/
















Текст
„1961 г Л
Е. Я. ЩЁГОЛЕВ
Доктор технических наук
1
РАДИОНАВИГАЦИЯ
огиз
ГОСУДАРСТВЕННОЕ ИЗДАТЕЛЬСТВО
ТЕХНИКО-ТЕОРЕТИЧЕСКОЙ ЛИТЕРАТУРЫ
МОСКВА
1946
ЛЕНИНГРАД
Редактор В. В. Владимирский
А 21373. Подписано к печати 20/VIII-1945 г. 5,25 печ. л. 5,2 уч.-авт.л. 39200 тип. зи. в. печ.л.
Тираж 10000 экз.
Отпечатано в типографии М-134 с матриц, изготовленных 1б-й типографией Огиза.
ВВЕДЕППЕ.
Радионавигация—слово, происходящее от латинского navis—
корабль — обозначает науку о вождении кораблей. В наше время,
в связи с успехами авиации и воздухоплавания, возникла и
получила особое значение наука о вождении самолётов и
дирижаблей —воздушная навигация или аэронавигация. В
распоряжении штурмана на хорошо оборудованном совре-
менном корабле имеется целый ассортимент специальных
навигационных приборов, подчас очень сложных и действую-
щих автоматически. Но ещё и сейчас, как и сто — полтораста
лет тому назад, компас, секстант и хронометр составляют
основной арсенал штурмана.
Наиболее древним из этих приборов является компас. Ещё
до нашей зры китайцы знали о свойствах магнитной стрелки
и пользовались ею для определения стран света. До тех пор,
пока компас не стал известен на Западе, моряки Старого света
были вынуждены ограничиваться плаванием лишь в непосред-
ственной близости от берегов. Бесспорно установлено, что древ-
ние финикияне заплывали в Северное и Балтийское моря; воз-
можно, что они огибали кругом всю Африку, но отважиться на
далёкие путешествия в открытом море моряки могли только
после того, как стало известно применение компаса. Ни откры-
тие Америки, ни кругосветные путешествия Васко-да-Гама и
Магеллана не могли бы иметь места, если бы моряки эпохи
«великих открытий», как называют 15-й и 16-й века, не руко-
водствовались в своих путешествиях показаниями компаса.
В эпоху «великих открытий» был уже известен и секстант
—прибор, и в настоящее время являющийся одним из важнейших
мореходных инструментов и служащий для определения высоты
светил над горизонтом. С помощью секстанта определяют ши-
роту местонахождения корабля, пользуясь для этого специаль-
ными, вычисленными заранее таблицами. Благодаря секстанту
Колумб, например, знал, что он находится в экваториальной
зоне, т. е. на широте, на которой примерно и лежит богатая Ин-
дия, новый путь куда через западный Атлантический океан
искал предприимчивый мореплаватель.
Течения и ветры могут совершенно нарушить расчёты
штурмана, так как учесть эти обстоятельства очень трудно,
3
часто совершенно невозможно. Местоположение корабля,
вычисленное на основании показаний компаса и лага (прибора,
показывающего пройденное судном расстояние относительно
воды), называется «счислимым местом» корабля. Счисление
позволяет определить место лишь очень приближённо. В исклю-
чительных случаях, когда нет навигационных инструментов ити
ими пользоваться оказывается невозможным в течение дли-
тельного срока, например, из-за скверных метеорологических
условий .мореплаватели могут не только допустить грубую ошибку
в определении места, но и полностью потерять ориентировку.
Для определения положения недостаточно знания одной
только широты, надо знать также и долготу.
Получение второй географической координаты—долготы—
ещё совсем недавно было очень трудным делом. Все способы
решения этой задачи основаны на одном и том же принципе:
наблюдением определяют точно время, когда какое-либо све-
тило проходит через меридиан данного места, и по разности вре-
мени прохождения этого светила в искомом и в известном ранее
месте вычисляют разность долгот. Простой пример: Солнце
проходит через меридиан в момент, когда оно выше всего над
горизонтом, т. е. точно в полдень. Пусть местный полдень нас-
тупает через два часа после полудня в Москве; это значит, что
определяемое место находится к западу от Москвы. Земля со-
вершает полный оборот в 360° за 24 часа; за один час она пово-
рачивается на 15°, следовательно, разности времени в два часа
должна соответствовать разность долгот в 30э. Таким образом,
наша задача сводится к очень простой на первый взгляд вещи:
надо лишь знать время в месте отплытия или в другом опреде-
ленном пункте (Москва, Гринвич, Париж) в момент наблюдения
светила. Но именно в этом и лежала в прежнее время главная
трудность. Её не удавалось преодолеть до тех пор, пока не были
изобретены часы, приспособленные к судовым условиям и со-
храняющие верность хода длительное время. Такие точные часы
имеются теперь на каждом корабле, совершающем дальние рейсы;
они называются хронометром. Хронометр современной конструк-
ции был изобретён в Англии в 1781 г. известным механиком
Гаррисоном. К точности хода хронометров предъявляют очень
высокие требования и перед отправлением в плавание их тща-
тельно и длительное время выверяют. Несмотря на это,
ошибка в определении времени, в ещё не так отдалённом
прошлом, могла иногда достигать значительной величины.
Это и понятно, когда ещё не было пароходов, парусные
суда затрачивали месяцы на переход из Америки в Европу;
кругосветные путешествия тянулись годами. Самая не зна-
чительная неточность хода хронометра, накопившись за
4
столь длительное время, влекла за собой большие
ошибки.
С появлением пароходов и ускорением рейсов сделалось воз-
можным чаще проверять показания хронометров, но, с другой
стороны, повыс ились и требования к точности определения место-
нахождения судов, в особенности совершающих регулярные
срочные рейсы.
Изобретение беспроволочного телеграфа коренным образом
изменило положение. Одним из первых применений его в навига-
ции, кроме использования нвпсм родственно для целей связи
кораблей с сушей, была организация службы времени. Ряд радио-
станций и, в первую очередь, Парижская—антенна её была
укреплена на Эйфелевой башне — стали в определённые часы пере-
давать сигналы времени, с помощью которых суда находящиеся
в открытом море, могли проверять свои часы. Радиослужба вре-
мени позволила легко решить труднейшую из навигационных
задач—задачу определения долготы, задачу, в течение многих
веков не поддававшуюся разрешению и только за последние два
столетия решённую приближённо путём применения хронометров.
Проверка времени необходима не только навигаторам. Осо-
бые ритмические сигналы, посылаемые некоторыми станциями,
служат для точного определения местоположения геодезичес-
ких пунктов при производстве больших картографических ра-
бот. Наконец, все мы привыкли проверять «по радио» наши до-
машние и карманные часы.
Служба времени—одно из первых и, может быть, важнейшее
применение радиотехники в навигации, но далеко не единствен-
ное. Уже в первые годы текущего столетия было положено осно-
вание радиопеленгации. Пеленгом называется угол, образуемый
каким-либо направлением с направлением, принятым за нуле-
вое, начальное. Обычно таким нулевым направлением считают
направление север—юг. Пеленговать—значит определять напра-
вление на какую-либо точку. Радиопеленгация—определение
направления приходящих к приемнику радиоволн или, иначе
говоря, направления, в котором лежит передающая радиостанция.
Радиопеленгация, позволяющая решать ряд навигационных
задач, нашла широкое применение и в морской и в воздушной
навигации. Радиопеленгатором можно контролировать показа-
ния магни гного компаса, обладающего, как известно, тем не-
удобством, что он устанавливается не точно по географическому
меридиану, а отклоняется от него на некоторый угол. Линии,
проходящие всюду через направление магнитной стрелки, но-
сят название магнитных меридианов; они сходятся в некоторой
точке—так называемом магнитном полюсе, который находится
в северо-восточной части американского континента, на зна-
5
чительном расстоянии от географического полюсе. Возможность
пользоваться любой из действующих передающих радиостанций
как маяком-ориентиром позволяет штурману определять своё
положение в самых тяжёлых условиях, когда никакие другие
методы применены быть не могут, например, на море в Густом
тумане, при «слепом» полёте и т. п. Каждый крупный пассажир-
ский самолёт, многочисленные военные самолёты имеют на бор-
ту простые или автоматически действующие пеленгаторные уста-
новки, в зависимости от их конструкции называемые радио-
компасами или радиополукомпасами.
Кроме пеленгаторов, радиотехника позволила создать ряд
других навигационных устройств. Поверхность земного шара
как в наиболее густо заселённых частях, так и в пустынных рай-
онах покрыта сетью радиомаяков, расположенных вдоль авиа-
линий—путей полёта пассажирских и почтовых самолётов. Ра-
диомаяки иногда строятся и для единичных специальных по-
летов. Всем памятна героическая экспедиция на самолётах к
северному полюсу, когда самолёты Водопьянова и его спутни-
ков направлялись в пути радиомаяком, построенным в бухте
Тихой. Столь же широко применяются радиомаяки и на море.
Конструкция и даже принцип работы их могут быть различны,
но все они безотказно служат делу повышения безопасности
самолёте- и кораблевождения в наиболее трудных условиях.
Капитаны кораблей, застигнутые бурей вблизи берегов, при
невозможности заблаговременно укрыться в какой-либо гавани
или бухте, выходят подальше в море, где отсутствует, по край-
ней мере, опасность разбиться о прьбрежные камни или быть
выброшенным на берег. Точно так же летчик предпочитает на-
бирать высоту во ьсех случаях, когда внезапный порыв ветра
пли невидимое во мраке и мгле препятствие могут создать опас-
ность для самолёта. Летчик всегда должен знать, на какой вы-
соте летит его самолёт. Для определения высоты пользуются
альтиметрами. Альтиметр —это барометр-анероид, проградуиро-
ванный в высотах. При подъ< ме давление воздуха уменьшается
и в соответствии с этим изменяется положение стрелки альти-
метра. Если самолёт во время полёта перейдс т в зону понижен-
ного атмосферного давления, то лётчик может быть введён по-
казаниями альтиметра в заблуждение, тем более опасное, чем
ниже летит самолёт. На большой высоте ошибка альтиметра
не играет важцой роли, но когда корабль летит низко, близко
от земли, всякая погрешность столь ответственного прибора
может вызвать катастрофу. В настоящее время разработаны и
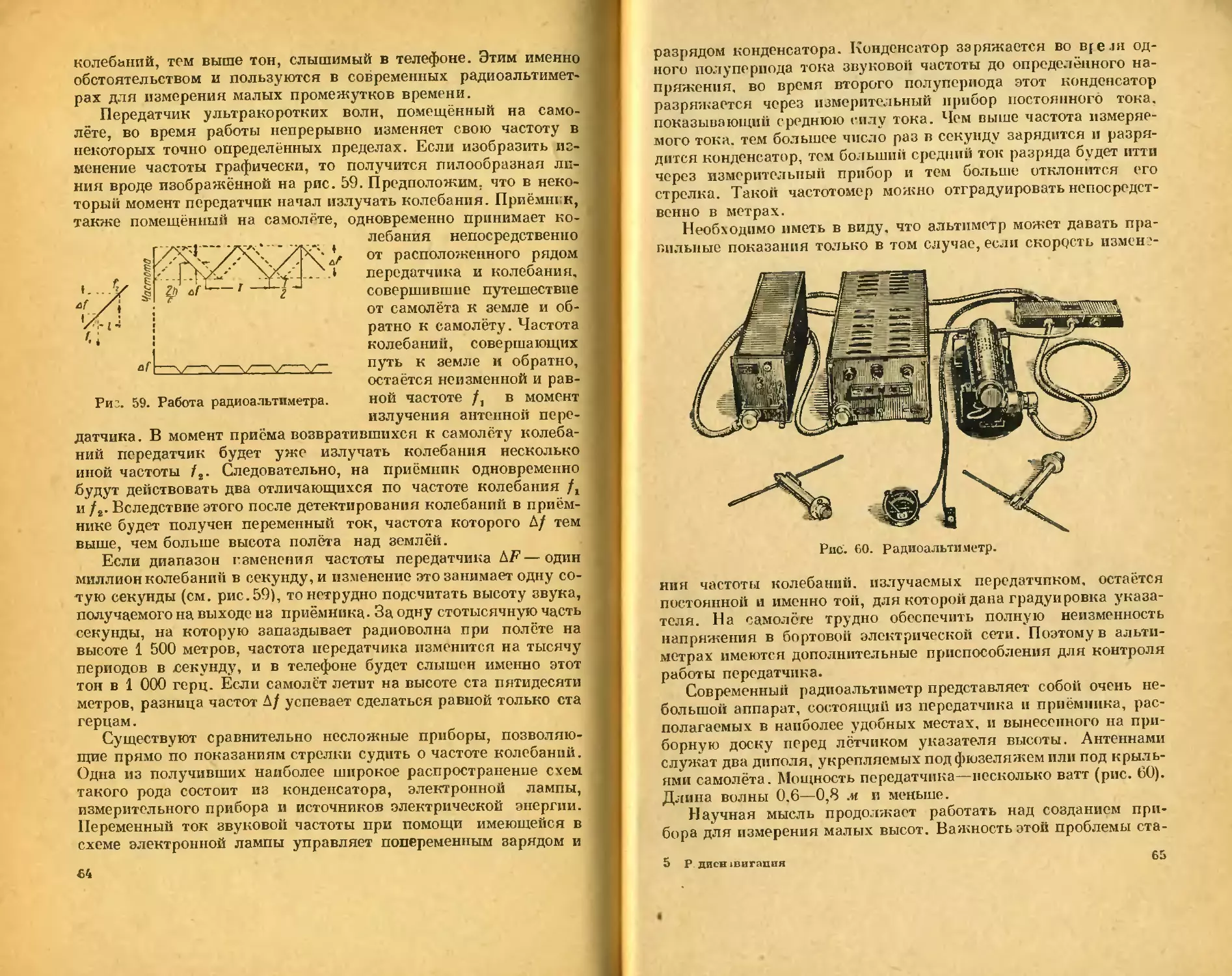
построены радиоальтиметры различных систем, отличающиеся
от барометрических именно тем. что они показывают высоту по-
лёта непосредственно по отношению к поверхности земли.
6
в открытом море капитан поручает управление кораблём
своим помощникам, но, как правило, при приближении к
берегу, при входе в порт капитан принимает управление кораб-
лём лично на себя или приглашает лоцмана—лицо, в совершен-
стве знающее фарватер. И в этот ответственный момент радио
приходит на помощь судоводителю: специальные, особо точно
работающие радиомаяки и указатели фарватеров обеспечивают
даже вслепую вход судов в гавань. В аэронавигации в послед-
нее время получили широкое применение устройства, позволя-
ющие лётчику совершать спокойно и безопасно посадку на
аэродроме в условиях очень плохой видимости.
Существуют радиоприборы, которые, в комбинации с авто-
матическими управляющими приспособлениями, позволяют
вести самолёт или судно по заданному курсу и даже совершать
посадку без участия пилота.
Всего перечисленного выше совершенно достаточно для того,
чтобы ясно представить себе роль радио в современном корабле-
вождении. Применение радионавигационных приборов позволяет
штурману точно знать координаты ведомого судна и тем самым
повышает безопасность плавания или полёта. Нельзя забывать
также о колоссальной роли радиосвязи в деле повышения
безопасности морского и воздушного сообщений. Во время
нормально протекающего рейса каждый корабль или самолёт
получает бюллетени погоды и предупреждения о надвигающихся
штормах, бурях и грозах и имеет, благодаря этому, возможность
принять соответствующие моры. В случае несчастья, аварии,
радиосвязь, как средство спасения человеческих жизней, играет
важнейшую роль. Каждый может припомнить многочисленные
случаи, когда только радио позволило спасти пассажиров и
экипаж терпящих бедствие судов или, по крайней мере,
уменьшить число жертв.
Применению радиотехники в навигации и описанию раз-
нообразнейших радионавигационных приборов посвящены мно-
гочисленные солидные книги. В маленькой брошюре нет воз-
можности полно осветить все стороны этого интереснейшего и
важнейшего направления радиотехники. Поэтому мы вынужде-
ны остановиться вкратце только на некоторых интересных с
принципиальной или практической точек зрения радиоприборах
и на самых простых примерах показать, как ими пользуется
штурман. Само собой разумеется, что многие из новейших при-
боров, применяемых теперь в военном деле, пока не могут
быть описаны.
5
ГЛАВА I.
ПУТЬ П ПОЛОЖЕНИЕ КОРАБЛЯ НА КАРТЕ.
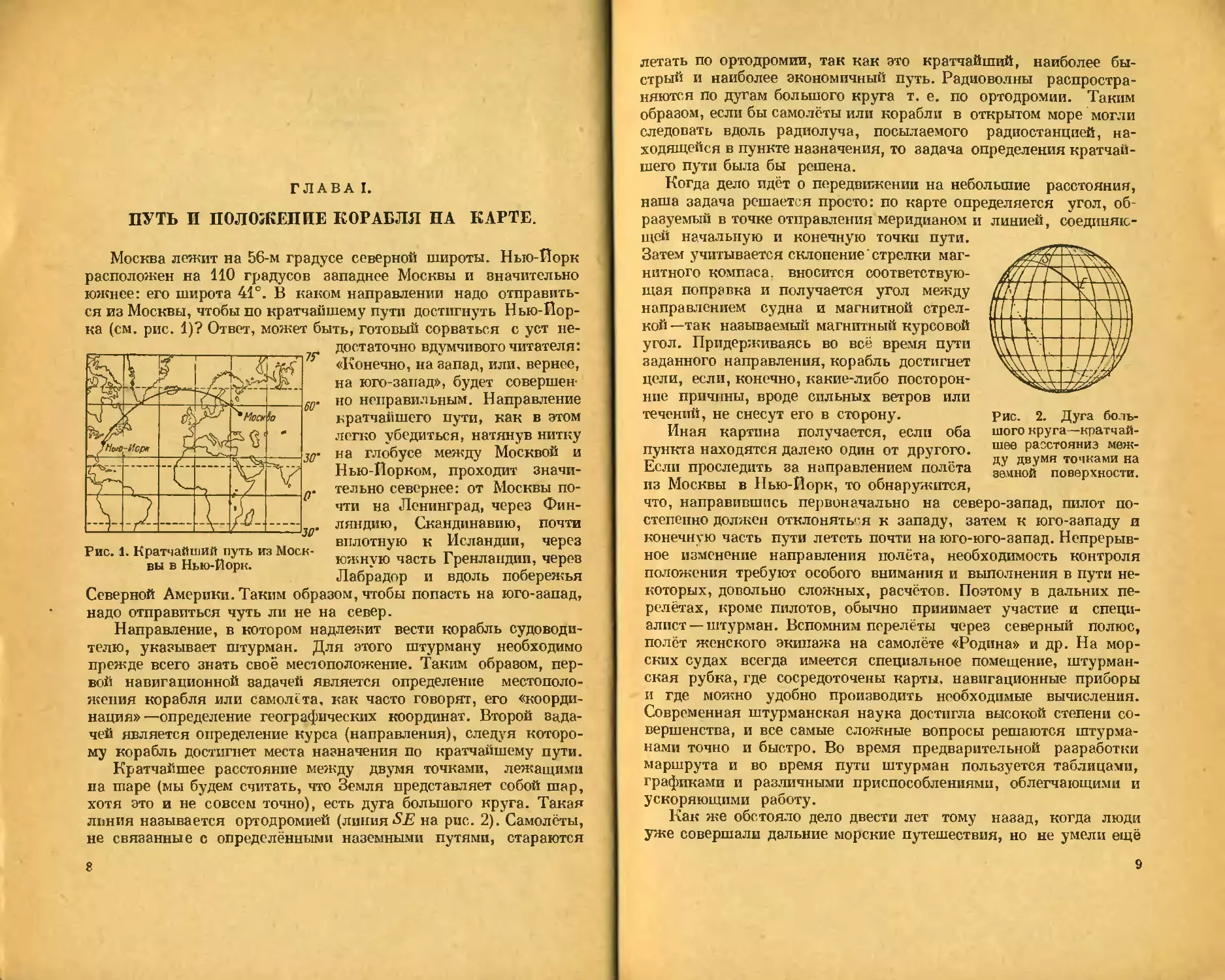
Москва лежит на 56-м градусе северной широты. Ныо-Порк
расположен на 110 градусов западнее Москвы и значительно
южнее: его широта 41°. В каком направлении надо отправить-
ся из Москвы, чтобы по кратчайшему пути достигнуть Нью-Пор-
ка (см. рис. 1)? Ответ, может быть, готовый сорваться с уст не-
Рис. 1. Кратчайший путь из Моск
вы в Нью-Йорк.
достаточно вдумчивого читателя:
«Конечно, на запад, или. вернее,
на юго-запад», будет совершен-
но неправильным. Направление
кратчайшего пути, как в этом
легко убедиться, натянув нитку
на глобусе между Москвой и
Нью-Порком, проходит значи-
тельно сев( рнее: от Москвы по-
чти на Ленинград, через Фин-
ляндию, Скандинавию, почти
вплотную к Исландии, через
южную часть Гренландии, через
Лабрадор и вдоль побережья
Северной Америки. Таким образом, чтобы попасть на юго-запад,
надо отправиться чуть ли не на север.
Направление, в котором надлежит вести корабль судоводи-
телю, указывает штурман. Для этого штурману необходимо
прежде всего знать своё местоположение. Таким образом, пер-
вой навигационной задачей является определение местополо-
жения корабля или самолета, как часто говорят, его «коорди-
нация»—определение географических координат. Второй зада-
чей является определение курса (направления), следуя которо-
му корабль достигнет места назначения по кратчайшему пути.
Кратчайшее расстояние между двумя точками, лежащими
на шаре (мы будем считать, что Земля представляет собой шар,
хотя это и не сивеем точно), есть дуга большого круга. Такая
линия называется ортодромией (линия SE на рис. 2). Самолёты,
не связанные с определёнными наземными путями, стараются
8
линиеи, соединяю -
Рис. 2. Дуга бо 1ь-
шого круга—кратчай-
шее расстояние меж-
ду двумя точками на
земной поверхности.
летать по ортодромии, так как это кратчайший, наиболее бы-
стрый и наиболее экономичный путь. Радиоволны распростра-
няются по дугам большого круга т. е. по ортодромии. Таким
образом, если бы самолёты или корабли в открытом море могли
следовать вдоль радиолуча, посылаемого радиостанцией, на-
ходящейся в пункте назначения, то задача определения кратчай-
шего пути была бы решена.
Когда дело идёт о передвижении на небольшие расстояния,
наша задача решается просто: по карте определяется угол, об-
разуемый в точке отправления меридианом и
щей начальную и конечную точки пути.
Затем учитывается склонение’стрелки маг-
нитного компаса, вносится соответствую-
щая поправка и получается угол между
направлением судна и магнитной стрел-
кой —так называемый магнитный курсовой
угол. Придерживаясь во всё время пути
заданного направления, корабль достигнет
цели, если, конечно, какие-либо посторон-
ние причины, вроде сильных ветров или
течении, не снесут его в сторону.
Иная картина получается, если оба
пункта находятся далеко один от другого.
Если проследить за направлением полёта
из Москвы в Нью-Порк, то обнаружится,
что, направившись первоначально на северо-запад, пилот по-
степенно должен отклонять я к западу, затем к юго-западу и
конечную часть пути лететь почти на юго-юго-запад. Непрерыв-
ное изменение направления полета, необходимость контроля
положения требуют особого внимания и выполнения в пути не-
которых, довольно сложных, расчётов. Поэтому в дальних пе-
релётах, кроме пилотов, обычно принимает участие и специ-
алист— штурман. Вспомним перелёты через северный полюс,
полёт женского экипажа на самолёте «Родина» и др. На мор-
ских судах всегда имеется специальное помещение, штурман-
ская рубка, где сосредоточены карты, навигационные приборы
и где можно удобно производить необходимые вычисления.
Современная штурманская наука достигла высокой степени со-
вершенства, и все самые сложные вопросы решаются штурма-
нами точно и быстро. Во время предварительной разработки
маршрута и во время пути штурман пользуется таблицами,
графиками и различными приспособлениями, облегчающими и
ускоряющими работу.
Как же обстояло дело двести лет тому назад, когда люди
уже совершали дальние морские путешествия, но не умели ещё
9
производить подчас весьма сложных математических расчётов?
Для целей навигации удобнее всего пользоваться глобусом, как
это сделали мы, определяя направление пути из Москвы на
Ныо-Порк. К сожалению, невозможно сделать глобус столь
больших размеров, чтобы он удовлетворял требованиям води-
телей судов. Если принять нормальный масштаб—один санти-
метр соответствует одной миле*), то окружность такого глобуса
была бы равна 396 м и его диаметр 126 м. Поэтому навигаторам
приходится пользоваться картами. Изображение на плоском
листе бумаги криволинейной поверхности земного шара—вещь
весьма сложная. Точная передача вообще невозможна. Как
известно, в плоском треугольнике сумма углов равна двум пря-
мым. В треугольнике, начерченном на сфере, эта сумма всегда
больше двух прямых. Одно это показывает, какие трудности
приходится преодолевать при графическом решении сферичес-
ких задач. Именно этим объясняются затруднения с нанесением
на карту правильного направления при пеленгации, прокладке
курса, определении положения и во многих иных случаях.
Существуют разные способы изображения земной поверх-
ности на плоскости. Есть возможность построить карту таким
образом, что на ней сохранится правильный масштаб поверх-
ностей— это так называемая равновеликая проекция. Углы па
такой карте оказываются совершенно искажёнными. Известны
картографические проекции, в которых сохраняется правиль-
ность углов, но зато масштаб карты получается различным в
разных частях карты. Уже в 16-м веке Герардус Меркатор сос-
тавил карту мира в равноугольной проекции. Карты в «мерка-
торской» проекции широко применяются и в настоящее время.
В этой проекции все меридианы параллельны друг другу,
направлены вертикально, и расстояние между ними везде оди-
наково. Параллели горизонтальны, и расстояние между ними
увеличивается от экватора к полюсам. Вследствие этого мас-
штаб карты переменный: чем ближе к полюсам, тем в большем
масштабе изображаются все объекты. Характерное отличие и
достоинство карт Меркатора состоит в том, что все линии, пере-
секающие меридианы под равными углами, изображаются на
ней прямыми. Это свойство чрезвычайно ценно для навигации:
если соединить прямой линией две точки, например, пункты от-
правления и назначения, то по карте простым измерением с
помощью транспортира определяется «курсовой угол»—угол
между меридианом и направлением, следуя по которому корабль
обязательно достигнет места назначения, но, правда, не по крат-
*) Одна миля равна длине дуги меридиана вГ, приблизительно
1,58 км.
10
чайшему пути. В экваториальных широтах удлинение пути не
велико, но оно возрастаете увеличением расстояния и удалением
От экватора. В нашем примере расстояние между Москвой и
Нью-Порком по ортодромии составляет 7 500 км, а по локсо-
дромии (так называется линия, образующая во всех точках рав-
ные углы с меридианами) длиннее на 500 км.
В те не очень отдаленные от нас времена, когда мореходное
искусство не стояло ещё так высоко, как сейчас, и когда слож-
ные вычисления не были доступны водителям кораблей, воз-
можность, пользуясь только картой, линейкой и транспорти-
ром, находить правильный курс явилась настоящим переворо-
том в мореплавании, позволившим морякам «оторваться» от
берегов и спокойно направлять корабли в открытое море. Удли-
нение пути в те времена не играло такой роли, как теперь, так
как продолжительность плавания в основном зависела от
погоды: силой, движущей корабли, был только ветер. И в на-
стоящее время удобство плавания неизменным курсом часто
заставляет штурмана отказаться от ведения корабля по орто-
дромии.
Если морские суда стремятся к сокращению пути ради эко-
номии угля или нефти, то для самолётов особенно важно лететь
по прямому направлению к цели. Уменьшение потребного
количества горючего увеличивает полезную грузоподъёмность
самолёта или, что иногда ещё важнее, при том же количестве
горючего возможно совершение более далёких перелётов. Ого-
воримся, что в наших простейших рассуждениях мы не учиты-
ваем многочисленных факторов, которые должен принимать во
внимание штурман при выборе пути, например, возможную
встречу на прямом пути неблагоприятных метеорологических
условий, высоких гор и т. п.
