/


















































































































































































Автор: Торгман А.И. Кудрявцев Н.Ф. Сергеев Л.П. Горшков М.Ф.
Теги: авиация военная авиация аэронавигация
Год: 1947



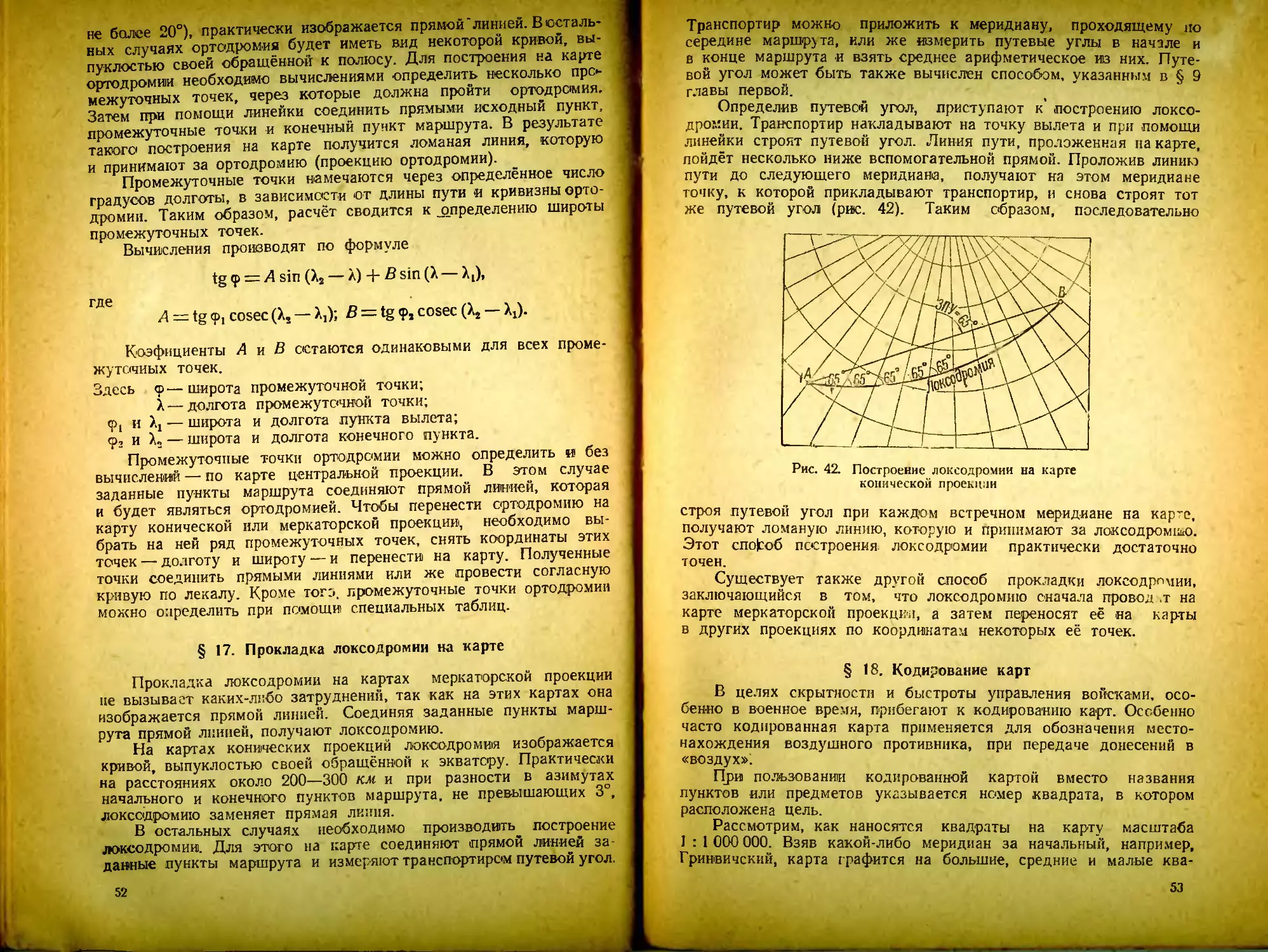
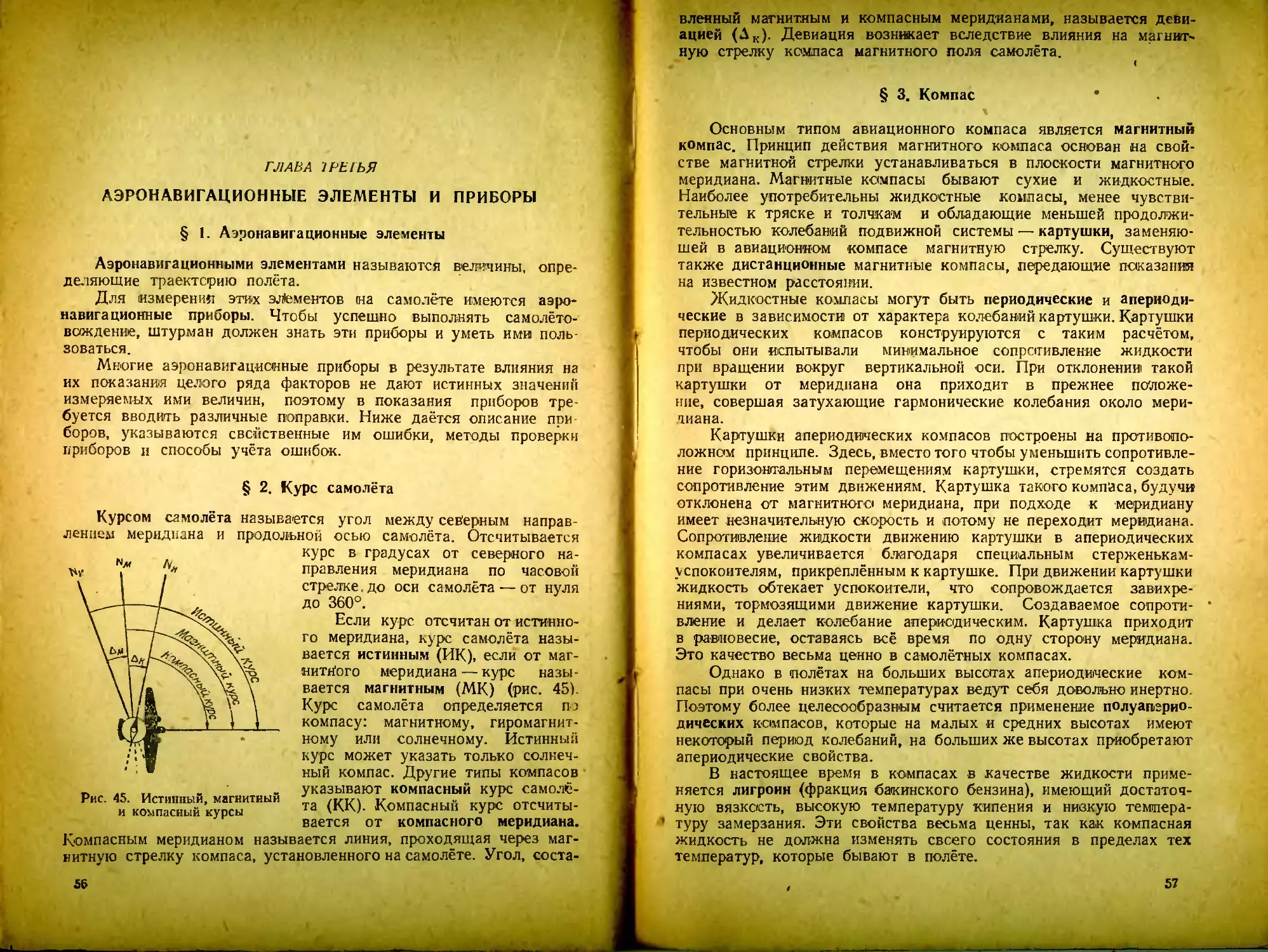
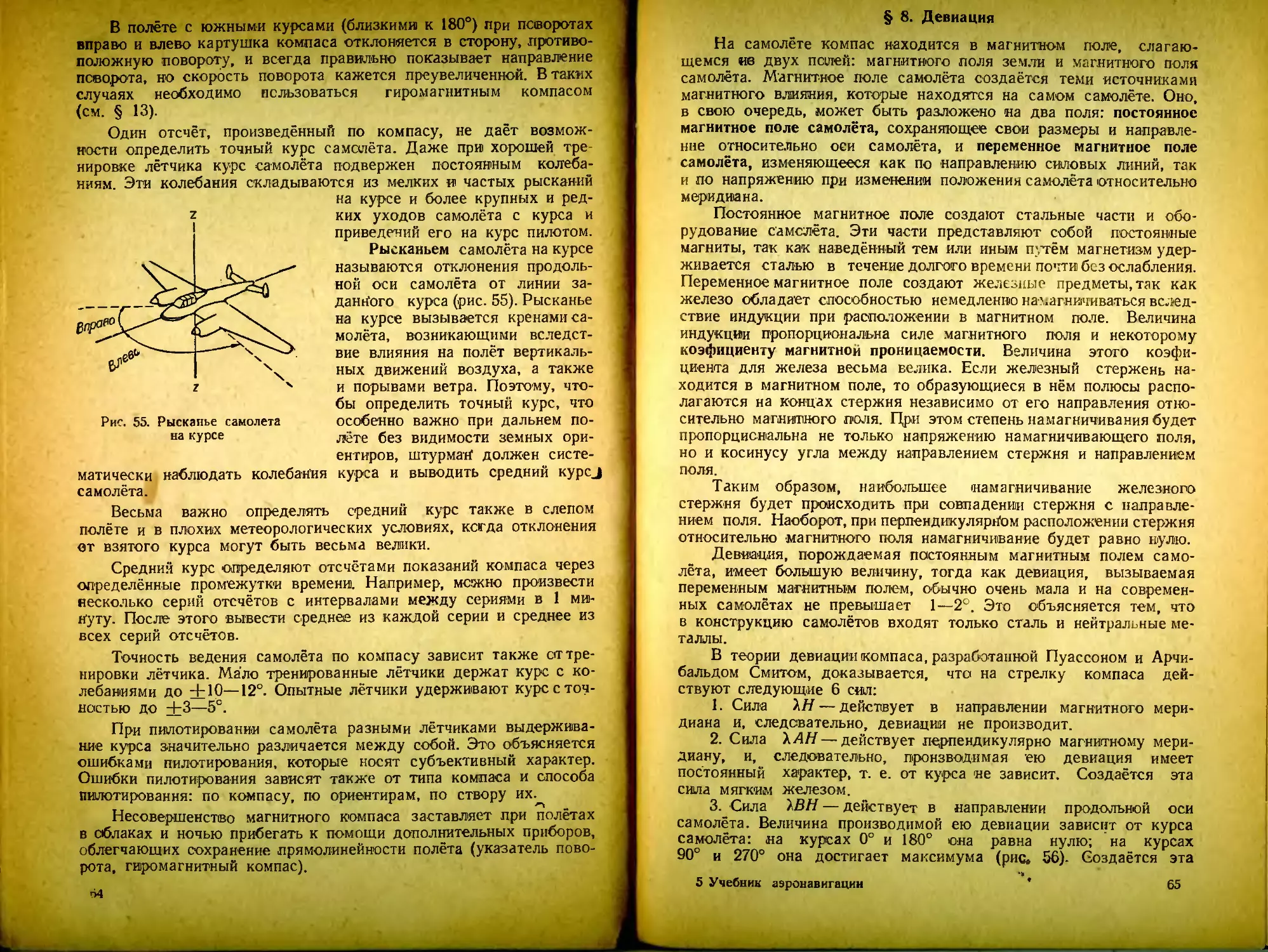
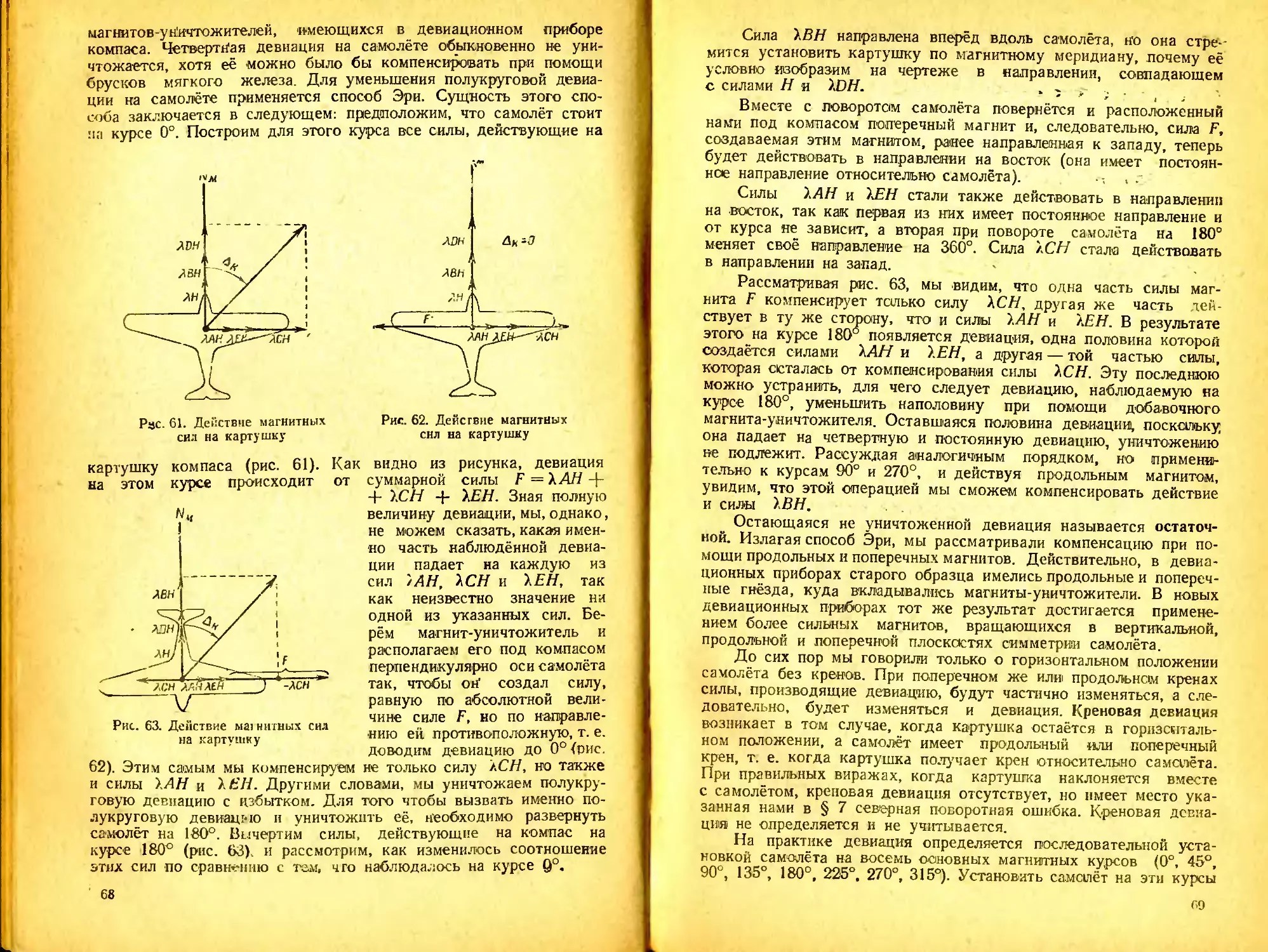
Текст
\ j >
А. И. ТОРГМЛН, H Ф. КУДРЯВЦЕВ,
Л. II. СЕРГЕЕВ, М. Ф. ГОРШКОВ
УЧЕБНИК
по
АЭРОНАВИГАЦИИ
ВОЕННОЕ ИЗДАТЕЛЬСТВО
МИНИСТЕРСТВА
ВООРУЖЕННЫХ СИЛ
СОЮЗА ССР
ШТ
А. И. ТОРГМАН, Н. Ф. КУДРЯВЦЕВ
Л. П. СЕРГЕЕВ, М. Ф. ГОРШКОВ
О 5Н
УЧЕБНИК
ПО АЭРОНАВИГАЦИИ
ДЛЯ ШТУРМАНОВ СТРОЕВЫХ ЧАСТЕЙ
И УЧИЛИЩ ШТУРМАНОВ ВВС
ВООРУЖЁННЫХ СИЛ СССР
ПОД РЕДАКЦИЕЙ
ГЕНЕРАЛ ЛЕЙТЕНАНТА АВИАЦИИ
СТЕРЛИГОВА Б. В.
ВОЕННОЕ ИЗДАТЕЛЬСТВО
МИНИСТЕРСТВА ВООРУЖЁННЫХ СИЛ СОЮЗА ССР
МОСКВА- 1947
ВВЕДЕНИЕ
Аэронавигация — наука о том, кдк определять местонахожде-
ние самолёта и направлять его к цели полёта.
Аэронавигация возникла одновременно с появлением самолё-
тов и других воздушных аппаратов. Своё начало она берёт из бо-
лее давней науки — морской навигации, задачи которой род-
ственны воздушной навигации.
Быстрое развитие самолётостроения и необходимость выпол-
нения полётов в любое время над любой местностью и на любое
расстояние дали большой толчок развитию аэронавигации. Широ-
кое практическое применение способов аэронавигации и научные
исследования в этой области значительно расширили её возмож-
ности.
Уровень развития аэронавигации в настоящее время позво-
ляет уверенно выполнять самолётовождение в любых по сложно-
сти метеорологических условиях, в различное время суток, над
любой местностью.
Как показал опыт Отечественной войны, точное самолето-
вождение и быстрая уверенная ориентировка являются важней-
шими условиями успешного выполнения боевых задач всеми ви-
дами авиации. От состояния штурманской техники и степени овла-
дения ею лётным составом и прежде всего штурманами зависят
основные качества боевой работы, а именно:
Возможность применения ВВС в ночное время и в плохую
погоду; превращение этих усложняющих полёт условий в содей-
ствующие выполнению боевой задачи, благодаря скрытности по-
лёта в облаках, за облаками и в тёмные ночи и, как следствие
этого, сокращение своих потерь; точный выход на заданную цель
в назначенное время; осуществление взаимодействия ВВС и на-
земных войск по месту и времени; точное определение места об-
наружения противника и привязывание фотоснимков У местности
при разведке; точность бомбометания, аэрофотосъемки, выброски
Десанта и других боевых действий, зависящих от правильности
определения исходных навигационных элементов для 'решения
этих задач; своевременный перехва,т воздушного противника, пра-
вильный выход на движущуюся цель в открытом море и ряд дру-
гих задач, решаемых методами тактической навигации; .предот-
вращение потери ориентировки и возвращение «а свои аэродромы
после бомбометания, разведки, воздушного боя и других боевых
3
задач; экономия горючего и моторесурса благодаря возможности
полёта кратчайшим путём.
В настоящем учебнике изложены вопросы теории и практики
применения штурманом самолёта всех существующих способов
аэронавигации. Наряду с этим в учебнике даётся краткое описа-
ние навигационных приборов и инструментов в объёме знаний,
требуемых штурману для использования их в полёте. Условия
самолётовождения в настоящее время характеризуются возрос-
шими скоростями, большой высотой полёта, значительным радиу-
сом действия и изменениями метеорологических условий в воз-
духе, усложняющими работу штурмана в полёте. При изучении
аэронавигации штурман должен уяснить себе последовательность
работы в процессе выполнения маршрутного полёта в различных
условиях.
В условиях боевой деятельности авиации обстановка полётов
часто меняется и требует быстрого решения в полёте вопросов
изменения маршрута, высоты, скорости и т. д. Поэтому для без-
опасного и успешного самолётовождения 'штурман должен не
только изучить основы аэронавигации, изложенные в учебнике, но
и обладать соответствующими познаниями в области авиаметео-
рологии, военной географии, тактики и особенно практическими
навыками в самолётовождении.
ГЛАВА ПЕРВАЯ
ОСНОВНЫЕ понятия
§ 1. Форма и размеры Земли
Земля представляет собой сфероид, или эллипсоид вращения
(рис. 1). Эллипсоид вращения есть идеальная математическая
форма, к которой ближе всего подходит действительная форма
Земли. На самом же деле в различных местах Земли имеются не-
Рис. 1. Земной
эллипсоид
Рис. 2. Определение
радиуса земного шара
значительные отклонен™ от формы идеального эллипсоида, и
истинная форма Земли есть геоид — неправильное математическое
тело.
Размеры Земли впервые были определены в глубокой древно-
сти (276—196 г. до нашей эры). Идея способа определения разме-
ров Земли заключается в том, что если определить широты и дол-
готы двух точек Л в В на её поверхности и измерить расстояние S
между ними, то можно легко вычислить угловую величину
дуги АВ и на основании этого определить радиус Земли (рис. 2)
Если обозначить радиус Земли буквой R, а дугу ‘АВ буквой а,,
то можно написать:
4 _ 5
360-60 ~ 2п/? ’
1 Считая что Земля имеет форму шара.
S
откуда
D_ 360-60 s
2п ‘ а •
где а — выражена в минутах дуги;
S — может быть взято в километрах или милях.
По результатам измерений длины дуги меридиана в 1°на раз-
личных широтах получены вероятнейшие значения размеров зем-
ного эллипсоида, т. е. величины его полуосей а и b и сжатия
(рис. 1).
а = 6 378 км, £ = 6357 км, с=^д.
Таким образом, форма Земли отличается от правильной формы
шара лишь незначительным сжатием у полюсов. В аэронавигации,
как науке прикладной, не требующей высокой степени точности,
в большинстве случаев этим сжатием пренебрегают и в первом
приближении принимают форму Земли как правильный шар. объём
которого равен объёму земного сфероида. В картографии же для
построения кзрт приходится учитывать сжатие Земли и рассматри-
вать форму её во втором приближении — как эллипсоид вращения *.
Радиус земного шара можно определить различными спосо-
бами. Обычно его принимают равным радиусу шара, объём кото-
рого равен объёму земного сфероида.
Объём эллипсоида вращения равен тса’£; объём шара равен
Сравнивая объём шара радиуса R, которым мы заменяем дей-
ствительную форму Земли, с объёмом земного эллипсоида, полу-
чим соотношение:
4 4 3 /~ г
зт tz Rs = 1 тлг Ь, откуда R = \/ а* °.
О О w
Подставляя в эту формулу значения а и Ь, принятые для
международного эллипсоида, находим:
R = 6 370,9 км.
§ 2. Точки и линии на земном шаре
Диаметр, относительно которого вращается земной шар, назы-
вается земной осью. Положение земной оси относительно тела
Земли можно считать постоянным, хотя в действительности зем-
ная ось незначительно перемещается. Земная ось пересекает
поверхность Земли в двух точках, которые называются полюсами
Земли. Северным полюсом называется полюс, смотря на который
1 С появлением радиолокации возникает необходимость учитывать сжатие
аемного сфероида при радиолокационных определениях на больших рас-
стояниях.
S
вращение Земли нам представляется происходящим против часо-
вой стрелки. Противоположный полюс называется южным.
Если рассечь земной шар любой плоскостью, проходящей
через его центр, то в сечении получится окружность большого
круга. Если же секущая шар плоскость не проходит через центр
земного шара, то в сечении получится окружность малого круга.
Окружности больших кругов равны между собой. Большой круг,
плоскость которого проходит через центр земного шара перпенди-
кулярно к земной оси, называется земным экватором. Экватор
делит земной шар на два полушария — северное и южное (рис. 3).
Плоскости, параллельные зем-
ному экватору, образуют на зем-
ном шаре малые круги, называе-
мые земными параллелями.
Параллель можно провести
через любую точку земной по-
верхности. Размеры земных па-
раллелей по мере удаления от
экватора уменьшаются.
Если рассечь земной шар пло-
скостью, проходящей через зем-
ную ось, то в сечении получится
большой круг, называемый зем-
ным меридианом (географиче-
ским или истинным меридианом).
Меридиан можно провести че-
рез любую точку земной поверх-
Рис. 3. Экватор, меридиан,
параллель
ности. Та часть полуокружности, которая заключена между полю-
сами Земли и проходит через заданную точку земной поверхности.
называется меридианом места. На земной поверхности можно про-
вести бесчисленное количество меридианов. Один из меридианов
может быть принят в качестве начального, или нулевого мери-
диана. В настоящее время начальным меридианом является мери-
диан, проходящий через астрономическую обсерваторию в Гринвиче
(в Англии) — Гринвичский меридиан. Ранее в качестве начальных
меридианов в различных странах были приняты другие мери-
дианы, например. Пулковский (у нас), Парижский, острова Ферро.
§ 3. Географические координаты. Широта и долгота
В аэронавигации широтой данного места называют длину дуги
меридиана между экватором и данным местом, а долготой дан-
ного места — длину дуги экватора, заключённой между главным
меридианом и меридианом данного места (рис. 4).
Кроме того, в аэронавигации долготы выражаются в едини-
цах времени. Эта система основана на суточном вращении Земли.
Полный оборот Земли на 360° происходит за сутки, т. е. через
24 часа каждый меридиан приходит в своё начальное положение.
Таким образом, 24 часа соответствуют повороту Земли на 360°,
7
1 час — на 15°, 1 минута — на 15' и 1 секунда — на 15", или пово-
рот на 1>о происходит за 4 минуты, а на 1'— за 4 секунды. Напри-
мер, долгота 30°30' может быть выражена как 2 часа 2 минуты.
Долгота, выраженная в единицах времени, называется долготой во
времени. Счёт долгот во времени производится точно так же от
начального меридиана, как и долгот, выраженных в градусах.
Широту и долготу можно также выразить в линейных едини-
цах. Длина дуги широты в 1' всегда равна одной миле, так как
она представляет собой длину. 1' дуги земного меридиана. Длина
Г действительного земного меридиана, эллиптического, есть вели-
чина переменная; обычно же под милей подразумевается длина Г
дуги меридиана Земли, принимаемой за шар, объём которого равен
параллели
объёму земного эллипсоида. Длина такой мили является величи-
ной постоянной и равной 1852 .и (см. § 7) Длина дуги в 1' дол-
готы на экваторе также равна одной миле. Длина дуги в Г долготы
на какой-либо параллели равна длине дуги на экваторе, умножен-
ной на косинус широты.
Чтобы доказать это, рассмотрим параллель aD на широте ф
(рис. 5). Возьмём на ней две точки а и Ь, меридианы которых
составляют между собой угол у, т. е. разность их долгот.
Точки пересечения меридианов с экватором обозначим бук-
вами А и В. Тогда
ab = ry, (1)
где г — радиус параллели на широте <р.
Из треугольника ОаЕ имеем:
r = R costp,
где R — радиус Земли.
С другой стороны, АВ=Еу, откуда
8
Заменяя в выражении (1) правую часть значениями г и
получаем:
ab — АВ cos <р. (2)-
Если дуга АВ соответствует углу Y =Г, то
a^ = cos<p миль.
Например, в Москве, на широте 56°, длина дуги долготы в К
равна 0,55 мили (cos 56°=0,55).
§ 4. Вращение Земли как средство счисления времени
Солнце является центральным светилом солнечной системы.
Вокруг него вращаются планеты, в том числе и Земля. Одновре-
менно Земля и планеты вращаются вокруг своих осей.
Рис. 6. Годовое движение Земли
Вращение Земли вокруг Солнца называется годовым движе-
нием Земли. Годовое движение Земли происходит (по замкнутой
траектории, имеющей форму эллипса, которая называется орбитой*
Земли (рис. 6). Путь по орбите Земля совершает в течение года.
Ось 3/гмли наклонена к плоскости орбиты под углом 66с33'. Пло-
скость земного экватора, следовательно, наклонена к плоскоепь
орбиты Земли на 23°27'.
Когда Земля находится в точках А и В, плоскость земного
экватора проходит через Солнце; в это время повсюду на земном
шаре день равен «очи. Эти точки на земной орбите называются
точками весеннего и осеннего равноденствия (22 марта й 22 сен-
тября).
Вращение Земли вокруг её оси называется суточным враще*
нием Земли. Видимое движение светил, наблюдаемое нами на не-
бесном своде, является следствием вращения Земли вокруг её оси.
Исследование видимого суточного движения светил установило-
полную неизменяемость продолжительности кажущегося обраще-
ния небесного свода или соответствующего ему оборота Землю
9
зокруг её оси. Поэтому период обращения Земли вокруг оси как
«неизменная величина принят за единицу времени и получил назва-
ние звёздных суток. Продолжительность звёздных суток соста-
вляет около 23 час. 56 мин.,
Счёт времени в звёздных единицах служит исключительно для
целей астрономии и совсем не употребляется в обыденной жизни.
Причиной этого является то обстоятельство, что начало звёздных
суток, вследствие собственного видимого движения Солнца, в
различные времена года приходится в разное время дня или ночи.
Так, например, 22 июня звёздные сутки начинаются в 6 часов
утра, 22 сентября — в полночь, в декабре — вечером. Ввиду того
-что обыденная жизнь человека распределяется повсюду в зависи-
'.мости от суточного обращения Солнца, продолжительность этого
обращения также принята за единицу времени и носит 'название
истинных суток. Истинные сутки представляют собой время пол-
ного суточного обращения Солнца. Начало истинных суток при-
нято в полночь.
Истинные солнечные сутки не постоянны по величине.
Правда, разница между наиболее долгими и наиболее корот-
кими сутками очень невелика. Однако, накопляясь, она вызывает
значительное расхождение между показаниями хронометров и
солнечных часов. В течение года это расхождение колеблется в
пределах получаса.
Неудобство счёта времени по истинному Солнцу, вызываемое
неравномерностью истинных солнечных суток, послужило поводом
для изыскания такой постоянной единицы времени, величина кото-
рой, а также начало и конец незначительно отличались бы от про-
должительности, начала и конца истинных суток. Наиболее подхо-
дящей к этим условиям единицей является промежуток времени,
равный средней величине из всех солнечных суток за год. Такая
-единица измерения времени называется средними солнечными
сутками.
Разность между продолжительностью средних солнечных
суток и звёздных суток составляет 3 мин. 56 сек., т. е. звёздные
сутки короче средних солнечных на 4 мин.
Ввиду того что начало средних суток считается в полночь,
т. е. в момент прохождения средним солнцем меридиана данного
места, время в один и тот же момент во всех точках одного и
того же меридиана будет одинаковое. На том же основании и
время в местах, расположенных на разных меридианах, отли-
чается между собой на разность долгот этих мест, выраженную
в единицах времени. Зная, что видимое суточное движение
Солнца происходит с востока на запад, легко понять, что время
во всякий момент на восточном меридиане будет больше, чем
на западном.
Местным временем называется среднее солнечное время на
меридиане данного места. Время на меридиане Гринвича назы-
вается гринвичским, или международным временем. Счёт среднего
времени в обыденной жизни представляет неудобства в том отно-
10
тении, что время в различных пунктах Земли, за исключением
пунктов, расположенных на одном меридиане, неодинаково. Так
как меридианов бесчисленное множество, то и одновременные
показания часов разнообразны.
В разных местах полдень наступает не в один и тот же физи-
ческий момент времени: в местах восточных — раньше, в запад-
ных — позже. Чтобы уничтожить разнообразие в показаниях часов
в различных точках земной поверхности, хотя бы в некоторой
полосе, введён упрощённый международный счёт времени по так
называемым часовым поясам.
Для единообразного счёта времени во всём мире поверхность
Земли условно разделена на 24 части (пояса) по числу часов в
сутках. Таким образом, поясом является участок земной поверх-
ности, ограниченный двумя меридианами, отстоящими по долготе
на 15°, или 1 час. В каждом таком поясе устанавливается единое
время, равное местному среднему солнечному времени на среднем
меридиане пояса. Основным меридианом в нулевом поясе является
Гринвичский меридиан, в первом поясе — меридиан 15° восточ-
ной долготы и т. д. При таком условном счёте время соседних
поясов различается повсюду ровно на один час, причем каждый
следующий пояс к востоку имеет время на один час больше, чем
предыдущий. Такой счёт времени представляет значительные
удобства при сравнении времени в различных поясах, так
как разница имеется лишь в показаниях часовых стрелок, показа-
ния же минутных и секундных стрелок одинаковы на всём
земном шаре.
Из практических соображений границы поясов выбирают не
строго по меридианам (иногда по рекам, по государственным гра-
ницам), придерживаясь ‘того, чтобы каждая граница проходила
приблизительно на 7°,5 от основного меридиана пояса. Система
поясного времени в Европе введена с 1884 г., в СССР — с 1 июля
1919 г.
В СССР имеются 11 часовых поясов. Вся западная часть
Союза входит во второй пояс, так что в Москве, Ленинграде,
Киеве, Минске и Одессе время одинаково.
При поясном исчислении легко пересчитать время одного
города на время другого.
Например, если в Лондоне 12 час. 10 мин., то в Москве
(П пояс) будет 14 час. 10 мин., в Казани (III пояс)— 15 час. 10 мии.
и т. д.
В некоторых странах — Англии, Франции, Бельгии и Голлан-
дии — действует «закон о летнем времени», согласно которому
стрелки всех часов ежегодно в середине апреля переводятся на
чае вперёд, а в начале октября отводятся на час обратно.
В СССР, на основании распоряжения правительства, стрелки
всех часов (во всех поясах) передвинуты на один час вперёд
(декретный час).
Поясное время, увеличенное на один час, называется декретным
временем. В некоторых случаях (расчёт времени наступления тем-
ll
ноты и рассвета) приходится переводить местаое время в декрет-
ное. Для этого пользуются формулой
7д=7м + Ап — X + 1 час,
где Тд — декретное время;
Ти— местное время;
Л'п—номер пояса (в часах), по времени которого идут часы
штурмана;
л—долгота места от Гринвича (выраженная в единицах
времени).
Пример. Местное время наступления темноты 20 час. 30 мин., пояс VIII;
долгота места 125°Е (от Гринвича). Определить наступление темноты по декрет-
вому времени.
Тя — 20 час. 30 мин. + 8 час. — 8 час. 20 мин. + 1 час = 21 час 10 мин.
§ 5. Истинный горизонт, видимый горизонт и его дальность
Кругозор наблюдателя ограничивается кривизной земной по-
верхности. Истинным горизонтом называется воображаемая пло-
скость, перпендикулярная к вертикали и прохоД'яшая Через глаз
наблюдателя.
Рис. 7. Видимыл горизонт Рис. 8. Понижение видимого
горизонта.
Видимым горизонтом называется наблюдаемая с самолёта
окружность, по которой земля как бы пересекается с небом. Если
наблюдатель находится в точке О (рис. 7) на высоте Н над по-
верхностью земли, то, проведя из точки О конус лучей О А, ОВ
и т. д., касательных к поверхности земли, получим кривую каса-
ния этого конуса с поверхностью земли — малый круг АВСЕ, пред-
ставляющий собой видимый горизонт наблюдателя.
Радиусом видимости, или теоретической дальностью видимого
горизонта называется величина сферического радиуса AD. Вслед-
ствие значительной разницы между величиной радиуса земли R по
сравнению с высотой глаза наблюдателя И в качестве радиуса
видимости принимают также длину касательной AO=d.
Из прямоугольного треугольника АОЕ (рис. 8) имеем:
ОЕ* = ЛЕ- + АСА, или (R + Н)г -f- R* + Л
откуда
R, + 2RH + H' = R' + d\
12
Сокращая на R2, имеем:
d* = 2RH + № = 2RH (1+ ^>) •
Так как высота Н равна нескольким километрам, a 2R —
около 12 500 км, то отношение представляет собой столь ма-
дую дробь, что ею можно пренебречь без всякого ущерба для
точности. Тогда получим:
d = V2RH-, (3)
здесь d— радиус видимости;
R— радиус Земли;
Н — высота полёта.
Эта формула не совсем верна, так как не учитывает земную
рефракцию. Земля окружена воздушной оболочкой — атмосферой,
плотность которой постепенно уменьшается с высотой. Световые
лучи, проходя через слои атмосферы различной плотности, пре-
ломляются. и глаз наблюдателя видит предмет гораздо дальше
его действительного положения. Преломляющая способность атмо-
сферы зависит от температуры, давления, влажности, присутствия
в воздухе пыли и других условий и поэтому непостоянна. Она
характеризуется коэфициентом земной рефракции К, величина
которого колеблется в пределах 0,01—0,15. Нормальной величи-
ной коэфициента К считают 0,08. Следовательно, действительная
дальность видимого горизонта D будет больше теоретической
дальности d, т. е.
D - d + Kd,
откуда
D = (l +K)d.
Принимая /<=0,08, имеем:
D— 1,084 = 1,08/2^77;
или приближённо
/3=1,08 /2-6371 /Я;
£>=121,6/77?
D- 122 /77;
(4)
здесь D — дальность в км\ Н — высота ькм.
Дальность видимого горизонта не следует смешивать с даль-
ностью видимости ориентиров. Видимость ориентиров обусловли-
вается тремя факторами: 1) свойствами наблюдаемого объекта и
окружающего его фона, 2) состоянием слоя воздуха, расположен-
ного между наблюдателем и объектом, и 3) свойствами человече-
ского зрения.
13
Дальность видимости ориентиров может быть определена
по формуле
£=
где I—линейные размеры предмета;
Н — высота полёта;
Z— угол, определяющий порог чувствительности зрения, ве-
личина которого зависит от состояния слоя воздуха (от
коэфициента экстинкции) и расстояния до объекта.
Понижением видимого горизонта называется угол, образуемый
касательной к поверхности земли и плоскостью истинного гори-
зонта (рис. 8). Линия LF представляет собой истинный горизонт
наблюдателя; угол п—понижение видимого горизонта. Величина
понижения горизонта зависит от высоты положения наблюдателя
над землёй и от земной рефракции (п= 1,78 VН, где л — в мину-
тах дуги, Н — высота полёта в м).
§ 6. Направление на земной поверхности
Направление на земной поверхности принято определять углом,
составленным какой-либо линией с земным меридианом.
В аэронавигации применяется обо-
значение Направлений от N по часовой
стрелке от нуля до 360°.
Пеленгом, или азимутом, какого-
либо предмета называется отсчитан-
ный таким способом угол между зем-
ным меридианом и направлением на
данный предмет (рис. 9).
§ 7. Единицы измерения
расстояний
В аэронавигации для измерения
расстояний пользуются главным обра-
зом метрическими единицами длины.
При установлении метрической системы мер в конце 18-го столе-
тия за единицу длины приняли 46666060 длины земного мери-
диана и назвали эту единицу метром. В Париже, в Палате мер и
весов, хранится исторический эталон — метр, представляющий со-
бой 0,001 часть километра. Позднее была более точно определена
длина одного метра, но сохранился, однако, прежний эталон.
В морской навигации расстояния издавна принято измерять
морской милей, которая представляет собой длину Г дуги земного
меридиана.
Величина морской мили п определяется из равенства:
з,---------------------------------
2пЯ __ 2те V агЬ
п ~~ 360-60 — 360-60 ' '
и
Подставляя вместо а и b их значении, примятые для между-
народного эллипсоида, получим:
п — 1 852,3 м.
Для приближённых расчётов 0,3 отбрасывают и принимают
длину морской мили равной 1 852 м.
Если принять другие величины для полуосей эллипсоида а и Ь,
то длина мили будет несколько отличаться от 1 852 м.
Например, в Англии длина морской мили принята равной
1 853 м, в Италии — 1 851,85 м, в США — 1 853,25 м. В Англии
и США, кроме того, применяется так называемая статутная миля
или английская миля, которая равна приблизительно 1,6 км. Она
не имеет прямого отношения к размерам Земли, как и наша ста-
рая мера — верста, и просто узаконена правительственным актом
Английские указатели воздушной скорости самолёта имеют
шкалы, градуированные в статутных милях.
Географической милей называется длина -гг градуса земного
меридиана; она равна 7 420 м.
Верста, старая русская единица длины, равна 1,0668 км.
Морская сажень встречается на старых морских картах для'
указания глубины моря; она равна 6 футам (фут равен 30,48 см).
Кабельтов в морской навигации служит для измерения
небольших расстояний; длина его равна 0,1 морской мили, или;
185 м.
§ 8. Ортодромия
Кратчайшим расстоянием между двумя точками на зем-
ном шаре является дуга большого круга, проходящего через-
эти точки (рис. 10). Плоскость большого
круга всегда проходит через центр
Земли.
Пусть на поверхности Земли имеют-
ся две точки А и В. Кратчайшим рас-
стоянием между точками А и В в дан-
ном случае будет дуга АВ большого кру-
га DAJ3C, называемая ортодромией.
Ортодромия пересекается с меридиа-
нами под разными углами. Экватор и ме-
ридианы можно рассматривать как ча-
стные случаи ортодромии. Дугой боль-
шого круга является также и линия пе-
ленга. Пеленг, как уже известно, пред-
Х:та1вляет собой угол, составленный зем-
ным меридианом и направлением на -уда- рис 10 Дуга Сольшого
лённый предмет. Линией пеленга яв- круга — ортодромич
Пяется в данном случае линия, соеди-
няющая место наблюдателя и удалённый предмет. На поверхности
Земли эта линия будет дугой большого круга, образуемой пере-
сечением поверхности земли с вертикальной плоскостью, проходя-
щей через запеленгованный предмет. Таким образом, всякий
измеренный пеленг является ортодромическнм пеленгом.
Длина пути S по ортодромии между двумя точками с ко-
ординатами X, и ф5, Х„ т. е. длина дуги большого круга,
вычисляется по формуле.
cos S = sin sin <р, 4- cos ф! cos Ф, cos (Х3 — XJ.
Вычисленное по этой формуле расстояние S будет выражено
в дуговой мере; переведя дугу в минуты и умножив результат на
1,85, получим расстояние в километрах.
§ 9. Локсодромия
Локсодромией называется кривая линия, проходящая по
поверхности земного шара и пересекающаяся е меридианами под
одним и тем же постоянным углом а (рис. 11).
Если продолжить концы локсодромии, то они не соединятся,
так как локсодромия является спиральной линией на земном шаре,
стремящейся приблизиться к полюсам, но никогда их не достига-
ющей. Локсодромия представляет собой на сфере нечто подобное
винтовой линии на цилиндре. Путь по локсодромии будет длиннее
пути по ортодромии. Если пункты полёта 'не очень удалены один
от другого, если широта их не очень высока, то разность между
этими двумя путями практически незаметна. Точно так же раз-
ность очень незначительна даже при больших расстояниях, если
маршрут мало отклоняется от меридиана (до 20°).
При больших расстояниях между пунктами полёта и напра-
влениях полёта, близких к Е — W, разность расстояний по орто-
дромии и локсодромии бывает довольно велика. Точно так же
разность велика при полётах в высоких широтах (в полярных
странах) даже при сравнительно небольших расстояниях.
В качестве примера приводим следующие данные:
Маршруты Длина пути по ортодромии • км Длина пути по локсодро- мии в км Разность в км
Нью-Йорк — Токио 10 833 12 824 1 991
Нью-Йорк — Париж 5 825 6 086 261
Париж — Токио Москва — Нью- 9 770 11 430 1 660
Йорк .... 7 492 8 325 833
Рис. 11. Локсодромия
на земном шаре
В полётах на большие расстоя-
ния, например, через СССР или че-
* рез океан, путь по ортодромии
иногда сокращает расстояние на
сотни километров.
На практике при полётах на большие расстояния необходимо
определять величину расхождения ортодромии с локсодромией и
разность в пути по локсодромии и по ортодромии. По этим дан-
16
Рис. 12. Вычисление
путевого угла
ным можно окончательно наметить путь по одной из основных
диний или комбинации их. Обычно для выигрыша в расстоянии
путь разбивают на этапы по ортодромии, соединяющей 'пункты
вылета и прибытия, полёт же производят по локсодромиям этих
этапов.
Постоянный угол, под которым локсодромия пересекает
меридианы, называется путевым углом.
Локсодромическим пеленгом назы-
вается такой пеленг, линия которого
представляет собой локсодромию, т. е.
пересекает меридианы под одним и тем
же постоянным углом. Путевой угол мо-
жет быть измерен на карте транспорти-
ром или же вычислен по формуле. Для
вычисления путевого угла необходимо
знать координаты пунктов вылета и при-
бытия. Пусть точка А изображает пункт
вылета, а В — пункт назначения (рис. 12).
Из треугольника АВС имеем:
tg® =
ВС
АС •
(5)
Как мы уже знаем,
ВС = (К— >j)cos® и АС —у.,— фг
Подставляя значения ВС и АС в формулу (5), получим;
tg a = cos ф, (6)
ь <₽2 — 91 7
где а. — искомый путевой угол;
Ф, ио, — широты пунктов вылета и прибытия, выраженные в ми-
нутах дуги;
X, и Хг — долготы этих пунктов, выраженные в минутах дуги;
ф — средняя широта перелёта в градусах.
Получаемый по формуле (6) результат будет правильным,
если конечная точка маршрута лежит в первой четверти (0—90°).
Если конечная точка лежит во второй четверти (90—180°), иско-
мый путевой угол получают, вычитая полученное число градусов
из 180°. Если же конечная точка находится в третьей четверти
(180—270е), к полученному углу прибавляют 180°, а ест в чет-
вёртой (270—360°), то полученный угол вычитают из 360°.
Длина пути по локсодромии может быть определена по фор-
муле, полученной из того же треугольника АВС (рис. 12):
S—185-^^-, (7)
’ COS a * ' '
где S — длина пути в км-,
ф, и ф.—широты пунктов вылета и прибытия, выраженные
ских милях (в минутах);,
a — путевой угол, вычисленный по формуле (6).
2 Учебник аэронавигации ....
в мор-______
« Г" •
£ А
17 _ __
— । —
§ 10. Земной магнетизм
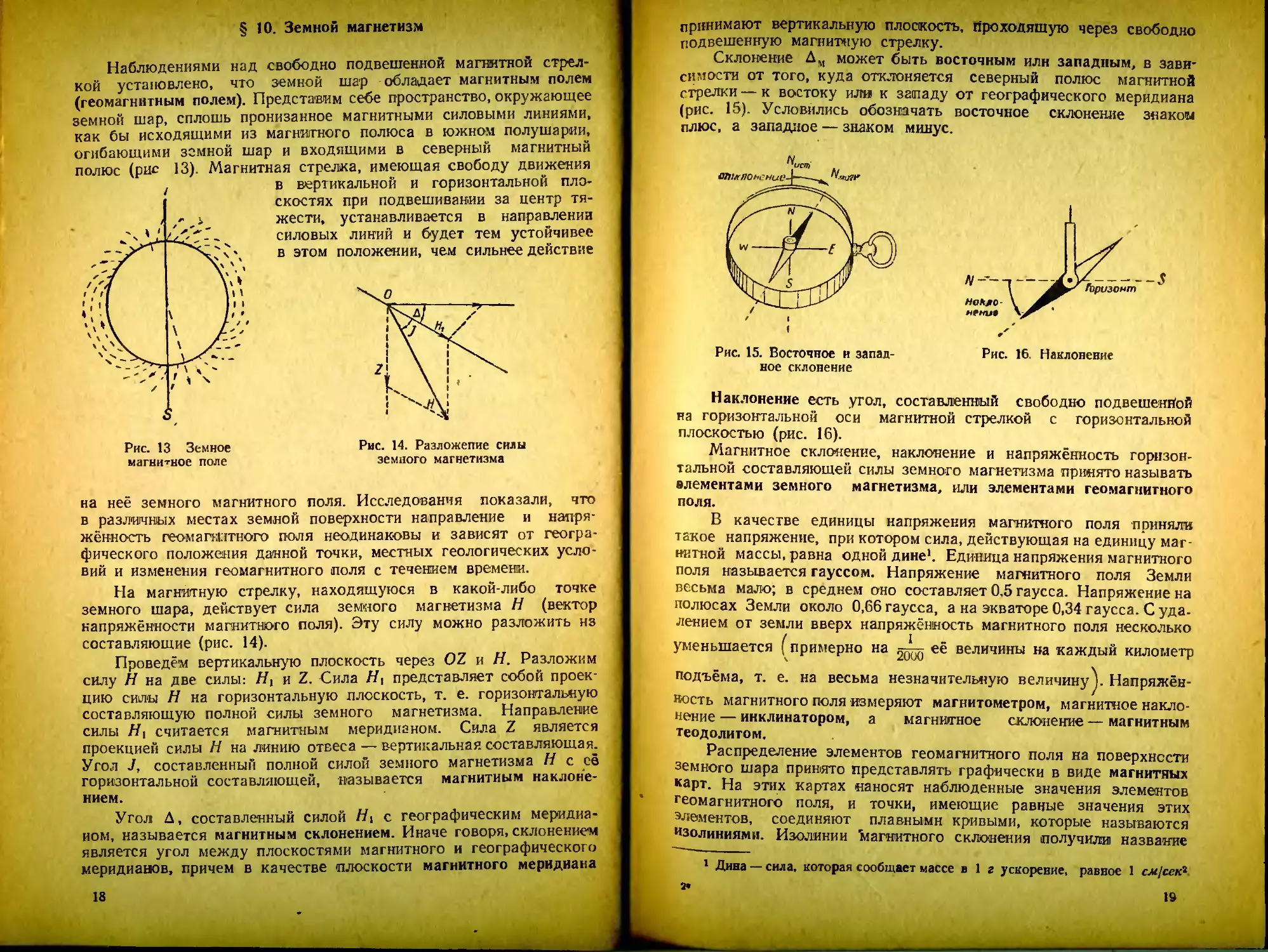
Наблюдениями над свободно подвешенной магнитной стрел-
кой установлено, что земной шар обладает магнитным полем
(геомагнитным полем). Представим себе пространство, окружающее
земной шар, сплошь пронизанное магнитными силовыми линиями,
как бы исходящими из магнитного полюса в южном полушарии,
огибающими земной шар и входящими в северный магнитный
полюс (рис 13). Магнитная стрелка, имеющая свободу движения
в вертикальной и горизонтальной пло-
скостях при подвешивании за центр тя-
жести, устанавливается в направлении
силовых линий и будет тем устойчивее
в этом положении, чем сильнее действие
Рис. 13 Земное
магнитное поле
Рис. 14. Разложение силы
земного магнетизма
на неё земного магнитного поля. Исследования показали, что
в различных местах земной поверхности направление и напря-
жённость геомагштного поля неодинаковы и зависят от геогра-
фического положения данной точки, местных геологических усло-
вий и изменения геомагнитного поля с течением времени.
На магнитную стрелку, находящуюся в какой-либо точке
земного шара, действует сила земного магнетизма Н (вектор
напряжённости магнитного поля). Эту силу можно разложить нз
составляющие (рис. 14).
Проведём вертикальную плоскость через OZ и Н. Разложим
силу Н на две силы,- Ht и Z. Сила Н\ представляет собой проек-
цию силы Н на горизонтальную плоскость, т. е. горизонтальную
составляющую полной силы земного магнетизма. Направление
силы Hi считается магнитным меридианом. Сила Z является
проекцией силы Н на линию отвеса — вертикальная составляющая.
Угол J, составленный полной силой земного магнетизма Н с сё
горизонтальной составляющей, называется магнитным наклоне-
нием.
Угол Д, составленный силой Hi с географическим меридиа-
ном, называется магнитным склонением. Иначе говоря, склонением
является угол между плоскостями магнитного и географического
меридианов, причем в качестве плоскости магнитного меридиана
18
принимают вертикальную плоскость, проходящую через свободно
подвешенную магнитную стрелку.
Склонение Дм может быть восточным илн западным, в зави-
симости от того, куда отклоняется северный полюс магнитной
стрелки — к востоку или к западу от географического меридиана
(рис. 15). Условились обозначать восточное склонение знаком
плюс, а западное — знаком минус.
Рис. 15. Восточное и запад-
ное склонение
Рис. 16. Наклонение
Наклонение есть угол, составленный свободно подвешенной
на горизонтальной оси магнитной стрелкой с горизонтальной
плоскостью (рис. 16).
Магнитное склонение, наклонение и напряжённость горизон-
тальной составляющей силы земного магнетизма принято называть
влементами земного магнетизма, или элементами геомагнитного
поля.
В качестве единицы напряжения магнитного поля приняли
такое напряжение, при котором сила, действующая на единицу маг-
нитной массы, равна одной дине1. Единица напряжения магнитного
поля называется гауссом. Напряжение магнитного поля Земли
весьма мало; в среднем оно составляет 0.5 гаусса. Напряжение на
полюсах Земли около 0,66 гаусса, а на экваторе 0,34 гаусса. С уда-
лением от земли вверх напряжённость магнитного поля несколько
/ 1 -
уменьшается примерно на ее величины на каждый километр
подъёма, т. е. на весьма незначительную величину). Напряжён-
ность магнитного поля измеряют магнитометром, магнитное накло-
нение — инклинатором, а магнитное склонение — магнитным
теодолитом.
Распределение элементов геомагнитного поля на поверхности
земного шара принято представлять графически в виде магнитных
карт. На этих картах наносят наблюденные значения элементов
геомагнитного поля, и точки, имеющие равные значения этих
элементов, соединяют плавными кривыми, которые называются
изолиниями. Изолинии Магнитного склонения получили название
1 Дина — сила, которая сообщает массе в 1 г ускорение, равное 1 см)сек*
2»
19
изогон, изолинии наклонения — изоклин. Изолинии горизонтальной
составляющей носят название изодин Hit а вертикальной соста-
вляющей — изодин Z.
Изолинии принято проводить для округленных значений дан-
ного элемента. Например, изолинии склонения проводят через 1°
или 5°, в зависимости от масштаба карты и густоты получаю-
щихся изолиний.
Магнитные карты различаются по масштабу и степени сгла-
женности изолиний. Существуют, например, мировые магнитные
карты, районные, карты отдельных магнитных аномалий.
На картах магнитного наклонения (рис. 17) имеется магнит-
ный экватор—линия, проходящая через точки земной поверхности,
в которых наклонение равно нулю. Эта кривая пересекает
земной экватор в двух точках, из которых одна лежит на долготе
20° W от Гринвича, а другая — на долготе около 175° W. Во всей
области, расположенной к северу от магнитного экватора, накло-
нение положительное, т. е. северный конец магнитной стрелки
инклинатора направлен вниз. В области к югу от экватора накло-
нение отрицательное, т. е. северный конец стрелки направлен
вверх. Все линии равных наклонений представляют систему кри-
вых, не пересекающихся между собой и окружающих, подобно
параллелям, магнитные полюсы Земли. Магнитными полюсами
Земли являются точки, в которых наклонение равно 90°, т. е.
стрелка становится вертикально. Северный магнитный полюс имеет
следующие координаты: широту 70° и долготу 97° W от Гринвича,
т. е. лежит в полярной области Северной Америки, вблизи полу-
острова Боотия Южный магнитный полюс лежит на широте 73°
и долготе 147° W в южной части Тихого оксана.
На картах магнитного склонения (рис. 15) имеются линии
нулевого склонения, называемые агоническими. Одна такая линия
идёт от северного магнитного полюса 'через материк Северной и
Южной Америки к острову Юж. Георгии. Другая нулевая линия
идёт от Нордкапа через Балтийское море, Каир к мысу Гвардафуй,
через Восточную Азию, острова Ново-Сибирские, Камчатку, затем
вдоль берегов Суматры, через Западную Австралию 'к южному
магнитному полюсу.
Между этими двумя линиями расположена область, заклю-
чающая океаны Атлантический, Индийский и часть Тихого. Во
всей этой области склонение западное. В остальной части земной
поверхности, занимающей Европейскую часть Союза ССР, почти
всю Азию, весь Тихий океан и большую часть материка Северной
и Южной Америки, склонение восточное, за исключением неболь-
шой области, ограниченной овальной линией нулевого склонения,
проходящей через Маниллу, Кантон, Иркутск и т. д., внутри кото-
рой склонение западное. Причины, обусловливающие такое распо-
ложение изогон, учёные связывают с геологическими процессами,
происходящими в земной коре. Действительно, контуры изогон
1 Исследованиями, произведенными в 1945 г., положение точки северного
магнитного полюса определено ближе к географическому северному полюсу.
20
Рис 17 Мировая карта магнитного наклонение
Рис. 18. Мировая карта магнитного склонения
в известной степени совпадают с изобатами (горизонталями рель-
ефа дна океанов) и с контурами и очертаниями древних матери-
ков. Например, замкнутый контур изогон в Тихом океане как раз
приходится на месте предполагаемого погрузившегося материка.
Крайние значения Магнитного склонения 180° — восточное и
западное. Кроме изогон, на магнитных картах указываются маг-
нитные аномалии.
Аномалиями называются районы с более или менее резкими
отклонениями от нормального распределения элементов геомаг-
нитного поля. Магнитные аномалии иногда простираются на
десятки и даже сотни километров, изменяясь по интенсивности.
Примером самой мощной в мире магнитной аномалии является
Курская магнитная аномалия. На протяжении Курской аномалии
имеются точки, на которых магнитная стрелка ведёт себя, как
на магнитном полюсе. Из других магнитных аномалий СССР
известны: Криворожская, Никопольская, Магнитогорская, анома-
лии Кольского полуострова. На Урале известны десятки интенсив-
ных и обширных аномалий *.
Для определения магнитного склонения в заданном пункте
необходимо взять карту изогон и заметить, какая изогона прохо-
дит через заданный пункт или вблизи него. Цифры, поставленные
при изогонах, обозначают склонение (в градусах). Если заданный
пункт лежит в промежутке между изогонами, то склонение
берётся среднее (с точностью до 1°).
При маршрутных полётах склонение определяется для каг
ждого этапа пути, лежащего между ближайшими контрольными
ориентирами. Кроме карт магнитного склонения, данные о вели-
чине склонения можно найти на морских и специальных авиацион-
ных картах.
В найденное по карте магнитное склонение следует вводить
поправку за изменение склонения. Дело в том, что геомагнитное
поле подвержено изменениям во времени, обусловленным различ-
ными причинами космического, геологического и атмосферного
происхождения. Все эти изменения носят общее название магнит-
ных вариаций. Детальное изучение магнитных вариаций выявило,
что имеются следующие их виды: 1) вариации, имеющие периоди-
ческий характер (суточные и годовые); 2) вариации, имеющие
закономерный, но не периодический характер (вековые); 3) эпи-
зодические вариации (магнитные возмущения, или магнитные
бури).
Вековой ход является важным видом геомагнитных вариаций,
так как непрерывные изменения в одном направлении, накапли-
ваясь за ряд лет, производят столь значительные изменения гео-
магнитных элементов, что магнитные карты непрерывно и заметно
стареют на протяжении нескольких десятков лет.
Поэтому всякая магнитная карта должна быть отнесена
к определённому моменту времени, называемому эпохой карты.
1 Влияние аномалий на самолётный компас существенно сказывается лишь
”ри полёте на малых высотах.
23
Вследствие вековых изменений магнитное склонение ежегодно
меняется в пределах нескольких минут (градусных). Величина го-
дичного изменения склонения указывается на специальных картах
изменений магнитного склонения (рис. 19). На этих картах проведены
линии равного изменения склонения — изопоры. Цифры при линиях
означают величину изменения склонения за год в минутах.
При определении склонения по магнитной карте нужно к най-
денной величине склонения прибавить поправку, взятую с карты
изменений склонения, умноженную на число лет, прошедших с мо-
мента составления магнитной карты до настоящего времени.
Пример. По магнитной карте эпохи 1930 г. найдено .магнитное склонение
для Москвы 6°10'. Определит» величину склонения в Москве в 1940 г. Годич
ное изменение склонения в районе Москвы +9'.
9'-10 = 9Э'; 6°10' +99' = 7°40'.
На магнитных картах, имеющихся в Штурманском справоч-
нике, изогоны проведены с учётом изменения склонения. Такой кар-
той можно пользоваться без внесения поправок в течение ряда лет.
Суточные изменения магнитного склонения имеют сравни-
тельно небольшую величину (до +5') и плавный ход в средних
широтах. В широтах свыше 67° суточные колебания склонения
резко увеличиваются и сильно усложняются магнитными возму-
щениями, которые почти непрерывно происходят в полярных
странах.
Годичные изменения склонения представляют собой как бы
отклонения от векового хода. По сравнению с суточными измене-
ниями они еще меньше.
Магнитными возмущениями называются изменения земного
магнитного поля, имеющие неправильный характер. Наиболее
сильные из них называются магнитными бурями. Очагом магнит-
ных возмущений являются полярные области. Распространение
магнитных бурь на меньшие широты зависит от их интенсивности.
Слабые магнитные бури охватывают преимущественно полярные
и прилегающие к ним области.
Сильные магнитные бури охватывают обычно весь земной
шар. Причины, вызывающие магнитные бури, находятся вне зем-
ного шара и связаны с пятнообразованием на Солнце. Имеется
определённая связь между 11-летней периодичностью магнитных
бурь и 11-летним периодом пятнообразования. Исследования
показали, что момент начала магнитной бури совпадает с момен-
том появления факелов в области солнечных пятен.
Магнитные бури обычно продолжаются несколько часов. Во
время магнитных бурь стрелка компаса ведёт себя очень беспо-
койно. Наблюдались магнитные бури, во время которых измене-
ния магнитного склонения достигали 10—20э и больше. В Слуцкой
магнитной обсерватории (около Ленинграда) была зарегистриро-
вана магнитная буря, во время которой изменения склонения
достигли 7°20'. На ледоколе «Георгий Седов» 10 апреля 1939 г.
в Ледовитом океане на широте 85—867 во время магнитной бури
амплитуда колебания магнитного склонения достигала 52° 12'.
Рис 19. Карта изменений магнитного склонения
ГЛАВА ВТОРАЯ
КРАТКИЕ СВЕДЕНИЯ ПО ТОПОГРАФИИ И КАРТАМ
§ 1. Планы и карты
Топография подробно, в геометрическом отношении, изучает
поверхность Земли, за исключением морей и океанов. Топография
исследует и применяет различные способы для изображения земной
поверхности на плоскости. Правильное изображение поверхности
Земли можно получить только на глобусе. Однако мелкий масштаб,
в котором обычно изготовляются глобусы, позволяет изобразить
поверхность Земли лишь в общих чертах. Поэтому подробное изо-
бражение земной поверхности делается на плоскости — обычно на
листах бумаги в виде плана или карты.
Земля имеет форму сфероида, а его поверхность не может
изобразиться на плоскости без искажений, поэтому приходится
прибегать к условным способам построения при помощи карто-
графических проекций (см. § 10).
Различие между планом и картой заключается в том, что на
плане изображение земной поверхности делается без учёта кри-
визны Земли.
Всякая воображаемая линия, проложенная «а земной поверх-
ности между двумя точками, будет длиннее прямой линии,
проложенной между этими же точками на бумаге (плоскости). По-
этому изображение земной поверхности в плане может быть сде-
лано с некоторыми ошибками. Эти ошибки выражаются в следую-
щих линейных величинах:
на 5 км земной поверхности 0,4 м
. 10 , . , 0,8 .
. 20 . . . 1,6 .
, 50 . . 4,1 .
. 100 . . . 8,2 .
Ошибка при измерении расстояния между двумя точками зем-
ной поверхности, равного 20 км, составляющая 1,6 м (около
1/12 000 расстояния), при построении плана в масштабе 1:10 000
выразится точкой и не имеет практического значения. В топогра-
фической практике участки Земли в радиусе 10 км при построении
их в общепринятых масштабах принимаются за планы.
Изображение всей земной поверхности, или отдельного мате-
рика, или страны, составленное по вычерченной картографической
сетке, называется картой.
'26
Изображение отдельного материка или государства с нане-
сением только важнейших предметов называется географической
картой, а карта, на которой нанесено большое количество местных
предметов и детально изображён рельеф местности, называется
топографической.
При построении планов и карт очертание наносимых предме-
тов проектируется на уровенную поверхность океана, продолжен-
ную через материки.
В аэронавигации карты имеют важное значение. Карта необ-
ходима для подготовки к полёту, тщательного изучения маршрута
полёта и выполнения навигационных, бомбардировочных и других
расчётов; картой пользуются в полёте для визуальной ориенти-
ровки, для прокладки пути и отметки расчётного места, для про-
кладки пеленгов, сомнеровых линий.
В полёте на карту наносятся данные воздушной разведки,
наземная и воздушная обстановка.
§ 2. Понятие о координатах
Величины, определяющие положение любой точки на пло-
скости и в пространстве, называются координатами.
Рассмотрим наиболее часто встречающиеся системы коорди-
нат при работе с планами и картами — прямоугольные и полярные
координаты.
Возьмём на плоскости две взаимно перпендикулярные прямые
линии ОХ и ОУ (рис. 20). Они называются прямоугольными
осями координат.
Прямую ОХ принято называть осью иксов или осью абсцисс,
а прямую ОУ — осью игреков или осью ординат *. Точка О пере-
сечения этих осей считается нача-
лом координат. Положение любой
точки на плоскости определяется
кратчайшими линейными отрезками
от осей до этой точки, например,
точек Кь As, Аз, А«. При этом все
отрезки иксов, отложенные вверх
от оси ОУ, принято считать с по-
ложительными знаками, а вниз —
с отрицательными знаками; все
отрезки игреков, отложенные впра-
во от оси ОХ, принято считать с
положительными знаками, а вле-
во — с отрицательными знаками. Те-
перь легко представить, что коор-
динаты точки, например, К3 бу-
дут — АХ и —4У, обычно вы-
Рис. 20. Прямоугольные
координаты
раженные в линейных мерах — сантиметрах, метрах и т. д.
Для всех точек, лежащих непосредственно на оси X, коорди-
наты У = 0 и для точек, лежащих на оси У, координаты X = 0.
1 В аналитической геометрии оси координат Ли У имеют противоположные
а правления, т. е. они меняются местами.
27
Полярные координаты Возьмём на плоскости прои (вольную1
точку О и проведём через неё прямую ON (рис. 21).
Полученную прямую ON в полярной системе координат
принято называть полярной осью, а точку О — полюсом. Положе-
ние на плоскости точек Кг и Кз будет определяться отрезками
(радиусами-векторами) ОК\, ОКг, ОКз и дирекционными углами
аь аг, а3. Следовательно,
Д' для определения любой
тючки на плоскости до-
Рис. 21. Полярные координаш
статочно знать величину
угла (образованного по-
лярной осью и радиусом-
вектором) и длину само-
го радиуса-вектора.
Дирекционные углы
отсчитываются от 0° до
360° по ходу часовой
стрелки.
В авиации полярные
координаты применяются
при кодировании карт.
Карты имеют сетку меридианов и параллелей, нанесённых че-
рез определённые интервалы.
На применяемых в авиации картах сетка, меридианов и парал-
лелей нанесена через следующие интервалы:
Масштаб карты Размеры листа по рамке Градусная сетка на листе
широта долгота широта долгота
1:25 000 0°05' 0°07',5 Прямоугольная коорди-
1:50 000 040' 045' натная сетка Гаусса-Крю-
1:100 000 0°20' 0°30' гера.
1:200 000 0°40' 1°
1 :500 000 2» 3’ 0°30' о°зо
1: 1 000 000 4’ 6е 1° 1°
1 :1 500 000 6° 9° Iе 1°
1:2 500 000 — — 2° 2°
Примечания 1. На территории Европейской части СССР и Европы в период
Отечественной войны издано много учетверённых листов карт, имеющих раз-
меры рамок по широте 1°20' и долготе 2°.
2. В последнее время на листах карт масштаба 1 :500 000 сетка по широте
наносится через 0’20'.
Кроме того, по рамкам каждого листа топографический
карты наносятся минутные деления, тем подробнее, чем крупнее
масштаб.
28
Прямоугольная координатная сетка Гаусса-Хрюгера наносится
на картах масштаба 1 : 200 000 и крупнее. Размеры сторон квад-
ратов сетки на картах СССР приняты следующие:
Для карты масштаба 1:2 '0 0Э0 5 см соответствуют 10 км местности
. . . 1 : 100 000 2 . . 2 .
. . 1:50 СЮ 2 . , 1 .
’ . . 1 .25 000 4 , . 1 .
Линии, образующие координатную сетку Гаусса-Крюгера, от-
стоят одна от другой на целое число километров, отсюда и сетку
часто называют километровой.
Порядок построения и чтения километровой сетки заклю-
чается в следующем: весь земной шар по литиям меридианов
разбивается на 36 координатных зон по 6° в каждой (рис. 22).
Счёт зон ведётся от меридиана Гринвича с запада на восток.
2 зона и т. о
Изображение координатная
зон на плоскости
Изображение зпориинатно
зон на шаре
Рис. 22. Изображение координатных зон
Счёт координат X ведётся в метрах или километрах от эква-
тора к полюсам. К северу от экватора координаты принято счи-
тать положительными, а к югу — отрицательными. Поскольку
СССР расположен в северном полушарии, то на наших картах
координаты X будут иметь положительный знак +•
Счёт координат У в пределах каждой зоны ведётся от осе-
вого (среднего) меридиана к западу и востоку от него. Но чтобы
избежать неудобств обращения с отрицательными величинами У,
расположенными к западу от осевого меридиана, координату У
осевого меридиана принято считать не за нуль, а за 500 км.
В результате все координаты У в пределах зоны будут положи-
тельными величинами, с той лишь разницей, что к западу от осе-
вого меридиана они будут меньше 500 км, а к востоку больше
500 км.
29
Одни и те же координаты могут повторяться во всех 36 эонах
земного шара.
Для того чтобы определить, к какой зоне относится точка,
впереди цифрового значения У приписывается номер зоны,
например, У = 3 520; в данном случае 3 показывает, что точка
расположена в третьей зоне, а остальные цифры определяют, что
точка находится в 20 км к востоку от осевого меридиана.
Координаты У = '4 360 и X = 6 240 показывают, что точка на-
ходится в четвёртой зоне в 140 км к западу от осевого меридиана
и в 6 240 км к северу от экватора.
Географические координаты позволяют быстро найти и
нанести на карту любую точку земного шара, а при помощи пря-
моугольных координат Гаусса-Крюгера можно определить рас-
стояние этой точки от экватора и осевого меридиана зоны.
I
§ 3. Условные знаки
Поскольку карта отражает топографическое содержание мест-
ности, то самой идеальной следовало бы считать ту карту, на
которой отражено всё, что имеется на местности. Но это сделать
невозможно.
Для того чтобы картой можно было удобно пользоваться,
топографические элементы местности изображают условными зна-
ками.
Условные знаки подразделяются на контурные и масштабные.
Контурные знаки применяются для обозначения предметов,
выражающихся в масштабе карты, например, леса, болота, насе-
лённые пункты и пр.
Масштабные знаки применяются для изображения предме-
тов, которые не могут быть выражены в масштабе карты.
Для каждого масштаба карты применяются, как правило,
свои особые условные знаки. Масштабными они называются
потому, что их размеры и количество зависят от масштаба карты:
чем масштаб крупнее, тем знаков больше и размер их крупнее.
К числу масштабных знаков могут быть отнесены: заводские
трубы, антенны радиостанций, нефтяные вышки, отдельные ко-
лодцы и т. д.
В отличие от контурных, масштабные условные знаки не
указывают размеров предмета, по ним, например, нельзя измерить
ширину дороги или величину отдельно стоящего дома.
Для удобного чтения карты многие условные знаки сопро-
вождаются поясняющими подписями, например, ’высота мачт,
пресная или солёная вода в колодцах, ширина и протяжённость
дорог между населёнными пунктами, длина и тоннаж мостов,
высота характерных точек рельефа и т. д.
В целях наглядности и удобства пользования условные знаки
печатаются разными красками. Некоторые современные карты
имеют до 20 разных красок.
Ниже приводятся некоторые условные знаки, применяемые
на картах, используемых в лётной работе.
30
Пути сообщения
1:100000
Двухколейные железные дороги
1 — труба; 2—малый мост; 3—мост
Насыпь (-|- 7,2 — высота в «)
Выемка (— 5,7 — глубина в м)
Тоннель
111ГП1 ППП1 lllllll —I
Части depot.чеудвиные
для движения
крутые подъела и
спуски (более 10°)
Пост через незкач
npenatrcnOi. я
Части дорог^неуЗоб-
_______ные для деитечьв
Комен стена
Illi
Дерееян.заоср
( ("f
ЗДИПНПППГ
Электрифицированные двухколейные железные дорог»
Строящиеся железные дороги
Полотно разобранных железных дорог
Узкоколейные железные дороги
Подвесные железные дороги
Автомагистрали и автострады
Усовершенствованные шоссе (асфальтированные, гудро
нированные и бетонированные)
Шоссе и мостовые
Строящиеся шоссе
Гравийные и грунтовые улучшенные дороги
Главные грунтовые дороги
Грунтовые дороги
Дороги с оградами
Дороги с изгородями по обе стороны
„ , (на грунтовой
I ати, гребни и улучшенной дороге,
фашины | ца грувтовой дороге
Полевые и лесные дороги
Караванные пути
Зимние дороги
1:200 000
Многоколейные железные дороги Одноколейные железные дороги
» Электрифицированные двухколейные железные дороги Электрифицированные одноколейные железные дороги
Железные дороги, нанесённые схематически
ни Трамвайные пути Узловые или большие станции Станции Разъезды и платформы
Автострады (посредине красного цвета)
Автомагистрали и усовершенствованные шоссе (асфаль-
тированные. гудронированные и бетонированные — по-
средине красного цвета)
Грунтовые улучшенные дороги, регулярно исправляе-
мые, допускающие движение автотранспорта (посре-
~~~ хЛш 2ZZZZ дине жёлтого цвета) Пароходные рейсы Железнодорожные паромы
|| 1 :500 000 Электрифицированные железные дороги Двухколейные железные дороги
— 1 F1— Одноколейные железные дороги
Узкоколейные железные дороги
Шоссе, мостовые (посредине жёлтого цвета)
Гравийные и грунтовые улучшенные дороги
Грунтовые дороги
32
1 : 1000000
Железные дороги на два пути и более
Железные дороги одноколейные
Электрифицированные железные дороги
Узкоколейные железные дороги
Станция
Разъезд
1 ------ -~> Автомагистрали и автострады действующие (нанесены
красным цветом)
Шоссе (красным цветом)
— Дороги грунтовые улучшенные, большаки, тракте'
и т, п. (жёлтым цветом)
Дороги грунтовые обыкновенные, просёлиш ы
§ 4. Изображение рельефа на картах
Для изображения рельефа существует ряд способов; самые
распространённые из них следующие:
— способ гори-
зонталей с отметка-
ми высот;
— гипсометри-
ческий способ;]
— изображение
отмывкой;
— изображение
штрихами.
Самым точным
и часто встречаю-
щимся является спо-
соб горизонталей.
Рассмотрим подроб-
Рис. 23. Изображение рельефа
нее его содержа-
ние.
Горизонтали представляют собой линии, соединяющие на
карте равные отметки высот. Чем больше на карте про-
ведено горизонталей, тем подробнее на ней отражён рельеф. Но
Количество горизонталей будет прежде всего зависеть от мас-
штаба карты: чем мельче масштаб карты, тем меньше на ней
может уложиться горизонталей, тем больше будет схематичность
рельефа. Кроме того, на топографических картах стремятся
3 Учебник аэронавигации
33
отразить не только рельеф, но и другие элементы мест-
ности, следовательно, для расположения их условных знаков
также необходимо оставить место. Поэтому для каждого мас-
штаба карты и характера рельефа при изображении его горизон-
талями устанавливается своя высота сечения. Понятие о высоте
сечения и изображении рельефа дают рис. 23 и 24.
В некоторых случаях для более подробного изображения
рельефа, кроме основных горизонталей, наносятся дополнительные
через половину высоты сечения; они изображаются пунктиром.
I. вершины. 2. Овраги о 3. Промоины. 4. Скалы. 5. Утесы.
6. Скалистые оОрывы. 7. Песчаные осыпи . 8. Земляные осыпи,
Ч Уступы, ю. СедловиныI II. Нвутые скаты (крупе 45е).
12 Лощин..
Рис. 24. Изображение рельефа
Одновременно с горизонталями и их подписями наносятся
и подписываются характерные точки рельефа — геометрические
точки. Геометрические точки называются абсолютными, когда они
исчисляются от уровня моря, и относительными, когда исчис-
ляются от какого-либо предмета или относительно друг друга
Например, высота горы может исчисляться относительно уровня
моря, тогда её отметка будет абсолютной, а высота той же горы
относительно её подошвы будет относительной.
На всех картах горизонтали наносятся по абсолютным отмет-
кам, а подписи их показывают высоту над уровнем моря.
Крутизна ската определяется сближением горизонталей — чем
горизонтали ближе, тем скат круче.
34
Расстояние между соседними горизонталями на карте назы-
вается заложением. Чем заложение меньше, тем скат круче.
Если заложения равны, то рельеф плавный; это следует учи-
тывать при выборе по карте мест, пригодных для устройства аэро-
дромов.
Издаваемые в СССР карты имеют следующую высоту се-
чения:
Карта масштаба 1:25 000 ..5л
. . 1:50000 . . . 10 ,
. . 1:100000 ... 10 ,
, . 1:200000 . . 20 .
1 :500 000 . . 40 .
. . 1:1000000 . . 50 .
Для определения утла крутизны ската пользуются шкалой
заложений, которая наносится на полях крупномасштабных карт.
Устройство шкалы следующее: по горизонтальной линии (осно-
вание шкалы) подписаны цифры, обозначающие крутизну скатов
в градусах. На перпендикулярных линиях отложены, в масштабе
карты, величины заложения, соответствующие указанным значе-
ниям крутизны скатов, в градусах
Рис. 25. Шкала заложений для определения
крутизны ската
Концы перпендикуляров соединены кривой, на которой нахо
дят крутизну скатов между горизонталями (рис. 25).
Определить крутизну ската можно следующим путём. Изме-
ряем циркулем или линейкой расстояние на карте между двумя
смежными горизонталями. Измеренное расстояние приложим
к шкале заложений так, чтобы один конец касался основания
шкалы, а другой — верхней кривой линии. Предположим, что они
совпали с точками А и Aj шкалы заложений. Отсчёт по основа-
нию шкалы показывает, что крутизна ската в данном месте будет
равна 1°30'.
Гипсометрический способ. Изображение рельефа горизонта-
лями передаёт подробности с достаточной точностью. Однако
способ изображения рельефа одними горизонталями не имеет той
наглядности, которую даёт гипсометрический способ изображения
рельефа, заключающийся в том, что отдельные высотные пояса
окрашиваются сплошным фоном коричневых оттенков, начиная
от жёлтого и бледяокоричневого и кончая тёмнокорнчне-
выми. Этот способ даёт наглядное изображение абсолютных вы-
сот и их соотношение, что позволяет без особого труда произво-
дить их оценку. Для горных районов боевых действий были изданы
карты масштаба 1 :200 000 с изображением рельефа гипсо-
з* 35
метрическим способом. По отзывам лётного состава, гипсометри-
ческие карты оказались значительно удобнее, чем карты с изо-
бражением рельефа одними горизонталями.
Гипсометрическим способом рельеф изображен на многих ли-
стах карты масштаба 1 : 1 000 000 нового издания.
Отмывкой рельеф изображается на некоторых мелкомасштаб-
ных картах. Сущность его заключается в том, что на картах сна-
чала наносятся горизонтали, а потом оттеняются южные и восточ-
ные скаты неровностей, предполагая, что источник освещения
находится в северо-западной или в северной части карты. Способ
отмывки применяется на некоторых наших картах, но он не поз-
воляет судить об абсолютных высотах и о крутизне скатов в гра-
дусах, а даёт лишь общее представление о рельефе.
Штрихами рельеф наносится на старых картах, которые в на-
стоящее время сняты со снабжения. При этом способе все неров-
ности покрываются штрихами, утолщающимися по мере увеличе-
ния крутизны. Для этой цели установлено несколько разрядов
с определёнными соотношениями между толщиной штрихов и рас-
стояниями между ними. Штрихи наносятся в направлении скатов:
чем круче скат, тем больше тень и толще штрихи.
Существенным недостатком этого способа является то, что по
штрихам нельзя определить высоту местности и определить кру-
тизну ската. Для изучения рельефа в целях безопасности полёта
на полях специальных маршрутных полётных карт наносится
сокращённый топографический профиль рельефа по маршруту.
При построении профиля также учитываются и наносятся господ-
ствующие высоты, расположенные вдоль линии пути в по-
лосе от 20 до 50 км вправо и влево от неё.
Горизонтальный масштаб профиля обычно! строится в мас-
штабе карты, а вертикальный выбирается в зависимости от харак-
тера рельефа.
Наличие профиля рельефа на маршруте полёта позволяет при-
нимать правильные решения в воздухе и быстро рассчитывать
безопасную высоту полёта.
§ 5. Глазомерная съёмка
При обследовании местности и выборе площади для устрой-
ства аэродрома требуется составить простейший графический
документ. Чаще всего такой документ (кроки) составляется путём
глазомерной съёмки. При глазомерной съёмке необходимо:
1) кроки ориентировать относительно стран света;
2) определить и вычертить линейный масштаб;
3) нанести рамку и все ближайшие опорные пункты, которые
имеются на крупномасштабной карте, с указанием расстояний от
рамки до опорных пунктов;
4) в масштабе съёмки нанести топографические элементы
местности (лес, кустарник, дороги, постройки и т. д.);
5) дать описание рельефа (общий уклон, канавы, бугры, ямы
и т. д.);
35
6) указать препятствия при подходах на посадку;
7) при нанесении на рабочем поле взлётно-посадочных полос
измерить и записать их магнитные азимуты, длину и ширину.
Полученный таким способом чертёж должен быть ориентиро-
ван (привязан) по крупномасштабной карте, например, мас-
штаба 1 : 100 000 или 1 : 200 000, с тем, чтобы при дальнейшей
обработке было видно, какой участок уточнялся на местности.
Для устройства стационарных аэродромов, где потребуется
планировка местности и сооружение построек, глазомерной
съёмкой ограничиваться нельзя. В таких случаях необходима ин-
струментальная съёмка по требованиям инструкций для производ-
ства топографической съёмки с применением геодезических инстру-
ментов: теодолита, нивелира, .мензулы.
§ 6. Масштаб к'арты
Масштабом называется отношение длины линии, взятой на
карте, к действительной длине той же линии на местности. Мас-
штабы выражаются в линейных или численных значениях.
Линейным масштабом называется прямая линия, разделённая
на равные между собой отрезки, каждый из которых соответ-
ствует определённому расстоянию на местности.
Численный масштаб выражается дробью, показывающей,
во сколько раз уменьшены действительные линейные размеры
предметов при изображении их на карте, например: 1 :200 000,
1 : 500 000, 1 : 1 000000 и т. д.
Зная численный масштаб карты, легко определить её линей-
ный масштаб. Для этого необходимо знаменатель дроби разде-
лить на число сантиметров, заключающихся в 1 км, т. е. на
100 000. Например, численный масштаб 1:200 000 соответствует
линейному масштабу 2 км в 1 см.
Главным масштабом называется величина, характеризующая
общее уменьшение при переходе на карту. Масштаб не является
постоянной величиной для всей карты, поэтому масштаб в каждой
данной точке и по данному направлению, в отличие от главного
масштаба, называется частным масштабом. Если главный масштаб
принять равным единице, то частные масштабы будут отличаться
от единицы (будут больше и меньше её). На многих проекциях
имеются направления, по которым частный масштаб не -изменяется
и равен главному масштабу.
§ 7. Определение -масштаба карты
На картах под южной рамкой листов наносятся линейный и
численный масштабы.
На каргах, составленных в проекции Меркатора, на полях
восточной и западной рамок даётся дополнительный линейный
масштаб. . .
Но иногда приходится пользоваться отдельными листами карт,
на которых отсутствуют как линейный, так и численный масштабы,
нацример, при склейке нескольких листов.
37
Масштаб карты в таких случаях можно определить следую-
щими двумя способами:
1) Если на карте нанесена сетка меридианов и параллелей,
то на рамках листов их выходы подписываются в градусах.
По таблице, приведенной на стр. 28, можно определить, к какому
масштабу относится карта.
Для контроля следует измерить циркулем отрезок меридиана
между параллелями и вычислить, какому расстоянию он соответ-
ствует, зная, что для средних широт СССР 1' дуги меридиан'а
равна 1852 м (миля). Предположим, что отрезок меридиана между
соседними параллелями соответствует 30' и его длина равна
11,1 см, тогда масштаб карты определится 1 852 X 30:11,1 =*
= 5 006 м, т. е. 1 см длины на карте соответствуют (с округле-
нием) 5 км длины на местности.
2) Если сетка меридианов и параллелей на карте отсутствует,
то циркулем можно измерить расстояние между двумя местными
предметами, помещёнными на этой карте, и сопоставить получен-
ное расстояние между этими же предметами на другой карте,
масштаб которой нам известен. Разделив расстояние между горо-
дами (в километрах) на измеренный отрезок карты (в сантиме-
трах), получим масштаб.
§ 8. Номенклатура карт
Число отдельных листов карты крупного масштаба для тер-
ритории большой страны бывает весьма велико. Чтобы выбрать
из них лист, необходимый для данного полёта, имеются сборные
таблицы. В этих таблицах каждый
Рис. 26. Прямоугольная
разграфка карт
отдельный лист карты имеет опре-
делённую нумерацию. Система де-
ления карты на отдельные листы,
определяющая рамки каждого ли-
ста карты, называется разграфкой
карты. Система обозначения отдель.
ных листов карты называется но-
менклатурой карты. Существуют
два вида разграфки: прямоугольная
и международная. Прямоугольная
разграфка производится простым
делением картографического изображения страны на листы прямо-
угольной формы (рис. 2G). В международной разграфке карт рам-
ками листов служат линии меридианов и параллелей.
При прямоугольной разграфке применяется простая номенкла-
тура, при которой каждый лист карты обозначается либо буквой,
либо цифрой. Такую номенклатуру имеют, например, карты в мас-
штабе 10 вёрст в дюйме и 25 вёрст в дюйме.
В международной разграфке и номенклатуре за основу взят
лист карты в масштабе 1 : 1 000 000 с размерами 4° по широте и
6° по долготе. В этой системе Северное и Южное полушария
38
делят яа 60 колони и 22 ряда. Каждая колонна обозначается
определённой цифрой. Нумерация колонн идёт от меридиана 180°
с запада ria восток (рис. 27), каждый ряд обозначается буквой
латинского алфавита, начиная от экватора: А, В, С и т. д. Таким
образом, каждый лист «миллионки» обозначается латинской бук-
вой и цифрой, например, N-35. Каждый лист карты в масштабе
1 : 500 000 представляет собой четвёртую часть листа «мил-
лионки», обозначаемую русскими буквами А, Б, В, Г (рис. 28).
Рис. 27. Международная
ра и-рафка
Рис. 28. Разграфка
карт 500 000
Рис. 29. Разграфка
карт 200 000
н-ЗЬ
Рис. 30. Разграфка карт 100 000
Следовательно, лист этой карты обозначается латинской буквой,
цифрой и русской буквой, например, N-35-A. Лист карты в мас-
штабе 1 :200 000 представляет собой одну тридцать шестую часть
листа «миллионки» (рис. 29),
обозначаемую римскими циф-
рами. Таким образом, каждый
лист карты в масштабе
1 : 200 000 обозначается ла-
тинской буквой, арабской циф-
рой и римской цифрой, напри-
мер, N-35-VII.
В период Отечественной
войны на Европейскую часть
СССР и прилегающих запад-
ных государств издано много
учетверённых листов карты
масштаба 1 : 200 000. Таких уче-
тверённых листов в миллионный лист вкладывается 9. Их номера
с N-35-I, II, VII, VIII по N-35-XXIX, XXX, XXXV, XXXVI (рис. 29).
Лист карты в масштабе 1 : 100 000 представляет собой 144-ю
часть листа «миллионки» (рис. 30)j номенклатура состоит из ла-
тинской буквы и двух цифр, например, N-35-144. Лист карты
в масштабе 1 : 50 000 определяется в результате деления листов
карты масштаба 1 : 100 000 на четыре части, обозначаемые бук-
вами русского алфавита А, Б, В, Г. Таким образом, номенклатура
листа этой карты состоит из латинской буквы, двух цифр и рус-
ской буквы, например, N-35-140-A.
39
§ 9. Ориентирование на местности по карте
и без карты
Поскольку карта отражает топографическое содержание
земной поверхности, то каждый умеющий её читать должен
уметь ориентироваться на местности. Чем крупнее масштаб карты,
тем больше нанесено ориентиров, тем легче по ней ориентиро-
ваться.
Ориентироваться — значит точно определить своё место-
нахождение относительно стран света и окружающих местных
предметов.
Для правильного определения направления движения карта
должна быть ориентирована по местным предметам или странам
света. Ориентировать карту можно по компасу или по небесным
светилам.
Установив компас осью С—Ю на рамку карты, поворачивать
карту с компасом до момента совпадения северного конца стрелки
компаса с буквой С компаса. Карта будет ориентирована, но
без учёта магнитного склонения. Зная величин}' и значение
мапнитного склонения по Авиационному штурманскому справоч-
нику для данного места, нужно довернуть карту на эту вели-
чину.
Определив азимут движения, желательно замерить контроль-
ные расстояния до ближайших встречных ориентиров, после чего
карту можно сложить и обращаться к ней для контроля, а дви-
жение продолжать по компасу.
Ориентирование без карты можно производить как по ком-
пасу, небесным светилам, так и по местным предметам. При поль-
зовании Солнцем и Луной следует учитывать время суток. Ночью
хорошо ориентироваться по Полярной звезде, перемещение кото-
рой на небесной сфере практически неощутимо, а разыскать её
легко по созвездию Большой Медведицы.
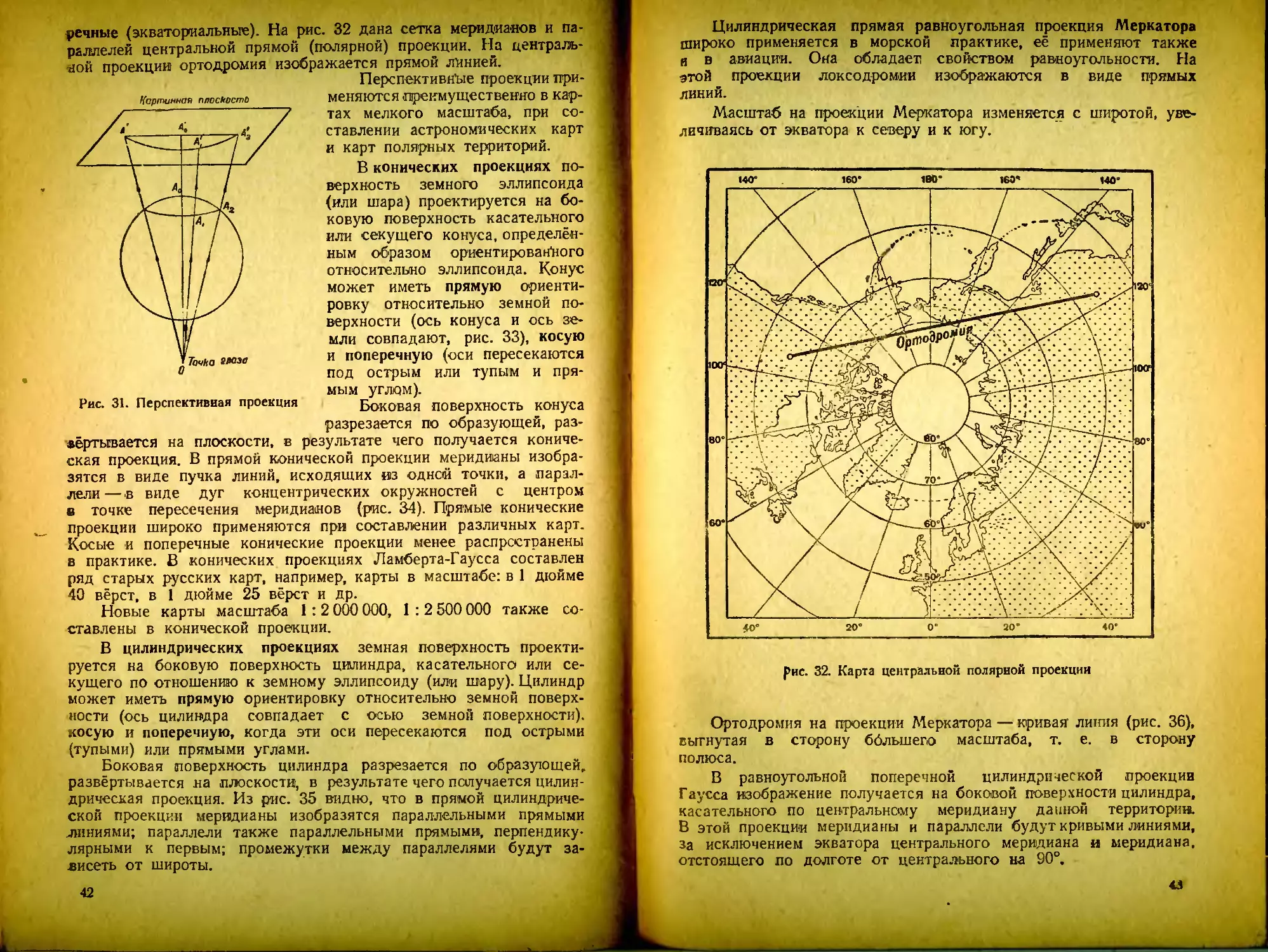
§ 10. Картографические проекции
Карты представляют собой условное изображение чйсти зем-
ной поверхности на бумаге в соответственно уменьшенном мас-
штабе. Карты составляются таким образом, чтобы каждый поль-
зующийся ими мог получить полное представление о свойствах,
виде, величине н взаимном положении местных предметов,
а также и об относительном превышении различных точек изобра-
жённого участка местности.
Небольшие участки земной поверхности могут быть изобра-
жены на бумаге без искажения их действительного вида.
Иначе обстоит дело, если требуется изобразить значительную
часть земной поверхности. Объясняется это тем, что поверхность
Земли не может быть перенесена на плоскость без разрывов,
складок или растягиваний отдельных участков.
40
При построении карты прежде всего строят географическую
координатную сетку, имеющую различный вид в зависимости от
рода выбранной картографической проекции, затем уже по гео-
графическим координатам на карту наносят данные, снятые на
местности. Существует большое количество разнообразных проек-
ций, изучаемых наукой — картографией.
Для развёртывания земной поверхности на плоскости при из-
готовлении карты прибегают к построению картографических
проекций.
Все существующие проекции могут быть подразделены по
двум признакам: по способу изображения на карте и по способу
построения проекции.
По способу изображения проекции подразделяются на:
1) равноугольные, или конформные; 2) равно-
великие, или эквивалентные; 3) произвольные.
В конформных проекциях бесконечно малые элементы земной
поверхности изображаются на карте без искажения, т. е. беско-
нечно малые контуры передаются подобными контурами (напри-
мер, бесконечно малый круг на земной поверхности отобразится
на карте также кругом).
В равновеликих проекциях отношение площадей карты
к соответствующим площадям земной поверхности есть величина
постоянная; в любом месте карты, в частном случае, это отно-
шение может быть равно единице. Равновеликие проекции не
равноугольны.
В произвольных проекциях преследуется цель уменьшения на
определённой территории тех искажений, которые получались бы
при применении конформных или эквивалентных проекций.
По способу построения проекции подразделяются на:
1) перспективные; 2) к о н и ч е с к и е; 3) цилин-
дрические; 4) поликони чес кие; 5) многогран-
ные; 6) условные.
В перспективных проекциях земная поверхность принимается
за поверхность шара *; она проектируется по законам линейной
перспективы из точки, в которой находится глаз, на картинную
плоскость, которая и является плоскостью карты. Точка, в кото-
рой находится глаз, располагается на так называемом основном
диаметре земного шара или его продолжении; картинная пло-
скость выбирается перпендикулярной к этому диаметру
(рис. 31). В зависимости от удаления глаза от центра земного
шара, выраженного расстоянием D, перспективные проекции
делятся на ортографические (£) = ос), внешние, стереографические
(D = R), центральные (D = О). В зависимости от наклона основ-
ного диаметра перечисленные проекции в свою очередь подраз-
деляются на прямые (полярные), косые (горизонтальные), попе-
1 Шаровую поверхность Земли при проектировании можно представить
себе в виде поверхности глобуса, уменьшенного до заданного главного мас-
штаба.
41
речные (экваториальные). На рис. 32 дана сетка меридианов и па-
раллелей центральной прямой (полярной) проекции. На централь-
ной проекции ортодромия изображается прямой линией.
Перспективные проекции при-
Рис. 31. Перспективная проекция
меняются .преимущественно в кар-
тах мелкого масштаба, при со-
ставлении астрономических карт
и карт полярных территорий.
В конических проекциях по-
верхность земного эллипсоида
(или шара) проектируется на бо-
ковую поверхность касательного
или секущего конуса, определён-
ным образом opneHTHpoBarfHoro
относительно эллипсоида. Конус
может иметь прямую ориенти-
ровку относительно земной по-
верхности (ось конуса и ось зе-
мли совпадают, рис. 33), косую
и поперечную (оси пересекаются
под острым или тупым и пря-
МЫМ углом).
Боковая поверхность конуса
разрезается по образующей, раз-
вёртывается на плоскости, в результате чего получается кониче-
ская проекция. В прямой конической проекции меридианы изобра-
зятся в виде пучка линий, исходящих из одной точки, а парал-
лели — в виде дуг концентрических окружностей с центром
s точке пересечения меридиааов (рис. 34). Прямые конические
проекции широко применяются при составлении различных карт.
Косые и поперечные конические проекции менее распространены
з практике. В конических проекциях Ламберта-Гаусса составлен
ряд старых русских карт, например, карты в масштабе: в 1 дюйме
40 вёрст, в 1 дюйме 25 вёрст и др.
Новые карты масштаба 1: 2 000 000, 1 : 2 500 000 также со-
ставлены в конической проекции.
В цилиндрических проекциях земная поверхность проекти-
руется на боковую поверхность цилиндра, касательного или се-
кущего по отношению к земному эллипсоиду (или шару). Цилиндр
может иметь прямую ориентировку относительно земной поверх-
ности (ось цилиндра совпадает с осью земной поверхности),
косую и поперечную, когда эти оси пересекаются под острыми
(тупыми) или прямыми углами.
Боковая поверхность цилиндра разрезается по образующей,
развёртывается на плоскости, в результате чего получается цилин-
дрическая проекция. Из рис. 35 видно, что в прямой цилиндриче-
ской проекции меридианы изобразятся параллельными прямыми
линиями; параллели также параллельными прямыми, перпендику-
лярными к первым; промежутки между параллелями будут за-
висеть от широты.
42
Цилиндрическая прямая равноугольная проекция Меркатора
широко применяется в морской практике, её применяют также
ч в авиации. Она обладает свойством равноугольности. На
этой проекции локсодромии изображаются в виде прямых
линий.
Масштаб на проекции Меркатора изменяется с широтой, уве-
личиваясь от экватора к северу и к югу.
рис. 32. Карта центральной полярной проекции
Ортодромия на проекции Меркатора — кривая линия (рис. 36),
выгнутая в сторону большего масштаба, т. е. в сторону
полюса.
В равноугольной поперечной цилиндрической проекции
Гаусса изображение получается на боковой поверхности цилиндра,
касательного по центральному меридиану данной территории.
В этой проекции меридианы и параллели будут кривыми линиями,
за исключением экватора центрального меридиана и меридиана,
отстоящего по долготе от центрального на 90°.
Проекциг Гаусса дает геометрическое основание для геодези-
ческих равноугольных прямоугольных координат, которые из-
вестны дол названием координат Гаусса-Крюгера и широко ис-
₽ис. 33. Коническая проекция
При составлении карт в
пользуются как в геодезической
практике, так и для построения в
проекции Гаусса-Крюгера ряда карт.
Крюгер разпаботал формулы
для непосредственного перехода с
эллипсоида на плоскость без приме-
нения вспомогательной сферы при
сохранении равноугольности.
Проекция Гаусса-Крюгера яв-
ляется равноугольной и многогран-
ной проекцией; многогранной пото-
му, что для обеспечения необходи-
мой точности на карту проекти-
руется не сразу вся земная поверх»-
ность, а лишь отдельные меридиан-
ные зоны с разностью долгот в 6°;
очевидно, что таких зон должно
быть 60.
проекции Гаусса-Крюгера вычисляют
прямоугольные координаты Гаусса-Крюгера для точек пересечения
Рис 34 Карга конической проекции
44
меридианов и параллелей. (Соединение этих точек даёт сетку
меридианов и параллелей. В проекции Гаусса-Крюгера строятся
советские карты крупного масштаба до 1 : 500 000. На этих кар-
тах ортодромия практически
близка к прямой.
Карты косой цилиндри-
ческой проекции составля-
ются для определённых мар-
шрутов; эта проекция носит
также название проекции
Кана, который предложил
построить эту карту в 1929'г.
для трансатлантического
перелёта Кост и Беллонта.
В проекции Кана цилиндр
касается земного шара по
ортодромии, совпадающей с
осью маршрута.
В этой проекции мери-
дианы и паоаллели изобра-
жаются в виде кривых. Но
если брать только полосу в
15° с обеих сторон большо-
го круга, принятого за но-
вый экватор, то меридианы можно рассматривать как прямые ли-
нии. Ортодромия в этой полосе весьма близка к прямой.
Локсодромия на карте проекции Кана изображается кривой
Рис. 36. Локсодромия‘и ортодромия меркаторской карты
В поликонических проекциях земная поверхность проекти-
руется на боковые поверхности ряда конусов, касательных к зем-
ной поверхности. Боковые поверхности! конусов развёртываются
на плоскости (рте. 37 и 38). Наиб злее часто встречается так назы-
ваемая простая поликоническая проекция, в которой центральный
45
меридиан изображается прямой линией, остальные меридианы —
кривыми, симметричными относительно центрального, а парал-
лели—дугами окружностей с различными центрами, которые
лежат на центральном меридиане.
Простая поликоническая проекция наиболее удобна для изо-
бражения территорий,
Рис. 37. Боковые поверх-
ности конусов полико-
цической проекции
вытянутых вдоль меридиана; она впервые
применялась в США, а потому часто назы-
вается американской проекцией. Простая
поликоническая проекция положена в осно-
вание многогранной проекции Лаллемана,
принятой с небольшими изменениями для
международной карты миллионного мас-
штаба, и называется международной проек-
цией. Наша карта 1 : 1 000 000 составлена
в проекции, мало отличающейся от между-
народной проекции и являющейся видоиз-
менением полпконической проекции. Лист
карты «миллионки» ограничен 4° по широте
и 6° по долготе; таким образом, зоны «мил-
лионки» и зоны проекции Гаусса-Крюгера
по разности долгот совпадают.
Условные проекции — это проекции, в
которых изображение меридианов и парал-
лелей ведётся по более сложным прави-
лам, отличающимся от тех, которые были
указаны в разобранных проекциях.
Рис. 38. Боковые по-
в рхности конусов по-
ликонической проек-
ции, развёрнутые на
плоскость
тали — коричневой;
§11. Краткие сведения о содержании
карт
Карта масштаба 1 : 100 000, или 1 км в
1 см. Проекция карты поперечная цилин-
дрическая Гаусса-Крюгера. Рамки трапеции
построены по прямоугольным координатам.
Размеры рамок: 2(У по широте и 30' по
долготе. Карта издаётся в четыре краски:
контуры — чёрной; воды — синей; горизон-
леса — зелёной. Рельеф выражен горизон-
талями через 10 м. В авиации используется как карта цели.
