/



































Автор: Агошков В.И. Марчук Г.И.
Теги: вычислительная математика численный анализ математика математическая физика прикладная математика
Год: 1981




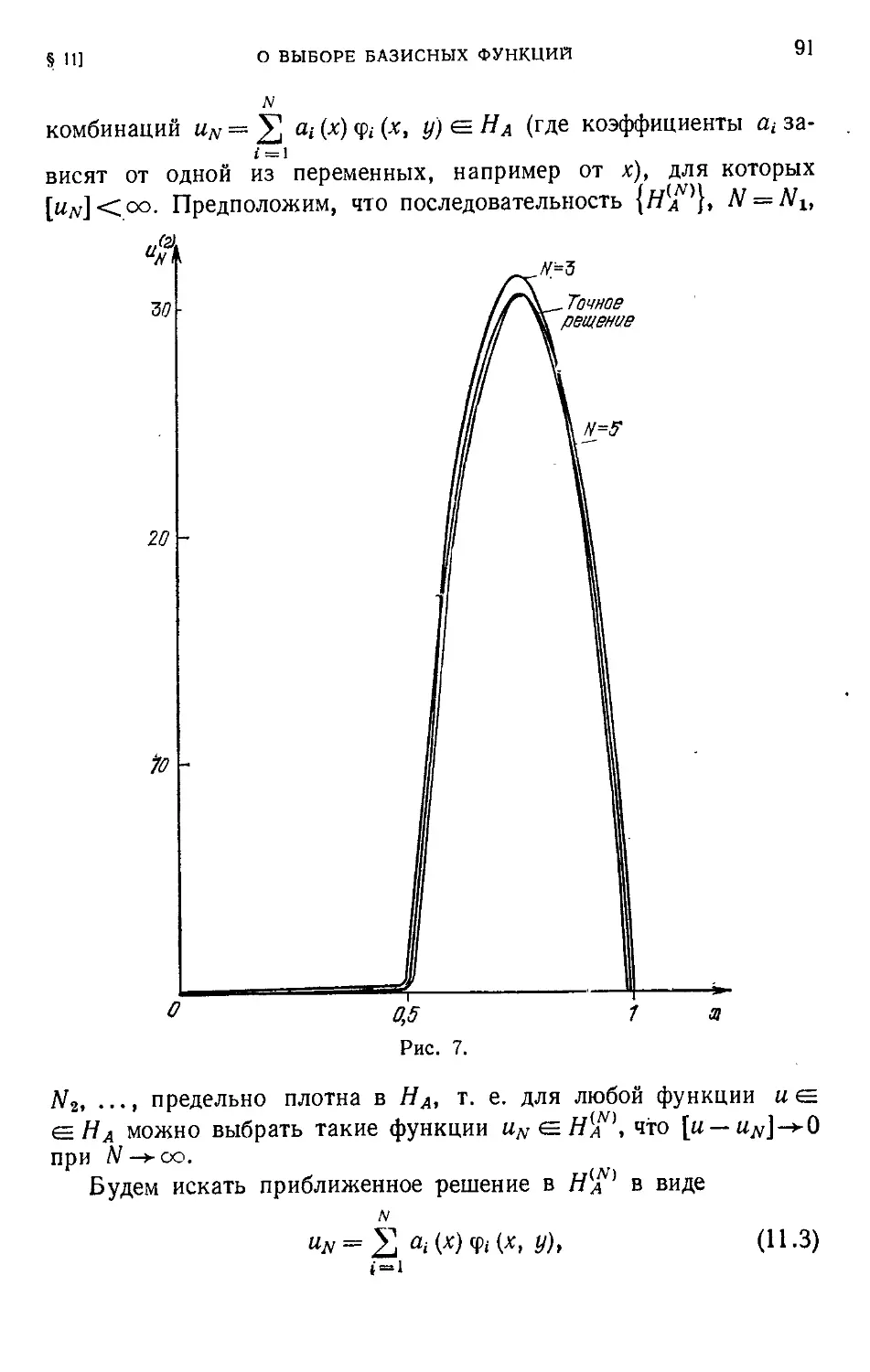
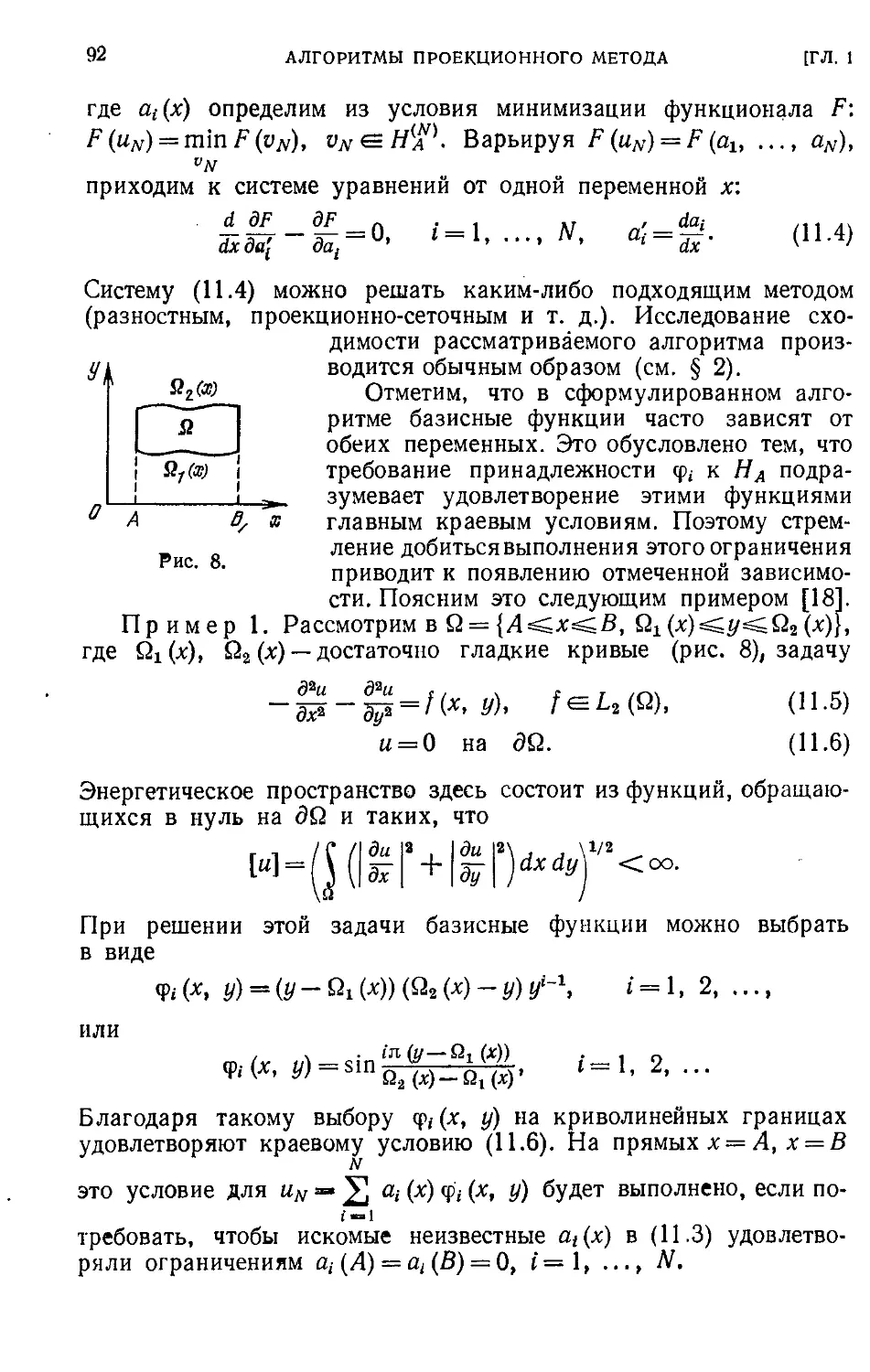
Текст
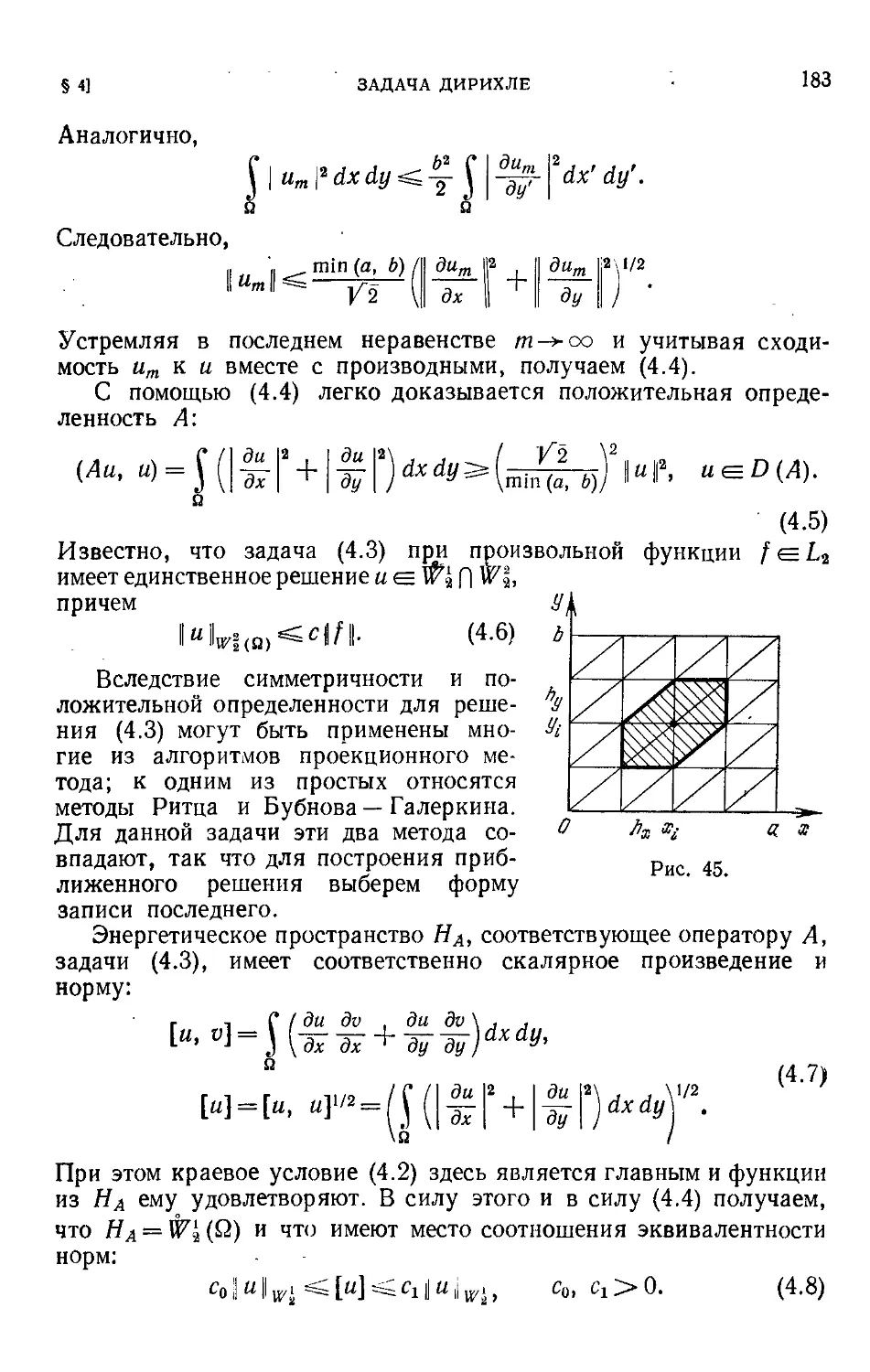
Г И. МАРЧУК, В. И. АГОШКОВ
ВВЕДЕНИЕ
В ПРОЕКЦИОННО
СЕТОЧНЫЕ
МЕТОДЕ!
Допущено Министерством
высшего и среднего специального образования СССР
в качестве учебного пособия
для студентов вузов, обучающихся по специальности
«Прикладная математика»
МОСКВА «НАУКА>
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
198 1
ten
мзо
УДК 519Д-
Введение в проекционно-сеточные методы. Марчук Г. И., А г о ш
к о в В. И. — М.: Наука. Главная редакция физико-математической литера-
туры, 1981, — 416 с.
Книга написана на основе спецкурса, читаемого на протяжении ряда лет
в Новосибирском университете и Московском физико-техническом институте.
Основные разделы в учебном пособии посвящены: описанию основных проек-
ционных (в том числе вариационных) алгоритмов в гильбертовых пространст-
вах; финитным функциям н теории аппроксимации; проекционно-сеточным
схемам и теории сходимости; методу интегральных тождеств в проекционной
формулировке и получению проекцноино-сеточных схем на его основе; реше-
нию некоторых задач математической физики проекционно-сеточным методом.
Для студентов старших курсов вузов по специальности «Прикладная ма-
тематика», а также для специалистов в области прикладной математики.
Рнс. 59. Табл. 4. Библ. 83 назв.
Гурий Иванович Марчук
Валерий Иванович Агошков
ВВЕДЕНИЕ В ПРОЕКЦИОННО-СЕТОЧНЫЕ МЕТОДЫ
Редакторы И. В. Викторенкова, Е. И. Стечкина
Технический редактор С. fl. Шкляр
Корректоры Т. С. Плетнева, Н. Д. Дорохова
ИВ № 11866
Сдано в набор 26.06.81. Подписано к печати 19.11^1». Формат 60X 901/,». Бумага тип. № 1.
Литературная гарнитура. Высокая печать. 2У слона, веч. л. 26. Уч.-изд. л. 28,21. Тираж
16 000 экз. Заказ № 1989. Цена 1 (Г ЭДк}» < И 1
Издательство «Наука»
Главная редакция физико-математической литературы
117071. Москва, В-71, Ленинский проспект, 15
Ордена Октябрьской Революции, ордеиа Трудового Красного Зиамеии Ленинградское
производственно-техническое объединение «Печатный Двор» имени А. М. Горького
Союзполиграфпрома при Государственном комитете СССР по делам издательств, поли-
графии и книжной торговли. 197136, Ленинград, П-136, Чкаловский пр.. 15
ZUZU4—19J
M5iwT12'81- 1702070000
£ Издательство «Наука».
Главная редакция
физико-математической
литературы, 1981
ОГЛАВЛЕНИЕ
Предисловие........................................................................................ 5
Введение........................................................................................... 7
ГЛАВА 1
НЕКОТОРЫЕ АЛГОРИТМЫ ПРОЕКЦИОННОГО МЕТОДА
§ 1. Схема алгоритмов . ............................................ 21
§ 2. Метод Ритца . ............................ 23
§ 3. Метод Бубнова — Галеркина............................. 43
§ 4. Метод наименьших квадратов............................. 56
§ 5. Обобщенный метод наименьших квадратов................... 59
§ 6. Обобщенный метод моментов........................................... 60
§ 7. Проекционный метод в гильбертовом пространстве. 63
§ 8. Метод Галеркина—Петрова............................. 65
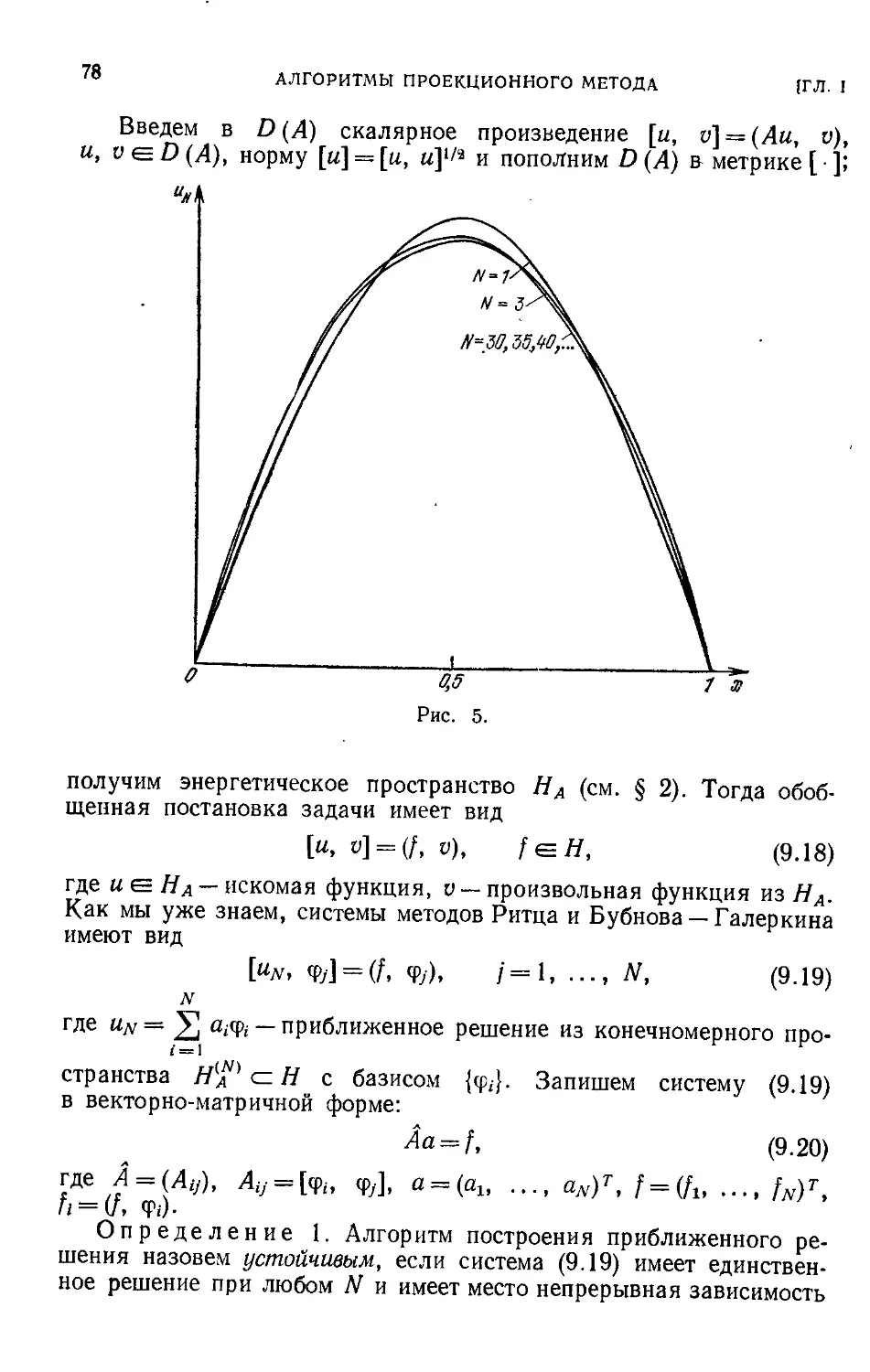
§ 9. Проблемы выбора базисных функций............................. 68
§ 10. О выборе базисных функций в обобщенном методе наименьших ква-
дратов ........................................................ 83
§11. Выбор базисных функций методом Канторовича ................................................. 90
ГЛАВА 2
АППРОКСИМАЦИЯ И ФИНИТНЫЕ ФУНКЦИИ
§ 1. Простейшие кусочно постоянные финитные функции.............................................. 97
§ 2. Кусочно линейные базисные функции в одномерном случае .... 100
§ 3. Кусочно линейная аппроксимация на прямоугольнике. Подпрост-
ранства IF,’ л, IF,’ л........................................ 109
§ 4. Кусочно линейная аппроксимация на многоугольной области .... 115
§ 5. Билинейные базисные функции................................................................ 120
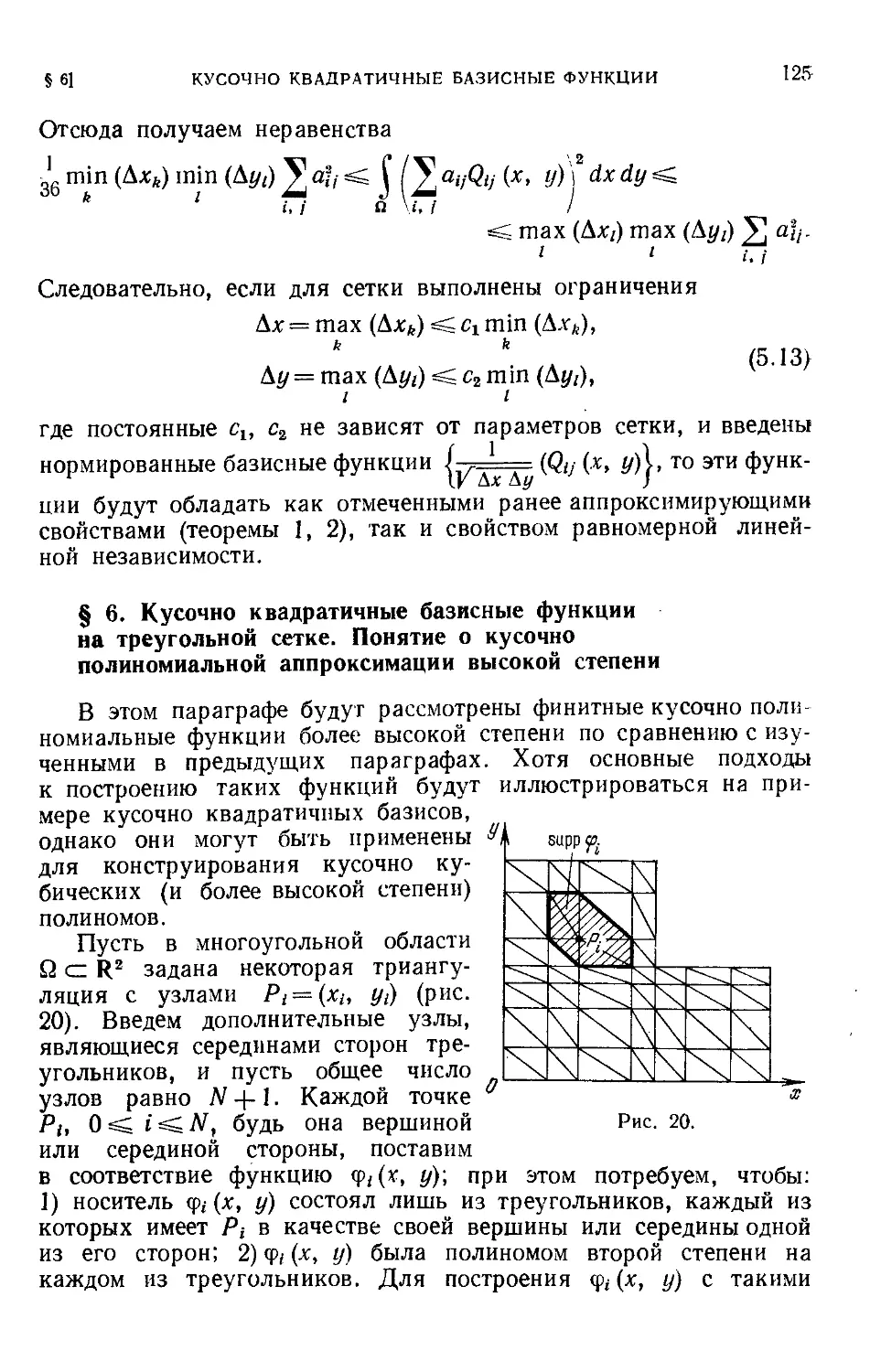
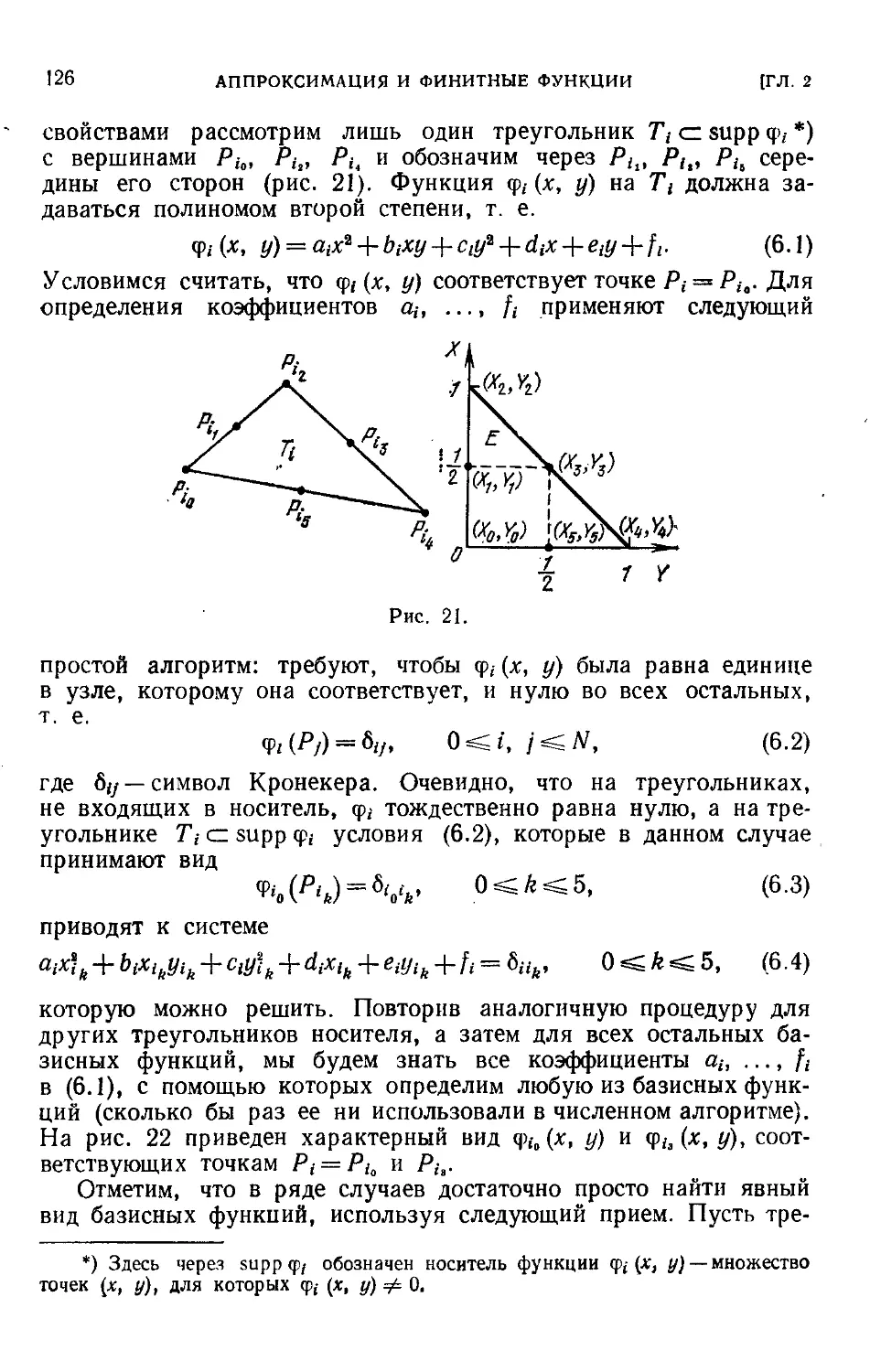
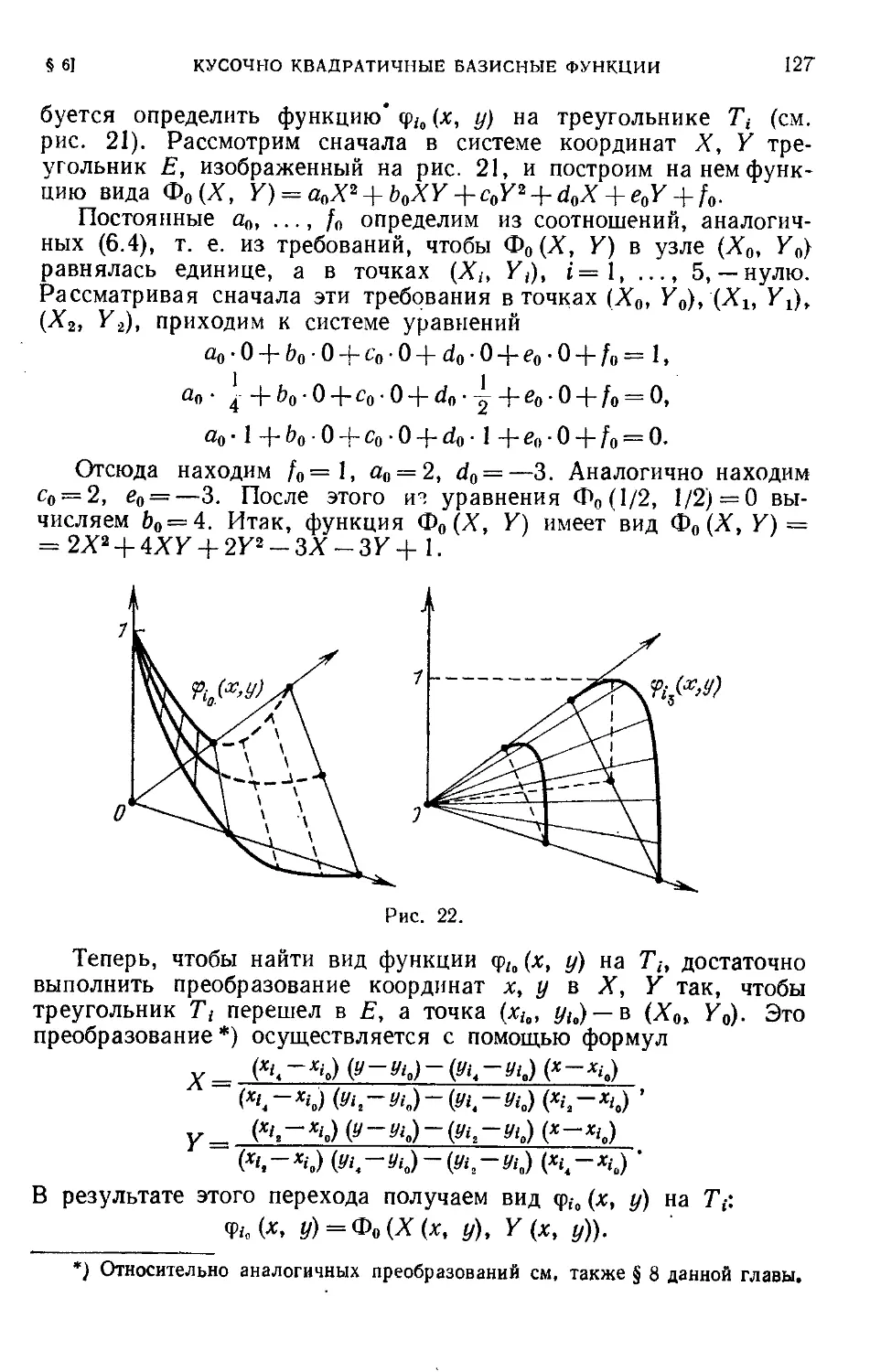
§ 6. Кусочно квадратичные базисные функции на треугольной сетке.
Понятие о кусочно полиномиальной аппроксимации высокой степени 125
§ 7. Построение базисов в случае области с криволинейной границей
(метод аппроксимации области).................................. 130
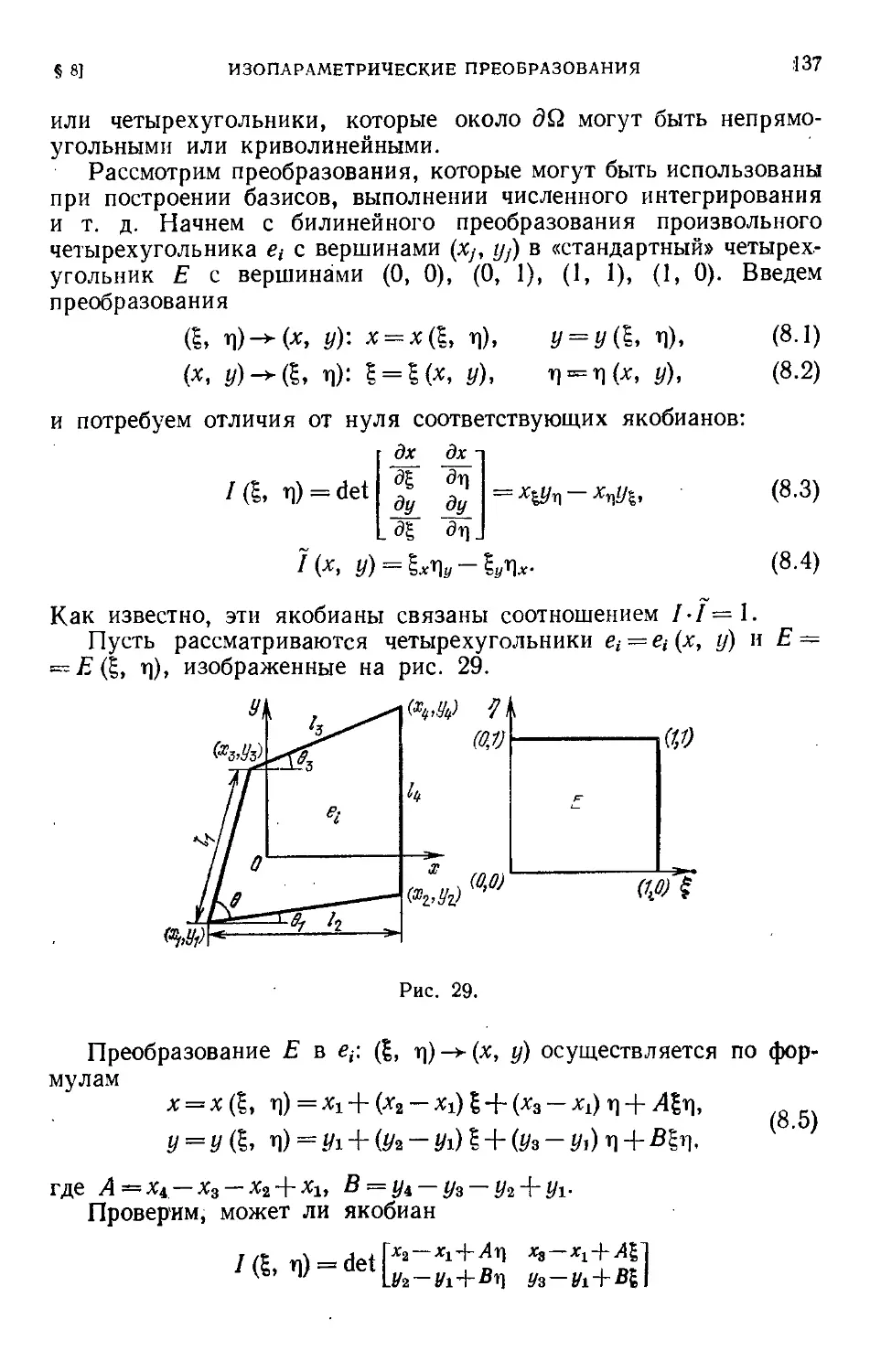
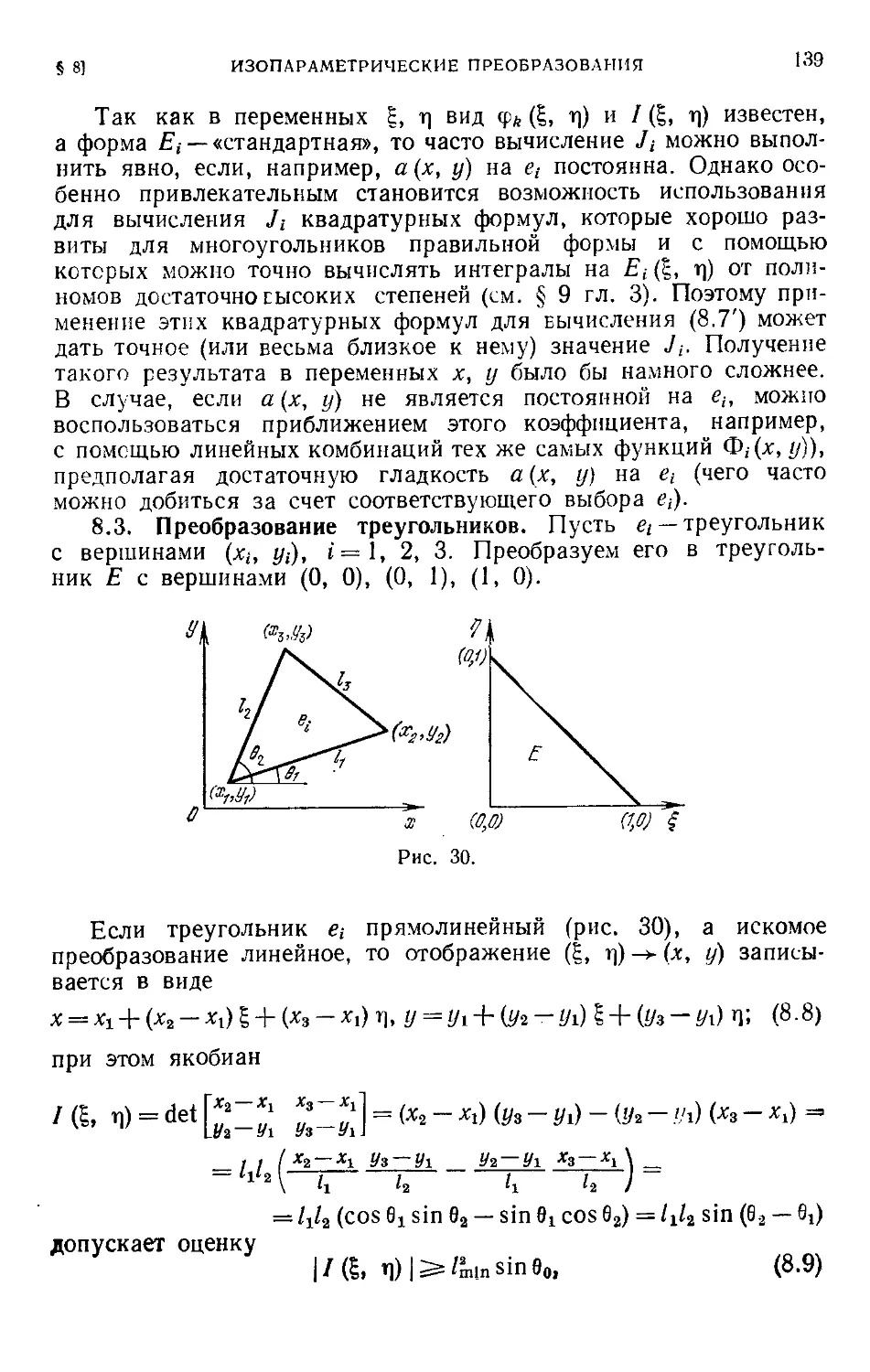
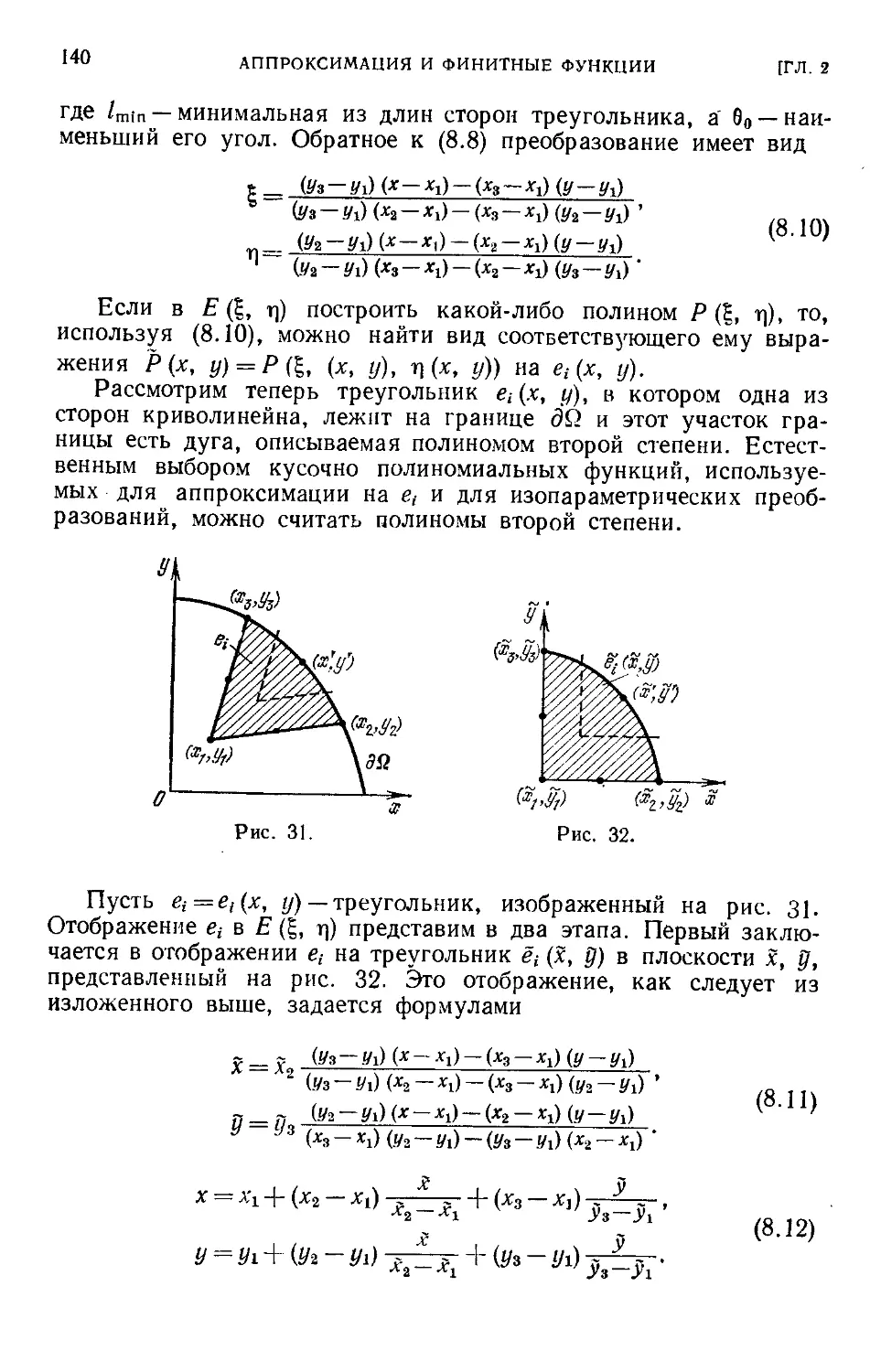
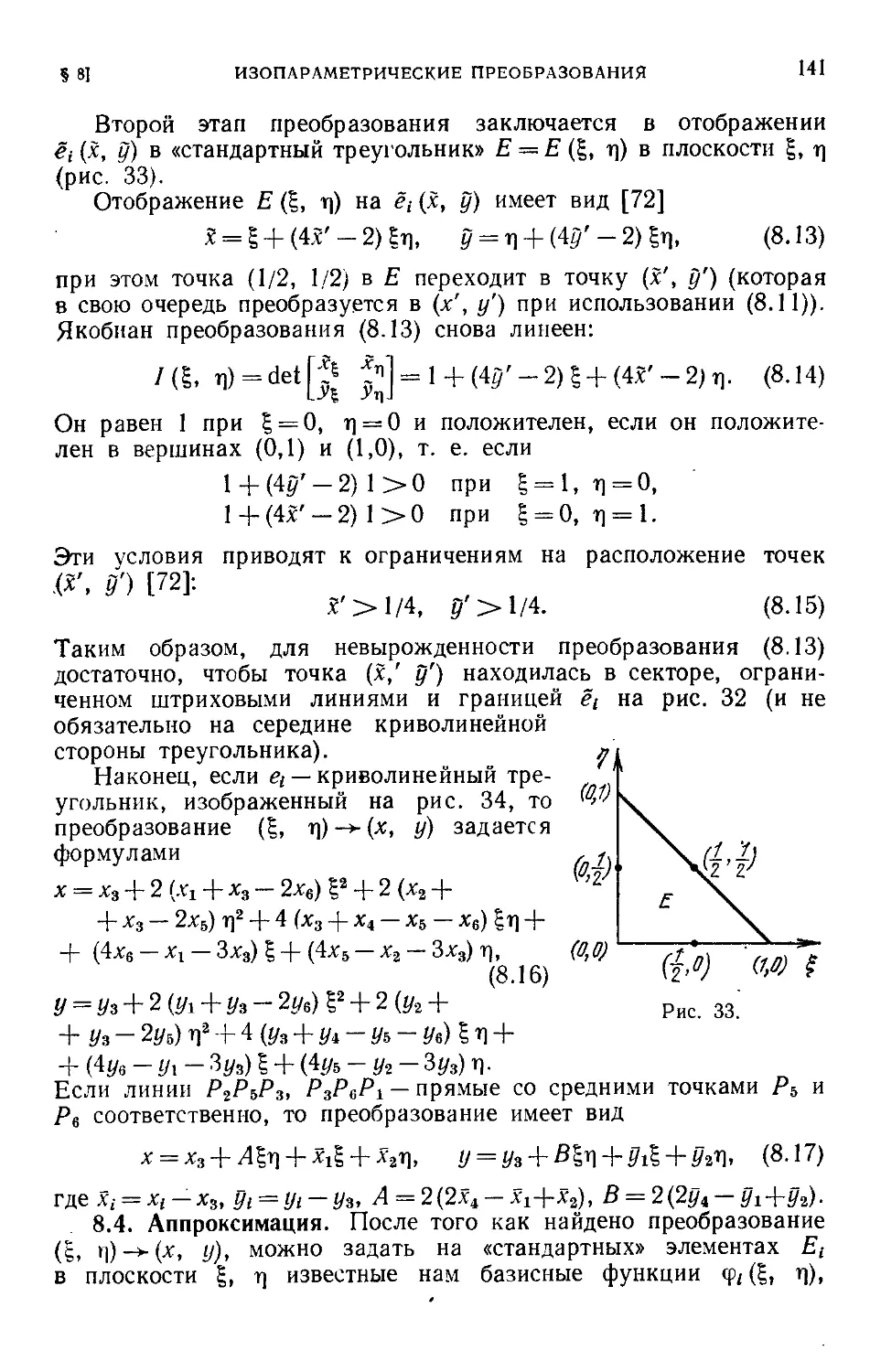
§ 8. Изопараметрическне преобразования н криволинейные элементы 135
§ 9. Теория аппроксимации Стренга— Фикса........................................................ 145
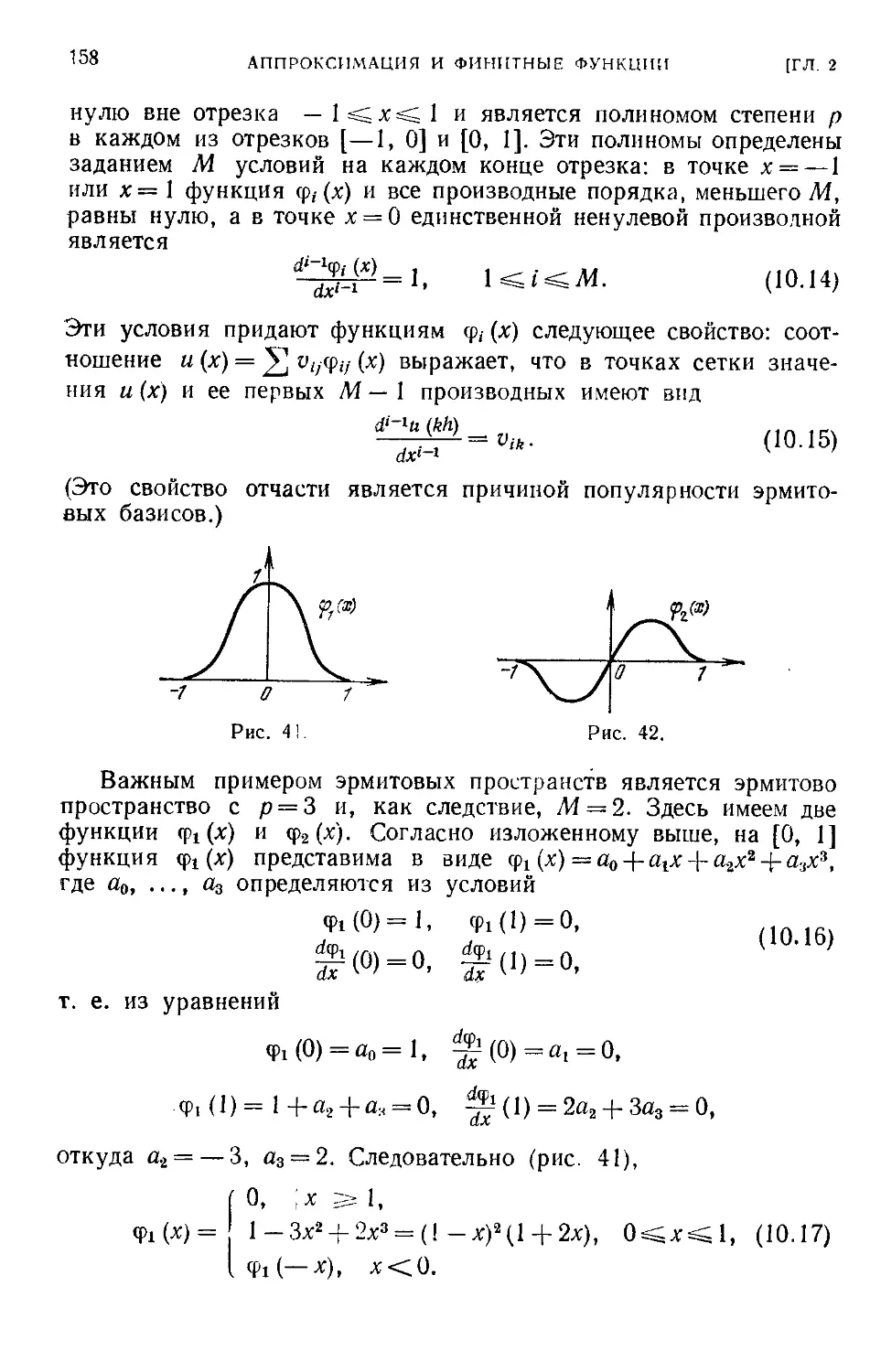
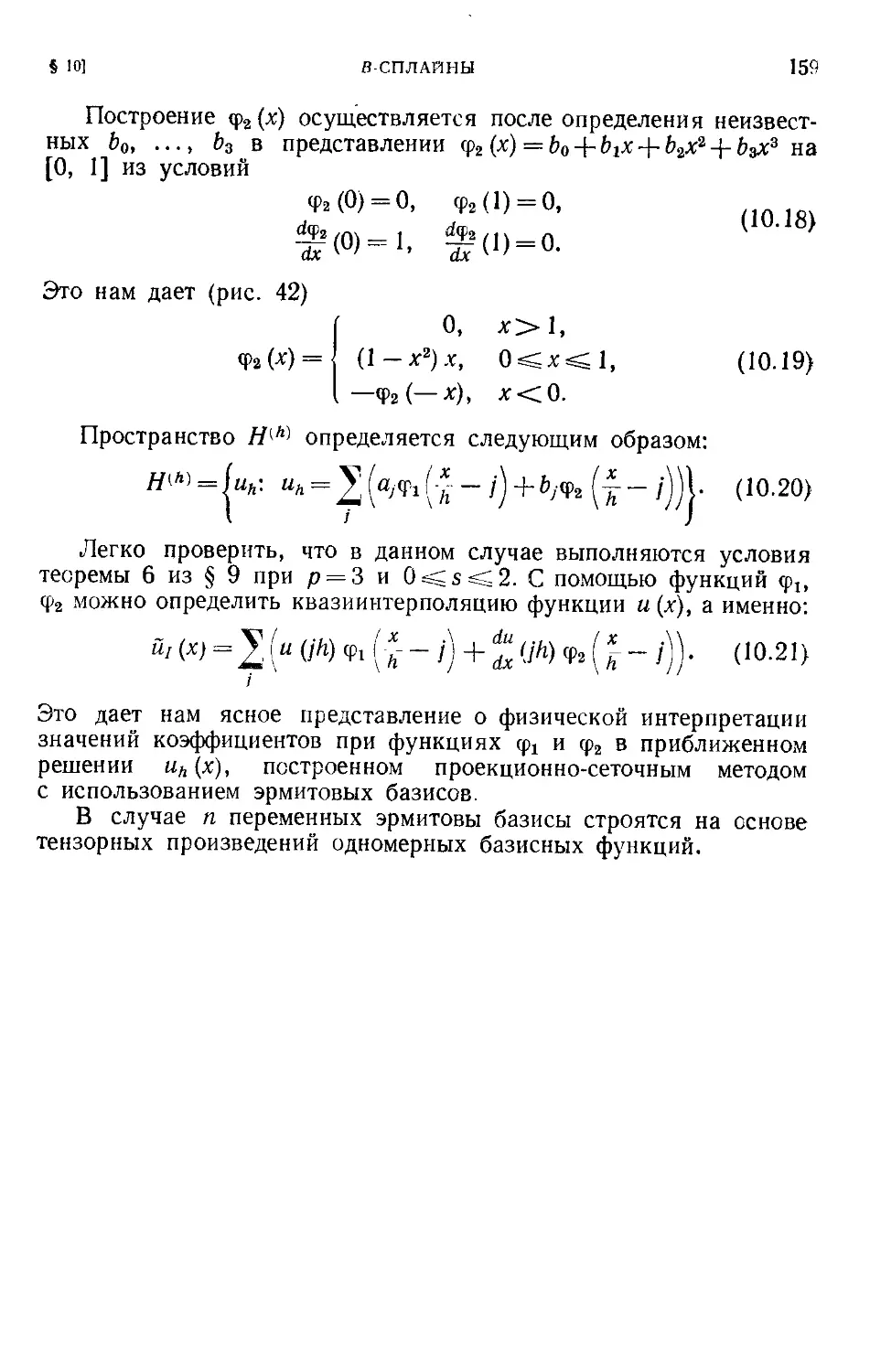
§ 10. В-сплайны н связь их с некоторыми аппроксимирующими функ-
циями. Эрмитово пространство................................... 154
ГЛАВА з
ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ ДЛЯ ЗАДАЧ
МАТЕМАТИЧЕСКОЙ ФИЗИКИ
§ 1. Построение проекциоино-сеточной схемы для обыкновенного диффе-
ренциального уравнения второго порядка ........................ 160
§ 2. Решение третьей краевой задачи для эллиптического уравнения
второго порядка................................................ 170
§ 3. Решение второй краевой задачи.............................................................. 179
1*
4
ОГЛАВЛЕНИЕ
§ 4. Решение задачи Дирихле для эллиптического уравнения второго
порядка......................................................... 182
§ 5. Проекционно-сеточный метод с применением сингулярных функций 200
§ ,6. Решение параболического уравнения проекционно-сеточным методом 205
§7. Решение гиперболического уравнения второго порядка......... 218
§ 8. Гиперболическое уравнение первого порядка.................. 223
§ 9. Численное решение интегральных уравнений................... 230
§ 10. Некоторые вопросы численной реализации проекционно-сеточных
алгоритмов ..................................................... 237
ГЛАВА 4
МЕТОД ИНТЕГРАЛЬНЫХ ТОЖДЕСТВ
§ 1. Понятие о проекционной форме метода интегральных тождеств . . . 255
§ 2. Проекционная форма интегральных тождеств для дифференциаль-
ного уравнения второго порядка . ................................ 256
§ 3. Приближенное решение краевых задач методом интегральных то-
ждеств в проекционной форме...................................... 261
§ 4. Метод интегральных тождеств для задачи на собственные значения 278
§ 5. Интегральные тождества для уравнения четвертого порядка .... 289
§ 6. Решение некоторых эллиптических уравнений................... 295
§ 7. Решение уравнения переноса.................................. 306
§ 8. Обобщенная формулировка метода интегральных тождеств....... 321
Г Л А В А 5
ПРОЕКЦИОННО-СЕТОЧНЫЕ АЛГОРИТМЫ ДЛЯ ЗАДАЧ ТЕОРИИ
ПЕРЕНОСА
§ 1. Формулировка, симметризация задач и свойства решений... 334
§ 2. Метод Ритца............................................ 351
§ 3. Метод Бубнона—Галеркина................................ 356
§ 4. Обобщенный метод наименьших квадратов.................. 371
Заключение. О решении некоторых уравнений эволюционного типа
методами расщепления............................ 394
Литература....................................................... 411
Предметный указатель ........................................... 415
ПРЕДИСЛОВИЕ
Настоящее учебное пособие является расширенным изложением
спецкурса по проекционно-сеточным алгоритмам, читаемого в
Новосибирском государственном университете и Московском
физико-техническом институте. Оно может рассматриваться как
развитие раздела вариационных методов книги Г. И. Марчука
«Методы вычислительной математики» (М., Наука, 1980).
Книга посвящена изучению алгоритмов проекционно-сеточного
метода и подходов, используемых при решении задач математи-
ческой физики. Изложение ведется, как правило, на примере про-
стых дифференциальных уравнений. Предполагается, что чита-
тель знаком с основами функционального анализа и уравнений
математической физики. Специальные результаты приводятся
по мере необходимости непосредственно в тексте.
Проекционно-сеточный метод (метод конечных элементов)
стал в настоящее время эффективным методом решения различ-
ных задач математической физики. Это обстоятельство в значи-
тельной степени обусловлено развитием мощной электронной
вычислительной техники и достижениями математики в области
теории проекционных методов, а также теории аппроксимации
с помощью функций с конечными носителями.
Поскольку проекционно-сеточный метод обычно представляет
собой модификацию проекционного метода (метод Ритца, метод
Бубнова —Галеркина и др.), использующую специальные финитные
базисные функции, то знакомство с этим методом можно осуще-
ствить следующим образом. Сначала рекомендуется познакомиться
с группой алгоритмов проекционного метода, затем изучить
некоторые наборы финитных функций, нашедших широкое при-
менение в вычислительной математике, и исследовать с их помо-
щью проблему аппроксимации. Далее уже можно рассмотреть
некоторые алгоритмы проекционно-сеточного метода для решения
конкретных краевых задач, изучая при этом уже специальные
вопросы. В таком порядке и расположен материал книги.
Первая глава посвящена изучению частных случаев проекцион-
ного метода, причем авторы ограничились рассмотрением его
лишь в гильбертовых пространствах. Во второй главе рассмот-
рены простые, но в то же время часто используемые в вычисле-
ниях финитные функции, изучены их аппроксимирующие свойства.
6
ПРЕДИСЛОВИЕ
При изложении теории аппроксимации Стренга —Фикса, помимо
доказательства сформулированных результатов об аппроксимации,
продемонстрировано, насколько мощным аппаратом исследования
является метод преобразования Фурье. Результаты, достигнутые
с его помощью, зачастую трудно получить на основе традици-
онно излагаемых в курсах рядов Тейлора.
В следующих трех главах демонстрируется применение про-
екционно-сеточных алгоритмов к решению различных задач мате-
матической физики. В третьей главе рассмотрены краевые задачи
для различных уравнений математической физики. Рассмотренные
здесь алгоритмы могут быть перенесены на более сложные задачи,
встречающиеся на практике.
В четвертой главе изучается один из эффективных методов
решения задач математической физики —метод интегральных
тождеств. При этом авторы рассматривают его как одну из
модификаций проекционного метода. При таком рассмотрении
этого метода остается возможность одновременно трактовать
его как один из вариантов разностных методоз, т. е. метод полу-
чения традиционных разностных схем.
В пятой главе некоторые из изложенных ранее методов при-
меняются к решению конкретного класса задач —задач для урав-
нения переноса. Здесь также рассмотрен алгоритм построения
специальных базисных функций, учитывающих особенности реше-
ний. Материал, приведенный здесь, можно рассматривать как
более расширенное и более глубокое изложение ряда освещенных
в предыдущих главах вопросов в применении к указанному классу
задач.
При формировании материала книги использовался ряд работ
советских и зарубежных математиков, в первую очередь моногра-
фии Л. А. Оганесяна, Л. А. Руховца [34], С. Г. Михлина [29],
[<?/], Г. Стренга, Дж. Фикса [3d], а также результаты исследо-
ваний, выполненных авторами в последние годы в Вычислительном
центре Сибирского отделения АН СССР. Список избранных работ
приводится в конце книги; в него включены оригинальные статьи,
а также общепринятые учебные пособия и монографии.
При работе над книгой авторы обсуждали ее содержание с
В. П. Дымниковым, Ю. А. Кузнецовым, А. М. Мацокиным,
В. В. Смеловым, В. В. Шайдуровым. Им авторы выражают глу-
бокую благодарность.
Авторы также приносят свою искреннюю признательность
Н. С. Бахвалову и В. И. Лебедеву, прочитавшим книгу в рукописи
и сделавшим ряд ценных замечаний по ее усовершенствованию.
Г. И. Марчук, В. И. Агошков
ВВЕДЕНИЕ
На протяжении многих десятков лет вариационные методы,
представляющие, собой частный случай проекционных, исполь-
зуются для решения задач математической физики. Сущность
многих из этих методов состоит в формулировке задачи в вариа-
ционной форме, как задачи об отыскании функции, реализующей
минимум или, в общем случае, экстремум некоторого функцио-
нала, и в последующем нахождении приближения к этой функ-
ции. Поэтому, чтобы в дальнейшем полнее раскрыть существо
описываемых вариационных и проекционных методов, проиллю-
стрируем близость некоторых задач математической физики к
вариационным задачам.
Рассмотрим простейший функционал
1
/(«) = § л (х, и, u')dx, (0.1)
о
где л = л (х, у, г) — заданная функция, непрерывная вместе
со своими производными до второго порядка включительно отно-
сительно переменных х, у, г, в некоторой области трехмерного
евклидова пространства.
Предположим, что функция и (х) непрерывна, имеет непрерыв-
ную производную и' (х) на (0, I) и на концах отрезка [0, 1]
принимает заданные значения
ы(О) = ыо» ы(1) = «1. (0.2)
Определим е-окрестность функции ы = и(х) как семейство функ-
ций {а,(х)}, удовлетворяющих на всем отрезке [0, 1] неравенству
| щ (х) — и (х) | =С е. (0.3)
Сформулируем теперь следующую задачу вариационного исчис-
ления: среди функций, лежащих в е-окрестности, имеющих непре-
рывную производную и удовлетворяющих условиям (0.2), найти
функцию, доставляющую экстремум функционалу J (и) (задача
с фиксированными концами кривых ы = ы(х)).
Найдем необходимые условия, которым должна подчиняться
функция и(х) для того, чтобы она сообщала функционалу J (и)
8
ВВЕДЕНИЕ
экстремальное значение в е-окрестности. С этой целью рассмот-
рим функцию т] (х), удовлетворяющую условиям
т1(О) = п(1) = О. (0.4)
Построим, далее, новую функцию ua(x) = u (х)-}-ат](х), где а —
малый параметр (в силу чего можно предположить, что иа (х)
также принадлежит е-окрестности). Подставив эту функцию
в функционал J, получим
1
J (“а) = § я (х, и (х) ат] (х), и' (х) + ат]' (х)) dx.
о
Будем рассматривать J (иа) как функцию от параметра а:
J (иа)—Ф (а). Назовем производную функции Ф(а) в точке а = 0
первой вариацией функционала J и обозначим ее символом 6J:
= .
da |а=о
Вторую вариацию 62J функционала J определим как вторую
производную функции Ф(а) в точке а = 0:
Используя вид J, найдем выражения для 6J и 62J:
1
6J = $ (ад + лЫ'Т]') dx, (0.5)
о
1
62J = $ («„'„'if* + + лад2) dx (0.6)
о
(здесь использованы обозначения па — дп/ди, п,гп) — д2л/диди,
и' = du/dx). Как известно, необходимым условием экстремума Ф (а)
при а = 0 является равенство Ф'(0)=0, т. е. 6J = 0. Выполняя
интегрирование по частям с учетом условий (0.4), получим
1
6 J = j т] (х) (л„ - ~ nv) dx. (0.7)
о
В силу произвольности функции Т] (х) приходим к выводу, что
кривая и (х), удовлетворяющая условиям (0.2) и доставляющая
экстремум функционалу (0.1), должна удовлетворять дифферен-
циальному уравнению
Пи'= °’
которое обычно называют уравнением Эйлера. Отметим, что если
ВВЕДЕНИЕ
9
и(х) доставляет функционалу J минимум (максимум), то, как
известно, в этом случае Ф" (0) = 62J Ss О (б2У-<0).
В качестве иллюстрации рассмотрим пример, в котором при-
мем ип = «I = О,
л = (0.9)
где q,J — достаточно гладкие функции и q>0. Тогда в рассмот-
ренной выше вариационной задаче
ла = 2<7« — 2/, —ли. = 2-~,
и в результате уравнение Эйлера (0.8) имеет вид
_g + <7H = f(x) (0.10)
(строго говоря, устанавливая необходимое условие экстремума
в случае (0.9), мы здесь должны требовать, чтобы и (х) обладала
непрерывными вторыми производными).
Итак, если функция из области определения функционала
1
J («) = f ((^)2 + qu* ~ dx, (0.11)
о
удовлетворяющая условиям ц(0)=и(1) = 0, сообщает экстремум
функционалу (0.11), то она удовлетворяет условию (0.10), т. е.
является решением первой краевой задачи
-g + (7« = /W, (0.12)
и(0) = ы(1)=0. (0.13)
Справедливо также и обратное утверждение, а именно: если и (х)
является решением задачи (0.12), (0.13), то эта функция сооб-
щает экстремум функционалу (0.11) на соответствующей области
определения.
Рассмотрим теперь еще одну вариационную задачу для функ-
ционала (0.1): среди кривых и = и(х), концы которых лежат на
заданных вертикалях х = 0, х=1, найти и (х), которая дает
экстремум функционалу (0.1) (задача со свободными концами).
Отметим, что здесь на концы кривых никаких других условий
не накладывается. Однако, несмотря на это, оказывается, что если
и (х) сообщает экстремум функционалу J (и), то при х = 0 и х = 1
она должна удовлетворять некоторым предельным условиям, ко-
торые непосредственно получаются из условия экстремума функ-
ционала (0.1). Покажем это.
Пусть некоторая кривая и (х) дает экстремум J (и) по сравне-
нию со всеми близкими кривыми иа (х) = и (х) + ат] (х) со свобод-
10
ВВЕДЕНИЕ
ними концами (здесь, в отличие от задачи с закрепленными
концами, т] (х) не обязательно обращается в нуль в точках 0 и 1).
Необходимое условие экстремума снова приводит к соотношению
1
67 = 5 (ад + ли'Т]')<1х = 0. (0-14)
о
Выполняя интегрирование по частям, получаем
1
j Т)(х)(лв —^ли^х + лвл)|*=] — |x = 0 = 0. (0.15)
о
В силу произвольности т] (х) функция и (х) удовлетворяет
уравнению Эйлера
л« - л„- = 0, (0.16)
а также предельным условиям
ли-(1) = 0, лв,(0) = 0. (0.17)
Условия типа (0.17), являющиеся одними из необходимых усло-
вий экстремума, часто называют естественными краевыми усло-
виями (подробнее о них будет сказано при рассмотрении метода
Ритца).
Снова рассмотрим иллюстрирующий пример. Пусть в задаче
со свободными концами л (х, и, и') имеет вид (0.9). Тогда в рас-
сматриваемой задаче уравнения (0.16), (0.17) принимают вид
<018»
(019)
т. е. в этом случае функция и (х), которая сообщает экстремум
функционалу, является решением уже второй краевой задачи
вида (0.18), (0.19). Справедливо также и обратное утверждение:
если и (х) —решение задачи (0.18), (0.19), то кривая и (х) сооб-
щает экстремальное значение функционалу вида (0.11) в задаче
со свободными концами.
Итак, мы рассмотрели выше простейший случай одной функ-
ции и и одной независимой переменной х. Аналогичным образом
могут быть рассмотрены более общие задачи. Пусть, например,
7 = 5 J л (х, у, и, их, uy)dxdy,
D
где функция л и граница выпуклой ограниченной области D об-
ладают необходимой гладкостью. Поставим задачу: найти функ-
цию и (х, у), непрерывную вместе со своими частными произвол-
ВВЕДЕНИЕ
11
ними до второго порядка включительно, имеющую заданное
значение на границе области и доставляющую экстремум функ-
ционалу J. Тогда, аналогично предыдущему, приходим к уравне-
нию Эйлера следующего вида:
д д п
Пи дх Пих ду ПаУ ~ °'
Распространение результатов на случай п переменных очевидно.
Итак, мы приходим к возможности одни и те же задачи ма-
тематической физики толковать либо с позиций задач для диф-
ференциальных уравнений (уравнений Эйлера), либо с позиций
задач вариационного исчисления об отыскании функций, достав-
ляющих экстремум некоторым функционалам. В последнем случае
функции (при наличии необходимой гладкости) будут решениями
соответствующих уравнений Эйлера. В рассмотренных выше при-
мерах задачи для уравнения Эйлера (т. е. задачи вида (0.12),
(0.13) и (0.18), (0.19)) можно записать в операторной форме:
Au = f, иеФ(Л), (0.20)
где Ф (Л) есть множество дважды непрерывно дифференцируемых
функций, удовлетворяющих в зависимости от рассматриваемой
задачи либо условию (0.13), либо (0.19), а Аи есть
Аи = — dtf+<Iu-
Как уже отмечалось, задача (0.20) эквивалентна соответству-
ющей вариационной задаче
J (и) = min J (v), »еФ(А/, (0.21)
где
J (и) = (Аи, и) —2 (f, и) =
1 1
= f (“£ + ?«- 2f^udx = t + qu2-2fu)dx.
о о
Эта задача обладает тем преимуществом, что при ее рассмотре-
нии в действительности можно ограничиться требованием нали-
чия у и(х), например, лишь кусочно непрерывных производных,
в то время как при рассмотрении соответствующего уравнения
Эйлера требуется существование у решения вторых производных.
Предположим теперь, что нам требуется отыскать функцию,
удовлетворяющую условиям и(0) = и(1) = 0 и доставляющую
функционалу (0.11) наименьшее значение. Иногда такую вариа-
ционную задачу решают следующим образом: сначала получают
уравнение Эйлера с соответствующими краевыми условиями,
а затем это уравнение интегрируют в явном виде. В нашем при-
мере вариационная задача сводится к отысканию решения задачи
12
ВВЕДЕНИЕ
(0.12), (0.13). Однако интегрирование получаемых дифференци-
альных уравнений вариационных задач осуществимо в конечном
виде лишь в редких случаях. Поэтому возникает потребность
в приближенном решении этих задач. Сделать это можно, рас-
сматривая вариационную постановку (минуя задачи типа (0.12),
(0.13)) и применяя так называемые вариационные методы.
Чтобы получить представление об этих методах, выберем
некоторый базис {<pj, от элементов которого потребуем, чтобы
они обладали второй производной по х и удовлетворяли условиям
(0.13). Затем будем искать приближение к и (х) в виде
N
Un (х) = J] а7ф7 (х),
/= 1
где коэффициенты а7-, / — 1, .... N, определим из условий мини-
мизации функционала J (и).
Как известно, (х) будет сообщать J (и) наименьшее значе-
N
ние среди функций вида и = У, bi<pi (х), только если
»= 1
dJ (и.л
-~р=0, i=l, N. (0.22)
aai ' 7
Поскольку
N N
J М = У, ащАц - 2 у aji,
i,j=l i=l
где
с a(pi arfi \ i
Atj = И 17 ~dx +QWjdx> = W TiW dx, i, /=1, ..., N,
о о
TO
-Aa = 2 2 Ла-A =0, i=l, N. (0.23)
V= i /
Таким образом, систему (0.22) можно записать в виде
N
2 Аа=А, i = l, ...,W. (0.24)
/=i
Если теперь решить эту систему и определить а>, j = 1...N, то
N
тем самым будет определена и функция uN= У at<f{, которую
i= 1
принимают в качестве приближения к и (х) и называют прибли-
женным решением рассматриваемой вариационной задачи, а также,
учитывая ее связь с (0.12), (0.13), и последней задачи.
ВВЕДЕНИЕ
13
Отметим, что к системе (0.24) можно прийти другим путем.
N
Так, будем искать приближение к и (х) в виде uN (х) == У (х),
i= 1
где постоянные определим из условия ортогональности невязки
d2u
rN (х) = —-|- quN — f (х) каждой из базисных функций <рг (х),
т. е. из уравнений
которые можно записать также в виде
/V 1 , , 1
/ cftcpi \ С е
--------^2’tPi + №<₽/;dxa/ = J f<Pidx, i = l, .... N,
/=i о----о
или, с учетом того, что •
о
в виде
N 1 1
2 f №^ + MW)dxa/=\f<pidx, i = l, (0.26)
в) \ и"* ил i
/=} о . о
Таким образом, проектируя невязку /д (х) на базисные функции <р;
и приравнивая результаты нулю, мы вновь приходим к системе
(0.24), решение которой определяет приближенное решение рас-
сматриваемой задачи uN(x) = У, aiqi(x').
/ = 1
Второй способ получения приближенного решения задачи
можно обобщить следующим образом. Пусть рассматривается
задача (0.20). Приближенное решение ее ищем снова в виде
п
uN = у «гф/. Коэффициенты at определим из условия ортогональ-
i = 1
ности невязки rN (х) = Яму — f некоторым, вообще говоря отлич
ным от <рг, базисным функциям т. е. из условий
1
$(Л«д— f)^jdx = O, / = 1, ..., W, (0.27)
о
или, что одно и то же, из системы уравнений вида
TV 1 1
2 f Ф/(--§г + <7ф/)^х= \ftydx, / = 1, .... У.(0.28)
i=i о о
14
ВВЕДЕНИЕ
Таким образом, система (0.28) получена путем проектирования
rN(x) на базисную систему {ф;}. Если же принять ф, = <р/, то,
учитывая (0.25), вновь приходим к системе (0.26). Итак, алго-
ритм отыскания приближенного решения задачи на основе по-
строения системы (0-28) есть обобщение алгоритма отыскания
его, исходя из минимизации функционала J (и). Он основан на
N
проектировании невязки rN (х) = AuN — f, где uN=^ai<pi, на
1
каждую из функций фу и приравнивании результата нулю.
А поскольку подобный алгоритм не связан непосредственно
с минимизацией какого-либо функционала, то его правильнее
называть проекционным. В случае ф, = ср/, как уже отмечалось,
системы (0.26) и (0.28) совпадают и представляют собой системы,
возникающие в одном и том же алгоритме, но в различных его
формах —в вариационной и проекционной. Для определенности
в данном случае будем считать его вариационным методом при-
ближенного решения задачи (0.21) или (0.12), (0.13)— он является
одним из представителей вариационных методов приближенного
решения рассматриваемой задачи.
Подобные вариационные методы позволяют уже при небольшом
числе N получать приближения uN, обладающие удовлетвори-
тельной точностью; часто в этих методах использовались базисные
функции <р,-, носитель которых совпадал со всей областью, на
которой определено решение задачи. Примером таких функций
при рассмотрении задачи (0.12), (0.13) могут служить функции
<р,- (х) = х' (1 — х), 1 = 1, ..., М. Выбор базисных функций такого
типа приводил к тому, что матрица системы (0.24)
-^Nl
^12 •••
^22 ^2Н
^.V2 &NN-
была плотной (т. е. почти все ее элементы Ац были ненулевыми),
а значит, систему (0.24) уже при N = 4, 5, 6 трудно было решать
без применения электронных вычислительных машин. Поэтому
хотя на протяжении многих лет задачи математической физики и
решались вариационными или проекционными методами, но задачи
N
эти были сравнительно простыми, а приближения uN= У,
i = i
зачастую были не очень точными, так как число N не могло
быть выбрано большим.
Начиная с 50-х годов стала бурно развиваться электронная
вычислительная техника. Память ЭВМ и их быстродействие были
еще малы, чтобы, можно было эффективно решать системы типа
ВВЕДЕНИЕ
15
(0.24) при больших значениях N, но уже первые ЭВМ позволили
получать достаточно точные приближенные решения задач, постро-
енные с помощью другого метода — разностного. Чтобы понять
одну из причин этого, рассмотрим указанный метод в применении
к задаче (0.12), (0.13) при q — \. Введем на отрезке [0, 1] набор
узлов, например xt = ih, i = 0,1, N, h=l/N, и запишем
уравнение (0.12) в точках хр.
-d^i(Xi) + u(xi)^f(xi), ^i = l.....М-1. (0.29)
Рассмотрим равенство
S = и ~2“<х'} + “(Хг+1) + е, (Л), (0.30)
где е, (h) — некоторая малая величина, стремящаяся к нулю при
h—>~0. Если подставить (0.30) в (0.29) и учесть (0.13), то будет
получена система равенств
+и (Xi)=z (Xi)+е. (h) t
и (х0) = и (xN) = 0, i=l, .... N — 1. (0.31)
Предполагая, что величины e((/i) малы, и отбрасывая их в (0.31),
приходим к системе
+ = f (Х/)> • = j...........N t
Ug = UN — 0,
(0.32)
компоненты решения которой при малых 8/ будут близки
к значениям u(xi). Таким образом, решив систему (0.32), мы
тем самым найдем приближенные значения точного решения задачи
в узлах Xi.
Описанный выше подход построения системы (0.32), которую
в векторно-матричной форме можно записать (учитывая, что
ио = их = 0) в виде
Г2 + 1_1
/l2 Л2
_ 1
А2
1
/I2
—- 2 +1
/г2 Л2^
а,
а2 = , (0.33)
aN-2 f (XN 2)
aN-l f (XM-1)
отражает идею построения приближенных решений многих задач
с помощью разностного метода. Хотя здесь система (0.33) и имеет
16
ВВЕДЕНИЕ
порядок N — 1, где N может быть значительно больше, чем
в (0.24), матрица ее имеет ненулевыми лишь диагональ, под-
диагональ и наддиагональ. Очевидно, что для хранения матриц
подобной структуры требуется гораздо меньший объем памяти
ЭВМ (в отличие от ситуации с матрицей системы (0.24)). Кроме
того, для решения систем типа (0.33) были найдены простые
экономичные алгоритмы. Таким образом, уже на маломощных ЭВМ
можно было решать системы вида (0.32) сравнительно больших
порядков, получая при этом достаточно точные приближения
к значениям ы(х,), i = 0, 1, 2, ..., N. Отмеченные выше обстоя-
тельства явились одной из причин того, что разностные методы
с развитием ЭВМ стали находить все более широкую область
применения.
Однако сразу же стали проявляться и некоторые из трудно-
стей в использовании разностных методов. Так, стремление умень-
шить величины e{(h) за счет других, более точных по сравнению
с (0.30), соотношений может привести к системе уравнений
с несимметричной матрицей. А отсутствие симметрии может
повлечь ряд других трудностей при численном решении таких
систем. (Отметим, что в вариационных методах мы, как правило,
приходим к системе с симметричной матрицей, если оператор
исходной задачи симметричен.) Далее, если рассматривается мно-
гомерная задача с криволинейной границей, то очевидно, что
построение выражений типа (0.30) у границы не всегда является
простой задачей. Кроме того, хотя оператор задачи — положи-
тельно определенный, может оказаться, что оператор разностной
схемы это свойство теряет. Например, пусть в задаче
-S + a£==^x)’ 0<х<1, (0.34)
«(0) = и(1) = 0 (0.35)
функция f(x) достаточно гладкая, а — неотрицательная постоян-
ная. Введем на сетке x, = i7i, i = 0, 1, ..., Af, h=\/N, разностные
аппроксимации
g (х,) = “ +“ + 81, i (h), (0.36)
(Xi) = + e, ((Л), (0.37)
где ex, / (Л), в2.(й)0 при й->-0. Тогда, используя (0.36), (0.37),
получаем следующую разностную схему для задачи (0.34), (0.35):
+ a = f (Xi), i = l,
«о = «л = О. .. ’ . '
N—\,
(0.38)
ВВЕДЕНИЕ
17
Легко заметить, что если постоянная а и шаг сетки h таковы,
что 2<ha, то матрица системы (0.38) заведомо не является поло-
жительно определенной, хотя оператор задачи (0.34), (0.35) обла-
дает этим свойством. Отсюда заключаем, что, по-видимому, при-
нятая аппроксимация (0.37) не совсем удачна и необходимо
воспользоваться другими формулами. Как мы увидим ниже, в
вариационных и проекционных алгоритмах подобных ситуаций,
как правило, не возникает.
В силу сказанного выше привлекательным становится кон-
струирование таких алгоритмов приближенного решения задач,
которые, с одной стороны, по форме были бы вариационными
или проекционными и, таким образом, обладали бы всеми их
преимуществами, а с другой стороны, чтобы эти алгоритмы при-
водили к системам уравнений, подобным возникающим в раз-
ностных методах (т. е. незначительное число элементов матриц
этих систем были бы ненулевыми). Такими алгоритмами являются
проекционно-сеточные алгоритмы (метод конечных элементов).
Чтобы прийти к этим алгоритмам, достаточно в вариационных
или проекционных методах в качестве базисных функций {<pj
брать функции с конечными носителями (финитные функции),
т. е. такие функции, которые отличны от нуля лишь на неболь-
шой части той области, на которой определено искомое решение
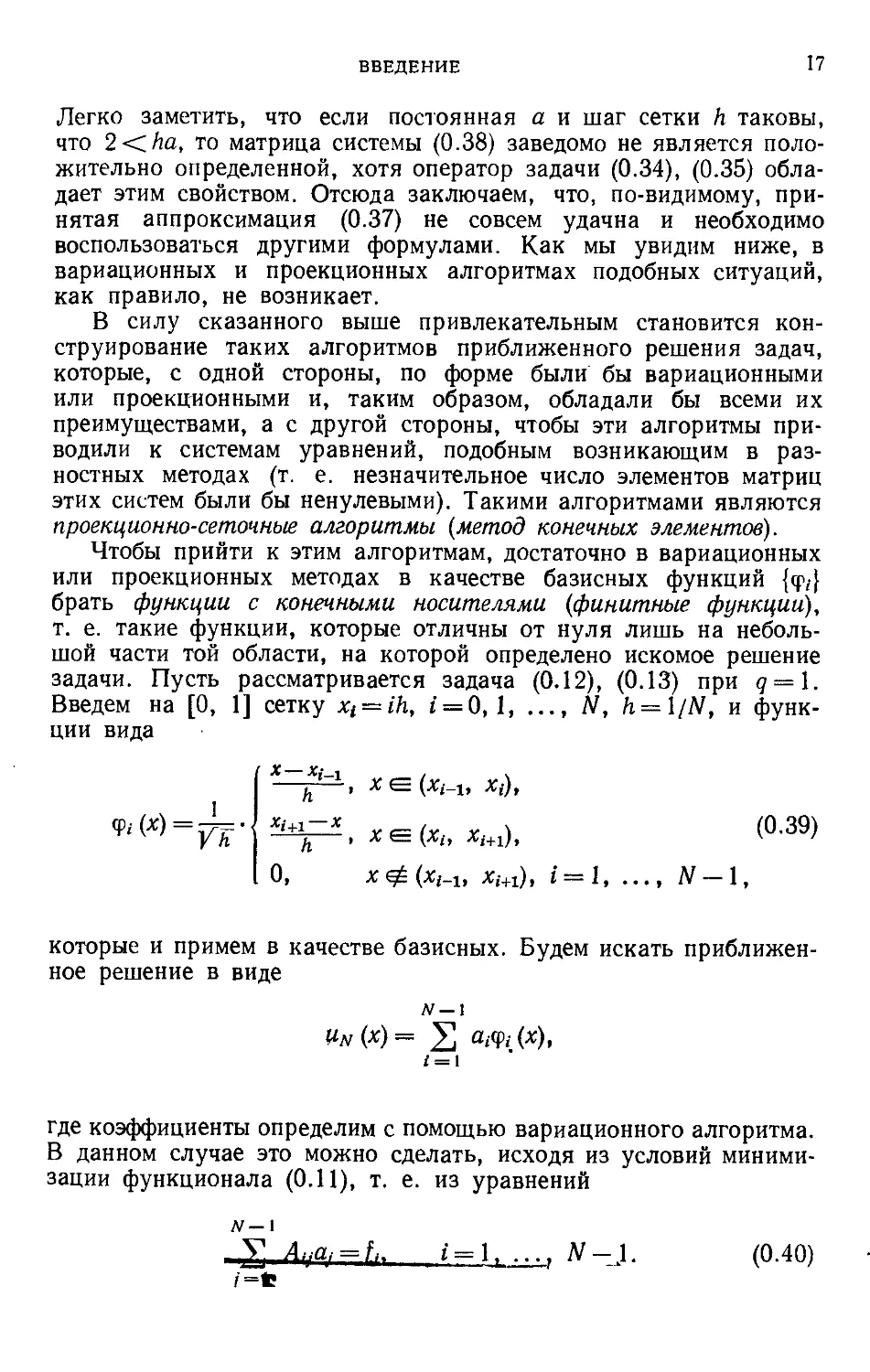
задачи. Пусть рассматривается задача (0.12), (0.13) при q = \.
Введем на [0, 1] сетку xt = ih, i = 0,1, W, h = 1/N, и функ-
ции вида
X — х,_1 , .
—Х(=(Х1_Ъ Xi),
Xi+1~X . .
—, xt=(xh xl+1),
0, x^(xi-u xi+1), i=l,
(0.39)
.... (V-l,
которые и примем в качестве базисных. Будем искать приближен-
ное решение в виде
N — 1
Ujv(x) = s а^(х),
1 = 1
где коэффициенты определим с помощью вариационного алгоритма.
В данном случае это можно сделать, исходя из условий миними-
зации функционала (0.11), т. е. из уравнений
N— 1
Ai,ia,t = fh
i=*
t = l, , (V-J. (0.40)
18
ВВЕДЕНИЕ
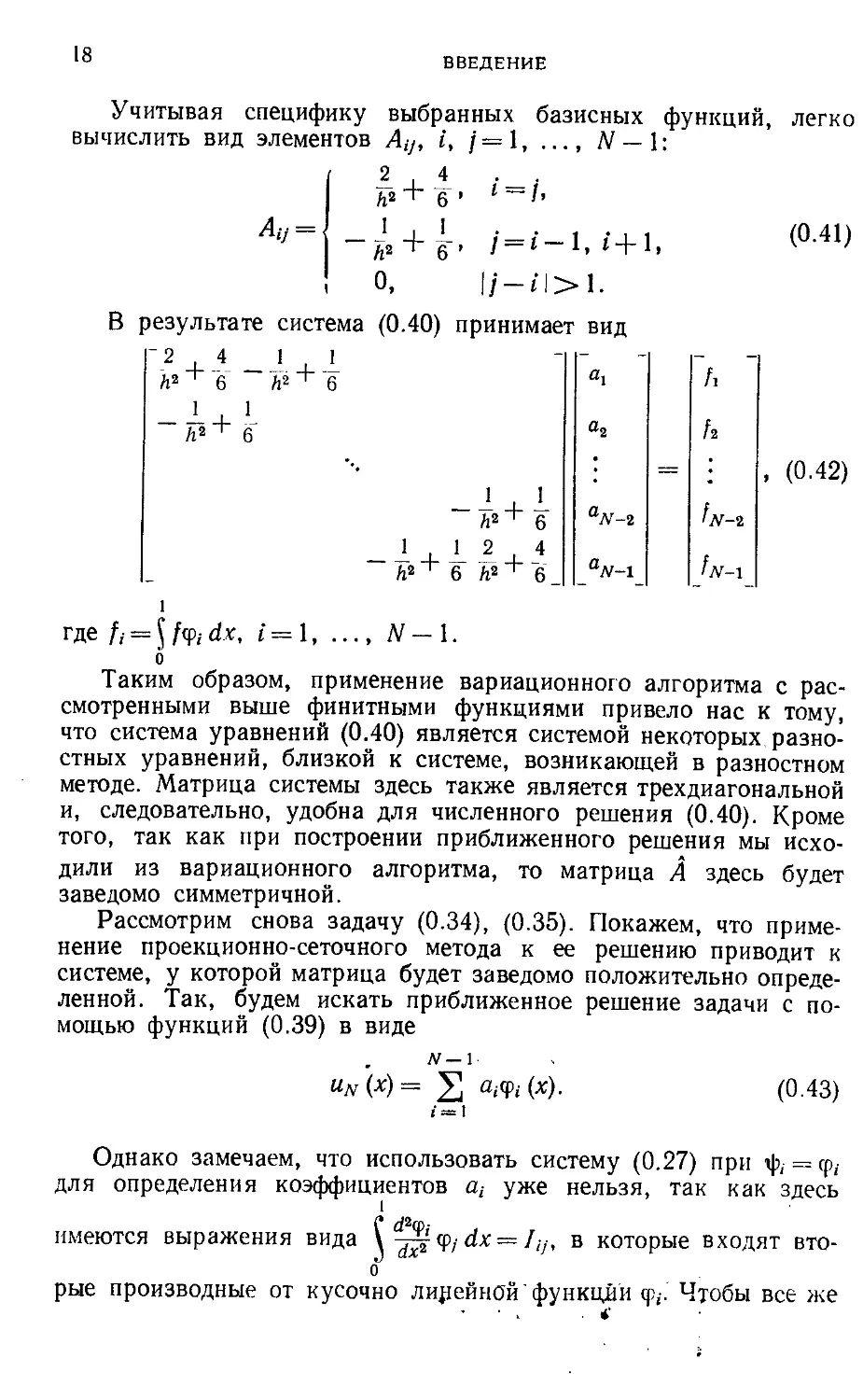
Учитывая специфику выбранных базисных функций, легко
вычислить вид элементов Ay, i, / = 1, .... N — 1:
В результате система (0.40) принимает вид
2 + 4 _ 1 , '
Л2 6 Л2 6
_1+1
Л2^ 6
(0.42)
1
где ft = § f<fi dx, i = l, ..., N — 1.
о
Таким образом, применение вариационного алгоритма с рас-
смотренными выше финитными функциями привело нас к тому,
что система уравнений (0.40) является системой некоторых разно-
стных уравнений, близкой к системе, возникающей в разностном
методе. Матрица системы здесь также является трехдиагональной
и, следовательно, удобна для численного решения (0.40). Кроме
того, так как при построении приближенного решения мы исхо-
дили из вариационного алгоритма, то матрица А здесь будет
заведомо симметричной.
Рассмотрим снова задачу (0.34), (0.35). Покажем, что приме-
нение проекционно-сеточного метода к ее решению приводит к
системе, у которой матрица будет заведомо положительно опреде-
ленной. Так, будем искать приближенное решение задачи с по-
мощью функций (0.39) в виде
N— 1
«Лг'(х) = S (0.43)
< = 1
Однако замечаем, что использовать систему (0.27) при ф, = (р,
для определения коэффициентов а,- уже нельзя, так как здесь
1
С d2(?i j г
имеются выражения вида \ dx — //у-, в которые входят вто-
о
рые производные от кусочно лилейной функций у,-. Чтобы все же
ВВЕДЕНИЕ
19
воспользоваться (0.27), нужно перейти к «слабой» форме записи
этой системы. Чтобы сделать это, необходимо в слагаемых 1ц
выполнить интегрирование по частям, в результате чего система
(0.27) принимает вид
N-\ 1 1А А А \ 1
У аА + = f^dx> l' = 1.......N-l, (0.44)
• ) \ иЛ I J
/=10 0
или, в матричной записи,
Aa + Ba = f,
(0.45)
i
где a = (alt .... a7V_1)r, f = (A, .... fN-i)T, =
о
2 _ L
л2 л2
i
Л2
1
/l2
_1 1
h2 h\
Матрица этой системы положительно определенна независимо от
соотношений между а и h. Действительно,
N — 1 N— I N— 1
У (^1/ 4* Bij) 2=: A.min
i.i = i i.i = ] / = 1
Л-min = ^2 Sin ~~2 > 0-
Таким образом, свойство положительной определенности оператора
задачи здесь при применении проекционно-сеточного метода авто-
матически сохраняется.
Итак, проекционно-сеточный алгоритм обладает рядом хороших
качеств как вариационного, так и разностного метода.
Отметим другие привлекательные черты проекционно-сеточных
методов. Так, коэффициенты а,- в системе (0.40) зачастую несут
ясную смысловую интерпретацию. Например, в рассмотренной
задаче коэффициент а,- равен значению приближенного решения
в узле хь умноженному на коэффициент ^h. Далее, оказалось,
что финитные базисные функции в ряде случаев легко можно
«приспособить» к геометрии области, и тем самым устраняется
одна из трудностей, возникающих в разностном методе. Кроме
того, обращаем внимание, что если при решении рассматриваемой
задачи надлежащим образом выбраны проекционный алгоритм
20 ВВЕДЕНИЕ
и базисные функции, то дальнейший процесс построения решения
задачи происходит «автоматически». Это приводит к предположе-
нию, что численную реализацию проекционно-сеточных алгоритмов
можно автоматизировать с применением ЭВМ.
Эти и ряд других обстоятельств обуславливают широкую попу-
лярность проекционно-сеточных методов, применяемых в настоящее
время для решения самых различных задач математической
физики.
Из сказанного выше делаем заключение, что проекционно-
сеточные методы основываются на проекционных (в том числе
и вариационных) методах, а также на использовании в них раз-
личного рода финитных функций, нашедших сейчас широкое при-
менение в теории аппроксимации. Поэтому в ближайших двух
главах изучаются некоторые проекционные методы и финитные
функции. Затем проводится построение проекционно-сеточных
схем для задач математической физики.
ГЛАВА 1
НЕКОТОРЫЕ АЛГОРИТМЫ ПРОЕКЦИОННОГО МЕТОДА
§ 1. Схема алгоритмов
Пусть в гильбертовом пространстве Н рассматривается
уравнение *)
Lu = Au-\-Bu — f, (1.1)
где А, В —линейные (т. е. аддитивные и однородные, но, может
быть, неограниченные) операторы в Н с областями определения
D(A), D(B), соответственно. Предполагается, что О(Л)еД(В)
и D (А) плотно в Н. Кроме того, введем в рассмотрение некото-
рый оператор К с областью определения О(К)эО(А).
Зададим функции
ф'"’, ф<"ф^’, #=1,2,...,
каждая из которых принадлежит D (А). Обозначим через Нм
линейную оболочку функций ф^’, i = l, ..., N. Будем считать,
что для этих функций выполнены условия: 1) при любом N
функции ф^', ..., Фд/' линейно независимы; 2) последовательность
подпространств {//дг} предельно плотна в Н, т. е. для любой
функции и е Н существуют такие элементы йл- е HN, N = 1, 2,...,
что
|| ы — «И = inf || Ц — М sS 8 (ц, N), ш^Нм,
W
где г (и, Af) —оценки погрешности аппроксимации, e(u, #)->0
при #->оо.
Набор функций ф^), ф^), ..., ф("), удовлетворяющих отме-
ченным условиям, будем называть базисом в Нм и обозначать
{ф^}- Входящие в него функции ф<^ назовем базисными.
Заметим, что базисные функции зависят от N и, вообще
говоря, ф^п =£= ф^») при Nx =£= Однако здесь не исключается
возможность, когда этой зависимости не будет, как, например,
в случае ф(.А/) = х', i=l, ..., N, #=1,- 2, ... Здесь мы имеем
обычную расширяющуюся последовательность базисных функций.
*) В дальнейшем предполагается (если не будет оговорено особо), что все
функциональные пространства вещественны.
22
АЛГОРИТМЫ ПРОЕКЦИОННОГО МЕТОДА
[ГЛ. 1
Примером функций ф^’, зависящих от N, могут быть ступенчатые
функции, определенные на (0, 1) и имеющие вид
О, 1 = 1....N, У = 1,2, ...
Условимся в дальнейшем индексы N в обозначениях базисных
функций и коэффициентов в комбинациях vN =
N
= У, с<л/>ф(у’ для упрощения обозначений опускать. Однако
i=i
зависимость от N соответствующих функций и выражений,
в которые они входят, в этом случае тем не менее подразумевается.
Введем еще один набор базисных функций, который (с учетом
сделанных выше замечаний) обозначим через {ф,-} и который не
обязательно совпадает с {ф,}. Предполагается, что все базисные
функции ф,- принадлежат множеству D(K)-
Будем искать приближенные решения уравнения (1.1) в виде
N
Un = ^ ад; (1.2)
< = 1
здесь at определим из системы уравнений *)
(AuN + BuN — f, Кф,) = 0, 1 = 1,..., У, (1.3)
где (ы, и) —скалярное произведение в пространстве Н с нормой
|«|| = («, и)'/2.
Разрешимость системы (1.3) и сходимость uN к «при У->оо
в каком-либо смысле будут зависеть от выбора К, {ф,}, {ф/} и от
свойств операторов А, В. Выбирая эти операторы и базисы так
или иначе, можно получить ряд известных методов приближенного
решения уравнения (1.1). Поэтому будем рассматривать алгоритм
(1.3) в данной главе в качестве основного. Ниже будут изучены
некоторые его частные случаи (например, метод Ритца, метод
Бубнова — Галеркина и др.), изложение которых углубляется
и расширяется в соответствующих параграфах.
Условимся в дальнейшем в случаях, когда для изложения
нет необходимости в представлении оператора L в виде L = A-]-B,
считать В нулевым оператором (оператором аннулирования), т. е.
В = 8. Такие ситуации могут возникнуть, например, когда на L
налагаются достаточно общие ограничения (например, лишь
*) В дальнейшем систему уравнений (1.3),. возникающую при решении
уравнения (1.1) с помощью какого-либо алгоритма, будем иногда называть
просто алгоритмом с соответствующим названием, подразумевая под этим сам
процесс построения системы (1.3).
§ 21
МЕТОД РИТЦА
23
существование обратного оператора Л-1) или, наоборот, сравни-
тельно жесткие (самосопряженность, положительная определен-
ность и др.). Это поможет нам, с одной стороны, несколько
упростить обозначения, а с другой — вписать излагаемые методы
в одну схему (1.3), следуя от простых методов к более сложным.
§ 2. Метод Ритца
2.1. Классический метод Ритца. Пусть в задаче (1.1) и в алго-
ритме (1.3) В = 6, К — 1 — тождественный оператор, ф; = фг, А —
симметричный положительно определенный оператор, т. е.
(Au, v) — (u, Av), (Au, и) у8и ||2, где у —постоянная, у>0,
и, v^D(A). В этом случае мы приходим к задаче
Au = f, f(=H. (2.1)
Общий алгоритм (1.3) при сделанных предположениях будем
называть классическим методом Ритца', он состоит в следующем:
1) Выбирается базис {<Р/}, Ф< е D (A), i = 1.?V, N — l,2,...
2) Приближенное решение ищется в виде
N
Un = У (2-2)
i=i
3) Коэффициенты находятся из системы уравнений
Ф/) = (Л ф<). i=l......N, (2-3)
или, что то же самое, из системы
Aa = f, (2.3')
где А —матрица с элементами Ау = (Аф,-, ф/), a = («i.aN)T,
f = (fi.?n)t, h = (f, Ф,).
Поскольку A — положительно определенный оператор и
N
{фг} — линейно независимая система, то при vN = У, &(фь
i=i
b = (biЬм)Т =#0 = (0........0)Т имеем
n N
(Ab, b)2 = ^ У At/blb/ = (AvN, vN)^y2\\vN\2X},
1=1 i = i
f. e. A — положительно определенная матрица, а значит, невы-
рожденная. Итак, система (2.3) имеет единственное решение а,
определяя тем самым единственную функцию uN вида (2.2).
Для uN можно получить априорную оценку: умножив уравне-
ния (2.3) на а, и просуммировав их по i, получим (AuN, uN) —
= (f, uN); но (AuNi «дг) Ss у2|| ыдг||г; следовательно, || uN f
24
АЛГОРИТМЫ ПРОЕКЦИОННОГО МЕТОДА
[ГЛ. 1
Оценим величину | (/, и^) |, воспользовавшись неравенством
Коши — Буняковского: | («, у) | и||||о||, u, v е Н. Тогда выпол-
няется неравенство | (/, uN) | || f ||||uNи мы приходим к оценке
«МКИЛ/Т2- (2.4)
При формулировке метода Ритца мы исходили из алгоритма
(1.3), однако известно, что метод Ритца основан на отыскании
минимума квадратичного функционала вида
F(u) — (Au, и) —2 (и, f) (2.5)
на множестве D (А), принимаемом здесь также в качестве области
определения F(u). Так, имеет место следующая теорема.
Теорема 1*). Для того чтобы некоторый элемент un^D (А)
сообщал минимальное значение функционалу энергии F (и), необхо-
димо и достаточно, чтобы этот элемент удовлетворял уравнению
Aun — f. Такой элемент единственный.
Из этой теоремы следует, что задача (2.1) и задача миними-
зации (2.5) эквивалентны. Поэтому можно сформулировать метод
Ритца следующим образом. Пусть Нц — линейная оболочка систе-
мы ерь ..., <р.у. Поставим задачу об отыскании минимума функ-
ционала F (и) на Нк, т. е. о нахождении функции uNe.HN,
для которой
Flu#) = min F (v), v^HN. (2.6)
V
N
Но так как о =5} b/Ф/, то F (ulV) = min F (v), где
z=i
N N
F(v)=>F(blt .... bN) — 2 bibj(A(Pt, <P/)-2£ bftf, <py).
i ./ = 1 / = 1
Чтобы найти минимум функционала F (v), вычисляем его производ-
ные по Ь, и приравниваем их нулю **). Приходим к системе
уравнений
ob[ ’ ’
которая, как легко заметить, эквивалентна (2.3). Таким образом,
для рассматриваемого класса операторов метод Ритца в форму-
лировке (2.3) и в формулировке минимизации F(u)HaHN приво-
дит к одной и той же системе уравнений для определения
коэффициентов аг, i = l...N.
*) Доказательство этой теоремы можно найти, например, в [7].
**) Поскольку в данной задаче оператор А положительно определенный,
легко убедиться в том, что ищется именно минимум F (uN), а не максимум.
$ 21
МЕТОД РИТЦА
25
Теорема 2. Если для любой функции иеД(Л) можно по-
N
строить такую последовательность элементов uN = с(ф,- е HN,
<=1
М = 1,2, что || А (и — uN) |->0 при N ->оо, то приближенные
решения uN сходятся к точному решению и0 уравнения (2.1) при
N ->оо и имеет место оценка
II «о - «лг II < с min || А (и0 - uN) ||,
с.
где с — положительная постоянная, не зависящая от щ и uN.
Доказательство. Воспользуемся соотношением, справед-
ливым для и0 и произвольной функции и е D (А):
(A(u0 — v), u0 — v) = (Au0, u0) + (Av, v) — 2(Au0, v) =
= (Aun, u0) + (Av, v) — 2(f, v) = F (v) + (Au0, u0) —
. -F(40) + F(u0) = F(v)-F(u0) + 2(Au0, u0)-2(u0, f) =
= F(v)-F(u0);
таким образом,
(A(u0 — v), u0 — v) = F(v) — F(uQ).
Поскольку «о доставляет функционалу F (v) минимальное значе-
ние на D (Л), а приближенное решение N минимизирует F (о)
на HN, то
(Л (и0 - uN), Uq — un) = F (un) — F («о) <
^F(vN)-F(u0) = (A(u0-vN), u0 — vn)
N
при произвольной функции vN = ^ с,ф,- из HN. Следовательно,
< = i
Vs I, «о - uN II2 (Л («0 - uN), и0 - uN)
< М («о — Vn), и0 — VN) < II А-1 III! Л (и0 — VN) Г,2,
II Wo - UN ||2 < II Л (и0 - vN) I,2.
В силу произвольности выбора коэффициентов с,, i=l, N,
N
в разложении олг= ^с;ф; получаем утверждение теоремы, поло-
i=i
ЖИВ
Замечание. Если известна оценка
1V)->O,
N -> оо,
26
АЛГОРИТМЫ ПРОЕКЦИОННОГО МЕТОДА
(ГЛ t
где е («о, N) — заданная функция от N, то из теоремы 2 следует
оценка погрешности*) f ий — uN || sgce (и0, N).
Пример 1. Рассмотрим задачу
+ = *ё=(0, 1),
u(0) = u(l) = 0,
где ^ — постоянная. Приближенное решение будем строить методом
Ритца. Возьмем в качестве базисных функций собственные функ-
ции оператора А = — dP/dx^A-q с областью определения D (А),
состоящей из непрерывных в [0, 1] и обладающих вторыми про-
изводными функций и(х), удовлетворяющих условиям
«(0) = и(1) = 0.
Прежде всего отметим, что ье собственное значение и соот-
ветствующая ему собственная функция ф, оператора А, являю-
щаяся нетривиальным решением задачи на собственные значения
Дф,- == Х,ф6 имеют вид ф( (х) = sin шх, Л,- = гял.2-}-<?, i — 1,2, ...
Приближенное решение uN будем искать в виде uN —
N
— 2 (х), гДе ai определим из системы Ритца:
1=1
N 1 I
У, ai + = / (х) фА (х) dx, 6=1,..., N.
1=1 о о
В силу ортогональности собственных функций ф,- в L2 (0, 1) мат-
рица этой системы является диагональной. Вследствие этого
коэффициенты аг можно выписать явно:
1
35 1'ял2 | iy~ f sin t лх dx,
о
и определить приближенное решение по формуле
N
un—^ Я/sin 1ЛХ.
i=l
2.2. Метод Ритца в энергетических пространствах. Теорема 1
устанавливает эквивалентность задачи (2.1) и задачи (2.5), но
в ней нет никаких утверждений о самом существовании решения
uoeD(A) этих задач. В п. 2.1 рассматривалась классическая
постановка задачи, когда решение уравнения Au — f есть функция,
принадлежащая области определения D(A) оператора А и удов-
летворяющая этому уравнению. Оказывается, что в такой поста-
*) В дальнейшем через с будет обозначаться постоянная, общая для рас-
сматриваемого выражения и не зависящая от изучаемых функций.
§ 2]
МВТОД РИТЦА
27
новке это решение может не существовать. Однако оно сущест-
вует в несколько более широком (чем D (Л)) пространстве.
Поэтому необходимо изменить постановку вариационной задачи
о минимизации F («), чтобы можно было гарантировать существо-
вание ее решения.
Пусть при рассмотрении (2.1) Л — симметричный положительно
определенный оператор с областью определения D (Л), плотной
в Н. Введем в D (Л) скалярное произведение и норму:
[<р, ф] = (Лф, ф), [ф] = [ф, ф]1/2- (2.7)
Пополняя D (Л) по введенной норме, приходим к полному гиль-
бертову пространству НА, которое называется энергетическим
пространством, порождаемым оператором Л. Каждая функция
из D (Л) принадлежит пространству НА, однако в результате
пополнения в НА могут появиться элементы, не входящие в D (Л)
(поэтому представление скалярного произведения [ф, ф] при про-
извольных ф, фе//лв виде (Лф, ф) уже не имеет места).
Пусть иеО(Л); используя (2.7), представим F (и) в виде
F («) = [«, и] — 2 (/, и). (2.8)
Такая форма записи позволяет рассматривать F(u) не только
на области определения оператора Л, но и на всех элементах
энергетического пространства НА. Поэтому расширим функционал
(2.8) (оставив за ним прежнее обозначение F (и)) на все про-
странство НА и будем искать его минимум на этом пространстве.
Легко показать, что в такой постановке вариационная задача
имеет всегда единственное решение. Действительно, так как опе-
ратор предполагается положительно определенным, т. е. (Аи, и)—
=[«, и]у21| и||2, иеО(Л), у>0, то при пополнении D (Л)
в НА соотношение знакоопределенности [и, и] у21| и останется
справедливым для любого элемента и е НА.
Функционал (/, и) ограничен в НА.
КА и)|<||/|||!и||<|/!|М = с[«].
Следовательно, по теореме Рисса о представлении линейного
ограниченного функционала в гильбертовом пространстве суще-
ствует элемент и0 е НА, однозначно определяемый элементом f
и такой, что для любого и е НА справедливо равенство (/, и) —
==[«о, и]. Но тогда F (и) можно представить в виде
F («) = [«, u] — 2(f, и) = [и, и]-2 [и, uo] = [u-«o]2-[«o]2- (2.9)
Из (2.9) видно, что в пространстве НА функционал F (и)
достигает минимума при и — и0. Как уже отмечалось, и0 — един-
ственный и принадлежит НА. Может оказаться, что и0 е D (Л);
тогда и0 будет также классическим решением рассматриваемой
28
АЛГОРИТМЫ ПРОЕКЦИОННОГО МЕТОДА
(ГЛ. I
задачи, т. е. будет удовлетворять (2.1). Если же и0^.НА, но
Uq^D(A), то назовем его обобщенным решением уравнения (2.1).
Итак, мы свели исходную задачу к задаче минимизации
функционала (2.8) в энергетическом пространстве НА. Рассмотрим
теперь . метод Ритца для приближенного решения последней
вариационной задачи, который в данном случае назовем методом
Ритца в энергетических пространствах.
Пусть заданы линейно независимые функции {cpf} с обо-
значим через Ну их линейную оболочку. Предположим, что
последовательность подпространств {Ну}, N =1,2,..., предельно
плотна в На, т. е. для любой функции и е НА существуют такие
элементы йу <=HN, N = 1,2,..., что
[и — wAr] = inf[« — w\^e(u, 2V)-»-0, N-*-oo, w^HN, (2.10)
w
где е(и, N) — оценки погрешности аппроксимации. Теперь метод
Ритца можно сформулировать следующим образом: требуется
найти элемент иу е Ну, минимизирующий F (и) на подпростран-
стве Ну. Реализация этого алгоритма состоит в следующем:
1) Задаются конкретные N и {ср,-}, ср, <=
2) Приближенное решение ищется в виде
н
Uy^^awi. (2.11)
(=1
3) Коэффициенты at находятся из условий минимизации функ-
ционала F (Uy), которые приводят к системе уравнений
= С=1,...,^.
да, ' ’ ’
Эту систему можно записать также в виде
Aa = f или [ыдг, ср,] = (/, ср,), i=l, ..., N, (2.12)
где а = (а1г ..., ау)Т и f — ..., fy)T — мерные векторы,
причем
Л = (/, Фс), (2.13)
а А — матрица Грама системы {cpj в скалярном произведении
пространства НА, е элементами
Д/ = [фь фД l=Ci,
(2-14)
Но Ду = [ф,-, ф/] = [ф/, ф/] = Ay, так что А симметрична, а в силу
неравенства
S 21
МЕТОД РИТЦА
29
при b = (bi, bN)T=/=0 матрица А является также положи-
тельно определенной. Поэтому система (2.12) имеет единственное
решение а, однозначно определяющее элемент uN, для которого
справедливо неравенство [«дт] ^ || Л/Т2-
Замечание. Если ф;еО(Л), то Ау можно представить
также в виде Ау — (А<р6 Ф/)- Если же <р,- D (А), то данное
представление, вообще говоря, не имеет места и выполняется (2.14).
