/





































Автор: Моргунов А.Н.
Теги: радиотехника военное оборудование радиоуправление системы самонаведения
Год: 1977
Похожие



Текст
Моргунов А.Н.
Системы самонаведения.
- Рязань: РРТИ, 1977. - 84 с.
Часть первая .
HFИНОШЫ УПРА чтения В CMCTUAU CAMOTAHF^MMH
Глава I. ОБЩАЯ- ХАРАКТЕРИСТИКА СИСТЕМ САМЮАНЙДОЯИЯ
§1. Самонаведение - способ радиоуправления.'
Под радиоуправлением понимается управление действием разно-
го рода объектов,осуществляемое С пом адью радиосредств,обеспе-
чивающих получение, передачу, переработку анфордаиии. Радиоуп-
равление может бьть использовано для изменения состояния и
свойств ЕОбык объектов,как правило, удаленных на значительные
расстояния от пункта управления.
При радиоуправлении летательным аппаратом ЛА главной
задачей является управление его движением. При этом ЛА рассмат-
ривается как твердое тело,которое находится в некотором прост-
ранственно-временном состоянии.характеризуемом вектором состоя-
ния Лс L- j •
При любом управлении требуется правде всего определить цель
управления. В широком смысле цель - это некоторое желаемое сос-
тоите объекта в будущем. С математической стороны цель можно
характеризовать вектором состояние ЛА в будущем ( Лц ).
Векторы исходного Ло и целевого Лц состояний ЛА можно
изобразить графически (рис.1) в обобщенной системе координат
Л. . Разность этих векторов 2"=ЛЧ_ЛО дает текущий вектор
рассогласования реального и требуе- '
мого (целевого) состояний ЛА.
Задача радиоуправления состоит
в уменьшении вектора рассогласова-
ния состояний 2" Д° значений,мень-
ших некоторой заданной величины £ .
В ждет кием случае условия достиже-
ния цели определены сведением Д
к нулю.
Чтобы решить поставленную задачу в системе радиоуправления,
необходимо:
I) получить информацию об обобщенных координатах цели (жела-
Рис.I. Вектора состояний,
2) иметь ингормапаю о векторе состояния ЛА - дс ;
3) переработать полученную информацию о Л и и Л - по задан-
Hossy усдотат * критерию) согласования состоящий,т.е,, выработать,
,-'5 “ _ —
аодример, текущее panппгляг.оняниа /\ -А.ц~Ла ;
4) выработать упраьляиэее воздействие на ЛА 4/х(21) (команду
управления),изменяющее состояние ЛА таким образом,чтобы свести
рассогласование состояний Л до значений точности управлении .
F ;
5) фиксировать достииение цели.
__ По месту получения информации о векторах состояний цели
Лц , ЛА Хо и месту формирования команду управления (JK
различают четыре основных способа радиоусресленля: командное
радиоуправление; радаотеленаведенпе; самонаведение; автоном-
ное радиоуправление.Если для достихсндл цели используется два
и более способов радиоуправления,то таксе управление называют
ксмблдировад/пл.
Самонаведение - это такой способ радиоуправления,при кото-
ром информация о пространственно-временных координатах цели
Ач .летательного аппарата ,а такие управлявшая команда
вырабатываются ня борту ЛА.при этом информация о дели
поступает извне. Схема циркуляции инфсшяции при самонаведении
ЛА на цель показана на рис.2.
Рис.2. Схема циркуляции информации при сямонявялении
ЛА на цель:
Ц - цель; ГВЦ - радиовизир цели; ЗУ - вычислитель-
ное устройстве; д - датчик вектора д ; АЗ - авто-
пилот; МН — метод наведения; ЛА - летяте-тьтг-гй ап-
парат
Информацию о получают при помощи радиовизира цели.
Информация о Ас Иыпабатнвается н₽радиотехническпыи дат-од-:--
мл,в частности,гироскопами. Часто сразу изменяется огла-
сительно Ас ,т.е. вырабатывается вектоп распбгдасоваадя
состояний .
3 зависимости от места нахехдензя источника энергии,исполь-
зуемой для самонаведения,различают активные,додузиттьиме и тяп-
сивные системы. Когда источник энергии входит в состав редзо-
- . - 6 - .
визира. цели,имеет место активное самонаведение. При располо-
жении источника анергии на пункте управления (носителе) само-
наведение назнпаетсн пл туя ути hw> w При использовании анергии
излучаемой самой целью — система самонаведения пассивна.
Преимущества активных и пассивных систем самонаведения
состоят в полной их автономии; пункт управления не ну-
жен в процессе полета JU.
Передатчик, устанавливаемый на пункте упри нла кия, давая
пс-луая тинную систему самонаведения,позволяет повысить дальность
действия системы,упростить бортовую яшгерятуру,
Как прнчило,пря всех видах самонаведения перед пуском ЛА
на пункте управления необходимо иметь начальные данные о па-
раметрах движения цели,которые используются для обеспечения
режима захвата цели бортовым радиовизирсм ЛА.
То обстоятельство,что в процессе полета ЛА отпадает необ-
ходимость в пункте упраьхения или его задача сводится только
к "подсвету" цели,является важным тактическим преимуществом
способа самонаведения,так как после пуска ЛА пункт управления
(носитель) может совершать самые произвольные маневры. Однако,
-с другой стсроош,поскольку параметры цели определяются на бор-
ту ЛА, то кожструктивао-техвологяческие решения бортовой аппара-
туры ЛА достаточно сложными,особенно при активном
саманаведевжи,когда на борт ставится радиопередающее устройство.
. Другой положительной особенностью систем самопаьедения
является повышение точности наведения по мере сближения ДА с
целью.
Самонаведение осуществляется в пределах прямой геометри-
ческой видимости между ЛА и целью,которая может быть как непод-
вижной, так и быстредькжудейся.
Состав аппаратуры система самонаведения зависят от того,
какие параметры траектории выбраны для выработки команды управ-
ленца. Во всех случаях радиотехнической системы самонаведения
в её состав входит радио визир цели,определяющий направление на
цель. Дополните ль»" используется селекция цели по дальности и
скорости. Принцип действия селектора зависит от характера из-
лучения .которое может быть импульсным и непрерывным. В случае
шдульспст- излучения селекция цели ведется по дальности с
помощью стробирующих импульсов, обрывающих приемник в моменты
гуэтодя отраженных от выбранной цели импульсов. При непрерыв-
ном излучении салекпяя цели ведется по скорости на основе доп-
-ч-
плеровского смещения частоты в отраженном от цели сигнала.
§2 . Метода наведения летательного аппарата
Наведение управляемого ЛА состоит в определенной организа-
ции его движения,обеспечивающей необходимую вероятность дости— - >.
нения цели. Условие достижения цели |Z | <1 б| описывает лишь
конечный результат управления ЛА,но не раскрывает процесс дос-
тлжения цели во времени. Так,при сближении вектор? состояния _
ЛА Ло с вектором цели Ач с точностью до £~ конец вектора Л,
может перемещаться в пространстве состояний {Д} . (рис.1) бес-
конечно большим числом путей,называемых траекториями ЛА. При
выборе траектории надо стремиться к обеспечению минимальной её •
кривизны,так как в этом случае уменьшается время наведения и
снижаются перегрузки на ЛА,что позволяет снизить стоимость дос-,
тпжения цели.
Движение ЛА определяется заданным законом управления. Закон
(алгоритм) управления задается в виде функциональной зависимос-
ти от состояний цели,ЛА и пункта управления (ПУ):
Ч > А® »• •
Еид Функции f(•••) определяется методом наведения.
Принято различать двухточечные метода наведения (первая точ-
ка - ЛА, вторая - цель) и трехтсчечные (первая точка - ПУ,вто-
рая - ЛА..третья - цель). Как двухточечные,так и трехточечные
метода наведсюи в свою очередь подразделяются на метода наве-
дения с упреждением и без упреждения.
Углем учреждения /} называется угол между радиусом век-
тором цели и вектором скорости
(рис.?). Угловое положение
радиуса вектора цели (линии визи-
рование) 7^ характеризуется уг-
лом 2г относительно опорной оси
.перемещающейся при <у чгжг-щпг
ЛА параллельно самой себе.
Ерж наведении с "упреждением для любого момента времени
угол унрехденад уз / 0,а при наведении без упреждения для
лз5б<зхз копыта времени уЗ 0.
Кетцда наведения без упреждения при двухточечно* наведе-
нии гз ~г:хелягтся на две группы: прямые к кривой погони.
15г тонн твезеяли с упреждением подрезделсттся на трн груп-
па: с постояниа* jrxat утгрежд/мтая, пярр тьчегпо сближения и
пропорционального наведения.
В системах сямоняведения используется двухточечные мето-
да и может применяться любой из указанных,но нелбол;ц.е рас-
пространение имеют: ’
- при медленных ж неподвижных целях - метод .кривой погони;
- при быстродвизущихся маневренных целях - метод параллель-
ного сближения.
Метод заведения по кривей погони характеризуется тем,что
вектор скорости ЛА непрерывно проходит через цель.т.е. уЗ =0.
Аналитические исследования законов дзижепия ЛА по кривой по-
гони [2,3,4] показывают,что если отношение скоростей %.=/7
находится в пределах f*n <2 ,то ЛА подходит к цели без по-
перечного ускорения, В случае п >2''aoKion ЛА к цели сопровож-
дается бесконечным возрастанием поперечного ускорения на ЛА. и
последний сходит с траектории. При наведении по кривой погони
основная задача радиотехнической системы измерения состоит в
определении угла л и управление ЛА так,чтобы обеспечить
ув » 0. У
Методом параллельного сближения называется такое движение
ЛА,при котором угловая скорость линии визирования равна нулву
т.е. = 2г * 0* Ерн этом'рииус вектор ЛА - цель пере-
мещается параллельно самому себе. Если движение пели равномерно
и прямолинейно и отношение ’скоростей -п постоянно,то по-
перечные ускорения,действуицие на ЛА,равны нулю. В слуша ма-
невра цели поперечные ускорения,испытываемые ЛА,не превышают
ускорений .действующих на дель. Аня литические исследования мето-
да параллельного сближения приведены в [2,3,4] . При наведе-
нии методом, параллельного сближения основная задача измеритель-
ной системы состоит в определении угловой скорости линии, визи-
рования цели !gr в управление ЛА так,чтобы обеспечить »=0.
§3 . Контур управления ,
Дкяжйнив ЛА при самонаведении осуществляется системой уп—
рамения,представдящей собой замкнутый контур, (рис.4),сос-
тсядагй жз следующих основных звеньев: I) кинематическое звено
(КЗ); 2)редкозвено (РЗ); 3) звено автрпилот-кЗрпус (АК);
4) динамическое звено (ДЗ).
- 9 -
Рис.4. Структурная схема контура управления:
Ц- цель; КЗ- кинематическое звено; РЗ- редисзвено; АК-
звено автопилот-корпус; ДЗ- динамическое звено; ИМ- по-
меха маневра цели; дч - вектор пространственно-времен-
ного получения цели; А, - вектор яристранственно-
ввеменнохо положения ДА; х - параметры,^измеряемые
радиовизиром; ик - комян?^ управления; игл - вектор
поперечного ускорения; - ошибка управления
Кинематическое звено устанавливает связь между перемещени-
ями цели и ДА Лр* и параметрами движения х .измеряе-
мыми радиотехническими устройствами системы ущ« рдения, Реаль-
но этого звена как устройства нет. Оно описывает пространствен-
но-временные связи и следует из клдиматиги и геометрии движения
Радаозвено эквивалентно отображает работу всей радиоаппара-
туры, входящей в систему управления,и связывает измеряемые пара-
метры движения х с командными ситнягами .
Звено автопилот-корпус уставаялтгчяят связь между командным
сигналом ук и возн/каэдим от него поперечным ускорением >
действулгдам на ДА.
Динамическое звено характеризует связь между пространствен-
ным положением ДА Л* и поперечным ускорением ,под дей-
ствием которого и изменяется пространственное положение JA.
Динамическое звено так же,как и кинематическое, не существует ,
в виде реального устройства,а устанавливается из динамики ж
геометрии движения.
Главными задачами исследования контура системы управления
являются: I) нахождение услотий устойчивого- управления;
2) анализ ошибок управления.
Ошибки управления можно находить для любой переменной,но
основной интерес представляют параметры рассогласования ,харак-
теризупдие отклонения траектории JLA от требуемой. Поэтому вы-
хедщми косрдиЕнтгми контура управления следует, считац пара-
метрн на вмхеде гунямическлтс звена.
Ошибки управления g ~ Лд- Х0.тР возникают из-за возмуще-'
нжй.дейстзуьсих на контур,и несоответствия структуру контура
условиям идеального управления. Поэтому, кроме основных звень-
ев на структурной схеме контура управления,показаны эквивалент-
ные помехи, обусловленные тремя оснсьн’с.ш факторами: движением
цели - помеха маневра (ПМ); оргаяизопакдали и естественными радио-
помехами (РП); возмущениями в звене автопилот-корпус (ветро-
вые нагрузки,перекос тяги двигателей ЛА и т.п.) - помехи движе-
ния (ЕД). Все возмущения,действущие на контур управления,
являются случайными процессами и,следовательно,основные метода
исследования контура системы радиоуправления, должны основывать-
ся на методах статистической динамики [5-II] .
§4. Источники ошибок в системах самонаведения
Оценка точности систем самонаведения связана с их дальностью
действия. Ниже будет показано,что существует минимально допус-
тимая дальность самонаведения,при которой начальная ошибка уп-
реждения не может быть выправлена вследствие ограниченной ма-
невренности ЛА,и пролах /7 резко возрастает (рис.5). С другой-
стороны, при определении мексдалльной
дальности действия систем самонаведения
нужно задавать надежность захвата цели,
так как срыв слежения также приводит-к
возрастании промаха.
Предварительные расчеты точности и
дальности действия систем самонаведе-
ния проводятся раздельно в предположе-
нии,что дальность действия системы превышает критическое зна-
чение ,а надежность захвата пели достаточно высока.
Основными источниками ошибок в системах самонаведения явля-
ются [3,12] : - начальная ослбка упреждения; - маневр цели
(наличие ускорения цели ); - естественные помехи; - орга-
низованные помехи; - мертвая зона управления.
Крсие того, точность систем самонаведения зависит от перек-
рестных связей между каналами управления и искажаадего дейст-
вия обтекателя носовой части ZA [з] .
Влияние начальной ошибки упреждения детально рассматривает-
ся ниже. Здесь только отметим,что минимальная величина промаха,
Рис.5 Ошибка упрезде-
ния Дл и промах /7
- II - -
обусловленная ошибкой упреждения г'
Л/^'Ч''3 й/г^; ’ (1)
где d/З - ошибка уцрекдеют; V,7 - линейная скорость ДА;
'^п./г.аА максимальное поперачцое ускорвние.выдерхиваимое ЛА.
Максимальное значение промаха, обусловливаемого маневром
цели,оценивается величиной
Иц* Т'
(2)
где - ускорение,развиваемое целью; Т - время запаздыва-
ния в системе управления,
К естествер~.чч помехам относятся:внутренние шумы радиопри-
сдаш устройств; х.итпт^’Д’ше,угловые и поляризационные флхи-
тусин’ с:ггч.аю2, страшенного от цели; отражения от подстилающей -
ПОвер;зссга8иаппимер земли; вибрации аппаратуры.
0уганизо’5яэдые помехи могут быть самыми разнообразными,
;<ак-+‘л; лопнне цели; металилзироваяные "облака”; лоиные радио-
сигналы; протиголокациоянне покрытия и т.п.
Под мертвой зоной управления понимается то расстояние /*
ыеяду ЛА и целью.иачяная с которого система управления прокип-
ели «жабка в угле упреждения d/j ,то
промах из-за наличия иортзол зоны
И , (з)
5 V/*<?**26 cos (сСуЗ)
где 6j^/? - отношение скоростей
цели и ЛА; уз - угол упреждения;
схй - угол ухода, цели. Указанные угло-
вые величины хгпедены на рис.6.
’'Мертвая зона управления может достигать 75 - 150 м.
§5. Угловые,амплитудные и пслярззацаоннне шумы
Сигнал на выходе радиовизира системы самонаведения определен
интерференцией большого числа элементарных сигналов,отраженных
от разлгчЕЫх участков (точек) корпуса цели.. В процессе наведенья
взалмиое дслозенге цели и ЛА непрерл-по гаменяется.з частности,
имеют место колебания корпусов ЛА и цели. Эти колебания носят
<mj"4a2"u3 характер и являются причинами фтгтуаций призпыаемого
от цели сигнала. Когда линейные размеры цели малы по сревнених
с росстаиием между антеннс-й головки самсназедения ЛА и целил,
фдхиту ют сигнала модно резне "ить на угдов«е.
