/







































































































































































































































































Автор: Дубов Ю.А. Травкин С.И. Якимец В.Н.
Теги: анализ кибернетика математика системный анализ
Год: 1986



Текст
ТЕОРИЯ И МЕТОДЫ
СИСТЕМНОГО АНАЛИЗА
Ю.А. ДУБОВ
СИ. ТРАВКИН
В.Н. ЯКИМЕЦ
МНОГОКРИТЕРИАЛЬНЫЕ
МОДЕЛИ
ФОРМИРОВАНИЯ
И ВЫБОРА
ВАРИАНТОВ
СИСТЕМ
МОСКВА "НАУКА"
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
1986
ББК 32.81
Д79
УДК 517.816
Дубов Ю.А., Травкин СИ., Якимец В.Н. Многокритериальные
модели формирования и выбора вариантов систем. - М.: Наука.
Гл. ред. физ.-мат. лит., 1986. — 296 с. - (Теория и методы
системного анализа.)
Разрабатьшается единый подход к постановке и решению задач
многокритериальной оптимизации, возникающих в различных по своей природ»
моделях системного анализа: многокритериальных моделях математического
программирования и оптимального управления, моделях со случайным
множеством альтернатив и моделях со структурным множеством вариантов. Особое
внимание уделяется анализу качественного отличия многокритериальных
моделей от традиционных задач скалярной оптимизации. Материал книги
излагается как на содержательном, так и на формально-математическом
уровне.
Для математиков и инженеров-специалистов по системному анализу,
исследованию операций, автоматизации проектирования, теории управления
и методам оптимизации.
Табл. 20. Ил. 51. Библиогр. 100 назв.
Серия "Теория и методы системного анализа"
Редакционная коллегия серии:
академик ДМ. Гвишиани (председатель)^
академик СВ. Емельянов (заместитель председателя)
член-корреспондент АН СССР С.С Шаталин
доктор экономических наук Б.З. Мильнер
доктор технических наук Ю.С Попков
©Издательство "Наука"
1 с О2ПППОПО-1 m Главная редакция
д ^02000000-103 ш 8б физико-математической
053 @2) -86 литературы, 1986
ОГЛАВЛЕНИЕ
Предисловие 5
Глава 1
Многокритериальные модели оптимизации в задачах принятия решений .... 7
§ 1.1. О причинах появления нескольких критериев оптимальности 7
§ 1.2. Примеры задач с частичным упорядочением альтернатив 10
§ 1.3. Примеры использования частичного упорядочения альтернатив для
решения некоторых традиционных задач 15
Глава 2
Условия оптимальности по Па ре то в статических многокритериальных задачах 18
§ 2.1. Условия оптимальности: выпуклый случай 18
§ 2.2. Условия оптимальности: невыпуклый случай 27
§ 2.3. Локальные условия оптимальности 31
§ 2.4. Условия оптимальности в негладких задачах 35
§ 2.5. Выводы 40
Глава 3
Процедуры решения многокритериальных задач 42
§ 3.1. Априорные процедуры многокритериальной оптимизации 43
§ 3.2. Процедуры апостериорного типа 48
§ 3.3. Адаптивные процедуры принятия решений в многокритериальных
задачах 52
Г л а в а 4
Условия оптимальности в динамических многокритериальных задачах 61
§ 4.1. Задача независимого выбора с дискретным временем 63
§ 4.2. Задача независимого выбора с непрерывным временем и теорема
Ляпунова 71
§ 4.3. Многокритериальные задачи оптимального управления с дискретным
временем 82
§ 4.4. Принцип максимума в многокритериальных задачах 102
Глава 5
Устойчивые решения многокритериальных задач 110
§ 5.1. Устойчивость оптимальных по Парето векторных оценок и
непрерывные многозначные отображения 111
§ 5.2. Понятие о собственной эффективности 115
§ 5.3. е-равномерные альтернативы и их свойства 123
§ 5.4. Необходимые и достаточные условия устойчивости 136
§ 5.5. Регуляризация неустойчивых многокритериальных задач 142
1* 3
Глава 6
Множество Парето и распределение случайных векторов 145
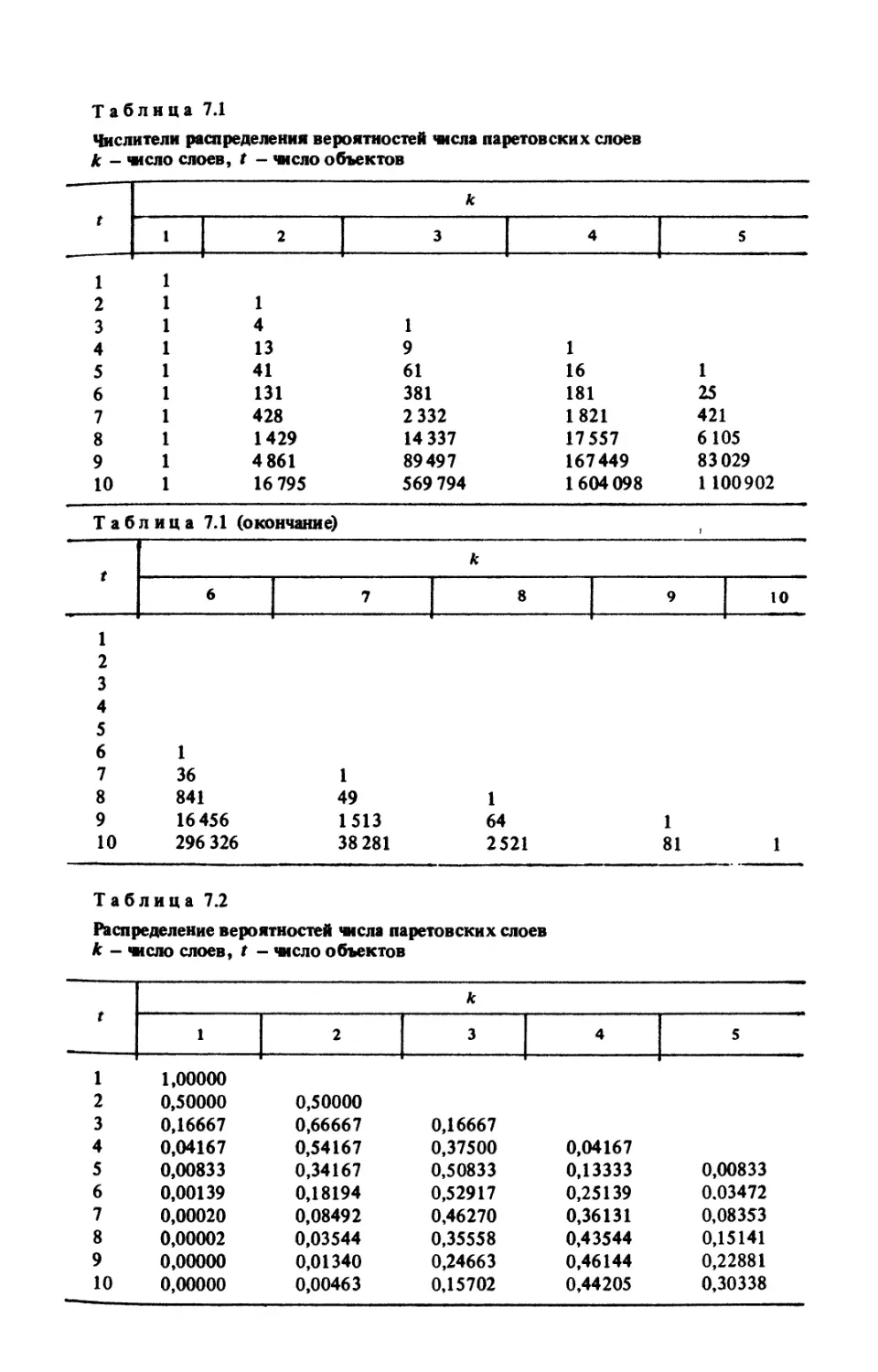
§ 6.1. Распределение числа элементов множества Парето 147
§ 6,2. Распределение числа элементов второго паретовского слоя 167
Глава 7
Анализ распределения числа слоев в выборке при паретовском расслоении . . 181
§ 7.1. Паретовское расслоение и задача декомпозиции частичного порядка . 181
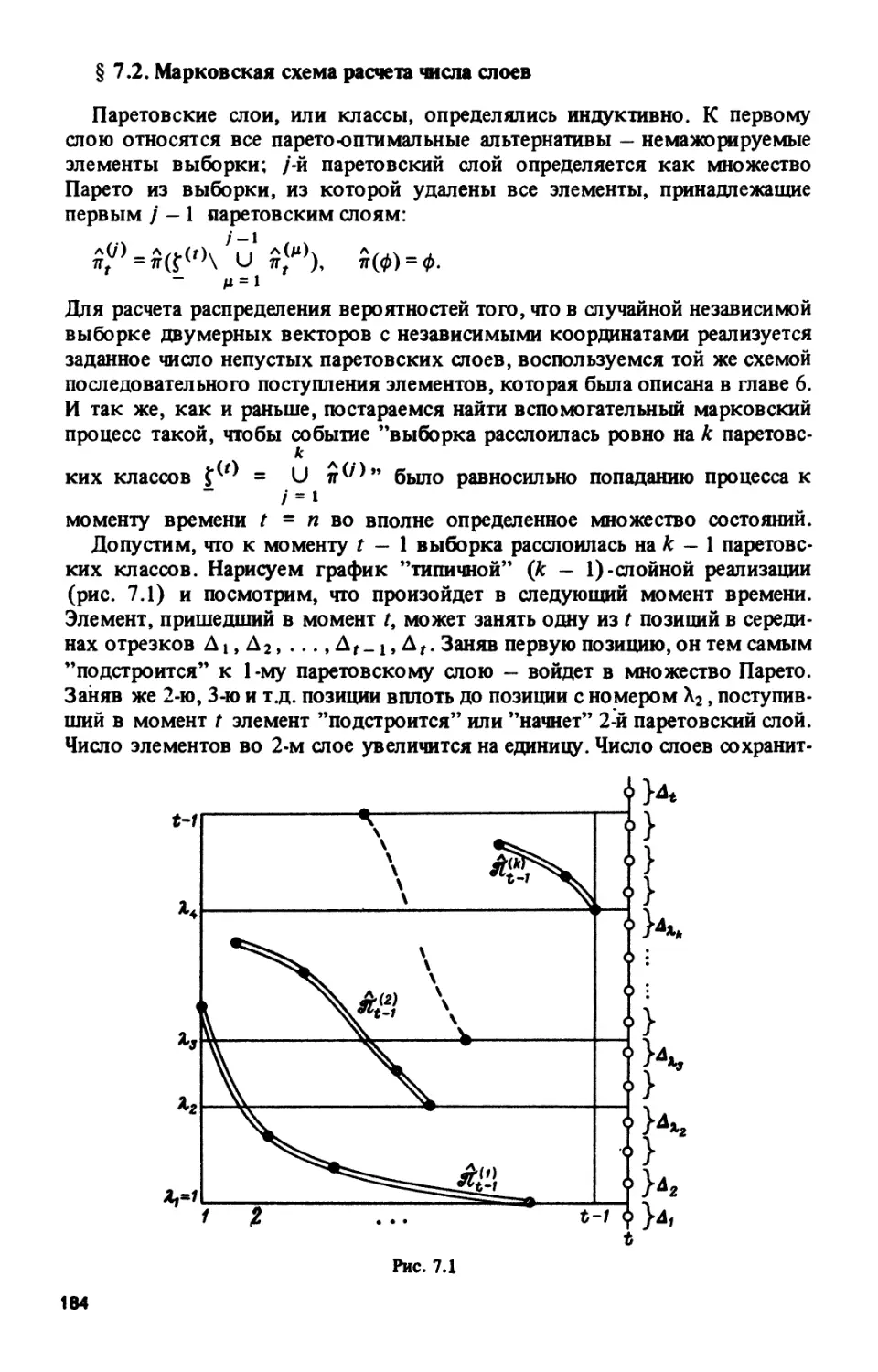
§ 7.2. Марковская схема расчета числа слоев 184
§ 7.3. Рекуррентные уравнения 191
§ 7.4. Уравнение в конечных разностях для двухслойных реализаций .... 196
§ 7.5. Общий случай 199
§ 7.6. Метод производящих функций 204
§ 7.7. Случай двухслойных реализаций 207
§ 7.8. Метод расчета распределения числа слоев. Трехслойная реализация . . 211
§ 7.9. Раскрытие неопределенности и общий метод расчета распределения . 218
Глава 8
Формирование альтернатив с требуемыми структурными свойствами 227
§ 8.1. Метод морфологического анализа 229
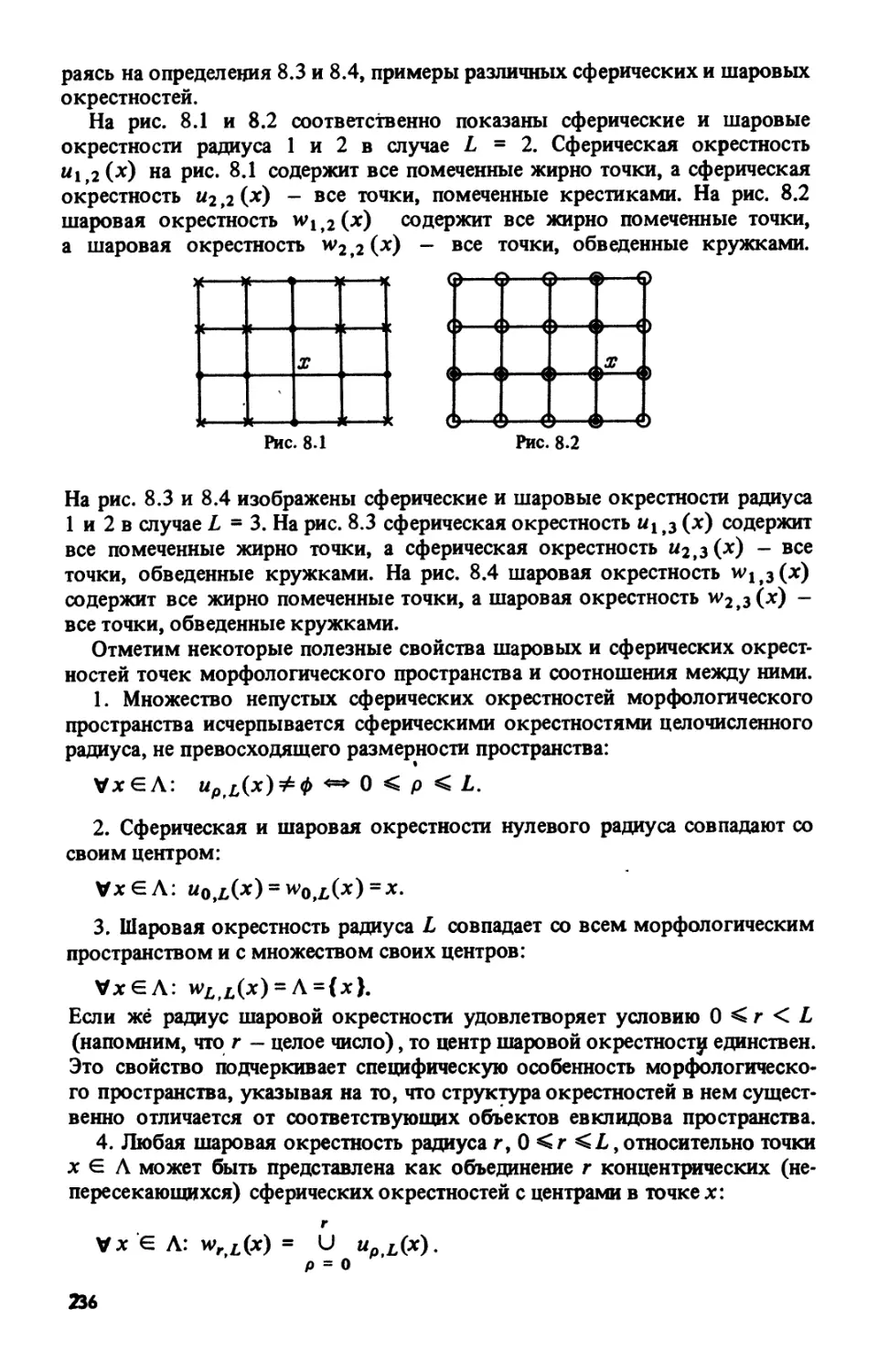
§ 8.2. Схема Эйреса и метризация морфологического пространства 231
§ 8.3. Сферические и шаровые окрестности в морфологическом
пространстве 235
§ 8.4. Медиана совокупности морфологических вариантов 249
§ 8.5. Метрика в Континуальной морфологии 253
§ 8.6. Тран ев ер сальные структуры морфологических систем 256
§ 8.7. Вероятностная модель морфологического пространства 259
Глава 9
Формирование лексикографически упорядоченных морфологических
вариантов систем
265
§ 9.1. Постановка и обсуждение задачи 266
§ 9.2. Аддитивная модель и методы ее решения 268
§ 9.3. Концентрические сферические окрестности 278
§ 9.4. Чувствительность лексикографического морфологического метода . 281
Дополнение при корректуре. Непаретовский выбор: доминирующий
показатель 283
Список литературы 286
Предметный указатель ' 293
ПРЕДИСЛОВИЕ
Постановка задачи выбора наилучшего решения предполагает наличие
правила, позволяющего сравнивать качество возможных альтернатив.
В простейшем случае такое правило может быть задано скалярной
функцией на множестве альтернатив, а наилучшее решение определяется из
условий экстремума этой функции. Однако в практических задачах
построение такой функции часто вызывает серьезные затруднения. Во многих
ситуациях оказывается удобным задавать на множестве альтернатив
несколько скалярных функций или критериев оценки. Традиционное понятие
оптимальности при этом заменяется на понятие "оптимальность по Парето",
а сама задача выбора называется многокритериальной. Основная
особенность задачи многокритериальной оптимизации состоит в том, чго ее
решением является, как правило, не единственная точка, а целое множество
оптимальных по Парето, или эффективных точек. Активно развивающаяся
в последние годы теория многокритериальной оптимизации посвящена
исследованию качественных и количественных характеристик этого
множества.
Следует отметить, что в существующей монографической литературе
практически отсутствует анализ той зависимости между характеристиками
множества Парето и методами их. определения, с одной стороны, и
способом задания множества альтернатив — с другой, которая наблюдается в
целом ряде ситуаций. Структура множества альтернатив часто оказывает
существенное влияние и на те формальные задачи анализа, которые можно
конструктивно решать, и на аппарат, с помощью которого этот анализ
может быть проведен.
В предлагаемой вниманию читателя книге делается попытка объединить
разнообразные результаты, получающиеся при трех наиболее
распространенных способах описания множества альтернатив. При этом основное
внимание уделяется тому влиянию, которое оказывает структура этого
множества на характер, постановку и методы решения задач
многокритериальной оптимизации. Такая постановка проблемы позволяет с единых
позиций оценить степень теоретической проработки отдельных задач и
наметить ряд перспективных направлений исследований.
Первый из приведенных в книге способов описания множества
альтернатив использует систему ограничений, как принято делать в задачах
математического программирования. Преимущество такого подхода состоит
в возможности применения эффективного аппарата теории оптимизации.
Типичные задачи, которые здесь возникают, - это вывод условий
оптимальности, анализ свойств оптимальных решений, построение и исследо-
вание сходимости соответствующих алгоритмов. Данной проблематике
посвящены главы 1-5. При этом авторы старались уделить особое
внимание не столько изложению формальных результатов, сколько анализу и
интерпретации их отличия от аналогичных результатов, получаемых в
традиционных задачах скалярной оптимизации.
Вторым способом описания множества альтернатив является их
перечисление. Такая ситуация типична для целого ряда задач, в которых
перечислить альтернативы легче, чем записать систему ограничений, которым
они должны формально удовлетворять. В отличие от ситуации,
рассмотренной в первых шести главах, здесь центральной проблемой является
определение числа оптимальных по Парето альтернатив среди заданного набора.
Поскольку наибольший интерес, по-видимому, представляет ситуация,
когда альтернатив достаточно много, часто предполагают, что множество
альтернатив формируется случайным образом, — тогда возникает задача
оценки ряда вероятностных характеристик множества оптимальных
решений и их асимптотических свойств. Выводу этих характеристик и
подробному описанию соответствующего математического аппарата, посвящены
главы 7-8/
И, наконец, третий способ задания множества альтернатив используется
при наличии некоторого детерминированного формального механизма,
позволяющего генерировать альтернативы по заданному алгоритму. Хотя
такие способы достаточно разнообразны, наиболее распространенным
является метод морфологического ящика, что и определило структуру
двух последних глав. В них изучаются свойства решений, оптимальных на
множестве, которое формируется посредством морфологического анализа.
Заметим в заключение, что рассмотренные в книге методы описания
множества альтернатив являются всего лишь наиболее распространенными
и хорошо изученными, но не универсальными. Довольно легко строятся
промежуточные ситуации, когда, например, множество альтернатив
задается перечислением точек некоторой фиксированной области —
своеобразная комбинация задач, рассмотренных в главах 1—5 и 6—7. Следует иметь
в виду, что получающиеся при этом результаты могут существенно
отличаться от приведенных в данной книге. В упомянутой "комбинированной"
структуре среднее число точек Парето в случайной выборке длины Сможет
иметь порядок y/N1, в то время как без дополнительных ограничений эта
величина не превышает lnJV. Однако значительная фрагментарность
результатов, полученных при рассмотрении альтернативных структур множества
допустимых решений, не позволила включить их в настоящую книгу.
Авторы не ставили перед собой задачу охватить всю тематику
многокритериальной оптимизации — нас интересовали две проблемы: выявление
особенностей многокритериальных задач, отличающих их от задач
скалярной оптимизации, и влияние способа задания множества альтернатив на
методы анализа я структуру получаемых результатов .В этом смысле данная
книга может служить полезным дополнением к недавно опубликованной
монографии В. Подиновского и В. Ногина, учебнику Т. Виноградской,
И. Макарова, А. Рубчинского и В. Соколова и книге Б. Березовского,
Л. Кемпнера и А. Борзенко.
Ю. Дубов, С Травкин, В. Якимец
Глава 1
МНОГОКРИТЕРИАЛЬНЫЕ МОДЕЛИ ОПТИМИЗАЦИИ
В ЗАДАЧАХ ПРИНЯТИЯ РЕШЕНИЙ
§1.1. О причинах появления нескольких критериев оптимальности
Задачи исследования операций самым тесным образом связаны с
принятием решений. Под "операцией" понимается совокупность действий,
направленных на достижение некоторой цели (Гермейер [1]). Заметим,
что из этого определения уже следует неразделимость понятий "операция"
и "цель операции", ибо в противном случае исследование операций не имело
бы смысла. Совокупность тех лиц, которые стремятся в данной операции
к поставленной цели, обычно называют оперирующей стороной. В задачах
исследования операций принято включать в состав оперирующей стороны
исследователя операции, который, как правило, сам не принимает решений
по выбору способов действий, а лишь помогает в этом оперирующей
стороне, являясь своеобразным консультантом.
Наиболее общие постановки задач исследований операций содержат
различные описания неопределенности и риска, но рассмотрение этих
ситуаций выходит за рамки интересующей нас проблематики, поэтому мы
ограничимся исключительно детерминированным случаем. В задачу
исследователя операций входит прежде всего выявление всех возможных способов
проведения операции т.е. описание множества альтернатив, из которого
следует осуществить выбор. Реализация этого выбора возможна, если
исследователь располагает определенной информацией о цели операции.
Такая информация необходима, хотя зачастую она оказывается весьма
неполной. Поскольку сам исследователь не принимает окончательных
решений, играя лишь вспомогательную, хотя и очень важную роль, то его задача
состоит в том, чтобы, используя всю имеющуюся у него информацию о
решаемой проблеме, подготовить обоснованные рекомендации по выбору
решения, а если имеющейся информации оказывается недостаточно,
разработать процедуру получения необходимых дополнительных данных.
Будем считать, что необходимо выбрать такую единственную
альтернативу х * из множества допустимых альтернатив X, которая бы наилучшим
образом соответствовала цели операции. Наиболее простой, наиболее часто
используемой и наиболее редко встречаемой в практических задачах
является ситуация, когда соответствие той или иной альтернативы цели
операции можно описать с помощью некоторой функции и(х). Тогда
альтернатива х1 считается предпочтительнее альтернативы х2, если и(х*)> и(х2) ;
следовательно, задача выбора наилучшего образа действий сводится к
отысканию максимума функции и(х) на множестве допустимых
альтернатив X. Функция и(х) обычно называется целевой функцией или
критерием эффективности. Ее построение входит в обязанности исследователя
операция, как, впрочем, и решение скалярной оптимизационной задачи
определения наилучшей альтернативы х *. Однако, как показывает
практика, именно построение функции, характеризующей цель операции, и
вызывает наибольшие затруднения.
Весьма распространенной является точка зрения, что эти трудности
объясняются наличием не однрй цели операции, а нескольких. Так,
постоянно встречающееся выражение "достичь максимального эффекта при
минимальных затратах" уже говорит о наличии по меньшей мере двух
критериев эффективности. А оценка плана выпуска продукции промышленным
предприятием производится на основе доброго десятка показателей,
которые зачастую бывают достаточно противоречивыми. Следует отметить,
однако, что предположение о наличии нескольких целей операции при
сохранении постановки задачи выбора единственной альтернативы по
меньшей мере нелогично. Действительно, если цели противоречивы, то не
существует альтернативы, которая бы наилучшим образом соответствовала
каждой цели, а следовательно, задача выбора единственной альтернативы
неразрешима. Тем не менее мы будем предполагать, что задача выбора
единственной альтернативы имеет решение независимо от того, что
известно исследователю о цели операции. Наличие единственной
альтернативы, которая выбирается в задаче исследования операций, говорит о том, что
эта альтернатива в некотором смысле лучше тех альтернатив, которые
не выбираются. Но, по-видимому, это и должно означать, что у
операции существует единственная цель, которая определенным
образом связана с критериями эффективности, но неизвестна
исследователю.
Таким образом, можно сделать вывод, что основная проблема состоит
не в том, что есть операции "одноцелевого" и "многоцелевого" характера,
а в том, что есть операции, цель которых точно известна исследователю,
и операции, цель которых ему неизвестна. В исследовании операции такая
ситуация получила название неопределенность в выборе цели.
Как же снимать эту неопределенность? Для этого необходимо получать
дополнительную информацию и прежде всего указать источник такой
информации. В качестве основного источника информации в задачах
принятия решений принято использовать человека — лицо, принимающее решение
(ЛПР), — входящего в состав оперирующей стороны. При этом
предполагается обычно, что ЛПР располагает достаточно полными сведениями о
цели операции, которые позволяют ему принимать решение. Обычно
говорят, что у ЛПР имеется некоторая система предпочтений, заданная на
множестве допустимых альтернатив и позволяющая определять, какая из
двух альтернатив лучше соответствует цели операции, а какая — хуже.
Выявление этой системы предпочтений и является основной задачей
исследователя в случае, когда цель операции ему неизвестна.
Следует отметить, что во всех случаях, когда в .качестве источника
дополнительной информации о цели операции выступает человек, процесс
принятия решений носит принципиально субъективный характер. Еще раз
подчеркнем, что в задаче, в которой необходимо выбрать единственную
альтернативу из всех возможных, бессмысленно говорить о наличии
нескольких целей: если мы хотим, чтобы эта задача была разрешима,
необходимо предположить, что существует единственная, хотя, возможно, и
неизвестная исследователю цель операции.
8
Вот тут и возникают многокритериальные задачи принятия решений.
Получение информации о системе предпочтений ЛПР, о которой заранее
ничего не известно, представляет собой весьма сложную и трудно решае-
j^yio проблему. Однако во многих практических ситуациях оказывается
возможным установить, что система предпочтений ЛПР обладает рядом
свойств, существенно облегчающих решение этой задачи. Например,
удается построить некоторый набор показателей, являющихся функциями
альтернатив и обладающих тем свойством, что если все эти функции в
точке х1 принимают большее (или не меньшее) значение, чем в точке х2,
то альтернатива х1 заведомо предпочитается альтернативе х2 (или не
хуже ее). Если обозначить эти показатели через //(х), /= 1,..., w, то
получим
fiipc1) > fi(x2), i = 1,...,п, fix1) Ф f(x2) => ЛПР предпочитает
альтернативу х1 альтернативе х2.
Введение такого набора показателей или критериев в те* случаях, когда
это оказывается возможным, чрезвычайно полезно. Это объясняется
прежде всего тем, что количество критериев обычно меньше размерности
множества допустимых альтернатив, что облегчает задачу выявления
предпочтений ЛПР. Кроме того, в практических задачах выявление предпочтений
ЛПР на языке оценок по отдельным критериям несравненно проще, чем
выявление предпочтений непосредственно на множестве альтернатив.
И наконец, построение набора критериев, согласованного с
предпочтениями ЛПР в сформулированном выше смысле, позволяет отбросить
значительное количество альтернатив, которые заведомо не соответствуют
цели операции.
Может сложиться впечатление, что после отсеивания "плохих"
альтернатив введенная система критериев уже сыграет свою роль и перестанет
быть полезной, поскольку все оставшиеся альтернативы будут в рамках
этой системы несравнимы. Однако это не так, ибо, как отмечалось выше,
оценки по критериям необходимы не только для "отсева", но и для
надежного и удобного получения информации о предпочтениях ЛПР.
Итак, в задаче исследования операций появляется несколько
критериев, потому что с их помощью удобно описывать неизвестную
исследователю цель операции или неизвестную систему предпочтений ЛПР.
Возникновение нескольких критериев, или, как часто говорят,
векторного критерия оценки качества альтернатив порождает две основные
задачи: Первая из них состоит в построении процедур выявления
предпочтений ЛПР на языке векторных оценок альтернатив. Этой задаче
посвящено значительное число работ по многокритериальной оптимизации,
в том числе ряд монографий. Некоторые процедуры такого типа будут
рассматриваться ниже. Вторая задача связана с построением процедур
отсеидания "плохих" альтернатив. Заметим, что наличие нескольких
критериев задает на множестве альтернатив частичное упорядочение.
"Подозрительными на наилучшее соответствие цели операции" являются
максимальные по этому упорядочению альтернативы. Поэтому отсеивание
"плохих" альтернатив означает выделение альтернатив, максимальных по
Данной системе критериев. Эффективность построения процедур отсева
во многом зависит от того, какими свойствами обладают "максимальные"
9
альтернативы и, прежде всего, насколько сильно отличаются эти свойства
от свойств оптимальных альтернатив в задачах скалярной оптимизации.
Таким образом, формальная модель, которая будет рассматриваться
далее, состоит в исследовании свойств максимальных элементов при
частичном упорядочении допустимого множества. Эта модель не является
отличительной особенностью только задач исследования операций. Частичное
упорядочение множества альтернатив довольно естественным образом
возникает в целом ряде задач теории игр, математической экономики,
оптимального управления. Некоторые примеры таких задач будут
рассмотрены ниже. Построение подходящего частичного упорядочения,
выделение максимальных по этому упорядочению элементов и анализ их
свойств во многих случаях позволяют не только решить исходную задачу,
в постановке которой отсутствует какое-либо упоминание о многокри-
териальности, но и получить полезную интерпретацию свойств полученного
решения.
§ 1.2. Примеры задач с частичным
упорядочением альтернатив
В этом параграфе мы рассмотрим два простых примера задач, в которых,
как и в задачах принятия решений с неопределенностью цели, учет
частичного упорядочения альтернатив может оказаться полезным.
Первый пример относится к матричной игре двух лиц с нулевой суммой.
Пусть дана платежная матрица II ац ||, / = 1,..., я, / = 1,..., т, элемент
ац которой определяет выигрыш первого игрока при выборе им стратегии
I, если второй игрок выбирает стратегию/. Выигрыш второго игрока при
этом составляет (—д// ). Обозначим через иг величину выигрыша, которую
может гарантировать себе первый игрок независимо от действий второго,
а через vu — величину выигрыша, больше которой первый игрок получить
не может при условии, что второй игрок действует разумно. В случае,
когда иг = и л = и, говорят, что игра разрешима и имеет цену и. Вычисление
значения и проводится одновременно с определением тех стратегий,
которые являются наилучшими для первого и второго игроков, а
следовательно, обеспечивают исход игры, характеризующийся ценой игры и.
Мы рассмотрим сначала более простую ситуацию, когда наилучшие
стратегии существуют в классе чистых стратегий, т.е. когда выполняется
равенство
vY = max min an = и = min max an = vn.
Известно, что среди п имеющихся у первого игрока стратегий есть
наилучшая. Чтобы ее определить, необходимо провести попарное сравнение
исходов, которые могут возникнуть при выборе двух различных стратегий.
Пусть сравниваются например, стратегии ix и / 2. Возможные исходы для
первого игрока характеризуются при этом двумя строками матрицы || ац ||,
т.е. векторамиa^j, я/2/, /= 1,... , т.Еслид|д/> Д/а/-, /= 1, ... ,гл, и
строка /1 не совпадает со строкой /2, то стратегию с номером \ъ можно
заведомо исключить из рассмотрения, поскольку при любом выборе
противника стратегия /*i обеспечивает первому игроку не меньший выигрыш, чем
10
стратегия г г > а в некоторых случаях позволяет получить больший выигрыш.
Могут однако существовать и строки /, к матрицы II ац ||, которые
несравнимы между собой в том смысле, что д/у > akj при некоторых/, а при
других/ имеет место обратное неравенство.
Мы приходим тем самым к выводу, что на множестве чистых стратегий
первого игрока задано частичное упорядочение, определяемое
коэффициентами матрицы || ац ||. Поскольку при решении игр в чистых стратегиях,
как следует из сказанного выше, можно выбрасывать любую строку
матрицы, доминируемую другой строкой, причем цена игры от этого не
уменьшается, то мы приходим к выводу, что оптимальная стратегия первого
игрока всегда содержится в множестве максимальных по данному
частичному упорядочению стратегий.
Из теории игр известно, что решение в чистых стратегиях существует не
всегда. Можно легко построить примеры матричных игр, в которых
выполнено неравенство
Vi - max min % < min max аи - ип.
1 Ki<n 1</<т 1</<т 1</<и
В этой ситуации решающее значение имеет получение информации о
намерениях противника. Для того чтобы скрыть свои намерения, игрокам
рекомендуется осуществлять свой выбор с помощью некоторого
случайного механизма. Тем самым предполагается, что на множествах чистых
стратегий i = 1,..., п, / = 1,..., т заданы распределения вероятностей pi,... ,р„,
и m
qi,...,qm,Pi,qj>09 /=l,...,w, / = l,...,w, 2 р( = 2 g. = l.
/=i /=i '
Обозначим множества смешанных стратегий игроков через Sn и Sm
соответственно. Основная теорема теории матричных игр утверждает, что любая
матричная игра разрешима в смешанных стратегиях, т<е.
— n m ^
vT = ffiax min 2 2 аир&: = v =
es qeS / i / i I; 7
n m
= min max 2 2
n m
где 2 2 ctiiPfij — средний выигрыш первого игрока при
использовании им смешанной стратегии р и при условии* что второй игрок
пользуется смешанной стратегией q. Для описания множества, к которому могут
принадлежать оптимальные смешанные стратегии первого игрока,
воспользуемся рассуждениями, аналогичными тем, которые применялись для
случая чистых стратегий. А именно, если
для любой смешанной стратегии второго игрока q G Sm9 то, очевидно,
что у первого игрока нет оснований предпочесть смешанную стратегию
Р2 смешанной стратегии р1. Если же при этом существует такая смешан-
11
ная стратегия q* второго игрока, при которой имеет место строгое
неравенство
п т п т
2 2 aifp}q* > 2 2 a(jp2q*9
то стратегия р1 безусловно является для первого игрока более
предпочтительной.
Тем самым мы приходим к выводу, что множество смешанных
стратегий первого игрока также частично упорядочено, и оптимальные стратегии
должны содержаться среди максимальных по этому частичному
упорядочению элементов. Заметим, что максимальные смешанные стратегии
несравнимы между собой, т.е. для любых максимальных смешанных
стратегий р1 и р2 существует такое разбиение множества смешанных
стратегий Sm второго игрока на непересекающиеся подмножества S^,S^ и 5^,
что выполняются неравенства
п т п т
п т
п т
(множество 5^ может быть пустым).
Дальнейшее сужение множества максимальных смешанных стратегий
S* может быть получено с помощью известной из теории игр теоремы о
свойствах оптимальных смешанных стратегий: если в матричной игре
строка /0 строго доминируется выпуклой комбинацией других строк, то
чистая стратегия /0 не входит ни в одну оптимальную смешанную
стратегию, и, следовательно, в оптимальной смешанной стратегии всегда р,о = О
(это означает, что при решении игры в смешанных стратегиях строка /0
может быть вычеркнута из платежной матрицы). Заметим, что если
доминирование не является строгим, то выбрасывание доминированных строк
может привести к уменьшению количества оптимальных стратегий, к
потере некоторых из них (простейшим примером является, по-видимому,
случай, когда в платежной матрице присутствуют две одинаковые строки).
Однако цена игры при таком отбрасывании не меняется, поэтому, если
задача состоит в поиске хотя бы одной оптимальной стратегии, то вполне
можно выбрасывать и не строго доминируемые строки.
В этом примере мы имеем ситуацию с четко сформулированной целью —
максимизация выигрыша первого игрока в предположении о разумном
поведении второго, но сама структура задачи приводит к рассмотрению
частичного упорядочения множества стратегий, которым можно
воспользоваться для редукции платежной матрицы.
В качестве второго примера рассмотрим следующую задачу. Пусть
необходимо выбрать некоторую альтернативу х из заданного множества X,
причем желательно выбрать такую альтернативу, которая обеспечит наи-
большее значение заданной функции /. Однако эта функция зависит не
только от х, но и от переменной величины >>, принимающей значения в
множестве Y, т.е. / =/(х, у). Если конкретная реализация у* известна заранее,
то мы имеем традиционную задачу /(х, у) -> max при условии у = у*.
*елг
Если же реализация у неизвестна к моменту выбора альтернативы х, то
принято говорить о "принятии решений в условиях неопределенности".
Наличие неопределенности порождает частичное упорядочение альтернатив.
Пусть, например, множество Y конечно: Y = {у1,.. ., у") . Тогда
каждой альтернативе х Е X ставится в соответствие вектор/ (х) = { / (х, у1),...,
f(x, уп)) или, обозначая f(x, у1) = /, (х), / = 1,..., и, получаем f(x) =
= { /1 (*)> • • •» fn (*) ) • Каждая компонента этого вектора характеризует
доход, который будет получен при выборе альтернативы х и
соответствующей реализации у G Y. Очевидно, что имеет смысл выбирать альтернативу
х1, а не*2, если//(л:1) > /}(х2),/ = 1,..., nj(xl) =?/(х2), поскольку
при любой реализации у альтернатива х1 обеспечивает не меньший доход,
чем х2, а при некоторых реализациях доход от х1 больше, чем от х2.
Наличие этого частичного упорядочения позволяет в дальнейшем рассматривать
только такие альтернативы, которые являются максимальными, и из них
осуществлять окончательный выбор.
Для реализации этого выбора необходимо, вообще говоря, располагать
информацией о механизме генерирования точек у Е Y. Если же такая
информация отсутствует, то можно пользоваться, например, принципом
гарантированного результата, выбирая ту альтернативу, которая
обеспечивает наибольший выигрыш при наихудшем исходе, т.е. альтернативу
х*, для которой
min ft (x *) > min ft (x),
где х — произвольная максимальная по рассматриваемому частичному
упорядочению альтернатива.
Заметим, что при использовании принципа гарантированного
результата максимизацию функции <р (х) = min // (x) следует проводить на
1 </<и
множестве максимальных по данному частичному упорядочению
альтернатив. Это вызвано тем обстоятельством, что функция <^(х) может
достигать своего максимума и не в максимальных точках. Действительно, пусть,
например,
ДГ= {*|0<х<1>, Y= {0,1), f(pc,y)=xy.
Тогда /*! (х) = 0, /2 (х) = х и \р (х) = min [Л (х), /2 (х) ] = 0. Это означает,
что по принципу гарантированного результата все альтернативы из X
неразличимы. Но легко видеть, что при х1 > х2 fx (х1) = /i (х2) = 0, но
/г (х1) =*х2 > х2 = /2 (х2). Поэтому в данной ситуации множество
максимальных альтернатив состоит из единственной точки х = 1, которая и
Должна выбираться в качестве наилучшей.
Интересная ситуация возникает в том случае, когда множество
бесконечно, например У представляет собой отрезок [0, 1]. В этом случае для
сравнения альтернатив х1 и х2 необходимо сравнивать между собой функ-
13
ции /(х1, у) и /(х2, у) на отрезке [0, 1]. Как и раньше, альтернатива х1
будет более предпочтительной, чем альтернатива х2, если /(х1,у) > f(x2,y)
для всех у € [0, 1] и хотя бы для одной точки у это неравенство будет
строгим. Если потребовать, чтобы функция /(х, у) была непрерывна по у,
то строгое неравенство, выполненное хотя бы в одной точке, будет
выполняться и на*некотором отрезке. Тогда частичное упорядочение
альтернатив может быть построено следующим образом: альтернатива х1
предпочтительнее альтернативы х2, если /(х1, у) > f(x2,y),y E [0, 1], и
существует хотя бы один отрезок \уп, уь], на котором это неравенство
выполняется строго.
Если необходимо выбрать единственную альтернативу х* Е Ху а какая-
либо дополнительная информация о реализациях у G Y отсутствует, то
следует воспользоваться принципом гарантированного результата, но
применять его по-прежнему к множеству максимальных по данному
частичному упорядочению альтернатив. Построение множества максимальных
альтернатив в этом случае имеет свою специфику по сравнению с конечным
множеством Y и рассматривается в рамках теории многокритериальной
оптимизации с бесконечным числом критериев (Наумов [1]). Эта
проблематика выходит за рамки настоящей книги, поэтому отметим лишь, что
здесь возможны разнообразные (и довольно интересные) постановки задач.
Исходя из начального частичного упорядочения, порожденного наличием
"множества неопределенндсти" У, можно строить различные упорядочения,
сужающие множество максимальных альтернатив, прибегая к ряду
эвристических предположений.Пусть,например,альтернативых1 их являются
максимальными, а следовательно, несравнимыми, но известно, что
суммарная длина тех отрезков, на которых f(x2, у) > /(х1, у), не превышает
заранее заданного малого числа а > 0. Это означает, что альтернатива х1
предпочтительнее альтернативы х2 "почти всюду", а если так, то для
заданного а > 0 можно построить следующее частичное упорядочение. Разобьем
отрезок [0,1] на два подмножества
1(х\х2) = {уе [0,1] |Дх\дО > Ях2,у)} ,
J(x\x2) = {ye[0yl]\f(xl,y)<f(x2,y)}y
и будем говорить, что альтернативах1 д-предпочтительнее альтернативых2,
если мера подмножества J(xl, x2) не превышает заранее заданного
положительного числа а. Нетрудно видеть, что в общем случае существуют
несравнимые максимальные по старому упорядочению альтернативы,
которые, тем не менее, оказываются сравнимыми в смысле я-предпочтитель-
ности.
Таким образом, из рассмотренных в этом параграфе примеров следует,
что учет частичного упорядочения альтернатив и выделение максимальных
альтернатив имеют большое значение. В матричных играх, например, это
позволяет уменьшить размерность задачи, а в задачах принятия решений
при наличии неопределенности - добиться однозначного решения,
получаемого с помощью принципа гарантированного результата.
14
§ 1.3. Примеры использования частичного упорядочения
альтернатив для решения некоторых традиционных задач
В этом параграфе мы рассмотрим некоторые традиционные задачи,
решение которых может быть получено с помощью частичного
упорядочения, заданного на определенным образом построенных множествах.
Первая из этих задач заимствована из теории игр.
Рассмотрим задачу построения матричной игры двух лиц с нулевой
суммой, которая обладала бы нулевой ценой игры v = 0. Для этого надо
подобрать соответствующую платежную матрицу А. Представим ее в виде
F -В
А=\ I- A.0
¦[ ]•
Пусть оптимальные смешанные стратегии первого и второго игроков р и
q представимы в виде р = [и, w], q = [х, у], где р > 0, q > 0, и положим
для определенности w > 0, у > 0, где строгое неравенство выполняется
покомпонентно.
Для решения этой задачи введем понятие "частичное упорядочение
матриц". Будем считать, что некоторая матрица D строго больше (больше)
нулевой матрицы, если все ее элементы строго положительны
(неотрицательны, но положительна их сумма). Тогда матрицу D* из некоторого
класса D будем называть максимальной, если в этом классе не существует
другой матрицы D, для которой матрица!) — D* больше нулевой.
Аналогично определяется минимальная в данном классе матрица. Рассмотрим
следующие две задачи.
Задача 1. Найти максимальную матрицу ?)*, такую что Сх > D*y для
некоторого неотрицательного вектора х и положительного вектора у,
удовлетворяющих условиям Fx <Ву.
Задача 2. Найти минимальную матрицу D*, такую, что Вти < Z)J w
для некоторого положительного вектора w и неотрицательного вектора и,
удовлетворяющих условиям FTu > CTw.
Все векторные неравенства, фигурирующие в постановках задач 1 и 2,
выполняются покомпонентно. Заметим, что в тех случаях, когда эти задачи
имеют решение, оно, вообще говоря, не является единственным и все
решения несравнимы между собой в рамках введенного частичного
упорядочения.
Рассмотрим, например, задачу 1. Если С = F = В = /, где I — единичная
матрица размерности п = 2, то неравенство Fx <By принимает вид: Х\ <д>ь
Х2 ^У2, а неравенство Сх > Dy может быть переписано как
*i >dnyl +dny2, x2
Система
dny2, x2 = d2lyx + d22y2
имеет бесконечное множество решений (d..)9 и каждое из них определяет
максимальную матрицу D*. Действительно, прибавляя к каждой такой
матрице D* матрицу, которая больше нулевой, получаем нарушение
неравенств.
15
Как показано в (Гейл, Кун и Таккер [1]), имеет место следующая
теорема.
Теорема 1.1 (теорема двойственности). Матрица D*
является решением задачи 1 тогда и только тогда, когда она является решением
задачи 2.
Одновременно с теоремой двойственности имеет место следующая
теорема существования.
Теорема 1.2 (теорема существования). Решение задач I и 2
существует тогда и только тогда, когда существуют неотрицательные
векторы х и и и положительные векторы у и w, для которых выполнены
следующие неравенства:
Fx<By, FTu>CTw. A.2)
Связь построенных таким образом матриц с исходной задачей
конструирования матричной игры дается следующей теоремой.
Теорема 1.3. Платежная матрица А, имеющая структуру A.1),
обеспечивает нулевую цену игры и оптимальные смешанные стратегии р[и, w],
Я Iх» У] 9 vv > 0, ^ > 0, тогда и только тогда, когда матрица D* является
решением задач 1 и 2.
Мы намеренно опустили доказательства всех теорем, поскольку здесь
нас интересуют не столько формальные результаты, сколько возможность
решения достаточно традиционной задачи (построение матричной игры с
заданными свойствами) с помощью частично упорядоченного множества
матриц.
В качестве второго примера рассмотрим задачу оптимальной
фильтрации. Пусть имеется линейная динамическая система
t), x(to)=xo,
Здесь x(t) — «-мерный вектор состояний системы, y(t) — р-мерный
вектор наблюдений, u(t) nv(t) — w-мерный и р-мерный белый шум
соответственно, A(i)9 B(t) и C(t) — матрицы соответствующих размерностей.
Оценка вектора состояний x(t) проводится с помощью линейного
динамического фильтра
w(t) = F(t)w(f) + G(f)y(f), w(t0) = w0. A.3)
Этот фильтр необходимо построить таким образом, чтобы он обеспечивал
несмещенную оценку состояний, т.е., чтобы выполнялось условие
E{x(t)-w(t)\y(S), to<S< r} = 0 Vr. A.4)
Обозначив e(t) = x(t) - w(t)9 определим ковариационную матрицу
ошибки:
Б(Г1) = Е{е(Г1У(^I^(^), 'о< S< M, A.5)
где t\ — заранее выбранный фиксированный момент времени. Задача
состоит в построении такого фильтра, который бы удовлетворял условию
A.4) и обеспечивал наименьшую в некотором смысле ковариационную
16
матрицу ошибки 2(?i). Для того чтобы определить возможность
сравнения матриц, введем следующее определение.
Определение 1Л. Матрица А считается более предпочтительной, чем
матрица В,если матрица В-А положительно полуопределена.
Очевидно, что определение 1.1 устанавливает частичное упорядочение
пространства квадратных матриц. Таким образом, задача состоит в том,
чтобы выбрать такие параметры фильтра F*, G*, wj в A.3), чтобы матрица
2*(ti) из A.5) была минимальной в смысле определения 1.1 в классе
всех квадратных матриц соответствующей размерности,
удовлетворяющих условию A.4).
Эта задача уже исследовалась (Атанс, Джиринг [1]), и было показано,
что в рассматриваемом классе матриц существует глобально минимальный
(или инфымольный, если следовать терминологии работы [1]) элемент.
Это означает, что существует такой линейный динамический фильтр
(F*, G*, Wq)9 для которого матрица S(fi) — 2*(*i) положительно
полуопределена для любых матриц 2(fO, удовлетворяющих условиям A.4),
A.5). Ковариационную матрицу 2*(/i) можно получить в результате
решения матричного уравнения Рикатти. Что же касается самого фильтра,
то для него получается явное выражение, совпадающее с известной
структурой фильтра Калмана—Бьюси.
Заметим, что глобальная минимизация ковариационной матрицы
ошибки является хорошо известным свойством фильтра Калмана (см.,
например,, Тсе [1]), но вывод уравнений фильтрации, исходя из решения задачи
минимизации на частично упорядоченном множестве, представляет
безусловный интерес. Этот вывод показывает, что аппарат решения
экстремальных задач с частично упорядоченным множеством альтернатив может
быть эффективно использован для решения достаточно разнообразных
проблем.
Подведем итог. Многокритериальные задачи оптимизации естественным
образом возникают в. задачах исследования операций как вспомогательный
аппарат решения задач принятия решений при неопределенной цели.
Формальная схема многокритериальных задач сводится к максимизации или
минимизации на частично упорядоченных множествах. Поскольку эта
формальная схема может быть эффективно использована как для решения
задач исследования операций, так и для решения ряда других проблем,
представляет интерес анализ разнообразных свойств максимальных по
частичному упорядочению элементов с целью использования этих свойств для
построения эффективных вычислительных процедур. Задаче анализа
свойств максимальных элементов и посвящена настоящая книга.
2. Ю.А. Дубов 17
Глава 2
УСЛОВИЯ ОПТИМАЛЬНОСТИ по ПАРЕТО В СТАТИЧЕСКИХ
МНОГОКРИТЕРИАЛЬНЫХ ЗАДАЧАХ
§ 2.1. Условия оптимальности:
выпуклый случай
Пусть на множестве альтернатив X С Rk определены п скалярных
функций /i(x),..., /„(х), представляющих собой критерии оценки качества
альтернатив. Мы будем говорить, что альтернатива х1 доминирует по
Парето альтернативу х2(х* >,х2), если ft (х1) > ft (х2), / = 1,..., и, и хотя
бы для одного / такое неравенство является строгим. Фактически это
означает, что выбор х1, а не х2 позволяет по каждому критерию получить не
меньшее значение выигрыша, а по одному — строго большее. Те альтерна-
тцвы, для которых не существует доминирующих их допустимых
альтернатив из X, называются оптимальными по Парето. Строгое определение
имеет следующий вид. "*
Определение 2.1. Альтернативах*е ^называется оптимальной по Парето
(тг-оптимальной), если для любой другой альтернативы х G X, для
которой /Дх) > ftipc*), i = l,...,/!, справедливы равенства /Дх) = /Дх*),
/ = 1,..., л. Множество оптимальных по Парето альтернатив
{^-оптимальных альтернатив) будем обозначать через 7гХ.
Заметим, что каждой альтернативе х G X ставится в соответствие ее
векторная оценка {fi(x),...,fn(x)}G Лл. Если альтернатива х
пробегает все множество X, то в пространстве векторных оценок Rn
образуется множество F = f(X), которое в дальнейшем будем называть
множеством векторных оценок. Множеству 7г-оптимальных альтернатив irX
соответствует множество я-оптимальных векторных оценок nF = / (яЛГ).
Множество векторных оценок часто используется для геометрической
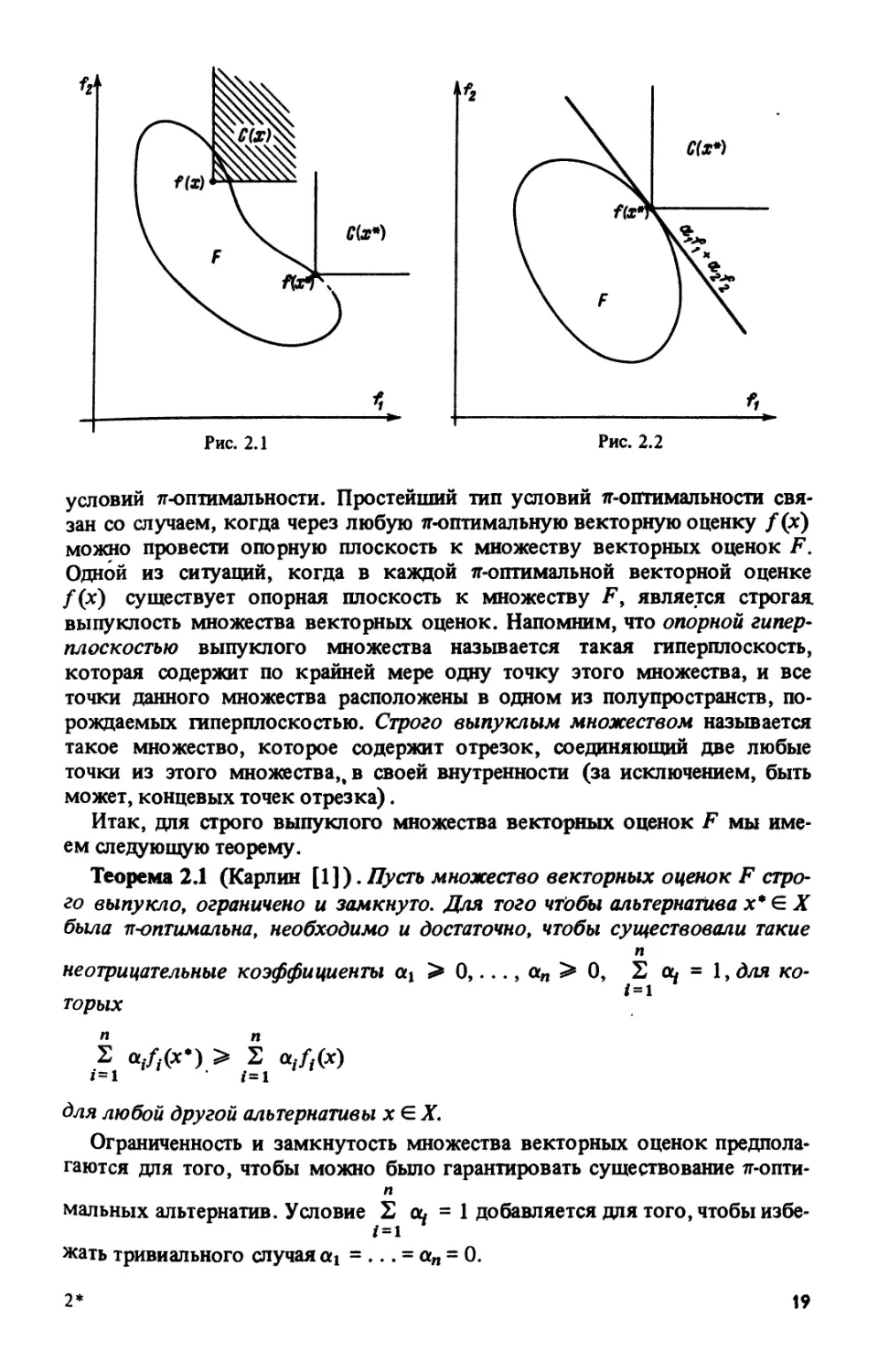
интерпретации понятия тг-оптимальности. Действительно, пусть множество
векторных оценок F С R2 в координатах fx и /2 имеет вид,
изображенный на рис. 2.1. Легко видеть, что множество векторных оценок,
доминирующих по Парето векторную оценку /(*), совпадает с
неотрицательным ортантом С(х)9 вершина которого перенесена в точку /(*).
Действительно, для любой точки a G С(х) имеем at > ft (x), / = 1,..., л, причем,
если а Ф/(х), то хотя бы одно неравенство будет строгим. Если
пересечение конуса С(х) с множеством векторных оценок F содержит какие-либо
точки, кроме /(х), то каждая из этих точек доминирует /(х) по Парето.
Поэтому на рис. 2.1 векторная оценка /(х) (или, что то же самое,
альтернатива х) не является 7г-оптимальной, а альтернатива х* тг-оптимальна,
поскольку пересечение конуса С(х*) с множеством векторных оценок F
состоит из единственной точки /(**).
Анализ геометрических свойств множества векторных оценок
оказывается чрезвычайно полезным при выводе необходимых и достаточных
18
Cix*)
Рис. 2.1
Рис. 2.2
условий тг-оптимальности. Простейший тип условий тг-оптимальности
связан со случаем, когда через любую тг-оптимальную векторную оценку f(x)
можно провести опорную плоскость к множеству векторных оценок F,
Одной из ситуаций, когда в каждой тг-оптимальной векторной оценке
f(x) существует опорная плоскость к множеству F, является строгая
выпуклость множества векторных оценок. Напомним, что опорной
гиперплоскостью выпуклого множества называется такая гиперплоскость,
которая содержит по крайней мере одну точку этого множества, и все
точки данного множества расположены в одном из полупространств,
порождаемых гиперплоскостью. Строго выпуклым множеством называется
такое множество, которое содержит отрезок, соединяющий две любые
точки из этого множества,, в своей внутренности (за исключением, быть
может, концевых точек отрезка).
Итак, для строго выпуклого множества векторных оценок F мы
имеем следующую теорему.
Теорема 2.1 (Карлин [1]). Пусть множество векторных оценок F
строго выпукло, ограничено и замкнуто. Для того чтЬбы альтернатива х* Е X
была л-оптимальна, необходимо и достаточно, чтобы существовали такие
п
неотрицательные коэффициенты а% > О,..., ап > О, 2 о^ = 1, для ко-
торых
/=1 1=1
для любой другой альтернативы хЕХ.
Ограниченность и замкнутость множества векторных оценок
предполагаются для того, чтобы можно было гарантировать существование тг-опти-
п
мальных альтернатив. Условие 2 с^ = 1 добавляется для того, чтобы
избежать тривиального случая ai = ... = otn = 0.
19
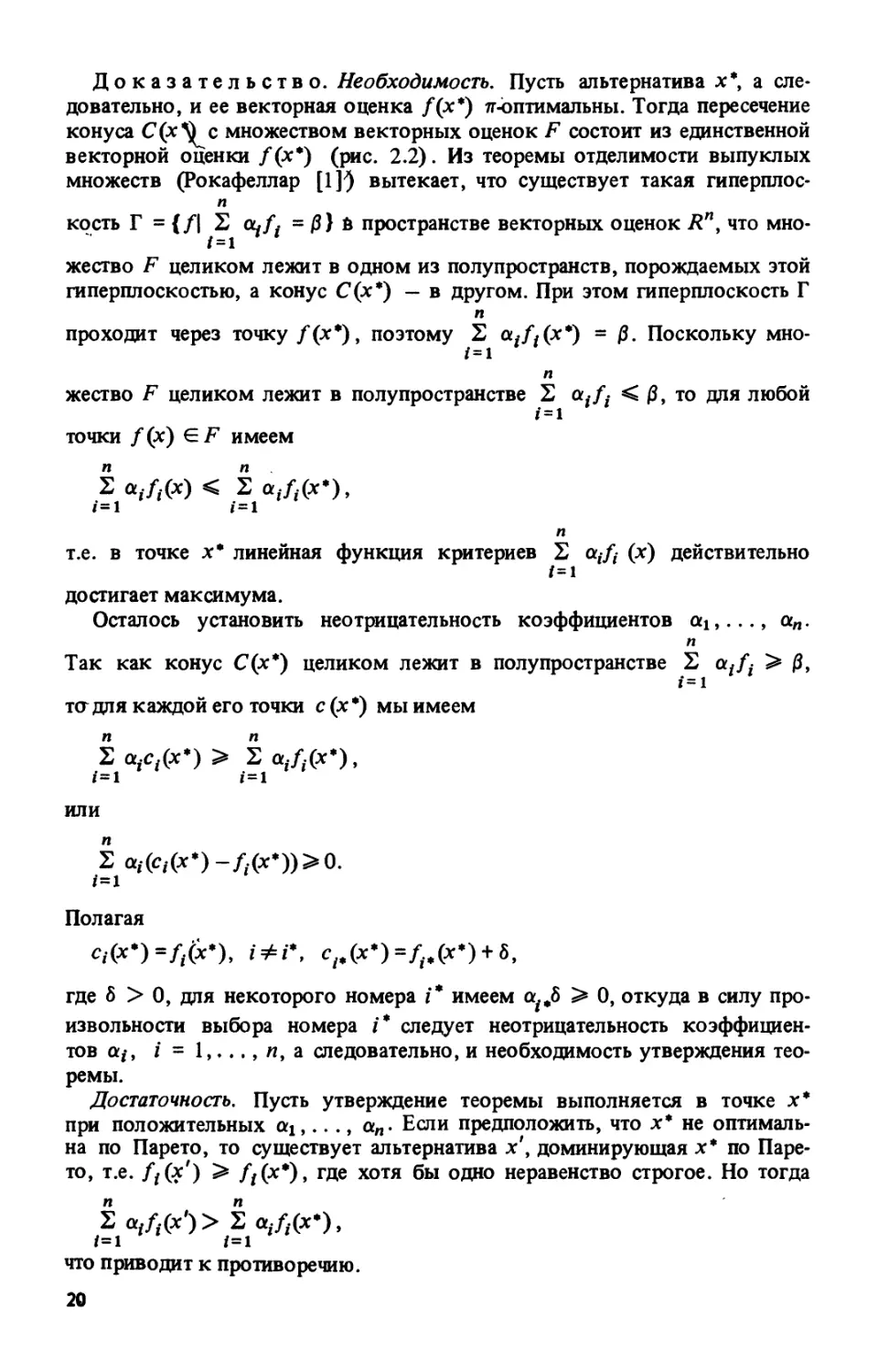
Доказательство. Необходимость. Пусть альтернатива **, а
следовательно, и ее векторная оценка /(**) лчштимальны. Тогда пересечение
конуса С(хЧ1 с множеством векторных оценок F состоит из единственной
векторной оценки /(**) (рис. 2.2). Из теоремы отделимости выпуклых
множеств (Рокафеллар [I]) вытекает, что существует такая гиперплос-
п
кость Г = {/| 2 Ojfj = J3) 6 пространстве векторных оценок Rn, что
множество F целиком лежит в одном из полупространств, порождаемых этой
гиперплоскостью, а конус С(х*) — в другом. При этом гиперплоскость Г
п
проходит через точку /(**), поэтому 2 с^/Дх*) = J3. Поскольку мно-
/=1
п
жество F целиком лежит в полупространстве 2 с^/,. < 0, то для любой
точки f{x) GF имеем
1=1 i=i
п
т.е. в точке х* линейная функция критериев 2 а,/} (х) действительно
/=i
достигает максимума.
Осталось установить неотрицательность коэффициентов ах,..., <хп.
п
Так как конус С(х*) целиком лежит в полупространстве 2 atft > j3,
та для каждой его точки с (х*) мы имеем
или
Полагая
где 5 > 0, для некоторого номера /* имеем atj> > 0, откуда в силу
произвольности выбора номера /* следует неотрицательность
коэффициентов а/, / = 1,...,«, а следовательно, и необходимость утверждения
теоремы.
Достаточность. Пусть утверждение теоремы выполняется в точке х*
при положительных аг,..., а„. Если предположить, что х* не
оптимальна по Парето, то существует альтернатива х\ доминирующая х* по Паре-
то, т.е. ffQc') > ff(x*), где хотя бы одно неравенство строгое. Но тогда
2 а,/Д*')> 2
f=i /=i
что приводит к противоречию.
20
Предположим теперь, что
2 «,//(**) > S
но некоторый коэффициент, например alf равен нулю. Если х* не
оптимальна по Парето, то для некоторой альтернативы х имеем fi (x1) >
> //(**)> * = 1,... , л, где хотя бы одно неравенство строгое. Легко
видеть, что на самом деле /,(*') '= /,•(**)> / = 2,... , и. Действительно,
если.этонетак, то
что противоречит исходному предположению. Следовательно, /j (л:') >
(
Рассмотрим векторную оценку /(х), лежащую на отрезке, соединяющем
/<*') и/(*•):
/(*) = /?/(*') + (J - Д)/(^Ф)э 0 < 0 < 1.
С одной стороны,
Д^./Дх) = 2 о^С*1) = 2 о^Ждс*).
С другой стороны, из предположения о строгой выпуклости множество
векторных оценок вытекает, что /(*) принадлежит внутренности F, а ни
одна точка, принадлежащая внутренности выпуклого множества, не может
максимизировать линейную функцию координат. Полученное
противоречие доказывает достаточность условий теоремы.
Существование опорной плоскости к множеству векторных оценок в
каждой тг-оптимальной точке гарантируется и в случае, когда множество
альтернатив X выпукло, а все критерии /,(*)> / = 1,..., и, — строго
вогнутые функции (в этих предположениях теорема 2.1 была доказана
в (Карлин [1]). Понятно, что множество векторных оценок F при этом
может и не быть выпуклым множеством.
Наиболее распространенный класс задач, в которых множество
векторных оценок не является строго выпуклым, будучи выпуклым,
представляют задачи линейного программирования с многими критериями.
Рассмотрим множество альтернатив
X={xERk\Ax=b, x>0}9 B.1)
где А — матрица размерности т X к, Ъ - m-мерный вектор; на этом
множестве заданы линейные критерии
т
/Дх)= 2 tpyXj, /=1,...,л.
Можно говорить, что векторный критерий в этой задаче задан как
/(*) = <*>*, B.2)
где Ф - п X ^-матрица с элементами <р/у-.
21
Для того чтобы получить условия эт-оптимальности, докажем две
простые вспомогательные леммы (Изерман [1 ]).
Лемма 2.1. Точка х* будет оптимальной по Парето в задаче B.1), B.2)
тогда и только тогда, когда задача линейного программирования
п
2 dty( -> max,
Ax=b, Iy =Фх-Фх*,
x>0, y>0, d/>0, /=1,...,и, B.3)
имеет оптимальное решение х, у, причем y = Q.
Утверждение леммы практически очевидно. Действительно, при у > О
фх G С(х*) для любой допустимой альтернативы х. Значит, если х* тг-оп-
тимальна, то у = 0 и Фх = Фх*. Наоборот, если оптимальное решение у = О,
то для любой альтернативы х, такой, что Фх > Фх*, имеет место равенство
Фх = Фх *. Это и означает 7г-оптимальность х*.
Лемма 2.2.1) Точка х* будет п-оптимальной в задаче B.1), B.2) тогда
и только тогда, когда задача линейного программирования
(и,Ь) — <w, Фх*> -> min,
и1 А - н>тФ > 0, wT > dT > 0\ B.4)
имеет оптимальное решение и, w, удовлетворяющее условию (и, Ь) -
- <н\ Фх*> = 0.
Для доказательства леммы 2.2 достаточно заметить, что задачи B.3)
и B.4) являются взаимно двойственными. Поэтому из теории
двойственности для задач линейного программирования следует, что точка х, у буйет
оптимальным решением в задаче B.3) тогда и только тогда, когда в задаче
B.4) существует оптимальное решение iit iv, и (d, у) = <м, Ь) —
— <iv, Cx*>. Поэтому х* оптимальна по Парето тогда и только тогда,
когда
Теперь можно сформулировать и доказать необходимые и
достаточные условия я-оптимальности в задачах линейного программирования с
многими критериями:
Теорема 2.2. Для того чтобы альтернатива х* была тт-оптимальна в за-
даче All), {22) у необходимо и достаточно, чтобы существовали такие
положительные коэффициенты аг > 0,..., ап > 0, для которых
2 а,/;.(х*) = <а,Фх*> > <ех,Фх>= 2 а,/,(х) Vx6l B.5)
Доказательство. Достаточность. Поскольку все оц
положительны, доказательство достаточности тождественно первой части
доказательства достаточности в теореме 2.1.
О Знак <., ,> здесь и далее обозначает скалярное произведение.
22
Рис. 2.3
Рис. 2.4
Необходимость. Если х* тг-оптимальна, то по лемме 2.2 задача B.4)
имеет оптимальное решение и, iv, удовлетворяющее условию <й, Ь) =
= (w, Фх*>. В силу оптимальности и, w в B.4) м является
оптимальным решением задачи линейного программирования
(и,Ь) -* min, итА > и>тф. B.6)
Из этого вытекает существование оптимального решения в задаче
линейного программирования, двойственной к B.6) :
< w, Фх > -* max, Ax = ЪУ х>0.
Для этой задачи из того, что (и, b) = <w, фх*>, следует, что х* -
оптимальное решение. Выбирая а/ = wf > dt > 0, получаем (а, Фх*) >
> <а,Фх> \fxex. П
Теорема 2.2 имеет чрезвычайно простую геометрическую
интерпретацию. Векторная оценка /(*), лежащая на отрезке АВ (рис. 2.3), не
является тг-оптимальной,посколькудоминируетсяоценкой fix*):
/2 (**) =/2 (*),/l (**)>/l(*),
хотя f{x) и максимизирует функцию 0/i() + 1 /2@ • В то же время
для оценки/(х*), являющейся тг-оптимальной, можно подобрать такие
положительные коэффициенты ai, a2, при которых она будет
максимизировать фуНКЦИЮ OLifi (Х) + а2/2 (X) .
Сходство между теоремами 2.1 и 2.2 состоит в том, что обе они
формулируются в терминах существования некоторой линейной функции
критериев, которая достигает своего глобального максимума в тг-оптималь-
ных точках, причем условия максимума этой линейной функции
одновременно являются необходимыми и достаточными условиями тг-оптималь-
ности. Легко видеть, однако, что существуют задачи с выпуклыми
множествами векторных оценок, в которых не удается добиться столь
удобного совпадения необходимых и достаточных условий тг-оптимальности,
если пытаться сформулировать их с помощью максимума линейной
функции критериев. Так, например, в верхней части множества векторных
оценок F, показанного на рис. 2.4, справедливы необходимые и достаточные
условия теоремы 2.2, а в нижней части — условия теоремы 2.1.
23
Для того чтобы установить связь между условиями теоремы 2.1 и 2.2,
введем следующие обозначения. Рассмотрим множество
А ={'ае/?й|а/>0, 1 = 1,... ,и, 2 а,= 1} B.7)
и отображения
х* -» [Sa(x*) = {aGcL4| 2 о>/,(х*) > 2 а^(х), хеЛГ)], B.8)
а->[5х(а)={х*еДГ| 2 а^/Дх*) > Да>/,(х), х€ЛГ}]. B.9)
Здесь
— замыкание А, х* в B.8) тг-оптимальна, а в B.9) принадлежит
множеству А. Отображение B.8) ставит в соответствие тг-оптимальной
альтернативе х* множество нормальных векторов гиперплоскостей, опорных
к F в точке fix*). Аналогично в B.9) каждому вектору коэффициентов
а Е А ставятся в соответствие все тг-оптимальные альтернативы, через
векторные оценки которых может проходить опорная к F гиперплоскость
с данным нормальным вектором.
Определение 2.2. тг-оптимальная альтернативах* называется регулярной,
если существует такая замкнутая выпуклая окрестность Uточки х*9 что
для любой альтернативы х € X П ?/из /(х) = /(**) вытекает, что х = х*.
Определение 23. Множество Парето называется регулярным, если
каждая его точка регулярна.
Фактически понятие регулярности означает существование для каждой
тг-оптимальной альтернативы окрестности в которой отображение х-*/(х)
взаимно однозначно.. Можно легко показать, что если все критерии ft (x) —
вогнутые функции и* хотя бы один критерий — строго вогнутая
функция, то множество Парето действительно является регулярным.
Теорема 23. Пусть множество альтернатив X выпукло, все критерии
/i(x),,.., fn(x) - вогнутые функции и множество Парето пХ регулярно.
Тогда множество ^-оптимальных альтернатив пХ содержится в замыкании
множества U Sx(a).
Доказательство. Обозначим U Sx(a) = М. Нам надо пока-
зать, что для любой я-оптимальной альтернативы х* существует
последовательность точек из М, которая сходится к х*. Для' этого мы построим
специальную последовательность, сходящуюся к х*, а затем покажем, что
она содержится в М.
Пусть х* — тг-оптимальная альтернатива. Перенося в Rk nRn начало
координат в точки х* и /(х*) соответственно, получаем без потери общности,
что х* = 0и/(х*) =0. Для х* выберем замкнутую выпуклую
окрестность U9 удовлетворяющую определению 2.2, и построим компактное
выпуклое множество N С U, также являющееся окрестностью х*. Если мно-
24
ясество U ограничено, то можно выбрать N= U. Для любого
положительного числа б, 0 < 6 < 1/и, где п — число критериев, положим
п
е, 2 а/ = 1}.
Рассмотрим функцию ? (а, х) = (а, /(*)>, определенную на (X П 7V) X
X Л (е). Поскольку все функции f{ вогнуты, и следовательно,
непрерывны, функция g непрерьюна по совокупности переменных, вогнута по х
и линейна по а. Так как множества X П Nn А (е) компактны и выпуклы,
то множества
(
{xeX\g(a,x)= min
ejrr
= max
непусты для всех а € А (е), х G X DNu выпуклы. Тогда из известной
теоремы Ки Фана (Ки Фан [I]I) следует существование точек а(е) €Л(б)
и х(е) EXHN таких, что
<<*(€),№) < <а(е), /(*(€))> < <aj(x(e))) B.10)
длявсехаеЛ(е) и х€.ХПМ
Поскольку х* = 0 принадлежит X П N и /(**) = 0, то из B.10) имеем
0. B.11)
Из B.10) и B.11) получаем
(aJ(x(e)))>0 VaG4(e). B.12)
В силу компактности X О N можно выбрать последовательность { еп } ,
п = 1,2,..., 0 < еп < 1/л, сходящуюся к нулю таким образом, чтобы
последовательность точек {х(еп)} , удовлетворяющая B.10), сходилась к х, т.е.
П
lim =x(€w) = xGArniV. B.13)
Из непрерывностиg (х, а), B.12) и B.13) получаем < a,f(x) > >0
G Л, откуда // (jc) > 0, i = 1, ..., п. Но поскольку х * оптимальна по Парето,
О Теорема Ки Фана. Пусть Li9 L2 - отделимые, локально выпуклые
топологические линейные пространства, Кх> К2 - компактные выпуклые множества в Lx и
L2 соответственно. Пусть g - непрерывная функция на Кх X К2, Если для любых
х0 е Кх, у0 е К2 множества
JgQcy,) = max^(i;j0)}
и
{y^K2\g(x0,y)= max g(xo,7i)}
выпуклы, ю
25
то из f{ (x) > 0 = // (х *), i = 1, ..., последует, что f(x) = /(*¦). Из
регулярности множества пХ вытекает, что х = х* = 0. Итак, построена
последовательность { х (б„ )) }, сходящаяся к х*.
Теперь покажем, что последовательность {х(еп)} содержит
подпоследовательность {х(е„к)}, которая содержится в М и также сходится к я:*.
Так как х* принадлежит внутренности N, то существует положительное
целое число и0 такое, что все точки х (en)GX П N принадлежат
внутренности N при п> п0. Можно легко показать, что при п> п0 точка х(еп) —
элемент множества М. Действительно, если это не так, то должна
существовать точка х' Е X такая, что
<а(еЛ), /(*')>><<*(ея),' /(х(е„))>. B.14)
Положим х"(Х) = A -Х)х(еп) + \х', 0 < X < 1..Так как множество
X выпукло, то х'^бХ при 0 < X < 1. Но для п > п0 точка х(еп)
принадлежит внутренности W, поэтому существует число X*, 0 < X* <
< 1, такое, чтох"(\*)€Ж Отсюда
>. B.15)
Но для а(еп)^А{еп) функция (а(еп), f(x)) вогнута по х. Поэтому из
B.14), B.15) следует, что
что противоречит B.10).
Таким образом, х(еп) € М для п> по,и для произвольной тг-оптималь-
ной альтернативы х* построена последовательность {х(еп)>} , которая
содержится в М и сходится к х* при п -» «>, что завершает доказательство.
Анализ доказательства теоремы 2.3 делает понятным смысл
накладываемого на множество Парето условия регулярности. Действительно, если
все точки из некоторой окрестности х* имеют одну и ту же векторную
оценку, совпадающую с / (*¦), то все они тгюптимальны, но не любая из»них
может являться пределом последовательности точек из М. Отказаться от
условий регулярности, которые в некоторых случаях могут оказаться
практически непроверяемыми, можно, если переформулировать теорему
2.3 в терминах векторных оценок. Заменяя в B.9) Sx(a) на Sf(<x), где
Sf(a)={f(x*)eF\ 2 щГ((х*)> S <*/?(*),xGJH
' /= i / = i
и обозначая
а^А J
получаем следующее утверждение.
Теорема 2.4. Пусть множество альтернатив X выпукло, а все критерии
fl(x) - вогнутые функции. Тогда множество поптимальных векторных
оценок nF содержится в замыкании множества М' = U Sf(oi).
абЛ J
Доказательство полностью аналогично доказательству теоремы 2.3.
Аналогичный результат для невыпуклых задач приводится в главе 5 и
использует вводимое там понятие в -равномерной оптимальности.
26
Следует иметь в виду, что теоремы .3 и 2.4 свидетельствуют о наличии
некоторого класса задач, в которых для справедливости одних и тех же
предложений приходится делать различные допущения в зависимости от
того, где формулируются эти задачи в пространстве альтернатив или в
пространстве векторных оценок.
§ 2.2. Условия оптимальности:
невыпуклый случай
Теоремы § 2.1 дают исчерпывающий ответ на вопрос, каким условиям
удовлетворяют тг-оптимальные альтернативы и векторные оценки в
выпуклых задачах. Однако в невыпуклом случае воспользоваться линейной
функцией критериев для получения оптимальных по Парето точек уже не
удается. Это понятно, поскольку при доказательстве теорем 2.1 и 2.2
существенно использовалась теорема отделимости, которая для
невыпуклых множеств уже неприменима.
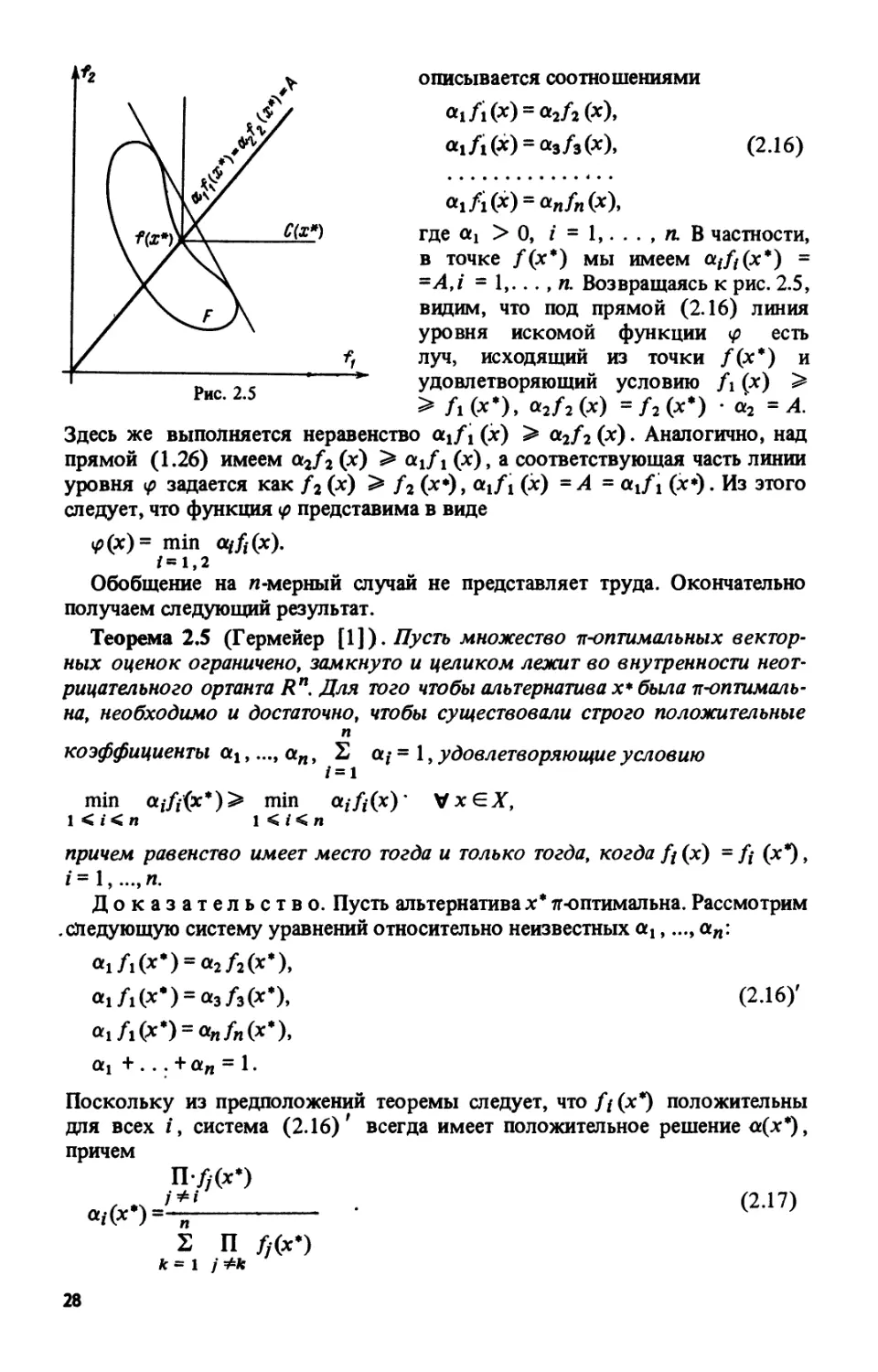
Рассмотрим невыпуклое множество векторных оценок, показанное
на рис. 2.5. Векторная оценка /(*¦) тг-оптимальна, так как пересечение
угла С(х*) с множеством F состоит только из этой точки. Но, как легко
видеть из рисунка, не существует линейной функции критериев, которая
бы достигала в точке /(**) максимального значения. Это означает, что в
невыпуклом случае нам нужны другие условия оптимальности по Парето.