Карта масштаба 1 :200 000, или 2 км в 1 см, составлена
в проекции Гаусса-Крюгера. Размеры рамок трапеции: 40' по ши-
роте и 1° по долготе, Некоторые листы издаются сдвоенными,
а на Европейскую часть СССР — счетверёнными. На карту на-
носятся все населённые пункты. Дороги наносятся все, а из про-
сёлочных— имеющие наиболее важное значение. Нанесены сред-
ства связи. Рельеф изображается горизонталями сечением через
20 м. Карта издаётся в пять красок: контуры железных дорог —
чёрной; прочие дороги, мосты, телеграфные и телефонные линии —
красной; воды — синей; леса — зелёной; горизонтали — коричне-
46
вой. Карта является основной рабочей картой в штабах авиации
ближнего действия. Она применялась « как полётная карта для
авиации с небольшим радиусом действия.
Карта масштаба 1 :500 000, или 5 км в 1 см, составляется
в проекции Гаусса-Крюгера. Размеры листов: 2” по широте и 3е.‘по
долготе. Кроме того, на территорию крупных авиационных узлов,
как Москва, Ленинград и др., изданы сводные листы в радиусе
200—250 км. Рельеф выражен горизонталями или горизонталями
с отмывкой. В последнее время применяется изображение рель-
ефа горизонталями с послойной гипсометрической раскраской.
Основное сечение рельефа принято 40 м, а в гористых районах
через 80 jw.
По содержанию карта довольно подробная и в Отечествен-
ной войне служила полётной картой для всех видов
авиации.
Карта масштаба 1 : 1 000 000, или 10 км в 1 см, составлена
в видоизменённой полпконической проекции. Размеры листов
карты: 4° по широте и 6° по долготе. На карте даны только наи-
более важные населённые пункты и главные дороги; последние
выделены красным цветом. Гидрография (воды) отображена
весьма полно и подробно. С некоторым обобщением обозначены
лесные пространства и болота. Рельеф изображён горизонталями.
В равнинных частях Европейской части СССР горизонтали про-
водятся через 50 ле, а в гористых через 100, 200 и 400 м, в за-
висимости от абсолютных отметок, характера и крутизны скатов.
В боевой работе служила и как полётная карта при полётах на
большие расстояния и как бортовая карта для самолётов с малым
радиусом действия.
Карта масштаба 1 :2 000 000, или 20 км в 1 см (бортовая
карта), составляется также в видоизменённой поликонической про-
екции на территорию Европы и важнейшие направления Азиат-
ской части СССР.
Карта масштаба 1 : 2 500 000, или 25 км в 1 см, издана на
всю Европу и значительную часть Азии.
Карта составлена в конической проекции и нашла широкое
применение как карта общего обзора.
Маршрутные полётные карты в основном составляются
в масштабе 1 : 1 000 000 и, как исключение, в масштабе
1 : 500 000 и 1 : 2 000 000. Этими картами в СССР обеспечиваются
все существующие и проектируемые авиатрассы. Массовое при-
менение карта находит при постоянных полётах транспортной
авиации и при перелётах частей и соединений на большие рас-
стояния.
§ 12. Карты, применяемые для самолётовождения
В зависимости от назначения и вида авиации для самолёто-
вождения применяются следующие карты:
47
Карты, применяемые для самолётовождения
§ 13. Измерение путевых углов и расстояний на картах
Рис. 39. Измерение путевого угла
на карте
Путевой угол измеряется на карте при помощи транспортира.
Наиболее удобным считается треугольный транспортир из про-
зрачного целлулоида с двойной оцифровкой. Таким транспорти-
ром можно измерять путевые углы бсшыде 180° без дополни-
тельных переводов. Тонкая
диаметральная линия 0—180°
служит для совмещения с
меридианом. Все три обре-
за транспортира-угольника
представляют собой пря-
мые грани, которые можно
использовать 1для проведе-
ния параллельных и пер-
пендикулярных линий.
Для измерения путе-
вого угла между пунктами
полёта проводят прямую ли-
нию, затем накладывают
центр транспортира на пере-
сечение данной линии с ме-
ридианом карты. Диаметр
транспортира (0—180°) при
этом должен точно лежать
на меридиане, а угол транс-
портира должен быть на-
правлен в сторону полёта,
угол отсчитыва-
ют у пересечения линии с
оцифровкой транспортира.
Если прямой угол транспортира направлен к востоку, то
отсчёт производят по оцифровке у обреза транспортира, если
к западу — отсчёт производят по внутренней оцифровке. При
измерении путевого угла на картах конических проекций транс-
портир следует прикладывать к меридиану, проходящему по
середине маршрута, так как меридианы на этих картах не парал-
лельны. При пересечении прямой трёх-четырёх меридианов по-
лучатся различные путевые углы при каждом из этих меридиа-
нов, причём разность в углах, измеренных у крайних меридианов,
будет достигать 2—3°. Измерив путевой угол по меридиану, про-
ходящему по середине .маршрута, находят угол, указывающий на-
правление локсодромии (рис. 39).
Найденный таким образом путевой угол называется задан-
ным путевым углом (ЗПУ).
Заданный путевой угол измеряется на картах в проекции
Меркатора аналогичным образом, только в этом случае транспор-
тир прикладывается к любому меридиану, так как они парал-
лельны между собой.
Расстояния на картах можно измерять циркулем, масштабной
линейкой и курвиметром.
4 Учебник аэронавигации
49
Навигационная масштабная линейка служит для измерения
расстояний на различных картах. На одной её стороне нанесена
шкала для карт в масштабе 10 вёрст и 25 вёрст в дюйме, на дру-
гой — для карт в масштабе 1 : 1 000 000, 1 : 500 000 и 1 : 200 000.
Курвиметр — прибор для измерения расстояний на карте. Он
весьма удобен для измерения криволинейных маршрутов. Стрелка
курвиметра, движущаяся по циферблату прибора, указывает рас-
стояние в сантиметрах или в дюймах; пользуясь масштабом
карты, легко определить действительное расстояние.
§ 14. Измерение расстояний на картах в проекции Меркатора
На морских картах измерять расстояния масштабной линейкой
невозможно, так как масштаб карт изменяется при переходе от
параллели к параллели. На этих картах в качестве масштаба
используются деления, имеющиеся на боковых краях рамки карты
в том промежутке широт, где лежат точки линий маршрута. Эти
деления даны в минутах дуги меридиана. Каждая минута соответ-
ствует длине одной морской мили в масштабе данного участка
карты (морская миля равна 1,85 км). Чтобы измерить длину уча-
стка пути, отмеряют циркулем его длину и переносят на рамку
карты так, чтсбы середина отрезка пришлась на средней широте
этого отрезка, после чего отсчитывают число минут, заключён-
ных между ножками циркуля. Число минут определит искомую
длину участка в морских милях.
В некоторых случаях приходится переводить расстояние, вы-
раженное в километрах, в мили и обратно.
Чтобы перевести расстояние, выраженное в километрах, в мор-
ские мили, необходимо число километров разделить на 1,85; для
перевода расстояния, выраженного в морских милях, в кило-
метры необходимо умножить число миль на 1,85.
§ 15. Определение широты и долготы места по карте
Долгота заданного пункта по карте определяется следующим
образом. Через заданный пункт проводят прямую, параллельную
ближайшему меридиану, и в точке пересечения её с крайней па-
раллелью читают искомую долготу места (рис. 40).
Широту пункта определяют, проводя через этот пункт пря-
мую, перпендикулярную меридиану. Искомую широту читают в
точке пересечения проведенной линии с рамкой карты. Можно
также измерить циркулем или масштабной линейкой расстояния
от данного пункта до ближайшего меридиана и до ближайшей
параллели и полученные отрезки отложить на рамке карты от
того меридиана и от той параллели, до которой были измерены
расстояния от данного пункта. Концы отложенных отрезков ука-
жут долготу и широту пункта.
Работа на картах упрощается благодаря тому, что оцифровка
меридианов и параллелей и их детальная разбивка даны не только
на рамках, но и на самой карте. Наносится точка на карту по за-
данной долготе п широте в порядке, обратном указанному.
50
Широта и долгота места на морских картах определяются анало-
гичным способом.
При определении долготы места по карте всегда следует
знать, от какого меридиана даны долготы на карте. На новых
картах долготы даны от меридиана Гринвича; на некоторых
листах 40-вёрстной карты долготы даны от меридиана Ферро, а на
10- и 25-вёрстной карте от меридиана Пулково. Для аэронавига-
ционных расчётов всегда принимается долгота от Гринвича, по-
этому долготы от Пулкова и от
Ферро приходится переводить в
долготы от Гринвича. Для этого
необходимо знать относительные
долготы меридианов (рис. 41).
М7°39’4б"ы
^30°f9'3!)"E
। О* грмнвича qiy Долгота ЗО’!Я
! I----------
ы'гом'Е.
Рис.
41.
Рис. 40. Определение долготы
и широты места на карте
Относительные долготы
меридианов
Меридиан Пулкова + 30о19'39" от Гринвича
» Ферро —17°39'46" от Гринвича
. Парижа + 2°20'14" от Гринвича
Зная эти величины, легко определить долготу от Гринвича.
Пример 1. Долготу 57’50' Е от Ферро выразить в долготе от Гринвича:
57’50' — 17°40' = 40° 10' Е.
Пример 2. Долготу 8’20' Е от Пулкова выразить в долготе от Гринвича:
8’20' + 30’20' = 38’40' Е
Пример 3. Долготу 5°10* от Парижа выразить в долготе от Гринвича:
5°10' + 2°20' = 7°30' Е.
§ 16. Прокладка ортодромии на карте
Ортодромия на картах многогранной и конической проекций
на расстояниях до 700 км и в тех случаях, когда полёт происхо-
дит в меридиональном направлении (с отклонением от меридиана
4«
51
не более 20°), практически изображается прямой "линией. В осталь-
ных случаях ортодромия будет иметь вид некоторой кривой, вы-
пуклостью своей обращённой к полюсу. Для построения на карте
ортодромии необходимо вычислениями определить несколько про-
межуточных точек, через которые должна пройти ортодромия.
Затем при помощи линейки соединить прямыми исходный пункт,
промежуточные точки и конечный пункт маршрута. В результате
такого построения на карте получится ломаная линия, которую
и принимают за ортодромию (проекцию ортодромии).
Промежуточные точки намечаются через определённое число
градусов долготы, в зависимости от длины пути и кривизны орто-
дромии. Таким образом, расчёт сводится к .определению широты
промежуточных точек.
Вычисления производят по формуле
tg <р = A sin (X, — X) + В sin (X — XJ,
где
А = tg <pj cosec (Xs — X,); В = tg cosec (X, — XJ.
К'Оэфициенты А и В остаются одинаковыми для всех проме-
жуточных точек.
Здесь ф—широта промежуточной точки;
X — долгота промежуточной точки;
и Xj — широта и долгота пункта вылета;
и X» — широта и долгота конечного пункта.
Промежуточные точки ортодромии можно определить и без
вычислений — по карте центральной проекции. В этом случае
заданные пункты маршрута соединяют прямой линией, которая
и будет являться ортодромией. Чтобы перенести ортодромию на
карту конической или меркаторской проекции, необходимо вы-
брать на ней ряд промежуточных точек, снять координаты этих
точек — долготу и широту — и перенести на карту. Полученные
точки соединить прямыми линиями или же провести согласную
кривую по лекалу. Кроме тогэ, промежуточные точки ортодромии
можно определить при помощи специальных таблиц.
§ 17. Прокладка локсодромии на карте
Прокладка локсодромии на картах меркаторской проекции
не вызывает каких-либо затруднений, так как на этих картах она
изображается прямой линией. Соединяя заданные пункты марш-
рута прямой линией, получают локсодромию.
На каргах конических проекций локсодромия изображается
кривой, выпуклостью своей обращённой к экватору. Практически
на расстояниях около 200—300 км и при разности в азимутах
начального и конечного пунктов маршрута, не превышающих 3°,
локсодромию заменяет прямая линия.
В остальных случаях необходимо производить построение
локсодромии. Для этого на карте соединяют прямой линией за-
данные пункты маршрута и измеряют транспортиром путевой угол.
52
Транспортир можно приложить к меридиану, проходящему но
середине маршрута, или же измерить путевые углы в начале и
в конце маршрута и взять среднее арифметическое из них. Путе-
вой угол может быть также вычислен способом, указанным в § 9
главы первой.
Определив путевой угол, приступают к’ построению локсо-
дромии. Транспортир накладывают на точку вылета и при помощи
линейки строят путевой угол. Линия пути, проложенная на карте,
пойдёт несколько ниже вспомогательной прямой. Проложив линию
пути до следующего меридиана, получают на этом меридиане
точку, к которой прикладывают транспортир, и снова строят тот
же путевой угол (рис. 42). Таким образом, последовательно
Рис. 42. Построение локсодромии на карте
конической проекции
строя путевой угол при каждом встречном меридиане на кар’с,
получают ломаную линию, которую и принимают за локсодромно.
Этот способ построения локсодромии практически достаточно
точен.
Существует также другой способ прокладки локсодромии,
заключающийся в том, что локсодромию сначала провод .т на
карте меркаторской проекции, а затем переносят её на карты
в других проекциях по координатам некоторых её точек.
§ 18. Кодирование карт
В целях скрытности и быстроты управления войсками, осо-
бенно в военное время, прибегают к кодированию карт. Особенно
часто кодированная карта применяется для обозначения место-
нахождения воздушного противника, при передаче донесений в
«воздух».
При пользовании кодированной картой вместо названия
пунктов или предметов указывается номер квадрата, в котором
расположена цель.
Рассмотрим, как наносятся квадраты на карту масштаба
1 : 1 000 000. Взяв какой-либо меридиан за начальный, например,
Гринвичский, карта графится на большие, средние и малые ква-
53
драгы. Стероны больших квадратов по широте имеют 30' и по
долготе 1°. Каждый большой квадрат делится на 9 средних со
сторонами по широте 10' и долготе 20'. Средний квадрат в свою
очередь делится на 4 малых — со сторонами по широте 5' и дол-
готе 10'. Всего в большом квадрате имеется 36 малых. Малый
квадрат может быть разделён ещё на 4 дополнительных, но это
делается в исключительных случаях. Дополнительные квадраты
на карты масштабов 1 : 1 000 000 и 1 : 500 000 не наносятся.
Каждый большой, средний и малый квадраты имеют свои
номера, при этом номера больших квадратов состоят из четырёх-
значных чисел, средних — из пятизначных чисел и малых — из
шестизна чных чисел.
Рис. 43. Кодирование карты
Нумерация строится по следующему принципу. Карты коди-
руемой территории с запада на восток разграфляются на пояса
размером 0°30' и с севера на юг на колонны размером 1°. Каждый
пояс и каждая колонна обозначаются двухзначным числом
(рис. 43).
Номер заштрихованной клетки, соответствующей большому
квадрату кодированной карты, будет 0305 (рис. 43).
Номер среднего квадрата складывается из номера большого,
к которому дописывается цифра среднего квадрата.
Из приведённого рисунка видно, что номера средних квадра-
тов будут следующие: 03051, 03052, 03053,..., 03059 (рис. 44).
Номер малого квадрата складывается из номера среднего,
к которому дописывается цифра малого, н'апример: 030544
(рис. 44).
В целях скрытности, для изменения номеров больших квадра-
тов, устанавливается система числовых ключей, которые можно
вычитать или прибавлять к четырёхзначному числу большого
квадрата, в едязл с чем номера последних изменяются.
§ 19. Учёт и хранение карт
Карта является документом, отражающим содержание мест-
ности, поэтому карта требует надлежащего учёта и хранения как
в мирное, так и в военное время. Для приобретения топографи-
ческих карт устанавливается определённый порядок, который
в армейских условиях регламентируется приказами.
54
Хранение карт должно обеспечивать их от утери, сырости и
порчи. Секретные карты учитываются и хранятся по инструкциям
наравне с секретными документами.
§ 20. Аэролоции
Аэролоции представляют собой подробные описания маршрут
тов воздушных линий. Аэролоции дополняют полётные карты и
дают штурману подробные данные, необходимые для самолёто-
вождения.
В аэролоциях указываются: ландшафтная характеристика
участке® маршрута, описание ориентиров, условия навигации в раз-
личное время года, условия посадки и взлёта, магнитные данные,
система обслуживания самолётов, метеорологическая служба,
климатологическая характеристика района (температуры, туманы,
облачность, грозы, ветер, снеговой покров и т. д.), места располо-
жения свето- и радиомаяков и характеристика их работы, кроки и
описания посадочных площадок и аэродромов (подходы, пре-
пятствия, опознавательные знаки и т. д.).
Аэролоции издаются на сравнительно большой срок, в тече-
ние которого, однако, на воздушной линии могут произойти из-
менения. Поэтому дополнительно к аэролоциям периодически
издаются дополнения, а также «Извещения об изменениях в аэро-
навигационной обстановке на воздушных линиях», в которых
указываются все происшедшие изменения с момента составления
аэролоции.
ГЛАВА ТРЕТЬЯ
АЭРОНАВИГАЦИОННЫЕ ЭЛЕМЕНТЫ И ПРИБОРЫ
§ 1. Аэронавигационные элементы
Аэронавигационными элементами называются величины, опре-
деляющие траекторию полёта.
Для измерения этих элементов на самолёте имеются аэро-
навигационные приборы. Чтобы успешно выполнять самолёто-
вождение, штурман должен знать эти приборы и уметь ими поль-
зоваться.
Многие аэронавигационные приборы в результате влияния на
их показания целого ряда факторов не дают истинных значении
измеряемых ими величин, поэтому в показания приборов тре
буется вводить различные поправки. Ниже даётся описание при
боров, указываются свойственные им ошибки, методы проверки
приборов и способы учёта ошибок.
§ 2. Курс самолёта
Курсом самолёта называется угол между сев'ерным направ-
лением меридиана и продольной осью самолёта. Отсчитывается
курс в градусах от северного на-
правления меридиана по часовой
стрелке.до оси самолёта — от нуля
до 360°.
Если курс отсчитан от истинно-
го меридиана, курс самолёта назы-
вается истинным (ИК), если от маг-
нитн'ого меридиана — курс назы-
вается магнитным (МК) (рис. 45).
Курс самолёта определяется по
компасу: магнитному, гиромагнит-
ному или солнечному. Истинный
курс может указать только солнеч-
ный компас. Другие типы компасов
указывают компасный курс самолё-
та (КК). Компасный курс отсчиты-
вается от компасного меридиана.
Компасным меридианом называется линия, проходящая через маг-
нитную стрелку компаса, установленного на самолёте. Угол, соста-
Рис. 45. Истинный, магнитный
и компасный курсы
56
пленный магнитным и компасным меридианами, называется деви-
ацией (Ак). Девиация возникает вследствие влияния на магнит-
ную стрелку компаса магнитного поля самолёта.
§ 3. Компас
Основным типом авиационного компаса является магнитный
компас. Принцип действия магнитного компаса основан иа свой-
стве магнитной стрелки устанавливаться в плоскости магнитного
меридиана. Магнитные компасы бывают сухие и жидкостные.
Наиболее употребительны жидкостные компасы, менее чувстви-
тельные к тряске и толчкам и обладающие меньшей продолжи-
тельностью колебаний подвижной системы — картушки, заменяю-
щей в авиационном компасе магнитную стрелку. Существуют
также дистанционные магнитные компасы, передающие показания
на известном расстоянии.
Жидкостные компасы могут быть периодические и апериоди-
ческие в зависимости от характера колебаний картушки. Картушки
t периодических компасов конструируются с таким расчётом,
чтобы они испытывали минимальное сопротивление жидкости
при вращении вокруг вертикальной оси. При отклонении такой
картушки от меридиана она приходит в прежнее положе-
ние, совершая затухающие гармонические колебания около мери-
диана.
Картушки апериодических компасов построены на противопо-
ложном принципе. Здесь, вместо того чтобы уменьшить сопротивле-
ние горизонтальным перемещениям картушки, стремятся создать
сопротивление этим движениям. Картушка такого компаса, будучи
отклонена от магнитного меридиана, при подходе к меридиану
имеет незначительную скорость и потому не переходит меридиана.
Сопротивление жидкости движению картушки в апериодических
компасах увеличивается благодаря специальным стерженькам-
успокоителям, прикреплённым к картушке. При движении картушки
жидкость обтекает успокоители, что сопровождается завихре-
ниями, тормозящими движение картушки. Создаваемое сопроти- •
вление и делает колебание апериодическим. Картушка приходит
в равновесие, оставаясь всё время по одну сторону меридиана.
Это качество весьма ценно в самолётных компасах.
L Однако в полётах на больших высотах апериодические ком-
пасы при очень низких температурах ведут себя довольно инертно.
Поэтому более целесообразным считается применение полуаперио-
дических компасов, которые на малых и средних высотах имеют
некоторый период колебаний, на больших же высотах приобретают
апериодические свойства.
В настоящее время в компасах в качестве жидкости приме-
няется лигроин (фракция бакинского бензина), имеющий достаточ-
ную вязкость, высокую температуру кипения и низкую темпера-
’ туру замерзания. Эти свойства весьма ценны, так как компасная
жидкость не должна изменять своего состояния в пределах тех
температур, которые бывают в полёте.
57
На двухместных и многоместных самолётах устанавливают
два компаса: в кабине лётчика — путевой компас и в кабине штур-
мана— главный компас. В качестве путевого компаса исполь-
зуется компас КИ-11, в качестве главного — А-4.
§ 4. Компас А-4
Котелок компаса А-4 представляет собой цилиндрический
сосуд, наполненный лигроином и закрытый стеклом (рис. 46).
Внутри котелка помещена картушка (рис. 47), состоящая из по-
плавка, к которому прикреплены два параллельных магнита из
специальной магнитной стали. В нижней .части поплавка находится
Рис. 47. Картушка компаса А-4
Рис. 46. Компас А-4
шпилька, направленная остриём вниз, опирающаяся на топку и
служащая осью вращения картушки. Поплавок служит для умень-
шения веса картушки, а следовательно, и для уменьшения трения
между шпилькой и топкой.
Топка сделана из агата и укреплена на колонке, установлен-
ной в центре котелка компаса. Топка с колонкой амортизированы
при помощи пружины. К поплавку прикреплён демпфер, увеличи-
вающий устойчивость картушки в вертикальной плоскости. Кроме
того, к поплавку прикреплены четыре успокоителя, на концах ко--
торых имеются цифры 0, 1, 2 и 3. Угол между успокоителями
с цифрами 0 и 3 равен 60°; углы между остальными успокои-
телями равны 100°. На поплавке имеются ещё два успокоителя,
расположенные параллельно магнитам картушки и образующие
стрелку. Конец успокоителя, направленного на север, окрашен
в красный цвет, а направленного на юг — в синий цвет. Успокои-
тели с цифрами служат для отсчёта курса. Картушка может сво-
бодно накреняться до 20°. Во избежание соскакивания её во
втулке поплавка имеется пружинящая шайба.
На внутренней стенке котелка укреплена стоградусная шкала.
Цена деления шкалы равна 1°. Нумерация на шкале идёт против
часовой стрелки (рис. 48).
58
Освещение компаса производится лампочкой в торец стекла
котелка. Торец покрыт белой краской, в результате чего шкала
прибора имеет мягкое освещение. Сбоку котелка находится отвер-
стие для доливки лигроина, закрытое винтовой пробкой. Для
устранения пузырьков воздуха, появляющихся в компасной жид-
кости при низких температурах, компас имеет в верхней части
Рис. 48. Шкала компаса
котелка кольцеобразную «уводящую
камеру». Схема устройства уводящей
камеры показана н'а рис. 49.
При понижении температуры об-
разующиеся в жидкости пузырьки воз-
духа уходят наверх в «уводящую
камеру» и rfe мешают наблюдению за
компасом.
Рис. 49. Схема уводящей
камеры
В нижней части компаса помещается девиационный прибор
(рис. 50), состоящий из коробки с продольными и поперечными
магнитами. Магниты вста-
влены в специальные ва-
лики; при вращении ва-
ликов магниты поворачи-
ваются в вертикальной
плоскости. Ключ для вра-
щения магнитов имеется
при компасе. Нейтраль-
ное (вертикальное) поло-
жение магнитов отмечено
специальными рисками.
Компас устанавливается
на самолёте при помощи
кронштейнов. Стоградус-
ная шкала компаса дол-
Рис. 50. Девиационный прибор
жна быть направлена вперёд, чтобы линия, проходящая через
центр шкалы и центр котелка, была параллельна оси симметрии
самолета.
Отсчитывается курс по компасу А 4 следующим образом:
сотни градусов читают по успокоителю, который находится против
стоградусной шкалы; десятки градусов считают непосредственно
по шкале. Например, на рис. 48 компас показывает курс, рав-
ный 270°.
§ 5. Компас КИ-11
Компас КИ-11 (рис. 51) является путевым компасом и пред-
назначен для установки на приборной доске в кабине лётчика.
59
Основное отличие компаса КИ-11 от других компасов заключается
в расположении его каргушки, позволяющем наблюдать показания
компаса при горизонтальном направлении взгляда лётчика.
Компасы подобной конструкции называются компасами
с вертикальной картушкой. Картушка компаса поплавкового типа
(рис. 52) с двумя магнитами. К поплавку прикреплена латунная
шкала с делениями и цифрами. Деления нанесены через 5°, оциф-
ровка — через 30°. Главные румбы обозначены буквами N, Е, S, W.
В центре картушки, снизу, укреплена шпшма остриём вниз,
опираюшаяся на топку и служащая осью вращения картушки.
Рис. 51. Компас КИ-11
(вид спереди)
Поплавок
h 3 6 4? 12 “"(ало
. Рис. 52. Картушка компаса
КИ-11
Топка с колонкой аморти зированы при помощи пружины. Коте-
лок компаса цилиндрической формы. В передней его части вста-
влено стекло, через которое наблюдают псссазания картушки. По
середине стекла нанесена вертикальная нить — курсовая черта, по
которой отсчитывается курс. Курсовая черта и шкала кар^шки
освещаются тремя лампочками, из которых средняя является
основной, а две другие — запасные. Для устранения пузырьков
воздуха в компасе имеется узодящая камера. Девиационный при-
бор стандартного типа.
Компас крепится на приборной доске стандартным крепёжным
кольцом, прикреплённым с обратной стороны доски тремя болтами.
Для снятия прибора достаточно отвернуть винт замка крепёжного
кольца, после чего прибор легко снимается.
§ 6. Перевод курсов
При выполнении аэронавигационных расчётов часто прихо-
дится переходить от одного значения курса к другому. Эти дей-
ствия называются переводом курсов.
Основные правила перевода курсов следующие:
1. Для перевода компасного курса в магнитный необходимо
прибавить к нему (алгебраически) девиацию:
мк=кк + V
60
2. Для перевода магнитного курса в компасный необходимо
вычесть из него (алгебраически) девиацию:
КК = МК— дк.
Пример 1. Компасный курс 140°, девиация + 10°. Найти машитный мрс.
140° + 10° = 150°.
Графическое решение этого примера показано на рис. 53. Проводим кочш.е-
ный меридиан и откладываем при иём компасный курс 140°. Проводим магнит-
ный меридиан (он пройдет левее на 10°) и получаем магнитный курс 150°.
Рис. 53. Графическое Рис. 54. Графическое построе-
построение к при- ние' к примеру 3
меру 1
Пример 2. Магнитный курс 90°, девиация + 10°. Найти компасный курс:
90° — (+ 10°) = 80°.
3. Для перевода магнитного курса в истинный к нему надо
прибавить (алгебраически) магнитное склонение:
ИК = МК +Дм.
Пример 3. Магнитный курс 240°, склонение —10°. Нтйти истинный курс-
210° 4- (— 10°) = 230°.
Графическое решение этого примера дано на рис. 54. Проводим магнитный
меридиан и откладываем при нём магнитный курс 240°. Проводим истинный ме-
ридиан (он пройдёт правее на 10°) и находим, что истинный курс равен 230°.
4. Для перевода истинного курса в -магнитный из него надо
зычесть (алгебраически) магнитное < клонение:
МК = ИК — Дм.
Ппимер 4. Истинный курс 270°, магнитное склонение—10°. Найти магнит-
ный курс:
270° — (— 10°; = 280°.
61
§ 7. Ошибки компаса
Компас устанавливают в том месте, которое предусмотрено
схемой нормального оборудования самолёта данного типа. Вообще
же при установке компаса стараются найти для него место, уда-
лённое от стальных и железных масс. Особенно важно удалить
компас от больших подвижных железных масс (пулемётов и пр.).
Нельзя ставить компас в одной горизонтальной плоскости с рабо-
чим магнето и вблизи самолётной радиостанции.
Компас, предназначенный для установки на самолёте, должен
быть испытан. Испытание компаса заключается в определении
застоя картушки и времени успокоения.
Застоем картушки называется свойство картушки быть нечув-
ствительной к малым отклонениям от меридиана. Застой происхо-
дит от трения шпильки о топку и картушки о жидкость. Пссле
отклонения картушка не возвращается в прежнее положение равно-
весия, а остаётся отклонённой на небольшой угол, называемый
углом застоя. Для испытания компаса на застой его поме-
щают в месте, по возможности удалённом от железных предметов
и других-компасов, и устанавливают по курсу N, постучав по
котелку пальцем. Затем подносят к компасу магнит и отклоняют
картушку примерно на 5°, после чего магнит удаляют. Когда
картушка успокоится, отсчитывают угол, на который она не дошла
до первоначального положения. Испытание повторяют несксг.ько
раз и берут среднее арифметическое из полученных данных. За-
стой картушки должен быть не более 1°, а при лёгких постукива-
ниях по котелку должен уменьшиться да 0°.
Для определения времени успокоения картушку отклоняют
магнитом примерно на 45° и в момент убирания магнита пускают
в ход секундомер. Останавливают секундомер в момент успокое
ния картушки. Время успокоения картушки должно быть не
больше 25 секунд. Компасы, имеющие застой и время успокоения
более указанных величин, к установке на самолёт не допускаются
и должны быть направлены в ремонт.
На самолёте компас может давать неправильные показания
вследствие различных причин. Например, курсовая черта компаса
может быть направлена не точно по оси самолёта. В таком случае
показания компаса будут давать ошибку, равную по величине
уклонению курсовой черты от правильного направления. Эта
ошибка называется установочной; она может быть исправлена
поворотом котелка в соответствующую сторону.
На самолёте, в непосредственной близости от компаса, нахо-
дится значительное количество стальных и железных предметов
(стальные трубы, органы управления, части мотора, пулемёты
и т. д.). Вследствие этого магнитная ось картушки компаса уста-
навливается не в плоскости магнитного меридиана, а образует с ним
некоторый угол, называемый девиацией (,ДК).
Северный конец картушки может быть отклонен к востоку или
к западу от магнитного меридиана. В первом случае девиация на-
зывается положительной и обозначается знаком плюс (+), а во
62
втором—отрицательной и обозначается знаком минус (—) Вели-
чина и знак девиации меняются с изменением курса самолёта.
Девиация сильно искажает показания компаса, а также вызы-
вает колебания картушки при перемене курса, поэтому стараются
насколько возможно уменьшить её. Уменьшению девиации способ-
ствует правильный выбор места установки компаса в самолёте. При
неудачно выбранном месте девиация компаса может быть весьма
велика; известны случаи, когда она была больше 100°. Другой
способ уменьшения влияния стали и железа на компас закло
чается в применении дистанционных компасов, дающих показания
на расстоянии. Такие компасы устанавливаются в том месте фюзе-
ляжа самолёта, где девиация незначительна. Наконец, девиацию
можно уменьшить, помещая вблизи компаса магниты. Способ
уменьшения девиации при помощи магнитов называется устране-
нием девиации и заключается в том, что девиацию сначала
определяют, а затем уменьшают при помощи девиационного при-
бора.
В полёте при работе винтомоторной группы части самолёта
приходят в колебательное движение, поэтому шпилька компаса
также начинает колебаться и создавать вынужденные колебания
картушки (картушка начинает «ходить»). Эти колебания иногда
достигают большой величины; когда периоды собственного коле-
бания картушки и самолёта близки, наступает явление резонанса
колебаний. Наблюдались случаи, когда картушка «ходила» в пре-
делех 10° или даже отклонялась на 20—30°. В таких случаях
необходимо установить другой компас.
Компасная жидкость предназначается для превращения коле-
баний картушки в затухающие или апериодические колебания,
а также для уменьшения трения шпильки о топку (в компасах с по-
плавком). Сопротивление жидкости зависит от её вязкости! (вну-
треннего трения жидкости), плотности и формы картушки. При
поворотах самолёта компасная жидкость приходит во враще-
ние в направлении поворота котелка и увлекает за собой кар-
тушку.
Таким образом, при поворотах самолёта компас не показывает
величины поворота или указывает, что поворот происходит с увели-
ченной скоростью. Ошибки этого рода называются увлечением
компаса. Время успокоения компаса после большого увлечения
доходит до 2 минут.
При любом повороте самолёта с креном картушка компаса
наклоняется вместе с самолётом, и на неё действуют не только
горизонтальная составляющая земного магнитного поля, нс
частично и вертика. иьная. Вследствие этого картушка стремится
повернуться в сторону поворота самолёта, и компас будет давать
неправильное представление о величине, а иногда и о направле-
нии поворота. Так как на северных курсах это особенно ощутимо,
то эту ошибку принято называть северной поворотной ошибкой.
Например, при повороте с курса, близкого к 360°, вправо или
влево картушка компаса не сразу показывает поворот, а иногда
даже показывает поворот в противоположном направлении.
ьЗ
В полёте с южными курсами (близкими к 180°) при псворотах
вправо и влево картушка компаса отклоняется в сторону, противо-
положную повороту, и всегда правильно показывает направление
поворота, но скорость поворота кажется преувеличенной. В таких
случаях необходимо пользоваться гиромагнитным компасом
(см. § 13).
Один отсчет, произведенный по компасу, не дает возмож-
ности определить точный курс самолёта. Даже при хорошей тре-
нировке лётчика курс самолёта подвержен постоянным колеба-
ниям. Эти колебания складываются из мелких и частых рысканий
Рис. 55. Рысканье самолета
на курсе
матически наблюдать колебания
самолёта.
на курсе и более крупных и ред-
ких уходов самолёта с курса и
приведений его на курс пилотом.
Рысканьем самолёта на курсе
называются отклонения продоль-
ной оси самолёта от линии за-
данного курса (рис. 55). Рысканье
на курсе вызывается кренами са-
молёта, возникающими вследст-
вие влияния на полёт вертикаль-
ных движений воздуха, а также
и порывами ветра. Поэтому, что-
бы определить точный курс, что
особенно важно при дальнем по-
лёте без видимости земных ори-
ентиров, штурман должен систе-
курса и выводить средний Kypcj
Весьма важно определять средний курс также в слепом
полёте и в плохих метеорологических условиях, когда отклонения
от взятого курса могут быть весьма велики.
Средний курс определяют отсчётами показаний компаса через
определённые промежутки времени. Например, можно произвести
несколько серий отсчётов с интервалами между сериями в 1 ми-
нуту. После этого вывести среднее из каждой серии и среднее из
всех серий отсчётов.
Точность ведения самолёта по компасу зависит также от тре-
нировки лётчика. Мало тренированные лётчики держат курс с ко-
лебаниями до + 10—12°. Опытные лётчики удерживают курс с точ-
ностью до +3—5°.
При пилотировании самолёта разными лётчиками выдержива-
ние курса значительно различается между собой. Это объясняется
ошибками пилотирования, которые носят субъективный характер.
Ошибки пилотирования зависят также от типа компаса и способа
пилотирования: по компасу, по ориентирам, по створу их.
Несовершенство магнитного компаса заставляет при полётах
в облаках и ночью прибегать к помощи дополнительных приборов,
облегчающих сохранение прямолинейности полёта (указатель пово-
рота, гиромагнитный компас).
§ 8. Девиация
На самолёте компас находится в магнитном поле, слагаю-
щемся «в двух полей: магнитного поля земли и магнитного поля
самолёта. Магнитное поле самолёта создаётся теми источниками
магнитного влияния, которые находятся на самом самолёте. Оно,
в свою очередь, может быть разложено на два поля: постоянное
магнитное поле самолёта, сохраняющее свои размеры и направле-
ние относительно оси самолёта, и переменное магнитное поле
самолёта, изменяющееся как по направлению силовых линий, так
и по напряжению при изменении положения самолёта относительно
меридиана.
Постоянное магнитное поле создают стальные части и обо-
рудование самолёта. Эти части представляют собой постоянные
магниты, так как наведённый тем или иным путём магнетизм удер-
живается сталью в течение долгого времени почти без ослабления.
Переменное магнитное поле создают железные предметы, так как
железо обладает способностью немедленно намагничиваться вслед-
ствие индукции при расположении в магнитном поле. Величина
индукции пропорциональна силе магнитного поля и некоторому
коэфициенту магнитной проницаемости. Величина этого коэфи-
циента для железа весьма велика. Если железный стержень на-
ходится в магнитном поле, то образующиеся в нём полюсы распо-
лагаются на концах стержня независимо от его направления отно-
сительно магнитного поля. При этом степень намагничивания будет
пропорциональна не только напряжению намагничивающего поля,
но и косинусу угла между направлением стержня и направлением
поля.
Таким образом, наибольшее намагничивание железного
стержня будет происходить при совпадении стержня с направле-
нием поля. Наоборот, при перпендикулярном расположении стержня
относительно -магнитного поля намагничивание будет равно нулю.
Девиация, порождаемая постоянным магнитным полем само-
лёта, имеет большую величину, тогда как девиация, вызываемая
переменным магнитным полем, обычно очень мала и на современ-
ных самолётах не превышает 1—2°. Это объясняется тем, что
в конструкцию самолётов входят только сталь и нейтральные ме-
таллы.
В теории девиации компаса, разработанной Пуассоном и Арчи-
бальдом Смитом, доказывается, что на стрелку компаса дей-
ствуют следующие 6 сил:
1. Сила ЪН — действует в направлении магнитного мери-
диана и, следовательно, девиации не производит.
2. Сила \АН — действует перпендикулярно магнитному мери-
диану, и, следовательно, производимая ею девиация имеет
постоянный характер, т. е. от курса не зависит. Создаётся эта
сила мягким железом.
3. Сила /ВН — действует в направлении продольной оси
самолёта. Величина производимой ею девиации зависит от курса
самолёта: на курсах 0° и 180° она равна нулю; на курсах
90° и 270° она достигает максимума (рис» 56). Создаётся эта
5 Учебник аэронавигации
65
девиация твёрдым самолётным железом (стальными предметами),
расположенным справа или слева от компаса.
4. Сила '/.СН—действует в направлении, перпендикулярном
продольной оси самолёта. Величина девиации, создаваемой этой
силой, на курсах 0° и 180°
Рис. 56. Действие магнитных сил
на картушку
вой характер, так как при повороте
обращается в нуль.
достигает максимального
значения, а на курсах 90°
и 270° равна нулю (рис.
57). Создаётся эта деви-
ация твёрдым самолёт-
ным железом, располо-
женным впереди или по-
зади компаса.
Девиация отсилХВ/7
и )СН носит полукруго-
самолёта на 360° два раза
Рис. 57. Действие магнитных сил
на картушку
5. Сила УОН— действует по зеркальному изображению маг-
нитного меридиана в диаметральной плоскости самолёта. Эта
сила на курсах 0°, 90°,
180° и 270° не произво-
дит девиации, а на кур-
сах 45°, 135°, 225°и 315°
даёт максимальное значе-
ние девиации (рис. 58).
6. Сила УЕН — дей-
ствует перпендикулярно
зеркальному изображе-
нию магнитного мери-
диана в диаметральной плоскости самолёта. Эта сила на курсах
45°, 135°, 225° и 315° не производит девиации, а на курсах 0е,
90°, 180е и 270° даёт максимальное значение девиации (рис. 59).
Силы УОН и УЕН воз-
никают за счёт магне-
тизма мягкого железа.
Девиация, создаваемая
этими силами, носит чет-
вертной характер, т. е. за
полный разворот самолё-
Рис. 58. Действие магнитных сил
на картушку
та девиация принимает
значение нуль четыре раза
Строя силы, произво-
дящие девиацию, для различных курсов самолёта, можно найти
суммарную девиацию для этих курсов. Например, на рис. 60 изо-
бражены силы, действующие на компас, когда ось самолёта рас-
положена по курсу 45°. Силы отложены по правилу геометриче-
ского сложения сил. Равнодействующая этих сил является ком-
пасным меридианом. Угол, образованный магнитным и компасным
меридианами, является девиацией (Дк).
6в
Кривая девиации компаса геометрически есть суммарный
эффект кривых различных девиаций. Математически кривая деви-
ации выражается формулой
Дк = А + В sin К + С cos К 4- D sin 2/< -Ь Е cos 2К.
где Дк — девиация на курсе К;
А, В, С, D и Е — некоторые вели-
чины, называющиеся приближёнными
коэфициентами девиации. Зная эти коэ-
фициенты, можно рассчитать девиацию
на любом курсе.
Для нахождения коэфициентов не-
обходимо знать остаточную девиацию на
восьми основных курсах.
Рис. 60. Действие магнит-
ных сил на картушку
Рис. 59. Действие магнитных сил
на картушку
Для вычисления коэфициентов служат следующие формулы:
АЛД- LNE + ДЕ -j-ASE + AS + ASIF Д IT + AW
(ДМ?—AS IT) sin 45°. (ДЕ - A IT)+ (ASE - AMT) sin 45°
4 i
q _ (A?V—AS) + (AVE — ASIT) sin 45° — (ASE—ANIT)sln45°
D = (WE + &SW)~(bSE+ ДЛЧТ).
p_ (AN+ AS) — (AE-|-AiT)
4 — ~
§ 9. Определение и (устранение девиации
Девиация компаса может достигать таких величин, что поль-
зоваться компасом становится трудно, а иногда и невозможно.
Поэтому, если имеется большая девиация, её уменьшают, доводя
до малых значений, порядка 2—3°. Это уменьшение девиации на-
зывается комиенсированнем, или уничтожением девиации. Ком-
пенсирование полукруговой девиации производится при помощи
5*
67
магнитов-ун'ичтожителей, имеющихся в девиационном приборе
компаса. Четвертйая девиация на самолёте обыкновенно не уни-
чтожается, хотя её можно было бы компенсировать при помощи
брусков мягкого железа. Для уменьшения полукруговой девиа-
ции на самолёте применяется способ Эри. Сущность этого спо-
соба заключается в следующем: предположим, что самолёт стоит
па курсе 0°. Построим для этого курса все силы, действующие на
Рас. 61. Действие магнитных
сил на картушку
Рис. 62. Действие магнитных
снл на картушку
картушку компаса (рис. 61). Как
на этом курсе происходит от
Рис. 63. Действие матнитных сил
на картушку
видно из рисунка, девиация
суммарной силы F = А АН -f-
4- ).СН 4- У.ЕН. Зная полную
величину девиации, мы, однако,
не можем сказать, какав имен-
но часть наблюдённой девиа-
ции падает на каждую из
сил '/АН, \СН и \ЕН, так
как неизвестно значение ни
одной из указанных сил. Бе-
рём магнит-уничтожитель и
располагаем его под компасом
перпендикулярно оси самолёта
так, чтобы он1 создал силу,
равную по абсолютной вели-
чине силе F, но по направле-
нию ей противоположную, т. е.
доводим девиацию до 0° (рис.
62). Этим самым мы компенсируем не только силу /-СН, но также
и силы ХАН и А ЕН. Другими словами, мы уничтожаем полукру-
говую девиацию с избытком. Для того чтобы вызвать именно по-
лукруговую девиацмо и уничтожить её, необходимо развернуть
самолёт на 180°. Вычертим силы, действующие на компас на
курсе 180° (рис. 63) и рассмотрим, как изменилось соотношение
этих сил по сравнению с тем, что наблюдалось на курсе 0°.
68
Сила \ВН направлена вперёд вдоль самолёта, но она стре-
мится установить картушку по магнитному меридиану, почему её
условно изобразим на чертеже в направлении, совпадающем
с силами Н и WH. » ~ .
Вместе с поворотом самолёта повернётся и расположенный
нами под компасом поперечный магнит и, следовательно, сила F,
создаваемая этим магнитом, ранее направленная к западу, теперь
будет действовать в направлении на восток (она имеет постоян-
нее направление относительно самолёта). , -
Силы 1АН и )£Н стали также действовать в направлении
на восток, так как первая из них имеет постоянное направление и
от курса не зависит, а вторая при повороте самолёта на 180°
меняет своё направление на 360°. Сила \СН стало действовать
в направлении на запад.
Рассматривая рис. 63, мы видим, что одна часть силы маг-
нита F компенсирует только силу АС7/, другая же часть дей-
ствует в ту же сторону, что и силы У. АН и лЕН. В результате
этого на курсе 180° появляется девиация, одна половина которой
создаётся силами ХД/7 и ).ЕН, а другая — той частью силы,
которая осталась от компенсирования силы ).СН, Эту последнюю
можно устранить, для чего следует девиацию, наблюдаемую на
курсе 180°, уменьшить наполовину при помощи добавочного
магнита-уничтожителя. Оставшаяся половина девиации, поскольку,
она падает на четвертную и постоянную девиацию, уничтожению
не подлежит. Рассуждая аналогичным порядком, но примени-
тельно к курсам 90° и 270°, и действуя продольным магнитом,
увидим, что этой операцией мы сможем компенсировать действие
и силы ).ВН.
Остающаяся не уничтоженной девиация называется остаточ-
ной. Излагая способ Эри, мы рассматривали компенсацию при по-
мощи продольных и поперечных магнитов. Действительно, в девиа-
ционных приборах старого образца имелись продольные и попереч-
ные гнёзда, куда вкладывались магниты-уничтожители. В новых
девиационных приборах тот же результат достигается примене-
нием более сильных магнитов, вращающихся в вертикальной,
продольной и поперечной плоскостях симметрии самолёта.
До сих пор мы говорили только о горизонтальном положении
самолёта без кренов. При поперечном же или продольном кренах
силы, производящие девиацию, будут частично изменяться, а сле-
довательно, будет изменяться и девиация. Креновая девиация
возникает в том случае, когда картушка остаётся в горизонталь-
ном положении, а самолёт имеет продольный или поперечный
крен, т. е. когда картушка получает крен относительно самолёта.
При правильных виражах, когда картушка наклоняется вместе
с самолётом, креновая девиация отсутствует, но имеет место ука-
занная нами в § 7 северная поворотная ошибка. Креновая девиа-
ция не определяется и не учитывается.
На практике девиация определяется последовательной уста-
новкой самолёта на восемь основных магнитных курсов (0°, 45°,
90°, 135°, 180°, 225°, 270°, 315°). Установить самолёт на эти курсы
с>9
Рис. 64. Девиационный пеленгатор
можно различным образом. Например, можно на цементной пло-
щадке при помощи шнура и мела нанести линии основных маг-
нитных курсов и установить самолёт параллельно этим линиям;
можно установить самолёт на любой магнитный курс при помощи
девиационного пеленгатора.
Для определения девиации на лёгких самолётах на аэродроме
выбирают открытую ровную площадку, удалённую от ангаров,
мастерских и пр. не меньше чем
на 100 м. С этой площадки деви-
ацион'ным пеленгатором опреде-
ляют один или два пеленга уда-
лённых ориентиров. Как изве-
стно, пеленгом является угол, со-
ставленный меридианом и напра-
влением на удалённый предмет.
Девиационный пеленгатор
(рис. 64), при помощи которого
берут пеленг, состоит из азиму-
тального круга (лимба) с градус-
ными делениями, небольшой бус-
соли, помещённой в центре
лимба, алидады с визирнТым при-
способлением и кронштейна. Ази-
мутальный круг имеет деления
от нуля до 360°. Круг может
вращаться вокруг своей оси. Для
придания кругу горизонтального
положения на нём имеется круг-
лый уровень.
Алидада представляет собой
линейку, вращающуюся относи-
тельно центра лимба. Визирное
приспособление алидады состоит
глазного, представляющего собой
планку с визирной щелью, и предметного, имеющего вид рамки
с предметной нитью. Для грубой наводки глазной диоптр снаб-
жён прорезью, а предметный — мушкой. На концах алидады
имеются риски для отсчёта пеленгов по лимбу.
Шаровой шарнир кронштейна даёт возможность придавать
лимбу горизонтальное положение.
Для закрепления лимба и шарового шарнира на кронштейне
имеются соответствующие зажимы.
Крепится пеленгатор к треноге или к самолёту скобой
с винтом.
Пеленги определяют следующим образом. Пеленгатор укре-
пляют на треноге или иной подставке, не содержащей стали и же-
леза, и устанавливают в центре выбранной площадки. Лимб пе-
ленгатора приводят в горизонтальное положение, ориентируют по
магнитной стрелке и закрепляют. Для ориентировки лимба совме-
щают метку, имеющуюся на кольце буссоли, с меткой на конце
из двух подъёмных
70
стрелки. Затем наводят диоптры алидады на какой-либо местный
предмет, удалённый от площадки не менее чем на 1 000 м, и от-
считывают магнитный пеленг (МП) этого предмета.
В качестве пеленгуемых предметов следует выбирать высокие
здания, фабричные трубы и другие местные предметы. Место, с
которого был взят пеленг, чем-нибудь отмечают, например, заби-
вают в уровень с землёй несколько колышков, зарывают плашмя
несколько кирпичей и т. п.
После измерения пеленга составляют таблицу курсовых углов
для восьми основных курсов.
Курсовым углом (КУ) называется угол, составленный осью
самолёта с направлением на удалённый предмет. Для курса N
курсовой угол и магнитный пеленг будут одинаковыми. Для дру-
гих курсов курсовые углы вычисляются по формуле: курсовой
угол равен магнитному пеленгу минус магнитный курс самолёта:
КУ = МП— мк.
Таблица курсовых углов
Наименование пеленга Магнитный курс в градусах
0 45 90 135 180 225 270 315
Фабричная труба 105 G0 15 330 285 240 195 150
Перед выводом самолёта на поверочную площадку следует
осмотреть компасы и убедиться, что они исправны. Все предметы
вооружения й оборудования самолёта должны быть на местах,
где они обычно находятся в полёте. Подвижным частям самолёта,
сделанным из металла, обладающего магнитными свойствами,
следует придать то положение, в котором они бывают в маршрут-
ном полёте; при таком их положении следует в дальнейшем про-
изводить отсчёты по компасу. Магниты девиационного прибора
компаса должны быть поставлены в нейтральное положение
Самолёт устанавливают на том месте, где стоял девиацион-
ный пеленгатор. Шасси самолёта должны находиться точна над
местом, где стоял пеленгатор.
Под хвост самолёта ставят подставку чтобы, упираясь в неё
своим костылём или какой-либо другой частью, самолёт принимал
положение горизонтального полёта.
Сначала самолёт устанавливают на магнитный курс 0°. Для
этого на шкале визира (пеленгатора) устанавливают отсчёт курсо-
вого угла для магнитного курса 0° и вращают самолёт до тех
пор, пока ориентир не попадёт в плоскость визирования (рис. 65).
Затем дают компасам успокоиться и отсчитывают компасные
курсы. Разность между магнитным курсом, на который был уста-
новлен самолёт, и компасным курсом является девиацией. Если
КК меньше МК, девиация имеет знак плюс, если КК больше
МК, — знак минус.
71
После этого самолёт устанавливают на магнитный курс 180°.
О г ре де лив девиацию на этом курсе, доводят её до полусуммы де-
виаций на курсах 0° и 180°, вращая поперечные магниты девиа-
ционного прибора (валик № 5). Например, если на курсе 0° ком-
пас показывал 352°, а на курсе 180° было 192°, то в первом слу-
чае девиация была +8°, а во втором —12°; полусумма девиацйи
равна
8 — 12_ qo
2 — '
Следовательно, показание компаса на курсе 180° надо довести
до 182°.
Точно такую же работу проделывают на курсах 90° и 270э;
при этом девиацию на курсе 270° доводят до полусуммы,
вращая продольные магниты (валик Е—IV).
л Предельная величина девиа-
Рис. 65. Установка самолёта на
курс с помощью девиационного
пеленгатора
ции после её уменьшения не
должна превышать + 10°.
После уменьшения полукру-
говой девиации последовательно
устанавливают самолёт на маг-
нитные курсы 0°, 45°, 90°, 135°,
180°, 225°, 270° и 315°. На каж-
дом курсе отсчитывают и запи-
сывают остаточную девиацию.
Во время определения девиа-
ции при поворотах самолёта не-
обходимо на каждом курсе ждать
2—3 минуты, пока не прекра-
тится увлечение картушки жид-
костью вследствие вращения са-
молёта, а при взятии отсчётов по
компасу следует слегка постуки-
вать пальцами по котелку или по стеклу компаса, чтобы умень-
шить влияние застоя.
Если возникает сомнение, что девиация будет изменять свою
величину в зависимости от того, работает мотор или нет, компас
проверяют при работающем моторе. Для этого самолёт устанавли-
вают на какой-либо курс в линию полёта и, укрепив его, запу-
скают мотор, давая ему работать на среднем режиме, обычном в
нормальных условиях полёта. Если при работе мотора получаются
небольшие расхождения показаний компаса, не превышающие ве-
личины застоя картушки, то можно считать, что показания компаса
от работы мотора не зависят. Если же окажется, что величина де-
виации зависит от работы мотора, то в таком случае необходимо
определить девиацию на всех восьми курсах при работающем
моторе.
На основании полученных значений строят график Девиации
для данного самолёта (рис. 66).
72
На график наносят две кривые: кривую для компаса штур-
мана — красной линией и кривую для компаса лётчика — синей
.талией. График укрепляют в кабине штурмана вблизи компаса.
Результаты работ по определению и устранению девиации за-
писывают в специальный бланк (протокол).
Рекомендуется после определения остаточной девиации вы-
яснить величину коэфициента А, и если он более 2°, та необхо-
димо устранить установочную ошибку компаса.
Установочная ошибка компаса является следствием неточного
расположения курсовой черты компаса, поэтому её иногда назы-
вают ошибкой курсовой черты. При правильном положении курсо-
вой черты линия, проходящая через курсовую черту и центр ком-
паса, должна быть параллельна продольной оси самолёта. Устано-
вочная ошибка устраняется поворотом компаса докруг его оси.
Курсь'
Рис. 66. График девиации
Величину установочной ошибки определяют алгебраическим
сложением остаточной девиации и делением полученной суммы
на 8 /число курсов, на которых определена остаточная девиация).
Полученный результат будет искомой установочной ошибкой.
Если установочная ошибка имеет знак плюс, то для устране-
ния её котелок компаса следует повернуть по часовой стрелке на
угол, равный установочной ошибке; если установочная ошибка
имеет знак минус, котелок компаса поворачивают против часовой
стрелки. Оценивать угол поворота котелка следует по показан’ию
компаса. При повороте котелка девиация изменится на величину
угла поворота, поэтому в таблицу девиации необходимо будет
внести исправления. Для этого к каждой девиации следует при-
бавить алгебраически установочную ошибку.
Для определения девиации на тяжёлом самолёте применяют
способ взаимного визирования, заключающийся в следующем.
В центре ровной площадки (радиусом около 50 л) устанавливают
и ориентируют по магнитной стрелке девиационный пеленгатор.
Самолёт перемещают тракторам по часовой стрелке вокруг девиа-
ционного пеленгатора на удалении от последнего примерно 50 м.
На каждом из восьми основных курсов самолёт останавливают
(рис. 67), и находящийся у пеленгатора наблюдатель визирует вы-
ступающий из самолёта визир и записывает обратный магнитный
пеленг, в то время как штурман, находящийся на самолёте, изме-
ряет визиром курсовой угол девиационного пеленгатора, записы-
вая при этом показания компаса.
73
Магнитный курс самолёта определяется по формуле
МК = МП - КУ.
Зная магнитный курс, на котором стоял самолёт, и показание
компаса, легко определить девиацию как алгебраическую разность
магнитного и компасного курсов:
Дк = МК — КК.
Рис. 67. Установка самолёта на курс
для тяжёлых самолётов и больше
виацию необходимо проверить зг
Уменьшение [девиации на
тяжёлых самолётах произво-
дится точно так же посредст-
вом доведения девиации до
полусуммы на курсах 180° и
270°.
Правильность показаний
' компасов следует проверять пе-
риодически, не реже одного
раза в месяц. Проверка произ-
водится сличением показаний
компасов.
Для этого самолёт устана-
вливают в линию полёта на
какой-либо курс и отсчиты-
вают показания обоих компа-
сов. Затем компасные курсы
переводят в магнитные. Если
разность между полученным
магнитным курсом МК лёт-
чика и штурмана больше 2°
5° для остальных самолётов, де-
ново. Сличать компасы необхо-
димо на двух взаимно перпендикулярных курсах.
Девиация может изменяться с течением времени в завнси
мости от многих причин. Магнитное поле самолёта может изме-
ниться под влиянием нагревания и толчков, которым подвепгаются
на самолёте некоторые части мотора и вооружение. Девиация
вообще может измениться с течением времени от причин, которые
не поддаются предварительному учёту. Поэтому определять де-
виацию компаса необходимо’ не реже чем через три месяца,
а также перед выполнением ответственного задания, после ре-
монта самолёта, переоборудования его, после длительней стрельбы
и при заявлениях экипажа о неисправностях в работе компаса.
§ 10. Определение девиации в полёте
Трудность установки тяжёлых самолётов на различные курсы
заставляет перенести определение девиации на таких самолётах
в воздух. Девиация в полёте может быть определена: 1) спосо-
бом пеленгования земных линейных ориентиров и 2) способом пе-
лтенгования тени самолёта.
74
Способ пеленгования земных линейных ориентиров заклю-
чается в следующем. Перед полётом штурман выбирает какойч
либо прямолинейный, отчётливо ви-
димый в воздухе ориентир, распо-
тоженный вблизи аэродрома, и оп-
ределяет его истинное направление
на карте при помощи транспортира.
Учтя магнитное склонение, штур-
ман находит магнитное направление
(пеленг) выбранного ориентира. В
полёте пересекают ориентир после-
довательно на восьми курсах (че-
рез 45°) (рис. 68). Во время каж-
дого прохождения ориентира штур-
ман, пользуясь навигационным ви-
зиром, определяет курсовой угол
ориентира, одновременна делая не-
сколько отсчётов по компасу. Сли-
чая магнитный пеленг ориентира с
его курсовым углом, штурман вы-
числяет магнитный курс самолёта;
сравнивая его с соответствующим
средним отсчётом по компасу, на-
Рис. 68. Определение девиации
в полёте
ходит девиацию. Каждое наблюде-
ние полезно повторить для уточне-
ния результатов.
Пример. Истинный пеленг дороги 95° (измерен на карте). Магнитное скло-
нение-j-6° (взято с карты изогон). Линейный ориентир лётчик нересекает с кур-
сом 45° (по своему компасу). В это время штурман определяет курсовой угол
дороги, равный 39°. Средний отсчёт по компасу штурмана 52°. Определить девиа-
цию компасов лётчика и штурмана.
Магнитный пеленг дороги равен 95° — 6° — 89°. Магнитный курс равен маг-
нитному пеленгу минус курсовой угол: 89° — 39° = 50°. Отсюда девиация ком-
паса лётчика равна магнитному курсу минус компасный курс:
50° — 45е = 4- 5°,
а девиация компаса штурмана равна
50° _ 52° = — 2°.
Способ пеленгования тени самолёта применяется при отсут-
ствии прямолинейных ориентиров и заключается в следующем.
Перед полётом штурман определяет магнитный пеленг солнца,
пользуясь для этого девиационным пеленгатором (удобно пеленго-
вать по тени, отбрасываемой каким-нибудь вертикальным штырём,
расположенным в центре лимба пеленгатора). В полёте, набрав
высоту около 800 м, штурман на произвольном курсе, вращая ви-
зир, находит тень самолёта. Выдержав полёт по прямой, снимает
курсовой угол тени самолёта, записывая при этом показания ком-
паса и часов. Изменяя последовательно курсы на 45°, полёт вы-
полняют по восьмиугольнику, делая указанные промеры на каж-
дом курсе. Вычисляют девиацию по формулам:
ФМПТ —КУТ = МК;
МК-КК= Дк.
75
Фактический магнитный пеленг тени (ФМПТ) слагается из
измеренного перед полётом пеленга тени плюс градусная поправка
на минутное перемещение тени за время от момента измерения
пеленга девиационным пеленгатором до момента снятия курсового
угла тени (КУТ). Величина градусной поправки на перемещение
солнца за 1 минуту определяется на основании магнитных пелен-
гов солнца, измеренных до и после полёта.
Пример. Магнитный пеленг тени солнца, измеренный в 14 час., равен 204°40';
в 15 час. он равен 226’20'; разность 21°40‘. Поправка на перемещение солнца за
1 минуту равна 21°40' :60 = 0,37°. Курсовой угол тени, снятый в 14 час. 20 мин.,
равен 130° и КК = 90°. Поправка на перемещение солнца равна 0,37-20 = 7°.
ФМПТ = 205° + 7° = 212°;
МК = 212° — 130° = 82°;
Дк = 82° — 90° = —8°.
§ 11. /Гироскоп
Магнитный компас даёт возможность определять курс само-
лёта, но вести самолёт по заданному курсу с достаточной точ-
Рис. 69. Гироскоп
новленное так, что ось его
ностыо, а также выполнять разво-
роты на заданное число градусов
по компасу довольно затруднитель-
но, так как картушка компаса под-
вержена различным колебаниям (ры-
сканье на курсе, увлечение кар-
тушки при разворотах и т. п.).
Поэтому на самолётах в допол-
нение к магнитному компасу приме-
няют гироскопические приборы. Эти
приборы позволяют более точно
сохранять курс в любых условиях.
К таким приборам относятся ука-
затель поворота и гиромагнитный
компас. Основную часть этих при-
боров составляет гироскоп. Гиро-
скопом называется тяжёлое враща-
ющееся тело, подвешенное или уста-
вращения может менять свое поло-
жение относительно окружающих предметов. Обычно гироскоп
состоит из тяжёлого диска (ротора), ось которого помещена в ме-
таллическом кольце (рис. 69). Это кольцо, в, свою очередь, поме-
щено в другом кольце, укреплённом на подставке. Такой подвес,
состоящий из двух колец, называется карданным подвесом. Ось
вращения ротора называется главной или осью хх. Ось вращения
внутреннего кольца называется осью уу, а ось вращения наруж-
ного кольца — осью zz. Если ось ротора гироскопа может одно-
временно поворачиваться относительно осей уу и zz то такой ги-
роскоп является гироскопом с тремя степенями с..ободы. Если
одну из осей — у у или zz зажать, то получится гироскоп с двумя
степенями свободы.
76
Существует понятие свободный гироскоп. Свободным можно
назвать такой гироскоп, который удовлетворяет следующим тре-
бованиям: 1) имеет три степени сво-
Рис. 70. Свободный гироскоп
сохраняет положение своей
оси в пространстве
боды; 2) все три оси гироскопа пе-
ресекаются в одной точке; 3) центр
тяжести гироскопа совпадает с точ-
кой пересечения осей; 4) трение в
подшипйиках ротора и осей мини-
мально.
Рис. 71. Вектор угловой
скорости
Свободный гироскоп обладает весьма интересными свой-
ствами. Основным свойством быстро вращающегося свободного
гироскопа является способность сохранять положение главной
оси хх неизменным в пространстве. Сохраняя положение главной
оси, гироскоп вследствие вращения Земли совершает так называе-
мое кажущееся движение относительно местных предметов
(рис. 70). Если к одному из колец гироскопа приложить силу,
стремящуюся повернуть главную ось вращения ротора, то можно
заметить, что гироскоп сопротивляется приложенной силе, т. е,
ось ротора не перемещается в направлении силы. Если силу при-
ложить мгновенно (толчок), то никакого видимого смещения оси
эотора не обнаружится. Если же сила будет действовать
продолжительное время, то ось ротора начнёт двигаться, причём
направление этого движения будет перпендикулярно направлению
действующей силы. Как только действие силы будет прекращено,
сейчас же прекратится и движение оси ротора. Такое движение
оси ротора называется прецессией, а угловая скорость, с которой
происходит это движение, называется скоростью прецессии. Явле-
ние прецессии объясняется сложением угловых скоростей.
Как известно, вектор вполне определяется тремя элементами:
направлением, точкой приложения и длиной. Углевая скорость
вращения о изображается вектором, направленным вдоль оси
вращения (рис. 71). Вектор всегда направлен в ту сторону, от-
куда вращение гироскопа представляется происходящим против
часовой стрелки. Точка приложения вектора угловой скорости на-
ходится на оси вращения. Длина вектора берётся в некотором
масштабе и заключает столько же единиц, сколько соответствен-
ных единиц заключается в величине угловой скорости о-
Пусть ротор гироскопа (рис. 72) вращается вокруг главной
оси xxi с некоторой угловой скоростью о. Эта угловая скорость
77
изображается вектором oxt. Допустим, что на гироскоп действует
некоторая сила F, стремящаяся повернуть его вокруг вертикаль-
ной осн гг, с угловой скоростью о,. Проведём вектор Ыр Век-
Wj можно сложить по правилу параллелограма, в ре-
торы о и
зультате чего получится равно-
действующий вектор w,. т. е.
ось ротора xxi совпадёт с векто-
ром о4. Это движение и будет
являться прецессией.
Таким образом, можно сфор-
мулировать следующее правило:
при приложении к гироскопу
момента внешней силы., стремя-
щегося повернуть его ось в ка-
кой-либо плоскости, ось гироско-
па совершает прецессионное дви-
жение перпендикулярно к этой
плоскости. Скорость прецес-
сионного движения зависит от
кинетического момента ротора и
величины момента приложенной
силы. Чем больше кинетический
момент, тем меньше скорость
прецессии.
Свойство прецессии используется в различных авиационных
приборах: указателе поворота, гиромагнитном компасе, авиагори-
зонте, автопилоте.
§ 12. Указатель поворота
Указатель поворота служит для одновременного указания по-
ворота и скольжения самолёта. Он состоит из двух приборов: ги-
роскопического указателя поворота и шарикового указателя
скольжения. Гироскопический указатель поворота является необ
ходимым дополнением к компасу; он весьма чувствителен к ма-
лейшим отклонениям оси самолёта от взятой прямой. Кроме того,
указатель поворота необходим при полётах в облаках, в тумане и
ночью, когда пилотировать самолёт приходится исключительно по
приборам. Указатель поворота устанавливают в кабине лётчика.
Принцип действия указателя поворота основан на свойствах
гироскопа с двумя степенями свободы. Устройство его заклю-
чается в следующем (рис. 73). Основная его часть — гироскоп —
представляет собой массивный металлический диск, по окруж-
ности которого имеются Нарезы. Ось гироскопа вращается на ша-
риковых подшипниках и укреплена в прямоугольной рамке. Рамка,
в свою очередь, имеет ось вращения, перпендикулярную к оси ги-
роскопа. С рамкой соединён диск, на котором имеется штифт для
•передвигания стрелки, гаситель колебаний стрелки (демпфер),
представляющий собой небольшой цилиндр с поршнем, и пружина,
удерживающая рамку в горизонтальном положении.
78
Con/it
Рис. 73. Схема устройства указателя поворота
Механизм заключён в коробку с двумя отверстиями. Одно от-
верстие соединено' проводкой с механическим насосом
(пампа АК-2). Другое отверстие заканчивается внутри прибора
соплом, через которое входит внутрь прибора воздух. Отверстие
это закрыто металлической сеткой.
На шкале прибора нанесены три деления: нулевое деление —
посредине, справа — «правый поворот» и слева — «левый поворот».
Стрелка прибора имеет форму лопаточки. На шкале укреплён
Рис. /4. Схема действия указателя скольжения
шариковый указатель скольжения, представляющий собой изогну-
тую стеклянную трубку, внутри которой помещён металлический
шарик. Для успокоения колебаний шарика трубка наполнена толуо-
лом, имеющим очень низкую температуру замерзания.
Действие прибора следующее. Во время полёта помпа выса-
сывает через шланг воздух из коробки прибора. Вследствие по-
лучившегося там разрежения в коробку через сопло поступает на-
ружный воздух. Сопло поставлено так, что струя воздуха уда-
79
Правый крен при npfh
нелинейном полете
Правильный правые
вираж
Поборот вправо со
Свольжениемна врыло
Поворот вправо с
заносом хвоста
Прямолинейный,
полет
Рис. 75. Показания
указателя поворота
условиях полёта и
ряет в нарезы на окружности гироскопа и
приводит его в быстрое вращение.
В прямолинейном полёте стрелка прибора
стоит на нулевом делении шкалы.
При повороте самолёта гироскоп вслед-
ствие прецессии стремится повернуть свою
ось в вертикальной плоскости и передвигает
рамку, в которой он находится. Движение
рамки передаётся стрелке, которая указывает
направление и примерную интенсивность по-
ворота. При правом повороте стрелка отходит
вправо, при левом — влево.
Шарик указателя скольжения, помещён-
ного на шкале, показывает отклонение пло-
скости симметрии самолёта, от направления
равнодействующей силы тяжести и центро-
бежной силы, возникающей при повороте са-
молёта. Поэтому при правильном вираже,
когда равнодействующая (рис. 74) лежит в
плоскости симметрии самолёта, шарик указа-
теля скольжения находится посредине трубки.
При вираже со скольжением шарик скаты-
вается внутрь поворота, а при вираже с зано-
сом хвоста — наружу поворота.
При крене без разворота стрелка стоит
против нуля, а шарик скатывается в сторону
крена, действуя подобно маятнику или от-
весу.
Рис. 75 даёт представление о характере
показаний указателя поворота при различных
режимах полета.
§ 13. Гиромагнитный компас
Гиромагнитный компас (ГМК) является
путевым компасом и устанавливается в ка-
бине лётчика. Прибор предназначается для
определения и выдерживания курса в любых
для выполнения разворотов на заданное число
градусов.
Гиромагнитный компас построен на принципе взаимодействия
гироскопа с тремя степенями свободы и магнитной стрелки.
Это взаимодействие выражается в том, что благодаря специ-
альней коррекционной системе ось ротора гироскопа автомати-
чески устанавливается параллельно магнитной оси магнитной
стрелки. Вследствие малой скорости прецессии гироскоп не реаги-
рует на все незначительные и быстрые колебания магнитной
стрелки, а стремится сохранить положение, определяемое средним
положением магнитной стрелки.
«О
Внешний вид прибора показан
на рис. 76.
В передней части корпуса при-
бора находится застеклённое окно,
в котором видна курсовая черта и
часть шкалы. Ниже окна помещён
указатель скольжения. Вверху при-
бора находится девиационный при-
бор. Сзади корпуса имеется шту-
цер для присоединения к помпе,
создающей разрежение в корпусе
прибора. Снизу в корпусе сделано
отверстие, закрытое сеткой (филь-
тром), через которое наружный
воздух поступает в механизм при- Рис. 76. Гиромагнитный компас:
бора. у— девиационный прибор; 2 — шкала
Внутри корпуса прибора курсов; а —указатель скольжения
(рис. 77) помещён механизм,
основная деталь которого —
свободный гироскоп с горизонтально расположенной осью.
Гироскоп заключён в камеру, подвешенную в вертикальном
кольце на шариковых подшипниках. Это кольцо, в свою очередь,
Рис. 77. Схема гиромагнитного компаса
укреплено на подшипниках в корпусе прибора. В полёте помпа от-
сасывает воздух из корпуса прибора. В силу создавшегося там
разрежения воздух извне поступает через фильтр, проходит по
каналу внутри кольца гироскопа и через разгонное сопло в виде
струи направляется на лопатки ротора. Отработанный воздух выхо-
6 Учебник аэронавигации
81
дит из камеры гироскопа через два вертикальных сопла 1 в ка-
меру магнитной коррекции и через особый канал 2 в камеру с
четырьмя отверстиями, которые наполовину прикрыты заслонками.
В камере магнитной коррекции помещены два параллельных
магнита 3, на оси которых укреплён эксцентрический диск 4.
Этот диск расположен над двумя вертикальными соплами и может
либо прикрыть оба сопла наполовину, либо закрыть одно из них
полностью. Над каждым соплом помещена приёмная трубка 5,
сообщающаяся с пневматическим реле.
Реле представляет собой камеру, внутри которой имеется эла-
стичная перегородка — мембрана 6. К мембране прикреплён стер-
жень, соединённый с двухсторонней заслонкой 7. Эта заслонка
прикрывает отверстия, из которых воздух выходит в вертикальном
направлении вверх и вниз. Ось ротора гироскопа всегда должна
находиться в горизонтальном положении и в плоскости компас-
ного меридиана. Если эти условия соблюдены, воздух, выходя-
щий из камеры гироскопа, создаёт одинаковое давление в обеих
камерах реле, и двухсторонняя заслонка находится в нейтральном
положении, т. е. оба отверстия открыты наполовину.
При отклонении ротора от меридиана, что может произойти
под влиянием суточного вращения Земли и трения в подшипниках,
камера гироскопа поворачивается, а вместе с ней смешаются и
сопла относительно эксцентрика. В результате смещения одно из
сопел закрывается, а другое, выходя из-под диска, открывается.
В приёмных трубках 5 возникает разность скоростных напо-
ров, создаваемых струями воздуха, выходящими из сопел 1. Эта
разность давлений вызывает изгиб мембраны реле. Мембрана,
выгибаясь, перемещает заслонку и открывает одно из отверстий
(й или 6), в результате чего возникает реактивный момент, вызы-
вающий прецессию гироскопа относительно оси zz и таким образом
заставляющий гироскоп возвратиться в положение меридиана.
Устойчивость гироскопа в положении меридиана составляет
около 0°,5. Быстрые колебания магнитной системы, происходящие
при различных эволюциях самолёта, не оказывают влияния на ги-
роскоп вследствие малой скорости его прецессии.
Для обеспечения горизонтальности оси гироскопа имеется
маятниковая коррекция, осуществляемая при помощи двух маят-
никовых заслонок 8. При горизонтальном положении оси ротора
заслонки прикрывают два боковых отверстия 9 камеры 10. При
наклоне оси ротора одно из этих отверстий открывается, а противо-
положное закрывается, вследствие чего возникает прецессия относи-
тельно оси уу, приводящая ось ротора в горизонтальное положение.
Девиационный прибор гиромагнитного компаса (рис. 78) имеет
неподвижные магниты и подвижной экран. Магниты расположены
крестообразно, причём их северные полюсы обращены к центру.
Экраном служит четырёхугольная пластинка из мягкого трансфор-
маторного железа, расположенная между магнитами девиацион-
ного прибора и магнитной системой компаса. Плайтинка может
перемещаться в двух направлениях при помощи винтов и зуб-
чатки. Нейтральным положением экрана считается его среднее
82
положение, т. е. такое, когда все четыре северных полюса магни-
тов одинаково закрыты экраном.
Для обеспечения правильной работы прибора необходимо,
чтобы давление в корпусе прибора было равно 80 мм рт. ст.
Ротор гироскопа при этом имеет
около 12 000 об/мин. Девиация
гиромагнитного компаса должна
быть устранена. Устраняется де-
виация гиромагнитного компаса
обычным порядком, но при этом
гироскоп должен быть приведён
в действие от вакуумпомпы. Пе-
ред устранением девиации надо
снять девиационный прибор и
убедиться, что экран занимает
нейтральное положение. При
уменьшении девиации на курсе
lo(J° вращают нижний винт де-
виационного прибора, а на курсе
270° — верхний.
Если девиация гиромагнитного
можно пользоваться как
Рис. 78. Девиационный прибор
гиромагнитного компаса
компаса не уничтожена, то им
курсодержателем, для сохранения курса.
взятого по магнитному компасу.
Отсчёт курса по гиромагнитному компасу весьма прост: читают
деление шкалы против курсовой черты прибора (как у компаса с
вертикальной картушкой).
§ 14. Дистанционный компас
Потенциометрический дистанционный компас (ПДК) состоит
из датчика, представляющего собой магнитный жидкостной ком-
пас с дополнительным устройством для передачи его показаний,
и показывающих приборов — репитеров.
Датчик может одновременно управлять одним, двумя или
тремя репитерами.
Репитеры монтируются в месте, где производится наблюдение
магнитного курса, а датчик там, где магнитные массы или другие
факторы, искажающие земное магнитное поле, минимальны.
Установка ПДК показывает таким образом в нескольких (да
трёх) точках самолёта магнитный курс, практически свободный бт
влияния магнетизма самолёта и его перераспределения во время
полёта (сбрасывания бомбовой нагрузки, вращения пулемётов на
турели, включения и выключения электрических агрегатов и т. п.).
Вращением кремальеры, имеющейся внизу на лицевой стороне
прибора (рис. 79), можно повернуть его шкалу так, что риска её,
соответствующая желаемому направлению полёта, подводится под
имеющуюся наверху прибора среднюю вертикальную черту непо-
движного задатчика курса. Если шкала так развёрнута и самолёт
находится на курсе, то стрелка репитера направлена вверх на черту
задатчика курса. Отклонение самолёта вправо или влево от
6*
83
заданного курса всегда отмечается отклонением стрелки прибора
также вправо или влево от средней вертикальной черты задат-
чика курса, что мнемонически указывает пилоту нужное напра-
Рис. 79. Лицевая сторона репитера
пдк
вление разворота! для приведения
самолёта на курс. Наличие за-
датчика курса разгружает также
пилота от необходимости удер-
живания в памяти нужного на-
правления полёта.
Принцип дистанционной пере-
дачи следующий (рис. 80}. На оси
датчика укреплена магнитная
картушка компаса и три располо-
женные под утлом 120°' одна к
другой щётки. Щётки скользят по
кольцевому потенциометру, к
двум диаметрально противопо-
ложным точкам которого подве-
дено питание непосредственно
от бортовой сети. Потенциометр
жёстко связан с корпусом датчика. Положение скользящих по
потенциометру щёток относительно точек подвода питания будет,
Датиин
Попазыващий прибор
Рис. 80. Электрокннематическая схема компаса ПДК
таким образом, определяться положением самолёта относительно
магнитного меридиана, по которому направлена магнитная система
картушки.
84
Напряжение, снимаемое с потенциометра щётками, подводится
к трём рамкам подвижной системы репитера. Рамки расположены
под углом 120° одна к другой.
Рамки находятся в поле постоянного магнита. При прохожде-
нии тока через рамки последние займут в пределах полной
окружности такое положение относительно магнитных полюсов,
при котором алгебраическая сумма моментов вращения, испыты-
ваемых рамками, окажется равной нулю.
Каждому положению щёток на потенциометре датчика соот-
ветствует одно определённое положение рамок репитера относи-
тельно его магнита. Рамки сидят на общей оси со стрелкой, вра-
щающейся относительно шкалы прибора, жёстко связанной с его
магнитом. Шкала разградуирована в градусах от 0° до 360э. Та-
ким образом, по стрелке репитера прочитывается курс самолёта
относительно магнитного меридиана.
Вращая кремальерой шкалу прибора, мы одновременно вра-
щаем жёстко с нею связанный магнит. Если электрическая схема
компаса включена, то силами электромагнитного взаимодействия
между магнитом и токами в жёстко связанных со стрелкой рам-
ках стрелка будет следовать за вращением шкалы, оставаясь всё
время на её риске, соответствующей курсу самолёта. Когда вра-
щением кремальеры эту риску подводят под среднюю вертикаль-
ную черту неподвижного задатчика курса, то стрелка репитера
будет показывать вертикально вверх на эту черту.
§ 15. Солнечный компас
При полётах в местностях, где магнитное склонение неиз-
вестно или где горизонтальная составляющая магнитного поля
Земли слишком мала, для конт-
роля показаний магнитного ком-
паса пользуются солнечным ком-
пасом (солнечным указателем кур-
са). Кроме того, солнечными компа-
сами пользуются при воздушном
фотографировании. Солнечные лучй
являются одним из точнейших ука-
зателей направления относительно
истинного меридиана, если только
известно время, а отсюда и азимут
Солнца.
Всем известен способ опреде-
ления направления на север при
Рис. 81. Приближённое опреде-
ление меридиана по часам
помощи карманных часов. Так как часовая стрелка вращается1 в
два раза быстрее Солнца, то, установив, её по направлению на
Солнце и разделив пополам угол между часовой стрелкой и циф-
рой 12, получают приближённое направление линии север — юг
(рис. 81). Солнечный компас определяет это направление весьма
точно. Принцип его устройства заключается в улавливании изо-
85
Рис. ?2. Солнечный указатель курса
бражения Солнца на экране, который перемещается часовым ме-
ханизмом со скоростью, соответствующей перемещению Солнца.
Солнечный указатель курса СУК-2 (рис. 82) устроен следую-
щим образом. Часовой механизм с циферблатом и стрелками за-
ключён в корпус /, к которому прикреплена тарелка 2, покры-
тая стеклянным колпаком 3. Под колпаком находится визирное
приспособление, состоящее из линзы 4 с диафрагмой «Ирис»
и матового стекла (экрана). На матовом стекле нанесены концен-
трические круги и перекре-
стие нитей 5. Визирная рам-
ка может наклоняться на угол
склонения Солнца. В свою оче-
редь, корпус с часовым меха-
низмом можно наклонять на
угол, равный широте места,
при помощи винта и червячной
шестерни. При этом ось вра-
щения 6 визирного приспосо-
бления располагается парал-
лельно земной оси. Ось визир-
ного приспособления вращает-
ся часовым механизмом со ско-
ростью один оборот за 24 часа.
При передвижении стре-
лок часов одновременно пово-
рачивается визирная рамка.В
нижней части прибора нахо-
дится лимб 7 с градусными
делениями от 0° до 360°,
индекс 8 для установки кур-
сов и шкала 9 для учёта угла
сноса. Подставка прибора снаб-
жена стопорными винтами
для установки прибора по
уровню. Часовой механизм
прибора имеет электрический
обогреватель на 24 в.
Прибор устанавливают в
кабине лётчика в месте, до-
ступном для солнечных лучей.
Перед полётом на приборе необходимо установить следующие
величины:
1) шпроту места на шкале «широта»;
2) визирную рамку — на склонение Солнца;
3) на часах — истинное время данного места;’
4) лимб — на заданный курс с учётом угла сноса.
В полёте необходимо управлять самолётом так, чтобы визир-
ная рамка была направлена на Солнце, а изображение Солнца
(«зайчик») находилось в центре матового ’стекла прибора. Сме-
щение «зайчика» с центра матового стекла в пределах малой
86
окружности означает отклонение от курса на 5°, а ь 'пределах
большой окружности — на 10°.
При полёте по параллели будет изменяться долгота, поэтому
приходится вносить поправку в установленное на часах прибора
истинное время. При полёте по меридиану приходится вносить по-
правку за широту 'места через каждый 1° широты. При изменении
угла сноса индекс также необходимо переставлять.
Существует несколько типов солнечных компасов, у которых
поправки за долготу и широту вводятся автоматически.
§ 16. Воздушная скорость самолёта
Воздушной скоростью V называется скорость движения само-
лёта относительно воздушной среды. Воздушная скорость разви-
вается под действием винтомоторной группы и зависит от техни-
ческих свойств самолёта, нагрузки его и плотности воздуха. На-
правление воздушной скорости приблизительно совпадает с осью
симметрии самолёта, иначе говоря, с продольной осью самолёта.
Воздушная скорость измеряется в километрах в час (км/час).
Величина воздушной скорости может изменяться в зависимо-
сти от режима полёта. Например, при наборе высоты воздушная
скорость уменьшается; при пикировании, наоборот, увеличивается.
Ветер не оказывает влияния на величину воздушной скорости.
Каждый самолёт обладает известным диапазоном воздушных
скоростей Различные режимы воздушных скоростей носят соот-
ветствующие названия, например: посадочная скорость, макси-
мальная скорость и т. д. Для целей аэронавигации необходимо
знать воздушную скорость самолёта в горизонтальном установив-
шемся полёте. С аэродинамической точки зрения это такая ско-
рость, при которой подъёмная сила равна весу самолёта.
Различают 'следующие режимы воздушных скоростей само-
лёта, относящихся к горизонтальному полёту.
Минимальная скорость — наименьшая скорость, при которой
самолёт может лететь горизонтально.
Экономическая скорость — горизонтальная скорость при по-
лёте с наименьшей мощностью мотора, с наименьшим расходом
горючего в единицу времени. При этой скорости самолёт с дан-
ным запасом горючего продержится в воздухе дольше, чем при
других режимах. Экономическая скорость самолёта получается
при достижении так называемого экономического угла атаки.
Наывыгоднейшая скорость несколько больше экономической
скорости. Она получается при некотором уменьшении экономиче-
ского угла атаки. При полёте на этой скорости расходуется наи-
меньшее количество горючего на 1 км воздушного пути и, следо-
вательно, самолёт может пройти наибольшее расстояние при дан-
ном запасе горючего (0,65—0,7 максимальной скорости).
Максимальная скорость — наибольшая скорость, при которой
самолёт может пройти данное расстояние в кратчайший срок.
Максимальная скорость получается при минимальном угле атаки
на горизонтальном режиме полёта.
87
Крейсерская скорость — средняя эксплоатационвая скорость
самолёта (0,85—0,9 максимальной скорости).
Режимы скоростей устанавливаются опытным путём для ка-
ждого типа самолёта и обычно помечаются в формуляре самолёта.
Знание воздушной скорости необходимо для решения различных
навигационных задач, для пилотажа и для выполнения всякого
рода тактических задач — бомбометания, фотографирования и т. п.
Для определения воздушной скорости на самолётах устана-
вливаются указатели воздушной скорости.
§ 17. Указатель воздушной скорости
Указатель воздушной скорости построен на принципе измере-
ния скоростного напора, т. е. давления воздушного потока на
встречающийся ему предмет. Скоростной напор называется аэро-
динамическим давлением. Воздушная скорость самолёта 'связана
определённой зависимостью с аэродинамическим давлением. В об-
щем виде, для скоростей полёта, меньших скорости звука, эта за-
висимость выражается формулой
к
где q — аэродинамическое давление в мм водяного столба;
р — статическое давление воздуха на высоте приёмника
в кг!м?\
„ Ср 0,241 . . „
К = =1,4—отношение теплоемкостей воздуха при по-
стоянных давлении и объёме;
р—массовая плотность воздуха в кг-сек-'м*-,
V—воздушная скорость в м/сек.
По этой формуле производится оцифровка шкалы указателя
скорости. Приближённое значение скоростного напора можно по-
лучить по следующей формуле:
Измерение скоростного напора можно производить различ-
ными способами. В настоящее время применяются главным обра-
зом указатели скорости с трубкой Пито и чувствительным мано-
метром с коробкой Види. Указатель воздушной скорости в сущ-
ности является диференциальным манометром, измеряющим раз-
ность давлений: статического и аэродинамического.
Указатель воздушной скорости состоит из приёмника —
трубки Пито—и измерителя (рис. 83). Трубку Пито устанавли-
вают на крыле самолёта во встречном потоке воздуха. Она со-
стоит из двух трубок: одна имеет открытый конец и воспринимает
динамическое давление, другая (нифер) воспринимает статиче-
ское давление через небольшие боковые отверстия а в стенках
трубки. Трубку Пито устанавливают точно в линии полёта и ПЭ-
88
раллельно продольной оси 'самолёта. Каждая из трубок посред-
ством проводки из алюминиевых трубок, проложенных по крылу
самолёта, соединяется с указателем скорости, пометённым в кабине
самолёта. Во избежание обледенения, что иногда наблюдается пр»
полётах в облаках, трубка Пито имеет электрический обогрев.
Г ис. 83. Схема указателя воздушной скорости
Внутри указателя скорости имеется манометрическая коробка
(Види) с волнистыми стенками, похожая по внешнему виду на
анероидную коробку высотомера. Полость манометрической ко-
робки соединяется проводкой с трубкой динамичёского давления
приёмника. Корпус прибора, т. е. пространство, окружающее мано-
метрическую коробку, соединяется с трубкой статического давле-
ния. Таким образом, указатель скорости в сущности является ма-
нометром, измеряющим разность давлений. Коробка, расширяясь,,
посредством рычагов передаёт движение зубчатому сектору, вра-
щающему стрелку прибора. Шкала указателя скорости градуиро-
вана в км/час. Каждое деление шкалы соответствует скорости
10 км/час. Оцифровка нанесена через 50 км/час. Основные деле-
ния, стрелки и цифры окрашены светящейся в темноте краской.
На двухместном самолёте устанавливают два указателя ско-
рости: один — у лётчика, другой — у штурмана. Работают они от
одного приёмника. Для обеспечения правильной работы прибора
трубку Пито устанавливают в таком месте, где поток воздуха ме-
нее всего возмущён прохождением самолёта (у конца крыла, на<
особой стойке под фюзеляжем и т. п.). Воспринимающий конец
трубки должен быть направлен вперёд, параллельно линии полёта.
Соединения трубопроводов должны быть герметичны. В низшей
89
точке трубопроводов устанавливают стаканчики с выпускными
кранами для периодического удаления воды, скапливающейся
в трубопроводе. Во время стоянки самолёта трубку Пито закры-
вают матерчатым чехлом.
§ 18. Ошибки в определении воздушной скорости
Указатель воздушной скорости, подобно другим приборам,
имеет погрешности, которые необходимо учитывать для определе-
ния истинной величины воздушной скорости. Ошибки указателя
скорости можно разделить на две группы:
1) инструментальные ошибки, происходящие от качества из-
готовления прибора;
2) ошибки применяемого метода, зависящие от несовершен-
ства самого метода определения скорости самолёта измерением
аэродинамического давления.
Инструментальные ошибки указателя скорости с трубкой
Пито происходят главным образом от недостатков самого при-
бора: от люфтов, затираний, недостатков регулировки, изменения
упругих свойств коробки (гистерезиса) и от температуры Меха-
низма. Инструментальные ошибки указателей скорости определя-
ются сличением показаний указателя скорости с показаниями
жидкостного 'манометра.
Ошибки применяемого метода состоят в том, что указатель
скорости показывает фактически не скорость, а аэродинамическое
давление. Аэродинамическое давление, как известно, зависит от
плотности воздуха, поэтому показания указателя скорости верны
-лишь при той плотности, для которой рассчитана шкала.
Шкала указателя скорости рассчитана для стандартной плот-
ности воздуха, равной 0,125, какая бывает у земли при давлении
760 мм рт. ст. и температуре -J-15° С. В верхних слоях плотность
воздуха обычно гораздо меньше, а так как скоростной напор про-
порционален плотности, то одной и той же воздушной скорости
на высоте будет соответствовать меньший скоростной иапор, чем
у земли, и, следовательно, указатель скорости покажет скорость
.меньше фактической.
Допустим, что на высоте полёта плотность воздуха Тогда
истинную воздушную скорость можно определить из выражения
₽1/2
?=— •
т. е. *
V — 2<? . (1)
иист— И рн '
Но так как шкала указателя скорости тарирована для стандарт-
ной плотности воздуха р0, то показание прибора будет иное, т. с.
Разделив первое равенство на второе, получим
Vе- = 1/ZEZ,
' Р//
90
откуда
Плотность воздуха можно выразить через температуру п да-
вление:
Ро _
рн ту; ’
где То и ро—стандартные абсолютная температура и давление;
7',/ и ря— абсолютная температура и давление «а высоте.
Подставляя значение — в формулу (3), имеем:
Логарифмируя эту формулу, получаем:
>gv„CT = igvnp+lig^4ig^.
По этой формуле и учитывается ошибка указателя скорости,
зависящая от плотности воздуха. На практике расчёт производят
при помощи навигационной счётной линейки. Кроме того, расчёт
может быть произведён по графику, по таблицам или путём при-
ближённого вычисления в уме.
Расчёт линейкой НЛ-8 производится следующим образом:
1) установить визирку линейки на
деление шкалы «Высота в км для V», ie^fnpnamvpa
соответствующее высоте полёта (по по-
казанию высотомера); ।__________।'
2) передвигая движок линейки, под- >----1----------1---
вести под визирку деление шкалы «Тем-
пература на высоте для V», соответ-
ствующее температуре на высоте;
3) установить визирку на деление
шкалы «Скорость по прибору», соответ-
ствующее показанию указателя скорости (исправленному ин-
струментальной поправкой);
4) отсчитать по визирке на шкале «Исправленная скорость»
искомую исправленную воздушную скорость.
Ключ для расчёта дан на рис. 84. При расчёте обе скоро-
сти, VnpH6 и Ииспр, можно увеличивать или уменьшать в 10 раз.
Примеры. 1. Дано: Нпр116 = 4 5Jj м, Р = — 20’, Vnpil6 = 320 км/час. Найти
исправленную воздушную скорость.
Решение. Совмещаем на линейке отсчёты /7приб и Р и против отсчёта
Vnf 5= 320 км/час читаем ответ — 396 км час.
2. Дано: Нприб = 6 000 м, Р — —40°, Ипр11б = 400 км/час. Найти испра-
вленную воздушную скорость.
Решение. VHcnp = 527 км/час.
01
Высота Высота
ВляН не прибору
Рис. 84. Ключ для
расчёта скорости
Приведённое правило справедливо при незначительном (до
20 мм) отклонении давления у земли при вылете от 760 мм. В тех
случаях, когда высотомер перед вылетом был установлен на 0 при
значительно меньшем давлении у земли (например, на горном
аэродроме), для расчёта УНСПр необходимо 0 шкалы высотомера
перевести на 760 мм, после чего брать отсчёт высоты для уста-
новки её на шкале лин'ейки НЛ-8 «Высота в км для V».
После отсчёта высоты 0 шкалы высотомера вернуть на преж-
нее место.
Чтобы не сбивать показания высотомера, в уме перевести вы-
соту по прибору в высоту от уровня моря.
При расчёте по графику (рис. 85) скорость по прибору берут
на правой стороне рамки графика и на пересечении горизонталь-
ной линии с наклонной, оцифрованной соответствующей высотой
полёта, читают искомую исправленную воздушную скорость. На-
клонные линии, идущие слева направо, и нижняя шкала служат
для расчёта скорости при температуре у земли выше -f- 6°. Дру-
гие наклонные линии и верхняя шкала служат для расчёта при
температуре у земли ниже + 5°.
Исправленная воздушная спорость
Температура у земли ниже+5°
Рис. 85. График для расчёта воздушной скорости
Пример. Дано:
+ 10°.
^приб - 300 км/час, /7,ри6 = 4 000 .и, температура у земли
Решение. Унгпр = 340 км час.
Определение V ИСпР или V р„я по таблицам весьма несложно
и особого объяснения не требует (см. стр. 94, сверху).
£2
Приближённый расчёт исправленной 'воздушной скорости
в уме производится путём добавления к скорости по прибору
(исправленной инструментальной поправкой) поправки, величина
которой определяется в зависимости от высоты полёта по табли-
це (см. стр. 94, снизу).
Пример. Яприб=3000 м, Кприб = 300 км/час. Найти Уиспр.
Решение. Ииспр = 300 45 = 345 км/час.
Учётом инструментальной и методической ошибки не всегда
исчерпывается определение истинной воздушной скорости. Указа-
тель скорости может иметь ошибки, зависящие от места уста-
новки приёмника. В полёте вокруг самолёта возникают завихре-
ния и возмущения воздушной среды, характер которых зависит
как от типа и размера самолёта, так и от его скорости. При боль-
ших скоростях поток искажается вокруг всего самолёта и даже
вынос трубки Пито на 1 м перед кромкой крыла не спасает от
влияния искажения потока. Эти ошибки называются аэродинами-
ческими и могут доходить до 25 км/час и более.
Аэродинамическая ошибка имеет постоянную величину для
данного типа самолёта. Её находят, определяя каким-либо другим
способом истинную воздушную скорость и сравнивая последнюю
с показанием прибора в полёте. Например, указатели скорости
проверяют в полёте по четырёхугольнику или на мерной базе
(СМ. § 21).
Точное сохранение воздушной скорости, даже на хорошо от-
регулированном самолёте, 'вообще говоря, невозможно. Обычно
воздушная скорость самолёта изменяется в некоторых пределах
(до + 5 км/час). Эти колебания скорости могут взаимно компен-
сироваться, если они направлены в ту и другую стороны. Ве-
роятная ошибка определения воздушной скорости .составляет
около 3%.
§ 19. Расчёт истинной воздушной скорости
В аэронавигационной практике приходится определять истин-
ное значение воздушной скорости, а также вычислять требуемое
показание указателя скорости, для того чтобы полёт производить
на заданной скорости.
Порядок расчёта истинной воздушной скорости следующий:
1) учитывают инструментальную поправку указателя скоро-
сти, прибавляя её алгебраически к отсчёту по прибору;
2) учитывают поправку на плотность воздуха (счётной линей-
кой, по графику, по таблице);
3) учитывают аэродинамическую поправку, прибавляя её
алгебраически к исправленной скорости (найденной по линейке,
графику или таблицам).
93
94
Пример. Отсчёт по указателю скорости 330 км/час. Инструментальная по-
правка 4- 10 км/час. Высота полёта (по прибору, исправленная только инстру-
ментальной поправкой) 3000 м. Температура воздуха на высоте —10°. Аэро-
динамическая поправка + 15 км/час. Определить истинную воздушную скорость.
1. К отсчёту по прибору прибавляем инструментальную поправку:
330-|- 10 = 340 км час.
2. При помощи счётной линейки находим исправленную воздушную ско-
рость, равную 400 км/час.
3. К исправленной воздушной скорости прибавляем аэродинамическую
поправку и получаем истинную воздушную скорость, равную 415 км/час.
При расчёте необходимого показания прибора (скорости по
прибору) сначала учитывают аэродинамическую поправку, вычи-
тая её алгебраически из заданной истинной скорости, затем про-
изводят расчёт счётной линейкой и находят скорость по прибору,
которую следовало бы держать в полёте, если отсутствовали 'ин-
струментальные ошибки. После этого из найденной скорости вы-
читают алгебраически инструментальную поправку и получают
необходимое показание прибора.
Пример. Заданная истинная воздушная скорость 300 км 'час. Высота полёта,
4 000 Температура на высоте 0°. Аэродинамическая поправка -|- 10 км/час.
Найти необходимое показание прибора.
Решение. 1. Из заданной истинной высоты вычитаем аэродинамическую
поправку: 300— 10 — 290 км/час,
2. Находим на линейке „скорость по прибору*, равную 240 км/час.
3. Допустим, что инструментальная поправка для скорости 240 км,час-
равна —20 км/час. Учитываем эту поправку, вычитая её из „скорости по при-
бору", и получаем искомое показание прибора, равное: 240 — ( — 20) = 260 км/час~
§ 20. Проверка указателя скорости
Проверка указатели скорости производится для определения
его инструментальных ошибок.
Указатель скорости может быть для проверки снят с само-
лёта или же проверен на самом самолёте. Для проверки необхо-
димо иметь: 1) жидкостный манометр, водяной или спиртовой;
2) термометр; 3) проверочную таблицу или график.
Манометр для проверки (рис. 86) представляет собой стеклян-
ную трубку, изогнутую в два колена. Между коленами манометра
укреплена шкала, разделённая на миллиметры. По середине
шкалы помещается нулевое деление, от которого оцифровка идёт
вверх и вниз через каждые 10 мм. Трубка манометра заполняется
до половины окрашенной водой. Нулевое деление шкалы должно
совпадать с уровнем жидкости в обоих коленах манометра. Одни
из концов трубки манометра остаётся открытым и, следовательно,
сообщается с атмосферой. К другому концу трубки присоединяют
резиновый шланг с тройником и грушей. Тройник служит для од-
новременного присоединения к манометру груши и проверяемого
прибора. При помощи резиновой груши создаётся необходимое-
давление в динамической коробке указателя скорости. Нажим на.
грушу производят микрометрическим винтом.
95
Для проверки указателя скорости манометр соединяют
с грушей и с динамическим штуцером проверяемого прибора. За-
тем, вращая микрометрический винт, нажимают на грушу. Давле-
ние, создаваемое грушей, передаётся прибору и манометру. Когда
стрелка прибора дойдёт до отсчёта 100 км/час, давление на грушу
-Рис. 86. Манометр для проверки указателей
скорости
Рис. 87. Г рафик
для проверки ука-
зателей скорости
прекращают и тотчас же производят отсчёт по обоим коленам
манометра. Сумма отсчётов даёт высоту столба жидкости в мил-
лиметрах; её записывают в бланк проверки. Проверку продолжают
подобным же образом, записывая отсчёты по манометру через
каждые 50 км/час показания прибора. Па крайнем отсчёте сле-
дует задержаться в течение минуты и проследить, не падает ли
давление, что может означать негерметичность проводки или ди-
намической камеры указателя скорости. Затем такая же проверка
производится при уменьшении показания прибора.
Проверяемый указатель скорости должен находиться в том
же положении, как и на самолёте, т. е. шкала его должна быть
вертикальна. Результаты проверки обрабатываются при помощи
специального графика (рис. 87). На шкале «Давление водяного
столба» находят наблюдённые давления по манометру и против
них на шкале «Скорость» читают соответствующие им скорости.
96
Скорости, найденные по графику, считаются истинными. Поправки
определяются как алгебраические разности истинных скоростей
и скоростей, показанных прибором. Если истинная скорость
больше показания прибора, поправка обозначается знаком плюс,
если меньше — знаком минус. Результаты проверки записывают
в специальный проверочный лист.
После проверки указателя скорости строят график поправок
(рис. 88). Для построения графика обычно берут средние поправки
из наблюдённых при увеличении и при уменьшении давления на
грушу. На средней вертикальной линии графика нанесены показа-
ния указателя скорости. Вправо от этой линии откладывают по-
правки со знаком плюс, влево — со знаком минус. Полученные
точки соединяют непрерывной линией.
Рис. 88. График поправок к указателю скорости
Кривую для указателя скорости штурмана наносят красным
цветом, а для прибора лётчика — синим. График поправок поме-
щают в самолёте рядом с прибором штурмана.
При проверке указателя скорости на самолёте манометр
соединяют с трубкой динамического давления приёмника.
В остальном проверка от обычной ничем не отличается. При про-
верке на самолёте попутно определяют герметичность всей про-
водки указателя скорости.
Для быстрой проверки приборов на самолётах применяют про-
верочный прибор с контрольным указателем скорости. Разумеется,
при этом необходимо знать ошибки контрольного прибора.
§ 21. Проверка указателя скорости в полёте
При полётах в строю нередко выясняется, что воздушная ско-
рость у всех самолётов фактически была одинакова со скоростью
ведущего, тем не менее указатели скорости на отдельных само-
лётах давали совершенно различные показания, отличающиеся
одни от других на 10—15 км/час и больше. Проверка указателей
скорости на земле после полёта давала вполне удовлетворитель-
ные результаты. Следовательно, самолёты имеют разные значения
аэродинамических ошибок указателя скорости (см. § 18). Поэтому
для уверенности в правильности показаний указателей скорости
в полёте, в особенности установленных на тяжёлых самолётах.
7 Учебник аэронавигации
97
необходимо проверять их в 'Воздухе. Полётную проверку указа-
теля скорости производят в такое время, когда нет сильной «бол-
танки» и сильного порывистого ветра.
Проверка указателя скорости в полёте по четырёхугольнику
(известна под названием способа Майера) заключается в следую-
щем. По карте выбирают маршрут в
Рис. 89. Определение истинной воздушной
скорости полёта по четырёхугольнику
виде четырёхугольника со
сторонами длиной не ме-
нее 10—15 км, с хороши-
ми ориентирами в начале
и в конДе каждого участ-
ка. Иногда маршрут на-
мечают вдоль прямоли-
нейных ориентиров, пере-
секающихся под углом
около 90°. Полёт выпол-
няют на заданной высоте
с постоянным режимом
воздушной скорости.
Штурман по секундоме-'
ру тщательно замеряет
время пролёта каждого
участка.
Результаты полёта
обрабатываются следую-
щим образом.
