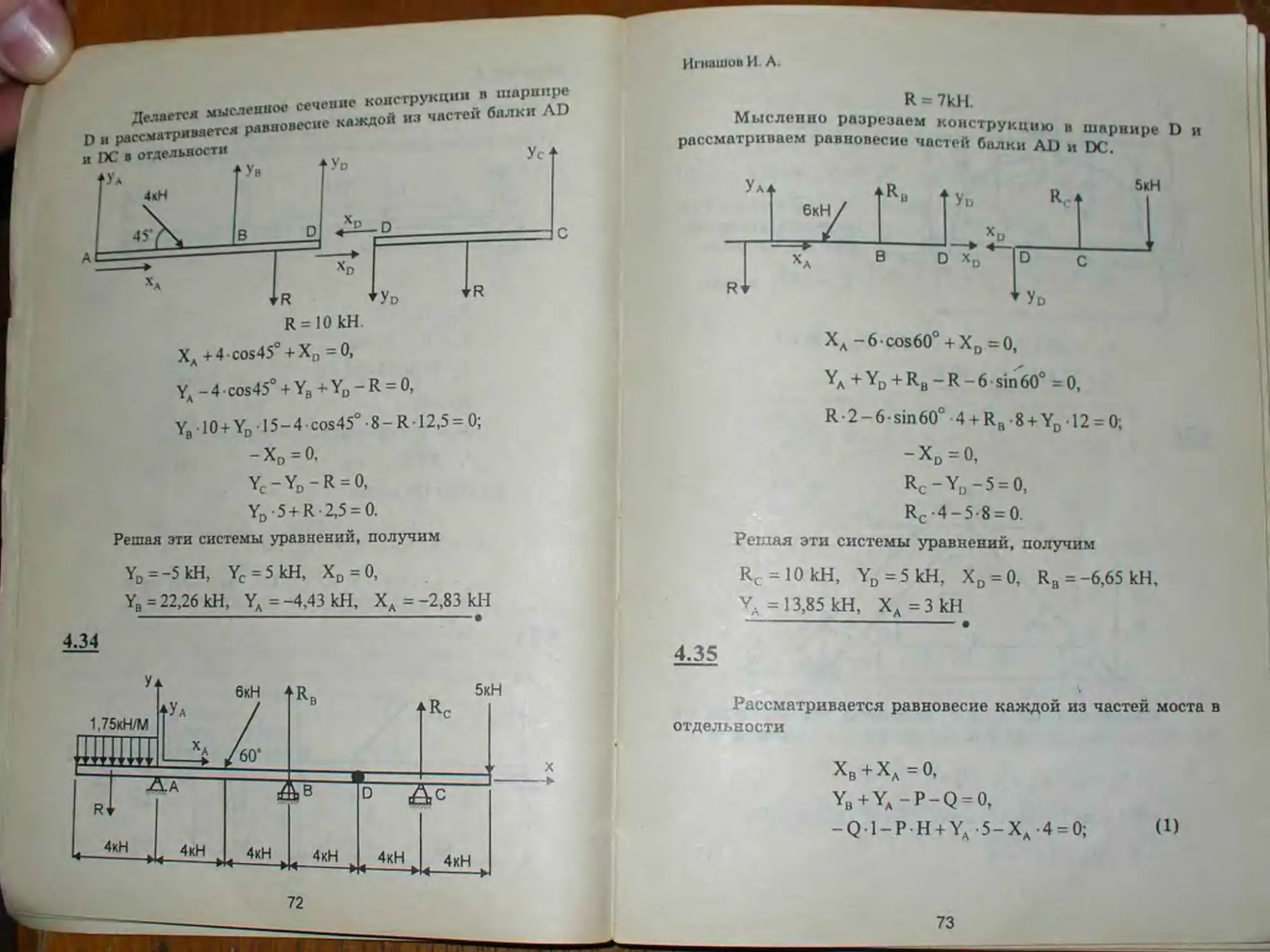
„. 'г=*’“Л л°
и IX? в отдельности
yD XD D Ус
с
R = 10kH
Хд +4cos45°+Xd =0,
Ya -4 cos45° + YB + Yo - R = 0.
YB10+Yo 15-4cos45° - 8- R-12,5 = 0;
-XD = 0, yc-yd-r = o, Yd-5 + R-2,5 = 0.
Решая эти системы уравнений, получим
YD=-5kH, Yc = 5kH, XD = 0,
YB = 22,26 кН, YA=-4.43kH, XA=-2,83 1kll
4.34
72
Игнатов И А.
R ~ 7кИ.
Мысленно разрезаем конструкцию в шарнире D и рассматриваем равновесие частей балки AD и DC.
ХЛ -6cos60° + XD = 0,
YA + YD + RB - R - б sin 60° = 0, R-2-6sin60° 4 + RB8 + YD12 = 0;
-xD=o, Rc-Yu-5 = 0, Rc-4-5 8 = 0
Решая эти системы уравнений, получим Rt=10kH, YD=5kH, XD = 0, RB=-6,65kH, v. = 13,85 kH, XA=3kH
4.35
Рассматривается равновесие каждой из частей моста в отдельности
ХВ + ХА =0, yb+ya -p-q = o, -Q1-P H + Ya -5-Ха-4 = 0;
(1)
73
Х(=-20кН, Хс = -20кН, Y, = 52 кН. Yc = 48 кН
Хс - X* = 0.
у Y*-Q=°.
5 + Ха-4 + Q1 = 0- (2)
Складывая последние уравнения (1) и (2), получим:
у = 8 кН. и далее
Хв=20кН,
4.36
Положительные Хс и Yc считаются приложенным .' к АС. Рассматривается равновесие АС и ВС в отдельное ги
Т+ХС=О, Ra+Yc-Q = O, -Tlcos45°-QACcos45°/2 + YcACcos45°--Хс AC cos45° =0;
71 h i'Hi'
74
HniauioB И. A.
-T-Xc=0, -Yc — P-Q+ RB = 0,
Y AC cos45° + X AC-cos45° + P BD-cos45° +
+ Q AC cos45° / 2 + T-1 cos45° = 0. ,o.
Складывал последние уравнения (1) и (2), получим:
Yc = ”2*8 Н; и далее RA = 408 Н,
Хе = -522 Н, Т = 522 Н, RB = 552 H.
--- •
4.37
Рассматривается равновесие каждой части моста в отдельности.
Уравнения равновесия левой части:
— S, 4- S, + S5 + S6 = О,
-S1-SJ-S6+Ss-P"^ = 0,
-S,+Ss-6 S6-P 2,5-72 = 0; (1)
75
уравнения равновесия сил правой пасти:
-Sj-S.-Sj+S^O.
-S.+S.-Sy-S^O.
6S,-S4+S4=o. (2)
Левые части уравнений <» в <2> подел<”Ы “ Решал X системы уравнений, получим
cos 4«5°.
,=-^р. s2=4p. s4
6 3 о
= 0, S,=-yP. s, = o.
S<
4.38
Рассматривается равновесие обеих частей в отдельности:
а = 60°.
S; cosa + XA =0.
S, + Sj sina + YA -P = 0,
-S, AB +P (AB-a)-S2 sina• AC = 0; (D
76
цгна»и”' 11 А
- Хл -Sj cosa = О,
S, sina + S4 -Ya = О,
Sj sina AC + S, АВ = 0. (2)
Из первых равенств (1) и (2) имеем:
s2 = S, И далее УЛ = 3,75 кН,
S, = S, = 5,77 кН, S, = 6,25 кН, ХА = -2,89 кН
12м
Рассматривается равновесие левой и правой арки в отдельности. Для левой арки имеем
Хд +Хс + 12 = 0,
Ya +Yc-R|-60 = 0,
Yc 8-Хс-12-R, 1.8-60-2-12-5 = 0; (П
77
для правой арки -
-хв-хс = о.
-Yc+Y»-60-R.’=°-
X 12 + YC 8 + 60-2 + R, 1.8-0-
здесь R,C. В, определены из уелвия равновесия поперечной
Ri-8-12 + R3 = 0.
-8 3,1-12-6,2 + R; 12.4 = 0.
___ R -8 кН R, = 12 кН <3> Откуда: к,-окп.
Из (1) я (2) с учетом (3) получим: yr=4,2kH, Ya=72,2kH, Хс=-14кН, Хв = 14кН, Хд=2кН. YA - 67,8 кН
4.40
45см
D В_________J
Rc
Р
Рассматривается равновесие балки АВ
ХА +RC cos 60° - 0,
YA+Rccos30°-Q-P = 0, Rc • cos30° 90 tg30° - Q • 45 - P • 90 - 0.
Откуда: Rc=60H, YA = -17 H, XA = -30 H
78
Сначала рассматривается равновесие всей конструкции как твердого тела; затем - равновесие балки АС.
Хд + Ха=0,
YA+YB-2P-Q = 0,
YB d-P d-Qd/2 = O; (1)
ХА-ХС = О,
Ya -Yc-P = 0,
-Yc d/2-Xc-b-P d/4 = 0. (2)
Решая (1) и (2), получим:
YA >'3--P+|. -Xa = Xb=^(P+Q).
4.42
Сначала рассматривается равновесие всей конструкции как твердого тела. Затем - равовесие балки АС.
79
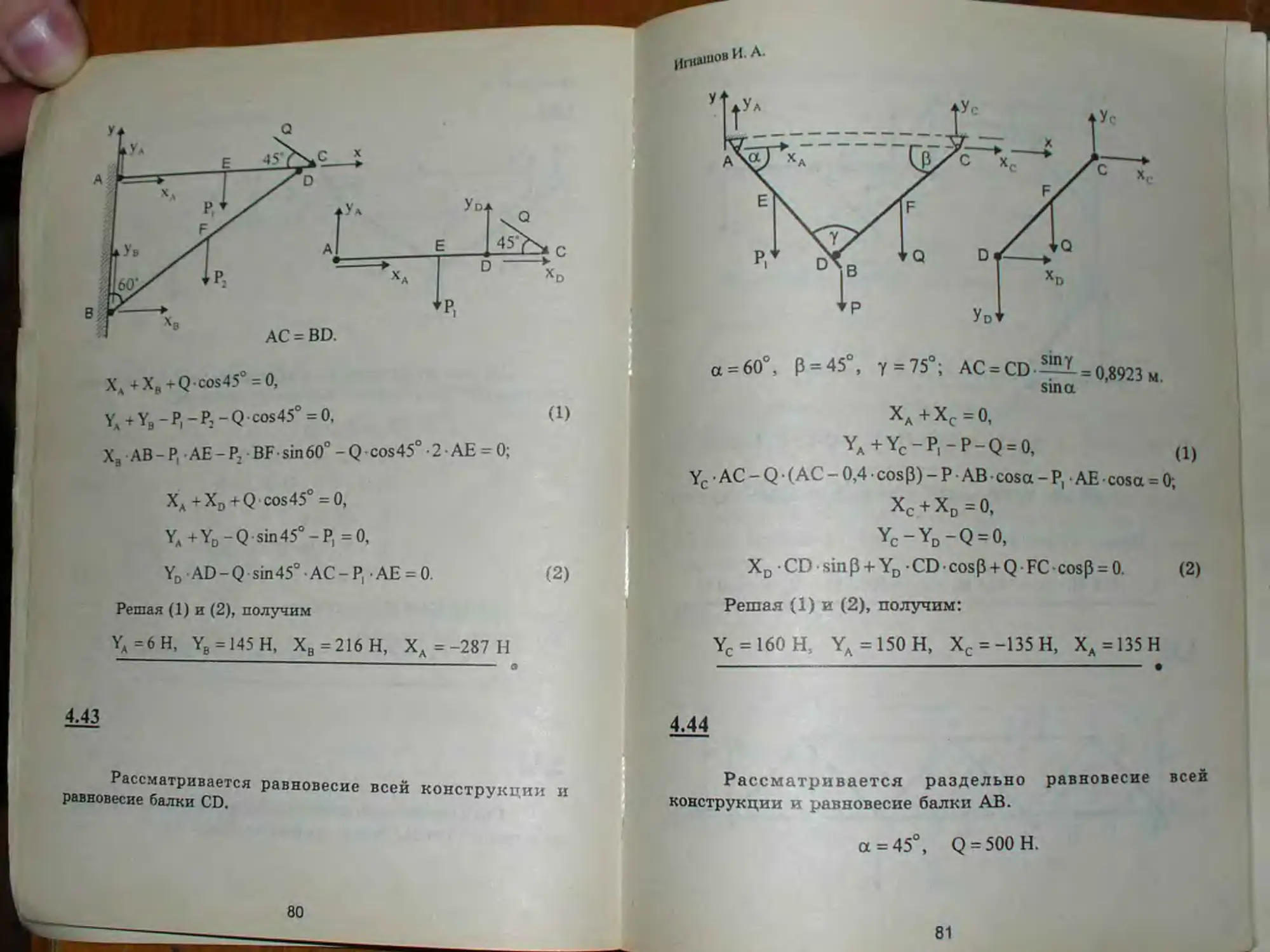
Lfnuu110"
AC = BD.
X, +X„+Qcos45° = 0,
Y» + Ye - P, - P; - Q cos45° = 0,
X, AB-P, AE-P, BF sin 60°-Q cos45° 2-AE = 0;
X*+XD+Q cos45° = 0,
Ya+Yd-Q sin45°-P, =0,
YD AD-Q sin45° AC-P, AE = 0.
Решая (1) и (2), получим
YA=6H, Yb = 145H, Xb=216H, Xa=-287 H
4.43
Рассматривается равновесие всей конструкции и равновесие балки CD.
a = 60°, P = 45°, 7=75°; AC = CD = 0,8923 m
sin a
XA+XC=O,
Ya+Yc-P,-P-Q = O,
Yc AC-Q (AC-0,4 cosP)-P ABcosa-P, AE cosa = 0;
Xc + XD=0,
YC-YD-Q = O,
XD CD sinp + YD CD cosp + Q FC cosp = 0.
Решая (1) и (2), получим:
Yc = 160H, Ya=150H, Xc = -135H, Xa=135H
4.44
Рассматривается раздельно равновесие всей конструкции и равновесие балки АВ.
a = 45°, Q = 500 H.
80
81
X.-S, cos45° = 0, Yc+S,cos45’-Q = 0. -Q-2+S, l cos45° = 0;
x,+s. cos45° = 0, YA+S, cos45°-Q = 0, S3-lcos4> -Q-2 = 0.
Откуда получим
S, = 1414 H, S2 = 1414H, Xc = 1000 H, Yc = -500 H
4.45
82
ИлмошвИ А
Скачала определяются реакции опор А и В
Х„ = 0, Ya+Y„-2P = 0, Ye3-3P = o
Откуда имеем: Y„ = Р, уд - р
После чего рассматривается равновесие уали А.
YA+S, cos45°=0, S;+S, cosAS0 = 0.
Откуда: S, =-141 kH, S;=100 кН
Затем рассматривается равновесие узла Е.
-S, cos45° - S, cos45° = 0, S, -S, cos450 +S, cos45° = o.
Откуда имеем: Sj = 141 кН, S, = -200 кН
Аналогично рассматривается равновесие узла С; откуда следует, что
S, = 0, S6 = 200 kH
Вообще, технология определения усилий в стержнях плоской фермы такова, что в рассматриваемом узле ве должно находится больше двух стержней с неизвестными усилиями.
4.46
У*
P +p
P=1OOkH
83
.,яЮТСЯ реакции опор А и В. Имеем:
у, = 150 кН. YA = 150kH.
гпивая’равкок^ие узла А. получим: рассматривая
S, =-150 кН. S3 = o.
Дальше расстаатрйваётсТ^авновесие узла F
-S,-Sj cos45° = 0, S4+S1cos45° = 0;
^212 кН, -150 кН
Затем узлы, рассматриваются в последовательности С, G. Н и D и находятся усилия в стержнях 5, 6, 7, 8 и 9.
5, 6, 7, 8 и 9.
УслоВИяиХИааХ°ДЯТСЯ ₽еаКЧИИ °П0Р А И В С°”°
84
Игяашов И А.
Хв_р tga = O, Y„ 4 h-s cosa 2 h + S sina .4 h = 0
Откуда: XB = 18,1985 kH; Y„ = 6,8015kH.
для нахождения S, делается мысленно сечени. ™ усматривается равновесие правой части конструкций Ил уравнения моментов сил относительно точки К имеем: '
Хв-5 h + YB-2 h-S, • h = 0, S| = IO4,6kH.
При a = 0, XB=0, Y„=25kH, 25-2h-S2h = 0, Sj = 50kH
4.48
P l-S 0,l = 0, S=10 P = 2kH.
2 Q-S = 0, Q CE cosa-N CE sina = 0.
S
N = Q-ctga = --ctga = 5 kH
85
a
OK _ 1
cosa=ro=6
Сначала рассматривается равновесие узла О. 2Scosa = Q, S = 3Q = 30kH.
Затем рассматривается равновесие рычага САЕ и вычисляется момент сил, приложенных к рычагу, относительно точки Е.
S-1-S,-0,5 = 0, S,=6-Q = 60kH
4.50
ос-45 , CD = AC cos45°.
Рассматриваются равновесие всей конструкции, затем -равновесие стержня АВ.
86
Игнатов И А
S1 + S,-P = o, Y„+Yo = 0.
Р 2 AC cos45“ - S, • | AC cos45° - S2 AC cos45° +
+ Y„ AC cos45° =0;
Xt-P = 0, Ya+Yc=0, P2 + Yc-Xc=0.
После решения, полагая AB^2AC, получим
XC = P, Yc=-P, YA = P, Yd = -P, S,=2 P. S2 = -p
4.51
Q Ij - R (d + I,) = 0. Откуда Q = 12 kH
87
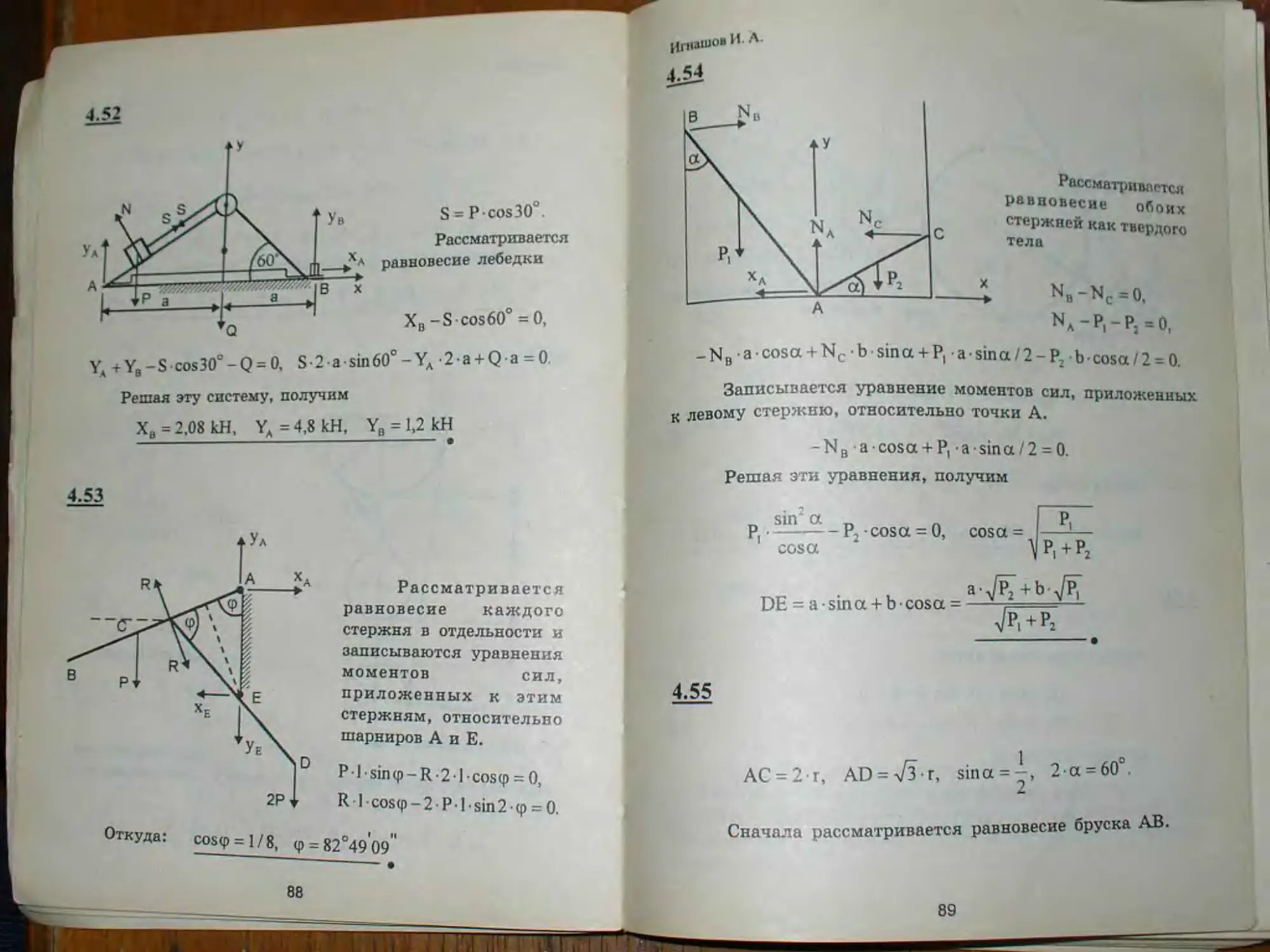
4.52
у +YB-S cos30°-Q = 0. S-2a sin60° -YA 2 a + Q a-0
Решая эту систему, получим
Ха = 2.08 кН, УА = 4,8 кН, Ya = 1,2 кН
4.53
Откуда: cos<p = 1 / 8, ф =
Рассматривается равновесие каждого стержня в отдельности и записываются уравнения моментов сил,
приложенных к этим стержням, относительно шарниров А и Е.
Р l sin(p-R-2 l cos(p = 0, R l cos(p-2 P l sin2 (p = 0.
82°4909"
88
Uniawob И. A
_NB a cosa+Nc b sina + P, a suia/2-P2 b cosa/2 = 0.
Записывается уравнение моментов сил, приложенных к левому стержню, относительно точки А.
-NB а-cosa + P,asina/2 = 0.
Решая эти уравнения, получим
_ sin a _
Р, —------Р2 cos a = 0, cosa =
cos a
DE = asina + bcosa =
4.55
AC-2 r, AD = V3r, sina = -, 2 a = 60°.
Сначала рассматривается равновесие бруска АВ.
89
XA -N„ cos30° = 0,
YA + N„-sin30°-P = 0.
N„ AD-P AB/4 = 0. (1)
Затем - равновесие цилиндра
ND cos30°-T cos30 -0,
Ne +Nd sin 30° -T sin 30 =0. (2)
VI
Из (1) имеем ND-P—-6,9H.
Из (2) -: T = Nd = 6,9H, Ya=-12,5H, XA = 6 H
4.56
Из треугольника а) имеем
-sina + Nsintp-P^O
N, -cosa-Ncoscp = 0.
Из треугольника b) -
N, cosa-N sin(p-P2 =0 N2 -sina-N-costp = 0.
90
(1)
(2)
I h нашов И. A
Из(1)и(2) получим соответственно
N sin(a + <p) = P, cosa, N cos(a + <p) = P, sina (3)
Тогда из (3) - № = P,2 cos2 a + P2 sin2 a = 300 H:;
из (3) также следует, что
lg(a + р) = s/З /3, a + q> = 30°; ф = 0.
Окончательно
N = 17,32 Н; ф = 0, N,=20H, N2 = 34,64 H.
4.57
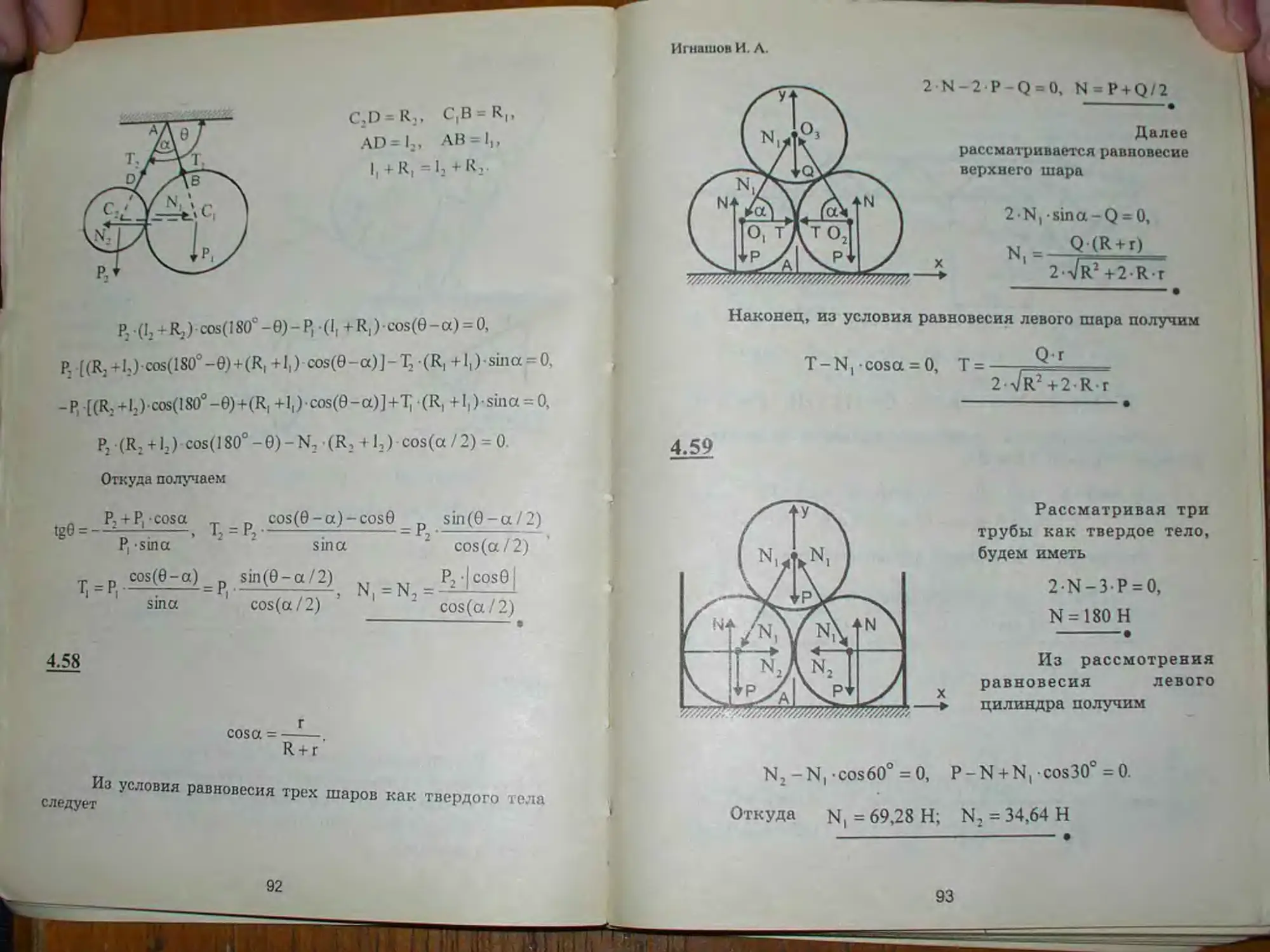
Рассматривается равновесие обоих шаров как твердого тела и вычисляется сумма моментов сил относительно точек А, Сг и С,, затем - равновесие левого шара и вычисляется момент сил, приложенных к этому шару, относительно точки А. В результате имеем уравнения
91
CjD=R;. C,B=Rp AD = h. AB = I|,
I, +R, =1, +R;
P, • (I,+R,) cos( 180° - 0) - P, (I, + R,) cos(0 - a) = 0,
P. [(R, + 1.) cos(18O°-0)+(R| +1,) cos(0-a)]-T3 (R, +l,)-sina = 0.
-p [(R,+l,) cos(180°-9)+(R|+lr) cos(0-a)]+T; (R,+I,)sina = 0.
P, (Rj + l,) cos(18O°-0)-N,(R: + 1,) cos(a/2) = 0.
Откуда получаем
P, + P,cosa y _p cos(0-a)-cos0 _ p sin(0-a/2) Pysina ’ * ‘ sina 2 cos(a/2)
cos(e-a) sin(0-a/2) P,-|cosS|
4 — *1 . ~ , IN । — IN, —------
sma cos(a/2) ' cos(a/2)
4.58
r
cos a =------
R + r
следует113 УСЛ°ВИЯ ра0новесия TPex Ш«РОВ как твердого тела
92
Игнатов И. Л.
2 N-2 Р -Q = О, N = P + Q/2
Далее рассматривается равновесие верхнего шара
2N,sina-Q = 0,
М - Q (R+0 2-Jr’+2Rt
Наконец, из условия равновесия левого шара получим
4.59
T-N1 cosa = О,
2-i/R!+2.Rt
Рассматривая три трубы как твердое тело, будем иметь
2N-3P = 0,
N = 180H ------•
Из рассмотрения равновесия левого цилиндра получим
N2-N, cos60° = О, P-N + N, cos30° = 0.
Откуда N) = 69,28 Н; N, = 34,64 Н
93
4.60
У
tea =—=3. a = 71,565°, у =a-45° =26,565°;
s 0,75
3 = 63,435°; p-y = 36,87°; Q = 112,5kH, P = 25kH.
Рассматривается равновесие фермы и определяются реакции стержней АЕ и BF
-S, cos0-S2 cosy = 0, -S) sinp-S2 siny-Q-P = 0,
S2 AB sina-Q x-P 3 = 0.
Откуда после несложных преобразований
(P+Q) cosp-3-cos45° sina З Р
Q sin(P-y) Q - 1,16 M
4.61
AB =1, =0,7 m, BC = 12=0,5m;
94
Игнатов И. А.
P = m g; 10, = 35 кг, m2 = 25 кг, шс = 15кг.
Рассматривается равновесие звеньев АВ и ВС раздельно; при этом реакции и моменты шарниров, изображенных на рисунке, считаются приложенными к левому от шарнира звену, по отношению к правому от шарнира звену эти величины имеют противоположные направления.
ХА - хв = О, Ya+Yb-P, = 0, Yb 1,-Р, 1,/2 + Мв -МА =0;
Хв = 0, -YB-P2-Pc=0, -Рс12-Р,.1,/2-Мв=0.
Откуда имеем
Мв =-(15-0,5 + 25-0,5/2) 9,81 = -135 Нм,
МА = Мв-(Р2+Рс)-1|-Р,1|/2 = ’
= -135-40-9,81 0,7-35 9,81-0,7/2 = -530 Н м
4.62
P,=m,-g = 35-9,81 = 343,35 Н;
Р, = m, -g = 25-9,81 = 245,25 Н;
Pc = mcg = 15-9,81 = 147,15 Н.
Рассматривается равновесие звеньев АВ и ВС раздельно.
ХЛ+Хв=0, YA+YQ-P,=o. Yb-1,-P111/2+Mb+Ma=0;
95
X, = 0. -Y.-P,-Pc=O. -М,-Р;М2-Рс11 = 0.
Откуда: У„ = -Р2 - Рс:
Мв =-(Р21,/2 + Рс1:) cos30° = -H7_H_m;
МА = -Мв +(Р, + РС) >1 + р| *1 /2 = 512 Н *'
Р, = m, -g = 392,40 Н, Р, = m2 g = 245,25 Н;
Р, = m,g= 147,15 Н; Ро = mD-g = 147,15 Н.
Рассматривается равновесие звеньев АВ, ВС и СР раздельно.
ХА + Хв = 0, Ул+¥в-Р,=0,
YB-1, cos45°-XB.l, sin45°-P,.l|.cos45°/2 + MB + MA =0;
хс-хв=о, Yc-Yb-P2 = 0,
Yc -12•COS15°-XC-12 Sinl5° - P2 -1, cosl5° /2 + Mt -MB = 0:
96
Игнатов И А.
-Хс = 0, -Yc-Pj-Pd = O, -Pn13 cos45° -Pj •lrcos45e/2-Mc = 0. Из написанных уравнений получаем
Хс = Хв = ХА=0. YC = -PJ-PO, Ye =-Р2 - Р, - PD;
Мс = -PD 1, cos45° - Pj -I, cos45° /2 = -46,8 Нм, ----------------------------------------•
M„ = MC-P, l2 cosl5°/2-(P, +Pn) 12 cos15° = -248 H m.
Мд =-MB + P, 1, cos45°/2-YB l, cos45° =664 Н м.
4.64
a = 30°;
AB = 1, =0,8m;
BC = l2=03 m;
F=3000H,
Рассматривается равновесие звеньев AB, ВС и CD
раздельно.
4 -287
97
Хд + ХВ -F cosa = О, YA + Y„ + F sina-P, =0, YB 1, + F sina-AE-P, -I, / 2 + Mu + MA = 0;
-xB+xc = o, -yb+yc-p.=o, у I. cosa + XC I2 sina - P, I, cosa /2 + Mt - M„ = 0;
-Xc = 0, -Yc-P,-Pd=0,
- PD Jj • cos2 • a - P, lj cos2 • a /2 - Mc = 0.
Из полученных уравнений равновесия следует, что Xc=X8=0, Yc = -P)-Pd, Y„ = -P2-P2-Pd;
Мс = -Ро I) cos2 а - Р, I, cos2 а /2 = -33 Н м,
Мв = Мс - (Р, + Ро) • 12 cosa - Р, 12 cos а / 2 = -213,5*Н • м, МЛ =-Ма +Р, J|/2-F sina AE+(P2 + Р3 + PD) • 1, = 502 Н м
4.65
tga = 3, а = 71.565°; AC = V10, cosP = ^±AD2pCl
2-AC AD
“ = 26,7655°;
Р = 58,7°;
У = 180° -а-р = 49,735°. АС
Ш£0 ~ CD’ sinP - °>45°3; е = У-<0 = 22,9695°.
98
Игнатов И. Л.
Последовательность определения усилий в стержнях плоской фермы такова: сначала рассматривается равновесие всей конструкции как твердого тела и находятся опорные реакции, затем методом вырезания узлов вычисляются усилия в стержнях. Имеем:
RA + R8-P = 0, Ra 2-Р (14-6 cose) = 0;
Р • (1 4-6-COSE)
Ra = —-— -------— = 26,1 кН, Ru - 8-26,1 = -18,1 кН
Равновесие узла В.
S4 4-Sj cosa = 0, S$ sina4-RB = 0.
Откуда: S5 = 19,1 кН, S4 = -6,04 кН ----------------------------------- ,
Равновесие узла А
-S4 - Sj cosa 4-S( cosy = 0, S3*sma+S( sin у =0.
Откуда: Sj = 12,39 kH, S, = 15,4 kH
Равновесие узла С
-S5 cosa 4-S3 cosa+ S, cose = 0, S, = 16,3 kH
4.66
a = ZCAE, tga = 4 / 5 = 0,8; a = 38,6598°; AD = V26 m,
99
AF=3/cosa = 3,8419 м; y = ZCAD, Igy = I/5 = 0,2; у = 11,3099°; a - Y = 27,3498
FD’ = AF’ + AD; 2 AF AD cos(a-y) = 5,9599 m;;
FD = 2,4413 m; x = ZADF;
sin x = sin (a - у) = 0,7230; x = 46,3025°;
P = ZAFD = 180° -27,3498° -46,3025° = 106,3477°;
<d = ZEFD = 180° -ft = 73,6523°; co - a = 34,9925°.
Определение опорных реакций
RA+RB-6 = 0, RB10-l-7-2-5-3-3 = 0.
Откуда - RB = 26/10 = 2,6 kH; RA = 3,4 kH
Равновесие узла A
Sj cosa + S2 cosy = 0,
Sj-since+ S2 siny + RA = 0. (1)
Равновесие узла F
- Sj -cosa+ S4 cosa +S3 cos(co - a) = 0,
- S| -sina + S4 -sina-S3 sin(co -a)-3= 0. (2)
Равновесие узла E
~S4 cosa+S5-cosa = 0,
- S4 sina-S, sina-S6-2 = 0. (3)
Равновесие узла G
- Sj cosa +S, -cosa -S, • cos(<o - a) = 0,
Sj-sina-s, sina-S, sin(m-a)-l = 0 Равновесие узла В
_s«cosa-S,-cosy = o. (5)
100
__________________________________
Игнатов И. А.
Решая последовательно системы уравнений (1). (2), (3), (4), (5), получим усилия в стержнях фермы
Номер 1 2 3 4 5 6 7 8 9
Усилие кН -7,3 5.8 -2.4 -4,7 -4.7 3.9 -0,8 -5.5 4,4
4.67
ZCAD=ZADC =
= ZDCA = 60°,
ZADB = ZCEB = 90°;
BD = V12 м.
Определение опорных реакций фермы
Кд + IV 6 = 0, RB 4-1 4-2-(l + Vi2 cos30°/2)-2-l = 0.
Откуда: - RB = 2,75 кН; RA = 3,25 кН.
Равновесие узла А
- S, - Ss cos 60° = 0,
S5 cos30° + RA -1 = 0. (1)
Равновесие узла D
- Sscos 60° + S6•cos 60° + S4 cos30° = 0,
S5 cos30°-S6 cos30°-S4 sin30°-2 = 0. (2)
101
Рааиовесие E
_S. eM30’+SJ cos30"-S, cos60 =0, S4.5in30’-SjSin30»-S,cos30’-2 = 0.
Равновесие узла В
S2+S3 cos30° - 0.
Решая последовательно системы уравнений, усилия в стержнях фермы ,
Номер 1 2___?__1___---------
^7^
(3)
(4)
находим
Определение опорных реакций.
Ra+Rb-12 = 0, -2-6-5-3 + R, 3-0.
Откуда: RB = 9kH, RA=3kH.
102
Игнатов И. А.
Равновесие узла А.
Sa = 0, S9 + Ra=0. (1)
Равновесие узла С
Ss+S7 cos45° = 0, -S,-S, cos45°-5 = 0. (2)
Равновесие узла В
- S7 -cos45° +S4 cosa = 0,
S7 cos45° +Ss +S4 sin a + Rn = 0. (3)
Равновесие узла D
- S6 + S3 • sin p + S2 • cosy = 0,
- S5-S3 cosp + S, siny-5 = 0. (4)
Равновесие узла E
- S, cosy — S| cosa) = 0. (5)
Решая последовательно системы уравнений (1), (2), (3), (4), (5), найдем усилия в стержнях.
Номер 1 2 3 4 5 6 7 8 9
Усилие кН -6.0 5.1 -3,1 -5,4 -2,0 2.0 -2,8 0 -3,0
4.69
AD = DB = 5 м,
103
Игнатов И. Л.
Определение •«»«“““ 3_4.5 = 0. v +2 = 0» Ya+Yb-4 = 0. Y„ 10 Л v 2 кН Y„=2,6kH, Ул = '4 кН- Откуда: Х„ ° -- 5.' .2 - Равновесие узла А s6+xA=o, s,+ya = o. О> Равновесие узла Е S4 cosa + S5 cosa = 0. S4-sina-S, sina-S, = 0. <2> Равновесие узла С _S4cosa+S,-cosa+ 2 = 0. -S4 sina-S2-sina-S} = 0. (3) Равновесие узла D -Ss-cosa-Sj+S,-cosa +S7 = 0, Sj+Ss sina+ S|'Sina-4 = 0. (4) Равновесие узла В S8 + Yb = 0. (5) Последовательно решая системы уравнений (1), (2), (3), (4), (5), находим усилия в стержнях
Номер 1 2 3 4 5 6 7 8 9
Усилие кН 4.5 -4,5 2 -2,4 2,4 2 0 -2.6 -1.4
4.70
Откуда: ХЛ = -1 кН, Y3 = 1 кН, YA = 3 кН.
Равновесие узла А
S, +S6 cos451’+ХА = 0,
-S6cos45“+YA=0. (у
Равновесие узла F
-S,+S2 = 0, -S,-4 = 0. (2)
Равновесие узла Е
-S6-cos45“ +S8 cos45“ + Ss = 0,
S6'Cos45° +S, + S, -cos45“ = 0. (3)
Равновесие узла D
-S,-S,-cos45°+S3 =0,
-Sj cos45°-S, = 0 (4)
Равновесие узла С
S, + S4 -cos45“ = 0. (5)
Последовательно решая системы уравнений (1), (2), (3), (4). (5), найдем усилия в стержнях фермы.
Здесь стороны, образующие прямой угол, равны а. Определение опорных реакций фермы
Номер 1 2 3 4 5 6 7 8
Усилие кН -2 •2 -1 1.4 2 4.2 -4 1,4
104
105
AE>FB»3m. ЕГ 4 м.
DE = СЕ = 3 м. a = Z EAD = »ZFBC = 4S’, P=.ZFEC, iga = 3' 4, a = 36,8699”.
Определенно опорных реакций фермы
X >2 = ft Y.+Y,-5.<H YB Ю-2-7-2-3-3 3 = 0.
*• . x -’Ul Y, = 2.9kH, YA=2,lkH.
Откуда имеем: X, - - »__________________ ,
Равновесие узла А
S, cos45’+SI = 0. S,-cos45’+YA = 0.
Равновесие узла D
S.-S, cos45* = 0. -S,-S, cos45” = 0.
Равновесие узла Е
-S2±Sj +Sj-cosa = 0. Sj +S< sina - 3 = 0.
Равновесие узла F
-S6+S, = 0, S7 = 0.
Равновесие узла С
(1)
(2)
(3)
(4)
-S, cos45” -S, sina = 0.