Справедливо следующее утверждение.
Теорема 3. Если последовательность подпространств {HN}
предельно плотна в НА, то приближенные решения uN, построен-
ные методом Ритца, сходятся при N-+oo к обобщенному реше-
нию задачи и0 в метрике пространства НА.
Доказательство. Приведем два доказательства теоремы,
часто используемые при изучении сходимости метода Ритца.
1) Каждое uN доставляет на HN минимум F(u), поэтому
в учетом (2.9) при произвольном w^HN имеем
[«о — «дг]2 = F (uN) — F(uo)^F(w) — F (u0) = [u0 — w]2.
Поскольку w произвольно, то, принимая во внимание (2.10),
получаем
[и0 — uN]A inf [«о — w] =sS е («0, N), w<=HN, (2.15)
W
где и (и0, IV)->0 при W->oo.
2) Запишем для и0 и и# тождества:
[«о, Ф/] = (А Фг), [«аг, Ф;] = (/. ФО, » = 1, •••, Af.
Вычитая второе соотношение из первого, получаем [и0 — uN, ф/]=0,
i = 1,
N. Следовательно,
«о — uN, У, c^t = 0 при
произ-
<=1
вольных постоянных Ci, cN или, что одно и то же (Ci = di —
— at, di произвольны),
[Ug — Uf/, Uo — Ндг] =
N
^0 «0 i
1=1
’Воспользовавшись неравенством Коши — Буняковского для
оценки правой части последнего равенства, получаем соотношения
[«O-UjvP^tUo-MAr]
N
«0 — У <Аф/
/=1
N
“о-2 дм
i-=i
30
АЛГОРИТМЫ ПРОЕКЦИОННОГО МЕТОДА
(ГЛ. 1
Но di произвольны, поэтому
[w0 —«jV]<inf
di
N),
где e (u0, N)-+G при N-+oo. Теорема доказана.
Пример 2. Пусть в пространстве Н = Ьг(Ъ, 1) рассматри-
вается задача из примера 1. Найдем вид скалярного произведения
и нормы в энергетическом пространстве НА, соответствующем
оператору А этой задачи.
Прежде всего отметим, что оператор задачи А = — d2!dx2A-q
симметричен:
1 i
(Au, v)=^—~-+(}u\vdx=\(~^+quv^dx = (u, Av),
о 0
и, veD(A).
Для доказательства положительной определенности опера-
тора А воспользуемся неравенством
1 1
1№<о, и = § и2 (х) dx =С | J] ~ I2 dx,
о о
которое справедливо для произвольной функции и(х), удовлет-
воряющей условиям н(0) = 0 (или н(1) = 0) и \duldx[L,<.oo.
Действительно, в этом случае
u№=\-^dx', |u(x)|^]/x|/'J | —|2dx',
о о
|ц(х)|2=Сх l-^-px, J u2dx^j J |^fdx,
о о о
а значит,
.. 1 II du ||3
||w||ls(o, в-—- 2 И dx i)’
Пусть и (х) — произвольная функция из области определения
оператора А. Тогда, используя последнее неравенство, получаем
(Ли, и)- j +
о
что означает положительную определенность оператора Л.
§ 2]
МЕТОД РИТЦА
31
Свойства симметричности и положительной определенности
оператора А позволяют ввести в D (А) скалярное произведение
1
о
и норму
[«]=[«, ы]1/2=1П|-£ Г+И•
'О '
Пополнив D (А) по норме, т. е. присоединив к D (А) множество
предельных точек всевозможных сходящихся по норме [ • ] после-
довательностей {пА} сд D (А), получим энергетическое простран-
ство На со скалярным произведением и нормой:
1
[w, vl= \(^i + quv)dx’ [“] = [“» “F2-
о
Отметим, что в рассматриваемом примере требование и (х) <=
еО(,4) означает, что функция и (х) должна обладать второй
производной, принадлежащей L2(0, 1). Если же требуется, чтобы
и (х) е На, то это подразумевает наличие у и (х) лишь первой
производной du/dx^L2(0, 1). Это показывает, что простран-
ство На значительно шире множества 0(A).
Если теперь искать приближенное решение задачи методом
Ритца, рассматриваемым в энергетическом пространстве На,
приняв в качестве базисных функций функции <p* = sinfen;x,
k=l, .... N, то система уравнений для определения коэффици-
ентов ait i — 1, ..., W, будет иметь вид
w
У, «<[фь Фа] = (Л Фа), k=l, N.
;=1
Заметив, что базисные функции ортогональны в данной задаче
в пространстве НА: [ф,-, Фа] = ((^п2 + ?)/2)6,а (6ift — символ Кро-
некера), легко находим решение этой системы:
ak = (j, Фа)/[Фа, Фа] = 2(/, фА)/(/г2л2 + ?),
а значит, и приближенное решение по методу Ритца:
w
Un = У ak sin kn,x.
k=i
2.3. Естественные и главные краевые условия. Примеры.
Рассмотрим один из вопросов, важных для практического исполь-
зования метода Ритца, — проблему выделения главных и естест-
венных краевых условий *). Принадлежность элемента и к области
*) О естественных краевых условиях см. также пример 5 § 3.
32
АЛГОРИТМЫ ПРОЕКЦИОННОГО МЕТОДА
[ГЛ. 1
определения D (Д) оператора А часто подразумевает, что и удов-
летворяет тем или иным краевым условиям: Т ки — 0, k = 1,..., К
(здесь Тк — оператор, определяющий k-e краевое условие). В ре-
зультате пополнения D (А) по норме [•] в полученном энергети-
ческом пространстве НА могут появиться элементы, которые
будут удовлетворять не всем условиям Тки = 0. Если в НА
окажутся элементы, не здовлетворяющие некоторому условию
7\ы = 0, то это краевое условие называется естественным для
оператора А. Краевое условие, которому удовлетворяют как эле-
менты из D (Д), так и элементы из НА, называется глав-
ным .
Практическая важность умения отличать эти условия состоит
в том, что базисные функции {<р,} не обязательно подчинять
естественным краевым условиям, так как их достаточно брать
лишь из энергетического пространства (и не обязательно из D (Д)).
Это обстоятельство в значительной степени облегчает выбор <р,
при решении многих практически важных задач, особенно в слу-
чае многомерной области со сложной формой границы. Отметим,
что в случае главных краевых условий проблема построения <р,-,
удовлетворяющих этим условиям, остается.
Укажем подход, который позволяет для конкретной задачи
установить, является ли то или иное краевое условие естествен-
ным. Рассмотрим задачу о минимизации функционала F (и) и
предположим, что существует функция и0, реализующая минимум
F (и) в классе функций, вообще говоря не удовлетворяющих
данному условию. Используя средства вариационного исчисления,
можно найти необходимые условия реализации минимума F (и)
функцией и0. Если окажется, что к ним относится и рассматри-
ваемое краевое условие, то оно естественное.
Наконец, приведем простой признак (без его теоретического
обоснования), позволяющий отличать естественные краевые усло-
вия от главных и применимый для ряда краевых задач. Пусть
в (2.1) Д — дифференциальный оператор порядка 2т, удовлетво-
ряющий некоторому однородному краевому условию вида Tku = Q.
Тогда краевое условие будет естественным, если выражение Т ки
содержит производные от и порядка т и выше (при этом в Тku
могут входить производные порядков, меньших чем т, а также
сама функция и с некоторыми весами). Если Т ки не содержит
производных от и порядка т и выше, то условие Тки — 0
является главным.
Пример 3. В задаче
*е(°> ^^(°> о.
7\и = и (0) = 0, Д-au I =0, о>0,
ах |х-1
§21
МЕТОД РИТЦА
33
согласно рассмотренному признаку условие Тги — 0 — главное,
Т2и = 0 — естественное. Действительно, здесь дифференциальный
оператор —dPu/dx2 — порядка 2m = 2 при /л = 1, а так как
условие 7,iU = u(0) = 0 не содержит производных от и порядка
выше m — 1 = 0, то это условие главное. С другой стороны,
в выражение Т2и = du/dx + ои входит первая производная (т.> е.
порядка выше m~ 1 =0), и это условие естественное. Отметим,
что в Т2и имеется также член вида аи, наличие которого не на-
рушает естественности условия 7’2« = 0.
Пример 4. Рассмотрим задачу
--^p(-x^ + q(-x)u^ = ^x^' хе(°>
u(0) = -J-(l) = 0, p(x)>0, <?(х)>0,
где р(х), q (х) — достаточно гладкие ограниченные функции. Тре-
буется охарактеризовать дифференциальные свойства функций
из энергетического пространства оператора задачи и определить,
каким краевым условиям они обязательно удовлетворяют (главные
условия), а каким могут не удовлетворять (естественные условия).
Рассматриваемую задачу можно записать в операторной форме:
Au = f, f Н = L2(0, 1),
где
Au=-ip^^+q(x)u’
D(A) = {u: u^Wl(0, 1), Ы(0)=^-(1) = 0},
где W'i (0, 1) — гильбертово пространство функций со скалярным
произведением
1
. . С / сРи d2v . du dv , \ ,
(и, V),v.2= \ -у-у 4- -г~ + uv dx
' j \ dx2 dx2 1 dx dx 1 j
0
и нормой \\ufwl = (u, u)1^.
В силу того, что
1
(Аи, v) = j + uvjdx = (Av, и),
А симметричен; а поскольку p (x) и q (x) положительны, то А по-
ложительно определенный. На основании этих свойств можно
ввести скалярное произведение
V^^Pd^ddx + qUV)dx
о
2 Г. И. Марчук, В. И. Агошков
34
АЛГОРИТМЫ ПРОЕКЦИОННОГО МЕТОДА
[ГЛ. 1
и норму
[ы] = [и, и]1'2.
Пополняя D (Л) в метрике [ ], получаем энергетическое про-
странство На-
^Рассмотрим вопросы, поставленные в примере. 1) Поскольку
функции р(х) и q(x) положительны, то для произвольного эле-
мента и е= НА
Со IU Ц < [«] С11| и Ц, с0, С!>0,
где ^ = ^(0, 1) — гильбертово пространство со скалярным про-
изведением
(u, v) 1 =;= С uv\dx
' ' J \dx dx 1 J
о
и нормой
(1 \ 1/2
S (I S Г+1 “,a)’
0 ' /
Таким образом, если и <= НА, то u е Wi, т. е. любая функция
из энергетического пространства суммируема а квадратом и обла-
дает суммируемой с квадратом производной.
Получим неравенство, которое будет полезно в дальнейшем.
Пусть тогда u(x)^W{. Запишем тождество:
X
u(x)=^^dx" + u(x'), х, х' е [0, 1].
х'
С использованием неравенства Коши — Буняковского получаем
12
dx + | и (х )
|«(х)|2<2 j |g|2dx + 2|u(x')|2.
Интегрируем последнее соотношение по х'; тогда
1 I
]u(x)|2=sS2 § ^~-fdx + 2 \u(x')?dx',
о о
I и (X) I < с I и 11^..
« 2]
МЕТОД РИТЦА
35
Если учесть, что функция и (х), принадлежащая (0, 1), яв-
ляется в то же время и непрерывной, причем при х, х'е [О, 1]
^|x-x,|1/2II«Iu4(0.i)_>0 пРи Iх-(2-16)
то мы приходим к неравенству
|«|с[о,и= max |и(х)| =^c|Ju
хе [0,1] 211 1
(2-17)
где постоянная с не зависит от функции и (х).
2) Покажем, что любая функция и е НА удовлетворяет усло-
вию и (0) = 0, которое, таким образом, оказывается главным.
Для этого рассмотрим последовательность {ит}, um^D (Д), схо-
дящуюся к и по норме [•] (очевидно, что по построению НА
такая последовательность существует), и запишем (2.17) для раз-
ности (и — ит):
max |u(x) —um(x)|=ssc||« —t.
хе [0,1]
Но | и — ит ->0 при т->схэ, так что в любой точке хе[0, 1]
имеем | и (х) — ит (х) | 0, m —оо. Таким образом, | и (0) — ит (0) | =
= | и (0) | —>0 при т->-оо, т. е.
и (0) = 0.
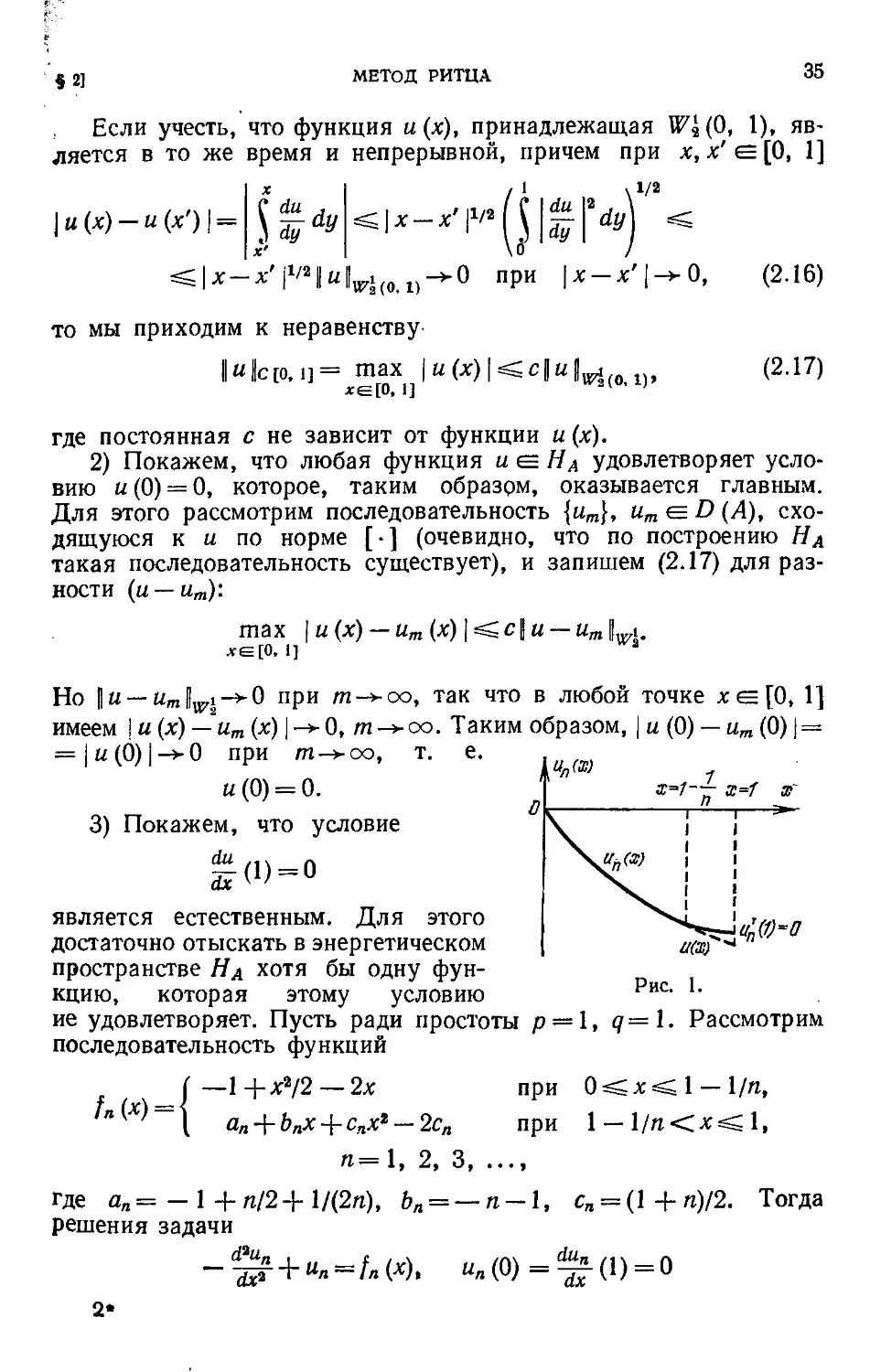
3) Покажем, что условие
^(1) = 0
dx v '
является естественным. Для этого
достаточно отыскать в энергетическом
пространстве НА хотя бы одну фун-
кцию, которая этому условию
ие удовлетворяет. Пусть ради простоты
последовательность функций
Рис. 1.
р — 1, q=l. Рассмотрим
—1 4-х2/2 — 2х
ап + Ь„х + с„хг-2с„
при 0=Сх=С1 —1/п,
при 1 —1/п<х=С1,
п=1, 2, 3,
где ап= — 1 + n/2-f- l/(2n), bn = — п — 1, = (1 + п)/2. Тогда
решения задачи
(*)» «л (0) =^-(0 = 0
2*
36
АЛГОРИТМЫ ПРОЕКЦИОННОГО МЕТОДА
[ГЛ. 1
находятся явно и имеют вид—2х-|-х2/2 приО^х=С1 — 1/п,
ап + Ьпх-\-спх2 при 1 —l/n<x==Sl (рис. 1).
Последовательность {и„ (х)} сходится в энергетической метрике
[•] к функции и(х) — хг/2— 2х. Действительно,
[» - и,]• - f (pg*11" + | и - u„ Is) dx -
1 — Мп
Но при хе(1-1/я, 1) имеем |du/dx| = [x|^2, |du„/dx| =
= I bn + 2cnx | -C 2, | и (x) | 2, | un | ==£ 2, поэтому [и — un]2 =sS
*-0. n-+co. Однако (1) = 1, в то время как ~ (1) = 0.
Итак, найдена функция и(х) из энергетического простран-
ства НА, не удовлетворяющая краевому условию ^-(1) = 0,
но являющаяся пределом элементов из области определения D (Д)
оператора задачи А, которые этому условию удовлетворяют. Та-
ким образом, условие ^(1) = 0 в данной задаче — естественное.
4) В заключение этого примера проиллюстрируем применение
признаков определения главных и естественных условий, сформу-
лированных выше. Один из них применяется совсем просто: так
как оператор А = — + Q — второго порядка, то 2т = 2 при
т—\. В краевое условие и (0) = 0 входит «нулевая» производная,
т. е. порядок ее не вышет- 1 = 0; следовательно, это условие —
главное. В условие ^-(1) = 0 входит производная порядка 1>
> т — 1 = 0; значит, условие ~ (1) = 0 — естественное.
Рассмотрим применение второго признака. Отметим, что функ-
ционал Ритца в данном случае имеет вид
4- qu* — 2uf]dx,
и Дд-
Допустим, что существует функция и (х) е НА, реализующая
минимум этого функционала. При этом мы не требуем, чтобы эта
функция удовлетворяла условию равенства нулю первой произ-
водной при х=1. Предположим ради простоты, что «(х) обла-
(1^11
дает второй производной ^^L2(0, 1) (для данной задачи это
можно легко доказать), a (ei2(0, 1). Поскольку и реали-
§ 2J
МЕТОД РИТЦА
37
зует минимум F (и), то первая вариация функционала, определяе-
мая как
6F(«, т]) = F (и + ат]) |а_о, т]еНл,
должна равняться нулю. Вычисляя 8F (и, т]), получаем
1
6F(U, т]) = 2 ^p~^ + quTt]-fr^dx = O.
о
В силу предполагаемой гладкости функций р(х), q(x), и(х) можно
выполнить интегрирование по частям, в результате чего послед-
нее равенство примет вид
1
„ f / d du , Л , , „ / du I du I \ n
2\[~dXPdx+C<U-fhdx+2\P^^\^-P^%J=0-
0
Отсюда, в силу произвольности т] (х) и так как т] (0) = 0, а р (х) >
> 0, следует, что и (х) удовлетворяет уравнениям
~TxP^ + (fu = f^
(условию и(0) = 0 функция заведомо удовлетворяет). Итак, в чис-
ло необходимых условий реализации функцией и (х) е НА мини-
мума F (и) входят два уравнения (2.18). Первое из них есть
основное дифференциальное уравнение нашей задачи, а второе
есть краевое условие. Это условие, таким образом, является
естественным, и решение и (х) (при наличии соответствующей
гладкости) ему заведомо удовлетворяет.
Пример 5. Пусть в рассмотренном выше примере р(х) имеет
разрыв первого рода в точке х0 е (0, 1). В этом случае задача
формулируется так: требуется определить функцию и (х), удов-
летворяющую почти всюду уравнению
Аи = - Zxp W ЙГ + ?и =
Х£(0, х0), Х£(хо, 1),
и условиям
ы(0) = ^(1) = 0, ц(хо-0) = «(хо + 0),
. . . , X (2.19)
р£ (^о-°)= (^о + 0)-
Какое из последних двух условий (называемых условиями сопря-
жения) является главным, а какое естественным?
38 АЛГОРИТМЫ ПРОЕКЦИОННОГО МЕТОДА [ГЛ. 1
В качестве области определения D (А) оператора задачи (2.19)
возьмем множество
D(A) = {u:geL2(0, l),^pf eL2(0, х0), ^р^^Ц(х0, 1),
“ (°) = 5F U) = °. (Р £) (*> - °) = (р (*о + 0)}.
Введем на этом множестве норму
(1 \1/2
$ (p|£|2+<7l“l2)dx) •
Пополним затем D (Л) в норме [ • ], т. е. присоединим к D (Л)
предельные точки всевозможных сходящихся по норме [ • ] после-
довательностей {uk}c.D(A). Тем самым построим энергетическое
пространство НА, имеющее ту же структуру, что и в предыду-
щем примере. А поскольку функции из НА являются непре-
рывными (это можно заметить из (2.17)), то эти функции удовле-
творяют условию и (х0 — 0) = и (х0 + 0); следовательно, оно глав-
ное. Если теперь предположим, что в НА существует и (х),
реализующая минимум функционала Ритца (он имеет прежний
вид), то, вычисляя первую вариацию и приравнивая ее нулю,
мы придем к следующим необходимым условиям минимизации
функционала Ритца функцией и(х):
~ + хе(0, х0), хе(х0, 1),
S-(l)-0. (р £>-») = (₽£> + <>)•
Следовательно, второе условие сопряжения является естествен-
ным, а значит, при решении задачи энергетическим методом ба-
зисные функции можно выбирать не удовлетворяющими этому
условию.
Пример 6. Рассмотрим уравнение
2 2
- 2 2 iav^+a(x)u=f(x^ (2-2°)
.=1/=1 * '
где x=(xi, x2)gQ, Q — ограниченная область из R2 с непре-
рывно дифференцируемой границей 3Q. Считаем, что коэффици-
енты Цу(х) непрерывно дифференцируемы в Q = Q-|-dQ и atj —
— ар, а коэффициент а (х) положителен и ограничен в Q. Пусть
для / (х) выполнено условие max | / (х) | < оо. Кроме того, урав-
5 2)
МЕТОД РИТЦА
39
некие предполагается эллиптическим, т. е. для любого ненуле-
вого вектора g = (£i, £г) выполнено соотношение
2 2
У,
i,i=l 1 = 1
для любой точки xeQ. Здесь р,0 — положительная постоянная,
не зависящая от х и
Если к уравнению (2.20) присоединить краевое условие Ди-
рихле
и = 0 на dQ, (2.21)
то мы приходим к постановке первой краевой задачи (2.20), (2.21):
необходимо найти непрерывную в Q функцию и (х), обладающую
непрерывными в Q вторыми производными и удовлетворяющую
почти при каждом хе Q уравнению (2.20), а также условию
(2.21).
Если вместо (2.21) ввести условие
^-=0 на dQ, (2.22)
dN ' '
где конормальная производная du/dN определяется следующим
образом:
2
^-==^2^^-(х)^со5(п, xt),
и —единичный вектор внешней нормали к dQ, то приходим ко
второй краевой задаче (2.20),_(2.22): необходимо найти непре-
рывно дифференцируемую в Q функцию и (х), обладающую не-
прерывными в Q вторыми производными и удовлетворяющую
почти при каждом хе Q уравнению (2.20), а также условию
(2.22).
Аналогично ставится третья краевая задача для уравнения
(2.20), в которой краевое условие уже имеет вид
^- + а« = 0 на dQ, (2.23)
где о (х) > 0 — некоторая функция, определенная на dQ.
Пусть требуется определить энергетические пространства за-
дач (2.20), (2.21) и (2.20), (2.22), а также выделить в них глав-
ные и естественные краевые условия.
Прежде чем ответить на поставленные вопросы, отметим, что
при исследовании задач для уравнения (2.20) (а также многих
40
АЛГОРИТМЫ ПРОЕКЦИОННОГО МЕТОДА
[ГЛ. 1
других уравнений математической физики) большую роль играет
формула интегрирования по частям'.
§ v('x')^dx = ~ $ u^dx^~ $ uycos(«. x{)ds, (2.24)
Й Q dQ
где « — единичный вектор внешней нормали к dQ, а также фор-
мулы Грина, которые легко можно получить из формулы (2.24).
Первая формула Грина-.
т
^vLudx= aik^^dx + auv dx — v ds, (2.25)
a i, a=i о о до
где
т т
Lu=~l 1&(а^ё-+а^и’
i=l /s=l
т
ди V ди , . ,
2j cos (п, Xi), X = (X!..xm).
I. Й = 1
Вторая формула Грина',
т
\uLudx= У f alk^~dx-\- f au2dx — f u~ ds. (2.26)
•J «J С'Л/ Д *1 CzlV
Й M = l Q Й do
Третья формула Грина-.
(vLu — uLv)dx= v^)dx. (2.27)
Й do
(Будем считать, что входящие в (2.24)—(2.27) функции и гра-
ница <9Q — достаточно гладкие.)
Обозначим через D (Д) область определения оператора
2 2
Ды =—У У ~ ац^--\-аи,
dxi 4 дх,- 1 ’
i=l/=1
в которую включим функции, непрерывные в Q, дважды непре-
рывно дифференцируемые в Q и удовлетворяющие условию (2.21).
Тогда (2.20), (2.21) можно записать в виде уравнения
Ди = Л f^H.
Здесь через Н = L2 (Q) обозначено гильбертово пространство
функций и (х) со скалярным произведением
(и, v) = (u, v)l,(Q)= и (x)v (х) dx
а
§ 2]
МЕТОД РИТЦА
41
и нормой
8«II = II« к,(«) = («. “)1/2 = МI «I2 dx}1'*.
\о /
Воспользовавшись формулой (2.25) и учитывая (2.21), легко
показать, что оператор А — симметричный:
(2 \
2 (х)^.^ + аМфф1^=(<Р, Дф),
7» / = I '
Ф, -ф D (Л).
А так как а (х) > 0, то
2
(Дф. ф) SS Ио 2 $ (Й7 dx + $ а W Ч’2 dx V2' Ф II2.
1=1 а 1 а
где у>0. Следовательно, рассматриваемую задачу можно ре-
шать методом Ритца. Энергетическое пространство Нд, возникаю-
щее здесь, имеет соответственно скалярное произведение и норму
(2 \
2 ач W Й) 5Г + а W И dx>
/== 1 1 1 !
(2
2
i. j=\
1/2
(2.28)
+ а (х) гр2 dx
Согласно одному из изложенных выше подходов, помогающих
отличить главные краевые условия от естественных, условие Ди-
рихле (2.21) будет главным. Функционал, который минимизи-
руется в данной задаче на пространстве Нд, имеет вид
(2 \
2 аи (х) 1г + а“2 — 2иЛ dx. (2.29)
i.i=\ ‘ ' )
N
Если минимизировать F (и) на функциях вида akq>k(x),
*=i
то базисные функции необходимо выбирать так, чтобы фА = 0 на
д£1, т. е. чтобы они удовлетворяли главному краевому условию.
Рассмотрим (2.20), (2.22). Оказывается, что оператор задачи
Д —вновь симметричный и положительно определенный. Соответ-
ствующее ему энергетическое пространство имеет скалярное про-
изведение и норму того же самого вида (2.28), что и для задачи
Дирихле. Однако функции из НА в данном случае могут уже
не удовлетворять условию (2.22), которое, таким образом, оказы-
вается естественным (см. пример 4). Поэтому, если минимизиро-
42
АЛГОРИТМЫ ПРОЕКЦИОННОГО МЕТОДА
[ГЛ. 1
вать функционал F (и) (того же вида (2.29)), то базисные функции
можно выбирать не удовлетворяющими условию (2.22).
Итак, в рассматриваемых задачах энергетические пространства
различны. В первой из них для функций из На всегда выпол-
нено (2.21), во второй же может оказаться так, что функции из
Нд вообще не удовлетворяют (2.22). Как мы увидим в после-
дующих главах, эти обстоятельства играют существенную роль
при аппроксимации решений этих задач, а также при численной
реализации всего алгоритма.
§ 3. Метод Бубнова — Галеркина
Основным недостатком метода Ритца является то, что он при-
меним только для уравнений с симметричными положительно
определенными операторами. От этого недостатка свободен другой
алгоритм проекционного метода — метод Бубнова —Галеркина
(иногда его называют просто методом Галеркина). Прежде чем
дать его описание, сделаем следующее замечание.
Как уже отмечалось в § 1, следует различать случаи, когда
базисные функции {tpj не зависят от N и когда эта зависимость
имеет место. В первом случае для подпространств HN, являю-
щихся линейными оболочками {<pj, N=l, 2, ..., имеет место
включение Hi cz Н2 cz Н3 cz... Во втором, как правило,
#= <p<w’> при (Vj #= N и отмеченного включения может не быть.
Различие в базисах часто необходимо учитывать при изучении
вопросов разрешимости, сходимости и т. д. Так, приводимая ниже
теорема 1 (а также теоремы из §§ 5, 6) доказывается для случая,
когда Hi cz Н/, при i < k. Если же базисы не удовлетворяют
этому свойству, то в ряде случаев применимы схемы доказа-
тельств, изложенные в примере 2 и теореме 2, в § 7 при рас-
смотрении проекционного метода, а также в § 10.
3.1. Случай оператора с самосопряженной главной частью.
Пусть в нашей основной схеме выполнены следующие предположе-
ния: К = 1, <рг = фь L = Я + В — линейный оператор, который
может быть несимметричным, неограниченным и не быть положи-
тельно определенным. В этом случае уравнение имеет вид
Lu = Au + Bu = f, f^H. (3.1)
Здесь будет рассмотрен лишь случай, когда А (главная часть
оператора L) — самосопряженный положительно определенный
оператор. Введем, как это сделано в § 2, энергетическое прост-
ранство Ид оператора А со скалярным произведенпем [и, и] и
нормой [ц] = [и, м]1/г. Умножим (3.1) скалярно в Н на произ-
§ 3]
МЕТОД БУБНОВА — ГАЛЕРКИНА
43
вольную функцию аеО(/1). Тогда приходим к равенствам, кото-
рым удовлетворяет решение уравнения:
(Au, v) + (Bu, v) — (f, v), (3.2)
[и, о] + (Вм, а) = (/, v). (3.3)
Равенство (3.3) допускает уже обобщенную постановку задачи.
Определение. Назовем обобщенным решением уравнения
(3.1) функцию и^НА, удовлетворяющую соотношению (3.3) при
любых veHA.
Предположим, что такое обобщенное решение существует.
Если при этом окажется, что u^D (Д), то в силу соотношения
[и, v] = (Au, о) получим (Au + Bu — f, и) = 0. Поскольку по пред-
положению D (Д) плотно в Н, то плотным в Н будет и НА. Поэ-
тому из последнего соотношения делаем заключение, что и удов-
летворяет также (3.1).
Сформулируем метод Бубнова — Галеркина для решения рас-
сматриваемой здесь задачи:
1) В НА выбираются базисные функции {<р/}, т. е. Здесь доста-
точно, чтобы <рг принадлежали НА, а не D(A).
2) Приближенное решение uN ищется в виде
N
uN—^i aiVl- (3.4)
i = l
3) Коэффициенты at определяются из системы уравнений вида
luN, <Pz] + (В«„, фг) = (/> фг)» i—1> •••» Н, (3.5)
или, в матричной форме,
ta = f, (3.6)
где L = (Lij), Lij = [q>it Ф,] + (В<ру, Фг), а = (аъ ..., aN)T, f =
— (fi, • •» /w)r> = Vt)- После определения at из (3.6) строим
приближенное решение по формуле (3.4).
Теорема 1 [74]. Пусть (3.1) имеет единственное обобщенное
решение и оператор Т = А~~1В вполне непрерывен в НА. Предпо-
ложим также, что последовательность подпространств Нм,
являющихся линейными оболочками {<рг}, предельно плотна в НА-
Тогда при достаточно больших N метод Бубнова — Галеркина
дает единственное приближение uN. Последовательность uN схо-
дится по норме На к обобщенному решению и.
Доказательство. Представим (3.3) в виде
[м, и] + (АА~хВи, v) = (f, v), [и, и] + [Д-1Вм, v] = (f, v).
44
АЛГОРИТМЫ ПРОЕКЦИОННОГО МЕТОДА
[ГЛ 1
В силу положительной определенности оператора А имеем
[м]2 у21| и ||2, и е На, у > 0; значит, при любом v е На
КА v) I с = у-
Следовательно, из теоремы Рисса о представлении линейного
ограниченного функционала в гильбертовом пространстве выте-
кает существование такого единственного элемента f е На (легко
заметить, что = что (f, v) = [f', v]. Поэтому
[и, ц] + |7м, «] = [/', «]. (3.7)
где Т = А~гВ, т. е. обобщенное решение рассматриваемой задачи
является решением уравнения u-\-Tu = f', рассматриваемого
в НА и имеющего вполне непрерывный оператор Т. Заметим
также, что равенство (3.5) можно представить в виде
[w.v, Фг] + [7’мдг, Фг] = [/', ф/], 1 = 1, •••, N. (3.8)
Если обозначить через {фг} систему, полученную путем орто-
гонализации {<рг} в /7л-метрике при нормировке [<рг] = 1, то и
СО
может быть представлена в виде и = С/Фь ci — [и, Ф/]> причем
i = i
ряд сходится в На и коэффициенты с{ удовлетворяют уравнениям
СО
0 = [и + Ти, Ф4- [Г, фг] = с, + 2 сДТфу, фД — [Г, фД,
/=1
1 = 1,2, ....
т. е. системе
Cf + S yijCj^bt, i = l,2, .... (3.9)
, = i
где tv = [T$7, Ф/], bi = [f', = фг).
Одновременно с (3.9) рассмотрим урезанную систему
+ £ i=l, N. (3.10)
/=|
Полная непрерывность Т в На и однозначная разрешимость
задачи (3.1) гарантируют существование такого No, что при
система (3.10) имеет единственное решение с(Л/> =
= (c<JV), ..., (доказательство этого см., например, в [29],
стр. 426), при этом вектор с(т = (с*^, ..., 0, ..., О)7" схо-
/ оо \ 1/9
дится к решению системы (3.9) в метрике ||с|1/, = (2 d • Это
§ 3J
МЕТОД БУБНОВА — ГАЛЕРКИНА
45
в свою очередь означает, что функция и<т = У\ сходится
z = i
к решению задачи и в метрике [•]. Покажем, что m(7V> = мдг. Для
этого отметим, что из процесса ортогонализации {Фг} имеем
Фу = 2j ₽лФь ₽и=йО, /=1..........N,
i=i
где коэффициенты ру7 образуют нижнюю треугольную матрицу
В=(р/7), в которой р/г = 0 при i>j, i, j=l, ..., AE Подейст-
вуем на обе части (3.6) матрицей В и запишем систему в виде
(BLBT) (В т)-1а = Bf. (3.11)
В силу соотношений
(BLB7’)i/ = £ р.7 £ р/й[Фг, Фй] + рк 2 руй[ТФг, Фй] =
Z=1 А=1 Z=1 k=l
~ N
5 ₽«Фь
Lz = i
= [Фь Фу]+17Фь Фу] = +17Фь Фу].
N
(Bf)i = 2 рг/(Л Ф;) = (Д фг) = &г
/=1
системы (3.10), (3.11) тождественны (т. е. матрицы и векторы
правых частей совпадают). Отсюда заключаем, что (3.6), наряду
с(3.10), однозначно разрешима, причем (ВГ)-1а = с(л/) и a==BTc(N'>.
Но тогда
N N / N \ N N
UN — a‘<Vi = JEj \ ) Ф< = су S Р//Ф»=
i = l i= 1 \/=1 / /= 1 1 = 1
N i N
= S ci 5 Р/«Ф« = 5 с/Фу = u(N)-
i=i z=i /=1
А это сразу же доказывает утверждение теоремы о сходимости
= в метрике [ •] к точному решению задачи.
Замечания. 1) Если выполнены условия теоремы 1, то
более тонкий анализ позволяет доказать также следующие
оценки [20]:
min и — У с/фг
ci l z=i
[N
« — с'ф<
Z=1
(3.12)
где ev->0 при N-+co.
46
АЛГОРИТМЫ ПРОЕКЦИОННОГО МЕТОДА
[ГЛ. 1
2) В рассмотренной модификации метода Бубнова — Галеркина .
базисные функции (так же как и в методе Ритца) можно выби-
рать не удовлетворяющими краевым условиям, если они оказы-
ваются естественными.
Пример 1. Рассмотрим задачу вида
хе(0,1).,>0,
u(0) = u(l) = 0,
или, в операторной форме,
Аи 4- Ви = f,
где Аи =— d2u/dx2, Bu = du/dx + <7«, # = L2(0, 1), О (А) —мно-
жество дважды непрерывно дифференцируемых на (0, 1) функций,
удовлетворяющих краевым условиям. В данной задаче НА = W't —
гильбертово пространство, состоящее из функций, принадлежа-
щих №3 (0, 1) и удовлетворяющих краевым условиям из (3.13).
Скалярное произведение и норма в (0, 1) имеют тот же вид,
что и в Wi (0, 1):
1 ( 1 \1/2
(«. ||и^= П1£Г+|и|2Ж •
о 'о /
Поскольку
1
(Au, и) + (Ви, и) — J(|£|2 + <7|M|2)dx^y2(U&4, у>0, (3.14)
О
то обобщенное решение задачи (3.13) в НА единственно. Но опе-
ратор задачи L = А + В не является симметричным, так что для
приближенного решения (3.13) нельзя воспользоваться методом
Ритца, в то время как условия применимости метода Бубнова —
Галеркина выполнены. В качестве базисных функций <рг можно
взять собственные функции оператора Аи = — d2u/dx2, u(0) =
= u(l) = 0: <р,- = sin inx. Система {<pj, как известно, полна в W$.
Кроме того, доказано, что оператор А~гВ вполне непрерывен
в НА [29]. Следовательно, все условия теоремы 1 выполнены, и
приближенные решения, построенные по методу Бубнова — Галер-
кина, будут сходиться к точному при Af->oo, и они имеют вид
N
uN — X at sin inx,
t = i
где at определяются из системы (3.6), которая имеет вид
La = f, (3.15)
§ 31
МЕТОД БУБНОВА - ГАЛЕРКИНА
47
где
£ = (Ly), /=(А, ...» fN)T,
= § ^W + ^(pi + (/(p!(p^dXt = 4i) = \f (X) <P< (X) dx.
0 x 0
Пример 2. Пусть С (0, 1) и Cw (0, 1)— пространства соот-
ветственно непрерывных и дважды непрерывно дифференцируе-
мых на (0, 1) функций с нормами
2
ЯUlie(0,1)== max | и (х) |, I “ 1с<«> <о, о = У S
xe(o,i) i=o Hcto.i)
Предположим, что в (3.13) функция f (х) принадлежит С (0, 1).
Тогда для рассматриваемой задачи при q (х) е С (0, 1) имеем
и (х) е С<2) (0, 1). Оценим при этих ограничениях скорость схо-
димости приближенных решений uN, построенных в примере 1,
к точному решению м(х) при N^<x>.
Отметим, что и (х) удовлетворяет равенству
[и, v] + (Bu, о) = (/, v) (3.16)
при любом v е НА, в том числе и при и = <рг = sin inx, i = 1.N.
С другой стороны,
[«м, <р(] + (5“лг, <Р<) = (А <₽z), i = l, N- l(3-17)
Из (3.16) и (3.17) имеем
[u — uN, <fi] + (B(u — uN). <р,) = 0,
N Л / N \
U — UN, 2 Citpi +[B(U — UN), 2 Ci<pi 1 — 0
(=1 J \ i = l /
при любых постоянных ct. Запишем тождество
[и — uN,
u — uN] + (B (и — uN), u — uN) =
N
(u — uN)— У c,<pz +
U — UN,
/ N
+ [B(u — uN), (u-uN) — 2 c^i
\ i= 1
(3.18)
Но {фД есть ортогональный базис в НА, поэтому обобщенное
СО
решение м(х) можно представить в виде и= t^sininx, причем
I “ l!Vi = П1S R IЙ Г +1 “ фх =4 2 Ul (n<i< + +1). (3.19)
b i.= i
48
АЛГОРИТМЫ ПРОЕКЦИОННОГО МЕТОДА
[ГЛ. 1
Выберем теперь в (3.18) с, —и, — at. Тогда (3.18) принимает вид
[и —uN]2A-(B (и —uN), u — uN) =
Г N 1 I N \
= и — uN, и — 2 «,Фг + [В (и — uN), и— v U/<pA
L i = i J \ i==i /
А поскольку
(В (и — UN), и — UN) + [и — UN]2 у2[« — UN]2,
А Г IV
u—uN, и- У, UiVi ^[u—Цд,] ц— 2 utqi
i-=\ i L 1=1
' N
B(u-uN), u- 2 uz<pz
i= i
^c0[u — uN]
где c0>0, то приходим к неравенствам
[N ] Г N
“ - S M/ф J + Co [« - M « - У “.Ф/
1=1 J L t=l
N 12
У “;Ф<
i=l
Uji2n2.
В силу (3.19) имеем
2 (М+!)2Я2
£=M4-1
«|<4л4
1
(W+l)2n2
ui (14л4 + *2Л2+ ИГ^ —
i = N +
Следовательно, [и — uN] c/(^ +1).
Из последнего примера можно сделать заключение, что иногда
на практике при исследовании сходимости приближенных реше-
ний к точным и получении оценок скорости сходимости в методе
Бубнова —Галеркина с успехом можно пользоваться методикой,
аналогичной примененной в примере 2. При положительной опре-
деленности оператора L = А + В автоматически будет иметь место
также и однозначная разрешимость системы (3.5). Поэтому в ряде
случаев в алгоритме Бубнова —Галеркина удается сравнительно
§ 3J
МЕТОД БУБНОВА - ГАЛЕРКИНА
49
просто исследовать вопросы разрешимости и сходимости, исполь-
зуя специфические свойства задачи.
Изложим методику, проиллюстрированную в примере 2, в бо-
лее общей формулировке.
Теорема 2. Пусть-. 1) уравнение (3.1) имеет единственное
обобщенное решение иеНА', 2) форма L(u, и) = [м, и] + (Вм, v)
является Н^определенной и Н ^ограниченной, т. е. для нее выпол-
нены соотношения L(u, и) Ssyo[«]2, \L(u, v) | [«]М» Vo, Yi =
= const; 3) последовательность подпространств {Я/Д, где Нм —
линейная оболочка функций {<р,-}, i = 1, ..., N, предельно плотна
в НА.
min
N
и— 2 Cjtpi
1=1
< е (и, N) О,
N —>• оо,
где е(и, N) — оценка погрешности аппроксимации. Тогда при
любом конечном N система (3.6) однозначно разрешима, прибли-
женное решение им сходится к и при N ->оо в метрике [•], а
также справедлива оценка погрешности
[u — uN\^ce(u, N).
Доказательство. Учитывая [«]2>=-Д||ц||2, и^.НА, легко
доказать положительную определенность матрицы L системы (3.6).
Действительно,
м j n N \
Li;c;cy = L J] с,ср,-, с,<ргЫ
i,j = l 4 = 1 1=1 /
при с = (ст, ..., слг)г=И=О = (О, ..., О)7’. Следовательно, система
(3.6) имеет единственное решение а = (аг, ..., aN)T, которое в свою
очередь однозначно определяет приближенное решение uN~
N
= 2 Для доказательства сходимости запишем тождества
i= 1
L (и, q>i) = (/, <Pi), L (uN, <Pi) = (f, <Pi), L (u — uN, <Pi) = 0, i = 1,..., N,
I N
L(u — un, u — Um) = L\u — un, и— c,<pi
\ t = i
50
АЛГОРИТМЫ ПРОЕКЦИОННОГО МЕТОДА
(ГЛ. 1
где Ct, i'=l, А/, — произвольные постоянные. Учитывая Яд-
ограниченность и Яд-определенность формы L (и, v), имеем
[U — Мдг]2 ^L(u — uN, и — uN) =
/ N \
= L[U — UN, U— Сгф{ Utf]
\ 1 = 1/
N
U — 2
i= 1
To
N
u - 2с®1
i=\
В силу произвольности ct справедливы также неравенства
N
N)-+0,
N —> oo.
Теорема доказана.
Замечание. В приведенной выше теореме, в отличие от
теоремы 1, не требуется включения подпространств HN1^Hn2
при что расширяет область ее применения. В частности,
она применима (естественно, при выполнении остальных условий)
при рассмотрении базисов, изучаемых в последующих главах.
3.2. Общий случай алгоритма Бубнова — Галеркина. Пусть
здесь, как и в п. 3.1, К = /, <pz = ip,-, но линейный оператор А
(так же как и L = А + В) может не быть симметричным, ограни-
ченным и положительно определенным. Алгоритм Бубнова —
Галеркина построения приближенного решения уравнения (3.1)
состоит в следующем:
1) Выбираются базисные функции i = l, ..., N, q>i^D(A).
2) Приближенное решение ищется в виде (3.4).
3) Коэффициенты а, определяются из условия ортогональности
невязки Lun — f к <ръ ..., ср#:
(LuN — f, <pi) = 0 i = 1, ..., N, (3.20)
или
N
2 (ср,, L<p*)a* = (/, <pz), i = l, ..., N. (3.21)
k= i
Отметим, что уравнения (3.21) по форме совпадают с соответ-
ствующими уравнениями алгоритма Ритца (если ф;еО(Ц). Таким
образом, если L — симметричный положительно определенный
оператор, то методы Бубнова —Галеркина и Ритца совпадают.
Обозначим через HN линейную оболочку системы {<р;}, / =
= 1, ..., N, а через LHN — линейную оболочку функций {L<pJ.
= 0.
$ 31 МЕТОД БУБНОВА — ГАЛЕРКИНА 51
Заметим, что если однородное уравнение Lu = 0 имеет только
нулевое решение, то функции £ф1, ..., £<рдг линейно независимы.
Действительно, в противном случае нашлись бы clt ..., cN, не
N i N
равные одновременно нулю и такие, что У cjL<p,- = L( У с(ф,-
4=1 \4=1
АГ
Но тогда 2с;<р,= О и сг = 0, i=l, N. Таким образом, при-
4=1
ходим к противоречию в силу линейной независимости функций
{ф,}, i=l, ..., N.
В дальнейшем нам потребуется понятие L-полноты системы {ф/}.
Определение. Последовательность линейно независимых
функций {ф,}, i = l, N, назовем L-полной, если, каковы бы
ни были ueD(L) и число е>0, можно найти N0 = N0(u, е) и
II / N° \ II
постоянные clt cNo такие, что Liu— У c^i] <е.
II \ 4=1 /И
Для формулировки теоремы сходимости нам необходимы будут
понятия оператора ортогонального проектирования и проектора.
Пусть /Их — замкнутое линейное подпространство гильбертова про-
странства Я, а М2—ортогональное дополнение подпространства Mv
Известно, что всякий элемент и е Н может быть единственным
образом представлен в виде и = и1-\- и2, где щ е Мг, и2 е /И2.
Отнесем каждому элементу и его проекцию на М±. Полученное
соответствие есть оператор в Я. Обозначим его через Рг и по
определению имеем PjU = ux. Оператор Pi называют оператором
ортогонального проектирования или ортопроектором на подпро-
странство Mlf a Uj — ортогональной проекцией и на /Их. Отметим
свойства ортопроектора Pf. 1) Рг — линейный самосопряженный
оператор; 2) ||Pi|| = 1; 3) Pi = Pi.
Оператор Ри заданный на пространстве Я (или на некотором
множестве из Я), назовем проектором на подпространство /Иъ
если он обладает свойствами: 1) каков бы ни был элемент иеЯ,
Р^еЛ^, т. е. 2) Р1 = Рг.
Чтобы иметь представление о структуре ортопроектора на
конечномерное подпространство, рассмотрим следующий пример.
Пример 3. Пусть Ядг — конечномерное подпространство гиль-
бертова пространства Я. Базис в HN обозначим через фь ..., фдг.
Найдем выражение, с помощью которого определяется оператор
ортогонального проектирования PN на Нщ. Для ортогонального
проектора разность u — PNu должна быть ортогональна в Я
любой функции v^HN, т. е. (и — PNu, и) = 0. Но v представима
N
в виде v = с№ с некоторыми коэффициентами ср, следовательно,
4 = 1
должны выполняться соотношения (u — PNu, ф() = 0, i = 1, ..., Я.
52
АЛГОРИТМЫ ПРОЕКЦИОННОГО МЕТОДА
[ГЛ. 1
N
Если записать иг = PNu в виде = У ^<р£, то приходим к урав-
i = l
нениям
[ N N
(« — У £/ф/, ф») = О, или 2 (ф/, Ф/)?/ = («, ф/), 1 = 1.....N.
\ у=1 / /=1
Матрица этой системы 7Й = М,-,-= (<рг, ф/), есть матрица
Грама, и она невырожденна. Следовательно, система имеет един-
ственное решение, компоненты которого имеют вид
N
L= (М-1),/(и, <Р7), [ = 1.....N.
Отсюда получаем выражение, с помощью которого определяется PNt
N
U1 = PNu = 2 (М-1);/ (и, <р;) <рь
i, i = l
Отметим также, что равенство их = 0 имеет место, если все коэф-
фициенты £,• равны нулю. А это в свою очередь (в силу невыро-
жденности М) приводит к системе (и, <р;) = 0, i = 1,..., N, которая,
таким образом, оказывается эквивалентной равенству нулю орто-
гональной проекции ur — PNu элемента и.
Замечание. Пусть PN — ортопроектор на линейную оболочку
H.v функций Тогда, учитывая изложенное в примере 3,
уравнения (3.20) можно записать в компактной операторной форме:
Px(LuN — f) = 0 или PNLuN = PNf,
которая часто используется при исследовании метода Бубнова —
Галеркина.
Сформулируем теорему сходимости алгоритма (3.21). Пусть
P'n, P'n — операторы ортогонального проектирования на HN, LHn
соответственно. Введем обозначение
где е LHiv, Utf #= 0.
Теорема 3. Пусть-. 1) тдг^тХ), где постоянная т не
зависит от N", 2) система {<р,} L-полна. Тогда последовательность
{Lun} сходится к Lu при любом feH; при этом имеет место
оценка
|| Lu - Lun|| ( 1 + -ЦII / - Pfi’f || (1 +1) И- Pflf ||. (3.23)
\ тлг/ ' т/
Доказательство теоремы повторяет доказательство аналогичных
утверждений из § 7, поэтому оно здесь не приводится.
§ 3] МЕТОД БУБНОВА - ГАЛЕРКИНА 53
Следствие. Если существует ограниченный оператор Lr1,
то имеет место сходимость uN к и при Н-^-со и справедлива
оценка
\U-UN\\^ IIL-1 II (1 + 1) И ~ Pn! II. (3.24)
Проиллюстрируем изложенное выше следующим простым
примером.
Пример 4. Пусть задача
Я2//
_y + <7u = f(x), хе(0, 1), fe=L2(0, 1), ?>0,
u(0) = u(l)=0,
где <? —постоянная, решается методом Бубнова —Галеркина при
базисных функциях Ф/(х) = sinircx, i = I, ..., N. Тогда, если
HN — линейная оболочка системы {Ф/}, то согласно примеру 3
оператор ортогонального проектирования на Нм имеет вид
РЖ=^ £(мА (Аф/)ф/ = 2£ (А Ф/)Ф/.
I = 1 / — 1 1=1
Легко заметить, что ортопроектор на LHN — линейную оболочку
функций L<pi = (i2jr2 + <?) sin »лх» i — 1, ..., N, — имеет ту же самую
структуру:
Р»7=2 £(А <Pi)<Pi = P»7.
<=i
Отсюда имеем HN = LHN, Tjv = 1, т=1>0. Следовательно,
согласно теореме 3 система уравнений метода Бубнова — Галеркина
однозначно разрешима (этот очевидный и простой факт известен
из примеров § 2), а также согласно (3.23) при т=1
I! Z, (ы — «v)|| = || / — LuN^2lf — РмЛ->-0, N-+oo.
Таким образом, из изложенной выше теории следует сходимость
невязки LuN — f к нулю, что не очевидно при рассмотрении этого
примера в § 2 при изучении метода Ритца.
Итак, 1) в методе Ритца при подходящем выборе функций
в ряде случаев удается не только указать сходимость приближен-
ных решений к точному решению в метриках исходного и энерге-
тического пространств, но также получить сходимость к нулю
невязки LuN — f', 2) если в общем алгоритме Бубнова —Галеркина
удается оценить снизу величину тлг>т>0 (что зачастую не
является простой задачей), то можно получить сходимость
в метрике типа ||u||r==jj Lu\. Так, в рассмотренном примере норма
|и||£ эквивалентна норме ЦиЦ^а, и здесь сходимость [Лидт — Д^-д
54 АЛГОРИТМЫ ПРОЕКЦИОННОГО МЕТОДА [ГЛ. 1
при /V—*-оэ равносильна сходимости ||u —Ux|rs->0 при W ->-оо.
Действительно,
lLuN - f |а = | Lun - Lu ||2 =
= (-^(“аг-“) + <7(«аг-«). - ^(uN-u) + q (un-u)} =
= II £* (Un ~ If + 2<71 а <Ылг ~ “> Г + <721 “at - «II2 2& To II «м - и II V|,
1L«X- Л2^т111«аг- "Ife,
где To = min(l, 2q, <?2)>0, yi = max(l, 2q, q2).
(Отметим, что из утверждений, изложенных в § 2 и п. 3.1,
сходимость uN к и в метрике !-|^|, вообще говоря, не следует.)
В заключение рассмотрим пример, в котором при решении
модельной задачи методом Бубнова —Галеркина естественные
условия понимаются несколько иначе, чем в § 2 при изучении
метода Ритца. Легко заметить, что излагаемое ниже может быть
распространено на ряд более сложных задач математической
физики.
Пример 5. Рассмотрим задачу
a^ + bu = f(x), хе (0,1), f е= L2 (0,1) = Н, а, Ь>0, (3.25)
и (0) = 0, (3.26)
и сформулируем ее обобщенную постановку. Для этого умножим
(3.25) скалярно в Л2 на произвольную функцию иеТГЦО, 1) и
выполним интегрирование по частям с учетом условия (3.26).
В результате приходим к равенству
— а[и, ddx) + b(u’ v)+au(l)v(l) = (f, v). (3.27)
Функцию и(х), для которой ||u||24-u2(l)<oo и которая удовлет-
воряет этому равенству при любом v е W2, назовем обобщенным
решением. Отметим, что здесь, кроме требования, чтобы UP +
4-и2(1)<оо, мы не налагаем других ограничений на и. В част-
ности, не требуется, чтобы обобщенное решение удовлетворяло
(3.26).
Предположим, что некоторая функция является обобщенным
решением. Тогда можно легко показать также, что ||dw/dx||<oo.
Найдем необходимые условия выполнения (3.27). Для этого
выполним интегрирование по частям в данном равенстве. В резуль-
тате имеем
+ и) + аы (0) и (0) = 0.
В силу произвольности выбора и е W2 получаем, что и (х) удов-
летворяет почти всюду (3.25), а также условию (3.26). По аналогии
§ 31 МЕТОД БУБНОВА - ГАЛЕРКИНА 55
с методом Ритца это условие (входящее в число необходимых)
также можно назвать естественным в рассматриваемой задаче.
И если мы будем решать (3.25), (3.26) методом Бубнова — Галер-
кина, то базисные функции можно выбирать не удовлетворяющими
(3.26). Но, несмотря на это, приближенные решения uN в пределе
будут подчинены этому условию. Докажем это для (3.25), (3.26).
Пусть {<р,}, i = l, ..., N, есть базис в (0, 1). Тогда алгоритм
Бубнова — Галеркина записывается в виде
N
«№= 5 АФ/, (3-28)
f=i
— a(uN, ^ + b(Ufr, фг) + а«лг(1)Ф,(1) = (/, Ф,),
i = l...N. (3.29)
Подчеркнем, что здесь не требуется, чтобы функции {ф,-} и uN
удовлетворяли (3.26). Не представляет труда доказать однознач-
ную разрешимость (3.29). Исследуем сходимость uN к и при У->-оо.
Запишем тождество
— а (и — uN, — “м)) + Ъ (и — uN, и — uN) + а | и — uN |2 (1) =
= — a(u — uN, ^~х(и — uz)^ + &(и — uN, и — и{) + а(и—uN)(u—«/)(!),
N
где U[= У, сгфг с произвольными коэффициентами сг. Из него легко
получаем следующие соотношения:
-?-(|Ы_иЛгр(1) + |И-иЛгр(0)) + Ь1и-иЛгр =
= — а — uN, (и — + Ь (и — uN, u — Ui)-\-
+ a(u-ui)
^а1и-илг(||-^(и-и/)| + И“-“лгН“--М +
-4-a’ м — uzI (1) I и-илг|(1)^(у |и-ЫлНа(1) + И« — «М F)l/2 X
xc(|i(«-«/)|a+l«-«rF+l«-«zl2(1))1/2- (3.30)
А поскольку для любой функции v е W* (0, 1) справедливо
соотношение |и(1) | ^сЦиЦ^!, то из (3.30) вытекает неравенство
|(| и-uN |2 (1) + | и - uN (0)) + b[u-UjvF
(3.31)
56
АЛГОРИТМЫ ПРОЕКЦИОННОГО МЕТОДА
[ГЛ. t
Но «е WI, так что учитывая плотность {<рж-} в и выбирая
соответствующим образом ut, получаем
|(| и-М2(0) + |“~Ux|»(l)) + bju_ Uxp-^O, tf + oo. (3.32)
Отсюда, в частности, следует важный вывод: хотя uN не удовлет-
воряет (3.26) при конечном А\ тем не менее это условие выпол-
нено в пределе: lim | uN — и | (0) = lim | идг (0) | — 0.
ЛГ-юо >оо
§ 4. Метод наименьших квадратов
Пусть В —в, ф,- = фг е D(A), К = Л и для оператора А суще-
ствует ограниченный обратный оператор Л-1. Тогда общая задача
принимает вид
Au = f, f<=H, (4.1)
и алгоритм (1.3) называется методом наименьших квадратов.
Формулировка его заключается в следующем:
1) Выбираются базисные функции (р,-е£> (Л).
2) Приближенное решение и# ищется в виде
N
< = 1
3) Коэффициенты at определяются из системы уравнений
(Лмдг, A(pi) = (f, Лф,), 1 = 1,..., IV, (4.2)
которую можно записать в векторно-матричной форме:
Aa=f, (4.3)
где а = (а1г ..., aN)T, f = ((/, Лф1), ..., (f, А<рк))Т, Л=(Л,У),
Лу = (Лф/, Л(р/) = ЛУ,-, А = АТ, N.
Вычислив элементы симметричной матрицы Л, компоненты
вектора f и решив систему (4.3), можно определить приближенное
N
решение uN= У, а,-фг.
<=1
Часто при формулировке данного алгоритма соотношение (4.2)
получают из условия минимизации функционала невязки J (и) =
= || Аи — /||2 на линейной оболочке системы {фг}.
Функция, реализующая минимум J (и), является приближенным
решением задачи (4.1) по методу наименьших квадратов. Действи-
N
тельно, образуем функцию uN = ^ а^ и подберем неизвестные at
§ fl
МЕТОД НАИМЕНЬШИХ КВАДРАТОВ
57
так, чтобы невязка || Аи,у — f||2 была минимальна. Заметим, что
N N
|| Aun - /г = 2 akam (A<pk, А<рт) - £ ак (ЛфЪ /) -
k. т=1 1
N
-2 ak(f, A<pk) + (f, f). (4.4)
Л=1
Дифференцируя (4.4) по ат, получаем систему уравнений
N
У, ak(A<Pk, Лфт) = (Л Лфт), т=1, N, (4.5)
/г=1
т. е. систему (4.2). Решив (4.5), определим коэффициенты а,-,
которые будут минимизировать функционал невязки.
Лемма 1. Если однородное уравнение Аи = 0 имеет лишь
нулевое решение, то приближенные решения иК могут быть пост-
роены методом наименьших квадратов при любом N, и они опре-
деляются единственным образом.
Доказательство. Пусть Аи = 0 имеет только нулевое
решение м = 0. Тогда, как уже знаем из предыдущего параграфа,
функции Лф1т ..., Лфдг линейно независимы при любом N. Необ-
ходимым и достаточным условием линейной независимости системы
гдеф/ = Лф/, является неравенство нулю определителя Грама:
det ((фг, %)) =/= 0. Следовательно, определитель системы (4.5) отли-
чен от нуля и она имеет единственное решение при любом N.
Рассмотрим теперь вопрос сходимости uN к и при JV->-oo.
Теорема 1. Метод наименьших квадратов дает последова-
тельность приближенных решений uN, сходящихся к точному
решению и, если последовательность {фг} является A-полной и
существует постоянная k такая, что для любой функции ue D (Л)
имеет место соотношение
Ци^МЛН
(4-6)
Доказательство. Множество £>(Л) с нормой простран-
ства Н образует линейное нормированное пространство, которое
отображается оператором Л в Н и которое обозначим через НА.
Из функционального анализа известно, что если линейный опера-
тор Л, отображающий линейное нормированное пространство НА
на линейное нормированное пространство Н, удовлетворяет для
любого элемента и^.НА условию (4.6), то существует обратный
линейный ограниченный оператор Л-1, причем ||Л-1||^й [25].
Следовательно, по лемме 1 приближенные решения uN могут быть
построены при любом N. Далее, поскольку {ф,} Л-полна, то при
заданном е>0 можно найти такие N0(u, е), aN, что
Аи — а, Лф/
/=1
е
58
АЛГОРИТМЫ ПРОЕКЦИОННОГО МЕТОДА
[ГЛ. 1
Это неравенство остается верным, если заменить на ц,
определяемые из (4.5), так как тогда левая часть этого неравен-
ства достигает минимума. В этом случае при имеем
j Au — Aun | < e/fe, и из (4.6) следует, что ||u — Цдг|<в, т. е.
uN-+-u при N ->оо. Теорема доказана.
Следствие. Если условия теоремы 1 выполнены, то
или
|| «jv — u|«Cfc| A (и v — u)| = Aun — Ли I,
Цидг-uJ^feH Л«м —/II-
(4.7)
Из этого следствия вытекает, что если uN построены по методу
наименьших квадратов, то формула (4.7) позволяет судить о
погрешности приближенных решений и — uN (хотя, как это будет
видно ниже из примера 1, эта формула может давать огрублен-
ный результат).
Отметим связь между методом наименьших квадратов и мето-
дом Ритца. Предположив, что Au = f, f^D(A*), где Л* — сопря-
женный оператор, и подействовав на (4.1) оператором Л*, полу-
чим уравнение
‘ Л*Ли = Л*Д (4.8)
Если оно разрешимо, то его решение минимизирует функционал
Ф(и) = (Л*Ли, u) —(u, A*f) — (A*f, и) = (Аи, Au) —(Au, f) —
~(f, Ли)-HI!= Mu-Д2-|lЛ2-
Но функционалы Ф(и) и У(и) = ||Ли —Л2 различаются на посто-
янные слагаемые, поэтому задачи их минимизации эквивалентны.
Итак, при выполнении условий теоремы 1 применение метода
наименьших квадратов к уравнению (4.1) равносильно применению
метода Ритца в энергетических пространствах к уравнению (4.8).
Укажем теперь некоторые недостатки и преимущества метода
наименьших квадратов. Пусть, например, Л — дифференциальный
оператор порядка т. Решая уравнение (4.1) методом наименьших
квадратов, мы фактически решаем методом Ритца уравнение (4.8),
оператор которого уже имеет порядок 2m. Еще одной трудностью
в реализации этого метода является требование, чтобы ф/ е D (Л)
(что, помимо ограничений на гладкость ф/, означает также удов-
летворение краевым условиям). В этом состоит недостаток метода
наименьших квадратов. Преимущество его в том, что, кроме
обратимости Л, мы никаких ограничений не накладываем на
оператор задачи (Л-1 предполагаем лишь ограниченным).
Пример 1. Пусть задача
~^ + qu = f(x), <? = const>0,
ах (4.9)
u(0) = u(l) = 0
§ 5) ОБОБЩЕННЫЙ МЕТОД НАИМЕНЬШИХ КВАДРАТОВ
59
решается методом наименьших квадратов, причем в качестве
базисных функций {<р,} берутся собственные функции оператора
Аи — —d2u/dx2, и (0) = и (1) = 0, т. е. <р/ = sin inx. Тогда, отыскивая
приближенное решение uN в виде
N
= £ di sin inx
i = i
и решая систему (4.5), находим а,: имеем
~ + 2qi2n2 + <72) а, = (i2n2 + <?) (Л sin inx)
и, значит,
„ _9 (Л sininx)
Следовательно, приближенное решение имеет вид
N
(f, sin inx) . .
2 W + /'Slnl3TX~
i = l
Итак, при выбранных базисных функциях методы Ритца,
Бубнова —Галеркина и метод наименьших квадратов приводят
в рассматриваемом примере к одному и тому же результату.
Оценить скорость сходимости здесь совсем просто. Так, непосред-
ственное вычисление показывает, что
оо
II 12 nV (A sininx)2
Ци UN || l2(o, 1) — 2 -
|=М + 1
оо
(л2^+1)2+<?)2 2 s*ni'3xx)2’ (4-Ю)
|=М + 1
|Лм№/||2 = 2 2 (A sin inx)2 = е (N)->0, N-^-oo. (4.11)
Г=М + 1
Если для оценки погрешности и — uN воспользоваться неравенст-
вом (4.7), то [и — fee(lV). Сравнивая этот результат с (4.10),
делаем вывод, что оценка, полученная с помощью (4.7), в неко-
торых случаях может оказаться огрубленной.
§ 5. Обобщенный метод наименьших квадратов
Рассмотрим задачу (1.1):
Au + Bu = f, (5.1)
и пусть в (1.3) выполнены следующие ограничения: <р,= ф,- еО(Д),
К = А, В и А — произвольные операторы, причем предполагается
60
АЛГОРИТМЫ ПРОЕКЦИОННОГО МЕТОДА
[ГЛ. 1
существование А-1. Алгоритм приближенного решения задачи
в этом случае принимает вид
N
Un=X а«Ф<» (5-2)
i=l
(Auv-j-Видг— f, Аф,) = 0, i=l, N, (5-3)
и называется обобщенным методом наименьших квадратов.
Сформулируем достаточные условия сходимости uN к точному
решению в этом алгоритме. Введем в D (А) новое скалярное
произведение
(и, и)л = (Аи, Аи), и, v^D(A),
и норму
1Ма = («, «)а2.
Пополнив D (А) по норме || • |л, получим гильбертово пространство,
которое обозначим через Ял. Теперь уравнение (5.1) можно за-
писать в виде
иА-Ти = Ь, f^A-'f^DlA), Т = А~1В, (5.4)
а уравнения для приближенного решения можно представить
в эквивалентной форме:
(uN, 4i)A + (TuN, <Pi)A = (fi, Ф<)а, i=l, ..., N. (5.5)
Теорема 1. Пусть: 1) уравнение (5.1) однозначно разреши-
мо; 2) {ф,} полна в НА', 3) оператор Т = А1В вполне непрерывен
в НА- Тогда система приближенных уравнений (5.3) однозначно
разрешима при достаточно больших N и иы сходятся к и при
N->-ck> как в метрике пространства Н, так и в метрике НА-
Доказательство теоремы повторяет доказательство теоремы 1
§ 3, и проведение его предлагается в качестве задачи к данному
параграфу.
В § 10 приводится еще одна теорема о сходимости рассмот-
ренного здесь алгоритма при конкретном выборе базисов.
§ 6. Обобщенный метод моментов
Пусть в гильбертовом пространстве Н (которое в этом пара-
графе предполагается комплексным) рассматривается уравнение
(М):
AuA-Bu = f, f^H. (6.1)
Предположим, что в (1.3) выполнены следующие ограничения:
<pt = ф,- е D (А) с: D (К), оператор А является /(-положительно
определенным (или положительно определенным в обобщенном
§ 6J
обобщенный метод моментов
6!
смысле), т. е.
(Au, Ки) Ss у2 j и |2, (Au, Ки) р21| Ки ||2,
где р, у —постоянные, р, у>0, иеО(Л). Алгоритм (1.3) в дан-
ном случае назовем обобщенным методом моментов', он состоит
в следующем:
1) Выбирается базисная система {<р(} cz D (Л).
2) Приближенное решение uN ищется в виде
N
^ = 2 й(Ф<- (6-2)
i=i
3) Коэффициенты щ определяются из системы уравнений
(Ли№|-5идг — f, — j— 1, ...» N, (6.3)
или, что одно и то же, из системы
N
У, [Ифь ^<Ф/)4-(Вфг, Кц>})]а{ = (f, Кц>;), N. (6.4)
i = l
Прежде всего отметим, что в силу К-положительной опреде-
ленности оператор Л обладает ограниченным обратным оператором.
Действительно, так как у21| и ||2 «С (Ли, Ки) || Ли || || Ки || и || Ки ||
=С|| Ли JI/Р2, то || и ||2sg || Ли ||2/(Р2у2). В силу теорем об обратном опе-
раторе (см. доказательство теоремы 1 из § 4) Л-1 существует и
|| Л-1 ||*С 1 /(у Р). Из условий положительной определенности
вытекает также, что число (Ли, Ки) вещественно. Покажем, что
(Ли, Ко) = (Ки, Av) Vu, veD(A). (6.5)
Для этого выберем и, и е Z) (Л) и запишем тождество
(Л(и + о), К (и + и)) — (Л (и — v), К(и —о)) +
-Н(Л (и4-io), К (и-j-io)) — i(A (и — iv), К (и —io)) =4 (Ли, Ко),
i = /ZZT, (6.6)
и аналогичное ему, поменяв Л и К местами:
(К(и + о), Л (и + о)) —(К (и —о), Л(и — о)) +
+ i (К (и-(-io), Л (и + го)) — i (К (и — io), Л (и — io)) = 4 (Ки, Av).
(6-7)
Но (Ли, Ки) вещественно, так что сравнивая слагаемые в (6.6)
и (6.7) с учетом свойств скалярного произведения, получаем,
что правые части в (6.6) и (6.7) совпадают, т. е. имеем (6.5).
На основании свойства (6.5) и К-положительной определенности
оператора Л на D(A) можно ввести скалярное произведение
(и, о)к = (Ли, Ко), и, ое£>(Л), (6.8)
62
АЛГОРИТМЫ ПРОЕКЦИОННОГО МЕТОДА
[ГЛ. I
в силу чего D(A) превращается в новое гильбертово простран-
ство Нк, которое можно считать полным *). Метрику в Нк опре-
делим соотношением || и = (и, «)к2.
Подействовав Л-1 на обе части (6.1), получим уравнение
и + 7’и = /1, /1 = Л-1/, Т = А-1В. (6.9)
Определение. Элемент и е Нк назовем обобщенным реше-
нием уравнения (6.1), если он удовлетворяет (6.9) в пространстве
Нк, т. е. удовлетворяет равенству
(и, v)k + (Tu, v)K = (fi, v)k Чое=Нк. (6.10)
Очевидно, что если элемент и удовлетворяет (6.1), то он является
также и обобщенным решением (обратное, вообще говоря, неверно).
Теперь систему (6.4) можно записать в виде
N
У, 1(фь ф;)к + (7фг, Ф/)к]ог=Л, Ф/)к, /=1.....N, (6.11)
4=1
ИЛИ
N
У, [(фй Ф/)х+(Вф/, Кф/)1а( = (А N. (6.12)
4 = 1
Алгоритм (6.12) можно рассматривать как процесс определения
приближенного обобщенного решения uN.
Теорема 1. Пусть уравнение (6.1) имеет единственное обоб-
щенное решение и оператор Т = Л-1В вполне непрерывен в Нк-
Тогда'. 1) существует такое целое Nn, что при любом N^N0
система (6.12) имеет единственное решение at-, 2) приближенные
решения uN сходятся в Нк (и в И) к решению уравнения (6.1).
Доказательство. Обозначим через {фД систему, получен-
ную путем ортогонализации {<рД в метрике пространства Нк при
нормировке |’фгк=1- Тогда обобщенное решение и может быть
представлено в виде
ы = 2с4ф4. Q = («, ФОк. (6.13)
причем ряд сходится в Нк и коэффициенты сг удовлетворяют
системе
СО
0 = (м + Тм, ф/)к —(/, Кф/) = С/ + 2 (Тф,, фДд-с, —(/, КфД,
4=1
*) Если это не так, то это пространство можно обычным образом попол-
нить и снова обозначить через Нк.,
§ 71
проекционный метод
63
т. е. системе
00
Cj + S С^Ч = ЬЬ (6.14)
/=1
где тУ = (Тф/, ф7)д., bj = (f, Kyj).
Системы (6.14) и (3.9) имеют одинаковый вид, и дальнейшее
доказательство теоремы повторяет рассуждения в доказательстве
теоремы 1 § 3.
Отметим, что так как здесь Т = предполагается вполне
непрерывным в Нк, то
| (Вф7, Ф()к1^с11ф/к11ф»к-
Кроме того,
|(А ^Ф/) 1 = 1(71, фЛН^11АНфА = (А КА-уу* (Ф/к^сЦфхк.
Следовательно, в обобщенном методе моментов можно сделать
предположение о принадлежности {фг} к Нк (а не к D (А)).
Поэтому, если в этом случае предположить плотность базиса {ф/}
в Нк, то утверждения теоремы 1 остаются справедливыми. Систе-
ма для определения коэффициентов а,- будет записываться здесь
в виде (6.12) (а не (6.4)), а сама задача решения (6.1) рассмат-
ривается в обобщенной постановке (6.10).
§ 7. Проекционный метод в гильбертовом пространстве
В этом параграфе будет изложен проекционный метод решения
уравнения
Lu = Au + Bu=f, f<=H, (7.1)
причем он будет рассмотрен лишь для случая гильбертовых про-
странств. Ниже мы покажем также, что все приведенные ранее
алгоритмы можно рассматривать как частные случаи проекцион-
ного метода.
Пусть Л —вообще говоря, неограниченный оператор, дейст-
вующий в Н и обладающий ограниченным обратным оператором
Л-1. Предположим, что множество определения D (L) и множество
значения R (L) плотны в Н.
Введем в Н линейно независимую систему {фг}. Соответствую-
щие Af-мерные подпространства, порождаемые {фг-}, обозначим
через Му. Предположим, что последовательность {Му} предельно
плотна в Н. Зададим последовательность проекционных операто-
ров Ру, каждый из которых отображает Н на соответствующее
пространство Му. Предположим в дальнейшем, что |Ру|«£с,
N = 1, 2, ... (Здесь Ру не обязательно являются ортопроекторами,
т. е. от них требуется лишь выполнение свойств P^ — PN,
PNH — MN. Отметим, что для приводимых ниже рассуждений
64
АЛГОРИТМЫ ПРОЕКЦИОННОГО МЕТОДА
[ГЛ. !
полезно рассмотреть определение проектора, ортопроектора и
пример 3 из § 3.)
Введем также линейно независимую систему {<рг}, (fjeDfL).
Подпространство, порождаемое {<pj, обозначим через а линей-
ную оболочку системы {Л<р,} — через LHN- Предположим, что
последовательность подпространств \LHn\ предельно плотна в Н
и для любого элемента и е Н
W) = inf||M —Иу||->-0, N ->оо, uN^LHN.
UN
Приближенное. решение задачи (7.1) ищем в виде
N
un = ^ a&i, (7.2)
<=1
где at определяются из уравнения
PNLuN^PNf. (7.3)
Теорема 1 [20, 70]. Пусть для любого N и любого элемен-
та v е LHN
т>0, (7.4)
где постоянная т не зависит от N. Тогда при любом N уравне-
ние (7.3) имеет единственное решение un-
Доказательство. Пусть Lun = vn- Тогда (7.3) записыва-
ется в виде
PnVn = PnI, vn<=LHn. (7.5)
Обозначим через Pn сужение Pn на LHN, т. е. Pn — оператор
с областью определения LHn, для которого PnV = P^v при v е LHn-
Согласно (7.4) и теореме об обратном операторе Pn обладает огра-
ниченным обратным оператором P~n, переводящим MN на LHN,
при этом IIPjvII^S 1/т. Следовательно, существует единственный
элемент vN = PljPNf, удовлетворяющий (7.5). Но тогда uN =
—L-^Vn — единственный элемент, удовлетворяющий (7.3). Теорема
доказана.
Теорема 2. Если выполнены условия теоремы 1, то при
N
любом N существует приближенное решение Un—У', ам, причем
i = 1
невязка LuN — f стремится к нулю при N и справедлива
оценка
e(f, N)^\LuN-fl <S(1+ с[х) e(f, N), (7.6)
где e(f, N) = inf | f - fN ]!, 1n<=LHn-
§ 8] МЕТОД ГАЛЕРКИНА - ПЕТРОВА 65
Доказательство. Пусть uN — решение (7.3) (которое
согласно теореме 1 существует), vN — LuN. Выберем произвольный
элемент fN^LHN. Так как P^P^n = fN, то
LuN-f = vN-f^p-NlPNf-f^P-N1PN(f-fN)-(f-fN).
Отсюда, используя оценку || =С|| 1||| Рд,|| ^с/т, получаем
II Lun - f II I P-n'Pn IIII f - fN II + И ~ (1 + с/т) И - fN
В силу произвольности элемента е LH^, а также условия
плотности {LHn} в Н, получаем сходимость невязки LuN — f
к нулю и оценку (7.6).
Следствие. Если f R(L), то имеют место сходимость uN
к и при N-^-oo и оценка погрешности
lu-uN\\ = II L-1L (и - uN) II ss IIL-1 IIII Lu - LuN |( =
= I! L-11| И - Lun || C || L-11| (1 + с/т) 8 (/, N),
m. e.
Sw-wH^I|£-4(l+c/T)iW-/M, fN^LHN. (7.7)
fN
Замечание. Пусть А, В, /( — операторы, относительно
которых справедливы предположения § 1. Предположим, что
{<р£} с£>(А) есть базис в Н. Введем систему линейно независимых
функций {ф,} с D (/(), которая /(-полна. В этом случае система
{ф< = /(.ф,.} может быть принята в качестве нового базиса в Н.
Пусть в (7.3) принято одно из основных ограничений: PN явля-
ется оператором ортогонального проектирования. В этом случае
уравнение (7.3) эквивалентно системе уравнений (см. пример 3
из § 3)
(Pujv, ф;) = (/, ФО» i = U •••» /V»
т. е. системе вида
(AuN4*BuN, — /Сф;), i = l, •••» /V,
которая с точностью до обозначений совпадает с системой (1.3).
Таким образом, если в (7.3) оператор Pn является ортопроекто-
ром (а не просто проектором на MN), то алгоритм (1.3) совпадает
с (7.3), т. е. (1.3) есть частный случай проекционного метода.
§ 8. Метод Галеркина — Петрова
Пусть К = 1, <р;е£>(Д), 1|),е//, L = A + В — оператор, удов-
летворяющий условиям § 7. Тогда алгоритм (1.3) называют
методом Галеркина — Петрова, который в случае уравнения
Lu = Au + Bu = f, fe=H, (8.1)
формулируется следующим образом:
3 Г. И, Марчук, В, И. Агошков
65
АЛГОРИТМЫ ПРОЕКЦИОННОГО МЕТОДА
[ГЛ 1
1) Задаются два, вообще говоря различных, базиса {фЛсг£)(Л),
{“фД с 77.
2) Приближенное решение ищется в виде
N
«№=5 (812>
г=1
3) Коэффициенты а,- определяются из системы уравнений
(Atifj—f, ф^)=0, i = 1, .N. (8.3)
Этот метод является также частным случаем сформулирован-
ного в § 7 проекционного метода. Действительно, пусть в (7.3)
оператор PN есть ортопроектор на Мл- — линейную оболочку
функций {ф;}. Тогда уравнение (7.3) эквивалентно системе урав-
нений (LuN — f, ф,) = 0, i = l, ..., N (см. пример 3 § 3), т. е.
системе (8.3). Итак, метод Галеркина— Петрова есть частный
случай проекционного метода, рассматриваемого в гильбертовом
пространстве при условии, что PN есть оператор ортогонального
проектирования. В силу этого сформулированные в § 7 теоремы
остаются справедливыми и в данном параграфе.
Рассмотрим теперь специальный набор базисных функций {ф,-}
в методе Галеркина — Петрова (при котором этот метод иногда
называют методом разделения области).
Пусть H = LZ(Q), где й — область m-мерного евклидова про-
странства, 77дг — линейная оболочка {<р,}. Базис {ф(} здесь уже
имеет конкретный вид: разобьем й на N подобластей йг,..., Йд,
N
так, чтобы U й,= й, Й,- (] й, = 0 при i /; обозначим через фА(х),
i=i
х е й, характеристическую функцию области ЙА:
Фа (х) =
Введем функции
.....N’ <8-4’
и примем за подпространство, являющееся линейной оболоч-
кой системы {ф*}. В этом случае (8.3) эквивалентна системе
(LuN-f, ф7) = 0, /=1......АГ, (8.5)
или
аг
$7.фг<7х= Jfdx, / = 1, .... Л7. (8.6)
»=) й, О,
Сходимость метода разделения области также вытекает из
утверждений § 7.
1, хей4,
0, х й*.
§ 8]
МЕТОД ГАЛЕРКИНА - ПЕТРОВА
67
Пример 1. Рассмотрим задачу
= /е (0,1),
и (0) = 0.
(8.7)
Пусть H = L2(0,1), L = d/dx, D(L) — {u: u^Wk, и(0) = 0}. Введем
на (0,1) сетку Xi = ih, i = 0, ..., N,h.= l/N, и примем в качестве
Ф,- и функции
х—х,_, , .
—х е= (x,-i, х^,
tpi(x) xi+i х , x е (X.t X;+i)t
0,
X (xf-b xi+1),
J_ ( 1. Xf=(Xi_i, Xi),
‘ P /i ( 0, x (x/~i, x,), i = 1, ..., N.
Согласно методу разделения области для задачи (8.7) имеем
Un = 2 а^1 (*)> 2 ai( S = №idx< <8-8)
<•=1 <=>
т. е. приходим к известной явной разностной схеме для реше-
ния (8.7):
ai-ai-^ = ‘ ( f dx, / = 1, .... N,
}'h Vh ' ' 1
xi-i
или
^=l = f/=^fdx, / = 1.......................(8.9)
х1-1
Проверим выполнение условий теорем из § 7. Здесь
{м 1 /
w. 10 = 2а«ф>(, L/7№=jv: v = —
i=l ' V
Тогда при v е LHff имеем
(х)
iPvfii2= 2^.(х)(у’
(а»~ g»-i)2
h
Найдем
N
TA, = inf;/’jVy|! = inf V -(af , vf=LHN,
v V
з*
68
АЛГОРИТМЫ ПРОЕКЦИОННОГО МЕТОДА
[ГЛ. 1
N
В силу || v ||2 = У, (а/ — aM)z/h, из условия || v || = 1 сразу сле-
i=i
дует, что тЛ' = 1, М = 1,2,... Это в свою очередь означает, что
т=1 (см. § 7).
Последовательность {LHN\ предельно плотна в L2. Действи-
тельно, если f е L2, то в качестве f^^LHN можно выбрать
N xi
^ = 2 ГДе \ fdx- ТоГДа ПРИ X<=(Xi-l, Xl)
(=1 о
fN =
предполагая, что df/dx eZ.2(0, 1), имеем
т. е.
Итак, показано, что все условия теорем § 7 выполнены, и
получена оценка скорости сходимости
«“ ~ к, <1^- (« - Мл)[г = |/ - 4г
справедливая при df/dx е Л2(0, 1).
§ 9. Проблемы выбора базисных функций
Как видно из предыдущих параграфов, при рассмотрении того
или иного алгоритма мы накладывали на базио |<р;} помимо
условия линейной независимости еще ряд ограничений, которым
функции (р( должны удовлетворять.
1. Как правило, от {<pj требуется плотность или А-полнота
в соответствующем пространстве (проблема плотности выбранной
системы базисных функций).
2. В ряде алгоритмов требуется, чтобы принадлежали
области определения оператора А. Это обстоятельство в случае
дифференциальных операторов накладывает помимо определенных
условий дифференцируемости еще требование удовлетворения
§ 9]
ПРОБЛЕМЫ ВЫБОРА БАЗИСНЫХ ФУНКЦИИ
69
краевым условиям, которым подчиняются функции из D (Л)
(проблема удовлетворения краевым условиям).
3. При решении задачи естественно желание при заданном
числе базисных функций добиться как мол. но меньшей погреш-
ности. Чтобы сделать это, стремятся уменьшить ошибку аппро-
ксимации решения задачи с помощью выбора {qy} (проблема
минимизации ошибки аппроксимации при заданном числе базис-
ных функций).
4. Уменьшить погрешность решения можно и за счет увели-
чения числа базисных функций. Но это приводит к решению
систем уравнений высокого порядка. Здесь мы сталкиваемся
с необходимостью выбора {qy} таким образом, чтобы процесс
решения таких систем и весь алгоритм построения приближен-
ного решения были устойчивыми (проблема устойчивости).
Рассмотрим некоторые подходы к решению этих четырех
проблем.
9.1. Плотность. 1. Пусть требуется провести анализ плотно-
сти {qy} в некотором пространстве НА. Предположим, что в НА
плотно некоторое другое пространство МаНА, элементы которого
обладают более наглядными свойствами (плотность М. в Н А будет
иметь место, например, если НА строится пополнением М в мет-
рике || • ||н ). В этом случае часто пользуются следующим простым
приемом. Сначала проверяют плотность {ср,} в М. Если это так,
то в силу плотности М в НА имеется плотность в НА.
При этом иногда сравнительно просто оценить ошибку аппро-
ксимации. Например, если известно, что для и е НА можно
найти такое up е М, что
II N II
II и - Up кд ^8!, Wp - У a,-qy _ е2
II i=l ||Я А
(при некоторых коэффициентах оу), то
дг
и — У a;qy Ё! + е2 = е,
где е может быть принято за оценку ошибки аппроксимации.
2. Другой подход к решению проблемы плотности состоит
в следующем. Пусть имеются два симметричных положительно
определенных оператора А и В. Если энергетические прост-
ранства НА и Нв состоят из одних и тех же элементов, то любая
система {qy}, плотная в Нв, плотна и в НА, и наоборот.
Пр им ер I. Рассмотрим задачу
Ли = -Ар(х)^-+<7(х)« = ;(х), (9.1)
и (0) = «(!) = О, (9.2)
70
АЛГОРИТМЫ ПРОЕКЦИОННОГО МЕТОДА
[ГЛ. 1
где 0cg(x)<ft, р0, Pi, <?i>0, р(х) имеет огра-
ниченную производную по х. Полагаем
Ви==-^' и(0) = ы(1)=0.
(9.3)
Пространства На и Нв (способ построения их изложен в § 2)
состоят из одних и тех же элементов, а именно из функций,
для которых
1
l^-pdxcCoo, и(0) = ы(1) = 0.
о
Поэтому примером системы, плотной в НА, может быть система
собственных функций {sintnx} оператора В, которая плотна в Нв
и которую мы неоднократно уже использовали.
3. Наконец, можно непосредственно исследовать аппроксима-
цию элементов из На с помощью линейно независимой системы
{<р;}. И если удастся показать, что при определенном выборе
коэффициентов at
N I
и — V а;фг е (и, N),
кд
где е(ц, У)->0 при N-^-oo, то этот результат будет одновре-
менно означать и плотность {<рг} в На- В следующей главе будут
рассмотрены различные наборы базисных функций и получены
теоремы аппроксимации, которые будут гарантировать плотность
этих базисов в соответствующих функциональных пространствах.
9.2. Удовлетворение краевым условиям. 1. Если рассматри-
вается задача, в которой краевые условия являются естествен-
ными, то данную проблему можно не решать, так как базисные
функции можно выбирать не удовлетворяющими этим условиям.
Однако отметим, что скорость сходимости приближенных решений
к точному в этом случае бывает, как правило, ниже.
Пример 2. Рассмотрим задачу
а-^ + ^ = /(х), хе(0, 1), МЛ2(0, 1) — Н,
и (0) = 0, a, b = const > 0,
обобщенная запись которой имеет вид (см. п. 3.2)
—а (и, ^) + b(u, ^) + au(l)v = v),
S 9]
ПРОБЛЕМЫ ВЫБОРА БАЗИСНЫХ ФУНКЦИИ
71
где у —произвольная функция из №4(0,1). Будем решать эту
задачу методом Бубнова — Галеркина G
изображенными на рис. 2. Сначала
будем искать приближенное решение
uN в виде
N
“N W = У, «><Р> (*),
i = 0
т. е. uN (х) не удовлетворяет краевому
условию. Неизвестные щ найдем из
базисными функциями,
Рис. 2.
системы
—a(uN, d.(pi/dx) + b (uN, 4>i)-\-auN (1) <p,(l) = (f, i = 0, 1,..., N,
или, в матричной записи,
а ( 2Wi а ( bh
2 +~6~ 2+1Г
a bh 4bh
2+Т~6~
4bh a bh
~6~ 2 +1Г
a t bh а ( 2bi
¥ + ~2 +~6
aN-\
aN
(f> Фо)
(А Ф1)
(А <Рм-1)
(А М
Результаты расчетов при /=100, а=10~а, b = 10_2 приведены
на рис. 3.
N
Если искать приближенное решение в виде uN= У (здесь
1=1
ил,(0) = 0), то система уравнений Бубнова — Галеркина имеет вид
a\~dxL’ + <Pi) = (/> ф«), i==l, N,
или, в матричном виде,
4bh a bh ~6~ 2 +'б~ a bh ~2+^~ '• ’•
4bh ~1Г а 2“ + ~ 6
a bh а , 2bh
~ 2 + Т 2 + 6 .
aN-i
aN
(f, Ф1)
(А Фа)
(А Флг-1)
(/- ЧМ
п
АЛГОРИТМЫ ПРОЕКЦИОННОГО МЕТОДА
[ГЛ. I
Численные результаты решения задачи в этом случае (при тех
же f, а, Ь) приведены на рис. 4. Сравнивая результаты расчетов,
замечаем, что если uN априори удовлетворяет краевому условию,
то скорость сходимости Un к и при N-+co выше, чем в случае,
когда базисные функции не удовлетворяют этому условию.
Но и в том случае, когда uN (0) =£ 0, наблюдается сходимость
значений Идг(О) к нулю, т. е. предел приближенных решений
удовлетворяет краевому условию.
2. Возможность выбора <рг-, не удовлетворяющих условиям
на границе, приводит к попытке свести задачу с главными крае-
выми условиями к задаче с естественными краевыми условиями.
Оказывается, что в ряде задач этот подход осуществить можно
с помощью метода штрафов. Поясним это на примере.
Пример 3. Рассмотрим уравнение Пуассона
т
-&u = f(x), х = (хи ..., Хт)ЕЙС Rm, Д = 2'&’(9-4)
1=1 1
с условием Дирихле
и = 0 на 3Q, (9.5)
которое в данной задаче является главным. Как известно из § 2,
задача (9.4), (9.5) сводится к проблеме минимизации функционала
(т \
2|^r_2“4dx (9-б>
i=i * '
в пространстве функций На, обращающихся в нуль на <3Q, для
которых
§ 9]
ПРОБЛЕМЫ ВЫБОРА БАЗИСНЫХ ФУНКЦИЙ
73
Метод штрафов в применении к (9.4), (9.5) состоит в замене
этой задачи задачей с введенным в краевое условие дополнитель-
диР ,
ным слагаемым e-g^ —штрафом:
— Дие = /(х), (9.7)
Ые + е^ = 0 на <?Й, (9.8)
где е >0 — малый числовой параметр, и условие на границе явля-
ется уже естественным. Согласно изложенному в § 2 задача (9.7),
(9.8) приводит к отысканию функции иЕ, для которой
/ з х 1/2
[“eh = $ 2 |SrdX + T $
\а i = i aa /
и которая доставляла бы минимум возмущенному функционалу
/78(у) = V 2 |^Г§ vzdx. (9.9)
й v = i ' / ав
При решении задачи о минимизации FE (о), как уже известно,
базисные функции можно выбирать не удовлетворяющими усло-
вию (9.8). Тогда, построив приближение к иЕ, мы построим при-
ближенное решение задачи (9.4), (9.5) (с учетом того, что ие->и
при е->0; в гл. 3 будет также оценена скорость сходимости иЕ к и).
3. В ряде случаев удается совсем просто построить базисные
функции ср,-, удовлетворяющие главным краевым условиям,
используя следующий подход: а) задаются некоторые линейно
независимые функции ф,-, обладающие свойствами плотности во
всем рассматриваемом функциональном пространстве (они не обя-
зательно удовлетворяют краевым условиям); б) строят простого
вида функцию ®, удовлетворяющую главным краевым условиям
и, возможно, некоторым дополнительным ограничениям; в) строят
искомые базисные функции фг- по формуле ф,= ®ф(-. Естественно,
что для установления плотности таких ф,- и их аппроксимирующих
свойств требуются дополнительные исследования.
Пример 4. Рассмотрим задачу (9.4), (9.5), где условие
(9.5)— главное. Пусть ® (хь ..., хт) = 0 —уравнение границы ЗЙ
области й. Допустим, что и>0 внутри Й и что эта функция и
ее первые производные непрерывны в й-|-дй. Тогда оказывается,
что система базисных функций
Ф^Ф^....../т) = ®(^1, •••, (9.10)
где tj, .... im пробегают независимо все целые значения от 0
до оо, плотна в энергетическом пространстве НА. Для ряда
практически интересных форм областей й (прямоугольник, шар
74
АЛГОРИТМЫ ПРОЕКЦИОННОГО МЕТОДА
[ГЛ. 1
и т. д.) достаточно просто построить такую функцию ®(х),
благодаря которой соответствующие краевые условия оказываются
выполненными (см. [18]). В случае одной переменной хх = х аналог
задачи (9.4), (9.5) имеет вид
и(0) = и(1) = 0, (9.11)
базисные функции (9.10) имеют вид qy (х) = ® (х) xl, i = 0, 1.
а в качестве ®(х) может быть принята функция со(х) = х(1 — х).
9.3. Минимизация ошибки аппроксимации. Как правило, во
многих задачах области имеют углы, коэффициенты уравнений
разрывны и т. д. Все это приводит к появлению особенностей
у решения задачи, что в свою очередь ведет к увеличению погреш-
ности приближенных решений. Рассмотрим некоторые из способов
устранения этих трудностей.
1. Прежде чем решать задачу, можно попытаться провести
предварительное изучение всех исходных данных и путем каких-
либо преобразований перейти к другим задачам, решения которых
уже обладают лучшими свойствами гладкости.
Пример 5. Решим задачу
-5+9W«W = l+rV‘,
ы(0) = и(1)=0, (9Л2)
где 7 (х) 0 — достаточно гладкая функция. Ясно, что наличие
в правой части слагаемого х~,/4 повлияет на гладкость решения и
и, как следствие этого, на погрешность приближенного решения.
Рассмотрим вспомогательную задачу
t/(O) = C/(l) =0,
решение которой имеет вид
(/ = ||х(- хз/*-Ы). (9.13)
Вводя функцию v = u — U, получаем задачу
v (0) = v (1) = 0,
решение которой обладает большей гладкостью по сравнению с и.
Если теперь с помощью какого-либо алгоритма построить прибли-
женное решение v к этой задачи, то приближение к и получим
по формуле uN = vN-\- U.
2. В некоторых задачах удается, проведя предварительные
теоретические исследования, выявить аналитический вид особен-
§ 9] ПРОБЛЕМЫ ВЫБОРА БАЗИСНЫХ ФУНКЦИЙ 75
ностей решения и их расположение в области определения реше-
ния. В этом случае для уменьшения ошибки аппроксимации
решения с помощью выбора {<р,} можно увеличить число базисных
функций с носителями в местах сосредоточения особенностей.
Этот подход аналогичен приему сгущения сеток в местах особен-
ностей решения в методе конечных разностей.
3. Предположим снова, что особенности решения задачи выде-
лены. Построим функции {ф,}, которые содержат особенности
решения (иногда их называют сингулярными, часто их число сов-
падает с числом выделенных особенностей) и которые допускаются
в выбранном методе (например, удовлетворяют главным краевым
условиям). Затем, добавив функции ф, к {ср,}, получим систему
{фъ ..., фЛ1, epi, ..., срдг}. Часто M<^N, поэтому общее число
новых базисных функций увеличивается незначительно по срав-
нению с N, но они уже содержат информацию об особенностях
решения. Поэтому ошибка аппроксимации с помощью системы
{ф1, ..., фль <Pi> •••, Фл'} оказывается гораздо меньше по срав-
нению со случаем использования {ср,-}. Одной из трудностей в таком
подходе является требование, чтобы эта система оставалась
линейно независимой.
Пример 6. В задаче (9.12) мы выделили особенность решения
i|x7/4, т. е. ~х7/4. Введем функцию и(х) = 1—х1 и образуем
сингулярную функцию
фх (х) = ® (х) х7/4 = х7/4 — х23/4. (9.14)
Очевидно, что она удовлетворяет краевым условиям (этого мы
добились, вводя и(х)). Пусть имеются базисные функции {<р;},
обладающие следующим свойством аппроксимации: в простран-
стве для произвольной функции v е W * можно подобрать
такие коэффициенты а,-, что
N
v~ S а‘^‘ (М-р 1)*-1 ’ (9.15)
i = i И
Здесь через IF* = IF* (О, 1) обозначено гильбертово пространство
со скалярным произведением
k 1 1
(«, 0^=2 uvdx
1=1 о о
и нормой
/ k 1 1.1/9
II«1 и = 2 S (STdx+ u*dx]
’ \i = l о О /
76
АЛГОРИТМЫ ПРОЕКЦИОННОГО МЕТОДА
[ГЛ. I
Образуем новую систему {® (х) х7/4, <pi... флг} и рассмотрим
порядок аппроксимации решения задачи в норме пространства
Функция и(х) в (9.12) принадлежит (но и <=£№§, поэтому
погрешность аппроксимации и (х) с помощью {<р,} допускает оценку
c/(N 4-1), т. е. можно найти такие коэффициенты ah что
м
(9-16)
z=i И
Оценим погрешность аппроксимации м(х) с помощью системы
{сох7/4, <ръ <рдг}. Прежде всего, возможно также представле-
ние и (х):
и (х) = v (х) - ~ х™ + ха8'4,
N
где v (х) е W%. Пусть uN = Mi + У] а^, где Ьх = —16/21, а коэф-
i = l
фициенты а, выбраны так, чтобы аппроксимировать функцию
v(x) = u (х) - Mi = и (х) + х7/4 - ~ х*3'* е W* с порядком 1)Ь
в энергетическом пространстве НА, соответствующем задаче (9.12).
Тогда
N
и (х) — Mi — 2
i = l
N
V (X) - а№
i=l
wl2
W'3
Итак, увеличение числа базисных функций {tpj за счет добавления
к ним функции ф1 = и(х)х7/4 приводит к значительному умень-
шению погрешности аппроксимации решения задачи в метрике
пространства W\.
Пример 7. Построим приближенное решение задачи (9.12)
(при ^=1) в виде
N
uN = Mi + У ащ,
» = i
где ipj (х) = х774 — х’3/4, <р,- (х) = sin inx. Коэффициенты ait blt i =
= 1, ..., ^, определим методом Бубнова — Галеркина из системы
fduN
Ы’^)==(Л /«=1+*-1/4.
/duM dtp. \
(1Г’ ср‘') = ^’ ф/)’ » = АГ,
§ 9] ПРОБЛЕМЫ ВЫБОРА БАЗИСНЫХ ФУНКЦИЙ 77
которая может быть записана в виде
N
аЬ1 + У Ci (пЧ2 + 1) а; = fo,
/=1
bi(n2ia+l)c/ + (nat2+l)ai/2 = /i, i = l, .... V,
где
1 1
fo = f W (*7/4 — х33/4) dx, ft —(х) sin inxdx,
о о
1
а = |^- x:)/i — + (х7/4 — xM'/4)2j dx,
о
1
с, = $(х,/4 — х33/4) sin inxdx, i = l, N.
о
Вычисление коэффициентов можно осуществить либо явно, либо
с помощью подходящих квадратурных формул.
Хотя матрица данной системы имеет заполненные первые
строку и столбец, тем не менее решение ее может быть легко
найдено точно:
\ 1 = 1 / \ 1=1 /
а,-= 2/,/(л21а4-1) — 2b1c;, i = l, .... N.
На рис. 5 приведены результаты расчетов приближенного реше-
ния uN задачи. Заметим, что уже при N>3 функции uN весьма
мало отличаются друг от друга.
9.4. Устойчивость. Как уже отмечалось, стремление исполь-
зовать большое число базисных функций приводит к необходимости
позаботиться об устойчивости как процесса решения системы
уравнений, так и всего алгоритма в целом. Это приводит к про-
блеме устойчивости; чтобы решить ее, вводятся дополнительные
требования на базисные функции. Прежде чем получить эти огра-
ничения на {ф(}, рассмотрим некоторые понятия, часто исполь-
зуемые при изучении устойчивости проекционных алгоритмов.
Существует ряд определений устойчивости и подходов к ее
исследованию. Рассмотрим некоторые из них. Изложение будем
вести на примере задачи, рассматриваемой в гильбертовом про-
странстве Н со скалярным произведением (•, •) и нормой
Н = (->
Ли = Д f<=H, (9.17)
где Л —оператор задачи с плотной в Н областью определения.
Он предполагается симметричным и положительно определенным.
78
АЛГОРИТМЫ ПРОЕКЦИОННОГО МЕТОДА
[ГЛ. I
Введем в D (А) скалярное произведение [и, о] = (Аи, v),
и, v^D(A), норму [«] = [«, и]1/* и пополним D(A) в метрике [ •];
получим энергетическое пространство НА (см. § 2). Тогда обоб-
щенная постановка задачи имеет вид
[и, v] = (f, v), f^H, (9.18)
где и е НА — искомая функция, о —произвольная функция из НА-
Как мы уже знаем, системы методов Ритца и Бубнова —Галеркина
имеют вид
[Идг, <ру] = (А фу), / = 1, N, (9.19)
N
где uN = 2 а№ ~ приближенное решение из конечномерного про-
z=i
странства И-д’ сд Н с базисом Запишем систему (9.19)
в векторно-матричной форме:
Aa — f, (9.20)
где Л = (Д/у), Ау = [ф» Фу], « = («1. Мг. / = (Л..........fn)t >
fi = (f, ф<)-
Определение 1. Алгоритм построения приближенного ре-
шения назовем устойчивым, если система (9.19) имеет единствен-
ное решение при любом N и имеет место непрерывная зависимость
$ 9] ПРОБЛЕМЫ ВЫБОРА БАЗИСНЫХ ФУНКЦИЙ 79
приближенного решения uN от исходных данных, причем J uN|| sg
с || /||, где постоянная с не зависит от АГ
В смысле данного определения, проблему устойчивости иссле-
довать легко (что является одним из достоинств вариационных
методов). Действительно, умножив (9.19) на коэффициент а} и
просуммировав по /=1, ..., V, получим [иЛг, uN] = (f, uN).
Используя положительную определенность формы [ , • ], получаем
У2 II u.v li2 < [mjv, М < ИIIII uN f,
IK IK с II Л, с=1/у2.
В силу последней оценки имеет место непрерывная зависимость uN
от исходных данных (в данном случае от /, но вообще в правую
часть (9.18) могут входить краевые значения решения и т. п.).
Далее, так как {ср,} —базис, то
N
(Аа, а)2 = У Aijaiaj = [uN, WvKKKvIK
г, / = 1
=К(А1а, a)2=sV2Xmin(A4)|a|||,
/ N W2
где I! а |'2 = ( У, a*1 , M — матрица Грама: M = (My), My = (ф,-, фу),
4 = 1 /
Xmin(Af)> 0 —минимальное собственное значение матрицы М.
Отсюда следует положительная определенность матрицы А при
любом конечном АГ Значит, система (9.19) имеет единственное
решение.
Таким образом, если принять определение 1, то рассматри-
ваемый алгоритм будет устойчивым, и это будет иметь место
всегда, когда решаемая задача достаточно «хорошая». Поэтому
постановку проблемы об исследовании устойчивости можно услож
нить. Так как элементы Ду = [ф,-, <р7], fi = (f, ф() часто вычисляют,
используя подходяшие квадратурные формулы, то здесь возможны
ошибки в вычислениях. Именно по отношению к подобным
ошибкам и можно рассмотреть устойчивость алгоритма, которую
можно назвать численной устойчивостью метода.
Итак, пусть в результате всех возмущений мы приходим
(вместо (9.20)) к системе
Аеак = 1г1 (9-21)
где Ае — возмущенная матрица, fe—возмущенный вектор правой час-
ти. Пусть ёл = (Лв — А) — матрица возмущений, ez = (fe — /) — вектор
возмущений правой части. Если (9.21) имеет решение ае —
= (aE.i,..., ак. ,\)Т, то оно определяет возмущенное приближенное
решение задачи
А
идг, е= У ае /ф/. (9.22)
1
80
АЛГОРИТМЫ ПРОЕКЦИОННОГО МЕТОДА
[ГЛ. !
Определение 2. Назовем алгоритм построения прибли-
женного решения устойчивым, если существует такая постоян-
ная С], что при ||2=CCi и любых еу система (9.21) имеет единст-
венное решение аЕ и имеет место оценка
II uN - Идг, е II ==S с2 II ёд ||2 + с31| е, ||2, (9.23)
где постоянные с2, с3 не зависят от N.
Для изучения устойчивости в случае данного определения
предположим, что базис {<pj удовлетворяет следующему условию:
для любого вектора b = (bi, ..., bN)T имеют место соотношения
с6|Ь|||^(^, iw) < св || b|Ц, (9.24)
N
где а положительные постоянные с5, се не зависят
i= 1
от /V.
Рассмотрим систему (9.21), переписанную в виде
(4 4“ Вд) — fz-
N
Поскольку при vN = 2 bityi выполняются неравенства
i~ 1
((Л-|-ёд)Ь, Ь)2 = (Ab, Ь)2 + (ёдЬ, Ь)г =
= [vn, vN]+(eAb, Ь)2^у2|1Ы|2Ч|ёдМИ1>
Ss уЧ II b II - II ёл Ila II b 111 =3 (уЧ - II ёл «а) II b Ц,
то, выбрав С1<у2с5 и потребовав, чтобы ||ёл||2^С1, приходим
к тому, что матрица ЛЕ = Л4-ёд положительно определенна:
(АеЬ, &)2^у?||Ь|Ц, у1 = уЧ-С1>0.
Следовательно, система (9.21) имеет единственное решение.
Вычитая (9.21) из (9.20), получаем тождество
А (а — ае) = ёАае — еу,
из которого следует, что
(j4 (П Пе), U аЕ)2 == (ВдОе ву, U ЯЕ)2,
у2 II uN - uNi g II2 [uA- - uN, E]2 = (Л (a — ae), a - aE)2,
1 (ёла£ - ву, a - ae) | < (|l ед ||21| aE ||2 + II By ||2) || a - ae ||2
<(1|ёд1'2||аеВа + ку||2)1^М,
V ct,
II uN - uN, е || «S —(|| ёд ,|21| ae ||2 +1| ef ||2).
y2 V c&
§ 9]
ПРОБЛЕМЫ ВЫБОРА БАЗИСНЫХ ФУНКЦИЙ
8]
В силу неравенств
Vi 14 ||2< (АеаЕ, аЕ)2 = (/е, ae)2 = (f, аЕ)3 + (е/> «е)2 =
= (/> мдг, е) + (е/> «е)2 f J || UJV, е II + II е/ Иг II «е |'г
II f IIсв И ае. Иг +1| е/ Ik II ае ||2>
Il«el|2<^ll/il+1^
и Y1
получаем
II и и II 1 (\\ ₽ Il Yce и с ii [ II ва Ik IIе/1'2 _i II о л
|1 илг нлс е II =^= III еА Рг "ЦТ 17 IH г | е/ 1г /
у2 У с5 \ ri Y1 /
-• - <с2II ёд||2 + Caliph,
где постоянные с2, с3 не зависят от N. Эта оценка завершает
доказательство численной устойчивости рассматриваемого метода
в смысле определения 2. Отметим, что здесь существенную роль
играет ограничение (9.24).
Условие (9.24) на базисную систему в некотором гильберто-
вом пространстве Н назовем условием равномерной линейной не-
зависимости базиса в Н. (Базисы в этом случае иногда называют
также почти ортонормированными или нормальными в Н.)
Другим понятием, широко используемым при исследовании
устойчивости алгоритмов, является сильная минимальность базиса.
Базисная система {<р*} в Н называется сильно минимальной
в Н, если наименьшее собственное число ^min (Л1) = min^; (Л1)
i
матрицы Грама Л4 = (Л4;у), Л4у = (ф,-, фу)я, i, j=l, ..., АГ, огра-
ничено снизу положительным числом, которое не зависит от АГ
Известно, что для того, чтобы алгоритм (9.19) был устойчи-
вым, необходимо и достаточно, чтобы базисная система {<р;} была
сильно минимальна в энергетическом пространстве На [31]. При
выполнении этого условия справедлива оценка
[tZjV — U.V, е j с7 II ®А ||2 + CS II е/ ||2»
(9.25)
где постоянные с7, с8>0 не зависят от АГ
Для установления сильной минимальности системы {<р/} в про-
странстве НА часто бывает полезным следующее утверждение [31].
Пусть гильбертово пространство Нг вложено в гильбертово про-
странство Н2 (т. е. Ht s Н2 и ||и||Я1 5=с|| и||я„ с>0) и задан
базис {<р/} с Нг. Тогда, если система {q>,} сильно минимальна
в Н2, то она сильно минимальна и в Hi.
Отсюда, например, можно сделать вывод, что условие силь-
ной минимальности для {<₽/} в НА в рассматриваемом здесь алго-
ритме будет выполнено, если выполнено условие равномерной
82
АЛГОРИТМЫ ПРОЕКЦИОННОГО МЕТОДА
[ГЛ. 1
линейной независимости {ср;} в (более широком) пространстве Н.