Исходя из ДЛИН1Ы
пройденных участков
маршрута и времени их
пролёта, вычисляют пу-
тевые скорости на этих
участках. Затем выпол-
няют графическое построение. Из произвольно взятой точки от-,
кладывают путевые углы выполненного маршрута (рис. 89). На пу-
тевых линиях откладывают в каком-либо масштабе путевые ско-
рости. В результате получают четыре точки.
Через три из них проводят окружность (известная геометри-
ческая задача), четвёртая точка при правильных измерениях
должна также уместиться на этой окружности. Радиус получен-
ной окружности будет равен искомой истинной воздушной скоро-
сти. Значительный «выброс» четвёртой точки указывает на непра-
вильные определения в полёте.
Разница между найденной истинной скоростью и показанием
указателя скорости, наблюдённым во время полёта, является пол-
ной ошибкой указателя скорости. Она складывается из трёх оши-
бок: 1) инструментальной ошибки, 2) аэродинамической ошибки
и 3) ошибки от плотности воздуха. Введя в показание указателя
скорости инструментальную поправку и за плотность воздуха
и сравнивая скорость, полученную в результате расчёта на ли-
нейке, с истинной скоростью, найдённой графическим построе-
нием, получают аэродинамическую ошибку прибора.
98
Пример. Магнитные путевые углы участков маршрута равны 22°. 261°, 143®
и 100’. Путевые скорости на этих участках 300, 375, 250 и 240 км/час. Показа-
ние указателя скорости 270 км/час, инструментальная поправка — 2 км/час.
Высота полета 2 000 м. Температура на высоте + 10°. Давление воздуха
у земли 760 мм" рт. ст. Найти истинную воздушную скорость и аэродинамиче-
скую ошибку прибора.
Выполнив графическое построение, находим, что истинная воздушная ско-
рость равна 310 км/час. По навигационной линейке определяем истинную ско-
рость 300 км/час. Таким образом, мы нашли два значения истинной воздушной
скорости; скорость 320 км/час, найденная в полётном испытании, более точная
величина. Поэтому разность в скоростях, в данном случае равная 10 км, час,
является аэродинамической ошибкой указателя скорости. Эту ошибку следует
учитывать каждый раз при расчёте скорости. >
§ 22. Высота полёта
Измерять высоту полёта Н можно от любого уровня, условно
принятого за нуль высоты, например, от уровня моря, уровня
аэродрома, уровня местности, над которой происходит полёт.
В зависимости от этого различают высоты абсолютную, относи-
тельную и истинную (рис. 90).
Нист.
Набсол
Н относит
Рис. 90. Высота
Абсолютной высотой называется высота самолёта над уров-
нем моря. Относительной высотой называется высота самолёта
относительно места взлёта (аэродрома вылета). Истинной высотой
является действительная высота самолёта над пролетаемой мест-
ностью. Самолёт, летящий горизонтально, имеет постоянную отно-
сительную (и абсолютную) высоту полёта, истинные же высоты
будут иметь различную величину в разных местах пути. Они будут
отличаться от относительной высоты, в зависимости от рельефа
местности, на величину превышения или понижения местности
относительно аэродрома вылета.
Высоту полёта можно измерять различными способами: баро-
метрическим, кинематическим, угломерным, акустическим, оптиче-
ским, электрическим и др. Основным способом определения вы-
соты полёта является барометрический (высотомером). Барометри-
ческой высотой называется высота, указываемая барометрическим
высотомером. Эта высота иногда может быть равна относитель-
ной или истинной высоте полёта, в зависимости от распределения
1*
99
давления и температуры в атмосфере. Кинематический способ за-
ключается в измерении высоты полёта по измеренному времени
пробега какой-либо точкой земной поверхности определённого
вертикального угла при известной путевой скорости или в опреде-
лении высоты по времени падения специальной навигационной
бомбы, сброшенной с самолёта. Угломерный способ состоит в из-
мерении вертикального угла предмета на земной поверхности, рас-
стояние до которого известно. Акустический способ заключается
в определении времени, в течение которого звуковой сигнал, от-
правленный с самолёта, вторично улавливается на самолёте (эхо);
зная скорость звука и скорость самолёта, можно определить вы-
соту полёта.
Наконец, высоту полёта можно определить при помощи радио-
высотомера.
Барометрический способ определения высоты полёта основан
на измерении атмосферного давления. Атмосфера, окружающая
землю, имеет вес, поэтому оказывает давление на Bice предметы,
находящиеся в атмосфере. На уровне моря атмосферное давление
составляет 1 033 г на 1 см2 поверхности, что соответствует высоте
ртутного столба 760 мм в трубке барометра. С высотой давление
атмосферы уменьшается, причем изменение давления происходит
неравномерно. Например, вблизи поверхности земли надо под-
няться на 10 м, чтобы давление упало на 1 мм. На высоте же
около 3 000 м надо подняться на 12 м, чтобы давление упало
на 1 jhjW. Та высота, на которую надо подняться, чтобы давление
упало на 1 мм, называется барометрической ступенью. С увели-
чением высоты барометрическая ступень увеличивается. Зная
давление воздуха у земли, барометрическую ступень и давление
на высоте полёта, можно приближённо определить высоту полёта.
Более точно высота определяется по формулам, в которых учиты-
вается влияние различных факторов на изменение давления воз-
духа с высотой.
Наиболее употребительной является формула Лапласа
Н= 18 400 1g
то Рн
где Н — искомая высота в м\
Т — средняя абсолютная температура;
То — температура воздуха у земли;
р0— давление воздуха у земли;
рн— давление на высоте.
§ 23. Высотомер
Высотомер построен на принципе измерения атмосферного
давления. Воспринимающей частью высотомера является полая
тонкостенная анероидная коробка (коробка Види), способная реа-
гировать на изменение атмосферного давления.
Анероидная коробка изготовляется из фосфористой бронзы
или из других металлов, обладающих наибольшей способностью
100
сохранять свои упругие свойства и достаточную прочность. Стенки
анероидной коробки обычно делают волнистыми, чтобы увеличить
их поверхность, а следовательно, и способность к сжатию и рас-
ширению при изменении давления. Анероидные коробки не имеют
каких-либо дополнительных пружин и работают только в силу
упругости гофрированной поверхности оснований. В настоящее
время на самолётах используются двухстрелючные высото-
меры. Основной частью двухстрелочного высотомера явля-
ются две анероидные коробки (рис. 91), жёсткие центры
Рис. 91. Схема устройства двухстрелочного высотомера
которых соединены между собой неподвижно, а внутренние по-
лости не сообщаются. Из коробок выкачан воздух. Вследствие
действия на коробки внешнего атмосферного давления у земли
стенки их сплющиваются, но не до полного соприкосновения.
С изменением высоты внешнее атмосферное давление изменяется,
стенки коробок расходятся, а их жёсткие центры получают дви-
жение. Так как анероидных коробок две, то система имеет ход
примерно в два раза больше, чем при одной анероидной коробке.
Передача прямолинейного хода коробок к стрелкам осуще-
ствляется при помощи шатунно-кривошипной передачи, состоящей
из валика с биметаллической пластинкой, тяги и сектора. От сек-
тора через ось мультипликатора и большую шестерню движение
передаётся на ось большой стрелки. Малая стрелка получает вра-
щательное движение от оси большой стрелки посредством при-
бора, состоящего из двух трубок и шестерни малой стрелки.
Сквозь полую ось малой стрелки проходкгг, не касаясь её стенок,
ось большой стрелки.
На приборе имеется рукоятка для вращения шкалы давлений
и перемещения стрелок. Вращение шкалы барометрического давле-
ния находится в определённой зависимости от перемещения стре-
101
лок. Это достигается тем, что шестерёнка рукоятки одновременно
вращает шкалу давления и основание, на котором смонтирован
механизм передачи на большую стрелку. Прибор имеет две темпе-
ратурные компенсации в виде биметаллических пластинок, состоя-
щих из инвара и антимагнитной стали. Шкала высотомера (рис. 92)
оцифрована от 1 до 10 км. Для показаний высоты свыше 10 км
стрелки имеют дополнительный ход на 2 км. Малая стрелка при-
бора показывает высоту в километрах, делая один оборот на
шкале при подъёме на 10 000 м. Большая стрелка показывает вы-
соту в десятках и сотнях метров и делает один оборот при
подъёме на высоту 1 000 м. Цена деления в этом случае равна
10 м. Барометрическая шкала служит
для учёта поправок в показаниях при-
бора от изменения барометрического
давления у земли. Шкала давлений
нанесена от 67б то 790 мм', цена де-
ления 1 мм рт. ст.
В дне корпуса прибора имеется
штуцер, который соединяется со ста-
тической проводкой указателя скоро-
сти. Это сделано для того, чтобы по-
казания высотомера зависели исклю-
чительно от высоты полёта и в них
не вкрадывались ошибки, вызываемые
Рис. 92. Шкала высотомера разрежением воздуха внутри кабины,
зависящие от скорости полёта. На-
пример, в кабине штурмана, которая помещается в передней
части самолёта, имеется некоторый избыток давления по сравне-
нию с атмосферным. В задней кабине может создаться разреже-
ние, повышающееся с увеличением скорости полёта.
Перед полётом, вращая головку установочной рукоятки, обе
стрелки высотомера устанавливают против деления «0» высоты;
при этом на шкале давлений устанавливается величина давления
наблюдаемого в данный момент у земли.
§ 24. Ошибки в определении высоты полёта
Чтобы определить истинную высоту полёта, необходимо учи-
тывать ошибки, свойственные высотомеру как измерительному
прибору, и ошибки, присущие барометрическому способу измере-
ния высоты полёта.
1. Ошибки первой категории называются инструментальными.
Они зависят от конструкции прибора и от качества его изготовле-
ния. Они могут быть определены и для них могут быть составлены
графики поправок для различных показаний прибора. Причиной
инструментальных ошибок высотомера является вообще невозмож-
ность построить прибор, действие которого не зависело бы от
некоторых факторов. Например, под влиянием температуры ко-
робка высотомера может изменять свою упругость, вследствие
чего изменяются и показания прибора. Для устранения влияния
102
температуры применяются биметаллические рычаги (спаянные из
двух металлов, имеющих разные коэфициенты расширения). Дей-
ствие биметаллических рычагов основано на их изгибании от изме-
нения температуры. Этот изгиб подбирается так, чтобы в основ-
ном изменение упругости коробки компенсировалось. Изменение
упругих свойств коробки может также происходить из-за механи-
ческого гистерезиса, т. е. способности материалов изменять свои
упругие свойства, если эти материалы находились в состоянии на-
пряжения.
При быстрых спусках самолёта показания высотомера запаз-
дывают. Это запаздывание вызывается остаточным (упругим)
последействием. Величина его доходит до 30—50 м. Высотомеры,
бывшие долгое время в работе, необходимо возможно чаще про-
верять, так как от усталости материалов изменяются упругие
свойства коробки.
2. Ошибки второй категории называются методическими. Они
не могут быть заранее ни устранены, ни вычислены. Их прихо-
дится учитывать в самом полёте; величина поправки в каждом
отдельном случае зависит от физической обстановки полёта.
Существуют следующие методические ошибки:
а) ошибки от несовпадения расчётных данных высотомера с
фактическим состоянием атмосферы;^
б) ошибки, вызываемые изменением топографического рельефа
пролетаемой местности.
Ошибки первого рода объясняются следующим. Шкала высо-
томера рассчитана по известной барометрической формуле. При
этом в качестве начального давления и начальной температуры
можно было бы взять любые данные и соответственно им опре-
делять давление и температуру на разных высотах, однако целе-
сообразнее расчёт производить для определённых, стандартных
данных. Поэтому высотомеры тарируются на основании таблицы
стандартной атмосферы. В этой таблице начальным давлением
считается давление 760 мм рт. ст., а начальной температу-
рой + 15° С.
Температура на высоте считается соответствующей темпера-
турному градиенту, равному 0,65° на каждые 100 м высоты.
Деления шкалы высот наносят по положениям стрелки, отвечаю-
щим тому давлению, которое будет наблюдаться на данной
высоте согласно таблице стандартной атмосферы. Таким образом,
показания высотомера относятся к какому-то определённому
состоянию атмосферы.
Однако в каждом отдельном полёте наблюдается расхожде-
ние действительных и принятых в расчёт величин метеорологиче-
ских элементов, вследствие чего высота полёта определяется
с ошибкой. Например, начальная температура (у земли) может
колебаться от + 30° до — 30° и больше, т. е. разность между
расчётной и фактической температурой летом достигает 15°, а
зимой 45°. Температурный градиент также может изменяться, и
не только по величине, но и по знаку; например, в атмосфере
иногда наблюдаются инверсии, т. е. повышение температуры с
ЮЗ
Учет
кой НЛ-8
/ад высоте
для Н
Высота
дляН
Рис. 93.
производится
Исправленное
высота
высота
лр прибору
Ключ для расчёта
высоты
высотой. Поэтому для определения истинной высоты полёта необ-
ходимо учитывать действительное распределение температур в
атмосфере.
Начальное давление в пункте вылета точно так же может
быть не равно 760 мм. Эта ошибка учитывается установкой стре-
лок высотомера перед полётом против нуля шкалы.
Поправки на изменение температуры вычисляются навига-
ционной счётной линейкой, при помощи графиков и таблиц.
[поправки навигационной счётной линей-
следующим порядком:
1) установить визирку линейки наде-
ление шкалы «Высота в км для Н»,
соответствующее высоте полёта (по по-
казанию высотомера);
2) передвигая движок, подвести под
визирку деление шкалы «Температура на
высоте для Н», соответствующее темпе-
ратуре на высоте;
3) установить визирку на деление
шкалы «Высота по прибору», соответ-
ствующее температуре на высоте;
4) отсчитать по визирке на шкале «Исправленная высота»
искомую исправленную высоту (рис. 93).
Пример. Высота по прибору, исправленная инструментальной поправкой,,
равна 4 000 м. Температура воздуха на высоте равна 0°. Найти искомую высоту
полёта.
Решение. Устанавливая на линейке данные величины, находим, что испра-
вленная высота равна 3 900 м.
График для расчёта высоты дан на рис. 94. На левой сто-
роне графика отложены высоты по прибору от 0 до 3 км, а на
правой — от 3 до 9 км, на нижней стороне графика исправленные
высоты от 0 до 3 км, а на верхней — от 3 до 9 км.
Температура на высоте указана при наклонных линиях от
— 30° до + 30°. Если высота по прибору меньше 3 000 м, искомый
результат читают по нижней шкале, если больше 3 000 м, — то по
верхней. Например, высота по прибору 2 000 м, температура на
высоте 0°, исправленная высота 1 900 м.
Таблица для расчёта высоты дана в § 18.
Ошибки второго рода обусловлены следующим: высотомер,
установленный на начальное давление в пункте вылета, в продол-
жение всего полёта будет указывать высоту над местом вылета,
а не над пролетаемой местностью, и чем разнообразнее будет
топографический рельеф, тем больше будут расходиться его пока-
зания с истинным значением высоты. Ошибки в данном случае
будут равны превышениям одной местности над другой. Эти
ошибки носят название ошибок за топографический рельеф. Они
принадлежат к важнейшим и неизбежным ошибкам барометриче-
ского способа измерения высоты полёта. Учитываются эти
ошибки крайне просто, если точно иввестно, над каким местом
104
пролетает самолёт, и если имеется карта с достаточно частыми
отметками высот местности относительно уровня моря.
Исправленная высота
Рис. 94. График для расчета высоты
Чотнос' ^00 М Шjem*900М
Поправка за рельеф вычисляется в метрах; она равна раз-
ности абсолютных высот местности и аэродрома вылета. Таким
образом, если местность
выше аэродрома вылета, по-
правка имеет знак плюс,
если ниже—знак минус. При
определении истинной высо-
ты полёта поправка за рель-
еф алгебраически вычитает-
ся из относительной высоты
(рис. 95). В высотомерах,
имеющих шкалу давлений,
эта поправка учитывается
путём установки на шкале
давлений нового значения
давления у земли (т. е. сме-
щением нуля шкалы высот соответственно этому давлению). Это
вполне понятно, так как барометрический способ требует измере-
ния давления не только на высоте, но и у земной поверхности.
Рис. 95. Поправка за рельеф
105
Вычисленная с учётом всех поправок высота полёта не
является абсолютно точной величиной, так как существует ряд
ошибок. Кроме того, полёт самолёта происходит не по идеально
горизонтальной линии, а по некоторой волнистой кривой, т. е. вы-
сота полёта постоянно изменяется в пределах + 25 м. Вероятная
-ошибка определения высоты полёта составляет около 5‘Vo.
§ 25. Расчёт высоты полёта
В аэронавигационной практике приходится определять истин-
ную высоту полёта, а также рассчитывать высоту, которую необ-
ходимо держать по прибору.
В первом случае расчёт выполняется следующим образом:
1) учитывают инструментальную поправку, прибавляя её алге-
браически к показанию прибора;
2) учитывают (при помощи счётной линейки, графика или
таблицы) температурную поправку и находят таким образом
«исправленную высоту»;
3) из найденной исправленной высоты алгебраически вычи-
тают поправку за рельеф или на изменение давления у земли.
Пример. Отсчёт пр высотомеру 4 900 м. Инструментальная поправка -|-100 м.
Температура воздуха иа высоте — 20°. Поправка за рельеф — 200 м. Опреде-
лить истинную высоту полёта.
Решение. 1. Учитываем инструментальную поправку:
4 900 -f- 100 = 5 000 м.
2. Находим при помощи счётной линейки «исправленную* высоту, рав-
ную 5 100 м.
3. Учитываем поправку за рельеф и получаем искомую истинную высоту
полёта:
5100—( — 200) = 5300 м.
При определении показания высотомера для заданной истин-
ной высоты полёта порядок расчёта обратный, т. е. сперва учиты-
вают поправку за рельеф, прибавляя её алгебраически к заданной
•истинной высоте. Затем производят расчёт «высоты по прибору»
(счётной линейкой, по графику, по таблице). После этого учиты-
вают инструментальную поправку, вычитая её алгебраически из
найденной «высоты по прибору».
Пример. Заданная истинная высота полёта 5 800 м. Поправка за рельеф
+ 200 м. Температура на высоте —20°. Вычислить показание высотомера.
Ре шение. 1. Прибавляем к заданной истинной высоте поправку за
рельеф;
5 800 + 200 = 6 000 м.
2. Находим счётной линейкой „высоту по прибору*, равную 5400 м.
3. Учитываем инструментальную поправку для высоты 5 400 м. Если она
равна — 1U0 м, то искомое показание высотомера;
5 400 —(—100) = 5 500 м.
106
При определении высоты над точкой, для которой известно
давление у земли (неприведённое), — поправка на рельеф не вво-
дится. В этом случае достаточно учесть только поправку на раз-
ность давлений у земли в пункте вылета и в интересующем
пункте по правилу «давление у земли больше, — высота больше».
При этом на каждый 1 мм разности давления берется 10 м вы-
соты.
Пример. Давление у земли на аэродроме вылета 750 мм, у цели — 700мм.
Заданная высота полета над целью Зиии м.
Решение. Разность давлений 50 мм соответствует разности высот 500 м-
Следовательно, высота по прибору должна быть 3 5>Х) м.
В этом примере падение давления у цели на 50 мм как бы соответствует
превышению цели над аэродромом вылета на 500 м.
Еще проще учесть изменение давления у земли, если 0 шкалы
высотомера установить на новое значение давления у земли. Этот
способ применяется при посадке на другой аэродром при пере-
лётах.
§ 26. /Проверка высотомера
Высотомеры следует проверять не реже чем раз в три месяца
и, кроме того, во всех случаях, когда возникает сомнение в пра-
вильности действия прибора. 'Проверка высотомера заключается
в определении его инструментальных поправок.
Прибор для проверки высотомеров (рис. 96) состоит из метал-
лического резервуара цилиндрической формы, ртутного манометра
и насоса для выкачивания воздуха.
Резервуар имеет внутри перегородку, которая разделяет
цилиндр на две камеры — верхнюю и нижнюю.
Нижняя камера является резервуаром разреженного воздуха.
В вёрхнюю камеру помещаются проверяемые приборы.
Камера закрывается массивной крышкой с резиновой про-
кладкой. Сверху крышка прижимается винтом. Верхняя камера
соединяется резиновым шлангом с ртутным манометром. Нижняя
камера соединяется с насосом. Обе камеры сообщаются между
собой трубкой, проходящей внутри корпуса. Соединение это пере-
крывается запорным краном. Выше этого крана помещается еще
один кран, через который в верхнюю камеру поступает воз-
дух извне.
Ртутный манометр служит для измерения давления в верхней
проверочной камере. Он представляет собой стеклянную двухко-
ленную трубку, заполненную до половины ртутью. Шкала мано-
метра разделена на миллиметры, причем деление «0» поставлено
по середине шкалы, где находится уровень ртути. Если из прове-
рочной камеры удалить воздух, то вследствие разности давлений
ртуть в одном колене манометра поднимется, а в другом опу-
стится. Вследствие такого устройства манометра для определения
высоты ртутного столба приходится брать сумму отсчётов по
обоим коленам.
107
При проверке высотомеров ‘необходимо соблюдать следую-
щий порядок:
1. Присоединить насос к нижней камере.
2. Присоединить манометр к верхней камере.
3. Разобщить при помощи кранов верхнюю и нижнюю камеры.
Рис. 93. Прибор для проверки высотомера
4. Открыть крышку прибора, отвинтив запорный винт и вынув
чеку.
5. Определить по барс метру истинное давление и температуру
воздуха в момент проверки.
6. Проверяемый высотомер поместить в верхнюю камеру при-
бора, предварительно установив шкалу давлений на 760 мм.
7. Смазать края крышки тавотом, закрыть крышку, вставить
чеку и завинтить запорный винт. Закрыть верхний кран.
8. Выкачать из нижней камеры как можно больше воздуха.
9. Медленно открывать кран, сообщающий камеры между
собой, одновременно следя за передвижением стрелки проверяе-
мого высотомера (стрелка будет подниматься, так как воздух
будет переходить из верхней камеры в нижнюю).
108
10. Когда стрелка дойдёт до высоты 500 м, запереть край и
быстро произвести отсчёт по правому и левому коленам мано-
метра. Найденные отсчёты записать.
11. Действуя таким же порядком, произвести отсчёты для
высот 1 000, 1 500 м и т. д. до наибольшей высоты. Во время про-
верки обычно оказывается, что в нижней ка-
мере не имеется достаточного разрежения;
тогда необходимо откачать воздух и за-
тем вновь продолжать проверку. Перед от-
счётами необходимо постукивать пальцами по
крышке цилиИдра.
12. Когда стрелка дойдёт до наибольшей
высоты, проверку надо приостановить на
15 минут.
13. Произвести испытание на спуск, впу-
ская в верхнюю камеру наружный воздух
(стрелка идёт в обратную сторону) и записы-
вая показания манометра через каждые
500 м.
14. Когда ртуть в манометре остановится
на нуле, записать последний отсчёт по вы-
сотомеру, так называемое остаточное после-
действие.
Полученные результаты проверки обраба-
тывают в следующем порядке;
1. Находят сумму отсчётов правого и ле-
вого колен манометра для всех моментов про-
верки (отдельно для отсчётов при подъёме
и отдельно при спуске).
2. В полученные суммы отсчётов вводят
температурные поправки на расширение рту-
ти по специальному графику. В график вхо-
дят по аргументам: показание манометра
и температура воздуха.
3. Находят приведённую сумму отсчётов
правого и левого колен манометра, для чего
к каждой сумме прибавляют алгебраическую
разность между 760 мм и давлением по баро-
метру.
4. Пользуясь гипсометрической шкалой
(рис. 97), находят истинные высоты, соответ-
Рис. 97. Гипсометри-
ческая шкала для
проверки высотомера
ствующие приведённым суммам отсчётов.
5. Сравнивая показания высотомера и соответствующие им
истинные высоты, находят поправки для каждого показания высо-
томера, отдельно для подъёма и отдельно для спуска. Знак по-
правок определяют так: если истинная высота больше показывае-
мой высотомером, знак поправки — плюс, а если меньше, то минус.
6. После определения поправок вычисляют средние поправки
(среднее арифметическое из поправок на подъём и на спуск для
соответствующей высоты) с округлением до 5 м.
109
Результаты проверки записывают в специальный провероч-
ный лист.
Высотомеры с герметичным корпусом и со штуцером мсгут
быть проверены не только в помещении, но и непосредственно
на самолёте. Для этого необходимо иметь контрольный высото-
мер, поправки которого для данной температуры известны. Про-
верка производится следующим образом. Освободив высотомер от
статической проводки, штуцер его присоединяют к тройнику,
имеющему на одном конце эталонный высотомер, а на другом
конце насос с краном. При помощи насоса создают разрежение,
соответствующее определённым высотам, и показания высотомера
сравнивают с показаниями эталонного высотомера.
Рис. 98. График поправок высотомера
Чтобы результаты проверки можно было использовать в по-
лёте, для данного высотомера составляют график поправок,
(рис. 98). На средней вертикальной линии графика отложены вы-
соты. Вправо от этой линии откладывают поправки со знаком плюс,
влево — со знаком минус. Цена деления на графике поправок
равна 40 м. Кривую поправок для высотомера лётчика наносят
синим цветом, а для высотомера штурмана — красным. На
графике отмечают дату проверки.
§ 27. Высотограф
Высотограф служит для непрерывной записи изменений вы-
соты полёта. Принцип его устройства аналогичен высотомеру.
Основной частью высотографа являются две анероидные
коробки 1 (рис. 99). Нижняя коробка прикреплена к основанию
прибора, а верхняя соединена рычажной передачей с длинным
пишущим рычагом 3, в конце которого имеется перо, наполнен-
ное специальными чернилами (не высыхающими и не замерзаю-
щими). Перо прижимается к барабану 2, внутри которого нахо-
дится часовой механизм. Барабан вращается с известной постоян-
ной угловой скоростью. На окружности барабана укрепляется
бумажная лента (барограмма), разграфлённая горизонтальными и
вертикальными линиями. Горизонтальные линии означают высоты,
вертикальные кривые — время (рис. 100).
ПО
Во время полёта, вследствие расширения анероидных коробок
и вращения барабана, на ленте прибора получается запись, по
Рис. 99. Схема устройства высотографа:
1 — коробка Вида; 2 — барабан; 3 — перо; 4 — арретир; 5 — диск
которой можно определить высоту в любой момент полёта, al
также и общую продолжительность полёта
Для установки пера вы-
сотографа перед полётом на
нуль имеется специальный винт,
находящийся под анероидны-
ми коробками; винт поднимает
или опускает анероидн'ые ко-
робки и таким образом пере-
двигает перо. Для отвода пера
от барабана служит подвиж-
ной рычат — арретир. Арретир
одновременно отводит перо и
останавливает часовой меха-
низм. Ход барабана можно из-
менять. Для этой цели на оси
барабана имеются шестерёнки.
Соединяя шестерёнки в из-
вестном порядке, можно по-
Рис. 100. Запись высотографа
лучить различные скорости вращения барабана: при сцеплени»
верхних шестерёнок барабан делает один оборот за 2 часа, при.
111
сцеплении средних — за 6 часов и при сцеплении нйжних — за 4 часа.
Для запоминания установки шестерёнок около рукоятки прибора
помещён диск 5 с цифрами 2, 4, 6. В зависимости от скорости
вращения барабана перо высотографа проходит каждый малый
промежуток между вертикальными линиями ленты за 2, 4 и 6 ми-
нут. Высотографы имеются для высот 6 000, 8 000 и 12000 м.
Механизм высотографа заключён в футляр, имеющий око-
шечко для наблюдения за работой прибора. К верхней и нижней
стенкам футляра прикреплены амортизаторы, при помощи которых
высотописец подвешивают в самолёте, чтобы прибор возможно
меньше подвергался вибрациям. Высотограф подвешивают в ка-
бине под сиденьем или в любом удобном месте. Амортизаторы
должны быть натянуты, чтобы прибор не раскачивался и не уда-
рялся о стенки кабины.
После полёта ленту с барабана снимают. Чтобы узнать про-
должительность полёта по записи высотографа, отсчитывают
число промежутков ленты, пройденных пером за время полёта, и
умножают на число минут, соответствующее установленной ско-
рости вращения барабана.
В показаниях высоты и записях времени высотографом воз-
можны ошибки. Ошибки в высоте определяются испытаниями
высотографа в приборе Гарфа (таблицу поправок помещают на
футляре высотографа).
Ошибки в записи времени происходят вследствие недоста-
точно точной регулировки часового механизма высотографа. Ход
барабана проверяют сравнением с показаниями точных часов.
§ 28. Самолётные часы
Столь же важным, как компас, аэронавигационным прибором
на самолёте являются часы. Часы служат для прибытия на цель
в заданное время, для определения промежутков времени при рас-
чётах иутевой скорости, для астрономической ориентировки, для
разведки и т. п.
В качестве часов штурмана приняты часы АЧХО (рис. 101).
На циферблате часов имеется шесть стрелок: часовая й минутная
стрелки основного механизма часов, минутная и секундная стрелки
секундомера, а также часовая и минутная стрелки счётчика вре-
мени, указывающие продолжительность полёта. Все стрелки,
цифры и деления на циферблате покрыты светящейся массой. В
нижней части часов, справа и слева, расположены головки с
кнопками.
Левая головка служит для завода механизма часов, перевода
стрелок, пуска в ход и остановки счётчика времени полёта. Заво-
дятся часы вращением этой головки против часовой стрелки. Пол-
ный завод пружины обеспечивает нормальную работу механизма
в течение 7 суток. Для перевода стрелок часов нужно вытянуть
головку до упора и вращать по движению стрелок. После пере-
вода стрелок следует вернуть головку в прежнее положение. Для
приведения в действие счётчика времени следует нажать на го-
112
Рис. 101 Часы штурмана
минутной шкалы на более мел-
ловку; тогда в сигнальном окошке верхней шкалы показывается
белый цвет, и стрелки этой шкалы начинают вращаться. Нажав
вторично на головку, останавливают ход стрелок; при этом в
сигнальном окошке показывается половина белого и половина
красного цвета. Если нажать головку в третий раз, то стрелки
счётчика времени полёта придут к нулевому положению; при этом
в сигнальном окошке появится
красный цвет.
Правая головка служит для
пуска в ход и остановки секун'до
мера. При первом нажиме вклю-
чается механизм секундомера;
при втором нажиме останавли-
вается стрелка секундомера; при
третьем нажиме стрелка прихо-
дит в нулевое положение. Если
промежуток времени, отсчитывае-
мый секундной стрелкой, больше
минуты, то на нижней шкале ча-
сов стрелка будет отсчитывать
полные обороты секундной стрел-
ки, т. е. минуты. Благодаря до-
полнительной разбивке основной
кие деления по секундной стрелке секундомера возможен отсчёт
с точностью 0,2 секунды.
Часы снабжены электрообогревателем, благодаря чему они
могут работать при низких температурах — до — 60° С. Электро-
обогреватель съёмный, его можно менять, не разбирая механизма
часов. Электрообогреватель включается в постоянное действие
при температуре ниже — 20° С. Включение обогревателя при тем-
пературе выше —20° не допускается, так как это может привести
к порче часового механизма. Питание электрообогревателя подво-
дится от источника тока на 12 в или от сети самолёта — 24 в.
§ 29. Проверка часов
Как бы совершенно ни был изготовлен механизм часов, всё
же ход его за достаточно продолжительный промежуток времени
нельзя считать равномерным и постоянным. Если в какой-либо
момент показания часов соответствовали действительному значе-
нию времени в этот момент, то по прошествии некоторого проме-
жутка времени эти показания могут оказаться неверными. Часы
в таком случае будут иметь, как говорят, некоторую поправку.
Поправкой часов в данный момент называется то число минут и
секунд, которое необходимо прибавить к показанию часов, чтобы
определить точное время. Если часы отстают, поправка имеет
знак плюс, если идут вперёд — знак минус. Таким образом, для
определения истинного момента времени по часам поправку алге-
браически прибавляют к показанию часов.
® Учебник аэронавигации НЗ
Если каким-либо образом определять поправку часов через
известные промежутки времени, например за сутки, можно заме-
тить, что величина поправок всё время изменяется. Следовательно,
поправка является величиной непостоянной. Алгебраическая раз-
ность двух поправок, определённых через одни сутки, называется
суточным ходом часов.
Суточный ход часов — величина не постоянная, а изменяю-
щая свое значение в зависимости от целого ряда таких внешних
факторов, как толчки, изменение температуры и др. Эти измене-
ния суточного хода называются вариациями. О качестве часов
судят главным образом по постоянству суточного хода. Чем
лучше часы, тем более постоянен их суточный ход и тем меньше
его вариации. У хороших часов средняя суточная вариация дохо-
дит до + 2 секунд. •
Проверяют часы с целью определения поправки и суточного
хода часов. Проверка заключается в сличении показания часов с
показанием особо точных часов, так называемых сличительных
часов. Сличительные часы ежедневно проверяются по хронометру,
который, в свою очередь, проверяется по сигналам времени, пере-
даваемым ежедневно в определённые моменты специальными
радиостанциями. В качестве сличительных часов допускается поль-
зование хорошими часами с секундомером.
Бортовые часы проверяются по сличительным часам следую-
щим образом. Записывают показания сличительных часов и бор-
товых часов на 1 минуту больше и для удобства круглое число
секунд сличительных часов. В момент записи времени по сличи-
тельным часам включают секундомер и переводят взгляд на бор-
товые часы. Заметив какое-либо положение секундной стрелки
бортовых часов, останавливают секундомер сличительных часов.
К записанному времени сличительных часов прибавляют число
секунд, зафиксированное секундомером. Полученный результат и
есть показание сличительных часов в момент замеченного времени
бортовых часов, когда был выключен секундомер.
Пример. Показание сличительных часов: 10 час. 15 мин. 30 сек. Показа-
ние бортовых часов: 10 час. 12 мин. 20 сек.
Найти поправку бортовых часов относительно сличительных часов.
10 час. 15 мии. 30 сек.
~Ю , 12 » 20 ,
Поправка равна -4-3 мин. 10 сек.
Чтобы найти полную поправку бортовых часов относительно
истинного времени, к найденной таким образом поправке надо
алгебраически прибавить поправку сличительных часов.
Бортовые часы лётчика проверяют без применения секундо-
мера, отсчитывая показания обоих часов на-глаз.
При проверке часов с секундомером следует обращать вни-
мание на исправность действия пускового механизма секундомера
п-1
и изредка проверять ход секундомера сличением его с ходом
.хорошо проверенных часов Результаты проверки бортовых часов
необходимо записывать в журнал определения поправки и суточ-
ного хода бортовых часов. Журнал проверки бортовых часов
ведёт техник по приборам.
Установленные на самолёте часы, как правило, следует заво-
дить ежедневно. Также ежедневно необходимо проверять суточ-
ный ход часов
Для систематической проверки часов в части должна быть
организована служба времени.
Служба времени имеет задачей установить такой порядок,
при котором все бортовые часы и личные часы командиров штаба
и лётного состава показывали бы одно и то же время. Для бор-
товых и личных часов устанавливается точность в полминуты.
Для штурманских часов, применяемых для астрономической ори-
ентировки, необходима точность 5 секунд. Проверяются и устана-
вливаются часы на точное время по сигналам (звуковым или зри-
тельным), подаваемым один-два раза в течение рабочего времени.
Сигнал подаётся лицом дежурного наряда по часам, ежедневно
выверяемым метеорологической станцией по радиосигналам точ-
ного времени. Сигнал времени состоит из предварительного и ис-
полнительного. Точность исполнительного сигнала 5 секунд. Ра-
диосигналы точного времени (по московскому времени) подаются
ежедневно широковещательными радиостанциями СССР.
При невозможности организации проверки часов по радио-
сигналам используются сличительные часы.
§ 30. Навигационный треугольник скоростей и его элементы
Атмосфера никогда не находится в состоянии покоя. Возд> ш-
ные массы постоянно передвигаются в горизонтальном и верти-
кальном направлениях. Горизонтальные передвижения воздуха
называются воздушными течениями (ветром), а вертикальные —
восходящими и нисходящими токами. Возникновение воздушных
течений объясняется разницей в давлении воздуха в различных
пунктах земного шара. Вертикальные движения в атмосфере воз-
никают вследствие неровностей земной поверхности и различного
теплового состояния соседних масс воздуха.
Скорость движения воздушных масс называется скоростью
ветра U и обычно выражается в км/час. Направление движения
воздушных масс называется направлением ветра 5 и измеряется
в градусах, причём указывается та точка горизонта куда Дует
ветер; метеорологические станции указывают обратное направле-
ние: откуда дует ветер. На обычных высотах полёта скорость
ветра в среднем составляет 30—40 км/час. При ци^онах скорость
ветра достигает 70—100 км/час. Скорость и нагфавление ветра
изменяются с течением времени и переменой места. На высотах
скорость и направление ветра сохраняются приблизительно в те-
чение 1—2 часов. Скорость и направление ветра у земли и на
высоте большей частью бывают неодинаковы. Как правило, с высо-
8»
115
той наблюдаются увеличение скорости ветра и изменение напра-
вления, Увеличение скорости ветра с высотой в среднем соста-
вляет около 4 км/час на каждую 1 000 м. На высоте 2 000 м ско-
рость ветра в среднем вдвое больше скорости у земли.
Вертикальные движения в атмосфере возникают большей
частью в тёплое время года и суток, т. е. летом и днём. Влияние
их на полёт самолёта сказывается в рему («болтанке»), затрудняю-
щем сохранение режима полёта. На больших высотах рему обычно
отсутствует. Влияние воздушных течений на полёт самолёта за-
ключается в изменении скорости и направления движения
самолёта.
В неподвижном воздухе (т. е. при безветрии) направление
движения самолёта относительно земной поверхности совпадает
скорость перемещения равна
с направлением его продольной оси, а
Рис. 102. Навигационный треугольник
скоростей
Совершенно иное происходит при
направление продольной оси самолёта
воздушной скорости. Что-
бы совершить полёт из
одного пункта в другой,
достаточно направить про-
дольную ось самолёта на
этот пункт и точно при-
держиваться взятого кур-
са. Кроме того, при без-
ветрии легко определить
время прибытия в другой
пункт, зная режим воз-
душной скорости и рас-
стояние между пунктами,
наличии ветра. При ветре
(курс самолёта) вообще не
совпадает с направлением движения самолёта относительно зем-
ной поверхности, а скорость перемещения относительно земной
поверхности не равна его воздушной скорости.
Ветер в верхних слоях атмосферы следует рассматривать как
перемешающийся слой воздуха. Относительно этого слоя скорость
и направление движения самолёта не изменяются; относительно
же земли скорость и направление движения будут иные.
Самолёт под действием воздушной скорости перемешается
в направлении своей продольной осн, в то время как скорость
воздушного течения увлекает его в сторону от этого направления.
В результате сложения этих движений самолёт перемещается по
равнодействующей, построенной на скоростях самолёта- и ветра.
Таким образом, мы имеем навигационный треугольник скоростей
(рис. 102).
Сторонами этого треугольника являются векторы воздушной
скорости, ветра и путевой скорости.
Вектор воздушной скорости определяется курсом самолёта
и величиной воздушной скорости; вектор ветра — направлением
ветра и величиной воздушной скорости; вектор путевой ско-
рости—путевым углом и величиной путевой скорости.
Элементы навигационного треугольника следующие-.
V — воздушная скорость самолёта, измеряемая в км/час;
у— курс самолёта;
U — скорость ветра, измеряемая в км/час;
ё— направление ветра;
IV — путевая скорость, измеряемая в км/час;
р— путевой угол самолёта (составленный меридианом и ли-
нией пути самолёта);
ф— угол сноса (угол между продольной осью самолёта и ли-
нией пути самолёта, измеряемый в градусах от оси само-
лёта до линии пути); в зависимости от направления ветра
снос может быть вправо или влево; в первом случае угол
сноса обозначают знаком плюс, во втором случае — зна-
ком минус;
с— угол ветра; угол между линией пути и направлением
ветра.
Угол ветра отсчитывают от линии
пути до вектора ветра, от 0° до 360°.
При угле ветра е = 0° — ветер попутный
при е = 180°—ветер встречный (рис. 103).
Элементы навигационного треуголь-
ника находятся в определённой зависи-
мости между собой; изменение одних
элементов вызывает изменение других
элементов.
§ 31. Угол сноса
Величина угла сноса зависит ют воз-
душной скорости самолёта, скорости
ветра и угла ветра е. Например, у бы-
строходных самолётов величина угла
Рис. 103. Угол ветра
сноса ф вообще меньше, чем у самолётов, имеющих малую воз-
душную скорость. Чем больше скорость бокового ветра, тем
больше угол сноса, и т. д.
Рассмотрим эту зависимость. Из треугольника ОАВ («рис. 104)
имеем: АВ 0А и у
:-- ИЛИ ------= -- ,
sin? Sine sin? Sllle’
откуда
U -
sin ф = -р sin е.
Таким образом, величина угла сноса зависит от отношения -р
и угла ветра.
Рассмотрим, как изменяется величина угла сноса в зависи-
мости от изменения воздушной скорости.
Допустим, что самолёт имеет воздушную скорость ОВ, а ско-
рость ветра U (рис. 104). Тогда в треугольнике скоростей ОБА
угол АОВ будет углом сноса Пусть курс и ветер не измени-
лись, а воздушная скорость стала какой-то другой ОВу, тогда
треугольник скоростей будет иным—OAiBlf а углом сноса будет
угол Д*ОВ|, или <р2. Из рисунка видно, что при неизменном ветре
117
и курсе ' гол сноса будет тем больше, чем меньше воздушная ско-
рость самолёта.
Теперь рассмотрим изменение величины угла сноса в зависи-
мости от изменения угла ветра. Отложим на произвольно взятой
прямой 1рис. 1051 отрезок ОЛ, изображающий в некотором мас-
штабе воздушную скорость самолёта за 1 час. Из точки А, как из
Рис. 104. Изменение величины
угла сноса при изменении воз-
душной скорости
центра, опишем окружность ра-
диусом, равным скорости ветра L'
за 1 час, в принятом нами мас-
штабе. Эта окружность является
геометрическим местом точек на-
хождения самолёта к концу еди-
ницы времени при условии влия-
ния ветра U. Покажем, что в за-
висимости от величины угла вет-
ра £ получаются различные углы
сноса при данной воздушной
скорости.
Рассмотрим треугольник скоростей ОАВ, в котором угол ЛОВ
есть угол сноса <р. Угол ветра £ в данном случае равен 45°. Если
уменьшить угол ветра £ до
нуля, ветер будет попутным
и угол сноса будет равен
нулю.
Теперь будем переме-
щать вектор АВ по окруж-
ности таким образом, чтобы
угол ветра изменялся от
)° до 180°. Сначала угол
сноса будет увеличиваться.
затем он достигнет макси- р;1С. Ю5. Изменение величины угла
мума, когда прямая OBt бу- сноса в зависимости от угла ветра
дет касательной к окруж-
ности, т. е. когда ЛВ будет перпендикулярна к ОВ{ (т. е. тре-
угольник O.lBj будет прямоугольным).
Продолжая перемещать вектор АВ в том же направлении, мы
увидим, что угол сноса начнёт уменьшаться и опять будет равен
нулю, когда угол ветра сделается равным 180° (встречный ветер).
Максимальный угол сноса получится в том случае, когда
направление ветра будет перпендикулярно к линии пути само-
лёта, а не 'к линии курса, т. е. когда £=90°.
Пусть угол AOBi =?max> тогда из треугольника OBiA имеем
или
U
SIH фшах — >
U ГП
фшах-- yr OU.
По этой формуле можно вычислять максимальные углы сноса
для различных воздушных скоростей и скоростей ветра.
118
Таблица максимальных углов сноса
(в градусах)
Воздуш- ная скорость самолета в км\час Скорость ветра в
10 20 30 40 50 60 80
200 3,0 6,0 9,0 12 15 18,0 24,0
300 2,0 4,0 6,0 8 10 12,0 16.0
400 1,5 3,5 4,5 б 7 8,5 11,5
500 1,2 2,5 3 5 5 6 7,0 9,5
Пример. Скорость ветра .>0 км час: истинная воздушная скорость 300км'час.
Найти максимальный угол сиоса.
Решение. — Ю’
300
Зная максимальный угол сноса, можно произвести расчёт курса
следования без помощи ветрочёта, в уме
угла сноса
Если точка В видна из точки А (рис. 106), то можно прилететь
в эту точку, направляя на неё ось самолёта. Однако этот способ
приведёт к удлинению пути. В самом деле, при ветре слева само-
лёт будет сносить вправо и он будет последовательно находиться
в точках At, А2 и т. д., если всё время направлять нос самолёта
на точку В. Таким образом, он опишет некоторую кривую и за-
тратит больше времени на полёт. Кроме того, самолёт уклонится
от заданного маршрута. Поэтому для полёта по линии АВ необхо-
димо учесть влияние ветра и нос самолёта направить не на
точку В, а в сторону, влево, под некоторым углом к линии АВ.
Такой угол называется расчётным углом сноса, или углом упреж-
дения о.
Если самолёт поставить на курс, равный дутевомх углу, то
ось его О А (рис. 107) будет на прямой ОВ. Для этого положения
можно построить треугольник скоростей О АС, из которого видно,
что самолёт будет двигаться по прямой ОВХ, с углом сноса ®.
Нам же необходимо лететь по прямой ОВ. Для этого нужно
119
повернуть нос самолёта влево на некоторый угол, который не будет
равен углу о. Докажем это.
Из треугольников ОАС и ОДС, (рис. 107) имеем:
U _ W В __ V
sin <р sin >. sin ш sin e ’
откуда
. , IT . . U .
sin/.— pSin® и sin о = -p- sin e.
Замечая, что угол e дополняет угол А до 180’’, имеем:
sin £ = sin А.
Заменяя sin £ равной ему величиной sin А, после сокращения
получаем:
W .
sin о = -р sin 9.
Таким образом, угол о вообще не равен углу 9. Если
W > V, то о > ф; если U7 < V, то о < 9. В частном случае когда
W=V,
= 9.
Отношение -у тем ближе к единице, чем меньше скорость
ветра и чем больше V. Поэтому при слабых ветрах и у быстроход-
ных самолётов о мало отличается от 9.
Угол упреждения определяется путём подбора или расчёта.
Курс самолёта, взятый с учётом угла упреждения, называется
курсом следования (КС).
Зная угол сноса, можно всегда определить путевой угол
самолёта. Для этого необходимо 'к курсу самолёта алгебраически
прибавить угол сноса. Найденный в полёте путевой угол назы-
вается фактическим путевым углом (ФПУ).
Пример. Магнитный курс 50°, угол сноса —10°. Определить фактический
магнитный путевой угол (ФМПУ).
ФМПУ = 50° + (— 10°) = 40°.
§ 32. Путевая скорость _
Величина путевой скорости зависит от величины воздушной
скорости, скорости ветра и угла ветра. Докажем это. В треуголь-
нике О АВ (рис. 108) стороны OA = V, 0B = W и AB—U. Опустим
из точки А перпендикуляр АЕ на линию ОВ. Сторона OB = W—
~ОЕ+ВЕ; ОЕ=ОА cos 9; ВЕ=АВ cos£. Отсюда
ОА cos 9 + АВ cos е, или U7= Vcos 9 + t7cos е.
Теперь посмотрим, как будет изменяться величина путевой
скорости при изменении воздушной скорости. Допустим, что само-
лёт имеет воздушную скорость V = О А (рис. 109), а скорость
120
ветра U—OB. Тогда в треугольнике скоростей О АВ линия 'АВ
является путевой скоростью МЛ. Если курс самолёта и ветер
оставались неизменными, а воздушная скорость изменилась на Д1/,
т. е. стала равной получим новый треугольник скоростей
ОА{В, в котором сторона А^ является путевой скоростью. Из
рисунка видно, что путевая скорость увеличилась «а XW. Про
ведём перпендикуляр DA к линии Из треугольника ЛО/ц
имеем:
Д П7= Д Vcos о.
Косинусы углов сноса от нуля до 10° весьма близки к еди-
нице, поэтому практически допускают, что A W = Д V, т. е.
Рис. 108. Построение к выводу
формулы путевой скорости
Рис. 109. Изменение путевой скоро-
сти в зависимости от изменения
воздушной скорости
кйкое-либо увеличение воздушной скорости 'вызывает пропорцио-
нальное увеличение путевой скорости.
Теперь посмотрим, как будет изменяться величина путевой
скорости в зависимости от изменения Угла ветра. Допустим, что
воздушная скорость и ско-
рость ветра неизменны.
Пусть ОА = V есть вектор
воздушной скорости само-
лёта (рис. ПО). Опишем из
точки А окружность радиу-
сом, равным скорости
ветра U, в том же мас-
штабе, в каком взят век-
Рис. ПО. Изменение путевой скорости
в зависимости от угла ветра
тор V. Если соединить ка-
кую-либо точку этой окруж-
ности с точкой О, то полу-
чится вектор путевой скорости W для данного угла ветра е. Пере-
двигая вектор U по окружности, т. е. изменяя угол ветра от 0°
до 180°, можно увидеть, что величина путевой скорости будет из-
меняться. Максимальная путевая скорость будет при угле ветра,
равном нулю; минимальная путевая скорость будет при угле ветра,
равном 180°. Путевая скорость будет равна воздушной скорости,
когда угол ветра будет равен углу межДу осью самолёта и напра-
влением ветра (курсовому углу ветра А). Это бывает при угле
121
сноса, близком к максимальному. Так как вблизи своего максимума
угол сноса изменяется незначительно, то можно принять, что
VV = V при максимальном угле сноса.
§ 33. Графическое решение навигационного треугольника
скоростей
Решить навигационный треугольник скоростей — это значит
на основании известных элементов треугольника найти другие,
неизвестные элементы. Решить треугольник можно аналитически,
графически и механически. Аналитическое решение выполняется
по указанным выше формулам. Графическое решение произво-
дится при помощи транспортира и линейки. Механически навига-
ционный треугольник решается при помощи счётных приборов —
ветрочётов. Существуют также способы решения треугольника
в уме и счётной линейкой. В данном параграфе рассматриваются
графические способы решения навигационного треугольника ско-
ростей
Пример 1. Магнитный курс самолёта 75°. Истинная воздушная скорость
300 км/час. Угол сноса + 12°. Путевая скорость 330 км/час. Определить ско-
рость и направление ветра.
Построение треугольника выпол-
няем на листе бумаги в каком-либо мас-
штабе; например, можно взять 40 км час
в 1 см. Проводим магнитный мери-
диан и от взятой на нём точки О при
помощи транспортира откладываем ли-
нию курса ОА так, чтобы оиа шла в
точку О (рис. 111). На линии курса
Рис. 112. Графическое определе-
ние ветра но двум углам сноса
Рис. 111. Построение
к примеру 1
откладываем в принятом нами масштабе воздушную скорость самолёта (за 1 час).
От точки А откладываем угол сноса <р и проводим линию пути самолёта АВ. На
линии пути откладываем отрезок, равный путевой скорости (за I час). Соеди-
няем прямой точку О с концом отложенного отрезка АВ. Эта прямая ОВ
является вектором ветра. Измеряя нашим масштабом длину вектора ветра,
находим скорость ветра, равную 70 км/час. Направление ветра определяем
транспортиром, учитывая, что вектор ветра всегда направлен от линии курса
к линии пути. В нашем примере направление ветра равно 145°.
Пример 2. На магнитном курсе, равном 45°, измерен угол сноса, рав-
ный + 15°. На дротом магнитном курсе, равном 315°, угол сноса 4- 7°. Истин-
ная воздушная скорость равна 260 км/час. Определить скорость и направление
.ветра.
122
Проводим магнитный меридиан и отмечаем на нём точку О. Пользуяс.»
транспортиром, проводим линию первого курса так, чтобы она шла в точке О
(рис. 112). На линии курса откладываем в выбранном масштабе bohvih'hvio
скорость и получаем точку А. Из точки А откладываем угол сноса и проводим
—первую путевую линию. После этого строим линию второго курса опять
таким образом, чтобы она шла в точку О. На ней откладываем точно так же
воздушную скорость и получаем точку В. От точки В откладываем угол сноса
на втором курсе и проводим вторую путевую линию BD. Пересечение линий
?1С и BD является точкой ветра Е. Соединив прямой точку О с точкой ветра,
получаем ОЕ — вектор ветра. Измеряя нашим масштабом длину вектора ветра,
находим, что скорость ветра равна 80 км/час. Измеряя направление вектора
ветра относительно меридиана, получаем направление ветра, равное 118°.
Если бы в примере был дай третий курс и измеренный иа иём угол сноса
т© третья путевая линия должна точно так же пройти через точку ветра.
Рнс. 114. Графическое определение
курса следования и путевой скорости
При решении данной задачи можно также узнать, какая путевая скорэсг.
была при первом курсе и при втором курсе. Отрезки ЛЕи BE являются путевым t
скоростями на взятых нами курсах.
Пример 3. На магнитном курсе, равном 45°, измерена путевая скорост:.,
равная 360 км/час. На другом магнитном курсе, равном 135°, путевая скорость
равна 340 км/час. Истинная воздушная скорость равна 320 км/час. Определить
скорость и направление ветра.
Строим магнитный меридиан и на нём отмечаем точку О (рис. 113). Прово-
дим линию первого курса так, чтобы она шла в точку О. На линии курса
откладываем в масштабе воздушную скорость и получаем точку А. Из точки А.
как из центра, проводим дугу окружности радиусом, равным путевой скорости
на первом курсе, взятой в принятом нами масштабе. Затем проводим линию
второго курса и, откладывая на ней отрезок, равный воздушной скорости, полу-
чаем точку В. Из точки В радиусом, равным путевой скорости на втором
курсе, проводим дугу второй окружности. Пересечение дуг даёт искомую точку
ветра. В нашем примере скорость ветра равна 45 км/час, а направление 70°.
Пример 4. Заданный магнитный путевой угол равен 120°. Направление
ветра 60°, скорость ветра 70 км/час. Истинная воздушная скорость 300 км час.
Рассчитать курс следования, угол сноса и путевую скорость.
На листе бумаги проводим линию, изображающую меридиан пункта вылета.
По середине меридиана отмечаем точку О. Из этой точки при помощи транс-
портира откладываем линию заданного пути ОА (рис. 114). Через точку О
проводим стрелку, указывающую направление ветра, к иа ней в принятом мае-
123
итабе откладываем скорость ветра в сторону, куда дует ветер. Конец отложен-
ного отрезка ОВ является точкой ветра. После этого из точки ветра, как из
центра, радиусом, равным воздушной скорости, проводим дугу, пересекающую
линию пути ОА. Полученную точку D соединяем с точкой ветра. В треуголь-
нике OBD сторона OD является путевой скоростью. Измеряя её, находим, что
путевая скорость равна 345 км час. Угол ODB является углом сноса ф; он
будет равен —11°. Из точки О проводим линию ОЕ, параллельную линии BD.
Линия ОЕ является линией курса, а угол МмОЕ— магнитным курсом следования,
равным 131°.
При графическом построении треугольника скоростей мы брали в каче-
стве пехотной линии магнитный меридиан, поэтому найденное направление
ветра в примерах 1, 2 и 3 и курс следования в примере 4 магнитные.
§ 34. Ветрочёт
Ветрочёт (рис. 115) состоит из трёх основных частей: сектора,
азимутального круга и линейки.
Металлический сектор является основанием прибора. На нём
разбита шкала сносов, нанесённая на его дуге. Нуль шкалы
сносов поставлен против осевой линии, называемой курсовой
чертой. Вправо от осевой линии разбиты деления сносов вправо,
влево — сносов влево. Деления нанесены через 1°. Каждый деся-
ток делений шкалы отмечен цифрой.
По осевой линии сектора имеется продольная прорезь, вдоль
которой перемещается азимутальный круг. Круг можно Закреп-
лять в желаемом положении барашком, имеющимся на обратной
стороне сектора. Барашек закрепляет положение круга на осевой
линии, вращение же круга остаётся свободным. По окружности
азимутального круга имеется градусная шкала от 0° до 360°.
124
Цифры, поставленные на шкале, обозначают десятки градусов.
Кроме цифр, обозначающих градусы, на шкале нанесены буквы
главных румбов (N, Е, S, W). На поверхности круга имеется
ряд концентрических кругов, отстоящих один от другого на
равных расстояниях, соответствующих скорости 10 км/час.
Все круги отмечены цифрами, обозначающими десятки километров
в час.
Один из концов линейки укреплён у вершины угла 'сектора,
а другой — передвигается по шкале сносов. Правый обрез линейки
является рабочим. Вдоль этого обреза по линейке нанесена шкала
скоростей. Каждое малое деление шкалы соответствует скорости
5 км/час. Цифры, обозначающие десятки километров в час.
поставлены через каждые 20 км.
При передвижении линейка про-
ходит над поверхностью азиму-
тального круга. Чтобы линейка
не выходила за пределы сектора,
на нём имеются ограничители.
Сектор служит основанием
прибора и одновременно шкалой
сносов. Азимутальный круг слу-
жит для установки курсов, за-
данных путевых углов, для нане-
сения точки ветра и других рас-
чётов. На круге прочерчивают
карандашом путевые линии, пу-
тевые дуги, вектор ветра и т. д.
Прочерченные линии легко сти-
раются обыкновенной резинкой.
Рис. 116. Ветрочёт
Линейка служит для установки
центра круга на данную воздуш-
ную скорость, проведения путе-
вых линий и путевых дуг, для отсчётов путевой скорости и для вы-
полнения расчётов. При работе с ветрочётом необходимо иметь
остро отточенный карандаш. Во время работы ветрочёт держат в
левой руке, опираясь на стол или на колени.
Устанавливают круг на данную воздушную скорость следую-
щим образом. Линейку устанавливают рабочим обрезом на нуль
шкалы сносов, затем слегка отвинчивают барашек и передвигают
круг так, чтобы центр его совместился с отсчётом воздушной ско-
рости на линейке, после чего барашек завинчивают. Для установки
круга на данный курс вращают круг и устанавливают заданное
деление курса против курсовой черты сектора. Вращают круг,
держа ветрочёт обеими руками и нажимая большим пальцем на
поверхность круга. Линейку устанавливают на угол сноса рабо-
чим обрезом. Линию «а круге проводят по рабочему обрезу линейки
остро отточенным карандашом. Важно, чтобы линия возможно
ближе проходила у обреза линейки. Ветрочёт следует хранить
в специальном кожаном чехле, на котором имеются кольца для
подвешивания в самолёте.
125
При помоши ветрочёта решаются все задачи на определение
элементов навигационного треугольника.
Идея устройства ветрочёта заключается в следующем: ветро-
чёт представляет собой подвижной треугольник скоростей, сто-
ронам которого мы можем придавать заданную величину. Одной
из сторон треугольника является расстояние от центра вращения
линейки до центра азимутального круга (ркс. 116). Это расстояние
мы принимаем за вектор воздушной скорости.
Передвигая азимутальный круг, мы тем самым устанавли-
ваем заданную величину воздушной скорости в том масштабе,
в котором нанесены деления скоростей на ветрочёте.
Другой стороной треугольника является линеика. Расстояние,
откладываемое нами на линейке, является вектором путевой ско-
рости. Третьей скоростью треугольника является вектор ветра,
который мы прочерчиваем на круге ветрочёта. Азимутальный круг
служит для ориентировки векторов воздушной скорости и ветра.
§ 35. Решение навигационного треугольника скоростей ветрочётом
Определение ветра по углу сноса и путевой скорости
Порядок решения этой задачи ветрочетом следующий:
1. Установить азимутальный круг ветрочёта на истинную воз-
душную скорость.
2. Установить против курсовой черты магнитный курс.
Рис. 117. Определение ветра по
углу сноса и путевой скорое ги
3. Установить линейку ве-
трочёта на измеренный угол
сноса.
•1. На линейке найти деле-
ние путевой скорости, найден-
ной во время промера, и про-
тив этого деления на круге
ветрочёта отметить точку вет-
ра (рис. 117).
5. Установить линейку на
нуль шкалы сносов, а круг по-
вернуть так, чтобы точка ветра
подошла под обрез линейки
выше центра круга, после
чего против курсовой черты
прочесть направление ветра.
Скорость ветра отсчитать по
делениям круга между точкой
ветра и центром круга.
Пример. Промер производится на магнитном курсе, равном 153е. Истин-
ная воздушная скорость при промере была равна 344 км/час, угол сноса
равен —8°, путевая скорость 355 км/час. Определить скорость и направление
ветра.
Устанавливая на ветрочёте указанные величины, находим, что скорость
ветра равна 50 к.и час и направление 74°.
126
Определение ветра по двум углам сноса
Порядок решения этой задачи ветрочётом следующий (рис. 118):
1. Установить азимутальный круг ветрочёта на истинную
воздушную скорость.
2. Установить против курсовой черты первый магнитный
курс самолёта.
3. Поставить линейку на угол сноса при первом курсе, и ПО;
обрезу её провести на круге первую путевую линию.
4. Установить против кур-
совой черты второй магнитный
курс.
5. Поставить линейку на
угол сноса при втором курсе,
и по обрезу её провести на
круге вторую путевую линию.
Пересечение путевых линий на
круге ветрочёта даст точку
ветра. Скорость и направление
ветра отсчитываются обычным
порядком.
Пример. На первом магнитном
курсе, равном 318°, измерен угол
сноса, равный -|- 8°; на втором маг-
нитном курсе, равном 280’, угол сно-
са 4- 10°. Истинная воздушная ско-
рость при промерах была равна
ИО км/час. Определить скорость и
управление ветра.
Устанавливая указанные вели-
чины на ветрочёте и проводя обе
• путевые линии, находим, что скорость
ветра равна 60 км/час,
нис 20°.
При решении задачи на
определение ветра
углам сноса можно найти пу-
тевые
первом
узнать
первом
надо установить на первый курс,
курсе; после этого на линейке против точки ветра отсчитать путе-
вую скорость Для определения путевой скорости на втором курсе
надо установить на ветрочёте второй курс и угол сноса и против
точки ветра отсчитать путевую скорость.
Определение ветра по двум путевым скоростям
Порядок решения этой задачи ветрочётом следующий
(рис. 119):
1. Установить на ветрочёте истинную воздушную скорость.
2. Установить против курсовой черты первый магнитный курс.
3. Отвести линейку в крайнее положение.
2^-курс
а направле-
Рис. 11е.
Определение ветра
по двум УС
го
но двум
скорости самолёта на
и втором курсах. Чтобы
путевую скорость на
курсе, круг ветрочёта
а
линейку—на угол сноса н'а этом
127
лутевои скорости, найденной на
Рис. 119. Определение ветра
по двум И?'
4. Прижать остриё карандаша к обрезу линейки у деления
первом курсе, и провести на
круге первую путевую дугу.
5. Установить против курсо-
вой черты второй магнитный курс.
6. Подобным же образом про-
вести на круге дугу второй путе-
вой скорости. Пересечение путе-
вых дуг на круге ветрочёта даст
точку ветра. Скорость и направле-
ние ветра отсчитать обычным по-
рядком.
Пример. На первом магнитном
курсе 47° измерена путевая скорость,
равная 315 км/час. На втором магнитном
курсе 359° путевая скорость 265 км/час.
Воздушная скорость при промерах была
равна 300 км/час. Определить скорость
и направление ветра.
Устанавливая на ветрочёте указан-
ные величины и проводя обе путевые
дуги, находим, чго скорость ветра рав-
на 60 км/час и направление ветра 130°.
Расчёт курса следования
Порядок расчёта курса сле-
дования на ветрочёте следующий
(рис. 120):
1. Установить азимутальный
круг ветрочёта на истинную
воздушную скорость.
2. Нанести на ветрочёт точку
ветра.
3. Установить против курсовой черты заданный магнитный
путевой угол.
4. Поставить линейку на нуль шкалы сносов и по обрезу её
провести на круге диаметральную линию, проходящую через
отсчёт заданного путевого угла (на конце диаметральной линии
около отсчёта заданного путевого угла поставить отметку в виде
стрелки, чтобы потом не перепутать концов диаметральной линии).
5. Линейку поставить так, чтобы она рабочим обрезом каса-
лась точки ветра.
6. Удерживая линейку рабочим обрезом на точке ветра, по-
вернуть круг так, чтобы проведённая диаметральная линия легла
параллельно обрезу линейки. После этого отсчитать против курсо-
вой черты искомый магнитный курс следования.
7. Против точки ветра на линейке отсчитать путевую ско-
рость и по концу линейки на шкале сносов прочесть угол
сноса.
При недостаточном навыке в вычислениях курса следования
могут быть ошибки, вызываемые неточной установкой линейки от-
128
носительно диаметральной линии. Для проверки расчёта к вычис-
ленному курсу надо прибавить найденный угол сноса, в резуль-
тате чего должен получиться заданный путевой угол. Если полу-
ченный результат неверен, значит, имеется непараллельность ли-
нейки и диаметральной линии, что
необходимо устранить и снова
отсчитать курс следования.
Пример. На ветрочёте нанесен?
точка ветра: направление ветра 196° и
скорость 55 км/час. Воздушная скорость
самолёта 340 км/час. Заданный магнит-
ный путевой угол маршрута 255°. Рас-
считать курс следования, угол сноса и
путевую скорость.
Устанавливая на ветрочёте указан-
ные величины и добиваясь параллель-
ности линейки и прочерченной на круге
диаметральной линии, находим, что маг-
нитный курс следования равен 263°,
угол сноса —8°, путевая скорость
$65 км/час.
В некоторых случаях для рас-
чёта курса следоган!1Я пользуют-
ся сведениями о ветре, получае-
мыми из метеорологических на-
блюдений. В этих случаях точка
ветра может быть нанесена на
ветрочёт следующим образом:
1. Круг ветрочёта установить
на какой-либо отсчёт воздушной
скорости, например, на 300
лм/час.
2. Установить против курсо-
вой черты направление ветра
(метеорологическое направление
ветра предварительно должно быть переведено в аэронавигацион-
ное; для этого необходимо к метеорологическому направлению ве-
тра прибавить 180° и вычесть алгебраически магнитное склонение).
3. Установить линейку на нуль шкалы сносов и, пользуясь
делениями линейки, отложить от центра круга вверх скорость
ветра в км/час.
§ 36. Ветрочёт-график для расчёта курса следования
Для расчёта курса следования и путевой скорости может при-
меняться ветрочёт-график (рис. 121).
График имеет форму круга, по окружности которого нане-
сена шкала углов ветра е от 0° до 360°. Из центра круга прове-
дены радиусы через 10°. Затем имеются концентрические круги,
.необходимые для нанесения на ветрочёт точки ветра. Круги даны
для скоростей ветра 20, 40, 60 и 80 км/час. Имеются также
наклонные линии, при которых указаны углы сноса от 0° до +20о
и —20°. Началом этих линий является точка О, расположенная
3 Учебник аэронавигации «9п
ниже центра круга А, отстоящая от центра на расстоянии АО,
равном некоторой воздушной скорости, отложенной в масштабе
Рис. 121. Ветрочёт-график
ветрочёта (рис. 122). На графике, с целью уменьшения его разме-
ров, эта точка отсутствует. Линии углов сноса проведены вправо
и влево от средней линии через 2°. Кроме того, из той же точки О
проведён ряд дуг путевых скоростей. Одна из дуг проходит через
центр круга. Эта дуга соответ-
ствует путевой скорости, равной
воздушной скорости, на которую
рассчитан данный ветрочёт. Дуги,
расположенные выше этой средней
дуги, оцифрованы поправками ДМ/
со знаком плюс, а дуги, располо-
женные ниже, —со знаком мин^с.
Эти поправки ДП7 цредставляют
собой разность между воздушной и
путевой скоростями.
Решение
производится
зом.
Рис. 122. Расчёт курса
следования
задач на ветрочёте
следующим обра-
1. Найти угол .ветра пс формуле
е-0 — МПУ,
где е — угол ветра;
& — направление ветра;
МПУ — заданный магнитный путе-
вой угол.
430
2. Нанести на ветрочёт точку ветра по найденному углу
ветра и скорости ветра.
3. Оценивая положение точки ветра относительно линии
сноса, отсчитать величину и знак угда сноса.
4. Вычесть алгебраически из МПУ найденный угол сноса в
найти таким образом искомый магнитный курс следования.
5. Отсчитать величину отстояния точки ветра от средней дуги
графика и найти таким образом ДИ/.
6. Прибавить алгебраически ДВ7 к воздушной скорости и
найти таким образом искомую путевую скорость.
Пример. Дано: МПУ = 100°, 6 = 160°, U = 70 км, час, Уист = 300 км/час
Найти УС, МКС и W.
Решение. 1. Находим угол ветра:
е = 160° — 100° = 60°.
2. Наносим на ветрочёт точку ветра и находим, что угол сноса ра-
вен + 10°.
3. Находим МКС: 100°—10’= 90°.
4. Отсчитываем Д 1У = + 40 км/час.
5. Находим W = 300 + 40 = 340 км/час.
§ 37. Таблица для решения треугольника скоростей
Решение треугольника скоростей можно производить с по-
мощью специальной таблицы, рассчитанной для определённых зна-
чений воздушной скорости, угла ветра и скорости ветра. При
пользовании таблицей предварительно необходимо определить
угол ветра по формуле: е —6— МПУ. Таблица имеет следующий
вид:
У=300 км / час
Угол ветра Скорость ветра в км/час Угол ветра.
20 40 60
Ф I 1У Ф 1У Ф W
0° 0 320 0 340 0 360 360°
20’ 1 319 3 337 4 365 ЗЮ’
40° 2 315 5 329 7 344 зчг
60° 3 310 7 312 10 325 Зоо’
80° 4 303 8 303 12 305 280°
90° 4 300 8 296 12 291 270°
100° 4 295 8 290 11 285 260°
120° 3 290 7 276 10 265 240°
140’ 2 284 5 268 7 251 220’
160° 1 281 2 262 4 213 200°
180° 0 280 0 260 0 240 180°
Знак угла сноса определяется следующим образом: если угол
ветра меньше 180°, угол сноса имеет знак плюс, если угол ветра
больше 180°, угол сноса имеет знак минус.
9»
131
Пример. Дано: V = 300 км'час, МПУ = 50’, в = 270°, U = 40 км! чао.
Найти: УС. МКС и W.
Решение. Угол ветра « = 270е — 50’ = 220’. Угол сноса = —5°. МКС =
= 50’ — (— 5") = 55°.
W - 268 км'час.
Чтобы избежать неудобстса иметь набор таблиц для каждой V,
применяют таблицы, аналогичные описанной, но вместо W в них
даны ±W, т. е. поправки к воздушной скорости. Такими табли-
цами, с достаточной для практики точностью, можно пользоваться
для разных значений V.
§ 38. Решение навигационного треугольника счётной
линейкой
Расчёт угла сноса и путевой скорости может быть выполнен
при помощи навигационной счётной линейки на основании угла
ветра, воздушной скорости и
скорости ветра.
Угол ветра, необходимый
расчёта, может быть так-
вычислен счётной линей-
Для этого необходимо:
1) установить визирку на
деление верхней шкалы, соот-
ветствующее направлению ве-
тра (О°—360°);
2) передвигая движок, подвести под визирку деление нижней
шкалы, соответствующее путевому ‘углу;
3) отсчитать против деления 0° или 360° искомый угол ветра.
Ключ для этого расчёта дан на рис. 123.
Угог
ветра
О'
направление
ветра
Сетевой
угол
ДЛЯ
же
кой.
Рис. 123. Ключ для расчёта угла ветра
Пример. Направление ветра 268’, магнитный путевой угол 15Г. Найти
угол ветра.
Решение. Угол ветра равен 117°.
Расчёт угла сноса и путевой скорости производится следующим образом:
1) установить визирку на деление шкалы .Расстояния*, соответствующее
воздушной скорости;
2) передвигая движок, подвести под визирку деление шкалы, соответ-
ствующее углу ветра на шкале .Синусы* (если угол ветра больше 180°, то
взять дополнение до 360°);
3) установить визирку на деление шкалы .Расстояния*, соответствующее
скорости ветра;
4) отсчитать по визирке иско-
мый угол сноса на шкале .Синусы*;
5) установить визирку на де-
ление шкалы .Синусы*, соответ-
ствующее сумме угла ветра и утла
сноса;
6) отсчитать по визирке на
шкале .Расстояния* искомую путе-
вую скорость.
Угол
сноса
Угол ветра
Угол плюс
ветра угол сноса
Скорость
ветра
воздушна0 Путевая
скорость скорость
Ключ к решению этой ри
задачи дан на рис. 124.
Пример. Воздушная скорость 300 км'час, скорость в^тра 40 км]час,
угол ветра 45°. Найти угол сноса и путевую скорость.
Решение. Угол сноса равен 5’, путевая скорость 330 км. час.
132
§ 39. Аэронавигационная счётная линейка
Аэронавигационная счётная линейка НЛ-8 (выпуска 1943 г.)
предназначена для аэронавигационных расчётов в полёте и на
земле при подготовке к полёту. Линейка устроена по принципу
обычной счётной логарифмической линейки, т. е. позволяет действия
над заданными числами заменить
более простыми действиями над
отрезками, из которых каждый
представляет собой в определён-
ном масштабе логарифм числа.
Линейка (рис. 125) состоит из ос-
нования /, движка 2 и визирки 3.
Визирка на обеих сторонах имеет
риски. Шкалы линейки (рис. 126)
Рис. 125. Навигационная счётная
линейка
нанесены на белом целлулоиде.
С помощью линейки можно производить все расчёты по определе-
нию воздушной скорости, высоты, путевой скорости, времени по-
лёта, дистанции ориентира и ряд других расчётов, например: сло-
жений 1и вычитание угловых величин, расчёты с синусами и танген-
сами, умножение и деление чисел, расчёты по переводу мер длины
и скоростей. Ключи для этих расчётов даны на рис. 127.
§ 40. Решение навигационных задач комбинированным
навигационным счётчиком (КНС)
Описание КНС
Комбинированный навигационный счётчик (КНС) предназна-
чен для выполнения всех штурманских вычислений и измерений,
производимых с помощью ветрочёта, счётной навигационной
линейки, транспортира и масштабной линейки. КНС состоит из
основания /, азимутального кольца II, вкладыша III и подвижного
диска IV. На лицевой стороне КНС помещены ветрочёт и транспор-
тир, на оборотной стороне — счётный навигационный круг, на
вкладыше — часть ветрочёта и масштабные линейки.
А. Ветрочёт (рис, 128)
Ветрочёт устроен следующим образом. Подвижное азимуталь-
ное кольцо оцифровано через 2° в пределах 0°—360°. В кольцо
вделана матовая прозрачная пластинка. На пластинке изображена
курсовая линия по направлению NS азимутального кольца.
К кольцу примыкает неподвижная шкала углов сноса, оцифрованная
также через 2°, с диапазоном от 0ч до +30° и от 0° до —30°. Вкла-
дыш имеет двухстороннюю разметку шкал. На каждой стороне на-
несена сетка путевых и воздушных скоростей и углов сноса. Диа-
пазон скоростей 100—450 км/час и 300—650 км/час, через -
10 км/час. Диапазон углов сноса от 0° до 10° и от 0° до 30°,
через 2°.
Б. Счётный навигационный круг (рис. 129, 130)
На оборотной стороне КНС имеется подвижной диск, 'на ко-
тором нанесены две основные рабочие шкалы: шкала 1 — вре-
мени в минутах или секундах с диапазоном 6 мин. — 10 ^ас. или
133
Рис. 126. Шкалы навигационной счётной линейки
Попраена
в курс
100
.Футы
г
-----1------
боковое
уклонение в км
у
Высота
---------1------
Пройденный
или оставшийся
путь
Вертикальный путь
Метры
Дистанция
100
Множитель
Множимое
Произведение
М/сек.
Км/час
Число
футов
, Угол
Синус Тангенс
Угол
100 Делитель
Частное Делимое
5) Курс Пеленг
I I
О Курсовой
угол
® ' 100 „ММ”
61) >-Jssi2._______________1
I У
—I--------------------’—
Числах синус Число
угла
© Угол г-7
I, у
Числохтангенс Число
Морсхие Километры
мили
О 100 „АН"
А/глийские Километры
мили
угла
Угол
_i___
Т“
Число
Угол
Т“
Число
Число-синус
угла
Число тангенс
угла
Рис. 127. Ключи для расчётов по НЛ:
I — для расчёта поправки в курс; 2 — для расчёта дистанции ориентира; 3 — для умноже-
ния чисел на линейке; 4 —для деления чисел; S —для расчёта пеленгов по курсу и
курсовому углу; 6 —для перевода морских миль в километры; 7 — для перевода англий-
ских (статутных) миль в километры; 8 — для перевода футов в метры; 9 — для перевода
скоростей, выраженных в м/сек, в км/час; 10 — для определения синусов и тангенсов углов,
II — для умножения числа иа синус угла; 12 — для умножения числа иа тангенс угла.
13 — для деления числа иа синус угла; 14 — для деления числа на тангенс угла
6 сек-—10 мин. и шкала 2 исправленных высот — скоростей
с диапазоном 100—1000, соответствующей размерности. Кроме
того, диск несёт две подвижные установочные шкалы у прорезей:
температуры для расчёта скоростей 7 с диапазоном от +30' С
до —60° С и высоты в км 4 для расчёта исправленной высоты
с диапазоном 0—12 км. Сопряжённые последним двум установоч-
ные шкалы — температуры 5 для расчёта высоты и высоты 6 для
расчёта скоростей — помещаются на неподвижной внутренней
детали и отсчитываются в рабочем положении через прорези
диска. Неподвижная шкала 3 — пройденное расстояние, путевая
скорость, длина пути, высота и скорость по прибору—помещается
«а основании КНС. ’Диапазон этой шкалы 10—1000. Для пользо-
вания тригонометрическими шкалами 8, 9 и 10 вкладыш выни-
мается из основания. Тригонометрические шкалы просматриваются
через матовую пластинку азимутального кольца и отсчитываются
с помощью курсовой линии азимутального кольца. Вращение
тригонометрических шкал осуществляется поворотом подвижного
диска.
В. Транспортир
Шкала транспортира изображена на лицевой стороне осно-
вания КНС с оцифровкой от 0° до ‘180° и от 180° до 360°. Цена
каждого деления равна 1°.
136
Г. Масштабная линейка
Штрихи масштабов нанесены на краях вкладыша. Всего
имеется 4 масштаба: 1:2500000, 1:1 000 000, 1'500 000 И
1 : 200 000.
/
Рис. 129. КНС
Пользование КНС
Г
Работа с ветрочётом
Определение курса следования и путевой скорости
при известном ветре
Дано: УИС1 - зоо км, час, Ъ° = 220’, U = 40 км/час, ЗМПУ = 293е.
Определить КС, УС, W.
Решение. 1. Передвигая вкладыш, установить УИС1 = 300 км/ час протнг
пентра азимутального кольца.
2. Установить азимутальное кольцо на отсчёт, раЕный направлению
ветра (222е), против треугольного индекса.
137
3. Нанести на матовую пластинку точку ветра над пересечением нулевой
линии сноса и линией скорости, равной 340 км[час, так как Увст = 300 км!час
и U — 40 км/час, итого 340 км!час.
4. Определить УС. для чего азимутальное кольцо установить на ЗМПУ =293'’.
•а против точки ветра сделать отсчёт УС = — 7°, пользуясь линиями сносов
«а вкладыше.
отсчётом УС на основании КНС; против треугольного индекса отсчитать
С ~ 300°.
6. Определить 1Г. отсчитав её значение против точки ветра по линиям
скоростей на вкладыше (311 км',час).
Определение ветра по двум углам снос:
Дано: Умст —300 км/час. Первый МК = 300°, УС = — 5°. Второй МК =254?
УС = — 2°.
Определить направление и скорость ветра.
Решение. 1. Установить вкладыш на отсчёт Уист = 300 км/час.
2. Первый МК = 300° совместить с треугольным индексом и по линии
сноса —5° провести на матовой пластинке черту.
3. Второй МК = 254° совместить с треугольным индексом и по линии
•сноса — 2° провести черту на матовой пластинке. Перекрестие двух линий
даст точку ветра.
133
4. Совместить точку ветра с нулевой линией сноса н отсчитать на азиму-
гальном кольце, против треугольного индекса, направление ветра (23Г), а по
линиям скоростей на вкладыше — скорость ветра (328—300 = 28 км/час).
Определение ветра по МК, УС и W
Дано: МК = 270°, УС — 5°, W = 340 км/час, VHCT = 380 км/час.
Определить направление и скорость ветра.
Решение. 1. Поставив вкладыш на отсчёт Иист = 380 км/час, совме-
стить МК — 270° на азимутальном кольце с треугольным индексом.
2. На пересечении линии сноса -|- 5° с линией W = 340 км/час поставить
точку ветра.
3. В остальном порядок соответствует предыдущей задаче. Ветер
полV чаем- о ~ 124°, U = 51 км/час
Работа на счётном круге
Расчёт путевой скорости по пройденному расстоянию и
времени полёта:
1. Установить деление шкалы /, соответствующее времени по-
лёта Т, против деления шкалы 3, соответствующего пройденному
расстоянию S.
2. Отсчитать на шкале 3 против индекса Д шкалы 1 искомую
путевую скорость IV (рис. 131).
Пример. Дано: S = 460 км, Т — 1 час
18 мин.
Определяем: 1Г = 354 км/час.
Рис. 131. Ключ КНС
Расчёт пройденного расстояния по путевой скорости и
времени полёта:
1. Установить индекс Д шкалы 1 против деления шкалы 3,
соответствующего путевой скорости W.
2. Отсч1итать на шкале 3 искомое пройденное расстояние •$
против деления шкалы 1, соответствующего времени полёта Т
(рис. 132).
Пример. Дано: W'— 275 км/час,
Т - 1 час 22 мии.
Определяем: 5 — 377 км.
Рис. 132 Ключ КНС
Расчёт времени полёта по расстоянию и путевой скорости:
1. Установить индекс Д шкалы 1 против деления шкалы 3,
соответствующего путевой скорости IV.
139
2.. Отсчитать на шкале 1 искомое время полёта Т против деле-
ния шкалы 3, соответствующего расстоянию S (рис. 133).
Пример. Дано: S = 850 км,
W = 415 км/час.
Рис. 133. Ключ КНС
Определяем: Т = 2 часа 03 мин.
Расчёт путевой скорости по времени пролёта базы,
равной высоте (рис. 134):
1. Совместить деление шкалы 1, соответствующее времени
пролёта базы Т (в секундах), с делением шкалы 3, соответствую-
щим высоте полета Н (в десятках метров). .
2. Отсчитать на шкале 3 против индекса @ шкалы 1 искомую
путевую скорость W (в километрах в час).
Пример. Дано: Н = 1600 м,
Т — 18 сек.
Определяем: IF = 320 км/час.
Рис. 134. Ключ КНС
Расчёт исправленной высоты полета по показанию
высотомера:
1. Совместить деление шкалы 5. соответствующее темпера-
туре t° на высоте, с делением шкалы 4, соответствующим высоте
полёта Нпрнв в километрах (по показанию высотомера).
2. Отсчитать на шкале 2 искомую исправленную высоту НЯСПр
против деления шкалы 3, соответствующего показанию высото-
мера 7/приб (рис. 135).
Рис. 135. Ключ КНС
Примечание. При отсчётах по шкалам 2 и 3 обе высоты Л7нспр и Л.
можно увеличивать или уменьшать в 10 раз.
*
Пример. Дано: Н ори6 = 2 500 м, t° - —20°.
Определяем Наспр - 2 340 м.
140
Расчёт исправленной воздушной скорости по показанию
указателя скорости:
1. Совместить деление шкалы 7, соответствующее темпера-
туре t° на высоте, с делением шкалы 6, соответствующим высоте
полёта 7/приб в километрах (по показанию высотомера).
Примечание. Для большей точности, а также при вылете с аэродрома,
расположенного высоко над уровнем моря, /7при6 в километрах следует отсчи-
тывать по высотомеру, установленному на начальное давление 760 мм рт. ст.
2 Отсчитать на шкале 2 искомую исправленную воздушную
скорость Уиспр против деления шкалы 3, соответствующего пока-
занию указателя скорости 1/Приб.
Примечание. При отсчётах по шкалам 2 и 3 обе скорости Ужспр и
Спряб можно увеличивать или уменьшать в 10 раз.
Пример. Дано: /7при6 = 2,5 км, t° — — 15°, 1/прн6 = 360 км/час.
Определяем: V„c = 396 км/час.
Умножение и деление чисел
Умножение (рис. 136):
1. Установить деление 100 или 1000 шкалы 2 на деление
шкалы 3, соответствующее множимому.
2. Отсчитать на шкале 3 искомое произведение против деле-
ния шкалы 2, соответствующего множителю.
Примечания. 1. При отсчётах по шкалам заданные числа можно
увеличивать и уменьшать в 10, 100. 1000 и т. д. раз.
2. Число знаков в произведении равно алгебраической сумме числа зна-
ков множимого и множителя, если против множимого устанавливалось деле-
ние 1000 шкалы 2, или на единицу меньше, когда против множимого было
установлено деление 100 шкалы 2.
3. Числом знаков у числа называется число цифр слева от запятой;
v десятичной дроби число знаков считается отрицательным и равным числу
нулей справа от запятой до первой значащей цифры.
Рис. 136. Ключи КНС
Примеры:
1) Н,3 х 4,52 = 64,6. Число знаков: множимое 2, множитель 1, произве-
дение: 2 -f- 1 — 1 =2 (примечание 2).
1 2J 4,8x3,3 = 25,4. Число знаков: множимое 1, множитель 1, произведение:
3) 0,035 X 480= 16,8. Число знаков: множимое— 1, миожитель 3, произве-
дение: — 1+3=2.
141
4) 36x 0,53= 19,1. Число знаков: множимое 2, множитель 0, произведе-
ние: 2 + 0 = 2.
5) 0,0026 X 0,031 = 0,000081. Число знаков: множимое — 2, множитель — 1,
произведение: — 2 — 1 — 1 = — 4.
Деление (рис. 137):
1. Совместить деление шкалы 2, соответствующее делителю,
с делением шкалы 3, соответствующим делимому.
2. Отсчитать по шкале 3 против деления 100 или 1000 шкалы 2
искомое частное.
Примечания. 1. При отсчётах по шкалам заданные числа можно уве-
личивать или уменьшать в 10, 100, 10ЭЭ и т. > раз.
2. Число знаков частного равно алгебраической разности числа знаков
делимого и делителя, если отсчёт частного был сделан против деления 1000, и
на единицу больше, если огсчёт был сделан против 100.
Рис. 137. Ключи КНС
Примеры:
1) 628:35 = 18,0. Число знаков: делимое 3, делитель 2, частное 3 — 2 + 1 =
= 2 (примечание 2).
2) 3,65: 72 = 0,90. Число знаков: делимое 2, делитель 2, частное 2 — 2 = 0.
3) 0,068:25 = 0,0027. Число знаков: делимое —1, делитель 2, частное —1—2-f-
+ 1 = - 2.
Перевод морских миль в километры
и обратно
Морские мили в километры (рис. 138):
1. Установить деление 100 или 1000 шкалы 2 на деление
шкалы 3, соответствующее заданному числу морских миль.
2. Отсчитать на шкале 3 искомое число километров против ин-
декса «мм» шкалы 2.
Рис 138. Ключи КНС
Пример. 220 морск. миль = 410 км; 780 морск. миль = 1445 км.
Километры в морские мили-.
1. Совместить индекс «мм» шкалы 2 с заданным числом кило-
метров нз шкале 3.
142
2. Отсчитать по шкале 3 против деления 100 или 1000 шкалы г
искомое число морских миль (ключи те же).
Пример. 420 км — 225 миль; 1 200 км = 645 миль.
Перевод английских миль в километры
и обратно
Расчёт выполняется так же, как указано выше, за исключе-
нием того, что вместо индекса «мм» на шкале 2 используется ин-
декс «ам».
Перевод футов в метры и обратно
Расчёт выполняется таким же порядком, как перевод морских
миль в километры, за исключением того, что вместо индекса «мм>
берётся индекс «футы».
Перев од амери к анс к их галлонов в литры
(рис. 139)
1. Установить деление 100 или 1000 шкалы 2 на деление
шкалы 3, соответствующее заданному числу галлонов.
2. Отсчитать искомое число литьов претив индекса «ам. гал -
шкалы 2.
Пример. 500 гал. = 1 900 л.
150 гал. = 570 л.
Перевод скоростей, выраженных в м/сек, в км/чеи.
и обратно
(рис. 140)
Из м/сек — в км/час
1. Установить деление jToj шкалы 1 на деление Шкалы 3, соот-
ветствующее заданной скорости в м/сек.
2. Отсчитать по шкале 3 против
индекса 1 шкалы 1 искомую скорость _
в км/час. ©
Пример. 96 м/сек = 345 км/час.
Рис. 140. Ключ КНС
Из км/час — в м/сек
1. Установить индекс шкалы 1 на деление шкалы 3, соот-
ветствующее заданной скорости в км/час.
2. Отсчитать по шкале 3 против деления |Ю| шкалы 1 иско*
мую скорость в м/сек (ключ тот же).
Пример. 480 км/час = 133 м/сек.
143
Расчёт поправки в курс по пройденному
и боковому уклонению
(рис. 141)
1. Установить индекс у шкалы 8 против деления шкалы 9,
•соответствующего пройденному расстоянию Sn;i.
2. Отсчитать на шкале 8 первую поправку в курс (для выхода
на линию, параллельную заданной линии пути) против деления
шкалы 9, соответствующего боковому уклонению (БУ).
3. Установить индекс V шкалы 8 против деления шкалы 9,
соответствующего оставшемуся расстоянию 50ст-
4 Отсчитать на шкале 8 вторую поправку в курс против деле-
ния шкалы 9, соответствующего боковому уклонению (БУ).
5. Сложить первую и вторую поправки. Сумма будет искомой
поправкой в курс.
Рис. 141. Ключи КНС
Пример. Дано: Snp = 140 км, БУ = 8 км, 80СХ - 95 км
Определяем: первая поправка равна 3,3°; вторая поправка равна 4.8*.
•Общая поправка в курс равна 3.3’ 4.8° = 8° (округленно).
Расчёт расстояния (дистанции) по высоте
и вертикальному углу
(рис. 142)
1. Установить индекс у шкалы 8 против деления шкалы 9,
соответствующего высоте полёта Н.
2. Отсчитать на шкале .9 искомое расстояние (дистанцию) D
-против деления шкалы 8, соответствующего заданному вертикаль-
ному углу А.
Пример. Дано: Н = 1 800 м, А — 5J’ -
Определяем: D =3000 м.
Рис. 112. Ключ КНС
Расчёт угла прицеливания по линейному относу
и высоте
(рис. 143)
1. Установить индекс у шкалы 8 против деленйя шкалы 9,
соответствующего высоте полёта Н.
2. Отсчитать на шкале 8 искомый угол прицеливания о3 против
деления на шкале 9, соответствующего линейному относу А.
Пример. Дано- Н — 3400 м,
А - 1 950 м.
Определяем: = 30°.
Рис. 143- Ключ КНС
144
Умножение и де.пение чисел на синус итак гене
Умножение числа на синус угла (рис. 144):
1. Установить индекс у шкалы 8 против деления шкалы 9,
соответствующего заданному числу.
2. Отсчитать на шкале 9 искомое произведение против деле-
ния, соответствующего заданному углу шкалы 8 (если заданный
угол меньше 5° или больше 175е) или шкалы 10 (если заданный
угол больше 5° или меньше 175е).
Пример. 240 • sin 14° = 58.
Рис. 144. Ключ КНС
Умножение числа на тангенс угла (рис. 145):
1. Установить индекс v шкалы 8 против деления шкалы 9,
соответствующего заданному числу.
2. Отсчитать на шкале 9 искомое произведение против задан-
ного угла на шкале 8.
Пример. 260 • tg 57° = 400.
Деление числа на синус
угла (рис. 146):
Рис. 145. Ключ КНС
1. Совместить деление шкалы 9, соответствующее заданному
числу, с делением шкалы 8, соответствующим заданному углу
(если заданный угол меньше 5° или больше 175°), или шкалы 10
(если заданный угол больше 5° или меньше 175е).
2. Отсчитать на шкале 9 против индекса v шкалы 8 искомое
частное.
Пример. 130 : sin 24° = 320.
Рис. 146. Ключ КНС
Деление числа на тангенс угла:
1. Совместить деление шкалы 9, соответствующее заданному
числу, с делением шкалы 8, соответствующим заданному углу. •
2. Отсчитать на шкале 9 против индекса V шкалы 8 искомое
частное.
Пример. 300: tg 31° = 500.
10 Учебник аэронавигации
145
Определение значений синуса и тангенса
заданного угла
(рис. 147)
шкалы 8 на деление 100 шкалы 9.
искомое значение синуса или тан-
деления соответствующего задзн-
определяется тангенс или синус
I. Установить индекс у
2. Отсчитать на шкале 9
генса (в сотых долях) против
ному углу на шкале 8, если
угла, меньшего 5° или больше-
го 175°, и на шкале 10, если
определяется синус угла боль-
шего 5° или меньшего 175°.
Примеры. sin 4° = 0,07;
sin 178’ = 0,035;
sin 20° = 0,34;
tg 3° = 0,052;
tg 35° = 0,70;
tg 71° = 2,90.
Рис. 147. Ключи КНС
§ 41. Решение навигационного треугольника в уме
Расчёт угла сноса, курса следования и путевой скорости
может быть произведён без помощи ветрочёта или таблиц, посред-
ством вычисления в уме. Для этого необходимо запомнить сле-
дующую таблицу, которая даёт приближённое решение.
Таблица для расчёта угла сноса и путевой скорости
Направление вегра Угол ветра Величина W Величина 9
Попутный .... 0° w= v+и гр — 0
Попутно-боковой 45° 2 W = V + J и 2 9 — 3 9max
Боковой 90° 1Г= V 9 = 9шах
Встречно-боковой 135° W-V—-U 2 9 — з 9шах
Встречный . . . 180° W-V—U Ф = 0
Пример. У11ст — 300 км/час, МПУ = 30°, 3 = 70°, U = 60 км/час. Найти
путевую скорость, угол сноса и магнитный курс следования.
Решение. Ветер попутно-боковой (угол ветра равен 40°), поэтому:
1) путевая скорость равна
IP =300 -|- 40 = 340 км/час-,
2) максимальный угол сноса равен
=Я-“=1’".
2
следовательно, искомый угол сноса равен ср =-j Фшах = 8°. Знак угла сноса
положительный;
3) магнитный курс следования равен
МКС = МПУ — <р = 30° — 8° = 22°.
146
§ 42. Измерение угла сноса и путевой скорости
Измерение угла сноса в полёте является важнейшей задачей
в аэронавигации. Зная угол сноса, можно определить фактический
путевой угол самолёта, ветер, курс следования и путевую ско-
рость.
От точности измерения угла сноса в большинстве случаев
зависит и точность самолётовождения. Измерение угла сноса осно-
вано на наблюдении земных визирных то-
чек. Визирными точками называются раз- 1роивенныи Путевая
г „ т путч, сксаость
личные мелкие объекты на земной поверх- ।;
ности: отдельные деревья, дома, кусты,
пруды, пятна и т. д.
Принцип измерения угла сноса за-
ключается в определении угла между
осью самолёта и направлением видимого
Т“
Время
G мин
Рис. 148. Ключ для расчёта
путевой скорости
перемещения земных предметов.
Угол сноса измеряется визиром или по отметкам на карте
фактического пути самолёта.
Основным способом измерения угла сноса визиром является
способ обратного визирования, при котором визирная точка, заме-
ченная по вертикали, наблюдается вторично под углом '40—50°.
Кроме того, существуют другие способы измерения угла сноса:
по бегу визирных точек, визированием вперёд под углом 45е' и по
боковой визирной точке. При всех измерениях угла скоса обяза-
телен одновременный отсчёт курса самолёта по компасу.
Путевая скорость измеряется также посредством наблюдения
визирных точек и других объектов земной поверхности.
Основные способы измерения 'путевой скорости следующие:
I. Определение путевой скорости посредством отметки вре-
мени пролёта известного расстояния между ориентирами.
2. Измерение времени пробега визирной точкой определённого
вертикального угла.
Для определения путевой скорости первым способом необхо-
димо отметить время пролёта каких-либо двух ориентиров. Изме-
рив по карте расстояние между ними, легко определить путевую
скорость по формуле
«=?.
где W —путевая скорость; S — пройденный путь; t — время.
В полёте этот расчёт выполняют на счётной линейке (рис. 148).
Пример Расстояние между ориентирами, равное 40 лиг пройдено самолётом
за 7 минут. Определить путевую скорость.
Совмещаем отсчёт 7 минут на шкале „Время" с отсчётом 40 км на шкале
.Пройденное расстояние", после чего против треугольного индекса читаем иско-
мую путевую скорость, равную 342 км/час.
io*. 147
Пройденной npmb в км
Рис. 149. График
148
Расчёт путевой скорости можно производить при помощи
графика (рис. 149).
На этом графике справа и слева отложено путевое время в
минутах, а сверху и снизу — пройденный путь в километрах. На
наклонных линиях указаны путевые скорости от 200 до 600 км/час.
Пользование графиком весьма несложно.
Пример. Путь длиной 180 км пройден за 27 минут. Путевая скорость равна
4С0 км/час.
При определении путевой скорости вторым способом изме-
ряют время пробега визирной точкой какого-либо определённого
Рис. 150. Промер W
вертикального угла. При этом пройденный самолётом путь за
время визирования будет равен высоте полёта или определённой
её части. Обычно берут либо угол, рав-
ный 45°, при котором пройденный само-
лётом путь (база) равен высоте полёта,
либо угол, равный 26 ,5, при котором
база равна половине высоты (рис. 150).
Зная истинную высоту полёта, легко
вычислить путевую скорость по фор-
муле
Пройденная,
база
Путевая
скорость
W=-j- збоо,
Время
.беек.
Рис. 151. Ключ для расчёте
путевой скорости
где Н — истинная высота в км;
t — время пролёта базы в секундах.
На самолёте этот расчёт выполняют аэронавигационной ли-
нейкой (рис. 151).
149
Пример. Истинная высота полёта 4 000 м. Время прохождения визирной точ-
кой вертикального угла 45° равно 41 секунде. Определить путевую скорость.
Совмещаем на линейке отсчёт 41 секунды на шкале .Время' с отсчётом вы-
соты на шкале „Пройденное расстояние', после чего против круглого индекса
читаем искомую путевую скорость, равную 350 км/час.
Наиболее точным из упомянутых способов является опреде-
ление путевой скорости по пройденному пути и времени. Вероят-
ная ошибка в определении путевой скорости составляет + 2—3%.
§ 43. Визир ОПБ-1М
Визир ОПБ-1м — это оптический прицел для бомбометанйя,
но он применяется и для целей аэронавигации.
Рис. 152. Схема визира
ОПБ-Im
Визир позволяет решать следующие
аэронавигационные задачи: 1) опреде-
лять угол сноса и путевую скорость;
2) измерять курсовые углы и пеленги
ориентиров; 3) определять вертикальные
углы ориентиров.
Визир ОПБ -1м представляет собой
оптическую трубу 1,5-кратного увеличе-
ния с полем зрения 32°. Внутри трубы
(рис. 152), в фокусе объектива, помещён
сферический прозрачный уровень, служа-
щий для приведения трубы в строго от-
весное положение. Внизу, под объектив-
ной линзой, имеется неподвижная приз-
ма, которая принимает лучи, падающие
от вращающейся призмы. Передви-
Рис. 153. Шкала визира
ОПБ-1м
гается призма червячным приводом и барабаном-рукояткой. Бла-
годаря такому устройству можно визировать через трубу любые
земные объекты и совмещать их изображения с видимым в поле
зрения трубы пузырьком уровня, хотя бы эти предметы и не нахо-
дились на одной вертикали с центром объектива.
150
Вращение призмы позволяет изменять углы визирования от
+ 75° до —15°. Таким образом, визиром можно определять, под
каким углом к вертикали виден тот земной предмет, на который
наведена труба и изображение которого совпадает с пузырьком
уровня, иначе говоря, можно измерять вертикальные углы ориен-
тиров. На барабане-рукоятке нанесена шкала высот от 400 до
6 000 м.
В поле зрения трубы видна шкала с делениями от 15° до
9° и от 0° до 75° (рис. 153). По этой шкале ходит указатель
(петелька), механически связанный с барабаном-рукояткой. При
таком устройстве угол, под которым направлен визирный луч, может
быть отсчитан на шкале по подвижному указателю. Это даёт
возможность штурману не отрывать глаз от окуляра при отсчёте
вертикальных углов. В поле зрения трубы видны также три парал-
лельные и одна перпендикулярная им линии. На средних взаимно
перпендикулярных линиях нанесена шкала вертикальных углов от
0° до 15°, что позволяет измерять вертикальные углы в преде-
лах 15°, не передвигая барабана-рукоятки, а также измерять вер-
тикальные углы объектов, выходящих за пределы установки
призмы (от 75° до 90°).
Снаружи окуляра расположено установочное кольцо со шка-
лой градусных делений. С кольцом связан 'видимый в поле зрения
трубы треугольный индекс. Этот индекс можно установить на
желаемый отсчёт вертикального угла; тогда вращение призмы
будет происходить через этот отсчёт с некоторой задержкой
(щелчком), что позволяет останавливать вращение призмы на
заранее указанном угле.
Для удобства промеров путевой скорости на визире укреплён
секундомер. В нижней части визира имеется карданное кольцо с
двумя пальцами, предназначенное для установки визира в под-
ставке (пяте). Для пользования в ночном полёте уровень визира и
внутренняя шкала освещаются электричеством. Интенсивность
освещения регулируется реостатами, помещёнными в верхней
части визира. Во избежание запотевания линз оптической системы
трубы в полётах при низких температурах имеется электрическое
обогревание.
Подставка (пята) визира укрепляется на полу кабины штур-
мана над отверстием для выпуска наружу призмы визира. Устрой-
ство пяты показано на рис. 154. Основанием пяты является
кольцо с несколькими отверстиями для болтов, которыми пята
крепится к самолёту. На поверхности кольца нанесена шкала кур-
сов от 0° до 360°. Оцифровка идёт против часовой стрелки.
Внутри этого кольца помещается другое, подвижное, кольцо с
двумя гнёздами, на которые опирается своими пальцами кардан-
ное кольцо визира. На этом внутреннем кольце нанесена шкала
пеленгов с делениями от 0° до 360°, идущими против часовой
стрелки. Деления «0» и «180» обоих колец отмечены треугольными
индексами. Индекс подвижного кольца, поставленный против де-
ления 180°, служит для указания углов сноса. Углы сноса отсчи-
тываются по шкале, нанесённой на неподвижном кольце. Для
151
закрепления подвижного кольца на каком-либо отсчёте служит
нежной тормоз. При нажатии ногой на тормоз последний осво-
бождает подвижное кольцо, а при отпускании застопоривает.
Пяту устанавливают на самолёте так, чтобы шкала углов
сноса была обращена назад, а диаметр основания 0°—180° был
точно параллелен продольной оси самолёта. В полёте визир нахо-
дится в специальных гнёздах у борта кабины в горизонтальном
положении и вставляется в пяту только во время измерений.
Рис. 154. Подставка к визиру ОПБ-1м
Для выверки установки пяты под визиром протягивают нить,
строго параллельную оси симметрии самолёта. Визир устанавли-
вают в пяте так, чтобы индекс углов сноса совпал с нулевым
делением шкалы пяты. Визируя в прицел (визир), определяют
положение диаметральной линии относительно протянутой под
самолётом нити. Если диаметральная линия окажется располо-
женной под некоторым углом к нити или будет пересекать её, то
соответствующим доворотом пяты надо добиться совпадения
линии с нитью, причём индекс прибора в этом случае не должен
сходить с нуля шкалы углов сноса. После этого пяту следует за-
крепить. Для периодической проверки установки пяты визира
необходимо на днище фюзеляжа нанести краской черту.
