/
















































































Текст
Б1
E. С. ПОБЕРЕЖСКИЙ
ШИФРОВЫЕ
R РАДИОПРИЕМНЫЕ
‘' УСТРОЙСТВА
Scanned & Djvued
by VWalentin aka WiZeR
aka_wizer@rambler.ru
ББК 17.4.5
П41
УДК 621.396.62
Побережский Е. С.
П41 Цифровые радиоприемные устройства. — М.: Радио
и связь, 1987. — 184 с.: ил.
Рассматриваются варианты структуры и вопросы проектирования цифро-
вых радиоприемных устройств. Определяются требования к параметрам
аналоговой и цифровой частей приемника. Анализируются методы дискрети-
зации и квантования, а также цифровые системы демодуляции, синтеза сеткн
частот и тактовой синхронизации. Основное внимание уделено цифровым
магистральным радиоприемникам декаметрового диапазона.
Для инженерно-технических работников, занимающихся разработкой
цифровой аппаратуры. Может быть полезна аспирантам, специализирующимся
в области радиоприема.
ББК 17.4,
Рецензент Г. М. Крылов, канд. техн, наук
Редакция литературы по радиотехнике
4473Б1
Производственное издание
ЕФИМ САМУИЛОВИЧ ПОБЕРЕЖСКИЙ
ЦИФРОВЫЕ радиоприемные устройства
Заведующий редакцией В. Л. Стерлигов
Редактор Л. И. Венгренюк
Художественный редактор Т. В. Бусарова
Переплет художника В. В. Третьякова
Технический редактор Г. 3. Кузнецова
Корректор Т. Л. Дземидович
ИБ № 1052
Сдано в набор 19.09.86 Подписано в печать 23.I2.8if
Т-23069 Формат 60Х90Л6 Бумага тип. № 2 Гарнитура литературная
Печать высокая Усл. печ. л. 11,5 Усл. кр.-отт. 11,875 Уч.-изд. л. 12,02 Тираж 10 000 экз
Изд. № 20943 Зак. № 107 Цена 60 к.
Издательство «Радио и связь». 101000 Москва, Почтамт, а/я 693
Московская типография № 5 ВГО «Союзучетиздат». 101000 Москва, ул. Кирова, д. 40
БИБЛИОТЕК V
© Издательство «Радио и связь», 1987)
ОГЛАВЛЕНИЕ
Предисловие........................... ... 4
Список принятых сокращений ... ..... 5
Глава 1. Общие сведения о цифровых радиоприемных устройствах 7
1.1. Причины внедрения цифровой обработки сигналов в технику радио-
приема ................................................................. 7
1.2. Многоканальные ЦРПУ ... . . 10
1.3. Многовходовые ЦРПУ и многоканальные ЦРПК 16
Глава 2. Динамический диапазон декаметрового РПУ и его влия-
ние на помехоустойчивость приема...................................21
2.1. Узкополосные станционные и интермодуляционные помехи . 2)
2.2. Необходимый динамический диапазон декаметрового РПУ . . . 29
2.3. Оценка влияния иитермодуляционных помех на помехоустойчивость
приема в декаметровом диапазоне ...... 33
Глава 3. Дискретизация в ЦРПУ..................................... И
3.1. Краткие сведения из теории дискретизации колебаний с финитным
спектром................................................................41
3.2. Время стробирования в интегрирующих устройствах выборки и хране-
ния при дискретизации узкополосных колебаний..................... . 47
3.3. Представление узкополосных колебаний отсчетами мгновенных зна-
i чений.................................................................57
| .3.4. Представление узкополосных колебаний парами отсчетов квадратур-
.' пых составляющих.....................................................62
'3.5. Представление узкополосных колебаний парами отсчетов огибающей
и фазы. Микроуровневая дискретизация..................................73
Глава 4. Квантование в ЦРПУ.......................................85
4.1. Выбор методов квантования .........................................85
)4.2. Равномерное квантование . . . .................88
4.3. Квантование с предсказанием 94
Глава 5. Цифровые функциональные узлы приемника ... 101
5.1. Структура цифровых демодуляторов при квадратурном представлении
колебаний.............................................................Ю1
5.2. Структура цифровых демодуляторов при представлении колебаний от-
счетами мгновенных значений и парами отсчетов огибающей и фазы . 114
5.3. Цифровые системы тактовой синхронизации....................... 121^
’ 5.4. Анализ и методы реализации ЦРСТС................................126
5.5. Система пассивного многоуровневого цифрового синтеза сетки частот 136
Глава 6. Магистральные ЦРПУ 146
6.1. Примеры реализации магистральных ЦРПУ с дискретизацией и кван-
тованием на промежуточной частоте . 146
6.2. Проектирование магистральных ЦРПУ 152
6.3. Основные принципы построения ЦЧПТ 167
6.4. Кодирование в ЦРПУ............................................. 172
Список литературы . ...................................179
ПРЕДИСЛОВИЕ
Цифровые радиоприемные устройства — одна из самых моло-
дых областей техники радиоприема, возникновение которой яви-
лось закономерным этапом эволюции радиоприемных устройств.
Создание первых радиоприемников способствовало зарождению
электронной технологии. На определенном этапе ее развития ста-
ла возможной реализация цифровых вычислительных машин. Б
свою очередь их совершенствование в значительной мере опреде-
лило прогресс полупроводниковой технологии, в частности, появ-
ление интегральных схем. Опережающее развитие цифровой эле-
ментной базы и быстрое расширение функциональных возможно-
стей цифрового оборудования в сочетании со сложностью или не-
возможностью решения новых задач радиоприема средствами ана-
логовой техники привели к интенсивному внедрению цифровых
методов обработки сигналов в радиоприемную аппаратуру. Ко-
личественное увеличение доли цифрового оборудования породи-
ло качественный скачок: появились цифровые радиоприемные ус-
тройства, в которых аддитивная смесь сигнала и помех на радио
или промежуточной частоте подвергается аналого-цифровому пре-
образованию, а вся последующая обработка (основная селекция,
демодуляция, оценка параметров сигнала и т. д.) выполняется в
цифровой форме^ Этим, в определенном смысле, завершился пер-
вый виток спирали развития техники радиоприема.
Ввиду новизны тематики к настоящему времени решены дале-
ко не все задачи анализа и синтеза цифровых приемников. По-ви-
димому, часть задач не удалось даже сформулировать. Тем не ме-
нее накоплен значительный материал, который нуждается в сис-
тематизации и обобщении. В этой книге предпринята попытка по-
следовательно рассмотреть основные процедуры обработки сиг-
налов в цифровой радиоприемной аппаратуре и дать целостное
представление о ее структуре и методах проектирования. Матери-
ал книги в значительной мере базируется на результатах работ
автора.
Невозможность осветить все разновидности цифровых радио-
приемных устройств, различающихся назначением и диапазоном
частот, вынуждает рассматривать общие принципы цифровой об-
работки принимаемых сигналов на примере связных приемников
декаметрового диапазона. Выбор именно этого диапазона частот
объясняется тем, что условия приема в нем предъявляют жесткие
требования к производительности цифрового оборудования и па- ।.
раметрам аппаратуры дискретизации и квантования. Поэтому со
здание цифровых приемников декаметрового диапазона, имея и
большое самостоятельное значение, в решающей степени опреде-
ляет характер внедрения цифровой обработки сигналов в радио-
приемные устройства других диапазонов.
Основное внимание в книге уделено выбору оптимальной струк-
туры цифровых радиоприемных устройств, методам дискретиза-
ции и квантования колебаний, процедурам цифровой обработки
сигналов и принципам реализации цифровой части приемного
тракта. Однако, поскольку главный тракт современных цифровых
приемников, кроме цифровой части, содержит еще и аналоговую,
рассмотрены и вопросы определения требуемого динамического
диапазона приемника, оценки влияния интермодуляционных помех
на помехоустойчивость приема, вычисления минимально необходи-
мого коэффициента усиления аналоговой части приемного тракта.
Это позволило установить связь между требованиями к парамет-
рам аналоговой и цифровой частей приемного тракта, с одной сто-
роны, и условиями приема сигналов — с другой.
Вопросы цифровой обработки сигналов, достаточно полно ос-
вещенные в литературе, в книге не рассматриваются. Поэтому
здесь опущены основы теории и техники цифровой фильтрации,
а изложены лишь особенности ее применения в радиоприемных
устройствах. При рассмотрении цифровых систем тактовой синх-
ронизации. основное внимание уделено анализу и синтезу разом-
кнутых систем, которые все шире применяются на практике, одна-
ко недостаточно отражены в литературе. Большое число работ по
системам цифрового синтеза сетки частот позволило ограничиться
| описанием методов оптимизации только одного из перспективных
II вариантов системы пассивного многоуровневого цифрового синте-
за. В то же время, несмотря на множество содержательных пуб-
ликаций, посвященных дискретизации и квантованию, особенно-
сти реализации этих процедур в цифровых приемниках потребо-
вали столь значительного расширения существующих представ-
лений о них, что изложение этих вопросов пришлось выделить в
отдельные главы.
СПИСОК ПРИНЯТЫХ СОКРАЩЕНИЙ
AM
АТ
♦АЦП
-АЧПТ
АЧСД
'АЧХ
• БДК
БИС
БОЧ
БРИ
— амплитудная модуляция
— амплитудная телеграфия
— .аналого-цифровой преоб-
разователь
— аналоговая часть прием-
ного тракта
— анализатор числа совпа-
дающих делителей
—• амплитудно-частотная ха-
рактеристика
— блок дискретизации и
квантования
— большая интегральная
схема
— блок опорных частот
— блок регулировки изби-
рательности
БРУ
БРУЧ
БУВР
БУЧИ
ВДЧ
дзс
ДКФ
ДНФ
ДРК.
— блок регулировки усиле-
ния
— блок регулировки усиле-
ния и чувствительности
— блок управления видами
работ
—• блок управления частот-
ной настройки
— вспомогательный дели-
тель частоты
— дополиитель знака сину-
са
— дополиитель кода фазы
— дизъюнктивная нормаль-
ная форма
— двоичный рефлексный
код
5
ДЧ — делитель частоты конъюнктивная нормаль- ная форма — система пассивного мно- гоуровневого цифрового синтеза (сетки частот) — селектор фронтов —• счетчик числа посылок
здч - ИС ИФП — ИЦФ — запоминающий делитель частоты интегральная схема 1измер,итель фазы посы- лок интерполирующий цифро- С'ПМЦС СФ счп
Д1 Л( кк вой фильтр кольцевой коммутатор УВХ — устройство выборки я
С КНФ — конъюнктивная нормаль- хранения
ная форма УО — устройство обработки
3J лз линия задержки УПЧ — усилитель промежуточ-
л; лтос — линейный тракт основ- ной частоты
СЕ ной селекции УРЧ —• усилитель радиочастоты
лшт — линейный широкополос- УУ — устройство усреднения
ЛI ный тракт ФД — фазовый детектор
ле МДНФ — 'минимальная дизъюнк- ФЗн — формирователь знака
М( тивная нормальная фор- ФМ — фазовая модуляция
ст МКНФ — ма минимальная конъюнк- ФНЧ ФТЧ — фильтр нижних частот — формирователь тактовой
ВС тивная нормальная фор- частоты
лс ма «ФЧХ — фазо-частотная характе-
м< нэ — нелинейн ы й эл ем ент ристика
Л1 ОТ — опорный генератор ЦАП — цифро-аналоговый преоб-
одч — основной делитель час- разователь
лс ОЗУ — тоты цгстс — цифровая гибридная си-
Tf оперативное запоминаю- стема тактовой синхро-
и/ щее устройство низации
окп — однокв ад .ратный преобра- цд — цифровой демодулятор
об окпв — зователь (фаза—синус) цзстс — цифровая замкнутая си-
де обобщенные коды с пос- стема тактовой синхро-
Ц1 тоянным весом низации
вь ом — однополосная модуляц-ия ЦП — цифровой интегратор
ОРК относительное равномер- • ЦОС — цифровая обработка сиг-
ное квантование налов
КС ОСФ — основной счетчик фрон- црпк — цифровой радиоприем-
ПР тов ный комплекс
А* ОФТ — относительная фазовая ‘ЦРПУ — цифровое радиоприем-
не телеграфия ное устройство
те пдк - ПОЗВДИ он ны й д в оичн ы й ЦРСТС — цифровая разомкнутая
сл код система тактовой синхро-
на ПЗУ — постоянное запоминаю- низации
щее устройство цстс — цифровая система такто-
ПР ППЗУ — перепр огр а м ми р уемое вой синхронизации
ал постоянное запоминаю- ЦСЧД — цифровой синтезатор ча-
ав щее устройство стоты дискретизации
ПСФ — парциальный счетчик ЦФ —• цифровой фильтр
фронтов ЦФНЧ — цифровой фильтр ниж-
пр пфк — преобразователь фаза— них частот
ча код чЦФОС — цифровой фильтр основ-
Ра ПФС — преобразователь фаза— ной селекции
синус • цчпт — цифровая часть приемно-
де РгП — регистр памяти го тракта
об “РПУ — радиоприемное устрой- чм — частотная модуляция
тр ство ЧТ — частотная телеграфия
ра СБИС — сверхбольшая интеграль- ная схема ЭВМ — электронная вычислитель- ная машина (цифровая)
зд СМДНФ — совмести о минимальная эз — элемент задержки
бо дизъюнктивная нормаль- эмо — электромагнитная обета-
ля ная форма новка
пр СМКНФ — совместно минимальная ЭУ — элемент управления
Глава 1
ОБЩИЕ СВЕДЕНИЯ О ЦИФРОВЫХ
РАДИОПРИЕМНЫХ УСТРОЙСТВАХ
1.1. ПРИЧИНЫ ВНЕДРЕНИЯ ЦИФРОВОЙ ОБРАБОТКИ
СИГНАЛОВ В ТЕХНИКУ РАДИОПРИЕМА
[Интенсивное внедрение цифровой обработки сигналов (ЦОС) в
технику радиоприема объясняется, с одной стороны, сложностью
или невозможностью решения ряда практических задач с помо-
щью аналоговой обработки, а с другой — прогрессом дискретной
микроэлектроники и расширением функциональных возможностей
цифровой вычислительной техники. Анализ развития радиоприем-
ных устройств (РПУ), теории и техники передачи и приема сиг-
налов позволяет обнаружить ряд проблем, эффективное решение
которых обеспечивается переходом к ЦОС^
Разнообразие условий связи и задач, решаемых связной ап-
паратурой, обусловили непрерывное увеличение числа использу-
емых сигналов и методов демодуляции. При аналоговой обработ-
ке это приводит к необходимости создания различных по струк-
туре модемов, удельный вес которых в общих затратах на аппа-
ратуру связи постоянно растет. ^Внедрение ЦОС позволяет реали-
зовать универсальные модемы, в которых изменением программы
можно быстро перейти на новый вид сигнала и метод демодуля-
ции. В результате снижаются объем и стоимость аппаратуры, за-
медляется ее моральное старение^
Устойчивая тенденция к росту загрузки радиодиапазона, уве-
личение уровня индустриальных помех и часто возникающая не-
обходимость сосредоточения большого числа различных радио-
средств в ограниченном пространстве привели к значительному
усложнению электромагнитной обстановки (ЭМО). Последняя во
многих случаях изменяется непредсказуемым образом из-за не-
возможности регламентации работы всех радиосредств, измене-
ния условий распространения радиоволн, интерференционных за-
мираний и других факторов. Создание РПУ с фиксированными
характеристиками, оптимальными при любой ЭМО, оказывается
или технически невозможным, или экономически невыгодным. Это
вынуждает придавать радиоприемной аппаратуре способность
адаптироваться к условиям связи. Простота автоматической сме-
ны алгоритмов ЦОС и высокая точность их реализации делает ее
наиболее эффективной в адаптивных РПУ и в РПУ, работающих
в адаптивных системах связи.
7
Д1
л с
С.
Э.-
Л£
СЕ
ЛГ
ле
ме
ст
ВС
лс
М(
Л1
лс
тр
ИГ
ОС
де
Ш
вь
КС
Д1
не
те
сл
на
пр
ал
ав
пр
ча
ра
де
об
тр
Ра
зд
бс
ля
пр
4
(Возросшие требования к качеству приема информации при тен-
денции к ухудшению ЭМО вынуждают применять такие сложные
алгоритмы, как оптимальное сложение разнесенных сигналов, из-
вестных с ограниченной точностью, компенсация и подавление со-
средоточенных помеху прием «в целом» и др./ Реализация этих
алгоритмов на базе аналоговой техники в большинстве случаев
оказывается недопустимо дорогой и малоэффективной из-за не-
точности их выполнения, вызванной разбросом параметров эле-
ментов и воздействием дестабилизирующих факторов. При исполь-
зовании ЦОС разброс параметров элементов и воздействие деста-
билизирующих факторов (если они не превышают предельно до-
пустимых норм, нарушающих работоспособность аппаратуры) не
влияют на точность выполнения выбранных алгоритмов. Высокая
степень интеграции цифровых микросхем и широкие возможности
рациональной организации ЦОС позволяют реализовать даже
очень сложные алгоритмы приема сигналов, сохраняя приемле-
мые объем и стоимость аппаратуры./
Рост интенсивности обмена информацией вызывает увеличение
насыщенности средствами связи. Поэтому снижение массы, габа-
рита и стоимости радиоприемной аппаратуры становится особен-
но важным. Переход к ЦОС является одним из наиболее перспек-
тивных направлений решения этих задач. Действительно,/ цифро-
вая аппаратура проще поддается микроминиатюризации, чем ана-
логовая, а высокая технологичность ее производства, связанная с
отсутствием операций настройки и регулировки при изготовлении,
однородностью элементной базы и технологических процессов и
их унификацией с производством цифровых электронных вычисли-
тельных машин (ЭВМ), уменьшает ее стоимость/
(Наибольшее снижение массогабаритных показателей и стои-
мости радиоприемной аппаратуры на один канал приема дости-
гается в многоканальных радиоприемных устройствах и комплек-
сах. Применение в них ЦОС сулит значительно больший, чем при
аналоговой обработке, выигрыш в объеме и стоимости аппарату-
ры благодаря эффективности организации обслуживания несколь-
ких каналов приема одним блоком, работающим в мультиплекс-
ном режиме ((режиме разделения времени). Кроме того, простота
согласования нагрузок, идентичность и стабильность характери-
стик различных каналов приема, удобство наращивания числа ка-
налов, возможность обеспечить заданную надежность при мини-
мальном резервировании служат дополнительными стимулами к
созданию многоканальных цифровых радиоприемных устройств и
комплексов (ЦРПУ и ЦРПК).
Высокая концентрация радиотехнических средств требует ав-
томатизации контроля и управления работой радиоприемных уст-
ройств и комплексов. Идентичность характеристик однотипной
цифровой аппаратуры, их независимость от воздействия дестаби-
лизирующих факторов и отсутствие необходимости в регулировоч-
ных операциях в процессе эксплуатации значительно упрощают
решение этой задачи в ЦРПУ и ЦРПК- Поскольку контроль и уп-
8
равление, как правило, выполняются или специализированными
цифровыми устройствами, или управляющими ЭВМ, переход к
ЦОС облегчает сопряжение радиоприемной аппаратуры с систе-
мой контроля и управления.
I Использование ЦОС позволяет реализовать узлы и блоки ра-
диоприемника с характеристиками, недостижимыми или трудно-
достижимыми в аналоговой аппаратуре. Кроме того, проектиро-
вание цифровых устройств и систем легче, чем аналоговых, под-
дается автоматизации, а их моделирование с помощью ЭВМ поз-
воляет достичь полного совпадения характеристик модели и объ-
екта моделирования. |
I Переход к ЦОС открывает возможность рассредоточения ра-
диоприемных центров и комплексов, так как после выполнения
аналого-цифрового преобразования смеси сигнала и помех циф-
ровые значения ее отсчетов могут быть переданы практически на
любое необходимое расстояние без ухудшения качества приема^
^В то же время внедрение ЦОС связано со значительными труд-
ностями и, способствуя решению ряда назревших задач радиопри-
ема, в свою очередь, порождает новые задачи. Так, в современ-
ных аналого-цифровых преобразователях (АЦП) минимально до-
стижимый шаг квантования таков, что требуется значительное
усиление сигналов в аналоговой части приемного тракта (АЧПТ).
Кроме того, преобразование аналоговых колебаний в цифровую
форму приводит к появлению погрешностей дискретизации и кван-
тования. Сам процесс цифровой обработки сопровождается пог-
решностями, вызванными округлением результатов вычислений и
ограниченной точностью реализации алгоритмов обработки. В тех
случаях, когда требуется представление принятой информации в
аналоговой форме, возникают дополнительные погрешности циф-
ро-аналогового преобразования. Все эти погрешности, чаще всего
рассматриваемые как специфические виды помех, прямо или кос-
венно связаны с недостаточным быстродействием и большой по-
требляемой мощностью существующей элементной базы. Анализ
перспектив развития микроэлектроники позволяет надеяться на
‘быстрое улучшение указанных характеристик.
I Цифровые радиоприемные устройства и комплексы не могли
одновременно появиться во всех диапазонах радиоволн, так как ре-
ализация большинства процедур ЦОС в РПУ и, прежде всего,
аналого-цифрового преобразования и цифровой фильтрации тем
сложнее, чем выше пропускная способность АЧПТ< (Эта пропуск-
ная способность пропорциональна произведению ширины полосы
пропускания АЧПТ на двоичный логарифм динамического диапа-
зона АЧПТ, определенного как отношение максимального напря-
жения на входе РПУ к минимальному.)^ Поэтому вначале ЦРПУ
появились в диапазонах километровых и более длинных волн, в
которых характеристики сигналов и помех позволяют ограничить-
ся небольшой шириной полосы пропускания и сравнительно ма-
лым динамическим диапазоном АЧПТ. На декаметровых волнах
условия приема сигналов предъявляют жесткие требования к ди-
9
Д1
л с
С.
ЭГ
Л£
СЕ
ЛГ
ЛС
М(
ст
паническому диапазону РПУ, а многообразие видов принимаемых
сигналов и технические ограничения вынуждают во многих слу-
чаях выполнять АЧПТ достаточно широкополосной. В результа-
те создание декаметровых ЦРПУ оказывается настолько слож-
ной задачей, что ее решение, имея самостоятельную ценность, в
значительной мере обеспечивает реализацию более высокочастот-
ных цифровых приемников и одновременно позволяет упростить
структуру длинноволновых ЦРПУ. Поэтому, хотя многие из рас-
сматриваемых в дальнейшем вопросов одинаково важны для циф-
ровых приемников различного назначения, работающих в любых
диапазонах радиоволн, все же основное внимание будет сосредо-
точено на построении связных ЦРПУ декаметрового диапазона^
1.2. МНОГОКАНАЛЬНЫЕ ЦРПУ
вс
лс
м<
л г
лс
тр
и;
об
де
ш
вь
кс
Д1
не
те
сл
на
пр
ал
ав
пр
ча
ра
де
об
тр
ра
ЗД
бс
ля
пр
4
Методы построения главных приемных трактов ЦРПУ и ЦРПК
рассмотрены в сравнительно небольшом числе работ [1—10]. Зна-
чительно больше публикаций посвящено анализу и синтезу узлов
и блоков ЦРПУ и ЦРПК, а также отдельных процедур ЦОС. Так,
методы построения цифровых демодуляторов (ЦЦ) приведены в
[2, 10—22 и др.], сведения об архитектуре цифровых систем об-
работки сигналов — <в [14, 23—33], цифровая фильтрация — в [14,
31—44 и др.], цифровые системы тактовой синхронизации — в
[45—53], цифровые синтезаторы сетки частот — в [14, 45, 54—62],
теория дискретизации и квантования колебаний, а также мето-
ды построения аппаратуры аналого-цифрового и цифро-аналого-
вого преобразований—в [1—9, 14, 42, 46, 57, 63—89]. Этот спи-
сок литературы не является исчерпывающим и может быть рас-
ширен за счет библиографии, приведенной в указанных работах.