Решая последовательно системы уравнений (1), (2), (3), (4), (5), определим усилия в стержнях фермы
Номер 1 2 3 4 5 6 7 8 9
Усилие кН •2,97 2,1 2.1 -2.1 1.5 0,9 0 4,1 0.9
106
12.2
АВ Юм, IX 4 ы. DI U и, u Z1AD. 1*11-3'6, о J9.SU4";
P-ZAIX IWr и-140.1944".
AD- DI /«ни 3,91м. у • / ПСА,
АС: = AD, + DC,+2 AD DC «na 55,31X1 м', АС 7.4376 м. siny = AD sina I AC - 0,3365; у -19,6668 Определение опорных 1>еакцмй фермы
Х„ - 2 -0, Ya+Yb-S = O, Y„ 10- 2 2.5 2 7 -3 3-0 Откуда: Хв = -2 кН, Yo = 2,8 кН, YA - 2,2 кН Роввовссис узла А
S, cosa +S, cosy « 0,
S, sina + S, siny » YA = 0. (1)
Равновесие узла D
- S, cosa + Sj + S, cosy - 0.
— S| sina -S, sin у - 3 = 0. (2)
Равновесие узла С
-S, sina-S, siny-2 = 0. (3)
Последовательно решая системы уравнений (1). (2), (3), пол учим усилия в стержнях фермы
Номер 1 2 3 4 5
Усилие кН -6 -7 4,9 2.5 -5,7
107
£Z=’
у = 59,0362”; P = ZGEF, tgP = 5/4,5; Определение опорных реакций формы
АВ = 7,5 м;
АС = 13,5 м; а = ZACB, tga = 7,5 /13,5; a = 29,0546";
у = ZAGB, tgy =7,574,5;
Р = 48,0128°.
хч+Хв = 0, УА-6 = 0, -Хв-7,5-2-4,5-2-4,5-2-1-13.5 = 0. Откуда получаем: Хв = —5,4 кН, ХА = 5,4 кН, 'i л — 6 кН.
Равновесие узла А
s, + xA = o, s7 + ya = 0.
Равновесие узла Б
Sj-cosa + S, -cosy + Xu = 0, - S, - Sg • sin у - S6 sin a -1 = 0. Равновесие узла G
S2-S, —Sg-cosy = 0, S,+Ss-siny = 0.
Равновесие узла F
-S6-cosa + Ss cosa+ Sl0-cosP = 0, -S,+S6-sina-S5-sina-S,„ sinP-2= 0. Равновесие узла E
-Slo-cosp + S, = 0, S„+S1(1;sinp = O.
(1)
(2)
(3)
(4)
(5)
108
Игнаш on И. Л,
Равновесие узла С
S„ sina-l = 0. (в)
Решая последовательно системы уравнений (1). (2), (3), (4), (5), (6), находим усилия в стержнях фермы
Номер 1 2 3 4 5 6 7 8 9 10 111
Усилие кН -5.4 -3,6 -1.8 2,06 2,06 4,1 -6 3.5 -3 2.7 Zj
АВ = 15м, CN = 5m, ON = 0,5m, a = ZNAC = ZNBC, tga = 5/7,5; a = 33,6901°; P = ZLAD = ZNBE, tgP = O,l;
p = 5,7106°; у = a - p = 27,9795°;
7 5 2 5
AL =-1—= 2,5124 м; AK = -2— = 3,0046 м. cosp cosa
LK2 - AK2 + AL2-2-AKALcosy =2,0122 M2; LK = 1,4185 m, Z AKL = 90“ - a = 56.3099°; ZLKF = 180“ - 56,3099“ = 123,6901°;
L1 - LK2 + AK2 + 2 LK AK cos56,3099“ = 15,7681 si2;
LF = 3,9709 м; <o = ZKFL, sin® = — sin56,3099° = 0,2972; co = 17,2912°;
109
ZLFD = 90--(«-) = 39'°187" V = Z°DC; e;f=4.5/W Ф = AC = 9,0139m.
%ние опорных реакций фермы
Определена v +Y„-1875 •cosa = 0,
Y +1875-sin a = 0. ya + в
Л-p 9,0139-P,-6,0092-P2-3,0046 = 0
“ ' \1040H. Y„ = 563 H, Ул = 997 H.
Откуда’ X, равновесие узла А
S, cosa+S, cosp + Р, sina = °.
YA+S,-sina + S7smp-P,-cosa = 0.
Равновесие узла К
-S, cosa+S, cosa+ Рг sina = О,
-Sl-sina-S„+S2-sina-P2-cosa = 0, Равновесие узла L
- S, cosP+S, cosP + S„ sine = 0,
- S, - sin p + S, • sin P + S,, cos e + S„ = 0.
Равновесие узла F
- S2 • cos a - Slg sin e + S3 • cos a + P3 • sin a = 0, -S, sina-S18-cose-S,7+S3 sin a-P3 - cosa - 0.
Равновесие узла D
(1)
(2)
(3)
(4)
-S, cosP + S9 + SI6 coscp = 0,
-Sg-sinP+Sg, + S,6-sincp = 0. (5)
Равновесие узла С
-S; cosa-S]6 -cosq> + S4 cosa+ SIS cosq> + P, - sina = 0,
_S, sina-Sl6-cos<f>-S4-cosa-Sls-cos(p-P4 sina = 0, (6)
110
Игнатов И. А.
Равновесие узла Е
- S9 + S10 cosp -S)$ cos<p = 0, -Sl0 sinP + Sls sin(p + Sl4 = 0.
Равновесие узла G
- S, cosa + S5-cosa + Sn sine = 0, S4 sina-S, sina-Sn cosc-S,4 = 0.
Равновесие узла H
- Ss • cos a + S6 • cos a = 0, S5 sina-S6 sina-S12 = 0. Равновесие узла В
- S6 cosa - Su cos₽ - Хв = 0.
Решая последовательно системы уравнений (1), (2), (3), (4). (5), (6), (7), (8), (9), (10), получим усилия в стержнях фермы
(7)
(8)
(9)
(10)
Номер 1 2 3 4 5 6 7 8 9
Усилие кН -1525 -1940 -1560 -970 -970 -970 1100 440 -215
10 11 12 13 14 15 16 17 18 19
-230 -230 0 0 0 -26 1340 -1130 1050 -750
111
j б. Силы трения 1-1, 2, 1.7)
5.1
5=2
P = 0,006 H; f = 0,2.
Сила нормального давления, изменяясь от листа к листу, увеличивается в арифметической прогрессии, так что суммарное давление при перемещении А из В будет
а максимальная сила
Q = F = Nf, N = O/f = 2/0,2 = 10 кН
N = Q cosa = Q = 12000 кН, R = Q 0,005 = 60 кН
P-Q sina -R = 0,
R + Qsina = Р = 156 кН*
N = Р cosa, F = N f = Р cosa f, Psina - F = 0,
P sina-P cosa f = 0, iga = f
F = N f = Pcosaf, Р sina-Р cosa f = О, tga = f = 0,8; a = 38°3935'
N =<И.200.Р, * 2
трения скольжения покоя Ft=NA f=241,2 Н.
При перемещении точки В число листов создающих давление на движущиеся листы, уменьшается
N-P + Qsina = 0, Qcosa-F = 0; F=fN = f(P-Qsina); Q cosa-f(P-Qsina) = 0.
112
113
-sina + f'cos<x _ q (cosa + f sina)2
f-P
Qmn “ . f3
f p = p
Q = 7osa + f sina’ da
Откуда tg« = f>
FA=N*-fA = PA-cosafA. FB = NBfB = PBcosaf„, Fc = Ncfc = Pccosafc.
Рассматривая последовательно предельные равновесия
грузов А, В, С, получим
Рд sina-P* -fA -cosa-i; = 0, Рв -sina-Рв-fB - cosa +1] - 1, = 0, Pcsina-Pcfccosa + T2 =0.
Откуда, исключая и T2 будем иметь
РА ' (а + Рв ' ^а + Рс ' fc РА + Рв + Рс
1 + 30/4 + 30
100
= 0,385;
a = 21,0567°; 1J = 2,66 Н; Т2 = 6,44 Н.
5.9
Na =Рл +P sin30° =130 Н, FA=NA f, = 65 Н, F-cos30° = 51,96 Н; 51,96 <65.
114
Игнатов И. Л.
ND = P*+PB + Psin30" = 330H, 51,96 <66
Оба груза остаются в покое.
= NB Л = 66 Н,
NA = PA cos30”, fa =n* f, = ₽A cos30" f,= = 51,96 Н.
РА sin30°-P±Fa =0;
отсюда, если Р > 102 Н,
тело А движется относительно тела В вверх; при Р >102 Н, тело А покоится относительно тела В. •
Теперь рассмотрим тело В.
Np -(РА + PB) cos30°, FB = NB-f,= 51,96 Н.
(РА + Рв ) sin 30° - FB - Р = 0; отсюда, если Р<98 Н,
оба тела движутся вниз по наклонной плоскости. При
выполнении неравенства
98 Н<Р<102Н -------------•
оба тс .-:л остаются в покое.
5.11
NA=PA-cosa,
Fa = Na fA = PA cosa-fA =86,6 H, PAsina-FA-T=O, 1=100 - 86,6 = 13,4 H;i
115
F _ ы = Ps cosa fB = 230194 ?! NB = PB cosa, FB-NB «в s ---------
Т°ГД • T F <0 FB > P8 *sina+ T = 213,4 H.
P Sina + T-FB <U. гв а
л_ -nv-ia остаются в покое. Следовательно, оба гру
5.12
О
tga=l/3, a = 18,4349°
На рисунке изображены силы, действующие на тело С со стороны тел А и В.
Рассматривается предельное равновесие тела С.
N„ - Nct cosa + FCB sina = 0,
FcA+NcD-sina+Fcg-cosa-QsO. (1)
Здесь FCB = NCB f2t FCA = Nca • fr (2)
Подставив (2) в (1), получим
Nca “ Nqj • (cos a - f2 • sin a) = 0, nca + NCB (sina + f2 cosa) = Q.
Откуда
N„ = -------------------------- <31
sina (l-f^ fjJ+cosa ff, + f2)’
N Q (cosa-f; sina)
sina d-^ fj + cosa (f. + fj)' <4>
Fca = N„ fj --Q f, (cosa-f; sina)
»*na (l-f,.f!) + cosa (fi + fj)-
116
|4гнаш°в И- А
Теперь рассматривается предельное равновесие тела А
Na -Гсл -Р* = 01 fa~Nca=0; Fa=N .г р _n ,
Р f
Откуда Nca = -5-4
“ 1-1? (в)
Из (4) и (6) имеем
q = рА f,-8hlcc (1;f- ^*g!£La±&) Л„,н
(1 —f,2) (cosa-f2 sina) — Н;
Из(3) NtB-95,83 Н; FtB = Nra f2 = 23,96 Н.
Развиваемая при этом сила трения рв(ве предельная) определяется формулой
FB = NCB cosa-FCT sina = 83,3 H ----------------------------•
Предельная сила трения Fa„)FB' поэтому тело В при опускании тела С будет оставаться неподвижным, двигаться будет тело А.
5.13
Рассматривается предельное равновесие цилиндра
N =
Q-2 N sin(9/2) = 0, Q 2sin(9/2)' Q-f F = 2 N f= .
sm(9'2)
Q f
P = F = —-----
sin(9/2)
При Q = P 6 = 2 arcsinf
117
г рассматривается предельное
Р равновесие цилиндра
Я * N* sin0-NB sin0 + FA cos0 +
+ FB cos0 = 0,
В NAcos0 + NBcos0-FAsin0 +
+ Fa sin0-T-Q = 0, -TR + FaR + FbR = 0.
Танках FA = NAf, FB = NB-f, то
Na (sin 0 + f • cos 0) - NB • (sin 0 - f • cos 6) = 0,
Na • (cos 0 - f • sin 0) + NB • (cos 0 + f sin 0) - T - Q = 0, -T+(Na +NB)-f = 0.
Откуда
(T+Q)(sin0-fcos0) (T +Q)'(sin0 + f-cos0)
N* ~ 2-(l + f2)sin0cos0 ’ ° 2-(l + f2)sin0-cos0
T=______QI_______
(l + f2)cos0-f' -----------------•
Самоторможение имеет место, когда Т—> оо, то есть (l + f2) cos0-f-> 0 или cos0-► f/(1 + f2);
0Sarccos[f/(l + f2)].
5.15
ОС=а, ОВ-Т.
Сначала рассматривается равновесие диска.
Игам"™
Хо + Хв = 0, Y0+Y0-Q = o, Q а +YB r sine-XllT cos6 = 0. (1)
Далее рассматривается равновесие шатуна и ползуна как твердого тела
N-Xb = 0, -YB-P = o, Р AB sincp-N AB cosq> = 0. (2)
Из (1) и (2) после несложных преобразований получим
Qacostp г sin (ф + 0)'
При наличии трения между ползуном и направляющими имеем
(3)
(4)
Хо + Х8 = 0, Yo+YB-Q = 0, Q а + YB r sin0 - Хв r cosO = 0;
N-XB=0, -YB-P±F = 0, Psinip-N-cosrpTFsincp = 0.
Выбирал перед F верхний знак и полагая силу трения, равной максимальному значению F = f-N, и выполнив элементарные выкладки, получим
Qa(cosq> + fsin(p)
Р"“= rsin(<₽+e)
Аналогично, фиксируя в (3) и (4) силу трения F с нижним знаком, получим минимальное значение Р.
Q a (costp-f sintp)
P"'"’ rsin(<(> + 0)
119
5.16
N + T cosp-P cosa = О,
P = ZOAM = ZAMO = 45° + a / 2.
Имеем систему сил, приложенных в точке М. Рассматривается предельное равновесие груза Р.
F+P sina-T sinP = 0; F=f N.
Тогда
Psin(<p + a). sin(p + <p)
£-0, da
tg(<p + g) tg(P + 4>)
= 2, tg<p = f.
5.17
При спуске груза P направление силы F будет противоположно указанному на рисунке в задаче 5.16. Тогда уравнения равновесия примут вид
N + Tcosp-Pcosa = 0,
P sina-T sin₽ + F = 0; F„p„ = f N. Ц)
Верхний знак перед F соответствует спуску груза Р Рассмотрим задачи нахождения области равновесия, для чего в уравнениях (1) F заменяется предельным значением и записывается система неравенств
Psina-Tsinp-f(p.Cosa-TcosP)<0, Psina-Tsin₽ + f.(p.Cosa-TcosP)>0.
Откуда находим
120
цпш1Н°вИ А.
л sin (а - ф) стбм . \
s|n(P<p) sinCP-fq,)-
tga sin a = - г-
Рассматривается предельное равновесие груза В.
~F + Psina = 0, N-Q-P cosa = 0; N = Q + р. cosa, f(Q + Pcosa) = Psma, tga = BO/15.
1 cosa = -f= V1 + tg2a
(1 + tg2a)(f-Q)2 = P2 (tga-f)2, tg2a - 0,20833 tga - 0,03125 = 0, tga = 0,3093 x = BO = 0,3093 -15 = 4,64 cm.
Зона застоя - 4,64 2 x < 4,64 см.
Q SD = R Sc R = Q SD/SC = = 100 Q, P = 14/4 = 3,5 kH, r = OK = 26 cm, 2-Ц = AB = 22 cm.
121
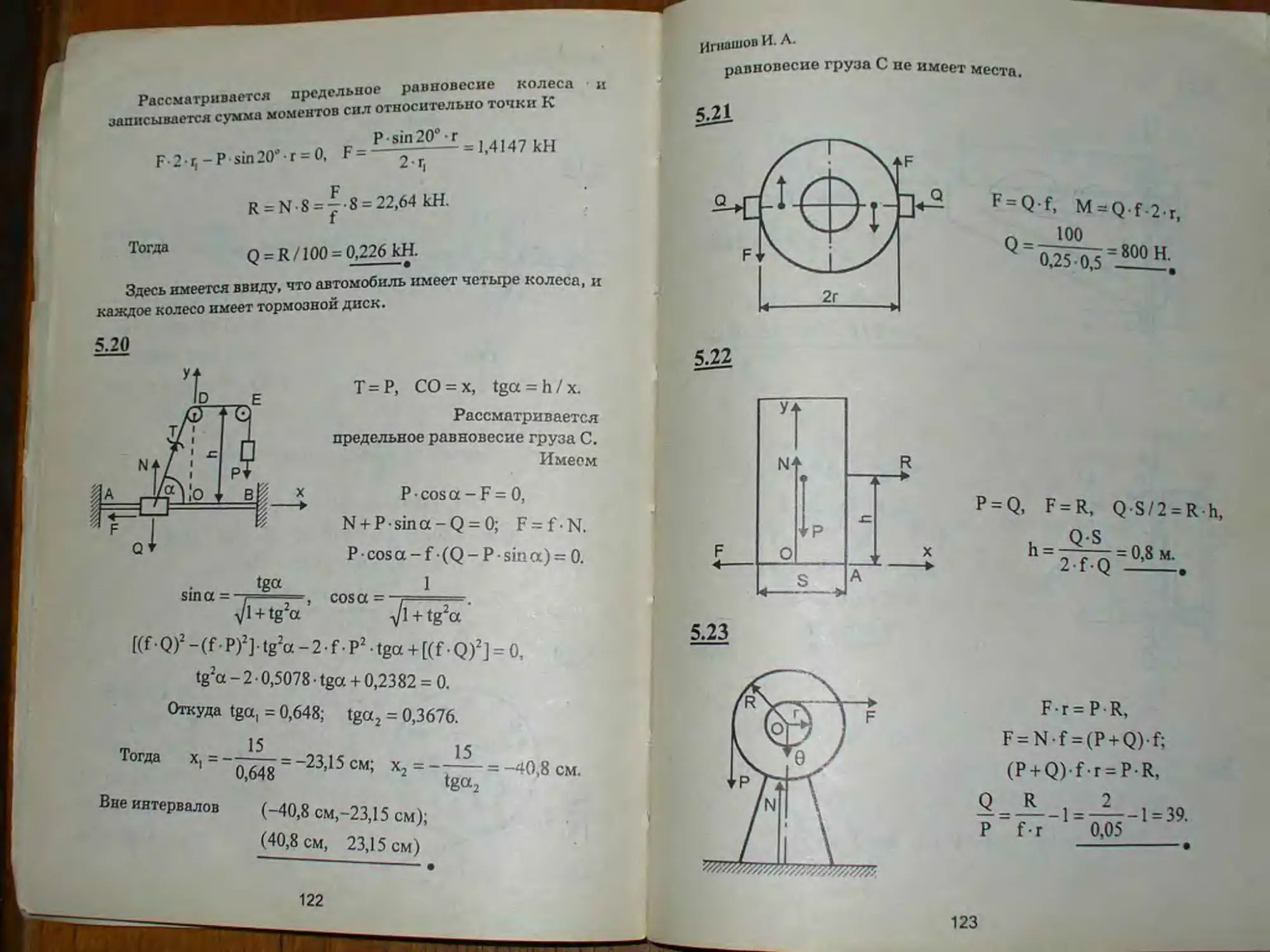
Игнатов И-Л-
равновесие груза С ие имеет места.
записывается сумма момент
_ -,о» r-0 F = ^^-£ = 1-4I47kH
F-2-ц - Р sin20 -г - и, г 2.г
r = N-8 = ~8 = 22,64 кН.
Тогда q = R/100 = 0,226 кН.
Здесь имеется ввиду, что автомобиль имеет четыре колеса, и каждое колесо имеет тормозной диск.
Т = Р, СО = х, tga = h / х.
Рассматривается предельное равновесие груза С.
Имеем
P-cosoc -F = О, N + P sina-Q = 0; F = f-N. Pcosa-f(Q-Psina) = 0.
1
cosa = -7=
V1+,g2“
[(f Q)2 - (f P)2] tg2a - 2 f P2 tga + [(f. Q)2] = 0, tg2a - 2 0,5078 tga + 0,23 82 = 0.
Откуда tga, = 0,648; tga2 = 0,3676.
Тогда x, =------— = -23 15 ru. v _ ,,n „
0,648 24’)Эсм- x2--j— =-40,8 см.
Вне интервалов (-40,8 См,-23,15 см);
(40,8 см, 23,15 см)
122
123
S24
5.25
Р a - N • b = О, -2F-Q + P = 0. N = Pa/b, F = 0,15N. -2 0,15 P a/b + P = Q, P(l-0,03) = Q.
P = 186H. -------•
5.26
N b-P a = O, 2 F-P = O. N = P a/b,
124
= f- N- f- p.B/b. P-2 f P a/bsO, aSb/2f = 10CM.
AC —а-n, CB = a m ассматривается предельное эвесие лестницы АВ na-fb = o. Fa + Nb-P = 0, NB- AB sina-FB AB-cosa -- P-AC sina = 0.
FA = f,-NA> FB = f2-NB.
Решая полученную систему уравнений равновесия, находим N =_JL_ N = pf2 t
5.28
Na-F = 0, Nb-Q-P = 0,
NB AB • cosa - F AB sin a - Q AB cosa / 2 = 0, NB = Q + P, FSfNB = f(Q + P);
(Q + P)-Q/2<f(Q + P)tga, Q + 2P
у
N,
tg<x&2f(Q+P)'
125
Тогда
АВ АВ l + f:
tg15» = f = 0,2679; а = 60".
na-fb=o, Fa+N,-P=0, ,..АВ cosa-FB ABsina- P• AC cosa = 0.
NB(v-fT'75)'r(AB“BP)=0’
ВР ВС _ f (f + j3) = 0 5
5.30
F, + F2 - P sin a = 0,
N, -N2 - P-cosa = 0, P • cosa • (1 - а - b) - N2 а = 0.
F,SN,f, F2SN2 f;
1-a-b 1-b
•------, N. = Pcosa---
а а
(1)
(2)
(3)
Из уравнений (1) с учетом (2) и (3) получим (1-Ь)+(1-а - b)—- tga > 0
и™ 2-Ua + 2 b+y tga.
126
Игнатов И. А. 531
Рассматривается предельное равновесие стержня АВ
Т cos<p-F = 0, Т sin(p + N-P = 0, т sinq> AB cosa-T cosq> ABsina-
p AB
_"~cosa = 0; F = f-N.
Выполнив элементарные преобразования, получим
tg<f> = 2 + |.
5.32
sinP = b/а.
Рассматривается предельное равновесие стержня АВ. Уравнения равновесия записываются в форме трех моментов относительно точек А,В и О.
Р b sin ф - F, а - F2 • а = О,
N, АВ sin Р - F, АВ cosp -„АВ
-Р-—-cos(p = 0,
Р-— costp- N, АВ sinp-F, • АВ-cosp = 0; (1)
F, <f N„ FjSf-N,. (2)
127
уравнений (1) получаем с учетом (2)
Из последних двух предельные значения
Р coscp (3)
Q„„pHne П) и принимая силы трения
Подставив (3) в первое уравнение (11
в виде (2). получим
bJ(i + f’)-f2C
«МФ 2-----a:.f
Fcostp-Nsincp = О, F<f-N, tgq>gf=O,l.
a b d
-- + y=2-(l-c°s<p), b = d(l-cos<p) + a < 0,75 cm.
5.34
В задаче необходимо рассмотреть предельное равновесие блока без учета силы трения качения.
P+I^ +Q--N-cos(p-F-sin<p=0, F-cos<p-N-sin<p = 0,
Ч [R-(R-r) sin<p]-P.[R+(R_r).sin(pJ + F.R_Q.(R_r).sin(p = 0 (1)
F=f-N.
128
Игнатов И. А.
(3)
N = _Vp.+Q coscp + f sin<p
Выражая P из третьего уравнения (1) и учитывая (3), получим
р [Р R + (P + Q)(R-r)sinq>](cosq) + fsinq>) 1 [R — (R — г) - sin q>]-[coscp + f smq>] + fR
_______________f R (P + Q)_________________
[R - (R - r) sin <p] • [cos<p + f • sinip] + f R
Из уравнений (1) следует, что равновесие возможно, если угол Ф равен углу трения; очевидно, при этом значении угла ф
Pi имеет минимальное значение.
Подставив в (4) функции (2), получим
P-(R Jl + f2-f r)-f r-Q R-Vl+F + f-г
5-287
129
5.36
Рассматривается предельное равновесие каждого груза в отдельности
T+F,-?sin(45° + a) = 0,
N, - Р cos(45° + a) = О, T-F2-Pcos(45°+a) = 0,
N2-Psin(45“ + a) = 0.
F,=f N„ F2 = f-N2. (1)
Из(1)следует
tg(45° + a) = |±|
или
I + tga 1 + f 1-tga 1-f
Тогда tga = f.
130
Игнатов И. Л.
Н = 3 м, S = 6 м
Q = 1500 kH, Р = (9 + h) 80 кН;
N, = (3,5h 18 + 3.5S 10) кН, F=fN=flO(6+O,9h)-7h кН,
N, + F-P-Q = 0;
(3,518h + 3,5'610) +
+ f-70(6h + 0,9h2)--80 (9 +h)-1500 = 0, h2 +5,1675 h-185,1852 = 0;
h = 11,3 м. -------•
5.38
Psina = k P/R, sina = к/ R = 0,001; a = 3'26’. --------------•
5.39
0,5
P-cos30“ = y^-300, P = 5,77 H.
131
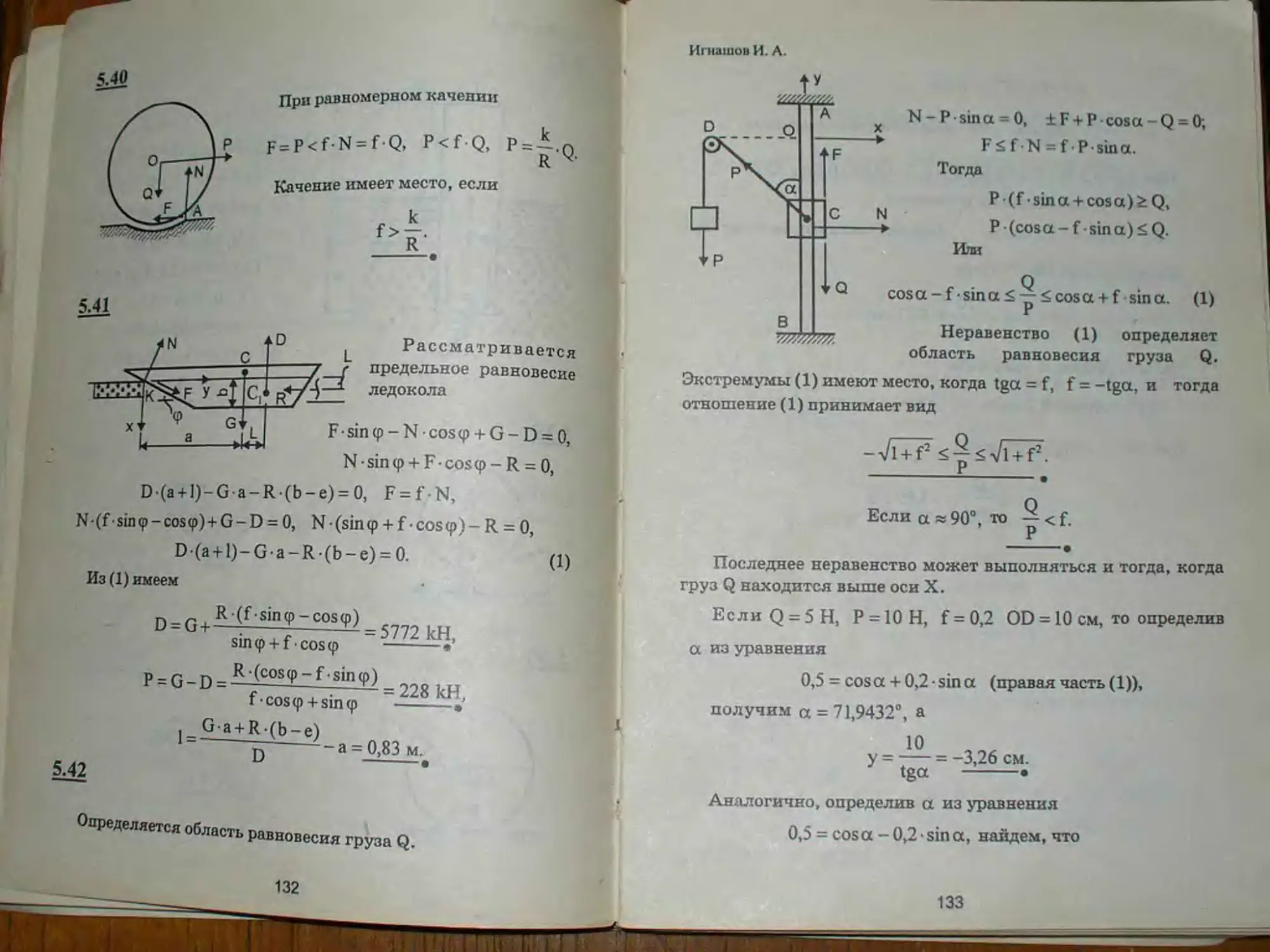
5.40
При равномерном качении
F=p<f-N = f Q, P<f Q, P = i.Q R
Качение имеет место, если
5.41
|Я«ХХ
Рассматривается предельное равновесие ледокола
F-sin<p-Ncos(p + G-D = 0, N • sin <р + F costp - R = о, D(a + l)-Ga-R(b-e) = О, F = fN,
N-(f sin<p — cos<p) + G — D = 0, N(sin<p + f • cos<p)- R = 0, D(a+l)-Ga-R(b-e) = 0.
Из (1) имеем
_ „ R-(fsinq>-cosra)
D = G + -4--~----- = 5772 kH,
smtp + f-costp ----*
p=G-D=Afef2i^) = 22gkH tcosq> + sin<p ------------.
. Ga + R(b-e)
1 ---------' - a = 0,83 m.
D
5.42
Определяется область равновесия груза Q.
132
Игнатов И. А.
N-Psina = 0, ±F + P cosa-Q = 0; FSf N = f P sina.
Тогда
P (f sina + cosa)tQ, P (cosa - f sin a) < Q.
Или
cosa-fsina£y 2cosa + f sina. (1)
Неравенство (1) определяет область равновесия груза Q.
Экстремумы (1) имеют место, когда tga = f, f = -tga, и тогда отношение (1) принимает вид
Если а и 90°. то — < f. Р
Последнее неравенство может выполняться и тогда, когда груз Q находится выше оси X.
Если(2 = 5Н, Р = 10Н, f = 0,2 OD = 10 см, то определив
а из уравнения
0,5 = cos a + 0,2 • sin а (правая часть (1)), получим a = 71,9432°, а
у = —— = -3,26 см.
tga --------•
Аналогично, определив а из уравнения
0,5 = cosa-0,2sina, найдем, что
133
Иишшов И. А.
а = 49,3277е; тогда
_ Ю _ „8 6 см. - нижняя граница зоны застоя. yXtga —:—•
При <? = 1,5Н, Р = ЮН, f=o.2 OD = IOcm„ Q/p = 0,|5 угол а находится из уравнения
0,15 = cosa + 0,2 • sin а. (правая часть неравенства (1))
Имеем: a = 87,0932°, тогда
у = — = 0,51 см. tga -----------•
Дальше решается уравнение
0,15 = cosa-0,2 sina (левая часть неравенства (1))
Имеем: a = 70,2392°, тогда
Глава 2
Пространственная система сил
§ 6. Силы, лилии действия которых пересекаются в одной точке [4, 2, 1,7]
6.1
a = 30°, 0 = 90°
Для равновесия системы сил, линии действия которых пересекаются в одной точке, необходимо и достаточно, чтобы сумма проекций на каждую из осей координат всех приложенных к точке сил была равна нулю (V = 0).
Имеем
— = -3,59 см. T cos45°-T cos45" =0,
tg“ * S1 sinl5°-S2sinl5° + 2Tcos45° = 0,
S, cosl5° + S2 cosl5° = 0.
Решая систему уравнений, получим
Решая эту систему уравненихх, получим
,_а = 21 = Ж = 2 а = 36*5211". S;=400H, S, = -200 Н.
8 Т, 160 4 -• --*
6.3
Рассматривается равновесие узла О.
S cos45° - 2 T-cos45° = 0, S* cos 45° -Q = 0.
Откуда
S=—^- = 141Н, cos 45
T = ^ = 71H.
2
T = 2P = 600H, S,=S2 = 300 H.
136
Игнашои И. А.
Откуда
а = 43,6°.
Тв = 580 Н, Тс = 320 Н, Td = 240H.
6.6
80
АК = 80см; C0SP = p^> 80
Р = 61,93°; cosa=—.
а = 36,87°
Рассматривается равновесие узла А.
2 S cosa-T cos₽ = 0, Tsinp-Q = 0.
Откуда
Т = 204 Н, S = 60H.
6.7
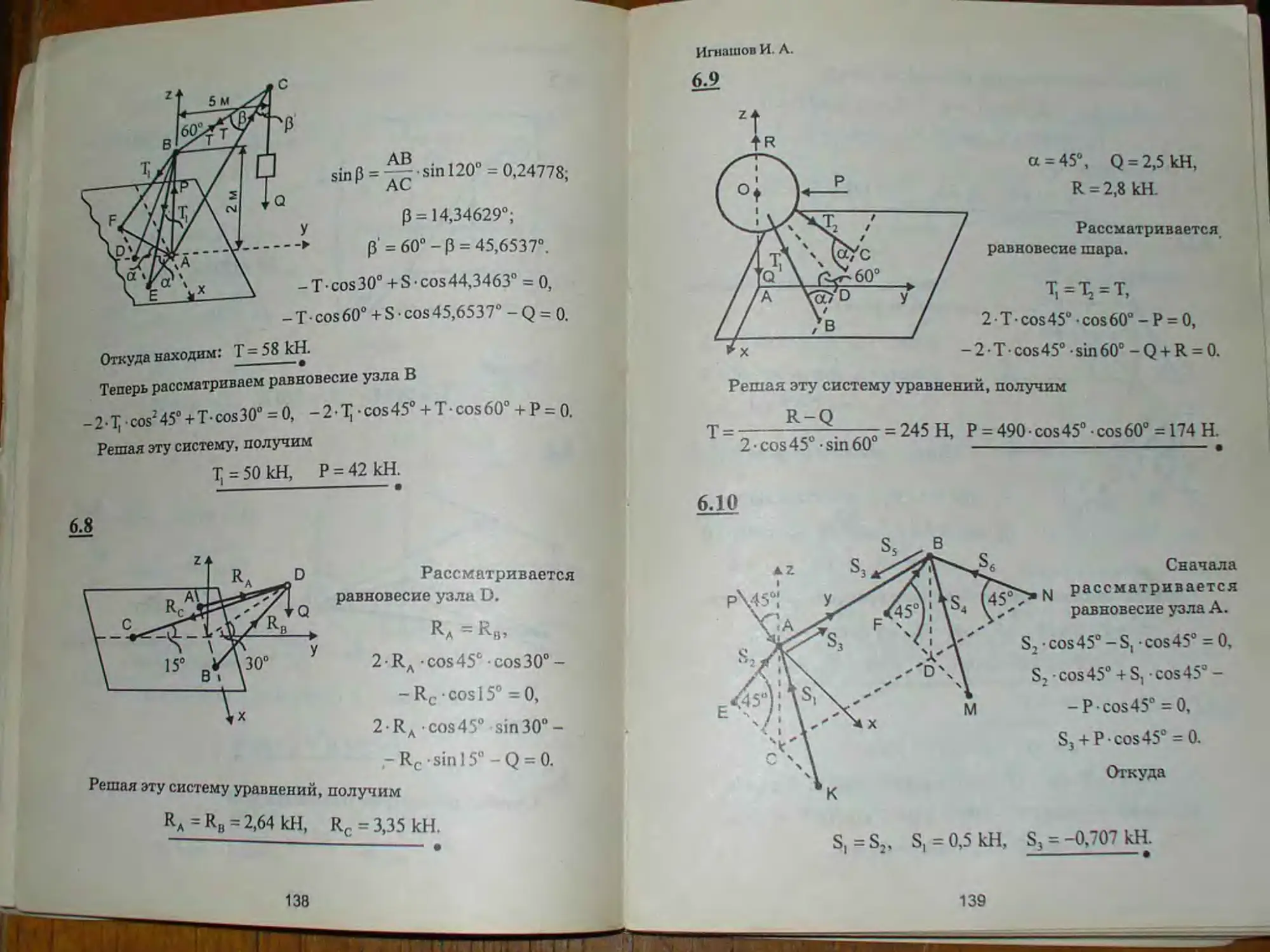
Сначала рассмотрим равновесие узла С.
5 АВ АС
ВС =-------- = 5,77 м; —- = . ,-п0•
sin 60 sinP sin 120
137
sin₽ = ^ sin 120° = 0,24778;
AC
P = 14,34629°; p' = 60° - P = 45,6537°.
cos30° + S cos44,3463° = 0, -Tcos60° + S cos45,6537° -Q = 0.
Откуда находим: Т-58 kH.
Теперь рассматриваем равновесие узла В
_2.1] • cos145°+Т-cos30° = 0, - 2 • Ц • cos 45° + Т cos 60° + Р = 0.
Решая эту систему, получим
Т; = 50 кН, Р = 42 кН
Рассматривается равновесие узла D.
2 • Ra • cos 45° • cos 30° -
- Rc cos 15° = 0,
2 Ra cos45“ sin30°-
- Rc-sinl5°-Q = 0.
Решая эту систему уравнений, получим
Ra = «в = 2,64 кН, Rc = 3,35 кН.
138
Игнатов И. Л.
a = 45°, Q = 2,5kH, R = 2,8 kH.
Рассматривается равновесие шара.
T, =T^=T,
2 T-cos45° cos 60° - P = 0, - 2 • T • cos 45° • sin 60° - Q + R = 0.
Решая эту систему уравнений, получим
т =------R-~Q = 245 Н, Р = 490 • COS45" cos 60° = 174 Н.
2 cos 45 sin 60 --------------------------•
6.10
Сначала
N рассматривается равновесие узла А.
S, -cos45° -S, cos45° = 0,
S2-cos45°+S,cos45°-
-Р-cos 45° = 0,
S3 + P-cos 45° = 0.
Откуда
S,=S2, S,=0,5kH, S, = -0,707 kH.
139
Откуда получаем с - 05 кН
S6 = IkH. s4=s, = -0.5 кН.
6.11
Сначала рассматривается равновесие узла С.
S sina + Sc - sina cos45° = 0,
У S cosa + Sc cosa cos45° = О, Sc cos45° - P = 0.
У
-> Затем - равновесие узла В.
SE • cos2 45° -SD • cos2 45° + S • sin a = 0,
SE • cos2 45° + SD cos2 45° + S - cosa = 0,
Se-cos45°+Sd-cos45°+Sa=0.
Решая последовательно эти системы уравнений, получим
Sc = P/cos45°, S = -P, SE = P(sina + cosa), SD = P(cosa-sina), SA =-P-V2-cosa
6.12
a = 60°, 0 = 90°, P = 0.
-SD cos60° +Tsin[270° -(90° + <p)] + T-sin(180° - <p) = 0, ~SD • cos 60’ + T sin[270° - (90° + <p)J+T• cos(180° - <p) = 0, -Scsin60’-SDsin60°+SB=0.
140
Игнатов И. А.
или
— SD - cos 60° + T-cos<p + T - sincp = 0, -Sc cos60" + Tsincp -Tcoscp - 0, - Sc • sin 60° - SD • sin 60° + SB = 0.
Откуда получаем
% = 2T(coscp + sincp), Sc = 2Т (sincp-coscp), SB = Т-2-л/З sincp.
6.13
ZCBF = 60°,
ZBCF = ZBFC = 60°;
следовательно, боковые грани пирамиды равносторонние треугольники, сторону которых обозначим а, тогда а = 45°.
Рассмотрим равновесие мачты.
-4• Т cos45° + R-Р = 0, R = 2Л + 2 = 4,83 кН.
141
6.14
AC = V> 00 + 22,25 = 10,9658 м.
a = 65,77°;
Z ВОС = 72”, АО ,В“=те =
— = 2,22222; 4,5
Пусть АС — а — 10,9658 м.
Рассматривается равновесие узла А.
Vx = 2-a-cosa(cos36°-cos 72°) =4,5 Н, Vz =^l a sina = -40 Н, Vy=0. V = 7V^ + VZ =40,25 H.
Мх = MZ = 0, Му =2asina-4,5(cos72°-cos36”) = -45.
Из уравнения центральной оси имеем
My=Vxz-Vz-x
Откуда при z=0 х = -45 / 40 = -1,125 м.
6,15
в
Рассматривается равновесие узла Р.
Сумма проекций сил, приложенных к узлу В, на вертикаль ОВ дает
3Scos30°-100 = 0,
S = 100/3 cos30” = 38,5 Н.
142
6.17
Откуда получаем
Рассматривается У равновесие узла D
2S,-cos260°-SjCos60°-
-P-cos60°=0,
2 S, sin60° +S2 sin60° -
-Psm60°-P = 0.
P(l-t-2sin60°) 30-2,732
2 sin 60“ (1 +cos 60°) " 2,598
S3 =31,55-30 = 1,55 kH.
6.18
Пусть ребро тетраэдра равно а, тогда ДЕ = а V3 / 2 и cosa = s/3/3, sina = л/2/3.
Рассматривая равновесие тетраэдра как твердого тела, будем Иметь 3-R = P, R = P/3.
143
Дальше рассматривается равновесие узла А, а также равновесие узла D.
3S sina = P, S = P-76/6;
(2-Tcos30°)2 + R2 = S2.