Но, пытаясь получить эти другие условия, целесообразно было бы
сохранить прежнюю структуру условий, т.е. их выражение через максимум
некоторой функции, что позволит анализировать выпуклые и невыпуклые
задачи по крайней мере с близких позиций.
Мы будем стремиться сформулировать следующее утверждение: для
того чтобы альтернатива х* была тг-оптимальна, необходимо и достаточно,
чтобы некоторая скалярная функция </>, зависящая от критериев //,...
-•-,fn> достигала в этой точке максимума. Для того чтобы это утверждение
было конструктивным, необходимо указать вид функции <р.
Будем предполагать, что множество векторных оценок F ограничено,
замкнуто и целиком лежит во внутренности неотрицательного ортанта Rn.
Это означает, что min min Л (х) > 0. Эти два предположения не явля-
1 </ <п хЕХ
ются слишком жесткими. Первое из них фактически .гарантирует
существование тг-оптимальных альтернатив. Второе предположение вводится
исключительно для удобства, поскольку любое ограниченное множество
в R п можно сдвинуть в положительный ортант, от чего отношение
доминирования по Парето между его точками не изменится.
Снова обратимся к рис. 2.5. Поскольку пересечение угла С(х*) с
множеством F состоит из единственной точки, то естественно считать, что
С(х*) есть множество уровня некоторой функции «/>:
C(x*)={yeRn
которая достигает своего максимума на множестве F в точке /'(**). Тогда
стороны этого угла представляют собой линии уровня этой функции, т.е.
описывают множество точек у Е Rn таких, что </> (у) =А. Проведем через
начало координат и точку/(х*) прямую линию. Легко видеть, что она
27
описывается соотношениями
B.16)
С(х*)
Рис. 2.5
где <*1 > О, / = 1,. . . , л. В частности,
в точке /(**) мы имеем «///(х*) =
=Л,/ = 1,..., л. Возвращаясь к рис. 2.5,
видим, что под прямой B.16) линия
уровня искомой функции </? есть
луч, исходящий из точки /(**) и
удовлетворяющий условию fx (х) >
> fi(**), *ifi{x) = /2(**) • «2 = А.
Здесь же выполняется неравенство axfx (x) > a2f2 (x). Аналогично, над
прямой A.26) имеем а2/г (х) > &\f\ (х), а соответствующая часть линии
уровня у задается как /2 (л:) > f2 (л:*), axfx (х) = А = a^i (**). Из этого
следует, что функция <р представима в виде
(р(д:)= min щ/{(х).
/=1,2
Обобщение на л-мерный случай не представляет труда. Окончательно
получаем следующий результат.
Теорема 2.5 (Гермейер [1]). Пусть множество -п-оптимальных
векторных оценок ограничено, замкнуто и целиком лежит во внутренности
неотрицательного ортанта Rn. Для того чтобы альтернатива х* была п-оптималь-
на, необходимо и достаточно, чтобы существовали строго положительные
п
коэффициенты ах,..., ап, 2 ос/ = 1, удовлетворяющие условию
/ i
min
1 < I < И
*)> min a
1 < I < /I
х)*
причем равенство имеет место тогда и только тогда, когда fa (х) =// (х*),
/=1,..., л.
Доказательство. Пусть альтернатива х* 7гоптимальна. Рассмотрим
.следующую систему уравнений относительно неизвестных осх,..., ап:
B.16У
+...+ая = 1.
Поскольку из предположений теоремы следует, что //(л:*) положительны
для всех I, система B.16)' всегда имеет положительное решение <*(**)>
причем
П-//(х*)
А
28
Рассмотрим функцию min a/(x*)//(*). Если эта функция достигает
к / < п
максимума в некоторой точке х , то
min ai(x*)fi(x')> min
I</< п 1 <i<n
=l...„я.
Пусть
min
Тогда ak(x*)fk(x') > ock(x*) fk(x*), или fk(x) > fk(xm). Для
произвольного номера/^ к
Тд k()k
ного номера/^ к
откуда//(jc') > //(^*). Поскольку/(л:*) яюптимальна по предположению,
то/(*')=/(**)•
Обратно, пусть функция min <*/(**)//(*) достигает максимума в
1 </<л
точке jc*. Если х* неоптимальна по Парето, то существует точка х' такая,
что ft(x') > fi(x*), / = 1, ..., и, где хотя бы одно неравенство строгое.
Предположим сначала, что все неравенства являются строгими, т.е.// (д:') >
> Ж**), / = 1,.... п. Тогда *,(*•) Ж*') > «/(*•) Ж**) = >4, i = 1,...,«, и
min а{(х*)/{(х')> min a/(
что противоречит предположению. Следовательно, ftix') = //(**)> '
fj(x') >fj(x*)> i ^ {1,..., и } //,/?= 0. Но это означает, что
min a/(x*)/,(x')= min <*/(
что также противоречит предположению.
Теорема 2.5 оказывается полезной при решении довольно часто
возникающей в приложениях следующей задачи. Пусть задана некоторая
альтернатива х*; необходимо либо показать, что она я-оптимальна, либо найти
яюптимальную альтернативу *', которая ее доминирует.
Наиболее простую структуру эта задача имеет в том случае, когда
рассматривается задача линейного программирования с многими критериями.
Пусть
X ={xGRk\Ax = b, x>0}9
т
fi(x) = 2 VyXj, / = 1,..., и,
^ - тХfc-матрица, Ъ—т-вектор, и имеется допустимая альтернатива
х* ? X. Определив коэффициенты <*/(**) по формуле B.17), получим
29
. задачу
к
min а,(х*) 2
max,
Ax = b, x > О,
которая переписывается в виде
Лх = 6, х>09
B.18)
Л:
2
i =1,..., л,
Рис. 2.6
Задача B.18) представляет собой задачу линейного
программирования и может быть легко решена обычными методами. Если ее решение х'
таково, что/(х') =/(**), то альтернативах* тг-оптимальна. В противном
случае тг -оптимальная альтернатива х' будет доминировать х *.
Заметим, что эта ситуация практически исчерпывает возможности
теоремы 2.5 для решения практических задач. Теорема 2.5 предназначена
специально для невыпуклых задач, решение которых, как известно, связано
со значительными трудностями. Более того, даже если все критерии
являются гладкими функциями, то нелинейная свертка min <*///(х) все
равно будет недифференцируемой, причем в самых "интересных"
точках. Решение задачи поиска глобального максимума недифференцируемой
функции на невьшуклом множестве представляет собой весьма серьезную
проблему. Как правило, в подобных задачах удается определить только
локальные максимумы. Связь локальных максимумов с тг-оптимальностью
рассматривается в двух последующих параграфах. Однако простота и
наглядность теоремы 2.5 делают ее чрезвычайно полезной для различных
теоретических построений.
Отметим здесь же, что если мы выберем произвольный положительный
п
вектор а = (а 1,..., ап}, 2 а2* = 1, и решим задачу максимизации
/= i
min ctiftix) -* max, x GX,
то, в общем случае, решение этой задачи будет неединственным. Если
некоторое множество альтернатив Х(а) обладает тем свойством, что
min
min
для всех х Е Х/Х(ос) и х* Е Х(а), то в X(а) могут входить и не
оптимальные по Парето альтернативы (рис. 2.6). Однако ни одна
альтернатива х*9 для которой существует х', удовлетворяющая условиям//(х')>
>//(х*), / = 1,..., л, не может войти в Х(а) ни при каких
положительных векторах а (Гермейер [ 1 ]).
30
§ 2.3. Локальные условия оптимальности
В предыдущих параграфах мы получали условия оптимальности по
Парею, сводя задачу многокритериальной оптимизации к скалярной задаче.
В выпуклом случае такой подход оправдал себя, однако в невыпуклых
задачах § 2.2 скалярная целевая функция, участвующая в формулировке
условий оптимальности, оказалась не дифференцируемой. Естественно,
что, преобразуя гладкую, но невыпуклую задачу многокритериальной
оптимизации в задачу с одной целевой функцией, желательно сохранить
хотя бы гладкость.
Условия оптимальности по Парето для гладких задач, которые
формулируются в этом параграфе, используют традиционный для задач
математического программирования подход. Если альтернатива х * не является
оптимальной по Парето, то^ смещаясь из нее в некотором допустимом
направлении 8 на малое расстояние, мы получаем положительное
приращение некоторь/х критериев, в то время как остальные критерии не убывают.
(Под "допустимым направлением'9 понимается направление, не выводящее
за пределы множеству альтернатив). Поскольку при дифференцируемых
критериях их приращения представляют собой скалярные произведения
соответствующих градиентов на направление смещения, то все эти
скалярные произведения неотрицательны, а для некоторых критериев —
положительны. Это означает, что для любого неотрицательного вектора а, сумма
компонент которого равна 1,
I а/ 6/ > 0, B.19)
/ = i
где 6/ — приращение критерия / по направлению 5. С другой стороны,
если альтернатива х * оптимальна по Парето, то смещение в любом
направлении приводит к уменьшению хотя бы одной компоненты векторного
критерия. Это означает, что для любого смещения 5 существует такой
вектор аE),
а,F)> 0, 2 а,E)=1,
i=s
ЧТО
2 ^FM/ <0. B.20).
Выражения B.19) и B.20) являются вполне достаточными для того,
чтобы можно было отличать тг-оптимальные альтернативы от
неоптимальных. Теорема, которую мы будем рассматривать в этом параграфе,
во-первых, утверждает, что для всех допустимых смещений из точки х *
существует общий вектор а (б), удовлетворяющий B.20), а во-вторых, позволяет
получить более удобную запись условий B,19), B.20), не использующую
смещений.
Следуя (Да Канха, Полак [1]), рассмотрим сначала каноническую
задачу. Пусть //(*), i = 1,.,., л, rf (х), / = 1,,.., т, - непрерывно
дифференцируемые функции и ?2 — подмножество Rk. В качестве множества
31
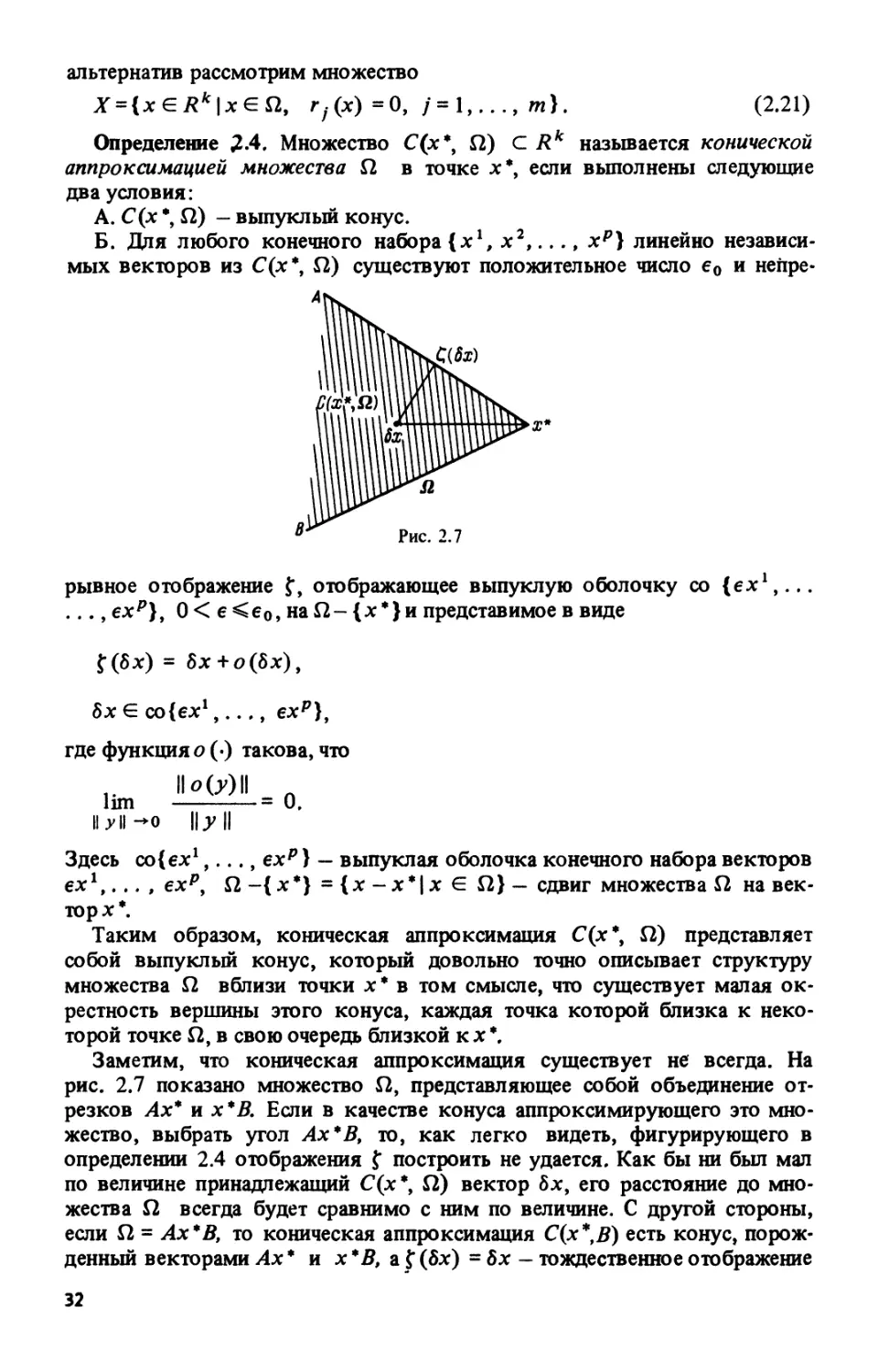
альтернатив рассмотрим множество
X = {xGRk\x<EU9 rf(x) = 0, /=1,..., т). B.21)
Определение 2.4. Множество С(х*9 12) СЛЛ называется конической
аппроксимацией множества 12 в точке х*9 если выполнены следующие
два условия:
А. С(х *, 12) - выпуклый конус.
Б. Для любого конечного набора {х1, х2,..., хр) линейно
независимых векторов из С(х*9 12) существуют положительное число е0 и непре-
?(8х)
1,..., ехр} — выпуклая оболочка конечного набора векторов
ехр9 ?2-{.х*} = {х -х*\х G 12}— сдвиг множества 12 на
векрывное отображение f, отображающее выпуклую оболочку со
... 9€ХР}9 0< €<е0,на12-{дс*}ипредставимоеввиде
f (дх) = дх + оEх),
8х Е cofex1,..., €ХР}9
где функциям (•) такова, что
11*0011 п
lim = 0,
II * II-* о ||^||
Здесь
ех\..
тордг*.
Таким образом, коническая аппроксимация С(х*9 12) представляет
собой выпуклый конус, который довольно точно описывает структуру
множества 12 вблизи точки х * в том смысле, что существует малая
окрестность вершины этого конуса, каждая точка которой близка к
некоторой точке 12, в свою очередь близкой к д: *.
Заметим, что коническая аппроксимация существует не всегда. На
рис. 2.7 показано множество 12, представляющее собой объединение
отрезков Ах* и х*В. Если в качестве конуса аппроксимирующего это
множество, выбрать угол Ах*В, то, как легко видеть, фигурирующего в
определении 2.4 отображения f построить не удается. Как бы ни был мал
по величине принадлежащий С(х*9 12) вектор 8х9 его расстояние до
множества 12 всегда будет сравнимо с ним по величине. С другой стороны,
если 12 = Ах*В, то коническая аппроксимация С(х*,В) есть конус,
порожденный векторами Ах * и х * В, a f (8х) = дх — тождественное отображение
32
(если в качестве f можно выбрать тождественное отображение, то С(х*, ft)
называется конической аппроксимацией 1-го рода).
Теорема 2.6. (Условия Да Канха-Полака). Пусть х* -я-оптимальная
альтернатива и С(х* ft) - коническая аппроксимация ft в точке х\ Тогда
существуют вектор aSRn и вектор -qERm такие, что
\)af>09 / = 1,..., п9
2) (а, г?) Ф О,
3) <а, F(jc*)x> + <7?, R(x*)x) <0
V* Е С(х*, ft), где C(x*,ft) - замыкание С(х*, ft).
Здесь F(x*)9 R(x*) — линейные операторы, составленные из частных
производных функций//(х) и r;(x) i' = l,,..,/i,/=l)...,WB точкех*:
R(x*)
Ъгх
Ъгх
1
V/,
B.22)
(х*)
Эх*
(*•)
B.23)
Доказательство теоремы 2.6 приведено в (Да Канха, Полак [1]).
В задачах нелинейного программирования множество ft обычно
задается набором неравенств. Пусть qi9 i = 1, . . . , s - непрерывно
дифференцируемые функции на Rk. Будем считать, что
ft ={xeRk\qi(x) < 0, i = 1,...,5}. B.24)
Для того чтобы получить аналог теоремы 2.6 в этой ситуации, нам
понадобится лемма Минковского - Фаркаша, которая утверждает, что если А -
матрица, Ь - вектор такие, что из неравенства Ах < 0 вытекает < Ь, х X О,
Vx, то существует вектор р < 0, удовлетворяющий условию Ь = Атр.
В любой точке х Е ft можно определить множество активных /(х) =
= {i\qf(x) = 0, / = 1,..., s) и неактивных 7(х) = И\я((х) < О,
i = 1,..., s) ограничений. Мы сделаем традиционное для задач
нелинейного программирования предположение: существует вектор z ERk такой, что
<V^(x*), z) < 0 V/ е 7(х*). B.25)
Здесь х* - тг-оптимальная альтернатива. Полезность этого предположения
очевидна, поскольку легко показать, что в этом случае непустое множество
C(x*,ft) = {xeRk |<V<7,(x*),*> < О,
является конической аппроксимацией первого рода для ft в точке х* и
C(x*,ft) = {xERk \<Vqt(?c*)9x> < 0, /е/(х*)}.
3. Ю.А. Дубов 33
Тогда из теоремы 2.6 следует, что существуют векторы a ? Rn и т? ?
удовлетворяющие условиям:
1) а( > О, / = 1,...,л;
3) 2 ч<7Мх*)9х>+ 2 i?,<Vr,(x*),*>< О
/ = 1 /=i
для любого jc, такого, что х G Rk и < Vfy(x*}, х > < 0, i € /(х*).
Обращаясь к лемме Минковского - Фаркаша, видим, что из нее
следует существование чисел р,- < 0, z E /(х*), таких, что
2 a/V/;.(x*)+ 2 ц,Г/(*') + 2 P/V<z,(x*) = 0.
1 = 1 1=1 I G/(x*)
Полагая P/ = О для i G /(x*), получаем окончательный результат
(Да Канха, Полак [1]) для задач математического программирования.
Теорема 2.7. Пусть х* — ^оптимальная альтернатива в задаче с
множеством X, определяемым по B.21), B.24). Если выполнено
предположение B.25), то существуют скаляры a,-, i = 1, . . . , п, т?,-, i = 1, . . . , mt и р,«,
/= 1,... ,s, такие, что:
1) щ > 0, i = 1,...,л;
2) Р/ < 0, i = 1,.7.,j;
3) (а,1?)^=0;
4) 2 atVfiQc*) + Ji т?/гДх*)+ Др, V*,(**) = 0; B.26)
5) 2 pf^(x*) = 0.
i = i
Уравнение E) представляет собой традиционное для задач
математического программирования условие дополняющей нежесткости.
Интересно установить связь между теоремами 2.1 и 2.7. Теорема 2.1
утверждает, что для тг-оптимальной альтернативы х* найдется линейная
функция критериев < а, /(х)>, достигающая в точке х* максимума. Пусть
множество X в теореме 2.1 устроено, как в теореме 2.7, т.е.
* = о,
/= 1,..., s}9 B.27)
где функции г; линейные, а функции qt выпуклые (для обеспечения
выпуклости X). Критерии // мы будем считать строго вогнутыми
функциями. Тогда тот факт, что функция (а, /(х)> достигает максимума в
точке х* при неотрицательных а/, можно записать в виде условий
оптимальности строго вогнутой скалярной функции на выпуклом допустимом
множестве. Условия Куна - Таккера в этом случае имеют вид:
2) pi < 0, i = l,...,s;
п т s
4) 2 <*/?/•(**) + 2 т^гД**) + 2 p,V«,(x*) = 0; B.28)
/=1 i = 1 /=1
5) 2 рМх*) = 0.
/ = 1
Условия af > 0, i = 1,. . . , п, и (а, г?) ^ 0 из B.26) здесь
отсутствуют, потому что а/ > 0 по теореме 2.1, а условие
2 щ = 1
/ = i
делает неравенство (а, т?) =?0 излишним. В остальном B.28) и B.26)
совпадают, но при этом B.26) было получено без каких-либо предположений
о выпуклости.
Разница между теоремами 2.1 и 2.7 наиболее отчетливо видна, если
попытаться использовать B.26) в качестве достаточных условий тг-опта-
мальности. В условиях теоремы 2.1 равенства B.26) и B.28)
эквивалентны, поэтому теорема 2.7 дает необходимые и достаточные условия
оптимальности. Бели же задача не обладает выпуклой структурой, то B.26)
соответствуют локальному максимуму функции <а, /(х)> на
допустимом множестве. Локальность условий B.26) следует из того, что
теорема 2.7 доказывается для малых окрестностей заданной точки. Поэтому
на самом деле теорема 2.7 дает необходимые условия локальной 7г-опти-
мальности (альтернатива х* называется локально п-оптималъной, если
существует такая ее окрестность U(x*), что х* - тг-оптимальна на
множестве U(x*) П X). Поскольку в выпуклом случае понятия тг-оптималь-
ности и локальной тгчштимальности совпадают, условия теоремы 2.7
являются достаточным.
Заметим, что теорема 2.7 дает более общие условия, чем теорему 2.1,
но при этом вводится дополнительное предположение о непрерывной
дифференцируемое™, которое в теореме 2.1 отсутствовало. Еще более
общие условия оптимальности можно получить, ослабив это
предположение.
§ 2.4. Условия оптимальности в негладких задачах
Весьма близкие условия тгчштимальности можно получить, если и не
предполагать непрерывной дифференцируемости всех функций,
входящих в описание задачи. Действительно, теоремы 2.6 и 2.7 утверждают,
что, если альтернатива x*ir - оптимальна, то конус D, соответствующий
увеличению всех критериев при малом смещении по поверхности г(х) = 0,
и конус К(х*), соответствующий всем возможным изменениям критериев
при допустимых вариациях из точки х*, не имеют общих точек, за
исключением начала координат, т.е. внутренности этих конусов не
пересекаются. Таким образом, критерием я-оптимальности может служить отсутствие
пересечения некоторой системы выпуклых конусов. Для построения такой
системы непрерывная дифференцируемость не нужна.
3* 35
Рассмотрим конус KCRk:
к = {xeRk \хек=>\хек, \>о).
Множество К* С Rk называется двойственным (полярным, сопряженным)
конусом, если
К* ={x'eRk \(х',х) > О, хек).
Нам понадобится следующий результат.
Теорема 2.8 (см. Гирсанов [1]) .Пусть Кх,К2,..., Кр, Кр + Х - непустые
выпуклые конусы в топологическом линейном пространстве, причем
р + 1
Кх, К2, . . . , Кр открыты. Тогда П Kf - ф тогда и только тогда, когда
/=1
существуют непрерывные линейные функционалы hj ? Kf, i = 1, 2, . . .
р + i
..., р +1, не все равные нулю, такие, что 2 А,- = 0.
/= 1
В том случае, когда исходная система конусов принадлежит
евклидову пространству Rk9 то в силу его рефлексивности система сопряженных
конусов также принадлежит этому пространству, поэтому утверждение
теоремы 2.8 в этом случае означает существование векторов ht EK}CRk.
Мы рассмотрим сначала основные определения и результаты,
связанные с задачей скалярной оптимизации вида
/(*) -» max, хЕХ=РП ait B.29)
/= 1
где Л/, / = 1,. . . , р, — множества с непустой внутренностью. В
обозначениях предыдущего параграфа
п( ={x\qt(x) < 0}, /=1,* .., s9
Пр + 1 ={*ki(*) = 0, /= l,...,m>. B.30)
Определение 2.5. Вектор z G Rk называется направлением возрастания
функции f(x) в точке х*, если существуют окрестность Uвектора z и число
X > 0 такие, что /(**+ Х>>) > /(**) для всех у € U и X € @, X).
Определение 2.6. Пусть $2 С Rk — множество с непустой внутренностью
и х* €= П. Вектор z ? Rk называется допустимым направлением в точке х*,
если существуют окрестность Uвектора z и число X > 0 такие, что х* + \у е
G п для всех у е U и XG @, X) !>.
Заметим, что конусы допустимых направлений могут и не быть
выпуклыми (рис. 2.8). Более того, если множество П имеет пустую внутренность,
то конуса допустимых направлений не существует (рис. 2.9). Здесь п -
^Очевидно, что направление возрастания и допустимые направления образуют
открытые конусы с вершиной в начале координат. Читателю рекомендуется сравнить
определение конуса допустимых направлений (при дополнительном предположении
о его выпуклости) с определением конической аппроксимации множества 12 в
предыдущем параграфе.
36
гладкая кривая на плоскости и, как легко видеть, для любой
окрестности U любого направления z существует такое число X > 0, что х* + \у ?
ф 12 ни для каких yGU и 0< X< X.
Определение 2.7, Пусть 12 С Rk - множество с пустой внутренностью
и х* € 12. Вектор z G Rk называется касательным направлением к_12 в
точке х*, если дня любой окрестности U вектора z и любого числа X > О
существуют у € U и X € (О, X) такие, что х*+ Х.у ? 12.
Геометрическая интерпретация касательного направления приведена
Рис. 2.8
Рис. 2.9
на рис. 2.9. Можно показать, что касательные направления образуют
замкнутый конус с вершиной в начале координат.
Теперь приведем условия оптимальности для задачи B.29).
Теорема 2.9. Пусть К - конус направлений возрастания f(x).e точке х*,
Mj - конус допустимых направлений для множества 12/ в точке х*,
i = 1,..., р, Mp+i - конус касательных направлений для множества
ftp+i в точке х*, и все эти конусы выпуклы. Если точка х* является
локальным максимумом f(x) на 12, то существуют векторы h0 E К*,
р + 1
hf € Mf, не равные одновременно нулю, такие, что 2 А,- = 0.
i = о
Доказательство этой теоремы сводится к применению утверждения
теоремы 2.8 к пересечению конусов К П ( П Л//), которое пусто в
/= 1
точке локального максимума f(x).
Для того чтобы получить условия яюптималыюсти, нам
понадобится ввести еще одно понятие, относящееся к конусу направлений.
Определение 2.8. Вектор i E Rk называется направлением
неубывания функции /(*) в точке **, если существуют окрестность U вектора z
и число X > 0 такие, что f(x* + Х^) > f{x) для всех у е Uh X € @, X).
Лемма 2.3. Направления неубывания образуют открытый конус с
вершиной в начале координат, который содержит конус направлений
возрастания в той же точке.
Доказательство. Пусть z — направление неубывания и у > 0 —
произвольно выбранное положительное число: Тогда yz - тоже
направление неубывания, поскольку вместо окрестности Um числа X > 0 можно
37
выбрать окрестность yU = {yy\y G U) и число X = \/у. Поэтому
направления неубывания образуют конус с вершиной в нуле. Если z - направление
неубывания, то по определению существует окрестность (/точки z,
каждый элемент которой у G U также есть направление неубывания,
следовательно, рассматриваемый конус открыт. Включение очевидно.
Теорема 2.10. Пусть f:Rk -* Rn, Kt - конус направлений возрастания
), i = 1,..., и, Lt - конус направлений неубывания для //(*),
/ = 1,..., w, ftj - множество с непустой внутренностью, i = 1,..., s,
^*+i ~ множество с пустой внутренностью, Мц - конус допустимых
направлений для ?2/, i = 1, . . . , s, Ms+l - конус касательных направле-
5+1
ний для П5+1, все конусы выпуклы и определяются в точке х* G П ft/.
Если точка х* является локально ^-оптимальной, то имеют место
неравенства
^ + 2 А<° * * 2 /?° = 0, / = 1,..., п, B.31)
/ Ф i ' k я 1 *
где Л/ € ЛГ/, А^) G L* для j = 1, . . . , л, /#/и i^^M^ k= 1, 2,...
..., S + 1, - не равные одновременно нулю векторы, принадлежащие
соответствующим двойственным конусам для всех i = 1,..., п.
Доказательство. Необходимым условием локальной тг-опти-
мальности является пустота пересечения каждой системы выпуклых ко-
s+l
нусов, т.е. Kt П ( Г\ Lt) П ( П Мк ) = 0V/. Чтобы это показать, пред-
}*i k=\
положим противное, т.е. существование номера /, 1 < / < w, такого, что
рассматриваемое пересечение не является пустым. Тогда в этом
пересечении можно выбрать направление z G Rk9 удовлетворяющее следующим
очевидным условиям: существуют окрестности и*2, U'z, / = 1,. . . , п, j Ф i
и U*y к = 1, . . . , s вектора z и положительные числа Х{>, Х;- и X* такие,
что:
а) Мх*+\у) >//(«•) для vyeul х е (ол);
б) Ж^+^)>Ж^*) V^Gt//, XG@,\), / = 1,...,л,
Выберем в качестве окрестности точки z множество
U2 = U* П [ П [//] П [ П ?^J,
/ # / Л: = 1
а в качестве X > 0 число
X = min (\h \h Xfr), / = 1,..., n, j Ф i, к = 1,.. ., s.
Поскольку z G Ms+ j, существуют X G @, X) viy€Uz такие, что х*+ \у G
G ?ls+ j. Вектор x' = x* + X>> не совпадает с х*9 принадлежит П ~ П Пк
к = 1
38
и удовлетворяет условию /(*') Ф /(х*), причем /)(*' ) > //(**),/ Ф /,
и //(*') >//(**)» что противоречит исходному предположению о ячшти-
мальности х*. Теперь утверждение теоремы очевидным образом следует
из теоремы 2.8.
Заметим, что из теоремы 2.10 вытекает одно важное следствие,
которое фактически является обобщением полученных ранее условий тг-оп-
тимальности. Для того чтобы получить это следствие, достаточно заметить,
что при выполнении дополнительного условия Kj=Lf9i = l9...,n
(которое отнюдь не означает, что Kt = Li9 i = 1, . . . , п) уравнения B.31)
вырождаются в одно уравнение*
п s + 1
2 ^ + 2 lk = 0. B.32)
1=1 к= 1
Окончательно получаем
Следствие. Если дополнительно к условиям теоремы 2.10 потребовать
выполнение равенства Kf = L\> то из локальной it-оптимальности х*
следует существование не равных одновременно нулю векторов ht G Kf и
lk G Mk, для которых выполнено равенство B.32).
Чтобы установить связь с результатами предыдущего параграфа, снова
рассмотрим задачу максимизации вектор-функции Л (х), . . . , /„ (х) на
множестве альтернатив B.30). Будем предполагать, что все функции,
входящие в описание этой задачи, являются непрерывно
дифференцируемыми. Можно легко показать, что если qt(x*) < 0, то М\ = Rk иЛ//*={ 0}.
Если же qi(х*) = 0, то М* = { р, Vqt (х*) | р/ <0 }. Для ограничений равенств
(в предположении о линейной независимости градиентов функций rt{x)
в точке х*) двойственный конус записывается как
И наконец, для целевых функций любой элемент двойственного конуса ht
представим в виде ht = щVfi(x*)9 i = 1,..., а,- > 0.
Окончательно получаем, что из оптимальности jc* по Парето вытекают
условия
j + ДР/ Vqt(x*) = 0,
lPiQi() = 0, B.33)
<*i > 0, i=l,...fл, Pi < 0, /=l,...,s, (а,т?,р)^0,
что совпадает с B.26).
Заметим, что если градиенты г{ (х) в точке х* линейно зависимы, то
существуют числа 7i,..., 7m такие, что
2 7/VM**) = 0, 2 7?*0.
39
Тогда уравнения B.33) выполняются независимо от я-оптимальности **,
если положить а,- = р/ = О, / = 1,..., л, / = 1,..., s.
Понятно, что если какие-либо из функций /, г, q не являются
дифференцируемыми, то теорема 2.10 остается справедливой, но привести
условия B.31) к виду B.33) уже не удается. В выпуклом случае
двойственные конусы* можно описывать, пользуясь понятием субдифференциала
выпуклой функции д(IК
Следует отметить, что теорема 2.10 справедлива для произвольного
линейного топологического пространства L, однако при этом следует
иметь в виду, что двойственные конусы принадлежат сопряженному
пространству L *, а их элементы представляют собой линейные непрерывные
функционалы на L.
§ 2.5. Выводы
В этой главе были рассмотрены наиболее известные типы условий я-оп-
тимальности: теорема Карлина, теорема Гермейера, условия Да Канха «~
Полака и условия теоремы 2.10. Последний тип условий является наиболее
общим из рассмотренных.
Действительно, в предположении о выпуклости и непрерывной диффе-
ренцируемости лемма Карлина выводится из теоремы Да Канха - Полака,
а если дифференцируемое™ не предполагать, то она следует из теорем
§ 2.4. Одновременно, условия Да Канха - Полака являются очевидным
следствием теоремы § 2.4 в гладких задачах.
Заметим, что теорема Гермейера не может быть, выведена из теорем
§ 2.3 и 2.4 в том виде, в котором они здесь сформулированы.
Действительно, записывая скалярную задачу оптимизации, фигурирующую в
утверждении этой теоремы
min<ty(jr*)//(x) -+ max, х G X,
как
{ -> max,
/•/(*) = 0, i=l,...,m, ^,(jc) < 0, /=l,...,s, B.34)
легко видеть, что множество допустимых альтернатив имеет такую .же
структуру, как ив § 2.3, но непосредственный вывод необходимых
условий максимума функции ? невозможен, так как в этюптимальной точке jc*
последние л ограничений являются активными, но условие B.25) для
них не выполняется. Аналогичное замечание справедливо и для
теоремы 2.10.
функция является дифференцируемой, то субдифференциал совпадает
с ее градиентом. В общем случае субдифференциал содержит производные функции
по всем направлениям. Если, например, функции ^(дг) недифференцируемы, то
в B.33) вместо 2) p/v <?/(**) появляется сумма S P/^/U*), где^/Ос*) е
i = i / = 1
е bqtix*).
40
Следует упомянуть, что существуют и более сложные формулировки
условий я-оптимальности, аналогичные теоремам § § 2.3 и 2.4, из
которых теорема Гермейера, правда, в несколько ослабленном виде, может
быть получена в качестве частного случая. Однако их рассмотрение
выходит за рамки данной книги.
И в заключение отметим два факта, которые, на наш взгляд,
заслуживают внимания. Первый из них состоит в том, что, несмотря на
существенно более общую по сравнению со скалярной оптимизацией постановку
задачи, получаемые здесь условия оптимальности ни по своему виду, ни
по аппарату, с помощью которого они получаются, не отличаются от
аналогичных результатов в теории скалярной оптимизации. Хотя материал
этой главы и не является достаточно полным, чтобы охарактеризовать
все результаты, полученные в данном направлении, он, по нашему мнению,
достаточно убедительно показывает, что, когда речь идет об условиях
оптимальности, разницы между задачами с одним критерием и задачами
с несколькими критериями нет.
Но, с другой стороны, некоторые утверждения, приведенные в данной
главе, позволяют обнаружить интересные качественные особенности
многокритериальных задач. Если на ограниченном, замкнутом и выпуклом
множестве альтернатив задана вогнутая целевая функция, то множество
ее максимумов, как легко убедиться, всегда замкнуто — поэтому любая
сходящаяся последовательность оптимальных альтернатив всегда имеет
своим пределом оптимальную альтернативу. С другой стороны, анализ
утверждения теоремы 2.3 показывает, что в многокритериальных задачах
дело обстоит по-другому: множество оптимальных по Парето
альтернатив даже в компактных выпуклых задачах может оказаться незамкнутым,
и последовательность тгюптимальных альтернатив может сходиться к
неоптимальной по Парето точке. Читатель может легко построить
соответствующий пример в пространстве векторных оценок при п > 3. Если п = 2,
то множество Парето в пространстве векторных оценок для задачи с
вогнутыми целевыми функциями и выпуклым, ограниченным и замкнутым
множеством альтернатив всегда замкнуто.
Глава 3
ПРОЦЕДУРЫ РЕШЕНИЯ МНОГОКРИТЕРИАЛЬНЫХ ЗАДАЧ
Очень многие задачи принятия решений могут быть сформулированы
как задачи выбора единственной наилучшей в каком-либо смысле
альтернативы из допустимого множества. Если качество или полезность
альтернатив измеряются с помощью известной скалярной функции, то
методологических проблем не возникает, и возможны лишь вычислительные
трудности, связанные с необходимостью решения соответствующей
экстремальной задачи. Совсем по-другому обстоит дело с многокритериальными
задачами. Здесь центр тяжести безусловно смещен в сторону определения -
а что же следует считать наилучшей альтернативой в задаче с несколькими
целевыми функциями, которые противоречивы и достигают максимума
в различных точках множества альтернатив? Основьюаясь на различных
определениях наилучшей альтернативы, можно провести некоторую
классификацию известных процедур решения многокритериальных
задач.
По-видимому впервые классификация такого типа была введена в
работах А.С. Красненкера (Красненкер [1]), где процедуры принятия решений
при многих критериях делились на "априорные" "апостериорные" и
"адаптивные" по типу используемой в этих процедурах дополнительной
информации. В процедурах' априорного типа делается явное или неявное
предположение, что вся информация, позволяющая определить наилучшее
решение, скрыта в формальной модели задачи, т.е. в описании множества
альтернатив и целевых функций и, следовательно, с помощью некоторых
преобразований может быть из этой формальной модели извлечена и
конструктивно использована. Апостериорные процедуры обычно связаны с
наличием некоторой системы гипотез или' аксиом, которые должны
проверяться для каждой конкретной ситуации принятия решений. Эти аксиомы
являются как бы дополнительными и в формальную модель задачи не
входят. Если проверка аксиоматики приводит к положительному результату,
то это позволяет в ряде случаев построить механизм выбора наилучшей
альтернативы. Проверка аксиоматики связана с привлечением
дополнительной информации. Название "апостериорные процедуры" объясняется, тем,
что сбор этой информации обычно предшествует сравнению альтернатив
с целью выбора наилучшей. И наконец, адаптивные процедуры тоже
используют дополнительную информацию, но, в отличие от апостериорных
процедур, здесь это делается последовательно, одновременно с анализом
множества допустимых альтернатив. В ряде случаев это позволяет строить
достаточно универсальные методы принятия решений в
многокритериальных задачах.
42
Эта классификация, как, впрочем, и многие другие классификации
процедур многокритериальной оптимизации, конечно, не является полной.
Достаточно заметить, что существуют процедуры, которые нельзя
однозначно отнести к тому или иному типу, например смешанные
априорно-апостериорные или апостериорно-адаптивные методы. Однако ее использование
позволяет достаточно полно представить возможности различных типов
процедур, их достоинства и недостатки.
Мы не ставим своей задачей дать сколько-нибудь полный обзор процедур
каждой группы. Вместо этого мы рассмотрим некоторые наиболее
типичные для каждой группы методы.
§ 3.1. Априорные процедуры многокритериальной оптимизации
Как уже отмечалось выше, априорные процедуры не используют никакой
дополнительной информации. Считается', что если множество альтернатив X
и целевые функции /i(jc) , ..., /„(*) заданы, то этого вполне достаточно
для объективного, не зависящего от отсутствующих в данной модели
факторов определения оптимального решения. Традиционная схема
рассуждений, правда, в значительно упрощенном виде, выглядит следующим
образом.
Каждый критерий /,- (х) характеризует некоторое локальное качество
альтернативы х, например вес, надежность, стоимость, быстродействие и т.д.
Наилучшая альтернатива, по-видимому, характеризуется наиболее удачным
сочетанием всех этих локальных качеств, т.е. имеет максимальное значение
"глобального" качества. Таким образом, для выбора наилучшей
альтернативы достаточно понять, каким образом глобальное качество зависит от
локальных качеств, после чего многокритериальная задача будет сведена
к задаче скалярной оптимизации, решение которой уже не составит труда.
Естественно, что вид глобальной функции качества существенно зависит
от типа решаемой задачи. В ряде практических ситуаций может
использоваться модель, в которой глобальное качество альтернативы представляет
собой сумму локальных качеств, т.е.
*(*)= 2 /,(*). C.1)
Такая модель получила название принципа равномерной оптимальности
(Борисов [1]). Этим часто пользуются в задачах, в которых критерии
имеют более или менее четко выраженную стоимостную окраску. Если
каждый критерий может быть охарактеризован в денежных единицах, то сумма
критериев соответствует доходу от выбора альтернативы jc.
Если же критерии /, (х) не выражаются в одних и тех же единицах
измерения, то для использования формулы C.1) их приводят к безразмерному
виду. В принципе это можно делать путем деления значения каждого
критерия на единицу соответствующего масштаба, однако известны и более
сложные способы приведения к безразмерному виду, например путем
введения функции (Волкович [1])
п f.(x) —f.m п
2 м '= I Х,/,(х)-С C.2)
/ = | ft ~fi / = 1
43
где
1
2 Х,//"; C.3)
1
/,. - максимальное, а //" - минимальное значение критерия ft (x) на
допустимом множестве. При этом вклад "локального качества"// в
"глобальное качество" \р зависит от того, насколько сильно меняется локальное
качество на допустимом множестве.
Легко видеть, что принцип равномерной оптимальности применим
далеко не всегда. Его основным недостатком является возможность
компенсации недопустимо малых значений некоторых критериев достаточно
большими значениями других. Действительно, если х характеризует проект
самолета, а критерии f\ и fi представляют собой его надежность и скорость
соответственно, то очень высокой надежностью может обладать самолет,
который никогда не сможет взлететь, а следовательно, будет иметь нулевую
скорость. Несмотря на явную бесполезность такого устройства, его
глобальное качество может быть довольно большим, если определять его по
принципу равномерной оптимальности.
Таким образом, мы приходим к другому принципу оптимальности:
*(х)= П /,(*), C.4)
который получил название принцип справедливого компромисса и, как
легко убедиться, присваивает нулевое значение качества самолету, который
не может летать. Этот принцип оптимальности весьма популярен и
встречается во многих работах, во-первых потому, что существуют разнообразные
схемы рассуждений, приводящие к C.4), во-вторых потому, что здесь
прослеживается тесная связь с концепциями решений в некооперативных
играх, а в-третьих, потому, что он является едва ли не самым древним из
известных принципов оптимальности — им пользовался еще Л. Кэролл
(Кэролл [1]). Рассмотрим приведенный им пример.
В конкурсе участвуют три вязальщицы Л, М и Н. Вязальщица Л успевает
связать 5 шарфов, пока М вяжет 2. Н успевает связать 4 шарфа, пока Л
вяжет 3. Пять шарфов Н весят столько же, сколько один шарф Л, а пять
шарфов М — столько же, сколько три шарфа Н. Один шарф М греет так же,
как четыре шарфа Н, а один шарф Л - как три шарфа М. Спрашивается,
какая из трех вязальщиц лучше, если быстроту вязки, легкость шарфа и
его способность сохранять тепло оценивать одинаково.
Решение выглядит следующим образом. По быстроте вязки качество
работы Л, М и Н, как легко видеть, оценивается числами 1, 2/з и 4/3. Для
оценки легкости шарфа следует иметь в виду, что чем больше вес, тем
менее искусной считается вязальщица. Значит, здесь Л, М и Н получают
оценки Vs> 5/з и 1. Аналогично оценивается и умение вязать теплые
шарфы: 3, 1, и %. Чтобы получить окончательный результат, необходимо
перемножить оценки, полученные вязальщицами и сравнить результаты. Имеем:
лучшей вязальщицей является М, затем Л и наконец Н.
Эта задача сопровождается объяснением, которое имеет смысл
процитировать. "Почему оценки претенденток надлежит именно перемножать,
44
а не складывать, подробно объясняется во многих учебниках, и я не буду
занимать здесь место повторением избитых истин. Однако
проиллюстрировать необходимость (курсив наш) умножения можно очень легко на
примере длины, ширины и глубины. Представим себе, что два землекопа А и В
пожелали узнать, кто из них более искусен в своем ремесле. Оба копают
ямы в форме прямоугольного параллелепипеда. Количество проделанной
работы измеряется числом кубических футов вынутой земли.
Предположим, что А выкопал яму длиной 10, шириной 10 и глубиной 2 фута, а В
выкопал яму длиной 6, шириной 5 и глубиной 10 футов. Объем первой
ямы равен 200, а второй - 300 кубическим футам. Следовательно, В
справляется со своим делом в 3/2 раза лучше, чем А. А теперь попробуйте
оценить по десятибальной системе длину, ширину и глубину каждой из ям,
а затем сложить оценки. Что у вас получится?"
Несмотря на довольно категоричный характер этого утверждения, его
вряд ли можно признать убедительным. Действительно, если качество
работы землекопов оценивается по C.4), то из этого отнюдь не следует, что
таким же образом следует оценивать и качество работы вязальщиц. Однако
рассмотренные примеры позволяют сделать следующие выводы.
1. Принцип равномерной~оптимальности, принцип справедливого
компромисса, а также другие подобные схемы в принципе равноценны. Без
рассмотрения конкретной задачи обоснованный выбор того или иного
принципа оптимальности невозможен.
2. Выбор принципа оптимальности для решения конкретной задачи
должен быть обусловлен структурой именно этой задачи. Использование
аналогий может привести к ошибочным результатам.
Рассмотрим еще один априорный принцип оптимальности, получающийся
на основе аппарата теории размытых множеств.
Пусть имеется множество альтернатив X, и к каждой альтернативе
предъявляются разнообразные требования: например, альтернатива должна
гарантировать высокую надежность, быть удобной в эксплуатации и т.д.
Численные оценки степени удовлетворения этих требований можно
получать, например, как вероятность безотказной работы, уровень шума и пр.
Однако эти оценки (и соответствующие им функции альтернатив)
недостаточно точно характеризуют степень удовлетворения предъявляемых
требований. Поэтому имеет смысл говорить о нечетких целях выбора и
использовать функции /,- в качестве функций принадлежности.
Напомним, что размытое подмножество А множества X задается
функцией принадлежности UA, которая приписывает каждому элементу х ? X
число в интервале [0, 1], характеризующее степень принадлежности
элемента х множеству А, Положим
f (х)
ус,(*)=-тг, /=i я; C.5)
и
тогда 0 <.Uci(x) < 1 (если все значения критериев неотрицательны) и
^сД*) можно рассматривать как функцию принадлежности альтернативы
х размытому множеству, характеризующему соответствие цели Q.
Если задана группа целей С\, С2, ..., Сп и необходимо выбрать
альтернативу, наилучшим образом удовлетворяющую всем целям одновре-
45
менно, то, как показано в (Заде [1]), можно ввести совокупную
цель С вида
с= h ch (з.б)
1 = 1
Поскольку функция принадлежности пересечению размытых множеств
определяется как
Uc(x)= min Uclx)% C.7)
1 < I < П l
то степень удовлетворения совокупной цели для каждой альтернативы
fiix)
«,(*) = ?/с(х) = min -~т-. C.8)
1 < / < п f.
Выражение C.8) совпадает с известным из теории исследования операций
принципом гарантированного результата. Под наилучшей альтернативой
здесь понимается такая альтернатива, которая максимально соответствует
совокупной цели, т.е. максимизирует C.8) на множестве допустимых
альтернатив.
Естественно, что замечания, сделанные выше, в равной степени
справедливы и для принципа гарантированного результата C.8).
Завершим наш обзор априорных процедур рассмотрением хорошо
известной процедуры, получившей название метод идеальной точки в
пространстве критериев (Салуквадзе [1]). Пусть на множестве альтернатив X
заданы п целевых функций /i (х), . .., fn (х). В пространстве векторных
оценок R" рассмотрим идеальную точку, или точку утопии ? ={?ь...,|-я},
где ?,. = min//(jc). Как обычно, мы предполагаем, что множество вектор-
xG X
ных оценок ограничено и замкнуто. Если бы точка ? принадлежала
множеству векторных оценок, т.е. если бы существовала альтернатива jc* E X
такая, что/,-(л:*) = ?/, / = 1,..., п, то,очевидно, что х* была бы наилучшей
альтернативой. Однако, как правило, этого не происходит, поэтому в
качестве наилучшей альтернативы предлагается выбрать такую точку,
векторная оценка которой находится ближе всего к идеальной точке ?.
Интуитивно такой подход представляется очень привлекательным.
Однако он не лишен довольно существенных недостатков, которые мы сейчас
отметим. Когда мы говорим о выборе точки "ближайшей к идеальной",
мы предполагаем тем самым, что в пространстве векторных оценок введена
некоторая метрика. Оставляя в стороне вопрос о законности такого
предположения, отметим лишь, что метрику в Rn можно вводить самыми
различными способами. Очевидно, что при разных метриках наилучшими
будут оказываться разные альтернативы. Более того, можно легко
показать, что для любой лчштимальной альтернативы найдется метрика, в
которой векторная оценка этой альтернативы будет ближайшей к идеальной
точке. Таким образом, от задачи выбора альтернативы мы пришли к задаче
выбора метрики, которая отнюдь не проще.
Даже если считать, что нам удалось подобрать хорошую метрику,
отвечающую характеру решаемой практической задачи, это еще не решает
проблемы. Действительно, функция расстояния до идеальной точки позво-
г
>^ст
о-5 ,«
о
•
ляет упорядочить все альтернативы
по степени и выбрать наилучшую
альтернативу. Возникает вопрос о том,
насколько разумным является такое
упорядочение с точки зрения теории
рационального выбора. Одной из
используемых в этой теории аксиом
является аксиома независимости от
непричастных альтернатив, требующая,
чтобы результат сравнения альтернатив
а и Ь зависел только от них и не
зависел от наличия или отсутствия
некоторой третьей альтернативы с.
Как легко видеть, метод идеальной
точки не удовлетворяет аксиоме неза- Рис. 3.1
висимости. Действительно, пусть
векторная оценка /(*') ближе к идеальной точке, чем /(*"), значит, дг'
лучше дс". Но добавляя к множеству X точку х* (рис. 3.1), можно добиться
такого смещения идеальной точки, что получится "х" лучше дг'".
Аналогичный эффект наблюдается и при использовании принципа равномерной
оптимальности в форме C.2), C.3).
С одной стороны, к процедурам, не удовлетворяющим аксиоме
независимости, следует относиться довольно осторожно, так как порождаемые
ими механизмы выбора обладают рядом нерегулярных свойств. Но следует
отметить, что многие реально встречающиеся процедуры не удовлетворяют
этой аксиоме, хотя и являются интуитивно приемлемыми. Пусть, например,
в качестве множества альтернатив выступает выпуклая плоская фигура, и
мы стремимся найти такую ее точку, которая, будучи использована в
качестве точки опоры, обеспечит горизонтальное положение фигуры. Понятно,
что такой точкой, т.е. наилучшей альтернативой, является центр тяжести,
а все остальные точки упорядочены по расстоянию до, центра тяжести.
Однако такое правило выбора не удовлетворяет аксиоме независимости
от непричастных альтернатив.
Подведем итог. Процедуры данного типа основаны на предположении
возможности априорного (до решения задачи) определения наилучшего
соотношения между требованиями, предъявляемыми различными
критериями. Понятно, что такая возможность существует далеко не всегда.
Кроме того, выбор конкретного вида глобальной функции цели не может
быть произведен в отрыве от решаемой задачи. Заметим, что, несмотря на
обилие известных априорных процедур, в литературе практически
отсутствует описание (хотя бы качественное) классов' задач, для которых
применимы те или иные принципы оптимальности. До тех пор, пока не будут
разработаны теоретические положения, позволяющие с достаточной степенью
точности определять возможные типы принципов оптимальности,
пригодные для решения конкретной практической задачи, возможности
применения этих процедур будут существенно ограничены.
47
§ 3.2. Процедуры апостериорного типа
Как уже отмечалось выше, в основе апостериорных процедур лежит
предположение,%что формальная модель многокритериальной задачи не
содержит информации, достаточной для однозначного выбора наилучшей
альтернативы. Для того чтобы это можно было сделать, предлагается полу-
чать такую информацию извне, а в качестве ее источника использовать
человека, непосредственно ответственного за выбор и последующее
использование принимаемого решения (лицо, принимающее решение, или ЛПР).
Вся сложность выбора альтернативы при наличии многих критериев
обусловлена тем, что существуют альтернативы, объективно несравнимые
между собой. Однако у ЛПР могут быть веские основания для того, чтобы
предпочесть одну из несравнимых альтернатив другой, поэтому, получая
от него информацию о предпочтениях, можно добиться заметного сужения
множества несравнимых альтернатив и в ряде случаев выбрать наилучшую
альтернативу, т.е. альтернативу, максимальную в соответствии с
предпочтениями ЛПР.
Заметим, что решения, принимаемые с помощью апостериорных
процедур, имеют принципиально субъективный характер. Это часто вызывает
критику и обвинения (в основном от сторонников априорного подхода)
в отступлении от объективности. Однако необходимость привлечения
субъективных суждений непосредственно вытекает из самой постановки
задачи — вся имеющаяся в наличии объективная информация уже
использована, например выделено множество оптимальных по Парето альтернатив,
а несравнимость по-прежнему сохраняется. Учет предпочтений ЛПР в этом
случае является одним из наиболее эффективных методов снятия
имеющейся неопределенности.
Основная проблема, которая здесь возникает, состоит в выборе языка
описания предпочтения ЛПР. Наиболее часто предполагают, что система
предпочтений ЛПР может быть представлена в виде некоторого бинарного
отношения, заданного на множестве альтернатив. Бинарное отношение на
множестве X есть множество R упорядоченных пар (х, у), где х € X, у Е X,
т.е. некоторое подмножество прямого произведения XXX. Само это
произведение обычно называют полным (или универсальным) бинарным
отношением на X. Если (х, у) Е R, то это может быть записано как xRy (х
находится в отношении R с у).
Рассматриваемые в этом параграфе бинарные отношения будут
характеризоваться некоторыми свойствами, которые мы сейчас приведем.
1) Ре флексивность. Бинарное отношение R на X называется
рефлексивным, если xRx для всех х G X.
2) Нерефлексивность. R нерефлексивно, если неверно, что xRx
для всех xGR (xRx).
3) Симметрия. R симметрично, если xRy =>yRx для всех х, у EX.
4) Асимметрия. xRy ^yRx для всех xjGI.
5) Транзитивность: xRy и yRz =>xRz.
6) Отрицательная транзитивность: xRy *>xRz или zRy
для всех х, у, z.
7) Связность: х,у€X=>xRy или yRx.
8) Слабая связность: х Фу =>xRy или yRx.
48
Рассматривая, например, бинарное отношение ">" на множестве
вещественных чисел, легко видеть, что оно нерефлексивно, асимметрично, транзи-
тивно, отрицательно транзитивно и слабо связно. В то же время бинарное
отношение " = " на том же множестве рефлексивно, симметрично и
транзитивно.
Имеются различные типы бинарных отношений, обладающие разными
наборами этих основных свойств. Так, асимметричное и отрицательно
транзитивное бинарное отношение называется слабым упорядочением; при
наличии слабой связности слабое упорядочение называется строгим
упорядочением, а рефлексивное, симметричное и транзитивное бинарное отношение
называется эквивалентностью. Заметим сразу же, что слабое упорядочение
является транзитивным бинарным отношением, т.е. транзитивность следует
из асимметрии и отрицательной транзитивности. Действительно, пусть xRy
и yRz. Тогда в силу отрицательной транзитивности из xRy следует (xRz или
zRy), a yRz =* (yRx или xRz). Однако zRy viyRz невозможны в силу
асимметрии, поэтому xRyt yRz=>xRz.
Мы будем считать, что предпочтения ЛПР устроены очень просто: для
любых двух альтернатив хну ЛПР может определить, либо что х лучше
У (х >у), либо что у лучше х (у>х), либо что х и у одинаково хороши
(у~х). Мы заранее исключаем тем самым случай, когда ЛПР не уверен
в своем предпочтении х или у или считает хну несравнимыми по
предпочтению. Более общее описание предпочтений ЛПР содержится, например,
в (Фишберн [1]).
Причина, по которой мы предъявляем к предпочтениям ЛПР столь
жесткие требования, состоит в том, что рассматривается задача выбора
единственной наилучшей альтернативы, и мы хотим, чтобы исходные
предположения о предпочтениях позволяли надеяться на возможность решения этой
задачи. Нетрудно видеть, что при несравнимости отдельных альтернатив,
например, задача выбора наилучшей альтернативы может оказаться
неразрешимой. Фактически мы предполагаем, что любая информация,
необходимая для выбора, может быть получена от ЛПР.
Однако нам необходимо предположить также, что получаемая
информация в определенном смысле непротиворечива. Так, если ЛПР предпочитает
альтернативу х альтернативе у, то имеет смысл требовать, чтобы это
исключало возможность предпочтения у по сравнению с х. Разумным критерием
согласованности для индивидуальных предпочтений является также
транзитивность. Если х предпочтительнее у, ay предпочтительнее 2, то здравый
смысл предполагает, что х предпочтительнее z. Кроме того, наличие
нетранзитивного цикла xRy, yRz, zRx на множестве из трех альтернатив делает
задачу выбора наилучшей альтернативы неразрешимой. Таким образом,
мы приходим к выводу, что для разрешимости нашей задачи отношение
"быть лучше" должно быть довольно близким к слабому упорядочению.
Аналогично, отношение "***" мы будем представлять как отношение
эквивалентности на множестве X.
Легко видеть, что любая скалярная функция и{х), заданная на X,
индуцирует на нем, в общем случае, два бинарных отношения — слабое
упорядочение и эквивалентность, которые строятся следующим образом: х > у,
если и(х) > и(у), и х ~у, если и (х) -и (у). Можно показать (Фишберн [1 ]),
что справедливо и обратное утверждение: для слабого упорядочения > и эк-
4. Ю.А. Дубов 49
вивалентности ~~ при некоторых дополнительных предположениях о
регулярности существует функция и(х) такая, что из х > у (х ^у) вытекает
и(х) >и(у) (и(х) = и(у)). Таким образом, в данной ситуации предпочтения
ЛПР описываются некоторой скалярной функцией и(х), которая заранее
неизвестна. Апостериорные процедуры принятия решений заключаются в
формулировке дополнительных требований (или аксиом), накладываемых
на предпочтения ЛПР, выполнение которых позволяет однозначно
восстановить функцию и(х), после чего задача принятия решений сводится к
скалярной оптимизации.
В качестве примера мы приведем апостериорную процедуру (Кини [1]),
использующую понятие "независимость по полезности". Пусть ? =
= (?i» • • •, ?л) - векторная оценка, и в пространстве векторных оценок
определена неизвестная функция и(х), описывающая предпочтения ЛПР
(обычно эту функцию называют функцией полезности). Представим % в
виде|=(т?,О,гдег? = (?1,...Лт), f = (U+ь • • • > in), П^ У, $^Z9
F = Y X Z. Зафиксировав J = f°, мы получаем маргинальную (шл
условную) функцию полезности w(i?, f °), заданную на множестве Y. Аналогично
определяется условная функция полезности и(т?°, ?) на множестве Z.
Будем считать, что Y не зависит по полезности от Z, если предпочтения
ЛПР на множестве Y при фиксированном J°? Z не зависят от выбораf °.
Фактически это означает, что из и(т?', ?°) > и (т?", ?°) для т?',i?"G Уи
некоторого элемента f ° Е Z вытекает и (т?;, f) > w A7", f) для любого f G Z.
Но тогда условная функция полезности на Y при любом f представляет
собой положительное линейное преобразование условной функции
полезности на Y при f = f °, а следовательно, исходная функция полезности пред-
ставима в виде
°) C.9)
Здесь c2(f)>40.
Следует отметить, что из независимости Y по полезности от Z, вообще
говоря, не следует независимость по полезности Z от У. В случае, когда
это имеет место, говорят о взаимной независимости по полезности. По
аналогии с C.9) в случае взаимной независимости по полезности имеем
"(T7,n = ^(r?)+^(r?)w(r?0,n, C.10)
где и (т?0, ?) - условная функция полезности на Z при т? = i?0, d2 (т?) > 0.
Полагая м(т?0, ?о) = 0, получаем из C.9)
"(г?о,О=^1(П + с2(П"(г?о,Го) = с1(О, C.11)
а после подстановки в C.9) -
"(t?i , ?) ="(т?о, $) + c2(O«0?i > to),
откуда
„и-
где т?1 — произвольная точка Y такая, что m(i?i,
50
Используя C.11) и C.12), перепишем C.9) в виде
.) vr. (злз)
Аналогично, вычисляя (ЗЛО) при f = f о и при произвольном f i таком, что
^°» получаем
.f.)+ [B^f;>-Bftfo) 1 «(*,0 vn. C.14)
L MWoffi) J
Подставляя C.14) прит|=т|1в C.13), имеем окончательную формулу
«(*?o,f) +
. л «(r?i,fi)-w№,f0)
, fo) + ; — "(^о, f) ~ «(^?o, О
или
о), C.15)
где ? - эмпирически оцениваемая константа, определяемая выражением
i) ч
. C.16)
Для определения константы к из C.16) введем функцию f (т?)
такую, что
Из формул C.9), C.10) после соответствующих преобразований легко
получается, что
Поскольку M(T?o,fo)="(r?i,f(i?l)) = 0, то
, >ч "(r?i,fi)-w(T?o,f(r?i))
"(r?i, fo) = — —— г— . C.17)
w(T?o,f(ni))-«(^o,fi)
Подставляя C.17) в C.16),находим
?1))
Вычисляя C.15) при (r?,f(i?)), можно получить
<зл9)
51
Подставив C.19) в C.15), получим
ы(т?, f) = . C.20)
1+*и(ИГ(|?))
Полагая т? = r/i, ? = ?0 и подставляя в C.20) выражение C.18), можно
вычислить значение м G71, fo), которое и использовать впоследствии для
определения/:.
Таким образом, мы приходим к выводу, что функция полезности
и0?, J) полностью определяется следующими величинами:
1) условной функцией полезности и (т?0, ?) для ? при произвольном tj0 ;
2) зависимостью ? (т?), определяющей так называемую кривую равных
полезностей: и(т?, fA7)) = 0 = w(t?0, ?о);
3) альтернативой (iji, fO, эквивалентной альтернативе 0?о, ?2) при
условии, что они не лежат на кривой равных полезностей.
Такова типичная структура апостериорной процедуры решения
многокритериальных задач. Сначала выполняется проверка исходной гипотезы о
независимости по полезности. Если ответы ЛПР позволяют сделать вывод,
что независимость действительно имеет место, то с помощью специальных
методов (часто использующих принцип лотереи) восстанавливаются все
величины, необходимые для идентификации искомой функции полезности.
Основным достоинством апостериорных процедур по сравнению с
априорными является четкое определение условий, при выполнении которых
ими можно пользоваться. Но их практическое использование часто
наталкивается на определенные трудности, связанные с необходимостью сбора
чрезвычайно большого количества информации (например, при
восстановлении условных функций полезности), а также с тем, что ЛПР во многих
случаях либо не может дать информацию, необходимую для реализации
процедуры, либо дает ее с большими ошибками. Причина этого
заключается в том, что вопросы, на которые приходится отвечать ЛПР при реализации
апостериорных процедур, являются для неподготовленного человека
достаточно трудными. По-видимому, выход состоит в том, чтобы
максимально приблизить структуру апостериорной процедуры к реальным
возможностям ЛПР.
§ 3.3. Адаптивные процедуры принятая решений в
многокритериальных задачах
Обилие информации, необходимой для реализации апостериорных
процедур, заставляет еще раз вернуться к исходной постановке задачи: она
заключается в отыскании наилучшей в соответствии с предпочтениями ЛПР
альтренативы. В то же время, пользуясь апостериорной процедурой, мы
получаем существенно больше - восстановив функцию полезности, можно
не только выбрать наилучшую альтернативу, но и упорядочить все
альтернативы. Существенно уменьшить, а в ряде случаев и упростить, требуемук*
от ЛПР информацию можно, если попытаться определить наилучшую или
наиболее предпочтительную альтернативу, не восстанавливая функцию
полезности. Процедуры, реализующие эту идею, используют подход,
основанный на выявлении предпочтений одновременно с исследованием
допустимого множества альтернатив (Руа [1 ]).
52
В основе процедур этого типа лежат следующие очевидные соображения.
Существование функции полезности гарантирует возможность решения
исходной задачи определения наиболее предпочтительной альтернативы.
Предположим, что функция полезности известна. Тогда мы будем
пользоваться какой-либо процедурой скалярной оптимизации. Например, можно
выбрать произвольную альтернативу дс°, исследовать поведение функции
полезности в окрестности этой точки, выяснить, в каком направлении
функция полезности возрастает, сдвинуться в этом направлении, получить
новую точку (она, по^идимому, будет предпочтительнее предыдущей) и
повторить процесс. Как можно реализовать такой алгоритм, если мы не
знаем функции полезности? Надо прибегнуть к помощи ЛПР и определить
направление движения и величину шага на основе его системы
предпочтений. Если мы стремимся реализовать алгоритм градиентного типа, то ЛПР
выступает в качестве своеобразного измерительного устройства,
выдающего информацию, на основе которой можно определять градиент
функции полезности в каждой точке. Если, в конце концов, такой человеко-
машинный алгоритм сойдется, то мы получим наиболее
предпочтительную альтернативу, хотя о функции полезности будем знать ненамного
больше, чем в начале работы с ЛПР.
Хотя подобные процедуры использовались довольно давно,
по-видимому, впервые общая идея их построения была высказана в работе (Джоф-
фрион, Дайер, Файнберг [1]). Эта идея практически сводится к тому,
чтобы выбрать любой известный алгоритм математического
программирования, который хорошо зарекомендовал себя при решении скалярных
оптимизационных задач, и распределить функции между человеком и
вычислительной машиной таким образом, чтобы в результате их
взаимодействия обеспечивалось получение всей необходимой для работы
алгоритма информации.
Следуя Джоффриону, рассмотрим человеко-машинную версию
алгоритма Фрэнка-Вулфа. Пусть существует неизвестная нам функция полезности
и \f\ (*)> • • •»fn (*) ] > заданная на множестве векторных оценок. Мы будем
считать, что множество альтернатив X выпукло, все критерии вогнуты, а
функция и согласована с упорядочением по Парето, т.е. возрастает в Rn.
Для того чтобы можно было гарантировать сходимость алгоритма,
предположим дополнительно, что функция и вогнута и непрерьюно
дифференцируема, а все критерии также являются непрерывно дифференцируемыми
функциями.
Алгоритм Фрэнка — Вулфа имеет следующую структуру.
1. Выбираем начальную точку л:1 G X. Полагаем к = 1.
2. Определяем направление наиболее сильного возрастания функции и
как решение экстремальной задачи
<V^w[/1(x),...,/w(x)],;;>^max, уЕХ. C.21)
Полагаем dk =ук -xk9 где ук -решение задачи C.21).
3. Определяем оптимальную величину шага tk по этому направлению
путем решения задачи на нахождение максимума функции полезности:
"[/i(** + А**),.. •, /„.(** + tdk)} -*max, 0 <f < 1. C.22)
Полагаем хк + 1 = хк +1 kdk, к = к + 1 и возвращаемся к 2.
53
Однако поскольку функция и не задана в явном виде, шаги 2 и 3 не
могут быть реализованы непосредственно; здесь нужна дополнительная
информация о предпочтениях ЛПР. Схема получения этой информации
выглядит следующим образом.
Ш а г 2. Дифференцируя м по х, получаем
(^r)xi C.23)
где (du/bf()k — частная производная и по /,-, вычисленная в точке
[fi(xk), . .., /„(**)]> a Vxfi(xk) - градиент функции /, в точке хк.
Неизвестными величинами в C.23) являются именно частные
производные (Ъи/Ъ/;)к. Поскольку на практике эти частные производные всегда
положительны (в силу монотонности и), можно поделить градиент C.23),
а следовательно, и целевую функцию в C.21) на (bu/bfi)k, от чего
решение C.21), очевидно, не изменится. Тогда задача C.21) примет вид
п
< 2 w,V,/,(**),.?>-* max, уЕХ,
/ = 1
где
к {b/fjf
, = гг. C.24)
1 (Эц/эл)*
Таким образом, для реализации шага 1 необходимо определить
коэффициенты C.24). Наиболее часто используемый путь их получения состоит
в определении такого (бесконечно малого) изменения А, величины
первого критерия, которое бы точно компенсировало изменение А/ величины
/-го критерия при неизменных значениях остальных критериев. Обычно
эту процедуру называют процедурой построения кривой безразличия или
процедурой нахождения предельных коэффициентов замещения.
Фактически это сводится к построению гиперплоскости, касательной к
поверхности равных значений и в точке хк. После деления на (du/df{ )k уравнение
такой гиперплоскости принимает вид
\fl ~fl(Xk)) +W2*[/2 -/.(**)] + ... +"*[/* "/*(**)] =0.
Таким образом, если ЛПР считает, что новое решение, полученное из
старого путем изменения значений первого и /-го критериев соответственно
на величины Ai и А/ (при неизменности значений остальных критериев),
является равноценным старому решению, то приближенно можно написать
к Ai
w, = , / = 2,...,я. C.25)
А/
При стремлении А| и А/ к нулю аппроксимация будет становиться сколь
угодно точной.
При реализации этой процедуры обычно выбирают малое значение А1?
после чего ЛПР последовательно назначает значения А2, ..., Д„. После
того как все А/ определены, коэффициенты wt вычисляются по
формуле C.25).
54
Шаг 3. Поскольку функция и не задана в явном виде, оптимизация
вдоль направления dk C.22) также должна осуществляться с помощью
ЛПР. В связи с этим предлагается построить кривые ft(xk + tdk) для
каждого из п критериев на одном графике при 0 < t < 1 и предъявить этот
график ЛПР, чтобы он выбрал значение г, при котором сочетание оценок
по критериям является наиболее предпочтительным.
Для того чтобы понять, насколько сложной является задача, решаемая
на шаге 3, заметим, что она превышает по трудоемкости задачу выбора
наиболее предпочтительного решения при двух критериях.
Наиболее эффективные процедуры многокритериальной оптимизации
адаптивного типа выгодно отличаются от человеко-машинного алгоритма
фрэнка-Вулфа за счет значительного упрощения задач, решаемых ЛПР на
шагах 2 и 3. Рассмотрим, например, человеко-машинную процедуру
решения многокритериальных задач линейного программирования (Сейвир [1]).
Пусть
|дг>0, Ax=b)f
к к
{ 2 *.,*,,..., 2
/ = 1 ' / = i
Функция полезности и(х) достигает своего максимума в тг-оптимальной
точке х*. Из теорем главы 2 вытекает, что существуют такие положитель-
п * к
ные коэффициенты а*,..., а*, что линейная функция 2 ty ? ^ Xj также
достигает своего максимума в точке х*. Поэтому нет никакой разницы,
определять ли х* или а*. Будем считать, что в результате решения серии
однотипных задач нам удалось получить статистическую оценку а
вектора а*. Процедура начинается с назначения а1 = 5 .
Шаг 1. Положить к = 1, определить хк - решение задачи линейного
программирования (<хк,Фх) -* шах с помощью симплекс-метода.
хе х
Ш а г 2. Предъявить ЛПР для анализа векторную оценку
* * * *.
uf,, pnff }
Шаг 3. В результате анализа векторной оценки Фхк ЛПР задает вектор
<Jk, определяющий направление изменения вектора хк. Как правило,
вектор dk состоит из 0, 1 и -1, причем d, = 1 соответствует указанию об уве-
к к
личении компоненты Xj , dj = -1 - указанию об уменьшении
соответствующей компоненты, a dk = 0 — отсутствию информации. Тогда новое
решение дс*+1 должно удовлетворять неравенству dk(xk*1 - хк) > 0.
Отсюда могут легко быть получены условия на а*+1 такие, чтобы
порожденное этим вектором решение задачи линейного программирования
отвечало указанному неравенству.
55
Записывая исходную задачу в виде
и переставляя столбцы симплексной таблицы ддя оптимального решениях
так, чтобы первые т столбцов соответствовали базису, C.26) можно
переписать в виде
Г Лв Ас ] \ хв] \ Ь
1 Г хв 1
\ [хс\
Опуская промежуточные преобразования, выпишем условие, которому
должно удовлетворять новое базисное решение х*+|. Оно будет отличаться
от хк за счет некоторой переменной */, которая войдет в базис, если будет,
выполнено условие
где dc — величина компоненты / вектора d9dB - вектор, составленный из
тех компонент d9 которые соответствуют базисным переменным хк,
(АсI - столбец / матрицы А с, соответствующей небазисным переменным,
Ав - матрица коэффициентов при базисных переменных. В этих
обозначениях условия на otk +1 имеют вид
№*<0, Н/= (-Фс-Фа^Лс). C.27)
Ш а г 4. Сре^и решений C.27) определяется положительный вектор,
возможно более близкий к а (задача квадратичного программирования).
Он обозначается через а*+1, после чего происходит переход к шагу 1.
Признаком остановки процедуры является условие dk = 0.
В этой процедуре удалось исключить шаг, связанный с одномерной
оптимизацией, однако задача выбора направления движения осталась.
Рассмотрим еще одну процедуру, в которой удалось исключить и эту задачу. В
работе (Хемминг [1]) предлагалось решать эту задачу многокритериальной
оптимизации с помощью процедуры поиска по деформируемому
многограннику (Спендли, Хекст, Химсворт [1], Нелдер, Мид [1]). В простейшей
модификации процедура состоит в следующем. В пространстве Rk строится
симплекс, в вершинах которого вычисляются значения целевой функции.
Затем из вершины А, в которой целевая функция минимальна, проводится
проектирующая прямая через центр тяжести симплекса. Затем точка А
исключается и строится новый симплекс, называемый отраженным, из
оставшихся точек и новой точки В9 расположенной на проектирующей прямой
на надлежащем расстоянии от центра тяжести. Продолжение этой
процедуры, в которой каждый раз вычеркивается вершина, где целевая функция
минимальна, а также использование правил уменьшения размера симплекса
и предотвращения циклического движения в окрестности экстремума
позволяют осуществить поиск, не использующий производных и в котором
величина шага на любом этапе фиксирована, а направление движения
изменяется автоматически.
56
При реализации соответствующей человеко-машинной процедуры от ЛПР
требуется "всего лишь'9 проводить парные сравнения альтернатив. Если,
как мы и предполагаем, предпочтения ЛПР описываются скалярной
функцией полезности и (х), то сравнение любых двух альтернатив и выбор из
них предпочтительной не должны вызывать затруднений.
Предположение, что ЛПР в состоянии сравнивать любую пару
альтернатив, может быть использовано для построения самых разнообразных
процедур человеко-машинной оптимизации, в которых не требуется определять
направление движения и величину шага. В качестве примера рассмотрим
человеко-машинную версию известного метода (ветвей и границ. Метод
ветвей 4f границ в его различных модификациях успешно используется для
решения дискретных задач математического программирования. Его
эффективность зависит от того, насколько удачно сформулированы
эмпирические правила, позволяющие уменьшить объем перебора.
Для реализации метода обычно постулируется некоторый априорный
принцип R разбиения множества альтернатив. X на непересекающиеся
подмножества. Поставим в соответствие исходному множеству
корневую вершину So некоторого дерева (дерева перебора). Будем называть
эту вершину вершиной нулевого уровня. Все вершины следующего,
первого уровня соответствуют различным подмножествам X,
получающимся в результате использования принципа разбиения R. Обозначая эти
подмножества через Х\, i = 1,..., пх, имеем
Х}П X} =0, U Х} = Х, X] С R(X). C.28)
Применяя принцип разбиения R к вершине s уровня к, которая
соответствует подмножеству X*, i € {1, ..., пк), получаем вершины ДГ*+1, лежащие
на уровне к + 1. Вершина раскрывается (т.е. разбивается соответствующее
ей подмножество альтернатив), если в данном подмножестве содержится
несколько альтернатив. При наличии единственной альтернативы разбиение
соответствующей вершины не производится. Если исходное множество X
конечно, то в результате этой процедуры, которая называется процедурой
в явления, получается конечное дерево, висячие вершины которого
соответствуют содержащимся в X альтернативам.
При полном переборе альтернатив фактически просматриваются все
висячие вершины дерева. Однако, воспользовавшись таким "древовидным"
представлением множества альтернатив, можно, применяя некоторые
эвристические i/равила, не раскрывать некоторые вершины дерева, если
из применяемых правил следует, что раскрытие этих вершин
малоперспективно. Это означает, что вершины просматриваемого уровня
упорядочиваются некоторым определенным образом, зависящим от эвристической
информации, и при переборе в глубину в первую очередь будет
раскрываться та вершина, которая представляется наилучшей.
Для того чтобы применять процедуру упорядочения, необходима мера,
которая позволяла бы оценивать "перспективность" вершины. Такая
мера обычно называется оценочной функцией. Оценочная функция должна
обеспечивать возможность ранжирования вершин - кандидатов на
раскрытие - с тем, чтобы выделить ту вершину, которая с наибольшей вероят-
57
ностью находится на лучшем пути к цели. Мы будем рассматривать
оценочную функцию, которая, вообще говоря, уменьшает усилия, затрачиваемые
на перебор, без потери гарантированной возможности найти оптимальную
альтернативу.
Пусть на множестве вершин дерева задана оценочная функция/(?„).
Рассмотрим некоторую вершину Sn, которой соответствует подмножество
альтернатив Хк. Можно показать (Нильсон [1]), что если f(Sn) > max
где f(x) — целевая функция, заданная на множестве альтернатив X, то
такая оценочная функция гарантирует нахождение оптимальной
альтернативы, несмотря на то, что многие альтернативы на нижнем уровне
просматриваться не будут. Будем называть такую оценочную функцию
гарантированной. А л
Пусть даны две гарантированные оценочные функции fi(Sn) nf2(Sn)y
причем для всех вершин дерева f\ <Л. Тогда можно показать, что перебор,
А
совершаемый при использовании оценочной функции Л, не больше, чем
перебор, совершаемый при использовании оценочной функции fi.
Гарантированную оценочную функцию, при которой перебор минимален,
называют точной. Построение точной оценочной функции эквивалентно по
сложности решению исходной задачи максимизации f(x) на X. Поэтому
на практике используют оценочные функции, которые с той или иной
степенью точности аппроксимируют точную.
Блок-схема алгоритма имеет следующий вид.
1. Пусть к = 0. Дано исходное множество альтернатив Хк = X и пустое
множество Sk, которое называется множеством нераскрытых вершин.
2. Применяем принцип разбиения R к множеству Хк и получаем систему
подмножеств R(X) C.28). Все множества из R(X) заносим в список Sk.
3. Для всех элементов списка Sk вычисляем значения оценочной
функции.
4. Выбираем вершину sk из Sk, в которой значение оценочной функции
максимально. Удаляем ее из Sk9 полагая )r = sk.
5. Если Хк состоит из единственной точки, процедура прекращает свою
работу, и оптимальная альтернатива найдена. В противном случае
заменяем к на к + 1 и возвращаемся к п. 2.
Рассмотрим теперь возможное использование этого алгоритма для
решения многокритериальных задач. Мы по-прежнему предполагаем, что
на множестве альтернатив X задана неизвестная функция полезности и(х),
которая является монотонно возрастающей в пространстве векторных
оценок. Реализация шагов 3 и 4 невозможна без использования информации
о предпочтениях ЛПР. Поэтому мы будем поступать следующим образом.
Рассмотрим множество X*, соответствующее некоторой вершине s,-, и
определим для него идеальную точку
«'•={«ь...,Й>, где *'= max fAx).
1 xexi
В силу монотонности функции полезности в пространстве векторных
оценок имеем и(%*) > max u(x)9 поэтому можно положить
i
58
Таким образом, мы получаем следующую реализацию шагов 3 и 4. Для
каждого подмножества альтернатив, соответствующего нераскрытой
вершине из списка S*, строится идеальная точка в пространстве векторных
оценок. Затем все эти идеальные точки предъявляются для сравнения ЛПР.
Выбор наиболее предпочтительной точки однозначно определяет наиболее
перспективную вершину, которая будет раскрываться в первую очередь.
Легко видеть, что построенная таким образом оценочная функция является
гарантированной. При этом, как и в предыдущей процедуре, от ЛПР
требуется парное сравнение альтернатив.
