/















Автор: Потапов В.С.
Похожие



Текст
5. ЭКСПЕРИМЕНТАЛЬНЫЕ ИЗМЕРЕНИЯ
АЭРОДИНАМИЧЕСКИХ СИЛ И МОМЕНТОВ,
ДЕЙСТВУЮЩИХ НА ОБТЕКАЕМОЕ ТЕЛО,
ИЗ ОПЫТОВ В АЭРОДИНАМИЧЕСКОЙ ТРУБЕ
Потапов В.С.
1. Введение
Очевидно, что для управления летательным аппаратом необходимо
знать, какие динамические нагрузки действуют на него в конкретных
условиях полета. При этом одна из важнейших проблем управления как
раз и состоит в учете этих внешних воздействий и отыскании способов
соответствующих реакций со стороны управления. «Классический» под-
ход состоит в том, что управляемое тело (например, самолет) рассматри-
вается как абсолютно твердое тело, подвергающееся действию внешних
сил, сводящихся к их равнодействующей и механическому моменту. При
таком подходе, конечно, не учитываются деформации элементов конст-
рукции и связанные с этим деформационные колебания, которые в слу-
чае резонанса с внешними пульсациями могут привести к разрушению
конструкции, как, например, это происходит при флаттере.
Из всего многообразия вариантов полета в рамках студенческого
практикума моделируется лишь относительно простой случай поступа-
тельного движения с постоянной скоростью (так называемый «крейсер-
ский полет»), причем изучается воздействие потока только на крыло
самолета, приводящее к возникновению подъемной силы.
Эксперименты проводятся на установке А-6 Института механики
МГУ, представляющей собой аэродинамическую трубу замкнутого типа
с открытой рабочей частью. Сечением конфузора при входе в рабочую
часть является эллипс с горизонтальным диаметром 4м и вертикальным
2,35. Скорость потока воздуха в рабочей части трубы может достигать
50м/сек.
Основная цель задачи практикума состоит в определении зависимо-
сти аэродинамических сил и их моментов от угла атаки а, который за-
данным образом меняется в ходе эксперимента (практически все целые
значения из интервала - 6° < а < 26°). Впервые для студентов эта рабо-
та была поставлена доцентом кафедры аэромеханики и газовой динамики
С.Г.Поповым и зав.лабораторией общей аэродинамики С.М.Горлиным
[1][2]. В результате обработки экспериментальных данных выявляется
63
важный физико-механический эффект, получивший в аэромеханике на-
звание «кризис подъемной силы». Этот эффект состоит в том, что моно-
тонный рост подъемной силы с ростом угла атаки от минимального до
некоторого определенного, зависящего от формы крыла т.н. «критиче-
ского значения», сменяется при а>акр падением подъемной
силы с увеличением угла атаки, так что при а = подъемная сила
оказывается максимальной. Соответственно, относительно малые значе-
ния силы сопротивления в докритической области многократно увеличи-
ваются в области а > . В практическом отношении оба этих явления,
т.е. падение подъемной силы и резкий рост силы сопротивления при
а > , могут привести к катастрофическим последствиям, особенно в
режиме посадки самолета, если эффект кризиса подъемной силы не учи-
тывается должным образом при управлении самолетом. Аэромеханиче-
ский аспект явления кризиса подъемной силы качественно состоит в
переходе от режима безотрывного обтекания крыла при а < ак^ (случай
«хорошо обтекаемого тела») к режиму отрывного обтекания при а >
(случай «плохо обтекаемого тела»).
2. Описание экспериментальной установки
В открытую рабочую часть аэродинамической трубы помещается
«измерительный прибор» - аэродинамические 6-ти компонентные весы,
представляющие собой жесткую внешнюю раму, на верхней части кото-
рой установлены весовые элементы. Эта рама является также внешней
опорой для системы подвесов, на которых укрепляется исследуемая мо-
дель. Принципиальная схема системы подвесов изображена на рис. 1.
Считается, что эта система подвесов жестко фиксирует в простран-
стве три точки: О, О', О3. К этим точкам через шарнирные соединения
прикрепляется исследуемая модель. В рамках физико-механического
практикума изучается модель крыла с конечным размахом L, прямо-
угольного в плане и имеющего один и тот же профиль в каждом сечении
по размаху со значением размера хорды b и максимальной толщиной h,
как изображено на рис. 2.
64
Рис. 1. Схема системы подвесов исследуемых моделей в рабочей части
трубы А-6. В точках В,В' расположены блоки. ~ достаточно
большие массы соответствующих грузов, {x,y9z}~ лабораторная
система декартовых координат с ортами ех ,ёу,е2, g = -gey, g > О
- ускорение силы тяжести. Заштрихованные области соответствуют
жесткому креплению с внешней рамой.