Отсюда Т = Р / 3 • Л — •
6.19
Сначала рассматривается равновесие тетраэдра как твердого тела.
3 R-3 P-Q, R = ^.
Затем рассматривается равновесие, например, ребра AD и вычисляется сумма моментов сил, приложенных к AD, относительно точки D с предварительной заменой сил Т равнодействующей.
R"=V2T!+2-T2/2=73T; -RAO+PAO/2+RoAOtga/2 = 0.
Здесь tga = д/2 (см. задачу G.18).
_ т 2Q + 3P Гс
Тогда Т =--------V6.
18
144
j4niaW°B ИА
м Р ю
3 sina 3 0.8165 4,08 Н
При отсутствии трения между шарами проекция сил, приложенных к шару А, на ось х дает
2 Т cos 30° - N cosa = 0.
Откуда
N cosa 2cos30”
4,08 0,577
2 0,866
= 1,36 Н. ----------•
Из условия равновесия узла
; = Тв=.L Q, 3 1 у/312-2-12
DE 1--J3-12-2-Р sin a =--=------------,
AD 31
„ КЕ 1-л/3-12-212
AK 21 +V3-12-212
1 —z 2-1 + т/з-1’-2-12 cosY = —=
Z КОЕ = 45°.
D следует .i+2.fr2-2£ с з 1 Уз-12-2-12
145
§ 7. Приведение системы сил к простейшему виду (4, 2, 1, 5]
Для равновесия произвольной системы сил, приложенных к твердому телу, необходимо и достаточно, чтобы главный момент системы сил и главный вектор были равны нулю:
М„ = О, V = 0.
В рассматриваемой задаче имеем:
VX=F,-FS = O, Vy = F6-F2 = 0, V, = F4-F,=0;
Mx=F4a-F,a = 0, M, =F,-a-F„ a = 0, M, = Fs-a-F2 a = 0.
Откуда получаем
F, = F2 = F3 = F4 = Fs = F6.
7.2
Mx=-Pa-Pc, My = Pb, M, = 0, VX = P, V, = P, V.--P.
MV = -P2(a + c) + P2b-0;
a = b - c.
146
Доан*0” И А.
7J
V. = P cos45*-p.co,45. = 0
V, = J P cos45“,
V. =2 P cos45’; (Ц M,=Pcos45,.a-p.co,4y.a = 0 M,=-2 P cos45’ a,
M, =2 P cos45° a. (2) V = -Jv2 + V,1 =2P;
M -V = -4 P2 cos2 45"+4 P2 • cos2 45“ = 0, p = M-V/V2=0 Уравнение центральной оси системы определяется формулой
Mx-(V,y-Vyz)_My-(VK-z-VIx) M,-(V,x-V, у)
V„ Vy =₽ (3)
В рассматриваемой задаче второй инвариант равен нулю; следовательно, параметр системы р=0. Главный V вектор
отличен от нуля, поэтому система приводится к равнодействующей!, равной главному вектору V • Линия действия равнодействующей находится из уравнений (3), где р-0.
Имеем после подстановки (1), (2) в (3)
х = а, у = z.
Это прямая, содержащая диагональ DG.
аУз СО 7з CF = — cosa=—=у,
v_F.(b^_^) = F,X v« 1 6 3 ’ 2 2
Vy = F,-0,5F2,
147
М- = Г
а = 0,
•у.уЦ }
М,=Е а (-[Г-й- 6 ’’°-
(2)
Из формул (1) И (2) следует, что второй инвариант М • V = 0, а главный вектор Уотличен от нуля; следовательно, система сил приводятся к равнодействующей.
Линия действия равнодействующей определяется ио формуле (3) задача 7.3.
Подставив (1) и (2) в (3), получим
V-Z
-^- = 0,
-i^(J-+F3)-(4-0,5F2)-x + ^F2y = 0.
О ~
Откуда
z-°- х=- б.уТГ-
VX = F-F = O, Vy = F-F = 0, V, = F-F = 0, V = 0. M,=2-Fa = 20HcM, M, = -2 F a=-20 Нем, M, =2-F a = 20 Н ем;
Система сил приводится к паре с моментом М.
148
цпишо»11 A-
М, cosa - м
cos(5 = Tr = ~- cosy-Mt. >/3
М 3 • 1 - = —
-------------г_________М з
v.=0, V, = P2, V, = P;
V = Jff7p*=14,4H.
M, = 0, M, = 0, M, = P*OA. _MV = P,.piOA, M._MV 96-1,3
Направляющие косинусы винтовой оси
cosa = V„/V = 0, a = 90°; cosB = V/V = -H-’ V208’
p = 33,690 Г; cosy=V,/V = -j=, у =56,3099°.
Параметр винта
MV P.R-OA p = -v^-=
Уравнение винтовой оси имеет вид
V-z-V, у Vx-Vxz Р2 OA-(V x-Vxy) —----------------5— =----------------= р.
V,
V, V,
Откуда получаем
V2y-Vyz = 0, V2x/Vy = p.
При z=0 у = 0, х = 0,9.
7.7
V, = P„ Vy = P2, V, = P,; V = y/Pi! + P2+р/ *°-М„=Р3Ь, Му = Р|-с, М, = Р2а.
149
м V = P, P> b + P, Р; <= + Р2 Р, » = 0.
Подели, носледиее равенство на Р,Р,Р„ получим £+А+—= 0.
р, р; рд
Так как здесь М • V = 0, то и параметр р-0.
ТоГДа из уравнения центральной винтовой
оси, - например, (3) задача 7.3. - при х-у-в=0 следует соотношение
р, b P, с_ Р2 а
Р, ~ Р,
7.8
Уравнение центральной винтовой оси имеет вид ^12z4^_4-(vx-z-v2.x) m,-(v-x-v -у)
V, -=р.
150
Игнатов
И. А.
Подставив координаты векторов М и еВ.гральи°й винтовой оси и положив там г-0, а-Л 2 FJ-F,1 а х_у=-2'
V о уравнение получим:
Е? + Е
г?
Записываются координаты векторов М и v
Ч = "2 Р, Vy = 2P, V, = 4 Р;
У = 2-Лр. МХ = 2 Р а,
М, = -2Ра, М, = 4Ра.
Минимальный момент
. MV -4-Рга-4Р2а + 16Р2а 2-Л
М ~ V 2-Тб Р -—Ра.
Параметр винтовой оси определяется по формуле
MV 8Р2а 1
Р“ V2 24 Р2 -З а’
Уравнение вентральной винтовой оси имеет вид
М,-(ЧуЧ г) = Му-(У„г-Угх) = М,-(Уух-УхУ) Ч Ч _ Ч _
Подставляя сюда координаты векторов Ми V и полагая г=0, получим:
-а + 2- у = а/3, -а + 2- х = а/3; х = у = (2/3)а< у, Тб vz Тб ч cosa = v = -—, cosp = - = —, cosy=V=3, cosa = -cosp - -(1/2)-cosy = -л/б / 6.
151
7.10
Мк = -Р,-10-Р,-5 = -50Н м, М, = Р3-4 + Р2-5 = 42Н.м, М, = -Рг Ю-Р,-4 = -68 Н м.
Минимальный момент
M^_2J2r68^= 53gH.M
М " V 5,385 ----------’
Направляющие косинусы оси
cosa=^- = 0, cosp = = 0,37 , cosy = = 03)3.
Параметр винтовой оси
Из уравнения центральной оси системы (например, задача 7.9) получаем при z=0
-50-5у = 0, у = -10м, 42 + 5-х =—17,66, х 11,93 м. --------------------• -------------------------------• •
7.11
*8а-ут = 0,416666, cosa = 0,923077, sin a = 0,384415.
152
0гн«“°“ И'А
Vx = - Р + F • cos а = -8000 + 5200 0,923 = -3200 кН,
V> = -G, - G2 - F • sin а = -18000 - 5200 0,3846 = -20000 кН, a 1
Mz = Р H-G, - + G2 •~ (b-a)-F-cosa h +
+ F-sina-[(b-a)-htga] = 8000-4-6000-5 + + 2000-5-5200-2,4-0,923+
+ 5200 0,3846 (5 - 2,4 5 /12) = 8480 кН • м.
Таким образом, искомые реакции
Rx = 3200 кН, Ry = 20000 кН. ---------------------—— •
Легко видеть, что в случае плоской системы в уравнении центральной винтовой оси (например, задача 7.9) остается только третье отношение, причем р=0.
Тогда
M,-(Vy x-V,-y) = 0, 8480 + 20000-х-3200-у = 0, 125 х - 20-у+ 53 = 0.
Эта прямая и определяет положение равнодействующей.
7.12
р||х. VX = P, Vy = F, V, = -G; V =-7р* + F: + G:~ 150 kH. M,=-FH, My = Ph, M, = 0.
153
Подставив сюда координаты векторов Ми V получим
14 y+2z-3O 30-5-Z-14 X . 2 х-5 у
5 " 2 14
Откуда при z=0 имеем
7у=14, 14х = 30,8.
Следовательно, ось динамы пересекает плоскость XOY "очке х=2,2 м, у=2 м.
154
jlniaui»» И A
§ 8 равновесие произвольной системы сил [4, 2, 1, 5, 7[
тошАПР = (свхй)лв = = СВ Psin20° =
= 3 400 0,34202 = 410,4 кН и.
£mz F = 4 F-3 cos75” = = 4 3 0,2588 = 3.11 кН м.
---------•
8.3
£m„F,=6-F-R = 0, F = 6/R = 6/0,6 = 10 кН.
£x, = Q-F=0, Q = F = 10 кН.
155
8.4
М, =10 15 = 150, Мд =20-10 = 200, М = Р 5. м=7м?+м1=250;
Р = 250/5 = 50 Н., tg(180°-а) = М, /М, = 3/4, tga =-3/4 а = arctg(-0,75) = 14343
/М
8.5
следующим образом:
Q = 100 кН, Р = 30 кН.
Рассматривается равновесие крана с противовесом F.
Уравнения равновесия сил, приложенных к рассматривае?лому телу, записываются
-Q-P + NA + Ne + Nc = 0, Q GH-P-4 + Nb BD-Na ad = o, Nb MD + Na MD-Nc MD = 0.
156
ргнашо» И. А-
Или
-13O + Na + N„ + Nc = o, 50-120 + No1-Na.1i nbO,5 + NaO,5-Nc1 = o.
решая эту систему уравнений, получим
Nc 43,33kH, NH=7833kH, NA=8,33kll
Рассматривается равновесие крана. Уравнения равновесия сил, действующих на кран, представляются в форме:
хА = хв = 0; - Р — Q + ZA + ZB + Zc =0, — ZA • АО + ZB • ВО = 0,
-P b-ZcOC + Qh = 0, xA AO-xb BO = 0.
Решая эту систему уравнений, получим
ХА = Хв = 0; Zc = -12,12 кН; ZA = ZB = 15,06 кН.
8.7
Рассматривается равновесие плиты
Ya+Yb = 0, Za+Zb-P+S = 0, SEF-PDC/2 = 0, ZB AB-S AE-P AB/2 = 0, -yB AB = 0.
157
Решая эту систему, получим
уЛ=у„=о, S = 138H,
Z, = 136H, ZA=-94H.
l.p + l.p + P =Р, 4 5 C
-PcDC-PbAB + PAB/2 = 0, PcCE-PAD/2 = 0.
Pc = —P, x = DC = —a, y = CE = — b. c 20 11 11
8.9
AD = ——
2
Рассматривается равновесие стола с грузом Q.
цгнаШопИ А.
~₽-Q+Na+ + No+Nc = 0,
-NAa/2+N,.
•a/2-Q.y = o,
-na~-nb-^+nc.^+q.x=0.
о о 3
Решая эту систему уравнений, получим:
Nc=-y
За 3 3а
P + Q , V3 . Р
NB = ——+ (у + —х)—.
3 3 а
8.10
Вычисляются моменты сил, приложенных в точках Ар А2, Aj, относительно прямых А1В и А2С. Имеем:
Р, R sinipj-Pj-R sinip, =0, P.Rsinqij-PjR-sinqi^O;
Р, _ sin tp, _ 2_ Р2 sinq>2 2 ’
Откуда следует'
Р, sin<p, 1
Р3 sinq>j >/3
159
2-sin(p! -sintp, = 0, V3-sin<P| -sin<p3 = 0;
<p, =360°-((p, + <p2).
Из второго уравнения (1) вытекает, что
•Уз • sin (р, + sin у, • costp, + cos<p( • sin <p2 = 0.
Из первого уравнения (1)
sinq»! = —-sintp,, cos(pt =, l- — -sin2 <p2.
2 V 4
Подставив (3) в (2), получим
(л/з + cosq),)2 = 4(1- — sin2tp,); З + 2-л/з cos(p, = 3;
4
При этом значении (p2 из (2) следует
»«ф|=-у’ <Р|=150°-
Окончательно J
(1)
(2)
(3)
<р2 = 90°.
гр, = 150°, <р2 = 90°, <р3 = 120“.
Из (1) имеем
Вычисляются моменты сил
относительно осей х и у
— Р, • R — Р2 R cosa-P, R cosP = 0, Р2 R sina- Pj R sinp = 0.
P, + Pj cosa + Pj cosp = 0,
Рг sina - P, sinp = 0. (1)
(P| +P3 COS0)2 + Р/ -sinp = p2; 2 P, P5 -cosp = P2 - p* - P(\
160
Игнатов И. А.
Р2 - Р2 - Р2 cosp = -?------'---— = -0,875; 0 = 151”.
2 Р, Р, -----.
р, sin а = — sin В = 0,9696; а = 75’50.
О '
8.12
Рассматривается равновесие шкива и вала.
Т1+Т2 + ХА+Хв = 0, 2Л + Zo = 0, ZB-50 = 0, Т,10-Т,10-М = 0, -Хв50 + 150 10 = 0.
Решая эту систему уравнений, получим М=500Нсм = 5Нм, Хв = 30Н, ХЛ=-180Н, ZA=ZB=0.
8.13
-10
А
Z
+ Q
а = 30°, DE = 1, P = 1000 H, Q = 250 H.
Рассматривается равновесие вала
XA + XB=0, Za + Zb-Q-P = 0, ZbAB-PAD-QAC = O, Q R-l sina-P = 0, -X„AB = 0.
6—287
161
Решая эту систему уравнени“’
„ =х =0, 1 = Ю см, Z„ = 950 Н, 7,
= 300 Н.
8Л4
Р = 100Н, R = 100cm, г = 10 см.
Рассматривается равновесие вала АВ
ХА+Хв + Р = 0,
ZA + ZB + Q = 0, ZB-100 + Q 10 = 0,
PR-Qr = O, -Хв 100-P-90 = 0.
Решая эту систему уравнений, получим
Q = 1000H, ХА=-10Н, XB=-90H, ZA=-900H, ZB=-100H. - .— -----------
8.15
Рассматривается равновесие ворота
ХА + Хв + Q = 0,
ZA+ZB-P = 0,
zdab=o,
Q R-P AK = 0, ~X„AB-QAC = 0.
Решая эту систему уравнений, получим
2^0, Р = 100Н, ZA = 100H, Х„=-400, ХЛ=-400Н
162
Игнатов И. Л.
8.16
\х,
= 30°, Q = 1000 H.
Рассматривается равновесие ворота
ХА +XB+Q sina = 0,
ZA +ZB +Q cosa-P = 0, ZB AB + Q cosa • AC + P AD = 0, Q-R-P-KD = 0,
-XB AB-Q sina-AC = 0.
Решая эту систему уравнений, найдем
XB = -200H, Р = 125Н, ZB=-384 H, ХА=-300Н, ZA=-357 H.
8.17
Рассматривается равновесие вала ворота с грузами Р и Q, удерживающими ворот в равновесии.
а = 30°, R = 6 r, АС = 0,5м, Р = 60Н.
ХА + XB + Pcosa = 0, ZA + ZB-Q-P sina = 0, ZB AB-Q AE +P sina AC = 0, -Qt+P R = 0, - XH • AB + P • cosa • AC = 0.
Решая эту систему уравнений, найдем
Q = 360 H, Хв = 17,3 Н, ХА =-69,3 Н, ZA = 160 Н, ZB = 230 H.
163
8Л8
Игнааюя И. А.
8.20
8.21
Рассматривается равновесие крышки ABCD.
XA+XB-S cos60°=0, ZA+ZB+Ssin60“-Р = 0,
ZB AB-P AB/2 = 0, Pcos60° AD/2--SADsin60° =0,
-XBAB = 0.
Решая эту систему уравнений, получим
О, S = 34,64Н ZB=60H ZA=30H ХА= 17,32
Рассматривается равновесие полки ABCD
ХА +ХВ -Tcosa = 0, ZA + ZD + Т sin a - G = о, ZB AB + T-sina AB/2--GAB/2 = 0,
G • AD / 2 - T sin a • AD = 0, -XB AB + T cosa AB/2 = 0.
Решая эту систему уравнений, получим С G С
Т=-----, хв =ХА =—ctga, ZA=Z.,=—.
2siim " А 4 6____8 4
8.19
Рассматривается равновесие крышки ABCD.
а = 60°
X* + XB-Q cosl5’=0,
ZA+ZB+Q sin 15° - Р = 0, ZB AB-P AB/2 = 0,
P cosa-AD/2-Q AD cosl5° =0, -XB AB = 0.
Решая эту систему уравнений, получим
Q = 104H, ZB=200H, Za = 173H, Хл = 100Н Xb = 0.
Рассматривается равновесие крышки ABCD.
ХА+ХВ-Т=О, ZA+ZB-P = 0, ZB АВ-Р АВ/2 = 0, Р cosa- ВС/2-Т ВС sina = 0, -ХвАВ + ТАВ = 0.
Решая эту систему уравнений, получим
Т = 17,32Н, ХВ = 17,32Н, ZA = ZB = 10H, ХА=Ю.
8.22
Рассматривается равновесие фрамуги.
V + Xs _ р.«кЗ(Г = о, ZA + ZB + Р cos60° - Q = 0, 2 дв+р со5б0’AB/2-Q AB/2 = 0,
Q.cos30"BD/2-PBDsin60" = 0, _ХвАВ+Ряп60°АВ/2 = 0.
Решая эту систему уравнений, получим
Р=50Н, ZB = ZA = 37,5Н, ХЛ = Х„ = 21,7 Н.
8.23
Рассматривается равновесие части моста ABCD.
ya+Yb+T cos30” = 0, ZA + ZB + Т sin 30“ - Р = 0, -TBC+Pcos60“BC/2 = 0, PAB/2-Z„ AB = 0, Ya-AB = 0.
Решая эту систему уравнений, получим
|'л = 0, ZA=7,5kH, Т=3,75 кН, Z8 = 5,625 кН. Y„ = -3,25 Н.
166
Игнатов И. А
8.24
а = 30“
Рассматривается равновесие рамы ABCD.
Xл + XD - Т cos30° • sin 30° = 0,
YA -T cos30° cos30° =0,
ZA+ZB+T sin30° -P = 0,
Zu AB + T sin30" AB-P AB/2 = 0, P BC/2-T sin30° BC = 0, -XB AB = 0. Решая эту систему уравнений, получим
Х„=0, Т = 200Н, ZB = 0, ZA = 100H, УЛ=150Н, Хд=86,6Н. —— -----------------------------------------------ф
8.25
Рассматривается равновесие ABCD, подверженной действию собственного веса.
sin а = AD / DE =
= 60/75 = 0,8
а = 53,13°.
Хн + Хк +
+ Ssina = 0, ZH+ZK +
+ S cosa - Р = 0,
ZK HK + S cosa • АН-Р HK/2 = 0, PAD/2-S-ADcosa = 0,
167
8.2Й , 7 =—IOOH, Хм — 133,3 II. Z(l-500l|.
^6.711.2^^12^---------------- •
рассмотрим®™ равновесие
крышки ABCD. Решая эту Реакция связи R
перпендикулярна ABCD. Рассматривается равновесие пластинки ABCD
X*-F = 0,
YA+YD+R sina = 0, ZA+ZD + Rcosa-P = 0, RAB-PcosaAB/2 = 0,
F.DHsina-ZDAD+PAD/2-Rcosa.AD/2 = 0, Y .AD+FDHcosa+RsinaAD/2 = 0.
Решая эту систему уравнений, получим
X, = I0H. R = 2,17H, ZD=3,27H, Za=-0,15H, Yd = -3,43IH, Ya=2,35H.
8.27
Рассматривается равновесие плиты, опирающейся на шесть стержней.
S, -sinp + Sj-sinp = 0, -S3 cosa = 0,
S| -cosp + Sj +S3 sina +S4 +S, cosp + S6 - P = 0,
168
Игнатов И А.
Sa a sina+S, a + S, cosp a+ S6 а - Р a/2 = 0, S, b cosp + S, b cosp + S6 b-P b/2 = 0, -S1cosP-b = 0.
Решая эту систему уравнений, получим
S, = S, =S4 =S, = 0, S,-S, = P/2. — •
8.28
Рассматривается равновесие плиты ABCD.
S, sina + S, sina = О, S4cosa + P = 0,
S, + S, cosa + S, + S4 cosa + Ss • cosa + S6 = 0,
S, -а + S, cosa a + S, a+ S4 cosa a = 0,
-S, a-S, sina a-S5-sina a-S6 a = 0, -S, sinaa + Pa = 0.
Решая эту систему уравнений, получим
S, = P Л. S4 = -P -J2, S, = -P-V2, S3 = P, S,=-P, St = P. -------------------------------------------------Ф
8.29
Рассматривается равновесие двери.
ХЛ+ Xll-P sin60° =0, УЛ + YB+ P cos60°-Т = 0, ZB-Q = 0,
-Q AC cos60°/2-P cos60“ AB-YA AB = 0,
ХЛ AB + Q AC sin60“/2-P sin60° AB = 0,
-T-ACsin60“ + P-ACsin60° = 0.
169
Решая эту систему уравнений, получим
Т = 320 Н,
ZB = 640 Н,
ХЛ = 69,3 Н,
Y* =-280 Н,
YB = 440 Н,
Х„ =208 Н.
Рассматривается равновесие стрежня АВ.
RA -Тв sina = 0,
Тл -Тв cosa = 0, RB-P = O,
-ТА AB sina + Ra AB cosa cosa = 0.
RAABsina+(P/2-RB)ABcosasina = 0. Решая эту систему уравнений, получим
R„=8H, Ra=2H, Та = 1,15Н, ТВ=2,ЗН. ------------------------------. 9
8.31
Рассматривается равновесие турбины. Коническая шестерня действует на турбину с силой R, при этом последняя перпендикулярна ОВ.
170
Игнатов И Л.
ХА + Хс - R • cosa = О, YA + YC = O,
Zc-P + Rsina = 0, - YA AC —R-sina ВО = О, ХА AC-R'Cosa-OC = 0,
M-Rcosa ВО = 0,
Решая эту систему уравнений, получим
R =2,071 кН, ХА =2,667 кН, YA = -0,107 кН, Yc = 0,107 кН, Zc = 12,54 кН.
8.32
Рассматривается равновесие или равномерное вращение ветряного двигателя.
хд+хс = о, -Yc + 4Qcos30° =0, ZA + Zc-P = 0, *301 ZcAC-PAB = 0, ХА )Г \ 4 Q-2 cos60°-P R =0,
Q=1,2kH -XcAC = 0.
171
получим ус =4,16 кН, = 1,333 кН.
2_---------
Решая эту систему уравнений.
Хг=Хд=0, Р = 4Ж Zr =2.667 кН, Z
Рассматривается равномерное движение подъемного механизма или его равновесие, что с точки зрения механики одно и то же.
а = 30°, Т,=2-Т2
X, + Хв+ЗТ, cos30° = 0, ZA + ZB + Т, sin 30“ = Q = 0,
Z„ 100+T; sin30° 60-Q-30-0, Q r Г, R-0,
-Хв 100-3 T; cos30°-60 = 0.
Решая эту систему уравнений, получим
1, =5 кН, Т, = 10 кН, Хв = -7,8кН, ZB = 1,5 кН,
172
Игнатов И. А.
Решая эту систему уравнений, получим
М,„=0.6кНм. ХА=ХВ=О, YB = -0,9kH, ZA = lkH, YA=-2jkFL
8.35
Сначала рассматривается равновесие груза Р.
Psina + F-T = 0, N-Pcosa = 0.
F = <p-N = 0,5-4cos30° = 1,732 кН.
Тогда Г = Р since + F = 3,732 кН.
Дальше рассматривается равновесие ворота, груз Р мысленно отбрасывается и действие его на ворот заменяется реакцией Т (действие равно противодействию).
ХА -XB + Tcosa = 0, ZA + ZB-Tsina-Q = O.
Z„ AB-T sina l-Q 0,75 = 0, Mip-Tr = 0,
Хв l,5-T cosa-l = 0,
Решая эту систему уравнений, получим
Х„=2.15кН, ZB = 1,65 кН, ZA = 1,02 кН. ХА =-1,082 кН, М„ =0,933 кН м.
173
8.36
Хд +ХВ +Т, + t| + Т2 sina + t2 sina = 0, ZA+ZB-T2cosa-t2cosa = 0,
ZB 200-T2 cosa 150-12 cosa-150 = 0, t,-20—T,-20+T2-25-12-25 = 0, -XB .200-(T, +t,)-50-(Tj +t2)sina 150 = 0. Решая эту систему уравнений, получим
t,=2kH, Т,=4кН, Хв =-4,125 кН, ZB = 3,9kH, X. = -6,375 кН, ZA=13kH. --------------------------—- •
8.37
DE = 1,25 дм = 12,5 см.
174
Игнатов И А
Рассматривается равновесие коленчатого вала вместе с маховиком.
х„ + хд + р cosl0"+(T + t)cos30° =0, zb + ZA + Р • sin 1СГ + (Т+1) sin 30° - Q = 0, Z„ (iii+ni + P sinlO° n+(T+t) sin30° (n+m+l)-Q (n+m+l)=0, P cos20° DE+(t - T) • 100 = 0,
-X„ (m+n)-P cosl0° n-(t+T) cos30f> (n+m+l) = 0.
Решая эту систему уравнений, получим
t = 2,58 кН, Т = 4,92 кН, Хв =-20,25 кН, ХЛ=-5,7кН, Х„ = -20,48 кН, ZB = 10,25 кН, ZA=-4,47kH.
8.38
Рассматривается равновесие вала и колонки.
Начало координат-на оси KL (точка М).
175
Игнатов И. А.
ХА + X,-2-T-2Tcosa = 0, YA =0. ZA+ZB+Zc+2Tsina-Q = 0,
Zs 0,25-ZA 0,25 - 2 Т sina 0,5 = 0, _ 1 аУз , 1 а 7з „ 2 а-7з
-ХА l-XB-l-Ze-^- 2 ~%л } 2 +^с’з" 2 ~О’
ГА j — + ХА 0,25-Хв 0Д5 + 2 Т 0^-2 T cosa-0,5 = 0.
Решая эту систему уравнений, получим
УА=0, Ха=959 Н, Хв = 1280 Н, Zc =5970 11, ZA=-2385 H, Zb=-1185H. ------------------------—------- ф
8.39
a =30° = л/6,
AC = а = 30 см.
Рассматри вается равновесие шкива и кронштейна.
Ya + Yc+2 • Р sina = 0, ZA +zB +zc + + 2- Р-cosa = 0,
5^F-z-t¥*2-t¥-! р'“" ;Т-°-
а а
ZA---Zc--2Psin60”FD = 0,
Yc |-YA|+2Psin30"FD = 0.
Здесь моменты сил Р относительно координатных осей вычисляются но теореме Вариньона.
Решая эту систему, получим
Yc =-2600 Н, YA = 1400H, Zb = 1154H,
ZA = 1847 11, Zc =-5081 Н.
8.40
tga = 3/4, = 36,8699”; AB = 60 cm, AD = 75 cm, EK = KF = 42.5 cm. R = T/cos45“
Из
теоремы косинусов имеем
2EK2-EF2 12,5
cosp = — — = 77777 = 0,00346; Z EKF = (5 = 89,8018“» 90°.
Z.-E.K J0lZ,J
KG = VeK2^-EG2 = 30,104cm; KG2 =OK2+OG2-2-OKOGcosa.
Из пос.ееднего уравнения находим: OK = 50 см.
Дальше
°G KG OG .
-----= —---, sin (p = -—• sina = 0,7474;
simp sina KG
ZOKG =(₽ = 48,3664”, h = OK • sin <₽ = 50 0,7474 = 37,37 cm
Рассматривается равновесие рамы.
Y, + YM - R-sinip = 0, ZL + ZM +R cosip-P = 0,
R h P AE sina = 0, Zm OM-Zl OL = 0,
Y, OL-Ym OM = 0.
176
177
Решая эту систему Т = 85 Н,_____Yi_
уравнений, получим:
= YM = 45 Н. ZL=ZM=60H.
Ml
(1)
Рассматривается равновесие стержня АА,.
Записываются сумма проекций сил на ось Z и сумма моментов относительно этой же оси.
а
2T-cosp = Р. M = T sinp OD = T sinP-г cos-
Откуда с учетом (1) получим:
Т =
Р Р• 1 Р-г sing
2• cosр 2• 7е2 -4 г2 sin2(a/2) ’ <Jq2 -4 г2 -sin2(a/2)
8.42
Сначала рассматривается равновесие треноги, для которой консоли являются связями, а реакции шарниров направлен; t вдоль стержней
nr, IV3 ЕО г
DC=~7"> tda = —= Л/3, а = 60°
4 АО
178
ЙгнаиювИ. A.
-S, cos60“ cos60° -S2cos60° cos60° +Sj Cos60° =0, S, cos 60“ • cos 30° - S; • cos60° cos30° - P = 0,
S, cos30° + S2 cos30° +S,cos30° -P = 0.
Или
S,+S2-2S, = 0, S,-S2 =4Р/-Уз, S,+SJ+S1=2 P/j3.
Откуда
2 8 4
S. = P —7=, S, = P —7= s2 = -p.—r. a)
3 з-Тз ’ з-Тз 2 з-Тз
Усилие S2 направлено от узла Et то-есть стержень BE растянут. Силы Sj и St, взятые с обратным знаком, будут внешней нагрузкой по отношению к левой консоли.
Дальше рассматривается равновесие этой консоли
X()+S,cos! 60°-S2-cos2 60°= 0, Yo-S, cos60° cos30“-S2-cos60° cos30° =0.
/ , -S, sin60°+S2 sin60° = 0, 1 I
Mx+S. cos60° cos30° —+ S,-cos60°-cos30 — -
-S, sin60“ | + S2 sin60° | l = 0,
179
§ 9. Центр тяжести [4,2,1,7]
M, +S, cos'60” -—-S2 cos’60° ~ = 0.
м, - S, cos’ 60" | + s, cos’ 60’ | • I = o. (2)
Модули сил S, и S, представлены формулами (1), a направления указаны на рисунке.
Решая систему уравнений (2), получим.
xo = -P v- Y° = p’ Z° = I'P;
pintauJonW-A
FD = R, FE = AE = r = R —
2 ’
Для решения задачи применяется метод группировки.
Координаты центров тяжести дуг I и И определяются по формуле
sina х = р----
a
8.43
mx=-p4cos45°-P-4 + |.cos45°)-2P(1-cos45’ + 1) =
2.
= _p.l.(Z2^ + |) = _4i97.mg.|.
M, =P-+P-(J+|.cos45’) + (P + 2-P)-(l + l.cos45°) =
.9 7-Л
-^2+~4 )'p * = 6.97 mgl;
Mz = 0.
где р - радиус дуги окружности, а половина центрального угла.
Имеем
sina 41 2 R V2
х2 =г---= R——.—=------
а 2 л л
„ /г ,1 к D sina 2 R
’ 2 л а л
42 п
L =nr=R— -it, L.=R—.
2 1 2
Тогда
„ л 2-R-V2 n 42 D f- ,1 1
L,-x, + L, x3 R 2 л +R' 2 ” R 4 л
L,-L:
= 0,52344 R
180
181
9.2
Применяется метод
группировки: 1 полукруг, 2 -треугольник ABD.
Координата центра тяжести кругового сектора определяется по формуле
2 sina
*=JR—
(1)
где R - радиус круга, а половина центрального угла; х отсчитывается от центра круга.
Из (1) имеем
2 2 4
х, = R— R—= R(1-t—); координата центра 3 л 3-л
тяжести треугольника
x2=j2-R = |-R, x2=R + x2=|r; S,=n R’/2,
"'-R'(I-A)+2R!R\ i .is
S,=2R’, xc = —--------------- = R .--T ~
^+2.R’ - l-* + l2.
9.3
AB = AO = 30 cm. A
/ Для решения задачи
/ применяется метод отрицательных
4___I- 2_________площадей, площадь треугольника
I АВО считается отрицательной.
\ Координаты центров тяжести
площадей кругового сектора и треугольника определяются по формулам соответственно
182
цгмаиюв И. А
2 sin (л/6) _ 10-6 60 2
АО n/ь л д см» х2 =~ DO = 10-Тз см.
Площади кругового сектора и треугольника
S, = ^ AO\ S2 = AB DO/2 = 225-73 cm2.
Центр тяжести кругового сегмента
_ S,-x,-S2-x2 9000-30-225
Хс= S,-S, ~ 1 SOit-775." 27,6 CMt
9.4
В формуле, определяющей центр тяжести площади концентрического кольца, площадь малого круга считается отрицательной.
Имеем
S| Xj-Sn -X-, л-r2 0-л г2-^/2 Г|• г2
Хг “ S, — S, л-г’-пг, 2(r’-rJ)'
Здесь х отсчитывается от центра большого круга
9.5
•у А
Расстояние центров тяжести площадей секторов от точки О по биссектрисе прямого угла определяется формулами
R0 = yR-
Л Sin-___4_ л
4
183
9.6
Тогда
я 4 x,=y, = rocos- = — CM,
S, =пг!/4,
S, X; —S, 'X| x‘=y‘= S2-S,"’ =
n 4
X;=yj=RO COS4=n CM'
S; = x-R!/4.
Ri ~f2Z^-'4 = 1,38 CM.
Диагональ квадрата OA = aV2.
Расстояние от точки А до центра тяжести площади кругового сектора
Х°" З-ТС а’
Тогда
х, =ОА-х0=а-х/2 (1-^-), х, = OA/2 = aV2/2,
S| = тс-а2 /16, S2 =а2,
Sj-Xj-S.x, а1-л/2/2-л-а’-У2(|-_2-)/16
х' - Vs =------------^716^
9.7
Рассматривается элемент плотины толщиной 1 метр ™оаддь сечения плотины делится на четыре части (ин рисунке составные части очевидны)
Имеем:
184
НПОШОвИА.
Земля
V, = 16 м1,
16
Х,= 3
4
У>= ^м;
Ч,=16 кН/м’.
Бетой
V2 = 10m’, х2 = 9м, у2 = 2,5м;
V3 = 7,5m’, х, = 11м, у, = 5/3м;
V4=2m’, х4 = 9,5м, ys = lu; q2 =24 кН/м’.
= УгдгХ,+д2(У2х,4-У,ха-у,.^
Хс V,q,+q2(V2 + VJ-V<) 16 1616/3 + 24(10-9 + 7Д11-2-9Д _ 16 16 + 24(10 + 7,5-2) “ —
Ч д. У^Чг (Ч-У1+УгУ»-У<-У«). Ус'“ У|Ч,+Ч:-(У2 + У,-У4)
_ 16 16-4/3 + 24 (10-2,5+7,5 5/3-2) _ t ?
16 16 + 24(10 + 7,5-2)
9.8
Применяется метод группировки
S, • х, + S2 X, bd;/2 + (a-d)d(a + d)/2 a’+bd-d’
S,+s‘ ~ bd + (a-d)d 2(a+b-d)’
185
s, у, +Sry1 = У" S,+S;
b:d/2 + (a-d) d*/2 b d + (a-d) d b1 + a-d-d2
~ 2(a + b-d) '
„ S,-y,+S;y, s,+s:
(h-d) b (h + d)/2+a d*/2 (h-d)b+ad (h!-d!) bu d’ 2-[(h-a) b + a d]
9.10
20 см
_ 2-20-(-l) + 20 2 10+15-2-21 990
2-20 + 2-20 + 15-2 “110 .
186
l(ol»iuo» И- A
_§i x,+S, x,+S
s,+s1+s,
6 1 + 9 5 + 119 75
6 + 9 + 11 "ТзCM'
S. V.+S; y^+Si-y, 6 1,5 + 9 0,75 + 11 2,75 46 23 y = " si + s2 + sj 6+9 + 11 =26=BCM
187
ВЕ’ + аВЕ-а1/2 = 0;
BR = £(^^ = O.366 a.
ya
S,=a:, S2=Y‘
S,-а/2-S; у/3 y" S,-S2
Откуда
/э
у = a • (1,5 - —) = 0,634 - a,
x = a/2.
P = -P; P = P;
(P.P) 0.
Точка О - пересечение меридиан. Сила Р/2, приложенная в точке D, -равнодействующая сил,
приложенных в точках А и С; следовательно, вторая
параллельная составляющая силы Р приложена в точке Е диагонали BD, причем DO=OE. Эта сила, в свою очередь, есть равнодействующая двух параллельных сил, приложенных в точках F и G, причем FE=EG, и следовательно, FG || АС. Отсюда следует, что ВС и BF равны одной трети сторон СВ и АВ соответственно.
— ----------•
9.16
АВ = 20 см, АС=10см, AD = 5cm.
188
AB = 20 см, AC = 10 см, AD = 5 см.
1.0 + 2-0 + 3-0 + 4-5 + 5-5 + 3-0 + 4-5 + 3-5 80
x= 1+2+3+4+5+3+4+3 = 25=2^_±M;.
1-0 + 2 20 + 3 0 + 4 -0 + 5-0 + 3-20 + 4-20 + 3-20 240 _
y = "--1 + 2 + 3 + 4 + 5 + 3 + 4+3 " 25
!.0 + 2 0 + 3-10 + 40 + 5-10 + 3-10 + 4 10+3-0 150
z= 1+2 + 3 + 4 + 5 + 3 + 4 + 3 25 ~6cM'.
OA = 0,8 m, OB = 0,4 m, ОС = 0,6 м.
(25+ 75) 0,' :-(25+50)-0,3+(75+200+25+50)-0,6 2625
x =----- --------------------------------------=------=0,263 м;
1000 1000 .
_ (25 < 75 25 +50+ 325)-0,4+(25+100+125) 0,8 400 1000 ~ 1000 ~ —
(3251 0,2+ (25 + 25 + 25 + 25)-0,4 105
z — ~ ЛЛЛ ~ B, 1 Uj M.
1000 1000 ------•
189
В числителях дробей опущены очевидные слагаемые, равные нулю.
9.18
Вес стержня пропорционален его длине.
(11 + 5 + 7)-(-22) + (10 + 2 + 6 + 3)-(-44) = _,2 см
х= 4411 ~—’•
(8 + 6)-22 + (4 + 7 + 3)-44 у — ---------------------— 10 СМ,
’ 44-11 ------•
(9+10)22 + 11-44+ (1 + 2+ 3 + 4)-(-22) 7 — —--------------------------- — и.
44-11 ------•
В числителях дробей опущены очевидные слагаемые, равные нулю. Под цифрами 1, 2,..., 11 подразумеваются веса стержней, равные 44 единицам.
9.19
190
""Ч-Ч
ИпишовИ А.
_ 2 2,5 + 2-1 + 1,5-2 + 2-3 + 2,5-3 23,5
* ~ 3 + 5 + 2 + 6 ~ = ° W м.
3 1,5 + 2,5 (1,5+ 0,75)+ 2 2,5-0,75 +1,5 О 75
У= Тб ------------“"«Я м.
9J0
V, =abc, V2=l’-d.
У,-0+У2-0
V, + Vj
V, b/2 + V; (b + d/2) 10-32 18 + 9 40 (8 + 20) у= V,+V, ~ 10-818 + 9-40 =1,8сМ;«
г=чо±уг°=о.
9.21
_ 19000 6 + 4500-3 + 5000-4,6 _ 150500 _5 2g м
Ус = 19000 + 4500 + 5000 “ 28500
9.22
Р,-0 + Р, (60-а) Р,+Р;
191
Р, 60 + Р, (60 - а) _ 30-60 + 45000 (60-а1
х, = ~ р + р 45300
д ' !_а^о_зоо^о = 04м
дх = х,-х!-р| + р! 45300 ---------
9.23
Известно, что
4 so
Vb ~SO-h'
(1)
1 SO-h
V, j SO-V; (h + —) i y-SO-V, (SO4-3 h)
= V,-V; “ 4' V, - V,
h a (Va +Vb) + b (Va-3-Vb)
4 (7a-Vb)(a + 7ab+b)
В (2) учтено, что объем усеченной пирамиды
V,-V2=| (a + Vab + b),
а также соотношение (1). Далее имеем
h а (7а+Vb)2 + b (Va-З л/Ь)-(7а+Vb)
4 (a-b)-(a + 7ab + b)
h (a2-b2) + 2 b (a-b) + 2 Jab (a-b)
4 (a-b)(a + 7ab + b)
_ h a + 2'Vab+ 3-b
4 a +Vab+ b ----------------•
192
Игнатов И. Л.
9.24
г = 0,4м; h = 2r;
Ф,=О,5г; ф2 = 0,2г;
AD2 =ч>; + r2 = 0,22 + 0,42; AD = 0,4472 м.
tga = — = 2, 4>i
AD
R. = АО. = ----= 0,5 м.
2 cosa
ЕО2 = ф2 + г2 = 0,082 + 0,42; ЕО = 0,40792 м. г ЕО
tgp = —= 5, R, =00, =---- = 1,04 м.
