/































































Текст
Федеральное космическое агентство Российская инженерная академия секция “Авиакосмическая”
НАУЧНО-ТЕХНИЧЕСКИИ журнал
АВИАКОСМИЧЕСКАЯ
ТЕХНИКА И ТЕХНОЛОГИЯ
AEROSPACE TECHNOLOGY
2010
РЕДАКЦИОННАЯ КОЛЛЕГИЯ
Главный редактор
А.С. Башилов академик-секретарь секции “Авиакосмическая” РИА, к.т.н.
Заместители главного редактора
ВД. Калач ано в действительный член РИА, д.э.н., профессор
А.И. Кузин действительный член РИА, д.т.н., профессор
Члены редколлегии
В.В. Алавердов действительный член РИА, д.т.н.
И.В. Бармин действительный член РИА и МИА, д.т.н.
К.К. Васильченко действительный член РИА, д.т.н., профессор
В.В. Горбатенко действительный член МИА, к.т.н.
Б.В. Гусев Президент РИА и МИА, член-корреспондент РАН, д.т.н., профессор
В.Г, Дмитриев действительный член РИА, д.т.н., профессор
Э.Н. Дудар член-корреспондент РИА, к.т.н.
Е,Г. Залуцкий
С.А. Колядин действительный член МИА, д.т.н.
Б.И. Каторгин академик РАН, д.т.н., профессор
А,М, Матвеенко академик РАН, действительный член РИА и МИА, д.т.н., профессор
А,А, Медведев действительный член РИА, д.т.н., профессор
Н.Ф. Моисеев член-корреспондент РИА, к.т.н.
А,А. Оксогоев действительный член РИА
В.С. Рачук действительный член РИА, д.т.н., профессор
О.С. Сироткин член-корреспондент РАН, действительный член РИА и МИА, д.т.н., профессор
Г.А. Соколовский действительный член РИА, д.т.н., профессор
Ю,А, Яшин Первый вице-президент РИА, д.т.н., профессор
Зарегистрирован Комитетом Российской Федерации по печати Свидетельство о регистрации от 9 апреля 1996 года № 014671
Адрес редакции 107113, Москва, Сокольнический вал, 37/10 © Институт технико-экономических проблем (ИТЭП), 2010
СОДЕРЖАНИЕ
ОБРАЩЕНИЕ К ЧИТАТЕЛЯМ...................................................... 2
ПЕРСПЕКТИВНЫЕ ПРОЕКТЫ АВИАЦИОННО-КОСМИЧЕСКИХ И РАКЕТНО-КОСМИЧЕСКИХ СИСТЕМ........................................................... 3
Т.Г. Агеева, Э.Н. Дудар, С.В. Резник
Комплексная методика проектирования конструкции крыла многоразового космического аппарата.......................................... 3
А.И. Кузин, В.В. Вахниченко, С.Н. Лозин, П.А. Лехов, А.И. Семенов, В.В. Горбатенко, А.М. Ромашкин, В.И. Бузулук, ВЛ. Плохих, И.Е. Ковалев, В.В. Цыплаков, А.А. Кондратов
Многоразовая ракетно-космическая система. Ближайшие перспективы разработки и летно-экспериментальной отработки......... 9
УПРАВЛЕНИЕ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ................................. 19
С.А. Капитонов
Исследование и разработка продукционных правил в системах экспертного оценивания качества систем управления полетом................... 19
В.М. Василец, А.В. Пономаренко, Е.В. Серпичева
Имитационно-интерактивное моделирование - система повышения эффективности проектируемых систем управления летательных аппаратов......... 29
А.Ш. Альтшулер, В.А. Лобанов
Математические модели пространственных колебаний жидких компонентов топлива в баках ракеты космического назначения на активных участках полета.. 39
ПРОЧНОСТЬ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ............................................ 47
М.П. Тепеницын, В.П. Тимохин Модификация панели крыла большого удлинения для ее облегчения............... 47
ПОЗДРАВЛЕНИЯ................................................................ 62
Кузину Анатолию Ивановичу - 60 лет.......................................... 62
АННОТАЦИИ СТАТЕЙ НА АНГЛИЙСКОМ ЯЗЫКЕ (ABSTRACTS)............................ 63
1
ДОРОГИЕ ЧИТАТЕЛИ!
Во второй номер нашего журнала за 2010 год включены статьи по направлениям:
• перспективные проекты авиационно-космических и ракетно-космических систем
• управление движением летательных аппаратов
• прочность летательных аппаратов
Завершает номер заметка, посвященная 60-летию Кузина Анатолия Ивановича - заместителя генерального директора ГКНПЦ им. М.В. Хруничева по стратегическим исследованиям и планированию развития ракетно-космической техники, доктора технических наук, профессора, действительного члена Российской инженерной академии и ряда других академий.
Редакционная коллегия обращается к специалистам предприятий авиационной и ракетно-космической отраслей, представителям НИИ и ВУЗов с предложением присылать рукописи статей с результатами исследований для опубликования в журнале «Авиакосмическая техника и технология». Новые требования к рукописям, разработанные в соответствии с рекомендациями ВАК, могут быть направлены авторам по электронной почте. Принимаются заявки на подписку. Заявки направлять по адресу edw&,pochta. ги, справки — по телефону (495)-497-49-61.
Редакционная коллегия
2
ПЕРСПЕКТИВНЫЕ ПРОЕКТЫ АВИАЦИОННО-КОСМИЧЕСКИХ И РАКЕТНО-КОСМИЧЕСКИХ СИСТЕМ
УДК 629.782.08
КОМПЛЕКСНАЯ МЕТОДИКА ПРОЕКТИРОВАНИЯ КОНСТРУКЦИИ КРЫЛА МНОГОРАЗОВОГО КОСМИЧЕСКОГО АППАРАТА
Т.Г. Агеева 1), к.т.н. Э.Н. Дудар 2\ д.т.н. С.В. Резник -
- МГТУ им. Н.Э. Баумана; 2) - ОАО «НПО «Молния», г. Москва
Крылатая конструктивно-компоновочная схема многоразового космического аппарата (МКА) обеспечивает не только комфортные условия полета, но и большую маневренность при движении в атмосфере. Указанные преимущества наиболее эффективно могут быть реализованы с помощью конструкций из композиционных материалов (КМ), так как КМ обладают высокой удельной жесткостью и прочностью. Для решения некоторых инженерных задач, в том числе и для создания крыла МКА, целесообразно использовать гибридные КМ. Авторами предложена методика проектирования крыла МКА из КМ.
Ключевые слова: многоразовый космический аппарат, композиционные материалы, оптимизация конструкции крыла
Введение
Для туристических полетов в космос необходимы специализированные транспортные средства - многоразовые космические аппараты туристического класса (МКА ТК), отвечающие требованиям повышенной комфортности и надежности, экономически эффективные и работающие на экологически чистых компонентах топлива. В настоящее время известно около 30 проектов МКА ТК, однако сведения о методах проектирования, материалах и конструкциях таких аппаратов довольно скудны. Та информация, которая доступна, как правило, включает сведения об общей компоновке, количестве пассажиров и характере траектории полета. Исходя из опыта создания ракетно-космической техники, очевидна необходимость в разработке комплексной методики проектирования, которая бы учитывала особенности МКА ТК и объединяла методы баллистики, аэродинамики, тепловых и прочностных расчетов.
Анализ показал, что для МКА ТК перспективна крылатая компоновочная схема, так как она обеспечивает комфортные условия полета и большую маневренность аппарата на этапе спуска. Крыло в данной схеме
представляет собой одну из наиболее важных частей конструкции. Преимущества крылатой схемы могут быть эффективно реализованы при помощи конструкций из КМ.
Рис. 1. МКА ТК «Одуванчик» МГТУ им. Н.Э. Баумана, Россия, 2006
В данной работе рассматривается комплексная методика проектирования крыла из КМ для МКА ТК «Одуванчик» (рис. 1), включающая следующие этапы:
1. Выбор общей компоновки МКА ТК крылатой схемы, исходя из его назначения.
3
2. Определение аэродинамических характеристик аппарата для заданной компоновки.
3. Расчет траекторных параметров.
4. Определение силовых и тепловых нагрузок на атмосферном участке траектории спуска.
5. Задание структуры крыла (выбор армирующего наполнителя и связующего, выбор количества слоев и углов укладки).
6. Определение температурного и напряженно-деформированного состояния для заданных в п. 4 нагрузок и заданной в п. 5 структуры крыла.
7. Повторение операций п. 5 и 6 до достижения минимальной массы конструкции крыла.
Формирование внешних обводов и определение аэродинамических характеристик
Крыло МКА ТК может иметь традиционную для крылатых космических аппаратов треугольную или трапециевидную форму в плане со стреловидностью 30...45°, что снижает максимальную температуру аэродинамического нагрева на передней кромке. Площадь крыла должна быть достаточной для обеспечения заданной посадочной скорости 200...240 км/ч при расчетной массе МКА. Для повышения боковой устойчивости целесообразно применить V-образное вертикальное оперение и дополнительные небольшие кили (винглетки) на концах консолей крыла (рис. 1). Аэродинамические управляющие поверхности - элевоны, рули направления, балансировочный щиток и воздушный тормоз - применяются для управления и стабилизации на атмосферном участке полета; двигатели реактивной системы управления (РСУ) — на верхнем участке в разреженных слоях атмосферы.
После принятия решений по конструктивным особенностям и компоновке формируется математическая модель аэродинамических обводов, и определяются аэродинамические характеристики (АДХ) аппарата с применением компьютерных систем геометрического моделирования и расчетной аэродинамики для диапазонов дозвуковых, трансзвуковых и сверхзвуковых скоростей полета (до М = 4). Как правило, на этапе оп
ределения облика крылатого космического аппарата повторяется несколько итераций, в которых корректируются внешние обводы и уточняются АДХ. В результате формируется аэродинамическая компоновка, отвечающая требованиям по посадочным и летнотехническим характеристикам, характеристикам устойчивости и управляемости и прочности конструкции. Следующий этап уточнения АДХ предполагает экспериментальные исследования моделей МКА в аэродинамических трубах.
За счет более тонкого крыла достаточно большой площади суборбитальный МКА ТК может иметь более высокое дозвуковое аэродинамическое качество (до Хтах ~ 7) по сравнению с орбитальными самолетами типа Space Shuttle или «Буран», что повышает комфортность горизонтальной посадки.
При аэродинамическом проектировании МКА очень важно использовать имеющиеся данные по аэродинамике крылатых космических аппаратов, испытанных в полете (экспериментальные аппараты «Бор», орбитальные самолеты «Спираль» и «Буран»).
Определение параметров траектории
Баллистические расчеты сопровождают все этапы проектирования МКА. Они выполняются с помощью компьютерных программ, моделирующих движение центра масс МКА ТК на всем протяжении полета (старт, разгон с помощью ракетного ускорителя, суборбитальный полет, вход в плотные слои атмосферы, спуск к аэродрому, предпосадочное маневрирование, заход на посадку и посадка). На более поздних этапах проектирования применяются компьютерные программы, учитывающие динамику углового движения относительно центра масс с учетом работы приводов аэродинамических органов управления и РСУ.
Управление траекторией при разгоне осуществляется путем коррекции угла тангажа при стабилизации по углам рысканья и крена. В результате достигаются заданные терминальные условия в точке завершения работы ракетного двигателя, обеспечивающие пребывание в невесомости в течение 3...5 минут на высоте полета 100...ПО км.
4
Рис. 2. Влияние заданной допостимой перегрузки и массы МКА ТК на максимумы скоростного напора и температуры:
а - влияние допустимой перегрузки при т = 3500 кг; б - влияние массы при пу = 3,5
Рис. 3. Изменение траекторных параметров по времени полета: а — угол атаки а; б - высота полета Н
Рис. 4. Изменение траекторных параметров по времени полета: а - скоростного напора q',6 — температуры кромки крыла Т
б
5
Экономические требования заставляют рассматривать проекты МКА ТК, в которых эти условия реализуются при минимально возможной скорости полета в конце разгона, что позволяет минимизировать массу и стоимость ракетного ускорителя. Поэтому траектория в начале пассивного суборбитального полета имеет большой угол наклона 6 к плоскости горизонта (например, при числе М = 3,8 на высоте Н = 46 км траекторный угол достигает 0 = 56°). Вход в плотные слои атмосферы в этом случае характеризуется пиковым нарастанием скоростного напора q, поперечной перегрузки пу и температуры аэродинамического нагрева поверхности МКА ТК Т.
При формировании типовой траектории необходимо учитывать ограничения, накладываемые на значения перегрузки пу и массу МКА ТК, так как эти параметры непосредственно влияют на уровень тепловых и силовых нагрузок (рис. 2). Значения перегрузки снижаются при уменьшении угла атаки, однако в результате в критических точках траектории температура и скоростной напор возрастают (рис. 2 а). С учетом экономических требований оптимальное значение максимальной перегрузки, как по медицинским показателям для человека, так и по уровню силового и теплового воздействия на аппарат, находится в диапазоне пу = 3,5...4,0 -для номинальных условий полета и пу - 4,0.. .4,5 - с учетом действия возмущений.
Определены аэродинамические характеристики и параметры траектории МКА ТК массой тп = 3500 кг при максимальной допустимой перегрузке иуДоп = 3,5 (рис. 3 а, 6), а также его силовые и тепловые нагрузки (рис. 4 а, б).
Структура крыла. Выбор армирующего наполнителя и связующего, количества слоев и углов укладки
По расчетам рабочая температура кромки крыла МКА ТК не превысит 180°С (рис. 4 а), поэтому в ней целесообразно использовать полимерные КМ (стеклопластики (СП), углепластики (УП), органопластики (ОП)). По проекту МКА ТК [1, 2] крыло должно представлять собой гибридную конструкцию, внешние слои которой выполне
ны из СП, УП и ОП на эпоксидном связующем.
Рис. 5. Схема кессона крыла из гибридного КМ: 1 - лонжерон; 2 - обшивка
Внутренний наполнитель - материал типа пенополиуретана (ППУ). Силовой элемент крыла - лонжерон - выполнен из углепластика (рис. 5).
Оптимизация конструкции
Сложность создания гибридной композитной конструкции заключается в нахождении рационального сочетания различных видов материалов, выборе углов их укладки, определении доли каждого материала в КМ. После задания определенной структуры крыла проводятся тепловой и прочностной расчеты, определяется напряженно-деформированное состояние объекта. На основании полученных результатов делаются выводы о работоспособности конструкции для заданных режимов нагружения. Таким образом, для оптимизации по массе и стоимости необходимо выполнить ряд расчетов, изменяя структуру объекта.
Рис. б. Характер распределения прогибов по размаху крыла
6
Углы укладки материала могут быть выбраны из условий работы конструкции. Крыло работает на изгиб и кручение, поэтому оптимальные углы укладки [0°/+45°/-45°] (слои с углами 0° воспринимают изгибающий момент, +45°/—45° - крутящий). В первую очередь необходимо оценить прогибы конструкции под действием максимальных нагрузок (рис. 6). Величина прогибов зависит от жесткости конструкции, и для крыла прямой стреловидности прогибы могут достигать 50... 100 мм. Увеличивая толщину слоя обшивки можно повысить жесткость конструкции, однако это приведет к увеличению массы. Увеличение толщины слоя
W, мм 36 34 32 30 28 26 24 22 20
10 15 20 25
ППУ с 10 до 30 мм (рис. 7) снижает величину прогибов с 35 до 25 мм. Дальнейшее увеличение толщины слоя ППУ не дает существенного уменьшения величины прогибов. Исходя из полученных результатов, можно выбрать толщину слоя ППУ 20.. .25 мм.
Рассмотрено два варианта крыла: с обшивкой, выполненной из СП, и с обшивкой из УП. В обоих случаях предполагалось, что лонжерон изготовлен из УП. Толщина каждого однонаправленного слоя составляет 0,3 мм, толщина слоя ППУ - 25 мм. Применение УП обшивки позволяет снизить массу конструкции на 4...5%, однако СП в 5...6 раз дешевле, чем УП.
30 35 40 45 Лппу, мм
Рис. 7. Изменения прогибов крыла W в зависимости от толщины слоя Ш1У hany
6 8 10 12
Число слоев
УП -СП
Рис. 8. Зависимость относительной массы крыла от числа слоев СП, УП
7
Структура оптимальной конструкции обшивки крыла
Таблица 1
5 слоев СП (5 X 03 мм) + 5 слоев УП (5 X 03 мм) + 1 слой ППУ (25 мм)
Название элемента Масса, кг Цена, долл. США
Обшивка СП 103,32 164
УП 73,8 470
ППУ 40 229
Лонжерон 32,59 207
Сумма (для одного крыла) 249,71 1070
Результаты расчетов показывают, что оптимальной является конструкция со структурой, приведенной в таблице 1. Такая структура обеспечивает снижение стоимости конструкции на 27% и увеличение относительной массы крыла на 0,8% по сравнению с крылом, у которого обшивки выполнены полностью из стеклопластика.
При оценке работоспособности конструкции был использован критерий максимальных напряжений. В соответствии с этим критерием максимальные напряжения в каждом из слоев сравниваются с предельными, и определяется коэффициент запаса прочности каждого слоя. Коэффициент запаса в каждом слое должен быть не менее 2.
Заключение
Суборбитальные транспортные системы, предназначенные для оказания услуг по космическому туризму, — одно из актуальных направлений развития ракетно-космической техники. Эти системы могут быть реализованы при относительно небольших затратах в ближайшие 5 лет. Поэтому предлагаемая комплексная методика проектирования крыла многоразового космического аппарата может быть востребована отечественными аэрокосмическими предприятиями.
Предполагается продолжить отработку методики в части более полного учета изменения температуры элементов конструкции под действием аэродинамического нагрева.
Отдельные результаты настоящей работы получены при финансовой поддержке по гранту РФФИ 09-08-00607а.
Литература
1. Резник С.В. Предварительные проектные исследования семейства многоразовых космических аппаратов туристического класса И Актуальные проблемы российской космонавтики: Труды 32-х Академических чтений по космонавтике. - М.: Комиссия РАН по разработке научного наследия пионеров освоения космического пространства, 2008. — С. 43-45.
2. Резник С.В., Степанищев НА. Проектноконструкторские решения легких многоразовых космических аппаратов туристического класса И Актуальные проблемы российской космонавтики: Труды 33-х Академических чтений по космонавтике. - М.: Комиссия РАН по разработке научного наследия пионеров освоения космического пространства, 2009. - С. 71-73.
3. Дудар Э.Н, Брук А.А., Резник С.В. Оптимизация технических характеристик перспективных космических аппаратов туристического класса И Авиакосмическая техника и технология, №4, 2009.-С. 37-41.
8
УДК 629.7.01
МНОГОРАЗОВАЯ РАКЕТНО-КОСМИЧЕСКАЯ СИСТЕМА.