цает фуда^'онпрсвать.
Рлс.б. Вектср'ше и
угловнз величины
- 12 -
амплитудные и поляризационные. шумы.
Под угловым щумом понимаются флюктуации направления прихода
отраженного сигнала, обус-лотогенные случайнХгЭ смещениями эффек-
тивного центра отравения пели. Физическая сущность углового
щума может быть понята
‘ зц
Франт отро^2^~~~.
женим волны'
Рис.7.Схема образова-
ния
углового щума
из рассмотрения рис.7,на котором обоз-
начено: О1- центр тяжести цели; 0 -
центр апертуры приемной антенны;
ЭЦ - эффективный кажущийся центр отра-
жения цели; - угловое положение
фронта отраженного сигнала; - нап-
равление прихода отраженного сигнала.
Таким образом,угловой щум - это
флюктуации угла .
Спектральная плотность угловых шу-
мов в области НИ31ГИХ частот оценивается зависимостью
/✓ \2
£
где £ - линейный размер цели; - расстояние кегду цель»
и ЛА; /Гр - коэффициент пропорциональности ,определяемый
типом цели и ракурсом излученияА '
Если в качестве направления на цель рассматривать нс нап-
равление 0^-0, а направление 0-ЭЦ,то'угол £ (см.рис.З) бу-
дет флюктуировать под действием угловых шумов. Таким образом,
на структурных схемах замкнутых контуров управления систем
самонаведения угловые шумы суммируются с углом ,
который является одной из выходных координат кинематических
жди дикгугичесхих звеньев. ' __
Амплитудный щум - это флштуации уровня напряженности E-(t)
результирующего поля в точке приема сигнала. Амплитудные щума
характеризуются коэффициентом помеховой модуляции,представля-
щим отношение случайного приращения Д U(t) уровня принимаемо-
го сигнала к его среднему значению (J„ :
/МУ- (5>
Вид спектральной плотности случайного процесса m^t) пока-
зан на рис.8,а математическая запись его такова [15] :
с«„=е/г—-———1
где 6^л -мощность щупов; CD0 - частота максимугла спектраль-
ной плотности: осГ -эт^ктизяая полоса круговых частот, заяи-
2
- 13 - . •
маемая процессом Тклосче значения величин 67лр , о< ,
£&)п}в ЛЧ зависят от типа цели.
/ * \ Злияние амплитудных цумов зависит ст
f । \ ?'з:эдз пеленгации сигнала. Так при моно-
I \ плульснсм пеленгования [13] ампхитуд-
г**~^_____I яле путли практического вятялля на сис-
тему самонаведения не оказывают. Для
'Гмиров со схазжруадгй антепаоЗ
шумов ‘ (I-iJ амплитудной дум опасен. Рас-
смотрим,^” в эгсч • <г вводится процесс(г/в контур
уцравлвнг^•
У радгозив./а со >- у чей антенной аншпттуджгй шум про-
является з канале с:тн -л •- . бдя в форде флектуаглй среднего
з .аченп-т эяпдатудд.д на . :гч-а детектор подается сигнал
= ?--Ъ '(?)
где ,77Л,„ -KOO-icr а’.ГЛИТу;Г1СЯ МОДу.ТЕЦИИ.ОбуСЗОГ-
.тгвае’пгл зтклс” таем цо.г: ~г разносигнального направления на
угол /2 с ( 4- -углегоя ’руга.гптельдостъ равнссигиальноЗ
зоны); £2,^ - -уутооа: яготота сканирования (вращения) диаг-
ргеллн наяраоле1П£эстл опте."! радаовизира; -пеленг цели.
Опор.-да нагоглогек ’сзсвого детектора по каналам курса и
TSHTcLSS. Г.ГО /3—ТС «
ц^.г6'»с-'“~-=-^; u^^sin&ct.
После qgept-CTn цереьао-пезия (^.осущест-
вляемой фазовым детектором,ла выходе фазового детектора
(берем канал курса) получаем: _ •
и^д.ц=К3 Uo U'P С^'5 ^08 ^тп (t)cosQCK t +
*<7; 5 /7?., (t) mfiMcos ^0f5mn(t)mAM cos(2Qwt^^)t
Заметим,что последнее слагаемое в полученном вырахеяиз
для u(t)g ^ мозно отбросить так как оно не погадает в полосу
прозрачности фильтра фазового детектора; предпоследним сла-
гаемым такие можно пренебречь,посколькуGmn(2$i.Cl^<Cifl>n^iCi^
0,5а^( • Таким образом, сохраняются только перше три
_ - 14 -
слагаемые и
ccs&„ t -
*m„(t)Ae^K„[hm„(tj\a&^~n’Mc<>sS.cltt. (в)
Из полученной зависимости следует,что амплитудный щум,во-
первых, приводит к аддитивной помехе - .
> (9)
действующей в контуре управления на выходе радиозвена.и, во-
вторых, оказывает параметрическое воздействие на радиозвено,
изменяя коэффициент передачи безынерционной его части по слу-
чайному закону тп (t) > так что радиозвено контура управления
становится нестационарным .Структура радиозвена с учетом дейст-
Рас. 10. Формирование
спектра процесса
вие.9. Радиозвено с учетом действия амплитудных шумов
Б соответствии с зависимостью (9) кавдая компанента спект-
ра процесса частотой ДУ дает в спектре процесса
U-(t)a.n суммарную и разностную |ги-,£СА| состав-
ляющие. Существенное значение имеют лишь разностные компоненты
в пределах полосы пропускания контура управления сис-
темы самонаведения. Они образуются участками спектра процесса
mn(t) ,лекащпми в районе частота
сканирования (рис. 10). Из-рис. 10 и зави-
симости (9) видно,что спектральная
плотность процесса u(t)cin на нулевой
частоте выражается через спектраль-
ную плотность процесса ftin (tj так:
СЮ
Отсюда заключаем,что частоту ска-
нирования диаграммы направленности
антенны целесообразно выбирать существенно выше час-
тота,соответствухссй коде спектральной плотности G^ (со) •
t - 15 -
При увеличении максимум функции б? W/? (^удаляется от
нулевых частот и аддитивное ’лмние ам.шкту,пдого дума на точ-
ность самонаведения ЛА уменьшается. Снизить аддитивное влия-
ние амплитудных шумов можно и за счет увеличения угловой чув-
ствительности у/ равносигнальной зоны,т.е. за счет сужения
диаграммы направленности антенны.
Поляризаплснный шутл - это флхктуации поляризации принимае-
мой ст цели радиоволны. При .наличии поляризацио-^-л.: флхжтуа-
ций напряжение на выходе антенны радаовизира
'a(t)=P(t)Um(t)cos[cPet -ад] , (II)
где P(tj - случайная функция,характеризующая флюктуация
уровня принимаемого сигнала за счет поляризационного шума.
Поляризационный шум эквивалентен амплитудным шумам. Вводя
коэх'ициент паразитной амплитудной модуляции сигнала за счет
поляризационных зумов
/77
годно оценить их влияние на контур управления по методике,
изложенной при оценке влияния амплитудных пулов.
Основное различие функций/7? (7^ и mn(t) состоит в тем,
что m(tjp является значительно более медленной. Зто позво-
ляет сутестт-сипо ослабить влияние поляризационных флюктуаций
с помешьт систем АРУ,а также путем использования антенн с
круговой поляризацией.
§5. Потенциальная точность радаовизиров
В основу построения радаозизиров систем самонаведения поло-
жены принципы сканирования н монопмпульсногс пеленгования.
По переработке входного сигнала радиовизирн систем самона-
ведения относятся к многокаиаличгм измерител системам
управления. Их потенциальная точность оценивается по спектраль-
ной плотности дума .за выходе оптимального дискримина-
тора, т.е. на входе инерционной части радаозвена контура управ-
ления. Определяется плотность следуидЙ! обрезсы .
Если число измерительных кяналсв радионязира /? я сигна-
.чы на входах U,(t).ис^).;
- 16 - X
где € - измеряемый параметр czrwAi±-,uJ.f(t),..»,LUn(t) - шумы
в соответствующих кяналаг, то_____________
_L = у ± /F^c^ZlS (13)
^.0 де J Z ’ к
где Na; спектрс.’шше плотности нормальных белых
^мое, эквивалентных щукам Ш-(2) ;< > - индекс усреднения
по множеству параметра б ; ----- - нцдекс усреднения по вре-
мени.
57. Радаовизжр как звено контура управления.
Его реальная точность
В системах самонаведения радиовизярсм цели определяется
структура радиозвена в замкнутом контуре управления.
Структурным показателем редиозвена является взаимная связь
измеряемого параметра рассогласования во взаимном положении ЛА
и цели с выходным напряжением радзовизира. Определдглми фак-
торами в этой взаимосвязи являются работа детекторов команд-
ных сигналов редиозизира при наличии помех и способ формирова-
ния спорных сигналов. Структура среднего значения напряжения
на выходе детектора ксыендного-сигнала и определяет эквива-
лент редиовизира в замкнутом контуре управления, т.е, структу-
ру радиозвена.
Уровень энергетического спектра фпктуаций в области низких
частот на вкхсде детектора командного сигнала определяет реаль-
ную точность редиовизира.
Во многих радиовизирах в качестве детекторов командного
сигнала используются фазовые детекторы. Среднее значение нап-
ряжения на янтода фазового детектора,которое в данном случае
и будет определять радаовкзир как звено контуре /траик-ния,
находится [б] по формуле
хоэффициент'передачи фазового детектора;
RfafyuoU Г *яая>квая спектральная плотность между входными
сигкахямж разового детектора (опореыы сигналом и сигналом
омжбшО.сжеденная в область нижних частот с параметрической
частоты Ci)ff .
Флхктуацил процесса на ваходе фазового детектора характеря-
ь- * 2 -*00 X***
(15)
где &(а))исо , G((J)uc ~ спектре сигнала ошибки и опоряого
сигнала на пледах фазового детектора,сиевяные в область ниж-
них частот с параметрической частоты Сйо •
Для определ яия спектра сигнала саябкж, спектра опорного
сигнала и взазмнего спектра между указанными сигналами необ-
ходимо. провести анализ преобразований полезных сигналов и
(16)
£1б] » При активном снмсяаведенжи дальность действия све-
тя» упраадеиия . , t-------у 1 1
р.: (4л-)3
3~п- мсщность генератора бортового передатчика
аа>тах
Рд — чувствительность приемника; Л — дайна излучаемых
радиоволн. . ,
ДЛВНН ВСллаС t
t -эффективная пло-
где
от 0,3 до 30000
- 18 -
управления оценивается зависимостью
(Pan Bkh'S$<p Drn Л2
Я *' (4^
РГн - мощность передатчика станции подсвета цели;
- козффицаент усиления перндяттуй антенны станции
подсвета паи; Ъ/-.п ~ коэффициент усиления приемной антен-
ны радиовизира цели; Г*ди^ — расстояние от ЛА, осуществляющего
самонаведение, до цели; - расстояние от станции подсвета
до цели.
Если самонаведение начинается с момента старта ЛА,то
&ои, “ гоц “ *4 ЛА так*'
^^Р-,мРг.и^э<Р^г,л А2
Ро(4^}3
Сопоставляя соотношения (18) и (14),имеем
(Rot4'Q'Ul)majt
(17)
где
Df.H
ац.ПА max =
(16)
Рг.нРг,н
(19)
г оа,.ПА max 1/
Роц. A max г
Практически всегда РГ1) > РГ.Я' и ^г.п ^^г.п • так что
дальность действия при п’олуактиьном самонаведении больше,
чем при активном, если самонаведение начинается сразу после
старта ЛА. Б случае,когда самснллсдение ЛА осуществляется
спустя некоторое время после его старта,согласно соотношениям
(14> И (1?)/ _(Р^‘Го^ах
Рг.А^Г.Л ^onflmax
Теперь при выполнении самонаведения ЛА с минимально допус-
тимого расстостя,когда ПА - ГОцА = Q П1<п .получаем
Рг.^г., _ Р<Ик. J
Рс.А^Г.А Pg min
Таким обрарсы.полуактиваое самонаведение требует значи-
тельно богиней мощности излучения.
Используя урлзг-ния радиолокации для расчета дальности
действия систем саггонаведения,необходимо учитывать мощность
цуыа прил’ьгитгр-ч бортового радиовизира, цели е коэффициент ис-
пользезанкя равноспгЕальной зоны по запряхеяию.
(20)
(21)
- 19 - .
Мощность собственных щумов приемных устройств,какиз извест-
но £l8J «определяется зависимостью
P^K-T0n3N^ , - (22)
где /7д - эффективная щумовая полоса ВЧ тракта,предшествую-
щего детектору; - коэффициент шума приемника; КТа =
4 х 10~21 Вт/Гц - ве-ЕГмиа постоянная.
Ориентировочно считают [ 14^ ,что Р» /р^ - 54-10.
Таким образом,оценка для реальной чувствительности прием-
ников радиовизиров систем самонаведения '
P0-(2^W'z°n3NM • (23)
Значения коэффициента щума приемников зависят от длины вол-
ны. При практических расчетах мокно пользоваться следу 1дсли
'данными р7] :
Л , см 2-6 10-40 ICC и более
10-20 7 - 14 5-10
Зависимость (23) применима как при импульсном, так и при
непрерывном излучении. В нервам случае она определяет пиковую,
а во втором - среднюю мощность входного сигнала.
В случаях,когда отношение сигнал/щум устанавливается из
анализа точности пеленгации цели, реальная чувствительность
приемника _ _ „ , / Р \
Р0 = КТ0 } • (24)
Затухание радиоволн в атмосфере учитывается соответствую-
щими коэффициентами [4] . Так, при активном самонаведении
коэффициент затухания
А . е*р (- О, <15^- q ; (25)
при полуактивнсм самонаведении коэффициент аятутян?^
Гпа = е*Р [~ (Роц тал Г*оц л?ох • <26
Здесь СР - коэффициент поглощения энергии трассой на
единицу её длины,зависящий от длинн волны и условий распро-
странения. Числовые значения для о2~ приводятся,например,
в работах [l9, 20j , -
Входящие в зависимости (14) и (17) коэффлциеятя усиления
- 20 -
приемно-передапцих антенн спредедены относительно максимума
зоне они
зоны (РЗ)
диаграммы направленности (рис.II). На равносигнальной
будут нахе. Коэффициент использования ря^иссп^я^льной
г F'M
f” F(0) F(O[ =
F(V>) г < Г‘
' _ ±_. -PW
(27)
Bic.II. К определение где и. - угловая чувствитель-
де^дента использо- но„ь зоны.
С учетом коэффициентов затухании
и использования раинесигнальной зоны имеем:
- для активных систем самонаведения
>♦ ' ^ктах . (28)
. *
- для посуактивпых систем самонаведения
/ П 1 _ Ги, тах'^Щ гчаи (29)
yOUt'^e^Jrncn и* К .И ’
fa* ' Крз.» К pl. в
где тах^ max - заданные максимальные расстояния между
целью и ЛА, целью и станцией подсвета; Крз.н » Крз.л -
коэффициенты использования раьЕосигяальной зоны станции подсве-
та и радаовизира ЛА. „ -
Глава 0. СИСТЕМЫ CAMCHAJ
<Я11»
Ж НА ШОПГДКЗНУГ ЦЕЛЬ
§1. Головки самонаведения
Пусть центр массы ЛА находится в точке С,центр массы цеди
расположен в точке Ц и цель неподвижна (рис. 12). Направление
& ЛА - цель (линта визирования) характе-
" х , - ризуется радиусом-вектором
I---(к—УГОЛ медду вектором скорости Лк.
z и линией визирования .обознача-
х емый через уз .называется углом
Рио.12. Векторная ₽ упреждения. Продольная ось корпуса
диятрймма к Lk—J(c» Угол между линией визи-
рования ж продольной осью корпуса ЛА - ес ; угол между про-
дольной осью корпуса ЛА и вектором скорости ЛА, обозначенный
через о^с » 'вазяз&атся. утлом скольжения.
Ня ведение ЛА на малоподвижную цель можно осуществить, во-
перзах, непрернвно направлял на цель продельную ось корпуса
." 21 "
ЛА.т.е. выполняя условие
(зо)
во-вторых, непрерывно направляя на цель вектор скорости ЛА,
т.е. выполняя условие
Jb-C • (3D
Как в первом,так и во втором случаях головка самонаведения,
установленная на ЛА, должна:
а) измерить утлы €с или уЗ г »
б) выработать командные сигналы, упразляидие рулями,которые
будут изменять пространственное положение ЛА таким образом,
чтобы выполнялись условия (30) или (31).
Система,раб танга;; по условию (30).называется системой
прямого самонаведения. Головка при прямом самонаведении (рис.