А этому условию, как мы увидим в следующей главе, при по-
строении базисных функций с конечным носителем в ряде слу-
чаев сравнительно просто удовлетворить.
Из изложенного выше следует, что для решения проблемы
устойчивости достаточно, чтобы выбранная базисная система {<рД
либо удовлетворяла условию (9.24) в Н, либо была сильно мини-
мальна в Нд. Иногда построить базисные системы, удовлетворяю-
щие этим условиям, совсем просто.
Пример 8. Так, при решении задачи (9.1), (9.2) достаточно
функции sin inx взять ортонормированными в Нв, т. е. чтобы
V 2
срг-=>-—sininx, i = l, 2, ... В этом случае базис {<р;} будет не
только сильно минимальным в Нв и НА, но и равномерно ли-
нейно независимым в энергетическом пространстве.
I N
Действительно, так как'при vN= У,
Г = 1
л ' [I dv кг ||2
(Ab, b)2 = [vjv, Уд,] 3s р01 || =А>2,
(Ab, &)2 = [1»лг, vN]^Pi
>2
|| dx
?1 ! dvN II2
2 dx II
V А?
то базис {ср,} равномерно линейно независим в Нд.
Пример 9. Если в примере 4 предположить достаточную
гладкость границы dQ и потребовать, чтобы функция со (х) была
дважды непрерывно дифференцируема в Q = Q-|-dQ, со>0,
внутри Q и ды/дп>0 на dQ (« — внешняя нормаль к <3й), то
система со (РП1 (xj)... РПт (xm)), n1F п2, ..., nOT = l, 2, ..., где
Рп (t) — нормированные полиномы Лежандра, будет плотна в НА
и сильно минимальна в L2(Q), а значит, сильно минимальна
в НА (см. [31], стр. 160).
В заключение отметим, что, помимо введенных в этом параг-
рафе требований на базисные функции, можно вводить дополни-
тельные ограничения, направленные на то, чтобы наиболее полно
учитывать специфические черты решаемой задачи и чтобы в ре-
зультате их выполнения базисная система {ср;} была в определен-
ном смысле рационально выбранной.
S 10]
О ВЫБОРЕ БАЗИСНЫХ ФУНКЦИИ
83
§ 10. О выборе базисных функций в обобщенном методе
наименьших квадратов
Рассмотрим в гильбертовом пространстве Н операторное урав-
нение
Au^XBu + f, (10.1)
где Д, —числовой параметр (при 1 = -1 это уравнение совпадает
с (1.1)), /еЯ, А и В —некоторые линейные (в общем случае
неограниченные) операторы. Предполагается, что D (Л) плотно
в Н и D(4)sD(B).
Применим для решения (10.1) обобщенный метод наименьших
квадратов. Для этого выберем последовательность HN, N = Nlt
N2.....конечномерных подпространств с базисными функциями
{Ф/}, причем H^czD(A) и последовательность {/Шдф плотна
в Н. Строим приближенное решение в виде
uN = £ а,Ф,-, (10.2)
£=1
где а,- определяем из системы линейных уравнений
(AuN, АФ1') = К(Вим, ЛФ,-) + (/, ЛФ/), 1 = 1, ..., IV. (10.3)
Одним из основных вопросов в рассматриваемом методе яв-
ляется выбор базисных функций. Если априори задаются функ-
ции {Ф,} с известными аппроксимирующими свойствами (ортонор-
мированные полиномы и т. д.), то в этом случае часто трудно
исследовать свойства системы {ЛФ,}, что затрудняет в свою
очередь изучение таких вопросов, как получение оценок скорости
сходимости, учет особенностей решения, специфики задачи и т. п.
Пусть область значений оператора В и функции f принадле-
жат некоторому подпространству HB,f az Н. Зададим в HBf исход-
ную базисную систему относительно которой предполагается
выполнение двух свойств: 1) для любого W-мерного вектора Ь =
= (bi,..., bN)T справедливо соотношение
Ci || b |
(Ю.4)
IN \1/2
где постоянные clt с2>0 не зависят от b и W, 'Ь92 = [ У, ;
'<=1 /
2) для любой функции v е Нв, существует такая линейная ком-
N
бинация У, btcpi, что
|| BA'v - фа, |] < е (N) || v J, (10.5)
где е(М)->0 при N->oo.
84
АЛГОРИТМЫ ПРОЕКЦИОННОГО МЕТОДА
(ГЛ. 1
Предположим, что существует Л-1 и что обращение оператора А
достаточно просто осуществить. В этом случае строим функции
{Ф,}, где Ф,= Л-1ф/ линейно независимы при каждом АГ, и они
принимаются в качестве базисных при решении (10.1) с помощью
обобщенного метода наименьших квадратов.
Отметим некоторые характерные черты рассмотренного здесь
алгоритма построения базисных функций.
1. По построению {Ф^} обладают особенностями решения и,
обусловленными их зависимостью от оператора Л, а за счет спе-
циального выбора системы {<р;} можно учитывать те или иные
особенности правой части уравнения (10.1), которые часто априори
известны.
2. В некоторых случаях может оказаться, что F (u, f) = КВи + f
будет обладать лучшими дифференциальными свойствами по срав-
нению с самим решением уравнения. В этом случае можно по-
пытаться с помощью малого числа исходных базисных функций
добиться эффективной аппроксимации F (и, f) и надеяться на
достаточно быструю сходимость uN- к и.
3. Если решение уравнения (10.1) зависит от переменных xit
i = l, ..., п, a HBi} состоит из функций, зависящих лишь от хь
t = 1, ..., m<Zn, то очевидно, что в данном случае достаточно
ввести базисные функции {<₽,}, зависящие лишь от Xi, ..., хт,
и с их помощью аппроксимировать F (и, Решение и
будет приближаться посредством uN по всем переменным. Это
обстоятельство приводит к значительному уменьшению количества
базисных функций, а следовательно, порядка решаемой системы
(10.3), что особенно важно при решении многомерных задач
математической физики.
4. Если переписать (10.3) в эквивалентном виде
N N
У, Ф/) = ^ Л а,(ВФ/, <Р/) + (А ф/), 1 = 1, •••, N, (Ю.6)
г = 1 i = 1
то легко заметить, что если <р,- почти ортогональны (т. е. (ф;, фу)
#=0 лишь при |j — то в левой части (10.6) возникает
ленточная (либо разреженная) матрица, что облегчает решение
системы с помощью итерационных методов. Если выбирать функ-
ции {<р;} к тому же с конечными носителями малых размеров,
то упрощается также вычисление {Ф,}, элементов матриц и зна-
чений fi = (f, ф,).
В силу отмеченного выше можно предположить, что обобщен-
ный метод наименьших квадратов при использовании специаль-
ных базисных функций {Ф,} может оказаться достаточно эффек-
тивным при решении некоторых задач, в которых можно доста-
точно быстро строить Д”1, например, когда оператор А обратим
в явном виде: дифференциальный оператор в уравнении переноса,
оператор Лапласа в квадрате, круге и т. д.
S 10T
О ВЫБОРЕ БАЗИСНЫХ ФУНКЦИИ
85
Рассмотрим вопросы разрешимости и сформулируем теорему,
которая по своим условиям несколько отличается от аналогич-
ной теоремы из § 5.
Изучим сначала вопрос разрешимости системы (10.3).
Лемма 1 ([17], стр. 489). Пусть V — линейный ограниченный
оператор из банахова пространства X в банахово пространст-
во Y, и пусть для каждого у существует такой элемент
хе X, что I Ух —«/ [ <71| 1/ И, [ х Ц с [ у ], где q<.l и с— постоян-
ные. Тогда уравнение Vx = y при любом y&Y имеет решение
хе X, удовлетворяющее неравенству ||хЦ с|у||/(1 — q).
Сформулируем следующее вспомогательное утверждение.
Лемма 2. Для произвольного N-мерного вектора у = (уъ ...
..., yNy можно построить такой элемент g Н, что
N
= > Уу1, (вы)-*- (Ю.7)
Z = 1
Доказательство. Пусть М — матрица с элементами М^=
= (<Рь ф/), I. / = 1, W. Так как {ф,} — базис, то М имеет
обратную матрицу Л4-1, причем из (10.4) следует, что
Ci sS || М ]3 с2, l/^^IIAHlIa^S 1/Ci. (10.8)
Построив
n
g=X (M~ly)i ф,-,
i = l
(10.9)
имеем
(£, ФО - (S фУ, ф;') = Л (М-1^ (<рг, фУ) =
\«=1 / /=1
= 5 MtJ (M^y)f = (ММ-'у^ус, (10.10)
/=i
в силу (10.4) справедливы соотнощения
ci II М-'у ||t< || g ||2 < || М-'у !|| с2 с21| М~1 III || у JI > || у III,
С1
II у III = I! ММ-!у III II Л? Ilf II М^у III < fl || g Р,
С1
т. е. получаем (10.7).
86 АЛГОРИТМЫ ПРОЕКЦИОННОГО МЕТОДА [ГЛ. !
Докажем разрешимость системы (10.3).
Лемма 3. Пусть-. 1) уравнение (10.1) имеет единственное
решение при произвольном f&H', 2) || Л«||^с||/||; 3) Л-1 сущест-
вует и ограничен-, 4) | А,|||ВЛ_1||<:оо. Тогда система (10.3) одно-
значно разрешима при достаточно больших N, причем для при-
N
ближенного решения uN = af^t справедлива оценка
t = i
(10Л1)
где положительная постоянная с не зависит от N.
Доказательство. Запишем (10.3) в виде
La — f, (10.12)
где L = (L0), Lv = ((I-M3A-l)<pt, <р,), /=(А, .... /ЛУ,
= (/, ф,), и попытаемся применить лемму 1 для доказательства
однозначной разрешимости (10.12). Прежде всего возьмем произ-
вольный вектор y={yi, ..., Ух)7 и построим для него элемент
g^H, для которого выполняется (10.7). Пусть G есть решение
уравнения AG = KBGg‘, введем w = AG', тогда w удовлетворяет
уравнению w = kBA~1w + g, причем w е HBt f.
В силу однозначной разрешимости (10.1) || (7 — ХВЛ-1)-1|| с, и,
значит,
с1/2
|| AG I = II ® II = |(/ - ^Л-1)-1^ || < с ||g II < с -±- II у Ц2.
И
Согласно сделанным ранее предположениям можно ввести
N
такой элемент фЛг= У, d/ф,-, что
1 = 1
|| lkBA~1w — i|w || 8 (W) || w ||;
введем
N
®№=fa|>Ar+g=2j b^h b = (blt .... bN)T, (10.13)
( = 1
где bi = ^di + (M-1y)it и оценим разность (Lb —у). Так как
r|; = (lfe —</),==((/ —7.В Л1) ф(), (Ю14)
w = kBA~1w-{-g,
§ Ю]
О ВЫБОРЕ БАЗИСНЫХ ФУНКЦИЙ
87
ТО
\Lb-y^ =
N N
= У, Tlx ((/ — Л”1) WN — g, ф() = У Т],' ((/ — ^ВЛ"1) (wN — W), <Pi)<
i=l 1=1
< (1 +1M I BA-1 II) II wN —w II £ W <
h=i II
=C(1 +1 А|||ВЛЛ,|) р^ + й'-ХВД-1®-^
xC (1 +| A III BA 1II) IКI e (N) > | c"2!1 Lb -y h,
I Lb — у l^sgce (N) ,iz/||2.
Таким образом, одно из условий леммы 1 выполнено. Второе
следует из соотношений
II b ||а sS с || wN |К с (|| g || + А || [),
IIЯЫ < (I IIIВ А-11| + се (АГ)) || w I!, || w К с || g В,
IIЬ ||а < с|| g-Ц < с|| у ||2.
Итак, показано, что для произвольного y — (yi, .... Ум)т,
Цг/Ва <оо, можно построить такой вектор & = (&i, ..., bN)T, что
II Ь ||2 <с|! У к
\Lb-y^ce.(N) lyh,
(10.15)
где при достаточно большом No и N No можно считать, что
се, (N) s^ q <Л и постоянные с не зависят от /V. Тогда в силу
леммы 1 получаем однозначную разрешимость (10.12), причем
IIаВгсIIfV( 1 — е(Л^)). Отсюда следует неравенство (10.11). Лемма
доказана.
Теорема 1. Пусть выполнены условия леммы 3. Тогда'. 1) при
достаточно больших N существует единственное решение системы
(10.3), однозначно определяющее приближенное решение задачи
N
ин=^а1$>1, для которого справедливо неравенство (10.11);
£ = 1
2) последовательности {«л'}> Мил4 сходятся соответственно к и
и Аи при N-^oa, и справедлива оценка
II N
|| Л (и — «дх) |К с min \\F(u, Л-S Ci<Pi
ct II
(10.16)
Доказательство. Однозначная разрешимость (10.3) и
справедливость (10.11) следуют из леммы 3. Поэтому исследуем
88
АЛГОРИТМЫ ПРОЕКЦИОННОГО МЕТОДА [ГЛ. 1
вопрос о сходимости. Пусть vlV есть ортогональная проекция
v=Au на линейную оболочку функций {<р;}. Запишем тождество
((/ - ХВЯ1) (vN - vN), ф,) = (§, Ф/), 1 = 1. W,
где vN=AuN, l, = 'KBA~1(yN — vY Последняя система, как уже
доказано выше, имеет единвтввннее решение, причем || vN — vN || -С
-е W). Тогда
|| Я (U,V - Щ II = II - V || || VN - 1/дг j +1| v - vN || <
Ч1
Но поэтому || Я (и — uN) ||->0 при N ->-оо. В силу
существования ограниченного оператора Я'1 имеем || и — uN || sS
|| Я'11| || Я (и — uN) || -> 0 при N->oo. А поскольку vN есть орто-
гональная проекция v, то при достаточно больших N справед-
лива оценка (10.16). Теорема доказана.
Пример 1. Рассмотрим задачу
~^P(x^ + u = f(x^ х^(0, 1),
и(0) = «(!) = 0,
где /(х) = 1000, р (х) = {1000 при 0<х< 1/2; 1 при 1/2<х<1}.
Сначала построим решение методом Бубнова — Галеркина,
выбрав в качестве базиса систему функций ф7-(х) = sin/лх, / = 1,
2, ... Приближенное решение и'к в данном случае ищем в виде
N
«^' = 2 а/’фДх); коэффициенты а)1' определим из системы
/=1
N
2 [(^ТЕР $0 + ^’ (₽>)]а/11 = (А Ф')’ /=1> N>
1=1
где (f, фу)= 1000 (1 — cos/л)/(/л), (ф,-, Фу) = {1/2 при i = /; 0 при
I /} >
г 100112л2/4 при i = j,
при г^;
к 2 \ 1-г/ 1 —/ /
Решая эту систему с помощью ЭВМ, можно определить коэф-
фициенты а}" и функцию u'n (х). На рис. 6 приведены резуль-
таты расчетов при W = 5, 10, 50.
§ 10]
О ВЫБОРЕ БАЗИСНЫХ ФУНКЦИЙ
89
Найдем теперь приближенное решение и'$ с помощью обоб-
щенного метода наименьших квадратов при специальном выборе
базисных функций {Ф;}. Пусть Ф,(х) есть решение модельной
задачи
‘ dx^dx
ф;(0)=Ф,-(1) = 0, i=l........N.
Его можно выписать в явном виде:
Ф,(х) =
1 (sin inx ,
\ 1000 "Г
х- 1,998 sin (t'n/2)'
Ё001 ,
0<x<~,
iW sintJW +
(х— 1) • 1,998 sin (in/2)'
Ё001 ,
90
АЛГОРИТМЫ ПРОЕКЦИОННОГО МЕТОДА
[ГЛ. 1
N
Ищем u'n как линейную комбинацию = а'?'Ф}(х), где a'j"
i=i
найдем, решив систему уравнений
(Л<, ГФ,) + «, ГФ/) = (Л Ж), 1 = 1...N,
или, что одно и то же,
N
2 а7’[(фУ, ф,) + (Ф/, Ф;)] = (/, ф(), t = l, .... N,
/=i
где
(Ф;>
Ф/) =
1,001 0,999 /1998 sin2 (/л/2) , . /л /л\
w “ 7^ \—iooi/л +sin Т cos 2-J
при
i,
0,999 /sin ((/+0 л/2) _ sin ((/ — i) л/2) \
2л(2л2 \ /+/ j — i )
0,999 . In I 1,998 sin (/л/2) . /л\
~ sm 2 (1,001..............in +COSM
при i =/= /.
i
На рис. 7 приведены результаты расчетов и'ы (х) при М = 3, 5.
Сравнивая приведенные выше результаты, отмечаем, что при-
ближенное решение задачи ti'fl, построенное на основе специаль-
ных базисных функций {Ф;}, уже при малых значениях N при-
ближает точное решение задачи значительно лучше по сравне-
нию с u'n-
§ И. Выбор базисных функций методом Канторовича
Л. В. Канторович предложил, используя метод Ритца или
Бубнова — Галеркина, сводить приближенно исходную задачу
в частных производных к решению системы обыкновенных диф-
ференциальных уравнений. Рассмотрим этот подход на примере
метода Ритца, предполагая ради простоты, что все рассматри-
ваемые функции зависят лишь от двух независимых переменных.
Пусть в области Q az R2 решается задача
Л« = /, fe=H, (11.1)
с симметричным положительно определенным оператором А,
D(A)czH, R(A) = H. Обычным образом (см. § 2) вводим энер-
гетическое пространство НА со скалярным произведением [•, •]
и нормой [•] = [•, • ]1/2 и сводим (11.1) к задаче об отыскании
функции и е НА, доставляющей минимум функционалу
F(u) = [u, и]-2 (u, f). (11.2)
Выберем линейно независимую систему функций {ф,(х, у)} az
az НА и введем подпространство Н(А\ состоящее из линейных
S И]
О ВЫБОРЕ БАЗИСНЫХ ФУНКЦИЙ
91
N
комбинаций uN = У а, (х) <р, (х, у) е НА (где коэффициенты at за-
i=i
висят от одной из переменных, например от х), для которых
[uyv]<oo- Предположим, что последовательность N — Nlt
N2, предельно плотна в НА, т. е, для любой функции ие
^НА можно выбрать такие функции uN е Н{А\ что [ы — U/vJ->-0
при N сю.
Будем искать приближенное решение в Ид1' в виде
N
= «Дх)фДх, у), (11.3)
92
АЛГОРИТМЫ ПРОЕКЦИОННОГО МЕТОДА
[ГЛ. 1
где at(x) определим из условия минимизации функционала F:
F (uN) = m\n F (vN~), Vk<=H<a}- Варьируя F (uN) = F (au ..., aN),
VN
приходим к системе уравнений от одной переменной х:
d dF dF п , da; ... ..
-г а-f — 5- = 0, 1=1, .... N, di = ~. (11-4)
dx da( da{ ’ ’ ’ ’ ‘ dx ' '
Рис. 8.
Систему (11.4) можно решать каким-либо подходящим методом
(разностным, проекционно-сеточным и т. д.). Исследование схо-
димости рассматриваемого алгоритма произ-
водится обычным образом (см. § 2).
Отметим, что в сформулированном алго-
ритме базисные функции часто зависят от
обеих переменных. Это обусловлено тем, что
требование принадлежности <р, к НА подра-
зумевает удовлетворение этими функциями
главным краевым условиям. Поэтому стрем-
ление добиться выполнения этого ограничения
приводит к появлению отмеченной зависимо-
сти. Поясним это следующим примером [18].
Пример 1. Рассмотрим в Й = {А=Сх=сВ, Йх (х)=сг/=сЙ2 (х)},
где Йх(х), йа (х)— достаточно гладкие кривые (рис. 8), задачу
= 01-5)
и = 0 на ЭЙ.
(П-6)
Энергетическое пространство здесь состоит из функций, обращаю-
щихся в нуль на ЭЙ и таких, что
ГТ /С А ди |S , \du |2\ , , \1/2
М = +\d^\)dxdy] <°°-
При решении этой задачи базисные функции можно выбрать
в виде
<Р/ (х, у)— (у — Qi(x)) (&2(х) — у) у1~\ 1 = 1, 2, ...,
или
ю. (х = sin 1Jl (У—fii (*)) i _ i 2
фдх, у) sin х., ...
Благодаря такому выбору ф,- (х, у) на криволинейных границах
удовлетворяют краевому условию (11.6). На прямых х = А, х = В
N
это условие для uN = У а,- (х) ф,- (х, у) будет выполнено, если по-
i “I
требовать, чтобы искомые неизвестные at(x) в (11.3) удовлетво-
ряли ограничениям a, (А) = at (В) = 0, 1=1, ...» N.
§11] О ВЫБОРЕ БАЗИСНЫХ ФУНКЦИИ 93
Однако в ряде задач можно ограничиться базисными функ-
циями, зависящими от одной из переменных, в то время как at
будут функциями от другой. В этих случаях процесс получения
явного вида (11.4) упрощается, как и весь алгоритм в целом.
Пример 2. Рассмотрим задачу для уравнения переноса ней-
тронов *) в Й = {0=Сх=с7\ O^p^l}:
i
52u С
+ р')«(*, р')^р'+/(*> р)>
о
ди п п
и-ц^-=0 при х = 0,
и-}-р|^ = 0 при х=Т,
где 0<;в(х, р, р')<1. Энергетическое пространство На и функ-
ционал Ритца здесь имеют вид
, 1 т
Яд = |и: [и, ц]= jj dp j {^^^x + uv}dx +
i >
4-$р(иц|ж_о + «^|х-г)Ф, [«] = [«, «]1/г)>
о )
1 Т 1
F (и) = ( dp ( + — би dp') dx-{-
о о ' о
1 1 т
+ J Р («2 U-о + и2 lx-г) dp - 2 $ dp $ uf dx.
О 0 0
Краевые условия здесь естественные, поэтому базисные функции
им не обязаны удовлетворять. Пусть выбрана какая-либо базис-
ная система {<ру (х)} (в качестве которой можно взять подходя-
щий базис из W'i (0, Т)). Приближенное решение будем искать
в виде
N
= а, (р) <р7 (х),
/ = |
где а, (р) находятся из системы (11.4), которая в данной задаче
является системой интегральных уравнений:
w 1
У, лр(н)«/(н) = 2 JMh. р')«/(р'Мр'+А(р)» •••> N>
/ = 1 /=1о
*) Описание постановок задач для уравнения переноса приводится в гл. 5,
94
АЛГОРИТМЫ ПРОЕКЦИОННОГО МЕТОДА
(ГЛ. 1
где
7 Т
Ау (р) = р2 J dx + jj ф/фу dx + р (ф,ф,. U-о + ф<ф/ |х-7-),
о о
т
ву (р, р') = $ 6 (Х, Р, р') ф,- (х) фу (х) dx,
о
т
fiW = 5 f (х, n)<Pi(x)dx.
о
Численное решение этой системы удобно осуществить, напри-
мер, методом замены интегральных уравнений системой линейных
уравнений с применением подходящих квадратурных формул для
приближения интегралов.
В заключение отметим, что рассмотренный выше подход к вы-
бору базисных функций (зависящих от некоторых из независи-
мых переменных, тогда как а, являются функциями от осталь-
ных переменных) весьма удобен в тех случаях, когда по харак-
теру задачи ее решение целесообразно аппроксимировать по
различным переменным разными методами (см. пример 2). Этим
обстоятельством обусловлено широкое использование такого под-
хода в теории переноса нейтронов [28], где по пространственным
переменным часто применяются аппроксимации с помощью раз-
ностных, вариационных и проекционно-сеточных методов, а при-
ближения по угловым — с помощью метода замены интегральных
уравнений системой линейных уравнений.
ГЛАВА 2
АППРОКСИМАЦИЯ И ФИНИТНЫЕ ФУНКЦИИ
В предыдущей главе были рассмотрены некоторые алгоритмы
проекционного метода для приближенного решения задач. В иллю-
стрирующих примерах в основном использовались базисные функ-
ции, не обладающие конечными носителями, малыми по сравне-
нию со всей областью. Основная цель этих примеров была
направлена на иллюстрацию алгоритма, при этом внимание не
акцентировалось на виде базисных функций. Однако, как уже
отмечалось ранее, одной из основных особенностей проекционно-
сеточного метода является использование в качестве базисных —
функций с конечным малым носителем
Построение их, как правило, осуществ-
ляется следующим образом. Сначала
область Q, в которой решается задача,
некоторым подходящим образом разби-
вается на конечное число М подоблас-
тей Q/, которые назовем конечными
элементами. Затем на Й,- или на объ-
единении их небольшого числа (напри-
мер, на объединении йь примыкающих
к некоторой точке Pft = (xA, «/*)) стро-
ится финитная базисная функция <рА
с носителем, равным Й< или выбран-
ному объединению, таким образом, что-
(финитных функций).
бы она на каждой подобласти й,- из своего носителя представ-
ляла собой многочлен (рис. 9). Все линейно независимые функции
такого вида принимаются в качестве базисных в выбранном
алгоритме решения.
Отметим преимущества такого выбора базиса: так как носи-
тели его функций, как правило, гораздо меньше Й, то скалярные
произведения (<р/( <рА) будут ненулевыми, если \ i — k\^M, где
М — целое число, М . Это в свою очередь приводит к сильной
разреженности матриц в рассматриваемом алгоритме, которые
по виду будут напоминать матрицы в разностных методах. Сле-
довательно, проекционный алгоритм с такими базисными функ-
циями обладает одним из замечательных свойств разностных
методов решения задач математической физики — он приводит к
системам с ленточными или разреженными матрицами.
96
АППРОКСИМАЦИЯ И ФИНИТНЫЕ ФУНКЦИИ
ГГЛ 2
Эта глава посвящена рассмотрению некоторых вопросов, свя-
занных с построением финитных функций, а также изучению их
аппроксимирующих свойств.
Здесь и в дальнейшем через й обозначается ограниченная
область в R", Й=Й + дй, дЙ —граница области Й.
Ниже будут использоваться следующие пространства вещест-
венных функций:
С (й) — пространство непрерывных функций на Й с конечной
нормой
ll«llC(«) = ™£l“(X)l- (0J)
Cw (Й) — банахово пространство функций, имеющих непре-
рывные в й производные до порядка k включительно; норма
имеет вид
И “ = S max | Dau (x) |, (0.2)
la I хе Й
где Dau = > a = (“i> a2...«л), — целые, | a | =
= «! + ... + «„.
LP(Q) — банахово пространство функций, p-я степень модуля
которых интегрируема по Й; норма имеет вид
(B) = f$|«(x)|Pdxy/p, 1=Ср<со. (0.3)
р \й /
В случае р = оо пространство (й) есть совокупность измери-
мых функций и (х), каждая из которых ограничена или совпа-
дает почти всюду с ограниченной функцией, причем норма ||ц||
определяется как «существенная грань» J и (х) j, т. е. как наи-
меньшее из чисел М, для которых неравенство | и (х) | выпол-
няется почти всюду, и обозначается
Il «к«(о> = SUP vrai | и (х) |. (0.4)
Из всех приведенных пространств лишь пространство L2 (й)
является гильбертовым; скалярное произведение и норма в нем
задаются соответственно следующим образом:
(«, v)La (я) = и (х) v (х) dx, ||u|lz.2(Q> = («, u)1/a. (0.5)
я
При решении краевых задач используется также гильбертово
пространство W* (Й), которое (при фиксированном k^O) является
пополнением множества бесконечно дифференцируемых в Й
§ 1]
КУСОЧНО ПОСТОЯННЫЕ ФУНКЦИИ
97
функций по норме
2 \! а; < к Я /
(0.6)
скалярное произведение имеет вид
(«. VM(G) = S \D^uD-vdx. (0.7)
При k = 0 пространство 1F2 совпадает с L2(Q).
W'i (Q) — гильбертово пространство, состоящее из функций,
принадлежащих 1Г2(Я) и равных нулю на 3Q. Норма и скаляр-
ное произведение в W) (Q) имеют тот же вид, что и в (Q).
1^2,0 (Й) — подпространство W1(Q), определяемое как 1F|.O =
= W2 (Q) П (И), т. е. состоящее из функций, принадлежащих
одновременно как так и F|(Q).
(Q) — банахово пространство с нормой
М^,а) = 2 PWooW-
’ ;al<s
(0-8)
§ 1. Простейшие кусочно постоянные финитные функции
Рассмотрим наиболее простые функции с конечным носителем —
ступенчатые функции. Выясним, каким требованиям из § 9 гл. 1
они удовлетворяют и как можно добиться выполнения других
ограничений.
Ради простоты рассмотрим случай одной независимой пере-
менной: Q = (a, b) <= R. Введем на [а, Ь] сетку п = х0<х1<...
...<ZxN-!<ZxN = b, hi^Xi — Xi-!, h = maxhi, i=l, 2, ..., N, раз-
бив тем самым [a, b] = Q на W подоб-
ластей Q, = (х/_1, xt), t = l, ..., N (ко-
нечных элементов). Зададим на каждом
(хы, Xt) характеристическую функцию
(рис. 10)
<₽/(*) = ( 0
xefo-i. Xi),
X^(Xi-lf Xi).
(1.1)
7
° а-ад... xi ...
Рис. 10.
Набор таких функций {ф;} примем в
качестве базисных при решении соот-
ветствующей задачи (например, инте-
грального уравнения типа Фредгольма, рассматриваемого в L2 (И)).
Линейную оболочку функций <р, (х), i = l, N, обозначим
через Нк.
4 Г. И. Марчук, В, И. Агошков
98
АППРОКСИМАЦИЯ И ФИНИТНЫЕ ФУНКЦИИ
[ГЛ 2
Рассмотрим некоторые свойства базисных функций. Прежде
всего отметим, что все они линейно независимы, причем
(ф,-, ф*) = 0 при i=£k, (ф,-, ф() = /г,-.
(1.2)
Множество Hn принадлежит любому из пространств Lp (Q),
р—1, 2, ..., а аппроксимирующие свойства этих функций
даются следующей теоремой.
Теорема 1. Для любой функции (z(x)e (^(Q) существует
такая линейная комбинация Ui (х) е HN, что
Р=1, 2, .... (1.3)
где постоянная с не зависит от и и, а норма в Wp задается
выражением
=!! u <Q) _*“||dx|r₽(O)*
Доказательство. Выберем в качестве ut функцию вида
N
«/ W = У «iTi <х),
I
X.
‘xi-l
Тогда при p<oo
b N xi
lu — Ujffc = $ | u - U/1₽ dx = J? J I и — Wy |p dx =
p a xi-l
u(x)-^{ J u(l)dl
xi-l
p
dx —
dx
xt
{ J (u(x)-u(g))dg
xi-l
Используя неравенство Гельдера
I и (х) v (х) dx I sC А | и (х) dx\'q Л | v (х) |₽ dx\1/p,
I Q I \S2 / \й /
9^1, \/p+\/q=\, (1.4)
§ п
КУСОЧНО ПОСТОЯННЫЕ ФУНКЦИИ
99
получим
р
Следовательно,
w xi ь
V uX + pio С \d“\p dx^h^A №\pdx =
dx\ J I dx I
a
b
i \dxl
a
wp
Для Loo рассмотрим разность u — ut на интервале (х^, хг); тогда
\U-Uj\-
Х1
(и (х) - и (g)) d%
1 xi-i
xi
« W - § «(?) d?
‘ xi-l
hi sup vrai
'W'io(O)’
([ M Ut (|oo h || U (Ц)
Теорема доказана.
Из этой теоремы следует, что выбранная система функций
{ср, (х)}< плотна в любом пространстве LP(Q), р= 1,2, ... (или
последовательность подпространств {Нм} предельно плотна
в Lp(fi), /7=1,2, ...).
Выясним, удовлетворяет ли система {ф(} условию линейной
равномерной независимости (как мы уже знаем из § 9 гл. 1, это
влияет на устойчивость алгоритма). Пусть для определенности {ф,}
рассматривается в /7 = L2(Q). Свойство равномерной линейной
независимости базиса требует, чтобы собственные числа матрицы
М = (М// = (ф/, ф,)) = Р AJ
были ограничены сверху и снизу положительными числами, не
зависящими от N = N(h). Как легко заметить, для выбранных
функций ф; (х) это условие в данном случае не выполняется.
4*
100
АППРОКСИМАЦИЯ И ФИНИТНЫЕ ФУНКЦИИ
[ГЛ. 2
Однако оно будет справедливо, если произвести нормировку функ-
ций {<р,- (х)}. В результате придем к нормированным ступенчатым
функциям (ради простоты оставим за ними прежние обозначения
Ф/ (х))
Ф'(Х) = Г5Т 0,
х е (x,-i, xt),
X ф (%,-!, Xt).
(1-5)
Очевидно, что результат об аппроксимации (1.3) в этом случае
остается справедливым, но здесь уже выполнено условие равно-
мерной линейной независимости базиса, так как все собственные
числа матрицы Грама Л4 = (Л4/у) равны единице и их значения
не зависят от N*=N(h).
Указанный способ нормировки финитных функций, наряду
с некоторыми дополнительными ограничениями на сетку в обла-
сти Q, часто используется для достижения базисными функциями
свойства линейной равномерной независимости (или сильной
минимальности).
В заключение рассмотрим случай многомерной области Q cz R".
Для определения кусочно постоянных функций введем разбиение
этой области на подобласти Q„ i == 1,2, ..., N, для которого
N
выполнены следующие свойства: 1) [J = 2) Q, О,- = 0,
;=1
iy=j; 3) max diam h, где diamQj = sup |x — y\, x, y<=Qi,—
i x. у
диаметр области Q,. Базисные функции, которые будем рассмат-
ривать в L2 (й), можно определить как
1, х = (хъ ..., хп) е Q,,
О, хф Q,.
Исследование свойств этих функций проводится по аналогии
с одномерным случаем.
§ 2. Кусочно линейные базисные функции
в одномерном случае
В этом и следующих параграфах будут рассмотрены одни из
наиболее распространенных финитных функций, нашедших широ-
кое применение в проекционно-сеточном методе, а именно кусочно
линейные финитные функции, которые часто называют функциями-
крышками. В этом параграфе будет рассмотрен одномерный слу-
чай этих функций.
2.1. Построение функций-крышек. Пусть функции и(х), для
которых мы хотим построить подходящие аппроксимации, опре-
’,‘м=^Ьи-{
§ 2]
КУСОЧНО ЛИНЕЙНЫЕ ФУНКЦИИ
101
делены на конечной области Q = [a, Ь]. Введем на {а, Ь] сетку
и — %о <1 %jv—i <С Хд- — b,
hi = x, — Xi^, /i = max/i;, г = 1, ..., N, (2.1)
и поставим в соответствие каждому узлу сетки функцию (рис. 11)
X S (x,_j, Xi),
Х(+1 х
hi+1
0,
Фо(х) =
ф/ (•*) =
X 6= (Xi, хм),
х^(хг_ь х/+1), 1=1,..., М —1;
, хе(х0, хг),
О, х ф (х0, *1);
(2.2)
Флг (х) =
Х *ЛГ-1
X е (Xjv-i, Хд),
X ф (XN_x, XN).
Очевидно, что эти функции линейно независимы и каждая из них
отлична от нуля лишь в интервале длиной порядка 2Л. Линейную
оболочку {ф,} обозначим через НN. Функции из HN явля-
ются непрерывными кусочно линейными функциями, обладаю-
щими суммируемой с любой конечной степенью первой производ-
ной. Таким образом, а:С (Q), HN o:W!,(Q) и множество Hn
можно обозначить соответственно через Ch (Q) или h (Q) в за-
висимости от того, в каком пространстве исследуется проблема
аппроксимации с помощью {ф»(х)}.
N
Если взять У№=2 (х) е//,v, то, как нетрудно заметить,
1 = 0
vN(Xi) — a.i, и, стало быть, коэффициенты в этой линейной комби-
нации несут ясный смысл: коэффициент а{ при фг (х) равен зна-
чению функции Vh(x) в точке xt. Отметим, что функции {ф,(%)},
102
АППРОКСИМАЦИЯ И ФИНИТНЫЕ ФУНКЦИИ
[ГЛ. 2
определенные выражениями (2.2), почти ортогональны, т. е.
только для соседних функций скалярное произведение (например,
в £2 (Q)) отлично от нуля:
С /х , х j ( = 0 ПРИ 1 — / > 1.
J I =#0 при li-/ <1.
(2-3)
Это свойство является причиной того, что система уравнений,
возникающая в проекционно-сеточном методе при использовании
функций (2.2) в качестве базисных, имеет разреженную матрицу.
2.2. Аппроксимация. Рассмотрим аппроксимирующие свойства
функций (2.2) или, что одно и то же, множеств НN — линейных
оболочек {ф,}.
Теорема 1. Если и(х) е№|(й), то существует такая
функция ui е Нк = №1<>'11 (Q), что
(2.4)
IIи ui Kuz| (й) IIы (й) , (2-5)
где постоянные Ci, с2 не зависят от h и от и(х).
Доказательство. Так как функция u(x)e.W^(il) (а тем
более и (х) е Wl (Q)) в одномерном случае непрерывна, то и (х)
имеет конечное значение и (х,) в любом узле xit i = 0, 1, ..., N.
Поэтому можно рассмотреть линейную комбинацию
N
“/(*) = S и(х,)ф,(х). (2.6)
1=0
Оценим разность и — щ в произвольной точке х^(х^и xt).
Для этого запишем следующие тождества, с учетом того, что
функция щ(х) кусочно линейна и du/(x)/dx = (и (xt) — и (х^))/^
при х е (x,_i, Xi):
и(х)-щ(х) = f ~(u — U[)dx' = ? (*2. _ } 1 dx' =
.1 ах JI dx dx' I
**. V. *- -1
dt
(2.7)
$ 2]
КУСОЧНО ЛИНЕЙНЫЕ ФУНКЦИИ
103
Применим к (2.7) неравенство Коши —Буняковского, расширяя
при этом пределы интегрирования:
(х)-«; Wl=s£-^- § dx' dx"
' Vi xt-i xi-i
Следовательно,
xi a
| Ц (%) — Uz (%) |a sg/l/ J |-^pg,
Xi-1
xi xi xi
Ci ix / \ u j f I I2 . , t f I d2zz I2 .
\ \u(x)~uI(x) 2dx^h) dx^h) dx.
Суммируя no i=l, ..., N последние неравенства, получим (2.4).
Если теперь сначала продифференцировать (2.7), а затем про-
вести те же самые рассуждения и оценки, то придем к (2.5).
Аналогично (исходя из тождества (2.7)) доказывается следую-
щий результат.
Теорема 2. Если u(x)^Wm, то существует функция
Uj е /Удг, для которой справедливы соотношения
U U/ Cs/la j U Цде-^» II Ч Ц/ t I Ч || •
Если же и (х) е Cla) (Q), то
l“-MC(Q)<<V*2|wiC(2)(a).
Здесь постоянные с3, с4, с3 не зависят от h и от и (х).
Из теорем 1 и 2 следует, что последовательность подпрост-
ранств Hjv предельно плотна в каждом из пространств U7^(Q),
C(Q), Wb, Боо(Й).
2.3. Равномерная линейная независимость. Заметим, что в
H = L3(Q.) функции ф((х) вида (2.2) не обладают свойством равно-
мерной линейной независимости, однако можно добиться выпол-
нения этого свойства, введя дополнительные условия. Предполо-
жим, что
h^c min hi, (2.8)
i
где постоянная с не зависит от ht и от разбиения й на =
— (Xi-lt X,), i — N. Рассмотрим нормированные функции-
104
АППРОКСИМАЦИЯ И ФИНИТНЫЕ ФУНКЦИИ
(ГЛ. 2
крышки:
- £ \ хе (x,_lt xt),
-I1—- , х е= (xi, хг+1),
л1+1
0, x^(Xi-i, хм),
( = 0, 1....N
(2.9)
(при г = 0, N рассматриваются полукрышки). Функции (2.9)
обладают аппроксимирующими свойствами, аналогичными свой-
ствам функций (2.2). Для доказательства теорем I, 2 достаточно
взять u/(x) = 2 Vh u(xi) Ф«(х). Однако функции (2.9) уже обла-
1=0
дают свойством равномерной линейной независимости в L2 (Q),
/ N \
т. е. для них справедливо соотношение! при vN = £ (x) J
' 1=0 /
/~N IN 41/2
2 а‘ ^11^к3(й)= 2 aiaf(<fh Ф/)) а'2,
1= О V, i = o /
(2.10)
где постоянные св, с7 не зависят от h = h(N). Действительно,
матрица М в элементами Му = (<р>, ф7) имеет вид
2/ц
ДГ ТГ
2 (/ц-)- /г2) .
л 1 6 6
л . 2 (/гЛ'-1+Лм) hN
6 6
hN 2flN
6 6
По теореме Гершгорина, утверждающей, что все собственные числа
некоторой матрицы А — (Ay), i, j = 1..N, находятся в объеди-
нении кругов |Л —1 = 1,..., N, получаем оценки
i'Ф
для собственных чисел (М) матрицы М:
Тогда в силу (2.8) имеем
1/(6с)^ММ)^1.
(2-11)
« 2]
КУСОЧНО ЛИНЕЙНЫЕ ФУНКЦИИ
105
Отсюда получаем (2.10), где cg=l/(6c) и с7«=1, так как
А
(Ма, а)2 = М^ащ < max (Л4) |l a |'£,
i =0 ‘
(Ma, а)2 min (Л!) || a ||J.
Если шаги сетки значительно отличаются друг от друга (т. е.
с в (2.8) достаточно велико), то минимальное собственное
значение Xmln (М) матрицы М будет значительно меньше макси-
мального Хтах (Л4). Малость A.mln (Л4) по сравнению с %тах (Л4)
характеризует близость базиса {tpj к линейно зависимой системе.
Поэтому отношение k (М) = | Zmax (Л4) |/| Zmin (Л4) | — спектральное
число обусловленности симметричной матрицы М — часто прини-
мается в качестве меры линейной независимости базиса {<р,-}.
Пример 1. Пусть в рассматриваемой выше матрице М при-
нимается N =10, 20, 50, й=1 /У, а шаги сетки выбираются
следующими:
1) h.j = h, i = 1, ..., У;
2) /i! = 0,0001/i, й2 = 1,9999/t, h3 = ... = hN = h;
3) /it =... =/i;V/2 = 0,0001/г, /гл,/.2 + 1 = ... = /jjV = 1, 9999/i.
В табл. 1 приведены результаты вычисления Xmin (Л4) и Zmax (Л1)
в данных случаях.
ТАБЛИЦА 1
N 10 20 50
Вари- ант ^min ^тах (^) *-т1п № ^•тах ^тах W)
1 0,24982 0,98564 0,25000 0,99616 0,25000 0,99936
2 0,33333 • 1о-« 1,24495 0,33333 ю-* 1,24495 0,33333- 10~« 1,24495
3 0,25018- 10~4 1,89978 0,25000- 10-> 1,97118 0,25000 • 10~4 1,98002
Приведенные результаты подтверждают, что если сетка равно-
мерна, то k (М) ограничено величиной ~ 2. Если же шаги сетки
резко отличаются по величине, то Zmin (М) становится значительно
меньше Xmax (М). Отсюда заключаем, что шаги сетки желательно
выбирать одного порядка.
2.4. Модифицированные функции-крышки. Итак, если заданная
функция и (х) обладает вторыми производными, суммируемыми
с квадратом, то с помощью введенных выше кусочно линейных
функций можно построить такую линейную комбинацию Uj из Ну,
что будут справедливы оценки (2.4), (2.5). Однако часто требование
106
АППРОКСИМАЦИЯ И ФИНИТНЫЕ ФУНКЦИИ
[ГЛ. 2
и(х)еК''*(й) для решений задач не выполняется. Например,
рассмотрим задачу с кусочно гладкими коэффициентами р(х),
q(x), которые терпят разрывы первого рода в конечном числе
точек х,-е (a, b), i=l, .... I:
и(а) = и (b) = 0,
u(Xi + 0) = u(Xi-0), (2.12)
du I _____ du I
— o’
где p >- p0 = const >0, q (x) < 0, f e L2.
Можно показать, что иф IF|(Q). Однако решение этой задачи
удовлетворяет неравенству
и при рассмотрении подобных задач бывает полезно ввести моди-
фицированные функции-крышки
0
х е= (хл_ъ х*),
хе (х*, х*+1),
x^(xft_1( х*+1).
Qfe (х) =
(2.13)
(Очевидно, что Qo (*) и Qn (х) задаются как полукрышки.) Линей-
ную оболочку функций {Q/ (х)} обозначим через //qV). Легко
заметить, что Hq^ a:W2 и Hf'rCla, b).
Теорема 3. Если непрерывная на (а, Ь) функция «(х)
удовлетворяет неравенству
<214»
где р(х)^ ро>0, mo существует такая функция и; е Hq1^, что
[u-UjWl^ с8/1а||и||д, (2.15)
/ b . 1/i
6) с9 J (p||e(u-«/)|2 + |w-«/|2)dx| - :
^cMuU, (2.16)
где постоянные с8, с9 не зависят от h и и (х).
§ 2]
КУСОЧНО ЛИНЕЙНЫЕ ФУНКЦИИ
107
Доказательство. Прежде всего заметим, что при замене
переменных
X
у~\^=у{х} (2,17)
а
xi
точки х, переходят в yi = J , a Q, (х) превращаются в обычные
а
функции-крышки <р, (у) вида (2.2), зависящие от переменной у и
ь
рассматриваемые на интервале (0, Т), где t = -^|у. Если обо-
а
значить U (у) = и (х (у)), то (2.14) примет вид
С HW)|a 4»
JI dy* | р(х(у))
Учитывая, что р(х)^р0>0, получаем
т
I I2 л
-r-s- aw<oo.
I dy2 I у
Выберем «/ (х) в виде щ (х) = 2 и (*») Qi (*)• Тогда для и — Ui имеем
1 = 0
b Т N
$ | и - U/ j2 dx = J р (х (у)) и ~ и (yi) <р; (у)
а 0 1 — 0
2
dy^
т
0) 5
о
Повторяя рассуждения теоремы 1, получаем
т
U-Uifdx^plLn 5
о
N
i=0
dy^
ь
(* I d?U I2
< IIP koo c max (yi - yi-iY J | | dy
a
b
a
= Il P llloo c max (yi - ^_!)41| u HSb
i
108
АППРОКСИМАЦИЯ И ФИНИТНЫЕ ФУНКЦИИ
[ГЛ. 2
В силу неравенства | yt — t/,_i | | х, — x,-i \/р0 имеем
\\u-Uj III, c/i41| и
Pi)
т. e. приходим к (2.15). Далее,
л b
Ш (“ - И/) Г dX^ Г S Р W ~ U1tfdx =
а а
Т f N t 2 Т
= FoS dy[U^~ dy^ah* \ \^\2dy.
о i \ j=0 / о
Отсюда и из оценки (2.15) получаем (2.16).
Пример 2. Рассмотрим задачу
~ip W^ + q(x)u = f(X),
L (2.18)
u(a) = g(&) = 0,
где p(x)>0, <7 (x) 5s0 — достаточно гладкие функции, /(х)е
^L2(a, b). Построим на основе функций tp; (х), определяемых
по формуле (2.2), пространство Н(д} функций, среди которых
можно искать приближенное решение по методу Ритца в энерге-
тической норме.
Энергетическое пространство Нд, соответствующее оператору
данной задачи, имеет норму
[u]=|Z J (p|J“|2 + <7|“i2)dx.
а
Обозначим через Hn линейную оболочку системы {<pj. Так как
условие ы(а) = 0 является главным, то функции, среди которых
мы будем искать приближенное решение задачи, должны удовле-
творять ему. Таким образом, из HN выделим лишь те функции
лг
uN == У, (х) е= HN, которые удовлетворяют условию vN {а) — 0.
1=0
Это приводит к требованию, чтобы а0 —0. Условие ^(Ь)=0 явля-
ется естественным, поэтому функции из Н^д ему не обязаны
удовлетворять.
Итак, приближенное решение можно искать в подпространстве
fN
vn- vn = 2 (x)
§ 3] АППРОКСИМАЦИЯ НА ПРЯМОУГОЛЬНИКЕ ЮЗ
Пример 3. Если краевые условия в (2.18) имеют вид
и (а) = и (д) = 0, (2.19)
то они оба будут главными. Поэтому функции, среди которых
следует искать приближенное решение задачи, имеют вид
N — 1
(2-2°)
i = 1
они образуют подпространство Н(А> с На. А так как НА в данном
случае совпадает с пространством (й), то Н{А} с: W>, (Й).
§ 3. Кусочно линейная аппроксимация на прямоугольнике.
Подпространства W]’ А, iVa’ л
Рассмотрим проблему аппроксимации с помощью кусочно
линейных финитных функций в случае двух переменных в прямо-
угольнике Й. При этом, как и в предыдущих двух параграфах,
сначала изучим ненормированные базисные функции, а затем
подправим их, чтобы они удовлетворяли условию равномерной
линейной независимости.
Итак, пусть в прямоугольнике Й = {О<.гСй, Q~:y-^b]
ставится задача аппроксимации заданной функции и (х, у) е
е= (Й) cz С (Й) с помощью кусочно линейных функций. Разо-
бьем Й на подобласти йу прямыми xt — ihx, у}- = jhy, hx = a/Nx,
hy = b/Ny (Nx, Ny — положительные целые числа), а затем разделим
каждый из прямоугольников йу диагональю, как это сделано на
рис. 12 (т. е. осуществим триангуляцию области й). Каждому
узлу (xit у/), i = 0, ..., Nx, j — 0, Ny, поставим в соответствие
функцию фу (х, у), равную единице в данном узле и нулю во всех
остальных и линейную в каждом треугольнике. Каждую из этих
функций ф,у (х, у) для введенной сетки можно выразить через
по
АППРОКСИМАЦИЯ И ФИНИТНЫЕ ФУНКЦИИ
|ГЛ. 2
стандартную функцию ф (s, t) вида
1 — S, 0=CssS 1, 0 z;; t s,
1 ~t, 0=Cs< 1, s
ф(5, /) = 1 +s-f, — 1 sgssgO, 0 = ^^s+!, (3 j
1+s, — 1 sSs^O, s c z o,
1+Z, - 1 ==S s ==S 0, -1 / sgs,
1 — s +1, 0=Cs=sC 1, s— 1
Носитель этой функции изображен на рис. 13, а общий вид ее —
на рис. 14.
Тейерь можно представить фу (х, у) в виде
y) = q>(x/hx — i, y/hu — j); (3.2)
эти функции часто называют функциями Куранта.
Введем для заданной функции и (к, у) е №|(Q) cz С (Q) набор
чисел
uy = u(x,-, yf), i = 0, 1.....Nx, / = 0, 1.....Ny, (3.3)
и построим линейную комбинацию
Nx
“i(x, У) — s X иуЧ>1/(*’ (3.4)
> = 0 / = 0
которая называется кусочно линейным восполнением функции
и(х, у). Очевидно, что щ е C(Q) (] (Q). Если xeu^WtftWl,
то автоматически получаем, что
Nx — l Ny—l
ui(x, у)= 2 2 ыт(*> у) (3-5)
i=i i=i
§ 3]
АППРОКСИМАЦИЯ НА ПРЯМОУГОЛЬНИКЕ
111
(суммирование ведется по узлам, лежащим строго внутри й),
т. е. щ е (й).
Запишем ряд тождеств, справедливых для произвольной функ-
ции и(х, у) еС|2; (Й). Поставим ей в соответствие линейную
Ny
комбинацию U/ (х, у) — и (х>> У/) Чц (х’ У) н рассмотрим раз-
1=0 /=0
ность и (х, у) — Ui (х, у) на треугольнике Т, изображенном на
рис. 15. Тогда
£(u-u,)=g(x, у)
hx
u(hx, 0)-»(0, 0) = С ди 0)d? =
'*х их '*х
о
Ч
о
d£,
т. е.
д , ч
У
y)du I- f — dv
“И -г J 5V ау
О
d%.
(3.6)
Аналогичным образом получаем тождество для производной по у:
— “/) = ду (х< ^~hy\ (-hx’ =
* о
ЧУ \%{х- ^>+>’ 6)Чч Ф=
о
% / У х \
4Hw(x’(37)
о Ч hx 1
Поскольку (и — и/) (0, 0) = 0, то
(U-U/)(X, y) = (U-U/)(X, y^-iu-u^^x, 0)4-
4- (и — и/) (х, 0) — (и — U[) (0, 0) =
У л . X .
<• о (и — иД р д (и — иД
= j 0)dp-
о о
112
АППРОКСИМАЦИЯ И ФИНИТНЫЕ ФУНКЦИИ
[ГЛ. 2
Учитывая соотношение
д(и — и,\ д(и — иД д(и — иД д(и — иД
У^-Чг1^ У + ^г^Р’У^
гдг(и-и,) , , д (и — иД
= - J + АН у^
приходим к третьему тождеству
с д (и—иД гд(и — иД
(и - и,) (х, у) = j -I д(} - ,> (х, q)dq+\ - д~' (р, У) dp —
о о
С со2 (и— иД
- \dP J ~дд'др (Р> ‘ftW- М
О о
Приведем некоторые результаты об аппроксимации с помощью
функций {фу (х, у)}.
Теорема 1. Если и (х, у) е Wl (Q), то существует функция
U[{x, у) вида (3.4), для которой справедливы оценки
| и — щ |lis(Q) ' ch2 j и l^i (Q), (3.9)
Il u и, ||де,1 *£-. ch [| и [|де,| (3.10)
где h = max(hXt hu), а постоянная с не зависит от h и и(х, у).
Доказательство. Пусть сначала и(х, z/)eC’21(Q). Положим
Ny
“Z (X, у) = 2 2 и (Xi, yj) фу- (х, у).
1 = 0/ = 0
Из (3.6), используя неравенство Коши —Буняковского, получаем
,f dxdy^
т
имеем
а из (3.7) и (3.8) соответственно
ch.3 |j и
J | Й (“ “ u'^dx dy ch21! u <T)’
T
J {(u-u^dxdy^ch^u^^,
§ 3]
АППРОКСИМАЦИЯ НА ПРЯМОУГОЛЬНИКЕ
113
где общая постоянная с не зависит от hx, hy и и(х, у). Анало-
гичные соотношения, как легко заметить, имеют место для про-
извольного треугольника Ту. Суммируя полученные результаты
по всем треугольникам, приходим к (3.9) и (3.10).
Пусть теперь и(х, у) еИ7|(й). Здесь тождества (3.6), (3.7)
в принятой выше форме записывать нельзя, так как производные
по х и у могут быть неограниченными функциями. Возникающие
от этого трудности при доказательстве (3.9), (3.10) можно обойти
следующим образом. Так как множество функций из С(2’(й)
плотно в (Й), то выберем последовательность {ит} с. С121 (й),
сходящуюся к и(х, у) в метрике (а значит, и в метриках W'j и
Л2 (й)). Пусть
Nx Ny
ит, I — 2 Ф</ (*» У)-
1=0/=0
Тогда
I U urn, I |!де-| (Q) J U ит ||де-| (Q) + |! Н/п Н/п, I Иде-' (Q)
; ' II и ит Иде-i (Q) + Ch J Um || де-| (эд. (3.11)
Но любая функция v е WI (й) к тому же непрерывна и спра-
ведливо соотношение ||у||С(й)=^с!1г’11де-|(а), значит, из сходимости ит
кив метрике №|(й) получаем сходимость ит в метрике С(й).
Отсюда и из очевидного неравенства
max | и — ит (xh г/;)| sg maxj и— ит(х, у)\ (3.12)
i, i х, де Q
следует, что каждая из последовательностей {um (x,-, у/)} сходится
к числу uij=‘u(xi, у/). Действительно,
У]) - иц I I и (Xi, yj)-um(Xi, y])\ + \um(xi, yj)-Uij\^
max_|u(x, y)-um(x, y)] + \um(xh yj) - Uy \
x,y^Q
^8 и (Qj I у/) 0, m —> oo.
Пусть теперь
Ny
“i (X, У) = £ 2 U (Xi, У;) <p;y (X, y)\
t = Q j=Q
устремляя в (3.11) m->oo и учитывая, что uy = u(xi, У7), получаем
\\и~и1 |!дег1 (Q) ^-СН\\ U ||де|(й).
Аналогично приходим к (3.9) для ие1Г2(й). Теорема доказана.
Рассмотрим пространства и W^h, которые часто исполь-
зуются, например, при решении эллиптических задач второго
114
АППРОКСИМАЦИЯ И ФИНИТНЫЕ ФУНКЦИИ
[ГЛ. 2
порядка. Обозначим через h множество функций вида
х Ny
иН==И аУФ<7(Х> У) ИЛИ и* = S aij4iJ (Х> У)>
i = 0 7 = 0 I, i
(xit у,) е ЙI = й + дй. (3.13)
Очевидно, что W^’h образует подпространство пространства (й).
(Отметим, что вторая форма записи удобна, когда й —некоторая
многоугольная область, не обязательно прямоугольник.)
Если рассматриваются функции и (х) е с. Wh то соответст-
вующее подпространство ^-А с: W' состоит из линейных ком-
бинаций вида
A^-lM -1
uA = У У a^t^x, у) или ик = ^а^(х, у), (xt,у (ЗЛА)
t = l / = 1 i.i
Изучим, выполняется ли условие равномерной линейной неза-
висимости для {<р,у (х, у)}. Для этого рассмотрим функцию (3.4)
на -треугольнике T = {0^x^hx, Q<Zy^(hy/hx)x}, записав ее
U/(x, y) = a-]-bxA-cy, (3.15)
где
п и (Cl 04 и h 0)-Ul(0,0) _ui0-u00
а — и/ (и, и) — и00, о —-----------------——,
_ ui(hx’ hy) — ui(hx> °) _ “п-цю
Ду hy
Используя (3.15), вычислим интеграл от и} по треугольнику Т:
1j uj dxdy = \ (а2 + 2abx 4- 2асу 4- 2cbxy 4- b2x2 4- c2y2) dx dy=
T T
hx hyxlhx
= J dx $ (a2 4- 2abx 4- 2acy 4* 2cbxy 4- b2x2 4- <?y2) dy =
о о
hjlx
= —12~ (uh 4- ulo 4- u00 4- UioUh 4- uooun + Woouio)• (3.16)
На основании (3.16) и соотношений
/ = 12 (un 4" wfo 4* uoo 4* uiouii + unuoo 4- Woo^io) =
= 24 ((un + uio + uoo)2 + uii + uio + uoo) =='24 uio + uoo)>
Ji2 4" “io 4- u6o 4- 2 (“io 4- uh 4~ uii + Uqq 4- uoo + “io)) =
— g (uii + «10 + uoo)
§ fl
АППРОКСИМАЦИЯ НА МНОГОУГОЛЬНОЙ ОБЛАСТИ
115
получаем неравенства
Nx А/у Nx
IT 2 Z = 2 Z $ t^dxdy^
i=oi=o «=i/=iai/
Nx
^hxhv^ X «?/
(3.17)
Отсюда заключаем, что введенные выше функции {ср»} не
обладают свойством равномерной линейной независимости в Lz (Q).
Но для того, чтобы функции Куранта обладали этим свойством,
достаточно ввести нормировку, определив эти функции следую-
щим образом:
’“йЬглОН’ 4-')- '-од........
/ = 0,1,..., Ny. (3.18)
Теорема аппроксимации в этом случае остается справедливой
(для чего достаточно взять в виде = У yhJTy и (xb yf) <р0- (х, у)\
но (3.17) принимает следующий вид:
С1 f S “’/)I S “vTv
\ I, i / I i, i
(3.19)
Ci = 1/24, c2 = l, что, как мы уже знаем из § 9 гл. 1, означает
равномерную линейную независимость функций (3.18) в L2 (Q),
а также сильную минимальность в U7‘(Q).
§ 4. Кусочно линейная аппроксимация
на многоугольной области
В этом параграфе мы рассмотрим аппроксимацию функций,
определенных на многоугольной области Q из R2, с помощью
кусочно линейных базисных функций. При этом Q будет разби-
ваться на треугольники (не обязательно прямоугольные).
Пусть задана многоугольная область Q с. R2. Введем разбие-
ние ее на треугольники Tt так, чтобы: 1) каждая пара тре-
угольников имела либо одну общую вершину, либо одну общую
сторону, либо не пересекалась; 2) объединение треугольников
составляло Q. Множество вершин (точек разбиения) обозначим
через (Ро, Pi, ..., PN), где Р, = (х,-, Уд (рис. 16).
Определим набор кусочно линейных функций {<р£ (х, у)}. Для
этого каждой точке разбиения Pt поставим в соответствие функ-
цию ф£(х, у), которая в точке Р{ равна единице, в остальных Р/
116
АППРОКСИМАЦИЯ И ФИНИТНЫЕ ФУНКЦИИ
(ГЛ 2
равна нулю и линейна на каждом треугольнике. Вид функции
Ф,(х, у) приведен на рис. 17.
Чтобы задать ф; (х, у) аналитически, достаточно для каждого
треугольника, входящего в носитель <р,- (х, у), составить уравне-
ние плоскости, проходящей через единицу в Р;, а в остальных
двух вершинах его —через нуль. Например, на треугольнике
•с вершинами (Ph Рп, Рт) функция <р, (х, у) имеет вид
У) ~ 1
Ут __ xi хп \ 1 1
Уп Ут хт хп/ \
У —Ут
Уп Ут
х—хп
хт хп.
(4.1)
Используя представление (4.1), можно определить вид ф,(х, у)
на любом другом треугольнике из носителя ф/ (х, у). В силу
произвольности индекса i считаем все базисные функции задан-
ными аналитически.
Здесь следует отметить, что построение базиса во многом зави-
сит от разбиения Q на Tt и от порядка нумерации узлов сетки.
После того как расположение узлов выбрано и нх коорди-
наты хранятся, например, в памяти ЭВМ, легко можно опреде-
лить, какие вершины являются соседними с вершиной Pt, а это
в свою очередь позволяет по формуле (4.1) построить функцию
Ф((х, у). Таким образом, задача построения базисных функций
даже при произвольной нумерации узлов сетки решается сравни-
тельно просто.
Обозначим через 117].h множество функций вида
N
uN(x, у)= Y У)< (4.2)
i — 0
где ah- 1 = 0, ..., У, — всевозможные наборы чисел. Очевидно,
что U7]>ft с С (Q) П (Q).
Пусть в дальнейшем через 90>0 обозначен минимальный из
углов во всех треугольниках TcQ, /г — максимальная из сто-
§ 4]
АППРОКСИМАЦИЯ НА МНОГОУГОЛЬНОЙ ОБЛАСТИ
117
рон треугольников, s = (sb s2) — произвольный единичный вектор,
's [ = V Si + si = 1. Производную по направлению s обозначим через
, д . д
(8 * * ) - $1 д + So д“ .
v ' 1 дх 1 i ду
Изучим некоторые свойства аппроксимации произвольной
функции и (х, у) е С(2) (й) с помощью функций uN е h (й).
Для этого возьмем U/(x, у) е (й) вида
N
(х, у) = 2 U (Л) Ф,- (х, у) (4.3)
1=0
и рассмотрим разность и — и1 для опре-
деленности на треугольнике Т, изображен-
ном на рис. 18. Векторы s, s(1), s(2) имеют вид
Р-Р‘ S(D- Pn-Pi
tP-PtT \Pn-Pi\
„(2) _ Pm Pj
Pm-Pi1'
Разложим (u — Ui)(x, у) в ряд Тейлора:
(и — ui) (х, у) = (и- ui) (Р,) + (s • V) (и -
(s • V)2 (и —и Л I
-щ) \Р \р- pt\+-—Ц—'-J I I р - Pi I2.
1 £ \р
(4-4)
где Р — некоторая точка
на линии PtP, отличная от Р и Р,. Но
(s • V)2 (и — и,\ I (s • V)2 и I-----------------
—Ч------L = —т— L и \P-Pi =У\х-хУ + (У-УУ^Н,
Z Ip * Ip
поэтому
(S*V)2(W — U Л Y1
—4------11 JP-PiP^h? 2 (4.5)
где i = (i1F i2), O^ij, i2sS2, 111 = t1 + t2, D\Pu = д1Ри/(д^хд*»у).
Прежде чем оценить слагаемое (s- V) (и — ui) \Р , докажем воз-
можность представления вектора s в виде
s = d1stl) + d2s(2), (4.6)
где di, d2 — некоторые постоянные. Запишем (4.6) в координатной
форме:
__я хп Х1 । я хт Х1 _ ____________ j Уп Ui । j Ут Ui
S1-dl i Pi-Pn l+ 2 I Pi-Pm I ’ 2 “dl 1 Pi-Pm +d2 Pi-Pm I’
или
sx = dt sin Si + d2 sin 02, s2 = — di cos Ux + d2 cos 0g.
118 АППРОКСИМАЦИЯ И ФИНИТНЫЕ ФУНКЦИИ [ГЛ. 2
Решаем эту систему относительно dx и d2:
d COS 62 — S2 sin ^2 _ S1 sin ~ s2 C°S 84
1 cos82 sin 6, +sin 62 cos 8j — sin 6 *
, _ s1cos81 + s2 sinOx _ sx sin 83 + s2 cos 83 ' ' '
2 cos 82 sin 84 + sin 62 cos 8X sin 8
Отсюда получаем оценки
, . , /^+l'Vsine;+cose^ 1 я i^- i
' 11 sin 8 sin 8 * 1 2 I sin 8 ’
Легко заметить, что эти оценки являются достаточно точными.
Чтобы убедиться в этом, допустим, что вектор s направлен вдоль
PiPk, а (х и /4 достаточно малы. В этом случае l/sinS.
Если 6fl — минимальный угол, то, очевидно,
е-ео^о, Sinl=^^o, cos^o.
A it 4 л
Но тогда
sin 6 — sin 60 = 2 sin cos О,
т. е. sin 6>s sin 90. Следовательно,
Представим теперь (s • V) (и — и,) |Р. в виде
(s • V) (и - и/) \Р. = dx (s’1’ • V) (и - u7) \р{ + d, (s(2> • V) (u - и,) |P..
Поскольку на Р,Рт, PiPn функция u7 превращается в пря-
мую, интерполирующую и (х, у) на этих отрезках, причем в точ-
ках Pit Рп, Рт значения и, н и совпадают, то для оценки
(s(1) • V) (и — u/) |р , (s(2) • V) (и — и7) \р. можно воспользоваться тео-
ремами аппроксимации кусочно линейными функциями для случая
одной переменной (см. § 2). Поэтому
(4.8)
। (S(D. V) (и - \Pi | «(s’1’ • V)2 и lC[PiPn} h^2h 2 \\D ‘-u ;|С(Г),
|i|=2
i‘l = 2
Из этих неравенств и из (4.8) следует оценка
| (s- V) (и -UlyP/\P- Pi\ |^(| dx|j (SW.V)(U- Ul)(Pi)\ +
+ |d2H(s'2EV)(U-U/)(P,)[)1P-Pl.j^^ 2 ^Dliutc^> (4-9)
§ 4] АППРОКСИМАЦИЯ НА МНОГОУГОЛЬНОЙ ОБЛАСТИ 119
где с>0. Теперь на основании (4.9) и (4.5) получим
maxfu-u/l У У J 'и ||с (Q>.
D ,— Т bin Uq Лшш Mil Qq
!/| = 2 1/1=2
Аналогично доказывается справедливость такой оценки для
любого другого треугольника. Следовательно,
Й«-«/I!c(Q)У P,,iulic(Q)>
1/1=2
где постоянная с не зависит от параметров сетки и от и(х, у).
Рассмотрим теперь производную (s • V) (и — я,) по произволь-
ному фиксированному вектору s(0) во внутренней точке Р^Т (эта
производная может не существовать вдоль сторон треугольника
и в его вершинах), и запишем (аналогично (4.4))
(sw • V) (и — Ы/) (х, у) = (Sw • V) (и - и,) (Pi) +
+ (s«” • V) (s<°> • V) (и - и,) (Р) I Р - Pt \.
Но (s(0) • V) (s(0) • V) (и — и,) (Р) = (s° • V) (s'0’ • V) и (Р), так что выпол-
няя разложение вектора s(0) в форме (4.6) и оценивая постоян-
ные dr, d2 так же, как и ранее, придем к ’ оценкам вида
supvraii(s‘°>-V)(u-u/)(P)|^^- 8^|,Чи1!с(Я),
max|j(s(0)-У |ID^u||C(Q).
• dill U()
1/1=2
Сформулируем полученные результаты в виде теоремы.
Теорема 1. Для произвольной функции и(х, у)^Сг>(9.)
существует такая функция uh^ W'’h, что
1/1 = 2
(4.Ю)
max|1(s(°’.V)(u-^)Uoo(7lT-^- 2 ^'Ис/я), (4.Н)
' 1/1 = 2
где постоянная с не зависит от параметров сетки и от функ-
ции и(х, у), sw — произвольный единичный вектор.
120
АППРОКСИМАЦИЯ И ФИНИТНЫЕ ФУНКЦИИ
[ГЛ. 2
Следствие. Если выполнены условия теоремы 1, то
2 |D!‘“ь=>. («12)
I i | = 2
m,axU(u-uft)2 <4лз)
l« 1 = 2
Для доказательства следствия достаточно взять в качестве sl0>
единичные векторы координатных осей.
Справедливо также следующее утверждение.
Теорема 2. Если и(х, у) е H7|(Q), то существует функция
щ(х, t/) sirHlQ), для которой справедливы оценки
1«-Н/Е,(я>^сЛа11 «Ц(£2), (4-14)
| и — Ы/ (Я) с sjn || и ll^a(Q), (4-15)
еде постоянная с не зависит от h, 60, и(х, у).
Доказательство этой теоремы будет дано в § 8.
В заключение отметим, что если в треугольнике Т все углы
острые, то
Sx = cos<p, s2 = sin <р,
। , . I cos <p sin fl4 — sin q> cos 6« I sin (04 — <p) sin 6 .
' 11 I sin в j sin 6 ‘ sin 6 ’
I Sin (6а + ф) sine .
Отсюда делаем вывод, что нужно стремиться триангуляцию об-
ласти проводить так, чтобы среди треугольников не было выро-
ждающихся (т. е. чтобы 60 не был близок к нулю) и чтобы углы
в них были одного порядка. Например, с этой точки зрения слу-
чай равносторонних треугольников является весьма привлека-
тельным, но не всегда заданную многоугольную область можно
разбить на такие треугольники.
§ 5. Билинейные базисные функции
В этом параграфе мы на случае двух переменных проиллю-
стрируем, как с помощью одномерных функций-крышек, изучен-
ных в § 2, можно строить базисные функции в многомерном
случае.
Пусть Q — некоторая прямоугольная область в R2. Введем
на Q сетку:
•До = < Xi <... •< хнх = Ai, Во = Уо < У1 < • • <ZyN=» Blt
&Ук — Уь — Ук-л, ^xi == Xi — xz_b
Ax=maxAxz, Ду = тахДуА, /г = тах(Дх, Ду).
I к
§ 5]
БИЛИНЕЙНЫЕ базисные ФУНКЦИИ
121
1ЛТ4-1
o ,
(У -У/-1
Ф/ (У) = &У/ У/+1-У
<ХУ)+1 о ,
Узлам сетки, принадлежащим Q = Q4-dQ, поставим в соответ-
ствие функции
(х-х.-. . .
х е (х,-, х,+1),
х(Ч1);
У е= (Уi-и У/),
. ч (51)
У^(У/, У/+1),
У Ф (У/-1, У/+1)'<
Q./(x, y)=4>i(x)<p/(y).
Рассмотрим всевозможные линейные комбинации функций
Qi/(x, у): _
uh = Zia‘/QiAx> У), (xh у/)е=&, (5.2)
А /
которые, как легко заметить, образуют множество
cC(Q) П 1^.)(Й). Функции Qy (х, у) назовем билинейными базисными
функциями. Исследуем возможность аппроксимации функций
и (х, у) е С(2) (Q) с помощью элементов из h.
Теорема 1. Если u^Cw(Q>), то существует функция
h ТТ771 h
U[^Wi такая, что
\\u — uhi Il,^c№I1 и ||c<2)(Q), (5.3)
||u — <c/i||u[c<2i(Q), (5.4)
где постоянная с не зависит от h и от и(х, у).
Доказательство. Пусть и1} (х, у) = ^«(х;, yj)Qif(x, у).
h *’ 1
Рассмотрим разность £ (х, у) = и — и/ на элементарном квадрате
л+1 = {х;-С x«g хж, yk^y^yk+i}- Запишем тождество, спра-
ведливое для любых (х, у) е Q/+1, л+и условившись под X/, х,+1,
ук, Ук+1 понимать соответственно xz-j-O, xz+1 —0, z/ft4-0, «/*+1 —0:
Цх, «/) = (х - X/) || (xz, //*) 4- (у-уь) fy(xh yk) 4-
4- J dx' J ^r(x", yk)dx"+ \dy' J A(*«. /)d/ +
xi xi X 4 “k
к У
+ $dx' $ у'^у'-
xl Vk
122
АППРОКСИМАЦИЯ И ФИНИТНЫЕ ФУНКЦИИ
ГГЛ 2
Учитывая, что и1} имеет на Qz+i, л+1 лишь одни член второй степени
вида ху ^и, значит, -^2-=-^-= Оу, а также что
d2uh. 1 'f1 V1 d*u
dxdy ~ Axz+1 \ук+1 J dX J дх" dy" (х > У ) &У >
Х1 Ч
получаем:
х/+1 xi 2
а) (х - Х[) Ц (xz, ук) = ( dx' ( ~ (х”, ук) dx",
ил ал7+1 J V ок
Х1
X X' XX'
б) ( dx' ( Д (х", у„) dx" = ( dx" ( (х", yk) dx",
J J OK J J дл
xl xl xl xl
X у
SC d2t
dx' \ d^^x'' y>dy'=
xl «k
xl+\ y*+l X U
Axz+1 \yM S dx" f dy" § dx' 5 (X'’ y'} ~ dFW (x 'У^ dy
X! 4 Xl 4k
и т. д. Следовательно, выражение для £ (x, у) принимает на
^Z+l, *+1 вид
хш xi
, x — xi С , , С д2и , „ , j j, ,
£ (*’ = ^7 J dx 3 (х ’ yk^dX +
• х^ х'
о
+ ( dy' {-^-(xt, y”)dy" +
Ai/Ui J ' dy"a V y
4k 4'
XX' . у у'
+ dx' f ^-(x", yk)dx"+ C dy' C ^(xi, y")dy" +
J J dx' J J oy"‘
xl xi 4k uk
4ks x
У
* J (djydy' y ) ~ dx^ (x ’ У )}dy ‘ (5.5)
4k
§ 5J
БИЛИНЕЙНЫЕ БАЗИСНЫЕ ФУНКЦИИ
123
Отсюда следует, что
|^(х, y}\^c^x3M + ^y'k+1) X I'0'' и1'с(а/+1,»+1)^
। i I = 2
sgc(Ax2 + Az/2) 2] \\D ruJC(a), (5.6)
,Zi = 2
где постоянная с не зависит от Ах, \у, и(х, у). Следовательно,
$ | и — и1} I2 dx dy -С
=Сс(Ax2 + by2)2mes(fiz+1,*+1)/ У II^Hcta)?, (5.7)
\!zi—a /
J I и — и1} 2dxdy <cmes (Q) (Ax2 4- Az/2)2f У ID'1 ufC(Q)V,
Q ' \l i| ==2 )
откуда получаем оценку (5.3).
Для доказательства (5.4) достаточно продифференцировать
(5.5) по х, у, после чего для производных аналогично получим
оценки
J | £(“"“/) Г dxdy^c^x + ^i 2 11£>,1,'Ис(а)Ь
I2 (V \2 (б-8)
\ hy(«-“/) dxdУ^c^x + ^y)i l У IIj|c(£2) j >
£2 \7I=2 /
из которых, учитывая (5.7), получаем оценку (5.4). Теорема до-
казана.
Замечание. Проследив за ходом доказательства теоремы I,
легко заметить, что при выполнении ее условий справедливы
более сильные (чем (5.3) и (5.4)) оценки:
II и - u!i ||с (fi) =sS с (Ax2 + Az/2) У IID 1 и ||c(Q),
maxid~x(u-“/)|L ,Q ,«Sc(Ax+Az/) У ||D 1 и |lc(Q), (5.9)
l, k II °* • 112-00 (ill k>
IZ|=2
п^х|^(и-и/)к(а^с(Дх+д^ 2
где постоянная с не зависит от Ах, Az/, u(x, у).
Рассмотрим простую модификацию подпространства ft
в зависимости от краевых условий. Для большей наглядности
введем ее на примере конкретной задачи.
124
АППРОКСИМАЦИЯ И ФИНИТНЫЕ ФУНКЦИИ
[ГЛ. 2
Рассмотрим на Q, изображенной на рис. 19, задачу
— Аи -Т и = f (х, у), f G= Ag (Q), А = -р ч 2,
> \ > »/> 4 \ дх2 1 ду2 ф 1Q)
и = 0 на dQ.
Как легко заметить, оператор задачи на соответствующей обла-
сти определения симметричен и положительно определен. Поэто-
му для приближенного решения (5.10)
можно воспользоваться методом Рит-
ца. Минимизируемый функционал
имеет вид
(5.П)
а энергетическое пространство совпа-
дает с IFa (Q). Краевые условия здесь
главные; следовательно, подпростран-
ство из W',, в котором мы будем ис-
кать приближенный минимум, должно состоять из функций, также
удовлетворяющих данным краевым условиям. В качестве такого
подпространства можно взять следующую модификацию прост-
ранства W71a’h :
^•ft = |uft: илеИ’\ u^p ayQij,
= (xh у,) е= Q), (5.12)
т. е. суммирование ведется лишь по тем индексам, которые соот-
ветствуют строго внутренним узлам сетки, в результате чего по-
лучаем функции иЛ, удовлетворяющие условию uft = 0 на dQ.
Теорема 1 в этом случае формулируется следующим образом.
Теорема 2. Для любой и е W'> (Q) П С(2) (Q) существует и е
е Wi h такая, что справедливы оценки (5.3), (5.4), (5.9).
В случае билинейных базисных функций можно ввести такие
ограничения на сетку в области и нормировку <р,(х), ф/(«/), при
которых обеспечивается равномерная линейная независимость
нормированных базисных функций в Ьг (Q). Действительно, не-
посредственные вычисления показывают, что
(У aijQij\ dx dy = [Ofe, l + (flfe, l + u*+l, z)2 +
a*+l, Z+l '
+ a*+i, i + (ak. i + ak, z+i)2 + (ak, i + ам, i + ak, z+i + qa+i, z+i)2 +
+ (ak-n, I + ak+l, Z+l)2 + Z+l + a*+l, Z+l)2 + ak, Z+l + flfc+l, Z+l]-
§ 61
КУСОЧНО КВАДРАТИЧНЫЕ БАЗИСНЫЕ ФУНКЦИИ
125
Отсюда получаем неравенства
g*6 min (Ax*) min (A//z) atjQi/kx, y)'\dxdy^
k 1 i о V. i /
=C max (Ax,) max (At/Z) У a^.
1 1 TTi
Следовательно, если для сетки выполнены ограничения
Ах = max (Ах*) - cr min (Ах*),
ь k
л гл х • гл х (5.13)
Az/= max (Аг/г) с2 min (At/Z),
i i
где постоянные съ с2 не зависят от параметров сетки, и введены
нормированные базисные функции |р=== (Qv (х, г/)}, то эти функ-
ции будут обладать как отмеченными ранее аппроксимирующими
свойствами (теоремы 1, 2), так и свойством равномерной линей-
ной независимости.
§ 6. Кусочно квадратичные базисные функции
на треугольной сетке. Понятие о кусочно
полиномиальной аппроксимации высокой степени
В этом параграфе будут рассмотрены финитные кусочно поли-
номиальные функции более высокой степени по сравнению с изу-
ченными в предыдущих параграфах. Хотя основные подходы
к построению таких функций будут иллюстрироваться на при-
мере кусочно квадратичных базисов,
однако они могут быть применены
для конструирования кусочно ку-
бических (и более высокой степени)
полиномов.
Пусть в многоугольной области
й cz R2 задана некоторая триангу-
ляция с узлами Р/ = (х;, yi) (рис.
20). Введем дополнительные узлы,
являющиеся серединами сторон тре-
угольников, и пусть общее число
узлов равно N +1. Каждой точке
Ph 0 i-^N, будь она вершиной
или серединой стороны, поставим
в соответствие функцию <р, (г, //); при этом потребуем, чтобы:
1) носитель <р,- (х, у) состоял лишь из треугольников, каждый из
которых имеет Р, в качестве своей вершины или середины одной
из его сторон; 2) ф( (х, у) была полиномом второй степени на
каждом из треугольников. Для построения ф; (х, у) с такими
126
АППРОКСИМАЦИЯ и ФИНИТНЫЕ ФУНКЦИИ
[ГЛ. 2
свойствами рассмотрим лишь один треугольник Г,- cr supp *)
с вершинами Pio, Pia, Pit и обозначим через Plt, Pit, Pis сере-
дины его сторон (рис. 21). Функция <р,- (х, у) на Т{ должна за-
даваться полиномом второй степени, т. е.
<р,- (х, у) = atx2 + bixy + cty2 + dix+ety+ft. (6.1)
Условимся считать, что <pf (х, у) соответствует точке Р,- = Pia. Для
определения коэффициентов а,, ..., применяют следующий
простой алгоритм: требуют, чтобы <р(- (х, у) была равна единице
в узле, которому она соответствует, и нулю во всех остальных,
т. е.
Ф/(^/) = бц> ОС, (6.2)
где бу —символ Кронекера. Очевидно, что на треугольниках,
не входящих в носитель, <р,- тождественно равна нулю, а на тре-
угольнике Ticzsupptfi условия (6.2), которые в данном случае
принимают вид
0^й^5, (6.3)
приводят к системе
aix4k->rbiXikyik-\-Ciy]k-\-diXik-\-eiyik-\-fi — б(1-й, (6.4)
которую можно решить. Повторив аналогичную процедуру для
других треугольников носителя, а затем для всех остальных ба-
зисных функций, мы будем знать все коэффициенты а,-, ..., f,
в (6.1), с помощью которых определим любую из базисных функ-
ций (сколько бы раз ее ни использовали в численном алгоритме).
На рис. 22 приведен характерный вид q)l0(x, у) и <р/з (х, у), соот-
ветствующих точкам Р1 = Р1о и Pia.
Отметим, что в ряде случаев достаточно просто найти явный
вид базисных функций, используя следующий прием. Пусть тре-
*) Здесь через supp <р; обозначен носитель функции <р(- (х, ^ — множество
точек (х, у), для которых <р(- (х, у) #= 0.
§ 6]
КУСОЧНО КВАДРАТИЧНЫЕ БАЗИСНЫЕ ФУНКЦИИ
127
буется определить функцию’ <р/о (х, у) на треугольнике Tt (см.
рис. 21). Рассмотрим сначала в системе координат X, Y тре-
угольник Е, изображенный на рис. 21, и построим на нем функ-
цию вида Фо(Х, Y) = anX2 + b0XY+ c0Y2-\-d0X+ e0Y + f0.
Постоянные an, , fn определим из соотношений, аналогич-
ных (6.4), т. е. из требований, чтобы Ф0(Х, Y) в узле (Хо, Ya)
равнялась единице, а в точках (X/, У(), i= 1, ..., 5, —нулю.
Рассматривая сначала эти требования в точках (Хо, Yo), (Хх, У^,
(Х2, У2), приходим к системе уравнений
ао О "У 1>о 0 4~ со 0 4- do 0 4- е0 • 0 f0 = 1,
ап • 4 + Ьо 0 с0 • 0 4- dn у + <?о • 0 4~ fo = О,
ао 1 4" 0 4~ со 0 -р do 1 4- вп 0 4- fo = 0.
Отсюда находим /0=1, а0 = 2, d0 = —3. Аналогично находим
Со = 2, е0 = —3. После этого из уравнения Фо(1/2, 1/2) = 0 вы-
числяем Ьо = 4. Итак, функция Ф0(Х, У) имеет вид Фо (X, У) =
= 2Х24-4ХУ4-2У2-ЗХ-ЗУ4- 1.
Рис. 22.
Теперь, чтобы найти вид функции <р/о (х, у) на Th достаточно
выполнить преобразование координат х, у в X, Y так, чтобы
треугольник Tt перешел в Е, а точка (х/о, у^ — в (Хо> Уо). Это
преобразование *) осуществляется с помощью формул
(xi~xi0) (Ч“Ч) ’
Y .. (Ч~Ч) (у~ч)~(ч~ч) (*~Ч)
~ Ч) (К ~ У‘о) - (Ч - Ч) (xit ~ Ч) ‘
В результате этого перехода получаем вид <pio (х, у) на Tt:
<Ч(*. у) = Ф0(Х(х, у), У (х, у)).
) Относительно аналогичных преобразований см, также § 8 данной главы.
128
АППРОКСИМАЦИЯ И ФИНИТНЫЕ ФУНКЦИИ
[ГЛ. 2
Аналогичным рассуждением можно определить вид и остальных
базисных функций, определенных на Tt.
Обозначим через Hn множество линейных комбинаций вида
N
«" (X, У) = ai^ (6-5)
1=0
и рассмотрим некоторые свойства функций из HN-
Очевидно, что Hn образует подпространство из Hn =
= W72,ftcW72. Кроме того, функции uh<=HN являются непре-
рывными на Q. Для доказательства этих утверждений доста-
точно показать, что uh непрерывна на сторонах треугольников.
На каждой из сторон uh будет полиномом второй степени от
одной переменной. На этой стороне лежат три узла —две вер-
шины и средняя точка. А так как полином второй степени тремя
значениями в узлах определяется однозначно и для двух сосед-
них треугольников эти значения одинаковы (значения в осталь-
ных узлах не влияют на uh вдоль этой стороны), то отсюда сле-
дуют наши утверждения. Таким образом, HN (Q).
Если для заданной функции u е IE) f) С (Q) построить ее ку-
сочно квадратичную интерполяцию
N
= Л u(Pi)4>i(x, у), (6.6)
1=0
то и/ = 0 на dQ, так как для стороны треугольника, лежащей на
dQ, 3 узловых значения (а значит, и весь полином) равны 0.
Теорема 1. Пусть и(х, у) (Т), для Т — некоторый
треугольник из разбиения Q; тогда для интерполянта ut, опреде-
ляемого по (6.6), справедливы оценки
max \Dl (и — ul)\^csh3~s "£\\D^и||С(т), |»l = s, (6-7)
х, 1/1 = 3
где h — максимальная из сторон треугольников, s = 0, 1, 2, а по-
стоянные cs не зависят от и и h.
Доказательство. Для доказательства воспользуемся фор-
мулой Тейлора для функций f (х, у) е C(S) (Т):
f(p>= 2 (Р D k 'f (Pi>+Rs’ p' Pi^T
ife|<2
Я3 = У (P~Pi)feD*7(P/ + e(P-P,)), 0<9<i,
!ftl=3 м <6-8)
fe = (fei, fe2), kt^o, \k\ = k1+k2, D* = dxk^>
(P - Pi)k = (x - Xt)k' (y - y^.
Пусть ч(Р) = и — ur Запишем для D ' е, |/|^3 разложение
§ 61
КУСОЧНО КВАДРАТИЧНЫЕ БАЗИСНЫЕ ФУНКЦИИ
129
в ряд Тейлора в окрестности точки Pt^T:
D'/:e(P) = PDl/le(^) + /?’/1. (6.9)
Здесь и далее через Pg (Р) обозначен полином в разложении
в ряд Тейлора, соответствующий разлагаемой функции g, a Rg —
остаточный член, в который входят производные лишь третьего
порядка. В (6.9) полином PDi/ie имеет степень 2 —1/|, а
V .(? D'k+P^Pi + btP-PM, 0<9<1,
|fe|=3-|/|
где [^ + /| = 3. Однако в нашем случае
£>|*+ле = £)1*+ли1 max | D Pa | = max | D'Pu |, |/| = 3,
PsT Per
поэтому
I R'eli | ‘^cshs~s У maxlD^'ul, |i| = s.
|/|=3 PeT
Поскольку u = Pa + Rtl, TO «/ = (P„)z + (/?„)/, где (Pa)/ =
^LPaPityi, (Ru)l — £Ra'Pi4>i. Здесь ПОЛИНОМЫ Pu, (Pa)i (второй
степени) тождественны, поэтому е = Ru — (Ru)i- Аналогично, с
учетом равенств PD\i\u = D'i । Ри, DP Ри = DiP (Ри)1 имеем
DPe = DPu - D'P ul = PDh\a + R\l' - ЯИ (Pa)7 - DP (fl„), =
= R\P — Dlli(Ra)i- Следовательно, в (6.9) Po]itR = — Т)|'|(7?я)/. Если
предположить, что стороны треугольника Т одного порядка, то
\DPqk(x, y)\^ch~w\, \Po\i\J^ch3~\P £||и||c(n Учитывая
|fe| = з
теперь полученную уже оценку для /?е'' = /?иУ|, приходим к
утверждению теоремы.
Замечание. Так же как и в § 4, можно показать, что
постоянные cs в теореме 1 допускают оценку cs^ c/sin 90, где
90> 0 —нижняя граница углов в триангуляции. Поэтому снова
при триангуляции области Q нужно избегать треугольников,
близких к вырожденным (т. е. 90, близкого к нулю).
Следствие. Если иеС<’>(й), mo существует такая функ-
ция uh I" h, что
\“~uh L (Q) CflS || U ||c<3) (Q), (6. 10)
II u - uh |>1 (Q) -c ch2 II и ||c<3) (Q), (6.11)
где постоянная с не зависит от и.
Доказательство этих оценок легко проводится на основе (6.7).
После рассмотрения кусочно квадратичной аппроксимации
становится прозрачной идея построения кусочно полиномиальных
5 Г. И. Марчук, В, И. Агошков
130
АППРОКСИМАЦИЯ И ФИНИТНЫЕ ФУНКЦИИ
[ГЛ. 2
финитных базисных функций более высокой степени, например
третьей. Пусть в этом случае 74 разбит, как показано на рис. 23.
Для построения базисной функции <р,- (х, у) (соответствующей узлу
Pi = Ph) на данном треугольнике запи-
шем ее в виде полинома третьей степени:
<р,- (х, у) = а0 + агх + а2у + а3х2 4- с^ху +
+ аьу2 4- оу/3 + ед2 4- акх2у 4- айх3,
где (х, у) е Т{. Этот полином определя-
ется десятью коэффициентами и, в част-
ности, десятью значениями в десяти уз-
лах Pt Здесь снова четыре,
узловых значения на каждой из сторон
1 кубический полином, заданный на этой
эсть базисной функции обеспечена. По-
строение базисных функций можно осуществить так же, как
и ранее. Аналогично предыдущему определяется кусочно куби-
ческое подпространство HN = W'2’h cz C (Q) (~| W2 (Q) и доказы-
ваются соответствующие теоремы аппроксимации.
Описанный выше подход можно обобщить на случай кусочно
полиномиальных аппроксимаций и более'высоких степеней, а также
на случай разбиения области Q на четырехуюльннки.
определяют
стороне, и
§ 7. Построение базисов в случае области
с криволинейной границей (метод аппроксимации области)
В этом и следующем параграфах будут описаны несколько
подходов к построению базисных функций в случае криволинейных
областей. Воспользуемся сначала тем, что мы уже умеем строить
базисы на элементарных треугольниках и прямоугольниках.
При решении краевых задач, например для эллиптических
уравнений второго порядка, мы часто имеем дело с функциями
и (х, у), которые должны удовлетворять тем или иным краевым
условиям. Поэтому далее будем выделять два случая: 1) когда
сама функция и (х, у) принимает на границе дО, заданное гра-
ничное значение; 2) когда на д£1 для и (х, у) заданы некоторые
краевые условия, в которые входят и производные от и (х, у) и
которые являются естественными для данной задачи. Примерами
таких функций могут быть решения задач вида
-A«4-u = f(x, у), (х, </)еЙ,
« = 0 на dQ, '
— Au-]-u = /(x, у), (х, у) е Й,
(7.2)
д- = 0 на dQ, v ’
дп ’
§ Л
МЕТОД АППРОКСИМАЦИИ ОБЛАСТИ
131
где « — единичный вектор внешней нормали к dQ. Решение за-
дачи (7.1) относится к случаю 1), и краевое условие здесь глав-
ное, а решение задачи (7.2) —к случаю 2). Целесообразность
разделения аппроксимируемых функций на два таких класса
обусловлена тем, что мы обязаны строить базисные функции так,
чтобы их линейные комбинации удовлетворяли краевому усло-
вию, если оно главное. Если же это условие естественное, то
базисные функции можно выбирать не обязательно удовлетворяю-
щими ему, что часто во многом упрощает численную реализацию
алгоритма. Ниже в качестве примеров упомянутых классов ап-
проксимируемых функций будут рассмотрены классы решений
задач (7.1) и (7.2) при достаточно гладкой границе д& и выпук-
лой области Q. Алгоритм построения базиса для случая невы-
пуклых областей или областей с кусочно гладкими границами,
как видно будет из дальнейшего, можно сформулировать ана-
логичным образом.
Рассмотрим сначала случай, когда краевое условие для и(х, у)
является естественным, и пусть, для конкретности, и (х, у) есть
решение задачи (7.2). Здесь мы, согласно изложенному в первой
главе, можем Строить базисные
функции, не удовлетворяющие это-
му условию. В таком случае при-
ходим к проблеме аппроксимации
на £2 самой функции и (х, у) (без
учета краевых условий). Введем
многоугольную область £2Л, пок-
рывающую £2, т. е. £2* го £2,
выполним разбиение £2Л на эле-
ментарные подобласти, например
на треугольники (рис. 24), и вве-
дем все необходимые узловые точки (т. е., возможно, не только
вершины треугольников, но и середины сторон и т. д.).
Каждому узлу Рг поставим в соответствие базисную функцию
<р; (х, у), построенную одним из способов, изложенных ранее.
Из всех построенных <pz выберем те функции, носитель которых
имеет ненулевое пересечение с £2, т. е. supp ср,- Q Q #= 0. Набор
таких ф/ и берется в качестве базиса при аппроксимации и (х, у)
на £2. Обозначим его через {ф,}, а через £2Л условимся обозна-
чать объединение носителей функций из {ф;}. На £2Л обычным
образом построим подпространство Л (£2ft) и рассмотрим суже-
ния функций из. Wl3' л (£2ft) на £2. Эти сужения и образуют под-
пространство Wlt' ft(£2), с помощью которого будут приближаться
и (х, у) на £2.
Теоремы об аппроксимации, справедливые для многоугольных
областей, будут справедливы и в данном случае. Но прежде чем
б*
•32 АППРОКСИМАЦИЯ И ФИНИТНЫЕ ФУНКЦИИ [ГЛ. 2
сформулировать эти теоремы, остановимся на понятии продолже-
ния функций с сохранением класса гладкости. Пусть на ограни-
ченной области QcR" задана функция и из пространства Ц7*(Й).
Под продолжением функции с сохранением класса гладкости (т. е.
с сохранением гладкости и нормы) и в более широкую область
Й гэ Й (допускается также Й = R") понимается такая функция
и* e^(Q), что u = u* в Й и || и* Ц(в)^с (Й)!1«1>(а), где по-
стоянная с(Й) зависит от Й и й /свойство lu\r/kin.^\ и*
у ** £ ( м ’ 1 Ч' g ( м >
очевидно). Аналогично определяется продолжение функции и из
класса С<4) (й) и других пространств.
Относительно возможности построения продолжений известно
следующее утверждение [9]. Пусть Й и й —ограниченные обла-
сти из R", Й cz Й, дй <= Тогда при любой функции и е
е= (Й) существует финитное в Й продолжение и* е (Й).
При этом ||и*||ЙХй(й)^с||и ||^(Ц), где постоянная с>0 зависит
лишь от Й и Й, а также ||u* ^с|| ulluzs(£2)- при всех s<.k.
Это утверждение имеет место и при менее ограничительных тре-
бованиях на гладкость <5Й. Например, оно остается верным, если
дй состоит из конечного числа кривых класса С{к\ пересекаю-
щихся под углами, отличными от 0 и 2л.
Рассмотрим теоремы об аппроксимации для случая, когда
{ср,} — кусочно линейные базисные функции, а подпространства
W7’’л (й) введены изложенным выше способом.
Теорема 1. Пусть и еС|(2, (й), дй еС’21. Тогда существует
такая функция П/ е W7!’ Л (Й), что
h2~k
— ui !1ц//г(Я) с Sjn д0 u 'с'21’ k = 0, 1, (7.3)
где 60 > 0 — минимальный из углов треугольников, IT’a = L2, h —
максимальная из сторон треугольников, ОО.
Доказательство. Пусть и* — продолжение функции и на
ЙЛ с сохранением класса гладкости. В этом случае L
с
«5с||ы||с<2>(0). Обозначим через и* функцию из Ц7.2,Л(ЙЛ), для ко-
торой справедливы оценки типа (7.3) (см. § 4), а через и, — су-
жение и* на Й. Тогда, так как и* = и и и*=и{ на Й, имеем
I« - «/ Ufe (0) = I! «* - м* Ц (Q) J и* - «/ (a/j) <
/;2-Й /г2-к
C1 sine7и;^‘2i (Qh) с sinе0 I'и^,2) щг
Теорема доказана.
§ 7]
МЕТОД АППРОКСИМАЦИИ ОБЛАСТИ
133
Заметим, что в случае описанного выше способа построения
Йл и выбранных на йл базисных функций при вычислении ин-
тегралов типа /г; = (ф,-, <py)c2(Q), i, / = 0, 1, N, интегрирова-
ние требуется осуществлять лишь по области supp ср,- f| Й supp <р7-
(а не по supp П supp ср,), которая может быть значительно
меньше, чем носитель каждой из функций ф,-, z' = 0, 1, ..., N
(рис. 25). Это обстоятельство может привести к плохо обуслов-
ленным матрицам, возникающим при решении задач проекцион-
но-сеточными методами. Поэтому в описанном выше алгоритме
построения базиса {ф,} желательно выполнение следующего огра-
ничения:
min [mes (supp <р,- Л Я)]
C]S== max [mes (supp ф/)] ’ (7-4)
i
где постоянная с>0 не зависит от выбираемой сетки, т. е. жела-
тельно, чтобы меры областей supp ф< П Й и supp ф7- были одного
порядка (при этом нельзя забывать о величине минимального
угла 60).
Рис. 25. Рис. 26.
Рассмотрим случай, когда аппроксимируемая функция удов-
летворяет главному краевому условию. Пусть для определенности
и(х, у) подчинена условию задачи (7.1), т. е. « = 0 на д£1. Для
построения базиса введем многоугольную область Йл, которая
содержится в Й, т. е. ЙА с Й, и зададим на ЙА сетку и необхо-
димые узловые точки. Область й здесь выпукла, поэтому пред-
положим, что граничные узловые точки ЙА находятся на дЙ
(рис. 26). Зададим на ЙА подпространство 1^2,Л(ЙА) с базисом {ф;},
построенным одним из известных способов. Пусть для определен-
ности {ф,} — кусочно линейные функции. Продолжим теперь
функции uh <= Wt,fl (ЙА) на Й\ЙА тождественным нулем. Тем
самым мы построим подпространство WV Л (Й), на котором можно
искать приближение функции и (х, у) (используя, например,
134 АППРОКСИМАЦИЯ И ФИНИТНЫЕ ФУНКЦИИ (ГЛ 2
методы Ритца, Бубнова — Галеркина и т. д.). Итак,
h (Q) = {и: и (Йл) при (х, y')^Qh,
и —0 при (х, у) <= Q\Qh}.
Сформулируем для данного случая теорему об аппроксимации.
Теорема 2. Если и(х, у) е W4(Q) П-С(а) (й), «ЭйеС'2', то
существует такая функция «/ е Wt ft(Q), что
|| ы — U/|f k eg с я |1ц|| (2) , 6 = 0,1, (7.5)
11 И7?(Я) Sin 0О 1 С1 (Я) V
где 90 — минимальный из углов, h — максимальная из сторон тре-
угольников сеточной области Йл, с > 0 — постоянная, не завися-
щая от h и от и (х, у).
N
Доказательство. Пусть и, = У, и (xit уд ср,- (х, у). Оценим
z=o
интеграл
1 (Й) = J (« ~ «г))2 + - U/))2) dx dy
я
С (\ ди |2 , I ди |2\ ецд \2
я\ял яй
+ (^ (« - Ы/)}2) dx dy = I (Й\ЙА) + / (ЙА).
Как уже известно,
I (ЙА) Sin2 0Q I' U ®C<2’ (Ял) C Sin2 0O ? u " C(2> (Я)" (7>6)
Получим оценку для / (Й\ЙА), которая будет зависеть от
того, насколько хорошо дйА приближает дй. Построение дЙА
представляет самостоятельный интерес. Здесь мы предполагаем,
что сетка на дЙА достаточно мелкая.
як Тогда расстояние от <9й до дйА будет
\ иметь порядок с/г2, где с —некоторая
постоянная. Следовательно, площадь
[ ' каждого сегмента TL (рис. 27) не будет
) превышать величины с/г3. Предположим
" ‘ также, что для минимальной из длин
Рис. 27. сторон Zimin выполнено ограничение
6=sSc/imin, с>0. (7.7)
Тогда число сегментов 7\ будет иметь порядок О (hr1). Учитывая
эти замечания, имеем *)
I (Й\ЙЛ) с/г21| и ||^>(Q4Qft) < с/г2Ц и ||с11, (й). (7.8)
*) Напомним, что ранее мы условились через с обозначать общую кон-
станту в выражениях. Поэтому в последовательности соотношений через с
могут быть обозначены различные постоянные.
5 8)
ИЗОПАРАМЕТРИЧЕСКИЕ ПРЕОБРАЗОВАНИЯ
135
Из (7.6), (7.8) следует (7.5) при k—\. Аналогично получаем
оценку при & = 0:
5 \u\2dxdy+ $ (u-utfdxdy^
Я \ Я д Я д
f + (7.9)
oil J Uq
я\яЛ
Представим u(x, у) при (х, y)^Tt в виде
и(х, у) — и(хг, yr) + \P-Pr\-^u(xi, ук),
где (х6, у^) — некоторая точка на линии РгР, не совпадающая
с Рг и Р, Рг — точка пересечения вектора внешней нормали п,
,j п ди ди । ди
проходящей через Р, с границей ой, — ni~g^~v 1ак как
и (хг, уг) = 0, а | Р — Рг | =С ch2, то
|и(х, у) I | Р - Рг 11 (х5, У0|=егс/12И1с'1>(7-г),
§|ы(х, y)|2dxdr/sgc/i4mes(7'/)[u|lc<i>(Ki)sSc/i7|ju||&il(Q), (7.10)
Ti
j | и (x, у) j2 dxdy^che ju'fc<i (Q)-
Я\Яд
Из (7.9) и (7.10) следует оценка (7.5) при k = 0, что завершает
доказательство теоремы.
Некоторые подходы к аппроксимации решений задач с неод-
нородными краевыми условиями будут рассмотрены в следующей
главе при построении проекционно-сеточных схем.
§ 8. Изопараметрические преобразования
и криволинейные элементы
В этом параграфе будет рассмотрен еще один подход к по-
строению базисных функций в криволинейных областях. Этот
алгоритм основывается на использовании изопараметрических
преобразований и конечных элементов в области с криволинейной
границей.
8.1. Понятие об изопараметрических преобразованиях. Подход
использования изопараметрических преобразований состоит в реа-
лизации следующих этапов.
Сначала формулируются исходные уравнения и обобщенная
постановка задачи в переменных (х, у) е Й. В этих же перемен-
ных вводится сеточная область, которая разделяет й на элемен-
тарные подобласти, которыми могут быть четырехугольники и
136
АППРОКСИМАЦИЯ И ФИНИТНЫЕ ФУНКЦИИ
[ГЛ 2
треугольники (в том числе непрямоугольные и с криволинейными
границами) (рис. 28).
Затем с помощью изопараметрических преобразований пере-
ходим от переменных х, у к новым переменным g, гр в которых
элементарные подобласти станут «стандартными», на этих подоб-
ластях можно одним из изложенных в предыдущих параграфах
способов построить базисные функции ср,- (£, т]) с известными
аппроксимирующими свойствами.
Далее в переменных g, т] строятся базисные функции ср,- Q, т]),
а также проводятся вычисления интегралов, скалярных произве-
дений и т. п. и решается система урав-
нений в проекционно-сеточном алгоритме.
При необходимости на последнем
этапе совершается обратное преобразо-
вание (£, г]) -> (х, у) для построения
базиса и приближенного решения задачи.
Как уже было сказано, в этом спо-
собе построения базиса, проведения вы-
числений и т. д. используются так
называемые изопараметрические преобразования. Они состоят в вы-
боре кусочно полиномиальных функций для преобразования ко-
ординат х(^, г)), г/ (§, т]). При этом термин «изопараметрический»
означает, что для преобразования координат выбираются такие
же полиномиальные функции, как и для самих аппроксимирую-
щих функций.
Выделим два случая: первый — когда вся область й может
быть преобразована в область Й = Й(£, т[); второй —когда такие
преобразования совершаются независимо для каждой из элемен-
тарных подобластей, на которые разбита исходная область Й.
Второй случай обладает рядом преимуществ перед первым и чаще
используется на практике. Поэтому именно он будет рассматри-
ваться в данном параграфе.
Введем следующее ограничение: будем предполагать, что гра-
ница области описывается кусочно полиномиальной функцией
той же самой степени, что и функции, осуществляющие изопара-
метрические преобразования. Отметим, что на практике именно
степень полиномов, описывающих границу, часто определяет
степень полиномиальных функций, используемых для преобразо-
ваний и построения аппроксимирующих функций иа подобластях,
прилегающих к границе.
8.2. Преобразование четырехугольников. Итак, пусть рассмат-
ривается задача аппроксимации заданных функций и(х, у), опре-
деленных на Q = Й (х, у) cz R2. Разобьем Й на конечные эле-
менты е,- так, чтобы узлы сетки совпадали с угловыми точками
области й. Плоская область обычно разбивается на треугольники
§ 8]
ИЗОПАРАМЕТРИЧЕСКИЕ ПРЕОБРАЗОВАНИЯ
.137
или четырехугольники, которые около dQ могут быть непрямо-
угольными или криволинейными.
Рассмотрим преобразования, которые могут быть использованы
при построении базисов, выполнении численного интегрирования
и т. д. Начнем с билинейного преобразования произвольного
четырехугольника с вершинами (ху, уу) в «стандартный» четырех-
угольник Е с вершинами (0, 0), (0, 1), (1, 1), (1, 0). Введем
преобразования
(?, т])->(х, у)'. х = х(|, т]), у = у (|, т]), (8.1)
(х, р)->(|, т]): % = Цх, у), г) = П(*, У), (8-2)
и потребуем отличия от нуля соответствующих якобианов:
/ (s, r]) = det
дх дх -
dg dr)
ду ду
di
— х».Уь
Цх, У) = 1х^}у-1у^х-
(8-3)
(8-4)
Как известно, эти якобианы связаны соотношением 1-1=1.
Пусть рассматриваются четырехугольники е,- = е,- (х, у) и Е =
= £(£, г]), изображенные на рис. 29.
Преобразование Е в е,-: (£, г))->(х, у) осуществляется по фор-
мулам
x = x(l, i')) = *i + (*2--Xi)£ + (x3-*i)1l + Л£т),
У = У(1, ^) = У1 + (У2-У1)1 + (Уз-У1)^ + В^.
где А =х4 — Хз-Хг + Хъ В = ул — уз — уг + У1-
Проверим, может ли якобиан
Уз-гб+В£|
138
АППРОКСИМАЦИЯ И ФИНИТНЫЕ ФУНКЦИИ
[ГЛ 2
обращаться в нуль внутри Е. Так как коэффициент при gr] равен
АВ — ВД = 0, то якобиан линеен относительно g и тр Следова-
тельно, если / (g, т]) имеет один и тот же знак во всех четырех
углах квадрата Е, то он не может равняться нулю в Е. Рас-
смотрим I (g, г]) при 1 = 0, т] = 0:
/ (0, 0) = (х2 - Х1) (Уз - Ух) - (Уз - У0 (Х3 - Xi) =
_ / / ( (х2 —xt) (Уз —Ух) (Уз — У1)(Хз — х1)\ _
1 2 \ IJ-1 1^1 /
= IJ2 (cos 0! sin (6 H~0i) — sin 0! cos (0 4-0t)) = 1Г12 sin 0. (8.6)
Поэтому /(0, 0)>0, если 0<л. Аналогичные утверждения
справедливы для любого другого угла. Следовательно, I (g, ц)
отличен от нуля всюду в Е, если четырехугольник et выпуклый,
т. е. каждый из его углов должен быть меньше л. Это требова-
ние является ограничением при выборе формы четырехугольников,
на которые разбивается область Q. При выполнении его можно
гарантировать также отличие от нуля 1 (х, у) в et.
Исходя из (8.5) можно построить преобразования g = g(x, у),
г] = г] (х, у). Однако отметим, что нередко на практике можно
обойтись и без явного вида функции g (х, у), г](х, у). Более
важным является знание выражений (8.5), так как с использо-
ванием их проводится вычисление элементов матриц, правых
частей систем в проекционно-сеточном алгоритме и различных
интегралов от приближенного решения. Проиллюстрируем это
на следующем примере.
Пусть требуется вычислить интеграл
Jt = §ыл(х, у)а(х, y)dxdy, (8.7)
ei
N
где uh(x, у)= ^a^hix, у), ^ — постоянные, Ф* (х, у) — постро-
k = 0
енные базисные функции (которые в переменных х, у, возможно,
имеют сложный вид), а(х, у) —заданная функция. Выполняя
замену переменных х, у на g, тр имеем
ФИ*. y)^4k(l, П). а(х< У)-*й& г]),
Ji= п)> У& ^))а(х(1. Г]), y(g, т])) I (g, r])!dgdr) =
Ei
= 5 uh (g, T]) a (g, T]) 11 (g, T)) I dg dn, (8.7')
Ei
где
Ц1, 4) = <s. »)>(?. Й, ч>.
N
«Л (I, n) = S ak^k (£, n)-
fe=0
§ 8]
ИЗОПАРАМЕТРИЧЕСКИЕ ПРЕОБРАЗОВАНИЯ
139
Так как в переменных g, т] вид <pft(g, tj) и I (g, tj) известен,
а форма ^ — «стандартная», то часто вычисление можно выпол-
нить явно, если, например, а(х, у) на et постоянна. Однако осо-
бенно привлекательным становится возможность использования
для вычисления У,- квадратурных формул, которые хорошо раз-
виты для многоугольников правильной формы и с помощью
которых можно точно вычислять интегралы на Е,- (g, т]) от поли-
номов достаточно высоких степеней (см. § 9 гл. 3). Поэтому при-
менение этих квадратурных формул для вычисления (8.7') может
дать точное (или весьма близкое к нему) значение У,. Получение
такого результата в переменных х, у было бы намного сложнее.