6Н ф ’ 2 2 2cosP
S, =2-те R,S,=2 л Е2 ф2, S = 2nrh,
S, z, + S2 -z, + S-z _
St + s, + s
К; Ф,-(ф, + h + <P|/2) +R;-<p, <|>2/2 +r h-(q>,+h/2) _ Rt ф, +R, ф2 +r h
0,5 0,2 (0,08 + 0,8 + 0,1) +1,04 • 0,08 "~ + 0,4 0,8 (0,08 + 0,4)
z =
0,5 0,2+ 1,04 0,08 + 0,4 0.8
0,2549
------= 0,507 м; х = у = 0.
0,5032 -------. —.
9.25
Равновесное положение рассматриваемой системы двух тел лимитируется принципом Торичелли: высота центра масс имеет стационарное значение, то есть в данной задаче центр
7—287
193
масс должен находится в точке С.
Имеем:
Z = г
V,-Z,+¥;•»» _ v,+v2
-•яг’-|г + лг2Ь(г + ~)
3 8_____________±-
|-n-r3 + K-r2h
относительно h, получим h = t/-j2.
Справедлив принцип Торричелли.
V, z, + V2 • z2
z° г V, + V, 2 з 5 1 з , , \
Г” г Тг + - л г -h-(r+-)_ l-n-r’ + l-n-r’-h
^-r2 + h-(r + |)
2-r + h
Решая это уравнение относительно h, получим: ь=г-7з.
194
Игнатов И. А.
9.27
S, = 64 см2, S2 = 16cm2,
S3 = 16cm2.
S. x.+S.-x2+S, x, 64-4 + 16'4 x = ——„—- =--------------—-----= 3,33 cm,
S,+S,+S3 96
S2y2+S3y, 16'4/3 + 16-4/3
y S.+Sj+S, 96 2-----
SjZj+SjZj 64-4 + 1616/3 z = =------—-----= 3,555 cm._
Sj + Sj + S
96
195
Отдел второй
Кинематика
Глава 3. Кинематика точки
„пив и уравнения ДВЯЖеВИЯ Т°ЧКП [4’2’1’5’7!
$ 10. Траектория . и
1) 0<t<5; t = 0,1,2,3,4,5; S = 5-4t + t2,
S = 5, S,=2, S, = l, S.=2, Ss=5, S^IO, a = 4+4+5 = 13 cm.
S
L-' 1 .Ъ ' ' ' '
-0,25 1 1,75 2
2) OSt£25; t = 0,05,1,15,2,25 S = 1 +2-1 -1_.
S, = l, S2 = 1.75, S,=2, S4 = 1.75, S5 = 1.
S. =-0.25 cm. a = 2 +1.25 = 3.25 cm.
J--------------- ----------------------•
S
S = 4sin 10-t
— its—, 90<t"S54“; t°= 9°,18°,27“,36 .45“,54".
20 10
S,=4 sin90°=4, Sj =4 sinl80° =0, S, = 4 sin270" =-4, S, = 4 sin360’=0, S5 =4 sin450’=4, S6 =4 sin540" =0. a = 5-4 = 20 cm ---------------------------------•
196
Игнатов И. А.
Траектория точки - прямая линия
2
2) x = 2t, y = 8t2. у = 2-х2 - парабола.
Точка движется координат вверх.
из начала
х у
3) x = 5 sinio t, y = 3coslOt. - = sinlOt, -=coslO t.
Возводим в квадрат и складываем
х* у 1
— + — = 1 -эллипс, 25 9
У
4) x = 2-3-cos5-t, у = 4sin5t-l.
х-2 . у+1 . , ,
------= -cos5t, —— = sin5-t.
3 4
Возводим в квадрат
складываем
197
(х-2)1 (У * - I -эллипс.
9^^ J6___________
Начальное положение - Х = -1. У = -‘
h y = s h t = - (e'-e-).
5) х = с h '-2 '
имеет место тождество
ch’-t-sh’ t = L
Возводим в квадрат и вычитаем х2_у: = 1 - гипербола.
Начальное положение - X 1» У
1М
м 1) f = f0 + e-t, x = x0 + ex t,
X? x~xn
-//e-t У = Уо + е, ‘- t = ~•
rX / x
/’Sr'A, e
* У-Уо = (х-Хо)’~-о___________________________ !i_.
Полупрямая, параллельная ё> с начальной точной Мо (г0).
2) f = f0 + cost e. Так как |cost| < 1, то х0-ех ^х<х0+ех, у0-еу <у <у0 + еу. Исключая из проекций время, получим еу у-у0 = (х-х0)- —. ех ------------------------•
Начальное положение точки МД^+ё), траектория точки - отрезок М,М,.
198
Hi нашив И. А
Поделив обе части равенств на “а” и “в”, возведя в квадрат и складывая, получим
X2 , У2 .
—7 + 7-5- = 1 -эллипс, а b
Начальная точка траектории Мо(-а,0);
точка движется по траектории слева - вверх - направо, асимптотически приближаясь к Mj
10.4
х 4
1) x = 3t2, y = 4 t2; t2=~, y = - x.
dx = 6 t dt, dy = 8tdt; ds = Jdx2+dy2 =10-1 dt, s=5 t\
2) x = 3sint, у = 3-cost; x2 + y2 = 9*
dx = 3 cost dt, dy = -3 sint dt;
ds = -Jdx2 + dy2 = 3 dt, 5=3-^
199
4)
. y = a sinJt; x + у - a;
3> X = ° C°S • , dt dy = 2 a sint cost <lt; rfK = -2 a cost suit dt. /=• .
r-r-TT 2 Л »in« cost d‘. 5 = a 72 s"
* 5 C0 -st1 dt dy = 50 tc°s5 Г dt; dx = -50‘J^Ldt' У d^JS?^501*’
X = t, y=1.5 t, z=0.5, z = O.5t.
Исключая время t получим
y = L5x; z = 05x.
10.6
x = 3sint, y = 2-cos2t.
x2
y = 2-(cos2t-sinat)=2-(l-2sm21) = 2-(l-2-y);
4-x:+9 y= 18. ,
10.7
x = a sink t, y = a cosk t, z = y t Проекция траектории на плоскость х у - окружность:
2 2 2 -
х +у =а , z = y.
Такое движение называется винтовым с шагом
h = 2-п-у /к.
-----------•
200
Hninuiun И. A.
dx = ak-cosk-t-dt, dy =-a к sink t dt, dz-ydt.
ds = -Jdx1 + dy2 + dz2 = ^/a2 k2 +y2 • dt s = -Ja’’ к2 + у2 t.
10.8
Закон гармонического колебания точки определяется формулой x = asin(k-t+e).
Здесь
а - амплитуда, наибольшее отклонение от положения равновесия;
к = 2-л/Т
Т - время полного оборота (колебания);
<р = 1 / Т - частота в герцах;
е - начальная фаза (положение) точки.
1. х =-7cosl2t = 7sin(12-t-—);
a(l=0, а = 7, к = 12, Т = л/6, ср = 6/л, £ = .
2. х = 4 • sin (л • t / 20) - 3 cos( л • t / 20) =
4 . л-t 3 л-t е . л-t =5(?sm^-rcos^)=5sm(^+E);
ао = О, а = 5, к = л/20, Т = 2 л/к = 40,
<р = 1/40 = 0,025; е =-arctg(3/4).
3) х = 2-4sinl40t; x-2 = -4 sinl40 t = 4 sin(140 t + п). a0=2, a = 4, к = 140, T = 2-n/k = it/70, Ф = 70/п, s = n.
4) x = 6sin218t; x = 3(l-cos36t),
x-3 = -3 cos36 t = 3 sin(36 t-n/2);
x„ = 3, a = 3, k = 36, T = n/18, <p = 18/n, e = -n/2.
201
1Д V = 1-2 (1 + COS - t),
5) x = l-4 cos - t. 30
x + | = -2 cos— t = 2 sin(— t--).
» = 2. k = >t/30, T=60, <p = 1/60, c = -it/2. a0 = “*• *
2-n 2-K , t
x = asin(k-t+3K/2). <c = V = ~M=— Рад/С-.
_4 = a sin(3 */2) = -a, a = 4 см.,
10.10
x = asn(kt+a), y= bsin(kt + p).
x = asin[(kt + P) + (a-p)] =
= a{sin(k • t + P)- cos(a - p) + cos(k • t + P) • sin(a - P)},
- = £ cos(a-P) + Jl-^- sin(a-p).
a b Vo
Откуда после несложных преобразований получим
2-ху
—+П-——cos(a-P) = sin2(a-P). а о а-о
10.11
х - а sin 2 cot, у = а-sin cot.
x = 2asina>tcosci)t = 2a— а
aJx2 = 4a2.y2-4y4=4y2.(a2-y2).
202
Игнатов И. А
2) х = а cos2 art, у = а cosort.
х = а (2 cos’art-1) = а (2 -у - I), а х-2 у’-а1.
а --------------------•
10.12
у = MN = — 1 sinart - 40 sinlO t. 1 2
Уравнение траектории точки М - эллипс.
х; V2
----- + ^-т = 1. х„ =2 1cosa> = 160cosa>t = I60cosl0t.
120- 40- в ----------•
-------------•
10.13
В начальный момент времени точка М совпадает с началом координат, точка А -с точкой В. Колесо катится без скольжения, поэтому дуга
MP = OP = АВ = vt;
следовательно,
MP = R<p = vt;
203
= 20 t.
Д“Л™ “o7-NP= Vt-R Sin-P, У = MN = R-Rcostp; X = ° x = 20.t-sin20 ',
10.14
• f g Г
x = v0cosat, y = V«sinat- 2 .
Исключаем время t, имеем: x g
,=^^’ 1212221^2^—
..y
Дальность полета x=0A определяется из условия у=0, тогда х=0 и
V» sin 2 • а х = ОА = —------------
g
Время движения снаряда из точки О в точку А находится из первого уравнения движения
2'V, sina
Т = —5-----.
g
Подставив Т/2 во второе уравнение движения, найдем
vjsin2a
10.15
Дальность полета снаряда будет, очевидно, максимальной, когда sin2a = l.
204
Игнатов И Л
Тогда
О Я 2а = -,
ОА
max
il, п_ v? T_^v°
В ’ 4 g’g
10.16
Из уравнения параболы
у = х • tga - -—J-г— х*, и учитывая, что
2•Vq•cos a
---ч— = 1 + tg2a, получим уравнение cos' a
i 2 • v! 2 • v2 • у
tga--------tga + (1 +----j=-) = 0.
gx gx
Откуда
tga =
v0±A/v40-2v;-yg-gixI _____________________
10.17
Парабола безопастности представляет собой огибающую семейства парабол (см, задачу 10.14). Для нахождения огибающей семейства кривых у = <р(х,а) необходимо исключить параметр а из уравнений
dy y = <p(x,a), — = <p(x,a) = 0.
da
В уравнении параболы
учитывая соотношение
—— = l + tg2a, в качестве параметра берут p = tga. cos' a
205
, dy gx
____+ — = x- ' p = 0;
Тогда y = xp-2vj dP v"
2 V? Й-X1 VO л VO 8
₽=Д> ys7'r^ (1V *i) = 2<2.v;
Последнее равенство и будет парабола безопастноеги.
Даны уравнения движения:
х = a -coskt, у = a sin kt,
z = y t. (!)
Связь декартовых координат с цилиндрическими имеет вид:
x = r cos<p, y = r sin<p, z = z. (2)
Сопоставляя (1) и (2), получим
г = а, <р = kt, z = yt.
10.19
Даны уравнения движения точки
х = 2 а-cos2 (kt /2) = а-(1 + cos kt), y = a sinkt, x-a = a coskt, y = a-sinkt;
(x-a)2 +y2 = a~ - траектория. dx = -a k sin kt, dy = a^ k coskt dt, ds = 1/dx7d7 = akdt, s = akt.
206
Игнатов И. А
10.20
- kt у sin kt
= 2 a cos—, tgq> = — -------
_____I kt 1 + coskt 2 '
Таким образом
kt cos-—,
kt
Ф-у.
г = 2 а •
10.21
Даны уравнения движения точки
х = R cos:(kt/2), у = (R / 2) • sinkt, z=Rsin(kt/2)
R „ , 4 R kt
x = — (1 + coskt), y = — sinkt, z=Rsm—.
R2 R2 kt
x2 + y2 + z2 = — • (1 + coskt)2 + — sin2 kt + R2 sin2 — =
= R2
На плоскости ху имеем
R , , R2
(х--)2+/=Т.
Пересечение сферы и цилиндра определяет траекторию точки.
х = г cosO costp, у = rcos0sinq>, z= rsinO.
(1)
207
Игнатов И. А.
„яя (1) с заданными координатами, полупим
Сопоставляя (1) о k(
о___
r=R, ф = р ы ~ 2 '
10J2
Задан закон движения точки:
x = A-e-Mcos(kt + s), y = Aeh,sin(kt + e). Полярный радиус определяется формулой
r = Jx2+y2 =А-е_|".
Полярный угел находится из отношения sinq> = - = sin(kt + s), <р - kt + e..
Исключая из уравнений движения время t, получим уравнение
траектории
0 = arccos , <р, - фс ф0 = фс arccos-—-—
z>1irc 2|)-гс
Теперь пусть
AD = a, a CD = s(t).
Имеем
a2+s2(t) = rc, Г
a2 +s2(t) —I2
COS<P2= гйг
+ 21, - IjCosqtj = a2 + s2(t), a2 +s2(t)-l?
, q>3 = ± arccos---------L
21,-1.
Дальше
tg<Pc=~~> tg(<P1±9) = —, <p,±9 = arctg—, а а а
s(t),. a2+s2(t) + l?-l2
<р, = arctg-Т arccos-----, - .
а 21.-Ja2+s2(tl
A 'k’('p_E) r = A-e k
- логарифмическая спираль.
§11. Скорость точки [ 4, 2, 1, 5, 7, ]
10.23
11.1
+ 2-1, 12-costpj,
Дальше
1? + г2-2-1,-rc-cos6, cos9 =
(р, = arccos—— — 2-1,-L
2-1, т(
м
х
V x,=a sinkt,, x2=a sinkt,;
x = a sinkt.
v = x = akcoskt;
kt, = arcsin—, kt, = arcsin a
= а к • cos(arcsin —) = к Ja2 -х;, а
. Х2 Г";
= a k cos(arcsin—) = к-^/а
х;.
Откуда вытекает
k2(a2-x?), v2 = k2 (а2-х2).
а)
208
209
Решая систему (1). полупим
Координаты точки М x = 30cos<(>, y = 10sin<p, ф = со t.
900 100
=-30-со-sinq>, у = 10-и coscp;
1 - годограф скорости.
11.3
x = 2cost, y = 4cos2t.
v, = x = -2sint, vy = у = -8-sin2t.
п 3
x = 0, t = —, t = --n. 2 2
a) vx = -2, vy = 0, v = 2 м / c;
л Л
cos(v,x) = -2/2 = -l, (v,x) = 7t.
в) V, = 2, vy = 0, v = 2 м / c;
a a
cos(v,x) = 2/2 = 1, (v,x) = 0.
210
Уравнения движения точки М и ползуна В представляются в виде
хм = 3/2-acoscot,
Ум = 1/2 a sincot;
хв = 2acoscot. (J)
Дифференцируя (1) по времени, получим
3 1
vx = хм = а со sin cot, vy = ум = - асо coscot;
vB = хв = -2 а со sin cot.
Модули скоростей
vM = -Jv2+v2 = a co)2 sin2cot + (-| a co)2 cos2cot =
- • л/8 -sin2 cot + 1, vB = 2-sin cot (а-со).
11.5
x = v0-tcosa0, у =-—-gt2+v0-t-sina0. (1°) . x
Из (1 ) следует t =------", тогда
v0 cosa
y = ----,8 X—=--+ x tga0 - парабола. (1)
2-v cos a0
211
У
И А * Координаты точки М
О"^1 v '’ ' • Х * определяются из условия
х г
dy v~sin2a0 (2)
-i=0, х= ~ '
dx_____________z ь .
Подставляя (2) в (1), получим
у = -^-sin2a0; (3)
' 2 g _____
------------•
(2) и (3) - координаты точки М.
Проекции скорости на координатные оси имеют вид
x = v0-cosall, y = v„ sina0-g t. (-1)
Точка находится на оси х в моменты
2-v0 sina0
Т=0, Т =-----£, подставив эти моменты
8 времени в (4), получим
vx=v0cosa0, vy=vo sinao; vx=v0 cosa0, vv=-v0 sina0.
11.6
У
Время движения по параболе из 0 в точку А из закона движения (1°) задачи 11.5 определяется выражением
2-Vo'sina,, g
212
Игнатов И. А.
Тогда v, -Т = ОА = v" s‘n^ao
g
V, = v„ cosa0 =20/2 = 10 M/c. vjsin2a„ 400-73 vA ---------------------- _ 2 c n
g 2-9,81 — ’ M;
11.7
точки определяется формулой
Закон движения точки в рассматриваемом случае запишется в виде
gt2 ,
У = --у + п, x = v-t. (i)
Время полета для первой
из (1) имеем
L2g 2-v;
100;-9,81 2-502
= 19,62 м.
---------•
Время полета точек
ЮО „ ---= 2 с.
50 ----
Высота других точек
h2 = h, =
9,81-4 2
= 19,62 м.
Скорость точки в момент падения из (1) определяется формулой
213
v=^7 (м=1Дз>; v,=7(wi^^3-71M'c'
V2=VS^5F = W2m/c, v,-J(^1OT^ = 10I^/c.
11.8
Уравнения движения точки приведены в задаче 11.5 . Скорость точки определяется формулами
У -gt + vosinao
х = v0-cosa0, y = -g-t + v0-sina0.
Вектор скорости v перемещается при движении снаряда по прямой х = v0 -cosa0, паралельной оси у; v0 cosa0 = 433м.
Скорость перемещения конца вектора v определяется производной
d
V| = dt= ”8 = ~9-81 м/с'-.
В начальный момент точка О совпадает с точкой К, точка А - с точкойО,; ОК = О,Р = vt.
х = О,Р - NP = vt - R • sin <р /2,
У = R-Rcos<p/2. (1) - скольжение отсутствует,
214
Цп«ашо»И А.
R Ф = V I, Ф = v t/R = Ю-t. (2)
С учетом (2) уравнения перепишутся
х= 10 t-0,5 sinlOt, У = 1 - 0t5cosl0t.
Дальше
х = 10-5«cosl0t, y = 5-sinl0t.
Вертикальное положение диаметра
ф = о, Ф = я; t = О, t = n/10.
В этом случае: у = 5м/с, v = 15m/c.
Горизонтальное положение диаметра
Ф = п/2, ф = Зя/2; t = n/20, t = 3n/20.
В этом случае скорость точки в обоих положениях одинакова: х = 10, у = 5; v = V125 = 11,18 м/с.
•-------—---------•
11.10
Уравнения движения точки М имеют вид (см. задачу 10.13)
X = 20 t -sin20t, у = 1 - cos20t. (1)
Здесь ф — МОР — 20t = я — <х.
х = 20 (1 - cos20t)B_0 = 20 (1 + cosa), y = 20 sin20t| , = 20 sina. (2)
V = 7х2+у2 = 20 72 (1 +cosa) = 40 cos|м/с.
215
a v ct _
cos(v,x) = 7 = cos7’ (V’x>-2‘ л v, ,a ,-л i _ ZS “ cos(v,y) = ~ = sin2, (v,y) 2 2-
Скорость точки направлена по МА.
Дальше из (2) имеем
x’ = 202 (l + cosa)2, y2 = 202 sin’a;
(I a
Х-’ + у2 = (20• 2): cos2 -, р = 2 • v0 cosy.
Годограф скорости - окружность радиуса Р
Скорость перемещения конца вектора скорости точки М определяется формулами
x = 400 sin20t, у = 400 cos20t;
следовательно, v, = 400 м/с*.
Направление вектора скорости на точку А имеет место для любого положения точки М слева от вертикального диаметра.
11.11
В начальном положении колеса точка 0 совпадает с точкой А, а точка К - с точкой о,
При качении колеса скольжение отсутствует, поэтому
КР = О,Р = АО; R (p = v-t, ф = v t/R=20 t. Координаты точки М
х - О|Р NP - V't — 0,6-sinф, у = R — 0,6 созф.
216
Hntauio»11 л
Окончательно
х = 10 ' - 0.6 sin 2Ot, у = 0,5-o,6 cos2ai| _ (1)
. удлиненная циклоида.
Дальше
х= I0-l2-cos20t, y = 12»in20t.
Нижнее положение
ф = 2 п к. ( = п к/10; тогда х=-2, У-0, v«2m/o.
Верхнее положение *
ф = (1 + 2 к) у, t = (l+2k) —; тогда х=22, у = 0, v=22m/c. -------------------------------------------------•
1М2
Уравнения движения
X = Л еcos(k t + e), у = А е‘К| sin(k t+ е). (1)
Дифференцируя (1) по времени t, получим
у, х - -А е[h cos(kt + E) + ksin(k 1 + е)|,
v, - у = -А-е'1" [h sin(k t+E)-k cos(k t+E)];
v = 7х2 + у" =л 7h: +к: е"ь'. г =х2 + у2 = А2 е 2М, г = Ае"’, q> = k t + e. у, =г--А Ь еи, v, = r <j> = A ke’M;
v = ^r+(r-<i>)2 = A e'hl Л2+h!.
11.13
Положение точки М определено сферическими координатами
г = R, X, <р.
217
Вектор скорости v расположен в касательной плоскости в точке М.
Из рисунка следует, что
V,_____R<P
ctg“ - . cos(p. x
Откуда
^ = ctgacos<p. (1)
Начальное положение: при 1 = Хо, ф = Фо-
Интегрируя уравнение (1) (интеграл табличный), получим
lntg(^+y) = ctga-A.+C.
Определив С из начальных условий, окончательно запишем решение уравнения (1)
<*f)=tg(^f)-e^-4
г = а, <р = kt, z = vt. (1)
В качестве обобщенных (криволинейных) координат возьмем параметры:
q(=r, q,=9, q3 = z. (2)
Для нахождения скорости точки в ортогональных криволинейных координатах необходимо прежде вычислить коэффициенты Ламе
218
Игнатов И А.
где x = r-cos<p, у = г sincp, z=z.
V»)
Подставив (4) в (3) и учитывая (2), получим:
Н- = *> Н, = г, Н, = 1. (5)
Тогда проекции скорости ва оси криволинейной системы координат определяются по формуле
= (i = 1,2,3) (6)
Учитывая (1), (2) и (5), из (6) получим
v,=r = 0, v,=r<j> = rk, V, = 2=v;
или v, =0, v,=ak, v, = v.
Чтобы найти годограф скорости, продифференцируем (4).
Имеем
vx = х =-a k sinkt, vy = у = ak coskt, v, = z = v.
11.15
v, = г = -a k sin (—), v, = г • <p - a k • cos( ,); =7v? + 4=a'k- .
219
v, . kt cosq>, = — = - sin — , r( 2
я kt
ч>. = 2+7-
а к2
vt, =Г| = 0, vVi =г, ч>, =^~.
11.16
У
r = R, <p = kt/2, 0 = kt/2.
Обозначим
q, =r, q, =<p, qj =0. (1)
X = r-COS0-COS(p,
у = r-cos0sin<p,
z = rsin0. (2)
Коэффициенты Ламе принимают вид
Hf = г, Нф = г cos0, Но = г. Тогда
а к • R п—г R к /----------гг
ve = r'0 =—; v = x/v„ + v0-= —Jl + cos-e.
----• -------------------------- ,
11,17
r<j> dr
— = -tga, —=-ctga d<p; при <p=0, r = r0. r = r„ e'
220
При а - л /2,
Здесь полюс А . неподвижная точка,
a - постоянный угол.
г = г0 - окружность;
(точка), в этом случае траектория точки М - прямая линия.
Примечание.
На рисунке, схематично изображающем картину движения корабля, предполагается, что положение рассматриваемой точки (корабля) определяется полярными координатами (г,<р) - Движение в плоскости. Таким образом, для нахождения уравнения траектории необходимо опредилить зависимость г от ф', обычно уравнение траектории получают из закона движения точки, исключая из уравнений движения параметр t (время). В рассматриваемом случае определяющим фактором для траектории является задание постоянного пеленга (угла а). Известно, что в полярных координатах скорость точки определяется формулой
у = г + гф.
Откуда и следует первая формула в решении задачи (см. рисунок), где tga - постоянная величина. Дальнейший ход решения очевиден: из векторного треугольника имеем отношение
гф — = tga.
Так как iga - постоянная величина, то г отсюда находится квадратурой.
221
§12. Ускорение
точки [4,2,1»5,7]
12.1 о
М у А X
А - пункт остановки
— = -04; начальные условия: t=0 х-0, х-20м/с. dt’ ’ ;
Тогда ^ = -0,44 + 20, х = -0,4 у + 204.
20
В момент остановки х = 0 и Т - - 50 с, а
s = ОА = -0,2 502 + 20 • 50 = 500 м..
12.2
тх
d2x
—=- = -а; начальные условия: dt2
t = 0, X = 0, х = V.
Тогда dx — = -а • t + v, a-t2 Х = ———+ V't.
dt 2
При t=T - время движения х = 0 и
v v-T 2-s 12
а = Т’ S=—, v = —= —= 600см/с.
12.3
<fx_
d(2 - g; начальные условия: t=0, х=0, х =0.
dx
Л=8‘>
222
Игнатов И А.
м
t, - 1С - время движения цервой капли, t2 - l-0.l-0.9c - время движения второй капли.
х, -х2 = Д х = | (1-0,81) = 0,932 м
X
12.4
М v
v0 = 111,1 м/с; M = _w-dt2
начальные условия: t=0, х=0, х = v0 и
dx
dt=-wt + v°’
В момент остановки х = 0, Т = — w ’
Vp t Ур_ Ур
2w w 2w’
v2
w = ^ = 5,143 м/с2.
12.5
__60_______
п-4Т-40,7139
- время падения
60
= 21 удар.
223
12.6
d;x dt2
П
-л3 sin — t;
при t-0, x-O, x — 2 n М/С.
Интегрируя уравнение при заданных начальных условиях
получим
п
x = 4-sin—
v|,.30t = 10 + 15 = 25 м/с,
w„
w = + wj = 0,708 м / с2.
12.8
du
v = w, t, Через 3 минуты w.
При t=120c v = 120/9 = 40/3 м/с,
v
г
20 1 .
7^ = iM/c-
224
Hi нашив И. А.
М
W. » V3 / р = 0,2222 м / с1 w = + w1 = 0,25 м/с1
12.9
При t=T - время движения ио дуге АВ
Уц-v (у0-у)(Уо + у) > s — w, 2'w
w _(Уо-У) (Уо + У)_1020=1м/ег ’ 2-S 1600 8
В начале пути - точка А
w„ = ^- = 0,28125м/с1, w = y/w2 + w2 = 0,308 м/с1
В конце пути - точка В
W, = v2/R = 0,03125 м/с1, w = ^w1+w1 =0,129 м/с1.
8- 287
225
_v2 too i м/с.
На первом участке имеем: W” " р 300 3
О
На втором участке
у2 100
w" =^-~400
t (м/с!> V3
Конец первого участка является точкой перегиба, в этой точке имеет место перемена знака кривизны, и нормальное ускорение скачком меняет направление.
120’ 0°
60’
12.11
При t=5c
S = 20 sin nt (см),
v = S = 20 я • cos nt см / c, w, = v = -20 n2 sin nt cm / c2, wn = v! / p = 20 n2 • cos2 nt cm / c2.
у = -20'Ясм/с, w, =0, wn =20-я2 см/с2. -------------• ------------a
12.12
S = ^-.(at+e-), v = S = —(1-e’"'), a a
12.13
Траектория точки - окружность
И г на ню» И. Л.
г2 =102
х = -4 л • sin(2 • 7rt / 5), у = 4 л • cos(2 7it / 5);
v = Jx? + у2 = 4 • л см /с.
, 8 ,
n’ cos(2xt/5); у = ---я2 sin(2Ttt/5)
2п-6
5
I..2 ~-T 8 л 2 w = -Jx +y =—— см/с
_л x л У _л л
cos(v,x) = — =-sina, cos(v,y) = —= cosa; (v,x) = — +a,
A a x л У
(v,y) = a. cos(w,x) = — = -cosa, cos(w,y) = — = -sina;
А — к
(w,x) = 7t + a, (w,y) = —+ a.
Так как
dv _ _
— = 0, то w = wt dt
12.14
Траектория пальца кривошипа - окружность х2+у2 = 752. x = -600 t sm4t2, у = 600-1-cos4t2; r-r-------------— dv ,
v = ^х' + у" = 600-1, w, = —=600 см с*,
v2 360000
w„ = — = —-----Г =4800 Г см /с .
227
12Л5
x=a (e“+e-“) = 2 « Ch(kt), у = a (c“-e‘k') - 2 a Sh(kt).
Sh(kt) = y/2a, Ch2(kt) = l + Sh2(kt);
x3 = 4 а’ (1 + /т). x’-y’=4 a:. x-2-a k Sh(kt), y = 2 a k-Ch(kt), x = ky, y = kx; v = k r., x = k у = 2 a k2 Ch(kt) = k2 x,
y = k x=2 a kJ Ch(kt) = k2-y; w = k2 r.
Здесь Sh (kt) и Ch (kt) - гиперболические функции.
12.16
x = -a sin2tot, y = -asintot.
x = -2 a to cos2tot, у = -a to costot, v = a - co V4 cos2 2tot + cos2 tot.
dv
Очевидно, что при t-0 (x=y=O) — = 0. dt
Далее, при t=0 х = 0 и у = 0; следовательно, w и wn в этот момент равны нулю. Таким образом, V2 р =----------------------------------------------= оо,
Wn
R = 1 м, vc =20 м / с. х = 20t — sin 20t, у = l-cos20t.
Z MCA = 20t рад.
228
Игнатов И. А
х = 20 (l-cos20t), у = 20 sin20t; Я = 400 sin20t, у = 400 cos20t; w = 400 м/с2.
а х * 71
cos(w,x) =— = sin20t, (w,x) = —-20t: w 2
У ----------’
cos(w,y) = — = cos20t, (w.y) = 20t.
Следовательно, ускорение направлено no MC.
dv i-------
v = 40-sinl0t, w = — = 400 cosl0t, w = Jw2 -w2 = 400 sinlOt dt v
v2 1600 sin’10t
-77—r ’ = 4sinl0t = 2 MA.
400 • sin 1 Ot ---------------.
P = ^
12.18
cp = 4 л t рад.
Координаты точки M
2 1
х = 1(1 + —) cos<p = lOO coscp, у = - sincp = 20-sincp.
Траектория точки М
X" у
У5о^ + 2(? = 1' * = "У = 80 л-coscp; v/^ = 80 п см/с. х = -1600 л2-coscp, у = -320-л2 sincp.
v2 6400
= 1600 л2 см/с2; wt/v4)=0. wn=w, р = — = 7лпл=^см' ~~~ v W 1OUU —-------•
229
12.19
a = 2 <p; <P = <ot’ 2 “5<P-l0't v = R a = 2'R'Ф = 2 л ем /с,
CM/X-
12.20
• _ • .5^--k-coscp; FF-k-sintp, 6 = <p = k-cos(p, ф-Ф d(p 2
ф = ш=7Гк^М> « = 2-Ч>; v = r d = 2-rA/2-k-sin4>. dV_2r.1.4X^<p = 2r.Cos<P, w. = *- 2
w = —= 8 k r sinqi; w = 2-k-r7cos!<p + 16 sin2<p =
= 2-kr1/l + 15-sin2<p.
1 , x = v0-t-cosa, y = vo t sina-— g-t .
x = v0 cosa, y = v0-sina-g t;
v = 7(v0 -cosa)2 +(v0 -sina - g t)2,
12.21
w = -g, w,/,
2-(v„-sina-gt)(-g) ।
dt 7(vo cos“)! + (v0 • sin a - g • t)2 ““
= V^ = g.cosa. р/1И) = ^ = ^- = р/х=л
230
Игнатов И А.
12.22
У
x = 3OO-t, у = 400 t-5-t2.
В 4 1
Г~\ t = x/3OO, у = -.х_—L—,х\
! ^\А х 3 60 300
о te ь *
, 60-300-4
L = ОА =--------= 24000 = 24 км, х = 300 м/с,
у = (400 -10 t) м / с; v = ^ЗОО2 + (400-10 t)2 Zlrt = 500 м/с.
х = 0, у = -10м/с2, w = y = !0 м/с2, dv 2-(400-10-t)-(-10) , ‘ ,
W' * г^ЗОО2 + (400-10-1)2 8м/с'
w„ = -7100-64 = 6 м/с2, р /,.„ = 5002 / 6 = 41,67 км.
Время движения точки до вершины параболы (В) Т= 24000/2-300 = 40 с. w,/t_4Oe=0; w„ = w = 10 м/с2, v/,.«.= 300 м/с, р = 3002/10 = 9 км.
Высота подъема точки равна
У /.-«с = 400 • 40 - 5 402 = 8000 м = 8 км.
12.23
х = 0, y = -g;
Начальные условия: t = 0 х = у = 0, x = v0-cosa, y = v0-sina.
Интегрируя дифференциальные уравнения и учитывая начальные условия, получим
gt
x = v0-t-cosa, у = -—— + v0-t-sma.
231
Исключая
t. будем иметь
8.*___+ х tga.
y = -2v’cos-a
u —JO м.
n₽B y” , 1000’ х_10001.зо=0.
x" 9.81 9’81
. ко1>еяь ЭТОГО уравнения равен дальности Положительный ьорень
полета снаряда L = 50968,4 + 1000 •
/2598 + Х058
101969 м = 102 км.
12.24 ________
x = a-t, y=₽ t-g t1/2. x = a. у = A/a2+(₽-gt)2;
dv
x = 0, y = -g- w, = j[
_g<₽r£2); w = v __v
12.25
x = 2-cos4t, y = 2sin4t, z = 2t.
x = -8 sin4t, y = 8cos4t, z = 2;
v = V64 + 4 = <68 м/с, w, = 0.
S=-32-cos4t, y = -32 sin4t, z = 0.
v2 68
w =w = 32m/c2, p = — = — = 2,125 м.
” w. 32 .
12.26
r = aeM, <p = kt.
_ <p
*-k’ г~а е> ’ логаРифмическая спираль.
232
Иг нашов И. Л.
v, = г = а к ем = к г, v, = r-<p = k г, v = ^vj *v2 =-71 к г.
Ускорение точки определяется по формулам:
w, = f-rq>2, = г фч-2 г ф.
г = а к2 -еы = к2 -г, w, = к2 г-к2 г = 0, w = w„ =2 к2 г.
dv г~ г~ г—
wT = — = V2 к г = V2 как е =V2-k’-r
w. = i/w1 - w2 = 72 k2 r, p = —= T2r. w„ ----------------------------------•
12.27
x = 2t, y = t2. x = 2, y = 2tcM/c, v = 71 +12 cm / c.
X = 0, у = 2 cm / c2, w = 2 см/с2.
При t = 1 c, v = 2-72 см/с,
Л 72 A n A 0 n
cos(v,x) = -y, (v,x) = 45°, cos(w,x) = - =0, (w,x) = 90.
12.28
x = 4t, y = tJ, t = x/4, у = x’/64 - кубическая парабола.
x = 4, y = 3 t2.
Конец вектора скорости сколь зит по прямой х = 4 > которая и будет годографом скорости.
v = л/Тб + 9• t4],=0 = 4 см/с; х = 0, y = 6-t|,=()=0 w|„o-0,
233
12.30
dv аш2 . cot I I 3 ,
W> ’ Л " "VSlnTl»-o = °> wn = 4-o = 4 ' a“ •
J v2 4
v^=ao>. p = — = -.a. w„ 3.
234
Игнашон И. А.
12.31
V. • COS' ф Г-:-г V. ——=-----z-----~
v<p ~ Г Ф = г‘------5 v = Vv? +v« =— \а' sm'9 + r cos ф.
-------------------------•
vА з . , Vt . Г
ф = - —-2-COS ф-51Пф. W =Г-Г ф =-------- COS ф (1-- СО5ф),
а* а а
v2 г
w = г Ф + 2• г-ф = 2 — • sinф-cos2 ф (1-- со5ф); а я
w = Jw; + w2 = b cos3 <p • -^1 + 3-sin2 <p.
12.32
r = a, (p = kt, z = yt.
v,=f = 0, уф = г-<р = ак, vt=y; v = Jy’+a2 k’. wr = f-r q>2 =-ak2, w, = 0, w, = 0; w =ak:.
dv , v2 y2 + k2-a2
w =—- = 0, w=w = ak‘; p = — = 75
1 dt " w„ к a
235
r = R. <p = kt/2, 0 = kt/2.
КИ в сферических координатах определяет, ся по формулам d
Лд IV =-------Т' (Г2 Ф-COS2 0),
w _f_r-02-r-4> cos °’ w’ r-cosQ dt Л
1 ,d /r2 Ф2 sinS cose] dt * Вычислив производные и подставив их в формулы (1), получим ,
w =_r.—(l+cos20), W,=-R y sin0. we=-R T sine.cose. ' Откуда, в силу ортогональности сферических координат
w=y^7^7^=R--y-7o+^^^ =
= R X. Vl+2-cos20 + cos40+sm2 9-sin4 е + 4-sin2 0 =
= R —i/l+3cos20+4sin29 = R—-74 + sin20.
236
Игнатов И. А.
Проекции вектора ускорения на оси сферической системы координат определяются по формулам
w, = г - г ф2 - г • X2 • cos2 ф,
=~ [-^г (г2 -ф)-г2 X2 cosipsinip],
1 d , w>- = 7X cos ’’>• r-cos<p dt
(2)
Подставив фи i из(1)1 (2) и заменив г на R, получим
V" V . , V .
w, = ——, w =——sin a tg<p, w, =—— sinacosa-tgtp.
' R ” R ' R
В силу ортогональности осей имеем
w = Jw; + w2 + w2 = ~ Jl + sin2atg!(p.
’ R
Проекции скорости в сферической системе координат имеют вид
v, = г, v9=+r-q>, vx =r i cosq>. (3)
Очевидно, что модуль скорости равен v;
следовательно, w. = 0и wn = w. . Тогда
у2 R
Р w„ Jl + sin2 a-tg:<p --------------------------- vcosa
Здесь R - радиус Земли, ф = ~ t + Фо-
12.35
г, ф. <р . тороидальные координаты
х = (а + г cos<p)'Costp, у = (а +r cosqO sinig, г = г sinq>.
237
Коэффициенты Ламе on-
Здесь q,=r. Ч»?*’ 4l=<₽'
Имеем
_ Ai . + (—)2 = (coscp cos 4/)2 +
H-=ldr dr dr
+(cos<psinv)2 + sin2<P = 1> H, - 1,*
„2 = A2 +, у + A2 = (a + r • cosq>)2 sin2 ц/ +
'di}/ W dip
+(a + r• cos<p)2 • cos2 <p = (a + r cosip)2, H„ =a + r cos<p; .
u.’ y- = r2 sin2 <p cos2 Y + r2 cos2<p +
• 'dtp d«p dip
+ r2 sin2<p sin2 ip = r2, H„ = r.
12.36
Для проекций скорости в ортогональной криволинейной системе координат имеем выражение
V„=H,q, (i = 1,2,3), где q, - обобщенные координаты, Н' - коэффициенты Ламе.
Тогда
vr=t vy =(а + гсо8ф)ф, Уфг ф. (1)
Ускорение точки в криволинейной ортогональной системе координат определяется следующим образом. Составляется
238
Игнатов И А.
функция квадратов скоростей
Тогда проекции вектора ускорения па оси выбранной системы координат определяются по формуле
В рассматриваемом случае
Т = | [г2 + (a + rcos<f>)2 ф2 +г2 ф2]. (3)
Здесь коэффициенты Ламе взяты из задачи 12.35, а проекции скорости определены формулой (1).
Подставляя (3) последовательно в формулу (2), получим wr = г-(а + гсо5ф)со5ф-ф2 -гф2,
= (а + Г СО5ф) ф + 2 С05ф-Г ф-2-Г 51Пф ф ф, w9 =гф + 2гф + (а + гсо5ф)5Шфф2.
- ' - --------- — •
12.37
Задан закон движения точки в тороидальных координатах г = R = const, 4/ = tot, <р = kt. (1)
Для определения проекций скоростей и ускорений точки достаточно координаты (1) подставить в формулы (1) и (4) задачи 12.36.
После чего получим
v,=0, v„ = (а + R coscp)-co, v, = R k;
v> = -ш2 (a + R cosq>) cos<p-R k2, w, = -2 R ak sinqt, wp = <o2 (a+ R С05<р) ф.
239
Положение точки М (центр
1238
схвата) определяется цилиндрическими координатами
4i = Ф> Чз = г» Чз = z> которые связаны с декартовыми координатами следующим образом x = r cos(p, y = r sinq>, z = z. (i) Для определения скорости и ускорения точки М необходимо найти коэффициенты Ламе
Подставив (1) в (2), получим
Hj=r2-sin2<p + r2-cos2<p = r2, Н„=г;
Н2 = cos2 ф + sin3 ф = 1, Нг=1;
Н2 = 1, Н2 = 1.
Проекции скорости находятся по формуле
v=H -q, (1 = 1, 2,3).
Из (4) с учетом (3) имеем
(3)
(4)
Уф=Г'ф, V,=r, v2 = z.