13) состоит из антенны 1; радиовизира цели 2,закрепленного
Рис.13. Структурная схема
головки прямого самонаведения
на корпусе ЛА; автопилота 3.
Угод <SC измеряется радиови-
зиром цели (радиотехническая
угломерная система). С выхо-
да радиовизира подучаем нап-
ряжение Us • - аналог угла
$с .которое и является
командным сигналом,поступявдим на автопилот. Автопилот управ-
ляет рулями,сводя £с к нулю.
Отметим, что наиболее просто измерять радиотехническими
устройствами" угол . Однако прямое самонаведение практи-
чески используется редко из-за большой кривизны кинематичес-
кой траектории ЛА. ' * *
Система,работаш-я по условию (31) .называется системой
флюгерного наведения. Здесь для измерения угла упреждения
уЗ, кроьв раддовиэира цели,измеряющего .используется флю-
гер,который измеряет угол скольжения с^с .после чего опре-
деляется угол упреждения 1 ‘как разность о^с~€с . .
В простейшем случае флюгер представляет собой пластину,
закрепленную на корпусе ЛА в точке 0 (рис. 14). Под действием
воздушного потока эта пластина зани-
мает положение,ссыпадапзее с направ-
лением потока. Воздушный потек,созда-
ваемый ЛА при его движении, совпадает
с направлением вектора скорости .
Поэтому флюгер,установленный на корпусе ЛА,укажет направление
зектора скорости относительно корпу :а,т.е.позволит измерить
угол о^с .
В зависимости от того,как .вводится угол скольжения в ко-
мандный сигнал, различают головки самонаведения с измеритель-
ным или силовым флюгером. Состав аппаратуры голсвк** самонаве-
дения с измерительным флюгером (рис.15) следуъ.“пиА: 1 -днтен-
наяра.<довизира дети* 2 - редиовизир, закрепленный на корпусе
ЛА; 3 - автопилот; 4 - фл терний датчик угла скольжения.
Рис. 15. Структурная схема головки самонаведения
с измерительным флюгером
Флюгерный датчик' 4 вырабатывает напряжение UoCc , пропор-
циональное углу с£с .которое вычитается (суммируется) из
напряжения U6c , выдаваемого радаовизиро! цели и пропорцио-
нального углу . В результате вырабатывается управляющий
ксмандный сигнал Ua ,пропорциональный углу :
Командное напряжение U* Up отрабатывается авто-
пилотом, который через рули сводит угол к нулю.
Недостаток головки с измерительным флюгером состоит в том,
что ось антенны визира оказывается отклоненной от направле-
ния на цель. А это требует расширения диаграммы направленнос-
ти антенны. В результате уменьшаются угловая чувствительность
головки и дальность действия системы. От указанного недостат-
ка свободна система с силовым флюгером.
Состав аппаратуры головки самонаведения с силовым флюге-
ром (рис. 16) следутцдй: 4 - антенна радиовизира цели; 2 -
радиовизир цели; 3 - автопилот; 4 - флюгерный датчик; 5 -
. подкжхнля платформа; 6 — датчик углового положения платформы;
7 — силовой следящий привод платформы.
Особенность головки самонаведения с силовым флюгером сос-
тоит в та t,что радиовизир цели влесте с антенной укреплен не
на корпусе JLA.a на специальной платформе 5,которая поворачи-
вается относ. тель\о корпуса ЛА. При этом радиовизир цели
\К рулям
Рис. 16. Структурная схёьл головки самонаведения *
с силовым фгггерсы
измеряет не угол £с ,а угол £л .определякщий направление
на цель относительно платформы,положение которой характери-
зуется осью ХА . Угол поворота платформ относительно кор-
пуса ЛА обозначим через .так что я . Напря-
жение U£ = U* .снимаемое с радиовизира цеди,и является
коиааДШ₽ сигналом для автопилота. Поворот платформ относитель-
но корпуса ЛА (угол ) измеряется датчиком.6,с нытодя
которого напряжение сравнивается с напряжением фогерно-
го датчика . Разностью этих напряжений
управляется силовой привод платформ 7,поворачиваний плат-
форму тадам образом,чтобы м* » О. т.е. О^( « .
Следовательно .при идеальной работе флюгервото жэмер.гада и
следл^его 'сзлсзого привада платформа ось ХА будет совпа-
дать с вектором скорости ЛА,и измеряема! раджоввзцрсы
угол SA • .соотватстведзо ' U^A » Ujt Z/<
Так как азтоцилот 3 отрабатывает командный сигнал U* »
сводя угол к нуля, то ось антеины радио визира в процессе
наведения оказывается все время направленной на цель. Это и
позволяет с/зл гь диатрем:^ папраьденности антенны.чтр увели-
чивает точность а дальность действия системы самонаведения. ,
§2. Гддиоззено головок самонаведения
Антенна радисвизира цели в совокупности с самим ^адаовизи-
рш образует радиозвено головки самоааведенгя. Егодзой величи-
ной радпозвеза является угол вазировааия пели .котернй
в общем случае представляет угол ьэзду линией ZA - п=дз,л :св_
•датформн ХА .на которой установлен радаовиззр. При идзаль-
- 24 -
ной работе флюгерно-силовой системы управления платфорлой
£А = уЗ ' . • Когда платформа неподвижна относительно кор-
пуса ЛА, то £А = 6с . Выходной величиной радиовизира
является напряжение,используемое для формирования командного
сигнала,поступающего на автопилот.
В системах самонаведения на малоподвижную цель различают
три вида радиозвеньев: - разомкнутое; - с компенсацией сигна-
ла; - со следящей антенной.
В разомкнутом радиозвене антенна радиовизира неподвижна
относительно платформы. Структура радиозвена (рис.17) включает
в себя два безынерционных элемента с коэффициентами передач
и Л/, и инерционный элемент с коэффициентом передачи
К(Р)? • ~
Рис .17. Структурная схема разомкнутого радиозвена
Элемент с коэффициентом передачи характеризует преоб-
разование геометрического углового параметра СА в его элек-
трический аналог хА и определяется антенной системой радио-
визира и методом пеленгования цели. Элемент с коэффициентом
передачи Кп характеризует безынерционную часть радиовизира,
которая в общем случае может быть нелинейной и нестационарной.
Инерционная часть радиовизира определена элементом с коэффи-
циентом передачи K(p)q> . Передаточная функция разомкнутого
радиоэвепа (в предположении,что безынерционная часть радио-
• звена линейна) ' '
<Ррз(Р)~^&-КП'К(Р^ ’ (32)
Радиозвено с компенсацией сигнала (рис.К) характеризуется
тем,что антенна радиовизира неподвижна относительно платформы,
но на вход безынерционной части {едиозвена поступает" не элек-
трический аналог ХА =угла ёА ,а разность Дх =
~ , где XCff - компенсирующая величина,снимаемая
с преобразователя,связанного с силовым пржодом отрабатываю-
щим сигнал (J^x с выхода инерционной части радисвизира.
Еыходной сигнал (Jpi радиозвена формируется с помощью допол-
нительной электромеханической системы съема данных,имеющей
коэффициент передачи Ф(р)сд *
- 25 -
(33)
К
*4
Рис.18. Структурная схема радиовизира с компенсацией
сигнала
Передаточная функция радиозвена с исчпенсадией сигнала при
линейности безынерционно;: части
и , «пК(р)<р*(Р)сп
^3(^-^(P)cd 1^Kn4<^v(p)^p)cn
Ездпозвено со следящей антенной характеризуется тем,что
антенна радаовизира поворачивается относительно платрорыы таким
образом,чтобы раваосигяальная зона совпадала с направлением па
цель. Если (рис. 19) /t. - продольная ось корпуса ЛА; Хл -
ось плг1фор.'Щ радиевкзяра; Хрз- калраз-
ЛС ленде разнссит-нальной зона антенны
й/урздиевпзлра.то/б^ = - £р3 пол-
ется ТСЛ углсм.который npeuJy jTC.1
антенной в электрический параметр
ХА - К$ДЕ > обрабатываемый
радаовизиром .Параметру хд па выходе
радпозизира соответствует напряжение
Рис.19. Гекторнач
диаграмма для радио-
звена со следящей
антенной
(Jcn .которое поступает на силовой привод антенны. Силовой
привод отрабатывает напряжение Ucn .разворачивая антенну и
сводя ДЕ к нулю. Выходной сигнал Up$ радиозвена формиру-
ется от силового привода посредством электромеханической сис-
темы съема данных. Структурная схема радиозвена со следящей
Рис.20. Структурная схема рддипя-ряня со следящей антенной
' i
‘ - 26 -
Передаточная функция радиозвена со следящей антенной (в пред
пояснении линейности безынерционной части)
Фрз(Р) “Ф(р)сд
КеКп K(p)ipK(p)c„
-f*K€KttK(p)?K(pka
(34)
Система съема данных монет выполняться в виде потенциомет-
ра, корпус которого соединен с платформой радиовизира, а ось с
приводом антенны.
Главное преимущество радиовпзира со следящей антенной сос-
тоит в возмозности применения узких диаграмм направленности
антенны без опасения потери цели при флюктуациях в траектории
двиаечия ЛА. Недостаток этого радиозвена заключается в его
слоаности.
1г
Траек-
CilGpUfi
/М
§3. Динамические и ктаематпческие звенья
Пространственное пояснение ЛА ври самонаведении определя-
ется углами • (jc ►ксторя® относительно опорной
оси Хо Хо устанавливаются направления продольной оси корпуса
ЛА.лдшп^визирования и вектора скорости ЛА (рис.21). Опорная
Ц - ось Х0Х0 3 процессе движения
центра тяжести ЛА но кинема-
тической траектории переме-
щается параллельно самой себе
Создастся опорная ось на ЛА
с помощью гироскопической
састег.ш.
Углы <рк , 2г • & соот~
ветственно называются: -
2f, - угол поворота линии визе-
Рис.21. К характеристике
•пространственного положе-
ния ЛА нри самонаведения
угол поворота оси корпуса ЛА;
рования; - угол поворота вектора скорости ЛА.
Для построения контура управления системы самонаведения
необходимо связать поперечное ускорение 14^ .действующее на
ЛА, с углами • /с »СЯ1РеД';лиз тем самым дияями-
ческое звено контура и измеряемые радионизирсм угловые вели-
чины . £с с углами . 2г • ’что дает кинаг,:а“
тгческое звено контура. Связь А » €с с утлагги $£. » Qr ’
К очевидна из ргс.21:
Обратимся к установлений связи углов <р* , <
поперечным ускорением Wn . Будем считать |г^|
Рис.22.К взаимной
связи углов д.
* Л ,с
» const
Разложим вектор скорости ДА на две
составившие (рие.22): >
- радиальную
Радиальная составляющая скорости
ЛА,;-авная скорости изменения длины
линия визирования,сокращает расстояние между ДА и целью,так
^cts(r-4r}~-lil’“‘/dt • ;зв>
Тангенциальная составляпсая скорости ДА, равная линейной
скорости точки С на окружности радиуса .поворачивает ли-
нию визирования вокруг точки Ц,меня£ угол .так
Будем считать,что угол упреждения мал,что
(38)
dt
что
(37)
абсолютно
справедливо при наведении ЛА по кривой погони (управление по
условию уЗ =0). Тогда уравнения (.36),(37) принимают вид:
='а'% Ыг<>-&•) ’-ъ d2r/dt
Отсюда '
^Jc dt “• dt
Используя операторную форму задис® .подучат
г^г(Р)-ТМ)-' ‘®’
Угол связан с поперечит .ускорением ДА (рис.23) зава-
<fl '™еаа
”• dt dt
В ооераторноА форме иа свндь имеет
Гс(Р)’7$-
Подставки (40) в (39).похучж
(40)
(41)
- 28 -
углами и Igr обратимся к
рис.24. Разложил вектор ско-
рости ЛА на ортогоналл-нке сос-
тавляииие:
гЬ> «я G?
Рис.24. К B3.jb4h?h связи Представим цель на направление
угла с углами *[г, \е сси точкой Ц^. Теперь
составляющая определит сближение тсч-и С с точкой в
соответствии с уравнением
^\ru,cos(^r-^}\ (42)
Составляющая определит линейную скорость поворота точ-
ки С вокруг точки Щ, меняя угол ,так что
^^n(fC~^ = ~^C0^2r-4^r ' (43)
из (43)
л= м(гс-г. ' dt
Подставив значение 2^ в уравнение (42).получим
(44)-
Соотношения (40),(41),(44) в совокупности определяют связь
углов • 2г ’ /с с попе?ечвцы ускорением Ц/п ,
действующим на ЛА,т.е. устанавливает структуру динамического
звена систем самонаведения на малоподвижную цель (рис.25,а).
Итак, динамическое звено систем самонаведения на малопод-
вижную цель (ДЗС) определяется как звено с одним входным
воздействием и тремя ( , Фк внхсдными координа-
тами (рис.25,б).
В частной случае, когда вектор скорости ЛА направлен по
оси корпуса ЛА, а наведение осуществляется по алгоритму
= 0, структура динамического звена упрощается. При ука-
зашг.-х условиях
dr <tc /(; dt (fc
оамснаведеная на малоподиигшуа цель
3 операторной .Jcpie уревненпе .4о; ирнннааег
%(&~ р 4с (Pi ‘
Такта обраэсм, угол формируется us угла
апериодического звеяа^косфйа-
циент передачи которого равен
г»1,а постснакая времени
Упрощепная структура дзлами—
веского звена приведена на
с помолу
структура ПЗС
§4. Контуры управления
Струк?у1_1ые схемы контуров управления систем самонаведения
запутаются дугам комбинации структурных схем кич • и »ти^е скота
звена,головки самонаведаиив, звена* антаи22от-корсус,Д1наачео-
кого звена. ЗессодноА йоордиаатоЯ контура квхается параметр,
оаредндевныА алгоритмом управивнкн.
При прямом самонаведении радвсзиижр цеди измеряет угол
Командны* сигнал > Ug^ поступает на автвов-
лот,связывапций через рули Uk с поперечным ускорением ,
измепяхщш пространственное псложвние ЛА - углы , Л
Контур замыкается. Его структурная «темя проведена на рнс.27.
Эаходной координатой коятура является угол Sq
- 30 -
Рис.2?. Структурная схема контура управления
при прямом самонаведении
В системах самонаведения с измерительным флюгером в соот-
ветствии с углем скольжения = fc ~ флюгер выра-
батывает напряжение U^ . Связь угла с£с с напряжением U^..
устянакгавеется через передаточную функцию флюгера
так что -о£сФ(р)<рл * Радиовизир цели измеряет угол
“ «Г ,зарабатывая напряжение U$c - cc-(P(p)pz. Нап-
Р'диния UdCc * Usс алгебраически суммируются,и на автопилот
поступает командное напряжение 4/х = U^ - U^e = Uys ,
пропорциональное углу упреждения = fa - tfa . Команд-
ное напряжение через звено автопилот-корпус преобразуется в
поперечное ускорение % . Связь Мп с углами Л-
определ!шцими пространственное положение ЛА,устанавливается
даааьпгческим звеном. Контур управления,структура которого
приведена на рис.28,замыкается. Еиходной координатой контура
В системах самонаведения с силовым флюгером радиовизир
установлен на подвижной платформе,которая относительно про-
дельной оси корпуса ЛА повернута на угол cxQ . Радиовизир те-
перь изыернет угол <5^ = £с - .вырабатывая упразляюгее
ня придание Uf(f моддьаемое на автопилот. Угловое положение
платформы определяется силовым приводом с передаточной
функцией Ф(р)ср'ва основе разности напряжений,снимаемых с
флюгерного датчика,передатсчная функция которого дат-
чика углового положения платформы, имеющего передаточную функ-
- 31 -
цию &(p)jn . Так как утлы <50 , cZj. связаны с углами ,
’ jc ,т0 КОНТУР управления оказывается замкнутым.
Зыходной координатой контура является угол уЗ . Структурная
схема контура системы самонаведения с силовым флюгером приве-
Рис.30. К определение урав-
нения траектория ЛА
йте. :С, ’/тууктутная схема •<очт’,г?а управления гнетемн
.аленаведенпя с углевым* ^июгэрси
J-c. Зшптча алгоритма /травления. .Уйнималззо
дегг'отымая дальность при самонаведении
При наведении ио кривой погони алгоритм управления дмз-зт
зад у3 = 3. Зсли угол упреждения .3 О,то имеет место спай-
ка з управлении д ЛА не попадает з цель.
Пусть з процессе ^мезаэеденэя.яачиаая с некоторого рассто-
яния иезду ЛА л целью,угол упреждения становятся отлитву.
зт ыу.гя а з процессе дальнейшего сблляеаия ЛА с целью сохгжнп-
3 системе- координат XOY, связан-
ной с‘ целью (цель неподвижна),
при уЗ С ЛА будет двигаться
по траектории Р0ЛЗ чрис,30).