В случае, если а (х, у) не является постоянной на eh можно
воспользоваться приближением этого коэффициента, например,
с помсщью линейных комбинаций тех же самых функций Ф;(х, у)),
предполагая достаточную гладкость а (х, у) на с,- (чего часто
можно добиться за счет соответствующего выбора е,).
8.3. Преобразование треугольников. Пусть ^ — треугольник
с вершинами (хг, у;), i=l, 2, 3. Преобразуем его в треуголь-
ник Е с вершинами (0, 0), (0, 1), (1, 0).
Если треугольник е, прямолинейный (рис. 30), а искомое
преобразование линейное, то отображение (g, tj) (х, у) записы-
вается в виде
х = Xi + (х2 — хх) g + (х3 - х,) т], у = z/i + (z/2 — У1) £ + (Уз — У1) п; (8-8)
при этом якобиан
/ (g, т]) = det Г*2-*1 = (х2 - *1) (Уз - У1) - {Уз - /Л) (х3 - хг) ==
1_У2 — У1 Уз — У11
— / / ( x2 — xi Уз — У1 __ У2~У1 х3 — хг \ _
12\ 11 l2 11 l2 )
= lxl2 (cos 0! sin 92 — sin 0! cos 62) = lxl2 sin (6.2 — 6i)
допускает оценку
11 (I, n) 12s /mln Sin 90» (8-9)
140
АППРОКСИМАЦИЯ И ФИНИТНЫЕ ФУНКЦИИ
[ГЛ. 2
где /min — минимальная из длин сторон треугольника, а 90 — наи-
меньший его угол. Обратное к (8.8) преобразование имеет вид
t = (Уз - У1) (-у - Xi) - (х3 - хх) (у - yt)
6 (Уз — У1) (х2— хх) — (х3 — xj (У2—Уi) ’
(У2-У1)(х-х,)-(х2-х1)(у-у1)
1 (Уз - У i) (х3 - Xi) ~ (х2 - xj (уз - yd ‘
(8.10)
Если в £ (5, т|) построить какой-либо полином Р (£, т]), то,
используя (8.10), можно найти вид соответствующего ему выра-
жения Р(х, у) = Р(1, (х, у), и\(х, у)) на е;(х, у).
Рассмотрим теперь треугольник е,(х, у), в котором одна из
сторон криволинейна, лежит на границе dQ и этот участок гра-
ницы есть дуга, описываемая полиномом второй степени. Естест-
венным выбором кусочно полиномиальных функций, используе-
мых для аппроксимации на е,- и для изопараметрических преоб-
разований, можно считать полиномы второй степени.
Рис. 31.
Рис. 32.
Пусть et=et(x, у) — треугольник, изображенный на рис. 31.
Отображение е,- в £ (g, т[) представим в два этапа. Первый заклю-
чается в отображении е,- на треугольник ё) (х, У) в плоскости х, у,
представленный на рис. 32. Это отображение, как следует из
изложенного выше, задается формулами
х = (Уз — У1) (х - xt) - (х3 — xt) (у — ух)
2 (Уз - У1) (х2 — хх) - (х3 - хх) (у2 - yd ’
п = у ~ У1) Iх ~ X Х1) ~ — *1) (у ~ У1) >
у j3 (х3 - Xi) (у2 — yd — (у3 — yd (Х2 — Xj)
X = А + (х2 - xj + (х3 - X,) -д- д.,
2Т 1 Уз~У1 (8.12)
У = У1+ (Уг - yi) + (Уз - У1)
§ 81
ИЗОПАРАМЕТРИЧЕСКИЕ ПРЕОБРАЗОВАНИЯ
141
Второй этап преобразования заключается в отображении
St (х, у) в «стандартный треугольник» Е = Е (В, т]) в плоскости В, л
(рис. 33).
Отображение Е (В, л) на (х, у) имеет вид [72]
х = В + (4х'-2)Вл. у = л + (4£'-2)Вл. (8-13)
при этом точка (1/2, 1/2) в Е переходит в точку (х', у') (которая
в свою очередь преобразуется в (х', у') при использовании (8.11)).
Якобиан преобразования (8.13) снова линеен:
/ (В, Л) = det Г*4 = 1 + (4у' - 2) % + (4х' - 2) Л. (8.14)
Lx? XTjJ
Он равен 1 при В = 0, л = 0 и положителен, если он положите-
лен в вершинах (0,1) и (1,0), т. е. если
1 + (4у’ —2)1>0 при £ = 1, т] = 0.
1+ (4х' —2) 1 >0 при В = 0, т] = 1.
Эти
условия приводят к ограничениям на расположение точек
S') [72]:
х>1/4, £'>1/4. (8.15)
Таким образом, для невырожденности преобразования (8.13)
достаточно, чтобы точка (х/ у') находилась в секторе, ограни-
ченном штриховыми линиями и границей
обязательно на середине криволинейной
стороны треугольника).
Наконец, если ^ — криволинейный тре-
угольник, изображенный на рис. 34, то
преобразование (В, л) -> (х, У) задается
формулами
х == х3 + 2 (х'1+ х3 — 2х6) ?2 + 2 (х2 +
+ х3 - 2х5) Л2 + 4 (х3 + х4 — х5 - хв) Вл +
+ (4хв — хл — Зх3) В (4х5 — хг — Зх3) л,
(8.16)
У = Уз + 2 (,У1 + Уз — 2i/g) ?2 + 2 (у2 +
+ Уз ~ 2Уй) Л2 + 4 (Уз + Уг — Уз ~ Ув) В Л +
ё1 на рис. 32 (и не
Рис. 33.
+ (4у0 — Ух— Зу3) В + (4«/5 - Уз~ Зу3) л-
Если линии РгРъРз, РзРеРх — прямые со средними точками Р5 и
Рв соответственно, то преобразование имеет вид
Х = Х3 + ЛВл + Х1В + х2л, У = Уз + В&] + д& + У21], (8.17)
где xi = xt-xs, yt^tji-уз, Я = 2(2х4-х1+х2), В = 2(2у4-У1+у2).
8.4. Аппроксимация. После того как найдено преобразование
(g, у), можно задать на «стандартных» элементах
в плоскости В> Л известные нам базисные функции <pz (В, Л),
142
АППРОКСИМАЦИЯ И ФИНИТНЫЕ ФУНКЦИИ
[ГЛ. 2
а затем, используя отображение (g, т])ч- (х, у), построить функ-
ции Ф, (х, y) = <p£(g(x, у), т] (х, у)). Легко заметить, что в таких
преобразованиях непрерывность (но не более) базисных функций
сохраняется, а полиномы в переменных В, ц уже не будут,
вообще говоря, переходить в соответствующие полиномы от х, у.
Поэтому базис {Ф£(х, у)} обычно используется при построении
аппроксимаций в метриках L2(Q) и ^(Й), а техника изопара-
метрических преобразований успешно применяется лишь для
решения дифференциальных уравнений до
второго порядка включительно.
Рассмотрим некоторые вопросы аппрок-
симации с помощью базисных функций
{Ф£(х, у)}, построенных с использованием
изопараметрических преобразований. Для
иллюстрации основных этапов анализа вы-
берем ради простоты случай кусочно ли-
нейных функций и преобразований.
Пусть Й —некоторая многоугольная
область. Зададим на й триангуляцию.
Естественно, что можно внутри области Й
задать треугольники регулярной формы,
возможно введение прямолинейных нерегуляр-
а около границы
ных треугольников (рис. 35). Зададим на введенных треугольни-
ках базисные функции {Ф£ (х, у)} описанным выше способом с воз-
можным использованием изопараметрических преобразований.
Для исследования аппроксимирующих свойств нагл прежде всего
потребуется оценка якобианов / (£, ц) и 7(х, у). Согласно (8.8)
и (8.9) имеем
ftmin Sin 60sg I (g, T]) =c/i2, (8.18)
где h, ftmin — максимальная и минимальная из сторон треуголь-
ников соответственно, 60 — минимальный из углов. Тогда
y)l = |/(L
1
(8.19)
§ 8]
ИЗОПАРАМЕТРИЧЕСКИЕ ПРЕОБРАЗОВАНИЯ
143
Рассмотрим преобразования производных OTi/(|, q) = «(x(§, -q),
yfe, т])) при отображениях (£, tj)j=±(x, у)\
dU — ди(х(^ л), УЙ. Л)) _ ди дх , ди ду
дхд^ 1 9у9^'
dU ди дх ди ду
Л) дх Л) ' ду Л) ’
d*U ди д*х ди д*у . дх (dlu дх , д*и ду\ . ду / д*и дх д*и ду\
д** ~~ дх д^* + ду д^* + ^х2 д2 + ду дх д£/ ' \дх ду д% ' ду* dg/ ’
d*U ди д*х ди д*у , дх !д*и дх ду\ ,9yl д*и дх д*и ду\
дг\* ~~ дх дх\* ' ду дх\* <9т] \дх2 <91] + дх ду Л]/ ' \дх 9у дт] ду* дг\) ’
d*U ди д*х . ди д*у дх /д*и дх д*и ду\ ,ду/ д*и дх д*и ду'
д^дг} ' — дх dg <9 q ду d| <9 q ' dgkdx2 Л) дх ду дх\/ 5g \дх ду dq ' ду* dq
Поскольку мы условились рассматривать кусочно линейные преоб-
разования et Eh то
dU ди , ди ди ди , ди
d'i дхХ^'дуУ^’ dr| дх^'дуУ^'
d*U з д*и . о д*и . g д*и о _
~д^ ~ Xi дх* + %ХЪУЪ дх ду + ду* ’ (8.20)
__ „2 d2tf I Оу и I ..2 ^2ц
Л? ~ ” дх* + дх ду ду* ’
d*U д*и . , . х д*и . о? '
<5q = х-.х^ + (х-.уп 4- у^хц) 4- у^.уц ,
а также
ди _ dU .. .dU — \dSL
дх ~ + Л) Т1ж’ ду ~ +
д*и _ d*U „ d*U . . d*U
дх* <?g2 + ^хТ]х + Лх ^2 •
52// _ <W . d*U 2d*U
ду* ~~ ~;у д& gt ап + Л// ^2 >
д*и t е d*U , ,е . t х d*U . d*U
дГду — Ixly + (?лЛ« + ЛЛ») ag dn + Лл-Лу -^1 •
Предположим, что выполнено условие квазирегулярности
введенной сетки:
/z^Co/imin, (8.22)
где с0>0 — постоянная, не зависящая от h.
Теорема 1. Если и (х, у) е Wl (Q), то существует линейная
N
комбинация U[ (х, у) = У й/Ф/ (х, у), для которой справедливы
1=0
144
АППРОКСИМАЦИЯ И ФИНИТНЫЕ ФУНКЦИИ
[ГЛ. ;2
соотношения
II « — «гк2 (Я) =^c/i21| и|Ц (я,, (8.23)
h
f« — «/i|w7i (Я)=^с-7—т-|| u||«72 (а), (8.24)
аш «о 2
где постоянные с не зависят от
Доказательство. Пусть
для треугольника регулярной
чаем
II ы — и! Ш2 (е;) Ch* || U ||Ц («.),
h, 0О, и(х, у).
at = u(Pi), P, = (xt, у,). Тогда
формы обычным образом полу-
ll u — uz ||Ц(е;) Ch2 ,| U ||Ц (ez) •
Пусть ^ — треугольник вблизи границы. Тогда
I « — U; ||1а (е.) —
ei
N
У)-% а)
/=о
Ф/(*, У)
2
dx dy —
= 5 |Z(1. л)1
Ei
N
U (?. Л) - 1] a,(pj (?, л)
/=о
1
dZ dr\ С
«S max 11 (E, tj) | $
Et
N
л)-2! <№>& л)
[=0
2
dcdr].
Используя известные уже теоремы аппроксимации и обозначая
через di максимальную из сторон элемента Eit получаем
I « — «/8L2 (е,)
__ I 7 /t м J 4 С I I д2и |« , о I W |2 . I W |2\ ,
sc max 11 (E, tj) I cd t J | 1 + 21 | j ^Л-
E.
Но из (8.8), (8.20) следует, что
|2
IW I» . o| W I» . IW h
I I ’^Z|<5s<?nl + I <?П2 I
«cH+xl+^+^dSI’ + l^l’+zl^l’),
Тогда
max(|xj|, |хп], | у^ |, |«/л|)^/1.
\и — Щ Ш2 sg
«smaxjZQ, т])|а/(4й4
max / (g, п)
min 1 g, tj)
Cd|/l4 Ц U ii2uz2 (e,j.
« 9]
ТЕОРИЯ АППРОКСИМАЦИИ СТРЕНГА - ФИКСА
145
Для рассматриваемого случая базисных функций и выбора Ei
якобианы /(£, т]), I (х, у) — постоянные, I-I — X, Следо-
вательно,
II и — «Z lli2 (et) с№ ы||1Г|(е;)-
Оценим теперь || и — us предварительно получим оценку
для д (и — и^/дх:
($(IW + IW)|/(^ n)|x
е. Е.
X
max (I I2 + | п* i2W max | Z (*, гр I § (|^|3 + 2|^J3
+
+ IX? R dT1 ^in п)П maX 11 n) 1 lj “
•C max (| |2 +1 |2) c/i41| и |lVs (e.)-
Однако
max (IlxI, | t]x |) gg , h- D •
U ' 1 1 Amins>n6o
Следовательно,
J IД (« - «/) I* dx dy chi iiu !!h M ЖЧ1 “ •
Аналогичная оценка справедлива также и для производной
д (и — щ)/ду.
Суммируя эти неравенства по всем et, получаем (8.23), (8.24).
Теорема доказана.
Аналогично можно доказать, что сформулированные в преды-
дущих параграфах теоремы об аппроксимации остаются справед-
ливыми и при использовании для изопараметрических преобразо-
ваний и базисных функций более высокой степени. Здесь
необходимо дополнительно привлекать оценки для якобианов
I (S, т)), I (х, у}, а также для отображений производных (8.20),
(8.21) (что в свою очередь может привести к определенным огра-
ничениям на гладкость границы, часть которой может выступать
в роли сторон элементов ег).
§ 9. Теория аппроксимации Стренга — Фикса
В этом параграфе будут сформулированы некоторые резуль-
таты об аппроксимации с помощью финитных функций, получен-
ные Стренгом и Фиксом-. Разработанная ими теория аппроксима-
146 АППРОКСИМАЦИЯ И ФИНИТНЫЕ ФУНКЦИИ [ГЛ. 2
ции особенно эффективна при рассмотрении финитных функций,
построенных на равномерных сетках. Для этого класса аппрок-
симирующих базисов получены глубокие и красивые результаты,
которые, в частности, с единой точки зрения позволяют рас-
сматривать многие из финитных функций, применяемых в теории
аппроксимации на равномерных сетках, в том числе и изученных
в данной главе.
Кроме того, формулировка этих результатов позволяет проде-
монстрировать эффективность использования теории преобразова-
ния Фурье в теории аппроксимации: с ее помощью сравнительно
просто могут быть получены оптимальные по точности резуль-
таты, которые на основе разложения в ряды Тейлора достигнуть
значительно сложнее.
Предварительно приведем некоторые сведения из теории пре-
образования Фурье —одного из мощных методов проведения
исследований, особенно эффективного в задачах, рассматриваемых
в периодических областях либо во всем пространстве. Однако
результаты, полученные для этих задач, часто (используя, на-
пример, продолжение функций) можно перенести на проблемы,
изучаемые в ограниченных областях.
Для задач, определенных на всем R", через / будем обозна-
чать мультииндекс / = (Д, ..., /„) из множества Z" всех мульти-
индексов. Примем для преобразования Фурье определение
Ф ® = (2л)М $ ф <р е L, (R”),
R"
где х = (хъ .... х„), ? = (?i, .... U, x? = (xigi+... + xn§„).
Тогда
ф(х) = -^75- S А
R"
— обратное преобразование Фурье. Отметим некоторые свойства
преобразования Фурье [2, 10]:
1) = (1Zyф, = (^)а<... (*L)%;
2) О«ф = ((— zx)a<p);
3) <р(х — х0) ф(£);
4) (<р*ф) = фф,
где
(ф*Ф)(*)=$ ф(^)ф(х-у)^= 5 = W-
R" R"
§9] ТЕОРИЯ АППРОКСИМАЦИИ СТРЕНГА - ФИКСА 147
Теорема 1 (Планшерель). Для каждой функции <р s Z.2(Rn)
существуют преобразования Фурье ф,феТ2:
Т = -^75- <p(x)e-'^dx,
Rn
ф© =-^Д $ фИФФх.
Преобразования ф, ф линейны, отображают L2 на Ь2 взаимно
однозначно, взаимно об-ратимы и имеют место равенства Парсевалт
(<р, ф) = (Ф, ф) = (Ф. ф), I ф;=.!Фч = ;!Ф\
Здесь ф, ф — функции, сопряженные к ф, ф соответственно.
Воспользуемся теперь методами преобразования Фурье, чтобы
дать другое определение пространства Ws2 для случая, когда
Q = R".
Теорема 2 [24]. Пусть Q = R". Тогда №2(R") можно опре-
делить либо с помощью соотношения
W72(R/,) = [u: Dau е L2(R”) Va, jajsgs},
либо с помощью равенства
№’(R") = [«: (1 + \У i2)s/2* е L2 (R")},
где 1 у 2 = у\ + .. .ф- у*п', при этом норма
l!“i’uzs(R«) = f £ ДЧ1Т
2 \j<x|==£s /
эквивалентна норме
«ЫЦ(кл)НК1 + !^2й1у ,п)
2 4-2 \ К /
Доказательство. Учитывая свойства преобразования
Фурье и теорему Планшереля, имеем j| D а ‘и i = у а й II, так что
11«liVs = $ ( S у2 aiMaW\idy-
2 Hn /
Однако (с соответствующей постоянной с) имеют место неравенства
(1+|У12)^ S У2>а' ^с(1+\у
|a|<s
С учетом которых получаем
III u III i^s =£= IIW il^s C'/’HI U Ulj^s-
2 2 2
Теорема доказана.
148
АППРОКСИМАЦИЯ И ФИНИТНЫЕ ФУНКЦИИ
[ГЛ. 2
Легко заметить, что скалярное произведение bAZ^R") можно
определить соотношением
(«. v)ws(Rn)= $ 0 + \у\2Уй(У)^(У)аУ-
2 R"
Приступим теперь к основной цели данного параграфа — рас-
смотрению вопросов аппроксимации.
Рис. 36.
Как видно из § 2, при рассмотрении аппроксимации в одно-
мерном случае с помощью кусочно линейных функций, построен-
ных на равномерной сетке, все базисные функции {<jy (х)) имели
одну и ту же форму и являлись сдвигами «стандартной» функции
(рис. 36) ф (х): ф, (х) = ф (х/й — /). Базис целесообразно было брать
нормированным в виде фу (х) = h~ 1/2ф (х/й — j).
Аналогичная ситуация имеет место и в двумерном случае при
рассмотрении, например, билинейных базисных функций. Исполь-
зуя идею такого метода построения базисов, рассмотрим проблему
аппроксимации в достаточно общей форме.
Пусть на R задана равномерная сетка Xj — jh. Предположим,
что задана некоторая финитная функция ф (х) <= (R). Обозначим
через Z множество целых чисел, а через Z+ —множество поло-
жительных целых чисел. Возьмем функции фу- (х) =h~l/2<p (x/h — j)
и изучим возможность аппроксимации в метрике UZ’ (R) с помощью
комбинаций вида
«л = 2! “WM- (9-1)
/ez
где Wj — некоторые постоянные, которые образуют множество Л(Л).
Если не будет оговорено особо, подразумевается, что область
интегрирования есть R, а область суммирования есть Z.
Теорема 3. Пусть для преобразования Фурье ффинитной
функции ф (х) е W'.> (R) выполнено условие ф (0) 0, но ф (£) имеет
нули порядка р в других точках, кратных 2л, т. е.
£>“ф (2л/) =0, 0 =£ j е Z, а р; (9.2)
S 9]
ТЕОРИЯ АППРОКСИМАЦИИ СТРЕНГА - ФИКСА
149
тогда для каждой функции usIF4 + l(R) существуют такие
веса {Wj}, что при h->0
|| и - 2 o'/Ф/II tszcshi>+1-s\\u<\ р+1, (9.3)
II / И 2
(9.4)
/
где постоянные cs и с не зависят от h и от и (х).
Доказательство. Сначала преобразуем (9.3), (9.4) при
помощи равенства Парсеваля в неравенства для преобразования
Фурье. Отметим, что
ф/ (?) = (2лЛ)-‘/2 J Ф (у - /) dx =
= 1/2 ф (у) e~i&,(-J'+l,'> dy = /1*/2е-‘^лф (/i?).
Тогда преобразование Фурье суммы w,(p/ имеет вид
pi1/2 У', Wje~^>h\ q>(/i?).
\ i I
Пусть Uh (?) = /i1/2 У wje-i^ih. Эта функция имеет период 2л/й
/
по переменной ?, так что если обозначить через й куб {?:
«g?sgn//i}, то (9.4) равносильно неравенству
5 \Uh\2dl^c\ |Й(?),М?. (9.5)
О R
Используя определение нормы в U^(R) через преобразование
Фурье, можно представить оценку (9.3) в виде
5 I й (?) - и» (?) ф (Л?) ;2 (1 +1 ? IV dl IIи |р^+(9.6)
Чтобы построить функцию Uh, удовлетворяющую этому нера-
венству, выберем сначала коэффициенты qa, а^р, так, чтобы
Ц7аП“ф(л)=1+О(1л1₽+1)- (9-7)
а
Поскольку ф(0)=^0, q0 можно определить из равенства доф (0)= 1 .
Тогда каждый оставшийся коэффициент q$ определяется из усло-
вия обращения в нуль fi-й производной от левой части (9.7) при
ц = 0. В самом деле, так как только a-я производная от т]“
является ненулевой при т] = 0, то это определяет q$, в порядке
150
АППРОКСИМАЦИЯ И ФИНИТНЫЕ ФУНКЦИИ
[ГЛ. 2
возрастания Р, из соотношения
V <7аО0-аФ(О)
в силу чего (9.7) достигнуто. "Теперь выберем веса w} так, чтобы
tA(B)=«(?) £ qa(htr (9.8)
х р
в Q = {?: —л/h sg ? eg л/h}. Условие (9.4) выполнено, так как
\Uh\^c\u. \ в Q. Покажем, что все интегралы
А = 5 I«(В) - Uh (В) Ф (АВ) I2 (1 + + 2Y dt,
А = 5 |й(В)!г(1+|в 2)м?,/з= ;с/л(Е)ф(.^)(2(1 + ш2т
R \О R\Q
ограничены величиной chuPvl~s} [I и f^.p+i.
Учитывая (9.7) и неравенство |й?|^л в Q, имеем
Л = 5 !u(=)t2|l -Xqa(hty<v(h^(l+ В,2)'^
ф й (?) |21 ft? j2 (1 +1 ? i2)‘ d? eg
eg ch2^+1-s} $ ! d (?) 2 (1 + I ? +’ d?.
Ho | ft? | Зал вне Q, поэтому
/2< 5 |u(?) 2|ft? 2<₽ ^’(1+iB ,2rd?^cft2<^’||u|^+1.
R\O 2
Для оценки /3 воспользуемся сначала периодичностью Uh (?):
А= $ |(/л(?)Ф(й?)!2(1 + ! Bl2m =
= $ 2 ;^л(В)Ф(ав + 2л/)12(1 +|?+^-12р?.
о
Т огда
1з^с \ I й (?) |2ft-2* 2 I ф (Л? + 2л/) 21 Л?4-2л/12*d?. (9.9)
a j^o
Чтобы показать, что в этом интеграле сумма есть О (| ft£ |2/h2)f
воспользуемся разложением ф в ряд Тейлора в окрестности
точки 2л/ с учетом (9.2):
<р (Л§ 4- 2л/) = (Л?)₽+’z)f1 *ф (е7)/(р +1)1,
Ml ТЕОРИЯ АППРОКСИМАЦИИ СТРЕНГА - ФИКСА 151
где 9, —некоторая точка из (2л/, 2n/4-/ig). Поскольку | hl | л,
ТО I/ig 4-2л/1 с | 0у| и
2 |Ф(^ + 2л/)Н^ + 2л/|2^с|^!2^1> 2 |^+'ф(9/)Г i в/-
/М i*0
Чтобы оценить сумму в правой части, воспользуемся финитностью
<р (%) и соотношениями
Г’Р? + ,ф(0 = (2л)-,/а(-0'’+1"’ J xp+^(x)Dsxe~wdx =
= (2n)-v* (— (—1 у J e~'7*D* гр+1ф (x) dx =
supp Ф
= (— i)P+1-s(—1)5Ф(/),
где Ф (x) = Dsx (x₽+1q> (x)) e £,3, supp Ф = supp q>. Тогда эта сумма
есть 2 |ф10/)|2. Пусть ради простоты supp<p = (—лф-е, л —е),
/ м
0<е<1. Введем функцию ф(х)={1, !х|=^л —е; (л — !х )/е,
л — е^|х|^л; 0, nsgix;}, преобразование Фурье которой имеет
вид (2/л)1/2 (cos (л — е) t — cos л/)/(/2е). В этом случае
(„) - (I)*'1 (,+..).
Правая часть этого равенства мажорируется выражением
АЦВ + (/ + и)2), А, В > 0 — постоянные. Тогда в силу равенств
Ф(0 = (Фф)(0.
со
ф(х)e~itx = 1 ‘ cos(n-e)(/+P)-cosn(/ + p) ivx
TV ' л ,1 (/ + 02е
— -.'3
имеем
Ф(0 = —172 Cc?S("-4(/ + 4-COSnp+0e^d
(2л)1/2 J (/ + у)2е
' —оо —.оо
— 1 Fc<»(n-e)(/+v)-cosn(/ + p) . .
л J (/ + 02 е v)av,
— оо
I Ф (fl ' 5g С f Л 1 ®
1 ( J S + (/-02 V’
— оо
l(T49h2-r f Adv {A\^(v)\^dv
J6+(9/_02- J 6 + (9/_02^=C J e + (9/_02 •
— QO —00 —oo
152
АППРОКСИМАЦИЯ И ФИНИТНЫЕ ФУНКЦИИ
[ГЛ; 2
И .
со
21 * ад I*«» 2
—со
f |O(w)|Mv^c||<p||a s, S^p,
—со *
а значит, /3 -С с | и (В) \2hr2s | hl |2р+2 с/г2^+1-’) || и ||^₽+i.
Проиллюстрируем применение теоремы 3 для решения проблемы
аппроксимации в случае ограниченных областей.
Пусть и (х) (= rf+1 (Q), Q с= R. Введем на R сетку с шагом h
и зададим функции {qy}, построенные по функции <р (х) <= W% (R),
удовлетворяющей условиям теоремы 3.
Теорема 4. Если и (х) е IFf+1 (Q), то можно построить
такую линейную комбинацию . uh = где суммирование
i
ведется лишь по индексам j, для которых supp qy f| Q =/= ф, что
|| u Uh || jjzS(Q) || и ||[|7P-f- , (9.10)
где постоянная с не зависит от h и от u(x), Osgssgp.
Доказательство. Пусть и* — продолжение и на R с со-
хранением класса гладкости. Тогда по теореме 3 существует такая
функция = что || и* - и*н Ц(К) ^chP+1~s || и*
Следовательно,
|| и — Uh || s = || и* — Uh II S г'"-- |1 и* — U* II s
11 "ифй) 1 ""iFj(O) 11 ифю
' || p + i «С chP+1-'5||'И || p + i
" flWV‘(R) 11 (Й)>
где в левой части всей последовательности неравенств в сумме
и* = 2 Wjtfj останутся слагаемые, для которых supp qy П & =/= ф.
I
В случае п независимых переменных xlr ..., x^eR” пост-
роение базисных функций можно осуществить на основе функции
q> (/) от одной переменной, удовлетворяющей условиям теоремы 3.
Для этого по всем переменным вводится сетка с шагом h (ради
простоты шаг сетки по всем переменным один и тот же). Через /
обозначается мультииндекс / = (/1, ./„). Алгоритм построения
базисных функций для случая п переменных прост и имеет вид
qy (х) = q>(/i in} (хх, ..., х„) = Л""/2 <Р - /х) • • • q> “ /») =
п
-h-w П<р(£-/А (9.11)
fc = i.
§9] ТЕОРИЯ АППРОКСИМАЦИИ СТРЕНГА-ФИКСА 153
Именно по такому алгоритму были построены билинейные функ-
ции в § 5 на основе кусочно линейных функций, рассмотренных
в § 2.
Если базис построен согласно (9.1 J), то утверждения теорем
3 и 4 дословно переформулируются на случай п переменных.
(Отметим, что в теореме 4 нужйо потребовать дополнительно,
чтобы Q допускала возможность продолжения функций с сохра-
нением класса гладкости.) Доказательство их проводится анало-
гичным образом. Мы предлагаем его в качестве упражнения
к этому параграфу, а здесь сформулируем без доказательства более
общие утверждения.
Пусть в R" задана финитная функция ф (х) е W% (Rn), обла-
дающая непрерывными производными порядка меньше р, причем
р-е производные принадлежат L2 (R")- Возьмем множество линей-
ных комбинаций вида
Щ, = wi4j (х), (9.12)
iez
где Z —множество мультииндексов / = (/i, ..., jn), а ф;-(х) =
= h-^Wx/h — /) = /гл/2ф (Xi//i — /1)... <р (xn/h — jn)- Ниже подразуме-
вается также, что
|al =at4-...4-а„ при 7.eZ и а,>=0, х“ = х“*... х“л,
। । , /а\ “1
a.-aj ...а„., (р) ~ р! (а_р) г
Теорема 5 (Стренг, Фикс). Если функция ф (х) принад-
лежит и финитна, то следующие условия эквивалентны:
1) ф (0)^=0, но ф имеет нули порядка р в других точках,
кратных 2л, т. е.
Оаф(2л/) = 0, если O^jsZ, |а|^р. (9.13)
2) Если j а | р, то /аФ “ /) есть полином от tlf ..., tn
i z
с главным членом ctr'-, c=£0.
3) Для каждой функции u (x) e (R'!) существуют такие
веса {да,}, что при h->-0
|u-5^|w,s:£Sc^P+1''silul!u?p + i, O^s^p, (9.14)
У, (9.15)
i
где постоянные cs и с не зависят от и (х) и от h. Показатель
/>+ 1 — s в (9.14) является наилучшим для рассматриваемых клас-
сов и №? + *.
154
АППРОКСИМАЦИЯ И ФИНИТНЫЕ ФУНКЦИИ
[ГЛ. 2
Предположим теперь, что имеются несколько финитных функ-
м
ций Фтей7’, т=1, .... М. Образуем %= с некото-
т = 1
рыми заданными коэффициентами dma. Что можно сказать об
аппроксимирующих свойствах функций % (подчеркнем, что от <рт,
кроме их принадлежности W$, ничего не требуется)? Ответ на
этот вопрос дает следующая теорема.
Теорема 6 (Стренг, Фикс). Пусть <р2, ..., <р,и принадлежат
W% (Rn) и финитны. Тогда следующие условия эквивалентны-.
1) Существуют линейные комбинации фа функций q>,, удовле-
творяющие соотношениям
фо (0) — 1, ф0 (2л/) = 0 для /=/=0,
2О₽фа_₽ (2л/) .
-----пт— = 0 для всех I е Z,
1^|а|^р, a^sO, P^sO.
2) Существуют линейные комбинации фа функций <рт, удовле-
творяющие соотношениям
Z-= у У
al fit
₽<a i '
ia|«Sp.
3)
Для каждой функции
что
м
« - S 2 WH4U W
i=1jc=Z
M
и e W$+1 существуют такие веса
ч Cshp+1~s || и || , ,
HzS(r«) "u>p + 1>
2 ' 2 Ю IK,
У, У, I Wij l2jC с II u||1!(R),
I >=1
где q);7- (x) = h~n/2q>i (x/h — j).
Отметим, что теоремы 5 и 6, доказательство которых можно
найти в [80], дают фактически алгоритм для построения базисных
функций, обладающих теми или иными аппроксимирующими свой-
ствами.
§ 10. В-сплайны и связь их с некоторыми
аппроксимирующими функциями. Эрмитово пространство
Применим изложенную в § 9 теорию для изучения некоторых
базисов, а также для их построения.
Определим прежде всего так называемые В-сплайны. Функ-
цию фр (х), преобразование Фурье которой имеет вид
ФР(Ю = р^Г*. (10.1)
\ ъ/ * /
называют В-сплайном степени р.
§ 101
ВСПЛАПНЫ
155
Рассмотрим ступеньку, изображенную на рис. 37. Найдем ф0(х)
(множитель (2л)-’/2 для упрощения опускаем):
+ » 1/2 1/2
фо (g) = 5 фо W е-'6* dx = 5 е ^х dx = (cos gx — i sin lx) dx =
— v> —1/2 —1/2
_ sin gx |i/2 ( cos lx 11/2 __ sin (g/2) ,.n c
I |_f/a+ g |_1/2- g/2 ’ <1U-Z
t. e. q>0 (x) является В-сплайном нулевой степени и обладает
свойствами:
A mi - 1 n ® - &4)cos (s/2) - (1/2>sin ©2)
Фо(0)-1=/=и, ------------------------
W /*«•
(10.3)
Следовательно, для ф0(х) условия теоремы 1 из § 9 выполнены
при а = р = 0 и оценки погрешности ап-
проксимации имеют вид
|v - S а7Ф/1 II«II И- (10.4)
где ip;- (х) = h 1/2([о (х//г — /). Базисные функ- —-.----
ции, построенные на основе В-сплайна 0 J/Z
нулевой степени, уже рассматривались в Рис. 37.
§ 1, если принять сетку равномерной.
Рассмотрим случай р—1. Прежде всего определим (pt (х) как
Ф1(х) = фо(х)*фоМ; (10.5)
тогда
Ф1 (?) = Фо (?) Фо (?) = (Фо (?))2 = •
Свойства ф! (х):
41 ©
Ф1 (0) = 1 #= 0,
= 2
2Л/
sin (1/2) d
1/2 dl
I =2sin«/^ = 0
12 Л/ л/ dg 1
Kpi (g)
d?
( 4фо''[2
42фо
4V £=гл/
(10.6)
= 2
Следовательно, имеем аппроксимацию вида
|- S wWi (х) [ C^~S II и II wl,
(Ю.7)
где ф7 (х) = h ^фх (х/й - /).
156 АППРОКСИМАЦИЯ и ФИНИТНЫЕ ФУНКЦИИ [ГЛ. 2
Построим график <pi (х):
Ф1 (х) = ф0 * ф0 =
4-те 1/2 х -1-1/2
= 5 Фо(у)фо(х-*/)^У = $ фо (х - у) dy = $ <р0 (z)dz =
— со —1/2 х—1/2
если х<—1, то х+1/2<—1/2 и ф! (х) «=0,
если х>1, то х—1/2>1/2 и ф1(х) = 0,
X-J-1/2
= если —1<х<0, то ф! — dz = x+l, (10.8)
-1/2
1/2
если 0 < х < 1, то ф1 = J dz = 1 — х.
х—1/2
Итак, ф1 (х) есть известная уже функция-крышка (рис. 38).
Заметим также, что (рис. 39)
^^ = Фо(*+у)-<Ро(х-у). (Ю.9)
Теперь становится ясно, что для более высоких значений р
функции фр (х) может быть вычислена с помощью свертки:
ФР (х) = Фр-1(х)*Фо(х). (10.10)
Полученная в результате функция фр равна 0 вне отрезка
— (р+l)/2«^x^ (р+1)/2, а внутри его она есть полином сте-
пени р на каждом единичном отрезке j — (p+ 1)/2 =Сх =S/ + 1 —
— (р+ 1)/2. Производная dqpjdx имеет преобразование Фурье вида
<*фр (g)
dx
i^P (I) = - e~‘^) фр_г (I),
поэтому мы имеем рекуррентную формулу
<*Фр W / , ! \ / i \
= фр-! + 2-j -Фр-Цх- 2J.
(10.11)
§ 101
В-СПЛАЙНЫ
157
Легко заметить, что множество
#(Л) = /«*: «л = 2} wi^i (*)> Ф/ = а-1/2Фр (х
' /
состоит из функций, которые являются полиномами степени р
в каждом интервале, с непрерывными в узлах сетки производными
всех порядков, меньших р. Производная порядка р ограничена,
и, значит, <рр е W$.
Одним из самых важных случаев после р = 1 является случай
кубических сплайнов р = 3 (рис. 40):
фз(х)=
0, х-с2,
(2 —х)3/6, 1^х=^2,
[1 +3 (1 - х) + 3(1 -х)2- 3(1 - х)3], 0-Сх<Л, (10,12)
Фз( —х), x«so.
Аналогично можно рассмотреть и случай р>3. Однако отме-
тим, что при рассмотрении базисов, построенных на основе
В-сплайнов степени р>3,
существенным образом будет
сказываться сложность реа-
лизации проекционно-сеточ-
ного алгоритма, основанного
на использовании этих бази-
сов. Поэтому случаи 0 яс р
3 являются наиболее при-
емлемыми в практических
вычислениях.
Многомерные В-сплайны <рр (хп ..., хп) в R" на основе одно-
мерного В-сплайна <рр(х) можно строить в виде тензорного
произведения:
Фр(хъ ..., х„) = фр(х1)фр(х2)...фр(хп). (10.13)
Аппроксимирующие свойства базисов, построенных на основе
Фр (хп ..., хп), даются теоремой 5 из § 9, и непосредственное их
изучение проводится так же, как и в одномерном случае.
Рассмотрим случай, когда имеются несколько финитных функ-
ций фт, т=1, ..., М, на основе которых строится базис (и
к исследованию которых может быть применена теорема 6 из § 9).
Иллюстрацию этого случая проведем на примере эрмитова про-
странства с кусочно полиномиальными базисными функциями
третьей степени.
Возьмем одномерный случай; пусть р нечетно, и пусть име-
ются М = (р-ф 1)/2 базисных функций ф, (х). Каждая из них равна
158
АППРОКСИМАЦИЯ И ФИНИТНЫЕ ФУНКЦИИ
[ГЛ. 2
нулю вне отрезка — 1^х^1 и является полиномом степени р
в каждом из отрезков [—1, 0] и [0, 1]. Эти полиномы определены
заданием М условий на каждом конце отрезка: в точке х = — 1
или х= 1 функция ф,-(х) и все производные порядка, меньшего М,
равны нулю, а в точке х = 0 единственной ненулевой производной
является
1, (10.14)
dx‘ 1 ’ ' '
Эти условия придают функциям ф,- (х) следующее свойство: соот-
ношение и (х) = УцФ// (х) выражает, что в точках сетки значе-
ния и (х) и ее первых М — 1 производных имеют вид
= Vik (10.15)
dx‘~l
(Это свойство отчасти является причиной популярности эрмито-
вых базисов.)
Важным примером эрмитовых пространств является эрмитово
пространство с р = 3 и, как следствие, М = 2. Здесь имеем две
функции Ф1 (х) и ф2(х). Согласно изложенному выше, на [0, 1]
функция ф1 (х) представима в виде ф! (х) = а0 ф-atx ф- а.2х2 ф-<т3х3,
где а0, , а3 определяются из условий
Ф1(о) = 1, Ф1(1)_о. (10Л6)
>(0)-0, *‘(1)-0,
т. е. из уравнений
Ф1(О) = ао=1, g>(0)=«1 = 0,
Ф1(1)=1ф-а2ф-а3 = 0, (1) = 2а2ф-За3 = 0,
откуда а.г = — 3, а3 = 2. Следовательно (рис. 41),
ф! (х) =
о, ; х 2г 1,
1 — Зх2 + 2х3 = (I — х)2(1 ф-2х), O^x^l, (10.17)
Ф1 (—*), х<0.
§ 10]
В-СПЛАЙНЫ
159
Построение q>2 (х) осуществляется после определения неизвест-
ных Ьо, Ь3 в представлении <р2 (х) = + &1Х + 62х2 4-&3Х3 на
[0, 1] из условий
*<0) = °- Ф.<1)=0, (]018)
*L-(0)=l, (Ь(1)-0.
Это нам дает (рис. 42)
q>2 (х) =
0,
(1 -х2)х,
—<р8 (—X),
х> 1,
0«=ХгС 1,
х<0.
(10.19)
Пространство /7(й) определяется следующим образом:
ий = 2(«;Ф1(-^ ~/) + М2 (Ю.20)
I i J
Легко проверить, что в данном случае выполняются условия
теоремы 6 из § 9 при р = 3 и 0eCs=c2. С помощью функций <pt,
<р2 можно определить квазиинтерполяцию функции и (х), а именно:
й/ = 2 [и <P1 [Ji ~ + dx ф2 ( *h ~ (Ю.21)
Это дает нам ясное представление о физической интерпретации
значений коэффициентов при функциях <pj и <р2 в приближенном
решении мл(х), построенном проекционно-сеточным методом
с использованием эрмитовых базисов.
В случае п переменных эрмитовы базисы строятся на основе
тензорных произведений одномерных базисных функций.
ГЛАВА 3
ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ
ДЛЯ ЗАДАЧ МАТЕМАТИЧЕСКОЙ ФИЗИКИ
В этой главе на примере ряда задач математической физики
иллюстрируются подходы к построению проекционно-сеточных
схем, решения которых будут определять приближенные реше-
ния исходных задач.
Алгоритм построения проекционно-сеточной схемы содержит
следующие основные этапы:
— обобщенная постановка задачи, исследование основных
свойств операторов задачи, формулировка результатов о сущест-
вовании, единственности и гладкости решения, выделение главных
и естественных краевых условий;
— выбор алгоритма проекционного метода, базисных функций,
удовлетворение главным краевым условиям;
— построение проекционно-сеточной схемы;
— изучение сходимости, оценки скорости сходимости;
— исследование вопросов численной реализации алгоритма
(численное интегрирование, устойчивость, свойства матриц системы
и возможные методы ее решения).
Эти этапы, как правило, и будут рассматриваться в дальнейшем
при построении проекционно-сеточных схем для конкретных задач.
§ I. Построение проекционно-сеточной схемы
для обыкновенного дифференциального уравнения
второго порядка
1.1. Постановка задачи. Рассмотрим задачу об отыскании
непрерывной на Q = (a, b) функции и (х), удовлетворяющей урав-
нению
~ZxP^Tx + q^u^=f^ U-1)
и краевым условиям
и (а) = и(Ь) = 0. (1.2)
Здесь f (х) е L2 (a, b), р (х), q(x) — ограниченные функции, 0<pusg
с; р (х) р1( 0 с; <? (х) <71, ро, pi, <71 — постоянные.
§ I] СХЕМА ДЛЯ УРАВНЕНИЯ ВТОРОГО ПОРЯДКА 161
Обозначим через А оператор задачи (1.1), (1.2), определяемый
выражением Аи= —-d-p~xA~ qu и областью определения D (Д).
Пусть D (Д) состоит из непрерывных функций и (х), обладающих
производной du/dx &.L2(a, b), таких, что Au^L2, и удовлетво-
ряющих краевым условиям (1.2). Теперь задачу (1.1), (1.2) можно
записать в виде операторного уравнения
Ды = /, (1.3)
которое будем рассматривать в гильбертовом пространстве Н =
= L2 (И) со скалярным произведением (и, v) = (и, и)^ и нормой
lluMlwk,- •
Изучим свойства оператора Д. Прежде всего отметим, что
множество D (Д) плотно в L2 и что оператор А является сим-
метричным:
ь
(Аи, = ^p^ + qu'jvdx^
а
b .
du \х = Ь [• / du dv , \ , _ г, , Л\ /, ..
= -PdxV\x = a+ J \PdxdX+(fUV)dX> и> <14)
а
а поскольку v (а) = и (Ь) = 0, то
ь
(Аи, u)= J [pd£~ + quvjdx = (Av, и),
а
Покажем, что оператор А является также положительно
определенным, т. е. для него выполнено условие
у2!] а.2^(Аи, и), u^D(A), (1.5)
где 0 —постоянная, не зависящая от и(х). Для доказатель-
ства этого факта достаточно воспользоваться неравенством Фрид-
рихса, которое для нашей задачи можно сформулировать так:
если функция и (х) обладает производной du/dx на (а, Ь), сум-
мируемой с квадратом, и в одной из точек х = а, х = Ь эта функ-
ция равна нулю, то имеет место оценка
||«|-й<“|. (1.6)
Докажем сначала (1.6). Пусть и(а) = 0. Тогда из тождества
Г. И. Марчук, В. И. Агошков
162
ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ
(ГЛ. 3
получаем
а
luix^Vx-al/^ J J ||2 dx,
a r a
\u(x)\2^(x-a) J |jgpx.
a
Интегрируя последнее соотношение по х, получаем (1.6) при
с «а (Ь — а)/У2.
На основании (1.6) имеем
11ыР^(г>~а)7- ^}^(Ь-а)2(Ли и)
2 \dx’ dx)~~~ 2р0 \Р dx’ dxj ~~~ 2р0 * ’ ”
т. е. получаем (1.5) при у = У2р0/(Ь — а).
Полученные свойства оператора А гарантируют существование
обратного оператора А~1, что в свою очередь влечет однозначную
разрешимость уравнения (1.3).
Пусть и (х) есть решение данного уравнения. Умножив (1.3)
скалярно в £2 на и (х) и выполнив интегрирование по частям
с учетом краевых условий, приходим к равенству
“)=^ “)•
В силу неравенств
1(А Э + (?«. «)]‘/2
имеем оценку
{РТх’ &) + (?“’ “)^сИИа- (1-7)
Отсюда, учитывая ограничения на р и q, получаем неравенство
11«М(Я)=^11Л. (1.8)
Если предположить, что р (х) обладает ограниченной производной
dp/dx, то, представив (1.1) в виде
d?u 1 dpdu\
-d^-Af~qU + dxdx)
и воспользовавшись (1.8), получаем
|g|«sd/!, I«1Ч.М)<«1П. (1.9)
§ I] СХЕМА ДЛЯ УРАВНЕНИЯ ВТОРОГО ПОРЯДКА 163
Итак, для рассматриваемой задачи имеет место следующий
результат: если р(х), q(x), dp/dx^. Lm, то задача (1.1), (1.2)
имеет единственное решение и(х), для которого справедливы
оценки (1.9).
Отметим, что на основании результатов § 2 гл. 1 можно сде-
лать вывод, что условия (1.2) являются главными.
1.2. Построение проекционно-сеточной схемы. Имея некоторую
информацию о свойствах оператора А, о существовании, единст-
венности и гладкости решения и(х), можно приступить к фор-
мулировке проекционно-сеточного алгоритма приближенного реше-
ния задачи (1.1), (1.2). А — симметричный и положительно опре-
деленный, поэтому естественно применить для решения задачи
метод Ритца в энергетических пространствах. Энергетическое прост-
ранство НА будет здесь иметь соответственно скалярное произве-
дение и норму
ь
[“’+ [“] = [“• О-10)
а
Учитывая ограничения на р, q и неравенство Фридрихса, заме-
чаем, что в нашей задаче НА совпадает с пространством и
имеют место соотношения эквивалентности норм
Со II IIuZg [“] £1II “ IIЦ7а• (!•!!)
Задача (1.1), (1.2), согласно теории метода Ритца, сводится
к проблеме минимизации функционала
£(«) = [«, и] —2 (и, f) (1-12)
в пространстве НА = W*. Но мы уже доказали существова-
ние и единственность решения и е W*, так что эта функция будет
также доставлять минимум функционалу F (и).
Зададим базисные функции. Поскольку в задаче о минимизации
F (и) допускаются функции из (т. е. область определения
функционала F (и) есть W$, то W-i принадлежат кусочно линейные
функции, удовлетворяющие условию (1.2). Поэтому выберем в
качестве базисных кусочно линейные функции (см. § 2 гл. 2).
Для их построения введем на (а, Ь) сетку
о = Хо <Z. Xi <... < Xjv = Ь, ,, । о\
hi = Х( — хн, i = l, h = (b — a)/N, ‘ ‘ '
которая удовлетворяет ограничениям
c2h hi c3h, (1.14)
6*
164
ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ
[ГЛ. 3
где с2, cg > 0 — постоянные, не зависящие от h, и от h. Поставим
в соответствие каждому узлу кусочно линейную функцию
хе(хи, xt),
ф/(х)=Йг ’ а & 4 1 1 £ я J,
х е (xz, xz+1),
Xi+1-Xi’
о, x^(x;_b xz+1).
(1-15)
Возьмем линейную комбинацию
N
(х) = У, ам (х)
1 = 0
и потребуем, чтобы она удовлетворяла главным краевым условиям
задачи, т. е. чтобы uh (а) = ао = uh (b) = aN = 0. Этим требованиям
будет удовлетворять линейная комбинация вида
N— 1
Uh (х) = У <Wz(x); (1.16)
i=i
множество таких линейных комбинаций обозначим через h =
= Н(а}. Очевидно, что W'l’h cz = HA.
Согласно теории метода Ритца в энергетических простран-
ствах, за приближенное решение задачи uh можно принять функ-
цию вида (1.16), минимизирующую F (и) на подпространстве Р^а,л.
Коэффициенты az этой функции находятся из условий dF(uh)/da{=A),
i=l, .... N— 1, которые приводят к системе уравнений
Aa = f, a = fa, ..., ajV_1)7', (1.17)
где элементы матрицы А = (Ау) и составляющие вектора f = ...
fN-i)T имеют соответственно вид
ь
А/“[фн Ф/]= j (р^-^ + <7Ф/Ф/)^ = +
a Qy
ь ° ,8)
где Qzy = (a, b) f] supp ф, Л supp фУ, /, = (/, ф,) = j fa dx = \fadx,
a Q.
£ii = (a, b) Q supp Ф; = (хЬ1, xM). Если вычислить Ay и //, пред-
ставляющие собой интегралы от известных функций, то матрица А
и вектор f будут определены.
Поскольку в методе Ритца матрица системы (1.17) сохраняет
такие свойства оператора А, как симметричность и положитель-
ную определенность, то можно гарантировать, что (1.17) имеет
§ 1] СХЕМА ДЛЯ УРАВНЕНИЯ ВТОРОГО ПОРЯДКА 165
единственное решение а = (а1, которое однозначно
определяет приближенное решение uh (х) задачи по формуле (1.16).
Отметим, что так как Ау — 0 при |i —/|>1 (носители функций
<р,- и ф/ в этом случае не пересекаются), то матрица А оказывается
трехдиагональной. Отсюда заключаем, что решить (1.17) можно
с помощью метода прогонки (метода факторизации), который
особенно эффективен для таких систем. Ряд других сведений
о структуре матрицы Л и ее свойствах, которые позволяют рас-
сматривать (1.17) как некоторую систему разностных уравнений,
следуют из приводимых в конце параграфа примеров.
1.3. Сходимость. Оценка скорости сходимости в L2. Исследуем
вопрос о сходимости приближенного решения uh к точному реше-
нию и(х) задачи (1.1), (1.2). Как следует из § 2 гл. 1, для при-
ближенного решения по методу Ритца справедливо неравенство
N—1
[и — ил] sg [и — пл], где ул = У, — произвольная функция из
i=i
7/(/,) = Fs’&. Учитывая (1.11), получаем
11«-Ул|1^1, v„(=Wi’b-
сл
В силу результатов об аппроксимации с помощью кусочно линей-
ных базисных функций {ф(}, из гладкости точного решения
u(x)^.Wl и из (1.19) следует не только сам факт сходимости
uh к и при й->0, но и оценка скорости сходимости:
Ju- (1-20)
Итак, имеем следующий результат.
Теорема 1. Если р, q, dpldx еL^la, b), то приближенное
решение uh, построенное по проекционно-сеточному алгоритму
Ритца, сходится к точному решению и(х) задачи (1.1), (1.2)
при h-t-О и справедлива оценка (1.20).
Оценим скорость сходимости uh к и (х) в метрике L2 (Q).
В силу неравенства Фридрихса ||ы —«лЦ^сЛИ/Ц. Однако эта
оценка часто оказывается весьма грубой. Рассмотрим один из
подходов исследования скорости сходимости uh к и в метрике £а.
Он будет излагаться в терминах и обозначениях энергетического
пространства, поэтому приводимые ниже рассуждения пере-
носятся без существенных изменений на более сложные задачи и
на случай многих переменных.
Отметим, что решение рассматриваемой задачи удовлетворяет
уравнению Эйлера (записанному в обобщенной форме):
[М] = (/Л (1.21)
166
ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ
[ГЛ. 3
Как мы уже знаем, решение уравнения (1.21) существует и для
него справедливы оценки (1.9). С другой стороны, приближенное
решение uh удовлетворяет соотношению
[uA, »л] = (А «л) (1.22)
при любой функции vh е Н(а} = IPs’ft. Вычтем (1.22) из (1.21),
ПОЛОЖИВ В (1.21) V = Vh‘.
[и — ыЛ, пА] = 0, vh^Wkb. (1.23)
Рассмотрим вспомогательную задачу
ЛФ = £,
где в качестве F возьмем и — uh. Из изложенного выше следует,
что эта задача имеет единственное решение Ф, для которого
справедлива оценка
ЦФЦ^а^сЦ^^сЦы —ыЛ||, (1.24)
и оно удовлетворяет также равенству типа (1.21):
[Ф, v] = (F, и), (1.25)
Положим здесь v = u — u.h^.Wk. Тогда (1.25) принимает вид
(F, v) = (u-uA, и-иА) = [Ф, u-uh]-[u-uh, ФА] =
= [Ф-ФЛ, ы-ыА]=С[Ф-ФЛ][ы-ыЛ]=С
^СЛИ11[Ф-ФА]^СЛИНФ-ФЛ^1, (1.26)
где ФА —произвольная функция из №%ь. Согласно результатам
аппроксимации можно подобрать ФА так, что ||Ф — ФЛ||и71^с/1||Ф||№,|.
Отсюда и из (1.26) G учетом (1.24) получаем
||«-иАГ<сй1П«Ф-ФЛ|1И ^сЛ211/НФ|^| иАЬ
Итак, искомая оценка скорости сходимости в L2 имеет вид
\\u-uhl^ch*m, (1.27)
где постоянная с не зависит от h, и(х), uh(x).
1.4. Примеры. Рассмотрим несколько примеров, иллюстрирую-
щих проекционно-сеточный алгоритм решения задачи (1.1), (1.2).
Пример 1. Пусть р(х), (х) — кусочно постоянные функции
с конечным числом разрывов, совпадающих с узлами сетки, и
Р<-1/2 = р(х) при хе(хм, xi), i=l, ..., IV, 7/_1/2=^(х) при
х е (х,-!, X;), i = 1,..., N. Найдем явный вид матрицы А в (1.17).
Так как Ау = 0 при |i —/|>1, то вычислить необходимо лишь
§ 11
СХЕМА ДЛЯ УРАВНЕНИЯ ВТОРОГО ПОРЯДКА
167
элементы A/-ltj, A/j, Aj+1j. Выпишем элемент Ац и рассмотрим
его составляющие:
А/ = [ф/, = + Ш Ту). /» /+1-
х/
/ „ d<Pj-i dtp/ \ _ Г ^ф/-1 dtp/ , __ 1
\Р dx ’ dx J j Р dx dx Pj-Vt >
*/-i
xi Ч+1
dtp/ dtpj\_ C Jd<p/^d , f d^\2Hx-n. , 1 4-n , 1
\P~diF’ dx J P\~dT) ax+ J Р\~йГ} dx-Pi-^hh/+Pt-^hhj+1'
x/-i XJ
( n d4i \_______
\" dx ’ dx ]
dtp/л dtp/
dx dx
dx — pJ+1/z hh^ ,
(<7Ф/-ь Ф/)= J <7Ф/-1Ф/= 9/-1/2 J (Xi X)^h' X1 1} dx-= qj_1/2,
xi-i xi-i '
(Wj> ф/) = 9/-V2 + <7;+i/2 ,
(?ф/+1, фу) = ?/+1/2-^-,
В итоге получаем матрицу
^1/2 . Рз/2 Рз/2
hht Л/г2 hht
_ -£з/2_
hh2
• Pn-3/2
h^N-l
___ PN-3l2 PN-312 . Рлг-1/2
^дг—l h^N-i h^N
2(h/2hl+2<l3/2
P 3/2^2
h2 93/2^2
^N-Sl^N-i
4N-3lihN-l 2c>N-3l2hN-l~1<~2clN-ll2hN
Пример 2. Пусть q(x)^q0>Q. Будет ли устойчив метод
прогонки для решения системы с матрицей из примера 1? Так
как для данной матрицы | Ац | = Ац> | Лы,/| +1 Л+1>/1, 1 = 2, ...
.... —2, Лц>| Л12|, Лдг_1,лг-1 >| Ллг-г.д,-!то согласно теории
метода прогонки он будет устойчивым.
168
ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ
(ГЛ. S
Пример 3. Пусть q = 0, р = const, и пусть ht = h, 1=1,..., N.
Требуется найти собственные числа матрицы из примера 1. При
сделанных ограничениях матрица А совпадает с матрицей, возни-
кающей при решении задачи (1.1), (1.2) разностным методом
с применением для аппроксимации dtu/dx* трехточечного соотно-
шения
<?и I _ , и (xt-J - 2и (xt) + и (хл+1)
dx» [х=х,~ Ла •
т. е, имеет вид
"А _ А
л» /г2
_ 1
Л»
__ J 2
ha
Собственные числа и соответствующие им собственные векторы
«(*) = («(*), ..., uUp-^y такой матрицы хорошо известны; они
имеют вид (см., например, [7])
A.ft = p-^-sina-^, = sin jknh,
6=1, .... N—l, I, ..., iV-1.
Пример 4. Рассмотрим задачу
du <L28)
u(a) = -g(&) = 0,
где p, q, f удовлетворяют введенным выше ограничениям. В чем
состоит отличие проекционно-сеточного алгоритма решения задачи
(1.28) от алгоритма решения задачи (1.1), (1.2)? Останутся ли
справедливыми оценки скорости сходимости приближенного реше-
ния ыл?
Вид скалярного произведения в энергетическом простран-
стве НА, соответствующем (1.28), останется прежним. Однако
функции из НА уже будут обязательно удовлетворять условию
и(а)=0 (это условие —главное), но в НА могут оказаться функ-
ции, не удовлетворяющие второму краевому условию задачи (1.28)
(это условие — естественное). Отсюда следует, что функции uh
из Н{А\ среди которых ищется минимум F (и), имеют вид
N
(1.29)
i =1
§ I] СХЕМА ДЛЯ УРАВНЕНИЯ ВТОРОГО ПОРЯДКА 169
т. е. здесь суммирование ведется до N. Они удовлетворяют
условию ыл(а)=0, но условие ~^(Ь)=0 может не выполняться.
Поэтому матрица А имеет порядок N, а не N— 1, как это было
раньше.
В остальном схема применения проекционно-сеточного метода
для решения задачи (1.28) остается прежней. Нетрудно проверить,
что верны и оценки скорости сходимости иь к и при й->0
в метриках W4 и L2.
Пример 5. Пусть <7 = 0, p = const в (1.28), и пусть ht — h,
i=l, ..., AL Найдем вид матрицы А при решении задачи (1.28)
проекционно-сеточным методом с кусочно линейными базисными
функциями. В результате простых вычислений имеем
А = р
- 2 __1
/г2 h2
1
h2
1
h2
1 1
h2 h2
т. e. снова получаем ту же матрицу, что и при решении (1.28)
разностным методом с использованием обычной трехточечной
разностной аппроксимации второй производной cPu/dx2 в точках xt.
Отличие разностной схемы от проекционно-сеточной (так же как
и в примере 3 для задачи (1.1), (1.2)) состоит лишь в виде ком-
понент ft векторов f правых частей этих схем.
Пример 6. Рассмотрим задачу с неоднородными краевыми
условиями
d du , с
’1хр7х"^С}и~^ (1.30)
и (а) = иа, и (Ь) = иь,
где иа, иь — постоянные, р, q, f — те же функции, что и в задаче
(1.1), (1.2). Как построить приближенное решение этой задачи
с помощью проекционно-сеточного метода? Можно либо строить
алгоритм, так чтобы приближенное решение удовлетворяло крае-
вым условиям, либо свести данную задачу к задаче с однород-
ными условиями на границе. Оба эти подхода легко реализовать.
В первом случае приближенное решение ыЛ ищется в виде ыл =
N
= W и требуется, чтобы ыл(а) = ыа, uh(b) = ub. Это при-
( = 0
водит нас к тому, что ай = иа, aN = ub. Остальные же коэффици-
170
ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ
[ГЛ. 3
енты а,-, 1=1, N — 1, находятся путем минимизации F(ил)
по этим коэффициентам.
Во втором случае предположим, что известна функция U (х),
удовлетворяющая условиям U(a) = ua, U(b) = ub. Тогда, вводя
v = u — U, приходим к задаче для v (х):
d dv , £,
~ ~dx Р~d^ + qV~t ’ (1.31)
v (а) = v (b) = 0,
где Г = 1-Яи + -^р^^Ц.
Задачу (1.31) можно решить также, каки задачу (1.1), (1-2).
Пусть vh — приближенное решение задачи (1.31); полагая uh =
= U + vh, получаем приближенное решение uh задачи (1.30).
В качестве U (х) можно выбрать решение задачи
'4^ = °- U(a)=ua, U(b) = ub,
которое легко находится и имеет вид
/ Ь \-1 х
и(х) = (иь-иа)П-^.\ ^+иа.
'а ' а
Отметим, что второй подход часто применяется как в теорети-
ческих исследованиях задач с неоднородным краевым условием,
так и при приближенном их решении. Выбор подходящей функ-
ции U (х) при этом существенно упрощается при рассмотрении
обобщенных постановок задач.
§ 2. Решение третьей краевой задачи
для эллиптического уравнения второго порядка
В этом и следующих параграфах рассматривается применение
проекционно-сеточного метода к решению задач для эллиптиче-
ского уравнения второго порядка в случае двух переменных.
Изложение в основном ведется на простых задачах, однако ход
рассуждений и многие результаты остаются справедливыми для
уравнений более общего вида. Вначале изучается третья краевая
задача, которая возникает при решении многих практических
задач; она представляет интерес еще и потому, что в ряде слу-
чаев к ней приближенно сводится задача Дирихле.
2.1. Постановка задачи. Рассмотрим третью краевую задачу вида
— Au = f(x), х = (хь х2)ей, (2.1)
a« + ^- = g(x), xe=dQ. (2.2)
§ 2]
ТРЕТЬЯ КРАЕВАЯ ЗАДАЧА
171
Предполагается, что f(x) е Н = L2 (й), граница дй достаточно
гладкая, g (х) е L2 (дй), а(х) —ограниченная функция, определен-
ная на дй, причем 0 <; <т0 eg ст (х) sg <тг, <т0, — постоянные.
Запишем (2.1), (2.2) в обобщенной формулировке (минуя клас-
сическую операторную постановку). Для этого умножим (2.1)
скалярно в L2 (й) на произвольную функцию иеЖ (й) и выпол-
ним интегрирование по частям е учетом краевых условий. В ре-
зультате приходим к равенству
[м, ц] = (f, о) + J gv da,
dQ
(2.3)
где
2
Sauvda-
t=i aa
Назовем обобщенным решением задачи (2.1), (2.2) функцию
меТГ^Й), удовлетворяющую (2.3) при произвольной функции
v е W2 (й).
Для исследования задачи в обобщенной постановке нам потре-
буется неравенство
(2 \
.2 § M2dcoj, (2.4)
i=i я ‘ ая /
справедливое для любой функции ие №|(Й). Докажем его, ради
простоты изложения, лишь для случая й — {0 -gXj-g a, 0sgx2sg&}.
Выберем последовательность гладких функций {vm}, сходящуюся
к v в №а(й). Запишем равенство
Х1
&т (%lf = (0>
О
из которого получаем
а
I Vm (%!, х2) I2 2л?! $ 14^- (хъ х2) I2 dXj + 21 vm (0, х2) |2,
о
a b a b b
| vm I2 dXj, dx2^a2^ | 12dxt dx2-\-2a | vm (0, x2) \2dx2 <
0* 0 0 0 0
2
t = 1
Аналогично имеем
2
SOt,™ +26IMl.<№
172
ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ
[ГЛ. 3
Следовательно,
(2
1=1
+ И,(ЭО)
(2-5)
где c = max(Z8, 2Z), Z = min(a, b).
Последовательности {vm}, {dum\dXi} сходятся в метрике L2 (Q)
соответственно к о, dv/dxt при m->co. В силу неравенства
II W L,(dQ) С Л W UlFj (S)’ (2-6)
справедливого для произвольной функции w е Щ (Q) [9], после-
довательность значений {vm |5В} на dQ сходится к функции на
/^(dQ), которую обозначим через и|ей; она называется следом
функции v на dQ. При этом для v |ва остается справедливым (2.6).
Устремляя т->-оо в неравенстве (2.5), приходим к (2.4).
С помощью (2.4) легко показать, что форма [ы, о] удовлетво-
ряет всем аксиомам скалярного произведения, а величина [м] =
= [и, и]'/2 может быть принята в качестве нормы в W'j(Q). Имеет
место эквивалентность норм [ • ] и || • 1)^,1 Q). Действительно, так как
для любой функции v е (Q) выполняется неравенство
5<,(ап)^с1М1иф то
(2 \ 1/2 / 2 \1/2
1=1 да > Ч'=1 /
+ (2.7)
С другой стороны, в силу (2.4) имеем
т. е. имеют место неравенства
С2’ СЗ>О-
Итак, пусть в (Q) введены скалярное произведение [и, у]
и норма [u] = [u, u]1/2. Покажем, что обобщенное решение задачи
(2.1), (2.2) существует и единственно. Для этого рассмотрим
функционал, стоящий в правой части в (2.3). Он является огра-
ниченным в Wi-
[o]<
(f, v) + J gv da =sS||/|IMI + <Vl/2ll£ll
dQ
L, (dQ)
c (I f u2+<v‘ U <W/2 [^1 c [4
$ 21 ТРЕТЬЯ КРАЕВАЯ ЗАДАЧА 173
Следовательно, по теореме Рисса о представлении ограничен-
ного функционала в существует функция ц0 такая, что
(A v) + $ gvdco = [«o. v],
да (2.9)
[ио]^(Ш2 + <т?‘ kllLon))1'2.
Но тогда (2.3) принимает вид
[и, v] = [«o, v], (2.10)
Отсюда следует, что обобщенное решение задачи существует,
единственно и совпадает с функцией и0. Следовательно, для него
справедлива оценка (2.9). Из § 2 гл. 1 мы знаем, что (2.10) есть
уравнение Эйлера в обобщенной форме, которому удовлетворяет
функция, реализующая минимум функционала F (и) =[и]2—
— 2 [и, и0] — [и — ы0]2 — [«о]2 в пространстве W^. Используя (2.9),
можно записать этот функционал в виде
F (и) = [м]2 — 2 (и, /) —2 guda. (2.11)
да
Итак, доказано, что обобщенное решение (необходимо и доста-
точно) минимизирует F (и) в
Заметим, что если предположить гладкость функции g (х), то,
как известно из теории эллиптических уравнений [79], обобщен-
ное решение задачи принадлежит IJZKQ), причем || и с,
где постоянная зависит лишь от области Q И^Я
и от функций /, g. Я;
2.2. Построение проекционно-сеточной S \
схемы. Построим проекционно-сеточный алго- 7\~
ритм решения задачи (2.1), (2.2). Из гл. 1 I \/_
известно, что при рассмотрении данной за- /
дачи методы Ритца (в энергетическом прост- ч. /
ранстве) и Бубнова — Галеркина совпадают. $ л
Краевое условие здесь естественное. л * 7’*’ г>
Опишем вокруг Q многоугольник (рис. 43), Рис. 43.
триангулируем его так, как это сделано в § 4
гл. 2, стремясь при этом, чтобы все элементарные треугольники
Q, имели площадь одного порядка, минимальный из углов б0
в треугольниках был всегда строго положителен и не зависел
от триангуляции, величины mes(Q;), mes(QnQy) были также
одного порядка при различных t и /. Обозначим через ЙЛ объе-
динение всех треугольников, имеющих ненулевые пересечения
с Q. Число вершин треугольников в ЙЛ обозначим через Af.
В качестве базисных функций выберем кусочно линейные функ-
ции {<р( (х)} (см. § 4 гл. 2).
174
ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ
[ГЛ. 3
Приближенное решение ищем в виде
N
uh= 2 (х),
i=i
где а,- определяются из системы уравнений
[uh, = ф[)+$ g<Pid®, i = l, N, (2.12)
dQ
ИЛИ
Aa = f, (2.13)
где а = (а1т ..., aN)T, f = ...» fN)T, A = (Ay),
2
f d(pi d(p/ f
Лу = Л^ = [ф/, фУ]= 2, J 1ST diTdXldx2+J огф/Ф/Жо,
k = l Qy dQ
fi~ 5 /W-"cidx2+ J gtyid®, Q,- = Q Г) supp <рг,
о, da
= Q 0 supp Ф/A supp Ф/, i, j—1, .... AA
Система (2.13) имеет симметричную положительно определенную
матрицу, в силу чего она имеет единственное решение, однозначно
N
определяющее uh = 2а<Фг(х)-
1 = 1
2.3. Оценки скорости сходимости. Оценим скорость сходимости
uh к и. Из теории метода Ритца (см. § 2 гл. 1) следует, что
[u-uhY = [u — uh, ы-аул]<[ы-ыА][ы-ауА], где юА = £
z=i
^• — произвольные величины. Отсюда, применяя (2.7), (2.8),
получаем
II и - uh Ц (Q) У1 + OiCf max (]/с+ 1 > Ус/а0) || и - wh Ц (В) ==
II Ы HifJ (£2) С* inf
z>.
= с4||«-а»А|И(£2),
(2-14)
и - У bitpt
[=1
W} (£2)
Из теории аппроксимации известно (см. §§ 4, 8 гл. 2), что для
произвольной функции u&Wl (Q) существует линейная комби-
нация И/ = 2 С/Ф/, ПРИ которой
i= I
h
ja — Uj Ц т SC С6 ~^-д- || и 11^,2 (0),
5 2Т
ТРЕТЬЯ КРАЕВАЯ' ЗАДАЧА
1’75'
где Л—максимальная’длина сторон треугольников, 0О —минималь-
ный из углов, с5> 0 —постоянная, не зависящая от h, 0О, и (х);
Тогда, используя этот результат и предполагая, что решение
принадлежит WJ, приходим к оценке в метрике W&.
N II
и — у, &,'ф;
« = 1 (Я)
г//1|и7|(Я)'^Сыпв0
И М llnrf (Q)*
(2.15)
Оценим скорость сходимости uh к и в метрике L2. Для этого
рассмотрим вспомогательную задачу
-ЛФ = Л
оФ+-^- = 0 на дй,
1 on 1
й и — Uh IL, (Q)
где Решение ее существует, причем
II Ф IIwi (Я) С II ? IIZ.2 (Я)>
и оно удовлетворяет равенству [Ф, t»] = (F, v) при 1»еЦ72(Я).
Принимая v = u — uh, получаем
(F, о) = [Ф, ы-«А]= Ф- У btfi, и-ил1^
i=l
Ф- ЩЬщ [п-иЛ]^(1+<Г1С1) Ф-2 Ьм
N
II U Uh Vj (Я)
N
У М;
Выбирая {/у}
так, чтобы
N
И (Q)
Wi, (Я)
in е0 IIф (я)»
получаем
|| U Uh ||1,(Я) С у sjn go j || U |де,| (Я) II Ч Uh ||/.,(Я)>
т. е. приходим к искомой оценке:
(2.16)
В заключение отметим, что поскольку в рассматриваемой задаче
краевое условие естественное и базисные функции могут ему не
удовлетворять, то часто в таких задачах используют равномерные
176
ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ
[ГЛ. 3
сетки. Это упрощает построение базисных функций и весь алго-
ритм в целом. Однако здесь может нарушиться условие равнове-
ликости tnes(Qj) и mes(QQQ;), что может привести к плохой
обусловленности матрицы системы. Поэтому, чтобы добиться
выполнения и этого условия, видоизменяют лишь те регулярные
треугольники (построенные на равномерной сетке), которые при-
легают к границе dQ. При этом можно ввести также треуголь-
ники с криволинейными сторонами с целью лучшего приближе-
ния dQ посредством dQft. Построение базисных функций на при-
граничных треугольниках нерегулярной формы можно осуществить,
например, с помощью изопараметрических преобразований
(см. § 8 гл. 2).
2.4. Изучение скорости сходимости с использованием простран-
ства с дробными индексами. При исследовании различных воп-
росов теории проекционно-сеточных методов часто бывают полез-
ными гильбертовы пространства №2 с дробным индексом $, позво-
ляющие получать наиболее точные результаты. Одним из про-
стых способов введения этих пространств является определение
их через преобразование Фурье (см. § 9 гл. 2). Пусть в простран-
ствах Wl (R") индекс s является произвольным конечным веще-
ственным неотрицательным числом (он может быть и дробным).
Рассмотрим ограниченную область йс R" с достаточно гладкой
границей и определим на основе ^(R”) пространства W'j(Q).
Примем в качестве Ц7|(П) совокупность тех функций и, которые
являются сужениями на Q функций мс из №|(Rn). Норма в IF|(Q)
вводится следующим образом:
= inf ЛМсЦ(кл)’ (2-17)
где нижняя грань берется по всем функциям Mte№|(R"), суже-
ние которых на область Q совпадают с и (т. е. по всем продол-
жениям на пространства R”). Легко проверить, что
(2.17) обладает всеми свойствами нормы. (Отметим, что если
0 —целое, то пространства (Q) совпадают с определенными
в начале главы 2 пространствами при сделанных выше огра-
ничениях на гладкость 3Q. Доказательство этого факта можно
найти в специальных работах.)
Для пространств W1(Q) с дробным индексом s>l/2 можно
также определить понятие следа на dQ. Например, известно, что
любая функция welT^Q) на дП обладает следом и |5a, у кото-
рого существуют «производные» до порядка s—1/2 включитель-
но, суммируемые с квадратом, т. е. ||ы|| s_i/2<oo, при этом
§ 2]
ТРЕТЬЯ КРАЕВАЯ ЗАДАЧА
177
справедливо соотношение [24J
II «ll^s —i/2(5Q) =Сс|| w (Q). (2.18)
Отсюда, например, можно сделать вывод, что если u^Wl(Q),
то для этой функции имеет смысл производная по нормали ди!дп,
причем
«Сс|ы|| а , с>0. (2.19)
Легко заметить также, что из определения (£2) вытекает
неравенство
1ЫЦ(£2)^С«ЫЦ(В) при S>V. (2.2°)
*
т. е. если функция и принадлежит (Q), то она является также
элементом из и справедливо (2.20). Соотношения, анало-
гичные (2.20), имеют место и для пространств Ц72(дй).
Воспользуемся введенными пространствами Wst с дробным s
для получения оценок погрешности приближенного решения при
рассмотрении задачи (2.1), (2.2). Прежде всего сформулируем
утверждение, касающееся существования решения этой задачи [79]:
для того чтобы существовало единственное решение задачи (2.1),
(2.2), принадлежащее (Q), необходимо и достаточно, чтобы
fe£2(£2), g<=W%2(dQ); при выполнении этих условий имеет
место оценка
<h (J f II.(а) + II g il^i/2 (й£2)) «S II и Ц(£2) с2 (j f |Lj (Q) +1|g Ц/2
(2.21)
где постоянные clt c2>0 зависят лишь от области Q.
Если теперь воспользоваться (2.21), то оценки (2.15), (2.16)
принимают вид
IIм Ыл lllFs (£2) С sin в0 П f II. (В) ~Hg’ V>/2(e0)V
/ Л \2 (2.22)
IIП - «л II,(В) -С с ('ll f ||L,(Q) +1| g 11^1/2 (ea)J.
Рассмотрим задачу (2.1), (2.2) вида
— ku = f, хей,
, du (2.23)
где e —малое положительное число. Пусть ме, а—приближенное
решение, построенное по изложенному выше алгоритму. Так как е
178
ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ
ГЛ. ЗГ
мало, неравенство (2.7) принимает вид
/ 2 \1/2
м== 21ШГ+И :руг«v<а>
4 = 1 SQ !
и оценки погрешности u — u&th имеют вид
I и — «в, h IIwI (Q) =sS y=- —- 6| f ||l,(Q) + — IIg- 1/2 (aQ) j.
c z h J, s , \ (2-24)
II U - Ue,h ||L,(Q) <sS - J k,(B) + 7 k 11^1/2 (dQ J •
Получим более точные оценки для и — иг< л. Для этого вос-
пользуемся неравенством (которое приводим без доказательства),
справедливым для произвольной функция rGlFIfQ):
(2 .
6 j* 137 Р+ -g- j* V2 dx j, (2.25)
<i>61 = 1 OJg j
где cos — внутренняя приграничная полоса области Q достаточно
малой ширины 6, дй дважды непрерывно дифференцируема, с —
постоянная. Согласно теории сходимости метода Ритца
[ы —ме,Л] <[« — «/], (2.26)
где «/ — произвольная функция из линейной оболочки системы {ф,}.
Пусть в дальнейшем в качестве «/ выбрана функция, для
которой справедливы оценки аппроксимации (см. § 8 гл. 2)
II« — V»/а) с Sin е0 IIи llirf w’
l|M-Mrkt(S)=^c/l2|l«|lri(Q).
Тогда из (2.25) и (2.26) имеем
2
[и - иг, Л]2 < 2 | (м “ М/) L(Q) + 7 11 и ~ Ul 11^ <e£2>
2
2 1^7(м-М/)L(Q) + i1 и~
i— 1
Следовательно, при 6 = е выполняются соотношения
.[« — Ие, л]2 sg (sjn II и 11^2 + -75- II и 11^,2 =<
< (1+Я («<=> + 71 <«) <2-27»
— и®.л|1Г/(0, sin (J(j ( 1 +т-)(|/к.<0>+у 15^/2(50,)-
§ 3)
ВТОРАЯ КРАЕВАЯ ЗАДАЧА
179
Повторяя рассуждения, проводимые при получении оценки
погрешности в метрике L2 (Q), приходим к неравенству
И» — »е, л Bl,(О) sin2 fl"' ( 1 + т) ^/IIl,(£2) + 4 (2.28)
§ 3. Решение второй краевой задачи
Рассмотрим в ограниченной области Q cz R2 уравнение
2
- 2 (3J)
i./=i ‘
с краевым условием
2
= У aij~ cos (п, х,) = 0, xe=dQ. (3.2)
(У х V мл/
i,i=l
Предполагается, что выполнено условие эллиптичности
2
Po£2gS У ац (х) sg pi£2,
2
где ? = (?i, В2), £2 = 2 Мо, (И > 0 —постоянные при любых
_ 1=1
xeQ = Q + <9Q и вещественных Пусть коэффициенты а.у (х)
имеют ограниченные в Q производные да^/дхк, k=l, 2, 0<p2sg
sca(x)sgp3, р2, р3 — постоянные, /(х)е£2(й).
В операторной форме задача (3.1), (3.2) имеет вид
Au=f, f^H = L2(Q), (3.3)
где
2
„ V д ди ,
Ли 2j ~дх^ a‘J 5x7+ аМ’
i, / = 1
D(A) = [u: MeIF.l(Q), ^- = 0 на дп}.
Легко проверить, что оператор А является симметричным и поло-
жительно определенным. Энергетическое пространство На, соот-
ветствующее А, имеет скалярное произведение
(2 \
VI ди dv , | ,
z аи л—h auv dx
1 дх< dx, 1 /
180
ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ
[ГЛ. 3
и норму
(/ 2 \ \ 1/2
f( 2 а^^"ё;+аигх1 •
й Ч/=| ' / /
При этом На Е Wi (Q) и имеют место соотношения эквивалент-
ности
С«11 Ы1ц7^(О) Ы С0, С11>0. (3.4)
При сделанных ограничениях задача (3.1), (3.2) имеет единствен-
ное решение ме^(й) и | и 0) -С с |i f с>0.
Предположим, что коэффициенты ai}-, а, функция f(x) и гра-
ница dQ обладают гладкостью, обеспечивающей наличие у реше-
ния и(х) B*Q = Q-|-dQ всех непрерывных производных третьего
порядка. Если умножить (3.1) на произвольную функцию v (х) е
е W% (Q) и выполнить интегрирование с применением формул
Грина, то решение задачи удовлетворяет равенству
[и, v] = (f, v), v^Wl,(Q) (3.5)
(которое может быть положено в основу определения обобщен-
ного решения). Отметим, что краевое условие в задаче (3.1),
(3.2) является естественным.
Поскольку и (х) по предположению обладает достаточной глад-
костью, то естественно применить в проекционно-сеточном алго-
ритме базисные функции, обладающие
лучшими аппроксимирующими свой-
Z' ствами по сравнению с кусочно линей-
ными. Выберем, например, кусочно квад-
I tратичный базис (см. § 6 гл. 2), построе-
г ние которого упрощается ввиду естест-
венности краевых условий.
Построим сеточную многоугольную
область йл (рис. 44), такую же, как в
§ 2. Помимо вершин треугольников вве-
Рис. 44. дем еще узлы, являющиеся серединами
сторон в Q,-, и пусть общее число всех
узлов равно М. Поставим в соответствие каждому узлу (xltk, х2,к)
базисную функцию фй (х) согласно алгоритму, рассмотренному
в § 6 гл. 2. Множество линейных комбинаций
N
Uh (X) = 2 ak(fk (х) (3.6)
* = i
обозначим через Н(а>. Как мы уже знаем, cz С (Q) П W4 (П).
Приближенное решение задачи будем искать в виде (3.6),
где ак определим по методу Бубнова— Галеркина из системы
§ 3]
ВТОРАЯ КРАЕВАЯ ЗАДАЧА
181
уравнений
[«а, <Р/] = (А Ф/), 7=1, .... N, (3.7)
или, в матричной форме
Aa = f. (3.8)
Здесь Л = (Д/7), a = (ai, .... aN)T, / = (/ъ .... fN)r,
Aif = Ац = [ф(-, ф7]= 2 J akl~S^S~dx+ j a(pi<pjdx,
A,Z=1Oz7 at/
ft= $ f (x) q>t (x) dx, £2( = £2 ("| supp фг, £2г/= £2 f| supp cp£ f) supp <p7.
ai
Вычислив Ay и /, подходящим способом (часто используют квад-
ратурные формулы), можно считать Ли/ определенными. А по-
скольку матрица Л положительно определенная:
Ssmin(p0, ц2)
n ||а
У >0.
Z=l М(О)
то решение уравнения (3.8) существует и единственно. Следова-
тельно, приближенное решение uh также однозначно определено
по формуле /3.6). В силу симметричности и положительной опре-
деленности А для отыскания ak могут быть применены разнооб-
разные итерационные методы (см. [7], гл. 4).
Оценка скорости сходимости иА к и получается из простых
соотношений
[и- uh]2 —[и — uh, и- wh]sg[и- ил][и -щА],
с0А«-«аЦ(О)^[«-Иа]^[и-®а]^с1|и-ща^1(О)>
l«-uA||lFi(Q)<cinf|M-oyA|liri(a), wh^H^\
и аппроксимирующих свойств кусочно квадратичных базисных
функций (см. § 6 гл. 2). Поскольку для и можно подобрать такую
функцию что || и — «/11^1(0, ®Sc7ia II «Вс(8>(0), где Л —мак-
симальная из сторон треугольников, то имеем оценку
I« - «а Ц (0) < С inf I а - wh Ц (0) < с II и - Ui Ц (0) < c/ia ||и [с(„ (0).
h
Отметим, что для задачи (3.1), (3.2) справедливо также заме-
чание, сделанное в конце п. 2.3 предыдущего параграфа.
182
ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ
[ГЛ. 3
§ 4. Решение задачи Дирихле для эллиптического уравнения
второго порядка
4.1. Задача Дирихле в прямоугольной области. Пусть тре-
буется построить численное решение задачи
— Au = f(x, у), (4.1)
м = 0 на Эй, (4.2)
где й = {0<х<а, 0<//<&}. Задачу будем рассматривать
в гильбертовом пространстве Д = Т2(Й). Оператор задачи, обо-
значаемый через А, задается дифференциальным выражением
ДЫ = _ДЫ = _(^- + ^.)
\ ох2 1 ду2 /
и областью определения D(A)={u: и е Wl(Q), u = Q на Эй}.
Теперь задачу (4.1), (4.2) можно записать в виде
Au = f, f^L2. (4.3)
Легко видеть, что оператор А симметричен:
. „ . С [ ди dv , ди dv\ , , , . .
°) = J й = ы)’ ое£)(Л)-
о
Для доказательства его положительной определенности получим
сначала неравенство Фридрихса:
. „ /II ди ||2 , II ди ||2\1/2 .
Иы»^с(|аг| +IWI) ’ (4-4)
где « — произвольная функция из Ц72(й), с_ т|П —L
Рассмот-
рим последовательность {ит} достаточно гладких функций, рав-
ных нулю на Эй и сходящихся к и в W2 (если й — прямоуголь-
ник, то такая последовательность заведомо существует). Запишем
тождество
X
ит(х, у) — § y}dx’,
О
(X, у)ей.
Из него получаем неравенства
х /а \ 1/2
\um(x, /)|dx'<x1/2( J
О *0 /
\ит(х, у)|2<:х J J I um\*dxdy^ J Гdx' dy’.
О .я я
§ 41
ЗАДАЧА ДИРИХЛЕ
183
Аналогично,
J I ит I2 dx dy J | |2dx' dy’.
я я
Следовательно,
min (а, Ь)
VT~
dUm I2 II dUm II2 V/2
it) +1Ши •
Устремляя в последнем неравенстве т-^со и учитывая сходи-
мость ит к и вместе с производными, получаем (4.4).
С помощью (4.4) легко доказывается положительная опреде-
ленность А:
(Аи, и) = J (| |2 + | |2) dx dy^-J^ J || и ||2, и е= D (А),
я
(4.5)
Известно, что задача (4.3) при произвольной функции (eL2
имеет единственное решение и е П и7!,
причем
IIы V| (я> c^f II"
(4-6)
Вследствие симметричности и по-
ложительной определенности для реше-
ния (4.3) могут быть применены мно-
гие из алгоритмов проекционного ме-
тода; к одним из простых относятся
методы Ритца и Бубнова — Галеркина.
Для данной задачи эти два метода со-
впадают, так что для построения приб-
лиженного решения выберем форму
записи последнего.
Энергетическое пространство На, соответствующее оператору А,
задачи (4.3), имеет соответственно скалярное произведение и
норму:
г т с / ди dv , ди dv \ , ,
[и, о|= I Н5--5—Р-я--;-]dxdy,
L ’ J J \ dx dx 1 dy dy /
[«] = [«, = (|^ |2 + Г) dxdyV2
\я /
При этом краевое условие (4.2) здесь является главным и функции
из На ему удовлетворяют. В силу этого и в силу (4.4) получаем,
что На = И7! (И) и что имеют место соотношения эквивалентности
норм:
Со J « |1 *== [«] - || « 11
Со, С1 0.
(4-8)
II «т II <
184
ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ
[ГЛ. 3
Как известно из § 3 гл. 1, в основе метода Бубнова — Галер-
кина лежит интегральное равенство
[и, v] = (f, v), f е Ц, (4.9)
которому удовлетворяет обобщенное решение и уравнения (4.3)
при произвольной функции v е На- Чтобы воспользоваться (4.9)
для построения приближения, необходимо также задать базисные
функции, в качестве которых мы выберем кусочно линейные
финитные функции, рассмотренные в § 3 гл. 2. Для их задания
введем по каждой из переменных равномерную сетку: с шагом
hx = a/Nx — по переменной х и с шагом hu = b/Ny — по у, и выпол-
ним триангуляцию области (рис. 45). Каждому узлу (xit yj)
поставим в соответствие базисную функцию
Ф"(Х’9)“Ж'
1 — ( Д — I) при X; eg X Х(ц,
\^Х ]
Йу
yj^y^yj+^Ax-xt),
Си ,\
f---J) при X,-XegXi+i,
йу
+ (*-*>)=££{/
при
Йу
^•^[/^Г/у+'-СХ-Х,--!).
1 । / * л
1 + й---1 ПРИ
Х^Х /
Йу
Уь-АгтАх-х^^у^Уь
rtx
1 +(Д— /) при Xi-i^X^Xi,
\ПУ /
Йу
У/-1 eg у eg У;-1 + (X - Xi-i),
1 _(£_ ^(йу*-/-)при xi^x^xi+1,
yj-n + hf~(x-Xi) ^y^yj.
. Множество линейных комбинаций
АГ^-1 NV~X
у) (4.10)
(=i/=1
обозначим через Н^ Очевидно, что Wzh является под-
пространством из На = №11.
§ fl
ЗАДАЧА ДИРИХЛЕ
185
Приближенное решение ил(х, у) будем искать в форме (4.10),
где найдем (согласно методу Бубнова —Галеркина) из системы
уравнений
[«л, <P*z] = (A <Pju), .........Wx-1, /=1, ...» Ny—1, (4.11)
или, в матричной форме,
Ла = Л (4.12)
здесь й = (йи, а21, ..., й12, ..., йд^-о, ..., cii.Ny-i, ...
..., аыx-i,nу-\У, f=(fu, /21» • • •» fl,Hy-l> • • •> fjvx-i, Ny-i)r,
Л = (Aijki),
Aijki — \$ij, <P*z] — J dx + dy dy jdxdy,
Qtjki
fki= J f(x> y}^ki(x, y)dxdy,
°ki
Q*z = Q Л supp (pkh Qtjkt = П A supp <py A supp <pkl.
Очевидно, что матрица А симметрична. Она также положительно
определенна; действительно, используя соотношения (3.19) из
гл. 2 и неравенство (4.4), получаем
(Аа, й)2 = Л ^V*zOz7a*z = [2] ац^ц, £ <WP*zlss
i. Ik. i _ Lt/ k, i J
^(min(a, b)} |2^/| Ssc2^,/’ C>°‘ (4’13)
H i. I II i.i
Из этих свойств А следует однозначная разрешимость (4.12).
Тем самым приближенное решение uh = У йуфу (х, у) также
<> /
определено единственным образом. В качестве метода решения
могут быть применены метод верхней релаксации, метод расще-
пления и др. (см. [7], гл. 4). Если умножить (4.11) на akl,
выполнить сложение по k, I и применить (4.4), то получим апри-
орные оценки для иА:
[uh, uft] = (f, uh) < || f 11| uh I =<S c || f ||
IA]=sSc|fll, ImaII^j =ssc||fll,
которые гарантируют устойчивость алгоритма в смысле непрерыв-
ной зависимости от исходных данных задачи. (Отметим, что здесь
имбет место также численная устойчивость в смысле определения 2
из § 9 гл. 1.)
186 ПОСТРОЕНИЕ ПРОЕКЦИОННО СЕТОЧНЫХ СХЕМ [ГЛ. 3
Итак, пусть после вычисления элементов матрицы А вектора f
и решения (4.12) приближенное решение uh (х, у) определено.
Оценим теперь скорость сходимости uh к и при
h = max(hx, hy)->Q. (4.14)
Рассмотрим последовательность тождеств
[«, фм] = (/> Фи)> 1иь, Ф«] = (Л Ф*/)»
[u-uh, <p*z] = O, [и — uh, ол] = 0
при и4е W2h или при vh — uh — wh, где wh — произвольная функ-
ция из Wl’ А:
[и — Uh, Uh — Wh] — 0, [и —Uh, U — Uh] = [u — Uh, и — Wh].
Применяя (4.8), имеем
И - uh || Vi С [и- иА]2 < с [и—ил] [u—w„] < СII и—uh II II и—арА I wi,
\\u-Uh ||ri ^с|| и-wh || г>,
II и - uh || wi =s= с inf Ц и - wh |1 wi, wh е= Wh.
wh
Используя результаты об аппроксимации § 3 гл. 2, из последнего
неравенства получаем
|1 и - uh IIch II и II wl ==s chII /1|. (4.15')
Повторяя рассуждения доказательства оценки скорости сходимости
в метрике L2 (П) из § 2, приходим к оценке
\\u-Uh\\^ch2W- (4.15")
Итак, доказана следующая теорема.
Теорема 1. Если то приближенное решение uh
сходится к и при h-*-0', при этом справедливы оценки (4.15'), (4.15").
Замечание. Если учесть результаты теоремы 1 из § 8 гл. 2,
то оценки (4.15'), (4.15") соответственно примут вид
где 90 —минимальный из углов треугольников, на которые раз-
делена й.
Пример 1. Найдем явный вид уравнений системы (4.12).
Поскольку на каждом из треугольников любая базисная функция
Ф// (х> У) линейна, то производные от ср,, на этом треугольнике
§ 41
ЗАДАЧА ДИРИХЛЕ
187
постоянны. Поэтому явное вычисление Ац не представляет труда:
4 hxhy
2 hjiy
О
о
2 hxhy
hl~
0
о
d<pki\______
\ ду ’ ду hxhy '
4 hjiy
hy 2
б
О
2 hxhy
f?y~
О
о
2 hxhy
при k = i, l = j,
при k — i 4-1, l = j,
при k = i + l, l — i+l,
при k = i, 1 = /4-1,
при k = i — I, l = j,
при k = i— I, / = /' — 1,
при k = i, I = j — 1;
при k = i, 1 = j,
при k = i 4-1, I = j,
при k = i-\-1, /=/4-1,
при k = i, 1 = j 4-1,
при k = i — 1, I = j,
при k = i — 1, I = j — 1,
при k = i, I = j — 1.
В результате система (4.12) имеет вид
%aij ai—If j aMfj , a,, /-j ai,j+l f
i=l, ...» Nx—1, /=1........Ny- 1,
где полагаем aoj = aNxj = 0, al0 = aiNy = 0.
Таким образом, проекционно-сеточный метод Бубнова — Галер-
кина при кусочно линейных базисных функциях в задаче (4.1),
(4.2) приводит к известной пятиточечной схеме (а не семиточечной,
как этого можно было бы ожидать). Однако здесь элементы век-
тора правой части имеют специальный вид: = у>ц)-
4.2. Задача Дирихле в области с криволинейной границей.
Пусть задача (4.1), (4.2) рассматривается в области Q с криво-
линейной границей. Ради простоты будем считать Q выпуклой,
а границу dQ —трижды непрерывно дифференцируемой. Оператор
задачи А вводтся так же, как и ранее. Уравнение (4.3) рас-
сматривается снова в #=L2(Q) при f^L2.
188
ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ
[ГЛ. 3
Чтобы доказать симметричность А, достаточно воспользоваться
одной из формул Грина:
- j ,^<kdy=j (gs + gg)*dp -J V (4.16)
где n — вектор внешней нормали к дЙ; с учетом краевых условий
имеем
(Ди, v) = (— Ди, v)
f (ди ди . ди ди\ , , . . .
и, veD(A).
(4.17)
Для доказательства положительной определенности А снова
достаточно воспользоваться неравенством Фридрихса, которое
здесь имеет прежний вид:
и s (й),
„ min (а, Ь) , „
где с =—у^~''’ а> Ь —Длины сторон прямоугольника П, в кото-
рый вписана область й (рис. 46). Докажем сначала это неравенство.
Для этого рассмотри^ произвольную функцию и е W\ (й) и продол-
жим ее нулем “ ~
4
ь
на
а №
Рис. 46.
П\й. Полученную функцию, определенную на
всем П, обозначим через й. Очевидно, что
йе1Га(П). Для й из п. 4.1 известно, что
«яв, min<а> (IIдйИ* _i_» v/a
, (П) • Ц дх IIljOT) || ду ||l, (П)У
Учитывая, что й = 0 в П\й и й = и в й,
имеем
, . _ min (а, Ь) /II ди № . II ди Цз \1/з
(7
(4-18)
Используя (4.17) и (4.18), получаем
(Ди, и)^уа||и|Р, ? = м- (4-19)
v ' • • 1 ’ ’ min (а, о)
Для рассматриваемой задачи также известно, что если
то решение ее существует и единственно, причем
а также || u||r6<c||f||-
Для решения задачи применим снова метод Бубнова —Галер-
кина и обратимся к выбору базисных функций. Решение этого
вопроса усложняется тем, что область имеет криволинейную гра-
ницу, а краевые условия являются главными. Остановимся на
простейшем подходе к решению этой проблемы, изложенном
§ 41
ЗАДАЧА ДИРИХЛЕ
189
и
в § 7 гл. 2. Введем многоугольную триангулированную область
ЙА с: Й, вершины которой лежат на Эй, с максимальной из
сторон треугольников h и минимальным из углов 0О (рис. 47).
На конечных элементах Йг зададим простые (и
удобные в практических вычислениях) кусочно
линейные базисные функции {<р7}. Выберем из
этих функций те, которые соответствуют только
внутренним узлам сетки (т. е. Pj е ЙА, Pj ф <ЭйА),
и примем их в качестве базиса. Пусть общее
число таких функций равно М. Образуем с по-
мощью этих функций линейные комбинации
У
« = 2 Wj(x, у). (4.20)
/=1
Продолжив uh нулем на Й\ЙА, получаем
Г1,Л<= (й).
Приближенное решение ищем в виде (4.20), где Я; определя-
ются из системы (4.12) с матрицей А и вектором f:
Рис. 47.
подпространство
f / dipt Лру дфД
лv = dxdy'
аи
J f(x, y)4i(x, у) dxdy,
°;
Йг/ — supp ср,- П supp ф/, й/ = supp фй
(4.21)
i, 1 = 1, ...» N.
Матрица А, как и ранее, симметрична и положительно опреде-
ленна, поэтому система уравнений для нахождения {я/} имеет
единственное решение, которое однозначно определяет приближен-
ное решение задачи иА (х, у) по формуле (4.20).
Для оценки скорости сходимости uh к и запишем тождество
[и — ик, и — и„] = [и — uh, и — оА], справедливое при произвольной
функции рае^’‘, из которого с учетом эквивалентности норм
[м] = |1«11нд и j получаем
к - «А II wl (0) С [и - пА] [и -uh]^c |u - uA ||и (0) II и - vh (0),
II« - «А IIН71 (0) с inf II и - vk lljpi (0), vh е= (Й).
vh
Применяя результаты аппроксимации (см. § 8 гл. 2), приходим
к оценке
и “ “ “а 1^1 (Q) С II и II(0) < с II f Ц, (4.22)
из которой естественно следует и сам факт сходимости иА
к и (х, у) при
190 ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ [ГЛ. 3
4.3. О подходах к решению задачи с неоднородными краевыми
условиями. Рассмотрим некоторые подходы, применяемые для
решения задачи Дирихле с неоднородными краевыми условиями
— Дм = Д (х, г/)е=й, ,49„.
u = g на дй.
Будем предполагать ради простоты, что область й выпукла,
граница дй — достаточно гладкая, f е L2, g(x, у) е1Г2/2 (дй).
Сформулируем сначала некоторые результаты о разрешимости
задачи (4.23) [79]. Для того, чтобы задача (4.23) при f = Q была
разрешима в (й) необходимо и достаточно, чтобы g е W22 (дй).
При выполнении этого условия имеют место оценки
С1II ё IIjfI/2 (йа) II И IIц/1 (Я) с2 || g ||г1/2 (аа),
где постоянные clt с2>0 зависят лишь от й. Если же рассмот-
реть задачу (4.23) при /#=0, то для того, чтобы она имела реше-
ние меИ72(й), необходимо и достаточно, чтобы (е^(й), ge
еП72/2(дЙ), при этом имеют место оценки
с3 ^11 / Ид,(Я) + 11 ё I!«z3/2 II и 11^2 (й) ^С4 ^|| f ||д2 (Я) + II ё llr|/2 (5Я)^’
где положительные постоянные с3, с4 зависят лишь от й.
I. Как уже отмечалось ранее, можно попытаться задачу (4.23)
свести к решению задачи с однородными краевыми условиями.
Пусть, например, удается подобрать элемент Ф из области опре-
деления оператора задачи (это означает также, что Ф = § на дй);
тогда, вводя функцию v = u — Ф, приходим к задаче для опреде-
ления v (х, у):
&u = f’, Г = / + А® е l2,
v = 0 на дй.
Приближенное решение vh этой задачи строится уже известным
способом, после чего приближенное решение uh исходной задачи
определяется как иь-и^Ф. Очевидно, что оценки погрешности
v — vh легко переносятся на u — uh. Отметим, что если рассматри-
вается обобщенная постановка задачи (4.23) (см., например, (4.9)),
то достаточно, чтобы Ф была функцией из 1Г2, а не из D(A).
II. Одним из простых и удобных в практических приложениях
подходов к аппроксимации краевых условий в (4.23) является
метод «сноса» краевых условий с дй на границу сеточной
области дйл. Пусть, например, в й заданы сетка и финитные
базисные функции, рассмотренные в предыдущем пункте. Прибли-
§ 4]
ЗАДАЧА ДИРИХЛЕ
1911
женное решение ищется в виде
N
Uh (X, «/) = 2 fl/ф/ (X, у),
t=l
где в сумму входят как функции {<Pi, ...,Фл'}, соответствующие
внутренним узлам, так и функции {фдг+1, .... ф#}, соответствую-
щие граничным узлам (т. е. узлам P/edQA). Коэффициенты <з,-
находятся из системы
[«л. Ф/] = (А Ф<), «=1.....Л/,
а также из условий в граничных узлах Р} = (xj, yj) е dQA:
Uh(Xj, yf) ~ g (xh yj), / = 2V-f-l, .... iV.
Дальнейшая реализация проекционно-сеточного алгоритма прово-
дится обычным способом.
III. Для решения (4.23) можно применить также метод штрафа.
Он заключается в приближенной замене (4.23) третьей краевой
задачей (в которой краевое условие уже является естественным)
— Дие=/, (х, i/)eQ,
• , •. (4.24)
ue + e^ = g, (*,!/) e=dQ,
где п — единичный вектор внешней нормали к dQ, е —малое поло-
жительное число.
Построение приближенного решения иЕ1Л задачи (4.24) можно
осуществить по алгоритму, изложенному в § 2 с использованием
кусочно линейных базисных функций. Согласно результатам § 2»
имеем оценки
II us - ие, h 11^1 (й) (1 + т) (ll f + 711 £11 < J ’
f «8 - Ue, h 11^ (fl) ^4 ( 1 + I}2 f' Z + 111 g 11(J •
Получим оценку для функции y = u — ug, которая является реше-
нием задачи
Ду = 0, v=g — e^ на dQ.
’ s дп
Эта задача имеет единственное решение nelT^Q) при g е W^2(dQ),
причем
“ V Vj (Q) C ^2/2 (dQ) ~ Ce I ~дп IIFj/2 (dQ) ‘
192
ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ
(ГЛ. 3
Однако из § 2 мы уже знаем, что (4.24) имеем единственное
решение ues И7|(Й), при этом + jU ll^i/z (J-
Следовательно, g учетом (2.19) имеем
| и — ug sg се | иъ I, ^2 (Q) ce (j f + — J g |^1/2 (aa J •
Отсюда заключаем, что если задача (4.23) рассматривается при
g—О в области с криволинейной границей дй, то применение
изложенной выше схемы рассуждений позволяет получить следую-
щую оценку скорости сходимости uSih к и при e«=:/i->-0:
I u — Ug, л (Q) Ы8 Ий7а(й) U&~ Ue, Л II UZa (Q)
Отметим, что метод замены задачи (4.23) задачей (4.24) позво-
ляет построить приближение ие к и, вообще говоря лишь с точ-
ностью порядка е как в метрике L2, так и в энергетической
метрике. Чтобы убедиться в этом рассмотрим следующую задачу:
dau , .л ,.
= Ъ Х&(0, 1),
u(0)=u(l)=0.
Согласно изложенному выше, заменим приближенно ее задачей
вида
dawe .
dxa
Ые(0) = 0, 8^+«в|м = о.
Решение этих задач соответственно имеет вид
, . х(1 — х) / л 14-2е , ха
и(х) 2 , ие(х) — 2(i + 8)x у
Проведя простые вычисления, убеждаемся, что
к - «8 к, (0.1) = 2/з(1+8) •
|и —«вкл = |^ 1) = 2(14-8)^ У
IV. Рассмотрим еще один метод решения (4.23) [34]. Проведем
внутри й кривую дЙе, «параллельную» дй и отстоящую от дй
на расстоянии е (рис. 48). Выберем некоторую точку (%', у') <=
S 41
ЗАДАЧА ДИРИХЛЕ
193
едй8 и проведем через нее вектор внешней нормали к д&е.
Точку пересечения п с дй обозначим через (х, у). Предположим,
что и (х, у) е С(2) (й), и запишем равенство
g(x, y)=*u(x, y)=>u(x', у') + е^(х', у') + О(е2).
Определим функцию g(x', y')-^=g(x, у) при (х’, р')едйЁ,
(х, у) е дй. Тогда решение и (х, у) задачи (4.23) удовлетворяет
уравнениям
— f, (х, у) е= Йе,
« + е^ = £Ч-О(е2), (х, у)е=дйе.
Опуская в краевом условии слагаемое О (в2), приходим к третьей
краевой задаче:
— Дые = /, (х, (/)ей£,
«e + e^f=g, (x,y)f=dQe,
решение которой принимается в качестве приближенного для
и (х, у) в йе. Итак, мы снова приближенно заменили (4.23)
решением на Йе задачи с естественными
краевыми условиями, для которой проб-
лема построения базисных функций часто
решается просто.
Оценим погрешность и — и& в метрике
flZi (Йе), предполагая достаточную глад-
кость функции и (х, у). Разность | = и — и8
есть решение задачи
Д£ = 0, (х, у) «= йе,
£ + е dn = (х, у), (х, у) е= дЙе, (4‘25)
где функция R(x, (х, у) + О (в3) = О (в2) при гладкой
функции и (х, у) также будет достаточно гладкой. Кроме того,
£е №|( причем
I £ к1(яе) с|т |гу« рй(!)се’
где с зависит лишь от йе. Если предположить непрерывную
зависимость с от Йе, то при достаточно малом в эту постоянную
можно считать зависящей лишь от й.
7 Г. И, Марчук, В, И. Агошков
194
ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ
[ГЛ. 3
Умножим (4.25) на 5 и выполним интегрирование по ЙЕ:
+|g|f +4 f №-4 ( тел,
2' 21 87 да. да,
& о
Н1Л)+|Ж,<«Лт j
ая8
т $ d® у II к ка(Э08) II5 k^Qg),
ая8
I 5 к2 (daj IIЯ к2 (ай8)< се2,
Воспользовавшись неравенством (2.4), получаем искомую оценку:
Обозначим через ыЕ, л приближение к ие, построенное по
алгоритму, изложенному в § 2. Согласно (2.27) для ие — ие_ Л
справедливы оценки
11 “е ~Us-h Vj (йе) йпГо (1+т) (8 f к (йг) + I II £ (5йе)) -
II «8 - «8. Л к2 (й8) < (1 + 4 Д|| f к2 (Й8) + 411£Ц/2 (5й8) j •
Следовательно, для и — u&f Л имеем
‘ ч <“.>е “'*+ Д (1 + т) ОIЬ, (°е> + Т И»;/. Л)) •
IU-»к,ре) «,Я + (1 + 4)*(if к,(2е) + 4lilw-wpo.))-
Стало быть, при надлежащем выборе e = e(/i) мы получим соот-
ветствующую оценку скорости сходимости иЕ_ h к и в области QE
при Л—»-0. Например, если g = 0, то при e = /i8/7 из последнего
неравенства вытекает оценка
chla/7
II« — «в, л II ьа(йе) <
4.4. Задача Дирихле для общего эллиптического уравнения
второго порядка. Пусть в ограниченной области Q cz R2 рассмат-
ривается уравнение
“ 2 Д.М*)|г.4-2 + «(*)=/W (4.26)
/./=1 ‘ ' /=1 *
§ 4]
ЗАДАЧА ДИРИХЛЕ
195
с краевым условием
и = 0 на 3Q.
(4.27)
Здесь х = (хъ х2)ей. Предположим, что выполнено условие
эллиптичности
2
У, ay W l&j < r£2,
i. i = l
(4.28)
2
где £ = (£1, ?2), е2 = У li, P-о,Hi > 0 — постоянные при любых
_ 1 = 1
,r= Q и вещественных g2. Функции aijt bi, a, f предполагаются
известными и удовлетворяющими ограничениям
О < и2 а (х) «С р3,
' 2 \1/2
Ъ} (х) < р-4, ац = a!h
4 = 1 /
где ц2, • • •, — положительные постоянные, причем щ — ц!/(2 ц2) >
>0, P-г —р-5>0. (Отметим, что последние ограничения можно
ослабить —они приняты здесь в таком виде для упрощения
изложения.) Пусть также /eA2(Q), а,;, Ь, имеют ограниченные
в Q производные дау!дхк, дЪ^дхь, &=1,2. Границу dQ предпо-
лагаем дважды непрерывно дифференцируемой.
Сформулируем (4.26), (4.27) в операторной форме. Для этого
введем операторы А и В:
2
1.1 = 1
D(A) = {u: u^Wi, Au е L2 (Q)},
2
D<s>=
1=1
2
U-. ueZ.2(Q), 2 &i j^W)
i=i ‘
Теперь (4.26), (4.27) можно записать в виде уравнения
Аи Bu = f,
(4.29)
рассматриваемого в пространстве 77 = Z.2(Q).
Отметим некоторые свойства операторов А и В. Воспользо-
вавшись формулой Грина (2.27) из гл. 1, легко показать, что
А симметричен: (Av, и) = (Аи, v). Применяя также формулу
Грина и учитывая введенные выше ограничения, приходим к
7*
196
ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ
[ГЛ. Э
неравенствам
2
(Ли, 2 |^|а4-Иг!«1а^(^ 4-Иа)|ы||а, ueD(A), (4.30)
где а— минимальная из длин сторон прямоугольника, описан-
ного вокруг Q (см. вывод неравенства Фридрихса в п. 4.2).
Таким образом, оператор А является положительно определенным.
Оператор В не симметричен. Поэтому оператор всей задачи
А = Д + В, D(L) = D(A) также не будет симметричным. Так как
(Аи, м) + (Вы, и)^
то оператор L является положительно определенным (более того,
он Н?2-определен, т. е. (Lu, и) ^с|| u||^,i). Для данной задачи
известно, что решение существует и единственно, причем справед-
ливо неравенство |и с || f|.