Для измерения угла сноса способом обратного визирования
визир вставляют в пяту и, нажав ногой тормоз, устанавливают его
так, чтобы обзор был в хвост самолёта (секундомером к себе).
Призму визира устанавливают на вертикальное визирование, т. е.
вращением барабана петельку ставят на нуль шкалы вертикальных
углов. Визир держат в таком положении, чтобы пузырёк уровня
находился в центре поля зрения.
Лётчик предупреждается о промере и должен строго сохра-
нять заданный режим полёта и курс. Штурман, держа визир в
строго отвесном положении, наблюдает за местностью и ожидает,
152
I
когда через пузырёк визира пройдёт какая-либо заметная визир-
ная точка.
Затем он следит за ней, не вращая визира в пяте. Когда
визирная точка достаточно удалится от вертикали, штурман рез-
ким поворотом прицела «сажает» визирную точку на курсовую
черту, тотчас же замечает показание компаса и отсчитывает угол
сноса по шкале на пяте визира (рис. 155). Измерения повторяет не
менее трёх раз и берёт среднее зна-
чение угла сноса и средний курс
во время промера.
Необходимость визирования под
возможно большим вертикальным
углом обусловливается тем, что са-
молёт за время измерения утла
сноса уклоняется вследствие ры-
сканья на курсе то вправо, то вле-
во от средней линии пути. При
увеличении вертикального угла ви-
зирования ошибка в измерении угла
сноса будет меньше. Точность из-
мерения угла сноса в значительной
мере зависит и от выдержива-
ния курса самолёта во время про-
Рис. 155. Отсчёт угла сноса по
пяте визира ОПБ-1м
мера.
Весьма трудно измерять угол
сноса при «болтанке». Если ви-
зиряая точка резко отходит в сторону от нити, не следует вращать
визир, а надо подождать, когда она снова подойдёт к нити
Сильно отличающиеся отсчёты угла сноса от остальных отсчётов
следует отбрасывать. В некоторых случаях при промерах на
одном и том же курсе углы сноса получаются и со знаком плюс
и со знаком минус. Это значит, что полёг происходит в плоскости
ветра; в таких случаях выгоднее считать, что угол сноса равен
нулю. Достижимая точность измерения угла сноса в полёте соста-
вляет + 1—2°. Вероятной ошибкой измерения угла сноса, уста-
новленной на основании математического анализа многочислен-
ных результатов измерений, является +
В тех случаях, когда возможно произвести только однократ-
ный промер, угол сноса определяют уточнённым способом. Этот
способ заключается в том, что в момент выбора визирной точки
под самолётом приступают к определению среднего курса само-
лёта. В момент максимального удаления визирной точки отсчиты-
вают курс и угол сноса. К измеренному углу сноса алгебраи-
чески прибавляют поправку, равную разности между по-
следним отсчётом компаса и средним курсом.
Пример. Магнитный курс во время отсчёта угла сноса равен 220е. Средний
магнитный курс во время промера 222°. Измеренный угол сноса10’. Найти
правильное значение угла сноса
220° — 222°=—2°.
Угол сноса равен
+ 10°-Р(—2°)= +8°.
153
Измерение угла сноса по бегу визирных точек заключается в
том, что призму визира устанавливают на вертикальное визирова-
ние* и, наблюдая за перемещением визирных точек, устанавливают
нить визира так, чтобы визирные точки перемещались парал-
лельно нити. Угол сноса отсчитывают обычным порядком на пяте
визира. Способ этот менее точен, чем способ обратного визиро-
вания.
Для определения угла сноса визированием вперёд, визир уста-
навливают секундомером от себя. Индекс пяты совмещают с
нулём шкалы сносов. Призму ставят на вертикальный угол 45°.
На тормоз не нажимают и
визир во время промера не
поворачивают. Заметив ви-
зирную точку в пузырьке
уровня, следят за ней, вра-
щая барабан-рукоятку. В
момент пересечения визир-
ной точкой поперечной нити
визира замечают деление,
под которым точка пере-
секла нить. Этот отсчёт и
будет углом сноса.
Принцип этого способа
заключается в том, что при
визировании под углом 45°
расстояние АВ (рис. 156) на земле равно высоте полёта АО. Тре-
угольник АВС равен треугольнику КВС и угол сноса 9 равен
вертикальному углу а.
Если визировать под углом 26°,5, то угол сноса) будет равен
удвоенному отсчёту по нити.
Порядок измерения путевой скорости визиром ОПБ-1м сле-
дующий. Штурман определяет по показанию высотомера истин-
ную высоту полёта, устанавливает визир в пяте так, чтобы обзор
был в хвост; призму устанавливает на вертикальное визирование
(на 0°), затем сообщает лётчику о начале промера. Повернув диа-
метральную нить примерно на угол сноса, штурман ожидает по-
явления визирной точки; в момент прохождения визирной точки
через центр пузырька уровня пускает секундомер. Наблюдая за
визирной точкой, устанавливает треугольный индекс на вертикаль-
ный угол 45°. После этого, вращая призму, удерживает визионую
точку впереди пузырька (на краю поля зрения). Когда рукоятка
попадёт на установленную задержку (45°), вращение призмы пре-
кращает, и как только визирная точка придёт в центр пузырька,
останавливает секундомер.
Для получения удовлетворительных результатов промер
производят несколько раз и берут среднее из отсчётов.
Путевая скорость вычисляется на аэронавигационной счётной
линейке.
При помощи визира можно определять дистанции и пеленги
ориентиров. Дистанцией ориентира называется расстояние от
154
ориентира до места, над которым находится самолёт
Дистанция определяется на основании истинной высоты
вертикального угла ориентира. Из рисунка видно, что
D—Htg а.
(рис. 157).
полёта и
дистанция
Дистанция вычисляется на аэронавигационной линейке.
Пример. Истинная высота полёта 3 000 м. Вертикальный угол, под которым
виден ориентир, равен 803. Определить дистанцию ориентира.
Устанавливаем треугольный индекс на деление 3 000 м (высота) и против
деления 80° читаем искомую дистанцию, равную 17 км.
Рис. 158. Прямой и обратный пеленги
Для определения пеленга ориентира наводят визир на ориентир
и совмещают его с диаметральной нитью. Одновременно отсчиты-
вают курс самолёта. Затем, не трогая визира, отыскивают на шкале
пяты «Курсы» истинный курс во время промера и против него на
155
шкале «Пеленги» читают искомый 'пеленг. Полученный пеленг явля-
ется прямым пеленгом (ИП), т. е. направлением от самолёта на
ориентир (рис. 158). Для получения обратного пеленга (ПОП) к ИП
необходимо прибавить 180°. Обратный пеленг определяет направле-
ние от ориентира на самолёт.
§ 44. Визир НВ-56
Навигационный бортовой визир штурман'а НВ-56 предназна-
чается для определения в полёте: одиночных значений углов
сноса, осреднённых значений углов сноса, путевой скорости само-
лёта и курсовых углов.
Рис. 159. Общий вид визира НВ-56
I
Визир состоит из оптической системы, механизма осреднения
углов сноса (пантографа) и счётного приспособления, объединённых
в общем корпусе (рис. 159). Сетка визира имеет четыре продоль-
ные и две поперечные линии углов. Продольные линии пересе-
каются по краям двумя наклонными, являющимися границами оп-
тической базы визира.
Визир монтируется в кабине штурмана на борту транспортных
самолётов типа Ли-2 и тяжёлых бомбардировщиков.
Измерение одиночных значений углов сноса
Наблюдая в окуляр прибора за перемещением земных визир-
ных точек, устанавливают рукояткой 1 продольные линии сетки
так, чтобы они совпадали с направлением движения ориентиров
точек. Затем производят отсчёт величины и направления утла сноса
по шкале сноса против индекса 2 (плюс — правый снос, минус —
левый снос).
156
Измерение осредненных значений углов сноса
В целях повышения точности прибегают к осреднению резуль-
татов измерения угла сноса. Наблюдая через окуляр земную по-
верхность, совмещают кончик указателя стрелки пантографа с
земным ориентиром и удерживают их совмещёнными во всё время
прохождения ор1гентира в поле зрения визира.
При этом слегка нажимают на карандаш, который прочерчи-
вает на матовом диске кривую линию действительного направле-
ния движения самолёта. Для большей точности таких линий
прочерчивают несколько, после чего поворачивают подвижный
диск так, чтобы нанесённые на нём линии были параллельны осе-
вым линиям, прочерченным карандашом на диске, и по индексу
отсчитывают величину и знак осреднённого значения угла сноса
по шкале.
Определение путевой скорости
Путевая скорость определяется по времени прохождения ви-
зирной точкой базы, равной половине высоты полета, с помощью
счётного приспособления. Так как оцифровка высоты шкалы про-
изведена в сотнях метров, то следует при расчёте путевой ско-
рости знать истинную высоту полёта в метрах, а время прохожде-
ния базы в секундах.
Для определения путевой скорости следует:
а) ориентировать продольные линии сетки по бегу земных
ориентиров;
б) наблюдая через окуляр, определить по секундомеру время
прохождения ориентиром базы визира;
в) на счётном приспособлении совместить деление, соответ-
ствующее найденному по секундомеру времени (в секундах),
с делением, соответствующим истинной высоте полёта в метрах,
и против индекса «.W км/час» прочесть путевую скорость само-
лёта на шкале высот. В случае необходимости Определения ско-
рости в английских милях в час следует прочесть значение W
против индекса «ам/час», а при определении W в узлах — против
штриха «мм/час».
Определение курсовых углов линейного ориентира
Для измерения курсового угла линейного ориентира необхо-
димо визировать этот ориентир, пользуясь продольными или попе-
речными линиями сетки визира.
Визирование производится вращением сетки с помощью руко-
ятки подвижного диска до тех пор, пока какие-либо из линий
сетки (продольные или поперечные) не станут параллельными
линейному ориентиру.
Видимые в поле зрения концы продольных линий имеют
условные значения 0° и 180°; концы поперечных линий имеют
значения 90° и 270°.
Во всех случаях, независимо от того, на каком борту само-
лёта установлен визир (левом или правом), обозначение 0° имеет
тот конец продольных линий, откуда при движении самолёта
157
ориентиры входят в поле зрения визира, а 180° — тот конец, в
сторону которого происходит видимое движение ориентиров
(куда уходят ориентиры, рис. 160).
Рис. 160. Видимое в поле зрения направление движения ориентиров:
I—при установке визира на правом борту само.МИа; //— при установке визира на левом борту
самолёта
Таким образом, 0° продольных линий всегда обращён к
хвосту самолёта, а 180° — к носу самолёта.
Условные значения 0е, 90°, 180° и 270° располагаются в поле
зрения по часовой стрелке.
Примечание. Ориентиры будут входить в поле зрения строго с конца
линий сноса только в том случае, если шкала углов сноса установлена на 0°
(см. рис. 1ь0).
Если же шкала сноса повёрнута на произвольный угол, то ориентиры
будут пересекать ' продольные линии сетки, однако концы линий при этом
сохраняют свои значения (рис. 161).
Рис. 161. Измерение курсовых углов визиром НВ-56:
I— при установке визира на правом борту самолёта; /1 — при установке визира на левом борту
самолёта
158
Для определения величины курсового угла линейного ориен-
тира необходимо к значению линий, которыми был визирован
ориентир, прибавить алгебраически показание шкалы сноса
(см. рис. 161).
Примечание. Курсовой угол линейного ориентира может иметь два
значения, отличающиеся между собой на 180°.
Для устранения этой неопределённости необходимо предва-
рительно, исходя из условий задачи, выбрать определённое напра-
вление визирования линейного ориентира, отметив его каким-либс-
характерным точечным ориентиром.
Если известен 1ЧП линейного ориентира, то за направление
визирования надо принять то направление, которое было выбрано
при определении его магнитного пеленга (см. рис. 161).
При измерении курсовых углов в целях определения девиации
магнитного компаса, когда требуется ряд последовательных захо-
дов на линейный ориентир, целесообразно предварительно рассчи-
тать ожидаемый курсовой угол, соответствующий взятому курсу
и магнитному пеленгу линейного ориентира.
Так как шкала подвижного диска (шкала сноса) имеет оци
фровку +55°, то для установки предвычисленного курсового
угла следует:
а) вычесть из величины этого угла значение ближайшего к нему
из основных румбов (0—90—180—270°) и остаток, со своим
знаком, установить на шкале углов сноса; при этом линии сетки
визира окажутся приблизительно ориентированными вдоль линей-
ного ориентира;,
б) при появлении ориентира в поле зрения уточнить курсовой
угол доворотами сетки.
Все записи производятся в определённом порядке.
Примерная форма бланка для записи расчётных и фактических
данных имеет следующий вид:
Название линейного ориентира — железная дорога
Направление визирования—на мост
МП = 143°
№ по пор. кк 33' дан- ный ПКУ пред- вычи- слен- ный Показания шкалы сноса КУ фак- тич. МК КК фгк- тич. штур' мана К КК фак- тич. лётчи- ка К
предвы- ч и елей- ные факти- ческие
1 2 3 4 5 С 7 8 9 10 11
1 360 143° — 37° — 40е 140° 3 358 + 5 40 — Iе
15&
Графы 1, 2, 3 и 4 этой таблицы заполняются на земле при
подготовке к полёту, графы 5, 8 и 10 заполняются в полёте,
графы 6, 7, 9 и 11 заполняются в полёте или на земле, при обра-
ботке результатов измерения.
§ 45. Бортовой термометр
Бортовой термометр ТВЭ-6 служит для измерения температуры
зоздуха, окружающего самолёт.
Прибор работает на принципе мостика Уитстона. Одно из плеч
мостика сделано из медной проволоки, сопротивление которой
изменяется в зависимости от температуры окружающей среды.-
Остальные три плеча сделаны из манганина, на который темпера-
тура не оказывает влияния. При изменении температуры среды,
в которой находится прибор, изменяется соотношение сопротивле-
ний плеч, вследствие чего стрелка гальванометра отклоняется.
По величине отклонения стрелки можно судить о температуре
среды.
Термометр состоит из приёмника и измерителя. Приёмник
устанавливают на крыле или фюзеляже. Измеритель помещают в
кабине штурмана (рис. IG2).
Рис. 162. Бортовой воздушный термометр
Теплочувствительная спираль приёмника сделана из мед-
ной проволоки толщиной 0,7 мм и заключена в латунную
оболочку.
В корпусе измерителя имеются гальванометр и три сопротивле-
ния. Шкала разбита на деления от —70° до +70°; нуль находится
по середине шкалы; цена деления 5°. Приёмник сообщается с из-
мерителем соединительной проводкой.
Электропитание прибора подводится от самолётной сети на-
пряжением 26,5 в.
160
§ 46. Каргодержатель
Личным аэронавигационным снаряжением штурмана является
лётная полевая сумка и каргодержатель. Лётная полевая сумка
сделана из керзы (прорезиненного полотна). К наружной части по-
левой сумки вместо (целлулоида пришита прокладка, на которой
имеются карманы для ветрочёта, аэронавигационной счётной ли-
нейки, полевого компаса и резинки. Эти карманы прикрываются
сверху общей накладкой.
Каргодержатель штурмана состоит из двух целлулоидных
пластин размером 300X400 мм, обшитых по краям кожей (см.
рис. 164). Толщина планшета около 7 мм. Целлулоидные пластины
соединены кожаной обшивкой с двух сторон. После закладки
карты между пластинами их скрепляют с одной стороны кожаной
накладкой, а с другой — кнопками. Таким образом, карта, вложен-
ная в каргодержатель, закрепляется с четырёх сторон. Поверх-
ность целлулоидных пластин слегка шероховатая; на ней можно
делать надписи карандашом и стирать их резинкой.
§ 47. Автоштурман
На морских кораблях уже давно применяются приборы — одо-
графы, автоматически записывающие ща карте путь корабля. Эти
приборы облегчают (работу штурмана в прокладке пути корабля на
карте и весьма ценны в боевой обстановке.
Морской одограф работает от гироскопического компаса и лага
и регистрирует путь корабля почти полностью, не учитывая лишь
дрейфа (сноса). По аналогии с морским флотом и в воздушном
флоте имеются приборы, записывающие на Карге путь самолёта.
Такие приборы для самолётов называются курсог рафами или авто-
штурманами. Однако создание такого прибора для самолётов
встречает значительные трудности, обусловленные влиянием ветра
на полёт самолёта. Дело в том, что дрейф судна в открытом море
весьма незначителен, в то время как снос самолёта, даже при боль-
ших его скоростях, достигает 10—12°. Точно так же скорость
движения судна легко учитывается лагом, а путевая скорость са-
молёта не может быть указана каким-либо прибором и её прихо-
дится промерять в полёте.
В настоящее время известен ряд конструкций курсографов, ра-
бота которых более или менее автоматизирована.
Автоштурман ib основном предназначен для непрерывной за-
писи пути самолёта и для вождения самолёта по проложенному
на карте маршруту. Прибор состоит из планшета с картой, компаса,
воздушного лага и распределительной коробки (преобразователя).
Эти части связаны между собой механическими и электрическими
передачами. В планшете имеется два ващика, автоматически пере-
матывающие карту. Перпендикулярно движению карты перемеща-
ется записывающее приспособлений (перо). Скорость и направление
И Учебник аэронавигация
161
ветра устанавливают в распределительной коробке поворотом рукоя-
ток. Компас служит для автоматической установки ® распредели-
тельной коробке курса (самолёта. Воздушный лаг предназначен для
измерения воздушной скорости и воздушного пути. Механизм,
заключённый в распределительной коробке, выполняет разложение
векторов воздушной скорости и ведра на два взаимно перпенди-
кулярных 'направления. Один ив полученных векторов исполь-
зуется для перемотки карты, а другой—для передвижения записы-
вающего приспособления. Таким образом, воспроизведение пути
самолёта на карте достигается перемоткой карты в одном яапра--
влении и (движением пера — в перпендикулярном направлений.
Существуют автоштурманы, в которых в качестве основного
прибора применён радиокомпас, автоштурманы, соединенные fc авто->
пилотом, и т. д.
ГЛАВА ЧЕТВЕРТАЯ
АЭРОНАВИГАЦИОННАЯ ПОДГОТОВКА К ПОЛЕТАМ
§ 1. Два вида подготовки к полётам
Для успешности выполнения боевого задания каждый полёт
должен быть обеспечен соответствующей аэронавигационной подго-
товкой. Тщательная аэронавигационная подготовка является основ-
ным условием точности и безопасности самолётовождения.
Подготовка к полётам подразделяется на предварительную
или общую навигационную подготовку и непосредственную или
навигационную подготовку полёта. Общая навигационная подго-
товка проводится систематически. К навигационной подготовке
полёта приступают после получения задании на полёт.
§ 2. Общая навигационная подготовка
Общая навигационная подготовка имеет целью держать
лётный состав в постоянной готовности к выполнению полётов
и сокращать до минимума объём работы по навигационной подго-
товке каждого полёта. Поэтому <в общую навигационную подго-
товку входит всё, что может быть выполнено до получения
конкретного задания на полёт.
Общая навигационная подготовка включает:
а) общую подготовку карт и аэронавигационных данных;
б) подготовку карты навигационной обстановки;
в) изучение района;
г) штурманскую подготовку лётного состава;
д) подготовку пилотажно-навигационного оборудования и лич-
ного штурманского снаряжения;
е) организацию земных средств обеспечения самолётовожде-
ния (ЗОС);
ж) организацию службы времени.
Немедленно по прибытии в новый район лётный состав под
руководством штурмана части приступает к подбору и подготовке
карт, сбору и уточнению аэронавигационных данных и изучению
района предстоящих полётов.
Для дальних полётов применяется основная полётная карта
масштаба 1 : 1 000 000. По этой карте выполняется вся аэронавига-
ционная работа в воздухе-
ii»
163
Для небольших маршрутов (до 400 км) используется основ-
ная полётная карта в масштабе 1 : 500 000.
Для ориентировки в районе цели или разведки берут карты
крупного масштаба 1 : 100 000 или 1 : 200 000.
В качестве запасной бортовой карты, на случай потери ориен-
тировки, подбирают карты мелкого масштаба: 1 : 2 000 000 или
1 : 1 500 000 (для одноместных самолётов 1 : 1 000 000) на весь воз-
можный район полётов.
Необходимые листы карт отбирают при помощи сборных таб-
лиц. Количество листов выбирают с таким расчётом, чтобы был за-
хвачен весь участок местности для района предстоящих действий.
Если район полётов заранее не определён, то для подготовки карт
и их изучения принимается район радиусом 300—500 км от своего
аэродрома.
Выбранные листы карт оклеивают. При склейке тщательно под-
гоняют между собой отдельные листы, не оставляя между ними про-
светов. Особое внимание следует уделить совмещению меридианов,
параллелей и основных ориентиров, переходящих с одного листа на
другой.
Если карты недостаточно подняты типографским способом, их
иллюминуют, т. е- выделяют расцветкой основные ориентиры. Ил-
люминовку выполняют карандашами (не химическими) или тушью.
Государственную границу (линию фронта) поднимают двойной
красно-синей линией. Железные дороги поднимают чёрным цветом,
причём однопутные отмечают поперечными чёрточками размером
0,5 см через каждые 3—5 см, двухпутные — парными чёрточками.
Станции отмечают красными' прямоугольниками размером 2X3 мм,
помещая их с соответствующей стороны дороги.
Шоссейные дороги поднимают красным цветом, грунтовые —
коричневым, реки — синим, озёра и моря — голубым, леса — зелё-
ным. Населённые пункты поднимают только в том случае/ если они
недостаточно резко выделяются на общем фоне кд рты.
Крупные населённые пункты закрашивают коричневым иди
бледнокрасным цветом. Иллюминовка Населённых пунктов не
должна искажать их действительной конфигурации.
Высоты местности, если они не подписаны или недостаточно
выделены на карте, отмечают чёрными цифрами с точкой впереди
(•120) в метрах от уровня моря, округляя до целых десятков. Зна-
чения высот местности берут с других карт или из Авиационного
штурманского справочника.
В местностях со сложным рельефом обозначают только наибо-
лее крупные возвышенности. В равнинных местах высоты отмечают
через 15—20 см карты. Важнейшие высоты местности подчёрки-
ваются.
Магнитное склонение, если оно не напечатано на карте, отме-
чают красной цифрой в различных местах карты ® зависимости от
изменения склонения, но не реже чем через 15—20 см карты.
Цифру обводят кружком такого же цвета.
Для справок и штурманских расчётов при подготовке к полё-
там и для изучения аэронавигационной обстановки лётным (составом
16»
штурман части составляет карту аэронавигационной обстановки,
которая хранится в штабе части. Карта должна охватывйть весь
возможный радиус действия самолётов в основном секторе полётов.
Масштаб карты 1 : 1 000 000 или 1 : 500 000.
На карту аэронавигационной обстановки наносят: линию фронта
или государственной границы, основные высоты местности, аэро-
дромы и посадочные площадки (красным цветом), магнитное скло-
нение и районы магнитных аномалий (лиловой штриховкой), назем-
ные радиостанции, световые навигационные средства и другие
средства 3OG, запретные зоны. Поднимают основные линейные
ориентиры и обводят красными кружками основные контрольные
ориентиры. Около основных ориентиров и пунктов отмечается
расстояние, путевое время и путевые углы от аэродрома до дан-
ных ориентиров.
К карте прилагают таблицу естественного освещения, состав-
ленную на месяц. Таблица содержит данные о времени наступле-
ния темноты, рассвета, восхода, захода Луны и её фазах, а также
о продолжительности светлого и тёмного времени.
Кроме того, к карте прилагается таблица расстояний, путевого
времени и путевых углов до основных ориентиров и пунктов.
На карте в центре аэродромного узла прикрепляют тонкий
шнурок, длина которого должна быть равна дальности полёта в
масштабе карты. Вдоль меридиана делается разметка в километрах.
Такой шнурок позволяет быстро определять длину любого ломаного
маршрута и досягаемость любых целей. Для быстрого определения
путевого угла при помощи натянутого через заданный ориентир
шнурка в центре аэродромного узла параллельно меридиану укреп-
ляется транспортир.
Лётный состав в период общей подготовки по самолётовожде-
нию должен тщательно изучить район полётов. Хорошее звание
района сокращает срок подготовки к каждому полёту, облегчает
ориентировку и самолётовождение по маршруту, предохраняет от
потери ориентировки и облегчает её восстановление.
При изучении района используют карты крупного и мелкого
масштабов, карту аэронавигационной обстановки, аэрографические
описания, схемы, фотоснимки отдельных ориентиров и снедения,
полученные от уже летавших в этом районе штурманов и лётчиков.
В результате изучения района штурман должен хорошо знать
общую обстановку района — характер местности, рельеф, основные
населённые пункты, реки, озёра, береговую черту, основные же-
лезнодорожные и шоссейные магистрали, а также все дороги в ма-
лонаселённых местностях, линию фронта (государственной гра-
ницы) — и детально знать район своего аэродромного узла в ради-
усе 50—75 км. Особое внимание уделяется изучению напамять ха-
рактерных признаков отдельных ориентиров. Изучая особенности
ориентировки в данном районе, штурман обращает внимание на ха-
рактер видимости ориентиров в зависимости от времени года и су-
ток, а также на изменения, внесённые войной (разрушенные пункты,
выгоревшие леса, новые дороги и т. п.). Необходимо также знать
Климат и метеорологические особенности район'а, точное место-
165
наложение аэродромов и посадочных площадок района и годность
их для посадки, запретные зоны и правила полёта над ними, время
наступления темноты и рассвета в данное время года с точностью
до 10 минут, месторасположение и характер работы средств ЗОС,
расположение и характер основных целей и средств ПВО против-
ника, магнитное склонение и установленный в части единый по-
рядок восстановления ориентировки.
Уровень штурманской подготовки экипажей является решаю-
щим фактором в успешности самолётовождения, поэтому лётный
состав постоянно тренируется в самолётовождении. Каждый штур-
ман должен систематически тренироваться в быстром и точном
jасчёте полёта и подготовке карты, в общей и детальной ориенти-
j овке с разных высот в различной местности, в точном самолёто-
вождении по компасу и навигационных расчётах, в радиопеленга-
ции при помощи РПК, радиомаяков и наземных пеленгаторов, в
штурманском глазомере, в быстром восстановлении ориентировки
всеми способами, в астрономической ориентировке. Тренировку по
этим вопросам следует выполнять во время подготовки и выпол-
нения любых полётов.
Установленное на самолёте пилотажно-навигационное обору-
дование должно всегда находиться в полном наличии и исправно-
сти. Штурман обязан периодически осматривать оборудование са-
молёта с целью выяснения наличия всех аэронавигационных при-
боров, надёжности их крепления и исправности. Подготовка пило-
тажно-навигационного оборудования заключается в периодической
проверке приборов. Проверкой приборов устанавливаются ошибки
в их показаниях для учета при самолётовождении. На основании
проверки составляются графики поправок к РПК, магнитному ком-
пасу, указателю скорости и высотомеру и прикрепляются в кабине
штурмана.
В качестве личного навигационного снаряжения штурман
всегда имеет: лётно-полевую сумку, кассету с бортжурналом, лист
графлёной бумаги для различных расчётов и заметок, масштабную
линейку, транспортир, счётную линейку, ветрочёт, полевой компас,
Авиационный штурманский справочник, цветные и простые каран-
даши, резинку, перочинный нож, набор карт. Для выполнения раз-
личных предварительных расчётов перед полётом, а также для
удобства работы в воздухе рекомендуется иметь дубликаты всех
графиков поправок к приборам.
В период общей навигационной подготовки выполняются все
мероприятия, рекомендуемые по службе ЗОС (земного обеспе-
чения самолётовождения). Подробные требования к службе ЗОС
изложены <в отдельной главе.
§ 3. Навигационная подготовка полёта
Непосредственная навигационная подготовка полёта имеет
целью: сократить до минимума аэронавигационную работу в полёте
иоблегчить её выполнение; выбрать наивыгоднейшие приёмы само-
лётовождения в зависимости от конкретной обстановки и харак-
тера задания: обеспечить надёжное и наиболее точное выполнение
155
задания. Непосредственную подготовку к полёту экипаж ведёт
совместно, договариваясь в процессе подготовки о всех деталях
самолётовождения.
Навигационная подготовка полёта заключается в подготовке
карты, изучении района полёта, расчёте полёта, разработке навига-
ционного плана полёта, осмотре оборудования, изучении метеоро-
логической обстановки и обеспечении средствами ЗОС.
Выполненная в определённой последовательности тщательная
навигационная подготовка к полёту является основным усло-
вием успешности, точности и безопасности самолётовождения.
Подготовка карты состоит из прокладки маршрута и заправки
её в каргодержатель.
Линию пути проводят н!а карге от исходного пункта маршрута
(ИПМ). В качестве ИПМ выбирают характерный ориентир, хорошо
известный экипажу, на удалении 10—30 км от аэродрома взлёта.
В некоторых случаях, в зависимости от боевой обстановки, ИПМ
может выноситься и на большее расстояние от аэродрома, вплоть
до линии фронта.
От ИПМ заданную линию пути проводят чёткой сплошной ли-
нией карандашом любого цвета, отличающегося от цвета карты.
Прокладка линии пути заканчивается в конечном пункте маршрута
(КОМ). Конечный пункт маршрута выбирают на удалении 10—30 км
от аэродрома посадки. От аэродрома взлёта до ИПМ и от КИМ
до аэродрома посадки никаких записей и обозначений на картах не
делают.
Линии пути на длинных участках с постоянным путевым углом
проводятся по прймюй, если угол, образуемый линией пути и мери-
дианом, вследствие Свойств проекции карты не изменяется более
чем на 3°. В противном случае линия пути проводится по локсо-
дромии.
После прокладки линии пути штурман намечает контрольные
ориентиры (КО) на каждом этапе маршрута. Контрольными ориен-
тирами называются выбранные специально для контроля пути ха-
рактерные ориентиры, находящиеся на самой линии заданного пути
или лежащие в стороне от неё в пределах видимости с самолёта.
Расстояние между контрольными Ориентирами может быть от 50
до 150 км.
При выборе контрольных ориентиров руководствуются сооб-
ражение^ их видимости с высоты полёта. Такими ориентирами в
первую очередь являются озёра, крупные Населённые пункты,
железные дороги М реки, пересекающие линию пути под углом,
близким к прямому.
Каждый контрольный ориентир, а также ИПМ и КПМ обво-
дят красным кружком. Размер кружка должен быть тйким, чтобы
ие затемнялись контуры ориентира. >
Разметка расстояний по линии пути производится, начиная от
цели до ИПМ и от КПМ до ИПОМ, отсечками вправо от линии
пути по ходу полёта через каждые 50 км. Возле отсечек, отмеча-
ющих 100, 200, 300 ит. д км, ставятся цифры 1, 2, 3 и т. д., ука-
зывающие оставшееся расстояние до цели (КПМ).
167
Справа от линии пути, в свободных от ориентиров местах
карты, между контрольными ориентирами отмечают в виде дроби
, расстояние (числитель) и штилевое время полёта (знаменатель)
до очередного контрольного ориентира.
Магнитные путевые углы (МПУ) указывают со знаком градуса
справа от записи расстояния и штилевого времени (например,
И8=).
Магнитные путевые утлы отмечают при изломе маршрута че-
рез каждые 15—20 см прямолинейного отрезка пути и при йзме-
нении магнитного склонения более чем на 1°.
Рельеф местности в полосе маршрута отмечают путём под-
чёркивания цифр высот местности, нанесённых на карту в период
общей подготовки к самолётовождению, причём отмечают только
те цифры высбт местности, которые отличаются от высоты аэро-
дрома вылета над уровнем моря более чем на 50 м. Кроме того,
у цели или в районе фотографирования надписывают поправку
к высотомеру за рельеф относительно аэродрома взлёта со зна-
ком плюс при превышении местности относительно аэродрома вы-
лета и со знаком минус — при понижении.
В случае если после подготовки карты штурману известен век-
тор ветра, его величину наносят условным знаком на карту в
, сторон!^ от маршрута.
• _Вся разметка маршрута выполняется карандашом любого цвета
(не химическим). ’ . и. л ' '
Пример прокладки и разметки маршрута показан на рис. 163.
Подготовленную таким образом карту заправляют в картодер-
жагель (рис. 164) или навёртывают на две фанерные дощечки так,
чтобы в полёте удобно было использовать. На район цели или
нового аэродрома посадки (при перелёте) подготавливается карта
крупного масштаба для детальной ориентировки. На этой карте про-
кладывается линия пути ют последнего контрольного ориентира и
обозначаются расстояние, время полёта и путевой угол.
Изучение маршрута полёта является важнейшим элементом
аэронавигационной подготовки к полёту. При изучении маршрута
полёта, тщательно и подробно просматривая его, выясняют общую
систему линейных ориентиров, предохраняющих от потери ориен-
тировки, общий характер земной поверхности, наличие и особен-,
ности крупных характерных ориентиров, их конфигурацию и вза-
имное расположение; особенности ориентировки в районе полёта;
наличие и характер аэродромов, посадочных площадок и мест,
пригодных или явно опасных для посадки; запретные зоны по марш-
руту, а также наличие и характер высоких предметов, предста-
вляющих опасность при полёте на малых высотах. Кроме того, на-
мечают и запоминают надёжный линейный ориентир на случай
восстановления ориентировки.
Особенно тщательно и детально следует изучить участок полёта
от аэродрома до первого контрольного ориентира, район пролёта
линии фронта и район цели. Район цели изучается по картам круц*
ного масштаба, планам или фотоснимкам. Полезно использовать
перспективные фотоснимки цели и ориентиров около неё.
Изучая цель, штурман выясняет её характер, размеры и точное
месторасположение, намечает систему ориентиров, обеспечивающих
быстрое и надёжное отыскание основной и запасной целей.
Рис. 163. Навигационная прокладка и разметка маршрута
На случай ухудшения метеорологической обстановки в районе
цели подбирается надёжный ориентир для отыскания цели.
Весьма важно проследить изменение рельефа местности по
маршруту и определить минимальную безопасную высоту полёта
169
(с учётом высоты своего аэродрома) на случай встречи с низкой
облачностью. Одновременно определяется превышение цели над
уровнем моря.
Ширина изучаемой полосы маршрута может доходить до
150 км, по 75 км вправо и влево от линии пути.
В основном маршрут изучается по полётной карте. Мелкие ори-
ентиры легально изучаются по карте в масштабе 1:200 000.
Полезно при изучении маршрута сравнивать различные карты, так
как при этом можно обнаружить ошибки и неточности той или
иной .карты.
Значительно облегчают знакомство с районом полёта аэронави-
гационные (описания и аэролоции отдельных маршрутов и районов.
Помимо изучения районов полёта по картам и аэролоциям,
желательно использовать сведения экипажей, ранее летавших по
этому маршруту, о наличии на маршруте ориентиров, не нанесённых
170
на карту, и их характеристиках, о разрушенных или сожжённых
ориентирах.
В результате изучения ма>ршрута штурман должен знать напа-
мятъ схему расположения и отличительные признаки основных ори-
ентиров в районе маршрута, чтобы для сохранения общей ориен-
тировки при необходимое) и не приходилось прибегать к пользованию
картой.
§ 4. Навигационный расчёт и план полёта
Навигационный расчёт полёта заключается в определении длины
участков маршрута между основными контрольными ориентирами,
обшей длины маршрута, путевого времени по участкам маршрута,
общей продолжительности полёта, запаса горючего, времени вы-
лета и прохода исходного пункта маршрута дЛя прибытия к цели
или на аэродром посадки в назначенное время, времени посадки,
резерва лётного времени в зависимости от продолжительности по-
лёта и общего запаса горючего. Результаты предварительного рас-
чёта штурман заносит в соответствующие 1рафы бортжурнала.
Как показал опыт Отечественной войны, при срочных вылетах
(по боевой трезоге) шт урманские расчёты могут ограничиться про-
кладкой маршрута, измерением расстояния и МПУ между кон-
трольными о[ иентирами и записью этих данных на карте. При
подобных .вылетах по маршруту, неодт с кратно перед этим облё-
танному, штурман ограничивается просмотром и проверкой ранее
нанесённого на карте заданного маршрута. Уточнение штурманских
расчётов производится после) взлёта.
Все расчёты времени ведутся для заданных или намеченных
высот и крейсерских скоростей самолёта по путевым скоростям,
определённым на основе метеорологической информации, и только
в случае её запаздывания или отсутствия расчёт времени можно
вып олнить по воздушным скоростям.
Порядок расчёта предполагаемой продолжительности полёта
следующий. Рассчитывают ветрочётом путевые скорости для каж-
дого заданного участка пути; по найденным путевым скоростям и
расстояниям на каждом участке рассчитывает путевое время для
каждого участка пути; затем подсчитывают суммарную продол-
жительности полёта по всему маршруту. К (полученной продолжи-
гелыюсти полёта прибавляют время на взлёт, сбор, па путь от
аэродрома до ИПМ и от КПМ до аэродрома посадки и время пре-
бывания над целью.
Пример. Рассчитать общую продолжительность полёта одиночного трёхмест-
ного самолёта по маршруту: ИПМ (Владимировка),—изгиб железной дороги—
цель (ст. N)—ИПОМ (Рубцова) — Еленовка—КПМ (оз. Красное).
На участке ИПМ (Владимировка) — изгиб железной дороги МПУ=263’’
8 = 137 км.
На участке изгиб железной дороги—цель (ст. N) МПУ=220°; 8 = 68 км.
На участке ИПОМ (Рубцова) — Еленовка МПУ = 70е; 8 = 103 км.
На участке Еленовка — КПМ (оз. Красное) МПУ = 42 ; 8 = 55 км.
Ветер на высоте полёта: 8 = 140°, U = 40км/час. Истинная воздушная
скорость на всех участках пути 360 км/час, за исключением участка Рубцова—
Еленовка, где скорость 400 км/час.
171
Решение.
Путевое время на участке ИПМ — изгиб железной дороги ... О ч. 25 м
Путевое время на участке изгиб железной дороги — цель ... О ч. 11 м.
Путевое время на участке ИПОМ — Еленовка...................О ч. 15 м.
Путевое время на участке Еленовка — КПМ...................О ч. 10 м.
Время полёта на участке цель — ИПОМ .....................0 ч. 0S м.
Продолжительность полёта по маршруту.......................1 ч. 09 м.
Время полёта от аэродрома до ИПМ и от КПМ до аэродрома 0 ч. 08 м.
Время на взлёт и посадку...................................0 ч. 10 м.
Общая продолжительность полёта.............................1 ч. 27 м.
На основании найденной продолжительности полёта опреде-
ляют необходимый запас горючего (в часах). Кроме того, при пере-
лете в одну сторону и отсутствии данных о ветре к указанному за-
пасу прибавляют ещё 5% на влияние ветра (для тихоходных типов
самолётов 10%). Зная заправку самолёта горючим и вычитая из
неё необходимый запас горючего, находят избыток горючего.
Ври полётах на предельную дальность расчёт запаса горю-
чего выполняет инженер авиачасти по эксплоатации на основании
специальных графиков расхода горючего на самолёте данного типа
при разных режимах полёта. Вылет с недостаточным запасом
горючего или с расчётом его <в обрез» запрещается.
Время взлёта и прохода исходного пункта маршрута для прибы-
тия на цель или аэродром посадки в назначенное время вычис-
ляется вычитанием из назначенного времени подсчитанного путе-
вого времени, при этом прибавляется время на случай возможного
запоздания. В каждом полёте рассчитывается время посадки как
сумма времени вылета с общей продолжительностью по-
лёта. Резерв лётНого времени определяется 'вычитанием продол-
жительности полёта из общего временного запаса горючего.
Определение времени вылета рассчитывается в зависимости от
времени выхода на цель; одновременно рассчитывается и время
посадки.
Дневной полёт рассчитывается так, чтобы закончить его за час
до наступления темноты, если не предусматривается ночная посадка.
Время наступления темноты, рассвета, а также восхода и за-
хода Солнца и Луны определяют по специальным графикам и
таблицам, помещённым в Авиационном штурманском справочнике.
Для определения момента наступления темноты, рассвета или
восхода, захода Солнца по графику находят местоположение
пункта, для которого требует ся определить момент. От этого пункта
идут по параллели до пересечения с кривой («Рассвет», «Тем-
нота», «Восход» или «Заход»), соответствующей дате определения
момента. От точки пересечения параллели с кривой поднимаются до
шкалы времени на верхней рамке и делают отсчёт. Этот отсчёт ис-
правляют за долготу пункта, взяв поправку по ближайшей нижней
шкале на меридиане пункта. Исправленное за долготу время есть
московское время определяемого момента для заданного пункта.
Пример. Определить московское время наступления рассвета 1 мая в г. Львов
(см. график в АШС-44, часть 1).
172
От г. Львов идём по параллели до пересечения с кривой .Рассвет' 1 мая.
От пересечения идём по меридиану вверх до шкалы времени на верхней рамке.
Делаем отсчёт 4 ч. 56 м. Исправляем отсчёт за долготуг. Львов, взяв поправку
4-24 мни. по ближайшей нижней шкале на меридиане г. Львов:
4 ч. 56 м.
+ 24 м.
5 ч. 20 м.
Для перехода к львовскому времени надо к полученному времени 5 ч. 20 м.
прибавить номер пояса пункта [Львов (2)] без двух часов, т. е. 0 часов. Таким обра-
зом, 1 мая по львовскому времени рассвет в г. Львов будет в 5 ч. 20 м.
Примечание. Цифры, обведённые кружками вверху графика, обозначают
номер часового пояса.
Кроме графика, для определения моментов рассвета, темноты,
восхода и захода 'Солнца, а также азимутов точек восхода и
захода, служат специальные Таблицы Солнца, изданные на период
1944—1980 гг. В этих таблицах даются значения вышеуказанных
моментов на каждый день года для широт от 30 до 70°. Получае-
мые из таблиц соответственно дате и широте места моменты рас-
света, восхода и захода Солнца и наступления темноты являются
московским декретным временем для пункта, расположенного на
меридиане 30° Е. Вводя в получаемые из таблиц моменты явле-
ний поправки за разность между долготой 30° Е и долготой
пункта, для которого определяются моменты, получаем москов-
ское декретное время для заданного пункта.
Подробные правила пользования Таблицами Солйца изложены
в Инструкции, прилагаемой к этим таблицам.
Моменты восхода и захода Луны определяют по таблицам
Авиационного штурманского справочника. С помощью таблиц
можно на каждый день определить моменты восхода и захода Луны
для любого пункта земного шара в пределах северных широт
от 30 до 80°.
В табл. 1 на каждый день года даны моменты восхода и
захода Луны в широте 56° да меридиане Гринвича, т. е. при
X = 0°. Эти моменты выражены в среднем гринвичском времени
и даются с точностью до 0,1 часа. Кроме того, отдельно для вос-
хода и захода даются вспомогательные величины — аргумент АХ
и аргумент Д<р, необходимые для получения поправок к указанг
ным моментам за долготу и широту места. Для получения по-
правки за долготу служит табл. 2. Входим в неё с выбранным
из табл. 1 аргументом АХ и в столбце ближайшей долготы не-
посредственно (без интерполяции) выбираем искомую поправку.
Для востотной долготы (от Гринвича) поправка берётся со знаком
минус (—), для западной — со знаком плюс (-}-).
Для получения поправки на широту служит табл. 3. Нахо-
дим в ней столбец широты, ближайшей к заданной, и интерполи-
руем в этом столбце для данного значения аргумента А<р искомую
поправку. Для восхода знак поправки берётся тот, который ука-
зан в таблице, для захода — знак обратный.
Обе поправки получаются в сотых долях часа, их надо (алге-
браически) сложить и, округлив получаемую общую поправку до
0,1 часа, прибавить с её знаком соответственно к моменту восхода
или захода, полученному из табл. 1.
173
В результате получаются моменты, выраженные в среднем
местным времени данного пункта. В табл. 4 даются моменты фаз
Луны с точностью до часа по среднему гранвичскому времени.
Пример. Определить моменты восхода и захода Луны 26 мая 19. . г.
в Сталинграде.
Определяем для Сталинграда:
<р = 48°45' N X = 44°2О' Е.
Из табл. 1 для 26 мая 19. . . г. имеем.
1945 г. Дата Восход Apr. ДХ Apr. Д<? Заход Apr. ДХ Apr. Д<₽
Май 26 19.6 0.05 4.3 3.7 0.01 4-5
Из табл. 2 и 3 выбираем.
Для восхода г Для захода
ч. ч.
Поправка за долготу .... —0.15 —0.03
Поправка за широту .... —0.68 +0.56
Общая поправка .... —0.83 4-0.53
Таким образом, для Сталинграда получаем:
восход 19.6 — 0.8=18.8 среднего местного времени,
заход 3.7 + ОД=4.2 » ,
Переход от среднего местного времени к поясному выполняется по формуле
П. В. = С. М. В. —Хвр №.
Моменты восхода и захода Луны, а также её фаза опреде-
ляются также по Таблицам восхода и захода Луны. Эти таблицы
выпускаются ежегодно для восточной и западной частей СССР в
пределах широт от 30 до 70°. Прежде чем определять моменты
восхода и захода Луны, измеряют широту заданного пункта
в целых градусах и долготу во времени, считая её от меридиана
30° Е при пользовании таблицами для западной части СССР или
от 135° Е при пользовании таблицами для восточной части СССР.
Долготе приписывают знак минус, если пункт находится к востоку
от одного из соответственно взятых меридианов, и знак плюс, если
пункт находится к западу от него. Для указанной цели удобно
пользоваться прилагаемыми к таблице картами.
Для определения моментов восхода и захода Луны берётся
та страница таблиц, которая соответствует заданной дате, и из
неё выписываются требуемые моменты, соответствующие широте
пункта. Полученные таким образом моменты при пользовании
таблицами для западной части СССР являются московским дек-
ретным временем для меридиана 30° Е, а при пользовании табли-
цами для восточной части СССР хабаровским декретным време-
нем для меридиана 135° Е. Если заданный пункт находится вне
меридианов 30° Е или 135° Е, то к полученным моментам необхо-
димо добавить долготу пункта с её знаком, найденную, как ука-
зано выше. Кроме того, прибавляется поправка на долготу с её
знаком, выбираемую из дополнительной таблицы. Эта поправка
174
находится по аргументам: дата, долгота и широта пункта. Полу-
ченные после этого моменты будут представлять собой соответ-
ственно московское или хабаровское декретное время восхода и
захода Луны в заданном пункте для наблюдателя, на высоте
уровня моря. В случае надобности
с помощью дополнительных таб-
лиц определяют поправку на высоту
полёта.
Пример. Определить моменты восхода
н захода Луны в г. Чита 22 мая 19 . г. Вы-
сота полёта 2 000 м.
1. С приложенной карты снимается для
г. Чита широта 52° и долгота + 1 я. 28 м.
2. Из таблиц определяется восход и
заход Лупы для меридиана 135° Е.
3. По таблице определяется поправка :
Широта 22 мая понедельник
Восход Заход
52° 5.22 8=4-14° 20. ЗУ 8=4-17
долготу: для восхода +2 мин.; для.
захода 4 мин.
Восход
Дата Долгота от меридиана 135° Е во времени
1 ч. 20 м. 0 ч. 40 м. + 4-
2 ч. 00 м. +
20 мая 4-1 +1 +0
25 мая 5 3 2
Заход
Дата Долгота от меридиана 135° Е во времени
2 ч. 00 м. + 1 ч. 20 м. + 0 ч. 40 м. +
20 мая +7 +5 +2
25 мая 3 2 1
4. Определяются моменты восхода и захода Луны для наблюдателя на высоте
уровня моря:
Восход = 5 ч. 22 м. Заход = 20 ч. 39 м.
4-1 ч. 28 м. 4-1 ч. 28 м.
6 ч. 50 м. 22 ч. 07 м.
+ 2 м. 4- 4 м.
6 ч. 52 м. 22 ч. 11 м.
5. Определяется поправка за высоту:
Склонение Высота Широта q>
Луны 6 полёта 45° 50° 55° 60°
4-12° 2 9 10
4-16° 2 9 11
+20° 2 10 12
6. Определяются моменты восхода и захода Луны для высоты 2000 м:
Восход = 6 ч. 52 м. Заход = 22 ч. 11 м.
—10 м. +11 м.
6 ч. 42 м. 22 ч. 22 м.
Если время вылета назначено таким, что часть пути прихо-
дится на тёмное время суток, рассчитывают, в какой точке марш-
рута произойдёт встреча самолёта с темнотой (рассветом).
175
Темнота (рассвет) перемещается с востока на запад. Следо-
вательно, при полёте на восток самолёт и темнота (рассвет) будут
двигаться навстречу друг другу. При полёте на запад темнота
(рассвет) будет нагонять самолёт.
Порядок расчёта покажем на примере.
Пример. 20 мая в 17 ч. 30 м. по времени III пояса (по этому же времени
идут и бортовые часы) самолёт вылетел из Москвы в Свердловск. Предполагаемая
путевая скорость 280 км/час. Расстояние между Москвой и Свердловском 1 450 км.
Определяем моменты наступления темноты по поясному времени III пояса:
в Москве......................21 ч. 45 м.
в Свердловске.................20 ч. 25 м.
Таким образом, темнота будет встречать самолёт. Определяем остаток пути
самолёта к моменту наступления темноты в Свердловске.
Момент вылета 17 ч. 30 м., а темнота в Свердловске наступает в
20 ч. 25 м.. следовательно, к этому времени самолёт пройдёт
280 км/час -2 ч. 55 м.—820 км.
Остаток пути равен
1450—820 = 630 км.
Расстояние в 1 450 км темнота проходит за 1 ч. 20 и., откуда скорость
её движения равна 1 085 км/час.
Поскольку темнота движется навстречу самолёту, скорость сближения будет
равна:
1 085 + 280= 1 365 км/час.
В момент наступления темноты в Свердловске расстояние между самолётом
и темнотой равнялось 630 км. Следовательно, встреча произойдёт через:
А - 630 =28 мин
U7 - 1365
после наступления темноты в Свердловске, т. е. в 20 ч. 53 м. К этому моменту
пройденный самолётом путь будет равен 950 км.
При расчёте догона самолёта темнотой скорость сближения
находят как разность между скоростью перемещения темноты и
скоростью самолёта.
Время, через которое темнота настигает самолёт, определяется
как частное от деления расстояния, пройденного самолётом к мо-
менту наступления темноты в ИПМ, на скорость сближения.
Штурманский план полёта разрабатывается и проигрывается
перед полётом штурманом и лётчиком. Он необходим для успеш-
ного выполнения полёта. Тщательно подготовленный план полёта
позволяет применять наивыгоднейшие приёмы и способы навига-
ции, обеспечивающие успешное самолётовождение, предотвращает
принятие необдуманных решений и обеспечивает согласованность
действий экипажа в полёте.
Самолётовождение можно осуществлять различными спосо-
бами в зависимости от задачи полёта и навигационной обстановки,
определяемой видимостью или невидимостью земной (водной)
поверхности, характером местности (суша, море, равнина, горы),
количеством и характером ориентиров, временем года (лето, зима,
осень, весна) и временем сутск (день, ночь), видимостью или не-
видимостью небесных светил, высотой полёта (малая, средняя,
большая), дальностью полёта, наличием средств ЗОС, составом
176
экипажа (одноместный, двух- или многоместный самолёт), соста-
вом группы (одиночный самолёт, подразделение или часть), сте-
пенью совершенства пилотажно-навигационного оборудования са-
молёта, боевой задачей полёта (бомбометание, разведка, воздуш-
ное ф°Т0ГРаФиР°вание> штурмовые действия, воздушный бой,
выброска десанта и т. д.).
Основным способом самолётовождения в любом полёте
является самолётовождение по компасу. Оно допспняется соот-
ветственно обстановке: визуальной ориентировкой, радионавига-
цией, астрономическими определениями.
Разработка штурманского плана состоит в выборе наиболее
надёжных способов самолётовождения по основным этапам по-
лёта и способов бомбометания с учётом навигационной и метео-
рологической обстановки полёта.
В результате разработки штурманского плана полёта экипаж
должен точно представлять себе и знать: порядок и способ вы-
хода на ИПМ; способ выхода на курс следования; способы само-
лётовождения и контроля пути по этапам маршрута; порядок ра-
боты на контрольном этапе перед целью для подготовки исходных
данных для бомбометания, воздушного фотографирования и т. п.;
способ выхода на цель; способ бомбардирования цели и манёвра
в районе цели (на боевом курсе и при уходе от цели); способы
самолётовождения на обратном маршруте; способ восстановления
ориентировки в случае её потери при полёте к цели или обратно;
варианты маршрута и профиля полёта; запасную цель и запасный
аэродром в зависимости от погоды, тактической обстановки и ис-
правности материальной части самолёта.
Способ выхода на цель, метод бомбометания и направление
захода выбираются с учётом привязки к надёжным ориентирам,
простоты самолётовождения к цели, скрытности подхода к цели,
метеорологической обстановки и рельефа местности. При этом
особенно тщательно разрабатываются вопросы обеспечения паи
большей точности выхода на цель и надёжного возвращения на
аэродром посадки. При определении способов самолётовождения
учитывается необходимое время для навигационных расчётов, с вы-
делением возможно большего времени для наблюдения за назем-
ной и воздушной обстановкой. Необходимо предусматривать вза-
имный контроль одних способов самолётовождения другими, осо-
бенно в случае их недостаточной надёжности.
Результаты расчётов и составления штурманского плана в со-
кращённом виде заносятся в левую часть бортжурнала. Сюда
же заносятся результаты определения моментов темноты, рассвета,
восхода и захода Солнца, Луны.
Перед каждым полётом производится осмотр пилотажно-
навигационного оборудования. Во время осмотра устанавливается
наличие всех положенных приборов, надёжность их крепления,
внешняя исправность, наличие графиков и даты проверки девиа-
ции компаса, указателя скорости и высотомера. Обнаруженные
Дефекты устраняются. Штурман проверяет наличие и размещает в
кабине съёмное оборудование и личное штурманское снаряжение.
12 Учебник аэронавигации
177
Пример заполнения левой части бортжурнала
Предварительный расчёт полёта
Маршрут МК (МНУ) Н V W 8 t
ИПМ (Владимировка)
263° 1500 360 338 137 .25
Изгиб железной дороги
220° зооо 360 365 68 .11
Цель (ст. N)
73° 3400 420 430 57 .08
ИПОМ (Рубцова)
70° 3 400 400 410 103 .15
Еленовка
42° 2500 360 350 55 .10
КПМ (оз. Красное)
420 1ч. 09м
Всего по маршруту
Общая продолжит, полёта 1 ч 27 м.
Запас горючего на 2 ч. 30 м.
Не = 3 400 W6 = 430 1 = Х = БК =67 БУРИ = + 6 =
Приводные Светомаяки
Поз. ПР, 350 к'ц Поз. к ц Поз. к ц Темнота 21 ч. 10 м. Рассвет 5 ч. 15 м. № № № Восх. Луны Зах. Луны
Pq — 755 мм Ветер У земли— 110° 30 км!час
to=+ 18° Н = 3 400 — 140° 40 км, час
/н = Н = км] час
о
178
Обеспечение средствами ЗОС заключается в своевременной
заявке на их работу, получении подтверждения о том, что заявлен-
ные средства будут работать, и выяснении данных о средствах
ЗОС (дислокации, позывных, волнах, характере и времени работы).
Для проверки радионавигационных средств рекомендуется произ-
вести настройку их и прослушивание на земле перед полётом.
Перед вылетом экипаж обязан ознакомиться с состоянием
погоды по маршруту и прогнозом метеорологической станции.
Изучению метеорологических условий полёта штурман
должен уделять особое внимание, так как от хорошего знания
метеорологической обстановки и возможного её изменения зави-
сит успех полёта.
Метеорологические условия полёта выясняются путём личного
изучения метеорологических и аэрологических бюллетеней и карт
при консультации дежурного метеоролога.
Основные вопросы, подлежащие изучению, следующие: со-
стояние, характер и высота нижней границы облаков, особенно в
районе цели и аэродрома посадки к моменту прибытия самолёта
в данное место; характер, толщина облачного слоя и возможность
обледенения; состояние и характер барических систем, их движе-
ние, наличие и характер метеорологических фронтов, время и место
их встречи в пути; господствующие ветры и их тенденции; нали-
чие и характер туманов; наличие и возможность встречи в пути
с погодой, опасной для полёта (шквалы, метели, грозы и т. п.).
Затем необходимо записать в бортжурнал давление у земли в
получить метеорологический бюллетень. При наличии сведений о
ветре рассчитываются курс следования, путевая скорость и время
полёта.
ta«
ГЛАВА ПЯТАЯ
ВИЗУАЛЬНАЯ ОРИЕНТИРОВКА
§ 1. Общая и детальная ориентировка
Визуальной ориентировкой называется определение место-
нахождения самолёта по карте и местным предметам.
Различают ориентировку общую и детальную.
Общая визуальная ориентировка—это такой вид ориентировки,
при которой экипаж определяет своё местоположение относи-
тельно характерных ориентиров в пределах видимости с данной
высоты полёта. Взаимоположенпе этих ориентиров соответствует
взаимоположению их на карте. Детальная ориентировка — это та-
кой вид визуальной ориентировки, при которой экипаж опознаёт
мелкие ориентиры в пределах их видимости с данной высоты по-
лёта и может по земным ориентирам совершенно точно отметить
своё местоположение на карте. Визуальная ориентировка выпол-
няется сличением карты с местностью; при этом основным прави-
лом визуальной ориентировки является ориентирование карты по
компасу. Общую визуальную ориентировку ведут при помощи карт
мелкого масштаба (1:1 (№0 000, 1 : 1 500 000, 1 : 2 000 000), а ле-
тальную ориентировку по картам в масштабе 1 : 500 001), 1 : 200 000
или 1 : 100000.
Самолётовождение по земным ориентирам визуальной ориенти-
ровкой допустимо только при полёте вдоль характерных линейных
ориентиров, например, железной дороги, шоссе, реки или берега
миря, или над полем боя в сочетании с самолётовождением по
компасу. Во всех остальных случаях визуальная ориентировка при-
меняется как вспомогательное и контрольное средство в дополне-
ние к самолётовождению по компасу.
§ 2. Условия визуальной ориентировки
Основные элементы, определяющие условия визуальной ориен-
тировки, следующие: характер местности, видимость ориентиров,
высота и скорость полёта, обзор с самолёта и характер задания.
Характер местности' имеет первостепенное значение при опре-
делении условий визуальной ориентировки.
180
Различают пять наиболее характерных типов местности:
1. Районы, насыщенные крупными и характерными ориенти
рами (морское побережье, большие реки, крупные озёра). В таких
районах ориентироваться легко. Например, побережье Балтий-
ского моря, Крымского полуострова, районы, прибегающие к ре-
кам Волга, Днепр или озёрам Ильмень, Ладожское.
2. Районы со средним насыщением линейными и точечными
ориентирами (дороги, реки, озёра, населённые пункты). В таких
районах тоже легко ориентироваться. Например, районы Централь-
ной чернозёмной области, Полтавской области и т. п.
3. Районы с быльшим количеством однородных ориентиров
(густая сеть пересекающихся железных дорог, районы с многочис-
ленными мелкими озёрами, речками, населёнными пунктами), за-
трудняющих ориентировку. В качестве примеров можно привести
районы Донбасса с густо развитой сетью железных дорог, озёрный
край Омской области и т. п.
4. Горные районы бывают двух видов: горы с резко выражен-
ным рельефом (ущелья, большие вершины) и горы со сглаженным
рельефом. В горах первого вида ориентировку вести легче, чем
в горах второго вида. Олнако и в том и другом случаях условия
визуал.люй детальной ориентировки весьма трудны. Горы первого
вида преобладают у нас на Кавказе, в Средней Азии. Горы второго
вида имеются в ДВК в виде сопок.
5. В районах однородной природы (большие лесные и водные
пространства, пустыни), например, на севере в тундре, в сибирской
тайге или калмыцких степях, визуальная ориентировка почти ис
ключается, и для определения местонахождения самолёта в по-
лёте требуется применение других способов самолётовождения.
Большое влияние на успешность визуальной ориентировки
оказывает хорошая видимость ориентиров с самолёта. Неблагопри-
ятные метеорологические условия в полёте (туман, дымка, облач-
ность) ухудшают видимость ориентиров и затрудняют ориенти
ровку.
Весной и осенью, когда часть местности покрыта снегом, а
часть свободна от него, видимость ориентиров тоже неблаго-
приятна, так как пятна снега и земли сливаются в общий неясный
фон местности и затрудняют ориентировку.
Расположение ориентира между наблюдателем и Солнцем
также затрудняет его видимость.
Высота полёта сильно влияет на видимость ориентиров. С
больших высот в хорошую погоду дальность видимости крупных
ориентиров увеличивается, в то время как видимость мелких ориен-
тиров ухудшается. На малых высотах из-за больших угловых
п гремещений самолёта опознавание ориентиров затруднительно.
Наилучшей высотой для определения ориентиров с самолёта
является высота 1000—2000 м.
Скорость полёта ограничивает время, необходимое для опо-
знавания ориентиров, и тем самым у сложияет условия ориенти-
ровки. Увеличение скорости особенно затрудняет ориентировку на
малых высотах полёта и при ограниченной видимости. На боль-
181
ших и средних высотах увеличение скорости на условия визуаль-
ной ориентировки влияет незначительно.
Ниже приводится таблица, показывающая, каким временем
может располагать штурман для рассмотрения ориентира при полёте
со скоростью 360 км/час и 600 км/час на высотах от 50 до 10 000 м.
Высота в м 50 500 2 000 4 000 6 000 8 000 10 000
Время (V-360 км/час) 3,5 сек. 35,5 сек. 2 мин. 23 сек. 4 мин. 45 сек. 7 мин. 9 мин. 30 сек. Имин. 50 сек.
Время (Р-600 км/час) 2,2 сек. 22,5 сек. 1 мин. 26 сек. 2 мин. 50 сек. 4 мин. 12,сек. 5 мин. 41 сек. 7 мин. 10 сек.
Из таблицы видно, что на малых высотах это время настолько
мало, что изучить ориентир почти невозможно.
Местность, видимая с самолёта, может быть подразделена на
зоны, определяющие условия видимости ориентиров. Местные
предметы, лежащие в зоне, радиус которой равен удвоенной вы-
соте, хорошо различаются во всех деталях. Контуры ориентиров
можно различать в зоне, имеющей радиус, равный семикратной
высоте полёта. За пределами этой зоны видны только пятна
с неопределёнными очертаниями. Ухудшение метеорологических
условий в той или иной степени сокращает радиус видимости.
Успешности ориентировки способствует хороший обзор с са-
молёта. На некоторых самолётах ориентировка затрудняется огра-
ниченными углами обзора. Это предъявляет к летнему составу
требование уметь быстро и безошибочно сличать карту с мест-
ностью со своего рабочего места в самолёте, поэтому лётный
состав должен изучить особенности ориентировки на том типе са-
молёта, на котором предстоит выполнять полёты.
Требования к визуальной ориентировке зависят от характера
задания. Например, на маршруте при полёте в тыл противника
штурман' ведёт только общую ориентировку, уточняя ДМ лишь
у контрольных ориентиров. Выполнение боевых заданий на раз-
ведку, фотографирование или полёты в районе цели и над полем
боя требует тщательной детальной ориентировки.
§ 3. Ориентиры
Всякий предмет на земной поверхности или участок земной
поверхности, резко отличающийся от окружающей местности, види-
мый с самолёта, изображённый на карте и могущий служить для
определения местонахождения самолёта, называется ориентиром.
Ориентиры бывают линейные, площадные и точечные. Реки,
дороги, берега морей являются линейными ориентирами. Площад-
ные ориентиры — это такие ориентиры, которые занимают отно-
сительно большую площадь и выделяются своими контурами на
фоне местности, например, леса, крупные озёра, большие наев’
182
лённые пункты, группы мелких предметов и т. п. Точечными
ориентирами являются перекрёстки дорог, мосты, мелкие насе-
лённые пункты, отдельные строения, мелкие железнодорожные
станции без посёлков и т. п.
В зависимости от возможности использования в полёте для
определения местонахождения самолёта ориентиры подразде-
ляются на главные и второстепенные. Основным признаком, по ко-
торому судят о качестве ориентиров, является дальность их ви-
димости с самолёта и степень опознаваемости.
Главные ориентиры — это железные и шоссейные дороги,
озёра и реки, крупные и средние населённые пункты и железно-
дорожные станции, берега морей, отдельные высокие горы, от-
дельные площади леса в безлесном районе и т. д.
Второстепенные ориентиры — это грунтовые и просёлочные
дороги, отдельные строения, мелкие реки и озёра, мелкие насе-
лённые пункты и т. п.
В зависимости от времени года, насыщения района одно-
родными ориентирами, высоты и скорости полёта отдельные
ориентиры теряют качества главных ориентиров. Например, зимой
замёрзшие реки и озёра являются второстепенными ориентирами;
при большом насыщении 'местности железными дорогами по-
следние также теряют своё значение главных ориентиров.
Искусственные ориентиры — это специальные знаки, созда-
ваемые на местности службой ЗОС для помощи визуальной
ориентировки; например, фигурная распашка земли в виде буквы Т,
прямоугольника, круга, треугольника и т. п. Эти знаки распола-
гаются в известных лётному составу местах в районах наиболее
вероятных полётов.
§ 4. Характеристика ориентиров при наблюдении
со средних высот днём
Крупные населённые пункты с больших расстояний заметны
в виде тёмного бесформенного пятна, выделяющегося на обшем
фоне местности. При наблюдении их под небольшими углами
хорошо видны улицы, отдельные постройки.
Крупные населённые пункты различаются между собой нали-
чием линейных ориентиров и расположением самого пункта отно-
сительно этих ориентиров, а также по характеру построек, улиц,
общей конфигурации и наличию площадей с крупными зданиями.
Промышленные пункты можно обнаружить по густой дымке
над ними. Иногда дымка бывает- настолько густа, что скрывает
самый пункт.
Средние населённые пункты хорошо заметны благодаря
пёстрой окраске стен, домов и крыш. В зимнее время заметны
издалека дым из труб домов и общее серое пятно пункта на белом
фоне местности.
Мелкие населённые пункты различаются между собой обшей
конфигурацией, направлением главных улиц, часто являющихся
продолжением шоссейных или других дорог. Хорошо видны от-
дельные здания, церкви, мосты.
183
Отдельные мелкие пункты опознаются по расположению от-
носительно других ориентиров.
В пересечённой местности на общем фоне деревни почти
незаметны и плохо отличимы одна от другой.
Деревни, расположенные в лесу, заметить трудно. Отдельные
хутора (постройки сельского типа) видны, но опознать их можно
только при наличии поблизости других ориентиров.
Изображение хуторов на картах крупного масштаба иногда
не соответствует действительному их виду.
Большие реки являются лучшими ориентирами в летний
период. Они представляются в виде широкой, тёмной, извилистой
ленты. Хорошо видны все иогибы и повороты. Берега рок чётко
выделяются на фэне местности светлым тоном берегового песка
или благодаря окаймлению кустами и деревьями.
При солнечном освещении реки различаются на большом
расстоянии по блеску воды.
В зимнее время замёрзшие река видны очень плохо даже
с небольших расстояний. С высоты 3 000 м и более замёрзшие
реки с низкими отлогими берегами почти не видны. Замёрзшие реки
можно опознать по тени, образуемой высокими крутыми берегами.
Мелкие речки хорошо видны при наблюдении по вертикали
под самолётом и хуже — в стороны. Они выделяются в виде
темной, узкой, извилистой полоски. Заметны мелкие частые из-
гибы и более тёмная растительность по берегам. В некоторых
местах берега речек выделяются на местности благодаря наличию
деревьев или кустарника.
Речки в лесу заметны" только при пролёте над ними.
При большем количестве мелких речек различать их (затруд-
нителен о.
Озёра видны с больших расстояний. Они отличаются от
окружающей местности тёмной, широкой, ровной поверхностью
и резко выделяющимися берегами. Озёра служат отличными
ориентирами. При ссинечном освещении озёра выделяются бле-
ском воды.
В зимнее время озёра различаются только по теням от высо-
ких берегов и по сплошной белой площади, не имеющей расти-
тельности.
Железные дороги отличаются правильными линиями тёмного
цвета. С небольшой высоты различаются рельсы и шпалы.
Со средних высот железные дороги представляются тёмной по-
лоской, причём можно подсчитать количество путей.
Железные дсрогп при изменении направления всегда имеют
плавные закругления.
При персгек'гивном наблюдении заметен характерный дым
паровозов.
В лесу железные дороги заметны только при наблюдении по
вертикали. Новые железные дороги отличаются светлым тоном
насыпи. Зимой железные д'оропи выделяются колеёй тёмного
цвета.
184
Шоссейные дорсги служат хорошими ориентирами. Выде-
ляются на местности в виде полос серого цвета. В отдельных
местах шоссе обсажены с двух сторон деревьями. Шоссейные
дороги отличаются от железных дорог большей прямолинейностью'
и более крутыми поворотами. Новые шоссейные дороги не всегда
бывают нанесены на карты. В зимнее время имеют чёрный или
тёмносерый цвет.
Грунтовые дороги подразделяются на улучшенные (боль-
шаки, почтовые дороги) и просёлочные.
Большаки и почтовые дороги соединяют средние и крупные
населенные пункты и тянутся на довольно значительные расстоя-
ния. Имеют широкую колею, по внешнему виду зачастую незна-
чительно отличающуюся от шоссейных дорог.
Просёлочные дороги проложены между малыми населённым!*'
пунктами. Они часто меняют свои очертания и направления. По-
этому ориентировка по просёлочным дорогам затруднительна.
Зимой дороги имеют чёрный или серый цвет, благодаря чему
хорошо заметны на общем светлом фоне. Однако зимой часто
направления просёлочных дорог изменяются от их изображения
на картах.
Лес хорошо различается с больших расстояний. Хвойные леса
отличаются от общего фона местности тёмнозелёной окраской.
Лесные массивы в безлесном районе можно с успехом использо-
вать в качестве ориентиров. В районах с преобладанием лесных
площадей ориентироваться пс ним невозможно. Со средних высот
можно различать отдельные деревья. Кон гуры лесов не всегда
сходятся с изображением на картах. i
Осенью лиственный лес имеет жёлтую окраску, летом —
светло-зелёную. <
Торфяные разработки хорошо видны летом и облегчают об
щую ориентировку. Заметны в виде тёмной площади, разбитой
на правильные четырёхугольники. Обычно имеется узкоколейная
железная дорога.
Ниже приводится таблица дальности видимости ориентиров
в зависимости от высоты полёта, данные которой могут меняться
в зависимости от метеорологических условий.
Дальность видимости {в км) ориентиров з зависимости от высоты полёте
днём, в ясную погоду
Высоты м Ориентиры''-- 300 500 1 000 2 000 3 000 4 000 5 000 6 000 7 000 8 ОСС
Крупные на- селённые пункты 12 18 30 47 60 70 80 90 104 113
Малые насе- лённые пун- кты 5 7 12 23 32 41 50 60 70 82
Большие Реки . . . • 5 10 16 28 38 47 59 72 84 97
Малые реки 3 8 11 17 23 31 37 42 50 6С
185-
Высоты 'х в м Ориснтирых 300 500 1000 2 000 3 000 4 000 5000 6000 7000 8000
Железные дороги 5 8 12 17 20 24 28 33 37 42
Шоссе . . 5 9 15 22 27 34 42 50 60 72
Просёлоч- ные дороги 3 5 9 12 15 17 20 22 25 25
Озёра . . . 5 10 16 28 38 47 59 72 84 97
Леса . . . 5 10 15 28 37 45 52 60 70 78
§ 5. Приёмы визуальной ориентировки
При визуальной ориентировке возможны три случая:
1) вблизи самолёта виден характерный, легко опознаваемый
ориентир;
2) в стороне от самолёта видны легко опознаваемые ориен-
тиры;
3) в зоне видимости с самолёта нет ни одного легко опозна-
ваемого ориентира.
В первом случае, когда самолёт приближается к характер-
иому, легко опознаваемому ориентиру, место самолёта легко
определить сличением местности с картой.
Сличение местности с картой складывается из нескольких
приёмов, выполняемых в определённой последовательности.
Штурман ориентирует карту по компасу, определяет на ней
ограниченный район вероятного местонахождения самолёта, за-
тем, рассматривая на местности характерный ориентир, определяет
и запоминает его наиболее главные признаки: характер и количе-
ство линейных ориентиров, находящихся у изучаемого ориентира,
«онтуры ориентира и его положение относительно линейных
ориентиров. Изучив ориентир, штурман переносит взгляд на уча-
сток карты, ограниченный районом вероятного местонахождения
самолёта. Отыскав на карте изображение ориентира, штурман све-
ряет его с наблюдаемым ориентиром и, если результаты сличения
вызывают сомнения в достоверности опознанного ориентира, оты-
скивает на местности дополнительные признаки, которые вместе
с ранее замеченными убеждают штурмана в правильном опозна-
вании ориентира.
Во втором случае, когда в стороне от самолёта видны легко
-опознаваемые ориентиры, штурман, ориентировав карту по ком-
пасу и определив на ней ограниченный район местонахождения
самолёта, запоминает взаимное расположение видимых на мест-
ности ориентиров. Сличая наблюдаемые ориентиры с рас-
положением их на карте, оценивает достоверность определения
района местонахождения самолёта. Затем, глазомерно определив
направление и удаление опознанных ориентиров от самолёта, оце-
нивает примерное положение самолёта на местности (рис. 165) и
определяет его ла карте.
186
Определив примерное местоположение самолёта, штурман
уточняет местонахождение самолёта детальней ориентировкой по
мелким ориентирам.
В третьем случае, когда в зоне видимости с самолёта нет ни
одного легко опознаваемого ориентира, штурман определяет на
карте расчётное место прокладкой пройденного пути, после чего
ориентирует карту по компасу и сличает район расчётного места
самолёта с видимой местностью, стараясь по второстепенным
ориентирам определить своё местонахождение.
Успешное сличение карты
с местностью основывается ьа
умении быстро ориентировать
карту по компасу (по странам
света) и читать её, различать
на местности ориентиры и
их детали в любых условиях
полёта, подмечать характер-
ные отличительные признаки
ориентиров, запоминать зри-
тельно ориентир и совокуп-
ность его деталей, отождест-
влять зрительное впечатление
с условными знаками ориен-
тиров на картах любых мас-
штабов и проекций, глазомер-
но оценивать расстояния и на-
правления между ориенти-
рами и их деталями.
Визуальная ориентировка
не будет потеряна, если штур-
ман имеет достаточные навы-
ки и строго последовательно bi
тировки.
Рис. 1G5. Определение ДМ обратными
засечками ориентиров, видимых с
самолёта
олняет правила визуальной ориен-
Самолётовождение вдоль линейного ориентира или по одно-
временно видимым с самолёта нескольким крупным характерным
ориентирам осуществляется визуальной ориентировкой. В этих
случаях штурман непрерывным сличением карты с местн'остью
устанавливает правильность направления видимого ориентира отно-
сительно заданного маршрута, после чего направляет самолёт на
видимый ориентир. Подобное самолётовождение по земным ориен-
тирам осуществляется в сочетании с элементарным самолётовож-
дением по компасу, т. е. определением направления по компасу и
времени полёта.
Опыт самолётовождения в различных условиях свидетель-
ствует, что для сохранения визуальной ориентировки штурман
должен тщательно готовиться к полёту, выполняя все указания
Наставления по штурманской службе и старших командиров. Осо-
бенное внимание необходимо уделять изучению района полёта.
Нельзя упускать ни одной «мелочи», так как кажущаяся с пер-
187
вого взгляда «мелочь» может привести к потере ориентировки
или значительному уклонению от заданного маршрута.
При визуальной ориентировке штурман ведёт запись курсов
и времени полёта на случай необходимости восстановления ориен-
тировки. Во время полёта он должен твёрдо знать, какой ориентир
находится справа, слева, сзади и впереди или севернее, южнее,
восточнее и западнее.
Если в полёте от штурмана требуется сохранение общей
ориентировки, то он только периодически уточняет её деталь-
ным опознаванием местности. Опознав ориентир под самолётом, т. е
действительное место самолёта (ДМ), штурман отмечает этот
ориентир крестиком размером около 1 см и записывает время его
пролёта в часах и минутах.
Штурман должен сохранять визуальную ориентировку незави-
симо от своего места в строю, т. е. летит ли он ведущим или
ведомым, так как в любой момент (особенно при выполнении
боевого задания) может возникнуть необходимость в самостоя-
тельном самолётовождении.
Переходить к картам другого масштаба следует только
у опознанных ориентиров, изображённых на обеих картах.
Штурман, правильно распределяющий своё внимание при
визуальной ориентировке, обозревает местность впереди и по сто-
ронам самолёта, насколько позволяют условия видимости. За-
метив ориентир далеко впереди, не сосредоточивает внимания
только на нём, а старается найти и опознать другие ориентиры,
находящиеся впереди и пс» сторонам.
ГЛАВА ШЕСТАЯ
САМОЛЁТОВОЖДЕНИЕ ПО КОМПАСУ
§ 1. Сущность самолётовождения по компасу
Самолётовождение по компасу лежит в основе всех полётов
в самых разнообразных условиях. Умелое самолётовождение по
компасу позволяет экипажу, независимо от наличия ориентиров,
точно выводить самолёт на Цель.
Самолётовождение по компасу позволяет выполнять полёты
любой дальности при возможности периодически измерять навига-
ционные элементы по видимой земной поверхности и пролетать
значительные расстояния при невидимости земли.
Наиболее удобны для самолётовождения по компасу при
небольших маршрутах карты крупного масштаба (1:200 000 и
1 :500 000), позволяющие одновременно вести визуальную деталь-
ную ориентировку; при больших маршрутах выгоднее применять
карты более мелкого масштаба (1 : 1 000 000 и 1 :2 000 000).
Самолётовождение по компасу заключается в следующем:
зная заданный путевой угол и скорость и направление ветра, рас-
считывают компасный курс следования для первого участка марш-
рута. С рассчитанным компасным курсом следования самолёт от-
ходит от ИПМ и следует по намеченной линии пути. Лётчик сохра-
няет заданный курс, скорость и высоту полёта. Штурман периоди-
чески определяет местонахождение самолёта счислением пути и
сличением карты с местностью.
В случае отклонения самолёта от линии пути в курс следо-
вания вводят необходимые поправки. Точность самолётовождения
по компасу зависит от умения лётчика сохранять заданный режим
полёта, от точности навигационных измерений и расчётов штур-
мана, своевременного учёта изменений ветра в пути и правильной
выверки навигационного оборудования.
Самолётовождение по маршруту, независимо от характера
боевого задания, выполняется всегда в определённом порядке.
Основной порядок работы экипажа по самолётовождению заклю-
чается в следующих последовательно выполняемых этапах:
— выход на исходный пункт маршрута (ИПМ);
— выход на линию заданного пути;
— контроль пути;
— > исправление пути при обнаруженных уклонениях;’
189
— подготовка навигационных данных для выполнения боевой
задачи полёта;
— выход на цель;
— выход на исходный пуйкт обратного маршрута (ИПОМ);
— контроль и исправление обратного пути;
— выход на конечный пункт маршрута (КПМ).
Практически считают, что при средних условиях, когда есть
возможность измерять угол сноса для исправления курса следо-
вания и W — для уточнения расчётов времени, точность самолёто-
вождения составляет в среднем 3°/о от длины пройденного пути,
а при отсутствии видимости земной поверхности — около 5%.
Вследствие непостоянства скорости и направления ветра эта
точность самолётовождения получается только при небольших
расстояниях (200—250 км), если отсутствует видимость земли.
Важнейшим условием успешного самолётовождения по ком-
пасу является выполнение полёта только определёнными курсами.
Произвольные необоснованные изменения курса и хождение по
кривым с непостоянным курсом совершенно недопустимы.
В этом случае должен быть осуществлён немедленный пере-
ход на визуальную ориентировку. В противном случае ориенти-
ровка может быть утеряна, и восстановление её прокладкой прой-
денного пути станет невозможным.
§ 2. Порядок самолётовождения по компасу
После того как стало известным направление взлёта, штур-
ман уточняет с лётчиком манёвр для подхода к исходному пункту
маршрута и курс следования к нему. Заняв своё место в кабине,
штурман устанавливает стрелки высотомера на нуль, записывает
в бортовой журнал давление и температуру воздуха, направление
ветра у земли, приводит в готовность оборудование и личное
штурманское снаряжение и при получении старта записывает
в бортжурнал время взлёта.
Отойдя от аэродрома, лётчик по указанию штурмана выводит
самолёт на ИПМ; штурман одновременно 'производит промеры,
необходимые для расчёта курса следования. Во время промеров
штурман и лётчик следят за ориентировкой. К моменту подхода
к исходному пункту маршрута штурман сообщает лётчику ком-
пасный курс следования. Проходить через ИПМ необходимо с воз-
можно большей точностью. В момент прохода ИПМ штурман
записывает время, курс, высоту и скорость полёта.
Пройдя исходный пункт маршрута, штурман должен прове-
рить визуально правильность общего направления полёта во избе-
жание грубых ошибок. Вслед за этим штурман измеряет угол
сноса и в случае необходимости доводит курс следования до
требуемой величины.
Установив правильный курс следования, штурман должен
рассчитать время прохода очередного контрольного ориентира.
Расчёт выполняется по путевой скорости, снятой с ветрочёта,
190
и уточняется пролётом контрольного этапа, намеченного в начале
пути, или другим способом.
Рассчитав время, штурман проверяет правильность выполняе-
мого пути детальной ориентировкой, отмечая «а карте крестиком
с указанием времени каждый достоверно опознанный ориентир
(отметка ДМ). Наблюдает за сохранением режима полёта и перио-
дически измеряет угол сноса для определения фактического
путевого угла. При плохих условиях ориентировки или неустой-
чивой погоде угол сноса промеряется через каждые 15 минут
полёта, а при благоприятных условиях — через 20—25 минут.
При подходе к контрольному ориентиру штурман сверяет
показание часов с расчётным временем и в результате детальной
ориентировки отмечает на карте действительное место самолёта.
Если ориентир пройден с отклонением, штурман исправляет
курс следования для точного выхода на следующий контрольный
ориентир. При большом боковом уклонении штурман прокладывает
на карте новую линию пути и рассчитывает курс следования
Результаты расчётов штурман записывает в бортовой журнал.
Дальнейшее самолётовождение, от одного до другого кон-
трольного ориентира, осуществляется подобным же образом.
В зависимости от задания штурман определяет время прибы-
тия «а цель и производит предусмотренный навигационным пла-
ном манёвр для погашения опережения или опоздания. Подходя
к контрольному этапу перед целью, штурман заранее рассчиты-
вает курс, скорость и высоту и добивается возможно точного
пролёта над входным ориентиром контрольного этапа. По данным
пролёта контрольного этапа штурман рассчитывает ветер и дру-
гие элементы, необходимые для выполнения боевого задания. При
отсутствии ориентиров для выполнения контрольного этапа нави-
гационные элементы уточняются другими приёмами.
При подходе к цели штурман принимает меры для возможно
более точного выхода «а цель, переходит на детальную ориен-
тировку, одновременно проверяя курс и время. Выполнив задачу,
экипаж выходит на исходный пункт обратного маршрута (ИПОМ).
От ИПОМ до КПМ самолётовождение производится таким же
порядком, как от ИПМ до выхода на цель. .
§ 3. Выход на ИПМ
Выход на ИПМ может осуществляться тремя приёмами: по-
земным ориентирам, по компасу с курсом, рассчитанным на земле
и по точке ЗОС, установленной в ИПМ.
Выход на ИПМ по земным ориентирам
Выход на ИПМ по земным ориентирам применяется при
наличии на пути от аэродрома до ИП/М хороших ориентиров,
знакомых штурману или лётчику. Самолётовождение осущест-
вляется сличением карты с местностью или направлением само-
лёта от одного известного экипажу напамять ориентира к другому.
19)
В обоих случаях направление полёта контролируется с помощью
компаса и часов. Простота и надёжность, особенно при отличном
знании района полёта, сделали этот способ наиболее распростра-
нённым.
Выход на ИПМ по компасу
Выход на ИПМ по компасу применяется в случае, если
штурман имел на земле до вылета сведения о ветре. Для осу-
ществления выхода штурман рассчитывает курс следования и
время полёта от аэродрома до ИПМ. Запись этих данных на
карте и в бортжурнал не делается. В полёте, выполняя рассчитан-
ный курс, штурман дублирует ориентировку сличением карты
с местностью. Способ этот наиболее применим в ночных полётах
или при отсутствии на местности ориентиров.
Выход на ИПМ по точке ЗОС
Выход На ИПМ по точке ЗОС требует наличия в ИПМ радио-
навигационной точки или светомаяка (ночью).
Выход на ИПМ по светомаяку производится визуально, а по
радионавигационной точке — одним из способов, изложенных в
главе 7. Эти способы наиболее применимы в сложных метеороло-
гических условиях и ночью.
§ 4. Выход на линию пути
В зависимости от навигационной обстановки полёта приме-
няются следующие способы выхода на линию пути:
1) с расчётом курса следования по шаро-пилотным данным;
2) с определением курса по боковому уклонению;
3) подбором курса по углу сноса;
4) с расчётом курса по ветру, измеренному в полёте на пути
ст аэродрома к ИПМ;
5) подбором курса по линейному ориентиру;
6) подбором курса по створу ориентиров;
7) использованием радионавигационных средств, установлеи-
•чых в ИПМ, на маршруте или в створе линии пути (см. главу 7).
Выход на линию пути по шаро-пилотным данным
Для выхода на линию пути по шаро-пилотным данным штур-
ман получает перед полётом сведения о ветре на тон высоте, на
которой предполагается полёт. Ветер должен быть определён не
ранее чем за час до полёта.
Получив шаро-пилотные данные, штурман рассчитывает ком-
пасный курс следования, угол сноса и путевую скорость. Резуль-
таты расчёта записывает в бортжурнал.
192
В полёте штурман берёт рассчитанный компасный курс и
с этим курсом проходит над ИПМ. К этому же времени лётчик
устанавливает скорость и высоту полёта соответственно расчёт-
ным данным. Ввиду того, что с момента определения ветра до
вылета ветер может измениться, рассчитанный курс может ока-
заться неточным, 'и самолёт будет отклоняться от заданной линии
пути. Поэтому штурман сейчас же после
проста ИПМ приступает к контролю
пути, в первую очередь уточняя угол
сноса и путевую скорость.
Положительное качество этого спо-
соба заключается в том, что данные для
полёта могут быть рассчитаны заблаго-
временно, и во время выхода на курс
следования штурман может уделить
больше внимания визуальной ориенти-
ровке. Применяется этот способ в полё-
тах на малых и средних высотах.
Выход на линию пути с определением
курса по боковому уклонению
Выход на линию пути по боковому
уклонению наиболее выгоден по точно-
сти и простоте выполнения. Порядок вы-
хода на линию пути этим способом сле-
дующий:
1) перед полётом на маршруте наме-
чают характерный ориентир на удалении
30—70 км от ИПМ (рис. 166);
2) в полёте берут курс, равный за-
данному путевому углу;
3) в момент прохождения ИПМ за-
Рис. 166. Выхот на путь
по боковому уклонению
писывают время и пускают секундомер;
затем, не меняя курса, ведут детальную
ориентировку, измеряют угол сноса и
средний курс;
4) выйдя к контрольному бриентиру, останавливают секундо-
мер, отмечают точное место выхода и записывают время.
На основании величины бокового ‘уклонения и пройденного
расстояния определяют угол сноса и берут новый курс следования
с упреждением на снос. Угол сноса может быть также определён
как разность среднего курса и ФМПУ. При большом боковом укло-
нении следует взять поправку для его погашения к моменту вы-
хода на очередной контрольный ориентир. По времени полёта и
фактически пройденному расстоянию рассчитывают путевую ско-
рость.
Положительным качеством этого способа является то, что он
позволяет лететь к ИПМ с набором высоты. Способ весьма
прост, точен и особенно удобен, когда на борту самолёта отсут-
13 Учебник аэронавигации
193
ствует штурман, а также при длительных маршрутных полётах. Он
применим во всех случаях, кроме полётов в безориентирной мест-
ности (море, тайга, пустыня).
Рис. 1G7. Выход на путь
подбором угла сноса
Выход на линию пути подбором курса по углу сноса
Выход на линию пути подбором курса по углу сноса выпол-
няется на основании известного равенства: ФМПУ = ФЛ1К+!?
следующим образом.
Исходный пункт маршрута проходят с курсом, равным задан-
ному путевому углу, или с учётом угла сноса, определённого глазо-
мерно (рис. 167). Ввиду того, что у ско-
ростных самолётов угол сноса большей
частью бывает не более 3—6°, штурман
ещё на земле, до вылета, зная прибли-
жённо направление и скорость ветра, мо-
жет определить поправку на угол сн’оса.
При пролёте ИПМ штурман записы-
вает время и измеряет угол сноса. Сло-
жив угол сноса с курсом и получив та-
ким образом фактический магнитный пу-
тевой угол (ФМПУ), штурман сличает
его с заданным (ЗЛШУ): если ФМПУ
больше ЗМПУ, то курс следования он
уменьшает на величину разности между
ФМПУ и ЗМПУ; если ФМПУ меньше
ЗМПУ, то увеличивает курс на разность
ФМПУ—ЗМПУ. Иначе говоря, к ЗМПУ
необходимо прибавить измеренный угол
сноса с обратным знаком.
После исправления курса штурман
снова измеряет угол сноса, определяет
ФМПУ и сравнивает с ЗМПУ. Если раз-
ность между заданным и фактическим
путевыми углами не превышает 2е, курс
можно считать подобранным. В против-
ном случае курс подбирают до тех пор.
пока разность ЗМПУ — ФМПУ не будет
превышать 2°.
При современных воздушных скоростях обычно бывает доста-
точно одного, в редких случаях двух исправлений курса. Этот
способ позволяет лететь к исходному пункту маршрута с набором
высоты. Недостаток способа заключается в том, что штурман дол-
жен отрываться от детальной ориентировки при измерениях углов
сноса.
Данный способ получил широкое применение в любых усло-
виях дневного полёта при видимости земли, особенно при необхо-
димости набирать высоту по маршруту и отсутствии щаро пилот-
ного ветра.
194
Прикер. Заданный магнитный путевой угол 40° После пролёта ИПМ штур-
ман измерил угол сноса 4-6° при курсе самолета 4Г. Следовательно, самолёт
летел с ФМПУ, равным
41е -f-б' = 47°.
Так как разность между ЗМПУ — 40’ и ФМПУ = 47° составляет -|-7о, то
штурман уменьшает курс следования на 7°. Прл новом Kvpce 33J угол сноса
оказался 4- 9° и таким образом ФМПУ = 42'. Окончательный курс следования
следует взять 31е, так как ФМПУ превышает ЗМПУ на 2°.
Выход на линию пути с определением ветра в полёте
Выход на линию пути с определением ветра в полёте приме-
няется, когда есть возможность определить ветер до ИПМ по
двум углам сноса, в условиях полёта в безориентирной местности,
при ломаном маршруте и манёвром «зигзаг» на прямом маршруте
(рис. 168).
Рис. 168. Манёвр «зигзаг* при измерении углов сноса
В первом случае над ИПМ самолёт должен пройти с курсом
следования, рассчитанным по ветру, измеренному до ИПМ.
Записав время пролёта ИПМ, штурман измеряет третий угол
сноса. По третьему углу сноса уточняет точку ветра и курс
следования.
Недостаток этого способа состоит в необходимости набирать
заданную высоту в районе аэродрома и удлинении 'пути при про-
мерах. Вообще же этот способ достаточно точен и поэтому при-
меним в полётах при отсутствии ориентиров на местности.
В полёте по ломаному маршруту выход на второй курс (после
первого излома пути) может быть выполнен путём его расчёта по
ветру, уточнённому измерением утла сноса на втором курсе.
Выход на линию пути по линейному ориентиру
Данный способ применяется в дневном полёте, при хорошей
видимости, когда на местности имеется прямолинейный ориентир,
направление которого совпадает с заданной линией пути (рис. 169).
Самолёт направляют вдоль линейного ориентира и полёт со-
вершают, не уклоняясь от него в стороны. При наличии бокового
13*
195
ветра, для того чтобы держать самолёт вдоль ориентира, прихо-
дится отклонять его продольную ось на ветер. Отворачивают са-
молёт постепенно, по 2—3°, добиваясь совпадения линии
пути с линейным ориентиром. После этого замечают курс по ком-
Рис. 169. Выход на путь по линейному
ориентиру
пасу и ведут самолет по
этому курсу.
Выход на линию пути,
по створу ориентиров
Этот способ выхода
на линию пути может
быть применён в тех слу-
чаях, когда на заданной
линии пути вблизи исход-
ного пункта маршрута
есть один’ или два харак-
терных ориентира, обра-
зующих створ с ИПМ
(рис. 170).
Ориентиры выбирают с таким расчётом, чтобы расстояние
между ними позволяло при приближении к одному из ориентиров
видеть другой. Это расстояние зависит от высоты полёта, однако
в среднем это расстояние должно быть не меньше 10 км.
Манёвр выполняется следующим образом. На линию створа
выходят за 3—6 км до первого ориентира (ИПМ) и направляют
самолёт так, чтобы створные ориентиры находились на одной ли-
нии, а самолёт не сходил с линии створа. Если дальний ориентир
уходит вправо, курс необходимо изменить влево и выйти снова на
линию створа; если же ориентир уходит влево, — курс изменить
вправо.
196
Для более быстрого выхода на линию пути, зная приближённо
направление ветра, сразу же направляют ось самолёта под неко-
торым углом к линии пути. Добившись положения, при котором
самолёт будет следовать по линии створа, замечают показание
компаса и в дальнейшем ведут самолёт с этим курсом.
При наличии третьего ориентира его используют для уточне-
ния курса.
Этот способ применяется при хорошей видимости.
Створные ориентиры следует выбирать по карте в масштабе
1 : 200 000 или 1 : 500 000. При выборе створа по карте в масштабе
1 : 1 000 000 могут получиться ошибки в определении путевого
угла.
Пролёт створа ориентиров можно использовать для расчёта
путевой скорости: для этого следует отмечать время пролёта
створных ориентиров и знать расстояние между ними
Особое значение этот способ имеет в ночных полётах, когда
в качестве створных ориентиров используются прожекторы, фары
автомашин, костры или специальные огни средств ЗОС, а также
при наведении самолётов на ближние цели. При использовании
прожекторов их лучи направляют под небольшими углами к гори-
зонту по направлению заданной линии пути. Использование таких
лучей прожекторов значительно облегчает правильный подбор
курса следования.
§ 5. Контроль пути
Когда ветер непостоянен или лётчик неточно выдерживает
режим полёта, самолёт уклоняется от заданной линии пути. Это
может происходить даже в тех случаях, если курс следования
и путевая скорость были вначале определены правильно. Если же
курс следования и путевая скорость уже в начале пути были опре-
делены Неточно, то уклонение самолёта от заданной линии пути
может достигнуть большой величины.
Для того чтобы правильно вести самолёт по заданной 'линии
пути, необходимо своевременно обнаруживать уклонения от за-
данного маршрута и исправлять эти уклонения. Это достигается
контролем пути в течение всего полёта.
Таким образом, контроль пути служит для проверки соответ-
ствия фактического 'пути самолёта заданному маршруту.
Контроль пути в несложных условиях полёта выполняется
простыми способами: визуальной ориентировкой и компасной на-
вигацией. В случае отсутствия видимости земли и при полётах
над безориентирной местностью контроль пути и определение ме-
стонахождения самолёта компасной навигацией дублируют спосо-
бами радио- и астрономической ориентировки.
Контроль пути способом компасной навигации заключается
в наблюдении за сохранением заданного режима полёта, измере-
нии угла сноса, путевой скорости и ветра, прокладки пути и пе-
ленгации ориентиров.
Какой из перечисленных способов и приёмов следует приме-
нить в каждом конкретном случае, решает штурман в зависимости
197
от условии полёта. Приёмы контроля пути компасной навига-
цией неравноценны. Одни из них дают возможность контролиро-
вать фактический путевей угол самолёта (контроль по направле-
нию), другие позволяют определять фактически пройденное рас-
стояние (контроль по дальности), третьи — определять расчётное
место самолёта, т. е. одновременно контролировать полёт и по на-
правлению и по дальности.
Одним из условий правильного полёта по компасу является
постоянный контроль за сохранением режима полёта. Как правило,
показания компаса, указателя скорости и высотомера в полёте всё
время изменяются. Поэтому лётчик должен так пилотировать са-
молёт, чтобы отклонения показаний приборов от заданных величии
были минимальными и, самое главное, чтобы среднее показание
приборов соответствовало заданным величинам. Штурман ведёт
постоянное наблюдение за показаниями приборов и определяет
среднее значение показаний.
Если заданный курс не выдерживается, то можно ожидать
уклонения самолёта от заданной линии пути. Увеличение воздуш-
ной скорости влечёт за собой увеличение путевой скорости и, сле-
довательно, преждевременное, против расчётов, прибытие к ориен-
тиру. При уменьшении воздушной скорости путевая скспость
уменьшится, и самолёт прибудет к ориентиру позже расчётного
момента. Поэтому необходимо проверять соответствие фактиче-
ской скорости по прибору заданной расчётной воздушной скоро-
сти Изменение высоты полёта может влиять на величину воздуш-
ной скорости, если лётчик изменяет высоту полёта, но сохраняет
ту же скорость по прибору. При изменении высоты меняется ве-
тер и, следовательно, ранее установленный курс следования бу-
дет не годен для дальнейшего пути, а путевая скорость не будет
соответствовать фактической.
Одной из основных причин отклонения самолёта от заданного
маршрута является изменение ветра. Если в пути изменится ве-
тер, то даже при условии сохранения курса следования фактиче-
ский путевой угол не будет соответствовать заданному путевому
углу вследствие изменения угла сноса.
Контроль пути измерением угла сноса является весьма распро-
странённым способом, обеспечивающим выполнение заданного
маршрута по направлению.
Для контроля пути угол сноса измеряют во всех полётах при
видимости земли, особенно над местностью, бедной ориентирами.
Частота измерения угла сноса зависит от обстановки полёта. При
неустойчивой погоде, изменении ветра и плохих условиях ориенти-
ровки угол сноса измеряют чаще, не реже чем через 15 минут
полёта. В благоприятных условиях измерение угла сноса произво-
дится через 20—25 минут. Так как при измерении угла сноса мо-
жет быть допу)щена ошибка в 1—2J, то при контрольных промерах
обращают внимание на систематическое расхождение измеренного
угла сноса от принятого в расчёт.
Наблюдение за углом сноса решает задачу контроля пути
только по направлению. Для того же, чтобы определить своё
198
местонахождение, необходимо знать расстояние, пройденное за
время полёта от последнего ориентира. '
Пройденное расстояние определяется на основании путевой
скорости и времени полёта (счисление пути). Путевую скорость
контролируют или периодическими измерениями визиром, пли про-
лётом контрольного этапа, или по отметкам ДМ (действительное
место). Так же, как и при контроле углов сноса, делают несколько
промеров путевой скорости, и если средняя величина её значи-
тельно отличается от предыдущей, то пересчитывают время при-
лёта к контрольному ориентиру.
Контрольные промеры ветра штурман делает не реже чем че-
рез 40 минут полёта и при обнаружении резких изменений угла
сноса или путевой скорости.
Лучше всего определять ветер по углу сноса и путевой ско-
рости на контрольном этапе. В случае отсутствия ориентиров ве-
тер можно определить по углу сноса и путевой скорости, измерен-
ной кинематическим способом, пли по трём углам сноса, применяя
способ «зигзаг».
Более точно угол сноса определяют по отметкам ДМ. Не-
сколько отметок ДМ позволяют прочертить на карте линию фак-
тически выполненного пути, определить фактический путевой угол
и, зная средний курс, найти значение угла сноса.
Определив значение вектора ветра, штурман рассчитывает но-
вый курс следования и путевую скорость.
В тех случаях, когда определение места самолёта непосред-
ственным сличением карты с местностью невозможно, местополо-
жение самолёта может быть найдено графическим построением,
по элементам движения самолета.
Данный способ, называемый прокладкой пути, состоит в опре-
делении на карте расчётного места самолёта.
Исходные данные для прокладки следующие: продолжитель-
ность полёта от последнего опознанного ориентира, фактический
путевой угол и средняя путевая скорость на данном курсе. Про-
кладка пути состоит в том, что штурман наносит на карту напра-
вление линии пути и по ней откладывает от последнего ориен-
тира расстояние, рассчитанное по V/ и времени полёта от данного
ориентира. Получаемая точка есть РМ самолёта (расчётное
место)
Расчётное место самолёта определяется также штилевой про-
кладкой. Для этого необходимо знать курс следования, продол-
жительность полёта на этом курсе и величину вектора ветра. Для
выполнения прокладки штурман от последнего ДМ наносит на
карту направление курса самолёта и поэтому направлению откла.
дывает величину воздушного пути самолёта на этом курсе. В ре-
зультате на карте получают «штилевую точку», в которой должен
находиться самолёт, если бы не было ветра.
От штилевой точки откладывают в направлении среднего
ветра отрезок, равный по величине смещению самолёта ветром за
время полёта от. последнего действительного места до момента
определения расчётного места Способ штилевой прокладки выго-
199
ден при прокладке ломаного пути, так как влияние ветра учиты-
вается однажды за всё время полёта.
Величину смещения вычисляют аэронавигационной счётной
линейкой, устанавливая треугольный индекс на скорость ветра,
и против времени читают искомое смещение. Конец отложенного
отрезка даёт на карте расчётное место самолёта.
Определение РМ прокладкой необходимо для проверки ви-
зуальной ориентировки, когда штурман не вполне уверен, что
наблюдаемый им ориентир действительно в данный момент полёта
Рис. 171. Ошибки прокладки пути
находится в зоне видимости, и для восстановления ориентировки,
когда по карте визуально не удаётся определить район место-
нахождения самолёта.
Прокладку пути обязательно выполняют при полётах в без-
ориентирной местности, вне видимости земли (в облаках, за
облаками) и ночью. В этих случаях прокладка пути выполняется
систематически через небольшие промежутки времени.
Определение расчётного места прокладкой базируется на зна
нии путевой скорости и путевого угла (или вектора ветра).
Допустим, что в полёте вели счисление времени t от пункта А
(рис. 171). Тогда можно определить расстояние S, пройденное са-
молётом от этого пункта для некоторого момента времени
5= Wt.
Точка М\ будет расчётным местом самолёта, определённым
по путевому углу а и путевой скорости W, но так как фактиче-
ская путевая скорость была W -ф- А IV, а путевой угол а -ф- Аа, то
действительно пройденное расстояние от пункта А за время t
будет
S-J- AS=(U7-|-AlV)f.
Откладывая это расстояние от точки А, получим действитель-
ное место самолёта Л1. Линейную ошибку Л4Л11 в определении
расчётного места самолёта можно рассматривать в виде двух её
составляющих: уклонения по дальности AS и бокового укло-
200
нения Ad. Легко видеть, что уклонение по дальности AS—AW7,
а боковое уклонение Ad — Ao.S (ввиду малости Аа). Считая тре-
угольник mMtM прямоугольным, получаем полную ошибку счисле-
ния МАЦ за время t:
МЛЦ = /А W-t~ + Aa'S2 = / /А VP + Да2 IP.
Примем
A IV= 4- 8 км/час, Аа -f- 2е = -j- 0,035; Uy = 270 км/час.
Тогда для ошибки прокладки пути за промежуток времени t
получаем:
МАЦ = 12,4t,
где ММ, выражено в км, t — в часах.