Находясь в точке ?.летательлх2
аппарат за зрема тхуя.
« const дрподлт путь
ds л i^ dt,
тедуявй радиус-вектор г
повертнвается на угол
• 'dV^^dssinji
уменьшается на велжчнну
__ -dr=ds-Gasft .
- 32 - ,
«Л* Р
Разд a.ran d<f> на dr .получай —• = - .
t^-.^incdr V
* r J tQJi
0TCBE tnr^tij^tnc
Й
г-Сехр(%^}
находим
Используя начальные условия Г
К/
С=гаехр
Итак, начиная с положения Р0,"ЛА движется по траектории
описываемой уравнением / >
г"г’“<р dj) <«>
Уравнение (47) описывает логар^мическую спираль (рис.30).
Из зависимости (48)
Если ось X рассма-г. иьать как поверх-
ность земли,то положение точки В и бу-
дет определять величину промаха П лета-
тельного аппарата,обусловленного сшиб-'
кой алгоритма управления.
Согласно (47),
П =геехр
(48)
следует,что для уменьшения величины
промаха при фиксированных значениях и Ji -^тязя умень-
шать Г о •
Установил условие,ограничиваидее снизу. Для этого
определим кривизну траектории ЛА
"т " 1 (49)
где dp - угол поворота касательной к траектории при переме-
; . В соответствии с рис.31 имеем
Таким образом, dj = dV я
sinfi (so)
T ds г '
Рас.31. л определению
кривизны треектории ЛА
- 33 - -
Зависимость (50) показывает,что кривизна траектории ЛА
монотонно возрастает с уменьшением расстояния до цели. С рос-
та.!
ная
кривизны траектории ЛА растут перегрузки на ЛА. Максималь-
кривизна,которую может выдержать ЛА, .
д’ , Wn тц
пТтах ^.2.
Wnmax ~ макявгальяое поперечное ускорение,выдерживаемое
(51)
где
летательным, аппаратом.
Если Xr ^Кттах »то сойдет с- траектории и будет про-
должать депкение по окружности. о радиусом
(52) ,
I^TmttX Wnmax
Теперь рассмотрю следужие случаи движения ЛА по логариф-
мической спирали. •
I. Пусть Гв таково,что точка М траектории,в которой кри-
визна КТ = Кттал «совпадает с точкой В (рис.30). В этом
случае на основе зависимостей (51),(50) ж (48) имеем:
sinfl Wnaax ' sin fl
П '~ЭГ’
Из (53) паареем
Q^a/n*lj7
"Птах
Считая угол fl мальм,
(53)
(54)
зависимость (54):
(55)
Подставив (54) в (48),наДдйв
(56)
. । «.вам Wnmax J Wantx J „
При Го ч^веккуа умеяьаватся М^Ктаах),
но промах,согласно зависимости (48),возрастает ( П >П|г X
2. Пусть Го таково,что точка М траектории,в которой *
кривизна яг « Кт max tCcmasun с точкой Ро. В этом случае
ЛА сразу же начинает двигаться до окрпвостж с радиусш
и промах г, =/,дА
mtfl l^atnax ‘ (57)
Сопоставляя зависимости (57) ж (56),видим,чтоП(>.
так как Sin fl <£. f • я’<в ’ a-anrr
Таким обраэсм,прк семонаведениж ЛА с ресстоякии^енькго
чем K^anm ,црзхах. из-за ошибкм в алгоритме управкенжя возрас-
j гос.ГЪ- ИЧНАЯ |
Рис.32. Зависимость
промаха от г
- 34 -
/Wa.maxW* отсутствии перегрузок на ЛА <Кт<^Ттах
на основе соотношения (48)
„ К
wem^xp tjfi • (58)
величины промаха ЛА из-за
ошибки алгоритма управления
от величины
Итак,оптимально минимальным
расстоянием при самонаведении
ЛА на малоподдглнув цель.обес-
печххшцим наименьший промах
из-за ошибки алгоритма управ-
ления,является расстояние }
определяемое зависимостями
(54),(55), При этом величина
промаха определена соотноше-
нием (56).
Глава Ш. СИСТЕМ!/ САМОНАВЕДЕНИЯ НА БЫСТРСДВИПУЩУЙСЯ НЕЛЬ
§1. Головки самонаведения
При ня ведении ЛА на быс тороднихутупся цель применяется
метод параллельного сближения,согласно которому линия визи-
рования ЛА-цель перемещается в пространстве параллельно самой
себе. Алгоритм управления имеет вид
(59)
v UL
Задача головки самонаведения состоит в тем,чтобы выработать
командное спряжения,пропорциональное угловой скорости поворо-
та линии низяро: акпл
(ео)
Так как при параллельном методе наведения углы между про-
дольной осьэ ЛА,вентерем скорости ЛА и налралтением на цель
( уЗ , £с ) могут достигать больших вели1 ли, тс практичес-
ки оказывается невозможным использование радиовизиров с непод-
вижной относительно корпуса ЛА антенной или антенной, ориен-
тхро’занней по вектору скорости ЛА.
Еалбсльзее респространение при наведении по скоростным
-35-
целям п-ыучлди:
- головки самонаведения с автоследащей антенной и скорост-
ным гироскопом;
- головки самонаведения со следящим (.силовым) гиропряьсдом.
Головки самонаведения с автоследя-дей антенной и скорост-
ным гироскопом построены по следужим принципам.
Поскольку 2г = ес + »то
dSc d<PK ‘ (61)
dt =’ dt dt
Следовательно,командный сигнал можно сформировать как сум-
му двух напряжений:
UK~Ui ' (62)
д сс а0 X
Если теперь обеспечить
К£^К<рк = К^г ’
(S3)
ЛА
°> а
/с
о
0}
то
Для форотрсвания напряжения U-c используется радиовизир,
установленный на корпусе ЛА,антенна которого с помощью сило-
вого привода автоматически следит за целью. Радиовизир выра-
батывает напряжение,пропорциональное угловому отклонению 4с
равносигиальзсго направления от линии визирования (рис.33,а)
У Напряжение 1/де = КрД с подается
-^на силовой привод,разворачиваний
антенну на угол ёРз так,чтобы
zi<5= ес~ ерл —-Q.
При использовании силового приведя
без жесткой обратной связи его пере-
даточная функция содержит интегрирую-
щее звено и система слежения антенны
за целью (рис.33,6) оказывается аста-
тической системой регулирования. Спис-
ка слежения Дё астатической системы
К а г
М3»
Рис.33. К саботе аьто- пропсргискалька скорости
следящей антенны изменения входной зегичина.т.е.
Д € ~ Sc Таким образом,на выходе
радиовизпра напрязгние сказывается проплр ,игит r,.m ,v ско-
рости изменения угла сс ‘ U&& = Ugo - Kg &с •
Напряжение вырабатывается скоростным гироскопом.
Итак, структурная схема <рис.34) гохонкм самонаведения сос-
тоит из 'радиозвена,которое должно осуществлять, диф-
- 36 -
ференцированне угла £с ,скоростного гироскопа,обеспечивающего
идеальное дифференцирование угла ,и сумматора сигналов
и Недостатки рассмотренной головки обусловлены:
I) невозможностью точного выпол-
нения условия (63);
2) снижением точности определе-
ния угловой скорости вращения
линии визирования за счет угло-
вых колебаний корпуса ЛА.
Рис.34. Эквивалент головки
самонаведения со следящей
антенной и скоростным гиро-
скопом
Головка самонаведения со следщга (силовым) гироприводом
построена на основе непосредственного определения • Антен-
на радиовизира жестко связана с главной осью позиционного
гироскопа,которая в начальный момент самонаведения (во время
захвата цели) выставляется на цель (рис.35,а). При отклонении
^.-4^1—
Рис.35. К работе голов-
ки самонаведения с
силовым гиропризодом
Ле оси антенны от направления
на цель радиовизир' вырабатывает сиг-
нал ошибки С/д^ .подаваемый на момен-
тный электродвигатель позиционного
гироскопа (рис.35,б). Под влиянием
приложенного момента Hz ось гирос-
копа прецессирует,отрабатывая угол
Ле . Передаточная функция гирос-
копа по прецессии соответствует интег-
рироваяию.и в установившемся режиме
отклонение /1 £ будет пропорционально
• Таким образом,
йсвивалентом головки является дшфре-
ревцилувдее звено (рис.35,в). г
§2.- Динамические и кинематические звенья
При самонаведении ЛА на бнстродк’хуцувся цель его простран-
ственное положение,как и в случае малоподвижной цели,опреде-
ляется углами*поворота оси корпуса ЛА % ,лдн^и визировали.:
lgr .вектора скорости ЛА относительно опорной осиД^Хр,
создаваемой гироскопический системой ЛА. Кроме того вектор
скорости цели относительно опорной оси ХвХв определен углем
у . Еа рас.36 приведена векторы и углы,опреде.шчипие прост-
ранственно-временное положение ЛА и цели.
мах самонаведения на быстродьилутдаеся цели
Будем считать,что и |z^| постсяшш. Проекции и
l^ip векторов скоростей и на линию визирования
определяют радиальную скорость сближения ЛА с целью:
{64)
Тангенциальные составлявшие , г^г векторов скоростей
и гАц к лигпа визирования определяют поворот вектора
вокруг точки Ц.при котором меняется угол igr • Линейная
скорость вращения точней С относительно точки Ц составляет вели-
чину do ' '
sin(/c~Qr) * J • (65)
Этобракая точку Ц на направление оси Хс (точка LJj,рис.36)
и раскладывая векторы и по ортогональным составля-
» 14-^’ Яй*е\ .Устанавливаем:.'
- скорость сближения точки С с точкой Ц»
- скорость вращения точки С вокруг точки IL
d^1 ' *
для случая
наведения на встречных курсах разности углов
и мала. Это позволяет линеаризовать ураэ-
ния \64),(6о),прообразовав их:
_ <- л 1
• t (63)
г- У?’
^-(^•5)—2 _<6S!
- 38 -
Переведи уравнение (69) в операторную форму,получаем
Угол fa связан с поперечным ускорением Wn .действующим
на ЛА,зависимостью (40) /
m(p)‘npw»(p)- (71)
Обратимся к уравнениям (66) и (67). Из (67) определяем
и;подставляя это выражение в уравнение (66),получаем
Когда 4^ = 0,из (72) следует зависимость (44).
Для случая наведения на встечкьх курсах с задравлением
продольной оси корпуса ЛА по линии визирования имеем:
“fa-?*; cas^-v^l; 1
Условия (73) позволяют упростить уравнение (72),преобразовав
его к виду -Jr j л-Л
Заметим,что при условиях (73) ~^с • ^десь зыак
“минус* указывает на то,что цель удаляется от ЛА,а "плюс" по-
казывает на её сближение с ЛА.
(74)'
at
Применив к
Итак,при условиях (73) • .
</«. /
~\tc К) Гц Щ
глягтг-чтпо (74) операторную форму записи,получил
4 * ЯгУи,
. >/ /с(р}—п,—; М-
(7S)
- 39 -
Согласно (75) угол 'связан с углами у* и Д посред-
ством апериодических звеньегл, имеющих постоянные времени
и коэФ1'г1П’-ента усиления соответственно
.при z£«-o
зависимость (75) переходит в зависимость (46).
Итак, соотношениями(70)-{75)определяется взаимная связь меж-
ду опорнн".'.' углами пространственного положения ЛА,поперечным
ускорением Мл и угловым положением fa вектора скорости цели
Под динамическим звеном систем самонаведения на быстродви-
зсудуяся цель понимается звено, обусяотствяихнее связь поперечно-
го ускорения Wn с угловым поворотом вектора скорости ЛА fa'
Структура дива, илческого звена определена зависимостью (71) и
показана на рис.37.
I)
Под кинематическим звеном систем само-
наведения на бнстродвизстцуюся цель по-
нимается звено,обуслсвяивахщее связь
углов и с углями Д и Д .
Структура кинематического звена опре-
делена зависимостями (70),(72) или (70)
(75). Ссответстзуицяе указанным з-ависи-
местям нелинейные и линейные структур-
ные схемы кинематического звена приве-
дены на'рис.38,а и 38,6..
Гтс.37. ^зкцнгческое
звено: з/ структур-
ная схема; б) обозна-
чение в контуре
Рис.38,а. Велине-ыыл. ч тухжая .схема кинематичэского
звена систем самонаведеччя на быстроддпутзуюся цель
40 -
Рис.38,6. Линейная структурная схема кинематического
звена систем самонаведения на быстрода-.дущуяся цель
§3. Контура управления
Структурные схемы контуров управления систем самонаведения
на быстродвикущуюся цель получаются комбинацией кинематичес-
кого звена,головки самонаведения,звена автопилот-корпус и
динамического звена. Всеедная координата контура определена
алгоритмом управления,т.е. значением ipr . Входным воздейст-
вием на контур является маневр цели, определенный углом .
В случае головки с автоследящей антенной и скоростным
гироскопом входным воздействием на радиовизир является угол
€с в - V/f ,а входным воздействием на измерительный ги-
роскоп - угол Яг • Идеальная передаточная функция радаови-
зира <P(fip^Keip , ,а скоростного гироскопа - Р •
КсмаддныЕ сигнал U* = преобразует-
ся звеном автопилот-корпус в поперечное ускорение Wn .
Через динамическое звено с передаточной функцией /iPcp по-
перечное ускорение определяет величину угла рс . Наконец,
кинематическим звеном определена связь углов и с
углами Oft и 0/г . В итоге контур, структурная схема которого
приведена на рис.39,замыкается.
РИс.39. Структурная схема контура убавления системы
сакснагедения с автоследащей антенной и скоростным'
гироскопа»
. - 41 -
Для системы самонаведения с головкой,использующей следящий
гиропривод,структурная схема контура управления приведена на
рис.40. Входным воздействием на радиовизир является угол •
Идеальная передаточная функция радиовизира Ф(р)р5-= Кцг’Р .
Командный сигнал U# Чг определяет через звено автопи-
лот-корпус поперечное ускорение Wn и Далее через динямячес-
кое звено - угол J*. . Углы Д и через кинематическое зве-
но меня-м: значения угла . В итоге контур замкнут. Угол &
в данном случае не используется.
Рис .40. Структурная схема контура управления системы
самонаведения с силовым гирспрохдсм-.
Отметим,что в контурах управления систем самонаведения по
скоростном полет рэдиовиэиры доляны выполнять операции идеаль-
ного дйфферейЦаровааия. Поэтому при наличии помех эквивалент-
ная структура радловязиров долзна соответствовать структурам
систем,ocj-щестзляпагас оптимальное статистическое дифференциро-
вание [iofcnj ‘ •
- 42 -
Часть втор а.я •
РДДИОйЕИРЫ СИСТЕМ САМСНДРГЛТНИЯ
Глава 1У. ИМПУЛЬСНЫЙ РАДИОЕИЗИР СО СКАНИРУШЙ АНТЕННОЙ
§1. Принцип действия
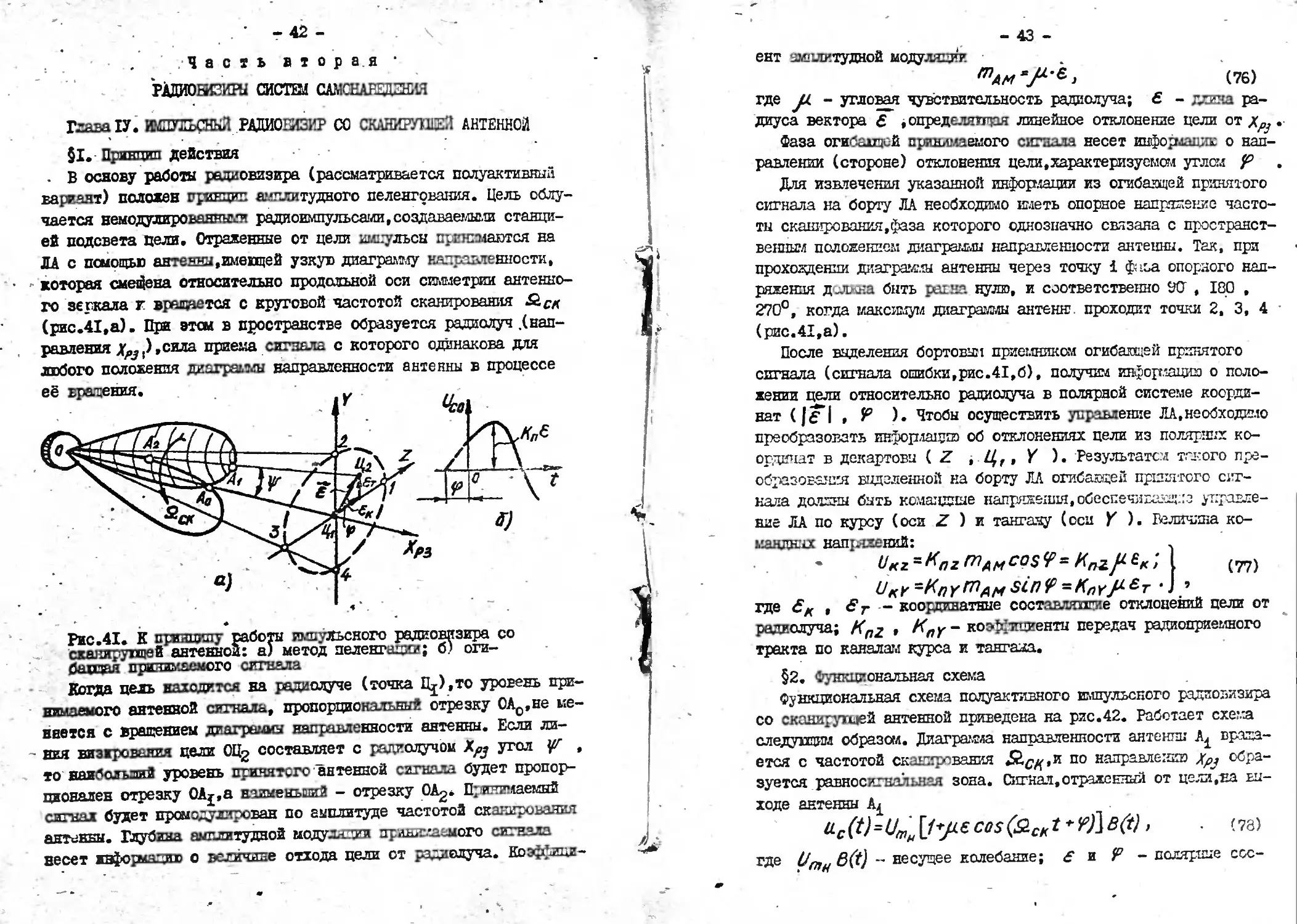
. В основу работы радиовизира (рассматривается полуактивный
вареант) положен принцип амплитудного пеленгования. Цель облу-
чается немодулированными радиоимпульсами .создаваемыми станци-
ей подсвета цели. Отраженные от цели импульсы пригсмаются на
ДА с помощью антенны,имеющей узкую диаграмму направленности,
которая сменена относительно продольной оси симметрии антенно-
го зеркала г вращается с круговой частотой сканирования &е/(
(рис.41,а). При этом в пространстве образуется радиолуч .(нап-
равления д^^.сила приема сигнала с которого одинакова для
любого положения диаграммы направленности антенны в процессе
её вращения.