Для реализации ЦОС в РПУ необходимы прежде всего дис-
кретизация и квантование колебания в приемном тракте. Это ко-
лебание в общем случае представляет собой смесь аддитивных
помех различного происхождения и сигнала, подвергшегося воз-
действию мультипликативных помех в канале связи. Из-за иска-
жений и помех колебание в приемном тракте является аналого-
вым при приеме не только непрерывных, но и дискретных сигна-
лов. Принимая во внимание перечисленные в § 1.1 преимущества
ЦОС, в ЦРПУ и ЦРПК желательно производить дискретизацию
и квантование как можно ближе к антенне. Однако современная
элементная база не позволяет это сделать.
В качестве примера оценим требования, которым должна отвечать аппа-
ратура дискретизации и квантования, устанавливаемая на выходе некоторой
идеальной антенны, перекрывающей диапазон декаметровых волн. В соответ-
ствии с теоремой Котельникова минимальная частота дискретизации в этом
случае должна быть около 60 МГц. Прежде чем определить необходимую раз-
рядность АЦП, остановимся на одном еше встречающемся заблуждении. Часто
полагают, что для исключения влияния шума квантования на качество приема
шаг квантования должен быть во много раз меньше минимально возможного
10
уровня сигнала на входе ЛЦП. В действительности же достаточно, чтобы спек-
тральная плотность сигнала была значительно больше спектральной плотности
шума квантования в полосе частот, занимаемой спектром сигнала. Спектраль-
ная плотность шума квантования зависит не только от шага квантования, но
и от частоты дискретизации, причем увеличение частоты дискретизации в опре-
деленных пределах снижает спектральную плотность этого шума (см. § 4.1 и
4.2). Поэтому при достаточно высокой (по сравнению с шириной спектра сиг-
нала) частоте дискретизации уровень сигнала может быть даже меньше шага
квантования. Необходимо лишь, чтобы эффективное значение напряжения смеси
сигнала и помех на входе ЛЦП превышало шаг квантования.
Хотя отказ от данного заблуждения позволяет сократить требуемую раз-
рядность ЛЦП, но для декаметрового ЦРПУ она остается значительной. Дей-
ствительно, если приемный тракт пропускает сигналы в полосе от 1,5 до 30 МГц,
то динамический диапазон РПУ, измеренный двухсигнальным методом относи-
тельно 1 мкВ, должен быть примерно 140 дБ (см. § 2.2). Считая, что в полосе
3 кГц обеспечивается предельная чувствительность, равная 1 мкВ (во многих
РПУ она выше), и воспользовавшись приведенными в § 4.2 формулами, полу-
чим, что число разрядов ЛЦП дблжно быть 19, а шаг квантования — меньше
300 мкВ. ЛЦП с такими разрядностью и шагом квантования, работающие при
частоте дискретизации, равной 60 МГц, в настоящее время нереализуемы. На
современной элементной базе практически ,невозможно выполнить и цифровой
фильтр основной селекции (ЦФОС), так как на его вход информация будет
поступать со скоростью, превышающей 1 Гбит/с. Еще большие трудности возни-
кают при попытке реализовать дискретизацию и квантование сигналов непо-
средственно на выходе антенны в диапазонах метровых и более коротких волн.
На частотах ниже 3 МГц необходимое быстродействие цифровой аппаратуры
достижимо. Однако чувствительность компараторов существующих ЛЦП и на
этих частотах оказывается недостаточной.
Надежды на возможность в будущем выполнять квантование
сигнала непосредственно на выходе антенны связаны прежде все-
го с развитием криоэлектроники, и в частности с созданием вы-
сокочувствительных быстродействующих АЦП на джозефсонов-
ских переходах [4, 84].
С учетом изложенного обобщенная структурная схема совре-
менного ЦРПУ имеет вид, приведенный на рис. 1.1. Аналоговая
часть приемного тракта ЛЧПТ выполняет предварительную се-
лекцию и усиление принимаемых сигналов. Далее установлен блок
дискретизации и квантования БДК, к выходу которого подключа-
ется цифровая часть приемного тракта (ЦЧПТ). В ЦЧПТ произ-
водится основная селекция сигналов, демодуляция аналоговых и
дискретных сообщений, а при приеме дискретных сообщений еще
и тактовая синхронизация, декодирование и цикловая синхрони-
зация. Кроме того, в ЦЧПТ может осуществляться ряд других
операций, например оценка параметров сигналов, сложение раз-
несенных сигналов, подавление или компенсация сосредоточенных
по спектру и импульсных помех и т. д. После демодуляции и де-
кодирования принятая дискретная информация с цифрового вы-
хода (Дц.вых) ЦЧПТ поступает в регистрирующую аппаратуру или
11
Д1
ЛС
С
Э;
л;
СЕ
ЛЕ
ЛС
М(
ст
ВС
лс
Ml
Л1
лс
Tf
ИТ
оС
де
Ц1
вь
КС
Д1
не
те
сл
на
пр
ал
ЭЕ
пр
ча
ра
де
оС
тр
Ра
зд
бе
ля
пр
4
Рис. 1.1
запоминающее устройство ЭВМ. При приеме аналоговых сооб-
щений цифровые значения отсчетов демодулированного сигнала
попадают в последовательно включенные цифро-аналоговый пре-
образователь ЦАП и фильтр нижних частот ФНЧ, где преобразу-
ются в непрерывный по уровню и по времени сигнал, поступаю-
щий на аналоговый выход (Дан.вых) ЦРПУ. Приемник содержит
и ряд вспомогательных блоков. Для большей наглядности на схе-
ме рис. 1.1 все соединения вспомогательных блоков как аналого-
вые, так и цифровые проведены тонкими линиями, и лишь в глав-
ном тракте приема выделены цифровые шины. Цепи питания, кон-
троля и индикации на схеме не показаны.
Блок управления частотой настройки БУЧН обеспечивает пе-
рестройку ЦРПУ по частоте, воздействуя на АЧПТ и БОЧ. В не-
которых типах ЦРПУ при смене частоты настройки необходимо
изменять и характеристики ЦФОС. В этом случае выходной сиг-
нал БУЧН должен воздействовать и на ЦЧПТ. Управлять часто-
той настройки можно как вручную, так и автоматически. Учиты-
вая, что ЦРПУ позволяют осуществить комплексную автоматиза-
цию процесса обслуживания приемной аппаратуры, предпочтитель-
нее автоматическое управление. Оно выполняется или по заранее
составленной программе, или в соответствии с некоторым поис-
ковым алгоритмом, предусматривающим 'нахождение оптималь-
ной рабочей частоты, например зондированием радиолинии при
согласованной перестройке передатчика и приемника. Реализация
подобных алгоритмов требует наличия канала обратной связи
[90—93].
Блок регулировки усиления и чувствительности БРУЧ, изменяя
усиление АЧПТ и чувствительность приемника, производит адап-
тацию ЦРПУ к условиям приема. Обычно наряду с автоматиче-
12
iCKOii предусматривается и ручная регулировка усиления и чувстви-
тельности. Однако в ЦРПУ чаще используется автоматическая
регулировка, которая может осуществляться по сколь угодно сло-
жному алгоритму. Как в аналоговых, так и в цифровых приемни-
ках конечной целью регулировки усиления и чувствительности яв-
ляется поддержание наилучшего в заданном смысле качества при-
ема в условиях изменяющейся ЭМО. В аналоговых РПУ эта цель
достигается защитой от перегрузок каскадов приемного тракта,
предшествующих демодулятору, и обеспечением оптимального ре-
жима работы демодулятора. В ЦРПУ защита от перегрузок кас-
кадов АЧПТ сохраняет свое значение. Но, наряду с этим, здесь
необходимо обеспечить такое напряжение колебания на входе
БДК и такие значения отсчетов в узлах ЦЧПТ, при которых отно-
сительный уровень шумов йвантования и округления минимален.
Блок регулировки избирательности БРИ изменяет амплитудно-
частотную, а иногда и фазо-частотную характеристики (АЧХ и
ФЧХ) приемного тракта ЦРПУ при смене сигналов или измене-
нии помеховой обстановки. Основная регулировка избирательно-
сти выполняется в ЦЧПТ благодаря простоте изменения парамет-
ров ЦФОС. Наряду с этим, в некоторых типах ЦРПУ необходи-
ма дополнительная грубая регулировка избирательности сменой
аналоговых фильтров или изменением их характеристик. В пос-
леднем случае, как правило, изменяют и частоту дискретизации в
БДК. При увеличении помех по соседнему каналу и неизменном
сигнале для обеспечения максимальной помехоустойчивости ча-
сто сужают полосу пропускания ЦФОС, чтобы исключить по-
падание на вход ЦД участков спектра с малым отношением сиг-
нал-помеха. В этом случае несколько увеличиваются искажения
сигнала за счет подавления части его спектра. При ослаблении
помех по соседнему каналу полосу пропускания ЦФОС расширя-
ют, уменьшая тем самым искажения сигнала.^ Изменение частот-
ных характеристик приемного тракта ЦРПУ при смене вида при-
нимаемого сигнала или скорости передачи информации БРИ про-
изводит под воздействием управляющих сигналов с блока управ-
ления видами работ БУВР (см. рис. 1.1). Смена видов сигнала и
скорости передачи информации может происходить как в соот-
ветствии с заранее составленной программой, так и в процессе
адаптации радиолинии, содержащей канал обратной связи [90—
93]. Смена вида сигнала часто требует изменения алгоритма ре-
гулировки усиления и чувствительности.
Структура всех блоков ЦРПУ зависит от того, на радио- или
промежуточной частоте производятся дискретизация и квантова-
ние колебания в приемном тракте. Выполнение указанных проце-
дур на радиочастоте обеспечивает более полное использование пре-
имуществ ЦОС и позволяет исключить из состава ЦРПУ синте-
затор сетки частот. Однако при этом перестраиваемый преселек-
тор должен иметь узкую полосу пропускания и высокую прямо-
угольность АЧХ, а тракт радиочастоты—достаточный коэффици-
ент усиления. Узкополосный перестраиваемый преселектор для де-
13
Д1
ЛС
С.
ЭЛ
Л{
СЕ
ЛЕ
ЛС
М(
СТ
ВС
лс
м<
Л1
лс
Tf
HJ
об
де
ш
вь
КС
ДЕ
не
те
сл
на
пр
ал
ав
пр
ча
ра
де
об
тр
Ра
зд
бс
ля
пр
4
каметрового РПУ можно создать используя явление сверхпрово-
димости, но работы в этом направлении не вышли из стадии экс-
перимента.
При дискретизации и квантовании на промежуточной частоте
структура значительной части приемного тракта и требования к
синтезатору сетки частот мало различаются у ЦРПУ и аналого-
вых приемников. Это затрудняет адаптацию и организацию мно-
гоканального приема, но облегчает достижение необходимого ко-
эффициента усиления АЧПТ и позволяет при высокой прямоуголь-
ности АЧХ довести ширину полосы пропускания АЧПТ до мини-
мально необходимой для прохождения всех видов используемых
сигналов (фильтрация каждого конкретного вида сигналов вы-
полняется ЦФОС). В результате снижаются требования к часто-
те дискретизации и разрядности АЦП, что значительно облегча-
ет реализацию БДК и ЦФОС.^
Многоканальное ЦРПУ декаметрового диапазона, в котором
дискретизацию и квантование выполняют на радиочастоте, описа-
но в [1]. Структурная схема ЦРПУ близка к изображенной на
рис. 1.1. В этом ЦРПУ ширина полосы пропускания перестраива-
емого преселектора была выбрана равной 1,5 МГц. В зависимо-
сти от частоты настройки ЦРПУ использовалась одна из четырх
возможных частот дискретизации, максимальная из которых сос-
тавляла 14 МГц. Разрядность АЦП равнялась девяти с учетом
знакового разряда. Смена рабочей частоты с шагом, равным
100 Гц, производилась по командам ЭВМ. При этом наряду с пе-
рестройкой преселектора выполнялась перестройка ЦФОС и в не-
которых случаях изменялась частота дискретизации. Поскольку
перестройка ЦФОС связана только с изменением коэффициентов
фильтра, в данном ЦРПУ отпала необходимость в синтезаторе
сетки частот. Была предусматрена возможность выбора одной из
восьми полос пропускания ЦФОС. Минимальное из этих значений
равнялось 250 Гц, а максимальное — 6 кГц. Дискретное измене-
ние полосы пропускания ЦФОС производилось по командам ЭВМ.
Предполагалось, что в дальнейшем данное ЦРПУ обеспечит од-
новременный прием 16 радиостанций, сигналы которых лежат в
пределах полосы пропускания АЧПТ. Многоканальность достига-
лась тем, что ЦФОС выполнялся многократно настраиваемым и
воздействовал на выходное колебание АЧПТ как несколько (в
данном случае 16) параллельно включенных фильтров. В таком
же режиме работал и ЦД.
Многократная настройка ЦФОС достигается циклической сменой коэффи-
циентов фильтра, которые можно хранить в постоянном запоминающем устрой-
стве (ПЗУ) или перепрограммируемом ПЗУ (ППЗУ). Длительность цикла пол-
ной смены коэффициентов должна совпадать с периодом дискретизации. От-
сюда следует, что для обеспечения /п-канального приема необходимо т-кратное
повышение быстродействия. Одновременно возрастает и объем памяти. Конкрет-
ные цифры, характеризующие требуемое увеличение объема памяти, определя-
ются видом ЦФОС и формой его реализации. Объем арифметического устрой-
14
ста гф зависит, а управляющего слабо зависит от числа каналов приема.
Поскольку эти устройства составляют наиболее сложную часть аппаратуры,
рентабельность .многоканальной цифровой обработки растет с увеличением числа
каналов [3]. Основным фактором, ограничивающим увеличение числа каналов
приема, является недостаточное быстродействие элементной базы.
Возможен и другой метод реализации многократно настраиваемого ЦФОС,
обслуживающего т каналов .приема. Этот метод базируется на процедуре,
аналогичной временной компрессии сигналов [97, 98]. В оперативном запоми-
нающем устройстве (ОЗУ) фиксируется серия, состоящая из цифровых значе-
ний, например п последовательных отсчетов обрабатываемого колебания. Эта
серия со скоростью, в т раз превышающей частоту дискретизации, т раз под-
ряд .поступает на вход ЦФОС. В течение времени трохождения серии коэффи-
циенты ЦФОС остаются постоянными, изменяясь в конце серии. Таким образом.,
ЦФОС при каждом повторении серии обрабатывает очередной канал приема.
После обработки т-го канала данная серия сменяется следующей, накопленной
к этому времени в ОЗУ. Наряду с новой серией отсчетов, в ОЗУ должны
сохраняться цифровые значения нескольких последних отсчетов входного, а при
рекурсивном ЦФОС и выходного колебаний фильтра от предшествующей
серии. Число сохраняемых отсчетов определяется порядком фильтра. Данный
метод требует такого же увеличения быстродействия арифметического устрой-
ства, что и предыдущий и еще большего увеличения объема оперативной памяти.
Кроме того, он приводит к некоторой задержке результатов вычислений, не
имеющей впрочем практического значения, если ЦФОС не включен в состав
петли обратной связи. Преимуществом этого метода является снижение в п раз
частоты смены коэффициентов фильтра, что позволяет использовать для хра-
нения их низкоскоростные ПЗУ большой емкости. Такая возможность важна
в многоканальных адаптивных ЦРПУ, где приходится сохранять большое число
коэффициентов. Заметим, что при реализации достаточно сложных адаптивных
алгоритмов приема сигналов может оказаться более целесообразным вычислять,
а не хранить в ПЗУ по крайней мере часть коэффициентов фильтра.
Применительно к описанному в [1] ЦРПУ повышение в 16 раз
быстродействия цифровой аппаратуры при частоте дискретизации
около 10 МГц представляется трудно реализуемым на современ-
ной элементной базе. Кроме того, из формул, выведенных в § 4.2,
следует, что разрядность АЦП в данном ЦРПУ явно недостаточ-
на при выбранной полосе пропускания АЧПТ. Недостаточна и из-
бирательность преселектора, который обеспечивал ослабление по-
мех наложения {перекрытия) только на 30 дБ. Поэтому в описан-
ном в [1] ЦРПУ качество приема сигналов заведомо ниже, чем
в лучших аналоговых РПУ. Тем не менее совершенствование эле-
ментной базы и методов проектирования цифровой аппаратуры
Должны в будущем обеспечить реализацию ЦРПУ, подобных рас-
смотренному, с параметрами, не уступающими лучшим аналого-
вым РПУ.
15
Д1
Л(
С,
Эг
л<
СЕ
ЛГ
ле
М(
ст
вс
л с
Mt
ЛГ
лс
тр
и;
об
де
Ш
вь
КС
ДГ
не
те
сл
на
пр
ал
ЭЕ
П?
ча
ра
де
об
тр
ра
зд
бс
ля
пр
4
1.3. МНОГОВХОДОВЫЕ ЦРПУ И МНОГОКАНАЛЬНЫЕ ЦРПК
Разнесенный прием — один из наиболее действенных методов
повышения помехоустойчивости связи [99—104]. Однако при про-
странственном, поляризационном и угломестном разнесении, а
также при частотном разнесении, превышающем полосу пропус-
кания приемного тракта, этот метод требует применения несколь-
ких РПУ, что существенно повышает его стоимость. Внедрение
ЦОС позволяет создать многовходовое ЦРПУ, способное при
указанных видах разнесения принимать сигналы всех ветвей. Уп-
рощенная структурная схема такого ЦРПУ приведена на рис. 1.2
[3]. Вспомогательные блоки здесь не показаны, так как их состав
не отличается от изображенного на рис. 1.1. Число ЛЧПТ равно
числу ветвей разнесения. Выходы всех АЧПТ кольцевым комму-
татором КК в течение периода частоты дискретизации поочередно
подключаются к входу БДК, работающего в мультиплексном ре-
жиме. В этом же режиме работают и основные узлы ЦЧПТ, а
также те узлы БРУЧ и БРИ, на которые поступают сигналы с вы-
хода ЦФОС или с ЦД.
При разнесенном приеме по всем ветвям, как правило, пере-
даются одинаковые сигналы. Однако различие условий прохож-
дения их в ветвях разнесения может потребовать и разных час-
тотных характеристик ЦФОС. В этом случае в течение каждого
периода дискретизации коэффициенты фильтра должны сме-
няться синхронно с переключением АЧПТ. Кроме того, из-за зами-
раний сигналов и помех может оказаться целесообразным и мед-
ленное изменение наборов коэффициентов ЦФОС, позволяющее
адаптироваться к условиям приема. ЦРПУ должно обеспечивать
прием непрерывных сигналов с различными видами модуляции:
амплитудной (AM), частотной (ЧМ), фазовой (ФМ) и однополос-
ной (ОМ), а также дискретных сигналов частотной (ЧТ), относи-
тельной фазовой (ОФТ), амплитудной (АТ) телеграфии и слож-
ных сигналов. Это требует большой универсальности ЦД, которая
проще достигается при его программной реализации. В многовхо-
довом ЦРПУ одной из важнейших процедур, выполняемых в
,ЦЧПТ, наряду с основной селекцией, демодуляцией и т. д. стано-
вится сложение разнесенных сигналов. Гибкость ЦОС позволяет
в зависимости от характеристик сигналов и условий связи легко
изменять и комбинировать методы приема разнесенных сигналов,
реализовывать адаптивные алгоритмы их обработки.
Y
16
Возможность одновременной обработки т сигналов (по чис-
лу ветвей разнесения) в многовходовом ЦРПУ, так же как и в
многоканальном ЦРПУ, рассмотренном в § 1.2, требует т-крат-
ного повышения быстродействия цифрового оборудования и уве-
личения объема памяти по сравнению со случаем одновходового
одноканального приемника. Поскольку объем арифметического ус-
тройства не зависит от т, по мере увеличения т растет рентабель-
ность многовходовых ЦРПУ. Число ветвей разнесения, необходи-
мое для достижения максимальной помехоустойчивости, при мно-
гих видах разнесения, например пространственном п особенно по-
ляризационном, невелико. Но в тех случаях, когда требуется
большое число ветвей разнесения, ограниченное быстродействие
элементной базы может оказаться препятствием к реализации
ЦРПУ с нужным числом входов. Чтобы обеспечить работу ЦЧПТ
в мультиплексном режиме, желательно иметь минимальную час-
тоту дискретизации. Снижение частоты дискретизации без увели-
чения помех наложения (см. § 3.3) требует уменьшения до мини-
мально необходимого значения полосы пропускания АЧПТ и по-
вышения прямоугольности ее АЧХ. Однако в ряде случаев даже
принятие мер по снижению частоты дискретизации не позволяет
достичь запаса быстродействия в ЦЧПТ, достаточного для функ-
ционирования ее в мультиплексном режиме. Тем не менее и в та-
кой ситуации многоканальная обработка может оказаться целесо-
образной.
Проиллюстрируем это на примере ЦРПК, структурная схема
которого приведена на рис. 1.3 [3]. Здесь напряжение с антенны
поступает в высокочастотный разветвитель. К его выходам под-
ключено п неперестраиваемых АЧПТ, АЧХ которых, вплотную
примыкая друг к другу, перекрывают весь декаметровый диапа
зон. Из-за неравномерности загрузки декаметровых волн целе-
сообразно полосу пропускания АЧПТ выбирать более узкой
(сотни килогерц) в загруженной нижней части диапазона, посте-
пенно расширяя ее (до нескольких мегагерц) по мере увеличе-
ния центральной частоты тракта. Такая разбивка частотного ди-
апазона, снижая вероятность забития и уровень интермодуляци-
онных помех, одновременно облегчает и техническую реализацию
фильтров в АЧПТ. Усиление в АЧПТ может быть как прямым,
так и с использованием одного или нескольких преобразований
частоты. Преобразование частоты облегчает достижение большего
коэффициента усиления, позволяет произвести фильтрацию на
тех частотах, на которых легко реализуются фильтры на поверх-
ностных акустических волнах, упрощает выполнение дискретиза-
ции благодаря большей прямоугольности АЧХ и оптимальному
выбору промежуточной частоты АЧПТ. Однако оно усложняет
АЧПТ. Поэтому, если быстродействие элементной базы и чувст-
вительность компараторов АЦП позволяют ограничиться коэф-
фициентом усиления АЧПТ, не превышающим 40... 50, дБ, целесо-
образнее применять прямое усиление. В противной^щ^^^трав-
дано использование преобразования частоты. ,»,♦**
4 4 / J D WI5«8«WE.W
Д1
лс
С.
З.г
л г
СЕ
Л!
ле
М(
ст
вс
лс
М(
Л1
лс
тр
и.
об
де
Ц1
BL
КС
Д1
не
те
сл
НЕ
nf
ал
ЗЕ
пр
ча
Р£
де
об
тр
Рг
ЗД
бс
лг
пр
4
Выходное колебание каждой из АЧПТ в БДК преобразуется i
последовательность цифровых значение"! отсчетов, поступающие
через уплотнитель в матричный коммутатор. Последний обеспечи
вает подключение к цифровому выходу каждой из АЧПТ любые
ЦФОС, сигналы которых лежат в пределах полосы пропускани?
данной АЧПТ. Цифровое представление колебаний позволяет г
одной АЧПТ подключать практически неограниченное числе
ЦФОС. Поскольку после основной селекции частота дискретиза-
ции, как правило, существенно снижается, демодуляция и декоди
рование сигналов, поступающих с нескольких или даже со все?
т ЦФОС, могут быть выполнены с помощью одного объединен
ного цифрового демодулятора и декодера. При приеме аналого-
вых сигналов цифровые значения отсчетов с выхода демодулятора
поступают в ЦАП, выходное напряжение которого сглаживается
ФНЧ. Если быстродействие достаточно, один ЦАП с мощным вы
is
ходом, работая в режиме разделения времени, может обслужи-
вать несколько каналов приема. Однако ФНЧ и в этом случае ос-
таются индивидуальными в каждом канале. При приеме дискрет-
ных сигналов в объединенном цифровом демодуляторе и декоде-
ре производится не только их демодуляция и декодирование, но
также тактовая и цикловая синхронизация, оценка качества при-
ема, а при необходимости и другие операции.