Итак, современная, в особенности воздушная, навигация
выдвигает требование к картографам о создании карты, на
которой кратчайшее расстояние на земной поверхности изобра-
жалось бы также кратчайшей, соединяющей две точки линией,
т. е. прямой. Представим себе источник света в центре прозрач-
ного земного шара (рис. 3). Будем наблюдать тени от меридиа-
нов и параллелей на плоскости, касательной к шару. В этом
случае всякая дуга большого круга проектируется в виде пря-
мой, где бы она ни находилась. Меридианы, так же как и
экватор, изображаются в виде прямых, параллели же будут изо-
гнуты и обращены выпуклостью к экватору. Такая проекция
носит название гномонической. То обстоятельство, что дуги
больших кругов изображаются на гномонической карте прямыми,
особенно удобно для обработки результатов пеленгации. Надо,
однако, иметь в виду, что углы на такой карте передаются
11
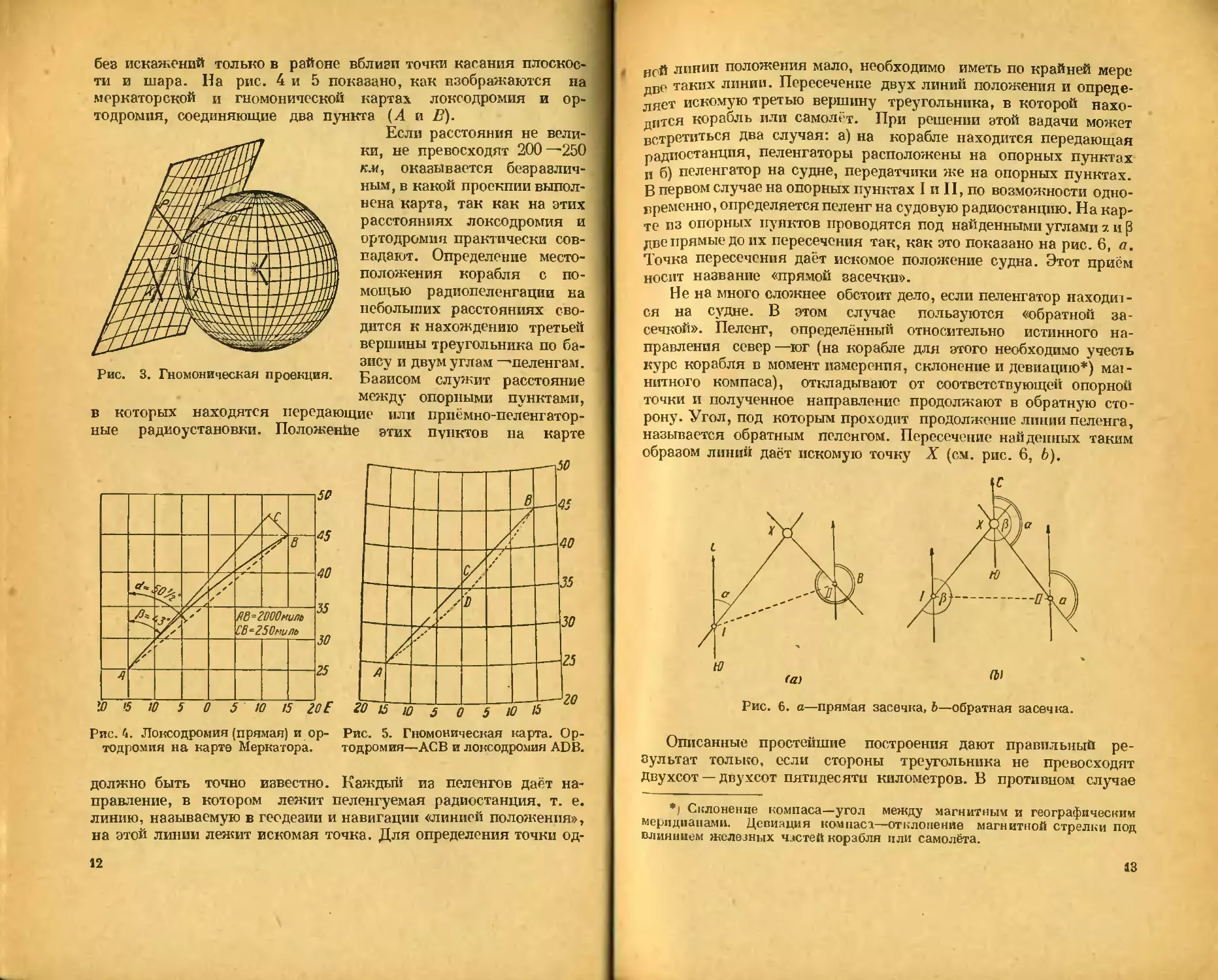
без искажений только в районе вблизи точки касания плоскос-
ти и шара. На рис. 4 и 5 показано, как изображаются на
меркаторской и гномонической картах локсодромия и ор-
тодромия соединяющие два пункта (А и В).
Рис. 3. Гномоническая проекция.
Если расстояния не вели-
ки, не превосходят 200^250
км, оказывается безразлич-
ным, в какой проекпии выпол-
нена карта, так как на этих
расстояниях локсодромия и
ортодромия практически сов-
падают. Определение место-
положения корабля с по-
мощью радиопеленгации на
небольших расстояниях сво-
дится к нахождению третьей
вершины треугольника по ба-
зису и двум углам -'пеленгам.
Базисом служит расстояние
между опорными пунктами,
в которых находятся передающие или приёмно-пеленгатор-
ные радиоустановки. Положенье этих пунктов на карте
Рис. 4. Локсодромия (прямая) и ор-
тодромия на карте Меркатора.
тодромия—АСВ и локсодромия ADB.
должно быть точно известно. Каждый из пеленгов даёт на-
правление, в котором лежит пеленгуемая радиостанция, т. е.
линию, называемую в геодезии и навигации «линией положения»,
на этой линии лежит искомая точка. Для определения точки од-
12
д линии положения мало, необходимо иметь по крайней мере
дВе таких линии. Пересечение двух линий положения и опреде-
ляет искомую третью вершину треугольника, в которой нахо-
дится корабль или самолёт. При решении этой задачи может
встретиться два случая: а) на корабле находится передающая
радиостанция, пеленгаторы расположены на опорных пунктах
и б) пеленгатор на судне, передатчики же на опорных пунктах.
В первом случае на опорных пунктах I и II, по возможности одно-
временно, определяется пеленг на судовую радиостанцию. На кар-
те из опорных пунктов проводятся под найденными углами аир
две прямые до их пересечения так, как ото показано на рис. 6, а.
Точка пересечения даёт искомое положение судна. Этот приём
носит название «прямой засечки».
Не на много сложнее обстоит дело, если пеленгатор находил-
ся на судне. В этом случае пользуются «обратной за-
сечкой». Пеленг, определённый относительно истинного на-
правления север —юг (на корабле для этого необходимо учесть
курс корабля в момент измерения, склонение и девиацию*) мал-
нитного компаса), откладывалот от соответствующей опорной
точки и полученное направление продолжают в обратную сто-
рону. Угол, под которым проходит продолжение линии пеленга,
называется обратным пеленгом. Пересечение найденных таким
образом линий даёт искомую точку X (см. рис. 6, Ь).
Рис. 6. а—прямая засечка, b—обратная аасечка.
Описанные простейшие построения дают правильный ре-
зультат толы to, если стороны треугольника не превосходят
Двухсот — двухсот пятидесяти километров. В противном случае
*/ Склонение компаса—угол между магнитным и географическим
меридианами. Девиация компаса—отклонение магнитной стрелки под
влиянием железных частей корабля пли самолёта.
13
ошибка, получающаяся вследствие незаконной замены сфери-
ческого треугольника плоским, оказывается слишком большой.
При больших расстояниях необходимо принимать во внимание
свойства карты, на которой производится построение, вводить
специальные поправки или же применять вспомогательные по-
строения (на сетке Вейрса). Об этом будет сказано дальше.
Для наших средних широт искажения контуров и масштабов
получаются наименьшими на картах конической проекции
(рис. 7). Как видно из этого рисунка, поверхность земли проек-
тируется на конус, разворачи-
ваемый затем в плоскость. На
таких картах меридианы оказы-
ваются прямыми, сходящимися
в одной точке —полюсе, парал-
лели же изображаются концен-
трическими дугами круга. На
правильно построенной для дан-
ного района карте разница меж-
ду ортодромией и прямой лини-
ей не превосходит допустимых
пределов на больших расстоя-
ниях, чем на картах иных про-
екций. Карты конической проек-
ции позволяют производить про-
стые построения при расстояниях
по долготе до двух тысяч километров. По широте зона малых оши-
бок значительно меньше, но всё же достигает нескольких сотен
километров.
Для постоянных авиалиний, а также для отдельных ответ-
ственных перелётов строят специальные карты, выбирая спо-
соб проекции так, чтобы весь маршрут пролегал в районах,
где искажения невелики. Полётные карты гражданского воздуш-
ного флота СССР составляются в конической пли цилиндричес-
кой проекции, чаще всего в масштабе в одном сантиметре десять
километров (1 : 1000000), и захватывают полосу до двухсот
километров вдоль трассы.
Моряки нормально пользуются меркаторскими картами.
Применяя эти карты, надлежит иметь в виду, что ортодромии
на них изображаются кривыми и, следовательно, определение
положения на них методом засечек на больших расстояниях
не может дать верного результата. Приближённо правильное
положение находится следующим образом. Засечкой опреде-
ляется приблизительно район нахождения судна. Затем, зная
приближённые его координаты, вводят поправку на сходимость
меридианов, так называемую поправку Живри. Таким образом,.
14
ходят угол, составляемый в месте расположения пеленгатора
тодромией и локсодромией, соединяющими опорный пункт с
искомой точкой. Введя в наблюдённый пеленг эту поправку,
пповодят прямую под новым, исправленным углом. Эта прямая
есть локсодромия, которая в районе второго пункта проходит
на карте в непосредственно!! близости от ортодромии. Благо-
даря этому точка пересечения построенных таким образом
локсодромий с достаточной степенью точности совпадает с точкой
пересечения ортодромий и даёт, следовательно, правильное
положение объекта.
ГЛАВА II.
РАДИОПЕЛЕНГАТОРЫ.
Радиопеленгатор имеет перед другими радионавигационны-
ми устройствами то преимущество, что им можно пользоваться
в любом месте и в любое время, так как среди десятков и сотен
радиопередающих станции всегда можно найти несколько удоб-
ных ориентиров.
Антенна радиопередатчика излучает электромагнитные волны,
распространяющиеся от неё во все стороны. Волны достигают
места приёма и действуют здесь на приёмную антенну, вызывая
в ней слабые электрические напряжения и токи, которые уси-
ливаются в приёмном устройстве и превращаются там в слыши-
мые звуковые колебания, в световые сигналы или в токи, управ-
ляющие индикаторными приборами (указателями).
Обыкновенная вертикально подвешенная антенна принимает
сигналы совершенно равномерно, с какой бы стороны они ни
проходили. В пеленгаторах для приёма радиоволн пользуются
рамочной антенной, или «рамкой», имеющей различную чувстви-
тельность в зависимости от направления радиоволн. Рамка
представляет собой катушку, обычно довольно большую, от
20—30 см до 1—2 м в поперечнике, состоящую из нескольких
витков провода. Если плоскость витков и направление прихо-
дящих радиоволн совпадают, то рамка принимает сигналы с
наибольшей силой. В положении, когда плоскость рамки и на-
правление волн взаимно перпендикулярны, приём отсутствует
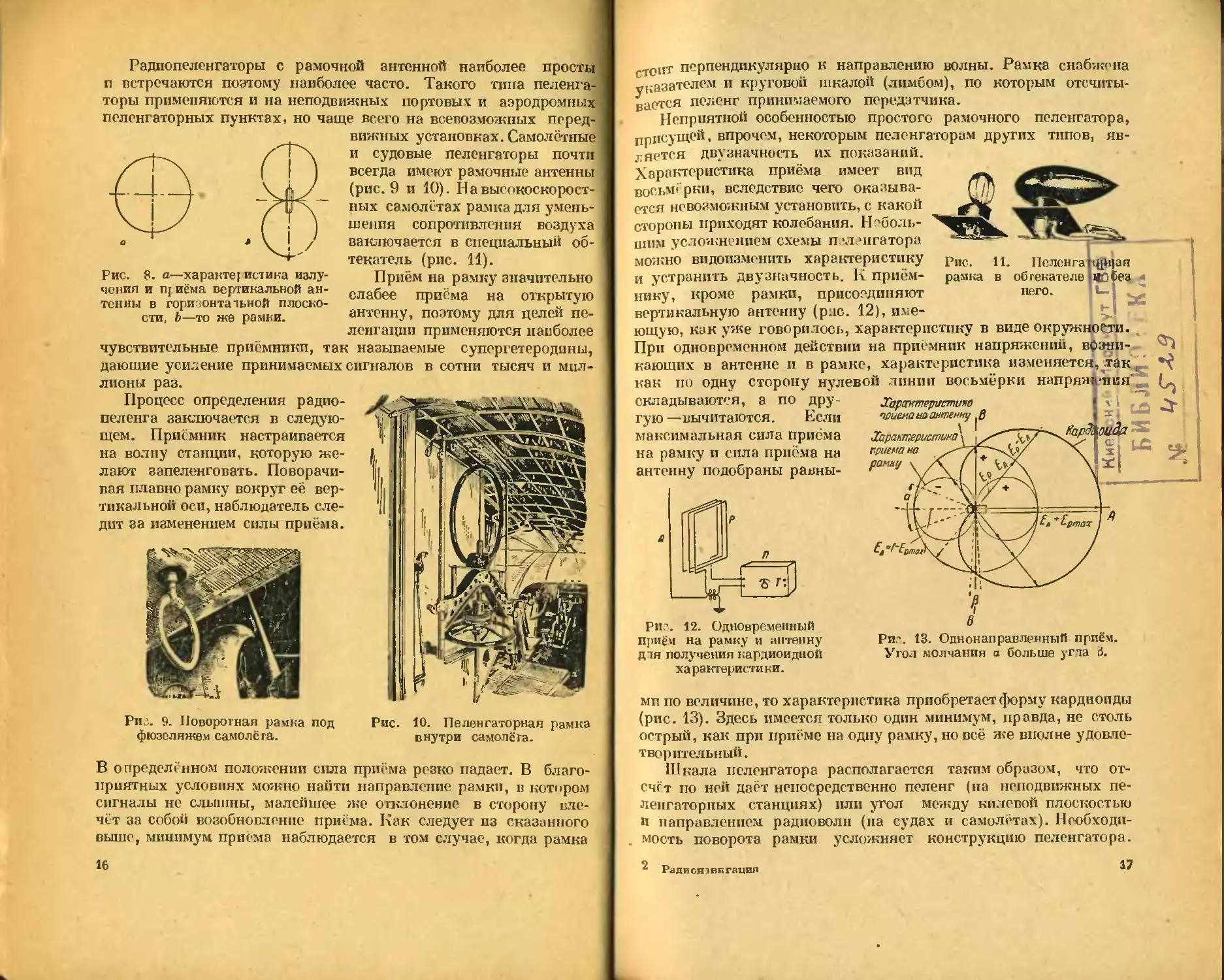
вовсе. На рис. 8 зависимость силы приёма от направления при-
ходящих радиоволн изображена графически. Такого рода гра-
фики носят название характеристик. Характеристика приёма
на рамку имеет вид восьмёрки (Ь), характеристика вертикаль-
ной антенны — окружнссти (а).
15
Рис. 8. а—характе( истина излу-
чения и приёма вертикальной ан-
тенны в горизонтазьной плоско-
сти, Ь—то же рамки.
Радиопеленгаторы с рамочной антенной наиболее просты
и встречаются поэтому наиболее часто. Такого типа пеленга-
торы применяются и на неподвижных портовых и аэродромных
пеленгаторных пунктах, но чаще всего на всевозможных перед-
вижных установках. Самолётные
и судовые пеленгаторы почти
всегда имеют рамочные антенны
(рис. 9 и 10). На высокоскорост-
ных самолётах рамка для умень-
шения сопротивления воздуха
заключается в специальный об-
текатель (рис. И).
Приём на рамку значительно
слабее приёма на открытую
антенну, поэтому для целей пе-
ленгации применяются наиболее
чувствительные приёмники, так называемые супергетеродины,
дающие усиление принимаемых сигналов в сотни тысяч и мил-
лионы раз.
Процесс определения радио-
пеленга заключается в следую-
щем. Приёмник настраивается
на волну станции, которую же-
лают запеленговать. Поворачи-
вая плавно рамку вокруг её вер-
тикальной оси, наблюдатель сле-
дит за изменением силы приёма.
Xapawnepvcrnmo
'Мила ею антенну
Характеристика
приема но
рамку
Каро оцЗх
ртах
s Т-
Рис.
10. Пеленгаторная рамка
внутри самолёта.
Риг. 9. Поворотная рамка под
фюзеляжем самолёта.
Риз. 12. Одновременный
приём на рамку и антенну
дтя получения кардиоидной
характеристики.
в
Риз. 13. Однонаправленный приём.
Угол молчания а больше угла d.
В о предел «ином положении сила приёма резко падает. В благо-
приятных условиях можно найти направление рамки, в котором
сигналы не слышны, малейшее же отклонение в сторону вле-
ч( т за собой возобновление приема. Как следует из сказанного
выше, минимум приема наблюдается в том случае, когда рамка
16
стоит перпендикулярно к направлению волны. Рамка снабжена
указателем и круговой шкалой (лимбом), по которым отсчиты-
вается пеленг принимаемого передатчика.
Неприятной особенностью простого рамочного пеленгатора,
присущей, впрочем, некоторым пеленгаторам других типов, яв-
ляется двузначность их показаний.
Характеристика приёма имеет вид
восьмёрки, вследствие чего оказыва-
ется невозможным установить, с какой
стороны приходят колебания. Неболь-
шим усложнением схемы п *л 'нгатора
можно видоизменить характеристику
и устранить двузначность. К приём-
нику, кроме рамки, присоединяют
вертикальную антенну (ряс. 12), име-
ющую, как ' же говорилось, характеристику в виде окружности
При одновременном действии на приемник напряжений, в^здИ'
кающих в антенне и в рамке, характеристика изменяется, так
как по одну сторону нулевой линии восьмёрки напряя* *пвя
складываются, а по дру-
гую—вычитаются. Если
максимальная сила приема
на рамку и сила приёма на
антенну подобраны равны-
Рис. II. Пеленг qplijaH
рамка в обтекателе йС^ез
него.
мп по величине, то характеристика приобретает форму кардиоиды
(рис. 13). Здесь имеется только один минимум, правда, не столь
острый, как при приёме на одну рамку, но всё же вполне удовле-
творительный.
Шкала пеленгатора располагается таким образом, что от-
счёт по ней даёт непосредственно пеленг (на неподвижных пе-
ленгаторных станциях) пли угол между килевой плоскостью
и направлением радиоволн (на судах и самолётах). Необходп-
. мость поворота рамки усложняет конструкцию пеленгатора.
Радисп‘впгацил
Рамка располагается в большинстве случаев снаружи, напри-
мер, над палубой корабля, приёмник же помещается внутри
радиорубки. Необходимо устраивать вводы-подшипники для
вращающейся оси рамки. В связи с этим могут встретиться за-
труднения при размещении всего устройства. Необходимость
вращать во время измерений подчас довольно громоздкую рам-
ку создаёт дополнительные неудобства.
Все эти дефекты устранены в пеленгаторах системы Беллини
и Този. Этот пеленгатор состоит из двух совершенно одинако-
вых взаимно-перпендикулярных рамок, гониометра и приём-
ника. Концы обмоток рамок присоединяются к двум, также
взаимно перпендикулярным «полевым» катушкам гониометра
(рис. 14). Внутри полевых катушек может вращаться третья
катушка, называемая искателем. Рамки и шкала гониометра
устанавливаются таким образом, чтобы отсчетом можно было
получить без дополнительных
вычислений и поправок пеленг
или угол по отношению к про-
дольной оси корабля. Искатель-
ная катушка присоединяется к
приемнику. На точность распо-
ложения всех частей пеленга-
тора надо обращать особое вни-
Рис. 15. Пеленгатор Лондонского
аэропорта.
Рис. 14. Пеленгатор Бет-
||ини и Този. Л—антенна,
Р—рамка, Г — гониометр,
И — искатетьная катушка.
мание, так как от этого зависит точность измерений. Изме-
рения производятся, как и с обычным пеленгатором, только
вместо вращения большой рамки оператор поворачивает лёгкую
катушку гониометра. Большим удобством пеленгаторов Бел-
18
линп и Този является возможность располагать рамки и гонио-
меТр в наиболее удобных местах, так как они связаны между
05Ой только четырьмя электрическими проводами. Пеленга-
торы Беллини и Този строятся как стационарного типа, так
я переносными. На рис. 15 показан пелен
гатор лондонского аэропорта, на рис. 16 —
амкп судового пеленгатора и на рис. 17 —
лёгкая переносная установка фирмы Теле-
функен. На последнем рисунке хорошо видна
антенна служащая для получения однона-
правленного карднойдальнего приёма.
Точность отсчёта пеленга по минимуму в
благоприятных условиях может быть очень
большой—ошибка получается значительно
меньше одного градуса. В среднем считается,
что пеленгаторы описанного типа позволяют
производить отсчет с точностью около одного
градуса. Необходь но различать точность от-
счёта углов по шкале и точность определения
'Z
Рис. 16. Рамки
пеленгатора Бел-
лини и Този на
пароходе.
действительного пеленга. Если нет никаких помех приёму и сила
приёма достаточна, то нетрудно найти место минимума с большой
точностью. Совсем другое дело,
если приём слаб—тогда погреш-
ность измерений значительно
возрастает. Ещё хуже условия
измерения при наличии радио-
помех или посторонних мешаю-
щих шумов. В этих условиях хо-
рошую точность можно получить
только при очень сильном при-
ёме, пеленгация же слабых или
очень удалённых станций может
оказаться вообще невозможной,
так как посторонние шумы и по-
мехи полностью «забивают» их.
Указанный недостаток является
общим для всех методов, где
требуется определение места ну-
левой пли мпнимал „ной слы-
шимости.
Рис. 17. Переносный пеленгатор Отсчеты пеленга с помощью
фирмы Телеф.ункен. рамочных пеленгаторов не ос-
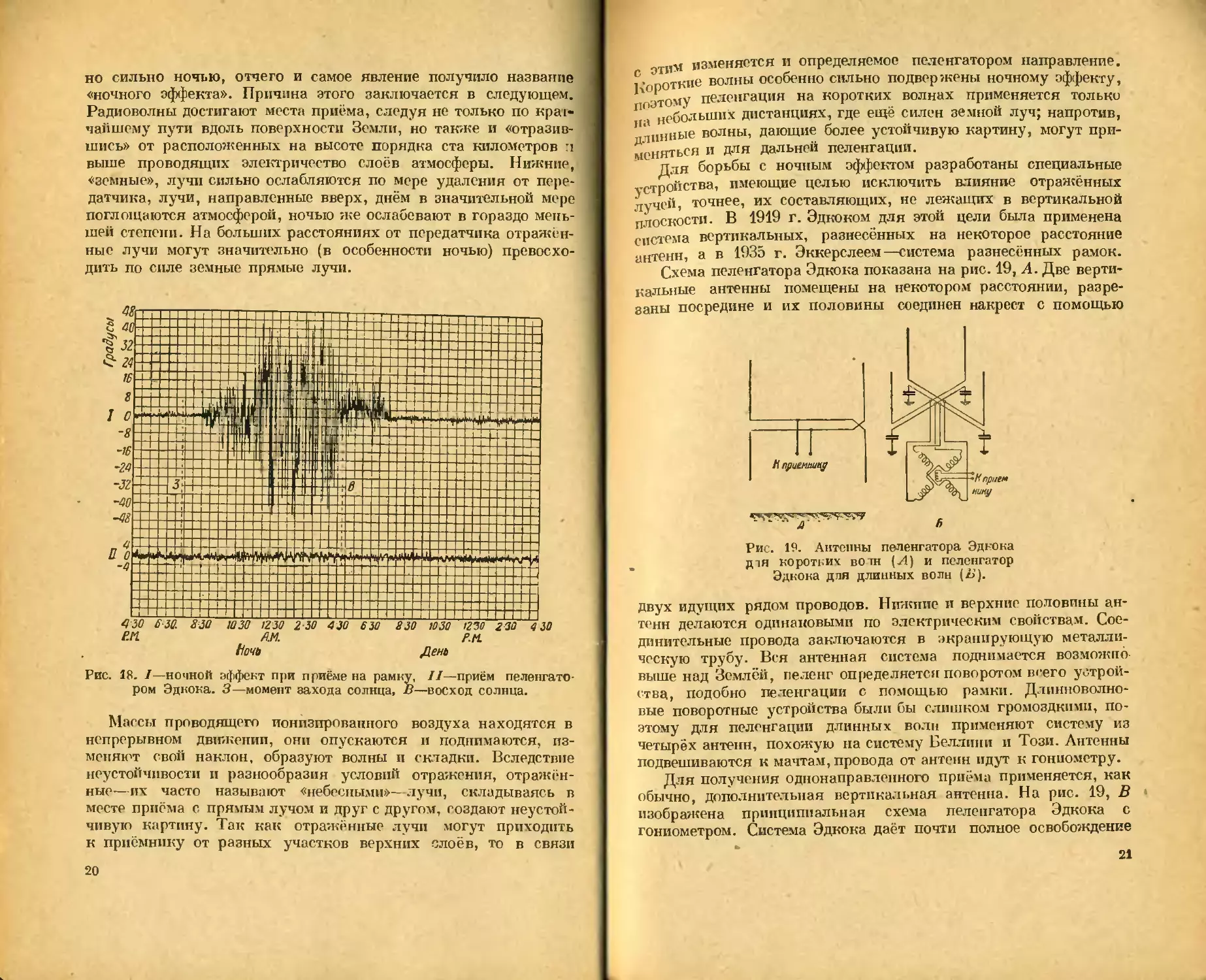
таются постоянными во времени, но колеблются около среднего,
соответствующего истинному, направления. Такое гуляние
пеленга, типичная картина которого показана на рис. 18, особен-
2*
19
но сильно ночью, отчего и самое явление получило название
«ночного эффекта». Причина этого заключается в следующем.
Радиоволны достигают места приёма, следуя не только по крат-
чайшему пути вдоль поверхности Земли, но также и «отразив-
шись» от расположенных на высоте порядка ста километров i
выше проводящих электричество слоёв атмосферы. Нижние,
«земные», лучи сильно ослабляются по мере удаления от пере-
датчика, лучи, направленные вверх, днём в значительной мере
поглощаются атмосферой, ночью же ослабевают в гораздо мень-
шей степени. На больших расстояниях от передатчика отражён-
ные лучи могут значительно (в особенности ночью) превосхо-
дить по силе земные прямые лучи.
Рис. 18. 7—ночной эффект при приёме на рамку, 77—приём пеленгато-
ром Эдкока. 3—момент захода солнца, В—восход солнца.
Массы проводящего иоипзпрованного воздуха находятся в
непрерывном движении, они опускаются и поднимаются, из-
меняют свой наклон, образуют волны и складки. Вследствие
неустойчивости и разнообразия условий отражения, отражён-
ные—их часто называют «небесными»—лучи, складываясь в
месте приёма с прямым лучом и друг с другом, создают неустой-
чивую картину. Так как отражённые лучи могут приходить
к приёмнику от разных участков верхних слоёв, то в связи
20
этим изменяется п определяемое пеленгатором направление.
Гопоткие волны особенно сильно подвержены ночному эффекту,
поэтому пеленгация на коротких волнах применяется только
небольших дистанциях, где ещё силен земной луч; напротив,
' ннные волны, дающие более устойчивую картину, могут при-
меняться и для дальней пеленгации.
Для борьбы с ночным эффектом разработаны специальные
устройства, имеющие целью исключить влияние отражённых
лучей, точнее, их составляющих, не лежащих в вертикальной
плоскости. В 1919 г. Эдкоком для этой цели была применена
система вертикальных, разнесённых на некоторое расстояние
антенн, а в 1935 г. Эккерслеем—система разнесённых рамок.
Схема пеленгатора Эдкока показана на рис. 19, А. Две верти-
кальные антенны помещены на некотором расстоянии, разре-
заны посредине и их половины соединен накрест с помощью
Рис. 19. Антенны пеленгатора Эдкока
дня коротких волн (Л) и пеленгатор
Эдкока для длинных волн (Z>).