Рис. 2. Общий вад исследуемого крыла с размахом L, хордой b и
толщиной h. Изображены прикрепленные к крылу стержни с отвер-
стиями О(0) О'(0) О<0)
viauimu ЧУ 9^~' 5ЧУ^
65
Это крыло крепится на системе подвесов, изображенных на рис. 1,
через шарнирные соединения таким образом, что совпадают точки
{0,0^}, {О',О'<0)}, {О3,Оз0)} . В результате проекция возникающей
механической системы крыло+подвесы на плоскость {х, у} принимает
вид, изображенный на рис. 3.
Рис. 3. Проекция системы крыло+подвесы на плоскость {х, у}. В
точках О,Оз,Од реализуется шарнирное закрепление. Эмпириче-
ский угол атаки а определяется как угол между отрезком ОО3 и
осьюх
Как видно на рис. 3, при некотором произвольном, но фиксирован-
ном, положении крыла, определяемом положением точки О3, отрезок
ОО3 составляет с осью х, по которой считается направленной скорость
потока воздуха К» при входе в рабочую часть, определенный угол а,
называемый эмпирическим углом атаки. Следует отметить, что по тех-
ническим причинам крыло подвешивается как бы «вверх ногами», так
что изображенная на рис. 3 картина фактически соответствует положи-
тельному углу атаки.
Угол атаки а в опыте является управляемым параметром, вариа-
ция которого осуществляется путем контролируемого изменения рас-
стояния между точками О3 и 04. При этом наличие закрепления в виде
«тележки» на заднем подвесе обеспечивает условие его параллельности
-66
вертикальному направлению (оси у) при любых а. Реально угол а мо-
жет изменяться в диапазоне -6° < а < 26°, принимая любые целые зна-
чения.
3. Экспериментальная методика определения
аэродинамических сил и моментов
На установке, изображенной на рис. 3, непосредственно измеряе-
мыми величинами являются механические напряжения в подвесах (1),
(2), (3), связанных как с внешней опорой (рамой), так и с исследуемой
моделью. При этом необходимо установить соотношение между этими
напряжениями и аэродинамическими силами, действующими на крыло,
что и делается в этом параграфе. Чтобы не вдаваться в излишние детали,
соответствующий анализ проводится в рамках упрощенной, идеализиро-
ваной схемы подвесов, приводящей однако к правильным окончатель-
ным результатам, к которым можно также прийти, рассматривая и ре-
альную схему. Такая упрощенная схема изображена на рис. 4.
В этой схеме считается, что подвесы (1), (2) представляют собой не-
весомые, абсолютно жесткие относительно растяжений и сжатий и абсо-
лютно мягкие относительно изгиба стержни, соединенные друг с другом
под прямым углом через шарнир в точке О, причем оставшиеся их концы
жестко заделаны во внешнюю опору. При этом, очевидно, точка О явля-
ется неподвижной точкой, к которой через шарнир присоединяется кры-
ловой профиль. Фиксация профиля в плоскости {х, у] происходит путем
присоединения в точке О3 через шарнир груза pg и вертикального
стержня (3), который связан с внешней опорой так, как показано на
рис. 4.
Если рассматривать эту систему с точки зрения теоретической ме-
ханики, то подвесы (1) и (2) играют роль механических связей, удержи-
вающих неподвижно в плоскости точку О, а подвес (3) - точку О3. При
этом внешними по отношению к данной механической системе являются
сила тяжести //og, действующая на крыло, и сила тяжести груза //g.
Поскольку в ситуации на рис. 4а крыло и груз находятся в состоянии
механического равновесия, то это означает, что со стороны внешней
опоры к системе оказываются приложенными точечные силы реакции
связей, обозначенные на рис. 4 векторами Ту ,ТгЛз > направленными по
связям, причем индекс «о» соответствует случаю отсутствия потока воз-
духа, Гоо = 0.
67
Рис. 4. Упрощенная схема системы подвесов модели крыла. На рис.
(а) изображена ситуация в отсутствие потока. На рис. (б) показана
ситуация, в которой на крыло действуют аэродинамические силы.
Рис. (в) подчеркивает, что аэродинамическая сила лежит в плоскости
{х у}, а ее момент (тангаж) направлен перпендикулярно этой плоско-
сти.
^8
Таким образом, ситуация, изображенная на рис. 4(a), с механиче-
ской точки зрения представляет собой равновесное состояние системы,
состоящей из крыла и груза, к которой приложена совокупность сил
реакций связей 7]°(/ = 1,2,3), действующих со стороны внешней опоры.