На основании изложенного можно считать, что расчётное ме-
сто самолёта будет находиться внутри круга вероятного местона-
хождения, радиус которого равен максимально возможному зна-
чению ошибки МАЦ, определяемой формулой
МАЦ = 12,4/.
В качестве примера приводим таблицу точности расчётного
места самолёта при путевой скорости 270 км/час и пройденном
пути от 270 до 1 350 км.
Контроль пути визуальной пе- ленгацией применяется в случае от- сутствия ориентиров и визирных то- Пройденный путь в км Продолжи- тельность полёта в Точность РМ в км
чек непосредственно под самоле- часах
том и наличия их в стороне.
Сущность пеленгации заклю- 270 1 12,5
чается в определении места само- 810 3 25,0 37,0
лета или его позиционной линии, 1080 4 49,5
т. е. линии на карте, на которой 1350 5 62,0
находится место самолёта в момент
пеленгации. Визуальная пеленгация
осуществляется путём измерения с самолёта пеленгов, створов и
вертикальных углов земных ориентиров. Проложенные на карте
или бумаге линии пеленга, створа или равных вертикальных углов
есть позиционные линии.
Если одновременно определить обратные пеленги (ИОП) двух
ориентиров и провести на карте линии пеленгов, то на их пересе-
чении будет расчётное место самолёта (рис. 172), так как самолёт
по условию, должен находиться одновременно на обеих линиях.
В действительности же между пеленгованием первого и второго
ориентиров проходит некоторый промежуток времени, поэтому
линии пеленгов относятся к различным моментам времени и точка
пересечения их не будет соответствовать действительному месту
самолёта. Чтобы избежать такого рода погрешности, следует один
из- ориентиров (более дальний) пеленговать два раза: до и после
пеленгации другого ориентира, и брать ИОП как среднее из этих
201
двух пеленгов. Таким образом можно уничтожить ошибку в пе-
ленге первого ориентира.
Устранение погрешности, образующейся за счёт неодновре-
менного пеленгования двух ориентиров, можно выполнить также
путём переноса на карте первоначально измеренного пеленга по
направлению курса самолёта на расстояние, равное произведению
скорости самолёта на время между двумя пеленгованиями.
Рас. 173. Определение РМ по пеленгу и створу
Следует заметить, что вследствие наличия ошибок в опреде-
лении курса и курсового угла получают РМ не в виде точки,
а в виде некоторого района, величина которого зависит также от
угла пересечения линий пеленгов. Для уменьшения величины этого
202
района не следует пеленговать такие ориентиры, линии пеленгов
которых пересекаются под острыми или тупыми углами. Имея
возможность определить линию пеленга и створа ориентиров одно-
временно, можно определить расчётное место самолёта (рис. 173).
Определив пеленг и дистанцию (по вертикальному углу и вы-
соте) какого-либо одного ориентира, получают две позиционные
линии. Одна из них будет линией пеленга, т. е. прямой, другая —
линией равных дистанций, т. е. окружностью. Пересечение этих
линий и даст расчётное место самолёта (рис. 174).
К
Рис. 174. Определение РМ по пеленгу
и дистанции
Определение РМ самолёта вышеуказанными способами ви-
зуальной пеленгации применяется в полёте над морем при види-
мости берегов, ночью, когда в стороне от самолёта видны ориен-
тиры, или над горами в условиях видимости отдельных, наиболее
крупных вершин.
Применение визуальной пеленгации особенно возрастает в ноч-
ных условиях при наличии световых средств ЗОС. Использование
способов пеленгации искусственно создаваемых световых ориенти-
ров даёт возможность с успехом определять местон'ахождение
самолёта, так как дальность видимости средств ЗОС, применяемых
в благоприятных метеорологических условиях, велика.
В боевых полётах при несложной обстановке применение ви-
зуальной пеленгации встречается особенно часто для определения
только одной позиционной линии самолёта. Так, например, при
выходе на курс следования визированием створа ориентиров опре-
деляют правильное направление полёта. Подходя к контрольному
ориентиру с отклонением от заданного маршрута, пеленгуют види-
мый контрольный ориентир для определения момента его прохода
и величины уклонения.
, Контроль пути с помощью радионавигации изложен в главе 7.
203
§ 6. Исправление пути
Если в результате контроля пути обнаруживается уклонение
от заданного маршрута или неточное по времени (преждевремен-
ное или с запаздыванием) прибытие к заданной цели, штурман
должен исправить путь. Исправление пути может быть выполнено
с расчётом выхода непосредственно на КПМ (или цель) пли на
очередной контрольный ориентир, или на тот ориентир, у которого
обнаружено уклонение (рис. 175).
Исправлять курс следует только в том случае, если величина
уклонения от заданной линии пути определена совершенно до-
стоверно и если она превышает возможные ошибки того спо-
соба аэронавигации, при помощи которого было определено
уклонение.
Поправки в курс следования вводят преимущественно у кон-
трольных ориентиров, где можно детальной ориентировкой более
точно определить боковое уклонение.
Рис. 175. Способы исправления пути следования
Исправлять курс во время полёта между контрольными ориен-
тирами рекомендуется только в тех случаях, когда величина укло-
нения от заданного маршрута у контрольного ориентира превысит
дальность его видимости. При наличии незначительных уклонений
Поправка в курс 2°
... I
Уклонение бкм
Пройденный
путь 170км
или если величина уклонения неиз-
вестна штурману, исправление пути
не производится.
Рис. 176. Расчёт поправки
на курс
Боковое уклонение от кон-
трольного ориентира может быть
найдено детальной ориентировкой
или при помощи визира измерением
вертикального угла контрольного
ориентира. При небольшом боковом
уклонении (2—3°) его величина оценивается глазомерно и по-
правка в курс следования определяется в уме.
При большом уклонении поправка в курс рассчитывается на
аэронавигационной счётной линейке. Величина поправки зависит
201
от величины уклонения, длины пройденного пути и оставшегося
расстояния до контрольного ориентира.
Пример. Пройденный путь 170 км', оставшийся путь до цели 85 км.
Боковое уклонение у контрольного ориентира G км. Найти поправку в курс.
Устанавливаем треугольный индекс линейки на пройденный путь 170 км
(рис. 176) и против уклонения 6 км читаем поправку за пройденный путь, рав-
ную 2°.
Затем устанавливаем тот же индекс на оставшийся путь 85 км и опять
против уклонения 6 км читаем поправку за оставшийся путь, равную 4°.
Общая поправка — 6е.
Если исправить курс поправкой за пройденный путь, самолёт
будет перемещаться параллельно линии пути, на расстоянии от
неё, равном боковому уклонению (рис. 177). Поправка за остав-
шийся путь заставляет самолёт двигаться на цель и сближаться
с заданной линией пути. Таким образом, в данном примере курс
надо исправить суммарной поправкой, т. е. на 6°. Поправка при-
бавляется к курсу следования при уклонении влево и вычитается
из курса при уклонении вправо. После выхода на контрольный
ориентир вторую часть поправки (за оставшийся путь! отбра-
сывают.
Пройдены,
КО ' Оставшийся путь
Первая поправь. а
-о
Вторая пог.павна
Рис 177. Исправление курса за пройденный и оставшийся курс
Исправлять курс по результатам контрольных промеров угла
сноса можно в том случае, когда разность между установленным
в начале полёта утлом сноса и измеренным в пути превышает 2°.
Поправку в курс в данном случае определяют как алгебраическую
разность между измеренным ранее и новым углом сноса (рис. 178).
Рпс. 178. Исправление курса по измеренному углу сноса
Пример. При отходе от ИПМ угол сноса был равен + 10е; через некото-
рое время угол сноса оказался равным -f-13°.
Найги поправку в курс
+ 10° — ( 4- 13’) - - 3°.
205
При обнаружении значительного уклонения от линии пути
и большом изменении магнитного путевого угла штурман опреде-
ляет на карте магнитный путевой угол на ближайший контрольный
ориентир или на цель и рассчитывает (или подбирает) новый курс
следования.
§ 7. Подготовка навигационных данных и выход на цель
Подготовка навигационных данных для выполнения задачи
полёта производится на последнем этапе маршрута перед выхо-
дом в район цели. Для выполнения боевой задачи: бомбометания,
воздушного фотографирования, выброски десанта и т. д., штур-
ману необходимо знать угол сноса, W, вектор ветра и истинную
высоту полёта на боевом курсе. Наивыгоднейшим способом опре-
деления этих величин является пролёт контрольного этапа. Вход-
ной и выходной ориентиры должны позволять быстро отме-
чать ДМ. Удаление выходного ориентира от цели подбирается
с учётом необходимого запаса времени для навигационных расчё-
тов до захода на цель. Длина контрольного этапа достаточна
в 20—30 км. В случае отсутствия подходящих ориентиров уточне-
ние навигационных данных производится измерениями с помощью
визира.
От последнего перед целью контрольного ориентира штурман
готовится к точному выходу на цель. Для этого, ешё до подхода
к последнему контрольному ориентиру, штурман рассчитывает
курс и путевое время от этого ориентира до цели.
Пройдя контрольный ориентир, штурман переходит на деталь-
ную ориентировку по карте крупного масштаба района цели, одно-
временно проверяя курс и время.
Заход на цель выгоднее производить со стороны солнца, что
затрудняет наблюдение за самолётом с земли. Поэтому при вы-
боре направления захода следует знать азимут солнца к моменту
бомбометания. При бомбардировании крупных промышленных
пунктов направление захода лучше выбирать против ветра
у земли, используя дымку. На случай необходимости бомбомета-
ния по расчёту времени или прицельного бомбометания из-за обла-
ков с выходом из них у самой цели штурман тщательно опреде-
ляет W на боевом курсе и общую поправку в курс, рассчитывает
время полёта от точки начала боевого пути до точки бросания
бомб или точки выхода под облака.
При действиях по объектам противника, расположенным
близко к переднему краю обороны, во избежание поражения своих
войск необходима особая точность детальной ориентировки и на-
вигационных расчётов. Это достигается детальным изучением мест-
ности по фотоснимкам и обозначением переднего края средствами
ЗОС и наземных войск и тщательными измерениями.
Обеспечение прибытия на цель или ориентир в назначенное
время достигается своевременным взлётом, изменением скорости
полёта или маршрута (удлинением или укорочением пути), а также
изменением высоты полёта с учётом распределения ветров по вы-
сотам.
206-
Выход на линию обратного пути, контроль и исправление
обратного пути и выход на КПМ выполняется приёмами, исполь-
зуемыми на соответственных этапах полёта к цели.
§ 8. Навигационные записи в полёте
В процессе выполнения полёта штурман имеет дело с боль-
шим количеством различных цифровых величин. Так как запом-
нить все эти величины невозможно, то он их записывает. Эти за-
писи служат также для последующего контроля выполнения
задания.
Пример записи в правой части бортжурнала
Место Бремя Н МК УС МПУ Разведдан- ные и дру- гие заметки
расчёт- ное факти- ческое
Взлёт . . . . 14.15 —
ИПМ .... ж - — 14.23 1 500 268° —5° 263° 320
11згиб ж. д. . 14.49 14.50 3 000 — — — —.
Контрольный этап — 14.50 3400 226° -6° 220° 365 S = 42.5 км t = 7 мин.
Боевой путь. — 15.00 — 227° -6° 221е —
Пель .... 15.01 15.01 — — — — —
ИПОМ . . . — 15.10 3 400 64° +6° 70° 373
Еленовка . . 15.26 15.27 2 500 36° 4-6= 42“ 352
КПМ .... 15.36 15.36 — — — —
Посадка . . — 15.40 — — — — —
Своевременные, регулярно и правильно записанные значения
навигационных элементов значительно облегчают работу штур-
мана. Аэронавигационные данные, определённые в полёте, запи-
сываются в правой части бортжурнала.
Записи необходимо вести в определённом порядке по гори-
зонтальным строкам. Каждая запись относится к определённому
моменту и местонахождению самолёта. Фиксирование аэронавига-
ционных данных должно минимально отвлекать штурмана от всех
других работ, поэтому записывать надо только основные данные,
при помощи которых можно в случае необходимости восстановить
ориентировку прокладкой, или произвести расчёт навигационных
элементов по пройденному этапу. Такие данные следующие:
а) расчётное и фактическое время пролёта основных кон-
трольных ориентиров и изменений курса;
б) компасный и магнитный курсы, углы сноса, путевые углы;
в) путевая и воздушная скорость, высота полёта;
г) температура воздуха, скорость и направление ветра.
Все фактические величины подчёркивают. Расчётные и факти-
ческие величины, относящиеся к одной графе или к одному пункту,
записывают дробью: числитель — фактические величины, знамена-
тель — расчётные.
К фактическим величинам относятся все навигационные эле-
менты, полученные в результате контроля пути и относящиеся к
настоящем}' или прошедшему времени.
207
К расчётным величинам относятся предвычисленные наперёд
элементы.
Все данные, для которых в бортжурнале нет специальных
граф, записывают в крайней правой графе. Здесь же, по мере не-
обходимости, фиксируют обстановку полёта (обход грозы, полёт
в облаках, снижение, набор высоты и т. п.).
В некоторых случаях аэронавигационные данные можно запи-
сывать непосредственно на полётной карте. Надписи следует де-
лать чётко
карты теми
И 50
4.52
f f }JbO8
к
установленными знаками, избегая загромождения
данными, которые могут быть записаны в борт-
журнале.
Все записи на карте делают простым каранда-
шом средней твёрдости в свободном от ориенти-
ров месте.
На полётную карту наносят (рис. 179) от-
метки ДМ —крестиком размером около 1 см с от-
меткой времени; отметки- РМ — треугольником
размером около 1 см с отметкой времени.
Расчётное время прохода контрольных ориен-
тиров записывают справа от линии пути. При несо-
впадении расчётного времени с фактическим по-
следнее записывают над расчётным и подчёрки-
вают
гг
Рис. 170.
Записи на
полётной карге
Линию нового заданного или фактического
пути обозначают простой чертой; линию пеленга —
чертой со стрелкой от ориентира на самолёт.
Цифра курса (компасного или магнитного) должна
быть со знаком градуса.
В случае отсутствия времени для записи в
бортжурнал на полётной карге можно записывать
к)рс и угол сноса — справа от линии гр ти.
Подчёркнутые цифры означают фактические
величины, неподчёркнутые — показания приборов.
Путевое время записывают слева от линии
пути с буквой £ впереди.
Чёткая и полноценная запись навигационных
данных в полёте обеспечивает успешное и безопас-
ное самолётовождение.
§ 9. Штурманский глазомер
и расчёт в уме
В сложной и быстро меняющейся обстановке
боевого -полёта штурман часто не имеет времени и
возможности сделать необходимое измерение на
карте инструментом пли на местности визиром, пли
произвести расчёт на НЛ-8. В этих случаях при-
обретает большое значение умение глазомерно определить тре-
буемое направление или расстояние и выполнить приближённые
расчёты в уме. Хороший глазомер, здравый смысл и правильный
208
приближённый расчёт в уме могут предохранить от грубых ошибок
в инструментальных измерениях и расчётах. Поэтому штурманский
состав постоянно тренируется в умении: глазомерно определять рас-
стояние и направление на земле и на карте, ьести счисление пути
по скорости и времени, определять путевую скорость по времени
полёта и расстоянию, определять поправки в курс, вести счёт се-
кунд, быстро и безошибочно переводить курсы в истинный, магнит-
ный и обратно, вводить поправки в показания приборов, определять
скорость н направление ветра по данным пролёта отрезка пути.
Штурманский глазомер и счёт в уме развиваются системати-
ческой тренировкой на земле и в полётах с проверкой результа-
тов инструментальным способом.
Тренировку в определении расстояния на-глаз производят сле-
дующим порядком: сначала приучают глазомер к определению
длины отрезков в 10 км на картах различного 'масштаба. Для
этого с помощью масштабной линейки откладывают на картах
отрезки, длиной равные 10, 20, 30, 50 и 100 км\ запоминают их
величину и затем на-глаз откладывают такие же отрезки, после
чего сличают их с отрезками, отложенными линейкой. Для облег-
чения глазомера целесообразно на краях планшета сделать
отсечки расстояний в 5, 10, 50 и 100 км или определить рас-
стояние на картах различного масштаба, измеряемое по длине
указательного пальца, ширине ладони и другим вспомогательным,
обыденным в жизни предметам (коробка спичек и т. и.). Точность
глазомепного определения расстояний можно довести до 5°/о.
Тренировку в определении на-глаз направлений на карте начи-
нают с запоминания направлений основных румбов 0°, 45°. 90°,
135°, 180е, 225°, 270°, 315°. По достижении хороших результатов
в определении основных румбов переходят к определению проме-
жуточных углов, не допуская ошибок, превышающих 5°.
Счисление пути по скорости и времени можно с достаточной
быстротой и скоростью производить в уме. Для этого следует,
зная диапазон скоростей своего самолёта, заранее рассчитать,
какой путь пролетает самолёт в 1 минуту «а различных скоростях.
Например, при скоростях 250,300,350 и 400 км/час соответству-
ющее расстояние округлённо будет равно: 4,2, 5, 5,8 и 6,6 км/мин.
Запомнив эти цифры, можно приближённо определить ‘путь, прой-
денный самолётом. Отложив глазомерно этот путь на карте от
известного ориентира, над которым начинался счёт минут, в напра-
влении полёта, можно глазомерно определить РМ самолёта-
Аналогично предыдущей решается задача ла определение
путевой скорости самолёта. Зная величину пути, пройденного
самолётом, и время полёта, можно сначала определить путь, про-
ходимый самолётом в I минуту, а затем и его путевую скорость
в км/час.
Определение расчётного путевого времени в уме можно выпол-
нить вычислением части пути, пройденной самолётом относительно
всей длины пути; например, расстояние 18 км пройдено самолётом
за 3 минуты; определить расчётное путевое время для расстояния
95 км. Расстояние 95 км делим на 18 км. получаем примерно 5
4 Учебник аэронавигации 209
Полученное число умножаем на время полёта и получаем расчёт-
ное путевое время (5 X 3 = 15 минут) 15 минут (точное время
будет равно 15,8 минуты).
Эту же задачу можно решить путём определения числа кило-
метров, проходимых самолётом за 1 минуту, и делением этого
числа на общее расстояние. Например, 18 км : 3 = 6 км/'мин,
95 км.. 6 = 15,5 минуты.
Для определения поправки в курс следования по аргумен-
там — пройденное расстояние, боковое уклонение (в градусах),
оставшееся расстояние — рекомендуется 'следующее правило:
если оставшееся расстояние равно пройденному, то поправка в
курс равна удвоенному боковому отклонению; если оставшееся
расстояние равно половине пройденного, то поправка в курс равна
утроенному боковому отклонению; если оставшееся расстояние в
два, три и более раз больше пройденного, то поправка равна 1,5
величины бокового отклонения.
Правильный перевод курсов 'и введение поправок к навига
ционным приборам легко выполняется по правилу — при переходе
от приборных величин к истинным все поправки (за исключением
поправки на рельеф местности) вводятся с прямыми знаками.
При переходе от истинных величин к показаниям приборов все
поправки вводятся с обратным знаком. '
Зная пройденный самолётом отрезок Пути и ДМ на карте,
можно глазомерно определить скорость и направление ветра. От-
ложив на карте по направлению курса самолёта отрезок штиле-
вого пути самолёта (по Уцст) за то же время, получим штилевое
РМ самолёта.
Расстояние от РМ штилевого до ДМ самолёта есть вектор
ветра.
§10. Потеря и восстановление ориентировки
Причины потери ориентировки
Выполняя полёт, экипаж должен всё время сохранять общую
ориентировку. Однако практика показывает, что возможность
потери ориентировки не исключена. Могут быть случаи, особенно
после выполнения полёта в плохих 'метеорологических условиях
или в сложных условиях воздушного боя, когда экипаж не узнаёт
пролетаемой местности при сличении её с картой, не находит на
местности ожидаемых по его расчёту ориентиров и не может опре-
делить правильного направления полёта для выполнения поста-
вленной задачи или своего местоположения.
В подобных случаях общая ориентировка считается потерян-
ной, и экипаж обязан её восстановить.
Детальная ориентировка считается потерянной, если коман-
диру экипажа или йггурману неизвестна точка местоположения
самолёта над земной поверхностью. Сохранение непрерывной де-
тальной ориентировки необязательно, однако штурман должен
уметь в любой момент быстро переходить от обшей к детальной
ориентировке в условиях, допускающих её ведение.
210
Основными причинами, способствующими потере ориенти-
ровки, ЯВЛЯЮТСЯ:
— плохая подготовка к полёту, заключающаяся в недоста-
точном изучении района полёта, неполной или небрежной подго-
товке карт, ошибочном или неполном навигационном расчёте по-
лёта, неисправном состоянии навигационного оборудования,
необеспеченности полёта средствами службы ЗОС;
— несоблюдение или нарушение в полёте основных правил
самолётовождения: полёт без учёта курса и времени, невыполне-
ние визуальной ориентировки, 'неучёт ошибок навигационных при-
боров, особенно девиации компасов, использование неправильных
данных о работе средств ЗОС;
— неподготовленность экипажа к полёту в сложных условиях
(например, неожиданное усложнение метеорологической обста-
новки при плохом метеорологическом обеспечении полёта);
— попадание в район магнитной аномалии на малой высоте
при недостаточном знакомстве с данным районом;
— дневной полёт, непредусмотренно заканчивающийся в су-
мерки и ночью при ошибочном расчете моментов их наступления
или отсутствии подобного расчёта;
— отсутствие выдержки у экипажей (особенно при неболь-
шом боевом опыте) при попадании под обстрел ЗА или при ата-
ках истребителями противника.
Потере ориентировки способствует слабый контроль готов-
ности экипажей до вылета и недостаточное внимание в послепо-
лётном разборе к выявлению ошибок в навигационной работе эки-
пажа, в организации и обеспечении полёта, могущих повлечь по-
терю ориентировки в последующих полётах. Ниже приводятся
примеры потери ориентировки, заканчивающиеся вынужденными
посадками.
Пример 1. Полёт происходил по маршруту Жмеринка — Волковинцы —
Хмельник при ясной погоде (рис. 180).
Штурман, надеясь на простоту маршрута, при отходе от ИПМ не сверил
направление железной дороги по компасу. Через некоторое время он обнару-
жил, что ошибся, и решил выйти на железную дорогу Жмеринка — Волковинцы.
Взяв примерно курс на железную дорогу, штурман не пытался восстановить
детальную ориентировку, так как был уверен, что находится на пути к Вол-
ковинцы. Выйдя к железной дороге и увидев населённый пункт, похожий на
Волковинцы (фактически это были Васютинцы), решил, что летит правильно
на Хмельник, и продолжал полёт с прежним курсом. В дал нейшем принял
Виннчковцы за Буцневцы. Однако в расчётное время пункт Хмельник не по-
явился, и штурман местности не опознал. Пролетев ещё немного и убедившись,
что ориентировка потеряна, штурман решил вернуться в Жмеринку и взял
курс 190°, надеясь выйти на железную дорогу западнее Жмеринки. Подлетев
к железной дороге, развернулся в восточном направлении и полетел вдоль неё.
Вскоре показался крупный населённый пункт, который, однако, штурман не
мог опознать. Окончательно запутавшись и зная, что горючее на исходе, про-
извёл посадку на имевшемся здесь аэродроме. Пункт оказался г. Винница.
Причины потери ориентировки: плохое знание района полёта, невыпол-
нение основного правила сличения карты с местностью (не ориентировал
карту по компасу), пренебрежение к контролю пути способами компасной и
визуальной ориентировки.
14»
2И
Рис. 180. К примеру потери ориентировки
Пример 2. Экипаж имел задание выполнить перелёт по маршруту Суджа —
Навля—Унеча (рис. 181). По прогнозу погоды, на маршруте ожидалась неболь-
шая облачность. Навигационным планом полёта предусматривалось самолёто-
вождение под обла> ами при видимости земли. Отойдя от Суджи, штурман дал
лё’.чику курс на Навлю и занялся измерением угла сноса и путевой скорости.
Лётчик, не расслышав штурмана, взял неверный курс. Через некоторое время
он обратил внимание штурмана на показавшееся впереди разветвление дорог
у Навли (фактически это был Михайловский хутор). Штурман, не определив-
шись у этого ориентира, дал лётчику курс на Унечу. Взяв новый курс, экипаж
встретился с низкой сплошной облачностью. Так как самолёт уже прошёл
большое расстояние и по прогнозу погоды на участке Навля—Унеча ухудше-
ния погоды не предполагалось, лётчик, решив, что низкая сплошная облачность
распространяется на небольшой район, вошёл в облака. Штурман, не будучи
готов к слепому полёту, рассчитал штилевое время прибытия к Унече и стал
ожидать этого момента. В расчётное время пробили облачность и, выйдя к
земле, оказались в дожде.
Не увидев в расчётное время Унечи. штурман решил, что самолёт немного
уклонился в сторону, и взял курс сначала вправо, затем влево, вышел на же-
лезную дорогу, но опознать её не сумел и произвёл посадку.
Причины потери ориентировки: нарушение основных правил самолёто-
вождения—полёт без контроля курса и времени на первом участке, неподгото-
вленность штурмана к полёту ь сложных условиях (ь оолаках).
212
Предотвращение потери ориентировка
Во избежание потери ориентировки следует проводить ряд про--
филакIических мероприятий.
Основной мерой является чёткое ’ выполнение всем п’-^трман
схим составом правил подготовки и выполнения полёта.
В период общей навигационной подготовки большее внимание
уделяется изучению района полётов и особенно района аэродрома.
Штурман напамять изучает все основные ооиентиры и систему их
взаимного расположения. В части, действующей с одного аэро-
дрома, устанавливается в зависимости от характера района и нави-
гационных условий полётов в нём единый способ восстановления
ориентировки. Этот способ штурман изучает и при необходимости
выполняет.
Рис. 181. Потеря ориентировки
Постоянно псцд’ерживается исправное состояние навитаиисчпгого
оборудования самолётов. Штурманский состав тренируется »
травильном его использовании.
Готовясь к выполнению задания, штурман обеспечи-
вает свой полёт работой средств ЗОС и выясняет правильные
данные их работы. Детально ознакомившись с метеорологической
обстановкой в районе полёта штурман предусматривает мероприя-
тия на случай ухудшения погоды.
?.1Э
В полёте штурман должен неуклонно выполнять свои обязан-
ности по самолётовождению. Это поможет предотвратить потерю
ориентировки.
Восстановление ориентировки
Убедившись >в потере ориентировки, штурман, перед тем как
принимать решение о её восстановлении, запрашивает других чле-
нов экипажа, так как возможно, что ориентировка потеряна не
всеми членами экипажа. Точно так же должен действовать экипаж
одиночного самолёта при полёте в группе.
Если ориентировка потеряна всеми членами экипажа, штурман
отмечает момент потери ориентировки и при наличии в зоне види-
мости крупного характерного ориентира становится у него в круг.
В тех случаях, когда с самолёта характерных ориентиров не видно,
полёт продолжают по. ранее выдерживаемому курсу. Если ориен-
тировка потеряна в районе расположения противника и штурман не
в состоянии её быстро восстановить, (немедленно берут курс, пер-
пендикулярный к линии фронта, в сторону своей территории. Для
облегчения восстановления ориентировки в полёте на малой высоте
рекомендуется набрать высоту, чтобы увеличить обозреваемый
с самолёта район местности.
В плохих метеорологических условиях восстановить ориенти-
ровку возможно уходом в тот район, где погода лучше.
В районе магнитной аномалии для восстановления ориентировки
предварительно набирают высоту 1 500 м, на которой влияние ано-
малии на компас практически исключается и можно взять правиль-
ный курс по компасу. Если поднять высоту полёта до 1 500 м ме-
шает облачность, для восстановления ориентировки используют
средства ЗОС и способы радионавигации.
Решение о способе восстановления ориентировки может быть
принято лишь после того, как определён оставшийся запас горю-
чего.
При потере ориентировки у экипажа, естественно, возникает
опасение за дальнейший исход полёта и желание как можно скорее
восстановить ориентировку. У неопытных экипажей это может
вызвать излишнюю поспешность в принятии решения и беспорядоч-
ное хождение в разные стороны. Такие действия, как правило,
приводят к вынужденной посадке,
В случае потери ориентировки самым главным и ценным
качеством является умение сохранить спокойствие, трезво оценить
создавшуюся обстановку и соответственно ей принять правиль-
ное решение. Общая ориентировка может быть восстановлена
выходом на:
а) характерный 'линейный ориентир;
б) приводную радиостанцию, радиомаяк, радиопеленгатор;
в) крупный световой ориентир (светомаяк).
214
Кроме того, общая ориентировка может быть восстановлена
с помощью астрономической ориентировки.
Определить местонахождение самолёта при потере ориенти-
ровки, не зная, хотя бы приближённо, района местонахождения, за-
труднительно и возможно лишь в редких случаях, когда с само-
лёта будет замечен характерный ориентир, хорошо известный штур-
ману. Поэтому, независимо от способа восстановления общей
ориентировки, необходимо сначала определять расчётное место (РМ)
прокладкой (инструментальной или глазомерной) или средствами
радионавигации и астрономической навигации. Это даёт воз-
можность наметить район, в котором должен находиться самолёт.
Размеры этого района зависят от тех средств, при помощи которых
было определено РМ. Определив район вероятного местонахожде-
ния, принимают решение о способе восстановления ориенти-
ровки.
Если решено восстановить ориентировку выходом на крупный
ориентир или светомаяк, видимый с самолёта, направляют к нему
самолёт, сличая карту с местностью или распознавая светомаяк
по характеру его работы.
В том случае, когда вблизи района вероятного (местонахожде-
ния есть линейный ориентир, ориентировка восстанавливается по-
лётом к нему. Выход на линейный ориентир является наиболее
Район
Рис. 1S2. Выход на линейный ориентир
надёжным способом восстановления ориентировки. Применяя этот
способ, штурман предварительно убеждается, что линейный ориен-
тир расположен достаточно далеко от района потери ориентировки
(чтобы не взять курса в обратную сторону) и направление линей-
ного ориентира исключает возможность пролёта мимо него; запас
горючего позволяет прибыть на этот ориентир, затем восстановить
детальную ориентировку и прилететь к конечной цели полёта или
на ближайший аэродром.
Для выхода на линейный ориентир штурман задаёт лётчику
курс, перпендикулярный к линейному ориентиру (рис. 182).
Выполняя полёт к линейному ориентиру, следует в то же время
непрерывно сличать карту с местностью, стараясь её опознать, и
следить за временем полёта. Выход к линейному ориентиру не
означает, что он опознан. Для опознания необходимо сверить его
215
направление по компасу и убедиться, что это тот самый ориен-
тир, на который предполагалось выйти. Если место самолёта ке
опознано, следует лететь вдоль линейного ориентира сличая
карту с местностью, до её опознания.
Пример (рис. 183). По заданию следовало совершить полёт из Ржева
ь Бологое Пролетев пункт Итомля, экипаж увидел впереди мощную грозовую
облачность и решил обойти её с востока. Частые изменения курса и плохая
видимость привели к потере ориентировки. Оценив обстановку, р< шили восста-
новить ориентировку выходом на линейный ориентир. Для этого штурмав
определил РМ, после чего выли курс с расчётом выйти на железную дорогу
северо-западнее Бологое. Выйдя на железную дорогу, взяли курс 130° в
пришли в Бологое, которое легко опознали по железнодорожному узлу.
Рис. 183. Восстановление ориентировки полётом к линейному ориентиру
При (наличии вблизи района потери ориентировки работаю-
щих приводной радиостанции, радиомаяка или радиопеленгатора
и соответствующего самолётного оборудования ориентировка вос-
станавливается выходом на одно из этих средств. Порядок ра-
216
боты изложен в главе 7 нашего учебника. Использование средств,
радионавигации для восстановления ориентировки является одним
из самых надёжных способов, поэтому необходимо уметь пользо-
ваться этими средствами.
В тех случаях, когда экипажу не удаётся восстановить ориен-
тирсэку, он принимает все меры к сохранению самолёта путём
посадки на своей территории, на ближайшем аэродроме или пло-
щадке до израсходования горючего и до насту”пения темноты.
В ночном полёте, если позволяет запас горючего, жипаж должен,
продержаться в воздухе до рассвета
ГЛАВА СЕДЬМАЯ
РАДИОНАВИГАЦИЯ
§ 1. Предмет радионавигации
Радионавигацией называется самолётовождение с помощью
^радиотехнических средств. Принцип действия средств радионави-
гации основан на свойствах направленного излучения и •напра-
вленного приёма электромагнитной энергии.
К средствам радионавигации относятся: радиомаяки, радио-
полукомпасы, радиопеленгаторы и радиолокаторы. Каждое из
средств состоит из двух основных устройств: земного и самолёт-
ного. Так, радиомаяк является земным устройством, радиостан-
цией с направленным излучением, а для его использования в на-
вигации на самолёте должен быть радиоприёмник.
Радиополукомпас является самолётным приёмным устрой-
ством, работающим в сочетании с земной, аэродромной или
иироковещательной радиостанцией.
Радиопеленгатор является земным приёмным устройством и
.для применения в навигации требует наличия на борту самолёта
приёмно-передающей радиостанции.
Каждое из радионавигационных средств в отдельности или
в любом сочетании позволяет вести самолёт по заданному, фикси-
рованному на земной поверхности направлению, определять пози-
ционные линии самолёта, контролировать правильность выполне-
ния полёта, определять расчётные места самолёта. Радионавига-
ционные средства значительно облегчают задачу самолётовожде-
ния во всех полётах вообще и являются совершенно незамени-
мыми при выполнении полётов над безориентирной местностью,
над морем, в сложных метеорологических условиях, вне види-
мости земли. Однако применение средств радионавигации может
дать xotponine результаты лишь при грамотном их использовании.
Поэтому тщательное изучение радионавигации и постоянная тре-
нировка в её применении должны занимать одно из основных
мест в повседневной работе лётного состава и технического
-обслуживающего персонала.
§ 2. Радиомаяки
Радиомаяком называется радиостанция с направленным излу-
чением.
Обычные радиостанции — широковещательные, аэродромные
<и т. п., излучают электромагнитную энергию одинаково по всем
218
направлениям. Радиомаяки же дают излучение в строго опреде-
лённых заданных направлениях.
Принимая сигналы радиомаяка, можно судить, по характеру
этих сигналов, о взаимном расположении приёмника и радио-
маяка, т. е. использовать последний как средство ориентировки.
Работу радиомаяка можно уподобить работе прожектора или
группе прожекторов, расположенных в одном месте и посылаю-
щих лучи в различных, заданных направлениях. Если каким-либо
способом различить эти лучи один от другого, например, придав
им различную окраску, то наблюдателю, находящемуся в стороне
от этих прожекторов, легко будет определить направление (по
Рис. 184. Горизонтальная и вертикальная антенны
цвету луча) от прожекторов на себя, т. е. определить свой ази-
мут, и выйти на этот прожектор, удерживая линию своего пути
в одном луче. Точно так же, если наблюдателю требуется итти
от прожекторов в какой-либо пункт, то для этого ему надо удер-
живать линию своего пути на одном и том же луче, который про-
ходит через этот пункт. С другой стероны, если наблюдатель
заблудился, то, определив, какие лучи от двух групп прожекторов
пересекаются на нём, он может определить, зная место располо-
жения этих групп прожекторов, и своё место.
Всё сказанное можно, повторить и о радиомаяках с той
только разницей, что сигналы от них принимаются на радио-
приёмник и определяются на слух. Для этого нужно, чтобы радио-
маяк посылал определённые сигналы в заданных направлениях
излучения. Направленное излучение обеспечивается особой фор-
мой антенн передатчика. Антенны обычных радиостанций пред-
ставляют собой или горизонтальный провод, подвешенный на не-
которой высоте над землёй, или вертикальную мачту (рис. 184).
Такие антенны называются антеннами открытого типа. Излучение
электромагнитной энергии через такие антенны происходит оди-
наково по всем направлениям. Сила приёма зависит только от
расстояния между радиостанцией и приёмником. Если обойти
с приёмником вокруг радиостанции на одном удалении от неё,
измеряя силу приёма, то всюду получится одинаковая громкость.
Это можно изобразить графически диаграммой. Пусть сила при-
ёма изображается длиной вектора, а направление между радио-
219
станцией и приёмником — углом между этим вектором и некоторой
начальной прямой ОВ. Тогда диаграмма открытой антенны
изобразится окружностью, в центре которой находится радио-
станция, а сама окружность представляет собой геометрическое
место точек концов векторов, изображающих силу приёма в раз-
Рис. 185. Диаграмма
излучения открытой
антенны
личных точках. Так как эта сила не зависит от направления, то
диаграмма открытой антенны и изображается окружностью
(рис. 185,).
Рнс. 187. Диаграмма излучения замкнутой антенны
Иначе дело будет обстоять, если радиостанция будет излу-
чать электромагнитную энергию через антенну особой формы,
замкнутого типа—рамочную антенну (рис. 186). Если опять
обойти с приёмником вокруг такой антенны на одном удалении от
неё (по окружности), измеряя силу сигнала, то можно обнаружить,
что _ эта сила зависит от направления между передатчиком и
приёмником. Находясь в направлении плоскости антенны, сила
сигнала будет наибольшей, по мере удаления от направления
плоскости сила сигнала будет уменьшаться и в направлении
перпендикуляра к плоскости будет равна нулю. Графически
220
изменение силы приёма изобразится диаграммой в виде
восьмёрки (рис. 137). Из этой диаграммы видно, как изме-
няется величина вектора силы приёма в зависимости от утла
между плоскостью антенны А" А и направлением на приёмник —
А, В, С. Так, например, в точке В сила приёма составляет поло-
вину силы приёма, в точке С — четверть. В точке D — на перпен-
дикуляре к плоскости антенны сила приёма равна нулю. Такое на-
правленное свойство замкнутых, рамочных антенн и испсыьзовано
в радиомаяках.
Действительно, если сила сигнала зависит от направления, то.
следовательно, имея возможность измерять силу сигналов, можно
определить и направление на радиомаяк и таким образом исполь-
зовать эти данные для целей
навигации. Однако одна ра-
мочная антенна позволяет оп-
ределять направление на себя
лишь очень грубо, и поэтому
в радиомаяках используется
система из двух или несколь-
ких рамочных антенн.
В настоящее время распро.
сгранены радиомаяки двух ви-
дов: первый вид — это радио-
маяки, работающие зоной; вто-
Рис. 188. Антенное устройство радио
маяка, работающего зоной
рой—работающие пеленгом.
Радиомаяк типа 13-А-1
может работать как зоной, так
и пеленгом. Для работы
зоной он использует две рамочные антенны, плоскости которых
пересекаются под углом 135°, для работы пеленгом используются
шестнадцать рамочных антенн, плоскости которых пересекаются
под равными углами (рис. 188).
Работа маяка заной состоит в следующем: по очереди через
каждую антенну маяка подаются сигналы по азбуке Морзе. Одна
антенна излучает букву А, другая — Н. Сила сигнала буквы А
будет наибольшей, если направление маяк — приёмник совпадает
с плоскостью антенны, излучающей сигнал А. и наименьшей (тео-
ретически равно нулю), если это направление будет перпендику-
лярно к той же плоскости. То же самое можно сказать и про
силу сигнала Н, т. е каждая антенна будет иметь свою диаграмму
излучения в виде восьмёрки. На рис. 189 изображена диаграмма
излучения радиомаяка, работающего зоной. По краям диаграммы
•нанесены буквы А и Н, которые своей величиной характеризуют
силу сигнала в этих местах. Очевидно, что одинаковая громкость
сигналов будет лишь на биссектрисах углов АОН, что и указанi
буквами одинаковой величины.
Практически одинаковая громкость сигналов имеет место
не только на биссектрисе, но в некотором секторе ВОС
(рис. 189). Происходит это потому, что слуховой аппарат человека
не в состоянии воспринимать незначительные изменения силы
221
звука. Этот сектор и называется равносигнальной зоной радио-
маяка. Две замкнутые антенны радиомаяка образуют четыре рав-
носигнальные зоны (рис. 189).
Так как угловая ширина зоны, т. е. угол при вершине сек-
тора ВОС, зависит от угла пересечения плоскостей антенн,
а именно зона тем уже, чем тупее угол, поэтому две из упомяну-
тых зон в маяке 13-А-1 имеют угловую ширину 2—3° (плоскости
антенн пересекаются под углом 135°), две другие, перпендикуляр-
ные к первым, — 10—12° (угол пересечения плоскостей равен
180° — 135° = 45°).
Широкие зоны (более 4—5°) не применимы для самолётово-
ждения, так как не обеспечивают необходимой точности, и по-
этому в маяке 13-А-1 используются лишь две зоны из четырёх.
Зону радиомаяка можно уподобить лучу прожектора. Как
луч прожектора, так и равносигнальная зона радиомаяка указы-
вают фиксированное направление на земной поверхности.
Как было уже сказано, работа радиомаяка зоной состоит
в поочередной подаче двух телеграфных сигналов А и Н.
В равносигнальной зоне слышимость этих сигналов одина-
кова, при отклонении от равносигнальной зоны слышимость од-
ного сигнала будет уменьшаться, а другого увеличиваться. Таким
образом, по относительной громкости сигналов можно судить, на-
ходится ли самолёт в зоне радиомаяка или вне её, справа или
слева. На рис. 190 изображены зона радиомаяка и различные по-
ложения самолёта относительно этой зоны. Величиной букв ука-
зана величина слышимости сигналов. В зоне слышимость одина-
кова, при отклонении от зоны слышимость сигналов будет разной.
При отклонении вправо (если смотреть на маяк) будет громче
звучать буква А, при отклонении влево—буква Н.
Таким образом, если вести самолёт так, чтобы в телефонах
звучали буквы А и Н с одинаковой силой, то путь самолёта сов-
падёт с зоной и, следовательно, её можно использовать как «не-
видимые рельсы», по которым будет двигаться самолёт из одного
пункта в другой, через которые проходят эти «рельсы».
Работа маяка пеленгом состоит в следующем. По очереди
через каждую из 16 антенн маяка излучаются сигналы по азбуке
Морзе. Каждой из 16 антенн присвоен свой определённый сигнал,
передаваемый через определённый промежуток времени. Скорость
передачи 30—60 сигналов (букв) в минуту. Порядок излучения»
антенн происходит по часовой стрелке. Таким образом, в про-
странство излучаются последовательно одна за другой 16 букв.
Так как каждая из антенн представляет собой рамку, то в мо-
мент своего излучения она даёт в двух направлениях максимум
слышимости (в плоскости рамки) и в двух направлениях мини-
мум (теоретически нуль) слышимости (на перпендикуляре к пло-
скости) (см. рис. 187). Следовательно, всего будет 32 направления
максимумов и 32 направления минимумов сигналов.
При установке маяка плоскости антенн строго ориентируются
по отношению к меридиану места установки. Таким образом, ми-
нимумы и максимумы громкости сигналов будут находиться
в строго определённых направлениях от маяка. Если настроить
радиоприёмник на радиомаяк, работающий пеленгом, то в теле-
фонах будут прослушиваться через одинаковые промежутки вре-
мени 16 букв, причём громкость букв будет различная: одна
буква будет звучать громче всех (плоскость её антенны совпа-
дает с направлением на приёмник) и одна буква будет звучать
тише всех или вовсе отсутствовать (плоскость её антенны пер-
пендикулярна к направлению на приёмник). Зная местонахожде-
ние радиомаяка, расположение плоскостей антенн относительно-
меридиана и присвоенные антеннам буквы, можно по пропадаю-
щей или по максимально слышимой букве определить направле-
ние ст радиомаяка на приёмник, т. е. определить пеленг приём-
ника от радиомаяка. Отсюда и название вида работы радиомаяка
223
Пеленг можно определять или по максимуму или по мини-
муму (отсутствию) слышимости сигналов. На слух легче опреде-
лить относительную громкость двух или нескольких сигналов в том
случае, когда абсолютная величина их минимальна, т е. легче раз-
личить из серии сигналов сигнал наиболее слабый, чем сигнал са-
мый громкий.
Кроме того, как видн'о из диаграммы направленности, измене-
ние направления вблизи минимума (OD) вызывает более резкие от-
носительные изменения силы сигнала, чем изменение направления
вблизи максимума (ОЛ), поэтому при прослушивании работы радио-
Рис. 191. Схема порядка излучения
букв
Рис. 192. Другой порядок
излучения букв
маяка определяют наиболее слабо слышимую (пропадающую)
букву и по ней определяют пеленг.
Таким образом, линия пеленга представляет собой не что
иное, как перпендикуляр к плоскости антенны, излучающей не-
слышимую в месте приёма букву, и определение пеленга сводится
к определению того перпендикуляра, антенна которого излучает
неслышимую в месте приёма букву.
) Так как плоскости антенн расположены в строгом порядке
по отношению к меридиану и составляют друг с другом угол в
!1°15', то и перпендикуляры к ним расположены в соответствую-
щем порядке в пространстве. Обозначая перпендикуляры теми
буквами, которые не слышны на направлениях этих перпендикуля-
ров, получим следующую схему порядка излучения букв
(рис 191).
Иногда может применяться другой порядок, указанный на
рис. 192.
Согласно первой схеме на направлении меридиана места
установки радиомаяка не слышно букву Р, на направлении ази-
мута 45—225° не слышно букву X, на направлении восток-запад
не слышно букву Сит. д.
224
На рис. 193 в точке О находится радиомаяк, работающий пе-
ленгом; в точках /, 2, 3 и т. д. — наблюдатели с радиоприёмни-
ками, слушающие работу радиомаяка. Наблюдатель 1, находя-
щийся на линии пеленга 22°30', очень хорошо слышит букву 3,
чуть слабее — буквы В и Ф, ещё слабее — С и П и т. д. Буквы
К и Ж слышны очень плохо и буква М совершенно не слышна.
Наблюдатель 2, находящийся в азимуте 112°30', очень хо-
рошо слышит букву М, чуть слабее — Ж и К, ещё слабее — Р и
X и т. д. Буквы Ф и В слышны очень плохо и букву 3 совершенно
не слышно.
Рис. 193. Изменение слышимости сигналов в зависимости от азимута
наблюла геля
Наблюдатель 3, находящийся между пеленгами 157°30' и
168°45', одинаково хорошо слышит буквы Н и Л, хуже У и С
и т. д. и одинаково плохо слышит буквы Ь и Г. Наблюдатели 4,
5 и 6, не знающие, на каких азимутах они находятся, могут их
определить по пропадающим буквам. Так, у наблюдателя 4 про-
падает буква Ж, следовательно, он находится в азимуте 11°15',
или 191°15', у наблюдателя 5 пропадает буква К, т. е. он нахо-
дится в азимуте 33'45', или 213°45>', у наблюдателя 6 пропадаю-
щих букв нет, но он одинакова очень плохо слышит Д и П, сле-
довательно, он находится между азимутами 135° и 146°15', или
315° и 326° 15'.
Как известно, слышимость любой радиостанции уменьшается
по мере удаления от неё. Так происходит и при удалении от
15 Учебпик аэронавигации 225
радиомаяка. Естественно, что в первую очередь уменьшается гром-
кость слабых сигналов, и чем дальше находится наблюдатель от
радиомаяка, тем больше букв он не слышит.
Сказанное поясняется рис, 194.
Пусть наблюдатель движется по линии пеленга «С» (пеленг
— 90°) от радиомаяка. В .начале пути громкость всех букв будет
хорошей, за исключением букв Л и В, слышимых слабо, и буквы
С, совершенно неслышимой. По мере удаления от радиомаяка
громкость букв будет уменьшаться и пропадать, что и указано
на рисунке соответствующими обозначениями. Отсюда следует,
что радиомаяк, работающий пеленгом, может быть использован
^150-176^00-225^ 250-300
©1
50-70км
100-125
Условные обозначения "
(2) Слышимость слабая
Г? бще слабев,
□ Выпадающий пеленг
О Елеуловимая слысиимоста
А Хорошая слышимость
Рис. 194. Пропадание слышимости букв в зависимости
от удаления от радиомаяка
как средство для определения позиционной линии самолёта или
как средство для выдерживания линии заданного пути при по-
лёте н'а маяк или от него. Для этого требуется определить про-
падающие буквы и правильно нанести линию пеленга этой буквы
на карту. Полученная линия и будет позиционной линией само-
лёта. Для ведения же самолёта на радиомаяк или от радиомаяка
нужно пилотировать самолёт так, чтобы пропадающей буквой всё
время была буква линии пеленга, совпадающая с линией задан-
ного пути.
Радиомаяк типа 13-А-1 представляет собой радиостанцию
стационарного типа с направленным излучением. Антенное устрой-
ство состоит из 16 замкнутых антенн треугольного типа. Высота
антенного устройства около 22 м и занимает по площади круг
радиусом около 40 м. Под антенной сетью находится помещение
для передатчика. На рис. 195 приводится внешний вид радио-
маяка 13-А-1.
Передатчик радиомаяка обеспечивает три рода работы: 1) не-
затухающими колебаниями, 2) тональной телеграфией и 3) теле-
226
фоном Нормальный диапазон рабочих волн радиомаяка от 600 до
1 100 м (от 500 до 273 кгц). Дальность действия 300—350 км.
Имеются маяки и других типов, отличие которых от описан-
ного состоит в другой форме антенн, дальности действия, числе
зон. Однако использование их для самолётовождения мало чем
отличается от использования радиомаяка 13-А-1 и поэтому о них
здесь не упоминается.
Рис. 195. Внешний вид радиомаяка типа 13-A-I
§ 3. Полёт на радиомаяк
Если в какой-либо точке маршрута полёта имеется радио-
маяк, то самолётовождение сводится к самым элементарным дей-
ствиям со стороны экипажа самолёта. Такой точкой маршрута
может являться его любая точка, как промежуточная, так и ко-
нечный пункт маршрута. В любом случае самолёт ведётся по
зоне или по пеленгу и обязательно проходит над пунктом уста-
новки радиомаяка.
Полёт по зоне
Установка направления зоны радиомаяка производится по
указаниям или экипажа самолёта или других лиц, ответственных
за перелёт самолётов. Нужное направление зоны определяется по
карте. Для этого следует провести на карте дугу большого круга
через точку места установки радиомаяка и пункт, с которого на-
чинается полёт по зоне, и измерить транспортиром азимут этой
Дуги, т. е. угол между меридианом 'места установки радио
маяка и дугой. Так как электромагнитная энергия распростра-
няется по дуге большого круга, то проведённая на карте дуга и
Укажет зону и её направление. На картах, применяющихся в
аэронавигации, дуга большого круга изображается с достаточной
точностью прямой, и поэтому следует на карте провести прямую
между упомянутыми пунктами и измерить её азимут в точке
места радиомаяка. Под этим углом и нужно направлять зону
Радиомаяка. Для этой цели следует применять карту масштаба
is*
227
1 : I 000 000, так как обычная дальность слышимости радиомая-
ков 300—350 км. Порядок выполнения полёта по зоне следующий:
I) Выйти на исходный пункт маршрута (или пункт, о г кото-
рого будет происходить полёт по зоне) и лечь иа курс, равный
заданному магнитному путевому углу. Если имеется возможность
определить угол сноса обычными способами, то следует учесть
его в курсе.
Если вход в зону производится вслепую, причём зона прохо-
дит в стороне от аэродрома вылета, то следует перед вылетом
наметить курс с аэродрома в какую-либо точку зоны. Для бы-
стрейшего входа в зону направление полёта следует выбирать
перпендикулярно к зоне. При полёте по этому курсу в телефонах
будут прослушиваться буквы А и Н с неодинаковой громкостью
до тех пор, пока самолёт не войдёт в зону. В момент входа
в зону (буквы звучат одинаково громко) лечь на курс, совпада-
ющий с направлением зоны на маяк.
2) Вести самолёт по магнитному или гиромагнитному ком-
пасу, контролируя правильность выдерживания курса по одинако-
вой громкости букв А и Н, которые прослушивает в телефон лёт-
чик или штурман.
3) Если угол сноса не был учтён или если он был учтён не-
точно, то по истечении некоторого промежутка времени самолёт
выйдет из равносигнальной зоны. Экипаж обнаружит это по уси-
лению слышимости одной и уменьшению слышимости другой
буквы. А имению, при отклонении влево от радиомаяка будет
громче звучать буква Н, слабее А; при отклонении вправо наобо-
рот— громче А, слабее Н.
Для запоминания удобно следующее правило:
При полёте по зоне «на» радиомаяк — слева громче Н,
справа А (в слове «на» Н — слева, А — справа).
Примечание. В некоторых радиомаяках может быть и обратный по-
рядок звучания букв.
Обнаружив различие в громкости букв, следует исправить курс
самолёта в сторону усиления пропадающей буквы. Курс следует
исправлять энергично, избегая мелких поправок. В зависимости
от предполагаемой силы ветра и его направления первая поправка
в курс должна быть 20—30°. Если поправка окажется большой и
самолёт выйдет из зоны с другой стороны, то следует опять из-
менить курс уже в другую сторону на величину, равную псповине
первой поправки. Если вторая поправка опять окажется большой
или, наоборот, недостаточной, то третью поправку нужно взять
равной половине второй и т. д„ пока не будет подобран правиль-
ный курс с учётом угла сноса (рис. 196).
Курс следования должен быть подобран задолго до прихода
к радиомаяку, так как линейная ширина гены у радиомаяка
сильно уменьшается и при подборе курса вблизи радиомаяка про-
изойдёт сильное разбалтывание самолёта на курсе. Если же курс
подобран километров за 50—100 от радиомаяка, то выход из зэны
вблизи его не представит неудобств, так как линия пути всё равно
пройдёт в непосредственной близости от него. Поэтому не следует
228
особенно добиваться одинакового звучания букв вблизи радио-
маяка.
При приближении к радиомаяку сила приёма сигналов воз-
растёт. Для того чтобы не перегружать телефонов, необходимо
всё более и более уменьшать громкость с помощью ручного регу-
лятора громкости. В момент пролёта самолёта над радиомаяком
приём сигналов резко обрывается, но через несколько мгновений
после пролёта снова резко появляется. После пролёта радиомаяка
сила сигналов будет уменьшаться и потребуется увеличивать её
с помощью ручного регулятора громкости.
Рис. 196. Полёт по зоне радиомаяка и порядок звучания букв
Пр1г полёте от радиомаяка порядок звучания букв будет
обратный: при отклонении влево будет сильнее звучать А, при от-
клонении вправо — Н (рис. 196).
При наличии на самолёте радиополукомпаса с подвижной
рамкой (типа РПК-2) можно момент выхода на радиомаяк отме-
тить очень точно и просто с помощью индикатора курса радио-
полукомпаса. Для этого при подходе к радиомаяку настроить
радиополукомпас на радиомаяк, установить переключатель рода
работ на «К», а рамку повернуть на КУР = 90°. Тогда до пролёта
радиомаяка стрелка индикатора курса будет находиться в крайнем
правом положении; в момент пролёта маяка стрелка будет пере-
ходить из правого положения в левое! после пролёта маяка
стрелка займёт крайнее левое положение.
(Можно, конечно, рамку установить на КУР = 270°, но
только тогда показания индикатора будут обратными)
Все эти явления и должны служить экипажу самолёта для
определения момента выхода самолёта на радиомаяк.
Полёт по пеленгу
Полёт на радиомаяк, работающий пеленгом, мало чем отли-
чается от полёта на радиомаяк, работающий зоной. Только в этом
случае зона, т. е. одинаковое звучание букв А и Н, заменяется
пеленгом, т. е. пропадающей и одинаково слышимыми соседними
с ней буквами.
Для определения буквы линии пеленга, совпадающей с ли-
нией заданного пути на радиомаяк, нужно на карте на точку
229
места установки радиомаяка наложить транспортир, на котором
размечены пеленги (рис. 191), и заметить ту линию пеленга, кото-
рая совпадает с линией пути. Буква этого пеленга и будет иско-
мой буквой.
Если линия пути проходит между пеленгами, то буквы этих
пеленгов и должны служить для контроля правильности выдер-
живания линии пути, а именно, должны быть обе неслышимы или
обе одинаково слышимы.
Контроль и исправление пути при полёте по пеленгу на радио-
маяк аналогичны таковым при полёте по равносигнальной
зоне. Следует только руководствоваться тем, чтобы сила звуча-
ния всех букв, расположенных по одну сторону линии пути, рав-
нялась силе звучания соответствующих букв, расположенных по
другую сторону линии пути.
Например (рис. 194), чтобы лететь по линйи пеленга «С»,
нужно не слышать букву С, а буквы В и Л, 3 и Н, Ф и У, П и
X и т. д. попарно были бы слышимы одинаково.
Если пропадающая буква (или буквы) соответствует пеленгу,
линия которого совпадает с заданной линией пути, то курс взят
правильно. Если пропадают буквы, принадлежащие другим пелен-
гам, то курс исправляют в сторону пропадания нужной буквы.
Величина поправок в курс берётся такая же, как и в случае ис-
пользования радиомаяков, работающих зоной.
Рис. 197. Выход на цель
по пересечению зон
Момент выхода на радио-
маяк, работающий пеленгом, оп-
ределяется так же, как момент
выхода на радиомаяк, работаю-
щий зоной.
В основном полёт по линии
пеленга следует рассматривать,
как полёт по равносигнальной
зоне.
§ 4. Полёт от радиомаяка
Зон'а или пеленг радиомаяка
могут быть использованы для
контроля линии пути, если ра-
диомаяк находится и сзади са-
молёта.
Выполнение полёта от радио-
маяка принципиально ничем не
отличается от полёта на радиомаяк. Различие состоит лишь в том,
что конечный пункт маршрута не отмечен самим радиомаяком и
ширина зоны или количество пропадающих букв (полёт по пе-
ленгу) всё время увеличивается, так как сила сигналов непре-
рывно уменьшается.
Следует ещё отметить, что при отклонении самолёта от зоны
или линии пеленга порядок увеличения силы сигналов будет
обратным (по сравнению с полётом на радиомаяк), т. е. при откло-
нении самолёта вправо от зоны громче будет звучать буква Н,
230
а при отклонении влево — буква А. В остальном порядок самолё-
товождения ничем не отличается от порядка самолётовождения
на радиомаяк.
Момент выхода на цель полёта может быть определён или
с помощью визуальной ориентировки или счислением пути, или
какой-либо позиционной линией. Так, например, цель полёта мо-
жет быть отмечена зоной другого радиомаяка (рис 197). Для
Рис. 198. Полёт по зоне от радиомаяка
этого следует точно подобрать курс следования по зоне основ-
ною радиомаяка, а затем, убедившись в точности выдерживания
Рис. 199. Полёт от радиомаяка, работающего пеленгом
курса, перейти к приёму бокового радиомаяка и вести самолёт до
обнаружения равносигнальнсй зоны. Одновременное нахождение
самолёта в двух равносигнальных зонах позволяет заключить, что
°н находится в районе цели полёта.
231
Предварительная подготовка для такого рода полётов за-
ключается в нанесении на полётную карту зон радиомаяков, по
которым должен происходить полёт. На рис. 198 приведён при-
мер полёта самолёта на цель от радиомаяка по зоне с контролем
расстояния по счислению. Выход на ИПМ производится виву-
ально, затем на контрольном этапе определяются курс следова-
ния и путевая скорость, после чего самолёт пробивает облачность
и выполняет полёт за облаками, контролируя направление полёта
зоной, а расстояние по счислению пути. Не доходя до цели 10—
15 км, самолёт пробивает облачность и выходит на цель визу-
ально. На рис. 199 приведён пример подобного же полёта от радио-
маяка, работающего пеленгом.
Для выполнения такого полёта следует нанести на карту ли-
нии пеленгов, как показано на рис. 199.
§ 5. Восстановление ориентировки с помощью радиомаяков,
работающих пеленгом
Процесс восстановления полностью потерянной ориентировки
по маяку, работающему зоной, является делом весьма сложным
и занимающим много времени, поэтому он не рекомендуется и
здесь не описывается.
Восстановление ориентировки по маяку, работающему пелен-
гом, несложно и заключается или в определении позиционной ли-
нии самолёта (по одному радиомаяку) или в определении его рас-
чётного места (по двум радиомаякам).
Для определения позиционной линии самолёта от радиомаяка,
работающего пеленгом, нужно:
1) Настроиться на радиомаяк и определить, какая (или какие)
из 16 букв пропадает (пропадают) или звучит слабее остальных;
тогда линия пеленга этой буквы или биссектриса угла, образован-
ного линиями пеленгов неслышимых букв, и будет являться по-
зиционной линией самолёта.
2) Определить, по какую сторону от радиомаяка находится
самолёт. Для этого, зная азимут найденной позиционной линии,
вести самолёт курсом, равным этому азимуту плюс или минус 90°,
и тогда по следующей пропадающей б^кве определится положение
самолёта относительно радиомаяка.
Так, например, штурман определил, что букву Н совершенно
не слышно. На карте в точке места 'радиомаяка он отмечает с по-
мощью транспортира (рис. 193) пеленг буквы Н и проводит его
линию по обеим сторонам радиомаяка. Эта линия и является пози-
ционной линией самолёта. Чтобы определить, по какую сторону
ст радиомаяка находится самолёт, берут курс самолёта 67° (ази-
мут буквы Н) +90° = примерно 150°. Тогда, если самолёт нахо-
дится восточнее радиомаяка, то пропадать будут буквы Л, С, В
и т. д., а если западнее, то буквы У, X, К и т. д. (рис. 193), т. е.
по порядку пропадания букв будет найдена и сторона направле-
ния на радиомаяк. Определив позиционную линию самолёта,
можно в дальнейшем использовать её для окончательного вос-
становления ориентировки или выходом на радиомаяк так, как
232
описано выше, или выходам на какой-либо линейный ориентир,.
а также определением ещё одной позиционной линии, полученной
с помощью других средств самолётовождения.
При наличии в районе полёта двух радиомаяков, работающих
пеленгом, можно испспьзовать их для определения расчётного
места самолёта. Действительно, каждый из радиомаяков _ даёт
возможность определить позиционную линию самолёта, пересече-
ние которых и даст расчётное место самолёта.
Для восстановления ориентировки по двум радиомаякам не-
обходимо:
1) установить самолёт в круг;
2) удостовериться (прослушиванием) в работе выбранных для
пеленгации радиомаяков;
Рис. 200. Определение расчётного места самолёта
по двум радиомаякам, работающим пеленгом
3) настроиться на одни из радиомаяков и определить пропа-
дающую букву (буквы);
4) настроиться на другой радиомаяк и определить пропадаю
шую букву (буквы);
5) проложить на карте линии пеленгов ст обоих радиомаяков;
точка пересечения этих линий и укажет центр района вероятного
местонахождения самолёта.
Для облегчения работы в воздухе можно до полёта подго-
товить карту, проведя линии пеленгов от выбранных маяков, как
указано на рис. 200. Пользоваться такой картой чрезвычайно-
просто.
Пример. Потеряв ориентировку, штурман определил, что при прослушива-
нии работы радиомаяка № 1 пропадают буквы 3 и Ф, а радиомаяка № 2 —
пропадает буква У. Таким образом, пеленг от радиомаяка № 1 пройдёт между
буквами 3 и Ф, а от радиомаяка № 2 — по букве У. Пересечение пеленгов
Даст расчётное место самолёта (пункт Т, рис. 200).
233
§ 6. Вывод самолёта на заданную линию пеленга радиомаяка
Как пример использования радиомаяка, работающего пелен-
гом, можно указать на применение его в качестве указателя за-
данного направления полёта, обязательного для выдерживания
зсемн пролетающими самолётами. Например, проход самолётов
между запретными зонами, вывод самолётов в определённые во-
рота и т. п.
Пусть, например (рис. 201), самолёты, летящие из области А
s область В, должны проходить между двумя запретными зонами
Рис. 201. Применение радиомаяка для указания линии пути
С и D. Чтобы выдерживать выполнение этого требования и
в слепом полёте, установим радиомаяк в точке Е, тогда свобод-
ный приход обозначится определённой линией пеленга (на нашем
рисунке буквой Ф).
Проход самолётов между запретными зонами С и D даже
в слепом полёте не вызовет затруднений. Для этого все самолёты,
находящиеся в области Л, должны настроиться на радиомаяк и
выйти на линию пеленга. Выход осуществляется по изменению
слышимости букв. Надо вести самолёт так, чтобы слышимость
буквы Ф всё время уменьшалась (вести самолёт к линии пеленга
выгоднее на перпендикулярных к ней курсах). В момент её пропа-
дания или минимальной слышимости самолёт будет находиться
на нужной линии пеленга. Определив этот момент, самолёт ло-
жится на курс, равный азимуту данной линии пеленга (в нашем
случае to 124°), и продолжает полёт по ней (см. § 4 «Полёт от
радиомаяка») до выхода в область В, момент которого может быть
определён или счислением пути или пеленгом другого радиомаяка,
или иными средствами самолётовождения.
234
Точно так же используется радиомаяк для вывода самолёта
на свой аэродром в том случае, когда последний находится в сто-
роне от места установки радиомаяка. Самолёты сначала идут на
радиомаяк, а затем от него по заданному пеленгу и счислению
времени на аэродром.
§ 7. Радиополукомпасы *
Радиополукомпасом называется самолётное радиоприёмное
устройство, обладающее направленными свойствами.
Установленный на самолёте радиополукомпас позволяет:
1) определять курсовые углы передающих радиостанций, т. е.
углы между продольной осью самолёта и направлением на радио
станцию, сокращённо обозначаемые КУР (рис. 202);,
Рис. 202. Курсовой угол
радиостанции
Рис. 203. Истинный пеленг
радиостанции
2) пилотировать самолёт с заданным постоянным курсовым
углом по отношению к заданной радиостанции.
Первое свойство радиополукомпаса — определять курсовые
углы радиостанций — позволяет в сочетании с магнитным ком-
пасом измерять на самолёте истинные пеленги радиостанций,
т. е. углы между истинным меридианом места самолёта и напра-
влением на радиостанцию. Этот угол сокращённо обозначается
ИРП (истинный радиопеленг) и равен сумме истинного курса
самолёта и курсового угла радиостанции (рис. 203), т. е.
ИРП = ИК 4- КУР.
КУР измеряется от 0 до 360° от продольной оси самолёта.
ИК и ИРП измеряются от 0 до 360° от истинного меридиана.
Так как радиоволны распространяются по дуге большого
круга передатчиком и приёмником, то, следовательно, направление,
определяемое радиополукомпасом, является направлением дуги
большого круга и истинный радиопеленг — истинным азимутом
радиостанции
235
Истинный азимут данной радиостанции является величиной,
не связанной с самолётом, но связанной с земной поверхностью.
Если на земной поверхности соединить между собой плавней
кривой все точки, в которых истинный азимут (ИРП) заданной
радиостанции является одной и той же величиной, то получен-
ная кривая будет называться линией равных азимутов; она обла-
дает тем свойством, что истинный азимут радиостанции в любой
её точке равен одной и той же постоянной величине.
На рис. 204 в точке А находится радиостанция.
Если задаться каким-либо значением истинного азимута а.
этой радиостанции, то на каждом меридиане найдём только одну
точку, в которой ИРП равен заданной величине Найдя на
Рис. 204. Линия равных азимутов Рис. 205. Линия равных азимутов
каждом меридиане такую точку и соединив их плавной кривой,
получим линию равных азимутов, характеризуемую величиной
азимута а.
Для каждого значения 'азимута данной радиостанции полу-
чается своя линия равных азимутов; так, на рис. 205 даны линии
равных азимутов для азимутов 0°, 45°, 90°, 135°, 180 , 225°, 270°,
315°; не трудно видеть, что линии равных азимутов 0 и 180° сли-
ваются с меридианом радиостанции.
Таким образом, радиополукомпас в сочетании с магнитным
компасом позволяет определять в полёте на земной поверхности
линию равных азимутов — «фиксированную» линию, т. е. пози-
ционную линию самолёта, которая может быть использована в на-
вигации как всякая позиционная линия.
Неверно иногда считают, что линия равных азимутов то же
самое, что и локсодромия. Следует отчетливо представить, что
это две совершенно! различные линии. Линия равных азимутов
это такая линия, во всех точках которой направления на одну за-
данную точку (радиостанцию) имеют один и тот же постоянный
236
азимут; локсодромия же — линия, пересекающая меридианы под
одним и тем же постоянным углом.
От радиостанции можно провести бесчисленнее множество
линий равных азимутов. Но так как ИРП определяют на само-
лёте в целых градусах, то считают, что от каждой радиостанции
идут 360 линий равных азимутов со значениями от 0"' до 360°.
Линия равных азимутов есть вполне определённая фиксированная
линия на земной поверхности. Следовательно, определив ИРП на
самолёте, мы будем знать позиционную линию самолёта. Для
этой цели до полёта можно нанести на карте линии равных ази-
мутов тех радиостанций, которые выбраны для пеленгации.
Тогда в полёте, определив ИРП, можно указать позиционную
линию самолёта. Если же в полёте будут определены истинные
пеленги двух радиостанций, то точка пересечения соответствую-
щих линий равных азимутов даст расчётное место самолёта.
Рис. 206. Прокладчик линий равных азимутов
Приведём некоторые способы построения линии равных ази-
мутов на картах конической проекции, применяющихся в аэрона-
вигации (в масштабах 1:1000 000; 1:2000 000; 1:2500000).
Самым быстрым и простым способом построения линии равных
азимутов является построение их при помощи специального про-
кладчика (рис. 206). Прокладчик состоит из транспортира и ли-
нейки. Линейку можно жёстко скреплять барашком с транспорти-
ром под любым углом. В центре транспортира имеется отверстие
диаметром 2 мм для отметок карандашом. Вдоль линейки сделан
вырез в направлении через центр транспортира. В вырезе поме-
щается движок с иглой, который с лёгким трением передвигается
вдоль выреза. Установив иглу на карте, можно передвигать и
вращать транспортир относительно точки, в которой установлена
игла. Края линейки скошены, и на них нанесены масштабы: на
одном — сантиметры, на другом — деления для карт мас-
штаба 1 : 2 500 000. Длина линейки 500 мм, диаметр транспортира
120 мм Линейка сделана из алюминия, транспортир — из целлу-
лоида.
Для построения линии равных азимутов на карте конической
проекции закрепляют линейку под требуемым углом и устанавли-
вают иглу на карте в точку радиостанции. Затем устанавли-
вают транспортир последовательно на каждый меридиан так,
чтобы деления «0» и «180°» транспортира совпадали с направле-
нием меридиана: нуль — с севером, 180° — с югом, и отмечают
237
через центр транспортира течку на каждом меридиане. Соединив
все точки, получают линию равных азимутов.
Можно указать другой способ построения линии равных ази-
мутов, не требующий специального прокладчика. При этом спо-
собе нужен только обыкновенный транспортир. В точке места радио-
станции на карте конической проекции (тех же масштабов, которые
указаны выше) откладывают при помощи транспортира угол от юж-
ной стороны меридиана радиостанций, равный заданному значению
азимута. Продолжают сторону этого угла до пересечения с меридиа-
ном, отстоящим на 1° от меридиана радиостанции (рис. 207).,
В точке пересечения стороны угла с этим меридианом отклады-
вают угол, равный заданному значению азимута плюс (минус) 0°,8,
Рис. 207. Прокладка линий равных азимутов
с помощью транспортира
и продолжают сторону этого нового угла до пересечения с мери-
дианом карты, отстоящим на 1° от вершины этого нового угла.
В этой новой точке пересечения откладывают угол, равный азимуту
плюс (минус) 1°,6, и продолжают сторону этого угла до пересече-
ния с третьим меридианом и т. д. Таким образом получают линию
равных азимутов, откладывая через каждый 1° долготы угол
больший (меньший) на 0°,8 предыдущего угла. Поправку в угол,
равную 0°,8 на каждый 1° долготы, прибавляют, если ИРП
меньше 180°, и вычитают, если ИРП больше 180°. Нужно помнить,
что линии равных азимутов имеют кривизну, обращённую вогну-
тостью к полюсу. Имея на самолёте карту, на которой проведены
линии равных азимутов заданных радиостанций, легко найти пози-
ционную линию самолёта, если определить истинный пеленг какой-
либо заданной радиостанции, для которой подготовлена карта.
Образец такой карты показан на рис. 208. На этой карте,
охватывающей район Киров — Архангельск — Усть-Уса, проведены
линии равных азимутов для трёх радиостанций, находящихся в го-
родах Киров, Архангельск и Усть-Уса. Линии равных азимутов
проведены через 10°, однако интерполяция не представит затруд-
нений и точность её будет лежать в пределах точности пеленга-
ции.
238
Допустим, например, что в полёте определён истинный пеленг
радиостанции, находящейся в Архангельске. Этот пеленг оказался
равным 320°, Следовательно, позиционной линией самолёта в этом
Рис. 208. Линии равных азимутов на карте конической проекции
случае будет являться кривая (линия равных азимутов), проходя-
щая через точку места радиостанции в Архангельске и оцифро-
ванная числом 320°. Следует заметить, что ввиду наличия ошибок.,
присущих радиопеленгации, мы получим не линию, а полосу,.
239
ширина которой пропорциональна величине ошибки и расстоянию
от радиостанции.
Запеленговав одновременно две радиостанции и получая
таким образом две позиционные линии, определим и расчётное
место самолёта. Например, истинные пеленги: архангельской
радиостанции, равный 310°, и усть-усинскон радиостанции, рав-
ный 39°, указывают, что расчётное место самолёта находится
в районе пункта Козьмино. Для более точного определения рас-
чётного места следует пеленговать все три радиостанции. Напри-
мер, 'истинный пеленг архангельской радиостанции равен 306°,
усть-усинской — 39° и кировской—175°. Интерполируя на-глаз,
находим расчётное место самолёта в пункте Яренск.
Другое применение радиополукомпаса—пилотирование само-
лёта с заданным курсовым углом по отношению к радиостанции—
получило самое широкое распространение в так называемых
«полётах на радиостанцию». В полёте, когда курсовой угол радио-
станции постоянно сохраняется равным нулю, обеспечивается при-
вод самолёта на эту радиостанцию при любых условиях видимо-
сти. Радиополукомпас используется для пилотирования только
с курсовым углом, равным нулю или отличающимся от нуля на
небольшую величину (на угол сноса)'.
Действие радиополукомпаса основано на направленных свой-
ствах рамочных антенн. Рамочной антенной или просто рамкой
называется провод, свёрнутый в катушку самоиндукции (рис. 209).
Если концы рамки присоединить к клеммам «антенна — земля»
приёмника, то, настроившись на радиостанцию, можно обнаружить,
что сила приёма зависит от угла, составленного плоскостью
рамки с направлением на радиостанцию. Сила приёма максимальна,
1 Радиополукомпас используется и при полётах от радиостанции, но только
как пеленгатор, в сочетании с магнитным компасом (см. § 11).
2-10
Рис. 211. Диаграмма силы приёма
на вертикальную антенну
когда плоскость рамки совпадает с направлением на радиостан-
цию, и минимальна или совершенно отсутствует, когда плоскость
рамки перпендикулярна к этому направлению. Зависимость силы
приёма от угла поворота рамки изображается графически вектор-
ной диаграммой (рис. 210). Так, когда радиостанция находится
в точке Л (в плоскости рамки), сила приёма максимальна и изо-
бражается вектором 1, для точки В вектором 2 и т. д.; для
точки, находящейся на перпендикуляре к рамке, равна нулю.
Таким образом, добившись
минимума силы приёма сиг-
налов поворотом рамки, мо-
жно сказать, что радиостан-
ция. на которую настроен
приёмник, находится в на-
правлении перпендикуляра к
плоскости рамки.
Если осуществить уст-
ройство, позволяющее от-
считывать угол между ка-
ким-либо фиксированным
направлением, например, от
продольной оси самолёта, и
перпендикуляром к рамке,
то тем самым возможно бу-
дет определить курсовые
углы радиостанций. Однако такое устройство не даёт возможности
определить стороны направления, в которой находится радиостан-
ция. Чтобы избежать двузначности в определении направлений,
Рис. 212. Одновременный приём на рамку
и вертикальную антенну
Добавляют к приёмнику ещё обычную антенну вертикального
типа, диаграмма силы приёма которой изображается окружностью
(рис. 211), и ведут приём одновременно на обе антенны (рис. 212).
При соответствующем подборе параметров антенн суммарная
Диаграмма силы приёма изобразится так называемой кардиоидой
(Рис. 213), которая однозначно определяет направление на радио-
станцию, так как минимум сигнала (теоретически нуль) имеет
Место только в направлении OF. Однако минимум, определяемый
Кардиоидой, недостаточно точен. Минимум сигнала (нуль) будет
1G
° Учебник аэронавигации 241
не только на линии OF, но и в некотором секторе KOL, поэтому
и направление на радиостанцию будет определяться неточно. Для
точного определения направления и стороны, а также для того,
чтобы это определение производить не на слух, а визуально,
используют в радиополукомпасе не сравнение силы звуковых сиг-
налов, а сравнение величины
Рис. 213. Кардиоида
электродвижущих сил, наво-
димых в рамке и открытой ан-
тенне. Это производится с по-
мощью особого устройства
(коммутатора и смесителя),
входящего в состав приёмни-
ка радиополукомпаса.
От этого устройства сиг-
налы подаются на зрительный
индикатор, называемый инди-
катором курса радиополуком-
паса. Сигналы, подаваемые иа
индикатор курса, пропорцио-
нальны по величине и напра-
влению сумме электродвижу-
щих сил, величина которых оп-
ределяется двумя кардиоида-
ми (рис. 214). Одна из кар-
диоид имеет значение положительное, а другая — отрицательное.
Если эта сумма равна нулю, т. е. две ЭДС равны по величине и
Рис. 214. Диаграмма электртчвидущих сил,
подаваемых на инциклтор курса
обратны по знаку, что имеет место, когда радиостанция находится
на линии АВ, перпендикулярной к плоскости рамки, то стрелка
индикатора курса будет стоять на нуле. Если преобладает ЭДС с
отрицательным знаком (радиостанция справа С, D, Е), стрелка
242
индикатора курса отклонится влево. Если преобладает ЭДС с по-
ложительным знаком (радиостанция слева F, G, Н), стрелка инди-
катора курса отклонится вправо. Таким образом, по поведению
стрелки индикатора можно судить не только о направлении на
радиостанцию (стрелка на нуле), но и о стороне этого направления.
Действительно, если придать перпендикуляру к рамке определён-
ное направление, например, указанное на рис. 214 стрелкой, и
зная, что положительному вращению рамки (по часовой стрелке)
соответствует отклонение стрелки индикатора курса вправо, легко
будет определить и сторону направления на радиостанцию. Дей-
ствительно, при пеленгации радиостанции получается два нулевых
положения стрелки индикатора курса, соответствующих направле-
ниям ОА и ОВ, однако искомой стороной будет являться ОД, так
как при повороте рамки с этой стороны вправо (радиостанция
остаётся влево) стрелка индикатора отклонится вправо, а при по-
вороте рамки вправо со стороны ОВ стрелка индикатора откло-
нится влево.
§ 8. Описание некоторых систем радиополукомпасов
и работа с ними
Всякий радиополукомпас состоит из следующих основных
частей: радиоприёмника, рамочной антенны, обычно помещаемсй
Рис. 215. Основные части радиополукомпаса
в обтекатель для уменьшения лобового сопротивления, открытой
антенны, умформера для пиггания ламп приёмника током высокого
напряжения, щитка управления приёмником, механизма настройки
приёмника, поворотного механизма рамки со шкалой курсовых
Углов, индикаторов курса (обычно двух) и индикатора настройкц
приёмника (рис. 215).
16»
243
Рис. 216. Внешний вид РПК-2
РПК-2
Индикатор курса
Индикатор настройки
щиток настройки
Щиток управления рамкой
. Щиток иправленл
Рис 217. Внешний вид отдельных частей РПК-2
244
Радиополукомпас типа РПК-2
Внешний вид всех основных частей этого радиополукомпаса
показан на рис. 216 и 217.
Щиток управления (рис. 217) смонтирован в алюминиеьой
коробке. На лицевой стороне щитка расположены:
— ручка выключателя сети и регулятора чувствительности
индикатора курса;
— предохранитель для низковольтной сети;
— ручка регулятора громкости;
— кнопка переключения длинноволнового диапазона и сиг-
нальная (красная) лампочка;
— кнопка переключения средневолнового диапазона и сигналь-
ная (зелёная) лампочка;
Рис. 218. Расположение радиополукомпаса
на самолёте:
1 — рамка; 2 — приёмник; 3 — жёсткая антенна; 4 — щиток
управления; 5 — дистанционная передача вращения рамки;
б—индикатор штурмана; 7—индикатор лётчика; 8 — умформер
— переключатель рода работы на три положения: «ММ*—маяк
модулированный, «МН» — маяк немодулировэнный и «К»—компас;
— тумблер выключения индикатора лётчика;
— две розетки для включения телефонов.
Механизм дистанционного управления настройкой приёмник*
имеет вид коробки со шкалой, стрелкой и рукояткой. На шкале
нанесена градуировка частоты в килогерцах. Внешняя шкала де-
лений соответствует диапазону средние волны» (от 410 до
1000 кгц), внутренняя шкала соответствует диапазону «длин-
ные волны» (168—410 кгц). Питание электроэнергией — от борто-
вой сети самолёта.
Обычное расположение отдельных частей радиополукомпаса
на самолёте показано на рис. 218.
При установке радиополукомпаса на самолёте особое внимание
надс уделить удобному расположению щитка настройки, индика-
тора настройки, шкалы курсовых углов и индикатора курса.
Индикатор курса должен быть расположен так, чтобы его пока-
зания можно было наблюдать одновременно с показаниями
магнитного компаса.
Работа с РПК-2
Порядок работы с РПК-2 следующий:
— включьть радиополукомпас поворотом доотказа вправо
ручки регулятора чувствительности индикатора;
245
— повернуть доотказа вправо ручку регулятора громкости;
— поставить переключатель рода работы в положение «МН»,
так как при этом положении обеспечивается наибольшая чувстви-
тельность индикатора настройки;
— нажатием соответствующей кнопки включить нужный диа-
пазон длин волн;
— установить стрелку шкалы настройки н'а нужную частоту;
— настроиться, пользуясь индикатором настройки; наилучшей
настройке будет соответствовать самое крайнее левое положение
стрелки индикатора настройки;
— установить переключатель рода работы в положение «К»-
При полёте на радиостанцию после этих
действий нужно:
— установить рамку радиополукомпаса на курсовой угол,
равный нулю;
— включить индикатор курса лётчика и подать ему сигнал о
готовности радиополукомпаса;
— после вывода самолёта на курс отрегулировать чувстви-
тельность индикатора курса;
— следить во время полёта, чтобы не изменилась настройка
(например, ст тряски) и чтобы чувствительность индикатора
курса была не слишком большой и не слишком малой. Большая
чувствительность утомительна для пилотирования, малая может
привести к большим уклонениям от линии кратчайшего пути.
Для определения курсового угла радиостан-
ции надо:
— вращая рамку при помощи ручки поворотного механизма,
установить стрелку индикатора курса на нуль; вращать ручку
следует в ту сторону, куда отклонилась стрелка индикатора курса;
— подать сигнал лётчику о начале измерений, чтобы он
точно сохранял курс самолёта во время измерений;
— после того как курс самолёта установится, уточнить поло-
жение стрелки индикатора и отсчитать на шкале курсовой угол.
Если во время измерений самолёт «рыскает» на курсе, то
следует подобрать такое положение рамки, при котором стрелка
индикатора курса будет равномерно колебаться относительно
нулевого положения.
Автоматический радиокомпас SCR-269-A
Радиокомпас типа SCR-269-A американской фирмы Бендикс
представляет собой автоматический радиокомпас, рамка которого
устанавливается автоматически на ту радиостанцию, на которую
настроен приёмник радиокомпаса.
Радиодевиация в этом радиокомпасе учитывается также авто-
матически с помощью специального механического компенсатора.
Таким образом, чтобы определить курсовой угол радиостанции,
нужно лишь настроиться на неё и взять отсчёт по шкале индика-
тора курсовых углов.
Радиокомпас SCR-269-A имеет приёмник, умформер, рамку в
обтекателе, открытую антенну, два щитка управления (приёмник
243
может управляться независимо с двух мест: от штурмана и от
.лётчика), ива индикатора курсовых углов (один индикатор штур-
мана, другой — лётчика).
Радиокомпас SCR-269-A индикатора курса не имеет, и полёт
на радиостанцию осуществляется выдерживанием стрелки инди-
катора курсовых углов на КУР = 0°. Индикатор курсовых углов
лётчика (рис. 219) и служит в основном только для этой цели.
Индикатор штурмана (рис. 220) большего размера, и его
шкала может независимо вращаться от руки; она служит для
установки истинного курса самолёта.
Рис. 220. Индикатор курсовых
углов штурмана
Рис. 21X Индикатор
курсовых уг.тоз лётчика
Таким образом, с помощью этого устройства можно произво-
дить механическое суммирование курсового угла радиостанции с
истинным курсом самолёта, т. е. определять истинные пеленги
радиостанций.
Так как стрелка индикатора курса своим остриём всегда
направлена на радиостанцию, то с помощью индикатора очень точно
определяется момент прихода самолёта на радиостанцию. В этот
момент стрелка быстро поворачивается с 0 на 180° и после прохода
радиостанции остаётся в этом положении.
Диапазон частот радиокомпаса iSCR-269-А составляет 200 —
1 750 кгц. Вес всего комплекта 35 кг (без кабелей и монтажных
деталей).
Устанавливается этот 'радиокомпас на самолётах дальнего
действия.
Работа с радиокомпасом типа SCR-269-A
Всё управление радиокомпасом сосредоточено в одном щигке
(рис. 221).
Для определения курсового угла радиостанции нужно:
— поворотом переключателя 11 в положение «сотр» вклю-
чить радиокомпас;
247
— убедиться о включении по загоранию зелёной сигнальной
лампочки .9: если лампочка не загорается, нажать контрольную
кнопку 12; эта кнопка переключает управление с ^одного щитка
на другой;
— поворотом переключателя 3 установить нужный диапазон;
— вывести до упора вправо регулятор громкости 7;
— вращением ручки настройки 10 установить нужную ча-
стот), руководствуясь показаниями индикатора настройки 5;
момент резонанса настройки определяется максимальным откло-
нением стрелки индикатора вправо;
Рис. 221. Щиток управления SCR-269-A
— убедиться на (слух (по позывным), что настройка произве-
дена на нужную радиостанцию;
— взять отсчёт по шкале индикатора курсовых углов; это и
будет курсовой угол радиостанции.
Дли определения истинного пеленга радиостанции вращением
ручки «var» на индикаторе штурмана установить против треуголь-
ного индекса значение истинного курса самолёта. Отсчёт против
острия стрелки будет являться истинным пеленгом .радиостанции.
Для полёта на радиостанцию нужно пилотировать самолёт так,
чтобы стрелка индикатора лётчика была всё время на нуле (тре-
угольный индекс индикатора штурмана).
При отклонении стрелки в какую-либо сторону возвращать её
в нулевое положение поворотом самолёта в ту же сторону.
Радиокомпас SCR-269-A может быть использован и как
обычный приёмник (например, для прослушивания радиомаяка)
Для этого переключатель // устанавливается в положение «ant>
218
(антенна), тем самым отключается цепь рамки и приём произво-
дится только на антенну на слух.
Может быть, наоборот, отключена цепь антенны, и приём
производится на одну рамку. Это достигается установкой переклю-
чателя //в положение «loop» (рамка).
Приём на одну рамку производится или три больших стати-
ческих помехах, мешающих обычному приёму на открытую антенну,
или для слуховой пеленгации радиостанций по минимуму слыши-
мости. Вращение рамки в этом случае производится с помощью
ручки 6.
Особая необходимость в слуховой пеленгации может (возни-
кнуть в случае повреждений открытой антенны, например, обрыва
её от обледенения.
Радиополукомпас РПК-10
РПК-10 представляет собой радиополукомпас с неподвижной
рамкой, устанавливаемой на самолёте под КУР — 0°. Его назначе-
ние — полёт на радиостанцию, и поэтому он устанавливается на
самолётах ближнего действия (на истребителях, штурмовиках
ближних бомбардировщиках и т. п.).
Рис. 222. Внешний вид РПК-10
Внешний вид РПК-10 показан на рис. 222 и 223.
РПК-Ю обладает значительно меньшими габаритами и весом,
чем РПК-2; это объясняется меньшим диапазоном частот, отсут-
ствием механизма вращения рамки, наличием только сдногс
индикатора курса. Индикатор настройки смонтирован в щитке
управления.
Диапазон частот РПК-10 275 — 725 кгц.
249
Работа с радиополукомпасом типа РГ1К-10
Порядок работы с РПК-10 для полёта на радиостанцию сле-
дующий:
— включить тумблер питания (общий для всей радиосистемы
самолёта);
Пндинатоо чурса
Щиток управления
Ллремючагпель рода работы
Рис. 223 Виеши .й вид отдельных частей РПК 10
— переключатель рода работы установить на «К»;
— регулятор громкости вывести до упора вправо;
— установить на шкале щитка настройки частоту заданной
радиостанции;
— небольшими движениями «взад-вперёд» ручки щитка на-
стройки установить стрелку индикатора (настройки на самое крайнее
положение влзво;
— проверить на слух, по позывным, что настройка произве-
дена на заданную радиостанцию; для этого переключатель рода
оаботы установить на «ММ» или «МН» (рис. 223).
После проверки переключатель снова устано-
вить на «К»;
— разворачивая самолёт, установить стрелку
индикатора курса на 0. Для этого усвоить пра-
вило:
Разворот впра, о — если стрелка в левом по-
ложении.
Разворот влево — если стрелка в правом по-
ложении:
— убедиться, что самолёт летит на радио-
станцию, соблюдая при этом правило:
при «даче правой ноги» — стрелка индика-
тора курса отклонится вправо; при «даче левой
ноги» — влево;
Примечание. При отсутствии такого соответствия
тазвернуть самолёт на 180°.
— вести самолёт по индикатору курса, удер-
живая стрелку на нулевом положении;
— при пилотировании самолёта по индика-
тору курса периодически контролировать правиль-
ность направления полёта магнитным компасом;
— выход на радиостанцию определяется:
а) по быстрому колебанию (до пределов
шкалы) стрелки индикатора курса попеременно
в обе стороны (при постоянном курсе самолёта);
б) проверкой — летит ли самолёт на радио-
станцию или уходит от неё;
Рис. 224. Показа-
иия индикатора
курса
в) визуальной ориентировкой
Примечание. Уход от радиостанции определяется по движениям
стрелки индикатора курса. При «даче правой ноги* стрелка отклонится влево
При ,даче левой иоги* стрелка отклонится вправо.
Зависимость показании индикатора курса от курса самолёта
приведена на рис. 224.
§ 9. Радиодевиация и её определение
Отсчёты, которые берут со шкалы курсовых углов радиополу-
компаса, в общем случае не соответствуют действитр пьным зна-
чениям курсовых углов радиостанции, а отличаются от них на ту
251
иную величину, т. е. радиополукомпас, установленный на само-
лёте, неточно указывает направление на радиостанцию. Эта раз-
ность между истинным курсовым углом радиостанции и отсчётом
по радиополукомпасу (сокращённо ОРК) называется радиодевиа-
цией, обозначаемой Др.
= КУР — ОРК.
Это соотношение поясняет рис. 225. Значение радиодевиации
может быть как положительным, так и отрицательным.
/ Радиодевиация возникает
/ вследствие искажения напра-
, вления приходящих радиоволн
л $ металлическими частями само-
А лёта, в которых под влиянием
_ приходящих радиоволн возни-
кает электродвижущая сила.
г#, Таким образом, на рамку дей-
/ ствует электромагнитная 'Энер-
/ гия, излучаемая радиостанци-
z ей и окружающими рамку ме-
Рис. 225. Радиодевиация таллическими частями само-
лёта. Поэтому рамка указыва-
ет направление суммарного
действия электродвижущих сил. Чтобы определить действительный
курсовой угол радиостанции, нужно к отсчёту по радиокомпасу
алгебраически прибавить значение радиодевиации, соответствую-
щее этому отсчёту, т. е.
КУР = ОРК + Др.
Если же требуется для заданного значения курсового угла
радиостанции определить соответствующее ему значение ОРК.
нужно из величины КУР алгебраически вычесть величину Др.
ОРК = КУР — Др.
Величина радиодевиации зависит от расположенных вблизи
рамки радиокомпаса металлических частей, т. е. от типа самолёта
и от места установки рамки на самолёте. Величина радиодевиации
изменяется также от курсового угла радиостанции, т. е. от вели-
чины угла поворота рамки. Если построить график зависимости
Др от ОРК, то получится 'кривая (раю. 226), которая носит назва-
ние кривой радиодевиации (аналогично кривой девиации магнитного
компаса). По оси абсцисс графика отложены значения отсчётов
радиокомпаса (ОРК), по оси ординат—соответствующие этим
отсчётам значения 'радиодевиации (Др). Таким образом, например,
значению ОРК = 60° соответствует Др = 9е, а значению ОРК —
== 150° соответствует Др= — 7°,5 и т. д.
52
Вид и форма приведённой на рис. 226 кривой радиодевиации
характерны в общем случае для всех кривых радиодевиации.
Кривая имеет так называемый четвертной характер, т. е. ме-
няет свой знак через каждые 90° (четверть крута) и имеет наи-
большие значения на курсовых углах, близких к 45°, 135°, 225° и 315°.
Максимальная величина радиодевиации гложет доходить до
20—25°.
При установке рамки радиополукомпаса на самолёте следует
выбирать для неё такие места, в которых радиодевиация не пре-
восходит указанных выше цифр и по возможности находится в
пределах 10—15°.
Рис. 226. Кривая радиодевиации
Радиодевиация может быть определена на земле или в
воздухе.
На земле радиодевиация определяется по видимой или по
удалённой радиостанции. При определении радиодевиации но ви-
димой радиостанции нужно, чтобы она находилась от самолёта
не ближе двух-трёх длин волны, на которой определяется радио-
девиация. Так. например, если определяется радиодевиация на
частоте 300 кгц, что соответствует длине волны I 000 м. радио-
станция должна находиться от самолёта не ближе 2—3 кл.
Однако не следует определять радиодевиацию по ближним мощ-
ным станциям (10 кет н выше), так как при этом могут полу-
читься ошибки вследствие искажений, вносимых электромагнит-
ным полем радиостанции.
Определять радиодевиацию лучше всего по аэродромной стан-
ции. измеряя курсовые углы визуальной пеленгацией мачты радио-
станции и одновременно делая отсчёты по радиокомпасу. Для
этого самолёт нужно устанавливать пол различными курсовыми
углами к радиостанции. Установка самолёта, девиационного пе-
ленгатора и пр. производится так же, как и при определении
девиации магнитных компасов. Нужно обратить особое внимание
на то, чтобы деления 0 и 180° девиационного пеленгатора были
строго параллельны продольной оси самолёта. При определении
радиодевиации на месте установки самолёта не должно быть
построек, проводов линий высокого напряжения, деревьев и т. п.
в радиусе не менее 300—400 м. Перед определением радиодевиа-
53
ции надо проверить й устранить установочную ошибку радио-
полукомпаса вследствие установки рамки вне плоскости электри-
ческой симметрии самолёта (обычно совпадающей с механической
плоскостью симметрии) или от неправильной установки азимуталь-
ной шкалы рамки, или от обеих причин одновременно. Проще
всего это сделать так: направить нос самолёта на радиостанцию
(КУР = 0), установить стрелку индикатора курса на нуль, отсое-
динить гибкий валик, повернуть
№ отсчёта КУР ОРК др
1 10° 9° + 1°
2 20° 15° + 5°
3 30° 33е — 3°
и т. д.
Определив
строят кривую
азимутальную шкалу так, чтобь
ОРК=0, после чего вновь присое-
динить гибкий валик.
Начинать определение радио-
девиации можно с любого курсо-
вого угла.
Результаты определения девиа-
ции записывают в таблицу.
углов.
радиодевиацию для 36 или 24 курсовых
девиации. Для построения кривой используют обыч-
ный бланк девиации компаса, а кривую строят таким же образом.
как и кривую девиации магнитного компаса.
Неизбежные ошибки в процессе определения радиодевиацни
дадут некоторый разброс точек, нанесённых на график. Обычно
нанесённые точки определяют ход кривой, и провести кривую по
полученным точкам не представляет труда. Однако разброс точек
не должен быть слишком большим. Точки могут отходить от про-
ведённой средней кривой не более чем на 1—2°. Если по получен-
ным точкам затруднительно провести кривую или если точки от-
ходят от проведённой кривой более чем на 1—2°, радиодевиацию
следует определить заново.
Имея кривую радиодевиации, легко определить курсовой угол
радиостанции. Например, пользуясь кривой радиодевиации, при-
ведённой на рис. 226, найдём:
для ОРК = 70е, Дрг= + 7С; КУР = 70°+ 7° =77°;
для ОРК = 310°, Др = — 10°; КУР = 310°— 10° = 300°.
Знать и учитывать радиодевиацию чрезвычайно важно. Оши-
баясь, например, на 1°, мы ошибаемся в определении РМ при рас-
стоянии до радиостанции в 500 км на 15 км. А так как радио-
девиация может доходить до 15—20е, ясно, что, не имея кривой
радиодевиации или если радиодевиация определена неточно, поль-
зоваться радиополукомпасом не только бессмысленно, но зача-
стую и небезопасно.
Исследованиями доказано, что радиодевиация в диапазоне
частот радиополукомпаса практически не зависит от частоты при-
нимаемого радиосигнала, поэтому кривая радиодевиации, снятая
на одной какой-либо частоте, будет соответствовать всем часто-
там диапазона радиополукомпаса. Также доказано, что радио-
девиация не зависит и от высоты полёта, причём радиодевиация,
определённая на земле, при прочих равных условиях не отличается
254
от радиодевиации, определённой в воздухе, поэтому радиодевиа-
цию можно определять на земле и только на одной какой-либо»
частоте. Иногда в полёте расположение каких-либо частей само-
лёта, оборудования или вооружения может быть по отношению
к рамке иное, чем «а земле. В таких случаях следует радиодевиа-
цию определить и в воздухе. Но эти случаи довольно редки, и
большей частью радиодевиация неизменна.
Весьма часто радиодевиацию приходится определять по неви-
димым, дальним станциям. В таких случаях курсовые углы радио-
станции определяют не непосредственно визуальной пеленгацией,
а косвенным путём. Чтобы объяснить способ определения курсо-
вого угла заданной радиостанции, обратимся к рис. 203, на кото-
ром точка О — местонахождение самолёта, NS — истинный мери-
диан этого места, АВ — продольная ось самолёта. 7? — местона-
хождение радиостанции, уюл NOR—истинный пеленг радио-
станции (ИРП), угол NOB — истинный курс самолёта (ИК)
угол BOR — курсовой угол радиостанции (КУР)
Из рисунка зидно, что
КУР = ИРП - ИК,
а так как
ИРП = МРП + Дм и ИК = МК4-ДЮ
то получим
КУР = МРП - МК.
Таким образом, зная магнитный пеленг радиостанции в дан
ном месте и определив магнитный курс самолёта, можно на осно-
вании этой алгебраической разности подсчитать курсовой угол
радиостанции, а зная ОРК, соответствующий этому КУР- опре-
делить и Др по формуле
Др = КУР — ОРК.
Величина МРП является постоянной для данного места и
данной радиостанции и легко определяется по картам конической
прое’кции. Чтобы определить МРП радиостанции в данном месте,
нужно н'а карте соединить прямой место радиостанции и место,
для которого определяется МРП. Измерив угол между меридиа-
ном данного места и направлением (проведённой прямой) на
радиостанцию, получим ИРП и, вычтя из ИРП значение Ды Д-1Я
данного места, получим МРП.
Определение радиодевиации в воздухе
Выбирают радиостанцию и линейный ориентир. Расстояние
между радиостанцией и линейным ориентиром должно быть не
менее 100—150 км\ желательно, чтобы направление линейного
ориентира совпадало с направлением на радиостанцию. Выбрав
день, когда нет рему («болтанки») и сильного ветра, выполняют
полёт над ориентиром, пересекая его с различными курсами.
255
Лётчик ведёт самолёт при помощи гиромагнитного компаса,
я штурман в момент пересечения линейного ориентира определяет
отсчёт радиополукомпаса и курсовой угол ориентира. Полученные
данные обрабатывают так же, как указано выше,
Кривую радиодевиации следует определять в воздухе для
18 курсовых углов (на 18 курсах) через каждые 20° шкалы рамки.
Особое внимание следует обратить на строгое выдерживание
курса. При наличии на самолёте автопилота следует его включать
после вывода самолёта на каждый «рабочий» курс и выключать
/ тля более быстрого выполнения разворотов) на разворотах к но-
вым курсам
§ 10. Полёт на радиостанцию
Если в конечном пункте маршрута полёта находится рабо-
тающая радиостанция, частота которой заключена в диапазоне
частот радиополукомпаса, то при помощи последнего осуще-
ствляется самый простой и надёжный способ радионавигации —
полёт на радиостанцию.
При этом способе экипажу самолёта не приходится делать
никаких расчётов и вычислений, чтобы точно притти в конечный
пункт маршрута. Всё, что требуется от экипажа, — это пилотиро-
вать самолёт так, чтобы стрелка индикатора курса стояла на
нуле при рамке радиополукомпаса, установленной на курсовой
угол, равный нулю.
Надёжность способа полёта на радиостанцию заключается
в гом, что самолёт точно придёт в район конечного пункта марш-
рута независимо от условий видимости ориентиров. Способ удо-
бен тем, что при нём не требуется присутствия штурмана, поэтому
его можно широко применять на одноместных самолётах. Ценность
этого способа заключается ещё в том, что в полёте можно отхо-
дить от заданной линии пути, например, для обхода грозы, можно
не опасаться потери ориентировки во время воздушного боя
или во время наблюдения за воздухом, так как радиополу-
компас позволяет из любой точки выйти на радиостанцию, распо-
ложенную на своём аэродроме. Для этого нужно только настроить
приёмник радиокомпаса на радиостанцию, установить рамку
на курсовой угол, равный 'нулю, и пилотировать самолёт по инди-
катору курса.
Напомним, что индикатор курса устроен так что при полёте
на радиостанцию в случае отклонения самолёта от курса вправо
стрелка индикатора тоже отклоняется вправо, а при отклонении
самолёта влево — отклоняется влево. Следовательно, для того,
чтобы вести самолёт кратчайшим путём на радиостанцию, надо
держать стрелку индикатора курса на нуле. При отклонении
стрелки вправо возвращать её в нулевое положение, довернув
самолёт влево, а при отклонении стрелки влево — довернул само
лёт вправо.
Чтобы не создавать «разбалтывания» самолёта, следует под-
шрагь соответствующую чувствительность индикатора курса:
увеличивать её, когда самолёт находится на большом расстоянии
256
от радиостанции или когда полёт происходит в спокойной атмо-
сфере, и уменьшать — при прибл окении ‘к радиостанции или
в случае полёта в неспокойной атмосфере.
В длительном маршрутном полёте, особенно при отсутствии
возможности производить визуальную ориентировку, целесооб-
разнее пилотировать самолёт по магнитному компасу, контроли-
руя полёт показаниями индикатора курса. Это диктуется тем со-
ображением, что радиополукомпас по тем или иным причинам
может выйти из стрся и, если не руководствоваться показаниями
магнитного компаса, легко потерять ориентировку.
Если конечный пункт Маршрута не может быть обнаружен
приёмами визуальной ориентировки, когда полёт на радиостанцию
происходит вне видимости земли, его можно обнаружить по пове-
дению стрелки индикатора курса.