двух идущих рядом проводов. Нижние и верхние половины ан-
тенн делаются одинаковыми по электрическим свойствам. Сое-
динительные провода заключаются в экранирующую металли-
ческую трубу. Вся антенная система поднимается возможно
выше над Землёй, пеленг определяется поворотом всего устрой-
ства, подобно пеленгации с помощью рамки. Длинноволно-
вые поворотные устройства были бы слишком громоздкими, по-
этому для пеленгации длинных волн применяют систему из
четырёх антенн, похожую на систему Беллини и Този. Антенны
подвешиваются к мачтам, провода от антенн идут к гониометру.
Для получения однонаправленного приёма применяется, как
обычно, дополнительная вертикальная антенна. На рис. 19, В
изображена принципиальная схема пеленгатора Эдкока с
гониометром. Система Эдкока даёт почти полное освобождение
21
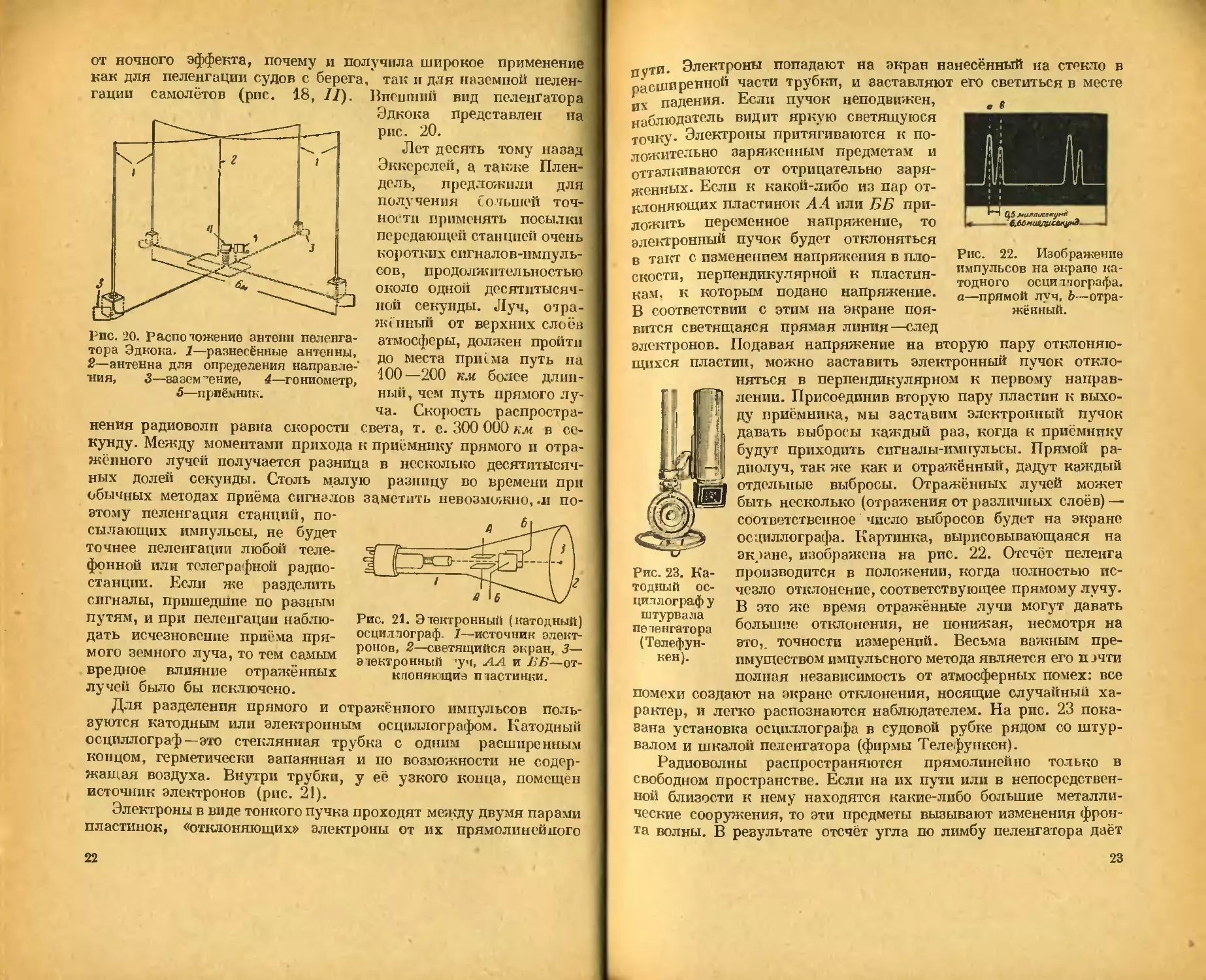
от ночного эффекта, почему и получила широкое применение
как для пеленгации судов с берега, так и для наземной пелен-
гации самолётов (рис. 18, II). Внешний вид пеленгатора
Рис. 20. Распотожение антенн пеленга-
тора Эдкока. 1—разнесённые антенны,
2—антенна для определения направле-
ния, 3—зазем -ение, 4—гониометр,
5—приёмник.
нения радиоволн равна скорости света, т. е. 300 000 км в се-
КУНДУ- Между моментами прихода к приёмнику прямого и отра-
жённого лучей получается разнпца в несколько десятитысяч-
при
по-
ных долей секунды. Столь малую разницу во времени
обычных методах приёма сигналов заметить невозможно, -л
этому пеленгация станций, по-
сылающих импульсы, не будет
точнее пеленгации любой теле-
фонной или телеграфной радио-
станции. Если же разделить
сигналы, пришедшие по разным
путям, и при пеленгации наблю-
дать исчезновение приёма пря-
мого земного луча, то тем самым
вредное влияние отражённых
лучей было бы исключено.
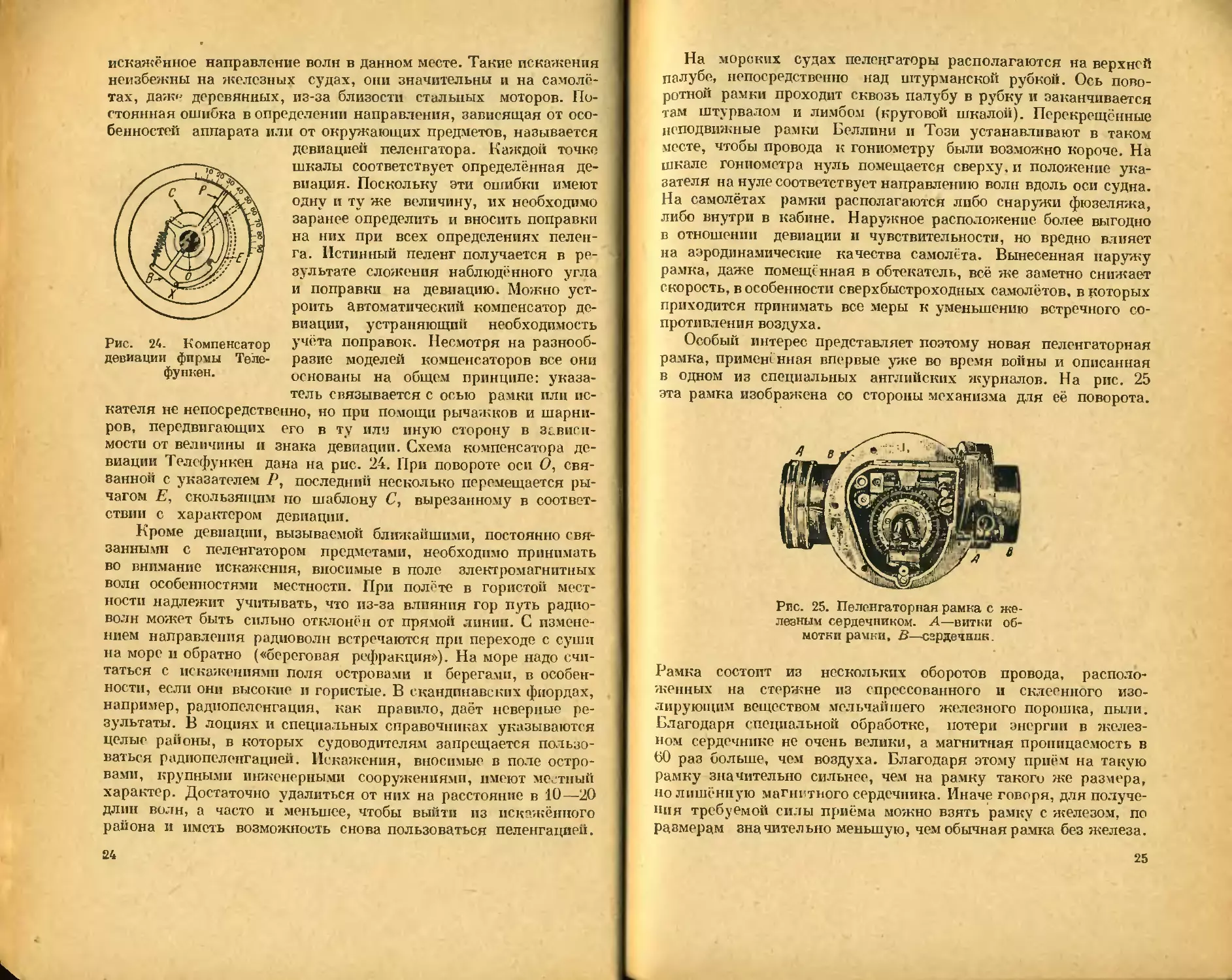
Для разделения прямого и отражённого импульсов ноль
зуются катодным или электронным
осцилл огр афом.
осциллограф—это стеклянная трубка с одним
Катодный
расширенным
концом, герметически запаянная и по возможности ие содер
жащая воздуха. Внутри трубки,
источник электронов (рис. 21).
Электроны в виде тонкого пучка
пластинок, «отклоняющих» электроны от их прямолинейного
Эдкока представлен на
рис. 20.
Лет десять тому назад
Эккерслей, а также Плен-
дель, предложили для
получения большей точ-
ности применять посылки
передающей станцией очень
коротких сигналов-импуль-
сов, продолжительностью
около одной десятитысяч-
ной секунды. Луч, отра-
женный от верхних слоён
атмосферы, должен пройти
до места приема путь на
100 —200 км более длин-
ный, чем путь прямого лу-
ча. Скорость распростра-
Рис. 21. Этектронный (катодный)
осциллограф. 1—источник элект
ронов, 2—светящийся экран, 3—
этектронный 'уч, АА и ББ—от
кпоняющиэ шастинки.
У её
узкого конца,
помещён
проходят между двумя парами
22
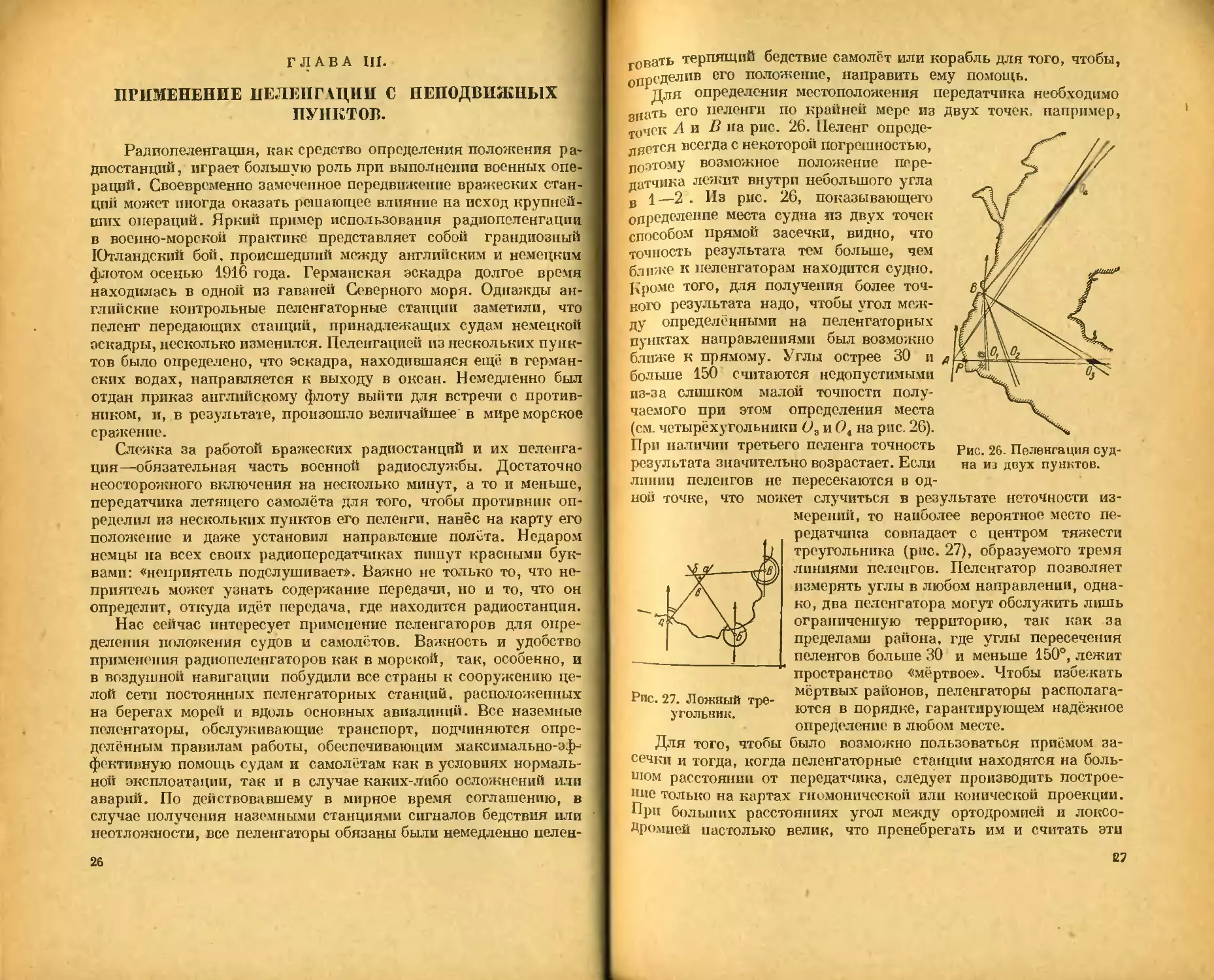
пути. Электроны попадают на экран нанесённый на стекло в
расширенной части трубки, и заставляют его светиться в месте
их падения. Если пучок неподвижен, в е
наблюдатель видит яркую светящуюся
точку. Электроны притягиваются к по-
ложительно заряженным предметам и
отталкиваются от отрицательно заря-
женных. Если к какой-либо из пар от-
клоняющих пластинок А А или Б Б при-
ложить переменное напряжение, то
электронный пучок будет отклоняться
в такт с изменением напряжения в пло-
скости, перпендикулярной к пластин-
кам. к которым подано напряжение.
В соответствии с этим на экране поя-
Рис. 22. Изображение
импульсов на экране ка-
тодного осциллографа.
а—прямой луч, Ь—отра-
жённый.
вится светящаяся прямая линия—след
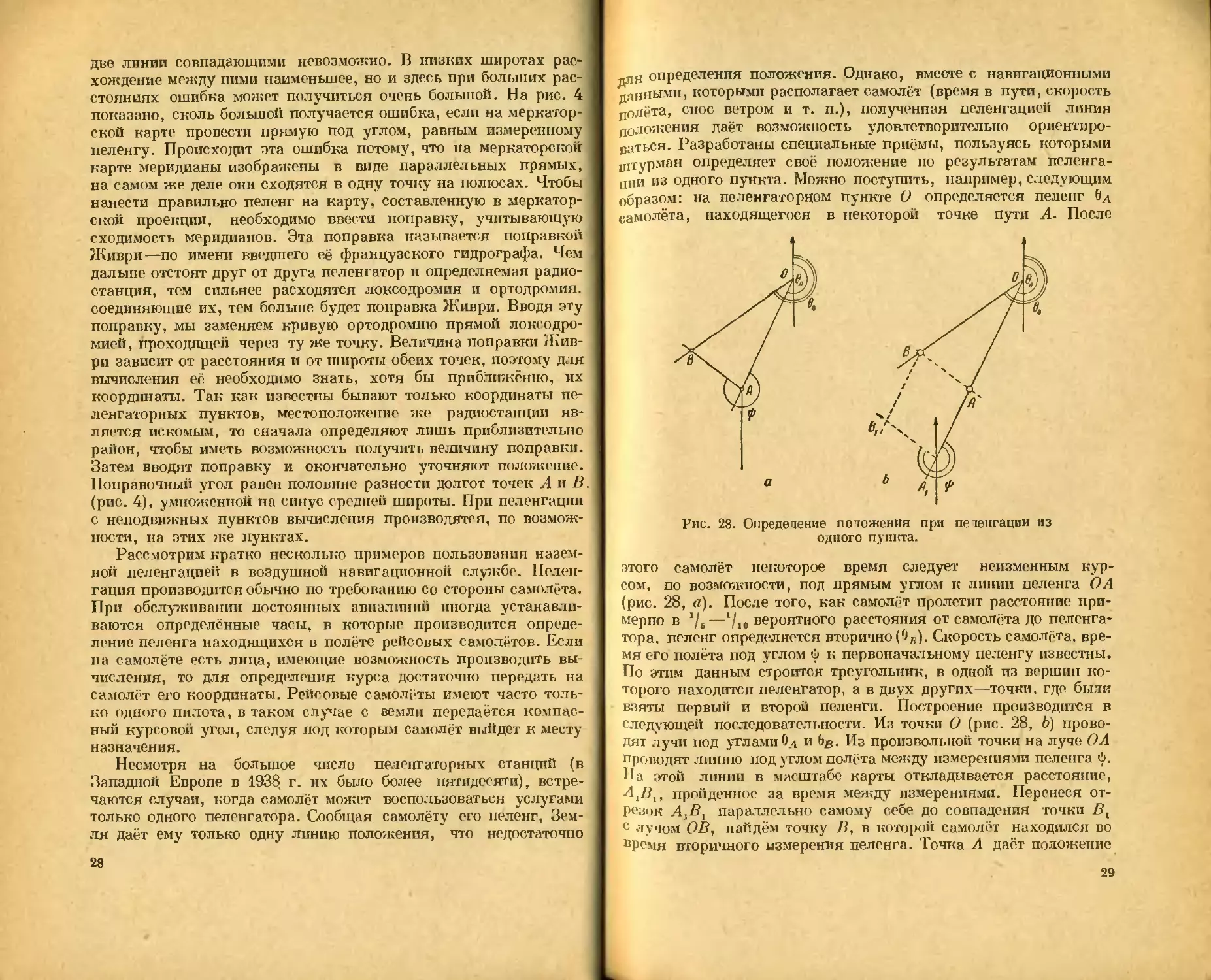
электронов. Подавая напряжение на вторую пару отклоняю-
щихся пластин, можно заставить электронный пучок откло-
Рис. 23. Ка-
тодный ос-
циллографу
штурвала
пе ленгатора
(Телефун-
кен).
няться в перпендикулярном к первому направ-
лении. Присоединив вторую пару пластин к выхо-
ду приёмника, мы заставим электронный пучок
давать выбросы каждый раз, когда к приёмнику
будут приходить сигналы-импульсы. Прямой ра-
диолуч, так же как и отражённый, дадут каждый
отдельные выбросы. Отражённых лучей может
быть несколько (отражения от различных слоёв) —
соответственное число выбросов будет на экране
осциллографа. Картинка, вырисовывающаяся на
экране, изображена на рис. 22. Отсчёт пеленга
производится в положении, когда полностью ис-
чезло отклонение, соответствующее прямому лучу.
В это же время отражённые лучи могут давать
большие отклонения, не понижая, несмотря на
это,, точности измерений. Весьма важным пре-
имуществом импульсного метода является его п эчти
полная независимость от атмосферных помех: все
помехи создают на экране отклонения, носящие случайный ха-
рактер, и легко распознаются наблюдателем. На рис. 23 пока-
зана установка осциллографа в судовой рубке рядом со штур-
валом и шкалой пеленгатора (фирмы Телефункен).
Радиоволны распространяются прямолинейно только в
свободном пространстве. Если на их пути или в непосредствен-
ной близости к нему находятся какие-либо большие металли-
ческие сооружения, то эти предметы вызывают изменения фрон-
та волны. В результате отсчёт угла по лимбу пеленгатора даёт
23
искажённое направление волн в данном месте. Такие искажения
неизбежны на железных судах, они значительны и на самолё-
тах, дажр деревянных, из-за близости стальных моторов. По-
стоянная ошибка в определении направления, зависящая от осо-
бенностей аппарата пли от окружающих предметов, называется
девиацией пеленгатора. Каждой точке
Рис. 24. Компенсатор
девиации фирмы Теле-
фуикен.
шкалы соответствует определённая де-
виация. Поскольку эти ошибки имеют
одну и ту же величину, их необходимо
заранее определить и вносить поправки
на них при всех определениях пелен-
га. Истинный пеленг получается в ре-
зультате сложения наблюдённого угла
и поправки на девиацию. Можно уст-
роить автоматический компенсатор де-
виации, устраняющий необходимость
учёта поправок. Несмотря на разнооб-
разие моделей компенсаторов все они
основаны на общем принципе: указа-
тель связывается с осью рамки пли ис-
кателя не непосредственно, но при помощи рычажков и шарни-
ров, передвигающих его в ту или иную сторону в зависи-
мости от величины и знака девиации. Схема компенсатора де-
виации Телсфункен дана на рис. 24. При повороте оси О, свя-
занной с указателем Р, последний несколько перемещается ры-
чагом Б, скользящим по шаблону С, вырезанному в соответ-
ствии с характером девиации.
Кроме девиации, вызываемой ближайшими, постоянно свя-
занными с пеленгатором предметами, необходимо принимать
во внимание искажения, вносимые в поле электромагнитных
волн особенностями местности. При полёте в гористой мест-
ности надлежит учитывать, что из-за влияния гор путь радио-
волн может быть сильно отклонён от прямой линии. С измене-
нием направления радиоволн встречаются при переходе с суши
на море п обратно («береговая рефракция»). На море надо счи-
таться с искажениями поля островами и берегами, в особен-
ности, если они высокие и гористые. В скандинавских фиордах,
например, радиопеленгация, как правило, даёт неверные ре-
зультаты. В лоциях и специальных справочниках указываются
целые районы, в которых судоводителям запрещается пользо-
ваться радиопеленгацией. Искажения, вносимые в поле остро-
вами, крупными инженерными сооружениями, имеют местный
характер. Достаточно удалиться от них на расстояние в 10—20
длин волн, а часто и меньшее, чтобы выйти из искажённого
района и иметь возможность снова пользоваться пеленгацией.
24
На морских судах пеленгаторы располагаются на верхней
палубе, непосредственно над штурманской рубкой. Ось пово-
ротной рамки проходит сквозь палубу в рубку и заканчивается
там штурвалом и лимбом (круговой шкалой). Перекрещённые
неподвижные рамки Беллини и Този устанавливают в таком
месте, чтобы провода к гониометру были возможно короче. На
шкале гониометра нуль помещается сверху, и положение ука-
зателя на нуле соответствует направлению волн вдоль оси судна.
На самолётах рамки располагаются либо снаружи фюзеляжа,
либо внутри в кабине. Наружное расположение более выгодно
в отношении девиации и чувствительности, но вредно влияет
на аэродинамические качества самолёта. Вынесенная наружу
рамка, даже помещенная в обтекатель, всё же заметно снижает
скорость, в особенности сверхбыстроходных самолётов, в которых
приходится принимать все меры к уменьшению встречного со-
противления воздуха.
Особый интерес представляет поэтому новая пеленгаторная
рамка, применённая впервые уже во время войны и описанная
в одном из специальных английских журналов. На рис. 25
эта рамка изображена со стороны механизма для её поворота.
Рис. 25. Пеленгаторная рамка с же-
лезным сердечником. Л—витки об-
мотки рамки, В—сердечник.
Рамка состоит из нескольких оборотов провода, располо-
женных на стержне из спрессованного и склеенного изо-
лирующим веществом мельчайшего железного порошка, пыли.
Благодаря специальной обработке, потери энергии в желез-
ном сердечнике не очень велики, а магнитная проницаемость в
60 раз больше, чем воздуха. Благодаря этому приём на такую
рамку значительно сильнее, чем на рамку такого же размера,
но лишённую магнитного сердечника. Иначе говоря, для получе-
ния требуемой силы приёма можно взять рамку с железом, по
размерам значительно меньшую, чем обычная рамка без железа.
25
ГЛАВА III.
ПРИМЕНЕНИЕ ПЕЛЕНГАЦИИ С НЕПОДВИЖНЫХ
ПУНКТОВ.
Радиопеленгация, как средство определения положения ра-
диостанций, играет большую роль при выполнении военных опе-
раций. Своевременно замеченное передвижение вражеских стан-
ций может иногда оказать решающее влияние на исход крупней-
ших операций. Яркий пример использования радиопеленгации
в военно-морской практике представляет собой грандиозный
Ютландский бой. происшедший между английским и немецким
флотом осенью 1916 года. Германская эскадра долгое время
находилась в одной из гаваней Северного моря. Однажды ан-
глийские контрольные пеленгаторные станции заметили, что
пеленг передающих станций, принадлежащих судам немецкой
эскадры, несколько изменился. Пеленгацией из нескольких пунк-
тов было определено, что эскадра, находившаяся ещё в герман-
ских водах, направляется к выходу в оксан. Немедленно был
отдан приказ английскому флоту выйти для встречи с против-
ником, и, в результате, произошло величайшее в мире морское
сражение.
Слежка за работой вражеских радиостанций и их пеленга-
ция—обязательная часть военной радиослужбы. Достаточно
неосторожного включения на несколько минут, а то н меньше,
передатчика летящего самолёта для того, чтобы противник оп-
ределил из нескольких пунктов его пеленги, нанёс на карту его
положение и даже установил направление полёта. Недаром
немцы на всех своих радиопередатчиках пишут красными бук-
вами: «неприятель подслушивает». Важно не только то, что не-
приятель может узнать содержание передачи, но и то, что он
определит, откуда идёт передача, где находится радиостанция.
Нас сейчас интересует применение пеленгаторов для опре-
деления положения судов и самолётов. Важность и удобство
применения радиопеленгаторов как в морской, так, особенно, и
в воздушной навигации побудили все страны к сооружению це-
лой сети постоянных пеленгаторных станций, расположенных
на берегах морей и вдоль основных авиалиний. Все наземные
пеленгаторы, обслуживающие транспорт, подчиняются опре-
делённым правилам работы, обеспечивающим максимально-эф-
фективную помощь судам и самолётам как в условиях нормаль-
ной эксплоатации, так и в случае каких-либо осложнений или
аварий. По действовавшему в мирное время соглашению, в
случае получения наземными станциями сигналов бедствия или
неотложности, все пеленгаторы обязаны были немедленно пелен-
26
гОвать терпящий бедствие самолёт или корабль для того, чтобы,
определив его положение, направить ему помощь.
для определения местоположения передатчика необходимо
“ „„„ V...-:. дВуХ точек, например,
Рис. 26. Пеленгация суд-
на из двух пунктов.
знать его пеленги по крайней мере из
точек Л и В па рис. 26. Пеленг опреде-
ляется всегда с некоторой погрешностью,
поэтому возможное положение пере-
датчика лежит внутри небольшого угла
в 1—2 . Из рис. 26, показывающего
определение места судна пз двух точек
способом прямой засечки, видно, что
точность результата тем больше, чем
ближе к пеленгаторам находится судно.
Кроме того, для получения более точ-
ного результата надо, чтобы угол меж-
ду определёнными на пеленгаторных
пунктах направлениями был возможно
ближе к прямому. Углы острее 30 и
больше 150 считаются недопустимыми
из-за слишком малой точности полу-
чаемого при этом определения места
(см. четырёхугольники О3 и Ot на рис. 26).
При наличии третьего пеленга точность
результата значительно возрастает. Если
линии пеленгов не пересекаются в од-
ной точке, что может случиться в результате неточности из-
мерений, то наиболее вероятное место пе-
редатчика совпадает с центром тяжести
треугольника (рис. 27), образуемого тремя
линиями пеленгов. Пеленгатор позволяет
измерять углы в любом направлении, одна-
ко, два пеленгатора могут обслужить лишь
ограниченную территорию, так как за
пределами района, где углы пересечения
пеленгов больше 30 и меньше 150°, лежит
пространство «мёртвое». Чтобы избежать
мертвых районов, пеленгаторы располага-
ются в порядке, гарантирующем надёжное
определение в любом месте.