Легкость, с которой можно строить подобные процедуры, вообще
говоря, настораживает, и не случайно. Возможности их практического
использования сильно ограничены. Часто оказывается, что ЛПР не в состоянии
отвечать на вопросы, которые предусматриваются этими процедурами,
без значительных и частых ошибок. Фактически эти процедуры пытаются
приблизить возможности человека к потребностям вычислительной схемы.
В обзоре (Ларичев, Поляков [1]) они получили общее название псевдо-
структуризованных.
В последнее время довольно интенсивно разрабатывается
альтернативный подход к построению адаптивных процедур, ориентированный прежде
всего на возможности ЛПР (структуризованные процедуры). Здесь прежде
всего выявляются типы вопросов, на которые ЛПР может отвечать без
особых затруднений и с достаточно высокой точностью, а затем на основе
этих вопросов строится процедура выявления предпочтений одновременно
с исследованием множества альтернатив. Несмотря на то, что
структуризованные процедуры с первого взгляда производят впечатление чисто
эвристических, в результате анализа их функционирования часто удается
установить аналогии с некоторыми алгоритмами математического
программирования.
Рассмотрим, например-, хорошо известный метод ограничений (Бенайюн,
Ларичев, Монгольфье, Терни [1 ]), состоящий из следующих шагов.
1. Пусть **1, X* =Х.
2. Выбирается, вообще говоря, произвольная оптимальная по Парето
альтернатива xkEXk, вычисляется ее векторная оценка /(j**), которая
предъявляется ЛПР. Одновременно ЛПР сообщается дополнительная
информация о структуре множества оптимальных по Парето векторных
оценок для альтернатив из Xki обычно в виде диапазона возможных
изменений критериев.
3. В результате анализа полученной информации ЛПР называет номер
критерия /(?), оценку по которому следует увеличить, и задает нижнюю
границу для этого увеличения С/(*>. На основе его ответа формируется
новое множество альтернатив
xk+l={xexk\fnk)(x)>cnk)}9
к заменяется на к + 1 и происходит возвращение к шагу 2.
Признаком окончания работы метода является выбор альтернативы хк
в качестве предпочтительной.
Причину высокой эффективности метода ограничений в тех случаях,
когда он применим, т.е. когда ЛПР может легко задавать нижние границы
на значения критериев, можно объяснить, например, следующим образом.
59
Пусть на выпуклом множестве X задана вогнутая функция и(х), которую
необходимо максимизировать. Выберем произвольную точку х° и
вычислим градиент Vw(jc°) . Легко видеть, что точка максимума х* удовлетворяет
условию <Vu(x°) ,х*> >{Vu(x°) ,х° >.Поэтому можно уменьшить множество
альтернатив за счет добавления ограничения <Vh(jc°), x)>{Vu(x°),x°).
При разумной стратегии выбора точки х° (например, при выборе х° "в
центре" множества X) через несколько шагов удается определить
сравнительно небольшую область, в которой и будет находиться х*. Если градиент
и(х) вычисляется с ошибкой, то можно вместо него пользоваться
единичным вектором е' = {0, ...,1,...,0}, который соответствует
максимальной компоненте градиента. Конечно, при этом может оказаться, что на
некотором шаге новое ограничение отсечет оптимальную точку. Бели этот
факт удастся установить, то прибегают к сдвигу соответствующего
ограничения, обеспечивающему попадание оптимальной точки в допустимую
область.
Аналогия с методом ограничений является довольно очевидной,
особенно если учесть, что при практической реализации метода ограничений
довольно часто приходится возвращаться назад и пересматривать ранее
введенные ограничения, оказавшиеся излишне "жесткими".
Известен ряд процедур, в которых какая-либо количественная
информация (вроде нижних границ на оценки по критериям) вообще отсутствует
(Бедельбаев, Дубов, Шмульян [1], Красненкер, Каплинский [1]). Здесь
от ЛПР требуется всего лишь оценка знаков некоторых компонент вектора
{du/d/i, ..., bujbfn}y т.е. ответ на вопрос, какие компоненты векторной
оценки желательно увеличить, а какие можно уменьшить. На основе такой
информации можно строить очень простые и малочувствительные к
возможным ошибкам алгоритмы, которые, однако, как показывают
практические результаты, уступают в эффективности методу ограничений.
Глава 4
УСЛОВИЯ ОПТИМАЛЬНОСТИ В ДИНАМИЧЕСКИХ
МНОГОКРИТЕРИАЛЬНЫХ ЗАДАЧАХ
На практике часто встречаются ситуации, когда решения принимаются
в последовательные моменты времени. Если считать, что время дискретно,
то в некоторый момент t необходимо выбрать альтернативу xt из
множества допустимых альтернатив. В общем случае это множество может зависеть
как от времени, так и от того, какие альтернативы выбирались в прошлом.
Последовательность выбираемых альтернатив образует стратегию {xt}.
Будем считать, что существует некоторая функция f(x), с помощью
которой можно оценивать качество альтернативы х. Эта функция также может
зависеть как от времени, так и от ранее выбранных альтернатив. Наша
задача будет состоять в том, чтобы, во-первых, установить связь между
качеством стратегии и качеством входящих в нее альтернатив, во-вторых,
выработать конкретные правила построения наилучшей. стратегии. Для
случая, когда функция / является скалярной, наиболее известными
задачами такого типа являются задачи оптимального управления, в которых
связь между качеством альтернатив и стратегий аддитивна.
Мы будем рассматривать динамическую задачу монокритериальной
оптимизации в следующей постановке. Пусть заданы дискретные моменты
времени /0» *ь • • • и множество альтернатив X(t0) С Rk. В момент
времени tk Ф t0 альтернатива x(tk) выбирается из множества X(tk, x(t0), . . .
..., x(tk_ i)). Каждой альтернативе x{tk) ставится в соответствие
векторная оценка /(*(**)) =(/i (*('*)> **. *('о), • •, *('*-1)), -.. ,/«(*('*),'*,
*('о), •.., *('*-i))}- Векторную оценку стратегии {x(tk)} будем
определять как сумму векторных оценок входящих в нее альтернатив:
= 2 fi(x(tk), tk9x(t0),. •. ,*(f*_i)),
к
D.1)
= 2 /„ (x(tk), tk,x(t0),... ,x(tk_t)).
Можно построить аналогичную динамическую модель и для случая
непрерывного времени. Здесь множество альтернатив в момент t Ф t0
X(t) = X(t,x(r)\T<t), D.2)
а векторная оценка стратегии {x(t)} имеет вид
*«*(*)>)«//,(*«,f,*(»)rT<,)*, /-1.....Я. D.3)
При этом необходимо вводить дополнительные условия на допустимые
61
стратегии, например требовать, чтобы они были кусочно-непрерывными
и полунепрерывными слева функциями.
По аналогии со статическим случаем стратегию {x*(t)} будем называть
тг-оптимальной, если для любой другой допустимой траектории {x(t)} из
соотношения
вытекает, что
*/({*(')}) = *>/({**(')}), /=1,...,л.
Задача состоит в получении условий, которым должны удовлетворять
выбираемые в последовательные моменты времени альтернативы, чтобы
стратегия была я-оптимальной. Очевидно, что эти условия будут в
значительной степени определяться структурой динамической модели.
Простейший возможный случай состоит в том, чтобы исключить
зависимость множества альтернатив и векторного критерия в момент
времени / от ранее выбранных альтернатив. Здесь мы получаем задачу, которую
в дальнейшем будем называть задачей независимого выбора. При
дискретном времени задача независимого выбора фактически представляет собой
выбор составной альтернативы из прямого произведения множеств X(t).
В непрерывном случае задача независимого выбора аналогична процедуре
формирования множества значений векторнозначной меры в известной
теореме Ляпунова.
Более сложные модели возникают в тех случаях, когда процесс выбора
не является независимым. Типичным примером являются задачи
оптимального управления. Пусть, например, рассматривается динамическая система
$=?«,*), х(Го) = *(ь D.4)
где x(t) — ^-мерный вектор управлений (в наших терминах — стратегия),
?(?) — m-мерный вектор состояний системы. Качество управления или
стратегии оценивается интегральным векторным критерием
*i ((*(О» = I /i(х (г), |(т), г) <*т, D.4')
Рассмотрим всевозможные состояния, которые достижимы системой
D.4) в момент v, 0< v< T, и обозначим множество таких состояний
через K(v). Пусть управление xl(t), t <v, переводит систему в состояние
tl(v)EK(v)t а управление x2(t), t<v, - в состояние k2(v)€K{y).
Если в момент v выбирается альтернатива x{v), то ее векторная оценка,
как видно из D.4), будет зависеть от того, в каком состоянии в этот
момент находилась система, а следовательно, и от того, какие
альтернативы выбирались в прошлом:
POO,
Таким образом, задача оптимального управления D.4), D.4') не
является задачей независимого выбора и описывается уравнениями D.3).
62
§ 4.1. Задача независимого выбора
с дискретным временем
Прежде чем сформулировать задачу, рассмотрим простой пример,
связанный с проектированием серии однотипных объектов. В момент tk
происходит выбор проектного решения из множества проектных решений
X(tk). Это проектное решение оценивается по нескольким критериям
/i, • • •, /л» которые характеризуют число изделий, входящих в данное
проектное решение, предполагаемые объем и вес проектируемого объекта,
число наиболее трудоемких операций, связанных с реализацией
выбираемого проектного решения, и др. После выбора проектного решения в
момент tk начинается проектирование следующего объекта серии. При этом
происходит выбор проектного решения из множества проектных решений
X(?k+i)y a оценка решения проводится с помощью тех же самых
критериев. Легко видеть, что ни множество, X(tk), ни векторная оценка
входящих в него альтернатив не зависят от того, какие проектные решения
были выбраны из множеств X{tk_x), X(tk_2)> • • > ^(*о) • Поэтому такая
задача, в соответствии с принятым определением, является задачей
независимого выбора.
Рассмотрим произвольную последовательных ограниченных замкнутых
множеств X(t0), X(t\), ... С /?*, на объединении которых заданы п
функций /i (х), ..., /„ (х). Стратегией является произвольная
последовательность альтернатив x(tk) таких, что x(tk) ? X(tk). Качество стратегии
определяется по формуле
Задача состоит в получении условий, которым должны удовлетворять
последовательно выбираемые альтернативы x(tk), чтобы стратегия {x(t)}
была я-оптимальна.
Легко видеть, что любая стратегия здесь представляет собой точку из
прямого произведения множеств TlX(tk), поэтому задача выбора на самом
деле является статической. Разложение на последовательность независимых
подзадач является просто удобной декомпозицией, которая снижает
размерность и позволяет в ряде случаев получать эффективное описание
оптимальных по Парето стратегий.
Таким образом, при конечном числе моментов времени tk мы можем
воспользоваться условиями эт-оптимальности, полученными в главе 2. Пусть
где г и q - непрерывно дифференцируемые вектор-функции размерности т
и s соответственно. Предполагая непрерывную дифференцируемость
критериев /i ,..,,/„ и выполнение условия B.25), получаем условия
оптимальности в виде существования решения следующей системы:
2)р*<0, /=1,. ..,s, * = 0,. ..,*;
3) (а, ц)*0;
63
4) 2 a,V( 2 /,(*(>*))) + 2 2 т?/* Vг. (*(/*))
1=1 *=0 /=l*=0
D.5)
5) 2 2 p»*,(*(**)) = 0.
/=u=o
Однако можно показать, что условия D.5) являются излишне слабыми.
Добиться усиления условий оптимальности можно за счет сравнения
рассматриваемой задачи с аналогичной задачей со скалярным критерием. Для
анализа нам понадобится операция геометрического суммирования
множеств (или суммирования множеств по Минковскому). Геометрическая
сумма множеств А и В имеет следующий вид:
A +B={a +
D.6)
Из D.6) следует, что А+ В есть объединение всех транслянтов1)
множества А (В) на векторы из В (А). Аналогично вводится операция умножения
множества на скаляр:
\A={\a\aGA}. D.7)
Приведем основные свойства операций D.6) и D.7).
1. Замкнутость множеств А и В, вообще говоря, не гарантирует
замкнутости множества A +J5 (см., например, Красе [1]). Действительно, пусть
А = {(х,у)\х>0, у>Цх),
В={(х,у)\х>0,у<-Цх). D.8)
Множества D.8) замкнуты, однако их геометрическая сумма не является
замкнутым множеством. Рассмотрим последовательность точек {ап} =
= ((*#!, 1/**)} €А прих„->0и {Ьп}= {(хП9-Цхп)} еВприхп-*0. Тогда
ап + ^л = B*и, 0) € Л +Д для любого л, причем последовательность {ап + Ьп}
сходится к точке @,0), которая А + В не принадлежит.
2. Для того чтобы множество А +В было замкнутым, достаточно
потребовать, чтобы были ограниченными и замкнутыми множества А и В.
Пусть множества А и В ограничены и замкнуты. Рассмотрим
произвольную сходящуюся последовательность {сп}9 сп€А+В, с пределом с". Нам
надо показать, что <Г G А + В, что и будет означать замкнутость. Так как
спЕ А + В, то сп = ап + ЬП9 ап€А, Ьп€В. В силу ограниченности
множества А из {ап } можно выделить сходящуюся подпоследовательность {<*пк} с
пределом ZT € А. Аналогично из {Ьп } можно выделить сходящуюся
подпоследовательность {Ьп } с пределом Ь ? /?. Рассматривая сходящиеся
подпоследовательности {ап } , {Ъп } с пределами а и b, легко убедиться,
*/ Ki
1)Транслянтом множества А на вектор Ъ называется множество {а + Ь\аеА).
64
что подпоследовательность {cnki) ={ank{ + bnjci} сходится к а +/> =с, а
значит, с?А +В.
3. В общем случае операция геометрического суммирования не является
дистрибутивной по отношению к умножению на скаляры D.7).
Дистрибутивность имеет место, если суммируемые множества выпуклы. Покажем,
что
для выпуклого множества А и неотрицательных Xt, Х2. Докажем сначала
включение (Хх + \2) А С \гА +\2А.Есппх€А,то
и включение доказано. Рассмотрим обратное включение \\А + \2А С
С (Xi +Х2)Л. Пусть х, ,)>€Л, XixGX^, X2<yGX2>4. Тогда XjJt + X^^
^ +X2i4,HO
x+
+ Л2 Ai + Л2
где 0 < a < 1. Из выпуклости множества А следует, что ajc+(l— a)
следовательно, (Xi + Х2) (ax + A - а) у) e (Xt + X2) А, и включение
доказано.
Невыполнение дистрибутивности для невыпуклого множества А
показано на рис. 4.1. Здесь множество А состоит из точек al9 а2, множество
2А - из точек 2аи 2а2у множество А+А - из точек 2дь 2а2> ах +а2.
Поставим в соответствие каждому подмножеству X(tk) множество
векторных оценок альтернатив F{tk) в момент времени tk. Поскольку
векторная оценка стратегии
{*('*)> *({*('*» есть 2 /(*('*)),
то, как легко видеть, множество векторных оценок стратегий
. D.9)
Мы будем считать, что все множества F(tk) ограничены и замкнуты. Тогда
множество векторных оценок стратегий Ф будет ограниченным и
замкнутым.
Рассмотрим сначала случай, когда л= 1, т.е. имеется только один
критерий. Множество векторных оценок альтернатив F(ik) и множество
векторных оценок стратегий Ф при этом являются подмножествами
вещественной прямой R. Легко убедиться, что оптимальная стратегия
{**('*)) в скалярном случае обладает следующими свойствами.
А. Если стратегия {**('*)) оптимальна, то все альтернативы x*(tk)
также оптимальны, т.е.
5. Ю.А. Дубов 6S
Рис. 4.2
Б. Если альтернативы x*(tk) оптимальны, то составленная из них
стратегия {x*(tk) } оптимальна.
В. Для любой оптимальной альтернативы x*{tk) в момент времени tk
существует содержащая ее оптимальная стратегия.
Проверим выполнение этих свойств для случая нескольких критериев
п > 2. Свойство А сохраняется при замене оптимальности на эт-оптималь-
ность. Действительно, пусть стратегия ix*(tk)} яоптимальна, но
альтернатива x*(tt) для некоторого момента времени f/ я-оптимальной не
является. Это означает, что существует такая альтернатива *(//) ? X{tt), что
/€<1,. ..,/!>//,
где 1Ф 0. Образуем новую стратегию {x\tk)}, которая совпадает с \
при Гл^Г/,ав момент Г/ содержит *(г,) вместо **(//) • Ее векторная оценка
следовательно,
/<Е{1,...,и}//,
что противоречит исходному предположению о я-оптимальности стратегии
{**('*)>•
Однако свойство Б уже не сохраняется, что следует из простого примера.
Пусть К= 1, X(t0) =X{ty) =Х, где X — единичный шар на плоскости
(*i >*2) с центром в начале координат, /i (х) = хх, f2(x) =x2. Множество
векторных оценок при этом совпадает с множеством альтернатив, а множество
я-оптимальных векторных оценок (альтернатив) представляет собой
Границу шара, лежащую в первом квадранте (рис. 4.2). Выберем эт-оптималь-
ные альтернативы x(t0) = A,0), x(tx) = @,1). Векторная оценка
стратегии v({x(tk)} ) = A,0) + @,1) = A,1). Легко видеть, что, несмотря на
выбор тгюптимальных альтернатив, получившаяся стратегия не является
я-оптимальной. Действительно, выбирая x*(t0) =x*(^i) = (n/2?2, \/T/2),
мы получаем стратегию ix*(tk)} с векторной оценкой y({x*(tk)} ) =
66
= (Vr2f/2,Vr27/2) + (\ГТ/29у/2}2) = (v^2>, V2), которая доминирует оценку
</?({х(г*)})поПарето.
Если ограничиться выпуклым случаем, то йюжно показать, что свойство В
выполняется. Действительно, если все множества X(tk) выпуклы, а
функции /i,... ,/л являются вогнутыми, то выполняются условия
теоремы Карлина (теорема 2.1) для множества векторных оценок стратегий Ф.
Это означает, что для любой яюптимальной стратегии{х*(tk)} найдется
п
неотрицательный вектор а= (<xl9... , а„),а/ >0, 2 О/ = 1, такой, что
/=1
< a, Z /(*•('*))> ><*,* flx(tk)))9 x(tk)eX(tk\ D.10)
к к
В силу линейности скалярного произведения D.10) приводится к виду
2 <<*,/(**('*))>> 2 <а,Д*('*))>, x(tk)GX(tky D.11)
Л; fc
Но задачи D.10) и D.11) являются задачами со скалярной целевой
функцией, а для них условия А, Б и В выполняются.
Более четкая формулировка условий оптимальности для выпуклых
задач имеет следующий вид. Поставим в соответствие каждой яюптимальной
альтернативех*.(tk) множествоSa(x*(tk)) (см. B.8)):
S*(x*(tk)) = {aeA \(cc,f(x*(tk)))>(aj(x(tk)))9 x(tk) eX(tk)}9
где А — замыкание множества А из B.7). В силу выпуклой структуры
задачи множество Sa(x*(tk)) Ф ф для любой яюптимальной векторной
оценки x*(tk) и любого номера к. Предположим, что имеются всего два
множества альтернатив X(t0) и X(ti), в которых выбираются тг-оптимальные
точки x*(t0) и x*(tt). Такой выбор позволяет построить непустые
множества Sa(x*(t0)) nSa(x*(t1)).
Покажем, что если 5а(дг* (Го)) nSa(x*(t\)) пу сто, то стратегия {x*(tk)}
не будет яюптимальной. Действительно, если {х* (г*)} оптимальна по Па-
рето, то в силу выпуклости найдется неотрицательный вектор а, для
которого справедливо D.10). Но тогда в силу линейности скалярного
произведения должно выполняться и D.11), следовательно, aeSa(x*(f0))>
а € Sa (x* (t i) ), что противоречит исходному предположению о пустоте их
пересечения. Таким образом, мы получаем следующий результат.
Теорема 4.1. Пусть множества X(t0 ), X(t i),..., X(tk) выпуклы,
критерии fx (x),... yfn(x) — вогнутые функции. Стратегия{х* (tk)} является
п-оптимальной тогда и только тогда, когда выполнены следующие два
условия:
1) все альтернативы x*(tk) яоптимальны;
2) П Se(*4
Из теоремы D.1) немедленно вытекает следующая процедура
построения яюптимальной стратегии. Выберем произвольную яюптимальную
альтернативу х*(t0) ?X(t0). Для некоторого вектора aGSa(x*(t0))
(множество Sa(x*(t0)) непустое в силу выпуклости) выберем яюптимальную
альтернативу jc* (r i), удовлетворяющую условию
D.11)
67
Затем снова выберем вектор а из пересеченияSa(x*(t0)) nSa(x*(ti))9
решим задачу D.11)'для Z(f2) и т.д. Полученная в результате стратегия
( **('*)) будет тг-оптимальной и, как следует из теоремы 4.1, любая тг-оп-
тимальная стратегия может быть получена таким образом.
Следовательно, мы приходим к выводу, что для выпуклых задач
выполняются свойства А и В, а свойство Б не выполняется.
По-другому обстоит дело с невыпуклыми задачами, для которых можно
гарантировать, в общем случае, только выполнение свойства А. Анализ
свойств оптимальных стратегий в невыпуклом случае удобнее проводить
в пространстве векторных оценок.
Определение 4.1. Оптимальную по Парето векторную оценку/,
принадлежащую множеству векторных оценок F, будем называть опасной, если
существует такое множество векторных оценок G, что оценка / + ? не
будет оптимальной по Парето в множестве F + G ни при каких g€G.
Наличие опасных векторных оценок хотя бы для одного момента
времени означает, что свойство В не имеет места. Более того, в задачах
независимого выбора, выбирая некоторую альтернативу в момент времени tk, мы,
в общем случае, не располагаем информацией о том, из каких множеств
придется производить выбор в будущем. Если опасные векторные оценки
существуют, то выбор в некоторый момент времени тг-оптимальной
альтернативы, обладающей опасной оценкой, может привести к тому, что
независимо от того, как осуществляется выбор в будущем, стратегия уже
не будет тг-оптимальной. Именно поэтому характеризация опасных
векторных оценок имеет большое значение.
Теорема 4.2. Любая п-оптимальная векторная оценка, не принадлежащая
границе выпуклой оболочки1) множества F {со F), является опасной.
Доказательство. Достаточно выбрать G = (п — 1) соF. Пусть
тг-оптимальная векторная оценка*/GF не принадлежит границе coF, т.е.
/€ int со F (int со F - внутренность со F) и# - произвольная я-оптималь-
ная векторная оценка, принадлежащая множеству G. Рассмотрим
множество
а = со(F + G ) = со(F + (п - 1) со F).
Очевидно, что f + g не принадлежит границе а, поскольку в противном
случае существовала бы линейная функция ( а, ? > , которая достигала бы
максимума на а в точке f + g. Но это означало бы, что на G функция < а,т?>
достигает максимума в точке ц = ?, а на F — в точке i? =/, что
противоречит предположению/Е int со F. Итак/ + # G int a
Но для любой внутренней точки множества а можно указать п его
крайних точек ?!,..., ?п и неотрицательные числа &х > 0,... ,0„> 0, 2 ft. = 1
такие, что
Г= 2 А.Г>«/+*,
где >п означает доминирование по Парето. Можно легко показать,
1) Напомним, что выпуклой оболочкой множества называется пересечение всех
выпуклых множеств, его содержащих.
68
что любая крайняя точка множества о представима в виде f r = пкг, где
а г — крайняя точка множества G = (и — 1) со F и /crE F.
п
Покажем, что точка ? jW может быть представлена как
1
2
где
/' Е F, g' € со F. Поскольку (J, >0,г =1,...,и,и ? 0Г = 1, то су-
1
шествует номер 5, при котором^ > 1//1. Положим для определенности
s = l. Перепишем выражение для f в вице
2
r=2
Легко видеть, что
#•=2
Следовательно,
r=l r=
7ir э Trг
/i-l л-1
При этом все 7г неотрицательны, а сумма их равна 1. Это означает, что
п
2 угк г принадлежит выпуклой оболочке точек множества F, следо-
п
вательно 2 у,кг Е coF и
(л-1) 2
Итак, если векторная оценка /Е F не принадлежит границе со F, то для
любой векторной оценки g E (п— 1) coF можно подобрать такие
векторные оценки f'GF и #'E(w-l)coF, что/'+^' >nf + g. Заметим,
что не представляет труда показать равенство множества тг [F + (л + l)coF]
и множества п [п со F ]. Однако само множество F+(/i+l)coFHe обязано
быть выпуклым.
Таким образом, выбор в момент времени tk альтернативы, через
векторную оценку которой нельзя провести опорную плоскость к множеству
векторных оценок, может привести к тому, что траектория не будет тг-оп-
тимальной. Это накладывает определенные ограничения на построение
6?
наиболее предпочтительной стратегии с учетом предпочтений ЛПР. В общем
случае при наличии опасных точек выбор наиболее предпочтительной
альтернативы в каждый момент времени не гарантирует, что будет получена
наиболее предпочтительная стратегия. Поэтому опасных точек при анализе
структуры предпочтений ЛПР следует избегать. Гарантированное
получение я-оптимальных стратегий обеспечивается только рассмотренной выше
процедурой для выпуклых задач.
Отметим, что для произвольной последовательности множеств
процедура выбора только таких альтернатив, векторные оценки которых
принадлежат границам выпуклых оболочек множеств векторных оценок,
является излишне "осторожной". Действительно, множество G, фигурирующее в
определении 4.1 и теореме 4.2, имеет достаточно специальную структуру.
Однако можно показать, что выбор опасных точек приводит к потери
оптимальности и в других ситуациях.
Пусть X(tk) = X, к = 0,1,... ,К. Мы будем считать, что множество
векторных оценок альтернатив F невыпукло. Множество векторных оценок
стратегий Фк определяется по формуле
F + F+...+F
ф
или
. ..+F
a: + i
что, очевидно, не меняет отношения доминирования между векторными
оценками. Покажем, что при больших К множество Фк очень точно
аппроксимирует со F — выпуклую оболочку множества F. Действительно,
пусть ?*; |2 G coF и ? = Х?* + A -Х)?2, 0<Х<1. Для любого е > 0
найдется такое число К9 что расстояние между некоторыми элементом rj ЕФК
и ? будет меньше 6. Действительно, так как J-1, ?2 € со F, то найдутся та-
кие точки м1,.
,
vn+1
GF и коэффициенты at9... ,
W+1
/1+1
/i+i /i+i
2 щи\ |2= 2 fti/.
/= 1 i= 1
Следовательно,
= 2
'= 2
Рис. 4.3
/1
2/1+2
где w* G F, 7/ > 0, 2 7/ = 1. Для
/= l
любого 7/ можно выбрать
рациональную дробь Pifat такую, что I #/<?,• -
- Г/ К 5, Xpi/qt = 1, где б > 0 - за-
70
данное число. Тогда
2«+2 . 2и + 2 р,
2 7/WZ- 2 — W1
Приводя дроби Pi/qt к одному знаменателю, имеем
Pi П <//
р. . 2/1 + 2 . '/*/ 4I
' = 2 '
1 2n + 2
2 W'P' П ^/
[
Обозначая
mi=Pi П Gy, Л: + 1=П ^.
получаем точку т? из множества Ф#
mxwl +...+m2n+2w2n+2
г) =
w GF, '
после чего можно выбрать 5 =е/Bп+2). При этом, чем больше #, тем
ближе становятся множества Ф# и со F. Следовательно, при достаточно
больших К через векторную оценку я-оптимальной стратегии можно
провести опорную плоскость к множеству векторных оценок Ф#. Это и
означает, что оптимальная стратегия может содержать только такие
альтернативы, которые не являются опасными.
На этом примере ясно видно, что происходит, если предпочтения ЛПР
приводят к выбору опасной точки. Если множество векторных оценок F и
линия уровня функции полезности ЛПР устроены так, как показано на
рис. 4.3, то в силу совпадения всех множеств F(tk) =F в каждый момент
времени будет выбираться альтернатива х*. Однако такой, наилучший
для каждого момента времени выбор приводит к неоптимальной по Паре-
то стратегии.
§ 4.2. Задача независимого выбора
с непрерывным временем и теорема Ляпунова
Переход к непрерывному времени существенно облегчает анализ свойств
я-оптимальных стратегий. Будем рассматривать задачу независимого
выбора в следующей постановке: необходимо выбрать такую кусочно
непрерывную и полунепрерывную слева стратегию{х(t)} , в каждый момент
времени принадлежащую некоторому множеству Х9 чтобы векторная оценка
этой стратегии
=/ fn№,t)dt
71
была я-оптимальна. При этом предполагается, что в классе кусочно
непрерывных стратегий существуют тг-оптимальные стратегии, т.е. множество
векторных оценок замкнуто.
Эту задачу можно усложнить, введя явную зависимость X(t) от
времени, но, как легко показать, все выводы относительно я-оптимальных
стратегий при достаточно общих предположениях сохраняются. Поэтому
мы будем рассматривать наиболее простой случай X(t) s X.
Рассмотрим сначала ситуацию, когда множество Xконечно. Тогда
предъявляемое к {х (/)} требование кусочной непрерывности сводится просто к
кусочному постоянству. Выберем произвольный неотрицательный вектор
п
а = { «1,. ..,<*„}, 2 ty = 1, и рассмотрим скалярный функционал
1 = 1
2
*=i
= ? ъ1 fi{x{t\t)dt=] 2 a,fi(?c(t),t)dt.
Можно показать, что любая кусочно постоянная функция (x*(t) } ,
удовлетворяющая условию
2 **/К*Ч0,0> 2 а>/,(*(О,О,*(О€ЛГ, D.12)
в любой момент времени t из отрезка [f <ь 7*1 является я-оптимальной.
Фактически это означает следующее. Пусть F(t) — множество векторных
оценок в момент времени г. Поскольку X - дискретное множество, то
множество F также дискретно. Условие D.12) гарантирует, что, выбирая в
каждый момент времени t альтернативу x*(t), удовлетворяющую условию
</i(**@,0, • ¦ - ,/•.(*•('),')>?[*соF(f)] П F@, D.13)
а также обеспечивая определенную согласованность такого выбора (см.
D.12)), можно получить я-оптимальную стратегию. Таким образом, D.12)
является достаточным условием тг-оптимальности.
Заметим, что условие D.12) может выполняться почти всюду на [to>T],
и от этого ничто не изменится, но мы исключим эту возможность, ограни;
чившись кусочно постоянными функциями.
Легко видеть, что в каждый момент времени имеет место включение
[п со F(t)] CiF(t)QitF(t) причем в общем случае [7rcoF@] nF(t)
может быть собственным подмножеством nF(t) на множестве
положительной меры. Поэтому естественно ожидать, что, выбирая в каждый
момент времени я-оптимальную альтернативу x*(t), удовлетворяющую D.13),
мы не можем перебрать все я-оптимальные стратегии. Следовательно,
получение необходимых и достаточных условий тг-оптимальности тесно связано
с анализом стратегий, которые хотя бы в один момент времени t содержат
альтернативу x*(t), не удовлетворяющую D.13). Сравнение D.13) с
определением 4.1 и теоремой 4.2 показывает, что любая я-оптимальная
альтернатива, не удовлетворяющая D.13), является опасной. Таким образом,
нас интересует вопрос, при каких условиях стратегия, содержащая опас-
72
ную альтернативу, может быть я-оптимальной? Ответом на этот вопрос
является следующее утверждение: если критерии // ( •, t) непрерывно или
хотя бы кусочно непрерывно зависят от времени, условие D.13) является
необходимым условием п-оптимальности.
Действительно, пусть в некоторый момент t * выбрана альтернатива
x*(t*)> не удовлетворяющая D.13). В силу требования кусочной
непрерывности искомых я-оптимальных стратегий и из-за дискретности
множества X эта же альтернатива будет выбираться и на некотором интервале,
содержащем t*. Без потери общности можно считать, что этот интервал
есть [t*9 r*+r]. Поскольку условие D.13) в точке x*(t*) не выполнено,
то Hx*(t*),t*) ? int соF(t*)9 следовательно, существует точка ??
€coF(r*) такая, что ?/ >//(**('*)>'*)> / = 1, ...,л. Это означает, что
найдутся п альтернатив х1,..., хп и неотрицательные числа 01,..., <3„,
Щ = 1, для которых будут выполнены условия
(!•). П. DЛ4)
Если считать, что критерии /i, • •. ,Д непрерывно зависят от времени,
то неравенства D.14) будут выполнены и на некотором интервале [?*,
г* + д]. Выберем из чисел гид наименьшее и обозначим его через а. Тогда
на интервале [/*, f*+a] выбирается альтернатива jc*(f*), не
удовлетворяющая D.13), и в каждой точке этого интервала выполняются
соотношения D.14). Интегрируя неравенства D.14) от f* до f*+a, получаем
/ °''f°fx(x*(t*),t)dt,
t*
t*+o t*+o
fit S fn{x\i)dt + ...+fin f fn(xn9t)dt> f fn{x*(t*\t)dt
t* t* t*
Если удастся построить на [г*, t* + а] такую кусочно постоянную стратегию
х' (г), что будут выполнены соотношения
t* + a t* + o t * + а
t* t* t*
D.15)
* f" fn(x'(t),t)dt=plt f° fn(x\t)dt + ... + Pnt f° fn(xn,t)dt,
t* t* t*
то это и будет означать, что исходная траектория х *(f) не является тг-етпи-
мальной. Отсюда очевидным образом следует необходимость условий D.13).
Стратегию х (t) будем строить следующим образом. Выделим в
интервале [г*, t* + а] такую конечную систему промежутков 1(х1, &)«, чтобы
73
были выполнены соотношения
/ f,(x\t)dt
'¦ -/»,, /-1.....И. D.16)
Здесь интеграл в числителе вычисляется по всем промежуткам из / (х1, 0i).
Если такая система действительно существует, то в ее дополнении выделим
конечную систему промежутков 1(х2, 02), удовлетворяющую
соотношениям
S fi(*
^ -Л. /-I....,*. D.17)
t + o
I ft(x2,t)dt
t*
и будем продолжать этот процесс вплоть до получения конечной системы
промежутков/(х*1,/?,,) такой, что
=0„, /=1,...,л. D.18)
/ ftQc",t)dt
Попостроению/(дсг,1Mг) C\I(xs,0s) = ф при г Ф s. Если
U 7(^,|3r)=[r*)?* + ff], D.19)
то искомую траекторию можно получить, полагая х' (t) =xr
Тогда условия D.15) выполняются автоматически. Поскольку каждая
система 1{хг, ft.) содержит не более чем конечное число промежутков,
построенная траектория будет кусочно постоянной1).
^Существование непересекающихся систем промежутков 1(хг, /Зг),
удовлетворяющих D.16), D.17), D.18) и D.19) гарантируется следующей теоремой.
Пусть на отрезке [0,1] заданы п > \ непрерывных функций gx (f),..., gn(t).
Пусть также фиксировано число аб @, 1). Существует такое множество Е с [0, 1],
являющееся объединением конечного числа отрезков, для которого выполнены
соотношения
ц (Е) = а (м (Е)
- сумма длин отрезков из множества Е),
1
fgi(t)*=n(E) fgAt)dt, /=1 я.
Е о
Эта теорема, сообщенная авторам в частной беседе, была сформулирована и
доказана Н.А. Бобылевым и А.В. Покровским. Теорема является аналогом известной
теоремы Ляпунова о выпуклости множества значений векторнозначной меры и тесно
связана с результатами, полученными в. (Халкин [1,2]).
74
Таким образом, если в некоторый момент времени выбрана
альтернатива x*(t*)9 не удовлетворяющая условию D.13), то соответствующая
стратегия уже не будет я-оптимальной. Это позволяет сформулировать
необходимые и достаточные условия оптимальности по Парето в следующем виде.
Теорема 4.3. При дискретном множестве X и непрерывно зависящих от
времени функциях f,(x, t), / = 1,..., nt кусочно постоянная стратегия
х*@ будет поптимальной тогда и только тогда, когда в каждый момент
времени выполнены следующие условия:
а) х* (t) it-оптимальна для всех t;
п
б) существуют неотрицательные коэффициенты с^,..., а„, 2 сь = 1
/=i
такие, что
<a,f(x*(t),t))Xa,f(x(t),t)h
x(t)ex, te[to,T].
Все приведенные при доказательстве теоремы 4.3 рассуждения
существенно используют предположение, что множество X дискретно. В этом
случае все кусочно непрерывные траектории являются кусочно
постоянными. Однако полученные необходимые и достаточные условия тгчшти-
мальности сохраняются и при отказе от предположения дискретности
множества X, если потребовать дополнительно, чтобы критерии // (х, i),
i = 1,..., л, непрерывно зависели не только от t, но и от х.
Пусть в момент времени t* выбрана альтернатива дс *('*), не
удовлетворяющая условию D.13). Если x*(t*) — изолированная точка множества X
(т.е. существует такая ее окрестность, которая с множеством X не
пересекается) , то эта же альтернатива будет выбираться и на всем интервале
[г* г* + т]. Если точка x*(t*) не является изолированной, то в силу
кусочной непрерывности рассматриваемых стратегий все альтернативы х (г),
выбираемые на интервале * [г*, t* + т], будут находиться в малой е-окрест-
ности x*(t*). Так как критерии /} (х, t), / = 1,..., л, непрерывны по
совокупности переменных, то в любом случае можно выбрать такое число
ц<т, что для всех альтернатив x(t)9tE [г*, г* + ц),условие D.13)также
не будет выполнено.
Из непрерывности функций /} (л\ i) очевидным образом следует, что
существуют такие альтернативы х1,..., хп и неотрицательные
коэффициенты /?i,..., 0„, 2 ft- = 1 ,а также число а </х, для которых выполняются
неравенства
ft/i(*!.O + -.. + 0*/i(^O> max
D.20)
max J
Интегрируя неравенства D.20), мы снова получаем схему, которая
использовалась при доказательстве теоремы 4.3, что означает справедливость этой
теоремы и при отказе от предположения дискретности множества
альтернатив.
75
Представляет интерес анализ роли опасных альтернатив в задачах
независимого выбора с непрерывным временем. Если в задачах с дискретным
временем выбор опасной альтернативы может привести к потере тг-опти-
мальности для всей стратегии в целом, то в задачах с непрерывным
временем выбор опасной альтернативы неизбежно приводит к потере
оптимальности. Объясняется это тем, что накладываемые на функции fx,..., /„
условия обеспечивают непрерывную зависимость многозначного
отображения t -* F(t) от времени. Поэтому множества F (t) и F(t + б) достаточно
близки друг к другу при малых е. Если суммируемые по Минковскому
множества F (г) близки друг к другу в близкие моменты времени, то их
сумма является выпуклым или почти выпуклым множестьом. Это и
приводит к тому, что ни одна тгоптимальная стратегия не может содержать
альтернативу, векторная оценка которой не принадлежит границе
выпуклой оболочки F (г).
Заметим, что задачи независимого выбора с непрерывным временем
часто встречаются в экономических моделях. Рассмотрим, например,
предприятие, выпускающее п видов продукции на основе поступающего
извне ресурса. В каждый момент времени t имеется возможность
использовать п производственных процессов с различными интенсивностями,
причем интенсивности использования отдельных процессов взаимосвязаны
и ограничены имеющимся в момент t ресурсом. При этом в качестве
векторного критерия оптимальности естественно рассмотреть суммарный по
времени выпуск отдельных видов продукции.
Будем сдатать, что предприятие является небольшим и не оказывает
заметного влияния на функционирование внешней экономической
системы. Тогда поступающий в момент t и распределяющийся между
различными производственными процессами ресурс, вообще говоря, не зависит от
того, с какими интенсивностями эти производственные процессы
использовались в предыдущие моменты времени. Если ресурс поступает
непрерывно, а слишком частое изменение плана выпуска нежелательно, то
оказывается удобным рассмотреть в качестве стратегии кусочно непрерывные
функции времени, что позволяет скачком менять интенсивности
использования производственных процессов в изолированные моменты времени и
сохранять непрерывное изменение интенсивностей на промежутках,
лежащих между моментами скачков. Это полностью укладывается в схему
последовательного выбора с непрерывным временем. Однако проблема
существования тг-оптимальных стратегий в классе кусочно непрерывных
функций сохраняется.
Рассмотрим теперь случай, когда в качестве допустимых стратегий
могут рассматриваться функции времени более общего вида. Будем
понимать под множеством допустимых стратегий § множество всех
интегрируемых на [t0, Т] вектор-функций f(x(t), t) таких, что x(t) G X,
/(* @> О е F (t) CRn для почта всех Г из [tOt Т\. Здесь F(t) -
множество векторных оценок альтернатив в момент f. Тогда множество
векторных оценок
Ф= < f f(x(t)9t)dt\fef).
Нам понадобятся следующие определения.
76
Определение 4.2. Многозначное отображение t -+F(t) называется:
а) борелевским, если его граф { (г,/(*@, '))!/(*(О> О GF)
является борелевским подмножеством [*о, П Х/?и О;
б) интегрально ограниченным, если существует интегрируемая вектор-
функция h: [t0, T] ->Rn такая, что h{ (f) > | gf I, i = 1,..., л, для всех ?
teF()
в) неотрицательным, если min {, > О для всех ? Е F(f) и дня всех Г;
1<<
г) замкнутым, если множество F (г) замкнуто для всех t.
Следующие две теоремы мы приведем без доказательства.
Теорема 4.4 (Ауман [1]). Если многозначное отображение F(t) боре-
левское и интегрально ограниченное, то множество векторных оценок
стратегий Ф непусто.
Существенным является то, что ни одно из используемых здесь
предположений не может быть ослаблено. Очевидно, что эти предположения
выполнялись при анализе более простых задач в начале этого параграфа,
поскольку мы использовали непрерывность критериев и компактность
множества альтернатив.
Теорема 4.5 (Рихтер [1]). Множество векторных оценок стратегий Ф
выпукло.
Одновременно с многозначным отображением t -> F(i) мы будем
рассматривать отображение t -* coF(f), при котором в каждый момент
времени t множество векторных оценок альтернатив представляет собой
выпуклую оболочку множества F (г). Множество векторных оценок стратегий
для t ->со F{i) будем обозначать через Ф\
Теорема 4.6 (Ауман [1]). Если многозначное отображение F (г)
неотрицательно и является борелевским, то Ф = Ф\
Заметим, что эта теорема не является следствием теоремы 4.5,
поскольку сделанные предположения являются существенными2).
Доказательство. Доказательство будем проводить по индукции.
Для /2=0 утверждение теоремы тривиально, поскольку F(t) = соF(t) = {0}
для всех t. Пусть теорема верна для всех размерностей, меньших п. Если для
размерности п утверждение теоремы неверно, то Ф'/Ф ^ Ф- Выберем
I G Ф'/Ф. Из теоремы 4.5 следует, что множество Ф выпукло, значит, в силу
теоремы отделимости для выпуклых множеств существует такой вектор
1) Напомним, что борелевским множеством на числовой прямой называется
элемент минимальной а-алгебры над совокупностью всех сегментов [а, Ь]; борелевским
множеством пространства более высокой размерности называется элемент прямого
произведения всех таких а-алгебр).
2) Существенность предположения, что F(t) - борелевское отображение следует
из простого примера (Ауман [1 ]). Пусть/? = 1 и g - характеристическая функция
подмножества [Го, Т] с внутренней мерой, равной нулю, и внешней мерой, равной 1.
Если F (г) содержит только две точки g (t) и 2, то Ф = { 2} , но Ф' = [1,2].
Чтобы показать, что теорема 4.6 неверна без предположения о неотрицательности,
положим /i = l nF(t) = {1/r, -l/t). В этом случае Ф =фи Ф' = (-«,, «>). Конечно,
при этом 0е [t0, T]. Этот же пример показывает существенность предположения
об интегральной ограниченности в теореме 4.4. Заметим, что из интегральной
ограниченности следует неотрицательность.
77
0, что
(а,т?>< <а,?> D.21)
для всех точек т? € Ф. Так как % Е Ф', то
где <р*@ € со F(t) для почти всех Г. Кроме того, функцию <р* можно
выбрать так, чтобы она была борелевской (поскольку по теореме Лузина
любая измеримая по Лебегу функция отличается от борелевской только на
множестве нулевой меры). Поскольку любая точка выпуклой оболочки
множества может быть представлена в виде выпуклой комбинации п + 1
точек из этого множества, для всех t существуют неотрицательные числа
и
<А>(О, • • • >*п@. 2 */@ = 1,иточкия0(г), ...,gn(t)GF(t) такие,что
f =0
n
**(')= 2 ^@^@- D.22)
/ = о
Теперь доказательство разбивается на следуюищ^ этапы.
1. Функции \рг и g* в D.22) можно выбрать так, чтобы они были
измеримыми, a g° была интегрируемой. Из D.22) вытекает, что найдется
функция^'(/) такая, что
2 gik(t)< Z tf(f).
k=l k=l
Поскольку нумерация g произвольна, это означает, что множество
G (г) С R <w + 1> +n <w + 1>, имеющее вид
V/,
2
непусто для всех г. Из того, что F и <р* — борелевские, следует, что граф
G — бореиевское подмножество множества R *n + 1) +W(W + O Поэтому
можно выбрать измеримые функции <^/ и#' такие, что
Таким образом, <Р; и gl измеримы и удовлетворяют D.22). Из
неотрицательности F (г) следует, что g° (t) > 0 (покомпонентно). Поэтому
) ? rf@ fc?/JW'
следовательно, интегрируемость g\ вытекает из интегрируемости <р* для
всех к.
2. <«,*'(')> <<<*,**(')> D.23)
78
для почти всех t и всех /. Действительно, пусть <а,?у @> > <<*, «Р*
для некоторого номера / и для t € S, где 5 - множество с положительной
мерой. Для любого момента времени t существует номер / такой, что
><«, **(*)>, D.24)
поскольку в противном случае в виду <р7 (г) > О мы бы имели
противоречие:
< а, *"@> = 2 *,(*)<«, *'«><
п
< 2
п
1 = 0 '
a, **(r)> =<o,^*(f)>.
Обозначим первый же номер /, удовлетворяющий D.24), через I (i) и
определим функцию ф как
tes,
Функиля ф измерима, но, возможно, не интегрируема. Для любого
положительного числа т положим Um = { t |i/// (t) < w, / = 1,.,.,«} и
определим последовательность интегрируемых функций
Но тогда i//m (г) € F(r) для всех /, поэтому из D.21) следует, что
D.25)
Заметим, что U Um = [t0, T], поэтому
m = 1
/
o. T\iu
D.26)
при m -> оо. Кроме того, для достаточно больших m множество Um П S
имеет положительную меру. Но тогда
umns
f (a<g>)dt> f
Это означает, что если
то e (m) монотонно возрастает с ростом шие (m) > 0 для достаточно
больших m, m > m0. Из D.26) следует, что при больших значенияхm(m> mx)
имеем
f <a,g°-<p*)dt>
T]/u
e(m0)
f
Из D.24) и определения ф следует, что
uJm,s
Поэтому при т > max(m0, mt)
<aj\l>mdt) - <a,/V
/ ,<w^> /
/
I'o. T)/um
что противоречит D.25). Отсюда следует D.23).
3. <a, *'(')> = <*. **(*)> V/ D.27)
(таких, что $t (г) > 0) и почта всех t. Предположим, что для некоторого
номера / D.23) выполняется как строгое неравенство, т.е. < а, g? (г) > <
< <а, </>*(г)>. Из D.23) и неравенства <^ (г) > 0 немедленно получаем
противоречие:
i=0 /=0
что доказывает D.27).
Пусть Н — гиперплоскость { у\(а9 у) =0}. Рассмотрим множество
E(t) = [F(t) -(р*@] ПЯ, Из D.27) следует, чтоg((t) - <p*(f) €?(/),
поэтому в силу D.22) 0 = <р*(г) - v*(t) G co?(r). Поскольку Я имеет
размерность п — 1, то из предположения индукции вытекает, что 0GS,
где?= {fe(t)\e(t)GE(t)}.
т
Пусть функция е* такова, что e(t) E E(t) и / е = 0. Тогда
'о
Т Т
e*(t) + <p*(r) e F(r) для всех г и / [е* + (р*] = / <р* = ?.
Следовательно 'о
но, ? € Ф, что противоречит исходному предположению, а значит,
доказывает теорему.
Представляет интерес тот факт, что для существования ячштималь-
ных стратегий отображение F(t) не обязано быть борелевским. Но при
этом условие неотрицательности уже перестает быть достаточным, и
приходится пользоваться более сильным условием интегральной
ограниченности.
Теорема 4.7. Если F (г) - замкнутое и интегрально ограниченное
отображение, то множество Ф компактно.
Для доказательства нам понадобятся следующие понятия. Если
AXt А2ь... — подмножества Rn, то х Е lim inf Ak тогда и только тогда,
когда любая окрестность х пересекается со всеми Ак для достаточно
больших к; х G lim БирЛ* тогда и только тогда, когда любая окрестность х
пересекается с бесконечным числом Ак. Если lim \nfAk = lim snpAk = A,
то A = lim Ak или Ак -+A.
80
Доказательство. Теорема 4.7 является следствием следующего
утверждения, которое представляет собой аналог леммы Фату.
Лемма 4.1. Пусть Fx (t), F2 (t),... - последовательность многозначных
отображений, <&i, Ф2,... - соответствующие им множества векторных
оценок стратегий, Ф* - множество векторных оценок стратегий для
многозначного отображения F(t) = lim supFfe. Если все отображения Fk
ограничены одной и той же интегрируемой функцией к, то Ф* Э lim вирФ*.
Действительно, пусть F - замкнутое и интегрально ограниченное
отображение; положимFx =F2 = ... =F. Тогда lim s\xpFk = clF=F1/l\im&\xpФk =
= с!Ф,*где Ф - множество векторных оценок стратегий для F. Тогда из
леммы 4.1 следует, что
Ф = Ф* Э lim sup Фк = cl Ф,
т.е. множество Ф замкнуто. Так как оно к тому же ограничено интегралом
функции й, которая ограничивает F, то множество Ф компактно.
Заметим, что при замене условия интегральной ограниченности на
неотрицательность в теореме 4.7 множество Ф может оказаться незамкнутым.
Пусть [Го, Т] = [0, 1], п = 2 и g(t) = { A-0/r, f/(l-f)> • Положим
F(t) = { 0, g(t) } . Тогда Ф представляет собой объединение открытого
положительного квадранта с началом координат.
Подведем итог. Пусть рассматриваются всевозможные интегрируемые
функции f(t) такие, что в каждый момент времени/(г) €F(t)9 где F (Г) -
множество векторных оценок альтернатив. В силу определения множества
векторных оценок для любого t функция/О) представима в виде/(л: (?), г),
где х (t) лринадлежит множеству альтернатив X. Тогда в качестве
допустимых стратегий рассматриваются такие функции { х (t) } , х (t) G X, для
которых вектор-функции /(х (t), t) интегрируемы.
Пусть множество векторных оценок альтернатив в каждый момент
времени является замкнутым борелевским множеством, а многозначное
отображение t -* F(t) интегрально ограничено. Тогда условия теорем
4.4—4.7 выполнены, и мы можем сделать следующие выводы.
1. В классе допустимых стратегий существуют тг-оптимальные
стратегии (заметим, что' б условиях теоремы 4.3. это нельзя было гарантировать).
2. Множество векторных оценок стратегий замкнуто, ограничено и
выпукло.
Отсюда немедленно следует, что для любой я-оптимальной стратегии
{x*(t)} существуют такие неотрицательные коэффициенты аг,..., а„, что
(а, *>({**(')»> > <*, *({*(')» > D.27)'
для любой допустимой стратегии (x(t)}. Здесь
x(t)GXt / = 1 я.
Из D.27)' и теоремы 4.6 вытекает, что я-оптимальная стратегия состоит
из таких альтернатив, векторные оценки которых в каждый момент
времени принадлежат границе выпуклой оболочки F(t). Однако, поскольку
все утверждения теорем 4.6 и 4.7 формулируются "почти всюду", в
тг-оптимальную стратегию могут входить и опасные альтернативы. Однако
6. Ю.А. Дубов 81
опасные альтернативы могут выбираться только на множестве моментов
времени, имеющем нулевую меру.
Сформулируем окончательный результат в виде следующей теоремы.
Теорема 4.8. Пусть множество альтернатив X ограничено и замкнуто,
критерии ft(x, t) непрерывны по совокупности переменных, в качестве
допустимых стратегий рассматриваются функции времени {x(t) } такие,
т
что x(t)€ X и интегралы ffi(x(t)9 t)dt существуют для всех i = 1,...
'о
..., п. Тогда существуют it-оптимальные стратегии, причем из п-оптималь-
HocTu(x*(t)} следует, что соотношения
<<*,/(**('),')> > <aj(x(t)9tn *@ ex,
выполняются почти всюду для некоторого неотрицательного вектора
§ 4.3. Многокритериальные задачи оптимального
управления с дискретным временем
Как уже отмечалось выше, наиболее простой случай задач
последовательного выбора альтернатив, не укладывающихся в схему независимого
выбора, представляют собой задачи оптимального управления с несколькими
критериями, В скалярном случае для описания оптимальных стратегий
часто используются принцип максимума Понтрягина и методы
динамического программирования. В этом параграфе будут рассмотрены
модификации этих методов для многокритериальных задач оптимального
управления с дискретным временем. Одновременно будет показано, что опасные
альтернативы продолжают играть большую роль и в более сложных, чем
независимый выбор, задачах.
Так как дискретная задача оптимального управления с конечным числом
периодов представляет собой* частный случай задачи математического
программирования, то %для получения условий тг-оптимальности мы можем,
при соответствующих допущениях, воспользоваться результатами главы 2.
Рассмотрим сначала некоторые уточнения этих результатов.
Пусть множество альтернатив Х9 как в B.21), задается в виде X =
= {х е Rk | х ? ?2, r;. (х) = О, /=1,..., m). Теорема 2.6 может быть
переформулирована в следующей эквивалентной форме.
Теорема 2.6'. Пусть х*€ X и С(х*9 п) - коническая аппроксимация
П в точке х *. Если множества
K(x*)={ueRnXRm\u = (F(x*)x, R(x*)x)9 хЕС(х*,
>,0) е RnxRm\yi >о, / = 1 п9 oeRm)
неотделимые, то существует альтернатива ЗГ ? 12, г(х) = 0, такая, что
fj(x*) <•/,(*), i = 1,..., п. Здесь F(x*) и R(x*) - линейные
операторы, определяемые по формулам B.22), B.23).
Для дальнейшего нам понадобится следующее простое утверждение.
Теорема 4.9. Пусть П' С Rk - произвольное множество, обладающее
следующим свойством: если х' € Q.', то существует вектор х € 12 такой,
что г(х') = г (х) и f{x) > f(x'). Если х * оптимальна по Парето в мно-
82
жестве X B.21), причем x*Gft' и С(х*9 ft') - коническая
аппроксимация ft' в точке х*, то существуют вектор а G*Rn и вектор т?€ Rn
такие, что:
1) а,->0, / = 1,..., щ
2) (a, tj)=O;
3) <а, F(x*)x>+<7?, R(x*)x)<0 V JcGC(^fi').
Доказательство. Фактически теорема 4.9 утверждает, что конусы
K'(x*)={ueRnXRm\u =(F(x*)x, R(x*)x, xSC(x\ ft')},
fc 0) G Л
должны быть отделимы. Предположим, что это не так. Тогда, заменяя в
теореме 2.6' ft на ft', мы получаем, что существует jc ' Е ?1', для которого
г(х') = 0 и //(*') >//(**), / = 1,..., п. Но тогда, по предположению
теоремы 4.9, должна существовать точка х " G ft такая, что г (х ") = г (х') =
= 0 и f(x ") > f{x') > /(* *), что противоречит предположению об
оптимальности х* поПарето.
Рассмотрим теперь динамическую систему, описываемую разностным
уравнением
И* + 1) s НО +*(', НО. *@), f «0,1,.... Г- 1, D.28)
где {(Г)^Л/ - состояние системы в момент г, х(г) - управление,
выбираемое в момент t, x(t) G Rk9 ng - функция, определенная на Л X Rl X
X Rk и принимающая значения из /?'. Многокритериальная задача
оптимального управления состоит в том, чтобы найти стратегию управления
{x*(t)} и соответствующую траекторию движения системы {?*@>,
определяемую из D.28), которые удовлетворяют следующим условиям:
)ОО*
б) Г@)С*@) =*<>' ПК"* где
иеЯ'|го«)=0}, ^о: R'^RSoyr0
в) Г(Г)€"Д:(ЗГ) =J^'rn^, где
l
{|G/?|rr<{H}, (/r: RRfrT:fiR;
T)W)eK(f)=K'(t),K'(t)=iteRi\qt(?)<0}9 r«l;...f Г-1,
где ?,: Rt -+R5t\
д) для любой другой стратегии {х(г)} и траектории (НО)»
удовлетворяющей а) —г), из неравенства
2'/К*(О, НО, 0> T2
Г@, О, f-i,..., л,
следует, что
Здесь /1Г@), АГ(Г) - граничные условия на фазовые переменные, А:(г) -
ограничения на фазовые переменные в каждый момент времени t = 1,
2,..., Г- 1, размерности вектор-функций ro> <7o, rf> Qr^t равны
соответственно m09s0,mT,sT и sf.
83
Прежде чем вводить предположения, при которых будут
сформулированы условия оптимальности стратегии управления по Парето, рассмотрим
одно дополнительное определение.
Определение 4.3. Пусть Р - выпуклый конус в R3. Множество S CRS
называется Р-выпуклым, если для любых z1, z2 E S и 0 < А < 1
существует вектор z(X) в Р такой, что Xz1 + A -X)z2 + z(X) G5.
Можно легко показать, что множество S является Р-выпуклым тогда
и только тогда, когда для любого конечного набора { z1,..., z* } € S и лю-
k
бых неотрицательных чисел \х,..., X*, 2 \к = 1, существует вектор
к
z(X1,...,Xit) еР такой, что 2 X/Z* + z(Xx,... ,\k)eS.
Относительно задачи D.28) мы будем предполагать следующее.
А1) для всех t = 0,..., Т - 1 и для всех x(t) G X(i) функции
g(t, |@»*@)Аи f(t, ?@, x{t)) непрерывно дифференцируемы по \{i);
A2) Пусть D = {(y, 0)eRnXRk\yeRn, yt > 0, / = 1,... ,n, 0eRk)
и w({, x, i) = (fid, x, t\ gi(%, x,t)). Тогда для любой точки % €Rl
множества { w(/, ?@, X(t)), t = 0,..., T- 1} /лвыпуклы;
A3) Функции гоA0 и гт{%) непрерывно дифференцируемы,
соответствующие якобианы /?о(€) и Rrik) имеют максимальный ранг для всех
%€К@) и %GK(T) соответственно;
А4) для всех i(t)eK'(t)9 Г = 0,1,...,Г, градиенты Vqft(i)9 где / €
€{/1qjt(%) = 0), линейно независимы.
Для того чтобы представить полученную задачу оптимального
управления в виде, подходящем для использовния теоремы 2.6, введем следующие
обозначения. Для t = 0,1,..., Т- 1 обозначим v(t) = (&(/), b(t)), где
a(t)Gf(tf ?@, ДО)» а /(Г, (?(О,ДГ(О) - множество векторных оценок
альтернатив в момент t\b(t) € g(t, f(f), АГ(г)) и vJ(t) G w(t, J(r), X(t)).Ho
поскольку все множества w(t, %(t), X(tJ), t = 0,1,..., T - 1, по
предположению A2 ^-выпуклы, то существует точка zrG 12 такая, что ?'(f) = ?*@>
Z>'@ = b*(t) и ii/@ > а*@, / = 1,..., л. Поскольку множество &' имеет
выпуклую структуру, удобно строить аппроксимирующий конус
для 12'.
Если z* тгоптимальное решение рассматриваемой задачи, то z* G 12, а
значит, z* G12', так как 12 Э 12.
Определение 4.4. Конус Т(х, А) с вершиной в точке ~х, принадлежащей
множеству А С Rk9 называется радиальным к А, если
Т{х, Л)= {х\х+ахеА Va,
0<a<€(Jc; х) где е> 0}.
Определение 4.5. Пусть В - множество в Rk9 определяемое
неравенствами, т.е. В = { х | qt(x) < 0, i = 1,..., m }, где qt - непрерывно
дифференцируемые функции. Конус /(*, 5) с вершиной в точке х GB называется
внутренним, если
84
Сейчас мы покажем, что конус
(»Ч0. со
является конической аппроксимацией множества п' в точке z* (см.
определение 2.4). Здесь W - якобиан отображения w(tf ?(f), лг(г)). Выпуклость
конуса С(Л Л') очевидна. Пусть для/ = l,...,tf 8*'= (8?'@), ... ,6^G),
6t/@),..., 8v*(T- 1)) - линейно независимые векторы в C(z», п*) и
5 = co^z1, F5z2,... ,J8zN), где € - положительный скаляр. Для любого
вектора bz G 5 можно однозначно записать
N
8z=? 2 11{(&гNг*, D.29)
где
Поэтому
N
^r), D.30)
N
€" 2 iif(8z)&v*(t). D.31)
Но по определению
81/@= Wfc Г@, ^40)^@ + ^@, D.32)
где u;'@e7V@, со w(r,f (г), ЛГ(Г)).
Из D.30), D.31) и D.32) имеем
N
в 2 9tf{6z)Szl. D.33)
Введенный в определении множества S положительный скаляр ?
определяется следующим образом. Для / = 1, 2,..., W и Г = 0,1,..., Т вектор
$?;@ принадлежит выпуклому конусу /(?*@, ^'@)- Поэтому из D.29)
N
следует что также и 2 ц(8гЩ1\т)еЩ*(г), K'(t)) для t= 0, 1, . . . , Т.
Это означает, что существуют положительные скаляры e"f, t = 0, 1, . . . , Г,
возможно зависящие от 5Z1, 8z2,..., 8z^, такие, что
N
(Г@ + е, 2 ц,(82Щ*Ю)еК'@, 0< е, < ё",. D.34)
85
Аналогично, для t = 0,1,..., Т- 1 .
N
Я V,Fz)vl(t)eT{v\t)9 со w(r, Г@, X(f))9
следовательно, существуют положительные скаляры ег, возможно
зависящие от 5Z1, bz2,..., 8zN9 такие, что
N
y*(O + ef 2 ^
J Х 0<е,<е,. _ D.35)
В качестве ~ё будем выбирать минимальное из чисел lt, et.
Из D.10) следует, что существует конечное множество A (О и скаляры
Ха@ такие, что
N
е2 М/(б2)и''@ = < 2 Xa(f)w(r, Г@, xe@)-w*@, D.36)
/=1 aGA(t)
тпе xa(t)eX(t), aeA(t), 2 Ха@=1, Ха@>0. Из D.36) и D.33)
a<=A(t)
получаем
Теперь определим отображение J из 5 на 12'-{z*} как
, • • •, У(П «@),..., к(Г- 1)}, D.37)
где
y(tt
б Z ц,№&&&, t = 0,1,..., Г, D.38)
(*, 6г)= 2
+ 55@, *a@)-V@> t = 0,1,..., Г- 1. D.39)
Из D.34), D.36), D38) и D.39) очевидным образом следует, что ?
отображает S на п' - {z*}. Разлагая D.39) в ряд Тейлора в окрестности
?*, получаем
к (г, 6г)=И/(г,Г@, **@)«?@ +
+ 2 Xa@u4f, Г@, **@) - w*@ +^ «О, D.40)
ел(г)
где \\o(t,bz)\\/\\8z 11-^0 при ||6z||^0. Из D.40), D.37) и D.38) следует,
что fFz) = 6z + с? Ez), где lim || о Fz) ||/|| 5z || = 0. Поскольку ? - непре-
рывное отображение, C(z*, П') является конической аппроксимацией п
в точке z*, т.е. u(r)Gw(r |@ ЛГ(О)
86
Пусть
г = A@), ЙО. ¦ • •. «7), и@),..., v(T- 1)),
r-i
r=o
D.41)
D.42)
D.43)
и, наконец,
г = О, 1,..., Г- 1}. D.44)
Будучи представленной в таком виде, задача оптимального управления
представляет собой многокритериальную задачу математического
программирования: максимизировать по Парето \p(z) при ограничениях r(z) - 0,
z??2, где z определяется соотношением D.41), </> получается из D.42),
r(z) и ?2 из D.43) и D.44) соответственно.
Рассмотрим теперь множество п', определяемое как
П1 = iz№)eK'(t)t t = 0,1,.. Л Г, v(t)E
е со w(t. «г), JT(r)), г = 0, 1,..., Т - 1}. D.45)
Можно легко показать, что множества 12 и 12' из D.44) и D.45)
удовлетворяют условиям теоремы 4.9. Действительно, пусть z* —
произвольная точка П'. Тогда для t = 0, 1, . . . , Г, ?*@ G ?'(/) и v*(t) =
= 2 Xy(r)i/(r), где \Дг)>0, Z Х7(г)=1, J* - конечное множество.
Таким образом, из теоремы 4.9 вытекает существование ненулевого -
вектора ^/ = (ао,я), а°€Ли,а°>0, тг^ -fr1, -р2,..., -рт9цо9цт)9
P*eRk, ц°
т-\
mT
9 цт eRmT такого,что
ba{t))- 2
Г=0
0 D.46)
для всех &z G C(z*, 12'). .Окончательно получаем следующий результат.
Теорема 4.10 (Да Канха, Полак [2]). Если стратегия {**(*)} =
= (лг*(О), л:*A),. ..,х*(Г- 1)} и соответствующая траектория {?*(/)} =
= (?*@), f*(l),..., ?*(Т)} п-оптимальны, то существуют неотрицательный
вектор a0 eRnf векторы р°, р1,..., рт в Rk, векторы Х°, X1,..., \TG
?RS, /i° eRm°, fxTeRmT такие, что:
(<J>9p°9p\...,pT, /i°, цт)Ф0;
87
2) />'-p'+i=A>'+iG(r.f(o, **@)+<*°f(
t = O,l,...,T-l
(G и Q - якобианы вектор-функций g и q);
3) p° = V*o«'@));
4) Рг= htrt(V(X»+хглг(Г(Г));
5) X'fCr, f@)-0. Y-O,l,...,r,
u гамильтониан
#(f. x, p, a0, t) = <a°. /(*. ?,*)> + <p, g(t, I x
удовлетворяет условию принципа максимума;
6) #(Г@, **@, P. «°, t)>H{?(t), x(t), p, a0, t) V x(t)&X(t), t
= О, 1,..,,Г-1.
Доказательство.
1) Это неравенство вытекает из теоремы D.9);
2) Пусть bv(t)= Wit, %*{t), x*(t))8$(t). Тогда D.46) принимает вид
(a0, F(t, Г (О,
О
и выполняется для всех 5|, удовлетворяющих условию
щи 4/С, !*(')) *0.
Поэтому из леммы Фаркаша следуют п. 2 и < X', q (t, %* (t)) = О, Г = 0,1, —
...,Г-1.
3) Это выражение можно считать определением р .
4) и 5). Выберем 8z = @, 0, ..., 0,5? (Г), 0,0,..., 0), причем5? (Г) та,
кова,что<УG/(Л,Г(П)?^(П> <0при^,(Г, f (Г)) = 0. Снова из
леммы Фаркаша следуют п.4и<Хг, <у. ( Г, 5*(Г)> =0.
6) Для t = 0, 1, 2, ..., Г — 1 выберем произвольную точку v' (t) €
€ cow(r,?*@, *(О). Тогда 5u(r) = у# (?) - y(r) G Г(и*(Г),
cow (г, ?*(г), *(/)), и, выбирая 6z = @,0,. ..,0,6 v @,0, ...,0) получаем,
что 5z € С (z *, 12'); поэтому из D.46) следует, что
0. D.47)
Подставляя в D.47) Sv(t) = и' ()Г) - у (О, получаем
1,^)-^,Г(О^*(О)> > о.
Очевидно, что это неравенство выполняется для любых {a1 (t),vf (t) ) €
<Ew(t, ?*(t),X(t)). Поэтому
0
что завершает доказательство теоремы.
Теорема 4.10 иллюстрирует возможности применения дискретного
принципа максимума для определения оптимальных по Парето стратегий и
соответствующих им траекторий движения системы. Заметим, что при ее
доказательстве существенно использовалась выпуклая структура задачи
оптимального управления. Тот факт, что вместо предположения о выпуклости
было сделано более слабое предположение о /)-выпуклости позволяет,
например, не рассматривать вопросы, связанные с наличием опасных
альтернатив. Действительно, можно показать, что при сделанных допущениях
опасных альтернатив в рассмотренной только что задаче не существует.
Однако во многих дискретных задачах оптимального управления
опасные альтернативы присутствуют и продолжают играть ту же роль, что и в
задачах независимого выбора с дискретным временем. Мы рассмотрим
одну из таких задач, а именно — задачу о распределении одномерного ресурса
в классической постановке Р.Беллмана (Беллман [1]) и на этом примере
исследуем возможности использования метода динамического
программирования.
Пусть имеется физический ресурс уу который можно разделить на к
частей *i, ..., хку получив при этом доход, измеряемый вектор-функцией
/(*i, «.,**) ={/i(*i>..., **)>•••> fn (xi,...,x*)>- Различные распределения
ресурса при этом определяются как
/= 1
и представляют собой множество альтернатив. Множество векторных
оценок, очевидно, зависит от имеющегося в наличии ресурса, т.е. от у, поэтому
D.48)
Наша задача состоит в том, чтобы выделить множество Парето в
пространстве векторных оценок,, из которого впоследствии может быть выбрана
еданственная (наиболее предпочтительная) векторная оценка. Восстановить
распределение хх ,...,*& по этой оценке не представляет труда.
Рассмотрим многошаговый процесс распределения ресурса. На первом
шаге распределение ресурса осуществляется по D.48), поэтому перепишем
D.48) в виде
F(l\y)={f(x)\xeX(y)}. D.49)
Пусть за счет издержек, которые требуются для получения векторного
дохода /(*), каждая часть ресурса */ уменьшается до я ,х,-, где 0 <а* < 1.
Тогда после первого распределения в нашем распоряжении.останется коли-
к
чество ресурса, равное^! = 2 агх(. Поэтому на втором шаге множество
/= 1
альтернатив может быть записано как
\xli> 0,
к к
1,...,*, 2 х}=ух = 2
/= 1 f= i
89
а множество векторных оценок
Fi2\y,x)={f(x1)\x1 еХг(у,х)}. D.50)
Множество векторных оценок двухшаговых стратегий, как следует из
D.49) и D.50), принимает вид
где х € Х(у), х1 € X1 (у, х). Аналогично для процесса распределения,
который длится N шагов, имеем множество векторных оценок ^-шаговых
стратегий
F<N\y) = U {/(*) +Дх1) + ... +/(*"-*)}, D.51)
x,...,xN-1
где х G ЛТ(>>), ..., xN~l € ЛГ^"! (у, х, х1, ..., х^~ 2). Заметим, что в данной
задаче множество альтернатив на шаге N полностью определяется тем, как
производилось распределение ресурса на всех предыдущих шагах.
Следовательно, рассматриваемая задача не является задачей независимого выбора.
Поскольку нас интересуют только я-оптимальные векторные оценки,
обозначим через Fj^(y) множество тг-оптимальных векторных оценок для
iV-шаговых стратегий распределения ресурса при начальном значении
ресурса у. Здесь N= 1,2,... Очевидно, что
Отсюда легко получается рекуррентное соотношение
>>)>, a={al9...9akh 0<a,< 1. D.52)
При больших значениях N удобно рассматривать бесконечношаговую
аппроксимацию исследуемого iV-шагового процесса. Тогда
последовательность уравнений D.52) можно переписать в виде
= **{/<*)+*¦( <а, х >)}, хеХ(у). D.53)
Функциональное уравнение D.53) можно считать определением
предельного (при N-*oo) множества я-оптимальных векторных оценок стратегий
и соответствующего ему множества стратегий, в частности им можно
пользоваться в качестве необходимых и* достаточных условий тг-оптимальности.
Однако здесь возникают обычные сложности, связанные с бесконечными
процессами, прежде всего —необходимость в получении условий
существования и единственности решения D.53). Если у D.53) нет решения, т.е. не
существуе! многозначного отображения у -* F(y), удовлетворяющего
D.53), то тг-оптимальных стратегий распределения также не существует.
Доказательство существования и единственности решения уравнения
D.53) не представляет особых трудностей. Как и в скалярном случае,
достаточно предположить, что вектор-функция f(x) "достаточно хорошо"
ведет себя в окрестности начала координат. В этом случае удается показать,
90
что для любого положительного
числа е > О существует такой номер М,
при котором для всех N>M
"расстояние" или "разность" между
множествами FN и FN+K целиком
содержится в сфере радиуса €,
Фактически единственная особенность
доказательства состоит в введении
понятия "разность" между различными
множествами оптимальных по Парето
векторных оценок.
Рассмотрим множества R(x) и
S (х), принадлежащие R п:
R(x) = {z GДл| Zi >xiy / = 1,..., л},
G ft
Рйс. 4.4
Здесь R(x)(S(x)) — множество точек Rn, доминирующих
(доминируемых) x по Парето.
Определение 4.6. Множество я-оптимальных векторных оценок F
доминирует множество 7гоптимальных векторных оценок G(F> G), если
выполнено условие
R(y) П F Ф ф V7 е G.
Поскольку х еR(х\ введенное таким образом бинарное отношение на
множестве всех множеств Парето является рефлексивным. Если F>G,G> H,
то R (х) П G Ф ф при х ^ Н. Выбирая у € R(\) П G и \р G R G) П F, легко
видеть, что ^>тг7,7>яХ, поэтому в силу транзитивности доминирования
по Парето R(х) ^РФф и отношение > транзитивно.
Установим теперь асимметрий) >. Пусть F > G, G > F и G Ф F. Но
тогда R (if) C\G Ф ф для некоторой оценки </jGF. Выберем y€R(}p) nG.
Поскольку F >- G, то R(y) П F Ф ф,к можно выбрать у* € R(y) П F.
Если <р' Ф у, то у' > и У > пФ> следовательно, у > п \р, что противоречит
исходному предположению о несравнимости всех точек множества F по
Парето. Но тогда у' = у = у для всех <р € F Ky€G; следовательно,
множества F и G совпадают, что также противоречит исходному предположению.
Таким образом, введенное бинарное отношение является отношением
частичного порядка (гл. 3).
Рассмотрим два произвольных множества я-оптимальных векторных
оценок F и G, которые, в общем случае, несравнимы по введенному
частичному упорядочению. Разобьем эти множества на три части (рис.4.4):
Gx =
D.54)
D.55)
91
Множества Flf G2, Fa, Gx состоят из сравнимых по Парето векторных
оценок; Так, для любой точки из Fx найдется доминирующая ее по Парето
точка из G2 и наоборот, а для любой точки из F2 - доминируемая ею точка
из Gx и наоборот. Множества F3 и G3 характеризуют несравнимость
исходных множеств F и G, поскольку состоят из несравнимых между собой
векторных оценок.
В том случае, когда выполнено условие
G3=F3=0, D.56)
можно определить операцию F *G (разность между F и G) по правилу
( U {*G)nF-7»U( U {R(<p)nG-<p}), D.57)
7 S G, if 6 F2
где под R (у) DF-7 понимается сдвиг множества R (у) П F на вектор
(-7) • Очевидно, что при F > G имеем F2 = F, Ft = F3 = G2 = G3 = ф,
Gi = G, и D.57) переписывается в виде
F*G = U {*G)nF-7>- D.58)
Ясно, что если построить Множества F' = Fx U Gx и G' = F2 U G2, то
F' > G' в силу D.54) и D.55), поэтому D.57) может быть переписано
в виде
F*G = C*F= U {R(y)C)F'-y}. D.59)
По "величине" множества F * G можно судить о том, насколько сильно
отличаются друг от друга множества F и (?, удовлетворяющие D.56).
Пусть F€ и G€ - е-окрестности множеств F н G, т.е. множества точек,
отстоящих от точек F n G соответственно на расстояния, не
превышающие в. Множества F и G отличаются не более чем на е, если G E F€ и
F С Ge. Можно легко показать, что если множество F * G целиком
содержится в шаре с центром в начале координат и радиусом б, то множества F
и G отличаются не более чем на е (обратное, вообще говоря,
неверно) .
Пользуясь введенным понятием разности паретовских множеств
(заметим, что оно введено только в пространстве векторных оценок), можно
установить условия существования и единственности решения
функционального уравнения D.53).
Теорема 4.11. Пусть
а) //(*) ~ непрерывные функции для / = 1, ..., п, х; > 0, / = 1,..., к,
2 xi <л/,@)*0,/ = 1,...,и;
б) если ш(у) = max max //(^), с - max tf/, то
г 1 < / < п 1 < I < к
2 w(cyv) <оо Чу > 0;
/ = о
в) 0 <а( < 1, i «1,...,*.
92
При этих предположениях существует единственное решение уравнения
E.53),причем F@) = {0}.
До казательство. Рассмотрим сначала случай, когда все функции
f( (x) принимают только неотрицательные значения. Тогда при любом
начальном значении у последовательность множеств я-оптимальных
векторных оценок {Ffii(y)) является монотонно возрастающей по отношению >.
Предполагая дополнительно ограниченность последовательности (FN(y)} и
пользуясь рассуждениями, аналогичными теореме Вейерштрасса, легко
установить сходимость этой последовательности к некоторому множеству
F{y) ПРИ ^-*°°»
Покажем, что это множество удовлетворяет соотношению
F(y) = ir*{/(x) + F( < а, х >)}, D.60)
е пА озна
бозначим
74F, *)=
где пА означает выделение множества Парето в замыкании множества А.
Обозначим
+ F((a,x))\ Z Xi=y, Xi>0, / = 1,...,*>. D.61)
/= i
Тогда функциональное уравнение D.52) переписывается в виде
FN+i(y) = nxT(FN9x). D.62)
Из D.62) вследствие монотонности по N получаем
F(y) >*xT(FN,x). . D.63)
Но если F(y) доминирует nxT(FN,x), то F(y) доминирует любое
подмножество T(Fn, x), состоящее из несравнимых по Парето точек.
Учитывая этот факт и переходя в D.63) к пределу по N, получаем
F(y) > «xT(F,xy D.64)
С другой стороны, из D.62) получается соотношение
Fn+i<J) < «xT(Ftx) VN,
а следовательно, и
F(y) < *XT(F^). D.65)
Сравнение D.65) и D.64) дает D.60).
Теперь покажем, что имеет место сходимость к F(y) и в том случае,
когда неотрицательность функций ft не предполагается. Для этого
рассмотрим множество uN(y), содержащее все возможные распределения
ресурса на шаге N, через которые проходит хотя бы одна яоптимальная
стратегия. Тогда имеем
T(FNtuN) D FN+1(y), D.66)
93
Из D.66) получаем ;
откуда в силу максимизирующих свойств и^ следует соотношение
/b+tOO > *T(FN,uN+l). D.67)
Учитывая D.59), из D.67) получаем
, uN+x)) > n(FN+2(y) * FN+X(y)). D.68)
Выражение, стоящее в левой части D.68), может быть преобразовано,
если учесть, что
= U [f(xN+l)^FN+l«atxN+l))]^
* [f(xN+l)+FN«a,xN+1))] =
= U [FN+1«atxN+1))*FN((a,xN+1))h
xn+i
D.69)
Пусть vN(y) = n(Fmi (z) * FN(z)), N= 1, 2, ... Так как (а,х > <cy
к
для всех неотрицательных х9 удовлетворяющих условию 2 xt = у, где
1 = 1
с = max д,-, то из D.69), D.68) следует, что
1 < / < к
< vN(cy). D.70)
Осталось оценить v x (у):
*Fi(z)) < nU(Fl((a,x))UF2((atx))).
X
Если m(^) = maxmax/Дх), то p(F2 (у) * ^ (у)) <т(су),гце р(А) -
X i
радиус шара, содержащего А. Таким образом p(vx (у)) ^т(су)', исполь-
зуя D.70), получаем, что p(vN(y)) <m(cN(y)). Если 2 m(cNy) < ©о,
N = 0
оо
то ряд 2 р (uN(y) ) сходится при всех у, и отсюда следует существование
N=0
предельного множества F(^), удовлетворяющего D.60).
Осталось установить единственность решения. Пусть G(y) - любое
другое решение, которое существует при всех у и G(Q) = {0}. Тогда/7 (у) =
= пТ(F, и), G(y) = тгТ(G, w). Отсюда получаются очевидные
94
соотношения
> nT(F,w),
y >irT(G,u),
что приводит к оценке
F(y) * G(y) <n{[nT(F, и) * irT(G, и)] U
U[irT(Ft w)*nT(Gf w)]) = it U {F\{a, ?>)*
*G((a, ?))UF({fl, r?))*G(<j,T?>)}. D.71)
Как и раньше, положим и (.у) = тг2 (F(z) * G(z)). Множество и (у)
непусто, и в начале координат оно состоит из нуля. Из D.71) получаем
v(y) < v(cy), откуда v(y) < v(cNy). В пределе при N -> <» имеем
v(y) < {0}, следовательно, F(y) = G(.y) для всех у> и теорема доказана
полностью.
Теперь перейдем к описанию свойств решения задачи распределения
ресурса. Для этого будем предполагать, что все критерии Д (л*), ...,/„(х)
являются однородными функциями х, т.е. удовлетворяют условию
/Дахь ..., ахк) = а/Дхь ..., хЛ), / = 1,..., w, для любого а> 0. В
частности, полагая <х = у9 получаем
^)..,zk), D.72)
к
где 2/ = *,•/;>, Zf > 0, i = 1, ..., Л, 2 z,- = 1. При этом ft{z) - непре-
i = 1
рывные функции 2, определенные при z > 0, причем /^ @) = 0, / = 1, ...,?.
Заметим, что любая векторная оценка из F(y) представляет собой
сумму сходящегося ряда, элементы которого являются векторными оценками
альтернатив, выбираемых в последовательные моменты времени. Из D.72)
следует, что каждой альтернативе xN соответствует "нормализованная"
альтернатива zN9 компоненты которой характеризуют пропорциональность
распределения наличного ресурса на шаге N, причем векторные
оценки xN и z N совпадают. Тогда
F{l)(y)={yf(z)\zez},
к к
ух = 2 aiXi = у 2 Z/,
i = l
95
2
/= l
Вводя обозначения F*' \y)=yF (*\ 1) ,F ^2\y)=yF ^2\i) и т.д., получаем
где
} N=\,2,...