БЛИЖАЙШИЕ ПЕРСПЕКТИВЫ РАЗРАБОТКИ И ЛЕТНО-ЭКСПЕРИМЕНТАЛЬНОЙ ОТРАБОТКИ
д.т.н. А.И. Кузин д.т.н. В.В. Вахниченко 2), к.т.н. С.Н. Лозин Ч П.А. Лехов Ч
А.И. Семенов к.т.н. В.В. Горбатенко Ч А.М. Ромашкин 2), д.т.н. В.И. Бузулук3),
д.т.н. В.П. Плохих3), д.т.н. И.Е. Ковалев 3\ к.т.н. В.В. Цыплаков 4\ к.т.н. А.А. Кондратов 4) -
- ФГУП ГКНПЦ им. М.В. Хруничева, г. Москва;
2) - ФГУП ЦНИИмаш, г. Королев, Московская область;
3) - ФГУП «ЦАГИ им. проф. Н.Е. Жуковского», г. Жуковский, Московская область;
4) - ФГУП ЛИИ, г. Жуковский, Московская область
Проанализированы ключевые технические решения и технологии создания МРКС-1. Определены первоочередные задачи создания летноэкспериментального комплекса МРКС-1 и показаны пути их решения. Определен предварительный состав наземных и летных демонстраторов для решения задач ЛЭК МРКС-1
Ключевые слова: многоразовая ракетно-космическая система, возвращаемый ракетный блок, возвратный полет, летноэкспериментальный комплекс, демонстратор
Отечественные и зарубежные исследования путей дальнейшего совершенствования ракет-носителей (PH) показали, что на ближайшую и среднесрочную перспективу радикально улучшить показатели надежности, безопасности и стоимости выведения PH можно только путем создания многоразовых возвращаемых первых
ступеней.
Создание многоразовой ракеты-носителя является необходимым шагом в совершенствовании средств выведения в ключевых направлениях, определяющих технико-экономическое и эксплуатационное совершенство носителя как транспортной космической системы по сравнению с уровнем традиционных одноразовых PH:
• снижение в 1,5...2 раза удельной стоимости выведения килограмма полезного груза (ПГ);
• повышение вероятности выполнения задач полета в 1,5.. .2 раза;
• кардинальное уменьшение или исключение районов падения отделяющихся частей PH и связанных с ними затрат.
Актуальность и своевременность разработки многоразовой ракетно-космической системы первого этапа (МРКС-1) однозначно определена и системностью программных мероприятий Роскосмоса в вопросе создания МРКС-1. В соответствии с Федеральной космической программой России в течение последних лет проведены или проводятся следующие работы:
• исследования по НИР «Азимут» -«Системные и технологические исследования в обеспечение последующего эскизного проектирования многоразовой ракетно-космической системы (МРКС)» (завершена в 2005 году);
• разработка аванпроектов МРКС-1 на конкурсной основе (завершена в 2008 году);
• опытно-конструкторские работы по теме «Двигатель-2015» (работы продолжаются с 2006 года);
• разработка аванпроекта летноэкспериментального комплекса «ЛЭК МРКС-1» (работы продолжаются с 2009 года).
9
Рис. 1. Схема возвратного полета многоразовой первой ступени к месту старта: БВ - блок выведения; ВРБ - возвращаемый ракетный блок
Проводимые в настоящее время научно-исследовательские работы по многоразовой ракетно-космической системе после 2010 года предусматривается перевести на этап ОКР.
В 2007...2009 годах ГКНПЦ
им. М.В. Хруничева по техническому заданию ЦНИИмаш, утвержденному Роскосмосом, разработан аванпроект по многоразовой ракетно-космической системе первого этапа МРКС-1. Основой МРКС-1 является частично многоразовая ракета-носитель с многоразовой первой и одноразовой второй ступенями.
Принципиальным отличием многоразовой ракетно-космической системы первого этапа от традиционных средств выведения является то, что первая ступень должна быть выполнена многократно используемой и самостоятельно возвращаемой к месту старта (рис. 1). Последнее обстоятельство обуславливает оптимизацию аэродинамической компоновки, выбор типа крыла, теплозащитного покрытия, двигателя для возвратного полета, других конструктивных элементов.
ГКНПЦ им. М.В. Хруничева к настоящему времени располагает результатами расчетно-теоретических и эксперименталь
ных работ по возвращаемому ракетному блоку (ВРБ) с прямым поворотным крылом, полученными по проекту «Байкал». По другим аэродинамическим компоновкам имеются результаты расчетнотеоретических исследований, проведенных совместно с ЦАГИ им. Н.Е. Жуковского.
Кроме ВРБ с прямым поворотным крылом практический интерес представляет схема с трапециевидным крылом, которая обеспечивает лучшее аэродинамическое качество на гиперзвуковых скоростях и снижение тепловых нагрузок при входе ВРБ в плотные слои атмосферы. Предлагаемая схема с трапециевидным крылом имеет форму крыла в плане (с наплывом) и киля, а также тип профилей их, подобные ОК «Буран».
Каждая из этих схем, представленных на рисунке 2, имеет свои положительные и отрицательные стороны.
Выбор наиболее рациональной из них является ключевой комплексной задачей лабораторно-стендовых исследований и летных экспериментов. При этом критериями выбора будут обеспечение допустимых тепловых потоков и обеспечение требуемых аэродинамических характеристик как на этапе выведения
10
многоразовой ракеты космического назначения (МРКН), так и на этапах аэродинамического спуска и активного возвратного полета. Эти этапы полета являются определяющими при выборе конструктивных решений и конструкцион
ных материалов.
В конструкции ВРБ предполагается использовать как традиционные, так и
перспективные конструкционные материалы. На рисунке 3 на базе варианта ВРБ с прямым крылом показаны основные применяемые конструкционные материалы. Для варианта ВРБ с трапециевидным крылом перечень применяемых конструкционных материалов и зоны их применения в конструкции ВРБ те же.
а
Рис. 2. Варианты аэродинамической схемы ВРБ: а - с прямым поворотным крылом; б - с трапециевидным крылом
алюминиево-литиевые сплавы
высокотемпературные композиционные материалы типа КМУ-8
высокотемпературные I композиционные
материалы типа УУКМ
Рис. 3. Схема применения в конструкции ВРБ основных конструкционных материалов
11
Предполагается конструктивное исполнение агрегатов конструкции ВРБ, обеспечивающих работоспособность в условиях значительных тепловых потоков, обусловленных большой скоростью полета при входе в плотные слои атмосферы. При этом конструкция агрегатов корпуса выполняется без применения внешнего теплозащитного покрытия. Основные технические решения, используемые в конструкции ВРБ, определяются особенностями схемы функционирования и комплексом действующих внешних нагрузок.
При разработке МРКС-1 в качестве одного из ключевых требований к формированию технического облика МРКН определено требование по выполнению задачи выведения ПГ при отказе одного жидкостного ракетного двигателя (ЖРД) в составе маршевой двигательной установки (МДУ) ВРБ. Данное требование было одним из основных, позволивших обосновать размерность маршевых ЖРД ВРБ и требования по эффективности системы аварийной защиты (САЗ) ЖРД, заключающиеся в обеспечении требуемого уровня безопасности их применения в составе многоразового носителя. САЗ ЖРД должна обеспечивать своевременное и гарантированное (в пределах заданной вероятностной характеристики) обнаружение предотказного состояния ЖРД и его отключение без вскрытия внешнего тракта.
Принципиальное значение для обоснования реализуемости проекта МРКС с заданными технико-экономическими характеристиками имеет решение проблемы межполетного обслуживания ВРБ по техническому состоянию. Такой подход к эксплуатации ракетно-космической техники является новым и требует разработки новых методов с последующей их отработкой на натурных изделиях. В то же время, практика эксплуатации современной авиационной техники предполагает систему обслуживания и ремонта, без которой самолет не сможет стать рыночной продукцией: эффективную систему интегрированной логистической поддержки жизненного цикла самолета, стратегию эксплуатации по состоянию, интегрированную систему
встроенного контроля технического состояния конструкции и высокий уровень эксплуатационного совершенства [3]. Главной задачей применительно к МРКС-1 является существенное снижение эксплуатационных расходов за счет использования системы контроля технического состояния ВРБ, и в первую очередь маршевых многоразовых ЖРД. Наличие такой системы также является новым элементом для ракетно-космической техники и представляет собой одну из ключевых технологий, успешное применение которой определяет технико-экономическую эффективность МРКС-1.
Важной проблемой создания ВРБ является обеспечение беспилотного возвратного полета от момента отделения от второй ступени до его посадки на ВПП. Решение проблемы предусматривает знание с высокой точностью аэродинамических характеристик ВРБ на всех режимах его полета, то есть от скорости, соответствующей М ~ 7,5 на высотах Н~ 60.. .70 км до М ~ 0,2 на посадке.
Таким образом, можно сформулировать ключевые технические решения и технологии в конструкции ВРБ (таблица 1), разработка которых необходима для подтверждения правильности наиболее критических конструкторско-технологических решений в интересах создания МРКС-1 и обоснования возможности создания МРКС-1 с требуемыми тактикотехническими и экономическими характеристиками.
Одним из ключевых технических решений является выбор аэродинамической компоновки ВРБ. Принятие решения сопровождается анализом не только аэродинамических характеристик (АДХ), но и анализом теплонагружения конструкции на больших скоростях. Для его проведения необходимо моделировать внешний набегающий поток. Характеристики анализируемых аэродинамических компоновок на предварительных этапах определяются расчетно-аналитическими методами.
В настоящее время задача моделирования трехмерного обтекания решается методами математического моделирования.
12
Однако эти методы дают достаточное соответствие реальному обтеканию только для известных аэродинамических форм в диапазоне скоростей до М = 3. Корректировка математических моделей осуществляется с помощью продувок в аэродинамических трубах и на основе анализа летных характеристик реальных изделий в реальных условиях полета.
Поскольку аэродинамическая компоновка ВРБ имеет ряд существенных особенностей и требует анализа параметров для широкого диапазона высот и скоростей, то применение только математических методов недостаточно. Поэтому исследования обтекания моделей ВРБ необходимо проводить в аэродинамических трубах (АДТ) при дозвуковых и сверхзвуковых скоростях.
Целью этих исследований является определение основных аэродинамических, теплофизических, аэроупругих, прочностных характеристик исследуемых различных аэродинамических схем и компоновок МРКН и ВРБ, проведение их сравнительного анализа и выбор оптимальных.
Следующей важной проблемой является выбор рациональных конструктивнотехнических решений, обеспечивающих работоспособность ВРБ на всех режимах эксплуатации в течение заданного ресурса. Ключевым моментом в этой проблеме является выбор конструкционных материалов. Как и в предыдущем случае, существуют расчетные методы анализа
Ключевые технические решения и технологии в конструкции ВРБ
конструкторских решений, но в общепринятой практике все конструктивные решения требуют экспериментальной проверки на натурных образцах. В частности, на натурных образцах проводятся статические, динамические, вибрационные и другие виды испытаний элементов конструкции изделия.
Одной из ключевых проблем создания эффективной и надежной многоразовой транспортной космической системы является создание многоразовых маршевых ЖРД с обеспечением требуемого уровня безопасности их применения в составе многоразового носителя. САЗ ЖРД должна обеспечивать своевременное и гарантированное (в пределах заданной вероятностной характеристики) обнаружение предотказ-ного состояния ЖРД и его отключение без вскрытия внешнего тракта. Работы в этом направлении осуществляются силами ведущих организаций ракетного двигателе-строения в рамках ОКР «Двигатель-2015», целью которой является создание многоразового ЖРД для первой ступени МРКС-1, в том числе создание эффективной системы диагностики и аварийной защиты двигателя.
Создание первых ступеней PH, решающей задачу многоразового использования за счет самолетной аэродинамической компоновки, требует определенных изменений в подходе к проведению наземных и летных испытаний этих изделий по сравнению с нормами, принятыми в отечественной ракетной технике.'
Таблица 1
Технологии
• технология применения и эксплуатации новых конструкционных материалов в конструкции ВРБ;
• технология межполетного обслуживания ВРБ по техническому состоянию на основании данных системы контроля технического состояния, в том числе технология обслуживания конструкции и агрегатов планера, РСУ, ВРДУ, СУ, других систем и приводов;
• технология межполетного обслуживания многоразового ЖРД по техническому состоянию на основании данных системы контроля технического состояния ЖРД__________________________
Технические решения
• определение рациональной аэродинамической схемы ВРБ, обеспечивающей устойчивость, управляемость и минимизацию теплового нагружения ВРБ на всех этапах полета;
• разработка и подтверждение эффективности системы аварийной защиты многоразового ЖРД;
• подтверждение работоспособности многоразовой конструкции ВРБ при циклическом тепловом и динамическом нагружении;
• отработка технических решений и алгоритмов, обеспечивающих автоматический полет и посадку ВРБ, в том числе групповую;
• разработка системы безопасности МРКН
13
Состав лабораторных моделей МРКН и ВРБ Таблица 2
Тип модели Назначение
Аэродинамические модели МРКН различных вариантов Исследование аэродинамических характеристик МРКН и ВРБ при совместном полете на до- и трансзвуковых режимах Исследование аэродинамических характеристик МРКН и ВРБ при совместном полете на сверх- и гиперзвуковых скоростях Исследование взаимодействия обтекания МРКН и ВРБ (интерференция) при разделении, а также вопросов аэродинамического нагрева
Аэродинамические модели ВРБ различных схем Исследование основных аэродинамических характеристик ВРБ при автономном полете на гипер- и сверхзвуковых режимах Исследование основных аэродинамических характеристик ВРБ при автономном полете на транс- и дозвуковых режимах как с закрытыми входами в ВРДУ, так и с работающими ВРДУ (в том числе на режиме посадки с отклоненными органами управления)
Дренированная модель ВРБ Исследование распределения давления по поверхности ВРБ в автономном полете на до- и трансзвуковых режимах
Тепловые модели ВРБ Исследование теплофизических характеристик ВРБ на гиперзвуковых режимах полета, тепловых потоков к отсекам ВРБ
Динамически подобные модели ВРБ Исследование аэроупругости ВРБ (в том числе поворотного крыла)
По нормативам, разработанным для PH еще МОМ СССР, перед началом эксплуатации необходимо выполнить всего несколько успешных пусков, при этом в силу одноразовой идеологии в процессе эксплуатации PH каждый полет является испытательным.
В авиации началу эксплуатации предшествует длительный и сложный процесс испытаний, зато при эксплуатации самолета проводятся только регламентные и обслуживающие работы.
Разный подход к отработке изделий приводит и к существенному различию в финансировании работ: более дешевый этап отработки ракетных изделий определяет их дорогую эксплуатацию, тогда как более длительный и дорогой процесс испытаний самолета дает возможность их рентабельной многолетней эксплуатации.
Аэродинамическая компоновка ВРБ представляет собой конструктивное объединение элементов ракетной техники (баки, сухие отсеки, маршевый ЖРД) и самолетной техники (крыло, киль, оперение, ВРДУ, шасси).
Одной из целей создания многоразовых средств выведения является существенное удешевление стоимости выведения 1 кг ПГ на орбиту за счет снижения заводских затрат
(многоразовое изделие рассчитано на 100 пусков) и затрат на эксплуатацию изделия.
Таким образом, вопрос отработки ВРБ является одним из ключевых и требует объединения ракетных и авиационных методов испытания.
Отечественная и зарубежная практика разработки и создания многоразовых ракетно-транспортных систем («Спейс Шаттл» США, «Энергия-Буран» СССР) показала эффективность экспериментальной отработки возвращаемых многоразовых летательных аппаратов при помощи наземных и летных демонстраторов с точки зрения обоснования достоверности принятых технических решений и обеспечения существенного сокращения сроков и затрат на их создание.
Так, в рамках создания ОК «Буран» впервые в отечественной практике были решены вопросы определения АДХ, устойчивости и управляемости ЛА самолетной схемы при полете в атмосфере на высотах до 100 км и при значениях чисел М до 28, что потребовало создания летающих моделей и летающих лабораторий. Летной отработке предшествовали наземные эксперименты соответствующего объема и сложности. В частности, было проведено около 78 тысяч продувок моделей в АДТ,
14
был создан полноразмерный стенд оборудования, позволивший оценить программное обеспечение системы управления (СУ) при работе с реальными приводами для всех режимов управления, характеристики контура обеспечения устойчивости и управляемости при взаимодействии с реальными рулевыми приводами и имитацией шарнирных моментов, характеристики систем навигации и посадки и достоверность формирования пилотажно-навигационной информации на всех этапах моделирования в замкнутой схеме полета, влияние нештатных ситуаций на программное обеспечение
СУ и ее отказобезопасность.
Для эффективной отработки многоразовой космической системы ГКНПЦ им. М.В. Хруничева разработаны предложения по летно-экспериментальному комплексу - демонстратору МРКС-1. К разработке ЛЭК привлечены предприятия традиционной кооперации ГКНПЦ им. М.В. Хруничева (КБХА, КБХМ им. А.М. Исаева, НПО «Энергомаш» им. В.П. Глушко, МОКБ «Марс»), а также ЦАГИ им. Н.Е. Жуковского, ЛИИ им. М.М. Громова, ММПП «Салют», ЦИАМ и некоторые другие предприятия.
Состав наземных демонстраторов
Таблица 3
Наземный демонстратор Исследуемые этапы полета ВРБ Решаемые ключевые проблемы. Способы отработки
Демонстратор для макетирования систем и агрегатов и отработки технологии эксплуатации (ВРБ-ДМТ) В интересах всех этапов полета и наземной эксплуатации ВРБ Комплексная отработка конструкции и компоновки изделия, установки систем, узлов и агрегатов, отработка технологии эксплуатации ВРБ при подготовке к пуску на техническом комплексе (ТК) и стартовом комплексе (СК), при межполетном обслуживании на посадочном комплексе (ПК)
Демонстратор для статических и частотных испытаний (ВРБ-ДСЧ) В интересах всех этапов полета ВРБ (активный участок, участок возвратного полета) Статические прочностные и ресурсные испытания ВРБ (аэродинамические, вибрационные, акустические и инерционные нагрузки)
Демонстратор для тепло-вибропрочностных и акустических испытаний (ВРБ-ДТВА) В интересах активного участка полета и этапа полета на гиперзвуковых скоростях при входе в плотные слои атмосферы Теплопрочностные, акустические и вибрационные испытания в условиях высоких температур, подтверждающие возможность эксплуатации изделия без теплозащиты
Демонстратор комплексных электрических испытаний и технологии эксплуатации «по состоянию» (ВРБ-ДСК) В интересах всех этапов полета ВРБ Комплексная отработка бортовых систем ВРБ, их взаимодействия между собой и с наземным комплексом управления (НКУ), отработка программного обеспечения СУ в рамках программы полета ВРБ как в штатных, так и в нештатных ситуациях
Демонстратор огневых стендовых испытаний ЖРД, САЗ (ВРБ-ОСИ) В интересах активного участка в части ЖРД и возвратного участка в части РСУ Проведение огневых испытаний ЖРД и ДУ реактивной системы управления (РСУ), отработка эффективности САЗ ЖРД
Стенды отработки воздушно-реактивной двигательной установки (ВРДУ) Дозвуковой участок возвратного полета ВРБ с работающей ВРДУ Комплексная отработка ВРДУ и воздухозаборников
Стенд климатических испытаний В интересах всех этапов полета и наземной эксплуатации ВРБ Проверка систем и агрегатов ВРБ на воздействие климатических факторов
15
Состав летных демонстраторов
Таблица 4
Детный демонстратор Исследуемые этапы полета ВРБ Решаемые ключевые проблемы.