Для того, чтобы было возможно пользоваться приёмом за-
сечки и тогда, когда пеленгаторные станции находятся на боль-
шом расстоянии от передатчика, следует производить построе-
ние только на картах гномонической или конической проекции.
При больших расстояниях угол между ортодромией и локсо-
дромией настолько велик, что пренебрегать им и считать эти
27
Рис. 27. Ложный тре-
у голыши'.
две линии совпадающими невозможно. В низких широтах рас-
хождение между ними наименьшее, но и здесь при больших рас-
стояниях ошибка может получиться очень большой. На рис. 4
показано, сколь большой получается ошибка, если на меркатор-
ской карте провести прямую под углом, равным измеренному
пеленгу. Происходит эта ошибка потому, что на меркаторской
карте меридианы изображены в виде параллельных прямых,
на самом же деле они сходятся в одну точку на полюсах. Чтобы
нанести правильно пеленг на карту, составленную в меркатор-
ской проекции, необходимо ввести поправку, учитывающую
сходимость меридианов. Эта поправка называется поправкой
Живри—по имени введшего ее французского гидрографа. Чем
дальше отстоят друг от друга пеленгатор и определяемая радио-
станция, тем сильнее расходятся локсодромия и ортодромия,
соединяющие их, тем больше будет поправка Живри. Вводя эту
поправку, мы заменяем кривую ортодромию прямой локсодро-
мией, проходящей через ту же точку. Величина поправки Жив-
ри зависит от расстояния и от широты обеих точек, поэтому для
вычисления её необходимо знать, хотя бы приближённо, их
координаты. Так как известны бывают только координаты пе-
ленгаторных пунктов, местоположение же радиостанции яв-
ляется искомым, то сначала определяют лишь приблизительно
район, чтобы иметь возможность получить величину поправки.
Затем вводят поправку и окончательно уточняют положение.
Поправочный угол равен половине разности долгот точек А н В
(рис. 4). умноженной на синус средней шпроты. При пеленгации
с неподвижных пунктов вычисления производятся, по возмож-
ности, на этих Hie пунктах.
Рассмотрим кратко несколько примеров пользования назем-
ной пеленгацией в воздушной навигационной службе. Пелен-
гация производится обычно по требованию со стороны самолёта.
При обслуживании постоянных авиалиний иногда устанавли-
ваются определённые часы, в которые производится опреде-
ление пеленга находящихся в полёте рейсовых самолётов. Если
на самолёте есть лица, имеющие возможность производить вы-
числения, то для определения курса достаточно передать на
самолёт его координаты. Рейсовые самолёты имеют часто толь-
ко одного пилота, в таком случае с земли передаётся компас-
ный курсовой угол, следуя под которым самолёт выйдет к месту
назначения.
Несмотря на большое число пеленгаторных станций (в
Западной Европе в 1938 г. их было более пятидесяти), встре-
чаются случаи, когда самолёт может воспользоваться услугами
только одного пеленгатора. Сообщая самолёту его пеленг, Зем-
ля даёт ему только одну линию положения, что недостаточно
28
-ля определения положения. Однако, вместе с навигационными
данными, которыми располагает самолёт (время в пути, скорость
полёта, снос ветром и т. п.), полученная пеленгацией линия
положения даёт возможность удовлетворительно ориентиро-
ваться. Разработаны специальные приёмы, пользуясь которыми
штурман определяет своё положение по результатам пеленга-
ции из одного пункта. Можно поступить, например, следующим
образом: на пеленгаторном пункте О определяется пеленг
самолёта, находящегося в некоторой точке пути А. После
Рис. 28. Опрвдепение положения при пеленгации из
одного пункта.
этого самолёт некоторое время следует неизменным кур-
сом, по возможности, под прямым углом к линии пеленга О А
(рис. 28, а). После того, как самолёт пролетит расстояние при-
мерно в ’/6—1/10 вероятного расстояния от самолёта до пеленга-
тора, пеленг определяется вторично (^л). Скорость самолёта, вре-
мя его полёта под углом Ф к первоначальному пеленгу известны.
По этим данным строится треугольник, в одной из вершин ко-
торого находится пеленгатор, а в двух других—точки, где были
взяты первый и второй пеленги. Построение производится в
следующей последовательности. Из точки О (рис. 28, Ь) прово-
дят лучи под углами Од и Ьв. Из произвольной точки на луче О А
проводят линию под углом полёта между измерениями пеленга <!».
На этой линии в масштабе карты откладывается расстояние,
AtBt, пройденное за время между измерениями. Перенеся от-
резок AiBl параллельно самому себе до совпадения точки /?,
с лучом ОВ, найдём точку В, в которой самолёт находился во
время вторичного измерения пеленга. Точка А даёт положение
29
самолёта при первом измерении. Точность такого рода опреде-
ления места самолёта, хотя и невелика, но достаточна для нави-
гационных целен. Неудобством является необходимость в не-
которых случаях значительного отклонения самолёта от пра-
вильного курса во время измерения и связанная с этим потеря
времени.
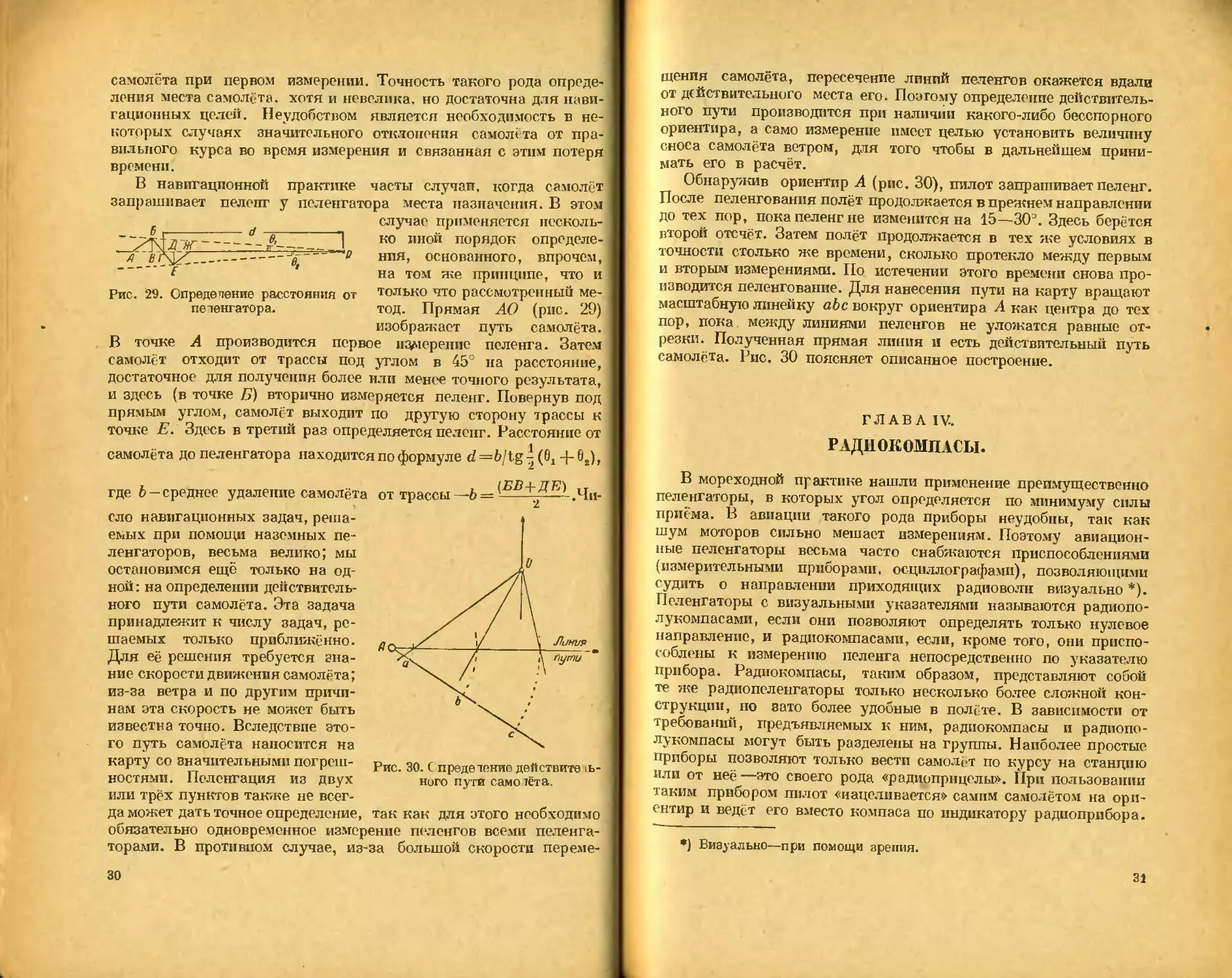
В навигационной практике часты случап, когда самолёт
запрашивает пеленг у пеленгатора места назначения. В этом
случае1 применяется несколь-
- ____i | ко иной порядок определе-
—д fAp' __________- - ния, основанного, впрочем,
-------[ * на том же принципе, что и
Рис. 29. Определение расстояния от только что рассмотренный ме-
пеленгатора. тод. Прямая АО (рис. 29)
изображает путь самолёта.
В точке А производится первое измерение пеленга. Затем
самолёт отходит от трассы под углом в 45° на расстояние,
достаточное для получения более или менее точного результата,
и здесь (в точке Б) вторично измеряется пеленг. Повернув под
прямым углом, самолёт выходит по другую сторону трассы к
точке Е. Здесь в третий раз определяется пеленг. Расстояние от
самолёта до пеленгатора находится по формуле <Z=fe/tg^(61-{-62),
, , (БВ+ДЕ) 1Г
где о —среднее удаление самолета от трассы —Ь = ----.Чи-
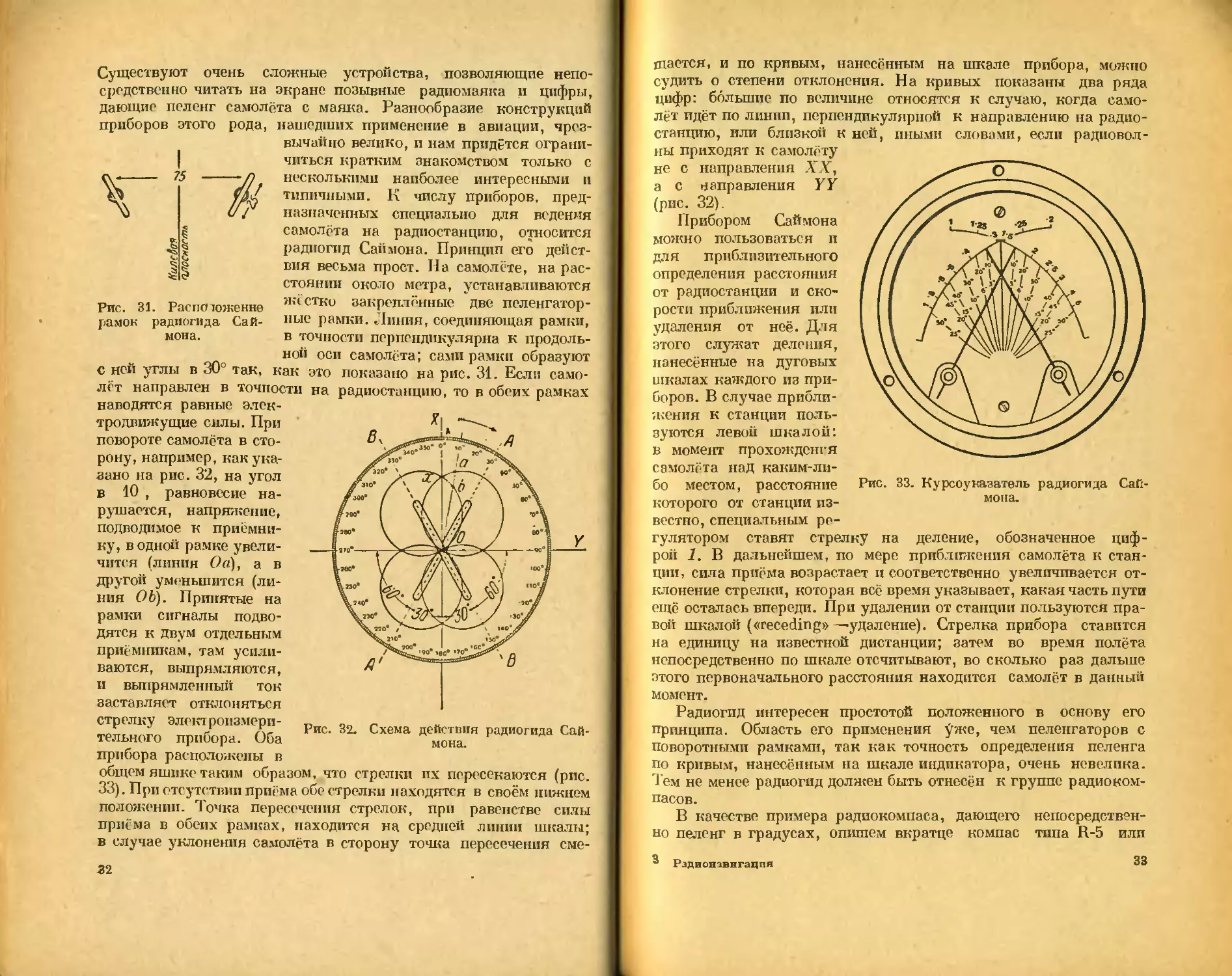
сло навигационных задач, реша-
емых при помощи наземных пе-
ленгаторов, весьма велико; мы
остановимся ещё только на од-
ной : на определении действитель-
ного пути самолёта. Эта задача
принадлежит к числу задач, ре-
шаемых только приближённо.
Для её решения требуется зна-
ние скорости движения самолёта;
из-за ветра и по другим причи-
нам эта скорость не может быть
известна точно. Вследствие это-
го путь самолёта наносится на
карту со значительными погреш-
ностями. Пеленгация из двух
или трёх пунктов также не всег-
да может дать точное определение,
Рис. 30. С предетенио действите 1Ь-
ного пути само 1ёта.
так как для этого необходимо
обязательно одновременное измерение пеленгов всеми пеленга-
торами. В противном случае, из-за большой скорости переме-
30
щения самолёта, пересечение линий пеленгов окажется вдали
от действительного места его. Поэтому определение действитель-
ного пути производится при наличии какого-либо бесспорного
ориентира, а само измерение имеет целью установить величину
с,носа самолёта ветром, для того чтобы в дальнейшем прини-
мать его в расчёт.
Обнаружив ориентир А (рис. 30), пилот запрашивает пеленг.
После пеленгования полёт продолжается в прежнем направлении
до тех пор, пока пеленг не изменится на 15—303. Здесь берётся
второй отсчёт. Затем полёт продолжается в тех же условиях в
точности столько же времени, сколько протекло между первым
и вторым измерениями. По истечении этого времени снова про-
изводится пеленгование. Для нанесения пути на карту вращают
масштабную линейку аЬс вокруг ориентира А как центра до тех
пор, пока между линиями пеленгов не уложатся равные от-
резки. Полученная прямая линия и есть действительный путь
самолёта. Рис. 30 поясняет описанное построение.
ГЛАВА IV.
РАДИОКОМПАСЫ.
В мореходной практике нашли применение преимущественно
пеленгаторы, в которых угол определяется по минимуму силы
приема. В авиации такого рода приборы неудобны, так как
шум моторов сильно мешает измерениям. Поэтому авиацион-
ные пеленгаторы весьма часто снабжаются приспособлениями
(измерительными приборами, осциллографами), позволяющими
судить о направлении приходящих радиоволн визуально *).
Пеленгаторы с визуальными указателями называются радиопо-
лукомпасами, если они позволяют определять только нулевое
направление, и радиокомпасами, если, кроме того, они приспо-
соблены к измерению пеленга непосредственно по указателю
прибора. Радиокомпасы, таким образом, представляют собой
те же радиопеленгаторы только несколько более сложной кон-
струкции, но зато более удобные в полёте. В зависимости от
требований, предъявляемых к ним, радиокомпасы и радиопо-
лукомпасы могут быть разделены на группы. Наиболее простые
приборы позволяют только вестп самолёт по курсу на станцию
или от неё—это своего рода «радиопрпцелы». При пользовании
таким прибором пилот «нацеливается» самим самолётом на ори-
ентир и ведёт его вместо компаса по индикатору радиоприбора.
•) Визуально—при помощи зрения.
31
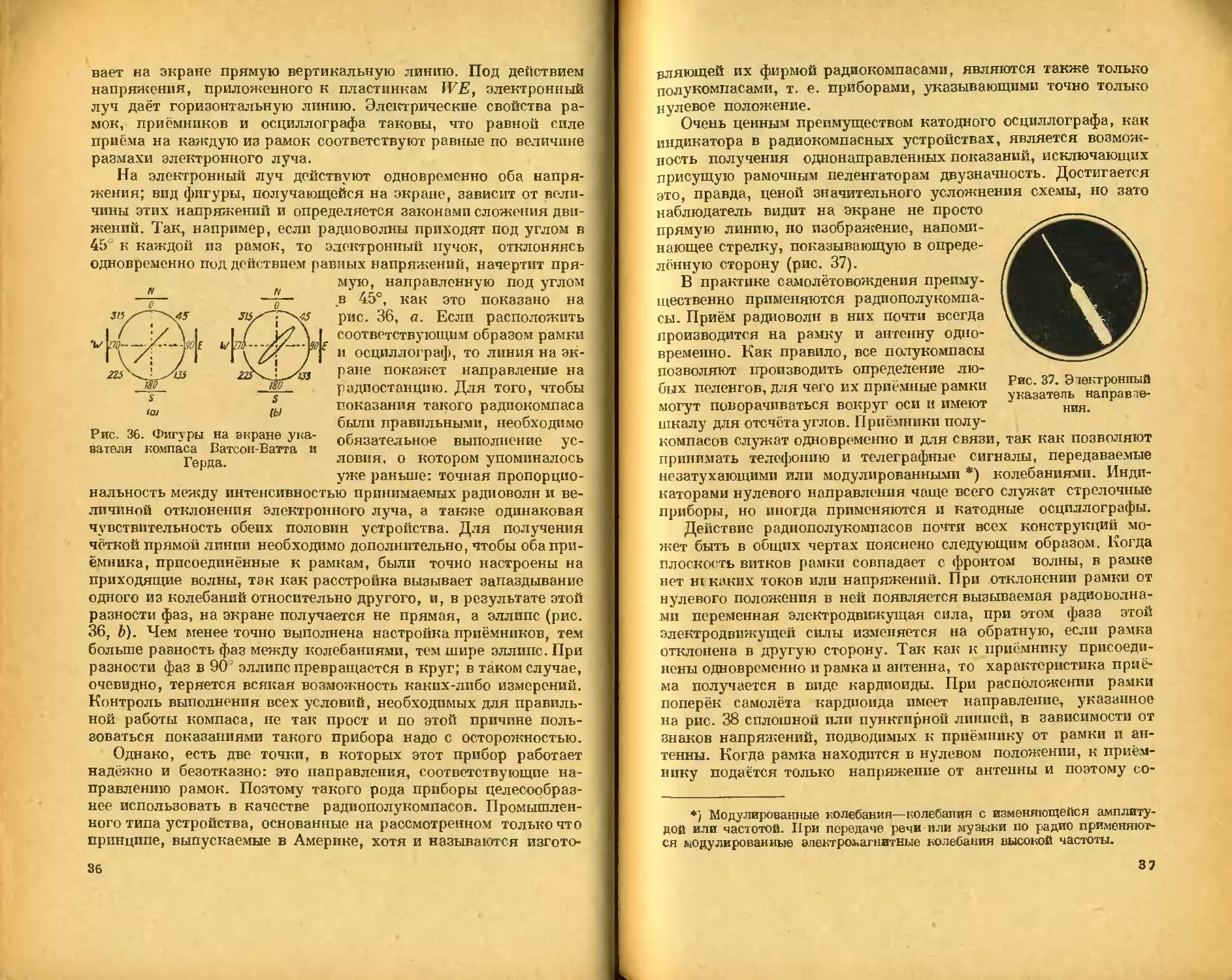
Рис. 31. Расположение
рамок радпогида Сай-
мона.
это показано на рис. 61. июли само-
на радиостанцию, то в обеих рамках
32. Схема действия радиогида Сай-
мона.
Существуют очень сложные устройства, позволяющие непо-
средственно читать на экране позывные радиомаяка и цифры,
дающие пеленг самолёта с маяка. Разнообразие конструкций
приборов этого рода, нашедших применение в авиации, чрез-
вычайно велико, и нам придётся ограни-
читься кратким знакомством только с
несколькими наиболее интересными и
типичными. К числу приборов, пред-
назначенных специально для ведения
самолёта на радиостанцию, относится
радпогид Саймона. Принцип его дейст-
вия весьма прост. На самолёте, на рас-
стоянии около метра, устанавливаются
жёстко закреплённые две пеленгатор-
ные рамки. Линия, соединяющая рамки,
в точности перпендикулярна к продоль-
ной оси самолёта; сами рамки образуют
с ней углы в 30° так, как ~“
лёт направлен в точности
наводятся равные элек-
тродвижущие силы. При
повороте самолёта в сто-
рону, например, как ука-
зано на рис. 32, на угол
в Ю , равновесие на-
рушается, напряжение,
подводимое к приёмни-
ку, в одной рамке увели-
чится (линия О а), а в
другой уменьшится (ли-
ния ОЬ). Принятые на
рамки сигналы подво-
дятся к двум отдельным
приёмникам, там усили-
ваются, выпрямляются,
и выпрямленный ток
заставляет отклоняться
стрелку электроизмери-
тельного прибора. Оба
прибора расположены в
общем яшике таким образо
33). При отсутствии приёма обе стрелки находятся в своём нижнем
положении. Точка пересечения стрелок, при равенстве силы
приёма в обеих рамках, находится на средней линии шкалы;
в случае уклонения самолёта в сторону точка пересечения сме-
, что стрелки их пересекаются (рис.
52
дастся, и по кривым, нанесённым на шкале прибора, можно
судить о степени отклонения. На кривых показаны два ряда
цифр: большие по величине относятся к случаю, когда само-
лёт идёт по линии, перпендикулярной к направлению на радио-
станцию, или близкой! к ней, иными словами, если радиовол-
ны приходят к самолёту
не с направления Y.Y,
а с направления YY
(рис. 32).
Прибором Саймона
можно пользоваться и
для приблизительного
определения расстояния
от радиостанции и ско-
рости приближения или
удаления от неё. Для
этого служат деления,
нанесённые на дуговых
шкалах каждого из при-
боров. В случае прибли-
жения к станции поль-
зуются левой шкалой:
в момент прохождения
самолёта над каким-ли-
бо местом, расстояние Рис. 33. Курсоукааатель радиогида СаП-
которого от станции из- мона.
вестно, специальным ре-
гулятором ставят стрелку на деление, обозначенное циф-
рой 1. В дальнейшем, по мере приближения самолета к стан-
ции, сила приёма возрастает и соответственно увеличивается от-
клонение стрелки, которая всё время указывает, какая часть пути
ещё осталась впереди. При удалении от станции пользуются пра-
вой шкалой («receding»—удаление). Стрелка прибора ставится
на единицу на известной дистанции; затем во время полёта
непосредственно по шкале отсчитывают, во сколько раз дальше
этого первоначального расстояния находится самолёт в данный
момент.
Радиогид интересен простотой положенного в основу его
принципа. Область его применения уже, чем пеленгаторов с
поворотными рамками, так как точность определения пеленга
по кривым, нанесённым на шкале индикатора, очень невелика.
Тем не менее радиогпд должен быть отнесён к группе радиоком-
пасов.
В качестве примера радиокомпаса, дающего непосредствен-
но пеленг в градусах, опишем вкратце компас типа R-5 или
3
Радионавигация
33
Рис. 34. Радиокомпас с враща-
ющейся рамкой. 7—рампа, 2—
приёмник, 3—устройство для
потучения двухфазного тока,
4—указатель. Рамка 1 и уст-
f ойство 3 укреп пены на одной
осп п вращаются элсьтромото-
’ ром.
RC-5 (рис. 34), выпускаемый во Франции и Англии. Этот ра-
диокомпас относится к классу компасов с постоянно вращаю-
щейся рамкой. Во время действия компаса рамка вращается
электромотором с постоянной скоростью около пяти оборотов I
в секунду. Каждый раз, когда рамка становится в точности по
направлению на радиостанцию (выбор требуемой станции произ-
водится, как обычно, настройкой приёмника), ток, получаемый
от приёмника, имеет наибольшую величину; наоборот, в моменты,
когда плоскость рамки совпадает с фронтом волны, приём от-
сутствует, и ток на выходе приём-
ника равен нулю. Так как за время
одного оборота рамки она дважды
проходит через минимум и макси-
мум силы приёма, то число пуль-
саций тока удваивается, и получа-
емый переменный ток имеет часто-
ту десять периодов в секунду. Мо-
мент максимума тока зависит от
направления самолёта: если само-
лёт идёт прямо па цель, максимум
силы приёма будет, очевидно, в мо-
менты, когда плоскость рамки нахо-
дится в продольной плоскости само-
лёта; если самолёт летит в направ-
лении, перпендикулярном к стан-
ции, то максимум приёма будет в
моменты, когда рамка проходит
о осью самолёта угол в 90 .
через плоскость, имеющую
Задача сводится к определению положения вращающейся
рамки в те мгновения, когда приём радиосигналов имеет мак-
симум. Электроизмерительный прибор—фазометр позволяет
легко решить эту задачу. В фазометре имеются два электро-
магнита, расположенных под прямым углом один к другому.
В обмотки этих электромагнитов пропускается перемен-
ным ток тон же частоты, что и частота тока, получаемого
от приёмника, т. е. частоты 10 герц. Специальным приспособле-
нием устроено так, что в тот момент, когда в одном из электро-
магнитов ток наибольший, во втором он равен нулю и, обратно,
в те моменты, когда ток проходит через максимум во втором
электромагните, тока в обмотке первого не будет.Говоря языком
электротехники, токи в обоих электромагнитах сдвинуты по
фазе на 90 . В центре между полюсами электромагнитов укре-
плена на оси вращающаяся катушечка таким образом, что витки
её при вращении могут принимать любое положение.
Когда в катушке тока нет, она может находиться в каком угод-
34
по положении, если же через неё, как в нашем случае, прохо-
дит переменный ток, она, вследствие взаимодействия магнит-
пых сил, займёт определённое положение, зависящее от момента,
когда ток в ней имеет наибольшую величину,—иными словами,
положение катушки зависит от разности фаз токов, протекаю-
щих через неё и через электромагниты. Максимум тока во вра-
щающейся катушке, которая присоединена к приёмнику, по-
лучается в момент, в точности соответствующий моменту прохо-
ждения рамки через направление приходящих радиоволн.
Таким образом, положение вращающейся катушечки определяет-
ся направлением радиоволн,
и указатель прибора всегда
показывает соответствующий
угол.
Индикатор радиокомпаса
по внешнему виду напоми-
нает обычный магнитный
компас (рис. 35). К подвиж-
ной катушке прикреплена
круговая шкала, разделённая
па градусы. Вея подвижная
система для успокоения вред-
ных качаний помещена в ке-
Рис. 35. К>рсоуказатель радиоком-
паса КС-5.
росян. Наклонное переставное зеркальце позволяет ставить
прибор в наиболее удобном месте перед штурманом или пило-
том. На рисунке слева показан этот же индикатор со снятой
крышкой, которая помещена здесь же внизу. Хорошо видны
шкала п лампочка для её освещения в темноте. Точность
отсчёта пеленга около 2°—достаточно высока. Достоинство этого
типа компасов, впрочем, присущее и ряду других конструкций, —
это возможность устанавливать индикаторы одновременно и у
штурмана, и у пилота; недостаток, также общий со всеми почти
рамочными пеленгаторами,—двузначность показаний, поэтому
и шкала имеет деления только от 0 до 180 .