Регулировка усиления и чувствительности каждой АЧПТ вы-
полняется по групповому сигналу. Для этого с выхода БДК циф-
ровые значения отсчетов поступают в БРУЧ, где формируется ре-
гулирующее воздействие, устанавливающее такой коэффициент
передачи АЧПТ, который обеспечивает оптимальный уровень ко-
лебания на входе БДК. Одновременно БРУЧ вырабатывает циф-
ровые управляющие сигналы, обратно пропорциональные коэф-
фициенту усиления АЧПТ. Эти сигналы используются при форми-
ровании масштабных коэффициентов на выходах ЦФОС, подклю-
ченных к данной АЧПТ. Частота следования цифровых значений
отсчетов управляющих сигналов, формируемых БРУЧ, в десятки
тысяч раз ниже частоты следования цифровых значений отсчетов,
поступающих с выхода БДК, а разрядность обоих видов отсчетов
одинакова. Поэтому их уплотнение, позволяющее передавать ин-
формационные и управляющие сигналы по одной и той же шине,
не вызывает никаких затруднений. Разделение отсчетов выходных
колебаний АЧПТ и управляющих сигналов с БРУЧ выполняется
распределителем, стоящим на входе ЦФОС.
Если в АЧПТ используется преобразование частоты, то селек-
тивные цепи в ней оказываются разделенными: фильтрация про-
изводится сначала на радио-, а затем на промежуточной частоте.
Как правило, фильтры промежуточной частоты имеют более вы-
сокую прямоугольность АЧХ. Следовательно, если сигналы в
БРУЧ поступают только с выхода БДК, то система автоматичес-
кой регулировки усиления и чувствительности может не отреаги-
ровать на перегрузку смесителя. Чтобы избежать этого в БРУЧ
наряду с цифровым сигналом с выхода БДК подается аналого-
вый сигнал со входа смесителя.
Возможны два режима регулировки избирательности. Б пер-
вом из них БРИ управляется БУВР и изменяет характеристики
ЦФОС при смене вида сигналов. Во втором при неизменном сиг-
нале он автоматически изменяет полосу пропускания ЦФОС в
зависимости от уровня помех по соседнему каналу. В простейшем
случае ЦФОС реализуется в виде каскадного соединения двух
фильтров. Полоса пропускания первого из них несколько шире,
чем второго, у которого она определяется шириной спектра при-
нимаемого сигнала. Сопоставление цифровых значений отсчетов
на выходах первого и второго ЦФ позволяет (при учете масшта-
бирования) оценить уровень помех по соседнему каналу, и в за-
висимости от этого уровня автоматически выбрать оптимальную
полосу пропускания второго ЦФ.
19
Д1
Л(
С
э>-
Л;
СЕ
ЛЕ
Л(
м<
СТ
ВС
лс
м«
ЛЕ
Л(
Tf
ЕМ
Of
де
ш
ВЕ
КС
ДЕ
не
те
сл
не
пР
ал
аг
Д
ча
ре1
де
of
тр
ра
зд
бс
ЛЕ
пр
4
В рассматриваемом ЦРПК смену частоты настройки каждо-
го из каналов приема осуществляет БУЧН путем изменения цент-
ральной частоты соответствующего ЦФОС и, в случае необходи-
мости, переключения входа этого ЦФОС с цифрового выхода од-
ной АЧПТ к цифровому выходу другой. Учитывая сравнительно
низкие требования к скорости обработки информации во вспомо-
гательных блоках, целесообразно их функции возложить на один
процессор, обслуживающий в мультиплексном режиме все АЧПТ
и ЦФОС. В некоторых случаях в ЦРПК оказывается наиболее
рациональным осуществление всех операций управления и авто-
матической регулировки тем же процессором, который производит
демодуляцию и декодирование сигналов.
Учитывая, что не все участки декаметрового диапазона исполь-
зуются одновременно, число БД К в комплексе можно сократить,
введя цепи коммутации между АЧПТ и БДК и подключая БДК
только к тем АЧПТ, которые используются в данный момент.
Так же как и в ранее описанных ЦРПУ, в рассматриваемом
ЦРПК все ЦФОС при наличии запаса по быстродействию можно
выполнять многократно настраиваемыми. Это значительно уве-
личивает число каналов приема практически npEi том же объеме
аппаратуры. Но, если даже быстродействие элементной базы не
позволяет выполнить ЦФОС многократно настраиваемыми, в
данном ЦРПК при т^Ю обеспечивается существенное снижение
стоимости и объема оборудования в расчете на один канал прие-
ма по сравнению с одноканальной приемной аппаратурой. Этот
выигрыш достигается, прежде всего, за счет того, что число АЧПТ
не возрастает с увеличением числа каналов приема, а преобразо-
вание колебаний на выходах АЧПТ в цифровую форму позволяет
к каждой из АЧПТ одновременно подключать практически неогра-
ниченное число ЦФОС. Рассматриваемьш ЦРПК обладает и ря-
дом других достоинств. Так, в нем число каналов приема может
наращиваться непосредственно в процессе эксплуатации. Кроме
того, поскольку АЧПТ в данном комплексе не перестраиваются,
в них может быть достигнута более высокая прямоугольность
АЧХ, чем в АЧПТ цифровых приемников, структурные схемы ко-
торых приведены на рис. 1.1 и 1.2.
На практике возможны различные модификации рассмотрен-
ного ЦРПК- Например, в некоторых случаях удобнее не уплот-
нять информащюнные сигналы с выхода БДК и управляющие с
выхода БРУЧ, а использовать дополнительный матричный ком-
мутатор. Б других случаях можно вообще отказаться от передачЕЕ
в ЦФОС управляющих сигналов с выхода БРУЧ.
Глава 2
ДИНАМИЧЕСКИЙ ДИАПАЗОН
ДЕКАМЕТРОВОГО РПУ И ЕГО ВЛИЯНИЕ
НА ПОМЕХОУСТОЙЧИВОСТЬ ПРИЕМА
2.1. УЗКОПОЛОСНЫЕ СТАНЦИОННЫЕ
И ИНТЕРМОДУЛЯЦИОННЫЕ ПОМЕХИ
Характеристики мультипликативных и аддитивных помех
оказывают решающее влияние на выбор структуры ЦРПУ и па-
раметров его основных узлов и блоков.
Мультипликативные помехи в декаметровом диапазоне связа-
ны с многолучевым распространением сигналов, а также с явле-
ниями диффузности, дисперсионности и магнитоионного расщеп-
ления лучей. Достаточно полные для практических расчетов све-
дения о характеристиках мультипликативных помех на декамет-
ровых волнах приводятся в [105].
Аддитивные помехи в тракте РПУ разделяют на флуктуаци-
онные, математической моделью которых служит белый гауссов-
ский шум, импульсные (сосредоточенные по времени) и узкопо-
лосные помехи от посторонних радиостанций (сосредоточенные
по частоте помехи). Флуктуационные помехи представляют собой
сумму собственных шумов РПУ, внешних флуктуационных помех
и той части импульсных помех, которая в избирательных цепях
приемника преобразуется в флуктуационную помеху [96,
107, 115, 116]. В результате в диапазонах декаметровых
и особенно более длинных волн уровень флуктуацион-
ных помех довольно часто определяется не внутренними, а
внешними источниками. Часть импульсных помех сохраняет свой
характер и в избирательных цепях РПУ. Однако, как уже указы-
валось, при размещении декаметровых РПУ на вынесенных ра-
диоприемных центрах помехоустойчивость приема определяется
прежде всего воздействием узкополосных станционных помех, ма-
тематической моделью которых может служить небелый локально
стационарный гауссовский шум. Интервал стационарности этого
шума определяется скоростью замираний станционных помех, так
как среднее время существования помехи на несколько порядков
превосходит интервал корреляции замираний ее огибающей. По-
этому в большинстве случаев интервал стационарности состав-
ляет 200... 400 мс.
При продолжительном наблюдении спектральную плотность
небелого шума, образованного узкополосными станционными по-
мехами, можно рассматривать как случайную функцию частоты
и времени Gy.n(f, t). Пример реализации Gy.n(f, t) приведен на
Рис. 2.1. В любой фиксированный момент времени t0 интенсив-
ность станционных помех x(f)=x(f, /о) = | 1 Gy.n(/, to) | являет-
21
Д1
лс
С
3J
л;
СЕ
Л1
ЛС
м<
СТ
ВС
лс
Ml
Л1
лс
Tf
MJ
of
де
m
BE
КС
Д1
не
те
CJ
НЕ
П{
aj
ЭЕ
П1
ЧЕ
Р<
де
of
Т[
ре
ЗЕ
бс
Л!
Щ
4
Рис. 2.1
ся случайной функцией частоты, стационарной на интервале в не-
сколько сотен килогерц, а зафиксировав частоту, получим слу-
чайную функцию времени, стационарную на интервале 10... 15
мин [105]. Величина х([) при каждом значении аргумента опре-
деляется воздействием многих независимых или слабо зависимых
мультипликативных факторов с соизмеримыми дисперсиями. К
ним относятся: разброс мощностей передатчиков, различие в
ширине спектра сигнала при той же мощности передатчика, раз-
ница расстояний! от мешающей станции до приемника, разнооб-
разие типов антенн и направлений главного лепестка их диаграмм
направленности, различие условий распространения радиоволн,
которое в свою очередь определяется различием географических
координат мешающих станций, разным состоянием ионосферы в
точках отражения радиоволн, некогерентностью интерференцион-
ных замираний мешающих станций! в точке приема и т. д. Следо-
вательно, в соответствии с центральной предельной теоремой
распределение х([) должно подчиняться логарифмически нормаль-
ному закону. Данные опытов не противоречат этой гипотезе [91].
Отметим, что экспериментальное распределение интенсивности
сосредоточенных помех получается усеченным ввиду ограничен-
ности динамического диапазона измерительных РПУ. Отсюда од-
номерный закон распределения x(f)
(А Г (In л-—lnx0)2 1 гг и!
I-----=ехр--------iпри хе[/г0,Я],
117(х)= । хо1/2я L 2 о2 J (21)
(0 при x^[h0, Н],
22
где /1 — нормирующий множитель; ho и Н — соответственно ниж-
няя и верхняя границы динамического диапазона измерительного
РПУ.
Учитывая стационарность х([) в пределах полосы пропускания
приемного тракта, из (2.1) легко получить выражение двумер-
ной плотности распределения, если известна корреляционная
функция /?([) процесса x(f). Функция R(f) и интервал fK корре-
ляции помех по частоте определяются шириной спектра мешаю-
щих станций и поэтому зависят от вида применяемых радиосиг-
налов. С развитием техники связи структура сигналов изменяется,
и, следовательно, претерпевают изменения R(f) и [к. Кроме того,
вид R(f) и значение fK в определенной степени зависят от выбо-
ра рабочей частоты, времени суток и года, географического поло-
жения приемного центра, диаграммы направленности антенны и
ее пространственной ориентации. По-видимому, этим вызвана
противоречивость сведений, содержащихся в литературе, об интер-
вале корреляции помех. Чаще всего его оценивают в 0,5 ... 2 кГц.
Вид R(f) для большинства радиотехнических расчетов существен-
ного значения не имеет.
Аппроксимация результатов измерения интенсивности узкополосных стан-
ционных помех логарифмически нормальным распределением представляется
наиболее обоснованной из физических соображений. Однако в ряде случаев,
когда Xo^ho, а о достаточно велико, экспериментальные данные удовлетво-
рительно сглаживаются монотонно убывающими функциями. Так, в [100, 106
и др.] использовалась плотность распределения
, (h/x2 при х е [й0, Н],
lT(x)=U F (2.2)
7 I 0 при [/!0, Я].
Из условия нормировки
h=hoH)(H—hB). (2.3)
На практике H^>h0 и, как следует из (2.3), /гж/г0. Покажем, что (2.2) можно
рассматривать как аппрсжсимацию распределения (2.1). Для этого перепишем
(2.1) в следующем виде:
1Г(х)= |(Л1/х)ехр{— [ln(x/x0)1/1<20]2} при х е [йп, Н], (2Ла)
I 0 при х [/г0, Я].
Разлагая функцию ехр[1п(х/х0)1/Г2а]2 в .ряд Тейлора в окрестности точки
хо ехр [о2] н ограничиваясь первыми двумя членами, запишем
ехр[1п (х/хо)1 / ]2 « х/х0 exp [o*/2J. (2.4)
Подставив (2.4) в (2.1а) и обозначив Аид ехр[<-т2/2] через h, получим (2.2).
Выбор одного из распределений (2.1)' и (2.2) связан лишь с удобством и прос-
тотой расчетов.
Рассмотренная выше модель узкополосных станционных помех
широко используется при расчете помехоустойчивости систем свя-
зи и зондирования, работающих в декаметровом диапазоне радио-
волн [91, 92, 100, 104, 106]. Однако ее использование при анализе
23
ДЕ
лс
С.
эг
лс
СЕ
Л1
лс
М(
ст
ВС
лс
м<
Л1
лс
Tf
ИГ
of
де
Ц1
вь
КС
ДГ
не
те
сл
не
пр
ал
ЭЕ
ПР
ЧЕ
де
of
тр
Ре
зг
бс
Л 5
П{
4
exoiF СТ _ Г7П - СТм нелинейных явлений в тракту
Пл -^л/ии —- РПУ приводит к громоздким пре-
--- образованиям и чаще всего не по-
зволяет получить удобно пред-
Рис- 22 ставимые результаты. Поэтому в
последнем случае, как правило, применяют более грубые матема-
тические модели [107—114], одна из которых будет использована
ниже.
Воздействие узкополосных станционных помех на помехоустой-
чивость приема не ограничивается возможностью их прохожде-
ния на вход демодулятора по основному и побочным каналам
приема, а связана еще и с такими нелинейными явлениями, как
блокирование (забитие), перекрестная модуляция, интермодуля!
ционные помехи. Экспериментально доказано, что при приеме н i
вынесенных радиоприемных центрах, удаленных от передатчи-
ков, интермодуляционные помехи представляют собой основнс!
вид нелинейных искажений, снижающих помехоустойчивост»
РПУ. Поэтому в § 2.2 определяется необходимый динамически!
диапазон РПУ по соседнему каналу, а в § 2.3 производится оцен-
ка влияния интермодуляционных помех на ' помехоустойчивость
приема. Для решения указанных задач необходимо найти анали-
тические выражения числа интермодуляционпых помех третьего
порядка, попадающих на заданный частотный интервал. Рассмот-
рим два метода получения этих выражений.
Представим РПУ в виде упрощенной математической модели
(рис. 2.2), состоящей из каскадно включенных линейного широ-
кополосного тракта ЛШТ с прямоугольной АЧХ, безынерционно-
го нелинейного элемента НЭ и линейного тракта основной селек-
ции ЛТОС, АЧХ которого также прямоугольна. Полоса пролу?
екания ЛШТ равна ДА с граничными частотами fH и fB, причем
нижняя граничная частота /„>ДА. Разделим полосу ДА на п оди-
наковых вплотную примыкающих друг к другу элементарных час-
тотных интервалов. Ширина элементарного частотного интервал;
Л/'/п равна средней ширине спектра узкополосной станциоп
ной помехи. Допустим, что станционная помеха на каждом эле
ментарном интервале появляется независимо от остальных с ве
роятностью р. Кроме того, предположим, что станционные помех]
синусоидальны, их частоты совпадают с центрами интервалов i
на одном элементарном интервале может находиться не более од
ной станционной помехи. Помехи на всех, даже соседних, интер
валах будем считать независимыми, а распределение их уровне!
U (выраженных в микровольтах эффективных значений напряже
ния) — логарифмически нормальным с параметрами р и о:
W(U) =ехр [— (U—р)2/2о2]/К^ о, (2.5)
77=201g И и так же, как р и о, выражается в децибелах относи-
тельно 1 мкВ.
24
Определим среднее число возникающих в НЭ интермодуляци-
онных помех третьего порядка, попадающих: а) в пределы поло-
сы AF пропускания ЛШТ, б) на s-й элементарный интервал (s=
= 1, п). Решение первого вопроса требуется для определения не-
обходимого динамического диапазона РПУ [ИЗ], а второго —
при оценке влияния интермодуляционных помех на помехоустой-
чивость приема [114].
Рассмотрим вначале точный метод 'решения [112]. Среди интермодуляцион-
ных помех третьего порядка в пределы полосы AF могут попадать помехи двух
видов: 1) 2fi—fj, 2fj—ft и 2) ft+fj—ft, fi+fi—fi, fi+fi fi-
Число Si пар интервалов, при попадании на которые станционные помехи
создают интермодуляционную помеху первого вида на s-м элементарном интер-
вале, найдем из следующих соображений. Очевидно, 81 равно1 числу неупоря-
доченных пар ((, у) натуральных чисел i и у, удовлетворяющих условиям:
l^i^n, 1=Су^п, ]
i * j, } (2.6)
2i—j=s. J
Выражая y=2i—s, можно переписать (2.6) следующим образом:
s + 1 2t ^s-f-n, •>
• , r (2-7)
i^s. J
В (2.7) первое неравенство является 'следствием второго, если учесть, что
Isgs<n. Отсюда 81 равно количеству натуральных чисел I, удовлетворяющих
условиям
т. е. 81 равно уменьшенному на единицу количеству четных чисел из интервала
[s + 1, s+п]. Следовательно,
8i=[0,5(s+n)] —[0,5s]—1^[0,5п—1]. (2.9)
Здесь квадратные скобки означают взятие целой части числа.
Аналогично е2 комбинаций из трех интервалов, при попадании на которые
станционные помехи создают интермодуляционную помеху второго вида на s-m
элементарном интервале, равно числу неупорядоченных троек (i, у, /) натураль-
ных чисел i, j и I, удовлетворяющих условиям
l^t^n, 1<у<п,
i#/, у#/, j (2.10)
1 + у — I — s. J
Для любой упорядоченной тройки (f, у, I), удовлетворяющей (2.10), тройка
(/> I) удовлетворяет (2.10), а при любой другой перестановке чисел i, j, I
хотя бы одно из условий (2.10) нарушается. Следовательно, число неупорядо-
-е:г"ых троек, удовлетворяющих (2.10), равно половине числа упорядоченных
троек, удовлетворяющих (2.10). Выражая l=i+j—s, из (2.10) получаем:
1^/^n, s+lCt+/^s + n, -1
«' * /, у # s, i * s. f ( ’
25
Среди всех п2 пар (i, /), удовлетворяющих первым двум условиям (2.11), ней
удовлетворяют третьему условию те пары, для которых i+j^s [число такт
пар равно (s—l) + (s—2)+...+l=0,5s(s—1)] или i+/^s+n+l [таких па;
(п—s)+:(n—s—l)+...+1=0,5(п—s+l)(n—s)]. Среди всех п2—0,5s (s -1)-.
—0,5(n—s+ l)(n—s) пар, удовлетворяющих первым трем условиям (2.11), чет
вертому условию не удовлетворяют пары вида (i, i) (таких пар [0,5(n+s)J —
—'[0,5s]), пятому и шестому условиям — пары вида (/, $) и (t, s) соответ
ственно (таких пар 2п). Учитывая изложенное и принимая во внимание, чте
пара (s, s) не удовлетворяет каждому из трех последних условий, находим:
е2 — 0,5 {п2— 0,5s (s— 1)-—0,5 (n—s -ф- 1) (и—s) — ([0,5 (n + s)] —
L. плотностью Wi(fi) = t/AF (рис. 2.3,а). Следовательно, частота 2[,- равномерно
распределена на интервале 2[„ ... 2fB с плотностью Wz(2ft) = 1/2AF (рис. 2.3,6).
Плотность распределения частоты интермодуляшюнной помехи пер-
вого вида можно найти как свертку плотностей 1С2(2[;) и W'lffJ. В результате
получим
1С3 (2Л —Л) =
0
(f—fH + A F)/2AF2
1/2AF
(fB + Д F—/)/2AF2
0
при
при
при
при
при
AF,
/и /в Д F,
f>fB + bF.
(2.15)
— [0,5s]) —2п + 2] »[0,25n2—l,5n+l—0,5s2+0,5ns + 0,5s]. (2.1)
Выражения (2.9) и (2.12) позволяют определить среднее число интермоду-
ляционных помех первого /ц и второго п2 видов, попадающих на s-й интервал.
Действительно, для того чтобы данная комбинация интервалов создавала на s-n
интервале интермодуляционную помеху третьего порядка, необходимо и доста-
точно, чтобы наряду с выполнением условии (2.6) или (2.10) на всех элемен-
тарных интервалах, входящих в комбинацию, присутствовали станционные по-
мехи. Отсюда
и1 = р2[0,5п — 1], (2.13
п2 = р3[0,25п2— l,5n+ 1 — 0,5s2 + 0,5«s+0,5s]. (2.14)
Из (2.13) и (2.14) следует, что ni не зависит от расположения s-ro интервала
а п2 тем больше, чем ближе к центральной частоте широкополосного тракта
расположен s-й интервал. Придавая s значения от 1 до п и суммируя (2.13)
и (2.14) по всем значениям s, можно определить среднее число интермодуля-
ционных 'помех третьего порядка обоих видов в пределах полосы AF. Таким
образом, изложенный метод позволяет точно решить обе задачи, но являете»
несколько громоздким.
Рассмотрим теперь приближенный метод решения [112, 113]. Допустим, что
частота f, каждой i-ft станционной помехи может принимать не дискретное, а
непрерывное .множество значений в пределах от /н до /5,- Тогда можно считать
непрерывной случайной величиной, равномерно распределенной в полосе fn -.-f
График плотности .распределения интермодуляцнонных помех третьего порядка
первого вида (2.15) изображен на рис. 2.3,в.
Из (2.15), учитывая, что каждая пара исходных колебаний создает две
ннтермодуляционные помехи первого вида, а максимальное число пар станцион-
ных помех равно С2п — числу сочетаний из п по 2, определяем среднее число
интермодуляционных помех первого вида, попадающих в полосу частот /н ...
A\ = 0,5ri(n — 1)р2, (2.16)
Поскольку, как следует из (2.15), интермодуляционные помехи первого вида
равномерно распределены в полосе частот [н — /в, очевидно, что
»1 = ^1/п = 0,5(п—1)р2, (2.17)
« [0,5 (n— 1)]. (2.18)
Для определения плотности распределения интермодуляционных помех вто-
рого вида найдем вначале плотность распределения Эта плотность
определяется как свертка двух идентичных равномерных распределений ЙА([,)
и IVi(/j) (рис. 2.4,а)
°
(f— 2/„)/AF2
(2fB—/)/AF2
to
lT4(/i + W =
при f^2fH,
при 2/H^/^2/H+A F,
при 2fH+ AFs£f<2fB,
при />2/в.
Свертывая WMA+h) (рис. 2.4,6) и (рис. 2.4,a), находим плотность рас-
пределения —f[) частоты интермодуляционной помехи второго вида
10
(f—/н + AF)2/2AF3
[(/—fH + AF)2—3 (f—/Н)2]/2А F3
(f—fB—AF)2/2AF3
0
при
при
при
при
при
/С/н— AF,
А,—AF</</H,
tn /в,
/в f ^5. f в + AF,
f>fB + AF.
(2..19)
Кривая распределения интермодуляционных помех третьего порядка второго
вида (2.19) приведена на рис. 2.4,в.
В соответствии с (2.19) в пределы полосы частот от [„ до /в в среднем
попадает две трети интермодуляциониых помех второго вида. Отсюда, учитывая,
каждая комбинация из трех станционных помех создает три интермоду-
Нионные помехи второго вида, а число комбинаций равно Сэп, получим, что
Д1
Л(
С
Э,-
л:
СЕ
Л1
Л(
Mt
ст
ВС
ЛС
Ml
Л1
лс
П
HJ
of
де
ш
BE
КС
ДЕ
НС
те
сл
НЕ
лр
ал
ЗЕ
пр
ЧЕ
рг
де
of
тр
Р<
зр
бс
ЛЕ
пр
4
среднее число интермодуляционных помех второго вида, попадающих в поло
частот от fn до fB,
N2 = п (п—1) (и—2) р3/3. (2.3
Из (2.19) и (2.20) можно получить
л2 = 0,25(п2—3«+2){1 +2(s/n) — 2(s/n)2}p9, (2.!
е2 = [0,25 (и2—Зи+2) {1 +2(s/n)—2(s/n)2}]. (2.3
Разница в выражениях (2.9) и (2.18), (2.12) и (2.22), (2.13) и (2.17), (2.1
и (2.21) объясняется пренебрежением неравенствами i=£j, при втор,
(приближенном) методе определения £i, е2, nt, п2, А\ и Л'2.