В силу ортогональности координатных линий
V = 7V»+V-+Vt = 7(Г’Ф)! +f2 +z2.
Проекции вектора ускорения определяются по формулам
id , .
W’-r'dt’(r Ф)’ wr=f~r9J> w2 = z.
(5)
240
Игнатов И. Л.
Технология получения проекций вектора ускорения описана о решении задачи 12.36.
С учетом (5) и в силу ортогональности координатных линий получим
w - -J(r • ф + 2 • г • ф)2 + (г - г • ф2 )2 + г2.
12.39
Вычисляя производные и подставляя их в (2),
будем
иметь
I
Н‘ - (sin9 coscp)2 + (sinO sin <p)2 + cos' 0=1, Нг = U*
Hg = r2 -[(cos(p-cos0)2 +(cos0-sin9)‘ +sin" 0] = r, Ho = r;« H2 = r2 •[(sin0-sin9)2+(sin0-cos(p)2] = r*-sin'O, Hg - r-sinO.
Дальше определяются проекции скорости
241
= Н„ q, ( = ’•2>3);
v, = r-e, v, = r sin9 <i>;
г-Г(г o)- V(/-sh.h Ф)
Записывается функция
т 2 Cf! + r! 62+r2sin:0<p2)-2 '
и по формуле
___L.c— —) (i = b 2,3)
w4, н, at d4i d4, находятся проекции вектора ускорения. Имеем:
w, =r-r O2-rsin20<j>2,
Wo = r.Q + 2 г ё — г sin©• cos0• <f>2, w,=2 r sin0 q>+2 r-cose e-cp + r-sin0-(p.
w = ^w2 + W2 + wj.
12.40
D
(p - угол между проекцией BCM на плоскость XY и осью X.
В качестве обобщенных координат примем параметры:
Ч| = ч>, 42 = 01. q3=|-(0i+e2)- (!)
Связь между декартовыми координатами и выбранными параметрами имеет вид:
242
Игнатов И. A.
х — [1, • sin 0, +12 • sin(0, + 02)J - cos<p,
у = [1,51пе, + 12.5т(0,+ег)]8шф,
z—1, cosOj+ij-coste.+ej. (2)
Вычисляем коэффициенты Ламе по формуле , dx , dy , dz
H’.=W +(dJ>:+'V 0=^.3)- ®
После вычисления частных производных от функций (2) из формулы (3) получим:
Нф =1, sinOt +12-sin(e, + 02),
Н0( = -J1* +12 + 2 -1, l2cos02,
Н„=‘г- (4)
Подставляя (4) в формулу
\.=Н„А.
находим проекции вектора скорости:
V„ =[1, sine,+l2 sin(e,+92)] <p,
v8i = -^l, +12 +2 1] Ij-cosOj •©,,
ve, = “12 (9|+02)- (5)
Возводя (5) в квадраты и складывая, получим v = {[!, -smB, +12 -sin(9| +02)]2 -ф2 + +(1?4-Ц4-21,1гсо8ег)-ё?+12г(ё,4-ё2)г}'п.
243
Глав» 4.Простейшие движения твердого тела
5 13. Вращение твердого тела вокруг
S неподвижной оси [4,2,1]
ш
угловая скорость твердого тола, вращающегося вокруг неподвижной оси, определяется по формуле
п-п
®= 30 ’
где п - число оборотов в минуту
1. п-1 об/мин, ш= — = 0,1047 рад/с;
2. п-1/60 об/мин, <0 = = °’001745 рад/с:
3. п=1/(60-12) об/мин, и = = °’000145 рад/с;
4. п=1/(60-24) об/мин, со =0,0000727 Р»д/с;
тс 15000
п=15000 об/мин, ш =-----------= 157) рад/с;
30 .
5.
13.2
.1 dcp ,
<р = kt ; со = —— = 3 • kt ; при t=3 с at
со = 27-я рад/с, тогда к = л и (p = 7c-t3 рад.
13.3
л-п л-120 dtp
“ = ’з?=-^Г=4 лрад/С! ^=“;
244
Игнатов И. Л.
ф = cot + с, при t-О Фо = л / 6 рад.
Тогда
ф = 4 • nt + л / 6; при t=l/2 с
13
Ф| = б П’ ~ ~Фо = 2 л рад.
13.4
<32Ф d ,d4>, „ d4>
^Г = Е> dt(dt)-E’ dt’ = Et+c- "Р" t = ° т = 0ис=0.
dq> t2
— = Et; <p = e—+c„ при t = 0 <p = 0 и c, = 0.
dt 2
et2
Ф = —, при1 = 120с ф = 3600-2-л рад,
Тогда s = л рад/с1.
1X5
st2 е-25 ,
ср = —, 12,52 л = , Е=2-лрад/с .
ш = <р =й|,.5с = 10-л рад/с.
13.6
л , io=<(>=8t, 4 n = s-10-60, е = —рзд/с;
Ef
Ф = Т;
ср, - --Q-- 6002 = 1200-л рад. п = ф, / 2 л = 600 об.
245
1X7
d?<P ._ c. t = 0 <о = 2ярад/с, Ф-0-
dr ” ’
. = - —+ 2-«t, m = -Bt + 2-n.
Ф 2
Если t-T - время до остановки, <о = О, а <р = 10 2 л рад.
Имеем 2я2 4л2 2я2 л , 2
Т=^. 20-л = -—+—= V £ = WPaa/C~
13.8
—~- = -в; t = 0 ш=40лрад/с, <p = 0. dr
Et2
(p = - — + 40-7it, co =-et + 40 л.
2
При t=T - время до остановки,
e
л 800 n2 1600-я2 800 л'
со = 0 и 80-2л = ------+-------=
е е
е = 5 лрад/с!. Т = -^-^ = 8с. 5-л
13.9
q> = 20° sinV> y = (2 t)°, 2[—20° =-°—рад, с 360
7° dm .
2 =J^pa.7. a>=^ = 2«.20cosV|,.0=2°-200 =
_ 4-я 40 л 1 2
360 360 ~ 810рад/с’
246
Игнатов И. А.
Изменение направления движения имеет место в моменты времени, когда ю = 0.
dtp
со= — = 0; созц/=0.
1. v = n/2, 2t, = 7[/2, t, = -~=45с
2 4-,
2. ч/=| я, 2.Ч = З к/2, ц=^.1“=135е.
z 2 4 я
13.10
<р = а sinkt; а = я/2, к = 2-л/Т = 4я 1/с; <p = ^-sm4nt.
Равновесие имеет место, когда 4-nt = nn, t = l/4c. со = ср = 2-я2 cos4nt, ш,=2 я2.
Очевидно, что в момент t=l/4c
е = со = 0.
13.11
K<p = asinkt, а = я/16, Т/4 = 2/Зс, к . Зл к = 2л/Т = Зя/4, <р = —sin—t,
\ Л Зя2 Зя Зя2
со =Ф = —cos—t, СО„„- рад/с -по-04 4 ________________•
ложение равновесия маятника.
247
248
Игнашов И. А
13J31
V
= Vp^ = 1O V63717g = 7890 M/c = = 7,98 км/с. v-T=2 n R, т _2-it R _ 2 а-6370
v 7,98 3600 = 1,4 ч?с°
13.17
w,
W, tga
= 10 м/с2,
со2 =^~ = 10(рад/с)2, e = wt/R = 10 7з рад/с2, w„ = a>2 R = 10 0,5 = 5 м/с2.
------•
13.18
х = 100 t! см. v = x = 200 t см/с, w, = v = 200 см/с2.
© = v / R = 20 • t рад / с, е = w, / R = 20 рад/с2.
w = R -Je2+o4 = 200• л/1 + 400-t* см/с2.
13.19
d2x
dt2
wQ;
при нулевых начальных условиях имеем:
249
x = w„t,
... t2 2x
x = ^~. w. = v2/R = w<,—, w, = w0.
w = ,/wJ + W" = wa Vl + 4 X: /R~ *
13.20
л 2-я _j
<p = <p0 sin kt, <Ро = зд- k~ т -37tc •
Ф ----sin5nt; OA = 3 cm.
v 30
к2 5-л3 . c
co = <p = —-.cos57rt, 6 = co = - 7 sin э л t.
T 6 о
В среднем положении стрелки
Ф = 0, sin5nt = 0, 5 nt = n п (п = 0,1, 2,...), t = n/5; следовательно, <о = я2 /6, е = 0; w, = ОА • е = О, wa =<в2 ОА =8,1 см/с2.
В крайних положениях
ш = 0, cos5rrt = 0, 5nt = (2 n + l)-n/2;
ш = 0, е = 5я’/6; w„=<d2 OA = 0, w, = е-ОА = 3-5п’ / 6 = 71,5 см/с2.
Угловая скорость обращается в нуль, когда t = (2 п + 1)/10; (п=0,1,2,...).
Угловое ускорение обращается в нуль, когда
• = п/5; (п-0,1,2,...).
§ 14. Преобразование простейших движений твердого тела [4,2,1,5,7]
250
цпгашо» И. A.
Скорость точек касания К, привад, лежащих обеим шестеренкам, одинакова.
V|=vu, Ru> = r3a>;
_ R 180 г = "з = = 60 мм.
d - 120 мм.
-----••
Из равенства скоростей точек касания шестерен имеем:
Г] со, = г2 (02, г,-со, = т4-(о4,
Г4 Г2 Г4
Г1СО,=Г2-(О4, 0),=— (04,
Г3 Г1 гэ
г2 г4 60 70 п =------=------= J э,
Г, г, 10 I2 .,
п и есть передаточное число.
14.3
<Й2=Г|-Ш1/Г2>
Е = 0,4п рад/с2, <₽, = 2 1 со, =Et; v, = v2, г, со, = r2 “j
Юп = г, 0,4Kt/r2, . = 25 30/75 = 10 ^
251
14.4
x = a sinkt, x = a k coskt;
= х = г,<о2; <a4 r4 = r3 <o2, Ji.ш = — — = —— a к coskt.
r4 r4 Г2 гг г<
50 см
v0K=v0,K; соОК = и, 0,К,
V, =V2, r,co, =r2co2, Vj = v4, r5-o>2 =r4-<o4;
г, r3rl
o>4 = —£0, ---<0. =
r. bh
8-6 It
= г^'ш'=17рад/с
В
= 0)4 г< = 0,785 см / с.
4 --------•
АО? = с2 = а2-Ь2 =
= 625-225 = 400 см2, с = 20 см;
ОК 5
»,=—со = —-9x = n рад/с.
Очевидно. Максимальная
угловая скорость будет
45
°>2=‘у9п = 81 л рад/с.
252
Из (1) и (2) следует
а -с'
“ 2 = ---------г • “ |
a -2accos<p + c
14.8
Максимальная о> колеса 2 40-8п = 10ш2, ш2 = 32прад/с.
Минимальная о колеса 2 10 8д = 40 ш2, ф2 =2я рад/с.
253
14.9
<р2=^-, е = 4прад/са. ш2=ф2 = й; г,ш, =Г|<ог г, со. ..
Т =——l = 24 с.
г. s
14.10
dcOj 50 л 50-л 2
Ej = ”dT = (10-0,5-t)2 d2 Рдад 1С ‘
При d=r имеем:
а>2 =ш, =20 я рад/с, е2 =2-л рад/с2; w,=e2R, w„=<o2 R; R = 15cm, w = 30-л-л/40000-л2 +1 см/с.
14.11
x = 2 r cos<ot, vx =-2 г•<£>-si’itot, wx = -2 г ш2 'cosmt = -а1 • х.
254
Игнатов И. A.
14Л2
COSCp
sina)2 ~1~—7-sm‘g = i-—cos2 a
21 2 2
Тогда
ct-cot x = г. coscot +1 coscp, sincp sina r
; sincp = -• sin a;
X x.
x = r(cos(ot + —cos2mt) + l— г 4 4
X
vx = x = -r<o(sma>t+ysin2<ot),
wx = x = -r<D2-(cos<ot + Xcos2a>t).
14.13
sina sunt а
-----=------, sina = --sin<p ar----------r
cosa = J1-X2 -sin2 q>, X = a/r
x = a cosq> + r cosa =
= a • cos<p + r Jl - X2 • sin2 q>.
14.14
Когда кривошип г и шатун 1 образуют одну прямую, ползун
В занимает правое крайнее положение (В1)-
255
X = 7(r + l)2-h2 - (г cos <p +1 cosa) = = r• 7(l + X)’-k’ -r• (coscp+7x2-(sin<p + k)2) = = г • [7(1+ M2-к2 - 7k2-(sin<p + k)2 - cosq>}.
14.15
<p = art, 2 • n = co 8, co = я / 4, n 4
<p = -t. t = -cp.
(1)
При y-0 r=x, тогда подставив (1) в уравнения движения стержня, получим
20 304---ср, 0^ср<л,
л
„„ 20
70-—<р, nScp^2n. я т
14,16
2
<p-cot, ср = —nt. Если 0<ср<2л,
0sts3c.
Подставив ср в уравнение контура кулака
256
Игнатов И. А.
г = (20 + —ф) см, п
получим
х = (20 + lo t) см.
•
Движение периодическое, Т-Зс.
14.17
Дальше, уравнение контура
АО-70 = 20, АО = 90 см.
При вращении кулака точка контакта стержня с контуром кулака, перемещаясь из С в D, движется по окружности
г = 90 см.
на участке DB имеет вид:
2
г = 90-к<р; приф = —л
На участке ВС:
2
г = 70+кф; при ф = ул
30 30
г = 70 см, тогда к = — и г = 90-—<р. л л
г = 90 см,
30 30
тогда к = — и г = 70+—ф. л л
14.18
DC = 5-3 = 15cm; а = 30°. h = DE = r(l-cos30°) = = 3Q-(1-cos30°) = 4,02 см.
9-287
257
14.19
Чертеж к задаче 14.18
DO= 10-4 = 6 см, DC = 7100-36 = 8 см.
х = -^-; при! = 4 с х = 8 см. и а = 1 см/с .
Глава 5. Плоское движение твердого тела
§ 15. Уравнения движения плоской фигуры [4,2,1,5]
15.1
Если ползун В принять
за полюс, то уравнения движения линейки АВ запишется следующим образом:
хв =2-г• cosco ot, ув = 0;
Фав=-“о1-
1 •
Минус - потому, что <рЛВ изменяется в направлении,
противоположном изменению угла <р
x.=vt, y„ = R.
OK = NM, vt = Rq>,
258
Игнатов И. А.
15.3
Система координат х'Ау' при движении шестеренки перемещается поступательно. В начальный момент, когда ф = 0, точка М совпадает с точкой Мо, точки К (касание шестерен) и N в этот момент также находятся в положении м0.
Угол поворота подвижной
шестеренки относительно осей равен
Z MAN = р = а + (р. (1)
Дальше имеем:
КМ0 = КМ (отсутствие скольжения), R • Ф = г а, а = R • ф / г. (2)
Подставив (2) в (1), получим
R р = (1 + у)ф. (3)
Координаты полюса А
хЛ =(R + r)-cos<p, уА =(R + r)sin<{>. (4)
Равенства (3), (4) и есть уравнения движения плоской фигуры (подвижной шестеренки).
15.4
Угол поворота подвижной шестеренки по отношению к неподвижным осям будет NAM = р и равный разности
Z МАК - ф. Из равенства дуг следует: R ф = г а, где
<x = ZMAK; и a = R V/r. Тогда
р = а-ф = -(--1)Ф- (!)
---£----•
259
Координаты полюса А хА -(R-r) cos<p, уЛ = (R-r)sin<p. (2)
Равенства (1) и (2) и будут уравнениями движения подвижной шестеренки.
15.5
У
x = rcosco0t,
<р = co„t.
Координаты полюса А
y = rsincoot. (1)
—— = ——, a = -arcsin(7 sinroot). sin a sincp »
Равенства (1) и (2) и являются уравнениями движения
стержня АВ.
15.6
Координаты полюса А х = -OA cosa = -vA t cosa, у = OA sina = vA t sina.
ОА 1 vAt
—— =——, q> = arcsin(—~ sina). sintp sin a 1
260
Mi iiaiuou И. A.
15.7
Координаты полюса A x — vt, у = Q, tg<p = H/(a-vt), H 4> - arctg-----.
___________a-vt Координаты точки В
. , l(a-vt)
X = Vt + 1-COS«> = vt + , 4
---------• 7H2+(a-vt)!
. Hl
у = 1 sincp = -, .
------• 7H2+(a-vt)a
Полярное уравнение движения точки М
ОМ = -р = a-acoscp; p = a-(coscp-l). (1)
/ 2 ~2
p = -y/x + у , coscp= —. (2)
Подставив (2) в (1), получим
х2 + у2 = а (х -д/х2 +у2). ------------------------•
261
15.9
OO, = ОА • costat+АВ-costp-ВО, cos(tot + tp), b = a costot + b costp-a cos(tot + <p), (b-acostot)(l-cosq>) = a sin tot sin <p,
a = 180° — (tot+ tp)
. , <p , Ф Ф
(b-a costot)-2 sin‘у = a sintot-2 sin— cos—.
Отсюда tp asincot *®2 b-acostot
Координаты полюса A x = acosa>t, y = asintot. (2)
Равенства (1) и (2) и будут уравнениями движения стержня АВ
15.10
АС = ОА sin tot = a sin cot.
AC a sin tat tga =----=-----------.
O,C acostot-b
Так как <p = 2a, to
Л <p a sin tot
tgT =--------
2 acostot-b ----------“------ •
262
Hniauiou И. A.
Координаты полюса А
хА - a coscot, УА с a sincot. (2)
Равенства (1) и (2) и будут уравнениями движения стержня АВ.
§16. Скорости точек твердого тела в плоском движении. Мгновенный центр скоростей [4,2,1,7,5]
16.1
Скорость любой точки плоской фигуры, определяется по формуле
vm=va + vma. (1)
Здесь vA - скорость точки, называемой полюсом, -вращательная скорость точки М вокруг полюса А; вектор скорости vK1A - по определению - перпендикулярен отрезку, соединяющему точку М с полюсом А.
Формула (1) имеет место для любой точки отрезка AM. Поэтому при условии, что va±AM, проекция скорости любой точки AM - на основании (1) - на направление AM равна нулю. ------•
16.2
v„ = xo = 20t|,s,e=20 см/с Д2 л vAO = «i> АО = —cos-t-36 =
2it2-cos~tLlc = V3-n2 см/с.
О 1
263
VA = v0 + vAo (1)
SUV non t-lc направлены по одной прямой Скорости V„ и VAO при
В противоположные стороны. Поэтому
va = v0-vao=20-V3.^=11cm/.c.
хс = 10 м/с, ус = -9,8t м/с, <р = 0 при t = 0; vAC - (О г = 0,2 л /2 м/с. vA=vc+vAC-
у* = хс + УЛС = 10 + 0,1л = 10,31 м/с.
16.4
При t = 1с <р = л/2;
хс = 10м/с, ус = -9,8м/с, vAC =0,1л м/с.
VA=VC+VAC (1)
Проектируя (1) на оси X и Y, получим
vAX = хс = 10 м / с, vAY = vAC +ус = 0,1л - 9,8 = -9,4858 м / с;
vA = 13,78 м / с
16.5
vc=vA+vCA, где уА = пр, vCA = гф.
264
Игнатов И. А.
Проектируя (1) на оси координат, получим
VCX = г(фСО5ф + фСО8ф),
vCY = г(ф8тф + фзтф). (2)
Модуль скорости точки С имеет вид
vc = г*^ф2 + ф2 +2-ф ф2 соз(ф-ф).
В этом случае для скорости точки В имеем
v* = np, УВЛ=>/2гф.
Проектируя (1) на оси координат, получим
vBx = НФ • COS<P + л/2 ’ф • cos(vy + 45°)), vBy = r(<j> sin<p + V2 vj/ sin(4/+450)),
vB = Гд/ф2 + 2 ф2 + 2-V2 <p-<j/ cos[450 - (ф-ц>)].
16.7
а = 60°, АВ = 1м.
Точка Р - мгновенный центр скоростей
хр = sin60° = 0,866 м, ур = 0,5м.
------------ •
265
16.8
Из способа перемещения плоской фигуры ABCD в положение A1B1C1D1 следует, что DO=DjO и BC^BjO; эти отрезки служат гипотенузами прямоугольных треугольников, изображенных на рисунке.
Из теоремы Пифагора имеем
(, , b , b+а ,
(Ь-у)2 + х2 =(—-у)2+(—у--х) , (—+х)2+(а--+у)2=(а-х)2+у2.
Решая эту систему линейных алгебраических уравнений, получим
b а а
у=г? х = 7
16.9
На основании теоремы: проекции скоростей концов
неизменяемого отрезка на его направление равны - имеем:
vA cosa = vB, ув = 155,88 см/с.
16.10
Точка Р - мгновенный центр скоростей. Ня основании той •ке теоремы, что и выше, имеем:
266
Игнатов И. А.
vc = ул cos45° = 2,83 м/с.
а = 45°, Р = 60°.
На основании теоремы (задача 16.9) имеем:
vB cosp = vA cosa, vB = 2,83м/с.
АР AB sin 30° sin 15°
AP = , co "0-9659 M,
4 sin 15
v. 2
““ =XP = 0,9659 =^P“/C-
16.12
7C . 7Г Ф—sm-t,
п2 П I n2
w = <P = — cos-1||И) = — рад / c.
Скорости точек А и В в рассмат риваемом положении механизма парал ле льны, поэтому стержень АВ в этот мо мент движется поступательно и
267
Откуда
a + b
(v, -v,) cosa = ABco ------co.
' 2 cosa
VI~V2 2 и =-----— cos a.
a + b
16.14
vB = OB co, “ad =vB/BP = (o -2 рад/с. PD2 =AP2 +AD2 -2 AP AD sin45°, AP = 12-V2cm, AD = 36cm. PD = /288 + 362-72)2 = 26,8328 cm,
268
Игнатов И. Л.
у» = PD to = 53,66 см /с. xD = 12 coscp, yD = 36sin<p
= 1.
16.15
Первое положение механизма
Точка В - мгновенный центр скоростей для АВ
°ав = va /АВ = со АО/ АВ = 6-vm=oabAB/2:
Второе положение механизма
Третье положениемеханизма
с -40/200 = 6-я /5 рад/с.
= 377 см / с. ------•
АВ движется поступательно;
Д>АВ=\ м = vA -6-Tt 40 = 7S4 см/с.
А о М_ В_х Точка В • мгновенный
Г~ А * - /,//' * центр скоростей для АВ.
♦ VA ** V,
03 лв = va ~ 6'к /5 рад/с. vM = ВМаАВ = 377 см/с.
Четвертое положение.механизма аналогично второму
16.16
sina = h/1 = 20/200 = 0,1
269
v /Ap=o> r/AP = <o r/h ctga = 3 tga рад/с;
RP = 3 20 tga = 60 • 0,1003 = 6,03 см / c.
= ^AB °
<°ЛЗ
Шатун AB движется поступательно, поэтому
vB = vA = 1,5 40 = 60 см / c.
vB = шAB BP = 60 0,1005 = 6,03 cm / c.
sina = h/1 = 0,1;
®ab = va /AP = 3-tga рад/с;
Четвертое положение механизма аналогично второму.
16.17
Треугольник АВР - равносторонний.
coab=va/AP, vb = шав ’ ~
= va-BP/AP = va;
*/2 = 2-20/2 = 20 см/с.
------в
270
Игнатов И. А.
16.18
16.19
“ли = VA / АР = ы АО/АР. vb =<о*о ВР = (л АО ВР/АР
- 40/sin60° = 46,19 см / с
vE = v0 =49,19 см/с.
---------а
Р - мгновенный центр скоростей для АВ.
<°ab = va/ap = vb/bp;
Va = <0|О,А.
vB = a>2O2B;
О.А О2В
АР _<“2' ВР ’
О,А О,Р О2В _ О2Е
АР ” PC ’ ВР РС ’
271
16J1
йвс
Точка С мгновенный центр скоростей для ВС,
Vc = 0; следовательно, “ос =0. ------------•
Далее имеем
= vB / ВС = <о0 АВ / ВС - 2 71 рад / с.
Стержень АВ совершает постоянное поступательное движение, поэтому
vD=vA =vB.
<а~ =VA/DP = vn 2/AO tg3Q° = 3,46 рад/с,* vK = vB = a pa • РЕ = 3,46 • i 1,547 = 40 см/с.
16.23
Точка Р - мгновенный центр скоростей для DE. Стержень АВ в данный момент движется поступательно, поэтому
ve = vB = vA = ш0 -ОА = 10-12 = 120 см / с.
ОЕ = ОВ-ВЕ = УаВ2-ОА2 -BE = 12 см.
cosa = DE/24 = T3/2, a = 30°. OP = OE-2 = 24 cm.,
wde = ve /РЕ = 120*2/24^3 = “--Уз рад / с.
272
Игнатов И. A.
Точка О - мгновенный центр скоростей для АВ.
ШЛ0 = v*1 ОА = 2 рад/с, vB = vD = aA0BO = = 215/cos30° = 34,64 см/с.
Точка О, - мгновенный центр скоростей для BD.
сово = vB /О,В = ш • ВО/О,В = 10/11,547 = 0,866 рад/с. , vo =о>во 'O|D - 8,66 см/с.
273
16.26
=
О, В О, А
v .^ = 512^ = 15 см/с.
А О,А 48 -------..
tga = OA/OO, =0,2; а = 11,3099°
_ Уд / др = ш ОА / (ОА + ОО, ctga) = = 60/312 рад/с. vB =<oAOi ВР;
вр = 7о,р2+о,в2 =
= 7(305,942)2 + (1,1882)2 = = 305,9443 см.
Тогда Ув=ш,о.ВР = 58,84 см/с..
Здесь на самом деле поршень В находится левее точки Ot; на результат это не влияет.
А
VB
Тогда О, мгновенный центр скоростей для АО,.
vA = to ОА = 5 12 = 60 см / с, toАО| = vA / АО, = 60/72 = 5/6 рад/с, vB = “ло, ВО, = 512/6 = 10 см/с.
Положение IV аналогично положению II.
16.27
vA = ю„ • ОА = 225 см /с.
Скорости точек А и О, параллельны, поэтому шатун АВ а рассматриваемый момент време-
274
ИгнашонИ. А.
ни движется поступательно; следовательно, ИЛГ1 = О. Ув = Уд в 225 см / с.
vD = vc'cos60° = 50 см/с, aDE = yD /DE = 0,5 рад/с.
16.29
Точка Р - мгновенный центр вращения катушки, поэтому
и
<о = -—> R-r
v = Rco = R-—.
R-r
16.30
VA=VB> “а ГА=ШВ rB.
Гд 52 coB=®A-^=-n рад/с, *B “
52
v = coa R = 35—л = 635,3 см / c = в 9
= 6.353м/с = 22,87 км/ч
275
16.31
Точка Р - мгновенный центр скоростей колеса, поэтому ур=У,=0.
<о = v0 / R = 10/0,5 = 20* рад/с.^
V = v4 = R^2 со = 14,14 м/с, v, = 2 • v„ = 20 м /
_У|_ _ У; _ V.-V2 2г+а а 2г
V, _ Ус _У,-ус
2г+а г+а г
Откуда
У|-У; _ У,-Ус 2г г
16.33
x = 2t2,
yK = x = 4t|,.lc=4M/c.
Точка С - мгновенный центр скоростей блока 1, тогда vc = 0
Ур _ Ук _ 4 2г 2г 2-0,2
= 10 рад/с.
276
Hi нашив И. А.
vE = со СЕ = 20 0,2236 = 4,47 м/с.
Точка В - мгновенный центр скоростей для подвижной шестеренки, поэтому
Ув=0-в
vA =(г, +г2) ш0 = 2,5-20 = 50 см / с
<в = vA /г, = 10 рад/с.
vD = 2va = 100 см/с; уг =vF =со ВС = 70,71 см/с.
16.36
ш = 2л рад/с, АВ = 100 см.
277
Точка В - мгновенный центр .ращен»» шатуна АВ.
__ V .----- —-л СМ / С
Vc = 2ir l0=20ircM/c, va-vc св ц 1° ш„=*л/ОА = -я рад/с.
В этом положении шатун АВ движется поступательно, поэтому = vc = со • ОС = 20л см / с, >ОЛ = VA /ОА = П рад/с-
АВ АВ-г’
АВ 100 200
-------= 20л-7Т- = -т_л см/с, АВ-г---90 9
10
)А = vA / оа=— л рад' с-
Четвертое положение механизма аналогично второму и соОА = л рад/с
16.37
Точка С - мгновенный центр вращения для шестерни 2,
vc = 0.
= vA /АС = <в ОА /АС = 4 рад/с.
vE = 2vA = 80 см / с. *
= vD = <о2 ВС = со2 AC-V2 = 56,57 см /с.
278
Игнатов И. А.
16.38
а = 60°, р = 30° BP = АВ tg60" = 259,81см.
vD =v* cos30° = 75-6-0,866 =389,7 см/с, “лв = vb /ВР = 1,5 рад/с,
vc = ® ав СР = 1,5 • 207,85 = 311,7727 см / с.
со, = vc /ЗОТз = 6 рад/с, “ов = vb 1 ов = 389Д / 60Л = 3,75 рад / с.
16.39
va = vb I cos45° = ш(г, -1,)/cos45° = = 8 15/0,7071 = 169,707 см/с, “ao, =va/AO, =4 рад/с.
''',p
mAB = v„/BP = 8-15/150 = 0,8 рад/с, to, = vc/CO = 0,8 160/25 = 5,12 рад/с.
16.40
q> = cot, OO,= a, p = tp+a. AOf = r2+a2-2ar cosq>,
r AO, AO,
sina=xo;sin(₽’ AP=^p=^^);
279
_ 2k _ ra> cos(q> + a) _ /cos(p cosa - sin <p sin a) =
">ao, -др" до, АО/
= {coscp ^/AO2-r2'Sin2 cp - г -sin2 cp} = rm(acos<p-r)
r2 + a2 -2ar coscp
d 3r2 -4arcoscp + a2
-(a>A0,) = -area sincp ----= 0;
rco
sincp = 0 1. cp = O coAO =------,
> rt0 *
2,<p = K 0>A01= —. --------------------------- 0
16.41
У
м <₽=“,>
0дЛ?1 в X г
** ” Sina = Y sincp. (1)
Координаты точки M имеют вид:
х = г coscp + (1 — z) • cosa,
y = zsina. f21
280
Игкишои И. А.
По условию задачи
cosa = ^1-(у81пф)‘ = l-y-p- sin'cp. (3)
Продифференцировав (2) после замены sina и cosa в ы -ражениями (1) и (3), получим
V, =* = -<>! sinф (1-Д1- Г СО8ф),
= У = “тг* со coscp.
§ 17. Неподвижная и подвижная центроиды 14,2,1,5,6]
Систему координат хОу считаем неподвижной; подвижная система, связанная с отрезком АВ=1.
В неподвижных осях координаты точки Р имеют вид:
хр = 1 -coscp, yp = bsincp. (1)
Из (1) вытекает, что
х’р+у2р = 1:. ----------•
Неподвижная центроида есть окружность радиуса 1 с
центром в начале координат.
Определение подвижной центроиды.
281
Координаты точки Р в ются следующим образом:
= ДР-cos ф = loos’ <р,
подвижных осях £Ат] записыва.
Tip = AP-sincp = I sincp coscp. (2)
Из (2) следует, что
nJ=l2sin’<p С052ф = 12(1--^)-у. Пр=0-^) ^р-
nJ+5p=*’^+7'7; Пр+^р-;) =7’
Следовательно, подвижная центроида есть окружность радиуса 1/2 с центром в середине отрезка 1.
Р
Прежде, чем решать задачу, сделаем одно почти очевидное замечание. Пусть круглый диск катится по прямой L на плоскости без скольжения.
Качение диска без скольжения означает, что скорость точки Р,
принадлежащей ободу диска, равна нулю; следовательно, точка Р является мгновенным центром скоростей для диска. Геометрическое место последовательных положений этой точки на ободе диска при движении последнего и определяет подвижную центроиду - окружность радиуса R. В то же время след, оставляемый точкой Р на неподвижной плоскости, есть прямая L, которая, - по определению, - и будет неподвижной центровдой,
Теперь перейдем к решению задачи
Рассмотрим блок А
282
Игнатов И. А.
Точка Р - мгновенный центр скоростей блока А; следователи™, подвижная центроида - окружность радиуса г • неподвижная центроида - прямая L касательная к окружности в точке Р.
vc Vn
Vc=2v«-
Далее рассмотрим блок В
Точка Р - мгновенный центр скоростей блока В
—=-----5— МР — - г
МР гв-МР’ 3 в’
R = OP = rB-|.rB=i-rB,
Из вышеизложенного следует, что подвижная центроида-окружность радиуса R = гв /3; неподвижная центроида -пр-я L, которая касается упомянутой окружности в точке Р.
ОА=АВ=г
Система координат хОу неподвижная; оси £ и Г| жестко связаны с перемещающимся шатуном АВ.
Координаты точки Р в неподвижных осях имеют вид:
283
Координаты щим образом:
xp = 2r cosq>, yp =2rcos<ptgq> = 2r'Sin<p. (1)
Из (1) вытекает, что
Хр + Ур=4г2, то - есть неподвижная центроида- окружность радиуса 2г :е О.
точки Р В осях £,Ап запишутся следую-jjp =r-2r-sin2<p = rcos2<p,
Пр =2rsin<p-cos<p = rsin2q>. (2)
Исключая из (2) параметр ф, получим
^ + Пр=г2---------— •
Подвижная центроида - окружность радиуса г с центром в точке А.
Геометрически центроиды удобнее всего строить на миллиметровой бумаге, фиксируя положение точки Р при различных значениях параметра Ф- Современная компьютерная техника с ее возможностями графического вывода результатов делает архаичными весьма громоздкие и неточные геометрические построения.
17.4
2а+<р = 180°, <х = 90°-у.
При вращении кризоши-па О А точка Р всегд; будет оставаться на окружности радиуса г=ОА, эта окружность и будет неподвижной центроидой.
284
Игнатов И. А.
в подвижных осях 5,Ат] координаты точки Р запишутся:
^P=2rsin^, np=2rcos^. (1)
Из (1) следует
Подвижная центроида - окружность радиуса 2г с центром в точке А.
AB=CD=b, AD-BOa, a<b.
Треугольник ABD равен треугольнику BCD.
Из равенства треугольников следует равенство помеченных на рисунке углов и равенство отрезков DP=BP=c.
ь:
Из теоремы косинусов
с2 = Ь2 +(а + с)2 -2Ь (а + с)-созф.
Откуда
а; + Ь2-2аЬсоэф -------------;—; АР = а + с = ттг--..
2(bcosq>-a) 2(Ьсо$ф-а)
Ъ2 ~СОБф
с =
хр = АР cosф = —------г,
2(Ьсо5ф-а)
Ь2 51Пф
yp = -APsin9 = -2(bcos(p^.
(1)
Из (1) вытекает, что
285
>+v2=-------"---p (2)
4(bcos<p-a)
Из первой формулы (1) имеем аЬ (Я1
Ь с°з<р-а = ^Тр
После подстановки (3) в (2) после некоторых преобра-зоваяий получится
(Хр-А)2 у2__, (4)
В2 С2
Здесь
а2 Ь'
А-2(Ь2-а2)’ В’ 4(Ь2-а2)2’
С2=^’ (Ь>а)'
Уравнение (4) есть гипербола с центром в точке А Координаты вершин гипербол определяются формулами
Ь2
хр = ±В + А= ———;
р'-’ 2(Ь + а)
действительная полуось гиперболы
ОА-ОМ = А-хР]=2(ь2_а2).
Уравнение (7) есть гипербола с центром на оси £ в точке £ = Ао, действительная полуось гиперболы
П_ at)2
2(Ь2 -а2)’ --------------- •
286
Игнатов И. А полуфокусиое расстояние
с = ±—£____
2(Ьд-а2)'
Отрезок с отсчитывается влево-вправо от точки А (см. рисунок). О
Вершины гипербол расположены на оси в точках г b-2a ь Ь+2а ^’2 b-а ’
Положение фокуса F' определяется равенством
b
A»-c =
г^^-ь2^-^.
Фокусное расстояние, измеряемое от центра А, в обозначениях формулы (4) определяется соотношением
1 _ р2 п2____Ь _ Ь3
“ +В ~4(Ь2—а2)2’ С=±2(Ь2-а2Г
Фокус левой ветви гиперболы совпадает с концом А стержня АВ; фокус правой ветви гиперболы не совпадает с точкой В стержня АВ
Нахождение подвижной центроиды
b2 -cos<p _ b
Sp 2(bcos<p-a) 2
b2 sin ф
Г|р 2(bcos<p-a)
Из первой формулы (5) имеем
а 2(1;,,-Ь)
C0S(₽-b-2(^-b) + b'
—--------).
b cosq>
(5)
287
Подставив (6) во вторую формулу (5), получим поело преобразований
(£|>-А„)г . (7)
В* С2
Здесь введены обозначения
Л Ь b:-2aZ R> a2'bJ -
А“-2 b2-a2’ В ~4(b2 —а2)2’
AB=CD=b, AD=CB=a; b>a.
Точка P - мгновенный центр скоростей для ВС.
Из геометрии антипараллелограмма следует, что СР=АР, BP=DP.
Из теоремы косинусов
PD2 = а2 + (Ь - PD)2 - 2а (b - PD) • cosip. Откуда
рр _ а2 + b2 -2ab cos<p 2(b-acos<p)
AP = b-PD =
b2-a2
2(b-a cosq>) ’
Тогда координаты точки Р в неподвижных осях хАу им<\ : следующий вид:
х (b2-a2) cosip (b2-a2)sin<p
2(b-acos<p) 2(b-acos<p)
288
Игнатов И. Л.
Из (1) следует соотношение
2b X,
(2)
СО5Ч,= (Ь2-а2)+2а-<
Возводя обе части формул (1) в квадрат, складывая и заменяя cos(p выражением образований получим
4
(2), после несложных пре-
Ь;-а
4
(3)
Уравнение (3) есть эллипс, центр которого расположен в точке х=а/2. В случае эллипса фокусное расстояние, отсчитываемое от центра эллипса, определяется формулой , Ь2 Ь2 - а2 а2 а с =---------------------------- —. с = ±—.
4 4 4 ’ _____2..
To-есть фокусы эллипса расположены в точках A a D. Нахождение подвижной центроиды
(Ь2 -a2)-coscp р 2(b-a coscp)
(b2 -a2)-sincp 2(b-a-coscp)
2b Л, COS<f> = (b2-a2) + 2aV
Ввполнив те же выкладки, что и выше, получим уравнение подвижной центроиды (3) с заменой переменных хр, уР на Ьр» Пр соответственно.
Н)
(5)
17.7
В прямоугольнике KFNC диагонали KN и CF равны и
I0-3B7
289
F
пересекаясь, в точке О делятся пополам, то-есть KO=OC=ON=OF=a; следовательно, в неподвижных осях хОу имеем:
xc = -a-coscp, yc = -asin<p.
Откуда
X- +yc =a‘.
с'у-
Неподвижная центроида - окружность радиуса а с центром в точке О.
В подвижных осях £Fr] координаты точки С запишутся
так
£c=-2a-sina, т|с = -2а cosa.
Откуда
Й+Чс = 4а!;
подвижная центроида - окружность радиуса 2а.
17.8
Ус = О'С = а-
Точка С - мгновенный центр ско ростей диска - при движении последнего все время остается на прямой, параллельной оси х
„„J*™ Прямая и есть неподвижная центроида; подвижная нентроида - окружность радиуса ОС с центром с тоТо“
290
Игнатов И. A.
Подставив (3) в (2), получим уравнение неподвижной центроиды
а:(Ус + Хс) = Хс-
В подвижных осях координаты точки С запишутся
Ис = АК = а tg<p, = АК • tgq> = а tg2q>.
Откуда
Пс = аЛс-
Это и есть уравнение подвижной центроиды
17.10
Неподвижная центроида хс = r-cos<p +lcosa, yc = xtgq> = = r-sinq> + l-cosa-tgq>.
с учетом малости a
хс = г costp +1, ус =r-sin<p + l-tgq>; (1)
291
/01 в (1), получим Подставив (2) в ( 2 , ,
(Хг-1Г(Ус + хс)-г хс-
Подвижная асит₽“У1ц3 те0ремы синусов имеем В силу условия г
sina = f.sin<p, а = Г“Ф = -^--
Также приближенно можно считать что
nc=l tg<p, n’.(I-sin2<p) = | s>n ср.
Подставив в (4) выражение sincp из (3), получим
Г4.^=1г-^-(13+Пс)-
(3)
(4)
Неподвижная центроида
AC = rctgcp, хР = -AO = -AC-coscp-г sincp ------,
sincp
AC cos ср г
уР= —— = Г"П—i sincp =-------.
sincp sin ср хР
Подставив sincp в формулу для ур, получим
r2-yp = xj(xj-r2).
Подвижная центроида
- АС = г • ctgcp, т|р = AC ctgcp = г -ctg2cp.
Откуда в .
Пр = г.ф: = _.^; ^ = г.,ь
292
Игнатов И А.
§ 18. Ускорения точек твердого тела в плоском движении. Мгновенный центр ускорений [4,2,1,5,7)
18.1
w“ = <р2 АО| = 8,12 см / с2.
Проектируем (1) на оси X и Y. Имеем
wAx = wo + wao =20 + ^7 = 25,17 см/с2, 6 ----------------------------------•
wAy = -п* /12 = -8,12 см/с2; wA = J+ wA> =26,45 см/с2.