Многообещающие перспективы открываются в области созда-
ния радионавигационных приборов в связи с введением катод-
ных осциллографов в качестве указателей. В этом отношении
представляет интерес принципиальная схема радиокомпаса,
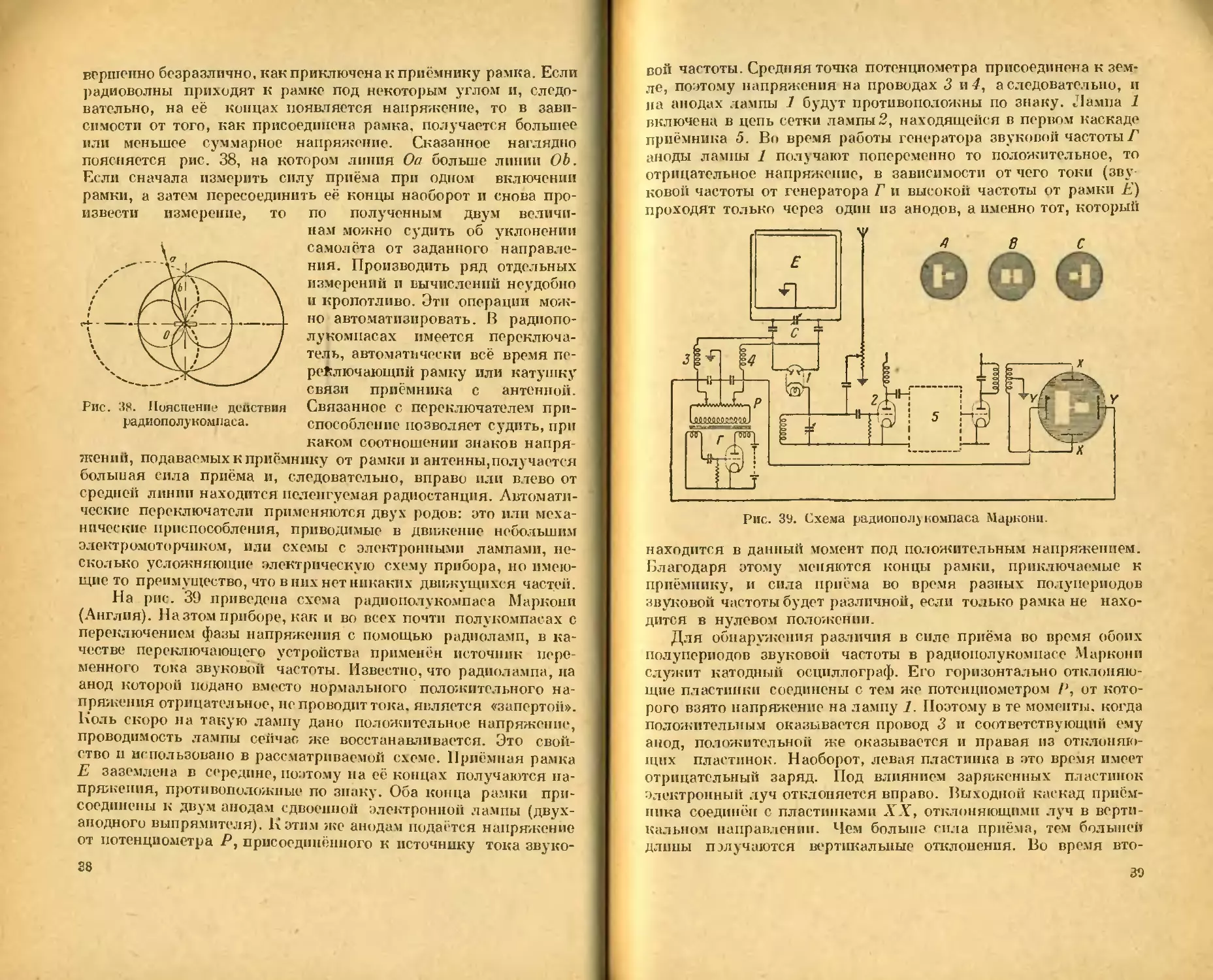
предложенная ещё в 1926 г. Ватсон-Ваттом и Гердом. Радио-
волны принимаются двумя взаимно-перпендикулярными рам-
ками. Каждая из рамок соединяется при посредстве отдельного
приёмника (усилителя токов высокой частоты) с одной из пар
отклоняющих пластин JVS и 1Г£ катодного осциллографа
(рис. 36). Под действием переменного напряжения, приложенного
к пластинкам NS, электронный пучок отклоняется и вычерчи-
3*
35
вает на экране прямую вертикальную линию. Под действием
напряжения, приложенного к пластинкам WE, электронный
луч даёт горизонтальную линию. Электрические свойства ра-
мок, приёмников и осциллографа таковы, что равной силе
приёма на каждую из рамок соответствуют равные по величине
размахи электронного луча.
На электронный луч действуют одновременно оба напря-
жения; вид фигуры, получающейся на экране, зависит от вели-
чины этих напряжений и определяется законами сложения дви-
жений. Так, например, если радиоволны приходят под углом в
45 к каждой из рамок, то электронный пучок, отклоняясь
одновременно под действием равных напряжений, начертит пря-
мую, направленную под углом
в 45°, как это показано на
рис. 36, а. Если расположить
соответствующим образом рамки
и осциллограф, то линия на эк-
ране покажет направление на
радиостанцию. Для того, чтобы
показания такого радиокомпаса
были правильными, необходимо
обязательное выполнение ус-
ловия. о котором упоминалось
уже раньше: точная пропорцио-
нальность между интенсивностью принимаемых радиоволн и ве-
личиной отклонения электронного луча, а также одинаковая
чувствительность обеих половин устройства. Для получения
чёткой прямой линии необходимо дополнительно, чтобы оба при-
ёмника, присоединённые к рамкам, были точно настроены на
приходящие волны, так как расстройка вызывает запаздывание
одного из колебаний относительно другого, и, в результате этой
разности фаз, на экране получается не прямая, а эллипс (рис.
36, Ь). Чем менее точно выполнена настройка приёмников, тем
больше разность фаз между колебаниями, тем шире эллипс. При
разности фаз в 90 эллипс превращается в круг; в таком случае,
очевидно, теряется всякая возможность каких-либо измерений.
Контроль выполнения всех условий, необходимых для правиль-
ной работы компаса, не так прост и по этой причине поль-
зоваться показаниями такого прибора надо с осторожностью.
Однако, есть две точки, в которых этот прибор работает
надёжно и безотказно: это направления, соответствующие на-
правлению рамок. Поэтому такого рода приборы целесообраз-
нее использовать в качестве радиополукомпасов. Промышлен-
ного типа устройства, основанные на рассмотренном только что
принципе, выпускаемые в Америке, хотя и называются изгото-
36
Рис. 37. Электронный
указатель направле-
ния.
вляющей их фирмой радиокомпасами, являются также только
полукомпасами, т. е. приборами, указывающими точно только
нулевое положение.
Очень ценным преимуществом катодного осциллографа, как
индикатора в радиокомпасных устройствах, является возмож-
ность получения однонаправленных показаний, исключающих
присущую рамочным пеленгаторам двузначность. Достигается
это, правда, ценой значительного усложнения схемы, но зато
наблюдатель видит на экране не просто
прямую линию, по изображение, напоми-
нающее стрелку, показывающую в опреде-
лённую сторону (рис. 37).
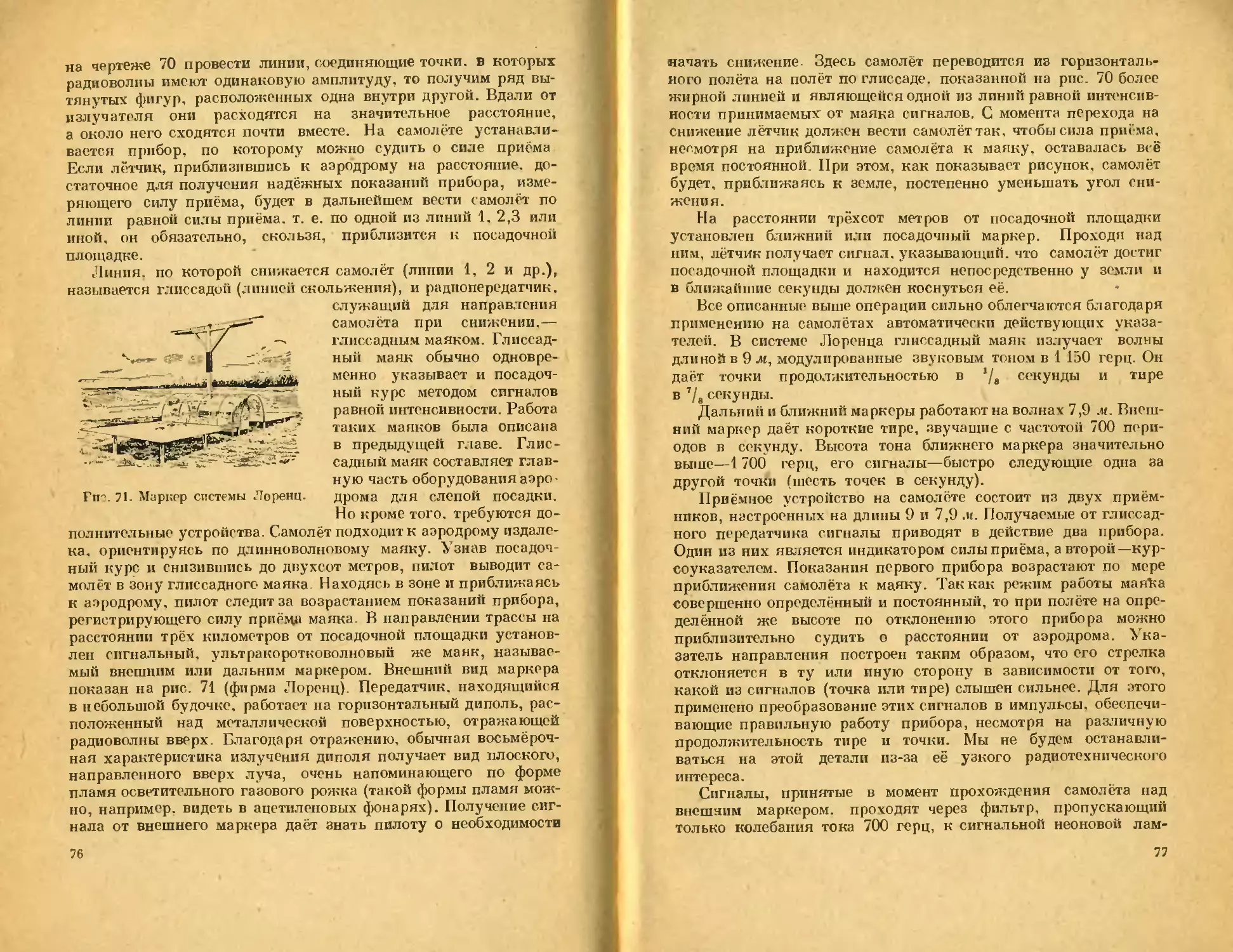
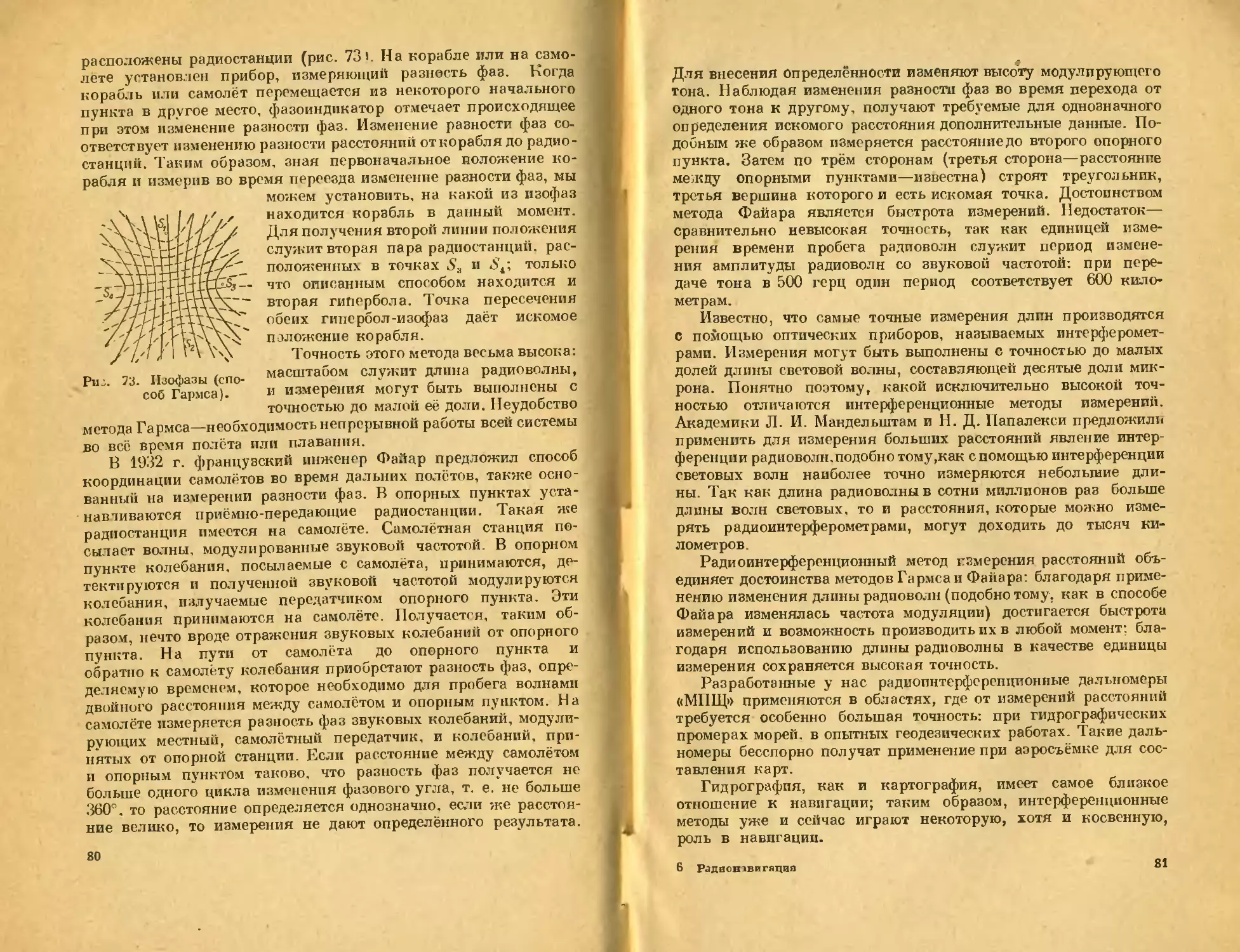
В практике самолётовождения преиму-
щественно применяются радиополукомпа-
сы. Приём радиоволн в них почти всегда
производится на рамку и антенну одно-
временно. Как правило, все полукомпасы
позволяют производить определение лю-
бых пеленгов, для чего их приёмные рамки
могут поворачиваться вокруг оси и имеют
шкалу для отсчёта углов. Приёмники полу-
компасов служат одновременно и для связи, так как позволяют
принимать телефонию и телеграфные сигналы, передаваемые
незатухающими или модулированными *) колебаниями. Инди-
каторами нулевого направления чаще всего служат стрелочные
приборы, но иногда применяются и катодные осциллографы.
Действие радиополукомпасов почти всех конструкций мо-
жет быть в общих чертах пояснено следующим образом. Когда
плоскость витков рамки совпадает с фронтом волны, в рамке
нет hi каких токов или напряжений. При отклонении рамки от
нулевого положения в ней появляется вызываемая радиоволна-
ми переменная электродвижущая сила, при этом фаза этой
электродвижущей силы изменяется на обратную, если рамка
отклонена в другую сторону. Так как к приёмнику присоеди-
нены одновременно и рамка и антенна, то характеристика приё-
ма получается в виде кардиоиды. При расположении рамки
поперёк самолёта кардиоида имеет направление, указанное
на рис. 38 сплошной или пунктирной линией, в зависимости от
знаков напряжений, подводимых к приёмнику от рамки и ан-
тенны. Когда рамка находится в нулевом положении, к приём-
нику подаётся только напряжение от антенны и поэтому со-
♦) Модулированные колебания—колебания с изменяющейся амплиту-
дой или частотой. При передаче речи или музыки по радио применяют-
ся модулированные электромагнитные колебания высокой частоты.
37
вершепно безразлично, как приключена к приёмнику рамка. Если
радиоволны приходят к рамке под некоторым углом и, следо-
вательно, на её концах появляется напряжение, то в зави-
симости от того, как присоединена рамка, получается большее
или меньшее суммарное напряжение. Сказанное наглядно
поясняется рис. 38, на котором линия Оа больше линии ОЬ.
Если сначала измерить силу приёма при одном включении
рамки, а затем пересоединить её концы наоборот и снова про-
по полученным двум величи-
нам можно судить об уклонении
самолёта от заданного направле-
ния. Производить ряд отдельных
измерений и вычислений неудобно
и кропотливо. Эти операции мож-
но автоматизировать. В радиопо-
лукомпасах имеется переключа-
тель, автоматически всё время пе-
реключающий рамку или катушку'
связи приёмника с антенной.
Связанное с переключателем при-
способление позволяет судить, при
извести измерение, то
Рис. 38. Пояснение действия
радиополукомпаса.
каком соотношении знаков напря-
жений, подаваемых к приёмнику от рамки и антенны,получается
большая сила приёма и, следовательно, вправо или влево от
средней линии находится пеленгуемая радиостанция. Автомати-
ческие переключатели применяются двух родов; это или меха-
нические приспособления, приводимые в движение небольшим
электромоторчиком, или схемы с электронными лампами, не-
сколько усложняющие электрическую схему прибора, но имею-
щие то преимущество, что в них нет никаких движущихся частей.
На рис. 39 приведена схема радиополукомпаса Маркони
(Англия). На этом приборе, как и во всех почти полукомпасах с
переключением фазы напряжения с помощью радиоламп, в ка-
честве переключающего устройства применён источник пере-
менного тока звуковой частоты. Известно, что радиолампа, на
анод которой подано вместо нормального положительного на-
пряжения отрицательное, не проводит тока, является «запертой».
Коль скоро на такую лампу дано положительное напряжение,
проводимость лампы сейчас же восстанавливается. Это свой-
ство и использовано в рассматриваемой схеме. Приёмная рамка
Е заземлена в середине, поэтому па её концах получаются на-
пряжения, противоположные по знаку. Оба конца рамки при-
соединены к двум анодам сдвоенной электронной лампы (двух-
анодного выпрямителя). Катим же анодам подаётся напряжение
от потенциометра Р, присоединённого к источнику тока звуко-
38
вой частоты. Средняя точка потенциометра присоединена к зем-
ле, поэтому напряжения на проводах 3 и 4, а следовательно, и
ла анодах лампы 1 будут противоположны по знаку. Лампа 1
включена в цепь сетки лампы 2, находящейся в первом каскаде
приёмника 5. Во время работы генератора звуковой частоты С
аноды лампы 1 получают попеременно то положительное, то
отрицательное напряжение, в зависимости от чего токи (зву
новой частоты от генератора Г и высокой частоты от рамки Е)
проходят только через один из анодов, а именно тот, который
Рис. 39. Схема радиополукомпаса Маркони,
находится в данный момент под положительным напряжением.
Благодаря этому меняются концы рамки, приключаемые к
приёмнику, и сила приёма во время разных полупериодов
звуковой частоты будет различной, если только рамка не нахо-
дится в нулевом положении.
Для обнаружения различия в силе приёма во время обоих
полупериодов звуковой частоты в радиополукомпасе Маркони
служит катодный осциллограф. Его горизонтально отклоняю-
щие пластинки соединены с тем же потенциометром 1‘, от кото-
рого взято напряжение на лампу 1. Поэтому в те моменты, когда
положительным оказывается провод 3 и соответствующий ему
анод, положительной же оказывается и правая из отклоняю-
щих пластинок. Наоборот, левая пластинка в это время имеет
отрицательный заряд. Под влиянием заряженных пластинок
электронный луч отклоняется вправо. Выходной каскад прием-
ника соединён с пластинками A.Y, отклоняющими луч в верти-
кальном направлении. Чем больше сила приёма, том большей
длины получаются вертикальные отклонения. Во время вто-
39
рого полупериода звуковой частоты напряжение, подводимое
от рамки к приёмнику, имеет другой знак, одновременно изме-
няется и знак напряжения на пластинках YY, в результате чего
электронный луч оказывается переброшенным на левую сто-
рону экрана. Отклонение луча по вертикали соответствует силе
приёма во время этого полупериода. Таким образом, на осцилло-
графе могут наблюдаться три характерные картины: рисунок В
соответствует правильному нулевому положению, рисунки же
А и С—отклонению самолёта в ту или иную сторону.
Большое число полукомпасов имеет схему, близкую к опи-
санной, с той наиболее существенной разницей, что вместо ка-
тодного осциллографа в них применяются электроизмеритель-
ные приборы, нулевое положение стрелки которых соответству-
ет точному направлению на радиостанцию. В частности, выпу-
скаемый нашей промышленностью радиополукомпас «Чайка»
построен по подобной же схеме. В «Чайке» рамка присоединяет-
ся к переключающему приспособлению не непосредственно, но
через промежуточный усилитель. Приёмник построен по супер-
гетеродинной схеме. С 1Ыхода приёмника колебания по-
даются к электродинамическому прибору—указателю курса.
Остановимся несколько подробнее на устройстве этого при-
бора, так как подобного же рода индикаторы применяются и
в других полу компасах. В приборе имеется неподвижная, так на-
зываемая полевая обмотка, и подвижная, вращающаяся на оси
лёгкая катушка, к которой прикреплена стрелка. Через полевую
катушку проходит ток от того же генератора звуковой частоты,
который управляет переключением напряжений. Подвижная
катушка присоединена к выходу приёмника и через неё идёт
ток той же звуковой частоты, но фаза его зависит от напра-
вления радиоволн, приходящих к рамке. Подвижная катушка
всегда стремится стать таким образом, чтобы её магнитные си-
ловые линии совпадали с магнитными линиями полевых кату-
шек. Поэтому подвижная катушка будет стремиться повернуться
в ту или иную сторону от своего среднего положения, в котором
она, при отсутствии тока в ней, удерживается пружинками. На-
правление вращения зависит от разности фаз токов в полевых
и подвижной катушках. По отклонению стрелки прибора вправо
пли влево судят об уклонении от правильного направления.
Отклонение стрелки тем больше, чем сильнее получаемый от
приёмника ток. Последний зависит как от угла поворота рамки,
так и от силы поля передатчика в данном месте. Поэтому дальняя
или слабая станция и при значительном уклонении от нулевого
направления вызовет только небольшое перемещение стрелки.
Чем сильнее приём, тем чувствительнее становится прибор.
Это свойственно, как правило, всем радиополукомпасам.
40
Как было сказано, число различных конструкций полу-
компасов весьма велико. Детальное рассмотрение их есть пред-
мет специальных книг, оно не может быть выполнено в малень-
кой брошюре, да и не входит в нашу
только в том, чтобы дать краткое
представление о принципах действия
радионавигационной аппаратуры и о
методах её применения на судах и
самолётах.
В заключение настоящей главы
рассмотрим ещё немецкий полуком-
пас фирмы . Телефункен типа Р-53,
задачу, заключающуюся
Рис. 40. Радиополукомпас
Р-53. (Телефункен).
отличающийся от всех упоминав-
шихся ранее тем, что перемена знака
подводимого к приёмнику напряже-
ния производится не ламповым переключателем, а механически.
Принципиальная схема прибора показана на рис. 40. Здесь,
мы видим, переключается не рамка, а антенная катушка К, но
Рис. 41. Прибор управтения
полукомпасом Р-53.
это различие не имеет принципиаль-
ного значения. Токи, получаемые от
антенны, проходят через катушку свя-
зи с приёмником П в направлении,
зависящем от положения переклю-
чателя 7, вращаемого моторчиком.
На той же оси мотора укреплён вто-
рой переключатель#, переключающий
одновременно измерительный при-
бор — обыкновенный миллиамперметр
постоянного тока. По схеме легко
проследить, что при перемене знаков
складывающихся напряжений, полу-
чаемых приёмником от антенны и
рамки, изменяется направление вы-
прямленного тока, проходящего через
миллиамперметр, в соответствии с чем
изменяется и знак отклонения прибо-
ра. Рис. 41 изображает прибор управления полукомпасом. На нём
сосредоточены все рукоятки, служащие для перехода с одного
рода работы на другой и для настройки приёмника. Ручка 1
служит для настройки при помощи гибкого привода (приём-
ники в большинстве самолётных конструкций помещаются от-
дельно от органов управления, там, где есть свободное место).
Цифрой 2 обозначен регулятор громкости звука в телефонах;
3—ручка подстройки связи приёмника с антенной; регулиров-
кой этой связи добиваются правильной формы кардиоиды и
41
зависящей от этого наибольшей остроты минимума; 4 —общий вы-
ключатель всего устройства; 5—выключатель гетеродина, спе-
циального прибора, служащего для приёма незатухающих ко-
лебаний; 6—коммутатор, устроенный по внешности наподобие
судового телеграфа (с капитанского мостика в машинное отде-
ление),служащий для изменения диапазона волн от 300 до 1 800
для перехода на приём телеграфа и телефона, на пеленгацию по
слуху, на схему полукомпаса и, наконец, для включения до-
полнительного переключателя, позволяющего вести самолёт
не по визуальному индикатору, а на-слух; 7—зажимы для за-
крепления гибких приводов. Отдельно помещённая слева ручка
со шкалой служит для поворота пеленгаторной рамки. Сверху
па рисунке изображен указатель нулевого направления.
ГЛАВА V.
ПЕЛЕНГАЦИЯ С САМОЛЁТА.
Пеленгация самолётов с земли, так же как и морских судов
с берега, представляет собой средство современной навигации,
позволяющее с большой долей уверенности вести корабль в тя-
жёлых метеорологических условиях. Однако, такого рода ра-
диообслуживание транспорта сопряжено с довольно большими
организационными и оперативными трудностями. Для пилота
гораздо удобнее иметь возможность самому в любой момент
производить определение своего положения, а пе запрашивать
об этом посторонние станции и ожидать затем от них ответа.
С этой целью в настоящее время все совершающие дальние рей-
сы воздушные и морские суда имеют радиокомпасы или пеленга-
торы.
Кроме огромного количества судовых, военных и прочих
радиопередатчиков разнообразного назначения, по всему миру
разбросаны сотни радиовещательных станций, работающих во
всякое время суток. Эти радиостанции служат прекрасными
ориентирами для штурмана, располагающего пеленгатором.
Географические координаты радиовещательных станций из-
вестны, и штурман имеет возможность выбирать наиболее удоб-
ные для него из числа работающих в данный момент. Иногда,
при совершении особенно ответственных полётов, радиовеща-
тельные станции специально работают в неурочное время, чтобы
облегчить ведение самолёта. Так, во время перелётов Чкалова
и Громова из Москвы в США радиостанция в городе Ванкувере
специально работала по ночам, передавая произведения Чай-
42
вСкого, благодаря чему экипаж самолёта имел возможность
знавать и выделять её из числа других, близких по волне.
Одной из самых простых навигационных задач является веде-
нпе самолёта прямо на радиостанцию. Но и в этом, самом про-
сТом случае дело обстоит не так просто, как это может казаться
на первый взгляд. Легче всего развернуть самолёт прямо на
радиостанцию и лететь по направлению к ней. Если бы воздух
был неподвижен, полёт действительно происходил бы по пря-
мому направлению к
станции. Боковой ветер
вызывает снос самолёта
в сторону, тем больший,
чем сильнее ветер. В ре-
зультате путь самолёта
получает вид кривой,
обращённой вогнутостью
против ветра (рис. 42).
Во время полёта аэро-
план постепенно разво- Рис. 42. Путь самолёта при ветре, а—угол
рачпвается и выходит компенсации сноса,
к радиостанции прямо
против ветра. Если радиостанция находится вблизи аэродрома,
то тем самым самолёт автоматически получает правильное направ-
ление для посадки, иначе говоря, выходит к аэродрому посадоч-
ным курсом. Простота такого «пассивного» метода полёта, необ-
ходимость наблюдения только за показаниями одного прибора —
указателя курса обеспечили этому методу самое широкое при-
менение. Во время сильного ветра, как это видно из чертежа 43,
путь самолёта может сильно удлиниться. Удлинение пути тем
значительнее, чем сильнее ветер (на море следует ещё принимать
во внимание снос корабля течениями), и на трассах большой
протяжённости может достигать недопустимой величины. По
лёты на большие расстояния должны производиться по возмож-
ности по ортодромии.