Выберем для приближенного решения задачи метод Бубнова—
Галеркина. Обозначим через НА энергетическое пространство
оператора А. Скалярное произведение и норма в нем соответ-
ственно имеют вид
[«, v]=j( 2 a(/^^ +auV}dX,
и-[«. “Г-J (2 к+“•)*’•
й V, /•— 1 /
Из эллиптичности задачи и ограничений на коэффициенты опера-
тора А следует, что нормы || и и [и] эквивалентны:
min (ро, р2) 1 и ii^i-5 [и]2 max (р1( р3) ] и (4.31)
и что пространства Яд и V, совпадают.
Если умножить (4.29) на произвольную функцию v е НА =»
= W\ (Q), то, выполнив интегрирование с применением формулы
Грина, получаем равенство [и, v] + (Bu, и) = (/, о), которому
8 Я
ЗАДАЧА ДИРИХЛЕ
197
удовлетворяет решение задачи (и которое можно положить
в основу определения обобщенного решения, см. § 3 гл. 1).
Введем теперь сетку, кусочно линейные базисные функции
и подпространство л =так же, как в п. 4.2. Приближен-
ное решение ищем в виде
N
uh=Yi <х> У>> (4.32)
1=1
где а, определим из системы уравнений
[«А, ФЯ+(В«А, Ф/) = (А Ф7), /=1......N, (4.33)
или, что одно и то же, из
(Л + В)а = Л (4.34)
где а = (ах....aN)T, f=^, .... fN)T, Л = (Д0), Й = (В,У),
2
Ли=[ф/, Ф/] = 2 J S?+ Уаф/ф/ dx>
А» £=*1
=2 Уbk ф/dx' = У dx'
Л=1 Й; Й(.
i,i = 1, ..., М, = supp ф/ П supp ф/, Q; = supp ф,-.
Величины By, Ay, ft представляют собой интегралы от известных
функций и могут быть вычислены с помощью подходящих квад-
ратурных формул (ошибки, возникающие при этом, можно отнести
к ошибкам^ округлений и учесть при исследовании устойчивости).
Матрица А симметрична и положительно определенна. Матрица
N
Атакже положительно определенна: при имеем
t=i
((Л 4- В) a, a) = \yh, уй]4-(Вул, ул) ==sc| vh >0.
Отсюда следует однозначная разрешимость (4.34), и значит, при-
ближенное решение uh определено единственным образом. Если
умножить (4.33) на ау и просуммировать результаты по /=1, ...
..., М, то получим
[“л. “л] + (Вий, uh) — (f, uft),
Ci I «л < [«л. иЛ]+(ВиЛ, ил)=(/, «л) И ВI “л S < IIHI «л (4-35)
Зта априорная оценка гарантирует непрерывную зависимость
«л от [.
198
ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ
[ГЛ. 3
Оценим скорость сходимости uh к и при Л->-0. Сделаем это
так же, как и в п. 4.1. Запишем следующие тождества при про-
извольной yAelTl’ft:
[«-«л, уА] + (В(м-мА), цА)=0, •
[u-uA, u — uh] + (B(u — uh), u — uh) =
= [u-uh, u-uA-yft] + (S(u-uA), u-uft-yft).
Полагая vh = — uh-\-wh {wh — произвольная функция из
имеем
[u-ua]24-(£ (« — “л), u —Mft) =
= [u-uA, м-и>А] + (В(м-мА), м-шА),
II и - «Л 11^1 < С ([« - МЛ]2 4- (В (и - uh), и - uh),
|[«-«Л. и — Wh] + (B(u — uh), u — wh)\^
^сЦм-илЦ^Ци-ШлЦ^, (4.36)
II « - «Л 11^1 СI и - Uh 1^11 и - Wh 1^1,
II « - “л 1^1 С inf I и - Wh. 1^1.
wh
Сформулируем следующий результат об аппроксимации: для
и е Wk существует такая функция ur^Wk, что
J м — м; 11^,1 (Q) «С с sin |1 и ||W2(£2). (4-37)
Действительно, можно показать, что
у § |-^| ^x^c/i’luJir^QjHlulluznQ) +|-^|ь8(5йа))
1= 1 П\ЯА
(ср. доказательство теоремы 2 из § 7 гл. 2), а из функционально-
го анализа известно, что ^ди/дп ||ьа (дЙА) ^cjl и||гз(й); поэтому
Ии llirl (й\йА) и iluzf (й)-
Оценка для Цы — М^(йд) получена в § 8 гл. 2:
| м — м/ 11ц7^йл) ;£= с -^7% “и (йл)'
Из последних двух неравенств получаем (4.37). Теперь из (4.37)
и (4.36) имеем
II« — “л V* (й) < с IIи Hrj (й> с 157^ II ? II’ (4.38)
§ 4]
ЗАДАЧА ДИРИХЛЕ
199
Оценим скорость сходимости в A2(Q). Для этого рассмотрим
вспомогательную задачу
л*ф=л
Ф = 0 на dQ, (4.39)
где 2 2
Д*Ф = — 2 + F = U-UfteL2(Q).
i, j-=l 1 i=l ‘
При сделанных выше ограничениях задача (4.39) имеет един-
ственное решение, удовлетворяющее неравенству
|ФМ(0)<сИ1 (4.40)
и равенству
[Ф, и]-}-(Д*Ф, v) — (F, v), (4.41)
где
«еШ В*Ф = ~2 -^-(М>).
1=1
При v = u — u/l (4.41) принимает вид
II и - uh II2 = (F, u-uft) = [O, u-uft] + (B*(D, u —uft) =
= [Ф, и-ил] + (ф, В (и-ил)) = [и —ил, Ф-Фл] +
+ (В(и — uh), Ф—Фл),
где Фл —произвольная функция из Тогда
|| и - uh |j2 -С [ и - uh ] [Ф - Фл ] 4- с || и - uh || wi || Ф - Фл ||<
С || и — Uh llj^i (й) || Ф — Фл lljpl (й) ‘-С С sin 0° || f || || Ф — Фл |lW1'
Выбираем ФЛ = Ф/ так, чтобы выполнялось неравенство (4.37):
|Ф-Ф»1И«^|Ф1И.
Тогда
/ h \2 *
IZ|-
Итак, при сделанных ограничениях иЛ сходится к и при А—>-0
и справедливы оценки (4.38), (4.42).
В заключение отметим, что изложенная выше схема решения
задач для эллиптических уравнений может быть перенесена на
200
ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ
[ГЛ. 3
случай большего числа переменных и на уравнения более высо-
кого порядка. Заметим также, что исследование сходимости и
получение оценок скорости сходимости можно проводить в энер-
гетических нормах, не переходя к нормам пространств WZ2(Q).
§ 5. Проекционно-сеточный метод с применением
сингулярных функций
При рассмотрении краевых задач часто оказывается, что их
решения обладают особенностями, которые могут быть обуслов-
лены негладкостью границы области (наличие углов), разрывами
коэффициентов уравнений на поверхностях раздела физических
сред, несогласованием краевых (или краевых и начальных) усло-
вий и т. д. Наличие особенностей будет сказываться на точности
аппроксимации с помощью выбираемых базисных функций. При
этом, если эти функции достаточно
гладкие, а решение «плохое», то естест-
венно, что приближение с помощью
такого базиса не будет достаточно эф-
фективным. В этом случае представля-
ется разумным использовать базис, ко-
торый учитывал бы нарушения гладко-
сти решения. Как отмечалось в § 9 гл. 1,
к одним из подходов построения таких
базисных функций могут быть отнесены
метод сгущения вводимых сеток и метод
включения в базис сингулярных функ-
ций. В настоящем параграфе на при-
мере простой эллиптической задачи бу-
дет рассмотрен второй из этих подходов (см. также пример 6
§ 9 гл. I). При этом мы попытаемся выделить основные этапы и
характерные черты этой модификации проекционно-сеточного ме-
тода, так как они имеют место и при рассмотрении более слож-
ных задач.
Прежде всего сформулируем задачу и отметим некоторые
свойства решения. Пусть Q —область (рис. 49) с входящим
углом Зл/2. Рассмотрим задачу
-Au = f(x, у), (х,</)еЙ,
и —0 на dQ, ’ '
где )£L2(Q). Она имеет единственное решение при-
чем (О 0 - постоянная, ||-|| = ||-Ць,, (•, -)l! = (-, •)).
Однако обобщенное решение и (х, у) при сделанных ограничениях,
вообще говоря, не принадлежит Wl (Q); в данном случае «е
Причина этого —в наличии входящего угла, равного
5 5]
ПРИМЕНЕНИЕ СИНГУЛЯРНЫХ ФУНКЦИЙ
201
Зл/2. Но для решения задачи имеет место разложение
и(х, y) = Aty(r, 0) + до(х, у), (5.2)
где гр (г, 6) = г3/2 sin (20/3), г = (х2 +у2)1/2, 0 = arcsin (y/r), O=g0=C
^Зл/2, А — постоянная (зависящая от f), w — некоторая функция,
до = 0 на dQ; при этом справедливо неравенство
IA l + ltt’||u7|(Q)<c||/:||, с>0, (5.3)
т. е. функция до (х, у) обладает по сравнению с и (х, у) большей
гладкостью. Иногда в разложениях вида (5.2) коэффициенты
перед функциями-особенностями гр (г, 0) удается выразить явно
через исходные данные задачи. В этом случае для приближенного
решения задачи целесообразно перейти (в обобщенных постановках)
от (5.1) к соответствующей задаче для функции до и строить
приближение уже для последней. Однако часто зависимость
коэффициентов типа А от исходных данных достаточно сложная,
поэтому считают их неизвестными и определяют в процессе при-
ближенного решения задачи.
Имея некоторую информацию о свойствах решения задачи,
о виде его главных особенностей и имея разложение типа (5.2),
можно приступать к выбору алгоритма проекционного метода и
построению базисных функций. В качестве алгоритма можно
остановиться на методе Бубнова — Галеркина, в основе которого
(для данной задачи) лежит равенство
[и, о] = (Д v), (5.4)
r 1 С / ди dv , ди dv \ , ,
\и, и|= \ -Э--5—}dxdyt
1 ’ * J \ дх дх ' ду ду j
о
которому удовлетворяет обобщенное решение и при произвольных
функциях v е IF) (Q)., Выберем теперь базисные функции. По-
скольку до е IF1(Q), разумно остановить выбор на кусочно линей-
ных функциях, рассмотренных в § 3 гл. 2. Введем сетки по обеим
переменным: с шагом hx — по х и с шагом hy — по у, h — max (hx, hy).
Пусть общее число внутренних узлов Р, = (xj, у]) dQ сетки
равно N. Зададим известным способом N кусочно линейных
функций (х, у)}. Добавим к ним сингулярную функцию гр0,
построенную на основе главной особенности решения гр (г, 6):
гро (х, р) = гр(г, 6) со (г/р), (5.5)
где со (/) —достаточно гладкая функция, равная 1 при 0=С(=С1/3
и 0 при (2=2/3, р> 0 — постоянная, задание которой изменяет
величину носителя гр0(х, у). В рассматриваемой задаче в качестве
со (/) можно выбрать решение задачи dia)/dti = O, 1/3 (sg 2/3,
202
ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ
[ГЛ. 3
с краевыми условиями со(1/3) = 1, со(2/3) = 0, со'(1/3) = со'(2/3)=0;
оно имеет вид со (!) = 1 — 3 (3/— 1)2 + 2 (3/— I)3. Таким образом,
1, 1/3,
со(/) = 1-3(3г-l)2 + 2(3f-1)3, l/3<i<2/3, (5.6)
0, ^2/3.
Пусть, далее, для определенности p = r0 = min(«, b). Примем
теперь в качестве базиса набор функций {ф0, срь ..., cpjV}, которые
при добавлении ф0 к {ср,} остаются линейно независимыми.
Приближенное решение будем искать в виде
N
«Л (X, у) =Мо (X, у) + у «/СР/ (х, у),
(5-7)
где а0, at, 1=1, .... /V, определяются из системы
[«л, Фо] = (А Фо), [ил, ср;] = (Д ср,), 1 = 1, .... ЛГ.
В матричной форме система (5.8) записывается в виде
" ао~| Г fo~
(5-8)
^оо = -^oi ••• ^олс
^10 i
(5-9)
А
а
f
(5.Н)
-AN0‘ J L J L _
где cz = (an .... aN)T, f = (A, .... fNy, А = (Ац), Л00 = [ф0, Фо],
Aoi = Аю = [ср,-, ф0], f0 = (f, фо), Atj = Ац = [cpz, cpy], ft = (j, (pi),
i, /=!,..., N.
Как и в предыдущих параграфах, легко видеть, что (5.8) имеет
единственное решение; при этом для uh справедлива оценка
IIыл Ikrl(Q) sScllfll, ОО. (5.10)
Прежде чем оценить скорость сходимости uh к и, преобразуем
разложение (5.2). Запишем его в виде
и(х, р) = Аф0 + ®(х, у),
где w = А (ф — фо) + tw = Аф (1 — со) + ш,
~ [ w при (х, у) е Йо = {х, у: г «£ г0},
| Аф (1 — со) + w при (х, у) е й\й0.
Для w, учитывая (5.3) и гладкость ф(1 —со) при г^г0, получаем
II (й) = И W Hu^CSo) "И10 llir^ (£2\£2о)
(I10 Huzj (Qo) +1 А |21| ф (1 — со) 11^2 (й\йо) + !l w 11^2 (й\йо))
^(IMlirlw+ci IА |)2<М/1а.
§ 5]
ПРИМЕНЕНИЕ СИНГУЛЯРНЫХ ФУНКЦИИ
203
Итак, справедливо разложение (5.11), в котором носитель
функции-особенности ф0 Уже локализован, и = 0 на йй и
|©U| + I Л|-Сс3ЦЛ, с3>0. (5.12)
Отметим, что здесь постоянная с3 зависит от г0 и при уменьше-
нии г0 возрастает. Поэтому стремление к существенному умень-
шению размера носителя ф0 может привести к значительному
росту постоянной с3.
Оценим скорость сходимости uh к и. Обычным образом при-
ходим к неравенству
IN
и — софо- ’
1=1
где с0, ci, i = l, ..., N, — произвольные постоянные. Учитывая
(4.4), получаем
II N II
|«-«AU (йinf и-софо-2 • <5-13)
со- С1II < = 1 М(й)
АГ ~
Рассмотрим линейную комбинацию = + 4фь в которой
1 = 1
с0 — A, c{ = w(xt, tji). На основе аппроксимирующих свойств {<р;}
(см. §§ 3, 8 гл. 2) заключаем, что
N
и — Софо — С‘Ф>
11 N
= Лфо + W - Софо - У С1Ф1
И (Q) II
N
W — 2 С,Ф/ (х, у)
И (й)
sin 80 И ® (й) С sin
(й)
где 90 —минимальный угол в треугольниках. Отсюда и из (5.13)
имеем
т. е. приходим к такой же оценке, как и в случае, когда реше-
ние принадлежит пространству Ц7|(й). Итак, включение лишь
одной сингулярной функции в базис позволяет получить скорость
сходимости, обычную для кусочно линейных функций на реше-
ниях из класса 1Г|(Й).
Следующий этап реализации рассматриваемого здесь проекци-
онно-сеточного алгоритма состоит в вычислении A,j, ft и в решении
системы (5.9). Первая трудность возникает при вычислении Лог
и f0, 1 = 0, I, ..., N, так как приходится брать интегралы от
сингулярных функций. Но эту трудность зачастую сравнительно
204
ПОСТРОЕНИЕ ПРОЕКЦИОННО СЕТОЧНЫХ СХЕМ
[ГЛ. S
просто преодолеть, если применить подходящие квадратурные
формулы. Иногда эти интегралы удается свести к однократным
и провести вычисление AOt и /0 аналитически.
Другая сложность вызвана «ухудшением» линейной независи-
мости базиса {фо, Ф1, •••, Фл4- Это означает следующее. Пусть
функции {(pj линейно независимы. Из способа построения ф0
видно, что носитель этой функции при стремлении h к нулю
может быть много больше носителей функций фь i=l, ..., N.
Поэтому при малых величинах h можно подобрать такие ненулевые
коэффициенты с,-, что линейная комбинация Ф„ = 2 будет
близка к фо- А это означает, что система {ф0, фъ ..., стано-
вится «почти» линейно зависимой. Последнее обстоятельство при-
водит к увеличению числа обусловленности матрицы системы (5.9)
и затрудняет процесс ее численного решения. Поэтому правиль-
ный выбор алгоритма решения (5.9) играет существенную роль.
Одним из подходящих методов является метод окаймления.
Запишем (5.9) в виде
Лоо ; Лх
А^А
где Ai = (Лоъ Долг)- Эта система эквивалентна системе
Л»» At
Лоо1 fo
Л-lj/
Введем обозначения А 1Л1Г = bt, Л'1/ = Ь2. Имеем систему
+ AoJAja — Хоо’/о, — Ь2,
которая уже легко решается.
Итак, решение системы (часто являющейся плохо обусловлен-
ной) свелось к решению систем с «хорошей» матрицей А:
Abi = A[, Ab2 = f,
(5.15)
и нахождению aQ и а по простым формулам
°о — (1 Aoo'Xjbi) 1 (Хоо/о — Лоо-Лг^з),
а = Ь2 — bido •
(5.16)
После этого приближенное решение задачи строится по формуле
(5.7), чем завершается численная реализация всего алгоритма.
Рассмотренная выше схема может быть перенесена на более
сложные задачи и на случай, когда разложение (5.2) содержит
несколько функций-особенностей ф (г, 9). Сохраняются также
| 81 ПАРАБОЛИЧЕСКОЕ УРАВНЕНИЕ 205
основные этапы построения приближенного решения: исследование
задачи и выделение особенностей; построение финитных, кусочно
полиномиальных и сингулярных функций; вычисление элементов
матрицы и вектора правой части системы; решение системы
уравнений.
§ 6. Решение параболического уравнения
проекционно-сеточным методом
Проекционно-сеточные методы могут применяться и к неста-
ционарным задачам, одним из отличий которых от.рассмотренных
ранее является наличие временной переменной t. Это будет ска-
зываться на формах проекционно-сеточных методов в применении
к нестационарным уравнениям. Если вспомнить результаты §§ 3
и 5 этой главы, то можно обратить внимание на то, что базисные
функции по пространственным переменным вводились так, чтобы
по возможности учесть конфигурацию области. Кроме того,
системы уравнений, возникающие при решении задачи, полу-
чались «связанными», т. е. неявными. Если для увеличения
порядка аппроксимации вводились кусочно полиномиальные
функции высокой степени, то связанность системы возрастала
(т. е. в каждое уравнение входило уже большее число неизвестных
по сравнению с тем, как если бы использовались простейшие
базисные функции). Если обратиться к временной переменной, то
можно заметить, что область изменения ее проста и часто пред-
ставляет собой отрезок [0, Т]. Поэтому здесь не возникает труд-
ностей, обусловленных геометрией области. Далее, если применить
для аппроксимации нестационарного уравнения с производной
по t простые кусочно линейные базисные функции, то при
использовании метода Бубнова —Галеркина будут возникать трех-
точечные неявные схемы по временной переменной. Таким образом,
мы теряем одну из возможностей численной аппроксимации
нестационарных уравнений по t— применение явных схем. Поэтому
при решении нестационарных задач проекционно-сеточный метод
часто применяется для аппроксимации решения лишь по прост-
ранственным переменным, а приближение по t осуществляется
обычным разностным методом (хотя не исключаются и другие
способы приближения по временной переменной).
В настоящем параграфе на примере параболического уравнения
с одной пространственной переменной рассматривается одна из
возможных форм применения проекционно-сеточных методов для
решения нестационарных задач.
6.1. Постановка задачи. Рассмотрим задачу
-^ + Л« = /, (6.1)
и(х, 0) = н(0), (6.2)
206 ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ [ГЛ. 3
где f = f(x, i) при каждом t принадлежит H = L2(Q), хей =
= (a, b), /е[0, Т], ит =«(о) (х) е L2 (й). Оператор А имеет вид
Au=--^p(x)~ + q(x)u, (6.3)
где р(х), q (х) — ограниченные положительные функции на й,
с областью определения
D(A)—{v: v^L2, -|-gL2, XueL,, v (а) = ~(Ь) = о}. (6.4)
Через НА будем обозначать энергетическое пространство, соот-
ветствующее А. Скалярное произведение и норма в НА соответ-
ственно имеют вид
ь
Iм’ J(p^-^+<7^)dx,
а
/ b \ 1/2
[ц] = [ц, ц]1/2 = Щр|^±|г+(7из^х1 .
'а '
Функции из НА (см. § 2 гл. 1) удовлетворяют условию
г/(а) = 0 (главное условие); в то же время среди них могут ока-
заться функции, не удовлетворяющие второму условию: ^(Ь) = 0
(естественное условие).
Сформулируем обобщенную постановку задачи (6.1), (6.2); при
этом из возможных постановок остановимся лишь на двух. Пусть
v (х, t) — произвольная функция из №2((0, Т)хй), удовлетворяю-
щая условию п(х, Т)=0. Умножим (6.1) на v, проинтегрируем
по области (0, Т) X й и выполним интегрирование по частям.
В результате приходим к соотношению
т
+ у)]dt = («(о). v(x, 0)), (6.5)
о
(> •) = (’»
которое можно положить в основу определения обобщенного
решения.
Определение 1. Назовем обобщенным решением задачи (6.1),
(6.2) такую функцию и е Ьг ((0, Т)ХЙ), обладающую производ-
ной ди]дх из Л2((0, Т)хй), для которой и (а, /) = 0, и удовлет-
воряющую соотношению (6.5) при любых v е W2 ((0, Т) х й) таких,
что v (х, Т) = 0, v (a, t) = 0.
При такой обобщенной постановке приближение решения можно
осуществить по всем переменным (в том числе и по t) в виде
рядов по каким-либо подходящим базисным функциям {ф,- (х) qy (/)}.
§ 6] ПАРАБОЛИЧЕСКОЕ УРАВНЕНИЕ 207
Но в этом случае по временной переменной будем получать, как
правило, неявные схемы, и здесь затруднено использование
обычных (и удобных на практике) разностных схем для аппрок-
симации производной по t. Поэтому часто в основу обобщенной
постановки принимается другое, интегральное соотношение.
Предположим, что обобщенное решение, в смысле определе-
ния 1, существует и при этом du/dt е L2 ((0, 7)хй). Принимая
ц (х, t) = w (х) Ф (t), где w (х) е W2 (й), w (а) =0, dO/d/ е Ь2 (0, Т),
Ф(Т) = 0, и выполняя в (6.5) интегрирование по частям, получаем
г
$[($-, “O + t"’ “(А №)]ф(0^ + Ф(0)(ы(х, 0)-ы(0), а>)=0.
о
Отсюда в силу произвольности выбора Ф (t) следуют соотношения
(первое из которых справедливо почти при всех t е (0, Т))
(du/dt, щ)(/) + [ц, щ](0 = (А w)(t), (6.6)
(и(х, 0), w) = (uw, w), (6.7)
которые могут быть приняты для определения обобщенного
решения.
Определение2. Назовем обобщенным решением задачи (6.1),
(6.2) функцию и (х, t), которая почти при каждом t е (0, Т)
принадлежит На, обладает производной du/dt е А2 ((0, Г)ХЙ)
и удовлетворяет почти всюду на (0, Т) соотношениям (6.6), (6.7)
при произвольных w (х) е НА.
При такой обобщенной постановке переменную t можно рас-
сматривать как параметр, и для аппроксимации задачи по этой
переменной уже возможно как применение разностных методов,
так и переход к (6.5). (Однако отметим, что второе определение
обобщенного решения требует уже существования du/dt е
G= Л2((0, Т)ХЙ).)
Если, помимо введенных выше ограничений, предположить,
что U(o) £= НА, то можно доказать существование единственного
обобщенного решения u<=W2((0, Т^хй). Если же, кроме того,
потребовать, чтобы dp/dx е Lm(a, b), то обобщенное решение
будет обладать конечной нормой
Г 7 TI/2
5(1>1Г+1^Г+|^Г+|“|,)л «
L-o J
Все эти ограничения в дальнейшем будем считать выполненными.
6.2. Построение проекционно-сеточной схемы. Для приближен-
ного решения задачи мы выберем соотношения (6.6), (6.7). При
этом сначала выполним аппроксимации по пространственным
переменным, а затем по t (но можно было бы эти аппроксимации
вводить по всем переменным одновременно).
208
ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ
[ГЛ. 8
Для аппроксимации решения по х выберем кусочно линейные
функции {ф,-(х)}, построенные на сетке a = x0<x1<...<x^i<
<Z.XN = b, hi = Xi — Xi-i, h = max hi, hs£cmin/i;, no алгоритму,
i i
изложенному в § 2 гл. 2. Функции {cpz} считаем нормированными и
удовлетворяющими условию равномерной линейной независимости:
N
CiS Ь1^
i«I
N 112 W
У Ми <с22 ы,
Z = 1 || 1
Cl,
c2>0.
N
Множество линейных комбинаций вида vh = «,ф, (x) образует
i=^ i
подпространство Ha^ <= НА. Отметим, что vh е Нл^ удовлетворяет
главному краевому условию: vh (а) = 0.
Приближенное решение будем искать в виде
N
uh(x, 0 = 2
/«I
(6.9)
где коэффициенты являются уже функциями от t е (0, Г) и опре-
деляются из системы обыкновенных дифференциальных уравнений
ф<) (0 + [«Л, (0 = а, Ф/) (0 (6. Ю)
при начальных условиях
(цЛ(х, 0) — w(o), ф,) = 0, i = l...N, (6.11)
которые получены из (6.6), (6.7) по методу Бубнова — Галеркина.
Задачу (6.10), (6.11) можно записать также в виде
^^+4a = f(0, (6.12)
Ва(О)=а{0}, (6.13)
где а (0 = (Й1 (0, .... aN (0)г, F (0 = (Л (0, • • •, М (ОН.. F, (t) =
(Л Ф>) (0> й(0) — («(О), 15 • • •» й(О),м)Г5 й(0), i = (П(О)5 ф/), В = (В,у),
Л = (Л/у), В,7-=ВЛ = (фь фу),
Ац = Ац = [ф;, фу] = J [р(х) ~+ q (х) ф,фу)dx,
а
i, j=l.....N.
А поскольку В есть матрица Грама, соответствующая {ф,}, то она
невырожденна. Матрица А, как это было показано в § 1, является
положительно определенной.
§ 6]
ПАРАБОЛИЧЕСКОЕ УРАВНЕНИЕ
20?
Если записать (6.12), (6.13) в форме
+ = а(0) = ^1а(0),
то согласно теории обыкновенных дифференциальных уравнений,
решение последней задачи существует, единственно и выражается
формулой
а = ехр }В_1а(0) + J ехр {— (t — /')} (f) dt', (6.14)
о
где ect — матричная экспонента, определяемая соотношением
11 г\Л
Из сказанного выше следует, что приближенное решение
N
uh (х, t)= (t) (pt (х) существует и определено однозначно.
i=i
6.3. Сходимость. Оценки скорости сходимости. Получим апри-
орную оценку для uh. Для этого умножим каждое из уравнений
(6.10) на соответствующую функцию «,(/), результаты сложим
по i и выполним интегрирование по V е (0, t). Получим
t t
J “*) + Iм*’ “*]] dt’ = $ (А dt’'
о L о
t t
у 1 «л II2 (0 + $ Ы (П dt' = J (f, И dt’ + II «л II2 (0).
о о
Поскольку
(N \ / N \
uh, У at (0) ф, ] (0) = (ц(0), У at (0) <pf ],
1=1 / \ 1 = 1 /
|1 «л ||2 (0) = (U(0), ыА(0)), II uh fl (0) <11 и{0} fl,
то
t
у IM2 (0+ 5 [«л]2(П^'<
о
(t \i/a /t \i/i
ji/iw ш«л|12(пИ +4и«(о)1г^
о / \о ]
(t u/a / t \i/a
$ I f II2 (П <#') c 11 uh IP (0 + J [HA]« + 1II W(0) IP,
6 / \ o’ I
c>0.
Из последних соотношений имеем, с применением неравенства
210
ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ
[ГЛ. 3
| ab | а2/(4е) + eb2 с подходящим е > 0, априорные оценки
1! «л Г (0 + $ [«л]2 dt' < с (а || f II2 dt’ + j ит II2),
° т ° ,т ' (6-15)
шах || uh J2 (0 + $ [ил]2 dt’ < с Н || f j2 (Г) dt' +|| ы(0) I2), с > О,
<е(О, г) о Уо1 /
из которых следует непрерывная зависимость приближенного
решения задачи от f и и(0). Оценим скорость сходимости uh к
и(х, t) при й->0. Запишем для £Л = и —иЛ тождества
(^, + Кл, уА] = 0, (£а, оа)(0) = 0,
справедливые при произвольной функции vh = bfli, i’ — 1,.N,
коэффициенты bi будем считать функциями от t. Тогда
(^, 1а) + [?А]2 = (%’ ы-ул) + [1А, «-fA],
t
' ^И2(0 + $ [£а]2Л' =
Q
t t
= §[|A, u-Vh\dt'+ U-цЛ)л' + |нЛ[2(0).
о 0
В силу соотношений
t
u~Vh)dt'=
О
i
= (|А, « - t»A) (0 - (?А, « - fA) (0) - 5 (Вл. й dt' =
о х
t
= (о - (|А) UW - vh (0)) - J (gA, 5 dt'
d
имеем
t / t \l/2 / t \l/2
*Н1Ы2(О+^А]2^'<Ш^МЧ Ш«-^]2И +
о \d J \o /
+ -J- II lA II2 (0) +1! |A I! (01! и - vh || (0 + II b (0)11 IIUW - Vh (0)|| +
/ t \lfl it И/i
+ miAiM') Шт-?г1М • <6-16)
\o / \o /
Поскольку uh(x, 0) — ортогональная проекция u0 на то
II h ii (0) || «(о, - vh (0)||. (6.17)
§ 6]
ПАРАБОЛИЧЕСКОЕ УРАВНЕНИЕ
211
Теперь из (6.16), (6.17), применяя неравенство | ab | а2/(4е) + &Ь2,
получаем следующие соотношения:
Нл I!2 (0 + n^]2^'<k-^ll(0 +
0
/ t i ч
+ сН[и-пл]МГ + ||и(о)-пл(О)р+ с>0, (6.18)
\d т о }
шах || ||2 (0 + [?л]2 dt шах || и - v^(t) +
t о t
(Т Т ч
5 [и - пл]2 dt + II um - vh (0)||2 + jj I g Г dt\.
0 0 J
Пусть vh имеет коэффициенты bi = u(xh t). Тогда из (6.18) с уче-
том свойств функций {<Pf} (см. § 2 гл. 2) получаем сходимость и:,
к и при /г->0:
т
max || и — uh ||2 (t) + J [и — uft]2 dt -> 0, /г->0,
t о
в предположении, что u(01 е L2 (Й), ди/дх, du/dt^L2((O, T)xQ).
Если же uw^HA, d2u/dxdt gL2((0, Т) X й), д2и)дх2 е
eL2((0, Т)ХЙ), то
/Г -.1/2
max || и — uh || (0 + Ц [u — uft]2 dt | ^Sch, с>0. (6.19)
* 'о /
Докажем некоторые другие оценки скорости сходимости иЛ
к и, предполагая далее, что все исходные данные достаточно
гладкие и выполнены все необходимые условия согласования. Это
дает возможность предположить также гладкость решения задачи.
Прежде всего, из (6.17) имеем || u(0) — uh (0)| -С ch2, положив vh (0) =
N N
= У, и (xit 0) <р, = u(o) (xi) (pi- Кроме того, имеем оценку
Z=1 Z=1
[uh (0) - и (0)] = [uh (0) - U(0)] <
[«(0) - Vh (0)] + [vh (0) - uh (0)] ch + c| Д (vh (0) - uh (0)) || sg
ch + Ch~ II vh (0) - uh (0)|| <ch + -J- < ch. (6.20)
Запишем тождество
t t
0 L
t i
“ $ i ~ dt' + - “A. (“ - vh) ] dt',
0 Q
212
ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ
[ГЛ. 3
N
справедливое при произвольной функции vh = У, bt (t) <рг (х)
с непрерывно дифференцируемыми коэффициентами b{(t). Отсюда
получаем
t
Я 1г г dt'+[?лР (0 i 1“ (°) - “л +
О
(t *1/2 / t V 1/2
$| i ~ МГdt) 51 it (u ~ ра>Г dt j +
d / \d /
/ t \ 1/2 / t \l/2
+ Я^“-ра)Рч ’
\dJ / \dJ L /
r .
j | |2 dt + max [£ftp (/) i c ^[u (0) - uh (0)P +
т , т > i/a / r > i/a>
+ Ш(“_МНЧЯ?аМ И^(“"ра)М •
0 \o j \o / /
N
Выбирая vh = У u(xit t)<pi(x), приходим к оценке
i = 1
(т \l/2
P ]| Q ||2 \
J II d/ (“ — U/,)|| di\ +raax[“ —“л]=^с/1. (6.21)
Наконец, докажем, что
I Т x 1/4
max || и — uh || (J) с№2, mu —uA||2dq ^ch3. (6.22)
* \o /
Для этого рассмотрим вспомогательную задачу
- ^+АФ = 0, .
ф(Г) = ф1(х), Ге (О, Т), (6,23)
где ®i(x) = u(x, Г) — uh(x, Г). В силу (6.21) заключаем, что
Ф1ЕЯл при любом t е (0, Г). Известно, что (6.23) имеет един-
ственное решение, для которого справедливо неравенство
j (ГжГ + |?Г + |”|’ + 1®г)Л«с<ф>иа>- <6-24>
§ 61
ПАРАБОЛИЧЕСКОЕ УРАВНЕНИЕ
213
Кроме того, если умножить (6.23) скалярно в L2{(t, f)xQ) на Ф,
то получим
|||ФЬ2(0+ $[Ф, Ф] dt" ~ 11Ф i,« (П,
откуда получаем
max ||ФН0 + (\ [Ф]2^У/2
О t' \о /
(6.25)
Умножим теперь (6.23) на функцию v е ((0, f)xQ),
и (/, 0) = 0, и выполним интегрирование по области (0, f)xQ.
Приходим к соотношению
5 v)^+ $ [Ф, v\di~
б о
г г
= (Ф, 0(0)-(Ф, 0(0+ J (ф; |)^+$ [Ф. v\dt,
J б
т. е. к соотношению
v t'
(Фь 0 (О = (Ф, 0 (0)+ J (ф, g) dt+ ( [Ф, v]dt.
о ' о
Полагая v = l,h = u — uh и учитывая, что
г Г
$(фл, %)^+ $[фл, У</м
о б
N
при Фл = У, с, (/) <Pi (х), имеем
i=i
f t-
j I* (f) = (Ф, (0) + $ (Ф - Фл, dt + J [Ф - Фл, Ea] dt
о о
te \’/2 / T \1/2
<11ФИ0ШлК0)+ J ||Ф-ФЛ|М) +
\o ) \o /
/t’ \1/а /Г \ 1/Я
+ $[Ф-Фл]М0 $И2Л ch*||Фх|| (tf) +
\o / \0 /
/*' \’/а /*' \i/a
+ сШ||Ф-ФлрЛ +ch $[Ф-Фа]2Л
\o / \o /
214
ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ
[ГЛ. 3
N
Пусть Фл= У, Ф(х,-, f)q>i(x); тогда
i = l
(f \1/2
II а2 а') < ch* j Фх || (Г)+ch* $ [Фр dt) +
\о '
//' \1/2
+ ch* ( у I ||2 dt \ < ch* j lh j (Г) + Ch* II ъ , (f) ch*,
max || lh (01| «С ch3/*,
где с > 0 — постоянная, не зависящая от h.
Для доказательства второй оценки (6.22) вместо (6.23) рас-
сматривается задача
_^- + Дф = Г, O^t^T,
dt 1 ’
Ф = 0, t = T,
относительно которой известно, что при гладких коэффициентах
р, q и при F е L2 она имеет единственное решение, для которого
справедливо неравенство
max||Фр (0 + IIIФ III2<4 1Л2^-
t о
Обычным образом получаем соотношения при v — ^h, F = %h и
N
произвольном Фл= У с,- (/) ф,- (х):
/ = 1
т т т т
f (F, v)dt=\ II h ||2 dt = У (-v) dt + У [Ф, v]dt =
о о o' b
т т
= (Ф, v) (0) + С (ф, -J-) dt + [Ф, u] dt =
0 x 0
T T
= (Ф, v) (0) + У [ф - Фл, dt+ У [ф - фл, gA] dt
о ' b
/ T \ 1/2 / T \ 1/2
^11Ф|1(0)||Ы(0)+ f ||ф-фл|12^ у|^р +
' b ) ' b '
/ T \ 1/2 / T \l/2
+ Ц[Ф-ФЛ]2^ ftuM <
\o / '0 '
IT \l/2 IT \l/2
^№Фа(0)+с/гт|Ф-Фл||24// +ch $ [Ф-Фл]2Л .
\o / '0 /
§ 61
ПАРАБОЛИЧЕСКОЕ УРАВНЕНИЕ
215
N
При Фл = 2 Ф (х<> О (х) имеем
i = i
Т /Т \1/2
$ ||£лГЛ^с/12ЙФ||(0) + с/г*|НФ^с/г2 $ ||Г||2Л <
о \о /
/Г \1/2
^С/12 $Нл|М
о /
т. е. получаем вторую оценку (6.22).
Итак, в предположении гладкости решения задачи (6.1), (6.2)
доказаны следующие оценки скорости сходимости uh к и при
0:
С II IP \
I (и — иЛ) ИИ + max [и — uh] ch,
X « 11 / о < t с т
/Т \1/2
max \u — uh||(0 + Ц [и — «л]2dt «Сch,
\о /
(6.26)
max \u — uh || (0 «С ch?'2,
'Т \ 1/2
jj || и — ил II2 ^ch2,
-о /
где с > 0 —постоянная, не зависящая от h.
Замечание. Построенное здесь приближенное решение ил =
= a, (t) (pt (х) иногда называют полудискретным приближением
i = i
по методу Бубнова —Галеркина.
6.4. Численное решение системы обыкновенных дифферен-
циальных уравнений. Следующий этап численного решения задачи
(6.1), (6.2) состоит в отыскании решения задачи (6.12), (6.13).
Для этого можно воспользоваться методом гармоник или разно-
стным методом. Поскольку первый из этих алгоритмов будет про-
демонстрирован в применении к гиперболическому уравнению
в следующем параграфе, то здесь мы рассмотрим разностный
метод. Предполагаем, что решение задачи (6.12), (6.13) достаточно
гладкое по t и производные от составляющих вектора а ограни-
чены равномерно относительно h.
Введем на [0, Т], ради простоты, равномерную сетку tj = jx,
x = T/J, j=0, ..., J. Тогда для (6.12), (6.13) можно записать
следующие хорошо известные схемы (относительно терминологии,
принятой ниже, см. [7], гл. 1).
Явная схема-.
+ Aahl = F (^x), Ba0 = a(0), J. (6.27)
216 ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ [ГЛ !»
Неявная схема:
& +Аа} = Р(^, Ёао = а(О), (6.28)
Схема К ранка — Николсона:
Й ^~а/-1+Л -/+2а/~х =Г(^_1/2), Вао = а(О), /=1, ...,</.
(6.29)
Здесь а7 = (ai,y, ...» aNJ)T, Z/_i/2 = (Z/ + ^-i)/2.
Схемы (6.27), (6.28) имеют первый порядок аппроксимации
по т, (6.29)— второй. Исследование устойчивости их проведем на
примере неявной схемы (6.28). Умножим (6.28) на а, скалярно
{N
а: а — (аъ ..., aN)T, (a, b\ —
i = 1
/ \1/2)
Ja|l2 = ( У, а?) о Получаем равенство
t=i ' '
фа}, а,)2 + т(Лау, а7)2 = т (F (/,), а7)2 + (Ва^ъ а})2
N
или, что одно и то же, при uhj = У, (х)
кмИ2 + т[“л,;]2 = т(/(^)» «л,/) + («л,/-1, «л,/)-
В силу соотношений
I («Л./-1, «Л,/) I + Т I ( f (tj), uh,j) I < TII f (tj) III UhJ || + II uhi/_i [ II uh,j К
< (т II f (0 II + Il II) (II UhJ ||2 + T\uh, J) '/2
имеют место неравенства
(II «л./ II2 + т [«Л J2)1/2 т II f (tj) ! + I «Л./-1 fl <
< TII f (tj) fl + (II12 + *[^J-1Y)'/2 ’SS---
•.. < T t II / (^<) fl + (II “Л. ОII2 + T [uh, 0]2) 1/2 <
tj ( max If (ti) II + (II uh, о II2 + T\uh, 0]2)l/2, (6.30)
t. e. схема абсолютно устойчива. Теперь на основании общей
теории разностных методов (см. [7], гл. 1) из аппроксимации
с порядком О(т) и устойчивости (6.30) следует сходимость aj
к a(tj)\ при этом справедлива оценка
(1“л(0)-“л,/й2+т[иЛ((/)-ыл,/]2)1/2^ст^ / = Ъ .... J, ОО.
(6.31)
5 6]
ПАРАБОЛИЧЕСКОЕ УРАВНЕНИЕ
217
Из (6.26), (6.31) следует, что
max [u (В) — uh /1 «С с (т|/2 + h),
max || и (tj) - uhJ J < с (t + /i3/2),
OsS/sSJ
k(^-«A./ll<c(4+/i3/2), 7=1,
(6.32)
J;
можно также получить ряд других оценок.
Для исследования устойчивости схем (6.27) — (6.29) можно
применять также спектральный критерий Неймана.
Пример 1. Покажем, что собственные числа матрицы В-1 А
положительны. Для этого запишем задачу на собственные значе-
ния для матрицы В-1Л:
$-Мс = Хс, или Ас = ХЁс.
Тогда, если X есть
= 1(Вс, с)2. Но
собственное значение В_М, то (Ас,
02 =
- N
(Ас, с)2 = 2
2
Следовательно,
A^Pmln(6_a)2
N
1=1
(6.33)
где Pmin р (х) Ртах, <7т1п ^== 7 (-0 ^== 7тах, Pmin, Ртах, 7min, Qmax
положительные постоянные.
Пд) и мле р 2. Оценим снизу и сверху собственные числа мат-
риц В и А. Из равномерной линейной независимости базиса {ф,}
получаем
С1^-^Г^С2’ С1> по-
следовательно, для собственных чисел %г = X,- (В) матрицы В имеем
q 5g X,-(В) =g с2, съ с2>0. (6.34)
Для (Л) справедливы неравенства
II N 2
, 2 С<Ф,-
h (А) mm (С1’е)а2 (pmin (6_а)2 + <7mln) ‘
/ 2 \
^Pmln ф ау “b^mlny, (6.35)
ЛД^^тах-^^^^^^ + ЭДтаД с3>0. (6.36)
21 8
ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ
[ГЛ. 3
Пример аЗ. ^Предположим, лчто собственные векторы {с;} и
{с*} матриц В-1 А и (В~1А)т = АВ~1 образуют биортогональную
полную систему. Найдем спектральный критерий устойчивости
N
схемы (6.27). Разложим а/ в ряд: а7= У, a\k}ck — и перейдем от
/г=1
(6.27) к соотношениям для коэффициентов подействовав
предварительно матрицей В-1 на (6.27). Будем иметь
,) + 1»(Й-Ы) <2., ..
где F^ =J& 1F (tf), 4)2, (B~M) — собственное значение мат-
рицы В-1А. Тогда при условии |1—тХА|^1 имеем
т. е. схема ^устойчива. Ограничение |1—(с учетом оце-
нок для X,- (А) и X,- (В) из примера 2) будет выполнено, если 0 <
<т<2/гпах | Xk (Ё-М) | и тем более если
О<Т<_________±2_____
сзРтах/^2
(6.37)
Итак, условие (6.37) является необходимым спектральным
признаком устойчивости схемы (6.27).
§ 7. Решение гиперболического уравнения второго порядка
7.1. Постановка задачи. Пусть xeQ = (a, b), t е (О, Т), А —
оператор, определенный в § 6, (•, •) = (•, H = Hl,(Q).
Рассмотрим задачу
^- + А« = /(х, /), *б=(0, Т), xeQ, (7.1)
и(х, 0}=и(О)(х), (7.2)
^(х, 0) = «(1,(х). (7.3)
Предположим, что при некоторых f, И(0), uw решение задачи
(7.1) —(7.3) существует. Умножим эти уравнения на произволь-
ные функции v(x), w(x)<=HA, где НА — энергетическое простран-
ство, соответствующее А. Тогда после интегрирования по частям
ГИПЕРБОЛИЧЕСКОЕ УРАВНЕНИЕ ВТОРОГО ПОРЯДКА
219
по х получаем равенства
»)(0 + [«, 0(0, (7.4)
(и(х, 0), w) = (um, w), (7.5)
°), w} = («(ih w)> (7-6)
которые примем для определения обобщенного решения.
Назовем обобщенным решением задачи (7.1) — (7.3) функцию
и (х, 0> которая при каждом t принадлежит НА, обладает произ-
водной d2u/dt2 е L2 ((0, Т) х Й) и почти всюду на (0, Т) удовлет-
воряет (7.4) — (7.6) при любых v, w е НА.
Предположим, что исходные данные задачи достаточно глад-
кие и удовлетворяют условиям согласования, обеспечивая суще-
ствование обобщенного решения и (х, t) такого, что и (х, t) е
е ((0, Т)ХЙ). Полагая v = du/dt в (7.4) и интегрируя это
уравнение по t' е (0, t), приходим к соотношению
<02 (0=2$ (f, (f) dt' + <« (О))2, (7.7)
о
где
<«>2(о=|#|2(о+м2(о,
[U]2 = [U, u](0, <u(0)>2 = |u(1) l2 + [u(0)]2.
Продифференцируем (7.7) по t:
2(u)^=2^f, -^)<2sn||^|(o<2mi<“>(о-
Тогда
•^^IlflKO, <«>(0<^ $|Д<Я' + <«(0)>.
0
Итак, для обобщенного решения справедлива оценка
(и (0) < j II f II (Г) dt’ + (II U(1) II2 + [U(0)]2)1 z2, (7.8)
о
которая, в частности, гарантирует единственность и(х, t).
7.2. Алгоритм приближенного решения задачи. Введем такие
же, как и в § 6, базисные функции |ф,(х)} и будем искать при-
ближенное решение задачи (7.4) — (7.6) в виде
«л (х, 0=5 а‘ (0 ф/ (х), (7.9)
»=i
220 ПОСТРОЕНИЕ ПРОЕКЦИОННО СЕТОЧНЫХ СХЕМ [ГЛ. >
где функции at (t) определим из системы уравнений
(Т- + Ф/] = (Л ф/){0’ (7Л0)
(«л(0), Ф<) = (««», Ф<). (7.11)
0), Ф<) = (и(1), ф0, 1=1......N, (7.12)
которую можно записать в форме
$*£-+Aa = F, 0<t<T, (7.13)
&г(О) = а(о), (7.14)
6%-(0)-aw, (7.15)
где вид в, A, F, ат определен в § б, а вектор а(1) =»(а1Л, ...
...» а1.м)г имеет компоненты а1г = (и{1), ф;).
Согласно теории обыкновенных дифференциальных уравнений
эта система имеет единственное решение (0}, однозначно опре-
деляющее иЛ = 2 °»Ф«(Х)- Умножим (7.10) на daddt, результаты
£ = 1
просуммируем по i=l,..., N и выполним интегрирование по
t' е (0, t). В результате приходим к равенству
i I дтг Г «+i И’ «> - $ (f- тг) + т| Г <°>+i W «»
о
Отсюда, как и при выводе (7.8), получаем
< «А> (О^рл W' + W(0),
где
< иЛ>2(0) =|^||2(0) + Ы2 (0).
Но поскольку
[“л]2 (0) <с[и(0)]2, О 0,
то
< иА> (0 {и|| (Г)dt' + с(Iuw II2 + [u(0)]2)’/2.
о
Следовательно, приближенное решение иА непрерывно зависит от
исходных данных задачи.
»п
ГИПЕРБОЛИЧЕСКОЕ УРАВНЕНИЕ ВТОРОГО ПОРЯДКА
22!
7.3. Оценка скорости сходимости. Чтобы оценить скорость схо-
димости ил к и(х, t), запишем тождества для |л = и —ил:
(ф. ф») (О+[Ва, Ф/] (0=0, 0 < t < т,
(14°), Ф/) = °, (ВЛ(0), ф/) = 0, i = l,..., N,
} 1ГГ +) 1?л’ sr\dt ~
= S ’~dF^u~ dt'+J [?л’ (ы -ы/)]dt' *
N
где u/ = 2 и{х„ i)<pi(x). В результате простых вычислений имеем
i=l
Цфо+ыю-
-|^-|a(0>+[W(0)+2O. 4<«- «,))(/)-
- 2(т-' 4 - "О <°) -2 J О • <“ -"-))Л'+
+2 ([и у-(«-«/)]<#', (7-16)
о
| тг Г ®+1 w w <| Г (°)+[Ы“(0) +
+2|^-|(')|4<“-“'>|«+2|>-|(0>|^-<“-“-)|(0)+
t t
+ 2 $ I I (О) I (« - «/) (^') dt’+ 2^ [gft](и - uz)] dt'.
и И Ч Ч о
При гладких и(1), u{0), и(х, t) имеем неравенства
I I (0 О (h*), |-gr (« - «/) | (0 ^0 (h3),
222
ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ
[ГЛ. 3
а также
= “(1) - 2 uw w) I[(°) °
|%|(0)^О(й2),
[Вл]2 (0) = [Вл, «(о) — «л — “z + Wz] (0) =
Г N
= Вл, И(0)- 5 «(0) (JC,) ф/ (О) + [Вл, и/-ил](0)^
=< [Вл] (0) О (ft) + [Вл] (0) [«/ - «л] (0) =С
^[Вл] (0){O(ft)+f II Mz-Мл 11(0)),
•1 «z - «л II2 (0) = (ill - Uh, Ut - uh) (0) =
= (uz - uh, щ - u) (0) ==S II U[ - uh 8 0 (№),
II «z - uh || (0) =C 0 (h2), [uz - uh] (0) «= 0 (ft).
Из приведенных выше соотношений и (7.16) следуют оценки
скорости сходимости uh к и при Л->-0:
I Г (0+[Вл]2 (0 о (Л1)+О (h2)+с I I (0 ft2+
t t
+ с J|-jA-|(nft2df +4[BAWf, (7.17)
о о
max {| 12 (0 + [Вл]2 (0}’/2 ch,
где постоянная с не зависит от ft.
7.4. Решение системы обыкновенных дифференциальных урав-
нений. Для численного решения задачи (7.13) — (7.15), как и в
случае параболического уравнения, можно применить разностный
метод. Но на практике часто бывает эффективным и метод гар-
моник, который мы и рассмотрим.
Предположим, что матрицы С = В_М и Ст обладают полной
биортогональной системой собственных векторов {cft}, {с*}. Будем
искать a (t) в виде ам — У, a* (t) ck, где аА (t) определим из (7.13)—
Л=1
(7.15) после подстановки в эти уравнения ам вместо а и умноже-
ния их скалярно на eg, ft= 1, .... М. В результате уравнения
5 8Г
ГИПЕРБОЛИЧЕСКОЕ УРАВНЕНИЕ ПЕРВОГО ПОРЯДКА
22?
для определения коэффициентов а* (0 примут вид
+ = d)2
(0) = ^aw, с1)2, ак (0) = (В-Ц0), с*к)г
(7.18>
где А* — собственное число, соответствующее ск. Из (7.18) можно
явно вычислить аА (0:
“а (0 = (^’41). 4)2 cos (УК 0 +
+ (В-1«(о), Са)2 sin (t — /')) +
t
+ $
о
(ё-'F, sin (УК (t-t'))dtr,
(7.19>
м
после чего находим ам = У, а* (0 ак и приближенное решение
А=1
М М
исходной задачи ил, л = 2 ам, / (0 <Р/(*), где <Аи, ; = 2 (0 с*.
1=1 А=1
ск = (ск, 1, ck,N)T. Предполагая ту или иную гладкость f (х, t)
по переменной t и привлекая априорную информацию о поведении
собственных чисел К из (7.19), можно получить оценки величин
ак (0, а значит, и скорости сходимости uht м к и при М-+ N ->оо.
§ 8. Гиперболическое уравнение первого порядка
В этом параграфе будет рассмотрено применение метода Буб-
нова — Галеркина для решения гиперболического уравнения пер-
вого порядка. При этом аппроксимация с помощью финитных
функций будет осуществляться лишь по пространственной пере-
менной. Приближение по временной переменной может быть
выполнено в дальнейшем, так же как и для параболических
уравнений, с помощью разностного метода (или каким-либо дру-
гим методом, по усмотрению пользователя). Отличием излагаемой
здесь методики от рассмотренных ранее является получение
оценки скорости сходимости: сначала оценивается разность между
приближенным решением ик и некоторым интерполянтом «/ точ-
ного решения, а затем выводится оценка разности ик и решения
и(х, 0. Изложение будет проводиться на примере задачи
^+a^- + b(x, l)u(x, t)=f(x, t), (8.1}
и{х, 0) = MwW, (8.2)
224
ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ
[ГЛ. 3
где /е(0, Т), Q = {(x, /): t е (О, Т), хе(0, 1)}, a = const>0,
b (х, t) > 0 — ограниченная функция, f = L2 (Q), um (x)e
eL2(0, 1), (•, •) = (•, в. II• 11 = 11 • k.(o, о- Все функции, в
том числе и искомое решение, предполагаются периодическими
по х с периодом 1. В дальнейшем всегда (если не будет оговорено
особо) предполагается, что исходные данные в (8.1), (8.2) таковы,
что решение и (х, t) достаточно гладкое по всем своим переменным.
Через И?! = №1(0, 1) будем обозначать подпространство из
№а (0, 1), состоящее из функций, периодических по х с периодом 1.
Скалярное произведение и норму в №х обозначим через (•, -)х
и Ц-Ц! = (•, -)’/2 соответственно.
Умножим (8.1), (8.2) скалярно в L2 (0, 1) на произвольную
функцию w е Получим следующие соотношения:
(0 + ам)(04-(&и, ®)(f)«(f, щ)(0,
(8.3)
(8-4)
(и, щ)(0) = (и(О), w).
(Равенства (8.3), (8.4) можно положить, как это делалось в пре-
дыдущих параграфах, в основу определения обобщенного решения
задачи.) Получим для решения и (х, I) априорную оценку. Выберем
в качестве w само решение и проинтегрируем (8.3) по t' е (0, t).
Учитывая, что (ди[ох, и)=0, имеем
[и]*==|и|*(0 + 2$(&и, u)dtf~2\(f, u)dt’ + ^uwf,
о о
2М^- = 2(/, м)<2Ш(0»«1(0’С2|Л(0[м](0.
о о
М(0^и/КО^, + ||И(О)||, (8.5)
о
шах | иЦ (0 + ($ (ри, u)dt\ cfj 171(0^'4-il «(о)|\ (8.6)
Отсюда немедленно следует единственность решения.
Приступим к изложению алгоритма Бубнова — Галеркина.
Введем на отрезке [0, 1] сетку 0 = Хо<хх<...<Х№ 1, Л, ==
— xt — Xj-i, h = max hit Л cx min hit max | hi — hi-t | -C c2h2, и поста-
§ 81 ГИПЕРБОЛИЧЕСКОЕ УРАВНЕНИЕ ПЕРВОГО ПОРЯДКА 225
вим каждому узлу в соответствие базисную функцию (х). Пусть,
ради простоты, это будет кусочно линейная функция:
[ х s *<)>
фДХ)== xe=(xhxM), <8-7')
О, х^Цх^, xi+1),
при 1 = 1, У—1, а для i = 0, i = N в силу условия перио-
дичности справедливо
Фо = фм>
Фм (х) =
X~XN-1
hN
xt—x
hi ’
0,
Хе(ХЛг_1, XN),
хе (х0, Xj),
х (х0, Xi) U (xN_lt xN).
(8.7")
Функции {ф; (х)} принимаются в качестве базиса, и прибли-
женное решение ил (х, t). ищется в виде
N
uh(x, t) = У, а;(0ф,(х), a0(t)=aN(t), (8.8)
i — 1
где af (/) определяются из системы обыкновенных дифференциаль-
ных уравнений
- Ф<) (0 + (« ф-) (0 + Ц>ик, <р,) (0 = (f, Ф/) (0 (8.9)
и начальных условий
(«л. Ф<)(О) = («(о). Ф.), l=sSi«SlV. (8.10)
Уравнения (8.9), (8.10) можно записать в матричной форме:
M~ + Aa + ^a = F(t), 0<t<T, (8.11)
Ма(0)=а(0), (8.12)
где М = (Му), А = (Л/у), В = (Ву), F (t) = (Л (t)...................... FN (t)Y,
Bi(t) = (f, Ф1), O = («j(0» •••» аЛг(О)Г» «(0) = (a(0),l> •••»
a(o)j = («(O), Ф<). Я/ = (фь Ф/), Ф/)> 5У = (^Фь Ф/)-
8 Г. И. Марчук, В. И. Агошков
226 ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ [ГЛ. 3
Легко заметить, что матрицы /И и А имеют вид
Матрицы Л4 и В симметрично и
положительно определенны:
(Ma, a)2^~mmhi J al^-~ J 4,
(Ba, а)^ (min b (х, t)j ~ al,
(8.13)
матрица А удовлетворяет соотношению (Аа, а)2 = 0. В силу отме-
ченных свойств матриц система (8.11), (8.12) имеет единственное
N
решение a(t), однозначно определяющее «*=51 (О ф/ (*)•
< = 1
Исследуем теперь оценку погрешности uh — u = l/l(x, t). Вве-
N
дем интерполянт точного решения Ui(x, 0=5 н(*ц 0ф<(*)» Для
i = l
которого в силу свойств кусочно линейных функций (см. § 2 гл. 2)
имеем
sup vrai \\u-ui ^(о. i> < О (/i2) sup vrai | II ,
t t II ил 1И-оо<0. I)
Л ди ди. I II d^u [ I®- И
sup,vra,k - ТГ L«. о «о Wsup,vrai „•
§ 8)
ГИПЕРБОЛИЧЕСКОЕ УРАВНЕНИЕ ПЕРВОГО ПОРЯДКА
227
Рассмотрим более внимательно разность gz = u —uz на интервале
(«/-!, Xi). Учитывая, что (u —uz)(x,-, t) — 0, имеем (при некоторых
Пь П» е fa-i, xt))
dl,
(x, t) = & (xh t) + (x - Xi) (Xi, t) +
(x — x.)2 dai, (x—x.)3 d3^,
+ -4^-^’ + 0 =
. . du , 1 f du . , „ , , \ . (x—Xi)2 d2u . л ,
— (X — Xi) ( ~g^ (Xi, t) — g^ (X , t) dx I + 2 gx2 (Xi, f) +
\ XZ~1 /
= (X- Xi) (Xi, t)-^ (Xi, t) + (Xl> t) +
+O(^ + -^=^^(Xl, /) + <^=p2ig(n/> 0 =
= (Xi, t)+O (hi). (8.15)
Аналогично получаем
/du du,\ (x—x.)(x—x.,) dsu
2 -от<8Л6)
Запишем следующие равенства для точного решения задачи:
Ч‘} + (а1х’ 4i) + (bu'> Ф/) + еь (8-17)
где = (ui-u), Ф/j + {а^(«/-«), Ч^+ОНщ-и), ^i), i=l,...
..., N. Поскольку
(Д («/-«), ф/) = -(«/-«, ^)=
1 ? 1 V
= “ л; 3 (Ui-u)dx + i^_ (Ut-u)dx,
xi-i +‘ “i
8*
228
ПОСТРОЕНИЕ ПРОЕКЦИОННО СЕТОЧНЫХ СХЕМ
[ГЛ. 3
то, учитывая (8.15), имеем
/ д \ М дги hl , । д2и
\дх ^Ut ~U^' ф,7 = 12 di? ^Xh 12- di? ° ~
= (Хо t)+о (h9),
!(£(“/-“)» ф<) | №)
Следовательно,
|ej ^0 (h9), i = l, ..., У. (8.18)
Кроме (8.17) из (8.4) получаем аналогичные равенства:
(«/, = b + <р,), (8.19)
где £, = («/ —и, <р,) (0), | & | >sS О (/is).
Запишем систему, которой удовлетворяет функция л = Ui — uh
и которая вытекает из (8.17), (8.19) и (8.3), (8.4) после вычита-
ния соответствующих уравнений:
/ SL . \ / 5L . \
[ Qt > Ф«у + \а > Ф'у + ffii. л> Vi) = е«»
(?/.Л, <p<)(O)=az, /=1,..., у.
Умножая последние уравнения на и(хг, /) — «,(/) и складывая их,
получаем
(%-, 5/,А) + (а-%Ч 5z.a) + №.a, ?/,л)= 2 е/(“(^> 0-fli),
i = l
«W(0)= 5 ^(«wW-aiW).
i = l
Отсюда, как и при выводе (8.5), следуют равенства
t / n \
[1лАу (9 = 2$ £ в, (и(хг, /') -at (Г)))dt’ + II?z,ЛIf (0),
о \« = i /
[а/.А]-^г1=2е' (ы(Х/’ ^~а^-
§ 81
ГИПЕРБОЛИЧЕСКОЕ УРАВНЕНИЕ ПЕРВОГО ПОРЯДКА
229
Однако
N
У 8i(«(Xi, O-Oi(0) -SS
Z=1
\ 1/2 / ^
У e?Az) I У
\1/2
|S I
II N II
II ?/, л II (0) = il И/ - Uh II (0) = У, u(0) (Xi) (Pi - uh (0) «=
lj i в 1 II
N 11 '
У ы(0) (xi) ф< — W(0) (x) + II U(0) (x)— WA||(O)=^
Z=1 II
II N II
•C 2 u(0) - у u(0) (X,-) Ф/ «S О (h?).
Следовательно,
[ ё/. a] d-^ ch? II Iz. aII (0 ch? [Sz, a] (0.
- ch?, [Iz, a] (t) - Ch?t + [gz. a] (0),
Rz, a] (O =< Ch?t +1| gz, A II2 (0) =< Ch? (t + 1),
/Г \l/2
sup vrai || uz - uh ,| (0 + \
о«5/<т \q
(8.20)
Чтобы получить оценку для u — uh, достаточно воспользоваться
неравенством треугольника [и — ил]«с[м — «zj + [uz — ил]'
/т \1/2
sup vrai 1| и — «л 11(0 +Ц (b(uh — и), uh — u)dt\ ^ch?. (8.21)
о ss t < т \п /
Последняя оценка и является результатом, который мы стреми-
лись получить.
Дальнейшая реализация всего алгоритма состоит в численном
решении задачи (8.11), (8.12). Это можно осуществить каким-либо
подходящим методом, одновременно оценив допускаемую на дан-
ном этапе погрешность.
Пример 1. Построим двухслойную неявную схему на равно-
мерной сетке tj = /т, x = T/J, для решения (8.11), (8.12) и докажем
ее устойчивость и сходимость приближенных решений к точному.
230
ПОСТРОЕНИЕ ПРОЕКЦИОННО СЕТОЧНЫХ СХЕМ
[ГЛ. 3
Одна из возможных схем имеет вид
Моо = а10),
(8.22)
порядок ее аппроксимации есть О(т) на гладком решении.
Для доказательства устойчивости умножим скалярно уравнения
схемы на а,-. Учитывая, что (Аа.-, аА = 0, и вводя обозначения
UA,/ = 2 ai’ i Ф< (Х)> иМееМ
<=1
(MaJt af)t+r(8aj, aj)2 = r (F (tj), ay)2 +(Л4аЛ1> ay)2,
||Мл./||2 + т(ЬиЛ.у, ИА.у)=Т(/-(/у), Uft,/) + («*,/-!• Uh,j),
8 Ил, / F + T (buh, J, Uh, j) =C (T (I f (tj)] + I Ил, y-1 II) I Ил, / II,
(II «л, j F + T (Ьил, /, Ил. y))1/a T If (tj)] + II Мл, y-i II =C...
...^tj max |/(^)| + (8ил,оР+т(Ьил,о. «л,о))1/г.
1 </«5 J
(luh.jfA-^(buhj, Uhj))1^
^tj max O+cfll“(o)F+t(buw, uto)))1/2,
1 < i < J
что дает нам устойчивость схемы.
Из устойчивости и аппроксимации получаем сходимость ил /
к uh(ij)= У, И/ (^/)ф«(х) при т->0, причем тах||ил,у —Нл(/у)||^О(т).
i=i I
9. Численное решение интегральных уравнений
Многие задачи математической физики приводят к решению
интегральных уравнений, к которым с успехом могут быть при-
менены проекционно-сеточные методы. Пусть, например, в гиль-
бертовом пространстве Н со скалярным произведением (•, •) и
нормой || • | = (•, • )1/2 рассматривается уравнение
u = KuA-f, f<=H, (9.1)
где К — интегральный оператор, определенный на всем простран-
стве, с ограниченной нормой, ||/(||<;оо. Предполагается, что это
уравнение однозначно разрешимо при произвольном элементе fe Н.
Применим для решения (9.1) метод Бубнова — Галеркина.
Согласно этому методу выберем в Н некоторый базис {<рг} и будем
§ 9J
ЧИСЛЕННОЕ РЕШЕНИЕ ИНТЕГРАЛЬНЫХ УРАВНЕНИЙ
231
искать приближенное решение в виде
N
uh=XaM‘’ (92)
i=0
где а,- определим из системы алгебраических уравнений
(«л, ф/) = (КиА> <pz) + (/, ф,), i = 0, 1.N, (9.3)
или, в матричной форме,
Ма = Ka + f, (9.4)
где М = (Му), = фу), а = («о, «1......... aN)T, К = {Кц),
Кц = (К<рь Ф/), / = (А>, А..fNy, = ф<), А / = 0, 1...N.
Вычисляя элементы матриц М, К, и компоненты вектора f и
решая систему (9.4), можно определить вектор а, а значит, и
приближенное решение uh.
Одной из трудностей в приведенном алгоритме является то
обстоятельство, что матрицы М и К в (9.4), вообще говоря,
плотные (если только в качестве базиса не выбрать собственные
функции соответствующей (9.1) задачи на собственные значения,
предполагая при этом ортогональность этих функций), и, до того
как начать процесс решения (9.4), приходится затратить некото-
рый объем времени ЭВМ на вычисление ~ № элементов матриц,
представляющих собой многократные интегралы. И если базисные
функции {<pz} не обладают конечными носителями, то задача
вычисления М и К будет достаточно трудоемкой. В то же время,
если функции {<pf} финитны, то отмеченная выше проблема нахо-
ждения элементов матриц М, К упрощается.
Если при рассмотрении многомерных задач, помимо трудностей,
связанных с вычислением элементов матриц М, К, возникает
проблема их хранения в памяти ЭВМ, то использование функ-
ций {фД с конечными носителями может также помочь обойти
эту трудность, так как если затраты времени ЭВМ, необходимые
для отыскания элементов матриц М, К, приемлемы по объему,
то можно вообще отказаться от их хранения, а применить для
решения (9.4) подходящий итерационный процесс и вычислять
элементы матриц М, К заново на каждой итерации.
В силу отмеченного выше уже можно сделать определенные
выводы об удобстве применения проекционно-сеточных алгоритмов
для численного решения (9.1).
Обратимся к вопросу сходимости uh к и при N ->оо. Если
предположить полную непрерывность оператора К., то согласно
теории метода Бубнова — Галеркина, изложенной в § 3 гл. 1,
232
ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ
[ГЛ. 3
для погрешности и — uh справедлива оценка
и w
|| и — uh J e(u, N)=c\ni и — У, сгф,-
ci II >=о
(9.5)
где 8 (u, N)-*-0 при W->oo, откуда, в частности, следует сходи-
мость Uh к и при NЯвный вид оценки скорости сходи-
мости (9.5) можно получить, задавшись конкретным видом К, f
и базисных функций {ф(}. Отметим, что часто для повышения
скорости сходимости uh к и можно воспользоваться приемами,
изложенными в гл. 1 (выделение и учет особенностей решения
при построении {ф,} и т. п.).
Проиллюстрируем изложенное выше на примере так называе-
мого уравнения Пайерлса
т
и(х) = ~ $ (1Х~21) (b(z)u(z)+g(z))dz,
О
(9.6)
которое можно записать в виде (9.1) при H — L2(G, Т), Ки =
т т
= ~[Ei(\x-z\)bu (z) dz, f (x) = у (| x - z I) g (z) dz.
о 0
Функция Ex (x) является одной из специальных функций Еп (х)
вида
„ . . е~х с / \ F е~ху j 1 п
Ео(х) = — , Еп(х)=\--^у, м=1,2, ...
л J У
1
Отметим некоторые их свойства:
£ло)=„4т »>|,
^1 (*) = Со— lnx +j—— 272! + 3?3! — •• • •
Со ^0,5772, Е2(х) = х(£0(х)-Е,(х)).
Предполагается, что 0^6(х)<1. Кроме того, ради простоты
пусть в дальнейшем b — постоянная, a g (х) — кусочно постоянная
функция с конечным числом разрывов в точках xit i = 0, 1, ...
..., I, /4-1, хо = О, х1+1 — Т. Известно, что оператор К в (9.6)
вполне непрерывен, а само уравнение однозначно разрешимо [47].
Рассмотрим свойства гладкости решения и (х), которые будут
полезны ниже при построении базисных функций и изучении
скорости сходимости. Доказано, что при сделанных выше огра-
ничениях решение уравнения (9.6) обладает производной du/dx е
§ 9]
ЧИСЛЕННОЕ РЕШЕНИЕ ИНТЕГРАЛЬНЫХ УРАВНЕНИЙ
233
еЦО, Т), 1=Ср<оо, которая представима в виде
1 +1
Й = Wn|x-^| + Vi(x) + V2(x),
А = 0
(9.7)
где F(x) = bu(x)+g(x), [Е]; = F (xz —0) — F (Я, + 0), F (%0 — 0) =
= F (Я/+14-0) = 0, Vi (x), V2 (x) — некоторые функции, причем Vi (x)
имеет почти всюду ограниченную производную dV-Jdx (0, Т),
a Vz (х) при любых х, х' е [0, Т] удовлетворяет соотношению
I V2 (х) - V2 (х')| с | х - х' | (1 4-1 In | х - х' 112) (9.8)
с постоянной с, не зависящей от х, х', и (х) [39].
Имея определенную информацию о свойствах решения задачи,
обратимся к выбору конкретных базисных функций q>f(x). Пусть
на [0, Т] введена сетка O = xo<.x1<Z...<Zxjv = T, hi — Xi — Xi-i,
часть узлов которой совпадает с точками i = 0, 1, ..., / + 1.
Предполагается, что сетка квазиравномерна и выполнено условие
h^cmaxh{, где h — T/N. Зададим на введенной сетке для опре-
i
деленности кусочно линейные нормированные базисные функции
q>i(x), i = 0, 1.N (см. § 2 гл. 2):
<₽/(*)= 7^.
х е (Х/-1, Xt),
х €= (ХЬ Х/+1),
X^(Xi-lt хм).
Если затем искать приближенное решение (х) в виде (9.2), то
приходим к системе (9.4), в которой
т т
fi = ^ § <Р/ (х) dx J g (г) Ei (| х - z I) dz,
d о
т
Mij= <p( (x) q>7- (x) dx,
о
т т
Kij = У § (X) dx \ <py (г) El (I x - z I) b dz.
о 0
Вычисление элементов ft, MtJ, Кц можно осуществить явно, если
воспользоваться соотношением dEn/dx = — E„_i (х), или привлекая
простейшие квадратурные формулы. Решить систему (9.4) можно
с помощью подходящего итерационного алгоритма, учитывая сим-
метричность и положительную определенность матрицы М. — К,.
Для оценки скорости сходимости uh к и при h = T]N ->0
воспользуемся неравенством (9.5) и аппроксимирующими свой-
234
ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ
[ГЛ 3
ствами кусочно линейных функций (см. § 2 гл. 2). Однако заме-
чаем, что в данной задаче решение не обладает суммируемой
с квадратом второй производной. Поэтому точное решение и(х),
вообще говоря, нельзя приблизить линейной комбинацией кусочно
линейных функций с погрешностью 0(h2). Однако здесь легко
получить оценку порядка (О h3/2). Действительно, пусть выбрана
м
функция «/= У и (xi) Vh (pi(x). Тогда, рассматривая погрешность
»=0
u — Ui на интервале (0, hi), имеем
ht hi х hi
^\u-u^dx= j dx ± j dx' j ^r-d-^P)dx"
0 0 0 0
Отсюда, воспользовавшись разложением (9.7), получаем соот-
ношение
fi,
hi х hi 2
и — «/ j2 dx^O (hl In4 hi) + ? dx ~ ( dx' ? (In x' — In x") dx"
J “1 J J
0 0 0
1
= О (hl In4 hi) + hl y2 In2 у dy — О (hl).
о
Аналогичная оценка порядка О (h3) справедлива для интеграла
от | и — U] j2 по окрестности любой из точек Яг, т. е.
х. 4- h
| и — |2dx=C О (h3).
х. — h
Замечая, что внутри интервала (%i-i, х,) при приближении,
например, к точке вторая производная от и (х) ведет себя как
[Г]//(х — хс), получаем
|ы-и/|Мх<0(/г4) О(Л4)О(-‘) = О(/13).
*i-i+h *i-i+h
В итоге имеем оценку аппроксимации
||Ы-Ы/|^О(йЗ/2).
Значит, согласно (9.5) справедлива оценка погрешности
Ju-M<O(/i3/2) (9.9)
при h = T/N —> 0.
Видоизменим несколько алгоритм отыскания приближенного
решения и учтем то обстоятельство, что некоторые из особенно-
§ 9)
ЧИСЛЕННОЕ РЕШЕНИЕ ИНТЕГРАЛЬНЫХ УРАВНЕНИЙ
235
стей поведения производной du/dx нам известны. Для этого
построим функцию, которая в узлах сетки равна нулю, а произ-
водная от нее имеет особенность вида In | х — х* | в окрестности
узла xk. Примером такой функции может быть
Фл(х) = $ ln|g-^|dg-(x-Xy_i)x*,/-U2.
Ъ-i
XG (Xy-j, Ху), /=1........W,
где
Xi
= J ln||--S*|dg, / = JV.
*/-i
Используя эти функции, построим линейную комбинацию
/ + 1 ' N
“i (X) = 2 Ф* (х) 4- 2 «/Ф/ W. (9.10)
Jfe = 0 / — о
в которой примем aj = ]fh и (xj).
Оценим разность и — и{. Пусть хе(ху, х,+1); тогда и — и; =
/+1
= 8 (х) — 8Л (х), где е (х) = и (х) — 2 ф* (х) [^л/2, 8Л (х) = ]/й и (х/) X
_ fe==0
Хфу (х) + J/A и (Xj+1) фу+1 (х). Поскольку 8 (Ху) =8* (Ху) И 8Л (х) ЛИ-
нейна на (ху, Xy+J), то
х */+1
Ы(х)-«/(х)=^? Jdx' 5 (^l_^L)dx" =
*/ *у
х */+1 (Г I +1
= l_\dx4 dx" 1 У [F]Jn|x'-^| + V1(x') + Va(x')-
Л/+1 /у 4 (L2 й)
/+1
— 2 (ln ।х’ - । - Х*./+1/а) —
fe=0
/+>
- |2[Flftln|x"-^| + lzi(^) + V2(x")-
-
/4-1 “ "j
- 2 -фЧ1п|х"-^|-Хм+1/2) =
k—0 JI
(f *4+1
= i Г%' J (Vt (x') - V, (X") + V 2 (X') - V. (x")) dx".
/+1 xi xi
236
ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ
[ГЛ. 3
Следовательно,
| и (х) — (х) | < О (Л2 In2 h), хе (ху, Xy+i),
II и — щ || sg О (h* In2ft).
(9.П)
Итак, линейная комбинация U[ аппроксимирует точное реше-
ние, причем справедлива оценка (9.11). Функцию М/можно запи-
сать также в виде
N
и, (х) = Ф (х) + 2 а/Ф/ (х), (9-12)
/=о
/+'
где а} = Vhu (xj), Ф (х) = 2} (•*),
*=о
Ф* (х) =
<Р» (*) +ДгтФ* (х), если хи — точка
разрыва коэффициентов,
ср* (ft), если xft y=xz, i = 0, 1,..., 7 4-1.
Но по предположению b постоянно и и (х) непрерывно; по-
этому в данной задаче <pft будет отличаться от <р* лишь при
ft = 6, N:
Фо (х) = Фо (х) - &ф0 (х)/(2’Кй), флг (х) = <pjv (х) 4- ftip.v (х)/(2 ),
Ф/ (х) = ф/ (х), j = 1, ..., N - 1.
Легко заметить, что функции {ф*} линейно независимы. Из (9.12)
заключаем, что приближенное решение uh можно искать в виде
N
Uh (х) = ф (х) 4- у, а*ф* (х), (9.13)
t=o
где ak определяются из системы уравнений
(uft, фу) = (КиА, Ф/)4-(А Фу), 1=0,1.....N, (9.14)
которую в матричной форме можно представить в виде (9.4), где
фу), Ку = (Кф(, фу), /,= (/, Ф,)-(Ф, ФО 4-(КФ, ФО,
i, j = 0, 1, ..., IV. Из (9.5) и (9.11) следует, что для приближен-
ного решения uh, построенного в виде (9.13), справедлива оценка
||ы-ыЛ|К0(й21п2й) (9.15)
при Л->0.
Таким образом, путем модификации базисных функций с целью
учета особенностей решения построено приближение нЛ, сходя-
щееся к ы(х) при ft->0 быстрее, чем при использовании обычных
кусочно линейных базисных функций. При этом мы учли особен-
§ 10] НЕКОТОРЫЕ ВОПРОСЫ ЧИСЛЕННОЙ РЕАЛИЗАЦИИ 237
ности решения без увеличения числа базисных функций (сравните
с методом введения сингулярных функций), и коэффициенты Я;
при базисных функциях {фу (х)} имеют прежнюю физическую
интерпретацию, т. е. a] = uh(x1)}/rh.
§ 10. Некоторые вопросы численной реализации
проекционно-сеточных алгоритмов
10.1. Численное интегрирование. Одним из основных этапов
численной реализации проекционно-сеточных алгоритмов является
вычисление элементов матриц и правых частей возникающих
систем уравнений. Иногда удается найти их точно, однако если
подынтегральное выражение является полиномом достаточно высо-
кой степени и область интегрирования представляет собой много-
угольник нерегулярной формы, то задача непосредственного
интегрирования затрудняется. Поэтому часто целесообразно поль-
зоваться методами численного интегрирования. Такой подход
обладает рядом преимуществ в силу следующих обстоятельств,
присущих проекционно-сеточным алгоритмам.
Пусть задача рассматривается в области Q. Тогда разбиение Q
на конечные элементы Q, можно осуществить так, чтобы подын-
тегральные функции на каждой подобласти Q, были достаточно
гладкими, в силу чего погрешности от применения подходящих
квадратурных формул для интегрирования по Q,- можно оценить
явно и добиться, чтобы эти погрешности были меньше любой
наперед заданной величины.
Кроме того, в проекционно-сеточных алгоритмах становится
удобным следующий подход к вычислению интегралов. Если на Q,
интегрируемые функции достаточно гладкие, то их можно прибли-
женно заменить кусочно полиномиальными функциями и после
этого вычислять интегралы уже от этих функций с помощью
квадратурных формул. Здесь погрешность просто оценивается
с помощью теорем аппроксимации из гл. 2. Отметим также, что
использование численного интегрирования для вычисления эле-
ментов матриц, правых частей систем и т. д. способствует авто-
матизации процесса приближенного решения всей задачи при
использовании ЭВМ.
Рассмотрим несколько квадратурных формул, которые могут
быть использованы для вычисления интегралов. Обратим внимание
на то, что наиболее популярными формами конечных элементов
являются отрезок, треугольник, четырехугольник. Поэтому рас-
смотрим квадратуры лишь для отрезков, треугольников и четы-
рехугольников регулярной формы, так как распространение их
на треугольники и параллелограммы нерегулярной формы можно
осуществить с помощью соответствующих замен переменных
(см. § 8 гл. 2).
238
ПОСТРОЕНИЕ ПРОЕКЦИОННО СЕТОЧНЫХ СХЕМ
[ГЛ. 3
I. Приведем формулы для вычисления интеграла
Л = J f (х) dx.
(Ю.1)
Формула прямоугольников имеет вид
(10.2)
где Х{ — произвольная точка из [Х/-1, xi]. Погрешность формулы
удовлетворяет оценке
| 11 - h | «S -Imax
• *<= Гг.
(10.3)
Если применение формулы вносит большую погрешность, то можно
отрезок интегрирования pQ-i, xf] разбить на более мелкие интер-
валы, введя сетку xl^1 = xi, о <*7. i<- • .<хг> м — Xt, и на каждом
интервале применить формулу (10.2). Выражение для вычисле-
ния Ц имеет вид
Л1 xi, h М
У| 5 f (^) ‘ = (^’. f fe)’
‘“Чм 1=1
где Я/, * —произвольная точка из [х/т *_], xf, *]. При этом
I xi, k Xj, k-i I2
2
max
*i,*l
I
I dx
max (X._x. j max |*L|. (Ю.4)
fe = l, ...,M z te *il a*
Отметим, что если в (10.2) в качестве X, взять середину
отрезка, т. е. Xi^=(xi-}-Xi-.1)/2, то формула (10.2) становится
точной, если f (х) — полином первой степени, причем
Л 1) fa - хг_1) | sg | х. - Xf-i |3 max
I
I dx* I
Формула трапеций имеет вид
zi=^Li(/(xi)+n^-i));
ее погрешность удовлетворяет оценке
12
(10.5)
(10.6)
§ ю)
НЕКОТОРЫЕ ВОПРОСЫ ЧИСЛЕННОЙ РЕАЛИЗАЦИИ
239
Формула точна для полиномов первой степени. Если для повы-
шения точности воспользоваться разбиением интервала (х{^, xi)
на более мелкие интервалы, то формула трапеций принимает вид
м
h = 2 (/ (*/, а) + / (X/, А-1)) (10.7)
А=1
с оценкой погрешности
1Хг~*г-г1 max I Xi. k - Xi, k-r I2 max (10.8)
Формула Симпсона имеет вид
Л=^^(/(хг-1) + 4/(-Ц^) + /(хг)); (10.9)
при этом
<10-10)
Формула точна для всех полиномов третьей степени. Благо-
даря простоте и сравнительно высокой точности формула Симпсона
очень часто используется в вычислениях.
Приведем еще одну широко используемую квадратурную
формулу.
Формула Гаусса имеет вид
п.
(10.11)
4 = 1
где
а веса Д/; и узлы у* для нескольких значений п имеют вид
п — Г. У1 = 0, Xi = 2;
п = 2: —Vj = у2 = 0,5773502692, Д1 = Д2 = 1;
п = 3: —V1 = у3 = 0,7745966692, у2 = 0,
Ai = Ая = 0,5555555556, А2 = 0,8888888889;
л = 4; —у, = у4 = 0,8611363116, —у2 = у8 =0,3399810436,
Дх = А4 = 0,3478548451, Да = Д3 = 0,6521451549.
240
ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ
[ГЛ. 3
Погрешность этой формулы имеет оценку
+ 1 ((2л)1)Ц 2 J ^2Я Г °’ 2
Формула точна для случая, когда интегрируемая функция f (х)
есть произвольный полином степени 2п — 1.
Рассмотрим теперь несколько квадратурных формул для случая
двух переменных.
II. Для построения квадратурных формул вычисления инте-
гралов
Xi У/
1у = 5 dx $ f(x, y)dy
xi-i y/-i
используется повторное применение квадратур для случая одной
переменной. Применим какую-либо квадратурную формулу к
внешнему интегралу:
xi yj N У/
J dx J f (х, y)dy^^ An j /(x„, y)dy,
xi-i «j-i n=I »/-i
где xrt e (x;_b x^, а затем для вычисления jj f (x„, y) dy восполь-
y/-i
зуемся формулой
У/ м
5 f(xn, y)dy^ 2 Bmf (xn, ym).
yj-i m=I
В результате получаем выражение для приближенного вычисле-
ния /у.
N М
1ij яа /у — 2 2 Cnmf (хп, Ут)> (10.13)
n=l m==i
ГДе С пт ”
Если первая из квадратур при выводе (10.13) точна для одно-
членов хк, k — 0, 1, ..., Pi— 1, а вторая точна для одночленов
у1, 1 = 0, 1, ..., Pi— 1, то формула (10.13) будет точна для всех
одночленов вида хку‘, где k = 0, 1, ..., — 1, / = 0, 1, ..., Р2 — 1.
Оценка погрешности \1ц — может быть легко получена на
основе соответствующих оценок для одномерного случая.
Приведем две формулы типа (10.13), полученные с помощью
формулы прямоугольников и формулы Симпсона, причем интегри-
§ 10] НЕКОТОРЫЕ ВОПРОСЫ ЧИСЛЕННОЙ РЕАЛИЗАЦИИ 241
рование по х и у осуществляется по одной и той же квадратуре:
hj = (xt - Xi-J (yj - yhl) Ц-2—> —2—) (10> 14)
/.y= у^ + Цх.^ y/) +
+ f(xh y^+ftXi, й) + 4[/[хн, —2~) +
f / */+-4-1 \ J xi + xi-i \"| cff xi+xi-i У/ + У/-1\\
+1 -----2 ’ ) + Ц---2---’ Vi}\ + 1W \--2--’ 2 • Д •
(10.15)
Как и выше, можно получить квадратурные формулы для
случая большего числа переменных, а также в случае, когда
интеграл /, имеет вид
ч>2 (*>
Ц — $ dx $ / (х, у) dy,
xi-! Ф1
т. е. когда область интегрирования Q ограничена линиями
х = х,-_1, x — Xi и двумя кривыми z/i = (pi(x), y2 = q>2(x).
III. Для вычисления интегралов
/ = ^/(х, у) dxdy,
где Q —некоторый многоугольник, используются
формулы, полученные непосредствен-
но для данной области Q.
Пусть, например, Q есть равно-
сторонний треугольник с радиусом
описанного круга h и с одной из
вершин Ро = (хо> Уо) на оси Ох (рис.
50). Через Pm = (xm, ym) обозначим
центр тяжести треугольника, который
совпадает с началом координат. Для
построения квадратурной формулы
12
AMPml + Z Aif(Pi)
1 = о
квадратурные
Рис. 50.
(10.16)
достаточно применить метод неопределенных коэффициентов —
с его помощью находим веса Ат — 9/12, А0 = А1 = Аг= 1/12.
В результате формула (10.16) принимает вид
7=фл2[^/(0, + 0)+/(-|,Ц^) +
242 ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ (ГЛ. 3
причем
|/-7|<О(/г6). (10.18)
Если ввести еще три точки Р,= (хг, yt), 1 = 3, 4, 5, являю-
щиеся серединами сторон треугольника, то получим более точ-
ную квадратуру:
7=фЛ»[27/(0> О) + 63о(/(/г, 0) + /(-4,^р) +
. .( h й/з'А , 8 IJh й/з\ , fl h \
+ц-т’ “~о+бтт’ —г/+Ц~ 2- °; +
+ /(4.Ц^))] (10.19)
с оценкой погрешности
| I-l\ ^O(he). (10.20)
Формула (10.19) точна для полиномов третьей степени.
Аналогично можно построить квадратурные формулы, более
точные по сравнению с рассмотренными выше, и для случая
большего числа переменных.
Проиллюстрируем применение квадратурных формул на при-
мере решения задачи
— р>0, q^0,
' dx 1 ' /v 7 f » (10.21)
м(а) = м(Ь) = 0.
Предположим, что p(x), q(x), f(x) — кусочно гладкие функции
с возможными разрывами первого рода в точках {Хк}, совпадаю-
щих с частью узлов сетки {х,}.
Пусть приближенное решение мл строится с помощью кусочно
линейных базисных функций {ф((х)} и метода Ритца. Коэффи-
N — 1
циенты at в разложении uh — У (х) находятся из системы
f=i
Aa = f, (10.22)
где А = (Ау), а = (аг..а^)г, f = .... /лг-1)г- Для опреде-
ления решения системы необходимо вычислить
\ f(x)q>i(x)dx,
-I \ ил иЛ /
aif ai
£1у = (а, b) П supp (p;n supp фу, Q, = (a, Ь)П5иррф,-:
матрица А трехдиагональна — ненулевыми будут лишь элементы
Дм-ь Ац, Aiii+1.
§ ю]
НЕКОТОРЫЕ ВОПРОСЫ ЧИСЛЕННОЙ РЕАЛИЗАЦИИ
243
Будем различать два случая. В первом считается, что на
любом интервале xt) известны значения функций р (х), q(x),
f (х) в каждой точке х е (хм, xf) (или по крайней мере в точках,
нужных нам для проведения численного интегрирования). Во
втором предполагается, что заданы лишь значения p(xt), q(xt),
f(xz), i = 0, 1, ..., N (в точках разрывов заданы два значения
этих функций). И здесь для выполнения интегрирования будем
на узлах, принадлежащих каждому из интервалов (%к, ЯА+1),
строить интерполянты p[t qr, fr и затем уже пользоваться ими
для вычисления Ау и ft. Проиллюстрируем первый случай на
примере вычисления Ау, а второй —на примере вычисления ft.
Если предположить, что значения р (х) и q (х) заданы не только
в xi, i = 0, 1, ..., N, но и в точках xi+V2 = (х,-+ х,+1)/2, то для
приближенного вычисления можно воспользоваться, например,
формулой Симпсона (10.9). Предполагая базисные функции нор-
мированными, т. е.
X — Xi_y . ч
—. ^е(Х,-1, X,-),
xi+l — X / X
, xe=(xh ХМ)9
0, х (х,_1, х/+1),
(10.23)
где h — (b — a)/N, hi = xi — xi-1, max ch, получаем
t
xi+l xi+l
A<,.+i = J P(x^^rdx + J q(x)(Qi(x)<fa1(x)dx =
xi xi
V1 У1
= ~ ir~h j p(x)dx+} q (*) <pi (*) Ф/+1 (*)dx ™
‘+ 1 X[ Xi
-Sir? [№• (P (*<+0)+4P +P - 0)] +
+ —6~ L4<? Hr-) 4/d+0 \f^h) -
Таким образом,
i+l Д/!\+i =
_ p (x,+0) + 4p («,.,-0)
~ 6hhi+1 6Л 4{~ )'
при этом
|Дм+1-Д(Л+1|<0(П (10.24)
Аналогично вычисляются выражения для Ац, Ау/-!.
244
ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ
[ГЛ. 3
Найдем ft. В данном случае мы условились воспользоваться
каким-либо интерполянтом Пусть это будет интерполянт, по-
строенный с помощью кусочно линейных функций, т. е.
fl (*) = f (Xi) + f (X,-1)
при xe(x,-_1, xt). Из § 2 гл. 2 известно, что || f — fi||z, (a, b/
CO(h2). Теперь в качестве fi = (f, ф4 можно приближенно взять
значение
х, x/+i
= ф«) = //(х)фДх)^ + 5 fi(x)<pi(x)dx.
Для вычисления интегралов воспользуемся формулой Симпсона.
Эта формула точна для полиномов третьей степени, значит,
предполагая ради простоты, что f (х) на (хг_ь xi+1) не имеет раз-
рывов, получаем
5 fi(x)q>i(x)dx =
i-1
= Гf (хн) 04-4 + 1
6 [ V 2 2yh
7+i
J fl (X) ф; (X) dx =
__ xi+l Xj
6
Следовательно,
11.. x 1 । л f (*/) 4- f (xi+i) 1 if/.. \ «1
f (Xi) w 4- 4----------------------4- f Ы 0J.
Zi ~ Z<e>. f (Xi) + f + f (XM),
j+\,-(x)dx<O(^)^t^i. (10.25)
Полагая A Xe = (4^), /^/е = (Ле).....f(N-\)T и решая систему
Aeae = fe, (10.26)
приближенно полагаем a₽wae = (aje), ..., адр_1)г, а также uht=&
N-l
а|8)Ф, М-
< = 1
10.2. Устойчивость. Одно из преимуществ проекционно-сеточ-
ных методов заключается в том, что они приводят к системам
уравнений с симметричной, положительно определенной матри-
§ 10] НЕКОТОРЫЕ ВОПРОСЫ ЧИСЛЕННОЙ РЕАЛИЗАЦИИ 245
цей, если такими свойствами обладал оператор исходной задачи.
Поэтому, если устойчивость понимать в смысле непрерывной зави-
симости приближенного решения от исходных данных, то, как
правило, здесь проблемы нет и устойчивость имеет место. Если же
понимать устойчивость в смысле определения 2 из п. 9.4 гл. 1 и
сходных с ним определений, то в этом случае приходим к необ-
ходимости условия равномерной линейной независимости или
сильной минимальности базиса {ср,}. Нередко выполнения одного
из этих свойств для кусочно полиномиальных базисов можно
добиться, введя нормировку и наложив определенные ограниче-
ния на сетки. Однако в ряде задач в областях с криволинейной
границей проблема устойчивости более трудна для решения, и
это требует построения специальных сеток около границы, введе-
ния криволинейных элементов и т. д. И если в результате удастся
получить базис, удовлетворяющий одному из отмеченных выше
свойств, то проблема устойчивости вновь будет решена.
Одновременно с исследованием алгоритма на устойчивость
можно получать оценки погрешностей, вносимых численным инте-
грированием в искомое приближенное решение. Рассмотрим,
например, задачу (10.21) и алгоритм ее решения, изложенный
в п. 10.1. В результате вычислений получаем
N— 1
млЕ) = а;(еЧ W-
Чтобы оценить погрешность uh — u^\ обусловленную числен-
ным интегрированием, заметим, что функции (10.23) удовлетво-
ряют условию равномерной линейной независимости, т. е.
АГ —1
d0 У
г = 1
АГ — 1
У, q<p/
1 = 1
d0, di 0.
Следовательно, алгоритм решения задачи устойчив в смысле опре-
деления 2 из п. 9.4. гл. 1. Далее, по лемме Гершгорина (см. [23],
стр. 208) в силу (10.24) имеем
IV —1
IIЛ — Ле||2^гпах |
‘ fe = i
Л;,А-Л%|<0(/12),
а также
246
ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ
[ГЛ. 3
Тогда, учитывая эти оценки и определение’ устойчивости, полу-
чаем неравенство
Таким образом, принятое выше приближенное вычисление A, f
привело к дополнительной погрешности такого же порядка, как
и при замене точного решения и(х) на uh(x). Но, как доказано
в § 1, j и — uh Ц£,(а. ft) сеО (h2). Следовательно, в качестве прибли-
жения к и(х) можно взять без значительной потери точности.
Отметим, что ситуация изменилась бы, если бы для вычисле-
ния применялась формула прямоугольников без дополнительного
существенного измельчения сетки. Действительно, пусть ради
простоты 7 = 0; тогда
1 >
A/.z+i = —йдг- J p(x)dx,
А+1 = — р( ,+2'+1) (Х/+1 - Xi),
I Ai, z+i — Aff+11 = 24АЛа (xl+1 - x,)s max | | < 0 (1).
»+-i •S’+iJ 1 1
Аналогичная ситуация имеет место при вычислении остальных
элементов матрицы. Таким образом, получаем .
U - ле|2^о(1), Ме)-
Следовательно, мы не можем гарантировать, что в результате
приближенных вычислений и при нахождении и^\ а не мл мы
допускаем погрешность по крайней мере того же порядка, что и
— и [l, (a. b)^O(h2). Отсюда вытекает предположение, что для
вычисления элементов матриц необходимо пользоваться квадра-
турами достаточно высокой степени точности.
10.3. О решении систем уравнений и числах обусловленности.
К преимуществам проекционно-сеточных методов относится также
то, что в силу финитности базисных функций матрицы систем
уравнений имеют сильно разреженную структуру, как это имеет
место и в разностных методах. Но здесь автоматически сохра-
няются «хорошие» свойства оператора задачи. Поэтому для реше-
ния систем уравнений с такими матрицами особенно удобны ите-
рационные методы. В ряде задач целесообразно также применение
прямых методов, таких, как метод прогонки (для решения систем
с трехдиагональной матрицей), метод окаймления (который в сово-
купности с итерационными методами может быть успешно при-
менен для систем, возникающих при использовании базисов
§ 10] НЕКОТОРЫЕ ВОПРОСЫ ЧИСЛЕННОЙ РЕАЛИЗАЦИИ 247
с сингулярными функциями) и др. Описание многих из этих
методов можно иайти в работах [7, гл. 4, 11, 27].
В ряде случаев в проекционно-сеточных методах матрицы
систем — разреженные, но имеют достаточно «разбросанную» струк-
туру. Поэтому, прежде чем применить тот или иной алгоритм
решения, зачастую целесообразно провести некоторые преобразо-
вания матрицы, стремясь сделать ее близкой к ленточной. Ряд
примеров, посвященных этому, описан в работе [37], в которой
также рассматриваются вопросы минимизации требуемой памяти
ЭВМ для хранения информации при решении систем с разрежен-
ными матрицами, проводится обсуждение прямых методов в при-
менении к таким матрицам.
Прежде чем выбрать метод решения и начать решение системы
Aa=f, (10.27)
полезно вычислить число обусловленности k (/1) = || А || j А-1^ По
величине k(A) часто можно судить о том, насколько решение а
чувствительно к малым изменениям данных (т. е. матрицы А и
вектора /). Так, пусть вместо (10.27) в силу каких-либо ошибок
получена система с возмущенной правой частью:
Ло1=/ + 6Д (10.28)
Тогда из (10.28), (10.27) находим
A (oi — a) = &f, di —а = A~lbf,
к- а II <11Л-МЯ6/И-
А поскольку ||/1| <|| А || || а |, то приходим к оценке относительной
ошибки решения системы:
,1^1-«II... II л-1 mm
II А || || а] ' ||f || ’
или
(10.29)
Отсюда заключаем, что чем больше число обусловленности, тем
вероятнее большая чувствительность решения системы к возму-
щениям в данных. Поэтому выбор метода решения исходной
задачи, построение сеточных областей и базисных функций необ-
ходимо проводить так, чтобы число обусловленности k(A) было
как можно меньшим. Отметим, что в силу неравенств || А | 3=
шах | (Л) |, [ Л-11| == (min | Л,-(Л) |J-\ где Л,-(Л) — собственные
248
ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ
[ГЛ. 3
числа матрицы А, имеем неравенство
max I Л; (Д) |
k (А) 1. (10.30)
min | (Д) |
I
В случае симметричных матриц при выборе спектральных
норм для матриц имеем спектральное число обусловленности
шах | (Д) |
k(A) = —. (10.31)
v ’ шт1Л/(Д)|
i
Соотношения (10.30), (10.31) позволяют судить о величине^ (Л).
Проведение дополнительных исследований по оценке k (Л) не-
редко входит составным элементом в реализацию проекционно-
сеточных алгоритмов. Поскольку в силу разреженности матриц
оценку сверху для max | X,- (Л) | можно получить сравнительно
точную, а в силу положительной определенности А (если, конечно,
она имеет место) легко получить ограничение снизу на min | X,- (А) |,
л i
то в ряде случаев получение оценок для k (Л) не представляет
труда.
Например, в алгоритме решения задачи (10.21) имеем (см.
также пример 2 § 6)
min Х; (Л) S& [р0 , max X,- (Л) ==s с3 + зд,
где 0)<.р0^р (x)sSpi, р0, plt q0, ^ — посто-
янные. Следовательно, k(A)-'-c/h2.
В общем случае для эллиптических уравнений порядка 2т
показано, что если сетки и базисные функции удовлетворяют
условиям устойчивости и аппроксимации, то для спектрального
числа обусловленности справедлива оценка
k(A)^c/h%n, (10.32)
где /imin — минимальная из сторон треугольников (многоугольни-
ков). Эта оценка слабо зависит от степени кусочно полиномиаль-
ных функций, а постоянная с возрастает при уменьшении мини-
мального угла 60 в конечных элементах. Изучению величины k(A)
в эллиптических задачах большое внимание уделено в работе [34],
в частности, рассматриваются вопросы, связанные с проблемой
получения оценок для чисел обусловленности.
10.4. О константах в оценках погрешностей. При решении
задач может сложиться ситуация, в которой шаги сетки выби-
раются малыми и, согласно имеющимся оценкам типа [и —
§ 10]
НЕКОТОРЫЕ ВОПРОСЫ ЧИСЛЕННОЙ РЕАЛИЗАЦИИ
249
ecc/i, ожидается достаточно точный результат, но тем не менее
это не происходит. Одной из причин этого может быть величина
константы с в правой части; она зависит от решения или
исходных данных задачи и может оказаться настолько боль-
шой, что доказанная оценка не будет гарантировать необхо-
димой точности при заданных величинах h. Поэтому подобные
оценки рассматриваются как асимптотические, т. е. при /г->-0.
Другие причины потери точности — возможные ошибки числен-
ного интегрирования и различного рода округлений при решении
системы алгебраических уравнений. Поэтому для получения оце-
нок погрешностей реально вычисленного приближенного решения
необходимо провести дополнительные исследования по изучению
устойчивости алгоритма, по оценке числа обусловленности и т. п..
а также исследование соответствующих констант.
Для иллюстрации рассмотрим задачу
-e’g + <?« = /(x), *е=(0, у),
и(°)=^© = °>
(10.33)
где f(x)eL2(0, л/2), q — неотрицательная постоянная е —малое
положительное число. Будем решать эту задачу с помощью ме-
тода Ритца, выбрав в качестве базисных нормированные кусочно
линейные функции ф,- (х), построенные на неравномерной сетке
0 = х0 < Xi <...< xN = л/2 и имеющие вид
* — *7-1 / к
---Х,),
-------, хе (Xi, xi+1),
'4+1
0 х (Xi-i, xi+i),
где 1 = 1, ..., N, h = (b — a)/N, hi = xi — Xi^1. Приближенное реше-
ние ищется в виде
N
uh= У, а(ср,(х); (10.34)
i= 1
коэффициенты аг находятся из системы
Ла = Д
где Л = (4,у), / = (/ь .... fN)T, a = (alt .... aN)T,
Л?2 [ d<pi d<fi \
Ац = [Ф,-, Ф/] = J (e2 + 9ф,фуJdx,
0
A = (A fpi) = j fq>idx, i, /=1, ..., N.
о
(10.35)
250
ПОСТРОЕНИЕ ПРОЕКЦИОННО СЕТОЧНЫХ СХЕМ
[ГЛ. 3
По формуле (10.34) строим приближенное решение uh(x), для
которого справедливо неравенство
[и — uh] = [и — uh, м —мл]*/2 inf
at
N
и — У
i = i
Правая часть, как известно из § 2 гл. 2, мажорируется величи-
ной c/imax И2и/с(х2 |'г2. Более детальное исследование (см. [36],
стр. 60) приводит к неравенствам
где (здесь и в дальнейшем) hmax = max hj, hmin = min hi. Однако
в данное выражение входит норма второй производной от неиз-
вестного решения, которую желательно оценить через исход-
ные данные задачи. Чтобы сделать это, найдем решение и(х)
в явном виде. Поскольку собственные функции и собственные зна-
чения задачи
®<(0)=^)=0
имеют вид Ф;(х) = 2n_|/2sin (2i — 1) х, X; = (2i — I)2 е2 + <7, причем
(Ф;, Ф;) = 6,у, то, воспользовавшись методом Фурье и приняв
в качестве базисной системы функции {Ф,-}, находим
«(х)=2^ф(-, А = (Л ф,).
1 = 1
[и]2 = (/, и) <;(/|||| U|| ^ЦЛ[«]А1. [и] =sS|inAi.
<Ри___VI (21-1)*^
</№ — Kt г’
1=1
00 00
i=l i=l
Таким образом, приходим к оценке
/Ла h' о\1/2
+ • (10.36)
§ 10] НЕКОТОРЫЕ ВОПРОСЫ ЧИСЛЕННОЙ РЕАЛИЗАЦИИ
251
Отсюда уже можно сделать вывод, что если даже система (10.35)
будет решена точно, то при выборе шагов сетки без учета ма-
лости параметра е может оказаться, что при hmax^e имеем [и —
— “л]~О(1), хотя значение hmax (так же как и 8) мало.
Рассмотрим теперь влияние ошибок численного интегрирова-
ния на искомое приближенное решение задачи (10.33). При этом
условимся, что оценки для него будем проводить лишь в энерге-
тической норме. Предположим сначала, что в результате числен-
ного интегрирования допущены ошибки при вычислении вектора f
и вместо (10.35) получена возмущенная система
Ла(1) = f + 6f, (10.37)
где Sf —вектор возмущений правой части, а(1) —вектор прибли-
женных значений коэффициентов а{.
N N
Оценим разность между функциями uh = а,ср,-, u'h = 2 а?'фь
/=1 i=t
определяемыми соответственно решениями систем (10.35) и (10.37).
Поскольку
Л(а(1>-а)=6/,
то
(Л(а'1)-а), aW-a)2 = [u'h“-uh]*~(8f, а‘Х)-о)2<|6/||а(1) — «I,
/ N \1/2
где || 6/ || = |j 6/|12 = У (6/)>? . Как было показано в гл. 2, спра-
\;=1 /
ведливы соотношения
Следовательно,
W - uh? < II6/ II CT2 II rtf’ - uh ||Li ||Sf II /2 * [<4‘> - uh]
' \ min/ \ min/ Aj
и искомая оценка имеет вид
[«к11
6ft у/2 1
lmln/ (?+е2)1/2’
(10.38)
Отсюда можно сделать заключение, что достаточными услови-
ями нахождения приближенного решения и'/,1’, отличающегося
от и на величину порядка hmax, являются следующие: минималь-
ный из шагов сетки не должен сильно отличаться от h, т. е.
сетка в определенном отношении должна быть квазиравномерной;
норма вектора S/ должна иметь порядок hmax; в случае q = 0
требования к точности вычисления элементов правой части воз-
252
ПОСТРОЕНИЕ ПРОЕКЦИОННО СЕТОЧНЫХ СХЕМ
[ГЛ. 3
растают и эти элементы становятся существенно зависящими от
степени малости параметра 8.
Предположим теперь, что в результате каких-либо приближен;
ных вычислений допущены ошибки при формировании матрицы А
и вместо (10.35) получена возмущенная система вида
(A+8A)a™ = f, (10.39)
где 6Л — матрица возмущений. Прежде всего заметим, что норма
этой матрицы должна быть достаточно малой, чтобы гарантиро-
вать однозначную разрешимость (10.39). Найдем условие, при
котором это будет иметь место. Поскольку
(Ла, а)2$гЛ
Z-2
т^ч = ттХ/(Л)^((? + е2)-^-,
то при выполнении неравенств
|| 6Л j^9( + 82)^₽, (Ю.40)
где 0 < р < 1, имеем
в Л^бЛ ||=С|| Л-ЧЩбЛ |=С р < 1.
Это в свою очередь гарантирует невырожденность матрицы Л + 6Л
и однозначную разрешимость (10.39).
Получим априорную оценку для а(2):
а<2) = (/-|-Л-1 бЛ)'1 Л-1/,
Н(а) К|| (7 + Л-i 6Л)~11| || Л-i || || Л >
и значит,
N N
Оценим разность функций uh = У а,<р,-, и'н = У a't'tyi- Но
А А 1=1 I = 1
Л (а — а(2)) = бЛа(2); тогда получаем
(Л(а —а(2)), a —a(2,)2 = [Uft — U/ia,]2 = (бЛа(2), а-а<2))2^
16Л |1 || aw j j а - || 6Л || || а<2> || (^Y/21| uh - || <
\Лт|п/
II6Л В ||а<2> II (^у/2 uh - «И.
\nmin/ Xi
§ ТО]
НЕКОТОРЫЕ ВОПРОСЫ ЧИСЛЕННОЙ РЕАЛИЗАЦИИ
253
Отсюда с учетом (10.41) имеем
' 6h ^/2 < Р ||/|| / 6/г '1/2
^min/ 1 0 \Лт1п/
1
(g + e2)1/a’
(10.42)
Из (10.42) помимо выводов, сделанных выше при вычислении
элементов вектора /, можно также сделать следующие.
Если рассматривать лишь условие (10.40), то для разрешимости
системы (10.39) при„<7^>е2 требования к точности вычисления
элементов матрицы А оказываются менее жесткими. Но в любом
случае применение квадратурных формул малого порядка точности
недопустимо. Действительно, если воспользоваться формулой
J fdx = f(Xi) (л, — Xi-j) О (hi), то получим погрешность вычисле
ч-i
ния элементов матрицы А порядка e2hi/(hth). Следовательно, в
данном случае условие (10.40) не будет выполнено.
С другой стороны, если обратиться к оценке (10.42), то можно
сделать заключение, лчто в действительности ограничения на
точность вычисления А должны быть значительно более жесткими,
а постоянная 0 должна выбираться весьма малой, чтобы обеспе-
чить необходимую точность вычисления, и величина этой малости
будет зависеть от е. Так, пусть q — 0, а правая часть / имеет
вид / = уфь где^ у — некоторая постоянная, Ф1 — собственный
вектор матрицы А, соответствующий первому собственному числу
^1,л» ЦФ1II = 1 •„ Предположим также, что возмущение 8А имеет
вид бЛ =— 0Л, О<0<1. В этом случае
а'2) = (/_[_ Л^бЛ)-1 Л-1/ =
Л (я-я12') = бЛ^2> = —рЛа'2' = — -А,
(Л (а -а'2»), а- а«>)г = [«л - «л2’]2 = - (Л а - а^)г.
Однако
а= 121
^1, л *
а(2) =__________
М. л(1 —0)’
(/, а-а™\
0Y2
Х1>А(1-0)'
Тогда в силу равенства Xlt л = е2 (1+О (/i2)) имеем
0 I Т I
(1 — 0)
0 I Т I
(I —0) в*
(10.43)
Поэтому, чтобы погрешность вычисления uh не превышала задан-
ной величины Д<^1, необходимо выбирать 0^Де. Это в свою
очередь накладывает дополнительные ограничения на точность
вычисления элементов матрицы Л (см. (10.40)).
254
ПОСТРОЕНИЕ ПРОЕКЦИОННО-СЕТОЧНЫХ СХЕМ
(ГЛ. 3
Отметим, что если бы оценки проводились не в энергетической
норме, а в метрике пространства W!lt то в силу неравенств
ОО оо
(«р = 2 =2 ёА? <2/ -
1 = 1 z==lv
00
min (Атт» 2 & - и‘-881! ы
1 z=i
?С(1/е)[и],
требования к выбору шагов сетки, точности вычисления элементов
матрицы и вектора правой части были бы более высокими, а кон-
станты в соответствующих оценках погрешностей умножались бы
на 1/8.