- , г ЧСО
Рис.41. К принципу работы импульсного радиовизира со
сканирующей антенной: а) метод пеленгации; б) оги-
бающая принимаемого сигнала
Когда цель находится на радиолуче (точка Hj),to уровень при-
нимаемого антенной сигнала, пропорциональный отрезку 0Ао,не ме-
няется с вращением диаграммы направленности антенны. Если ли-
ния визирования цели OUg составляет с радиолучом угол ,
то ваябольанй уровень принятого антенной сигнала будет пропор-
ционален отрезку ОА^.а наименьший - отрезку OAg. Принимаемый
сигнал будет прсысдулирован по амплитуде частотой скатыроваяия
антенны. Глубина амплитудной модуляции принимаемого сигнала
несет информацию о величине отхода цели от радиолуча. Коэффици-
- 43 -
ент амплитудной модуляции •
(76)
где JA - угловая чувствительность радиолуча; £ - длина ра-
диуса вектора £ .определяпцая линейное отклонение цели от .
Фаза огибающей принимаемого сигнала несет информацию о нап-
равлении (стороне) отклонения цели,характеризуемом углом Р
Для извлечения указанной информации из огибающей принятого
сигнала на борту ЛА необходимо иметь опорное напряжение часто-
ты сканирования,фаза которого однозначно связана с пространст-
венным положением диаграммы направленности антенны. Так, при
прохождении диаграммы антенны через точку 1 <ф;за опорного нап-
ряжения дллна быть paina нули, и соответственно УСГ , 180 ,
270°, когда максимум диаграммы антенн;, проходит точки 2, 3, 4
(рис.41,а).
После выделения бортовым приемником огибающей принятого
сигнала (сигнала ошибки,рис.41,б), получил информацию о поло-
жении цели относительно радиолуча в полярной системе коорди-
нат (ff I , F ). Чтобы осуществить управление ЛА, необходимо
преобразовать инфорлащпо об отклонениях цели из полярных ко-
ординат в декартовы ( Z , Ц,, Y ). Результате.'-! такого пре-
образования выделенной на борту ЛА огибающей принятого сиг-
нала должны быть командгше напряжения,обеспечивающие управле-
ние ЛА по курсу (оси Z ) и тангажу (оси Y ). Величина ко-
Knzrn^CQS^^K^^’,
(77)
мандных наш.чяений:
UKY^KnY^AMSinV^KnY^e.T J.’
где £к , <?г - координатные составляитие отклонений цели от
радиолуча; К, Кпу~ козффжциенты передач радиоприемного
тракта по каналам курса и тангажа.
§2. Функциональная схема
функциональная схема полуактивного импульсного радиовизира
со сканирутцей антенной приведена на рис.42. Работает схема
следующим образом. Диаграмма направленности антенны А^ врата-
ется с частотой сканирования по направлению Xpj обра-
зуется равносигвальная зона. Сигнал, отраженный от цели,~на вы-
ходе антенны А^
• (78)
где 6(t) -- несущее колебание; £ в F - полярные ссс-
- 44 -
таьляшке измеряемого углового отклонения ; у4 - чу зет-
Рис.42. Функциональная схема падуактивного импульсного
радговизира: Ат- антенна со сканирующей диагражой нап-
равленности; 2 - электродвигатель с редуктором,вращаю-
щий облучатель; 3 - генератор опорных 'плрянений; 4 -
ВЧ преобразователь и УПЧ; 5 - амплитудный детектор; 6 -
схема АРУ; 7 - видеоусилитель; 8 - детектор сигнала сетб-
кл; 9 - Фильтр сигнала ошибки; 10 - усилитель сигнала
ошибки; 11,12 - фазовые детекторы каналов курса и танга-
жа; 13,14 - фильтры детекторов каналов курса и тангаза;
Аг,- антенна,принимающая зондиьухщие импульсы; 15 -прием-
ник сигналов сиьхроииза-чги; 1ь~ генератор стробируьркх
импульсов; 17 - временной дискриминатор; 18 - блок уп-
равления задержкой
В высокочастотном преобразователе и УПЧ 4 осуществляется
гетеродинирование в усиление принятого сигнала. Амплитудный
детектор 5 превредает радиоимпульсы в видеоимпульсы,которые
после усиления поступают на детектор сигнала сюбки 8. Фильтр
сктг.г-ла сшибки 9 выделяет модулирующее видеоимпульсы вапряхе-
ние - сигнал ошибки,которое усиливается усилителем 10. *?ак что
на фазовые детекторы 11,12 каналов курса и тангажа поступает
и (Осо ^со К г cos f
где Кса~ коэффз ^ент усиления приемниксм сигнала опибкз;.
- ко’8ф*яциент,учитывапцЕа работу схемы АРУ-6.
- 45 -
Опорное напряжение для фазовых детекторов формируется гене-
ратором 3 и имеет вид:
Lc(t)0f,=U0cos^CK-t ; a(t)aT^uoscnS!.ci<t‘ (80)
На выходе фильтров фазовых детекторов курса 13 и тангажа 14
образуются напряжения l/g* и U$T .яглтацлеся приборными ана-
логами проекций отклонения £ на горизонтальную и вертикаль-
ную плоскости, проход г:ие через ось Xpj. Напряжения Z/<rx , U£t
в зависимости от типа головки самонаведения либо используются
для управления положением антенны.либо непосредственно посту-
пают на автопилот.
Из-за малых габаритов антенны А^ нельзя обеспечить высокую
разрешающую способность по углу,и поэтому вводится дополнитель-
ная селекция цели по дальности. Для селекции цели по дальности
используется специальный канал, вырабатывающий стробирующие
импульсы открывадщие УПЧ канала пеленгации цели на вре-
мя прихода отраженных от цели импульсов. Так как при самонаве-
дении расстояния мезду целью,ЛА и носителем (станцией подсве-
та) меняются с течением времени,то должен меняться и момент
открытия УПЧ. Это достигается автоматическим слежением стробиру
ющсго импульса за временным положением цели. Задержка строби-
рующих импульсов относительно сигналов синхронизации,принима-
емых антенной Ag и приемником 15 при облучении цели носителем,
должна клеть величину у
~ "q "Rckj t (SI)
где /?<4 - расстояние от станции подсвета до цели; -рас-
стаг£ние'‘от ЛА до дели; RCM - расстояние от станции подсвета
до ЛА; С - скорость распространения радиоволн. •
Сигналы синхронизации запускают генератор строб-импульсов
16. Величина задержки регулируется сапряжением,поступавщ;ш на
генератор строб-импульсов с блока управления задержкой 18.
Захват цели в начале слежения осуществляется автоматом захва-
та, входяцшл в блок управления задержкой. Автомат захвата на
генератор строб-импульсов подает пилообразное напряжение,под
действием которого строб-импульс перемещается до тех пор,пока
не совпадает с импульсом,отраженным от цели.
- 46 -
§3. Потенциальная ТОЧНОСТЬ
Разложил принимаемый антенной сигнал (78) по декартовым
составляющим отклонений цели от Xpj :
u(t)^Um/tB(t)[tt/iecos<fcos,Q.CMt-/iescf)9,sinSict<-t\.
отсвда aCtj^U^^casSL^BCt)',
^(^cY~Unn .1 •
Так как функции casQCKt и s^Q.Cf(t ортогональны,то сигна-
лы u(t)cZvi a(t)cy могут быть разделены независимо друг от дру-
га и каналы измерения величин 62 * модно считать незави-
симыми, а радиовизир по каждому каналу управления представляет
собой однокамальный измеритель.
Спектральную плотность помех на входе антенны обозначим
через Мо , Теперь,согласно зависимости (13),спектральная
плотность шумов на входе оптимального дискриминатора, определя-
ющая потенциальную точность радиовизлуа по каналам,
• (83)
Используя зависимость (82) ,и?лес^:
п = А ^1ПН В ft) са$&cxt )
г , -|5 °£Z
>
< [^]'> sWmo .
Замечая, что Рос средняя удельная мощность
несущего колебания.ролучаем ?-• - .
„1О * '
>____ /*
Итак,потенциальная точность по координатным составляющей
радиовизира со склнир>иаей антенной зависит От двух факторов:
I) средней удельной мощности, входного сигнала Рос;
2) УГЛОВОЙ ЧуВСТБИТеЛЬЯОСТИ у.'ГЯОСЯГ'ЯЗЛЬНОЙ впнч /х .
Чем бглъае ух .тем для одного и того хе углового откло-
нения F' бслыве глубина амплитудной модуждщи прпнгиаемого
- 47 -
радиовизирам сигнала (сМ.зависимость 7б),т.е. уровень полезно-
го сигнала на входах фазовых детекторов возрастает и щумы в
меньшей мере влияют на точность измерений. С увеличением сред-
ней удельной мощности входного сигнала редиовизира также повы-
шается уровень полезного сигнала на входах фазовых детекторов,
который пропорционален .
г Ан ОС
§4. Радаовизир как звено контура управления
Эквивалентом радиовиэпря в контуре управления является ра-
диозвено, структура которого определена структурой среднего
значения напряжения ^и.^У на выходе фазовых детекторов канала
курса и казала тангажа. Согласно зависимости (14),для опреде-
ления ^и.дУ необходимо установить взаимную спектральную плот-
ность опорного напряжения и напряжения сигнала ошибки.действу-
ющих на входах фазового детектора.
При небольших отклонениях цели от рахносигнальыой зоны и
невысоком уровне пума можно считать,что тракт выделения сигна-
ла ошибки до фазовых детекторов линеен. Тогда формирование
спектров сигнала ошибки и опорного сигнала будет проходить в
соответствии с зависимостями (79) и (80) по схеме,приведенной
Рис.43. Схема формироьадщч спектров сигналов,поступа-
вши на входы фазового детектора
В соответствии с яшьедетаой схемой спектры и взаимные спек-
тры сигналов, пог.туппАщит на входы фазового де те к тора, будут
следующими: о ).
- 48 - х >
Среднее значение напряжения на выходе фазового детектора
канала курса и талгаха^
I do - и171ниои.Е,2.уКсокг^а •
иог>исо J
Таким образом,импульсный радиовизир со скандрупдсй антенной
представляется в контуре упрадлешиг в виде радиозвена (рис.44)
состоящего из безынерционной части с коэффиц тентом передачи
Кг^/сК^^КзО^и,, (ss>
и инерционной части, определяемой фильтром фазового детектора
ф(с эффективней полосой пропускания £ С1(
w ——---------
т
• . Кроме того,на
выходе безынерционной части
будут действовать флкктуиругн
щая помеха со спектральной
плотностью в области низких
частот &(0)<р ъ амплитудные щумы
(см.§5,гл.1).
G(O)<p
Рис.44. Эклг.вчлент радаовизи-
ра в контуре управления
§5. Реальная точность уггиовизира
Спектральную плотность флуктуационной помехи на выходе фазо-
вых детекторов,которой и определяется реальная точность радио-
визира .найдем,подставив соотношения (85) в формулу (15).
ИсЛу -ьИМ у 2 2 2
&(в)ф=&ш.8х ^С° ^г> Кд Uо е [с,-2 ся] ' (86)
Эффективное напряжение помех, сспровсздзпвее коузндиы^ сиг-
нал.форшруемчй редвовизирсм
^=^4^ 1/а(аи.ея&ск .
Зреднеквадратическое угловое отклонение равпостгЕальнсй
зоны от цели, обусловленное шумами, ___________
6* = — —1 / Gtu.sx 2.ск
ЯЛ (37)
r и. < 2Рн.ех
где ссектргшлая плотность щумов на входе радиовизира:
,Эн.8х~ иосность несущей входного полезного сигнала; -
угловая чувствительность равносигзальнсй зоны; Sr..- коугозая .
Зависимость (87) показывает,что уменьшить шумовую ошибку в
пеленгации' цели мсхно за счет сдизензш частоты сканирования
луча. Однако сппхение частоты сканирования луча прнводдт к уве-
- 49 -
личению уровня амплитудных шумов, величину которого оценим,ис-
пользуя зависимости (6) й (10):
Qrn) _ (од)
' тп '
Результирующее шумовое напряжение,сопровохгт-хдае командный
сигнал, /-------:------------,
—------------•\/q О Gut.an ^•С.кСС.^
Г и-вх сх* z
На практике выполняются условия &.ск»а)е ; •
Это упрощает предццущю зависимость,которая преобразуется
' и - ** i/TTZ
“si>iSu r^S"
Теперь среднеквадратическая ошибка пеленгации цели, обуслов-
ленная результирующим шумом,
" ~ в Ош-ЭТ. f
£“г Ъч
Зависимость (89) показывает,что существует оптимальная кру-
говая частота сканирования луча радиовизира,пуп которой обеспс-
чивается миниглутл щумовой ошибки пеленгования.
Устана.чл.-:ваем:
О =1/.^.£Г .
^ск.оп/п I аш 6х >
(90)
^luari G-u.8^2'
(91)
^g--* “ J Г
где Qlu 0= ~ спектральная плотность амплитудных шумов.
В заклгчение отметим, что недостатком радьовизира со скаяиру-
пцей антенной является его чувствительность к флвктуакиятл амп-
литуды входного сигнала,обусловленная последовательным с тече-
нием времени форлированпем равнссигнальной зоны в пространстве.
- 50 -
Глава У. АЖИТУДНП2 МОНОИГ.ШУЛЬСНЫП РАДИОВИЗИР
§1 . Общие замечания
Мснопмпульсное пеленгование является одним из основных спо-
собов, позволягиих исключить влия.т:е флюктуаций амплитуды отра-
женного от цели сигнала на работу радиовизира. Здесь сравни-
ваются параметры одного и того не сигнала,принятого одновре-
менно на разные антенны.
Сам теплин "моноимпульсный" означает использование для оцен-
ки углового положения цели только одного импульса.
Для
по два
кости.
§2 .
Совместим в "одной точке" две антенны Aj и А^» развернув
максимумы диягрилм направленности антенн на угол 2^ (рис.45).
^1 К, А, Бри этом образуется равнссигнальная зо-
% на.совпадалпая с плоскостью Хр^ОУРЗ .
При малых отклонения:: в от
рз равноелгнальной зоны сигналы на выходе
антенн майю записать в виде
осуществления монолмпульсной пеленгации необходимо иметь
независимых канала приема по каздой координатной плсс-
Пр»; г гл пеленгадни
О
Рис.45. К прощипу
а’-шлитудного монопм-
пульсного пеленгова-
ния
у^^'чъ'И у j
(о
где U0B(t) - несущее колебание;
ность равносигнальнсй
Отношение разности
зоны.