Существует метод вождения самолётов при помощи радио-
пеленгаторов таким образом, чтобы полёт происходил по линии,
близко совпадающей с наикратчайшей,—полёт с коррекцией
сноса или «активный» метод полёта. Сущность этого метода,
как показывает уже его название, заключается в том, что штур-
ман во время полёта вносит поправку на снос самолёта ветром
и в дальнейшем эту поправку уточняет и контролирует. Для
этого в начале полёта штурман замечает показания магнитного
компаса, т. е. определяет магнитный курс. Затем самолёт по
пеленгатору держит курс на цель. Постепенно, из-за разворота
самолёта ветром, показания магнитного компаса изменяются.
43
I
Когда изменение это достигнет величины 8 = 3—5 , штурман
поворачивает рамку на вдвое большую замеченного уклонения,
и самолёт, изменив направление, продолжает полет
по указателю радиополукомпаса или пеленгатору (рис. 43) до
тех пор, пока не выйдет
обратно на первоначаль-
ную линию полёта. О вы-
Рис. 43. Активный метод полёта.
ходе на трассу штурман
судит по тому, что показа-
ния магнитного компаса в
сумме с углом, на который
была повёрнута рамка, сде-
лаются равными первона-
чальному курсовому углу.
После этого рамка пелен-
гатора несколько возвра-
щается обратно и устанав-
ливается под углом Р, до-
статочным по мнению штур-
мана для компенсации сно-
са самолёта ветром. Далее
полёт совершается по ука-
зателю курса. Так как
угол Р является лишь пер-
вым приближением и так
как метеорологическая об-
становка может изменить-
ся, то через некоторое время курсовой угол снова изменится.
Тогда штурман повторно приводит самолёт на трассу и уточ-
няет величину угла, компенсирующего снос самолёта. Таким
Рис. 44. Полёт аэроплана от пеленгатора.
образом, действительный путь самолёта и в этом случае не
является кратчайшей прямой линией, ортодромией, но не откло-
няется от неё слишком далеко.
Полёт от радиостанции по определённому направлению схо-
ден с описанным только что способом подхода к станции, но
требует несколько более сложных вычислений, часть которых,
правда, может быть сделана заранее ещё на земле. Рис. 44
показывает, как происходят такие полёты. Точность выхода
к намеченной цели невелика из-за того, что угол у имеет
44
сравнительно большую величину, что на расстоянии в
200—300 км может дать отклонение в сторону до 4—6 км.
Ца больших расстояниях неточность пропорционально воз-
растает.
Ведение корабля или самолёта по заданному пути чрезвы-
чайно облегчается, если есть возможность пеленговать несколь-
ко станций. Достаточно определить пеленги на две станции
для того, чтобы, применив обратную засечку, узнать положе-
ние самолёта. Точность определения своего места с самолёта
меньше точности, получаемой при наземной пеленгации, и объ-
ясняется это прежде всего тем, что пеленгация разных станций
с самолёта производится штурманом последовательно, а при
современных скоростях самолё-
тов, порядка 400—БООклз в час,
самолёт за пару минут, необхо-
димых для пеленгации, успевает
пролететь десяток километров.
Поэтому направление на вторую
пеленгуемую станцию в момент
измерения может заметно отли-
чаться от направления на неё
в точке А, где производилось
измерение первого пеленга. Если
в точке А (рис. 45) было про-
ведено определение пеленга на
станцию I и в точке В на стан-
цию//, то положение самолёта,
определённое, как точка пересе-
чения линий / А и II В, ока-
Ри'. 45. Определенна положения
самолёта пеленгацией из двух
пунктов.
жется в стороне от действительного пути, а именно в точке С.
Для навигационных целей в большинстве случаев и такая,
не слишком большая точность оказывается удовлетворитель-
ной. В случае необходимости, точность определения можно
значительно повысить, взяв дополнительные измерения и введя
в расчёт поправки на скорость и направление движения самолёта.
Пеленг, определённый с самолёта на какую-либо радиостан-
цию, даёт одну линию положения. При пеленгации самолёта с
земли, как мы уже говорили, линия положения есть ортодромия.
Какой же вид имеет линия, на которой сохраняется постоянным
магнитный пеленг данной радиостанции, т. е. её азимут? Линия
равных пеленгов не совпадает ни с ортодромией, ни с локсодро-
мией. На рис. 7 цифрой 1 обозначена ортодромия, цифрой 2 —
локсодромия и цифрой 3—линия равных пеленгов радиостанции,
расположенной в точке В- Нанесение на карту последней, часто
необходимой для штурмана линии положения самолёта или
45
корабля, является довольно сложным и не может быть выпол-
нено настолько быстро, как это иногда требуется условиями
полёта. Для решения этой задачи Вейре предложил особую кар-
тографическую сетку, на которой линии постоянного пеленга
изображаются прямыми, если пеленгируемые радиостанции
расположены на среднем, нулевом меридиане этой сетки. На
сетке Beiipca параллели изображаются отрезками эллипсов, а
меридианы—гиперболами, имеющими общие с эллипсами фо-
кусы. Из геометрии известно, что эллипсы и гиперболы, имею-
щие общие фокусы, пере-
Рис. 46. Определение координат радио-
станции на сетке Вейрса.
гея под прямым уг-
такпм образом, на
Вейрса углы между
лом;
сетке
меридианами и паралле-
лями оказываются, как и
в натуре, прямыми. Эква-
тор и средний меридиан
изображаются прямыми, пе-
ресекающимися под пря-
мым углом. На сетке Beiip-
ca меридианы, в противо-
положность другим карто-
графическим сеткам, к по-
люсам расходятся,поэтому
в полярных районах эта
сетка не применима. Па
рис. 46 схематически показана координатная сетка Вейрса.
Рассмотрим, как решается с помощью сетки Вейрса следую-
щая задача? С самолёта определены пеленги двух радиовещатель-
ных станций, имеющих следующие координаты: станция А —
широта <р = 43,4о с. ш., долгота Х = 12,(У в. д., пеленг 110 ; стан-
ция Б—шпрота © = 46,3 с. ш., долгота К = 8,0° в. д., пеленг 18 .
Требуется определить координаты самолёта. Прежде всего на
нулевом меридиане сетки точками отмечают широты пеленгуе-
мых станций. Затем из каждой точки с помощью транспортира
проводят лучи под углом, соответствующим обратным пеленгам
данной станции. После этого одна из прямых переносится в
сторону на величину разности долгот обеих станций, так, чтобы
перенесённая линия пересекалась с неперенесённой. Перено-
сится линия, образующая более острые углы с меридианами.
После определения точки пересечения на сетке Beiipca отсчи-
тывают её координаты и наносят её положение на полётную
карту. Эта точка и есть место самолёта. В нашем примере эти
координаты оказались равными 44,7° северной шпроты и 7,2°
восточной долготы.
46
ГЛАВА VI.
радиомаяки.
Любая радиостанция, которой пользуются моряки пли воз-
духоплаватели для ориентировки, является для них радиомая-
ком. Однако название «радиомаяк» обычно применяется по от-
ношению к передающим станциям, построенным специально с
целью указывать путь воздушным и морским судам. Простейшим
типом радиомаяка является станция, излучающая волны во все
стороны равномерно и дающая для опознавания достаточно ча-
сто свои позывные—присвоенные ей знаки азбуки Морзе или
звуковые сигналы. Снабжённые пеленгаторами корабли и само-
лёты могут измерить пеленг такой станции и по позывным отли-
чить её от других. Такие простейшие радиомаяки небольшой
(•равнптельно мощности устанавливаются в местах оживлен-
ного движения судов, у проливов, в опасных для судоходства
местах. На всём побережья Европы, например, до войны насчи-
тывалось около двухсот таких маяков. Наши моря тоже были
«обставлены» такими маяками.
Для маяков, предназначенных указывать путь морским
судам, важно, чтобы их излучение было направлено главным
ооразом в сторону моря;
самолётные маяки должны
иметь характеристику излу-
чения требуемого вида не
только в горизонтальной пло-
скости, но и в пространстве.
Характеристика излучения
определяется системой приме-
нённых на станции антенн.
Па аэродромных станциях,
предназначенных служить не
только для связи, но и в ка-
Рис. 47. Пространственная характе-
ристика излучения вертикальной ан
тенны.
честве маяков, применяются
чаще всего антенны, симметричные относительно вертикальной
оси, имеющие характеристику излучения, подобную приведённой
на рис. 47. Вертикальная антенна в горизонтальной плоскости
излучает одинаково во все стороны. В вертикальной же плоскости
картина совершенно иная; по мере увеличения угла с горизон-
талью интенсивность излучения уменьшается, и точно над радио-
станцией сила поля оказывается весьма малой. Такое свойство
вертикальных антенн очень удобно и полезно для самолетных
маяков. Действительно: самолёт летит в темноте или в тумане,
пользуясь радиокомпасом, о приближении к радиостанции лёт-
чик судит по постепенно, медленно возрастающей силе приёма.
47
Сила приёма—слишком неопределённая величина, чтобы по ней
можно было бы точно судить о расстоянии от станции, в осо-
бенности вблизи от места назначения, где положение самолёта
надо знать точно. Здесь на помощь приходит только что упомя-
нутое свойство вертикальных антенн не излучать вверх. Пока
самолёт находится далеко, слышимость сигналов маяка воз-
растает по мере приближения, когда же самолёт оказывается
и непосредственно над радиостан-
цией, сигналы резко ослабевают.
____________, ____ ~~~~ ’ Район такого резкого и силь-
- • •_______' - .-5^^ ного ослабления сигналов назы-
Рис. 48. Конус мотчания. вается конусом молчания. На
рис. 48 графически показано из-
менение силы приёма на самолёте в зависимости от расстояния.
Буквой 71/ обозначен конус молчания. По резкому снижению
слышимости сигналов с последующим снова быстрым возраста-
нием её до первоначальной величины лётчик с достоверностью
устанавливает факт прибытия к маяку.
Обширный класс составляют радиомаяки, излучающие ра-
диоволны в определённом направлении в виде луча. Направле-
ние этого луча может оставаться либо всегда постоянным—это
так называемые зональные маяки, либо луч может вращаться
по кругу, проходя постепенно все 360 —это маяки, работаю-
щие пеленгом. Зональные маяки устанавливаются в тех слу-
чаях, когда необходимо обеспечить движение в определённом
направлении. В настоящее время в США на линиях граждан-
ского воздушного сообщения установлено несколько сотен зо-
нальных маяков, обслуживающих все авиалинии. В Европе до
войны имелось также большое количество таких маяков. Радио-
маяки, дающие пеленг, обслуживают все направления; они со-
общают судам и самолётам их обратный пеленг.
Для того, чтобы использовать какую-либо радиостанцию
или простой ненаправленный радиомаяк в целях ориентировки,
штурман должен иметь в своём распоряжении пеленгатор или
радиокомпас. Радиомаяк, работающий зоной или дающий пеленг,
позволяет определить направление, пользуясь обыкновенным
радиоприёмником. Это немаловажное преимущество обеспечило
этим типам маяков широкое распространение. Кроме них суще-
ствуют радпомаячные установки и других систем; некоторые
из них позволяют определяться с высокой точностью, но они
ещё не вошли в практику, отчасти потому, что разработаны были
только в самое последнее время, отчасти потому, что в них при-
меняются не обычные радиоприёмники, а специальные аппараты.
Отличие радиомаяка от обычного радиопередатчика заклю-
чается в специальной форме антенного устройства, дающего
48
неподвижный или вращающийся луч. Антенное устройство
маяка, дающего пеленг, представляет собой шестнадцать рас-
положенных звездообразно горизонтальных антенн, имеющих
характеристики излучения в виде восьмёрки (подобные харак-
теристике рамки). Рис. 49 схематически показывает устройство
и расположение антенны такого маяка. Антенны располагаются
Рис. 49. Антенны радиомая-
ка, работающего пеленгом.
Рис. 50. Сигналы маяка, работа-
ющего пеленгом.
по странам света. Число антенн и углы между ними, рав-
ные 11' 15', соответствуют румбам магнитного компаса. Каждая
из антенн состоит из двух подвешенных более или менее гори-
зонтально проводов, внутренними концами присоединённых к
коммутатору. Коммутатор, вращаясь, по очереди присоединяет
к передатчику все расположенные по кругу антенны. С каж-
дой антенны посылается определённый сигнал. Эти сигналц
указаны на рис. 50. Так как антенны излучают в разных
направлениях неравномерно, то приёмник, находящийся в пре-
делах слышимости маяка, будет хорошо принимать сигна-
лы, передаваемые антенной, которая расположена вдоль на-
правления от приемника на маяк. Сила приёма сигналов,
посылаемых другими антеннами, падает по мере увеличе-
ния угла между антеннами и определяемым направлением.
Сигналы перпендикулярной антенны не будут приняты вовсе .На
больших расстояниях от маяка может пропасть приём не одной,
но нескольких букв. Штурман, принимая сигналы маяка, слы-
шит то усиливающиеся, то замирающие знаки азбуки Морзе.
Определив, какие знаки слышны громче или тише всего, он
4 Радионавигация
49
легко может узнать, например, воспользовавшись рис. 50, об-
ратный пеленг на маяк. Если одинаково хорошо слышны не-
сколько соседних букв или если ряда букв нельзя принять, за
пеленг берётся среднее из всех, одинаково хорошо или плохо
прослушиваемых направлении. Так как характеристика антен-
ны симметрична, то по силе звука в приёмнике можно опре-
делить угол лишь в пределах полуокружности. Этот недостаток
не имеет большого практического значения, так как в подавляю-
щем большинстве случаев судоводитель знает, по какую сторону
от маяка он находится.
Маяки, дающие пеленг, не позволяют определить угол с
точностью, большей 5—10 , и могут служить только для грубой
ориентировки. Причиной этого являются слишком грубые скач-
ки в направлении излучения из-за небольшого количества ан-
тенн. Увеличение их числа нецелесообразно: и без того сложное
антенное хозяйство усложнилось бы ещё более, а главное, не
увеличилась бы точность измерений из-за трудности установить
ухом небольшую разницу в слышимости соседних знаков. Для
увеличения точности применяют маяки с непрерывно вращаю-
щейся характеристикой излучения. В зависимости от системы
маяка в приёмнике может появляться на короткое время силь-
ный прием в момент, когда вращающийся радиолуч «осветитя
приёмник, либо может происходить резкое кратковременное
исчезновение слышимости, если вращающийся маяк имеет ха-
рактеристику излучения, близкую к восьмёрке.
Маяк с непрерывным вращением восьмёрочной характерис-
тики можно получить, как бы обернув пеленгатор Беллини и
Този. Вращающуюся катушку гониометра, рассчитанную в
данном случае на большие силы тока, присоединяют к пере-
датчику. Полевые катушки гониометра включены в середине
двух горизонтальных антенн, установленных под прямым уг-
лом (рис. 51, 6). Внутренняя катушка вращается электро-
мотором с постоянной скоростью и, в соответствии с её по-
ложением, в антеннах получаются изменяющиеся по величине
токи. Эти токи, складываясь, образуют суммарное поле, диа-
грамма которого имеет форму восьмёрки. Эта восьмёрка враща-
ется, след) я за изменением положения внутренней катушки.
С целью сделать сигналы радиомаяка доступными для приёма
простыми радиоприёмниками, передача обычно производится
топально-модулированными колебаниями. Пеленг определяется
по исчезновению приёма.
При пользовании маяками с непрерывно вращающимся лу-
чом невозможно передавать отличительные знаки, особые
для каждого направления. Таких знаков потребовалось бы
слишком много, это вместо пользы принесло бы только вред,
50
так как сильно затруднило бы определение пеленга. Действи-
тельно, если задаться точностью в два градуса, то потребовалось
бы девяносто отдельных знаков. Поэтому здесь применяют иной
прием, очень простой и позволяющий получить высокую точ-
ность. Маяк работает не непрерывно: сначала он даёт во время
одного оборота луча свои позывные, затем в момент, когда
нулевая линия характеристики излучений проходит через на-
правление север—юг, даётся особый отличительный сигнал.
Рис. 51. Схема маяка с вращающейся харак-
теристикой (6) и последовательность давае-
мых им сигналов (а).
Рис. 52. Секундомер
для определения об-
ратного пеленга.
После этого сигнала подаётся тире. Так как может оказаться,
что приёмник находится в таком направлении от радиомаяка,
что отличительный сигнал не будет принят, так как будет пере-
дан в момент прохождения через направление приёмника нуле-
вой зоны (очевидно, что это будет иметь место, если приёмник
находится к северу или югу от маяка), через четверть оборота
даётся второй сигнал для направления запад—восток. После
этого даётся длительное тире, пока луч не пройдёт остальные
s/4 окружности (рис. 51,а). Такой цикл повторяется три раза.
После паузы в течение нескольких минут снова даются позыв-
ные. а затем сигналы направления и тире. Продолжительность
одного оборота луча маяка известна, обычно она равняется ровно
одной минуте. Пеленг определяется по промежутку времени от
момента получения сигнала направления до момента исчезно-
вения приёма во время длинного тире. При этих измерениях
следует пользоваться секундомером. Имеются секундомеры с
циферблатом, специально приспособленным для этих измере-
ний (рис. 52). В момент получения сигнала направления на-
жимают кнопку для пуска в ход стрелки, отсчитывающей се-
кунды. Стрелка секундомера двигается синхронно с вращением
луча маяка. В момент исчезновения приёма повторным нажимом
4»
51
кнопки останавливают стрелку, которая и покажет искомый
угол. Для повышения точности и исключения случайных оши-
бок наблюдение повторяют несколько раз и берут среднее из
полученных отсчётов. При хорошей слышимости маяка точность
определения угла может достигать Р/г—2°.
Для передачи и приёма сигналов в определённом направле-
нии радиотехники сооружают антенные устройства, обладаю-
щие большой степенью направленности. Луч, посылаемый та-
кими остро-направленными антеннами, напоминает луч про-
Рис. 53. Вращающийся маяк Маркони.
жектора. Было бы очень заманчиво применить такой радиопро-
жектор в качестве маяка. Из-за громоздкости и сложности та-
кого рода антенных устройств сделать их поворотными оказы-
вается возможным только, если применять самые короткие
волны, длиной не более нескольких метров. Но даже и в этом
случае маяк принимает вид большого, лишенного технического
изящества сооружения. На рис. 53 показан внешний вид вра-
щающегося радиомаяка, дающего острый пучок лучей. Хоро-
шая направленность достигается применением ряда располо-
женных в определённом порядке п на определённом расстоянии
излучающих вертикальных антенн-диполей, снабжённых, кро-
ме того, дополнительно диполями-отражателями. Вся сеть ан-
тенн с помощью мачт и тросов укреплена на солидной раме,
вращающейся вокруг оси и поддерживаемой круговыми рель-
сами. Время одного оборота маяка, показанного на рис. 53,—
две минуты. Длина волны—6 м.
В стремлении улучшить обслуживание навигаторов в кон-
струкцию радиомаяков всё время вносятся улучшения и усовер-
шенствования. Упрощения рациональны только в том случае,
52
еели они не влекут за собой каких-либо неудобств для пользую-
щегося маяками персонала судов и самолётов. Если путём
усложнения наземного устройства можно облегчить работу
штурмана—такое усложнение должно быть признано заслужи-
вающим проведения в жизнь. Пятнадцать лет тому назад впер-
вые было предложено применить для передачи
пеленга на судне телевизионную станцию.
Маркони в Англии в последнее время осу-
ществил эту идею. Телевизионный маяк со-
стоит из передатчика ультракоротких волн,
вращающейся антенны и приборов для пере-
дачи изображений. Одновременно с поворо-
том радиолуча перед объективом телевизора
проходят цифры, соответствующие направ-
лению максимального излучения. Приём про-
изводится на специальный приёмник, имею-
щий приспособления для синхронизации с
передатчиком, благодаря чему на экране
Риг. 54. Изобра-
жение позывных и
обратного пеленга
на экране тетеви-
зионного маяка.
телевизора рисуются цифры, дающие обратный пеленг. Рядом,
на том же экране, получается изображение позывных маяка
(рис. 54).
Радиомаяки, дающие одну или несколько узких зон, опре-
деляющих фарватер или воздушную трассу, получили примене-
ние для судовождения в узких проливах, среди островов, во-
обще везде, где опасно слишком большое отклонение в сторону
от правильного пути. Больше всего они используются на воз-
душных линиях. В Европе до войны действовали десятки зо-
нальных маяков. В настоящее время в США на больших авиа-
линиях работает несколько сот длинноволновых и свыше пяти-
десяти ультракоротковолновых маяков, не считая радиомаяв-
ных установок ближнего действия, служащих специально для
целей аэродромной службы: для указания посадочного курса
и т. п. Антенное устройство зонального маяка состоит из двух
симметричных антенн-диполей, расположенных горизонтально
под углом один к другому. Каждый из диполей -обладает вось-
мёрочкой характеристикой излучения. Через одну из антенн
посылается сигнал азбуки Морзе «А», состоящий из точки и тире;
вторая антенна передает знак «Н»—тире и точку. Оба эти знака
передаются непосредственно один за другим таким образом,
что тире и точки одного знака приходятся точно на паузы дру-
гого (рис. 55). В пространстве вокруг каждой из антенн имеются
районы, где слышимость сигналов наибольшая, и районы, где
сигналы полностью исчезают. Из рис. 55 видно, что характери-
стики излучения обеих антенн частично налагаются друг на дру-
га. Благодаря этому получается четыре показанных пунктиром
53
направления, в которых слышимость сигналов «А» и «Н»
одинакова. В сторону от этих линий равной слышимости прием
одного из знаков резко снижается, второго же возрастает.
Расположенные точно под прямым углом две одинаковые антенны
создают четыре равные по ширине зоны под углом в 45° к осям
антенн. По желанию, равносигнальные зоны могут быть направ-
лены и не только под прямым угломодна й другой. Д, in получе-
ния иных углов ан-
тенны делаются не
симметричными, при-
чём степень асиммет-
рии точно .рассчи-
тывается. Благодаря
этому приёму, можно
одним маяком обслу-
живать разветвления
и пересечения авиа-
линий под разными
углами. Применяя ан-
тенны сложных кон-
струкций, можно по-
лучить не четыре, а
только две и даже од-
ну зону равной слы-
шимости букв «А» и
«II», можно также
сильно сузить зону
равной слышимости
этих сигналов. Для того, чтобы получить рабочую зону
по возможности уже, но усложняя антенны, применяют распо-
ложение обоих диполе!! не под прямым углом, но под более ос-
трым, например, под углом в 60 . На рис. 55 показано взаимное
расположение двух антенн, установленных таким образом, что их
рабочая зона направлена под углом в 10 к востоку от меридиана.
Перпен щкулярно к рабочей проходит более широкая «ложная»
зона. В ложной зоне, как в этом можно убедиться из того же
рисунка, слышимость сигналов больше, чем в рабочей, но сте-
пень изменения слышимости при уклонении от правильного
пути значительно меньше.
Итак, когда самолёт находится точно на линии равной слы-
шимости сигналов « \» п «II», пилот знает точно направление на
маяки, развернув самолёт по магнитному компасу, направляет
его к цели. В дальнейшем обязанности пилота сводятся к тому,
чтобы вес ги самолёт всё время в зоне, где обе буквы слышны оди-
наково. Если по какой-либо причине, из-за сноса ветром, на-
пример, самолет уклоняется в сторону, пилот об этом узнает
по усилению слышимости одной из букв. Зная в каком секторе
какая буква слышна громче, лётчик определяет, в какую сторо-
ну снесло самолет, и соответственно изменяет направление. Во-
обще говоря, линия полёта при этом не может быть прямой,
угол, в котором ухо слышит сигналы с равной силой, хотя и
очень острый, но все же равен нескольким градзеам. Поэтому
самолёт будет «рыскать» между границами, где уже заметна
разница в силе сигналов.
Ведение самолёта вдоль линии зональных маяков, обслужи-
вающих трассу, не представляет затруднений для пилота, так
как маяки располагаются на таком расстоянии, что каждый
следующий маяк становится слышимым ранее, чем прекратится
приём предыдущего. В тех исключительных случаях, когда из-за
потери ориентировки самолет попадёт в район, где не слышно
вовсе одного из сигналов, или же в ложную зону, маяк поз-
воляет восстановить ориентировку и продолжать полёт далее в
правильном направлении. Для этого необходимо прибегнуть к
выполнению некоторых эволюций в воздухе, затрачивая на это
лишнее, в большинстве случаев, правда, не слишком длитель-
ное время. Об этом и о некоторых других приёмах навигации
по радиомаякам речь будет итти в следующей главе.
ГЛАВА VII.
ОРИЕНТИРОВАНИЕ ПО РАДИОМАЯКАМ.
Радиомаяки выгодно отличаются от обыкновенных световых
маяков во много раз большим радиусом действия. К сожалению,
средства, имеющиеся в нашем распоряжении для обнаружения
радиоволн и определения их направления, значительно грубее
оптических методов. Для примера достаточно сравнить радиопе-
ленгацию и визуальное определение направления. В то время
как хороший теодолит позволяет измерять углы с точностью до
долей минуты, мы считаем вполне удовлетворительной точность
определения направления радиволп, если угол измерен с по-
грешностью, в сто раз большей. Надо’ правда, заметить, что при-
чина меньшей точности измерений весьма часто лежит не только
в меньшей точности радпоизмерительнои аппаратуры, но так-
же и в физической сущности процессов, с которыми мы имеем
дело. Припомним, что радиоволны в громадном большинстве
случаев достигают приёмника не по кратчайшему пути, но после
отражения от неустойчивых, подвижных верхних слоёв атмос-
феры.
55
54
Небольшая точность радионавигационных срецств влечёт
ва собой возможность получения значительных ошибок при
пользовании только этими средствами. Тем не менее значение
радионавигации этим не умаляется: только при её помощи воз-
можно сохранение регулярных рейсов на линиях воздушных
сообщений, только методы радионавигации позволяют уверенно
вести самолёт в наиболее тяжёлых метеорологических условиях.
Немаловажная роль здесь принадлежит радиомаякам.
Чтобы полностью использовать все возможности радио-
навигации, требуется специальная подготовка и известный опыт,
так как даже наиболее простые из навигационных задач тре-
буют для их решения и знаний, и внимания. Наиболее простое
задание—приведение самолёта к радиомаяку по зоне равной
слышимости сигналов требует при выполнении довольно слож-
ных эволюций. Только при совершенном безветрии самолёт
будет лететь прямо к маяку, но и то только в том случае, если
пилот, выйдя в зону, дальнейший полёт будет направлять,
руководствуясь не столько радиомаяком,сколько магнитным ком-
пасом, так как азимут линии равной слышимости знаков «А» и
«Н»> или зоны молчания какой-либо буквы должен быть изве-
стен экипажу самолёта. Если имеется боковой ветер, то вызы-
ваемый им снос самолёта может быть (при отсутствии видимости
земли) обнаружен только после того, как самолёт достигнет
района с достаточно резкой разницей в слышимости сигналов.
Следует подчеркнуть, что вследствие несовершенства уха раз-
ница в силе сигналов замечается нами только после того, как
она достигнет значительной величины. В особенности трудно
сравнивать силу сигналов на фоне помех, помехи же всегда
имеются на самолёте.
Снос самолёта в воздухе, точно так же, как и снос корабля на
воде, имеет место и при полёте прямо на световой маяк, но в
этом случае пилот непрерывно вносит поправку на снос, и по-
тому самолёт не отклоняется в сторону от цели. Когда самолёт
направляется к радиостанции при помощи пеленгатора, он
проходит путь такой же, какой он прошел бы, если бы летел на
световой маяк. При ведении самолёта по маяку уклонение в
сторону от заданного курса может быть замечено водителем
только после того, как самолёт выйдет из соответствующей зоны.
Для того, чтобы исправить ошибку в курсе, пилот должен по-
вернуть на угол, заведомо больший требующегося только для
компенсации сноса. После того, как самолёт лёг на новый курс,
лётчик узнаёт о том, что самолёт пересёк трассу только тогда,
когда самолёт выйдет к противоположной границе зоны маяка.