Таким образом, первый метод позволяет точно решить поставленные зада1
а второй только приближенно. Однако преимуществами второго метода являет
его простота и большая наглядность. Кроме того, из-за своей громоздкое
первый метод .мало пригоден для исследования интермодуляционных помех вь
ших порядков, в то время как второй может быть .использован для этой цр.
Более того, для некоторых видов интермодуляциопных помех высших порядк
он даже упрощается. Действительно, распределение частоты интермодуляци
ной помехи пятого порядка вида /т—fk можно в соответствии
центральной предельной теоремой считать близким к нормальному со средв
значением fH+0,5AF и дисперсией 5АК2/12. Очевидно, что подобные результи
несложно получить для интермодуляционных помех такого же вида седьм!
девятого и более высоких порядков.
Вопрос о числе интермодуляционных помех третьего поряд;
попадающих на заданный частотный интервал, возникает при ан
лизе нелинейных искажений не только в РПУ декаметрового Д
апазона, но и в многоканальных системах связи с частотным pi
делением, в радиоизмерительной и другой радиотехнической i
паратуре. Поэтому область применения приведенных выше р
зультатов выходит за рамки теории радиоприемных устройств.
28
2.2. НЕОБХОДИМЫЙ ДИНАМИЧЕСКИЙ ДИАПАЗОН
ДЕКАМЕТРОВОГО РПУ
Сильная загрузка диапазона декаметровых волн в сочетании
с техническими трудностями создания узкополосного преселекто-
ра порождает стремление к максимальному увеличению динами-
ческого диапазона декаметровых РПУ. Поэтому важно устано-
вить аналитическую зависимость между необходимым динамичес-
ким диапазоном РПУ по соседнему каналу D, полосой пропуска-
ния его переселектора ДА и статистическими характеристиками
узкополосных станционных помех. В ЦРПУ решение этой задачи
позволяет не только сформулировать требования к ряду пара-
метров АЧПТ, но и определить необходимую разрядность пред-
ставления отсчетов в БДК и ЦЧПТ (см. § 4.2 и 4.3). Данная за-
дача была решена в [113]. Некоторые дополнительные результа-
ты приведены в [3]. Излагаемый ниже материал базируется на
указанных работах.
Выражение, устанавливающее связь между D, AF и статисти- ч
ческими характеристиками узкополосных станционных помех,
можно найти, наложив определенные ограничения на интермоду-
ляционные помехи третьего, порядка. Такая возможность обус-
ловлена тем, что наиболее широко применяемый метод оценки ди-
намического диапазона по соседнему каналу основан на измере-
нии интермодуляционных продуктов третьего порядка [108]. Лег-
ко убедиться, что во всех практически важных случаях любой ра-
зумный критерий, минимизирующий влияние интермодуляцион-
ных помех на качество приема сигналов, является монотонной
функцией отношения 9 среднего числа Ми интермодуляционных
помех третьего порядка, превышающих некоторый порог, напри-
мер 1 мкВ, к среднему числу Nc станционных помех, попадающих
в приемный тракт.
Главный приемный тракт РПУ цредставпм упрощенной мате-
матической моделью, изображенной на рис. 2.2. В дополнение к
описанию этой модели в § 2.1 предположим, что полоса пропус-
кания ЛТОС может быть любой, но не выходящей за пределы
полосы пропускания ЛШТ ДА. Поэтому, в принципе, в ЛТОС мо-
гут попасть все помехи, частота которых находится в пределах
ДА. Затухание фильтров, стоящих в ЛШТ и ЛТОС, за границами
полосы пропускания этих трактов полагаем бесконечным.
Воспользуемся рассмотренной в § 2.1 моделью узкополосных
станционных помех. В соответствии со сделанными при описании
модели допущениями число станционных помех, попадающих в
ЛШТ, подчиняется биномиальному закону распределения. По-
этому в пределах ДА их среднее число
Nc=np. (2.23)
Можно показать, что (см., например, [ИЗ]) напряжение ин-
термодуляционной помехи первого вида с частотой, равной 2[,—
nHi = [/2i(7;/D3, (2.24)
29
д
л,
С
э.
л
CJ
л;
Л'
м
ст
ВС
Л(
м
Л)
л<
Т]
и.
о(
Д(
Ц]
BI
КС
Д1
не
те
CJ
Нс
aj
аг
п{
Чс
Рг
де
of
Tf
рг
з~
бс
Л 5
П1
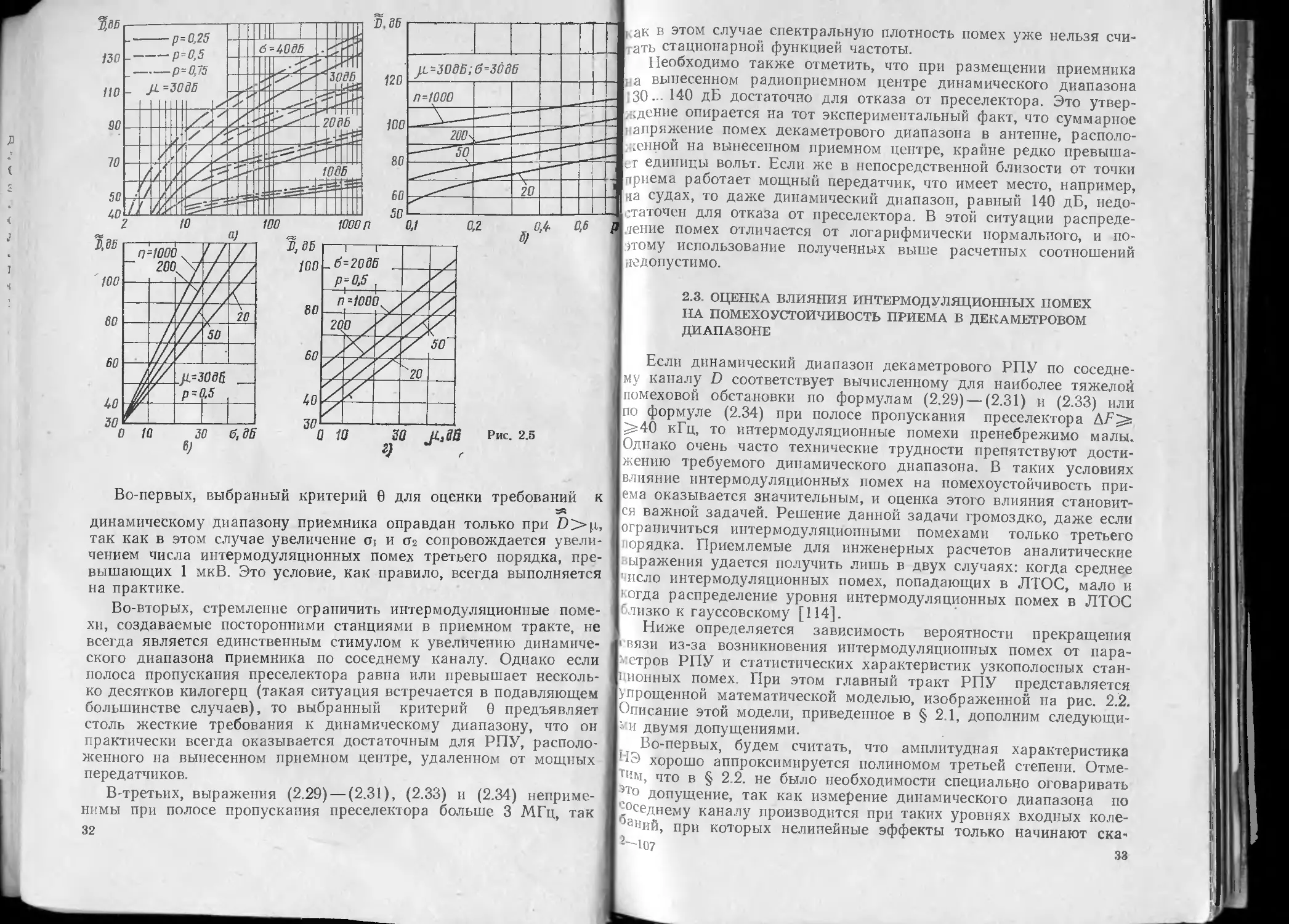
Как указывалось выше, необходимый динамический диапазон
по соседнему каналу находим из условия
MiN!+M2N2^Nc. (2.32)
После подстановки (2.16), (2.20) и (2.23) в (2.32) и после преоб-
разований запишем
ДР=+[ V4 (Mi—2pM2) 2—21,3 (0,667р2М2— 0,5pMi—0) М2 +
+4рМ2-2М1]Д/„/2,67М2р, (2.33)
где Д/п = Д77/н — средняя ширина спектра узкополосной станцион-
ной помехи.
Выражение (2.33) с учетом (2.29) — (2.31) позволяет найти
при заданных полосе пропускания преселектора и статистических
характеристиках узкополосных станционных помех необходимый
динамический диапазон РПУ по соседнему каналу. Можно ре-
шить и обратные задачи, например, при заданных динамическом
диапазоне и статистических характеристиках помех определить
максимально допустимую полосу пропускания преселектора. Ес-
тественно, что расчеты целесообразно проводить для наиболее
жесткой помеховой обстановки. Выбор коэффициента 6 в извест-
ной мере субъективен. По-видимому, разумно подбирать его та-
ким, чтобы среднее число интермодуляционных помех третьего
порядка в полосе пропускания преселектора составляло неболь-
шую долю от среднего числа станционных помех, попадающих в
эту полосу, т. е. реальный приемник незначительно отличался от
идеально линейного. Исходя из этого, можно рекомендовать 0 =
=0,2.
На рис. 2.5 приведены зависимости необходимого динамичес-
кого диапазона РПУ D от полосы пропускания преселектора ДР,
выраженной в числе п элементарных частотных интервалов, ши-
рина каждого из которых Д[п=1 кГц, и статистических характе-
ристик станционных помех р, у, и о. Расчеты проводились по
формулам (2.29) — (2.31), (2.33) для 0 = 0,2. Как видно из кривых,
требования к динамическому диапазону РПУ возрастают с
увеличением ДР, р, у, и о. При этом зависимость D от у и о ли-
нейная, скорость же увеличения D при расширении ДР монотон-
но убывает.
В общем случае зависимость D от ДР, р, у, о не удается вы-
разить явно. Однако при р>0,1 и п^40 для 0 = 0,2 эта зависи-
мость хорошо аппроксимируется выражением
5= [(0,72-0,185 1g Юр) 1g п+0,14+lg Юр]о+у+2. (2.34)
При использовании формул (2.29) — (2.31), (2.33) и (2.34) не-
обходимо учитывать следующие ограничения.
31
а второго вида с частотой fc + fj—fi
U„z=2UiUjUlID\ (2-25
где Ui, Uj, Ui — эффективные значения напряжения узкополосны:
станционных помех с частотами fi, f„ fi соответственно.
Из (2.24) и (2.25) следует, что при логарифмически нормаль
ном распределении станционных помех (2.5), распределение ин
термодуляпионных помех обоих видов также логарифмическ,
нормальное с параметрами
И1=3(р—О), О1 = У5о, I (2.26
р.2==3(р,-|-2—D), o2=]/<3o, J
СВ
где 7)=20igZ)— динамический диапазон по соседнему каналу
выраженный в децибелах.
Среднее число интермодуляционных помех третьего порядк;
с уровнями, превышающими 1 мкВ, в полосе ДР
Na=MiNt+M2N2, (2-27)
где Mi, М2 — коэффициенты, определяющие долю интермодуля
ционных помех третьего порядка первого и второго видов соответ
ственно, превышающих 1 мкВ; Ni, N2 — математические ожила
ния числа интермодуляционных помех третьего порядка первого
второго видов соответственно, попадающих в полосу частот о
/к ДО /в-
Выражение (2.27) справедливо в той мере, в какой можно счг
тать независимыми число интермодуляционных помех определег
ного вида, попадающих на заданный интервал частот, и долю нс
мех этого вида, превышающих некоторый уровень, наприма
1 мкВ. Величины М и N2 определяются по формулам (2.16)
(2.20) соответственно, а выражения коэффициентов Mi и М2 на!
дем как вероятность превышения интермодуляционной помехе
уровня, равного 1 мкВ:
Mi= 7 W(Ual)dUm, М2= J W(UH2)dUK2, (2.2
о о
где £7И1=20 lg Um, Ua2 = 20 lg UIi2.
Из (2.28) с учетом (2.5) и (2.26) получим
Л41=0,5{1—Ф[1,34(Б—у)/о]}, (2-2
М2=0,5{1—Ф[1,73(В—у—2)/<т]}, (2.3
где
ф(х)=^— f exp [—t?l2]dt. (2.3
1/2 л о
30
дЗБ
130
/10
so
10
too
80
60
50
ADz
ДЗВг
120
100
80
80
200
60
_ 6=2066
-^4
П =1000
}L=30d6 __
р = 0,5
30 б, 06
8)
топ
11,36
100
10
п=юоЬ
200
60
50*—
0,1
40
10 30 11, в В
9 г
Рис. 2.5
40
30
0 10
Во-первых, выбранный критерий 0 для оценки требований к
динамическому диапазону приемника оправдан только при Z)>p,,
так как в этом случае увеличение Oi и ст2 сопровождается увели-
чением числа интермодуляционных помех третьего порядка, пре-
вышающих 1 мкВ. Это условие, как правило, всегда выполняется
на практике.
Во-вторых, стремление ограничить интермодуляционные поме-
хи, создаваемые посторонними станциями в приемном тракте, не
всегда является единственным стимулом к увеличению динамиче-
ского диапазона приемника по соседнему каналу. Однако если
полоса пропускания преселектора равна или превышает несколь-
ко десятков килогерц (такая ситуация встречается в подавляющем
большинстве случаев), то выбранный критерий 0 предъявляет
столь жесткие требования к динамическому диапазону, что он
практически всегда оказывается достаточным для РПУ, располо-
женного на вынесенном приемном центре, удаленном от мощных
передатчиков.
В-третьих, выражения (2.29) — (2.31), (2.33) и (2.34) неприме-
нимы при полосе пропускания преселектора больше 3 МГц, так
32
D.36
j.L-30eB;6'30d6
n=tooo
2U0-
"~50
20
как в этом случае спектральную плотность помех уже нельзя счи-
,| гать стационарной функцией частоты.
Необходимо также отметить, что при размещении приемника
—I— - на вынесенном радиоприемном центре динамического диапазона
iL - 30..- 140 дБ достаточно для отказа от преселектора. Это утвер-
IL ждение опирается на тот экспериментальный факт, что суммарное
11апряжение помех декаметрового диапазона в антенне, располо-
женной на вынесенном приемном центре, крайне редко превыша-
=р- с г единицы вольт. Если же в непосредственной близости от точки
— приема работает мощный передатчик, что имеет место, например,
-----па судах, то даже динамический диапазон, равный 140 дБ, недо-
—L ;таточен для отказа от преселектора. В этой ситуации распреде-
Р дение помех отличается от логарифмически нормального, и по-
I этому использование полученных выше расчетных соотношений
I недопустимо.
0,2
0,4 0,6
6/
2.3. ОЦЕНКА ВЛИЯНИЯ ИНТЕРМОДУЛЯЦИОННЫХ ПОМЕХ
НА ПОМЕХОУСТОЙЧИВОСТЬ приема в ДЕКАМЕТРОВОМ
ДИАПАЗОНЕ
Если динамический диапазон декаметрового РПУ по соседне-
му каналу D соответствует вычисленному для наиболее тяжелой
помеховой обстановки по формулам (2.29) —(2.31) и (2.33) или
по формуле (2.34) при полосе пропускания преселектора
^40 кГц, то интермодуляционные помехи пренебрежимо малы.
Однако очень часто технические трудности препятствуют дости-
жению требуемого динамического диапазона. В таких условиях
влияние интермодуляционных помех на помехоустойчивость при-
ема оказывается значительным, и оценка этого влияния становит-
ся важной задачей. Решение данной задачи громоздко, даже если
ограничиться интермодуляционными помехами только третьего
юрядка. Приемлемые для инженерных расчетов аналитические
ыражения удается получить лишь в двух случаях: когда среднее
пело интермодуляционных помех, попадающих в ЛТОС, мало и
когда распределение уровня интермодуляционных помех в ЛТОС
лизко к гауссовскому [114].
Ниже определяется зависимость вероятности прекращения
вязи из-за возникновения интермодуляционных помех от пара-
1 стров РПУ и статистических характеристик узкополосных стан-
I1 ионных помех. При этом главный тракт РПУ представляется
р прощенной математической моделью, изображенной на рис. 2.2.
I Описание этой модели, приведенное в § 2.1, дополним следующи-
I - и двумя допущениями.
I Во-первых, будем считать, что амплитудная характеристика
| ЧЭ хорошо аппроксимируется полиномом третьей степени. Отме-
Шм, что в § 2 2. не было необходимости специально оговаривать
п° допущение, так как измерение динамического диапазона по
“°седнему каналу производится при таких уровнях входных коле-
аний, при которых нелинейные эффекты только начинают ска-
407 яя
зываться и члены аппроксимирующего полинома, имеющие сте-
пень выше третьей, пренебрежимо малы.
Во-вторых, предположим, что полоса пропускания ЛТОС рав-
на Afn=ibF/n и ее границы совпадают с одним (например s-м) из
п элементарных частотных интервалов, на которые разделена по-
лоса пропускания ЛШТ. Следовательно, прекращение связи насту-
пает при поражении s-ro интервала, т. е. при превышении эффек-
тивным напряжением помех на s-м интервале некоторого порого-
вого значения Uo, которое определяется видом и уровнем сигнала,
а также методом его демодуляции и декодирования.
Узкополосные станционные помехи представим моделью, опи-
санной в § 2.1 и использованной в § 2.1 и 2.2.
В идеально линейном приемнике вероятность поражения s-ro
интервала
Рп=Рс=1—9с, (2.35)
где рс и 9с — соответственно вероятности поражения и непораже-
ния s-ro интервала станционной помехой. Очевидно
рс=р f 1П(^)й(П)=О,5р{1-Ф[(По—и)/о]}, (2.36)
Е.
где (Jo~~201gt/o; Ф(х)—интеграл вероятностей, определяемый
формулой (2.31).
В диапазоне декаметровых волн практически всегда и
чаще всего поэтому в соответствии с (2.36) в подавляю-
щем большинстве случаев рс незначительно отличается от р.
Из-за ограниченности динамического диапазона РПУ по со-
седнему каналу на s-й интервал, кроме станционной помехи, мо-
гут попасть интермодуляционные помехи третьего порядка обои)
видов. Как показано в § 2.2, эти интермодуляционные помех!
имеют логарифмически нормальное распределение, параметры ко
торого можно найти по формулам (2.26).
Среди помех, попадающих на s-й интервал, статистическая за
виспмость в общем случае может быть существенной только ме
жду различными интермодуляционными помехами второго вид?
и между интермодуляционными помехами первого и второго ви-
дов; зависимость же между станционной и интермодуляционным!
помехами первого вида полностью отсутствует, а между различ
ными интермодуляционными помехами первого вида и межд*
станционной и интермодуляционными помехами второго вид!
пренебрежимо мала. Поскольку в реальных условиях рс незначи
тельно отличается от р, можно исключить из рассмотрения ка!
маловероятную ситуацию, когда уровни станционной и ссвокуп
ности интермодуляцнонных помех на s-м интервале в отдельност!
меньше, а в сумме больше Uo. Это, а также практическая незави
симость станционной помехи на s-м интервале от интермодуляци
онных помех, попадающих на тот же интервал, позволяют при
ближенно считать поражение s-ro интервала станционной и интер
34
модуляционными помехами независимыми событиями. Отсюда
полная вероятность поражения s-ro интервала
Рп~ 1—9с9и=р<+рн—РсРи, (2.37)
где рк и — соответственно вероятности поражения и непораже-
ния s-ro интервала интермодуляционными помехами.
Из (2.35) и (2.37) следует, что при сделанных выше допуще-
ниях снижение помехоустойчивости приема из-за ограниченного
динамического диапазона РПУ можно охарактеризовать величи-
ной рн.
Среднее число интермодуляцнонных помех первого гц и вто-
рого п2 видов будем определять по формулам (2.13) и (2.14),
поскольку они без усложнения записи дают более точный резуль-
тат по сравнению с (2.17) и (2.21). Данные формулы и кривые
рис. 2.3,в и 2.4,в показывают, что «1 не зависит от расположения
s-ro интервала, а п2 тем больше, чем ближе к центральной часто-
те широкополосного тракта расположен s-й интервал. Усредняя п2
по всем возможным значениям s, получаем
п2о = р3 [0,33/г2—1,25п+2,33].
Рассмотрим случай, когда среднее число интермодуляцнонных
помех, попадающих на s-й интервал, т. е. в ЛТОС, достаточно ма-
ло. Данное условие заведомо выполняется при п2о<1 или, с уче-
том главного члена выражения п20> при
3 /--
р<РЗ/и2. (2.38)'
Очевидно, что при этом помехи всех видов, попадающие на s-й ин-
тервал, с очень малой погрешностью можно считать статистичес-
ки независимыми. Естественно также в таком случае пренебречь
возможностью поражения интервала совокупностью интермодуля-
цпонных помех, каждая из которых имеет уровень меньше Uo, в
то время как общее напряжение совокупности превышает Uo. От-
сюда
Ри~ Ри1^и2, Ри~ 1 <7и1<7и2, 1—?С<7и1<7и2,
(2.39)
где ри1 и р„2 — вероятности того, что s-й интервал не будет пора-
жен интермодуляционпыми помехами первого и второго видов
соответственно:
<7nl~TlE,l, <7»2l~
(2.40), (2.41)
<1 — вероятность того, что станционными помехами, попадающи-
ми на одну из ei комбинаций двух интервалов, не будет создана
интермодуляционная помеха первого вида, поражающая s-й ин-
тервал; л2 — вероятность того, что станционными помехами, попа-
дающими на одну из е2 комбинаций трех интервалов, не будет
с°здана интермодуляционная помеха второго вида, поражающая
s"й интервал.
Каждая из величин и л2 определяется как сумма вероятно-
(тей того, что интермодуляционная помеха этой комбинацией во-
д
л
с
э.
л
с:
л
л
м
С'
В(
U1
м
л
л
т;
и.
OI
Д'
ц
BI
Kt
д
Н(
тс
CJ
и:
п]
а.
ai
п]
ч;
р;
д<
0<
Т{
Р‘г
з;
б,
Л)
П1
4
распределение каждого из слагаемых к нормальному. Интермо
дуляционные помехи, как указывалось в § 2.2, имеют логарифм»
чески нормальное распределение, которое при малых значения;
параметра о незначительно отличается от нормального. Однак<
различие между этими распределениями быстро увеличивается I
ростом о. Поэтому, используя в качестве критерия сходимости i
нормальному закону близость к нулю коэффициентов асимметрш
и эксцесса и учитывая случайный характер числа интермодуляци
онных помех, попадающих в узкополосный тракт, можно пока
зать, что при встречающихся на практике значениях п и р распре
деление эффективного напряжения интермодуляционных помех t
узкополосном тракте РПУ может быть удовлетворительно аппрок
симировано нормальным законом только при условии, что пара
метр о распределения узкополосных станционных помех не превы
шает 10 дБ. Если это условие выполняется, то
Ри«0,5{1-Ф[(1/0-ти)/ои]}, (2.46
рп« 1 —0,5 {1+Ф [ (Пс—ши) /о„]} {1 _0,5р [ 1—Ф ((U о—ц) /о)]},
(2.47)
где 1Пц и ои — соответственно математическое ожидание и средне
квадратическое отклонение эффективного напряжения суммы ин
термодуляционных помех на s-м интервале,
ти=п1й14-п2о2, (2.48
где «1 и а2 — математическое ожидание напряжения одной интер
модуляционной помехи первого и второго видов соответственно:
щ = ехр [3(р—D) /201g е+0,5 ( ]/5 о/201 g е)2], (2.49
а2 = ехр [3(ц+2—3)/201ge+0,5(/3cr/201ge)2]. (2.50
Для определения а„ сделаем допущение о независимости все:
интермодуляционных помех, попадающих на s-й интервал. Учиты
вая, что дисперсия суммы случайного числа одинаково распреде
ленных независимых случайных величин равна произведению дне
Персии одной случайной величины на среднее число случайны)
величин плюс произведение квадрата математического ожидание
одной случайной величины на дисперсию числа случайных вели
чин [65], после преобразований получим
n,o2i {ехр [ (1^5 cr/20 1g е)2] — р2} +
+«2й22{ехр [( ]/3o/201ge)2]—р3}. (2.51
Подставляя в (2.48) и (2.51) формулы (2.13), (2.14), (2.49) и
(2.50), можно определить ти и ои. Найденное по формуле (2.511
значение ои меньше действительного, поскольку при выводе эта»
формулы не учитывалась статистическая зависимость между ин
термодуляционными помехами, попадающими в ЛТОС. Поэтому
38
ыражения (2.46) и (2.47) при подстановке в них Он, вычислен-
ного по формуле (2.51), дают при £/о<ти верхнюю, а при Uo>
->tnu нижнюю границы ри и рп.