и суммы указанны?: сигналов
_u~ci~U.cz /} ,
-----------= ив (11 >.9о)
U-cz rUci '
Итак,при амплитудном моноимпульснал пеленговании ппфопладпя
об отклонении цели от рьвносигыальнсй зоны заключена в отно-
сительной разности сигналов,принятых паевой и второй яятеяяями
садиовигира.
Из соотношения (93),в частности,следует,что коэффициент
передачи антенного звена радиовизира равен угловой чувствитедь-
§3. Потенциальная точность
Для получения' команды управления в одной плоскости,согласно
соотношению (93) .используются два сигнала:U.(t,e)Cf и U.(tt€.)c2“
Поэтому амплитудный моноимпулъсный радиовизир относится к
- 51 -
двухканальным измерительным системам и его потенциальная точ-
ность, согласно общей зависимости (13) ,устанавливается формулой
— = -L/\du(t,£)cfV\ + f_ /\du(t,E)ciY\
saia *,Ч де J / Nz \L де J / ’ (Э4^
где /V, , N2 - спектральные плотности мощности щумов.сопро-
эасцшвде сигналы (2С1 * U.C2 .
Используя зависимости (92),имеем:
ас >
Л'
J / Г’ D °с '
Полагая,что вумы в каналах визира чдентпчны,т
= , получаем дг
2^*Рас ’
где Рос - средняя удельная мощность несущего кг.
Сопоставляя зависимость (95) с зависимостью 34), цп’хсди
Qi
ч выведу, что потенциальная точность амплитудного лсчс'.слпу'льс-
ногс раддсвизнра з 4 раза выше,чем импульсного рздпеддгз ос
сканирующей антенной.
§4. функциональная схема
функциональная схема амплитудного монсиг-пухьсисго ьз.
2
P;ic. 46
В состав радаовизира входят следующие функциональные эле-
менты: 1,2 - приемные антенны; 3,4 - БЧ тракты (УЗЧ.сгесител;:;,
5,6 - логарийлические УПЧ; 7,8 - амплитудные детекторы; 9,10 -
видеоусилители; II - гетеродин; 12 - разностный каскад.
Как было показано идге,информация о величине углового отк-
лонения С цели от равносатыаадгой зоны содержится в соотно-
шении а пякт;гл сигналов Li^ и . . Знак отклонения спреде-
- 52 -
лен пре та;. гением уровня сигналов друг над другом. Чтобы исклю-
чить операцию деления,предусматриваемую алгоритмом (93),в ра-
диовизире используются логарифмические УПЧ. Входные Ugx / •
Ugx2 И ных-дные УР02™ сигналов радаовизира связа-
ны соотношениями:
^tbat ’‘Kfln^Cl.t Ugxfj ,
UguiZ =Кitn (Р-1 Увхг) )
где /fz , Kg ; (If • 0-1 - амплитудные параметры каналов
радаовизира.
Поскольку -
%=^[zo“£l; (эт)
то при идентичности аыплитудно-частотных характеристик кана-
лов,т.е. при вдпслияний условия
К(-К2^Ка\ at = az~a0 , (98)
будем иметь
у f+jie
Uk =Kg 1П ’ (99)
При малых значения
Состяететорккп
UK^2.KaJL€> : (100)
. Обратим особое внимание на необходимость обеспечения иден-
тичности и достаточнее стабильности амплитудно-частотных ха-
рактеристик кяяалсв в рас134атриваолз4 радионазире,в то время
как к <чзои« характс рпстяклм каяалон никаких сдецизхиахл
требований не пуедигвияетгат-
§5. Влияние яеждсатхпвости аицпуднмх характеристик кана-
лов на точность пеленгований
Допустим.что канале рцддоввзкрп иеидюлтжчиы.т.е. П, I П1 .
К2 . Тогда сфорорсванаЛ на-основе заявси. остей (96),
(97) ксмаддннй скхявж
(JK=trr
[a2(t^)ug}^ ’
- 53 -
Возьмём Q.f —o£Q.g = 9 К % = » А/** К % ~ДК
и преобразуем 44 •
л =/л
* ' [a2(f-juE)uo^
= К0tn г^а2{^£)^ J. (их)
Из последней записи видно,что наряду с полезулл сигналом
. на выходе радиовизира возникает сигнал помехи
U^tn^[aB^(/^£)]^J . (102)
Итак,
• <Ш>>
Система управления,получив сигнал Цк t отработает угол <S#
связанный с Цк условием идеальности каналов:
Uir2KojMK . (IC4)
Приравн-'ьак соотношения (103) и (104) .устанавливаем ошибку
в пеленгации цели, обусловливаемую неидеятичностью алшлитудных
характеристик радиовизира:
Сшибка визирования
Л& = l^tn\oCK0^U«(i+/Ji£KK:\ (105)
при е = о
• (кв)
★‘•'‘Of*’
Проанализируем зависимость (106) от Кд. Когда Кд—- О,
то оч Когда Кд «*<= , то
4/П ~ 2(^
|кд-* оо Iй
?пс.47. Зависимость
Ко
- 54 -
График зависимости Z<S от Ко приве-
ден на рис.47.
Таким образом, при неизменных зна-
чениях , с*< , й.о , Uо ошибка
визирования с увеличением Ко стремит-
ся к пределу,зависящему от угловой
чувствительности yz равноолгнмьной
зоны и неадентичнсстя ос характерис-
тик каналов по параметру д . Три
этом
2ц
Следовательно,даибслез галндм является обеспечение -
тячнссти коэффициентов CL, . а.^ входадих в эмилиту"
характеристики каналов г фосте . , Л
Kti.il \i2f,2 U£х./,-3 J '
Зсли считать,что ошибка пеленгазщз за
параметров каналов не будет превосходить
счет
2ц.
го необходимый коэффициент усилеий тракта амплитудного жнс-
ддд/льснсго радиовизира после логарифмического 7ПЧ долхен
быть не менее
ц = In (ао Uq]
Ла ‘ 1псС
При этом ошибка визирования
. <xcs)
Соотношение (IC8) подучается подстановкой зависимости ,1С6)
з зирахение для и разрешением получаемого результата
относительно Я_ .
- 55 -
Глава У1. ФАЗОВЫЙ ЖНОИШШСНЫЙ РАДИОШЗИР
§1 . Принцип пеленгования
Антенны А^ и Ag радиовизира разнесены на базу cL ; диаграм-
мы направленности антенн одинаковы. Равносигнальная зона
(плоскость равные фаз) XpjOypj расположена на перпендикуляре
к центру базы (рис.48). Отклонение цели ст разносигнальной
зоны приводит к тому, что сиг-
налы от цели приходят на ант:
:ш с линейным взагсяпг.’ запаз-
дывание!.’. у _ + d.
l2 € у
Соответственно временное ч
пазов.е запазд^пярге с:т ?.
Ряс.48. К принципу (базового
:.юнс;2.лульсного пеленгования
Сигналы на выходах антенн мозко записать ь виде
*’с' ~д~* >
sin\uoti ,
где CJ0 - круговая частота несущего иолебагггг; Л - .
волны несущего колебания; Pf(t) , ^(t) - дсбавсчи." ф
сдвиги прпнг-iaeimx сигналов; U}(t) > Uz\t) ~ к
маемых сигналов.
Информация сб угловом отклонении пели от гявпос" ц-й
зоны заключена в разност:! нринятык а. гочйт.т с’г::дт?-. :??.
ность фаз, в предислодс-кш r,(t) - Ш — Cj ссса-’х
^2£de^h£, (Ш)
Л
Отсюда,коэ^кациент передачи антенного зве-г-а гздлогит”а
Ke-2h
§2 . Потенциальная точность
Командный сигнал управлешгя по одной кссг ьжатч .г?:
определен разностью фазЛ^: =Kv>^,f . Дл-ч .
параметра ё используются два сигнала ( Ис) л U-cz
ленные соотношениями (НО) Следователь:-о, азон-й ..'с::-
сный радиовизир относится к двудканатьяы:д па.:ер::тель:ас: еяо?;-
мам и его потзчдиальная точность,согласно зависимости (13),
- 56 -
устаиа^сивается формулой:
J_ - L /(Л(Шг1г\ .
a„ Hi-\~Se ]/ ftOJ/' ни
где N1 > Nz - спектральное плотности щумов.сопроэсхдгслчие
сигнадн Ucf и U.C2 •
3 сооттететзиа с зависимостями (НО) имеем;
= uf(t)h cos[afft+he+W];
/‘fe—У="Ш{г : f cosZhe-cssZ^t^-
~^Sin2hc-SCil^-\pJo^'h^f^)\\ •
Г 1
-Замечая ,~то на интервале [-><1 лрз лпяйетрпчясм распре-
делено! плотности вероятностей параметра £
<sin2he>-<cos2hs> = Q ,
получав - - ;—г~^—
Анадагичас ____________
Таким об сазом, потенсдальнаа точесстъ мсзоиашульснаго фазо-
вого раджовизгрв <наитие гса урезаем спввтрагъзой плотности
щумов на выходе остяыадъаого джезгрвминмора
Ng _ /VUg
Рос ’ 2^2d2Pac ' (Ш)
где Ng - Nt - Nz .
Соответотвухди знборсм Л и d у^>уе:вь спектральной
плотности лумов О.ша можно существенно снизить.
§ 3. Фунхтшляяшдяя схема
Фувкпжсвахьная схема мпнпимчульснсго радиогизира приведена
за, рис. 49. Работает схема елндупцим образом. После преобра-
зования X yomyg сигнальгЦрИБЛТЫ1. .1 И-*-ЦУЯМИ £ и 2,поступают
на фазовый де тел тор 12. С внходд фильтра фазового детектора
сигнал (Jca ^сшз^кявоашЛ разности фазупршятях антенааа
- 57 -
Рис.49. Структура фагового мсноимпульсного радиовизира:
1,2 - приемные антенны; 3,4 - смесители: 5 - гететодин;
6 - фазоврещатель на~^а £ 7 - перхзстраивае^ии фазо-
вращатель; 8,9 - УПЧ; 10,11 - АРу; 12 - фазовый детек-
тор; 13 - фильтр фазового фетектора; 14 - УНТ; 15 -
двигатель с редуктором; 16 - тахогенератор; 17 - датчик
команды управления; 18 - система частотной подстройки
гетеродина
сигналов,поступает на силовой привод,который отрабатывает его
путем изменения через фазовращатель 7 разы наптягения гетеро-
дина,подаваемого на смеситель 4. Вариация фазы указанного иап-
рянсния гетеродина ведется до тех пор,пока UC!J не станет
равным нулх. Командное напряжение 4/х снимается со специаль-
ного электромеханического датчика 17.
Поскольку информация об угловом положении цели заключена в
раоностп Фаз сигналов принюлаемых антеннами, то вадяым факто-
ром является неидентпчность фазовых характеристик каналов
радиовизира. Оценил влияние невдентичности фазовых характерис-
тик каналов радиовизира на точность пеленгации цели.
Сигналы с выходов антенн:
Ui(t}=Uosin(aot +he) • U,2(t)=UoS(.n(uo't~he')
на выходах УПЧ:
U'Sxt'W -UofSin (an4t+h 8^ }
^XlW^UazSLn^fjyt-hG^-y) .
- 58 -
Сигналы на входах фазового детектора:
“jtyvxi=u«4t stofunt+ht+Ay);
a(t)tuxt =UmZ sin(ag, t-he+p-%) .
Здесь AY - фазовый сдвиг,обусловленный неадеытичностью
фазовых характеристик каналов.
Фазовый детектор перемножает сигналы на своих входах, и пос-
ле 4-L'aTpa НЧ аа_~ржние на силовом нриводе примет вид:
U^iKlu;4Gos(2he =
^K^U^cosA Vsin(2he +
★jKdUiv sin A Vcds(2hs- ¥>) -
Так как силовой привод отрабатывает Ugg путем изменения
величины фазовой задержки F ,то разность 2he - Ф мала и
иеп^К2ди„ч cos A ¥‘(2be-V)^aUnv sin Л Y, (114)
Итак, невдентичность фазовых характеристик каналов радао-
визира приводит к умеыьоению коэффициента передачи по полез-
ной составляющей сигнала на величину cosAY и к появлению
напряжения помехи . .
. (П5)
Ошибку в педе игации цели сменим слидупаш обрезам.'
При идентичных кашах
^ni/(»tiC2he~Y)
я равновесие в кашах редаошзира наступает,котда О»
’•е* (Пб)
При невдентичности фазовых характервстак каналов отпев^
нию цели от равяосиЕшьно! зеин ии^угох g ссютвет-
ствовать равновесав cacroai рцдштаара лра утаювем повороте
силового привода же на угол 9^ та ва угож . Вмжчпу
угла (J* найдеМ'Ясяпиив в яаякзшость (П4) F» ж
приравняв результат цуж / .
яа . 9- • .
- 59 -
Фазовая ошибка в равновесии системы радаовизира
- £ = tg J К. (П7)
Поскольку = 2 he »то фазовой ошибке ЛР будет соот-.
ветствовать ошибка в пеленгации цели
. «и)
2h 2h &d ’ -I
§4. Радповизир как звено контура управления
Сигналы на входах фазового детектора, определенные соответ-
ственно сигналами,принятыми первой и второй антеннами радио-
визира, могно записать в виде:
UmHsLnC6.)n4t+h&j"C0t(t) ;
“Фвш t-he* ,
где Kc , f, - общее усиление принимаемых сигналов по каналам;
Umii- амплитуда принятого сигнала; Uit(t], ~ Е7"л'.-5ус-
лсвленные щуцрми на входах антенн.
Отнесем фаз- полезных составл-тадх сгдчалзз
к сазспг.: задертсаи,обусловшп’аз:-г: г.сгффт п? п?у "
налов визира по сигналу, что позв-аыс? „трпхг.^ь пслез-тд:
составляющие как результат прсходгд’спг с::п_, соглзлм-хга
ния Ufn^sin^nv ^г-32 с : сг</а-аа.'Т".-
и передач ' -£Л
Ki=KcKr*e -> Kz~*cKrc
Для щумов,действующих на входа: антенн,кос^^^ажты передач
каналов визира не будут зависеть от фазовых сдиггсв полезных
сигналов,обусловливаетстх отклонениет: дели от равнее. .“-льне—
го направления. Поэтсглу по щу.:а-.: коэ'ффзпхпенты передач
визира в пределах эффективной полосы ( 2^ - Л'-птс-ль-
ность сигнального импульса) будут определены сазккллосЕ&л
^Гкс‘кг ’> fftU2=^c^e~j(^~v>).
Итак, формирование спектров сзп'ымсв.поступа’-эдк па ксо.ды
фазового детектора, будет проходить по схеме, пргвздепноп на
рис. 50.
Рис.50. Схема формирования спектров сигналов на гхсдях
фазового детектора
Взаимный спектр сигналов,поступающих на входа фазового де-
тектора ,,2
(П9Х
Перенося взаимный спектр в область низких частот л беря ° ’о
действительную часть,получаем:
Теперь,используя формулу (14).находим среднее значение нап-
ряжения на выходе фазового детектора:
<u)>’Uh,K!cKi Кs cos (ы,-у.£)г
» н„ к; Ki к3 cos (f-v).
Стсвда 999
<“а> = 6^ Кс К*Ка sin (2eh-¥>)-
л/ i/2. r/2 (121)
X-—sen^ .
Нзпряхение <«J> и отрабатывается силовым приводом ви-
зира, Из условия равновесия системы <^ИдУ = Ucn = 0 нахо-
дим отрабатываемый фазовый угол .которым и определено
вырабатываемое визиром командное напряжение = К<р
Когда щумов нет,то р =<?£Л , UK =Kr2he и радиови-
зир как звено контура управления эквивалентно представляется
линейной системой (рис.51,а).безынерционная часть которой
имеет коэффициент передачи 2пКр .
При наличии щумов получим,приравняв зависимость (121) к ну-
иэ, следующее:
Scrf^h-P) _ NaAcJiH _ No A. fn4
sinV Pc.Sx
Так как
тс раз-эвд. угол,отрабатываемый радиовпзирсм при нал
определяется соотношением
пудов.
Пусть угол
Тейлора в сыр;
гения: , z„
ctq v^ctn 26h + ~D l '
/ PcBj(-sin 2.eh
P - 2zh + 6 . Разлогим ct^(28t
ТНОСТД 2&h , ограничиваясь двул ч.че:
(122)
•азло-
Теперь
Отсюда
Такта образом.
(>7|^_-г£Л -
= ctQ2zh+Q(_ —2L—) .