Масштабированные летные демонстраторы Вход ВРБ в плотные слои атмосферы, полет с гиперзвуковой скоростью Обеспечение стабилизации полета ВРБ на больших (по модулю) углах атаки (до 50°) с помощью РСУ и органов аэродинамического управления при М = 5...7. Определение тепловых режимов нагружения конструкции ВРБ
Сверхзвуковой полет ВРБ Обеспечение устойчивого полета на сверхзвуковых скоростях (М = 2...5) в условиях максимального скоростного напора с углами атаки (по модулю) 20°...30° с помощью аэродинамических органов управления. Определение тепловых режимов нагружения конструкции ВРБ
Трансзвуковой полет ВРБ Обеспечение устойчивого полета ВРБ на трансзвуковых скоростях (М = 0,8... 1,5) на углах атаки 10°... 15° с помощью аэродинамических органов управления. Определение тепловых режимов нагружения конструкции ВРБ
Летающая лаборатория на базе самолета Ил-76 Запуск ВРДУ Отработка запуска ВРДУ от авторотации с реальным воздухозаборником
Летающая лаборатория на базе самолета типа Як-40 Заход на посадку и посадка на аэродром Отработка СУ и программного обеспечения, в том числе при взаимодействии с НКУ
Полномасштабный демонстратор ГЛИ Дозвуковой полет ВРБ в крейсерском режиме. Заход на посадку и посадка на аэродром Отработка в натурных условиях летнотехнических и посадочных характеристик, характеристик устойчивости и управляемости, СУ при взаимодействии с НКУ, системами навигации и УВД. Отработка всего комплекса средств возврата и посадки. Подтверждение внешних нагрузок и напряжений конструкции ВРБ и достаточности средств послеполетного обслуживания
Системный демонстратор В интересах всех этапов полета, в том числе в составе МРКН Комплексная отработка всех систем ВРБ. Отработка полного цикла полета и межполетного обслуживания
Предлагаемый летно-экспериментальный комплекс (ЛЭК) МРКС-1 представляет собой совокупность наземных и летных демонстраторов с функционально взаимосвязанными экспериментально-техническими средствами и сооружениями отработки, хранения, технического обслуживания (в том числе послеполетного), подготовки, пуска и контроля полета на участках выведения, спуска и посадки.
Наземные демонстраторы должны представлять собой натурные масштабные и полноразмерные стенды и модели (модели для аэротермодинамических продувок, модели для экспериментальной отработки элементов и систем ВРБ, макеты для прочностных испытаний, испытаний подсистем ВРБ, ДУ и другие). Они предназначены для оценки и подтверждения проектно-расчетных и конструкторских решений, положенных в
16
основу построения ВРБ, и частично решают задачи традиционной для ракетной техники экспериментальной отработки.
Летные демонстраторы ВРБ должны представлять собой летающие лаборатории, масштабируемые и полноразмерные изделия, предназначенные для экспериментальной отработки как отдельных систем, например, СУ, ВРД, так и для комплексной отработки технологий создания многоразовых ступеней в реальных условиях и областях их функционирования для подтверждения принятых технических решений.
При создании наземных и летных демонстраторов должно быть обеспечено подобие внешних обводов, воспроизведение параметров траектории полета на возвратном участке и уровня характерных
нагрузок демонстратора и натурного объекта.
Основными целями разработки ЛЭК -демонстратора МРКС-1 являются:
• обоснование рационального технического облика, основных технических решений, принципов построения и функционирования МРКС-1 и ее составных частей;
• комплексная оценка реализуемости проекта МРКС-1 с требуемыми тактикотехническими и технико-экономическими характеристиками.
Отработка ВРБ предусматривает выполнение основного объема испытаний в наземных условиях. При летных испытаниях проводится лишь та отработка, которая в наземных условиях невыполнима или экономически нецелесообразна.
ЛКИ
Горизонтальные летные испытания
Отработка систем на летающих лабораториях
Летные эксперименты с масштабируемыми демонстраторами
Исследования на наземных демонстраторах, создание летноэкспериментальной базы
Модельные исследования в АДТ
Выбор аэродинамической схемы ВРБ
Рис. 4. Этапы создания летно-экспериментального комплекса МРКС-1
17
На основе анализа проектных параметров ВРБ, определяющих технический облик и принципиальные расчетные и конструктивные решения построения МРКН, и ключевых технических решений и технологий в конструкции ВРБ определен предварительный состав наземных и летных демонстраторов.
Предлагаемый состав наземных и летных демонстраторов и стендов представлен в таблицах 2, 3 и 4.
Этапы создания летно-экспериментального комплекса МРКС-1 показаны на рисунке 4.
Комплексная отработка ВРБ в реальных условиях, как на активном, так и на возвратном участках полета, и технология эксплуатации изделия могут быть осуществлены на системном демонстраторе (демонстраторе технологий средств выведения нового поколения), который может представлять собой как масштабируемое, так и полномасштабное изделие (ВРБ) со штатной или близкой к ней комплектацией. При испытаниях системного демонстратора должно быть обеспечено воспроизведение параметров траектории полета ступеней МРКН и уровня характерных нагрузок (аэрогазодинами-ческих, тепловых, динамических и других нагрузок).
В настоящее время в рамках программы российско-французского сотрудничества «Урал» рассматривается возможность создания многоразовой первой ступени на компонентах топлива «кислород-метан» для ракеты-носителя нового поколения сверхлегкого класса. По нашим предварительным оценкам многоразовая первая ступень подобной PH может рассматриваться в качестве масштабируемого системного летного демонстратора ВРБ многоразовой ракетно-космической системы первого этапа.
Разработка, создание и эксплуатация такого демонстратора в составе PH сверхлегкого класса может быть проведена на основе максимального использования существующего проектного и технологического заделов по одноразовым ступеням и другим агрегатам и системам из состава
авиационной и ракетной техники российского и европейского производства, что, в частности, в значительной степени определяет его соответствие целям, задачам и предполагаемым результатам исследований российско-французской программы совместных исследований «Урал».
Кроме того, создание многоразовой первой ступени PH нового поколения -масштабируемого системного летного демонстратора МРКС-1 - потребует необходимости создания и полной отработки летно-экспериментального комплекса МРКС-1 (за исключением полномасштабного демонстратора ГЛИ ВРБ). Полученные при этом результаты предусматривается в полном объеме использовать в опытноконструкторской разработке полномасштабной МРКС-1.
Литература
1. Кузин А.И., Лозин С.Н., Лехов П.А., Семенов А.И., Горбатенко В.В. Проектные исследования ГКНПЦ им. М.В. Хруничева по обоснованию многоразовой ракетно-космической системы // Авиакосмическая техника и технология, 2010, № 1.
2. Многоразовый орбитальный корабль «Буран» / Под ред. Семенова Ю.П., Лозино-Лозинского Г.Е. и др. - М.: Машиностроение, 1995.
3. Аэрокосмическое обозрение, 01.2009.
4. ЦАГИ им. проф. Н.Е. Жуковского / Материалы аванпроекта ЛЭК в части наземных и летных демонстраторов МРКС-1, 2009.
5. ЛИИ им. М.М. Громова / Предложения в аванпроект ЛЭК в части летных демонстраторов МРКС-1, 2009.
6. МОКБ «Марс» / Предложения по экспериментальной отработке СУ ВРБ МРКС-1, 2009.
7. ММПП «Салют» / Предложения по экспериментальной отработке ВРД МРКС-1, 2009.
8. Работы КБХА по освоению СПГ (метана) в качестве горючего для перспективных ЖРД, 2009.
9. Анализ проектных параметров и характерных областей функционирования многоразовых ступеней МРКС на основе существующих проектных проработок и формирование общих требований к наземным и к летным демонстраторам. ЦНИИмаш, 2005.
18
УПРАВЛЕНИЕ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
УДК. 629.7.05
ИССЛЕДОВАНИЕ И РАЗРАБОТКА ПРОДУКЦИОННЫХ ПРАВИЛ В СИСТЕМАХ ЭКСПЕРТНОГО ОЦЕНИВАНИЯ КАЧЕСТВА СИСТЕМ УПРАВЛЕНИЯ ПОЛЕТОМ
к.т.н. С.А. Капитонов - ОКБ «Сухого», г. Москва
На основе анализа восприятия объекта исследования и схем вывода рас-суждений специалистами обоснованы продукционные правила оценивания качества систем управления полетом по различным экспериментальным данным.
Ключевые слова: СУП, процесс, оценка, эксперт, мотивация, шкала, алгоритм, эксперимент, суждение
Дальнейшее усложнение элементной базы и алгоритмов систем управления (СУ) летательными аппаратами (ЛА) и бортового оборудования, образующего контур управления ЛА, привело к тому, что контур управления ЛА описывается таким понятием как сложная система (СС), которая характеризуются большой размерностью фазового вектора и вектора возмущений неопределенно математической модели [1].
Задача оценивания СС требует применения методических подходов, адекватных объекту исследования, характеризуемого онтологическими атрибутами: назначением (перечнем выполняемых функций), соответствующим набором свойств и характеристик, условиями применения, структурой и составом элементов. Исходным пунктом для формирования методики оценки свойств СУ является осознание ее основного предназначения и применяемого способа достижения целей функционирования. При этом предполагается, что должны быть известны потенциальные возможности применяемого способа реализации СУ, обеспечивающего достижение целей функционирования.
Основой методики оценивания качества СУ является оценивание качества переходных процессов (ПП) [2] с использованием временных характеристик (ВХ), которые относятся к классу феноменологических, то есть проистекают из природы самого объекта исследования и являются основными.
При этом полученные ВХ могут соотноситься с качественной оценкой летчика (ОЛ). В [3] разработана методика предварительного определения требуемого значения времени ПП исходя из располагаемых характеристик управляемости ЛА, что позволяет обоснованно соотносить потенциальные возможности по управляемости ЛА в контуре управления с процедурой установления требуемых ВХ.
Так как набор ВХ является векторным показателем качества (ПК), то для полного и сбалансированного учета всех составляющих ВХ требуется разработка специальных методик их шкалирования, к которым относятся: скаляризация векторного показателя путем построения аддитивного показателя с весовыми коэффициентами, выбор главного показателя из набора ВХ с ограничением остальных [1]. При этом результат будет определяться набором весовых коэффициентов, либо выбранным показателем из набора ВХ, что всецело зависит от мнения экспертов.
Существующие теоретические методы анализа качества ПП, разработанные в теории автоматического управления (ТАУ), предназначены для определения ВХ без построения кривой ПП по математической модели (ММ) линейной стационарной СУ в виде передаточной функции и не учитывают специфику проведения испытаний. Эта специфика заключается в том, что при испыта
19
ниях доступным в первую очередь является ПП как реакция на испытательный сигнал, а затем уже ММ СУ, которая может быть получена в результате идентификации по экспериментальным данным, что является самостоятельной и нетривиальной задачей.
Применяемые при экспериментальном оценивании качества СУ такие частотные характеристики (ЧХ) как запасы устойчивости по фазе и амплитуде, являющиеся наиболее простыми и наглядными формами запасов устойчивости, имеют связь с ВХ [2].
Важнейшей проблемой при оценивании качества ПП является разработка его эталона, в максимальной степени соответствующего представлениям специалистов о требуемых динамических свойствах СУ.
Таким образом, при разработке методики оценки СУ ключевыми моментами являются: выбор оцениваемых характеристик, отражающих основные свойства СУ, и выбор допустимых областей изменения их значений, способа их определения и алгоритма семантической обработки полученных результатов измерения. При этом под способом определения динамического свойства (характеристики) предполагается как инструментальный способ, так и «органолептический» способ прямого сенсорного восприятия свойств и характеристик исследуемого объекта; а под методикой оценки подразумевается вербальное описание сути метода (способа) оценивания свойств (характеристик).
К2
частотные характеристики 50
100 -| 75 -
50 -
25 -
0 -И
10
10
10
10
10
0 1 2 3 4 5 6 7
100
75 -
К3 50 -
25 - Ю оК
точностные характеристики
50
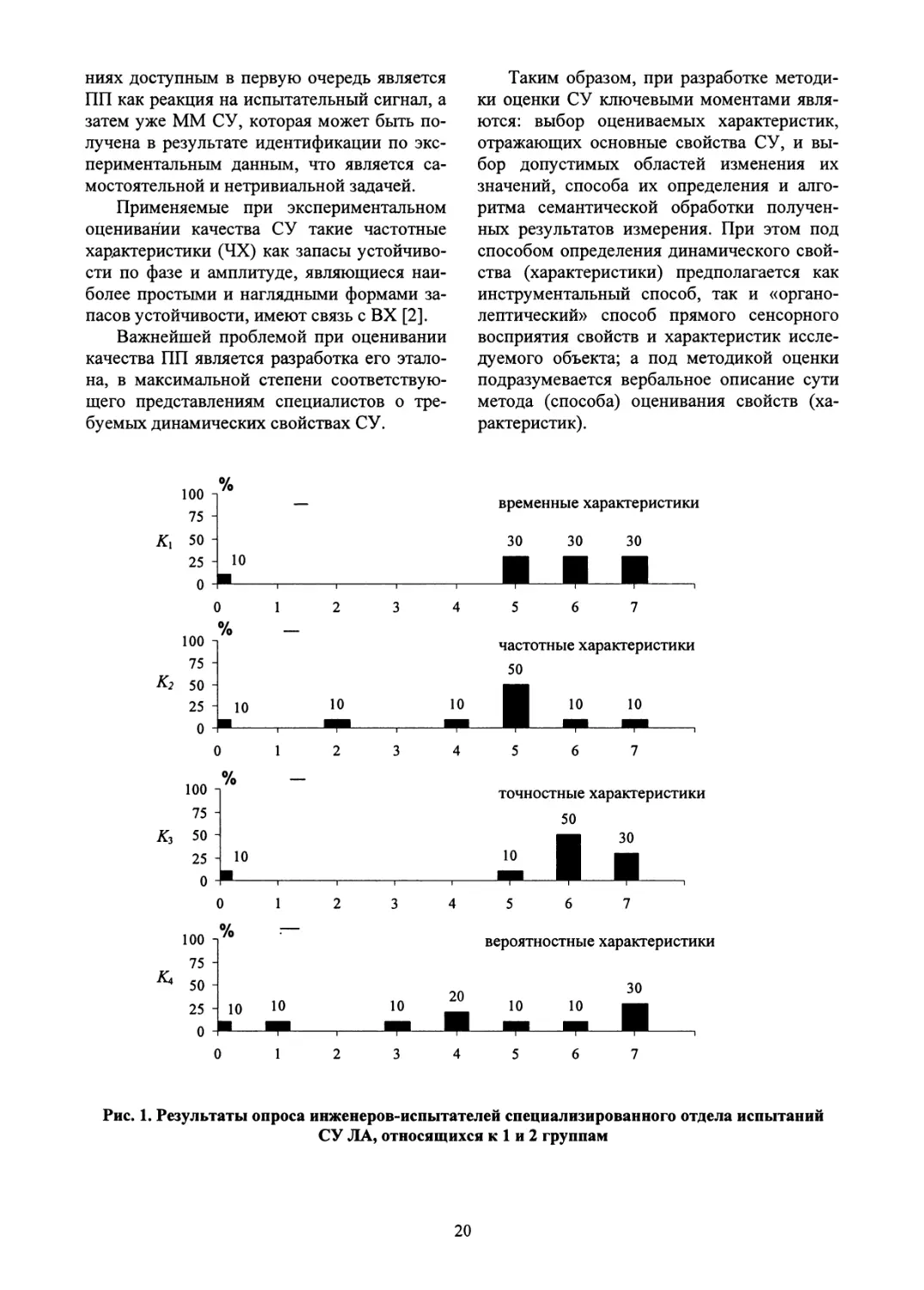
Рис. 1. Результаты опроса инженеров-испытателей специализированного отдела испытаний СУ ЛА, относящихся к 1 и 2 группам
20
100
75
К2 50
25
0
100
75
Кз 50
25
О
0 1 2 3 4 5 6 7
100
75
Кд 50
25
О
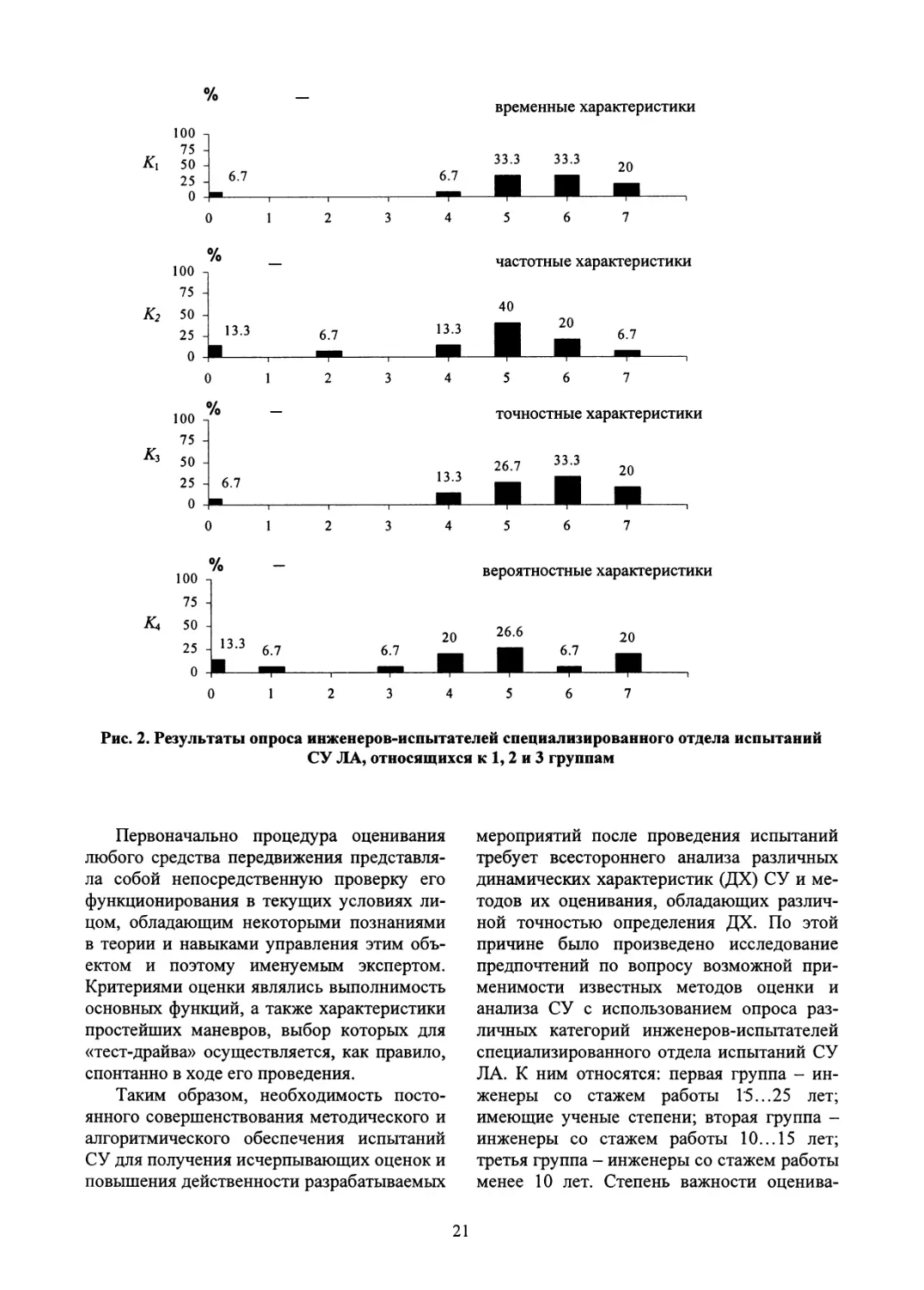
Рис. 2. Результаты опроса инженеров-испытателей специализированного отдела испытаний СУ ЛА, относящихся к 1,2 и 3 группам
Первоначально процедура оценивания любого средства передвижения представляла собой непосредственную проверку его функционирования в текущих условиях лицом, обладающим некоторыми познаниями в теории и навыками управления этим объектом и поэтому именуемым экспертом. Критериями оценки являлись выполнимость основных функций, а также характеристики простейших маневров, выбор которых для «тест-драйва» осуществляется, как правило, спонтанно в ходе его проведения.