Таким образом, уже на примере рассмотренной выше простой
задачи можно сделать вывод о важности получения констант,
входящих в оценки погрешностей реально вычисляемых прибли-
женных решений. Как правило, эти константы оказываются
зависящими от гладкости точного решения, размеров области,
величины норм исходных данных, степени неравномерности сеток,
вида базисных функций, ошибок численного интегрирования, при-
меняемого для вспомогательных вычислений, ошибок округления
при решении систем алгебраических уравнений. И если удается
получить явный вид данных констант или мажорант для них, то,
используя имеющуюся априорную и апостериорную информацию,
необходимо провести варьирование компонент алгоритма (выбор
сетки, базисных функций, подходящих квадратурных формул,
метода решения систем уравнений и т. п.) с целью уменьшения
этих констант и получения приближенных решений с заданной
точностью.
ГЛАВА 4
МЕТОД ИНТЕГРАЛЬНЫХ ТОЖДЕСТВ
В этой главе будет рассмотрен широко применяемый метод
интегральных тождеств (интегро-интерполяционный метод, метод
баланса). Он традиционно относится к разностным методам, однако
ниже будут получены проекционные формы интегральных тождеств,
что позволяет-рассматривать этот метод как одну из модификаций
проекционного метода. Будет проиллюстрировано применение про-
екционных форм к решению краевых задач. При этом при изу-
чении вопросов устойчивости, аппроксимации и сходимости будет
использоваться как методика, принятая в теории разностных
схем, так и методика, принятая в проекционных алгоритмах.
§ 1. Понятие о проекционной форме метода интегральных
тождеств
Рассмотрим уравнение
~^Р(Х) ^c + <i(x)u=f(x), a<x<b, (1.1)
с некоторыми краевыми условиями. Одна из модификаций метода
интегральных тождеств для решения этого уравнения состоит
в том, что вводится сетка
а = х0 < х1/2 < Xj <... < Xyv_1/2 < xN — b (1.2)
и (1.1) интегрируется в интервале (х;1/2, х,+1/2). В результате
приходим к интегральным тождествам
*1+1/2
$ (qu (х) — f (х)) dx = 0, (1.3)
*1-1/2
где = W (х,+1/2), W (х) = p(x)d~ (х).
Используя приближения входящих в эти тождества производ-
ных и интегралов, а также краевых условий, получаем соответ-
ствующие разностные схемы.
256
МЕТОД ИНТЕГРАЛЬНЫХ ТОЖДЕСТВ
[ГЛ. 4
Переформулируем этот алгоритм следующим образом. Введем
систему {ф( (х)} ступенчатых функций
(1 При .«Е (Х/-1/2, х/+1/2),
W/ (X) = <
(О при х ф (хг_1/2, Х/+1/2).
Тогда тождества (1.3) —не что иное, как результат проекти-
рования в L2 (a, b) уравнения (1.1) на систему {ф;}, т. е. (1.3)
можно представить в виде системы тождеств
~(ipTx’ +(<?м’ 0 -4)
Этот этап построения приближенного решения совпадает с этапом
в проекционно-сеточном методе, а тождества (1.4) являются про-
екционной формой тождеств (1.3).
Итак, если задана некоторая система базисных функций {ф; (х)},
то интегральные тождества можно получать путем проектирования
уравнений, описывающих задачу, на данную систему.
На следующем этапе построения численного решения задачи
интегральные тождества можно приближать двумя способами:
а) либо приближенно вычислять интегралы с помощью квадратур
и т. п.; б) либо искать приближенное решение uh в виде разло-
жения, вообще говоря, уже по другим базисным функциям {ф/(х)}.
Именно с таких позиций метод интегральных тождеств и будет
рассматриваться в данной главе. Это позволит в ряде случаев
трактовать его как одну из модификаций проекционного алгоритма
и привлекать для обоснования процесса решения задачи теорию
проекционных методов.
§ 2. Проекционная форма интегральных тождеств
для дифференциального уравнения второго порядка
Рассмотрим проекционную форму интегральных тождеств, вве-
денных в [26] и широко применяемых для решения уравнения
диффузии:
+ х^{а,Ь), (2.1)
с краевыми условиями
u(a) = u(&) = 0. (2.2)
Предполагается, что р(х), ^(х)е£оо(а, b), f(x)^L2(a, b),
p(x)>0, 7(x)=s0.
Метод интегральных тождеств, применяемый для решения
задачи, состоит в том, что, исходя из (2.1), (2.2), получают
§ 2]
УРАВНЕНИЕ ВТОРОГО ПОРЯДКА
257
тождества
(и (xk) - и (xft+1)) I jj + (и (xk) - и (х*_х)) ( jj +
' xk ' '**-1 '
xk+i/2 /**+х \-1 р
+ J (9u-f)dx = -H $ (?u-f)d? +
xk-l/2 ' xk xk х*+1/г
/ xk \-1 xk *
+ С _^L С *L С (qu~f)dl, (2.3)
\ J Р (*) / J Р (х) J
**-1 1 xk-l xk-t/i
k=l........AZ-1,
ГДе U — Xq ЛГ1/2 <C Xj < X3/2 < • • •<^ZXj^-3/2<Z.Xj^-i^iXj^-i/2^.^N — b—1
некоторый набор точек. Используя теперь ту или иную аппрок-
симацию входящих в (2.3) интегралов, получаем соответствующую
разностную схему.
Наша ближайшая цель — показать, что (2.3) можно записать
в некоторой форме, которую будем называть проекционной формой
интегральных тождеств и которая близка к равенствам, возни-
кающим в методе Бубнова — Галеркина. Однако, по сравнению
с последними, проекционная форма тождеств дает возможность
использовать для построения приближенных решений разрывные
базисные функции и позволяет доказать сходимость приближен-
ных решений при достаточно общих предположениях о гладкости
исходных данных.
Выполним ряд простых преобразований в (2.3). Пусть
х*+1 r*+i
= - J ф(^)^+ $ Рь(х) Ф (х) dx.
Xk+l/2 “k
9 Г. И, Марчук, В, И. Агошков
258
МЕТОД ИНТЕГРАЛЬНЫХ ТОЖДЕСТВ
[ГЛ, 4
Аналогично получаем
хк -1 xk х
S га J га $ ’•’««=
'**-1 ' Xk-1 **-1/2
**-1/2 xk
= — J i|) (x) dx + P* (x) ф (x) dx,
**-l **-l
где
xk / xk
~ \_____ C dx’ I C dx\
pk{x>~ j ^)\ з
* 4-i >
Теперь тождества (2.3) принимают вид
/**+i \-1 / xk \-1
(u(xft)-u(xft+1))f J + (и (xk) - и (xft_i)) ( jj +
'xk ' **-1 '
xk xk+l
+ $ (1 — pA. (а:))-ф (x) dx + 5 (l-pftW)^(x)dx = O.
xk-i xk
Пусть
xk / xk x-1
, C dE I C dE \ .
'-Jr® ) ra •
x 4-i '
Qk (x) = x ixk+i \-1 (2-4)
1 _ S (S p©) ’ xe (-Xk'Xk+i)’
xk 'xk ‘
0, x (x*-i, xA+1), k= 1,2, ..., N~ 1;
тогда (2.3) запишутся в виде
jxk+l \-1 / xk У”1
(u (xk) - u (x*+i))f J 4- (u (xk) - и (xft_j)) I J +
\ xk / ^x^ /
+ (<?«,&) = (/.&). ......X-l, (2.5)
ь
где ((p, ф) = Jq>i|)dx, ||ф| = (ф, ф)1/2-
а
Замечая, что
(n^ 4Q* \ -
у dx’ dx j
lxk+i \-1 / xk \-1
= .(«(XA)-U(XA+1)) \ M + (U (X*) - U (Xft_i)) I ,
\ V P \л) / \ J P \л) I
\ X. I h . J
<b Я-Д. *
§ 2] УРАВНЕНИЕ ВТОРОГО ПОРЯДКА 259
можем представить (2.3) также в виде
+ = k={.......................N~1' <2-6>
\ ил ил j
Рассмотрим теперь некоторый интерполянт uz (х) функции и (х)
такой, что Uj (х) = и (х,), 1 = 0, N, предполагая при этом, что
имеет смысл производная duj/dx. Тогда в силу равенства
/ du dQA / duj dQA
\Pdx’ dx J у dx ' dx /
выражение (2.6) эквивалентно равенству
+ k=l,...,N-l. (2.7)
Итак, тождества (2.3) эквивалентны каждому из соотношений
(2.5) —(2.7). Соотношение (2.6) есть нечто иное, как известное
равенство, применяемое в методе Бубнова — Галеркина для по-
строения приближенного решения на основе использования {Q* (х)}
в качестве базисных функций. Если воспользоваться соотноше-
ниями (2.5), то замечаем, что здесь становится возможным исполь-
зование разрывных базисных функций {ср,(х)}. Действительно,
пусть, например, функции <р, (х) кусочно непрерывны с возмож-
ными разрывами первого рода в точках, не совпадающих с узлами
сетки xk, k=\, ..., N— 1. Тогда каждая из этих функций имеет
конечное значение в хк, а значит, и их линейная комбинация
ик = 2 aktfk (х) с произвольными постоянными а*, будет прини-
fe = 0
мать конечное значение в узлах X/, т. е.
N
£<№(*/)< °°» «=1, ...» W-1.
h — 0
Таким образом, функции {фк (х)} допустимы для построения при-
ближенного решения с использованием соотношений (2.5), хотя
{ф/ (*)} — система разрывных функций.
Наконец, применение тождеств в форме (2.7) позволяет, как
увидим ниже, достаточно просто исследовать вопросы сходимости
и, в частности, получать оценки скорости сходимости в равно-
мерной метрике.
Таким образом, метод интегральных тождеств может рассмат-
риваться как один из проекционных алгоритмов, а соотношения
(2.5) — (2.7) могут использоваться наравне с (2.3) при построении
приближенных решений задачи (2.1), (2.2) с достаточно широким
выбором базисных функций. Исследованию этих вопросов будет
посвящен следующий параграф.
е*
260
МЕТОД ИНТЕГРАЛЬНЫХ ТОЖДЕСТВ
[ГЛ. 4
Пример 1. Пусть в (2.1), (2.2) коэффициент q(x) тождест-
венно равен нулю, 0 <2 Ро р (х) <2 pi, Ро, Pi — постоянные. По-
строим разностную схему, решение которой совпадает с точным
решением задачи в узлах сетки (т. е. схему, имеющую бесконеч-
ный порядок аппроксимации).
Если спроектировать основное уравнение на функции Qk(x),
определяемые выражением (2.4), то придем к системе тождеств
А+1 у”1 j xk у-1
(« (xk) - и (xft+1)) I J + (u (Xft) - U (Xk^)) J = fk,
' A-l '
fe=l....N-l,
b
где (x) Qk (x) dx, и (x0) = и (xN) = 0. Следовательно, решение
a
a=*(ai....ам-1)г системы
А+1 У-1 / xk У-1
-~A +(aA-aw)f J —A ~fk,
xk ' A-i '
ao = aN = O,
будет совпадать с вектором u = (u (xx), ..., и (x7v_1))7’, если система
уравнений (2.8) имеет единственное решение. Для доказательства
N — 1
однозначной разрешимости (2.8) введем функцию vN*= У <Ш(*)
и запишем (2.8) в виде
/ dVfj dQ.\
(2.9)
Умножая (2.9) на ак и суммируя по й=1, ..., IV — 1, получаем
/ dvy\_lf .
\Р dx ’ dx J A-
Отсюда с применением неравенства Фридрихса и соотношения (1.6)
из гл. 3 следуют неравенства
I dvN 1|2 Ь — а
1 — 1
II 4х ||
Ь — а
Ро/2
ИII,
тах| vN (х) a^x^b,
‘Чу!!
dx II’
(2.Ю)
тах | а( | «£с||Л, i = 0, 1, .... N.
i
§ 3)
ПРИБЛИЖЕННОЕ РЕШЕНИЕ КРАЕВЫХ ЗАДАЧ
261
Кроме того, легко заметить, что матрица системы (2.8) симмет-
рична и положительно определенна (что легко доказать, исполь-
зуя форму записи (2.9)). Таким образом, (2.8) однозначно раз-
решима при любых /е4(а, Ь).
§ 3. Приближенное решение краевых задач
методом интегральных тождеств в проекционной форме
3.1. Уравнение диффузии. Рассмотрим применение тождеств
(2.5) —(2.7) для приближенного решения задачи (2.1), (2.2),
используя при этом два базиса: один —из ступенчатых функций,
являющихся примером разрывных на (а, Ь) базисных функций;
второй —из функций {Q/(x)}, которые непрерывны на (а, Ь).
Пусть /i,= x,+i/2 —X/-I/2, h = max hit и пусть через ф,(х) обо-
i
значена характеристическая функция интервала (x,--i/2, x/+i/2),
через <р0 (х) — интервала (х0, *1/2), через <рл (х) — интервала
(хл-1/2, хл). Примем {<р/} в качестве базисных функций и будем
искать приближенное решение в виде (х) — У а^(х), где по-
z=o
N — 1
лагаем ай = а^ = 0. Тогда uh(x) = У, а,фг(х), где {aj определим
z=i
из соотношений (полученных на основе (2.5))
(хл+1 \-1 / xk \-1
J яУ +(“*(**)-“* (**-*)) И +•
хь ' Ч-i '
+ (qu\ Qk) = (f, Qk), k=l....tf-1. (3.11
Система (3.1) в матричной форме имеет вид
Aa = f,
где а = (аг, ..., а^)7, .... fN-i)7, Лх=(Лу),
xi+l
h=(f, Qi)= $
xi-l
fi+l \-1
Ay = (Ф/ (x,) - Ф/ (X/+i)) ( J 1
4 /
f (X) Qt (X) dx,
+
/ \ *y-i
+ (ф/ (xi) - q>7 (Xi-l)) ( J 4- J фу (x) Qi (x) q (x) dx,
'xi-i ' xi-i
i, j=l, .... 1V-1.
262
МЕТОД ИНТЕГРАЛЬНЫХ ТОЖДЕСТВ
[ГЛ. 4
Вычислив Atj. и ft и рещив систему, найдем коэффициенты
а1( ..., a.V-i, с помощью которых строится кусочно постоянное вос-
N — 1
полнение приближенного решения uh (х) = (х), а0 = aN = 0.
Исследуем вопрос о разрешимости системы (3.1) и оценим
скорость сходимости uh к и(х) при Л->0. Получим сначала
априорную оценку для решения системы (3.1), для чего введем
следующий интерполянт приближенного решения:
N — 1
и/(х) = aiQi(x)> ui (xi) = (xi), 1=1, .... N — 1.
I =1
Перепишем (3.1) в эквивалентной форме:
/ dii) dQ,\
(р-^, *=1- N-L
Умножая последнее уравнение на а* и суммируя по k= 1,..., N — 1,
получаем
/ du? dti!\ . ,
\Р^ + Ur)-V’ Ul\
или, что эквивалентно,
/ du!} du*}\
\Р -fa, 'd^) + ((luh> uh) = (f> rf-uP
Из последнего равенства выводим:
/ ’ du? du?\ b t , „ „ . „
\P-dt' ~df) + (qU ’ “)^И1|«?|| +
+ (qult, uh)il‘2(c[[iihl — uhy u,} — uhy/2.
/ du? dt/!\'
Так как || и!* || =g с (р , -^-1 , то о учетом неравенства | ab j sg
=geaa + ^2/(4e), 8>0, имеем
(pd£’ i£)+(Puh' “ft)<c{n^a+llu/- “ЛП-
В силу того, что
*Z-t-l/2 xZ+l/2 / X V2
У (u*-«ft)adx= J и i(ui~uh>)dx\dx =
xl-l/2 Ч —1/2 Ц '
х/ + 1/2 / X dj, х/+1/2
= У dx ( у ~ dx j < О (h2) у р (х)
xi — l/2 Xxi ' Xi — \L1
du/j
dx
dx,
2
§ 3] приближенное решение краевых задач 263
имеем априорную оценку
/ duh, duh t t сП
[p ± ““x-raw <3-2)
из которой следует, что при достаточно малых h система (3.1)
имеет единственное решение.
Оценим погрешность приближенного решения. Для uh(x) и
ы£(х) справедливо равенство
/ du*! dQb \
Ы’ w-tf. <ы.
Пусть в (2.7)
АГ-1
ut(x) = У u(Xi)Qi(x).
» = 1
Тогда справедливы соотношения
(pfatui-ul), ^} + ((l(u-uh), &) = 0,
(рТх(ui~иЪ' “ty+(q(u-uh, и-uh =
= (q(u — uh), -(Uj-u^ + ku-uh)^
^c(q(u — uh), и — и*)1'21(Uj — uty — (u — uh ||,
(«/-«?)» + «-«*)<
^c(||u/-uft|i2 + ll“-u/||2)> c>°-
Как мы уже знаем,
II III ' '\г dx ' dx j 1—0 (Л2)
Кроме того, легко показать, что
||U-U/|^O(^)(pg, О (hh.
Таким образом, получаем оценки
^-u^ + kqiu-uh, зз
шах | и (xi) - uh (xt) \ + (q(u-uh, и- и11)1'2 < jSo(h)•
Замечая, что в приведенных рассуждениях достаточно, чтобы
р(х), q (x) е Loo (a, b), f(x)<=L2(a, b), приходим к следующей
теореме.
264
МЕТОД ИНТЕГРАЛЬНЫХ ТОЖДЕСТВ
(ГЛ. 4
Теорема 1. Пусть р(х), q(x)^L&(a, b), f {х) Ь);
тогда при достаточно малых h система (3.1) однозначно разрешима,
приближенное решение uh сходится к точному решению за-
дачи (2.1), (2.2) при h~+0 и имеют место оценки (3.3).
Пример 1. Пусть в задаче (2.1), (2.2) р и q — постоянные.
Пусть также xt = ih, xt_1!t = (xt + хи)/2, h = (b — a)/N. Тогда
в силу того, что ф<(лу) = 0 при i=# j, легко определить вид
матрицы А системы (3.1):
2 —1
—1 •
• —1
—1 2
+ <7Л
“6/8
1/8
I/O
1/8 6/8.
Таким образом, матрица А симметрична, в диагональным пре-
обладанием.
Если же на сетку не накладывать ограничения равномерно-
сти, то А имеет вид
<7
2
6ц &12
&21
6М-1, М-2
bN-2, N-1
где hi = Xi — х;_ъ 1=1, ..., N, Ьц = 3 (ht + /г,-+1)/4, bt, = h{/4,
bi,i+i = hi}.1/A. Здесь матрица А также симметрична и о диаго-
нальным преобразованием, что гарантирует, например, устойчи-
вость метода прогонки в применении к решению системы урав-
нений с матрицей А.
Воспользуемся теперь тождествами (2.6) и базисом {Q,} для
построения приближенных решений. Прежде всего заметим, что
при замене переменных
у ~ J р ®
а
задача (2.1), (2.2) принимает вид
~^i + P(y)q(y)u = f(y), 0<у<Т,
(3-4)
ь
С Л,
J Р (I)'
а
и (0) — и(Т) = 0,
§ 3] ПРИБЛИЖЕННОЕ РЕШЕНИЕ КРАЕВЫХ ЗАДАЧ 265
Следовательно, при f (х) е (а, Ь) имеем и (у) е WI, 0 (О, Т) =±=
= 1^2 (О, Т) П (О, Т). Приближенное решение ищем в виде
N — 1
«*(*) = У aiQi(x),
r = i
где неизвестные а, определяются из однозначно разрешимой
системы
&W> &)- * = 1’ •••’ N~1’
т. е. строим приближенное решение с помощью обычного метода
Бубнова — Галеркина при базисных функциях {Q/(x)}. Если учесть,
что Qi (х) при замене (3.4) переходят в обычные кусочно линей-
ные базисные функции-крышки, то, применяя известные резуль-
таты теории аппроксимации из§ 2 гл. 2, сразу приходим к утверж-
дению, что при выполнении условий теоремы 1 приближенное
решение сходится к точному при /i = max|xz — и имеют
i
место оценки
/ = 0, 1. (3.5)
2
Но для точного решения справедливо и соотношение (2.7), где
N — I
«/= У, u(xi)Qi(x). Тогда
i = 1
(p£c(ui~uh)> ^x{ui-uh)}-sr{q{u-uh), u,-uh) = o,
Зх^и1~и^)+^^и~и11^ и-и^ =
= (q (и — и*), и —и,) ^(q (и —uh), и— и*)1^ (q (и — и,), и — и,)1/2.
Следовательно,
и-и*)^
==£с||ы-М2^О(/14) (3.6)
и имеют место оценки
[(рТх^и,~и^’ + и /2< О (А2),
max | и (xi) — uh (xi) | ==£ О (А2).
266
МЕТОД ИНТЕГРАЛЬНЫХ ТОЖДЕСТВ
(ГЛ. 4
Далее, в предположении, что f е Lx>, имеем
max \u(x)-u1(x)\^O(hl^)lpl/2~(u-u1)l =
t 'E (х(._г xt) II "S (Xi-V xi)
l У‘ \ 1/2
J |$|4 -
4-i 7
(3-8>
Отсюда и из (3.7) следует оценка
ll«-«ftl!C(a>6)^O(/i2). (3.9)
Из полученных результатов вытекает следующая теорема.
Теорема 2. Пусть выполнены условия теоремы 1; тогда
N—1
uh(x) = У, а&(х)
i=i
сходится к точному решению задачи при h->0 и имеют место
оценки (3.7). Если, кроме того, f (х) е Lx{a, b), то справедлива
также оценка (3.9).
3.2. Вырождающееся уравнение. Рассмотрим уравнение с выро-
ждением
-^x“p(x)^- + g(x)u = f(x), хе(0,1), (3.10)
где а>0, р (х) е= (0, 1), q(x) g= Lx (0,1), f(x) е= Ц (0, 1), 0<
< р0 р (х) sg pi, р0, pi — постоянные, q (х) 0. При построении
приближенных решений ограничимся простейшими базисными
функциями {ср,} — характеристическими — и случаем 0 <а<; 1 (сла-
бое вырождение). Краевые условия имеют вид
ы(0) = и(1) = 0.
Введем функции
(х) —
xe(xw, Xk),
x<={xk, Xfc+1),
0, х^(хА_1, хА+1), k=l, ..., N-1,
$ 3J ПРИБЛИЖЕННОЕ РЕШЕНИЕ КРАЕВЫХ ЗАДАЧ 267
и с помощью известных преобразований получим тождества
(U (X*) U (хА+1)) ( £ар (£) ]
+ («(Х*)-«(хА-1)) J +(?«- = (?»). (3.11)
4-1 ‘
, -£) + (qu, Qk) = (/, Qk), (3.13)
где щ (x) — произвольный интерполянт функции и (х), для кото-
рого имеет смысл dut/dx и для которого u/(xi) = «(x/).
Пусть, как и в п. 3.1, введены характеристические функции
ф. (х), i = 0, 1,..., #. Будем искать приближенное решение в виде
N
«ft w = Z ад.- (*).
1 = 0
где принимаем а0 = = 0, а остальные постоянные определяются
из системы уравнений
/*f+i \-1 / xk \-1
(UA(x*)-«ft(Xft+1))^ gafg)-j +(Uft(Xft)—Uft(XA_1))H +
+ №, Qk) = (f, Qk), k={..........N-l. (3.14)
Эту систему можно представить в матричной форме:
Аа = f,
где Л=(ЛУ), а = (аъ .... aN-!)T, / = (/1, .... fN-i)T, ?{ = (f, Qt),
\-1
— ( j s“P© j +(^6 (f>i+1)’ / —l'+l»
/xi \-1
л. J ~u Iwa)
tx^' \-1 / \-1
iw) +(SfsA)) +(^«’Ф/)»
Xxi ’ 4--i ’
o, |/-i|>l.
268
МЕТОД ИНТЕГРАЛЬНЫХ ТОЖДЕСТВ
ГГЛ. 4
Изучим вопрос о разрешимости (3.14) и оценим скорость схо-
димости uh (х) к и(х) при /i = max +i/а —1/2 1-»-0. Сначала
i
получим априорную оценку для uh(x). Для этого введем интер-
N— 1
полянт приближенного решения ы* (х)= У aiQi(x)-. (xk) = uh(xk),
i = 1
k—l, N — l. Запишем тождество
/ du1} du*} \
y^P-dT’ ~dr) + ^uh’ uh)=(f> и'г) + (яи‘'’
и оценим его правую часть:
II/1| I || + (quh, uh)l/2(q^uh — u>}'), uh — uf)^2^
1 If fl / du1} du1}\i/2
Отсюда получаем неравенство
/ did} duh,\ t / IlfII» „ _
\^P-ST’^r/ + ^ “h^c\T^ + luh
Учитывая соотношения
*1+1/2 *1+1/2 /X \2
J |«J —uftj2dx= ^-4 ^-(u/~ td^dx' j =
*1—1/2 *1—1/2 '*/ /
^t1/2 /* л..Л \a /*‘41/2 ,
’W $ ^‘n
*1 — 1/2
„1— a V1 — a
Л1+1/2~Л1- 1/2
1 —a
xi-
*1 + 1/2
xi — \l2
приходим к искомой априорной оценке для uh:
( duh, du1} \
[xap-jd-, —r—]-sr(quh.
\ r dx dx / ' w
1/2
du1}
dx'
du1}
dx
2
dx,
1 — e2 (ft) ’
(3.15)
2
xl—a xl — a
где &2(h) = 0(h) max - + 1/?_ J~1/2, X-J/? = xp = 0, хЛ+1/2 = xN = 1,
£ r
§ 3]
ПРИБЛИЖЁННОЕ РЕШЕНИЕ КРАЕВЫХ ЗАДАЧ
269
Из (3.15) заключаем, что при достаточно малых h система (3.14)
однозначно разрешима и приближенное решение uh определено
единственным образом.
Оценим погрешность приближенного решения uh. Пусть Ui =
N— I
= У, и (xi) Qi (х) — интерполянт точного решения и(х). Запишем
равенства
(“/-“/)> -^г)+(?(«-«*)> ^)=0> k~l........N~1’
^Р^и~и^ fx(ui-uty + (^u-uh'>' u~uh>)-
= (q (u — uh'), (u-u^-^-uty.
Оценим правую часть последнего, применяя неравенство Коши —
Буняковского и неравенство треугольника:
| (? (ы- «"), (и - м7) - (м* - «?)) |
^c(q(u-uh), Ы-ЫЛ)1/а(||ы_Ы/|| + ||ыл_ылцу
Имея в виду, что при xs (*/-1/2, -Vz+i/a)
х 2
|«(x)-«/(x)|2 =
1«
„1— а „1 — a Х1 + Ч2
xi-f-1/2 ~~xi—l/2 С „ , . d . .2,
.. i ---------- J (*) | ^ («-«/)] dx,
xi —1/2
5 *ap I /x (“ ~ Г dX T-I! 0)' ’
приходим к оценке погрешности
(“/ “ “/)’ Ь (,ui ~ “/)) + (<?(“- “ft)’ “ ~
" с 1-8 0) •
А принимая во внимание, что
„ „ / „du du\i/b.. ч1/.
И«1с(0,1)^с^х“-5Г,/(1-а)1/2,
(3.16)
получаем также оценку
max\u(xi)—ull(xi)\+(q(u-uh), и-и^/^с------------(3.17)
i (1 —a) (I —8 (n))
Теорема 3. Если p(x), q(x)^Lrx, f(x)^L2, то при доста-
точно малых h система (3.14) однозначно разрешима, приближен-
270
МЕТОД ИНТЕГРАЛЬНЫХ ТОЖДЕСТВ
ГГЛ. 4
ные решения uh сходятся к и при h->-Q и имеют место оценки
(3.16), (3.17).
Замечание. Аналогичным образом может быть рассмотрен
случай задачи с сильным вырождением, когда 1 и краевое
условие имеет вид: и (1) = 0 *). Здесь можно ввести сетку 0=Xi/2<
< Хг < х3/2 <... < xN-1/2 < xN = 1. Пусть
I
Qi (х) =’ 1-
Х6Е(Х1/2, Xj),
хе(х,, х2), (3.18)
0, X (Ху2, Х2),
а остальные Qit i = 2, ..., /V — 1,— те же, что и раньше.
Дальнейший ход построения приближенного решения uft(x) =
N — 1
= 2 а«Ф<(х) (гДе ф<(х) —характеристическая функция интервала
i=i
(хм/2, x,+i/a) при i=l, .... IV— 1) остается прежним.
3.3. Уравнение переноса. Построим приближенное решение
самосопряженной задачи о переносе нейтронов
dx^^ + Pu==q ^9<И. Ю dp' +f (х, р),
Р <( (3.19)
и—--^- = 0 ПрИ х = а, « + — -^- = 0 при х = Ь,
р дх г 1 р дх г ’
где р = р (х) > 0, q = q (х) 0 — кусочно гладкие функции клас-
са С(1) с возможными разрывами первого рода, которые будем
предполагать совпадающими с частью узлов сетки {х,}, 8 (р, р') =
=8(р\р)>0, 8 е Лоо, $ 8 dp' = 1, f (х, р)еАм, р (х) — q (х) > 0.
о
Введем на
ht = xt — x,_j,
по формулам
Qk (x) =
[а, Ь] сетку а = х0<Х1С...<хл = 6, h — maxhi,
i
и определим функции Qk(x), k = 0, 1, N,
xk j xk x-1
1 - $ p (|) d| j P (В) Д . X e (xft_!, xft),
x \xk-i /
x /xk+i \-1
l-$p(|)dg 5 p(|)dg , xe(xt, xM),
xk \ xk /
0, xe(xA_1( xA+1).
*) См, Агошков В. И. О вариационной форме интегрального тождества
Г. И, Марчука. — Новосибирск: ВЦ СО АН СССР, 1977.
§ 3]
ПРИБЛИЖЕННОЕ РЕШЕНИЕ КРАЕВЫХ ЗАДАЧ
271
В качестве ср,- (х), i = 0, 1, N, выберем обычные кусочно ли-
нейные функции-крыщки.
Умножим уравнение задачи (3.19) на Q,(x) и проинтегрируем
по хе (а, Ь) с учетом краевых условий; получим систему тождеств
fXt \ -1
pw(x0, р) + ра(«(х0, |х)-ы(Х1, р)Щ p(x)dx\ +(/С«, Qo) = (/:, Qo),
\*0 /
pa (u(xit p) — u(xi+1, p)) J p(x)dx
+ (и(хг, р) —м(хг_ь р)) p(x)dx
• ) +(К«, Qi) = (A Q,),
t = l,..., N -1, (3.20)
/ XN \ 1
рИ(Хдг, p) + pa(«(Xyv, р)-И(Хдг-1, P)) P(x)dx) +
\*W—1 /
+ (Ku, QN) = (f, Qn),
1 b
где Ku = p (x) u — q (x) jj Qu dp,', (<p, ф) = J <p (x) ф (x) dx. Систему
0 a
(3.20) можно записать в виде
[и, Qi] = (j, Qi), i = 0, 1..........N, (3.21)
где
/1 du, dv,\
[и, ti] = p2^- -grJ + p(«/W/|x_e + u/V/|x_&)+(KM, v),
Uj, V[ — интерполянты функций и, v соответственно, построенные
по системе {QJ.
Приближенное решение будем искать в виде uh (х, р) —
N
= У а, (р) ср,- (х),. где а,- (р) определяются из системы интегральных
1=0
уравнений
[uh, Qi] = (f, Qi), i = 0, 1,...,У.
Для получения априорной оценки приближенного решения uh
воспользуемся тождеством
[uh, uh] = (f, uk) + (f, и1} — ик) + (Кик, uh — uk)t (3.22)
где «у —интер пол я нт uh по системе {Q,}.
Выполним простые оценки. Прежде всего заметим, что
1 ।
^(Ки, ujdp^c^tu^dp, j|-j| = (-, -)1/2«
и о
т
МЕТОД ИНТЕГРАЛЬНЫХ ТОЖДЕСТВ
[ГЛ. 4
Действительно,
1
J (/Си, и) dp —
о
I b b II
р(х) иг dx — \q (х) dx$d|x§0 (ц, р')и(х, ц)и(х,
О а а 0 0
b 1 Ь /! 0/2 Л 1 \1/2
Ss \dx^pu2dp — и2 dp j H OuMp') dx^
a 0 a \0 j \0 0 /
b 1 ft 1 1
Ss j dx j pu2 '’p — \dx\qu2 dp^c^lu I2 dp.
a 0 а 0 0
Получим оценку для ||uft —и* ||. Поскольку на интервале (хг_ъ x,-)
разность uh — и* имеет вид
uj (х, и) - uh (х, р) = at (р) I *-
- $ Р (.У) dy I J р (у) dy\ I 4-
+ «/-1(н)
s- у-1
- Рdy\ p^dy]
'i—1 '
то, учитывая сделанное выше предположение о кусочной гладко-
сти р (х), легко показать, что при хе (хм, х(-)
| uh (х, р) - и1} (х, |х) | =sS О (hi) (| ai (р) | -Н (ц) |).
Тогда
II “А ~ ы/ ft-i. xi) 0 № hi (I uh M) I2 +1 (Xi-i, P) I2).
| “ft “ ILc. b>^0 (h2) 1 uft F£i(0, b) О (h2) [u\ u>].
Из (3.22) и последнего соотношения получаем неравенства
$[u\ u"]dp^ + uft]'/2 + 0(/i)[u\ и*]) dp,
о о
(l-O(/i))$[u\ ub]dp^(U№“hH-0 (/1)И||[и\ «Т2)Ф^
о о
/1 0/2 /! .1/2
^c(i+o(/i)) m/iNii П«л> ыАЫ
\0 / \0 /
§ 3]
ПРИБЛИЖЕННОЕ РЕШЕНИЕ КРАЕВЫХ ЗАДАЧ
273
и искомые априорные оценки (считая h достаточно малым):
' 1 , 1 ,1/2,1 .1/2
«*]dp)'/a^C-}±§gH|7||adp) ^сНИЦМр)
o' ' \о / \о /
/1 .1/2 ,1 .1/2
[J||MApdpj К |7lladp I .
\0 / \0 /
Из полученных неравенств следует однозначная разрешимость
системы интегральных уравнений и непрерывная зависимость
приближенного решения uh (х, р) от исходных данных задачи.
Оценим погрешность приближенного решения uh(x, р). Здесь
нам потребуется следующий результат [39], касающийся гладко-
сти точного решения задачи.
Лемма 1. Если р (х), q (х) е Loo (а, Ь), в (р-, р') е Lm ([0, 1] х
х[0, 1]), f (х, р)е/.ю([й, fc]X[0, 1]), то для любых точек х, х’,
х' = х + йе(а, Ь), решение и(х, р) удовлетворяет соотношению
/* \1/р ( h,/p, 1<р<оо,
Н и(х + й, р)-и(х, p)fdpj =sSc|7||z.OT-j p=L
X
Замечание. При замене переменных z/ = Jp(|)d| уравне-
а
ние (3.19) примет вид
= J §0ыО/> Ю4*' +
о
и очевидно, что для его решения и (у, р) справедливы утвержде-
ния леммы.
Запишем равенство
1 1
J[m— uh, и —Mft] dp =$(/((« —i?), (и — uh) — (иj — uj)) dp
о o'
и оценим его правую часть:
1
J(K(m — uh), (и —и*) —(и;— и*)) dp
о'
, 1 .1/2 ,1 1 .1/2
sgcH || m — MA|j2dp] Ш|м — M/Pdp+Jlla* —a^dpj
\o / \0 0 /
Как показано выше,
i i i
5II мл - и] II2 dp < О (h2) J [м\ ЫЛ] dp О (йа) JII f ||а dp,
о о и
274
МЕТОД ИНТЕГРАЛЬНЫХ ТОЖДЕСТВ
(ГЛ. 4
а из леммы следует, что
1 1 т
J ||ы-ы/||М|х= jj dp J |х)- щ(у, |х)|^0(/г)И111оо,
О 0 0
ь
где Т = J р (х) dx. Тогда
J (К (и — uh), (и — uh) — (iij — «*)) dp
о
/' V1'
О (h)'^ || f 11^ I II и - ил||2 dp
\о /
и, как следствие этого соотношения, получаем оценку погреш-
ности приближенного решения:
/1 \ 1/2
K[u-uh, =^O(/i1/2)||/||z.OT. (3.23)
\0 /
Итак, исходная задача для уравнения переноса путем дискре-
тизации ее по пространственной переменной сведена к системе
интегральных уравнений, решение которой можно получить
известными методами, например методом Бубнова — Галеркина.
Оценка скорости сходимости при этом может быть легко получена
исходя из свойств выбранного базиса и гладкости решения систе-
мы, которую можно исследовать, предполагая соответствующую
гладкость по ц функций 0 (ц, ц') и f(x, р).
3.4. Параболическое уравнение. Применим метод интегральных
тождеств к построению алгоритма приближенного решения задачи
для параболического уравнения с разрывными коэффициентами. При
этом оценим скорость сходимости приближенных решений, основы-
ваясь лишь на реально существующей гладкости точного решения.
Пусть область Q = [a, b]x[0, Т] разбита на несколько под-
областей x(ft)]i(z)], k=l, ..., /С, /=1, ..., L,
m=l.......М, xm = a, x№ = b, 0°> = 0, t^ = T. Через S<n-m>
обозначим границу раздела Q(n) и Q(m>. Предположим, что р (х),
др/дх, q(x), f (х, t) в каждой из областей Q(m) удовлетворяют
соотношениям
IФ(х, 0 |^О(!х-х' |“),
| <р (х, f) — <р(х, (') | ^0 (| t — V |“/2), 0<а<1,
а на S<n- m) могут наблюдаться разрывы первого рода.
Рассмотрим задачу
ди д ди , . . .. , ,,
Тх'Р ~dx+(lu==f’
[ы] = о, [р = 0 на £<'’• т>, (3.24)
и (a, t) = u (b, () = 0, и (х, 0) = 0,
§ з]
ПРИБЛИЖЕННОЕ РЕШЕНИЕ КРАЕВЫХ ЗАДАЧ
275
где O<po=Cp(A)=Cpi, 0^q(x)^q1, р0, Fh, ft — постоянные,
[и] —скачок v при переходе из Q(n) в Qtm). Известно (см. [21]),
что существует единственное решение задачи (3.24).
Введем сетки по обеим переменным: a = x0<xi/2<x1<...
...<2<2хц = Ь, 0 = to<2ti<2t2<2• • <2tj-i<2tj= Т и опреде-
лим функции
Qk (х) =
xk / xk \ -1
1 ~ S Р%ГI $ 707) ’ х е Xft)’
х Ч-i '
х txk+i (3.25)
1 ~ j ₽%) ’ х е (х*’
xk \ xk '
О, х*+1), £=!,..., N — 1.
Проектируя первое уравнение (3.24) на функции {Q* (х)}
получаем тождества
Qi) (0 + [р (О + №, Q() (t) = (A Qt) (О,
i=l..................................................А7— 1 (3.26)
/ ь \
(здесь и в дальнейшем (м, v) = ^uvdx, || и|| = (и, м),/2 . Проинтег-
\ а /
рируем по t е (0_1( 0), / = 1, ..., J, каждое из соотношений
(3.26); получим тождества
(м, Qi) (0) - (и, Q>) (tf-J + \ {(«(хг, t)-u (xi-lt
(qu, Qi)dt =
+ (и (хг,
Ч
= J (f, Qi)dt, j=l, ..., J-I, i=l.................N-l, (3.27)
4-i
которые можно представить в виде
9 (
(и, Qi)(tj) — (u, Qi) (tj^i) + \ (р-^,
dQA
-dd-) + (Qu> Qi)tdt='t/f/l,
, 1 = 1, N-l, (3.28)
/=1
W-! 4
где ft (х, 0=2 и (Xi’ = dt> xi
276
МЕТОД ИНТЕГРАЛЬНЫХ ТОЖДЕСТВ
[ГЛ. 4
Применим тождества (3.28) для построения приближенного
решения задачи. Существует несколько возможностей использовать
их для этой цели. Остановимся на одной — приближении интегралов
по временной переменной с помощью квадратурных формул. Вы-
берем простейшую квадратурную формулу вида
9
) (и, <р) (0^т = ту(ы, <р)(/у) + 87,
9-1
где
. («. <Р) (</)-(«. <Р) (О I
|<т/ шах -------------п, 0<а<1.
'49-1-9) 1/1 1
Тогда (3.28) можно записать следующим образом:
/ ди, dQ,\
(U, Qi)(tj)+Tj[p-g+-(x, tj), ~^j + xj(qu(x, tj), Qt) =
+ ^ + (qR„ Qz),
/=1, ...» J, i=l......JV-1, (3.28')
где
t
du, fl du,
Ri-Xj-^tx, tj)- -^(x, t)dt,
9-i
9
/?2 = т/«(х, tj}— ) u(x, f)dt.
‘i-i
Приближенное решение задачи в момент времени tj будем
искать в виде
N— 1
«/ W = S aJiQi W ’ / = 1...J •
[=1
Постоянные {й/Д определим из системы уравнений, которая
возникает из (3.28) при замене и (х, tj) на и* (х) и отбрасывании
слагаемых, включающих Rlt Rt:
(«/, Qi)+ "9 \Р + TJQi) = V//+ , Qi),
1 = 1...J, i=l........N- 1, (3.29)
Ug=0,
5 3]
ПРИБЛИЖЕННОЕ РЕШЕНИЕ КРАЕВЫХ ЗАДАЧ
277
и которую в матричной форме можно представить следующим об-
разом:
= j = 1, ..., J, (3.30)
где а/ = (ал, ..., ау, N-i)т, а0 = (0.0)т, = ч fj. N-i)т,
а. элементы симметричных трехдиагональных матриц M =
А = (Лг/) имеют вид
Mlk = (Qlt Qk), Aik = (p^~, d-^ + (qQt, Qk), i, k=\, .... 1V-1.
Решая последовательно систему (3.30), можно определить векторы
о,-, / = 1, ..., J, а значит, и приближенное решение задачи при
t = tj.
Очевидно, что при каждом фиксированном j система (3.30)
однозначно разрешима, так как матрицы Л1, Л, а значит, и мат-
рица Al + т/Л, положительно определенны. Отсюда вытекает
существование приближенного решения задачи. Чтобы доказать
непрерывную зависимость его от функции источников f (х, t),
достаточно получить априорную оценку для Для этого
умножим каждое из уравнений (3.29) на соответствующие коэф-
фициенты о,-,-, выполним суммирование по / = 1, .... /', 1 = 1, ...
..., N — 1 и воспользуемся оценкой | ,, ы*) | у || ] |а +
+ у||ы/||а- В результате приходи^ к неравенству
ll и.*, V1 // ди1! \ \ 'Л
Ц1 + 2 w т -я- + (’“?"?) < 2 (&• “?) <3-31>
/=1 /=1
Поскольку
1/2
«/)
то из (3.31) поручаем оценку
/9' W2
ШЛ2^ , /' = 1,
\ о )
(3.32)
НЭ которой вытекает непрерывная зависимость от /(х, ().
278
МЕТОД ИНТЕГРАЛЬНЫХ ТОЖДЕСТВ
(ГЛ. 4
Можно также показать *), что при сделанных выше ограниче-
ниях на исходные данные задачи для погрешностей
lj(x) = u(x, tj) — u*(x),
N — I
= «/(x, tf)-U*(x)= 2 (“(•*<, 6) - aJi) Qi (X)
1 = 1
справедливы оценки
О (т1 + о (/?) lctr + $ ИIеdt\
\ о /
( J , д, ж . 1/2
max || ||+2 Ъ' RP Т- -дГ) + W 0 + т(1+а)/2)-
' 4=i '
Итак, если исходные данные задачи удовлетворяют введенным
выше ограничениям, то приближенные решения и* (х) сходятся
к значениям точного решения и (х, tj) при /г->0, т->0.
§ 4. Метод интегральных тождеств для задачи
на собственные значения -»
Задачи на собственные значения часто встречаются на прак-
тике. К ним, например, сводятся проблемы собственных колеба-
ний механических систем, расчета критического состояния ядер-
ного реактора и др. В этом параграфе на примере простого
уравнения будет проиллюстрирован подход к приближенному
решению таких задач с помощью метода интегральных тождеств,
который здесь, в силу выбора базисных функций, приведет к той
же системе, что и в методе Ритца. Однако методика исследования
вопросов сходимости в данном случае будет, как и в предыдущих
параграфах, несколько специфичной. Ниже будут рассмотрены
такие этапы алгоритма, как постановка задачи, формулировка
метода решения, оценка погрешностей первого собственного числа
и соответствующей собственной функции, обсуждены возможные
методы решения дискретной задачи. Изучение вопросов числен-
ного интегрирования можно выполнить так же, как и в случае
неоднородных уравнений, а исследование проблемы численной
устойчивости в задачах на собственные значения подробно про-
ведено в [31] для широкого класса уравнений. Поэтому послед-
♦) См. сноску на с. 270,
§ 4] ЗАДАЧА НА СОБСТВЕННЫЕ ЗНАЧЕНИЯ 279
ние два этапа здесь рассматриваться не будут (хотя являются,
как и названные выше этапы, обязательными при решении прак-
тических задач на собственные значения каким-либо приближен-
ным методом).
4.1. Постановка задачи. Рассмотрим задачу об отыскании
чисел X и ненулевых функций и (х), удовлетворяющих уравнению
+ = a<x<b, (4.1)
и краевым условиям
и (а) = и (Ь) = 0, (4.2)
где р(х), q (х) — положительные ограниченные функции:
0<p0<PW<Pi> 0<<7o<?W<<?i, Ро< Pi> 9о> 9i = const.
Задача (4.1), (4.2) в операторной форме имеет вид
Lu = ku, (4.3)
где Lu = — р (х) ~ + 9 (х) м, D (L) = {ui к е W-) (a, b), Lu е
их их
— L2(a, ft)}.
Уравнение (4.3) рассматривается в Л2(а, Ь). Пусть в дальней-
шем (•, •)!-! = (•< •)< II• 1кг = II • II = (*< -)1/2- Как неоднократно отмеча-
лось в предыдущих параграфах, оператор L является симметрич-
ным и положительно определенным. Именно для таких операторов
собственные числа и соответствующие им собственные функции
обладают рядом свойств. Сформулируем некоторые из них.
а) Собственные числа симметричного оператора вещественны.
Действительно, если £щ = Хм, то, используя симметричность L и
свойства скалярного произведения в комплексном пространстве,
имеем Х(м, «) = (£,«, м) = (м, Ьи) = (и, Хп) = Х(м, и), т. е. Х = Х
вещественно.
б) Собственные функции u,-, Uj симметричного оператора, соот-
ветствующие различным собственным числам Xf =/= Ху, ортогональны:
(Lu, — XjM/, Uj) = 0, (LUj — LjUj, Ui) — 0,
0 = (Luh Uj) — (LUj, щ) = (X; — Xy) (ut, Uj), (4.4)
W, Uj)*=0, i=£j.
Отсюда также получаем ортогональность и( и Uj по энергии, т. е.
ь / du- du- '
[«,, Uj] = \ (р + 4uiuijdx^ (Lu" ui^i i=£i- (4-5)
280
МЕТОД ИНТЕГРАЛЬНЫХ ТОЖДЕСТВ
ГГЛ. 4
в) Собственные числа положительно определенного оператора
положительны:
(Luh U{) = hi (щ, щ), Хг = (Ьщ, щ)/(щ, щ) > 0.
г) Задача на собственные значения для симметричного поло-
жительно определенного оператора может быть сведена к неко-
торой вариационной задаче. В частности,
inf R (v) = Xi«SXf, t = 2, 3, .... v^Hl, (4.6)
tl
где Hl — энергетическое пространство, соответствующее L, co
скалярным произведением [м, и] и нормой [м] = [и, м]1/2, a R (и)
есть отношение
R (и) = [и, и]/(и, v),
называемое отношением Рэлея.
Докажем (4.6). Пусть (ненулевой) элемент и е Нl сообщает
минимум R (у). Тогда при 13 е Hl и малых а имеем
A R (и + ат1) | =2[и’ и] = 2 -^4ПИ = о.
da ' 1 и |а=о (и, и)2 (и, и)
Поскольку т) произвольно, то 7? (и) — собственное значение, и мы
можем обозначить его Кг = Р (и), а функцию и обозначить через иг.
В силу того, что на Ul достигается минимум R (v) в HL, равный Хь
имеем Хх < R (Uj) = X; для других собственных значений и соот-
ветствующих им собственных функций при /=/=!
Отметим несколько свойств, характерных для задачи (4.1),
(4.2). Известно, что ее собственные числа образуют бесконечно
возрастающую последовательность положительных чисел Xi<X2<
<...<ХП<..., а соответствующие им собственные функции щ,
1=1, 2, ..., образуют полную систему как в Н — 1^(а, Ь), так
и в HL-
Поскольку собственная функция определена с точностью до
постоянного множителя (т. е. наряду с Ui собственной функцией
будет любой элемент Ui = cut), то для устранения этой неопреде-
ленности впредь будем считать м,- нормированными, т. е. ||и, || = 1,
i = l, 2, ... С учетом этой нормировки и отмеченных ранее свойств
имеем
Получим для Хг в (4.1), (4.2) границу снизу. Для этого вспом-
ним. что собственные значения Хг и функции щ уравнения (4.3)
§ 4]
ЗАДАЧА НА СОБСТВЕННЫЕ ЗНАЧЕНИЯ
281
при р~ 1, q— О имеют вид
Хг=/Т^_, й(=1Лf (4.8)
‘ (Ь — а)2’ ‘ V Ь — а Ь — а ' '
Тогда система {«,} полна в W$ (а, Ь). Следовательно, представ-
ляя щ в виде ряда по
«<= У Ui,kukt Циг||а= У | и1)к |2= 1,
Л=1 k=l
имеем
Хг = [ий Ui]^qo(Ui, щ) + ро(^~, =
“ Яо “F Ро Щ, k^hfn^k (Pkt ^т) =
fe = 1 т = 1
оо
= <jo + po 2 —а)2 •
k= 1
Итак,
^^9o + PO(^2. ; = 1, 2, ... (4.9)
Замечание. Из доказательства (4.9) легко усмотреть спра-
ведливость неравенства Фридрихса
(4Л°)
Л и ах lit, (а, 6)
при произвольной функции «s^(a, b).
4.2. Формулировка алгоритма. Для приближенного решения
задачи (4.3) применим метод интегральных тождеств. Для этого
введем сетку a — x0<.xij2<.x1<...<xN-y2<.XN = b и поставим
в соответствие каждому узлу xt функцию Q,-(x) вида (3.25) и
функцию <р,- (х) (вообще говоря, отличную от Qf (х)), для которой
выполнены условия: <р,- (х;) <оо, /=1, ..., Af —1. Предположим,
что {<р/ (х)} есть базис. Спроектируем (4.3) в L2 (а, Ь) на функции
{<?/ (х)}.
В результате приходим к тождествам
/х/+1 \-1 / xi \-1
(«(ха-Мх.чх)) $ +(u(x/)-u(x<_1)) J +
\ X,. / Ц.! /
-\-(qu, Qi) = k(u, Qi), i = (4.11)
282
МЕТОД ИНТЕГРАЛЬНЫХ ТОЖДЕСТВ
[ГЛ. 4
или, что то же самое,
/ dur dQ. \
\р-£, + <М=К(“’ Qi)> l‘ = 1- •••» N-1> (412)
N—l
где щ(х) = 2 w(x,)Qz(x).
i= 1
Приближение к собственной функции и (х), соответствующей X,
будем искать в виде
N—1
чн(х)= 2 a/(pi(x).
(4.13)
Поскольку краевые условия и (а) = и(Ь) = 0 являются главными,
предполагается, что базисные функции {<р» (х)}, по которым раскла-
дывается uh (х), удовлетворяют им. Коэффициенты {at\ определя-
ются из системы
/Х/+1 I \-1
(Ид (Х;) — Мд (Xz+1)) I утл] + (uh (Xi) — Мд (xi-l)) ( +
\ J р \л) I \ J р \х) I
\xt 1 Хх^ 1
+ (^д, Qi) = ^(«ft, Qi), i = 1, N- 1, (4.14)
или, в матричной форме,
La = №Ma, (4-15)
где
а==(аъ алг_1)г, Д4 = (М0), £ = (Ly),
*/+i
A4yi = (<Pi, Q/)= Ф/ (x) Qj (x) dx,
Lh
+ (Wi, Qj),
i, j=l, .... ^-l.
Отыскивая собственные числа i=l, ..., N— 1, матричной
задачи (4.15) и соответствующие им собственные векторы а(
с помощью подходящего численного метода, можно принять X?
в качестве приближений к некоторым точным собственным значе-
N — 1
ниям Ц задачи (4.3), а функции У, (х), построенные
§ 4J
ЗАДАЧА НА СОВСТВЕННЫЕ ЗНАЧЕНИЯ
283
на основе векторов а{, — в качестве приближений к собственным
функциям ut (х). Пусть в дальнейшем для упрощения изучения
сходимости %? к ХА принимается, что ср, (х) = Qi (х), i = 1,..., N — 1.
В этом случае матрицы L, М будут симметричными и положи-
тельно определенными. Следовательно, приближенные собственные
значения %? будут вещественными и положительными.
Отметим, что если через обозначить линейную оболочку
{Qi (х)}, то
infR(vA) = l?^X1, ЦАе//кЛ), (4.16)
vh
dR (и*) d
dalk ~даГь
где через %? обозначено наименьшее из Л?. Действительно, пусть
/V
м{* = 2 auQi (*) *= Hi? сообщает минимум R (vh) на подпростран-
стве //£Л). Тогда
N—1
2 аиаи- [<?г,
-----------= 0, 7=1, ...» ЛГ-1.
2 a^a^iQi, Q;)
i. i=i
Вычисляя эти производные, приходим к тому, что м1 = (а11, ...
..., a1N-i)T удовлетворяет (4.15) при %? = R(u?). Так как м?
сообщает минимум R (цА) лишь на подпространстве H(l cz Hl, то
очевидно, что
4.3. Сходимость. Оценки погрешностей. Во многих практических
задачах наиболее важным является первое собственное значение,
обладающее определенным физическим смыслом. Поэтому вопросы
сходимости и оценки погрешностей будут рассмотрены лишь для
X? и и* 1}.
Прежде всего покажем, что наименьшие приближенные соб-
ственные значения А,? сходятся к Так как и? сообщает R(vh)
минимум на подпространстве Hl\ то для произвольной функции
vh е II vh || = 1, имеем
0 A.J — Xj = R (mi) — R (мх) R (v^) — R (mx) =
= [У/>, Ул]-[«1, u1] = [u1-vh]i + 2[vh-u1, M1]<
[Mi - УА]а + 2 [Mi - уа] [MJ = [Mt - vA]a 4- 2 [Mi - цА],
и значит,
0 Xj - %i inf ([мх - vA]a + 2 [Ai [Mi - vft]) + 0 (4.17)
284
МЕТОД ИНТЕГРАЛЬНЫХ ТОЖДЕСТВ
(ГЛ. 4
при А = тах|х2 —х(-1|->0, vh е Н^, в силу плотности Я**’ в HL
(см. теоремы об аппроксимации из § 2 гл. 2).
Теорема 1. Если р(х), q(x) eLJa, b), то при
h->-0 и справедлива оценка
Xj А^ 4" сЛ2 (9i + А^)2. (4.18)
Доказательство. Пусть |!«i||=l, ||mi||=1. Введем интер-
полянт Ui,/= 2 ui (xi) Q; (х)> Для которого, согласно теоремам об
<=1
аппроксимации из § 2 гл. 2, имеем
II Wi - Mi, 11| sSc/i2| ™ p | sS ch2 fa + Xi),
III «1,/11-11 +
Запишем тождества
/ du. . du. r\
\P~1T’ ~ar) + ('qU1> “w) = M«i, Ml,/),
(/£, v)+(’“!•
(p^,^)+W. «?)-
1 [7 du. , du. z\ "I
“ (“i> “i, /) Lv “3x“ ’ ~dir) + (qU1> Mi.')|.
Но м? сообщает минимум R (t>A) на подпространстве функ-
ций vh^HL, || «а 11=1, поэтому
„ 1 // du. , du. ,\ \
О А< - А* < (И1 ((р , -^-j+(9u1>z, U1(/)j-
1 // du. , du. z\ \
_(“1-“1,/, «!,/) LdUl,I dUl.l\ ,
ll“i./la(“i, “1,/) v dx ’ dx J
+(^Х7)(^’Ъ
c II “1~“1. /II (n dui.f dui.i\ > M“i-“1,/Illl“i,d ,
l! “i, /II l(“i, “i./)|\ / II “i, i II2 l(“i, “i, /)|
+1кЪ)1' 1 - Л‘ +^ (₽ >• г) +
4-cpi/ia(9i + A,i)^c/i2(Pi + \i) A.! +c9i/i2(<7i -J- AJ = c/i2(<7i4- Ai)2, c>0.
Отсюда следует оценка (4.18).
§ 4]
ЗАДАЧА НА СОБСТВЕННЫЕ ЗНАЧЕНИЯ
285
Пусть {ui} — последовательность приближенных собственных
функций, соответствующих {%?} и подчиненных условию норми-
ровки II U1 || = 1.
Лемма 1. Величина | (мх, u?)| не может стремиться к нулю
при h-+Q.
Доказательство. Предположим противное, т. е. что
|(и1> ПРИ Л->0. Тогда для любого малого е>0 найдется
такое ho, что при h<h0 имеем ](«!, м?)|<е. Представим м? в виде
ряда по {«*}:
Wi = 2 (wf, «*)«* = (“?. «i)«i+ S W. Uk)uk.
4 = 1 4=2
Тогда
A? = 7? (w?) = [ux, ut] = (uj, U])ui-j- У u»(u?, и^ =
4 = 2
2 oo
^Ax(mx, Ml)2 + ^-2 У, (Ui, Ukf
4 = 2
4 = 2
4 = 2
Учитывая (4.18), имеем
A2(l-e)^A1+O(/i2).
(4-19)
Выберем e и h достаточно малыми — так, чтобы А2 (1 — е) — Ai > О,
О (7i2) <(Аа (1 — е) — Ах)/2. Тогда из соотношения 7^(1—е)=с
Ах + О (Л2) имеем А2 (1 — е) Ах + (А2 (1 — е) — Ах)/2, А2 (1 — е) Ах.
Таким образом, приходим к противоречию между последним
неравенством и неравенством А2 (I — е) — Ах>0. Лемма доказана.
Возьмем функции U1} = и1}/^, мх), предполагая h достаточно
малым.
N — 1
Лемма 2. Для Ui, мх, mx,/= 2 u1(xi)Qi(x) справедливы
/=i
соотношения
(4.20)
Доказательство. Пусть | = мх / —£7?. Тогда
ОО
||wx,/ — 1/х || = у (|, ил)а4-(мХ|Х — Ui, мх)2.
4 = 2
286 МЕТОД ИНТЕГРАЛЬНЫХ ТОЖДЕСТВ (ГЛ. 4
Поскольку (С/*, «1) — 1 и
(ui,/ — Ui, — — Mi> Mi)4"(Mi — Mi)= (Wi,I — ult u-i),
I («1,1 - Ui, Их) I2 II «1II2 J Ml. z - Ml ||2 ch* (qi + M2,
00
то для оценки —(7?||2 необходимо оценить 2 (В, M*)2- Для
ft = 2
этого рассмотрим тождества при |a==m1iZ — U1}:
/ du, , d&A
\P~dx~' to)+ №''> ^) =
==^i(Mi,z, ?а) + (Ai (Mi — «1, z) — q (th — Mi, J, I/,),
1)+^?’ ^)=a?(l/?, gA),
[I]2 = Al II g II2 + (8, £),
где
8 = (Ai — A*) Ui + A] (Ml — Mi, z) — Я (ui ~ ui, i)>
8 81 - (Al + Я1У ch* +1 Al - A? 1)| иЧ || = (Al + qtf ch* + ch*/\ (ult u*)|.
Из леммы 1 можно сделать вывод о существовании такой посто-
янной Со>0, что при /i->0 будет выполняться соотношение
|(mi, м?)| >с0 (иначе снова получили бы |(мь м?)|->0 при /г->0).
Следовательно, || е (Аг + qi)* ch* + ch*/c0 sg 0 (h*).
Представим | в виде ряда по системе {uk\. Тогда
1= 5 (5, мА)мъ
k = i
R]2= 2 Mft)2 = Ax 5 (5, M^ + (8, g),
t=l t=l
2 (Aft-Al) (g, Mft)2=(8, g),
fe = 2
а значит, также
Л-2 —
$ 4]
ЗАДАЧА НА СОБСТВЕННЫЕ ЗНАЧЕНИЯ
287
Вторая оценка из (4.20) следует из первой и из того, что
hi -UiВ Mi - мх, г |1 + J Mi, z-Ui JО (ft2) •
' 1 Ag—**1
Следствие. Последовательность {м?} сходится к мх при
h-+0, и справедлива оценка
<4-2»
Доказательство. Из (4.20) получаем
При Л->0 величину (мх, м?) можно считать знакопостоянной,
близкой по модулю к единице. Пусть для определенности (мх, м?)>0
(если (мх, м*) отрицательно, то, умножив иЧ на —1, снова по-
лучим приближенный собственный элемент, для которого
(м1( м{1)>0). Тогда
||м1-м?||2=1-2(м1, m?)+1=2(1-(mi, «?)) =
.2(<-(“р О
1+(«Р «?)
О (Л4)
(Х2 — Лх)2’
т. е. получаем оценку (4.21).
Теорема 2. Если р(х), q(x)^Lo3(a, b), то при h-+0
справедлива оценка
(4.22)
Доказательство. Полагая Цл=мх,/ — и1}, запишем тождества
/ du. , dv.\
\P~dT’ ~d^) + ^U1’ ил) = Х1(МЬ
Э+W. “»)=W. '>«)
) . ' ь (4.23)
(p fa(ul. I ~~ ul), ^(“1. / Ml)]+ G?(M1 — M?)> Mx —M?) =
\ Ux j
— z) + (^1Mi — ^lUi, Ult I — U1).
Поскольку
|| «1,/—z~ м?)> ^(м>1, I— M?)) 1 ,
UA UA J
M1,7 ~ м» I c(p - м?), ^.(м1>7-г«д)у/а,
288
МЕТОД ИНТЕГРАЛЬНЫХ ТОЖДЕСТВ
[ГЛ: 4
то из (4.23) с использованием (4.18), (4.21) получаем
max | Mi z — Ut\ gg .° ^-Z-.
' A2 —Aj
Из результатов аппроксимации (см. § 2 гл. 2) известно, что
max I mi j — мх j ch21 / р II
a<x<b 11^ dx Itaofc. 6)
В силу неравенств
получаем
II «1 — М? ||с(а. 6) =С II W1 — Ml, I ||с(0. 6) + || «1. I ~ М1 Ис (а, Ь) "S
-с ° ft2) I ch3 A1/2 (At + ^t) О (А3)
А2 — А) 1^ Ро А2 — Ai
4.4. О методах решения дискретной задачи. Поскольку система
(4.15) может иметь большой порядок, то зачастую отыскание
всех собственных значений и соответствующих им собственных
функций является весьма трудной задачей. Поэтому в таких слу-
чаях находят лишь те собственные числа, которые представляют
наибольший интерес, например несколько первых: АА sS АА sg...
... АА. Когда известна нижняя оценка для № (которую в проек-
ционных методах часто можно получить на основе положитель-
ной определенности оператора) и при этом ААу=0, задачу об оты-
скании k первых наименьших чисел можно свести к нахождению k
первых наибольших значений путем преобразования задачи (4.15)
к задаче
^а = £-1Ж
или, что то же самое,
Аа — ра, (4.24)
где А = L~lM, р = 1/АА.
Если теперь нас интересует наибольшее собственное значе-
ние pi задачи (4.24), то для его нахождения можно воспользо-
ваться, например, методом Люстерника, изложенным в [7, гл. 1].
В этой же работе описываются методы отыскания наименьшего
собственного значения р.
Для решения задачи (4.24) может быть также применен ите-
рационный метод с чебышевскими параметрами, обеспечивающий
устойчивость счета, предложенный в [67] и который, как отме-
§ 51 УРАВНЕНИЕ ЧЕТВЕРТОГО ПОРЯДКА 289
чается в этой работе, дает существенный выигрыш в скорости
сходимости по сравнению с методом Люстерника.
Для решения задачи (4.15) может быть использован и метод
деления пополам. Поскольку матрицы L, М в (4.15) трехдиаго-
нальные, симметричные и положительно определенные, то для них
имеет место теорема о разделении корней определителей матриц
Lj — LMi, где Lit — матрицы главных миноров порядка I.
Эта теорема лежит в основе метода деления пополам (см. Дж. Уил-
кинсон. Алгебраическая проблема собственных значений.—
М.: Наука, 1970). Этот метод эффективен и прост в реализа-
ции на ЭВМ.
§ 5. Интегральные тождества для уравнения
четвертого порядка
В этом параграфе будет получена проекционная форма инте-
гральных тождеств для обыкновенного дифференциального урав-
нения четвертого порядка (см. [14]) и проиллюстрировано ее
применение для построения разностных схем первого и второго
порядков точности. Ради простоты уравнение рассматривается
лишь при периодических краевых условиях.
5.1. Формулировка задачи и проекционная форма интеграль-
ных тождеств. Рассмотрим уравнение
Lu = £ Р W S + q W и = (5Л)
где р (х), q (х), / (х) — периодические функции с периодом 1,
0<po^PW<Pi, 0<^0^^(х)^^1, Ро, Pi, Яо, <7i = const.
Обозначим через подпространство из Ц7а(0, 1), состоящее
из периодических функций с периодом 1. Умножив уравнение (5.1)
на произвольную функцию v (х) е Fa, проинтегрируем результат
по [0, 1]. Выполнив простые преобразования, приходим к ра-
венству
[«, ^] = (Л v),
(5.2)
где
г , f d2u (Pv\ , , .
(«, о) = («, ц)ь,(0. 1), |«Е = («, «)‘Я
Назовем обобщенным решением уравнения (5.1) функцию
u^W2, удовлетворяющую (5.2) при произвольной функции v^W2.
Ю Г. И, М«рчук, В. И. Агошков
290
МЕТОД ИНТЕГРАЛЬНЫХ ТОЖДЕСТВ
1ГЛ. 4
С помощью теоремы Рисса о представлении линейного огра-
ниченного функционала можно показать, что при сделанных огра-
ничениях на р(х), д(х) и при
<с°. velFa, ц#=0. (5.3)
и 11 'W'l
обобщенное решение существует и единственно, причем [ и -=S
Если же предположить необходимую гладкость функ-
ций р(х), q(x), f(x), то обобщенное решение и(х) будет также
удовлетворять уравнению (5.1).
Введем на [0, 1] сетку
О = хо<^1 <• • -<.xN = 1, h=l/N, Xt = ih, i = 0, 1, ..., N, (5.4)
и пусть
dx,
(x—Xj) (h — \x—Xj I)
J P(x)
ak+i/2 — Sfe+i/Yfe+i — Sfe/Yfe-
Рассмотрим функцию Qk (x), равную
1
Xfe-2-W
P(w)
P(«)
(x—co) (Xft 2—(0)
P(«)
при Xft_2 ==s X < Х*_х,
1
afe-l/2Vfc-l
xk-l x
f (Xfe-2-W)3 । (x-<o)(xa-2-w)
J p(w) d®+j p(ffl)
xk *k
1
afe+l/2Vfe
г/ fe—1 \
L '“k '
при
xft_1^x<xft,
§ 51
УРАВНЕНИЕ ЧЕТВЕРТОГО ПОРЯДКА
291
xk+2
_ f (Х*+2~®)2
J Р(®)
Xk
(-5— + —^- +
\“*+1/2?* “*+1/2?*+1
J P (®)
xk J
i \ r/xp+i _ \
a—7/ ) Xjf&rdm (x*+1-x>
“*-1/2?*/ \ J P '> /
L 'Xk /
Xk+1 x
_ C (x*+i-®)2 I C (x-co)(xA+1-co)
J P(®) "’J p(w)
xk xk
Г/х*+2
----!----- I f d(0
“*+l/2?*+l \ J P (®)
L XX.
при xk^x<.Xk+i, (5.5)
x*+2 X
C (xfc-a>)2 d , C (x-<o)(xA+8-m)
J P (®) J P (®)
xk xk
при X*+i«SX<X*+2,
О при x^[xk_2, xft+2].
Отметим свойства функций {<?*}, установленные в [42]:
1) {Q* (х)} — система линейно независимых функций; 2) функции
Qk (х), dQk (x)/dx непрерывны в точках xk, xk±\, а в точках х&±2
они равны нулю; 3) если р (х) — разрывная функция, то вторая
производная d2Q* (x)/dx2 также разрывна, однако функция
р (х) (d2Qk/dx2) вновь является непрерывной и обладает производ-
ной интегрируемой с любой конечной степенью; 4) в слу-
чае р (х) = 1 функция Qk (х) принимает вид
Qk (х) — 6/гз
— (х*_2-х)3,
4 (xk-i - х)3 - (х*_2 - х)3,
(хА+2 - х)3 - 4 (xft+1 - х)3,
(х*+2 - х)3,
О,
Х*-2 X' Xk-lt
х*-1 =ss х ==£ xk,
Xk^X^ xfr+1,
X*+1 - X - xft+2,
X^[Xk-2, xm].
Легко заметить, что в этом случае Q*(x) можно определить по
формуле Qk (х) = Q (x/h — k) через функцию
О, х 2,
л/х- (2 —х)»/6, 1^х^2,
[(2 —х)3 — 4 (1 — х)3]/6, O^x^l,
Q(—х), х<0.
10
292
МЕТОД ИНТЕГРАЛЬНЫХ ТОЖДЕСТВ
(ГЛ. 4
Имеем (2 —х)8-—4 (1 -х)3 = 1 + 3 (1-х)-фЗ (1-х)«-3 (1-х)8,
стало быть Q (х) совпадает с кубическим В-сплайном <р3 (х).
Следовательно, аппроксимирующие свойства функций Qk (х), с по-
мощью которых построены интегральные тождества при р(х) = 1,
определяются соотношением (см. § 10 гл. 2)
где wk — заданные коэффициенты, cs — постоянные.
Получим интегральные тождества. Для этого последовательно
принимаем в (5.2) v = Qk, k = — 1,..., N Ц-1. В результате приходим
к тождествам вида
[«, Q*] = (р £ - ^) + (<7«. = (А &)• (5-7)
Если учесть равенство
/ d2u cPQk\______(du d d*Qk\
\P dx2 ’ dx2 j \dx' dx? dx2 )
= _ (— u fa) + 2u (xfe+1) - и (хк+2) _ — и (xfe_t) + 2u (xk) - и (xk+Q\ 1_.
k Vfe+1 K+i/2
/— и (Xfe_t) + 2ц (xk) — и (xfe+1) _ — Ц (xfe_2) + 2ц (xk_J — и (xk) \ 1_
k V* V*-i ) a*-i/2 ’
то тождествам (5.7) можно придать следующую форму записи:
_ /— « (х^) + 2ц (хк+1) - и (xfc+2) _ — и (х^) + 2ц (xfe) - ц (хйп) \1
\ Va+i V* / a*+i/2
(—и (xk-i) + 2ц (Хк) - и (xfe+1) _ — и (xk_2) + 2ц (xA_t) - и (хк) \_1
k v* Va-1 / «*-1/2
+ (<?«, &) = (А Qk)- (5.8)
В случае р (х) = 1 эти тождества принимают простой вид:
дз Iм — 4u (Xfe-i) + 6u (xk) — 4u (x*+i) + и (x*+2)] Ц-
+ (qu, Qk) = (f, Qk). (5.9)
5.2. Схема первого порядка точности. Проиллюстрируем при-
менение полученных интегральных тождеств для построения при-
ближенных решений задачи.
Схему первого порядка точности для большей наглядности
получим для случая, когда р=1 и интегральные тождества имеют
вид (5.9). Для построения схемы предположим, что обобщенное
решение и (х) обладает первой производной du/dx е L2. Введем
следующее представление слагаемого (qu, Qk):
(ди, Qk) = и (хк) (д, Qk) + ей, (5.10)
§ 51
УРАВНЕНИЕ ЧЕТВЕРТОГО ПОРЯДКА
293
где
\&к\^сдх№2
Опускаем в (5.10) ек, подставляем результат в (5.9) и делим на h.
Приходим к системе уравнений
jji [w*-2— 4и*+1-|-uk+i]-}-Bkkuk = fk, k= 1, ..., N,
где Bkk = I (<7, Qk)L1 (Я), fk = -j- (f, Qk)Lz(R}. В силу периодичности и (x)
принимаем u^ = uN_lt u0 = uN, uN+1 = ult uN+i = u2. В результате
приходим к схеме
Au + Bu — f, (5.Н)
где « = («ь .... uN)T, f = ..., fN)T, B = diag(B/z),
~ 6 —4 1... о ... 1 — 4
—4 • 1
1 • —4
4 1 ... О ... 1 —4 6.
Если предположить существование решения системы (5.11),
то, отыскав с помощью подходящего метода {и*}, можно принять
их в качестве приближений к {и(х*)}.
Проведем обоснование построенной схемы. Прежде всего отме-
тим, что ошибки аппроксимации et/h здесь допускают оценки
Докажем устойчивость схемы. Матрица А симметрична. В ка-
честве ее собственных векторов можно взять векторы <р7- с ком-
понентами = е1'*0, где 9 = /2лй. Собственные числа (А) имеют
вид
Л/ М) =4 (3 - 4 cos 9 + cos 29) = ~ (1 - cos 9)2 =
— (1 — cos 2n/7i)2 0, (5.12)
причем Л,дг(Л) = О, ф№(..., 1, 1, 1, ...). Стало быть, матрица Л
положительно полуопределенна. Но для элементов В и справед-
ливы оценки с0 =g Вц =g clt с0, сг > 0, поэтому в сеточном
294
МЕТОД ИНТЕГРАЛЬНЫХ ТОЖДЕСТВ
[ГЛ. 4
пространстве
г w 1
Li = {и: (и, v)i, h = J] hutVi, || и ||2. h = (и, u)^h\
I Z=1 J
матрицы В и Д + В положительно определенны. Следовательно,
СоIIUII h^(Ви, + u)i,h = (f,
II/Ik, л IIи Иг, л» J3)
IIи Иг, л ~ II/ Иг, л>
60
т. е. схема устойчива.
Пусть ит = (и (х^, ..., u(xN))T, 1 — ит~и. Тогда вектор g
удовлетворяет уравнению
(А + В)1 = -Ё,
где е = (е1//г, eN/h). Применив к нему оценку (5.13) и оценки
для e,t/h, приходим к
/ \ 1/2 / xi+2 J/2
||«7’-«кй^с| 2 М8 * * *^)2 * *) 2 & $ I’Srf'M ;С
V=1 / \{ = 1 х._2 /
II dx ||l,’
т. е.
II иг-и ||2, л О (h).
(5.14)
В заключение отметим, что здесь предполагалось лишь, что-
бы u^Wi, так что ограничения на / (х) можно взять еще более
слабыми по сравнению с условием (5.3).
5.3. Схема второго порядка точности. Эту схему мы получим
в предположении, что Ц/Ц^-г <оо, р(х), В этом слу-
чае, как упоминалось в п. 5.1, обобценное решение задачи
существует, единственно и ||«||1Г|^с||/||й7-г. Введем кусочно линей-
ные функции-крышки
Х~дг'~1 , X €= (Xi-t, хг),
<Pi(5) = j х>'+1~х, хе(х/, х,+1), <5-15)
I 0, х^(х;_ь xi+1), t = 0, ..., N,
фо = 4W
и будем искать приближенное решение в виде
+ с°
Ц" (х) = £ ai(fi (X). (5.16)
i=—СО
§ 6] РЕШЕНИЕ ЭЛЛИПТИЧЕСКИХ УРАВНЕНИИ 295
Коэффициенты а{ найдем из системы уравнений
— I !-uh (xk)-\-2uh(xk+1)-u>1 (xM) _ — uh (хк+1) + 2ил (xk) —uh fa-J\
“*+1/2 \ ?*+l /
। 1 /—(xft_i)+2«A (xk) — uh(xk+l) _ —uh (xk_2)+2uK(xk_i) — uh (xk)\
Vk ъ-i /“*
+ (<7«л» Qb)L,w = (f, QJlm, k=l, N, (5.17)
где полагаем
uh (xt) = uh (xN+i +/), / =0, ±1, ±2,i = 0, 1,N. (5.18)
В работе [42] доказано, что система уравнений (5.17), (5.18)
при достаточно малом Л>0 имеет единственное решение а ~
= (аи aN)T и справедливо неравенство
Г/ d2uh d2uh \ 11/2
IVt. "!.«)] C'MI'P с>°- <5-19>
+00 А
Здесь через «/, q (х) = u/Qt (х) обозначен интерполянт прибли-
1~ —ОО
женного решения пл(х) по системе {Qk (х)}, коэффициенты {и-1}
которого находятся из однозначно разрешимой системы
(xk) = uh(хк), k = 0, ±1 ±2, ... Кроме того, справедлива
следующая оценка погрешности:
| («/. Q - «Л О) I + il « - i ' Ch2 | f
4-СО
где «/, <? = 2 UiQi (X) — интерполянт точного решения:
j — —00
П/,о(х*) = ы(х*), k = Q, ±1,±2, ...
§ 6. Решение некоторых эллиптических уравнений
В этом и следующем параграфах мы применим метод интег-
ральных тождеств для построения приближенных решений неко-
торых многомерных задач математической физики, причем метод
будет рассматриваться в проекционной формулировке, т. е.
тождества, лежащие в его основе, будут получены путем проек-
тирования исходных дифференциальных уравнений на систему
финитных функций.
Прямое произведение A®Ei матриц (см. [23])
а11 • • а1т
6ц ... 61л
-ат1 • • атт
6Л1 ... Ьпп
296
МЕТОД ИНТЕГРАЛЬНЫХ тождеств
[ГЛ, 4
определяется как блочная матрица
Л®Ё =
ап В ... а1т В
атВ • • • О-ттВ-
размерности (mn)X(mn). Отметим некоторые свойства прямого
произведения матриц:
1) если ц —скаляр, то (цЛ)®$ = Л®(цВ) =ji (Л®В); 2)
(ЛД-£)®& = Л®£д-Д®С; 3) л А®(В + С) = А®В + А®С; 4)
Л®($®С) = (Л®$)®С; 5) (Л®$)г = АТ ®ВТ; 6) если Л, С —мат-
рицы размерности mxm, В, Ь — размерности пХп, то (Л® В) х
X (д®£)) = (ЛС)®(/?£>); 7) если Л и 1т (единичная матрица) —
размерности тхт, Ё, 1п — размерности пХп, то А хЁ = (Л® 1п)х
Х{1т®В}', 8) если А и В —неособые матрицы, то (Л®В)_1 =
=Л-10В"1; 9) если Xj, ..., Xm — собственные числа матрицы А,
Pi, ..., |хя —матрицы В, то собственными числами матрицы Л®В
являются числа Xrp.s, г=1, ..., т, s=l,..., п; собственные
числа матрицы Л®/ЯД- Ап® В совпадают с тп числами ХгД-ц5;
10) если А и Ё являются самосопряженными (положительно
определенными самосопряженными, унитарными) матрицами, то
таковой будет и матрица Л®$; 11) если Ах = Хх, Ву — уу, то
(Л®й)z = Xpz, где z = (x1y, .... хту)Т, z = (z1,1.z„a, г1>2, ...
• • • , 2> • • •, 21, т, ... , Zn, т)Т , Zfj — ytXj. л
Отметим также и следующее свойство: если А имеет размер-
ность тхт, 1п — размерность пхп и эти матрицы вещественны,
то матрицы Л и Л®/„ положительно определенны одновременно.
Действительно, так как матрица Л® 1п положительно определенна
одновременно с матрицей ~ (Л®Д) Д- Л (Л® Д)7' = Л (Лд-Лг)®7п,
то, используя свойства симметричных положительно определенных
матриц, получаем: если Л®/л положительно определенна, то
таковой будет и матрица Л (Л Д- Л)г ®7П, а это означает, что
и Что£- (Л Д-Лг) и Л-положительноопределенные
матрицы. С другой стороны, если Л положительно определен-
на, то этим свойством обладает и Л (Лд- Аг). Следовательно,
Х,-^^-)>0, Хг{Л±Л_^Х5(/„)>0 и матрицы-Л (Лд-Лг)®7„,
Л®7л положительно определенны.
6.1. Уравнение Пуассона. В этом параграфе для иллюстрации
отличия метода интегральных тождеств от разностных методов
§ 6]
РЕШЕНИЕ ЭЛЛИПТИЧЕСКИХ УРАВНЕНИИ
297
и от таких методов, как метод Ритца, Бубнова — Галеркина и
т. п., будет рассмотрена задача для уравнения Пуассона. Отличие
будет и в способе получения схем, и в методике обоснования
алгоритма и получения оценок скоростей сходимости.
Рассмотрим в единичном квадрате й задачу
/ д2и , д2и \ £, . /с 1 \
— (Их2 + Ну») ~ (б'1)
ц = 0 на Зй, (6.2)
где
И 1^1== sup 01 <оо, веГИЙ).
v • |«’Нй)
Известно, что в этом случае обобщенное решение задачи (6.1),
(6.2) существует и единственно, причем
II U И Иц/а1»
(6.3)
Построим сначала систему интегральных тождеств. Для этого
введем на й равномерную сетку с шагом h= 1/N по обеим пере-
менным х, = ih, у, = jh и зададим си-
стему функций {<р,- (х) (fj (z/)}, i, j=l, ...
... , JV-1,где<р,(0 = -^ф(у- а ф(0
— функция-крышка (рис. 51):
ф(0 =
' 1+Л
1-Л
. О,
t <= (—1.0),
t е (0, 1),
t Ф (-1.1).
Спроектируем (6.1) ортогонально в Л2(й) на систему
{<р(-(х) <р7-(#)}. В результате получаем систему интегральных
тождеств
1
о
/ х ~«(x<-i, y) + 2u(xh y)-u(xi+1, у)
т J \!j }
dy +
, С ,-«(*. г//-1) + 2«(х, yj) — u(x, yi+1)
+ \ Ф/ W------------------------dx =
==(/. Ф/ МФ/ W)L.W=fij,
i, / = 1, ..., ЛГ-1.
298
МЕТОД ИНТЕГРАЛЬНЫХ ТОЖДЕСТВ
ГГЛ 4
Введем следующие матрицы порядка N — 1 и векторы размер
ности (N — I)2;
f = «(1) = {«?/)- «(2) = {«?/}.
1 1
u'ff = 5 и (Xi, у) <pj (у) dy, u'ff =\и(х, yj) ф,- (х) dx.
о о
Тогда систему тождеств можно записать в виде
(J®A)u™ + (A®I)uw=f- (6.4)
Следующий этап алгоритма состоит в аппроксимации (6.4)
таким образом, чтобы соотношение имело тот же вид, но в него
входили бы компоненты одного вектора, а не двух. Для этого
имеется несколько способов. Мы остановимся на одном из них.
Введем вектор и с компонентами «у, упорядоченными так же,
как в ы(1), ц(2), и имеющими вид
«у = («, Ф/ Му (х))д2(й). j=l, , АГ-1.
Тогда (6.4) можно представить в виде
(7® А+ Л ®7) и = / + (7® A) eW + (А®7) 8<2), (6.5)
где 8(1) = ц — и11'1, 8<2) = и —и(2). Если предположить, что компо-
ненты векторов (7®Л)8(1), (Л®7)е(2) малы, то, опуская эти век-
торы в (6.5), приходим к известной пятиточечной схеме:
(7®Л + Л®/)ил = /, ил = {«*•}, (6.6)
которая в покомпонентной форме имеет вид
—ц-1-!, у—Ц?+|, j — u1}, — /+1 ,
Д2 (6.7)
иол = 4./=«?,о=«?,№0’ 1‘> /= 1. - - - ,Л7—1.
Матрица А симметрична, и все ее собственные числа положи-
тельны. Отсюда и из свойств прямого произведения матриц выте-
кает, что собственные числа симметричной матрицы (Л®7+7®Л)
тоже положительны. Это в свою очередь гарантирует однозначную
разрешимость (6.7). Решение этой системы можно принять
в качестве приближений к усредненным значениям точного реше-
ния {«у}. (Отметим, что при сделанных ограничениях понятие
§ 6] РЕШЕНИЕ ЭЛЛИПТИЧЕСКИХ УРАВНЕНИЙ 299
значения и (х, у) в точках (х,-, z/7), вообще говоря, не имеет
обычного смысла, так как и (х, у) может и не быть непрерывной
функцией.)
Оценим скорость сходимости uh к и. Для этого вычтем (6.6)
из (6.5); получим систему
(/® А + А®Г)Ъ = 8<i) + (A ®f) в^, (6.8)
где £ = ц — цл. Будем рассматривать (6.8) в конечномерном про-
/ N— I \
странстве L* = I и = {иу}, (и, и)2, л = У Н*иуиу, j| и ||2. л = («, и)^2Л.
I /=1 '
Оценим прежде всего нормы векторов 8<г>. Имеем
е//’ = <₽i W Фу (У) (и (х, у)-и (х{, у)) dxdy =
а
X
= § ф< (*) Ф/ (у) dxdy ~ (х', у) dx',
Й х.‘
I ец | § Фг (х) <р7 (у) dxdy \ | dx' =С
Q *(_i
Л+1-«/+1 \‘/2
Ц \-^dxdy\ ,
Ч-i yj-i '
откуда
N— 1 xi+il/j+}
||eW|lb^2 У h2 \ { \~\*dxdy^ch2\\%!-f
11 1 ’ J J I дх | а || дх ||l2 (Q)
£./=1
Аналогично показывается, что
Подействуем на (6.8) матрицей (t АА 01)-1. Тогда полу-
чим систему
£ = (/0 /+ А 0 A-1)-1 + (Л-i 0 А + /0 Г)-18<*). (6.9)
Замечая, что все собственные числа каждой из матриц
(/®/+Л 0 Л-1)-1, (А-10 А + /0 Z)-1, а значит, и их спектраль-
ные нормы, меньше единицы, из (6.9) легко получаем оценку
300
МЕТОД ИНТЕГРАЛЬНЫХ ТОЖДЕСТВ
(ГЛ. 4
погрешности:
IIU. h IIС ® М- Л ® Л-1)-1 к й + II (4-1 ® А 4- 1 ® Z)-1 е(2) «2. н -
^ || (/ ® / + Л ® Л-1)-1 IIII е(» ||2, ft + II (Л-1 ® Л + /® Z)-11| |1е(а| к н
II 8(1) к н +1| е(а) к h,
8u-«AkA*Sc/i|-|M 4-c/i||-~II ;
(£2) II °У IIl2(Q)
таким образом,
1|и-“лкл^с/1||и||^^с/г||Л|й7-1. (6.10)
Если на основе функций и, uh построить соответствующие ин-
N—l N—1
терполянты uj = У, htu (xlt г/j <рг (х) <pz (у), и*= У (х) <р7 (у)
>/=1 i,l=i
с использованием той же функции <р (/), то имеют место анало-
гичные оценки погрешностей для и{ — и^, и — и* ив метрике про-
странства L2(Q): 1|«z — «?Цг, (0) ^c/i||7k-i(a),
«Sc/iIIHhz-i да.
Л“7
УГ0
Рис. 52.
а>о-0
6.2. Уравнение Гельмгольца. Пусть в области Q = Qi(JS22, изображенной
иа рис. 52, рассматривается задача
{д2и , д2и \ , _ , . , . .
- (х’ У) =f (х> У)> (6.11)
и = 0 на dQ, (6.12)
где f удовлетворяет ограничению
II/Ь-1 “ sup -L^i_52J- < 00, (и, v) = (u, v)LiW, ||u|| = (u, u)i/2, veWl3(P),
® v II (I
а функция Q (x, у) кусочно постоянна:
Qi, (x, у) <= Qi,
Q2, (x, у) <= Й2,
где Qn Q2 —неотрицательные постоянные.
Введем на £2 сетку xi=ih, t = 0, .... 2N, yj — jh, /=0, 1, ..., N, h=l/N,
и определим такие же функции {ф; (х) ф/(у)}, что и в предыдущем пункте.
Спроектировав (6,11) на {ф,ф/}, 1=1, , 2N — 1, / = 1, ..., IV—1, придем
Q(x, У) = |
§ 6]
РЕШЕНИЕ ЭЛЛИПТИЧЕСКИХ УРАВНЕНИИ
301
к системе интегральных тождеств
(/дГ ® A2n) и<1‘ + 0АГ ® 4а) И<2) + =/• (6.13)
где
A2N &
2N— 1
(Qu) —((Qu)u, (Qu)2Ar_ltl...........(Qu)i,n-v n-i)T>
f = '2N-1, 1’ •••’ tiN-liN-l)7'
фгф/), фгф,),
а векторы u'1’, u121 имеют тот же вид, что и в п. 6.1, но только соответству-
ющей размерности. Пусть для дальнейшего
•••’ U2N-1,V •••’ U1.N-V •••’ U2N-1. N-1)T, uiJ~(u>
$ = diag (Qy, a), Qy, у = J Q (x, y) <pt (x) фу (x) dy.
Q
Запишем (6.13) в виде
(<v® A2N+AN<3»f2N+^)u=f+e, (6.14)
где e = Qu — (Qu) + (tN<8) A2N)(u — u,1>) + (AN ® f2N) (u — u'2)). Предполагая e
малым и опуская его в (6.14), приходим к системе
AUh — (^N ® + ® uh=f’ (6.15)
решение которой принимаем в качестве приближения к и. Матрица А системы
(6.15) симметрична и положительно определенна в пространстве £г. л сеточных
2N- 1 JV-1
функций со скалярным произведением (и, и)л = UijVijtf и нормой
(=1 /=1
||ил|[ = (и, и)}/2, причем при малых А
(Аи, и)д ^/y + min QA || и Н, у=2л2 — О (А2) 2л2. (6.16J
302
МЕТОД ИНТЕГРАЛЬНЫХ ТОЖДЕСТВ
[ГЛ. 4
Для ил легко получить априорную оценку
(АиЛ, ил)л = (Л
(А«л. «л)л/2>
(6.17)
где с= 1/^y + min
Чтобы оценить погрешность £ = и— ил, рассмотрим уравнение Alj = e,
которое можно представить также в виде
/?5 = е + К£, (6.18)
ГДе В (Ау ® А2дг 4" Ад, ®/^д,-|-QmaxAv ® ДлО’ ^max maxQp ^==QmaxAv®
®/2jV —Q. Поскольку при сделанных выше ограничениях обобщенное решение
задачи (6.11), (6.12) принадлежит W%, причем || u ||» . г£с ||/1| то дальней-
**2 ^2
шие оценки проведем при этом предположении. Учитывая
(Q“)z/-($u)i/ =
= j ф/(х) Ф, (у) Q (х, У) dx dy j фг (х') ф7 (у') (и (х, у) — и(х', y'))dx'dy’,
имеем
/ХЫ V'2
, * । /С г / \ди I2 I ди 12\ \
|(Qu)//-(Qu)(/|=gc dx •
Vi-i yi-i /
Следовательно,
||(Qu) — Qu |lft -S;ch || и ’ ., || A"1 ((Qu) — Qu) ||ft s^ch J и
** 2 Wa
Оценим вектор e1 = B-i(/A,® А2Л,)(и-и<1>)-(/д,®/2у+ Ад,® A^ + Q^xAv®
® 4jv)-1(«- u(1)). Матрица A v® A2\, + Qmax/V ® A2^ положительно опреде-
ленна, поэтому j д ’1 (/д, ® А2д,) j < 1. Следовательно,
II ei 1’л < II u- u(1) Ih^ch'i и ;i,, (Q).
Аналогично доказывается соотношение
II S'1 (Ад, ® /2дг) (u —u'2l) 'j :<с/г “ lltzi (Q).
Отмечая, что
, Л Q
I,в-*;; I; B-11S й /Г| ==£|i B-1; Qmax
• < ^max
имеем
t S 11л «li B-Je 11л + B-lKl U ss ch ; и ; + В -> jX || ’ g »A
**g I be )
Q
V + Qmax"^ h'^Ck U (Q)’
li S !л ch ~ j и 'ri (Q).
I *
В результате приходим к следующему утверждению.
§ 61
РЕШЕНИЕ ЭЛЛИПТИЧЕСКИХ УРАВНЕНИЙ
303
Если 0<Q(x, у) < со и < °о. го приближенное решение ид схо-
2
дится к вектору и, составленному из усредненных значении точного решения,
и справедлива оценка погрешности
(6.19)
S
где с не зависит от h.
6.3. Уравнение диффузии. Рассмотрим в й = й1и^2 (см. рис. 52) задачу
для уравнения диффузии
— (а~ р 7^ + Р + =f(x‘ У)’ (6.20)
\дх дх. ду г ду / 1 ' ' ' '
[«]=[₽ = ° ПРИ *=1> (6-21)
и = 0 на Зй, (6.22)
где Q, f те же, что и в (6.11), а р(х, у) имеют вид
Р(х, у) —
Ръ
Ръ
(х, у) е= йь
(х, у) е= й2,
Pi, р2—положительные постоянные. Символ [и] означает разность между пре-
х=1, вычисленными при подходе
дельными значениями и (х, у) на прямой
к ней со стороны области Qj и области
й2. Аналогично понимается и выражение
Г ди 1
гЭя 1 ГДе П — вект0Р н0Рмали к пря-
мой х=1, направленный внутрь й2.
Сформулируем обобщенную постанов-
ку задачи. Для этого умножим (6.20)
скалярно в Т2 на произвольную функ-
цию сеИ71(й) и выполним интегриро-
вание по частям с учетом условий (6.21),
(6.22); получим равенство
I -ди до \ . f ди до \ , ._ .
(₽ эг- + W/+(Q“’ °) =
= (Л о). (6.23)
Назовем обобщенным решением задачи (6.20) —(6.22) функцию u^Wl3, удов-
летворяющую (6.23) при произвольной функции Нетрудно показать,
что обобщенное решение существует, единственно и |] и s£ сj]/
Введем сетку и функции {ф; (х)ф/(х)} так же, как и в предыдущем пункте.
Кроме того, здесь удобно будет использовать и функции-полукрышки ф}+) (х),
ф'-'(х) (Рис- 53). Будем теперь последовательно полагать о = фг (х)ф/(х) в (6.23).
Тогда, проведя простые вычисления, получим интегральные тождества
(iN ® л&) u'v +1 (An ® Р2+а) и'2’ +) + i(Ал- ® М “,2> -’+(Q«)=А (6.24)
где IN, An, f, (Qu), и111 (а также употребляемые ниже, Qu) те же, что и
при решении уравнения Гельмгольца, а остальные матрицы и векторы
304
МЕТОД ИНТЕГРАЛЬНЫХ ТОЖДЕСТВ
[ГЛ. 4
имеют вид
P0M 0 6 — Pi/h2 0
0...0 h2 Р1 + Рг № 0...0
0 — ps/A2 0 6
И(2, +> — +>}, ult. +> = J ф<+1 (х) ф/ (у) „ (Х1 у) dx dy,
и1*' = {и^- -’}, u'fr = j ф'/-’ (х) ф/ (у) и (х, у) dx dy,
[=1......22V —1, / = 1, ..., N — 1,
P'2jv, P^, P2W = y (Р^+Р^)—Диагональные матрицы порядка 27V —1
с элементами (P^v),;. (^)ip 02m)/p Равными Pi ПРИ KN, ра — при i > М
И (?Zn)nN = Ptf (^2n)nN = Pv (^2w)mN = “2‘(P1 + P2)-
Систему (6.24) можно записать в виде
0V ® ^2N “Ь ® ^2М“Ь ® и ~ f "Ь е> (6.25)
где
8 = (lN ® А^) (и - «*>) +1 (AN ® Р^) (и - и* +>) +
+ ~2 0м ® ^2м) (“—«,s’ _,)~(QU)+Q«-
Опуская вектор е, приходим к системе уравнений
Auh ~ (?М ® ^2М + Ам ® + Uh ~f (6.26)
с симметричной положительно определенной матрицей; решение системы иь
принимается в качестве приближения к и. Легко получить также априорную
оценку
11Ма = (л"л- «л)л/2^с1 f 1ft.
Решение (6.26) можно получить различными методами (см. [7], гл. 4).
Здесь мы рассмотрим лишь оценку погрешности £ = и —иЛ, которая удовлет-
воряет уравнениям
А£=е,
Bg = e + ^, (6.27)
g = B-ie+5-i^,
§ 6] РЕШЕНИЕ ЭЛЛИПТИЧЕСКИХ УРАВНЕНИЙ 305
где
= Стах = mfax Qb
— In ® ^2N + AN ® ?2N + Cmax/jv ® I2n,
5-ie = Й-l (IN ® Alfa) (u - u,u) +1 5-1 (An ® P$) (« - a's- +-) +
+ (An ® P^) (“~ u'2’ "’) + B-' (Qu- (Qu)). (6.28)
Рассмотрим оценки для составляющих вектора В-18. Запишем первую из них
в виде
5-1 (tN ® А(и - ««>) = (fN ® + Qmax (fN ® А'& + An® P'.^)-1)-1 X
x (Jn ® A2n + AN ® ^a)"1 (?n ® A'21n) (u ~
Учитывая, что
I (!n ® ^"^max (?N ® A%1n + An ® ^2N) !)
j (4v ® Agfa + An ® ^N)-' Cn ® A&) (u- U<i>) |ft =
= || (^V ® ^2N/2)Qn ® ^2n)Qn ® A^n + An ®
*(4v ® A^n)(!n ® (4v ® Pl2® (“-«(1)) Ik =
= || (^v ® ^2^2) Qn ® Kn + AN ®> P12nA{2n 1^2n)~1 (Jn ® P[2n) (“ — u<1)) 11л ®=
II4 ® ^/2 IIII iN ® IIII ® +An ® П'Х
max p'/2
sS -----172-1 “ - u<1’ k sS ch ! и !| 1 s= ch II / II !
i
получаем
II В-' (fN ® A^) (u-u<n.) |A ch II f 11^.
Оценим второе слагаемое в (6.28):
I ~ Й-i (An ® Р&) (и-и^ +>) |ft
< -2 | ® А'^ + У (An ® +
+ 2- (А* ® /$2^))’1 (An ® Р^) (и-и^ +’) |л =
=1 ® #>У/2) (2Л^‘ ® ® 4а+
+ ® ® ^,1/2) («- «(2’ +)) t
^gl^ii/ll^.
Аналогично получаем оценку для третьего слагаемого в (6.28), а получе-
ние аналогичного неравенства для ||В-1 ((Qu) — Qu) [л не представляет труда.
306
МЕТОД ИНТЕГРАЛЬНЫХ ТОЖДЕСТВ
[ГЛ. 4
Следовательно,
, Qmax
“ + Стах + Ymin Pi
YminPi + Qmax
——=--------ни.
у min pi " “
Итак, если выполнены сделанные выше предположения, то система (6.26) имеет
единственное решение которое сходится к и, причем справедлива оценка
(6.29)
где с не зависит от h.
В заключение заметим, что рассмотренную выше методику получения
проекционно-сеточных схем можно распространить и на ряд других краевых
задач для эллиптических уравнений. Отметим также, что при таком построе-
нии приближенных решений часто формально допустимыми в алгоритме реше-
ния задачи являются «дельта-источники» в качестве f (х у), осциллирующие
функции Q (х, у) и т. п. Для решения возникающих при этом систем уравне-
ний могут быть применены эффективные методы, исследованные в работах
[3, 11, 27].
§ 7. Решение уравнения переноса
Рассмотрим уравнение переноса
1 2л
+ + = Й J и(х’ у' + f <7 !)
о о
с краевым условием
и = 0 на dG, цп х < 0- (7-2)
Здесь G — {x, у. 0<х<а, 0<у<;Ь}, ц = — у2 cos ф, q =
= ]/1 — у2 sin ф, f (х, у, у, ф) е Лоо, о (х, у), os (х, у), ос = о — ст, е
е Лоо, о^о0>0, ос^оСо>0, 0<у<;1, 0=.сф--С2л,
а0, о<-„ — постоянные, п = (пх, пу) — вектор внешней нормали к dG.
Запишем интегральный член уравнения (7.1) в виде
1 2л 4
J dy' J иЖ|>= J? оЛ«(А), (7.3)
О О 6 = 1
где
1 п/2
= u(fc) (х, у, у', ф') с/ф',
о б
uw(x> У, у', ф') = ы(х, У, у', ф'+ (&—1) л/2),
§ П
РЕШЕНИЕ УРАВНЕНИЯ ПЕРЕНОСА
307
и рассмотрим задачу (7.1), (7.2) последовательно на каждой из
подобластей GxQ* при 6* = {у, гр: 0<у<;1, (k— 1) л/2<гр<;
<6л/2}, fe=l, 2, 3, 4. Выполнив замены переменных гр на
гр-)-(& — 1) л/2, приходим к системе уравнений
H(A,^ + n(ft)^ + ou(ft, = o. 2 Su^+fW (7-4)
с краевыми условиями
и(*) = 0 на dG, ^wnx + y\wny < 0, (7.5)
где p(ft) = фЛ1 — у2 cos (гр + (k— 1) л/2), r](ft) = ]/ 1 — у2 sin (гр +
+ (k— 1)л/2), uw — u(x, у, у, гр + (й—1) л/2),/(ft) = /(x, у, у, гр
-f- (k — 1) л/2), 0 <гр < л/2.
Для решения задачи (7.4), (7.5), как правило, применяются
итерационные методы. Одним из простейших является метод
простой итерации:
di№
^)-irL + ^k>-^- + ou^i = osZ Su(n} + fW> (7-6)
Z = 1
u^-i —0 на dG, uwnx + r\wny <z 0, (7.7)
где n = 0, 1, 2, ..., — начальное приближение, u^->-uw при
n—>oo. В результате исходная задача сводится на п 4-1-м шаге
к процессу решения задач
quW ди<к>
nW_^±L + y]w_i+L + au(k) f(k) 2, 3, 4, (7.8)
u^.=Q на dG, + (7.9)
где f^ = os^ Su& + fM.
i= i
В свою очередь каждую из задач (7.8), (7.9) при 6 = 2, 3, 4
заменой переменных можно свести к задаче на GxQL. Поэтому
в дальнейшем будет изучаться алгоритм- построения численного
решения задачи (7.8), (7.9) лишь при /г=1, т. е. на GxQi,
когда ц(1>>0, т)(1> > 0. Условимся для упрощения обозначений
зависимость функций от переменных р, г) не указывать, рассмат-
ривая их как параметры. Кроме того, верхние и нижние индексы
в обозначениях u« + i, /«’, ц(1), т)(1) также будем опускать.
Таким образом, задача, к которой будет применяться метод
интегральных тождеств, имеет вид
Н+ Л J + аи = f (х, у), (7.10)
и = 0 на dG, р-Нк + < 0> (7-11)
где 0<ц<1, 0<п<1, Ц2 + п2<1-
308
МЕТОД ИНТЕГРАЛЬНЫХ ТОЖДЕСТВ
[ГЛ. 4
7.1. Обобщенная постановка задачи. Система интегральных
тождеств. Умножим (7.10) на произвольную функцию v(x, у) е
e№s(G), полученное равенство проинтегрируем по области G и
выполним интегрирование по частям. В результате приходим
к равенству
~^Гх~ T)^) + (gu’ = и)> (7-12)
где (и, = § uvdxdy. Кроме того, в силу краевого условия (7.11)
G
имеем
Ь а
р. $ и (0, yjViljfidy + ^u^x, 0) v2 (х) dx = 0
о о
(7.13)
при произвольных функциях Vi(z/)eZ.2(0, b), v2(x) eL2(0, а).
Назовем обобщенным решением задачи (7.10), (7.11) функцию
и(х, У), для которой
Ь а
J + dxdy + P f u2(a< У)аУ+П J u2(x’ b')dx<<x>,
G 0 0
и которая удовлетворяет равенствам (7.12), (7.13) при произволь-
ных v (х, у) е W2 (G), Vi (у) е L2 (0, b), v2 (х) е Л2 (0, а). Известно,
что определяемое таким образом обобщенное решение и (х, у)
существует и единственно, причем если /, ae L<x>, то функция
и (х, у) принадлежит Leo и почти всюду на G и dG удовлетворяет
уравнению (7.10) и условию (7.11).
Введем в G сетку О = хо<х1<...<хл1-1<х№а, Ахг=х/ —
— Xi-!, О = Уо<У1<...<Ум-1<Ум = Ь, Ayj = у—yj-!, и функ-
ции {ф; (х)}, {ф7(у)} вида
ф/(х)=^-
n*i
X — Xj-i
t^Xi
Х/+1 X
&xi+1
X е (Xi-lt Xi),
xt=(xh x/+1),
x^(x/_i, xi+1), Z=1..........ЛГ-1,
<pj(y) = -jr-
nyj
ути„у,л.
о, У^(У]-1, yj+1), j=l,
.... M-l,
где Hx., Hyj — произвольные положительные нормировочные коэф-
фициенты.
§ 7J
РЕШЕНИЕ УРАВНЕНИЯ ПЕРЕНОСА
309
Примем в (7.12) последовательно v(x, y) — ^i{x)^j (у), i =
= 1, .... IV—1, /=1.......М — 1. Тогда, проводя простые вы-
числения, приходим к системе интегральных тождеств
р, (/и ® А) «(1) + П (А ® In) + (ff«) = f + He(1) + ne(a). (7-14)
где
U(«=(^), ...4^-1....................“jV-,. U
6=1, 2,
(o«) = ((ou)ll, (o«)2i, .... (оы^-1.1, ...
• ••» (^w)i,Ai-i, (оУ)г,Л1-1, (^u)n-i,m~i)t>
f = /21. •••> Fn-1,1> •••> •••> Z/V-l, M-1)T,
e(1) = (e'n, 0, .... 0, е^’ж-ь 0.......Of,
e<2> = (e<l>, e-V, .... etf’-i, 1, 0.Of,
xt+i e
иУ = л7~ \ dx \ Т/ (У) “ (x, y) dy,
x. 0
= J y J “(x’ dx>
Uj 0
(au)<7 = (ou, ф/ (x) <p7 (y)), = (pi(x)(pj(y)),
xt b
e'o =-йг dH % (у) u (x> y) dy>
Hx* 0J 0J
61/ f* C
eoJ = -77г- \ dy \ Ф/ (x) и (x, y) dx,
Hy, J J
(6u, 61/ —символы Кронекера),
Hu Hu
иМ-1 уМ-1 _
310 МЕТОД ИНТЕГРАЛЬНЫХ ТОЖДЕСТВ [ГЛ. 4
Полагаем теперь в (7.13) сначала v2(x) = 0, (у) — <р, (у),
j—l,..., М — 1, а затем (у) = 0, v2 (х) = (х), i = 1, ..., N — 1.
В результате получаем также тождества вида
ь
$Ф/(!/)«(0, y)dy = O, / = М-1, (7.15)
о
§ q.'i (х) и (х, 0) dx = 0, 1 = 1, ...,N—1. (7.16)
о
Системы (7.14) — (7.16) состоят из точных равенств, которым удов-
летворяет обобщенное решение задачи и на основе которых можно
определить алгоритм приближенного решения задачи (7.10), (7.11).
7.2. Построение схемы. Следующим этапом алгоритма является
аппроксимация систем тождеств (7.14) —(7.16). Запишем (7.14)
в виде
Аи = / + ре(1) + Т]е(2) + е’3» + е<4) + е<5>, . (7.17)
где Л = ц(/Л1®Л1) + г](Л2®/л,) + а, о = diag (од), а7,- = (0, <p7 (z/) х
Хф«(х)), /=1, .... М — 1, 1=1,..., 1, е^ — С^и—uw),
= е,^ = ди — (ои),&^ = С2(и — и{2\) С2 = т] (Л®4у),
U = (Иц, U21 • • > Й-1.1, и1, М-1> и2, ЛГ1> • • • , UN-1, м-1)т > uif —
= (и, фг (х) фу (у)), и рассмотрим одну из простейших аппрокси-
маций тождеств (7.17), которая состоит в замене векторов «(1\
ы(2) на и и отбрасывании векторов е(1), е^2>, е(5). При таком
подходе приходим к системе уравнений
Auw=f, (7.18)
решение которой «(л) принимается в качестве приближения к
вектору и, построенному на основе точного обобщенного решения.
Решение (7.18) находится из соотношений, представляющих
собой покомпонентную форму записи (7.18):
.Л tA
\ I ui / i yj
или, что одно и то же, из соотношений
' ,.h „ft \
иу = + М- + (7.19)
' xt У/ l\uxi nyt /
1 = 1, .... — 1, / = 1, ..., М- 1,
где полагаем
4 = °> “?о = 0, 1= 1, ..., (V —1, М-1.
§ 7]
РЕШЕНИЕ УРАВНЕНИЯ ПЕРЕНОСА
311
Таким образом, алгоритм приближенного решения задачи
определен. Теперь необходимо провести его обоснование, т. е.
исследовать вопросы аппроксимации, устойчивости, сходимости,
и изучить свойства матриц.
Введем пространство L* со скалярным произведением
АГ—I М — I
(Ц, v)h = 2; 2; Hx Hy UtjVij
Z = 1 / = 1
и нормой
[и|А = (и, ц)А/2
и рассмотрим свойства матриц Сг, С2, А, которые имеют вид
“А (2)
С и
А(2) А(2)
—с 21 С 22
А <2) А(2)
—См— 1, М —2 См-1, М—1
Л21 Л22
^Ж-1, М-2
нк
N-1 \V-1
j=l, М-1.
1] .