18.2
4> = at|1=o = 0,
<о = п / 2 рад / с, хс=0, ус =-9,8 м/с2.
wA=wc+w’+w“. (1) х wc =-ус = -9,8 м/с2, w*c = 0, wAc = о>2-0,2 =-^-м/с2.
Проектируем (1) на оси х, у. Имеем
293
о r+п1/20 =-9.31 м/с1.
w =0, ww--v’e ---•
Ф=4.1.=’'/2рад'
w =-я2/20=-0,49 м/с1.
Теперь **Ах ______
w = -9,8м/с2, wA=Vw- + w*> " А» •
Ф = ф(‘). Ф = Ф(О.
-4-\ w- WC = WA + w£ + w“ . (!)
Чой________________ wA = w; + w", (2)
। x we wa =w" =
w?A=4ir, w“=vp!r.
'll/ 1Ц/1 /
‘ \/1 ' •!/ Проектируя равенство (1) на
J^**-*^ координатные оси, получим
«'С=_'УА'3‘П(*, + '**'СОЗ<Р_'¥"'5‘ПЧ'+'У’’А C0S4/ = = г(ф С05ф-ф2-вшф - 4<3-SmV|/ +у-СО8ф),
WCy =WA •СОЗф + И’’ 8Шф+ w“.A -СОБф + w“?A • 81П ф =
= г(ф-8Шф + ф2 - СОБф + ф2 cosy +ф - sin чО
18.5
Z ВАС = 45°, АВ = г^.
Здесь для решения задачи достаточно в компоненты вектора ускорения решения задачи 18.4 вместо Ф подставить Ф + 45 , а расстояние от точки В до полюса А равно rV2.
Тогда
294
IIr нашив и. A
, = г[фСОЯф - ф1 5Й1ф -- 4>JV2 sin (ц| + 45°) +
cpVi сок(ф + 45°)],
г[ф 51Пф + ф’ -СО5ф +
+ ф2 /2 зш(ф +45°)+ фл/2 sin(\|i +45°)].
18.6
Ф = 30°.
Здесь и ниже для нахождения ускорений точек плоской фигуры применяется теорема:
если известны скорость и ускорение одной точки
плоской фигуры и траектория другой точки, то можно определить ускорение любой точки плоской фигуры.
vu cos30° = vA sin30°, vA =-V3-vB =34,64 см /с;
co ah = vB I BP = 20/10 рад/с.
wA=wB + w^+w“, (1)
где w^ = eABAB, w“ = шАВ AB = 80 см/с2.
Принимая за положительное направление от А к В и проектируя (1) на АВ, получим
wA cos60° = -w3 cos30° + w“ , wA = -wB -л/з + 2- w“ = 142,68 см/с2.
------------•
Направление ускорения точки А указано на рисунке.
295
“лв Bp
ZOAB = P,
P = a-<p, vB coscp = VA cosp.
BP
AB
cos(a-<p)
cos(a-cp) sina’
sina v. sina
cos<p AB-cos(a-<p) АВ costp ’ wB=wA+w*+w“;
WA=0, wba=EabAB. wba=(°ab'AB.
Проектируя (1) на AB, получим
(1)
l-COS3(p
uc 1 uc vAsin2a
wB cos<p = w“, WB=—w“ =
Проекция (1) на направление, перпендикулярное АВ, дает
e
, -sm a
----5—-sinm.
cos <p
8.8
wb = wa+w'₽a+w“ia.
(1)
296
Ипшшов И. Л.
wA = coj ОА = 225-40= 90 м/ с2, w?A = Е^ АВ, w“ = и3авАВ = 9-2 = 18 м/с1.
Проектируя (1) на АВ, получим
wb = wA + w“A = 90 +18 = 108 м/с2.
Проекция (1) на перпендикуляр к АВ дает: е^ = 0 Тогда
tgji = —^®- = 0, ц = 0; BQ = -= = 12 м,
“лв “ли 9 ---------•
w. wB BQ AQ BQ ’ в AQ '
BQ = 0,4 м; AQ = 1,96 м.
= 18,37 м/с2;
18.9
АВ = 2 АО, ZABO = 30°; 01^ = 0, tgn = ®, н = 90°.
Q - мгновенный центр ускорений АВ.
AQ = AO ctg30°, AM = AQ cos30“ = AO-3/2 = = AB 3/4 или BM = АВ/ 4. *
297
Точка О - мгновенный центр скоростей для АВ.
v, со ОА _ ,
—Л- =-------- Ш = 2 рад/с.
ОА ОА
wB = wA + wBA + = wj + w' + w- + w“ . (1)
wA =o>2-OA = 4-15 = 60cm/c2, wj = e-OA = 4-15 = 60 cm/c2, w“ = < AB = • ОА - tg30° = 4 -15 - 0,57735 = 34,64 cm / c2,
Проектируя (1) на AB, получим 25,359 ,
- w. cos30° = -60 + 34,64, wa = -7777- = 29,3 cm / c'.
“ 0,e6o ---------------*
Проекция (1) на перпендикуляр к АВ дает
- wB • sin30° = w‘IA - wA;
wba = wA - wB -Ilin 30° = 60-16,64 = 45,36 cm / c2, wba 45,36 ,
s*R =----=------------= 5,24 рад / c.
" AB 15-0,57735 —___________Lz_____.
18.11
Точка Р - мгновенный центр вращения АВ. Легко что АР-АВ. Тогда
_ vA со-ОА 10-20
Шлв = ap = ~ab- = -ioo~ = 2 рад/с
Wb=w*+w^+w*a,
wa = со2 ОА = 100-20 = 2000 см/с2,
видеть,
(1)
298
Игнатов И. A.
. <-0 иг HUU -
wB cos45“ = —wBA , wB = -^y = -565,7 см/с2
Проекция (1) на перпендикуляр к АВ дает
wB cos45° = -wA + w’, wBpA = 2000 - 400 = 1600 см I c2;
c;iB = 1600/100 = 16 рад/с2.
18.12
Проектируя (1) на АВ, получим
wB cosa = wA sina +w^,
sina = h/l; wB=a>2 r [l+
299
Проекция (1) на перпендикуляр к АВ дает h , .
sina = WA sina + wjA; wDA = j'(wb wA
<o2r’hl m2-r2h
= (l’-hJ)w’’ e<B (l2-h2)2'2
Из проекции (1) на перпендикуляр к АВ находится угловое
ускорение АВ
£AB=7i4w-
18.13
Проектируя (1) на ВО,
a = 30°; a>AB=0, vn = vA =со-а, w“ =0.
Wb+wS=wa+w^; (1) wJ = v2/BO, = ш2а/2, wA=o>2a, wB=dvB/dt, wba = Елв ' AB — 6AJi • 2a.
получим
300
Игнатов И. А.
Откуда
co* 2a/2 = (o2a + EAB-2acos30°.
Е
w’B = WB; .sin30°=-^i W,
Проекция (1) на перпендикуляр к во, Дает
<02aV3
3
>8.14
Точка о, - мгновенный центр скоростей для BD.
va = <в ВО, £0so = vb/BOi =
= “щ=Трад/с-
(1)
Wd + w” = wB + wB + w“ +w’. vD = ы bd ' DO| = 5^3 см I c; w£,=v2/DO, =7,5cm/c2, wB=dvD/dt, wB = e-BO = 20 см/с2, wb =4-5 = 20 см/с2,
w“b = <»2d • BD = cm / c2, w‘d"b = ebd • BD.
Проектируя (1) на BD, получим
wd = wb cos300 + wB sin 30° + w“ = 10 + —-Уз = 31,65 см / с’
wD = д/(«о)2+«): =32.5см/с:.
301
Из проекции (1) ни перпендикуляр к BD следует W"D = wj sin 30° - w" cos30° + W&, <e=w“+w"Bcos30»-w'sin30“ = = 1073-2,5= 14,82 см/с2;
6bd = 14,82 / BD = 2,57 рад/с:.
18.15
Точка В - мгновенный центр скоростей АВ, vB = 0; следовательно, wB = 0.
vA =со ОА = 10 см/с, wA = <о2 ОА = 10 см/с2, <0AB = vA /АВ = 0,5 рад/с.
wB = w" +w‘pa+w“. (1)
Проектируя (1) на АВ, получим
w’ = -wA - w“ = -10-| 20 = -15 см/с2. .
18.16
В рассматриваемой задаче имеем WB=wJt+w;+w* +w£a. (1)
Проектируя (1) на перпендикуляр к АВ, получим
0 = wA + wJA, = -w; = -e OA = -2 10 = -20 cm / c2;
6ab ~ wba /AB = -20/20 = -1 рад/с2.
302
Игнатов И. А.
18.17
л . л q> = -sin~t рад, о 2
л2 п
“ = ф = — cos-t рад/с,
..л3 л .
е = <₽ = — (-smyt) рад/с ;
при t = 0 <о = л2 /12, Е = 0.
Ниже все величины вычислены при t=0.
Имеем
иАВ = 0; va ~ vA = АОш = 2л2 см/с.
w'B+wnB=wA+w‘pA+w“;
wA = vB/О,В = л4/3 см/с2,
wA =<о2АО = л4/6 см/с2, wBA=0.
Проектируя (1) на АВ, получим
(1)
wB cos30° - wB sm30° = wA sm30°.
Откуда
wB = (wB + wA ) • tg30° = л4 • tg30° / 2 см / c2, wB = V(wB)’+(wa)2 = 42,95 см /с2. .
ZABD = 90°.
sina = DB/DP, cosa = BP/DP.
Точка P - мгновенный центр скоростей для BD.
BP2 +202 =(40-BP)2, ВР = 15см, DP = 25cm;
303
g
= 40». «.„"V./BP»!»- »D’»» DP = 5 25 “
(1)
1000 2 =v;/Dc=-r«>
w- хшЬ. BD = y 20or.
= 40-<£>
Проектируя (1) на DC. получим
Wo = w» | + w"o'5 + w™'5'
Откуда
. 5
4 125 128 , 400.
“ - = Ш1-40(—-1-^-)--“ ' 9 •
20 9
em = ww 'BD = *•
18.19
a + p = 90°,
BK = p, vA=vB.
При мгновенно-поступательном движении ускорения точек плоской фигуры, вообще говоря, неодинаковы. Для нахо-
ждения ускорения точки В необходимо определить угловое ускорение стержня АВ при условии, что точка А - полюс.
a = cot, со =5 рад/с, ОА = 12см, ОО, =60 см, АВ = 60 см.
Из теоремы косинусов имеем
304
ИгиашовИ. А
АО, - 37.94733-,/2,6-coscot см,
АО АО, . „ a-sincot
т~т = ~— , tinp = I ,
sinfi sin a Vb-coscot
где a = 0,316228; b = 2,6.
- „ 2b coscot-cos2 cot-1
P cosp = aco ,
2(b-coscot)vl
b — coscot -a1 sin1 cot
cos₽ = i/l~sin:p =
b-coscot
2b • coscot - cos1 cot -1
p = aco-------------p-- ।
2(b-coscot)-Vb-coscot-a! sin1 cot
. r, AO, v,
AP =--------—, co^ = —— cos(a + P).
cos(a + P) *® AO, H
(d +p)-sin(cx + P)
Елв“ dt ~"V-
AO,
Здесь “точками" обозначены члены, обращающиеся в нуль при а + Р = 90°; так как coscot = 0,2 при а + Р = 90°, то при
этом значении p = 0. Тогда при a + P = 90°
JVU t
sab=_77? = -5-102 рад/с •
Jo,О
= wba-wa =60-5,102-25 12 = 6,12 cm/c2, v2 3600 „о
p =----= —— = 588 cm.
wB 6,12 ---------.
305
18.20
Из равенства треугольников АОВ и АМВ следует, что ВМ=АО, BN=AN=BP=AP;
MBcos<p + a-sin<p = a, MB = a(l-sin<p)/cos<p;
MB a vA VA ,, ,
AP = BN =-----=-—:—, а>АМ=т^ =-----------(l + sin<p), <p = coM).
cos<p l + sin<p AP a
doAU v* ,VA,2
eAM=-dt- = T'<,>'C0S<f>= T 'Cos<p-(l + sin<p).
v2
wm = wSa+«Sa; = a = y-(l + sin<p)2, wSa =®am a = ^-cos<p-(l+sin<p). wM =a/(w^a)2 +(w^)2 =
VA I--------5-------- V2 r-
= —•(l + sm<p)A/(l + sin<p) 2+cos2<p = — V2'(l + sin<p)3'2. d a
306
Игнатов И. Л.
_ _ costp
*8И w'“A 1 + sincp
1 Ч> ф cos ~ - sin --
ф . Ф.2 (cos-+ sin-)
Ф . Ф V2 cos —-sin— —
ф . Ф ' -Jl c0SI + S,n2 Т
18.21
Л ф1 sin<4~j)
п Ф, cos(---)
= tg(45’-y); р = 45°-|.
V = const, <0 = V / г, е = 0, w0 = 0. wM = <о2 - г =v2 / г.
18.22
Е =
V
<0 = — = 2 рад/с, R
da) 1 dv w
T=R
w, = w0 + w* +w“;
w0 = 2m/c2, wfj =®r = l м/с2 w“ = 1 м/с2.
wIX=2m/c2, wly =V2 м/с2, w, = Тб =2,449 м/с2.
Точно так же вычисляются ускорения точек 2,3,4.
307
18.23
Q = v0/R = 2 РаД/с> e=w0/r=6 рад/с2. w4 = w0+wjo+*«>; w0=3m/c2, wr0=s-R = 3M/c2, w“ =o2R = 2m/c2.
w4 = /(w’)2+(w0+w“)2 = V9T25 = 5,83 м/,с2. Аналогично вычисляются ускорения других точек.
18.24
w0 С w»
co = v0/R = l рад/с, s = w0/R = l рад/с2, tgp = s/<o2 = l> р=45°. OQ= , W° - = 0,3536 м.
Л:+а4
wc = w0+wg,+w^0;
w0 = wg, = 0,5 м/с2, wc = w“ =co!R = 0,5 м/с\ wM =w0+w’0+w^); wjo =0,25m/c2, w^0 =0,25 м/с2, wm = 7(wmo)2+(wo-w^o)2 = 0,3536. jVm = <d /4 = 0,25 м I c, w»o = 0,25м/с2; p = / w„q = 0,25 m.
18.25
x = 2t2M, v = 4tM/c, w = 4m/c2.
“| = 2 / 0,4 = 5 рад / c, e| t=0 5c = w / 0,4 = 10 рад / c2.
308
Игнатов И. А.
vo = 1m/c, wo = 2m/c2. wD = w0+«S>+'5S>; w^ = 10-0,2 = 2 м/с2, w« =25-0,2 = 5 м/с2.
wD = -JCwo + w^^+Cw^)2 = V41 =6,4 м/с2, wB = V(wo + <o)2+(^)2 = V53 = 7,28 м/с2, wc = 7(w0-wg,)2+(w“)2 = 5 м/с2.
18.26
Точка С - мгновенный центр ускорений для L; при x=t2 м
vd = x = 21m/c, Wq = 2m/c2;
®l|i-o,5« ~ vdZCD= 10 рад A;, sL = Wq/ CD = 20 рад/с2, v0 = a, -CO = 1 м/с, w0 = sL - CO = 2 м/с2. wB =w0 + w^,+w“ ;
w0 = 2m/c2, wg. = e, BO = 4 м/с2, wIE, =<d?-BO = 20 м c2; Lt L
w„ = y/(22')2 +16 = 22,36 м/с2.* wD = w0 + wJJ, + wJJ,;
309
wD = 7(2-4)’+20’ =20,1 м/с’. wA = w0 + w?o + w“oi wA = 736+400 = 20,9 м/с’..
ZAOP = 120°, AB = 3R, Z APO = ZOAP = 30°, AP = 2Rcos30°.
Из треугольника APB следует
AB АР АР „ 2Rcos30°sm60 1
----—> sina = —— sin60 =-------------—--------= ~, sin 60° sin a AB 3R
a = 30°.
a = v0 / R. w0 = 0, 6 = 0, w*0 =0, wA = wAO = v’, IR, vA =<o -AP = v0 -2Rcos30°/R. vA _ v0-2R-cos30° v0
“AB " AK “ 3R’ ctg30° =3R'_
WB = WA + W* + .
Проектируя (1) на AB, получим
wB-cos30° = wA cos60”+ (|^-)2-3R.
Откуда w„ =б73-у’/9R.
Проекция (1) на перпендикуляр к АВ дает
- wB sin 30° = -wA • cos30“ + wBA.
Откуда w* =2T3-v’/9R;
Елв = /AB = 2j3-v’/27 R’, vD = a>AB • BK = 2v„.
310
Игнатов И. Л.
18.28
Точка А - полюс шестерни II, точка М - мгновенный центр скоростей шестерни II.
vA = а> АО = 48 см / с;
“лм = VA / R = 4 рад/с, = wA /R = e- AO/R = 16 рад/с2.
wA=wA+wA; wA = e AO = 8-24 = 192 см/с2, wA =co2 AO = 4-24 = 96 см/с2, wM=w;+w;+w^A+w^A. (1)
Здесь W’ = Едм R = 1612 = 192 см/с2,
w“ = co L,-R = 16-12 = 192 см/с2. MA AM
Проектируя (1) на ОА, получим
w, = 192-96 = 96 см/с2, w, = 0; wM = w, = 96 см/с2.
Для точки N имеем
wn = w;+w;+w^a+w“. (2)
Из рисунка видно, что
= 7('<+'v; +wj)2 = 7(384)2 +(192 + 96)2 = 480 см/с2.
Нахождение положения мгновенного центра ускорений Q шестерни II.
tgg = ^-=!, ц = 45°; tgP = ^- = ^- = 2, р = 63°2605', £ам Wa 96
а = р - 45° = 18°26 05", AQ = = 9,4867 см.
22’63
311
MQ = /aQ: + AM: - 2 AQ AM cos( 18.435°) = 4,24 cm.
AQ MQ
sin M sin 18,435°
sin M = — sin 18,435 = 0,707046;
MQ
ZM = ZAMQ = 45°.
На рисунке масштаб линейных величин и ускорений разный.
18.29
Точка касания С - мгновенный центр скоростей шестерни П, точка О) - полюс.
= “о '(г, +г2) = 9-20 = 180 см/с2;
312
Игнатов И. А.
a-vA/r,-®0(r1 + rJ)/r, =3-20/5 = 12 рад/с.
w“ = ш2 г, = 144-5 = 720 см/с2.
Ускорение wuc одинаково для всех точек обода подвижной шестеренки, поэтому
.«_Wa =720-180 = 540 см/с2, ,“' + wA =720 + 180 = 900 см/с2,
w2 = w4 = a/w2a+(w“:)2 = 742 см/с2.
18.31
где w?a=sAr-AB, w“ =о2 АВ. •* DA ЛИ ’ НА АВ
Если щда = 0, то проекция (1) ва АВ имеет вид
wA - cosa = wA cosa = wB cosp.
Что и требовалось доказать.
18.32
Если eAB=0, w‘p =0.
Тогда проекция ;2) (задача 18.31) на направление, пер-пендикулярное к АВ, дает
wa -smP — wA sina = wA - sina.
Что и требовалось доказать.
313
18.33
**ВЛ WB = *Л + WBA + W“A ’
A -J w* = Sab АВ,
W, **< WB\ = 0)ав АВ.
Проектируя (1) на АВ и на перпендикуляр к АВ, получим собственно
wb = -wa+®ab’AB, <=^ = ТГ2(Р^.
w£=0, ^ = 0,
18.34
fwA w« Wb=wa+w-+<a. (1)
* AWCA f WB
Проекция (1) на AB и на
А' С _4 в перпендикуляр к АВ дает w&* соответственно
W“BA=O, «лв = .
WB = WA + WB* • w&=wb-wa=-10cm/c2, Елв = w’ /АВ = -1 рад/с2. wc = wA + wBA =24-6 = 18 см /с2. --------------------• ----- ч
18.35
wB = wA+w^+w“. (1)
Проектируя (1) на перпендикуляр к АВ, получим
= wB + wA = 4 м / с2; sab = wba 1 AB = 20 рад / с2.
314
Игпашов И. А.
Из проекции (1) на АВ следует, что
И л» = °'
wc = wa+w?a. wc = wa-w
•Д =2-20 0,1 = 0.
wB = wA + W?A + wBA. (1)
Проектируя (1) на AB и на перпендикуляр к АВ, получим соответственно
• cosa + wJcA.
w“ = (w в - wA ) cosa = 0, roA;, = 0; WBA = (wB-wA)sina = 0, Sab-Q-wc = wA=wB^a.e
18.37
wB=wA+w^+w“ .
WBA=SAB'a" WBA=<0AB'a'
Проектируя (1) на получим
WB=WBA.
<эАП = 10/а (рад/с)2.
(1)
АВ,
Проекция (1) на перпендикуляр к АВ дает
0--wA-w^; еА5 = 10/а рад/с2.
wc = wB + w* +w“ ,
w‘bc=Eab BC. wg;:=<o^ BC. (2)
315
Проектируя (2) на ВС, получим wo =w« = <а^а=Юсм/с2.
Проекция (2) па перпендикуляр к ВС дает wC1 Ю 10 О, следовательно, wc = 10 см / с Л ф
Точно так же найдем, что wD = 10 см/с\_
Определение положения мгновенного центра ускорении.
tgp = ^ = l, P = 45L
ША0
w. Юа
а п _ А =----------= =---см - половина диагонали
10^ —
A
18.38
wA =wB + w^ + w“ . (1)
Проектируя (1) на АВ, получим wА cos60° = -wB + wAB. й^-АВ = 24, <oJg=24/AB
Проекция (1) на перпендикуляр к АВ дает
wA cos30° = w’, еав=8т/3/АВ.
wc = wB+w’+w“. (2)
Проектируя (2) на СВ и на перпендикуляр к СВ, будем иметь
WC| = w„ cos60°- w“ = 8-24 = -16 см/с2, wc, = wB sin 60° - w‘pB = 8^3 - 873 = 0.
316
Игнатов И. А.
1839
а = 60°, р = 45°. wA = wB + + w“ .
(1)
Проектируя (1) на AB и на перпендикуляр к АВ, получим соответственно
wA cos45° = wB cos60° -
wAB =wB cos60“-wA cos45° = 2,21-72 = 0,7958 м/с2,
o>^ = w“ /АВ = 3,9789 (рад/с)2, шАВ=2рад/с.
wA sin45° = wB sin60° + w^,
= wA sin 45° — wB - sin 60° = 72 — 2,2173 = —2,4136 м/с , eab = wj^ /AB = -12,06 рад/с2.
wc = wB + wX+wg,. (2)
Проектируя (2) на два взаимно перпендикулярных направления, будем иметь
WC1 = wB sin 60° + w* = 2,6218 м / с2, wc, =wB-cos60°-w“ =1,81 м/с2; wc = 7(2,6218)“ +(1,81)2 = 3,19 м/с2.
WB=WA+W* w“a =eabAB, <а=ш;вАВ.
(1)
317
Проектируя (1) иа АВ и на перпендикуляр к АВ. получим соответственно
w,.cos45’ = w“. ^=4/2 = 2. <»,„, = J2 рм/с. , w,.si„45" = wA+wSk. w’ =w„ s.n45 -w -= 4-2 = 2см/с’. еА8 = <*/АВ=1_рад£.с.-
WC = WD + W* +w“B. (2)
Проектируя (2) на два взаимно перпендикулярных направления, будем иметь
wCi = wB • cos45° - w“ =4-4 = 0, wCj = wB sin45° + w‘B = 4+2 = 6 См/c , wc =6 см/с2.
18.41
wB = wA + w-B;+w“. (1)
Проектируя (1) на AB и на перпендикуляр к АВ, получим wBcosp = -wA -cosa + wBA;
w“A =wBcosP + wA-cosa, <o^b = wba/AB. wB sinP = wJpA -wA sina,
w‘ia =wB-sinP + wA sina, eAB = wBpA /АВ.
wc = wA+w^+w“cA. (2)
Проектируя (2) на два взаимно перпендикулярнт-дх направления, будем иметь
wc, =wA cosa-w“ =wA cosa-a2B AB/2 = = (wA cosa-wB cosP)/2,
318
Игнатов И. А.
Wci =wAsina-wgk = wAsina-eABAB/2 = = (wA sina-wB-stop).
Wc = a/(wC|)2+(wc,5’=
= 1. Jw2a + w2 -2- wA wB cos(p-a) = 8,66 см/с2. .
Глава VI
Движение твердого тела, имеющего неподвижную точку. Пространственная ориентация.
8 19. Движение твердого тела, имеющего неподвижную точку [4,2,1,5,6]
19.1
Резулы ирующая угловая скорость Q определяется по теореме косинусов
Из теоремы синусов
Q со. . •' . со, .
~т— =---------, sina = sin•. Q z) = —• sin0,
sin 9 sina - Q
г—r-z— yid' -co; -sin2 0 co, +co. cos0
cosa = у 1 - sin* a =-------= i
-J®2 s-coi +2-0,-co, cosG
319
19.2
СМ±со.
Точка M участвует в двух вращениях с угловыми скоростями СО И СО].
Имеем
VM = ю X г + ф, X г, где г = СМ.
Легко видеть, что оба вектора в правой части имеют одинаковое направление. Модули векторных произведений
|шхг| = <о-г, хг| = ш, -r-sm(y + y) = <o, -r-cosy;
следовательно,
¥ = (<04-0)! -COSy)-r.
19.3
ОС = 4 см, АС = 3 см vc = 48 см / с tga = 3/4 = 0,75, cosa = 0,8 sin a = 0,6
OA - мгновенная ось вращения конуса.
® = vc/CD = 48/3-0,8 = 20 рад/с,
<о, = vc/CE = 48/4-0,8 = 15 рад/с.
Угол поворота в плоскости хОу
<P=co,t = 15t
320
Игнатов И. A.
xi - = 20 cosl5t,
_ dco _ е = -^- = <о,хсо,
У, = соу = 20 sin 15t, z,=0. £ = 15-20 = 300 рад/с3.
19.4
ы, - 2л рад / с, со = 2п рад/с. v8 = 2л-ОВ = 36^2 п = 160 см / с
_ dec _ _ Е = ——= а, хи, dt 1
в = ш, а =4л2 = 39,5 рад/с3.
ОА — мгновенная ось вращения.
Ускорения точек А и В определяются по теореме Ривальса w = Exf+a2h.
Для точки А
|ё х г| = 4п2 • ОВ = 72V2 л2 см/с3,
|<о2h| = 4 л2 ОВ = 72 Л л2 см / с2;
wA = 144л2 = 1421 см/с2.
Для точки *
|sxf| = 4л2 ОА = 1242 к2 см/с2, wB = 72 Л л2 = 1005 см/с2.
19.5
п -п v0, со 00,
со, = —— = 4л рад/с, со. =____________ = 2ю,= 8п рад с.
' 30 ----5-2. ’ О.Е ОО.-зшЗО0 ' ----------—.
11—287
321
19.6
(Смотрите рисунок к предыдущей задаче)
ОС - мгновеная ось вращения кругового конуса А. поэтому vc = 0. -------------------------•
Скорость точки D
vD = а>, FD = 8л ОО, = 80л см/с.
Ускорения точек С и D определяются по теореме Ривальса w = exr + (02h.
Для точки D r = OD, h = DF , тогда
|ёхг| = 16-Уз л2 -10 / cos30° = 320л2 см / с2 |<o2h| = 64л2-10 = 640л2 см/с2.
=-320л2 sin 30°-640л2 sin 30° = -480л2 см/с2, woz = (320-640)л2 -cos30° = -160л/3 л2 см/с2. ---------------------------------------я
19.7
ОО, = 100 см. <ое =4я рад/с, ша=4л рад/с;
322
Игнатов И. А.
19.8
ОМ2 — мгновенная ось вращения, v2 = О,
v0 = <о. O,N = <0, 00, • sin 22,5° = 153,07л см/с, Vj = 306,14л см/с.
Ускорения точек определяются по теореме
Ривальса
w = Exf + w2h.
Для точки М2 г = ОМ2, h = 0.
IsXf| = е ОО, /COS22.5" = 1223л2 см/с2, w2 = 1223л2 см/с2. --------------------------—. а
Для точки о, г = 0О|, Й = ОД
|ёхОО,| = е ОО, =8т/2100л2 = 800^2 л2 см/с2, |со;ОДч| = 16л2- 100-sin22,5° = 612,29л2 см/с2; woy = -800V2 л2 sin 67,5° + 612,29л2 -cos45° = = -1045,25л2 + 432,95л2 = -612,3л2 см /с2, w0! = 8OOV2 -cos67,5° -612,29л2 -s*n45° = = 432,95л2 - 432,95л2 = 0.
323
Для точки М, f = OMi. h = M,M.
(ёхбМ.| = 8Т2 л2 00, /00322,5° = 1224,59л2 см /с2,
I 2 м м1 16л2 00 1224,59л' см/с ;
|ш;.м,м|=1бя ои, cos22i5°
w,v =-1224,59л2 + 1224,59n2cos45tl = -358^67^ см/с, w = -1224,59я2 cos45° = -866л' см/с .
19.9
ОА = R = 4л/з см.
Задачу удобно рассматривать в обращенном виде.
wA = e-R, е = wA / R = 4а/з = соа сое = со2 ctg30°. ш, = ^4>/з-tg30° =2 с'1.
19.10
Скорость точки тела, совершающего движение около неподвижного центра, определяется по формуле
324
Игнатов И. А.
19.11
19.12
со = 7 рад/с cos2 а + cos2 р + cos2 у = 1,
откуда cosP = y.
Скорость точки М определяется по формуле
v = со х г -
i
2 О
j к
3 6
2 О
, тогда
vx=-12, vy=0, vx=4.
Из аналитической геометрии известно, что перпендикуляр, опущенный из точки M0(x0,y0,z0) на прямую L
325
х—X, у-У|_д~А О)
1, m, ni
где x.y.z - текущие координаты L,
X ,y„z. - координаты точки, через которую проходит L;
I ,т,.п, - направляющие косинусы L; представляется уравнениями
I, (х-х0) + П1| (y-y<i) + ni <z"‘zo) = ®’
х-х„ у-у0 Z-Zo
X,-хо У,-Уо Z|-Zo 1, m, n. = 0. (2)
Здесь в рассматриваемой задаче
Xj _ _ Z( = 0 (начало координат).
Подставив в (1) значения х, = у, = z, = О и направляющих косинусов 1, =2/7, Ш|=3/7, п,=6/7, получим уравнение прямой L в симметричном виде
y = 3x/2, z = 2y. (3)
Переписав уравнения (2), будем иметь
2x + 3y + 6z-6 = О,
3x-z = 0.
Координаты точки пересечения перпендикуляра и прямой L найдем, решая совместно уравнения (3) и первое уравнение(4)
Получим при этом
12 18 36
49’ у 49’ 49 ‘
326
Игнатов И. А.
Тогда длина NM (см. рисунок)
d ~ ^(49} +(49_2)’+(45)’ =^1'И + 80,+36* = 1,807 м.
19,13
Для точки М( (0,0,2) имеем
v«i = z1<o,-y, <о„ v»i = х, <ог-z, <ах,
Уг1=у,в>,-х,Ш>;
Откуда: <ох=-1, соу = 1/2.
Далее рассматриваем точку М2 (0,1,2)
vx2 = z2“,-y:-o>1.
Vy2=X2C0t-Z20)„
vx2=y2a>x-x2toy.
Подставив сюда координаты точки м;, получим
v,2 = l-a>„ v,2=2, vu = -1.
V = 7Vx2+Vy2+V>2 = 7(1-<B.)2 + 5-
л V , cos(xy) =
1-w, 7(1-<ог)2+5
2
3’
(1-<а,)2=4, 1-шг=-2, ш,=3. co = J<B2+o>2+io2 = 3,2 рад/с.
Уравнение мгновенной оси имеет вид
327
19.14
х___у___L
" ®> “ х+2у = 0.
х 2у z 31' 1 3’
z+3x = Of
Eq
vA =OAo>0,
vA <»0 AD sina’
to - .
sin a
m<, de.
— - v . e,) = ----ei + • ' J.
dt dt sin a 1 sin a sina dt
z42
(0- __ Eo _ COq _
z,+-7-2-(<o»xe1) = —-----e,+-?—-cosa-e,
sina sina sina sma
= -— 6,+<oj-ctga-e2. sma
O,C = R, ОС — OB = R/cosa, BD = BC cosa = 2R • tga cosa = = 2R sina.
328
Игнатов И. А.
'EXOC-(sina Ь'+<“" с,8“ ^)х°С = ^ ё,хОС +“° С,В“ЛХ5£ = ^~ (-к.е,хОС = 0)
«B = -OB+^.BD = (-^.-ei+a)J.ctga.-e))x5g+
+ <° BD=sina®,xOB+<a»ct8“e!xOB+
+ ^’2Rsin“(-5>) = 2R^^ + ^(-e.-2e1).
§ 20. Пространственная ориентация; кинематические формулы Эйлера и их модификация;
аксоиды [4,2,1,5,6]
20.1
ОМ - в плоскости Г|О<.
Единичные векторы осей (£r]Q, (xyz), (x.y.z,) обозначим соответственно (xoy°z°), (x°y°z°).
По определению, направляющим косинусом между
329
„ 7 „ — / 7° „7° - единичные векторы этих направлениями |иш ( 1 , m t°
вживлений) называют скалярное произведение ml.
т“.|’ = т" I°cos(m°P) =
= m° cos(m“ 1°) = 1“ cos(m° P) = cosa,
0 10 1
так как in =1 - 1-
Из приведенного выше рисунка легко усмотреть, что между единичными векторами имеют место зависимости j" = z°sinP + x°cos₽,
^0 = zl°’Cosp-x°-sinp, x“ = V-cosP + ?-sinp, у° = cosa +z° sina,
z° = z“-cosa-y“-sina. (1)
Углы между осью Г] и осями (xyz) видны непосредственно. Из (1) имеем
cos(V х°) = х° = р z° sin р cosp +£° х° sin р • cosp +
+ 5°х° •cospcosp + ij°-zl°sinpsinp = sinpsinpcosp-
-sinp sinp cosp + cosp cosp-cosp + sinp sinp-cosp = cosp.
Здесь учтено, что (см. рисунок)
V-z? = COS(90°-P) = sinp, ? -х“ = cos(90° +р) = -sinp, i°-X°=COSp, ^°z“ = cosp.
Совершенно аналогично записываются и другие скалярные произведения единичных векторов (1)
cos(^°у0) = £°-у° = sina sinp, cos(£° z°) = • z° = sin р • cosa, cos(rj0 x°) = 0,
330
Игнатов И. А.
cosCrj0 у°) = cosa, соз(ц° z°) = -sina, cos(^° x°) = x° = - sinp, cos(^° y°) = y° = sina • cosp, cos(C,° z°) = ^° z° =cosa cosp. Полученные результаты сводятся в таблицу
n
X cosg 0 -sinp
У sina sinp cosa sina cosp
z cosa sinp -sina cosa cosp
ОМ - отрицательное направление оси z,.
Из приведенного выше рисунка видно, что некоторые косинусы углов записываются непосредственно; например.
cos(|“ х°) = cosp, cos((“y“) = 0, cos(^“z°) = sinp,
cos(ii°y°) = cosa, cos(£°y°) = sina.
331
Остальные косинусы находятся с использованием зависимостей „ п _0 .
rj° = у,-cosa-z,-sina,
= у? • sina + z“ cosa, х“ = Х|° cosp - z° • sin p, z” = z° • cosp+x°-sin p. (1)
Из (1) имеем
cos(n°x°)= n° x° = sma sinp, cos(n°z°) = rj° z° = -sina cosP, cos(l° x°) = £° • x° = -cosa sinP, cosK° z°) = • z° = cosa cosp.
При выводе последних соотношений учтены значения скалярных произведений единичных векторов. Например,
х° • у° = 0, Xj° • z® = О, z° • z® = 1 и тому подобные.
Результаты вычислений сведены в таблицу
5 П
X cosp sina sinp -sinp-cosa
У О cosa sina
Z sinp -cosp-sina cosa-cosp
20.3
Единичные векторы осей
осей xyz-x“,y°,x°. Фик-сируются три направления N,L,M, единичные векторы которых соответственно
П ,1 ,т°; при этом ON±OM, OL1OM.
332
Игнатов И. А.
Единичные векторы V.x°,n°,y“ мог .
через единичные векторы посредством за“и^“
V = n° -cosy-nf-siny, X» =i« -cosy + a" -sin,, n° = n° siny + m° cosy, y° = a“ .со8ф_р ,sin(|)
Тогда имеем
cos(? x°) = ? x” = (n cosy-m° -siny).(i«.C0S((, + a». say) = = n“ • 1° cosy cosy - m’ • 1° - sin у - cosy + + n“ • m° • cos у sin y - tn0 • m° sin у sin у =
— cosS-cosy -cosy — siny-siny,
cos (| “ у ") = l У ° - (n“ cos у - m° • sin у) • (tn” • cosy -1° • sin у) =
= n m cosy-cosy — m°-m°-siny-cosy —
-n“ -1°-siny-cosy + т° 1“-siny-siny =
= -siny cosy-cosO-siny-cosy,
co>(V z°) = S,° z° = (n°-cosy - m°-siny)-z° =
- n° -z° cosy -m° -z’ siny = sin9-cosy,
cos(rj°x 1 = rj“ x° =(n° siny + m° cosy)-(i0-cosy + ni° siny) =
= n° 1° siny-cosy+ m°-I0-cosy-cosy + + m° m” - cosy siny+ n° -m°-siny - siny = = cosO-siny - cosy+cosy - siny,
cos(rj“ у" I rj° y° = (n° - siny+ m°-cosy)-(m” -cosy- Iе siny) = n° -m° siny - cosy + m° - m° - cosy -cosy-- n° 1° sin у • siny - m° J" cosy • siny =
= cos ц/ • coscp - cos0 sin у • sintp.
333
costn" z’) = • z° = (n“ sin у + m° • cos v) z“
= n° • z“ sin Y + 'cos V = sin 0 S” V’
cos(4°'x°) = • x° = (1° cos<p + m° sinq>) =
= Г £°. cosv + m° £0 • sin Ф = ~ sin 9 cosv,
cos(fV) = ? У° = (®“ c°s<P -'° sin4>) =
= m“ cos<p -1° <° • sin q> = sin 0 sin <p,
COS(4“z°) = ?ZO = COS0.
При написании последних формул использованы известные соотношения между единичными векторами (скалярное произведение).
5
X cose • cos ф-соэф-зИф- sincp -sine-cosep
У -Sincp С05Ф -COS0 -Sin9-COScp sin0-sincp
z sin0-cos cp COS0
__________________П________________ х cose sinср • cos<p + cos ср- sincp у cos \р • cos<р - cos0 -sin ц/ -sin<р z sine-sincp
20.4
Векторы угловых скоростей ф,ф,О, изображенные на рисунке к задаче 20.3, проектируем последовательно на оси xyz и Получим
сох = 0-sincp-cp-sinO-coscp, соу = 0-coscp + \j/-sin0-sincp, сог = <p + \p-cos0;
= ср sin 0-cos ip -0-sincp, con = 0-cos\p +<p-sin0 sin \p.
co^- = ф + cp-cos0.
334
Как и в задаче 20.3 Фиксируем на пересечении три направления N.L.M, единичные векторы которых(
сувке за неимением места единичные вектора не изоб-ражены).
Система координат (V, П°Л°) условно неподвиж-ная, система координат xyz (х’.у’,^) подвижная. При этом
MC1NC, MC1LC, m°-n° = 0, тЧ’=0,
(п°1°) = —+9, cos(n°l°) = -sin9. (1)
Единичные векторы осей координат могут быть выражены через единичные векторы п5°Д°,п° посредством зависимостей
£° - n° cosy + m° siny, rj° = i° cos6 + x° sin9,
C° m°cosy-n° siny, x° = n° cos9 + o°-sin9,
y° - i"-cos(p + m0-smy, z° = m’-cosy-F siny.
Тогда
costx°) = E,°x° = cosy cos9,
cos (J, ° у °) = V • у ° = sin у sin q> - sin0 cosq> cosy, cos(V z°) = 1° -z° = siny -cos<p+ siny sin9 cosy.
335
сМ(л”хс) = п“ x =sin0.
С05(П*У)»п’у’ = «»вс“*-c05(n“'j?) = n', *° = -sinlf’ cos0' cosf^x0) = C° • X° = -sin V cose, cos(^° y°) = y° = sincp • cos4/ + sin0 • sin у • coscp,
CoS(£0z0) =C° z° = coscp cosy - sincp sin0 -sin у. При записи последних формул, кроме (1), использованы соотношения: х° -1° = О, Т)° • п° = 0.
5 n
X cos у - cos 0 Sins
У sincp-sin у - cos<p sinO cosy COScp -cos 0
Z coscp sin у + sincp • sin0 cos у -sin<pcosS
c
X -cosO-siny
sin ср-cosy +coscp-sin0-siny
г coscp • cos у - sincp • sin0 • sin у
20.6
Проектируя указанные на рисунке к задаче 20.5 векторы ср,0,у сначала на оси xyz, а потом - на оси получим
= cp + y-sin0, соу =0 sincp+ ф-coscp COS0, со, = 0-coscp-ф-sincp cos0;
= ср coscp-COS0 + 0-sinу, сол = cp-sin0 + y, со; = -cp-siny-cos0 + 0-cosy.