Таким образом, необходимость постоянного совершенствования методического и алгоритмического обеспечения испытаний СУ для получения исчерпывающих оценок и повышения действенности разрабатываемых
мероприятий после проведения испытаний требует всестороннего анализа различных динамических характеристик (ДХ) СУ и методов их оценивания, обладающих различной точностью определения ДХ. По этой причине было произведено исследование предпочтений по вопросу возможной применимости известных методов оценки и анализа СУ с использованием опроса различных категорий инженеров-испытателей специализированного отдела испытаний СУ ЛА. К ним относятся: первая группа - инженеры со стажем работы Г5...25 лет; имеющие ученые степени; вторая группа -инженеры со стажем работы 10... 15 лет; третья группа - инженеры со стажем работы менее 10 лет. Степень важности оценива
21
лась в баллах от 1 до 7. О соответствует отсутствию какого-либо ответа. Результаты опроса для первой и второй групп приведены на рисунке 1, для первой, второй и третьей групп - на рисунке 2, откуда видно, что все рассмотренные характеристики являются значимыми. Максимальное предпочтение все инженеры отдают ВХ, следующими по предпочтению являются точностные характеристики. Таким образом, у каждого специалиста может существовать индивидуальная шкала оценивания ДХ, структурированная либо неструктурированная, постоянная либо непостоянная (вариабельная, зависящая от многих значимых для индивида обстоятельств). При этом индивид, принимаемый в качестве эксперта, может объяснить, каким образом формируется оценка, либо не может этого сделать ввиду неструк-турированности этой процедуры и оцениваемой предметной области. Представленные данные позволяют сделать вывод, что в среднем уровень значимости перечисленных ДХ и способов их получения следует считать равнозначными. Это укладывается в известное высказывание, что «истина лежит посередине», то есть все рассмотренные ДХ являются равноценными. Для линейных систем это известно теоретически, а для нелинейных систем они могут быть неравноценны по информативности и точности определения. Это явление объясняется тем, что по умолчанию основными базовыми представлениями являются: для понятия «система» - линейная СУ; минимальная ошибка управления равна нулю при бесконечно большом коэффициенте усиления разомкнутого контура; случайный процесс -нормальный стационарный случайный процесс. Эта особенность, при ее не учете, может провоцировать неверные суждения о качестве при некоторых условиях.
Под экспертной оценкой (ЭО) СУ будем понимать осмысленное суждение о качестве СУ в целом, либо о ее отдельных свойствах, либо характеристиках, выражаемое вербально с использованием общепринятых либо специально разработанных лингвистических построений (конструкций), формируемое на основе уровня теоретической подготовки и практического опыта без ин
струментального определения доверительной вероятности.
В основе осознаваемых способов формирования оценки свойств СУ могут лежать принципы:
• прагматизма, когда точность управления является допустимой, то есть не превышает установленную практическим путем предельно допустимую ошибку управления в проверяемых условиях;
• оптимальности, когда точность управления является максимальной, то есть ошибка является минимально возможной для заданного диапазона условий, в который попадают проверяемые условия.
В первом случае эксперименты могут быть проведены на реальном образце в ограниченном диапазоне условий; во втором случае должна быть проведена обоснованная последовательность полностью управляемых по условиям летно-модельных экспериментов с обязательным использованием сведений о ММ, при этом формальные методы оптимизации применимы только внутри одного класса ММ.
ЭО, как правило, не являются оптимальными оценками, которые могут быть получены с использованием полного набора вероятностных характеристик измеряемых и коррелированных с ними величин. Процесс ЭО характеризуется:
• способом восприятия объекта исследования (оценки);
• способами шкалирования параметров (характеристик) объекта исследования -разбиения диапазона изменения ДХ на непосредственно воспринимаемые поддиапазоны;
• способом классификации качества объекта;
• наличием описания правил вывода ЭО.
Все составные части процесса ЭО могут иметь неоднозначное представление и являться условными. Если для формирования необходимых составляющих процесса формирования ЭО используются научные положения из рассматриваемой предметной области (в случае СУ - ТАУ), то ее следует считать научно обоснованной.
22
Если эксперт в состоянии выделить лишь объект исследования и сформировать ЭО на неспециализированном языке, являющемся подмножеством естественного языка с уровнем различаемого качества не более двух, то ее можно считать по форме примитивной. Более точное выражение посредством ЭО качества объекта исследования с помощью многоуровневых шкал качества является предпочтительным для определения необходимых дополнительных настроек СУ, устраняющих выявленные недостатки и зафиксированные в результате ЭО.
По степени достоверности результаты эксперимента по определению ДХ можно классифицировать следующим образом:
• А Р > 0,9 — точные;
• В Р = 0,7...0,9 - ограниченно точные;
• С Р = 0,5...0,7 -приближенные;
• Д Р < 0,5 - неточные.
К классам С и Д относятся ЭО, определенные для оценки качества СУ с использованием теоретических конструкций ТАУ. В настоящее время в практике оценки ДХ СУ доверительная вероятность не определяется, поэтому их следует считать приближенными. Следует различать понятия экспертного оценивания и экспертного опроса. В первом случае речь идет об участии достаточно подготовленных, в том числе и по методикам проведения оценивания, высококвалифицированных специалистов. Во втором случае - о массовом привлечении специалистов для ответов на вопросы, касающиеся их деятельности, в обычном либо необычном для них форматах.
Эксперт может формировать ЭО с раскрытием и без раскрытия механизма их формирования, что обусловлено наличием значимой для него мотивации, например:
• нежелание демонстрации собственного набора правил их формирования, мало отличающегося от распространенного;
• желание скрыть возможные недостатки алгоритма формирования ЭО, даже при их отсутствии;
• нежелание высокопоставленных специалистов участвовать в процедуре формирования ЭО наряду с рядовыми специалистами;
• боязнь получить неправильную ЭО даже при анонимном опросе.
Таким образом, основным мотивом при определении экспертных оценок в ходе опросов для привлекаемого специалиста следует считать фактическое отсутствие анонимности, то есть имеет место рефлексивное поведение опрашиваемого, при котором он прогнозирует оценку его самого как специалиста в ходе проведения опроса. При проведении формальных опросов большинство специалистов, не имеющих достаточного опыта экспертного оценивания, стремятся приблизить свои оценки в сторону их средних (по их разумению) значений. Другая, значительно меньшая часть привлекаемых специалистов либо отказывается участвовать в процессе, либо выдает крайние, приближающиеся к явно неадекватным, оценки, которые впоследствии или отбрасываются, или, ввиду их малого числа, не влияют на выходные показатели. Эти явления имели место при проведении описанного выше и практически полностью поясняют результаты опроса. С другой стороны, следует разбираться с причинами возникновения эпатажных оценок, так как они исходят исключительно от опытных специалистов, имеющих индивидуальную точку зрения по обсуждаемым вопросам, а не «топить» их с помощью методик статистического оценивания. Крайние оценки в ряде случаев могут свидетельствовать об «очевидной» (для некоторых специалистов обусловленной их должностным и психологическим статусом, уровнем практической и теоретической подготовки, ответственности) низкой эффективности предложенной методики оценки СУ, либо о ее неадекватности предмету и задачам исследования. Эти оценки выдаются, как правило, опытными специалистами, склонными к самостоятельным действиям, поэтому несовпадение их мнений с ожиданиями корреспондента является, скорее нередким, чем редким, а эти мнения должны, в первую очередь, всесторонне и углубленно изучаться с целью реконструкции хода рас-суждений и исходных посылок.
23
Тестовая методика проведения опросов с указанием возможных вариантов выбора альтернатив может считаться методикой генерации новых знаний по сравнению с методикой поиска требуемых решений без указания каких-либо вариантов решения, ориентированного на массового респондента с неконтролируемым (неизвестным) уровнем профессиональной подготовки.
Исходя из вышеизложенного следует, что для формирования ЭО, основанных на опыте и знаниях конкретного специалиста, в ряде случаев целесообразно применять методику формирования ЭО, заключающуюся в получении требуемых сведений для ее построения из неформальной доверительной беседы, проводимой исключительно с респондентом вне рамок какого-либо опроса, по вопросам, определяемым исследователем-корреспондентом заранее и без заполнения респондентом каких-либо отчетных формализованных документов. При этом корреспондент обязан соблюдать предельную конфиденциальность и создавать обстановку истиной доверительности. Чересчур подозрительный (опасающийся за свою репутацию) либо крайне педантичный (желающий выполнять все исключительно по правилам, которые даже не существуют, либо не могут существовать) респондент не сможет отказаться даже от короткой беседы на тему оценки СУ, так как это выходит за рамки профессиональной этики. В то же время, используя декларируемый принцип добровольности, он может отказаться от опроса, либо по тем или иным причинам выдать несоответствующие его мнению ответы. В подобных беседах со специалистами важно определить их установку (мотив) при формировании ЭО исключительно по косвенным вопросам.
Вывод о качестве СУ по сведениям, полученным от эксперта, необходимо воспроизводить (реконструировать) с помощью некоторой модели его суждений, обязательно содержащей модель используемых понятий как индивида с максимальным учетом его особенностей, либо как человека, принадлежащего к определенному подмножеству специалистов.
В качестве такой модели могут быть использованы модели дедуктивного и индуктивного мышлений, хотя логика отдельно взятого индивида может очень отличаться от представленных типов мышлений [3], несмотря на то, что технические специалисты привержены четким и логичным рассуждениям - то есть любой человек логичен не до конца. Такой подход к реконструированию процесса формирования ЭО является продуктивным для создания «имитатора разума» субординированных коллективов экспертов, совокупностей экспертов и «осред-ненных» виртуальных индивидов-экспертов. Индивидуальные особенности экспертов могут воплощаться в различных реализациях составных частей процесса формирования ЭО. Например, разбиение диапазона изменения выбранного ДХ или параметра СУ для каждого может быть индивидуальным, но оно всегда будет приближаться к научнообоснованному при использовании теоретических конструкций и характерных соотношений ТАУ.
Такой подход на основе анализа суждений с использованием совокупности формализуемых понятий из рассматриваемой предметной области позволит учесть всесторонние мнения по конкретному вопросу различных экспертов (по образу мышления, служебному положению, а также по уровням и глубине проводимых ими методической работы и инновационных исследований) - исследователя-теоретика и инженера-практика, летчика, занимающегося эксплуатацией одного типа ЛА, и летчика-испытателя.
Примером построения продукционной системы (шкалы) для оценки качества СУ с воспроизведением предметно-ориентиро-ванного мышления специалиста, может являться методика с разбиением ВХ на поддиапазоны, соответствующие градациям оценки инженера (семибальная шкала оценки качества ПП) [3]. Условия принадлежности ПП к классам эквивалентности Р, могут быть сформулированы по результатам анализа полетных данных либо опроса летного состава в следующем виде, учитывающем пространственно-временной размах ПП:
24
Ръ (О — 0,05) Cl (tn 6imin)> P6- (^ — 0,1) О (/n 1,2/n mjn)/P7,
P s' (& — 0,2) Cl (tn 1,3/л т\п)!Рб>
P$'• (o 0,3) Г'» (tn 1,4/„ min)/^»
Рз‘- (d — 0,4) Cl (tn iS l,5/nmin)/T74, Рз- — 0,5) Cl (tn 1,6tn min)/P3,
P1 ’ (O 0,5) Cl (tn 1,6tn min)j где tn min - оптимальное значение tn, обеспечиваемое полным и рациональным использованием располагаемых управлений.
Классам эквивалентности Р7, ..., Р\ может быть поставлена шкала баллов от 7 до 1, или четырехбальная шкала качественной оценки: Р7, Рь - отлично; Р5 - хорошо; Р4 -удовлетворительно; Р3...Р1 — неудовлетворительно.
При жестких ограничениях на диапазон изменения tn качество ПП может различаться только по виду кривой ПП, которая характеризуется поведением ПП на начальном его этапе, поведением ПП после первого прохождения заданного значения до завершения ПП. Обоснование требуемого значения tn [4] является важнейшим этапом в разработке методики оценивания ПП. При произвольных управляющих сигналах в дирек-торном и автоматическом режимах целесообразно воспользоваться шкалами Купера-Харпера, Цуварева [5].
Примером формирования ЭО по определению сходимости данных модельного и летного экспериментов с использованием модели рассуждений индивида является продукционная система, основанная на индуктивной логике [6]. В основу алгоритмов семантической обработки данных должно быть положено понятие близости результатов экспериментов, совпадения и несовпадения, различия, а также правдоподобные рассуждения, основанные на экспериментально установленных фактах. Под близостью точек и областей следует понимать их близость в геометрическом смысле, то есть некоторые расстояния между точками (областями) на прямой, плоскости и пространстве, соответствующими точечным (интервальным) оценкам показателей качества (ПК). В ходе проведения правдоподобных рассуждений на основе экспериментально
установленных фактов должен быть получен некоторый качественный результат, отражающий представления о подтверждении результатов моделирования данными натурного эксперимента.
Практическая значимость смысла полученного качественного результата может варьироваться на множестве формулировок: «отбросить как недостоверные данные», «принять к сведению при проведении дальнейших исследований», «соответствует/не соответствует».
Для этого должны быть рассмотрены области возможного нахождения ПК (ОРМ), вычисленного по данным моделирования с некоторой доверительной вероятностью, и области возможного нахождения значения ПК (ОВН), определенного по данным натурного эксперимента с некоторым показателем достоверности (правдоподобия), под которым может подразумеваться как статистическая характеристика [4], так и нестатистические характеристики.
При проведении процедуры валидации результатов моделирования данными натурных экспериментов считается, что:
• имеют место ОРМ и серия ОВН, порождаемых небольшой выборкой натурных экспериментов по определению значений ПК;
• по форме ОВН представляют собой эллипсы с центрами в точках, соответствующих измеренным (вычисленным) оценкам ПК, размеры полуосей которых определяются размерами доверительных интервалов для соответствующих координат и определены при одинаковых доверительных вероятностях (значения оценок правдоподобия);
• рассматриваются попарно ОРМ и ОВН, каждая пара может находиться в так называемых «жергоновых соотношениях» [6], отражающих возможные их взаимные положения на прямой (плоскости, в пространстве размерности не менее 3). Исходя из этого рассмотрим возможные соотношения между множествами ОРМ и ОВН,*, где ОВН* соответствует к-му измерению ПК в натурном эксперименте, число которых равно и:
S = ОРМ п ОВН* * 0; (1)
S = ОРМ о ОВН* = 0; (2)
25
ОРМ с ОВНл; (3)
ОРМ d ОВН*. (4)
Соотношение (1) является основным положительным результатом валидации, при котором возможно говорить о качественном совпадения результатов моделирования и натурных экспериментов, при этом возможно наличие только одной общей точки ОРМ и ОВНа, то есть области касаются друг друга в общей точке, а при выполнении условия (4) все п измерений непосредственно подтверждают измерения ПК, проведенные в ходе моделирования.
При выполнении условия (3) ОРМ подтверждается результатами натурного эксперимента частично; при выполнении условия (2) ни одно из п измерений непосредственно не подтверждает измерения ПК, проведенные в ходе моделирования. Однако, учитывая то обстоятельство, что размеры ОВН* и распределение значений ПК внутри них определяются как качеством испытываемой системы, так и погрешностями измерений, в случаях полного и частичного несовпадения ОРМ и ОВНд. (выполнения условий (2) и (3)) для оценки возможности совпадения ОРМ с данными натурных экспериментов необходимо рассматривать относительное положение среднего значения ПК, определенного в ходе натурных экспериментов, ПКср и ОРМ. Если выполняется условие
ПКср е ОРМ, (5)
то может быть сформулировано утверждение о качественном подтверждении ОРМ данными натурных экспериментов; если условие (5) не выполняется, то может быть сформулировано утверждение об отсутствии качественного подтверждения ОРМ данными натурных экспериментов.
По совокупности выполненных условий (1) (не менее 50% от общего их числа) и условия (5) может быть сформулировано заключение о качественном соответствии ОРМ данным натурных экспериментов. Доля частичных совпадений ОРМ и ОВНд, по которой устанавливается соответствие данных, может уточняться для каждого объекта исследования и применяемых средств изме
рений, алгоритмов и вычислительных средств обработки данных измерений.
В качестве меры (параметра) достоверности совпадений (несовпадений и различий) ОРМ и ОВНд и среднего значения ПК ПКср могут быть использованы следующие величины:
• параметр совпадения ОРМ и ОВНА: рск, алгебраически определяемый как вероятность нахождения значения ПК в ОРМ в предположении о равномерной плотности распределения значений ПК внутри областей
РсА = ^/(/орм/овна), (6)
где I - размер области S; /0РМ, /овна - размеры областей ОРМ и ОВН*;
• параметр совпадения (степени общности) одномерных областей ОРМ и ОВН* рСАь алгебраически определяемый как вероятность нахождения значения ПК в области 51, являющейся дизъюнкцией ОРМ и ОВНд в предположении о равномерной плотности распределения значений ПК внутри областей
Pda ~ / / 4>ь (7)
где 1,1st, - размеры областей 5, SI;
• параметр несовпадения ОРМ и ОВИд дЛ1, алгебраически определяемый как вероятность нахождения значения ПК в интервале 52, находящемся между интервалами ОРМ и ОВШ
Qkl ~ lf>2 / /щах» (8)
где Isi, - размер интервала 52; 1тах - максимальное расстояние между граничными точками интервалов, которое равно /тах = /оРМ + /оВНА + /.S2i
• параметр несовпадения <7ср1 среднего значения ПКср и ОРМ, алгебраически определяемый как отношение значения ПК в интервале 52, находящемся между интервалами ОРМ и ОВНд
(7cpi = /орм1 / /ср-орм» (9)
26
где /Орм1 - расстояние от точки, соответствующей ПКсР; /ср-орм - расстояние между точкой, соответствующей ПКср и центром области (интервала) ОРМ.
Параметры совпадения рс* и рск\ принимают равные значения: 1 - при полном совпадении ОРМ и ОВН* (выполнение условия (4)); 0 - при соприкосновении ОРМ и ОВН* в одной точке.
Параметр несовпадения qk\ принимает значение 1 при бесконечном увеличении длины интервала /<д и 9 при совпадении ОРМ и ОВН* в одной точке. Введенные параметры совпадения (несовпадения) областей ОРМ и ОВН* позволяют учитывать влияние погрешностей измерения значений ПК в натурных экспериментах.
В качестве эвристических правил вывода правдоподобных заключений о качественном совпадении результатов моделирования и натурных экспериментов, учитывающих свойства достаточной близости и ограниченных различий для данных моделирования и натурных экспериментов, могут быть использованы следующие правила - область ОРМ соответствует множеству областей ОВЩ, если:
• доля частичных совпадении ОРМ и ОВН* с параметрами совпадения, принимающими значения не менее 0,1, составляет не менее 50% от общего их числа натурных экспериментов л;
• несовпадающие ОРМ и ОВЩ имеют максимальные значения параметра несовпадения по координатам, не превышающие 0,2;
• несовпадающие ОРМ и точка, соответствующая ПКср, имеют значение параметра несовпадения, не превышающее 0,1.
Пороговые параметры предложенного эвристического алгоритма могут варьироваться в зависимости от исследуемого объекта, погрешностей оценивания.
Таким образом, ЭО могут выполняться при оценивании результатов всех видов экспериментов по определению ДХ (динамических свойств) СУ. Предложенная методика в полной мере подходит для определения соответствия полученного набора эксперимен
тальных данных (аналог ОРМ) множеству заданных значения ПК (аналог ОВН).