312
МЕТОД ИНТЕГРАЛЬНЫХ ТОЖДЕСТВ
[ГЛ. 4
Докажем соотношения положительной определенности
. „ . uh?d
(Ciu, и)А Ss II v ||й, d = л2 — О (й|) № л2,
(C2u, (7.20)
(Av, v)h^[d(^- + ^-} + aolllv^
I \&ii x i у j j
где hx — a/N, hy = blM, &0 = mincrl7, Нх = тах Hx., Hy = maxHy..
a i 1 i J'
Получим первое из них. Имеем
М— 1 N — 1 )N— 1 М — 1 \
(CjU, и)А = 2 Ни Нх\% 2 (сДудА, о// =
i=i i=i 'k = u = i /
М—1 М-1 IN—1M — 1 X
= н У, ну у, нх. 2 У (t^ji(^AikOki}vij-=
i=i i=i 4=1 /=i /
М-1 N— 1 N— 1 M—1 М—1 М—1
= Н У НУ, TiH^i У ^AikVkjXij = И У Ну У У (A^ikVyjVij^
i=l 1 i= 1 6=1 /=1 i=^l k^=i
M—1 Л1—1
= Н 2 Vj\ = p± 2 ^/Ui + Ar>y, Vj\,
l=i i=i
где
м-i
(W/. Vj)2= У UijVij,
t = i
Поскольку собственные числа матрицы
1+Xr=
2 —1
—1
известны в явном виде, причем при достаточно малых hx = a/N
имеем minX, (Х+то
(С1У, HUj^
j=l 1=1 Xi V
Остальные отношения из (7.20) доказываются аналогично.
§ n
РЕШЕНИЕ УРАВНЕНИЯ ПЕРЕНОСА
313
В силу, того, что матрица Я —нижняя треугольная, таковой
будет и А-1. Обращение матрицы А здесь не представляет труда,
и непосредственным вычислением А-1 легко убедиться, что Ал
является матрицей с неотрицательными элементами. Кроме того,
из (7.20) заключаем, что
j , Г/ иЛ| \ 1-1 1
(7.21)
На основании изложенного выше сформулируем следующие
утверждения.
Теорема 1. При любых &xh &yf, Нх,, HU/, i=l.......У—1,
/ = 1...М — 1: 1) система (7.18) имеет единственное решение
2) для и(Л) справедлива априорная оценка
11«(Л)(|Л<с||/11Л, (7.22)
где с< 1/а0; 3) при f(x, у)3^0 все компоненты приближенного
решения м(л> неотрицательны.
Для изучения проблемы аппроксимации зададим конкретные
величины HXl, HUj. Пусть в дальнейшем
Нх~ Нх^ = &Х(, Ну — Ну. =
H = max(Hx, Ну), i=l, ..., N — 1, j = l.....М-1.
Предположим также, что для введенной сетки выполнено ограни-
чение kyj^CtH, где с0, ^ — положительные постоян-
ные, не зависящие от i, j и Н.
Исследование вектора
е = р,е(1) г)е(21 -ф s(8) е(4> е(8\
составленного из ошибок аппроксимаций, проведем при предпо-
ложении, близком к реальным задачам. Будем считать, что обоб-
щенное решение и(х, у) принадлежит пространству (G),
0<а< 1, т. е.
11 и (G)= ( У Цх-хГ+(у-у')^ 'dxdy dx'dy' +
+ $ \u(x, y)\2dxdy\l/2<Zoo- (7.23)
о /
Теорема 2. Пусть выполнено ограничение (7.23); тогда для
вектора 8 справедлива оценка
№\\^сН<*, (7.24)
где с не зависит от Н.
Доказательство. Оценим сначала компоненты вектора
х=це(1> +пе<21 + е<3> + е’41,
314
МЕТОД ИНТЕГРАЛЬНЫХ ТОЖДЕСТВ
[ГЛ. 4
которые записываются в виде
+ («-«(1’)),7+(с2 (И-И«>))у =
/ a<₽i (х) Ф/ (у) Эф,-(х) фу ({/) \
= II ---£7------h П-----77-----и, —U,-------5--------Т|---5------ •
НХ »Ну \ ’ ** дх । ду )
Для этой цели воспользуемся преобразованием Фурье. Обозначим через й (х, у)
продолжение и (х, у) на все пространство R2 с сохранением класса гладкости
(мы предполагаем, что такое продолжение возможно). Пусть й (g) есть пре-
образование Фурье функции й (х, у).
и © = ~ й (х, у) e~‘x^e~iy^ dx dy.
R’
Тогда
HL(a)( =(J +
(R > \R2 /
где £ = ©, У, dg=<©<©, IB l = © + Bi)1/2- Но й есть продолжение и (x, у)
с сохранением класса гладкости, поэтому || й II sg с j и II и
(R2> игр (G)
й (х, у) = и(х, у) при (х, у) е G. Используя последнее свойство функции
й (х, у), получаем
(й, ф, (х)ч>/(у))-(й, Ф,--1(х)фУ(г/)) (й, фДх)ф/(</))-(й, Ф/ (х)фу_х(4/))
х,7 = ц----------------------------- +Л-------------------------------
/ _ Йф,- (х) фу (у) Эф,- (X) фу (у) \
\ Эх 1 ду j
Если же учесть свойства преобразования Фурье и то, что
Фа W Ф^(У) =е~^кНхе~1Уну$ (ffxi]) ф (//©),
где ф (0 = (sin2 t/2)/(t/2)2, получаем выражение для х;у:
(• / 1 _ е~^1Нх I _ е~1^2НУ \
X*/ = \ I М-----Ц-------Н П-ут------' (Р-В1 + ПВг)у х
R* х у
ХЙ © Л^е^Уу (Н&) ф (ВД dt, = /(’> + 1$,
где
, (• ( 1_е~^Л [ _е~ 1^2Ну \
\ ----НП--------------’ №+ ПВг)ух
Хй © $ (1.НХ) Ф ©Я„)
р / 1_е“^нх \
= \ ( Н------Й~х-----Ь ’l -н------------; (цВ1+ПВг)у х
R2\« ' А У
хй © ф (^Нх) $ ©Д^) eik^H^eiri2Hy <©
$2: Л <; £1 Нх <С Л, —Л < ^2 ^£/ ft}*
§ 7]
РЕШЕНИЕ УРАВНЕНИЯ ПЕРЕНОСА
315
Поскольку при g е S2
\-е~^нХ \-е~^ну
р.---------рр--------------/©Ц+§2т]) =
= 1 и5?ЯхА (51. Нх) +t£W2 &. Ну) I,
где /1. /г равномерно ограничены относительно g, Нх, Ну, то /й’ есть коэф-
фициент Фурье функции
w = xf, + й$ ^Нх) $ (12Ну),
принадлежащей L2 (Q), при разложении ее в ряд по системе {е ik^iHxe~^^yj.
Используя свойства рядов Фурье, имеем
N— 1 М — 1 со оо
k=l /=1 k=—00 / = — 00
= j | ш © ,М=СсЯ2 (ц+ п)2 5 I ё I4 ! й ;М =
й й
р /I t 2 н- Iti2 м2 \2-а
=с№(ц+т])2 \ ш2а|й|2 Р1' +1ё2‘ J
\ Пх Пу /
sgс№а'! (р + n)2 j I 5 i2“ i « I2 с№“-2 (ц + n)2 j (I 5 I2 + D“ i й I2 Й5
й d
^c//2«-2 (и + т])2||й||2 ( ^c//2“-2(p4-T))2J«ja
U7^'(R2) W^’(G)
т> r(2).
Рассмотрим выражение для iki»
/« = j (5) й © P^P7*2"^,
R!\H
где
/ i___e~‘^iHx j______v V a
F ® -----~tTx----*11---H~y-----{ + ^2^/₽ &1Hx) ф =
= l^Hy (1 ~ e~llrHx) $ (ilHx) Q2Hy) +
+ *\Hx (1 - e-‘^) ф &НХ) ф (&iy) - 2щНу -?-п2(^У} ф &Hy) -
sin2©^/2)A
21Т)йх 12Цу/2 ф
sin (l2H^/2)1
52йд/2 Г
, „ с (Ц + г)) | sin ©//х/2)
IF (5) I < —ft
5i//x/2
Выполним замену переменных:
61 ®1+//х’ ^+Ну’
1/11^1. 1/21^1. 5' = ©, 50 eQ;
»(2)
тогда hi принимает вид
l'ki
й
22 F Ц' Н-2л/) й
»/1 /а
, 5а + ^
пу
I — (/1* /а)-
е 1 хе 2 У di ,
316
МЕТОД ИНТЕГРАЛЬНЫХ ТОЖДЕСТВ
[ГЛ. 4
Следовательно,
Е* V №’М|22^ (§'+2«/)й
* = 1 1 = 1 й| Н /•
Однако
c(u + t1)2
И*
5Г22 I F (?' + 2л/) pj
я Ь, /=
I £2+ н
ПУ
2л/2\ I2’
/а
sin4 (^'Нх/2 + л/j) sin4 ЩИ у/2 + л/2)
(11^х/2 + я/1)2 (sa^y/2 +’Чг)2
с(ц + п)2 / V 2\/ У 1 \ е(Ц + п)а.
№ Zi i? Zj il Г~ № ’
значит,
м — 1 м—1
fe=l 1 = 1
| ;й |> e J | J(K+^, а+5Ь) 1’^ «
c(n + n)2 P a (^1 + ^)“
45 H* J 1 (fe) (2л2)* —
R2\fl
^с№«-2(ц + п)2 j (l + lg|2)“l«@f2^
R2\«
<^с№«-»(ц+т|)2||й0’ ,a) ^c№“-2(H+n)2ll«ll!
W'a (R8)
1 <0)
Учитывая полученные неравенства, приходим к оценке
W_| м—1 N—1 М — 1
2 s ^л-^2//2 2 2 алтт)
i=i /=1 1=1 /=1
ssc№(jx+n)2fl2“-2||«||2 (а)
wi
(G)
^с//2а.
Оценка элементов вектора е'5' осуществляется следующим образом:
е'й=аЛ1-(а“)и=
= J Фй (х1) Ф1 (Уг) а (х', у') dx’ dy' J <pft (x) <pz (y) (u (x, y) — u (x,' y')) dx dy,
I eW I c J Ф1 (У) dxdyx
rxi+l yl+i xk+l yl+l
I J , \ , I C □ C \ U (X , у ) — u (x, y)\2
\ dx' \ dy \ dx \ ,4—v
J J J J ((ж-х')2+(у-у')2)1+а
L**-i yi-i xk-i yi-i
11/2
X((x—x')2 + (y — /)2)1+“ di/j ==S
r-'ft+i y'" x
==? — Н1+а
Htn
I U(x’, у’) — и(х, у)\3
3 иу 3 “л 3 ((х-Х'^+(у-у')^ау
^k-1 yl-l xk-l и1-1
1/2
X
2
§ 71
РЕШЕНИЕ УРАВНЕНИЯ ПЕРЕНОСА
317
2 2
Л = 1 Z = l
ffz+zaff2
6 6
| и (х', у') — и(х, у),2
{(х-х')2+(у-у’)2)^
dx dx’ dy dy' sg cH2a II и II3
wr’(G)
Суммируя полученные неравенства, приходим к утверждению теоремы.
Запишем теперь уравнение для вектора ошибки и — u(ft\ кото-
рое вытекает из (7.17), (7.18):
А (и — и<Л>) = е.
Если к решению этого уравнения применить неравенство (7.22)
и воспользоваться результатами теоремы 2, то приходим к сле-
дующему утверждению.
Теорема 3. Если обобщенное решение и(х, у) принадлежит
классу (G), 0<а<;1, то вектор и(Л) при сходится
к вектору и, компоненты которого utj = (и, <р( (х) <р/ (у)) — осред-
ненные значения и (х, у), и справедлива оценка погрешности
\\u-u^\\h^cHa, (7.25)
где с не зависит от Н.
7.3. Схема второго порядка точности. При построении схемы
будем предполагать, что по каждой из переменных х, у сетка
равномерна, HXi = Hx, — Кроме того, изучение ошибок
аппроксимации проведем на частном классе гладких решений,
предполагая одновременно с этим гладкость о(х, у), что позво-
лит применить для исследования алгоритма технику рядов
Тейлора.
Пусть
U=(Uu, «21» •••> •••» u2, М-1, •••»
Запишем систему тождеств (7.14) в виде
Н (7м ® A) (Zm ® Йу) и + Л (^2 ® ?n) (Йм 0 Lv) « + би =
= + Це(1) + + И (/м ® Л) [(7Л 0 Йу) и - и*1)] +
+ П (Л ® Z/v) [(^м ® Zu) и - U(2)] + &U - (аи),
318
МЕТОД ИНТЕГРАЛЬНЫХ ТОЖДЕСТВ
[ГЛ. 4
где — f + g и вектор g имеет компоненты gi} = f {х0, у^У.
ybijz + Hxi, y0)fyil2, или, что одно и то же,
(Н (4и 0 Л А) + П (Агбм ®fN)+a)u = fw + е, (7.26)
где
ev = р
е = ре*1» + т]е<2> + р (1М 0 А) [(7м 0 Вм) и — и(1)] +
+ П (А 0 4v) [($м 0 Zv)« - «(2)] + а« - (стм),
8 = (811» е21, ..., ejv-l.i, ..., 8it Л1—1, 82. До—1, ••, eN-l, М-1)Г>
/3 1 \ /3 1 \
(у"'’/-2 \2"“г~ь/ 2 и‘-2’1'] ,
Нх +
3 1 \ !3 1 \
2 й'7 2 Мг'/1/ 2
~ (н + П > Ф« (*) Ф/ («/)) + <¥</ -
Если предположить, что 8,у малы, то, опуская е в (7.26), при-
ходим к системе
AuW = fW, (7.27)
где А = р (1М 0 A-iBn) 4-т] (Л2Йм 0 /дг) + <5; ее решение прини-
мается в качестве приближения к и.
Матрица А в (7.27) является нижней треугольной, поэтому
отыскание и(Л) не представляет труда и вычисление компонент
вектора можно осуществить по формулам
+ йИ2«- “4 + <7'28>
где полагаем . = и^\ =0, /’ == 1, ..., М — 1, u^Q = = 0,
t = l, ..., М-1'.'
Не представляет труда доказательство соотношений положи-
тельной определенности
- - nW’
({1м® ArBN)v, и)л=э — Мл,
((A2Bm®1n)v, V)h^^\\vfh, (7.29)
(Av, v)h (pH* +1)^) +a0) II v K,
с помощью которых нетрудно получить априорную оценку
|!«(',,1!л^с:1/(1)1|л, (7.30)
из которой следует, что ц(Л> непрерывно зависит от /.
§ 71
РЕШЕНИЕ УРАВНЕНИЯ ПЕРЕНОСА
319
Оценим погрешность u —Заметим, что если функция
v (х, у) достаточно гладкая, то .
|(и, <pf (х) <р/ (у)) - v (Xt, yj)\^O(H2). (7.31)
Действительно,
(v, (fi (х) (ff (у)) - v (xi, у/) = $ ф,- (х) ф, (у) (v (х, y) — v (xt, у/)) dxdy =
G
= | <М*) ф/ (У) (v (Xi, yj) + (x- xt) yx (Xi, yj) +
+ (У~У/)^(хь У/) + 1у(х, y)-v(Xi, yf)}dxdy =
= $ Ф< W Ф/ (У) \if dx dy,
a
где lif(x, у) — некоторая функция, для которой |£y|sgc№. Сле-
довательно, | (v, tyity) — v (xh yf)\^O (№).
Получим неравенства, аналогичные (7.31), для е;/. В силу
(7.31) имеем
|П;/«г/-(п«)г/|^О(№),
| (н £ + П Ъу ’ Й (xt, у,)) | О (И2),
а также
u,7-2u;_i./+1uz_2,/ * °
И---------—--------- = Й J ф/ dy J Ф/ ^\2U (~Х' У) ~
х о о
-2и(х-Нх, у) + ^и(х-2Нх, y)^dx =
= И J Ф/ (У) dy J ф( (х) (^х (х, у) + О (Д!)] dx =
= yj) + yO(H>),
3 о ,1
2 ui/-2uI-,/_1 + jUi.f-z д
*1---------Ну---------= ду
тогда при i, j #= 1
|еу!^О(№).
Если i = l, то
r/MnO (HI),
(7.32)
з Л11
— u,f — 2u0/+ g- U-if ,3 .
-------7TX----= Wx \T “ (X1’ lJ^ ~ 2u (X°’ + 2 “ (X-J’ yft) +
+ hO (Hx) = [Jx^u (Xl, y,) + U (x_b y/)j + pO (Hxj;
320
МЕТОД ИНТЕГРАЛЬНЫХ ТОЖДЕСТВ
[ГЛ. 4
принимая
p.u(x_b У]) = ри (х0, yt) — НХЦ ~х (Хо, У>) + Р-0 (Hi) =
= 0-Hx[f(xo, У])-^у(хй, yj) — a(x0, yj)u(x0, У^ +
+ pO(tf?) = -tfJ(Xo, у}) + ^О(Н1),
имеем
3 Л,1
9 «1/ 2йоу~|- U—if о 1
и ---------------= Д 4 “(Хь yi^ ~~ i f(х<”У/)+и° (н
Следовательно,
|8у+gi/|«£p-O(#x), М-1. (7.33)
Аналогичным образом показывается, что
I е/i + gn | ^rjO (Ну), 1=1, .... N—1. (7.34)
Получим теперь оценку погрешности л£ = и —и(Л). Для этого
умножим скалярно обе части равенства 4j = e4-g на вектор g.
В результате приходим к соотношениям (Л^, |)A = (e + g, |)А,
(бЛ|, l)h^(Al, l)A = (e + g, |)л, где
6А = ц1м ®
Отмечая, что
1
4ff.
1
4Н
4Ну
4НуА
® Z/V + (?м. ® ?n)-
(bAl, S)A^(e + g, g)A = (6^-v*(8+£), бЛ^?)д«с
^||бД-1/2(е + ёг)Вд||бЛ^|1й==(6Л-1(е + ^), 8 + ^)'/2(бЛ^, ?)>/2,
^Ш1^(бЛ|, |)л*С(бЛ-1(8 + £), e+g)A =
"V^1 (е, -4-е №
__ V V о, И Ц1 V (ен + &и) ^пхпу
N —
-ь
/ = 2
1 ^°(Н1)4НХН1 , 1 Р2°(^)4^у
<То^и + Н в аоД»4"И
I а / = 2
О (Н*) 4-^0 (Н'у)+О (HI) О (Н*),
•I м-
321
§ 8]
ОБОБЩЕННАЯ ФОРМУЛИРОВКА МЕТОДА
X
получаем оценку
J и — ы(Л) ||л =s£c№
(7.35)
с постоянной с, не зависящей от Н.
В заключение отметим, что рассмотренные выше алгоритмы
построения приближенных решений могут быть распространены
непосредственно на систему интегро-дифференциальных уравне-
ний (7.4). При этом основные выводы, полученные в пп. 7.2, 7.3,
остаются справедливыми и в этом случае [40].
§ 8. Обобщенная формулировка метода
интегральных тождеств
В этом параграфе метод интегральных тождеств будет сфор-
мулирован в сравнительно общей форме в том его понимании,
как это отмечалось ранее. Одновременно будут приведены простые
примеры, иллюстрирующие излагаемый материал.
8.1. Алгоритм получения интегральных тождеств. Рассмотрим
в гильбертовом пространстве Н уравнение
Au + Bu=f, (8.1)
где А —линейный (в общем случае неограниченный) оператор,
действующий в Н, с областью определения D (А) с Н, плотной
в ТУ, и с областью значений 7?(A)s/7, В — линейный, симмет-
ричный, ограниченный в Н оператор с D(B) = H, R(B)^H.
Предполагается в дальнейшем, что операторы А + В и В являются
//-определенными: ((А +5) v, v) уо II v ||2, v^D(A), (Bv, v)^z
v^H, y,->0, а также что уравнение (8.1) имеет един-'
ственное решение и е D (А) при заданной функции f е Н.
Введем в Н систему линейно независимых функций {ф,},
плотную в Н. Линейную оболочку системы {ф,-} обозначим че-
рез Н$\ Спроектируем уравнение (8.1) ортогонально на Н^.
В результате получаем систему интегральных тождеств
АГ«+(В«Л) = (/. # .....N, (8.2)
где A\N}u — (Au, ф,).
Может оказаться, что оператор А(ЛГ), задаваемый как система
операторов А^*:
A(JV) = {A<W, i=l.....М},
будет иметь область определения, более широкую по сравнению
с 0(A), и поэтому можно расширить A<W), т. е. построить такой
оператор А^' с областью определения О(А(Л/)), что D (A(;V>) с
czD(A^) и А^и= Awu при ueD(AM).
11 Г. И8 Марчук, Bs И. Дгошков
322
МЕТОД ИНТЕГРАЛЬНЫХ ТОЖДЕСТВ
[ГЛ. 4
Обозначим через
Aw = [ff\ i = l, ...,N}
n
расширение А(л,) с областью определения D (А(ЛГ)) = n
/= 1
Отметим, что если иеЩА], то по определению расширения
оператора будем иметь
А<% = А(% = {А<%, 1=1, ..., N} = {(Au, %), i=l, .... IV}.
Если же »еО(Л(Л'>), но v^D(A), то в общем случае нельзя
представить AtW> как совокупность операторов {— {(At», гр,)},
а сделать это можно только через систему для которой
представления (Аи, гр,) уже не имеют места. Это обстоятельство
является одним из отличий излагаемого ниже алгоритма реше-
ния (8.1) от ряда методов, изложенных в гл. 1.
По предположению « е О (Л) и А’Л’и = AV^u, поэтому
система (8.2) оказывается эквивалентной системе
А^и + (Ви, гр,) = (/, гр/), г = 1, ...» У, (8.3)
которая является основной, для дальнейшего, системой инте-
гральных тождеств.
Для построения приближенного решения мы воспользуемся
именно этой системой, благодаря чему появляется возможность
использовать для построения приближенного решения базисные
системы, не принадлежащие 0(A), т. е. можно искать прибли-
жение Мд/ = У, й/ф/ яа и, где функции ф/ могут принадлежать лишь
z = i
D(AiN). Последний путь построения приближенного решения
с помощью {ф,} будем называть проекционным подходом в методе
интегральных тождеств. Но можно воспользоваться и классиче-
ским алгоритмом аппроксимации входящих в (8.3) выражений
С помощью разностных отношений и квадратурных формул. Такой
подход будем называть разностным.
Пример 1. Рассмотрим в Я = Л2(0, 1) задачу
~5 + и = ^> f(x)^L.(Q, 1), (8.4)
И(О) = «(1) = О. (8.5)
За область определения оператора А = — dt/dx2 принимается мно-
жество D(A) = \u: u^W'l(Q, 1), и (0) = и (1) = 0}. Через В обо-
значим’оператор Ви= 1 и.
§ 81
ОБОБЩЕННАЯ ФОРМУЛИРОВКА МЕТОДА
323
Пусть {тр/ (х)} есть система кусочно линейных функций-крышек:
хе(хм, х^,
Xf=(Xh Х/+1),
х^(х,-1, х,+1),
1 = 1, м.
(8.6)
Спроектируем уравнение (8.4), которое теперь можно представить
в виде (8.1), на систему {ф,}. В результате приходим к (8.2), где
AzV>« = (—, ф/), (В«, ф,) = («, ф,),
(U, V) = (U, 0l2(O, I).
Если выполнить теперь в А\Ы]и интегрирование по частям, то
получим
A<N)„_(du 4фЛ _
Л‘ U\dx’ dx) —
xi xi+i xi xi+i
= (* C du 1 dx- f 1 dx=>
J dx dx ax+ J dx dx dX ~ J dxh* dX J dxh* dX
xi-i xi xi-i xi
_ U (Xi) — u (x,_j) и (xi+1) — U (Xi) _ — и (xt d + 2u (Xi) — и (x/+1)
h* h* ~~ h*
Это выражение имеет смысл не только для функций ыеТГ|(0, 1),
которые заведомо непрерывны, но и для функций, являющихся
кусочно непрерывными с возможными разрывами первого рода,
не совпадающими с хг, г=1, ..., М, и равных нулю при х = 0,
х = 1. Множество таких кусочно непрерывных функций обозначим
через D (A<W)); оно принимается за область определения операторов
д(М)и — Ц + 2ц (X,)-u (х<+1),
Очевидно, что D (А) с: (A<w>), и если usD(A), то А\Ы}и =
= ASW>« = (—d2w/dx2, фг). Оператор A(yv) = {A/W), i=l, ..., N}
является расширением A(N\ а его область определения D (A<w>)
включает в себя не только D (А), но и пространство UZj, кото-
рое совпадает с энергетическим пространством оператора А.
Итак, система интегральных тождеств (8.3) для задачи (8.4),
(8.5) при выбранных функциях ф< (8.6) имеет вид
-‘fe-J+y.l-fe,) +(„, = (=1.....ц_
и (х0) = и (Хдчх) = 0.
11*
324
МЕТОД ИНТЕГРАЛЬНЫХ ТОЖДЕСТВ
[ГЛ. 4
8.2. Разностный метод аппроксимации интегральных тождеств.
Рассмотрим разностный подход к построению приближенных
решений задачи на основе интегральных тождеств (8.3). Для этого
введем в области задания функций сетку и определим сеточные
функции: Uh — проекция точного решения на сетку, uh — вектор
приближенного решения задачи. Предполагается, что размерности
uh и uh совпадают и равны N. Пусть для слагаемых, входящих
в (8.3), определены аппроксимации
N N
J] Д(.У)Ыд / + б(1), (В«, ^)= £ в..Ыл ,+ е-; (8.8)
/ = 1 j = i
где ошибки аппроксимации. Определим матрицы и векторы
вида 4 = (Л<">), Вл = (В/у), / = ((/, ФО, ..., (/, ф„))г, е<*> =
= ..., ej*))7'; тогда система уравнений для определения при-
ближенного сеточного решения uh имеет вид
+ (8.9)
Пусть введены сеточное пространство Hlt h — пространство реше-
ний с нормой ||-11,л и сеточное пространство Hh — c нормой ||-||л-
Теперь к исследованию схемы (8.9) можно применить общую тео-
рию разностных схем, из которой вытекают следующие утверж-
дения. Если система (8.9) имеет единственное решение при любом
IV, причем справедлива априорная оценка
II «Ч. л^ИЛл, (8.10)
то при выполнении условий аппроксимации
II е(1> k С ех (У) -> 0, || eW ||Л < е2 (N) 0, (8.11)
приближенные решения uh сходятся к uh при N ->сс; при этом
справедливы оценки погрешности
11«Л-«л111.л<О(е1 + е2). (8.12)
Отметим, что по сравнению с обычными разностными методами
(когда не осуществляется предварительная проекция исходного
уравнения на Я^ю) здесь осуществляется аппроксимация интег-
ральных тождеств (8.3), в силу чего для обоснования алгоритма
может потребоваться меньше ограничений на' гладкость решения
уравнения (8.1), чем это имеет место в разностных методах.
Однако в рассмотренном здесь алгоритме остается одна из основ-
ных трудностей разностных методов: необходимо строить А№\
так, чтобы получить хорошую аппроксимацию (8.11), не
потеряв при этом устойчивости (8.10).
§ 8] ОБОБЩЕННАЯ ФОРМУЛИРОВКА МЕТОДА 325
Заметим также, что при выполнении аппроксимаций (8.8)
может сказаться, что е)‘’ = 0. В этом случае остается задача
оценки е)2’, которая решается, как правило, проще и при более
слабых ограничениях на точное решение исходного уравнения
(8.1).
Пример 2. Проиллюстрируем применение разностного под-
хода на приближенном решении задачи (8.4), (8.5) путем аппрок-
симации тождеств (8.7). Пусть
«л = («(*1), ..., u(xN))T, uh = (ux...............uN)T,
A^U = Ai, i-!U (Vl) + AiiU (Xi) + Ai. i+l« (\-+l) =
_ — и fo-t) + 2u (xt) — и (xi+x)
Л2
t. e. здесь e'/’= 0. Для приближения (Bu, ф,) = (м, %)l,(o, n ради
простоты воспользуемся формулой прямоугольников. Для этого
нам достаточно предположить, что задача (8.4), (8.5) обладает
обобщенным решением, принадлежащим лишь пространству
W^(0, I). Тогда
(Ви, ф/) = м(х/)(1, ф,) + е|2’ = u(x<)-W,
где
Система (8.9) в данном примере имеет вид
__,.л _J_ 9„Л_,.л
—-------------- + u1=-f, fi= J f(x)$i(x)dx,
‘‘-1 (8.13)
«5=«^+i=°. * = i.........N-
Она, как известно, имеет единственное решение. Определив
например, с помощью метода прогонки, можем принять
в качестве приближений к {«(%?)}.
326
МЕТОД ИНТЕГРАЛЬНЫХ ТОЖДЕСТВ
[ГЛ. 4
Определим пространства сеточных функций
( N 1
ЯЛ= Л2,Л=(ыЛ: (wft, Ул)л= 5 ЧЧ-« t“4 = (wft» “л)2л}.
\ i ж= 1 /
( w
Я1,л = ^2’л= «л-. (ил, 0%1.А» S huivi +
W2 /=1
1 V?t
л
*+' /.А ,/
+ 2
rjh = — 11^ ==
V0
Умножив каждое из
результаты с весом h,
= tA =0, li uh jl. i л = (ыл, uhy12. .1.
w + i ' iH’ I
уравнений (8.13) на и! и просуммировав
приходим к равенству
8«%1,ь = (А «а)а,
откуда получаем оценки
И«%1.л=£;||Лл-
Поскольку e;*’ = 0 и
/ N \ 1/2 / N у/2
1е<г»|!Л= У/1|еГ|2 У 2^ f ==
II Иьно> О
то согласно (8.12) приходим к оценке погрешности
вил-«ьЦ1л^О(й).
(8-14)
Пример 3. Рассмотрим в Я = Ь2(0, 1) задачу
м(0) = «(!) = О,
где О<ро^р(х)^ри pOt /?1= const, /? (х) е= (О, 1), =
= sup{|(f, u)Lj(0 i, |/Muzj}> v=/=0. Естественно, что при
сделанных ограничениях на исходные данные эта задача подра-
зумевается в обобщенной постановке: требуется отыскать такой
элемент «(х)е(Г»(0, 1), что при любой ие ЙЛ(0, 1) выполнено
§ 8]
ОБОБЩЕННАЯ ФОРМУЛИРОВКА МЕТОДА
327
равенство
(8.15)
Как мы знаем из предыдущих параграфов, обобщенное решение
существует и единственно, причем |«|rtl^i.
Ставится вопрос: можно ли построить схему, решение которой
совпадает со значениями точного обобщенного решения в наперед
заданной системе точек 0 = х0 < Хх <... < Хдг < Хдг+1 = 1 (т. е.
схема в этом случае имеет бесконечный порядок аппроксимации)?
Ответ здесь положителен, и получить его совсем просто. Для
этого подставим в (8.15) вместо и(х) последовательно искривлен-
ные функции-крышки, определенные по формуле (2.4) этой главы.
Тем самым мы спроектируем основное уравнение задачи на
{Qi(x)}. В результате приходим к системе интегральных тождеств
/ xi /х£+1 \
(ы (хг) — и (Х/-1)) I J -Щх) ] + (и ~ u ( j ррО / ~
\*/-1 / \ xi /
= (А
и (х0) = и (хм+1) = 0, I = 1, ..., N.
Отсюда заключаем, что решение системы
/ Х1 \-1 // xi /*i+i V1'
/ f '
J P(X)
«?-
t = l, .... N,
\ / \ ' / /
/V V1
_ыл \ dX.\ =
l+l J P(x)
\xi J
tth s tth a 0
и дает ответ на поставленный вопрос, т. е. и! = и (x(), i — О,
1, ..., W + 1. Легко показать также, что последняя система
обладает симметричной положительно определенной матрицей.
В качестве других, более сложных примеров на использование
разностного подхода для построения приближенных решений
с использованием интегральных тождеств могут служить задачи,
рассмотренные выше в п. 5.2 и в §§ 6, 7 этой главы.
8.3 Проекционный метод аппроксимации интегральных тож-
деств. Введем еще одну систему линейно независимых функций
{ф4, таких, что <рг е D i = 1,..., N. Линейную оболочку {<р(}
обозначим через Н(^. Предполагается, что последовательность
подпространств предельно плотна в Н. Очевидно, что
328
МЕТОД ИНТЕГРАЛЬНЫХ ТОЖДЕСТВ
ГГЛ 4
с D (А(Л'>) и {О (Д(ЛА))} плотна в И. Оператор проектирова-
ния на обозначим через Р^\ Предполагается, что D (Р1^) = Н.
Отметим, что здесь мы пока не ограничиваем себя в выборе Р(£\
требуя лишь, чтобы P^v е В дальнейшем пред-
полагается, что размерности и Н<м совпадают.
Рассмотрим общую схему проекционного подхода построения
приближенного решения. Будем искать его в Н^) в виде
N
tlfj =
i = 1
где at определим из системы уравнений
A({N}un + (Bun, фу) = (/, ф,), i = l, .... N, (8.16)
или
S (Л/ + (Вф/, ф,))оу = (Л ф,), 1=1.............N. (8.17)
/=i
Сформулируем некоторые условия, при выполнении которых
имеет место однозначная разрешимость (8.16) и сходимость uN
к и при М->оо.
В дальнейшем всегда будем предполагать, что базисы удов-
летворяют условию равномерной линейной независимости, т. е.
di с J2
11 с ||2,
II с (а»
где dr....dt>0 — постоянные, не зависящие от c = (clt..., cN)T,
I N \ 1/2
и ||c||2 = ( У, cf . Будем также пользоваться обозначениями
(u, v)B = (Bw, v), || и |1в = (и, и)1в'2.
Введем следующие условия.
Условие 1. Матрица А-(А^) с элементами Дг/ = Д$ЛГ)ф/ ф-
+ (фь ф/)в положительно определенна, и
N N N N
У! У AtjdCj (фь фу)в.
<=1 / = 1 Z = 1 j = l
Условие 2. Базисы {ф,-}, {ф,} удовлетворяют ограничению
N
§ 81
ОБОБЩЕННАЯ ФОРМУЛИРОВКА МЕТОДА
329
где постоянная 8 не
|с имеет вид
I с |д. iv =
зависит от с = (съ cN)T и N, а норма
С(С/(ДГ><Р/ + (<Р,-,
Ф/)в)
1/2
N
2
/ = 1
Условие 3. В FEN> можно найти такую функцию «ф =
N
= Ь/ (ы) Ф< с некоторыми постоянными bit что для любого не-
нулевого вектора с = (съ ..., с^)т
S ci (ЛУ (“Ф -«) + (“<₽-«. ^)в) |
-------------17|--------------1 8! (У) -> О,
I с IA.N
||И —«ф||в=^82 (W)-»0, У->оо.
Теорема 1. Если выполнены условия 1—3, mo: 1) система
(8.17) имеет единственное решение а-, 2) справедлива априорная
оценка
-0);
N
3) приближенные решения uN— У, а,ф; сходятся к точному при
i = i
# -> оо и справедливы оценки погрешности
' N 11/2
2 - at) (fe; - aj) + II «ф - «м Ив < О ,
L/1/=l (8.18)
Доказательство. Прежде всего отметим, что при выпол-
нении условия 2 вместе с матрицей А — (Лу) положительно опре-
деленной будет и матрица системы (8.17). Действительно, при
произвольном ненулевом векторе с = (с1) ..., cN)T имеем
У с/с/(АГ>Ф/ + (В(Р/> 1М) =
Л/г=1
N N
= S CiCj (А^’фу+ (В<Р/, ф;))+ У С/СДф/, фг-ф;)ВЭэ
i./ = l I, /.=.1
Ss=|c|a,m-
N
У с.С/(ф/, Ф<-ф<)в
i, /=1
^4^-0[сХм = (1-0)М2а,м>о-
Отсюда, в частности, вытекает однозначная разрешимость (8.17).
330
МЕТОД ИНТЕГРАЛЬНЫХ ТОЖДЕСТВ
ГГЛ. 4
Для получения априорной оценки для вектора решения а =
= (аи ..., aN)r умножим (8.17) на at и выполним суммирование по
1 = 1....N. Получаем равенство
N /
У, (AV% + 0k ф/)в)^а7я= /=, Mi
i, i=1 ' i •« 1
или, что то же самое,
/ N \ N
|а|д,№и> У, Mi + У, Ф/ - %)в-
\ / = | / ij^l
Поскольку
’ N \ II N II
А У, Mi <1/1 2J Mi< Иа.ло
‘ 1 = 1 ' li i s= 1 II
i./«i
<9|<ф,лг,
то, приходим к соотношениям вида
I a|A,№sSc|fS|aiA. w + s’«!a. n,
(1 — 6)|а|д, к<с||Л|«|а,ль klA,w<cJ/ll/(l -9),
где с не зависит от а и N.
Рассмотрим вопрос сходимости. Запишем равенства
ЛГ'Мф + («<₽» Ф0в = (Л ^) + Л<л°(«ф-«) + («<₽-“> Ш
+ («лг, Ф0в = (Л ФО»
АН («ф-«лО + («Ф-илг, Ф0в = А(Л’(иФ-“) + («<₽-«. Ф<)в-
Отсюда при с=(сп .... cN)T, ct = bt (м) — а,, имеем
Л’
У С,(АГ' (Иф-ИЛ') + (Иф-«ЛГ, Ф0в) =
1=1
= S Ci (АГ’ («ф - и) + («ф - и, 1ft)в),
1^1
k li, № У, Ci У с, (ф/, ф, - ф()в + У Ci (А^’ («ф - и) 4-
i = l /=1 ( = 1
+ (Мф - и, tyi)B) < 6 | С N + У, Ci (AjW) (Ыф - и) + («ф - и, i|5Z) п
< 0 к 1А, N + 41 (Л/) i с |Л, N.
§ 8]
ОБОБЩЕННАЯ ФОРМУЛИРОВКА МЕТОДА
331
Следовательно,
|б|л.АГ<
81 W
1— в
| и — UN I || и — UN [в И и — Иф [в 4* II «ф ~ UN Ив 82 + к I A, N
чем и завершается доказательство теоремы.
Замечания. 1) Может оказаться, что ЛгЛГ)ы(р = Aimu, i =
= 1, ..., N. В этом случае проблема аппроксимации сводится
к более простой задаче получения соотношений
лг
У Ci (“ф И, фг)
i ее 1
(N) | с|д, х,
|и-Иф|в^е2(М).
с
2) Если фг е D (Л), то рассматриваемый алгоритм совпадает
изложенным в гл. 1 методом Галеркина —Петрова. Оценки
погрешности в этом случае принимают вид
((Л(Иф-Илг), Иф-ИуЖ«ф-«^Ю|/2^о(-]тгё).
(8.19)
Отметим, что здесь в слагаемое (Л(иф — u.N), uv — uN) входит
функция иф (а не точное решение и).
Пример 4. Рассмотрим в # = L2(0,1) задачу
р,-57 + &и = /(х), хе (0,1),
ы(0) = 0, b = const,
(8.20)
где ц>0- параметр, b > 0, 7 е L2 (0, 1). Будем решать ее с по-
мощью функций {фг (х)}, {фг (х)}, изображенных на рис. 54. Интег-
ральные тождества, как результат проекции основного уравнения
332
МЕТОД ИНТЕГРАЛЬНЫХ ТОЖДЕСТВ
ГГЛ. 4
из (8.20) на {Ч’« (-*")}» имеют вид
Н + b (и, фг) = (/=, Ъ), i = 1..N.
Приближенное решение ищем в виде и.н—^ a^t(x), где пола-
1=0
гаем Оо = 0, в силу чего краевое условие из (8.20) будет выпол-
нено. Остальные коэффициенты находим из системы (8.17),
которая здесь имеет вид
Кл
+- b (uN, ф,) = (/, ф;),
или
лг
Н ~~h~l +Ь^а! fa/’ Ч’’)’
i=l,..., N, Оо = 0.
Проверим выполнение условий
= (Вгу), где Ву = (ф,-, <р7 -ф/)в,
1
—1 .
1-3.
имеют
Матрицы Д = (Ац) и В =
вид
Г1
+ Ь
1
Л
—1
1
В = Ь
1/4
—1/4
Легко показывается, что
1/4
— 1/4 0J
(Ас, С)2 = 2 Д«/Й<7 >(-^+&)(С, с)2,
i. /=1
I (Вс, с)21 ==s 4 to с)2>
I (Вс, с)2 I b (с, c)t/2 _ ______Ь _____ J _ .
I С t h (|хйя2/2 + Ь)(с, с)2 2 (цйп»/2 + Ь) 2 ~ 1
Следовательно, условия 1 и 2 выполнены. Для проверки третьего
N
примем bt (и) = и (xt), иф= 2 «(xi) ф/ (х)- Тогда
<=|
4(ЛО . ЯфМ-Яф(^-1) «(*/) — « («4-1) п
(«ф - «) = Н-л------Н —;—ft----= 0.
§ 8]
ОБОБЩЕННАЯ ФОРМУЛИРОВКА МЕТОДА
333
Предположим, что точное решение обладает гладкостью:
| и (х) — и (х') |»
\х — х' |1+2*
0<а<1. (8.21)
В этом случае
0<а< 1,
I «Ф - «Ив < cha,
(^ф и, *Ф*)в
1=1
,1/2
С? I! «ф - и || sg с IС |л, N Ц Иф - cha I С |л, V.
Выполнены условия аппроксимации при 81^82 = O (ha), поэтому
согласно (8.18)
Г N -11/2
У Ац (и (Xi) - at) (и (Xi) - di) < О (ha),
J
(8.22)
iu-uNl^O(h“).
Если предположить, что || du/dx || < оо, то данные оценки оста-
нутся справедливыми при а = 1. Однако именно последнее пред-
положение для точного решения часто не выполняется. И это
есть одна из характерных черт задачи (8.20), являющейся про-
стейшей из задач с малым параметром р, который может быть
близок нулю, или из задач для уравнения переноса нейтронов,
в которых, как правило, ~^L2(0, 1). Однако ограничение (8.21)
здесь может иметь место.
ГЛАВА 5
ПРОЕКЦИОННО-СЕТОЧНЫЕ АЛГОРИТМЫ
ДЛЯ ЗАДАЧ ТЕОРИИ ПЕРЕНОСА
Проекционно-сеточные методы с успехом применяются для
решения задач теории переноса нейтронов. Однако здесь возникает
ряд трудностей, обусловленных «неприятными особенностями» этих
задач — в первую очередь их существенной многомерностью.
Значительные трудности связаны с обоснованием проекционно-
сеточных методов и получением количественных оценок скорости
сходимости. Одной из трудностей следует признать и проблему
аппроксимации границ и краевых условий — здесь добавляется
задача отыскания и приближения «освещенных» и «теневых»
частей границы, что вызвано зависимостью краевых условий от
угловых переменных.
В этой главе рассматриваются некоторые подходы к решению
уравнения переноса с помощью проекционно-сеточных алгоритмов.
Будут приведены обобщенные формулировки задач, выбраны
соответствующие им проекционные алгоритмы, рассмотрены методы
построения базисных функций, в том числе специфических для
задач теории переноса. Для ряда задач будут выписаны проек-
ционно-сеточные схемы и рассмотрены способы получения оценок
скорости сходимости.
§ 1. Формулировка, симметризация задач
и свойства решений
1.1. Уравнение переноса. Пусть D — выпуклая область в R3,
ограниченная кусочно гладкой границей из класса С(1), Q —еди-
ничная сфера в R3 с центром в начале координат, s = (s1( s2, s3),
з 1
si = sinO cos ф, s2 = sin6sini|), s3 = cos9, O«c9«cn,
i=i
0^ф=^2л. Рассмотрим стационарное уравнение переноса
(s, grad<p) + а<р = J 9 (ро)ф(х, s’)d<£>' +F (1.1)
й
С краевым условием
ф(х, s) = 0 при x^dD, (s, n)<0. (1.2)
§ 1] ФОРМУЛИРОВКА ЗАДАЧ И СВОЙСТВА РЕШЕНИЙ 335
Здесь неизвестная функция <р (х, s) есть поток частиц в точке
х=(хь х2, x3)^D, летящих в направлении s = (sb s2, s3); F =
= F (x, s) —функция источников, определенная на Dx О; п —еди-
з
ничный вектор внешней нормали к dD; (s, п) — У, Sj/if, ц0 =
<=1
з
= (s, s')=2SiS7,
i=l
3 2л п
(s, grad <р) = S; <р dco' = sin 0<р (х, s') d0;
i=i * а о о
а(х), bs (х) — почти всюду ограниченные функции от xefl;
6 (р0) Зг 0 —функция, характеризующая анизотропию рассеяния,
относительно которой предполагается, что она суммируема на
{—1, 1], причем 9 (м-о) da' = 4л. В дальнейшем предполагается,
о
что функции а(х), bs(x) удовлетворяют соотношениям 0<ао«С
^a(x)^alt Q^bs(x)/a(x)^blt а0, аъ bi~const, и что а(х)
вне D продолжена нулем на все R3. Для исследования уравне-
ние (1.1) часто записывают в виде
l(s, grad<p) + (p = ^-§ 8 (р0)<р(х, s')d<o' + A (1.3)
а
где b (х) — bs (х)/а(х) «с blt f {х, s) — F(x, s)/a(x).
Обозначим через В гильбертово пространство, в котором
скалярное произведение и норма определяются соответственно
следующим образом:
(<р, ф)= а(х)<р(х, s) ф (х, s)dxda,
яхп
Йф1 = (ф> <P)1/2 = f 5 а(х)|ф(х> s)|2dxd®V/2.
\ЙХО /
Обозначим через D (L) множество функций <р е В таких, что
-1 (s, grad <р) е В, и почти всюду удовлетворяющих краевому
условию (1.2). Задавая на D(L) оператор L:
M> = 7(s, grad<p) + <p,
и обозначая через S оператор, стоящий в правой части уравне-
ния (1.3):
s4) = ^- 0 Ы <Р (-*> s')du)',
а
336
АЛГОРИТМЫ ДЛЯ ЗАДАЧ ТЕОРИИ ПЕРЕНОСА
[ГЛ. 5
запишем задачу (1.3), (1.2) в операторной форме:
Lq> = S(p + f. (1.4)
Здесь и в дальнейшем считается, что f е В. Теперь задача (1.3),
(1.2) ставится следующим образом: требуется найти функцию
<р е D (L), удовлетворяющую почти всюду в D х Q уравнению (1.4).
Сопряженная к (1.4) задача имеет вид
Л*ф = 5ф4-£, (1.5)
где g^B, А*— сопряженный к L оператор, определяемый выра-
жением А*ф =— (s, grad ф) 4-ф; его область определения
D (L*) — множество таких функций ф(х, s), что ф(х, —s)eD(L).
В силу этого задачу (1.5) можно записать в форме
-7(8, §габф)4-ф = ^- § 9(|.10)ф(х, s,)dw'+g(x, s), (1.6)
£2
ф(х, s) = 0 при x<^dD, (s, n)>0. (1.7)
Отметим некоторые частные случаи задачи (1.3), (1.2). Один
из наиболее важных, часто встречающихся в теории ядерных
реакторов — случай изотропного рассеяния и изотропной функции
источников, т. е. 9(Цо)=1 и f = f(x). Здесь задача (1.3), (1.2)
имеет вид
•|(s, grad ср) 4-<р = ~ jj ф(х, s’)da’+f(x), (1.8)
а
<р(х, s) = 0 при x^dD, (s, n)<0. (1.9)
Иногда область D можно представить как плоскопараллельный
слой: £) = {%: 0 &•-:Хз = zsg Т, —оо^х1( х2^со), в котором
функции а, b зависят лишь от z, a f — от z и одной угловой
переменной 9. В силу этого функция <р будет зависеть также
лишь от z и 9 и уравнение (1.3) принимает вид
-^cos9-^4-(p = -^- sin 9'<р (г, д') М'~ ( 9 (и0) t/ф' + f.
о о
Если свести переменную ц— cos 9, то задача (1.3), (1.2) записы-
вается следующим образом:
1
£1г + (Р = ^-§ 0(И> Н')<р(г> и')^'+/(г, Н). (1Ю)
— 1
<р(0, р,) = 0 при р>0, <р(7\ [i) = 0 при р<0, (1.11)
§ 1]
ФОРМУЛИРОВКА ЗАДАЧ И СВОЙСТВА РЕШЕНИЙ
337
где ™
0(Ь Н')= 2л J 0 (Ио)
о
Скалярное произведение и норма в В соответственно имеют вид
т 1
(<р, ф) = $ dz a (z) <р (г, р) ф (z, р) dp,
о —1
/Г 1 .1/2
j|cp|| = H dz $ a(z)<p2(z, р) dp) .
\О —i /
Пусть D — шар радиуса R с центром в начале координат, а
функции a, b, f зависят от х через радиус r = (хЦ-хЦ-х!)172.
Угловая зависимость f выражается посредством р = cos fr, где ft—
угол между направлением s и радиус-вектором из точки О
в точку х. В координатах г и р задача (1.3), (1.2) записывается
в виде
+ + $ б(Ь Н')ф(г, Ю W + f (г, р),
(1-12)
Q<r<R, —1 < р < 1,
<р(/?, р) = 0, —1<р<0, (1.13)
где
Л
0 (и. Il') = i $ 6 (нн' + Hi - Р2) (1 - н'2)cos ф)dtp.
о
Скалярное произведение и норма в В при рассмотрении дан-
ного случая задачи соответственно имеют вид
R 1
(<р, ф) = jj г2 dr jj а (г) ср (г, р) ф (г, р) dp,
о -1
/R I \1/2
1'<₽1!= $ г2dr 5 a(r) I ф(г, р) |2dpI .
\о — 1 /
1.2. Симметризация задач. Оператор задачи (1.3) (1.2), как
легко заметить, не является симметричным. Однако в ряде слу-
чаев можно перейти от задачи (1.3), (1.2) к задаче, в которой все
операторы симметричны (см. [47]), что имеет известные преиму-
щества. Пусть, например, функции 6 (р0) и f (х, s) — четные отно-
сительно угловых переменных, т. е. 9 (р0) = 9 (—р0), f (х, s) =
= /(х, —s). Тогда, выполнив в (1.3) замену s на —s, приходим
к уравнению
- (s, grad <р (х, — s))4-(p(x, — s) =S<i>+f(x, s).
338 АЛГОРИТМЫ для ЗАДАЧ ТЕОРИИ ПЕРЕНОСА [ГЛ 5
Складывая его с (1.3) и вычитая из (1.3), получаем два соотно-
шения:
-~(s, grad v) + и = Su 4~/, (s, grad и) -f- v = 0, (1-14)
где
и (x, s) = ~ (<p (x, s) + ф (x, — s)), v (x, s) = ~ (ф (x, s) - ф (x, —s)).
(1-15)
Исключая в первом из них v, приходим к уравнению
— grades, grad u)^ + u = Su + f(x, s). (1.16)
Краевые условия (1.2) переходят в условия для и{х, s):
и — ~ (s, grad и) = 0 при x^dD, (s, n)<0, (1-17)
«4-|(s, gradu) = 0 при x^dD, (s, n)>0. (118)
С другой стороны, если некоторая функция и (х, s) удовлетворяет
уравнениям (1.16) —(1.18), то функция
Ф (х, s) = и — ~ (s, grad и) (1-19)
является решением задачи (1.3), (1.2).
Запишем (1.16) — (1.18) в операторной форме:
Lou = Su-\-f, (1.20)
где
Lou = — -Ms, grades, grad и)) 4-и,
D(L0) = {u: и<=В, Lou^B, u — -^(s, gradu) = 0 при xedD,
(s, n)<0, «4~(s, gradu) = 0 при zs®, (s, n)>0|.
Легко заметить, что оператор задачи (1.20) уже является сим-
метричным.
В случае плоскопараллельной (рис. 55) области D (см. (1.10),
(1.11)) задача (1.16) — (1.18) записывается в виде
~ + J 6(и’ Н')«(г, H'W4-/(z, и),
о
0<z<T, 0<|К1,
= (121)
Ы4-И^=х0, г^Т,
1 a dz ’
§ и
ФОРМУЛИРОВКА ЗАДАЧ И СВОЙСТВА РЕШЕНИЙ
339
в случае сферически симметричной области (см. (1.12), (1.13)) —
в виде
1 — р.а д
г дц
I2
ll-j-U —
1
= b (z)\ 0(н, И')“(Л ц') dll' + f (г, р),
(У
(1.22)
. 1 [ ди ,
U 4----7Т Н "5-F
1 а (г) дг 1
1 — ца ди \ I
г = д
O^r^R, 0<р<1.
Рис. 55.
фиксированном
Симметризация стационарных задач при более общих предпо-
ложениях относительно исходных данных рассмотрена в работе
[47].
При изучении сформулированных выше за-
дач и методов их решения важное значение
имеет формула интегрирования по частям [27]:
(£,ф, ф) = $ (s, л)ф(х, $)ф(х, s)dxda>-\-
QXdD+
4-2(<р, ф)4~ $ ($, п)ф(х, в)ф(х, s)dxd(a —
QXdD-
-(ф, Аф), (1.23)
где д£)+ —часть границы dD, для которой при
направлении s выполнено условие (s, л) > 0, д£)_— часть границы
dD, для которой (s, п) < 0. С помощью данной формулы легко
доказать положительную определенность операторов L и Lo:
(Zxp, <р) = у (s, п) |ф(х, s) |2 dx d® 4~ || ф |j2 X ф li2. (1.24)
ЙХДО+
фЕЙ (L),
(Аоф, ф)= $ |(s, n) II ф (х, s) |2 dx d® 4" (ф. ф) +
Q xdD
+ (4<s’ Srad(P)> <s> grad ф)) XIФ II2, U(=D(L0). (1.25)
Можно показать также (см. [47]), что в рассмотренных выше
задачах оператор L.-1, действующий из В в В, существует и огра-
ничен, причем || А-11| 1 — e~a'd, где d —диаметр области D.
Кроме того, оператор S действует из В в В, симметричен и огра-
ничен; если выполнено условие (что в дальнейшем всегда будет
предполагаться)
^(l-e-^Xl, (1.26)
то оператор I — SL-1 будет положительно определенным в В:
((/ — 5£-г)ф, ф)^У1|ф||2, где Yi= 1 — bj(l — e-°*d)>0, и уравне-
340
АЛГОРИТМЫ ДЛЯ ЗАДАЧ ТЕОРИИ ПЕРЕНОСА
(ГЛ. 5
ние (1.4) имеет единственное решение <р = (/ — SL^^L^f и
||<р||<(1-е-^)И||/Т1.
1.3. Обобщенные постановки задач. Обобщенные постановки
задач имеют важное значение не только для исследования разре-
шимости уравнений, но они, как мы видели в предыдущих главах,
лежат в основе проекционно-сеточных алгоритмов. От того, какую
из них выбираем, зависят требования на гладкость базисных
функций, на необходимость удовлетворения краевым условиям
и т. д. Поэтому здесь будут рассмотрены некоторые из обобщен-
ных постановок задач для уравнения переноса, используемые
в дальнейшем для построения приближенных решений.
Введем гильбертовы пространства
HA=fu: (и, v)A = (u, о)4- । (s> rt) I uvdxdo), || и||л = (и, ы)а/21
I dD X £2 J
Hi={u: (u, 0i = (-~(s, gradu), ±(s, grad 0^4- (и, 04-
4- $ | (s, n)\uvdxdti>, ||«||i = (u, u)l/2l.
dD Xfi )
Пусть ф —решение задачи (1.3), (1.2), ф —произвольная функ-
ция из Hr. Умножим (1.3) скалярно в В на ф и выполним
интегрирование по частям с учетом краевых условий. Получим
равенство
— ^<р, (s, gгadф)^4- (ф> Ф)4- (s, ti) срфdxda —
до+хй
— (Stp, ф) = (/, ф), (1.27)
которое берется в основу определения обобщенного решения.
Определение 1. Обобщенным решением задачи (1.3), (1.2)
назовем функцию <р е НА, удовлетворяющую (1.27) при произ-
вольном элементе ф е НА.
В дальнейшем вопросы разрешимости задач в обобщенных
постановках рассматриваться не будут, так как сама задача (1.3),
(1,2), согласно приведенным в п. 1.2 результатам, имеет единст-
венное решение. Это и дает ответ на вопрос о существовании
обобщенного решения. Нас будут интересовать требования, накла-
дываемые на гладкость и удовлетворение краевым условиям
в обобщенной постановке, как факторы, в значительной степени
влияющие на ход проекционно-сеточного алгоритма. Так, в (1.27)
не требуется, чтобы <р удовлетворяла краевому условию (1.2).
Однако если обобщенное решение ср е НА обладает некоторой
дополнительной гладкостью (об удовлетворении краевым условиям
при этом ничего не предполагается), то оказывается, что <р = О
при х е dD, (s, n) < 0. Действительно, пусть ф е Нх. Тогда,
§ 1] ФОРМУЛИРОВКА ЗАДАЧ И СВОЙСТВА РЕШЕНИЙ 341
выполняя в (1.27) интегрирование по частям, приходим к соотно-
шению
gradcp)4-(p —Sep —Д i|^4- ( (s, п) | cpip dx d® = 0.
<3D_xQ
Отсюда в силу произвольности гр заключаем, что ф почти всюду
удовлетворяет как уравнению (1.3), так и краевому усло-
вию (1.2). Таким образом, условие (1.2) в рассматриваемой задаче
оказывается естественным. (Заметим, что здесь понятие естествен-
ности краевого условия несколько отличается от рассмотренного
в § 2 гл. 1.) Поэтому данная постановка задачи удобна в слу-
чаях, когда конфигурация области D такова, что строить базис-
ные функции, удовлетворяющими краевым условиям, будет доста-
точно трудно.
Привлекательной является модификация равенства (1.27),
в которой отсутствовало бы слагаемое j (s, п) фгр dx da>. При
dD+xQ
реализации проекционно-сеточного алгоритма это избавило бы от
вычислений интегралов по множеству dD+xQ = {(x, s): x^dD,
s ей, (s, n) > 0}. Добиться отсутствия данного слагаемого можно,
потребовав гр = 0 при хеdD, (s, п)>0. Таким образом, прихо-
дим к следующей постановке задачи.
Определение 2. Обобщенным решением задачи (1.3), (1.2)
назовем функцию ф ей, удовлетворяющую равенству
- (ф, 7 grad гр) 4-(ф, гр) = (3ф, гр) + (Д гр) (1.28)
при произвольной функции гр е Hlt для которой гр —0 при х е dD,
(s, n)>0.
Снова от ф не требуется удовлетворения краевым условиям.
Более того, здесь нет даже условия $ | (s, п)|ф2с!х(1(в<оо.
dDxQ
Если предположить существование обобщенного решения в смысле
выполнения соотношения (1.28), то для него легко получить
априорную оценку. Действительно, пусть гр есть решение сопря-
женной задачи £*гр = 3гр4-ф; тогда из (1.28) следует, что ||ф||2=
=(Д гр), несогласно известным результатам |гр||^с||ф||. Следо-
вательно, |!фII2sgIfIIIIгрII с 17IIIIфII, ||ф||^с||Д|. Если окажется,
что фе//1, то, выполняя интегрирование по частям в (1.28),
приходим к равенству
(£ф — Зф — Д гр) 4- J | (s, п) | фЧрсЬссЕсо = 0.
dD_xQ
В силу произвольного выбора гр вновь функция ф удовлетворяет
задаче (почти всюду) (1.3), (1.2).
342
АЛГОРИТМЫ ДЛЯ ЗАДАЧ ТЕОРИИ ПЕРЕНОСА
(ГЛ. 5
Однако при рассмотрении (1.28) мы снова приходим к про-
блеме удовлетворения краевым условиям для функции ф, но
подобные ограничения на ср по-прежнему сняты. Очевидно, что
это скажется в проекционно-сеточном методе на требованиях
к базису, с помощью которого будет приближаться ср, и к функ-
циям, на которые будет проектироваться уравнение (1.3).
Естественно предположить, что если базисные функции {<р,},
которыми приближается решение задачи ср, принадлежат области
определения оператора задачи, то скорость сходимости прибли-
женных решений к точному будет выше. Поэтому в тех слу-
чаях, когда удается построить {ср,} так, чтобы {<р,} cz D (L), пред-
почтительной будет следующая постановка задачи (фактически
эквивалентная (1.3), (1.2)).
Определение 3. Обобщенным решением задачи (1.3), (1.2)
назовем функцию <р е Hi, ср = 0 при х е dD, (s, п) < 0, удовле-
творяющую равенству
(4<s> grad Ф)’ ^) + ((Р> 4’) = (S<P. Ф) + (Л Ф) (1-29)
при произвольной функции фе В.
Эта постановка задачи удобна для применения метода Буб-
нова—Галеркина, метода наименьших квадратов, метода момен-
тов. При этом здесь имеется достаточный произвол в выборе
функций ф. Так, если потребовать, чтобы (риф принадлежали
одному множеству, то несложно получить различные априорные
оценки для ср (а в проекционно-сеточном методе — для приближен-
ного решения) и доказать положительную определенность
матрицы системы. Действительно, пусть ф = ф. Тогда согласно (1.24)
у § |(s, п) | ф2с1хс((в + ||ф||2 = (5ф, ф)4-(/, ф).
dD+XQ
Однако так как b(x)sgb1<l, то |ф|2 — (Зф, ф)5з(1 — ЬОЦфЦ2,
Следовательно,
min(j
(до+X я
I (S, п)|фМхсйо-Нф|12г^с11Л2-
(1.30)
dD+XQ
В (1.29) можно потребовать также, чтобы ф е В или ф е D (L*).
Это приведет к той или иной модификации проекционно-сеточного
алгоритма. Однако, как мы знаем из гл. 1, наличие двух раз-
личных базисов (т. е. ситуация, когда ф и ф в (1.29) принад-
лежат различным множествам) часто усложняет исследование
алгоритма решения задачи, но численная реализация его может
§ 11
ФОРМУЛИРОВКА ЗАДАЧ И СВОЙСТВА РЕШЕНИЙ
343
существенно упроститься (вычисление элементов матриц, правых
частей, интегралов по границам и т. п.).
Следующая постановка задачи относится к случаю, когда 0 (р,0)
и /(х, s) в (1.3) являются четными. Тогда, как отмечалось в п. 1.2,
задача (1.3), (1.2) сводится к задаче (1.16) — (1.18), для которой
возможна уже вариационная постановка, рассмотренная в общем
в виде в § 2 гл. 1. Сформулируем ее.
Введем на D (£0) скалярное произведение [и, у] = (£ом, у), кото-
рое можно записать в виде
[и, у]= ! (s, п) | и (х, s) у (х, s) dx da 4- (и, у) +
QXdD
+ (l(s,grad«), l(s, grad v)^ — (Su, у), (1.31)
и норму
[«] = [«, м]1/2. (1.32)
Пополняя теперь D(L0) по норме (1.32), приходим к энергетиче-
скому пространству ВА. Учитывая ограничения на исходные
данные задачи (1.1), (1.2), замечаем, что нормы |1 и ||i и [м] для
функций из В а эквивалентны. Действительно, [m]2 = ||m||i — (Sm, и)^
^||м||1 + Ь11|м}2^с2||м||1, где с2 — 1-J- Ьъ С другой стороны, [м]2=
=|«||f-(S«, «)Ss=|«||i — llUifS&cJIwllf, где Ci=min (1/2, 1-6х)>0.
Таким образом,
О <сх К и 11 [м]2 ==Sc21 и III < оо. (1.33)
Как знаем из § 2 гл. 1, задача (1.16) — (1.18) сводится к оты-
сканию минимума квадратичного функционала [47]
F(m) = [m]2 — 2(f, u) = ^l(s, grad м), (s, grad «)
+ («, u) — (Su, u) — 2(f, u). (1.34)
где uf=BA.
Определение 4. Обобщенным решением задачи (1.16)—(1.18)
назовем функцию и е ВА, реализующую минимум функцио-
нала F (и).
Согласно свойствам оператора Lo — S, задача о минимиза-
ции (1.34) имеет единственное решение и^ВА. Краевые усло-
вия (1.17), (1.18) здесь являются естественными. Поэтому, если
решать задачу о минимизации F (и) проекционно-сеточным мето-
дом, то базисные функции можно выбирать не удовлетворяющим
(1.17), (1.18).
На основе функции и^ВА, реализующей минимум F (и),
определим обобщенное решение исходной задачи (1.3), (1.2)
с помощью соотношения
ф = «— ~(s, grad«). (1.35)
344
АЛГОРИТМЫ ДЛЯ ЗАДАЧ ТЕОРИИ ПЕРЕНОСА
ГГЛ. 5
С помощью (1.35) по приближенному решению uh задачи (1.20)
определяется и приближенное решение срл задачи (1.3), (1-2):
фл = «л-~ (8, grad«A).
Отметим, что в (1.20) и в (1.34) функция и — четная относительно s:
и (х, s) — u(x, —s), поэтому д (s> grad«)da> = 0. Если требуется
а
определить не ср (х, s), а интеграл
Фо (х) = 4^ jj ф (х, s) dw
й
(именно он зачастую представляет наибольший интерес), то ср0 (х)
и приближение к нему ф0, л определяются более простыми фор-
мулами:
Фо (х) = и (х, s) dco, ф0.л(х)=4^ § uh(x, s)d<o. (1.36)
а а
Введенные выше обобщенные постановки задач и будут упо-
требляться в дальнейшем.
1.4. О дифференциальных свойствах решений. Весьма важным
в теории проекционно-сеточных методов (как и вообще в при-
ближенных алгоритмах) является наличие той или иной гладкости
решения задачи. Однако получение этой информации в задачах
теории переноса связано со значительными трудностями при про-
ведении соответствующих исследований. Ситуация в практически
важных задачах такова, что гладкостью (в обычном понимании
этого слова, т. е. непрерывной дифференцируемостью, квадратич-
ной суммируемостью производных по пространственным перемен-
ным и т. п.) решения уравнений переноса, вообще говоря, не
обладают. Если же оказывается, что гладкость имеется, то она,
как правило, бывает недостаточна, чтобы получить эффективные
оценки погрешностей, аналогичные доказанным, например, в эллип-
тических задачах. Поэтому исследование скорости сходимости на
реальном классе решений является одной из проблем в теории
приближенных методов для задач переноса.
Однако если поставленная задача однозначно разрешима, то,
как правило, можно подобрать частное гладкое решение, которое
будет соответствовать специальным исходным данным (здесь можно
воспользоваться известным приемом подстановки гладкой функ-
ции в уравнение и отысканием соответствующих ей правых частей
и т. д.). В этом случае оценку скорости сходимости погрешности
можно проводить для этого частного гладкого решения. Естест-
венно, что результаты, полученные здесь, не переносятся на
общий случай. Но если они достаточно оптимистичны, то можно
§ и
ФОРМУЛИРОВКА ЗАДАЧ И СВОЙСТВА РЕШЕНИЙ
345
надеяться, что алгоритм будет эффективен и в реальных ситуа-
циях. Но, конечно, наиболее желательным результатом является
тот, который получен при реальных предположениях о гладкости
точного решения. Поэтому приведем некоторые из сведений,
касающихся дифференциальных свойств решений задачи (1.3),
(1.2), при этом ограничимся случаем
8(Ио) = 1, f=f(x).
Прежде всего отметим, что решения задач теории переноса’
обычно не обладают гладкостью по пространственным и угловым
переменным, даже если коэффициенты и функция источников —
достаточно гладкие функции. Например, решение простейшей
задачи (1.10), (1.11)
дф . ,
Ф (0, ц) = 0, ц > 0,
Ф(Т, р)=0,
ц<0,
имеет вид
Тогда
, х (l—e-*/*, ц>0,
ф(г’ И)“| 1_е<г-г)/ц> и<0.
_L е-г/ц
н ’
J_e(7--z)/n
^(г, н) =
ц > 0,
Ц<0,
(* (• I r)m |2 1 / (* р~2Т/И \ 1
dz = -*- |1П8|-dfi >1(|1П8|-Е1(2Т)),
8 0 '8 '
С e~t№
где 0<8<Т, (/) = \---dp, функция ElU) ограничена при
о
1 т
t>0. Следовательно, dp | 1 dz->oo при 8-> 0 и ф(г, р)
8 0
не обладает производной dq/dz, принадлежащей £2 ((0. (-1,0)
(хотя, как легко заметить, ф е L2, [idtp/dz е L2). Таким
образом, при рассмотрении задачи (1.10), (1.11) даже при глад-
ких коэффициентах и / (г, р) предположение о существовании
у решения ф(г, р) производных dq/dz, diyldzi и т. д., принад-
лежащих В, вообще говоря, неверно.
Какой же гладкостью (кроме гладкости вдоль направления
полета частиц) обладает решение данной задачи? Оказывается,
что ф (г, р) может иметь гладкость «в среднем». Так, если а (г),
b(z), Т)), то при любых г, г' е (0, Т), |z —z'|=C/i
346
АЛГОРИТМЫ ДЛЯ ЗАДАЧ ТЕОРИИ ПЕРЕНОСА
[ГЛ. 5
(см. [39])
/' \1/р ( h1^, 1<р<оо,
^|ф(2, н)—ф(г',н)№у p=it О-37)
|фо(г)-ф0(г')1^сИкооЛ(14-|1пЛ|), (1.38)
1
где фо (г) = | J Ф (г> М-) dM--
—3
Обозначим через С/а) множество функций от г, таких, что
на каждом из интервалов (г,_х, z,), 7=1,2, 7 4-1, го = О,
z/+1 = T, Zj-xCz,, они принадлежат классу С(а) ((Z/-x, г,)), 0<а<
<1, т. е. для них выполнено свойство | ф(г) — ф(г') | =^с|г —г'|а,
г, г'е(гг_х, гг). В точках г,- функции феС® могут иметь раз-
рывы первого рода. Предположим, что в (1.10), (1.11) коэффи-
циенты a (z), b (г) принадлежат С^, а также что
\f(z)-f(z')\^c\z-z'\a, z,z' (=(21-!, Zi).
Тогда можно показать, что функция интегрального потока ф0 (г)
обладает производной d^dz и
/ Т \1/Р
| ^\Р dzj ^с’ (1-39)
Если же a, b, f е С/’, то
G (z) 4- 2 [°1/ехр J-
/ = 0 I z. J
С dG , I С а © d| I . ,
- j^(z')exp - dz'
0 I 2' '
. . при z 6= (zh г/+х), ц>0,
Ф(г, ц) = ] ~ (1.40)
7 + 1 П\ 1
G(z)~ 2 [GJ/exp j^d| 4-
i = i + 1 'г '
т ~ (г’ )
4-j^(z')exp
2 \Z *
при ze(z;, г/+х), p<0,
где С(г)=Ь(г)ф0(г)4-/(г), [б]*=б(гА-О)-б(гА4-О)=[Ь]х.фо(г*)4-
4-[/]*. а функция ~(z) = (z), ze^-x, zf), /=1, .... 74-1}
может иметь разрыв в точках гь 7 = 0,1, ..., /4"1’
5 1J ФОРМУЛИРОВКА ЗАДАЧ И СВОЙСТВА РЕШЕНИЙ 347
При сделанных предположениях производная от ф0(г) имеет
вид
^ = -^-(V1(z)4-V2(2)).
Здесь функция Vi(z) внутри интервала (zf_x, z() обладает произ-
водной dVi/dz, для которой в окрестности точек гг справедливо
асимптотическое выражение
dVi^) =а(гЦО],
dz г—zi
Функция V2 (z) при любых z, z' e (z,_i, z,) удовлетворяет соот-
ношению
I V2 (z) - Vi (z’) | =ss c | z - z' | (1 4-1 In | z - z' 112).
Как из (1.10), так и из (1.40) видно, что при ц = 0 решение
Ф (г, р) может быть разрывным в точках zh 1—1, ...» 7, причем
ф(г, —0)-ф(г,-4-0) = [Ь]гфо(zf)+ [/],. Решение ф(г, р) будет не-
прерывным в области (0, Т) х (—1, 1), если потребовать непрерыв-
ность функций b (г) и /(г). А для того чтобы функция ф (г, р)
_ о 5<р (г, ц,) „ „ ,
обладала производной , принадлежащей В, необходимо,
помимо непрерывности a (z), b(z), f (г), потребовать также, чтобы
они принадлежали классу С}1’ и чтобы b (4-0) = Ь(Т — 0) =/(4-0) =
= f (Т — 0) = 0. (Последние требования, как правило, в физиче-
ских задачах не выполняются.)
Рассмотрим свойства решения ф (г, р) сферически симметрич-
ной задачи (1.12), (1.13), предполагая а (г), b(r), f(r) кусочно
непрерывными на [0, /?], с возможными разрывами первого рода
в точках rh i = l, .... I +1, го = О, ?/+1 = 7? и что для каждой
из этих функций при г, г' fi), i = l, ..., 7 4-1, справед-
ливо соотношение
|ф(г)-ф(г,)1^ск-г,|(14-|1п|г-г'||). (1.41)
В этом случае решение задачи (1.12), (1.13) уже непрерывно
в области [0, /?]х[—1, 1], при этом (см. [49])
|ф(г, р)-ф(г, ц')| sgcr/'lfp-fl'2 j,
г (= (0, /?), р, р' 5s 0,
I Фо (г)-фо (г')1=^с1 г — г' I (1 4-| In] г — г' i I), (1.42)
г, г' €= [0, R],
J₽=0, г = 0,
дг 9 д|л ’ ’
1
где фо(/’)~ 2
348
АЛГОРИТМЫ ДЛЯ ЗАДАЧ ТЕОРИИ ПЕРЕНОСА
ГГЛ. S
Доказано также (см. [48]), что функция <р0 (0 непрерывно
дифференцируема в интервалах (rz_b rt), t = l, ..., 7+1,
а в окрестности точки rL справедлива формула
= 0)) + О(1), (1.43)
где G (г) = а (г) b (г) ф0 (г) + f (г) а (г).
Обратимся к задаче (1.3), (1.2) при 6 (р,0) = 1 и f — f(x). Пусть
область D допускает разбиение на конечное число подобластей Dit
i = 1, ..., 7, с кусочно гладкими
u ________________ # границами dDz. Любая прямая, про-
ходящая через точку г D в на-
7 \правлении s, пересекает поверхность
I ^2 / I 1
\/ Y= U лишь в конечном числе
1=1 X
п-/—1— . точек {/-,} (рис. 56). В случае, если
D содержит зоны с плоскими или
О----------------------•» цилиндрическими поверхностями,
последние предполагаются продол-
Рис. 56. женными до пересечения с внешней
границей.
Обозначим через Сца пространство вещественных функций
с нормой
I ф Ц, а (О) = J J max I 7)*ф | + sup _ ,
fe = 0 (fe) x>
где Dkq> — производная k-го порядка от ф, т (р) = р“ при 0 <а < 1
и т(р) = р (1 +1 Inр |) при а=1, p$sO.
Пусть f е La,', тогда существует единственное решение задачи
Ф (х, s), которое вместе с (s, grad ф) принадлежит пространству
£оо(7)хП) [47]. Если же при этом а(х) ^С10(Р/), dDf^Clt0>
то функция интегрального потока ф0 (х) = J ф (х, s) dco принад-
я
лежит пространству C0,i(Z)).
Для формулировки свойств гладкости решения ф(х, s) пред-
положим, что а(х) е Cl a(D/), b (х) ^Coa(Df), dD, —кусочно
гладкая поверхность классаСо,а, f (х) еС0>а (£>/), а>0, /= 1,..., 7.
Пусть точка (г*, s*) такова, что в окрестности точек Г/ таких,
/
что (г;,8*)<(г*, s*), /= 1, .... K.I, поверхность у= (J dDf при-
/=1
надлежит классу CZt0, 1, а^О. В [54] доказаны следующие
утверждения. Если направление s* не является касательным,
т. е. (nj, s*)+=0 для всех j=l, /<./, то функция ф(х, s)
§ IJ ФОРМУЛИРОВКА ЗАДАЧ И СВОЙСТВА РЕШЕНИЙ 349
в точке (г*, s*) имеет ограниченные производные по простран-
ственным и угловым переменным. Если же направление s* — ка-
сательное, т. е. (П;, s*) = 0 хотя бы при некоторых /= 1,..., 7< /,
то в окрестности этого направления производные по простран-
ственным переменным Drq> имеют особенность порядка | г — г*
а производные по угловым переменным ведут себя как |s — s* |-1/а
при условии, что радиусы кривизны поверхности у в точках rj
конечны. На поверхностях с нулевой кривизной производная
решения <р (х, s) по угловым переменным имеет особенность
ln|s-s0|, где So — касательное направление, а сама функция
<р (х, s) — разрыв вдоль этого направления.
В заключение отметим свойства решений периодических задач,
в которых коэффициенты а(х), Ь(х) и fix, s) в уравнении (1.3) —
периодические по каждой пространственной переменной с перио-
дом, который ради простоты примем равным 2л. В качестве D
здесь принимается куб D — {0 х, 2л, 1 = 1, 2, 3}. Уравнение
переноса рассматривается при условиях периодичности по пере-
менным хг, i = l, 2, 3, вместо условий (1.2), (1.17), (1.18).
Периодические задачи обладают рядом характерных черт,
отличающих их от краевых задач теории переноса. Одна из них
заключается в том, что решения этих задач будут гладкими функ-
циями от Xi, i—1, 2, 3, если такой гладкостью обладают а(х),
b(x), f(x, s) (как отмечалось выше, решения краевых задач для
уравнения переноса подобным свойством, вообще говоря, не обла-
дают). Однако если исходные данные не обладают гладкостью,
то решение периодической задачи в общем случае также не будет
гладким. Например, пусть рассматривается периодическая задача
для уравнения (1.16):
- н2й+« = Ж>
z е (0, 2л), р е= (0, 1),
где
00
Li /1+/2)1/2’
Z = — со v '
00
10,(0. 2Л) = 2л 2
I = — 00
Решение ее имеет вид
00
«(г, Р)= У «/(р)е//г,
I — — оо
щ (И) =---------------------•
' (1+ /2)1/2 (1 + р2/2)
350
АЛГОРИТМЫ ДЛЯ ЗАДАЧ ТЕОРИИ ПЕРЕНОСА
ГГЛ. 8
Пусть uN = у И;(р)е;и. Тогда |ajvk,(o. 2л) <w, но
] II llw'l (0, 2л) — J
6 о
1 1
= 2л 2 f(l+C)l«<l,<<l*“2» 2
111 < N 0 111 sS N 6 '
Следовательно, функция u(z, ц) не обладает производной ди/дг,
принадлежащей L2 ((0, 2л)х(0, 1)). Из изложенного вытекает
следующее предположение: чтобы решения периодических задач
имели по пространственным переменным определенную гладкость,
достаточно наложить ограничения на гладкость исходных данных.
Действительно, доказано, Что если (Уа/дх^, ftb/dx1. е Lm (D), j =
= 1, 2, 3, и для f(x) выполнено ограничение ||/]wt(D) <оо,
то обобщенное решение и(х, s) уравнения (1.16) удовлетворяет
неравенствам
J il« ,О) Ж» < оо, $ II <s> Srad «) (о, < оо.
Q 2( Q 2
Функция интегрального потока
ФоМ = ^ У s)dco
в этом случае принадлежит пространству U7j+I/2(Z>).
Замечание. Ряд утверждений, помимо изложенных выше,
о гладкости решений уравнений переноса имеется в работах
[39, 47, 48, 54].
Уже приведенные выше сведения говорят о специфике урав-
нений переноса, и можно предположить, что изучение алгорит-
мов приближенного решения этих уравнений окажется значительно
сложнее, чем это было, например, при рассмотрении эллиптиче-
ских задач.
§ 2]
МЕТОД РИТЦА
351
§ 2. Метод Ритца
В этом параграфе будет изложена общая схема метода Ритца
для решения уравнения переноса. Затем метод Ритца будет более
подробно описан для задачи в плоскопараллельной геометрии.
2.1. Общая схема алгоритма. Пусть в (1.3) 9(—ц.о) = 9 (ц0),
f(x, s)=f(x, —s). Тогда (1.3), (1.2) сводится к самосопряженной
задаче (1.16) —(1.18), приводящей к задаче минимизации функ-
ционала (1.34) в энергетическом пространстве ВА (или в Hi),
которую удобно приближенно решать методом Ритца. Рассмотрим
алгоритм в общей форме.
Зададим в Rsx[0, л]х[0, 2л] некоторую сетку с максималь-
ным расстоянием между узлами h. Пусть в /-й точке сетки
каким-либо способом определена функция <р7- (х, s), которая при-
надлежит Hi, четна относительно s, но не обязательно удовле-
творяет условиям (1.17), (1.18). Затем .оставим лишь те функ-
ции <ру, носители которых имеют ненулевое пересечение с П=Ох
х[0, л]х[0, 2л]. Пусть число таких функций равно N, они пред-
полагаются линейно независимыми, а их линейная оболочка
обозначается через Н*. Будем также предполагать, что последо-
вательность подпространств {Д*}, /г->0, предельно плотна в Hi.
Для выполнения этого условия достаточно, чтобы была
предельно плотна,. например, в пространстве (П) (так как
1Га(П) в свою очередь плотно в Hi).
Согласно методу Ритца будем искать приближенное решение
в Я* в виде
N
uh= У a^i(x, s), (2.1)
i = i
где а, определяются из условия
странстве Hh., т. е. из условий
dF(uh)
dat ~и’
минимизации F на подпро-
i=l, ...,1V. (2.2)
Систему (2.2), как известно из § 2 гл. 1, можно записать в мат-
ричной форме:
Aa = f, (2.3)
где А = (Ац), aN)T, / = (Д......fN)T,
ft= \ f (х, s) <pt (х, s) dxda,
DxQ
At/ = $ U*) (s*grad <s’grad +a ф/ (x> s) ф/ “
DxQ
— фДх, s) ScpJ dxda+ \ | (s, n) | q>(- (x, s) g>7- (x, s) dx da,
dDxQ
i, j = 1, .... IV.
352 АЛГОРИТМЫ ДЛЯ ЗАДАЧ ТЕОРИИ ПЕРЕНОСА [ГЛ. 5
Матрица Л симметрична и положительно определенна. В силу
этого система (2.3) имеет единственное решение а, которое одно-
значно- определяет приближенное решение uh. Если вектор а
определен каким-либо подходящим методом, то за приближенное
решение задачи (1.3), (1.2) принимается функция
фл = «л-^(«, grad «л).
Если нас интересует приближение <pOiA к функции интегрального
потока фо(*) = 4~ J q>da>, то за <р01Л берется функция
Q
N
Фо, Л = 4^ J «л (X, s) d(0 = 2 ai У ф/ (х’ s)
Q »=1 \ Q /
Сходимость uh к и (х, s) в метрике Нг (а это означает сходи-
мость фл к ф (х, s) в В) вытекает из плотности {Н*} в Нг. Если же
для точного решения и (х, s) имеет место оценка аппроксимации
inf [и — цЛ]^е(Л),
°л
где 8(Л)->-0 при Л-»-О, то согласно теории метода Ритца спра-
ведлива оценка погрешности
[« — «й] sS 8 (Л).
Отметим, что, несмотря на логическую простоту алгоритма
; метода Ритца в применении к решению (1.20), численная реали-
/’ зация связана со значительными трудностями, по большей части
| обусловленными существенной многомерностью задачи. Искомое
[ решение и (х, s) здесь зависит от пяти переменных (хг, х2, х3, ф, 9),
что приводит к системе (2.3) с матрицей А большого порядка.
Поэтому при проведении практических расчетов задачи (1.3), (1.2)
и (1.16) —(1.18) часто заменяют их приближенными моделями
(например, предполагая плоскую параллельность, сферическую
симметричность области D и т. п.), которые затем уже решают
численными методами, в том числе и проекционно-сеточными.
В следующем пункте будет проиллюстрировано применение метода
Ритца к решению задачи (1.16) — (1.18) в плоскопараллельной
геометрии (т. е. к задаче (1.21)). При этом базисные функции
будут строиться зависящими лишь от пространственной перемен-
ной, а искомые коэффициенты а{ будут зависеть от угловой
(см. алгоритм выбора базисных функций, изложенный в §11 гл. 1).
2.2. Метод Ритца для задачи в плоскопараллельной геометрии.
Пусть рассматривается задача (1.21), которая сводится к про-
блеме минимизации функционала (1.34) в пространстве ВА или Н±.
§ 2]
МЕТОД РИТЦА
353
Скалярное произведение в Нг и функционал F (и) здесь соот-
ветственно имеют вид
т 1 1
(«, v)i = f dz f ~ ~ + а«о) dp + f и (uv |г_0 + uv |г_г) dp.,
(2.4)
т 1
+ $М«’(0, ц) + «8(7,) Н))-
О
Т I 1
— J dz J dp^ b (z) и (z, ц) и (z, ц') 9 (ц, ц') dp' —
ООО
т 1
— 2 $ dz $ и (г, ц) f (z, ц) dp. (2.5)
о о
Построим приближенное решение задачи, используя кусочно
линейные базисные функции по переменной г. Для этого введем
по переменной г сетку 0 = 20<2i<...<2!V = 7’, — г^, и
поставим в соответствие каждому узлу z{ базисную функцию <р/ (г),
определенную согласно (2.2) гл. 2. Приближенное решение ищем
в виде
N
Uh (Z, и) = 2 а,- (ц) ф,- (2), (2.6)
1 = 0
где функции а/ (ц) найдем, минимизируя функционал (2.5). В ре-
зультате приходим к системе интегральных уравнений
Аа = J 9 (ц, ц') Ва(р’) dp.'+f, (2.7)
где Л (ц) = \Аи (ц)), В = (Bf/),
Ait (р) = р* j 7^5-dz+^a(z) Ф< (г) Ф/ (z) dz +
+ Р (<Pi (0) Ф/ (0) + ф/ (Т) <р/ (71)),
т
= \ b(z)(fi (z)(pj(z)dz,
О
f (ц) = (fo (p), • • - IN (р))г, ft (и) = j а (2) f (г, ц) фг (z) dz,
а = (ао(р), .... aN(p))r, i, j = 0, 1, ..., Л/.
12 Г. И. Марчук, В. И. Агошков
354
АЛГОРИТМЫ ДЛЯ ЗАДАЧ ТЕОРИИ ПЕРЕНОСА
[ГЛ 5
Исследуем вопрос сходимости uA(z, р) к и (г, р). Сам факт
сходимости вытекает из общих утверждений § 2 гл. 1. Если бы
точное решение рассматриваемой задачи обладало вторыми про-
изводными по г, суммируемыми с квадратом, то из аппроксими-
рующих свойств {ср,- (г)} вытекало бы, что [и — uh] -с О (h). Однако
предположение о такой гладкости и (г, р), как следует из § 1,
не выполняется даже в случае постоянных коэффициентов. Поэтому
оценка скорости сходимости проекционно-сеточных алгоритмов
в задачах теории переноса требует, как правило, дополнительных
исследований.
В рассматриваемой задаче ответить на поставленный вопрос
можно, если заметить, что при кусочно постоянных a(z), Ь (z)
изложенный выше алгоритм совпадает с методом, рассмотренным
в п. 3.3 § 3 гл. 4. Искривленные функции-крышки Qk (х), введен-
ные там, совпадают с <р* (г), в результате чего можно утверждать,
что оценка погрешности, полученная в п. 3.3, остается справед-
ливой и здесь. Таким образом, если a (z), b (г) кусочно постоянны,
а /(г, р)еТю((0, Т) Х(0, 1)), то приближенное решение uh (г, р)
сходится к и (г, р), причем справедлива оценка погрешности
(1
|-~^(И/-«л)|2 + !!«-«а112+ § н((«/ -«л)2|г=0 +
О
I \ \1/2
+ («/-«А)а1 dp (2.8)
I* — * / /
В силу сделанных предположений о коэффициентах задачи и
введенной сетке, матрица А (р) будет диагонально преобладающей
при любом ре [О, 1]. Отсюда и из предположения Ь (z) < 1 сле-
дует, что собственные числа матрицы А (р) при произвольном
фиксированном значении ре[0, 1] и собственные числа системы
(2.7) будут отделены от нуля положительной постоянной, не
зависящей от hk. Эти обстоятельства гарантируют устойчивость
рассмотренных алгоритмов.
Приведем два численных примера, иллюстрирующих примене-
ние метода Ритца для решения уравнения переноса в плоском
слое.
Пример 1. Рассмотрим задачу
1
A2W (•
— Н2 дг» + м = Ь J udv + f(z)< ге[о, 1], ре [0,1],
о
, ди | ди I л
W + M дг |г=1 -и~^ Эг|г = о-0
§ 2]
МЕТОД РИТЦА
355
1
при Ь±=0,2, / = 0,84-0,1 +е(г—1)/Цг') dp', Zi = ih, h—\[N.
о
Ее точное решение имеет вид
и = у [2 - (е~г/'г +
Система (2.7) принимает вид
1
6 + 7г) fl° ( 6” ~ 7г2)fll = ( бГ00"^ 6 fll)
о
/ 1 92\ / \ । /2р2 । 4 \ , . / 1 р2\
yg /г2/ fl/-1 \ Л2" + I}] а> ( 6 Л2/ fl/+1
1
= 0,2 ^-g az_i + у а7- + g g7+ijdp'j = 2, , N — 1, (2.9)
о
/u.2 , 2 . ii\ . , / 1 ii2\ .
ft2 + “6 + h ) a‘v ~ЦТГ ~ h2 J a'N~1 ~
1
— 0>2 f 6 a.v (M-z)+ g a.v-i (p')J + ^m,
о
А г/+1
где f0 = \<Pn (z)f(z)dz, fj= $ ф,- (г) / (г) dz, j=l, .... N-l,
°
i
/№ 5 <?N(z)f(z)dz.
Систему (2.9) можно решить, например, с использованием
метода квадратур для приближения интегралов по р. и дальнейшим
применением итерационного алгоритма. В табл. 2 приведены
результаты численных расчетов при использовании квадратуры
Гаусса с пятью узлами и метода простой итерации для решения
системы алгебраических уравнений. Число узлов N на отрезке
[0, 1] было взято равным 20.
ТАБЛИЦА 2
ц = 0,0469 И = 0,9531
"Л и “й и
г = 0 0,511 0,500 0,325 0,325
г = 0,25 0,998 0,996 0,387 0,384
г = 0,5 1,000 1,000 • 0,408 0,408
г = 0,75 0,998 0,996 0,387 0,384
г= ] 0,511 0,500 0,325 0,325
12*
356
АЛГОРИТМЫ ДЛЯ ЗАДАЧ ТЕОРИИ ПЕРЕНОСА
(ГЛ 5
Пример 2. Рассмотрим задачу
ц* д 1 ди । С . । £
- z ч ч-------7"Т -I* И — \ U dz -I- f 9
а (г) дг а (г) дг 1 * * * л 1 ' *
о
ге(0, 1), ite[0, 1],
, и ди | и ди I п
U-U “ . =u— л- =0,
1 а дг |г = । а аг о
где а (г) и f (г) определены следующим образом:
а(г) =
2 при ге[0, 0,2),
4 при ге[0,2, 0,8),
2 при г е [0,8, 1],
0 при ze[0, 0,4),
f(z) = l 5 при ге[0,4, 0,6),
0 при ze[0,6, 1].
На рис. 57 приведены результаты приближенного вычисления
1
«о (г) = $ и (z, ц) dp с помощью проекционно-сеточного алгоритма
о
и метода квадратур при решении системы интегральных уравнений.
§ 3. Метод Бубнова — Галеркина
В этом параграфе будет рассмотрен алгоритм метода Бубнова —
Галеркина для решения задачи (1.3), (1.2), при этом в основу
будет положена обобщенная постановка задачи в смысле опреде-
ления 1 из § 1. Вначале изложим общую схему алгоритма, а затем
применим ее к сферически симметричной задаче, исследуя при
этом вопросы аппроксимации, устойчивости, сходимости.
3.1. Общая схема алгоритма. Рассмотрим задачу (1.3), (1.2)
(в которой уже не предполагается четность 9 (р0), f(x, s) по
угловым переменным) в обобщенной постановке (1.27):
Л (<р, Ф) = - (ф, ± (s, grad) ф) 4- (ф, ф) 4-
+ 5 (s- л)ффс!х<*со-(-$ф, Ф) = (/, Ф). (3.1)
§ 3] МЕТОД БУБНОВА - ГАЛЕРКИНА 357
где ф е /7Ъ а искомое обобщенное решение <р предполагается
принадлежащим НА. Относительно удовлетворения краевым усло-
виям никаких предположений не делаем.
Введем некоторую сеточную область Щ, покрывающую П =
= D х [0, л] х [0, 2л], и поставим в соответствие каждому /-му узлу
области Щ базисную функцию ср,- (х, s). Затем оставим лишь те
функции <р7- (х, $), носители которых имеют ненулевое пересечение
с П. Пусть общее число таких функций равно N, они предпола-
гаются линейно независимыми, принадлежащими //i, а последо-
вательность подпространств {#*} при А—>0 предельно плотна
в Нх (здесь /i — максимальное расстояние между узлами сетки,
И1} — линейная оболочка функций {ф/(х, s)}).
Сформулируем алгоритм решения задачи в общей форме. При-
ближенное решение ищется в виде
м
Фл (х, s) = У а.ф,- (х, s), (3.2)
1 = 1
где коэффициенты а, определяются из системы линейных уравнений
А (фЛ, Ф,) = (А ф7), /=1, •••, (3.3)
или, в матричной форме, в
Aa = f, (3.4)
где й = (й1, .... aN)T, f=(fi, .... fN)r, fi= J f(x, s) ф,(х, s)dxda,
DxQ
A-(Aij), Лу = Л(ф,-, Ф/)=-(ф,-, -|(S, gradф7)^) + (ф,-, Ф/) +
4- $ |(s, ri)\(pt(pjdxd(£> — (5ф,-,ф7)= J (—ф, (s, gradф;)-|-йфгф7—
dD+XO ОХЙ
— aSq>i(p,)dxda + j i(s> n)iTtfP/dxd®.
dD+XO
Покажем прежде всего, что матрица А положительно опреде-
ленна. Пусть
N , N ,1/а
(АЬ, Ъ)г= 2 АцЬ^, i&i|e = (2 bl] •
<• / = i \i=i /
у
Тогда при vh — 2 bfltix, s), b = (bb bNy имеем
(=i
(Ab, b)2 = A (vh, vk) = - (цЛ, (s, grad +
+ (»л, vh)-\- J (s, «) vl dx da — (Soft, vA).
|Щ+ХЙ
358
АЛГОРИТМЫ ДЛЯ ЗАДАЧ ТЕОРИИ ПЕРЕНОСА
[ГЛ. 5
А поскольку
(—yft, ~(s, graduA))=- J vh(s, gradyA)dxdco =
DxH
= (s> grad vh) vh dxda — $ (s, n) vsh dx da —
DxQ QX^D+
— $ (s, n)v'hdxda,
ЯхйД-
$ (s, grad vh) vh dx da =
oxa
= Y (s, rijVhdxda-}-^ (s, n)v2hdxda,
QxdD± QxdZ>-
то приходим к соотношениям
(Ab, &)a = y (s, «) vl dx da — ~ (s, n)vfidxdaA-
3D+xS dD-ха
+ (Vh, Vh)-(Svh, vh) = ~ § ](s, n)jv-hdxda +
dDx &
+ kd8- (Svh, ^(1-Ш12>0 (3.5)
при b=£0, t. e. матрица А положительно определенна. Отсюда
можно сделать вывод об однозначной разрешимости системы (3.4).
Если вектор а определен из (3.4) с помощью подходящего алго-
ритма, то ср* строится по формуле (3.2).
Покажем, что <рл сходится к ф при Л->-0, предположив, что
Ф е Н±. Для этого рассмотрим тождества
Л (ф, Ф/) = (/, ф,), (Афй, <pd = (f, Ф,),
/ N \
А((ф-Фй), <Р,) = 0, А[ф-фл, £с,ф,-) = 0, i=l.......N,
\ i = i /
при произвольных постоянных с,-. Тогда
/ N \
Л(ф-фл, ф —фй) = А ф-фД, ф-2с,ф<), (3.6)
\ i = 1 /
а так как
А(Ф~Фй, Ф-Фл)^ I J |(s, п)Нф-Фй|2 + (1-&1)11Ф-ФлР.
dDx Я
§ 31
МЕТОД БУБНОВА - ГАЛЕРКИНА
359
4-1! Ф — фл И ф- .У с/ф.-
Ф — Фл |2 (s, п) dxda\1/2 х
N 2 >1/2.
Ф — У с,ф,- dx dco
i=i I I
II N
«5 сIIФ - Фл ||д Ф - У Ci^i
II »=1 1
то из (3.6) получаем неравенства
miWy, I -(h]IIФ-ФлНа <<зЦф — Фл к
(3-7)
Из (3.7) вытекает сходимость Фл к ф при h-+0, так как
inf
с.
N
Ф- У С/ф/
1 = 1
^е(Л),
(3-8)
где е(А)^-0 при А —> 0 в силу предполагаемой плотности {//f}
в
Для получения явного вида оценок скорости сходимости е(Л)
в (3.8) необходимо не только задать конкретный вид базиса {ф,},
но и привлечь известные результаты о гладкости точного реше-
ния ф. И здесь, как уже отмечалось ранее, решения задач пере-
носа, как правило, в реальных ситуациях не обладают класси-
ческой гладкостью. Однако эту гладкость можно предположить
для какого-либо специально подобранного частного решения и
функции источников. В этом случае, задавшись конкретными
базисными функциями {ф,}, можно найти явный вид оценки е(Л).
Пусть, например, в (3.8) функция ф (х, s) дважды непрерывно
дифференцируема, а {фг(х, s)} —базис, построенный на основе
тензорных произведений одномерных функций-крышек. Тогда,
как известно из гл. 2, е (A) ^ch || ф |[c<s> и || ф — фл ||д ch | ф ||с<2 •,
360
АЛГОРИТМЫ ДЛЯ ЗАДАЧ ТЕОРИИ ПЕРЕНОСА
[ГЛ. 5
Предположим, что нас интересует оценка погрешности не в мет-
рике На, а в более слабой, например в ||-||. В эллиптических
задачах для получения такой оценки мы пользовались приемом,
изложенным в § 1 гл. 3. Именно, рассматривается вспомогатель-
ная задача L*<D = S<D4-G (в обозначениях уравнения (1.5)), где
G = <p —фл. В последующем функция Ф вновь аппроксимируется
базисными функциями. В результате получаем увеличение ско-
рости сходимости фл к ф при Л->-0 в метрике || -1|, если только
II N
будет справедлива оценка аппроксимации Ф — сгф,-
II ‘ = 1
^с/1||Ф|Ь)^сЛ||С||. А последняя оценка, как правило, не вы-
полняется (даже если для ф предполагалась гладкость). Труд-
ность здесь в том, что в уравнении Л*Ф = 5Ф-(-б правая часть
априори задается равной ф —фл и относительно гладкости ф уже
нужно не предполагать ее, а ограничиваться имеющейся в дейст-
вительности. И здесь уже нет уверенности, что будет ФеС'21.
Кроме того, если даже удается доказать, что Ф е С(2>, то зачастую
оценка |Ф||с<«>^с||С|| не выполняется. Поэтому прием, успешно
используемый в эллиптических задачах для исследования скорости
сходимости в более слабых метриках, при решении задач теории
переноса методами Ритца или Бубнова —Галеркина часто мало-
эффективен.
Одним из путей, который может быть предложен для полу-
чения оценки скорости сходимости в метрике ||-|| при рассмотре-
нии задачи (1.3), (1.2) с гладким точным решением, является
путь непосредственного получения этой оценки, минуя рассмот-
рение каких-либо вспомогательных задач. Естественно, что он
потребует более детального изучения ошибок аппроксимаций, чем
в обычных проекционно-сеточных алгоритмах. Именно таким спо-
собом будет исследована в следующем пункте оценка скорости
сходимости в случае сферически симметричной задачи.
3.2. Сферически симметричная задача. Рассмотрим задачу (1.12),
(1.13) при 0 = 1 и f = f(r), обобщенная постановка которой имеет
вид: ищется функция ф(г, р)е/7л, удовлетворяющая равенству
Л(Ф, Ф) = (/, ф), /еВ, (3.9)
при любой ф(г, [i)ef/i. Здесь
я 1
НА- (и, и)А = $ га dr \ а (г) и (г, р) v (г, р) dp +
0 —1
1
+ (/?, р) v(R, p)dp.,
о
/К 1 1 \1/2
I!u!a = h f2^r 5 aui 5 hMp) ;
4) —I Q /
§ 3] МЕТОД БУБНОВА - ГАЛЕРКИНА 361
R I
Hi. (и, v)i= r2dr ^a(r)uv + ~^^ + -^^^x
О —1
1
х(н + Jin «(я. «ж нж
/ R 1 \
и и I С о j С ! 9 , 1 ! ди , 1 — и,2 ди \21 , ,
«< = Рdr ра«2+ _. и^+—№ +
\о -1 /
1 \ 1/2
+ R2\ Ы«2(Я. нИн ’
—1 /
R 1
(/, Ф) = 5 г2 dr а (г) f (г, р) ф (г, ц) dp,
О -1
1
Л (ср, ф) = J N?2cp (R, ц)ф(Я, p)dp +
О
Я 1
+ С г2 dr j facp^-cpj'p +
О -1 '
1
_ a(r^A'l j 0(И) и')ф(г> р')ф(г> p) du'.
-i
Замечание. При изучении сферически симметричной за-
дачи часто удобно пользоваться равенством
+ <310>
Введем на [0, /?] и [—1, 1] соответственно сетки
0 = Го<Г1<...<Г№ R, rt = ihr, hr=R/N,
—1 =Po<Pi<---<Pm= 1. Р/ = /Лн> йц = 2/Л1,
построим кусочно линейные функции-крышки ср, (г), 1 — 0, ..., N,
Ф/(м)< / = 0, М (рис. 58), и образуем билинейные функции
где у,/ > 0 — нормировочные коэффициенты (которые зададим после
изучения устойчивости). Приближенное решение <рл будем искать
в виде
N М
чЛг, Н)= У У, а<Ж (г, и); (3.11)
i=0i=0
362 АЛГОРИТМЫ ДЛЯ ЗАДАЧ ТЕОРИИ ПЕРЕНОСА (ГЛ. В
коэффициенты а{]- определим из системы уравнений
Л(фА, фу) = (А фу), * = 0.......N, j = 0, М, (3.12)
или, в матричной форме,
Aa=f, (3.13)
где f = (Ду), а = (а,у), А = (Аци,), Ащк = А (ф;у, ф<А), /, i = 0, 1,..., N,
k, j = 0, 1, ..., М.
Рис. 58.
Так же как и в
вается положительная
общем случае в п. 3.1, легко доказы-
определенность матрицы А: при сл =
А М
= У, У, airtij(r, р), « = («о) имеем
1 = 0/=0
1
(Аа, а)2=Д(сА, vA)>y J Я2 Ы ^ + (1-М1М2>0. (3.14)
—1
Отсюда следует однозначная разрешимость системы (3.13). Оты-
скав каким-либо из методов ее решение а, мы определим прибли-
женное решение исходной задачи по формуле (3.11).
Перейдем к обоснованию изложенного алгоритма решения
сферически симметричной задачи для уравнения переноса. Изу-
чим сначала вопрос устойчивости. Для этого необходимо задать
конкретный вид нормировочных коэффициентов -у,у. Пусть bit
i = 0, 1, .... М,— некоторые постоянные. Тогда, как известно
из § 2 гл. 2,
м 1
Ci У h^b* === $
1 = 0 -1
м
Л М.(и)
/ = 0
2 М
dp^c2 У h^bf,
i = 0
(3.15)
где Ci,
с2 > 0 — постоянные, не зависящие от /гц и {/?,}. Покажем,
что
§ 3]
МЕТОД БУБНОВА - ГАЛЕРКИНА
363
где а,-— постоянные, с3, ct > 0 — постоянные, не зависящие от hr
и {а,}, po = 0,lr?; Pi = 0,5rf; i = 2, .... AL Оценим снизу
составляющие интеграла
я
$ r*
О
У а«-ф< (/•)
< = о
м
У «1'ф/ (г)
1 = 0
У ak<fk(r) dr.
*=о
2
Получим сначала оценку для второго слагаемого:
2 5
i=2 г.
У «*Ф* (г)
/г = 0
2 JV
dr У r?-i
1=2
У ak(fk(r)
fe = О
dr =
М rt
(«! + (а, + a,--i)2 + al-1) Ss
«н
N
1=2
6
V rl-^ + rjh, > rlhral г^_М V r*(hr
L ‘ 6 '“в- * § г Z z “ё--
1 = 2 1 = 2
Вычислим первое слагаемое
N
i = 0
0
2
dr = 0 2ai+6a»ai+2а»)-
Тогда
я
Уf2
о
^^42 rihrai +^rlhral +
^(12a? + 6aoai + ^)+^^
. 6 2. , . lrN-1 \2 ГЛ1^^аЛ1
r+6o/-IMi+^—
+ 4r(l6a> + 6«0«i + ao)H-
-1аМЛ)
6
М-1
1=2
rlhr
60
N
2 а-Ф>- w
t = 0
6
Но 16а? + 6a0ai + a„ Эг 0 и (ry-i/r^)2 1, поэтому
я
S г2
о
м
У й.Ф; (г)
£=0
2 У
dr С3
1«0
364
АЛГОРИТМЫ для ЗАДАЧ ТЕОРИИ ПЕРЕНОСА
[ГЛ. 6
где с3«« 1/6 — постоянная, которую можно считать не зависящей
от hr.
Аналогичными рассуждениями доказывается второе неравен-
ство из (3.16).
Из (3.15) и (3.16) делаем вывод: если нормировочные коэф-
фициенты уу выбрать в виде
Уу = (₽ЛЛ)~1/2» » = 0.....N, j = 0....М, (3.17)
то имеет место равномерная линейная независимость базиса {фу},
т. е. справедливы неравенства
II N м II
<Cellb|l2.
II i = о j = 0 ||l2
(3.18)
IN M \ 1/2
где b = {bij}, \\b ||2= 2 У Ь2ц\ , cs, ce>0 —постоянные, не за-
о / = о /
висящие от hr и h^. Действительно,
2
м
'л» 2
i=0
d[i =
Аналогично показывается, что
N М
У, 2 (Г,
1 = 0 ; = 0
Н)
2 JV М
^c-2ci X X b‘i-
L ., 1 = 0 / = 0
Итак, (3.18) доказано. Однако, как известно из гл. 1, 2, условия
(3.18), как правило, гарантируют численную устойчивость алго-
ритма. Покажем, что в данном случае это также имеет место.
Пусть в результате погрешностей вычислений мы вместо (3.13)
приходим к системе
Леае = /е (3.19)
с возмущенными Ав и fe. Будем считать процесс построения при-
ближенного решения задачи устойчивым, если существуют посто-
§ 3J МЕТОД БУБНОВА - ГАЛЕРКИНА 365
янные р, q, d, не зависящие от hr и h^, такие, что при | А — Л8 |2 < d
будет иметь место однозначная разрешимость (3.19) и справед-
лива оценка
1|а-о8|1л = (Л(й-а8), а~ае)^ ^р\\ А - Ае k + qU-Mt- (3.20)
Докажем наличие устойчивости в смысле данного определения
Прежде всего заметим, что при выполнении (3.18) матрица А
положительно определенна:
(Аа, а)2 = А й;,а|),7, У aiyt|)fA I У II2
\ л / л / / I л / II
Ssa0(l -Ь1)| У M^lf S=«o(l -&i)CiC31а|Ц = у2 jаЩ
II g i II
с положительной постоянной у2 = do (1 — bt) ctc3, не зави-
сящей от hr и Йц (напомним, что a0 = inf vrai й(г)>0). Отсюда,
в частности, заключаем, что || а||2 Гf |12/у.
Выберем в качестве d величину, меньшую у2; тогда при усло-
вии ||Л — Ae}2cd будет иметь место положительная определен-
ность матрицы Л8. Действительно,
(Аеа, а)2 = (Аа, а)2 + ((Ае — А) а, а)2^
Ss У21! a ill - IIЛ е — А "2 5 а Ц (у2 — d) I' а ||| > 0.
Следовательно, в этом случае система (3.19) имеет единственное
решение и для него, как легко заметить, справедлива оценка
ll ae ll2 =S = С f fe f2 •
I u
Оценим погрешность £ = й —ae. Для этого рассмотрим равен-
ства
Л (й-йе)=/ — fe + (Ae~ А)ае,
(Л?, g)2 = (/-fe. ^ + ((Ле-Л)йе, ?)2.
Отсюда, с учетом полученных выше соотношений, имеем
ШаА^И-ШинчЛе-Л|МаеНи,
(||/-/в^ + 1|Ле-Л||2сИ8[г)^
(II f ~~ fe Иг + II Л в — Л ||2 С И f — fE ||2 + С 8 Л — Л 8 ||2 I f ||2).
366
АЛГОРИТМЫ ДЛЯ ЗАДАЧ ТЕОРИИ ПЕРЕНОСА
[ГЛ. 5
/Я I \ 1/2
Но || f ||2 Сх Ц г2 ^af2(r, p)dpj dr, где ct — постоянная, поэтому
'о -I /
Il I h Y(!! f-^'2 + c “ л м f ~ /е 1'2 + <h U - А Е Ы
^|(|1/-/е1!2+^|1/-/е1!2+с1й-Ле|12) = рМ-Лер2 + д||/-/е||2,
т. е. алгоритм устойчив.
Исследуем проблему аппроксимации, предполагая, что ср (г, р)
трижды непрерывно дифференцируема по всем своим переменным.
Введем интерполянт
Ф/(О Н) = Е2 УоФ(0, Н/)Фч (г> Н) (3-21)
1=0 / = 0
и запишем следующие тождества для точного решения:
А (Ф/, Фо) = (/, Фо) + 8|V + < + 8у', (3.22)
где j
еу = — $Р^2 (ф (R, р) —c₽i(R, р))фу(/?, p)dp +
о
R 1
, С 2 С I ч
+ J г2 dr J (ср - cpz) р dp,
О —1
р р 1 — р2 дф,-,-
8у = \ r2dr —— (ср - cpz) dp,
6 -1
Я 1 / /1 \ \
еу = — J г2 dr f «(Ф - Ф/) Фу - у ( 6 (ф - ф/) dp’ фу j dp.
о —1 ' '-1 / /
Оценку для легко получить, вспомнив аппроксимирующие
свойства билинейных функций (см. § 5 гл. 2):
I W I 77 r^hrh^ |1 ф - ф, к» 0 (^ + Йи)-
YiJ Уи
Поскольку уу «=; г,- hrh^, то
Н’ |^Глло(^+^).
Чтобы оценить 8у’ и 8у, потребуется более детальное изучение
функции ошибки аппроксимации |(г, р) = ф(г, р) —ф/(г, р). Как
следует из § 5 гл. 2, ее можно представить в виде
р) = 51(г, р) + ?2(г, р) + 1з(г, И), (3.23)
ri^r^rl+1, pfts^p<pft+1,
§ 3]
МЕТОД БУБНОВА - ГАЛЕРКИНА
367
где
51 (г, р) = (r - п) (п> В*) + j dr' j* (r"> В*) dr" =
ri ri
rl+i rl r r'
= dr' J в(r"’ dr"+$dr' ^ V' dr"'
rt Г' rt rt
52(Л В) = (В“В*) В*)+^В' y")dy" =
P* P*
P*+l Pft P M.'