Стрелка индикатора курса при полёте самолёта над радио-
станцией приобретает большую подвижность и может совершить
одно-два быстрых колебательных движения, или «упасть» в ка-
кую-либо сторону. После пролёта радиостанции показания стрелки
индикатора курса меняются на обратные, т. е. при отклонении
самолёта вправо стрелка идёт влево, а при отклонении самолёта
влево стрелка идёт вправо. Для определения момента прихода
в конечный пункт маршрута штурман (лётчик) самолёта, зная
по расчёту времени примерный момент прибытия в конечный
пункт маршрута, сосредоточивает внимание на поведении стрелки
индикатора курса. Возросшая подвижность стрелки указывает на
приближение к радиостанции, самый же момент прибытия будет
обнаружен отходом 'стрелки от нулевого положения. Если этот
момент будет пропущен, штурман (лётчик), слегка отклоняясь от
курса, по поведению стрелки индикатора может судить о том,
пролетел самолёт радиостанцию или нет.
Можно рекомендовать ещё один способ определения момента
выхода на радиостанцию. Он состоит в следующем: при приближе-
нии к радиостанции, находясь на расстоянии 50—100 км от неё,
рамку радиополукомпаса устанавливают на угол 5—10°. Тогда
в момент пролёта радиостанции стрелка индикатора курса резко
«упадёт» в сторону, что и будет являться указанием пролёта
радиостанции.
Можно также устанавливать рамку при приближении к радио-
станции на КУР — 90й (или 270°); но тогда пилотировать следует
по магнитному компасу. В этом случае стрелка индикатора в момент
прохода радиостанции перейдёт от одного крайнего положения
в другое.
Излучаемая радиостанцией электромагнитная энергия распро-
страняется по дугам большого круга, поэтому путь самолёта,
летящего на радиостанцию при помощи радиополукомпаса,
должен совпадать с дугой большого круга, соединяющей место
вылета с местом радиостанции. Однако это происходит только
в безветрие или при попутном (встречном) ветре. Во всех осталь-
ных случаях, когда направление ветра образует некоторый угол
с направлением дуги большого круга, путь самолёта относительно
-7 Учебник аэронавигации
257
земной поверхности не будет совпадать с дугой большого круга,
а изобразится некоторой кривой (радиодромией), вид которой при-
ведён на рис. 227.
На этом рисунке точка А — место вылета, точка В — место
радиостанции, прямая АВ — дуга большого круга, по которой
летел бы самолёт при отсутствии ветра, кривая АСВ — путь само-
лёта при ветре. Очевидно, что форма и величина этой кривой
зависят от скорости самолёта и ветра и от угла между напра-
Рис. 228. Радиодромии для различных
значений Л
влением ветра и направлением пути АВ, иначе говоря, зависят от
V
величины отношения скорости самолета к скорости ветра: п = -ц
и от угла ветра е.
На рис. 228 изображены кривые полёта на радиостанцию для
различных значений п (угол ветра постоянен и равен 60°), а на
рис. 229 — кривые по-
лёта для различных
значений угла ветра е
(п постоянно и рав-
но 5). Рассматривая
рис. 228 и 229, можно
притти к выводу, что
при наличии ветра уве-
личивается длина пути,
а следовательно, вре-
мя полёта, и изме-
няется курс самолёта
тем, что ось самолёта всё
тогда как сам
(см. рис. 227). Последнее объясняется
время направлена на радиостанцию (КУР=ОГ),
самолёт движется по криволинейному пути.
Изменение курса самолёта не представляет каких-либо не-
удобств, поскольку лётчик ведёт самолёт не по магнитному ком-
пасу, а по индикатору курса радиополукомпаса. Увеличение же
времени полёта и величина отклонения от линии кратчайшего
пути п подлежат дальнейшему рассмотрению.
На рис. 230 приведён график, при помощи которого можно
определить увеличение времени At в процентах от времени полёта
258
по кратчайшему пути. По оси абсцисс отложены значения угла
ветра от 0° до 180°. По оси ординат отложены величины удли-
нения времени в процентах от времени полёта по кратчайшему
пути.
Рис. 229. Радиодромии для различных значений с
Кривые графика соответствуют различным значениям отно-
шения -jj == п. Зная воздушную скорость самолёта, скорость и угол
ветра, по этому графику можно определить увеличение времени
полёта.
Пример. V = 300 км’час, U = 50 км/час, е - 60е. Полёт будет продолжаться
2 часа.
Определить увеличение времени при полёте па радиостанцию.
Определяем п — ттр = 6 и по рис. 230
времени составит всего около 1 минуты
Рассматривая рис. 230, мож-
но притти к выводу, что увели-
чение времени—величина вообще
незначительная. Отношение воз-
душной скорости современного
самолёта к скорости ветра не мо-
жет быть меньше 3, так как если
считать воздушную скорость са-
молёта равной 300 км/час, то
скорость ветра должна быть рав-
на 100 км/час, что встречается
очень редко. Ио даже если взять
п = 3 и самый неблагоприятный
случай, когда угол ветра е —75°,
то получим увеличение времени
примерно на 6,5%. С другой сто-
находим М = 1%, т. е.
увеличение
Рис. 230. График увеличения
времени полёта
роны, в зависимости от дальности действия радиополукомпаса,
при скорости самолёта 300 км/час время полёта на радиостанцию
редко будет превышать 4 часа. Следовательно, для этого случая
получим увеличение времени всего на 15 минут. Обычно же п не
17«
259
будет меньше 5—4, следовательно, увеличение времени не будет
превышать З.б^/о — величины, с которой вообще можно не счи-
таться.
Рассмотрим величину отклонения от линии кратчайшего пути.
На рис. 231 приведены кривые максимальных уклонений от линии
кратчайшего пути. Эти уклонения даны в процентах от расстоя-
ния между местом вылета и местом радиостанции, измеренного
по дуге большого круга. По оси абсцисс отложены значения угла
ветра, по оси ординат — максимальные уклонения в процентах.
Кривые построены для различных значений п.
Максимальные уклонения бу-
дут на расстоянии примерно */
пути от радиостанции. ’
Задавшись опять отношением
п = 3, получим при £ = 105° наи-
большее значение уклонения л,
равное примерно 12,5°/о. Для рас-
стояния 1 000 км это будет со-
ставлять 125 км. Если отклоне-
ние от линии пути нежелательно,
то при полёте на радиостанцию
необходимо учитывать ветер.
Чтобы самолёт летел по пу-
ти АВ (см. рис. 227), рамку радио-
полукомпаса необходимо повер-
нуть на курсовой угол, равный
С° 30° 60° 90° 120° 150° ISCft
Рис. 231. График максимальных
уклонений от линии пути
углу сноса. Определив в пункте вылета угол сноса, соответствую-
щий пути АВ, устанавливают рамку на значение ОРК=ф— Лр>
если снос правый, и на значение ОРК = (360°— ф) — Лр. если снос ’
левый. Зная, что правый снос обозначается знаком плюс, а левый
знаком минус, можно обе формулы объединить и написать сле-
дующую формулу:
ОРК = (ЗбО° + <р) —Др.
Таким образом, при сносе вправо выражение в скобках будет
равно углу сноса, для которого и определяется радиодевиация.
При сносе влево выражение в скобках будет иметь значение, близ-
кой к 360°, для которого и определяется радиодевиация. В первом
случае радиодевиация положительна, во втором — отрицательна.
Пример 1. Угол споса равен -|-10о. Найти отсчёт радиополукомпаса. По
кривой радиодевиации (см. рис. 226) определяем значение Др для КУР = 10°;
получаем Др = 3° и ОРК = 7°. На эту величину и устанавливаем рамку радио-
полукомпаса.
Пример 2. Угол сноса равен—15°. Найти ОРК. Определяем Др для
КУР = 360° — 15° = 345°; определяем Др = — 4 и ОРК = 349°. Установив рамку
иа этот угол и ведя самолёт по индикатору, мы поведём самолёт иа радиостан-
цию с учётом угла сноса по кратчайшему пути.
Приведённая выше цифра отклонения представляет собой,
конечно, исключительную величину. Обычно отклонения будут
значительно меньше. Кроме того, для расстояний порядка 1 000 км
260
ветер редко сохраняет постоянство направления, и поэтому откло-
нения самолёта по одну сторону кратчайшего пути будут компен-
сироваться отклонениями по другую сторону пути. Для меныигих
же расстояний и отклонения будут меньшие. Ещё следует заме-
тить, что, каковы бы ни были отклонения от линии пути, самолёт
всё равно всегда выйдет на радиостанцию.
Поэтому учитывать ветер в полёте на радиостанцию прихо-
дится в редких случаях, а в слепом полёте и нецелесообразно,
поскольку в слепом полёте ветер может быть определён неточно
и приводит только к дополнительным ошибкам.
Полёт на радиостанцию без учёта сноса получил название
«пассивного», а с учётом сноса — «активного».
§ 11. Полёт от радиостанции
Лица, плохо знакомые с радиополукомпасом, представляют,
что радиополукомпасом можно пользоваться при полёте от радио-
станЦии так же, как и при
полёте на неё, т. е. пило-
тировать самолёт от ра-
диостанции на цель, вы-
держивая постоянное
значение курсового угла,
равное 180°.
Следует сразу же
отметить, что полёт от
радиостанции по индика-
тору курса радиополу-
компаса невозможен, и
радиополукомпас в таком
полёте играет лишь роль
пеленгатора. Действи-
тельно, летя ‘ от радио-
станции по индикатору
курса радиополукомпаса,
рамка которого устано-
влена на КУР = 180°
(чтобы отклонения стрел-
ки индикатора курса были
обычными, т. е. при от-
клонении самолёта вправо
стрелка отклонялась впра-
во), в случае отклонения
самолёта от заданного
курса показания индикатора будут правильные, а в случае отклоне-
ния самолёта от линии пути показания индикатора будут обрат-
ными отклонению. Сказанное поясняется рис. 232.
На этом рисунке А — исходный пункт маршрута, В — конеч-
ный пункт маршрута. Прямая АВ ~ линия заданного пути. При
отсутствии ветра и полёте мужным курсом самолёт находится
261
в положении /, стрелка индикатора — на нуле. При отклонении
само пета от курса вправо (положение II) или влево (положение III)
стрелка индикатора отклоняется соответственно вправо или влево,
т. е. индикатор даёт гранильные показания. При наличии же сноса
(положения IV или V) показания индикатора будут обратными
отклонению самолёта от линии пути. Устанавливая стрелку инди-
катора на нуль поворотом самолёта в нужную сторону (пользуясь
показаниями стрелки ищи катора), приведём самолёт в положе-
ние VI или VII. Таким образом, самолёт полетит уже с другим
курсом. Если вести самолёт по индикатору курса при полёте от
радиостанции, то курс самолёта будет изменяться до тех пор,
пока продольная ось самолёта не будет находиться в плоскости
ветра. Следовательно, вести самолёт от радиостанции при помощи
индикатора курса невозможно. Правда, можно было бы соответ-
ствующим поворотом рамки учесть угол сноса, но поскольку
точно учесть этот угол не представляется возможным, а, кроме
того, в пути снос может меняться, то вести самолёт по индика-
тору курса в этом случае нецелесообразно и неудобно.
Хотя пилотировать самолёт по индикатору курса при полёте
от радиостанции и не представляется возможным, радиополуком-
пас в сочетании с магнитным 'компасом позволяет контролировать
линию пути, если производить полёт по линии равных азимутов.
При выполнении такого полёта нужно подобрать курс сле-
дования так, чтобы в течение всего полёта сохранялось равенство
ИК + КУР = ИРП0,
где ИРПо — значение азимута от точки цели на радиостанцию, от
которой производится полёг.
Так, например, летя из Нарьян-Мара в Сале-Хара (рис. 233)
от радиостанции, «ужно подобрать такие курсы, чтобы
ИК + КУР = 287 = ИРП0.
Полёт выполняется так.
Самолёт проходит над радиостанцией с ИК = 107°.
Через 5—10 минут после её пролёта определяем КУР. Ес пи
ИРП = ИК + КУР равен 287, то продолжается полёт с тем же
курсом, если ИРП больше или меньше ИРП„ = 287, то курс изме-
няется на 15—20° Курс увеличивается, если ИРП меньше ИРПл,
и уменьшается, если ИРП больше ИРП0. Если первая Поправка
оказалась большой или недостаточной, о чём будут говорить
дальнейшие ИРП, то изменить курс на половину первой поправки
в нужную сторону. Если после второй поправки курс не подобран,
опять изменить его на половину второй поправки и т. д., пока он
не будет подобран.
Подобрать курс нужно, не доходя до цели по крайней мере
100—150 км так, чтобы быть над ней строго в заданном азимуте.
При выполнении полётов от радиостанции не всегда будет
возмэжно подготовить карты построением линий равных азиму-
тов. В таких случаях достаточно измерить ИРП в точке цели и
ныдержи зать в полёте это значение, памятуя, что при полёте от
262
Рис. 233. Пучок линий равных азимутов
радиостанции И'РП увеличиваются при сходе самолёта с ИРП0
вправо (курс надо уменьшать) и уменьшаются при сходе самолёта
с ИРПо влево (курс надо увеличивать).
Имея возможность в пункте вылета пройти над радиостан-
цией, можно легко определить угол сноса. Для этого следует
отойти от радиостанции курсом, равным заданному курсу сле-
дования + 180°, на расстояние 10—15 км. Затем развернуться на
радиостанцию и вести самолёт на неё по индикатору курса
с рамкой, установленной на КУР = 0°. В момент прехода над
радиостанцией заметить компасный курс и в течение 2—3 минут
Рис. 234. Определение угла сноса пролётом над радиостанцией
вести самолёт по магнитному компасу, строго сохраняя замечен-
ный курс. В течение этого периода времени (2—3 минуты) опре-
делять курсовые углы радиостанции (взять 5—10 отсчётов), тогда
алгебраическая разность между средним арифметическим каче-
нием всех отсчётов курсовых углов 'и 180° даст значение угла
сноса на этом курсе, причём знак разности укажет и сторону
сноса ( + вправо, — влево).
Сказанное поясняется рис. 234.
§ 12. Определение позиционной линии самолёта
Как уже известно, позиционной линией самолёта, опреде-
ляемой с помощью радиополукомпаса, является линия равных
азимутов.
Линия равных азимутов характеризуется величиной истинного
пеленга (азимута) радиостанции.
Истинный пеленг радиостанции равен сумме истинного курса
самолёта и курсового угла радиостанции. Следовательно, опреде-
лив на самолёте истинный курс и курсовой угол радиостанции
и сложив их, получим истинный пеленг радиостанции — число,
характеризующее позиционную линию самолёта. Имея карту, на
которой заранее, до полёта, нанесены линии равных азимутов для
2Ь4
радиостанций, используемых для радионавигации, определим эту
позиционную линию самолёта на карте. Вся работа по определе-
нию позиционной линии самолёта с помощью радиополукомпаса
складывается из следующего:
1. До полёта подготовить карту, т. е. для выбранных радио-
станций вычертить линии равных азимутов. Линии равных азиму-
тов следует чертить через 5—10° для района предполагаемого'
полёта. Желательно, чтобы для каждой радиостанции ЛРА нано-
сились своим цветом. Масштаб карты следует выбирать исходя
из дальности использования радиостанций. Так, для расстояний,
не превышающих 300—400 км, можно применять «миллионку»,
для больших расстояний масштаб 1 : 2 000 000 или 1 : 2 500 000,
в конической проекции.
При построении линий равных азимутов следует руководство
ваться указаниями, изложенными в § 7.
2. В полёте для определения позиционной линии самолёта
следует:
— настроить приёмник на нужную радиостанцию и сориенти-
ровать на неё рамку;
— в течение одной-полутора минут строго выдержать режим
полёта, так, чтобы при спокойном состоянии атмосферы картушка
магнитного компаса совершала колебания, не превышающие
1—2°, а при возмущённом состоянии атмосферы колебания кар-
тушки совершались равномерно в обе стороны относительно-
среднего курса. При наличии автопилота следует его вклю-
чить:
— убедившись в правильности курса (определив средний
курс), запеленговать радиостанцию и взять средний отсчёт по
магнитному компасу. Напоминаем, что «запеленговать радиостан-
цию» значит установить рамку радиополукомпаса (РГЕК-2) в такое
положение, чтобы стрелка индикатора курса или стояла на нуле
(при спокойном состоянии атмосферы) или же колебалась
равномерно в обе стороны относительно нулевого положения
(при «болтанке»). Для автоматического радиополукомпаса термин
«запеленговать» означает «взять средний отсчёт по шкале инди-
катора курсовых углов»;
— записать отсчёты по магнитному и радиополукомпасу и
время момента пеленгации;
*— известить лётчика об окончании пе-
ленгации и о возможности ненапряжённого
пилотирования. После пеленгации, однако,
следует строго выдерживать курс, чтобы
иметь возможность полученную позицион-
ную линию использовать к моменту окон-
чания обработки результатов пеленгации;
— произвести подсчёты, необходимые
для вычисления истинного пеленга радио-
станции.
Подсчёты удобно сводить в такую
таблицу:
Станция------------
Частота ------------
Время --------------
КК-----------------
ОРК ----------------
И К-----------------
КУР ----------------
ИРП ----------------
265
В первую строку таблицы записывается название радиостан-
ции или пункт, в котором она находится, во вторую — частота
станции, в третью — время пеленгации, в четвёртую и пятую
строки записываются отсчёты по магнитному и радиополукомпасу,
в шестую и седьмую — исправленные значения отсчётов за девиа-
цию (и магнитное склонение для КК). В последнюю — сумма
ИРП = ИК + КУР;
— определив ИРП, на карте найти (или проин терполировать)
соответствующую линию.
Это и будет позиционной линией самолёта в момент пелен-
гации.
Пример. Выполняя полёт из Вельска в Усть-Уса (см. рис. 208) по линии
равных азимутов (ИРП = 48°) усть-усинской радиостанции, решили для контроля
ото дальности опре, елить позиционную линию от архангельской радиостанции.
Произведя соответствующие измерения и вычисления, нашли, что ИРП = 300°.
Таким образом, расчё ное место самолёта определяется точкой пересечения линий
равных азимутов с ИРП = 48° (от Усть-Уса) и с ИРП = 300° (от Архангельска).
Если подготовленной карты с линиями равных азимутов нет.
го можно определить позиционную линию проведением на карте
линии пеленга.
Линией пеленга, определяемой с помощью радиополукомпаса,
будем называть ортодромию, проходящую между радиостанцией
и самолётом. На применяемых картах она изображается прямой.
Для того чтобы её провести на карте, надо по известному ИРП
вычислить обратный пеленг радиостанции, отложить этот угол
от северной стороны меридиана ‘места радиостанции и провести
лод этим углом прямую, это и будет искомая линия пеленга, на
«конце» которой (где она пересекается с меридианом счислимой
точки самолёта) находится ‘самолёт.
Истинный обратный пеленг радиостанции (ОРП) не равен
ИРП-г 180°, как это бывает при визуальной пеленгации, т. е. при
небольших расстояниях. Значение истинного обратного пеленга
радиостанции определяется по формуле
ОРП = ИРП + 180э 4- е,
т. е. истинный обратный пеленг радиостанции равен истинному
пеленгу радиостанции плюс 180°, плюс величина е-
Величина е носит название поправки за схождение меридиа-
нов и выражается для указанных выше карт формулой
е — 0,8 (Хр Хм),
где A() — долгота места радиостанции;
).м — долгота места приёма;
е — величина алгебраическая.
Значения долготы, входящие в эту формулу, следует брать
-в целых градусах с округлением числа минут до ближайшего
целого числа градусов. Например, если А=37°29/, то следует
•2бб
взять л =37°, а если л = 37°ЗГ, то взять X =38°. Поступая
таким образом, допускают ошибку, не превышающую 0,5°.
Пример 1. Хр = 37°, Хи = 30°. Найти поправку за схождение меридианов «.
t = (37°—30°)-0,8 = 5°,6.
Пример 2. Хр = 40°, Хм = 50°. Найти е.
с = (40° — 50°)0,8 = —8°.
Рис. 235. Угол схождения
меридианов (на карте конической проекции)
В качестве долготы места приёма следует брать долготу
расчётного места самолёта, известного по результатам счисления
пути.
Величина е есть не что иное, как угол схождения меридианов
на карте конической проекции. Если радиостанция находится
восточнее самолёта, то е имеет положительный знак, а если
западнее, то отрицательный. Сказанное поясняется рис. 235.
Таким образом, абсолютная величина е прибавляется к ИРП,
къгда радиостанция восточнее самолёта, и вычитается, когда
западнее. ’
Процесс определения линии пеленга следующий:
— вычислить так, как указано выше, истинный пеленг радио-
станции (ИРП);
— по вычисленному ИРП опредепить истинный обратный
пеленг радиостанции по формуле
ОРП = ИРП + 180° + 0,8 (Хр — Хм).
Табличка для подсчётов приводится на стр. 268, а пример за-
полнения её — на стр- 269;
267
— на карте в точке места радиостанции отложить с помощью
транспортира от северной стороны меридиана угол, равный ОРП,
и провести под этим углом из точки места радиостанции пря-
мую— линию пеленга.
Отрезок этой прямой в районе счислимого места и предста-
вит позиционную линию самолёта.
Масштаб карты выбирается из тех же
соображений, как и при вычерчивании ли-
ний равных азимутов.
Этот способ определения позицион-
ной линии менее точен, чем способ с лини-
ями равных азимутов в силу ошибки, вно-
симой в ОРП за счёт незнания точной ве-
личины долготы места самолёта.
Станция--------——
Частота —----------
Хр _
Время-----------_---
КК-----------------
ОРК----------------
ИК_________________
КУР________________
ИРП----------------
----------------
\»-Ч.--------------
0.8 (\, -%) -------
ОРП----------------
§ 13. Определение расчётного места
самолёта
Расчётное место самолёта определяет-
ся точкой пересечения двух ' позиционных
линий. Имея возможность на самолёте опре-
делить две линии равных азимутов от двух
различных заданных радиостанций, тем
самым определяется и расчётное место
самолёта. Определив ИРП двух извест-
ных радиостанций и имея заранее, до полёта, подготовленную
карту с линиями равных азимутов, находим в точке пересечения
двух линий равных азимутов, соответствующих полученным пе-
ленгам, расчётное место самолёта (см. § 7). Для повышения
точности следует производить пеленгацию трёх радиостанций.
Процесс определения расчётного места удобно производить
по следующей схеме:
— до полёта подготовить карту — нанести линии равных ази-
мутов для выбранных радиостанций;
— в полёте убедиться в нормальной работе радиостанций в
предупредить лётчика о строгом выдерживании курса самолёта;
• — быстро запеленговать по очереди радиостанции;
— стать самолётом в круг или лететь определённым курсом
и произвести обработку результатов пеленгации, сводя все под-
счёты в таблицу;
— вычислив ИРП, на карте по точке пересечения ЛРА опре-
делить расчётное место самолёта, соответствующее моменту вре-
мени пеленгации.
Пример. В полёте запеленгованы радиостанции, находящиеся в городах
Киров, Архангельск, Усть-Уса. Данные пеленгации сведены в таблицу (значения
радиодевиации взяты с графика, см. рис. 226): Дк’ =4-4°; Ди = 14".
268
Станция Киров Архангельск Усть-Уса
Частота 250 180 465
Время 14-15 14—16 14—17
КК 42 44 42
ОРК 124 235 344
ИК 60 62 60
КУР 115 244 339
ИРП 175 306 39
Отыскав на карте (рис. 208) линии равных азимутов, оцифрованные вычи-
сленными значениями ИРП, определим, что расчётное место самолёта
в 14 час. 16 мин. было в районе пункта Яренск.
Если в полёте экипаж не располагает заранее подготовленной
картой и нужно определить своё расчётное место с помощью
радиополукомпаса, то можно будет определить его проведением
на карте линий пеленгов.
Последовательность работы при определении радиопеленгов
указана выше.
Записи при радиопеленгации следует вести в таблице:
Станция Ленинград Казань
Частота 271 458
Zp 30° 44°
Время 10 ч. 20 м. 10 ч. 21 м
КК 90° 90°
ОРК 226° 321°
ИК 100’ 100°
КУР 231° 319°
ИРП 331° 59°
Ч. 38° 38°
*р —Ч. —8° +6°
о.8 е-р-м go +5°
ОРП 145° 244°
В качестве долготы места приёма следует брать долготу рас-
чётного места самолёта, известного по результатам счисления
пути.
Если расчётное место неизвестно (при потере ориентировки),
место самолёта определяют последовательным приближением. Для
этого сначала прокладывают на карте линии пеленгов без учёта
269
поправки за схождение меридианов и в 'месте пересечения ‘линий
пеленгов отсчитывают долготу места ам. Затем находят поправки
к одному и другому пеленгам, исправляют их на эти поправки и
в результате получают искомое место самолёта.
Пример. В полёте запеленгованы две радиостанции: Ленинград (Хр = 30°}
и Казань (Хр = 44е). Для радиостанции Ленинград ОРК = 226°; Др = + 5°;
для радиостанции Казань ОРК = 321°; Др = — 2°. Истинный курс во время пе-
ленгации был равен 100°.
Приближённая долгота самолёта Хм = 38°.
Определить местонахождение самолёта.
1. Наводим ОРП для радиостанции Ленинград:
КУР = 226°+ 5° =231°;
ИРП = 100° + 231° = 331°; е = (30° — 38°) 0,8 ~ —6°;
ОРП = 331° — 180° — 6° = 145°.
2. Находим ОРП для радиостанции Казань:
КУР = 321* —2° = 319°;
ИРП = 100° + 319° - 59°; е = (44°— 38”) 0,8 = + 5°;
ОРП = 59° + 180° + 5° = 244°.
3. Прокладываем на карте линии обратных пеленгов и в пересечении их
получаем расчётное место в районе Задонска (рис. 236).
Точность определения пеленгов радиостанции в полёте
в большой степени зависит от качества пилотирования самолёта.
Рис.
236. Определение расчётного места
прокладкой линий пеленгов
влево и вправо от Нуля.
Поэтому в момент пе-
ленгации лётчик дол-
жен приложить всё
умение и старание, что-
бы вести самолёт по
курсу. Однако из-за
колебания курса не
всегда возможно уста-
новить рамку так, что-
бы стрелка индикато-
ра в течение некото-
рого времени остава-
лась неподвижной, в
нулевом положении. В
нялась
стрелки
этих случаях нужно’
рамку установить так,
чтобы стрелка индика-
тора одинаково откло-
Если амплитуда колебаний
слишком большая, следует отрегулировать чувствитель-
ность индикатора. Не следует, однако, придавать индикатору
слишком малую чувствительность, так как малая подвижность
стрелки может привести к ошибкам в отсчёте курсовых углов.
270
Только слаженная работа экипажа даст хорошие результаты
пеленгации, поэтому нужно возможно больше времени уделять
тренировке в пеленгации радиостанций.
Если самолёт оборудован автопилотом, то в момент пелен-
гации целесообразно его включить, так как он обеспечит более
точное выдерживание среднего курса, что особенно важно при
полётах в неспокойном воздухе.
Примечание. При определении расчётного места самолёта с по-
мощью радиополукомпаса проходит некоторый промежуток времени между взя-
тием пеленгов первой и второй радиостанций, поэтому к моменту взятия пе-
ленга второй радиостанции пеленг первой радиостанции изменится на некото-
рую величину, зависящую от расстояния от самолёта до радиостанции, курсового
угла этой радиостанции и скорости самолёта (рис. 237).
Прямая Л В—путь самолёта;
в точке Р находится радиостан-
ция; в точке А—самолёт в момент
пеленгации радиостанции Р. В
точке В самолёт находился в мо-
мент пеленгации второй радиостан-
ции. Из рис. 237 видно, что пеленг
радиостанции Р в точке В изме-
нился по сравнению с пеленгом
в точке А на угол а.
Таким образом, проложив из
карте обратные пеленги от пер-
вой и второй радиостанций, полу-
чим расчётное место не в точках
Л и В, а где-то в третьей, фиктив-
ной, точке, тогда как в действи-
тельности самолёт находился (в
момент взятия пеленга второй
радиостанции) в точке В. Это
Рис. 237. Изменение пеленга
происходит вследствие неучёта
угла а. Угол а называется поправкой за время. Эта поправка имеет суще-
ственную величину в тех случаях, когда самолёт находится вблизи радио-
станции и имеет значительную скорость. Поправка достигает максимальной
величины при курсовых углах, близких к 90°.
Практически, если время между двумя пеленгациями не превышает 0,5—
1 минуты и самолёт находится от радиостанции не ближе 200 км, при современ-
ных скоростях полёта поправка за время имеет незначительную величину
(около Iе), которой можно пренебречь.
Однако в некоторых, редких, случаях может представиться необходимость
учёта поправки за время. Для этого можно рекомендовать следующие способы:
1) Пеленгацию производят как обычно, но на карте переносят линию
первого пеленга (пли отрезок линии равных азимутов) параллельно самой себе
по направлению курса самолёта на величину пути, пройденного самолётом за
время пеленгации.
Точка пересечения перенесённой линии первого пеленга с линией второго
пеленга и укажет район местонахождения самолёта.
2) Первую из радиостанций пеленгуют два раза—до и после второй, так,
чтобы промежутки времени между пеленгованиями были по возможности одина-
ковы и не превышали 1 минуты. Взяв среднее арифметическое из пеленгов
первой радиостанции, получим пеленг её, отнесённый к моменту пеленгации
второй радиостанции, т. е. получим правильное расчётное место.
Следует отметить, что первый способ более удобен, чем.
второй.
27 J
§ 14. Определение позиционной линии и расчетного места
с помощью РПК-10
Радиополукомпас типа РПК-10 с 'успехом может быть исполь-
зован и для восстановления общей ориентировки самолёта.
Действительно, как известно, истинный пеленг радиостанции
равен истинному курсу самолёта плюс курсовой угол радиостан-
ции. Но если курсовой угол радиостанции равен нулю, что имеет
место всегда, когда самолёт летит на радиостанцию по индика-
тору курса радиополукомпаса, то истинный пеленг радиостанции
будет равен истинному курсу самолёта.
Рис 238 Полёт по радиодромии
Соотношение ИПР = ИК будет иметь место не Только при
полёте в штиль, когда самолёт летит по ортодромии, но и при по-
лёте при ветре, когда путь самолёта проходит по радиодромии.
В любой точке радиодромии ИК = ИПР, как это видно из
рис. 238.
Из всего изложенного выше следует, что для определения
позиционной линии самолёта (линии равных азимутов) с помощью
радиополукомпаса типа РПК-10 нужно настроиться на выбранную
радиостанцию и вести на неё самолёт по индикатору курса
и, после того как картушка магнитного компаса успокоится, отсчи-
тывать показания последнего в течение 1—2 минут. Среднее зна-
чение всех отсчётов представит собой среднее значение компас-
ного курса самолёта за промежуток времени в 1—2 минуты.
Прибавив к среднему значению курса девиацию и магнитное склоне-
ние, получим значение истинного пеленга радиостанции, на осно-
вании которого и строится позиционная линия самолёта.. Эта пози-
ционная линия будет относиться к тому моменту времени, кото-
рый соответствует моменту взятия отсчётов с магнитного ком-
паса.
Этот способ определения пеленгов радиостанций имеет безу-
словные преимущества перед обычным определением их.
272
Эти преимущества заключаются в большей простоте и в боль,
шей точности. Простота состоит в следующем:
— лётчик пилотирует самолёт по индикатору курса, а не по
магнитному компасу;
— штурману во время измерений нет необходимости следить за
показаниями двух приборов: индикатора курса и магнитного ком-
паса, и управлять вращением рамки для идентичности колебаний
стрелки индикатора курса с картушкой магнитного компаса, что
особенно важно при полётах в неспокойной атмосфере;
— исключаются лишние операции: отсчёт угла по шкале кур-
совых углов рамки, исправление его На радиодевиацию, суммиро-
вание его с курсом самолёта.
Простота выполнения измерений сказывается и на повышении
точности, а именно;
1. При пилотировании по индикатору курса возможно выдер-
жать более точно, без больших колебаний, среднее направление
продольной оси самолёта, так как радиокомпас является безинерт-
ным, свободным от собственных колебаний прибором курса, чего
нельзя сказать про магнитный компас.
Примечание. Принципиально говоря, при пилотировании по индикатору
курса курс самолёта непрерывно меняется (см. рис. 238), но это изменение при
обычных отношениях скорости самолёта к скорости ветра н при тех расстоя-
ниях от радиостанции, при которых целесообразно определять позиционную
линию (а не применять прямой выход на радиостанцию), совершенно ничтожно
за тот промежуток времени, в который производится измерение пеленга, а по-
этому можно считать с достаточной практической точностью, что подобного
изменения курса не происходит.
Возможность управления чувствительностью индикатора курса
повышает качество пилотирования и точность выдерживания
курса, так как самолёт не «разбалтывается» дополнительно на
курсе при полёте в неспокойной атмосфере, что всегда имеет
место при пилотировании по магнитному компасу и стремлении
сохранить заданный курс.
2. Так как пеленг равен курсу самолёта, а этот курс может
быть определён как среднее значение за период времени
в 1—2 минуты, то совершенно очевидно, что пеленг будет взят
значительно точнее, чем в обычном способе — пеленгацией
рамкой.
3. Отсутствие радиодевиации (которая определяется также
с некоторой ошибкой), отсутствие необходимости суммирования
курса с курсовым углом уменьшает возможность появления до-
полнительных ошибок.
Как видно из сказанного, этот способ имеет большие преиму-
щества перед обычным способом и поэтому его можно рекомен-
довать для применения не только с радиополукомпасами с непо-
движной рамкой типа 'РПК-10, но и с любыми другими радиополу-
компасами с подвижной рамкой (например, с РПК-2). Единствен-
ным недостатком способа является необходимость изменения
Курса самолёта, что не всегда можно допустить, особенно в тех
Учебник аэронавигации 273
случаях, когда позиционная линия определяется не для восстано-
вления ориентировки, а для контроля пути. Следует, однако, заме-
тить, что, хотя вообще и не рекомендуется при потере ориенти-
ровки ломать курс, однако в этом случае излом курса не предста-
вляет ничего опасного, так как, во-первых, он кратковременен,
а во-вторых, даёт возможность с повышенной точностью опреде-
лить позиционную линию, после Чего самолёт может, если это
нужно, лечь опять на прежнй курс; отклонения от прежней линии
кути будут незначительны.
Рис. 239. Определение расчётного места с помощью РПК-10
Умея таким образом определять позиционную линию, можно
определить и расчётное место самолёта по двум радиостанциям.
Для этого нужйо, определив, как описано, позиционную линию по
одной радиостанции, настроиться на другую радиостанцию и опре-
делить таким же способом позиционную линию и от этой радио-
станции. Перенеся точку пересечения двух пеленгов по линии
второго пеленга (по направлению к радиостанции) на величину прой-
денного расстояния с момента начала поворота самолёта с пер-
вого пеленга на второй до момента получения точки пересечения
пеленгов, определим точку расчётного места (центр района ве-
роятного местонахождения самолёта).
Величину пройденного расстояния можно определить по фор-
муле
S = Vt,
где V — скорость самолёта в км/мин, at — время в минутах.
274
Так как время t мало (2—3 минуты), то за скорость V можно
брать прямо приборную скорость самолёта.
Сказанное поясняется рис. 239, на котором: АВ — путь само-
лёта, потерявшего ориентировку; С, D — радиостанции, по которым
экипаж решил определить расчётное место; СЕ — линия пеленга
от первой радиостанции; Е — точка начала разворота на радио-
станцию D; DF — линия пеленга от второй радиостанции (D):
Н — точка пересечения двух линий пеленгов; К — расчётное
место, определяемое сдвигом точки Н по линии HD на вели-
чину S = Vt.
Приведём порядок работы по определению расчётного места
самолёта с помощью радиополукомпаса с неподвижной рамкой
(типа РПК-10).
До полёта:
— проверить правильность установки нулевого положения
рамки. Стрелка индикатора курса должна стоять на нуле, когда
нос самолёта направлен на радиостанцию (КУР = 0);(
— иметь достоверную кривую девиации магнитного компаса.
Определение позиционной линии в полёте:
— выбрать радиостанцию, настроиться на неё, убедиться в её
работе, прослушать позывные;
— подать сигнал лётчику о развороте самолёта по индикатору
курса для полёта на радиостанцию;
— лётчик разворачивает самолёт в сторону, обратную положе-
нию стрелки индикатора, до тех пор, пока стрелка установится
на нуль;
— лётчик пилотирует самолёт по индикатору курса на радио-
станцию. Чувствительность стрелки индикатора подбирается та-
кая, чтобы самолёт дополнительно не «разбалтывался»;
— после того как лётчик начал пилотировать самолёт по инди-
катору и картушка магнитного компаса успокоилась после ви-
ража (проходит 1—1,5 минуты), штурман в течение 1—2 минут бе-
рёт отсчёты по магнитному компасу и выводит их среднее зна-
чение;
— среднее значение компасного курса исправляется «а девиа-
цию и магнитное склонение и таким образом получают истинный
курс, равный истинному пеленгу радиостанции (ИРП);
— определив истинный обратный пеленг радиостанции по фор-
муле
ОРП = ИРП ± 180°-М,
откладывают с помошью транспортира в точке радиостанции
угол, равный ОРП, и проводят линию пеленга до предпо-
лагаемого места самолёта.
Отрезок линии пеленга в районе этого места и будет пози-
ционной линией самолёта.
is* 275
Определение расчетного места в полёте:
— выбрать две радиостанции; прослушать их позывные; на-
строиться на первую из них;
— подать сигнал лётчику и определить ИРП1,
— настроиться на вторую радиостанцию и подать сигнал лёт-
чику о развороте на неё.
В момент начала виража пустить в ход секундомер или заме-
тить положение минутной стрелки на часах. Определить ИРП2.
Продолжать пилотировать самолёт на вторую радиостанцию;
— определить истинные обратные пеленги радиостанций и
провести линии пеленгов;
— выбрать момент времени, для которого желательно опреде-
лить РМ, и подсчитать, сколько целых минут от момента пуска
секундомера до этого момента;
— умножить в уме это число минут на минутную скорость
самолёта (округлённую до целых километров в минуту);
— полученное расстояние отложить от точки пересечения
пеленгов по линии второго пеленга по направлению к радио-
станции.
Эта точка и укажет центр вероятного местонахождения само-
лёта.
При наличии возможности до полёта подготовить карту с ли-
ниями равных азимутов можно процесс определения расчётного
места, описанный выше, рекомендовать для использования и на
одноместных самолётах.
§. 15. Вывод самолёта на заданную линию равных азимутов
При решении некоторых навигационных задач бывает необхо-
димо вывести самолёт на заданную линию равных азимутов.
Необходимость в этом может возникнуть, например, когда
требуется вести самолёт на цель по ЛРА от радиостанции, лежа-
щей в стороне от аэродрома, или когда требуется выйти на ра-
диостанцию с определённой стороны, не совпадающей с основной
линией пути и т. п.
Так как каждая ЛРА характеризуется определённым значе-
нием ИРП, то момент нахождения самолёта на заданной ЛРА
будет характеризоваться равенством суммы ИК + КУР этому зна-
чению ИРП. Следовательно, можно подойти к заданной ЛРА
с любым курсом и тогда сигналом прихода на неё будет служить
величина КУР- равная
КУР = ИРП0 —ИК,
где ИРП0 — значение ИРП для заданной ЛРА.
Пусть, например, требуется выйти на ЛРА, характеризуе-
мой ЙРПо = 256°; курс самолёта (истинный) равен 195°. Опреде-
ляем КУР = ИРПо —ИК = 256 — 195 = 61°. Следовательно, идя
с курсом 195°, будем находиться тогда на заданной ЛРА, когда
на шкале индикатора курсовых углов (у автоматического радио-|
полукомпаса) будет отсчёт, равный 61°.
276
Для обычного радиополукомпаса (типа РПК-2) следует зара-
нее установить рамку на соответствующее значение ОРК (для
полученного КУР), и тогда момент прихода самолёта на заданную
ЛРА будет характеризоваться приходом на нуль стрелки индика-
тора курсов. Так, в нашем случае для КУР = 61°
ОРК = КУР — = 61° — 9° z= 52°
(с графика радиодевиации, рис. 226)
Колебания самолёта на курсе заставят колебаться и стрелку
индикатора курсов и картушку магнитного компаса, поэтому сле-
дует при подходе к заданной ЛРА строго выдерживать курс,
с одной стороны, а с другой — брать средние отсчёты колебаний
стрелки индикатора курса или индикатора курсовых углов, всё
время контролируя и показания магнитного компаса, так как
только суммой показаний магнитного и радиополукомпаса будет
характеризоваться приход самолёта на заданную ЛРА.
§ 16. Дальность действия радиополукомпасов
Дальностью действия радиополукомпаса называется наи-
большее расстояние между радиостанцией и радиополукомпасом,
Рис. 240. Дальность действия
радиополукомпаса над земной
поверхностью
Рис. 241. Дальность действия
радиополукомпаса над морской
поверхностью
при котором ещё возможно вполне надёжное использование ра -
диополукомпаса.
Дальность действия радиополукомпаса зависит от мощности
i частоты принимаемой радиостанции.
Электромагнитная энергия, излучаемая радиостанцией, pacj
сеивается на пути между радиостанцией и приёмником. Это рас-
сеивание больше над земной поверхностью, чем над морем. Соот-
ветственно этому и дальность действия радиополукомпаса больше
над морской поверхностью, чем над земной (рис. 240 и 241).
277
Пример. Мощность радиостанции 20 кет, частота 200 кгц (1500 м).
Определить дальность действия радиополукомпаса над земной поверхностью и
над морем.
По графикам рис. 240 и 241 находим. 1 100 км над земной поверхностью и
1 340 км над морем.
Для перехода от длины волн в метрах к частоте колебаний в килогерцах
и обратно пользуются формулами:
300000 _ 300000
г~; А — /
где f— частота колебаний в кгц',
К — длина волны в м.
§ 17. Земные радиопеленгаторы
является приёмной радиостанцией,
свойствами, и служит для определе-
ния на земле, в месте своей уста-
новки, азимута (пеленга) летящего
самолёта.
На рис. 242 в точке Р находит-
ся пеленгатор, NS — истинный мери-
диан его места, в точке А нахо-
дится самолёт; АР — дуга боль-
шого круга (по которой распростра-
няется к пеленгатору электромаг-
нитная энергия, излучаемая самолёт-
ным передатчиком). Угол NPA = а
между северной стороной мериди-
ана места пеленгатора и дугой боль-
шого круга АР и является истин-
ным азимутом самолёта, который
измеряется пеленгатором Р. С точ-
ки зрения экипажа самолёта, угол а
является истинным обратным ази-
мутом пеленгатора.
Для того чтобы определить с
Земной радиопеленгатор
обладающей направленными
Рис. 242. Азимут самолёта,
определяемый земным радио-
пеленгатором
помощью пеленгатора азимут само-
лёта, экипажу самэлёта необходимо подать радиосигналы,
а персоналу пеленгатора принять и запеленговать их. Для этого,
естественно, на самолёте должен быть радиопередатчик. Так как
азимуты определяются в большинстве случаев для экипажа само-
лёта, то для того чтобы результаты пеленгации сообщить на са-
молёт, пеленгатор должен располагать радиопередатчиком, а са-
молёт радиоприёмником. Таким образом, состав средств, необхо-
димых для самолётовождения с помощью земных радиопеленга-
торов, следующий:
На самолёте — приёмно-передающая радиостанция; на земле—
радиопеленгатор и приёмно-передающая радиостанция.
278
Для всех самолётов, находящихся на одной ортодромии, про-
ходящей через место пеленгатора, азимут будет один и тот же и
не будет зависеть от курса самолёта (рис. 243), отсюда будет
верно и обратное положение: самолёты, находящиеся под одним
азимутом, находятся на одной ортодромии. С другой стороны, са-
Рис. 243. Позиционная линия самолёта, определяемая
земным радиопеленгатором
молёты, Находящиеся под раз-
личными азимутами (рис. 244),
находятся и на различных
ортодромиях. Таким образом,
определяемая с помощью ра-
диопеленгатора ортодромия,
проходящая через место ЗРП
и самолёта и характеризуемая
измеренным азимутом, являет-
ся позиционной линией само-
лёта.
, Имея возможность опре-
делить с помощью радиопе-
ленгатора позиционные линии
самолёта, можно использовать
их для следующих целей:
— контроль пути или вос-
становление ориентировки по
одной позиционной линии;
— определение расчётного
двух позиционных линий*
Рис. 244. Позиционные линии
самолёта на сфере
места самолёта по пересечению
279
— вывод самолёта на пункт установки земного радиопелен-
гатора;
— вывод самолёта в район цели при полёте от радиопелен-
гатора.
Принцип действия земных радиопеленгаторов основывается
или на направленных свойствах рамочных антенн или на напра-
вленных свойствах сочетания двух или четырёх вертикальных
антенн; таким образом, антенное устройство земного радиопелен-
гатора представляет собой или рамку (подобную рамке РК) или
четыре вертикальные антенны. Наибольшее распространение полу-
чили радиопеленгаторы с антенным устройством второго типа, так
как такое антенное устройство имеет ряд преимуществ перед ан-
теннами рамочного типа: око свободно от ошибок, присущих ра-
мочным антеннам, и обладает большей дальностью действия
и большей чувствительностью.
Производя приём на антенное устройство, состоящее из двух
вертикальных антенн, устанавливаем, что оно обладает такими же
направленными свойствами, как и рамочная антенна, и диаграмма
направленности также имеет вид восьмёрки, т. е. сила сигнала
будет максимальна, когда направление на радиопередатчик совпа-
дает с плоскостью антенн, и минимальна (равна нулю), когда это
направление перпендикулярно плоскости антенн. Однако осуще-
ствить для целей пеленгации такую систему подвижной сложно,
и поэтому для пеленгаторов устраивают две пары неподвижных
вертикальных антенн (плоскости этих пар взаимно перпендику-
лярны) и определяют направление с помощью специального
устройства, называемого гониометром.
Гониометр представляет собой систему обмоток из двух непо-
движных (А и В) и одной подвижной (С) (рис. 245). Плоскости
неподвижных обмоток расположены под прямым углом друг
к другу и образуют статор гониометра, а подвижная об-
мотка, расположенная внутри их, называется ротором или
искателем гониометра. Каждая обмотка статора при-
соединяется к своей паре вертикальных антенн, а искатель соеди-
няется с приёмником (рис. 246).
Производя приём на такое устройство, устанавливаем, что ми-
нимум слышимости сигнала в телефонах будет тогда, когда пло-
скость рамки искателя будет перпендикулярна к направлению на
передатчик, т. е. устанавливаем полную аналогию между искате-
лем гониометоа и подвижной рамочной антенной и, следовательно,
возможность определения с помощью его направлений на пере-
датчики.
Таким образом, уничтожается необходимость вращения всей
антенной системы, которое заменяется вращением небольшой ка-
тушки— искателя. Гониометр имеет шкалу, разбитую на 360°,
причём нуль этой шкалы соответствует направлению на север,
поэтому поворот искателя и определяет азимут передатчика.
На рис. 247 показан общий внешний вид одного из типов
радиопеленгатора SCR-551-A. •'
280
Рис. 245. Схема гониометра
Рис. 246. Схема пеленгатора
281
Рис. 247. Внешний вид одного из типов пеленгатора SCR-551-A
§ 18. Порядок взаимодействия экипажа самолёта с персоналом
земного радиопеленгатора
Для получения хороших результатов пеленгации требуется
чёткая слаженная работа экипажа самолёта (радиста) и персонала
радиопеленгатора и надёжная двухсторонняя радиосвязь.
Для получения радиопеленга от отдельного пеленгатора ра-
дист самолёта подаёт следующие сигналы:
— позывной пеленгатора................... 2 раза
— сигнал ДЕ.............................. 1 раз
— позывной самолёта...................... 2 раза
— букву А (или нажатие ключа)..........в течение 30 сек.
— позывной самолёта...................... 1 раз
— конец передачи ЕЦ...................... 1 раз
после этого радист самолёта переходит на приём.
Оператор пеленгаторного пункта, приняв свои позывные, пе-
ленгует самолёт во время подачи сигнала буквы А или нажатия
ключа, а затем через связную радиостанцию передаёт резуль-
таты пеленгации по следующей форме:
— позывной самолёта..................... 2 раза
— сигнал ДЕ............................. 1 раз
— позывной пеленгатора.................. 2 раза
— величину пеленга в градусах трёхзнач-
ным числом................................ 2 раза
— конец передачи ЕЦ...................... 1 раз
Получив результаты пеленгации, радист самолёта даёт кви-
танцию по следующей форме:
— позывной пеленгатора.................
— принятый радиопеленг — трёхзначным
числом ..................................
— сигнал ЕЦ............................
1 раз
2 раза
1 раз
Приведённая форма, по которой производится запрос и полу-
чение пеленга, не является стандартной. Её следует рассматривать
лишь как приведённую для примера. Она может изменяться или
дополняться другими сигналами. Так, например, для секретности
передача может кодироваться или содержать в своем тексте па-
рень. При запросе может быть указано, какой пеленг желательно
получить: прямой или обратный, истинный или магнитный и т. п.
Поэтому в каждом отдельном случае форма связи между
самолётом и пеленгаторам устанавливается особым приказом
командования.
§ 19. Контроль пути и восстановление ориентировки по одному
радиопеленгу
Как установлено выше, с помощью земного радиопеленга-
тора определяется позиционная линия самолёта. Эта линия пред-
ставляет сабой ортодромию, проходящую через место установки
пеленгатора под азимутом, равным азимуту самолёта.
283
На картах конической проекции, применяющихся в аэронави-
гации (масштаба 1 : 2 000 000; 1 : 2 500 000), можно с достаточной
точностью считать, что в средних широтах на расстояниях до
I 500—2 000 км дуга большого круга изображается в виде прямой.
Поэтому позиционные линии самолёта, определяемые с помощью
земного радиопеленгатора и изображённые на сфере ортодро-
миями, примут вид прямых на карте конической проекции (рис. 248).
Рис. 248. Вид позиционных линий па карте
Поэтому, чтобы получить позиционную линию самолёта от
радиопеленгатора, нужно на карте (масштаба 1 : 2 000 000 или
1 : 2 500 000) в точке места пеленгатора с помощью транспортира
отложить от северной стороны меридиана угол, равный истинному
азимуту самолёта, и провести под этим углом прямую. Это и бу-
дет позиционная линия самолёта в момент подачи самолётом сиг-
нала для пеленгации (нажатие ключа). В дальнейшем эта линия
используется как вообще всякая позиционная линия.
Пример. При полёте из Ельца в Москву была потеряна ориентировка.
Экипаж запросил пеленг из Ленинграда. Он оказался равным 145°. Проведя на
карте прямую от Ленинграда под углом 145°, определили, что она пересекает
железную дорогу Москва—Смоленск (рис. 236). Так как по времени самолёт не
должен был пролететь эту дорогу, то экипаж решил итти по линии пеленга до
пересечения с железной дорогой. Взяли курс, равный 145° + 180° = 325°, и
через некоторое время вышли на дорогу. Убедившись (с помощью магнитного
компаса), что её направление совпадает с направлением на карте, полетели по
ней и вскоре вышли на Москву.
Л
Так как получаемая на карте позиционная линия относится
к тому местонахождению самолёта, которое он имел в момент
подачи сигнала для пеленгации, а на получение и нанесение на
карту результатов пеленгации требуется некоторое время (3—
284
4 минуты), то, естественно, необходимо для точной ориентировки
учитывать смещение самолёта за это время. Для этого доста-
точно умножить всвдушную скорость самолёта на время и пере-
нести на этот отрезок пути по направлению курса самолёта полу-
ченную позиционную линию параллельно самой себе. В течение
всего этого времени самолёту необходимо выдерживать постоян-
ный курс.
Чтобы не выполнять расчёт на смещение самолёта, можно
во время пеленгации и обработки результатов её стать самолё-
том в круг.
§ 20. Определение расчётного места самолёта по пересечению
двух позиционных линий
Умея определять позиционную линию самолёта по одному ра-
диопеленгатору, несложно определить и расчётное место самолёта
по точке пересечения двух позиционных линий от двух радиопе-
ленгаторов.
Для этого следует:
— получить пеленг от первого радиопеленгатора;
— получить пеленг от второго радиопеленгатора;
— построить на карте позиционные линии самолёта;
— по точке пересечения этих линий определить центр района.
вероятного местонахождения самолёта.
Пример. При выполнении слепого полёта из Москвы в Харьков экипаж
потерял общую ориентировку и решил её восстановить с помощью радиопе-
ленгаторов. один из которых установлен в Ленинграде, а другой в Казани.
Истинный пеленг от ленинградского пеленгатора оказался равным 145°, а от
казанского 244°. Отложив с помощью транспортира эти углы и проведя линии
пеленгов, по точке пересечения их определили, что самолёт находится в районе
Задонска (рис. 236).
Процесс определения позиционных линий производится так
же, как это описано в § 19 главы 7. Следует только учесть то
обстоятельство, что пеленги берутся обоими пеленгаторами в раз-
ное время, поэтому следует линию первого пеленга сдвинуть по
направлению курса самолёта параллельно самой себе на величину
пройденного самолётом пути за промежуток времени между двумя
пеленгациями (точнее, между двумя нажатиями ключа). Лучше
будет, если во время пеленгации и получения результатов её на
карте поставить самолёт в круг.
При частом использовании каких-либо заданных пеленгаторов
в заданном районе полётов целесообразно подготовить карту.
Подготовка её состоит в нанесении на неё ортодромий (прямых
линий на карте конической проекции) от точек стояний пеленгато-
ров и оцифровке их соответствующими им азимутами. Тогда
в полёте отпадает необходимость в графической работе и расчётное
Место на такой карте определяется глазомерно (рис. 249).
Для облегчения работы экипажа самолёта пеленгаторы
иногда объединяются в группу, состоящую из двух или несколь-
ких пеленгаторов, расположенных на некотором расстоянии один
285
от другого, командного пункта, имеющего связь с этими пе-
ленгаторами, и приёмно-передающей радиостанции для связи с са-
молётом.
При такой организации данные о пеленгации самолёта посту-
пают с пеленгаторов на командный пункт, где обрабатываются
и откуда на самолёт сообщаются сразу его координаты. В этом
случае работа экипажа самолёта состоит лишь в запросе коорди-
нат и получении их от командного пункта.
Рис. 249. Схема карты для радиопеленгации
§ 21. Полёт на земной радиопеленгатор
1. Земной радиопеленгатор, находящийся в конечном пункте
прямолинейного маршрута, может быть использован экипажем само-
лёта как надёжное средство контроля линии пути и точного вы-
вода самолёта в этот пункт. Для этого необходимо вести само-
лёт так, чтобы его азимуты, измеряемые пеленгатором в течение
всего полёта, были равны азимуту исходного пункта маршрута.
Иными словами, нужно вести самолёт так, чтобы его линия пути
совпадала с ортодромией, проведённой между ИПМ и КПМ. С
точки зрения самолётовождения такой путь является наиболее вы-
годным, как путь наиболее короткий.
Как известно, при выполнении полёта по ортодромии (что
всегда имеет место при значительной длине маршрута) последняя
заменяется рядом вписанных в неё локсодромий, число которых
определяется тем соображением, что путевые углы двух срседник
локсодромий разнились бы друг от друга на величину 3—4°.
С другой стороны, принято локсодромию не вычерчивать, а пред-
ставлять её на карте прямой, если наибольшее отклонение её от
этой прямой не превышает 5—10 км или если разность путевых
углов на концах прямой не превышает 3—4е. На картах кони-
286
ческой проекции (и на «миллиоике»), применяющихся в аэронави-
гации, ортодромия с достаточной точностью изображается прямой,
поэтому процесс подготовки на карте полёта по ортодромии за-
ключается в проведении прямой (ортодромии) между ИПМ и КПМ
и разделении её на отрезки так, чтобы путевые углы каждых двух
соседних отрезков, измеряемые по среднему меридиану отрезка,
разнились друг от друга на 3—4° (рис. 250). Ведя самолёт
с этими путевыми углами по магнитному компасу так, чтобы и
течение всего полёта сохранялся постоянный азимут самолёта от
пеленгатора, приведём его в КПМ по кратчайшему пути.
Момент появления
самолёта над пеленга-
тором фиксируется пер-
соналом пеленгатора
по шуму моторов, о
чём и извещается по
радио экипаж самолё-
та. Если подобного из-
вещения экипаж не по-
лучил, то определение
прохода пеленгатора
производится по изме-
нению азимутов само-
лёта на 180° (после
пролёта пеленгатора).
Рис. 250. Подготовка карты для полёта
на радиопеленгатор
При наличии видимости момент выхода на пеленгатор опре-
деляется визуально.
Определение угла сноса для учёта его в курсе следования
производится обычными способами при видимости земли, а при
невидимости — или по шаро-пилотным данным, полученным на
земле, или подбором курса следования. В последнем случае линия
пеленга уподобляется зоне радиомаяка.
Порядок выполнения слепого полёта на радиопеленгатор сле-
дующий:
— перед полётом подготовить карту: провести прямую (орто-
дромию) между ИПМ и КПМ. Разделить её на отрезки и для
каждого отрезка определить путевые углы. По обеим сторонам
от этой прямой провести ещё линии пеленга, разнящиеся сп пер-
вой на 2°. Такой «пучок» ортодромий облегчит пользование картой
в полёте;
— лечь на курс, равный путевому углу первой локсодромии;
— через 10—15 минут после вылета запросить пеленг. Если
полученный пеленг «укладывается» в «пучок», продолжать полёт
тем же курсом;
Примечание. Перемена курсов, соответствующая переходу с одной
локсодромии на другую, производится по счислению времени.
— периодически каждые 10—15 минут запрашивать пеленги.
При «выходе» пеленга из «пучка» изменить курс в обратную
287
сносу сторону на 15—20° и следить за изменением получаемых
пеленгов.
Если первое изменение курса велико или мало (по показа-
ниям пеленгов), изменить снова курс (в нужную сторону) на 5—
10°. Такими последовательными изменениями курсов можно по-
добрать нужный курс и установить движение самолёта в «пучке».
При выполнении такого полёта на самолёт с пеленгатора
должны передаваться его истинные пеленги (азимуты).
2. Часто практикуется вывод самолёта на радиопеленгатор в
случае потери экипажем ориентировки. В этом случае подгото-
вленной карты не будет и полёт выполняется так:
— потеряв ориентировку и решив вывести самолёт на извест-
ный радиопеленгатор, экипаж запрашивает курс на пеленгатор
(магнитный или истинный), который приближённо равен азимуту
самолёта плюс или минус 180°;
Рис. 251. „Пассивный" полёт на радиопеленгатор
— получив этот курс, самолёт устанавливается на него и
выдерживается до получения второго курса. Второй курс эки-
паж запрашивает минут через 5—15 (в зависимости от удаления
от пеленгатора: чем ближе, тем чаще должны запрашиваться
курсы). Если второй курс равен первому, самолёт продолжает вы-
держивать его, а если не равен, то устанавливается на этен новый
курс;
— итак, запрашивая (периодически—через 5—15 минут) курсы,
самолёт строго следует этим курсом, пока не выйдет на радио-
пеленгатор (рис. 251).
Экипаж самолёта при работе с радиопеленгатором должен
помнить, что получаемые им курсы (или пеленги) относятся к мо-
менту подачи сигнала для пеленгации и поэтому необходимо
всегда учитывать перемещение самолёта за время, протекшее
между моментом подачи сигнала для пеленгации и моментом полу-
чения и реализации данных пеленгации. При соблюдении этого
нельзя будет впасть в ошибку, т. е. относить получаемый пеленг
(курс) к моменту его получения, а не к моменту подачи сигнала
для пеленгации.
Эта ошибка мсжет иметь большое значение, особенно при на-
хождении самолёта вблизи пеленгатора и большого промежутка
времени между упомянутыми моментами.
288
§ 22. Полёт от земного радиопеленгатора
При выполнении полёта по прямолинейному маршруту радио-
пеленгатор, установленный в ИПМ, может быть использован для
контроля пути по направлению. Выполнение такого полёта мало
чем отличается от выполнения полёта на радиопеленгатор, и по-
этому всё сказанное в п. 1 § 21 остаётся в силе и для этого
случая.
Различие между ними состоит в том, что при полёте от радио-
пеленгатора «пучок» ортодромий расходится и пункт прилёта не
отмечен самим радиопеленгатором. Эти два обстоятельства умень-
шают точность определения момента выхода на цель, и поэтому
следует строго следить за изменениями пеленгов, немедленно
возвращая самолёт на заданную ортодромию (линию пути} при
получении пеленга, отличного от азимута цели.
Рис. 252. Подготовка карты для полёта от радиопеленгатора
Наужно заблаговременно, до прихода к цели, подобрать необ-
ходимый курс, чтобы двигаться по заданной ортодромии с учётом
сноса. Подбор курса осуществляется так же, как и в полёте на
пеленгатор. Особенно строго нужно следить за совпадением линии
пути с заданной ортодромией при приближении к цели, находя-
щейся на значительном удалении от пеленгатора (свыше 200 —
300 км), так как в этом случае небольшим изменениям пеленга
самолёта соответствуют большие линейные отклонения его от
цели (КПМ).
Контроль пути по расстоянию 'производится или счислением
или позиционными линиями от других каких-либо средств само-
лётовождения. В частности, можно пользоваться пеленгами от
другого расположенного в стороне пути от радиопеленгатора. Для
этого целесообразно пользоваться картой, подготовленной так, как
показано на рис. 252. На такой карте проводится пучок ортодро-
мий от пеленгатора, стоящего в пункте вылета, и ряд ортодромий
от бокового пеленгатора. В полёте, подобрав нужный курс для
полёта по заданной ортодромии, переходят на работу с боковым
9 Учебник аэронавигации
289
пеленгатором, с помощью которого определяют путевую скорость
самолёта и момент выхода в пункт цели (КПМ).
§ 23. Точность радионавигации
Ошибки, возникающие при определении позиционных линий
самолёта с помощью того или иного радионавигационного сред-
ства, можно разделить на три группы:
1) ошибки, возникающие от неисправности аппаратуры;
2) сшибки, связанные с условиями распространения радио-
волн;
3) ошибки наблюдений или случайные ошибки, зависящие от
обстановки и наблюдателя.
К ошибкам первой группы следует отнести такие, которые
возникают при расстройке приёмника, скручивании гибких вали-
ков управления рамкой и настройкой, замыкании открытой
антенны и т. п. Такого рода неисправности должны быть устра-
нены перед полётом.
Ошибки второй группы возникают, например, от ночного
эффекта, береговой и горной рефракции. Ночной эффект заклю-
чается в том, что за 1—2 часа до и после захода и восхода
солнца наблюдаются большие ошибки в определении курсовых
углов радиостанций или пеленгов (зон) от радиомаяков типа
13-А-1. Величина этик ошибок непостоянна и может достигать
40—90°. При таких условиях пользоваться радиополукомпасом
или радиомаяком не следует. Береговой эффект проявляется при
пеленгации наземной станции с самолёта, находящегося над мо-
рем. Радиоволны, переходя с земной поверхности на морскую,
преломляются, и поэтому радиополукомпас указывает ложное на-
правление на радиостанцию. Береговая рефракция может созда-
вать ошибки в показаниях радиокомпаса, достигающие 8° и более.
Береговой эффект свойственен всем радионавигационным сред-
ствам. Горный эффект проявляется аналогично береговой рефрак-
ции, когда вблизи самолёта расположены массивы гор, за кото-
рыми находится пеленгуемая радиостанция. Ошибки от горного
эффекта также доходят до 8° и более. Таким образом, при пелен-
гации береговых радиостанций и при пеленгации в горах к пока-
заниям радиополукомпаса следует относиться критически.
Перечисленные ошибки не поддаются учёту, и поэтому при
таких условиях лучше средствами радионавигации не пользо-
ваться.
Однако даже при благоприятных условиях возможны так на-
зываемые случайные ошибки, возникающие при определении и обра-
ботке радиопеленгов. Этими ошибками являются неточности отсчё-
тов, неточности учёта девиации и неточности показаний радио-
полукомпаса. Таким образом, расчётное место самолёта, определяе-
мое пересечением двух линий пеленгов, представляет собой не
точку, а некоторый район. Величина этого района зависит от точ-
ности определения и обработки пеленгов, от расстояний между
радиостанциями и между самолётом и радиостанциями. Действи-
290
Рис. 253. Ошибка в пеленге
тельно, допуская некоторую ошибку в определении и обработке
пеленга, получают на карте не линию пеленга, а зону, ширина ко-
торой увеличивается с удалением от радиостанции. Так, например,
допуская ошибку в обратном пеленге Ч~Да. фактически вместо
прямой АВ получают зону CAD, следовательно, геометрическим
местом точек вероятных
нахождений самолёта бу-
дет не прямая АВ, а зона
CAD (рис. 253).
Угловая ширина зоны
равна 2Да, а линейная
ширина её в данном ме-
сте (точка О) будет равна
h = 28 tg Да, где h —
ширина зоны, измеряемая
по перпендикуляру к
АВ (h = О'О"), a S = АО — расстояние между радиостанцией
и данным местом О. Приведенная формула получается из тре-
угольников АОО' и АОО". Эти треугольники — прямоугольные и
равны между собой (О'О" перпендикулярна к АВ). Из треуголь-
ников находим
OO'=zOOtt=^=Sig8a.,
т. е.
/z = 2StgAa.
Определяя расчётное место по двум радиостанциям, получают
его как район пересечения двух зон (рис. 254). Этот район пред-
Рис. 255. Различные формы
четырёхугольника ошибок
Рис. 254. Четырехугольник ошибок
ставляется четырёхугольником, форма и размеры которого зави-
сят от угла пересечения пеленгов и от расстояния до радиостан-
ции. Угол пересечения пеленгов ф равен .разности истинных
пеленгов радиостанций.
19»
291
На рис. 255 показаны различные формы четырёхугольника
ошибок в зависимости от угла ф.
Для удобства оценки величины района вероятного место-
нахождения самолёта вместо четырёхугольника ошибок можно
Взять круг, радиус которого равен половине длины наибольшей
Диагонали четырёхугольника.
Если ввиду малых размеров четырёхугольника по сравнению
с расстоянием от расчётного места самолёта до радиостанции
Заменить его параллелограмом, стороны которого параллельны
линиям пеленгов, то получим подобные треугольники АСВ и
чсЬ (рис. 256). Из подобия треугольников легко вывести формулы,
Дающие связь между радиусом круга возможных нахождений
самолёта и известными элементами треугольника АСВ.
Эти формулы следующие:
г _ 2 tg Да Г _ tg Да
D sin Ф И L sin ф ’
Где L—расстояние между радиостанциями (база);
D — расстояние между расчётным местом самолёта и середи-
ной базы L;
г — радиус круга вероятного нахождения самолёта.
Для ф< 90э радиус вычисляется по первой из приведённых
По этим формулам состав-
лена таблица, при помощи
которой легко определить
величину г в зависимости
от ф и D (или L). Таблица
рассчитана для Да = 2°,5.
формул; для ф > 90° — по второй.
L
Рис. 256. Размеры четырёхугольника
ошибок
Например, имея ф = 140°, получим,
В
ф° г/О0/0 ф°
0 со 90 4,4
10 50,4 100 4,4
20 25,6 110 4,6
30 17,5 120 5,0
40 13,6 130 5,7
50 11,4 140 6,8
60 10,1 150 8,8
70 9,3 160 12,8
80 8,9 170 25,2
90 8,7 180 СО
что Г ~г = = 6,8%, т.
е.
если расстояние между радиостанциями равно 500 км, то радиус
г = 34 км. Из таблицы видно, что пеленгация при острых и тупых
углах приводит к большим ошибкам в определении место-
нахождения самолёта, а поэтому пеленговать надо такие радио-
Л
292
станции или пользоваться такими радиопеленгаторами, разности
пеленгов которых находятся в определённых пределах. Такими
пределами угла ф следует считать 50 и 130° и как крайние пре-
I 40 и 140°.
Определив в полёте расчётное место, можно, пользуясь
таблицей, определить и район вероятного местонахождения само-
лёта, если очертить окружность соответствующим радиусом.
Сказанное выше о точности относилось к пеленгации радио-
компасом, но то же самое можно повторить и для земных радио-
пеленгаторов и для радиомаяков.
Угловая точность всех радионавигационных средств при бла-
гоприятных условиях равна 2—Зэ, поэтому приведённая таблица
годится для определения района вероятного местонахождения са-
молёта при использовании любых средств радионавигации.
§ 24. Радиовысотомеры
Существующий способ измерения высоты полёта самолёта
основывается на методе барометрического нивелирования. Этот
способ измерения высоты в условиях полёта связан с рядом оши-
бок, которые, если не будут учтены, приводят к значительным
ошибкам в определении высоты. -Сюда в первую очередь отно-
сятся ошибки в начальном давлении и в начальной температуре,
так как их надо брать в точке действительного места самолёта,
в момент определения высоты, а их учитывают для аэродрома
взлёта и момента вылета. Значительную ошибку в определении
высоты может дать среднее значение температур на уровне земли
и уровне высоты полёта, так как это среднее значение подразу-
мевает линейное распределение температур в слое воздуха от
уровня земли до высоты полёта и не учитывает могущие иметь
место изменения температур в инверсионных слоях воздуха.
Кроме того, не всегда точно может быть определён рельеф про-
летаемой местности над аэродромом вылета для расчёта истинной
высоты полёта, особенно в условиях слепого полёта. К ряду пе-
речисленных ошибок можно прибавить ещё некоторые, менее зна-
чительные.
Все эти ошибки могут привести к относительной ошибке в опре-
деляемой в воздухе истинной высоте в пределах 10—20%, а ино-
гда и более.
Однако в большинстве случаев для бомбометания, воздуш-
ного фотографирования, при пробивании облачности, для слепой по-
садки и т. п. необходимо знать высоту значительно точнее.
В связи с этим давно делались попытки построить высото-
мер на каком-либо другом принципе. В частности был осуще-
ствлён высотомер, основанный на принципе звукового эхо-лота.
В эхо-лоте излучается сильный звуковой сигнал, который,
дойдя до земной поверхности, отражается от неё и доходит об-
ратно да самолёта. На самолёте измеряется интервал времени
между моментом излучения основного сигнала и моментом при-
293
хода отражённого. Зная скорость распространения звука и ука-
занный интервал времени, можно определить длину (Пути, прохо-
димого сигналом. Очевидно, что эта длина пути равна удвоенной
высоте полёта самолёта (рис. 257).
at
2'
где Н — высота полёта;
а — скорость распространения звука;
t — интервал времени.
Однако звуковым эхо-лотом высота измеряется также с
ошибками. Эти ошибки возникают за счёт непостоянства ско-
Рис. 257. Измерение высоты полета
рости распространения зву-
ка, за счёт различной отра-
жательной способности зем-
ного покрова, за счёт шу-
мов моторов. Значительно
лучшие результаты даёт ис-
пользование не звукового
сигнала, а радиосигнала, так
как скорость распростране-
ния радиоволн постоянна и
не зависит от среды, в ко-
торой они распространя-
ются.
Основная трудность в
создании радиовысотомера—
между моментом излучения
это измерение интервала времени
основного сигнала и моментом прихода отражённого. Действи
тельно, скорость распространения радиоволн очень большая и
равна
С — 300 000 км/сек.
а интервал измеряемого времени чрезвычайно мал. Так, например,
для измерения высоты в 5 км необходимо измерить интервал вре-
мени, равный (исходя из формулы)
2Я_ 2-5
С 300 000
= 0,000033 сек.,
т. е. интервал времени равен 33 миллионным долям секунды или,
как говорят, 33 мксек (микросекундам). Для более низких высот
интервал времени будет ещё меньше. Так, для высоты 150 м
(0,15 км) интервал времени равен
t - — = .2‘0'15- = 0,000001 сек. = 1 мксек.
С 300 000
Конечно, измерять такие малые интервалы времени обыч-
ными средствами не представляется возможным, и поэтому при-
бегают к косвенным методам, основанным на методах радио-
техники.
204
В настоящее время в радиовысотомерах нашли себе приме-
нение следующие два метода: метод частотный и метод им-
пульсный.
Радиовысотомер, основанный на частотном методе, работает
так: на самолёте на небольшом расстоянии один от другого на-
ходятся передатчик и приёмник.
Передатчик непрерывно, с постоянной мощностью, излучает
радиоволны. Однако частота передатчика, в противоположность
обычным передатчикам, не постоянна, а быстро изменяется по
времени между наибольшим и наименьшим значениями. Приёмник
в каждый момент времени принимает два сигнала. Один сигнал
идёт непосредственно по кабелю от передатчика к приёмнику;
другой сигнал, отражённый, идёт от передатчика к земле и от
земли к приёмнику. Очевидно, что частоты обоих принимаемых
сигналов различны, и разность частот зависит от интервала вре-
мени между приёмом основного сигнала и отражённого, т. е. от
зысоты полёта. Таким образом, измеряя разность частот приём-
ного и отражённого сигналов, измеряется высота полёта, которая
указывается специальным, тарированным по высоте стрелочным
индикатором. Измерение разности частот может производиться
с весьма высокой точностью, что позволяет измерять истинную
высоту полёта самолёта с точностью, необходимой для слепой
посадки самолётов, т. е. с точностью 2—3 м. Частотные высото-
меры не могут обеспечить измерение больших высот, так как
требуют достаточной мощности отражённого сигнала. Обычно они
позволяют измерять высоты до 1 000—1 500 м.
Для измерения больших высот (до 8—10 км) требуется боль-
шая мощность передатчика высотомера, что влечёт значительное
увеличение его веса и габаритов. Поэтому применяют другой
метод измерения высот — метод импульсный. В этом методе из-
лучение передатчика происходит импульсами с постоянной часто-
той. Импульсы подаются через малые промежутки времени.
В паузах между излучениями импульсов в передатчике накапли-
вается энергия, вся излучаемая в импульсе. Таким образом, энер-
гия импульса во много раз превышает среднюю мощность пере-
датчика. Измерение высоты в этом случае происходит как изме-
рение запаздывания прихода отражённого импульса от земли по
сравнению с приходом в приёмник прямого импульса. Индикатором
служит катодная трубка, тарированная по высоте, на экране кото-
рой можно видеть сигнал прямой и отражённый; расстояние
между этими сигналами и является мерой высоты.
Точность импульсного высотомера хотя и меньше частотного,
но значительно превышает точность барометрического.
Радиовысотомеры удобны тем, что дают возможность не-
посредственно, без всяких расчётов и дополнительных действий,
достаточно точно определять истинную высоту полёта самолёта.
Кроме того, импульсный радиовысотомер позволяет судить о
рельефе пролетаемой местности, что важно в слепом полёте. С по-
мощью радиовысотомера можно также определить, пролетает ли
самолёт над сушей, над морем или над горами.
295
§ 25. Земной локатор
Земной локатор представляет собой импульсную приёмо-
передающую радиостанцию и служит для обнаружения самолётов,
находящихся в воздухе, и для определения их азимутов в пункте
своей установки и расстояний до них. Принцип действия земного
локатора аналогичен принципу действия импульсного радиовысо-
томера. Через специальную антенну периодически излучается мощ-
ный импульс электромагнитной энергии, накопляемой в передат-
чике в периоды прекращения излучения. Этот импульс, встречая на
своём пути какой-либо предмет, отражается от него. Отражённый
импульс принимается приёмным устройством локатора, в котором
с помощью специального устройства измеряется промежуток вре-
мени между подачей основного импульса и приёмом отражённого.
Зная этот промежуток времени и скорость распространения элек-
тромагнитной энергии, можно определить с помощью индикатора
(катодной трубки) расстояние между локатором и предметом.
Антенна, излучающая импульсы, имеет специальную форму, обусло-
вливающую излучение в строго заданном направлении, в котором
только и возможно обнаружить предмет и определить расстояние
до него- Вращение антенны в горизонтальной плоскости даёт воз-
можность вести эти определения в любых направлениях, а угол по-
ворота рабочего направления антенны относительно меридиана
места её установки позволяет определить величину азимута пред-
мета.
Таким образом, могут быть определены расстояние и азимут
любого предмета и в частности самолёта.
По техническим соображениям локаторы работают на ультра-
коротких волнах, в силу чего локатором могут обнаруживаться
самолёты, находящиеся только над видимым горизонтом места
установки локатора.
Максимальное между локатором и самолётом расстояние, на
котором может быть обнаружен самолёт, определяется формулой
s = но ун,
где Н — высота полёта самолёта.
Размерность S и Н — в км.
Практически величина S меньше и зависит от параметров
локатора. Импульсный метод излучения позволяет при малой
потребляемой мощности излучать в импульсе большую мощность,
необходимую для получения достаточной величины силы отра-
жённого импульса. Так, например, при потребляемой мощности
в 200 вт в импульсе может быть получена мощность в 100 кет.
Этим достигается также и то, что локационная радиостанция
имеет значительно меньшие габариты и вес, чем обычная радио-
станция непрерывного действия, излучающая постоянную мощ-
ность, равную мощности импульса.
Земной локатор позволяет обнаруживать летящие самолёты
на довольно значительных расстояниях от места своей установки;
так, например, согласно приведённой выше формуле, при высоте
296
полёта самолёта 1000 м это расстояние равно НО км\ при высоте
полёта 4 000 м расстояние равно 220 км и т. д. Эти расстояния
расчётные; практически они будут несколько меньше. Обнаруже-
ние и определение координат самолёта не зависит от состояния,
погоды и времени суток и может производиться при любых усло-
виях видимости.
Земной локатор может быть использован и для навигацион-
ных целей, поскольку он позволяет определять расчётное месте
самолёта.
§ 26. Применение земного локатора для навигации самолёта
Как уже оказано выше, земной локатор позволяет ’опреде-
лять азимут и расстояние самолёта в пункте своей установки,.
Рис. 259. Позиционная линия —
окружность
Рис. 258. Позиционная
линия — ортодромия
т. е. позволяет определять расчётное место самолёта. Действи-
тельно, при определении азимута самолёта определяется позицион-
ная линия последнего, представляющая собой ортодромию, про-
ходящую через пункт установки локатора и пункт местонахожде-
ния самолёта. На рис. 258 в точке О находится локатор, в точке
А — самолёт, линия О А — ортодромия, а — азимут самолёта. Уста-
новив расстояние до самолёта, определяют позиционную линию
последнего, представляющую окружность с центром в пункте
установки локатора, и радиус (/?), равный этому расстоянию
(рис. 259). Пересечение этих двух позиционных линий одно-
значно определяет точку местонахождения самолёта, т. е. его
расчётное место (рис. 260). Для каждого заданного значения ази-
мута а и расстояния R получаем расчётное место самолёта
(рис. 261). Очевидно, что величины а и R не завися^ от курса
самолёта, а лишь только от точки его местонахождения. Воз-
можность определения расчётного места самолёта с, помощью
земного локатора позволяет применять последний для следующих
навигационных целей: »л
— восстановление ориентировки самолёта (определение егс
расчётного места);
297
— привод самолёта на локатор;
— вывод самолёта в район цели
— определение путевой скорости
полёта;
и путевого угла самолёта;
Рис. 260. Расчётное место Ряс. 261. Однозначность определения
самолёта расчётных мест
— вывод самолёта в район аэродрома посадки, находящегося
з стороне от пункта установки локатора;
— определение ветра на высоте полёта самолёта;
— определение курса следования, путевой скорости и угла
сноса на контрольном этапе.
Решение этих задач не зависит от времени суток и может
производиться в любых условиях видимости, что делает земной
локатор особенно ценным при выполнении полётов вне види-
мости земных ориентиров.
Восстановление ориентировки самолёта
Самолёт, потерявший ориентировку, посылает по радио за-
прос земному локатору с просьбой определить его местонахожде-
ние. Получив от самолёта запрос, на земном локаторе определяют
азимут и расстояние самолёта и сообщают по радию эти данные
вместе с временем момента пеленгации экипажу самолёта. Полу-
чив данные с земли, экипаж самолёта на карте с помощью
транспортира отсчитывает от точки установки локатора азимут
самолёта и под этим азимутом откладывает полученное расстоя-
ние, которое и укажет расчётное место самолёта.
Можно экипажу нд самолёт сообщать не азимут и расстояние, а
сразу район его местонахождения, если на локаторе проделать
те же построения. Например, азимут самолёта а = 60°, расстояние
до самолета R= 115 км, тогда расчётное место самолёта нахо-
дится в районе пункта А (рис. 262). Если <х =220° и /?=70 км,
но расчётное место будет в районе пункта В.
293
Привод самолёта на локатор
Методика привода самолёта на локатор аналогична методике
привода на земной радиопеленгатор, только в первом случае эки-
пажу на самолёт ещё могут сообщаться его расстояния до лока-
тора, что позволяет рас-
считать путевую скорость
самолёта и время его при-
бытия в район установки
локатора. Эти расчёты мо-
гут выполняться или на ло-
каторе и экипажу самолёта
сообщаться готовые дан-
ные, т. е. курс следования,
путевая скорость, время
прибытия, или (непосредст-
венно на самолёте по со-
общаемым с локатора дан-
ным об азимутах, расстоя-
Рис. 262. Определение расчётного места
ниях и времени моментов
пеленгации.
Вывод самолёта в район цели полёта
При невидимости земли, ночью или при плохих условиях види-
мости земной локатор может служить для вывода самолёта в
район цели. Для этого нужно определить по карте расстояние и
азимут цели от локатора и вести самолёт так, чтобы его путевой
угол соответствовал измеренному азимуту цели. С локатора эки-
пажу самолёта сообщаются поправки в курс при уклонении само-
лёта от заданной линии пути, его путевая скорость, определяемая
на локаторе по ряду последовательных засечек расстояний, и его
расстояние до цели. Момент выхода самолёта в район цели опре-
деляется на локаторе по совпадению измеренных расстояния
и азимута с расстоянием и азимутом, определённым по карте
для цели; прибытие в район цели с локатора сообщается на
самолёт.
В силу ошибок, присущих локаторам, самолёт может быть вы-
веден не точно на цель, а лишь в район цели, величину которого
можно характеризовать кругом с радиусом 2—4 /си.
Определение путевой скорости и путевого угла самолёта
Имея возможность определять с помощью локатора расчётные
места самолёта, можно по ряду последовательных точек расчёт-
ных мест, нанесённых на карту, построить линию пути самолёта,
определить её путевой угол и путевую скорость самолёта. Эти
определения можно делать или на локаторе, сообщая экипажу
самолёта готовые данные, или на самолёте по получаемым эки-
пажем самолёта от локатора данным о расстояниях и азимутах и
моментах времени (рис. 263).
f
299
Вывод самолёта я район аэродрома посадки, находящегося
в стороне от пункта установки локатора
В этом случае, установив расчётное место самолёта, можно
определить из этой точки путевой угол на нужный аэродром и
сообщить его на самолёт. Затем, когда самолёт станет на этот
курс, последовательными засечками определить его путевую ско-
рость и время прибытия на аэродром. Момент выхода самолёта
в район аэродрома определяется на локаторе дополнительной за-
сечкой (рис. 264).
Рис. 263. Определение путевого угла
и путевой скорости
Определение ветра на высоте полёта самолёта
Как известно, для определения ветра достаточно знать сле-
дующие величины: путевую и воздушную скорость самолёта, пу-
тевой угол и курс самолёта.
Путевую скорость и путевой угол можно определить, как опи-
сайо выше, с помощью локатора, а получив данные с самолёта о
его воздушной скорости и курсе, можно на ветрочёте рассчитать
ветер на высоте полёта самолёта. Этот расчёт может быть произ-
ведён и на самолёте, если с локатора сообщить ему его путевую
скорость и путевой угол.
Определение курса следования, путевой скорости и угла сноса
на контрольном этапе
Обычно метод контрольного этапа применяется перед слепым
полётом. На контрольном этапе определяются курс следования,
путевая скорость и угол сноса самолёта. Контрольный этап вы-
300
полняется методами визуальной ориентировки на маршруте дли-
ной 30—50 км.
При невозможности выполнения контрольного этапа сред-
ствами визуальной ориентировки (отсутствие видимости земных
ориентиров), он может быть выполнен с помощью земного лока-
тора. Процесс выполнения аналогичен выводу самолёта в район
цели, т. е. самолёт выводится на маршрут полёта с помощью лока-
тора, подбирается нужный курс следования и определяется рядом
засечек путевая скорость самолёта. Эти данные сообщаются на
самолёт, экипаж которого руководствуется ими как данными,
получаемыми на обычном контрольном этапе. Длина контрольного
этапа при работе с локатором определяется дальностью действия
локатора.
§ 27. Применение земного локатора для перехвата самолётов
противника
Основное назначение земных локаторов—обнаружение само-
лётов противника для перехвата их. Для этой цели локатор или
группа локаторов устанавливается в районе охраняемого объекта.
На локаторе ведётся наблюдение за воздухом, т. е. наблюдают
за показаниями индикатора, вращая антенну в пределах углов
охраняемого сектора. Появление отражённого импульса на инди-
каторе говорит о присутствии в воздухе самолёта. В течение 2—
4 минут определяют по карте путевой угол и путевую скорость
этого самолёта и рассчитывают курс и скорость своих истре-
бителей, которые должны лететь на перехват самолёта
противника. Сообщают по радио этот курс истребителям и в даль-
нейшем следят за движением самолётов, своих и противника,
внося, если требуется, коррективы в курс своих истребителей.
Цель работы локатора состоит в том, чтобы вывести свои истре-
бители в сферу видимости самолёта противника.
§ 28. Самолётный локатор и его применение
По типу земного локатора имеются самолётные локаторы,
только меньших габаритов и веса. Самолётные локаторы устана-
вливаются на истребителях-перехватчиках и служат для ближнего
наведения истребителя на самолёт противника. Необходимость в
самолётных локаторах возникает потому, что недостаточная точ-
ность действия земных локаторов не позволяет выводить истреби-
тель на расстояние, близкое к дистанции действительного огня, и
окончательное сближение истребителя производится самим лётчи-
ком по показаниям индикатора самолётного локатора.
§ 29. Заключение
На основании всего изложенного в этой главе приходим к вы-
воду, что радионавигация является важной частью аэронавигации.
301
Однако использование средств радионавигации мыслимо лишь в
сочетании с другими средствами самолётовождения и в первую
очередь со средствами компасной навигации, являющейся вообще
основой всей аэронавигации.
Как пример, можно указать, что без компасной навигации
немыслим даже такой простой 1полёт, как полёт на радиостанцию,
в котором необходимо вести контроль средствами компасной нави-
гации, особенно в тех случаях, когда радиокомпас подвержен дей-
ствию ночного эффекта.
Во всех же других, более сложных полётах необходимость
в компасной навигации ясна сама по себе.
ГЛАВА ВОСЬМАЯ
АСТРОНОМИЧЕСКАЯ ОРИЕНТИРОВКА
§ 1. Сущность астрономической ориентировки
Астрономической ориентировкой называются способы опреде-
ления местонахождения самолёта в полёте посредством астроно-"
мических наблюдений.
В результате астрономических наблюдений, после соответ-
ствующих расчётов, могут быть получены на карте линии местона-
хождения самолёта, называемые сомнеровыми позиционными
линиями. Астрономические наблюдения, необходимые для этой
цели, заключаются в измерении углов между направлениями на
светила и плоскостью горизонта. Эти углы носят название высот
светил. При измерении высоты одного светила, например Солнца,
получается на карте одна сомнерова линия, на которой располо-
жена искомая точка местонахождения самолёта; при измерении
высот двух светил, например двух звёзд ночью, получаются две
сомнеровы линии, точка пересечения которых является искомым
местонахождением самолёта.
Ввиду того что в условиях полёта на самолёте плоскость го-
ризонта определяется с некоторой погрешностью, зависящей от
конструкции измерительных инструментов и условий полёта (полёт
в спокойных условиях или при рему), измерения высот светил
также страдают погрешностями, которые целиком сказываются на
положении сомнеровых линий на карте. В результате этого точ-
ность астрономической ориентировки оказывается в пределах
15—30 км. Эта точность целиком зависит от качества измеритель-
ных инструментов, условий полёта и опытности штурмана, произво-
дящего измерения. При пользовании секстантами с осредняюшим
устройством точность может быть повышена до 8—10 кл за счёт
компенсации случайных погрешностей измерений, которую даёт
осредняющее устройство.
Большим преимуществом астрономической ориентировки перед
другими способами навигации является полная независимость по-
лучаемых результатов от дальности и продолжительности полёта
и степени видимости земной поверхности. В боевой обстановке
противник ие может помешать использованию приёмов астрономи-
ческой ориентировки, как это возможно, например, в радионавига-
ции.
303
Указанные особенности астрономической ориентировки опре-
деляют её применение толью как средства общей ориентировки и
го тсшько в тех случаях, когда другие способы самолётовождения
не могут быть использованы или дают меньшую точность- Осо-
бенно большое значение приобретает астрономическая ориенти-
ровка в дальних ночных полётах при отсутствии световых ориен-
тиров, а также в дальних полётах за облаками, над морем или над
безориентирной местностью.
§ 2. Отвесная линия, или вертикаль
При любых астрономических наблюдениях, производимых с
«елью определения местонахождения на земнсм поверхности,
Рис. 265. Отвесная линия
или вертикаль
посредством астрономических
большую роль играет направление
отвесной линии, или вертикали. Вер-
тикаль есть направление действия
силы тяжести. Если считать Землю
за шар, как это принято в аэрона-
вигации, то отвесная линия, или
вертикаль, в лю бой точке земной по-
верхности будет совпадать с ради-
усом Земли, проведённым в эту
точку. Таким образом, направление
вертикали есть направление к цент-
ру Земли. На рис. 265 изображён
земной шар и три точки Л, В и С на
его поверхности. Каждая точка
земного шара имеет свою вертикаль,
причём направления этих вертика-
лей составляют между собой раз-
личные углы в зависимости от рас-
стояния между точками.
При определении местонахо-
ждения на земной поверхности
наблюдений измеряют углы, соста-
вляемые вертикалью, или отвесной линией, с направлениями на
светила. Эти измерения производят при помощи инструментов
весьма разнообразных конструкций, имеющих в своём устройстве
специальные приспособления для фиксирования направления верти-
кали. К числу таких приспособлений относятся: уровни, маятники
и гироскопы различных систем. В авиации для этой цели приме-
няются специальные измерительные инструменты, называемые
ав рационными секстантами.
Э 3. Географическое место светила, зенитное расстояние, высота
и азимут
Прямая ОС (рис. 266), проведённая из центра Земли О в на-
правлении на светило С, пересекает земную поверхность в точке с,
называемой географическим местом светила. Наблюдатель, находя-
304
щийся в этой точке, будет видеть светило по направлению отвес-
ной .танин, т. е. светило будет находиться над головой наблюда- ч
теля, или, как говорят, в зените. Если наблюдатель будет нахо-
диться в другой течке М, расположенной на некотором расстоянии
от географического места светила, то направление МС на светило
уже не будет совпадать с отвесной линией ZO, проходящей через
место наблюдения.
Угол CMZ между направлением на светило и отвесной ли-
нией называется зенитным расстоянием светила. Зенитное расстоя-
ние обозначается буквой z. Часто вместо зенитного расстояния
Рис. 266. Направление на све-
тило, географическое место
светила, зенитное расстояние
и азимут светила
Рис. 267. Вертикаль, горизон-
тальная плоскость, зенитное
расстояние н высота светила
рассматривают его дополнение до 90°. Угол, дополняющий зенит-
ное расстояние до 90°, называется высотой светила и обозначается
буквой h. Очевидно, что z + h = 90°, отсюда:
й = 90° — z и г = 90° — h.
Таким образом, когда светило видно в направлении отвесной
линии, т. е. когда его зенитное расстояние равно нулю, высота
его равна 90°. Наоборот, когда зенитное расстояние равно 90°,
высота светила равна нулю. Зная зенитное расстояние светила,
всегда можно определить его высоту, и наоборот. Например, зе-
нитное расстояние z = 68°15', высота будет А = 90° — 68° 15' =
= 21°45‘'; высота h = 34°21', зенитное расстояние будет z = 90°—
— 34°21' = 55°39' и т. д.
Проводя плоскость, перпендикулярную к отвесной линии ZO,
проходящей через место наблюдателя М, получим плоскость
горизонта (рис. 267). Очевидно, что высота светила h будет равна
углу СМВ между направлением на светило» МС и плоскостью
20 Учебник аэронавигации
305
горизонта. Высота светила измеряется также углом между напра-
влением на светило МС и вертикальной проекцией МВ этого на-
правления на горизонтальную плоскость.
Угол ВМс (см. рис. 266) между меридианом данной точки М
и дугой большого круга, проведённой из этой точки в географи-
ческое место светила с, называется азимутом светила. В астроно-
мии азимут отсчитывают от южного направления меридиана МВ
(от точки юга) в обе стороны: к востоку и к западу от 180°.
В первом случае азимут называется восточным и сопровождается
буквой Е, во втором случае — западным и сопровождается бук- <
вой W. Азимут светила будет восточным, если географическое
место светила расположено к востоку от меридиана наблюдателя,
и западным — если к западу. Азимут обозначается буквой А.
Направления, в которых видно какое-либо сзетило из различ-
ных точек поверхности Земли, можно для большинства светил
считать параллельными между собой, так как расстояния от све-
тил до Земли очень велики по сравнению с размерами последней, i
Поэтому луч МС, по направлению которого наблюдатель, находя- (
щи'йся в точке М, видит светило С, будет параллелен лучу ОС,
проходящему через центр Земли *.
Ввиду этого зенитное расстояние светила, наблюдаемого в ,
точке М, будет равно углу МОс между радиусами Земли, прове-
дёнными в эту точку и в географическое место светила. Угол МОс ।
стягивается дугой Мс большого круга на поверхности земного
шара. Отсюда следует, что расстояние от наблюдателя до геогра-
фического места светила, выраженное в дуговых мерах, равно |
зенитному расстоянию наблюдаемого светила.
Зная радиус земного шара, можно вычислить длину дуги Me I
в линейных величинах, т. е. получить расстояние от наблюдателя |
до географического места светила в километрах. При этих под- 1
счётах с достаточной точностью можно считать, что на земной 1
поверхности длина дуги, стягивающей угол в 9°, равна 1 000 км. 1
Полезно запомнить следующие соотношения:
1О 1000 100
Г ——g— км', 6 =-g- км.
Пример 1. Наблюдатель видит светило на зенитном расстоянии z = 54°.
На сколько километров он удален от географического места светила?
,, 1000
Каждый градус равен —-— км, поэтому
J-222 . 54 - 6 000.
9
Таким образом, наблюдатель находится на расстоянии 6 000 км от геогра-
фического места светила.
Пример 2. Наблюдатель видит светило на высоте h = 2б°42'. На каком рас-
стоянии он находится от географического места светила?
1 Непараллсльность этих лучей имеет существенное значение только для
ближайшего к Земле светила—Луны. Угол между лучами называется параллак-
сом и учитывается при наблюдениях Луны-
306
Сначала по высоте определяем зенитное расстояние:
z i 90° — h = 90е - 26°42' = 63°18 .
Каждый градус равен -1999. км, а каждые 6' — '99 лл, поэтому
—991-63 + 1°9 • 19 - 7 000 + 33 = 7 033;
9 9 6
следовательно, наблюдатель находится на расстоянии 7 033 км от географиче-
ского места светила.
§ 4. Круг равных высот светила
В предыдущем параграфе мы видели, чта измерение
ного расстояния или высоты позволяет непосредственно
расстояние от наблюдателя до
географического места све-
тила. Однако, зная только это
расстояние, ещё нельзя судить
о местонахождении наблюда-
теля, так как точек, удалён-
ных на данное расстояние от
географического места свети-
ла, существует бесчисленное
множество. Все эти точки, на-
пример Mi, М2, М:1 и т. д.
(рис. 268), расположены на ок-
ружности малого круга зем-
ного шара, описанной вокруг
географического места свети-
ла с, как около центра.
Дуговой радиус этого кру-
га равен измеренному зенит-
ному расстоянию светила. Этот
малый крут Называется кру-
гом равных высот данного све-
тила, так как для всех наблю-
дателей, расположенных на
этом круге, светило в один и
на одинаковом зенитном расстоянии
одну и ту же высоту. Для каждого светила
сти множество кругов равных высот с различными радиусами в
зависимости от зенитного расстояния. Чем больше зенитное рас-
стояние, или чем меньше высота, тем больше радиус круга рав-
ных высот, и наоборот. Все эти крути будут иметь один и тот же
центр, совпадающий с географическим ‘местом светила.
Использование кругов равных высот составляет основу ориен-
тировки по небесным светилам. Для наблюдателя, измерившего
зенитное расстояние или высоту светила, круг равных высот пред-
ставляет собой линию положения наблюдателя. Практическое
зенит-
получить
Рис. 268.
Круг равных высот
светила
тот же
и,
момент наблюдается
следовательно, имеет
можно прове-
го-
307
использование этих линий положения сводится к построению на
карте сомнеровых линий, представляющих собой спрямлённые
отрезки дуг кругов равных высот.
§ 5- Определение координат географического места светила
Для определения положения круга равных высот на земном
шаре необходимо знать радиус
Рис. 269. Долгота и широта
географического места светила
этого круга и положение его
центра, т. е. положение геогра-
фического места светила. Дуго-
вой радиус круга равных высот,
как уже было сказано выше, ра-
вен зенитному расстоянию наблю-
даемого светила; положение ге-
ографического места светила оп-
ределяется так же, как и поло-
жение любой точки поверхности
земного шара, т. е. его долготой
и широтой. Для определения дол-
готы и широты географического
места любого светила в астроно-
мии даётся следующая формула
(рис. 269):
А* = ТГр -f- /?; о* — 5,
где ГГр — гринвичское время
(гражданское), превращённое в
единицы дуги из расчёта 24 ча-
са = 360°;
R — разность между долготой географического места све-
тила и гринвичским временем;
5—величина, равная широте географического! места све-
тила и называемая в астрономии склонением светила.
Для пояснения величины R рассмотрим меридиан Земли ON
(рис. 270), на котором в данный момент полночь, т. е. ноль часов
по местному гражданскому времени. Этот меридиан находится
всегда на стороне Земли, противоположной Солнцу. Назовём его
полуночным меридианом Земли. Полуночный меридиан, будучи
связан с направлением на Солнце, не участвует во вращении
Земли и, следовательно, перемещается по долготе в обратном на-
правлении, т. е. к западу.
Очевидно, что в любой момент западная долгота полуночного
меридиана Земли равна гринвичскому времени Тгр.
Величина R для любого светила представляет собой угол NOC
между полуночным меридианом и меридианом ОС географиче-
ского места светила. Величина R отсчитывается от полуночного
меридиана в направлении к западу до меридиана географического
места светила. Из определения величины R следует, что, например
для Солнца, величина R всегда близка к 180° (изменяется в тече-
308
ние года примерно от 176 до 184°, так как счёт времени по
Солнцу мы ведём, осредняя неравномерное движение Земли по
орбите).
Рис. 270. Зависимость долготы географического места
светила от времени. Величина Л? для светила
Рис. 271. Движение географического
места светила относительно земной
поверхности
Следует иметь в виду, что формула координат географиче-
ского места светила всегда даёт западную долготу, отсчитывае-
мую от гринвичского меридиа-
на к западу до 360°. Западная
долгота географического мес-
та любого светила всегда воз-
растает вследствие вращения
Земли с запада на восток.
Действительно, луч ОС (рис.
271), направленный из центра
Земли О на светило С, связан
только с положением светила
в пространстве и не участвует
во вращательном движении
Земли вокруг её оси. По этой
причине географическое место
светила перемещается в на-
правлении, обратном враще-
нию Земли, т. е. с востока
на запад. Это непосредственно
видно также из формулы
координат географического
места светила, так как в нее
входит в качестве слагае-
мого гринвичское время Т^р — величина всегда возрастающая.
Величины R для многих светил и их склонения 5, т. е. ши-
роты географических мест, даются в особых астрономических тао-
309
лицах, называемых Астрономическими ежегодниками, издавае-
мыми на каждый год. Вследствие движения небесных тел в про-
странстве величины R и 8 у всех светил изменяются со временем.
Поэтому в Ежегоднике они даны на каждый день для различных
моментов гринвичского времени. Наиболее быстро изменяются
величины R и 6 у Луны и менее быстро — у Солнца, планет и
звёзд.
§ 6- Построение кругов равных высот на глобусе
Имея Астрономический ежегодник, можно по формуле опре-
делить долготу и широту географического места светила для
Рис. 272. Построение круга
равных высот на глобусе
Рис. 273. Определение местонахо-
ждения наблюдателя по пересе-
чению кругов равных высот двух
светил
момента наблюдений и построить круг равных высот, соответ-
ствующий измеренному зенитному расстоянию или высоте светила.
Это построение очень просто выполнить на земном глобусе
(рис. 272). Для этого нужно отметить на глобусе географическое
место светила с по его долготе и широте, поставить ножку цир-
куля в эту точку и, раскрыв его на величину хорды, стягивающей
дугу, равную измеренному зенитному расстоянию z, описать во-
круг географического .места светила окружность малого круга.
Это и будет круг равных высот светила, представляющий собой
линию положения наблюдателя.
Если наблюдатель измерил зенитные расстояния Z| и z2 или
высоты двух различных светил С} и С2 (рис. 273) и отметил время
по часам, то он может выполнить аналогичные построения для
310
этих двух светил и получить таким образом два круга равных вы-
сот. Эти два круга в общем случае пересекутся в двух точках Л/,
и М?.. Одна из этих точек даёт местоположение наблюдателя.
Отсюда следует, что для определения положения наблюдателя на
земной поверхности необходимо измерить зенитные расстояния
или высоты по крайней мере двух различных светил.
§ 7. Построение сомнеровых линий на карте
Построение кругов равных высот на земном глобусе хотя и
выполняется очень просто и быстро, но использовать практически
зти построения для ориентировки по небесным светилам не пред-
ставляется возможным ввиду очень
мелкого масштаба изображения
земной поверхности на глобусах
нормальных размеров. Поэтому су-
ществуют способы построения кру-
гов равных высот светил на плос-
ком изображении земной поверхно-
сти, т. е. на географических картах.
Когда круг равных высот све-
тила используется для целей опре-
деления местоположения наблюда-
теля, нет необходимости рассматри-
вать полностью всю окружность
этого круга, достаточно рассмот-
реть лишь -небольшую дугу этой
окружности, проходящую в преде-
лах района вероятного положения
наблюдателя. Считая этот район
сравнительно небольшим, можно
предположить, что в пределах этого
района дуга окружности круга рав-
ных высот изображается на карте в
виде отрезка прямой. Такая спрям-
Рис. 274. Способ построения
линии Сомнера
лённая дуга круга равных высот, изображённая на географической
карте, носит название сомнеровой линии.
В аэронавигации принят метод построения сымнеровых линий,
предложенный Сент-Илером. Этот метод заключается в следую-
щем. Па карте, в районе предполагаемого местонахождения
наблюдателя, произвольно выбирают определённую точку Л10
(рис. 274), называемую приближённым местом, и для неё вычис-
ляют азимут Ло наблюдаемого светила С и его высоту h0 или
зенитное расстояние z0, т- е. расстояние Л40с от этой точки до
географического! места с светила. С другой стороны, наблюдатель,
измеряя высоту h или зенитное расстояние z светила, получает
расстояние от точки своего местоположения до географического
места светила. Если сравнить эти два расстояния, т. е. вычис-
ленное зенитное расстояние z0 светила для точки Л10 и измерен-
ное наблюдателем z в точке М, то можно судить, насколько
311
последняя находится ближе или дальше от географического места
светила, чем выбранная им точка приближённого места. Если из-
меренное зенитное расстояние г окажется меньше, чем вычислен-
ное z0, то, очевидно, наблюдатель находится ближе к географи-
ческому месту светила, чем точка Л40, на величину разности
20 — z, превращённой в линейные меры на поверхности земного
шара; если, наоборот, z больше, чем z0, то наблюдатель нахо-
дится дальше ни эту же величину.