Здесь снова производится поворот, пилот или штурман, руко-
водствуясь данными о скорости и направлении ветра, учиты-
56
Рис. 56. Ори-
ентировка
самолёта по
двум радио-
маякам.
вают по возможности величину скоса и продолжают полёт по
прямой, пока снова не будет достигнута одна из границ зоны.
Таким образом, при полёте только по маяку, без помощи маг-
нитного компаса (а такие условия имеют место в высоких ши-
ротах, где показания магнитного компаса ненадёжны), самолёт
непрерывно «рыскает» между границами зоны радиомаяка.
По этой причине путь самолёта, направляющегося к маяку,
всегда представляет собой не прямую, но зигзагообразную
линию. Дтя уменьшения этого вредного рыскания пилот ста-
рается пользоваться всеми другими, возможными в данных
условиях навигационными средствами, например, при полёте над
облаками показаниями солнечного компаса—прибора, опреде-
ляющего страны света по положению Солнца.
При полёте к маяку неточность ведения самолёта не играет
большой роли, так как самолёт всегда будет выведен к цели,
т. е. к маяку. Несколько хуже обстоит дело при полёте от маяка
на какую-либо цель. Зона молчания маяка, даю-
щего пеленги, или зона равной слышимости маяка,
работающего по методу «Л—И», имеет раствор
в несколько градусов. Каждый градус даёт ошиб-
ку в */Б7 от расстояния между самолётом и мая-
ком. На расстоянии в тысячу километров ошибка
может быть в несколько десятков километров. Мы
знаем, что точность приведения самолёта на цель,
в действительности значительно выше, но достига-
ется это путём использования штурманом всех
разнообразных приёмов аэронавигации и путём
их взаимного контроля.
Наличие двух или нескольких маяков позво-
ляет определять положение со значительно боль-
шей точностью, а следовательно, и точнее и уве-
реннее вести самолёт по заданному пути. Доста-
точно иметь два маяка для того, чтобы определить
координаты самолёта. Предположим, что самолёт
направляется зональным маяком / (рис. 56). Одно-
временно пилот замечает исчезновение какой-либо
буквы из даваемых вторым, работающим пеленгом
маяком, например, У. Не требуется каких либо пояснений для
того, чтобы установить, что самолет находится в районе,
заштрихованном на чертеже. Точность ориентирования по
радиомаякам всегда удовлетворяет требованиям в середине
пути. При подходе же к цели, если радиомаяк не расположен в
непосредственной близости к месту назначения, пилот, зная
своё приблизительное местонахождение, должен пользоваться
всеми представляющимися возможностями для уточнения его,
57
например, путём выхода к бесспорному и хорошо заметному
ориентиру (к большой реке, острову и т. п).
В случае полной потери самолётом ориентировки достаточно
оказаться ему в районе слышимости маяка для того, чтобы иметь
возможность точно определить своё положение и продолжать
полёт далее по правильному направлению. Однако, определение
своего положения по одному маяку далеко не так просто, как
это может показаться с первого взгляда. Дело в том, что приём
сигналов маяка не даёт ещё достаточно данных для того, чтобы
определить, с какой стороны от него находится самолёт. Всегда
есть риск, что будет избрано ошибочное направление, и самолёт
вместо того, чтобы приблизиться к маяку, начнёт от него уда-
ляться. Ошибка будет замечена не скоро, только тогда, когда
приём сигналов маяка заметно ослабеет. Для точной ориенти-
ровки одного опорного пункта—маяка—недостаточно. Лётчик
может узнать точно своё местоположение только в том случае,
если он пролетит непосредственно над маяком; лишь тогда можно
точно рассчитать правильный курс и продолжать полёт в тре-
буемом направлении, так как место маяка известно обычно дос-
таточно точно. О прохождении над маяком судят по изменению
слышимости в конусе молчания, если же антенны маяка тако-
вы, что конуса молчания нет,—по усилению приёма, по появ-
лению особого характерного хлопающего звука, сопровождаю-
щего работу переключателя антенн, или по уведомлению с земли
о слышимости шума мотора.
Главная трудность при восстановлении ориентировки с
помощью маяка заключается, как было уже сказано, в опреде-
лении направления для выхода к маяку. Рассмотрим, что надо
делать для того, чтобы вывести самолёт к маяку? Предположим,
что самолёт находится в районе, где слышны оба сигнала, но с
различной силой. Пилоту неизвестно, с какой стороны от мая-
ка он находится, но направление зон маяка он, очевидно, дол-
жен знать и легко узнаёт, как только услышит позывные этого
маяка. Прежде всего надлежит вывести самолёт в одну из равно-
сигнальных зон. Определив, какая из букв «А» или «Н» слышна
сильнее, находят, в каких двух квадрантах может находиться
самолёт. Если сильнее слышна буква «А»,—значит, самолёт
в I пли III квадранте, если «Н» сильнее,—значит во II или IV.
Самолёт направляют под углом в 45° к зонам маяка (рис. 57) по
магнитному компасу. Где бы самолёт ни находился, он через
некоторое время достигнет Одной из зон равной слышимости
«А» н «Н». Теперь требуется определить, в какую из зон попал
самолёт и, следовательно, в каком направлении лежит маяк.
Для этого достаточно изменить курс на 90 . Если после пово-
рота влево, как это показано на рисунке, самолёт, бывший во
58
II или IV квадрантах, выйдет в район слышимости буквы «А»,
значит, он прошёл зону I—II, если же усилится приём буквы
«Н»,—значит, самолёт только что был в зоне I—IV. В обоих слу-
чаях вопрос о направлении на маяк решается определённо.
Изменив курс на обратный и войдя снова в зону, лётчик направ
ляет самолет к маяку и, пройдя
маяк, ложптся на правильный курс.
Восстановить потерянную ори-
ентировку при помощи маяка, ра-
ботающего пеленгом, несколько
проще. Определяется, какая буква
не слышна в районе, где нахо-
дится заблудившийся самолёт.
Этим самым устанавливается, на
каком из лучен находится самолёт.
Следующий этап—определение на-
правления на маяк. Для этого са-
молёт направляется по компасу
Рис. 57. Выход самолёта к ма-
яку.
под прямым углом к линии мол-
чания маяка. Вскоре после начала полёта по новому курсу
исчезнет слышимость одной из двух соседних букв. Этого уже
достаточно для суждения о том, с какой стороны находится
маяк.
Имея в своём распоряжении данные о расположении маяков
и о направлении их зон, штурман может уверенно направлять
самолёт, покрывая без посадки и даже без других ориентиров
расстояния в тысячи километров. Вспомним, что при полёте
на северный полюс экспедиции Папанина, лётчики вели свои
машины, руководствуясь сигналами зонального маяка, построен-
ного для этого на Земле Франца-Иосифа. На оборудованных
радиомаяками линиях воздушных сообщений самолёт переходит
из района действия одного маяка в район другого, непрерывно
чувствуя связь с землёй и зная, что он на верном пути. Уже за-
долго до второй мировой войны вся Европа и Америка были
покрыты сетью радиомаяков. Радиомаяки установлены были
также вдоль отдельных авиалиний протяжением более десяти-
пятнадцати тысяч километров, например, по всему пути из Ан-
глии в Австралию. Бесперебойное и регулярное воздушное
сообщение в большой мере обеспечивается радиомаяками—одним
из главнейших средств радионавигации.
Отмечая совершенно исключительную роль радиомаяков
в аэронавигации, не следует забывать о том, что радиомаяки и
на море выполняют не менее важную задачу: луч маяка и там
рассеивает ночную тьму, пробивает самый густой туман, он
светит путеводной звездой тогда, когда все другие средства ори-
59
ентировки отказываются служить. Сигналы радиомаяков слыш-
ны на расстояниях в десятки и сотни раз больших, чем звуки
сигнальных колоколов, звучащих в тумане. Сигналы радио-
маяков спасли тысячи судов от аварий и десятки тысяч лю-
дей (а может быть и много больше) от неизбежной гибели
в морских волнах.
ГЛАВА VIII.
РАДИОАЛЬТИМЕТРЫ.
Альтиметрами называются приборы, служащие для опреде-
ления высоты. Альтиметрами пользуются при горных восхож-
дениях, альтиметрами обязательно снабжаются самолёты. На-
помним вкратце принцип действия альтиметра. Альтиметр—это
обыкновенный барометр-анероид. С увеличением высоты дав-
ление воздуха на имеющуюся в приборе герметически закры-
тую коробку уменьшается. В связи с этим вдавленность крышки
коробки уменьшается, и это изменение отмечается стрелкой,
соединённой с крышкой коробки. Альтиметр должен быть ус-
тановлен на нулевое деление на уровне, с которого начинается
подъём, например, на аэродроме или у подошвы горы. Баромет-
ры-анероиды, применяемые в качестве альтиметров, имеют шкалу,
проградуированную в метрах, и показывают непосредственную
высоту подъёма над первоначальным уровнем. Показания та-
кого альтиметра правильны только в том случае, если давление
воздуха на уровне земли остаётся неизменным. Это условие
выполняется далеко не всегда: давление может измениться как
в районе подъёма, так и на болыном от него расстоянии;
кроме того, самолёт во время полёта может перейти в область с
совершенно иным атмосферным давлением. В этих случаях по-
казания альтиметра будут ошибочными.
Не требует пояснения неудобство, и даже опасность пользо-
вания такими приборами во время слепого полёта: лётчик, до-
веряя прибору, может предполагать, что полёт происходит на
достаточной высоте, в то время, когда на самом деле он летит
на несколько сотен метров ниже. Такая ошибка не важна при
полёте на большой высоте над ровной местностью, но при по-
лёте в горах или на незначительной высоте неверные показания
альтиметра могут явиться причиной катастрофы. В истории
авиации и воздухоплавания насчитывается много случаев,
когда воздушные суда (дирижабли и аэропланы), идя на недо-
статочной высоте, с хода налетали на горы или холмы. У всех
ещё в памяти трагическая гибель дирижабля, направлявшегося
60
на помощь героическим папанинцам и натолкнувшегося в ту-
мане и темноте на скалу около Кандалакши. Кто знает, не вёл
ли вахтенный штурман корабль по альтиметру, показания ко-
торого были неверны?
Чтобы устранить погрешность альтиметра, воздушным су-
дам сообщают по радио давление на уровне земли. Зная это
давление, лётчик может соответственно переставить шкалу аль-
тиметра и тем уничтожить" ошибку в его показаниях. Указан-
ная мера не всегда достигает цели и не всегда может быть про-
ведена, так как самолётам постоянно приходится летать в райо-
нах, где невозможно получить такого рода сведения—бомбарди-
ровщики, летящие в глубь вражеской территории, лишены этой
возможности на всё время полёта. Задача постройки альтимет-
ров, которые давали бы действительную высоту полета над зем-
лей, поставлена была очень давно, в самом начале развития ави-
ации, значительно раньше, чем возник вопрос о слепых полётах.
В мореходной практике встречаемся с подобной же задачей:
штурман должен знать глубину в месте, где плывёт и будет плыть
корабль. В открытом море глубины более чем достаточны для
безопасного плавания судов. Все опасные места, острова, мели,
подводные камни в районах оживлённого движения судов всегда
ограждаются разного рода сигналами (маяками, вехами и т. п.).
Несмотря на это, необходимость определить глубину может
встретиться во время каждого плавания. Поэтому лот—при-
способление для измерения глубины—имеется на каждом, даже
самом маленьком судне. Лот—это просто груз, укреплённый на
конце тонкой крепкой бечевки. Глубину определяют по длине
бечёвки, выпущенной до момента касания грузом дна. Совре-
менные. хорошо оборудованные суда имеют для этой цели иной,
более совершенный прибор, называющийся эхо-лотом.
Следует остановиться на устройстве эхо-лота, так как именно
этот прибор является непосредственным предшественником со-
временных радиоальтиметров и основан на общем с ними прин-
ципе: на отражении волн от поверхности земли. Эхо-лот сос-
тоит из двух частей: источника колебаний и его приёмника. В
подводной части судна устанавливается источник ультразву-
ковых колебании. Ультразвуковой сигнал, посланный с кораб-
ля, распространяетсн в воде, отражается от дна и возвращается
обратно к кораблю. Здесь он воспринимается специальным те-
лефоном, тоже установленным в днище корабля (гидрофоном).
Скорость распространения звука в воде равна в круглых циф-
рах 1 500 м в секунду. Определив время, потребовавшееся сиг-
налу для прохождения расстояния от корабля до дна и обрат-
но, и разделив его на два, получим после умножения на 1 500
глубину в метрах.
61
Применение звуковых или ультразвуковых волн для опре-
деления высоты полёта самолёта невозможно по целому ряду
очевидных причин, но вполне возможно использовать для этой
цели радиоволны (рис. 58). Скорость распространения радио-
волн почти точно равна 300 тысячам километров в секунду.
Она столь велика, что за время прохождения радиоволн от
самолёта до земли и обратно, как бы высоко и быстро самолёт
ни летел, он не успеет переме-
ститься на сколько-нибудь замет-
^^^*><2^=—===—* ную величину. Это обстоятельство
! ' обеспечивает возможность измере-
J ' ния действительной высоты полёта
! над поверхностью отражающей
t j волны, но в то же время создаёт
; ; и ряд затруднений. Несколько ки-
лометров радиоволны проходят за
стотысячные доли секунды. Альти-
метр особенно необходим при по-
лётах на небольшой высоте, но
Рис. 58. Принцип радиоаль- в таких случаях волны успевают,
тиметра. вернуться к самолёту за миллион-
ные и ещё меньшие доли секунды.
Методика точных измерений столь малых промежутков вре-
мени, естественно, основывается на совершенно особых при-
ёмах, о которых подробнее будет сказано несколько дальше.
Здесь же заметим, что кроме трудностей измерения очень малых
промежутков времени есть ещё обстоятельства, вносящие не-
определённость в результаты измерения очень малых высот по-
рядка нескольких метров. Например, что считать высотой по-
лёта над лесом? Пилоту надо знать высоту над самым высоким
деревом, стоящим на пути. Очевидно, такая задача не под силу
ни одному прибору. Радиоальтиметр не может дать высоту
над вершинами деревьев, он покажет высоту над грунтом или
нечто среднее, в зависимости от характера растительности.
Ошибочные измерения могут получиться и в других условиях.
Радиоволны могут отразиться от неглубоко залегающих грун-
товых вод, если поверхностный слой достаточно сух. Во всех
таких случаях пользование альтиметром на очень малых высо-
тах невозможно, несмотря на то, что были проведены удачные
опыты измерения расстояний от отражающей поверхности до
четырёх метров.
Технические модели радиоальтиметров предназначены для
измерений высоты от нескольких десятков метров и до нес-
кольких километров. Мощность радиопередатчика не превосхо-
дит нескольких ватт. Как было сказано, задача сводится кизме-
62
рению тех ничтожно малых промежутков времени, которые
требуются радиоволне, распространяющейся со скоростью света,
чтобы дойти от самолёта до земли и вернуться обратно. Подсчи-
таем потребное для этого время, если самолёт летит на высоте
1,5 километра. Путь волны туда и обратно составляет три ки-
лометра. При скорости распространения в 300 000 км/сек на
это требуется одна стотысячная секунды. Если бы самолёт
летел на высоте в 150 л, для этого потребовалась бы только одна
миллионная.
Ранее, при обсуждении вопроса о помехах пеленгации, мы
видели, что импульсный метод позволяет отделить с помощью
осциллографа прямой луч от отражённых лучен, запаздываю-
щих по отношению к прямому на малые доли секунды. Здесь
также возможно применение импульсного метода, но затрудне-
ния сразу же возникают при измерении малых высот. Доста-
точно вспомнить, что ранее мы имели дело с тысячными долями
секунды, а здесь требуется измерять величины, в тысячи раз
меньшие. Для определения высоты по импульсному методу
необходимо получить столь короткие импульсы, чтобы изо-
бражения на экране осциллографа посылаемого и принятого
сигналов не налагались одно на другое. Трудность получения
очень коротких импульсов кладёт естественный предел при-
менению этого метода при определении малых высот.
Радиотехника даёт средство обойти это затруднение и произ-
водить наблюдения при наложении прямого сигнала на отра-
жённый. Для этого пользуются хорошо известным всем радио-
любителям приёмом—гетеродинированием. Когда два элек-
тромагнитных колебания действуют одновременно на детек-
тор, то в телефоне, включённом в детекторную цепь, идёт пе-
ременный ток частоты, равной разности частот обоих колеба-
ний. Этим приёмом пользуются радиотехники, чтобы принимать
сигналы, передаваемые посредством не слышимых ухом неза-
тухающих колебаний. Колебания, приходящие от корреспон-
дента, подводятся к детектору. Одновременно от отдельного
стоящего здесь же на приемной станции источника радиоволн
маленькой мощности к этому же детектору подаются колебания,
отличающиеся от принимаемых на несколько сотен периодов в
секунду. В результате, в телефоне будет слышен звук, высота
которого равна разности частот принимаемого и местного коле-
баний. Этот звук слышен только в те моменты, когда имеются
налицо оба колебания, т. е. тогда, когда на передающей стан-
ции нажат ключ Морзе. Во время пауз между знаками в теле-
фоне ничего не слышно, так как колебания гетеродина (так на-
зывается местный источник колебаний) в одиночку также не
слышны. Чем больше разница в частоте обоих накладываемых
63
колебаний, тем выше тон, слышимый в телефоне. Этим именно
обстоятельством и пользуются в современных радиоальтимет-
рах для измерения малых промежутков времени.
Передатчик ультракоротких волн, помещённый на само-
лёте, во время работы непрерывно изменяет свою частоту в
некоторых точно определённых пределах. Если изобразить из-
менение частоты графически, то получится пилообразная ли-
ния вроде изображённой на рис. 59. Предположим, что в неко-
торый момент передатчик начал излучать колебания. Приёмник,
также помещенный на самолете, одновременно принимает ко
лебания непосредственно
от расположенного рядом
передатчика и колебания,
совершившие путешествие
от самолёта к земле и об-
ратно к самолёту. Частота
колебаний, совершающих
путь к земле и обратно,
остаётся неизменной и рав-
ной частоте /, в момент
Риз. 59. Работа радиоальтиметра.
излучения антенной пере-
датчика. В момент приёма возвратившихся к самолёту колеба-
ний передатчик будет уже излучать колебания несколько
иной частоты /2. Следовательно, на приёмник одновременно
будут действовать два отличающихся по частоте колебания /,
и/2. Вследствие этого после детектирования колебаний в приём-
нике будет получен переменный ток, частота которого Д/ тем
выше, чем больше высота полёта над землёй.
Если диапазон изменения частоты передатчика ДЕ — один
миллион колебаний в секунду, и изменение это занимает одну со-
тую секунды (см. рис. 59), то нетрудно подсчитать высоту звука,
получаемого на выходе из приёмника - За одну стотысячную часть
секунды, на которую запаздывает радиоволна при полёте на
высоте 1 500 метров, частота передатчика изменится на тысячу
периодов в -секунду, и в телефоне будет слышен именно этот
тон в 1 000 герц. Если самолёт летит на высоте ста пятидесяти
метров, разница частот Д/ успевает сделаться равной только ста
герцам.
Существуют сравнительно несложные приборы, позволяю-
щие прямо по показаниям стрелки судить о частоте колебаний.
Одна из получивших наиболее широкое распространение схем
такого рода состоит из конденсатора, электронной лампы,
измерительного прибора и источников электрической энергии.
Переменный ток звуковой частоты при помощи имеющейся в
схеме электронной лампы управляет попеременным зарядом и
€4
разрядом конденсатора. Конденсатор заряжается во в[езя од-
ного полуперпода тока звуковой частоты до определённого на-
пряжения, во время второго полуперпода этот конденсатор
разряжается через измерительный прибор постоянного тока,
показывающий среднюю силу тока. Чем выше частота измеряе-
мого тока, тем большее число раз в секунду зарядится и разря-
дится конденсатор, тем больший средний ток разряда будет итти
через измерительный прибор и тем больше отклонится его
стрелка. Такой частотомер можно отградуировать непосредст-
венно в метрах.
Необходимо иметь в виду, что альтиметр может давать пра-
вильные показания только в том случае, если скорость измен?-
Рпс. 60. Радиоальтиметр.
нпя частоты колебаний, излучаемых передатчиком, остаётся
постоянной и именно той, для которой дана градуировка указа-
теля. На самолёте трудно обеспечить полную неизменность
напряжения в бортовой электрической сети. Поэтому в альти-
метрах имеются дополнительные приспособления для контроля
работы передатчика.
Современный радиоальтиметр представляет собой очень не-
большой аппарат, состоящий из передатчика и приёмника, рас-
полагаемых в наиболее удобных местах, и вынесенного на при-
борную доску перед лётчиком указателя высоты. Антеннами
служат два диполя, укрепляемых под фюзеляжем пли под крыль-
ями самолёта. Мощность передатчика—несколько ватт (рис. 60).
Длина волны 0.6—0,8 .и и меньше.
Научная мысль продолжает работать над созданием при-
бора для измерения малых высот. Важность этой проблемы ста-
5 Р диен шагания
65
ловится ясной, если принять во внимание, что самолёт далеко
нс всехда имеет возможность приземлиться на хорошо видимом
аэродроме. В военное время самолётам иногда приходится са-
диться в случайных местах, ночью, в темноте. Самолёт, снабжён-
ный альтиметром, показывающим малые высоты, имеет больше
шансов на благополучную посадку, чем самолёт без альтиметра.
ГЛАВА IX.
РАДИОМАЯКИ БЛИЖНЕГО ДЕЙСТВИЯ.
Радиомаяки, предназначенные для указания направления
на больших расстояниях, излучают длинные волны порядка
тысячи метров. Короткие волны, длиной в несколько десятков
метров, для радиомаячной службы применяются редко из-за
особенностей их распространения. Ультракороткие волны об-
ладают одним недостатком, делающим их непригодными для
связи на большие расстояния. Эти волны, подобно волнам све-
товым, распространяются только в пределах прямой видимости.
Правда, благодаря дифракции они могут огибать препятствия
и достигать районов, уже скрытых от передатчика выпукло-
стью Земли, но при этом они резко ослабляются. Прием УКВ
за пределами в несколько десятков километров или, при вы-
соко расположенной аппаратуре, в 100—150 км уже невоз-
можен.
Этот недостаток с точки зрения связистов является достоин-
ством в тех случаях, когда требуется получение большой силы
приёма вблизи передатчика и в то же время ограниченный ра-
------------ диус действия его. Ультракорот-
-------- '--кие волны в последнее время по-
'------—--------- лучили применение в установках,
служащих для указания пути
Рис. 61. Характеристика ивлу- судам и самолётам на небольшом
чения радиопрожектора. расстоянии, например, в качестве
указателей фарватера при входе
в порт или правильного посадочного курса. Благодаря малой
длине волны ультракоротковолновые передающие устройства
требуют очень небольших по размерам антенн. Чем короче
волна, тем меньше размеры наружных устройств. Ультрако-
роткие волны позволяют сооружать отражающие устройства,
направляющие главную массу анергии в определенном направ-
лений и притом в виде узкого пучка, напоминающего лучи
прожектора (рис. 61). Благодаря малым размерам самая слож-
66
Рис. 62. Ультракоротковол-
новый прожектор на «Нор-
мандии» .
ная антенная установка для УКВ получается не очень дорогой
и потому может быть установлена в большом количестве
мест.
Сходство с оптической аппаратурой увеличивается также
благодаря тому, что в радиотехнике сверхвысоких частот
(волны короче одного метра) завоевали прочное место металличес-
кие рефлекторы, играющие ту же роль, что и зеркала той же
формы в световых прожекторах.
Внешний впд передатчика или приём-
ника колебаний сверхвысоких частот
ни в какой мере не напоминает нам
привычную радиоустановку с мачта-
ми, проводами антенны и всем про-
чим. На рис. 62 показан передатчик
дециметровых волн, установленный
на гигантском трансатлантическом
корабле «Нормандия».
История применения ультракорот-
ких волн в навигации очень коротка.
В 1932 г. Маркони произвёл опыт,
доказавший возможность и целесооб-
разность применения УКВ для нави-
гации. В глубине залива, на берегу, недалеко один от другого,
были установлены два параболических прожектора, посылавших
вдоль фарватера узкие радиолучи, пересекавшиеся под очень
острым углом. Район, где налагались друг на друга оба луча,
представлял собой зону, подобную зоне обычных маяков, с той
разницей, что здесь эта зона была значительно уже. На опытном
судне «Электра» были установлены два приёмника, позволявших
принимать волны, излучаемые береговыми прожекторами. Все
иллюминаторы рулевой рубки были полностью плотно закрыты,
оттуда был вынесен даже компас. Несмотря на это «Электра»
была введена в порт по узкому пути так же уверенно, как будто
ведущий судно мог видеть все знаки, указывающие фарватер.
Опасность этого опыта и эффект, им произведённый, были тем
большими, что узкий вход в бухту лежал между скалисты-
ми островами, грозившими судну тяжёлой аварией в случае
неудачи. Со времени этого опыта радиоуказатели фарватеров
получили значительное распространение, и большое число их
было установлено у входа в европейские и американские
порты.
Следует здесь же упомянуть ещё об одном получившем при-
знание применении ультракоротковолновых прожекторов. Мы
говорим об указателях препятствий на пути корабля или са-
молёта. Тридцать лет тому назад весь мир был потрясён вестью
5*
67
о трагической гибели громадного трансатлантического корабля
«Титаник», происшедшей в результате столкновения его на
полном ходу с пловучеи ледяной горой. Тысячи людей погибли
при этой катастрофе, случившейся только потому, что шедший
полной скоростью корабль не успел отклониться в сторону
когда перед ним в тумане внезапно выросла смертоносная ле
дяная громада. Если бы вахтенные были своевременно преду
преи.дены о наличии препятствия впереди корабля, катастрофы
не произошло бы.
Именно в связи с этим кораблекрушением впервые была вы
сказана мысль о возможности применения радио для «освещения»
пространства впереди наподобие того, как автомобильные фарь
позволяют видеть препятствия шоферу. Прошло, однако, почти
три десятилетия, прежде чем удалось создать приборы, дейст-
вительно выполняющие своё назначение. В1935 г. на пароходе
«Нормандия» была установлена ультракоротковолновая аппа-
ратура для обнаружения айсбергов. В дальнейшем такого родг
приборы были доведены до высокой степени чувствительности
и точности: на расстоянии около тридцати километров с само-
лета можно с уверенностью обнаружить тонкую вершину три-
лона—трёхгранного обелиска, установленного на территории
Международной выставки в Нью-Порке. В порту в Бордо уста-
новлена аппаратура, позволяющая обнаруживать в тумане
находящиеся в море суда, разыскивающие вход в порт. Даль-
нейшим развитием этого нового направления в радиотехнике
явилась радиолокационная аппаратура — приборы для обнару-
жения и определения положения самолётов и судов. Радио-
локаторы играют в настоящей войне важную роль, как верный
способ предупреждения о приближении вражеских судов и
самолётов, они же применяются и для
указания самолётам их положения (в рай-
оне аэродромов).
Последней новинкой радиотехники
сверхвысоких частот являются радио-
горьы. В качестве излучателей для
самых коротких волн (5—30 см) можно
применять раструбы, напоминающие
своей формой инструмент горн, откуда
и произошло название таких излучате-
лей—радиогорны. Радиогорн изобра-
жен на рис. 63. Незначительных раз-
меров прибор установлен на треноге
и может быть переносим и направляем в любую сторону.
Удобство такого прибора в аэродромной службе очевидно,
особенно он удобен для подвижных аэродромов. Малые
n
Рис. 63. Радиогорн.
68
размеры этих приборов позволяют применять их в таких
условиях, где невозможно пользование более громоздкими
сооружениями. Радиогорн может быть помещён, например,
в углублении на посадочной площадке и прикрыт сверху
изоляционным настилом. Расположенный так радиогорн может
служить точным указателем места приземления. Распростра-
нению радиоприборов, рабо-
тающих на волнах, меньших
метра (дециметровых и сан-
тиметровых), препятствовала
ранее невозможность полу-
чения в этом диапазоне ко-
лебаний достаточной мощно-
сти. За два года до настоя-
щей войны это препятствие
было преодолено. В Америке
были разработаны новые ра-
диолампы, предназначенные
для генерации и приёма са-
мых коротких волн. Возможно, что радпогорны в ближайшее
время начнут вытеснять применяющиеся теперь ультракорот-
коволновые устройства для слепой посадки самолётов, пока же
они находятся ещё в стадии
Рпе. 65. УКВ—маяк системы Лоренц.