Указанные алгоритмы формирования ЭО должны постоянно уточняться с учетом проведенных результатов экспертного оценивания экспертами различного уровня.
Перечень ПК, выбираемый для процедуры задания требований и оценки СУ, должен полностью описывать динамические свойства САУ на заданных режимах управления и в предусмотренных условиях эксплуатации, в том числе с учетом характеристик ЛА как объекта управления и аппаратуры СУ; исключить неоднозначное толкование; быть минимально возможным по размерности; содержать ПК, определимые в ходе испытаний с требуемой достоверностью при современном и перспективном уровнях развития техники, а также нормативные значения которых согласуются с ТАУ и ЭО и обеспечат правильную интерпретацию результатов. В случае линейных ММ ЛА, алгоритмов СУ и других элементов контура управления, существует взаимнооднозначное соответствие между ЧХ и ВХ. В случае нелинейности указанных элементов контура управления такого соответствия не будет, а расхождения между теоретическими соотношениями, основанными на линейной теории, в условиях значительного уровня шумов в ЛЭ будут возрастать, что не всегда будет приводить к очень точному совпадению теоретической ММ с ее уточненным вариантом в ходе ЛЭ. Однако необходимость использования результатов моделирования для сокращения сроков требует комплексного использования различных ПК, что при наличии некоторой минимальной избыточности будет гарантировать достоверность. Общая структура заданного множества ПК будет иметь вид ПК = {ВХ, ПХ, ЧХ, СХ, БП}, где ПХ, СХ, БП - соответственно параметрические и статистические характеристики контура, образуемого СУ, и показатели безопасности полета. В частных случаях подмножества, указанные в скобках, могут быть пустыми. Это определяется требованиями, предъявляемыми к СУ. Исходя из вышеизложенного можно определить следующий обязательный состав ДХ, подлежащих определению в ходе экспериментов с приемлемой точностью. При
27
этом набор ВХ должен различаться для явно выраженных колебательных ПП в стационарных системах в виде классического набора ВХ [2]; многочастотных колебательных ПП и апериодических ПП в стационарных и нестационарных системах в виде коэффициента формы в виде отношения длины дуги ПП и отрезка прямой, соединяющего начало координат и конец дуги ПП, для колебательных ПП в стационарных и нестационарных системах [7]; в виде мажоранты нормы векторного ПП, определяемого по минимальному и максимальному корню уравнения Ляпунова, соответствующего матрице ММ замкнутого контура, для многомерных систем [8]. ЧХ по виду могут различаться для слабовыраженных колебательных или апериодических систем (запасы устойчивости по фазе и амплитуде, частота среза) и для выраженных (коэффициент колебательности и полоса пропускания, определяемые по вещественным ЧХ [2]).
Набор ПХ может быть представлен в виде параметров диаграммы Вышнеградского для линейных систем третьего порядка, в виде обобщенных нормированных диаграмм - для линейных систем, описываемых уравнением выше третьего порядка, при этом порядок ММ [8], по которой осуществляются расчеты ПХ, не должен превышать 5...7. СХ должны быть определены с доверительной вероятностью не менее: 0,9 - для САУ, заданная ЭО которой менее 4; 0,95 - для САУ, заданная ЭО которой равна 6; 0,99 - для САУ, заданная ЭО которой равна 7. БП - в виде вероятности невыхода определяющего параметра за предельно-допустимые значения.
Предложенные совокупности ПК и алгоритмов вывода суждений о качестве СУ могут использоваться при задании требований и оценке СУ экспертами и в продукционных системах оценки качества СУ. Вос
становление схем рассуждений экспертов позволит создать обобщенную продукционную систему, учитывающую основные черты индивидуального и группового способов мышления специалистов, что повысит качество семантической обработки экспериментальных данных.
Литература
1. Дружинин В.В., Канторов Д.С. Проблемы системотехники. - М.: Сов. радио, 1976. - 286 с.
2. Справочное пособие по теории систем автоматического регулирования / Под редакцией Е.А. Санковского. - Мн.: Вышейная школа, 1973.-584 с.
3. Нормирование быстродействия при автоматическом управлении летательными аппаратами ntk
4. Методика классификации и качественной оценки характеристик управляемости систем автоматического управления полетом-07 № 5
5. Сильвестров М.М., Козиоров А.М., Пономаренко В.А. Автоматизация управления ЛА с учетом человеческого фактора. - М: Машиностроение, 1986. -184 с.
6. Поспелов ДА. Моделирование рассуждений. - М.: Радио и связь, 1989. - 183 с.
7. Капитонов С.А., Покотило С.А. Геометрический подход к оценке переходных процессов / Изв. ВУЗ, Электромеханика, № 2, 2003. - С. 7-11.
8. Капитонов С.А. Использование корневых показателей качества при оценке координированного автоматического управления / Материалы НТК «Авиационные системы в 21 веке». -М.: ГосНИИАС, 2006. - С. 11-13.
9. Петров Б.Н. и др. Системы автоматического управления объектами с переменными параметрами. Инженерные методы анализа и синтеза. -М.: Машиностроение, 1986. - 256 с.
28
УДК 004.946.
ИМИТАЦИОННО-ИНТЕРАКТИВНОЕ МОДЕЛИРОВАНИЕ - СИСТЕМА ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ ПРОЕКТИРУЕМЫХ СИСТЕМ
УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
д.т.н. В.М.Василец д.т.н. А.В. Пономаренко °, Е.В. Серпичева2) -
° - ОАО РСК «МиГ», г. Москва;
2) - МАИ (ГТУ), г. Москва
Проанализированы методы инженерно-технического сопровождения проектирования современных авиационных комплексов. Рассмотрена возможность использования для эргономических исследований интерактивной системы обучения экипажа ЛА и имитационного моделирования систем проектируемых ЛА с сочетанием экспериментальных и аналитических методов.
Ключевые слова: имитационные исследования, интерактивная система обучения, эргатические характеристики, полиноминальная модель
Анализ современных тенденций технического прогресса приводит к выводу, что в авиации проблема «человек — техника» приобретает особо важную роль, так как от ее решения зависит главное — полнота использования экипажем потенциальных возможностей, заложенных в современных авиационных комплексах. С несогласованностью характеристик возможностей человека с характеристиками летательного аппарата (ЛА) связано снижение проектной эффективности и надежности системы «человек - ЛА», увеличение числа ошибок членов экипажа и предпосылок к летным происшествиям. В этой связи становится понятной обязательность инженерно-психологического обеспечения (сопровождения) проектирования перспективных авиационных комплексов, систем обучения и систем тренажа с целью учета человеческого фактора.
Основы теории психофизиологического и инженерно-психологического анализа проектирования и оптимизации деятельности летчиков, космонавтов и специалистов операторского профиля разработаны в 70-х годах прошлого столетия Бодровым В.А., Заваловой Н.Д., Ломовым Б.Ф., Пономаренко В.А. и другими специалистами НИИ Авиационной и космической медицины [1,2].
Основными методическими принципами инженерно-психологических исследований систем управления, наряду с известными
принципами системного анализа являются:
• проведение исследований на моделирующих стендах, воспроизводящих основные физические и психологические условия деятельности человека-оператора;
• моделирование с опорой на профессио-грамму деятельности экипажа при взаимодействии с оборудованием, а оценивание оборудования - с опорой на эффективность действий человека;
• выбор и моделирование сложных и наиболее типичных, с точки зрения использования оборудования, условий и режимов полета, в которых человек исчерпывает свои возможности по компенсации недостатков техники;
• использование комплекса оценок, характеризующих не только технические показатели системы, но и психологическое состояние человека-оператора, что позволяет выявить причины затруднений и ошибок при выполнении операций человеком (принцип комплексной оценки).
Для получения в эксперименте достоверных результатов необходимо добиваться, чтобы условия проведения исследований соответствовали реальным не только по степени сложности внешних воздействий летчика, но и по внутреннему содержанию деятельности.
29
Рис. 1. Структура и состав ИАСОТ
При этом предлагается для повышения экономической эффективности, ускорения создания новых и модификации существующих ЛА использовать интерактивную систему обучения и тренажа (ИАСОТ) инженерно-технического и летного состава самолетов серии МиГ. Созданная ИАСОТ (рис. 1) основана на принципах формирования повышенной мотивации творческого решения профессиональных задач обучаемого состава [3].
Интерактивное автоматизированное обучение предусматривает осуществление диалога обучаемого с моделями обучающей системы и электронным инструктором (эталонным летчиком), а также воздействия инструктором на процесс обучения через ПЭВМ или непосредственно на обучаемого.
Метод интерактивного обучения с повышенной (управляемой) мотивацией деятельности обучаемого в автоматизированных обучающих системах (АОС) состоит: • в создании условий диалога обучаемого с АОС;
• в гибком варьировании характеристик ЛА, состава и вида представления информации о состоянии управляемого процесса, способов решения задач в АОС;
• в выдаче на информационное поле, в соответствии с методикой обучения, информации об оптимальных управляющих воздействиях (управляющих сигналах) и рациональных алгоритмах деятельности;
• в возможности повторения или изменения способа деятельности с любого момента;
• в корректной оценке качества деятельности;
• в возможности воспроизведения управляемого процесса на информационном поле в натуральном масштабе времени по данным тренировочного полета (по результатам выполненного тренировочного упражнения);
• в возможности перехода в любой момент тренировочного упражнения на «эталонное» автоматизированное управление процессом эксплуатации ЛА.
30
Своевременное создание такой обучающей системы или ее отдельных элементов наряду с комплексными тренажерами и применением летно-эксплуатационной подготовки является первоочередной задачей перед началом эксплуатации различных модификаций самолетов фронтовой авиации, что единодушно признается авиационными специалистами всего мира.
Работы по концептуальной проработке и разработке методологических основ обоснования облика системы первичного обучения инженерно-технического и летного состава, а также по созданию ее конкретных элементов (подсистем, решающих локальные задачи) ведутся на протяжении последнего десятилетия, как за рубежом, так и в России (НИИАС, ВВИА им. проф. Н.Е.Жуковского, НИИАО, РСК «МиГ», ОКБ «Сухого» и других исследовательских институтах МО).
Однако известные сегодня по материалам открытой печати зарубежные разработки, а также ряд отечественных разработок первичного обучения ориентированы самое большее на «компьютеризацию» учебников и инструкций по эксплуатации.
Вместе с тем, сегодня даже в мирное время до 60% всех авиационных аварий и катастроф происходит из-за ошибок управления ЛА при пилотировании и его наземной подготовки к полетам. Поэтому актуальной является задача разработки такой активной системы обучения, как ИАСОТ.
Основой подобной системы должны стать разработка системы представления информации, обеспечения адекватности реакции систем ЛА на управляющие воздействия органов управления и выполнение работ по обслуживанию в реальном масштабе времени, программно аппаратное обеспечение процесса обучения (вопросы - ответы) и контроль преподавателем процесса освоения программ обучения.
Для того чтобы моделировать адекватные реальным условия деятельности и ее внутреннюю структуру, проведению инженерно-психологического исследования должны предшествовать анализ этих условий и составление профессиограммы специалиста, взаимодействующего с оцениваемым оборудованием. В процессе такого анализа выявляются предполагаемые особенно
сти воздействия, критические моменты деятельности, наиболее трудные этапы использования оборудования, что учитывается при планировании экспериментов по его оценке.
При проведении эксперимента для получения данных, которые могут быть положены в основу инженерно-психологических требований к технике, необходимо использовать методические приемы усложнения условий деятельности, в которых оператор вынужден использовать резервы своих психофизиологических возможностей. В условиях полета средней сложности нивелируются различия во взаимодействии летчика с более или менее совершенным оборудованием, то есть недостатки оборудования могут компенсироваться усилиями летчика. Кроме того, неожиданное усложнение условий - нередко предпосылка летного происшествия, поэтому исследование влияния усложнения на летчика дает знание об особенностях действий летчика при наступлении аварийной ситуации, об изменении структуры деятельности, характеристик восприятия и мышления, позволяет определить, что является критическим компонентом деятельности, что именно нарушается во взаимодействии летчика с самолетом, какой компонент деятельности необходимо обеспечить в первую очередь усиленной подготовкой и техническими средствами. Усложнение условий деятельности является одним из основных способов выявления преимущества одного из нескольких вариантов или систем управления ЛА при сравнительных исследованиях [4... 8].
Очень важно в процессе проведения имитационных исследований поддерживать также высокую мотивацию испытуемых. Как правило, сохранение мотивации обеспечивается осознанием оператором значимости исследования, естественным стремлением показать себя с хорошей стороны.
Для системных инженернопсихологических исследований необходимы дидактические моделирующие комплексы ЛА, позволяющие изучать деятельность человека в системе «летчик - ЛА - среда» во всем многообразии факторов, присущих реальному полету, а также отрабатывать перспективные системы обучения и тренажа.
31
Такой комплекс должен обладать:
• полнотой и точностью моделирования режимов полета, гибкой структурой математической модели, позволяющей оперативной изменять характеристики моделируемого объекта и бортовых систем;
• информационным и динамическим подобием систем полуавтоматического управления, возможностью варьировать состав, содержание и форму представления информации;
• надежной и гибкой системой управления экспериментом, позволяющей варьировать условия его проведения, методику исследований;
• развитой системой регистрации, сбора и автоматизированной обработки полетной и психофизиологической информации, позволяющей использовать различные методы оценки.
Широкое использование ЭВМ при разработке систем управления (СУ) стимулирует применение методов имитационного моделирования для решения различных задач, в числе которых: анализ эффективности альтернативных режимов управления; исследование влияния факторов полета на систему и операторскую деятельность летчиков (рис. 2); обучение летчиков; отработка нештатных ситуаций; анализ работоспособности и уровня подготовки летчиков; оптимизация параметров системы и другие задачи (рис. 3).
Итак, имитационное моделирование предполагает, по существу, не только полу-
натурное моделирование объектов исследования, но и моделирование психологических аспектов взаимодействия человека с управляемым объектом.
Сам процесс разработки методики имитационного исследования должен обязательно предусматривать проведение исследования: во-первых, в условиях, психологически подобных реальным, то есть в условиях загрузки внимания, лимита времени, при неожиданных осложнениях обстановки полета; во-вторых, анализ реакции оператора, как сложных поведенческих актов, так и более элементарных действий, причем, в зависимости от функций и особенностей использования оборудования, основное внимание обращается либо на двигательные реакции, либо на процессы сбора информации, принятия решения и другие действия [9].
Участие человека-оператора в моделировании систем управления ЛА приводит к необходимости учитывать также особенности операторской деятельности, ее зависимость от возмущающих воздействий (особенно от факторов полета и энергичного маневрирования ЛА фронтовой авиации), состояние человека-оператора, участвующего в эксперименте (общее состояние здоровья, слуха, зрения, утомляемости), уровни тренированности и профессиональной подготовленности (понимание процессов управления, навыки управления), длительность работы системы. Поэтому при отработке и оптимизации систем основным видом моделирования является имитационное.
В общем случае, при сравнении систем по множеству показателей необходима проверка условий:
o^=(F,0k,u,t)eo6.,
0M-(F > U, t )€ Oq, ,
ОЙ=(Г,0к,и,1)6Яйе),
N .®k . U, t )€ ,
(i, v ,n,k)6 [1,2,...n], u6U,Oken0
где Q0. ,«0, &60
области приемлемых значений соответственно эргономических, медико-биологических, технических и субъективных показателей
32
Рис. 2. Сравнение систем по оценке операторской деятельности
Оценка концепции системы
Комплексирование и проверка реальных элементов
Проверка МО системы
Оценка характеристик СУ
Испытание в комплексе на ЛА
Летные испытания, работоспособность и .характеристики
Рис. 3. Этапы создания полуавтоматических и автоматизированных систем управления ЛА:
1 - разработка и оценка математического обеспечения (МО), применяемого для моделирования; 2 — испытания реальных подсистем; 3 — определение функциональных характеристик подсистем; 4 - полунатурное моделирование действующих подсистем; 5 - комплексирование и проверка характеристик датчиков бортовых систем радиоэлектронного оборудования; 6 - комплексная проверка МО; 7 - имитационное моделирование; 8 - наземные испытания ЛА; 9 - летные испытания
При принятии решения о моделировании, создании моделирующего стенда той или иной сложности исследователь должен решить ряд вопросов, связанных с выбором технических средств моделирования и разработкой плана эксперимента.
При организации моделирования СУ необходимо учитывать способность к адаптации и вариабельности деятельности человека, проявляющейся в изменении его характеристик при повторении опытов, способности самообучаться и использовать дополнительную информацию в процессе моделирования.
Моделирование СУ на экспериментальных стендах с имитацией возмущающих воздействий позволяет получить ответы на вопросы, касающиеся оптимизации структуры и параметров системы, и учитывать влияние факторов полета на работу системы при анализе ее эффективности, а также обеспечить лучшую взаимосвязь человека и автоматических элементов системы.
Следует отметить, что исследования на любом моделирующем комплексе не исключают проведения чисто математического моделирования на этапах подготовки и
последующих натурных испытаний системы.
Для сокращения затрат и сроков экспериментального исследования на комплексе целесообразно использовать достижения теории планирования эксперимента и математической статистики, позволяющие уменьшить объем работ и получить данные о точности и надежности результатов.
Мощные вычислительные средства с развитым математическим обеспечением, входящие в состав комплекса, позволяют существенно повысить степень автоматизации и управления исследованием. В данном случае имеется в виду возможность проводить исследование в автоматическом, интерактивном и диалоговом режимах и при комбинации этих режимов; представлять информацию при помощи графических и алфавитно-цифровых дисплеев на любом этапе исследований; оперативно вмешиваться в ход исследования вплоть до изменения темпа, алгоритма; легко переводить ЭВМ из режима «управления» в режим «консультации» и наоборот; автоматизировать контроль над ходом исследования на отдельных этапах и в целом.
33
В первую очередь возникает вопрос о возможности экспериментальных исследований для решения поставленной задачи и целесообразности сочетания экспериментальных и аналитических методов. Исследователь должен при этом использовать накопленный опыт, интуицию, а также экспертные оценки специалистов в области решаемых проблем. Поэтому операции на первом этапе подготовки исследования плохо формализуются и пока практически не автоматизированы.
При проектировании систем обучения и тренажа основная трудность заключается в том, что отсутствует эффективная оценка качества этих систем. В ряде случаев сравнительную оценку вариантов систем представления информации оператору, вариантов систем автоматизации решения ряда других задач можно получить, используя косвенные показатели: количество ошибок, совершаемых оператором при решении предъявляемых ему задач управления; время обнаружения оператором отклонения от заданного режима работы объекта; точность выполнения заданной программы; характеристики психофизиологического состояния оператора (неравномерность пульса, изменения кровяного давления); интенсивность глазодвигательной активности. Эти показатели легко регистрируются в ходе исследования. В качестве факторов, определяющих численное значение этих показателей, могут рассматриваться характеристики системы представления информации, вид возмущения, вид режима управления, степень автоматизации, характеристики диалогового режима моделируемых систем, структура системы и другие факторы.
Целью первых этапов исследования является проверка гипотезы о зависимости функций отклика измеряемых показателей от факторов, выбранных по предварительным соображениям для решения поставленной задачи. При экспериментальных исследованиях широкое распространение получили полиномиальные модели, связывающие выбранные показатели с варьируемыми. Параметрами модели являются коэффициенты полинома, определяющие вклады факторов функции связи (функции откликов), и среднеквадратические отклонения, характери
зующие погрешности определения коэффициентов и аппроксимации. В общем виде такая модель представляется следующим образом:
к к к
г=в'« + 1.в'1х1+ ^„х.х,^^, 7=1 ,=1>/=/ 7=1
где Y - функция отклика, В', В',, В'у - коэффициенты полинома; Хх, Xjt, X, - переменные, независимо варьируемые в процессе эксперимента;
к - число независимых переменных.