Таким образом, откладывая от точки Мо по направлению
дуги Мос отрезок М0М, равный величине разности z0 — z, можно
получить некоторую точку М, называемую определяющей точкой,
для которой зенитное расстоя-
Рис. 275. Прокладка линий Сомнера
на карте
ние светила будет равно зе-
нитному расстоянию z, изме-
ренному наблюдателем. Если
сравнивать высоты светила —
измеренную h в вычисленную
ho, получим обратное. Точка
М будет ближе к географиче-
скому месту светила, чем точ-
ка Л1о, если измеренная наблю-
дателем высота h окажется
больше вычисленной высоты
й0, и дальше — в противопо-
ложном случае. Дуга ЛШ0,
равная разности зенитных рас-
стояний Zo—z, вместе с тем
будет равна разности высот
Дй = й — h0, так как
MM0 = z0 — z — (90° — Ло) —
— (90° — h) — h—/г0 = ДА.
Если величину этой разности определять алгебраически,
всегда вычитая из измеренной высоты высоту вычисленную, то
установим следующее правило. Если разность высот Дй поло-
жительна, наблюдатель находится ближе к географическому
месту светила, чем приближённое место, если отрицательна, —
то дальше.
Зная разность высот A й, можно помучить положение точки М
непосредственным графическим построением на карте. Для этого
необходимо иметь азимут До наблюдаемого светила, вычислен-
ный для приближённого места наблюдателя — точки Мо. Отметив
положение этой точки на карте (рис. 275) по её долготе и широте,
следует провести из неё прямую Мос по направлению на геогра-
фическое место светила согласно вычисленному азимуту До и
отложить в этом направлении отрезок Л70Л1, равный разности
высот АЛ, превращённой в линейные величины соответственно
масштабу карты. Откладывать разность высот от приближённого
места наблюдателя следует в направлении географического места
312
светила (или, кратко говоря, «к светилу»), когда разность высот
положительна, и в обратном направлении («от светила»), когда
эта разность отрицательна.
Полученная таким образом определяющая точка М, вообще
говоря, не будет представлять собой точку местонахождения
наблюдателя, но будет лежать на круге равных высот, проходя
щем через местоположение наблюдателя, так как для этой точки
высота светила, или его зенитное расстояние, такое же, как и
измеренное наблюдателем. Чтобы провести через эту точку часть
дуги круга равных высот, достаточно провести через неё прямую,
перпендикулярную к направлению на географическое место све-
тила, так как всегда небольшая часть дуги окружности перпен-
дикулярна к её радиусу. Эта прямая и будет искомой сомнеровсй
линией, на которой располагается наблюдатель.
§ 8. Вычисление высоты и азимута светила.
Часовой угол светила
Метод построения сомнеровых линий на картах предполагает
необходимость вычисления высоты и азимута наблюдаемого све-
тила в произвольно взятой точке земной поверхности для мо-
мента наблюдений. Вычисление сводится к решению сферическо-
го треугольника, образованно-
го тремя точками на поверхно-
сти земного шара — северным
полюсом Р, географическим
местом светила с и заданной
точкой Мо, для которой вычис-
ляются высота (или зенитное
расстояние) и азимут светила
(рис. 276). В этом треуголь-
нике две стороны PC = 90°—
— ©*, РМо=9О°—<р и угол
между ними сРМъ= X-J-X*
известны, так как положения
точек с и Мо на поверхности
Земли заданы их географиче-
скими координатами.
Рис. 276. Сферический треугольник
для определения высоты и азимута
светила
Здесь
X* — западная долгота гео-
графического места
светила;
9*—широта географического места светила;
X — восточная долгота точки Мо — приближённого места
наблюдателя;
ф — широта точки Л1о.
Решение этого треугольника позволяет определить сторону
cMo = Zo, т. е. зенитное расстояние светила, а следовательно,
и его высоту h0 в точке Мп и азимут светила Ао посредством
угла сМ0Р, так как Ло= 180°— £_сМйР.
313
Вычисления, которые необходимо проделать для получения
искомых величин, достаточно громоздки и требуют затраты вре-
мени и внимания, поэтому в практике астрономической ориенти-
ровки эти вычисления не производят, а пользуются готовыми
таблицами. Существует два тала таких таблиц для получения
высот и азимутов: таблицы для Солнца, Луны и планет и таблицы
для восьми ярких звёзд.
Таблицы для Солнца, Луны и планет составлены для каждого
целого градуса широты географического места светила, т. е. его
склонения, по двум аргументам: широте места наблюдения <р и
разности долгот между меридианом пункта наблюдения и геогра-
фическим местом светила- Оба аргумента в таблицах даны через
Рис. 277. Часовой угол светила
Рис. 278. Направление отсчёта
часового угла светила
целый градус. Последний аргумент, представляющий собой угол
сРМп в сферическом треугольнике еРМс, т. е. угол между мери-
дианом графического места светила и меридианом места наблю-
дателя, называется часовым углом светила.
Часовые углы отсчитываются к востоку и к западу от мери-
диана наблюдателя до 180° и называются соответственна восточ-
ным Е или западным W.
Часовой угол светила обозначается буквой t и легко может
быть вычислен, если известна долгота географического места
светила А* и долгота наблюдателя А. Легко понять (рис. 277),
что, имея западную долготу географического места светила А*,
нужно к ней прибавить восточную долготу наблюдателя или вы-
честь западную долготу, чтобы получить часовой угол светила,
отсчитываемый к западу от меридиана наблюдателя, т. е.
В формуле знак плюс относится к восточным долготам,
а знак минус — к западным, что указано буквами Е и W у обо-
значения долготы.
314
По этой формуле получается всегда западный часовой угол
светила. Если он оказывается больше 180°, то его можно пере-
вести в восточный, взяв его дополнение до 360°. Например, за-
падный часовой угол светила, равный t = 238°\V. можно заме-
нить восточным часовым углом (рис. 278).
/ = 360° —238°=122° Е.
Если в формулу часового угла подставить значение долготы
географического места светила А*=7'гр+/?,то получим следую-
щую полную формулу для часового угла:
f=7rp + /?±tfv.
Наконец, вводя сюда вместо гринвичского времени Г1р по-
ясное время Т какого-либо пояса N (восточного Е или запад-
ного W), получим окончательно:
t=T^N'l + R±^,
где N4—количество часов, равное номеру часового пояса.
Время Т и количество часов N'1 должны быть переведены
в единицы дуги согласно соотношению: 24 часа = 360°. Верхние
знаки в последней формуле соответствуют восточным долготам
и поясам, нижние — западным долготам и поясам, что указано
буквами Е и W.
Часовой угол светила, поскольку он является аргументом всех
таблиц, служащих для получения высоты и азимута, имеет боль-
шое значение в практических расчётах при астрономической
ориентировке. Имея часовой угол светила для момента наблю те-
ний, можно непосредственно из таблиц получить высоту и азимут
светила для построения сомнеровой линии.
§ 9. Авиационный секстант АС
Авиационный секстант является основным инструментом для
измерения высот светил при астрономической ориентировке в по-
лёте. Общий вид секстанта изображён на рис. 279. В кор-
пусе секстанта собрана оптическая система, состоящая
из объективной линзы А (рис. 280), трёхгранной приемы В,
уровня С, пятигранной призмы D, окулярной линзы Е и
плоскопараллельной стеклянной пластинки F. На корпусе сек-
станта с одной стероны имеется круглая рукоятка для держания
его во время измерений, а с другой стороны — угломерный бара-
бан со шкалой для отсчёта измеренных высот. Существенной
частью секстанта является уровень, заполненный чистым бензи-
ном. Для регулировки величины пузырька уровня при изменении
температуры, кроме основной камеры уровня, имеется ещё допол-
нительная камера, закрытая гибкой мембраной. Величину пузырька
315
можно изменять давлением на мембрану посредством крышки
с нарезкой и гайки, воздействующих на мембрану при завинчи-
вании гайки.
Секстант при измерениях удерживают обеими руками: ле-
вой— за рукоятку, правой — за угломерный барабан. Наблюдатель
становится лицом к свети-
Рис. 279. Авиационный секстант АС
лу, а корпус секстанта рас-
полагает в вертикальной
плоскости, проходящей че-
рез светило; при этом объ-
ективную трубку направляет
на горизонт. Направление
лучей в оптической системе
показано на рис. 280. Лучи
от горизонта, пройдя через
объектив А, преломляются
в трёхгранной призме В и
направляются вниз через
уровень С в пятигранную
призму D. Преломившись в
пятигранной призме D, лучи
выходят через окулярную
линзу Е и, пройдя через
плоскопараллельную пла-
стинку F, попадают в глаз
наблюдателя, который ви-
дит в поле зрения изображение горизонта и пузырёк уровня.
На пути лучей, идущих от окуляра в глаз наблюдателя, нахо-
дится плоскопараллельная стеклянная пластинка F, отражающая
Рис. 280. Оптическая схема
секстанта
Рис. 281. Измерение высот звёзд
секстантом АС
своей верхней поверхностью лучи от светила. Поворотом пла-
стинки вокруг оси О, перпендикулярной к плоскости рисунка,
можно добиться совпадения отражённых лучей светила с лучами,
идущими из окуляра. Таким образом, наблюдатель будет видеть
в поле зрения светило, совмещённое с пузырькам уровня. Поло-
жение плоскопараллельной пластинки при совмещении иэображе-
316
ний зависит от высоты светила над горизонтом. Поворотом пла-
стинки управляет угломерный барабан, по шкале которого от-
считывают ивмеренную высоту светила. Шкала барабана разбита
на деления через 10 минут дуги с оцифровкой каждого градус-
ного деления.
При наблюдении Солнца глаз располагают выше плоскопарал-
лельной пластинки, как показано на рис. 280, причём для защиты
от яркого солнечного света на пути лучей устанавливают свето-
фильтры. При наблюдении звёзд секстант поднимают выше и рас-
полагают глаз ниже плоскопараллельной пластинки (рис. 281). При
этом визируют звёзду прямо через плоскопараллельную пластинку,
а изображение пузырька уровня получается вследствие отражения
от нижней поверхности пластинки.
При ночных наблюдениях уровень и индекс на шкале угло-
мерного барабана освещаются небольшими электролампочками.
Для регулирования силы света лампочки, освещающей уровень,
в её цепь включён реостат, помещённый в рукоятке секстанта.
Питание электроосвещения секстанта—от бортовой самолётной
сети стандартного напряжения (24 в).
§ 10. Методика измерений авиационным секст'антом АС
Влияние ускорений на уровень секстанта неизбежно приводит
к разнообразным по величине ошибкам в измерении высот светил,
носящим случайный характер и снижающим результирующую
точность астрономической ориентировки. Так как этих ошибок
избежать нельзя, нужно соответствующим образом организовать
измерения, чтобы, по возможности, компенсировать случайные
ошибки. Единственным средством уменьшения этих ошибок
является взятие среднего из нескольких измерений. Как правило,
только среднее арифметическое не менее чем из 5—7 измерений
может дать результаты, пригодные для практического использо-
вания. Одиночные отсчёты только случайно могут дать удовлет-
ворительные по точности результаты, поэтому сии должны быть
совершенно исключены из практики штурмана.
Для простоты работы пользуются графическим отметчиком
результатов измерений- Для этой цели к угломерному лимбу сек-
станта прикреплена специальная пластинка, загнутая своим краем’
к целлулоидной пластинке для записей. По краю пластинки де-
лают отметки карандашом при каждом наведении секстанта на
светило. После окончания серии наблюдений эти карандашные
штрихи осредняют на-глаз, т. е. между ними проводят прямую,
определяющую среднее положение угломерного лимба во время
наблюдений. Пользование этим простым приспособлением необхо-
димо рекомендовать, так как оно позволяет достигнуть большей
точности.
В настоящее время в авиационных секстантах часто приме-
няют специальные механизмы, автоматически дающие средний
результат при непрерывном измерении высоты светила в продол-
жение некоторого промежутка времени. Такой секстант с «осред-
317
няющим» механизмом в значительной степени повышает точность
астрономических наблюдений в полёте. Точность измерений сек-
стантом с осредняющим механизмом доходит до 8—10 км.
Большое значение при измерениях высот секстантом имеет
сохранение режима полёта самолёта. Штурман должен требовать
от лётчика безукоризненно точного ведения самолёта по курсу
со строгим сохранением скорости при выполнении астрономических
измерений.
Для получения наибольшей точности измерение секстантом
выгоднее всего производить в плоскости продольной оси самолёта,
т. е. когда светило видно в направлении носа или хвоста само-
лёта. При этом самолётные ускорения в меньшей степени влияют
на результаты измерения. В особых случаях, когда результатам
астрономических наблюдений придаётся исключительно важное
значение (например, при восстановлении ориентировки астрономи-
ческими средствами), следует изменить курс полёта, чтобы иметь
наблюдаемое светило в плоскости продольной оси самолёта.
§ 11. Поправки для высот светил
Измеренная секстантом высота светила должна быть испра-
влена инструментальной поправкой прибора и поправкой за ре-
фракцию. Инструментальные поправки берут из аттестата при-
бора.
Рис. 282. Рефракция
Рдс. 283. Параллакс
Рефракция есть явление, благодаря которому светила кажутся
расположенными выше их действительного положения. Это проис-
ходит вследствие свойства атмосферы преломлять световые лучи
(рис. 282). Величина рефракции (угол) зависит от высоты светила
и высоты полёта. При расположении светила вблизи горизонта
рефракция имеет наибольшую величину, а в зените она равна
318
нулю. Величина рефракции даётся в особых таблицах. Рефракция
всегда вычитается из измерении высоты светила.
В случае наблюдения Луны в найденную высоту, кроме того,
вводят поправку за параллакс. Параллаксом называется угол
между прямой линией, идущей из центра Земли на светило, и ли-
нией, ^направленной на светило с места наблюдения (рис. 283).
Наибольшую величину параллакс имеет при расположении Луны
на линии горизонта.
Параллакс понижает высоту светила и поэтому прибавляется
к измеренной высоте. Учёт параллакса производится по Астроно-
мическому ежегоднику.
§ 12. Таблицы для расчёта часовых углов
В § 8 была приведена формула расчёта часовых углов светил.
Чтобы упростить работу штурмана в полёте, вместо расчёта по
формуле пользуются специальной таблицей, описание которой
приводится ниже.
Напишем формулу расчёта часовых углов только для восточ-
ных долгот в следующем виде, причём все величины, входящие
в эту формулу, выразим в градусах:
/ = (?’ + /?) +(л—15°№).
Из этой формулы видно, что часовой угол светила состоит
из двух частей: первая часть, т. е. сумма (Т 4- R), представляет
собой часовой угол светила на среднем меридиане часового
пояса, по времени которого идут часы штурмана; вторая часть,
т. е. разность (А—15°№), есть алгебраическая разность между
долготой меридиана, для которого рассчитывается часовой угол,
и долготой среднего меридиана часового пояса Для вы-
числения первой величины, т. е. суммы Г-)- /?, служит приводимая
ниже таблица (см. стр. 320).
Таблица разделена тремя жирными линиями на шесть прямо-
угольных частей: в левом верхнем и в левом нижнем прямо-
угольниках помещены величины R в целых градусах от нуля
до 359°; в правом верхнем и в правом нижнем прямоугольниках
даны часы поясного времени Т; минуты поясного времени даны
в левом среднем прямоугольнике. Искомый ответ, т. е. сумма
7'4-/?, дана в правом среднем прямоугольнике, который разделён
вертикальной ломаной линией на две части: справа находятся
положительные значения суммы 7'4-/?, или западный часовой угол
светила на среднем меридиане часового пояса; слева—отрица-
тельные, или восточный часовой угол.
При пользовании таблицей измерения высот светил необхо-
димо приурочивать к определённым моментам, для которых ми-
нуты поясного времени кратны четырём, например, 22ч 04 м,
22ч 08м, 22’1 12м ит. д. Таблица годна для времени любого часо-
вого пояса.
ЗЮ
Градусы величины R
Часы поясного времени
Минуты поясного времени
sir 2* T 4“ 5 6’ 7° 8" 9' 10- II" izj 13” 14е 15м 1Б" 17" 18" 19"1гс 21" |И" 7Т Г]!" !2*
15 1Б 17 !6 19 20 21 22 23 24 25 26 27-28(29 14 15 16 17 18 19 20 21 22 2? 0 1 2 3 4 5 6 7
30 ?• 32 33 34135 36 37 38 39 40 41 П 43 44 13 14 15 16 17 18 19 20 21 22 |ZS C 1 2 3 4 5 6
45l 4G 47 48 «|50 51 62 53 54(55(56 57] 58 59 12 13 И 15 16 17 18 19 20 21 22 23 0 1 2 3 4 5
ЁЁ1 Гб i 6? f3 64.65 66 67 68 99 70 71 72 Th 7< 11 12 13 14 15 16 17 18 19 LO 21 22 23 0 1 2 3 4
76 77 78179180 «1 82 83 M 85 86 87 88 89 10 11 12 13 14 15 16 17 Н8 19 20 21 22 23 0 1 2 3
92 93'94'95 96 97 99 99 ЙК 101 102 !ОЗ|(И ПвТйэ 9 10 11 12 13 14 15 16 17 •8 I19 20 21 22 23 0 1 2
1И Vk r wiMfiio 111 112 113 114 [115,116 П71 8 9 10 11 12 13 !4 ys 16 17 18 19 20 21 22 23 0 1
122 «234124.125 шрзэрб 126 I27jl?8 1291130 131 132Пзз;>з4 М7ЗД1Й9 7 в 9 10 Ч 12 to 14 15 16 17 18 19 20 2l n 23 0
135,136(137 Ml М2 М3 144'145,146 6 7 8 9 10 11 •2 13 М 15 16 17 18 19 20 21 a 23
1W i5!|l52l 153;IM!l55 Йб||571|58 159 ib0|i61 162Т«з!|64 5 6 7 8 9 10 11 12 13 IJ 15 16 17 18 19 2C 21
165|16f. ipcpBl’ •p 1681169.1^ 1711:721173 174 I75;Г76 177 178,179 4 5 6 1 8 9 1и И 12 13 14 15 16 17 IS 19 20 21
182 ’831<4 '86 187 Ic8 189 {ЩВД| 192 ;93 194 3 4 L- 5 6 7 8 9 Ю II 12 13 14 15 16 17 ?8 19 20
ачаг vs 90’ 75’ 60- 45* 30- 15е 0* 15* GO’ «1ЫГ 75- 90*’I05‘
5a;oo' 134 119110в 89 74 59 44 29 (4 1 16 31 46 ]Ы 176 91 106121
08 04 OCT L_ 133 118(103 88 73 58 43 28 13j 2 r ’2 47 IS2 77 92 107*122
0₽ 04 ЮСГ и 132 117ПО! 87 72 57 42 27 12 3 18 33 43’63 78 93 lira 123
16 12 08 04 ж 131 116] 101 86 71 56 4Г 26 11 4 19 34 49 79 94 1.19424
20 16 12 08 04 w 130 115 100 85 70 55 40 25 10 5 20 35 50 65 80 35 (110(125
24 20 16 12 08 (M СО’ 129 114 99 84 69 54 39 24 9 6 21 36 Si 66 81 96 111 126
28 24 20 16 12 08 34 ocr 'ГЛ 113 38 83 6б 53 38 23 ZJ 7 22 37 52 S7 82 971112 127
32 28 24 20 16 12 С8 04 0C1 171 112 07 62 G7 5? 37 22 7l 8 23 38 53 68 83 98 Ill3 128
ЗБ 32 28 24 20 16 121 08 04 XT 126 III 96 81 |66 51 36 21 6| 9 24 3^ 54 69 24 99 114 129
40 36 32 28 24 70 16 12 08 04 or - 125I1IC 95 80 165 50 35 90 "5| 10 25 40 55 7C 85 ICO IIS I130
44140 36 32 28 24 20 16 12 08 04(00" I24I1C9 94 79 64 49 341 19 4 11 26 41 56 71 86 JOI 116(131
48 44 Lio 3b 32 23 24 20 16 08,04 00’ 133 108 93 78(63 58 33 18 3 12 27 42 57 72 87 102iH7 132
52 43 40|36 32 а 24 co ,9 12 08 04 IO(TI 122(107 92 77 62 47 32 17 2 1 13 M 43 58 73 88 103*116 133
56 5L 56 44 40 36 32 28 24 20 16 12 08 04 or IZl-:O6i9l 76 61 46 31 16 1 14 29 44 59 74 89 104 119 134
52J 48 44 40 зГ *32 If 24 20 IS 12 И 04 120(|05|в0 7J 60 45 30 15 15 30 45 60 75 90 1C5 120 135
c 5? 48 44 L!L 32 28 24 70 IS 12 EJ ЦО 1)04 89 74 59 44 29 И 1 16 31 46 61 76 91
f 56 52 48 44i4d 36 32 28 24 20 16 1? 118 ИОЗ 88 73 58 М3 2В 13 2 17 32 J47 62 77 92 l07't22 ’137
56 52 48 44 40 36 32 28 24 20 16 117 102 67 72 67 42 27 12 3 18 33 4ft 63 78 93 цИйТэд
56 w|« 44 40 36 32 21 24 20 116 101 86 71 56 41 28 11 4 19 84 49 64 79(94 1093241139
56 52 48 44 40 36 32 28 24 115 Юи;85 70 55 40 25 ’0 5 20 S3 iso 65 80 95 ПО 125 ио
56 52 48 44 40 36 32 28 IJ4 9С 64 69 54 39 24 9 6 21 36 El 66 Bl [96 111 <126'141
56 52 48 44 40 36 32 113)98(83 68 53 33 23 8 7 22 37 □ 67 82’97 112 12? 142
56 52 48 44 40 36 112 97 62 ь 52 37 22 7 6 23 38 ш Б8 83 98 Il3j!26.l43
56 52 48 44 И. III 46 81 к 51 36 21 С 9 24 39 ED 69 84 99 114 129'144
56 32 48J44 ПО 95 90 65 50 35 20 5 10 25 40 3 70 85 00 115 П30’|«5
Ы 52 48 109 94 ?9 64 49 34 19 '4 1 II 26 41 56 71 8Б 101 116,131 '146
56 52 108 93 78 83 48 33 18 12 27 42 67 72 87 102 1171132'147
56 1П7 92 77 62 47 32 17 2 □1 28 43 58 73 1 88 04 18 !*3" И8
13.Г Ж 191* 19Г l!» Ж 202 ZtJ zw ZOf! zJ зов rd 2м 3” 4Ч 5Ч 6" 7" и*4 9' tsi II" I?4 w 14“'t5"i Г I7“lw“'l9"
212 213(214 ss £!« 212 2W 219 21 222'23,2» 1 г 3 4 5 Б 7 8 Ell 10 11 12 13 4 15 16. 17 1b
225-22Ь|2£7 228229 232(233 2Я4.215 236 237|Z38|239 0 1 2 3 4 5 6 7 6 9 10 11 12 13 1 14 15 116 17
2ч 241 ?4Z 7<3iM4 24! Z«7|24 ?C«J 761 2nj253'2M ?3 0 1 2 3 4 5 6 7 8 9 13 П 121 13 ”1 IS IS
255(256 aiizss ME 262(263 264 265 266 22 23 0 1 2 3 4 5 Б 7 8 9 IC II. 12 13 14 IS
zzd 271 Г2 273'274 7?5]2?6;?77 278 2*1 28212831244 21 22 23 2 1 2 3 Л 5 Б 7 8 9 10 11 12 । 13 14
tzto 287 2Ы,'’Я9 F” 2?2 -93 234^2t6 2Я299 го 21 22 23 0 1 2 3 4 5 8 7 8 9 10 HI 12 n
ЮО 301 w 3Q213M.3O5 & 307 3» TO$[1JC HU 3It 313 314 ИЕЭИ п 73 0 3 4 5 6 7 e 9 10 11 12
SI5j316|3l7 3Wj3l9p2(y2l 322 323 324.325326 3z^a>]S3 18 19]?С 21 ~Т1 75 т T 4 s d 8 s nr ir
330 33i 33? щзидаззб|3з? эм 17 .’8 is г5 21 22 7Т 0 1 2 3 4 sl г T 8
34? 346,3471348(348 352(353 354 155 355 357[854IIS3j - 17 LI8 и 20 21 22 231 0 1 2 3 ±L 5 6 7 в 9
>i величины R
чавы поясного времени
К полученному по таблице часовому углу светила на среднем
меридиане часового пояса нужно алгебраически прибавить раз-
ность Л— 15°N4, т. е. разность долгот заданного меридиана
и среднего меридиана часового пояса, чтобы получить часовой
угол светила на заданном меридиане. Если в результате алгебраи-
ческого суммирования получится отрицательная величина, это зна-
чит, что часовой угол светила восточный (Е); если получится по-
ложительная величина, то — западный (W).
Разности/ — 150Л/4 можно раз и навсегда написать на каждом
из меридианов карты, предназначенной для астрономической
ориентировки, причём эта оцифровка меридианов карты сохра-
няется постоянной на всё время, пока штурман пользуется вре-
менем данного часового пояса. Например, если штурман поль-
зуется московским временем, т- е. временем Ш часового пояса
(с учётом «декретного» часа), то средним меридианом часового
пояса будет меридиан с долготой IS^TV'1 = 15°-3 = 45°. На этом
меридиане разность л—15J/V'* равна нулю; на меридианах, лежа-
щих к востоку от этого меридиана, разность л—15 ЛГ1 будет по-
ложительна, на меридианах, расположенных к западу. — отри-
цательна.
Таким образом, меридианы карты для московского времени
нужно оцифровать числами, равными X—45°, которые для крат-
кости назовём условными долготами.
Пользоваться таблицей нужно следующим образом:
1) найти число градусов величины R в левом верхнем или
в левом нижнем прямоугольниках;
2) от этого числа двигаться вправо по строке до числа часов
поясного времени, находящихся в правом верхнем или в правом
нижнем прямоугольнике;
3) опуститься (или подняться) по столбцу от числа градусов
величины R да числа минут поясного времени в левый средний
прямоугольник;
4) на пересечении строки, в которой были найдены минуты
поясного времени, со столбцом, содержащим часы поясного вре-
мени. прочесть в правом среднем прямоугольнике искомый ответ.
Пример 1. Поясное время наблюдения (III пояса) 23 часа 28 мин.; R — 65э
Найти часовой угол для долготы 22°.
Находим в левом верхнем прямоуготьнике таблицы число 653 (градусы /?);
двигаемся по строке вправо в правый верхний прямоугольник до числа 23ч (часы
поясного времени); опускаемся от числа 65 ’ вниз по столбцу в левый средний пря-
моугольник до числа 28« (минуты поясного времени). На пересечении строки,
содержащей эти минуты, со столбцом, в котором оказались часы поясного вре-
мени, находим искомый ответ: -|-57о. Так как задана поясное время III пояса,
то меридиан карты с долготой 22° будет оцифрован числом 223 — 45° = —23°
(условная долгота).
Таким образом, получаем:
По таблице.....................- 4-57°
Условная долгота................—23°
Часовой угол ........................... VV (западный)
21 Учебник аэронавигации 321
Пример 2. Поясное время наблюдения 20 час. 16 мин.; R — 335°.
По таблице для Т — 20 час. 16 мин и R — 335“
находим......................... —81°
Условная долгота по карте.......—15°
Часовой угол ................... — 96°Е (восточный)
Пример 3. Поясное время наблюдения 12 час. 48 мин.; R — 176°.
По таблице для Т — 12 час. 48 мин. и R = 176° находим . . 8°.
Условная долгота по карте..........—13“
Часовой угол.......................— 5°Е (восточный)
Чтобы учесть минуты в величине R, необходимо рассчитать
часовой угол, принимая во внимание сначала только целые гра-
дусы величины R и отбросив минуты, а затем изменить на это
число минут долготу меридиана, для которого производился
расчёт, причём так, чтобы рассчитанный для прежней долготы
часовой угол остался без изменений и для новой долготы. В слу-
чае восточных долгот, которые входят в формулу как слагаемые,
их придётся всегда уменьшать на количество минут, входящих
в величину R. Например, если в первом из приведённых выше
примеров величина R была равна 65r 431', то нужно было бы вместо
заданной долготы 22° взять долготу 22°—43“', т. е. на 43' меньше.
Изменять долготу удобно при построении сомнеровой линии
на карте, поступая согласно следующему правилу: точку прибли-
жённого места самолёта на карте выбрать вначале на меридиане
с долготой, выражающейся в целых градусах, а в дальнейшем,
при построении ссмнеровой линии, эту точку сместить по парал-
лели к западу на число минут долготы, равное минутам в вели-
чине R. При этой новой смещённой точке приближённого место-
нахождения самолёта строится сомнерова линия.
Описанная выше таблица предназначена для расчёта часо-вых
углов светил. Для звёзд расчёт часовых углов может быть ещё
более упрощён применением специальной таблицы, входами в ко-
торую являются поясное время и долгота.
Устройство таблицы легко уясняется из общей формулы для
расчёта часового угла любого светила:
t=T+I\r> + R±-& .
В случае расчёта чассеых углов для звёзд величину R в этой
формуле можно считать равномерно возрастающей приблизительно
на 59' за 24 часа. Поэтому, обозначив через /?р значение вели-
чины R для какой-либо звезды в 0 час. гринвичского времени,
можем для любого момента поясного времени Т написать:
/? = /?0 + ^(7'+№).
где — гринвичское время, выраженное в часах. Подста-
вляя это значение R в общую формулу для часового угла,
322
получим:
t= T^N^ + R0 + ^-(7’q=№)=tX^
Положим теперь, что
Т' = Где Л/4 + ^ (Г ср AT4) zr X»»
найдём окончательно:
t=r + R0.
Таким образом, часовой угол звезды может быть вычислен как
сумма двух слагаемых: величины Т', зависящей от поясного вре-
мени Т и долготы X, и величины RQ, постоянной для данной
звезды в продолжение данных суток.
Для нахождения Т' можно составить таблицу с двумя вхо-
дами: поясное время и долгота. Такая таблица, составленная для
московского времени (время Ш пояса) и для восточных долгот
от 16° до 40°, приводится ниже (см. стр. 324—325). Таблица со-
ставлена только для тёмного времени суток, ст 19 часов до
7 часов. Московское время в таблице дано в левом столбце с ин-
тервалом 10 минут, долготы обозначены в заголовках столбцов
и даны с интервалам 2°.
Из формулы следует, что величина Т' возрастает пропорцио-
нально времени; кроме того, она увеличивается или уменьшается
совместно с увеличением или уменьшением восточной долготы,
причём на такое же число градусов и минут, что и долгота. Гра-
дусы величины Т' находятся в таблице на строке, соответствую-
щей заданному московскому времени, и в столбце, обозначенном
вверху заданной долготой. Минуты величины Г находятся на той
же строке в последнем столбце; они одинаковы для всех долгот,
выражающихся целыми градусами.
При необходимости получения величины Т' для промежуточ-
ных моментов времени, не указанных в таблице, можно пользо-
ваться табличками пропорциональных частей, помещёнными
справа. В этих табличках даны изменения величины Т' для минут
времени и их десятых долей. При пользовании этими табличками
необходимо помнить, что с увеличением времени величина Т'
возрастает.
Таблица построена для чётных градусов долготы; для нечёт-
ных градусов величина Т' находится из таблицы как средняя
между двумя смежными столбцами.
Для использования данной таблицы необходимо перед полё-
том выписать из Астрономического ежегодника для даты, соот-
ветствующей началу ночи, величины Ro для выбранных звёзд. Эти
величины будут постоянны в течение всей ночи и поэтому в по-
лёте не придётся прибегать к Астрономическому ежегоднику.
21*
323
Таблица для расчёта часовых углов звёзд
М основ- Д о Л Г О т а Е
ское
время 16 О 18 О 20 О 22 О 24 26 28 30 32 34 О 36 О 38 О 40
ч. м. О О О О О О О О О О о о О /
19 00 256 258 260 262 264 266 268 270 272 274 276 278 280 39
10 259 261 263 265 267 269 271 273 275 277 279 281 283 10
20 261 263 265 267 269 271 273 275 277 279 281 283 285 40 м. О г
30 264 266 268 270 272 274 276 278 280 282 284 286 288 11 0 0 00
40 266 268 270 272 274 276 278 280 282 284 286 288 290 41 1 0 15
50 269 271 273 275 277 279 281 283 285 287 289 291 293 И 2 0 30
289 -* 3 0 45
20 00 271 273 275 277 279 281 283 285 287 291 293 295 42 4 1 00
10 274 276 278 280 282 284 286 288 290 292 294 296 298 12 5 1 15
20 276 278 280 282 284 286 288 290 292 294 296 298 300 43 6 1 30
30 279 281 283 285 287 289 291 293 295 297 299 301 303 13 7 1 45
40 281 283 285 287 289 291 293 295 297 299 301 303 305 44 8 2 00
50 284 286 288 290 292 294 296 298 300 302 304 306 308 14 9 2 i5
21 00 286 288 290 292 294 296 298 300 302 304 306 308 310' 44 10 2 30
10 289 291 293 295 297 299 301 303 305 307 309 311 313 15 м. 0.0
20 291 293 295 297 299 301 303 305 307 309 311 313 315,45
30 294 296 298 300 302 304 306 308 310 312 314 316 318 16 0
40 296 298 300 302 304 306 308 310 312 314 316 318 320 46 .2 .3
50 299 301 303 305 307 309 311 313 315 317 319 321 323 16 о 5
22 00 301 303 305 307 309 311 313 315 317 319 321 323 325 47 .4 6
10 304 306 308 310 312 314 316 318 320 322 324 326 328 17 .5 8
20 306 308 310 312 314 316 318 320 322 324 326 328 330 48 .6 9
30 309 311 313 315 317 319 321 323 325 327 329 331 ЗЗЗ1 18 .7 11
40 311 313 315 317 319 321 323 325 327 329 331 333 335* 48 .8 12
50 314 316 318 320 322 324 326 328 330 332 334 336 338 19 .9 14
1.0 15
23 00 316 318 320 322 324 326 328 330 332 334 336 338 340 49
10 319 321 323 325 327 329 331 333 335 337 339 341 343 20
20 321 323 325 327 329 331 333 335 337 339 341 343 345 50
30 324 326 328 330 332 334 336 338 340 342 344 346 348 20
40 326 328 330 332 334 336 338 340 342 344 346 348 350 51
50 329 331 333 335 337 339 341 343 345 347 349 351 353 21
0 00 331 333 335 337 339 341 343 345 347 349 351 353 355 52
10 334 336 338 340 342 344 346 348 350 352 354 356 358* 22
20 336 338 340 342 344 346 348 350 352 354 356 358 0 53
30 339 341 343 345 347 349 351 353 355 357 359 1 3 23
40 341 343 345 347 349 351 353 355 357 359 1 3 5 53
50 344 346 348 350 352 354 356 358 0 2 4 6 8 24 - 1
1 00 346 348 350 352 354 356 358 0 2 4 6 8 10 54
10 349 351 353 355 357 359 1 3 5 7 9 11 13 25
20 351 353 355 357 359 1 3 5 7 9 И 13 15 55
30 354 356 358 0 2 4 6 8 10 12 14 16 18 25
40 356 358 0 > 2 4 6 8 10 12 14 16 18 20 56
50 359 1 3 5 7 9 11 13 15 17 19 21 23 26
2 00 1 3 5 7 9 11 13 15 17 19 21 23 25157
10 4 6 8 10 12 14 16 18 20 22 24 26 28 27
20 6 8 10 12 14 16 18 20 22 24 26 28 30 57
30 9 11 13 15 17 19 21 23 25 27 29 31 33 28
40 11 13 15 17 19 21 23 25 27 29 31 33 35 58
50 14 16 18 20 22 24 26 28 30 32 34 36 38 29
324
Москов- Д О Л г о г а Е
ское
время 16 18 20 22 24 26 28 30 32 34 36 38 40 1
ч. м. о О G С О с О о о о О о О /
3 00 16 18 20 22 24 26 28 30 32 34 36 38 40 59
10 19 21 23 25 27 29 31 33 35 37 39 41 43 30
20 22 24 26 28 30 32 34 36 33 40 42 44 46 00 м. О г
30 24 26 28 30 32 34 36 38 40 42 44 46 48 30 0 0 00
40 27 29 31 33 35 37 39 41 43 45 47 49 51 01 1 0 15
50 29 31 33 35 37 39 41 43 45 47 49 51 53 31 2 0 30
3 0 45
4 00 32 34 36 38 40 42 14 46 48 50 52 54 56 02 4 1 00
10 34 36 38 40 42 44 46 48 50 52 54 56 58 32 5 1 15
20 37 39 41 43 45 47 49 51 53 55 57 59 61 02 6 1 30
30 39 41 43 45 47 49 51 53 55 57 59 61 63 33 7 1 45
40 42 44 46 48 50 52 54 56 58 60 62 64 66 03 8 2 00
50 44 46 48 50 52 54 56 58 60 62 64 66 68 34 9 2 15
10 2 30
5 00 47 49 51 53 55 57 59 61 63 65 67 69 71 04
10 49 51 53 55 57 59 61 63 65 67 69 71 73 34 м. •
20 52 54 56 58 60 62 64 66 68 70 72 74 76 05 0.0 0
30 54 56 58 60 62 64 66 68 70 72 74 76 78 35 .1 2
40 57 59 61 63 65 67 69 71 73 75 77 79 81 06 .2 3
50 59 61 63 65 67 69 71 73 75 77 79 81 83 36 .3 5
.4 6
6 00 62 64 66 68 70 72 74 76 78 80 82 84 86 06 .5 8
10 61 66 68 70 72 74 76 78 80 82 84 86 88 37 .6 9
20 67 69 71 73 75 77 79 81 83 85 87 89 91 07 .7 11
30 69 71 73 75 77 79 81 83 85 87 89 91 93 38 .8 12
40 72 74 76 78 80 82 84 86 88 90 92 94 96 08 .9 14
50 74 76 78 80 82 84 86 88 90 92 94 96 98 39 1.0 15
7 00 77 79 81 83 85 87 89 91 93 95 97 99 101 09
Наприм 2р, отпр >авл яясь в поле Т 14 авг] /ста 19- 13 ’• ( В ь очь на
15 августа) и наметив для наблюдений звёзды а Андромеды и л
Орла, выписываем из Астрономического ежегодника для 14 августа:
а Андромеды /?о = 32О°Ю'
а Орла /?0= 24°32'.
В дальнейшем Астрономический ежегодник не потребуется.
В полёте выбирают из таблицы величину Т' для московского
времени наблюдений и для долготы приближённого местонахо-
ждения самолёта. К этой величине прибавляют Ro для наблюдае-
мой звезды и получают таким образом западный часовой угол
звезды. Если сумма окажется больше 360°, из неё вычитают 360°.
Если полученный таким образом западный часовой угол будет
больше 180°, необходимо его вычесть из 360°, разность будет
восточным часовым углом.
При расчёте часового угла сразу же после сложения вели-
чин У и Ro необходимо в сумме оставить только целые градусы,
а минуты отбросить, уменьшив соответственно «а это число минут
325
заданную долготу приближённого местонахождения самолёта.
Чтобы не производить вычитания, следует минуты часового угла
приписать справа к долготе со знаком минус, а при построении
сомнеровой линии на карте точку приближённого местонахожде-
ния самолёта сдвинуть по параллели к западу на это количество
минут по долготе.
Пример 1. Найти часовой угол звезды а Волопаса (Арктур) 25 мая 1943 г.
в 23 ч. 20 м. по московскому времени на долготе 24°Е.
Из Авиационного астрономического ежегодника для
25 мая 1943 г. для звезды а Волопаса (в 0 час.
гринвичского времени)..........................Ra~ 28°26
По таблице для московского времени 23 ч. 20 м. и
долготы 24° находим.............................Т' — 329°50
t - 358’(16')W
или 2°Е для долготы 24° — 16'.
Пример 2. Найти часовой угол звезды а Льва (Регул) 1 апреля 1943 г.
в 22 ч 40 м. по московскому времени на долготе 35°Е.
Из Авиационного астрономического ежегодника для
1 апреля 1943 г. для звезды а Льва.............Ro — 37°09'
По таблице для московского времени 22 ч. 40 м. и
долготы 35° находим................................Г = 330°48
Сумма — 367°(57')
-360°
Г = 7°W
для долготы 35е—57'.
Пример 3 Найти часовой угол звезды а Волопаса (Арктур) 12 февраля
1943 г. в 4 ч. 42,7 м. по московскому времени на долготе 25°Е.
Находим Т' по таблице:
для Т - 4 ч. 40 м. н X = 25°Е.................... 51°03
изменение за 2 м..................................... 0°30'1 по таблич
, за 0.7 М................................. С11 ) кам справа
для Т - 4 ч. 42.7 м. иХ = 25СЕ..............Г - 51°44'
Из Авиационного астрономического ежегодника
выписываем...............................Ra — 287°54'
Г = 51°44
t = 339°(38')\V
или 21°Е для долготы 25° — 38'.
§ 13. Авиационный астрономический ежегодник
Каждая страница Астрономического ежегодника обозначена
датой, для которой она предназначена. На странице расположены:
1) таблицы величин R и R для Солнца, Луны, планет и восьми
звёзд, 2) таблица величин R 4- а для всех звёзд и 3) таблица по-
правок за параллакс для Луны. Входом во все таблицы (кроме
таблицы за параллакс) служит гринвичское время ТГр. Интер-
валы, через которые дан аргумент 7’|р таблиц, различны и взяты
с таким расчётом, чтобы была обеспечена возможность выборки
326
из таблицы искомых величин для промежуточных значений вре-
мени 7\р без особой интерполяции, просто на-глаз. Так, в таблице
для Солнца этот интервал равен 2 часам, в таблице для Луны —
1П минутам, в таблицах для планет — 2, 4 и 8 часам и, наконец,
в таблице для звёзд величины R и R + а даны на каждый час.
Входом в таблицу поправок за параллакс Луны служит высота
Луны.
Кроме указанных таблиц, на каждой странице Астрономиче-
ского ежегодника дан также момент наступления ближайшей
фазы Луны.
Для распознавания планет к Ежегоднику прилагается карта
видимых путей планет с указанием их положения среди звёзд на
первое число каждого месяца.
Смена страницы Ежегодника совершается при перемене грин-
вичской даты, т. е. в ноль часов по гринвичскому времени. Этот
момент в каком-либо восточном часовом поясе происходит
в N часов по поясному времени. До этого момента приходится
пользоваться страницей для предыдущей даты. Например, в X во-
сточном часовом поясе страницу Ежегодника придётся сменять
в 10 часов (т. е. утром), а до этого момента нужно пользоваться
страницей для прошедшего дня.
§ 14. Карта звёздного неба. Отыскание звёзд
Для возможности применения приёмов астрономической ориен-
тировки в ночном полёте необходимо изучить звёздное небо,
уметь распознавать звёзды и находить нужную для наблюдений
звезду. В практике астрономической ориентировки используются
лишь восемь звёзд, для которых составлены таблицы высот
и азимутов. Знакомство со звёздным небом в том объёме, кото-
рый требуется для отыскания этих восьми звёзд, «е представляет
больших трудностей, и необходимые для этого навыки легко при-
обретаются практикой.
Ориентировка на звёздном небе облегчается тем, что все ви-
димые невооружённым глазом звёзды разделяются н’а группы,
называемые созвездиями. Созвездия образуют характерные и
легко запоминаемые очертания. Каждое созвездие имеет опреде-
лённое название, присвоенное ему ещё в глубокой древности.
Звёзды в созвездиях обозначаются обычно буквами греческого
алфавита (а — альфа, JJ-—бета, у — гамма, b—дельта и т. д.);
кроме того, многие ив них имеют ешё и собственные имена
(см. табл, на стр. 328).
При опознавании звёзд следует иметь в виду их яркость, ко-
торая определяется некоторым числом, называемым звёздной ве-
личиной. Звёздная величина тем меньше, чем больше яркость.
Звёзды весьма разнообразны по яркости и, следовательно, имеют
различную величину, характеризующую эту яркость. Например,
звезда а в созвездии Лиры, называемая Вегой, имеет величину,
равную 0,1; Полярная звезда (а Малой Медведицы) — вели-
чину 2.1; следовательно, Вега ярче Полярной, и её более удобно
327
наблюдать даже в светлую ночь. Полезно знать,
звёзд, величины которых разнятся одна от другой
приблиз1ггельно в 2,5 раза больше одна другой.
что яркости
на единицу,
При астрономической ориентировке в полёте наблюдают
только наиболее яркие звёзды, величина которых не меньше 2,5.
В 'настоящее время для этой цели выбраны восемь звёзд, входя-
щие в состав восьми созвездий. Эти звёзды и созвездия штурман
Название звезды
1 а Андромеды (Альферац) 2,2
2 а Тельца (Альдебаран) . . 1,1
3 а Возничего (Капелла) . . 0,2
4 а М. Пса (Процион) . . • 0,5
5 а Льва (Регул) . . . • . 1,3
6 а Волопаса (Арктур). . . 0,2
7 а Лиры (Вега) 0,1
8 а Орла (Альтаир) .... 0,9
должен хорошо изучить и
уметь находить их на небе в
любое время ночи.
Кроме этих звёзд, для
определения широты пользуют-
ся наблюдениями звезды а
Малой Медведицы, называе-
мой Полярной, величина кото-
рой равна 2,1.
Изучение звёздного неба
облегчается при помощи кар-
ты звёздного неба, которая
даёт изображение всего неба,
видимого в любое время ночи
над горизонтом, а также указывает взаимное расположение созвез-
дий и звёзд. Карта звёздного неба (рис. 284) напечатана на тёмно-
синём фоне, звёзды обозначены белыми кружками и сгруппиро-
ваны пунктирными линиями в созвездия. На карте даны названия
созвездий, буквенные обозначения и собственные имена некоторых
звёзд.
Карта звёздного неба заключена в плоский футляр, в кото-
ром она вращается вокруг центра, совпадающего с северным по-
люсом мира. Неподалеку от этого центра находится Полярная
звезда. В футляре карты сделан овальный вырез, ограничивающий
часть неба, видимую в данный момент над горизонтом. Этот
овальный вырез представляет собой горизонт наблюдателя, нахо-
дящегося на широте 55° (средней широте СССР). Для других
широт овальный вырез карты не будет совпадать с действитель-
ным горизонтом. При пользовании картой на других широтах
можно считать, что для более северных широт открывается часть
неба на севере (у стрелки N) и закрывается часть неба на юге
(у стрелки S); для более южных широт положение обратное.
На краях выреза горизонта имеются четыре кружка со стрел-
ками, внутри которых помещены буквы: N — север, S — юг, Е —
восток и W — запад. Эти кружки обозначают стороны горизонта
При сличении с небом карту следует держать над головой, ориен
тируя её соответственно сторонам горизонта. При рассматривании
участка неба вблизи горизонта карту нужно держать вертикально
так, чтобы стрелка, соответствующая стороне горизонта, была на-
правлена вниз. Например, изучая небо в северной части горизонта,
необходимо карту держать перед собой так, чтобы стрелка с буи
вон N была направлена вниз.
328
Прежде чем пользоваться картой звёздного неба, её нужна
установить на время наблюдений, так как вид звёздного неба за-
висит от времени наблюдения*
Рис. 284. Карта звёздного неба
Для этой цели на футляре карты сделан дугообразный вырез
через который видна шкала, разделённая на дни года. На краях
выреза нанесена шкала местного времени от 18 до 6 часов. Чтобь
установить карту на время наблюдений, необходимо её вращать
внутри футляра до тех пор, пока деление шкалы, соответствую-
щее данному дню года, видимое через дугообразный вырез, со-
впадёт с делением шкалы времени, соответствующего заданному,
моменту. Местное время, на которое нужно устанавливать карту,,
не совпадает со временем, показываемым часами штурмана, иду-
щими обычно по поясному времени. Местное время получается,
если из показания часов штурмана вычесть количество часов, рав-
ное номеру часового пояса, по которому установлены часы, и при-
бавить восточную долготу места наблюдении, выраженную в еди-
ницах времени.
Прежде чем начать изучение звёздного неба, необходимое-
найти на звёздной карте и отметить какими-либо заметными зна-
ками перечисленные выше восемь звёзд. Карту звёздного неба
329
•следует перед сличением с небом установить по времени и ориен-
тировать по странам света. Ознакомление с небом проще всего
«начать с известного всем созвездия Большой Медведицы. Это со-
звездие состоит из семи ярких звезд, расположенных в виде фи-
туры, напоминающей ковш с ручкой. Оно может служить отправ-
ным пунктом при первоначальном знакомстве с небом. Сличая
звёздную карту с небом, можно перейти от созвездия Большой
Медведицы к соседним созвездиям и звёздам и в дальнейшем,
переходя от созвездия к созвездию, изучить взаимное расположе-
ние необходимых для наблюдений звёзд.
Удобны следующие простые приёмы отыскания звёзд по уже
известным звёздам (рис. 285). Проводят мысленно линию через
две крайние звезды в ковше Большой Медведицы в направлении
открытой стороны ковша и вблизи этой линии находят одиноко
стоящую звезду Малой Медведицы, называемую Полярной. Про-
должая дугу, образованную ручкой ковша, находят яркую звезду—’
330
Арктур —а созвездия Волопаса. Продолжив линию, соединяющую
середину ковша с Полярной, находят созвездие Пегас, имеющее
вид большого квадрата, в одном из углов которого находится
звезда Альферац — а созвездия Андромеды. Продолжив линию
через две верхние звезды ковша Большой Медведицы в сторону,
противоположную рукоятке ковша, находят созвездие Возничий,
напоминающее пятиугольник, в одном из углов которого располо-
жена яркая звезда Капелла — а созвездия Возничего.
При пользовании картой звёздного неба следует иметь в виду
неизбежные искажения очертаний 'созвездий, в особенности на
краях карты, вызываемые проекцией карты.
По карте звёздного неба можно изучить созвездия в течение
нескольких вечеров, и отыскание любой из перечисленных выше
звёзд в полёте не будет вызывать затруднений. Однако приобре-
тённые навыки необходимо закреплять практикой, иначе они скоро
могут быть забыты.
§ 15. Карта для астрономической ориентировки
В комплект самолётной аппаратуры и расчётных пособий для
астрономической ориентировки в полёте входит карта, заранее,
раз и навсегда, подготовленная к работе в полёте. Для этого при-
меняются карты мелкого масштаба, например 1 2 500 000. Необ-
ходимо склеить вместе те листы карты, которые охватывают
район вокруг аэродрома радиусом, примерно равным дальности,
действия самолёта (в исключительных случаях, например при
больших перелётах, карта подготавливается сообразно маршруту
полёта). Карта должна храниться в кабине самолёта в сложенном
виде, наравне с остальным астрономическим оборудованием и
пособиями.
Подготовка карт для астрономической ориентировки заклю-
чается в следующем:
а) провести меридианы через каждый градус долготы от
Гринвича и оцифровать их значениями долгот;
б) провести параллели через каждый градус широты и оцифро-
вать их значениями широт;
в) разделить отрезки параллелей между двумя смежными
меридианами на шесть равных частей, по 10 минут долготы в
каждой части;
г) разделить отрезки меридианов между двумя смежными
параллелями на шесть равных частей, по 10 минут широты в каж-
дой части;
д) оцифровку меридианов и параллелей сделать настолько
частой, чтобы можно было прочитать долготу любого меридиана
и любой параллели, когда карта свёрнута для работы в кабине
самолёта.
§ 16. Таблицы высот и азимутов
Таблицы служат для нахождения высот и азимутов светил,
имеющих склонение от — 29°,5 до + 29°,5, т. е. Солнца, ’Луны,
331
।
планет и восьми звёзд: а Андромеды, а Тельца, а Возничего,
а М. Пса, а Льва, а Волопаса, а Лиры, а Орла.
Таблицами можно пользоваться в пределах северных широт
от 30 до 75°. Таблицы изданы в трёх сборниках:
Сборник I для широт от 30 до 45°,
» II для широт от 45 до 60°,
» III для широт от 60 до 75е.
Каждый Сборник содержит 30 таблиц для Солнца, Луны и
планет, 8 таблиц для звёзд, таблицы поправок за рефракцию и
перевода минут дуги в километры и пояснительный текст.
Для удобства работы с таблицами они сделаны разборными
и собраны в одной обшей папке, в которой и должны храниться.
Для работы в полёте выбранные таблицы следует заложить в
металлическую кассету или в картонную папку.
В таблицах приняты следующие обозначения
— широта;
t— часовой угол светила;
ДЬ — минуты склонения светила;
Л — табличная высота светила;
f— индекс, служащий для определения поправки к таблич-
ной высоте;
А— азимут светила, отсчитанный от юга к востоку или к
западу до 180е;
Ф—йпол — алгебраическая разность между широтой места и высо-
той Полярной звезды;
IV— запад;
Е — восток.
§ 17. Таблицы для Солнца, Луны и планет
Таблицы составлены для каждого целого градуса склонения,
начиная от нуля и до 29е включительно. Нумерация таблиц ве-
дётся по градусам склонения; таким образом, в каждом сбор-
нике имеются 30 таблиц следующих номеров: 0, 1, 2, 3, 4 и т. д,
до № 29.
Каждая таблица, кроме таблицы № 0, напечатана на сдвоен-
ном (развёрнутом) листе, т. е. на четырёх страницах; таблица № О
напечатана на одинарном листе, т. е. на двух страницах. Аргумен-
тами для входа в таблицы являются: склонение светила, его часо-
вой угол и широта приближённого места. Склонение в целых гра-
дусах напечатано со знаком плюс вверху каждой страницы и со
знаком минус — внизу на левых страницах. Таким образом, каж-
дая таблица может служить как для положительного, так и для
отрицательного склонения, одинакового по абсолютной величине.
Таблицы построены для каждого целого градуса широты.
Значения широт указаны вверху и внизу в заголовках столбцов,
причём диапазон широт в каждом сборнике разбит на две поло-
332
вины; одной половине соответствует одна сторона сдвоенного или
одинарного листа другой половине — оборотная сторона листа.
Часовые углы даны в левых и правых крайних столбцах на
каждой странице с интервалом в 1°. Часовые углы в таблице № О
даны только в левых столбцах. Во всех таблицах, за исключением
таблицы № 0, часовые углы в левых столбцах соответствуют по-
ложительному склонению, напечатанному вверху; они возрастают
сверху вниз: от нуля до 90° — на левых страницах развёрнутого
листа и от 90° до некоторого предельного значения — на правых
страницах. Часовые углы для отрицательного склонения, напеча-
танного внизу, помещены на правых страницах в правом столбце;
они возрастают снизу вверх от нуля и до некоторого предельного
значения. Часовые углы в таблице № 0 возрастают сверху вниз
от нуля до 90".
На правых страницах каждой таблицы (за исключением
таблицы № 0) имеется жирная ступенчатая линия. Она разграни-
чивает таблицу на две части: верхняя часть, расположенная выше
этой линии, относится к положительному склонению, часть, нахо-
дящаяся ниле, — к отрицательному склонению, обозначенному
внизу.
Заданное значение склонения светила определяет номер
таблицы, которой нужно пользоваться при определении высоты и
азимута светила. Таблица, номер которой равен п, вычислена для
склонения, равного +л°, но может быть использована при всех
значениях склонения, заключающихся в пределах 1°, по 30' в обе
стороны от + п°, т. е. в пределах от + (п° — 30') до + (п° + 30')
и от —(п°— 30') до — (п° + 30'). Например, таблица № 18 при-
годна для склонений от + 17°30' до + 18 30' и от — 17°30' до
— 18°30'.
Искомые величины — высота светила Л, индекс / и азимут
светила А — берутся в таблицах в одном столбце с заданным
значением широты ф. Ввиду того что в общем случае заданное
склонение не выражается целым числом градусов и, следова-
тельно, не соответствует ни одному из табличных склонений,
необходимо исправлять взятые из таблиц величины небольшими
поправками на разницу между заданным склонением и табличным,
т. е. на минуты склонения. Поправку необходимо вносить только
в табличную высоту, азимут же надо знать с точностью до 1°;
разница в склонениях, не превышающая при указанном выборе
таблиц О',5, не изменит существенно величины азимута. Для опре-
деления поправки к табличной высоте на минуты склонения слу-
жит индекс /, помещённый рядом в одной строке с высотой, и
небольшие таблички пропорциональных частей, напечатанные на
полях таблицы. Поправка к табличной высоте определяется из
этих табличек на пересечении столбца, обозначенного вверху зна-
чением индекса f, со строкой, соответствующей минутам склоне-
ния Д6, взятым в левом столбце каждой таблички. Индексы /
представляют собой целые числа от 5 до 10 включительно. Когда
индекс / равен 5, поправка к табличной высоте равна половине
числа минут склонения; когда индекс f равен 10, поправка равна
333
числу минут склонения. Вообще же поправка к табличной высоте
за минуты склонения Д8 равна уд-/-Д8.
Следует иметь в виду, что склонение светила должно быть
дано в такой форме, как это принято в Авиационном астрономиче-
ском ежегоднике, начиная с 1941 г., т. е. в виде алгебраической
суммы целого числа градусов и числа минут Д6, не превышаю-
щего 30; при этом как градусы, так и минуты склонения могут
иметь знаки плюс или минус. При указании склонения в такой
форме пользование таблицами чрезвычайно просто1: градусы скло-
нения своей абсолютной величиной указывают номер таблицы;
знак склонения указывает направление входа в таблицу — сверху,
если плюс, и снизу на левой странице, если минус. Минуты скло-
нения Д8 и индекс / дают поправку к табличной высоте. Необхо-
димо помнить, что знак поправки к табличной высоте всегда оди-
наков со знаком минут склонения.
Таблицы для Солнца, Луны и планет годны в продолжение
неограниченного периода времени.
Пользование таблицами для Солнца, Луны и планет
Прежде всего надо выбрать таблицу, соответствующую гра-
дусам склонения светила. Далее необходимо обратить внимание
на знак склонения: если склонение имеет &нак плюс, то в таблицу
надо входить сверху и искать заданный часовой угол на левой
странице в левом столбце, когда он меньше 90°, и на правой стра-
нице в левом столбце, когда он больше 90°; если склонение имеет
знак минус, в таблицу следует входить снизу и пользоваться
только правой страницей, причём заданный часовой угол нужно
искать в правом столбце на этой же странице. Когда градусы
склонения равны нулю, приходится пользоваться таблицей № 0,
напечатанной на одинарном листе; при этом часовой угол всегда
будет меньше 90°, и его следует искать в левом столбце таблицы.
Порядок работы с таблицами следующий:
1. Рассчитать по таблице часовых углов (или арифметически)
часовой угол светила в целых градусах; записать его величину и
наименование.
2. Найти в таблице рассчитанный часовой угол светила.
3. Перемещая палец или карандаш по строке, в которой най-
ден часовой угол (для удобства можно наложить линейку), оста-
новиться в столбце, соответствующем заданной широте (эти
столбцы ограничены жирными вертикальными линиями и состоят
каждый из трёх колонок; значения широт указаны вверху и внизу
каждого столбца).
4. Из найденного таким образом места таблицы выписать
три рядом стоящие величины: табличную высоту й, индекс / и
азимут А. К азимуту сейчас же приписать наименование часового
угла (W — западный или Е — восточный).
5. В табличках, напечатанных на полях, найти столбец, обо-
значенный вверху индексом /, и строку, обозначенную в левом
334
столбце минутами склонения ДЬ. На пересечении этой строки го
столбца прочитать поправку табличной высоты в минутах дуги.
6. Приписать к найденной поправке тот же знак, что и у
минут склонения ДЬ, прибавить её с этим знаком к табличной
высоте, в результате чего получить искомую расчётную высоту
светила.
Пример1. Склонение светила о =-|-18° — 23'; часовой угол t = 52°W
широта <f — 48°.
Определить расчётную высоту и азимут светила.
Градусы склонения 18°) показывают, что нужно пользоваться таблицей
№ 18, причём знак плюс указывает, что в таблицу следует входить сверху и
искать часовой угол в левых столбцах. Так как он меньше 00°, то придётся
пользоваться левой страницей. Найдя на этой странице строку, соответствую-
щую часовому углу 52°, нз столбца, обозначенного сверху и снизу широтой 48°..
выписываем:
48°
h / А
(=52° • • . 38с25' 7 73°
По индексу f—7 и по минутам склонения Д8 ——23' определяем из таблички
на полях поправку к высоте, равную —16', причём у этой поправки ставим знак
минус, так как минуты склонения Д8 имеют знак минус. Прибавляем к таб-
личной высоте найденную поправку с её знаком н получаем искомую расчётную
высоту:
38°25' — 16' = 38°09'.
Азимут будет 73°W, так как заданный часовой! угол был западный.
Пример 2. Склонение 8=-|-27о+13'; f=74°E; <p=56°.
Из таблицы № 27 (вход сверху; часовой угол в левом столбце на левой стра-
нице) выписываем:
В табличке на полях для Д8=-|-13* и /=8 поправка к высоте равна +10'
Следовательно, расчётная высота будет: 30°55' -f-10' = 31°05' и азимут 93°Е
335
Пример 3. Склонение 4=—14°-|-21'; t— 36°W; <₽=50°.
Из таблицы № 14 (вход снизу; часовой угол в правом столбце на правой стра-
нице) выписываем:
Для До=+2Г и f= 9 поправка к табличной высоте равна -|-19'. Искомая
фасчётная высота будет: 18°37' + 19’ = 18°56' и азимут 37CW.
Пример 4. Склонение Ь — —20° — 15’; t — 42°Е; <? — 47°.
Из таблицы № 20 (вход снизу; часовой угол в правом столбце на правой стра-
нице) выписываем;
Для Д4 = — 15' и f =9 поправка к табличной высоте равна —14'. Иско-
мая расчётная высота будет: 13°04'—14'= 12°50' и азимут 40 Е.
§ 18. Таблицы для звёзд
Таблицы содержат высоты и азимуты звёзд, названия кото-
рых указаны вверху каждой таблицы. Каждая из восьми таблиц
напечатана на сдвоенном листе, т. е. на четырёх страницах. Для
«хода в таблицы служат название звезды, её часовой угол и
широта приближённого места Таблицы построены для каждого
градуса широты. Значения широт указаны вверху и внизу в заго-
ловках столбцов, причём диапазон широт в каждом сборнике
разбит на две половины: одной половине соответствует одна сто-
рона сдвоенного листа, другой половине—оборотная сторона листа.
Часовые углы даны в левых столбцах на каждой странице;
на левых страницах помещены часовые углы от нуля до 90° и на
правых страницах — от 90° до некоторого предельного значения.
Интервал часовых углов равен 1°.
Искомые величины — высота h и азимут Л звезды — берутся
в таблицах на одной строке с заданным значением часового
угла t звезды из столбца, обозначенного вверху и внизу задан-
ным значением широты <р. При этом табличная высота и азимут
никакой поправки не требуют, так как каждая таблица вычислена
для точного значения склонения звезды, соответствующего опре-
делённой эпохе. Изменения координат звёзд, происходящие со
336
временем, столь невелики, что в продолжение срока годности
таблиц мало влияют на данные в таблицах величины.
Кроме высот и азимутов, в каждой таблице даны значения
алгебраической разности (9 — Анол) между широтой места <р и высо-
той йот Полярной звезды
Разности (<ь — Лип.,) служат для определения широты по
высоте Полярной звезды, когда последняя наблюдается одновре-
менно с одной из указанных в таблицах звёзд. Эти разности берут
из таблицы для заданного значения часового угла звезды, назва-
ние которой указано вверху. Разности ' о — h :0 1 помещены во вто-
ром и третьем столбцах слева на каждой странице, рядом со-
столбцом часовых углов. В зависимости от наименования часо-
вого угла звезды (W — западный, Е — восточный) величину
(о — Лпол следует брать в соответствующем столбце, обозначенном
вверху буквами W или Е на одной строке со значением часового
угла.
Пользование таблицами для звезд
Порядок работы с таблицами следующий:
1. Рассчитать часовой угол1 звезды в целых градусах; записать'
его величину и наименование.
2. В таблице для выбранной звезды найти рассчитанный часо-
вой угол (в левом столбце на левой странице, если он меньше 90°,
и в левом столбце на правой странице, если он больше 90).
3. Перемещая палец или карандаш по строке, в которой най-
ден часовой угол, остановиться в столбце, соответствующем задан-
ной широте.
4. Из найденного таким образом места таблицы выписать две
рядом стоящие величины: искомую расчётную высоту h звезды и
её азимут А. К азимуту сейчас же приписать наименование часо-
вого угла (W — западный или Е — восточный).
Если одновременно с измерением высоты звезды была изме-
рена высота Полярной звезды, то для определения широты необ-
ходимо.-
5. Из второго или третьего столбцов слева, озаглавленных
вверху или внизу значением разности © — йпол. выписать величину
алгебраической разности между широтой места и высотой Поляр-
ной звезды. Эту разность следует брать на строке часового угла
во втором столбце, обозначенном буквой W, когда часовой угол
выбранной звезды западный, или в третьем столбце, когда часо-
вой угол восточный (Е).
6. Найденную из таблицы разность ср — Апол (она дана в мину-
тах дуги) прибавить с её знаком к высоте Полярной звезды и по-
лучить широту местонахождения самолёта.
Пример 1. Звезда а Возничего: часовой угол /=25° W, широта <р—56°.
Найти расчётную высоту, азимут звезды н разность между широтой и
высотой Полярной звезды.
В таблице для а Возничего в строке, соответствующей часовому углу 25°,
в столбце для широты 56° находим: расчётная высота й=71“29', азимут
X=68eW.
-2 Учебник ааровиш ацил
Г
337
Разность <р—ЛПглдля часового угла 25° W (во втором столбце, так кая
часовой угол западный) будет— 13'.
Пример 2. Звезда а Волопаса: f=79®E, <?—48®.
Из таблицы находим: Л—21с36', Л=9б°Е.
ф-АПол=+19'
(в третьем столбце, так как часовой угол восточный).
Пример 3. Звезда а Лиры: t—103° Е, <?—59°.
Из таблицы получаем: Л =26 29', А- 121СЕ.
Ф —йПол=+52'-
Пример 4. Звезда а Тельца: t-97° W, 0=53".
Из таблицы находим: Л=8°5о', Я = 105°№.
Ф-Йпол= ~Н6'-
В 1941 г. проф Р. В. Куницкий разработал новые таблицы
высот и азимутов звёзд, совершенно исключающие какие бы то
ни было расчёты при пользовании ими в полёте. Таблицы непо-
средственно по долготе, широте и поясному времени дают высоту
и азимут звёзд. Они составлены для тех же восьми звёзд, что и
описанные выше таблицы высот и азимутов.
Таблицы состоят из двух частей: постоянней части, в которой
даны высоты и азимуты звёзд, и переменной части, в которой
даны на каждый день года моменты поясного времени, соответ-
ствующие некоторым средним значениям часовых углов звёзд
для средней долготы. Таблицы охватывают по широте область от
52 до 58°, а по долготе — от 16°Е до 40сЕ. Широты в таблицах
даны через 2°, долготы — через 4°.
Таблицы требуют некоторой подготовки перед полётом. Эта
подготовка заключается в вычислении моментов поясного вре-
мени, соответствующих табличным значениям часовых углов на
различных долготах в пределах таблицы. Табличные часовые
углы выбраны с таким расчётом, что их значения соответствуют
наиболее удобному для наблюдений положению звезды на восточ-
ной и на западной частях неба. Интервал времени в таблицах для
одной и той же долготы равен 20 минутам; для смежных долгот,
при одном и том же часовом угле, — 16 минутам.
§ 19. Выбор таблиц перед полётом
В полёт следует брать только те таблицы, которыми придётся
пользоваться на самолёте. Остальные таблицы могут быть оста-
влены на земле. При выборе таблиц необходимо руководство-
ваться видимостью тех или иных светил, временем полёта (время
года, время суток) и протяжённостью маршрута полёта по широте.
Если в полёте намечено наблюдать Солнце, Луну или пла-
неты, следует посмотреть по Авиационному астрономическому
338
ежегоднику, чему будут равны значения градусов склонения этих
светил в продолжение всего полёта. Число градусов склонения
указывает номер таблицы, которую необходимо взять в полёт.
Для ночного полёта необходимо выбрать таблицы для тех
звёзд, которые будут доступны для наблюдения в продолжение
всего полёта. Видимость тех или иных звёзд выясняется перед по-
лётом по карте звёздного неба. Для этого следует установить
звёздную карту на местное время, рассчитанное приблизительно
для времени середины полёта и для средней долготы района, по
которому проходит маршрут. Затем по расположению созвездий
относительно выреза горизонта, имеющегося на карте, можно
судить о том, какие из восьми звёзд будет удобнее наблюдать
в полёте.
Следует иметь в виду, что когда наблюдение звёзд лрозо
диггся с целью получения только одной сомнеровой линии, можно
выбирать любую звезду, лишь бы она не была слишком близка
к горизонту или к зениту. Если же звезда наблюдается совместнс
с Полярной, то для определения местонахождения самолёта жела-
тельно выбирать звезду на востоке или на западе (т. е. с азиму-
том, близким к 90°) с таким расчётом, чтобы сомнерова линия,
соответствующая её высоте, была расположена примерно по ме-
ридиану. В этом случае расчётное место, полученное в точке пере-
сечения сомнеровой линии с параллелью широты, будет опреде-
лено по Полярной звезде более точно. Если для контроля пути
предполагается использовать одни сомнеровы линии или в комби-
нации с позиционными линиями, даваемыми средствами радиона-
вигации, желательно для наблюдения выбирать такие звёзды,
которые давали бы сомн'еровы линии соответствующего на-
правления относительно линии пути или линии радиопеленга
(зоны радиомаяка). При этом нужно помнить, что направление
сомнеровой линии всегда перпендикулярно к направлению rfa
светило.
Протяжённость полёта по широте обусловливает выбор сбор-
ника таблиц. Если маршрут полёта целиком располагается в пре-
делах широт, охватываемых одним сборником, то придётся брать
все таблицы этого сборника. Если маршрут полёта проходит
в двух поясах широт, соответствующих двум сборникам, таблицы
придётся брать из этих двух сборников, смежных по широтам
Если же большая часть маршрута располагается в пределах ши-
рот одного сборника и лишь на 100—200 км по меридиану пере-
ходит за крайнюю параллель в этом сборнике, можно пользе
ваться таблицами только этого сборника, выбирая точки для по-
строения сомнеровых линий на крайней параллели.
Необходимо иметь в виду, что широта 45°, разграничивающая
первый и второй сборники, встречается как в первом, так и во
втором сборниках; шпрота 60° также имеется во втором и
в третьем сборниках. Поэтому при полётах вблизи этих смежных
широт можно пользоваться любым из смежных сборников, выби-
рая точки для построения сомнеровых линий на параллелях
45 или 60°.
22»
339
§ 20. Особенности астрономической ориентировки в полёте
в различное время суток
Основным приёмом астрономической ориентировки в полёте
является прокладка сомнеровых линий на карте, получаемых
в результате измерений высоты светил. При этом могут быть по-
лучены сомнеровы линии по наблюдениям любых светил и парал-
лель на основании измерений высоты Полярной звезды. Сомне-
ровы линии используются или самостоятельно или в сочетании
с другими средствами ориентировки (счисление пути, прокладка
на карте, радиопеленгация).
В зависимости от времени суток определяют:
1) в дневном полёте — сомнеровы линии по Солнцу и Лу-не.
если Луна видна одновременно с Солнцем;
2) в полёте в сумерках — сомнеровы линии по Луне и по яр-
ким планетам;
3) в полёте ночью — сомнеровы линии по Луне, планетам,
звёздам и широту по Полярной звезде.
В дневном полёте основным средством астрономической
ориентировки является наблюдение Солнца. Однако сомнеровы
линии, полученные по наблюдениям только одного Солнца, не
дают того определённого указания о местоположении самолёта,
которое могут дать две пересекающиеся линии, полученные по
одновременным наблюдениям Солнца и Луны. Пересечение этих
линий определит местоположение самолёта с тем большей точ-
ностью, чем ближе к прямому угол между проекциями направле-
ний на Солнце и Луну на плоскость горизонта. Наиболее удобны
для наблюдений Луны совместно с Солнцем — фазы Луны первой
и последней четвертей, за два дня до наступления этих фаз
и в продолжение двух дней после наступления. При этом в фазу
первой четверти Луна удобна для наблюдений во второй половине
дня, т. е. с полудня и до захода Солнца, а в фазу последней чет-
верти — с восхода Солнца и до полудня.
Полёт в сумерках особенно беден средствами астрономиче-
ской ориентировки, если не видно Луны. Сумерки вечерние и
утренние являются критическим переходным периодом, когда
применение средств астрономической ориентировки затрудняется
отсутствием светил. Поэтому особое значение приобретают наблю-
дения ярких планет в вечерние сумерки, когда Солнце уже зашло,
а звёзды ещё не видны, или на рассвете, когда звёзды уже не
видны, а Солнце ещё не взошло. Однако более удобны наблюде-
ния Луны. Можно считать, что через два дня после новолуния и
до полнолуния Луна удобна для наблюдений после захода
Солнца, т. е. в период вечерних сумерек. После полнолуния и за
два дня до наступления новолуния Луна видна перед восходом
Солнца, т. е. удобна для наблюдений в утренние сумерки, на
рассвете.
Данные о видимости планет в период вечерних и утренних
сумерек приведены в Астрономическом ежегоднике. На каждой
странице указаны созвездия, вблизи которых находится планета,
340
и период суток, в течение которого планета доступна для наблю-
дений. Кроме того, дана карта неба, на которой нанесены види-
мые положения планет на каждый месяц. Особенно рекомендуется
обращать внимание на возможность -наблюдений Венеры вечером,
непосредственно после захода Солнца, когда она бывает видна
в западной части неба, или утром, перед -восходом Солнца, в вос-
точной части неба. В это время Вен&ра очень ярка и удобна для
наблюдений.
Полёт ночыр наиболее благоприятен для применения средств
астрономической ориентировки. В ночном полёте могут быть по-
лучены сомнеровы линии по наблюдениям любой яркой звезды ив
числа тех, для которых составлены таблицы высот и азимутов, и
одновременно определена широта по Полярной звезде. Для более
точного определения места самолёта следует наблюдать совместна
с Полярной звездой другую звезду, расположенную по воз-
можности ближе к востоку или к западу (имеющую азимут, близ-
кий к 90°). Пересечение сомнеровой линии, полученной по наблю-
дениям этой звезды, с параллелью широты, определённой по
высоте Полярной звезды, даёт место самолёта на карте. В случае
видимости Луны или планет в ночном полёте можно ’получить
сомнеровы линии по наблюдениям и этих светил.
§ 21. Порядок работы в полёте при астрономической
ориентировке
Применяя методы астрономической ориентировки в полёте,
штурман должен:
— выбрать светила для наблюдений. При этом следует
иметь в виду, что сомнерова линия проходит всегда перпендику-
лярно к направлению на светило. Соответственно этому можно
заранее предвидеть, как пройдёт эта линия на карте и как она
может быть использована для ориентировки. Для этого следует,
ориентировав карту по компасу и посмотрев на небо, мысленно
про-вести эту линию на карте перпендикулярно к видимому напра-
влению на светило. Для определения места самолёта по наблю
дениям двух светил желательно выбрать такие светила, напра-
вления на которые, спроектированные на горизонтальную пло
скость, составляют между собой угол, близкий к прямому;
— выбрать на карте точку приближённого места самолёта
с долготой и широтой в целых градусах. Точка приближённого
места самолёта, при которой будет строиться сомнерова линия,
выбирается произвольно в районе предполагаемого местонахо-
ждения самолёта. Расстояние от неё -до действительного места
самолёта может доходить до 200—300 км;
— наметить момент проведения наблюдений с учётом вре-
мени, затрачиваемого на всю подготовительную работу. Показа-
ние минутной стрелки часов в намеченный момент должно де-
литься на четыре;
— выбрать из Астрономического ежегодника величину R и
склонение светила для намеченного момента наблюдений;.
341
— рассчитать часовой угол светила в момент наблюдений
для долготы точки приближённого места самолёта;
— по полученному часовому углу и широте точки прибли-
жённого места самолёта выбрать из таблицы высоту и азимут
светила;
— сместить по параллели точку приближённого места само-
лёта к западу на число минут долготы, равное минутам в вели-
чине R-,
— через смещённую таким образом точку приближённого
места самолёта провести меридиан и построить направление на
светило (линию азимута) соответственно значению азимута, полу-
ченного из таблицы;
— заблаговременно, до наступления момента наблюдений,
приготовиться к измерениям секстантом. За полминуты до насту-
пления этого момента начать измерения высот и закончить их
через полминуты после этого момента. Определить и записать сред-
ний отсчёт измеренной высоты светила. При наблюдении какой-
либо звезды совместно с Полярной звездой высоту последней
измерять после измерения высоты выбранной звезды и время при
этом не отмечать;
— исправить измеренную секстантом 'высоту светила двумя
поправками: поправкой секстанта (прибавить с её знаком) и по-
правкой за рефракцию (вычесть), а в случае наблюдений Луны —
ещё и поправкой за параллакс (прибавить). Поправка за рефрак-
цию определяется по измеренной высоте светила и по высоте
полёта из таблички, помещённой на вкладном листе в таблицах
высот и азимутов. Поправка за параллакс Луны определяется из
таблички, данной на каждой странице Астрономического еже-
годника;
— определить разность высот, алгебраически вычитая из
измеренной (исправленной) высоты светила высоту, найденную из
таблиц. Перевести полученную разность высот в километры при
помощи таблички, данной на вкладном листе в таблицах высот
и азимутов;
— отложить по линии азимута от смещённой точки отрезок,
соответствующий разности высот в километрах (откладывать
в направлении на светило, если разность высот положительна, и
от светила, если разность высот отрицательна). Через конец
отрезка провести сомнерову линию, перпендикулярную к направле-
нию на светило.
§ 22. Использование результатов астрономической ориентировки
в полёте
Полученные в результате астрономических наблюдений сом-
неровы линии или параллели широт могут быть использованы
в полёте самостоятельно или в сочетании с другими позицион-
ными линиями, полученными, например, в результате радиопелен-
гации.
342
Одна сомнерова линия может быть использована для:
а) выхода на параллельный ей линейный ориентир;
б) выхода к определённому пункту при условии знания при-
ближённого расположения самолета относительно этого пункта;
в) восстановления ориентировки полётом в направлении этой
линии;
г) контроля пути по дальности в случае перпендикулярного
расположения её к линии заданного пути;
д) контроля боковых уклонений в случае параллельности её
линия заданного пути.
Две астрономические позиционные линии дают расчётное
место:
а) на пересечении двух сомнеровых линий, полученных по
одновременны':.’ наблюдениям двух светил;
б) на пересечении сомнеровой линии и параллели широты
(только в ночном полёте).
Для получения расчётного места самолёта могут быть ис-
пользованы следующие комбинации:
а) сомнерова линия или параллель широты и линия пеленга
радиостанции;
б) сомнерова линия или параллель широты И зона радио-
маяка;
в) сомнерова линия или параллель широты и линия визуаль-
ного пеленга удалённого ориентира.
При использовании астрономических позиционных линий для
целей ориентировки необходимо помнить об ошибках в измере-
ниях высот светил на самолёте. В результате этих ошибок
каждая сомнерова линия или параллель широты, определённая
по высоте Полярной звезды, должна рассматриваться как полоса,
ширина которой будет тем больше, чем больше допущенная при
измерениях высоты светила ошибка. Соответственно этому рас-
чётное место самолёта, получаемое в точке пересечения позици-
онных линий, может отличаться от фактического места само-
лёта, находящегося в пределах некоторого района, окружающего
эту точку.
Основная особенность астрономических средств аэронавига-
ции состоит в том, что точность расчётного места самолёта,
полученного в результате астрономических наблюдений в полёте,
не зависит ог дальности и продолжительности полёта от исход-
ного пункта маршрута или от последнего опознанного ориентира.
В любой момент полёта, независимо от дальности, точность
астрономических определений одна и та же. Это обстоятельство
определяет целесообразность применения астрономических
средств ориентировки в каждом отдельном случае. Например,
при самолётовождении по компасу совершенно нет необходимости
пользоваться приёмами астрономической ориентировки в первые
два-три часа полёта от исходного пункта или от последнего
«познанного ориентира, так как в этом случае точность полёта
по компасу выше точности астрономических определений. Через
343
несколько часов полёта точность астрономических определений
превысит точность, даваемую в результате счисления пути.
Следует помнить, что точность определения расчётного места
самолёта пеленгованием двух радиостанций зависит от удаления
самолёта от этих радиостанций и от их расположения относительно
самолёта. Поэтому в некоторых случаях точность методов радио-
навигации будет выше точности астрономических определений, и.
следовательно, использовать последние будет нецелесообразно.
Только в тех случаях, когда радиостанции столь далеки от само-
лёта, что ошибки пеленгации вызывают значительные ошибки
в расчётном месте, точность астрономических определений выше
и применение астрономической ориентировки становится целесо-
образным.
Числа, характеризующие точность астрономических опреде-
лений в полёте, зависят главным образом от условий полёта и
опытности наблюдателя. Средние значения следующие:
Наблюдение одного светила Точность ссмнеровой линии 32 км
Наблюдение двух светил Точность расчётного места разность азимутов ошибки в определении светил РМ в км 30е 51 60° 39 90° 36
Эта таблица даёт точность астрономических определений
с обычным секстантом. При работе с секстантом, имеющим осред-
няющий механизм, точность увеличивается примерно в два раза.
ГЛАВА ДЕВЯТАЯ
ЗЕМНОЕ ОБЕСПЕЧЕНИЕ САМОЛЕТОВОЖДЕНИЯ
§ 1. Назначение службы ЗОС
Земным обеспечением самолётовождения ведает служба ЗОС
Эта служба обеспечивает надёжность и безопасность полётов авиа-
ции, особенно в сложных условиях (при плохой метеорологической
обстановке и ночью).
Задачами службы ЗОС являются:
а) обеспечение вывода самолётов на заданные маршруты, в
районы целей и наведение самолётов на цель;
б) обеспечение возвращения самолётов в район своих аэродро-
мов и на заданные аэродромы посадки;
в) обеспечение надёжности восстановления потерянной ориен-
тировки;
г) обеспечение самолётовождения по заданным маршрутам
при полётах вне видимости земли (ночью, в облаках, за обла-
ками, в тумане);.-
д) обеспечение расчётов на слепую посадку;
е) обозначение аэродрома посадки или зоны ожидания.
§ 2. Средства службы ЗОС
Выполнение своих задач служба ЗОС обеспечивает различ-
ными многочисленными средствами. Этими средствами являются
наземные радио- и световые установки, пиротехнические средства
и опознавательные знаки.
К наземным радиоустановкам относятся радиостанции, радио-
маяки и радиопеленгаторы.
Радиостанции подразделяются на широковещательные и при-
водные. Все эти радиостанции используются с помощью радио-
полукомпаса, имеющегося на самолётах, для вывода самолётов
в район расположения радиостанции, полёта от радиостанции или
для определения расчётного места самолёта пеленгацией двух
или более станций.
Широковещательные радиостанции в своём большинстве
стационарные. Они используются при полётах на дальние
маршруты.
345
Приводные радиостанции бывают мощные, средней мощ-
ности и маломощные.
Мощные приводные радиостанции используются в тех же
целях, что и широковещательные. Преимуществом их является
сравнительное удобство передислокации, так как они раз-
мещаются в железнодорожных вагонах. Мощные приводные
радиостанции требуют незначительного времени на развёртывание
и также легко могут быть свёрнуты.
Приводные радиостанции средней мощности используются
преимущественно для полётов на радиостанцию и для боковой
радиопеленгации. Эти радиостанции размещаются в специальных
автомобилях и поэтому обладают большой подвижностью.
Маломощные приводные радиостанции используются для
привода самолётов к месту их расположения. Дальность действия
этих радиостанций небольшая, поэтому они используются
главным образом для обозначения пункта, в который
самолёт должен выйти, т. е. аэродром посадки, контрольный
пункт, обозначающий место прилёта линии фронта, и т. д. Радио-
станция имеет небольшой вес, портативна, требует небольшого
времени на развёртывание и, смонтированная на автомобиле, обла-
дает большой проходимостью.
Радиомаяки подразделяются на мощные и маломощные, ста-
ционарные и подвижные. Радиомаяки используются с помощью
радиоприёмников, имеющихся на самолётах, главным образом для
полёта на радиомаяк и от него на цель (ориентир), а также для
определения местоположения самолёта по двум маякам.
Стационарные радиомаяки могут работать пеленгом и зоной.
При работе зоной сигналы даются с перекрытием. Эти радиомаяки
могут использоваться круглосуточно.
Подвижные радиомаяки размещаются в специальных автома-
шинах. Эти радиомаяки допускают работу пеленгом незатухаю-
щими и модулированными колебаниями на 16—18 румбов; зоной
с поочередной подачей «А» и «Н» тональными и незатухающими
колебаниями. Применение маломощных радиомаяков целесооб-
разно только в дневное время сутск, так как они не свободны от
«очных ошибок.
Кроме указанных основных видов работы, все радиомаяки мо-
гут работать телефоном и телеграфом на привод. В этом случае
методы их использования подобны приводным радиостанциям.
Радиопеленгаторы бывают стационарные и подвижные.
Стационарные радиопеленгаторы предназначаются для пе-
ленгования самолётов, выполняющих маршрутные полёты по
трассам или дальние полеты, имеющие особое значение.
Подвижные радиопеленгаторы дислоцируются в районах рас-
положения обслуживаемых частей. Они используются при возвра-
щении самолётов в район базирования, к месту посадки или для
контроля пути. Подвижные радиопеленгаторы работают со-
вместно со связными радиостанциями, образуя радиопеленгатор-
яый пункт. Размещаясь на специальных автомашинах, радиопелен-
3-16
гаторный пункт обладает хорошей подвижностью. Время на готов-
ность к работе относительно небольшое. Однако для развёртывания
радиопеленгатора должна выбираться площадка достаточно ров-
ная, в открытой местности, на достаточном (не менее 500 .и) уда-
лении от промышленных зданий, электрических, телефонных и
телеграфных линий, железных дорог, рек, озёр, ущелий, гор и
лесов.
Все радиопеленгаторы в основном лишены ночных ошибок
и могут использоваться круглосуточно.
Светомаяки используются для обеспечения самолётовождения
в ночных полётах. Светомаяки подразделяются на мощные и мало-
мощные, стационарные и подвижные.
Мощные светомаяки предназначаются для создания в ночное
время наземных ориентиров и трасс, а также для ближних целе-
указаний и сигнализации. Вращение и качание светомаяков осу-
ществляется вручную или автоматически с переменной скоростью.
Подвижные, мощные маяки смонтированы на автомашине.
Л^аломощные светомаяки предназначаются для обозначения
контрольных пунктов у линии фронта и для выхода на свой
аэродром. Светомаяки перевозятся на кавалерийской тачанке и
обладают большой проходимостью. Вращение и качание осущест-
вляется вручную.
Кроме светомаяков, в ночное время используются для обозна-
чения местности и облегчения ориентировки следующие мало-
мощные электрифицированные знаки:
а) электрифицированное полотнище «Попхем» размерами
6 X 7,5 м. Для подачи сигналов служит командный прибор (ком-
мутатор). С помощью коммутатора возможна подача номерных
сигналов от 1 до 9 и все сочетания из 9 знаков в сторону их
возрастания.
6) автомобильная фара с питанием её от агрегата свето-
ыаяка или аккумулятора.
в) электрокостёр в виде нескольких арматур с лампами нака-
ливания, смонтированными в коробке с общим выдвижным филь-
тром;
г) гирлянда в виде нескольких арматур с лампами нака-
ливания, устанавливаемых на подставках. С помощью гир-
лянды могут выкладываться различные условные световые фи-
гуры.
Пиротехнические средства разделяются на дневные и ноч-
ные.
К дневным пиротехническим средствам относятся наземные
сигналы чёрного, красного и белого дыма и дымовые посадочные
шашки чёрного, оранжевого и белого дыма.
К ночным пиротехническим средствам относятся наземные
факелы красного, зелёного, белого, жёлтого огня, а также соче-
тания этих цветов. Дальность видимости пиротехнических средств
ЗОС в значительной степени зависит от прозрачности атмосферы
и положения наблюдателя.
347
Средствами ЗОС являются также цветные наземные злаки.
Они разделяются на зимние и летние. Наносятся эти знаки на
снег или на грунт специальными красками или подсобными цвет-
ными материалами. Цвет знака должен ярко выделяться на об-
щем фоне окружающей местности. Форма знака выбирается
чёткой, экономичной и легко наносимой (кольцо, квадрат, тре-
угольник и т. д.). Размер знака определяется в каждом отдель-
ном случае. Знаки наносятся преимущественно на открытой мест-
ности.
Для обозначения ориентиров в числе других средств исполь-
зуются полотнища ЗОС из белой материи. Сочетанием нескольких
полотнищ изображается требуемый условный знак.
Средствами ЗОС могут являться любые другие подсобные
средства, например, группа костров определённой конфигурации,
срубленный лес, сложенный в виде условного знака, распашка
земли и т. п.
§ 3. Порядок размещения и характер работы средств ЗОС
В зависимости от своего назначения средства ЗОС подразде-
ляются на фронтовые, обслуживающие полёты частей и соедине-
ний фронта (округа), централизованные для обеспечения главным
образом перелетающих отдельных самолётов и частей, и трассо-
вые для обслуживания трасс. Определяя место для расположения
средств ЗОС, руководствуются их назначением. Так, например,
фронтовые и централизованные средства ЗОС, используемые для
обеспечения полётов над своей территорией, располагаются в ин-
тересах обеспечения наибольшего числа самолётов (частей). При
этом они располагаются на наиболее вероятных маршрутах,
чтобы каждое средство могло быть использовано как исходный или
конечный пункт маршрута. Месторасположение средств ЗОС
подбирается с учётом возможности и удобства полёта от
точки ЗОС на характерный ориентир или более мощное средство
ЗОС.
Точки ЗОС, предназначаемые для наведения самолётов на
цель, выносятся возможно ближе к линии фронта, принимая во
внимание дальность действия и возможную точность применения.
Средства ЗОС, выделяемые для обслуживания трасс, разме-
щаются непосредственно на маршруте трассы или в стороне от
него для обеспечения контроля пути по направлению или по
дальности. Располагая средства ЗОС, принимают внимание
их мощность с тем, чтобы устранить возможность взаимных
помех.
Расположение средств ЗОС должно устранить возможность
использования их противником. Сведения о месторасположении
точек ЗОС и характере их работы являются секретными. Перио-
дически происходит передислокация средств ЗОС и изменение
характера их работы. При обнаружении противником средства ЗОС
прекращают свою работу.
31.S
Месторасположение средств ЗОС должно отвечать требова-
ниям технической эксплоатации. Например для радиопеленга-
тора выбирается ровная площадка вдали от промышленных пред-
приятий, электрических линий; площадка для светомаяка должна
обеспечивать его видимость с любого направления. При располо-
жении средств ЗОС учитывают возможность размещения и снаб-
жения личного состава и технических средств, подъездные пути,
возможности организации связи как внутри точки ЗОС, так и
внешней (с обслуживаемыми частями и КП службы ЗОС).
Эффективность использования средств ЗОС в значительной
степени зависит от их расположения и характера работы. Работа
средств ЗОС характеризуется различными элементами. Так,
например, характер работы радиосредств ЗОС определяется ча-
стотой, позывными и видом работы (передача телефоном, тональ-
ным или незатухающим телеграфом, радиовещание). Для свето-
технических средств характер работы определяется числом обо-
ротов или качаний, направлением вращения или сектором кача-
ния. углами подъёма луча, опознавательными сигналами, цветом
сигналов. Для дымовых и пиротехнических средств характер ра-
боты определяется их цветностью, количеством очагов, временем
перерывов и периодичностью работы.
Определяя вид работы средств ЗОС, исходят из общих требова-
ний их применения. Например, если средства ЗОС предназначаются
для обеспечения наведейия самолётов на цель, выгоднее применять
их в направленном варианте, например, направление луча свето-
маяка, створ световых точек и т. п. При таком виде работы эки-
пажу самолёта легче использовать это средство для определения
направления на цель. Если средства ЗОС предназначаются для
обеспечения полётов над своей территорией 'или для выхода само-
лётов к месту их расположения, целесообразнее, чтобы они рабо-
тали во всех направлениях, например работа радиомаяка пеленгом,
вращение светомаяка. В этом случае экипажу удобнее их исполь-
зовать для выхода в зону действия одного из средств ЗОС.
В ближних полётах при достаточном количестве средств ЗОС
используются различные комбинации вида их работы.
§ 4. Порядок использования средств ЗОС
Для использования средств ЗОС штурман должен знать их дан-
ные. Данными работы средств ЗОС являются: местоположение
средства, адрес для направления заказа на его работу, условное
название (шифр) точки, характер работы. Все эти сведения вместе
с перечнем средств ЗОС хранятся у старших штурманов. Наносить
Данные о средствах ЗОС на полётные карты нельзя. Они записы-
ваются штурманами различными необщепринятыми условными
знаками. Записи должны быть достоверными, так как пользование
неверными данными приведёт к потере ориентировки.
Работой средств ЗОС обеспечивается каждый полёт. При под-
готовке к полёту штурман выбирает из перечня средств ЗОС те.
344
которые могут быть использованы для обеспечения самолётово-
ждения по заданному маршруту. Обеспечение работы средств ЗОС
выполняется направлением заявки «а их работу. Заявка напра-
вляется заблаговременно в адрес начальника службы ЗОС, которому
подчиняются заказываемые средства. Заявка подаётся через опера-
тивного дежурного авиачасти (соединения) одновременно с заявкой
на полёт. Заказывать работу средств ЗОС можно только на время,
необходимое для их использования, помня, что излишнее время их
работы приводит к ненужному расходу материальных средств и
изнашиванию материальной части. При отмене вылетов необходимо
отменить заявку на работу средств ЗОС, не допуская их «холостой»
работы.
Работа средств ЗОС будет надёжной только после получения
подтверждения о готовности их к обеспечению заявки.
Вылетающий экипаж должен совершенно чётко знать порядок
использования заказанных средств ЗОС на каждом этапе полёта.
Только при этих условиях можно считать применение средств 3OG
надёжным.
ГЛАВА ДЕСЯТАЯ
ВЫПОЛНЕНИЕ САМОЛЁТОВОЖДЕНИЯ В ОСОБЫХ
УСЛОВИЯХ
Рассмотрим особенности самолётовождения в различных усло-
виях ^навигационной обстановки.
Фактическая обстановка в полёте, особенно по длинному марш
руту, может быть весьма разнообразна. В каждом случае штур-
ман самостоятельно принимает решение о (выборе наивыгоднейшего
приёма навигации, обеспечивающего выполнение задания. При под
готовке к маршрутному полёту необходимо предусматривать воз
можные изменения навигационной обстановки.
Основные правила и приёмы подготовки и выполнения полёта
во всех не рассмотренных в этой главе случаях такие же, как в
дневных полётах в несложных условиях (см. главы пятую ь
шестую).
§ 1. Особенности самолётовождения в малоориентирной
местности
Малоориентирной называется местность однообразного фона
не имеющая ориентиров, сличимых с картой. К такой местности
относятся: тайга, степь, большие лесные массивы, а также мало-
обследованные районы, для которых нет точных карт.
Самолётовождение в малоориентирной местности значительно
осложняется невозможностью ведения визуальной ориентировки.
Основным способом самолётовождения в такой местности является
компасная навигация, а при наличии наземных средств (радиостан
ций, радиомаяков и т. д.) — радионавигация.
При полёте на больших высотах в однообразной местности из-
мерение угла сноса затруднено, а пеленгация ориентиров и изме-
рение путевой скорости по высоте полёта невозможны ввиду от-
сутствия ориентиров и неточного знания рельефа местности.
Подготовка к полету
При подготовке к полёту в малоориентирной местности учиты-
вают особенности навигации в этих условиях. Для успешного
самолётовождения маршрут прокладывают прямыми линиями. Для
точного выхода на малозаметную цель выгоднее проложить мар-
шрут на ближайший к ней характерный ориентир и от него — нг
цель.
351
Изучению маршрута штурман должен уделить большое внима-
ний. Тщательно изучить подробности местности, которые можно
использовать для визуальной ориентировки при полёте по маршруту
или в стороне от него, например, овраги, балки, поселения, тро-
пинки и караванные пути, группы озёр, реки и т. д. На случай вос-
становления ориентировки следует изучить далёкие ориентиры в
стороне от маршрута: вершины гор, берег моря, озёра, большие
реки. Большое значение имеет выяснение у лётчиков, ранее летав-
ших в этом районе, всех особенностей, имеющихся на местности,
могущих помочь ориентировке.
Полёт целесообразно выполнять на высоте 600—800 м, чтобы
можно было измерять углы сноса по видимым пят нам от складок
местности, по отдельно стоящим деревьям, кустам и т. п.
При наличии средств ЗОС необходимо предусмотреть их ис-
пользование в полете. При отсутствии средств ЗОС необходимо
принять меры к обеспечению полётов созданием искусственных
ориентиров.
В навигационном плане указывают приёмы контроля пути при
встрече с плохой погодой. Навигационное оборудование подгото-
вляют так же, как и при полёте в сложных условиях.
Выполнение полета
Выход на курс следования выполняют с предварительным
•пролётом контрольного этапа.
Если малоориентирная местность начинается сейчас же после
пролёта ИПМ, курс следования рассчитывают по шаро-пилотным
данным или по ветру, определённому до ИПМ по двум углам сноса.
В этом случае курс следования уточняют длительной пеленгацией
ИПМ после его пролёта для определения утла сноса и ФМПУ.
Контроль пути выполняют частыми промерами угла сноса
с определением среднего курса расчётом ФМПУ и сличением его
с ЗМПУ. Каждые 30—40 минут штурман уточняет величину вектора
ветра по углу сноса и W.
При наличии средств астрономической ориентировки и радио-
навигации контроль пути выполняется так же, как и при полёте за
облаками.
В полёте необходимо внимательно следить за земной поверх-
ностью, так как по направлению дыма и пыли можно судить о на-
правлении ветра у земли.
В течение всего полёта штурман ведёт прокладку пути, учи-
тывая при этом величину среднего вектора ветра. Путевую ско-
рость уточняет, при наличии контрольных ориентиров, по времени
и пройденному расстоянию, в случае отсутствия ориентиров — рас-
чётом на ветрочёте по вновь измеренному вектору ветра. Попереч-
ные линейные ориентиры (речки и караванные пути) не следует
использовать для уточнения путевой скорости, если их местонахо-
ждение в районе маршрута не уточнено, так как эти ориентиры
-часто бывают неточно нанесены та карты или же совсем на них
отсутствуют. ' '
352
Курс следования исправляют в тех случаях, когда измеренный
угол сноса отличается от предыдущего более чем на 2° и полу-
ченное РМ в значительной степени (больше возможной погрешности
определения) отклонено от заданного маршрута.
Исправление курса при уклонении, обнаруженном средствами
астрономической или радионавигации, а также восстановление
ориентировки в малоориеНтирной местности выполняют так же, как
и при полёте за облаками.
Выход на малозаметную цель обеспечивается применением
средств радионавигации или радиолокации. Для поиска цели эки-
паж должен применить заранее рассчитанный манёвр, начиная его
от последнего РМ.
§ 2. Особенности самолётовождения над морем
В полёте над морем при видимости береговой черты затруд-
няется визуальная ориентировка, а над открытым морем совер-
шенно исключается возможность применения визуальной ориенти-
ровки. Для навигационных измерений требуется применение нави-
гационных бомб. Специальные задачи, выполняемые авиацией в
море, например, обнаружение в открытом море движущихся кораб-
зей, определение места, курса и скорости противника и т. п., тре-
буют точного выполнения заданных маршрутов. Точное самолёто-
вождение над морем возможно только при тщательной подготовке
:< каждому полёту и выполнении его с учётом всех особенностей
такого полёта и при умении применять радионавигацию и астроно-
мическую ориентировку.
Подготовка к полету
Для выполнения полёта над морем маршрут прокладывают на
картах в масштабе 1 : 1 000 000 или на морских картах меркатор-
ской проекции. Линия пути должна быть с минимальным числом
изломов.
Штурман детально изучает береговую черту, её общий характер,
отдельные ориентиры, рельеф и все средства обеспечения само-
лётовождения; радиомаяки, радиостанции, световые маяки, прожек-
торы и сигнальные огни.
Помимо расчёта полёта, может потребоваться решение различ-
ных навигационных тактических задач, например расчёт точки
встречи с кораблём в море.
Подготовка навигационного оборудования включает обеспече-
ние полёта морскими навигационными бомбами.
Выполнение полёта
Выход на курс следования выполняется расчётом курса по
шаро-пилотным данным о ветре или промером ветра по двум-трём
углам сноса над береговой чертой на заданной высоте полёта. При
базировании на достаточном удалении от береговой черты перед
выходом в море определяют исходные данные «а контрольном
этапе (УС, W и ветер). После отхода от ИПМ его пеленгуют для
уточнения ФМПУ.
^3 Учебник аэронакнгацнн 353
В море возможно изменение ветра (береговые ветры), поэтому
после пролёта береговой черты и вылета в море уточняют вектор
ветра, курс следования и путевую скорость. Если маршрут полёта
вначале проложен вдоль береговой черты, угол сноса и путевую
скорость определяют пеленгованием береговых ориентиров или
визирных точек.
Контроль пути при видимости береговой черты выполняют
обычными приёмами компасной навигации, преимущественно пелен-
гуя боковые ориентиры и визирные точки и прокладывая путь.
В полёте над открытым морем контроль пути осуществляют
систематическим определением расчётного места прокладкой пути
по среднему ветру. Вектор ветра определяют по трём углам
сноса, измеренным на ломаном маршруте, или манёвром «зигзаг».
Ветер может быть определён также глазомерно на малых
высотах: по барашкам волн или измерением визиром направления
ветра по барашкам волн и одного угла сноса на курсе, перпенди-
кулярном к направлению ветра. На средних высотах ветер может
быть определён измерением угла сноса и путевой скорости по
навигационной бомбе. Вектор ветра уточняют не реже чем через
каждые 30 — 40 минут полёта.
При обеспечении полёта средствами радионавигации и астро-
номическими определениями штурман использует их для контроля
пути в случае длительного полёта вне видимости берегов.
Применяя способ ^радионавигации, штурман учитывает, что
точность измерения радиопеленгов зависит от следующих обстоя-
тельств: ।
— характер^ местности, где расположена радиостанция, — го-
ристая или лесистая, близость к станции железнодорожных путей,
телеграфных или телефонных проводов или электростанций;
— береговой рефракции (влияние береговой черты).
Вследствие неравномерного движения электромагнитных волн
над сушей и над водной поверхностью результаты измерений радио-
пеленга получаются с ошибкой. Если направление радиопеленга
примерно параллельно берегу, возможны ошибки' до 4—5°. Ошибка
будет наименьшей, если пеленг пересекает под прямым углом гра-
ницу воды и суши — береговую черту. Поэтому пеленгацию радио-
станций производят преимущественно при пересечении направления
радиопеленга И береговой черты под углом 45—<90°.
Приёмы астрономической и радионавигации применяют в допол-
нение к компасной навигации, главным образом для контроля пути
при полёте на цель и для обеспечения выхода на КПМ или на свой
аэродром.
Путь следования намечают по правилам полёта в сложных
условиях. Для выхода на движущуюся цель предварительно
решают задачу на сближение или перехват.
Восстановление ориентировки выполняется:
а) выходом на береговую черту и полётом вдоль неё для
установления действительного места визуальной ориентировкой;
б) выходом на радиомаяк или радиостанцию в комплексе с
астрономическими определениями;
354
в) в ночном полёте расчётом РМ астрономическими определе-
ниями и выходом на световые ориентиры на береговой черте.