предварительных испытаний.
Эксплоатационную служ-
бу в настоящее время несут
ультракоротковолновые уста-
новки, работающие на волнах
от 2—3 до 8—10 метров. Ма-
яки, работающие на УКВ,
являются важнейшей состав-
ной частью устройств для
слепой посадки самолётов.
На рис. 64 показано схема-
тически устройство маяка
фирмы Лоренц, на рис. 65
изображён внешний вид это-
го же маяка. Колебания с
длиной волны в 9 м подво-
дятся к антенне—диполю А,
расположенному в середине. По обеим сторонам этого диполя
установлены два подобных же диполя, служащих отражателями.
Отражающие диполи могут разъединяться посредине с помощью
реле В (рис. 64). Когда включён отражатель В, энергия на-
правляется преимущественно влево, и характеристика излуче-
69
ния получает вид, показанный сплошной линией. При вклю-
чении отражателя С (В в это время размыкается) характе-
ристика изменяется и становится такой, как это изоб-
ражено пунктиром. Включение и выключение диполей В и С
производятся одновременно двумя реле, управляемыми автома-
тически. Типовое колёсико D, замыкающее цепь реле, может
иметь любую форму и
подавать различные сиг-
налы. Колёсико, изобра-
жённое на рисунке, даёт
тире, когда ток выклю-
чен (это положение по-
казано на рисунке), и
точки при замыкании
тока. Вдоль оси XX
получается зона равной
громкости точек и ти-
ре. Благодаря вытяну-
той форме характери-
Рис. 66. Излучатель американских поса- стик излучения Зона
дочных маяков. маяка получается доста-
точно узкой. В отличие
от маяков дальнего действия, дающих знаки «А» и «В»,
посадочные маяки дают обычно точки и тире, т. е. буквы
«Е» и «Т».
Рис. 67. Расположение излучателей американского Посадочного
маяка.
На аэродромах гражданской авиации в Соединённых Шта-
тах Америки применяются ультракоротковолновые маяки более
сложной системы, дающие исключительно узкую зону. Антен-
70
Рис. 68.
Характерис-
тика изу-
чения поса-
дочного ма-
яка (США).
ное устройство маяков этой системы состоит из десятка излуча-
телей своеобразной формы, расположенных в один ряд на точно
определённых, зависящих от длины волны расстояниях (рис. 66
и 67). Характеристика излучения таких маяков приведена на
рис. 68. Приёмник принимает модулированные радиоволны, даю-
щие в телефоне одновременно два тона: более низкий в 90 герц
и более высокий в 150 герц. Отклонение в 1,5° от оси симмет-
рии даёт уже очень сильное изменение слышимости того или
другого тона. Применение модулированных тонально колеба-
ний позволяет выполнить простой и надёжный указатель курса.
Стрелка указателя стоит на нуле при равной ин-
тенсивности звука обеих частот и отклоняется
в соответствующую сторону при усилении одного
из тонов. Маяки описанной системы применя-
ются для указания посадочного курса на аэро-
дромах ряда больших городов, в том числе и в Ва-
шингтоне.
Комбинируя различным образом излучатели и
направляющие и отражающие антенны (директоры
и рефлекторы), можно получить радиолуч, направ-
ленный в одну сторону. В маяках системы Мар-
кони, дающих однонаправленное излучение, вдоль
оси зоны устанавливается ряд отражающих про-
водов. образующих колебательные цепи. По обе
стороны от них располагаются направленные ан-
тенны, состоящие из вертикальных и горизон-
тальных участков, каждый длиной в четверть
рабочей волны. К обеим антеннам подводятся
колебания с помощью высокочастотных кабелей,
идущих от передатчика, помещённого в специаль-
ном здании, в непосредственной близости от ан-
тенн. Антенны переключаются автоматически и
посылают вправо и влево от трассы отличительные сигналы.
Для полноты обзора следует упомянуть, что ультракороткие
волны позволяют осуществить передвижные радиомаяки, осо-
бенно удобные для военных подвижных аэродромов. Весь такого
рода маяк помещается на одном автомобиле. Мотор автомобиля
приводит в движение динамомашину, дающую необходимую
электроэнергию. В крытом кузове машины установлен передат-
чик и всё остальное оборудование. Излучатели располагаются
на крыше. Такой автомобиль-маяк, поставленный соответ-
ствующим образом, сразу, мгновенно превращает каждый луг
или поле в аэродром, оборудованный с электрической стороны,
по крайней мере, наиболее совершенными современными поса-
дочными средствами.
71
ГЛАВ Л X.
СЛЕПАЯ ПОСАДКА САМОЛЁТА.
Преодолев морские просторы, судно достигло прибрежной
полосы, оно находится у входа в порт. Здесь перед судоводи-
телем возникают новые задачи. Чтобы избежать опасности при
проходе по узкому, незнакомому фарватеру, капитан вызывает
лоцмана. В скверную погоду судно может отстояться где-либо
в защищённом месте или подождать улучшения погоды в откры-
том море.
На линиях воздушных сообщений дело обстоит значительно
сложнее. Вот один из примеров. В 1939 г. в Ныо-Лорке откры-
валась Всемирная выставка. Рано утром в день открытия с од-
ного из Московских аэродромов вылетел в первый в мире бес-
посадочный скоростной перелёт Москва—Сегерпая Америка само-
лёткомбрига В. К. Коккинаки. Полёт шёл успешно, была пересе-
чена Скандинавия, осталась позади Исландия, появились и ис-
чезли скалы и ледники Гренландии, показался впереди Нью-
фаундленд, а затем и побережье Северной Америки. До этого
времени погода благоприятствовала полёту, но у побережья
Америки навстречу самолёту стал надвигаться туман. Аэродром
в Нью-Йорке сообщил по радио, что приём самолёта возможен
только в том случае, если он снабжён приборами для слепой
посадки. Так как на самолёте Коккинаки не было такого спе-
циального оборудования, то несмотря на то, что он находился
недалеко от Ныо-Порка, пришлось повернуть обратно и ле-
теть по пройденному только что перед этим пути, разыскивая
район, где облака и туман позволили бы сделать посадку. К
счастью, возвращаться пришлось не очень далёко, и самолёт
благополучно приземлился на одном из прибрежных островов
в заливе Святого Лаврентия.
Несмотря на успехи метеорологии в лётной практике ещё
слишком часты случаи, когда самолёт, поднявшийся при благо-
приятных предсказаниях погодя попадает затем в сплошную
облачность или непроницаемый туман. Во время пути само-
лёт может пытаться выйти из облачности, поднявшись на боль-
шую высоту, в крайнем случае он может итти слепым полётом,
руководствуясь радионавигационными средствами. Если в рай-
оне назначения земля оказывается закрытой сплошной пеленой
облаков или тумана, посадка может оказаться весьма опасной
или даже вовсе невозмо-жной. Но так же невозможно для само-
лета и ожидание изменения погоды. До недавнего времени
единственным выходом из такого тяжёлого положения было,
получив по радио сведения о ближайшем районе с достаточной
видимостью, немедленно лететь туда и там при первой воз-
72
можности совершить посадку. Хорошо, если на самолёте был
достаточный запас горючего; в противном случае только счастье
могло спасти лётчиков в самолет.
Лишь лет за пять перед войной были разработаны методы
и приборы для безопасного приземления самолётов в условиях
плохой видимости. В настоящее время посадка самолёта на
специально оборудованных аэродромах может совершаться с
полной безопасностью даже в тех случаях, когда видимость
в горизонтальном направлении только 300—350 метров, а ниж-
няя кромка облаков или тумана оставляет свободный слой над
землёй метров в 30.
Существуют приборы и для автоматического, приземления
самолётов Такими приборами были снабжены, в частности,
опытные самолёты, испытывавшиеся на манёврах в некоторых
армиях, как об этом сообщали газеты ещё задолго до войны.
Эти самолёты без участия людей благополучно совершали
посадку в заранее указанных местах (на оборудованных для
этого аэродромах).
Без сомнения, научно-техническая' мысль продолжает ра-
ботать в этом направлении и можно думать, что недалёк тот
час, когда посадка самолётов будет совершаться автомати-
чески с той же высокой степенью надёжности с какой в насто-
ящее время осуществляется управление в полёте с помощью
автопилота.
Если облачность не носит сплошного характера или облака
находятся достаточно высоко, самолёт имеет возможность само-
стоятельно выйти из облаков и, находясь внизу, в области
хорошей видимости, полностью ориентироваться и провести
посадку обычным путём.
Если аэродром и прилегающий к нему район закрыты низ-
кими облаками, опасность посадки, и без того значительная,
увеличивается ещё и за счёт возможности столкновения с
другими снижающимися или поднимающимися самолётами.
Для устранения этого вблизи аэродромов устанавливаются
определённые зоны, движение в которых, так же как и по-
рядок посадки, при плохой погоде регулируется диспетчером с
земли.
Каждый ожидающий своей очереди для посадки самолёт
получает точные указания по радио, в каком месте зоны и на
какой высоте ему следует находиться. Контроль место-
нахождения ожидающих самолётов производится либо по
радиомаякам, либо пеленгаторами (наземными или само-
лётными).
При высокой облачности место выхода из неё не играет осо-
бой роли, при низкой же необходимо вывести самолёт под об-
7?
лака в районе, где нет препятствий и откуда удобно подойти к
посадочной площадке. Пока самолёт находится в облаках, вне
видимости аэродрома, он получает с земли указания, помогаю-
щие ему ориентироваться и направляющие его в район, где без
опасений можно опуститься ниже облаков. После того как ус-
тановлено, что самолёт в действительности находится в указан-
ном ему месте, он получает распоряжение «пробивать» облач-
ность. По выходе из облаков, самолёт самостоятельно подходит
к аэродрому и совершает посадку. Самолёт, пробив облака при
низкой облачности слишком далеко от посадочной площадки,
может оказаться не в состоянии подойти к ней. Для того, чтобы
и в этом случае, т. е. при низких облаках, посадка произошла
благополучно, необходимо вывести самолёт из облаков так,
чтобы он появился непосредственно у места посадки и был при-
том на правильном курсе.
Метод, применяемый в этом случае, называется методом ZZ
по буквам, входящими сигнал посадки, передаваемый самолёту.
Порядок операций при посадке по методу ZZ удобнее всего про-
следить по рис. 69. В первоначальной, подготовительной ста-
Рис. 69. Процесс посадки по методу ZZ.
дин самолёт берёт направление прямо на аэродром. В это время
с земли на самолёт сообщается атмосферное давление на уровне
аэродрома для коррекции альтиметра и, кроме того, посадоч-
ный курс, т. е. направление полёта во время приземления. О
прохождении над аэродромом пилот узнаёт либо по изменению
силы приёма радиомаяка, либо ему сообщают об этом с земли,
где следят за появлением шума мотора. Если самолёт во время
подхода к аэродрому пользуется указаниями наземного пелен-
гатора, то последний многократно передаёт самолёту обратные
магнитные пеленги, пользуясь которыми пилот направляет
аэроплан к цели. По получении уведомления о том, что самолёт
74
находится точно над аэродромом, пилотповорачиваетивтечение
7—8 минут уходит от аэродрома по направлению, обратному по-
садочному курсу, получая при этом для контроля свои магнит-
ные пеленги. Отлетев на достаточное расстояние, самолёт раз-
ворачивается (о чём сообщает на аэродром передачей слова
turn), ложится на посадочный курс и начинает снижение. Пра-
вильность направления полёта всё время контролируется назем-
ным пеленгатором. Как только на земле будет услышан звук
приближающегося самолёта, об этом сообщают пилоту с ука-
занием, с какой стороны он слышен. В момент, когда самолёт
пролетает над границей аэродрома, подаётся сигнал посадки,
состоящий из двух Z с
последней буквой позыв-
ных радиостанции аэро-
дрома между ними. По-
лучив приказ садиться,
пилот быстро снижает
самолёт и выводит его
из облачности в непос-
редственной близости от
посадочной площадки,
днём на таком расстоя-
нии удовлетворительно
видимой, ночью же ос-
вещённой посадочными
Рис. 70. Характеристика излучения глис-
садного маяка-
огнями.Если самолёт выходит на посадку не точно,ему дают,
вместо сигнала ZZ, буквы JJ. Получив этот сигнал, пилот обя-
зан повторить заход снова.
Из сделанного нами краткого обзора видно, сколь сложна и
далеко не безопасна посадка самолёта при плохой видимости,
посадка действительно «вслепую»). Пилот до самого посадочного
момента должен полностью полагаться на чужие указания. В
настоящее время разработаны различные системы слепой посад-
ки. Они все основаны на общих для всех систем принципах
и отличаются только в деталях. Поэтому мы остановимся толь-
ко па двух—системе, принятой на аэродромах Американской
Администрации Воздушных Сообщений, и на системе фирмы
Лоренц.
На рис. 46 было показано, какой характер имеет излучение
вертикальной антенны, расположенной непосредственно на
земле, в случае, если поверхностные слои почвы могут считать-
ся хорошо проводящими. Характеристика излучения припод-
нятого над землёй ультракоротковолнового вертикального
диполя показана на рис. 70. Наиболее интенсивное излучение
направления под некоторым углом к горизонту (пунктир). Если
75
на чертеже 70 провести линии, соединяющие точки, в которых
радиоволны имеют одинаковую амплитуду, то получим ряд вы-
тянутых фигур, расположенных одна внутри другой. Вдали от
излучателя они расходятся на значительное расстояние,
а около него сходятся почти вместе. На самолёте устанавли-
вается прибор, по которому можно судить о силе приёма
Если лётчик, приблизившись к аэродрому на расстояние, до-
статочное для получения надёжных показании прибора, изме-
ряющего силу приёма, будет в дальнейшем вести самолёт по
линии равной силы приёма, т. е. по одной из линий 1. 2,3 или
иной, он обязательно, скользя, приблизится к посадочной
Гп?. 71. Маркер системы Лоренц.
площадке.
Линия, по которой снижается самолёт (линии 1, 2 и др.),
называется глиссадой (линией скольжения), и радиопередатчик,
служащий для направления
самолёта при снижении.—
глиссадным маяком. Глиссад-
ный маяк обычно одновре-
менно указывает и посадоч-
ный курс методом сигналов
равной интенсивности. Работа
таких маяков была описана
в предыдущей главе. Глис-
садный маяк составляет глав-
ную часть оборудования аэро-
дрома для слепой посадки.
Но кроме того, требуются до-
полнительные устройства. Самолёт подходит к аэродрому издале-
ка. ориентируясь по длинноволновому маяку. Узнав посадоч-
ный курс и снизившись до двухсот метров, пилот выводит са-
молёт в зону глиссадного маяка. Находясь в зоне и приближаясь
к аэродрому, пилот следит за возрастанием показаний прибора,
регистрирующего силу приёма маяка В направлении трассы на
расстоянии трёх километров от посадочной площадки установ-
лен сигнальный, ультракоротковолновый же маяк, называе-
мый внешним или дальним маркером. Внешний вид маркера
показан на рис. 71 (фирма Лоренц). Передатчик, находящийся
в небольшой будочке, работает на горизонтальный диполь, рас-
положенный над металлической поверхностью, отражающей
радиоволны вверх. Благодаря отражению, обычная восьмёроч-
ная характеристика излучения диполя получает вид плоского,
направленного вверх луча, очень напоминающего по форме
пламя осветительного газового рожка (такой формы пламя мож-
но, например, видеть в ацетиленовых фонарях). Получение сиг-
нала от внешнего маркера даёт знать пилоту о необходимости
76
начать снижение. Здесь самолёт переводится из горизонталь-
ного полёта на полёт по глиссаде, показанной на рис. 70 более
жирной линией и являющейся одной из линий равной интенсив-
ности принимаемых от маяка сигналов. С момента перехода на
снижение лётчик должен вести самолёт так, чтобы сила приёма,
несмотря на приближение самолёта к маяку, оставалась всё
время постоянной. При этом, как показывает рисунок, самолёт
будет, приближаясь к земле, постепенно уменьшать угол сни-
жения.
На расстоянии трёхсот метров от посадочной площадки
установлен ближний или посадочный маркер. Проходя над
ним, лётчик получает сигнал, указывающий, что самолет достиг
посадочной площадки и находится непосредственно у земли и
в ближайшие секунды должен коснуться её.
Все описанные выше операции сильно облегчаются благодаря
применению на самолётах автоматически действующих указа-
телей. В системе Лоренца глиссадный маяк излучает волны
длиной в 9 м, модулированные звуковым тоном в 1 150 герц Он
даёт точки продолжительностью в ’/» секунды и тире
в 7/в секунды.
Дальний и ближний маркеры работают на волнах 7,9 .«. Внеш-
ний маркер даёт короткие тире, звучащие с частотой 700 пери-
одов в секунду. Высота тона ближнего маркера значительно
выше—1700 герц, его сигналы—быстро следующие одна за
другой точки (шесть точек в секунду).
Приёмное устройство на самолёте состоит из двух приём-
ников, настроенных на длины 9 и 7,9 .и. Получаемые от глиссад-
ного передатчика сигналы приводят в действие два прибора.
Один из них является индикатором силы приёма, а второй— кур-
соуказателем. Показания первого прибора возрастают по мере
приближения самолёта к маяку. Так как режим работы маяЪа
совершенно определённый и постоянный, то при полёте на опре-
делённой же высоте по отклонению этого прибора можно
приблизительно судить о расстоянии от аэродрома. Ука-
затель направления построен таким образом, что его стрелка
отклоняется в ту или иную сторону в зависимости от того,
какой из сигналов (точка или тире) слышен сильнее. Для этого
применено преобразование этих сигналов в импульсы, обеспечи-
вающие правильную работу прибора, несмотря на различную
продолжительность тире и точки. Мы не будем останавли-
ваться на этой детали из-за её узкого радиотехнического
интереса.
Сигналы, принятые в момент прохождения самолёта над
внешним маркером, проходят через фильтр, пропускающий
только колебания тока 700 герц, к сигнальной неоновой лам-
77
почке, которая зажигается и указывает этим начало снижения.
Вблизи от аэродрома сигналы ближнего маркера, пройдя чере»
другой, пропускающий только колебания тока 1700 герц
фильтр, зажгут вторую сигнальную лампочку, сигнализи-
руя о близости земли.
Все четыре индикатора объединены в одном компактном
приборе, внешний вид которого показан на рис. 72. Верти-
кальная шкала принадлежит указателю интенсивности при-
ёма, в нижней части—обозначенный буквами LR указатель
направления. О и /—две сигнальные лампы. загораю-
щиеся при прохождении над внешним и ближним мар-
керами.
Применяемая в настоящее время в Амерпке система слепой
посадки самолётов принципиально подобна только что рас-
смотренной системе, но в деталях от неё отличается значи-
Рис. 72. Индикатор-
ный прибор аппара-
туры для слепой по-
садки (Лоренц).
тельно и не имеет ряда её недостатков.
В качестве глпссадного маяка применяется
устройство, схема которого приведена на
рис. 67. Благодаря тому, что районы,
расположенные вправо и влево от плоско-
сти снижения, отличаются не формой сиг-
налов, а высотой тона (90 и 150 герц), ука-
затель направления получается очень про-
стой конструкции. Указатель интенсивно-
сти и курсоуказатель объединены вместе
в одном приборе. Правильное направление
соответствует вертикальному положению
стрелки курсоуказателя, нормальной силе
приёма во время снижения отвечает го-
ризонтальное положение второй стрелки.
Правильному пути самолёта отвечает правильный прямоуголь-
ный крест, образуемый пересекающимися стрелками. Смещение
точки пересечения стредки в любую сторону от центра указы-
вает на отклонение самолёта в ту же сторону от правильной ли-
нии полёта.
Сигналы от маркеров принимаются отдельным приёмником,
также имеющим фильтры, разделяющие сигналы ближнего
и дальнего маркеров. Маркеры включают сигнальные лампоч-
ки накаливания. Конструкция маркеров более сложная, чем у
Лоренца; их антенное устройство состоит из ряда расположенных
над металлической сеткой диполей, создающих длинную, узкую
полосу излучений, расположенную поперёк трассы. Иногда
для повышения безопасности применяют не два, а три маркера,
в связи с чем в приёмнике ставятся три фильтра и три сигналь-
ные лампочки.
78
ГЛАВА XI.
НЕКОТОРЫЕ НОВЫЕ НАПРАВЛЕНИЯ
В РАДИОНАВИГАЦИИ.
Все описанные выше методы вождения воздушных п морских
судов и определения их положения основаны на изменении
силы принимаемых радиосигналов: правильное направление
при пеленгации устанавливается по минимуму слышимости; раз-
ница в интенсивности правых и левых сигналов используется
в зональных маяках; радиомаяки, работающие пеленгом, дают
сигналы различной слышимости в разных секторах. Методы
эти обладают одним общим недостатком, присущим в той пли
иной мере каждому из них—это сравнительно небольшая точ-
ность.
Более десяти лет тому назад появились первые предложе-
ния, отличающиеся в принципе от рассмотренных выше способов.
Эти новые методы основываются на фазовых зависимостях,
имеющих место в пространстве, в котором распространяются
радиоволны. Несмотря на то, что к настоящему времени фазо-
вые методы не получили ещё большого распространения, на
них следует остановиться, так как в своём дальнейшем разви-
тии эти, дающие высокую точность методы завоюют всеобщее
признание. Не имея возможности детально разбирать различные
существующие предложения, остановимся бегло только на
способах Гармса и Файара и скажем несколько слов о новом,
разработанном в СССР способе определения расстояний по методу
Мандельштама и Папалекси.
Способ Гармса заключается в следующем. В районе полётов
в определённых опорных пунктах располагаются две передаю-
щие радиостанции и S2, настроенные таким образом, что они
излучают волны с определённой постоянной разностью фаз.
В каждой точке пространства между колебаниями, излучае-
мыми этими станциями, имеется определённая разность фаз.
Эта разность фаз зависит от разницы расстояний от точки до
каждой из опорных радиостанций. Если предположить для про-
стоты, что обе станции St и St излучают колебания синфазно,
т. е. таким образом, что токи в их антеннах одновременно дости-
гают максимумов и одновременно проходят через нуль, то в точках,
находящихся на равных расстояниях от станций, разность фаз
будет равна нулю. Во всех точках, где разность расстояний равна
целому числу волн, разность фаз также равна нулю. Геометри-
ческое место точек с равной разностью фаз представляет собой
гиперболу. Если нанести на бумагу линии равных разностей
фаз (изофазы), получим семейство гипербол, в фокусах которых
79
расположены радиостанции (рис. 731. На корабле или на само-
лете установлен прибор, измеряющий разность фаз. Когда
корабль или самолёт перемещается из некоторого начального
пункта в другое место, фазоиндикатор отмечает происходящее
при этом изменение разности фаз. Изменение разности фаз со-
ответствует изменению разности расстояний откорабля до радио-
станций. Таким образом, зная первоначальное положение ко-
рабля и измерив во время переезда изменение разности фаз, мы
Риг. 73. Пзофазы (спо-
соб Гармса).
можем установить, на какой из изофаз
находится корзбль в данный момент.
Для получения второй линии положения
служит вторая пара радиостанций, рас-
положенных в точках Sa п только
что описанным способом находится и
вторая гипербола. Точка пересечения
обеих гипербол-изофаз даёт искомое
наложение корабля.
Точность этого метода весьма высока:
масштабом служит длина радиоволны,
и измерения могут быть выполнены с
точностью до малой её доли. Неудобство
метода Гармса—необходимость непрерывной работы всей системы
во всё время полёта пли плавания.
В 1932 г. французский инженер Файар предложил способ
координации самолётов во время дальних полётов, также осно-
ванный на измерении разности фаз. В опорных пунктах уста-
навливаются приёмно-передающие радиостанции. Такая же
радиостанция имеется на самолёте. Самолётная станция по-
сылает волны, модулированные звуковой частотой. В опорном
пункте колебания, посылаемые с самолёта, принимаются, де-
тектируются и полученной звуковой частотой модулируются
колебания, излучаемые передатчиком опорного пункта. Эти
колебания принимаются на самолёте. Получается, таким об-
разом, нечто вроде отражения звуковых колебаний от опорного
пункта. На пути от самолёта до опорного пункта и
обратно к самолёту колебания приобретают разность фаз, опре-
деляемую временем, которое необходимо для пробега волнами
двойного расстояния между самолётом и опорным пунктом. На
самолёте измеряется разность фаз звуковых колебаний, модули-
рующих местный, самолётный передатчик, и колебаний, при-
нятых от опорной станции. Если расстояние между самолётом
и опорным пунктом таково, что разность фаз получается не
больше одного цикла изменения фазового угла, т. е. не больше
360°, то расстояние определяется однозначно, если же расстоя-
ние велико, то измерения не дают определённого результата.
80
Для внесения определённости изменяют высоту модулирующего
тона. Наблюдая изменения разности фаз во время перехода от
одного тона к другому, получают требуемые для однозначного
определения искомого расстояния дополнительные данные. По-
добным же образом измеряется расстояние до второго опорного
пункта. Затем по трём сторонам (третья сторона—расстояние
между опорными пунктами—известна) строят треугольник,
третья вершина которого и есть искомая точка. Достоинством
метода Файара является быстрота измерений. Недостаток—
сравнительно невысокая точность, так как единицей изме-
рения времени пробега радиоволн служит период измене-
ния амплитуды радиоволн со звуковой частотой: при пере-
даче тона в 500 герц один период соответствует 600 кило-
метрам.
Известно, что самые точные измерения длин производятся
с помощью оптических приборов, называемых интерферомет-
рами. Измерения могут быть выполнены с точностью до малых
долей длины световой волны, составляющей десятые доли мик-
рона. Понятно поэтому, какой исключительно высокой точ-
ностью отличаются интерференционные методы измерений.
Академики Л. И. Мандельштам и Н. Д. Папалекси предложили
применить для измерения больших расстояний явление интер-
ференции радиоволн.подобно тому,как с помощью интерференции
световых волн наиболее точно измеряются небольшие дли-
ны. Так как длина радиоволны в сотни миллионов раз больше
длины волн световых, то и расстояния, которые можно изме-
рять радиоинтерферометрами, могут доходить до тысяч ки-
лометров.
Радиоинтерференционный метод гзмерения расстояний объ-
единяет достоинства методов Гармса и Файара: благодаря приме-
нению изменения длины радиоволн (подобно тому, как в способе
Файара изменялась частота модуляции) достигается быстрота
измерений и возможность производитьихв любой момент: бла-
годаря использованию длины радиоволны в качестве единицы
измерения сохраняется высокая точность.
Разработанные у нас радпопнтерференционные дальномеры
«МПЩ» применяются в областях, где от измерений расстояний
требуется особенно большая точность: при гидрографических
промерах морей, в опытных геодезических работах. Такие даль-
номеры бесспорно получат применение при аэросъёмке для сос-
тавления карт.
Гидрография, как и картография, имеет самое близкое
отношение к навигации; таким образом, интерференционные
методы уже и сейчас играют некоторую, хотя и косвенную,
роль в навигации.
6 Радионавигация
81
Упоминавшиеся только что фазовые и интерференционные
методы не являются единственными, разработанными в настоя-
щее время. Есть все основания полагать, что в ближайшем бу-
дущем радиоинтерференционная и фазоизмерительная аппа-
ратура, разработаннае специально для навигационных целей,
позволит значительно повысить точность вождения судов и
самолётов и тем самым позволит разрешить наиболее слож-
ные из ещё не вполне решённых проблем навигации вообще и, в
особенности, азронавигации.
ОГЛАВЛЕНИЕ
Введение .................................................. 3
Глава I. Путь и положение корабля на карте................... 8
Глава II. Радиопеленгаторы ......................... 15
Глава III. Применение пеленгации с неподвижных пунктов . 26
Глава IV. Радиокомпасы ........................... 31
Глава V. Пеленгация с самолёта..........................• . 42
Глава VI. Радиомаяки............................. 47
Глава VII. Ориентирование по радиомаякам................... 55
Глава VIII. Радиоальтиметры ..... 60
Глава IX. Радиомаяки ближнего действия ..................... 66
Глава X. Слепая посадка самолёта............................ 72
Глава XI. Некоторые новые направления в радионавигации . . 79