Тогда D.53) переписывается в виде
F(l) = nz{f(z) + F«a,z))}. D.72)'
Здесь уже множество альтернатив на шаге N не зависит от ранее
выбиравшихся альтернатив, оно постоянно и равно z. Зависимой от
выбиравшихся в прошлом альтернатив стала векторная оценка альтернативы,
выбираемой на шаге N. Так, например, если в первый момент времени выбрана
нормализованная альтернатива z, то векторная оценка любой
альтернативы, выбираемой в следующий момент времени, будет умножаться на
(afz >, т.е. зависеть от z. Поэтому даже за счет введения предположения об
однородности критериев воспользоваться схемой независимого выбора не
удается. Заметим, что между решениями функциональных уравнений
D.53) и D.72)' существует простая связь: F(y) = j>F(l).
Как уже отмечалось, векторная оценка из F(l) представляет собой
сумму сходящегося ряда, элементы которого являются векторными оценками
нормализованных альтернатив, выбираемых в последовательные моменты
времени. Поскольку множество нормализованных альтернатив Z является
постоянным, можно ввести понятие чистой стратегии распределения, при
которой в каждый момент времени выбирается одна и та же
альтернатива z ? Z. Векторную оценку любой чистой стратегии будем называть
чистой векторной оценкой. Бели же последовательно выбираемые
нормализованные альтернативы различны, то такую стратегию и соответствующую
ей векторную оценку будем называть смешанными.
Нас будут интересовать соотношения между чистыми и смешанными
векторными оценками. Чтобы упростить анализ, сведем нашу задачу
к задаче с независимым выбором. Для этого достаточно положить
at = a, I = 1, ..., к у 0 <а < 1. Тогда векторная оценка альтернативы на
шаге N не будет зависеть от того, какие альтернативы выбирались в прошлом.
Действительно, для z *, например, имеем
<flr,z>/(z1) = [ 2 ^/z/]/(z1) =
/= i
= [а ? ZtViz1) =af(zl\
/= i
что уже не зависит от z. Произвольная чистая векторная оценка
96
в этом случае имеет вид
*({*•»- 2 akf(z*)=f{z*) 2 aN=^-9 DЛЗ)
JV=O N=0 l -<*
где z* - выбираемая на каждом шаге альтернатива. Смешанная векторная
оценка определяется по формуле
<,({*}) = 2 2 *'/(*'). D.74)
где // - множество моментов времени, в которые выбирается
альтернатива z* G Z.
Рассмотрим условия, при которых любая смешанная векторная оценка
может быть представлена в виде выпуклой комбинации чистых векторных
оценок. При п критериях достаточно рассматривать такие смешанные
стратегии D.74), в которые входят не более п различных альтернатив
(поскольку в конечном счете нас интересует оптимальность по Парето). В
случае независимого выбора такое представление смешанной векторной
оценки эквивалентно возможности выделения п подпоследовательностей
геометрической прогрессии со знаменателем а и суммой а, причем сумма
каждой такой подпоследовательности равна oi9 / = 1, ..., л, где О( -
наперед заданные числа, 2 af = a.
Рассмотрим процедуру построения таких подпоследовательностей при
оо
п = 2. Пусть 2 aN = а. Выберем произвольное число ох, 0 < ах < а, и
лг = о
будем строить подпоследовательность геометрической прогрессии
1, а, а2 у ... с множеством номеров / и с суммой ог следующим образом.
Положим / = {0}. Если ои> 1, то положим / = / + {0}; в противном
случае / не меняется. Первым элементом / будет номер того члена
геометрической прогрессии* aNy для которого впервые выполнено
соотношение aN > а1# Пусть / содержит некоторый номер к. Если
а*+| < ах - 2 а)\ то / = / + {к + 1}. В противном случае увеличим
номер к + 1 на единицу, снова сравним соответствующий член прогрессии
с ох - 2 а)г и будем продолжать двигаться дальше по прогрессии
/е/
вплоть до получения элемента а1 < ох - 2 а'". После этого полагаем
/е/
/ =/ +{/},и процедура повторяется.
Очевидно, что эта процедура действительно позволит получить любое
число о%, 0 < ог < а, если только не окажется, что после того, как
элемент as не включен в /, сумма всей оставшейся части прогрессии будет
меньше чем О\. Например, если ох < 1, то номер к - 0 не входит в /.
Но сумма всей оставшейся части прогрессии 2 aN может оказаться
N=1
меньше ог; тогда построить искомую подпоследовательность не удается.
7. Ю.А. Дубов 97
Отсюда следует, что нам необходимо условие 2 />1 или а/ A - а) >
> 1, откуда а > Й. Можно легко показать, что это же условие является
и достаточным для построения подпоследовательности, обладающей
нужными свойствами.
Легко проверяется, что необходимым и достаточным условием
возможности построения таких подпоследовательностей при произвольном п
является выполнение соотношения а > (п - \)/п. Отсюда следует, что при
а > (п - \)/п любая выпуклая комбинация чистых векторных оценок
является векторной оценкой некоторой смешанной стратегии {z0}.
Действительно, векторная оценка любой чистой стратегии
. 1_
1 -д
Выпуклая комбинация векторных оценок чистых стратегий представима
в виде
п п п п
Pjip({Z }) — О 2$ P(j{Z ) = 2а OpiJyZ)— 2л Ojf(Z ),
п п
где а/ = aft, / = 1,..., л, ft > 0, 2 ft = 1, 2 ог = а. Для того чтобы
построить смешанную стратегию с векторной оценкой 2 Oif(z')9
необходимо сформировать множества индексов У/, / = 1,..., я, такие, что
U /, = {0,1,2,...}, П/.- = 0и 2 a'=oh /=l,... ,w. Возможность
построения таких множеств гарантируется условием а> (п- \)/п.
Искомая смешанная стратегия будет состоять в выборе альтернативы zN =z*
при NGJit i = 1,... ,л.
Заметим, что при а< (п - \)/п не любая выпуклая комбинация
чистых векторных оценок соответствует некоторой смешанной векторной
оценке. Можно показать, что в этом случае множество смешанных
векторных оценок, которые можно получить как выпуклые комбинации п
чистых векторных оценок, является нигде не плотным множеством
нулевой меры, хотя и имеет мощность континуума.
Таким образом, мы получили условия, при которых любая выпуклая
комбинация п чистых векторных оценок является смешанной векторной
оценкой, т.е. соответствует некоторой смешанной стратегии. Поскольку
обратное утверждение очевидным образом всегда справедливо — любая
смешанная векторная оценка является выпуклой комбинацией чистых,-
то отсюда следует, что при а> (л — 1)/л через любую я-оптимальную
векторную оценку стратегии можно провести опорную гиперплоскость ко
всему множеству векторных оценок стратегий F(l).
Существование опорной гиперплоскости в каждой точке множества
F(l) означает, что для каждой я-оптимальной стратегии существует
линейная функция критериев, достигающая на этой стратегии максимума.
Но это и означает, что если в некоторый момент времени была
выбрана опасная альтернатива, то содержащая ее стратегия уже не будет
я-оптимальной.
98
J*/A-*)
t//(t-a)
Рис. 4.5
Сделанный вывод фактически
совпадает с тем, который был получен при
анализе задач независимого выбора с
непрерывным временем. Это объясняется тем,
что условие а> (п-1)/п обеспечивает
малое изменение множества векторных
оценок альтернатив в последовательные
моменты времени. Физическая
интерпретация условия а> (п-1)/п состоит в
том, что наличный ресурс от шага к шагу
убывает достаточно медленно. Заметим,
что в противном случае не имеет смысла
рассматривать бесконечношаговые
стратегии распределения ресурса, поскольку за
несколько первых шагов наличный
ресурс уже становится пренебрежимо малым.
Пример. Пусть yN = ayN_l9 N= 1,2,... ,у0 = У, 0< xN<yN.В
качестве критериев выберем функции fx(x) = х и f2(x) = (у - хJ. Если
величина а достаточно близка к 1, то тг-оптимальные векторные оценки
стратегий целиком содержатся в отрезке, соединяющем точки (у 1A - а)у 0)
и @, у21A - а) в пространстве векторных оценок R2. Заметим, что в
множестве векторных оценок альтернатив существуют всего две точки,
не являющиеся опасными: @, у2) и (у, 0) (рис. 4.5). Это означает, что
выбор в любой момент времени альтернативы jc^ такой, что 0 < xN< yN9
приведет к тому, что соответствующая стратегия уже не будет тг-опти-
мальной. Однако каждая альтернатива xN, 0 < xN < yN9 тг-оптимальна.
Итак, мы установили, что если я/ = a, i = 1,... ,'к, и потери, связанные
с распределением ресурса, не слишком велики, то отсутствие опасных
альтернатив в стратегии является необходимым условием я-оптимальности.
Естественно ожидать, что аналогичный результат будет иметь место, если
параметры различны, но мало отличаются друг от друга. Заметим, что в
этой ситуации уже нельзя говорить о независимом выборе.
Пусть все at различны. Покажем, что любая смешанная векторная
оценка представима в виде выпуклой комбинации чистых, и наоборот - любая
выпукла^ комбинация чистых векторных оценок соответствует некоторой
смешанной векторной оценке. Рассмотрим для простоты смешанную
стратегию, состоящую в выборе альтернатив zl и г2 (общий случай получается
аналогично). Векторная оценка для чистой стратегии выбора z1
или
поскольку < a, z1 >< 1, а для чистой стратегии выбора г2
При построении векторной оценки для смешанной стратегии выбора z1 и
7* 99
z2 следует учитывать, что если на шаге к выбрана альтернатива z', / =1,2,
то векторная оценка альтернативы, выбираемой на шаге к + 1 должна
домножаться .на (а, г1). Так, например, векторная оценка смешанной
стратегии {z (t)} = z1, z1, z2, z1, z2, z2, z1,... имеет вид
*({*№= f(zl) + <a, zl)f(zl) +({a, zl))*f(z2^
+ {{a, zl)f{a, z2)f{z2) + « a, z1»3(<j, z2)Jf(z2) + >
+ «a,zl)f((a,z2))*f(zl) + ... D.75)
Каждый член ряда D.75) есть f(zx) или f(z2) с коэффициентом,
равным коэффициенту при предыдущем члене ряда, умноженному на (a, z1)
или (a, z2). В общем виде векторную оценку смешанной стратегии {z(t)}
можно записать как
т2
2 «a,z1»Wl
S «^
()[ (L»
1=1
+ 2 (Uz1>)"l+'l2(<*>z2>)Wl+l'~1 + ..•]• D.76)
/=i
Выпуклая комбинация чистых векторных оценок ^({z1}) и <p({z2})
имеет вид
1 -
D.77)
Для того чтобы установить, что смешанная векторная оценка является
выпуклой комбинацией чистых, достаточно показать, что коэффициенты
при /(z1) и /(z2) в D.76) и D.77) совпадают при некотором /3,0 < 0< 1.
Это означает, что
+ 2 (<a,z2»mi(<a.z1»+/~1 +...], D.78)
100
m3
+ S «а,г1»"«+яЧ<в>гЪ)т'+/-1 + ...]. D.79)
Неотрицательность выражений, стоящих в правых частях D.78) и D.79)
очевидна. Значит, осталось показать, что сумма этих выражений равна 1, т.е.
(l-(atz2))[ 2
2)
D.80)
Раскрыв скобки и сгруппировав члены с одинаковыми степенями (a, z1)
и (at z2>, легко убедиться, что D.80) представляет собой тождество.
Этот результат обобщде-Гся на любую смешанную векторную оценку.
Таким образом, мы установили, что любая смешанная векторная оценка
при различных #; является выпуклой комбинацией чистых.
Доказательство того, что любая выпуклая комбинация чистых
векторных оценок соответствует некоторой смешанной векторной оценке, мы
приводить не будем, отметим лишь, что оно строится аналогично
рассмотренной выше ситуации с независимым выбором. Окончательный результат
сформулируем в виде следующей теоремы.
Теорема 4.12. Пусть выполнены все условия теоремы 4.11, функции
//(*)> / = 1,.. ., я, однородны степени 1, и потери от распределения
ресурса не слишком велики (at > (п - 1)/и). Тогда через каждую точку
множества F(y) можно провести опорную плоскость к этому множеству
с неотрицательным вектором, а следовательно, ни одна стратегия,
содержащая опасную альтернативу хотя бы в один момент времени, не является
тт-дптимальной.
Заметим, что вогнутость критериев ft(x) при доказательстве
теорем 4.11 и 4.12 не предполагалась. Поэтому можно легко построить
примеры задач распределения, в которых присутствуют опасные альтернативы.
Во всех приведенных выше рассуждениях существенно использовалась
однородность критериев //(*). To, что их степени однородности
полагались равными 1, позволило осуществить переход к нормализованным
распределениям ресурса, пользуясь формулой D.72). Если степени
однородности pt различны, то соотношение F(y) =yF(l) уже не будет выполнено,
а следовательно, не будет выполняться и равенство D.72), но утверждение
теоремы 4.12 останется справедливым, если заменить условие а{ >(п - \)/п
на в| > ((« ~ 1)/и) х1р> где р = max pf. Так, в рассмотренном выше при-
мере с независимым выбором достаточно положить а > 1/у/Т.
101
Во всех задачах, которые рассматривались в этой главе, отмечалась
возможность существования оптимальных по Парето альтернатив,
которые не могут входить ни в одну оптимальную по Парето стратегию. Было
показано, что через векторные оценки таких альтернатив нельзя провести
опорную плоскость к множеству векторных оценок альтернатив; такие
альтернативы назывались "опасными". Мы установили, что в задачах
независимого выбора с дискретным временем я-оптимальная стратегия
может содержать опасные альтернативы, но существуют ситуации, когда это
приводит к потере я-оптимальности. В то же время в задаче независимого
выбора с непрерывным временем ни одна я-оптимальная стратегия не
может содержать опасной альтернативы. Этот же факт имеет место и в
только что рассмотренной задаче о распределении ресурса, не являющейся
задачей независимого выбора; однако здесь пришлось ввести
дополнительные предположения об однородности критериев и медленном
убывании ресурса. Естественно ожидать, что переход к задаче с непрерывным
временем, как и в случае независимого выбора, может привести к
некоторому усилению полученных результатов.
§ 4.4. Принцип максимума в многокритериальных задачах
Мы будем рассматривать многокритериальную задачу оптимального
управления с фиксированным временем управления Т и без ограничений
на правом конце траектории. Пусть динамика системы описывается
векторным дифференциальным уравнением
l=g(lx)9 D.81)
где ? - га-мерный вектор состояний системы, х - управляющее
воздействие (x(t) - альтернатива, выбираемая в момент t). Качество стратегии
управления {*(/)} оценивается интегральным векторным критерием
<p1({x(O},r)=//iax)A,
D.82)
где //(?,*), i = 1,..., л, — показатели качества выбираемых в момент t
альтернатив. Поскольку предполагается наличие зависимости ft от ?,
эта задача не является задачей независимого выбора. Функции g будем
считать ограниченными, непрерывными по совокупности переменных
и дифференцируемыми по ?. В качестве множества допустимых
стратегий управления {*(/)} рассмотрим класс кусочно непрерывных функций
времени, в каждый момент времени принимающих значения из данного
множества альтернатив X. Начальное значение вектора состояний ?
считаем заданным:
При этих условиях требуется найти я-оптимальную стратегию управления
102
{x*(t)) и соответствующую ей траекторию движения системы {(• *(/)},
Мы начнем с качественного анализа задачи, для чего предположим,
что X - подмножество числовой прямой R, а задача D.81), D.82), D.83)
такова, что в классе допустимых стратегий существуют я-оптимальные
стратегии. Пусть стратегия {**(')) я-оптимальна. Рассмотрим стратегию
{x(t)), которая везде, кроме бесконечно малого интервала т — е < t < т,
совпадает с {**@)> а на этом интервале отличается от нее (рис. 4.6).
t-i % t
Рис. 4.6
В теории оптимального управления такая стратегия {*(/)) называется
образованной в результате игольчатой вариации. За счет этор вариации
дальнейшее движение системы % (t) при t > т будет отличаться от ?*(f),
причем разность между траекториями в момент г будет равна, с точностью
до бесконечно малых высшего порядка, разности ?(т) — €*(г) скоростей
изменения траекторий в этот момент, умноженной на длину промежутка б:
- Г (г) = еК'(г) - |* (г)] = е[*(Г (г), х(г)) - *(Г (г), х*(т)]9 D.84)
где х(т) — отличная от х*(т) альтернатива, выбираемая в момент г и
характеризующая игольчатую вариацию стратегии управления {х*(/)}. Такое
же приближенное равенство можно записать и для векторной оценки
стратегии на интервале [t0, г]:
*«*(')>, г) -*({х*@>, г) = €{?«х@>, *)-*«*•(')>. г) =
= е /(Г(г), дс(г)) -/(Г(г),**(')). D.85)
Введя обобщенные векторы состояний и управлений у = (<р, I) и А =
= (/,g), можно переписать уравнения D.84) и D.85) следующим образом:
y=h{ytx), D.86)
причем D.84) и D.85) принимают вид
Лг)-Г(г) = €(^(г)-;>(г)) = €(А^*,дс)-Л(Г^*)). D.87)
Из D.87) следует, что разность между состояниями у(т) и у*(т) отлична
от нуля, хотя и мала. Поэтому при t > т расхождение между траекториями
y(t) и .у*@ будет существовать. Но из-за того, что разность у(т) -у*(т)
бесконечно мала, все последующие значения y{t) также будут мало
отличаться от y*{t).
Введем вектор вариации обобщенной траектории by (t), определяемый
равенством
y«), D.88)
103
с начальным значением
Ьу(?) = e{h(y, х) - h(y*,x*)) при t = T. D.89)
Уравнения в вариациях для системы D.88) линейны и имеют вид
я+m dhi(y,x)
2 Y iyi9 / = 1 Я + /П, D.90)
dr 1=1 byt
где, как уже отмечалось, m — размерность вектора состояний {,Ау =/;- при
/ = 1,..., п и hj- = gj__n при / = п + 1,..., п + т. Эти уравнения можно
проинтегрировать при начальных условиях D.89). Нас прежде всего
интересует значение Ъу при / = Г, причем в первую очередь — значения первых п
компонент, которые соответствуют вариации 8<р(Г) = </>({*(f)}, T) —
— #({x*(t)}9 T) векторной оценки, возникшей вследствие игольчатой
вариации управления на интервале т — е< t < т.
Так как векторная оценка стратегии {x*(t)} я-оптимальна, то за счет
перехода к стратегии {*(/)} все компоненты <?({**(О), ^) не могут
одновременно увеличиться. Следовательно,
0. D.91)
Это означает, что вектор 5<р (Т) не доминирует по Парето начало
координат в R", т.е. имеет хотя бы одну отрицательную компоненту, какова бы
ни была стратегия {jc (r)} .
Соотношение D.91) можно переписать следующим образом:
» 0, D.92)
где Ф(Г) — матрица, подобранная таким образом, чтобы
= 5</>(Г). Очевидно, что в качестве Ф(Т) можно выбрать прямоугольную
п X (w + m)-матрицу, причем квадратная п X «-матрица, находящаяся в
левой части Ф(Г), единичная, а все остальные элементы Ф(Г) равны нулю:
1 0 ... О 0 ... О
О 1 ... О 0 ... О
О 0 ... 1 0 ... О
г
D.93)
Нам нужно получить такую матрицу >^(г) = II Фу(О II, которая бы в
каждый момент времени / удовлетворяла соотношению
Ф(Г)8Яг) = *(Г)8^(Г). D.94)
Тогда в частном случае при t = т из D.94) следовало бы равенство
D.95)
которое позволяет оценить величину 5<р (Т) по левой части D.95), связав
тем самым 6<р (Г) с х(т), а следовательно, со всеми альтернативами,
которые можно выбирать в произвольный момент времени т.
Как и в задачах оптимального управления со скалярным критерием,
здесь можно найти дифференциальное уравнение, которому
удовлетворяет матрица Ф(г) . Из D.94) следует, что
V(t)dy(t) = const,
104
откуда
d
— V^(f)by{i)] =0, D.96)
dt
или
d Г d 1
Ф(г) — 6>> (f) + — Ф(г) б>> (f) = 0. D.97)
dt L dt J
В развернутом виде равенство D.97) можно переписать как
п+т d n+m dufsjit)
2 iMO — буДг) + 2 L— dy,(t) = 0, / = 1,...,п. D.98)
Подставив в D.98) значения —5уу. из D.90), имеем
2 ^«@ 2 Ьук —^—'— + 2 byj(f) —-j-— = 0, /=1,...,/!.
/=i * = i Э^ /=i A D.99)
Изменяя порядок суммирования по / и к в первом слагаемом D.99),
приходим к окончательному выражению:
Ъук dt J
1 = 1,. .. ,/!,
*=lf...,n+m. D.100)
Левая часть D.100), как видно из D.96) и D.97), тождественно равна
нулю при любых Ьук. Необходимым условием этого является равенство
нулю фигурных скобок в D.100), откуда следует, что
2а
dt /=i " дук
i = 1 , . . . , /2,
* = 1,...,я + /я. D.101)
Полученная система D.101) представляет собой совокупность
дифференциальных уравнений, линейных относительно Ф.
Теперь рассмотрим величину Ь\р(Т) = Ф(тNу(т) * 0. Подставив
сюда 8у (г) из D.89), после сокращения на 5 получим
*(т)А(;Л*)-*(т)й(д>*.х*) »0, D.102)
где Ф — решение системы дифференциальных уравнений D.101) с
начальными условиями D.93). Введем векторный гамильтониан
H(x.t)**(fMy(t),x(t)). D.103)
Гамильтониан Н из D.103) задает векторный критерий, с помощью
которого можно оценивать выбор альтернативы x(t) в любой момент време-
105
ни г. Компоненты этого векторного критерия имеют вид
п п+т ,
Hi(x,t)= 2 ^1//Д$@» *@)+ 2 ^i/@*/(€@> х@)»
s D.104)
п п+т
Нп(х, г)= 2 ^„///($@, *@)+ 2 ^
Анализ структуры матрицы \^(Г) из D.93) и системы D.101)
показывает, что квадратная я X «-подматрица, стоящая в левой части ^(/), не ме-
няется во времени, вследствие чего —- фц (t) = 0, / = 1,..., п, j = 1,...
..., п. Поэтому выражения D.104) можно упростить:
. 0 = /,A@, *@) + 2 fy@*/«@. *@). /= 1 ,..,«• D.105)
/ + Я+1
Из D.102) следует, что альтернатива х*(т) является в момент
времени г я-оптимальной * задаче выбора альтернативы из А'с векторным
критерием Я ={#ь..., #„} из D.105). Фактически это означает следующее.
Пусть выбрана некоторая стратегия управления {•**(?)} > которой
соответствует траектория движения системы ?*@ из D.81). Зная эту
траекторию, можно записать систему дифференциальных уравнений D.101):
D.106)
и решить ее при граничных условиях D.93) для t - Г. В результате решения
системы D.106) будет получена матрица ^@> что позволит определить
векторный гамильтониан D.105), задающий систему критериев (#i, . . .
... ,Я„) на множестве альтернатив X. Если стратегия{х*(г)}оптимальна
по Парето, то каждая альтернатива x*(t) тгюптимальна в задаче с
критериями D.105).
Сформулируем полученный результат в следующем виде.
Теорема 4.13. Пусть стратегия {x*(t)} и траектория {?*(/} являются
^-оптимальными решениями задачи D.81), D.82). Тогда в каждый момент
времени альтернатива x*(i) является п-оптимальной в задаче с множеством
альтернатив Хи критериями Hi (x, t\i = 1,..., п D.105).
Таким образом, нам удалось установить, что если в задаче D.81), D.82)
существует тгоптимальная стратегия, то она составляется из я-оптимальных
альтернатив (правда, с несколько видоизмененным векторным критерием).
Эта ситуация полностью аналогична той, с которой мы встретились в
задачах независимого выбора с непрерывным временем.
Как и раньше, нас интересует вопрос о роли опасных альтернатив, т.е.
таких ячштимальных альтернатив, которые не входят ни в одну я-оптималь-
ную стратегию. Можно показать, что, как и в случае независимого выбора,
ни одна альтернатива, через векторную оценку которой нельзя провести
опорную плоскость к множеству векторных оценок (с критериями #,),
106
не входит в оптимальную по Парето стратегию. Чтобы установить этот
факт, нам понадобится конструкция, аналогичная той, которая
использовалась при доказательстве теоремы 2.6. Мы сначала приведем
необходимые условия тгоптимальности для случая, когда множество альтернатив
содержится в линейном топологическом пространстве, а затем установим
связь этих условий с условиями я-оптимальности в динамических задачах
с непрерывным временем (Да Канха, Полак [2]).
Пусть SC — линейное топологическое пространство, на котором заданы
непрерывные векторные функционалы \р: X -* Rn иг: ЗС -+ Rm. Пусть,
кроме того, задано некоторое множество 12 С «2?. Необходимо найти
точку { х*} е?Р такую, что {**} G 12 и г( {х* } ) = 0, которая была бы тг-оп-
тимальна,т.е.из^({л:})> щ ({**} ), / = 1,... ,я,{*)€П, /•({*}) = О,
вытекало бы, что </>({ х } ) = <^( {х*} ).
Как и при доказательстве теоремы 2.6, нам понадобятся линейные
аппроксимации множества 12 и непрерывных функционалов у и г в точке
{х*} .
Определение 4.7. Выпуклый конус С({х*} , 12) называется конической
аппроксимацией множества ограничений 12 в точке {х*} Е12 ио отношению
к функционалам у и г, если существуют непрерывные линейные
функционалы Ф'({х*} ): 9С -¦ Rn и Д'({х*} ): 5?"* Rm такие, что для любого
конечного набора {{ х1} ,{х2} ,..., {**}} линейно независимых
векторов из С({х*} ,п) существует непрерывное отображение f6, переводящее
выпуклую оболочку е? = со {б { л1) ,е{х2} ,... ,€{**}} в п -{х*}для
всех 6,0 < е < 1, и непрерывные функционалы o^tе: Й7 -*ЛИ иоГ9е: 3? -+Rm,
удовлетворяющие следующим условиям:
1) —г: -> о при е -* 0 равномерно для {х } € 5;
е
ЪоГ€(е{х}) II
2) : > 0 при е -^ 0 равномерно для {х } € S;
е
Читателю предлагается сравнить определение 4.7 с определением 2.4
конечномерной конической аппроксимации. Такое сравнение
представляется полезным, поскольку приводимая ниже теорема 4.14 отличается от
теоремы 2.6 только определением конической аппроксимации.
Теорема 4.14. Пусть{х*} - n-оптимальная точка из 12, г({х*} ) = О,
С({х*} , ?1 - коническая аппроксимация 12 в точке { х*} . Тогда
существуют неотрицательные коэффициенты а,-, /= 1,... ,л, и вектор V е Ят*
такие, что:
1) (а, 10*0;
2) (а, Ф'({**) )({*}) > + <ч, *'({*•))({*>) > < 0 V{x> G
€(?({**} ,12 , где Ф'({х*} ),/?'({**} ) — линейные непрерывные
функционалы, фигурирующие в определении С({х*} , 12); С( {jc* } , п) -
замыкание С({х*} ,12).
107
Рассмотрим теперь задачу оптимального управления D.86)
y-h&x), te[to,T]9 D.107)
где x(t) GRk — альтернатива, выбираемая в момент t из множества X С Rk,
h = (f,g) -отображениею/Г ХД*вДЛ+т(/(?,л:)еД'1, g& x) eRm),
непрерывное по x и непрерывно дифференцируемое по ?. Необходимо
найти стратегию {x*(t)} и соответствующую траекториюО>*@) ,
удовлетворяющую D.107), для которых выполняются следующие условия:
1) для tG[tOyT] функция {х*} — измеримая Ограниченная функция,
значения которой в каждый момент времени содержатся в множестве
XCRk;
2) выполнены следующие граничные условия:
а) .У*(*о) = Уо = @, ?о), где %о - заданный вектор в Rm;
б) к(?*(Т)) = 0, где к: Rk -+R1- непрерывно дифференцируемое
отображение, якобиан которого К(%) имеет максимальный ранг для всех ?,
удовлетворяющих условию к (?) = 0;
3) для любого управления {x(t) } и соответствующей траектории {у (t)) »
удовлетворяющих пп. 1 и 2, из соотношений
> }Т, 1 = 1,... ,/i,
следует,что *({x(t)} f)=v({x*(t)}, T).
Для того чтобы привести задачу оптимального управления к виду,
удобному для применения теоремы 4.14, выберем в качестве ЗС прямое
произведение пространств 5Х5Х...Х5 = 5Л + т, где S — пространство
полунепрерывных на [t0, T] функции с поточечной топологией. Пусть ?2-
множество всех абсолютно непрерывных функций j =(<l, ?) на [t0, Г],
У' [*о,Т] -*Ли+т, которые удовлетворяют дифференциальному
уравнению D.107) почти всюду на [to,T] при условии, что функция {x(t)}
удовлетворяет п. 1 иу (to)=(Q, %0). Пусть, кроме того, <р(» = <Р((Х(*))» Г)
и г(у) = к(?(Т) ). Функции у и г непрерывны.
Пусть стратегия {х*@) и соответствующая ей траектория {y*(t)}
являются тг-оптимальными. Коническая аппроксимация множества ?2 в точке
{у*} строится следующим образом. Пусть ty(t,r) - (л + т)(п + т) -
матрица, удовлетворяющая линейному дифференциальному уравнению
~nt9 г) ~ (Г(rXx*(O)*ft r) D.108)
почти всюду на [to, 7 ], причем Ф(г, г) — единичная матрица. В любой точке
sE[to,T], являющейся точкой регулярности{х*(t)} ,.можно определить
10 при Го <t<s,
*fci)[*(F(ftiO- D.109)
где v - произвольная точка из X и
С({у*} ,n) = {8ye&\6y(t) = ? yfiy,i9Vi(t)>
i = i
i=l,...Д}, D.110)
108
k - произвольное конечное число. Наконец, для Ьу = E</>, 6?)€ «2?можно
положить
Проверка условий теоремы 4.14 и определение 4.7 позволяют сделать
вывод о существовании неотрицательного вектора aGRn и вектора т? € R1,
(а, т?) ^ 0, для которых
) D.111)
выполняется для всех 5>>ЕС({.)>*} ,?2). Подставляя ду(Т) из D.110) в
D.111) и проводя обычные преобразования, получаем окончательный
результат.
Теорема 4.15. Если управление {x*(t)} и соответствующая траектория
{ У *@} * {{ ^*@) 9 i ?*@) ) ^оптимальны, то существуют вектор а > 0,
а е R", и вектор-функция т?: [t0, Т] -> Лт
(ЭЩ*(Г))\Г
I 7 для некоторого у G R!;
д| /
3) с)лл всех v €Х и почти всюду на [t0, T)
< а, /(Г @, **@) > + < i?@, ^(Г @, х *@) > >
(Г @, у) >• DЛ12)
Заметим, что D.112) представляет собой линейную комбинацию
критериев #,(*, 0 из D.105). Таким образом^ теорема 4.15 утверждает, что для
любой тг-оптимальной стратегии существует линейная комбинация
"обобщенных критериев" #,-, которая почти всюду на [t0, T] достигает
максимума в точках множества альтернатив, соответствующих альтернативам,
входящим в эту стратегию. Это означает одновременно, что ни одна опасная
альтернатива не может входить в тг-оптимальную стратегию (с точностью
до множества нулевой меры).
Следует упомянуть, что теорема 4.13 не является следствием
теоремы 4.15, поскольку в последней утверждается всего лишь
неотрицательность вектора коэффициентов а. Эти теоремы дополняют друг друга -
теорема 4.13 утверждает, что эт-оптимальная стратегия составлена из я-опти-
мальных альтернатив, а теорема 4.15 позволяет точно определить, из каких
именно тг-оптимальных альтернатив может состоять тг-оптимальная
стратегия.
Подводя итог результатам этой главы, отметим еще раз особую роль,
которую играют опасные альтернативы в динамических задачах
многокритериальной оптимизации. Поскольку опасные альтернативы не могут
входить ни в одну тг-оптимальную стратегию, выбор в каждый момент
времени является довольно ограниченным, что позволяет в ряде случаев
выбрасывать достаточно большое число я-оптимальных альтернатив.
109
Глава 5
УСТОЙЧИВЫЕ РЕШЕНИЯ МНОГОКРИТЕРИАЛЬНЫХ ЗАДАЧ
Понятие устойчивости является весьма существенным для возможности
практической реализации рекомендаций, полученных с помощью
оптимизационных моделей. Многокритериальные задачи оптимизации не
представляют собой исключения из этого правила. Однако прежде чем исследовать
устойчивость, надо прежде всего описать используемый принцип
оптимальности. В многокритериальных задачах таким принципом является принцип
оптимальности по Парето.
Необходимость исследования устойчивости решений
многокритериальных задач возникает в самых различных постановках. Например,
множество альтернатив X и критерии //могут зависеть от дополнительных
параметров, относительно которых не известно ничего, кроме области, в
которой они содержатся. Или критерии представляют собой весьма сложные
функции альтернатив, вследствие чего вычисление их векторных оценок
требует значительных затрат. В этом случае имеет смысл аппроксимировать
их какими-либо простыми зависимостями, которые, тем не менее, будут
достаточно близки к исходным критериям. Поскольку множество
векторных оценок при переходе к аппроксимации критериев изменяется,
естественно потребовать, чтобы множество я-оптимальных векторных оценок
при достаточно точной аппроксимации менялось мало.
Наконец, третья ситуация, приводящая к необходимости исследования
устойчивости, состоит в следующем. При исследовании задач управления
сложными системами, например городскими или региональными, часто
используют модели, описывающие случайные взаимодействия между
элементами этих систем и преобразующие эти взаимодействия в некоторый
регулярный процесс. Обычно такое преобразование строится по аналогии
с методом максимума правдоподобия и позволяет выделить в исследуемой
системе наиболее вероятные состояния. Изменения наиболее вероятного
состояния можно осуществлять за счет управления входными параметрами
модели, множество возможных значений которых и соответствует
множеству альтернатив. Значения критериев в этом случае вычисляются
относительно наиболее вероятного состояния, но в реальной системе, в силу ее
стохастической природы, эти значения как бы "плавают" около вычисляемых
в модели оценок, причем вероятность больших отклонений очень мала.
Однако наличие таких отклонений приводит к необходимости анализа
устойчивости.
Итак, пусть на множестве альтернатив X заданы критерии /i(x), . . .
...,/w(x), определяющие множество векторных оценок F. Тогда при
обычных предположениях можно говорить о множествах я-оптимальных
110
альтернатив п X и векторных оценок nF. Для некоторого другого
множества X и критериев/iOO,..., fn (x) получаются свое множество векторных
оценок F и соответствующие паретовские множества пХ и nF. Анализ
устойчивости сводится к выявлению условий, при которых из того, что X
и/(х) в каком-либо смысле близки к X и/(х) соответственно, следовало
бы, что пХи nF близки к п X и nF.
В § 5.1 будет установлена связь между устойчивостью и непрерывностью
некоторых многозначных отображений. Затем в § 5.4 будут приведены
необходимые и достаточные условия устойчивости для некоторого частного
класса задач. Эти условия существенно используют понятие "е-равномер-
ной оптимизации" (§ 53), которое тесно связано с введенным Джеффрио-
ном понятием "собственной эффективности'9 (§ 5.2). В § 5.5 описывается
схема регуляризации неустойчивых многокритериальных задач. Заметим,
наконец, что везде в этой главе исследуется устойчивость множества
я-оптимальных векторных оценок nF, поскольку именно это множество имеет
особое значение для задач принятия решений, так как на нем определяются
предпочтения ЛПР.
Завершая это краткое введение, следует сказать, что на протяжении этой
главы авторы сознательно ограничивались довольно частными
постановками задач, стремясь при этом к простоте изложения и, по возможности,
к более полному изложению основных результатов. Читателю,
интересующемуся этой тематикой можно порекомендовать работы О.А. Молодцова
[1], О.А. Молодцова и В.В. Федорова [1], а также статью Т. Танино и
И. Савараги [1].
§ 5.1. Устойчивость оптимальных по Парето векторных
оценок и непрерывные многозначные отображения
На протяжении этой главы мы будет предполагать, что множество
альтернатив не изменяется, т.е. Х=Х, а изменению подлежат только критерии
f\ (*),..., /w(x). Пусть критерии можно записать в виде Дх, и) ={/i (х, и),...
... ,/„(*, и)} , где и принадлежит некоторому множеству U. Будем считать,
что U содержится в некотором нормированном линейном топологическом
пространстве, в котором сходимость определяется в терминах
последовательностей. Без потери общности можно предполагать, что О Е U.
Множество векторных оценок в этом случае зависит от параметра и:
F(u) =/(ДГ, и), uEU. Будем называть множество 7г-оптимальных векторных
оценок nF(u) устойчивым в нуле, если для любого 5 > 0 можно указать
т?>Отакое,чтор(тг^(м), tfF@))<5 при II и IKtj. Здесь расстояние между
множествами nF(u), nF@) G Rn определяется с помощью метрики Хаус-
дорфа
p(nF(u),nF@)) =
= max { sup inf r(a, b\
UerrF(M) bBnF(O)
sup inf r(a, b)\. E.1)
b€ffF(O) aGirF(u) )
Использование операций sup и inf в формуле E.1) объясняется тем, что
111
множество тг-оптимальных векторных оценок, как было показано в главе 2,
в общем случае не является замкнутым, а следовательно, максимум и
минимум на этом множестве могут не достигаться. Под г(а, Ь) понимается
расстояние в Rn.
Очевидно, что устойчивость можно обеспечить в том случае, когда
многозначное отображение и -*» kF(u) непрерывно в нуле. Таким образом, для
получения достаточных условий устойчивости следует рассмотреть условия
непрерывности этого отображения.
Нам понадобятся следующие определения.
Определение 5.1. (Танино, Савараги [1]). Многозначное отображение 12:
u-+Rn называется
а) полунепрерывным снизу в точке и = О, если для любой сходящейся
к нулю последовательности {uk} , lim ик = 0 и a G 12 @) существуют
целое число mm сходящаяся последовательность { я* }?/*" с пределом а
такие, что я* € 12(и*) для к > т;
б) полунепрерывным сверху в точке ы = 0, если для любых сходящихся
последовательностей{ м* }, laг} ? 12(и*), lim м*= 0, предел последователь-
кости i ак} принадлежит 12 @);
в) непрерывным в нуле, если оно является одновременно
полунепрерывным сверху и снизу в нуле;
г) равномерно компактным вблизи нуля, если существует такая
окрестность АО 0, что замыкание множества U п(и) ограничено и замкнуто.
u<EN
Для вывода достаточных условий непрерывности многозначного
отображения U->irF(u) нам подадобится следующая лемма.
Лемма 5Л, Пусть SI - многозначное отображение 12: и -»Rn,являющееся
полунепрерывным снизу в нуле и такое, что множество 12 (и) выпукло для
всех и из малой окрестности нуля. Пусть { ик) , {ак) - последовательности,
сходящиеся кОиа соответственно, причем a G int 12 @). Тогда ак? 12(м*)
для всех к, за исключением конечного числа индексов к.
Доказательство. Так как а € int 12 @), то существует число
5 > 0 такое, что шар с центром в точке а и радиусом 5 целиком содержится
в 12@). В силу сходимости последовательности {ак) существует индекс m
такой, что г(в *, а) < 5/2 при к > т. Пусть к>тъс/с ? 12(и*). При
достаточно больших к все п(ик) — выпуклые множества, и можно воспользоваться
теоремой отделимости, из которой следует существование вектора ос ? Rn,
II ol II = 1, для которого
su
Рассмотрим вектор
или
af =
af =at + E/2 + <а, ак-а>) <xh i = 1,..., п.
Легко видеть, что ~ак принадлежит б-окрестаости точки а: г(ак, й) < 5.
112
Действительно,
г(ак,а) = \Ы2 + (а,ак -а)\- На IK
<5/2+ \(ауак-а >|<«/2+ iair(ak,a)<8.
Одновременно расстояние между 2Г* и ?1(ик) не может быть меньше 5/2,
поскольку
но доиуиобой точки a G п(ик) имеем
г(ак,а'1>\(а,ак-а > I = | (<<*,**>-<(*,**>) +
+ (<«,**>)-< <*У>)|>5/2.
Если ак Ф п(ик) для бесконечного числа индексов к9 то можно выбрать
бесконечное число точек ак, находящихся в 6-окрестности точки а. Отсюда
Рис. 5.1
можно сделать вывод о существовании в замыкании этой окрестности
предельной точки 5" последовательности {а к) ; без потери общности можно
заключить, что {о*} сходится к а. Так как "а принадлежит замыканию
6-окрестности точки а> а следовательно, принадлежит 12@), и в силу
полунепрерывности снизу 12 (и) в нуле, получаем, что существуют число
т и последовательность {?*} такие, чтоак €п(ик) цдяк>т' к{ак) ->3'.
Но это означает, что { ак - ак) -»0, что противоречит полученному ранее
выводу о том, что расстояние между ак и ?1(ик) превышает 6/2. Таким
образом, число индексов Л, для которых ак фп(цк) — конечно, что и
завершает доказательство.
Теперь можно перейти к формулировке условий устойчивости. Для
этого нам понадобится еще одно дополнительное понятие. Будем говорить,
что альтернатива х1 сильно доминирует ( >*) альтернативу х2 поПарето
(х1 >* х*)9если
fi(xl)>fi(x2) Vi, / = 1,...,л.
Альтернатива х* называется слобо n-оптимальной (полуэффективной),
если не существует какой-либо другой допустимой альтернативы, сильно
доминирующей х* по Парето.
' Множества слабо оптимальных альтернатив п*Х и соответствующих им
векторных оценок ir*F, как легко убедиться, содержат множества пХ и
ffF, что можно проиллюстрировать двумя ситуациями на рис. 5.1.
8. Ю.А. Дубов 113
Теорема 5.1. Отображение u-*nF(u) будет непрерывным в нуле, если
выполнены следующие условия:
1) отображение и -*F(u) непрерывно в нуле;
2) F(u) — непустое компактное множество в окрестности нуля;
3) отображение u-*F(u) равномерно компактно вблизи нуля;
4OrF(O) 7rF(O).
Доказательство. Пусть имеется последовательность {и } G U,
{ик)-+0. Рассмотрим сходящуюся последовательность {ак} G nF(uk)
с пределом а. Если удастся показать, что aGnF@), то это будет означать,
что многозначное отображение и -* nF(u) полунепрерывно сверху в нуле.
В силу непрерывности (а значит, и полунепрерывности сверху)
отображения u-+F(u) в нуле, заключаем, что а G F @). Пусть а $ я *F @); тогда
существуют точка a GF@) и строго положительный вектор dGR% такие,
что а + d = а'. Из полунепрерывности снизу отображения u-+F(u) в нуле
следует существование числа m и последовательности {Ък) €Rn таких, что
~ак GF(uk), k>m,n{(ik} -+a'. Отсюда и из сходимости {ак} -> а следует,
что { л* - ак) -*а - а =</ > 0.
Воспользовавшись утверждением леммы 5.1, немедленно получаем,
что сГк - ак G R1 для всех ку за исключением конечного их числа, или
а~к - ак =dk9dk €Д", {dk} -+d > 0. Но это означает, что для достаточно
больших к ак > ак, i = 1,. . . , п, Лк Ф ак9 что противоречит ранее
сделанному предположению ак G nF(uk). Таким образом, приходим к выводу,
что a G tt*F @). Но в силу условия 4 теоремы это и означает, что а е itF @).
Итак, полунепрерывность сверху отображения^ -* nF(u) в нуле
установлена. Для доказательства полунепрерывности снизу надо установить,
что существует последовательность^*}, ак G nF(uk), сходящаяся к
а € itF@). Из непрерывности отображения и -> F(u) следует, что
существуют число т' и последовательность {а>к} такие, что J* € F(uk) при
к> т и {а к) -+а. Из условия 2 теоремы вытекает, что F(uk) — непустое
компактное множество при к > т", где т" — достаточно большое число.
Выберем т = max(w', /и"). Тогда из леммы 5.1 следует существование
последовательности {ак}, ак G irF(uk), для которой а* >п ак при к> т.
При 1 < Л < w выберем векторы я* произвольно. В силу равномерной
компактности отображения и -> F(u) вблизи нуля последовательность
{ак} имеет предельную точку а\ которая содержится в F@) из-за
непрерывности F(u). Это означает, что последовательность{ак - ак)имеет
предельную точку а' - а, причем a\>ai,i = 1,..., п. Поскольку a G nF @),
то а = д, а значит, д — единственная предельная точка для ограниченной
последовательности {ак}. Отсюда следует, что для произвольной точки
a G ttF(O) можно построить последовательность {ак}9 удовлетворяющую
условию о* G nF(uk) при fc > m и сходящуюся к д. Это и означает
полунепрерывность снизу отображения и -*"nF(u) в нуле.
Заметим, что условия 1—3 теоремы 5.1 фактически обеспечивают
непрерывность отображения и -> n*F(u) в нуле, а добавленное к ним
условие 4) GrF@) = ?r*F@)) позволяет перенести полученные результаты и
на множество ttF(O) . Поэтому возникает естественный вопрос - насколь-
114
ко жестким является ограничение ttF(O) = n*F(O) для непрерывности
или устойчивости nF или, другими словами, можно ли обеспечить
непрерывность ttF(u) в нуле, не вводя этого условия? Ниже будет показано,
что это условие фактически является необходимым (а не только
достаточным) условием устойчивости. Для этого мы будем пользоваться двумя
тесно связанными понятиями — "собственная эффективность'9 и "е-равно-
мерная оптимальность", которые вводятся в следующих двух параграфах.
§ 5.2. Понятие о собственной эффективности
Понятие "собственная эффективность" (proper efficiency) впервые
было введено Куном и Таккером (см. Кун, Таккер [1]). Пусть множество
альтернатив X задается в виде X = {х G Rk \g(x) > О, х > 0), а критерии
//(*), i = 1,. . . , п - непрерывно дифференцируемые функции. Мы будем
предполагать, что вектор-функция g(x) также является непрерывно
дифференцируемой.
Определение 5.2. Оптимальная по Парето альтернатива х* называется
Собственно эффективной, если не существует бесконечно малого
приращения dx, при котором альтернатива jc* + dx допустима, т.е. х* + dx € X
и F(x*)dx> 0, F(x*)dx*6, где, как и в главе 2,
F(x*) =
Компоненты вектора F(x*)dx представляют собой- дифференциалы
dx):
с*; dx) = < Vfi(x*),dx) = 2 (x*)dx,-.
I = i Эх,-
Таким образом, если альтернатива х* - несобственно эффективная (т.е.
не является собственно эффективной), то можно найти такое
смещение dx, при котором альтернатива х* + dx остается допустимой, но
dfi(x*; dx) > 0, i = 1,..., п, причем для некоторых номеров / имеет
место строгое неравенство. Заметим, что в силу исходного
предположения о тгюппшальностах* это не означает, что x*+dx >nx*.
Пусть х* тгоптимальная альтернатива, не являющаяся собственно
эффективной. Выберем необходимое приращение dx и запишем
дифференциалы критериев в виде
fi(x*+dx)-fi(x*)-dfj(x*; dx) = o(\\dx\\), /= 1,...,л.
В силу я-оптамальности х* + dx и несравнимости векторных оценок /(**) и
f(x* + dx) имеем
E.2)
max
i < / <w
min
l < / < n
Ж**+<**)-/}(*
J
8*
115
Поскольку, как уже отмечалось, векторные оценки /(**) и /(х* + dx)
несравнимы, то A/min в E.2) представляет собой отрицательную
величину. Можно показать, что для любой тг-оптимальной альтернативы, не
являющейся собственно эффективной, величина А/тах имеет более высокий
порядок малости по сравнению с A/min (Клингер [1]), например,
уменьшение оценки по некоторому критерию при переходе от х* к jc* + dx имеет
первый порядок малости (по II dx ||), а максимальное увеличение оценки —
всего лишь* второй порядок малости. Действительно, если х*
оптимальна по Парето, 'то для любого допустимого приращения dx существует
номер i такой, что //(х* + dx) < //(х*) или же для любого номера / //(** +
+ dx) = fi(x*). При отсутствии собственной эффективности для любого
номера i выполнено неравенство dft(x*\ dx) > О, причем для некоторых
номеров это неравенство является строгим, и //(х* + dx) - //(х*) *
= dfi(x*; dx) + o(\\dx\\). Поскольку увеличение первого порядка
(df{(x*\ dx) > 0) не может быть сбалансировано уменьшением более
высокого порядка (o(\\dx\\))9 то для оптимальных по Парето и
несобственно эффективных альтернатив имеет место следующая характеризация:
если альтернатива х* оптимальна по Парето и несобственно
эффективна, то существует допустимая альтернатива х* + dx такая, что
одновременно выполнены следующие три условия:
1) fi(x* +dx)<fi(x*) для некоторого номера /;
2) dfj(x*; dx) > 0 для любого номера /;
3) существует номер г, для которого dfc(x*\ dx)>0.
Представляется довольно естественным вывод, что альтернативы,
удовлетворяющие условию этой характеризации, являются нежелательными,
и их следует исключить из рассмотрения при выделении оптимальных по
Парето точек, поскольку при малом смещении в окрестности данной точки
мы получаем весьма незначительный проигрыш по некоторым критериям,
но очень существенный выигрыш по всем остальным. Предположим, что
мы находимся в точке х*, обладающей таким свойством. Возникает
естественный вопрос - является ли эта точка несобственно эффективной в
смысле определения 5.2. Ответ оказывается отрицательным.
Пусть X = {х е R 1 х > 0}, h(х) = х2, f2(x) = -х3, х* = 0. Прежде
всего, заметим, что х* тгюптимальна. Далее,
Эх v ' '
следовательно, dft(x*; dx) = 0 для любого допустимого смещения dx,
поэтому точках* = 0 не является несобственно эффективной поКуну — Так-
керу. Однако /i (x* + dx) = (dxJ, /2 (х* + dх) = - (dx) 3 и при малых dx
проигрыш при переходе от х* к х* + dx по критерию /2 на порядок ниже,
чем выигрыш по критерию/].
В связи с этим возникает следующее обобщение определения 5.2.
Определение 5.3. (Джоффрион [1]). Альтернатива х* называется
собственно эффективной, если выполнены следующие условия:
1) х* тгюптимальна;
2) существует конечное число М > 0 такое, что для любых номеров
i и /, для которых //(ж) > fi(x*),fj(x) < У/(х*),где х - произвольная
116
допустимая альтернатива, выполнено неравенство
В дальнейшем мы будем понимать собственную эффективность только
в соответствии с определением 5.3.
Если альтернатива х* несобственно эффективна, то для любого сколь
угодно большого числаМ>Онайдутся точкахЕ1иномерi, для которого
f,ix*)-ff(x)
где / - любой номер, такой, что .//(**) >Ж*). Если выбрать
последовательность {Мк}9 стремящуюся к бесконечности, и учесть, что число
критериев конечно, то для некоторого критерия /о можно найти такую
альтернативу х, что переход от х* к х даст сколь угодно большое
относительное увеличение //о по сравнению с уменьшением оценок по всем
остальным критериям.
¦ п
Рассмотрим линейную функцию 2 <*///(» со строго положительны-
п *= 1
ми коэффициентами а,- 2 а/ = 1.
i = 1
Теорема 5.2. Альтернатива х*, для которой
2 а/Ж**) > 2 <*/,(*), * € X.
всегда является собственно эффективной.
Доказательство, яоптимальность очевидна. Выберем М =
= (и - 1) max {(*//а/} /Предположим противное, т.е. что для неко-
1 </,/ < л
торых критериев /)¦ и jcGI имеет место неравенство
fi(x)-fi(x*)>M(ff.(x*)-f.(x))
ддя веех номеров / таких, что ff (x) < ff. (x *). Но это означает, что
>
Умножая на щЦп - 1) и суммируя по / ^ /, получаем
что противоречит условию теоремы.
Заметим, что условие теоремы 5.2 в выпуклом случае соответствует
достаточным «условиям оптимальности по Парето (гл. 2, теоремы 2.1
и 2.2). При формулировке необходимых условий оптимальности по Парето
обычно используется неотрицательность векторов ос/, / = 1,..., л. Это
наводит на мысль, что в выпуклых задачах необходимые и достаточные
условия собственной эффективности совпадают.
117
Теорема 5.3. Пусть X - выпуклое множество, ft (х) - вогнутые на
X функции. Альтернатива х* будет собственно эффективной тогда и только
тогда, когда существуют положительные коэффициенты аь . . . ,а„, такие,
что
2 * fib*) > 2 Oifi(?c)9 x ex.
i=i i=i
Доказательство. Достаточность следует из доказательства
теоремы 5.2, так что осталось показать необходимость. Если х* - собственно
эффективная альтернатива, то существует число М > О такое, что для всех
i = 1,..., л, система неравенств
не имеет решения в множестве X. В силу вогнутости критериев для
любой системы (i) существуют неотрицательные
0, / = 1,...,л, 2
* = 1
такие, что
eZ a»
или, что то же самое,
2
Суммируя по I, получаем после очевидных преобразований
2 A + М 2 <*<'*> )/Дх) < 2 A + М 2 (*<'*> )/,(*•), xei,
/ = i /#/ 7 /=i /#•/ ;
что и завершает доказательство.
Читателю рекомендуется найти формулировки теорем главы 2 для
случая собственно эффективных альтернатив.
Заметим, наконец, что меэвду множеством ттГ оптимальных по Парето
векторных оценок и множеством ireF векторных оценок для
собственно эффективных альтернатив существует простая связь (Джеффрион
[1]): neF С irF С ifF. Мы не будем здесь заниматься выводом этого
соотношения, укажем лишь, что его можно получить по аналогии с
доказательством теоремы 2.3.
Объединяя утверждения теорем 5.3 и 2.2, получаем очевидное
следствие.
Следствие 5.1. В задаче линейного программирования с несколькими
критериями B.2), B.3) любая гт-оптимальная альтернатива является
собственно эффективной.
118
Дальнейший анализ свойств собственно эффективных альтернатив
позволяет установить связь между собственной эффективностью и
устойчивостью некоторых скалярных оптимизационных задач. Этот анализ
интересен также и потому, что здесь впервые возникает понятие
е-равномерной оптимальности, которое будет рассмотрено в общей постановке
в следующем параграфе.
Введем следующее обозначение: Jk = {1,..., п)/{к).
Определение 5.4. Альтернатива х* называется:
а) к-оптимальной по Парею, если из /*(*) > /*(**) Для некоторой
альтернативы х Е X следует, что существует хотя бы один номер / € Jk
такой, что ff(x) < ff(x*);
б) к-собственно эффективной, если она ^-оптимальна по Парето и
существует положительное число Мк > О, удовлетворяющее следующему
условию: для любой альтернативы дг€ X такой, что fk(x) > /*(**)
существует хотя бы один номер / Е Jki для которого Л(х) <fj(x*) и
[fk(x)-fk(x*)]/[ff(x*)-fj(x)] < Мк.
Из определения 5.4 непосредственно следует, что альтернатива х*
является тгоптимальной (собственно эффективной) тогда и только тогда,
когда она является ^-оптимальной по Парето (Аг-собственно эффективной)
для всех к = 1,..., п.
Рассмотрим теперь следующую задачу (Р€) скалярной оптимизации:
max [fk(x) + 2 €,/,(*)], х е X, е,- > О, / € Jk (P€)
ПустьХ\ - множество решений задачи (Р€). Между ^-собственно
эффективными альтернативами и решениями из X* существует следующая
простая связь.
Лемма 5.2.
1) Если х* ? Х% для некоторого неотрицательного вектора е, то х* -
собственно эффективная альтернатива.
2) Пусть fa (х), . . . , fn(x) - вогнутые функции, а множество
Xвыпукло; альтернатива х* будет k-собственно эффективной тогда и только тогда,
когда существует неотрицательный вектор е такой, чтох*&Х*.
Доказательство.
1) Доказательство п. 1) фактически сводится к анализу следующих
двух случаев. Пусть Uk ={/ | е; > 0, / € Jk). Если Uk = 0, то е; = 0 для
всех j €Jk. Но тогда в точке х* функция fk (x) достигает своего
максимума на Х\ следовательно, не существует такой альтернативы х Е X, для
которой fk{x) > /*(**). Поэтому по определению 5.4 х* — ?-оптималь-
ная по Парето альтернатива.
Пусть теперь Uk = ф и дня некоторой точки х€1 выполняется
неравенство fk(x) > fk(x*). Поскольку х* является решением задачи Р€9 то
/*(*) + 2 e,f,(x) < fk(x*) + 2
/ е Jk i e Jk
или, что то же самое
119
Так какД(х) >/*(**), то
2 €,/,(*)< 2 е,-/;(**),
или
В силу положительности всех €,, j E Uk, имеем /)(х) -//(**) < 0 для
некоторого / Е С/Л, или $(х) - /) (х*) < 0 для некоторого / € Jk. В
соответствии с определением 5.4 это означает, что jc* - ^-оптимальная по Па-
рето альтернатива.
Чтобы установить, что jc* - ^-собственно эффективная альтернатива,
выберем Мк = (п - 1) max 6/. Допустим, что существует х € X, для
которой fk(x) >/*(**) nfk(x) -/*(*') >Л#*(/}(*•) -//(*)) для всех/
из/Л таких что fj (х) < ^ (jc*) . По определению Мк имеем
Разделив обе части этого неравенства на п — 1 и просуммировав по всем
/ G /fr, получаем
E.3)
После элементарных преобразований E.3) принимает вид
что противоречит исходному предположению х* € X* и доказывает
первую часть леммы.
2) Достаточность утверждения п.2 вытекает из доказательства п. 1.
Осталось установить необходимость. Пусть jc* — ^-собственно
эффективная альтернатива; тогда система неравенств
/*(*)-/*(**)> О,
fk(x)+Mkfj(x)-fk(x*)-Mkff(x*) > 0, / е Jk9
не имеет решения в X. В силу выпуклости множества ЛГ, вогнутости
функций //(jc) и теоремы отделимости для выпуклых множеств существует
неотрицательный и не равный нулю вектор е € Rn такой, что
ek[fk(x)-fk(x*)] + |^ ejlAW+AfJ/W-AH-MJ^)]
E.4)
л
для всех jc € Л". Поделив E.4) на С = 2 €/ и проведя соответствующие
/ = 1
преобразования, получаем
fk(x) + 2 (Mke}/C)fj(x) <
< /*(**) + 2 {Mke'ilC)f,{x')
120
Так как Мк, О О и е) > О, / G Jk, то л:* G **, где е; = (Мке})/С> О,
что и завершает доказательство.
Лемма 5.2 позволяет получить необходимые и достаточные условия
^-собственной эффективности и установить их связь с устойчивостью
решений скалярных оптимизационных задач. Рассмотрим следующую
задачу:
шахД(х)
//(*)-*/><>, /е/ъ хех, (Pbtk)
где параметры bj выбраны произвольно.
Определение 5.5. Функция возмущения v задачи Pbtk определяется
как
v(y) = sup {A(x)|/,(*)-*/ > уь J € Jk).
Х
Заметим, что если задача Pbfk имеет решение, то оптимальное значение
целевой функции в ней равно v @).
Определение 5.6. Задача Pbfk назьюается устойчивой, если и@) -
конечная величина и существует число М>0 такое, что
<^ v>> ф о.
Если задача Pbtk не является устойчивой, то отношение приращения
целевой функции к величине возмущения может быть сделано сколь
угодно большим.
Следующая лемма показывает, что при наличии вогнутой структуры
устойчивость задачи РЬук для некоторого Ь является необходимым и
достаточным условием ^-собственной эффективности.
Лемма 5.3. Пусть f\(x)9 . . . , fn(x) - вогнутые функции, заданные на
непустом выпуклом множестве X и х*~~ k-оптимальная по Парею
альтернатива. Для того, чтобы х* была к-собственно эффективной, необходимо
и достаточно, чтобы задача Ръ к, где bj =fj(x*), была устойчива.
Доказательство. Очевидно, что задача Ръ к не только имеет
непустое множество решений, но и оптимальным ее решением
является х*. Докажем сначала достаточность. Пусть Р^ к устойчива.
Двойственная к ней задача имеет вид
min { max [fk(x) + S еД/ДО-/,(*•))]>, (PFк)
e> 0 х€ЕХ jJ DpK
где € - (л - 1)-вектор двойственных переменных. Но из теории
двойственности для задач выпуклого программирования (см. например, Рока-
феллар [1]) следует, что из устойчивости РЪк вытекает существование
оптимального решения €* в задаче DFk. Но тогда х* - оптимальное
решение задачи
Рк =
Но так как {- 2 е?/,(х*)) - константа, не зависящая от х, то х* - опти-
121
мальное решение задачи Р* при е = €*. Теперь из леммы 5.2 следует, что
х* - ^-собственно эффективная альтернатива, и достаточность доказана.
Пусть теперь х* - ^-собственно эффективная альтернатива. В силу
леммы 5.2 существует неотрицательный вектор е € Rn~l такой, что х* Е X*.
Но это означает, что х* — оптимальное решение задачи Р'€ и рк = /*(**).
Следовательно, (х*, е) — допустимое решение D^ k (поскольку
значением целевой функции в D^ к при (х, е*) = (х*, е) является Д (**)). Это
означает, что <рк </*(**)• Но так как х* - оптимальное решение P-g к,
то оптимальное значение целевой функции вP-g к есть/* (х*). В силу слабой
теоремы двойственности для задач нелинейного программирования имеем
Фк > /*(**)> т.е. <рк = fk(x *) и (х*, б) - оптимальное решение Dfik, что
и означает устойчивость Ръ к.
Заметим теперь, что х* является ^-собственно эффективной
альтернативой для всех к тогда и только тогда, когда для всех к задача Р_ устойчива.
Одновременно ^-собственная эффективность х* для всех к эквивалентна
собственной эффективности х*. Отсюда и из леммы 5.3 вытекает
следующий окончательный результат.
Теорема 5.4. Пусть выполнены все предположения леммы 5.3.
Альтернатива х* является собственно эффективной тогда и только тогда, когда
все задачи Р_ , к = 1,..., неустойчивы.
Приведем пример использования этой теоремы. Пусть
Можно показать, что Ес ={х|0< х< 1} - множество собственно
эффективных точек,.Ен ={0, 1} - множество я-оптимальных и несобственно
эффективных точек. Выберем х* = 1 и рассмотрим задачу Р :
max(-jc3), -(jc-1J>0, -x2 +1 >0, х>0. (Рь,з)
Если бы эта задача была устойчива, то в силу единственности оптимального
решения существовали бы неотрицательные множители е{, е2 такие, что
2 E.5)
Положим*5 = 1—8,0<6<1.ТогдаXg GА'^оэтому,подставляях$ - 1 — 6
в E.5) и проводя соответствующие преобразования, получаем
б3 -C + 6, +е2M2+C + 2е2)8<0,
или после сокращения на S:
82 -(З + б! +€2)8+C + 2е2)<0 V8, 0<8< 1. E.6)
Переходя к пределу при 8 -»+0 в левой части E.6) имеем 3 + 2е2<0;
что противоречит условию е2 > 0.
Устойчивость задачи Р_ при 0< х*< 1 мы проверим для х*= 1/2 и
bfk
к = 3. В этом случае задача Р_ имеет вид
тах(-х3), -(х-1J+A/4)>0, -х2+A/4)>0, х>0. (/»_ J
Ь,к
Множители €i, €2, связанные с оптимальным решением х* = Ы, должны
122
быть такими, чтобы неравенство
-ОС3 -€,[(*- IJ - К] -€2[*2 -И] < -%
E.7)
было выполнено для всех х€Х Непосредственно устанавливается, что
€\ =—,€2=0 удовлетворяют E.7), что и означает устойчивость задачи.
Пожалуй, наиболее существенными недостатками этих результатов
являются сложность проверки устойчивости скалярных оптимизационных
задач и невозможность использования этих результатов кроме как в
выпуклых задачах. Однако структура задачи Р€ допускает обобщение и на
невыпуклый случай с помощью теоремы 2.5 и понятия е-равномерной
оптимальности, которое будет введено в следующем параграфе.
§ 5.3. е-равномерные альтернативы и их свойства
Элементы е-равномерной оптимальности по Парето рассматривались
в (Дубов и др. [1]) с целью уменьшить количество несравнимых по Парето
векторных оценок путем введения более широкого конуса
доминирования, содержащего положительный ортант в своей внутренности.
6-равномерная оптимальность не только позволяет в ряде случаев получать
информацию о сравнимости некоторых оптимальных по Парето альтернатив,
но и помогает идентифицировать альтернативы, не являющиеся
собственно эффективными. Кроме того, понятие е-равномерной оптимальности
оказывается весьма конструктивным при анализе устойчивости
многокритериальных задач и при регуляризации неустойчивых задач.
Рассмотрим множество, показанное на рис. 5.2, Множество
оптимальных по Парето векторных оценок представляет собой линию АВ. Из
рисунка видно, что векторные оценки, лежащие на линии АК, мало
отличаются одна от другой по величине критерия /2, тогда как по значениям fx
это отличие может быть существенным. Поэтому часто оказывается
желательным дополнить свойство неулучшаемости по Парето, чтобы получить
некоторую равномерность при переходе от одной оптимальной по Парето
альтернативы к другой.
Пусть /(*) s{/i(x), ..., fn(x)} - векторная оценка альтернативы х
Увеличим все ее компоненты, кроме первой, на неотрицательные величины
X/, i а2,...,л. Для того чтобы
получившаяся при этом новая векторная оценка g была
несравнима по Парето с /(*), необходимо
выполнение соотношения g\ < Л («*) • Однако
слишком сильное уменьшений первой
компоненты векторной_оценки может привести
к тому, что векторная оценка g будет менее
предпочтительной, чем / (х), несмотря на
увеличение всех остальных компонент.
Естественно считать, что векторная оценка
g будет более предпочтительной, чем f(x),
если разность f\ (x) -gly соответствующая
уменьшению первой компоненты векторной Рис. 5.2
123
оценки, пропорциональна суммарному увеличению всех остальных
компонент векторной оценки при переходе от/(х) к g9 но имеет брлее высокий
порядок малости, т.е. f\ (х) — g\ = б(Х2 + ... + Хп) > где е — малое
положительное число. Аналогичные рассуждения можно провести и относительно
других компонент векторной оценки.
Рассмотрим векторные оценки/ = {/i,...,/„} ng = {gi9. .-,gn) имно-
жества индексов
/ = №>/,}, J=U\gi<fi), /U/={1,...,«}. E.8)
Заметим, что всегда можно подобрать такие (возможно отрицательные)
числа €/,/ Е У, что будут выполнены равенства
2 Or, -//), /е/, E.9)
за исключением случая, когда 2 (?/—//)= О для некоторого /Е/.
Определение 5.7. Векторная оценка g называется е-доминирующей
по отношению к векторной оценке / (записывается g ^ /), если
существуют непустые множества индексов / и / из E.8) и 6s max б.-, где е,-
определяются из E.9), причем 0 < е < 1.
Отметим, что введенное понятие €-доминирования не является
рефлексивным (неверно, что f*€f) в силу определения множеств /и / E.8),
причем условия симметрии (gbef**f>eg) и транзитивности ((h>€g,
g b€f) =*h>*€f) также не выполняются.
Множество векторных оценок, находящихся в отношении
е-доминирования с /, будем называть f-классом е-доминирования и обозначать через К i :
}. E.10)
Будем говорить, что векторная оценка g сиЛьно 6-доминирует векторную
оценку f(g>-€f)t если для любой векторной оценки ? из ^существует
векторная оценка ? е^| такая, что f/>?/, /=1, ...,п (или f сильно
доминирует % по Парето). Любая максимальная по отношению сильного
б-до минирования векторная оценка /(x),xGI, называется е-равномерной.
На рис. 5.3 показаны векторная оценка/(дс), ее класс б-доминирования
Kf для заданного 0 < е < 1, и сильно е-доминирующая ее векторная
оценка g. На рис. 5.4 для выпуклого множестваF показано множество
е-равномерных векторных оценок (дуга АВ).
Рассмотрим основные свойства в-равномерных векторных оценок.
Для этого введем обозначение:/(х,е) ={/i(*,€),... ,/„(*, е)},где/К*>€) =
=/,(*)+€ Z/,(*).
/*/
Лемма 5.4. Дая того чтобы векторная оценка /(х1) е-доминировала
векторную оценку /(л2), необходимо и достаточно, чтобы существовало
такое собственное подмножество I множества индексов {1, ..., п), что
Доказательство. Сначала докажем необходимость. Поскольку
для любого индекса i такого, что //(х2) >//(х!), (/?/), имеет место
равенство
Ж*2)-Ж*1)** 2
124
причем et< e для всех таких г, то
Ж*2) -Ж*1)<« ? (Ж*1) ~Ж*2))-
Отсюда
A -е)(Ж*2)-Мх1))<е 2 (//(дс>)-//(*2)),
E.11)
а из положительности левой части и условий, накладываемых на е, следует,
что
(/(')-//(Дса))>0.
Если/*(*')>/И*2), то
E.12)
2) + е 2 Ж*2) =/*(х\е),
/ 1
где строгое неравенство следует из E.12). Если /к (х1) < fk (x2 ), но
Л(*2)-/*(*') = е* ^(/Дх1)-//(х2))<е.2
то, как и в предыдущем случае,
> //(),
илиД(х2,е) < Д^.е).И,наконец,при/к(х!) < Д(х2)и
2 2
] Ф К
E.13)
после очевидных преобразований получаем Д (х2, е) = Д (дг1, б). Поскольку
orctge
arctge
Рис. 5.3
Рис. 5.4
125
6= max e#, то хотя бы один индекс к для которого
/е/
/*(*')</*(*2)
и выполнено E.13), обязательно существует,что и доказывает
необходимость утверждения леммы.
Перейдем чк доказательству достаточности. Пусть
Тогда можно положить //(х\ е) =/}(х2, е) + X/, причем X,- = 0, /€ /, X/> О,
i?l. Необходимо показать, что для всех индексов /, таких что f)(x2) >
>fi(xl) > выполнено неравенство
Л(*2)-//(**)< «2 (//(*')-/,(**)). • E.14)
Рассмотрим векторную оценку /(я2) + X', где вектор X' представляет
собой решение системы уравнений
К\ = К\ + €Л2 + . . ¦ + 6Лл-_| + €ЛИ,
Х2 = еХ', + Х2 + ... + eX'w_! + еХ'л,..., E.15)
Хл = eX't + еХ2 +... + еХ'л^! + Хг„,
или, в матричной форме,
Х= • V. E.16)
Уравнение /в системе E.15) имеет вид
и представимо в виде
Х, = € 2 Х}+A -€)Х/. E.17)
п
Обозначая ? \-через>% запишем систему E.16) как
1-е ... .
1 -е е
О
'1-е е
А\
E.18)
гдеХ = {Х,, ...,Хл,О},Х' = {Хг,,...,Х^, j}. Решение системы E.18),
как легко установить, имеет вид
1
126
п
Подставив E.19) в уравнение 2 X/ =у> получим
п \. _ €у п *~
2 — - «j\ 2 (\f-ey) = (\-€)y,
2 А/«
ИЛИ
2
откуда
-e 2
y~ . E.20)
п
Поскольку 2 X/>0, то из E.20) следует, что при /€/ Xj<0 (так
как X/ = 0, i G /) и
х; = -е 2 х;. E.21)
f
Если же Х/<0,но /^/, то
х; + е 2 х;. =х,>о,
1*1
откуда
х;<-€ 2 Ху.
f*i
Теперь рассмотрим величину
/Н*2) + Х/ + е 2
1= 1,...,И.
Отсюда следует, что при XJ < 0 (а хотя бы один такой номер обязательно
существует)
//(^2)-/;(^) = ^<-в>2/Х;.= б 2 (//(х1)-//^2)). E.22)
причем при /€/ E.22) превращается в равенство. Лемма доказана
полностью.
Рассмотрим теперь необходимые условия €-равномерной оптимальности.
При этом будем считать, что множество векторных оценок F ограничено,
замкнуто и целиком лежит в положительном ортанте Rn.
127
Теорема 5.5. Если векторная оценка /(**), х*ЕХ9 ^оптимальна и е-рав-
номерна, то существуют положительные коэффициенты 0i, ..., &п такие,
что
min А[/,(дс*) + е 2 ff(x*)]>
> min /ШМ + е 2 /,(*)], ,
1 < i < л / Ф /
Доказательство. Доказательство будем проводить от противного.
Если-для любых положительных Рг,..., $п существует альтернатива х& € Л",
для которой
min *,[/,(*•) + € 2 /,(*•)]<
< min ft[/,(^)+ 2 /,(*')]= min jS^^e),
то из теоремы 2.5 и условия F С R" вытекает, что для некоторой
альтернативы jc выполняются неравенства
)>/,(*•,€), /= 1 л. E.23)
Из E.23) и предыдущей леммы вытекает, что альтернатива х не является
е-доминирующей по отношению к альтернативе jc*. Если показать, что х
сильно в-доминирует **, то это будет означать, что векторная оценка /(**)
не является б-равномерной, что и докажет теорему.
Рассмотрим произвольную векторную оценку ?, принадлежащую
классу 6-доминирования для /(**)• Из доказательства леммы 5.4 следует,
что эта векторная оценка представима в виде | =/(**) + X', \) + е 2 \}>
> 0, i = 1, ..., и, где хотя бы для одного номера / имеет место равенство
нулю. По определению сильного б-доминирования необходимо построить
векторную оценку т? из класса 6-доминирования для/(дг) такую, что т?/ >
> ?,-, /=1,...,/?. Представим г\ в виде
/= 1 я, E.24)
где
*>i = fi(xm) + Х;« -/,(*) + «,, б/> 0, 1=1 я, E.25)
и покажем, что существуют такие 5/ > 0, что
v\ + e 2 v)>0, /= l,...,/i, E.26)
где при некотором номере ? имеет место равенство нулю. Подставляя
E.25) в E.26), получаем
; # ;/,()л();,^ j /; p
= //(х*, €)-/,(*, е) + Х,+ 8,+ 6 2 6у, E.27)
/ ф i
где X/ = X'f + е 2 \- > 0. Рассмотрим систему неравенств
5,+ 6 2^/>/,(х,€)-/;.(^,€)-Х/, /=!,...,/?. E.28)
128
Очевидно, что система E.28) имеет положительное решение 5*, при
котором все неравенства обращаются в строгие. По построению X' существует
номер I* такой, что Л/* = 0. Отсюда следует, что вектор 5' = 0 не является
решением E.28), поскольку в левой части будет 0, а в правой части при
/ = /* будет положительное число //(*, е) -//(**, е) (см. E.23)), т.е.
неравенство с номером / = /* при 6' = 0 имеет обратный знак. Поэтому можно
рассмотреть вектор д(у) = 75*, 0<7^1- При 7 = 0 вектор 5G) не
является решением E.28), а при 7 = 1 вектор 5G) - решение, при котором
все неравенства выполняются строго. Отсюда следует, что существует
такое положительное число 7*, при котором положительный вектор 5G*)
будет являться решением E.28) со строгими, неравенствами при /?/и
равенствами при /Е/, где / — непустое множество индексов, /U/ =
= {1,...,«}.
Отсюда и из E.28) следует, что E.27) принимает вид
E.29)
причем множество / непусто. Следовательно, т?=/(х) + v' (EKf^ и щ>
>?,-, i = 1, ..., и, по построению. Отсюда следует, что векторная оценка
f(x*) не является е-равномерной. Полученное противоречие доказывает
теорему.
Проведенный анализ показывает, что одновременно с множеством
векторных оценок F С R" имеет смысл рассматривать множество
векторных оценок F(e) С R%, получающееся при отображении xG Z->/(*, e) =
= {/i(*, <0,... ,/„(*, е)} е R», где
Л(х,е)«/,(*) + € 2 /,(*), /=l,...,/i, 0<е<1.
i+i
Рассмотрим множества
min Ь
> min ЬМх9€); х*, хЕХ,
и F°(e) = U R€(P). Легко видеть, что если /(**, б) €F°(e) при неко-
^ >о
тором €, 0<е< 1, то векторная оценка /(**) тг-оптимальна в
множестве F (п. 1 леммы 5.2). Действительно, если это не так, то существует
векторная оценка f(x) €F такая, что fi(x) >fi(x*), /G/, и/}(*) =//(^с*),
iGJ, ID / = 0, /U/= {1, ..., п). Но тогда 2 /,(*) > 2 ft(x*). Следо-
i=i i=i
вательно,
2 ?
е 2 /,(*•)=/*(**, е),
/ = i
Это означает, что
min At/*(*>e)> min
\<k<n \<k<n
9. Ю.А. Дубов 129
при любых положительных &, ..., ft,. Поэтому /(дс*, б) ^F°(e)9 что
противоречит сделанному предположению.
Таким образом, мы приходим к выводу, что если векторная оценка
/(дс) е-равномерна, то /(дс, е) GF0(e) и /(дс) яоптимальна в
множестве F. Отсюда, в частности, следует, что если векторная оценка /(дс, е) тг-
оптимальна в множестве F(e)9 то она 6-равномерна. Следовательно, зная
множество F(e), можно получить все б-равномерные векторные оценки
и соответствующие им альтернативы.
Переход от множества F к множеству F (е) позволяет сохранить ряд
полезных свойств, которыми обладало множество векторных оценок F.
Так, например, если множество F было выпуклым, то и множество F(e)
будет выпуклым. Действительно, пусть /(дс1, e) и/(дс2, е) - векторные
оценки из F(e). Рассмотрим их вьшуклую комбинацию otf(x19 е) +
+ A - a) /(дс2, е), 0 < а < 1, и перепишем ее в виде
+ е[ Xjf(xl)a+ff(x2)(\-OL)l i=l л. E.30)
Из предположения о выпуклости F следует существование
альтернативы дс* такой, что /(дс*) = а/С*1) + A — а) /(х2). Тогда из E.30) получаем
что и означает выпуклость F (б).
Для практического использования аппарата €-равномерной оптимизации
необходимо установить связь между тг-оптимальными векторными
оценками в множествах F и F(e). Пусть векторная оценка / (х*) является тг-оп-
тимальной. Тогда из теоремы 2.5 вытекает существование таких
положительных коэффициентов <*i,.."., а„, что
min (*//(*•)> min a,/;(x) xeX, f{x)*f(x*). E.31)
1 < i < n 1 < i < и
Напомним, что в E.31) значения аХу . . . , <хп определяются в результате
решения системы
= «2/*(*•), ei/i(**) = es/3(**),-.., E32)
Система E.32) имеет положительное решение, если// (дс*) >0,/ = 1,...,«,
что гарантируется условием FC/?J, Как и раньше, решение E.32) будем
обозначать через а (дс *).
Если альтернатива х* является к тому же лчштимальной в множестве,
F(e), а следовательно, и в-равномерной, то, как было показано в теореме
5.5, существуют положительные коэффициенты ft,..., ft, такие, что
min /Ш(**) + е 2 fj(x*))>
1 < I < П / Ф I
> min ft</,(*)+ 2 /,(*)
1 < I < П I Ф I
130
причем в результате решения системы уравнений
Hi (Л(*•) + « 2 //(*•)) = foft(*•) + * 2 /,
E.33)
01 (Л(*•) + * 2 //(*•)) = 0*0* (*•) + * 2 /,(*•))
/ * 1 / чь я
можно определить положительный вектор j3 (х ¦) такой, что
min 0,(х*) ft (*•) + € 2 /,(*•)]>
1 < / < я / # I
> ' min 0,(**)[Л(*) + 2 /,(*)],
1 < i < n j Ф i
^/, <*•)*//(*) + * 2./К*)
хотя бы для одного 1. Заметим, что условие /3i + . .. + ft, = 1 в E.33)
отсутствует. Для установления связи между а(х*) и /3(х*) будем считать, что
max min сц (х ¦ ) /)• (х) =
X €:Х 1 < I < П
= max min 0, (*•>[/,(*) + 2 /}(х)]=С.
л: G X 1 < i < п j Ф i
В этом случае линии уровня функций min a,(x*) /,(х) и
1 < / < п
min 0/ (х*) [/)• (х) + е 2 // (х)] принимают вид, показанный на рис. 5.5.
1 < / < п / = /
Соотношения между а(х*) и 0(х*) непосредственно получаются из
условия
•) + € 2 /,(х*)],1 = 1,...,я,
откуда имеем
П^ в,(г*)
|3/(х*)= — , /=1 л. E.34)
П ау(х*) + е 2 П а/(х*)
j Ф i к = 1 у Ф к
Легко видеть, что ах (х*) + . . . + ап(х*) = 1, но для ]3i (х*) + ... + ft,(x*),
где ft (x*) определяются по формулам E.34), это уже неверно. В силу
построения (рис. 5.5) величина 01 (х*) + ... + ft,(x*) зависит отх* и
достигает максимального значения в точке х такой, что ах (х) - . . . = а„(х) = 1/л.
Соотношения E.34) устанавливают связь между коэффициентами
а(х») и 0(х*) при использовании условий эт-оптимальности, приведенных
в теореме 2.5. В случае, когда множество векторных оценок F (а
следовательно, и F(e)) обладает выпуклой структурой, можно
воспользоваться условиями теоремы 2.1, причем связь между тгоптимальными
векторными оценками/(х*) € F и/(х*, б) Е F(e) оказывается существенно
проще, чем в только что рассмотренном случае.
Как уже отмечалось, из выпуклости F вытекает выпуклость F(e).
Следовательно, если/(х*, е) — я-оптимальная векторная оценка в множест-
9* 131
Рис. 5.5
ве F(e), то существует неотрицательный вектор 0, ft > 0, / = 1, . .. , л,
&i + ... + Pn = 1 такой, что
2 ft/, (*•,€)> 2 fitft(x,e)9xex.