§ 3. Особенности самолётовождения в горах
Условия самолетовождения в горах
Визуальная ориентировка в горах во многих случаях услож-
няется рельефом земной поверхности. Глубокие ущелья и долины
рядом с высохшими реками создают светотени, скрывающие ориен-
тиры. Кроме того, в этих условиях визуальную ориентировку
особенно затрудняют непросматрнваемые «мёртвые» пространства
(обратные скаты гор, глубокие ущелья), в которых от глаз наблю-
дателя скрываются ориентиры.
Ориентиры, расположенные на обратных по отношению к по-
лёту склонах гор, становятся видимыми штурману только при
вертикальном наблюдении, ввиду чего значительно сокращается
время на их опознавание.
Дороги и вьючные тропы пролегают преимущественно вдоль
горных долин, в ущельях, по гребням и карнизам гор. Режим
многочисленных горных рек и потоков крайне неустойчив. В периоды
таяния снегов и выпадения осадков реки затопляют низмен-
ности, долины и меняют своё направление, во время лез них засух
реки, наоборот, пересыхают. Плотность населения в горах незначи-
1ельна. Промышленные пункты редки. Селения малых размеров
разбросаны на значительные расстояния. Строительным материалом
в малых поселениях служат обычно земные породы (камень, извест-
няк, глина), поэтому постройки сливаются с общим фоном земной,
поверхности, особенно если они расположены на склонах гор.
При 1визуальнюй ориентировке в благоприятных атмосферных
условиях необходимо учитывать, что горный воздух чрезвычайно
прозрачен, и поэтому видимые дальние ориентиры кажутся распо-
ложенными близко.
В горных районах можно )наблюдать разнообразие климата,
почвы и растительности в зависимости от высоты района, географи-
ческой широты и близости водных пространств, что в некоторых
случаях может облегчить ориентировку. Общая ориентировка облег-
чается также при наличии выделяющихся над рельефом горных
вершин.
Разнообразие климатических условий и пересечённость рельефа
создают особенности метеорологических условий, затрудняющие
самолётовождение. Горные районы характеризуются резкими изме-
нениями температуры, сильными ветрами, частыми изменениями
ветров, особенно по направлению, частыми грозами и ливнями,
туманами и низкой облачностью.
В ряде районов имеются рудные заложения, влияние которых
может искажать показания магнитных компасов на 60—90е. Не-
благоприятные условия распространения радиоволн снижают точ-
ность радионавигации.
23*
355
Подготовка к полету
При подготовке к полёту в горных условиях штурман должен
особенно тщательно изучить характер местности и превышение её
над уровнем моря и аэродромом вылета. В качестве контрольных
ориентиров обычно выбирают наезженные постоянные дороги,
перевалы, крупные населённые пункты, большие реки, вершины
наиболее характерных гор, горные озёра. Большую помощь ориен-
тировке оказывает изучение направления хребтов и долин на ящи-
ках с песком, особенно для штурмовой авиации.
Метеорологическая обстановка изучается в таком же объёме,
как и при подготовке к слепому полёту.
Выполнение полета в горных районах
Полёт в горных районах можно выполнять выше гор и ниже
их — по долинам и ущельям.
Самолётовождение выше гор выполняют обычными приёмами
в зависимости от метеорологических условий (в ясную погоду,
в Облаках или за облаками).
При полёте в ясную погоду штурман должен учитывать, что
на незначительной высоте полёта частое, изменение в'етра может
привести к ошибке в курсе следования. Поэтому в полёте необ-
ходимо возможно чаще измерять угол сноса и уточнять куре сле-
дования. Измерение путевой скорости по высоте полёта невоз-
можно ввиду того, что в каждый данный момент неизвестно
точное превышение «местности над уровнем моря.
Общей ориентировке, кроме обычных ориентиров, помогают
характерные вершины гор и хребты, а также .долины, направление
которых следует проверять по компасу.
Над однообразным горным рельефом, чрезвычайно затрудняю-
щим визуальную ориентировку, самолётовождение выполняется
по правилам полёта над малоориентирной местностью.
Применение средств радионавигации на (небольшой высоте
(до 1 000 .и) дублируется средствами компасной и астрономической
(при полёте да облаками) навигации, ввиду того что пересечённый
рельеф вызывает ошибки при измерении радиопеленгов. По этой
же причине на высотах до 500 м радионавигация не применяется.
Штурман должен твёрдо знать и выполнять правила безопас-
ности при полёте в облаках и за облаками. Кроме обычных правил
безопасности, ® полёте над горами при облачности запрещается:
а) переваливание через вершины и гребни в облаках;
б) пробивание облачности вниз;
в) приближение к крутым склонам гор;
г) выполнение полёта ниже вершин гор на малой высоте.
Слепой полёт допустим при условии заведомого превышения
над вершинами гор не менее 500 м. Пробивать облачность допу-
стимо только по истечении расчётного времени прибытия в равнин-
ный район или к морю. К расчёту момента выхода из облаков
нужно отнестись особенно внимательно, не допуская просчётов.
356
Полёт ниже вершин гор ^выполняется по долинам и ущельям.
Заходить в долину или ущелье можно лишь после того, как nrrvp-
ман точно установит по карте её местонахождение и основное
направление. Контроль пути выполняется непрерывной детальной
визуальной ориентировкой по изгибам хребтов и долин и по другим
ориентирам. Кроме того, штурман ведёт приближённо ('ввиду труд-
ности сохранять постоянный курс) счисление пути.
Выполняя полёт ниже вершин гор в облачную погоду, штурман
должен следить за развитием облачности (опусканием её ниже вер-
шин гор) и за повышением местности, чтобы не допустить полёта
в облаках ниже вершин гор. При значительном развитии облачности
нужно избирать высоту для полёта выше гор или же вернуться
обратно. При сомнении в правильности визуальной ориентировки
полёт ниже гор необходимо превратить.
Восстановление ориентировки выполняется обычными приёмами
после набора высоты, обеспечивающей видимость основных воз-
вышенностей.
§ 4. Самолётовождение на малых высотах
Условия самолетовождения на малых высотах
Основные особенности самолётовождения на малых высотах
следующие:
а) ограниченный обзор местности' с самолёта, не позволяющий
видеть удалённые ориентиры;
б) быстрое перемещение ориентиров относительно самолёта,
что значительно сокращает время на рассматривание ориен-
тиров;.
в) сокращение дальности действия радионавигационных и
радиолокационных средств.
Эти особенности затрудняют ведение визуальной ориентировки
и применение радиопеленгации. Наряду с этим приобре-
тают значение отдельные вертикальные ориентиры (трубы, высокие
сооружения и т. п.).
Возможность столкновения с препятствиями требует от штур-
мана напряжённого внимания при наблюдении впереди леркашей
местности, поэтому полёт на малой высоте утомителен.
Тактика штурмовых действий требует выполнять полёт по
ломаному маршруту применительно к складкам местности, что за-
трудняет полёт по компасу.
При малейшем уклонении от контрольных ориентиров их
можно не обнаружить; поэтому необходимо обеспечить точное со-
хранение маршрута полёта. Учитывая условия полёта и требования
к навигации на малых высотах, штурман прокладывает линию пути
вблизи линейных или крупных площадных ориентиров.
Контрольные ориентиры должны располагаться на самой линии
пути и не реже чем через 50—70 км. Штурман детально изучает
357
характер и схему линейных ориентиров, ограничивающих район
полёта по направлению и дальности. Особенно внимательно
изучает контрольные ориентиры и местность около них, а также
все известные препятствия в районе полёта (фабричные трубы,
мачты, высокие здания, отдельные вершины гор). Объект штурмо-
вого удара часто представляет собой малозаметную цель, что тре-
бует внимательного наблюдения за землей. В штурмовой авиации
отсутствие штурмана на самолёте возлагает всю работу по навига-
ции на лётчика.
Изучая метеорологическую обстановку, штурман выясняет
районы с низкой облачностью и плохой видимостью. Получив
шаро-пилотные данные о ветре, штурман рассчитывает курс следо-
вания, путевую скорость и записывает результаты в бортжурнал.
По известной температуре у земли и приближённому падению да-
вления на высоте полёта рассчитывает [истинную скорость полёта
или скорость по прибору,-
Выполнение полета
Выход на линию пути выполняют расчётом курса по шаро-
пилотным данным о ветре или по ветру, определённому до ИПМ.
Вектор ветра рассчитывают по его направлению на земле (по напра-
влению старта) и по одному углу сноса, измеренному на курсе,
перпендикулярном к направлению ветра.
При невозможности выйти на курс следования этими приё-
мами подбирают курс следования по створу ориентиров или по
боковому уклонению. Путевую скорость Определяют только по
времени пролёта расстояния между двумя ориентирами, так как
измерение её визиром на малой высоте невозможно-. Контроль пути
выполняют визуальной ориентировкой с отметками ДМ и времени
пролёта их и точным сохранением курса следования.
Опознавать ориентир начинают за 2—3 минуты до расчётного
момента его пролёта. Для того чтобы не вычислять каждый раз
время появления того или иного ориентира, 'рекомендуется всю
линию пути разметить на 5- или 10-минутные отрезки.
Для визуальной ориентировки используют карту в масштабе
1 : 500 000; для 1непрерывной детальной ориентировки на небольшом
маршруте служит карта в масштабе 1 : 200 000. Штурман должен
знать ориентиры напамять, так как на рассматривание карты
в полёте времени Нехватает.
Правильность курса следования контролируют измерением
угла сноса по бегу земли и расчётом ФМПУ. Путевую скорость
уточняют расчётом её по времени и расстоянию между двумя
любыми ориентирами или двумя контрольными ориентирами. Из-
менение ветра определяют по наземным признакам (пыль, дым,
волны на воде) и одному углу сноса, или по углу сноса и путевой
скорости, измеренным на одном курсе.
Если контрольный ориентир не был обнаружен через 5 минут
после расчётного момента его пролёта, то это значит, что само-
358
лёт прошёл в стороне от него. В этом случае рассчитывают мо-
мент пролёта следующих ориентиров, находящихся правее или ле-
вее линии пути или поперечных к линии пути линейных ориентиров,
и сличают карту с местностью. Кроме того, рекомендуется уточ-
нить ФМПУ по курсу и углу сноса. Это даст возможность опре-
делить, в какую сторону уклонился самолёт от заданного марш-
рута.
Если в дальнейшем очередной контрольный ориентир, не-
смотря на принятые меры, не обнаружен, следует набрать высоту
и восстановить ориентировку.
Исправляют путь следования и восстанавливают ориенти-
ровку по правилам полёта на средних высотах.
Выход на малозаметную цель производится от характерного
ориентира по рассчитанному курсу и времени.
§ 5. Самолётовождение на больших высотах
Условия самолетовождения на больших высотах
На больших высотах детальная визуальная ориентировка за-
трудняется вследствие большого расстояния от наблюдателя до
ориентиров. Для того чтобы рассмотреть мелкие ориентиры (от-
дельные здания, мосты, просёлочные и частично грунтовые до-
роги), штурману приходится напрягать зрение, и уже при незна-
чительном ухудшении видимости эти ориентиры совсем не видны.
Поэтому при наличии на линии пути и немного в стороне от неё
только мелких ориентиров визуальная ориентировка на больших
высотах невозможна.
Ниже приводится характеристика видимости и различимости
различных ориентиров с больших высот (см. стр. 360, 361, 362).
С увеличением высоты полёта в ясную погоду при отсут-
ствии дымки резко возрастает дальность видимости крупных
ориентиров (река, озеро, берег моря и т. п.). В этих условиях при
наличии на линии пути или в стороне от неё в пределах види-
мости подобных ориентиров сохранять общую ориентировку
легко.
Дальность видимости крупных ориентиров по высотам по-
лёта приведена в таблице на стр. 185 (см. главу пятую). Приве-
дённые в таблице величины непостоянны, так как они зависят от
прозрачности воздуха в районе наблюдения. При дымке даль-
ность видимости ориентиров уменьшается, что видно из таблицы
(см. стр. 362).
Таким образом, общая ориентировка зависит от наличия
в районе полёта крупных ориентиров и от прозрачности воздуха.
Как правило, полёт по некоторой части маршрута, а иногда
и по всему маршруту выполняется в условиях полной или частич-
ной невидимости земной поверхности из-за наличия облаков.
В таких полётах экипаж должен быть готовым в любую минуту
применить все способы самолётовождения по приборам.
359
Видимость ориентиров при наблюдении вертикально вниз онём
в ясную погоду
Ориентиры Высота в л
6 000 8 000—9 000
Крупные населённые пункты Общие контуры пунктов и линей- ные ориентиры вокруг них видны хорошо и распознаются легко. Про- сматриваются отдельные большие дома и улицы. Пункты различаются между собой как общими контурами и линейными ориентирами вокруг них, так и внутриконтуриым содержанием— общим направлением главных улиц, количеством, характером и местопо- ложением крупных площадей, рек, озёр, характером отдельных выделяю- щихся построек. При наблюдении пункта издалека (особенно промыш- ленных пунктов) видна довольно гу- стая дымка над пунктом Общие контуры пунктов видны хорошо. Отдельные здания просматриваются с трудом. Направления улиц видны плохо. Выделяются линейные ориентиры во- круг пунктов (шоссе, ре- ки). Для определения раз- меров пункта требуется хо- роший глазомер. Опозна- ются пункты по их распо- ложению относительно ли- нейных и других крупных ориентиров, а также по их контурам.
Мелкие населённые пункты Дерении просматриваются с трудом. При расположении их на сером фоне вспаханных полей или в лесу видны плохо. Отдельные контуры почти не нидны, и ориентироваться по ним не- возможно. Опознавание деревень возможно по общим контурам, если они характер- ны, и по взаимному расположению линейных ориентиров. При наличии вблизи деревни линейного ориентира отыскание её значительно облегчается. Мелкие пункты без характеризующих их линейных ориентиров не всегда распознаются. Отдельные дома в де- ревнях видны только при вниматель- ном рассмотрении. Мелкие населённые пунк- ты не просма гриваются. Видны только общие кон- туры и линейные ориенти- ры около самых пунктов. На пёстрой местности и в лесу деревни незаметны. Опознавание крупных де- ревень возможно по их расположению относитель- но линейных ориентиров. Улицы в деревнях ве про- сматриваются.
Большие
реки
Служат наилучшими ориентирами
для определения местонахождения са-
молёта. Реки хорошо выделяются на
фоне земли тёмным цветом, резким
очертанием берегов и характерными
изгибами. Песчаные берега хорошо
видны на общем фоне земли.
В зимних условиях замёрзшие реки
почти не видны. Можно различить
только реки с высокими берегами
по их тени. Большие мосты заметны
в виде полоски.
Видны хорошо так же,
как и с высоты 6000 м.
Опознавание изгибов реки
требует большого внимания.
По виду приближаются к
изображению на картах
(меньшая разница в мас-
штабах).
В зимних условиях за-
мёрзшие реки почти неза-
метны. Мосты можно раз-
личить с трудом.
360
Продолжение
Высота в м
Ориентиры 6 000 8 000—9 000
Малые речки Видны хорошо н виде тёмных, из- вилистых линий. Сличение с картой незатруднительно. Особенно хорошо выделяются слияния речек. В лесу речки почти незаметны, а зачастую совсем не видны. Зимой замёрзшие речки почти не видны и ориентироваться по ним не- возможно. Мосты почти не видны. Видны в виде узких из- вилистых линий. Для опо- знавания речек I ребуе гея значительное внимание. Мосты не видны.
Озёра Видны хорошо по общим характер- ным очертаниям и изгибам берегов. Отличаются от окружающей местно- сти тёмным тоном. Зимой замёрзшие озёра различимы на окружающей мест- ности только по общему белому фо- ну, заключённому в контуры берегов. Хорошо видны общие контуры. Зимой видны так же, как и с высоты 6 000 м.
Железные дороги Железнодорожное полотно видно как узкая тёмная прямолинейная по- лоса. имеющая плавные пово- роты. Количество путей не опреде- ляется. При тщательном рассмотрении мелкие железнодорожные станнин можно определить по более широкому полотну у станции и вытянутому по- сёлку. Крупные железнодорожные станции видны так же, как и крупные населённые пункты. Пути можно заме- тить по дыму паровозов па них. Железнодорожное полот- но заметно с трудом в виде тёмной линии. Трудно от- личимо от шоссейных ма- гистралей. Железнодорож- ные станпии определяются по общему контуру.
Шоссейные дороги Отчётливо видны по узким серым полоскам, более светлым, чем окру- жающая местность. Часто шоссе про- легают в середине населённых пунк- тов, что встречается реже при наблю- дении железных дорог. В отличие от железных дорог отсутствуют прямо- линейные контуры железнодорожных станций. Зимой имеют тёмный (гряз- ный) цвет в отличие от общего бело- го фона. Хорошо видны н виде узкой светлой прямой ли- нии на тёмном фоне земли и тёмной линии на снежном покрове.
Грунтовые । просёлочные дороги Грунтовые дороги видны отчётливо узкими, светлыми неирямолилейными Грунтовые дороги видны плохо и зачастую сливаются
361
Продолжение
Высота в м
Ориентиры 6000 8 000-9000
полосками между населёнными пунк- тами. Просёлочные дороги различимы при внимательном наблюдении, но опо- знать их трудно. Зимой наезженные дороги различаются на общем белом фоне по тёмному цвету. Мало наез- женные дороги незаметны. с общим фоном местности. Лесные и просёлочные до- роги не видны.
Лес Отдельные деревья и мелкий ку- старник сливаются с пятнами местно- сти и различимы с трудом. Лесные массивы заметны в виде тёмнозелё- иых пятен с резко очерченными края- ми. Общие очертания лесных массивов видны отчётливо в виде тёмных пятен. Ку- старник сливается с общим фоном местности.
Дальность видимости крупных ориентиров с высоты 6 500 м
Погода при наблюдении
Ориентиры
ясно, видимость
хорошая
облачность 3—4 балла,
малая дымка, видимость
на земле 8—10 км
Дальность видимости в км
Большой город.............
Среднее селение...........
Железная дорога..........
Дым от паровоза..........
Шоссе.....................
Грунтовая дорога ......
Озеро.....................
Большая река..............
Речка ....................
100
70
35
50—60
60—70
40
100
100
60
60-70
40
15—20
40
25—30
15-20
50—60
70
20-30
Инструментальные способы самолётовождения (компасная,
астрономическая и радионавигация), применяемые на больших
высотах, дают меньшую точность, чем на средних высотах. На-
бор большой высоты занимает много времени. За это время уве-
личивается влияние не известных штурману промежуточных ветров,
что снижает точность навигации. На больших высотах скорость
чзетра в среднем возрастает вдвое против скорости на средних
362
высотах. Нередко скорость ветра на больших высотах достигает
80—100 км/час и даже 150 км/час.
Точность самолётовождения на больших высотах снижается
вследствие ухудшения условий измерения отдельных навигацион-
ных элементов. Например, если угловые ошибки при глазомерном
определении вертикали с самолёта в полёте на средних высотах
не вызывают больших отклонений, то эти же угловые ошибки,
допущенные штурманом в полёте на больших высотах, влекут за
собой большие линейные отклонения. Это вызывает неправильное
суждение о ДМ самолёта и с ФПУ, определённом по двум-
трём ДМ.
Условия полёта на больших высотах отражаются на физиче-
ском состоянии экипажа, вследствие чего точность навигацион-
ных расчётов, наблюдений и измерений снижается. Даже при
кислородном питании у лётного состава наблюдаются общая
усталость, сонливость, дрожание рук, что затрудняет работу
штурмана. При резких изменениях..атмосферного давления (форси-
рованный набор высоты и особенно снижение) возникают чрезвы-
чайно болезненные ощущения в области уха.
Кислородное и обогревательное снаряжение и высотное об-
мундирование значительно стесняют движения экипажа при выпол-
нении навигационной работы.
Маневрирование одиночных самолётов, а также в составе
подразделения (при сборе подразделения, разворотах и г. п.) за-
трудняется ввиду уменьшения диапазона скоростей и повышения
инертности самолёта.
Из всего сказанного ясно, что точность самолётовождения
на больших высотах меньше, чем на средних высотах. Навига-
ционная же обстановка высотного полёта требует от штурмана,
наряду с применением наивыгоднейших элементарных приёмов
навигации в простейших условиях (при ясной погоде), готовности
в любой момент полёта перейти к самым трудным способам са-
молётовождения, обеспечивающим полёт в сложных условиях.
Навигационная подготовка к маршрутному высотному полету
Навигационная подготовка к высотному полёту по маршруту
должна проводиться особо тщательно, чтобы ухудшение погош
на маршруте не застигло экипаж врасплох. Независимо от прог
ноза погоды, к полёту должны быть подготовлены все средства
и способы навигации, как простые (визуальной и компасной), так
и сложные (астрономической и радионавигации).
Особое внимание уделяется обеспечению полёта средствами
службы ЗОС. Кроме обычного обеспечения полёта своей точ-
кой ЗОС, находящейся на КПМ и состоящей обычно из привод-
ной радиостанции, светомаяка или пеленгатора, заказывается ра-
бота других средств ЗОС в полосе полёта и широковещательные
радиостанции (мощные радиомаяки и пеленгаторы) для дальней
радиоориентировки.
363
Первый контрольный ориентир после пролёта ИПМ должен
находиться от ИПМ на расстоянии, которое пролетит самолёт за
время набора заданной высоты. В качестве контрольных ориенти-
ров выбирают наиболее крупные характерные ориентиры, ‘хорошо
видимые с больших высот. Маршрут должен быть изучен в рай-
оне по 150 км в обе стороны от линии пути. При этом все ориен-
тиры необходимо подразделить на видимые с большой высоты
и видимые со средних высот, а также ясно Представлять их вид
с этих высот.
Расчёт времени прибытия к цели или к месту посадки в дли-
тельном высотном полёте вызывает значительные затруднения,
так как невозможно предусмотреть все изменения метеорологи-
ческих условий по маршруту, особенно изменение ветра по высо-
там. Возможность увеличения или уменьшения скорости для на-
гона или погашения времени ограничена, так как в высотном
полёте диапазон скоростей значительно сокращается.
При подготовке к маршрутному полёту на большой высоте
затрудняется выбор наивыгоднейшей высоты полёта, так как тре-
буется строго учитывать изменение расхода горючего по высотам
и скоростям.
Возрастающий расход горючего на той или иной высоте, ка-
жущейся на первый взгляд наивыгоднейшей по значению путе-
вой скорости, может значительно сократить дальность полёта,
и этот неблагоприятный фактор превысит выигрыш в увеличении
путевой скорости.
В каждом отдельном случае выгодность полёта на той или
иной высоте определяется в зависимости от тактических условий,
наивыгоднейшей путевой скорости, времени полёта, запаса горю-
чего, полезной нагрузки самолёта, материальной обеспеченности
полёта (например, запас кислорода), степени подготовленности
экипажа к полётам на больших высотах и т. д.
Изучению метеорологических условий полёта экипаж должен
уделить особое внимание, так как от знания метеорологической
обстановки зависит успех полёта на большой высоте.
Основные вопросы, подлежащие изучению накануне вылета,
следующие:
а) повторяемость облачности и её характер в районе полёта
в данное время года по высотам;
б) повторяемость ветров (направление и скорость) по высо-
там в районе полёта, вероятность их изменения, возможность
и характер их изменения по направлению и скорости за единицу
времени;
в) районы образования местных туманов и дымки, их харак-
тер и распределение.
В день вылета экипаж изучает метеорологическую обста-
новку по синоптическим картам, обязательно под руководством
опытного метеоролога. При этом необходимо обратить внима-
ние на;
а) состояние, характер и высоту нижней границы облаков,
особенно в районе цели и аэродрома посадки;
364
б) характер, толщину облачного слоя и возможность обледе-
нения; •
в) наличие метеорологических фронтов, их состояние, дви-
жение, время и место к моменту встречи их в пути;
г) господствующие ветры и их тенденции;
д) наличие и характер туманов.
Перед длительным высотным полётом штурман получает бор-
товую карту поготы, а также вертикальный разрез атмосферы
по линии пути.
Выполнение полета на больших высотах
Общин порядок самолётовождения на больших высотах та-
кой же, как и на средних- высотах. Особенность заключается
в том, что выход на курс следования обычно выполняется не
в начале пути, а после окончания набора заданной высоты.
Наилучшие приёмы ориентировки при наборе высоты:
а) ориентировка по местности (отметки ДМ по местным
ориентирам) и курсу, рассчитанному по шаро-пилотным данным;
б) сличение линейного ориентира на местности с картой при
наличии вблизи линии пути и параллельно ей линейного харак-
терного ориентира достаточной длины;
в) подбор угла сноса и курса с одновременным сличением
карты с местностью.
Счисление пути с учётом скорости и времени полёта при на-
боре высоты даёт только приближённые результаты ввиду изме-
няемости ветров и других атмосферных условий на различных
высотах.
Вся работа по уточнению курса, путевой скорости и ветра,
т. е. выход на курс следования, относится ко второму этапу
самолётовождения на больших высотах. Прежде чем приступить
к выполнению этой работы, штурман должен точно определить
местонахождение самолёта. Определение своего места относи-
тельно контрольных ориентиров следует производить с помощью
навигационного визира.
Пройдя над контрольным ориентиром, экипаж берёт курс,
подобранный к моменту окончания набора высоты, и уточняет
исходные данные. Курс, путевая скорость и угол сноса уточня-
ются сравнительно легко при наличии двух характерных ориенти-
ров пролётом контрольного этапа.
Длина контрольного этапа зависит от скорости самолёта. На
высоте 6 000—8 000 м можно с успехом выполнить эту работу
при длине контрольного этапа 45—70 км, имея скорость
300—450 км!час.
При наличии характерного выходного ориентира контроль-
ного этапа легко уточнить курс следования определением боко-
вого уклонения и введением соответствующей поправки в курс
с целью выхода на оч!ередной контрольный ориентир. Для упро-
щения расчёта боковой поправки в курс можно заранее разметить
на карте боковые уклонения. Лучшим способом определения пу-
тевой скорости является засечка времени пролёта всего контроль-
365
ного этапа. Ветер определяется по путевой скорости и углу
сноса, найденному хак разность фактического пути (или измерен-
ному обратным визированием).
При наличии на линии пути трёх характерных ориентиров
можно с успехом подобрать курс следования по створу этих
ориентиров. В этом случае результат будет менее точен, но до-
статочно надёжен при соответствующих навыках штурмана
и лётчика. При отсутствии характерных ориентиров или в случйе
даже незначительного закрытия их разорванными облаками
исходные данные можно определить другим приёмом. В таком
случае курс следования уточняют эмпирическим подбором угла
сноса, который промеряют обратным визированием. Путевую ско-
рость можно определить ' по бегу визирной точА-.и под уг-
лом 26,°5—45е.
Указанные три основные способа определения исходных дан-
ных в начале выполнения маршрута на заданной высоте полёта
наиболее применимы на больших высотах. В условиях низкой
облачности для выхода на курс следования используются спо-
собы радионавигации, не требующие видимости земли.
Контроль пути в условиях видимости земной поверхности
в основном производится методами счисления пути по фактически
измеренным навигационным элементам и визуальной ориентиров-
кой. При невидимости земной поверхности, особенно в полёте на
аэродром посадки, применение средств радионавигации для кон-
троля пути имеет решающее значение для успешности полёта.
Исправление пути выполняется введением в курс поправки,
рассчитанной по боковому уклонению.
Как правило, исправлять курс необходимо при пролёте кон-
трольных ориентиров и только в случае значительного уклоне-
ния — по другим характерным ориентирам.
Исправлять путь по изменившемуся углу сноса в высотном
полёте можно при условии, если штурман твёрдо уверен в дей-
ствительной величине изменившегося утла сноса. Этот способ ме-
нее применим из-за трудности точного промера угла сноса (осо-
бенно при малых его значениях) на больших высотах.
В случае потери ориентировки после продолжительного сле-
пого полёта применяют имеющиеся на самолёте средства радио-
навигации. При потере ориентировки после выхода из облаков
на большой высоте и при отсутствии средств радионавигации не-
обходимо уточнить ветер, определить РМ по штилевой точке или
по путевой скорости и ФМПУ. Расчёт выполняется по среднему
ветру, определённому по величине векторов ветра, измеренных до
входа и после выхода из облаков. После расчёта РМ переходят
к сличению карты с местностью.
Если ориентировка потеряна на местности, бедной ориенти-
рами, или при возвращении на аэродром посадки, необходимо
восстановить её методами радионавигации или астрономической
ориентировкой. При потере ориентировки после выхода из облаков
на средней или малой высоте восстанавливают её обычными су-
366
шествующими способами. При этом следует тщательно учитывать
время и путь, пройденный самолётом в период снижения.
Переход от обшей ориентировки к детальной на большой вы-
соте при полёте над местностью, богатой ориентирами, выпол-
няется лето обычным порядком. При полёте над местностью,
бедной ориентирами, уточнить детальной ориентировкой расчёт-
ное место самолёта довольно трудно. Поэтому после расчёта РМ.
в случае невозможности быстро сличать карту с местностью при-<-
нимают решение о выходе на крупный или линейный ориентир.
§ 6. Самолётовождение в облаках и за облаками
Условия навигации в облаках и за облаками
Самолётовождение при полёте вне видимости земли наиболее-
трудно выполнимо. Основная трудность заключается в том, что
экипаж лишён возможности контролировать фактический путь
полёта визуальной ориентировкой. Это условие определяет выбор
наивыгоднейшего способа навигации, заставляя прибегать к ин-
струментальным способам самолётовождения — компасному, ра-
дионавигации и астрономической навигации.
Применение компасной навигации при полёте в облаках
в значительной степени ограничено ввиду полной невозможности
определить элементы навигации по наземным визирным точкам
и небольшой точности при длительном счислении пути по ветру,
определённому до момента начала слепого полёта. При компас-
ной навигации требуется периодически выходить из облаков для
контроля пути. Поэтому в длительном маршрутном слепом полёте
способы радионавигации приобретают первостепенное значение.
Наиболее благоприятны для слепого полёта слоистые и сло-
истокучевые облака. В кучевых облаках вследствие турбулент-
ности воздуха точное самолётовождение невозможно. Входить
в кучевые облака целесообразно только на короткие сроки в це-
лях маскировки. Вхождение в грозовые облака и полёт в непо-
средственной близости от них совершенно недопустимы, так как
в них нарушается устойчивость полёта от резких восходящих
и нисходящих потоков и создаётся угроза целости конструкции
самолёта. При встрече с грозовой облачностью её следует обхо-
дить в стороне или сверху (при достаточном запасе высоты). По-
лёт под грозовыми облаками допускать не следует. Полёт
в облаках при температуре от +2° до — 15° опасен вследствие
возможности обледенения.
Условия навигации при полёте выше сплошных облаков по
своему характеру отличаются от условий навигации в облаках тем,
что позволяют применять астрономическую навигацию. Частые
снижения под облака для контроля пути по видимой земной по-
верхности вызывают увеличение расхода горючего и уменьшают*
точность контроля пути по времени и расстоянию во время сни-
жений и набора высоты. В то же время может встретиться облач-
ность такой толщины, что для полёта над ней придётся набирать,
большую высоту.
S67
Подготовка к полету
При подготовке к полёту в облаках и за
облаками
учитывают
квалификацию экипажа, состояние навигационного оборудования
самолёта, характер района полёта и прогноз погоды на день вы-
лета. В зависимости от этого выбирают маршрут полёта. Обычно
полёт выполняют не прямо на цель а немного в сторону от неё
(на 5’/о от общего расстояния
Рис. 286. Выход на цель при полис
за облаками
предполагаемого слепого полёта),
чтобы после выхода под облака
самолёт оказался в заранее на-
меченной стороне от цели. Сни-
зившись под облака, экипаж уве-
ренно летит на цель в намечен-
ную сторону. Наиболее благопри-
ятные условия навигации в тех
случаях, когда у цели есть ли-
нейный или крупный ориентир.
Тогда выход на цель выполняет-
ся по этим ориентирам (рис. 286).
Маршрут прокладывают с
наименьшим количеством изло-
мов, с учётом расположения
радионавигационных средств че-
рез характерные ориентиры,обес-
печивающие возможность быстро
отметить ДМ самолёта при вы-
ходе из облаков. В начале пути
выбирают характерный ориентир
для контрольного этапа.
Весь район вероятного ме-
стонахождения самолёта при вы-
ходе из облаков должен быть
детально изучен (наличие отдельных ориентиров, их характеристика
и общий характер местности в этом районе). Весь район полёта
целесообразно распределить по секторам или районам (лесистый,
полевой и т. д.).
Особенно тщательно должен быть изучен рельеф местности,
чтобы исключалась возможность столкновения с наземными пре-
пятствиями при выходе из облаков.
После проработки полётного задания штурман готовит, как
правило, две карты: основную полётную карту и карту крупного
масштаба районов выхода из облаков для детальной ориенти-
ровки.
Для самолётовождения с помощью средств радионавигации
необходимо своевременно заказать все средства ЗОС, 'могущие
облегчить работу штурмана.
Для радиопеленгации на борту самолёта должна всегда на-
ходиться карта мелкого масштаба с нанесёнными данными о ра-
1 Если непосредственный выход на цель не обеспечен средствами радио*
навигации или радиолокации.
3b8
диосганциях, радиомаяках, а также с разметкой координат для
астрономической навигации. Для этой цели используют имею-
щуюся бортовую карту, которую соответственно подготовляют
При изучении прогноза погоды экипаж должен уделить осо-
бое внимание следующим вопросам:
а) характер и форма облачности, район её распространения
и характер изменения её по маршруту;
б) высота нижнего и верхнего оснований облаков, многоярус-
ность и районы образования туманов;
в) возможность обледенения;
г) характер и направление движения барических систем;
д) прогноз и распределение ветров по высотам.
Метеорологическую обстановку изучают по синоптической
карте для получения общего представления о состоянии атмо-
сферы.
Перед слепым полётом необходимо тщательно проверить на
самолёте навигационное оборудование, особенно приборы слепого
пилотирования: авиагоризонт, указатель поворота, гиромагнитный
компас, вариометр, указатель скорости, а также автопилот, тща-
тельно проверить работу радионавигационных и астрономических
приборов. Следует также проверить обогрев приборов на случай
обледенения.
Выполнение полёта
Вывод самолёта к ИПМ выполняется обычно на малой вы-
соте ввиду низкой облачности (300—600 м). Поэтому удаление
ИПМ от аэродрома должно быть не более 15—30 км. В качестве
ИПМ выбирают хорошо знакомый экипажу заметный ориентир,
обеспеченный радионавигационной точкой.
Лётчик ведёт самолёт на ИПМ по курсу, задаваемому штур-
мано1и (курс равен ЗКПУ плюс примерное упреждение на снос,
определённое глазомерно на земле по направлению движения
облаков).
Выход на курс следования перед заходом в облака является
одним из ответственнейших этапов навигации.
При выборе приёмов выхода на курс следования принимают
во внимание тактическую обстановку, высоту нижнего основа-
ния облаков, наличие на самолёте радионавигационной аппаратуры
и соответствующее земное обеспечение.
Наилучшим приёмом выхода на курс следования является
выход на курс следования по шаро-пилотным данным о ветре
с последующим уточнением его на контрольном этапе под обла-
ками. При выходе на курс этим приёмом входной ориентир кон-
трольного этапа выбирают с расчётом такого удаления его от
ИПМ, чтобы обеспечивался своевременный набор высоты до
нижнего основания облаков. От ИПМ до входного ориентира кон-
трольного этапа курс уточняют измерением угла сноса. На кон-
трольном этапе курс не изменять. Когда ИПМ является входным
ориентиром контрольного этапа, исправлять курс после пролёта
-4 Учебник еэронависацик
369
ИПМ следует только в крайнем случае, при обнаружении грубого
уклонения сейчас же после пролёта ИПМ.
Выход на курс следования контролируется обратной пеленга-
цией радионавигационной точки, установленной в ИПМ.
Выбор длины контрольного этапа зависит от наличия на линии
пути достаточно надёжных характерных ориентиров, от тактиче-
ской и метеорологической обстановки, а также от длины пути
предстоящего полёта по приборам.
На контрольном этапе необходимо определить курс следова-
ния, пут'евую скорость, ветер и поправку в курс на боковое укло-
нение. Основной работой штурмана на контрольном этапе является
определение путевой скорости и бокового уклонения. От точности
определения бокового уклонения и последующего исправления
пути зависит правильный выход по направлению к контрольному
ориентиру. В этом отношении контрольный этап является этапом
прицеливания, поэтому при расчете поправки для исправления
курса нельзя пренебрегать малейшими уклонениями. Ввиду относи-
тельно малой высоты полёта на контрольном этапе боковое укло-
нение определяют визуально по выходному ориентиру. Угол сноса
определяют обратным визированием, путевую скорость — по вре-
мени пролёта всего этапа, а ветер рассчитывают по углу сноса и
путевой скорости.
Выход на курс следования при отсутствии шаро-пилотных дан-
ных о ветре и характерных ориентиров для контрольного этапа
выполняется полётом от ИПМ по трём курсам («зигзаг») для опре-
делении ветра по трём углам сноса.
Когда слепой полёт начинается в пути следования на заданной
высоте, исходными данными для дальнейшего контроля пути слу-
жат ФПУ и путевая скорость, уточнённые до начала слепого
полёта.
В условиях низкой облачности и малой видимости, когда сле-
пой полёт начинается непосредственно после пролёта ИПМ, выход
на курс следования и полёт могут быть выполнены только при
наличии на самолёте средств радионавигации и соответственного
земного обеспечения. Уход в облака с набором высоты сейчас же
после пролёта ИПМ может быть вызван условиями погоды или
необходимостью быстро и скрытно уйти от цели.
Во всех случаях выхода на 'курс следования средствами
радионавигации следует максимально использовать для дублиро-
вания компасную навигацию.
Контроль пути выполняется всеми имеющимися у штурмана
средствами (компасная и радионавигация, а при полёте за обла-
ками и астрономическая навигация).
Наряду с приёмами радионавигации штурман ведёт счисле-
ние пути. При полёте в облаках счисление пути выполняется по
ФПУ и по путевой скорости, определённым до входа в облака.
Контролируя путь, штурман всё время тщательно следит за уста-
новленным навигационным режимом полёта.
370
При равномерных колебаниях курса в обе стороны на 6—7°
нет необходимости исправлять курс. Поправки вводят только в
тех случаях, когда уклонения носят постоянный характер в одну
сторону более 2°.
При слепом полёте в течение не свыше одного часа штурман
может ограничиться применением способа компасной навигации,
а при полёте на аэродром посадки—средств радионавигации.
Контроль пути при полёте в облаках или за ними свыше одного
часа или в неустойчивой барической системе выполняется
в основном с применением способов радио- и астрономической
навигации.
Исправление пути при длительном полёте в облаках и за ними
может быть допущено только при неоднократном определении
уклонения способами астрономической и радионавигации и под
тверждении этого уклонения счислением пути. Исправлять
курс следует только на половину определённого бокового укло
нения.
При появлении окон в облаках штурман уточняет действитель
ное место самолёта и промеряет угол сноса. С увеличением коли-
чества окон и уменьшением облачности полёт выполняют по
правилам самолётовождения при видимости земли.
Если средства радионавигации и астрономической навигации
не могут быть использованы, необходимо выходить под облака
примерно через каждые 200—300 км пути полёта вне видимости
земли для контроля пути.
Длина этапов полёта в облаках определяется точностью сле-
пого самолётовождения, постоянством ветра, допустимой величи-
ной отклонения от контрольного ориентира и возможностью
использования радионавигации.
При неустойчивом ветре выход из облаков делается через
каждые 20—30 минут полёта. Выполняя полёт на радиостанцию,
радиомаяк, радиопеленгатор, дальность слепого полёта опреде-
ляется дальностью их слышимости. Длительный полёт в облаках
наиболее применим при возвращении с боевого задания.
Для выхода из облаков штурман за 5—7 минут до расчётного
момента появления контрольного ориентира даёт команду лётчику
о снижении, а сам детально просматривает на карте район выхода
из облаков и следит за сохранением заданного режима полёта,
уделяя особое внимание высоте. Лётчик, точно выдерживая задан-
ный режим полёта, снижается с малой вертикальной скоростью.
В большинстве случаев выход из облаков происходит на вы-
соте 600 м и ниже, поэтому расчёт безопасной высоты полёта
перед вылетом и её учёт при пробивании облаков имеют большое
значение. Снижаться под облака можно только до безопасной вы-
соты полёта. По достижении этой высоты и при невидимости зем-
ной поверхности снижение необходимо прекратить.
Выйдя из облаков, штурман восстанавливает детальную
ориентировку, отмечает действительное место самолёта и время,
уточняет угол сноса и путевую скорость. При уклонении от задан
кого маршрута вводит поправку в курс и снова даёт команду
2М»
371
лётчику о входе в облака. Если детальная ориентировка не вос-
становлена, дальнейший слепой полёт следует прекратить до
восстановления ориентировки.
После длительного слепого полёта точно опознать местность
не удаётся. Поэтому сначала определяют район местонахождения
по общему характеру местности, а затем восстанавливают деталь-
ную ориентировку.
Восстановление общей ориентировки после слепого полёта
может быть выполнено различными способами. Наиболее надёж
ные из них следующие:
1) при полёте с преднамеренным уклонением в сторону от ли-
нейного ориентира — выход на данный линейный ориентир с после
дующим полётом к цели;
2) при наличии радиополукомпаса — выход на радиостанцию;
3) при обеспечении полёта радиомаяками или (радиопеленгато-
рами — выход на радиомаяк, определение РМ по двум радио-
маякам, выход на радиопеленгатор;
4) определение РМ счислением по среднему ветру, получен-
ному в пути (в начале и конце маршрута), с последующим выхо-
дом на линейный (крупный) ориентир; во всех случаях при выходе
на линейный ориентир полёт к нему необходимо выполнять одним
курсом;
5) определение РМ средствами радио- и астрономической
навигации (например, по одной сомнеровой линии и одному радио-
пеленгу, по двум радиопеленгам).
При годной потере ориентировки и невозможности её вос-
станови о имеющимися у экипажа средствами принимается реше-
ние о полёте на запасную цель, расположенную у характерного
ли’ьей1 эго ориентира, находящегося в известной стороне от
ос ь изной цели на расстоянии, значительно превосходящем
г. -зможные уклонения.
Все приёмы следует дублировать визуальной ориентировкой.
При выполнении любого из указанных способов восстановле-
ния ориентировки необходимо в первую очередь учесть запас
горючего, обеспечивающий применение того или иного способа.
При точном соблюдении заранее разработанного навигацион-
ного плана и умелом применении указанных выше способов
навигации потеря общей ориентировки маловероятна. Между тем
детальная ориентировка теряется. Поэтому от штурмана требуется
умение быстро переходить от общей ориентировки к детальной.
Переход к детальной ориентировке состоит в определении
расчётного места с последующим сличением карты крупного
масштаба с местностью и выполнении одного Из указанных ниже
манёвров:
1) при полёте в сторону от цели — выход на линейный ориен-
тир с заранее определённым курсом:
2) при полёте прямо на цель (ориентир), имеющую линейный
ориентир, расположенный перпендикулярно к линии пути, манёвр
поиска цели начинается полётом с курсом, который был до
372
нотери ориентировки, в течение времени, равного 3—Б^/о общего
времени слепого полёта.
При необнаружении линейного ориентира выполняют полёт об-
ратным курсом продолжительностью 6—10°/о общего времени
слепого полёта. После обнаружения линейного ориентира летят
вдоль него (в обе стороны) на удаление возможного бокового
уклонения.
В течение всего полёта фиксируют курсы и время;
3) при полёте на цель (ориентир), имеющую линейный ориен-
тир, расположенный вдоль линии пути, манёвр поиска цели начи-
нают изменением курса следования на 90° и полётом к линейному
ориентиру на удаление, равное возможному боковому уклонению
В случае необнаружении линейного ориентира летят обратным
курсом на величину возможного двойного бокового уклонения.
При встрече с линейным ориентиром выполняют полёт вдоль него
в обе стороны на удаление возможного уклонения по дальности,
постепенно расширяя район обследования до момента обнаруже-
ния цели;
4) в тех случаях, когда полёт выполняется на цель (ориентир),
не имеющую линейного ориентира, манёвр поиска цели может быть
построен в виде «коробочки» с расчётом охвата всего района воз-
можного уклонения от цели.
§ 7. Самолётовождение ночью
Условия самолетовождения ночью
Самолётовождение ночью, особенно на больших высотах,
наиболее сложно. При подготовке и выполнении маршрутного
ночного полёта необходимо всесторонне и тщательно изучить
особенности навигации ночью. Основная особенность заключается
в ухудшении видимости земной поверхности.
Степень видимости земных ориентиров в ночном полёте зави-
сит от следующих обстоятельств.
Географическая широта района полёта. Ночи на различных
широтах отличаются степенью освещённости. Видимость ночью
в северных широтах значительно лучше, чем в южных. Продол-
жительность сумерек в южных широтах меньше, чем в северных.
Время года значительно влияет на степень видимости ориен-
тиров ночью. В зимнее время снежный покров усиливает освещён-
ность и создаёт более резкий контраст с наблюдаемыми ориенти-
рами, поэтому их легче опознать. Например, на снежном покрове
лучше выделяются незамёрзшие реки, озёра, крупные постройки
и т. п. В то же время заснеженные ориентиры (например, дороги,
замёрзшие реки) совсем не видны.
При отсутствии снежного покрова ориентиры, сливаясь с об-
щим тёмным фоном местности, менее заметны. Весной и осенью
осадки значительно влияют на видимость ориентиров. Большое
количество выпадающих осадков, а также таяние снега создают
373
общий тёмносерый фои местности, и ориентиры видны значи-
тельно хуже.
Фазы Луны имеют значительное влияние на видимость земной
и водной поверхности. В период полнолуния, длящийся ежеме-
сячно несколько дней, степень освещённости приближается к бе-
лым ночам, и видимость ориентиров лишь незначительно отличается
от дневной, особенно в безоблачную погоду. Луна в фазе первой
и последней четвертей меньше освещает земную поверхность, но
всё же значлггельно облегчает визуальную ориентировку.
Большое значение имеет правильное расположение наблюда-
теля и ориентиров относительно Луны. Когда Луна стоит высоко
над горизонтом, ориентиры видны и распознаются лучше, если
самолёт находится на линии створа Луна — наблюдаемый ориен-
тир, при условии, что самолёт находится в тёмной части гори-
зонта. Это обеспечивает и маскировку самолёта.
При низком положении Луны над горизонтом ориентиры
заметны лучше, если самолёт находится в створе линии Луна —
наблюдаемый ориентир, но между Луной и данным ориентиром.
В сумерки, особенно перед восходом Луны, а также в период
между заходом Луны и наступлением рассвета видимость резко
ухудшается. Это объясняется тем, что, например, в вечерние
сумерки на земле уже темно, а на высоте полёта освещённость
ещё значительная. Штурману приходится наблюдать неосвещён-
ную область из освещённой. Кроме того, в это время суток ухуд-
шается прозрачность воздуха из-за дымки.
В течение всего периода от восхода до захода Луны степень
видимости изменяется. Наилучшая видимость — при верхней
кульминации Луны.
Метеорологические условия значительно влияют на степень
видимости ориентиров. Облачность, туманы, дождь, снегопад,
дымка могут значительно ухудшить видимость ориентиров, вплоть
до полной невидимости их.
Облачность влияет на сокращение дальности видимости
и, кроме того, может вызвать ошибки в ориентировке, так как
тени от отдельных облаков меняют конфигурацию ориентиров.
Отдельные облака, находящиеся ниже самолёта, можно принять
за лес или водную поверхность.
Сильные дожди и снегопады почти исключают возможность
опознавания ориентиров.
Характер местности в районе полёта также влияет на степень
видимости. В открытых степных районах видимость лучше, чем
в лесных районах. Чем светлее общий фон местности, тем резче
выделяются на ней ориентиры.
Высота полёта. Ночью с увеличением высоты полёта, как и
днём, видимость ориентиров ухудшается. Дальность видимости
отдельных крупных ориентиров увеличивается только в том случае,
если они освещены; неосвещённые ориентиры не видны. Таким
образом, с увеличением высоты полёта условия общей и деталь-
ной ориентировки ухудшаются, особенно в условиях затемнения.
3Z4
Освещение кабины самолёта оказывает влияние на видимость
ориентиров и затрудняет визуальную ориентировку. Наблюдение
ориентиров из освещённой кабины невозможно. Каждый раз перед
сличением карты с местностью штурман должен тушить свет и
выжидать некоторое время, пока глаза привыкнут к темноте.
Только после этого возможно наблюдение ориентиров. Примене-
ние переносной лампы с узким лучом света, приборов со светящи-
мися шкалами, облучение приборов и карт УФО лучше обеспечи-
вают возможность наблюдения ориентиров и не демаскируют
самолёт.
При благоприятном 'сочетании условий видимости ориенти-
ровка ночью особых затруднений не представляет. При неблаго-
приятных же условиях ориентировка значительно затрудняется,
а в отдельных случаях и совсем невозможна.
В светлые лунные ночи ориентировка выполняется так же,
как и днём, при неблагоприятной видимости. В темные ночи, осо-
бенно с больших высот, земная поверхность почти не различима,
что чрезвычайно затрудняет выполнение визуальной ориенти-
ровки.
Видимость ориентиров с различных высот в светлые и тёмные
ночи приведена в таблице на стр. 376—380.
При наличии световых ориентиров визуальная ориентировка
ночью значительно облегчается, а общая ориентировка в благо-
приятных условиях становится легче дневной.
Дальность обнаружения световых ориентиров зависит от све-
тосилы источника света, степени темноты ночи, прозрачности
атмосферы и высоты полёта. С увеличением всех этих элементов
увеличивается дальность видимости световых ориентиров (см.
таблицу на стр. 381).
Возрастающая с увеличением высоты полёта дальность види-
мости световых ориентиров при наличии их в районе маршрута не
даёт возможности вести детальную визуальную ориентировку,
так как опознать световой ориентир с большого расстояния
трудно. Это объясняется тем, что обычно виден только пучок
света или отдельные световые точки. Даже при полёте над све-
товым ориентиром его трудно опознать вследствие отсутствия
ночных авиационных карт, передающих точное изображение кон-
туров световых ориентиров. В большинстве же случаев контуры
ориентиров, изображённые на картах, не совпадают с их действи-
тельными видимыми контурами.
Ночью теряется представление о дальности видимости свето-
вых точек и, следовательно, об удалении этих ориентиров. В рай
онах, богатых световыми ориентирами, при наблюдении с больших
высот видно одновременно много световых точек. Неосвещённые
ориентиры в своём большинстве вообще не видны в тёмную ночь.
Всё это усложняет опознавание объектов. Поэтому в тёмную
ночь, особенно при полётах на больших высотах, нельзя приме-
нять в качестве основного способа самолётовождения визуаль-
ную ориентировку.
375
Видимость ориентиров в светлую лунную ночь
Высота в м
200—300 | 600—2 500 | 2 500 6000
Крупные населённые пункты Видны хорошо. Разли- чаются отдельные круп- ные строения, улицы, ли- нейные ориентиры, под- ходящие к пункту; уло- вить их общее напра- вление трудно. Плохо видны контуры пункта. Световые ориентиры имеют меш шее значение в ориентировке по срав- нению с полётом на сред- ней высоте, так как обзор в стороны и вперёд огра- ничен и определение местонахождения само- лета по взаимному рас- положению световых ориентиров невозможно. Опознать световой ори- ентир труднее, так как он находится в зоне ви- димости с самолёта корот- кое время. Освещённые населён- ные пункты по своим контурам значительно от- личаются от конфигура- ции на карте. Неосвещённые пункты видны при наблюдении вертикально вниз. За- метна общая масса строе- ний, пересечённая широ- кими улицами. Можно определить контуры пунктов и линейные ори- ентиры, подходящие к ним. Освещен- ные пункты видны хоро- шо. Неосве- щённые вид- ны плохо и только при наблюдении вертикально вниз.
Мелкие населённые пункты Отдельные деревни видны хорошо. Выделя- ются церкви, окрашен- ные в белый цвет, разли- чаются главные улицы и отдельные дома. Деревни, расположенные в лесу и оврагах, заметны только при непосредственном пролёте над ними. Хоро- шо заметны линейные ориентиры, подходящие к селениям. На пёстрой местности селения не вид- ны. Хутора можно заме- тить с большим трудом. Ориентироваться по ним нельзя. Опознавание мел- ких пунктов при отсут- ствии водных или линей- ных ориентиров невоз- можно. Заметны только при пролёте над ними по об- щему контуру пли в ви- де серого пятна, к кото- рому подходят дороги или другие линейные ориен- тиры. Отдельные хутора не видны. Деревни на пёстрой местности не видны. Контуры не раз- личаются. Селения в лесу видны с трудом. Пункты опознаются только те, которые расположены вблизи линейных или дру- гих характерных ориен- тиров. Не видны.
Реки Видны хорошо, осо- бенно под некоторым уг- лом к вертикали. Луч- шие ориентиры в лун- Легко опознаются по блестящей поверхности от лунного освещения. Лучше видны при на- Заметны в виде узких светлых из- вилистых
376
Продолжена
Ориентиры В ы сота в м
200—300 600-2 50Э 2 500—6 U0O
ную ночь выделяются светлой поверхностью (отблеском от луны). ! блюдении под небольшим углом (40—45°) к верти- кали; при наблюдении их вертикально под самолё- том не видны. Для опо- знавания изгибов рек тре- буется большая внима- тельность. лент. Иногда реки бывают темнее об- щего фона местности. Малые реки не видны.
Озёра Видны хорошо и яв- ляются лучшими ориен- тирами. Охватить общий контур больших озёр не- возможно. Распознаются легко, даже если их имеется зна- чительное количество в данном районе. Чётко раз- личаются берега озёр. Видны.
Железные дороги Видны хорошо с близ- кого расстояния в виде тёмной узкой полосы. Хорошо заметны расхо- ждения путей у станций при пролёте над ними. В перспективе хорошо вид- ны насыпи. Видны слабо, в виде прямой тёмной ленты. Пути не видны. Неосве- щённые станции видны при внимательном наблю- дении только под само- лётом. Освещённые стан- ции видны хорошо в виде вытянутых освещённых прямоугольников. Не нидны.
Шоссейные дороги Хорошо выделяются на фоне земной поверх- ности в виде светлых пря- мых полос. Так же, как и с малых высот, но более узкие полосы. Хорошо заметно движение автотранспорта при включённых фарах. Заметны с большим трудом. Не- прерывная ориентиров- ка по ним затрудни- тельна.
Грунтовые и просёлоч- ные дороги Грунтовые дороги вид- ны только те, которые проходят в открытой без- лесной местности. Разли- чаются в виде светлых кривых полосок. Просё- лочные дороги заметны не все и только при вни- мательном рассмотрении. Опознать их нельзя. При полёте вдоль дороги они часто, скрываясь в лесу и оврагах, теряются из виду, а затем вновь по- являются. Дороги видны только при вертикальном наблюдении. Грунтовые дороги за- метны только те, которые хорошо накатаны, в виде светлых, плохо заметных или совсем скрывающих- ся полосок. Просёлочные дороги не видны Не видны.
377
I i р о д о л ж е н и е
Ориентиры Высота в м
200—300 600—2 500 2 500—6 000
Лес Хорошо различается по общему тёмному фо- ну. Контуры лесных пло- щадей не видны. Отдель- ные деревья различимы с трудом. < Можно опознать общие контуры при полёте над ним или немного в сто- роне; отличается от об- щего фона местности тём- ным цветом. Виден с большим трудом. Лег- ко спутать с тёмным фо- ном земной поверхности.
Видимость ориентиров в тРмную ночь
Ориентиры Высота в м
800-3 000 4 000-5 500
Крупные Освещённые пункты видны зиа- Неосвещённые пункты не
населённые чителыю лучше, чем при луне. видны. Освещённые пункты
пункты Дальность видимости непостоянна и обманчива. Линейные ориентиры, подходящие к пунктам, не видны или очень плохо заметны. Световые ориентиры распознаются главным образом по расположению их от- носительно места наблюдения и по расчёту времени прилёта к ним, по количеству света, очертаниям и частично по взаимному распо- ложению световых точек или осве- щённых участков (если они изве- стны наблюдателю). Неосвещённые пункты с высоты более 1000 м трудно различимы; заметны в виде серого пятна со смазанными очер- таниями. При горизонтальной ви- димости 3—5 км совсем не видны. при наблюдении с большой ди- станции трудно распознаются, так как видна только маленькая освещённая площадь. Свето- вые пункты, расположенные вертикально под самолётом, можно распознать по харак- терному расположению свето- вых точек (если наблюдатель уже бывал над этим пунктом и световые точки ему извест- ны). При большом количестве освещённых населённых пунк- тов теряется представление о дальности и направлении на тог или иной пункт.
Мелкие Заметны в виде нескольких све- Неосвещённые пункты не
заселённые товых точек, не отличающихся от видны. Отдельные световые
пункты других световых точек. Поэтому ориентироваться по видимым све- товым точкам чаше всего невоз- можно. Неосвещённые пункты вид- ны с малых высот (до 1000 .и) только при непосредственном про- лёте над ними. Пункты, располо- женные в лесу или на берегу озера. точки в мелких пунктах за- метны, но так как дополни- тельных признаков не видно, пункт не опознаётся.
376
Продолжение
В ы с о т а в
)риеитиры 800—3 000 1 4 000-5 500
не видны, так как сливаются с об- щим тёмным фоном. С высоты бо- лее 1 000 м они совсем не видны.
Реки Распознаются с трудом в исклю- чительных случаях (при больших размерах рек и хорошей прозрач- ности воздуха). Заметны в виде тёмных извилистых полос. При на- личии над водой тумана заметны в виде белых извилистых полос. Не видны.
'Келезные дороги Не видны. Заметны освещённые станции и огни паровозов. С ма- лых высот видны красные огни светофоров. Не видны Ззметны ог«и станций, опр иных по рас- чёту времени, ixpn большом количестве станций можно опо- знать наличие дороги по ха- рактерному прямолинейному расположению световых точек вдоль дороги (если по расчёту времени известно, что в дан- ном месте есть железная до рога).
Шоссе Различаются очень слабо, при пролёте над ними, в виде серой полоски. Хорошо видно движение автотранспорта при включённых фарах. Не видны.
Грунтовые и просёлочные дороги Не видны. Не видны.
Лес Заметен только при наличии отдельных площадей леса на се- ром фоне полей. Не виден.
Озёра Малые озёра не видны. Боль- шие озёра иногда можно заметить по белесому туману над водой. Без расчёта времени туман можно спутать с облаком. . Не видны.
379
Дальность видимости различных ориентиров в светлую лунную ночь
(в км)
Ориентиры Высота в м
300 500 1000 2 000
Крупные населенные пункты осве-
щенные ........................
То же, затемнённые . . . • . . .
Мелкие населенные пункты осве-
щённые ........................
То же, затемнённые .............
Большие реки .......... . . . .
Малые реки.....................
Железные дороги.................
Шоссе..........................
Почтозые дороги................
Озёра . •......................
Лес ...........................
10—20 2-3 30 5 40 10 50 10
5 10 15 20
1 о 3 5
5-10 15 20 20—30
1—3 3-5 5 10
2—3 3-5 5 5
1 2 3 5
1 1 2 3
5 10—15 20 30
3 5 10 15
Дальность видимости различных ориентиров в тёмную ночь
(в км)
Ориентиры Высота вл
300 500 1 000 2 000 3 003 4 000 5 000
Крупные населённые пункты освещённые . • • 10 30 45 65 80 100
То же, затемнённые 1-2 2-3 3 0 0 0 0
Мелкие населённые пункты ос- вещенные • • . . 5 8 10 10 15 15 25
То же, затемнённые Большие реки 1 2 0 0 0 0 0
1 1 2 0 0 0 0
Железные дороги 1 1 0 0 0 0 0
Шоссе 1 1 1 0 0 0 0
Почтовые дороги 0 0 0 0 0 0 0
Озёра 5 8 10 10 0 0 0
Лес 1 1 2 3 0 0 0
Особенностью, объясняющей сложность применения способа
компасной навигации в тёмную ночь, является невозможность вы-
полнения навигационных промеров в любой момент полёта из-за
полного отсутствия или незначительного количества световых то-
чек. Ночью штурман может делать промеры только при наличии
световых точек или с применением специальных ночных навига-
ционных бомб, запас которых ограничен и их не всегда можно
применять над своей территорией.
По этой же причине для навигационных промеров чаще при-
ходится использовать боковые визирные точки, так как точно
под самолётом ориентиры и световые точки наблюдаются сравни-
тельно редко. Следовательно, самолётовождение ночью требует
от штурмана применения более сложных приёмов навигации, в част-
ности пеленгации боковых ориентиров.
380
В ночных полётах исполь-
1}тотся приёмы радионавигации и
ютрономической ориентировки.
В сочетании с компасной навига-
цией они дают возможность
успешно выполнять длительные
ночные полёты.
Дальность видимости световых
ориентиров и огней в тёмную ночь
при наблюдении со средних высот
(2 000—4 000 м)
Ориентир
Дальность
видимости
в км
Особенно большое значение
имеет организация земного обес-
печения самолётовождения. Для
успешного самолётовождения над
воей территорией организуется
световое обеспечение. При неви-
димости ИПМ его обозначают
световой точкой (прожектором,
кострами и т. п.), хорошо види-
мой с самолёта. Далее на линии
пути так же обозначают вторую
световую точку в качестве вы-
ходного ориентира контрольного
этапа или створа.
Для точного выхода на уда-
лённую цель возможно ближе к
линии фронта устанавливают
створ мощных световых точек в
направлении на цель. Расстояние
между точками в каждом створе
примерно 25—30 км. При бомбар-
дировании объектов в ближнем
Отблески зенитного про-
жектора ............
Специальный освети-
тельный снаряд зе-
нитной пушки . . .
Большие промышлен-
ные освещённые го-
рода ...............
Огни доменных печей.
Проблесковые свето-
маяки • .
Постоянные маяки . .
Костры..............
Осветительные бомбы.
Сигнальные ракеты . .
Огни одиночных домов
Огни паровозов . . .
Фары автомашин . . .
Большие освещённые
железнодорожные
станции ............
Мелкие освещённые же-
лезнодорожные стан-
ции и большие сёла.
Небольшие освещённые
города .............
120
100—120
60-100
40—80
20—100
20—60
10—40
30—70
20-30
10—15
10-25
5—15
50—75
15-60
30—60
тылу противника на удалении
ю 30 /ск от переднего края
с успехом применяются средства наведения (створы из световых
точек: фар, светомаяков, костров), а также целеуказание пуле-
мётными и орудийными трассами наземных войск. Если створ
световых точек на линии фронта установить нельзя, то в различ-
ных точках у линии фронта устанавливают световые маяки для
облегчения определения местонахождения самолёта. Штурман
должен изучить характер и расписание работы световых маяков.
Возвращение на свой аэродром обеспечивается установкой в рай-
оне аэродрома прожекторов, фигур из костров, радиомаяков,
пеленгаторов и приводных радиостанций.
При прокладке маршрута следует избегать частых изломов
линии пути. Особое внимание необходимо уделить выбору и изу-
чению надёжных контрольных ориентиров. Большую помощь
в ориентировке оказывает изучение направления, дальности види-
мости и вида ориентиров с различных точек маршрута. Полезен
также опрос ранее летавшего в этом районе экипажа о види-
мости ориентиров.
При расчёте полёта штурман определяет момент наступления
рассвета ц необходимый запас горючего; выполняет все расчёты и
381
подготовительные работы, обеспечивающие широкое и надёжное
применение способов астрономической навигации и радио-навигации.
Навигационный план полёта должен предусматривать чёткое
расписание работ на каждом этапе с указанием средств и спосо-
бов, обеспечивающих самолётовождение. При полёте в местах,
бедных ориентирами, намечают, по каким светилам будут произ-
водиться измерения и время их выполнения, время радиопеленга-
ции (каких радиостанций), места определения ветра по навигаци-
онным бомбам, способы определения исходных данных бомбоме-
тания и восстановления ориентировки. При использовании радио-
навигационных средств необходимо учитывать наличие «ночного
эффекта».
Метеорологическая обстановка изучается в таком же объёме,
как и при подготовке к полёту в облаках и за облаками. Особое
внимание необходимо уделить степени видимости и условиям,
влияющим на видимость ориентиров.
При подготовке навигационного оборудования, кроме работы,
рекомендуемой для обеспечения полёта в сложных условиях,
серьёзное внимание обращается на удобное освещение кабины
самолёта.
Выполнение ночного маршрутного полета
Наиболее надёжным и точным приёмом выхода на курс сле-
дования ночью является расчёт курса по вектору ветра, опреде-
лённому до пролёта ИПМ, на заданной высоте полёта. Этот
приём целесообразно применять на средних высотах полёта, так
как набор заданной высоты должен выполняться в районе аэро-
дрома, затрачивать же время на набор большой высоты в районе
аэродрома недопустимо.
Для выхода на курс следования можно применить расчёт
курса по шаро-пилотным данным о ветре на высоте полёта. По
этим же данным о ветре рассчитывают путевую скорость и время
прилёта к следующему контрольному ориентиру. Пролетая над
ИПМ с рассчитанным курсом, штурман как можно точнее изме-
ряет угол сноса для расчёта фактического путевого угла. Выход
на ИПМ может быть также обеспечен радионавигационной точкой
Другим приёмом является выход на курс следования по створу
ориентиров или по боковому уклонению на контрольном этапе.
Для выполнения этого приема в начале пути намечают 2—3
видимых ориентира. В случае отсутствия подходящих ориентиров
можно использовать светомаяки, заранее выставленные в нужных
точках на местности. При использовании светомаяков следует
направлять их лучи не строго вверх, а наклонно в направлении за-
данного маршрута, что облегчает контроль пути.
Контроль пути осуществляется сочетанием различных способов
навигации, применяемых в зависимости от обстановки полёта.
Учитывая условия ночного полёта, штурман придерживается
следующего порядка визуальной ориентировки и компасной нави-
гации. Сличает карту с местностью преимущественно при подходе
к контрольным ориентирам и пролёте их. Отмечает действитель-
ное место самолёта во время полёта между контрольными ориен-
тирами только при наличии характерных, достоверно опознанных
ориентиров. Для опознавания этих ориентиров надо перед сличе-
нием карты с местностью определить расчётное место самолёта или
хотя бы район его местонахождения в данный момент.
После этих определений штурман внимательно изучает по
карте опознаваемый ориентир (район). При опознавании линейного
ориентира, обозначенного на карте, необходимо убедиться в пра-
вильности его направления относительно других ориентиров и
стран света. Площадные ориентиры, не имеющие собственного
направления, следует опознавать заранее, не долетая до них, про-
веряя правильность их расположения определением и сличением
направления «самолёт — ориентир» по карте и на местности. Штур-
ман должен чётко знать порядок работы световых средств ЗОС,
так как только при этом условии их можно успешно использовать
при ориентировке. При сомнении в правильности опознания ориен-
тира следует снова проверить расчётное место самолёта и обра-
тить внимание на второстепенные признаки, по которым можно
опознать ориентир.
Глазомерные определения направления или вертикали выпол-
няются с большими погрешностями, особенно ночью, поэтому при
наличии времени их следует дублировать измерениями визиром.
Для отметки на карте бокового уклонения от ориентира опре-
деляют дистанцию до него по вертикальному углу и высоте по-
лёта. Каждая отметка действительного места должна соответ-
ствовать фактическому местонахождению самолёта.
Контроль ФПУ измерением угла сноса и среднего курса еле
дования применим при наличии под самолётом или недалеко
в стороне от него световых визирных точек. Определение угла
сноса обратным визированием является надёжным приёмом, но
сравнительно редко применимым вследствие отсутствия под само-
лётом световых визирных точек Поэтому в ночном полёте про-
меры угла сноса следует делать обязательно во время пролёта
контрольных ориентиров, а также использовать для этой цели
любую световую точку, оказавшуюся на линии пути самолёта не-
зависимо от того, надлежит ли в данный момент по навигацион-
ному плану заниматься измерением угла сноса или нет. В ноч
ном полёте чаше, чем в дневном, следует прибегать к промер}
угла сноса по боковой визирной точке.
Расчёт времени пролёта ориентиров выполняется по фактиче-
ской путевой скорости, измеряемой на маршруте, по расстоянию
и времени полёта между предыдущими контрольными ориентирами
или по путевой скорости, определённой на ветрочёте.
Контроль пути прокладкой выполняется в течение всего
полёта по маршруту, когда невозможно сличать карту с мест-
ностью.
Пеленгация ориентиров и световых точек применима тогда,
когда точно на линии пути нет световых точек. В этих случаях
углы сноса и путевая скорость измеряются по боковым визирным
точкам. Пеленгация бокового ориентира выполняется с одно
383
временным измерением вертикального угла этого ориентира для
последующего расчёта местонахождения самолёта по пеленгу и
дистанции.
Контроль пути средствами астрономической и радионавига-
ции выполняется при каждой возможности по правилам, изложен-
ным в соответствующих главах настоящего учебника.
В ночном полёте штурман исправляет курс, как только ему
станут достоверно известны величина и знак уклонения. Поэтому
перед введением поправки в курс необходимо дублированием раз-
личных приёмов убедиться в наличии и величине уклонения. Лю-
бую поправку в курс рассчитывают на основании измерения вели-
чины уклонения от заданного маршрута, а не её глазомерного
определения.
Поправку в курс за боковое уклонение, обнаруженное у кон-
трольного ориентира, вводят немедленно после пролёта данного
ориентира с расчётом выйти точно на следующий контрольный
ориентир. Поправку в курс за боковое уклонение, обнаруженное
между контрольными ориентирами, вводят только в тех случаях,
когда известно, что увеличение бокового уклонения к моменту
пролёта контрольного ориентира превысит расстояние, с которого
можно уверенно опознать этот ориентир.
Когда световых ориентиров нет и невозможно определить
величину уклонения по действительному месту самолёта, курс
исправляют по уклонениям, обнаруженным средствами астрономи-
ческой и радионавигации. В этих случаях тщательно проверяют
величину уклонения всеми доступными приёмами и способами и,
если подтверждается наличие уклонения, превышающего возмож-
ную ошибку его определения, вводят поправку в курс.
Выход на цель выполняется полётом от характерного ориен-
тира с точно рассчитанным курсом и временем полёта с после-
дующим визуальным поиском цели с помощью осветительных
авиабомб. В ряде случаев выход на цель может быть обеспечен
средствами радионавигации и радиолокации. Выход на ближние
цели облегчается наведением с помощью светомаяков или других
световых средств.
Восстановление ориентировки в тёмную ночь при отсутствии
средств ЗОС является самой трудной задачей аэронавигации. При
наличии в районе полёта надёжных видимых ориентиров или све-
товых точек ЗОС ориентировку восстанавливают определением
РМ (прокладкой по ФПУ и путевой скорости или по штилевой
точке) и полётом на видимый ориентир или в район нескольких
крупных видимых ориентиров.
При наличии средств астрономической и радионавигации и
невозможности выйти на ближайший видимый ориентир ориенти-
ровку восстанавливают этими средствами. При невозможности
восстановить ориентировку указанными способами и достаточном
запасе горючего продолжают полёт до рассвета, после чего
определяют расчётное место самолёта и выходят на линейный
ориентир.
ГЛАВА ОДИННАДЦАТАЯ
ТАКТИЧЕСКИЕ НАВИГАЦИОННЫЕ ЗАДАЧИ
§ 1. Выход на цель в заданное время
Вылет в заранее рассчитанное время обеспечивает точный
выход на цель в заданное время, особенно в ближнебомбардиро-
вочной и штурмовой авиации при действиях по переднему краю
и по неглубокому тылу противника. Однако перемена обстановки
в полёте может изменить путевое время, поэтому штурман дол-
жен уметь покрыть обнаруженный в полёте недостаток времени
или погасить его избыток. Точность выхода па цель в заданное
время обеспечивается: 1) изменением скорости полёта, при полёте
одиночным самолётом и при большом диапазоне скоростей само-
лёта; 2) способом петли при наличии линейного ориентира для
построения петли.
При первом способе штурман сначала определяет время, остав-
шееся до назначенного момента прибытия к цели, затем по полу-
ченному времени и оставшемуся расстоянию находит требуемую
путевую скорость. Имея путевую скорость, путевой угол и вектор
ветра, штурман подбирает на ветрочёте соответствующую воздуш-
ную скорость.
Пример. Находясь от цели на расстоянии 320 км, в 10 ч. 22 м. штурман
определил, что с воздушной скоростью 280 км!час и путевой скоростью 267 км]час
самолёт прибудет к цели в 11 ч. 34 м. Заданный же момент прибытия к цели
11 ч. 30 м. ЗМПУ =85°. Ветер 8=310°, (7=40 км]час.
Определить воздушную скорость самолёта, обеспечивающую прибытие к
цели в заданное время.
До назначенного момента прибытия к цели осталось:
II ч. 30 м.—10 ч. 22 м.=1 ч. 08 м.
Вычисляем на азрэнавигационной линейке требуемую путевую скорость:
чтобы пролететь 320 км за 1 ч. 08 м., нужно лететь с путевой скоростью
280 км!час.
Затем рассчитываем воздушную скорость на ветрочёте. Для этого проводим
на лимбе диаметр путевого угла, наносим вектор ветра. Отвинчиваем барашек и
передвигаем лимб так, чтобы диаметр путевого угла был параллелен линейке.
Точка ветра должна совпасть с делением найденной ранее путевой скорости
280 км час. После этого закрепляем барашек, линейку ставим на нуль и против
центра лимба отсчитываем искомую воиушную скорость 293 км'час.
Если ветер неизвестен, эту задачу можно решить, допуская,
что путевая скорость увеличивается на ту же величину Д W. на
какую изменяется и воздушная скорость. В этом случае, опре-
25 Учебник аэронавигации 3S.1
делив требуемую путевую скорость (280 км/час), штурман нахо-
дит разность между прежней и новой путевыми скоростями
(280 — 267 = 13 км/час) и на эту разность увеличивает (так как
самолёт запаздывает) воздушную скорость:
280-f- 13 = 293 км1час.
При значительном запаздывании и невозможности погасить
время увеличением воздушной скорости надо лететь к цели по
кратчайшему пути, срезая изломы маршрута. Если штурману
известно распределение ветра по высотам, можно изменением вы-
соты полёта подобрать иаивыгоднейшую скорость полёта.
Для упрощения расчётов в воздухе
можно заранее (на земле) наметить кон-
трольный ориентир на маршруте и соста-
вить табличку требуемых путевых скоро- ст.Хрущвво
стей в зависимости от времени пролёта
ориентира.
Сущность способа петли состоит в
том, что штурман удлиняет путь само-
лёта петлеобразным полётом в сторону
от маршрута или в направлении, проти-
Шаик
Рис. 288. Пример погашения
избытка времени на петле
1эпчиховс
16-30
Рис. 287. Способ погашения избытка
времени на петле
расчётом погасить избыток
воположном маршруту (рис. 287), с
времени и ейова выйти в прежнюю точку маршрута.
Время полёта на петле до момента поворота обратно вычисляется
по формуле
1Г2
6 -(Р > 1Г, + W2 ’
где t — избыток времени;
— время полного разворота;
Wj — путевая скорость при полёте от точки начала петли;
W2 — путевая скорость при полёте обратно.
386
С достаточной точностью можно также пользоваться упрощённой
формулой
------Tv------
Пример (рис. 288). По заданию, над ст. Хрущёве нужно быть в 17 ч. 10 м
К реке 1 Lua самолёт подошёл в 16 ч. 21 м.. имея 1F=315 км]час и V=350 км, час.
Ветер о = 70'', 17=50 км час. Определить избыток времени и погасить его
на петле.
Время разворота /р на 360° равно 2 минутам.
До ст. Хрущёво остаётся 147 км. При Ц7—315 кМ[Час самолёт прибудет
к станции через 28 минут, т. е. в 16 ч. 43 м. Следовательно, имеется избыток
времени: t = 17 ч. 10 м.— 16 ч. 43 м. = 27 мин.
Намечаем погасить этот избыток времени t иа петле вдоль грунтовой по-
роги Топчиково —Шацк (ЗПУ = 45°). Начала петли у Топчиково.
303
f ~ 19395 + 303 “ S’2 мин-
Подойдя к Топчиково в 16 ч. 30 м., пускаем секундомер и летим вдоль
дороги. Время разворота на курс 45’ равно примерно ЗОсек., поэтому разворот
обратно надо сделать тогда, когда секундомер отработает 8 мнн. 42 сек.
Вернувшись к точке начата петли у Топчиково, берём прежний курс. При
правши но выполненной петле секундомер к этому времени должен отработать
27 мив
§ 2. Маневрирование скоростями
Расчёт времени догона выполняется по формуле
5
"Т------------г
Рис. 289. Расчёт времени
догона на линейке
где S — расстояние до впереди идущего самолёта;
Д V— избыток скорости догоняющего самолёта.
Пример. S — 10 км, воздушная скорость своего самолёта Vt = 380 км!ч0,с,
воздушная скорость догоняемого самолёта противника V3 = 260 км/час. Найти
время догона t.
1. Определяем избыток скорости ДV =
= 380 — 260=120 км]час.
2. Вычисляем время догона /счётной ли-
нейкой.
Для этого треугольный индекс шкалы
.Время" совмещаем с делением, соответ-
ствующим ЛК, и против Sчитаем время догона
t = 5 мин. (рис. 289).
Чтобы определить время t догона при известном временном
интервале Л/, нужно найти дистанцию умножением At на V
впереди идущего самолёта, после чего решить задачу так же.
как предыдущую.
Пример, it — 5 мни., V — 250 км час, ДУ = 50 км/час.
5-250
t = = 25 мин.
Длина пути, пройденного за время догона, и место, где
будет настигнут догоняемый самолёт, определяются на основании
известного времени нагона и путевой скорости.
гз»
387
Пример. Впереди идущий самолёт имеет V = 280 км/час. Догоняющий са-
молёт может держать скорость V — 360 км/час. При этом скорость 1Г будет
равна 325 км/час. Дистанция между самолётами 85 км/час.
Определяем время догона счётной линейкой, для чего треугольный индекс
шкалы .Время" подводим к AV = 80 км/час и против дистанции читаем
время: 1 ч. 04 м.
За время догона (1 ч. 04 м.) при путевой скорости 325 км/час пройден-
ный путь будет равен 347 км. Следовательно, догон произойдёт в точке, от-
стоящей о/исходного пункта догона на 347 км.
Если необходимо догнать впереди идущее подразделение
в заданное время, то сначала определяют необходимую скорость
сближения. При известной дистанции скорость сближения опреде-
ляется по формуле
XV=y
На счётной линейке совмещаем S и t и против треугольного
индекса читаем А V.
Догон может быть выполнен пли путём увеличения на &V
скорости догоняющего, или путём уменьшения на А V скорости
догоняемого, или же путём соответствующего изменения скоро-
стей того и другого.
Следует запомнить, что при малой величине A V догон бывает
невозможен.
Задача на отставание решается так же, как и при догоне.
Разница заключается лишь в том, что если при догоне скорость
догоняющего подразделения увеличивается на A V, то при отста-
вании она уменьшается на величину A V.
Задача на смыкание решается так же, как и задача на догон.
Размыкание, или увеличение дистанции, выполняется таким же
порядком, нс сзади идущие подразделения должны не увеличить,
а уменьшить скорость на величину ДУ, или впереди идущее под-
разделение должно увеличить скорость на (ту же величину. При
отсутствии достаточного диапазона скоростей ведомые должны
соответственно уменьшить скорость, а ведущее подразделение
одновременно её увеличить.
Время сближения самолётов, летящих встречными курсами,
вычисляется на счётной линейке на основании воздушных скоро-
стей и дистанций между ними.
Пример. Самолёты, летящие на встречных курсах, имеют скорости 300 и
350 км/час. Дистанция между ними 65 км. Определить, через какое время
самолёты сблизятся.
1. Находим скорость сближения:
300 + 350 = 650 км/час.
2. Устанавливаем треугольный индекс счётной линейки па суммарную
скорость 650 км час и против расстояния 65 км читаем искомое время, рав-
ное 6 мин.
При малых дистанциях и больших скоростях время сближения
измеряется секундами. Все эти задачи наибольшее применение
388
встречают в частях истребительной авиации, где штурманы должны
быть Натренированы в решении их в уме. В частях бомбардировоч-
ной авиации эти задачи встречаются при сборе крупных соединений
§ 3. Расчёт элементов разворота
Радиус
бирака
Рис. 290. Вираж самолёта
Сила
/пямести
иентровежнал
сила
Элементами разворота являются: 1) угловая скорость самолёта
(измеряется в градусах в секунду и обозначается «»». 2) время раз-
ворота t на заданный угол; 3) время полного виража Т (разворота
на 360°); 4) радиус вира-
жа R в л; 5) воздушная
скорость самолёта V в
*1сек\ 6) угол крена са-
молёта р .
Элементы разворота
вычисляются на основа-
нии соображений, что са-
молёт, выполняющий раз-
ворот (вираж), находится
пол воздействием двух
сил: силы тяжести, рав-
ной произведению массы
in на ускорение g, и цен-
тробежной силы, равной
1/2
R
Рассматривая треугольник
следующую формулу для определения угла крена j3;
АВС (рис. 290), можно вывести
~r~
, R _ уз
° с АН nig Rg
Воздушный путь самолёта, выполняющего вираж, предста-
вляет собой правильный круг, поэтому можно считать, что длина
этого круга равна 2tzR или VT. Следовательно,
у-__ 2~R
Формулы угла крена и времени виража являются основными
формулами разворота, исходя из которых можно получить формулу
для расчёта остальных элементов разворота. Например
Если эту формулу представить в виде
R = ~ VT,
то, вычислив отношение равное 0.16, получим:
Я = 0,16 УЛ
где 0,16 — постоянная величина.
Угловая скорость выразится формулой
Отсюда
to
Заменив Т в формуле расчёта радиуса виража значением
получим:
D_ V- 360°
К— 2г.а ’
360
Так как величина 2п нам известна (6,28), то отношение = 57,
тогда можно формулу радиуса виража представить (в виде
Я = 57 — -
ш
где 57 — постоянная величина.
Угловую скорость соответственно можно определить по фор-
муле
0 = 57^
отсюда
R =57 — •
Преобразуем основную формулу расчёта угла крена
Зная, что g — 9,8 10. находим:
„ И3
tg (3 = 0,1 -
у
Но так как R = 57 то
57—
ш
Отсюда имеем:
tg? = 0,0018 Vw.
Значение воздушной скорости в зависимости от радиуса виража
и угловой скорости можно вычислить по формуле
1/=0,0175Я«.
390
Эта формула выведена на основании того, что R = 67 сле-
довательно.
И=^ь>, или V—gj Ra.
Отсюда
Рис. 291. Схема разворота
группы самолётов
V = 0,0175 Rg>.
На практике для определения элементов разворота пользуются
графиками, помещёнными в Авиационном штурманском справоч-
нике.
При выполнении расчёта элемен-
тов разворота группы самолётов сле-
дует учитывать, что разворот подраз-
деления не может быть выполнен с та-
ким же малым радиусом, как и раз-
ворот одиночного самолёта. Поэтому
штурман должен уметь рассчиты-
вать минимальный радиус разворота
своего подразделения во избежание
выбора неправильного радиуса раз-
ворота.
Величина минимального радиуса
разворота зависит от диапазона ско-
ростей, допускаемых для крайних са-
молётов строя, а также от ширины
фронта подразделения (рис. 291).
Введём обозначения:
Ушах к Кз — максимальная скорость
него самолёта,
Vmin и Ад — минимальная скорость и радиус разворота внут-
реннего самолёта,
V и R —средняя скорость и радиус разворота среднего
самолёта,
а — ширина фронта.
Угловые скорости разворота
этому можно написать
V
г-г7 max
0=57
или, сокращая на 57,
и радиус разворота внеш-
всех самолётов одинаковы, по-
г* *7 п
57"ТЛ“
I/ V .
_ max min
/?2 #1
На рис. 291 видно, что
Rt= R 4-
/?! =/?— jG.
Подставляя эти величины в предыдущее равенство, получим:
V V .
r max r min
R + -^-а /? — у fl
391
Выполнив преобразования, найдём:
jo = Vm,„R + V„„, jK,
ИЛИ
»(Г„- V^)=jo(V„„+ Vm,„).
Отсюда
p___ 1 ( ^max “Ь ^min)
V + V
Обозначив буквой К выражение 9 гр” у получаем:
- ' *max |'га1п/
R — K-a.
По этой формуле и вычисляют минимальный радиус разворота
ведущего (среднего) самолёта.
Пример. Vmax = 300кл/час, — 220 км/час, ширина фронта соедине-
ния а = 200 м. Найти минимальный радиус разворота ведущего.
1. Определяем величину К'.
300 + 220 520
К~ 2 (300-220) “ 160 " 3’25’
2. Находим искомый радиус:
R - 3,25-200 - 65) м.
На практике для определения минимального радиуса разворота
пользуются таблицей, помещённой в Авиационном штурманском
справочнике.
§ 4. Расчёт на перехват
По донесениям о времени и месте прохождения самолёта про-
тивника на карте, или на схеме прокладывают линию пути и опре-
деляют его пулевую скорость. На линии пути наносят исходное
место противника М к моменту своего вылета и вспомогательную
точку В — место противника через 30 минут после вылета само-
лёта-перехватчика (рис. 292). Затем соединяют исходный пункт А
самолётов-перехватчиков (истребителей) и исходное место против-
ника М прямой линией. Через вспомогательную точку В проводят
прямую, параллельную А.М. От своего ИПМ откладывают вектор
ветра АК за 30 минут (в ту сторону, куда дует ветер). Из конца
вектора ветра К радиусом, равным воздушной скорости самолётов
перехватчиков за 30 минут, засекают точку С, из которой откла-
дывают вспомогательную прямую через точку В Через получен-
ную засечкой точку С и ИПМ истребителей проводят прямую до
пересечения с линией пути противника. Полученная точка пересе-
чения Ц есть место встречи.
392
Курс на встречу определяет линия КЦ; направление её изме-
ряют транспортиром. Время полёта на перехват определяют по
длине пути МЦ и по путёвой скорости противника.
При незнании ветра для большей надёжности перехвата увели-
чивают принимаемое в расчёт значёние скорости противника ,на
10%, что перекроет возможную ошибку из-за неучёта ветра В
этом случае, если скорость противника окажется мёньше учтённой
при решении задачи, перехватывающие истребители прилетят к
месту встречи раньше противника. Следовательно, они имеют воз-
можность патрулировать в расчётном месте встречи до появления
противника или итти ему навстречу. В случае большого преиму-
щества в скорости истребителей по сравнению с самолётами про-
тивника для простоты решения задачи перехвата применяется спо-
соб нагона; в этом случае истребители берут курс на противника
без упреждения на скорость последнего. Задача решается с по-
мощью средств радионавигации.
§ 5. Расчёт на сопровождение
Организуя сопровождение, маршрут бомбардировщиков назна-
чают с расчётом пролёта мимо аэродрома истребителей при следо-
вании к цели. Для расчёта на сопровождение указывается маршрут
бомбардировщиков, профиль и скорость полёта и время появления
над аэродромом истребителей. Штурман сопровождающей истре-
бительной части прокладывает на карте маршрут сопровождения.
Затем определяет операционный остаток горючего во времени., для
чего из полного запаса горючего во времени вычитает время, не-
обходимое на взлёт, сбор, посадку, требуемый запас на ведение
воздушного боя и на непредвиденные задержки в пути. Зная one
рационный остаток горючего на сопровождение, линию пути бом-
393
бардировщиков и вектор ветра по маршруту, штурман определяет
допустимый радиус действия (сопровождения) своих истребителей.
Если встреча с бомбардировщиками происходит не над аэро-
дромом истребителей, а в другом заданном месте, то три опреде-
лении операционного остатка горючего из общего запаса вычита-
ется, кроме указанных величин, время, необходимое на полёт от
аэродрома до места встречи и обратно.
§ 6. Определение радиуса действия самолёта
Радиусом действия самолёта называется наибольшее расстоя-
ние, на которое .мож'ет отлететь самолёт от своей базы и вер-
нуться обратно, не пополняя горючее.
Расчёт радиуса действия выполняется на основании данных
о распределении ветров по маршруту. Штурман определяет опера-
дионный запас горючего в часах. Для этого из общего запаса го-
рючего вычитает необходимый резерв на
Рис. 293. Расчёт радиуса
действия самолёта с воз-
вращением на другую
базу
возможные уклонения в пути, изменение
ветра и время на полёт от аэродрома до
ИПМ и от КПМ до аэродрома.
После этого штурман рассчитывает
значения путевых скоростей при полёте к
цели (W,) и при полёте обратно (1У2) и
производит расчёт радиуса действия по
формуле
о_ IF.-IF, г
к ~ w{ + ил ’
где R — радиус действия в км;
Wi и — путевые скорости при полёте к
цели и обратно;
Т—операционный запас горючего
в часах.
Пример. IFj — 348 км/час, 1Г2=?1э км ч с.
Г = 4 часа. Определить радиус действия:
348-315
R = 348 + 315
-4 = 662,4 км.
Радиус действия можно определить
также при помощи специальных номограмм
или графиков.
В некоторых случаях радиус действия рассчитывают с возвра-
щением на другую базу.
Расчёт выполняют графическим способом иа карте или схеме.
Для расчёта необходимы такие же данные, как и в предыдущей
задаче.
Пример. Определить радиус действия при условии, что взлёт выпошяегся
с аэродрома А. а посадка — на аэродроме В (рис. 293). V — 320 км, час.
Т — 4 ч. 30 м. Ветер: Ь — 247°, U ~ 60 км/час. Истинный курс следования ил
первом этапе (аэродром взлёта — цель) равен 25”.
394
Из точки А проводим линию курса (25°). Из точки В откладываем в направ-
лении, противоположном направлению ветра (60°), путь ветра за время Т, рав-
ный 270 км.
На линии курса откладываем воздушный путь самолёта AD за 4 ч. 30 м ,
равный 1 440 км. Соединяем прямой точки С и D и делим её пополам; из
точки X восстанавливаем перпендикуляр. На пересечении его линией курса AD
получаем штилевую точку поворота Е.
Измеряя расстояние ЛЕ, получаем искомый радиус действия, равный
950 км.
§ 7. Сбор соединения
Рис. 294. Сбор соединения маневри-
рованием скоростями
Сбор соединения в общий строй может быгь выполнен манев-
рированием скоростями или на петле.
При сборе соединения маневрированием скоростями назначают
частные маршруты построения для предварительного сбора каждой
части и главный маршрут
для окончательного сбора
всего соединения (рис. 294).
Частные маршруты на-
мечают между частными
контрольными пунктами
(КП) и главным контроль-
ным пунктом (ГКП). Глав-
ный маршрут построения
ограничивают вначале глав-
ным контрольным пунктом
(ГКП) и в конце — исходным
пунктом маршрута (ИПМ).
В качестве ГКП может быть
выбран ИПМ.
Каждой части задают момент прибытия к ГКП. Этот момент
рассчитывают таким образом, чтобы между частями была незна-
чительная временная дистанция, равная по величине возможной
максимальной суммарной ошибке во времени прибытия к ГКП
предыдущей и последующей частей.
Каждая часть, начав взлёт с расчётом прибытия к ГКП в
заданное время, производит сбор на частном маршруте путём у!ве
личения скоростей ведомых подразделений. После пролёта ГКП
части смыкаются, увеличивая скорость до принятой в расчёт воз-
душной скорости.
Резкое маневрирование 'скоростями для погашения избытка
времени или покрытия его недостатка при следовании соединением
не рекомендуется.
Сбор на петле является наиболее простым и точным способом
сбора нескольких подраздел!ений, а также регулирования движения,
т. е. смыкания, размыкания и прибытия на цель в заданное время.
В Отечественной войне наибольшее применение получил) способ
сбора на петле. Сущность способа заключается в следующем
(рис. 295).
395
Для построения нескольких подразделений в общую
колонну назначается общий линейный ориентир, имеющий вначале
точечный ориентир, называемый контрольным пунктом (КП). Все
подразделения, независимо от дистанций между ними, последова-
тельно ложатся на курс вдоль линейного ориентира. Ведущий пер-
вого подразделения рассчитывает общее время пребывания на петле
и момент поворота обратно с расчётом, чтобы к моменту вторич-
ного прихода к КП последнее подразделение легло на курс вдоль
линейного ориентира (см. § 1 главы 11).
Рис. 295. Сбор на петле
Подразделения, следующие вдоль ориентира, увидев на своём
пути встречные подразделения, разворачиваются на обратный путь
и одновременно пристраиваются к встречному подразделению.
Общая продолжительность пребывания на петле равна времени
пролёта всех подразделений через КП плюс некоторый запас (10—
20°/о) на возможные запаздывания.
Стр.
ОГЛАВЛЕНИЕ
Введение............................................ •.................... 3
Глава первая. Основные понятия............................................. 5
§ 1. Форма и размеры Земли.......................................... 5
§ 2. Точки и линии на земном шаре................................... 6
§ 3. Географические координаты. Широта и долгота.................... 7
§ 4. Вращение Земли как средство счисления времени.................. 9
§ 5. Истинный горизонт, видимый горизонт и его дальность .... 12
| 6. Направление на земной поверхности............................. 14
§ 7. Единицы измерения расстояний....................• . . 14
§ 8. Ортодромия..................................................... 15
§ 9. Локсодромия.................................•................... 16
§ 10. Земной магнетизм.............................................. 18
Глава вторая. Краткие сведения по топографии и картам .... 26
§ 1. Планы и карты................................................. 26
§ 2. Понятие о координатах.......................................... 27
§ 3. Условные знаки................................................ 30
§ 4. Изображение рельефа на картах................................. 33
§ 5. Глазомерная съёмка............................................ 36
§ 6. Масштаб карты........•........................................ 37
§ 7. Определение масштаба карты..................................... 37
§ 8. Номенклатура карт............................................. 38
§ 9. Ориентирование на местности по карте и без карты...... 40
§ 10. Картографические проекции..................................... 40
§ 11. Краткие сведения о содержании карт ...........• . . . . 46
§ 12. Карты, применяемые для самолётовождения....................... 47
§ 13. Измерение путевых углов и расстояний на картах................ 49
§ 14. Измерение расстояний на картах в проекции Меркатора ... 50
§ 15. Определение широты и долготы места по карте.................... 50
§ 16. Прокладка ортодромии на карте.................................. 51
§ 17. Прокладка локсодромии на карте.......-......................... 52
§ 18. Кодирование карт............................................... 53
§ 19. Учёт и хранение карт.......................................... 54
§ 20. Аэролоции........................................................ 55
Глава третья. Аэронавигационные элементы и приборы 56
§ 1 Аэронавигационные элементы...................................... 56
§ 2. Курс самолёта............•.................................... 56
§ 3. Компас......................................................... 57
§ 4. Компас А-4..................................................... 58
§ 5. Компас КИ-11................................................... 59
§ 6. Перевод курсов.............................•................... 60
§ 7. Ошибки компаса................................................. 62
§ 8. Девиация...................................................... 65
§ 9. Определение и устранение девиации............................. 67
397
Стр.
§ 10. Определение девиации в полёте...........................
§11. Гироскоп................................................
§ 12. Указатель поворота.....................•................
§ 13. Гиромагнитный компас....................................
§ 14. Дистанционный компас...........................• . . . .
§ 15. Солнечный компас........................................
«§ 16 . Воздушная скорость самолёта...........................
§ 17. Указатель воздушной скорости............................
§ 18. Ошибки в определении воздушной скорости ..... • . . .
§ 19. Расчёт истинной воздушной скорости......................
§ 20. Проверка указателя скорости.............................
§ 21. Проверка указателя скорости в полёте.............• . . .
§ 22. Высота полёта............................................
. § 23. Высотомер...................•..........................
§ 24. Ошибки в определении высоты полёта......................
§ 25. Расчёт высоты полёта....................................
§ 26. Проверка высотомера.....................................
§ 27. Высотограф..............................................
§ 28. Самолётные часы.........................................
§ 29. Проверка часов..........................................
§ 30. Навигационный треугольник скоростей и его элементы . . . .
§ 31. Угол сноса..............................................
х § 32. Путевая скорость........................................
§ 33. Графическое решение навигационного треугольника скоростей
§ 34. Ветрочёт................................................
§ 35. Решение навигационного треугольника скоростей ветрочётом
§ 36. Ветрочёт-график для расчёта курса следования............
§ 37. Таблица для решения треугольника скоростей..............
§ 38. Решение навигационного треугольника счётной линейкой . . .
§ 39. Аэронавигационная счётная линейка.......................
§ 40. Решение навигационных задач комбинированным навигацион-
ным счётчиком (КНС)..........................................
§ 41. Решение навигационного треугольника в уме.............•
§ 42. Измерение угла сноса и путевой скорости.................
§ 43. Визир ОПБ-1м ...........................................
§ 44. Визир НВ-56.............................................
§ 45. Бортовой термометр......................................
§ 46. Картодержатель..........................................
§ 47. Автоштурман.............................................
74
76
78
80
83
85
87
88
30
93
95
97
99
100
102
106
107
ПО
112
113
120
122
124
126
129
131
132
133
133
146
147
150
156
160
161
161
Глава четвёртая. Аэронавигационная подготовка к полётам . . 163
§ 1. Два вида подготовки к полётам........................... 163
§ 2. Общая навигационная подготовка.......................... 163
§ 3. Навигационная подготовка полёта......................... 166
§ 4. Навигационный расчёт и план полёта...................... 171
Глава пятая. Визуальная ориентировка.............................. 180 (
§ 1. Общая и детальная ориентировка......................... 180 I
§ 2. Условия визуальной ориентировки........................ 180 I
§ 3. Ориентиры.............................................. 182 '
§ 4. Характеристика ориентиров при наблюдении ю средних высот
днём........................................................ 183
§ 5. Приёмы визуальной ориентировки........................ 186
Глава шестая. Самолётовождение по компасу........................ 189
§ 1. Сущность самолётовождения по компасу.................. 189
§ 2. Порядок самолётовождения по компасу.................... 190
§ 3. Выход на ИПМ......................................... 191
§ 4. Выход на линию пути................................... 192
§ 5. Контроль пути....................................... 197
398
Стр.
§ 6. Исправление пути.......................................................................................................... 204
§ 7. Подготовка навигационных данных и выход на цель............... 200
§ 8. Навигационные записи в полёте.................................. 207
§ 9. Штурманский глазомер и расчёт в уме............................ 208
§ 10. Потеря и восстановление ориентировки..................• 210
Глава седьмая Радионавигация.........................................................................................................218
§ 1. Предмет радионавигации.............................................................. 218
§ 2. Радиомаяки........................................................ 218
§ 3. Полёт на радиомаяк . . ,.......................................... 227
§ 4. Полёт от радиомаяка....................................................................................................... 230
§ 5. Восстановление ориентировки с помощью радиомаяков, рабо-
тающих пеленгом...................................-.......... 232
§ 6. Вывод самолёта на заданную линию пеленга радиомаяка .... 234
§ 7. Радиополукомпасы.......................• 235
§ 8. Описание некоторых систем радиополукомпасов и работа с ними 243
§ 9. Радиодевиация и её определение....................... 252
§ 10. Полёт на радиостанцию........................ 256
§ 11. Полёт от радиостанции........................ 261
§ 12. Определение позиционной линии самолёта...................... 264
§ 13. Определение расчётного места самолёта.............• - • 268
§ 14. Определение позиционной линии и расчётного места с помощью
РПК-10....................................................... 272
§ 15. Вывод самолёта на заданную линию равных азимутов....... 276
§ 16. Дальность действия радиополукомпасов ..................................................................................... 277
§ 17. Земные радиопеленгаторы...........•....................................................................................... 278
§ 18. Порядок взаимодействия экипажа самолёта с персоналом земного
радиопеленгатора............................................. 283
§ 19. Контроль пути н восстановление ориентировки по одному радио-
пеленгу . . ........................................... 283
§ 20. Определение расчётного места самолёта по пересечению двух
позиционных линий............................................ 285
§ 21. Полёт на земной радиопеленгатор................, . . . . 286
§ 22. Полёт от земного радиопеленгатора ........................................................................................ 289
§ 23. Точность радионавигации................................................................................................... 290
§ 24. Радиовысотомеры........................................................................................................... 293
§ 25. Земной локатор.......................................................................................................... 296
§ 26. Применение земного локатора для навигации самолёта .... 297
§ 27. Применение земного локатора для перехватасамолётов противника 301
§ 28. Самолётный локатор и его применение....................................................................................... 301
§ 29. Заключение..................................................................................................................102
Глава восьмая. Астрономическая ориентировка ......... 303-
§ 1. Сущность астрономической ориентировки . . . ............................................................................. 303
§ 2. Отвесная линия, или вертикаль . ... f. ........... 304
§ 3. Географическое место светила, зенитное расстояние, высота
и азимут...............•..................................... 304
§ 4. Круг равных высот светила........................................................ 307
§ 5. Определение координат географического места светила .... 308
§ 6. Построение кругов равных высот на глобусе.......................................... 310
§ 7. Построение сомнеровых линий на карте.................................................... 311
§ 8. Вычисление высоты и азимута светила. Часовой угол светила . 313
§ 9. Авиационный секстант АС.. 315
§ 10. Методика измерений авиационным секстантом АС.317
§ 11. Поправки для высот светил..................................................... 318
§ 12. Таблицы для расчёта часовых углов......................................................... 319
§ 13. Авиационный астрономический ежегодник................................................. 326
§ 14. Карта звёздного неба. Отыскание звёзд................................................. 327
§ 15. Карга для астрономической ориентировки.................................................................................... 331
399
Стр.
§ 16. Таблицы высот и азимутов.......•.................................... 331
§ 17. Таблицы для Солнца, Луны и планет................................... 332
§ 18. Таблицы для звёзд................................................... 336
§ 19. Выбор таблиц перед полётом.......................................... 338
§ 20. Особенности астрономической ориентировки в полёте в различ-
ное время суток.............................................. 340
§ 21. Порядок работы в полёте при астрономической ориентировке 341
§ 22. Использование результатов астрономической ориентировки
в полёте..................................................... 342
Глава девятая. Земное обеспечение самолётовождения.............................345
§ 1. Назначение службы ЗОС..................... 345
§ 2. Средства службы ЗОС................................................. 345
§ 3. Порядок размещения и характер работы средств ЗОС .... 348
§ 4. Порядок использования средств ЗОС......... 350
Глава десятая. Выполнение самолётовождения в особых условиях 351
§ 1. Особенности самолётовождения в малоориентирной местности 351
§ 2. Особенности самолётовождения над морем... 353
§ 3. Особенности самолётовождения в горах..... 355
§ 4. Самолётовождение на малых высотах................................... 357
§ 5. Самолётовождение на больших высотах....... 359
§ ’ 6. Самолётовождение в облаках и за облаками. 367
§ 7. Самолётовождение ночью.............................................. 373
Глава одиннадцатая. Тактические навигационные задачи . . . • 385
§ 1. Выход на цель в заданное время...........•.......................... 385
§ 2. Маневрирование скоростями........................................... 387
§ 3. Расчёт элементов разворота •........................................ 389
§ 4. Расчёт на перехват.................................................. 392
§ 5. Расчёт иа сопровождение............................................. 393
§ 6. Определение радиуса действия самолёта............................... 394
§ 7. Сбор соединения..................................................... 395
Редакторы: полковник Захаров М. В. и майор Берсон И. Б.
Технический редактор Кузьмин И. Ф. Корректор Клецкая Л. И.
Г'8-‘и|- Подписано к печати 15.07.4/ г. Объем 25 п. л.
25.9 уч.-изл. л.В 1 п. л. 48 000 тип, зн. Изт. № 39956. Зак. 1153.
Отпечатано с матриц во 2-й типо| рафии Военного Издательства МВС СССР
им. К. Е. Ворошилова