При этом поскольку система находится в состоянии равновесия, можно
утверждать, что соблюдаются условия механического равновесия, со-
стоящие, как известно, в том, что сумма всех сил и сумма всех моментов,
действующих на систему, должны равняться нулю. В данном случае:
Tj0 + f2° + f3° + Aoi + MS - О,
Мо (Mog) + Мо (Mg) + Мо (Т3° ) = о
причем ради простоты рассматривается момент сил относительно точки
О, к которой приложены силы 7]° и Г2° >так что они обладают нулевыми
моментами.
В проекциях на оси {х, у, z} отсюда следует:
т£> =(M0+M)g
<
т^> = 0 = = т£у
(3.1)
(Pog)+Mz0 (pg) + T3a = o
(3.2)
где а - “плечо” силы Ту , которое, как видно из рис. 46 связано с фикси-
рованным расстоянием /х, называемым базой подвески, очевидным
соотношением:
a = lxcosa
(33)
Для того, чтобы определить характеристики силы тяжести и ее точки
приложения, проводится специальный эксперимент, называемый «нуле-
вой продувкой». При этом труба выключена, и получаются, в основном,
сведения относительно зависимости момента сил тяжести от угла атаки
крыла, что важно при реальной схеме крепления. Эта часть эксперимента
называется «нулевой продувкой». Измеряя силы , на основании
формулы (3.1), (3.2) получается информация относительно силы тяжести
и ее момента, действующих на систему.
69
Получив эти данные, проводится вторая часть эксперимента, когда
включается труба, так что система оказывается под внешним воздейст-
вием набегающего потока воздуха со скоростью порядка 25 м/с. Этот
поток обтекает изучаемое крыло, так что в результате возникает их аэро-
динамическое взаимодействие. Как схематически изображено на
рис.4(б), классический подход описания взаимодействия состоит в том,
что на каждый малый элемент площади крыла с размером d2S около
точки г с внешней нормалью Я со стороны потока будет действовать
поверхностная сила
dF = f(n)d2S (3.4)
с поверхностной плотностью
7 = Г(3.5)
где ру (г) - компоненты тензора механических напряжений в точке
крыла г .
В результате считается, что механическое взаимодействие крыла и
обтекающего его потока воздуха состоит в том, что к поверхности крыла
оказывается приложенной система поверхностных сил (3.4), распреде-
ленная по крылу с плотностью (3.5). В то же время, поскольку крыло
считается абсолютно твердым телом, то систему сил (3.5) достаточно
характеризовать, во-первых, равнодействующей:
F = jf(n)d2S, (3.6)
$
где поверхностный интеграл берется по всей замкнутой поверхности
крыла и называется аэродинамической силой. При данной плоской кон-
фигурации полета эта сила лежит целиком в плоскости {х, у} и обладает
проекцией X на ось х (скорость), называемой силой сопротивления, и
проекцией Y на ось у, называемой подъемной силой, так что (3.6) можно
записать в виде:
F = Xex+Yey (3.7)
Свойство силы сопротивления состоит в том, что она имеет диссипатив-
ную природу, так или иначе связанную с силами трения, и является все-
гда положительной:
70
X > 0 (3.8)
Возвращаясь к системе (3.5), укажем, во-вторых, что распределенная
поверхностная сила создает механический момент относительно оси
вращения крыла. Для определения элементарного момента dM$ отно-
сительно точки О, достаточно произвести векторное умножение радиус-
вектора го, проведенного из точки О в точку приложения силы:
dF = f(jr0)d2S. В результате получается:
dMo=[roxdF] = [roxf(ro)]dS
Из этой формулы видно, что в случае обтекания симметричного относи-
тельно плоскости z = 0 крыла суммарный момент аэродинамических сил
мо = f[r0 *f]dS = Ммег = Мо(F) (3.8)
фактически направлен по оси z, перпендикулярной плоскости {х, у}, и
имеет некоторое конкретное значение, обеспечивающее равновесие. В
авиации момент аэродинамических сил (3.8) принято называть «танга-
жем».