= J d^\3 (rh d*" + J dV J S (О, в") dy",
{Л *z •/ C/JX v •/ С/1Л
p* p' Pfc p*
rZ+I P>S+1 г Ц
f>=si У У W>'.
rl rl p*
Из вида ?3(r, p) делаем вывод, что
15з (г, р) [ =sS 1г,ЬцО (hr 4- йц).
Выполним в интегралах, входящих в формулы для gi и 12, раз-
ложение в ряд Тейлора функций 52ср/5г2, д2ср/дц2 около точки
(fi, И*), в результате чего функции и примут вид
51 (г, |хА) = (rh ft*) [(/- - а) (г - rz+1)] + О (h^),
5г (rh р) = 2- (гг, уц) [(ц - ук) (и - р*+1)] + О (НЦ), <3-24>
ге[п, гг+1], pe[pft, pft+i].
Если и 12 рассматриваются при г е [о_1( о], р е [p*-i, И*],
то аналогичное разложение проводится снова около точки (rlt pj.
В этом случае функции и g2 имеют вид
51 (г, рА) = (rh pfc) [(г - ri) (г - n-j)] + О (К),
1L <3-25>
5а (rh р) = 2 ^2 (го Iх*) [(Н ~ Н*) (В - Нл-1>] + 0 (W-
368
АЛГОРИТМЫ для ЗАДАЧ ТЕОРИИ ПЕРЕНОСА
[ГЛ. 5
Используя представления (3.24) и (3.25), оценим еу при
/У=0, М:
+ О(йи(/1; + Л^)) dr =
1
я
J гф,- (г) [О (йи (/ijJ + /i’))] dr
о
гАД.О (Ц + h*) г----
‘ =Г/1ЛО(^+^)- (3.26)
V Р1ПгПц
Эта оценка имеет место и при /=0, М, так как в этом слу-
чае под интегралами будет 1 — р2 № /ги, что сохраняет прежний
порядок аппроксимации.
Так же как и для 8у, показывается, что при i^=N справед-
лива следующая оценка для 8у:
|8У,|^/М110(^ + ^). (3.27)
Если же i = А/, то
1
«‘А] = $ и#2 (ф (R, и)-ф/(Я, ц)) qNJ(R, n)diL-
0
- j Г2 dr J (ф (г, и) - ф/ (г, р)) р dp,
rp-i ->
§ 31
МЕТОД БУБНОВА - ГАЛЕРКИНА
369
Я2(ф(Я, р)-ф/(Я, р))-
х 7л'' L
о
1н1
rN
~ § г2 (ср (/?, р) — ср/ (R, р)) dr dp 4-
rN — 1
<Р/ (р) 1 о
-д— h I г2(ф(г, р)~Ф/(г, p))dr dp.
Тд7 nr J
L rN-i J
Отметим, что из (3.28) следует, что
1
7л>
(3.28)
т е. оценка для е'^} превышает по порядку оценки для е^/ и е$.
Сформулируем следующий результат об аппроксимации.
Теорема 1. Для любого набора постоянных Ьц, i = 0, ..., (V,
N М
j = 0, .... М, и для vh(r, р)=2 S ЬчУч (г> Iх) справедливо не-
; = 0 / = О
равенство
N М
i=0 j = 0
^O(h‘+h^\\\ vh III,
i
(3.29)
где sif = ^ + ^ + ^>, |||vft||!2 = | p| fl21 vh (R, p) |2 dp +1| vh ||2.
—i
м
Доказательство. Оценим сначала сумму У, s’iyjbNj'-
0 М и / х / i rN \
। С I । V bNi^i (и) / 1 (• „, • . , \ ,
+ 1 '(12 "ПГ— Г 1 Г2 (ф - ф/) dr dp =
•’ <Nf \nr J /
-1 1=0 \ rN_t I
1 / rN \
J H«h(R. Н)1^2(ф-ф/) |r = R~^- J /-2(ф-ф/^грр +
О / r,V \
+ J | p | vft (/?, P) J г2(ф-ф/) dr dp
-1 \ rN_! /
У s'Nibxj =
i=o
г2 (<p — ф/) dr dp +
370
АЛГОРИТМЫ ДЛЯ ЗАДАЧ ТЕОРИИ ПЕРЕНОСА
[ГЛ. 5
Но ) ср — ср/1 О (hr + h^), поэтому
м
У, eNjb^j
i=o
/1
==s О (h2r + h^[ 5 Hl vh (R, |а)Ин +
''0
0 \
+ $ |p|\vh (R, +
—i '
(3.30)
Для оставшейся суммы на основе оценок для 8<*> полу-
i, i
чаем неравенства
К *Иьц I У' О (h* + Ч) Vhrh* \ bij 11
i. i I i I
о (h* + hti\\Ь\\^О(^Г + liftII vh IIО (h* + h^) |I| vh III (3.31)
(здесь мы воспользовались соотношением (3.18)). Объединяя (3.30),
(3.31), приходим к утверждению теоремы.
Сформулируем теорему о сходимости.
N М
Теорема 2. П риближенное решение фл (г, р) = У У
( = 0/ = 0
построенное по методу Бубнова — Галеркина, сходится к точному
решению ф (г, р) при hr, йи->0, причем
1 \ 1/2
R2 J I pt 11 ф — фл I2 4-II ф — фл|,2 ^Offi + h^): (3.32)
—1 /
N М
Доказательство. Пусть vh = ф, — фЛ = У Суфу(г, р),
;=о/=о
где Су = ууф(п, рД —йу. Тогда vh удовлетворяет равенствам
A(vh, фу) = еу, i = 0, .... N, j = 0, M. (3.33)
Умножив (3.33) на Су и сложив по i и /, получаем
N М
A(vh, Vh) = 2 EyCy.
1=0/=0
Согласно теореме 1
N M
2 У еУсУ
i=o/=о
^O(h* + h£)\\\vh\\\
и так же как при выводе (3.7) получаем оценку снизу:
|Л(цЛ> v/,)|^min(y, 1 - fei) HI vh ||j2.
§ 4]
ОБОБЩЕННЫЙ МЕТОД НАИМЕНЬШИХ КВАДРАТОВ
371
Следовательно,
НЫН^
min(4’1—61
(3.34)
Однако для <р — ф/, согласно теоремам аппроксимации из § 5 гл. 2,
справедлива оценка
Н|ф-ф/1112 = 5 ^21и'(ф-ф/)2Ф + ?ф-ф/112<О((^ + /1ц)2). (3-35)
—1
Из (3.34) и (3.35) с использованием неравенства треугольника
получаем (3.32):
III Ф - Фл III III ф - ф/ III + III ф/ - Фл III О (^ + Лц).
Теорема доказана.
§ 4. Обобщенный метод наименьших квадратов
В этом параграфе будет исследован алгоритм численного ре-
шения задач для уравнения переноса, основанный на применении
обобщенного метода наименьших квадратов (см. § 5 гл. 1) и
базисных функций, построенных специальным образом (см. § 10
гл. 1).
4.1. Задача с анизотропным рассеянием в плоскопараллель-
ном слое. Рассмотрим задачу (1.10), (1.11) из § 1:
45+^=И0<р4ц,+^г- и). (41)
геО = [0, Т], peQ = [-1, 1],
<p(T, р) = 0 при —lsgp<0, ф(0, р) = 0 при 0<рsg 1, (4.2)
или, в операторной форме,
£ф = 5ф + /,
(4.3)
где f е В.
В дальнейшем предполагается (если не будет оговорено особо),
что функции а (г), b (г), f (г, р) кусочно гладкие по г, класса С(1',
с возможными разрывами первого рода в конечном числе точек г,-,
1 = 1, ..., /• Ради простоты функции 9 (р, р') и f (г, р) по угло-
вой переменной считаем принадлежащими классу C(z>.
Введем на [0, Г] сетку с узлами 0<г0<zx<...<zN^ <_zN =
= Т так, чтобы для hf = zt — z^x и h — T/N имели место соот-
ношения
0 <. c9h <= h] <; cth, j=l, •••, N, (4.4)
372
АЛГОРИТМЫ ДЛЯ ЗАДАЧ ТЕОРИИ ПЕРЕНОСА
[ГЛ. 5
где постоянные с0, Ci не зависят от /. Предполагаем, что часть
узлов совпадает с точками г,-, i=l, /, /<А'.
Определим простейшие финитные функции
, , 1(1 при Z/-1 z Z/, / — 1, N, „
<р,-(г) —-7=1 п 7 (4.5)
V h ( 0 в остальных точках,
и построим функции {Фу (z, р)}, где Ф7 —решение задачи £Ф; =
= ф/, / = 1, ...» N, и определяется формулами
г ( г 1
J а 'х) <р7- (х) exp j — J dx'№, О,
о I х J
1 ( X 1
С . . . . I (* а (х’) , , I dx п
I а(х) ф/ (х) ехр И -^-dx ( —, р<0.
J I J Н I Н
г \г }
Очевидно, что {Ф7} линейно независимы. Вид их для практиче-
ски важного случая кусочно постоянных коэффициентов может
быть выписан явно. Если же a (г) — кусочно гладкая, то вычис-
ление Ф7 (г, р) можно осуществить с помощью простейших квад-
ратурных формул, учитывая финитность фу (г).
Функции {Фу} удовлетворяют краевым условиям (4.2) и обла-
дают особенностями решения задачи, обусловленными «присут-
ствием» оператора L. Однако они не описывают полностью пове-
дения решения в зависимости от р. Поэтому при рассмотрении
анизотропных задач (т. е. когда 0 =й= 1 и f = f(z, р)) необходимо
вводить дополнительные базисные функции, зависящие от угло-
вой переменной.
Пусть на Й определена система линейно независимых финит-
ных функций фу(р), /= 1, ..., М, с носителями порядка Др = 2/Л4
и обладающих следующим свойством аппроксимации: для любой
м
Ф(р)еС':':' можно построить функцию ф/=^ (р), где at—
некоторые постоянные, такую, что (см. гл. 2)
T-T/C(Qr'0(W)').(f4:i'(Q). (4-6)
Образуем функции
coZy (г, р) = Ф,- (г, р)фу (р), i— 1, ..., Л/, /'= 1, ..., М, (4.7)
совокупность которых и примем в качестве базисной системы при
решении уравнения (4.3). Очевидно, что при любых W и Л4 функ-
ции {со/у} линейно независимы, принадлежат области определения
оператора Айв силу того, что = ф,ф7, последовательность
{со//} при N, Л4->-оо А-полна в пространстве В.
§ 4] ОБОБЩЕННЫЙ МЕТОД НАИМЕНЬШИХ КВАДРАТОВ 373
Будем искать приближенное решение (4.3) в виде
N М
Фл (г, р) = 2 2 аг/й>,7 (z, р), (4.8)
; = 1 /=1
коэффициенты aif определяются из системы линейных алгебраиче-
ских уравнений
^(Фй, <о//) = (/, Ьа>ц), /=1, .... N, /=1, .... М, (4.9)
здесь X (<р, ф) = (Лф, 7,ф) —(Хф, Аф), ф, феЖ), или, в мат-
ричном виде,
4а = Д
где Л = (Л<7, ftZ), Л/ЛИ = (Аиу, Лсо«) - (Хсо,7, [ми) = (ср,- (г) фу (р),
фДг) ф, (р)) - (ХФ, (г, р)фДр), Ф*(г)фг(р)), a = (af/), f =
Матрица А — положительно определенная. Действительно,
при рд = 2а//®у
i’ i
(Аа, а)2 = 2 У, Ац, к1ацак1 = (Lvh, Lvh) - (ХоЛ, Lvh) =
i, i k. i
= (Lvh, Lvh) — (SL~lLvh, Loft)^:(l-fei)||Loftf =
= i1 - bi) | J] a^t (г) ф7 (ц) ||> О
II i, j li
(здесь мы учли, что ((7 — SL-1) v, v) (1 — Ьх) | v ц2). Следовательно,
(4.9) имеет единственное решение, и поэтому <рЛ определено
однозначно.
Исследуем вопрос сходимости <рЛ к точному решению <р. В
силу способа построения базиса {а»,7} и свойств оператора задачи
условия теоремы 1 из § 10 гл. 1 выполнены. Отсюда (рЛ-хр,
(L — S)<ph-+ f при /i->0, Др->-0. Чтобы оценить скорость сходи-
мости <рл к <р, сформулируем следующее утверждение: для функ-
ции Q (<р, f) = StpA-f можно построить такую линейную комбина-
N М
цию Q= у, у, ауфДгПДр), что
1<?(Ф. + (4 10)
Доказательство (4.10) очевидно, если учесть предположения
о гладкости a (z), b (z), f (г, р), 0 (и, ц') и свойствах функций
{Ф;(2)ф/(р)}.
Теорема 1. Приближенное решение фЛ сходится к ф при п,
Др-э-0, причем
Щф-ФлЛКООЖДнУ)- (4.11)
Доказательство. Поскольку
=^(Ф, ф)ClIДфI2, |^(ф, ф)|<с2|ЬрНЛф|,
374
АЛГОРИТМЫ ДЛЯ ЗАДАЧ ТЕОРИИ ПЕРЕНОСА
(ГЛ. 5
где с,, с2>0, ф, то из тождества X (ф — фЛ, ф —фл) =
лг м
=<55’(ф — фл, ф —ф/), где ф/= У У, С7/Ф7Ф/ с произвольными
7 = 1 /=1
постоянными, следует неравенство || L (ф — фЛ) „2 гС с3 L (ф — ф/) j2,
где постоянная с3 не зависит от рассматриваемых функций, от Л
и Др. Отсюда следует, что
II N м II2
IIL (ф - Фл) li2 с3 inf Q (г, р) - У, У .
0/11 1 = 1/=| ||
Из этого неравенства и из (4.10) следует утверждение теоремы.
Рассмотрим случай, когда 0 (р, р') и f (г, р) имеют вид
j j
9 (И, И = S 9Л (Н) р> (И'). f (г. Р) = £ fj (г) Р, (р), (4.12)
/=1 /=1
где Pj (р) — ортонормированные полиномы Лежандра, 0У- — постоян-
ные, J — конечное число, а относительно функций fj (г) предпо-
лагаем, что они кусочно гладкие, класса С(11, с возможными
разрывами первого рода в точках zh i=l, ..., I.
В случае, когда J невелико, приближенное решение ищем
в виде
N J
4h(z, р)=У У а,уФу(г,р)Ру(р), (4.13)
7=17=1
где ау определяются из системы уравнений
X (фЛ, ю,у) = (/, Lcoiy), i = l....N, j=l, .... J,
или, что одно и то же,
(£фЛ, ЛФ;Ру) = (5фл, ЛФ,РУ) + (А W>i), (4.14)
1= 1, ..., N, /=1, ..., J.
Отметим, что при таком выборе базисных функций в левой части
(4.14) имеет диагональную матрицу.
Теорема 2. Если 0 и f имеют вид (4.12), то фЛ сходится
при h-+0 к ф и справедлива оценка
IIР (Ф - Фл) II О (h). (4.15)
Доказательство. Обычным способом (см. теорему 1)
приходим к неравенству
II J N J 2
И (ф - Фл) ||2 с inf 2 Pf (р) (0упу + 7У) - У у Cy^iPj =
cli II 7=1 7=1/=1
J Т N
= с inf 2 $ a(z) 0упу (г)+/у-У сгуФ< (z)
с,7/=10 7=1
dz,
§ 4] ОБОБЩЁННЫЙ МЕТОД НАИМЕНЬШИХ КВАДРАТОВ 375
1
где n.j(z} = b(z) J Р;(р')ф(г, p')dp'. Из [39] следует, что n,(z)
— 1
на каждом из отрезков [z^, z,] имеет квадратично суммируемую
производную по z. С учетом этого обстоятельства и аппроксими-
рующих свойств функций {<р,} получим
Щф-фл)!2^^2),
что дает нам (4.15).
4.2. Случай изотропного рассеяния. Вид базисных функций.
Рассмотрим изотропную задачу (4.1), (4.2), т. е. когда 9 = 1 и
f = f(z). При решении этой задачи функции {Фу (г, р)} уже опи-
сывают поведение решения <р (г, р) в зависимости от р (этот вывод
можно сделать, например, из результатов нижеследующей теоре-
мы 3). Поэтому здесь нет необходимости вводить дополнительные
базисные функции {ф7- (р)}, что приводит к значительному сокра-
щению числа базисных функций, а следовательно, и порядка
решаемой системы.
Приближенное решение ищется в виде
N
фл (г, р) = У (г, р), (4.16)
i=i
где коэффициенты а,- определяются из системы
#(фА, Ф,) = (А АФ,), (4.17)
которая однозначно разрешима.
Теорема 3. Пусть а (г), b (г), f (г) — кусочно гладкие функции
класса С(1) с возможными разрывами первого рода в конечном
числе точек zit i=l, ..., /. Тогда приближенное решение (4.16)
сходится к точному решению задачи при h-+0 и имеют место
оценки
Щ<Р-фЛ)11^ад, (4.18)
II Фо - Фо. Л IU,[0, rj < о (h2 In , (4.19)
I
где фо (г) = ~ Ф (г, р) dp.
— 1
Доказательство. Доказательство (4.18) повторяет, с
очевидными упрощениями, доказательство теоремы 1. Докажем
(4.19). Для этого рассмотрим тождество
X (ф- Фл, 7._1А*'1ф) = ^’(ф-фЛ, £-1^*-1ф-2]с/ф<(2))),
где L* — оператор, сопряженный к L, |=1)(г)е£а[0, Т], с,- —
произвольные постоянные. Так как функция Т(ф —фЛ) не зависит
376
АЛГОРИТМЫ ДЛЯ ЗАДАЧ ТЕОРИИ ПЕРЕНОСА
(ГЛ. 5
от |т, то это тождество можно переписать в виде
[Г / N \
Ж (ф — Фл. = 2 И о (z) L (ф — фл) 1507,*-1ф — У с<фг dz —
Lo \ <-i /
Г / N \
— $ 5 (ф — Фл) S0L*-1i|) — У, С;ф< (г) dz ,
О \ 1 = 1 /
1
где 50ф =фф.. Отсюда получаем
—1
г
$ а (?) Ф (?) (Фо (?) - Фо, л (?)) dz
о
— bi || а (<р0 — ф0. л) |1Л11| ф ||Лоо
N
< с IL (ф — фл) |к, Го, Г] S0L*-1ф — У, с,ф,-
Асо[0,.Г|
где постоянная с не зависит от ф и h. Полагаем
c/ = (SoL*-1,|))(z/+1 + 0).
Учитывая, что SgL-1i|j = S0L*-hf (см. [47]) и что для функции
ф (z) = S0L-1i|>, согласно результатам из § 1, выполнено соотношение
| Ф (г) - Ф (У) | ^ch (1+| In h\) || ф1|Доо, \z-z'\^h.
получаем
N
S0L*-\ - У С;ф/ ^}ф|Ьоо О {h (1 + I In h')}.
i ~ 1 £qo
Следовательно,
т
( аф(Фо — q>o. h)d2
0_______________
liWco
- bl II а (фо - фо, л) Ik, С
<Щф-Фл) k,O(/i(l+|ln/i|)).
(4.20)
(4.21)
Из (4.21) и (4.18) следует неравенство
(1 - bi) || а (фо - фо, л) к,го, т] О (/i2 (1 +1 In h I)).
Из этой оценки с учетом того, что bi < 1, а (г) а0 > 0, и пред-
полагая h малым, получаем (4.19). Теорема доказана.
Исследуем сходимость ф0, л к фо ПРИ более общих предполо-
жениях относительно а(г), b(z), f(z).
Теорема 4. Пусть а (г), b(z)e 7.^(0, Г], /(г)еАДО, Т],
рЭ=1. Тогда ф0,Л сходится к ф0(г) при /г->-0 и имеет место
оценка
И Фо — Фо, л кло, rj^ О (4.22)
§ 4]
ОБОБЩЕННЫЙ МЕТОД НАИМЕНЬШИХ КВАДРАТОВ
377
Доказательство. Утверждение теоремы следует из (4.21),
если докажем равномерную относительно h ограниченность вели-
чины ||Л(ф — <рл) llz-j- При этом достаточно исследовать случай р=1.
Умножим каждое из уравнений (4.17) на коэффициент Cj =
—sign aj, результаты сложим по j от 1 до N и выполним простые
оценки. Тогда получим
1 Т N 1 Т N Т
$ dp $ а (г) 2 I at | <pf (г) dz bi $ dpja^] | al\tpidz + 2 J a\f\dz,
-10 i = l — i о z = i о
i т n т
? dp. а (г) I ai I Ф/ (z) dz а (г) j f I dz.
—1 0 i=l 1 0
Но поскольку
Г 1 TIN T
[dz J a | L(ph | dp -C dz a | at J <p;dp^ yzry § a (z) i f | dz,
o—i 6 — 1 t=l о
то ||Афлк1 и И(ф —фл)к, равномерно ограничены, а значит,
приходим к оценке (4.22).
Замечание. Рассмотрим изотропную задачу при а(г) — 1,
f(г) = г, 6 = 0, Т = 1 и сетке Zi-i-h с шагом h=\./N. Тогда
2.
в (4.16)а, = ^ zdz = -1 +- ~1 и, следовательно, || L (<р — <рЛ) j2 =
г/-1
N г1
= 2 § |г —2dz = -^-. т. е. оценки (4.11), (4.15), (4.18),
'=' г/-1
вообще говоря, неулучшаемы.
Запишем (4.17) в виде
N
diiai= У, Bijaj + ft, i=\,...,N, (4.23;
»=i
где d,i = (<p/, <pt), Bij = (SCS)i, <ру), = (pi). В левой части (4.23)
имеем диагональную матрицу, что упрощает решение системы
с помощью итерационных методов. Далее, в силу свойств исход-
ных базисных функций {фД упрощается вычисление элементов
матрицы и значений (f, фД. Эти вычисления' несложно осуществить
с помощью соответствующих квадратурных формул [5]. Если
коэффициенты задачи кусочно постоянны, то d,;, By находятся
явно в (4.23). Например,
By = 2bt (ofa + Е3 (afa) - 1/2), -
378
АЛГОРИТМЫ ДЛЯ ЗАДАЧ ТЕОРИИ ПЕРЕНОСА
[ГЛ. 5
оо
где a(z) = ai, b(z) — bi, г е [Z(~i, г,], Еп (х) = е—^~ dy. Значения
!
функций Е3(х), е~х можно достаточно точно и экономично вычис-
лять, используя методы табулирования и разложения в ряд этих
функций (см. [19], стр. 327), а также их различные приближения.
Рис. 59.
В заключение выпишем вид функций {Фг (г, р)} для случая
кусочно постоянных коэффициентов а (г): {аг = const, z^^z^zi,
i=l, ..., AQ (рис. 59).
Случай р > 0:
Ф/ = -7=
Vh
0, г г,-!,
1 — exp [--v - j, Z;^ < z sg zf,
( a;+1(z — Z;))/, ( aih;}\
exp (1 - exp ,
г,<г^г,-+1;
( a/(z—z7_1)'i <4hiL ( “A))
exp|-------------ir\1-eXPb-rW’
i—i 1
г>г/+1, гЛ1<г<гу, / = « + 2, ..., N,
§ 4]
ОБОБЩЕННЫЙ МЕТОД НАИМЕНЬШИХ КВАДРАТОВ
379
Случай р<0:
Ф,
' 0, zt\
При численном решении задач с помощью ЭВМ приведенные
выше функции Фг (г, р) можно описать в виде вещественных
процедур или в виде блока в необходимых частях программы.
4.3. Сферически симметричная задача. Рассмотрим сферически
симметричную задачу для уравнения переноса с изотропным
рассеянием:
+ + ф = l*W + W, (4-24)
<р(7?, р) = 0 при — 1=Ср<0, (4.25)
или, в операторной форме (см. § 1),
L<p = S<p + A
(4-26)
Построим приближенное решение уравнения (4.26) с помощью
обобщенного метода наименьших квадратов. При этом будем
предполагать, что а (г), b (г), /(г) —кусочно гладкие функции
с возможными разрывами первого рода в точках г,-, i = 1,..., / + 1,
го = 0, r!+1 — R.
Введем на [О, Л] сетку с узлами 0 = ro<r1<...<r;V = R
таким образом, чтобы для hj = rj — rj_l и h = R/N имели место
соотношения
О<Coh-СhjCrh, j=\, ..., N, (4.27)
где постоянные с0, Ci не зависят от hj и h. Будем в дальнейшем
предполагать, что если сетка неравномерна, то узлы сетки выбраны
так, что часть из них совпадает с узлами rt,i = 1, ..., 1, в кото-
рых функция — ( <р dp' 4- f (г) терпит разрыв. В случае
— 1
сетки с равномерным шагом h такого рода предположение не
делается.
380
АЛГОРИТМЫ ДЛЯ ЗАДАЧ ТЕОРИИ ПЕРЕНОСА
(ГЛ. 6
Зададим следующие функции:
[ 1 при Г^^Г^Г; j=l, N,
<р,- (г) = { „
[ 0 в остальных точках,
и рассмотрим систему {Фу (г, р)}, образованную из решений
уравнений
ЛФу = Фу(г), /=1, -V.
Каждое такое решение Фу (г, р) определяется формулами [49]
к
ф,(г, р) = ( ехР {—/ (г, Р- И)}Ф/(Р)°(Р)_Рd <0
J (р2-г2(1-ц2))1/2
Ф, (г, р) = Фу (г, - р) ехр {— 2J (г, г, р)} +
+2ехр(-/(г, г, и)) $ Р>».
г/|-Ц!
где
р
, . . (’ а (и) и du
(г, р, Р)~ ) (ц2_г2(1_[г2))1/г>
р
, . . (* а (и) и du
J (г, О, Р)= \ -----—-------
V J___(u2- г2 (1 - и2))1/2
rVi— ца
Здесь (как и в задаче (4.1), (4.2)) при 9 — 1 и f = f (г) функции
{Ф7 (г, р)} определяют характер зависимости решения уравнения
(4.26) от переменной р. Будем искать приближенное решение
в виде
Фл (г, р) = У а,Ф, (г, р), (4.28)
/ = 1
где коэффициенты а/ определим из системы уравнений
#(<рА, Ф/) = (А ЬФ/), /=1......К- (4-29)
Здесь X (ф, ср) = (Аф, £<р) —(Хф, Lcp), ф, <pe£>(L).
В матричной форме систему (4.29) можно записать как
Аа— Ba-{-f,
где Л — diag(XZi), Дн = (фо ф/) = 2 $ г2 а (г) dr, B =
ri-i
ri i
Bi, = (<pz, ХФу) = r2a (r) b (r) dr $ Фу (r, p) dp,
rz-i ~'г
f = (fr.....fN)T, h = (f, Ф/) = 2 f r2f(r)dr.
§ 41 ОБОБЩЕННЫЙ МЕТОД НАИМЕНЬШИХ КВАДРАТОВ 381
В силу свойств операторов L и S, матрицы рассматриваемых
систем положительно определенны. Следовательно, (4.29) одно-
значно разрешима, и тем самым приближенное решение задачи
ФА(г, р.) определено единственным образом. Вычислив at, можно
определить фА (г, ц) по формуле (4.28).
Рассмотрим вопросы аппроксимации и оценим скорость сходи-
мости фА (г, ц) к точному решению ф(г, р).
1
Теорема 5. Для Q(r')=~ dpf (г) можно построить
—I
N
такую функцию Qh (г) = У, пгф,-, что справедливы оценки: если
i=i
сетка неравномерна, то
VQ-QM^Ofh); (4.30)
если же сетка равномерна с шагом h, то
fQ-СЛil =^O((i) +О (й1/2)/7 max |A;Q|. (4.31)
i = l./
Здесь &tQ = Q(fi + O) — Q(fi — O).
Доказательство. Рассмотрим сначала случай неравномер-
ной сетки. Пусть a, = Q (/,_! +0). Тогда
j г2а (г) | Q — Qh 2 dr sg О (hs), i — 1,
r‘ e
r2a (r) | Q — Qh |2 dr = r2a (r)
ri—l ri-l
^(^”7ai^‘? 5 |Pra|^| ^r’ ^^2.
ri—l ri-l
Следовательно,
Л R
J r2a|Q-QAj2dr=cQ(ft3)-f-O(ft2) J r21 pr 0 (ft2).
0 r, ’
Пусть теперь сетка равномерна с шагом й. Рассмотрим интер-
вал (Г/-1, г/), внутри которого находится точка разрыва
Полагаем в этом случае at = (Q(/\ -f-0) +Q(f‘i — 0))/2, а остальные aft,
/г=#/, выбираются равными Q(/Vi + 0). Выполним оценку Q —QA
382
АЛГОРИТМЫ ДЛЯ ЗАДАЧ ТЕОРИИ ПЕРЕНОСА
[ГЛ. 5
на (Г/-1, г,), воспользовавшись при этом (1.43):
IQ-Qft |а = I Q(r) - a,|2 = [ Q (г) - Q (f< - 0) - Q ^+°-L-.Q|2
(г- \ 2
‘gdrU^ + O^ln^L
Следовательно,
$ а (г) г21 Q-Qh \2dr ==£ О (й31п2й) + 0 (й) | Д.-Q |2.
г/-1
Г1
Аналогичным образом, оценивая $ r*a |Q —Q* |dr, получаем
ri
г s
\ г2а (г) | Q - QA |2 dr О (h3 In2+ О (й) | Д.-Q |2.
r/-i
Оценка Q — Qh на интервалах, внутри которых нет точек разрывов
Q, проводится, как и для случая неравномерной сетки. Суммируя
полученные оценки, имеем (4.31). Теорема доказана.
Если повторить рассуждения доказательств теорем 3, 4, при-
влекая результаты теоремы 5, то придем к следующим утвержде-
ниям.
Теорема 6. Приближенное решение yh(r, ц) сходится при
й->0 к точному решению <р(г, ц) уравнения (4.26), и имеет
место оценки: если шаг сетки неравномерен, то
||£(ф-фл)||^О(й), ,4
II фо — фо, л к, <о. у?» =0 (й211пй |); 1 ’
если сетка равномерна, то
\\L^-tph)\\^O(h) + O(h^)yi max | Д.-Q |,
i=i..................................I
II фо — фо, л I'l, (0, я> (4.33)
sgO (й21 Inй |)-f-0 (й3/211пй |) )/7 max j Д/Q|;
1 = 1.7
если же f (г) лишь суммируема по сфере со степенью р, р^ 1,
то фо, л сходится к ф0 при h->-0, причем
!фо — Фо. лк,(О. ^0(й|1пй|). (4.34)
Здесь
। я
Фо (Г) = 2 У ф (Г, р) dp, j ф U1(o, Я) = \ г21 ф (г)| dr.
§ 4] ОБОБЩЕННЫЙ МЕТОД НАИМЕНЬШИХ КВАДРАТОВ 383
Замечание. Если априори предположить, что <р0(<) =
= i J cpdp обладает большей степенью гладкости, чем это утвер-
—I
ждается в § 1, и в качестве ф,- (г) использовать финитные функции
с лучшими аппроксимирующими свойствами (см. гл. 2), то уточ-
нение полученных выше результатов очевидно.
Одной из важных характеристик методов приближенного реше-
ния уравнения переноса является выполнение условия баланса
[26, 28, 49]. Проверим, выполняется ли это условие в обобщенном
методе наименьших квадратов, на примере сферически симметрич-
ной изотропной задачи. Для этого умножим каждое из уравнений
системы (4.29) на единицу, результаты сложим и, выполняя эле-
ментарные вычисления, приходим к выражению
R R
/ (г)+$/-2а (')(! - b (г)) Фо, Л (г) dr = а (г) г2 f (г) dr, (4.35)
о о
। 1
1 С 1 С
где j (г) — j I |1фА (R, р) dp, Фо. л= 2~ \фьйр, которое представляет
о -1
собой условие баланса для этой задачи. Следовательно, если
исходные базисные функции {ф,- (г)} выбраны таким образом, что
функция, тождественно равная константе, приближается ими
точно, то при решении уравнения переноса данным методом
условие баланса выполняется.
Приведем вид базисных функций Ф,- (г, р) для случая, когда
коэффициент а (г) кусочно постоянный и а (г) = я7-_1/2 при г е
'/). /=1............
Случай р 0:
’ 0, г >rf,
1 - exp {— а7_1/2 (Уrf - г2 (1 - р2) - г | р |)},
ф./r u)=J _____________
> ' g-p,(r.U)(eXp {— ЦЛ1/2]Лг)_, -Г2(1 -р2)} —
- ехр {— az_1/2 /г)-г2(1-р2)}),
ге(гы. rk), k^zj-l;
где
/-1_______________________________________
₽i(r, р)= У, aZ-i/2(]Azs-r2(l-p2)-/rf_i-г2(Г-р2))-|-
+ «Л-1/2 (Kd-r2(l -р2) - Г I р |) - Я7_1/2 Уг2-! -Г2(1 -р2).
Случай р>0:
Ф/(г, р) == Ф/ Д, — р)е~ г> (г, р) е~ J в),
384
АЛГОРИТМЫ ДЛЯ ЗАДАЧ ТЕОРИИ ПЕРЕНОСА
[ГЛ. 5
где
У (г, г,
H)=a/-i/2J/rf-r2(l-Ft2)+ 2 —<2(1 ~ Р2)-
4 = i + i
- /г?-, - г2 (1 - р2)) + а*_1/2(/г|-г2(1-р2) - Ф),
г /1 - р2 е- (rz_lt rt), г е (/*_!, Г*),
V {г, р) =
здесь
О, г>г/, r/l - р2
sh («/-1/2 Vг/-г2(1 -р2)), г>г/, гУ1- р2е(ф!, г,);
sh (02 + пЛ1/2 ]/г?-г2(1 - ft2)) -
-sh(₽24-Я/_1/2/г;., -г2(1 -р2)),
Г>Г/-1, rVl -р2
sh (а,_1/2гр), Г£(ГН, г,), г ]/1 - р2 е Гу);
sh (₽2 + Я/-1/2Ф) - sh (₽2 + аЛ1/2 /г/-] - г2 (1 — р.2)),
г е= (гн, г,), г V1 - р2 < r,-i,
О, г<г/_1;
02 (г, р) = a/-i/2 Vrl - г2 (1 - р2)+ S аг-_1/2(/Н-г2(1-р2)-
i = I 4- I
- /г?_, - r2(l - р2)), Г е (Фь rz), I j - 1.
Пример 1. Решим с помощью метода, изложенного в этом
параграфе, следующую задачу:
4)(^ + iv^)+<P=-2 J<p^'+Hr). (4 36)
Ф(/?, р.) = 0, —lsgp<0,
где
а (г) = 2, Ь — 0,5,
f (г) = у И 4- j ch (2гр) ехр {—2/1-г2(1 -р2)} dpi
'О /
Точное решение (4.36) имеет вид
• 1 (1 -ехр {-2 (/1 - г2 (1 - р2) -г р |)}), р<0,
ф(г, р)= . ____________
^(1-ехр{-2(/1-г2(1-|12) + ф)}), р>0.
В табл. 3 приведены результаты расчетов при N = 10, 20, й =
= \/N,
§ 41
ОБОБЩЕННЫЙ МЕТОД НАИМЕНЬШИХ КВАДРАТОВ
385
ТАБЛИЦА 3
<₽(г, ц) <₽л, Лг=Ю <₽А, АГ = 20
р, =—0,6 о о —. II II II 0,4323 0,3543 0 0,4315 0,3532 0 0,4321 0,3540 0
ц = 0 1 1 LO о о—. II II II - 0,4323 0,4115 0 0,4315 • 0,4106 0 0,4321 0,4113 0
ц = 0,6 ю о II II 11 0,4323 0,4561 0,4546 0,4315 0,4553 0,4516 0,4321 0,4560 0,4536
Отметим, что здесь для вспомогательных вычислений исполь-
зовались простейшие квадратурные формулы прямоугольников и
трапеций без дополнительного деления интервалов (г/ i, г/)
(см. § 9 гл. 3).
4.4. Многомерное уравнение переноса. Рассмотрим задачу (1.8),
(1.9), или, в операторной форме,
Лф = 5Ф + /, (4.37)
I
предполагая, что для области D= [J О, выполнены ограничения
/ = 1
из п. 1.4. Пусть также а (х) е Ci 0 (Dj), 6 (х) е Со „ (G;), / =
= 1, ..., /, 0<а<1.
Пусть для каждого значения параметра h любую подобласть Dit
: = 1, ..., /, можно разделить на конечное число подобластей О*-*0,
k = 1, ..., Nt, таким образом, чтобы diam D\k} <ch, где константа с
не зависит от k, j, h. Обозначим через ф*,- (х) характеристиче-
скую функцию Совокупность {фь(} примем в качестве исход-
ных функций {ф;(х)}, гДе РаДи простоты обозначения введена еди-
ная нумерация, N = J] IV/. Очевидно, что система {ф, (х)} плотна
в L2(D).
Пусть Ф, (х, s) естц решение задачи
АФ,= фг, i=l.........N, (4.38)
где
d I
Ф,(х, s) = § а (х — ?s) ф, (х — £s, s)exp<—$ а (х — £'s) d^' ? (4.39)
о I о J
13 Г, И, Марчук, В. И. Агошкоз
386
АЛГОРИТМЫ ДЛЯ ЗАДАЧ ТЕОРИИ ПЕРЕНОСА
[ГЛ. 8
где d — диаметр области D. Легко заметить, что функции {Ф,(х, $)}
при каждом фиксированном N линейно независимы. Примем их
в качестве базисных функций и будем искать приближенное ре-
шение в виде
N
фл = У, фФ; (х, s); (4.40)
коэффициенты а{ определим из системы линейных алгебраических
уравнений
^(Фл, Ф/) = (А W 1=1............N, (4.41)
где X (ф, ф) = (Лф, Лф) —(Зф, Лф), ф, фе D(L).
Система (4.41) обладает положительно определенной матрицей
и имеет единственное решение, однозначно определяющее при-
ближенное решение (4.40). Систему (4.41) можно записать в виде
N
(фЬ Фг)Ф= У, a^SL-1^, ф() + (Л фе), i=l, .... JV. (4.42)
/ = 1
Отсюда и из представления оператора SL-1 [47] в виде
у а (х') К (х, х') f (xr) dx',
D
где
( 1 1
expl— |х — х' | (а(х£ + (1—
К(Х, х’) =---*-------|х_хл8-----------
13 \ 1/2
\Х — х' I = ( У, (Xi — х[)а1 ,
'/ = 1 /
вытекает, что при решении системы уравнений (4.41) необходимо
вычислять элементы
В// = j а (х) j а(х’) К (х, x')dx'dx. (4.43)
supp q>( supp <p.
Знания явного вида функций Ф, на данном этапе вычислений
не требуется. После того, как az определены, фА (х, s) имеет вид
Nd ( i ]
Фл(х, s) = 2 а^а(х — !з)ф;(х — £s)exp< — $а(х — £'s)dHdg. (4.44)
Если практический интерес представляет функция ф0,А(х) =
= — j* фА (X, s') ds', построение которой может быть выполнено
9 ~
§ 4] ОБОБЩЕННЫЙ МЕТОД НАИМЕНЬШИХ КВАДРАТОВ 387
по формуле
Д'
Фо,л(*)=2^ j а(х')ф;(х')К(*, x')dx', (4.45)
i = 1 D П supp <pf
то в этом случае также нет необходимости строить Ф, (х, $)
в явном виде
Замечание. Так как функция <рЛ, определяемая форму-
N
лой (4.44), является решением уравнения Lqh — У (х), то
i = i
в случаях, когда необходимо узнать не только ф0.л(х), но и
<рЛ (х, $), можно поступать так: 1) из системы (4.42) определяются
коэффициенты яг; 2) построение фЛ (х, $) осуществляется не по
формуле (4.44), а при помощи какого-либо (приближенного) алго-
ритма решения уравнения АфЛ = У, (х). Например, для пло-
z = i
ских областей в X — У-геометрии может быть применен метод
интегральных тождеств, изложенный в § 7 предыдущей главы.
Прежде чем оценить скорость сходимости фЛ к ф, сформули-
руем следующее очевидное утверждение: если ф(х) е Со а (£>/),
i = I, ..., I, 0<а=с1, то можно построить функцию ф7 =
N
= У п.ф,- (х) такую, что
»=|
( О (ha) при 0<а<;1,
пр» <4'46>
Теорема 7. Пусть f (х) еСоа (£>,), 1=1, ..., I. Тогда
функции фЛ (х, s) сходятся при h-> Q к ф (х, $) и справедливы
оценки
И(ф-фа)||^О(/1“),
|фо —фо,лк1(0)^°(Ла“4-Л1+“|1пЛ|) при 0<а<1;
II Мф - Фл) II О (h | In h I),
ПФо-Фо.лЦа., <о)=сО(/121п2Л) при а=1.
Доказательство. Повторяя рассуждения теоремы 1, при-
ходим к неравенству
| L (ф - фА) || с inf IQ (х) - у bi4>i (х) ,
bi II <=i II
где Q(x) = 4^ \ ф£йо' + f(x). Отсюда и из утверждений п. 1.4 и
43Т J
Й
(4.46) следуют первые оценки из (4.47) и (4.48).
13*
388
АЛГОРИТМЫ ДЛЯ ЗАДАЧ ТЕОРИИ ПЕРЕНОСА
[ГЛ. 5
Рассмотрим теперь тождество
/ м
<5?(ф — фА, L-1L*-1ip) = Х I ф — фл, L_1L* 'гр— X с,Ф,-
) 1 = 1
где гр (х) — произвольная функция из (D), с, — произвольные
постоянные. Легко заметить, что для левой части этого тождества
справедлива оценка снизу:
$а(х) (фо - Фо, л) ф (х) dx
D
- Vi fi а (фо - Фо, л) k, IIФ ксо «S
^Щф-фл,
где у1 = Ь1(1 — e~a'd)<z 1. А с учетом того, что (L — 5)(ф — фА)
не зависит от s и 5Л'1гр = SL*-1ip, после простых оценок полу-
чаем мажоранту для правой части рассматриваемого тождества:
/ N
^(ф —фл, L-1L*-1Tp —2 c&i
N
X с«ф?
я
Пусть Ci = / J k_hp dco'j (xt), где xt — внутренняя точка из supp ф,-;
\й /
тогда
I N
У L-hpdco - 2 с,ф,- sg||ip|Lco(O)0(/ia4-/i(r+; ln/i|)).
£2 i 1 ^со
Объединяя полученные сценки, имеем
I j ер) (Фо—Фо, л)гр(х)Щс1
—------нП------------ “ V1!! а (фо - Фо. л) к, (О)
HvILooCD)
«с О (ha + h In I') i! L (ф - qiA) HL).
Из этого неравенства в силу произвольности выбора ip е Lm (D)
следует, что
(1 - 71) И (Фо - Фо.л) к, (О) О (ha + h In || L (ф - фл) к,- (4.49)
Поскольку 1 — 71 > 0 и справедливы первые оценки из (4.47), (4.48),
получаем остальные утверждения теоремы.
Пусть в рассматриваемой задаче f (х) е Lp(D), p^l. Тогда,
следуя доказательству теоремы 4, легко доказать равномерную
ограниченность относительно h величины ||А(ф — Фл)ко Затем,
повторяя рассуждения теоремы 7, приходим к неравенству (4.49),
из которого вытекает справедливость следующего утверждения.
§ 41 ОБОБЩЕННЫЙ МЕТОД НАИМЕНЬШИХ КВАДРАТОВ 389
Теорема 8. Пусть а(х), b (х) ^COia(Di), i=l, ..., I,
f (x) e Lp(D), p^l. Тогда фо л сходится к ф0(х) при h-+0 и
имеет место оценка
Ифо — Фо>лк1(0)=СО(й“ + й1п-у), 0<а<1. (4.50)
Замечание. Метод, рассмотренный выше для решения урав-
нения (4.37), может быть применен и для решения сопряженного
к нему уравнения
£*ф = 5ф4-£, g^B. (4.51)
Здесь мы получим систему линейных алгебраических уравне-
ний, матрица которой совпадает с матрицей системы (4.41). Это
обстоятельство может быть полезным в тех задачах теории пере-
носа, где, помимо решения прямого уравнения (4.37), требуется
знать одновременно и решение сопряженного к нему. Отметим,
что оценки скорости сходимости приближенных решений за-
дачи (1.8), (1.9) остаются справедливыми и при рассмотрении
алгоритма решения сопряженной к ней.
Пример 2. Пусть в задаче (1.8), (1.9)
D={x = (xlt х2, х3): 0<х,<1, i=l, 2, 3},
з
а=1, 6 = 0,5, /(х)= 103П М1 -xt).
i = i
Вычислим интегральный поток ф0(х) как при помощи обобщен-
ного метода наименьших квадратов, так и с помощью построения
приближенной функции Грина. В табл. 4 приведены результаты
вычислений фо.л(^) при Л\ = 5, лг2 = 0,5, х3 = 0,5. При решении
системы (4.41) здесь было сделано три итерации по методу по-
следовательных приближений, и увеличение числа итераций
практически не приводило к уточнению решения. Увеличение
числа шагов по каждой из переменных приводило к изменению
в третьей значащей цифре.
ТАБЛИЦА 4
х, = 0,1 х, = 0,3 Xt — 0,5
Фо, А (ОМНК) 2,635 4,578 5,324
Фо, л (Гр.) 2,633 4,575 5,320
4.5. Задача с сосредоточенным источником. В ряде практиче-
ских случаев возникает необходимость отыскания значения инте-
грального потока ф0(х^) = ~ J ф(хА, s)da в некоторой заданной
а
390
АЛГОРИТМЫ для ЗАДАЧ ТЕОРИИ ПЕРЕНОСА
ГГЛ. В
точке хк е D в зависимости от выбираемых функций источни-
ков f(x). Здесь <р и f связаны уравнением
Lq> = Sq + f (х), f (х) = F (х)/а(х). (4.52)
Очевидна неэффективность решения подобной задачи путем оты-
скания (приближенным способом) решения ф, соответствующего
каждому источнику f(x), и нахождения затем значения ф0(хА,).
Поэтому эту задачу часто решают, вводя сопряженное уравнение
Е*ф = 5ф + §, g(x) = G(x)/a(x), (4.53)
где G = 6 (х — хк) — дельта-источник, решение которого играет
роль функции Грина. Если умножить (4.52) на ф скалярно в В,
а (4.53) на ф и результаты вычесть, то приходим к равенству
(А М’) = (5Г. ф).
или
§ а (х) f (х) фо (х) dx = § а (х) g (х) ф0 (х) dx, (4.54)
D D
где
Ф«(-г) =47F J Ф(х- s)d®> фо(х)=4Цф(х, s)dx.
й й
Если предположить непрерывность а(х) в окрестности точки хк,
то, используя свойства 6-функций, приходим к соотношению [7]
Фо (хк) = \a(x)f (х) ф0 (х) dx = \ F (х) ф0 (х) dx. (4.55)
D D
Из (4.55) делаем вывод: чтобы отыскать все значения {ф0 (х*)},
соответствующие интересующему нас набору {/(х)}, достаточно
один раз решить (4.53), а затем пользоваться формулой (4.55).
Итак, вся задача сводится к отысканию численного решения
сопряженного уравнения (4.53) с сосредоточенным источником
G = 6(x — хк). Проиллюстрируем, как это можно сделать с по-
мощью алгоритма, рассмотренного в предыдущем пункте.
Предположим сначала, что уравнение (4.53) решается при
g (х) е FJ (D), а коэффициенты а(х), Ь(х), ради простоты, будем
считать из COia(D), 0<а<1. Пусть введены исходные базисные
функции {ф; (х)} — те же самые, что и в предыдущем пункте.
Приближенное решение уравнения (4.53) ищем в виде
х
фл (X, S)=2j S)> ®i(x> S) = (£*)"4i-
i=l
Коэффициенты bt определим из системы линейных алгебраи-
ческих уравнений
(Ь*фл, £*Фг) = ($фл, L*&i) + (g, А*Ф;), /=1,...Л, (4.56)
§ 41
ОБОБЩЕННЫЙ МЕТОД НАИМЕНЬШИХ КВАДРАТОВ
391
которая однозначно разрешима. Приближенное решение (х, s)
сходится к ф (х, s) при h-+0, причем
|!Л*(ф-фЛ)||^О(Л“), К-ih,,ALw^O(/iaa). (4.57)
Пусть теперь в (4.53) функция g (х) имеет вид g (х) = 6 (х — хк)/а (х),
xk<=D. Следуя работе [53], представим решение ф(х, s) как
п — 1
Ф = У Vi + u.
> = 1
Здесь функции иг (х, s) и и (х, s) определяются как (обобщенные!)
решения уравнений
- -- (s, grad vt) 4- vt = gh i=l, п-1,
- у (s, grad «) + « = £„,
где
6 (x— x>.) b C j -1
ёо~^Г(ХГ’ = J Vi~ida’ t=1’ •••’
й
b C , ,
j uda + gn,
Й
рассматриваемых’ при краевом условии (1.7). Число функций vt
определяется номером п, при котором gn, а следовательно, и
и (х, s) становятся обладающими той или иной гладкостью. В [53]
показано, что при g = 8(x — xk)/a(x) функция g3 имеет особен-
ность вида ~1п|х —xft|. Но так как ||1п|х —хА|||^1(£))=сс, где
постоянная с не зависит от xk, то будем предполагать, что g9 е
€= (D), D <= 7?з-
Обозначим через иЛ(х, s) приближенное решение (4.53) при
g — g3 е (D) и определим приближенное решение сопряженного
уравнения (4.53) при g = f> (х—Хь)/а(х), положив
п— 1
Фл = У, Vi(x, s) + uh(x, s). (4.58)
Если воспользоваться оценками (4.57), то легко заметить, что
при любой непрерывной функции f(x) справедлива оценка
I \f(x')($o-tyo.h)dx
I D
(4.59)
Рассмотрим (4.51) и (4.52) одновременно. Тогда при g =
= 6 (х — хк)/а(х) имеем (4.55). Пусть фЛ —приближенное реше-
ние (4.53), определяемое формулой (4.58). Назовем приближенным
392
АЛГОРИТМЫ ДЛЯ ЗАДАЧ ТЕОРИИ ПЕРЕНОСА
[ГЛ. w
значением функции <р0(х) в точке хк величину
<Ро. к (хк) = У (х) а (х) ф0,л (х) dx. (4.60)
о
Из (4.59) следует, что если /(x) = C(D), то <р0, h(xk) сходится
к <Ро(*а) при й->0 и справедлива оценка
I фо (*а) - <Ро.л (**) (4.61)
Именно изложенным выше способом вычисляется ряд значе-
ний <p0.ft(xft) в примере, приведенном в конце п. 4.4.
4.6. Устойчивость. Покажем, что обобщенный метод наимень-
ших квадратов при специальном выборе базисных функций обла-
дает устойчивостью.
Запишем систему (4.42) в виде
La=f, (4.62)
где а = (аъ .... aNf, f^(ft...........fNy, L = 1 — B, 8 = (Bt/),
^'/ ==4л 1 a(x)b(x)dx I а(х')К(х, x')dx'l 1 a(x)dx\ ,
о,- 4 у
fi= § a(x)f (х) dx! j а (х) dxV1, Dk = D fjsupp <pA.
Dt \d. )
Пусть в результате ошибок вычислений вместо L, f получены
возмущенные L8, f&. Тогда вместо (4.62) имеем систему
L8fl8=/8. (4.63)
Если (4.63) разрешима, то ее решение ае = (а1-е, ..., aNiе)т опре-
делит возмущенное приближенное решение
N
ф8,л(х, s) = 2 аг.8Ф/(х, s). (4.64)
< = 1
Будем говорить, что процесс построения приближенного реше-
ния устойчив, если существуют постоянные р, q, г, не зависящие от
h, такие, что при || L —L8 ||оо<г система (4.63) однозначно разрешима
и при любой функции ф (х, s) е La, (й х О) имеет место соот-
ношение
I (L (<P/t <Р8, /,), Ф) | | f Г || . .. Г _ Г || , . z-r.
11,1,11 <Pi|L L8 [[оотЯ II/ /sllooi (4.65)
SWootaxD)
/ N \
где i|f||00 = max||L||Oo = max \ Ly\\.
i i \j = l I
§ 4] ОБОБЩЕННЫЙ МЕТОД НАИМЕНЬШИХ КВАДРАТОВ 393
Запишем (4.63) в виде
а8 = Вае4-(7— Le)ae-f-/e (4.66)
и обозначим через г любое число, удовлетворяющее соотношению
0<г<1—yi, где у1 = /?!(1 —e-a*d)<l. Так как ||B|L^Ti, то
при ||L — Ls "ю г < 1 — yi система (4.63) имеет единственное ре-
шение, которое может быть построено, например, методом после-
довательных приближений и для которого справедлива априорная
оценка
I |L .1 /е оо/( 1 Ут г) = С || (со. (4.67)
Пусть f(x) е Lm(D). Тогда Ц/1«> J /La,(т» и, следовательно,
f «8 IL С (II { - fR |L 4- II f ||Loo (D)). (4.68)
Из (4.62) и (4.63) имеем систему относительно % —а — ае:
l = Bl + CU-L)ae + (f-fe),
которая однозначно разрешима, причем
II ? IL (IIL — Lg IL || o8 IL -H f — fe l'oo)/( 1 — yi).
Отсюда с учетом (4.68) получаем
I Gl ~~ Gig |L Gi l| Li Lg oq II f f8 |L,
где постоянные c8 не зависят от h. Но тогда
|(Ь(<Рл-<Р8.л), it) I __ N j a (x) У {at — a!t 8) <pz (x) (x, s) dx da Й x D i = l
ii't Loo (ЙХЙ i 't!L0O(flxD)
==s/?i|L-A8|L4-<7 7-ZelL,
где р = 4С1Л \a(x')dx, q = 4c2n ^a(x)dx, т. e. процесс построения
D Й
решения устойчив.
ЗАКЛЮЧЕНИЕ
О РЕШЕНИИ НЕКОТОРЫХ УРАВНЕНИЙ
ЭВОЛЮЦИОННОГО ТИПА МЕТОДАМИ РАСЩЕПЛЕНИЯ
В настоящей книге проекционно-сеточные методы были подробно рассмот-
рены зачастую применительно к простым случаям задач математической физики.
В силу простоты постановок этих задач соответствующие математические модели
и их проекционно-сеточные аппроксимации допускали сравнительно простой
анализ и теоретическое обоснование. Однако на практике исследователю могут
встретиться значительно более сложные проблемы. Возникает вопрос: нельзя ли
с помощью подходящей редукции сводить данные более сложные задачи или
их дискретные приближения, возникающие после проекционно-сеточной аппро-
ксимации задачи по пространственным переменным, к более простым, в частности
рассматриваемым в книге, и чтобы после этой редукции численное решение
исходной задачи легко реализовывалось с помощью ЭВМ? Оказывается, что
такой весьма универсальный метод упомянутой выше редукции и для многих
эволюционных задач существует. Это —метод расщепления.
Кроме того, следует отметить, что во многих случаях стационарная задача,
например для уравнения эллиптического типа с положительно определенным
оператором, может быть приближенно заменена соответствующей задачей для
уравнения эволюционного типа. И можно показать, что при некоторых доста-
точно широких условиях решение данной эволюционной задачи при стремле-
нии временной переменной к бесконечности стремится к решению исходной
эллиптической задачи. Именно поэтому можно считать, что эволюционная
задача является подходящим объектом для исследования широкого круга задач
математической физики.
В силу отмеченных выше обстоятельств в настоящем заключении будут
приведены некоторые сведения из теории метода расщепления в применении
к задачам для уравнений эволюционного типа du/dt + Au = f с положительно
полуопределенным оператором А. В дальнейшем применение этого метода
иллюстрируется на примере задач для уравнения параболического типа и
нестационарного уравнения переноса.
1. Метод покомпонентного расщепления. Пусть некоторая задача матема-
тической физики после применения к ней проекционно-сеточного метода све-
дена к системе обыкновенных дифференциальных уравнений
5 + Яф = /, /е(0, Т) (1.1)
при начальном условии
<P = g, f = 0. (1.2)
Пусть здесь A (0 = A (0 + ^2 (0> А(0^0, Д2(0^0, т. е. Aa(t) — поло-
жительно пол уоп ре де ленные матрицы (при каждом фиксированном t) в неко-
тором пространстве вектор-функций ф со скалярным произведением (ф, ф) и
нормой || ф [ = (ф, ф)1/2. Рассмотрим аппроксимацию матриц Да(0 на отрезке
в форме = (^-j-1/2) в предположении, что их элементы имеют
достаточную гладкость. Построим для задачи (1.1), (1.2) сначала при / = 0
систему разностных уравнений, состоящую из последовательности простейших
ЗАКЛЮЧЕНИЕ
395
схем Кранка—Николсона
ф/+1/2-ф' ,
ФЯ1-Ф/+1/2 фЯ1 + ф/+1/2_ (L3)
т "Г 2 ’
где т — Т/J, / = 0, 1, ..., / — 1, Ф° = £.
Система разностных уравнений (1.3) при исключении вспомогательных
функций ф;+1/2 может быть приведена к уравнению
ф/+1 = ТЛрЛ (1.4)
где
т/=(2+1 д')’1 (z —~ д') [1+1 д')’1 (? —~ Д'). (1.5)
Изучим сначала проблему аппроксимации. Для этой цели разложим опе-
ратор TJ по степеням т, предполагая, что тЦЛ^Цс 2. В результате получим
+ т2- ((Л{)г+2д(Д{+(д')2)—... (1.6)
Если операторы коммутируют, т. е. А{А£=*А^А{, то разложение (1,6)
можно записать в виде
TJ^l- %AJ+у (Л0а - •.. (1.7)
Таким образом, если Л1(0^0> Л2(0^0, то при достаточной гладкости
элементов этих матриц и решения ф задачи (1.1), (1.2) разностная схема (1.3)
абсолютно устойчива (это следует из леммы Келлога, утверждающей, что если
Л О, о О, то j (7 — оЛ) (2 + оД)-11|^ 1, и согласно которой имеем || ТЦ 1)
и аппроксимирует исходное уравнение (1.1) со вторым порядком по т в случае,
если Л{, Л' коммутируют, и с первым порядком, если не коммутируют.
Теперь будем операторы Л! (/) и Л2 (0 аппроксимировать не на отрезке
как в (1.3), а на отрезке ^tj+1. Положим Л^ = Ла(^)
и рассмотрим следующие две системы разностных уравнений:
ф^ф: + Л/’р/+1^+<р/ = о,
ф/+1_ф/+1/2 ф/+1+ф/+1/2_ О-9)
т + 2 “и-
Цикл вычислений состоит именно в поочередном применении разностных
схем (1.8), (1.9). Аналогично предыдущему можно показать, что на полном
цикле вычислений с помощью (1.8), (1.9) имеем
ф/+1 = Пф/-1, (1,10)
396
ЗАКЛЮЧЕНИЕ
+ — 2 ^1) + 2^'1) (^—2(^—2^«)Х
X(/+у < (/ - j Л{) = / -2тЛ'+(Л/)а - • • •
Если оператор шага TJ сравним с оператором шага схемы К ранка —Николсона
ф/+1 _ фЛ-1 ф/+1 -|_ ф/-1 _
2i Н А 2 “ °’
то можно установить, что с точностью до величины т2 операторы шага TJ для
двуциклической схемы расщепления (1.8), (1.9) и схемы Кранка — Николсона,
примененной к удвоенному интервалу по времени, совпадает независимо от того,
являются операторы Аа коммутирующими или нет. Таким образом, этот
прием снимает весьма сильное требование коммутативности операторов.
Переходим к обсуждению вопроса об устойчивости метода. Из соотноше-
ния (1.4) следует, что (ф/+1 [| гС Ц TJ || || ф/1|. Поскольку, как было показано выше,
| TJ | 1 при Аа^О, то || (рУ+11| || ф/||. Отсюда непосредственно вытекает, что
(1.11)
т, е. схема (1.3) устойчива.
Если рассматривается двуциклический метод, то на каждом шаге цикла
имеют место оценки вида || ф/+1 || || ф/-11|. Это означает, что и двуциклический
метод абсолютно устойчив.
Таким образом, если АНО^О, Д2(/)^0, то при достаточной гладкости
решения ф задачи (1.1), (1.2) и элементов матриц (/), А2 (О система раз-
ностных уравнений (1.8), (1.9) абсолютно устойчива и схема (1.10) аппрокси-
мирует исходное уравнение (1.1) со вторым порядком по т.
Пусть теперь /#=0 в (1.1) и будем искать решение данной неоднородной
задачи с помощью двуциклического полного расщепления. С этой целью рас-
смотрим систему разностных уравнений вида (1.8), (1.9), записанных в более
удобной форме:
(? + у Л{) Ф;-1/2 =
' ' ' (1.12)
(? + 2‘ <Р/+1/2 = - 2
(/+р')ф/+1 = (?-р{)ф/+1/2,
где Разрешая эти уравнения относительно фЛ1, получим
фЯ1 = 7’/ф/-1 + 2тг/7’^/, (1.13)
где
р;). (1.14)
С помощью разложения по степеням малого параметра т придем к соотношению
ф/+1=| / _ 2T/V + (А>)2]фЛ1 + 2т ()’ - tAj) (т“), (1.15)
ЗАКЛЮЧЕЙИЕ
397
которое в свою очередь преобразуем к виду
Ф7+1~Ф71 + д/(/-тД/)<р/-1 = (/А-тД/)//+О(т2). (1.16)
Исключим ф^~х, используя разложение решения в ряд Тейлора в окрестное™
точки tj_v С точностью до та будем иметь
ф/=ф/-1+^у-1т + О(т*). (1.17)
Производную dq/dt исключим с помощью соотношения
“ W~x+/'+ о (т). (1.18)
Подставим (1.18) в (1.17). Тогда
ф/= (7 — ТА/) ф/^+тАЧ- О (т2). (1.19)
Отсюда
(7 — тД/) ф/-1 = ф/— ifJ + О (т2).
Подставим соотношение (1.19) в (1.16). В результате будем иметь
<P?+I^<p;~1 + W=/7+ О (т2). (1.20)
Очевидно, что уравнение (1.20) аппроксимирует исходное уравнение (1.1)
на отрезке со вторым порядком по т.
Таким образом, найдена разностная аппроксимация неоднородной задачи
(1.1), (1.2) второго порядка по т с помощью двуциклического ,метода.
Устойчивость метода доказывается элементарно. В самом деле, оценим (1.13)
I! ф7+1 II II t> IIII ф/-1 II + 2т || t[ IIII Ц II II ff ,|. (1.21)
Выше отмечалось, что || Т}^\ 1, следовательно, || t11| || Т{ || \\Т}% || || || || t[ || 1.
Поэтому |! ф/+11| || ф/-11| + 2т || fi ||, откуда получаем
k (1.22)
где |i / j = max ||//J. Из (1.22) следует устойчивость схемы на любом конечном
интервале времени.
Систему уравнений (1.12) можно записать также в следующей эквивалент-
ной форме:
(7+2 Ф/-2/3 = (7ФЛ\
(7+’А/)Ф^3 = (7-р/)ф/-273.
ф/+х/з = фМ/з_|_2т^( (j 23)
(7+-; Д7)ф/+2/3 = (7—}д/)ф^з,
(7+-2-а7)ф/+1 = (7-|д/)ф7+2/3.
Исключая неизвестные величины с дробными индексами, приходим к (1.13).
Отметим, что в некоторых случаях запись уравнений в форме (1.23) пред-
почтительнее, чем в форме (1.12),
398
ЗАКЛЮЧЕНИЕ
Итак, если ЛгСО^О, толпри достаточной гладкости решения ср,
функции f (t) и элементов матриц Л2 система разностных уравнений (1.12)
абсолютно устойчива на отрезке и аппроксимирует исходное урав-
нение со вторым порядком по т.
До сих пор предполагалось, что исходный оператор А представлен в виде
суммы двух операторов более простой структуры. При решении сложных
задач математической физики зачастую приходится иметь дело с расщеплением
операторов на большое число слагаемых. Рассмотрим случай, когда А =
п
— Аа, причем Аа^0. Для задачи (1.1), (1.2) имеет место следующая
а=1
схема расщепления на отрезке
+-J Л7) = (1 ф7"1,
(^ + у (ф7-т/7) = Л^Ф7 1/Я.
(7 + у Ф7+1/” = (7 (ф7 + ^7),
(1.24)
А{) Ф7+1 = Л7) ф7+<'1~1)7'1,
где А^а = Аа (tj). Нетрудно убедиться, что эта схема в предположении необхо-
димой гладкости ср имеет второй порядок аппроксимации по т и абсолютно
устойчива (ее также можно представить в виде, аналогичном (1.23)).
В заключение рассмотрим квазилинейную задачу с оператором, зависящим
от времени и от решения задачи,
+ ф)ф=о, (1.25)
ф = £, / = 0. (1.26)
Относительно оператора A (t, ф) предположим, что он имеет вид A (t, ф) =
п
— 2 У’ Ф)» (?> Ф) О» и обладает достаточной гладкостью. Предполо-
а = 1
жим, что решение ф также является достаточно гладкой функцией времени.
Рассмотрим на отрезке tj_± t tj+1 схему расщепления вида
фУ+УД-ф/-1 + А- ф/+1/«-1-|-фМ =
ф7-ф7 1/П , д/ ф7 + ф7-1'"’ _
Ф7+1/я-ф7 + д/ ф7+У” + ф7 = 0
(1-27)
Ф7+1—Ф7+1~1/п + д/ ф7+1+ф/41 Уд=0,
где AJ=A(t/t ф>), ф/ = фМ —тД (tj-!, ф>-1)ф/-1, Ф° = ^.
ЗАКЛЮЧЕНИЕ
399
Методами, изложенными в [7], несложно доказать, что схема расщепления
(1.27) имеет второй порядок аппроксимации по т и абсолютно устойчива.
Аналогичным образом определяется метод расщепления для неоднородных
квазилинейных уравнений. Это открывает широкие возможности применения
проекционно-сеточных алгоритмов в сочетании со схемами покомпонентного
расщепления к решению нестационарных квазилинейных задач гидродинамики,
метеорологии, океанологии и других важных областей естествознания.
2. Решение двумерного параболического уравнения *). Рассмотрим двумер-
ное параболическое уравнение, применяющееся для описания различных физи-
ческих процессов в океанологии, теории теплопроводности и др.:
du _ А Ад“ _ Аг — —. — 7 — — f /9 П
dt дх дх ду ду дх ду ду дх~! ( }
с начальным и краевым условиями вида
и —О, / = 0, (2.2)
ц = 0 на дй, (2.3)
где Й— ограниченная односвязная область из R2 с дй еС121, (х, у) е й, /е
е (О, Т), 7<оо. Коэффициенты А, В, G, Z е С(2) (Й) являются функциями
(X, у), f = f(x, у, V).
Если разделить симметрическую и кососимметрическую части дифферен-
циального оператора со смешанными производными на основе представления
C = (G —Z)/2, D = (G + Z)/2, то уравнение (2.1) можно записать в виде
ди д ди д ди д п ди
dt дх дх ду ду дх ду
ду дх дх ду ду дх ’’
В дальнейшем предполагается, что функция f (х, у, t) при каждом фиксиро-
ванном t е (О, Т) принадлежит С(1) (Й), а также
То S 2 Лй + ВЦ + 2ЭЦЦ ?11 g |2,
0<?2^Л, В, |D|, \С I ^Уз, yx = const>0, (2.5)
(£=(£1, У, 1£|2=£? + У).
Для формулировки рассматриваемой задачи в обобщенной форме умножим
скалярно в Ь2 (Й) уравнение (2.4) на произвольную функцию v е W* (Й) и
выполним интегрирование с применением формул Грина, учитывая краевое
условие (2.3). В результате придем к равенству
+ = (2-6)
где
г 1 С ( л ди dv I О ди dv . П ди dv I
[^> J \ дх дх^~ ду ду+ дх ду^~
п ди dv ди dv ди dv\ , ,
"т" Г' "ч— 5—р С -х— -С -X— 3— j dx dy.
ду дх ду дх дх ду) у
*) Марчук Г. И., Кузин В. И. Схема решения двумерного парабо-
лического уравнения методом конечных элементов в комбинации с методом
расщепления.— Препринт ОВМ АН СССР (в печати).
400
ЗАКЛЮЧЕНИЕ
Назовем обобщенным решением задачи (2.4), (2.2), (2.3) такую функцию
т
u(xf у, t), что f \\ и Й . dt < со, du/dt е L2 ((О, Т) XQ) и удовлетворяющую
д’ W 2 ( □ )
почти при каждом t е (О, Т) равенству (2.6), а также условию
(и, оу)=О, / = 0, (2.7)
при произвольных v, w (= (Q).
Согласно работам [21, 24] при сделанных выше ограничениях существует
единственное обобщенное решение задачи, для которого справедливо нера-
венство
т
о
Для приближенного решения рассматриваемой задачи введем на Q прямо-
угольную сетку, узлы которой образованы пересечением линий Xt=dhx, у;=^
— jhy. Предполагается, что 0 < с0 < (hxlhy) < ct, с0, ^ — постоянные, и пусть
h—max(hXt hy). Каждый элементарный прямоугольник Qt+1,/+1={(х, у)\ (х, т/)е
gQ, Xf^x^Xf+1, У]-^У^У]+\} триангулируем диагональю, направление
которой определяется знаком величины J/+1, у+1= j Ddxdy: если /х+1,/+1^
л _ °«+1’ /+1
^0, то Ql+1, у+1 триангулируется диагональю с положительным наклоном;
если 7/+1,/+1 < 0 —диагональю с отрицательным наклоном.
Рассмотрим область Йл с й с границей dQh, являющуюся наибольшим
объединением треугольников, принадлежащих Q. Множество пар индексов
(/, /) узлов сетки, принадлежащих QA, обозначим через Rh, а множество
индексов, соответствующих граничным узлам dQh обозначим dRh. Пусть также
в дальнейшем
01 =Л*. У)' (х, у) е |J Q/+1,/+1 Q Q,
I i )
О2=/(*. У)- (X, У)^ U О/+1,/+1П О> Л+1,/+1<01,
I «, / )
д®!, dQ2 — границы Qx, Q2 соответственно,
*? = {(*, /): (Ь /) е Rh, у?) so,},
/?,={(*> /): /)<=£*, (*,•> У}) е О2},
dR^, — соответствующие множества граничных узлов,
Г* =={(/и, п): (/тг, n)f=dRh, (пг—1, п) & R*[ (J у
Г2={(т’ n): n)f=dRh^
Tm, n —произвольный треугольник из
Г^’^={(/тг, и): (/тг, ri)t=dR^ (m—1, п— 1) R^ U^},
r^’x = {(/77, n): (/77, n)GzdR^ (/77—1, П — 1) 0 R% U ^2}.
‘Каждому узлу (х/, у/) е поставим в соответствие кусочно линейную базис-
ную функцию ф/у (х, у), определенную в § 4 гл. 2. Через х/у обозначим носи-
тель ф,7(х, у).
ЗАКЛЮЧЕНИЕ
401
Будем искать приближенное решение задачи в виде
у, t) = У а,7 (/) <р,7 (X, у), (2.9)
i. isRk
где функции aij (t) определим из системы дифференциальных уравнений
Ф«)(0 + [«Л, Фн](0 = (/. Ф«)(0, (2.10)
при начальных условиях
ОМ, Фн) = 0, / = 0, (k,l)e=Rb. (2.11)
Задачу (2.10), (2.11) можно представить в матричной форме
В^+Ла = /, 1е(О, Т), (2.12)
а(0) = 0, (2.13)
где В = (В//Н), Л = (Л,7н), В,7*/ = (Ф,7, Фн), 4i/w=[<pv, <ры], f = (fkt) - век-
тор-столбец с компонентами fkl = (f, фл/) (/). Она имеет единственное решение
a = (aftl)t однозначно определяющее uh(x, у, t)t и для uh (х, у, t) справедливо
неравенство (рм. вывод (6.15) из § 6 гл. 3)
т т
max ||Uftlj2(0+H“A> “л]Л^С ИЛМ- (2-14)
/6(0, Г) о 6
Для получения оценки скорости сходимости учтем, что поскольку в приве-
денном выше алгоритме сетка прямоугольная, то расстояние между dQ и dQh
имеет порядок 0(h). Поэтому (как следует из доказательства теоремы 2 из
§ 7 гл. 2) справедливо лишь следующее утверждение об аппроксимации: если
обобщенное решение и (х, у, t) принадлежит WI ((0, T)xQ), то существует
такая линейная комбинация У] Ьц (/) ф// (х, у), что
(/. /)6«*
/Т \1/2
Используя этот результат и повторяя рассуждения из § 6 гл. 3, приходим
к оценке скорости сходимости вида
/Г \1/2
max |«-uA||(0+H 1«-«лРН7.(О.<Й ^Ch1^. (2.15)
/е(0, Т) \й I
Рассмотрим теперь алгоритм отыскания численного решения задачи (2.12),
(2.13). Прежде всего отметим, что матрицу В в (2.12) можно приближенно
заменить диагональной матрицей Ь с элементами Р/гШ = cpkidxdy. В этом
случае задача (2.12), (2.13) заменяется следующей:
D^+Aa = f, а(0) = 0, (2.16)
где за решением оставлено прежнее обозначение а = (л^). Можно показать*),
*) Акопян Ю. Р., Оганесян Л. А. Вариационно-разностный метод
решения двумерных линейных параболических уравнений. —ЖВМ и МФ, 1977,
17, № 1, с. 109—119.
402
ЗАКЛЮЧЕНИЕ
что приближенное решение определяемое решением (2.16), имеет тот же
порядок точности, что и до перехода от Л к Ь.
Если провести вычисление элементов матрицы А, то можно заметить,
что для нее справедливо представление
А = Aj-f-А2 +А3 +А4, (2Л7)
где матрицы Аа задаются следующими выражениями:
пЬт+1.п + №+1. п + ат-1, п)Ьт.П~
nbm-i.n + WW. nbm+l,n + W-l. nb^n,
(Aib)mi я n j bm n+1+(am’ n _|_ i + am’ n _ () bm n
~m, n h t am, n h t Rm, n h
am, n — \°m, n-1 । Pm, n + \°m, n+1 ' Pm, n —
n~ arn-}-\, n H-l^m+1. n+i“b(am’H-1, (2.18)
+ n — 1) n~ am’— 1, n — l^m-1, n-l + Pm+1, n + l^m+1, n+l"b
~bPm — 1, n — 1, n-1,
am+1, n — l^m+1, n-l “b i, n —l+am — 1, «4-l)^m,n
am’—1, n+п+1“ЬРт’ч-1, n — l^m+1, n-l+ Pm — 1, n + n+l>
где a"1;/1, l* имеют ВИД
am'
П__
П
„m,
n
Qi Qi
-2 D^^d-^-dxdy+ j* A^^j2dXdy+
Qi Qa
+ У B(^)2dxdy+2 J Dd^d^dxdy,
Q 2 Я 2
C J Чп+l, nd(fm,n\ J-4
„ = \ A-----------5^- dx dy— 1 D -------ч--
n J \ dx dx / y J \ dx dx
Qi Qi
^m+l, i f л 1» n d^m, n\ Att ।
---—-----x— ax dy + i A --5=---x— dx ay+
dx dy ] J \ dx j * 1
Q2
, C n( d(fm + i.nd(Pmin Ь<рт1пд<?т \
J \ dy dx dx dy )
m, n
'm, n u™m ± 1, n n
„".n fpf »Рт,Я±1»Рт,»\
“m, ' dy dy )
Qi
dx dy —
Oi
d(tm. п±1дЪп.п ,
dy dx ’ *"
ftPm, n ± I
dx
д(?т,
by
dxdy,
(2.19)
ЗАКЛЮЧЕНИЕ
403
т п С п I дфт +1, п ± 1 ^т, п
«<П±1,Я±.= --------------дГ~
Qi
„т.п ________С п (дУт±1, п + 1 ^т, п
ат±1,п + 1 } \ ду дх
Qa
d<Pm±l,n±I^Pm.
дх ду
дфт + 1, п р 1 ^Ф/п, п \
дх ду J
dxdy,
dx dyt
гп, п _ С /> (^т±\, п дфт> п ___
J \ ду дх
>т. п ___ С р / ^т, п ± 1 ^т, п _
'т,п±\—\) ду дх
Q
дЧ>т+1,пдЧ>т,п\. .
—Тх-----dT)dxdy’
/^Ф/п±1, п±1 ^Фт, п ^Ф/п±1, п ± 1 дЧт,п\, J
—дГ^—Тх--------------Тх------orrxdy‘
(д^т ± 1, п + 1 ^т, п дфт± 1, /гzjz 1 ^Фди, п\ . ,
------Тх--------Тх------дГГхЛу-
Кроме того, проведя простые вычисления, имеем: если (хт, уп) е Qx, то
ат±1. л= (ft? “ ЛХ ЛУ’
й1Г1хт±1, я
ат,п±\= (ftj ~ dX dy' (2’20)
^1Пхт, п±1Пхяг,п
ат’± 1, п± 1 ~h^fTy йУ' ат'± 1, п +1 “0’
^1Пхги±1, п±1Пхя1,п
если (хт, уп) е Q2, то
«т±1’.п= ^c+hxh^)dXdy'
Й2^ХЛ1± 1, пПхт, п
ат.п±1= (ч + h^}dXdy’
1 П^яг, п
ат±1, п±\ ~0’ ат± 1, п +1 = hxhy Ddxdy.
Из приведенных формул для (З™’/2 следует, что
„т, п __ („т, п \„т'п А (^пг»п _Ьгугп»п \
ат, п \а/и4-1, п । ат— 1, п) \ат, п-^ ^т, п—
(Пт,п л_г/т>п \ (пт>п -i_rvm>n \
\ат— 1, п — 1 ' ат + 1, «4-?/ \ат-[- 1, п — I"« ат— 1, n + 1/’
пт, п __ry^±l»'i Пгп, п _____r^rn.n^i
ит±1,п ^т, п ’ а/и, п±1 ат, п ’
(2.21)
„т,п _______rfin±\.n±.].
°v/i±l,/i±l а/п, п »
Рт. п ___ ат+\.п
т + \,п гт.п
Рт.п _______ о/п±1,п + 1
wi±l,n±l Рт, п *
„т.п ______„т.п
um±l,n + l ат±1,п + Р
Рт. п ___ от.п±\
т,п±_\ Рт,п »
Рт. п _____ rw± 1» п + 1
m±l.n-i-l Рт, п *
(2.22)
404
ЗАКЛЮЧЕНИЕ
Найдем условия, при выполнении которых матрица будет положительно
полуопределенна. Для этою рассмотрим соотношение
(Aib, Ь)2= 2 ат+1, п^т+1, п + (ат'+1, п~^ат— 1, п) ^т,п ~
(т,
1, пЬт-1, п) Ьт,п+ 2 (Pm +1, /Ап+ 1» п + P/n-1, rfim— 1, п) Ьт, тг
(т, n)(=Rh
Используя свойства (2.22), получаем, что вторая сумма равна нулю. Для
первой же суммы, применяя (2.21) и перегруппировывая члены, имеем
(Ы, b)2= 2 «т’+1,я(^,я-^+1,л)8 +
(т, /Ое/^иг?
+ S 1, п (^т, n — bfn+l, п)2»
(m, /i)e/?2Ur2
откуда, привлекая (2.20), получаем
(А А Ь)2 =
= S 5 “ Txh^dxdy (b">.n — bm+i,n)2 +
(т, /г)е^иг^ п^т, п
~Ь hxhy^ п bfn+i> п)2
(т, /г)е/?2иГ2 %т+1, п^%т, п
и можно сделать заключение, что условие
т
т, п
л , , hx
А ах ау^ -г-
hy
у D dxdy
Тт, п
(2.23)
является достаточным для положительной полуопределенности матрицы Дх.
Аналогичным образом показывается, что если
(* ^17
\ Bdxdy^^
„CIQ Х
tn, п"
D dx dy
VTт> п cz Q,
т, п11
то матрица А2 также положительно полуопределенна.
Если провести простые преобразования, то аналогичным образом получаем
(Аз^, b)2 Ddxdy(bm>n bm+i} л+х)2,
(m, у %m+l, n+i нт, п
(А^Ь, b)2— / hxhy D dx dy\(bmtn ^т+ъп-^^
(т, х \ нт+1, п-1 П нт, п /
Отсюда, учитывая специальный выбор направления диагоналей в Q/+i,/w
заключаем, что Д3, Д4 также положительно полуопределенны. (Отметим, что
вся матрица А является положительно определенной.)
ЗАКЛЮЧЕНИЕ
405
Полученное представление А в. виде суммы четырех положительно полу-
определенных матриц позволяет для решения (2.16) использовать методы рас-
щепления, в частности двуциклический метод расщепления, схема которого
в применении к (2.16) имеет вид
(£» + у лх) aJ-^ = (d - А^ а1-\
(£> + | А^а^2 =^b-~A^aJ-^,
(£> + j Л8) = (£>- Л3) аГ™,
[Ь+~А,\(а1-тпЦЬ-Х А^а)-^,
V 7 ' ' (2.24)
(£> + у Л4) =(£>- J (а^+тЛ),
(£>+у А3)а^1/2=(б—J Лз)а'+1^,
(б + у Ла) ai+™ = (Ь —£ А^ а^1'2,
(д+-р1)а/+1 = (£>_-1д1)вЛзл
где x = T/J, j=l, ...» j, а°=0,
Эта схема позволяет по известным векторам al"1, fi определить вектор аЦ
который принимается в качестве приближения к a (tj) в момент времени tj.
На основе а/ строится приближенное решение задачи (х, у, tj)
= 2 „ ak, flkl (*’ УУ
(/?,/) е/Г
Если, как и в п. 1, предположить, что для каждой из матриц Аа выпол-
нено ограничение т || £>-1Да £2 < 2, то легко показать, что схема (2.24) обла-
дает вторым порядком аппроксимации по т и устойчива. На основании этих
утверждений можно оценить погрешность, допускаемую при решении задачи
(2.16) с использованием схемы (2.24), а также результирующую погрешность
в определении приближенного решения исходной задачи (2.4), (2.2), (2.3)
в произвольный момент времени / = 1, ..., J.
Итак, алгоритм численного решения рассматриваемой задачи для парабо-
лического уравнения определен полностью, и для полученная решения в точ-
ках tj достаточно последовательно решить задачи (2.24), ка'ждая из которых
фактически сводится к решению одномерных задач с использованием метода
прогонки.
В заключение отметим, что выше были рассмотрены равномерные сетки’
по каждой из переменных и для этого случая было получено разложение
сеточного оператора А на сумму одномерных, что позволило применить один
из методов расщепления. Аналогичные результаты могут быть получены для
некоторых нерегулярных сеток частного вида, а также задач Неймана и неод-
нородных краевых и начальных условий.
§ 3. Решение нестационарного уравнения переноса. В теории ядерных
реакторов важную роль играет нестационарная задача для односкоростного
уравнения переноса нейтронов. Если принять обозначения из § 7 гл. 4, то
406
ЗАКЛЮЧЕНИЕ
данную задачу можно записать в следующем виде:
1 2л
1 ди , ди , ди , Оо С , , С > । *, । г»
VV \ “<*> у- 0^+А
о о
и = 0 на dG, + (3.1)
u — ul0), t = 0,
где t е (О, Т), Т <оо, и = (х, у, у, ф, /) —плотность потока нейтронов, обла-
дающих скоростью о>0. Ради простоты предполагается, как и ранее, что
ос = о —(Ту^ ос0 >0, асо —постоянная.
Воспользовавшись преобразованиями из § 7 гл. 4, сведем (3.1) к задаче
2 S“,z,+P’>
Z=1
u(k}=Q на dG, + < 0, (3.2)
UW = U\§, / = 0, 6=1, 2, 3, 4,
которую будем решать с помощью алгоритма, изложенного в пп. 7.1, 7.2 гл. 4.
Пусть в дальнейшем для упрощения обозначений принимается
^lxi ~ "hx» \ = Ну- “ hy
(отметим, что все полученные ниже результаты остаются справедливыми и
в случае неравномерных сеток по х, у). Тогда, вводя те же базисные функции
ф«7 (*» что и в § ? гл. 4, путем аналогичных рассуждений перейдем от
(3.2) к решению системы уравнений *)
7 о 1 ® А) +1 п'*’ I 02 ® Лг) +$<*>) «'*’ =
= 5 P<fc>»SU»>+/W (3.3)
/==1
с начальными условиями
= / = 0, £= 1, 2, 3, 4, (3.4)
где при формировании векторов и матриц нумерация их элементов начиналась
следующим образом: при 6=1 от угла х = 0, у = 0', 6 = 2 —от х = а, у = 0’,
6 = 3 —от х = а. у = Ь; 6 = 4 —от х — 0, у = Ь, и здесь
(fe) M(fe) u(k) (k) (k) (k) \t
u —V4, 1’ “2, 1» UN—\,1> “l.M — 1’ U2,M — 1’ UN — \,M — 1) ’
f(k) 1 f(k) f(k) f(k) f(k) XT
I "“VI,1’ 12, P IN— 1, P 11,M — P 12, M — 1.........IN — 1, M —.1) »
w(0)““Vu(0)l, P и(0)2, P u(0)N—1, P “(0)1,M — P “(0)2, M— P •••
\T
•••» “(O)AT—1, M — 1) >
d^k\ 6^—диагональные матрицы, элементы а(Л) определяются по формулам
аШ7в{а//’ 6=1; 6 = 2; ол_/ Л1_у., 6 = 3; oz M_j, 6 = 4|,
*) См, также [40].
ЗАКЛЮЧЕНИЕ
407
матриц <j(sk) определяются аналогичным образом
выражениях о на
cs. Компоненты векторов /(А),
fc = l,
k = 2,
где ot-y = (cy, ф/у), а элементы
путем замены в приведенных
имеют вид
(f(n, Фг/)
A’jv-i,/).
Фдм, м-/), * = 3,
Г’.Ф/.Ж-/), * = 4>
Матрицы Р1*’Z) здесь имеют вид
Р<1, 1>=р(2. 2> = pi3, »)==/>.4, 4> =fM0iN,
pil, 2) = /5(2. D — pCb 4)
р(1» 3)_=р(3, 1)=_.р(2, 4>
р(1, 4) = ^(4. 1)==р(2, 3)
ГО П)
N — 1,
£ = 1,
k = 2
(И(0)’ ^N-i, M-j)f k==^
(U(0)’ Ф/.2И-;), ^ = 4‘
=А«.2’=Р2®Р1(
=^<з. 2>=р2 /дг»
а Го 1
р2= / |л4 — 1.
1 о
₽‘=koj
В дальнейшем нам будут полезны следующие
матриц:
p{k, I) е р(т, l)__p(k, т)
легко проверяемые свойства
a = diag (okk),
(3.5)
и матричные операторы
Bi = diag (Bb kk),
£1.^ = 1^*’
= ^.kk = ^> *=1.2, 3,4,
/>(1. 1) p(l» 4>
— diag (о5,
В2 — о — Os
S.
p(4. 4)
“(0)\/-
№ Ф/Д
(M(0)» VN-ij),
Тогда (3.3), (3.4) можно представить как
—+ (Bl + B2) а = /, а = а(0), / = 0.
Пусть L2, h — гильбертово пространство вектор-функций со
произведением и нормой вида
4 дг—1 м — 1 1 л/2
(и, р) = 2 2 3 Р? и№ (V. Ф) ’ (Y> Ф)
k = 1 i = 1 j = 1 О 0
[u||=(a, «)1/2.
(3.6)
скалярным
408
ЗАКЛЮЧЕНИЕ
Из результатов § 7 гл. 4 следует, что матрица Вг является нижней
треугольной с положительными элементами на диагонали и неположительными
вне ее. Кроме того, положительно полуопределенна и обращение В{ не пред-
ставляет труда. Оператор В2 является симметричным в L2, h и положительно
определенным: (В2и, и) ос0 || и ';2. Эти свойства В2 гарантируют сущест-
вование и единственность - решения и (у, ф, /) задачи (3.6). причем легко
показать, что для и (у, ф, 0 справедлива априорная оценка
[Т \1/2 / /Т \1/2\
max f«[(/)+ f ||«,2d/ ||a(0)J+ ( У *dt . 3,7)
fe(0, п \б’ / \ \oJ / /
Если же предположить, что точное решение исходной задачи (3.1) при
каждых фиксированных значениях (у, ф, /) принадлежит (G), то так же,
как и в § 7 гл. 4 имеем
/ Т \ 1/2
max II «||(0+1 II ит~~и It2 (0 dt] ^Ch, (3.8)
re (0, Т)" " \0J 1/11 /
где h = max (hx, hy), вектор ur=«r(y, ф, t) имеет ту же структуру, что и
и = и(у, ф, /), но с элементами (и, ф;/), равными осредненным значениям точ-
ного решения задачи (3.1).
Указанные свойства Въ В2 позволяют сформулировать следующий алго-
ритм решения (3.6) на основе метода двуциклического покомпонентного рас-
щепления:
\ \ / у (3-9)
(7 + р2)/?-1/3=(7-р2)^3,
»/+1*3 = и'-1/8 + 2т/,
(/ + }в2)и^3 = (7-4в2)«/+1/3.
(/ + ~2
где 7—единичная матрица той же размерности, что и Bh
т = &t = T/J\ tf~j At, u° = u{Q)f
Чу
{/-г
(3.10)
(3.11)
(3.12)
Из свойств Вь В2 следует, что схема (3.9) — (3.11) абсолютно устойчива,
причем
max || uJ\\^C (|| u(0) i'4-max' [Ц). (3.13)
i i
Если же предположить, что т || Ва J < 2, то при необходимой гладкости реше-
ния задачи (3.6) схема (3.9) — (3.11) будет также обладать вторым порядком
аппроксимации по т. Отсюда можно сделать соответствующие выводы о ско-
рости сходимости векторов и. к векторам «г(/у) в произвольный момент вре-
мени tj.
Остановимся на алгоритмах решения системы (3.9) — (3.11). Поскольку
А Т А
матрица 14~ % является нижней треугольной, то отыскание решения пер-
вого уравнения (3.9) не представляет труда при любых фиксированных р/Л),
ЗАКЛЮЧЕНИЕ
409
T]fA), и оно может быть найдено по формулам, аналогичным (7.19) из гл. 4.
Рассмотрим теперь второе уравнение из (3.9), записав его как
^ +’2'^2) w = (3.14)
где и = 4?~1/3, g = — у В2 j г/“2/3, или как систему
4
u'ft) + J ~ &**’ l)Su<l> +g'*>, (3.15)
Z = 1
6=1, 2, 3, 4.
Данную систему можно решить явно. Действительно, подействуем на (3.15)
оператором Р^,п' S (jм ® 1N + ~ . Тогда получаем уравнение вида
p(m, k) Su(k) = .1. р<>”’ k>ClM®lN+l- O,k> Г №{k’ l)Su^ +
l = \
+ (3.16)
С учетом свойств (3.5) имеем
Р(т- k) ( / Л1 ® d'*> f | ^P(k-1> =
Следовательно, система (3.16) эквивалентна следующей:
P(m’ftWft) = A 2 + 0<т'У ^sm)P(m'l)SuW +
+ p(m, k>(lM®IN + ~ б'*’)’1 Sg(k\
откуда получаем
2 p<m’ д^'Г-р^Гх
fe = l
~1 (3 17)
= + | /7v + |d(ft)-| a^)'1 X
x у p(fc, l)Sg(l) +g(*)l fe=l, 2, 3, 4.
l = \ J
Если учесть, что — диагональные, то отыскание элементов векто-
ров и(Л), согласно (3.17), может быть осуществлено по явным формулам. Так,
например, выражения для компонент а'А' имеют вид
Ц<1 _ -2 I х
И 2 + та;.).’ \2+та})’ —та^’/;- л
xS^'+g^+^’-z, м -y+^^-^+g;-}'). (3.18)
410
ЗАКЛЮЧЕНИЕ
Выражения, аналогичные (3.17), (3.18), могут быть вписаны для решения
первого уравнения из (3.11).
Выполним теперь аппроксимацию уравнений по угловым переменным (у, ф).
Для этого введем аппроксимацию интеграла Sep с помощью подходящей квад-
ратурной формулы:
L D
2 2 А1аЧ>(Уь trf).
Z=1 d = 1
где Aid—веса, (yz, ф^)~узлы выбранной формулы. Заменяя интегралы
в (3.9) —(3.11) квадратурными формулами и рассматривая эти системы при
y = yz, / = 1, ..., L, d=l, ..., D, приходим к системе линейных алге-
браических уравнений, аппроксимирующих исходную задачу,
(/+1 А. и) в£Т'3-(/--1- 4,. м) =:.г’л.
4/'/3 = икГ,/3+М/>
(/ +у К Ъ la) ,/3.
(3.19)
(/ +| К U) 4z+1 = (/К 2/3 ,
где векторы^ имеют туже размерность, что и! в (3.9) — (3.11), ttfd =
= "<О> (rz, Bi, zrf = ^i(Yz. ’I’rf). а оператор B2, м определяется
образом:
1> ... р<1. 4>-1 L D
следующим
£(4.1) pli, 4)
S S Лг</Фм-
Z=1d = l
Как отмечалось, первое и последнее уравнение в (3.19) легко могут быть
решены по явным формулам, подобным (7.19) из гл. 4. Решение же второго
уравнения (3.19) реализуется по формулам
fjv+i *’Т х
х 2 2 2
т = \ l = \d^\ /
k^\......4, /=1. ..., L, d=l, ..., £>,
где
и по тем же формулам с заменой / на /4-1 реализуется решение четвертого
уравнения (3.19).
Таким образом, алгоритм численного решения нестационарного уравне-
ния определен. В результате мы пришли к абсолютно устойчивой схеме,
имеющей на гладких решениях второй порядок по т и первый по h. Порядок
аппроксимации по угловым переменным зависит от выбранной квадратурной
формулы. Отметим, что в приведенном алгоритме исходная задача сводится
к проведению вычислений по явным формулам без какого-либо итерационного
процесса и обращения плотных матриц, что делает этот алгоритм простым и
удобным на практике.
ЛИТЕРАТУРА
В списке указывается литература, содержащая более подробное изложение
отдельных вопросов
I. Учебная литература
1. Бахвалов Н. С, Численные методы. —М.: Наука, 1975.
2. Владимиров В. С. Уравнения математической физики. — М.: Наука, 1967.
3. Воеводин В. В. Численные методы алгебры.—М.: Наука, 1966.
4. Воеводин В. В. Линейная алгебра. — М.: Наука, 1980.
5. Крылов В. И. Приближенное вычисление интегралов.—М.: Наука, 1967.
6. Ладыженская О, А. Краевые задачи математической физики. —М.: Наука,
1973.
7. Марчук Г. И. Методы вычислительной математики.—М.: Наука, 1980.
8. Марчук Г. И., Шайдуров В. В. Повышение точности решений разностных
схем. —М.: Наука, 1979.
9. Михайлов В. П. Дифференциальные уравнения в частных производных. —
М.: Наука, 1976.
10. Никольский С. М. Курс математического анализа. — М.: Наука, 1973, т. 1,2.
11. Самарский А, А., Николаев Е. С, Методы решения сеточных уравнений.—
М.: Наука, 1978.
12. Треногий В. А. Функциональный анализ.—М.: Наука, 1980.
13. Фаддеев Д. К., Фаддеева В. Н. Вычислительные методы линейной алгебры.—
М.: Физматгиз, 1963.
II. Монографии
14. Бабушка И., Витасек 3., Прагер М. Численные процессы решения диффе-
ренциальных уравнений. — М.: Наука, 1969.
15. Бесов О. В., Ильин В. П., Никольский С. М, Интегральные представления
и теоремы вложения. — М.: Наука, 1975.
16. Варга Р. Функциональный анализ и теория аппроксимации в численном
анализе.—М.: Мир, 1974.
17. Канторович Д. В., Акилов Г. П. Функциональный анализ в нормированных
пространствах.—М.: Физматгиз, 1959; Наука, 1977.
18. Канторович Л. В., Крылов В. И, Приближенные методы высшего анализа. —
М.: Гостехиздат, 1949.
19. Кейз К., Цвайфель П. Линейная теория переноса. — М.: Мир, 1972.
20. Красносельский М. Д., Вайникко Г. М. и др. Приближенное решение опе-
раторных уравнений. — М.: Наука, 1969.
21. Ладыженская О. Д., Солонников В, Д., Уральцева Н. Н. Линейные и ква-
зилинейные уравнения параболического типа. — М.: Наука, 1967.
22. Ладыженская О. А., Уральцева Н. Н, Линейные и квазилинейные уравнения
эллиптического типа.—М.: Наука, 1973.
23. Ланкастер П. Теория матриц.—М.: Наука, 1978.
24. Лионе Ж.-Л., Мадженес 3, Неоднородные граничные задачи и их приложе-
ния.— М.: Мир, 1971,
412
ЛИТЕРАТУРА
25. Люстерник Л. А., Соболев В. И. Элементы функционального анализа. —
М.: Наука, 1965.
26. Марчук Г. И. Методы расчета ядерных реакторов. — М.: Госатомиздат, 1961.
27. Марчук Г. И., Кузнецов Ю. А. Итерационные методы и квадратичные функцио-
налы. — Новосибирск: Наука, 1972.
28. Марчук Г. И., Лебедев В. И. Численные методы в теории переноса нейтро-
нов.— М.: Атомиздат, 1971.
29. Михлин С, Г. Вариационные методы в математической физике. — М.: На-
ука, 1970.
30. Михлин С. Г. Проблема минимума квадратичного функционала. — М.:
Гостехиздат, 1952.
31. Михлин С. Г. Численная реализация вариационных методов. — М.: Наука,
1966.
32. Михлин С. Г., Смолицкий X. Л. Приближенные методы решения дифферен-
циальных и интегральных уравнений. — М.: Наука, 1965.
33. Оганесян Л. А,, Ривкинд В. Я., Руховец Л. А. Вариационно-разностные ме-
тоды решения эллиптических уравнений. Ч. I.—Дифференциальные урав-
нения и их применение. Вильнюс, 1973, вып. 5.
34. Оганесян Л, А., Руховец Л. А. Вариационно-разностные методы решения
эллиптических уравнений. — Ереван: Изд-во АН АрмССР, 1979.
35. Соболев С. Л* Некоторые применения функционального анализа в матема-
тической физике. — Л.: Изд-во ЛГУ, 1950.
36. Стренг Г., Фикс Дж. Теория метода конечных элементов. — М.: Мир, 1977.
37. Тьюарсон Р. Разреженные матрицы.—М.: Мир, 1977.
38. Файвежс (Fairweather G.) Finite element Galerkin methods for differential
equations. — N. Y.; Basel. Lecture notes in pure and applied mathematics,
v. 34.
III. Статьи
39. Агошков В. И. О гладкости решений уравнения переноса и приближенных
методах их построения. I, II. — В кн.: Дифференциальные и интегро-диффе-
ренциальные уравнения. Новосибирск: ВЦ СО АН СССР, 1977, с. 44—72.
40. Агошков В. И. Решение уравнения переноса в X — Y-геометрии методом ин-
тегральных тождеств. — Новосибирск: ВЦ СО АН СССР, 1979. Препринт
№ 159.
41. Агошков В. И. Приближеннее решение уравнения переноса в плоском слое.—
Численные методы механики сплошной среды, 1973, 4, № 4.
42. Агошков В. И., Степанов А. И. Проекционная форма интегральных тождеств
для уравнения четвертого порядка. — Новосибирск: ВЦ СО АН СССР, 1980.
43. Агошков В. И., Шутяев В. П. Проекционно-сеточный метод решения урав-
нения переноса в сферически-симметричной области. — В кн. Численные
методы и статистическое моделирование в теории переноса, Новосибирск:
ВЦ СО АН СССР, 1980.
44. Бабич В. М. К вопросу о распространении функций. — УМН, 1953, VIII,
вып. 2 (54), с. 111—113.
45. Бахвалов Н. С. К оптимизации методов решения краевых задач при наличии
пограничного слоя.' — ЖВМ и МФ, 1969, 9, № 4, с. 841—859.
46. Бабушка (Babuska I). Approximation by hill functions. Tech. Note BN-648.—
Inst, for Fluid Dynam. Appl. Math. Univ, of Maryland, 1970.
47. Владимиров В. С. Математические задачи односкоростной теории переноса
частиц. — Труды МИАН СССР, 1961, 61.
48. Владимиров В. С. Особенности решения уравнения переноса. — ЖВМ и
МФ, 1968, 8, № 4.
49. Владимиров В. С. Численное решение кинетического уравнения для сферы.—
Вычислительная математика, 1958, № 3, с. 3—33,
ЛИТЕРАТУРА
413
50. Волевич Л. Р., Палеях Б. П. Некоторые пространства обобщенных функций
и теоремы вложения. — УМН, XX, вып. 1 (121), с. 3—74.
51. Волков Е. А. Метод сеток для конечных и бесконечных областей с кусочно
гладкой границей. —ДАН СССР, 1966, 168, № 5, с. 978—981.
52. Волков Е. А, О методе регулярных составных сеток для уравнения Лапласа
на многоугольниках. — Труды МИАН СССР, 1976, 140, с. 68—102.
53. Гермогенова Т. А. Задачи с сосредоточенными источниками в стационарной
теории переноса. — М.: ИПМ АН СССР, 1971.
54. Гермогенова Т. А. Локальные свойства решения уравнения переноса.—
ДАН СССР, 1969, 187, № 5.
55. Дуглас, Дюпон (Douglas J., Dupont Т.). Galerkin methods for parabolic equ-
ations. — SIAM J. Numer. Anal., 1970, 7, № 4.
56. Дьяконов E. Г. Асимптотическая минимизация вычислительной работы при
применении проекционно-разностных методов. — В кн.: Вариационно-раз-
ностные методы математической физики. Новосибирск: ВЦ СО АН СССР,
1978, с. 149—164.
57. Дьяконов Е, Г. Некоторые классы операторов, эквивалентных по спектру
и их применению. — В кн.: Вариационно-разностные методы решения за-
дач математической физики. Новосибирск, 1976.
58. Зламал (Zlamal М.). On the finite element method. — Numer. Math., 1968,
12, № 5, p. 394—409.
59. Зламал (Zlamal MJ. A finite element procedure of second order accuracy. —
Numer. Math., 1970, 14, № 4, p. 394—402.
60. Зламал M. Криволинейные элементы в методе конечных элементов. — SIAM
J. Numer. Anal., 1973, 10, № 1.
61. Злотник А. А. Оценка скорости сходимости в Ь2 проекционно-разностных
схем для параболических уравнений. — ЖВМ и МФ, 1978, 18, № 6, с. 1454—
1465.
62. Канг, Хансен (Kang С. М., Hansen К. F.). Finite element methods for reactor
analysis. — Nucl. Sci. Eng., 1973, 51, № 4.
63. Канторович Л. В. Один прямой метод приближенного решения задачи о ми-
нимуме двойного интеграла. — Изв. АН СССР, ОМЕН, 1933, № 5, с. 647—
652.
64. Келлог (Kellog R. В.). Higher order singularities for interface problems. — In:
The Math. Foundat. of the Finite Element Meth, with Appl. to Partial Diffe-
rent. Equations. N. Y.: Academic Press, 1972, p. 589—602.
65. Кондратьев В. А. Краевые задачи для эллиптических уравнений в областях
с коническими или угловыми точками. — Труды Моск, матем. общ., 1967,
16, с. 209—292.
66. Курант (Courant R.). Variational methods for the solution of problems of equ-
ilibrium and vibrations. — Bull. Amer. Math. Soc., 1943, 49, p. 1—23.
67. Лебедев В. И. Итерационный метод с чебышевскими параметрами для опре-
деления наибольшего собственного значения и соответствующей собствен-
ной функции.’—ЖВМ и МФ, 1977, 17, № 1, с. 101—108.
68. Мартынюк А. Е. Некоторые новые приложения методов типа Галеркина, —
Матем. сб., 1959, 49 (91), № 1.
69. Марчук Г. И., Агошков В. И. О выборе координатных функций в обобщенном
методе Бубнова—Галеркина. — ДАН СССР, 1977, 232, № 6, с. 1253—1256.
70. Мацокин А. М. Автоматизация триангуляции областей с гладкой границей
при решении уравнений эллиптического типа, — Новосибирск: ВЦ СО АН
СССР, 1975. Препринт № 15.
71. Миллер, Левис, Россоу (Miller W. F., Lewis Е. Е., Rossow Et С.). The appli-
cation of phase-space finite elements to the two-dimensional neutron transport
equation in X — /-geometry, — Nucl. Sci. Eng., 1973, 52, № 1.
72. Митчелл A. P. Введение в теорию метода конечных элементов. — В кн.:
The Mathematics of Finite Elements and Applications, L.; N, Y.: Academic
Press, 1973,
414
ЛИТЕРАТУРА
73. Михлин С. Г. Вариационно-сеточная аппроксимация. — Записки научн.
сем. ЛОМИ. Л.: Наука, 48, с. 32—188.
74. Михлин С. Г. Некоторые достаточные условия сходимости метода Галер-
кина.— Ученые записки ЛГУ, № 135, серия матем., вып. 21, 1950.
75. Оганесян Л, А. Сходимость вариационно-разностных схем при улучшенной
аппроксимации границы. —ДАН СССР, 1966, 170, № 1.
76. Петришин (Petryshyn W. V.). Direct and iterative methods for the solution
of linear operator equations in Hilbert space. — Trans. Amer. Math. Soc.,
1962, 105, p. 136—175.
77, Польский И. И. Об общей схеме применения приближенных методов. —
ДАН СССР, 1956, 111, № 6.
78. Польский Н. И. Проекционные методы в прикладной математике. — ДАН
СССР, 1962, 143, № 4, с. 787—790.
79. Слободецкий Л. Н. Обобщенные пространства Соболева и их приложение
к краевым задачам для дифференциальных уравнений в частных производ-
ных. — Ученые записки Ленингр. гос. пед. ин-та, 1958, 197, с. 54—112.
80. Стренг, Фикс (Strang G., Fix G.). A Fourier analysis of the finite element
variational method. Preprint, 1970.
81. Тихонов A. H., Самарский А. А. Об однородных разностных схемах. —
ЖВМ и МФ, 1961, 1, № 1, с. 5—63.
82. Федорова О. А. Вариационно-разностная схема для однородного уравнения
диффузии. — Матем. заметки, 1975, 17, № 6.
83. Юкаи (Ukai S.). Solution of multi-dimensional neutron transport equation
by finite element method, —J, of Nucl, Science and Technology, 1972, 9(6),
p. 366.
. ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Аппроксимация кусочно линейная 109.
115
Базис 12, 21
Базисные функции 21
----- билинейные 120
-----Куранта НО
----- кусочно квадратичные 125
-------линейные 100, ПО, 115
-------постоянные 97
Вариация функционала вторая 8
----- первая 8
Восполнение функции кусочно линей-
ное НО
Метод моментов обобщенный 60
— наименьших квадратов 56
--------обобщенный 59
— проекционный 63
— разделения области 66
— разностный 15
— расщепления 394
— Ритца в энергетических пространст-
вах 26
---классический 23
— сноса краевых условий 190
— штрафа 72, 191
Методы вариационные 12
Неравенство Гельдера 98
— Фридрихса 182
Задача со свободными концами 9
— с фиксированными концами 7
Интегрирование численное 237
Краевая задача первая 39
---- вторая 39
---- третья 39
Краевые условия главные 31
----естественные 10, 31, 54
Конечные элементы 95
Константы в оценках погрешностей
248
Криволинейные элементы 135
Метод аппроксимации интегральных
тождеств проекционный 327
-----------разностный 324
---- области 130
Метод Бубнова — Галеркина 42
— Галеркина — Петрова 65
— интегральных тождеств 255
--------, проекционная форма 257
--------, формулировка обобщенная
321
конечных элементов 17
Оператор ортогонального проектиро-
вания 51
Ортогональная проекция 51
Ортопроектор 51
Основная схема алгоритмов 21
Отношение Рэлея 280
Оценка скорости сходимости в L2
165
Подходы к решению задачи с неодно-
родными краевыми условиями 190
Полудискретное приближение Бубно-
ва — Галеркина 215
Построение базисов в области с кри-
волинейной границей 130
Преобразования изопараметрические
135
— треугольников 139
— четырехугольников 136
Проблемы выбора базисных функций
68, 83, 90
Продолжение функции 132
Проектор 51
Проекционный алгоритм 14
Проекционно-сеточная схема для вто- .
рой краевой задачи 179
-------- гиперболического уравнения
218, 223
416
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Проекционносеточная схема задачи
Дирихле 182
-------- интегрального уравнения 230
--------обыкновенного дифференци-
ального уравнения 160
-------- параболического уравнения
205
-------- третьей краевой задачи 170
--------Уравнения переноса 351, 356,
371
-----с применением сингулярных
функций 200
Проекционно-сеточные алгоритмы 17
Пространства 0, 97
— С, Wk 96
Пространство LD 96
— Wl2 34
— Wl2 46, 97
— Wl 33
Равномерная линейная независимость
базиса 81, 103
Решение классическое 27
— методом интегральных тождеств вы-
рождающегося уравнения 266
-----------задачи на собственные зна-
чения 278
----------- параболического уравне-
ния 274
----------- уравнения Гельмгольца
300
--------------диффузии 261, 303
-------------- переноса 270, 306
--------------Пуассона 296
--------------четвертого порядка 289
— обобщенное 28, 171, 206, 289, 308,
340
— системы обыкновенных дифферен-
циальных уравнений 215, 222
Сильно минимальная система 81
Симметризация задач для уравнения
переноса 337
Сингулярные функции 75, 200
След функции 172
Сплайны кубические 157
Схема Кранка — Николсона 216
— неявная 216
— явная 215
Теория аппроксимации Стренга —- Фи-
кса 145
Уравнение Пайерлса 232
— Эйлера 9
Условия сопряжения 37
Устойчивость 77, 244
— численная 79
Формула Гаусса 239
— интегрирования по частям 40
— прямоугольников 238
— Симпсона 239
— трапеций 238
Формулы Грина 40
Функции модифицированные 105
— с конечными носителями 17
— сингулярные 75, 200
— финитные 17, 95
Функции-крышки 100
Фурье-преобразование 146
Число обусловленности 247
--- спектральное 105
Энергетическое пространство 27
Эрмитово пространство 154
В — сплайны 154
L — полнота системы функций 51