336
((п1ашо» joj
тема хоордиа„ *“’• ««• “ижнпя; едиви ” ’ п°л-/к а «о 7а 7. U лекторы сУвке за пейзажем ш ’ фикси;;™: направления N.L.M. едив^. ные векторы р щ'1
рых на рисунке также не показаны; при этом ’
LC1MC, MC1NC, тЧ° = 0, т п = 0 Гп" z°=0, n°.z°=0, Т)’Л« = О, 1Г т”=0.
Единичные векторы осей координат выражаются через единичные векторы 1°,т°,п0 и углы Эйлера посредством зависимостей
= m“ cosy +1° - sinц/,
rj° = n“ cos9- z° -sinG, C,° = 1° cos 9 -m° - sin 9,
х° = ni° cos<p + n° sincp,
y° = n° cosp - m“ sin 9, z° = i° cose-n°-sine. (i)
cos(n° 1°) = cos(~-0) = sinO.
Далее имеем из (1)
cos(£° x°) = ^“-x0 =cos9 cos9 + sin9-sine sin9, cos(^° у °) = ^° • y° = - sin9 • cos9 + cos9 sin9 -sin 9, cos(E,° z°) = Ё,0 • z° = sin9 cosO,
337
cos(n“'x“) = n° xo = sin<pcos0.
cos(q”y°) = n“ y° = cost₽ c°s9.
cos(q°V) = n<’z”=-sin9-
cos(^°"x0) = x“ = sin Ф • sin 0 • cos у - cosy sin у,
COS(5°y°) = • У° = cosip sin0 cosV + sin<p sin у,
cos«;° z°) = ?“z° = cos6 cosy.
5 n
X cosy -cos у + sin у-sin 0-sin у siny-cos 9
У - siny • cosy + cosy • sin9 sin у cosy cos9
Z cosGsiny -Sine
Q
X siny sin9-cosу - cosy-sinу
У cosy • sin9 cos у + siny • sin у
L£ COSB-COSy
20.8
Векторы угловых скоростей <p,0,y, изображенные на рисунке к задаче 20.7, проектируем последовательно на оси координат xyz и Получим
их = 0cosip + у -cosO sinip, соу = у -cosO cosip - 0 sinip, ш2 = ф-у-sin0;
<о5 = 0-cosy-кр-siny cos0, <x>n = y-y-sinS,
“с = -0 sin у + ф cos у COS0.
338
цгнашовИ.Л-
При движении параллели и меьип ЧКИ По ственно имеем АИаЯу Соот®ет-
*e = R coS4,.x, ун = ц.ф
Откуда
R-coscp’ |{ •
Скорость изменения утла <р есть угловая скорость ф, в е к -тор которой направлен по оси S в отрицательном направлении перпендикулярно к плоскости АОВ; вектор угловой скорости X совпадает по направлению с вектороми Таким образом, имеем
со, =-ср = -vH ! R, со = (X + U)cosq> = (U+———)-cosip,
* R-coscp
VE
• - (X + U)sin<p = (U+-----------)-sincp.
R-coscp
20,11
Угловая скорость трехгранника Дарбу как вектор перпендикулярна £От| и при данном направлении v совпадает с положительным направлением оси
339
Из рисунка к задаче 20.10
4Z следует, что
у ’’t n U{ = 0, U,=U cos<p,
\ Ut = Using..
'; v---► £ Следовательно,
s"o
Ф* = U-costp cosy, соу = U-cosy sin у, G)x = u-sincp + y = U-sin<p + v/p-
Здесь U угловая скорость вращения Земли, она образует с осью z угол я/2-у.
20.12
Дальше
Из рисунка к задаче
20.10 имеем: vN=R(p, vE=i-R-cos(p, v, = 0;
Us=o, Un = U-cosg>, U; = Using..
<o , =-<0 COS0 = -~ COS0, Y R
cos0
co о = U-cosy-cos0 + X-cosycos0 = ——• (UR-cosy+ X-R-cosy) = R
cosO v _
= -(U-R-cos(p+vE) = — -cos20, co 0 = (U+A.)-siny + 0.
К К _£_________________e
Здесь U - угловая скорость вращения Земли; 0- угловая скорость вращения плоскости х°Оу° в плоскости £,От];
при этом tg 0 =-----—______
vE + R- U-cosy
340
Игнатов И . A.
Тогда
ЕдИНИ"™е векторы иредставляются гп„ Щим образом ДУЮ’ ^^'“sa + yj-sina, 2° = y?cosa-xf.sinai
=z“sinp-y).cospi z° = Zrsinp+y».C()sp
cos(^“ z°) - E,‘J -z0 = sina-cosp,
cos(r|0 z°) = V-z° =cosacosp,
cos(£°z0) = ^°-z° = sinp.
£ n
z sina-cosp cosa-cosp sinp
Из рисунка к задаче 20.10 имеем
U, - 0, Un=U cos<p, U; = U sincp.
Тогда, спроектировав векторы аир, изображенные на рисунке, и учитывая формулы (1), получим
<оч = р - U-cos(p-sina,
соу = d cosP + U^coscp-cosa-sinP-siiKp cosP), (о, = a sin Р + U • (coscp • cosa • cosp + sinф • sinp).
341
20.14
При наличии восточной и северной составляющих скорости точки подвеса к проекциям угловой скорости пре-ей задачи добавятся проекции угловых скоростей X и о (смотрите задачу 20.9)
Выполнив элементарные выкладки, получим
V vn
ш =B-(U + r——)cos<psma-— cosa,
* н Rcosip к
ш =dcos0 + (U + -r-^—)(cos(pcosasinP-
’ Rcosip
- sin <p cosp) - sin a sin P,
К
Ci> =a sin0 + (U+———) (COS9-cosa cosp+
' Rcos9
+ sin ф-stop).
Ф = 4t, v|/ = n/2-2t, 0 = n/3.
<j> = 4, w = -2, 0 = 0.
(psinOsiny = 2V3cos2t,
-<psin6cosip = -2T3sin2t,
z = <ot = vp + <pcos0 = -2 + 2 = 0.
“ = V“«+“y = V12 + 12 =2^3 рад/с, Ex = -4^3sin2t, Ey =-4V3cos2t; е=4л/з рад/с2
342
Ипипю» И. А-
20J6
ОС ~ «гноаспнал ос1.
конуса а розуль ”
"ив! еледоаатально п **“*'
'--А - кругов
^омпрИаерщиие2и1,’п()“^ конус с углом цри aepmaae 2(J
нь1Й аксоид круговой 0,25
tgct = ~5/Г ~ °'04629б; 2ct = 2 arctg(0.0463) = S°18,
5,4
tgP - 0 25 “ 21,6; 2Р = 2’arctB<2l-6) = 174°42
п 1
со г = ф + <j> cos9 = an + - = n (а + 2);
sx = V3 sin(ant), ey =+—'V3 cos(ant), e,-0.
Уравнение неподвижного аксоида имеет вид х____________________у____z_
й)х СОу (О,
Чтобы неподвижным аксоидом была плоскость хоу, необходимо выполнение условия z=0. Откуда следует, что
й1 = п(а+-) = 0, а- 2
у = ф0 + п, t, 0 = 0О,
ф = ф„ + п24;
ф = п2, 4>=п„ 0 = 0.
ОМ - в плоскости zo£;
ш = д/n f + n2 + 2n,n2•cos0o.
Проектируем векторы угловых скоростей последова-
тельно на координатные оси xyz и Имеем
<ом =<j/ sin0 sin<p = п, - sin0o - sin (гр0 + n2t),
<ау = ф sin 0 совф = п, sin 0О • cos (ф0 + n2t), и, = ф + ф • cos0 = n2 +n, cos0o;
со5 = ф5т0-зтф = n2 sin0o sin (\р0 +n,t),
<0л =ф-8Ш0-СО8ф =П2-8Ш0о-СОЗ(фо + П|1), б); = Ф + ф • COS0 = П, +n2 COS0o.
Уравнение подвижного аксоида
X____у___
°>х и, и/
ЦПИ“>°’ и Л
Подставив в (3) выражения (I), получва
х ". соа(Фо + п2,) = у.п,.51пЧ + пл
X• (П2 + п, COS0J = Z-п, • sine,.sin((p() + П]0 Далее из (4) следует ’ И'
x = y<g(4>0 + n2t),
X = z ni'sin9o'sin(<<>o + n,n nj + n,cos0o (5)
Исключив в (5) время t, получим после элемевтапных преобразовании арвых
„г,.Д_ (д,- sin О,)2
(n2 + n, cose„)2 Z (6)
Неподвижный аксоид •
JL=jl=A.
con П)
Подставив в (7) выражения (2), получим ^ = ntg(4'o + n|t), n,sin0o-sin(Vo+n,t)
С — (_ •----:-----------. (о!
(n,+n2-COS0o)
Исключив опять из системы (8) время t, получим
(^ашОо)2 2
П (n, + n2 coS60)2 Ч'
(1)
(2)
(3)
Уравнения (6) и (9) - конические поверхности (круговые конуса). Сечение конуса в плоскости 1)0^.
n2sin60 г
Т) ” ” п, +п2 cos90 "°
_ п _ Пд -зшЭо M te“ " “ п.+п. созЭ»
344
345
П; sjn60 _ пг sin80
sina = ~7=f=-==---* a co
7п? + Пз+2П|П2СО5в0 ------
Аналогичное выражение для угла раствора вершине конуса имеем для (6)
n, sin0o n, sin0o
sin a = г, , „ - “ m
Vni, + nJ + 2-nlnJcos0o —.
Глава 7
Сложное движение точки
§ 21. Уравнения движения точки [4,2,1,5]
21.1
х, =2-cos(nt + ;t/2) = -2sinJtt, х2 = 3cos(nt + n) = -3cos7rt.
х = х, +х2 =-У13 (cosa cosrrt + sina sin nt) = = -Vi~3 -cos(a - nt);
tga = 2/3, a = 33°41'24"
21.2
x = rto„t, y = a sinco,t,
c^x rcoo
x
t =-----, y = asin
r<0„
346
x = v t + 10, y=o>rt + 6; t = x-10
v ’ ’ ~ “ ----+6,
У = 6,28-x-56,8 ' -----------•
21.6
у - A -sin kt; A = 2,5 cm., T = — =—c.
к - — = 50л с’1, у = 2,5-sin(50 itt). T --------------------
347
21.7
x = vt, у = a-sinkt-y0; к = 2п/Т-4пс . i = х/ V, у = 0,0008 sin (0,8т: x) +1,5 (м)
21.8
x = a-sin(cot + a), y = b-sin(cot + P).
x = a • sin [(cot + P) + (a - p)] =
= a {sin(cot + P) cos(a -p) + sin(a -P)-cos(cot + P)} =
= a(7-cos(a-P) + sin(a-P)-Jl-A2 }• b VO
Откуда
(-)2 + (^)2 - 2 • cos(a - P) = sin3 (a - P).
a b a-b
21.9
x = a-sin2-cot, y = a-sincot.
X у / у ,
— = 2 smcot-coscot = 2-—Jl-(—) , a a V a
x2-a2 = 4-y2-(a2 —y2). ------------------------ •
21.10
-----► •• J Б- J — 2 ’ л~v u
Г Т- 1^ /2-4,905
j-......... T = ^g _ - = ! c , s = x = v.T = lQt
, , gx2
t = x/v, y = ~7 = 0,049-x3. 2-v‘ —------------------,
348
Hriiaui“D И. A.
21Д1
^X costot, n-v "'Xsintot;
x= asincot.
Тогда
C = a sincot coscot n-» • i ’ 4- asm1 cot.
sinwt=JSi
V+(T1-?!=T-L 4
21Л2
S=^(h,-h2) = ^xQ,OOPS MM,
1 09
S = 7'(h|'t'hz) = ?oo=0-0045 MM-
Из теоремы косинусов
= OjA = ^a* +r2 +2 a r cosot. ------------------------------- •
Теорема синусов
г г • ,
—— = —-------, sincp =— smcot.
sincp sincot t,
г sin cot r sincot
; tg(p =-------------
a + rcoscot
sincp
tgcp = -y==^= =- —
^-S‘a 4> V h-^y.s^cot
349
x = lsincp, y = l cos<p-r; x2 +(y + r)2 - I2. '
(j = OB, cot = cp + a.
I 1 . , .
=--------sin © = —-----sin (cot - a)
sin cot sin cot
=--------(sin cot cos a - coscot sin a);
sin cot
Г 1 r
=------, sina = -sincot. sina----------sin cot-1
I --------{sincot- J1-(t)2 sin2 cot - coscot 7-sincot} s=
sincot V 1 1
Л2 . , »!•(!-Л-coscot- — -sin cot...).
21.15
x
x = 0, у = g; t = 0 x = 0, x = -v0 cosa y = 0, y = v„ sina.
Откуда
x = -vot cosa,
gt
У = -^- + votsina;
У = -xtga +
___gx; 2vjcos2a
350
Игнатов И. Л.
СКО₽ОСТей И,2.1.5,71
§ 22. Сложение
22.3
АС = vot, ВС = v.t;
351
X
v,t Vot cosv0 sinp’
sinp = ycosv0.
22.4
Рисунок к задаче 22.3 a = K/2 + (Vo_P)' AB = 1.
l2 = t!-(vo + v? +2-v0-v, sin(v0-P)];
1 v,t T_ 1 ^(Vo)
sina cosy/p’ v, cos(iy0-P)’
_I _ Vpt T_ 1 sinP sina sinP’ v0 cos(4>0-p)’
______________1_______________1_ cosy0
д/vj + v’ +2-v0-v, -sin(4/0 — P) vi cos(4/0-P) 1 sinp
"v0 cos(v„-P)'
При записи ответа можно также учесть, что vo+vi +2-v0 v1sin(4/0-p) = [v0 sin4/0+7v| -vj-cos! у0 J
22,5
vm = rP; P = 2a, mt = |--2a = y-p,
352
Игнатов И. A.
22.6
ОА = 2 • OD = a - Скорость корабля (переносное движение);
АВ и DB - направление флюгера (ветра) относительно корабля (относительное движение);
OB = v - направление ветра (абсолютное движение). При этом
ZBOA = ZBAO = 45°, АВ1ОВ, DB1OA; следовательно, V//OB и имеет направление “сю”. Модуль v = aV2/2.
22.7
(V + v) t,=l, (V-v) t,=l.
В
12-287
353
, АГ. К
1 = АВ = —V =200 м V--------------------
354
Игнатов И. А.
22.11
v€ = Збл/i км/ч, v, = 36 км/ч, а = 45°.
Из теоремы косинусов: -
v, = 36 км/ч: направление v - северо-восток.
22.12
Имеем
Если механизм и кривошип вращаются в противоположных направлениях, то абсолютная скорость точки С равно 0.
vA = vr+ve; УЛ = АВ-sinсоot, vr =у = Q0 AB-cos(o0t, ve =co0ABsinco0t; va=AB-coo.
Дальше
va _ vM
AC AC-1’
vM = (AB-21)a>0.
22.13
Вращения в одном направлении г-,--------- АВ АВ
Va=VVe+V; =АВ (°0> Vc=-^- W0+— СОо=АВ СОо;
355
I
ctgwot, a = -
Следовательно, AB движется поступательно.
ve = R co = 2л м/с
— sin 30° = 0,312285552; V.
v, =(e + l sina) a> = = (0,05 +0,25) 10=3 м/с, = 0,51,2 = 0,6 м/с.
= д/152+(2тг)2-30it-V3 =
= 10,06 м/с.
v, v, . „ s,nP = sinp sin 30
₽ -18,19702258° = 18° 1Г 49" 2; (v,, R) = 60" - p = 41“ 4 8 10 7.
356
ИшашовИ. A.
22.16
п n
<О = —paazc, v,
D тс n 2 "ЗО-’
vr = -J uI 2 + v2 - 2 • u • ve • cosa,
u2 = v2 + v2 + 2 • ve • v, • cosp,
cosp = ^rv-~v- = I’”»*-*.. 2 • v, • v, v, ’
д/1-cos’p 60-usina
tg p -----— =-----------------,
cosp 60 u cosa-п D n
22.17
I • l-totgtp
OA =------. v, = OA =-------—
costp costp
to = <j>.
22.18
Спарник AB движется поступательно.
to = — = 20 рад/с; R
Vj = co 0,5 =10 м/с, v3 = <0-1,5 = 30 м/с, v = v = "Js co / 2 = 22,36 м / c.
357
22Л9
22.20
Из (2) и (3) получим
va=v,+vc.
<p = <p,+a, <p,=<p-a, a>, =a> -a.
a I a
-----= —----, sma = y sinq»,.
sina sintp, 1
а .
a cosa = -j--<pI costp,,
a cos<p,
a = 7-co,-------
1 cosa
Icosa
<o, = <o ------------
Icosa + a-cosci
a2 =12 + s2-2lscosa,
I2 = a2 + s2 -2as-cosq>.
Подставив (5) в (4), будем иметь
(1)
(2)
(3)
(4)
(5)
Из (1) следует
со zl I -а
“1 = 2(1+'7)-
358
Игнатов И. А.
vr = v. sina = 1(о sina = I • со • -J I - cos2 a.
Подставив сюда выражение cosa из первой формулы (5), после несложных преобразований получим
со ---------------------------------
vr - ^•V(l + s+a)-(l + s-a) (a + l-s)(a + s-l).
Легко видеть, что 1 - а <, s < 1 + а; следовательно, 1 1 COlm»x=“-;----------------, <0lm=C0-----.
х t-a’ i«n«n 1 + a Дальше, из равенства нулю производной dvr
= 0 следует, что s2 = I2 - а2. as
Тогда vrmax =со-а; минимальное значение vr имеет место при вертикальных положениях кулисы:
О
22.21
1 О]А = 0,Зм, R|= 0,35 м; со0=7рад/с.
R
соЕ = —-coD =2 рад/с.
VA=Vr+Ve. (1)
ve = соАв х АВ1АВ.
Для положений кулисы 2 и 4, когда О,А 1 АВ, ve = 0; следовательно, со 2 =со4 = 0.
359
Для положения 1 из (1) имеем vA = v, -а), (0,7 + 0,3) = 0,А а)1..
Для положения 3
v. = у. = 0) (0,7-0,3) = 0,А о)Е>
а), =0,6 рад/с. ----------
со3 = 1,5 рад/с.
22 22
“---- Чертеж к задаче 22.20
Угловая скорость кулисы определяется формулой
(задача 22.20)
со 12-а2
Для вертикальных положений кривошипов ОА имеем;
S,=a + 1, Sj = l-a;
следовательно,
7[ 1 4 7С 14
“' = 2(1 + 7)=7" раД/С’ Ю)=7 (1 + Т) "4 21 РаД/с-
Для горизонтальных положений кривошипов
s2 = 12+а2.
Тогда из (1) следует
7 + —) = 0,64 п рад/с.
г = ОА = 0,08м, 1 = АВ = 0,24 м,
<о = 40 • п рад / с.
Из решения задачи 21.14 имеем
5 = 1(1 -X coscot...), где Л = г/1.
360
Игнатов И. А.
v, ~£> = r-w-sitKot]^.^ =r u).
v, =ш (!-г)«40 п 0,16 = 20,11 м/с, v, = <o (1 + г) = 40 п-0,32 = 40,22 м*/с.
V. = ш 7с2 + г2 = 40 n Vo,064 = 31,79 м/с, V, = г о = 40 п-0,08 = 10,0531 м/с, vi = v. = Tv2 + vj = 33,34 м / с.
22.25
V. = v,+ve. (1)
Из (1) следует
= v, sina = l a 0,5= 0,942 м/с.
22.26
СК = р.
CD = vot = (p + r)sina,
361
sina =
(1)
Из (1) имеем:
va - cosa = v0 sina.
VJ t / (p+r) _ ----
v.=v« ,s“ = f , Vot:" 7(P+r)j - <vot)
§ 23. Сложение ускорений точки [4,2,1,5,7]
Система координат А1] связана с призмой АВС и определяет переносное движение; перемещение Р относительно £,Лт] будет относительным движением. В рассматриваемой задаче переносное движение — поступательное; следователь-
362
Игнатов И. А.
во. ускорение Кориолиса равно нулю Тогпя женин ускорений запишется следующим образо“°
где wp . абсолютное ускорение точки Р, wr - относительное ускорение точки Р, wc - переносное ускорение той же точки,
Проектируя (1) на оси х,у, получим
х = w, cosa + we,
y = -w, sina, при t = 0 x = 0, y = h;
Интегрируя эти уравнения с будем иметь
х = у = 0.
учетом начальных условий,
x = 0,2t, y = -O,lt;
x = 0,lt’, у =-0,It2/2 + h. (2)
Из (2) следует
v _ т/*2 +У2 = 0,1 • 75 • t м / с, у = -—• х+h;
______________________________2
wр = cosa)2 + (w, sina)2 = 70,04 + 0,01 = 0,175 м / с2
23.2
Подвижная система 4От| движется поступательно; следовательно, ускорение Кориолиса равно нулю.
wM = wr + we;
wf = wj + w", we =s = 0,2 м/с2;
363
v = ^. - = 0,2143 t рад/с, a = 0,2143 рад/с2
a' = R' z, ' z. R
W| = w,' + w, = 0.0386 + 0,2 = 0,2386 м/с2.
w„ = w," = (0,2143 t)2 0,1 s|= 0,8266 м / c2.
w„=Jw? + w2 =0,860 м/с2.
Для точки N имеем
WN = 7(0,2-0.03 86)2 + (0,8266)2 = 0,842 м / c2.
23.3
v,-m-RV2 = у„-72 = у3, v;=2v0, v„=0.
Переносное движение - поступательное перемещение системы А Т), поэтому кориолисово ускорение точек гусеницы равно нулю. Имеем
364
Игнатов И. А.
w ।=#w. + w:)’+(w;)j = j( w„++ w.' w» = = Jbv0-^)’+w>.
w1=2w0, w4=0.
- •
23.5
Переносное движение — поступательное перемещение системы поэтому ^От}, ускорение Кориолиса точек ротора равно нулю.
WA = Wr + we = Wr +We; we=w,
<p = t2 рад, co =2t рад/с, e = 2 рад/с2;
wj = OA e = 0,2'2 = 0,4 м/с2, w? = 0,A <o2 =0,8 м/с2, wc = 0,492 м/с2, w, = wt + w’ cos60° - w" cos30” = 0, w„ = wj sin 60° + w" - sin 30’ =0,746 м/с2.
wA = 0,746 м/с2; tgP = w„/w, =oo, P = y-
23.6
w = wc=0A©2, <o! =w/0A = 0,492/0,2 = 2,46; w = 1,57 рад/с.
365
Ипми«ои И. A.
X = as in cot, we = x = -a-co2 sin cot, wt =co2 I,
при этом ОА занимает вертикальное положение. Тогда
23.8
23.9
(p=--t2, C0 = <p = t, Е = ф = 1.
W = W, + W, = W,' + w“ + we. w’= £ • 1 = 0,2i/2 м/с2, w"=a>J-|Lc= 0,2^2 м/с2 w, =0,4 м/с2.
1. w, = w„ + w;cos45“-w°cos45° = 0,4 м/с2, w„ = wj sin45° + w" • sin 45° = 0,4 м / с2, W, =7632=0,41/2 м/с2.
2. w, w,-2 wJ cos45“ =0 w„ = wj sin45” + w“.sin45»=i0 w, = 0.
3—w:+w:.cos45«.w,.co545e=0i4M w„ =2 w; —= 0,4 м/с2, w, = 0,4i/2 м/с2.
4. w, = w, +2 wJ cos45° =0,8 м/с1, w„=0, w4=0,8m/c2.
w0
23.10
W=W„ + w;+w‘; w=/wj+(w;)1+(w‘)1 =
= 7^ + (4'0,25)2 +(16 0,25)2 = 4Д8 мIc2.
AM = 0,9 м, ф = 60-тПрад w0 = 4m/c2, ii=w0 = 4;
при t = 0 x = 0, x = 0.
Тогда x = 2-t2 m.
у = AM'coscp = 0,9 cos60-nt, z = AM sincp = 0,9 sin60 nt, t v, =AM cp = 0,9-60n, x = 4t; w" =(60n)2 0,9 = 31978 м/с.
Откуда
366
367
м/с w--w> 31978 м/с2
23.11
тогда sin 8 rrt = 0;
х = 0,1+ 0,05 sin 8 7rt (м), v = x = 0,4л• cos8• Trt м/с.
w„„ = 2m,xvt;
2-6л'0,4л-cos 8л1.
”“ = 4,8л2 при cos8 nt=l, w"=x-fi>2, wt =-3,2л2-sin8 nt. wA = ,/(w™)2+«)2 = V(4>2)2 +(°,1'36л2)2 = = 6л2 м/с2;
v,=x = 0, w„p=0.
23.12
w„p=2‘<oexv,:
21
W«,P =2-<oe-vr =2’2л-—= 24 м/с2.
23.13
w. wr+w,+we+w„p; co, = <p = л cosrrt, г, n’ sinnl; wr"=co;.R, w; = er.R, w,=<0<R, wKpp=2-(0e-vI;
368
Игнатов И. А.
wc” = OM ffl’, W;=E, OM, w„p = 2 zt cosnt.
„ . 5 25 ,
w. = wc" + w, =sin-tt-(— + n ) =-10,95м/с',
, 5 10 5 , 2
wn = w< +w«oP = sm-K + — n cos-n = 4,37 м/с .
23.15
369
23.16
Проектируя (1) на ось х, получим
co^asinyt = ^^sinyt + OAco2. Откуда - со = со J 2,
то есть <о = е = 0. we = w” = ОА • со
а со; . со.
" 2 sm2 11
„ 2
w.op = 2co-vf =a co, cos—t, co. . co.
vr =a-a>, cos—t, ve =a co,-sin — t.
23.17
wm = wt + w. + w„p.
v2
w" = —= 4 м/с2, г
v2
Wen=-L = l м/с2, г
370
Игнатов И. А.
%=2'«, V,=2 4 03 = 4м/сг;
wM = w;<-w;-w.., = 5-4MM/e>.
у-2 <o, v, + l = 0, у, .2 м/с,
23.18
v, = v, + vt; v,=2m/c, v, = 2km/c; v< = v, cos45° + v,=7,7m/c, vn = v, cos45° = 1,414 м/с. -----------------•
w, = wc + w„p, w, =0;
w, =w” =co2-OC = 8n2 м/с2, w„p = 2-o-v, =16n м/с2;
w5 = wKpp cos45“ = 8>/2n м/с2 = 35,54 м/с2, wn = -w" - w,op cos45° = -8л2-8^п = -1143 м/с2.
-3-19 v.=vr+ve. vt = v, cos<p + v,,
vn = v, sinq>.
wn = w" cosq> - w" - wKop costp = -[r <o2 + v, (2 co - ' )-cosq>l.
371
ОА = г, 0,0 = а. <p = wt. r = OlA = Va2 + r,+2-arcos4>, __I— = -Д—, sinq>, =— sintp, sin<P] sin<p ь
rJ = a!+4’-2 a § cos<p,.
a2+^2-r a + rcoscp
«»Ф|= 2a-V 5 г-sin cot
a + rcoscot
Дифференцируя (1) дважды по времени, получим
г (г2 -a2)sincot e-ф,-arw (a2 + ra + 2.arcos<ot)2
23.21
23.22
Из решения задачи 23.20 имеем
е = агш2 —___________________
(a +r2+ 2 а r-coscoty
372
Илишюа И Л.
Так что при <p = o>t = 0 и ip = j g0° к = 0. при ф = 90" и ф = 270"
S = 0,3 0,4 9 --ML _, ,
0,0625 1,21 рад/с
Е=-0,3 0,4 9 -^-,.,,, , ,
0,0625 - Рад'с
23.23
Из решения задачи 23.20 имеем уравнение «носнтелъного движения камня кулисы
£ = + г2+2 a-r-coseil.
Дифференцируя (1), получим ar-co-sincot co Е-coscot — Е,-sincot
G — » ч------• Г • (0 • -----
V '
При ф = о и <р = 180° агсо2 агсо2 1,08 ,
------= -~ = -1,543 м/с2, а + г 0,7 -_____.
1,08 1,08 - . -----= -—- = 10.8 м/с.
г-а 0,1 ----------,
При ф = 90° и ф = 270° (а г со) (0,36)2 , м
(0,09 +0,16)3'2 ’____
(1)
wr = 5
$
агсо
(а-г-со)2 (0,36)'
w = -------г—'— =------------- и — 1,037 м / с .
' (0,09 + 0,16) -----------
373
Дифференцируя (1) по времени и учитывая, что
sincot а со .
§ = -аг-ш-—-—, § = -—— • х, получим
(а + г coscot) (а coscot + г)
v = г I и ——5—-----“77'—
(a +r +2ar-coscot)
w = r 1ш-2-
а (г2 -a2)(a + rcoscot)-r2 (а • coscot + г) (а2 + г2 + 2а • г coscot)5'2
sincot.
23.25
Из решения 23.24 следует, w-О, так как sin ф = 0.
При ф = 90° и ф = 270° имеем
что при ф = 0° и ср = 180°
соответственно
.,г (,‘-»г)-г< 0,007008
(а2+г2)5'2 0,003162 =
0,007008
W ~ 0,003162 =?’22 м^с'
-2,22 м/с2,
374
Игнатов И. А.
23.26
РС = р = 0,2м, ОС = 0,1л/Т0м. ОР = 0,2 м, ш = 2 рад / с,
Е = 3 рад/с’; V, =0,25м/с, wj = 0,5 м/с’.
w = W + W + w
• « вор
23.27
wi = wrop + w” sinp~ w" - w' cosp = = 1 + 0,2 - 0,3125 - 0,5808 = 0,3067 м / с’, wn - w! - w< sinp- w" cosp =
= 0,5 - 0,1506 - 0,7744 = -0,425 м/с’;
w = + w„ = 0324 м/с’.
wj v t-w’+wj+w . w, = 8cm/c’, w’ = e OM sin60c, w" =ю’ ОМ sin60°.
375
При t=l с имеем
V3
w„p =2<0-8t-—= 16л/3-1г;
w, =w"-w, sin60“, w„ = w, cos60°, w„i = w„,p + w’.
w, = ^jv/2 + wj + wj, = 35,55 см /с2.
23.28
w,=w, + w,; w„p=0(coj| v,).
= n2 . Л
W, = 5 = -a-—-Sin-t,
n 2
we = wen=ciT a = a- —.
4
При t=l с имеем
w = Tw2+w2 =a~-V2 м/с2.
4
О
23.29
w. = w,+wc + wKop,
(1)
w - j: - n 71 Л
r —a~*cos—
4 2
376
Проектируем (1) на три взаимно направления. Имеем
перпендикулярных
w, = wj + w, cos45° = л/2 a-к2 C0Syt+ Л), .и> -Ла-п2 п
W„ = w,cos45 =------------cos-t, wul = w„p = -a.n: sin^t.
При t=lс
wM =-7(2a it2)2+(a-!t2)’ = a-it2j5 м/с2;
При t=2c
9 л/2
V, =a n2J(2-^2 -)2+(—)2 = 0,445 a-n2 м/с2. V 00 1 •
23.30
ws =WI+Wt + W„p. w’ =OM е = 6м/с2. W;=OM (o2 = 15m/c:, wup=2<ovr = 12M/c:;
377
w,=w,"-w,= 14,1 м/с2,
w„ =w;-w„p=-6m/c2.
tea = — = 0,425532;
w,
a = 23,051301“ = 23°0304
= 7(14,1)2+ 36 = 15,32 м / c2.
23,31
E с л и у = ОМ = 0,5 • t2 см, т0
y = v,=tcM/c, y=wr=lcM/c2; coe = Ф = (2t +1) рад/с, se =ф = 2 рад/с2. wM = w, +Wc + w„p.
При t=2 с w“ = ОМ-co2 =50 см/с2, wc' =ОМ се =4 см/с2, w„p = 2toe v, = 20 см/с2;
у, =2 см/с = 0,02 м/с, V, =2-5 = 10 см/с = 0,1 м/с;
w, = -(50-1) = -49 см / с2 = -0,49 м/с\
w. = w.' + w.op = 4 + 20 = 24 см / с2 = 0,24* м / с2. -------------------------------------<*
23,32
ОМ = х = 2rcosn>t, х = -2r w sintot = -2r о)=
378
23J3
л = 0,М = rsincp, x = r«(p-cos(p = u— sincp
1 и2 1
X = w = -Ц(р- ----------------7-5—,
sin ср г sin ср
Относительно окружности имеем
и U
s = NM = r-cp, v = s=r-cp = — —; v sincp
dv coscp u2 coscp „ v3 _ u
dt U 1 sin2 ср г sin5 ср г г • sin ср
Здесь при записи ответов учтены формулы (1).
379
2334
Интегрируя (2) при начальном условии (1), получим а v
arcsin(— r) = <ot, г = —-sincot.
' ir ЛЧ
Из (3) имеем
dr
v, = — = vcoscot.
' dt ----------,
Далее
x = r-coscot, y = r-sin<ot; x2 + y2 = r2 = (—)2-sin2 cot co
X2+y2=J.y, х2+(у_ХГ=(_^)2
Абсолютное ускорение *
w. =7^2+У2 =2<o-v, так как x = -2avsin2at, y = 2co-v-cos2cot.
23.35
w> = we + witp.
380
w„, = 2<ov;
w. =«>-J(ra)’ +4v\
2336
OP = 30 cm = 0,3 m. w, =w’ + w* + we>, w’=e-OP = 8-0,3 = 2,4 м/с1, w’=<o!-OP = 9 0,3 = 2,7 м/с1 w„p =2-3-1,2 = 7,2 м/с1.
V = w” + wKop = 9,9 м/с1, w0 =w, =2,4 м/с1; w, = -Jw1 + wj = 10,19 м/с1.
23.37
В рассматриваемой задаче co,|| v,. поэтому w„p=0. Тогда
W, = V«)2+(w;)? = 7(2.7)2+(2Л)2’ = 3.612 м^с1.
23.38
Если ось вращения совпадает с диаметром, Р пендикулярным хорде, то
wj=o, w;=0hw, =w„p = 7,2m/c-.
381
23.39
t ».
Направление северо-восток означает, что у, образует 45° с плоскостью экватора;
= 0,000072722 рад/с,
V = Rcoe = 463,8 м/с, v, = 10,3 м/с;
v = ^v2 + v2 + 2v, • vc • cos45° =471 м/с, w ,p = 2ис v, = 0,000072722 10,3 • л/2 = 0,00106 м / с2.
23.40
w, = w„p+wen; W«»P = 0,00106 м/с2, wc" = v2/R = 0,03373 м/с2;
w, = w,op+w" = 0,034787 м/с2.
23.41
w,=w^+w:+w„p.
w" = v2 / R, w" =<o2 R.sincp, w»p = 2co v coscp. Wi = w" coscp = v2 coscp /R,
w«=w?sin<P + we"=(v2/R+w2R).sin(p
wm ~w«Op = 2co v.coscp.
382
111„аи10“ИЛ
w, = V*' + w“ + w"’
R2 + R‘'sinJ Ч>+2®1 • v’U+cos19).
23^2
-OM = R sincot. v, = R-co coscot, vp = Rcosincot;
v, = -Jv2 +v2 =Ra. w, = wl + w; + w„p;
w =-R co2-sincot, w" = Rco2 sincot, wep=2R-co2-cos(ot.
w =w? • w, = 2R-co2-sincot, w„=w„p = 2R-co2-coscot;
w, = Jw; +w2 = 2R-co2.
Координаты точки M
у = R-sincot coscot, x = R sin2cot; x’ +y2 =R*-sin’cot = x-R,
2 R:
(x-T)2+y =r
23.43
= OM-co =7x2 +c?-co, cosa
vr = u, Ve
vt+ve, va
383
w, = w" + wMop;
w" = co2 -OM, w =2ua>; W[ = w" sin<x = a>2 x,
w„ = w; cosa + w„p =<o2 c + 2u-o;
w, = = o>7(a>x)z + (<ac+2u)2-
Вектор vc перпендикулярен плоскости рисунка.
23.44
OM = vrt, ve = OMsin<pa>2 = = d>2 -v, -t-sin®! t, vp =ОМ ю, = vt t <D,.
V, = 7V? + (vr • t“I )2+(<»2 • vr t sin® ,t)2 = vrA/l + (<02 +Ш2 sin2co,t) t2
23.45
w. = w:+wj+w;+wK„p.
384
Ипшшт и. А.
w? = vJ/R = 2 м/с1, w? = m1R = 8 м/с1, «; = b-R = 8m/c2, W4=4-v,=8m/c1,
w, = ,/(10-8)’+64 = -/б8 = 8,25 м I с1, > а = —-—--------= 4, а = 75° 57' 49 .
w" + wj - wTOp ________________
23,46
w’
2 i
Ф = тг, co=2t, e = 4t.
s = OM = (4t2-10t + 8) cm. v. = v, +v,.
v, =s = 8t-io|„le = -2 см/c, w,=8cm/c2;
v, = OM • co = (4t2 - lot + 8) 2121= 4 cm /c.
v, =7V? + VJ = ^20 =4,47 см/с. w, = w, + w" +wj +w„p.
w" = ОМ со^,.^ = 2-4 = 8 см/с2, w' = OMe|,.le = 8 см/с2, wm|J =2<o, v,|,.|C = 8 см/с1.
w, = V(8-8)2+(8-8): = 0.
13—287
385
Для точек 1 и 3 уСКо. реяие Кориолиса равно нулю (S-. II Я-)- в точках 2 и 4 УСКо. рения Кориолиса равны но модулю и противоположны по направлению.
w, =wr+we + wrop.
Для точки 1 ,
W°=— w"=co2r; w,=—<r.
5f,=wr+w,, w, r . . r«
Для точек 2 и 4
w, = w: + w: + w„p; w? = 7- w."=<-2r. wKop=2We.u.
f—--------“Л ц2
wi=J(a,!-2r)!+(y)2 + (2<oI-u)2 =-— • *
Для точки 3
“2 2 ,
wa = — + coe -3r.
23.48
Переносное и относительное движения одно; . направления.
Для точки 1
w.=w; + wen+wKOp;
386
Иптшдв и. л.
и’ 1
у, wt = си г, wwp = 2cu и; w, = со2 г-и1 /г-2сои.
Для точки 2 и 4 имеем w"=V5 r (oJ, wmp=2co u;
cosa + w>op = и2 Zr + w2r + 2a) u,
w» - w" sina = 2<o2r; w, = J(2<o!r)! + (u‘ / гta’i + 2o> u)1.
Для точки 3 " •
wa = u2/г + 3-со2г + 2сои.
скорение Кориолиса для всех точек равно по величине и направлено к центру круга. Если изменить направление движения жидкости на противоположное, то направление ускорения Кориолиса также изменится на противоположное; при этом переносное и относительное ускорения не изменятся.
23.49
w" = vr t sina со2 + a sina co2, w№p =2co vr sina.
Векторы w" и wKOp лежат в плоскости, параллельной основанию конуса; следовательно, вектор w представляет собой гипотенузу треугольника с катетами w" и wTOp.
387
W| =w,“-w, -sma^ic = IO-5-5 м/с2, W|1 = w, cosa = 5-73 м/с2, wra = w,op = 10 м/с2, w, = i/200 = 14,14 м/с2.
23.51
OM=a+v t, e = — -(l.5 рад/с2, dt
co = 0,5 t рад/с. w" =C ’. sina co2, w, = OM • sina • e, wMp = 2a>-v,-sina. wi = w; = O.M ii)2sina|, 2c = 0,4 м/с2, wu = WI + w,op|,.2e = 0,2 + 0,3 = 0,5 м /c2, w. = 1/0,16 + 0,25 = V67l 0,64 м/с2.
388
Hi «шло, Ц. д
23.52
w„p = 2®, XV,.
w.»p = 2 v, <o sin60“ =
= 2-1,5—-24-3600 2
= 0,000189 м/с2 =
= 1,89-10-* м/с2.
w.
tga=—t, g
... . 500-0,000189
: 500 • tga --------
9,81
= 0,0096 m. --------
Ускорение Кориолиса перпендикулярно плоскости рисунка - к нам.
wwp = 2covr-sina =
л-25 0,73
^^^г-2-6610;м/сг-
23.54
В рассматриваемой задаче ffi.lv,; следовательно, _ *20
w„, = 2со -v =-= 2 91-10 м/с2
р е г 6-3600 м/с •
389
23.55
Ускорение Кориолиса для точек 1 и 3 равно пулю; в первом случае - v( = О, во втором - v, || ю".
Для точек 2 и 4 ускорения Кориолиса равны по величине и противоположены по направлению.
v2 = а> г -л/2 =v0-T2 м/с, где <j> = v0/r;
w2 = w4 = 2ш. • v, • 4 Л = 2о>. v0 = = 5,8110; м/с’.
23.56
W»p=2<OeXVr.
w, = 2со. • v, cos30° =
л 1,110,866
= ~ 6-3600 -1398J0'4 м/с^
23.57
а = 60°, V, = 1,Ц м/с.
390
Игнатов И. А.
we «e>J-R sin 30° =
<___v w io’
'12-3600-------= 0,016923 м/с’;
— •
W" = v'/Rsin30°=2.v;/R = 3,86м/с’; w~p = 2tt>,-v, =1,64 м/с’.
Здесь о. - = 0,7272 • 10м рад / с.
23,58
Векторы и w перпендикулярны плос-кости рамки и направлены в сторону вращения.