Итак, механическое взаимодействие крыла и потока сводится к то-
му, что к крылу оказывается приложенной система поверхностных сил с
равнодействующей (3.6) и моментом (3.8). При этом из-за наличия свя-
зей такая система сил не приводит к какому-либо перемещению крыла,
так что оно оказывается в том же геометрическом положении, как и в
случае отсутствия потока. Поэтому в ситуации с наличием потока
(рис. 46) можно вновь записать условия механического равновесия, учи-
тывающие теперь внешние по отношению к системе аэродинамические
силы. Очевидно, по сравнению с (3.1), (3.2) условия равновесия модифи-
цируются следующим образом:
{Г2 + Т3 + Y = + ц )g,
Тх = - X 1 '
(Aog) + ЛЛо(А£) + Т3а + АЛДГ) - 0 (3.10)
Вычитая теперь из линейных уравнений (3.9), (3.10) уравнения (3.1),
(3.2) и исключая тем самым учет сил тяжести, приходим к основным
соотношениям метода:
71
Y = Т2 -Т2+Т3 ~Т3,
=-01-70, (3.11)
Л/2О(£) = а(7’зо-Г3)
которые дают линейную связь между непосредственно измеряемыми
напряжениями Г и аэродинамическими взаимодействиями X,Y,MZO.
Формулы (3.11) составляют основу метода измерения аэродинамических
воздействий на крыло. В связи с (3.11) заметим, что в правой части стоят
непосредственно измеряемые реакции связей 7), имеющие с точки зре-
ния механики, упругую природу. В то же время левые части (3.11) вовсе
не связаны с какими либо связями и зависят фактически лишь от взаимо-
действия модели и потока воздуха. Именно на соотношении (3.11) и
заключается методика измерения аэродинамических воздействий потока
на крыло.
Таким образом, экспериментальное определение аэродинамических
воздействий на крыло проводится в два этапа. На первой стадии при
выключенной трубе, согласно (3.1), (3.2), измеряются напряжения в
связях, отвечающие нагрузке системы за счет силы тяжести. На второй
стадии включается пропеллер, создающий поток в трубе, и измеряются
напряжения 7}, определяемые (3.9), (3.10).
Данные этих двух экспериментов позволяют найти аэродинамиче-
ские характеристики по формулам (3.11).
4. Способ измерения сил реакций связей и устройство
весового элемента
Для того, чтобы найти аэродинамические воздействия, согласно
(3.11), необходимо измерить силы реакций связей. Очевидно, существует
много разных способов их измерения, однако на данной установке силы
измеряются при помощи весов рычажного типа. Чтобы ввести в схему
подвесов (рис. 4) весы, рассмотрим для определенности, узел заделки
стержня (2) с внешней опорой. Изначальная цель этого закрепления со-
стояла в том, чтобы не давать возможности точке О перемещаться в