/ =l i=i
Подставляя выражение ддя/,(х, €) в E.35), получаем
ft [/,(*•) + * 2 /,(*•)]> 2
/ 4fe / / = 1
ИЛИ
2 ft/,(x
/ = l
2
/ = l
2 ft/,(x) + e 2
/=i / = l
Из E.37) имеем
A-е) 2 /ft+r!_)/l(x.)>
i = l \ 1 - e /
2
i=i
-6
X xex,
откуда после сокращения на 1 - 6 получаем соотношение
/ = 1
1-е
i = 1
Рассмотрим 2 \fit + б/A - б)]:
/= 1
и/ е\ " лб пе 1 + (л -
2 /ft+ )= 2 ft + =1+ =
/ = i \ 1—6/ /=i 1—6 1—6 1—1
E.35)
2 ff(x)]y E.36)
Ф i
E.37)
E.38)
132
е
Поскольку ft + > 0, i = 1,..., п, при положительных значениях е,
то коэффициенты
(л-1)е 1+(и-1)е
1 -€
строго положительны, и их сумма равна единице. Подставив E.39) в
E.38), получим
2 (*,/,(*¦)> 2 OLifiixlxGX, E.40)
/= 1 /=1
что означает я-оптимальность векторной оценки / (х •) в множестве /\
Наоборот, пусть выполнено E.40). Тогда E.36) будет выполнено,
если
fo , ,
Отсюда получаем окончательный вьюод.
Теорема. 5.6. Пусть множество альтернатив X выпукло, все критерии
//(х)- вогнутые функции. Альтернатива х* является е-равномерной тогда
и только тогда, когда существуют положительные коэффициенты а/,
/ = 1,.. *п, удовлетворяющие условиям:
€
1) <*/> —— —-, /=1,...,л,
1 +(w-l)e
2) 2 <%/,(*•)> S а^/#(х),*еЛГ.
/ = 1 / = 1 *
Теперь покажем, что с помощью понятия е-равномерной
оптимальности можно получать полезные обобщения условий я-оптимальности (см.
гл. 2). Обозначим через Ф (б) множество е-равномерных векторных оценок
при некотором €, 0 < е < 1.
Теорема 5.7. Пусть компактное множество векторных оценок F
содержится во внутренности положительного ортанта Rn: F СД?. Если
векторная оценка f(x*) п-оптимальна, то она содержится в замыкании Ф(е)
прие ->О:
nFC cl Ф(б).
€ > 0
Доказательство. Утверждение теоремы 5.7 означает, что любая
тгоптимальная векторная оценка является пределом сходящейся
последовательности б-равномерных векторных оценок. Предположим противное.
Поскольку векторная оценка fix*) ^оптимальна, для коэффициентов
ai (**)> • • • > ля(х*), удовлетворяющих B.17), выполнено строгое
неравенство
min <*,(*•)//(*•)> min «/(x»)/,(x),
1 < / < п 1 < i < п
E.41)
133
Теперь определим коэффициенты ft (х*),... ,/?„(**) по формулам E.34):
0,(г*,е) = ^— : .
П (*,(*•) + € ? П /,(*•)
/ # / А: = 1 / Ф к
Выберем произвольную последовательность {ек} , сходящуюся к нулю.
Из E.34) следует, что lim ft (x *, е к) = а* (х *), / = 1,...,л. Поскольку,
в силу сделанного предположения, оценка/(х*) не является е-равномер-
ной ни для какого положительного значения 6, то существуют такие е-рав-
номерные альтернативы х к, / (х к ) Ф/(х*), что
min 0/(**,€*)//(х*)>
1 < /< п
> min 0/(x*, €)//(*•). E.42)
В силу компактности множестваF из последовательности{f(xk)) можно
выделить сходящуюся подпоследовательность {f(xks)) с пределом
причем из E.42) вытекает, что
lim min 0,(х*, e**)//(**J)> lim min ft(x*, е
или
min а,(*•)/,(дс) > min
Ki<n Ki<
Сравнение полученного неравенства с E.41) показывает, что/(х) =/(jc*).
Полученное противоречие доказьюает теорему.
Теорема 5.6 является обобщением теоремы 2.4 на случай невыпуклых
многокритериальных задач. Прежде чем перейти к исследованию связи
между 6-равномерной оптимальностью и собственной эффективностью,
отметим, что равенство nF = cl Ф(е) в общем случае неверно, поскольку
6>0
множество тг-оптимальных векторных оценок не является замкнутым.
Действительно, пусть
Легко видеть, что критерии fx (x) и /2 (х) непрерывны и множество
векторных оценок F компактно (рис. 5.6). Однако последовательность
тг-оптимальных альтернатив {хк} = !/з — AД) при к -+°° сходится к
альтернативе х* = х/з, которая не оптимальна по Парето: ее векторная оценка
(Й, Уз), а у альтернативы х = 2/з векторная оценка (Й, 2/з).
Следует подчеркнуть, что выпуклость множества векторных оценок
не гарантирует замкнутости множества тг/ч
134
Сравнение теорем 5.2, 5.3 и 5.6 позволяет получить следующую харак-
теризацию б-равномерных альтернатив.
Следствие 5.2. Если множество альтернатив выпукло и критерии /,•(*) —
вогнутые функции, то любая е-равномерная альтернатива при е> О
является собственно эффективной. Наоборот, любая собственно эффективная
альтернатива является е-равномерной для некоторого положительного е.
Это следствие допускает непосредственное обобщение на невыпуклый
случай.
Рис. 5.6
Теорема 5.7. Любая е-равномерная альтернатива является собственно
эффективной.
Доказательство. Если альтернатива х* является е -равномерной,
то для любой другой альтернативы х существует такой индекс к, что
(!-*)/*(*) +е Д/Ддг) < A -е)/Л(**) +е .2/,(*•),
или
(!-€)(/*(*)-/*(**))
¦ 2
/ = 1
7
E.43)
Предположим, что альтернатива х* не является собственно эффективной.
Тогда для любого числа М можно указать альтернативу х и номер /, для
которых неравенство
//(*) -//(**) > ЩГ,(х') -/,(дс)) E.44)
будет выполнено при всех /. Покажем, что если число М не ограничено
сверху, то E.43) будет нарушено. Для этого просуммируем E.44) по
всем/ Ф i. Получим
(и - 1) (/,(*) -/,(*•)) > М 2 _ (/,(*•) -/,(*)),
или
Перепишем E.43) в виде
E.45)
E.46)
135
Из E.45) и E.46) очевидным образом следует, что при М > п— 1
« [//(*) -/,(*')] + е 2 [/}(*) -/}(*¦)] > 0.
Аналогичным образом из E.44) получаем, что при М> A -е)/е
О - е) [/*(*)-/*(**)]+ « [/#(*)-/#(*•)]>0.
Поэтому, выбрав Л/ > л - 1 + (A - е)/е), можно гарантировать, что
неравенство E.43) будет нарушено. Поскольку этот вывод не зависит от к,
то отсюда следует, что альтернатива х* не может быть е-равномерной.
Полученное противоречие доказывает теорему.
§ 5.4. Необходимые й достаточные условия устойчивости
В этом параграфе мы будем исследовать задачу устойчивости в
несколько специфической постановке, предполагая аддитивный характер
возмущений, накладываемых на векторный критерий. Основной задачей будет
получение необходимых и достаточных условий устойчивости с целью
выяснения роли, которую играет п. 4 в теореме 5.1. Что касается всех
остальных условий теоремы 5.1, то они будут выполняться автоматически
в силу специальной структуры исследуемой задачи.
Будем считать, что на ограниченном и замкнутом множестве
альтернатив X заданы п критериев, являющихся полунепрерывными сверху
функциями. Полунепрерывность сверху означает, что для любой сходящейся
последовательности альтернатив {хк } с пределом х* выполняются
неравенства /,- (х*) > lim ft(xk), / = 1,..., п. Можно легко показать, что в
К-юо
этом случае множество я-оптимальных векторных оценок действительно
существует.
Рассмотрим произвольное множество полунепрерывных сверху и
ограниченных п-мерных функций h(x) = {ht (x)9..., hn(x)}9 заданных на X.
Без потери общности можно считать, что
max max I/*,(*)!< 1. E.47)
В^ качестве возмущенного критерия будем рассматривать вектор-функцию
Л*) = /(*) + 5 ^ (*), где 8 - положительный скаляр.Множество
я-оптимальных векторных оценок в задаче с критериями f(x) обозначим
через nF.
Определение 5.8. Множество тг-оптимальных векторных оценок nF в
задаче с векторным критерием/(дс) ={/iM,...,/n(x)} называется
устойчивым, если для любых полунепрерывных сверху функций h х (х),...
..., hn(x), удовлетворяющих E.47), и для любого г\ < 0 существует
число б0 > 0 такое, что при б < 50 выполнено соотношение p(nF, nF) < 17,
где nF - множество я-оптимальных векторных оценок в задаче с
критерием f(x) = f(x) + Sh (x), p(., ¦) — расстояние между множествами nF
и тг F, определяемое по формуле E.1).
Заметим, что в задачах со скалярным критерием множества nF и nF
состоят из одной точки на прямой, поэтому можно легко показать, что
136
любая скалярная задача оптимизации всегда является устойчивой в смысле
определения 5.8.
Обозначим через Ф(е) множество е-равномерных векторных оценок
при е > 0; Ф@) соответствует множеству 0-равномерных векторных
оценок, которое, как легко видеть, совпадает с множеством слабо
оптимальных по Парето векторных оценок п *F ( § 5.1).
Теорема 5.8, Множество nF является устойчивым тогда и только тогда,
когда выполнено включение
Ф@)*С cl Ф(е). E.48)
е>0
Доказательство. Для доказательства необходимости покажем,
что если E.48) не выполняется, то задача неустойчива. Если Ф@)$?
<t cl Ф(е), то из теоремы 5.6 следует, что существуют альтернативы
€>0
х1 и х2, для которых выполнены следующие условия:
1) fix1) еФ{0);
2)f{x2)e cl Ф(€);
6>0
3)f{x2) я-оптимальна {fix2) E
4.fi(x2) >fi{x1)9 /G/, ft{x2) =
"У)"/ 2inf r{f{x1)9f{x2))=k>0.
{x\f(x2) Gel Ф(е)}
€>0
Рассмотрим полунепрерывную сверху вектор-функцию h (x),
удовлетворяющую условиям:
l)hf(x) =0, xGX, i
2)ЛДH Ф\
Д) \
3) ЛД*1) =], /€/.
Множество nF обязательно будет содержать возмущенную векторную
оценку f(xl) = /(х1) + 8h (x1), поскольку в противном случае мы бы
получили противоречие с исходным предположением/(х1) G Ф@), причем
включение fix1 )SnF будет иметь место при любом 5 >0.
Следовательно,
p{nF, nF) >
sup ^ > t inf r{f{x')J{x)+dh
> inf r{f{x1) + 6h{x1)9f<ix'))>
{x'\f(x')(EiTF)
> inf [/•(/(x),/(x'))-«||/i(jc1)||]> *-
{^'|/(x')e7rF}
Отсюда следует, что p{nF9 nF) ^k>0 при б ->0, и задача неустойчива.
Покажем теперь, что при выполнении E,48) задача устойчива. Для
этого определим сначала
sup inf г{f{x) + 5Л (х), f{x')).
{X\f(x)+6h(x)<EnF} {x'\f(x')GnF}
137
Здесь возможны два варианта.
а) /(*) G Ф@). Если f(x) e nF, то
inf
{}
Если же f(x) ^ ttF, to из E.48) вытекает существование сколь угодно
близкой k/(jc) оценки/(х") EirF.
Пустьг(/(х), f(x")) = д.Тогда
,/(*") + «II /l||
В силу произвольности выбора /z здесь также
inf г(/(*)+ 8* <*)),/(*')) <
(f)eF}
Поскольку последняя оценка не зависит от х, то
sup' ^ inf X
6h()GF} {x'\f(x')SnF}
где sup' означает вычисление верхней грани по всем векторным оценкам
f(x) + 8h (x) e nF таким, что/(лг) G Ф@).
б) /(дс) f Ф@). Но тогда в силу соотношения Ф@) =tt*F существует
векторная оценка /(х")еФ@) такая, что fi(x")>fi(x),i =l,...,w.
Без потери общности можно считать, что /(*") G nF. Следовательно,
имеет место неравенство
inf
{
Дх") <r (/
Легко видеть, что если r(f(x),f(x")) > 2Ъ\/~п, то имеет место
противоречие с исходным предположением о принадлежности векторной оценки
f{x)+bh(x) множеству nF. Следовательно, r(f(x)9f(x"))<:2b^n!
Отсюда
inf
{
sup ^ inf
6/()F} {fl/(')
где sup" означает выделение верхней грани по всем векторным оценкам
fix) +6Л(дг) GnF таким, что fix) ^Ф(О). Окончательно получаем, что
sup inf
{x\f(x)+6h(x)enF}{xr\f(x')GnF}
Теперь определим величину
sup"
138
Пусть f{x) + 8 А(х') G ttF. Тогда
inf ^ r(f(x
{x \f(x)+6h(x)GnF)
<'</(*') + 8A(x'),/(*')) = 8 \\h(x')
Если же f(x) + 8A(x') ^nF9 то существует векторная оценка
+ 5 /г (х") такая, что
') +8 А/Ос'), /= 1 л,
причем /(х ") + 5 A (x") € я F. Тогда
inf ^ #•(/(*) +8 А(х),
6/()eF}
E.49)
Осталось вычислить г (f (xtf), f(x ). Отметим, что соотношения// (х") >
>fi(x), i = 1,... ,/2, f(x") Ф/(х') противоречат исходному
предположению о я-оптимальности векторной оценки /(*')• Значит, либо fix1)
доминирует f(x") по Парето, либо эти оценки несравнимы. Если f(x )
доминирует /(*"), то как и выше, получаем r(f(xf), /(*") <28\fn.
Если же f(x') несравнима по Парето с /(*"), то расстояние г (f (x'),
" может быть, вообще говоря, сколь угодно большим.
Предположим, что при некотором 8 > О
или
Я*") ^/(*
Выберем произвольную последовательность^*}, сходящуюся к нулю.
Если для любого элемента этой последовательности 8* существует оценка
f(xk) такая, что f(xk) >irf(x) +5*(А(У) -А(**)), то из
последовательности { хк } в силу компактности можно выделить сходящуюся
подпоследовательность {х *} с пределом х. Для предельной векторной оценки
/(х ) справедливы соотношения // (х ) >// (х'), / = 1,...,п. Поскольку
векторная оценка/(х') я-оптимальна^то/(х") =/(х').
Следовательно, если последовательность {&к) , для каждого элемента
которой существует векторная оценка f(xk) >тг/(х') +8*(А(х') - h(xk))
бесконечна, то, начиная с некоторого номера Kt9 расстояние r(f(x '),
f{x )) становится меньше 8 при / > Кх .Тогда E.49) принимает вид
inf
{x\f(x)+6h(x)GnF}
Если же эта последовательность конечна, то, начиная с некоторого номера
К2, векторная оценка /(*') +8*А(х') будет я-оптимальной при к>К2,
т.е. fk(xf) +8kh(x') G nF. В этом случае справедлива оценка, получен-
139
наявыше:
Окончательно получаем
sup inf
откуда
max
sup
5M
inf
sup
inf -/(/(*) +
6fc()eF}
sup
6A(
inf
Поэтому при любом т? > 0 достаточно выбрать 5 =
Теорема доказана полностью.
Фактически теорема5.8 означает, что основной причиной неустойчивости
Рис. 5.7
множества itF является наличие в X альтернатив х, удовлетворяющих
одновременно следующим двум условиям:
1) х не оптимальна по Парето;
2) не существует альтернативы х'Е Xтакой, что// (х') >// (х), / = 1,...
...,я.
Пример. Пусть
Здесь множеством тг-оптимальных альтернатив является отрезок [И, 1],
множеством я-оптимальных векторных оценок nF — отрезок,
соединяющий точки (И,1) и A,0) на плоскости векторных оценок (fi,f2)
140
(рис. 5.7). Замыкание cl Ф(е) совпадает с этим отрезком, а Ф@) не
содержится в нем. Из рисунка видно, что те точки Ф@), которые не
входят в cl Ф(е), удовлетворяют сформулированным выше условиям 1) и
е>о
2). Следовательно, задача с таким множеством векторных оценок
является неустойчивой. Действительно, функции hi(x) = 0, h2 (*) = 1 -х
удовлетворяют всем условиям теоремы 5.8, и множество векторных оценок
ttF, получающееся при критериях
1+5-5*,
-B+5)х+2+5,
сильно отличается от nF при сколь угодно малых значениях 5 (на рис.5.7
множество nF показано штриховой линией).
Из теоремы 5.8. можно вывести ряд полезных следствий. Рассмотрим
одно из них. Пусть множество альтернатив JTвыпукло, все критерии// (х)-
вогнутые функции. В этом случае, как следует из теоремы 5.6, для любой
е-равномерной альтернативы х* существуют такие положительные
коэффициенты ах,..., а„, что
,/() /Ж)> xex.
Пусть
/=1 1=1
В сипу утверждения теоремы 5.6 множество е-равномерных векторных
оценок Ф я U Ф (е) представимо в виде
0<е<1
Ф= U Sf(a). E.50)
«ел
В то же время множество
Ф@)= U Sf(a)9 E.51)
«ел*
где А - замыкание А. Отсюда вытекает следствие.
Следствие 5.3. Для того чтобы задача с выпуклым множеством
альтернатив и вогнутыми критериями была устойчива, необходимо и
достаточно, чтобы выполнялось включение
U Sf(ot)C cl U 5>(а). E.52)
Л а>0 ел
141
§ 5.5. Регуляризация неустойчивых многокритериальных задач
При анализе неустойчивых задач возникает проблема их
регуляризации, т.е. преобразование неустойчивой задачи в близкую к ней
устойчивую. Использование аппарата е-равномерцой оптимальности не только
позволяет получить удобную схему регуляризации, но и оценить
"количество" неустойчивых задач в заданном диапазоне изменений критериев.
Вместо критерив fx (jc), ... ,fn(x), заданных на множестве
альтернатив X, будем рассматривать систему критериев
/,(Х,€) = A -€)/,(*) + € J //(*), 1=1,...,#1. 0<€<1. E.53)
В полученной таким образом новой многокритериальной задаче
множество векторных оценок, как и ранее, обозначим через F(e). Через Ф(е, е')
будем обозначать множество е'-равномерных' векторных оценок в задаче
с критериями E.53), т.е.
'' ?//(*•,€), 1=1,..., Я,
Д
1=1,. ..,Л>.
Нас интересует возможность выполнения включения
Ф(е,0)С cl Ф(е, е'). E.54)
е'>0
Если E.54) выполняется, то множество nF(e) устойчиво при
соответствующем е > 0.
Заметим прежде всего, что для любой векторной оценки f(x)
существует не более чем одно значение е, при котором f(x,e) €Ф(е,0), но
/(*, е) ? d Ф(е, б'). Действительно, если f(x, е) е Ф(е, 0), но f(x9 e) ?
е'>0
ф с\ Ф(е,е), то существуют векторная оценка /(х,е) и непустые
е'>0
множества индексов /,/,/и/={1,...,л} такие, что
Жх,€)=/,(г.б), /G/, /,(*,€)>/,(*,€), /е/ E.55)
Из E.55) получаем
Д [//(*)-//(«)]>0, E.56)
)-Л(х ))=€ Z (/}(J ) -/,(*)), /G/,
г)-/|(*))<в?ог,(*)-//(г))> /е/. E57)
/=1
142
откуда видим, что в силу E.56) правая часть E.57) монотонно
возрастает по в и положительна, а в левой части стоят либо отрицательные
величины, либо величины, монотонно убывающие по е. Отсюда немедленно
следует, что при е1 > е справедливы соотношения
+ €1 2 /,(*), /=1,...,и. E.58)
/=1
Неравенства E.58) означают, что приеме векторная оценка /(х, б1)
уже не может принадлежать множеству Ф(е1,О). Если предположить, что
/(х, €2) Е Ф(е2,0) при €2<е, то, повторив приведенные выше
рассуждения, получим, что f(x,e) ф Ф(е, 0), что приводит к противоречию.
Поэтому можно утверждать, что для любой векторной оценки/(дс) существует
максимум одно значение е, при котором /(jc, e) ЕФ(е,0), но /(х,е) ф
ф cl Ф(е,е'). Поэтому можно утверждать, что если множество вектор-
е'>0
ных оценок F (а следовательно, и F(e)) конечно, то существует такое
число F>0, что при любом е,0<€ < е", множество векторных оценок
ттГ(е) будет устойчивым, т.е. будет выполнено включение E.54).
Этот же результат справедлив и для многокритериальных задач
линейного программирования. Если множество альтернатив X={xGRk I х>
>0,Ах<Ь} компактно, то множество векторных оценок представляет
собой ограниченный и замкнутый многогранник F в Rn9 который является
выпуклой оболочкой конечного множества своих вершин. Поскольку,
как легко показать, устойчивость некоторого множества влечет
устойчивость его выпуклой оболочки, то достаточно рассмотреть условия
устойчивости и соответствующую регуляризирующую модель для конечного
множества вершин F.
В общем случае, если множество F является континуальным, то можно
рассмотреть его счетную аппроксимацию Фс. Будем говорить, что
множество Фс является счетной аппроксимацией F, если любая окрестность
каждой точки F содержит хотя бы одну точку из Фс, любая окрестность
каждой точки из Фс содержит хотя бы одну точку из F и множество Фс
не более чем счетно.
Легко видеть, что из устойчивости этФс вытекает устойчивость irF и
наоборот. Действительно, если множество irF устойчиво, то Ф @) С cl Ф (е).
е>0
Пусть Фс @) ф cl Фс (е). Тогда существует точка ? € Фс @) такая, что
' €>0
inf r(?>0 =а>0. Значит, можно выбрать точку f(x)GF, сколь
re d Фс(е)
€>0
угодно близкую к |, причем inf r(f(x),d) =a. Надо показать, что
0ес1Ф(е)
€>0
f(x) G Ф@). Если это не так, то существует точка/(х') G Ф@) такая, что
// (х') >// (jc) , i = 1, ..., п. Но по построению множества Фс это означает,
что существует точка кбФс такая, что к/ >//(х),/ = 1,...,п, а следо-
143
вательно, К{ >?/,/ = 1,..., и, что противоречит исходному
предположению % е Фс @). Аналогично устанавливается и тот факт, что из
устойчивости тгФс вытекает устойчивость nF.
Из счетности Фс следует, что при континуальном множестве векторных
оценок F множество nF(e) будет устойчивым почти всюду на 0< е< 1.
Окончательный вывод состоит в том, что, в то время как задачи
оптимизации со скалярным критерием в рассматриваемой постановке всегда
устойчивы, многокритериальные задачи могут быть неустойчивыми.
Введение рассмотренной выше схемы регуляризации позволяет сделать их
устойчивыми почти всюду, причем для довольно широких классов задач можно
гарантировать устойчивость на некотором интервале, содержащемся в
@,1).
Глава 6
МНОЖЕСТВО ПАРЕТО
И РАСПРЕДЕЛЕНИЕ СЛУЧАЙНЫХ ВЕКТОРОВ
Задачи многокритериальной оптимизации, рассмотренные в
предыдущих главах, в некотором смысле близки к оптимизационным. Как и в
обычных задачах скалярной оптимизации, в них необходимо получить
какое-либо оптимальное решение, хотя оптимальность здесь понимается
в смысле Парето. В силу близости постановок задач вполне естественным
представляется и общий вывод, что по аппарату и по структуре
получаемых результатов многокритериальные задачи сходны со скалярными
задачами. Определенная специфика проявляется только в отдельных
моментах, например в динамических или стохастических многокритериальных
задачах.
Однако при переходе к нескольким критериям часто возникают новые
задачи, постановка которых в случае линейно упорядоченного множества
альтернатив просто не имеет смысла. Так, например, при оптимизации по
скалярному критерию нас чаще всего интересует произвольная (но
единственная) точка, в которой достигается глобальный экстремум, поскольку
все остальные точки экстремума от нее практически неотличимы. Именно
поэтому в задачах выбора по скалярному критерию ограничений на число
получаемых решений, как правило, не накладывается . Более того, если
бы такие ограничения были наложены, то это привело бы к некорректно
поставленной задаче типа: найти от двух до пяти глобальных максимумов
гладкой функции на множестве X Если / — не скалярный критерий, то
стремление воспользоваться заданной процедурой выбора с тем, чтобы
выделить заранее намеченное количество наилучших решений, выглядит
вполне естественно, поскольку различные тг-оптимальные точки
несравнимы между собой, и, несмотря на некорректность в постановке задачи,
такие задачи не только ставятся, но и решаются практически.
В качестве простого примера ситуации, когда необходимо выбрать
заданное число тг-оптимальных альтернатив, можно рассмотреть задачу о
распределении заявок в вычислительных системах (Березовский, Травкин
[1]). Пусть имеется М каналов обслуживания (в данном случае,
процессоров) , на которые поступают группы заявок на обработку. Естественно,
что количество заявок, которые могут обслуживаться в любой заданный
момент времени, не должно превышать М. Кроме того, будем считать, что
если в системе загружено менее m каналов, то ее функционирование
неэффективно. Если оценка заявок производится по нескольким критериям
(например, внешний приоритет, потребность в памяти, время счета и др.),
то мы тем самым в каждый момент времени должны отбирать для
обслуживания mt я-оптимальных заявок, причем m <mt <Л/.
10. Ю.А. Дубов 145
Предположим, что в нашем распоряжении имеется процедура,
позволяющая выделить заданное число оптимальных по Парето точек для
фиксированного множества альтернатив X и заданных критериев /i,...,/w.
Пусть теперь мы имеем дело с другой многокритериальной моделью, в
которой множество альтернатив и критерии в некотором смысле близки
к X и /i,...,/n соответственно. Вполне естественным представляется
рекомендовать процедуру, приведшую к успеху при решении какой-нибудь
конкретной задачи, для решения близких к ней по типу задач. Но чтобы
строго обосновать такую рекомендацию, нужно решить одну из
труднейших проблем теории выбора и принятия решений — очертить область
применимости созданного метода.
На практике переход к новой задаче часто означает просто изменение
совокупности предъявленных на выбор вариантов решений; формальная
структура оценки альтернатив остается неизменной. И все же из-за
некорректности в постановке задачи в принципе почти всегда можно подобрать
такую совокупность вариантов, что данное правило выбора окажется
несостоятельным: выбрано будет либо слишком много, либо слишком мало
вариантов. По-видимому, возникновение таких предъявлений в
практической работе-довольно редкое событие. Вопрос о том, как часто
предъявление на выбор нового множества вариантов приводит к несостоятельности
процедуры выбора, формально сводится к анализу распределений
вероятностей числа отбираемых вариантов.
Для постановки задачи в вероятностных терминах требуется либо
описать совокупность (генеральную) равновозможных предъявлений, либо
указать механизм, посредством которого генерируется множество,
предъявляемых на выбор альтернатив. В следующих двух главах понятие
альтернативы отождествляется с вектором критериальных значений, а
случайная альтернатива — со случайной точкой в критериальном пространстве
(пространстве признаков). Мы сосредоточим внимание на базисной модели
паретовского выбора из случайного предъявления п точек — независимой
случайной выборки векторных величин с независимыми непрерывно
распределенными координатами.
Такая модель, хотя и не в терминах теории выбора, впервые
исследовалась в (Барндорф — Нельсон, Собль [1]) для оценки границ случайных
множеств w-мерных точек. В 1973 г. паретовский выбор другим методом
радикально исследуется для оценки количества условно оптимальных
траекторий дискретного сепарабельного динамического программирования
советскими учеными в Киеве (Кукса, Шор [1]). В 1975 г. вычислены
математическое ожидание и дисперсия числа элементов множества Парето (Ива-
нин> ПЬ [2]) (Березовский, Травкин [1]).
Поскольку задача возникает в самых разнообразных контекстах, то одни
и те же результаты переоткрываются*заново и по-разному. В последнее
время некоторые из них нашли отражение в монографиях по
многокритериальной оптимизации, теории выбора и теории принятия решений (Поди-
новский, Ногин [1]), (Березовский и др. [1]), (Виноградская [1]).
Ограничимся обсуждением модели выбора из двумерных альтернатив,
на которой относительно наглядно можно продемонстрировать серию
методов вероятностного и комбинаторного анализа задач выбора, тем более,
что такая модель представляет и самостоятельный прикладной интерес
146
(Подиновский, Ногин, [1]). Не все из этих методов могут быть обобщены
на m-мерный случай, но с их помощью устанавливается связь задачи анализа
паретовского выбора с рядом комбинаторных проблем и конструкций
теории графов.
В этой главе задача паретовского выбора исследуется методом
геометрических вероятностей, методом ладейных многочленов, посредством
сведения к анализу случайных подстановок и с помощью введения
вспомогательного марковского процесса. Приводятся соответствующие асимптотические
результаты. Вывод осредненных характеристик распределения числа паре-
товских элементов в случайной выборке рассмотрен для общего случая с
т критериями.
§ 6.1. Распределение числа элементов множества Парето
Рассмотрим случайную независимую выборку, состоящую иэ п
двумерных векторов jf(w) = {?/,/= 1,..., п) с независимыми координатами
?/= Gfi/» ?2/) > распределенными по абсолютно непрерывным1), а в
остальном - по совершенно произвольным законам:
/=1,...,и, F,= f f,(y)dy, Л€С(Л,), /=1,2.
oo
Элемент выборки ?€?(л) принадлежит множеству Парето тг(?(и)), если
выполнено условие 2)
vr'ei<">: (Г * Г)^(Г' = Г). F.1)
Поскольку f и ?' - случайнее величины, это условие означает, что
произошло случайное событие, определенное на произведении вероятностных
пространств (R\, 85 \ F)n, где 85 - а-алгебра борелевских множеств в R 2.
Множество Парето в нашей модели — случайное множество, и утверждение
о том, что число его элементов равно к9 означает, что произошло ровно к
событий, удовлетворяющих F.1), и п -к противоположных, когда
условие F.1) оказывается нарушенным. При этом не уточняется, какие именно
элементы выборки j^w) вошли в состав множества 7г(?(л)), а какие в
дополнение к этому множеству. Таким образом, число тг-оптимальных
элементов выборки есть случайная целочисленная величина v= card7r(t(/l)),
принимающая значения от 1 до п. Требуется вывести закон распределения
случайной величины v.
С каждым элементом выборки f €?(и) = {f i, ?2 > • • •»?я} свяжем
вектор ранговых оценок (р, г). Ранги риг- целочисленные случайные
величины, принимающие значения от 1 до п. Случайная величина р
принимает значение /, когда при упорядочении первых координат векторов
$/ = (?i/, ?2/)» /€1,...,л, по убыванию их значений первая координата
1) То есть предполагается, что существует непрерывная плотность распределения.
2) Здесь п обозначает паретовское подмножество случайного множества j; 'и', а
запись u > v для векторов м, и е Rm означает, что щ > и/ при всех /.
10* 147
?i/ вектора Jy оказывается на /-м месте. Аналогично определяется и
случайный ранг г, но — относительно упорядочения вторых координат. Если
исключить из рассмотрений события, которые происходят с нулевой
вероятностью, то в силу допущения об абсолютной непрерывности законов
распределения координат векторов выборки определение рангов
становится корректным: появление связных рангов, вызванное совпадением
значений координат f//t и %цг при некоторых индексах i = 1, 2; /ь /г;
/i ^7*2, с вероятностью 1 невозможно. В дальнейшем, если нет специальных
оговорок, все утверждения делаются с точностью до событий нулевой
меры.
Как следствие независимости координат элементов независимой
выборки, их ранговые координаты р/ и /у тоже будут независимыми (р,- — ранг
1-й координаты элемента ?,-, гу- — ранг 2-й координаты элемента {у, причем
индекс / может быть равным /). Довольно простое, но очень существенное
утверждение состоит в том, что при любом/ величина р7- распределена
равномерно на 1,..., и. Однако величины р/, / = 1,..., п зависимы в сово-
п
купности,например,почти наверное 2 р;- = и. Но вектор р = (Pi, . . . , рЛ),
принимающий значения на множестве всевозможных перестановок из п
элементов, — также равномерно распределенная величина. Например,
при п =3
F(x) 1
= / dF(x) f P(y<Si>3)dF(y)= f —^ dF(x) = — .
— oo _oo _oo 2 3!
Более подробное обсуждение этого вопроса можно найти в книге (Гаек,
Шидак [1]). Важно, что если некоторое событие зависит только от
ограничений, налагаемых на значения рангов элементов выборки, то для того,
чтобы вычислить вероятность этого события, не требуется знания функции
распределения координат: при любом абсолютно непрерывном законе
распределения значений координат ранги распределены равномерно. Можно
даже не требовать существования непрерывной плотности распределения
координат элементов выборки: допустима и сингулярная компонента
распределения, но не допускается дискретная составляющая.
Условие F.1) принадлежности элемента ?: р($) = Р> КО = Г множеству
Парето можно переписать в терминах рангов: не существует элемента
f'Ef*") такого, что
(Р(Г')>Р)& (г(П>0 F.2)
и, значит, искомое распределение величины v также не зависит от
законов F\ и F2.
Этим фактом можно воспользоваться двояко. Первый путь состоит
в замене законов Fx и F2 на более простые. Например, можно считать, что
координаты векторов f / распределены равномерно на [0, 1 ], т.е. перейти
к модели, в которой п точек случайным независимым образом бросаются
148
в единичный квадрат, и вероятность попадания точки в заданную область
равна площади этой области. Или считать координаты векторов нормально
распределенными случайными величинами — прием, эффективно
использованный в работе (Кукса, Шор [1]) для анализа распределения множества
Парето при зависимых координатах выборки.
Второй путь состоит в исследовании распределения множества Парето
непосредственно в ранговой модели.
Проследим сначала, как работает первый подход - метод
геометрических вероятностей. Для того чтобы найти вероятность события v = 1,
построим две системы гипотез. Единственным паретовским элементом
может оказаться любой из элементов выборки: обозначим через Л/
событие ?/?tf(f^). При различных /события Л/ несовместны, поэтому
вероятность появления одного паретовского слоя
п
Р(?=1)= X P{v = \&ht).
/=i
Вторая система гипотез: элемент ft принял значение (х, у) х, у G [0, 1].
Но вероятность того, что (дг, у) > $у есть вероятность случайно брошенной
точке попасть в прямоугольник [О,дс] X [0,у] (рис. 6.1). Величины {у, / =
= 1,...,«; )Ф U независимы в совокупности, поэтому
Следовательно,
n l
'=1 0 0
п
П 1 1
\n~1dxdy= 2 — = —.
/=i о о /=1 л2 п
Для вычисления Р(*> = 2) потребуется сделать II предположений о
том, какие именно элементы выборки принадлежат множеству Парето,
и ввести систему гипотез о значениях их координат.
149
[ ? j
Вычисления сведутся к расчету [ ? j одинаковых интегралов (рис. 6.2)
l х2 1 У1
2fdx2f dxx fdyxf (xlyl+x2y2-xly2)n~2dy2 =
0 0 0 0
2 "г1 l
п2(п- 1) *=i к '
(Множитель 2, стоящий перед интегралом, учитывает, что, помимо случая
*i <x2t У\ >у2у есть еще и случай несравнимости, когда знаки неравенств
меняются на противоположные.) В результате получим
п к=\ к
Аналогичные расчеты для P(v = 3) приводят к формуле
о (и)з
dx.
Х[\-х! ~ Х"х2-хх
ДГ3 — Х2
2 я-3 j п-З—т |
= -2 —- 2 ———, («)з = «(«-!)(«-2).
п т = о т + 1 л = о m+fc + 2
Общий вид распределения на этом пути угадать можно, но выкладки
кажутся неоправданно громоздкими. Однако, как будет показано позже,
этот путь оказывается полезным и при анализе модели с т зависимыми
показателями, но не при выводе распределений, а для вычисления
нескольких первых моментов. Заметим, что при зависимых показателях
непосредственный расчет такого типа, по-видимому, представляет собой
единственный общий метод получения серии частных результатов.
Второй путь к решению сформулированной выше задачи состоит в
использовании комбинаторного подхода при полном переходе от
пространства X в пространство векторных ранговых оценок {1,...,и}Х{1,...,и}.
Заметим, что при этом теряется свойство независимости элементов
выборки, что несколько усложняет анализ. Так, например, на вопрос,
аналогичный отчасти рассмотренному выше, "с какой вероятностью элемент
выборки с заданными неслучайными значениями ?* = (х, у) координат
мажорирует заданное число других элементов и только их?", при первом подходе
можно ответить почти сразу. Достаточно заметить, что мы здесь имеем
аналог схемы Бернулли: вероятность успеха "брошенная точка
мажорируется точкой (х, у)" равна ху ивп- 1 испытаниях к успешных
испытаний произойдут с вероятностью ( ^ J (ху)к A - ху)п ~1 ~к. Получить
ответ на аналогичный вопрос в случае, когда заданы ранги (р, г) элемента ?,
гораздо сложнее. Кроме того, что этот вопрос представляет и сам по себе
150
п ' ' ' '
iV////////////A
ШШк
-
-
некоторый прикладной интерес1), его
можно рассматривать как вспомогательную
задачу для вывода распределения
величины*'.
Мы ответим на этот вопрос, используя
комбинаторные методы и технику
ладейных многочленов (Риордан [1]),
полезную в ряде задач анализа распределений,
встречающихся в1 теории выбора.
Поскольку любая реализация вектора р или ? в
виде перестановки о= (рг,...9оп)
равновероятна, мы можем поставить во ' Рис.6.3
взаимно однозначное соответствие каждой
реализации выборки объема п некоторую схему расстановки п не
угрожающих друг другу ладей на шахматной доске D размерности п X п.
Число Nij(k) всех различных расположений ладей, таких, что в левом
нижнем углу доски D на доске Do (рис.6.3) размерности (/ - 1) X (J - 1)
окажется расположенным ровно к ладей, будет (с точностью до
множителя 1/(я- 1I) равно вероятности того, что элемент ?: р(?) = *> KH = /
доминирует ровно к элементов выборки. Более того, поскольку поле (/, /)
уже занято, то исключив из доски D ию вертикаль и /-ю горизонталь,
получим доску D\ Число всевозможных расстановок п - 1 ладей, в
которых ровно к ладей занимают позиции на полях доски Do С D\ обозначим
ЩФ)• Значение Щ(к)/п\ и будет искомой вероятностью — вероятностью,
того, что элемент с рангами (/, /) мажорирует ровно к элементов
выборки ]?п\
Расположить заданное число к ладей на доске D' можно Mk(D0) =
= I I ( I k\ способами (надо выделить квадрат, состоящий
из пересечений к вертикалей и к горизонталей, и на нем расположить к
ладей). Производящая функция величин Мк, к GO, пу Мо = 1, равная по
определению
**-D vr/"" ** ***kZ
9 к>0
и представляющая собой многочлен степени не выше min(/ - 1, / - 1) < л,
называется ладейным многочленом доски Do. Это определение
естественным образом обобщается на доски произвольного, а не только
прямоугольного вида. В нашем случае конкретной доски Do ладейный многочлен
F.3)
F.4)
к>о\ к )\ к
Производящая функция искомых величин Щ(к)
1) Например, если принято решение браковать элементы, занявшие в конкурсе
несколько последних мест одновременно по двум критериям, то как много элементов
окажется забракованными?
151
n+1-l
n-l
n
Рис. 6.4
У//.
У//
й
ш
У///,
У///,
&
///
{//
2
<^
-*»
У/л
называется многочленом попаданий на квадратной доске размерности
{п — 1) X (и - 1) в область Do. Связь между этими двумя многочленами
дается формулой
которая означает, что для того, чтобы получить многочлен попадания
Т = 2N(k)uk, надо в ладейный многочлен R(z) вместо zk записать
(п - 1 - к)\(и - 1)к, к = 0,1,..., раскрыть скобки и перегруппировать
члены по возрастанию степени переменной и. Доказательство этой
формулы методом включения и исключения приведено в (Риордан [1]). Таким
образом,
('-'К'--1)
m > 0
(и - I)"
Вычислив коэффициент при и , получим, что вероятность
мажорирования элементом выборки с рангами (/,/) ровно к остальных элементов
m-k
(-i)
m —к
С)
С-1)?-1)
Вернемся к вычислениям появления заданного числа и тг-оптимальных
элементов в выборке объема п. Если мы знаем, что некоторый элемент f
выборки J^w) имеет ранги (/,/), то в соответствующей схеме расстановок
ладей этому событию соответствует постановка ладьи на поле (п + 1 — /,
я + 1-/).
Число п\ Р(у = 1) есть число возможных расстановок п не угрожающих
друг другу ладей на доске размерности пХп, в которой правое верхнее
поле (и, п) занято. Но число таких возможностей равно (п - 1)! И мы еще
раз вывели,что Р(у =!) = («- 1)!/и! = 1/и.
152
Для расчета вероятности P(v = 2) надо ввести гипотезы: ранги я-опти-
мальных элементов равны соответственно (/, 1) и A,/), /, / = 2, . . . , и.
Найдем вероятность того, что все остальные элементы мажорируются
этими двумя. Определение этой вероятности сводится к вычислению числа
способов расставить %п - 2 ладьи на заштрихованной части доски D2
размерности (я - 2) X (п - 2) (рис. 6.4), полученной из доски размерности
п X п исключением горизонталей и вертикалей, пересекающихся на поле
(п + 1 — /, п + 1 -/),ивсех тех полей доски ?>2, которые одновременно
выше (п -/)-й горизонтали и правее (п - /)-й вертикали (рис. 6.4).
Вероятность того, что множество Парето состоит из двух элементов, найдется
(с точностью до множителя 1/л!) суммированием чисел всех таких
расстановок по всем гипотезам {/ = 2,..., и; / = 2,..., п). __
Легко найти ладейный многочлен О(х) для дополнительной доски D2
(незаштрихованной части доски на рис. 6.4). Собственно, это уже сделано:
в формуле F.3) найо заменить / на / - 1 и / на / - 1:
('*">*'•
Воспользуемся еще раз общей теорией ладейных многочленов (Риор-
дан [1]), согласно которой (теорема 2, с. 213) если R(x) = Хгкхк и
к
Q(x) - I,qkxk - ладейные многочлены двух досок, дополняющих друг дру-
к
га на квадратной доске со стороной п, то
Ъгк(п - к)\хк = lqk(n - *)!(-*)*(! +*У " к• F.5)
Из этой формулы выводим
rk = 2 {-\)"qv ~ ( ) ,
v (n -k)l \k - v /
и, в частности,
г„= ?,{-\)vin-p)\qv. F.6)
V
Для того чтобы рассчитать число способов расстановки к неугрожающих
друг другу ладей на доске D2, в формуле F.6) надо изменить п на п - 2
./i-2\//-2\ „
и вместо qv подставить v\ I 1Г I. После очевидных упрощении
получим, что вероятность P(i, j) появления ровно двух тг-оптимальных
элементов с рангами (/, 1) и A,/)
С")
Просуммируем это выражение по всем гипотезам Нц = (p(f х) = /, r(f х) = 1,
Р(?г) = 1, *(&г) =/), /, / = 2,..., п. Каждая из гипотез принимается с вероят-
1 1
ностью — • : с такой вероятностью две ладьи занимают наперед за-
п п - 1
153
данные позиции на доске. Выпишем окончательный результат:
п п
2 2 />(!,/) =
1
п(п —
П(П - 1) 1=2
л-2
- 2 (-1)"
F.7)
Сравнение F.7) с полученным ранее значением для Р(у = 2) приводит к
комбинаторному тождеству
1
п-2
п — \ v=o
Для того чтобы комбинаторным методом рассчитать очередную
вероятность Р(у = 3), надо ввести систему гипотез о том, какие ранги получают
три я-оптимальных объекта, и найти число размещений п — 3
неугрожающих друг другу ладей на трехступенчатой доске. Это нетрудно сделать:
формула F.5) позволяет свести эту задачу к поискам числа размещений
ладей на двухступенчатой доске, типа, изображенной на рис. 6.4, т.е. к
задаче, которую мы только что решали. Вычислив вероятность Р{у = 3),
мы будем знать ладейный многочлен доски с тремя ступеньками (рис. 6.5)
и, следовательно, окажемся подготовленными к расчету величины Р(у = 4)
и т.д.
Намеченная таким образом итеративная процедура в принципе позволяет
выписать общий ответ в виде многократных сумм по всем расположениям
заданного числа несравнимых между собой точек целочисленной решетки
{1,...,«} X {1, ...,/?}•. Здесь прослеживается полный аналог с
предыдущим методом, в. котором приходится интегрировать по ступенчатым
областям, определенным координатами элементов, вошедших в множество
Парето (рис. 6.1,6.2).
Для расчета распределения числа тг-оптимальных элементов в
двумерном случае оба способа расчетов
не слишком перспективны: в
следующем параграфе общий ответ будет
получен с меньшими усилиями.
Однако каждый из методов имеет как слабые,
так к сильные стороны. И одно из главных
достоинств изложенного комбинаторного
метода состоит в том, что он применим
для досок произвольного вида и,
следовательно, для анализа широкого класса
моделей выбора с цензурированными
предъявлениями (см. Кендалл, Стюарт [1 ]).
Перейдем к рассмотрению метода, кото-
Рис 6.5 торый в полную меру используется в еле-
154
дующей главе— метода сведения задачи к исследованию подходящим
образом построенного случайного процесса (марковской цепи). Прежде
всего отметим, что при комбинаторном анализе распределения числа
элементов в множестве Парето нигде не использовался тот факт, что
расставляемые на доске ладьи были помечены номерами тех элементов выборки,
которые принимают значения рангов, отвечающие занятому полю доски.
В силу независимости элементов выборки, то, как мы их нумеруем,
оказывается несущественным. Воспользуемся этим замечанием и предположим,
что элементы выборки поступают в некоторую систему последовательно,
в порядке убывания рангов вторых координат. В момент времени t = 1
поступает элемент с наибольшим среди всех остальных п элементов
значением второй координаты, в момент t = 2 следующий по величине второй
координаты элемент и т.д. Поступившие к моменту t в систему элементы
сортируются: из них выделяется подмножество Парето я?1), к которому
относится только тот элемент из имеющихся в системе, для которого среди
всех поступивших ранее его не найдется ни одного превосходящего его по
значению первой координаты.
Рассматривая последовательность величин vt - card nt — чисел элементов
в сложившемся к моменту времени t множестве Парето - как
случайный процесс, мы сводим стоящую перед нами задачу к задаче определения
вероятности достижения процессом заданного состояния к к заданному
моменту времени t = n. Формально мы, таким образом, переходим от
рассмотрения вероятностного пространства A2,2, Р) случайных подстановок
порядка п к исследованию стохастической последовательности {vt, Sr} ? = г,
где {?;}"=! — возрастающая последовательность под-о-алгебр 2 такая,
что при любом t случайная величина vt измерима относительно а-алгеб-
ры 2Г (даже более конкретно 2, = 85 (vx,..., vf), (Роббинс, Сигмунд,
[]
Элемент, поступивший в систему в момент времени ;, может либо
пополнить сложившееся к предыдущему моменту множество Парето nt_ г,
либо оказаться мажорируемым одним из элементов, ранее поступивших
в систему. Обозначим индикатор первого из этих событий через т?г:
, если очередной элемент паретовский,
/1,есз
в противном случае.
Очевидно,
t
card*?, = *>, = 2 г?,.
т=1
Вероятность наступления события vt = 1 равна вероятности того, что
? max %х т и, значит, P(nt = 1)= 1/f, а отсюда следует, что
{if)
переходные вероятности процесса из состояния vt_x -к в момент t - 1
в одно из двух возможных состояний vt-k и vt = k+ 1 зависит только от
момента времени t, но не от того, по какой траектории процесс достиг
1) Через nt обозначается множество тг-оптимальных элементов в случайной
последовательности длины t.
155
состояния vt_ i-к. Таким образом, процесс vt марковский, а величины щ
независимы в совокупности.
Производящая функция индикатора щ
^(T?r = O)+p(r?r=l)z=l + —
Величина vn - сумма независимых величин, поэтому ее производящая
функция ipn(z) = ?,P(vn=k)zk равна произведению производящих
функций слагаемых
п / 1 z \
= П A-— + -). F.7)'
Эту формулу можно переписать в виде
z(z + l)-.. .-(z+я- 1) / л + 1+z \
^ - F.8)
\ п /
п\
или в виде
1 T(z+n)
T{z) n\B(n, z)
F.9)
где Г( *) и /?(•, •) - соответственно гамма- и бета-функции Эйлера.
Если вместо вероятностей Р{у = к) мы рассмотрим числа NHtk =
= п! /)(*> = к), то для них производящая функция имеет вид
Mz)= П (/-1+z).
Выделим в правой части множитель при t = n; оставшееся произведение
есть производящая функция чисел Nn_lk для выборки, объем которой
на единицу меньше чем п:
*,.(*) = (*-1+*)*ii-i(*). FЛ0)
Записав производящие функции фп ^ Фп-i в виде рядов с
неопределенными коэффициентами и приравнивая коэффициенты при одинаковых
степенях переменных, получим рекуррентное соотношение
^Д=(/1-1)^Л-1Д+^^1,Д-1. FЛ1)
Одна из выписанных выше формул F.7), F.8) или F.10) для
производящей функции или рекуррентное соотношение F.11) должны навести
на мысль, что выписанное распределение есть распределение абсолютных
значений чисел Стерлинга первого рода1) s(n, к), с помощью которых и
запишем окончательный ответ:
«,,2)
п\
') Число s (п, к) у по определению, есть коэффициент при пк в разложении п\ по
степеням п: п\ в 2 s(n, k)nk.
к
156
о
о
о
о
о
о
о
7
6
5
4
3
2
Рис. 6.6
Вернемся снова к прямым комбинаторным расстояниям, но уже с
позиций найденного ответа, что позволит очертить еще один подход к
исследованию вероятностных распределений, возникающих в задачах выбора, при
котором становится возможным воспользоваться хорошо разработанными
методами анализа цикловой структуры случайной подстановки. Заметим,
что точно к такому же результату приводит известная задача о
распределении числа простых циклов в случайно выбранной подстановке степени и,
когда на симметрической группе Sn задано равномерное вероятностное
распределение. Вывод распределения F.12) для циклов случайной
подстановки, предложенный в 1936 г. В. Феллером (Феллер [ 1 ]), также
основан на идее представления искомой случайной величины в виде суммы
индикаторов.
Для того чтобы выявить не только формальную, но и модельную
близость этих двух результатов, укажем, что каждая расстановка п не
угрожающих друг другу ладей на шахматной доске размерности п X л, которую
мы использовали в качестве представления реализации ранговых оценок
элементов случайной выборки, может быть взаимно однозначно
соотнесена с графиком перестановки р = (Pi, ..., р„) ранговых оценок первых
координат элементов выборки (рис. 6.6). Определим элемент р{-
перестановки р как паретовский, если р; = min { pj: j < / } , и будем писать,
что | 7г(р) | = к, если в перестановке р имеется ровно к тг-оптимальных
элементов. Результат F.12) говорит о том, что среди всех п\ элементов
симметрической группы Sn число перестановок р таких, что | тг(р) | = к
(обозначим множество всех таких перестановок S* к) равно | s(n, к) |.
Запишем ту же самую перестановку р в циклическом виде.
Перестановка р переводит первый элемент набора е = A,2, ..., п) (т.е. единицу)
в элемент рх, элемент рх (стоящий на месте Pi в наборе е) - в элемент
Pi,2- Если оказалось, что р12 = 1» то получен первый цикл: A%рх). В
противном случае элемент рь 2 набора е переходит в некоторый элемент
pt з и так далее, пока на некотором шаге величина рх д не окажется
равной 1. Если к = п - 1, то перестановка р содержит один простой циклA,
Pi» Pi, 2» •••» Pi,n - i)• Если к < п — 1, то, начиная с любого элемента,
например с минимального, не вошедшего в первый цикл, повторим процедуру
выделения циклов.
На рис. 6.6 приведен график перестановки р = D, 6, 3,1,5, 7,2), которая
в циклической записи имеет вид рс= (A,4), B,6, 7), C), E)). Обозначим
157
С(р) число циклов в перестановке р. Из результата Феллера следует, что
мощность множества перестановок порядка и, содержащих по к простых
циклов S^ k ={р:С(р) =к) равна | sn,k I- Следовательно, на одноименных
линиях уровня | тг(р) | = к и С(р) = к функции | тг(-) | и С имеют
одинаковое число элементов. И тем не менее эти функции различны, в чем можно
убедиться на примере перестановки (п, п - 1, ..., 1), для которой С(р) = 1
и I тг(р) I = п\ для перестановки, график которой изображен на рис. 6.6,
имеем п = 7 и С(р) = 4, | п(р) | = 3. Таким образом, формула F.12) дает
еще одну малоизвестную комбинаторную интерпретацию чисел Стирлинга
1-го рода.
Естественно, что коль скоро мы одно и то же множество разбили двумя
различными способами на одно и то же число попарно равномощных непере-
П л П А
секающихся классов Sn = U S*. и Sn = U S* . и | Si . | = | S° . | -
. _ I Пу К Ь- — 1 "* » »
п
= | 5 (л, ?) |, то существует довольно много, а именно П (| s (n, к) |!),
к =1
различных взаимнооднозначных отображений a: Sn -+Sn, таких, что
Vp:|7r(a(p))| = C(p). F.13)
Для любой перестановки r? Sn определим перестановку .о Ф а" (г),
тогда | тг(г) | = | я(а(р)) | = С(р) = С (а'1 (г)). Каждое из этих
отображений можно трактовать как "объяснение" того, почему распределение
числа циклов совпадает с распределением я-оптимальных точек на
графиках элементов симметрической группы.
Конечно, не всякое объяснение убедительно. Приведем одно из наиболее
удачных построений (принадлежащее А. Рудакову) отображения a: Sn ~*Sn,
удовлетворяющих условию F.13). Пусть р = (рх, р2,..., Рп) е Sn. Искомую
перестановку будем выписывать в циклическом виде. Первый цикл Сх =
= (ci, ь ci,2> — > citkl) (гДв^1,/ — различные числа из {1, ...,п}икх <п)
опредетим как цикл длины кх = п + 1 - рх. Обозначим через р'1 к-и
элемент перестановки р, обратной к перестановке р и определим /-й элемент
cXtj первого цикла Сх искомой перестановки а(р) условием cxj =
= р +.. _ . Это выражение является по существу формальной записью
определенной процедуры, которую мы проиллюстрируем на примере
построения первого цикла перестановки а(р) для перестановки, имеющей
в цикловой записи (рис. 6.6) вид рс - A,4), B, 6, 7), C), E) или рс =
= A, 4), B, 6, 7), поскольку циклы единичной длины обычно не пишут.
Начнем с крайне левой точки A, 4) графика перестановки (рис. 6.6).
Ее абсцисса равна 1. Единицей мы и откроем первый цикл: схх = 1. Найдем
точку с ординатой на единицу большей, чем у первой (уже построенной);
ее абсцисса и определит значение сХ2- (В нашем примере первая точка
находится на высоте 4 (рх = 4) и на высоте 5 имеется точка E, 5), и
поэтому cXt Y = 5.) Снова ищем точку на одно деление выше просмотренной,
т.е. с ординатой рх + 2; ее абсцисса определит третий элемент цикла clt 3.
(Имеется точка B, 6), поэтому сх 3 = 2.) Процесс закончится после
определения абсциссы точки с орринатой и, т.е. на сХп + х _ Pi. И первый
цикл перестановки а(р) будет построен. В нашем примере Сх = A,5,2,6).
158
Отметим, что, кроме рх =4, все остальные элементы pfij €Cj,no
построению не тг-оптимальные.
Исключим из рассмотрения уже просмотренные точки и повторим
процесс, если это возможно (т.е. если card Сх Фп), выписывая цикл С2.
Крайняя левая точка, с которой начинается просмотр,' с необходимостью
я-оптимальная: на графике левее ее нет точек с меньшими ординатами.
Для рассматриваемой перестановки второй ийкл оставляет элемент 3 на
месте: С2 = C). Закончив построение второго цикла, если еще остались
непросмотренные точки, повторяем процедуру, выписывая цикл С3,и т.д.:
С3 = D,7).
В выбранном примере процесс закончился построением третьего цикла -
непросмотренных точек не осталось: ас D, 6, 3, 1, 5, 7, 2) = A, 5, 2, 6),
C), D, 7), или в обычной записи а D, 6, 3,1, 5, 7, 2) = E, 6, 3, 7, 2,1,4).
В общем случае процедура остановится не позже чем на и-м шаге.
То что число циклов С(а(р)) в построенной перестановке совпадает с
числом 7г(р) тгоптимальных элементов перестановки р ясно из самой
процедуры: циклы открываются индексом одного из тг-оптимальных элементов
перестановки р, т.е. рС( { Е тг(р) все последующие элементы в цикле таковы,
что рсп >рс.. (т.е.сп <с/уирс/1 <рс//).
Воспользуемся найденным соответствием для "циклового" вывода
распределения числа элементов в множестве Парето. Подстановка а
принадлежит цикловому классу {1а*, 2а*, ..., п*п }, если она содержит а; циклов
п
длины /и 2 / а,- = и. Число С(а) = С(а\, а2, • •> <*л) элементов в цик-
/ =i
ловом классе { l*1^*2,..., па" ) равно (Сачков [2], с. 49, 172)
Производящая функция cn(z) = 2 С(а) Uzp . Число С(а) называется
цикловым индикатором симметрической группы. Если теперь положить
все zj равными одному и тому же значению z, то коэффициент при z*
будет равен cnk - числу всех подстановок, которые состоят ровно из
& циклов:
*к
{а: 2/ау = п Loij=k
но это и есть число всех подстановок, содержащих к яоптимальных
элементов спк =Nn>k. Поэтому фп(г) = XNnkzk =cn(z,z9 ...,z).
к
Установленное соответствие между числом тгоптимальных элементов и
числом циклов на элементах симметрической группы позволяет
проинтерпретировать многие результаты о случайных отображениях (Колчин [1])
в терминах теории выбора. Пусть, например, предъявление^С) на выбор
считается допустимым, если ему соответствует подстановка некоторой
подгруппы G симметрической группы, а в остальных случаях происходит
отказ от выбора. Тогда если CQ (z) — цикловой индикатор подгруппы G,
то, как и выше, производящая функция числа тг-оптимальных элементов в
предъявлении равна CG{zy z, ..., z). В частности, если G = А знакопере-
159
менная группа, то (Сачков [2], с .182)
*
\s(n,k)\+s(n,k)
2
Во многих прикладных и теоретических задачах представляют интерес
средние характеристики множества Парето при большом числе альтернатив.
Вопрос об асимптотике распределения числа элементов множестваПаретопри
возрастании объема выборки оказался решен еще до того, как стал известен
закон распределения числа я-оптимальных элементов. Числа Стерлинга 1-го
рода, через которые выражается это распределение, хорошо изучены в связи с
той ролью, которую они играют в различных других вопросах
комбинаторного анализа. Теперь выяснилась их связь и с основной моделью теории
выбора, согласно которой выбору подлежат недоминируемые решения -
множество Парето. Поэтому здесь уместно привести соответствующие
результаты об асимптотике распределения чисел Стерлинга.
Доказательство этих результатов мы, однако, опустим: его можно найти, например,
в монографиях (Сачков, [1], [2]). Но сначала отметим результат Феллера
(Феллер [1]): число подстановок, для которых число циклов заключено
между lnrt + aln1'2/* и lnw + ]31nl/2w асимптотически равно п\ [Ф@) -
-Ф(а)]. Соответствующее утверждение работы (Колчин, [1],с. 52)
состоит в том, что для числа vn циклов в случайной подстановке
вероятность
1 ( (N-lnnJ
Р(уп =Л0= г—г~, ехр
( (N-lnnJ)
[ 2\пп )
и эта оценка равномерна относительно целых N, для которых (N -
— lnw) In -7/12w лежит в любом конечном интервале.
Известны более точные асимптотические результаты при п -^°° и
1) при к = о(\пп) — формула Жордана
1 [ln/i+C]*-1
'¦*-*>" о-в. ' <бл4>
где С = 0,5772... - постоянная Эйлера,
2) при к<п- O(nq),q €@,1),п -*«>,* ->«> - первая формула Мозера
иВимана (Мозер, Виман [1])
, F.15)
где
1
В(ы,п)= f х"~1A -х)п~Чх
-интеграл Эйлера 1-го рода, Н-т- 2 I Л и со — единственное
решение уравнения '= ° \ w +' /
я-1 со
2 =*;
/ = О СО + I
160
3) при п - о(у/п) <к<п имеет место вторая формула Мозера и Вимана
* к \пк
) A+оA))- F16)
Несколько первых моментов распределения{рп(у = к)} и асимптотику
этих моментов нетрудно получить непосредственно.
Дифференцируя формулу F.9) по z и полагая z -* 1, получим, что
математическое ожидание числа элементов множества Парето равноZf^ =
= У(п + 1) + Г'A), где V(z)- логарифмическая производная Г-функ-
п 1
ции, Ъ(п + 1) = 2 — + С, Г'A) -С- постоянная Эйлера. Менее фор-
/ 1 /
мальный вывод, использует то, что число vn паретовских элементов вы-
п
борки объема п есть сумма независимых случайных величин vn = 2 г?,.
Так как каждая из них принимает значения 0 или 1, то для
математического ожидания EVn величины vn имеем
Vn
,= 1)= 2 Inn.
Второй момент:
п 2 n
Evi =E( L 17,-) = 2* Ех\ +2 Ъ
п /=1 /=1 ' i>
но 77f? = г), и величины т^. независимы, поэтому
« 1 1
Е„г=Е„ +2 2 Ег\:Ег\:= 2 —-2 2 —
J k = i к
Для дисперсииDVfj =EV* - (EVnJ аналогично получим
Y. — / —^
При вычислении моментов более высокого порядка используем то,
что сумма коэффициентов в разложении по степеням z к-н
производной производящей функции распределения дает нам k-Pi факториальный
момент:
)(^)^()|^1 F.17)
Отсюда последовательно
Вообще же, используя определение чисел Стирлинга 1-го рода
/(/-1) ... (/-* + 1)= 2 sk,vj\
у = 0
11.Ю.А. Дубов 161
имеем
к
fti = 2* Sfc p E j..
!> = 0 ' V
Обратный переход от факториальных моментов к обычным
осуществляется посредством чисел Стирлинга 2-го рода5„>л, определяемых как
коэффициенты разложения числа tn по нисходящим факториалам
п
(t)k = t (Г- 1) ... {t-k + 1), аименно t" = 2 Sn v (t) v. Таким образом,
v = 0 '
*"?% = (> 5^WfMl* FЛ8)
Умножив обе части равенства F.18) на ик/к ! и суммируя по всем ку полу-
/ (/)* // \\
чим соотношение для биномиальных моментов [ ведь = ( 1 ):
\ к\ \к)]
2
Mv>n(« 1).
Посредством формулы F.17) теперь выводим, что
к\ и
и, следовательно,
Теперь для получения асимптотических оценок можно воспользоваться
выписанными выше формулами F.14)—F.16). Подстановкой этих
выражений в правую часть соотношения F.18) приходим к общему ответу:
1 *
Обсуждая методы анализа распределения числа элементов множества
Парето на моделях со случайными предъявлениями, следует указать, что
переход к выборкам из многомерных векторов f/ = (^,..., \т), т > 2,
оказывается отнюдь не тривиальным. Уже для размерности т = 3 общий
результат, т.е. выражение распределения через известные специальные
функции или комбинаторные числа, для конечных выборок
произвольного, но фиксированного объема неизвестен. Для конкретных расчетов
распределения в основном используется метод геометрических
вероятностей (Барндорф-Нельсон, Собль [1]) и метод ладейных схем. Несколько
более замкнутые результаты получены для моделей выбора, в которых
координаты альтернатив считаются дискретными случайными
величинами (Травкин [1]), (Березовский и др. [1]), но этот круг задач здесь
нами не рассматривается.
162
Что же касается моделей с непрерывно распределенными
координатами элементов выборки, из которой предстоит сделать выбор, то в (Барн-
дорф—Нельсон, Собль [1]) предложен достойный внимания метод,
эффективный для анализа распределения числа элементов в множестве Парето
на малых выборках из элементов произвольной, но конечной размерности
[см. также (Березовский, Трахтенгерц [1]) ]. Идея метода состоит в
расчете вероятности того, что выделенное подмножество элементов выборки
Iм = (?i, ?2 ,...,?„), например первые к элементов { fr, & ,...,?*) =Гк),
не попадают в множество Парето и затем используется принцип
включения - исключения. В силу независимости координат векторов расчет
этой вероятности сводится к вычислению вероятности того, что
выделенные элементы выборки только по одной координате, скажем по первой,
мажорируются некоторыми подмножествами невыделенных элементов.
Вычленим вопрос о вычислении этой вероятности в самостоятельную
задачу: Пусть т?ь i?2,..., % - п скалярных, независимых, одинаково
распределенных случайных величин и существует плотность
распределения величины Th. Разобьем выборку rj^ = { 1?^ 1 = 1,..., п) на два
подмножества: т?^1* = т?*** U К, где т?*** = {т?,, / = 1,..., к }
считаются выделенными элементами, а в К входят все остальные п - к
невыделенных элементов. Пусть задано семейство подмножеств {Kh i = 1,..., к)
множества К. Подмножества Кг не обязательно различны, но не пустые.
Требуется рассчитать вероятность того, что каждый элемент щ G^*^
к
меньше любого элемента множества Ki9 т.е. вероятность Р { П [т?, <
/ = 1
<min{r?|r?GA:/}]} .
Для решения этой задачи введем систему гипотез о том, как
упорядочены выделенные в т? ** * элементы выборки г\м . Пусть р = (р A), р B) ,...
. .., р(к)) Е Sic — некоторая перестановка чисел 1, 2,..., к, a Sk —
множество всех таких перестановок. Гипотеза Яр состоит в том, что *7Р(!) >
к
^ ^B) ^ • • • ^ ^р(к)* Рассмотрим событие П [т?,. < min{77: 1?€ К;}] П
П Яр. Наступление этого события равносильно тому, что VP(i) <
< min{7?: т?€ ?p(i)} и т?рB) < minfr?: V^lVp^)} U #p(i) U KpB)) и
т?рC) < min{T?: r?G{r?pA) ,i?pB)} UA:pA) U Kp{2) U Кр{ъ)) итд.,ина-
че говоря,
k k
П [q. <min { т?: T7 GKf } ] = П Л,,
где
— событие, состоящее в том, что р (/) -й элемент выборки получит
наименьший ранг (займет крайне левую позицию) в упорядочении по возрастанию
определенного подмножества элементов из t?(w). Отметим, что число эле-
11* 163
ментов, которые мажорируют элемент т?р(|), равно
а в силу того, что при любом непрерывном законе распределения значений
случайных величин ц( ранги (независимых) величин распределены
равномерно, получим
П [
Теперь суммируем по всем к! гипотезам об упорядочении элементов в
?7 *** и вычисляем искомую вероятность:
Р( n[i?,<min{i?: 1€*,Ш =
= 2 П р+| U KD(n\fl.
Перейдем к расчету вероятности р (к) того, что в независимой
случайной выборке, состоящей из п m-мерных векторов, к выделенных
векторов и, может быть, другие тоже не попадут в множество Парето. Считаем,
что к < и, поскольку очевидно, что р(п) = 0. С точностью до
перенумерации элементов в выборке j?*w* = { ft,, f2,..., fw } , где f, -
= в/.i» ?/,2> • • • > ?/,m)> можно предполагать выделенными первые к
элементов, т.е. множество f*fc* = { j\, i G 1, ^}. Переобозначим остальные
/i - /г элементов, положив f = { f^ = Sk+fJ € 1, и - А:} . Тогда событие,
состоящее в том, что i-й элемент из^*** мажорируется элементом из ?,
п-к ^ „ ""
выписывается в виде U [f{. < ^ ], и надо вычислить вероятность
к п-к
р(к)=Р(П U [f,«5»-
Но '"! /~1
* я-* ^ ^
Р( П U [f. < f.]) = F/(nu [f. -< f.J) =
/ = 1 / = 1 ' ; ' 7
= E П /("u* [f, < ^]) = ? П A - "if A -/(f,< {•)))•
Здесь /(Л) - индикатор события Л: 1(А) = 1, если событие А происходит,
и 1(А) = 0 в противном случае. Для индикатора события .П [ff. < f. ]
("элемент f мажорируется любым элементом множества {$),/€./}")
164
введем упрощающее запись обозначение/( П [$f -< $\])=/,(/), и рас
кроем внутреннее произведение в последнем из выписанных выражений
для вероятности р (к) :
р(к) = Е П ["г /.(/)- 2 /#C/i,/a) +.-.].
1 = 1 / = i /,</,
Теперь видно, что еще одно перемножение приведет к выражению
вероятности р (к) через сумму вероятностей вида />(?, •< Кх, f2 < #2,..., ?* -<
где #;- С j*, и запись f;. •< Kj означает, что любой элемент ?t G Kj
мажорирует элемент f;-, т.е.
min |u , ^ 2 < min ^ 2
,..., JA г Е К), |; 2 Е А,?,
где Jf ? -- совокупность /i-x координат векторов из Kj. Так как
координаты элементов выборки — независимые случайные величины, то
k ^ m к
Р(П [f; < Kj)) =. П^ Р(П^ R/fJi < min U/M: «liM €^ }]).
Но выражение в правой части означает вероятность того, что некоторая
координата имеет наименьший ранг среди остальных одноименных
координат, а мы знаем, что распределение рангов свободно от распределения
значений координат; следовательно,
р(Д В/<*/]) = [/>( Д R/.i<min {ki:kieKl>])Г•
Теперь для того, чтобы при расчете вероятности р (к) использовать
предыдущий результат, полученный для скалярных случайных величин,
остается вспомнить, что ^ j = %к +1 х,и переобозначить tit на %t x.
Поскольку вероятность р(к) вычислена, то все готово для
вычисления распределения числа элементов в множестве Парето. Действительно,
вероятность P(N^ = п — к) того, что множество Парето я случайной
выборки m-мерных векторов состоит из п - к элементов, равна вероятности
того, что ровно к элементов выборки не будут тгюптимальными. А так как
/ п\
имеется I ) возможностей выделить непаретовскую часть выборки, то
С)
С помощью формулы включения - исключения вероятность Р(п = j[)
вычисляется через вероятности р (к): ~
-к
и, следовательно, после очевидных подстановок приходим к окончатель-
165
ному ответу, имеющему вид
(п \ * . / к\
) 2 (-1L ) p(n+j-k).
Непосредственный расчет числа я-оптимальных элементов в
многомерной выборке с помощью описанного метода предполагает вычисление
сумм, содержащих до п! слагаемых. Метод пригоден только для анализа
выборок малого объема и связан с очевидными вычислительными
трудностями. Поэтому целесообразно привести уже затабулированные
результаты (Барндорф—Нельсон, Собль, [1]), полученные для выборок,
содержащих не более пяти элементов (табл. 6.1).
В связи с указанными трудностями вполне понятен интерес многих
авторов к осредненным характеристикам, вычисление которых
значительно проще. Прибегнем к методу геометрических вероятностей, т.е. будем
считать, что имеем дело с выборкой из п точек, равномерно
распределенных в w-мерном единичном кубе Q = [0, 1] т. Пусть /у - означает
индикатор события "/-я точка выборки попадает в множество Парето"- Тогда
п
число тгюнтимальных элементов в выборке равно N*? = 2 /;.. Далее
и, следовательно, надо найти вероятность того, что первая точка попадает
в множество Парето. При гипотезе, что ^ = (хь х2,..., хт) точка fi
будет тгоптимальной, если ни одна из остальных точек выборки не попа-
т
дает в параллелепипед П [0, дг;], что происходит с вероятностью
[1 — П xv ] . Формула полной вероятности теперь дает
/ A - П хЛ П dx,- =
т л-1 /я — 1 \
П хЫхГ 2 (-1L )(*
= 1 ' ' Л = 0 \ к }
= 2 (-!)( )/
Аг =0 \ к /Q / =
Из этого результата непосредственно видна асимптотика с ростом числа
координат у элементов выборки фиксированного объема п. Другой
вывод этого результата приводится в книге (Подиновский, Ногин [1]).
Путем замены у\ = П дс7-, yt = x(, i > 2, переменных интегрирования можно
прийти к асимптотическому разложению по п:
где
а = _ с \пт~2~к tdt.
* k\(m-2-k)\ о t
166
Таблица 6.1
Распределение числа N*? яюптимальных элементов в случайной m-мерной выборке
объема п = 2,5. Математическое ожидание Еп и дисперсия Dn
Р2 A) = 2A/2)w, />2B)=1 -2A/2), Е2 =2-2(l/2)w, Я3 = 2(l/2)m - 4U/4)
P3(l) = 3(l/3)m, />3B) = 6(l/2)m-9(l/3)m; />3 =C)=1 - 6U/2O" + 6(l/3)m,
E9 = 3 - 6U/2) + 3(l/3)m, ZK = 6(l/2)m.+ ЗЦ/3) - 36(l/4)m + 36U/6) -9(l/9)w
P4 A) = 4(l/4)"\ P4 B) = 12(l/3)m - 24E/24)"' + 6(l/6)m, PA C) = 12(l/2)w -
-36(l/3)m-8(l/4)"I+48E/24)- 12A/6)"', P4 D) = 1 - 12(l/2)m + 24(l/3)m +
+ 4U/4) - 24E/24)w + 6(l/6)"\ EA = 4 - 12U/2) + 12(l/3)m - 4(l/4)w,
D4 = 12U/2) + 12Ц/3) - 116(l/4)w - 48E/24)"' + 300U/6) - 96(l/8)m +
+ 96U/12) - 144(l/9)m - 16(l/16)m
Ps A) = 5(l/5)"\ Ps B) = 20(l/4)m + 60A/6)"' - 60C/20)m - 60B/15)"* + 60G/60)"* -
- 10(l/10)m - 20U/5), Ps C) = 30(l/3)m - 120E/24)m - 210(l/6)m+ 240C/20)"' +
+ 240B/15)w- 240G/60)m + 40U/10) + 30A/5)"', Ps D) = 20П/2) - 90(l/3)m -
- 40(l/4)m + 240E/24)m + 240Ц/6) - 300C/20)"' - 3OOB/15)m + 300G/60)"' -
-50(l/10)w- 25(l/5)w, Ps E)= 1 - 20A/2)'"+60(l/3)m + 20(l/4)~ 120E/24)^-
- 90(l/6)w + 120C/20)m + 120B/15)w - 120G/60) + 20U/10) + 10A/5)"'.
Es =5-20(l/2)m + 30(l/3) -20(l/4)m+5(l/5)m, Ds = 20A/2)"' + 3O(l/3)m -
- 260Ц/4) - 240E/24)w + 1140П/6) + 120C/20)w + 120B/15)"' - 120G/60)m -
- 220Ц/10) - 10U/5) - 25(l/25)m - 900U/9) + 2OO(l/2O)w - 400(l/16)w -
- 800U/8) + 300(l/15)w - 1200U/12).
Для вычисления дисперсии распределения надо посчитать вероятность
того, что два отмеченных элемента выборки попадут в множество Парето.
Мы не будем приводить общую формулу, полученную в работе (Ива-
нин [2]), но выпишем асимптотические значения дисперсии для случаев
11 \ 2 + 6/
1
— +
к3
к = г к2 / = 1 /
§ 6.2. Распределение числа элементов
второго паретовского слоя
В предыдущем параграфе показано, что при больших выборках в
множество Парето в среднем попадает число точек в количестве логарифма
от объема выборки. Этот результат интуитивно не очевиден: если точки
равномерно и независимо бросаются в единичный квадрат, то вроде бы
в конце концов он окажется весь заполненным. Во всем квадрате, сущест-
167
вует только одна максимальная точка A.1), а все остальные уступают ей
по значению хотя бы одной координаты.
Этот факт имеет принципиальное методологическое значение для
организации процедур решения многокритериальных задач и даже для самой
постановки задачи многокритериальной оптимизации - он показывает
фактическую несоизмеримость задачи выделения множества тг-оптималь-
ных альтернатов и задачи выделения единственной "наилучшей" тг-опти-
мальной точки. Действительно, при наличии выборки, состоящей из
N = 1000000 альтернатив, количество тг-оптимальных точек имеет
порядок \nN ъ 14 (при повышении размерности пространства векторных
оценок мощность множества Парето оценивается степенью от натурального
логарифма, т.е. достаточно медленно растущей функцией от объема
выборки). Понятно, что выделить 14 наилучших точек из миллиона,
существенно сложнее, чем выделить одну наилучшую из 14. В определенной
степени это объясняет и структуру предшествующих глав, где основное
внимание уделялось именно выделению я-оптимальных точек.
Из общих соображений и в связи с тем, что в задачах принятия решений
находят широкое применение процедуры последовательного выбора,
часто приводящие к тому, что выделяются не только недоминируемые
альтернативы но и "следующие" за ними, возникает законный интерес
к вопросу: сколько альтернатив окажется выбранным на втором туре?
В конкретной модели выбора этот вопрос можно сформулировать
следующим образом: какова мощность множества Парето, выделенного из
совокупности альтернатив, из которой предварительно удалены все тг-оптималь-
ные элементы? Или иначе: как много элементов содержится в множестве
тгB) (А) = тт(А\п(А)), если множество альтернатов А случайное? Будет
ли множество тг*2) (А) в среднем больше, чем множество Парето п(А)
или, наоборот, меньше его? Что можно сказать про следующую итерацию:
тгC) (А) = тг (А\ф ^ (A) U тг (А))). Постараемся ответить на
поставленные вопросы в рамках рассмотренной модели: альтернативы оцениваются
двумя независимыми и абсолютно непрерывными показателями и
множество предъявления j;*'1* = {?,,/ = 1,... ¦> п } представляет собой
независимую выборку.
Вернемся снова к схеме последовательного поступления элементов
выборки $}п^ в некоторую систему. В r-й момент времени в систему
поступает элемент f-ro ранга по второй координате и из накопившихся
элементов (обозначим эту часть выборки через ? ^ ) выделяются все те, которые
принадлежат множеству тг/2* = тг(? *г)\#(? *r)). Совокупность случайных
величин р^ = card тг ^ образует дискретный случайный процесс с
множеством состояний {l,...,w—1}; причем в момент t достижимы
только состояния с номерами от 1 до t — 1: один из элементов (первый)
выборки f(f) заведомо принадлежит тг (f(f)) и, значит, card тг *2) < cardf(r) - 1 -
= Г-1.
В отличие от процесса vt, с помощью которого мы нашли распределение
числа я оптимальных элементов, процесс v^ не марковский и столь же
компактных результатов, как в предыдущем случае, ожидать не приходится.
Мы восстановим марковское свойство (независимость значений
переходных вероятностей от предыстории), проведя изучение процесса v\2> сов-
168
местно с другим процессом X (?), который определим следующим образом:
X@ = min { рт ,: Гт е ЯB> (f О), т < Г },
где PT t ~ Pt (^т) Р^1* элемента f E ?*я* (который поступает в систему в
момент г (и, значи?, г (f) = г) при упорядочении всех накопившихся к
моменту t элементов в системе по возрастанию значений их первых
координат. В частности, ртп = рг. На рис. 6.8 представлена одна из реализаций
О О О О
г 4
Рис. 6.8
в t
выборки $}') графиком перестановки рт(?(г)) = (Pi (')»•••» Рт@),
соответствующей ранжированию выборки$}т^ по убыванию значений
первых координат ее элементов. Величина Х(г) — ордината самой низкой
точки второго слоя.
Таким образом, от процессам р^ мы перешли к процессу к г= 0>*2\Х(г))
блуждания по целым точкам решетки {(/,/),/> 1, / > 2 } (рис. 6.9).
В любой конкретный момент времени t достижимы только состояния
И*»/). 1</<*-1,2</<я)и еще одно, выделенное, состояние @,0),
в котором процесс находится в момент времени t = 1, но может
оставаться и дольше. Если процесс находится в состоянии @, 0), то множество
тг *2' (f W) = ф. На рис. 6.9 состояния, достижимые к моменту t = 4,
помечены черными кружками.
Утверждение о том, что в момент времени t - 1 процесс к, находится
в состоянии @, 0), означает, что произошло случайное событие "все
элементы выборки jft*-1) оказались несравнимыми между собой": ?*г+|* «
= тг^'-)). При условии, что такое событие имело место, вероятность
остаться в том же состоянии и в момент t равна вероятности того, что
число элементов в я(?О) станет на единицу больше, чем в ?(f ^~"!^),
а это, мы знаем, происходит с вероятностью 1//: координата %it должна
быть больше любой другой %Хт, т< t.
Событие p(f г) = к означает, что ровно к — 1 величина из{ {ь/, i = 1,...
.,., t) оказалась больше, чем %х t, а остальные — меньше. Поскольку
величины ?ь/, i = 1,..., г, независимы в совокупности и одинаково
распределены', то при любой гипотезе о том, как упорядочились значения,
принятые величинами $liT>r€l,...,f-lf вероятность того, что р, (? г) «
= А:, будет одной и той же, равной 1/г. Этим положением о том, что
значение ранга pf(fr) не зависит от распределения рангов pr-1(fr), r Ф t,
Ш
t-1
Рис. 6.10
мы неявно пользовались и ранее, например, при рассмотрении ладейных
схем. Оно существенно используется и в дальнейшем.
Первый вывод, который теперь можно сделать: из состояния @, 0)
в момент t — 1 процесс nt может перейти в любое из состояний @, 0),
О, /), / G 2, п с вероятностью 1/г, поскольку при к > 2, pt(?t) = X(f)
<)(О
Р(к{ = @,0)|к,_!= @,0)) = j.