На рис. 2.8 приведены рассчитанные по формуле (2.46) с уче-
том (2.13), (2.14), (2.48) — (2.51) зависимости верхней (сплошная
линия) и нижней (штриховая линия) границ ри от D для различ-
ных значений п, р, ц, о. Расчеты проводились для Uo= 1 мкВ и
,$=|[/г/2]. Они дают точное значение D, соответствующее ри = 0,5,
которая достигается при mH=U0.
6)
39
д
л<
с
э.
л
С1
Л!
Л'
М
•С1
ВС
Л С
м
л
Л1
Т1
и.
о(
Д'
ц
BI
кс
Д1
НС
тс
€.1
н<
П1
а,
ai
п;
ч;
Р'
Д'
01
TJ
Р:
з;
б,
л:
п
4
В известной мере выражения (2.46) — (2.51) можно использо
вать даже тогда, когда распределение уровня интермодуляцион
ных помех в узкополосном тракте РПУ значительно отличаете)
от гауссовского. В этом случае ри<0,5, а рп<0,5(рс+1) при тк =
= По, так как распределение интермодуляционных помех имеет пр
ложительную асимметрию и, следовательно, медиана лежит левее
математического ожидания. Иными словами, результат, получен
ный для гауссовского распределения интермодуляционных поме;
при ти~П0> можно рассматривать как верхнюю границу во все;
остальных ситуациях.
Таким образом, для декаметровых РПУ, амплитудная характе
ристика которых может быть хорошо аппроксимирована полино-
мом третьей степени, полученные выше результаты позволяю!
дать достаточно точную оценку влияния интермодуляционны!
помех на вероятность прекращения связи в двух случаях: когдз
среднее число интермодуляционных помех, попадающих в тракп
основной селекции РПУ, мало и когда распределение уровня ин-
термодуляционных помех в этом тракте близко к гауссовскому, а
ти~^о. В общем случае удается получить нижнюю границу
ри и рп, а при близком к гауссовскому распределении уровня ин-
термодуляционных помех в узкополосном тракте еще и верхнюю
границу этих вероятностей, если mK>UQ.
Приведенные выше результаты были получены для случая, ког-
да ширина полосы пропускания тракта основной селекции равна
средней ширине спектра узкополосной станционной помехи, но
их нетрудно скорректировать и для ситуаций, в которых это ус-
ловие не выполняется.
Кратко остановимся еще на одном вопросе. Из выражений
(2.13) и (2.14), а также (2.17) и (2.21) следует, что среди интер-
модуляционпых помех третьего порядка, попадающих на некото-
рый элементарный частотный интервал, среднее число помех пер-
вого вида не зависит от расположения этого интервала, а сред-
нее число помех второго вида тем больше, чем ближе к централь-
ной частоте преселектора расположен данный интервал. Анало-
гично выражения (2.15) и (2.19) и соответствующие им кривые
на рис. 2.3,в и 2.4,в показывают, что плотность распределения ин-
термодуляционной помехи первого вида равномерна в пределах
полосы пропускания преселектора, а плотность распределения по-
мехи второго вида имеет максимум на центральной частоте пресе-
лектора. В соответствии с этим вероятность поражения некоторого-
элементарного частотного интервала интермодуляционными поме-
хами оказывается тем выше, чем ближе он расположен к цент-
ральной частоте преселектора. Отсюда естественно возникает
предложение расположить узкополосный тракт основной селекции
не в центре, а на краю полосы пропускания преселектора. К та-
кому предложению следует отнестись с большой осторожностью,
так как выигрыш в помехоустойчивости даже при выполнении
всех сделанных выше допущений невелик, а, кроме того, в реаль-
ных условиях на краю полосы пропускания преселектора наиболее
4е
lbHO сказываются неравномерность его АЧХ и ее температур-
ная и временная нестабильность. В ЦРПУ смещение тракта ос-
новной селекции на край полосы пропускания преселектора вооб-
ще нецелесообразно, поскольку это усилило бы влияние возника-
ющих при дискретизации помех наложения (см. § 3.3) на помехо-
устойчивость приема.
Дополнительные сведения о воздействии аддитивных и муль-
типликативных помех на главный тракт РПУ можно найти в
£10, 94—96, 107—111, 115, 116 и др.].
Глава 3
ДИСКРЕТИЗАЦИЯ В ЦРПУ
3.1. КРАТКИЕ СВЕДЕНИЯ ИЗ ТЕОРИИ ДИСКРЕТИЗАЦИИ
КОЛЕБАНИИ С ФИНИТНЫМ СПЕКТРОМ
Хотя дискретизация и квантование колебаний освещались в литературе
[14, 42, 46, 57, 63—73, 82—88 и др.] с самых различных позиций, создание
ЦРПУ потребовало значительного расширения существующего представления об
этих процедурах, поскольку аналого-цифровому преобразованию в радиоприем-
ной аппаратуре присущ ряд особенностей. Важнейшими из них являются отно-
сительная узкополосность колебания на выходе АЧПТ и то, что в ЦРПУ ана-
лого-цифровому преобразованию подвергается не сигнал, а аддитивная смесь
сигнала и помех, причем сигнал может составлять небольшую часть преобра-
зуемого колебания. В данной главе рассматриваются вопросы, связанные с
дискретизацией, а в следующей — с квантованием колебаний в ЦРПУ.
Дискретизация — это представление непрерывного (аналогового) сигнала
дискретной последовательностью отсчетов, по которым с заданной точностью
можно восстановить исходный непрерывный сигнал. Известны два подхода к
теории дискретизации. Первый базируется на теореме Котельникова и связан
с изучением фундаментальных свойств сигналов. При втором — дискретизация
рассматривается как импульсная модуляция, что облегчает, например, оценку
допустимых отклонений параметров аппаратуры дискретизации. Ниже исполь-
зуются оба подхода, так как они взаимно дополняют друг друга. При этом
в данном параграфе приводятся необходимые для понимания последующего
материала сведения из теории дискретизации колебаний с финитным (строго
ограниченным по ширине) спектром. В § 3.2—3.5 рассматриваются вопросы дис-
кретизации полосовых колебаний в реальных условиях, причем основное вни-
мание уделено новым результатам, полученным в процессе разработки ЦРПУ
[3, 5. 7—9, 74—81].
В соответствии с теоремой Котельникова колебание u(t), спектр которого
«е содержит частот выше fB, может быть точно восстановлено по своим отсче-
41
(
Э
Л
с
л
л
W
с
в
М
л
л
т
и
о
том (мгновенным значениям), взятым через интервалы причем интер
поляционная формула имеет вид [63—69]:
и (/) = и (п Д I) sine 2л /в (/ —n&t), (3.1
П~—со
где
sin 2л /в (/ — п к t)
sine 2л fB (t — п Д /) = - ; -----—- — синус импульс.
2зт jр [t ti Д
Доказательство теоремы Котельникова приводится во многих работах. По1|
этому, опустив его, остановимся на некоторых аспектах физической интерпре'
тащии теоремы, ее обобщении, на колебания с полосовым спектром и анализе
условий, при которых она справедлива.
Из (3.1) следует, что для восстановления колебания по его отсчетам, взя
тым через интервал Д/=1/2]в, достаточно последовательность отсчетов пропус
тить через ФНЧ с идеально прямоугольной АЧХ и граничной частотой, равной [,
(рис. 3.1,а). Действительно, импульсная характеристика такого фильтра пред
ставляет собой синус-импульс (рис. 3.1,6), и поэтому результат свертки после
довательности отсчетов колебания с импульсной характеристикой данного фильт-
ра совпадает с (3.1).
Для колебаний, спектр которых примыкает к нулевой частоте, ширина
спектра ;\F—fc и, следовательно, частота дискретизации
/д = 1/Д/ = 2)в = 2ДА. (3.2)
Однако для полосовых колебаний со спектром, удаленным от нулевой частоты,
fB>AF. Было докавано, что минимальное значение fa, при котором еще воз-
можно точное восстановление колебания, определяется не fB, а ДА, и, в общем
случае, среднее число отсчетов, необходимое для представления на интервале Г.
произвольного колебания с финитным спектром, равно 1NFT независимо от рас-
положения спектра на оси частот и способа дискретизации. Это, разумеется/
не означает, что на вид колебания внутр,и интервала Т не .влияют последующие
и предшествующие отсчеты. Однако, учитывая большую скорость убывания
интерполирующих функций, например синус-импульса в (3.1), при Д/Тз>1 во
всех практически важных случаях этим влиянием можно пренебречь.
С позиций теории модуляции описанный метод дискретизации можно рас-
сматривать как амплитудно-импульсную модуляцию последовательности беско- \
иечно коротких импульсов, следующих с .интервалом Д/. Спектр немодулиро-1
ванной последовательности таких импульсов дискретный равномерный, с интер-1
валами между гармоническими составляющими, равными fa = \/At. Временная
функция и спектральная плотность модулирующего колебания и[1) изображены
к
д
н,
Т(
с.
н,
п
а.
ai
п]
ч;
Р-
Д'
О'
11
р;
3:
61
Л!
nj
Рис. 3.2
с( Й »
0 рИС 3.2,0 Поскольку и(1)—реальное колебание, его спектральная плотность
зеркально симметрична относительно нулевой частоты. Для удобства различения
Зеркально симметричных составляющих им придана трапециевидная форма. При
выполнении балансной амплитудно-импульсной модуляции слева и справа от
каждой 113 гармоник спектра последовательности коротких импульсов, включая
нулевую, образуются два зеркально симметричных отображения спектральной
плотности u(t), а сами гармонические составляющие исчезают. На рис. 3.2,6
показаны .последовательность отсчетов н(«Д<), полученная в результате дискре-
-"зации колебания u(t), и ее спектральная плотность при выборе частоты дис-
^етизации по формуле (3.2). В этом случае многократно повторяющиеся ото-
-----------1 спектра исходного колебания вплотную, но без перекрытия, примы-
,т друг к другу. Это позволяет с помощью ФНЧ с идеально прямоугольной
(она показана штриховой линией) выделить спектр исходного непрерыв-
колебания, восстановив его из заданной последовательности отсчетов.
тИзании -
крс.-
бражения
каю'-
АЧХ
яого
43
42
д
Л'
С
э.
л
С1
л
л
м
С'
ВС
Л1
м
л
Л'
Т]
и.
of
д*
W
BI
К(
Д1
не
те
CJ
н<
Щ
ад
ai
ni
Чс
Р‘
де
о(
Ч
Р‘
з;
бс
л >
Ч
4
Если же частота дискретизации, как это изображено на рис. 3.2,в, выби!
рается ниже, чем это требуется в соответствии с формулой (3.2), то в спектр J
последовательности отсчетов отображения спектра исходного колебания пере!
крываются, что исключает возможность точного восстановления исходного кол«
бания с помощью ФНЧ. При выборе [д>2[в, как показано иа рис. 3.2,г, I
спектре последовательности отсчетов отображения спектра исходного колебаний
не примыкают друг к другу вплотную. Это позволяет или расширить поло й
пропускания ФНЧ, используемого для восстановления непрерывного колебания!
или применить для этой цели фильтр с непрямоугольной АЧХ. I
Из рис. 3.2 видно, что дискретизация колебания и выделение части спектра]
последовательности его отсчетов фильтром с соответствующими параметрам!!
позволяют выполнить перенос спектра исходного колебания и некоторые видь]
модуляции исходным колебанием несущей частоты, совпадающей с одной и:-|
гармоник частоты дискретизации. Кроме того, анализ рис. 3.2 показывает, что|
не только колебания, спектр которых примыкает к нулевой частоте, но и поло-
совые колебания со спектром, удаленным от нулевой частоты, могут быть точно '
восстановлены по отсчетам своих мгновенных значений, взятым через интервал I
At=ll2hF. если граничные частоты спектра кратны его ширине, т. е.
fH = iAF, где i=0, 1, 2, 3,... (3.3)
При этом интерполяционная формула имеет вид [68]
и (t) — 2 и (и A O’sinc nA F (t — п A f) cos 2л f0 (t — n&t), (3.4)
П=*—OO
где
/о = 0,5 (/н + fB) = f„ + 0,5 Д F = fB—0,5 Д F (3.5)
— центральная частота спектра колебания.
При выполнении условия (3.3) из (3.5) получаем
/о = ((+0,5) ДР.
Выражение (3.4) переходит в (3.1) при (=0, когда спектр исходного коле-
бания перестает быть полосовым, так как его нижняя граница совмещается
с нулевой частотой.
Интерполирующая функция в (3.4) представляет собой импульсную харак-
теристику полосового фильтра с идеально 'прямоугольной АЧХ, граничные час-
тоты которого совпадают с границами спектра исходного колебания. На
рис. 3.3,а и б соответственно изображены АЧХ и импульсная характеристика
такого фильтра.
На рис. 3.4,а приведена спектральная плотность полосового колебания, для
которого выполняется условие (3.3). Спектральная плотность последователь-
ности отсчетов этого колебания, взятых через интервал Д/=1/2ДА, изображена
на рис. 3.4,6. Здесь же штриховой линией показана АЧХ интерполирующего
фильтра. Выбором частоты дискретизации /д>1/Л/=2ДА и в этом случае воз-
можно снижение требований к параметрам интерполирующего фильтра благо-
даря появлению свободных интервалов между отображениями спектра исходного
колебания (рис. 3.4,в). Однако, в отличие от случая дискретизации колебаний,
спектр которых примыкает к нулевой частоте, для полосовых колебаний ука-
занная возможность реализуется только при определенных соотношениях меж-
ду /д и /о-
44
45
(
э
€
Л
Л
ь-
с
в
Л
V.
л
л
т
и
о
д
ц
в
к
д
Hl
т<
с.
н.
п
а.
а’
П'
ч.-
p.
Д'
01
П
Р;
з:
б.
Л'
п,
4
обработки сигналов имеют следующие два
колебаний.
При первом из них полосовое г-- '
интервал Afj = l/Af парами отсчетов, ____ ___
значением u(t), а другой — мгновенным Г"":___и\i) — колебания, сопряис
ного по Гильберту с u(t). Интерполяционная формула в этом ----------
вид [68]:
соли условие (3.3) не выполняется, возможно
дискретизации и последующего точного восстановления пс
с финитным спектром по его отсчетам, число которых на
2\РТ. Однако, в этом случае уже не удается с~д.. _ .....
венных значений колебания. Наибольшее практическое значение для цифре,
' । ,Риг..«-- ,.— метода дискретнзаци)
колебание u(t) представляется в"
тов, один из которых является
значением ii(t)—г— ' д______
' ,з в этом случае имц
несколько мето t
полосового колебав
.а интервале Т рац|
ограничиться отсчетами mjJ
(н полоса з
взятыми ч-е
*' млн ОВвнн
и (f) = ;
Выражение (3.8) легко получается
и (f) = У] [и (п Д fj) sine лД F (t—п Д /х) cos 2л f0 (t—пМг) —
П=з—оо
—и (п Д fx) sine лД/7 (t—п Д /1) sin 2л f0 (t-^n Д Ц)].
Прн втором из указанных методов дискретизации
n (f) = и (f) cos ф (!) — и (t) cos [2л f0 t + <р (t)]
представляется совокупностью пар отсчетов огибающей U(t)
<p(f), следующих с тем же интервалом АЛ:
У] U (п Д ti) sine лД F (t— п Д Ц) cos [2л f0 (t — п Д Ц) -|-ф (n A Zx)j.
=—. оо
(3.8
(З.й
полосовое колебание 1
(3.7,
н фазы ф(1) илц
из (3.6), если учесть, что
ф (f) = arctg [« (!)/«(!)].
(3.7)
(3.9
получаем
(3.11
- V/— V (t) + и2 (i),
Заметив, что в соответствии с
ф (!) = 2л f0 f ф- <р (О
н преобразовав (3.8) с учетом
«(f) = U (п Д fx) sine лД F (!—п Д fx) cos [2л f0 t ф- <р (п Д 1г)].
П—— оо
Вывод формул (3.6) и (3.8) базируется на понятии аналитического сигнала
(колебания)
й(!) = «(!)ф-/«(!), (3.12)
огибающая и полная фаза которого определяются выражениями (3.9), а мгно-
венная частота 1
Ц!) = ф'(!)/2л. (3.13)1
Аналитический сигнал -имеет односторонний спектр, т. е. в его спектре от-1
, составляющие на отрицательных частотах. Такой спектр плотно укла- I
оси частот с периодом повторения ДА. Этим и объясняется воз- I
оставления полосового колебания минимально допустимым числом 1
отсчетов при произвольном размещении его спектра. Однако для представления
46
(3.10)
сутствуют С'
Дывается на
можность
представления
ексиого и, в частности, аналитического колебания требуется два канала,
канал исходного колебания и канал колебания, сопряженного по Гиль-
исходным. В каждом из каналов колебание имеет двусторон-
Поэтому взятие отсчетов с частотой дискретизации /д»=
Е01
апримеР
ерту с
ий спектр.
” вызывает перекрытие отображений спектра колебания в спектре
последовательности отсчетов (рис. 3.4,г). Разумеется, в таких условиях, расто-
ргая только одним каналом, невозможно выделить исходное колебание из
спектра последовательности отсчетов. Но наличие второго канала позволяет вы-
полнить эту операцию, скомпенсировав одно из двух перекрывающихся отобра-
жений спектра. Полосовое колебание, представленное отсчетами огибающей и
и фазовой
изменения
точно вос-
фазы может быть восстановлено, например, путем амплитудной
модуляции гармонического колебания в соответствии с законами
отсчетов.
Описанные выше процедуры дискретизации позволяют абсолютно
становись колебание по его отсчетам. Но при этом делался ряд допущений,
выполнение которых на практике невозможно. Так, предполагалось, что коле-
бание имеет бесконечную длительность, его спектр идеально ограничен по
ширине (финитный спектр), отсчеты являются бесконечно короткими и берутся
в точно фиксированные моменты временя с бесконечной точностью, для восста-
новления колебания используются фильтры с бесконечно крутыми скатами АЧХ
и бесконечным затуханием за пределами полосы пропускания. В действитель-
ности, число отсчетов конечно, колебания, несущие информацию, имеют нефи-
нитный спектр, истинные моменты взятия отсчетов несколько отклоняются от
предполагаемых, значения отсчетов определяются с ограниченной точностью, а
идеальный восстанавливающий фильтр физически нереализуем. Однако погреш-
ности дискретизации и интерполяции, не превышающие допустимых значений, не
ухудшают качества приема и обработки .информации, так как чувствительность
адресата к искажениям сигнала всегда ограничена. Ошибки, возникающие при
дискретном представлении колебаний, .исследовались, нацример, в [63—68], но
анализ особенностей дискретизации в ЦРПУ выявил необходимость уточнения
и дополнения ряда известных результатов. Поэтому при изложения последую-
щего материала по мере необходимости будут затронуты и эти вопросы.
3.2. ВРЕМЯ СТРОБИРОВАНИЯ В ИНТЕГРИРУЮЩИХ
УСТРОЙСТВАХ ВЫБОРКИ И ХРАНЕНИЯ ПРИ
ДИСКРЕТИЗАЦИИ УЗКОПОЛОСНЫХ КОЛЕБАНИЙ
Как правило, в ЦРПУ преобразование непрерывного колеба-
ния в цифровую форму выполняется в два этапа. Вначале с по-
мощью устройства выборки н хранения (УВХ) производи гея дис-
кретизация выходного колебания АЧПТ, а затем в АЦП осуще-
ствляется квантование отсчетов, поступающих с выхода УВХ
(Рис. 3.5). Задачей УВХ является определение мгновенного зна-
чения входного колебания в момент взятия отсчета и фиксация
этого значения на время, необходимое для преобразования анало-
говых значений отсчетов в цифровую форму.
Наибольшее распространение в ЦРПУ получили два типа ана-
логовых УВХ, использующих конденсатор в качестве запоминаю-
Шего (накопительного) элемента. В УВХ первого типа при иода-
д
л
с
э
л
с
л
л
N
С
В
К
Л
л
т
и
о
д
Ц
в
к
д
н
т<
с.
н
п
а.
а
п
ч
Р
Д
о
Т,
р
3
б
л
п
4
че стробирующего импульса на управляющий вход аналогов I
ключа происходят заряд конденсатора с малой постоянной вреЛ
ни до напряжения входного колебания и отслеживание его урЛ
ня. С окончанием стробирующего импульса входное колебаЛ
отключается от накопительного элемента, в котором фиксируем
напряжение, равное уровню колебания в момент окончания стЛ
бирующего импульса. К этому моменту и относится отсчет. 1
промежутке между строб-импульсами УВХ сохраняет значен!
предыдущего отсчета. Поскольку в течение интервала стробйд
вания УВХ этого типа работают в режиме слежения за входнЛ
колебанием [57, 73], будем называть их следящими (не смени
вать с цифровыми УВХ, работающими ни принципе автоподстр<Л
ки!). Ко второму типу относятся интегрирующие УВХ, в котор д
производятся интегрирование входного сигнала в течение врекЛ
ни действия стробирующего импульса и хранение результата цд
тегрирования в промежутке между этими импульсами [73]. Дд
интегрирующих УВХ характерны отнесение момента взятия оя
счета к середине интервала стробирования и стирание информя
ции в накопительном элементе (разряд конденсатора) в коиц|
каждого .периода дискретизации. В ЦРПУ целесообразно приме
нять интегрирующие УВХ из-за большего динамического диапазо!
на '[76] и лучшей фильтрации. Вместе с тем особенности дискре!
газации в ЦРПУ требуют нового подхода к определению макси!
мально допустимого времени стробирования At?, которое опреде!
ляет возможности фильтрации и накопления энергии колебания
в интегрирующих УВХ <[6, 7, 74, 75]. Такой подход развивается
ниже.
Напряжение на выходе интегрирующего УВХ I
+0.5 д«с
цв= [ Д/с-рт) d-t—Uo&tc, (3.14)>
—0,5 д<с
где Uo — среднее значение u(t) на интервале А£с. В (3.14) и в
дальнейшем для упрощения преобразований перед интегралом
опускается коэффициент, обратно пропорциональный постоянной
времени интегрирования. Значение коэффициента легко учесть
соответствующим выбором масштаба.
Результатом стробирования (выборки) должно являться мгно-1
венное значение ы(/с) колебания u(t) в середине интервала A/J
Рис. 3.5
48
при линейном изменении u(t), как следует из (3.14), Uo=u(tcJ,
и «в прямо пропорционально u(tc). Колебания, несущие информа-
цию, В общем случае, изменяются не по линейному закону. Одна-
ко на небольших интервалах времени этим можно пренебречь
точно так же, как при малых изменениях аргумента приращение
функции заменяют ее дифференциалом. Максимально допустимым
считают такое значение Д/с, при котором ошибка, вызванная от-
клонением закона изменения колебания от линейного, достигнет
(но не превысит) некоторого предельного значения, не снижающе-
го качества приема. Для колебаний, несущих информацию, эту
ошибку практически всегда можно рассматривать как центриро-
ванный стационарный (локально) случайный процесс. Поэтому
будем ее оценивать средней мощностью (дисперсией) Рсш. Пре-
дельной разумно считать мощность Рош, равную мощности шу-
мов квантования Ршк, так как аналоговые значения отсчетов, за-
фиксированные в УВХ, в дальнейшем подвергаются квантованию
в АЦП. Приравнивая выражения Рош и Рш.к, получаем уравнение,
решение которого позволяет определить максимально допустимое
значение ДЦ.