вертикальном направлении. Ясно, что та же цель будет достигнута, если
вместо непосредственной заделки установить на внешней опоре рычаг
так, как изображено на рис. 5а.
72
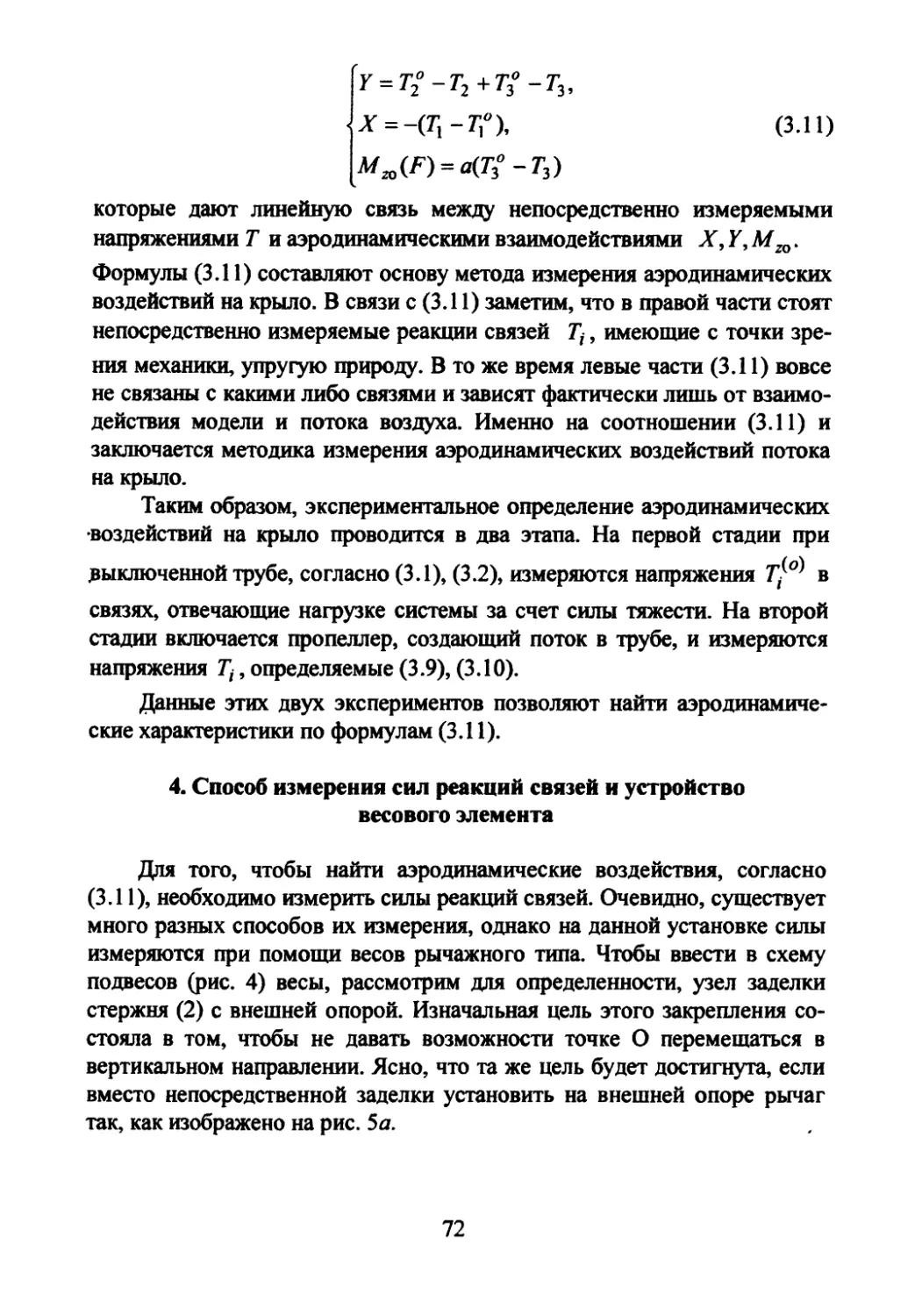
Рис. 5. (а) Закрепление точки О относительно перемещения в верти-
кальном направлении, уточняющее крепление на рис. 4(a).
(б). Показано образование из рычага рычажных весов, Zq — длина
левого плеча, / - равновесное положение груза с весом mg, Т% -
приложенная внешняя сила.
Если на правом плече рычага сделать малый по сравнению с его длиной
зазор и разместить на нем свободно перемещающийся груз с известной
массой ту то рычаг превращается в «примитивные» рычажные весы,
преображенные на рис. 5(6). С помощью таких весов можно измерить
силу 72°, если переместить груз в «равновесное» положение Z, когда
конец правого рычага не имеет физического контакта с краями зазора, и
поэтому на правое плечо в равновесном состоянии будет действовать
лишь сила тяжести груза mg. Записав условие равновесия рычага в виде
равенства моментов относительно опоры (О), получим соотношение:
T?lo=mgl,
из которого следует, что при известных lQ,m,g, длина Z прямо пропор-
циональна измеряемой силе Г2°. На экспериментальной установке ис-
пользуется модифицированная версия примитивных весов, изображен-
ных на рис. 5. Основная модификация состоит в том, что процедура
«взвешивания», т.е. переход к равновесному состоянию, осуществляется
автоматически при помощи так называемой следящей системы, которой
снабжаются весы.
73
Эта система представляет собой электромотор с постоянным то-
ком, который укрепляется на той же опоре, что и рычаг. При этом учи-
тывается такое свойство электромотора, как изменение направления
вращения его ротора при изменении направления электрического тока,
проходящего через его обмотку. Длина ротора электромотора сопоста-
вима с размахом правого плеча рычага на рис. 5, причем на ротор наре-
зается резьба с определенным шагом и на эту резьбу накручивается со-
ответствующая гайка с вилкой. Эта вилка связана с грузом весов и спо-
собна перемещать груз горизонтально вправо или влево в зависимости
от направления вращения ротора, однако она не действует на груз в вер-
тикальном направлении (передача вращательного движения в поступа-
тельное).
Принципиальная схема весового элемента изображена на рис. 6.
Рис. 6. Принципиальная схема весового элемента. М - электромотор по-
стоянного тока, Б+, Б_ - источники питания тока с разными полюсами, Р -
ротор электромотора с нанесенной на него резьбой, С - электромеханиче-
ский счетчик оборотов ротора, m - перемещаемый груз.