Если ограничить полином заданием конечного значения порядка и ввести следующие обозначения:
FQ=A,FX= Xx,F2= X2,...,Fk= Хк,
Fk+i = X2, Fk+2 = X2,... F2k = Х2, ...,Fk = Хк,
то полином будет записываться как однородное линейное уравнение
Y = B0F0+BxFx+... + BpFp,
где Fo, Fi,..., Fp - исследуемые факторы, число которых Р = Ck+d .
Выбор полиномиальной модели диктуется сложностью изучаемых процессов, недостаточностью их знания, удобством применения статистических методов при обработке результатов исследования, возможностью уточнения модели (путем повышения порядка полинома), линейностью полинома относительно коэффициентов.
Обработка результатов эксперимента позволяет получить численные данные по точности и достоверности искомых зависимостей. Интерпретация результатов исследования, а также выводы об успешном решении поставленной задачи основываются на анализе этих зависимостей.
Рассмотрим упрощенную структурную схему типовой модели системы полуавтоматического управления ЛА. В эту модель входит модель кабины ЛА, оборудованная элементами, с которыми взаимодействует человек-оператор (пульт управления, ин
34
формационные приборы, оптические приборы, органы управления СУ и органы управления оптическими или другими элементами бортового оборудования).
Кабину ЛА можно закрепить на плече центрифуги для моделирования перегрузок, являющихся важным фактором, который влияет на процесс управления при выполнении фигур пилотажа на самолете.
Для имитации динамики управления, а также для обеспечения ощущений, возникающих при управляющих воздействиях, модель кабины может разворачиваться вокруг осей ориентации и продольно перемещаться по всем осям с помощью специального привода, управляемого вычислителем, в соответствии с программой моделирования и динамикой процесса управления.
Параметры процесса управления, характеристики систем и функциональное состояние оператора регистрируются и обрабатываются в блоке регистрации и вычисления данных эксперимента. Этот блок обычно представляет собой часть аналого-цифрового комплекса, дополненного специальной аппаратурой для регистрации психофизиологических показателей деятельности человека-оператора.
Возможность создания перегрузок, имитация движения кабины, шумов приводит к тому, что летчик получает дополнительную информацию для построения своей концептуальной модели процесса управления. Это позволяет ему более полно формировать такие психические образования, как знание, навык и умение.
Возможность формирования у оператора концептуальной модели с помощью физического моделирования и с применением реальной аппаратуры определяет его преимущество по сравнению с математическим моделированием.
Концепция построения системы психофизиологической оценки подготовленности летчика на пилотажных тренажерах определяет комплекс характеристик, который следует использовать для повышения объективизации самой оценки.
Этот комплекс должен включать следующие характеристики:
• эффективность выполнения полетного задания;
• степень нервно-эмоционального напряжения;
• резервные возможности летчика.
Наиболее сложным является вопрос учета данных психофизиологического контроля при комплексной оценке качества деятельности и уровня обученности летчика на тренажере. Элементы и последовательность объективной оценки подготовленности летчика (курсанта) на тренажере в самом общем виде представлены на рисунке 4.
Подготовлен
Рис. 4. Последовательность объективной оценки подготовленности летчика на тренажере
Как видно из рисунка, решение о подготовленности летчика может быть принято лишь в том случае, когда его показатели по всем четырем элементам оценки будут соответствовать нормативным требованиям. Однозначное заключение о слабой подготовке
35
летчика должно быть сделано, когда качество пилотирования низкое, а показатели нервно-психического напряжения выходят за их нормативные значения. В случае если у летчика при хорошем качестве пилотирования психофизиологические показатели выше нормы, целесообразно продолжить тренировки в целях снижения высокого нервно-психического напряжения. В противном случае вопрос о подготовленности
летчика должен решаться с участием специалиста авиационной медицины.
Дальнейшее развитие этого направления должно идти по линии уточнения критериев психофизиологической оценки подготовленности летчика на тренажере и разработки, создания и внедрения в практику комплексной автоматизированной (инструментальной) системы объективной оценки, контроля и управления обучением летчика на тренажере (рис. 5 и 6).
Рис. 5. Система объективной оценки качества выполнения упражнений на тренажере
36
Рис. 6. Система объективной оценки контроля и управления обучением летчика на тренажере
Нетрудно заметить, что широкое использование данной системы объективной оценки и контроля процесса тренировки летного состава предполагает обязательную автоматическую обработку показателей качества пилотирования и нервноэмоционального напряжения летчика. Такая система объективной оценки, контроля и управления обучением летчика на тренажере обладает еще одним важным свойством -дает возможность накапливать достоверные данные, позволяющие раскрыть психофизиологическую природу навыка летчика, эффективно управлять процессом его формирования.
Однако следует помнить, что объективная система оценки и контроля степени подготовленности летчика или курсанта на тренажере ни в коем случае не должна полно
стью заменить инструктора. Она может и должна лишь расширить возможности инструктора, повысить надежность его заключений.
В зависимости от признака свойств реальной системы, воспроизводимых в модели, можно выделить взаимосвязи между элементами системы, человеком и системой. При таком моделировании воспроизводятся связи человека-оператора не только с исследуемой СУ по управлению конкретным режимом полета ЛА, но и со всеми системами в процессе подготовки и проведения режима полета, а также с последующими операциями, которые выполняются после исследуемого режима. Выполнение при моделировании управляемого полета всего цикла операций и подготовки придает определенную эмоциональную окраску операторской дея
37
тельности и позволяет оптимизировать порядок и время выполнения операций.
Функциональное моделирование позволяет исследовать поведение системы в различных условиях и при этом оценить изменение характеристик системы.
Системы управления ЛА функционируют в условиях, когда априорная информация до полета известна только частично. Например, при управлении ЛА приходиться считаться с тем, что его характеристики не постоянны во время полета в результате расхода топлива, движения средств поражения, действия других факторов. Поэтому во время полета осуществляется автоматическое пополнение информации об изменении внешних условий и параметров объекта управления в процессе работы системы. На основе полученной информации появляется возможность варьировать параметры, структуру и алгоритмы системы таким образом, чтобы обеспечивалось увеличение эффективности применения системы, то есть в таких системах реализуется адаптивное управление, а сами системы принято называть адаптивными (самонастраивающимися, самоорганизующимися, самообучающимися).
Новым классом систем управления, обеспечивающих высокую эффективность в условиях неопределенности, являются интеллектуальные. К этому классу систем управления относятся системы, в которых не только анализируются отдельные параметры и процессы внешних условий функционирования системы, но и распознаются ситуации, в которых функционирует система. Решение задачи распознавания ситуации позволяет реализовывать в системе управления такие решающие устройства, которые в зависимости от определенной ситуации формировали бы новую цель управления. Изменение цели управления может приводить к смене критерия оптимизации. Реализация интеллектуального управления повышает оперативность решения задач, и на основе этого открываются определенные возможности по повышению эффективности полета.
Таким образом, в настоящее время для повышения эффективности и качества операторской деятельности летчика при созда
нии систем полуавтоматического и автоматизированного управления значительно возрастает роль ПМС, особенно содержащих имитационные системы неинструментальной информации. Следует отметить, что моделирование не заменяет полностью летные испытания в качестве окончательного этапа процесса разработки СУ. В качестве промежуточных исследований большая роль в отработке СУ отводится моделированию в полете с использованием самолетов-имитаторов, которое составляет очень важную и интересную часть программы разработки СУ ЛА.
Литература
1. Бодров В.А. Экспериментально-психологическое исследование совмещенной операторской деятельности. Методология инженерной психологии, психологии труда и управления. -М.: Наука, 1981.-С. 192-209.
2. Бодров В.А. Информационный стресс. - М.: Пер. СЭ, 2000.
3. Пономаренко А.В., Калмыков В.Б., Калабу-хов В.С., Халтобин В.М. Автоматизированная система обучения с процедурным тренажером для изучения авиационной техники инженерно-техническим и летным составом / Труды Международного юбилейного симпозиума «Актуальные проблемы науки и образования» (АПНО -2003).
4. Красовский А.А. Основы теории авиационных тренажеров. - М.: Машиностроение, 1995.
5. Сильвестров В.Ю. Концепция построения специализированных компьютерных тренажеров для летного и инженерно-технического состава модернизируемых и перспективных ЛА. - М.: Наука И Автоматика и Телемеханика, № 7, 2001.
6. Вопросы разработки автоматизированных систем обучения / Под ред. Ветошкина В.М. -ВВИА им. Н.Е. Жуковского, 1999.
7. Доброленский Ю.П., Завалова Н.Д., Пономаренко В.А., Туваев В.А. Методы инженерно психологических исследований в авиации. - М.: Машиностроение, 1975.
8. The Urer В F-104D Side Stick Control System // The Society of Experimental Test Pilots Technical Revue, № 2, 1979.
9. Завалова Н.Д., Ломов Б.Ф., Пономаренко В.А. Образ в системе психической регуляции деятельности. - М.: Наука, 1986.
38
УДК 629.782.051
МАТЕМАТИЧЕСКИЕ МОДЕЛИ ПРОСТРАНСТВЕННЫХ КОЛЕБАНИЙ ЖИДКИХ КОМПОНЕНТОВ ТОПЛИВА В БАКАХ РАКЕТЫ
КОСМИЧЕСКОГО НАЗНАЧЕНИЯ НА АКТИВНЫХ УЧАСТКАХ ПОЛЕТА
к.т.н. А.Ш. Альтшулер, В.А. Лобанов - ГКНПЦ им. М.В. Хруничева, г. Москва
Разработаны математические модели пространственных, не являющихся в общем случае малыми, колебаний жидких компонентов топлива (горючего и окислителя) в баках гипотетической ракеты космического назначения (РКН) на активных участках полета, в частности, на участке работы двигателя разгонного блока (РБ). В качестве механической модели рассматривается твердое тело и п математических маятников, точки подвеса которых жестко связаны с корпусом РКН. Разработанные математические модели удобны для реализации на ПК и используются в инженерной практике для исследования устойчивости и управляемости движения РКН.
Ключевые слова: ракета космического назначения, колебания топлива
В соответствии с [1] колебания жидкости в осесимметричном баке можно представить как движение эквивалентных математических маятников, точки подвеса которых закреплены на продольной оси бака. Каждый маятник соответствует своему тону колебаний жидкости. Масса маятника соответствует массе колеблющейся жидкости, длина нити соответствует собственной частоте тона. Точка подвеса маятника зависит от уровня жидкости в баке.
Данная маятниковая модель колебаний жидких компонентов топлива в баках РКН на активных участках полета является общепринятой [1]. Однако обычно она используется для описания малых колебаний жидкости около положения равновесия и дополняется линеаризованными уравнениями плоского движения РКН (в плоскостях тангажа, рыскания и крена) в приращениях к опорному движению [1], [2]. В ряде случаев, в частности при исследовании устойчивости движения РБ непосредственно после запуска двигателя, необходим учет пространственного (сферического) движения математических маятников, моделирующих колебания жидкости в баках. Математические модели пространственного движения РКН, включающие модели пространственного движения маятников, по нашему мнению, являются наиболее адекватными при отра
ботке системы управления (СУ) РКН на моделирующих стендах с использованием реального бортового программного обеспечения СУ. При этом в общем случае углы и угловые скорости отклонения маятников не являются малыми.
Возможность исследования пространственных (в том числе не малых) колебаний жидких компонентов топлива в баках путем замены жидкости маятниковой моделью обоснована работе [3]. Однако предложенная в этой работе математическая модель описывает движение твердого тела лишь с одним маятником и является достаточно громоздкой, что затрудняет ее использование в инженерной практике.
Ниже рассматриваются два подхода к разработке удобной для программирования на ПК математической модели, описывающей пространственное (в общем случае не малое) движение системы, включающей твердое тело и п математических маятников, точки подвеса которых жестко связаны с твердым телом. Предполагается, что нити всех маятников постоянно натянуты.
Первый подход состоит в аналитическом выводе разрешенных относительно старших производных дифференциальных уравнений движения с относительно простым, с точки зрения программирования на ПК, алгоритмом расчета правых частей
39
уравнений. Второй подход предполагает использование возможностей современных ПК и их программного обеспечения, в частности применение символьных (аналитических) преобразований в среде инженерных вычислений Matlab с дальнейшим экспортированием результатов в блоки пакета Simu-link для моделирования движения РКП.
Рассмотрим механическую систему, включающую в себя:
• жесткий корпус РКП и «замороженную» на рассматриваемый момент времени топливную массу в баках, магистралях и двигателе, не участвующую в колебаниях (далее для краткости используется термин «твердое тело»);
• систему п пространственных математических маятников, точки подвеса которых жестко связаны с корпусом РКП (рис. 1).
Свяжем с твердым телом декартову систему координат OXYZ, начало которой О находится в центре масс (ЦМ) твердого тела,
ось ОХ направлена параллельно продольной оси РКП к носу, ось OY перпендикулярна оси ОХ, параллельна плоскости I-III РКП и направлена в сторону III полуплоскости, ось OZ дополняет СК до правой прямоугольной. Масса твердого тела т0, положение его ЦМ, осевые и центробежные моменты инерции твердого тела относительно осей связанной с ним системы координат (ССК) считаются неизменными.
Материальная точка z-го (z = 1,..., п) маятника с постоянной массой т, может совершать движение таким образом, что расстояние между ней и точкой подвеса остается равным постоянной длине нити
В рамках первого подхода к разработке математической модели указанной механической системы рассмотрим уравнение относительного движения материальной точки маятника
= F, + 7; + Ф^ер + Ф,кор, (1)
где а°ТИ — относительное ускорение материальной точки маятника относительно ССК;
F^g-kf™- (2)
главный вектор активных сил, действующих на материальную точку маятника (силы тяжести и силы вязкого трения);
g — ускорение земного тяготения;
к, - коэффициент вязкого трения;
Р/тн - относительная скорость материальной точки маятника относительно ССК;
Tt - сила натяжения нити математического маятника;
фпвр =_w.(5o +двр +5°с) - переносная сила инерции [4];
фк°р _ _т дк°р _ кориолисова сила инерции [4];
а0 - ускорение ЦМ твердого тела;
Й“р =ехт; - вращательная составляющая переносного ускорения;
5“с =йх(йх?;) - осестремительная составляющая переносного ускорения;
-к°р _ 2йх Р'0™ - кориолисово ускорение;
40
8 - абсолютное угловое ускорение твердого тела;
со - абсолютная угловая скорость твердого тела;
а; - радиус-вектор материальной точки математического маятника с началом в ЦМ твердого тела.
Ускорение ЦМ твердого тела aQ можно представить в виде
50=g + 5Ka\ (3)
где Йкаж - кажущееся ускорение ЦМ твердого тела. Подставляя выражения (2), (3) в уравнение (1), получим
f к -
5°™=^—-^°™-5,., (4)
где 5,. = а™ + а? + й,ое + а™* (5)
Рис. 2. Углы ориентации нити маятника
Представим радиус-вектор материальной точки маятника с началом в ЦМ твердого тела в виде суммы
/}=р^+/,ё,., (6)
где р, — радиус-вектор точки подвеса маятника с началом в ЦМ твердого тела;
ё, - единичный вектор направления нити маятника с началом в точке подвеса.
Так как р, = const, то Иотн = = /. ,
' dt'dt
d'Vom
5°™ = —J’ ГДе ШТРИХОМ обозначены локальные производные.
Ориентация нити математического маятника (вектора ё.) задается углами svi и (рис. 2), где 5’v, - угол между нитью и плоскостью OXY ССК, s^i — угол между проекцией нити на плоскость OXY и осью, противоположно направленной оси ОХ.
Диапазоны изменения углов: 7Г ТС 71 71 ___. ~
- 2 < sy, <2,~2<S^i<2' ПРИ ЭТ°М °’
если г, > 0 и s& > 0, если у, < 0, где X/, у„ z, -координаты материальной точки маятника в ССК.
Представим в ССК векторы ё(, ^отн, -готн .
а, ,7] , а, :
-COS5v,COS5e,
ё,. = -cos^sin^,.
sinsv,
j^OTH _
/, —“Sins • COS^- COS5 • Sin^.
at at v
< sm^ “^TC0S5Y' C0S^'
at at
—^-COSS • at
; (8)
41
-*OTH d
+li
d • J d Sfy;
—f- Sin S • COS Sbi + —f - COS 5 • sin S* + dt dt
(ds 42 dt
Ti = mili
dsyi dt
ds Y asbi
dt
cos2
(11)
d
(ds Y . dt J
-mi(ai e().
coss^ cos% -
о? ds^t dsQi .
~2< ,J
at at
. d2s . . d\t
—f - sin S4i sin sbi -1, -f- cos s* cos sbi +
Lil Ul
( dS,,,;^
В соответствии с третьим законом Ньютона, со стороны нити z-ro математического маятника на твердое тело действует сила -Т', поэтому вектор кажущегося ускорения ЦМ твердого тела вычисляется по формуле
n
+li
dt
dt
.07 ** ds$i •
+21—*----—Sin 5,
' dt dt
d2 s
COS5V, sin5d, +
V/COSS*
Vi
dt
sin^,
-каж
w0
(12)
где F - главный вектор сил тяги двигателей и аэродинамических сил, действующих на твердое тело. При этом выражение (5) принимает вид:
7] COS5V, COS5d, 7]cossv< sinse, -7]sinsv/.
n
—------I-ext;+сох((ох/;)+ (13)
w0
+2©x^°™.
d
aXi aYi azi.
Уравнения движения ЦМ твердого тела и его движения относительно ЦМ имеют известный вид [4]:
Проектируя уравнение (4) на оси ССК, после преобразований получим
d Syi _ dt2
(ds Y
as$i •
к dt J
. kj ds,^
Sin 5 COSS--------7—
mi dt
@Yi • &Yi
-y-sin^,. cos^,. —^-Sin^,. sin^ -
(9)
dt
dF — —каж lF=g+a
—+юхК = М,+Мт, dt FT’
(14)
(15)
^Zi
-y-cos^,.;
твердого
d2stn _ о dsbj kj dsbi dt2 dt dt g’1" zw,. dt axi^s^-aYicossbi
(tOSSy,-t
(10)
где r - радиус-вектор ЦМ масс тела с началом в центре Земли;
V — вектор абсолютной скорости ЦМ твердого тела;
К - вектор кинетического момента твердого тела относительно его ЦМ;
MF — главный вектор моментов сил тяги двигателей и аэродинамических моментов относительно ЦМ твердого тела;
42
п
Мт = ^Tj(pj xej) - главный вектор момен-7=1
тов сил натяжения нитей относительно ЦМ твердого тела.
Вектор угловой скорости твердого тела в ССК связан с вектором кинетического момента соотношением
й = Г’£, (16)
Система уравнений (19) относительно сил натяжения нитей Tt (i = 1, 2,..., п) является линейной алгебраической и может быть приведена к виду
(20)
Здесь
а„. = 1+-^Ц (ё,. + т0 (Г1 (р, х ё,)) х г-)
(/ = !,...,«);
твердого тела.
Из уравнений (15), (16) получим _ d(b d'(b 8 = — =-----=
dt dt
п
= Г1(М/г-йх^ + £ту(рухёу)).
7=1
-* /-* /т-1 /-* — \\ —\
aij =—et(ej + (! (py xejy)xri)
J mQ J
(21)
(17)
'dsbl\2 2 I dt ) C°S
Подставляя (17) в (13), будем иметь п
а,=---------+ r\MF-(bxK +
пг0
+Xr7(p7>4))x'i+®x(®x'i)+ (18)
7=1
+2йх^°™.