При дискретизации колебаний, спектр которых примыкает к
нулевой частоте, вполне разумно полагать, что отклонение закона
изменения колебания от линейного за время стробирования сни-
жает точность определения значений отсчетов в интегрирующих
УВХ. Однако в ЦРПУ аналого-цифровому преобразованию под-
вергается аддитивная смесь сигнала и помех, представляющая
собой, как правило, узкополосное колебание (3.7). Покажем, что
использование гипотезы о линейном изменении колебания за вре-
мя стробирования неоптимально при дискретизации узкополосных
колебаний. С этой целью вначале, основываясь на данной гипоте-
зе, найдем максимально допустимое значение Д/с при стробирова-
нии узкополосных колебаний. Такая задача решалась в [3]. За-
тем, определив альтернативные гипотезы и выбрав наиболее при-
емлемую из них, сравним значения максимально допустимого вре-
мени стробирования узкополосных колебаний при выбранной ги-
потезе и гипотезе о линейном изменении колебания за время
ДА [6, 7, 74, 75].
Признаком узкополосности колебания является выполнение ус-
ловия
ДА</0. (3.15)
Как известно, при выполнении условия (3.15) форма узкополосно-
го колебания на интервалах, соизмеримых с периодом централь-
ной частоты fo, незначительно отличается от синусоидальной. По-
этому при использовании гипотезы о линейном изменении колеба-
ния за время стробирования замена узкополосного колебания
u(t) гармоническим, частота которого равна f0, практически не
влияет на результаты определения Д/с. В соответствии со сказан-
ным расчет проведем для гармонического колебания с частотой
fo и амплитудой Nh, где N — половина числа уровней квантова-
49
ния АЦП (отсчеты имеют двухполярный характер), h — ша
квантования. При этом
1 /2 to 1
POw=2f0 f Nh sin 2nfot--------
о A
2
+0,5 ДГС
J Nh si п 2л/о (/ф-т) dt dt
-0,5 д/с
(
J
1
С
в
ъ
л
л
т
и
о
д
в
в
(3.19)
К
д
н
TI
с.
н.
п
а.
а’
п
41
р-
Д(
01
Т)
р*
з;
б(
.15
П1
(3.16j
При равномерном квантовании, практически независимо от зако
на распределения квантуемого напряжения, если его среднее ква-
дратическое отклонение
Рш.к=/12/12. (3.17]
Приравнивая (3.16) и (3.17), получаем, что время стробирования
в этом случае не должно превышать
Л/с«0,5//о/А. (3.18)
Перейдем к поиску альтернативных гипотез о характере изменения сигнала
за время стробирования в интегрирующих УВХ. Очевидно, в качестве гипотезы
приемлем любой закон изменения колебания u(Z), при котором коэффициент
жроиорциональнссти между ив и и(tc) не зависит от /с, т. е.
'с+°.5д-'с
“в = J и (0 = A (A fc) « de).
ф-0.5Д/с
Отметим, что в принципе не обязательно ограничиваться линейной зависи-
мостью между ив и u(tc). Однако любая другая зависимость потребовала бы
усложнения УВХ, что нежелательно. Поэтому определим, при каком виде функ-
ции u(t) коэффициент пропорциональности K(Atc) в (3.19) не зависит т 1С.
Продифференцировав (3.19) по tc и А/с, получаем соответственно
« de + 0,5 A tc)— и (tc — 0,5 А /с) = К (А/с) «' de),
0,5 [и (tc + 0,5 A tc) -|- и (tc— 0,5 A tc)] = К' (А /с) и (tc).
Из (3.20) и (3.21) следует, что
Л(Д/с) = 0, Х'(А/С) = 1 при Д/с = 0.
Продифференцируем (3.20) по /с, а (3.21) по А/с, тогда
и' (/c4-0,5AZc) —«' de — 0,5 A tc) = K (A /с) и" (tc),
0,25 [и' (tc + 0,5 A tc) — и' (tс—0,5 А /с)) = К” (А /с) и (tc).
Из (3.23) и (3.24) находим
*"('е) . Л" (А <с) „
------= 4---------= С, где С — const.
К (A tc)
(3.20)
(3.21)
(3.22)
(3.23)
(3.24)
(3.25)
“(*с)
Определив все возможные п.ри различных С общие решения дифференциального
уравнения (3.25), удовлетворяющие условиям (3.22), и проверив выполнение
(3.19), находим, что кроме линейно изменяющегося колебания в классе функ-
ций, имеющих вторую производную, уравнению (3.19) удовлетворяют гармо-
ническое колебание, экспонента, гиперболические синус а косинус.
То, что у гармонического колебания щ пропорционально u(tc)
с коэффициентом пропорциональности, не зависящим от /с, явля
50
I сЯ наиболее важным ре-
зультатом. Действитель-
но, поскольку узкополос-
ное колебание гораздо
ближе по форме к гармо-
ническому, чем к линейно
изменяющемуся, целесо-
образно определять мак-
симально допустимое зна-
чение ДА как время, в те-
чение которого ошибка,
вызванная отклонением
формы узкополосного ко-
лебания от гармоническо-
го, не превышает предель-
ного значения. Иными словами, при дискретизации узкополосных
колебаний в интегрирующих УВХ вместо гипотезы о линейном из-
менении колебания за время стробирования рациональнее использо-
вать гипотезу о его синусоидальном изменении. Это иллюстрируется
рис. 3.6, где узкополосное колебание изображено сплошной ли-
нией, а синусоидальное — штриховой. Абсолютная величина ошиб-
ки при гипотезе о линейном изменении u(t) пропорциональна
б0= |п(А) —-До|, а при гипотезе о синусоидальной форме этого
колебания 6i=|C/i—Uo\, где U, — среднее за ДА значение сину-
соидального колебания с частотой [0, амплитудой А (А), началь-
ной фазой qp(A). Благодаря близости формы узкополосного коле-
бания к синусоидальному 61С60.
Найдем выражение коэффициента пропорциональности между
«в и u(tc) при гипотезе о синусоидальной форме колебания в те-
чение времени стробирования. Для этого в (3.14) поставим под
знак интеграла синусоидальную функцию с амплитудой U(tc) и
фазой <р(А). В результате получим
= (sin л/оДА/л/о) U (tc) sin [2nf0A+<р (tc) ] = К (ДА) и (А) (3.26)
Из (3.26) следует, что коэффициент пропорциональности между
«в и и (А)
А(ДА) =sin лАДА/л/о (3.27)
максимален по абсолютной величине при ДА= (2t'+l)/2A, где i=
=0, 1, 2, 3, ... Наибольшее практическое значение имеет первый
максимум при ДА=1/2А(1=0). поскольку дальнейшее увеличение
ДА не снижает требований к максимально допустимому времени
апертурной дрожи, а отклонение формы колебания от синусои-
дальной возрастает с увеличением ДА- Таким образом, для узко-
полосных колебаний оптимально значение ДА=1/2А, если сред-
ияя мощность ошибки вызванной отклонением формы колебания
От синусоидальной за это время, не превысит допустимого значе-
ния. В противном случае приходится уменьшать ДА до значения,
°зволяющего ввести мощность ошибки в допустимые пределы.
51
с
J
J
с
в
’Л
J
т
и
о
д
Ц
в
к
д
н
т<
с.
н
п
а.
а-
п
ч<
р-
Д'
0<
TJ
рг
з;
б.
-и
nj
4
Ошибка стробирования при гипотезе о синусоидальной форм
u(t) возникает из-за того, что огибающая U(t) и фаза ф(/) уч
кополосного колебания u(t) изменяются в течение интервал]
Д/с. Так как Д/с<С1/ДТ, полагаем это изменение линейным: I
U(t)=U(tc)+U'(tc)x, |
ф(/) =ф(М +ф'(/с)т=ф(/с) +2лАЖ)т, I
где А/(/с) =фЖ)/2я=/Ж)—f0, а случайные процессы U(/) i
ф(/) считаются дифференцируемыми. Подставляя (3.28) в (3.7'
и опустив слагаемые второго порядка малости, получаем
u(t) — U{tc) sin [2nfo/+<p(/c)]+H'(^)Tsin [2nfo/+
+ф(М]+2лД/^с)тг/(/с) cos [2nf0/+q)(fc)].
В (3.29) первое слагаемое соответствует регулярной
щей напряжения, а второе и третье, вызванные otkj.
мы u(t) от синусоидальной за счет изменения U(t)
ветственно, носят случайный характер и приводят
пряжение которой на выходе УВХ
^ош
(3.2,
(3 3ij j
(3.32h
в ви-1
определяется
а второй i
мощность
(3.29|
составляю!
отклонением фор]
и ф(/) соот4
к ошибке, на]
___ 1
+0.5 Д/с 4
J {H'(/c)Tsin [2л,/о(/с+т)+ф(/с)]+ I
—0,5Д/с 1
-)-2пА{ (/с)тП(/с) cos [2^0(/с+т)+ф(/с)])йт=Л(/с)В(Д/с), (3.30) |
где
Л(/с) = [П'(/с)/2л/о] cos [2лАЛ+ф(М] —
—[ДЖ) sin [2лЖ+ф(М],
В (Д/с) =sin nfoA4/nfo—Д/с cos nfoAtc.
Таким образом, напряжение ошибки в (3.30) представлено
де двух сомножителей, первый из которых (3.31) с-
скоростью изменения амплитуды и фазы колебания,
(3.32) учитывает зависимость ошибки от А/с. Средняя
ошибки
Аш (/с) = [Пош(/с)]2= И (/с)] 2 [В (Д/с) ] 2,
где черта означает усреднение по ансамблю. Колебание
правило, можно рассматривать как стационарный или
но стационарный случайный процесс. Поэтому ниже
РОш(/с) и [Л (/с)]2 будем писать Рош и А2.
Из (3.30) —(3.33), в частности, следует, что, с*
изменяются линейно, то мощность ошибки при д/с
не зависит от /. Однако, в общем случае, линейность
U(t) и ф(/) в течение Д/с является лишь приближением тем
лее точным, чем меньше Д/с по сравнению с 1/AF. Поэтому у
занные формулы следует применять с тем большей ос'
стью, чем больше значение произведения Д/СДР. Ниже
пользуются только для A/c^l/2fo, что при выполнении
(3.15) гарантирует высокую точность вычислений.
52
(3.33) I
u(t), как!
локаль- I
вместо I
если U(t) и ф(/) 1
при Д/с= (2i+l)/2fo I
нейипг™, изменения I
ием тем бо- I
ука- И
осторожно- I
они ис*
условия I
Приравнивая выражение Рош (3.33) к мощности шумов кван-
вания (3.17), запишем уравнение
A2[B{Atc)]2=h2/12, (3.34)
з которого с учетом (3.31) и (3.32) можно получить правило вы-
бора AF-
I Перед тем как проиллюстрировать такую возможность, напом-
1нм, что границы спектра колебания, несущего информацию, не-
сколько условны. Поэтому, хотя в принципе, центральная часто-
та [о и ширина спектра AF узкополосного колебания могут быть
пределены любым разумным образом, для удобства дальнейших
Преобразований определим 2л/'о как математическое ожидание
Случайной величины, плотность вероятности которой равна одно-
сторонней нормированной спектральной плотности GH(w), а 2лАУ
как ее удвоенное среднее квадратическое отклонение:
f0« -L J (dGh^)^, (3.35)
2 Л л
ДК* = 1/ 7 (о—2n);)2GH(®)d®, (3.36)
Л V о
где
GH (о) = — ? г (т) cos ®тс/т, (3.37)
Л о
г(т) — нормированная корреляционная функция u(t).
Перейдем к определению Д/с. Пусть, например, узкополосное
колебание представляет собой стационарный центрированный га-
уссовский процесс с дисперсией о2 и симметричной относительно
f*o спектральной плотностью. У такого процесса огибающая и
фаза в совпадающие моменты времени независимы, а фаза рас-
пределена равномерно [65, 72]. Кроме того, для стационарных
случайных процессов {67]
[2лД{ (/)[/(/)]2 2 (лДК*о)2
при /*о и AF*, определенных в соответствии с (3.35) — (3.37).
Если же стационарный случайный процесс является центрирован-
ным гауссовским с симметричным спектром, то {67]
2л(% = 2п(о=ф7(О=2^Ж, (3-38)
Т^А/ (/) П (/) ] 2= (ЛДА*о)2. (3.39)
Из (3.31), (3.38) и (3.39) находим
^2= [<т2ш+(лАУ*а)2]/2(2л/о)2, (3.40)
Где — дисперсия производной от огибающей колебания.
Л большинства колебаний отличие максимальной существен-
и частоты в спектре от f*0 незначительно превышает 0,5ДЕ*.
53
Отсюда |
Си- (З.41
Если спектральная плотность колебания равномерна в предет!
полосы частот ДЕ= УЗДЕ* и равна нулю за ее пределами, I
приближенное равенство (3.41) становится точным. 1
Подставляя (3.41) в (3.40), получаем |
(
с
J'
ъ
<
Е
J
Ti
J
1
Е
С
I
1
Е
Д2=(ДЕ*о)2/(2/о)2. (3 41
Воспользовавшись правилом «трех сигма», положим, что чис!
уровней квантования 2/V = 2(3oB/ft), где ов— среднее квадратиш
ское отклонение отсчетов на выходе интегрирующего УВХ. '
сюда с учетом (3.26) найдем |
/i=3(Tsin TtfoMc/Nnfo- (3.4i
Разложив в (3.32) и (3.43) синус и косинус в ряд Маклорена
подставив (3.32), (3.42) и (3.43) в (3.34), после преобразован!
запишем правило выбора Д/с для рассмотренного случайного пр
цесса.
Д/< =
l/2f0 при NsZ 1,73/о/ДЕч
1.027/ Y (2МДЕ*+1,73/0) /о+0,147/0/ (МАЕ*)2 1
при N> 1,73/о/ДЕЧ
(3.44^
В (3.44) равенству Л/= 1,73/о/ДЕ* соответствует равенство Poltl =
=Лг/12 при Д/с=1/2/о-
Если узкополосное колебание представляет собой сумму сину
соидального сигнала с частотой fo и нормального шума, спект
Г
I
С
F
П
а
а
г
ч
I
X
с
1
Г
(
Г
Г
4
ральная плотность которого такая же, как у рассмотренного уз
кополосного случайного процесса, то ограничения на Д/с ослабли
ются в сравнении с результатами расчета по формуле (3.44) п<
мере увеличения отношения сигнал-шум.
Изложенное выше, в частности, показывает, что Д/с определи
ется не только соотношением между ДЕ*, f0 и IV, но и зависит oi
конкретного вида спектральной плотности колебания или, что то
же самое, от его корреляционной функции. В то же время дискре-
тизации в ЦРПУ подвергаются колебания с различными харак-
теристиками. Единственное ограничение, накладываемое на эти
колебания, заключается в том, что их спектральная плотность дол-
жна быть пренебрежимо мала за пределами физической полосы
пропускания ДЕ аналоговой части главного тракта ЦРПУ. Пола-
гая АЧХ аналоговой части прямоугольной и симметрично располо-
женной относительно f0, можно убедиться, что Рош тем меньше,
чем больше энергия квантуемого колебания сосредоточена вблизи
fo. Менее благоприятным является рассмотренный выше случай,
когда спектральная плотность колебания равномерна в пределах
ДЕ. Максимум же Еош соответствует сосредоточению всей энергии
54
лебания па границе полосы пропускания аналоговой части глав-
° о тракта ЦРПУ, т. е. когда колебание является гармоническим
1 амплитудой Nh, равномерно распределенной фазой и частотой
-4-0,5AF, которая априорно неизвестна и в процессе работы не
Измеряется. Используя полученные выше формулы, несложно по-
лзать, что в этом случае правило выбора А/с приобретает следу-
ющий вид:
при Ar<O,47fo/AF*,
(1/2 f0
Д/с= { 0,535/J/(2A'AF*+O,47fo)fo4-0,01 lfo/(A/AF*)2
при /V>O,47/o/AF*.
(3.45)
Зависимость AF от f0 для нескольких значений AF* и 2W = 512
(восемь разрядов плюс знак) иллюстрируется рис. 3.7. Кривые на
рис. 3.7,а рассчитаны по формуле (3.44) и соответствуют случаю
аналого-цифрового преобразования узкополосного нормального
процесса с симметричным относительно f0 и равномерным в пре-
делах AF спектром, а кривые на рис. 3.7,6 — по формуле (3.45)
и определяют нижнюю границу при использовании гипотезы о
синусоидальной форме колебания. Точке излома кривых соответ»
ствует равенство FOU] = /i2/I2 при А/с= 1 /2/о. Штриховой линией на-
несены рассчитанные по формуле (3.18) зависимости А/с от /0 при
гипотезе о линейном изменении колебания за время AF(2JV =
=512). Кривые показывают, что применение гипотезы о синусои-
дальной форме узкополосного колебания вместо гипотезы о его
линейном изменении в течение интервала AF обеспечивает при
фиксированных f0, AF* и N значительное увеличение времени
стробирования.
Для существующих на практике условий выигрыш составляет
от нескольких десятков до нескольких сотен раз. Увеличение AF
позволяет полнее использовать энергию колебания, снизить требо-
55
д
л
с
э
л
с
л
J
к
•с
£
Рис. 3.8
вания к максимально Д(
стимому времени апертур
дрожи, уменьшить нели|
ные искажения, возниц
щие в аппаратуре дискш
зации. В [76] было экс
риментально доказано, '
следящие УВХ вносят б<
шие нелинейные искажен
чем интегрирующие, у
торых Д£с определялось
формуле (3.44). Таким
разом, изложенные выше результаты обеспечивают решение сл(
ной технической задачи и получение значительного экономичес
го эффекта без каких-либо дополнительных затрат, поскольку
менение гипотезы не требует доработки ни УВХ, ни других уза
ЦРПУ.
Совершенствование УВХ, коррекция вносимых ими частота
искажений позволяют увеличить Д£с по сравнению со значеки
ми, определяемыми формулами (3.44) и (3.45). В частности, и
I показано автором совместно с М. В. Зарубинским, некото-
’10усложнение УВХ устраняет ограничение А/с значением l/2f0.
с 3.8 приведена схема, а на рис. 3.9 — временные диаграм-
' Спряжений интегрирующего УВХ свободного от указанного
fr ничения. Узкополосное колебание u(t) (рис. 3.9,а) перед по-
[Учением в интегратор в течение Д/с (рис. 3.9,6) умножается
I, последовательность знакопеременных импульсов частоты f0
13 9,в). Последовательность запускается фронтом стробиру-
”г0 импульса. В конце каждого периода дискретизации стара-
' и импульсами (рис. 3.9,г) разряжается конденсатор интег-
тора. На рис. 3.9,6 показано напряжение на выходе перемно-
1теля, а на рис. 3.9,е—выходное напряжение УВХ без учета
версии знака в интеграторе. В рассмотренном УВХ перемноже-
е и последующее интегрирование не обязательно означают пе-
нос спектра колебания u(t) на нулевую частоту. Благодаря
нфазности стробирующих и знакопеременных импульсов, распо-
жение отображений спектра колебания определяется соотноше-
ем между fa и fo- В рассмотренном УВХ дополнительное улуч-
шение фильтрации достигается изменением амплитуды и длитель-
ности знакопеременных импульсов по определенному закону.
Таким образом, если сняты ограничения на структуру интегри-
кющих УВХ и возможна точная реализация предложенных алго-
[итмов формирования отсчетов, верхняя граница Д/с при дискре-
тизации узкополосных колебаний определяется только АЛ’ и не
звисит от fo-
В интегрирующих УВХ можно увеличить Л/с и при дискретизации колебаний,
[иектр которых примыкает к нулевой частоте, скорректировав результат инте-
грирования с учетом высших (начиная со второй) производных колебания в
ередиие интервала Л/с- На, практике, как правило, достаточно учесть значение
элько второй производной.
3.3. ПРЕДСТАВЛЕНИЕ УЗКОПОЛОСНЫХ КОЛЕБАНИЙ
ОТСЧЕТАМИ МГНОВЕННЫХ ЗНАЧЕНИЙ
В § 3.1 указывалось, что полосовое колебание с финитным
спектром при выполнении условия (3.3) может быть пред-
ставлено совокупностью своих мгновенных значений, взятых через
интервал A/=1/2AF. Интерполяция в этом случае производится
по формуле (3.4). Однако у колебаний, несущих информацию,
спектр нефинитный. В результате при дискретизации возникают
“специфические помехи, называемые помехами наложения или пе-
рекрытия. На рис. 3.10,а изображен спектр исходного колебания,
а «а рис. 3.10,6 показано перекрытие его отображений. Легко
заметить, что спектральная плотность последовательности отсче-
тов уникальна только на интервале [&/д, (k + 0,5)/д], где k — но-
в’еР гармоники частоты дискретизации /д. Поэтому изображенный
Увеличенном масштабе на рис. 3.10,в интервал частот от 0 до
от л (^ = 0) дает полное представление о характере перекрытая
Сражений спектра.
57
д>
л<
С
э.
л
С1
л:
Л'
м
С-
В(
л
'М
л
л
TI
и
о
д
ц
в
к
д
н
т
с
н
п
а
а
п
ч
Р
д
с
т
Г
С
г
4
kG(f)
Gif)
6)
-45/д
Рис. 3.10
фильтра I-----::::
Речь может идти лщ
котор
1ПВОДНТ к желаемым результатам. Остановимся подробнее на
вопросе.
Пусть в ЦРПУ некоторое узкополосное колебание представля-
ли отсчетами мгновенных значений, причем заведомо Ц>2ДА„,
е ДАп— полоса пропускания АЧПТ, определенная по уровню
счабления 3 дБ. Спектр последовательности отсчетов для поло-
нтельной полуоси частот изображен на рис. 3.11. Здесь спектр
сходного колебания заштрихован, и реальный нефинитный
пектр заменен трапециевидным с идеально ограниченной поло-
сой ААп- Пусть, кроме того, известно, что можно пренебречь эф-
Йуктом наложения, если минимальный частотный интервал между
паницамп (по уровню ослабления 3 дБ) соседних отображений
Впектра исходного колебания не меньше некоторого минимального
невозможЖкачения fM- В таких условиях с целью минимизации частоты ди-
•кретизации естественно потребовать, чтобы частотные интервалы
ie и fy, отделяющие любое отображение спектра исходного коле-
бания от соседних слева и справа, отвечали условию
fx=fv=fp^fM. (3.46)
Будем называть оптимальной минимальную частоту дискрети-
зации, обеспечивающую выполнение условия (3.46). Найдем алго-
ритм определения оптимальной частоты дискретизации по задан-
когда колебание представляет собой "с-~и|ным /о, ДА„ и fM. Прежде всего отметим, что здесь возможны два
ый от помех, обе гостякляютир ^разных случая: в первом из них ближайшая к спектру исходного
колебания гармоника частоты дискретизации kfa лежит ниже его
(^о>^/д), а во втором — выше (/о<й/д).
Вначале рассмотрим первый случай. Именно ему соответству-
ет РИС. 3.11. Из рПС. 3.11 ОЧеВИДИ ’ -—"''"о аплталшрния:
/._^д=0,25/д, Ц=2(ДЕп+/р).
Преобразовав (3.47), запишем
fR=4f0/(4k^l),
где
*=[Мд].
(3.50) квадратная скобка означает операцию
числа.
Из рис. 3.10 следует, что с помощью
точно восстановить исходное колебание, гсчь может ид
об уменьшении вызванной помехами наложения ошибки, :
содержит две составляющие. Первая возникает вследствие потерА
части спектра, лежащей за пределами интервала [/г/щ, (&+0,5)/Л
а вторая — за счет попадания на этот интервал «хвостов» другм
отображений исходного спектра. Как видно из рис. 3.10, при вы
делении колебания фильтром с прямоугольной АЧХ, физическая
полоса пропускания которого равна 0,5/д, мощности обеих состав-1
ляющих равны. Если дискретизация производится на передающе^
КОНЦе ЛИНИИ СВЯЗИ, F'Ar'no сшна.ц
практически свободный от помех, обе составляющие ошибки и!