При этом полюса батарей Б+, Б_ подобраны так, что при замкнутой
верхней цепи (контакт с верхним краем зазора) груз т перемещается
вправо, а при замыкании нижней цепи - влево. Из схемы на рис. 6 ясно,
74
что при фиксированной силе rf груз перейдет в конечном счете в рав-
новесное состояние, в котором будут отсутствовать контакты правого
плеча рычага с краями зазора. Результат измерения фиксируется при
помощи электромеханического счетчика оборотов ротора электромото-
ра («С» на рис. 6). Этот результат передается через электрический ка-
бель на пульт управления установкой, где и выдается экспериментатору
в виде печатного числа «По», означающего, сколько оборотов соверша-
ется ротором электромотора для того, чтобы переместить груз т из «ну-
левого», исходного положения «О» в равновесное для силы Т®. Как
видно из рис. 6, По пропорционально расстоянию от «нулевого положе-
ния» до равновесного. Совокупность чисел = п$(а) и фиксируется в
«нулевой продувке». При запуске аэродинамической трубы в том же
самом положении крыла с углом атаки а на левый рычаг весов, изо-
браженных на рис. 6, будет действовать, вообще говоря, другая сила .
При этом весовой элемент отбалансирует эту силу , и счетчик выдает
показание «п» (оборотов) на пульт управления. Очевидно, что разность
показаний (и-и0) пропорциональна разности сил 72 -Т^0:
Т2 — Г® = 4(л-Wq) (4.1)
причем если размер зазора очень мал по сравнению с размахом правого
рычага, то к в (4.1) практически не зависит от величины измеряемых
сил и, «путем тарировки», задается для весового элемента в виде кон-
г.кГ
кретного числа с размерностью [к] = —. Силы здесь определяются в
об
т.н. «технической» системе единиц, в которой 1 кг массы равен 1 кГ ве-
са, т.е. 1 кГ = 1кг -9,8 = 9,8 ньютон.
с2
Таким образом, на рассмотренных весах измеряется значение (4.1),
входящее в общее выражение для сил (3.11). Для того, чтобы опреде-
лить другие слагаемые в (3.11), необходимо иметь в наличии достаточ-
ное количество весовых элементов, каждый из которых устроен по опи-
санному выше принципу.
Если вернуться к рис. 4, то экспериментальная схема определения
аэродинамических сил и их момента с учетом измерительных устройств,
будет выглядеть так, как показано на рис. 7.
75
Рис. 7 (а, б). Установка весовых элементов для измерения аэродина-
мических сил и их момента. В случае отсутствия потока определяют-
ся силы }, а при его наличии - силы {7}}, i = 1, 2,. Изображен
также блок Б, посредством которого горизонтальный подвес соеди-
няется с внешней опорой.
Если ввести индекс i - 1,2,3, соответствующий вертикальным под-
весам на рис. 7, то очевидно, что при «нулевой продувке» с каждого из
весовых элементов « X, К, Л/,» получатся данные noi, имеющие смысл
количества оборотов соответствующего ротора электромотора, как это
было объяснено выше.
При наличии потока аэродинамические силы уравновешиваются
реакциями связей, согласно (3.11). В результате с весов / = 1,2,3, пока-
занных на рис.7, получатся показания , имеющие смысл числа оборо-
тов соответствующих роторов, и именно эти показания фиксируются
печатными устройствами на пульте управления всей установкой. Так, в
разобранном здесь варианте, сила Т2 отвечает показанию весов и02, а
сила Т2 - показаниям п2. В результате имеем согласно схеме, изобра-
женной на рис. 7,
76
72 -Т2 - к2(п2 -и02)
<Т} -7;° = At(nt -и01) (4.2)
Ь “ 1з = *з("з “ Лоз)
Формулы (4.2) и лежат в основе метода измерения силы.
5. Порядок оформления работы и представления
окончательных результатов измерений
При каждом фиксированном значении угла атаки а , который мо-
жет принимать любые целые значения в диапазоне - 6° < а < 26°, с
весовых элементов, изображенных на рис. 7, снимаются показания
пх е пХ9 п2 = пу9 п3 = пт , относящиеся к потоку воздуха с некоторой
фиксированной скоростью При этом первоначально снимаются
показания весов {лох>ио>,,иош.} при отсутствии потока: ^=0 (т.н.