Подставляя (18) в (11), получим
cos2
(19)
— + rl(MF-a)XK)xri +
+Йх(шх/;) + 2йх17отн).
Таким образом, дифференциальные уравнения движения системы «твердое тело + п математических маятников» имеют вид (9), (10), (14), (15). Эти уравнения разрешены относительно старших производных и удобны для численного интегрирования на компьютере. Последовательность вычисления правых частей уравнений следующая: вначале вычисляются координаты векторов , ё,, j70TH по формулам (6), (7), (8), затем решается линейная алгебраическая система уравнений (20), (21), и определяются силы натяжения нитей 7). Далее вычисляются координаты вектора кажущегося ускорения акаж по формуле (12), координаты вектора ускорения 5, по формулам (18). При этом, в связи с тем, что уравнения (14) обычно проектируются на оси инерциальной системы координат (ИСК), необходимо преобразование координат вектора кажущегося ускорения акаж из ССК в ИСК с помощью соответствующей матрицы преобразования.
43
При использовании указанного выше второго подхода к разработке математической модели движения механической системы, включающей твердое тело и п математических маятников, составим выражение для кинетической энергии системы в виде суммы
Г=Гп+Гв + Тм,
(йх = ysin^cos \|/ + xj/cosO;
<ву = ycosf>cos\|/-\j/sinO;
coz =O-ysin\|/;
A/e = Mz;
My = Mx cos в - MY sin 0;
My = Mx sin О cos у+My cos в cos у - Mz sin xp,
где
- ки-
где Mx, My, Mz - проекции на оси ССК вектора суммы моментов (относительно осей ССК) внешних сил, действующих на систе-
му.
нетическая энергия поступательного движе
ния твердого тела;
тт d ЭТ
Нахождение выражения — -—
в сис-
кинетическая
энергия вращательного движения (здесь 1Х, Iy, Iz - моменты инерции относительно главных центральных осей твердого тела); Тм - кинетическая энергия маятников.
Предположим вначале, что в систему входит один маятник массой гп\. Тогда
т 1
гм = 2W1
^м V ! Г dyM V , Г ^м dt J ( dt J I dt
^м dzM
где _ проекции вектора ско-
рости маятника на оси ИСК. Система уравнений Лагранжа второго рода имеет вид
где q = [qv..q^ =[хуz^yy^ zrf - вектор обобщенных координат;
=[/> fy fz м* Му му о о]г - вектор обобщенных сил, действующих на систему;
Fx, Fy, Fz - проекции вектора суммы внешних сил, действующих на систему, на оси ИСК.
Для рассматриваемой в данной статье последовательности поворотов у, ПРИ переходе от ИСК к ССК
теме уравнений (22) приводит к весьма громоздким выкладкам даже для слагаемого кинетической энергии 7в, а для слагаемого Тм выписать все члены этого выражения практически невозможно (их сотни). Выходом из этой ситуации является использование символьных вычислителей, встроенных в ПК. В частности, авторами использовались символьные преобразования в среде инженерных вычислений Matlab, позволившие получить из системы уравнений (22) матричное уравнение вида
A'q + B-C = Q,
(23)
где А =ЛП + Лв+Лм;
В = Вп + Вв + Вы',
Ап - матрица размерности 8x8, диагональные элементы которой равны массе твердого тела mQ, а все остальные элементы равны 0;
Ав, Ам - матрицы размерности 8x8;
Вп — нулевой вектор-столбец размерности 8x1;
Вв, Вм - векторы-столбцы размерности 8x1;
дТ ЭТ
э^1
Матрицы Ав, Ам и векторы-столбцы Въ, Вм были получены с помощью символьного вычислителя Matlab с использованием операторов diff и jacobian.
44
гр
Рис. 3. Изменение по времени углов ориентации нити 1-го маятника
Рис. 4. Изменение по времени углов ориентации нити 2-го маятника
45
Численное интегрирование системы уравнений (23) осуществляется с помощью пакета программ Simulink.
Сравнение результатов расчетов, проведенных с использованием двух указанных подходов к разработке математической модели движения системы «твердое тело + п математических маятников», показало их полное совпадение. В качестве примера рассмотрим движение гипотетического разгонного блока массой около 20 т с двумя баками, колебания компонентов топлива в которых моделируются двумя маятниками с массами 4 т и 300 кг. На рисунках 3 и 4 показаны зависимости от времени углов отклонения маятников в плоскостях рыскания и тангажа после включения двигателя разгонного блока. Из рисунков видно, что в баках возникают колебания сложной формы, частоты которых определяются параметрами маятников. Колебания не затухают, так как в данном расчете не учитывались силы вязкого трения.
При разработке математических моделей не учитывалось возможное наличие в баках продольных демпфирующих перегородок. В случае если эти перегородки достаточно широки (их ширина составляет более 30% радиуса бака), при вращении твердого
тела вокруг продольной оси возникнут заметные секториальные колебания жидкости, учет которых в математической модели возможен с помощью пар синхронно отклоняющихся в разные стороны маятников. Если же ширина перегородок в баке мала, их наличие может быть учтено введением в математическую модель дополнительной силы, действующей на материальную точку маятника.
Литература
1. Колесников КС. Динамика ракет. - М.: Машиностроение, 2003.
2. Микишев Г.Н., Рабинович Б. И. Динамика тонкостенных конструкций с отсеками, содержащими жидкость. - М.: Машиностроение, 1971.
3. Докучаев Л. В. Нелинейная динамика летательных аппаратов с деформируемыми элементами.-М.: Машиностроение, 1987.
4. Курс теоретической механики / Под ред. Колесникова К.С. - М.: Издательство МГТУ им. Н.Э. Баумана, 2005.
46
ПРОЧНОСТЬ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
УДК 629.735.33.017
МОДИФИКАЦИЯ ПАНЕЛИ КРЫЛА БОЛЬШОГО УДЛИНЕНИЯ ДЛЯ ЕЕ ОБЛЕГЧЕНИЯ
к.т.н. М.П. Тепеницын к.т.н. В.П. Тимохин 2)-
- ЦАГИ, г. Жуковский, Московская область;
2) - ОАО «МВЗ им. М.Л. Миля», г. Москва
Практически любая конструкция при повторной проработке может быть облегчена без кардинальных ее изменений [1].
Предложен алгоритм пересчета площадей подкреплений нижней панели крыла большого удлинения с целью облегчения силовой конструкции. Для иллюстрации предлагаемого способа использован участок конструкции крыла реального самолета и два определяющих случая нагружения — А’ и D. В качестве ограничений взяты заданные допускаемые напряжения при растяжении и критические напряжения потери устойчивости при сжатии. Для расчетов использован комплекс MSC.Nastran.
Ключевые слова: крыло, силовая конструкция, Nastran
В работе предложен алгоритм облегчения концевой части нижней панели крыла и подтверждены полученные при этом следующие характеристики конструкции:
• сохранен уровень напряжений, не превышающих допускаемых при расчетных нагрузках;
• отсутствует потеря устойчивости в диапазоне эксплуатационных нагрузок.
В качестве расчетных случаев нагружения использованы: случай А’, при котором в конструкции крыла имеют место максимальные нагрузки, изгибающие крыло вверх (верхняя панель сжата и может потерять устойчивость), и случай обратной нагрузки D, когда нижняя панель может потерять устойчивость от сжимающей нагрузки.
Специфика работы заключается в том, что в качестве объекта исследования взята модель нижней панели крыла, сохранена геометрия внешних обводов крыла, уровень напряжений в исследуемой панели и характеристики конструкционных материалов. Построена объемная расчетная модель, включающая стенки лонжеронов и обеспе
чивающая моделирование реальных условий работы нижней панели в системе крыла. При этом верхняя панель не меняется.
Таким образом, предложены оригинальные способы вычленения из конструкции крыла отдельного участка с соответствующим закреплением, а также ввод в расчет внешних нагрузок на конструкцию, определенных по действующим в ней напряжениям. Это позволяет, используя результаты выполненного ранее конечно-элементного расчета, рассмотреть участок крыла, представляющий интерес, сохранить специфику приложения нагрузок к панели крыла при реальных граничных условиях и, в то же время, значительно сократить количество неизвестных и, следовательно, упростить и ускорить процесс параметрических расчетов.
Следует подчеркнуть, что взятые в качестве исходных данных задачи внутренние усилия, на основании которых определялась нагруженность новых вариантов конструкции, имеют сложный характер, что препятствует использованию упрощенных методик выявления потери устойчивости и опреде
47
ления несущей способности для получения достоверных результатов. Поэтому основные расчеты на каждом шаге велись с использованием комплекса MSC. Nastran.
В результате работы получено снижение массы силовой конструкции.
Перечислим подробнее исходные материалы, с помощью которых выполнялась работа. Начнем с описания формирования геометрии. Вид крыла в плане приведен на рисунке 1.
Данные геометрических параметров обводов рассчитываемой конструкции были представлены координатами наружной поверхности крыла в двух сечениях: по нервюрам № 6 и № 20.
С использованием комплекса AutoCAD по координатам заданных точек двух упомянутых выше нервюр - 6-й и 20-й - строились сплайны дужек их верхней и нижней панелей. Хорды панели кессона по нервюрам № 6 и № 20 разбивались каждая на 10 частей, и соответствующие точки этих нервюр (10%, 20%, ... хорды) соединялись прямолинейными отрезками вдоль продольного направления крыла. Эти построения позволили с помощью AutoCAD-а определить декартовы координаты в 11 точках всех промежуточных нервюр, что можно считать достаточным для воспроизведения формы
поверхности крыла. Дужки промежуточных нервюр по этим точкам прорисовывались также с помощью сплайнов. Затем выполнялось построение осей стрингеров нижней панели концевой части крыла при виде в плане. После завершения указанных построений по каждой нервюре можно было определить координаты осей стрингеров по трем осям.
Начальные размеры поперечных сечений стрингеров концевой части нижней панели между 15-й и 21-й нервюрами были взяты из исходного проекта. Путем параметрических расчетов они были уменьшены с целью облегчения конструкции. Толщины обшивки при этом оставались прежние. Последнее было сделано по соображениям сохранения как гладкости обшивки, так и характеристик аэроупругости [2].
Толщины стенок лонжеронов и поперечные размеры стоек лонжеронов, а также поперечные размеры стоек и поясов нервюр и толщины стенок нервюр отсутствовали в имеющихся в наличии исходных данных. Поскольку модификация этих элементов конструкции крыла не планировалась, то было принято решение ввести их в упрощенном виде, что выражено в отсутствии стоек, подкрепляющих стенки, и исключении у стенок потери устойчивости.
Рис. 1. Вид крыла в плане
48
Толщины элементов поперечных сечений стрингеров
Таблица 1
Нервюра Фактические данные
*^обш. Т D С 51 В\ н ^CTD.
Стрингеры 7 и 10
15-16 3,3 5 0 0 4,5 30 34 282,5
16-17 2 5 0 0 4,5 30 34 282,5
17-18 2 5 0 0 4,5 30 34 282,5
18- 19 1,5 5 0 0 4,5 30 24 232,5
19-20 1,5 5 0 0 4,5 30 24 232,5
20-21 1,5 5 0 0 4,5 30 24 232,5
Стрингер 17
16-17 2 5 0 0 4 26 34 254
17-18 2 5 0 0 4 26 34 254
18-19 1,5 5 0 0 4,5 30 24 232,5
19-20 1,5 5 0 0 4,5 30 24 232,5
20-21 1,5 5 0 0 4,5 30 24 232,5
Следующим шагом формирования расчетной модели была организация возможности рассмотрения только нижней панели концевой части крыла и одновременное исключение из рассмотрения верхней панели, в то же время, приложение к нижней панели реальных нагрузок и граничных условий.
Для этого было предпринято следующее. В тонкостенной конструкции полученной выше модели концевой части крыла, включающей верхние и нижние обводы, была построена нейтральная плоскость. После этого отбрасывалась верхняя часть модели и в дальнейшем рассматривалась только нижняя, но к объемной расчетной модели нижней панели с участками нервюр и лонжеронов, расположенных между обшивкой и условной нейтральной плоскостью, достраивалось симметричное относительно этой плоскости ее зеркальное отображение. Эта пространственная конструкция закреплялась по нервюре № 15, образуя, таким образом, тонкостенную замкнутую консольную оболочку, что, по мнению авторов, позволило
наиболее полно воспроизвести реальную конструкцию.
В таблице 1 приводятся исходные поперечные размеры стрингеров нижней панели на участке от 15-й до 21-й нервюры.
На рисунке 2 приводится схематическое изображение при виде в плане модели концевой части нижней панели крыла, где в наглядной форме представлены размеры поперечных сечений стрингеров и поясов лонжеронов до и после облегчения.
Для наглядности толщины обшивки и поясов подкрепляющих элементов до проведения облегчения приведены на рисунках 3 и 4.
Как говорилось выше, для проведения расчетов напряженно-деформированного состояния (НДС) требовалось ввести в модель элементы нервюр и стенок лонжеронов. Типовая схема нервюры (здесь № 16) дана на рисунке 5. На этом же рисунке приведена таблица толщин стенок и поясов, представляющих собой уголки.
49
Рис. 2. Исходные и облегченные размеры подкрепляющих элементов
6.50*00
6.13*00
5.77*00
5.40*00
5.03*00
4.67*00
4.30*00
3.93*00
3.57*00
3.20*00
2.83*00
2.47*000
2.10*000
1.73*000
1.37*000
i.oo*oool
Рис. 3. Толщины обшивки и подкрепляющих элементов
Напомним, что нервюры и стенки лонжеронов являются как бы приспособлением, служащим для более точного воспроизведения условий работы панели в конструкции. Поэтому для них заранее была исключена при расчете возможность потери устойчивости и разрушения.
В заключение рассмотрения конструктивных аспектов исследования отметим, что при выполнении расчетов по MSC.Nastran
каждый отсек автоматически дополнительно разделялся на 7 подотсеков, что можно видеть на пространственном изображении модели и ее фрагментов на рисунках 6 и 7. На этих рисунках видны и другие подробности геометрии расчетной модели. Это разбиение позволяет, на основе принципа Сен-Венана, сократить влияние заделки до длины одного отсека между 15 и 16 нервюрами.
50
6.50+000»,
6.15+ЭОГл.
5.79+ООоИ
5.44+00»
5.09+00»
4.73+00.
4.38+00»
4.03+00»
3 67+ООоЦ 3.32+00011
2.97+00»
2.61+0СП к
2 26+000t
1.91+OOoS
1 55+ООоН
1.2О+ООоИ
Рис. 4. Толщины обшивки и подкрепляющих элементов в зоне 15 — 17 нервюр
NN не о 15 16 17 18 19 го 21 иониеяся м<о«ооо
1,5 1,5 1,2 1,2 1,0 1,0 1.0 to
лове ~eooo«w м»гз»1.5 гъ»г5«|.э гз»гзч.з гз»гз»1.з гогон.з говгоа|.г го-гомл «го«1.о
Рис. 5. Параметры нервюр
Рис. 6. Общий вид расчетной модели нижней панели
51
Рассмотрим ход определения внутренних усилий для ввода их в расчет.
Из набора исходных данных для описываемой работы берутся значения нормальных и касательных напряжений, полученные в предварительном расчете ИДС в отсеках между нервюрами. Напряжения приведены для поясов лонжеронов, стрингеров и панелей обшивки. Эти напряжения преобразуются в усилия, касательные к обшивке, которые прикладываются в узлах конечноэлементной модели в виде внешних нагрузок.
Для получения величин усилий, которые прикладываются в узлах расчетной сетки, следует по-разному использовать исходную информацию для нормальных и касательных напряжений.
Чтобы сделать это для элементов жесткости, используются исходные значения площадей поперечных сечений.
Нормальные напряжения, направленные по размаху и действующие в элементах жесткости и в обшивке, при умножении на соответствующие площади поперечных сечений, перпендикулярных продольной оси крыла, дают усилия. Полученные таким образом усилия в элементах жесткости и в обшивке, направленные вдоль крыла, используются для получения графика изменения суммарного усилия в панели по размаху. Не будем приводить эти вычисления, поскольку они весьма объемны. Они выполняются для каждого отсека между нервюрами, в отсеке для лонжеронов, панелей обшивки между элементами жесткости и для стрингеров, а также для обоих случаев нагружения.
Рис. 7. Фрагменты расчетной модели нижней панели
52
Nz, кгс
О 500 1000 1500 2000 2500 3000 3500 Lz, ММ
7.00Е+04
6.00Е+04
5.00Е+04
4.00Е+04
3.00Е+04
2.00Е+04
1.00Е+04
0.00Е+00
Рис. 8. Усилия в отсеках концевой части крыла: нижняя панель. Случай А’
Nz, кгс
О.ОЕ+ОО -5.0Е+03 -1.0Е+04 -1.5Е+04 -2.0Е+04 -2.5Е+04 -3.0Е+04 -3.5Е+04 -4.0Е+04 -4.5Е+04
Рис. 9. Усилия в отсеках концевой части крыла: нижняя панель. Случай D
С помощью этих вычислений можно построить графики изменения нормальных усилий вдоль размаха, приведенные на рисунках 8 и 9. На этих же графиках даны численные значения приращения нагрузок в каждом отсеке, которые и вводятся в дальнейшем в расчет.
Переход от касательных напряжений к сосредоточенным усилиям более сложен. Для каждой клетки обшивки берутся осред-ненные значения размеров вдоль границ в продольном направлении крыла и перпендикулярном к нему.
Границами панелей в направлении вдоль крыла принимаются стенки лонжеронов и оси стрингеров, в перпендикулярном направлении - стенки нервюр. При определе
нии усилий предполагается, что клетки имеют форму прямоугольников. По границам клеток на пересечениях их с двумя взаимно ортогональными отрезками, проходящими через центр клетки, прикладываются две равные пары сил. Они имеют противоположные направления и должны создавать в клетках касательные напряжения, равные по величине заданным. Усилие по каждой из четырех кромок делится пополам и переносится в противолежащие углы конечноэлементной модели.
Для получения суммарных усилий в узловых точках расчетной схемы от нормальных и касательных напряжений следует использовать приращение усилий от нормальных напряжений в каждом отсеке. Величи
53
ны этих приращений приводятся на рис. 8 и 9 соответственно для случаев нагружения А’ и D. Частное от деления приращения усилия в каждом отсеке к полной величине усилия в отсеке дает коэффициент, который позволяет вычислить долю усилий, прикладываемых к узловым точкам расчетной схемы и вызванных нормальными напряжениями в элементах жесткости и обшивке. Далее выполняется суммирование усилий в узловых точках от нормальных и касательных напряжений.
Рассмотрим расчетные операции и проанализируем результаты исследования. После проведения предварительных расчетов и получения результатов для исходной конструкции были уменьшены толщины поперечных сечений подкрепляющих элементов и повторно выполнен статический расчет модели.
Поскольку в случае А’ нижняя панель крыла испытывает растяжение, определяющим в поведении конструкции является не-превышение допускаемых напряжений при расчетных нагрузках. Допускаемые нормальные напряжения составляют 30...32 кг/мм2 [3]. На рисунке 10 приведена диаграмма эквивалентных напряжений, а на рисунке 11 - касательных напряжений в пане
ли, полученных в статическом расчете без учета потери устойчивости и в линейной постановке. Максимальное эквивалентное напряжение равно 24,6 кг/мм2 (здесь и далее используется IV теория прочности, то есть гипотеза Г у бера-Мизеса-Г енки). Максимальное касательное напряжение составляет 2,7 кг/мм2.