кажают сигнал. Различие между ними заключается в том, что!
при фиксированном значении /д вторую составляющую можнЬ]
существенно уменьшить, сузив полосу пропускания и повысив
прямоугольпость АЧХ фильтра, стоящего перед дискретизатором,
а первую составляющую уменьшить таким способом невозможно.
Дискретизируемое колебание в ЦРПУ представляет собой ад-
дитивную смесь сигнала и помех, причем в декаметровых прием]
никах сигнал, как правило, составляет незначительную часть об]
щего напряжения колебания, а спектр сигнала существенно уж«|
спектра колебания. В таких условиях первая составляющая
ошибки пренебрежимо мала, и решающую роль играет вторая со:
ставляющая. Действительно, если на скате АЧХ АЧПТ окажется
недостаточно подавленная мощная станционная помеха, то она
при перекрытии может наложиться на полезный сигнал. Поэтому
в ЦРПУ для уменьшения помех наложения необходимо добивать-
ся максимальной прямоугольности АЧХ АЧПТ. Эту задачу значи]
тельно легче решить при дискретизации на промежуточной, а не
на радиочастоте, так как на промежуточной частоте проще реа-1
лизовать высокоизбирательные фильтры. Уменьшение помех на-
ложения достигается также повышением и рациональным выбо-|
ром /д. Повышение Ц означает ужесточение требований к быст-1
родействию АЦП и ЦЧПТ Поэтому следует с большой осторож-1
ностью использовать данный путь, тем более, что он не всегда!
.58
а во втором-—выше
° ----Ч. TJ. О/ЛПТПР-ТГTRV-
л следующие соотношения:
(3.47), (3.48)
(3.49)
(3.50)
усечения до цело-
В
ГО
О
Рис. 3.11
3/д
д
59
Д1
Л(
с
э;
л
С!
л
л
м
с
в
л
‘N
J
I
1
с
J
I
I
Оптимальная частота дискретизации существует только при выполне!
условия I
/е 0,5 (Д Fn -|- fM), (,j|
в противном случае она отсутствует. Поэтому будем полагать условие (,j|
выполненным. Тогда, подставив в (3.48) fM вместо }р, найдем /Д П1 — п Л
предварительное значение частоты дискретизации. Очевидно, что /д^/д.в1.I
лее, подставив в (3.50) /д.п1 вместо fa, определим kn—предварительное зЛ
ние номера гармоники частоты дискретизации, наиболее близкой к fo. Очеьи!
что или k=ku, или k—ka—1. Поэтому, введя в (3.49) kP вместо k, полу Л
Ц.пг—'второе предварительное значение частоты дискретизации. После
проверяем выполнение условия (3.46) при частоте дискретизации, равной Л
Если условие (3.46) выполняется, то Ц—Ц.пг и расчет окончен. Если нет,]
подставив в (3.49) значение k, равное kE—1, находим /д.
Во втором случае (fo<kfp) алгоритм определения оптимад
ной частоты дискретизации аналогичен, но требует введения с]
дующих поправок: вместо формул (3.49) и (3.50) спрадедлш
формулы
/д=4/0/(4/г-1), fe=[f0/^+I], (3.49а), (350
а вместо условия (3.51) —условие
Л>1,5( Fn+fM).
Определив оптимальную частоту дискретизации для первого]
второго случаев, можно выбрать одну из них с учетом удобств
ее формирования и дальнейшего использования.
Важность оптимального выбора частоты дискретизации noi
черкивается тем, что простое повышение Ц без учета взаимное
расположения отображений спектра исходного колебания можв
оказаться не только бесполезным, но и опасным. Пусть, например
fo= 125 кГц, AFn=l кГц, тогда при выборе fa~20 кГц частотнь!
интервалы между границами всех отображений равны 9 кГц, чтс
как правило, обеспечивает хорошее ослабление помех перекрыта!
Увеличение же /д до 25 кГц вместо дополнительного ослаблен!!
помех наложения приводит к полному перекрытию зеркально сим
метричных отображений спектра исходного колебания. Вообще пс
лез но отметить, что полное перекрытие отображений спектра нс
ходного колебания наблюдается, когда отношение fo/fA или равн
целому числу, или содержит дробную часть, равную 0,5.
Из рис. 3.11 и приведенных выше алгоритмов можно заметит!
что при заданных АТ7,, и fM одна и та же частота дискретизации
оптимальна при нескольких значениях fo. Например, /д=10 Mil
оптимальна при f0 = 2,5\ 7,5; 12,5; 17,5; 22,5 МГц, ..., если AFn =
= 1 МГц, /м=4 МГц. В случае дискретизации на радиочастоте эт
позволяет сократить число значений /я, необходимых при пер:
стройке ЦРПУ. Выбор /Р>/м допускает некоторое отклоненй
частоты дискретизации от оптимальной. В результате необходй
мое число значений Ц снижается до уровня, при котором в ЦРП1
можно отказаться от синтезатора сетки частот.
60
П п оптимальной частоте дискретизации все отображения спек-
1 ^сходного колебания разделены частотными интервалами,
тРа ими обеспечивающими пренебрежимо малый уровень
Рав”1’ наложения. Следовательно, в первом приближении можно
П°М(?ть что спектр исходного колебания u{t) строго ограничен в
сч1'1ге А^=0.5/д, расположенной либо от fH=kfa до (/?+0,5)fA
п° fo>kfa, либо от fH= (й—0,5)/д до fB=kfa при fo<.kfn. Таким
fit азом, граничные частоты спектра оказываются кратными его
°ирине,'т. е. выполняется условие (3.3). Поэтому справедлива ин-
терполяционная формула (3.4). Перепишем ее, разделив четные
oi=2*m) и нечетные (n=2m+l) отсчеты, следующим образом
.[68]:
н(/) = u(2mA/)sinc jcAF(/—2mAt) <cos2nfo(t—2mAt)-\-
4- у u(2mAt-)-At) sincn,AF(i—2mAt—A/) cos 2л/д (/—
—2mAt—At).
Учитывая, что At=i/2AF, a fo= (i+0,5)AF, преобразуем
cos 2n[o (/—2m At) =cos 2jtf0Fcos m (2t'+1) л+
-|-sin 2nfot sin т(2/+1)л— (—l)mcos 2nfot,
cos 2л/о(/—2mAt—At) =cos 2n/o/cos (2mt'+m+£+0,5)n+
+sin 2nfot sin (2mi+m+i+O,5)n= (—l)m+i sin2nf0£
Подставив (3.53) и (3.54) в (3.52), получаем
2 (—l)mu(2mAt) sinenAF (t—2mAt) Icos2%f0/—
(3.52)
(3.53)
(3.54)
u(t) =
ГП——со
y> (—1)™+»+1ы(2тА/-|-1Д^) sinenAF(/—2mA/—At) sin2^fot
(3.55);
В (3.55) выражение в квадратных скобках первого слагаемого
представляет собой огибающую косинусной составляющей исход-
ного колебания, а выражение в квадратных скобках второго сла-
гаемого— огибающую его синусной составляющей. Легко заме-
тить, что из (3.55) вытекает алгоритм преобразования отсчетов
мгновенных значений колебания в отсчеты его квадратурных со-
ставляющих [75]. Действительно, достаточно разделить отсчеты
мгновенных значений на последовательности четных и нечетных
отсчетов и в каждой из последовательностей через один отсчет
Инвертировать знак. Следует, однако, учитывать, что получен-
ные таким образом отсчеты квадратурных составляющих отно-
сятся к разным моментам времени, сдвинутым друг относительно
^РУга на время At. Для формирования последовательности пар
отсчетов квадратурных составляющих, относящихся к одному и
61
тому же моменту времени, необходимо по крайней мере в одно
канале установить цифровой интерполирующий фильтр.
Кратко поясним формулу (3.55). Вначале остановимся на о
туации, когда fo>kfR. Перепишем (3.47) следующим образом]
Л>=(£+0,25)/д. (3.J
Из (3.56) видно, что на периоде частоты дискретизации уклад]
вается k + 0,25 периодов центральной частоты колебания. Преи
брегая целым числом периодов, отмечаем, что при каждь
последующий отсчет колебания смещается по фазе относителы
предыдущего на л/2. Следовательно, четные отсчеты совпадаи
с нулями синусной составляющей и амплитудными значения>
косинусной, а нечетные — с амплитудными значениями синуснЛ
составляющей и нулями косинусной. Именно поэтому четные чЯ
счеты используются для определения огибающей косинусной с«
ставляющей, а нечетные — синусной. Отсюда же становится я J
ной необходимость инверсии знака каждого второго отсчета у
последовательностях четных и нечетных отсчетов: фазовый сдвщ
между соседними отсчетами одинаковой четности равен л. Ec.i
А)</г/д, то
/«= (/г-0,25)/д.
Следовательно, в этом случае каждый последующий отсчет сдви-
нут по фазе относительно предыдущего на —л/2. Со спектральной
точки зрения такое изменение знака фазового сдвига между с<л
седнимн отсчетами означает зеркальный переворот отображения
спектра исходного колебания.
3.4. ПРЕДСТАВЛЕНИЕ УЗКОПОЛОСНЫХ КОЛЕБАНИЙ
ПАРАМИ ОТСЧЕТОВ КВАДРАТУРНЫХ СОСТАВЛЯЮЩИХ
Обычно под квадратурными составляющими Ус(/) и УД/) узко-
полосного колебания u(t) понимают огибающие его синусного г
косинусного компонентов
u(t) = U(t) cos [2л/о/~Нр(/)] = V<-(/) cos 2л/0/—Vs(0 sin 2л/о/,
где
Ус(/) = t7 (/) cos ф(/), Vs (0 = t/(0sin <р(/). (3.57)
Составляющие Ус(/) и Vs(t) совпадают с действительной п
мнимой частями комплексной огибающей С(/) колебания u(t): ]
V (/) = и (/) е^™= Ус (/) +/ys (/). (3.53)
Так как комплексная огибающая V(/) узкополосного колебания
u(t) содержит в себе всю обусловленную модуляцией информа]
цпю, цифровую обработку колебания u(t) можно производить!
располагая лишь квадратурными составляющими Уг(/) и У,(0 I
62
амплитудой U (t) и фазой <р(0. исключив тем самым цент-
пальную частоту.
г ‘В § 3.1 было показано, что узкополосное колебание с финит
м спектром, ширина которого АЛ, может быть представлено
Н„едующими с интервалом A?i = 1/А/ парами отсчетов, один из
которых является мгновенным значением исходного колебания
«(/), а другой — колебания u(t), сопряженного по Гильберту с
родным. Интерполяция в этом случае выполняется по формуле
(3 6) Такой метод дискретизации применим и к несущим инфор-
мацию колебаниям, имеющим нефинитный спектр, если границы
спектра выбрать по уровню ослабления, при котором можно пре-
небречь помехами наложения. Пусть ширина спектра AF колеба-
ния w(0 соответствует этому уровню. Если fn^&F и
менно
/о—^/д,
одновре-
(3.59)
то на периоде дискретизаций укладывается целое число периодов
центральной частоты. В результате отсчеты п(/) и й(1) совпада-
ют с отсчетами квадратурных составляющих Ус(0 и Vs(/).
Структурная схема устройства, реализующего этот метод дис-
кретизации, приведена на рис. 3.12,а. Здесь исходное колебание
поступает на два УВХ: на одно—непосредственно, а на другое —
через преобразователь Гильберта. С выходов УВХ отсчеты Гс(0
и Vs(t) через коммутатор поочередно проходят на АЦП. Поэтому
время, отводимое на квантование одного отсчета, равно примерно
1/2/д. Преобразование Гильберта, как известно, сводится к пово-
роту' всех спектральных составляющих колебания на угол л/2
без изменения их модуля. Эта операция производится с помощью
фазовращателя. Но при тех высоких требованиях, которые предъ-
являются к динамическому диапазону ЦРПУ, необходимая точ-
ность поворота на один и тот же угол всех спектральных состав-
ляющих без изменения их амплитудных значений приводит к при-
емлемым по сложности техническим решениям только для очень
узкополосных колебаний.
В принципе, высокая точность поворота всех спектральных
составляющих на один и тот же угол достигается применением
Двухканального преобразования частоты, при котором в качестве
гетеродинных напряжений каналов используются сдвинутые по
фазе на л/2 гармонические колебания одной и той же частоты,
как правило, равной fo (рис. 3.12,6). Поскольку спектр гетеро-
динного напряжения монохроматичен, точный поворот на угол
л/2 не представляет затруднений, а преобразование частоты в
идеальном случае обеспечивает одинаковый угол поворота всех
спектральных составляющих. Однако невозможность достижения
идентичности двух аналоговых каналов в широком диапазоне тем-
ператур и в течение длительного времени приводит к значитель-
°и погрешности и в этом случае.
При использовании аналоговой элементной базы довольно час-
0 погрешность выполнения точной операции оказывается на-
63
г и сдвинутые друг относительно друга на время, равное
й /д,__„ пппнг символизирует элемент задержки ЭЗ).
некоторой паре отсчетов узкополосного колебания u(t) (3.7), в
теристики аппаратуры. Поэтому ппи пЛощения Улучшает хар^
ных колебаний в ряде спучяап ап дискРетизаЦии узкополсц.
Гильберта интегрированием ити Замена преобразованJ
колебания или введением ппА?1^Ффе?еНцированием исходно!
входящими ;Гка“™"е“ отсчета,,!
замены преобразования Гильберта РУ°М пошед"и|1
“ гар^ничеекото колебаний ]
некий, взятые через интервал, r’C™“X 1
зорым подводятся
ioh (этот сдвиг символизирует элемент задержки ЭЗ).
* т-i в некоторой паре отсчетов узкополосного колебания u(t) (3.7), в
м(даУСйремени to—l/4/о формируется первый отсчет
| __ и (to—l/ifo) = и (to—Wo) cos [2л fo (t0— l/4f0) + ф (t0 —1/4/0)],
1 (3.60)
в
(3.63)
момент to — второй отсчет
„2 — U (to) = U (zo) cos l2jt fo to + q> (t0)] (3.61)
Ьсли бы U(to—ll4fo)=>U(to) и ф(/о—l/4fo)=<p(/o), TO, как следует из (3.60),
первый отсчет был бы
и* = и (t0) Sin [2л foto + ф (t0)L (3-62)
он совпал бы со взятым в момент времени to отсчетом колебания u(t),
Сопряженного по Гильберту с колебанием u(t) (3.7).
В действительности огибающая и фаза изменяются, что приводит к воз-
Ьикновению методической ошибки. Поскольку 1//д^>1/4/0, можно ограничиться
[щнейным приближением:
U (to— l/4f0) = U (to) — U' (4)/4/0, \
ф(4— i/4/0) = q>(M—ч>' (M/4fo-
Здесь, как и в § 3.2, полагаем случайные процессы U(i) и ф(/) дифференци-
руемыми. Подставив (3.63) в (3.60), получаем с точностью до слагаемого вто-
рого порядка малости!
«1 = « (to— 1 /4/0) = U (t0) sin [2л f0 ta + ф (t0)] —
— V (МММ sin [2л f0 ta + ф (MJ —
— [^ do) <₽' (M/4fol cos [2л fo t0 + ф (t0) 1 • (3-64)
Сопоставление ‘выражений (3.62) и (3.64) показывает, что первое слагаемое
з (3.64) является точным значением отсчета u(t), взятого в момент времени to,
а методическую погрешность определяют остальные слагаемые, одно из кото-
рых вызвано изменением огибающей, а другое—‘фазы за время l/4/о. Следо-
вательно, для определения средней мощности методической ошибки Рош доста-
точно возвести в квадрат и усреднить по ансамблю сумму второго и третьего
слагаемых. Пусть, например, узкополосное колебание представляет собой гаус-
совский стационарный процесс с дисперсией, равной о2. У такого процесса
огибающая и фаза в совпадающие моменты времени независимы, а фаза рас-
пределена равномерно [65, 72]. С учетом этого получим
Лип = { О2, + [17 (0 ф' (t)]2}/32/2. (3.65)
Для упрощения дальнейших преобразовании воспользуемся выражениями
(3.35)—(3.37). Тогда справедливы формулы (3.38) и (3.39). Подставляя (3.39)
I и (3-41) в (3.65) , получаем
I Рош « (лД Г* 0/4 /0)2. (3.66)
I °ЦенкЖ-еНИе может служить удовлетворительной, с точки зрения практики,
I ства °И сРедне® мощности методической ошибки для подавляющего болыпин-
I ^кополооных центрированных гауссовских процессов. Если же такой про-
I 3"107
I оэ
64
цесс имеет прямоугольный спектр, то приближенные равенства (3.41) и (3.6ft
становятся строгими.
С учетом соображений, изложенных в § 3.2, условие применимости рассма]
риваемого метода дискретизации можно записать в виде
(3.67
При равномерном квантовании и о2>/г мощность шумов квантования вычисляет
ся по формуле (3.17). Число уровней квантования 2Л' (двойка подчеркивае-
двухп-олярный характер отсчетов) определяется необходимым диапазоном i
шагом квантования. В соответствии с правилом «трех сигма» для центрирован
ных гауссовских процессов обычно выбирают 2А=2(Зо//г). Отсюда с учетом
(3.17) запишем
Рш.к = (УЗ O/2.V)2. (3. б8>
Из (3.66), (3.67) н (3.68) находим условие
1.1 /о/Л-F*. (3.69)1
при выполнении которого в качестве отсчетов квадратурных составляющих цент-
рированного гауссовского узкополосного процесса можно использовать его мгно-
венные значения, отделенные друг от друга интервалом l/4/о-
В ЦРПУ информация о характеристиках колебания на выходе АЧПТ всегда
ограничена. Известна лишь максимальная ширина спектра колебания, опреде-
ляемая полосой пропускания фильтров, стоящих в АЧПТ. Результирующую АЧХ
этих фильтров в первом приближении можно считать прямоугольной с цент-1
ральной частотой fo и физической полосой пропускания ДА, симметричной от.но-4
сительно f0 (среднеквадратическая полоса пропускания ДА*=ДА/|Лз). Очевидно,!
что, чем больше спектр узкополосного колебания -сосредоточен около частоты /о,*
тем при большем числе уровней квантования можно использовать данный метод
дискретизации. В рассмотренном выше случае, когда спектральная плотность!
колебания равномерна в пределах Д/7, -область применения метода существенно
сужается. Но наиболее неблагоприятным является сосредоточение всей энергии
колебания на границе полосы пропускания АЧПТ. Поэтому найдем, при каком
числе уровней квантования можно применить рассматриваемый метод дискре-,
тизации, когда колебание u(t) гармоническое с априорно неизвестной частотой
fi=fo+J/r3AA*/2, амплитудой Nh и равномерно распределенной фазой. Есля
условие применимости метода выполняется для такого колебания, то оно авто-
матически будет выполняться для всех остальных колебаний.
Из (3.64), (3.67) и (3.68) получим, что в последнем случае использование11
сдвинутых на время l/4f0 отсчетов мгновенных значении узкополосного колеба-
ния в качестве квадратурных составляющих возможно, когда
0,3 fo/ДА*. (3.70)
Хотя условие (3.70) получено для прямоугольной АЧХ, оно с достаточной для
инженерных расчетов точностью может быть использовано практически при всех
реальных АЧХ аналоговой части приемного тракта.
На рис. 3.13 изображены зависимости минимально допустимого значения fJ
от XF* при заданном числе п разрядов АЦП (n=log2 2А—1 + log2 N, единица,
соответствует знаковому разряду). Сплошные линии рассчитывались по фор-
муле (3.70) и наиболее жестко ограничивают область применения рассматрн-1
66
Еаемого метода, а штриховые — рассчи
таНным по формуле (3.69) и соответ-
ствуют случаю, когда аддитивная смесь
принимаемого сигнала представляет со-
бой узкополосный центрированный гаус-
совский процесс со спектром, близким
к равномерному в пределах полосы про-
пускания АЧПТ. Размерность величин,
откладываемых по обеим координатным
осям, одинаковая.
В формулах (3.69) и (3.70) под ДГ*
подразумевалась среднеквадратическая
полоса пропускания АЧПТ, так как в
общем случае на возможные значения
полосы пропускания ЦФОС не наклады-
вается никаких ограничений, и, в част-
ности, она может совпадать с полосой
пропускания АЧПТ. Однако, если известно, что полоса пропускания ЦФОС не
превышает некоторого значения, заведомо меньшего полосы пропускания АЧПТ,
то в формулы (3.69) и (3.70) следует подставлять максимальное значение сред-
ней квадратической полосы пропускания ЦФОС. Введя цифровую интерполяцию
на выходе БДК, можно уменьшить методическую погрешность и снять ограниче-
ния, налагаемые формулами (3.69) и (3.70).
При реализации данного метода необходимо добиться иден-
тичности характеристик лишь УВХ. Это сокращает объем регули-
ровочных работ и ослабляет воздействие дестабилизирующих фак-
торов.
В целом, всем рассмотренным методам присущи органические
недостатки, связанные с тем, что и перенос спектра колебания на
гулевую частоту, и формирование квадратурных составляющих
производятся в аналоговой части БДК- Первое вызывает такие
нежелательные явления как дрейф нуля, прямое прохождение уп-
равляющих сигналов, увеличение нелинейных искажений и уров-
ня шумов. Второе связано с необходимостью добиваться идентич-
ности характеристик аналоговых каналов квадратурных состав-
ляющих.
От этих недостатков свободны цифровые методы формирова-
ния квадратурных составляющих. Один из них иллюстрируется
структурной схемой (рис. 3.14). Здесь вначале формируются
«кв(нД0 —цифровые значения отсчетов мгновенных значений ко-
лебания u(t). Поскольку соотношения между ft, и выбираются
таким образом, чтобы уменьшить помехи наложения, ни одно из
отображений спектра исходного колебания не попадает на нуле-
вую частоту (см. рис. 3.11). Последовательность икв(пД/) умножа-
ется на последовательности [cos 2лДпД/]кВ и [sin 2л/]ПД(] кв, где
fi=|fo—^д|—центральная частота самого низкочастотного ото-
бражения спектра колебания, k — номер ближайшей к [0 гармони-
ки /д. В результате умножения отображение спектра с централь-
3* 67
U(t)
УВХ ------3
W g 1/7/1 t)
АЦП
Рис. 3.14
ной частотой fi исчезает, но на интервале от нуля до 0,5 [д появ-
ляются отображения на нулевой частоте и частоте
f2 = 2A+(fA-4A)[4h/M.
Здесь квадратная скобка означает усечение до целого числа.
Идентичные цифровые фильтры нижних частот ЦФНЧ с импульс-
ной характеристикой g(nAt), включенные после умножителей,
должны подавлять отображение спектра с центральной частотой
fz без внесения искажений в отображение на нулевой частоте. Эти
ЦФНЧ могут использоваться и в качестве ЦФОС, поскольку в
ЦРПУ, как правило, частотные характеристики ЦФОС симметрич-
ны и, следовательно, в них отсутствуют перекрестные связи.
Описанный метод упрощается, если выбрать в соответствии
с (3.49) или (3.49а), что обеспечивает минимум помех наложения
при симметричном спектре колебания на входе БДК. В этом слу-
чае ft = 0,25/д, и, следовательно, отсчеты опорных гармонических
колебаний принимают значения только 0, +1 и —1 (рис. 3.15).
Умножение на такие колебания сводится к выделению в тракте
косинусной составляющей четных, а в тракте синусной — нечетных
отсчетов и инверсии знака каждого второго отсчета в обоих трак-
тах. В результате одновременно с формированием квадратурных
составляющих автоматически понижается в два раза частота ди-1
скретизации в тракте каждой из них. Тем самым сохраняется чис-1
ло отсчетов, приходящихся на
заданный временной интервал.
Однако в каждой паре отсчеты
квадратурных составляющих)
относятся к разным моментам!
времени. Последующая цифро-
вая интерполяция позволяет
получить пары отсчетов, отно-
сящихся к одним и тем же мо-
ментам времени. Эти моменты
могут быть любыми, но удоб-
нее выбирать их или совпада-
ющими с моментами поступле-
ния отсчетов одной из кйадра-
cs гщпдг
А
Рис. 3.15
68
турных составляющих, или равноудаленными от отсчетов обеих со-
ставляющих. Таким образом, описанный цифровой метод форми-
рования пар отсчетов квадратурных составляющих из отсчетов
мгновенных значений при выборе в соответствии с (3.49) или
(3.49а) сводится к методу, вытекающему из выражения (3.55) [75].