° ' S(.n22ah)
б 4. л ! NgAfnv
--------- do ЭрИ-г ---—
sln!2sh-Pc .xsin2sh
e^-^jn.sin^h
Рс-вх
<р= Zeh- No&fMsin2&h .
L Pc. вx J
Командное Еапрядспие, вырабатываемое рэдтовизирсм при
•ши сут-.ов,
2sh-
рс.8х J
В ;сответств:ш с последним ссотнспеяиетд рад;:овиз::р игл
звено пептура управления эквивалентно предсталляето.'7 огру
б з»’н?гтр*о’г~т."ч часть которой*нелинейна (рпо.о~,б).
- 62 -
$ ——
,меньше своего номинального зна-
Это озыачает.что отслеживание углового рассог-
межлу целы» и ЛА будет замедлезиш и в силу
Рис.51. Эквивалент фазового монегз/лульсного рад «визира
в контуре управления: -а) линейный; б) нелинейный
§5. Влияния воинов на точность визирования цели
Анализируя эквивалент фазового импульсного радиовизира в
контуре управления (рдс.51),можно отметить следупцее.
Вс-первых,при наличии шумов угол р .определяпсий уровень
командного напряжения U*
чения .
ласоьания £
этого возрастут динамические ошибки управления.
Во-вторых, г фиксяровавнсм € с ростом уровня щумов
(растет /1^ ) угол может уменьшиться до нуля и кшацд-
ное напряжение зарабатываться не будет. Более того,далъней-
ний рост приведет к смене знака р
<Р из-за щуиов’ означает,что угол g
отрабатываться системой самонаведания,а наоборот.сама систе-
ма управления ЛА начнет увеличивать угловое рассогласование
, S меаду целью п Летательным аипгратсм,доводя его до вели-
чины,при которой у" « О,
FIК агате ль-
. Одена же знака
не только не будет
Если на графике (рис.52)
на ост пл зазисгагссти (124'
провести под угле 45° пряную
F, = 2he и пезтроить при
различных уровнях шума Nq'l
функцию
~ sin2s h >
£b4 2 PcM
Рис.52. К влиянию шума на точ-
ность' визирования цгди тс нетрудно прийти к следу" им
с
Л>/
5
- 63 -
выводам.
I. Когда касательная к фуцкцхд F2 в точке Ро = 0 прехо-
дит под прямой Fj (шум ),угловое рассогласование
мевду целью и ЛА будет отрабатываться системой управления пол-
ностью;
2. Когда касательная к функции Fz в точке <ра - 0 прохо-
дит над прямой Ff (щум ),угловое рассогласование
медду целью и ЛА будет отрабатываться системой управления лишь
до уводящей величины бу ; при этом если £, < ,то рас-
согласование возрастет до ,а если ,тс рас-
согласование уменьшится до бу .
'^личина уводящего углового рассогласования меяду целью и
ЛА определяется из уравнения
sin 2е<, Л. <126)
Уровень шумов,при котором касательная к функции г2 в точ-
ке ро = 0 совпадает с прямей /у .назовем критическим.
Используя условие .
cLFi.
—чг = -7пЛ. • (127)
CW0 |^=47
находит: критический уровень шума
(128)
^кр' д/„, :
Отметим,что при
т.е. когда „b-jm
Nq~15‘Nq'Kp ,
уравнение (126) принимает вид 2£yh
(129)
, и уведт'.ое рас—
согласованче б. = ‘ (130)
* 4-а
Глава У!!.АМП31ТУЕЯ0-4'А30В11! гаЯОИМПУЛЬСЙ-Ь! РД^!0П2ИР
§1. Принцип пеленгования
Рассмотренным аг.тлптудн1лл и фазовым монопмпульспнм радсхсзи-
зирам присуши ошибки из-за неэдзнткчности а’.хплгтуд:влс и фазо-
вых характеристик каналов. При этом гозшчхает самостоятель-
ный мешающий сигнал управления, складавапщкйся с полезтп.ч окт-
налом. Естественна разработка принхпшов построения и техпех-
ческой реализации такого мочод пульоного радиоьпзира,в которо:'
неидентдчность адхли1удных и фазовых характеристхк каналов пе
приводила бы к появлению аддитивного маиющего ехттната уерсцы"'-
- 64 -
кия. К таким визирем и относится асютудно-фаэовый моноим-
пульсный редиовизир, принцип действия которого состоит в следу-
ющем. Две антенны и совмещены в "одной точке" с развер-
нутыми на угол 2% максимумами диаграмм направленности (рис.
53). Равносигнал.чная
зона
Al
X
Д
<рА
совпадает с плоскостью Xpj 0УРЗ .
При малых отклонениях £ це-
2УЛ ли от разнос сгнальной зоны
сигналы на входе антенн
4г
где U0B(t) - несущее колеба-
ние'; JJ - угловая чувстви-
тельность равносигнальной зоны.
Рис.53. К принципу действия
амплитудно-фазового моноим-
пульсного радиовизира
Допустил,что во входном устройстве после антенны сигналы
U(t), и u(t)z взаимно суммируется и вычитаются,т.е. преобра-
зуются в сигналы:
u(t)Sil/ ~u(t),-u.(t)z-2jieUaB (t);
Если в качестве несущего сигнала 8(t) использовать синусо-
идальное колебание В (t) =Sl/7^)et ,то
(131)
и(^вх1 x^k=2.jL€U0 sina)e t;
u(t)ex2 ’ =2U0 sin&at. _
Анализируя соотношения (131),можно сделать следлсте
выводы: I) уровень разностного сигнала пропорционален угло-
вому отклонению £ цели от рсвпосигнальаой зоны;
2) изменение знака отклонения ( -£ ) приводит к из-
менению фазы разностного сигнала U.(t)A по отношению к фазе сум-
марного сигнала u(t)s скачком на величину 3? .
Итак,измеряя уровень разностного сигнала.монно определить
величину углового отклонения цели от равносигналъзой зоны,а
определяя фазу разностного сигнала относительно суммарного,
можно установить знак углового отклонения цели. Подав сигна-
лы U.(t)& на фазовый детектор (ФД) .получаем с его вы-
хода командный сигнал U.(t)K .уровень которого определен вели-
чиной углового отклонения £ ,а полярность - знаком откло-
нения ( + £ ).
Рздвовизиры, использующие идею суммирования и нычитания
сигналов моноимпульсной амплитудной антенной системы в сочета-
нии с фазовым дискриминатором, ня-цгйяптгч амплитудно-фазовыми
моноямпульслымЕ редаовизиреми. Для них невдевтичность ышлитуд-
ннх и фазовых характеристик каналов,по которым проходят сигна-
лы и(Р)л и u(t)x ,не оказывает непосредственного влияния, на
точность пеленгования. Прежде чем более детально рассмотреть
этот вопрос,оценим потеяри/мплун точность моноимпульснах амп-
литудно-фазовых :адиовизиров. 1
§2. Потенциальная точность
Для оценки углового отклонения £ цели от р.с носигнальной
плоскости используются два сигнала: u(t)g v. u(tjs ,так что
амплитудно-фазовый моноампульсаый радиовизир относится к двух-
каналппсаду измерителю и его потенциал .лап точность,согласно
зависимости (13),устанавливаете;- формулой:
£/4<Т^Х<Р₽Т>. »
где Aij > Лх - спектралиие плотности мощности щумов,
сопровождающих соответственно разностный и суммарный сигналы.
Поскольку u(t)s не зависит от £ ,то = 0. Произ-
водная от разностного сигнала
-^^=2/4^56/70)^. .
Соответственно <ВД> = ^ , (133)
где Рк - средняя мощность несущего колебания.
Установим уровень щума,которым сопровождается разностный
сигнал. Возьмем
где a(t)ct, u(t)C2- полезные составляющие входных сигналов;
- шумы первой и второй антенн.
Будем считать, что шумы в антеннах имеют одинаковые мощнос-
ти 6^ и корродированы между собой. Коэффициент корреляции
щумов р . Тогда,мощность разностных щумов
=^6о 0~/>) '
Поскольку мощности &Q соответствует спектральная плот-
ность flg И &д ~ NgA(l) , ТО 6"^ »J 6) 2 Nд (1 ‘
- 66 -
Таким образом.
Подставив соотношения (133),(134) в формулу (132).получим
оценку потенциальной точности ампчитудно-фазового монолмпулъ-
сного радиовизира , .
Siu° 2jll2P0C ' (I35)
§3. Функциональная схема
функциональная схема аглиитудно-фазового моноимпульснсго
радиовизира приведена г.а рис.54. Внутри рефлектора 5 разме-
щаются симметрично облучатели 1-4,сигналы с выхода которых
U1 - U-4 суммарно-разностными элементами ВЧ 6-9 преобразу-
ются в суммарный сигнал 44j - Uf + U2 + tZ3 + U^ .сигнал
курса Up = ( Ut + U2 ) - ( U3 + U^ ) и сигнал тантала
UT = ( Ut + Us ) - ( Uz + U.4. ).
Суммарному сигналу соответствует диаграмма направленности
с максимумом по оси' Xpj (рис.55,а). Сигналам UK и цг соот-
ветствуют диаграмм с равносигнальнши зонами в плоскостях
хР3оу и XfiJon (рис.55,б,в).
Сигналы us , Up , UT поступают на смесители 10-12 и да-
лее на УПЧ 14-16. Гетеродин 13 для трех канатов общий. Сигналы
с выходов УПЧ поступают на фазовые, детекторы 18,19,при этом
в качестве опорного используется сигнал с суммарного каната.
С выходов фазовых. детекторов попарно перемноженные сигналы
х И.т и Uz * Up поступают на импульсные детекторы и
фильтры-усилители 20,21, которые и выделяют напряжения,опре-
деляемые величиною и направлением отклонения цели от равносиг-
нального направления по плоскостям курса и таигахч. Силовые
приводы 22,23 отрабатывают командные сигналы,поворачивая реф-
лектор относительно осей z и Y так,чтобы цель оказывалась
на равносигнальнсы направлении (ось Xpj). Во внешние цепи
командные сигналы снимаются с датчиков 2ч,25.
Рассмотрим влияние неидентичности амплитудных и фазовых
характеристик каналов по сигналам 44г , ик , ат . Запяаец
выражения для составляющих указанных сигналов:
«г= Uo (f-ji £к) sinc^o-t
, . U5*U^U0(1-JL&p) sinaot;
Рис.54. Структура монопмцульспого а\:шп1тудас-<азов''го
радковпзпрл: Г,2,3,4 - облучатели; 5 - т?э?л?ктог>; 6,7,
6,9 - суи ’арно-разностные ВЧ элементы; 10,11,1’2 - сае-
сктел?; 13 - гетеродин; 14,15,16 - УПЧ; 17 - АРУ; 18,
19 - фазовые детекторы: 20,21 - <ыш>трн-усЕлитзли;22,
23 - силовые приводы; 24,25 - датчики команд
Рио.55. Диаграги направленности антенны а’ллитуддо-
фазсвого хонойипульснсго радиоввзира.
- 68 -
Ufi-u^UaCf^/iCrjsin^t;
a^u.4.=Ue(f-/i&r)^cuot.
Таким образец,
«г=2U,Sin O),t;
Uf( ~2jA £f( Uf SIU Cl)g t1
Ur-2jieTlJ0SLn <Dot,
(136)
Рассмотрим капал курса. На фазовый детектор 18 этого канала
с учетом ылглитугьой ж фазовой негде и тичкосги трактов усиленлн
сигналов ц£ и (JK 6JJ3H поступать напрасная
и; =4«6К и, кк sln(am t+дуь);
a^20oK^sln(cdn4t),
где Кц и ^х - коэффициенты усиления трактов сигналов Цк и
‘ us ; - фазовая нэидегачвость трактов усиления ежгва-
лов Uk и Ц.% .
На выходе фазового детектора после фильтра пагучаем
<lia'>=<(L^u!^>=2UezjkeKKQKliK^cos^\(rll, (138)
Таким образом* различия в коэффициентах усиления к фезсжх
характеристиках каналов, по которым преходят сигналы и%. »
• UT не приводят к поавлесиг в кямвопп каттрпкппец
дополнительных аддитивных помеховых ооставляищих.а жзмеяквт
литтп, чувствительность радиовизира к угловш отклсяенвм пая.
Пусть Ucnmin ~ пороговая чувстпктельность силовых приводов.
Тогда угловая чувствительность радиовизира при идентичных
каналах, ' ^л/я
а при амплитудной и фазовой неидентичности каналов
- UcHfTiin
Ле~ 2U^gK^/L-COSЛЧ'к ‘
Абсолютное изменение угловой чувствительности радиовизира
2U^]U. КзК^созЛ^ /
- 69 -
Относительное изменение чувствительности [адиовизира из-за
мшгитудной и фазовой невдентичности кяналов усиления сигна- >
лов и.к
где
(139)
к’
(140)
'X
2
S-
В
• составит величину
= .___L_______f
cCcosAV* '•
К* Кц - -]
°^в к ~ ~й~ е '
As Ад l • j
§4. Влияние щумов на*точностъ визирования цели
Напряжение, отрабатываемое силовыми приводами по каналам
курса и Ttriraxa,формируется с помощью фазового детектора на
основе суммарного и разностного сигналов. Полезные составля-
ющие этих сигналов на входах фазового детектора
^^Q~2.UgK^stn/
^4 ^2UDjJLeK&sin<dri4t
Наряду с полеатыми сигналами на входах фазового детектора
действуют шумы соответственно по суммарному и разностному
R3H3JI3MZ ц/ _ »» . // / . •
где u^u./ - U-ul4. - шумы по вибраторам 1-4 антенной системы ви-
зира. Будем считать,что мощность щуыов по каадому вибрато-
ру антенной системы визира одинакова:’ »а сами щумн
вибраторов пспарно ьзагглно коррелированье (коэффициент кор-
реляции щумов J3 ). Тогда мощности шумов суммарного и раз-
ностного каналов на входах смесителей будут соответственно
равны: . „ в
Отсюда спектральные плотности щумов суммарного и раз-
ностного каналов
/^=4^(h3j>); Na-4No (f-f).
После усиления на входах фазового детектора спектральные
плотности щумов составят:
. при
А1£гГх,| + ПЧ | ,
<•> е|^4-- - I ,
Д &)<?</]
2 Г
(141)
N&a=4-N»(ll-J})KA t при -6jepj/7v±
- 70 -
В соответствии с соотаошешьвли (140) и (141) схема формиро-
вания спектров сигналов,поступаыях на входы разового детекто-
Рис.56. Схема фор.стрования спектров сигналов на входах
фазовы о детектора
Взаимная спектральная плотность между сигналами на входах
фазового детектора
&.{&>) л 2> = ~ ^ач}
(142/
ACO/rv I
^пч~ 2. J'
Напряжение на выходе фазового детектора,отрабатываемое
силовым приводом, ♦
Re ~
(143)
КЛ ка U^8N0K&KsKa^fnS(f-fi)(^/i.
Силовой привод разворатаваст антенную систему визира до тех
пор, полз не станет равным нулю. Приравнивая зависи-
мость (143) к нулю и полагая £ = - £w .находим ошибку ь пе-
ленговании дели .обусловленную цумяа
(14ч)
и1
При импульсном излучении Afn4= ~ Эс
энергия в импульсе. Так что . “ ч
- 71 -
Если излучение’непрерывное,то = р , N0Af -Р. Кх~а
§5. Рйдаовизир как звено контура управления
Из выражения (143) для среднего напряжения фазового детек-
тора следует,что радиовизир как звено контура управления
может быть представлен структурной схемой рис.57. Б состав
звена входят:
- безынерционный элемент с коэлкиц .ентом передачи
kS4 -4-u3fiKAkzKa;
- помеха со спектром флюктуаций G(P>)d и средним уровнем
- инерционный элемент с коэффициентом передачи Ф(Р)<р ,
характеризуэдий структуру фильтра фазового детектора;
- элемент обратной связи с коэффициентом передачи Ф(Р)сп •
характернау?да:й работу силового привода;
- датчик командного сигнала с коэффициенте;: передач;: ^(Р)^
В целом имеет место радиоззено с компенсацией входного сиг-
нала.
Рис.57. Эквивалент мснослпульсного атаьтатудно-фазового
радиовизпра в контуре управления
- 72 -
Глава УШ. РДЙЮВИЫ'РП С НЗПРЕР2ШЛ ИЗЛУЧЕНИЕМ
§1 . Общие замечания
Наряду с импульсными радаоБизисами цели используются радио—
визиры с неп~ер:1вннм излучением. Основное их преимущество сос-
тоит в простоте выделения сигпалоь от движущихся целей путем
использования селекция цели по скорости на основе допплеровс-
кого сдвига частоты. Креме того,в радпоБпзнрат с непрерывны?.!
излучением существенно укекьтеедл :.ппвг:злъное расстояние до
пели,при котором визир нормально функционирует.