В случае D нижняя панель крыла испытывает сжатие, поэтому при 67%Ррасч она не должна терять устойчивость и при этом до 100%РРасч - не разрушаться.
Первые два рисунка для этого случая нагружения приводят результаты статического расчета, исключающего потерю устойчивости. На рисунке 12 дана диаграмма эквивалентных напряжений при 100% нагрузки, максимум равен 20,8 кг/мм2. На рисунке 13 также для 100% нагрузки даны касательные напряжения.
Для этого случая нагружения были выполнены два расчета потери устойчивости, использующие различные подходы. В первом подходе использован линейный расчет потери устойчивости (материал конструкции обладает линейной упругостью), во втором - нелинейный расчет с упругопластическим материалом. Оба подхода дали примерно один и тот же результат.
1М*001
ШНЮ1
1 53*ШЛ
12БЧЮ1
1Л1ЧМП
9J2*»
4Л7>иП‘
Ж
I 40*00 L в
Рис. 10. Случай А’, нагрузка 100%, эквивалентные напряжения
54
Рис. 11. Случай А’, нагрузка 100%, касательные напряжения
2W001L 1 94*0шЯ
1 8О+ОО1Я 1 67*001Я
1 53*001Я 139*0019
1 25*001 Я 111*001 Я 972*001® 033*001 Л Б.95*00(Л 5.5G*00lL 4.17*0й|| 279*00*6, 140*001®
139-00»
Рис. 12. Случай D, статический расчет, нагрузка 100%, эквивалентные напряжения
В линейном расчете потери устойчивости критическая нагрузка достигается при 69%РРасч- Картина деформации конструкции, потерявшей устойчивость, дана на рисунке 14. Для наглядности на рисунке 15 приводится также график перемещения характерного узла расчетной модели, который находится в зоне потери устойчивости. На
рисунке 16 дана диаграмма эквивалентных напряжений в модели для 68%Ррасч, а на рисунке 17 - для 100%. На рисунке 18 для этого же нелинейного расчета с линейно упругим материалом представлена диаграмма эквивалентных напряжений при 100%Ррасч для критической зоны, где имеют место максимальные напряжения.
55
83O*OU(1
556*00>
Ш*00»
4.09НИИ
3,35*UOC
2.61*00fl
1.87*00
1.13*00
39ЯМ»
Рис. 13. Случай D, статический расчет, нагрузка 100%, касательные напряжения
Рис. 14. Случай D. Расчет потери устойчивости с линейно-упругим материалом: ^Ркрит = 69%; картина деформации
процент Рр
Рис. 15. Случай D, расчет потери устойчивости с линейно-упругим материалом: перемещение характерного узла
56
1.57*001
1.47+001
1.36+001
.36-002
1.26+001
1.15+001
1.05+001
9.44+000
0.40+000
7.36+000
6.31+000
5.27+001
4.23+0I
3.18+01
2.14+001
1.10+01
5.36-002
Рис.16. Случай D. Расчет потери устойчивости с линейно-упругим материалом: диаграмма оЭкв в модели для 68%Ррасч
4.88+001
3.91+001
3.58+001
3.26+001
2.93+001
2.61+001
2.29+001
1.96+001
1.64+001
1.31+001
9.87+001
6.63+001
3.39+001
1.43-0011
4.56+001
О 4.23+001
Рис. 17. Случай D. Расчет потери устойчивости с линейно-упругим материалом: диаграмма оэкв в модели при 100%Ррасч
Для нелинейного расчета с упругопластическим материалом принята зависимость о-е, приведенная на рисунке 19. В соответствии с таблицей 2 текучесть начинается при 37 кг/мм2. Зона потери устойчивости, как и момент ее возникновения, сов-
нейной упругостью. В этом можно убедиться, рассматривая рисунки. Так, на рисунке 20 приводится картина деформации конструкции на начальной стадии потери устойчивости, а на рисунке 21 - фрагмент критической зоны конструкции.
падают с тем, что получено в расчете с ли-
57
,91*001
3.58+001
3.26+001
2.93+001
2.61+001
2.29+001
1.96+001
1.64+001
1.31+001
9.87*01
6.63+001
Рис. 18. Случай D. Расчет потери устойчивости с линейно-упругим материалом: диаграмма оЭкв в модели при 100%РраСч
4.23+ooi
Рис. 19. График о-£ для упруго-пластического материала: начало текучести при 37 кг/мм2
На графике вертикальной деформации избранного узла в критической зоне (рис. 22) можно видеть процент нагрузки, при котором инициируется изменение в поведении конструкции.
Несущую способность конструкции легко проверить по графику (рис. 23), на котором приведено перемещение узла панели, расположенного в концевом сечении. Видно, что вблизи 100% нагрузки начинается резкое заваливание кривой перемещения.
На двух последних рисунках - 24 и 25 -для расчета с упруго-пластическим материалом приведены диаграммы распределе
ния эквивалентных напряжений в конструкции при эксплуатационной и расчетной нагрузках соответственно.
В заключительной части рассмотрения вопросов, связанных с потерей устойчивости, необходимо отметить следующее. В комплексе MSC.Nastran учитывается возможность нарушения плоской формы изгиба. Что касается местной потери устойчивости, легко определить критические напряжения, если известны параметры ребер жесткости [4]. В рассматриваемой задаче критические напряжения местной потери устойчивости лежат в пределах 23...28 кг/мм2, что превышает напряжения при эксплуатационных нагрузках, приведенные на рисунках 16 и 24.
Таким образом, конструкция отвечает также требованиям, существующим при сжатии: отсутствие потери устойчивости при эксплуатационных нагрузках и разрушения при нагрузке, превышающей расчетную на незначительную величину.
В таблице 2 оценена величина облегчения рассматриваемой части конструкции по сравнению с исходными ее характеристиками. Выигрыш в весе составляет примерно 8,4 кг.
58
Рис. 20. Случай D. Расчет потери устойчивости с упруго-пластическим материалом. Картина деформации конструкции
Рис. 21. Случай D. Фрагмент критической зоны конструкции из упруго-пластического материала при потере устойчивости
Рис. 22. Случай D. Вертикальное перемещение избранного узла в критической зоне конструкции из упруго-пластического материала при потере устойчивости
59
процент Рр
Рис. 23. Случай D. Вертикальное перемещение концевого сечения конструкции из упруго-
пластического материала при потере устойчивости
w*oo
Рис. 24. Случай D. Расчет потери устойчивости с упруго-пластическим материалом: эквивалентные напряжения при РЭКспл
230*001 _
705*001
131*001 176*001 132*001 1 47*001
1 32*001 118*001 1.03*001 05*00-
Рис. 25. Случай D. Расчет потери устойчивости с упруго-пластическим материалом: эквивалентные напряжения при РраСч
739*0
60
Вычисление облегчения нижней панели концевой части крыла
Таблица 2
Отсеки 15- 16 16- 17 17- 18 18- 19 19- 20 20- 21 21-конц. сеч.
L отсека, мм 650 650 650 650 530 490 300
пояс 1-го лонжерона Fhcx мм2 217 217 217 217 217 217 217
ОИСХ Г 392,1 392,1 392,1 392,1 319,7 295,6 181 2364,7
F 1 умении мм2 162,8 118,8 118,8 96 96 96 96
Оуменыи г 294,1 214,6 214,6 173,5 141 130,8 80,1 1248,7
АОоблегч г 98,0 177,5 177,5 218,6 178,7 164,8 100,9 1116
стрингер №7 F 1 исх мм2 282,5 282,5 282,5 232,5 232,5 232,5 232,5
ОИСХ г 523,3 523,3 523,3 430,7 351,2 324,7 198,8 2675,3
F 1 уменьш мм2 172,5 106 96 65,25 57,8 57,8 57,8
Оуменьш г 319,6 196 177,8 120,9 87,3 80,7 49,4 1031,7
АОоблегч г 203,7 327,3 345,5 309,8 263,9 244 149,4 1843,6
стр-р № 17 Аналогично стрингеру № 7
стр-р № 10 Аналогично стрингерам М »№7и 17
стрингер №11 F 1 исх мм2 282,5 282,5 Здесь стрингера № 11 нет
ОИСХ г 523,3 523,3 1046,6
F 1 уменьш мм2 172,5 106
Оуменьш г 319,6 196 515,6
АОоблегч г 203,7 327,3 531
ПОЯС 2-го лонжерона Гисх мм2 226 226 226 226 226 226 226
ОИсх г 408,4 408,4 408,4 408,4 333 307,8 188,5 2462,9
Fуменьш мм2 162,8 118,8 118,8 96 96 96 96
Оуменьш г 294,1 214,6 214,6 173,5 141,4 130,8 80,01 1249,0
АОоблегч г 114,3 193,8 193,8 234,9 191,6 177 108,5 1213,9
Суммарное облегчение г 1027 1680 1408 1383 1162 1074 657,6 8391,7
Литература
1. Шейнин В.И., Козловский В.И. Весовое проектирование и эффективность пассажирских самолетов, т. 1 -М.: Машиностроение, 1977.
2. Хертель Г. Тонкостенные конструкции / пер. с немецкого. -М.: Машиностроение, 1965.
3. Нестеренко Г. И. Расчетные характеристики перспективных конструкционных материалов для планера самолета И Техника воздушного флота, № 3-4, 1995.
4. Астахов М.Ф., Караваев А.В., Макаров С.Я, Суздальцев Я.Я. Справочная книга по расчету самолета на прочность - М.: Гос. изд-во Оборонной промышленности, 1954.
61
ПОЗДРАВЛЕНИЯ
КУЗИНУ АНАТОЛИЮ ИВАНОВИЧУ - 60 ЛЕТ
(\ сентября исполнилось 60 лет замес-ZAj тителю главного редактора нашего журнала, заслуженному деятелю науки России, доктору технических наук, профессору Кузину Анатолию Ивановичу.
А.И. Кузин в 1973 году окончил Военную Краснознаменную академию им. Маршала Советского Союза С.К. Тимошенко, в 1976 - адъюнктуру. С 1976 по 1980 год служил в Костромском высшем командном училище в должности старшего преподавателя. С 1980 по 1987 год проходил службу в 50 ЦНИИ Минобороны РФ на должностях от старшего научного сотрудника до заместителя начальника института по научной работе. После объединения 50 ЦНИИ с 4 ЦНИИ Минобороны РФ с декабря 1997 года занимал должность заместителя начальника института по военно-космическим исследованиям. С 2001 года после увольнения из рядов Вооруженных сил РФ по настоящее время работает заместителем Генерального директора ГКНПЦ им. М.В. Хруничева по стратегическим исследованиям и планированию развития ракетно-космической техники.
Как специалист в области средств выведения космических аппаратов А.И. Кузин участвовал в военно-техническом и технико-экономическом обосновании необходимости создания космодрома «Свободный», руководил разработкой тактико-технических требований к космическим ракетным комплексам «Протон-М», «Ангара», «Союз-2», «Рокот», «Стрела», комплексам разгонных блоков «Бриз-М» и «Фрегат». В составе государственной комиссии он непосредст
венно участвовал в проведении летноконструкторских испытаний многоразовой космической системы «Энергия-Буран», PH «Союз», «Протон-М», «Рокот», РБ «Бриз-М» и «Фрегат».
А.И. Кузин был научным руководителем ряда комплексных НИР, заданных постановлениями Правительства и решениями Министра обороны России. В настоящее время в рамках Федеральной космической программы руководит в ГКНПЦ им. М.В. Хруничева научно-исследовательскими и проектно-поисковыми работами по многоразовым космическим системам, перспективным космическим комплексам исследования и освоения околоземного космического пространства, Луны и планет Солнечной системы.
Наряду с серьезной научной работой А.И. Кузин также активно занимается общественной деятельностью. Он является вице-президентом Российской Академии космонавтики им. К.Э. Циолковского, действительным членом Российской инженерной академии, членом-корреспондентом Академии военных наук, членом Высшего экологического совета при Государственной Думе РФ, а также ряда других общественных организаций.
А.И. Кузин вносит существенный вклад в подготовку научных кадров, являясь членом диссертационного совета по присуждению ученых степеней доктора технических наук. Им подготовлено 14 кандидатов технических наук, опубликовано более 300 научных трудов.
А.И. Кузин награжден орденом «За военные заслуги», восемью медалями и почетным знаком «Заслуженный испытатель космической техники», является лауреатом премии Правительства Российской Федерации.
Редакционная коллегия журнала сердечно поздравляет Анатолия Ивановича Кузина с 60-летием, желает хорошего здоровья, счастья и дальнейших успехов в научно-исследовательской и общественной деятельности.
62
ABSTRACTS
ADVANCED PROJECTS OF AEROSPACE AND ROCKET-LAUNCHER SYSTEMS
COMPLEX APPROACH TO THE WING CONSTRUCTION DESIGN FOR REUSABLE SPACE VEHICLE
T.A. Ageeva °, E.N. Dudar2), S. V. Reznik ° -
MSTU named after N.E. Bauman, Moscow;2) - NPO MOLNIYA, Moscow
Winged structural layout for Reusable Space Vehicle (RSV) gives comfortable flight conditions as well as more maneuverability at descent in the atmosphere. These advantageous may be realized more efficiently by the structure from Composite Materials (CM) having high rigidity and strength stability. For the wing development the choice of hybrid CM is the most expedient solution. The authors have suggested the method of the RSV wing designing from CM.
Key words: reusable space vehicle, composite materials, wing construction optimization -pp. 3-8
REUSABLE SPACE ROCKET SYSTEM. NEAREST STEPS OF DEVELOPMENT AND FLIGHT TESTS
A.I. Kuzin 1), V.V. Vakhnichenko 2\ S.N. Lozin P.A. Lekhov 1}, A.I. Semenov 4 V.V. Gorbatenko °, A.M. Romashkin 2\ V.I. Buzuluk3), V.P. Plokhikh3), I.E. Kovalev3), V. V. Tsyplakov 4), A.A. Kondratov 4) -
- Khrunichev State Research and Production Space Center, Moscow;
2)- TsNIIMASH, Korolev, Moscow region;
3) - TsAGI, Zhukovsky, Moscow region;
4) - Lil, Zhukovsky, Moscow region
The key technological solutions are considered for the task of Reusable Space Rocket System (RSRS-1) creation. The most important problems of flight experimental complex creation for the RSRS-1 are determined and the ways of these problems solutions are shown. Preliminary content of ground-based and flight tests demonstrators are determined for the task of RSRS-1 experimental development.
Key words: reusable space rocket system, reusable rocket booster, return flight, flight experimental complex, demonstrator - p. 9-18
CONTROL OF FLYING VEHICLES
STUDY AND DEVELOPMENT OF EXPERT ESTIMATION RULES FOR THE FLIGHT CONTROL SYSTEMS
S. A. Kapitonov - Sukhoi Design Bureau, Moscow
Upon the analyses the specifications of specialists’ watching of flight control system (FCS) upon results of experiments the rules of FCS expert estimation are founded.
Key words: FCS, process, estimation, expert, motivation, scale, algorithm, experiment, conclusion
-p. 19-28
IMITATION-INTERACTIVE MODELING - RISING EFFICIENCY OF CONTROL SYSTEMS DEVELOPED FOR FLYING VEHICLES
V.M. Vasilets Ч A. V. Ponomarenko E. V. Serpicheva 2) -
- ОАО RSK MIG, Moscow,2) - MAI (State Technical University), Moscow
The paper considers the methods of engineering-technical support for modem aircraft complexes development. There is shown an opportunity to use ergonomic researches of interactive system for the crews training as well as imitation modeling of onboard system operation on the base of experimental and analytical methods.
Key words: imitation researches, interactive system of training, ergonomic characteristics -pp. 29-38
63
MATHEMATICAL MODELS OF LIQUID FUELS SPATIAL OSCILLATIONS IN THE FUEL TANKS OF SPACE ROCKET IN LAUNCHING FLIGHT
A.S. Altshuler, V.A. Lobanov - Khrunichev State Research and Production Space Center, Moscow
There are developed mathematical models of spatial oscillations that are not weak in general case for the propellant components (fuel and oxidizer) in the tanks of hypothetic space rocket in launching flight, in particular, at working upper stage. Mathematical model includes rigid body and n mathematical pendulums rigidly connected with the rocket body. These models handy for personal computers are applied in practice for the purpose of space rocket stability and controllability study.
Keywords: space rocket launcher, fuel oscillations -pp. 39-46
STRENGTH OF FLYING VEHICLES
WING PANEL MODIFICATION FOR WEIGHT REDUCTION IN THE CASE OF LARGE WING ASPECT RATIO
M.P. Tepenitsyn V.P. Timokhin 2) - !) - TsAGI, Zhukovsky, Moscow region;2) - MIL Moscow Helicopter Plant, JSC, Moscow
There is considered the problem of weight reduction by the way of further construction improvement without its cardinal change. The algorithm of re-count for lower panel support surface is suggested to reduce weight of load-carrying construction. The method is illustrated by the example of existing aircraft wing. Permissible tensions at extensibility and critical tension at loss of stability are taken as the constraints. Nastran computer program was applied for numerical calculations.
Key words: wing, load-carrying construction, Nastran -pp. 47-61
CONGRATULATIONS
60-TH BIRTHDAY OF ANATILY KUZIN
September 20, 2010 is 60-th Birthday of Anatoly Kuzin - Deputy Director General of Khrunichev State Research and Production Space Center, Doctor of technical sciences, Professor, Deserved person of sciences in Russian Federation. He is well known specialist in the field of space vehicle launching into an orbit, have been involved in the works on SVOBODNY Launching Site substantiation, PROTON-M, ANGARA, SOYUZ-2, ROKOT, STRELA launchers and BREATH-M, FRIGATE space tags creation. He was also involved in the activity on flight tests of several space rocket launchers, including ENERGIA-BURAN system. In current time he is responsible for the project-research works on reusable launchers and advanced space systems for missions to the Low Earth Orbits as well as to the Moon and Mars. He is Vice-President of Russian Academy of Astronautics named after K. Tsiolkovsky and real member of Russian Academy of Engineering (RAE). He also is Deputy Chief Redactor of our journal, issued by the Aerospace Section of RAE and Russian Space Agency. He is a member of several scientific councils in the universities and ecological council in Russian parliament. Dr Kuzin has been awarded by the Order for Military Merits and by 8 medals. He id the author of 300 scientific papers.
Key words: space rocket launchers, reusable systems, advanced research works, scientific activity
-p. 62
64
Вниманию читателей!
В связи с регистрацией журнала “Авиакосмическая техника и технология” в Государственном комитете РФ по печати объявляется подписка на журнал для организаций и частных лиц. Стоимость годовой подписки (4 номера) для организаций - 1199 рублей (включая НДС), для частных лиц - 220 рублей, без стоимости доставки.
Журнал выходит каждый квартал.
Оплата принимается на счет:
125362 г. Москва, ул. Свободы, 35
Секция “Авиакосмическая” РИА,
ИНН 7710066930, КПП 771002004
р.с. 40703810500000000200 в ОАО ВТБ, г. Москва, БИК 044525187, к.с. 30101810700000000187, ОКПО 00046172, ОКОНХ 98400
Телефон для справок: (495) - 497 - 49 - 61
Факс: (495)-497 - 53 -51
E-mail: edw@pochta.ru
Редактор Э.Н.Дудар
Оригинал-макет подготовлен Е. О. Линевой
Подписано в печать 20.09.2010 Бумага офсетная
Формат 60x90/8 Усл. печ. л. 8,0. Заказ № 37. Тираж 1000 экз.
ФГУП «Типография Россельхозакадемии» 115598, Москва, ул. Ягодная, дом 12 Тел.: (495) 329-45-00, 976-35-78