Допустим, что произошло событие кг = (/, /) Ф @, 0): "в момент t - 1
процесс находился в одном из возможных состояний". Тогда, если
Pt($t) = 1> то поступивший элемент пополняет множество Парето
полной выборки f t_k и ранги остальных элементов рг(?г), т ? {1,..., t — 1}
становятся на единицу больше, чем были в момент t — 1: pr(fT) =
= Pf_i(?r) + 1. На единицу увеличивается и номер состояния процесса
Х(г): Х(г) = Х(г - 1) + 1 =/ + 1. Процесс с вероятностьюP(pr(ff) = 1) =
1
= — переходит из состояния (/, /) в состояние (/, / + 1). Графически
такой переход можно проиллюстрировать так: пополним график
реализации выборки ?f_j, например, такой, как на рис. 6.10, еще одной
вертикальной линией справа (Г, •). Горизонтальные деления (•, р) р = 1,...
..., t - 1 разбивают эту линию на t отрезков {Aki к = 1,...,/}. С
событием pf (f t) = к свяжем появление точки в середине /г-го, считая снизу
вверх, отрезка.
170
Если перенумеровать значения pt_x (fr) так, чтобы были перечислены
все точки:
(P,_i(fr), если pt_x($T)< к и тФк,
P,-i(fT) + 1> если рГв1(Гт)>*.
к, если т = fc,
то мы получим график перестановки соответствующий выборке в
момент t. При появлении точки в отрезке Ai процесс переходит из
состояния (/',/) в состояние (/,/ + 1) : число элементов во втором слое остается
тем же самым, но ранг самого низкого из них увеличился. Появление
точки на заданном отрезке Ак происходит с вероятностью 1//. Но если
точка попадает в один из отрезков Ах € {А*, 2 < к < X(f-l) = /}, то
она станет в начало второго слоя, т.е. f, Е я/2^ и Pr(fr) = МО, а
процесс из состояния (/,/) перейдет в состояние (/ + 1, X). Наконец,
появление точки в любом из оставшихся t — X отрезков { Ак, к >/} оставляет
процесс Kt в том же состоянии, в котором он и был, что происходит с
вероятностью (t - j)/t.
Подведем итог. Процесс nt = (v'f, \(t)) есть неоднородная по времени
марковская цепь со множеством состояний {@,0) U {(/,/): />!,/> 2}.
Отличные от нуля переходные вероятности цепи задаются следующими
соотношениями:
а) для переходов из нулевого состояния
P(Kr = @,0)Ur^1 =@,0)) = y, F.19)
^(^ = (l,/)Ur-i=(O,O) = y, / = 2,...,f; F.20)
б) для переходов из любого отличного от @,0) допустимого состояния
i =D/)) = — » F.21)
1=а/))=у- /*0, Х = 2,...,/, F.22)
(//))
F.23)
Вероятность того, что число' элементов в множестве тг^2) равно к, есть
вероятность попадания процесса Kt к моменту t = n в множество
состояний {(к, /), / = 2,..., п). Обозначим через Л,/(О вероятность события
*г = О',/); тогда
Согласно общей теории марковских цепей задачу можно считать
решенной: остается занумеровать счетное множество состояний процесса
числами натурального ряда, вместо системы равенств F.19)—F.23) выписать
171
привычную матрицу переходных вероятностей и привести ответ в виде
произведения п последовательных переходных матриц, умноженного на
вектор начальных состояний. Однако если мы хотим вместо общих
рекомендаций попытаться найти конкретный ответ, то этим путем идти
не следует.
Воспользуемся следующим построением. Из соотношений F.19) и
F.20) с помощью теоремы о полной системе гипотез (Феллер [1]) (в
момент t - \ процесс находился в каком-нибудь фиксированном состоянии)
выводим
—¦ *u<t-о - jpu-1(' - о ¦ тг • F-24)
Здесь использовано то, что
Для / > 1 из соотношений F.21), F.22) аналогично получаем
t-f 1 1 *+W
t г m=i F.25)
Начальное условие для второго из выписанных рекуррентных уравнений
определяется как решение первого уравнения.
Предположим, что мы каким-то образом определили 0' - 1)-ю строку
матрицы iPtiif - 1I1; тогда в правой части F.25) будет стоять
известная функция и для определения вероятностей Pfjif) предстоит решить
разностное уравнение типа F.24), но с другой правой частью. Замена
#//@ = (Ofpij(О. (О/ = r(f - 1) • «. • ••('-/ + 1) сводит уравнения
F.24) и F.25) к виду
л^^-О^ —]—¦ > F.26)
Nij-dt - 1) = ' г"' ^V1;w(r~1} . F.27)
Сходство левых частей этих уравнений наводит на мысль рассмотреть
вспомогательное уравнение
Nj(t)-Nf(t - 1) -Nj-iU - 1) =e/(r), F.28)
в котором величина a^(t) считается заданной. Область значений
параметров / и г, в которой величины Nj(t) отличны от нуля, зависит от
параметра /.' Решение вспомогательного уравнения ищется в "стандартной
области" suppNj(t) = l(t,j): t> j > 0}, вне которой величины Nj(t) = 0.
Обозначим через Ф(г, и) двойную производящую функцию чисел Nj (t):
t
Ф(г,1/)= 2 2 Njit^u*. F.29)
f=0 /=0
С помощью уравнения F.28) ее можно записать в виде Ф(г, и) =S{ +52 +
172
+ А, где А = A (z, и) - производящая функция заданных чисел ду- (г) и,
следовательно, известный ряд, а
t
5=2 2 Nj(t — 1)г*и* = гФ(г,и),
1 г=о /=о
г
S2 = 2 2 NiX(t — l)z*uJ =гиФ(г, м).
Поэтому
<D(z, м) = : . F.30)
1 - z - zu
Поскольку
1 - S /г
\ -Z-ZU f = 0 /=0\/>
мы видим, что числа Nj(t) получаются в результате двумерной свертки
по области t>j чисел дД/) и биномиальных коэффициентов
*~Т)ар{т). F.31)
j-v J
Здесь суммирование ведется по всем значениям г и v, для которых
выражение, стоящее под знаками сумм, имеет смысл.
Величины Nxj (r) в уравнении F.28) отличны от нуля в области t>j>
> 2; сделаем замену, положив Nj (/) = jVb/-+2 (t + 2), после чего уже можно
воспользоваться результатом F.31) и выписать решение уравнения F.30):
Nuj(t) = 22/ [ " Т " 2) —Ц- , F32)
rv\]-v-2j (t-v)\
Замена к = г — v и перемена порядка суммирования после очевидных
упрощений дают
'-/ 1 /1 - 1 - к \
Nuj(t)= 2 — ( ). F.33)
Перейдем к уравнению для чисел N{j(t)9 которые отличны от нуля в
области ((/,/):/ + 1 - i > }> 2}. Носителем функции Mtj(t) =
= ^/,/+2 (t• + i + 1), определенной на множестве целых точек, будет
"стандартная" область {(г, /): г > / > 0}. Чтобы для чисел Mtj(t) выписать
рекуррентное соотношение, в формуле F.28) надо заменить t на t + / + 1
и / на / + 2. После таких замен в левой части уравнения F.28) сменим
индекс суммирования: m = д + 2, что приведет левую часть к виду
* ^/-1 а@
где (а)д = ( 1 • /?! - нисходящий факториал (Риордан [1]). При / = 2
р \и/
173
в числителе выражения, стоящего под знаком суммы, появится величина
Мг и =NX Д+2(Г + 2) = 22 ( Г ) — • F.34)
т v \\1 — V ) (Т — v)\
Теперь все подготовлено для применения формулы F.31). Выпишем
результат:
г / г
:т?о Л ?о — — " Г М'-1>"(Г)- F35)
Ясно, что итерациями по / можно в виде соответствующей многократной
суммы выписать и окончательный ответ. Напомним, что вероятности
событий "во множестве я*2^(?^) = 7r(f ^\^(f ^)) содержится ровно /
элементов" выражаются через числа NiyJ- (n):
р№ = о = Д -~-^./(") • F-36)
Система соотношений F.34) F.36) дает достаточно простой алгоритм
вычисления вероятностей, и с этой точки зрения задача доведена до того
же уровня, что и задача вывода распределения множества Парето: числа
Стерлинга проще посчитать по рекуррентным формулам, чем найти
справочник, в котором они затабулированы до нужного значения. Но именно
благодаря им возможно было провести полный асимптотический анализ
распределения. К сожалению, из-за того, что структура процесса v^
сложнее, такого наглядного выражения распределения через дискретные
специальные функции не получается.
Теперь рассмотрим задачу оценки математического ожидания. Так
же как это было сделано для процесса vn9 определяющего число я-опти-
мальных элементов выборки, случайную величину v^, можно
представить в виде суммы величин т?г — индикаторов принадлежности элемента,
поступившего в систему в момент t к второму слою (к множеству
1, если j
r=i ' 10 в противном случае.
Индикаторы т?г, t = 1,..., w, — зависимые случайные величины, поэтому
при выводе распределения вероятностей Р(у^ - 0 и был введен
вспомогательный процесс А (О. Но для вычисления математического ожидания
? B) это несущественно. Математическое ожидание суммы случайных
величин равно сумме математических ожиданий, значит,
п п
Rv&) - 2 Er\t = 2 P(tj =fl).
Если f > 1, k>lmfit(it)=k9 что при любом к происходит с вероятностью
1/?, то элемент ff принадлежит множеству я^2^(? *')) (а так}как ни'один
из последующих элементов не может мажорировать предыдущий, то - и
174
множеству пB) (? {n))) в том и только в
том случае, когда все поступившие в
систему Д° момента t элементы, которые
превосходят элемент ? t по первой
координате, являются элементами множества
^d(fl))# Поскольку мы знаем, что
Pt(it) =*> т0 имеется ровно к -• 1
элементов (рис. 6.11). Обозначим их ?A),
? B),. ¦ •> ?(*—!)> считая, что
нумерация соответствует порядку поступления
в систему: если f (/) = ?г, и ?(/ + 1) =
= f,/+1,TO/,- < ti+i. Положим$(к) = ?r.
Пусть J(l), *B)....,*(*-!)¦ *(*) "
значения первых координат элементов
)f )
Рис. 6.11
р р
f A), ? B) ,...,?(*- 1), f (*); тогда мы можем записать
(а) 1
= min
(г)
Если.р(?г) = 1, то при t Ф 1 заведомо r\t = 0: элемент ?t e ?r(f(f >). Таким
образом, при Г =?1
In 1
F37)
f *-* fit — IV
Поскольку при Г = 1 в системе имеется только один элемент, то Р (т?! = 1)
= 0, и, значит,
r=2 f дг=1 А:!
Сменив порядок суммирования, запишем:
и так как
¦г1.-!,
Л!
то
т.е. при больших выборках во втором паретовском слое приблизительно
вдвое больше элементов, чем в первом.
175
Эту же схему расчета математического ожидания можно применить
и для выяснения среднего числа элементов в третьем паретовском слое,
т.е. в множестве я<3>(Г<я>) = Я(Г<я>\и У (?<">)), и в слоях более
высокого порядка, но при одном условии: надо знать, с какой
вероятностью вся выборка расслаивается на заданное число слоев. Так, поняв,
что система величин f A),..., f (к - 1) независима от ограничений ? (к) <
< ИО» 1 = 1, ...,*- 1 при выводе математического ожидания Evn мы
могли бы сразу воспользоваться тем, что в выборке из к — 1 элементов
вероятность события f (*~*> = я^*)) равна 1/*!, и выписать
соотношение F.37).
Введем в рассмотрение случайную величину ?„, равную числу паретов-
ских расслоений в выборке ?*"*, которую определим условием: еслр
?„ = /,,то
где
С помощью этой случайной величины для математического ожидания
величины vjf) числа элементов множества я^) (f ^w)) мы можем записать:
EpW= Z — 2 />(?*=/)= 2 />(!*=/) Z —.
Например, ниже будет показано, что математическое ожидание числа
элементов в третьем паретовском слое
= 2
-1
к\
У -1
где перед второй суммой стоит вероятность расслоения выборки ровно
на два множества: Г(#1) = *(t(ll)) U я<2>(Г<й>).
VvN
^o
>0
Рис. 6.12
t-t t
176
•-с
fmmmmmm
\
слой
2-й слой
J-й слой
Рис. 6.13
Прежде чем перейти к обсуждению вопроса о числе паретовских
расслоений случайной выборки, скажем несколько слов о близких по типу
вопросах, которые решаются очерченным выше методом. Задача расчета
распределения числа элементов второго паретовского слоя была сведена
к исследованию неоднородного марковского процесса блуждания по
двумерной целочисленной решетке. Незначительными изменениями
соотношений F.24), F.25) можно прийти к модели процесса,
перечисляющего число точек, попадающих в один из двух первых паретовских
слоев.
Для расчета распределений точек во множествах тг^(?*"*), />2, уже
нужно ввести процесс К/, состояния которого описываются /-мерными
точками: числом элементов вя^(|^)и "началами" паретовских слоев,
начиная со 2-го и до /-го включительно. Мы говорим о "началах" множеств
(() в том смысле, в котором рассмотренную выше величину
: ?r€7><2>(r(f)), т? t) (рис. 6.12)
можно считать "началом" второго паретовского слоя, сложившегося к
моменту t.
Действительно, рассмотрим график "типичной" реализации рангов
элементов случайной выборки (рис. 6.12), где предполагается, что
элементам множества тг^(?^) соответствуют целые точки плоскости,
попадающие на /-ю штриховую либо сплошную линию (сплошной линией
выделены места точек третьего слоя). При различных предположениях
о том, в каком из t отрезков А/, / = 1,..., г, окажется очередная точка,
можно почти непосредственно выписать вероятности перехода процесса к&
из состояния (^,Х1,Х2) в момент t — 1 в
достижимые состояния к моменту t (рис. 6.13),
Любая из стрелок, кроме петли, имеет вес
lit. Но процесс еще должен "добраться" до
трехмерных состояний — выйти из множест-
ва я <2> (f <">) (рис. 6Л4, 6.15). На диаграм- \
мах переходов рис 6,13—6.16 все стрелки — \
весом lit.
Но и состояния вида (О, 1, 0) достигают*
ся не сразу: в выборке f^""*1* может
сформироваться только один слой X ^ =
= тг (f <f-l)) состояние @, 0, 0) (рис. 6.16). Рис. 6.14
\
12. Ю.А. Дубов
177
/-а слой
2-й слой
Рис. 6.15
J-й слой
И этим все переходы, происходящие с отличной от нуля вероятностью,
исчерпаны. Вследствие этого можно выписать три системы рекуррентных
уравнений для расчета вероятностей распределения числа элементов
выборки в третьем паретовском слое.
Если еще больше детализировать состояние процесса, т.е., помимо
величин \ (/), ввести величины /i/ (О, равные числу элементов в тг О (f (r)),
то получим процесс, определяющий совместное распределение
элементов выборки ?^ по / паретовским слоям. Переходя от процесса
*г = (*>*, МО) к процессу 0t *= (Mi(O> /*г@> МО) и обозначив через
Pt (x, у, /) вероятность события "во множество Парето попало х
элементов IX i(t) = х, во второй паретовский слой - у элементов ц2 (О = У> и он
начинается значением Л(/) = /", мы вместо системы уравнений F.24),
F.25) получим
t-y 1 f+l-/
Pt(x.y,O= Рт_г(х-\9у,1-1)+— 2 />,-!(*,;>>-1,/),
t t j=y
Подводя итог обсуждения марковского подхода к анализу процедуры
последовательного выбора тг-оптимальных совокупностей, констатируем,
что подход достаточно эффективен с алгоритмической точки зрения: вывод
распределений сводится к расчетам по рекуррентным формулам. Однако
при попытке получить замкнутые результаты для математического
ожидания числа элементов нескольких первых паретовских слоев мы
столкнулись с задачей оценки числа таких слоев. Анализу этой задачи будет
посвящена следующая глава. Теперь же отметим, что уже из полученных
результатов можно сделать вывод о том, что переход от процедуры паретовского
выбора к выбору альтернатив из* нескольких первых паретовских слоев
принципиально не изменяет ситуацию: при
больших предъявлениях на выбор число
выбираемых альтернатив оказывается сравни-*
мым с логарифмом от объема предъявления.
Но это означает, что вероятностная модель
плохо отражает ситуацию, которая возника-
N ет при практических применениях процедур
^ выбора паретовского типа. Практики
испытывают затруднения от того, что как пра-
4———
i/ i \
/ ! \
Рис 6.16
178
вило, число тг-оптимальных вариантов оказывается недопустимо большим.
Серьезным ограничением описанных моделей можно считать допущение
о независимости координат элементов выборки. Но, как следует из
результатов работы (Кукса и Шор, [1]), к логарифмической оценке числа па-
ретовских элементов приводит и анализ модели с зависимыми, нормально
распределенными показателями качества альтернатив.
Рассогласование с опытом решения практических задач можно
приписать тому, что, по-видимому, предъявляемые на выбор альтернативы явно
или неявно цензурируются. Рассмотрим случай, когда с каждой
альтернативой связывается затрата некоторого ресурса или когда за качество
альтернативы (за высокие значения показателей) надо платить. И выясним
к каким результатам приведет вероятностный анализ модели паретовского
выбора, если предположить, что дорргие альтернативы заранее исключены
из предъявлений на выбор.
Вычислим математическое ожидание числа паретовских элементов
в выборке из п m-мерных точек, равномерно и независимо друг от друга
распределенных в той части первого ортанта пространства признаков,
которая находится под плоскостью ах = с. Величина д?,- интерпретируется как
стоимость альтернативы ?. Предполагается, что если альтернатива
оказывается дороже пороговой цены, то она исключается из числа
предъявляемых на выбор.
В предыдущем параграфе мы по существу вывели формулу
где интеграл — вероятность того, что отмеченный элемент выборки
окажется яоптимальным, mes?2 — нормирующая константа, у(х) — мера той
области пространства признаков п, любая точка которой покоординатно
болыце отмеченного элемента ^выборки (в задаче без ограничений на
стоимость альтернатив mes?2= I, y(x) - Пх,). Не ограничивая общности,
т
можно считать, что константа с = П (/я,-I/. Величина у(х) есть объем
i
доли первого ортанта, расположенной под плоскостью а(у - х) = с, где
у — текущая точка плоскости, ах- фиксированный вектор оценок
отмеченной альтернативы. С учетом выбора значения константы с находим, что
ах\т
(-т)"
EN"=n f (i-(i-—)m) Adxh
\х: х >О,ах<с}\ \ С / I
После замены переменных интегрирования
интеграл приводится к виду
и
12* 179
где
U={u\O< ит< ит„х< ..< их< 1),
и, следовательно, его можно свести к однократному интегралу
EN™=nmf (I -um)n-x(\ -u)m~ldu.
о
Если теперь разложить биномиальный множитель A - и)т~1 и сделать
еще одну замену и = t ~m, то нетрудно прийти к ответу:
™ . n\T(klm)
EN% =- 2 (-1)* ±LJ- -
*=i Г(п + к/т)
Это точная формула для математического ожидания числа паретовских
элементов в случайной выборке, но записанная в виде асимптотического
разложения при п ->°°. И поскольку при больших значениях п
г[п+—j
то, ограничившись первым слагаемым в сумме, получим EN™ ~
Таким образом, число тг-оптимальных элементов в случайной выборке,
цензурированной линейным ограничением, в среднем имеет порядок
арифметического корня от числа предъявленных на выбор альтернатив. В
частности, для двумерных выборок EN2n ^ у/тш. Для больших выборок
асимптотический результат качественно не изменится, если учесть большее число
линейных ограничений или гладкое нелинейное ограничение на область
допустимых значений альтернатив и даже если ослабить предположение о
равномерности распределения точек в пространстве признаков.
Глава 7
АНАЛИЗ РАСПРЕДЕЛЕНИЯ ЧИСЛА СЛОЕВ В ВЫБОРКЕ
ПРИ ПАРЕТОВСКОМ РАССЛОЕНИИ
§ 7.1. Паретовское расслоение и задача декомпозиции
частичного порядка
В предыдущей главе была поставлена задача паретовской
классификации. Для оценки распределения элементов случайной выборки по паретовс-
ким слоям потребовалось оценить число слоев, на которые разбивается
предъявленное на выбор множество альтернатив. Число паретовских
слоев — важнейшая характеристика модели выбора. Ведь &-й слой - это
совокупность тг-оптимальных вариантов части выборки, которая остается
после удаления из нее элементов, принадлежащих к - \ предыдущим
слоям. Иными словами, это то, что будет выбрано на к-и итерации процедуры
паретовского выбора.
Все элементы одного и того же паретовского класса несравнимы между
собой. Однако если их считать эквивалентными (f ~ ?', если f G тг**) и
f' G nW) для некоторого к, то вся выборка окажется линейно квазиуиоря-
доченной: f > f' тогда и только тогда, когда ? G ?<*>, f' G тгA) и к < /.
Естественно, что разбиение выборки на линейно упорядоченные классы
несравнимых элементов можно, а зачастую и просто необходимо
проводить не на основе модели паретовского выбора, а по какому-нибудь
другому принципу (см. Дополнение при корректуре). Иногда полезно относить к
fc-му слою те элементы, каждый из которых мажорируется ровно к - 1
элементном той же выборки, и допускать, что некоторые из слоев могут
оказаться пустыми (Травкин, Казанский, [1]), либо вместе паретовского
выбора рассматривать одну из его модификаций (Глущенко, [1]), что
повлечет и другую классификацию альтернатив.
Здесь существенно различать случаи, в которых классификация
элементов выборки проводится на основе только порядковой (ранговой)
информации о критериальных оценках альтернатив, и случаи классификаций
с пороговыми правилами, когда принадлежность к определенному классу
обусловливается значением критериальных оценок альтернатив, а не только
рангами. Каждая из классификационных процедур может рассматриваться
как способ аппроксимации частичного порядка линейным квазипорядком,
т.е. как способ сведения задачи выбора к оптимизационной проблеме. Как
отмечалось в главах 1 и 3, при обсуждении задач многокритериальной
оптимизации частичная упорядоченность альтернатив, индуцированная
частичной упорядоченностью точек пространства векторных оценок, часто
интерпретируется как модель системы предпочтений. Причем сама модель
многокритериальной оптимизации вводится для описания задач с
неопределенностью целей, в которых невозможно точное априорное определение
линейного упорядочения альтернативных вариантов. Правила выбора
отражают ту степень неопределенности, которая сохраняется при формали-
181
зации задачи, классификационные процедуры - степень формального
доопределения задачи, обеспечивающую линейную упорядоченность классов
несравнимых альтернатив.
Паретовская классификация оправдана в моделях, в которых
выбранная совокупность тгюптимальных (и, следовательно, несравнимых между
собой альтернатив) выводится из системы, в которой эти альтернативы
сравнивались с другими и были выбраны. Для принятия решения о
включении одного из оставшихся в системе элементов в очередную группу
наилучших альтернатив не имеет смысла "вспоминать" о том, какие позиции этот
элемент занимал в ранжировках по критериальным оценкам в
первоначальной совокупности предъявленных на выбор альтернатив.
В этой главе процедура паретовской классификации исследуется в
рамках вероятностной модели с двумя независимыми критериями
посредством введенной ранее схемы последовательного поступления элементов
выборки в блок фррмального выбора. Таким образом, в основу исследования
положен метод построения вспомогательного случайного процесса, к
изучению которого и сводится задача оценки распределения числа классов
при паретовском расслоении выборки. Однако, прежде чем перейти к
детальному рассмотрению метода, целесообразно осветить еще один аспект
проблемы, связанный с другим подходом к анализу недоопределенных
оптимизационных задач.
Поскольку вся исходная информация, на основе которой предстоит
сделать выбор оптимальных вариантов, сосредоточена в системе
предпочтения, то степень неопределенности проблемы можно охарактеризовать как
степень отличия отношения предпочтения от линейного порядка. В
частности, относительно подмножеств линейно упорядоченных по предпочтению
альтернатив неопределенности в выборе лучшей из них не возникает.
Поэтому полезно попытаться провести декомпозицию частичного порядка,
которым моделируется отношение предпочтения в задачах многокритериальной
оптимизации, на несколько линейных порядков с "перекрестными"
связями. Другими словами, ставится задача о покрытии графа частичного
порядка минимальным числом цепей. Эта задача имеет и самостоятельное
значение для ряда других вопросов теории выбора, не связанных с
многокритериальной постановкой (Алескеров и др. [1 ]).
Покажем, что в случае двух критериев вопрос об оценке минимального
числа максимальных цепей, покрывающих граф частичного порядка
случайной выборки, равносилен задаче об оценке числа слоев при паретовской
классификации.
Напомним, что линейно упорядоченное подмножество В множества А
называется максимальным (или максимальной цепью), если к нему нельзя
добавить ни одного элемента из дополнения А\В, не нарушив свойства
линейной упорядоченности. В графе частичного порядка, из которого
удалены транзитивно замыкающие дуги (диаграмма Хассе, Горбатов [1]),
таким подмножествам соответствуют максимальные цепи. Напомним, что
мы рассматриваем конечные предъявления (выборки) и, следовательно,
конечные графы частичного порядка. А в таких графах каждая цепь имеет
максимальную и минимальную вершины.
Число максимальных линейно упорядоченных подмножеств конечной
выборки, не имеющих общих элементов и в совокупности содержащих
182
всю выборку, не может быть меньше, чем максимальное число взаимно
несравнимых элементов выборки: ведь никакие два несравнимых элемента
не могут принадлежать к одному и тому же классу линейно упорядоченных
элементов. Их не может быть и больше, так как это означало бы, что
существует некоторая цепь Т - максимальное линейно упорядоченное
подмножество, - не содержащая элемента из некоторой максимальной
совокупности взаимно несравнимых элементов. Но тогда минимальный
элемент m этой цепи несравним ни с одним из максимальных элементов цепей,
содержащих по элементу из Т. Поскольку эти максимальные элементы
несравнимы между собой (максимальную цепь нельзя продолжить), то
вместе с элементом m мы получаем множество несравнимых элементов,
содержащее на один элемент больше, чем множество Т. Значит, вопреки
предположению, множество Т не максимальное. Таким образом, мы доказали,,
что число максимальных линейно упорядоченных подмножеств выборки
равно числу элементов максимального подмножества взаимно
несравнимых альтернатив выборки.
Если f = (?1, ?2) и f' = (?1, ?2) - две точки (два элемента выборки),
принадлежащие множеству Г несравнимых между собой элементов, то либо
%\ > ?i и Ь < %\, либо ? 1 < %\ и ?2 > %\. Изменим направление одной из
осей координат на противоположное. Это приведет к изменению знаков
неравенств, которые связывают соответствующие координаты элементов
выборки, на противоположные. В результате любые два элемента множества Т
окажутся сравнимыми между собой. Если множество Г было
максимальным подмножеством взаимно несравнимых элементов выборки, то теперь,
после смены порядка (на одной из осей) на противоположный, множество
Т переходит в класс максимальных линейно упорядоченных элементов
выборки; более того, из всех таких классов в классе Т содержится
наибольшее число элементов. Отметим, что в классе линейно упорядоченных
подмножеств выборки, ни одно из которых нельзя дополнить еще одним
элементом, не нарушив линейного упорядочения, помимо множества Т могут
оказаться и другие равно мощные Г подмножества выборки. Сейчас
существенно лишь то, что мы установили взаимно однозначное соответствие
(обратный переход очевиден: надо снова поменять направление одной из осей)
между каждой реализацией, которая допускает декомпозицию частичного
порядка на заданное число максимальных линейно упорядоченных
подмножеств, и реализацией, разбивающейся на то же самое число
последовательных паретовских подмножеств. Действительно, каждый элемент класса
линейно упорядоченных альтернатив принадлежит ровно одному классу
подмножеств паретовского расслоения выборки. Следовательно,
распределение числа паретовских слоев совпадает с распределением числа элементов
в максимальном подмножестве взаимно несравнимых элементов выборки
или, что то же самое - с распределением числа элементов в максимальной
антицепи соответствующего графа частичного порядка.
Как будет видно из дальнейшего, связь распределения числа паретовских
слоев с конструкциями теории графов значительно глубже: можно найти
связи с задачами перечисления бинарных деревьев, транзитивных
ориентированных графов, плоских деревьев с висячими корнями порядка п и
неассоциативными произведениями с п сомножителями.
183
§ 7.2. Марковская схема расчета числа слоев
Паретовские слои, или классы, определялись индуктивно. К первому
слою относятся все парето-оптимальные альтернативы - немажорируемые
элементы выборки; /-и паретовский слой определяется как множество
Парето из выборки, из которой удалены все элементы, принадлежащие
первым у — 1 паретовским слоям:
Для расчета распределения вероятностей того, что в случайной независимой
выборке двумерных векторов с независимыми координатами реализуется
заданное число непустых паретовских слоев, воспользуемся той же схемой
последовательного поступления элементов, которая была описана в главе 6.
И так же, как и раньше, постараемся найти вспомогательный марковский
процесс такой, чтобы событие "выборка расслоилась ровно на к
паретовских классов ?**' = U
было равносильно попаданию процесса к
моменту времени t = n во вполне определенное множество состояний.
Допустим, что к моменту t — 1 выборка расслоилась на к - 1
паретовских классов. Нарисуем график "типичной" (к - 1)-ел о иной реализации
(рис. 7.1) и посмотрим, что произойдет в следующий момент времени.
Элемент, пришедший в момент /, может занять одну из t позиций в
серединах отрезков Ai,A2,...,Af-i,Af. Заняв первую позицию, он тем самым
"подстроится" к 1-му паретовскому слою - войдет в множество Парето.
Заняв же 2-ю, 3-ю и т.д. позиции вплоть до позиции с номером Х2,
поступивший в момент t элемент "подстроится" или "начнет" 2-й паретовский слой.
Число элементов во 2-м слое увеличится на единицу. Число слоев сохранит-
t-i
Рис. 7.1
184
Состояние процесса хо)
в момент t-1
Элемент занимает
1-ю позицаю
длемеит занимает и-ю
позицию и начинает
2-й слой
Элемент начинает
{к-1)-й слой
Рис. 7.2
ся тем же самым. Бели поступающий в момент t элемент занимает одну
из позиций с номерами от Х2 + 1 до Х3, то он подстраивается к 3-му слою.
В остальных слоях число элементов остается неизменным и число всех
слоев будет тем же самым. Вообще, число слоев изменится только в тех
случаях, когда элемент, поступающий в систему в момент /, занимает одну
из позиций с номерами \к + 1, X* + 2,..., t. В этих случаях будет ровно на
один слой больше, причем последний слой будет состоять только из одного
элемента, поступившего в систему в момент t.
Теперь ясно, какой процесс положить в основу исследования
распределения интересующей нас величины - числа элементов в паретовском
расслоении случайной двумерной выборки. Это процесс к( •) блуждания по
множеству конечных строго возрастающих последовательностей
натуральных чисел
Процесс к( •) находится в состоянии X = (X!, Х2, ..., \к) в том и только
том случае, если сформировавшаяся к моменту t>\k выборка
разбивается ровно на к паретовских классов и nt -й класс, или слой, "начинается"
элементом ранга Л/. В момент t процесс равновероятно занимает одну из t
возможных позиций. И если в предыдущий момент / - 1 он находился в
состоянии X = A, Х2, ..., X*), и элемент, пришедший в систему в момент
времени г, занял 1-ю позицию, то в момент t процесс к перейдет в состоя-
ние к (г) = A, Х2 + 1, X з + 1,..., X* + i).
Имеем
РA,Х2
G.1)
Пусть / — некоторое число, большее или равное 2 и не превосходящее к - 1.
Если элемент, поступивший в систему, занимает одну из позиций с номером
X/ + 1, X/ + 2,..., Х/+1, то процесс к( •) из состояния X переходит в со-
185
стояние
1Д2,... Д/,/иД/+1 + 1....Д*+ 1 и
Х/ + 1,...,Х/ + 1> . G.2)
Наконец, если этот элемент займет одну из позиций с номером
Xfc + 1, Xfc + 2, ..., f, то процесс к( • ) перейдет из состояния Х^ в
состояние A,Х2,...,Х*.м).и
1
{X* + 1 /¦}.
G.3)
Схема переходов отражена на рис. 7.2, где всюду X 4 = 1, диаграмма,
отражающая процесс блуждания к( •) по точкам целочисленной решетки,
приведена на рис. 7.3.
Теперь можно получить более наглядное описание интересующего нас
марковского процесса со счетным множеством состояний, чем то, которое
дается диаграммой переходов на рис. 7.3. Дело в том, что при подходящей
нумерации состояний процесс к( •) удается описать семейством
переходных матриц, имеющих четко выраженную блочную структуру. Из
всевозможных отображений множества натуральных чисел в множество
состояний процесса Л выберем такое, при котором состояния, достижимые только
Рис. 7.3
186
к моменту времени t и в которые невозможно попасть раньше, получают
значения большие, чем номер любого из состояний, достижимого с
ненулевой вероятностью до момента t. К состояниям, впервые достижимым к
моменту /, относятся только те элементы множества Л, у которых
последний элемент последовательности X = (Xi,. .., Л*) равен t(\k = t).
Пусть п — натуральное число; используя единственность двоичного
разложения, запишем его в виде
п= 2 *4 G.4)
считая, 0 < vx < v2 < .. . < vr . Зададим отображение а: {п}п> х -»Л,
перечисляющее состояния процесса к по степени достижимости к моменту
времени t, соотношением
а(и) = а( Z 2^) = A, 2,. .. ,рх +1,*>2 + 2,Рз+2,. ...iv + 2), G.5)
из которого, в частности, следует, что значение п = 1 присваивается
состоянию X = аA) = аB°) = A), впервые достижимому к моменту t = 1. В
момент времени t = 2 процесс к( • ) либо остается в том же состоянии, либо
впервые попадает в состояние а{2х) = A,2). В следующие моменты t = 3 и
г = 4 впервые могут оказаться достигнутыми состояния а C) = а B° + 21) =
= A,3) и а D) = аB2) = A, 2, 3) и т.д. Отметим, что если в сумме G.4)
выделить последнее слагаемое 2 г и положить п = 2 2м, иными слова-
*> м = 1
ми, если записать число п в виде п = л' + 2 г, то из определения
функции а (я) следует
1A, 2,.. . ,iv+1), если и' = 0 и,
следовательно, г = 1;
(a(/?'),iv +2), если я'^0.
Каждому из 2f~2 состояний, впервые достижимых к моменту t > 1,
присваивается одно из значений вида п = fc + 2Г~2, где А: = 1, 2,..., 2Г~2 =
= 1, 2f~2, причем при к = 2Г~2 имеем п = 2Г", т.е. номер состояния
X = 1, 2,..., t. Нетрудно выписать и обратное отображение а: Л-»{и}„>ь
ставящее в однозначное соответствие каждой последовательности из Л ее
порядковый номер п = а"! (X):
2*, если ХЛ =Л,
X _1 1 к X
2Лш i+_ ? j^, где w = min{X/: Х/ + 1^Х/+1>,
4 /i = m +1
при кФ\к.
Например, оГ1A, 2, 3, 4) =8, а~1A, 2, 4) = 2 + 16/4 = 6. Поскольку
процесс к( •) может всегда (т.е. с ненулевой вероятностью) остаться в том же
состоянии, в котором он находился в предыдущий момент времени, то
187
множество всех состояний процесса, в которых он может находиться в
момент t - 1, имеет мощность 1 +
т = 1
'~1
f l, и в следующий мо-
мент оно увеличивается еще на 2'~1 состояний, впервые достижимых к
моменту t. Таким образом, матрица переходных вероятностей процесса из
состояний, достижимых до момента t — 1 включительно, в состояния,
достижимые к моменту t, имеет размерность 2*~х X 2Т.
Отметим еще, что, как следует из диаграммы переходов (рис. 7.2),
процесс к( •) из состояния n(t - 1) = X переходит в любое из достижимых
состояний с одинаковой вероятностью, равной 1//. Поэтому вместо
рассмотрения стохастических матриц P(t) можно ограничиться рассмотрением
матриц, состоящих только из нулей и единиц: Q(t) = tP(t). Несколько
первых матриц выписываются непосредственно. В момент t = 1 процесс к( •) с
вероятностью 1 попадает в состояние A). Положим Р(\) = Q(l) = A).
Переходы в момент t = 2 описываются матрицей ??B) = A, 1). В момент
t = 3 получаем прямоугольную матрицу размерности 2X4:
1 1
В момент г = 4 - матрицу
BD) =
1110 10 0 0
0 1110 10 0
0 1 10 10 10
,00010111
Однако общая закономерность в структуре матриц переходов впервые
проявляется при значении t = 5:
/11 1010001000000 0\
f 01 1 1010001000000
01 10101000100000
000101 1 10001000 0
01 10100010001000
0001010001 100100
0000001001 101010
00000001000101 1 1
В правом верхнем углу матрицы Q(t) располагается подматрица б (г - 1).
Обозначим R(t) подматрицу матрицы Q(t) размерности 2*~3 X 2Г~3,
которая располагается непосредственно под матрицей Q(t - 1), а
остальную часть матрицы Q(t) обозначим S(t). С введением этих обозначений
мы получаем первое матричное соотношение для процесса к( •)
V
Q(t-\)
R(t)
S(t)
G.8)
В левом верхнем углу матрицы R(t) располагается подматрица R(t — 1),
188
Таблица 7.1
Числители распределения вероятиостей числа паретовских слоев
к - число слоев, t - число объектов
1 ]
2 1
3 1
4 \
5 1
6 1
7 1
8 1
9 1
10 1
L
1 1
L 4
L 13
1 41
1 131
1 428
1 1429
L 4 861
1 16 795
1
9
61
381
2 332
14 337
89497
569 794
1
16
181
1821
17557
167449
1604098
1
25
421
6105
83 029
1100902
Таблица 7.1 (окончание)
t
6
7
*
8
9
10
1
2
3
4
5
6
7
8
9
10
1
36
841
16456
296 326
1
49
1513
38 281
1
64
2521
81
Таблица 7.2
Распределение вероятностей числа паретовских слоев
к — число слоев, t — число объектов
1
2
3
4
5
6
7
8
9
10
1,00000
0,50000
0,16667
0,04167
0,00833
0,00139
0,00020
0,00002
0,00000
0,00000
0,50000
0,66667
0,54167
0,34167
0,18194
0,08492
0,03544
0,01340
0,00463
0,16667
0,37500
0,50833
0,52917
0,46270
0,35558
0,24663
0,15702
0,04167
0,13333
0,25139
0,36131
0,43544
0,46144
0,44205
0,00833
0.03472
0,08353
0,15141
0,22881
0,30338
Таблица 7.2 (окончание)
t
1
2
3
4
5»
6
7
8
9
10
6
0,00139
0,00714
0,02086
0,04537
0,08166
Таблица 7.3
t
1
2
3
4
5
6
7
8
9
10
Е
1,00000
1,50000
2,00000
2,41667
2,79167
3,14028
3,46528
3,77034
4,05935
4,33496
7
0,00020
0,00122
0,00417
0,0155
D
0,00000
0,25000
0,33333
0,40972
0,49826
0,57060
0,63213
0,69101
0,74743
0,79998
М3
0,00000
0,00000
0,00000
0,08218
0,11212
0,13072
0,16554
0,20110
0,22884
0,25328
к
8
0,00002
0,00018
0,00069
0,00000
0,06250
0,33333
0,48944
0,70346
0,98250
1,23925
1,47786
1,73042
1,99719
9
0,00000
0,00002
АСИММ
0,00000
0,00000
0,31334
0,31879
0,30329
0,32938
0,35011
0,35414
0,35398
10
0,00000
ЭКСЦЕСС
- 2,00000
0,00000
- 0,08446
- 0Л6650
0,01767
0,10134
0,09508
0,09751
0,12077
под ней - матрица, заполненная нулями, остальная часть матрицы R(i) -
единичная матрица размерности 2Г~3 X 2*~ 3
G.9)
Разобьем матрицу S (t) на четыре квадратных подматрицы: единичную
подматрицу левого верхнего угла, нулевую подматрицу справа от нее,
подматрицу S(t - 1), расположенную в правом нижнем углу, и остальную
часть матрицы S(t), которую обозначим U(t):
R{t-\)
0
Е
U(t)
° V
S(t-\)J
G.10)
Верхняя половина матрицы U(t) есть разность Q{t - 2) - R{t - 2);
нижняя половина - просто матрица R(t - 2)
V
RU - 2)
/
G.11)
190
Для выписанной системы матричных соотношений G.8) - G.11) в
качестве начальных значений следует воспользоваться формулами G.6) и
G.7), задающими явный вид матрицы QC) и GD), и положить
/О 1 1 0\
\ 0 0 0 1 /
5D) =
1
0
1
0
0
1
0
1
0
0
1
1
0
0
0
1
Доказательство этих соотношений можно провести методом
математической индукции, используя диаграмму переходов G.2). Это потребует
некоторой внимательности и подробного рассмотрения каждого из 11 случаев -
по числу подматриц матрицы Q(t):
QU-
R{t-
R(t-
0
2)
1)
1)
S(t-
E
-1)
E
Q(t-2)-R(t
R(t - 2)
-2)
0
S{t-
-2)
Соотношения G.8) - G.11) были положены в основу одного из
алгоритмов расчета вероятностей разбиения случайной выборки на заданное
число паретовских классов, что сводилось к вычислению произведения
1 t
p(t) = — П Q(t) и последующему суммированию по всем координатам
— t! т = 1
вектора p(t), которые соответствуют к -элементным последовательностям
X из Л, к = 1, 2, ..., t. Распределение числа паретовских слоев в выборках
объема t = 1, ..., 10 и соответствующие средние характеристики:
математическое ожидание, дисперсия, третий и четвертый моменты, а также
коэффициенты асимметрии и эксцесса приведены в табл. 7.1 - 7.3.
§ 7.3. Рекуррентные уравнения
Заметим, что /-я координата вектора q(t) -t\p(t) определяет число тех
реализаций (из t\ возможных), при которых выборка разбивается на
заданное число (равное числу элементов в последовательности а(/) = X)
паретовских классов с фиксированной спецификацией: минимальный ранг
элемента v-го паретовского класса равен Х„. Поскольку
П
7 = 1
где q(t) - вектор-строка размерности 2 , то
<7,@=
.
- 1).
G.12)
191
Однако, для того чтобы воспользоваться этим соотношением, которое
представляет собой частный случай уравнений Колмогорова для марковских
цепей, надо предварительно вычислить коэффициенты Qij(t).
Выведем равносильное соотношение тем же методом, который
использовался в предыдущем параграфе. Прежде всего вернемся от нумерации
состояний процесса к() целыми числами к последовательностям X,
положив /ДХ) = Уа-^х)^) и задавшись некоторой спецификацией X =
= A, Х2, ..., X*), и посмотрим, из каких состояний, в которых может
находиться процесс в момент времени t — 1, он может в следующий момент
перейти в состояние X. Если в момент времени t — 1 выборка отвечает
спецификации A, Х2 - 1, Х3 - 1, ..., X* - 1), то элемент, поступающий в
момент t и занимающий первую позицию (рис. 7.1), переведет эту
выборку в разряд выборок со спецификацией X.
Допустим теперь, что сложившаяся к моменту t - 1 выборка отвечает
спецификации A, Х2, Х3, ... ,Х„, м, ^+2 - Ь^+з - 1,... ,Х* - 1) при
некотором значении индекса v таком, что 1 <i> <А; — 1, и ju€
^ X^ + i, Xy + 1 + 1, ..., Х„+2 - 1. Тогда элемент, поступающий в систему в
момент t и занимающий позицию с номером Х^ + ь переводит выборку в
разряд выборок с паретовской спецификацией X. Варьированием
параметров v и \х мы еще не получим всех логически возможных вариантов
реализаций, которые в следующий момент времени могут быть переведены в
класс выборок с заданной спецификацией X: остался не рассмотренным
еще класс (к - 1)-слойных реализаций выборки из t - 1 элементов.
Действительно, если в момент t — 1 сформировалась выборка со спецификацией
1, Х2, . .., Хл_! и если поступающий в момент t элемент займет позицию
с номером X* и тем самым сформирует еще один паретовский слой,
то результирующая выборка окажется нужной нам спецификации X.
В результате этих рассуждений мы приходим к рекуррентному уравнению
/с —I Xv + 2~2
...,Х^М,Х,+2-1,.Д*-1)+Л-10Л2 -1,Хэ -1,... Д*-1),
G.13)
которое равносильно уравнениям G.1) - G.3).
В рассуждениях, которые привели к выводу этого уравнения, мы
прибегли к серии предположений о спецификации выборки, сложившейся к
моменту t- 1, не все из которых сделаны корректно. Если в исходной
спецификации Х_= (Xi, Х2,... ,Х*) два последовательных элемента
отличаются на единицу (Х„+2 =Х„ + 1 + 1), то не существует значения м,
удовлетворяющего условию ц = Х„ + 1, Х„ + 1 + 1,.. ., Х^+2 - 2, и,
следовательно, спецификация A, Х2,..., Х„, д, Х„+2 — 1,..., X* - 1) лишена смысла.
Такие случаи будут автоматически исключены, если значение любой из
внутренних сумм в уравнении G.13), у которой верхний предел
суммирования меньше нижнего, считать равным нулю.
Более общее условие, гарантирующее адекватность задачи решения
системы конечных разностных уравнений G.13), /=1,2,..., задаче пе-
192
речисления специфицированных паретовских классов, состоит в том,
чтобы считать функции /V(X) определенными на множестве всех
целочисленных последовательностей, но отличными от нуля только на множествах
Л, = ( К: 1 - Хх < Х2 < . .. < X* < t} - множествах состояний,
достижимых процессом к( • )' к моменту t:
supp/,(-) = A,. G.14)
В крайнем частном случае, когда Х = A,2,..., Г), этим условием
приравниваются нулю все внутренние суммы в уравнении G.13), включая
последнее слагаемое /f_i(l, 1,2,3,... ,г- 1):
ЛA,2 Г) =/г.! A,2 г - 1).
С учетом начального условия
ЛA)=1 G.15)
мы приходим к очевидному результату /гA,2,..., t) = 1, а вероятность
того, что все элементы выборки объема t окажутся линейно
упорядоченными отношением предпочтения > , т.е. разобьются на t паретовских
классов, равна
Вообще, соотношение G.13) оказывается удобным для расчета
вероятностей появления многослойной реализации случайной выборки. Пусть
/ € 2, 3,..., t и последовательность X получена из набора A,2,...,/)
исключением из нее числа /. С целью упрощения записи переобозначим
величины ftA, 2,..., / — 1, / + 1,..., г), положив
ЛA,2,...,/-1,/+1,...,г)=^@. G.16)
Если Is Г, то в формуле G.13) только одна, последняя, внутренняя сумма
отлична от нуля:
следовательно,
Если i<t и /#2, то тоже лишь одна из внутренних сумм в G.13)
отлична от нуля:
/f1(,,,/) ,
м = I -1
и, значит,
gt(j) = 1 +*,_! (О = t - i +gf@ = t - 1.
Наконец, gfB)= 1 +?f ^B): все внутренние суммы равны нулю, но
отличен от нуля первый член формулы G.13), следовательно, gtB) =/—l,
так что, окончательно, при t > 2 справедливо равенство
gt(i) = t-l. G.17)
13. Ю.А. Дубов 193
Теперь для вероятности появления (г -1)-слойной паретовской
реализации случайной выборки объема t получаем
?()
1=2 Г!
GЛ8)
Далее, переходя к рассмотрению (t - 2) -слойных специфицированных
реализаций, из формулы G.13) заключаем, что, кроме одного из чисел
/,(Х_), а именно - числа реализаций, отвечающих спецификации Х =
= A,4,5,..., t), все остальные числа /f(XJ, \_ € Лг_2> представляются
суммой двух величин вида gt-i@ и последнего члена формулы G.13).
В частности, при / > 3 и /+1<г имеем
Л0, 2,..., i-U+1,...,/ -1,/+1,..., t)=gt(i,j) =
= 2 f2
При 2 < / < f — 1 для чисел gt(i, t) получаем
G.19)
Наконец,
'2
и, следовательно, при любых значениях />2, />/
G.20)
Если исключить случай / = 3, то эта формула оказывается верной и
при i = 2:
= 2 2
Остается рассмотреть последний случай: / = 2 и / = 3. Но в этом
случае
G.21)
и мы приходим к следующему результату: вероятность P{Lt=t -2}
появления (t — 2) -слойной паретовской классификации случайной выборки
194
объема t
t\ 2<i<j<t \ 2
G.22)
Если здесь все, кроме одного класса реализаций с заданной спецификацией
/t-l\
X, оказьюаются равно мощными, содержащими по 2 ( t + 1
вариантов с различными матрицами ранговых оценок, то в случае реализаций с
t - 3 паретовскими классами уже появляются четыре типа спецификаций,
для каждой из которых число возможных реализаций выборки
различающихся матрицами ранговых оценок будет одним и тем же.
Имеется только одна спецификация X = A, 5, 6, ..., t)9 которой отве-
/ \
/г-1 \
I I
/г1 \
чает I I различных реализаций выборки объема /:
две спецификации каждой из которых отвечает 5( ^ j — 2f + 4
различных реализаций выборки:
(Г)-»
t — 4 спецификации, получаемых из набора. A,2,..., г) исключением
чисел 2, 3 и числа /, гФ4, и каждой из таких спецификаций отвечает
( t -\ \
1 I -
t + 2 реализации случайной выборки:
г+2. G.23)
Любой другой спецификации для (г - 3)-слойных реализаций случайной
/ t - 1\ / t - 1 \
выборки, а таких осталось I I - j J спецификаций, отвечает
It - \\ \ 3 / \ 1 /
61 1-ЗГ + 5 различных по матрицам ранговых оценок
реализаций случайной выборки объема t\
*,(/,/,*) «б^Ч-Зг+ 5. G.24)
Вывод этих соотношений посредством формулы G.13) проводится
аналогично выводу соотношений G.19) и G.20), и мы здесь его опустим.
Собирая вместе эти результаты, приходим к включению: вероятность
P{Lt = t - 3} появления (t — 3)-слойной паретовской классификации
13* 195
случайной выборки объема t:
t\ 2
Однако эффективность этого метода расчетов вероятностей появления
реализаций с заданным числом паретовских классов резко падает при
каждом следующем переходе к меньшему числу классов. Для расчетов начала
распределения {P(L = к)}, т.е. для небольших значений к, оказьюается
более удобным перейти от системы уравнений G.13) к равносильной
системе уравнений в конечных разностях.
§ 7.4. Уравнение в конечных разностях
для двухслойных реализаций
Прежде чем перейти к выводу формулы для вероятности появления
двуслойной реализации случайной выборки обсудим один вроде бы не
относящийся к делу вопрос: что изменилось бы во всех проведенных
рассмотрениях, если в определении предпочтения > на множестве ранговых
оценок альтернатив
(fi,Pi) >fa,Ра)<->('! <r2)&(Pi <р2)
знаки неравенств изменить на противоЬоложные, т.е. использовать
отношение %:
(г1,р1)^(Г2,р2)<^(Г1>Г2)&(р1 >р2).
Это означало бы, что мы вместо задачи классификации по минимальным
элементам ^-элементного подмножества целочисленных точек двумерной
сетки {l,...,f}X{l,...,f} рассматриваем задачу классификации этих
точек методом последовательного выделения множественных максимумов.
Формально же переход к предпочтению >о означает изменение направлений
осей координат в пространстве ранговых оценок альтернатив, что приводит
всего лишь к изменению индексации рангов. И, значит, после замены г,- =
= t + 1 — г * и р,- = t + 1 — р* и соответствующего изменения Х„ = t + 1 — ци
спецификации X = (Xt, X2»• • •, X*), k<t,\\=l на спецификацию ц =
= 0*1, М2 »•••»/**)> все полученные до сих пор формулы будут описывать
соответствующие результаты для задачи классификации выборки по
последовательным максимальным паретовским классам.
Отметим, однако, что поскольку в спецификации fx значение /ii всегда
равно t9 то в обозначении для числа различных ранговых реализаций
случайной выборки, отвечающей спецификации р, можно опустить индекс,
указывающий на объем выборки. Обозначим это число a(/i). Имеем a(fi) =
= ft (I, t + 1 - д2, • • -,t + 1 - цк). Переход к задаче на максимум привел
196
лишь к новой системе обозначений, но именно в этих обозначениях
формулы для расчетов вероятностей появления реализаций с небольшим числом
классов принимают более простой вид. Целесообразность смены нотации
становится очевидной уже при расчетах вероятности появления двуслойной
реализации случайной выборки. *
Действительно, при работе с величинами/Г(Х) для специфицированных
двухслойных реализаций из формулы G.13) получаем
i(l,X-l), G.26)
д = X
и, следовательно,
Заменив в этом соотношении значение X на X + 1, в левой части равенства
получим сумму, совпадающую с той, которая выписана в формуле G.26);
поэтому
или
ЛA,Х)=Л0Д-1)-Л-1A,Х-2). G27)
Используя операторы конечных разностей
уравнение G.27) можно переписать в виде
[1 - A - А2)(Аг + Д2 - Дх Д2)] /= 0. G.28)
Если рассчитывать величины а(/х),то вместо формулы G.26) получается
a(f, ju) = *{t - 1) + Д2 ot(t - 1, v) + a(t - 1, /i), G.29)
i>= l
и, следовательно,
Z a(f-l,*>) = a(f,AO-a(f-l).
у = l
Теперь следует заменить ц на /х — 1 и сделать подстановку в формулу G.29);
получается уравнение 1-го порядка:
<*(*, fi) = <*(f - 1, ц) + а(г, /х - 1), G.30)
или — в конечных разностях —
A-Д,-Дд)а(*,м) = 0. G.31)
Уравнения G.28) и G31) описывают одни и те же величины, но второе
из них на два порядка ниже первого. Посредством еще одной замены
0(н, д) = а (и + д, ц) его даже можно свести к виду
197
Таблица 7.4
Распределение чисел специфицированных двухслойных реализаций
случайной выборки a(f, ц) = //(\, t + 1 - д)
1
2
3
4
5
6
7
8
9
10
11
12
1
1
1
1
1
1
1
1
1
1
1
1
0
1
2
3
4
5
6
7
8
9
10
11
0
2
5
9
14
20
27
35
44
54
65
0
5
14
28
48
75
ПО
154
208
273
0
14
42
90
165
275
429
637
910
0
42
132
297
572
1001
1638
2548
0
132
429
1001
2 002
3640
6188
0
429
1430
3 432
7 072
13 260
Таблица
t
7.4 (окончание)
8
9
м
10 И 12
1
2
3
4
5
6
7
8
9
10
11
12
1
1
1
1
1
1
1
1
1
1
1
1
0
1430
4862
11934
25194
0
4862
16 796
41990
0
16 796
58 786
0
58 786
0
т.е. к соотношению, задающему правило расчета биномиальных
коэффициентов при построении треугольника Паскаля:
СИГМГ,)-
Но в нашей задаче уравнение G.30) решается при других граничных
условиях: а(д, ji) = 0, a(f, 0) = 1, t > 2. Второе из них выписано из
следующих соображений: при д = 1 из уравнения G.30) следует a(f, 1) = a(f, 0) +
+ a(f — 1, 1), непосредственно же из соотношения G.29) для случая м = 1
точное рекуррентное соотношение выписывается в виде а (Л 1)= ot{t — 1) +
+ a(t — 1,1); поэтому можно отождествить a(t, 0) с ot(t — 1) = 1.-
Несколько первых значений чисел специфицированных двухслойных реализаций
198
случайных выборок объема t= 1,. .., 12 приведены в табл. 7.4, где t —
объем выборки, д - спецификация второго слоя.
Отметим, что, как следует из формулы G.29), вероятность появления
двухслойной реализации случайной выборки
/>Ur = 2} = -~ [а(Г+1,О-1Ь G32)
т.е. последние числа в строках таблицы 7.1, будучи уменьшенными на
единицу, определяют числа различных по ранговым оценкам двухслойных
реализаций. Мы еще вернемся к уравнению G.30), но сначала получим
аналогичное конечно-разностное представление системы уравнений G.13)
для общего случая fc-слойных реализаций.
§ 7.5. Общий случай
Прежде всего выпишем аналог уравнения G.13) для величин <*(/i) :
( - 1,. ..,/!„,_! - l,^/lw + 1,. ..,/!*) +
m - 2 v = цт + ! + 1
+ or(Mi -1 Л-i -1) 0*1=0. G.33)
При т-къ нижнем пределе первой внутренней суммы появляется
величина Д& + 1,которую в данном случае следует считать равной нулю. Помимо
уже введенных операторов Ат конечных разностей
Q j г,..., цк),
введем в рассмотрение операторы ?) = 1 — Ау сдвига/-го аргумента функ-
ции на единицу влево и положим Т\ = ?",, Гш = II ?). С помощью операто-
pa Tm, /72 = 1,..., Л, уравнение G.33) можно переписать в виде
<*00= 7^00+ S TmoKm + ^.^(мь ... ,/i*_i), G.34)
где
Сразу же отметим, что
4w<7*,w=t*Qx). G.35)
Для того чтобы от уравнения G.34) перейти к уравнению, в которое не
будут входить суммы ок w, целесообразно построить еще и операторы
к
другого типа. Определим оператор А 0 как суперпозицию А 0 = П А7 всех
199
к операторов конечных разностей Д/, / € 1,.. . ,к; оператор Ах* - как
суперпозицию всех операторов А,, кроме Ai:
Л0 = А1Л1=Л1A-Г1), G.36)
и семейство операторов А х т — как произведение
Аит = А2А3 .. . Aw_! Aw + 1 .. . А*, А1у2 = 1, если к=2.
Заметим, что поскольку суперпозиция операторов А7- коммутативна, то
Аг =i41)W Aw.
Применим теперь оператор Ах к обеим частям уравнения G34).
Поскольку Ак a Oil, . . . ,М*-1) = 0,тоиЛ1Г*_1а0'1>... ,/иЛ-1) = 0, поэтому
к
Ala(iJL) = AlT1ot(!j.) + 2
т - 2
или, с учетом G.36),
к
т - 2
Но А\Ок%т =А1гПАтокт =АХ w aQj), и мы приходим к искомому
уравнению в конечных разностях:
к
(Ао- 2 ТтАит)а(ц) = 0. G.37)
т - 2 ~~
Структура этого соотношения наводит на мысль описать ее с помощью
операции дифференцирования. Построим формальный полином
*(")= П (l-^co-E-1^)
т = 2
и будем считать, что при со = 1
т.е. выражение в левой части представляет собой тождественный оператор.
Таким образом, вместо оператора A i можно записать значение полинома
) при со=1. Результат формального дифференцирования полинома
при со = 1 приводит к сумме,входящей"в выражение G.37), которое
поэтому можно переписать в виде
(А1^A)-1//'A))а(м) = 0. G.38)
Однако выведенное конечно-разностное уравнение не равносильно
уравнению G33) в области Dk={ fx: /ii >д2 > ... >цк ^ 1 }. При его
выводе использовалось равенство G35), которое может оказаться
неверным лишь в случае окт - 0. Но такой случай вполне возможен:
существуют такие спецификации?, что в формуле G33) отсутствует т-я внутренняя
сумма. Это будут все те и только те спецификации, для которых цт + { =
= цт - 1. Поэтому, если любые два рядом стоящих элемента в
спецификации ^различаются более чем на единицу, то уравнение G37) равносильно
уравнению G33).
200
С учетом сделанного замечания о необходимости учитывать случаи
окт = 0 и, по существу, повторяя вывод соотношения G.37), нетрудно
получить соответствующие разностные уравнения на границе (на /-мерных
гранях Г/ = {}л: мт/+ j = fxm. — 1 } целочисленного конуса Dk).
И тем не менее можно ограничиться только одним уравнением G.37).
Дело в том, что для каждой точки /4, лежащей на гиперграни Г) конуса Dk,
найдется внутренняя точка jjl* (т.е. такая, что при любом wGl,...
..., к - 1: ii*m + х Ф /ijj,— 1), для которой (*(//) = <*(//*). Более точное
утверждение состоит в следующем: пусть /?Е?>идш +1 =цт - 1, hojuw +2 <
<цт -2 при т<к- 1; или/!* =/i*_i - 1,но тогда
Например, при Л: = 2 этим объясняется совпадение чисел, стоящих на второй
и третьей диагоналях табл. 7.1:
i-2). G.39)
Непосредственно по формуле G.33) выписываем
a(M,/z-l)= Z а(м-1,*0 + а0и-1).
у= 1
Но если выделить из под знака суммирования слагаемое при v = ji - 2, то
по той же формуле получим
1, ц - 2) + Д2 а(м - 1, у) + a(/i - 1) я <*(М, Ai - 2). G.40)
Приведем вывод соотношения G38) для трехслойных реализаций;
этой процедурой иллюстрируются почти все основные приемы общего
доказательства соотношения G38). Начнем с рассмотрения случая т = 2.
Составим разность
Используя уравнение G33), выводим
Дз<*(МьМ2,М2 -l) = A3a(jLt1 - 1,м2,М2 - 1),
следовательно,
1,М2>М2 - 1).
Но
т.е. Д3 a(/i2 + 1, М2, М2 - 1) = 0, и, значит, при m = 2 и * = 3 формула G38)
справедлива.
201
Для случая т = 1 надо показать, что разность
,Mi -2,/12)= О
(предполагается, что ц2 ^Mi - 2). С помощью того же уравнения G.33)
теперь получим
- 1,/ii - 2).
i> = 1
Но уже выяснено (см. G.40)),что A2(/ii - 1,/ii - 2) =0; поэтому после /
последовательных применений формулы
Ма-1
р = 1
/ui - 1,д2) = A2a(/ii - 1,/ui -2,jtx2 - 1))
самой к себе полним
а
у= 1
положив же / = ju2 - 2, имеем
A2a(/*i,jii - l,//2) = (jLi2 ~ l)A2a(jUi -jli2 + 1,/ii ~м2, 1).
Но
Д-2
v= 1
м-з
-l,/i -2,1)+ 2
у = l
и, следовательно,
А2а(д! -112 + 1,Mi -М2, О580,
что и завершает доказательство справедливости равенства G.38) для
трехслойных специфицированных реализаций.
Таким образом, соотношения G.38) играют роль граничных условий
при представлении задачи расчета числа специфицированных реализаций
случайной выборки как решения конечно-разностного уравнения G.37).
Для того чтобы замкнуть задачу, остается еще выписать начальные условия.
Вспомним, что остался не рассмотренным целый класс спецификаций,
для которых анулируются величины ок т, а именно — все спецификации
вида
V = {Hi,IH,...,VV9k+l-v9k-v9...929l)9 iiv>k + 2-v. G.41)
202
Для каждой из такой спецификации в уравнении G.33) отсутствуют
к + 1 - v последних сумм, но сохраняется последний член а(ц1 — 1, ...
... ,М„- 1,A;-i>,..., 1).
Если, как это делалось при выводе уравнения G.37), при такой
спецификации м мы применим к обеим частям уравнения G.33) оператор Ai =
= П А/, то получим уравнение почти такое же, как для спецификации
/= 2
м' = (Mi,..., iiv); но только из-за того, что величины Д! a (mi,..., fiV9
Тс + 1 - v,.. ., 3, 2) отличны от нуля, в правой части появится еще одно
слагаемое А\ Г„а( м', к - v9..., 1). Поэтому вместо уравнения G.37)
число реализаций случайной выборки со спецификацией паретовских
классов вида G.41) следует рассчитывать по формуле
(Ао- 2 TmAltm)a(ji9)^AlTva(^9k -*>,..., 2,1) G.42)
т = 2
и использовать решение этого уравнения как начальное условие для
решения уравнения G.37).
Приведем пример расчета нескольких значений вероятностей появления
трехслойных реализаций (в выборке объема Mi € 1,6). При Mi = 3
существует только одна трехслойная реализация (л = C, 2, 1) и P(L3 = 3) =
= jj- a C,2,1) = 1/6.
При т = 4имеются три различных спецификации: D, 2, 1), D, 3, 1) и
D,3,2), но по формулам G38) все они дают одно и то же число
<>D, 3, 1) = аD, 2, 1), аD, 3, 2) «а D,3, 1) = а D, 3, 1) = а D, 2, 1),для
которого по соотношению G.42) имеем A - ZTi)aD, 2, 1) =^аD, 1),
или а D, 2,1) = а C, 2, 1) + а C,1) = 3, и значит,
/>а4=3)=— [<кD,2, 1) + аD,3, 1) + аD,3,2)] =— = 0,375.
4! 4!
При Mi = 5 выясняется, что существуют два различных числа:
аE, 2, 1) = аD, 2,1) + аD, 1) = 3 + 3 = 6,
аE,3, 1) = аD,3, 1) + аE, 2, 1)+аD, 2)-аD, 1) = 3+6 + 5- 3 = 11,
и
1
P(L3 =3)=— F + 5- 11) = 61/5! = 0,58333.
При Mi = 6 имеется уже 4 различных числа, первые 3 из которых
рассчитываются по формуле G.42) и соответственно равны а F, 2, 1) = 10,
а F, 3, 1) = 26, а F, 4, 2) = 42, и число, а F,4, 2) = 47, принадлежащее
внутренности конуса D6. В результате получаем
1 381
P(L3 = 3) =— A0 + 2 • 26 + 2 • 42 + 5 • 47) = = 0,529167.
6! 6!
Некоторые из результатов расчетов специфицированных трехслойных
реализаций отражены в табл. 7.1 (третий столбец).
203
Близкий по содержанию, но в некотором смысле более сильный метод
анализа системы соотношений G.83) представляет собой метод
производящих функций, к рассмотрению которого мы и перейдем.
§ 7.6. Метод производящих функций
С помощью метода производящих функций уравнение G33) сводится
к некоторому функциональному уравнению для функций от комплексных
аргументов или формальных переменных. Пусть и_ = (wi, и2, - • . , ик) —
вектор с комплексными координатами. Многомерной производящей
функцией чисел а(д), /i €D%, D\ = {/i: °° > Mi > ju2 > ... > M* ^ 1)
называется сумма
Ы")= 2 maQi)u»4it*...ull*. G.43)
Умножим обе части уравнения G33), которое теперь можно записать в
виде
l I Mm = v
на моном
«ё = П и/',
I = 1
и просуммируем полученное уравнение по конусу D\. В результате такого
суммирования в левой части будет стоять производящая функция Ф& (и),
справа же появятся k + 1 функций Qm^Qmin)-
<**(«) = &+ 2 fiw+fim + i- G.44)
w = 2
Прежде чем приступить к вьи&нению вида функций Qm ,т€1,...Д+1,
сделаем одно простое замечание относительно величин Гт
а(д).Рассматривая величину Тт а(ц) как функцию от целочисленных аргументов, легко
видеть, что ее носитель
- К- • •
содержится в конусе /)?; и если произвести замену переменных
iytj- 1, если j<m,
[, если />w,
то Tma(jj) = а(Х)и область suppTma(^i) преобразуется в конус D*.
Используя это замечание, для функции Qx получим
204
Для вычисления функции
нужно просуммировать величины Тт _ j aQx)
+ 1] ] О supp Гт _i<*
по области
Mm =
_! -К...
ПаиррГда _!«(/!)
.. .<jUi - 1 <«>}
которая после замены переменных
/- 1, если /< т,
, если /= /я,
#, если / > /и,
перейдет в область D^U{/xw: Xm+1 +l*>Mm >\m). Следовательно, в
результате такой замены переменных (индексов суммирования) мы можем
записать:
Qw= 2 2 a&)H*i+1...
• • • ит _ 1
= П tt;
m+1
«fc =
X
Но последняя внутренняя сумма этого выражения равна
поэтому
1 «
Gm = П 2
I —Unt t"
1
и, значит,
1,««+!,..., и*)] т€3,...,*-1.
G.45)
205
Для случаев аи =2 и т = к никаких осложнений не возникает: вполне
аналогично выводится, что
G.46)
1 -
к
п
1 = 1
Щ
Qk = — №к Ш) - Ф* (Mi, «2, • ¦ • , м*-2< и*-ь м*, 1). G.47)
1-м*
Остается посчитать функцию (?*-1«
Замена переменных Х;- = д7- - 1, / Е 1,... Д - 1, дает
G^!= П и,
/= 1
= —— П и, 2
1W \
Следовательно, величина Qk-\ выражается через разность производящих
функций для (к — 1)-слойных специфицированных реализаций случайной
выборки:
1
— Ф*_1 (мь . .., ик_2, м*_1 • ик)]. G.48)
Группируя полученные результаты G.44)-G.47), приходим к
функциональному уравнению, связывающему распределение специфицированных
fc-слойных реализаций с распределениями специфицированных (к— 1)-слой-
ных реализаций и с &-слойными реализациями, в которых один из слоев
не специфицирован:
П щ П щ
га=2 1-Мт / "" 1 — Uk
к 1 т
~Ф*-1(М1,... ,М*.2*М*.! -М*)]- 2 П К/Ф*(И1
т=2 1 -Um /=1
• • • , "ш -2 , (Мш -1 Mw), 1, Mw + 1, . . . , Uk) . G.49)
Это уравнение, а точнее бесконечную систему уравнений, заиндексирован-
ную индексом к (т.е. числом паретовских классов, на которые
расслаивается реализация выборки), еще нужно дополнить начальным условием
1 -м,
— производящей функцией числа однослойных реализаций.
206
§ 7.7. Случай двухслойных реализаций
Исследуем подробнее уравнение для числа двухслойных
специфицированных реализаций. Перепишем уравнение G.49) при к = 2:
I -М2
или, несколько проще,
= ихи2\ Ф2(М|М2,!)- G.51)
[ 1 -их 1 -ихи2 J
Это — производящая функция чисел а(цх,ii2), отличных от нуля только
в конусе D2 и удовлетворяющих конечно-разностному уравнению G.30):
/*2-1).
Но если нас не интересует, как ведет себя решение уравнения G.30) вне
конуса D2f то мы можем каким-нибудь удобным образом доопределить
числа a(/ub/i2) для спецификаций, не имеющих физического смысла.
Положим, например, а(цх, ц2) = -а(ц2, цх) при цх <ii2. Если числа
при /i
10 в противном случае
являются решениями уравнения G.30) и имеют производящую
функцию (8.51), то числа
при ц
0 в противном случае
удовлетворяют тому же уравнению G.30), но производящая функция
для них получается из Ф2 (их, и2) заменой индексов у переменных щ и и2:
UXU2 Г W2 ^1^2 1
2)- ; ^2(^1^2, О .
1 -W! -W2 L 1 ~U2 1 -UiU2 J
Для производящей функции чисел
2) при М
/i2) при
0 в остальных случаях,
которые дают интересующий нас ответ в конусе D\, получим
иги2 / их и2 \
1 -w, -и2 \ 1 -их 1 -м2/
207
В результате простых преобразований нетрудно получить
Mi -М2 Ux М2
+
- их — м2 1 -Mi 1 -м2
G.52)
Теперь разложением в ряд первого члена из правой части G.52) мы
приходим к окончательному ответу: число различных по ранговым
оценкам специфицированных двухслойных реализаций в случайной выборке
объема 11 \
(и. +д2 — 1 \ / Mi +Ма — 1 \
)-( ) G.53)
М2 / \ Ml /
(второй и третий члены правой части G.52) "подправляют" этот результат,
зануляя значения a(Mi> 0) и а@, д2)). В табл. 7.1 эти значения затабули-
рованы для спецификаций /?= (цх, д2 ) таких, что 0 < д2 < Mi < 12.
Для вывода формулы, определяющей вероятности появления
двухслойной паретовской реализации случайной выборки объема t =Мь нужно
просуммировать эти числа по ц2 и результат разделить на цх! Обратим,
однако, внимание на то, что производящая функция чисел
*)= М|?*
равная Ф2(со, 1), входит в правую часть уравнения G.51) с аргументом
со = uv. И если положить м2 = 1 — щ, тем самым приравнивая нулю левую
часть равенства G.51), то получим
Mi Mi(l -Mi)
1 -М! 1 -Mj(l -Mi)
Положим теперь ux(\ -ux) =w и определим значение их как тот из
корней квадратного уравнения и\ — Mi +w = 0, который при со-^0 также
стремится к нулю:
Тогда
со
Ф2(<о, 1)
— Mi (со) 1 — со
или после соответствующих преобразований
Ф2(со, 1)= 1 . G.54)
2w 1 — со
Таким образом, мы получили явный вид производящей функции числа
двухслойных реализаций случайной выборки. Входящая в G.54) функция
Х(со)= — A -Vl-4cJ) G.55)
2со
208
широко встречается в перечислительных комбинаторных задачах: она
представляет собой перечисляющий ряд для бинарных деревьев с Mi
узлами, транзитивных ориентированных графов с Mi вершинами, плоских
деревьев с висячими корнями, неассоциативных произведений с Mi
сомножителями, и, как мы теперь знаем, для числа различных по ранговым
оценкам двухслойных реализаций случайной выборки, увеличенным на
единицу: в правую часть соотношения G.54) входит еще и член
1 — W л =0
Коэффициенты при сУ в разложении в ряд функции х (<^) являются
числами Каталана
-—ГУ
coef ,X(w)=—- . G.56)
Таким образом, вероятность появления случайной выборки объема
= t, которая распадается на два паретовских класса, равна
2>= -Lj—
t\
Но зная производящую функцию Ф2('-о, 1) числа двухслойных реализаций
выборки, мы теперь можем выписать и явный вид производящей
функции числа двухслойных специфицированных реализаций:
р р
1 t-i I r/ 2t\ I
=— 2 a(r,M2)= I I —r — 11.
ILL . G.57)
и2) ^.
A-Mt)(l -Mi -u2) 2A-«t -и2)
Коэффициенты при щ и w2 в разложении этой функции в ряд должны
определить числа
. /Mi+M2-1\ /Mi+M2-1\
a(Mi,M2) = ( I-I J. G.53)
\ M2 / \ Mi /
Рассмотрим эту ситуацию подробнее. Для этого разложим в ряд первую
дробь, стоящую в правой части соотношения G.57):
ихи2 /1 1 \
=«i( ]=
Wi)(l -Hi -W2) \\-Ul-U2 1-Wi/
A -
= 2 2
Ma s 0 Mi s 1 \ M2 / " M, = 3
С тем, чтобы выписать ряд для второй дроби соотношения G.57),
проведем несколько предварительных выкладок. Разложением в бином Ньютона
нетрудно убедиться в том, что
A -4со)/2= 2 )cjm.
m =0 \ W /
14. Ю.А. Дубов 209
Далее,
doj - Bт\ c°m+1
1 _ 4а?1 w=o\m / Ая+1
чем мы, по существу, доказали формулу G.56). Но теперь, заменив со
на щ и2, получим для интересующего нас ряда
5 (mi+m'W- И2*)
2 = о \ w. / * = i\ к- 1 /
(UlU2)k
т. = О т-
-к /\к-\
Таким образом, исходя из соотношения G.57), для числа а(д!,/х2)
двухслойных специфицированных реализаций мы получаем выражение
»Ma) I /2*-2\//ii +/i2
которое должно совпадать с G.53). Но это означает, что должно быть
верно комбинаторное тождество
\ max(^i,/i2) /
А:-
В частном случае Mi = ju2 = w оно обращается в хорошо известное тождество
/2и-1\ ? -J_/2*-2\/ 2ii-2ft \
\ w / * = i * \ *-1 /\ w-A: /'
которое можно найти, например, в книге Феллера (Феллер [1 ]).
Мы пришли к тождеству G.58), решая двумя различными способами
задачу нахождения числа специфицированных двухслойных реализаций
выборки, но это тождество можно доказать и непосредственно. Проведем
доказательство методом коэффициентов (Егорычев [1]). Пусть для
определенности ii\ >Дг- Обозначим через в правую часть тождества G.58),
и, считая, ч^о ( т 1 = 0, когда п< т, распространим суммирование на все
значения к> 1:
* = 1 * \ *~ 1 /\ Mi -Л: /
/ ц{ +м2 -2к\
( I
\ Их-к I
ц{ м2 \
Записав биномиальный коэффициент ( I как вычет в нуле
\ к I
210
от функции z~"> -1+* A + z)M> +M> ~2 *, получим
¦ J
i \\
J
2vi \z\-p z
~ 1 / 2k - 2 \ / z \к dz
; = 1*Л к- 1 /\A +ZJ/ ~ "
Следовательно,
Тождество G.58) доказано.
§ 7.8. Метод расчета распределения числа слоев.
Трехслойная реализация
Непосредственный анализ распределения числа специфицированных
реализаций с более чем двумя паретовскими классами путем попытки
разрешить уравнение G.33), доопределяя величины а (у) вне конуса Dk,
не ведет к быстрому успеху. В правую часть уравнения G.49) уже не
входят интересующие нас производящие функции Фк(> Ь • • • > О чисел
неспецифицированных реализаций с заданным числом слоев. Не очень
понятно, ка? распространить идею антисимметризации решения для
величин a(/i), зависящих более чем от двух аргументов. И тем не менее то,
что мы знаем метод расчета производящей функции для двух слоев,
позволяет продвинуться и в исследовании общей проблемы.
Что, собственно, сделано? Найден метод решения уравнения
/(/,/)= 2 /(/- 1, ») + а(/,/), G.59)
v-m
определенного в области / >/ > т, т.е. в конусе D2, начало которого
сдвинуто в точку (т+ 1, т). Здесь /(/,/) — функция целочисленных
аргументов, подлежащая определению, a(ij) - известные величины. Но к такому
виду сводится и уравнение G.34), если положить/О^, д2) = <*(Mi, M2, f?) =
= а(у), а из правой части выделить только члены /Tia(y) и Т2ок2. А это
означает, что мы можем последовательно рассчитать производящие
функции распределений ?-слойных реализаций со специфицированными
"началами" (к - 2)-х последних паретовских слоев.
Проиллюстрируем эту процедуру расчетом распределения чисел
трехслойных реализаций. Для этого сначала выпишем (точнее - повторим) вывод
решения уравнения G.30). Обозначим через </>(м, и) и A (w, v)
соответственно производящие функции для /(/,/) -искомых величин и a(ij) -
14* 211
величин известных:
« ? 2 fit,Пи1 и',
A(u,v)= ? 2 att/)«V,
/ = m +1 / = m
(следовательно, функция A (u9 v) тоже считается известной). Далее, имеем
A - и - v) <p(w, v) = uv[A (w, v) -<p(u, v, 1)]. G.60)
В предположении, что существует и аналитическая в окрестности нуля
функция <р(со, 1), мы можем положить u=l -v и тем самым занулить
левую часть уравнения G.60). Но тогда </>(со, 1) =A(U(co), V(cS))9 где
1 i в
1 - F(cj)= — A -VI -4со)
и, следовательно,
[А (и, и) - Л (?/(ии), К(ии)]. G.Ы)
)
1 -W -U
Все это было проделано раньше, но мы упустили из рассмотрений случай,
который теперь оказывается решающим, — когда производящая функция
лежит на линии особенностей, т.е. на множестве {u,v: и = 1 — и).
Поскольку U{и- A — и)) = и, то при у= 1 — и правая часть соотношения G.61)
обращается в нуль. Считая же функцию <р(и, v) непрерывной в окрестности
нуля, для определения ее значений при v = 1 - и мы должны раскрыть
неопределенность типа 0/0. В результате получим
ф, 1 -м) = иA -и) [u*l{u(\ -w), \)-A'v{u, 1 -и)}.
Производная функции <р(со, 1)
В свою очередь
[Аи("> 1 м)-^(и, 1 -и)],
1 - 2и
а отсюда уже следует
и(\ -и)
ц))= ^ ^
G.62)
Отметим, что если при фиксированном значении и разложить функцию
1 — И) в ряд Тейлора и затем подставить Л = м, то получим
, 1-и)= i ^(fc)(w, D-77 . G.63)
212
При выводе производящей функции для двухслойных реализаций
функция А (м, и) имела вид
1 1
А(ии) = Ф1(и)-Ф1(иь)= - -- ,
1-м 1 -uv
и если учесть, что U(cS) V(cj) = со, то по формуле G.61) сразу же
выписываем:
G.64)
V(uv) ¦
uv Г 1 11
Ф2(м,v) = -
2К ' 1-м-у L 1-м V(uv) 1
- результат, равносильный соотношению G.57). Далее, в этом случае
uAi(u,v)-vAUu,v)= j^-y ,
и посредством соотношения G.62) выводим
Ф (м, 1 - м) = -
и2
G.65)
Раскрывая левую часть этой формулы по определению производящей
функции и приравнивая коэффициенты при одинаковых степенях переменной м,
выводим еще одно комбинаторное тождество, связывающее числа
двухслойных специфицированных реализаций выборки между собой:
2^1. G.66)
Но важнее другое: мы теперь можем сделать первый шаг в вычислениях
числа трехслойных специфицированных реализаций — получить явное
выражение для величин а^, ц2,1), приведенных в табл. 7.5.
Из вида рекуррентного соотношения для чисел <х(дь д2, О (частный
случай соотношения G.33)):
<*(Mi,M2,l)= S' а(м1 - 1,^,1) +«(М! -1,М2 - 1) G.67)
v = 2
заключаем, что уравнение для производящих функций этих величин
задается той же формулой G.61), только роль функции А (и, и) теперь выполняет
производящая функция числа двухслойных реализаций Ф2 (и, и), домножен-
наяна A -и):
uv
Отсюда и по формуле G.61) получаем
ни
[
), V{ut v)]9
[A
1 —и - v
213
Таблица 7.51
Таблица трехслойных реализаций а (м, zv
10
2
3
4
5
6
7
8
9
10
0
1
3
6
10
15
21
28
36
0
3
11
26
50
85
133
196
0
11
42
106
219
400
671
0
42
162
423
913
1 749
0
162
627
1672
3 718
0
627
2 431
6 578
0
1431
9 438
0
9 438
Таблица 7.52
Значения а(м, v, 2)
10
3
4
5
6
7
8
9
0
3
11
26
50
85
133
10 196
Таблица 7.53
Значения а(м, *>,
0
И
47
127
275
520
896
3)
0
47
204
577
1321
2 649
0
204
879
2 536
5 995
0
879
3 751
10 934
0
3 751
15 873
0
15 873
0
10
4
5
6
7
8
9
10
0
11
47
127
275
520
896
0
47
225
675
1609
3 324
0
225
1 075
3 322
8 257
0
1075
5 035
15 695
0
5 035
23 133
0
23 133
0
Значения <*(м, *>% 4)
м
5
6
7
8
9
10
5
0
47
225
675
1609
3 324
6
0
225
1 173
3 820
9 844
7
0
1 173
6 031
19 991
8
0
6 031
30 138
9
0
30 138
10
0
Значения с*(м, "> 5)
10
6
7
8
9
10
0
225
1 173
3 820
9 844
Таблица 7.54
Значения <*(д, у, 6)
0
1 173
6 529
22 700
0
6 529
35 556
0
35 556
0
10
7
8
9
10
0
1 173
6 529
22 700
0
6 529
38 265
0
38 265
Значения а(д, i/, 7)
8
V
9
10
Значения а(д, и
...