Так как при непрерывном излучении затруднена развязка отра-
щенного сигнала от прямого азлучсн:х,то прпмзнялт раздельные
передающие и приемные антенны,разнося /х на возможно большее
расстояние друг от друга. Из этих соображений наиболее благо-
приятным является полуактивное самонаведение,когда на лета-
тельной аппарате расположена только приемная антенна,а переда-
ющая находится на пункте управления.
Используются родаовнзиры с непрерывным излучением при наве-
дении ЛА на наземные,морские и япзколетяаде воздушные вели.
По этиа целям радиовизиры с непрерывна.! издуенпем оказывают-
ся более эффективными,чем импульсйые.
§2 . Функциональная схема
Функциональная схема рэдиовззпра со сканирующей антенной
при непрерывном излучении сигнала и полуактпвксм самонаведе-
нии приведена на рис.58.
Отраженный от цели ситная принимается антенной А, со скани-
рующей диаграммой направленности. Прямой сигнал от пункта уп-
равления (носителя) принимается антенной Ag. С помощью смеси-
телей 1,2 принятые сигналы преобразуются на промежуточную час-
тоту и,усиленные УПЧ 3,4,поступают на смеситель 5,выделяющий
колебания допплеровской частоты FA .усиливаемые усилителем 7.
Гетеродин S общий для смесителей 1 и 2.
Так как FA за счет взаимного перемещения цели и ЛА изме-
няется, то для узкополосной фильтрации необходима система
сложения за сигналом допплеровской частоты. В её состав вхо-
дят: смеситель 8,частота сигнала на выходе которого подаер-
хдзается приблизитдтьно постоянной: = £. + F. - const
JLn jt var •»>
узкополосный усилитель 9; частотный дискриминатор 10; уыраг-
д:е:д»ц реактивный элемент II; перестуди, явный по частоте гене—
- 73 -
Рис.58. Структура радловизира при непрерывном излучении
сигнала и полуактивнсм самонаведении: А,,А9 - приемные
антенны; 1,2 - смесители; 3,4 - УПЧ; 5 - смеситель; 6 -
гетеродин; 7 - фильтр и усилитель допплеровской частоты;
8 - смеситель; 9 - узкополосный УПЧ; 10 - частотный
детектор; П-управляеппй. реактивный элемент; 12 - пе-
рестраивае.мый по частоте генератор; 13 - схема поиска
сигнала; 14 - амплитудный детектор; 15,16 - фазовые детек-
торы; 17 - генератор опорных напряжений; 18 - силовой
псинод облучателя антенны; - разпосигнел’Л’ое направле-
ние
ратор 12. В режт/.е поиска сигнала схемой поиска 13 выраба-
тывается пилообразное напряжение, пеленги ::.,з через отравляе-
мый реактивный элемент II частоту генератора 12 в диапазоне
до тех пор,пока fCM не попадет в полосу узкополосного уси-
лителя 9. С появлением напряжения &(()„ поиск пускгатаэтся
и наступает режим слежения за Ел .
Отселектированпый сигнал U.(t)M при отг-лояонип гдлп от рдв-
носигнальиого направления Хрг оказывается прсмсду-т~оь-глс:
по амплитуде частотой сканирования Q.CK антенны кт_. После
амплитудного детектора 14 модулирующее колебание u(t)M
дает сигнал ошибкии($)со,который поступает на фазовый детек-
тор 15,16 каналов курса и тангажа. Опорное напряжение для
фазовых детекторов снимается с генератора 17,связанного с
электродвигателем 18,вращаюаги.1 облучатель антенны А/. С выхо-
дов фазовых детекторов 15,16 снизится командные сигналя по
курсу U* и тпнгаду UT
- 74 -
§3 . Способы оценки параметрической частоты
допплеровского процесса
Во многих случаях допплеровский сигнал характеризуется широко-
полосни?.: спектром,перекрывающим удскртликадионную характеристи-
ку частотного (фазового) детектора. В этих случаях система сле-
гения запчастотой допплера" должна жестко привязываться к не-
которой параметрической частоте спектра,след 1 за её пзремеще-
Способы оценки параметрической частоты процесса по его
и,в частности.допплеровского про-
чло нормированная спектральная плот-
случайного процесса x(t) z ,
с» (<У/
наем, .
энергетическому спектру -[27]
цесса, основываются на том,
ность
(I4c)
СОц
рассматриваться как плотность вероятиосте;! текущей час-
о> процесса в диапазоне частотной BH6cpiui{aJe[&JA,<^fl
может
тоты
Действительно .функция a (aj) обладает следующими свойствами:
О' XX
(147)
—
В теории вероятностей и математической статистике дек?за-
роется,что условия (147) необходимы и достаточны [22,23,24]
чтобы функция ,пм удовлетворяющая,была плотностью вероятнос-
тей своего аргумента; кроме того,в работе [2l] при достаточ-
но обща условиях установлена прямая связь мецду нормирован-
ной спектральной плотностью процесса плотностью расп-
ределения вероятностей его текущей частоты
Итак,пусть наблгдаеаый случайный процесс (допплеровский
сигнал) J((tj характеризуется вор1<яуоваяно2 спектральной
плотностью .где СОв- неизвестная круговая параиет-
рпческая частота спектра.переаемезие которой ж должно отеле-
киваться пра выделении допПдеровсксго егцната. Поскольку
векзвестга.то сна и должна быть оценена следящей системой.
Известно,что вся жвфориялия,которую можно получгть о пара-
мглте.наблвдая процесс x(t) .заключёна в апостериорной
ПЛС7НССТ2 вероятностей параметра. Поэтому, наблюдая частотную
выборкури]е [&)*., дая оценки параметрической частоты
энергетического спектра. процесса.необходимо получить адостери-
:с-бтс плотность вероятностей
- 75 -
Пусть совместная плотность распределешьч вероят-
ностей текущей а) и параметрической <л>а частоты процесса,
Т0ГДЭ W(W0) ~ W(cj) W$] = W (и0) *(%)-
Замечая,что
получаем
Так как до
w (йН=fa (а‘•
измерений нет каких-либо сведений
(148)
о пункциях
^V(CJ0)i W(cjj ,10 их следует считать равномерно распределен-
КИЛИ L25! »и Т0Гда ЛуИ г >
(MS)
Итак,оценка параметрической частот: лззбого процесса (в тал
числе и допплеровского) монет бить спснструигсгака на основе
ОРО ЛОС UTpOIklUHOil СНСКТ} ГсЛГ IIC?/ 11ЛСТ ХСТ 1.
Вытекающие из завксдлосгп (14‘?) зб_> .-.и:з способы сценки
параметричсско:* частоты случа млн: и. оьгзсоз z их свойства
рассмотрены в работе [2l] . Пр ~ спгтслвно дсгит ;р::'сг'о: у прс-
црссу,1г.:с::цо_гу место в р?ац ов.:з:: ._т с I.? ;ре,':’ст~.1 из-уч хт:ал,
представля-зтся пелесообразь-аы гклелвть сл-.”у.-лда частцуе оцсп-
ил: I) одз1н:а по нале: •0 .7,3-е. -ддт..’ ~’:?д олгорпплгм дао) /\ д^' ~с’ = ; '
2) оценка г.с зпера'ет.ппско у цдтрр,;•„дц--дт*зпл,:.'«я
алгэрит и ;м \^x(a>^)d6J -j ;• .(I5D
3) средаевзаешеппач оце’п:а,уст.г!глл.::гд.’.:д’ атгэрип о:.: zs (Iе9) .
§4. Структура следящих устройств
На основе алгоритглсв (15С)-(152) мстлго составить стру?;т;"-
ные схем устройств слекения за параметрической частотой доп-
плеровского спектра.
а) Сведение по средневзвешенной оценке
Используя выражение (146),пропотавии алгориг! (х52) в виде
„ - 76 -
----------------• <I53>
( GxX(<o)d<o
a>n
Интеграл в знаменателе определяет мощность входного процесса
«I**™}"5 его среда614! квадрату,т.е.
j^хх^^ " Рх ‘
Сйн ✓
Подынтегральная функция СО Gxxfaj) интеграла, стоящего в
числителе соотношения (153).может рассматриваться как спект-
ральная плотность процесса,прошедшего через лилейный фильтр
"оценки" с амплитудно-частотной характеристикой
tIM)
Следовательно,числитель выражения (153) представляет собой
мощность процесса y(t) .полученного на выходе фильтра "оценки"
fa Gxx (co)dco=Рд~ <y\t) > .
Таким образом, <^~У2'^)У
= ’ (155)
Соотношение (155) показывает,что для выделения сигнала,
пропорционального средневзвешенной частоте допплеровского
спектра,необходимо:
-во-первых, сигнал x(t) с выхода усилителя 7 допплеровских
частот (см.рис.,58) превратить в сигнал y(t) .пропуская x(t)
через фильтр с амплитудно-частотной характеристикой 1/со ;
— во-вторых, сигналы x(t) и y(t) подать на квадраторы,а за-
тем проинтегрировать;
— в третьих,результаты интегрирования разделить друг на друга.
• С выхода делителя напряжение,пропорциональное средневзве-
шенной частоте допплеровского спектра,подается на реак-ч^зч-э
элемент II, управлял щй частотой генератора 12. Сигнал, выклх>-
чаший систему поиска,подается на неё с интегратора тадятония
мощности входного процесса. Шходной сигнал и. (t)M снимается с
усилителя промежуточной частоты
Б соответствии с изложенным,Фуекциоебльпдя схема слежения
за допплеровской частотой по средневзвешенной оценке гриродяня
на рис.59.
(156)
Рис.59, Структура устройства слезе.пэт за допплеровской
частотой по средневзвешенной оценке
б) Слежение по энергетическому центру
В соответствии с зависимостями (146) и (151) имеем
^03
-Как правый,так и левый интегралы в (156) представляют со-
бой мощности входного процесса, пропущенного через фильтры с
равномерной (прямоугольной) амплитудно-частотной характерис-
тикой на частотах <- сдвз и <^>ё • Обозначая сиг-
налы на выходах указанных фильтров через yt(t) и y2(t) .полу-
чаем алгоритм слеяения в виде •
• . <15?)
Техническая реализация этого алгоритма такова. Сигнал с вы-
хода усилителя допплеровской частоты поступает на смеситель и
после усилителя промежуточной частоты разделяется полосовыми
фильтрами со "сшитыми" частотными характеристиками на два сиг-
нала - .которые возводятся в квадрат и интегри-
руются. Результаты^интегрирования взаимно вычитаются. Получен-
ное разностное напряжение усиливается и подается на реактив-
ный элемент для перестройки управляемого генератора,который
изменяет свою частоту ДО тех пор,пока разностное напряжение
не станет равный нулю. Схема поиска выключается сигналом;
снимаемым с сумматора результатов интегрирования. Вводной
сигнал U. (t)M снимается с усилителя промежуточной частоты.
- 78 -
Структурная схема устройства слекекия за допплеровской часто-
той по энергетическому центру спектра пр оцесса приведена на
Рис.60. Структура устройства слеаепия за энергет.гяескпа
центрслГ спектра допплеровского провеса
в) Слезете по энергетическому максимуму
Для получения структуры следящего устройства по алгерч'п.д'
(150) заппЕегл производную ст нор.з:рованнсй ссекгральнсй плот-
ности процесса в виде
-^—z.--------KHm----------------------—-у----------------'
дй) Ди-~о • (158)
Ао)г
Поскольку при й) = й)0/я производная делзнг бить равна
нулю, то алгоритм слспения определен равенства.:
£14) (й), ) =AO)GXX (й)+Ай),й)а) . (159)
Согласно соотношению (150) .сдстема стекетя долге! состо-
ять пз двух каналов. Первая каналом выделяется сосредоточен-
ная в полосе частот Ай) на частоте о модность дспсле-
ровского процесса
Вторым каналом выделяется такке мощность в той хе полосе -
Ай) ,но при сдвиге спектральной плотност .г допплеровского
процесса на величину Ай) ‘
ДР2=Аа£хх(^Аа),й)^<^(1)>.
В соответствии-с разлосты, АР^ ~АРТ прогзводвтся перес-
тройка Гетеродина,который выдает две частоты": й)гуа к й)^а^Ай).
Перестройка гетеродина прекращается,когда достигается усло-
вие ДР, - ДР2 = 0. Очевидно,что кавалъЕые фильтры настроена
на одну и ту не частоту СД/tq ж имеют равные полосы Ай) .
Структурная схема системы слоения эа движением допплеровс-
кого спектра по его максимуму приведена на рис.61.-Вихсддай
сигнал снимается с допплеровского усилителя пресбраио-
ваеных частот,а схема поиска нвхлючается сигналом с сумлатора
результатов интегрирования.
Рис.61. Структура устройства слеаения за допплеровской
частотой по максимуму энергетического спектра
В заключение отметил,что вопросы точности оценок парамет-
рической частоты случайных процессов по их энергетическим
спектрам рассматривались в работах [26,2?] .
- 80 -
ЛИТЕРАТУРА
I. Волковский С.А.,Свопрленко Е.И.,Савинов В.А. Радпоуст-
ройства систем уцрззлонгл летателыньш аппаратами."Машино -
строение", 1972.
2. Лек А.С. Управляемые снаряда. Теортехиздат, 1957.
3. Гуткин Л. С. Принципы управления беспилотными объектами.
"Ссветсное радио", 1953.
4. Радиоуправление ракетами,снарядами и космаче смели ап-
-- паратами. Под ред. Л.С.Гуткина. "Советское радио", 1968.
5. Лервачев С.В..Балуев А.А..Чилпкин В.'.'. Статистическая
динамика радиотехнических следящих систем."Сслетское радио",
1973.
6. Казаков Е.И. Статистические метода проект:грованпя сис-
тем управления. "Машиностроение", 1969.
7. Пугачев В.С..Казаков И.Е..Евланов Л.Г. Основы статисти-
ческой теории автоматических систем. "Машиностроение", 1974.
8. Солодовсклй В.В..Матвеев П.С. Расчет оптл'альных сис-
тем автоматического управления при наточил помех. "Машино-
строение", 1973.
9. Санкоэский Е.А. Вопросы теории автоматического управ-
ления. "Высшая школа", 1971.
10. Цейтлин Я.М. Проектирование оптимальных линейных сис-
тем. "Машиностроение", 1973.
II. Моргунов А.Н. Лекции по статистической динамике систем
управления. Изд. РРТИ, Рязань, 1975.
12. Основы рдгоупразления. Под ред. В.А.Вейцеля н В.Н.Ти-
путика. "Советское радио", 1973.
13. Леонов А.И..Фомичев К.И. Моноимпульсная радиолокация.
"Советское радио", 1970.
14. ТИпугин В.Н.,Вейцель В.А. Радиоуправление. "Советское
радио", 1962. • .
15. Бевдат Дж. Основы теории случайных шумов и её примене-
ния. Перевод с англ, под ред.В.С.Пугачева. "Наука", 1965.
16. Сайбель А.Г. Основы радиолокации. "Советское рядно",
1961.
17. Чембровский С.А..Тончеев Ю.И.,Самойлович Г.З. Обдие
пгшпппш проектирования систем управления. " 'л- тпчлг трое чиа "
1972. .
- 81 -
18. Ологилев К.А. .Вознесенский И.В.,Фиников Л.А. Нуиопрп-
емники СВЧ. Воениздат, 1967.
19. Теоретические основы радиолокации. Под ред.В.Е.Дулевича.
"Советское радио", 1964.
20. Аренберг А.Г. Распространение дециметровых и сантимет-
ровых волн. "Советское радио", 1957.
21. Моргунов А.Н. 0 способах оценки параметрической часто-
ты по энергетическое спектру процесса. Медвуз,сб."Радиоэлек-
тронные устройства",выл.I. Изд.РРЭД,Рязань, 1976.
22. Гнеденко Б.В. Курс теории вероятностей. "Наука", 1965
(с. 133-135).
23. Митропольский А.К. Техника статистических вычислений.
"Наука", 1971 (с. I59-I6C).
24. Смирнов Н.В. ,Дунгн-Барковский И.В. Курс теории вероят-
ностей и математической статистики. "Наука”, 1269 (с. 114).
25. Сысоев П.П. Оценка параметров,обнаружение и различие
сигналов. "Наука", 1969.
26. Моргунов А.Н. 0 точности способов оценки параметри-
ческом частоты случайных процессов по inc энергетическим спек-
тра:/.. Медвуз,сб."Радиоэлектронные устройства",чип.I. Изд.
РРТЯ, Рязань, 1976.
27. Моргунов А.Н. Точность оцепил пара/етрдьеской частот
прямоугольного радиоимпульса п случайного стационарного ЬЧ
процесса. Со. "Некоторые задачи апг.тиза и cin-теза ра.'иосиг-
налов и их обработки”, вып. 64. Труды Рг'Тл, гиз.ень, 1??4.