«нулевая продувка»). На основании этих измерений по формулам (3.11)
рассчитываются аэродинамические силы, действующие на исследуемый
крыловой профиль с геометрическими параметрами: Ь - среднее значе-
ние хорды крыла, h- средняя толщина профиля, L- размах крыла,
причем, как правило, h « b9L. Если на основании теории размерностей
определить в качестве определяющих размерных параметров в набе-
гающем потоке массовую плотность воздуха ра09 скорость потока Va)9
линейный размер хорды Ь и площадь крыла в плане S' = bL, то размер-
ные силы можно представить в виде:
X = CxqS9 Y = CyqS9 M2Q = mzqSb (5.1)
1 2
где через q^—раУы обозначен динамический напор, имеющий раз-
мерность давления, a CX9Cy9mz - безразмерные коэффициенты сопро-
тивления, подъемной силы и момента. Эти коэффициенты не зависят от
определяющих параметров и, казалось бы, должны быть одинаковы для
всех геометрически подобных тел. Опыт показывает однако, что в доз-
вуковых потоках весьма существенной оказывается зависимость аэро-
динамических сил от кинематической вязкости воздуха v, по порядку
77
величины равной 0,15 см2/с. В аргумент безразмерных функций
Сх,Су,т2 вязкость v может войти только в безразмерной комбинации
bV^
с определяющими параметрами: Re =——, называемой числом Рей-
v
нольдса, так что
С = (Сх ,Су ) = С(а; Re), mz - mz (a; Re) (5.2)
Поскольку число Re содержит линейный размер b, то, вообще говоря,
нельзя утверждать, что безразмерные коэффициенты одинаковы для
всех геометрически подобных тел. Необходимо также, чтобы выполня-
лись т.н. условия механического подобия течений, критерием которого в
дозвуковых потоках является близость значений чисел Рейнольдса в
геометрически подобных ситуациях. Именно в этом случае на основа-
нии измерений сил на сравнительно малой модели достаточно большого
тела можно делать предсказания о силах, действующих на большой объ-
ект, путем расчета коэффициентов (5.2), которые будут одними и теми
же для большого и малого тела.
Для измерения динамического напора q, входящего в определения
(5.1), и расчета скорости потока = y]2q/ р^ используется трубка
Пито, в критической точке которой статическое давление рп связано с
давлением р^ в набегающем потоке со скоростью интегралом
Бернулли:
Рп ~ Р<х> + Я = Ратм + Я (5-3)
Здесь учтено, что в аэродинамической трубе с открытой рабочей частью
Рао - Ратм > где Ратм “ атмосферное давление во время проведения
эксперимента. При этом на данной установке давление рп измеряется
не с помощью манометра, а прибором типа анероида, изображенным на
рис.8.
78
Рис.8. Устройство для измерения давления на установке А-6.