9 10
8
9
10
0
6 529
38 265
0
38 265
9
10
0
38 265
и остается подставить сюда найденные выражения для Ф2 и ФA/9 1 — U):
uv Г uv(\— v) /1 1 \
l-u-v [l—u-v \1— и V(uv) I
-U2(uv)( Н G.68)
\l -2U(uv) V(uv) )\
В зависимости от того, какими приемами мы воспользуемся для того,
чтобы представить правую часть рядом, мы можем получить различные
выражения для чисел a(jul5/u2,1). Постараемся выразить коэффициенты
этого ряда числами двухслойных специфицированных реализаций.
Другими словами, попробуем обратить формулу G.67), в которой числа
специфицированных двухслойных реализаций выражаются суммой чисел для
трехслойных реализаций с фиксированным единицей началом третьего
слоя. Дифференцируя производящую функцию двухслойных
реализаций по первому аргументу, имеем
Э
— Ф2 (w, v) =
ди
v(l-v) / 1 1 \ uv /1 Э 1 \
" (l-u-vJ \ 1-й V(uv)J l-u-v [A-йJ ди V{uv)/9
и, значит, формулу G.68) можно переписать в виде
2 JL uv ( u2v 2 JL_L и* \
$l(u,v)-u v 9w г- {_u_v ^(lwJ" u У"эй+ ~V(l-2U) I
Ho
Э 1 1 Э U2 v
=. и =
ди V у2 ди (uvJ 1 -2U
U3 = U2 U2 = U2 l-uv
V(\-2U) " 1-2U ~ V " 1 -2U V~
следовательно,
+
uv Г u2v 1— mu]
Ф2 —A -UV)<&2 — —I + 1 ¦
\-u-v L(l-wJ 1-й J
Э
— Ф2 A^у)Ф2
ди \-u-v 1A -иJ
Добавим в квадратные скобки нулевое слагаемое, записанное в виде
1 —uv 1 -uv
1-й 1-й
и перегруппируем члены так, чтобы выделилась функция Ф2 (w, v):
<рх (w, v) =
Э uv Г u2v 1-wul
= u2v — ф2_A_ми)ф2 1+ - .
ди 1 - u-v [ (l -иJ 1 -w J
216
Окончательно получаем
u2v
= м2и— Ф2 -A -ми)Ф2 + - . G.69)
дм A-й)
Остается перейти к соотношению между коэффициентами
соответствующих рядов для правой и левой частей этого уравнения:
Последний член в формуле G.69) обеспечивает равенство нулю значений
a(/i, 1,1). Для чисел a(n,v) у нас уже есть явная формула G.53),
следовательно, можно выписать и явное выражение для чисел a(/i, i>, 1).
На этом первый шаг процедуры последовательного вычисления
производящих функций для чисел трехслойных реализаций можно считать
законченным.
Следующий шаг состоит в выводе явного выражения для
производящей функции чисел а(м,*>, 2) трехслойных реализаций, у которых начало
третьего слоя фиксировано значением 2. Для того чтобы это можно было
сделать, необходимо вычислить значения функции y(u,v) на линии
особенностей, т.е. при v = 1 — м.
Вывести формулу для у (м, 1 — м) можно, исходя либо из выражения
G.68), либо из выражения G.69). Возникающие здесь неопределенности
раскрываются в принципе так же, как это было сделано при выводе
функции Фа (м, 1 — м), хотя выкладки становятся более сложными:
раскрывается неопределенность 2-го порядка. Опуская вывод, выпишем:
5
A - 2мJ ~~ A
и, переходя к соотношению для коэффициентов, получим следующую связь
между числами трехслойных реализаций со специфицированным единицей
началом третьего слоя:
и3 Г 1 4 _ . .
, 1-м) =— , + г ¦ + G.70)
4 [ A-2мK A-2 ч2 " ^ ч * ' V
(-1?! V W-/, р, 1) = (М2 + 5м - 24J"~6 + 1
\/ /
(результат, параллельный формуле G.66), для двухслойных реализаций).
Рекуррентное соотношение для чисел а(м,*>,2) - частный случай общей
формулы G.33) - имеет вид
(,,) (м
\=з
Перейдем к производящим функциям
</>2 (uf v) = 2 а(м, v, 2)u»vv9
>>2
UV
[0)(O *((M)]. G.71)
О ;[0
1 -и - v
Мы опять получили уравнение вида G.61), только теперь A(u9v) = кр \ + Ф2 ¦
Формула G.61) дает решение функционального уравнения G.71), если
217
известно значение А (и, I -и). Но А (м,1-й) есть сумма правых частей
соотношений G.70) и G.65):
А(Ц, 1 -h) = </>i(W, 1 -М) + Ф2(И, 1 -М) =
и3 Г 1 4 11 1
= — г + г +
4 L (l-2w) (l-2wJ 1-2к J
+w2. G.72)
Подстановка G.68), G.64), G.72) в формулу G.71) и дает явный вид
производящей функции для числа трехслойных реализаций, начало третьего
слоя которых фиксировано значением 2.
На этом заканчивается второй шаг процедуры последовательного
вычисления производящих функций числа трехслойных реализаций случайной
выборки. И начиная с этого момента, мы можем уже вычислить
производящую функцию для числа четырехслойных реализаций, два последних слоя
дсоторых начинаются элементами рангов A, 2), C, 2) и C,
1).Рекуррентные соотношения, связывающие числа а(/х,р,/,/) при i <3 имеют вид
а(ц,!%2,1)= 2 а(м-1,Х,2
Л1— 3
= 2
+ а(/1 - 1, * - 1,2,1) + <*(Д - 1, *> - 1,2),
и, значит, уравнение для производящих функций
UV
1 — U —V
[A -U)?>l(W, V) -<
UV
[A - U)(V?2 i (W, V) + Ф2 (U, V)) - ^з 2 (M U, 1)]
1 -W-
— одного типа с уравнением G.61), и к ним обоим применима вся
изложенная выше схема решения. После этого можно даже перейти к
исследованию распределения пятислойных специфицированных реализаций вида
G.61).
§ 7.9. Раскрытие неопределенности и общий метод
расчета распределения
Возвращаясь к вычислениям трехслойных реализаций со
специфицированным началом третьего слоя, мы видим что основные трудности здесь
появляются при вычислении значений функций </?/ (и, и) на линиях
особенностей^, v: i;= 1 -м}. И этот аспект проблемы требует специального
рассмотрения.
Действительно, из рекуррентного соотношения для трехслойных
реализаций
v Л-1
<*(м, vy X) = 2
218
уравнение для производящей функции
выписывается в виде
uv
) [A V)( 0/(>
1— U-V /=1
откуда следует
ми
*х(и>«0в*х-1<и. «0 + " [(l-»k-i-^-iW 1-^0]. G.73)
1—м-и
где I/= U(uv) = 1/2A —VI — 4ш>). Поскольку нас интересует предел
этого выражения при v ~+1 — и, то разумно перейти от переменной v к
бесконечно малой переменной х = 1 — и — v.
U=U(u(l-u-x)),
G.74)
Общая схема исследования, которое теперь намечается, выглядит
довольно прозрачно. Задача была бы решена полностью, если в нашем
распоряжении оказалась формула, с помощью которой можно рассчитывать
производящую функцию числа трехслойных реализаций с произвольным
фиксированным значением начала третьего слоя, определенную на линии
особенностей v = 1 — и, по таким же функциям, полученным на
предыдущих шагах, т.е. с меньшим значением параметра, фиксирующего начало
третьего слоя.
Ниже будет показано, что функцию <?\(w, 1 —и) можно выразить через
производные функций <р0 («> 1 - и) > V i («> 1 - ") >«• •, «?\-1 (", 1 - ")
порядка не выше X и таким образом записать ее как функцию от матрицы
фх=|
G.75)
Зная такую зависимость и вычислив матрицу Ф3, мы почти
автоматически можем выписать результат третьего шага расчетов -
производящую функцию чисел a(ju, v, 3), а после вычисления — еще 2 Л производных
Ф^ и<р**+1*, / =0, ...,Х,и производящую функцию чисел а0х,р,4)
и т.д. Более того, в результате итерирования формулы G.75) функция
/ Х+1 \
0Х("> 1 -м) выражается через I J производных функции #о(и9 1-м).
Например, зная зависимость
Vi=G (<?<ь 0о )> G.76)
219
получим, что производная \рх выражается через производные функции <р0:
bG , bG
G.77)
Еще одно дифференцирование сложной функции G.77) позволит и вторую
производную функции \рх выразить через производные функции у0:
Ч>'\ = ^2 (^о> <Ро»<А> > <А>' )• G.78)
Поскольку
, п I,
то подстановка сюда правых частей формул G.76) - G.78) приведет к
искомой зависимости </? 2 = G (<р0, «р о} ^ о »<Р о") •
Мы рассмотрим этот пример более конкретно несколько позже, когда
выведем зависимость G.75). Пока же отметим, что вывод такой
зависимости равносилен выводу явного выражения для производящей функции числа
специфицированных по началу третьего слоя трехслойных реализаций
случайной выборки, поскольку к-я производная функции <р0 («> 1 -")
вычисляется элементарно:
4к\и, 1 — и> = Л![2*"0 -2м)"* -A -и)~1-*].
После этого становится возможным и расчет неспецифицированных
трехслойных реализаций. И не только трехслойных: схема решения не меняется
при переходе к большему числу слоев.
Итак, нас интересует решение уравнения
,l)], G.79)
имеющее устранимую особенность в точках (м, 1 - и), а значит, такое, что
^ (мA -и\ 1) = м 2 </>w(w, 1 -и).
Положив здесь w = ^/(cj) = A — у/ 1 — 4со)/2, получим
*x(a>,l)stf(w) S ^(^(w),l-^(w)).
т=0
Заменим в этой формуле со на wu и подставим ее правую часть в уравнение
G.79):
\-1
A -u-v)\pAu, v)-uv 2 [A
Л w=o
Если теперь выделить из-под знака суммы слагаемое, отвечающее индексу
т = X — 1, то оставшаяся сумма окажется равной A— м — и )^_ j (и> v).
220
Поэтому при v Ф\ —и для X > 2 выводим
Г UV
„х(м. и) = |1 +0 -v)
UV
1-и -v
При X = 1 эту формулу надо слегка изменить:
uv uv
() ()
JU(uv),l-U(uv)). G.80)
l
U=U(uv).
1-и —v \-u-v
Рассмотрим соотношение G.80) как разностное уравнение для функции
кр (м, v) относительно X, и выпишем его решение:
UV 1 Х-1 UV
Л ¦ 1-м-v \ \ —и -v
(М,У) = |1
UV Х-1Г UV ЛX-1-m
2 1+A-и) Uspm{U,\-U). G.81)
1 -М -V т = 0 I 1-U-V J
Имея в виду предельный переход при v -* 1 - м, введем новую переменную
х= 1 — u — v и обозначим ?/(*) = U(u(l -и — х)) и Л(*) =х + м(м + х) A —
и-х).В новых обозначениях уравнение G.81) принимает вид
мA-м-д:)Г /1 1 \
(
m=0
В числителе дроби стоит разность двух функций 7\_ j (x)—H\_ i (x):
г^гД
1 -м 1 - 1/(х) /
= 2
И если функция <рх(х) =ук(и, 1 -и-х) разлагается в ряд Тейлора в
окрестности нуля, то необходимо, чтобы для любого и € 0, 1,..., X + 1
при х = 0 тождественно выполнялось условие
Г^>@) = Я^>@). G.82)
Из определения величин 7\(к) и #\(х) и условия G.82) следует, что
В такой записи еще не совсем ясно, что полученная формула дает нам
искомую зависимость G.75), которая выражает функцию </>\(м, 1— и)
221
через производные функции <р( (и, 1-й) при / < X. Но это так. Надо только
преодолеть технические трудности, вызванные стремлением выписать в
явном виде (X + 1) -ю производную сложной функции в точке х = 0.
Рассмотрим сначала функцию Гх_ i (х) как произведение двух функций:
Тх-1 (*) = K(x)L(x), ОД = R\x) -xRx~l,
\ 1-и 1-U(x) Г
и .применим формулу Лейбница для производной от произведения двух
функций: /
)() G.83)
П /
Поскольку по той же формуле
(x/?x-1(^))(w)=^(^XW)('i)+w(^xW)(X"'l), G.84)
то при х = 0 имеем
Явное выражение для величин
Лх,м=(Л(Х)(*))
дается формулой
/=0
G.87)
где ( ) = X!//!i>!(X — / — X)! и [ • 1 — целая часть числа. Для
/ X \
( ) = X!//!*>!(Х — / — X)! и [ • ] —
вывода этого выражения можно воспользоваться общими приемами
(формула Бруно [Риордан, 1], полиномами Белла), но, учитывая что
R(x) - полином 2-й степени по х, и, следовательно, /?'" = 0, то
непосредственными рассуждениями по индукции нетрудно получить, что величина
/?х>м может быть представлена в виде
^()^^(Г(У G.88)
где (Х)^ = Х!/(Х-м)!, R0 =Д°@), а коэффициенты дМэ/- удовлетворяют
системе разностных уравнений
при начальном лм>0=1,/1>1 и граничном я2/-1,/ s 0 условиях.
Разрешив эту систему, получим
222
Подстановка этих коэффициентов и значений производных функции R (х)
в точке х = О
в формуле G.88) после некоторых элементарных преобразований
приводит к соотношению G.87). Поэтому будем считать, что явное выражение
для производной АГ^+1"'1^ @) нами получено. (Мы опускаем очевидные
подстановки: получающиеся в результате формулы довольно громоздки,
а для целей непосредственных численных расчетов иметь сводную формулу
совсем не обязательно.)
Заметим, что п-я производная функции L (х) при п Ф 0 и х = 0 есть и-я
производная по х от сложной функции
-и-х\
) , со(*)
1 - U(co(x))
взятой с обратным знаком в точке х = 0. Производную этой функции по
переменной w выпишем, воспользовавшись формулой Бруно:
dn * dk n k\Qnk
*=i dUK
где
n 1 / tfO(co) \*/
/=i kf \ /! /
В правой части последней формулы суммирование ведется по всем
неотрицательным целочисленным решениям уравнения
2 к.=к
при условии
Но
(/)fc^L ! G.89)
)J1
} (/-1)! A
В этом можно убедиться, например, так: положим
тогда
1 1
и, следовательно, Ь'(со) = 2Ь3(со) .Формула G.88) принимает вид
?(/-!)= WlHll 62/-l G90)
(/-1)!
Проведем ее проверку индукцией по/. При/ = 1 формула G.90), очевид-
223
но, справедлива (ведь 0! = 1). Допустим, что она верна для некоторого
фиксированного значения/ > 1, тогда
0-1)! ' 0-1)! /!
Нам требуется найти производные функции L (х) не по переменной со, а
по переменной х в точке х = 0. Но поскольку со = мA— и — х) я U(to) \x=o =
= и, то такой переход оказывается несложным. В точке х = 0 п-я
производная функции L (х)
^% , G.91)
к=\ A-м)
Г
—
Ay! L
2,-2
G.92)
/
Теперь, для того чтобы выписать (\+ 1)-ю производную функции Т(х)
при х = 0, нам остается собрать вместе результаты G.85), G.87), G.86),
G.88) и G.91), G.92) и подставить их в правую часть G.83).
Перейдем к расчету (X + 1)-й производной функции Ях-1 (х), которая
зависит от производящих функций $m (U91 -t/), m €{0,..., X - 1} .
Мы достигнем поставленной цели - выявить зависимость G.75),
представив ее в виде
1 ~и) = ¦оТТ?[г^@)" 1С JoУк-т^*>("'1 ~и)] G93)
и указав коэффициенты 7&,т* Для этого введем вспомогательные
функции Ук,т (х) у определив их из условия
Z у {X)JL. ^0,1^0). G.94)
к dXK
Положим
5 = (xm/?x-^w(jc)Gm(x))<x+1> G.95)
и распишем правую часть G.94) по формуле Лейбница:
5= 2 CmtVGtf\x)9 G.96)
где
G.97)
224
Согласно соотношению G.86) имеем
А+1
i-m.\-v> G.98)
и можно применить формулу G.87). Таким образом, коэффициенты при
G%\x) B формуле G.92) найдены.
Выделим из правой части формулы G.96) слагаемое при v = 0, не
содержащее производной:
=Д CmtVG%\x\ G.99)
а производные G ' (x) выпишем по формуле Бруно:
т
v
где <pm = (pw ( U, 1 - G) и величины б^Л определены соотношением G.92).
Перепишем эту сумму, группируя коэффициенты при одинаковых
производных:
v jk
^) S At.,-—Ли,
*«1 dU
причем QVtV + i = 0 (в этом случае в G.92) область суммирования
оказывается пустой). Подставим полученный результат в формулу G.99).
После смены порядка суммирования в появляющейся при этом двойной
сумме получим
^ х + 1
= l
( 2
Таким образом, условие G.94) определяет
^ х + 1
v = 1
\ + 1
7m,ArC*0 = 2 Cmv$kv-
v = к
Наконец положим 7т, * = Утк @). Это и есть искомые коэффициенты
в формуле G.93). Чтобы показать это, отметим, что U@) =«и
Ст,Х+1 |х:=0 ~ * R
15. Ю. А. Дубов 225
поэтому при х = О
= 1
Величины Gy Л @) определены формулой G.92), а коэффициенты
Cm, v - формулой G.98). Далее,
_ 0 Z
/с =0
^V 1 -и).
Теперь, просуммировав обе части этого равенства по т от нуля до X — 1,
окончательно получим
Х21 2
ш = 0 к = 0
что в силу G.95) и завершает вывод соотношения G.93). Искомая
зависимость G.75) найдена.
Глава 8
ФОРМИРОВАНИЕ АЛЬТЕРНАТИВ С ТРЕБУЕМЫМИ
СТРУКТУРНЫМИ СВОЙСТВАМИ
В ряде важных прикладных задач понятие альтернативы как
формального математического объекта, будь то элемент конечномерного
пространства или реализации случайной величины, оказывается неконструктивным.
Часто альтернативы обладают рядом структурных особенностей, учет
которых приводит не только к определенным теоретическим и вычислительным
трудностям, но и влечет необходимость постановки и решения задач,
принципиально отличных от рассматривавшихся ранее.
В традиционной постановке множество альтернатив обычно задается
либо с помощью неявного описания (например, посредством системы
ограничений, как в многокритериальных задачах математического
программирования, рассмотренных в главе 2), либо с помощью явного
перечисления, используемого в ряде дискретных задач и некоторых конструкциях
общей теории выбора (Айзерман, Малишевский [1]). Однако и в том и в
другом случае как множество альтернатив, так и сами альтернативы
воспринимаются как заданные. Естественно, что в этих условиях на первый
план выходят проблемы исследования свойств! множества максимальных
(или тг-оптимальных) альтернатив, построения вычислительных процедур
их определения и т.д.
Уже при отказе от предположения о наперед заданном множестве
альтернатив появляются новые задачи. Если множество альтернатив случайное, то,
рассматривая каждую его реализацию, можно говорить о выделении я-опти-
мальных альтернатив и анализе их свойств, прибегая для этого к
результатам глав 2, 4 и 5, но значительно больший интерес здесь вызывают
проблемы получения вероятностных характеристик я-оптимального множества и
исследование послойной структуры, рассмотренные в главах 6, 7. Однако и
здесь возможным наличием у альтернатив определенных структурных
свойств обычно пренебрегают. Во многих случаях такой подход себя
оправдывает.
Заметим теперь, что можно легко представить ситуацию, в которой,
прежде чем описать множество альтернатив (как детерминированное, так
и случайное), необходимо объяснить, как устроены его элементы. Эта
задача, получившая название задача формирования, обладает рядом
интересных особенностей, которые и рассматриваются ниже. Поскольку модели
формирования чаще всего используются в задачах автоматизации
проектирования, управления производством и его организации, где уже сложилась
определенная терминология, нам будет удобно в дальнейшем использовать
вместо термина альтернатива эквивалентный термин вариант системы.
15* 227
Множество альтернатив при этом будет соответствовать совокупности
вариантов системы, наделенных требуемыми структурными свойствами.
Уже само упоминание, что вариант системы обладает структурой,
означает, что он состоит из некоторого числа структурных единиц, которые
в дальнейшем будем называть элементами. К любой системе — технической,
экономической или организационной - обычно предъявляются
определенные требования, которые формулируются в виде выполняемых системой
функций. Естественно, что формирование варианта системы означает как
перечисление входящих в него элементов, так и распределение между
ними системных функций. Структура варианта позволяет установить,
таким образом, не только, будет ли система выполнять свои функции, но и
насколько хорошо она это сможет делать.
Здесь возможны три основные формулировки задачи формирования
и выбора:
- определить все я-оптимальные варианты системы;
- определить подмножество я-оптимальных вариантов,
удовлетворяющих определенным требованиям;
- определить наиболее предпочтительный я-оптимальный вариант.
Заметим сразу же, что формально ничто не мешает свести любую из этих
трех задач к традиционной постановке. Например, в широко
распространенном случае, когда любой вариант системы состоит из конечного числа
элементов, а распределение системных функций между ними также может
быть осуществлено конечным числом способов, можно сперва
сформировать "расширенное" множество альтернатив, включив в него все мыслимые
варианты, затем "отфильтровать" это множество, удалив из него варианты,
не обеспечивающие выполнение системных функций, а с "остатком"
поступить, например, так, как это делается в главах 2 и 3. Задача формирования
и задача выбора при этом разделяются.
Однако попытка разделить задачи уже на этапе формирования приводит
к непреодолимым вычислительным трудностям, которые иллюстрируются
оценками, полученными в данной главе. Исключительная трудоемкость
задачи формирования даже в простейших постановках заставляет
рассматривать задачу формирования и выбора как единое целое. При этом
перечисленные выше задачи принимают довольно специфический вид:
- сформировать все тг-оптимальные варианты системы и только их;
- сформировать множество я-оптимальных вариантов,
удовлетворяющих заданным требованиям, и только их;
- сформировать наиболее предпочтительный я-оптимальный вариант и
только его.
По-видимому, рано говорить о том, что эти задачи решены в сколько-
нибудь общем виде. Поэтому представляется полезным обсудить отдельные
подходы к их решению и выделить как наиболее перспективные
теоретические результаты, так и некоторые хорошо зарекомендовавшие себя
вычислительные методы. Этому обсуждению и посвящены две последние главы
книги.
Простейшая и наиболее часто используемая модель задачи формирования
получается при использовании метода морфологического анализа, краткое
описание которого приводится в начале главы 8. Затем, для того чтобы
обеспечить требуемую направленность процесса формирования вариантов,
228
вводится понятие метризованного морфологического пространства,
формулируются и обсуждаются аксиомы метрики в морфологическом
пространстве, устанавливается единственность метрики, удовлетворяющей этим
аксиомам. Наличие метрики позволяет построить определенную систему
окрестностей для так называемых "базовых точек" морфологического
пространства; варианты системы формируются таким образом, чтобы они
принадлежали данным окрестностям. Приведены оценки числа получаемых
при этом вариантов. Затем полученные результаты обобщаются на случай,
когда различные морфологические классы представляют собой
континуальные множества, например отрезки числовой оси.
Следующее обобщение классической схемы состоит в том, что
допускается возможность выполнения отдельными элементами системы
нескольких системных функций. Правило составления морфологического' варианта
при этом существенно изменяется. Достаточно естественным инструментом
анализа в данной ситуации является аппарат трансверсальных структур,
а оценки числа вариантов определяются с помощью перманентов
соответствующих матриц.
Глава завершается выводом вероятностных характеристик для
отдельных оценок в случае, когда морфологическое пространство можно
рассматривать как случайное. Используемый при этом аппарат опирается на
результаты, полученные в главах 6 и 7.
§ 8.1. Метод морфологического анализа
Морфологический подход, предложенный в 40-х годах швейцарским
астрофизиком В.Цвики, является довольно эффективным средством для
решения задачи формирования вариантов разнообразных систем. Он
позволяет выявить, систематизировать и изучить все возможные способы
построения системы, предназначенной для реализации заданных функций.
Наиболее характерным и существенным свойством морфологического
подхода является его направленность на поиск полноты и общности
вариантов. Он позволяет систематически выявить всю совокупность возможных
вариантов, проанализировать последствия принимаемых решений и учесть
наличие нескольких целей, для достижения которых предназначается
проектируемая система.
В работе (Цвики [1]) описаны и проиллюстрированы на примерах три
развитых Ф.Цвики морфологических метода: метод систематического по-
крытия поля, метод отрицания и конструирования и метод
морфологического ящика. Последний применяется наиболее часто и сам по себе
довольно прост, однако практическое применение этого метода при решении неко
торьгх задач вызывает определенные затруднения.
Метод морфологического анализа по ФДвики состоит в реализации
следующих этапов:
1. Точная формулировка решаемой задачи (описание желаемых
функциональных свойств исследуемой системы);
2. Выявление максимально полного перечня основных функций
системы;
3. Определение различных альтернативных способов реализации каждой
из выявленных ранее функций и генерирование всех возможных вариантов
229
Таблица 8,1
Функции
системы
Возможные способы отдельных
реализаций функций
Число
способов
аB)
а(/)
a(L)
• М*,
*/*,
рассматриваемой системы, каждый из которых состоит из цепочки,
содержащей ровно по одному способу реализации каждой отдельной функции
(заметим, что при этом элемент системы фактически соответствует
некоторому способу реализаций одной системной функции, т.е. является одно-
функциональным) ;
4. Определение эффективности вариантов системы;
5. Выбор и реализация наиболее предпочтительного варианта.
После осуществления 3-го этапа метода получается морфологическая
таблица (табл. 8.1). В этой таблице цепочкой связанных способов показан
один из вариантов рассматриваемой системы. Общее число всех возможных
L
вариантов N определяется так: N- П kt, где kt - число возможных
/ = 1
способов реализации /-й функции, a L - число всех функций системы.
При использовании метода морфологического анализа приходится
сталкиваться с необходимостью решения ряда вопросов. Как сформулировать
задачу и оценить точность ее формулировки? Как можно удостовериться
в полноте списка выявленных функций и способов их реализации и каким
образом осуществлять их выявление? Каким должен быть способ оценки
эффективности вариантов? Как преодолеть проблему размерности,
возникающую в связи с тем, что число всевозможных вариантов системы велико
даже при решении относительно небольшой по сложности задачи? Каким
образом проверять и учитывать несовместимость отдельных способов
реализации разных функций?
Возможность получения ответов на перечисленные вопросы и
конструктивность этих ответов определяются степенью сложности и новизны
решаемой задачи и неопределенностью исходной информации. Характер
ответов зависит от уровня квалификации и опыта исследователя, его интуиции
и степени понимания им сущности рассматриваемой системы.
Проблема размерности, возникающая в процессе формирования
вариантов исследуемой системы с использованием метода морфологического
анализа, порождается наличием следующего противоречия. С одной
стороны, приступая к изучению системы, желательно с максимальной полнотой
230
исследовать все возможности ее построения, чтобы не упустить из виду ни
одной потенциально лучшей. С другой стороны, возможности тщательного
и детального изучения и сопоставительного анализа всех различных
вариантов ограничены как временными рамками, так и средствами,
выделенными на проектирование и испытание вариантов. Поэтому здесь
особое значение приобретает исследование возможной локализации
областей исследуемых вариантов системы; эти области должны включать в себя
варианты, предпочтительные в заранее определенном смысле, причем их
число должно находиться в разумных пределах. Один из способов,
позволяющих осуществить такую локализацию, был предложен Р.Эйресом
(Эйрес, [1] ) ¦ Он состоит во введении понятия "расстояние" для
морфологических вариантов.
§ 8.2. Схема Эйреса и
метризация морфологического пространства
Р. Эйрес обратил внимание на то, что совокупность всех возможных
вариантов рассматриваемой системы, представленных в морфологической
таблице, можно разделить на три группы: известные, ранее исследованные
варианты; неизвестные варианту; варианты, в которых наряду с
элементами из известных вариантов имеются и новые. Применительно к задаче
моделирования процесса появления технических новшеств Эйрес рассуждал
следующим образом. Развитие любой научно-технической области идет по
пути варьирования параметров уже известных технических решений (если
понимать слово "параметр" достаточно широко), поэтому вероятность
появления нового, более эффективного технического решения (варианта
системы) существенно зависит от того, какую часть известные варианты
составляют от их общего числа. Для оценки этой вероятности необходимо
научиться рассчитывать число таких вариантов, которые отличаются от уже
известных заданным числом элементов.
Чтобы определить расстояние между вариантами, имеющимися в
морфологической таблице, полезными оказываются следующие понятия.
Морфологическое пространство - множество дискретных точек, каждая
из которых есть определенная комбинация способов реализации функций
системы. Морфологическое расстояние - число функций, по которым два
варианта имеют несовпадающие элементы. Морфологическая окрестность
(морфоокрестность) - подмножество морфологически близких
вариантов. Поверхность морфоокрестности - множество всех вариантов,
отличающихся от точек окрестности самое большое одним элементом. Число
таких вариантов называется площадью поверхности.
Введем теперь понятия и формальные определения, необходимые для
строгого исследования пространства морфологических вариантов системы.
Пусть заданы:
- конечное множество Е9 элементы которого будем называть
элементами системы;
- разбиение а:{1, ..., L) -+ 2Е множества элементов на
морфологические классы.
Здесь оA) СЕ- совокупность элементов системы, принадлежащих
морфологическому классу /, L - общее число классов. В дальней-
231
шем будем предполагать, что разбиение о удовлетворяет условию
оA) Г\оA') =0 при/ Ф1*.
Определение 8J. Морфологическим пространством Л называется
множество Л С 2Е такое, что для всех х G Л и для любого индекса
/ е {1,...,/,} множество хГ)оA) одноэлементное.
Из этого определения следует, что х содержится в Л,т.е. является
вариантом морфологической системы, тогда и только тогда, когда х есть
множество представителей классов а(/), / = 1, ..., L :х = {xit ...9xL), где
х, ?а(/).
Как уже отмечалось во введении к этой главе, упростить процесс анализа
совокупности морфологических вариантов системы можно за счет
исследования локальных областей морфологического пространства, которые содер.
жат варианты, обладающие определенным структурным свойством. Для
этого и вводится метризация морфологического пространства.
Итак, пусть х = (xit ..., xL ) - морфологический вариант, х G Л,
Р(х> У) - расстояние между вариантами х и у. Для того чтобы функцию
р>: А2 -> [0, ©о) можно было назвать "расстоянием", необходимо, чтобы
она обладала свойствами, характерными для расстояний в метрических
пространствах.
Аксиома 1. р(дс, у) > О, причем равенство достигается тогда и только
тогда, когда х = у.
Аксиома 2. р (х, у) = р (у, х).
Аксиома 3. р(х, z) +p(z,>>) >p(x,y).
Аксиома 3 выполняется со знаком равенства, если вектор 2 лежит
"между" точками х и у. Понятие "между" в морфологическом
пространстве требует специального пояснения. Введем следующее определение.
Определение 8.2. Тернарное отношение Л С Л3 называется отношением
между 9 если и только если для любых xjrzGA,
zR(xty)*=> V/€{1, ...,?} (z/=x/) или (z/=j>/). (8.1)
По определению 8.2 вариант лежит между двумя другими различными
вариантами, если он составлен только из элементов, входящих в оба
варианта.
По аналогии с линейными пространствами, в которых неравенство
треугольника превращается в равенство, если все три точки лежат на одной
прямой, введем следующую аксиому.
Аксиома 4.
р(х, z) + p(zt у) = р(х, у) *=> zR(x, у).
Чтобы сформулировать следующую аксиому, обозначим через х',у
проекции векторов х и у на подпространство, порожденное ортами с
номерами несовпадающих координат векторов хну.
Аксиома 5 (аксиома сегмента).
V*, у е Л => р(х, у) = р(х', у' ). (8.2)
Введем, наконец, последнюю, "калибровочную" аксиому,
определяющую значение минимально возможного расстояния в морфологическом
пространстве.
232
Аксиома 6. (L = 1) =»Vx, ye A: p{x,y) = 1.
Эта аксиома означает, что расстояние между двумя различными
элементами одного и того же морфологического класса равно 1.
Введенная совокупность аксиом позволяет доказать существование и
единственность метрики в морфологическом пространстве.
Теорема 8.1. Аксиомы 1 — 6 однозначно определяют р при
любых L > 1.
Доказательство. Доказательство проведем индукцией по L .
L
Пусть Л представлено в виде Л = П а(/). Если L = 1, то для пар вида
/ = 1
(xifXi) по аксиоме 1 р(хг,хг) = 0. Для пар вида (xitXf),.i Ф] в силу
определения 8.2 не существует варианта, лежащего между ними. Используя
аксиому 6, получим p(xit дсу ) = 1.
Допустим, что расстояние однозначно определено для всех
морфологических пространств размерности L строго меньше, чем Г. Рассмотрим
два варианта х и у морфопространства размерности Г. Пусть
A5={Xi,X2,...,Xr}- подмножество номеров несовпадающих координат
векторов х и у, Хг < Хт + 1, г € {1,..., Г-1}. Тогда, если t < Т, то в силу
аксиомы 5 р(х,у) = р (хх %,..., хх t, У\ %,..., У\ t) и, значит, по допущению
индукции р(х, у) - однозначно определенная величина. Если же все
координаты векторов различны (х* Фу и i е {1» — > Т}), то рассмотрим
последовательности векторов
Вектор z' по определению 8.2 лежит между х* и у' и, следовательно,
по аксиоме 4
По допущению индукции все pi9 i € { 2, ..., Т} определены однозначно.
Из аксиом 5 и 6 следует
Р*-Рт=1. (8.3)
Но поскольку рт = р(хт9ут) = р(хТ9ут) = 1 и р(х,у) = р1, то суммируя
(8.3) по i от 1 до Т — 1 однозначно определяем Pi = Г.
Одно из полезных свойств введенной таким образом функции
расстояния в морфологическом пространстве формулируется следующим образом.
Утверждение 8.1. Доя всех L
min p(x, у) = 1 (8.4)
{х, у : х Ф у)
и достигается на векторах хи у, отличающихся одной координатой.
Доказательство. Доказательство проведем от противного.
Допустим, что существуют два различных вектора х и у такие, что р(лг, у) < 1,
Тогда возможны два случая: либо существует третий вектор z, отличный
как от х, так и от у и лежащий между ними, либо такого вектора z нет.
233
В последнем случае векторы хну отличаются только одной
координатой. Действительно, поскольку они различны, то у них есть различные
координаты и если таких координат больше чем две, то можно построить
вектор z, лежащий между jc и у и отличный от них, что противоречит пред.
положению.
Так как векторы хну отличаются лишь одной координатой (без
нарушения общности можно считать, что первой), то по аксиоме 5 имеем:
Р(Х»У) = P(*b.Vi)> но тогда из аксиомы 6 следует р(х,у) = 1, что
противоречит принятому допущению.
Рассмотрим теперь случай, когда существует вектор z ^ не равный ни х
и ни у и лежащий между ними: z x e R (*, у).
В силу принятого допущения и из аксиом 1 и 4 имеем р(х, zx) < 1.
Обозначим через k(x,z) число несовпадающих координат у векторов х
и z. Тогда к(х, z х) < L , и к(х, z i) - целое положительное число.
Если не существует z 2, лежащего между х и z i и не совпадающего ни
с одним из этих векторов, то мы приходим к противоречию с принятым
допущением по первой части доказательства. Если же такой вектор
существует, то в силу тех же аксиом 1 и 4 имеет место р(х, z2) < 1. Используя
определение 8.2, можно получить к(х, z2) < k(x, z i).
Продолжая этот процесс, построим
k{xtzx)>k{x,z2)>k(x9z3)>...
Через конечное число шагов v процесс должен оборваться, так как по
построению k(x,Zi) - строго убывающая последовательность
положительных целых чисел. В результате определится вектор zv такой, что
p(x,zv) < 1, причем не существует zv+iy отличающегося от х и от zv
и лежащего между ними. Но тогда снова по доказательству первой части
утверждения приходим к тому, что допущение р (х, у) < 1 неверно.
Следующая теорема устанавливает формулу для расстояния р.
Теорема 8.2. Единственное расстояние р, удовлетворяющее всем
аксиомам, дается соотношением
рпЛ= 2 A-8,,,), (8.5)
/ = 1 '
где Ьх у - символ Кронекера:
( 1, если дс/=.у/,
Х/'у* [0 в противном случае.
Доказательство. Из теоремы 8.1 следует, что аксиомы 1 - 6
определяют р однозначно. Аксиома 1 выполняется чри (8.5), так как
L
2 8Х ,у. < L, а Ьх х = 1. Аксиома 2 следует из того, что
5х,, yt =byl9xr Легко видеть,что
234
Суммируя (8.6) по / G {1,..., L }, получим
L L L
L- S 6xhyi+L- 2 Ь Z>L- 2 5* -
/= i /=i /= i
что соответствует
p(x9y)+p(y,z)>p(x,z). (8.7)
Учитывая (8.7), а также то, что (8.6) обращается в равенство лишь при
yt = дг, или >>/ = z t, убеждаемся в выполнении аксиомы 4.
Пусть Т = | {/: jc, = >>, } |. Тогда из (8.5) следует
p(x,jO = I-( 2 6X/tV/+ 2 6X/,V/)=/,-r.
/ e г / ?. г
И если хй ну* те же, что и в формулировке аксиомы 5, то р(*#,yf) *=
= L — Ту т.е. выполнена и аксиома 5.
Аксиома 6 также выполняется, поскольку если между вариантами х
и у нет промежуточного варианта, то они отличаются не более чем одним
L
элементом. Поэтому 2 дХ( 9 v = Z, - 1 и, значит, р(х, у) = 1.
Введя метрику в морфологическом пространстве, перейдем теперь
к систематическому анализу окрестностей некоторых выделенных точек
пространства.
§ 8.3. Сферические и шаровые окрестности
в морфологическом пространстве
Прежде всего отметим, что, несмотря на совпадение аксиом 1-3
(§ 8.2) с обычными аксиомами расстояния, геометрическая структура
окрестностей в морфологическом пространстве довольно специфична.
Пусть г и р - целые неотрицательные числа, не превышающие L.
Определение 8.3. Сферической окрестностью мр> L (x) радиуса р с
центром в точке х, х € Л, называется подмножество точек метризованного
пространства Л, отстоящих от точки х на расстоянии р:
y)^p\ х.уеЛ). (8.8)
Определение 8.4. Шаровой окрестностью wr$ L (jc) радиуса г с центром
в точке х,хЕ Л, называется подмножество точек метризованного
морфологического пространства Л, отстоящих от точки х на расстоянии,
не большем г:
*г,ь(х)={у: р(х,у)<п х.уеА). (8.9)
Используя представление морфологического пространства Л в виде
L
?-мерного целочисленного параллелепипеда Л = П а(/), приведем, опи-
/= 1
235
раясь на определения 8.3 и 8.4, примеры различных сферических и шаровых
окрестностей.
На рис. 8.1 и 8.2 соответственно показаны сферические и шаровые
окрестности радиуса 1 и 2 в случае L = 2. Сферическая окрестность
"i,2 (•*) на рис. 8.1 содержит все помеченные жирно точки, а сферическая
окрестность и2,2 (*) - все точки, помеченные крестиками. На рис. 8.2
шаровая окрестность и>1э2(х) содержит все жирно помеченные точки,
а шаровая окрестность и>2>2(х) - все точки, обведенные кружками.
©—Ф Ф Ф—ф
\ )
)
X
о
Рис. 8.1
Рис. 8.2
На рис. 8.3 и 8.4 изображены сферические и шаровые окрестности радиуса
1 и 2 в случае L = 3. На рис. 8.3 сферическая окрестность их >3 (*) содержит
все помеченные жирно точки, а сферическая окрестность u2ts(x) - все
точки, обведенные кружками. На рис. 8.4 шаровая окрестность и>1>3(*)
содержит все жирно помеченные точки, а шаровая окрестность w2>3(x) -
все точки, обведенные кружками.
Отметим некоторые полезные свойства шаровых и сферических
окрестностей точек морфологического пространства и соотношения между ними.
1. Множество непустых сферических окрестностей морфологического
пространства исчерпывается сферическими окрестностями целочисленного
радиуса, не превосходящего размерности пространства:
VjcGA: иРгЬ(х)Фф <=> О < р < L.
2. Сферическая и шаровая окрестности нулевого радиуса совпадают со
своим центром:
VxGA: uOtL(x) = wOtL(x) = x.
3. Шаровая окрестность радиуса L совпадает со всем морфологическим
пространством и с множеством своих центров:
Если же радиус шаровой окрестности удовлетворяет условию 0 < г < L
(напомним, что г — целое число), то центр шаровой окрестности единствен.
Это свойство подчеркивает специфическую особенность
морфологического пространства, указывая на то, что структура окрестностей в нем
существенно отличается от соответствующих объектов евклидова пространства.
4. Любая шаровая окрестность радиуса г, 0 <r <L, относительно точки
х G Л может быть представлена как объединение г концентрических
(непересекающихся) сферических окрестностей с центрами в точке х:
U uPtL(x).
= о
236
5. Непустое пересечение двух сферических окрестностей, вообще говоря,
не является сферической окрестностью. Пересечение любых двух
сферических окрестностей радиуса/ — 1 непусто.
Заметим также, что если точки х1 и х2 принадлежат шаровой
окрестности wr,L (x) с центром в точке х, то точка z, лежащая между ними, т.е.
[z, (х1, х2)] G R (см. (8.1)), может и не принадлежать этой окрестности.
Действительно, пусть L = 4, х ={ 2, 2, 2, 2}, г = 2. Выберем х1 = {1, 2, 2,1},
Рис. 83
Рис. 8.4
х2 ={2, 3, 3, 2). Очевидно, что р(х, х1) = р(х, х2) = 2, следовательно.,
х1 € и>2,4 (х), х2 € w2t4 (х). По формуле (8.1) точка z = {1,3,3,1} лежит
между х1 их2, но p(x,z) =4.
Важной характеристикой метризованного морфологического
пространства является число точек, содержащихся в шаровых и сферических
окрестностях произвольного радиуса. Обозначим через р, р = 0,..., г, радиус
сферической окрестности, вложенной в шаровую окрестность радиуса г,
с центром в точке х, пусть kt = I o(l) I - число элементов
морфологического класса. Рассмотрим семейство множеств {DPtL ,P=1,•••,?), каждое
из которых есть р-подмножество множества (J, ...,?}, элементы
которого упорядочены по возрастанию: DPtL ={ / = (lx, . . . , /р) 11 </р <
Теорема 8.3. Число точек NrL (x) шаровой окрестности радиуса г,
О <г <L, с центром в точке х € Ане зависит отх и определяется
соотношением
S 2 П (А:/ — 1). (8.10)
Р = ! Dp,L / = 1
Доказательство. Так как представление морфологического
пространства в виде декартова произведения определено с точностью
до перенумерации координат (морфологических классов) и
перестановки значений на осях, то без нарушения общности можно считать, что х
имеет все координаты, равные 1, т.е.
jc = {1,1,...,!}. (8.11)
NrL = 1
Учитывая (8.11) и соотношение мевду шаровой окрестностью и
вложенными в нее сферическими с совпадающими центрами (см. свойства 2 и 4)
получаем, что число точек шаровой окрестности можно определить
суммированием точек по сферическим окрестностям:
1{ЛрA,д>) </•}!= 2 МрЬ(х),
р = о
(8.12)
237
где MPtL (x) = | Upti (jc) | — число точек сферической окрестности радиуса р
с центром в точке х.
Пусть у принадлежит сферической окрестности радиуса р и имеет только
координаты /i, /2, . . . , /р, отличные от 1 (т.е. у имеет р несовпадающих
с 1 координат). Число способов выбрать значение координаты /у равно
кц — 1. Следовательно, число точек сферы радиуса р таких, что лишь коор-
р
динаты /i, . . . , /р и только они отлиады от 1, равно П (kt. - 1). Сум-
/ = 1 '
миру я по всем l^DPtLy получаем
MPfl(x) =2 П (Ь.-1). (8.13)
После подстановки (8.13) в (8.12), из того, что сферическая окрестность
нулевого радиуса (свойство 2) содержит только одну точку, получим
(8.10).
Следствие. Для числа точек сферической окрестности
морфологического пространства справедливо следующее рекуррентное соотношение:
MnL = MPtL_x + (kL - lWp-if?-i. (8Л4)
Доказательство. Выделим из (8.13) первый множитель и
представим MfitL в виде
MPtL » 2 (*|t -1) 2 2 ...
- 2
* П (*,.-1). (8.15)
/р = 1 / = 2 7
В (8.15) выражение, записанное под второй суммой, в соответствии с
(8.13) есть Л/р_1,/ _j и, следовательно,
L
\М — V /Ь I \АЛ /О 1 ?\
Н>*-* / -- п ' 1 V*/
Вынесем из-под знака суммы в (8.16) последний член. Имеем
/, = р
В соответствии с (8.13)
2 (к.
поэтому окончательно получаем
Теоретико-множественный способ доказательства следствия
использует представление сферы upL в виде
238
PiJL- 1 X <1»U( y ^# ^«p-l.L-1 Х{^})]. (8.18)
Действительно, пусть У) = Я)\{1}, где {1} - одноэлементное множество.
Рассмотрим множество
ПО = VAW) = П Ah
/= 1
где
jKy, если / e DpL,
{1} в противном случае.
Тогда uPtL = и F(/). Представим множество Z>p L ={/: 1 < L <
Dp,L
< /p_i < . . </i < L) в виде?>р>/, =^p,l-i + Я*, где/Г ={(/,, . . .
. ..э'р-ь'х): К/p-i </p-2< ...</i<^-l>.Значит/)* = {/:/ =
= (/(p- 1),/l),^(P- О G#p-i,L _i).Следовательно,mp>l =(wp,l-i x
Далее,если /(р)е/)*,то
= П Л, * rL = >l-i(/<P - О) X
/= i
и, значит,
«pL=(«pi-iX{l}U[ U ( U FL.,X
'^?>p-l,Z,-l yL Ф 1
X (/(p-O) X{rL})). (8.19)
Меняя в (8.19) порядок второго и третьего объединения, получим (8.18).
Но число точек в (upL_x X { 1}) есть не что иное, как число точек
MPtL-\ в сферической окрестности радиуса р в (Z, - 1)-мерном
пространстве с центром в точке 1, т.е.
l"p,L-lX{l}| = |Wp,L-ll =Mp,L-l-
Поскольку все множества, взятые в (8.18) в круглые скобки,
пересекаются, то справедливо соотношение
MPtL =Mp,L-l + 2 Mp-i.L-b
которое равносильно (8.14). Соотношением (8.14) можно
воспользоваться для получения оценок на MpL и NFyL.
Введем в рассмотрение производящую функцию ML(z) = 2 MPtLzp
р = о
для подсчета значений MPiL. Умножением на z9 и суммированием обеих
частей соотношения (8.14) с начальными условиями М^^ = О, Л/о^ = 1,
получим
Afo(z)=l, M1(z) = z(*1-1)+1, ATL(z) =
^z). (8.20)
239
Таблица 8.2
Значения Л#р>/,(*/ = 2)
0 (
1 1
2 1
3 1
4
5
6
7
8
9
10
) 0
[ 1
I 2
L 3
I 4
I 5
I 6
L 7
I 8
L 9
I 10
0
0
1
3
6
10
15
21
28
36
45
0
0
0
1
4
to
20
35
56
84
120
0
0
0
0
1
5
15
35
70
126
210
Таблица 8.2 (окончание)
10
0
0
0
0
0
1
6
21
56
126
252
Т абл
0
0
0
0
0
0
1
7
28
84
210
и ц а 8.3
Значения MpL{ki
0
1
2
3
4
5
6
7
8
9
10
0
0
0
0
0
0
0
1
8
36
120
= 3)
0 1 1
(
]
J
) 0
1 2
1 4
1 6
L 8
1 10
L 12
1 14
1 16
1 18
L 20
0
0
0
0
0
0
0
0
1
9
45
2
0
0
4
12
24
40
60
84
112
144
180
0
0
0
0
0
0
0
0
0
1
10
3
0
0
0
8
32
80
160
280
448
672
960
0
0
0
0-
0
0
0
0
0
0
1
4
0
0
0
0
16
80
240
560
1120
2 016
3 360
Таблица 8.3 (окончание)
ю
0
0
0
0
0
32
192
672
1792
4 032
8 064
0
0
0
0
0
0
64
448
1792
5 376
13440
0
0
0
0
0
0
0
128
1024
4608
15 360
0
0
0
0
0
0
0
0
256
2 304
11520
0
0
0
0
0
0
0-
0
0
512
5 120
0
0
0
0
0
0
0
0
0
0
1024
Таблица 8.4
Значения Л/р/Д*/= 4)
1
0
1
2
3
4
5
6
7
8
9
10
0
1
1
1
1
1
1
1
1
1
1
0
3
6
9
12
15
18
21
24
27
30
0
0
9
27
54
90
135
189
252
324
405
0
0
0
27
108
270
540
945
1512
2 268
3 240
0
0
0
0
81
405
1215
2 835
5 670
10206
17010
0
0
0
0
0
243
1458
5103
13 608
30618
61236
Таблица 8.4 (окончание)
Ю
0
0
0
0
0
0 .
729
5103
20412
61236
153 090
16. Ю. А. Дубов
0
0
0
0
0
0
0
2187
17 496
78 732
262440
0
0
0
0
0
0
0
0
6561
59 046
295 245
0
0
0
0
0
0
0
0
0
19683
196830
0
0
0
0
0
0
0
0
0
0
59 049
241
Таблица 8.5
Значения Afpf/,(fc/ = 5)
0 (
1 1
2 1
3 ]
4 J
5 1
6 1
7 1
8 ]
9 ]
10
) 0
[ 4
8
12
I 16
L 20
I 24
I 28
I 32
1 36
L 40
0
0
16
48
96
160
240
336
448
576
720
0
0
0
64
256
1280
1280
2 240
3 584
3576
7 680
0
0
0
0
256
1024
3 840
8 960
17 920
32 256
53 760
0
0
0
0
0
0
6144
21504
57 344
129 024
258 048
Таблица 8.5 (окончание)
10
0
0
0
0
0
0
4 096
28 672
114 688
344 064
860160
0
0
0
0
0
0
0
16 384
131072
589 824
1 966 080
0
0
0
0
0
0
0
0
65 636
589 824
2 949120
0
0
0
0
0
0
0
0
0
262 144
2 621440
0
0
0
0
0
0
0
0
0
0
1048576
Теперь, итерируя (8.20), получим
ML(z) = П
(8.21)
В частности, для гиперкуба (морфологического пространства из равно-
мощных классов) кг = к имеем
(8.22)
(8.23)
(8.24)
т.е. если кг = к, то
Для шаровой окрестности соответственно получим
= 2
242
Значения (8.24) можно найти по таблицам 0-распределения (см.
Большее, Смирнов [1]), переписав соотношение (8.24) в равносильной форме:
r,r+l). (8.25)
О-г)
Используя оценку Чернова (Эрдеш, Спенсер [1]), получим следующую
оценку для числа точек в шаровой окрестности при кг s к:
NrtL < exp|(I-r)ln — -+rln — + Link . (8.26)
L k(L - r) kr J
Отметим, что рекуррентное соотношение (8.14) позволяет затабулиро-
вать значения числа точек сферической окрестности с использованием ЭВМ.
Расчетные значения указанного числа приведены в табл. 8.2-8.5 для
случаев, когда число элементов в ?-м морфологическом классе меняется от
2 до 5, число морфологических классов - от 0 до 10, а радиус
сферической окрестности - от 0 до 10. Заметим, и это естественно, что при kL =2
значения числа точек сферической окрестности совпадают со значениями
биномиальных коэффициентов.
Расчетные значения числа А/Р,х,, представленные в табл. 8.2—8.5,
получены для случаев равномощных морфологических классов. В случае, когда
классы неравномощны, алгоритм расчета чисел MPti остается
принципиально тем же самым. Табл. 8.6 и 8.7 содержат значения числа MpL для
двух случайным образом выбранных значений мощности любого из L
морфологических классов.
Полученные в этом параграфе соотношения (8.10) и (8.14) для расчета
числа точек шаровой и сферической окрестностей произвольного радиуса
в более общей постановке задачи формирования морфологических
вариантов системы должны рассматриваться как верхние оценки. Дело в том,
что в ряде задач на ранних стадиях морфологического анализа
исключаются из рассмотрения некоторые заведомо нереализуемые варианты.
Причиной такого исключения могут быть запрещения на совместимость
элементов различных классов. В морфологическом пространстве таким
вариантам будут соответствовать запрещенные точки, которые следует
исключить из числа точек рассматриваемой окрестности.
Часто при задании множества запрещенных вариантов используются
матрицы бинарных отношений. Рассмотрим простой пример,
иллюстрирующий этот подход. Будем предполагать, что морфологический вариант*
допустим тогда и только тогда, когда все входящие в него элементы
попарно совместимы. Пусть задано морфологическое пространство
L
Л= П a@M(Xi,X2,....XL)), \€Л,= {1 *,>•
Каждой паре координат / и к вектора х Е Л ставится в соответствие
индикатор совместимости элементов Х/ и \к:
1, если X,. и \к совместимы,
0 в противном случае.
16* 243
Таблица 8.6
Значения*/. L (Jcl
*7) *
S9k2 = 5, k3 = 5, *4 = 8, *, = 4, *6 = 3, *7 = 5, ks = 6,*9 = 7,
0 <
1 1
2 ]
3 ]
4 1
5 1
6 1
7 1
8 1
9 1
10 1
) 0
L 4
L 8
I 12
L 19
L 22
L 24
I 28
I 33
L 39
I 45
0
0
16
48
132
189
233
329
469
667
901
0
0
0
64
400
796
1 174
2 106
3 751
6 565
10 567
0
0
0
0
448
1648
3 240
7 936
18 466
40 972
80 362
0
0
0
0
0
1344
4 640
17 600
57 280
168 076
413 908
Таблица 8.6 (окончание)
10
0
0
0
0
0
0
2 688
21 248
109 248
452 928
1 461 384
Таблица 8.7
0
6
0
0
0
0
0
10 752
116 992
772 480
3 490 048
0
0
0
0
0
0
0
0
53 760
755 712
5 390 592
0
0
0
0
0
0
0
0
0
322560
4 856 832
0
0
0
0
0
0
0
0
0
0
1 935 360
Значения М„ /,(*, =5,*, = 8, кг = 4, к, =4,Jts = 3,Л, = И,ft, =3,*, =9,*;, =3,
0 J
1 1
2 1
3 1
4 1
5 1
6 1
7 1
8 1
9 1
10 1
1 0
L 4
L И
L 14
L 17
1 19
1 29
L 31
[ 39
41
L 42
0
0
28
61
103
137
327
385
633
711
752
0
0
0
84
267
437
1843
2 497
5 577
6 843
7 554
0
0
0
0
252
786
5 516
9 202
29 178
40 332
47 175
0
0
0
0
0
504
8 364
19 396
93 012
151 368
191 700
Таблица 8.7 (окончание)
6
0
0
0
0
0
0
5 040
21768
176 936
362 960
514 328
7
0
0
-О
0
0
0
0
10 080
184 224
538 096
901 056
8
0
0
0
0
0
0
0
0
80 640
449 088
987 184
9
0
0
0
0
0
0
0
0
0
161 280
610 368
10
0
0
0
0
0
0
0
0
0
0
161 280
Для вариантах, все элементы которого попарно совместимы,
N(x)= П 6(X.,Xft)=l.
к, />*
И, значит, что число 7Vвсех допустимых вариантов
N= 2 N(x). (8.27)
/м
В частном случае, когда из I I априорно заданных матриц Bik =
= [b(\{, Xr)] размерности к{Хкк только L матриц, а именно матрица
BLl и матрицы Bii+l9 i = 1,..., L — l9 содержат нулевые элементы,
N равно сумме диагональных элементов матрицы П Вг /+1.
Приведенные выше результаты позволяют реализовать локальный
подход к решению задачи формирования, при котором формируются и
исследуются только варианты системы, находящиеся в некоторой
окрестности заданной точки морфологического пространства. Выбор этой
"базовой" точки, обычно определяется содержательной постановкой
задачи. В качестве базовой точки может выступать, например, уже
существующий вариант системы или же некоторый гипотетический вариант,
обладающий достаточно высокими оценками по критериям, но недопустимый
из-за попарной несовместимости его элементов. В последнему случае выбор
окрестности, должен осуществляться таким образом, чтобы была
обеспечена ее непустота.
Особый интерес представляет задача формирования варианта,
совмещающего в себя свойства нескольких базовых точек. Число таких
вариантов совпадает с числом точек морфологического пространства,
содержащихся в пересечении нескольких шаровых окрестностей произвольного
радиуса.
Пусть ^, г1э г2 - целые неотрицательные числа, не превосходящие L.
Обозначим
245
области суммирования по индексам ja и jp. Следующая теорема дает
точное значение для числа точек пересечения двух шаровых окрестностей
морфологического пространства.
Теорема 8.4. Число точек пересечения двух шаровых окрестностей
L
метризованного пространства Л = П а(/), центры которых находятся
на расстоянии s друг от друга, а радиусы соответственно равны гх и г2
равно
2 2 "Y*9* /2<* + к)-"-
к=0 \ S+K — Ц
M к
X 2 2 П П <*) -1H) -2). (8.28)
Доказательство. Если представить шаровые окрестности в виде
объединения концентрических сферических окрестностей (свойство 4),
то для пересечения этих окрестностей получим соотношение
"V, L (*) n "V, iW=uV (*)n ", l (*). (8-29)
При этом, поскольку две сферические окрестности радиусов мир, центры
которых отстоят на расстоянии s друг от друга, не пересекаются при
ц + v < s, то объединение по м и v в правой части (8.29) распространяется
лишь на область D = {/jt, ^ I s — r2 +1 < 5 -1^ + 1 <ц < rt } . Задача
подсчета числа точек Ns (гх, r2) = I wr L (х) П wr L (у) \ в пересечении двух
шаровых окрестностей и>г L (дг) и wr L (у) сводится, следовательно, к
задачам для сферических окрестностей. Таким образом, если будут
определены величины Ms С, р) s 11*^ L (х) П м^ L (у) |, то из (8.29) следует,
что их сумма по всем значениям м и р, принадлежащим D, дает искомую
величину
Ns(rltr2)= 2 2 MsUx,v). (8.30)
Найдем сначала число точек в пересечении сферических окрестностей,
центры которых находятся на максимальном расстоянии друг от друга
(s = L). Затем с помощью полученного выражения для ML (д, v) уже
нетрудно будет получить и общий ответ для Ms (ii,v),s </,. Воспользуемся
тем, что в морфологическом пространстве всегда можно так переставить
значения на осях координат и перенумеровать сами координаты, что
центром сферической окрестности радиуса м станет точка 1 = A, 1,..., 1), а
центром второй сферической окрестности — точка 2 = B,2,..., 2).
Пересечению сферических окрестностей. u^L A) П uv L B)
принадлежит, например, точка z = (zl9 z2,..., ^m + ^-l> 2, 2,..., 2, 1,Л,..., 1)
такая, что zf > 2, / < м + v - L. Очевидно, что рA, z) = д и рB, z) = v.
246
Число всех точек z такого вида равно
д + v-L
П (*,-2).
/ = 1 '
Все точки z, принадлежащие пересечению сферических окрестностей
u»yL ("О n wy,L B), будут учтены, если перебрать всевозможные наборы
из /i + v -L координат со значениями zf. > 2. Число таких наборов равно
H + v-L
2 П (*. -2),
где суммирование ведется по области Da ss{/e,a=l,...,ji + i;-
-? l/i </2<...</M + l,_jJ •
Для точек, принадлежащих пересечению сферических окрестностей,
необходимо, чтобы из оставшихся 2L -\i-v координат/,-мерного
вектора z €ид/,A) пи„?,B) ровно L — ц координат имели бы единичные
значения, а остальные L —v координаты имели бы значения z-, равные 2.
Все такие наборы, состоящие из единиц и двоек, можно получить
2L-\i-v\
I способами. Следовательно,
L-ix J
В том частном случае, когда числа элементов каждой оси
морфологического пространства одинаковы (kf = к), из полученного соотношения
следует
L. (8.32)
Перейдем к рассмотрению случая s <L. Так же, как и раньше, не
произойдет потери в общности результата, если в качестве центра сферической
окрестности радиуса ц выбрать точку 1, а за центр сферической
окрестности радиуса v принять точку с = B,2,..., 2, 1,1,..., 1).
Рассмотрим векторы z G u^ L A) П uv L (с) такие, что ровно к (к <v)
координат вектора z с индексами / > s отличаются от единицы. Число
способов выбрать к таких координат равно
2 П <fc-l), (8.33)
где суммирование распространяется на область D$ = { /р, 0 = 1,..., к | s <
247
)i < /2 < •.. < /к } .В частном случае, когда kj = Jfc, эта величина равна
-1)<<. (8.34)
Для векторов J', z\ T размерности s, получающихся из первых s координат
векторов 1, z, 2 должны выполняться условия
р(Г\г')=д-к, р (У, *') = *-к. (8.35)
В s-мерном морфологическом пространстве множество всех векторов z'
представляет собой пересечение двух сферических окрестностей с
радиусами д - к ир-к соответственно. Их число находится из соотношения (8,31),
если сделать подстановки: ц: = ii — k9p: = v — k9L: = s. Следовательно, из
(8.31) имеем
где область суммирования D% определена выше.
Из (8.33) и (8.36) следует, что число всех различных векторов z,
принадлежащих пересечению и^ь A) П uv L (с) и таких, у которых ровно
IX координат с индексами/ > s отличны от единицы, равно
1 } М ) 2 2, П X
X (*. -2) П (*, -1). (8.37)
Из (8.32), (8.34) и (8.36) для *, = * получаем
/2(* + 1с)-/1-|Л / f \
Л^с (М^)= ( 1 ( ) X
* \ 5+К—JU / \$-Д+ К, S-Р + К /
XI l(fc--2)M + i;-2K-'*(fr--l)\ (8.38)
\ к I
Варьируя теперь к от 0 до s - max (д, v), мы переберем все точки
пересечения i/M L A) П му L (с), и, значит, для подсчета их числа имеет место
соотношение
s - max Ox, и)
Ms(ja,p)= 2 MK(pi,p). (8.39)
Собирая вместе результаты (8.30), (8.37) и (8.39), получим утверждение
теоремы.
Для случая */ = к из (8.30), (8.38) и (8.39) получаем следующий вывод.
Следствие. Для морфологического пространства в случае кг = к91=1,... 9L,
число точек в пересечении двух шаровых окрестностей радиусов гх и г2 равно
1 г\ гг s- max 0*, v)
2 2 2 X
ц=$-г, + 1 v=s— д+1 к=0
248
'•( L )*
\ 2(s + K)-ii-p,Z,-s-K,K '
X (*-2)M-|'-2-K-f (k-\)K. (8.40)
Доказательство. Доказательство следствия сводится к
несложной проверке эквивалентности выражения, стоящего под знаком сумм в
(8.40)^, предварительно помноженного на I 1 , выражению, стоящему в
правой части соотношения (8.38).
Укажем, что при s = 0 и ц = v соотношение (8.37) определяет число точек
сферической окрестности, а при s = 0 и гх =г2 соотношение (8.40) дает число
точек в шаровой окрестности.
§ 8.4. Медиана совокупности морфологических вариантов
Результаты, полученные в предыдущем параграфе, создают
предпосылки для локального решения перечисленных во введении к главе задач:
множество 7гч)птимальных вариантов или некоторое его подмножество
формируются в окрестности некоторого базового варианта. Если таких
вариантов несколько, то рассматривается пересечение их окрестностей.
Однако в последнем случае возможен и иной подход, которому посвящен
данный параграф.
Из соотношений (8.28) и (8.40) видно, что число точек в пересечении
шаровых окрестностей может быть весьма значительным. В этом случае
имеет смысл говорить о вьзделении таких точек морфологического
пространства, суммарное расстояние от которых до всех базовых вариантов
минимально. Такая постановка задачи имеет определенный содержательный
смысл.
В любой морфологической таблице, построенной при решении
прикладной задачи анализа системы, содержатся все ранее реализованные варианты,
относительно которых известны их достоинства и недостатки, а также
затраты, связанные с их анализом и реализацией. Поэтому, если задача
формирования вариантов системы решается при наличии ограниченных ресурсов,
а относительно возможностей реализации вариантов, сильно отличающихся
от известных, имеется исходная неопределенность, то имеет смысл
ограничиться первоочередным анализом таких новых вариантов, которые
наиболее близки к совокупности известных. Иными словами, встает задача
определения вариантов, в среднем наиболее близких ко множеству базовых
(в данном случае —ранеереализованных) вариантов. При этом
предполагается, что реализовать такие промежуточные варианты будет проще,
поскольку в значительной степени можно будет использовать опыт,
полученный при разработке и применении базовых вариантов.
Введем следующее определение.
Определение 8.5. Медианой множества точек Y метризованного
морфологического пространства Л называется любая точка х € Л, суммарное
расстояние от которой до всех точек множества Y минимально.
249
По этому определению множество всех медиан М множества Y есть
= Argmin —- Z p(xj). (8.41)
л \Y\ s=Y
Выделение всех медиан множества У<Л осуществляется в
соответствии со следующей процедурой.
Алгоритм "Медиана".
1. Задание множества Y: Y = {yj, /= 1,... ,7V}CA.
2. Построение классов эквивалентностей по отношению равенства R на
множествах 1-х координат векторов у^ - Yx = {>>/ h j = 1, . . . , N): { YrfR,
/=1,...,L}.
3. Определение семейства максимальных по числу элементов классов
эквивалентностей для каждого / = 1,..., L:
Z/ = Arg max
L
4. Построение множества медиан М- П zh где?/— набор предста-
/=i
вителей семейства Z/.
Дадим обоснование того, что приведенный алгоритм выделит все
медианы множества Y. ь
Теорема 8.5. Пусть у={У1 = (уи ,... ,yJL\ /=l,..,iV}CA= П а(/).
Тогда для множества М медиан множества Y справедливо следующее
соотношение:
j N L
М = Arg max — 2 р(х, у,) = П г/.
А хбЛ N /=1 /=1
Доказательство. Используя формулу (8.5) для расстояния меж-
L
ду двумя точками х и у: р(х,у)= 2 A -6*. У|) и свойства операции
взятия максимума, получим
N L
М= Arg max 2 Ъ Ьх. y.r (8.42)
В силу неотрицательности слагаемых в (8.42) максимум выражения
L N
2 2 Ьх. х. достигается на тех векторах х, /-е координаты которых
максимизируют сумму 2 дх. v. .. Следовательно,
/=i ' /fl
L TV
М = П Arg max 2 6Х, у. ..
/=1 ^/€Л /=1 ' Л'
7V
Но Arg max 2 8Х у. как раз и есть множество представителей мини-
xt /=i " /f'
250
1
"\
5
J
2
* 1
f 2 J ¦ *
Рис. 8^
«Ir
ft
2 J ¦ 5
J 4 5 6
Рис. 8.6
Рис. 8.7
мальных (по числу элементов) классов эквивалентностей на множестве
Приведем теперь примеры выделения медиан. На рис. 8.5 Y =
= {У1>Уг,Уъ) - все известные варианты (помечены жирными точками).
Множество медиан M = [ml> m2tnt3} - (обведены кружками). На рис. 8.6
Y ={у\, у г* У г* Ул), медианой является точка ух. На рис. 8.7 Y -
= {^ь Уг* У г* У*> ^s)- Медианами являются точки т2 HWi =yi. На
последнем рисунке дана иллюстрация выделения совокупности медиан в
соответствии с алгоритмом "Медиана".
В табл. 8.8 приведены индексы элементов, вошедших в состав 15
произвольно выделенных вариантов 10-мерного пространства морфологических
вариантов. Табл. 8.9 содержит 12 медиан этой совокупности, найденных
с помощью алгоритма "Медиана".
Следует- отметить, что приведенный выше алгоритм позволяет решать и
обратную задачу, связанную с выделением точек, максимально удаленных
от базовых вариантов. Эта задача может возникнуть, например, если
базовые варианты обладают крайне нежелательными свойствами, или же при
проектировании новых технических систем, когда необходимо найти
решение, радикально отличающееся от уже известных.
Определение 8.6. Антимедианой множества Y метризованного
морфологического пространства Л называется любая точка ха € Л, суммарное
251
Таблица 8.8
Массив базовых вариантов
/ — номер базового варианта, / — номер морфологического уровня
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
1
1
2
3
4
5
6
7
8
9
1
2
3
4
5
6
2
1
2
3
4
5
6
7
8
6
5
4
3
2
1
2
3
3
6
2
8
6
5
2
5
4
3
4
6
7
8
9
4
5
2
4
1
7
5
9
7
5 ]
3
4
5
6 1
7 ]
8 1
3 1
6
1
1
L 1
L 1
1 1
1 1
7
L 2
1 2
1 2
1 2
1 2
1 2
1 3
1 4
L 1
1 6
1 4
L 5
L 7
1 8
1 9
8
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
9
2
2
3
3
3
3
3
3
3
3
3
3
3
3
3
10
3
4
4
4
7
5
6
6
6
6
6
6
6
6
6
Таблица 8.9
Массив медиан
т - номер медианы, / — номер морфологического уровня
1
2
3
4
5-
6
7
8
9
10
11
12
1
1
2
3
4
5
6
1
2
3
4
5
6
2
2
2
2
2
2
2
2
2
2
2
2
2
3
6
6
6
6
6
6
6
6
6
6
6
6
4
5
6
7
8
9
5 112 13
5 1
5 ]
5 1
5 1
5 1
7 1
7 1
7 1
7 1
7 1
1 ]
[ 1
1 1
1 1
1 1
1 ]
1
L 1
7 1 ]
12 13
L 2 1
1 2 1
L 2 i
1 2 1
1 2 1
1 2 1
1 2 1
1 2 1
1 2 1
1 2 ]
1 3
3
L 3
1 3
L 3
1 3
1 3
1 3
1 3
L 3
10
6
6
6
6
6
6
6
6
6
6
6
6
расстояние от которой до точек множества Y максимально:
xflGArgmax —2 ()
Алгоритм, выделяющий
Arg max — S
Л |У|
252
по существу, совпадает с алгоритмом нахождения медианы. В нем нужно
только сменить операцию взятия "min" на операцию взятия "max" и ввести
проверку на использование всех элементов каждого морфологического
класса.
§ 8.5. Метрика в континуальной морфологии
Преимущества локального подхода наиболее отчетливо видны в
ситуации, когда перебор морфологических вариантов заведомо невозможен.
Она возникает, например, в случае, когда морфологические классы имеют
континуальную мощность.
Пусть множество ограничений в задаче математического
программирования зависит от векторного параметра а, размерность которого равна
числу ограничений. Для задач линейного программирования эта
зависимость может быть записана следующим образом:
причем относительно щ известно лишь, что щ Е а(/), где о([) — некоторое
подмножество числовой оси, например
В этом случае семейство множеств {о(Г)} — допустимых изменений
параметров щ — можно рассматривать в качестве семейства
морфологических классов, а вариант системы представляет собой одну из
альтернативных задач математического программирования, получающуюся при выборе
конкретного представителя щ для каждого морфологического класса оA).
В дальнейшем мы будем продолжать использовать векторную запись
варианта системы у = (ati, ..., а^), где щ — представитель
континуального морфологического класса a(f). Заметим лишь, что o(J) может быть
не только отрезком числовой оси, но и произвольным подмножеством
конечномерного пространства. В этом случае щ является вектором.
Метрикой, существование и единственность которой в конечном
морфологическом пространстве Л были установлены в §8.2, можно наделить
и пространство с морфологическими классами континуальной
мощности Лс. Расстояние p(y,z) между вариантами У и z при этом будет
равно числу несовпадающих координат в векторном представлении у и z.
Расстояние р как функция на Ас X Лс принимает L + 1 значение. Как и
прежде, варианты, полностью состоящие из различных элементов,
находятся на расстоянии L. По определению 8.2 вариант со лежит между
вариантами у и z, если р(у, z) = p(y, oj) + p(co, z), т.е. когда неравенство
треугольника превращается в равенство.
Определение 8.7. Совокупность всех вариантов, расположенных между
двумя заданными вариантами у и zt называется морфологическим
отрезком \у, zb
Теорема 8.6. Любой отрезок [у, z] континуального морфологического
пространства Ас конечен и содержит 2P^'Z* элементов.
Доказательство. Сначала докажем вспомогательное
утверждение: если вариант со лежит между вариантами у и z, в которых из некото-
253
рого морфологического класса а@* выбран один и тот же элемент <*/, то
этот же элемент входит и в состав промежуточного варианта со.
Допустим противное: пусть для некоторого значения /0 выполнено
равенство j>/e = z/o « ft/e, но со1о Ф а!о. Обозначим через Jo множество
номеров несовпадающих координат вариантов у и z: Уо = {/ Е { 1,...
... ,?}|^/^2,}. Число элементов в /0 равно p(y,z). Обозначим через т
число элементов в множестве {/1/ €/0» Уг & <*>/}. Следовательно, число
элементов в множестве {/1/ €/0, У/ = со/} совпадает с числом элементов
в множестве {1\IGJO, z, т* со/) и равно 'р(yf z) - т. Поскольку со/о Ф у/о,
то число несовпадающих координат у вариантов у и со не меньше чем
т + 1, и, значит р(у, со)>т + 1. Аналогично, р(со, z)> p(y, z) - т + 1 и
вопреки предположению о том, что вариант со лежит между вариантами
у и z, оказывается, что
p(yt z) < р(у, со) + р(со, z) = р 0>, z) + 2.
Для доказательства основного утверждения разобьем отрезок \y,z] на
подмножества вариантов, расположенных между у и г и отстоящих на
расстоянии т от варианта z и на расстоянии p(y,z)-m от варианта у
(отметим, что для некоторых значений w G { 0, ¦.., р0\ г) }
соответствующие подмножества могут быть пустыми):
Vm ={co|co€[k,z], p0>,co) = pO\z)-m, p(co,z) = m}.
Очевидно, что
\y,z]= U Vm, УтПУт.=ф,
^МГ°„ v /p(v^)\
если тф m . Покажем, что мощность множества Vm равна I ).
\ т I
Действительно, если расстояние от варианта у до со равно р(у, со) =
= Р(У, z)-m, то ровно т координат со совпадают с координатами
варианта у. Если номера совпадающих координат вариантов у и со выбраны среди
номеров координат, по которым отличаются варианты у и z, что можно
сделать I I способами, то только этими координатами вариант со
отличается от варианта z. Для вычисления мощности отрезка \у, z]
остается просуммировать мощности множеств Vm:
S
т>0\ Ш
Доказательство закончено.
Из теоремы 8.6 следует, что отрезок [)\z], соединяющий два любых
морфологических варианта у и z в континуальном морфологическом
пространстве, всегда конечен. В то же время любая окрестность -
сферическая или шаровая - континуальна. Поэтому для реализации локального
подхода в ряде случаев оказывается удобным осуществлять формирование
и выбор вариантов, принадлежащих некоторому отрезку \y,z]. Можно
показать, что, несмотря на континуальность морфологических классов, при
этом сохранится характерная для предыдущих параграфов дискретная
структура задачи.
254
Действительно, поскольку общие элементы двух вариантов у и z
входят в состав любого варианта из отрезка \у> z], то при сравнении
промежуточных между у и z вариантов систем их можно исключить из
рассмотрения. Это означает переход от морфологического пространства Ас к
подпространству, состоящему из морфологических классов с номерами из Jo.
В нем варианты у и z расположены на максимальном расстоянии друг
от друга, равном \J0 \ = Р(У*2)- Чтобы указать, что отрезок \ytz]
рассматривается теперь в этом подпространстве, будем писать [у, z]. Заметим,
что мы претендуем на большее, нежели переход к подпространству Л§ =
= П сг(/) (которое континуально).
0
По двум заданным вариантам у и z, отстоящим в До на максимальном
расстоянии друг от друга, построим p(y,z) морфологических классов
/) = {j,,z/}, /€У0. Тогда \yTz] = П 2(/) и все варианты из \yTz]
представляют собой точки конечного морфологического пространства
Ло = П 2(/). Будем говорить, что Ло порождается вариантами у и z.
0
Эта конструкция допускает обобщение. Пусть Vk = {у*} *= i -
подмножество из К морфологических вариантов пространства Лс. В частности,
если V2={yl, у1}, то отрезок ty1, ;>2]здпишем в виде [F2]. При к > 2
множество [Vk] определим индуктивно:
[Vk]= U [и>,ук].
Можно легко убедиться, что это определение корректно, т.е. не зависит
от нумерации элементов множества Vk. Рассмотрим подмножество J\ -
= (/1У* = у}, I - 2,... ,к} номеров морфологических классов, из которых
в любой из вариантов в Vk входят идентичные элементы. Положим /0 =
= {1,... ,L)/Li и обозначим через Л(/о) подпространство
морфологического пространства Лс, состоящее из морфологических классов с номе-
рами /?/0. Проекцию множества [Vk] в Л(/о) обозначим через [Vk].
Теорема 8.7. Проекция [Vk] есть конечное морфологическое
пространство, в котором морфологический класс сг(/) содержит все различные
1-е элементы вариантов множества Vk:
И8 П {yl *=1,...,*>.
Доказательство опустим.
Теорема 8.7 позволяет сформулировать новое понятие окрестности,
которое в случае континуального морфологического пространства
оказывается более конструктивным, чем сферическая и шаровая
окрестности §8.3.
Выберем произвольный морфологический вариант и обозначим его
через у1, затем выберем к — 1 вариантов у2,... ,ук, находящихся на
расстоянии m от у1, Vk-i =ly2,... ,ук).
Определение 8.8. Звездной окрестностью Smyk_l варианта у1
называются все точки морфологического пространства [Vk] и только они.
Вариант у1 называется центром звездной окрестности (очевидно, что
центрами являются все варианты у1,..., ук).
Заметим, что в силу конечности Wk\ в нем уже можно пользоваться
конструкциями ?8.3.
Таким образом, переход к морфологическим пространствам вида
[Vk] позволяет свести изучение морфологической системы с
континуальной мощностью морфоклассов к серии рассмотренных ранее дискретных
задач морфологического анализа. Кроме того, в отличие от шаровой
окрестности, звездная окрестность характеризуется свойством, по смыслу
близким к выпуклости: если у,zESmtvk_x> то и любой промежуточный
вариант со Е [у, z\ также содержится в этой окрестности.
§ 8.6. Трансверсальные структуры морфологических систем
До сих пор предполагалось, что каждый элемент морфологической
системы может выполнять только одну системную функцию. Отказ от
простейшей схемы морфологического анализа в результате включения в
состав варианта многофункциональных элементов заставляет пересмотреть
правило композиции варианта системы из элементов морфологических
классов.
Любое К — подмножество VK вариантов традиционной схемы
морфологического анализа полностью описывается матрицей v = \\akt ||, к = 1,..., К,
/= 1, ...,?. Рассмотрим транспонированную матрицу ит и исключим из
нее строки, целиком состоящие из идентичных элементов, т.е. строки с
номерами /€Е/0. В результате получится новая матрица Vq. Если среди
элементов строки / матрицы vl нет одинаковых, то эта строка составляет
морфологический класс аA) пространства [K^J.Ho и при наличии в
строке / матрицы vl одинаковых элементов ее можно отождествить с
морфологическим классом пространства [VK],однако здесь морфологический
класс уже следует рассматривать как мультимножество.
К использованию мультимножеств для описания морфологических
классов приводят и менее формальные соображения. Часто многие
элементы системы имеют полифункциональное назначение. Процессор ЭВМ может
быть использован для выполнения различных программ, электромотор —
для транспортера и в перемешивающем устройстве. Если
полифункциональный элемент, настроенный на выполнение только одной функции,
отождествить с однофункциональным элементом и считать его альтернативой
элементу, использованному в анализируемой системе, то соответствующий
морфологический класс будет содержать эквивалентные элементы, т.е.
окажется мультимножеством. Более того, полифункциональный элемент
при этом может входить в состав нескольких морфологических классов,
что приводит к нарушению условия
а(/)Па(/') = 0 при 1Ф1\
Расширение понятия морфологического класса влечет соответствующие
изменения в правиле составления вариантов системы. Пожалуй самый
естественный подход к конструированию такого правила состоит в том,
чтобы свести исследование морфологической структуры с
полифункциональными ..элементами к стандартной схеме морфологического
анализа.
256
Назовем полифункциональный элемент, который можно использовать
для выполнения *, но не более чем к> функций системы, к-блоком. Число к
характеризует универсальность полифункционального элемента. Очевидно,
что саму систему можно рассматривать как универсальный ?-бпок,
выполняющий все L функций.
Предположим сперва, что при построении системы допустимо
использовать вместе с каждым ?-блоком еще к - 1 идентичных экземпляров.
Каждый такой экземпляр будет выполнять только одну функцию системы.
Пометим идентичные fc-блоки номером выполняемой функции. Все
1-блоки т$кже будем считать помеченными. Теперь можно составить новый
список морфологических классов, в котором все элементы различаются.
Определение 8.9. Вариантом системы называется упорядоченный набор
из L блоков, в котором на месте / находится любой из помеченных блоков
морфологического класса /, / = 1,..., L.
Для сформулированного варианта можно определить число входящих в
него помеченных копий любого ft-бпока X. Если \>к9 вариант недопустим.