а = 45°.
w =w"+w'+w"+w' + w . . е е «р
V, =0>,1 = ^м/с, е + 1 sina = 0,4035 м.
w” =a>J-1 = 1Д337 м/с2, w,’=s,1 = 0,2m/c’, w" = <o’-(e + l-sina) = l м/с’, wj = s-(e+1-sina) = 0,4035 м/с’, w„p =2oj-v, -sin45° = 1,7447 м/с’, w, = w" + w" cos45° - w; • cos45° = 1,7909 м/с’, w„ =(w^ + wr’) cos45° = 1,0138 м/с’, wlD =w;+w„p = 2,1482 м/с’. w> = 7wi +wo +wm =2,939 м/с’.
391
23.59
Рисунок к задаче 23.58
а = 30°, е = 0, w. =0.
= w," + w,' +W.‘ +sw w.=v»/|‘ w;=0.1M/c\ w.»=«’/4, Wiq =2<o vr cos30° = V3 n, W| -w; + w;.sin3O’ = l+H2/4 = 3,4674 м/с2, Wjj = cos30° = т/З м/с", Wa = wwp — V3 дм/с w, = 7w? + wJ+wm = 6,69 м / c2.
При t = л/ш, q> = 0;
и, = <j> = -<₽„• ш, е = Ф = 0,
<p, =’t- w, =w;+w,"+ww.
w”=<o2 a, у/" =(<p„ co)2 (1-a), w„p =2v,-<oe =2a-<p0-to2.
-w„p-w,"=(<p„-o))2-(l-a)-2(p0a-co2-a<o2
= ш2{ф2(1-а)-а-(1 + 2<р0)}. ------------------------ •
23,61
Ф = kt, r = OM = aekl.
v, = v,+ve; v, =r = a k ea, ve = Vp = r<p=akekl;
392
Игнатов И. А.
v =71 а к eta. w,=w.+w’+wllin. w =f = а к2 cta, w" =ш2 г = a к2 eta, we(| = 2(oevr = 2a k2 we=2ak2?
w' = L = V5 a k’ e“, w* = Jw' -(«')' = 41» k1 e“.
dt ---------• ------“
23.62
Ось x направлена по касательной к параллели на восток (от нас); к- угол между V и осью у на плоскости хоу
w>op =2 (<о, xv,); ш, (0, to costp, o sintp), v, (vsink, vcosk, 0).
i
w„p=2
0 vsink
j
to costp vcosk
k
to sincp 0
wx = -2to v sincp cosk, w, =2co v sintp sink, w, =-2<ovcostpsink.
23.63
W,
393
23.64
w, = w" = ш: (R + h) cos<p, w = w2 (R + h) cos<p sincp, wa = -mJ(R + h)cos2 <p, w„=0. ------------------•
23.65
Положение точки определяется сферическими координатами
q,=r = R + h, q2=<P> q3 = X. (1)
Здесь ф - географическая широта. Л, - долгота.
Связь сферических координат с декартовыми представляется в форме:
х = г-соБф-созА,, у = rcoscpsinX,
z = r-sin<p. (2)
По формуле
находятся коэффициенты Ламе.
Выполнив элементарные выкладки, получим
Нг=1, Нф=г, Hx = rcos(p. (3)
Далее, по формуле
\=н,,Чр (> = 1,2,3) (4)
394
Игкашон И. А.
определяются проекции вектора скорости
V,-r-h, v, аг ф, vl = r cos<p X. (5) Для дальнейшего необходимо вычислить ф „ j. Имеем:
у, = Гф + г-ф, ф *n(R+h)-VfVM
r (R + h)2
i - 1 r • ve
r cosq> 'Vf+ r '<vn’,8<P-v,)]. |Qj
Здесь приняты обозначения условий задачи
rv»=vN. vl = vE, v, = vb. Записывается функция
Т = —(г2 +г2 -<р2+г2 cos2<р X.2).
и подставляется в формулу
1 d dT dT
w4.=7F (^ 0=!.2-3)- W
Hq dt dq, dq,
Вычислив производные от функции Т и учитывая (3) и (6), из (7) получим:
v2 +v!
w,2 = h-г <j>2-г cos2ф A? = vb--r~77, ix ~г П
wr), = =2г-ф + г-ф + г-созф-31Пф-Х1 =
_ 2vb-VN , vN (R + h)-vh vN , jL.p,.-“ R+h R+h R+h
Wfs = wx =2r •к-СО8ф-г Х ф 8Шф+ г Х -СОБф-
- R+h R+h
395
^“s’,(7^+W^Sin<₽"r2c0Sip
R+h K+n
23.66
(1)
(2)
we =(R + h)cos<pro2. (3)
Проектируя векторное равенство (1) на оси х, у, z и учитывая (2) и (3), а также ответ задачи 23.65, получим
V.-V.
Wx = VE + -j^£- + 2-(vh • COSCp - VN • sinф) •
vh-vN Vg
Wy-VN+ R + h +‘j^^ tg<P + (R + h) co • sincp-coscp+2 vE (o sintp,
vn+ve
W»=vh~ j^ + || -(R+h)'© -cos2cp-2vE © coscp.
396
Игнатов И. А.
2X67
С в
<P = <Ot, (1>=4к рад/с, w. =w"=a>2OA;
WKVA = Ю2ОА- COS<(> = = 16it2 cos4nt = = 63,2 cos47tt м/с2.
23.68
(см. рисунок к задаче 23.67)
w; = 10,5 м/с2, w’A =e-OA = l 03м/с2.
E > 0,
•*КУЛ =WA cos 60° + w A cos 30° = 0,683 м/с2.
£<0,
'л'кул = 0,433-0,25 = 0,183 м/с2. e<0.
23.69
При решении задачи 22.26 получено соотношение для скорости стержня
Vpt
7(r + p)2-vJ-t2
Тогда ускорение стержня
dv Ур(р + Ог
dt [(p + r)2-(v„ t) ]
------------------
397
23.70
о> =
5Л = Я рад/с, г = 40 мм
зо
v9=<ar, уь=0,2мм/с;
= = 125,7 мм/с
2.40 = 394,8 мм/с2
Wi=2o).v,=2<o2r = 789;5_MM/c2.
w„ =W, =w0-tga.
Глава 8
Сложное движение твердого тела § 24. Сложение движений тела [4,2,1,5,7]
а) Сложение плоских движений тела
24.1
Задачи подобного типа проще решать методом Виллиса (метод остановки). Суть в следующем: неподвижной плоскости хо,у мысленно сообщают угловую скорость, равную по
398
j4n>a,noB^’ А
величине и противоположную по направлению угловой скорости кривошипа OjOj. Тогда кривошип в этом сложном движении будет неподвижен, а любая шестерня с номером v имеет угловую скорость
Здесь (О, - абсолютная угловая скорость по отношению к [еподвижной плоскости.
В рассматриваемой задаче имеем:
а) ш,=0-шт, Sjstaj-iBn,;
- и т Г2 Г1 + *2
= —; “2=---(a>> = a>m)-М;---------------------Г, Г;
в) Внутренней зацепление шестерен I и П. В этом случае
— ® III Г2 *1 ~*2 / \
——ш— = —, ш2=-------------(ш, = шш);
."“ill Г, Г;
24.2
Й|=-С0ол. “2=“2-“0Л, m =~;
0),-0>О* ।
ш, =2(00* =2ш0; =<», +ш, =ш, +о>0
ш, =в,;
399
Игнашо» И. А.
400
401
24.8
cd j - угловая скорость вала I CDj=-(O|, co2=a),-a)l, <o2=c5_j,
24.9
I "
О - угловая скорость рамки. 5,=-Q, й2=й3=со2-П,
1
co, П '
a>2-Cl _ _ i; Q г, г.
<o,-Q г3 ’ <o4-JJ r,-r3 ’
1
я r2r4 2500'
24.10
<o, - угловая скорость вала I
Й2=со2-Ш11 ш3 = а21
402
цпвОЮвИ А
(О, - О),
СОц -со.
(02 “(О,
г, г*’ “<=“,+(“>-<0,) =
= 280 рад/с.
24.11
<о, - угловая скорость вала I
S, = —со, —со,, S)so>]-0l, =
II — ш. +<о. г,
I1 а>4 = ш4 - и»,,---!----L__l
™ <0,-10, Г| ’
<од —«>! _ _ СО, + <0, _ Г, 'Г,
а>4-И| г,’ ш4-и, Г|-г5'
г. г 70-30
со4 =<0, — — _ /.О] +<!>[) = 1200-go (160+1200) = -585 об/мин
24.12
со, - угловая скорость вала I
Г—12
S, = —со,, 51=ш1-<0|. 5, = й,,
403
со, = 01,-<>.
, ,, £Ь.).Й] =-375 об/мин.
®4=0>n“V _ Г ' *-------
24.13
Ш1 . угловая скорость втулки и рукоятки.
со, = со,, <04 = 0;
24.14
coR - угловая скорость шестерни радиуса R,
со4 =ши. со, = со, -coR,
й2 = ©з =со3 -<oR,
~ СО.-СОН г,
со. =co.-(oR. —------ = ,
CO3-COR г4
CO2-COR _г, £в. = _1о.
Ш| —coR г’ (Оо R’
(d4~(0R VI гГгз
“.-<Ок=г2 г4’ “‘"-(“--“я)*»»-
404
to s - угловая скорость водила S. 5a = cot-ws, 5В = toB-cos,
Отсюда, так как со, = О, “. = 0, <oe=2cos.
Угловая скорость и угловое ускорение 2 определяются методом Виллиса. Пусть <й0 - угловая скорость кривошипа.
Тогда
ш0 = -а>о-®<»
-2ш. 1
ш,=со,-со0, со2 = <о2-соо; ---
и,-<о„ 2
2-
<ог-“о
-2со
= 1, <о3—<оо, е; = -Ио
Дальше имеем
va=3R-cd0, vma=R coo; vM=ViO R coo. wA=3Re0, w^ = 3R coJ, w^=Re„, w^ = R<b?.
wi=w^-<=Rso-3R<“o-wii=wm* -w; = Rco„-3Re0.
= 7(R • в» ~ 3R • coo2)2 + (R a>o - 3R • e0)J = = R7lO(Eo+<a04)-12co2E0.
--------------------•
405
24.16
Из равенства дуг В„МО = ВМ- Г <Р'=Г’(|>’ следует равенство углов
Ф1 = ф2 =Ф-
Тогда угол поворота шестерни А относительно неподвижных осей хоу тождественно равен нулю; следовательно, й = © = 0, и шестеренка
А движется поступательно. Таким образом,
скорости всех
точек шестерни А одинаковы:
V = VA = 1соо; то же справедливо и для ускорения:
24.17
VM-VA+VMA> WM=«A
Шестерня 2 движется плоско параллельным образом; следовательно, скорость и ускорение точки М определяются по формулам
б) Сложение пространственных движений тела
24.18
VA =АВ-со(, vA = АС-со2;
406
цп1аи“’»И'А'
ю 2 _ АВ _ АВ! АО sin(a/2) <о, АС АС/АО sin(p/2)' <о2=2 sinl5° (o,=5,18o6/MHH.
24Д9
ZBDO = 7t/2. vB = vr+ve, 6л
vr = BD-to, =5-— = л м/с,
v. = (ODtg20° +5)cos20’tOj =
= (2 tg20“ + 5) • cos20° = 5,636 м / c.
Vg = 745,636 = 8,778 м/с.
24.20
R
co, -r = w0-R, <°t ~ r
Мгновенная абсолютная ось вращения проходит через точку касания шестерен - шестерня F неподвижна - и точку О; следовательно, скорость точки касания шестерен равна нулю. Тогда имеем
©о-
407
Ш1 = + + 2<o, <d0 cosa =
= —.Vr’ + R’ +2R r • cosa.
R R j
= a„ —wo sina = у coo sma.
= v,+v,; vr =(R +j tga) cot, v, =(r-—) <o,, <o, = r <o, /R; vt> =v,-v. = (R + ^ tga) o>, -1-0,5
= — • (1 + 0,6 • 0,2) = (\28 m / c.
408
ИЛ--ИА-
(R -x) cof = 0,5 м/с. ------------------’•
м _^Й. = О,5 14 = 7 рад/с. со, = -ja,’ = J4949 pm/t
do) ______ — - со
-—— = со,хсо , е — со со -sina = со со —--
е' dt ’ ’ со, ”
= сог сое = 7-70 = 490 рад/с2.
-----•
СО, • fl ®Г • «
—— = —, sinp=—sina.
sinp sina co,
dw, _ —
e = —-L = coe xco,, dt
7П1 .
E = coe m1sinP = <oe “. sina = ‘0''30 S1“a'
24.25
__ aw. — —
co, = д/ш? +coj = V34 рад/с; s= л -“i
409
D
£0 /2
e = co, -со,-sina = <о, • co • — = co, -co, =15 рад /c‘;
• * co, -------•
sina = —= -7==, a = 59° 02 10 4.
co, V34--------------------------•
24.26
WA = + < = R «7^+4®;,
wb = w* = +4a>’.
•
410
ЦП*-0' ИЛ ^22
24J8
основанием к< •. рого является круг радиуса г, а образующей - ОС, неподвижный аксоид-конус с вершиной в точке 0 в образующей ОС.
411
,,^*4 рад/с. 3.5рад/с
24.30
v, =R w, =35 см/с, v2 = Ro2 = 15cm/c;
24.31
412
24J2
Л^шовИ. а.
r4 + NP=?1±o=2 NP = 2.r 1sd
NP 16 R. 2 «’ 16 R’=“.-2RC, ш,г8рад/с
mN
R, = RU = R, v0 = <o R,
a R
v,
2 г, + КР_г>+КР’ “1'^ + кр) = \
“3"г5 + КР tj + KP’ V| (2 r! + KP) <o„ v2 = KP0,;
V (2r, + KP) Vj KP
W|=^ шз> u“=r;=Y<“’’ “>'m=a,«x-
2r,+2KP-KP o>R <o>, п = шо у; -------Т+Кр т = “"'Х’
R KP to R T-^Fn=““y-
Откуда
-4<4> too 2 n m
24.33
В этом случае будут иметь место соотношения
2г3+КР _^_.и.п = -<»(, у;
т’“° ’ Г) + КР
413
<2 z.
m, = 2 рад/с.
o>, = -' *"* =5 рад/с.
tga = 0.5; a = 26 33 54 I
Ускорения точек определяются по теореме Кориолиса
w, = w, +wc + wwp.
1. w, =<»; г = 4 3=12см/с’, w, =<oJ R = 150cm С wwp =2-<», -v, = 2-5-3-2 = 60 см/с‘;
w, = w€ + w_, = 210 см /с\ w„ = w, = 12 см / с*.
w, + wj = 210,34 см/с1 = 2,1 м / с;.
2. w, = w,-w„f = 150 - 60 = 90 см/с!, wn=w, = 12cM с
414
3.
4.
2. vA =ш, R, vt «в, К.
»с= j . V.-iVc-V,, v, = co,R =2 a>, R-<n« К. tot = 2'0, “U>v
0. v,
. v, »2 to, R,
R. и, - 2 w.
если ш4 =<o..to °*, ~ M«
если ш, =2<a,, to a), 11
= 1.тэ м/г
415
5.
24.36
Если а, = 60 об/мин, то из формулы со. = 2а>.-о>4 сле-
дует. что ш, = 0 при ш4 = 120 об / мин.
24.37
416
24.38
24.39
b
ЗЕ
ОН
~8е
Система координат вращается вокруг оси вместе с кривошипом (переносное движение.
Скорости точек В и D определяются по теореме о сложении скоростей в сложном движении.
ve =©3 -R,;
14—287
417
Из (1) имеем
R, ш, =-o>u 'ri +“>j Kr R, <i>2 =<>>« Г;+n>3 R>-
Из (2) следует
Ri T; <ol + R; rl mj. _ 90 + 225 = 7 рад/ c
“i- R.-r^RjT, 45 -------
_ R. R, («>,-«>!) = = 5 рад/с.
r,R, + r,R, 45 --------------
24.40
Пусть оз, имеет направление, противоположное пре-дыдущему. Тогда
<о,==3 рад/с, “да=^=15 рад-,с-
24.41 4
Рассматривается вращение крестовины шарнира Гука вокруг неподвижной точки пересечения АВ и СА, причем
АВ=СД и АВ1СД Абсолютную угловую скорость крестовины можно представить двояким образом
©,=©,+ ©° = со2 + со°, (1)
где (Dj и со2 - переносные угловые скорости, со? и со? - относительные. .
I 2
Соотношение (1) справедливо для произвольного положения крестовины.
Если плоскость CDG вертикальна, вектор со? пер-
418
Ilf 'iiauion И. A.
пецдикулярен плоскости рисунка. Проекция (1) на ось х дает при а = 60°
<0|=со2 cosa, (О|/со2 = cosa = 0,5.
если плоскость CDG горизонтальна, вектор ©“ перпендикулярен плоскости рисунка. Проекция (1) на ось дает при a = 60°
a = co2, со,/со2 =1 /cosa =2.
24.42
сое = ©.
Сообщаем рукоят-а ке вращения, равное со по величине и противоположное ей по направлению. Тогда
©,=©,-©, й2= ©J-со, з=©2» ©4=со4-со, ©|=0.
Дальше
-со г2 со2 —со г4 со г2 г4
(О2“С0 Г| ’ о>4—CD г3 ’ С04-С0 Г, ГJ ’
г, 80 .
<о4 =(1 + —)-со = (14-—)-4,3 = 12,3 с-’;
Г, 4J
419
to =di< = 12,3—4,3 = 8 с"1.
Е-й -to sina = 4,3-9,08 0,88 = 34,36 с’
Скорости точек*Е и F определяются по законам сложного движения точки. Имеем
-v+v v =0, vr=o>, d/2 = 0£M/c , vF = v6;
-w+W+W . w, =<o,2 d/2 = 64-0,05 = 3,2 м/с2, w = 2© .v =2-4,3-0,4 = 3,44 м/с2, w, = 0, "top « '
Wf=1/^7<= 4,698 м/с2; wF = wB.
Е
24.43
AB = AC = r.
д = <ocAG = a>c-r-ctga-cosa, vA = <o, AD = <o, -r-cosa; ©, = to, ctga = 0,1-6,46 =
= 0,646 рад / c;
:, = 5, x to,, e, = 0,0646 c~2
vA =<o, r cosa = 0,646 0,25-84/85 = 0,16 м/с, VB =2'vA =0,32 м/с, vc=0. ----------------------• --------•
Ускорения точек В,А,С определяются по теореме Ривальса
w = exf + co2h.
Имеем
В) | е, хОВ 1 = 0,0646.^ = 0,1056 м/с2 sina
| <о2-ВЕ | = 0.6462 2-0,25-84/85 = 0,2062;
420
Игнатов И. А
w' = 0,1056 sin2а = 0,03192 w.. =0^6-0,1056 cos2a = 0.10554. =
А> I Ё.хОА | = 0,0646 0^5ctga = 0,1043,
I <oJ-AD | = 0,6461 0,25 cosa = 0,1031; wi = 0,1043 sina = 0,01595, wu = °,1031 - 0,1043 84 / 85 = 0, wA = 0,016 м I c1.
C) | e, xOC | = 0,0646 0,25/sina = 0,1056 м/с1,
wc =0,1056 м/с1.
v„„ = v0cos45“; -------------•
ось винта проходит через точку О’ с координатами
v0cosa -------, у = 0.
0)
24.45
Чтобы движение тела А по отношению к телу В было число вращательным, необходимо равенство скоростей v0 = v, cosa; составляющую Vj -sina представляем как пару (ш, ,©’) причем плечо
421
d = J = V| sin a / co ।
24.46
§ 25. Смешанные задачи на сложное движение точки и твердого тела [4,2,1,5,7,3]
25.1
жении скоростей для точки М имеем
Подвижная система £ О2 Т] движется поступательно; следовательно, переносное движение будет также поступательным.
По теореме о ело-
v,=vr + v, = vtl + vr2+ve. (1)
г . 3
vri=J<P = r-- itt, vr2=s=80-t;
3 v. = r<p = r--7tt.
422
Игнатов И. А.
Проектируем (1) па неподвижные оси х и у с учетом (2) при t“lc
3 Зл/1
v«x = 80 (— • л + —— • 7t -1) = 430 см /с, = 30• 41 7t = 133 см /с.
Таким образом у, = 450 см / с.
Для абсолютного ускорения точки М имеем
w, = w, + We = w,|+wrl + w„+ wt; (3)
dv,. 3 dvl2 ОЛ
W"=T = r'4 ’' W'’ = -S" = 80’
v 9 3
w,„ = 2-^- = r- n! t’, w, = r ip = r- n. W)
Г o *•
Проектируем (3) на неподвижные оси х и у с учетом (4) при t=lc
2 3 •*’+-•70 = 1058 см/с2,
Зл ,
~) = -495 см /с2.
s = AM = 20 sin — t см.
Подвижная система координат £Ат), скрепленная с шестерней 2, перемещается поступательно; следовательно, переносное движение будет также поступательным. По теореме о
сложении скоростей имеем для точки М
423
_ л ?2)
vr=s=10 xcos-l, v. = r <p»r-g.
Проектируя (1) на неподвижные оси хоу, полупим v„ = v, - v, sirup,
Vix=v, cosq>. (3)
При t-0 из (3) следует v =10-л, vw = 10-я; следовательно,
= 10 ns/2 =44,4 cmJc.
Аналогично получаем из (3) значения проекций при t-lc и модуль скорости
V.2, v-' =31-4см/с.
Теорема о сложении ускорений в рассматриваемом случае имеет вид
w, = wr+we; (4)
. . л .. л2
wr=-5-K2sin-t, wet=rq>, wen=r—. (5)
Проекции (4) на неподвижные оси запишутся
F 2 . Л л2
w« = -5 п‘ sin— t-г —coscp,
2 36
w„=-w„ sincp. (d)
Полагая в формулах (в) t=0 и t=lc, получим соответственно
л2
=г— = 16,45 см/с2, эо -----------•
W*' °'^5+^зГ)2 + (1|)2 = 64’12 СУ1 с2•
424
Игнатов И. А.
В относительном движении (относительно призмы) цилиндр движется плоскопараллельным образом; движение призмы - переносное движение. Угловая скорость цилиндра
“-V./R; v,=o>.AD = v€^, va =5/2161’+4t2 =j6£cm/с. делХтсХ^Г ТОЧКИ А В ОТВМИ«”ЬНОМ движении деляется по формуле
Wr=wc + w£+ W-.
Теорема о сложении ускорений имеет вид wA =w, + w. = wc+w;’+w“ + w„ где wc=4cm/c2, wJJ. = wc=4cm/c2, w“=£i)2-R = v2/R, w, = 2cm/c2.
Проектируя (1) на оси x и у, получим wAx=2-(l+^ t2), wAy=2>/2 (^ t2-2). к к
При R=24 см, t-1 с будем иметь
опре-
(1)
(2)
/ /э /?
wA =2, (1 + — )2 + 2 - 2)2 = 5,57 см/с2.
V 6 6 ------•
25.4
Обозначим:
AC = BC = R, OA = OB = 2R, а = 60°;
425
шм = vc/СЕ = со DC/CE = = coctg30°, coM=const.,
f = OB, f = OA, h = BF,
Движение точки В вместе с конусом А около вепод. вижвой точки О будет относительным; переносное движение - поступательное.
Для скоростей имеем:
,BF = 3R co = 60 см/с, ve = 80 см/с;
V» ________
v = д/vT+vF = 100 см/с, УЛ=Уе = 80см/ с.
Ускорения точек А и В в относительном движении определяются по теореме Ривальса
w,=EMxf + ffl2Mh. (1)
При coM=const, eM=-^- = cox<DM> ем=сосом=со ctgSO0.
Из (1) следует, что
w*r = ем г = °2 -2R = 80V3 см/с2, wA = wAt - we = 0.
----------- •
Далее, для точки В получим из (1)
сом • h = Зл/З R-со2,
|sMxf| = B2-ctg30l)-2R. (2)
Проектируя (3) на иметь
wB = wr+we. (3)
оси у и Z и учитывая (1) и (2), будем
г 7з wBy = -8073- — = -120 см/с2,
We‘=-ЗУЗ со2 R + 80-Уз COS600- we =-160л/з см/с2.
426
Игнаш» и А-
Тогда
25.5
W“ ~ = 302 см/с2.
Если a = 2t, то <p = t2,a “м = v./CE = 2t ctg30° (см. рисунок к задаче 25.4) Далее имеем из чертежа
мму шм'cost‘=2Vi-t-cost2, “м, =C3Msint2 =2V3tsint2;
_ dmMy г
Ew - dt = 2V3 • cost2 - 4»/3 t’ -sin t2,
r- . Г-
emx ~~^~ = 2v3'Sint2+4V3-t2 cost2,
Emz = 0.
(1)
Из формулы wB — eM x OB + ш ц h - относительное ускорение точки В (рисунок 25.4) - следует
i
к
0
wa = Ем»
ОВ,
J
Ему
ОВу
ов,
+ а2 h.
(2)
Относительное движение - плоскопараллельное перемещение колеса по стреле вокруг оси О,О2.
Имеем:
ш = 1 рад/с, s = ОС = 60 (l + t) см.,
vc = sc = 60 см/с, а, = vc/R = 6 рад/с.
Скорость точки М находится по формуле
vM=vt+v„
427
где v> = ш, DM = 2vc sinl5°. v,=<»fc + Rsta30) = = 1(120+5) = 125 см/с; (t - !)•
Переносная скорость V. перпендикулярна плоскости рисунка (на рисунке не показана).
vM = ^Osin 15°)2+12? = Щ8_м/с.
Ускорения точек А к В находятся по теореме Кориолиса
WA=w+we+Wc, w,=2m.xvr. (2)
Относительное ускорение точки А определяется по фор-муле
w,a=wc + w^+w“; (3)
wc=0. w£=0, w“=v2/R.
Дальше
w, =<o2 [60 (l + t)-R],=l = ИО со2, wc = 2-|fflexv, | = 2-l vc = 120 см/с2.
Тогда проекции (2) на два взаимно перпендикулярных направления дадут
wi=w,-w, = v^/R-110 = 250cm/c2, w„ = 120см/с2;
Раскрывая в формуле (2) определитель по элементам пер вой строки и учитывая (1), получим
wa. = 2л/з (cos t2 - 2t2 • sin t2) OB • sin 60°,
Wb, = -2j3 (sin t2 + 2t2 cos t2) OB • sin 60°,
=2a/3 (sint2 + 2t2 cost2) OB cos60“ cost2 -
"2V3 (cost2-2t2 sint2) OB cos60° sint2-
-12t2-2R.y-We. (3)
При1-1с и Ф = t2|,_lp =3282,80635°,
Игнатов И. А.
так как 1 рад.-57,29577951» пп,.„
• проекции i'll
w„ U) дают
»« ->'.5234 см/с1 и,
„ "•» *->28.8099 см/с1
wb. =-277,1281 см/с1.
Тогда *3 = >R7^<=307.896cm/c1
Аналогично опреДеляется уско^^’
25.6
wc = 0, так как vD = 0.
wD = ^/wj+w1 = 379,5 см/с1.
25.7
Переносное движение - вращение рамки вокруг оси OjO2; относительное перемещение - плоскопараллельное движение шестерни 1; r=R/4=AC=PC.
Для скорости точки А имеем
vA=vr+ve; (1)
429
We + WAC
.psi-APse)«4'v ’
V =0>,Ar-pC
3 ,c перпендикулярна плоскости рисунка).
v. = 4 R “' (V'’
_---? <O|) ' R /[ § + 9 = 103,9 cm / c.
v* = A+v;= 4 ---------
ускорение тонки А находится по теореме Кориолиса.
WA=w,+we + wt; (2)
w, = W.+<+"«’ wc=®o7R’ w«=0’
« -,,?.ac=-4-ac=<Oo-7 R; we" = ffl; |-R, wAc=<°i A PC2 4 4
w; = 0, wt=2|5'exvr| = 2<»e-wo-3O = 6O <B2.
Проектируя (2) на три взаимно перпендикулярных направления, получим
w, =we+w" = 30-<0g +30и2 = 60toj, w„ = w“ = 90<o2, wnl=wk=60«2; wA = (Вдт/2-бО2+90° = 494,8 cm/c2.
25.8
При o)t =(2-t) рад/с, st=-l рад/с2.
3
Тогда при t = 2c, wk=0, wJ=0, w'=-l - R.
Следовательно, w, =wc = 30»J,
wn =w”c = 90'<oJ, wm =-30 cm/c2;
WA = “oV(12O)2 + (36O)2 +(30)2 = 380,6 cm / c\
Игнатов И. А.
25.9
Переносное движение -вращение системы вокруг оси относительное движение перемещение шестерни 1 по шестерне 2.
Имеем:
“<, = < рад/с, Ео = 1 рад/с.
3 v0=-Rt, <о,=
R г- г-
v, =“iу V2 =30V2t
^2 = 310-', е,=Зс-!;
, 3
см/с, ve = - R ti), =60 см/с.
Теорема о сложении скоростей дает при t-1 с va =7V?+V« = 73,5 см/с.
Вектор переносной скорости точки А перпендикулярен : >сти рисунка и направлен к нам.
Ускорение точки А находится по теореме Кориолиса
wA=w,+wc+wk, wk =2со, х vr; (1)
wr =wc + w£ + w“ , wc = w’+wj;
wJ = 3R / 2 = 30 cm / c2, Wc = 3R t2 / 2|= 30 cm / c2, we" =3R <oJ/2 = 30<b2, wj?. = Re,/2 = 3R/2, w“cc = R co2/2 = 9O-t2, wk=2|w,xv,| = 120t.
Проектируя (1) на три взаимно перпендикулярных направления, получим при t=lc
w, = Wc+ wAc = 30 + 90 = 120 см/с2, w,. = w" + w! -w£ = 120 cm/c2, wnl = wk = 120 см /с2;
431
25JJ>
HniaulOB И. А.
Для точки В имеем
Здесь коРи‘ рисунка и
СМ = МВ = 1 = 8см. xM=3 1-cos— 4
п 3 п
yM=l sin7 t; ХМ =-4 ’t l sin--t,
Л , л
Ум = -yl-COS—-t.
7М 4 4
---Г = 120-Уз = 207,8 см / с .
_ /w? + »'u+w'“ --------
** ’ V СОВО ускорение перпендикулярно плоскости ;^ено к нам-
В, xOB + <uJ BA;
механизма и искомые величины изобразим в
vr = bt / 4
Для ускорения точки М при t=0 имеем
Положение момент t-0.
<o, = ^ = 2V3c-, ш.=^ = 2ТЗс-, Уз г £, = ш,-ш,-— = W3
ОМ = 3-1, у, = 1-л/4, v,=3-l-it/2, л 1 v¥ = vr+v.=y(31+-) = = 14- л = 44 см / с
du>, _ d( е, LABOC,
wM =3-1-со1+у -п11 + 2-у 1-со = ||-л1-1 = 93,8 см/с1.
w = 3o2l
w;=3ht2/16
«р в
х
2Ц1
Относительное движение - перемещение конуса ВОС около неподвижной точки О; переносное движение - вращение системы вокруг оси OjO2. Следовательно, ускорения точек В и С определяются по теореме Кориолиса.
(1)
Ег -ОВ = 1207з см/с1, ш?-АВ = 12-20у = 12ОУ30 = см/с1,
we = 0, w>p = 2-3-60 = 360 см/с1. (2)
Проектируя (1) с учетом числовых значений (2) на два пездякулярных направления, получим
w( = 120-Уз + 360 —60-Уз = 464 см/с1,
w„ = 120-— = 180 см/с1. wa =497,7 см/с1.
< -огичные выкладки имеют место для точки С.
w, = ш1-ОС + бУз-10= 150л/3 см/с1.
w„ = 6-УЗ-Ю-Уз = 180 см/с1, wc=316cm/c2.
1 •
25.12
Чертеж к задаче 25.11.
Пусть vB = 60t см / с, тогда ю, = vB / АВ = 2-Уз -1,
433
432
^ = 2л/3 ». ф,=а/3 t;, °>1=2VJ '• dt
гдеф, - угол поворота й, «округ оси О,О,.
* xyz, связанные с конусом 2 и при
Возьмем оси _ напраалена от нас. Проекции
t*=0 совпадающие с со, на эти оси запишутся
’Ш1=-3..соа(7з.Г), ay=-3sin(73 t2).t, Ю.=-73.,
_ _^i = _3.Cos(a/3-t2) + 6V3 t2 sin(V3 t2), Е’- dt
е =^.=_3.sin(5/3-t2)-6a/3t2cos(73t2), у dt
Ei=^=-73.
1 dt
Рассмотрим произвольную точку М образующей
(г = ОМ). Дальше имеем
г„ =r--y--cos(a/3’t2), ry = r-^-’Sin(V3-t2), г г/2.
(1)
ОС
(2)
Ускорение точки М относительно конуса 2 определяется по формуле
WM = ё, X г =
Е,
г,
j
Ev
к
е2 г,
Раскрывая в (3) определитель по элемента строки, получим
W«=E,
e2Ty=-3V3-r-t2-cos(V3-t!), w» = Е«'Гх ~Ех Л =-3V3-r-t2.-sin(V3 t2), wx = E,ry-e rx=9rt2.
(3)
первой
(4)
434
Йгнашов И. А.
Проекции переносного ускорения точки М на те же оси имеют вид л
w«=-9r —.cosb/3-t2),
w«,=-9r--y-Bin(V3tJ),
W“ = ° (Б)
Складывая одноименные проекции (4) и (5), будем иметь w, =-3V3r(t2+|)cos(V3t!), w„=-3V3r(t2+|).sin(V3t2),
wB=9rtJ. (6)
Следовательно, модули ускорений точек, лежащих на образующей ОС конуса 1, выражаются формулой
'v м = 7W?+W5 + Wm = Зг • ^3-(t2+|)2+9t4. (7)
При t= 1с(7) имеет те же значения, что и для vB = 60 см / с. Например, для г=20 см имеем wc = 316 см/с2.
Для точек, расположенных на других образующих конуса 1, формула (7) принимает другой вид.
Относительное движение - вращение конуса около точки Q; переносное движение — вращение системы вокруг оси О,О2.
Так как QC - мгновенная ось вращения в относительном движении, то
vc = vc, т.е.
435
vc=o>. ОС = 40 см/с.
Ускорение точки С определяется по теореме Кориолиса w, = w, +w, + w„p;
- г v ПС w = 0 (V =0), Ё, = со, х со
где w,=e, xVv, wwp w or । г
2a__7J3c-' и=-^- = 2с_|, е, =<о,-со, =4л/з с 2.
Ш;= —-2V3C , др
Тогда w, =е, <ОС = 4-Уз10 = 40ч/3 см/с2,
w = со2 ОС = 4-20 = 80 см/с’, wc = 7W’ +w* = 105,8 см/с2, е е — »
25.14
При a, =2tc"’ со, = (t2 +2) с-1; w, = w*+w;, w,’ = e,OC=40t см/с2, w" =со2 ОС = (t2+2)2 <20 см/с2, wr =40\/з см/с2.
w« =7(40t)!+[20(t2+2)2]2 + 1600-3|,e,c = 197 см/с2.
25.15
со, = 4 n-t рад/с.
Диск К относительно платформы L совершает два движения - вращения с угловыми скоростями ш, и ь>,.
Скорость точки А находятся по формуле
V.=V,+Ve (1)
При t=Ic vrJ.ve;
v,-со,-г = 8п<10 = 80л см/с, v =со -ОО — тп ал ________________________’ *• шГии, - 2п <30 = 60л см , уа=7<ЙТ=10п10= 314 см/с.
436
Ускорение точки А определяется но теореме Кориолиса
но;
Ш! г -640л1 см/с1, “рОО, = 120х’ см/с1, = 2v, <о,=2-80п <>,= = 320л1 см/с1. (3)
Величина (3) вычис-лена при t=l с.
Векторы (2) взаимно перпендикулярны, поэтому
+ (w")2 + (w„p)2 = 7160 см/с2.
25.16
s = CM = 20-sin—t, 2
л
Ф=Г’
sina = — sin (р.
I---— * COS<p
cosa = VI-sin’ a, a = ~ •------
8 cosa
Определение скорости муфты M.
vr = s = 10n cosyt|,.0 = 10я см/с;
хм = г cosq> + (20 + s)-cosa, ум =(20-s) sina;
437
X =-5я sin<p-d (20+s) sina|,.o = 0.
ум = a (20-s) cosa|,.о = 5я / 2 см / с,
V| = v, = 10я см/с, V, = ум = 5я/2 см/с, vM = Vv? + vj = 32,3 ему с.
Ускорение точки М находится по теореме Кориолиса.
Имеем 1 71 I „
w, = § = -5я sinyt|,rf = 0,
х = -5я2 cos<p/2-d(20+s)sina - a2 (20 + s) cosa =
= -45я2 /16 см/с2 (t = 0),
yM =d(20-s)cosa-d2(20-s)sina|1_„ =0, w„. =20л2/8 = 5п2/2 см/с2. top
wm =7^м +WLP = 3,763 n2 = 37,14 см/с2.
Игнатов И. А-
Определение СКОРОСТИ точки М.
v> =s = 4V2 t м/с; xM=AMsina, yM=AMco»a;
*м = ДМ d cosa|,., = 1 м/с, yM =~AM a sinal,., =-> M/e> v, = v, • sina + xM =5 м /с, vy= —vr cosa - yM = -5 M /c vM=Sj2 = 7,07 м/с.
Ускорение точки M находится по теореме Кориолиса. Имеем
w, =4V2 м/с2,
хм = AM • (a • cosa - a2 -sina)^., = 0,
Ум = -AM (a sina + a2 cosa)|l,1 = -l м/с2, w„p=2-a-vt|1.1=4r/2 м/с2,
w, = w„„-yM-sina|,., = 72м/с2,
wn =wr+yMCOsa|,., = j2'-M/c2,
F)
wM=— л/81 + 49 = 8,06 м/с2.
25. IS
<о,=2пс’', s = AM = 10 cos2ntcM.
При t=0 точка M совпадает c точкой C
<0 =
vA =ш, AO, v. AO 4
AK 1 AK V3
— — 4 2 --1
Ё = й),Х(1), 8 = ^'n •
439
w =s = -40n:cos2nt см/с", w,-exOC;
80 2 . ,
w, =—я CM/C .
Другие составляющие вектора ускорения тоски С равны нулю.
160 , , 40-УЗ , 2
— Л*см/с , wn = 2 П СМ/С ,
40л2 /—
3
440
0П1а1ПО»И А
Литература
J Бать М.И., Джанелидзе Г.Ю., Кельзов А.С. Теоретическая механика в примерах и задачах. - М,: Наука, т.1, 1966. - 484 с.
2. Бухгольц Н.Н. Основной курс теоретической механики. - М,: Наука, т.1, 1965, - 468 с.
з. Геронимус Я.Л. Теоретическая механика. - М,: Наука. 1973, - 512 с.
4. Мещерский И.В. Сборник задач по теоретической механике. - М,: Наука. 1986, - 448 с.
5. Лойцянский Л.Г., Лурье А.И. Курс теоретической механики. - М,: Наука, т.1, 1982, - 352 с.
6. Мантуров О.В., Солнцев Ю.К., Соркин Ю.И., Федив Н.Г. Толковый словарь математических терминов.
М.: Просвещение. 1965, - 540 с.
7. Тарг С.М. Краткий курс теоретической механики. - М,: Наука. 1966, - 480 с.
441
Содержание
Статика твердого тела
,5
Глава 1. Плоская система сил ..........
S 1 Силы девствующие по одной прямой.............5
§ 2. cZ. линии действия которых пересекаются в одной точке................................... 34
8 3. Параллельные силы..........................
§ 4. Произвольная плоская система сил...........?
§ 5. Силы трения...............................
...............135
Глава 2. Пространственная система сил
§ 6. Силы, линии действия которых пересекаются в одной точке....................................1 • 3 5
§ 7. Приведение системы сил к простейшему виду . . 146
§ 8. Равновесие произвольной системы сил......155
§ 9. Центр тяжести............................181
Кинематика
Глава 3. Кинематика точки ........................196
§ 10. Траектория и уравнения движения точки . . 196
§ 11. Скорость точки...........................209
§ 12. Ускорение точки..........................222
Глава 4. Простейшие движения твердого тела........244
§ 13. Вращение твердого тела вокруг неподвижной оси........................................ 244
§ 14. Преобразование простейших движений твердого тела................................. 91-п
442
Ип1ашо" И л
Глава 5. Плоское движение твердого тела...........
§ 15. Уравнения движения плоской фигуры 258
§ 16. Скорости точек твердого тела в плоском движении. Мгновенный центр скоростей.........263
§ 17. Неподвижная и подвижная центроиды .... . . 281
§ 18. Ускорения точек твердого тела в плоском движении. Мгновенный центр ускорений . 293
Глава 6. Движение твердого тела, имеющего неподвижную точку. Пространственная ориентация .... 319
§ 19. Движение твердого тела, имеющего одну неподвижную точку...............................
§ 20. Пространственная ориентация; кинематические формулы Эйлера и их модификация; аксоиды.....................................329
Глава 7. Слг ное движение точки..............346
§ 21. У . ..зления движений точки...........346
§ 22. С . жение скоростей точки............351
§ 23. Сложение ускорений точки..............362
Глава 8. ложное движение твердого тела.........398
§ 24. Сложение движений тела................398
а) Сложение плоских движений тела .... • - • • 398
б) Сложение пространственных движении тела . 406
§ 25. Смешанные задачи на сложное движение точки и твердого тела........................
.........441
Литература............................ 442
Содержание.......................
443
Заказ 287. Тираж 5000. 2000 г
Отпечатано с оригинал-макета в ООО ПФ «Полиграфист» 160001, г. Вологда, ул. Челюскинцев, 3., тел.: (8172) 72-55-31, 72-60-72