ТП - трубка Пито, П - объемная пружина, ВЭ - весовой элемент
Трубка Пито (ТП) шлангом Ш соединяется с растянутой объемной
пружиной П, внутри которой давление равно рп. При этом равновесное
состояние пружины пропорционально давлению рп, так что чем боль-
ше рп, тем меньше сила fp, действующая на левое плечо весового
элемента ВЭ, устройство которого такое же, как и на весах для измере-
ния аэродинамических сил. При этом если давление в пружине рп , то
сила fp, пропорциональная рп, уравновешивается весовым элементом,
который выдает показание nv. При «нулевой продувке» давление в
пружине будет равно , и весовой элемент даст показания «Vq.
Очевидно, разность этих показаний пропорциональна разности давле-
ний, так что можно записать
(«v - «V. )kv = р„- Рапм = q (5.4)
где kv - заданный тарировочный коэффициент прибора. По этой фор-
муле и рассчитывается динамический напор.
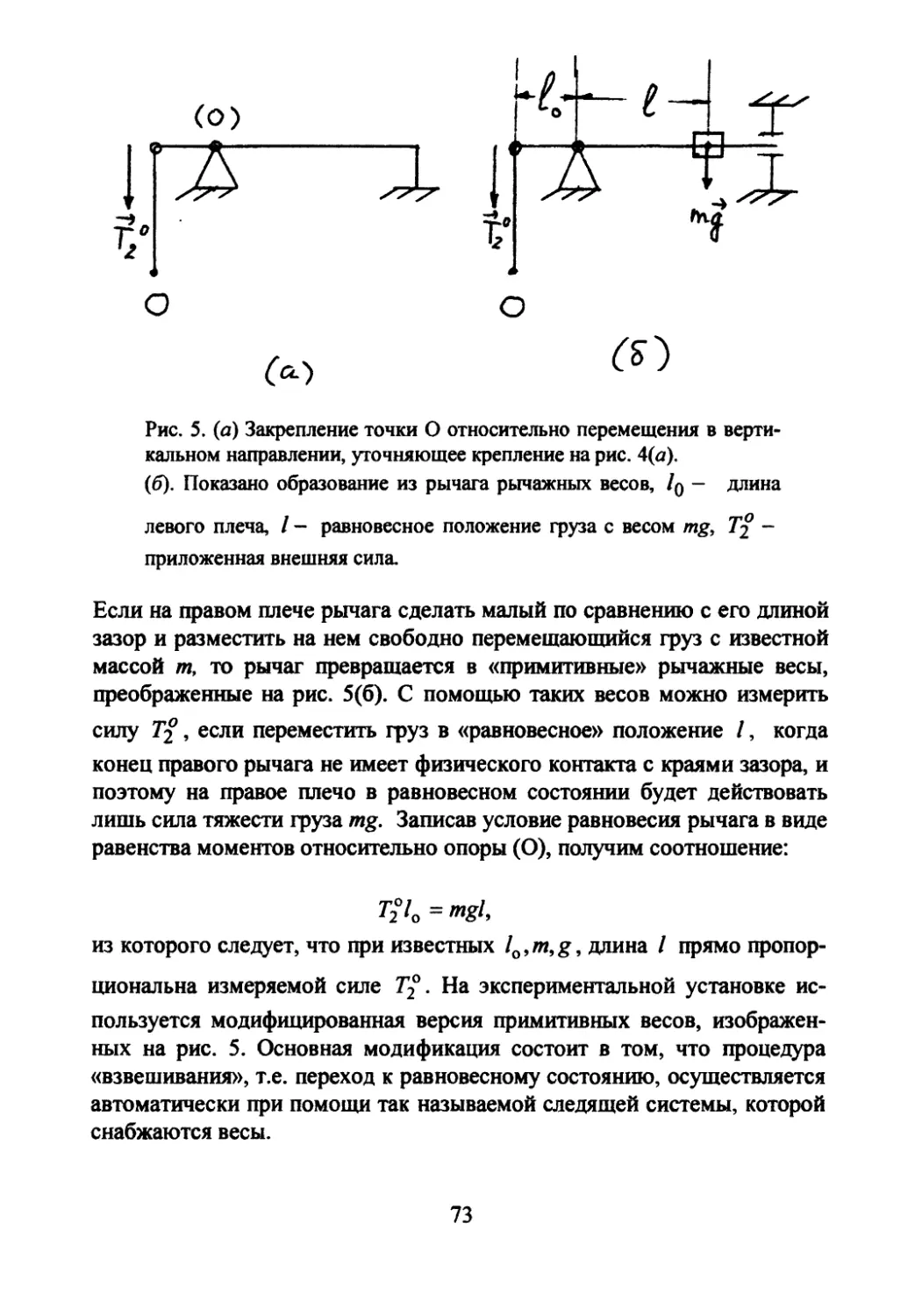
Таким образом, измеренные на опыте при разных а значения
переносятся в таблицу, где приводится расчет искомых
зависимостей (5.2) согласно схеме:
79
Угол атаки а -6 -4 ... 26 Дополнительные данные
# / Г / 8S *а 'Р U а 7 '* " II 1 1 II а 11 Ъ а а * € t f 7 * £' ~ м ’ •’ > n 1 8 м Ч 4) П 3 “&» 1 °5 II 1 ЙО Ь । 11 > <3 « 1 aj а *- ла R а 8 Ъ 1 ~ ’ 1 ? < ч> * 1^-1- v л 2 VOOM ) о ‘.(S- -> 6(м) = S = M(m2) = .) 0,0159м2 га - 5 W = В (мм.рт.ст.)= Г(°С) = Роо = 288 В рн (t + 273) 76( „ ...кГсек2 Рн» 0,125 4 м ^оо = Рао v(cm/c2) = R==^ V
80
♦)
Прим. Измеренная величина С'х относится к сопротивлению созда-
ваемой системой крыло плюс подвесы. Эти подвесы не дают вклада в
подъемную силу, однако обладают собственным коэффициентом сопро-
тивления Ст9 который измеряется независимым способом, например,
при удалении модели из потока, и его значение приведено в правом
столбце. Эта поправка учитывается при расчете коэффициента сопротив-
ления крыла Сх.
Для окончательного оформления работы данные из таблицы следу-
ет представить в графической форме для зависимостей:
1. Сх=Сх(а).
2. Су=Су(а).
3. Считая, что (1) и (2) являются параметрическим представле-
нием кривой, построить зависимость Су =Су(Сх) с нанесен-
ными на этой кривой значениями а - т.н. «поляру крыла».
4. Построить график т2 - mz(a).
ЛИТЕРАТУРА
1. С.Г.Попов. «Определение аэрогидродинамических сил и момен-
тов обтекаемого тела из опытов в аэродинамической трубе». Лаборатор-
ный практикум под редакцией С.Г.Попова, М., изд. Московского уни-
верситета, 1972, п.5
2. «Аэродинамические трубы Института механики» под ред.
С.М.Горлина и Г.Е.Худякова. Научные труды №14, Москва, 1971.
81