Если же \<к, то из списка элементов, входящих в данный вариант,
следует исключить X — 1 копий данного &-бпока.
В случае, когда Аг-блоки можно использовать для выполнения только
одной, хотя и любой из к возможных, функции системы, такой подход
приводит к неоправданно большому перебору. При анализе систем с такими
полифункциональными элементами целесообразно воспользоваться другим
определением варианта.
Определение 8.10. Вариантом системы называется упорядоченное по
номерам функций системы множество различных представителей
морфологических классов, т.е. трансверсаль (в общем случае пересекающегося)
семейства множеств { a(l), I = 1,..., L).
В соответствии с определением 8.10 варианты системы, которые
различаются порядком расположения составляющих блоков, различны.
Например, вариант (У\,Уг) отличен от варианта (уг,У\): в нем первую функцию
системы выполняет 2-блок у\9 вторую — 2-блок у2\ во втором варианте
(У2*У\) 2-блоки ух ЙУ2 меняются ролями. Если из содержательных
соображений некоторые из таких вариантов различать нецелесообразно, то
приходим к следующему определению.
Определение 8.11. Вариантом системы называется пересечение орбиты
заданной группы подстановок, действующей на трансверсали семейства
морфологических классов, с множеством всех трансверсалей.
Пояснительный пример к определению 8.11 приведен после обсуждения
трансверсальной схемы морфологического анализа.
Оценка числа вариантов для трансверсальной схемы дается перманентом
матрицы инциденций, элементы которой есть индикаторы принадлежности
функционального блока к морфологическому классу. Напомним
определение перманента.
Определение 8.12. Перманентом per А матрицы А = 1к//||, i = 1,..., m,
j = 1,...,п, m < л, называется сумма $>ацх п2B .« amim > гДе
суммирование производится по всем размещениям из п элементов 1,..., п по т.
Из основных свойств перманентов (Кофман [1]) нам понадобятся
следующие.
Vl 17. Ю.А. Дубов 257
1. Перманент матрицы инвариантен относительно любой перестановки
строк и столбцов.
2. При умножении какой-либо строки (или столбца) на скаляр X
перманент умножается на X.
3. Если А — квадратная матрица, то
а) per А -регЛт,
где Ат — транспонированная матрица, и
б) если ||а,у|| получается из Ik//II вычеркиванием строки /истолбца/,то
per || в,/1|= 2 <ty per || Oty ||, /=l,...,w.
Пусть все блоки, которые можно включить в вариант системы,
пронумерованы и составляют множество Е-1еп, л = 1,... ,N}. Тогда матрица
инциденций А состоит из элементов
{1, если блок еп может выполнять функцию /,
О в противном случае.
Число различных вариантов системы - число трансверсалей семейства
множеств { а(/), / = 1,..., L }, рассматриваемых как морфологические
классы, — равно per А. Например, для системы
{е3, М, оB)= {еи е4>,
<гC) = {<?!, е2у е*, е5)
матрица инциденций А равна
А =
Значение перманента per А равно 8.
Методы вычисления перманентов близки к методам расчета
определителей. Можно, например, воспользовавшись свойством 36, разложить
матрицу А по первой строке:
A 0 1 0 \ /1 0 1 \
I + per [
1 1 1 1У \1 1 1/
Очень полезным для приложений оказывается тот факт, что алгоритм
формирования трансверсальных вариантов в точности соответствует процедуре
вычисления перманента и получается в результате замены единиц в матрице
инщГденций А блоками еп. В рассматриваемой ситуации это приведет
к матрице
/О 0 е3 е4 О
а = I ех 0 0 е4 О
258
элементами которой служат либо нули, либо блоки еп. Формальное
вычисление перманента матрицы а приводит к списку всех вариантов:
per а = е3ехе2 ®е3ехе4 ®е3ехе$
®е3еАе2 ®е3еАе5 ®еАехе2
где знак $ заменяет запятую.
Приведем обещанный пример к определению 8.12.
Пример. Пусть имеются четыре функциональных блока Е = {eXt е2,
е3,е4}> причем ех, е2, е3 - 3-блоки, а е4 - 1-блок. Допустим, что каждый
3-блок может быть использован как проигрыватель, магнитофон или
радиоприемник, но должен выполнять только одну функцию, а 1-блок е4 - это
радиоприемник. Система должна выполнять три функции одновременно.
Тогда семейство морфологических классов выглядит следующим образом:
радиоприем: аA) = {ех, еъ е3, е4),
проигрывание: аB) = {ех, е2, е3),
запись: аC) = {ех, е2, е3).
Матрица инциденций в этом случае записывается как
А =
Ее перманент per A = 12, следовательно, имеются 12 трансверсальных
вариантов системы:
W = {(еи e2t е3), (еь е3, е2\ (е2, eXt еъ\ (e2t e3t ex\
(ег, ей е2), (е3, е2> ех)9 (е4, ех, ег\ (eA>.eXf еъ\
(eAt е2, ех), (е4, е2, е3), (е4, е3, ех\ (eAf еъ% е2)}.
Допустим, что безразлично, какие блоки выполняют функции
радиоприема и проигрывания, но на какие кассеты ведется запись - не
безразлично. Тогда среди 12 вариантов имеются три лары эквивалентных
(ех, е2, е3) - (e2f eXf e3), (ex, е3, е2) - (е3ь еь е2),
(е2, е3>ех)- (e3te2,ex).
Группа подстановок, действующая на трансверсали, есть G = {A), A,2)},
где A) - тождественная подстановка, A,2) - транспозиция двух первых
блоков. Применение подстановки A,2) к варианту (e4,eXie2) не дает
элемента из W (т.е. приводит к недопустимому варианту). Множество всех
вариантов равно V = W П [ и <7Ы ].
e w
§ 8.7. Вероятностная модель морфологического
пространства
Вопрос о числе вариантов системы, подлежащих сравнению, остается
критическим при любой схеме морфологического анализа. Для
конкретного массива данных оценить объем перебора, как правило, нетрудно;
труднее ответить на вопрос: как часто появится задача, объем перебора в кото-
259
рой превысит возможности алгоритмической или человеко-машинной
процедуры сравнения вариантов.
Бели число элементов кх в морфологическом классе а(/) есть
случайная величина, равномерно распределенная на отрезке [1, 21/ ], то ее
ожидаемое значение есть Lt. Средний объем морфологического пространства
L
равен Ер = П ?/, Но чтобы получить сведения о том, как часто число
/ = 1
морфологических вариантов будет находиться в заданных пределах, нужно
знать распределение случайной величины v. Такая информация особенно
важна при больших значениях параметров Lt.
Приведем вывод оценки распределения числа элементов в случайном
морфологическом пространстве, считая |а(/)|= Z,/ -> «>, Положим
?/ = fc/ /2Z,/. Поскольку
Р(а < h < Ъ) = Ь - а + o(j-\ (8.43)
будем считать величины ?/ равномерно распределенными на [0, 1]. Выпи-
шем распределение величины v° = П ki, которое в силу соотношения
/ « 1
L
(8.43) аппроксимирует распределение объема v = П kt морфологиче-
ского пространства, нормированное предельными распределениями
классов L/:
L *i
v = П j~. (8.44)
Величины 77; = — lh?7 независимы в совокупности и распределены по
экспоненциальному закону
Свертка L экспоненциальных распределений
/>( Z щ <У)= 1- S у'е-^//!
/ = 1 / = о
Отсюда
Плотность распределения f(x) равна (-1пх)/'~/(? - 1)!
математическое ожидание есть 1/2L. Теперь, в силу (8.44), получаем искомую оценку:
L - 1 ь
у Б (Z,ln2+ 2 1
^ /= 1 m = 1
Р( П *, < Я
2** П
260
Для схем с трансверсальной морфологической структурой выбор рандо-
мизируемых параметров сложнее. Вероятностная модель должна отражать
процедуру порождения данных задачи. Рассмотрим одну из таких
процедур. Предположим, что каждый морфологический класс составляется
отдельным разработчиком системы. Это дает основание считать
первоначальные составы морфологических классов независимыми выборками.
Пусть rt - вероятность того, что блок е, включенный в состав
морфологического класса а(/), может выполнить и некоторую другую функцию
системы: ею с равной вероятностью может быть любая из оставшихся L - \
функций. После составления списков блоков эти списки корректируются.
Каждый список пополняется неучтенными разработчиком блоками из
других списков, которые реализуют ту же функцию системы. Требуется
рассчитать распределение объема скорректированного морфологического
пространства.
Ограничимся исследованием предельной модели, воспользовавшись
приближением распределения длин первоначальных списков непрерывным
равномерным распределением (соотношение (8.43)). Если длина списка /
равна kt, то доля входящих в него блоков, выполняющих к тому же и
некоторую другую функцию системы (/'), равна /*,?,/(/, - 1). Пусть
вероятность того, что этот же блок учтен и в списке /', равна su,. Тогда
список /' пополнится на (\sn>.)r.lkll(L - 1) = qll>kl элементов.
Здесь qn, — вероятность того, что блок из списка / пополнит список /'.
В этом случае объем построенного морфологического пространства можно
оценить как
L L
v = П (*, + . S qu.kt).
/'= i /= i, 1Ф /'
Осталось заменить в этом выражении значения длин первоначальных
списков &/ случайными величинами ?/.
Замечание. Идентификация модели потребует оценки
параметра q *., который в свою очередь целесообразно моделировать случайной
величиной. В этом случае последующие выкладки следует рассматривать
как расчет условных распределений.
Изучим подробнее случай системы с двумя морфологическими классами
(L = 2) и, чтобы не усложнять модель, будем считать, что параметры qx 2 и
q21 одинаковы. Это означает что вероятность наугад выбранному из
первоначального списка блоку оказаться полифункциональным постоянна для
всех списков. И вероятность того, что этот блок встретится в списке
другого разработчика, также одинакова для всех списков. Расчет распределения
величины v = (?х + <\%г)(A\\ + %%) равносилен вычислению объема
области
D2 ={x,y\(x+qy)(y+qx) < z, 0 < * < 1, 0 <у < 1},
Р{у < z) = / dxdy.
261
Сделаем замену переменных А: (х, у) -> (и, и),
(и = x+qy,
А =
[v = qx+y,
¦С :)
Преобразование А переводит область Dz в область Gz :
Gz = {ufv\uv < z, О < w + qv < 1 - ?2, 0 < и + qu < 1 - q2}.
Определитель det^4 = 1 - q2 равен якобиану D(u, v)/D(x,y) - площади
образа единичного квадрата. Вероятность
Р(р < z) = 1 , f dudv
1-Я2 g2
равна площади той части этого образа, которая расположена под
гиперболой uv = z.
Рассмотрим отдельно два случая: z <q и q < z < A + qJ. В первом
случае
Up Z/U
S du f dv]/(l-q2) =
где (м0, у о) - точка пересечения прямой и - qv с гиперболой ми = z.
Значит, uo=qv0,H
P{v<z) =(-zln^)/(l~^2), z <G.
В случае z > q снова выделим интеграл по области [щ, vx] П
П {м, и. | t/u < z}:
+ / dti / dv)/(l-q2\
ux ux
где иi и v% - координаты точки пересечения прямой v - qu+ \ -q2 сти-
церболой uv = z. Перегруппировка членов и подстановка значения
интеграла
f du f dv - z In
дают
262
-q2 ~
Поскольку Vi -qui +1 — q2, получаем окончательный ответ:
+ _z . / l-i ""
1 -q2
где
Вычисление распределения для большего числа морфологических
классов - задача важная с прикладной точки зрения. Но процесс вычислений
сложнее и ведет к громоздким выражениям. Поэтому желательно получить
более простые аппроксимирующие выражения. Справедлив следующий
результат.
Теорема 8.7. Распределение F(u) = P{v <и) допускает оценку
* F{u) < <р(у), (8.45)
где <?(•) - функция распределения суммы L независимых и равномерно
распределенных на [0, 1] случайных величин, у - единственный в
сегменте [I — 1,/ ] корень полинома
Q,{y)=i
я I ' я1
а параметр I однозначно находится из условия
М/_1 < и < м/, (8.46)
где
щ = (/,)J"f(i-* + /*)'.
Идея доказательства состоит в выводе уравнения для касательной
плоскости к поверхности
L L
u = U(x), ?/(*)= П (q Z *, + (!-?)*,),
проходящей через точку пересечения с прямой хх = х2 = ,., = */, а именно,
уравнения
X/ =
\-q+Lq
из которого и следует нижняя оценка (8.45). Поверхность и = ?/(х) в
первом ортанте расположена ниже этой плоскости.
Верхняя оценка получается в результате замены поверхности и = U(x)
плоскостью, проходящей через точки пересечения поверхности с ребрами
263
единичного гиперкуба [0, 1] L . Расположение точек пересечения на ребрах
определяется величиной м. Поскольку
/ = 1
то для любого не равного нулю значения и выполняется только одно из
условий (8.46). В случае выполнения условия / поверхность и = U(x)
пересекает ребро, лежащее на прямой
JC,- = 1, если / < / - 1,
*/ = ',
X/ = 0, если j > I + 1,
(L\
и, следовательно, еще I j - 1 ребер. Если в (8.45) переменную у заме*
нить на у = г + / - 1, то корень полинома Rt (т) = Qi (т + / - 1) = 0
определит значение t - г в точке пересечения прямой с поверхностью. В
предельном случае при q =' 1 имеем
? х,
» = (ЗЕ*/),
/ = 1
и, следовательно,
Р(р < и) = *
Глава 9
ФОРМИРОВАНИЕ ЛЕКСИКОГРАФИЧЕСКИ УПОРЯДОЧЕННЫХ
МОРФОЛОГИЧЕСКИХ ВАРИАНТОВ СИСТЕМ
Одно из приложений исследованного в предыдущей главе локального
подхода к решению задачи формирования состоит в том, что он позволяет
свести модель формирования и выбора к уже упоминавшейся схеме явного
перечисления. Для этого в морфологическом пространстве строится
некоторая окрестность, затем формируются и проверяются на допустимость
входящие в нее варианты, и, наконец, осуществляется выбор одной или
нескольких наиболее предпочтительных альтернатив. Однако на практике
такая последовательность операций может быть реализована только в том
случае, если имеется информация, необходимая для однозначного
построения искомой окрестности. В некоторых прикладных задачах эта
информация может быть и не связана с критериями оценки варианта,
например выбор производится среди вариантов, близких к заданному по
построенной в § 8.2 метрике.
Но существуют и более сложные модели, в которых построение
исходной окрестности (или, что то же самое, некот'орой совокупности базовых
вариантов) представляет самостоятельную проблему. Как правило, в этих
моделях задается совокупность условий, которым должно удовлетворять
искомое решение, причем эти условия формулируются относительно
векторных оценок вариантов. Часто оказывается, что варианты,
удовлетворяющие заданным условиям, локализуются в сравнительно небольшой по
объему области морфологического пространства, и определите любого из
них позволяет эффективно использовать локальные методы.
Естественно, что точное решение задачи в такой постановке можно
гарантировать только при выполнении определенных предположений.
В настоящей главе основными допущениями являются следующие:
1) векторная оценка варианта представляет собой сумму векторных
оценок входящих в него элементов;
2) критерии оценки варианта лексикографически упорядочены.
Относительно этих предположений следует сделать одно замечание.
Аддитивная зависимость векторной оценки варианта от векторных оценок
элементов при отсутствии запрещений на сочетания элементов фактически
эквивалентна рассмотренной в главе 4 модели независимого выбора, хотя
непосредственное использование результатов этой главы здесь и не
проводится. Что касается лексикографического упорядочения критериев, то оно
выбрано в основном из-за наглядности, а также потому, что оно довольно
часто встречается в прикладных задачах морфологического анализа.
18. Ю.А. Дубов 265
§ 9.1. Постановка и обсуждение задачи
В практике проектирования сложных технических и экономических
систем широко распространены задачи, когда исходная информация о
разрабатываемом объекте включает в себя, помимо данных о структуре
системы и описании элементов, также и информацию о целях, для достижения
которых создается система, и требованиях, предъявляемых к ней. Такую
информацию в процессе проектирования чаще всего удобно использовать
в виде критериев, по которым производится оценка степени достижения
поставленных целей.
Если проектируемая система предназначена для последовательного
достижения ряда частных целей, а степень достижения каждой цели
определяется соответствующим критерием, то критерии, с помощью которых
будут формироваться предпочтительные варианты системы, строго
ранжированы.
Исходная информация о системе должна включать в себя^ также и
зависимости между оценками системы и оценками элементов, входящих в ее
состав, по каждому из критериев.
И наконец, на этапе проектирования системы, как правило, имеются или
могут быть определены ограничения на число формируемых
предпочтительных вариантов.
Естественно, что в процессе проектирования системы необходимо уметь
использовать все эти данные с тем, чтобы можно было более детально и
всесторонне исследовать все возможности построения системы, учитывая
уже на этапе формирования вариантов не только ее структурные
особенности и элементный состав, но и ряд важных оценочных характеристик.
Рассмотрим задачу формирования предпочтительных морфологических
вариантов системы, призванной обеспечить достижение ряда строго
упорядоченных частных целей. В такой формулировке задача ставится тогда,
когда достижение глобальной цели разрабатываемой системы
осуществляется в результате последовательного достижения частных целей.
К сходной постановке мы приходим и тогда, когда проектируемая система
содержит подсистемы, относящиеся к разным уровням иерархии. При этом
каждая подсистема обеспечивает достижение одной из частных целей.
Тогда достижение глобальной цели системы может быть обеспечено в
результате последовательного достижения целей подсистем, начиная с
подсистем нижнего уровня иерархии.
Приведем формальную постановку задачи.
Пусть Е - множество элементов системы, которое считается заданным,
|?Г| - т, а(/) СЕ — морфологический класс /, а{1) Ф 0, а(/) П
L L
Г\о{1') = ф при I Ф1\ U а(/)=?", Л= П а(/) - морфологиче-
*= 1 /= 1
ское пространство, L - число морфологических классов. Вариант
системы X представляет собой вектор (х1у ..., xL ) номеров элементов,
выбранных из различных морфологических классов, */ € {1, ..., kj),
/ = 1, ..., L, ki - число элементов в морфологическом классе а(/).
Вклад элемента Х\ Е а(/) в достижение цели / будем оценивать
скалярной функцией /у, определенной на Е. Тем самым каждому элементу
266
ставится в соответствие его векторная оценка f(x) ? Rn (здесь
предполагается, что число целей равно и) с компонентами fx (дс),... ,/„ (х).
Обозначим через <р(Х) = {<Pi(X), ..., <?Л(Х)} векторную оценку
варианта X. Здесь </>/ (X) есть некоторая функция от /^ (хг), ...,fj (xL), т.е.
от соответствующих оценок элементов хг, ,.., х^ , входящих в вариант X.
Последовательность в достижении частных целей системы определяет
строгую упорядоченность критериев:
Здесь \pf > <Pj означает, что критерий yt строго важнее критерия <р;-.
Строгая ранжировка критериев порождает отношение
лексикографического предпочтения на множестве вариантов системы.
Определение 9.1. Вариант X лексикографически предпочтительнее ва-
# lex f
рианта X (X >• X ), когда выдолняется одно из п условий:
;
но
- 1, но
п) */(Х)«*/(Х'),/в1,...,я-1, но
Определение 9.2. Вариант X эквивалентен варианту Х'(Х ~ X1),"когда
по каждому критерию варианты X и X1 имеют одинаковые оценки.
Заметим, что элементный состав вариантов X и X1 при этом различен,
т.е. X *Х'.
Определение 9.3. Вариант X лексикографически не менее предпочтите-
lex
лен у чем вариант Xf ( X > V ), если выполнено одно из условий,
указанных в определениях 9.1 или 9.2.
Если Ло - ограничение на требуемое число предпочтительных вариантов
системы, то в общем случае задача сводится к формированию первых Л^о
предпочтительных морфологических вариантов системы,
лексикографически упорядоченных на основе оценок у ( X ). Таким образом, задача
строго формулируется следующим образом: задана вектор-функция
определенная в морфологическом пространстве Л = П оA) со значе-
i = 1
ниями в пространстве векторных оценок Rn. Требуется сформировать
No-элементное подмножество М <L такое, что для X Е М и Xf G L/M
X > Х# и ни для одного X G М не найдется X1 € L/M такого, что
х' >хх.
Рассматриваемый ниже метод решения этой задачи основан на
морфологическом принципе формирования в сочетании с лексикографическим
принципом включения элементов в вариант системы. Морфологический принцип
приводит к тому, что формируются варианты, содержащие ровно по
18* 267
одному элементу-представителю от морфологического класса. Лексикогра-
фический принцип означает, что очередной элемент, включаемый в состав
варианта системы, обеспечивает наибольший вклад в векторную оценку
варианта с учетом строгой упорядоченности критериев.
Лексикографический морфологический метод содержит пять основных
этапов:
1. Точная формулировка задачи. Вербальное описание системы.
2. Определение и анализ целей. Формулировка критериев оценки
вариантов и их упорядочение.
3. Определение морфологических классов элементов.
4. Получение оценок элементов по каждому критерию. Построение
морфологической матрицы.
5. Формирование требуемого числа лексикографически упорядоченных
вариантов системы.
§ 9.2. Аддитивная модель и методы ее решения
При постановке задачи формирования требуемого числа
лексикографически предпочтительных вариантов системы в предыдущем разделе
необходимо указать связь между оценками вариантов системы и элементов,
составляющих систему, по каждому критерию. Во многих практических
задачах степень достижения системой любой из частных целей определяется
суммой вкладов, вносимых каждым элементом системы в достижение
данной цели.
Бели суммарный эффект от использования совокупности элементов,
составляющих вариант системы, равен сумме эффектов от каждого из них,
то между оценками элементов системы по критерию и ее вариантами-устаг
новлена аддитивная зависимость. В этом случае векторная оценка
варианта системы определяется как
/ =1
и задача состоит в том, чтобы сформировать требуемое число No
лексикографически предпочтительных морфологических вариантов системы,
оценки которых принадлежат множеству
L
/ = 1
или
Ф = 2 F,,
/= 1
где F/ = /(а(/)) - множество векторных оценок для морфологического
класса /, / = 1, ..., L, знак 2 означает, как и в главе 4, суммирование
множеств по Минковскому.
Рассмотрим алгоритмы решения задачи. Однако вначале необходимо
сделать следующее замечание. Рассмотрение аддитивной зависимости между
268
векторными оценками элементов и вариантов, вообще говоря, не
оказывает существенного влияния на структуру алгоритмов, хотя одновременно
делает более ясным и понятным их анализ. Дело в том, что введение более
сложных зависимостей (линейная комбинация векторных оценок
элементов) , например типа взвешенных сумм,, не приводит к сколько-нибудь
существенному изменению задачи. При наличии нелинейной зависимости
между векторными оценками вариантов и входящих в них элементов
приводимые ниже алгоритмы будут работоспособными, если можно
осуществить аппроксимацию этой зависимости кусочно линейной функцией.
Перейдем к описанию алгоритмов. Поскольку большинство практически
важных задач имеет большую размерность (из-за количества элементов и
критериев) и требует большого перебора, то возникает необходимость
разработки таких методов формирования требуемого числа
предпочтительных вариантов системы, когда, не просматривая все возможные
комбинации элементов, мы можем получить решение, наверняка содержащее все
предпочтительные варианты, и при этом среди вариантов, оставшихся
непросмотренными, не остается ни одного предпочтительнее, чем любой из
сформированных.
Основными параметрами, которые должны учитываться при разработке
алгоритмов решения задачи, служат: L - число морфологических классов,
m — число исходных элементов, N— число всевозможных морфологических
вариантов, п — число критериев, NQ — ограничение на число формируемых
вариантов. Кроме того, существенна информация о том, как распределены
значения оценок элементов по критериям.
В принципе, рассмотрев все или наиболее часто встречающиеся
соотношения между параметрами, можно построить универсальный алгоритм
формирования требуемого числа предпочтительных вариантов. Однако такой
алгоритм будет довольно громоздким, и эффективность его применения будет
существенно зависеть от соотношений между параметрами реально
решаемой задачи. Можно отказаться от построения универсального алгоритма
и пойти по пути создания алгоритмов, которые ориентированы на решение
наиболее широко распространенных задач, характеризующихся
определенными соотношениями между основными параметрами. Примем вторую
точку зрения как наиболее практически обозримую и рассмотрим три
алгоритма, каждый из которых целесообразно использовать для
определенного типа данных.
Алгоритм "Морфоперебор". Этот алгоритм целесообразно применять
в тех случаях, когда число формируемых вариантов No близко к числу все-
L
возможных морфологических вариантов N = П kt, которое в свою оче-
/= 1
редь находится в разумных пределах (jV^IO6). В алгоритме "Морфопере-
бор" генерируются все морфологические варианты системы, формируется
множество их векторных оценок Ф, а затем на нем решается стандартная
задача лексикографической максимизации. В результате формируется
No-элементное множество М С Л лексикографически предпочтительных
вариантов системы. Блок-схема алгоритма "Морфоперебор" приведена на
рис. 9.1. Через arg lex max здесь обозначено множество решений задачи лек-
269
arg lex max f (n) \ j:=0 \
n «A I
сикографической максимизации. Заметим, что обведенная на схеме
штриховой линией часть алгоритма может быть реализована разными
способами, например с использованием характеристической функции, широко
применяемой в машинном программировании при упорядочении массивов
данных в позиционных системах счисления.
При применении алгоритма "Морфоперебор" в процессе формирования
вариантов практически не используется специфика рассматриваемого
морфологического пространства. Оказывается, что такая информация
позволяет строить алгоритмы, радикально сокращающие перебор элементов
морфологического пространства.
Алгоритм "Фильтр*. Использовать алгоритм "Фильтр" целесообразно
для тех задач, в которых число элементов в морфологических классах
270
достаточно велико (я = 2 kt ^ 102 -г 104 ), в каждом классе содержится
/ = 1
много элементов с близкими или даже совпадающими векторными
оценками, а требуемое число вариантов No существенно меньше числа всевозмож-
L
ных вариантов N- П &/.
/ = 1
Этот алгоритм основан на идее понижения размерности решаемой задачи
за счет "просеивания" (фильтрации) элементов в различных
морфологических классах. Такая фильтрацюдоаключается в сравнении элементов по
степени их вклада в векторную оценку варианта системы с учетом
информации о строгом упорядочении частных целей системы и
исключением из последующего рассмотрения таких элементов, которые вносят
наименьший вклад. Исключение становится возможным на основе
информации о функциональной зависимости между оценками элементов и
варианта (напомним, что в рассматриваемой задаче предполагается
аддитивная связь). При реализации процесса фильтрации на каждом шаге
алгоритма существенно используются данные об ограничении No на число
формируемых вариантов.
Пусть Л/ - некоторое подмножество морфологического класса а(/),
/ = 1, ..., L , и пусть v - число точек морфологического пространства,
образованного этими подмножествами:
v = П Л,. (9.1)
/ = 1
Алгоритм "Фильтр" строит минимальное морфологическое пространство
вида (9.1), для которого еще выполняется условие
v>NOt No> 0. (9.2)
Блок-схема алгоритма "Фильтр" приведена на рис. 9.2. Рассмотрим
последовательность выполняемых им операций.
Построение начинается с пространства нулевой размерности Л/ = ф9
I = 1,..., L, для которого по определению положим v = 1.
Вначале подготавливаются и вводятся исходные данные: No,
Л= П а(/), Л/ =0.
/ = 1
1. Положить Vi = 1.
2. При некоторых исходных данных потребуется несколько раз
просматривать морфологические классы. Положить // = 0.
3. Положить / :=/ + 1.
4. Найти в каждом классе элементы, имеющие максимальные оценки по
первому критерию:
mt = max fx(y).
Определить новое множество Л/ « Л/ U Arg max Д (у) и число элемен-
271
Hem
:= argrran v (?
Формирование
No вариантов
(морфопвребор; шар; др.)
Рис. 9.2
L ^
тов в полученном морфологическом пространстве П Л/. Положить
/ = 1
v:=v • |Л/ |.
5. Проверить, все ли морфологические классы просмотрены.
Если / < L , то перейти к п. 3, если / = L , то перейти к п. 6.
6. Сравнить число точек в построенном пространстве с числом требуемых
вариантов Л^. Если v < No, то перейти к п. 2, если v > No, то перейти
к п. 7, если v = No, то перейти к п. 29.
7. Выделить те морфологические классы, в которых максимальные по
значению критерия Д элементы оказываются минимальными по сравнению
с элементам других классов:
ре = Argmin т1%
/ = i,..., L
8. Положить / := 0 (индекс / перечисляет элементы множества д, т.е.
ц ={//,/.= 1,...,1м1>.
9. Положить / :=/ + 1.
10. Поскольку исключать из класса Л/ какой-либо элемент можно,
только если этот класс содержит более одного элемента, то проверить,
верно ли, что | Л/Л = 1. Если | Л/у | = 1, то перейти к п. 11, а если | Л/. \Ф\9
то перейти к п. 12.
11. Положить Л/. : = Л/.. Поскольку такие одноэлементные классы
следует исключать из дальнейшего рассмотрения, то положим д* = ц. Далее,
положим ц* := fx*/{lj} и перейдем к п. 13.
12. Найти в Л/. множество лексикографически минимальных
элементов. Положить
/(/,) -lexmin/ОО;.
у е л/у
jti/ = Arglexmin /О).
13. Проверить, просмотрены ли все элементы множества ц. Если / Ф | д |,
то перейти к п. 9, а если / = | ц |, то перейти к п. 14.
14. Найти лексикографический минимум на множестве векторов
{/( h )> '/еМ*} • Положить /Г = Arg lex min /(//).
Отметим, что элементы множества /х, имеющие одинаковые векторные
оценки, могут входить в разные морфологические классы. Рассмотрим
альтернативные варианты исключения элементов множества /Г из
соответствующих морфологических классов. Пусть к - индекс, перечисляющий
элементы множества /Г = { 1цку к = 1,..., | ]х \) , a q - индекс (вообще
говоря, зависящий от //(*).* Q = qQj(k))), который перечисляет элементы
множества #/(*) ={JV ^ = ^ — > I A4/(it) I}. Логически не исключена всз-
273
можность того, что Hj(k) = Л/. . Но все элементы из Л/ исключать
нельзя. Значит, в этом случае наибольшее значение, которое может
принять <?, равно I l*jtk\ I - 1. Обозначим через <7 наибольшее число
элементов, которые можно попробовать исключить из Л/.
15. Положить к :« 0.
16. Положить к : к + 1.
17. Проверить на совпадение множество И^ь) и множество Л/
Если цПк) = Л//(Л), то перейти к п. 18. Если vj(k) Ф Л//(Л), то
перейти к п. 19.
18.Положить %:= 1М/(*) I — 1.
19. Положить У:в I М/ (*) I.
20. Проверить, все ли элементы множества /Г просмотрены. Если
* ^ I ? I > то перейти к п. 16, а если к = | /Г |, то перейти к п. 21.
Таким образом, каждой возможности исключения элементов
множества м из разных морфологических классов поставлена во взаимно
однозначное соответствие точка qf = (<h,<72> •••> ^|~|) пространства
Y = П A, ..., УО/с*))}. Выбор вектора G означает, что из класса
л = 1
Л? . исключается #* элементов множества Д\ Если принято решение
исключить множество элементов, определяемое вектором ^, то из
элементов, оставшихся в морфологических классах, можно сформировать
p(q)'P П (l - Як \ (9.3)
к = 1 \ I Л//ГАЛ | /
вариантов системы. Но число v(q) должно быть не меньше чем No. Поэтому
область D пространства Y, из которой допустимо выбирать решение <?,
определяется условием v($)>N0:D ={qG Y: v(q)>No) . Если D = ф9
то сокращение элементов в морфологических классах провести не удается.
В противном случае задача определения q сводится к задаче минимизации
v(q)-No-+ min . (9.4)
В силу монотонности минимизируемой функции область D можно
заменить ее паретовской границей nD.
Если множество решений задачи (9.4) содержит несколько элементов,
то безразлично, какой из них взять:
<7о ? arg min v(q) € Arg min [v(q) - No ].
21. Определить область D:
D = \q\p- f
I k =
274
22. Проверить, можно ли проводить сокращение морфологических
классов. Если пФф, то перейти к п.23. Если D = ф, то перейти к п. 30.
23. Выделить множество Парето nD. Определить решение
q0 = arg min v(q) = (??, ...., qK )
и соответственно множество ц?.^ = {yq | 4 Е A, . .., q^}} элементов,
подлежащих исключению. Сформировать новые морфологические классы,
положив
Дальнейшее сокращение элементов в классах невозможно, если
= («i.--->?,jn)-
24. Положить Аг:=О.
25. Положить ¦*:= к + 1.
26. Проверить на совпадение векторы §о и ?. Если <7о = ?, то перейти
к п. 27, если % ^ 5> то перейти к п. 30.
27. Проверить, просмотрены ли все координаты векторов <7о и#. Если
к Ф | Д'|, то перейти к п. 25. Если fc = | Д | перейти к п. 28.
28. Сформировать новые множества М/(*)> положив Щ$у= /^(*)^/(*)» и
перейти к п. 14.
29. Сформировать новое морфологическое пространство, положив
а(/):=Л7, /=1,...,1.
30. Сформировать все морфологические варианты.
31. Закончить работу алгоритма.
Следует отметить,что алгоритмом "Фильтр", вообще говоря, не
гарантируется построение морфологического пространства, содержащего в
точности требуемое число морфологических вариантов. И это естественно, так
как требуемое число вариантов No может не быть представимым точно
в виде L сомножителей. Действительно, такая ситуация возникает, если
No - простое число, и существуют хотя бы два морфологических класса,
в которых после фильтрации осталось больше одного элемента. Или же
No — нечетное число, а хотя бы в одном морфологическом классе осталось
четное число элементов. В обоих случаях точное решение недостижимо.
Если же требуется получить в точности No морфологических вариантов,
то на пониженном с помощью алгоритма "Фильтр" морфологическом
пространстве мо,жно использовать алгоритм "Морфоперебор".
Алгоритм "Шар". Существует достаточно широкий класс практических
задач формализуемых как задачи формирования лексикографически
предпочтительных морфологических вариантов, в которых требуемое
L
число No существенно меньше N= П fc/. Если при этом число критериев
/ = 1
оценки п не меньше 10, то применение алгоритмов "Морфоперебор" или
"Фильтр" потребует проведения большого количества "лишних'? сравнений
и в конечном счете окажется неэффективным. Именно для решения задач,
когда N0<N, n> 10 и предназначен алгоритм "Шар". Идея построения
алгоритма "Шар" основана на использовании свойств метризованного
275
морфологического пространства, рассмотренных в главе 8, и свойств
лексикографического отношения предпочтения.
Определение 9.4. Лексикографически упорядоченным морфологическим
L
пространством называется пространство вида Л = П а(/), каждой точке
/ = 1
X которого соответствует точка ip(X), определенная в пространстве
векторных оценок Rn, которое упорядочено лексикографическим отношением
предпочтения.
Изучение свойств лексикографически упорядоченного
морфологического пространства приводит к формулировке результата, который позволяет
вести формирование требуемого числа вариантов в шаровой окрестности
определенного радиуса с центром, соответствующим лексикографически
наиболее предпочтительному варианту.
Пусть при линейном упорядочении вариантов из двух
лексикографически эквивалентных на первое место ставится тот, который морфологически
близок к лексикографически наилучшему: Xi = arg lex max <p(X). И в классе
\6Л
\6Л
Arg lex max </>(X) в качестве Xi мы выбираем любой вариант, а остальные
х е л
нумеруем произвольно.
Теорема 9Л. Первые No, лексикографически упорядоченных по
векторным оценкам морфологических вариантов, содержатся в шаровой окрест-
ности wrf/,(Xi ) радиуса г < log2 No с центром в точке Хь соответствующей
наиболее предпочтительному варианту. При log2 N0<:L оценка неулуч-
шаема.
Доказательство теоремы, так же как и ее формулировка, состоит из
двух частей. Покажем, что первая часть теоремы верна, поскольку
выполняется равносильное ей утверждение 9.1.
Утверждение 9.1. Если существует морфологический вариант X,
отстоящий от лексикографически максимального Xi = arg lex max </>(X) на расстоя-
KG A
нии г, то его порядковый номер в линейном упорядочении всех вариантов
по значениям </?(Х) по лексикографическому принципу - не менее чем 2Г.
Доказательство. Строго между вариантами X и Xi лежат ровно
2' - 2 варианта, у которых от 1 до г — 1 компонент в X замены
соответствующими компонентами Xi. Следовательно, каждый из этих вариантов
по векторным оценкам лексикографически предпочтительнее X. Отсюда
следует справедливость первой части утверждения теоремы.
Для доказательства неулучшаемости оценки (вторая часть утверждения
теоремы) достаточно показать, что существуют данные, при которых
оценка достигается строго, т.е. когда r = \og2N0. Пусть а(/) ={Х./|Х/ =
= 1,..., kj} , / = 1,..., L. Положим «pi (Л/ = 1) = 1 для всех / < г < JL, a все
остальные оценки как по первому, так и по остальным m - 1 критериям -
тождественно равными 0.
Утверждение 9.2. Вариант X, в котором X/ = 2, если /=1,...,г мХ/ = 1,
если /E{r+l,...,L}e лексикографическом упорядочении вариантов
занимает И'-е место.
Доказательство. Действительно, существует один вариант,
276
r-I
оценка которых равна г — 1 и т.д.; ( г ) вариантов с суммарной оценкой,
равной 1. Поэтому вторая часть теоремы также справедлива.
Описание алгоритма
Алгоритм "Шар" состоит из двух основных блоков. В первом
проводится лексикографическое упорядочение элементов всех морфологических
классов. В каждом из них оставляются только представители классов,
эквивалентных по векторным оценкам элементов, и указываются
мощности классов эквивалентности.
Во втором блоке формируется требуемое число предпочтительных
морфовариантов, лежащих в шаровой окрестности радиуса log2N0
с центром, соответствующим лексикографически максимальному
варианту.
Процедура формирования лексикографически предпочтительных
вариантов системы строится на основе свойства вложенности отношения
лексикографического предпочтения в отношение частичного порядка,
определенного принципом покоординатного сравнения векторов. В результате на
каждом шаге формируемое множество вариантов строится из
подмножества тг-оптимальных вариантов.
Для описания первого блока примем следующие обозначения: Л/ —
область лексикографической максимизации; М/ — номер представителя
лексикографически упорядоченных классов эквивалентности элементов
/-го морфокласса; $(щ) — лексикографически максимальный элемент;
Ац - множество решений задачи лексикографической максимизации; v[X{ —
мощность множества ЛМ/.
Начальные данные: / = 0, оA) = Л/, L, щ = О, Л0/ = Ф, *>М/ ~ °-На '"м шаге
реализуются следующие действия.
1./:=/+1.
2. Определить Л/; А): = A'/V4M/.
3. Проверка: если Л^ Ф ф, to перейти к п. 4, если Л/ = ф, то перейти к п. 8.
4. щ:=уц+ 1.
5. Определить Аи = Arg lex max /(X).
6. Найти *>М/ = |ЛМ/1.
7. Определить /(///) = lex max /(X) и перейти к п. 2.
8. Проверка. Если /< Z,, то перейти к п. 1; если / > L, то перейти к блоку
формирования вариантов.
Во втором блоке из лексикографически упорядоченной по оценкам
в каждом классе морфологической таблицы Л = {ц = (ц\,..., hl)} форми-
L
руются варианты, упорядоченные по оценкам г(/х)= 2 /(д/). Примем
следующие обозначения для описания второго блока: i - номер шага,
щ — множество ^оптимальных вариантов на i-м шаге, v — текущее число
сформированных вариантов, А — множество лексикографически
предпочтительных морфовариантов.
ПОЛОЖИМ / = О, V = 0, 7Ti = A, . . . , 1).
1. f:=i+ 1.
2. Определить А - Arg lex max </?(/x).
277
к 6B)
Рис. 9.3
6A)
3. Найти
v + 2
L
п
/= 1
д .
4. Проверка: если v < No, то перейти к п. 5; если v>Nq9 to перейти
к п. 10; если v = No, то перейти к п. 11.
5. / = / + 1, и для всех ц G А определить к = ц + в/, где е/ = @,0,...
..., 0,1,0,..., 0) - единичный орт.
6. Проверить, существует ли в irj\A элемент, у которого хотя бы одна
из / - 1 первых координат больше, чем соответствующая координата в к .
Если такой элемент к множества я,\Л существует, то перейти к п. 7, если
не существует, то перейти к п. 8.
7. Исключить вектор к' из вновь формируемого множества щ.
8. тг/:= (щ\А)и {к}.
9. Проверка: если А не исчерпано, то перейти к п. 5, если А исчерпано, то
перейти к п. 1.
10. Исключить последние v векторов и перейти к п. 11.
11. Закончить работу алгоритма.
На рис. 9.3 для двумерного морфологического пространства
иллюстрируется процедура формирования лексикографически упорядоченных
предпочтительных морфовариантов системы. Показан переход от /-го
шага второго блока к D + 1)-му. Найденное к f-му шагу множество
тг-оптимальных вариантов содержало три варианта. После того как у них
был выделен лексикографически максимальный X* , в новое паретовское
множество 7Г|+ г добавились два ранее доминируемых варианта, помеченных
черными точками.
§ 9.3. Концентрические сферические окрестности
При формировании лексикографически предпочтительных вариантов
системы с использованием свойств метризованного лексикографически
упорядоченного морфологического пространства фактически учитывались
как свойства метрического пространства, так и свойства
лексикографического отношения предпочтения. Представляет интерес рассмотреть ситуации,
279
когда оба принципа - метрический и лексикографический — совпадают в
том смысле, что приводят к формированию сопадающих множеств
предпочтительных вариантов исследуемой системы. Анализ этих ситуаций
приводит к изучению лексикографически упорядоченных концентрических
сферических окрестностей морфологического пространства.
Теорема 9.2. Существует класс данных, когда все варианты, содержащие-
ся в сферической окрестности точки Хх = arg lex max *p(X) с радиусом
\ е л
р, р О</,, лексикографически предпочтительнее вариантов из
сферической окрестности радиуса р + 1.
Доказательство. Пусть/(/) - элементы /-го морфологического
класса, имеющие лучшие оценки по наиболее важному критерию, а#(/) —
следующие за ними по оценкам элементы, /<г ^L. Естественно, что при
этом г > 1. Ограничимся при доказательстве рассмотрением первых г
классов, содержащих по два элемента. Все оценки элементов классов с
номерами больше чем г и классов с номерами меньше г (кроме элемента /(/))
по всем критериям выберем произвольными, но на порядок меньшими,
min(min/(/), min #(/)). Лексикографически наиболее предпочтительный
/ /
вариант имеет рценку
Z /(/)=*. (9.5)
/= 1
Оценки вариантов сферической окрестности радиуса 1 с центром в Ai
?/(/) + #(/) положим равными а,..
Оценки вариантов из сферы радиуса v определяются через значения а
и а, по формуле
2 Д0+ 2 *(/„)= * щг-О^-Ов. (9.6)
Для ^ = 2 имеем
«/ + а/-а. (9.7)
Действительно, вычитая из (9.5) уравнение
2 /@+ *(')-*, (»Л)
получим g(i) = /(/) - (а - а,), т^. приходим к (9.7).
Аналогично показывается справедливость (9.6). Тогда становится
возможным следующее утверждение.
Теорема 9.3. Оценки всех вариантов, содержащихся в сферической
окрестности радиуса г, полностью определяются заданием оценок г + 1
вариантов: <r, oti, а2,..., аг.
Доказательство. Обозначим /= (fl,... ,/г) - вектор
наибольших оценок в г g^ig1,... ,gr) классах; аналогично а = (а1, . . . , аг)-
вектор оценок вариантов сферы радиуса 1. Тогда система (9.5), (9.6) в
279
силу (9.8) эквивалентна системе
2/' = *, /=? + *-<*. (9.9)
Для того чтобы было справедливо предыдущее утверждение, необходимо,
чтобы значения а и а удовлетворяли следующей системе неравенств:
а>аг>... >а\ (9.10)
2 a'-(s-l)*> 2 a'-sa, s = 1 г— 1. (9.11)
1=1 I = Г - S
Условия (9.10) упорядочивают оценки вариантов в сфере радиуса 1.
Условия (9.11) требуют, чтобы минимальная оценка в сфере радиуса s была
больше максимальной оценки в сфере радиуса 5+1.
Система (9.10), (9.11) совместна. Ей удовлетворяют, например,
значения а и а, определяемые из условия
Действительно,
2 сг'-(*-1)а = 2
/=1 / =
(9.12)
С другой стороны,
Г r-\ j
2 а'-s- a =a-(r+ l)(s+ l)e+ 2 — е
I = Г - S / = Г-5-1 Г
(подставлено значение а* и проведена замена / = / + 1)
..-*¦¦>.-(,¦ o«i[(; )-('¦;" ")]-
Остается показать, что
Неравенство (9.13) равносильно неравенству
которое справедливо, поскольку при г > 2 дискриминант квадратного
трехчлена левой части отрицателен,
Для построения числового примера остается выбрать значения а и g
и из(9.12)опредилить е. Положим г =3,0 = 39,^ =3, g2 = 2, g3 = 1.
Тогда а1 = 39 - 4е, а2 = 39 - 32/Зе, а3 = 39-3 7з е. Из (9.8) Z1 = 3 + 12/3 е,
280
/2=2+11/з€,/3=1 + 10/3€. Так как fl +f2 +/3 = *, то 6 = 3. Отсюда
f1 = 15, f2 = 13, /3 = 11. Таким образом, имеем морфологическую
матрицу данных
A>= аB)=
l7i=3, 1
аC)
72-2, 173 = 1.
Рассчитывая оценки вариантов, получаем следующую таблицу:
Радиус
сферы, р
Номер
варианта
Оценка
варианта
0
1
39
1
2
29
3
28
4
27
2
5
18
6
17
7
16
3
8
6
Таким образом, нам удалось установить совокупность условий, при
которых каждый из принципов, положенных в основу лексикографического
морфологического метода, обеспечивает формирование одного и того же
множества упорядоченных по качеству предпочтительных вариантов
системы. Построенный с использованием теоретических результатов пример
показывает, что морфологические варианты, которые лежат в
сферических окрестностях с большим радиусом, имеют менее предпочтительные
оценки, чем варианты, принадлежащие сферическим окрестностям
меньшего радиуса. При этом центру сферических окрестностей соответствует
лексикографически максимальный вариант.
9.4. Чувствительность лексикографического
морфологического метода
В этом параграфе мы остановимся на анализе одного из свойств
лексикографического морфологического метода, которое характеризует его
чувствительность к изменению исходных данных. Использование
лексикографического морфологического метода предполагает получение надежной
информации об упорядочении критериев. От того, насколько точны такие
данные, существенно зависит состав элементов, входящих в вариант.
Упорядочение критериев может меняться вследствие неопределенности
описания целей, противоречивости экспертных суждений, е помощью которых
выявляют упорядоченность критериев, корректировки информации о
задаче в ходе ее решения и т.п. Оказывается (и это естественно), что метод
чувствителен к таким изменениям в том смысле, что состав элементов,
входящих в предпочтительный вариант, может подвергнуться
значительному изменению.
Чувствительность метода к изменению порядка критериев
проанализируем на следующей модели.
19. Ю.А. Дубов
281
Пусть задано разбиение m-элементного множества на L классов (w =
L
= 2 &/) и заданы L абсолютно непрерывных критериев1), по которым
оцениваются элементы fjj = 1,...,/,. Пусть оценки элементов по
критериям независимы в совокупности. Критерии строго упорядочены. Задача
состоит в том, чтобы определить, с какой вероятностью изменится состав
варианта в результате изменения порядка критериев.
Как и в аналогичной модели генерации случайных данных,
рассмотренной в главе 6, можно ограничиться только ранговой информацией об
оценках элементов по критериям: R = (г у) — матрица рангов размерности
тXL, гц — ранг i-го элемента по /-му критерию. Положим для
определенности, что при ранжировании элементов элементу с большей оценкой
присваивается меньшее значение ранга. Напомним, что если исключить из
рассмотрения события нулевой вероятности, то столбцами матрицы R
являются некоторые случайные перестановки из 1,2,..., т, причем любая
ранжировка т элементов по любому из L критериев равновероятна.
Рассмотрим случай равновероятного однотранспозиционного
изменения в упорядочении двух соседних критериев: в матрице меняются
местами два соседних столбца. Путь А - событие, состоящее в том, что при
транспозиции двух критериев вариант будет содержать те же самые элементы.
Утверждение 9.3. Вероятность того, что вариант, состоящий из L
элементов не изменится при одном однотранспозиционном изменении в
упорядочении L критериев равна
Доказательство. Фиксируем ранжировку A,2,..., т)
элементов по первому критерию и рассмотрим полную систему гипотез (Ио -г
-г) относительно/, - 1 возможных транспозиций.
Гипотеза h0: все L критериев на своих местах:
Гипотеза hx: переставлены местами первой и второй критерии. Тогда
т(т — 1)
для того чтобы не изменился элементный состав варианта, должно
выполняться:
1)^11 ='12 =1,
т.е. элемент, имеющий минимальный ранг по первому критерию, должен
иметь его и по второму критерию (это возможно в одном из т случаев) и
2)r22 =min{r/2, i = 2,...,I>
(это возможно в одном из т - 1 случаев).
1) Существует непрерывная плотность распределения значений оценки элемента
по /-му критерию/(*) = Р {?,- < у}.
Ъ х
282
Гипотеза И2: переставлены местам второй и третий критерии. Тогда
Гипотеза Л,: переставлены местами /-й и (/ + 1)-й критерии, / < L - 1.
Тогда по индукции получим
\ />0 m>L-\>L
(т + 1 - i)(m - О
Отсюда по формуле полных вероятностей имеем
_ J_ / i 1 \
L \ /=i (w+ l-i)(m-0/
Заменим индекс суммирования: v =m - i\ получим
1 / «-1 1
~(l+ Z '
.!(,¦ V (i-_L).I(,t_i—).
L \ v=m-L \p v + \ > L\ m(m+L) '
Следствие.Яри т->°°9р(А) стремится к — + Ol —г- I.
L \m2 I
ДОПОЛНЕНИЕ ПРИ КОРРЕКТУРЕ
Непаретовский выбор: доминирующий показатель
В прикладных задачах, в которых показатели качества альтернатив нельзя
считать равноправными, паретовский выбор неприменим. Обсудим одну из
схем многокритериального выбора, когда один из показателей имеет сильно
выраженное преимущество перед остальными (Травкин, Казанский [1]).
Пусть чем выше оценена альтернатива по этому доминирующему
показателю, тем больше оснований отнести ее к классу первого приоритета.
Упорядочим альтернативы по убыванию значений доминирующего
показателя и проинтерпретируем ранги как моменты поступления альтернативы
в некоторую систему обслуживания. Независимо от того, какие оценки
имеет первая альтернатива по остальным дополнительным показателям,
ей всегда присваивается первый приоритет. Альтернативе, поступившей
в систему в момент t = п + 1 — / первый приоритет присваивается только
в том случае, когда не менее, чем по ц дополнительным показателям ее
оценки оказываются выше соответствующих оценок всех ранее
поступивших альтернатив.
Таким образом определено параметризованное семейство правил выбора
{См}?=1, последовательно вложенных друг в друга в том смысле, что
выбор по правилу CM + i из множества альтернатив, отобранных по
правилу См, приводит к тому же результату, что и выбор См + 1 из исходного
множества альтернатив. Чем больше параметр /i, тем меньшему количеству
альтернатив присваивается первый приоритет.
19* 283
Скажем, что альтернатива а принадлежит классу /-го приоритета П/, если
найдется не менее д дополнительных показателей, по каждому из которых
среди всех ранее поступивших альтернатив альтернатива а имеет ранги
не ниже и+ 1 - /, а для п — I это свойство уже не выполняется.
Для модели, в которой альтернативы выбираются из случайной
независимой выборки объема п и оценены по k + 1 независимым непрерывно
распределенным показателям (т.е. при независимых координатах
векторной оценки случайной альтернативы) производящая функция совместного
распределения появления заданного числа альтернатив /-го приоритета
*(и)=П 2 [///,(/!,*+ 1 -M)-/(/_l)//(M,* + l-M)]Wb A)
/ = 1 / = 1
где Is (ц, v) — усеченное /^-распределение. Отсюда для распределения
мощности класса первого приоритета имеет место рекуррентное соотношение
При д=1 математическое ожидание и дисперсия числа альтернатив
первого приоритета возрастают как логарифм от объема выборки: ?м(и) =
= к\пп + о A). При одном дополнительном показателе этот класс совпадает
с множеством Парето.
При м>1, к > 1 существуют предельные распределения вероятностей
числа альтернатив первого приоритета, производящие функции которых
имеют вид
*>"*(") = П Г-'О-Ми)),
V = 1
где Г ( •) - гамма-функция, a bv (и) — корни многочлена
zk [Il/2 (/u,* + 1 - д) +/i-(i/z)(* + 1 - М, ju)].
В частности <р°?2(и) = sinтгу/Т^и/п\Л -м.
В случае с одним дополнительным показателем безусловное
распределение мощности класса /-го приоритета имеет вид
(/-1)!
Поскольку [(/ - 1)/h]"~V/(» = 1 +оA), то для классов низкого
приоритета
/- 1 [1п/?-1п(/- 1)]"
) 1
П VI
Положив в формуле B) и = 1, найдем, что вероятность отсутствия в
выборке альтернатив /-го приоритета равна (/- 1)/и, и, значит, математическое
ожидание числа непустых классов равно («+ 1)/2.
Из-за того, что некоторые из классов могут оказаться пустыми, для
прикладных целей важно знать какие из классов и как часто будут
встречаться в предъявляемых на выбор множествах альтернатив. Для ответа на
этот вопрос целесообрзано вложить схему выбора с доминирующим
показателем в более общую конструкцию, которая, с одной стороны позволит
охватить более широкий класс задач выбора, а с другой — избавиться от
несущественных сейчас деталей, связанных с многомерностью задачи по
числу дополнительных показателей.
284
Пусть как и раньше альтернативы поступают в систему в порядке
убывания оценок по доминирующему показателю, но вместо назначения
приоритетов на основе сравнения альтернатив по дополнительным показателям
предположим, что альтернатива, поступающая в момент t = п+ 1 - /
распределяется в один из / первых классов приоритетности по некоторому
известному закону: {рп+1_/(/)} '=1> 2 Pn+i-i(O = 1, независимо оттого, как
распределятся остальные альтернативы (для выбора по доминирующему
показателю надо положитьPi(l) = ////(м, к + 1 - ц) - /(/_ i)//(ju, к + 1 - ц).
Производящей функцией совместного распределения теперь будет
п i
Скажем, что выборка отвечает спецификации z = (z,, ..., zv), если все
альтернативы разбиваются на v непустых классов приоритетности с
номерами zx < z2 < ... < zv.
Обозначим P«(z) вероятность того, что выборка объема п отвечает
спецификации z и введем операторы ?"\ исключающие из вектора z его
m-ю координату: &wz = (zx, ..., zm^if zw + 1, ..., zv). Опуская
доказательство, выпишем результат: семейства распределений вероятностей
появления выборок заданной спецификации для выборок объемов /?и«+1
связаны рекуррентным соотношением
V V
m ~\ m- 2
где diyj — дельта-функция Кронекера, и могут быть рассчитаны при
начальном условии Pi A) =Pi(l) = 1.
Для рассмотренного выше случая с одним дополнительным
показателем Рл + 1-/ = 1// и в соотношении C) лучше перейти от вероятностей
Pw(z) к величинам Nn (z) = w!Pw(z). Найдем, например iV(z) |2 = AХд).
Из формулы C) получаем конечно-разностное уравнение
решая которое, получимЛ^A, X, ц) = 1 + 2п+1~^ - 2W+1"M + 2м-*Зи+1-Л
Вообще, для схемы с одним дополнительным показателем
распределение числа реализаций, в которых альтернативы разбиваются ровно на v + 1
классов со спецификациейz = A, z[, z'2>..., z'v) = A, z') в явном виде
задается соотношением
лгя(*> s (/ + 1)я+1(-1Г"/5; п
/ = о \ = 1
где внутреннее суммирование ведется по области v > ix >i2 >...>//> 1.
Безусловное распределение числа непустых классов Nvn
приоритетности (без указания на спецификацию) для модели выбора с одним
дополнительным показателем совпадает с распределением чисел Эйлера Nvn =
V И + 1
/=о
285
СПИСОК ЛИТЕРАТУРЫ
А й г н е р М.
1. Комбинаторная теория. - М.: Мир, 1982. - с. 556.
Айзерман М.А., Малишевский А.В.
1. Некоторые аспекты общей Теории выбора вариантов. - Препринт Института
проблем управления, М., 1980.
Алескеров Ф.Т., Завалишин Н.В., Литваков Б.М.
1. О разложении функции выбора по системе более простых функций "Автоматика
и телемеханика" № 3,1979, с. 107-118.
Атанс, Джиринг (Athans M., Geering H.)
1. The infimum principle. - IEEE Transaction on Automatic Control, AC-12, №5, 1974,
p. 485-494.
А у м а н (Aumann R.J.)
1. Integrals of set-valued functions. - J. Math. Anal, and Appl. №12, 1965, p. 1-12.
Б арн д о р ф-Н е л ь со н, С о б л ь (Barndorff-Nielsen О., So bel M.)
1. On the distribution of number of admissible points in a vector random sample.
Теория вероятностей и ее применения, 1966, т. XI, вып. 2, с. 283- 305 (англ.).
Бедельбаев А.А., Дубов Ю.А., Шмульян Б.Л.
1. Адаптивные процедуры принятия решений в многокритериальных задачах. -
Автоматика и телемеханика, 1976, № 1, с. 136-145.
Бедельбаев А.А., Ко пей кин А.Б., Попков Ю.С.
1. Об эффективности смешанных стратегий в задачах оптимизации. - Автоматика
и телемеханика, № 9,1976, с. 90-95.
Беллман Р.
1. Динамическое программирование. - М.: ИЛ, 1960. - с. 478.
Бенайюн Р., Ларичев О.И., М онго л ьфье Ж., Тер ни Ж.
1. Линейное программирование при многих критериях: метод ограничений. -
Автоматика и телемеханика, 1971, № 8, с. 108-114.
Березовский Б.А., Борзенко В.И., К е м п н е р Л.М.
1. Бинарные отношения в многокритериальной оптимизации. М.: Наука, 1981.—
с. 150.
Березовский Б.А., Данилов В.Н., Кортнев А.В., Коссов О.А., Ма-
шинский АЛ., Травкин СИ., Якимец В.Н.
286
1. Формирование наборов высших растений для замкнутой биотехнической
системы жизнеобеспечения. - М.: ОНТИТЭИМикробиопром, 1977.
Березовский Б.А.,Травкин СИ.
1. Диспетчеризация очередей заявок в вычислительных системах. - Автоматика и
телемеханика, 1975, № 10, с. 165-17.1.
2. О распределении числа элементов множества Парето. - В кн.: Вопросы
кибернетики. Труды Института кибернетики и ВЦ АН УзССР, вып. 83, 1975, с. 92-99.
Березовский Б.А.,Трахтенгерц Э.А.
1. Вероятностная оценка длины очереди наиболее предпочтительных требований
в операционных системах. - Автоматика и телемеханика, 1975, № 7, с. 187-195.
Большее Л.Н.,Смирнов Н.В.
1. Таблицы математической статистики. - М.: Наука, Главная редакция физико-
математической литературы, 1983.
Борисов В.И.
1. Проблемы векторной оптимизации. - В кн.: Исследование операций.
Методологические аспекты. - М.: Наука, 1972.
Б урча ков А.С., Гафт М.Г., Кафорин Л.А., Ларичев О.И.,
Озерной В.М., Харченко В.А.
1. Методика выбора подмножества предпочтительных (рациональных)
вариантов технологических схем угольных шахт. - М.: Московский горный институт, 1972.
Виноградская Т.М..
1. Среднее значение числа неподчиненных решений в многокритериальных
задачах. - Изв. АН СССР, сер. 'Техническая кибернетика", 1976, № 2, с. 36-38.
Волкович В.Л.
1. Многокритериальные задачи и методы их решения. - В кн.: Труды семинара
Кибернетика и вычислительная техника, "Сложные системы управления", Киев,
Наукова думка, вып. 1, 1969.
Гаек Я., Ш и да к 3.
1. Теория ранговых критериев. - М.: Наука, 1971. - с. 375.
Гейл,Кун,Таккер (Gale D.,Kuhn H.W.,Tucker A.W.)
1. Linear programming and the theory of games. - In: Activity analysis of production
and allocation. Cowles Commission Monograph. №13/Ed. T.C. Coopmans. - New York:
J. Wiley & Sons, 1951, p. 317-329.
Гермейер Ю.Б.
1. Введение в теорию исследования операций. - М.: Наука, 1971. - с. 383.
Гирсанов (GirsanovI.V.)
1. Lectures on mathematical theory of extremum problems. Lecture Notes in Economics
and Mathematical Systems, Springer-Verlag, 1972, № 67, p. 311.
Глущенко А.С.
1. Распределение вероятностей числа собственных паретовских альтернатив. -
В кн.: Анализ нечисловых данных в системных исследованиях. - М.: ВНИИСИ, 1982,
вып. 10, с. 110-116.
Горбатов В.А.
1. Теория частичного упорядочения систем.- М.: Советское радио, 1976.
287
Да Канха, Полак (Da Cunha N.O., Polak E.)
1. Constrained minimization under vector-valued criteria in linear topological spaces. -
In: Mathematical Theory of Control/A.V. Balakrishnan, L.W. Neustadt (Eds), New York,
Academic Press, 1967.
2. Constrained minimization under vector-valued criteria in finite dimensional spaces. -
J. Math. Anal, and Appl., 1967, №19, p. 103-124.
Джоффрион (Geoffrion A.M.)
1. Proper efficiency and the theory of vector maximization. - J. Math. Anal, and
Appl., 1968, №22, p. 618-630.
Джоффрион А., Дайер Дж., Файнберг А.
1. Решение задач оптимизации при многих критериях на основе
человеко-машинных процедур. - В кн.: Вопросы анализа и процедуры принятия решений. - М.:
Мир, 1976. с. 116-127.
Дубов Ю.А.
1. Автоматизированное проектирование жилых зданий из стандартных
элементов.-В кн.: Организация, методы и технология проектирования. - М.: ЦНИИС,
1976, сер. XIII, вып. 7, с. 6-9.
Дубов Ю.А., Икоева Н.В., Имельбаев Ш.С., Ко в ал ь чу к С.Г., Ко-
пейкинА.Б., Попков Ю.С., Ря з анц ев А.Н., ШмульянБ.Л.
1. Оптимальное планирование и проблемы управления развитием городских
систем (обзор и задачи исследования). - Автоматика и телемеханика, 1976, №6,
с. 78-116.
Егорычев Г.П.
1. Интегральное представление и вычисление комбинаторных сумм. -
Новосибирск: Наука, 1977. - с. 285.
Емельянов СВ., Наппельбаум Э.Л.
1. Методы исследования ложных систем. Логика рационального выбора. - М.:
ВИНИТИ, 1977.
Заде (Zadeh L.A.)
1. Fuzzy sets. - Information and Control, 1965, №8, p. 338-353.
3 а й о н ц (Zionts S.)
1. A survey of multiple criteria integer programming methods.-Ann. Discr. Math.
№5, 1979, p. 389-398.
Иванин В.М.
1. Асимптотическая оценка математического ожидания числа элементов
множества Парето. - Кибернетика, 1975, № 1, с. 97-101.
2. Вычисление дисперсии числа элементов множества Парето для выборки
независимых векторов с независимыми компонентами. - В кн. Теория оптимальных
решений, Киев: Институт кибернетики АН УССР, 1976, с. 90 - 100 (препринт).
Изерман (Isermann H.)
1. Proper efficiency and the linear vector maximum problem. - Operation Res.,
1974, №22, p. 189-191.
Калпайн, Голдинг (Calpine H.C., Golding)
1. Some properties of Pareto-optimal choices in decision problems. - OMEGA,
1967, v. 4, №2, p. 141 - 147.
К an л и н с кий А.И., К р ас н е н ке р А.С., Цыпкин Я.З.
1. Рандомизация и сглаживание в задачах и алгоритмах адаптации. - Автоматика
и телемеханика, №6, 1974, с. 47-57.
288
Каплинский А.И., Красненкер А.С.
1.0 формировании диалоговых алгоритмов векторной оптимизации. -
Автоматика и вычислительная техника, 1977, № 5, с. 116-127.
К а р л и н С.
1. Математические методы в теории игр, программировании и экономике. -
М.: Мир, 1964, с. 838.
К ас те н (Castaing C.H.)
l.Sur les multi-applications mesurabtes. - RIRO, 1-re Annee, 1967, №1, p. 91-126.
Каськов Н.Н.
1. Теоретико-множественное определение понятия системы. - Системные
исследования. - М.: Наука, 1972.
КацВ.М., Якобсон Б.М.
1. Морфологический анализ при разработке новых приборов и устройств. -
Приборы и системы управления, № 6,1975, с. 15-18.
Кемени Дж., Снелл Дж.
1. Кибернетическое моделирование. - М.: Советское радио, 1972.
Кен дал л М., Стьюарт А.
1. Статистические выводы и связи. - М.: Наука, 1973.
Кини Р.
1. Функции полезности многомерных альтернатив. - В кн.: Вопросы анализа и
процедуры принятия решений. - М.: Мир, 1976.
К и Фан (KyFan)
1. Fixed point and minimax theorems in locally convex topological spaces. - Proc.
Natl. Sci., U.S., 1952, №38, p. 121-126.
К л и н г е р (Klinger A.)
1. Improper solutions of the vector maximum problem. - Operations Res., 1967,
№ 15, p. 570-572.
Ко л чин В.Ф.
1. Случайные отображения. - М.: Наука, 1984. - с. 207.
Корн Г., Корн Т.
1. Справочник по математике для научных работников. - М.: Наука, 1984.
Красненкер А.С.
1.06 адаптивном подходе к задаче принятия решений при нескольких
критериях. -- В кн.: Вопросы оптимального программирования в производственных
задачах. Изд. Воронежского университета, 1972, с. 18-23.
Красе И.А.
1. Математические модели экономической динамики. - М.: Сов. Радио, 1976.
К у к с а А.И., Шор Н.З.
1.0 методе оценки количества у словно-оптимальных траекторий дискретного
сепарабельного динамического программирования. - Кибернетика, 1972, № 6,
с. 37-42.
Кун, Таккер (Kunh H.W., Tucker A.W.)
1. Nonlinear programming. - In: Proc. Second Berkeley Symposium on Mathematical
Statistics and Probability/J. Neyman, Ed., Univ. of California Press, Berkeley, California,
1951, p. 272-301.
289
КэрролЛ.
1. История с узелками. - М.: Мир, 1974. - с. 496.
Ларичев О.И., Поляков О.А.
1. Человеко-машинные процедуры решения многокритериальных задач
математического программирования (обзор). - Экономика и математические методы,
1980, т. XVI, вып. 1, с. 129-145.
Месарович М.
1. Общая теория систем и ее математические основы. - М.: Наука, 1969.
Мин к X.
1. Перманенты. - М.: Мир, 1982.
Мозер, Виман (Moser L., Wyman M.)
1. Asymptotic development of the Stirling numbers of the first kind. - Canad. J.
Math., 1957, №5, p. 317-321.
Молодцов О.А.
1. Регуляризация точек множества Парето. - ЖВМ и МФ, 1978, т. 18, № 3,
с. 597-602.
Мо л о дцо в О.А., Федоров В.В.
1. Устойчивость принципов оптимизации. - В кн.: Современное состояние теории
исследования операций. - М.: Наука, 1979. - с. 236-263.
Наумов Г.Е.
1. Правило множителей для векторной задачи оптимизации с бесконечным
числом критериев. - Изв. АН СССР. Техническая кибернетика, 1978, № 2, с. 36-38.
Нелдер, Мид (Nelder N., Mead R.)
l.A simplex method for function minimization. - Computer Journ., 1965, №7,
p. 140-148.
Нильсон Н. (Nielson N.)
1. Искусственный интеллект. - M.: Мир, 1973.
По дин ов с к ий В.В., ГавриловВ.М.
1. Оптимизация по последовательно применяемым критериям. - М.: Советское
радио, 1975.
П о д и нов с кий В.В., Ногин В.Д.
1. Парето-оптимальные решения многокритериальных задач. - М.: Наука, 1982. -
с. 256.
Поспелов Г .С, Ириков В.А.
1. Программно-целевое планирование и управление. - М.: Сов. Радио, 1976.
Риордан Дж.
1. Введение в комбинаторный анализ. - М.: ИЛ, 1963. - с. 287.
2. Комбинаторные тождества. - М.: Наука, 1982. - с. 255.
Рихтер (RichterH.)
1. Verallgemeinerung eines in der Statistic benotigten Satzes der Masstheorie.-Math.
Annalen, 1963, №150, p. 85-90.
P о б б и н с Г., С и г м у н д Д.', Ч а о И.
1. Теория оптимальных правил остановки. - М.: Наука, 1977. - с. 168.
290
Рокафеллар Дж.
1. Выпуклый анализ. - М.: Мир, 1973. - с. 576.
Руа Б.
1. Проблемы и методы принятия решения в задачах с многими целевыми
функциями. - В кн.: Вопросы анализа и процедуры принятия решений. - М.: Мир, 1976. -
с. 80-107.
Садовский В.Н.
1. Основания общей теории систем. - М.: Наука, 1974.
Салуквадзе М.Е.
1.0 задаче линейного программирования с векторным критерием качества. -
Автоматика и телемеханика, 1972, № 5, с. 99-105.
Сачков В.Н.
1. Вероятностные методы в комбинаторном анализе. - М.: Наука, 1977. - с. 320.
2. Комбинаторные методы дискретной математики. - М.: Наука, 1977.
Сейвир (SavirD.)
l.Multiobjective linear programming. - Operation Research Center, Univ. Calif.,
Berkeley, ORC 66-21,1966, p. 32.
Сен (SenA.K.)
1. Choice functions and revealed preferences. - Review of Economic Studies, №38,
1971, p. 307-317.
Спендли, Хекст, Химсуорт (Spendley W., Hext G.R., Himsworth F.R.).
1. Statistical experiment design. - Technometrics, 1962, № 4, p. 72-84.
2. Статистические задачи обработки систем и таблицы для числовых расчетов
показателей надежности/Под ред. Р.С. Судаков а. - М.: Высшая школа, 1975.
Танин о, Савараги (Tanino, SawaragiY.)
1. Stability of nondominated solutions in multicriteria decision-making. - J. Opt.
Theory and Appl., 1980, v. 30, №2, p. 229-253.
Травкин СИ.
1. Применение символического исчисления к расчету конечных распределений. -
В кн.: Экспертные оценки в задачах управления: Сборник трудов. - М.: Институт
проблем управления, 1982, с. 96-103.
Травкин СИ., Глущенко А.С.
1. Классификация элементов случайной выборки при последовательном выделении
паретовских множеств. - В кн.: Модели и методы формирования и
многокритериального выбора предпочтительных вариантов систем, М., В НИИ СИ, 1981, вып. 1, с. 48-64.
Травкин СИ., Ка-занский А.Е.
1. Вероятностный анализ модели классификации с доминирующим показателем.-
В кн.: Модели и методы формирования и многокритериального выбора
предпочтительных вариантов систем. - М.: ВНИИСИ, 1981, № 1, с. 65-80.
Tee (TseE.)
1. On the optimal control of linear systems with incomplete information. - Ph. D. Diss.,
Dep. Elec. Eng., Mass. Inst. Technol., Cambridge, 1969.
Уиттекер Э.Т., Ватсон Дж.Н.
1. Курс современного анализа. - М.: ГИФМЛ, 1962-1963, т. 1, 2.
Фел л ер В.
1. Введение в теорию вероятностей и ее приложение. - М.: Мир, 1967, т. 1. 2.
291
Фишберн П.
1. Теория полезности для принятия решений. - М.: Наука, 1978. - с. 352.
Халкин (HalkinH.)
1. On a generalization of a theorem of Lyapunov. - J. Math. Anal. Appl., 1965, №10,
p. 325-329.
2. Some further generalization of a theorem of Lyapunov. - Arch. Rat. Mech. An.,
1964, №17, p. 272-277.
X e м м и н г (Hemming T.)
1. A new method for interactive multiobjective optimization: a boundary point ranking
method. - In: Multiple Criteria Decision Making, Proc. Conf. Jony-en Josas, France, 1975,
Berlin, Heidelberg, 1976, p. 310-318.
Холл Д.О., Фей джин Р.Е.
1. Определение понятия системы. В кн.: Исследования по общей теории систем.-
М.: Наука, 1969. - с. 252-282.
Хуан г, Магуэль (Hwang C.L., Maguel A.S.)
1. Multiple objective decision making methods and applications. A state-of-the-art
survey. - Lectures notes in economics and mathematical systems, 1979, №164, p. 351.
Цвики (Zwicky F.)
1. Discovery invention, research through the morphological approach. - New York:
McMillan & Co., 1969.
Ш рей дер Ю.А.
1. Равенство, сходство, порядок, - М.: Наука, 1971.
Э й р е с Р.
1. Научно-техническое прогнозирование и долгосрочное планирование. - М.: Мир,
1971.-с. 296.
Эрдеш П., Спенсер Дж.
1. Вероятностные методы в комбинаторике. - М.: Мир,. 1976.
Я к и м е ц В.Н.
1. Формирование лексикографически упорядоченных морфологических вариантов
системы. - В кн.: Модели и методы формирования и многокритериального выбора
предпочтительных вариантов систем. Труды ВНИИСИ, 1981, № 1, с. 23-34.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Аксиома независимости 47
- сегмента 232
Алгоритм "Медиана" 250
- "Морфоперебор" 269
- "Фильтр" 270
- Фрэнка - Вулфа 53
- "Шар" 275
Альтернатива допустимая 7
- оптимальная по Парето (тгюптималь-
ная) 18,28
локально 35
несобственно эффективная 115
регулярная 24
слабо (полуэффективная) 113
собственно эффективная 115,116
- сильно доминируемая по IJapexo 113
- &-оптимальная по Парето 119
- А:-собственно эффективная И 9
Антимедиана множества 251
Аппроксимация коническая множества
32
ограничений 107
- счетная 143
Асимптотика распределения чисел Стир-
линга160
Бруно формула 225
Вариант лексикографически не менее
предпочтительный 267
- предпочтительный 267
- эквивалентный 267
Гермейера теорема 28,40
Гиперплоскость опорная 19
Да Канха-Полака условия 33
Дерево перебора 57
Диаграмма Хассе 182
Доминирование по Парето 18,91
Жордана формула 110
Задача Беллмана о распределении
одномерного ресурса 89
- выбора многокритериальная 5
- независимого выбора 62
- математического программирования
многокритериальная 89
- о покрытии графа частичного порядка
минимальным числом цепей 182
- о распределении заявок в
вычислительных системах 145
- оптимизации многокритериальная 5
- устойчивая 121
- формирования 227
Игра с нулевой суммой матричная 10
Индикатор цикл о вый симметричной
группы 159
Карлина теорема 19
Каталана числа 209
Ки Фана теорема 25
Класс морфологический 237, 256
Компактность вблизи нуля 112
Компромисс справедливый, принцип 44
Коэффициент замещения 54
Кривая безразличия 54
Критерий векторный оценки качества
альтернатив 9
- эффективности 7
Лейбница формула 224
Лемма Минковского 33
- ФаркашаЗЗ
Лицо, принимающее решение (ЛПР) 8 и
д., 52 и д., 57
- ! — »субъективность суждений 48
Матрица более предпочтительная 17
- максимальная 15
- минимальная 15
Медиана множества 249
Метод ветвей и границ 57
293
Метод геометрических вероятностей
162,166
- динамического программирования 82
- идеальной точки в пространстве
критериев 46
- коэффициентов 210
- ладейных схем 151,162
- морфологический 229
- морфологического ящика 229
- ограничений 59
- отрицания и конструирования 229
- производящих функций 204
- систематического покрытия поля 229
Метрика Хаусдорфа 111
Минковского - Фаркаша лемма 33
Многочлен ладейный 151
- попаданий на квадратной доске 152
Множество альтернатив 7
—, оптимальных по Парето (л-оптималь-
ных) 18
- векторных оценок 18
л-оптимальных 18
доминирующее 91
устойчивое 136
- двойственное (полярное,
сопряженное) 36
- допустимых стратегий 76
- нераскрытых вершин 58
-Парето 5,147
- регулярное 24
Мозера - Вимана первая формула 160
Морфоокрестность 231
Направление возрастания функции 36
допустимое 36
-касательное 37
- неубывания функции 37
Независимость по полезности 50
взаимная 50
Нерефлексивность бинарного отношения
48
Неопределенность в выборе цели 8
Непрерывность в нуле многозначного
отображения 112
•
Окрестность морфологическая 231
- звездная 255
- сферическая 235
- шаровая 235
Оптимальность по Парето (тг-оптималь-
ность) 5
6-равномерная 159
равномерная, принцип 44
Отношение бинарное 48
- асимметричное 48
- ко рефлексивное 48
- полное (универсальное) 48
- рефлексивное 48
- связное 48
- симметричное 48
294
Отношение бинарное слабо связное
48
-- слабого упорядочения 49
— строгого упорядочения 49
— транзитивное 48
отрицательно 48
— эквивалентное 49
— между 232
Отображение многозначное борелевское
77
— замкнутое 77
— интегрально ограниченное 77
— непрерывное в нуле 112
— полунепрерывное сверху 112
снизу 112
— равномерно компактное вблизи нуля
12
Отрезок морфологический 253
Оценка векторная 18
— смешанная 96
— чистая 96
— е-доминирующая 124
сильно 124
— е-равномерная 124
— я-оптимальная 18
опасная 68-71
, устойчивость 111
Парето множество 5,147
— регулярное 24
Перманент матрицы 257
Площадь поверхности 231
Поверхность морфоокрестности 231
Подмножество размытое 45
Поиск по деформируемому
многограннику 56
Пол у непрерывность сверху 112,136
— снизу 112
Понтрягина принцип максимума 82
Предпочтение лексикографическое 267
Принцип гарантированного результата
13,46
— максимума Понтрягина 82,102
— равномерной оптимальности 43
Программирование динамическое 82
-линейное 21,55
— математическое 82
Пространство морфологическое 229,231,
232
— лексикографически упорядоченное
276
Процедура адаптивная 42,52
— апостериорная 42,48
— априорная 42,43
— ветвления 57
— поиска по деформируемому
многограннику 56
— построения кривой безразличия
(нахождения предельных коэффициентов
замещения) 54
Процедура псевдоструктурированная
59
Псевдоструктура 59
Разность паретовских множеств 92
Раскрытие вершины 58
Расслоение паретовское 181
Расстояние морфологическое 231
Регуляризация неустойчивых задач 142
Рефлексивность бинарных отношений 48
'Связность бинарного отношения 48
слабая 48
Симметрия бинарного отношения 48
Симплекс отраженный 56
Стерлинга числа 1-го рода 160,161
Стратегия 61
-, образованная в результате игольчатой
вариации 103
- распределения чистая 96
- смешанная 11, 96
- максимальная 12
- я-оптимальная 62
Субдифференциал выпуклой функции 40
Суммирование множеств по Минковско-
му (геометрическое) 64, 264
Схема Эйреса 231
Таблица морфологическая 230
Теорема двойственности 16
- Гермейера 28,40
- Карлина 19
- Ки Фана 25
- Ляпунова 62
- существования 16
Теория выбора общая 227
Точка базовая 222
-идеальная (точкаутопии) 46
- эффективная
Транзитивность бинарного отношения 48
отрицательная 48
Трансверсаль семейства множеств 258
Упорядочение слабое 49
- строгое 49
Упорядочение частичное альтернатив
14
- матриц 15
Управление оптимальное 61
Условия Да Канха - Полака 33
Устойчивость 110 и д.
- множества я-оптимальных векторных
оценок 136
Фильтр Калмана - Бьюси 17
Формула Бруно 225
-Жордана 160
- Лейбница 224
- Мозера - Вимана первая 160
Фрэнка - Вулфа алгоритм 53
Функция возмущения 121
- многомерная производящая 204
- оценочная 5 7
- гарантированная 58
точная 58
- полезности 50
- принадлежности 45
- целевая 7
Хассе диаграмма 182
Хаусдорфа метрика 111
Цепь максимальная 182
- марковская 155
Цвики метод морфологического анализа
229
Цель операции 7
Центр звездной окрестности 255
Числа Каталана 209
- Стерлинга 1-го рода 160,161
Чувствительность лексикографического
морфологического метода 281
Эйреса схема
Эквивалентность 49
Элемент класса матриц глобально мини^
мальный (инфимальный) 17
- системы 228, 231
Юлий А натольевич Дубов,
Сергей Иванович Травкин,
Владимир Николаевич Якимец
МНОГОКРИТЕРИАЛЬНЫЕ
МОДЕЛИ ФОРМИРОВАНИЯ
И ВЫБОРА ВАРИАНТОВ СИСТЕМ
Серия 'Теория и методы системного анализа", № 18
Редактор Д.С. Фурманов
Художественный редактор Т.Н. Кольченко
Технический редактор С.В. Геворкян
Корректоры ИМ. Кузьмина, Т.В. Обод
Набор осуществлен в издательстве
на наборно-печатающих автоматах
ИБ № 12240
Сдано в набор 13.01.86. Подписано к печати 08.05.86
Г — 11512. Формат 60 X 90 1/16. Бумага офсетная
Гарнитура Пресс-Роман. Печать офсетная. Усл.печл. 18,5
Усл.кр.-отт. 18,5. Уч.-изд.л. 20,46. Тираж 5000 экз.
Тип. зак. 21 Цена 2 р. 80 к.
Ордена Трудового Красного Знамени
издательство "Наука"
Главная редакция физико-математической литературы
117071 Москва В-71, Ленинский проспект, 1 5
4-я типография издательства "Наука"
630077 г. Новосибирск-77, ул. Станиславского, 25