Со спектральной точки зрения задачей интерполирующих циф-
ровых фильтров (ИЦФ) является подавление отображения с цент-
ральной частотой f2 (в данном случае ft=0,5fti) без внесения ис-
кажений в отображение на нулевой частоте. Одновременно в
ИЦФ выполняется понижение (децимация) в два раза частоты
дискретизации. Равенство нулю каждого второго отсчета на вхо-
де ИЦФ в сочетании с проводимой в нем децимацией до [Д1 =
=0,5 приводят, к тому, что при вычислении выходных отсчетов
косинусной составляющей используются значения только четных,
а синусной — только нечетных отсчетов исходной импульсной ха-
рактеристики g(n\t) [8, 9]. Следовательно, импульсные характе-
ристики ИЦФ в каналах косинусной и синусной составляющих
должны быть равны
gi(nAft)=g(2nA0, 1 (371)
£2(«ЛА1+0,5Д^1)=£[(2/г+1)МЬ J
где А/( = 2А/, /г = 0, 1, 2,... Соответствующие передаточные функ-
ции ИЦФ
/71(z)=/710^) = [/7(z)+/7(-z)]/2, |
H2^=^H20{z2) = [H(z)— Н(—z)]/2, J
где z=exp[/<oA/], Н (z) — передаточная функция исходного ЦФНЧ.
В принципе, возможен и противоположный порядок разделения
отсчетов g(nM).
Если ЦФОС, применяемый в ЦРПУ, является нерекурсивным,
то в большинстве случаев целесообразно совместить основную се-
лекцию и интерполяцию. При этом исходный ЦФОС рассчитыва-
ют на частоту дискретизации [д, а затем, разделив четные и нечет-
ные отсчеты его импульсной характеристики, находят импульсные
характеристики ЦФНЧ в тракте каждой из квадратурных состав-
ляющих. Упрощенная структурная схема БДК для данного слу-
чая приведена на рис. 3.16. Здесь дискретизация u(t) в УВХ про-
изводится с оптимальной частотой, выбранной в соответствии с
69
(3.49) или (3.49а). После преобразования в цифровую форму от-11
счеты мгновенных значений с выхода АЦП поступают в распреде-11
литель, где разделяются на четные и нечетные. Формировате щ I
знака ФЗн инвертируют знак каждого второго отсчета. Нерекур-Ц
сивные ЦФНЧ выполняют интерполяцию и основную селекцию.|1
Вместо двух ФЗн на выходе распределителя можно на его вхолеЦ
включить один, изменяющий знак каждой второй пары отсчетов.»
В случае рекурсивного ЦФОС использование его в качестве I
ИЦФ может повысить требования к производительности цифровой!
аппаратуры. Так, при реализации ЦФОС в виде каскадного соеди-ч
нения рекурсивных звеньев второго порядка, рассчитанных мето-|
дом билинейного z-преобразования, в каждом звене необходимо
(без учета масштабного множителя) выполнить два умножения,
если прототипом служит фильтр Баттерворта или Чебышева, i(
три умножения при эллиптическом фильтре-прототипе. После пре-
образования передаточной функции исходного ЦФОС в соответ-
ствии (3.71а) в каждом звене потребуется четыре умножения. Сле-
довательно, в этом случае совмещение функций ИЦФ и ЦФОС не-
желательно.
|Таким образом, выбор fA в соответствии с (3.49) или (3.49а) ’
не' только минимизирует помехи наложения, но и снижает стои-
мость БДК за счет замены умножения более простыми операция-1
ми, отсутствия необходимости синтеза отсчетов опорных колеба-1
ний и снижения требований к производительности ЦФ. При дру-|
гих цифровых методах формирования квадратурных составляю-!
щих, например при использовании цифрового преобразователя,
Гильберта, выбор fa в соответствии с (3.49) или (3.49а) также
позволяет существенно упростить аппаратуру.
^Однако при указанном выборе /д расположение отображений,
спектра таково (см. рис. 3.11), что в полосу частот, занимаемую
спектром колебания, попадают не только разностные, но и сум-!
марные интермодуляционные помехи и гармоники всех нечетных^
порядков, возникающие за счет нелинейных искажений в выход-)
ных каскадах АЧПТ и в УВХ. В частности, из нелинейных про-
дуктов третьего порядка в этой полосе, наряду с разностными ин-,
термодуляционными помехами видок 2fr—/у и f.i+fj—fi, оказыва-1
ются и суммарные — видов 2fi+fj и f.i+fj+fi, а также гармоники
вида ЗД-, 3fj, 3ft. Попадание разностных интермодуляционных по-
мех не связано с процессом дискретизации (см. § 2.1). Попадание
же суммарных интермодуляционных помех и гармоник наиболее
опасных порядков может быть устранено без увеличения помех
наложения повышением /д. Так, если выбрать fR в 2 раза выше
значения, найденного по формуле (3.49) или (3.49а), то суммар-
ные интермодуляционные помехи и гармоники ниже седьмого по-
рядка в полосу частот, занимаемую спектром колебания, не попа-
дают. Повышением fд в 3 раза устраняется попадание гармоник
и суммарных интермодуляционных помех, порядок которых ниже
11-го. Вообще, если fa кратна центральной частоте самого низ-
кочастотного из отображений спектра, то оценку минимального
70
порядка пт гармоник и суммарных интермодуляционных помех,
попадающих в полосу частот, занимаемую спектром колебания,
дает формула
Пг=/д/|/0_Л/д|-1.
Учитывая, что АЧХ простейших интегрирующих УВХ имеет
вид
K(tt)=sin (соД/с/2)/(иДА/2), (3.72)
можно существенно ослабить суммарные интермодуляционные по-
мехи и гармоники третьего порядка, выбрав A/c=l/3fo.
Таким образом, если нелинейные искажения в выходных каска-
дах АЧПТ и в УВХ пренебрежимо малы или гармоники и суммар-
ные интермодуляционные продукты третьего порядка отфильтро-
вываются интегрирующим УВХ, целесообразно, выбрав fn по фор-
муле (3.49) или (3.49а), формировать квадратурные составляю-
щие в соответствии со схемой, приведенной на рис. 3.16. Если же
эти условия не выполняются, удобно выбирать fд в 2 раза выше
значения, определяемого формулой (3.49) или (3.49а). Действи-
тельно, уровень нелинейных продуктов седьмого и более высоких
порядков, попадающих при этом в пределы спектра колебания ис-
ключительно из-за дискретизации, значительно меньше уровня раз-
ностных интермодуляционных помех всех нечетных порядков, ко-
торые попадают в полосу частот, занимаемую спектром колебания,
и в отсутствие дискретизации. Одновременно такой выбор fn, хотя
и повышает в два раза требования к быстродействию АЦП, по-
зволяет достаточно просто формировать отсчеты квадратурных со-
ставляющих. Остановимся на этой возможности.
В рассматриваемом случае центральная частота самого низ-
кочастотного отображения спектра колебания (и соответственно
частота f, опорных колебаний) равна fA/8 или 3fJ8. При этом, как
видно из рис. 3.17, отсчеты опорных колебаний принимают значе-
ния 0; ±1/^2; ±1. Следовательно, в аппаратуре по схеме рис.
3.14 синтез опорных колебаний сводится к правильному чередова-
cosz’^nZf
а)
Рис. 3.17
cos 27rfinAt
$\n7<Tf-LnAt
71
нию этих значений, а перемножители используются лишь для уиД
ножения на 1/V2, причем результаты умножения в трактах ква1|
ратурных составляющих могут отличаться только знаком (с JI
рис. 3.17). Поэтому число умножений на каждом периоде частот
П сокращается в четыре раза по сравнению с общим случаем.
При указанном выборе сравнительно просто реализуется
другой метод формирования отсчетов квадратурных составляю-
щих. Непосредственно на выходе АЦП устанавливается ЦФ, по;
давляющий участки спектра, на которые попадают гармоники я
суммарные интермодуляционные помехи 3, 5, 11, 13-го и други]
порядков п, отвечающих условию
п=4(21'4-1 )±1 где 1=0, 1, 2,...
На рис. 3.18,0 показано подавление этих участков режекторньпу
ЦФ (его АЧХ изображена штриховой линией). На выходе режек-
торного ЦФ производится снижение (децимация) в два раза. В
результате отображения спектра исходного колебания перемеща-
ются, как показано стрелками (рис. 3.18,о), на те участки ос)
частот, на которых были подавлены гармоники и суммарные ин
термодуляционные помехи. Расположение отображений спектра
после децимации приведено на рис. 3.18,6. При этом соотношение!
между f0 и Ц соответствует (3.49) или (3.49а), что позволяет за-
вершить формирование квадратурных составляющих с помощью
аппаратуры, структурная схема которой изображена на рис. 3.16.
Спектральная плотность дискретизированной комплексной огиба-'
ющей на выходе этой аппаратуры показана на рис. 3.18,в. Реали!
зация режекторного ЦФ не вызывает затруднений, так как подав-
ление на 20 ... 30 дБ обеспечивает достаточное превышение мощ-1
Рис. 3.18
72
тьЮ разностных интермодуляционных помех нечетных порядков
Н°1цности суммарных интермодуляционных помех и гармоник, по-
рздаюших в пределы спектра колебания из-за дискретизации.
3.5. ПРЕДСТАВЛЕНИЕ УЗКОПОЛОСНЫХ КОЛЕБАНИИ ПАРАМИ
ОТСЧЕТОВ ОГИБАЮЩЕЙ И ФАЗЫ. МИКРОУРОВНЕВАЯ
ДИСКРЕТИЗАЦИЯ
В § 3.1 отмечалось, что узкополосное колебание u(t) с финит-
ным спектром может быть представлено совокупностью пар отсче-
тов огибающей U(t) и полной фазы ф(/) или фазы <р(7). При этом
интерполяция в соответствии с формулами (3.8) или (3.11) позво-
ляет точно восстановить исходное колебание. С учетом соображе-
ний, изложенных в § 3.3, такие же методы дискретизации примени-
мы и к колебаниям, несущим информацию и, следовательно, имею-
щим нефпнитный спектр. Восстановление дискретизированных ко-
лебаний в этом случае не может быть абсолютно точным, но по-
грешность, как правило, удается уменьшить до приемлемой вели-
чины. Однако использование амплитудного и фазового детекторов
для выделения огибающей и фазы колебания затруднительно из-за
жестких требований к характеристикам этих устройств, предъявля-
емых в связи с последующей дискретизацией. Близость форм узко-
полосного и гармонического колебаний на интервалах времени, со-
измеримых с периодом центральной частоты, позволяет реализо-
вать ряд новых методов представления узкополосных колебаний
отсчетами огибающей и фазы. Эти методы были развиты в [7, 78—
81]. Так как применение их в ЦРПУ открывает ряд интерес-
ных возможностей, проведем анализ указанных методов.
У гармонического колебания
нг(/) = Uo sin ф (t) =U0 sin (2nfcT+(po)
фаза может быть определена измерением времени Д/ф от момента
to стробирования до момента tn первого положительного перехода
колебания через нуль, а амплитуда — измерением н'г(М —произ-
водной колебания «,(/) в момент t„ (рис. 3.19). Действительно,
Для гармонического колебания амплитуда и полная фаза, опреде-
ленная при отбрасывании целого числа периодов, соответственно х-
U0^=u'T(tn)/2n.f0,
с, г (3.73)
ф1 (/о) =<р(^о) =2л—J 2nfodt=2n(l—ЬД^ф).
/о
Близость формы узкополосного колебания к синусоидальной на
интервалах, соизмеримых с периодом центральной частоты, позво-
ляет, хотя и с ограниченной точностью, использовать соотношения
(3.73) при взятии отсчетов огибающей и фазы узкополосного коле-
бания
= sinip(f) =U(t) sin [2nfo^+<p(O]> I3-74)
73
Рис. 3.19
для которого выполняете
условие (3.15). Естествен
но, что u(t) полагаем диф
ференцируемым. Период Ilf
следования пар отсчете;
огибающей и фазы в это&
случае, как и при другиj
способах дискретизации, оп
ределяются шириной спек-
тра колебания. В дальней-
шем будем считать, что fo
кратна Тогда ф, (/о) =
= <р(/о). ‘Такой метод диск-
ретного представления узко-
полосных колебаний назван
[75] микроуровневой диск-
ретизацией, поскольку все
измерения, необходимые
для определения отсчетов
огибающей и фазы, произ-
водятся при равных или близких к нулю значениях мгновенного на-
пряжения колебания. При указанном методе измерения нелиней-
ные искажения типа ограничения по максимуму никак не влияют
на результаты взятия отсчетов. Как видно из рис. 3.19, такое огра-
ничение не изменяет ни А/ф, ни u'i (/n), по которым определяются
значения отсчетов фазы и огибающей соответственно. Следователь-
но, в ЦРПУ микроуровневую дискретизацию можно использовать
для борьбы с нелинейными искажениями типа ограничения по мак-
симуму, возникающими в АЧПТ. В частности, возможно восстанов-
ление формы узкополосного колебания на выходе амплитудного ог-
раничителя.
При использовании микроуровневой дискретизации для борьбы
с нелинейными искажениями необходимо учитывать два обстоя-
тельства. Во-первых, восстановление формы узкополосного колеба-
ния возможно на выходе тракта только с безынерционной нелиней-
ностью. В действительности, все нелинейные цепи в АЧПТ инерци-
онны. Речь может идти лишь о допустимости пренебрежения этой
инерционностью. Пусть, например, нелинейные искажения типа ог-
раничения по максимуму возникают в усилителе, включенном меж-
ду выходом узкополосного фильтра и входом дискретизатора.
Инерционностью усилителя можно пренебречь, если она не сказы-
вается на производной (крутизне) колебания в точках перехода
через нуль. Для узкополосного колебания u'(tn) ~2nfoU (/п). Следо-
вательно, для повышения с помощью микроуровневой дискретиза-
ции верхней границы динамического диапазона приемного тракта
по сравнению с верхней границей динамического диапазона усили-
теля в п раз необходимо, чтобы верхняя граничная частота полосы
пропускания усилителя была в п раз выше минимально необходи-
мого в линейном режиме значения. Во-вторых, при несимметричных.
74
нелинейных искажениях на входе дискретизатора смещается нуле-
вой уровень колебания. Чтобы избежать ошибок в определении от-
счетов огибающей и фазы из-за этого смещения, необходимо преду-
смотреть возможность его устранения. Действительное положение
нулевого уровня может быть найдено или по максимумам u'(t),
совпадающим с моментами перехода через нуль u(t) (рис. 3.19)'
или сравнением положительной и отрицательной частей периода
и (0 (термин «период» применительно к узкополосным колебаниям
не является строгим, так как эти колебания — непериодические, но
здесь он не приводит к ошибкам). Последний способ точнее и по-
этому перспективнее.
Точность микроуровневой дискретизации повышается, если ис-
пользовать не положительный, а любой ближайший к моменту t0
переход u(t) через нуль и учитывать знак перехода Дополни-
тельное повышение точности достигается использованием при вы-
числении отсчетов огибающей и фазы (3.73) вместо f0 значения
мгновенной частоты f(tn), определенного, например, по длительно-
сти Тп периода, серединой которого является момент А (рис. 3.19).
Отсчет огибающей можно найти не только дифференцировани-
ем, но и интегрированием u(t) на интервале от £ до /п+Д/з, где
At3 — время, достаточно малое, чтобы н(/п+А/3) было ниже уров-
ня, на котором сказываются нелинейные искажения (рис. 3.19).
Действительно, если на интервалах, соизмеримых с l/f0, пренебречь
различием форм узкополосного и гармонического колебаний, то вы-
ходное напряжение интегратора с точностью до постоянной вре-
мени
^п+^з
j U'(to) sin 2nfotdt= U (to) sin2 л/оД/з/л/о, (3.75)
т. е. пропорционально значению отсчета огибающей. Как следует
из (3.75), в отсутствие ограничения в АЧПТ оптимальное значе-
ние At3= l/2fo.
Для определения отсчета огибающей с помощью быстродейст-
вующих параллельных АЦП можно воспользоваться пропорцио-
нальностью u(ta+At3) амплитуде колебания u(t).
Отсчет огибающей может быть найден измерением интервала
Дт (рис. 3.20,а), в течение которого при переходе через нуль
u(t)^[—Е, +£]. Очевидно, что
(7(/*)^£/sinnf0AT, (3.76)
где t* — момент времени, к которому относят отсчеты. Несложно
показать, что во всех практически важных случаях вместо (3.76)
можно пользоваться формулой
U(t*)^E/nfoAr. (3.76а)
Требования к величине Е противоречивы: уменьшение Е повышает
точность определения малых значений огибающей, но одновремен-
но снижается точность определения ее больших значений. Это про-
75
-------------------------1
тиворечие разрешается вве4
дением нескольких порогов.
Пример использования двум
порогов показан на рис.
3.20,6. Порог мал, что!
обеспечивает высокую точ-1
ность определения малых
значений огибающей. По-
рог Е2, используемый при |
определении только боль-
ших значений амплитуды»
существенно выше Ei, но I
ниже уровня, на котором I
сказываются нелинейные ис- I
кажения.
Как и во всех описанных I
в данной главе случаях ис- I
пользования близости форм 1
узкополосного и гармониче-В
ского колебаний, методичес-1
кая погрешность микроуров- I
невой дискретизации вызва- I
на изменением огибающей U (/) и фазы q>(/) за время измерения (
Д^и. Если отсчет огибающей определяется путем дифференцирова- I
нпя и (t) в момент tn, то Д^ф (см. рис. 3.19), причем Д^ф мож- I
но рассматривать как случайную величину, не 'зависящую от U(О
и f(i) и равномерно распределенную на интервале 0... 1/fo- По- I
скольку время Д/ф достаточно мало, изменения огибающей и фа- 1
зы в течение Д/ф можно считать линейными. Очевидно, что для
минимизации средней мощности методической ошибки Ры.ош целе-
сообразно результаты измерения огибающей и фазы относить к
моменту /* = /о+1/2)о- Тогда с учетом (3.73)
<р (/*) — 2л’( 1—/оЛ^ф) +л
и ошибка в определении <р(/*)
Дф=2лДГ(/*)(Д/ф-1/2/о), (3.77)
где Д/(/*)—отклонение f(t*) от f0. С учетом (3.73), (3.74) и
(3.29) несложно показать, что ошибка в определении U (t*)
bU=&u'/2nf0=U'(t*) + (П. (3.78)
Ошибка представления u(t) при взятии пары отсчетов
Ды (/*) = Д t/sin [2л)о/*+<р(/*)]+Дч>П(/*) cos [2д)о/*+<р(И]•
(3.79)
В случае, когда и (t) является центрированным гауссовским
процессом с дисперсией о2, равномерной спектральной плотностью
в пределах физической полосы пропускания AF= р^ТДЕ*, где
76
^F* — среднеквадратическая полоса пропускания (3.36), из (3.79)
следует
Рм.оШ1=(дЩт==0,5[(Лир+(Д^иГ], (3.80)
где аргумент t* опускается ввиду стационарности u(t). Из (3.77) и
(3.78) с учетом сделанных выше допущений получим
(|Дф^)2= (2лА/6/)2/12/20, (3.81)
(A77)'2=<y2u,/12f20+ (2лЛГ1/)2/ (2л/о)2. (3.82)
Подставив (3.81) и (3.82) в (3.80) и приняв во внимание (3.38),
(3.39) и (3.41), находим
Рм.ош I = [' (2л2+3) /24] о2 (AF*/f0)2« о2 (AF*/fo)2. (3.83)
Точно так же можно показать, что, если вся энергия сосредото-
чена на границе AF, т. е. u(t) представляет собой_гармоническое
колебание с априорно неизвестной частотой fB± )F3AF*/2 и равно-
мерно распределенной начальной фазой, то
Рм.ош 2= [ (Л2+3) /4] о2 (iAF*/fo)2 « 3,2о2 (AF*/M2. (3.84)
Из (3.83) и (3.84) следует, что относительное значение методи-
ческой погрешности равно в первом и во втором случаях соответ-
ственно
бм.ош 1 = р м.ош l/o ~ AF*If 0, бм.ош 2 =-= Рм.ош 2,/о ~ 1,8AF’ //о-
(3.85)
Видоизменив способ реализации микроуровневой дискретиза-
ции, можно снизить методическую погрешность. Как указывалось
выше, для этого необходимо, во-первых, при каждом взятии отсче-
тов U (ft) и ф(0 одновременно брать и отсчет f(t), например, из-
меряя длительность 7П периода, серединой которого является 1П
(см. рис. 3.19), во-вторых, использовать для измерений не обяза-
тельно положительный, а любой ближайший к to переход u(t) че-
рез нуль, идентифицировав его. Первое позволяет свести до пре-
небрежимо малой величины А<р и ту часть AU, которая вызвана
отклонением f (t) от f0, а второе — в 4 раза уменьшить дисперсию
Д/ф. Методическая погрешность в этом случае максимальна при
равномерной в пределах AF спектральной плотности колебания:
любое сосредоточение спектральной плотности вокруг некоторой
частоты, лежащей в пределах AF, приводит к уменьшению Рм.ош.
Можно показать, что таким образом удается ограничить Рм.ош и
бм.ош значениями, определяемыми выражениями
Рм.ошз^О,1о2.(Д/7/о)2, бм.ош з~О,ЗД^*//о. (3.86)
Задавшись допустимым значением Рм.ош ИЛИ бм.ош, по форму-
лам (3.83) — (3.86) находим, при каких соотношениях между
AF* и f0 применима микроуровневая дискретизация.
77
Некоторые методы микроуровневой дискретизации
На рис. 3.21 приведена упрощённая функциональная схема ус«*
тройства, реализующего микроуровневую дискретизацию и кван^
тование узкополосных колебаний. В этом устройстве отсчет фазы
определяется заполнением импульсами точно известной высокой
частоты интервала времени от момента 10 до момента tn любого
ближайшего перехода колебания u(i) через нуль, а отсчет огиба!
ющей — заполнением теми же импульсами интервала Лт, в тече-1
ние которого при переходе через нуль | u(t) | <Е. На рис. 3.22 при-
ведены временные диаграммы, поясняющие процесс взятия отсче-
тов в двух случаях. В первом из них и (/) в момент t0 отрицатель-
но, а во втором —положительно. При этом в первом случае амп-
литуда колебания невелика, и u(t) не ограничивается, а во вто-
ром u(t) подвергается двустороннему симметричному ограниче-
нию (рис. 3.22а). Напряжение, соответствующее логической еди-
нице, на выходе сдвоенного компаратора появляется тогда и толь-
ко тогда, когда |«(0|<;Е, а на выходе компаратора, когда
——---------Импульсы —————,
дискретизации заполнения устаноВки
Рис. 3.21
78
у(/)7>0- Селекторы фронтов СФ формируют короткие импульсы
яз положительных фронтов напряжения на их входах.
В отсутствие импульсов дискретизации импульсы заполнения
в счетчики амплитуды и фазы не проходят, а в счетчик фазы с по-
мощью шифратора записываются двоичные кодовые комбинации,
соответствующие л при положительном переходе п(/) через нуль,
и 2л при отрицательном. Непосредственно перед приходом им-
пульса дискретизации триггеры 7\, Т2, Та находятся в состоянии,
/котором на их прямом выходе присутствует единица, а на инвер-
сном— нуль, в счетчике амплитуды записано число, равное нулю,
а в счетчике фазы — число, равное л, если u(t0)>O, и равное 2л,
если н(/о)<0. Процесс взятия отсчетов огибающей и фазы начи-
нается в момент to поступлением импульса дискретизации. Эти
импульсы следуют с интервалом A/j, определяемым шириной
спектра колебания. На их длительность не накладывается жест-
ких ограничений: в принципе, она может быть выбрана любой на
интервале примерно от (3/4) f0 до АЛ—1/fo- На рис. 3.22,6 для удоб-
ства иллюстрации длительность импульсов дискретизации выбра-
на незначительно превышающей (3/4) fo.
В момент t0 триггер Та переводится в состояние, ,в котором еди-
ница присутствует на его инверсном выходе, а нуль — на прямом.
В это же состояние переводится и триггер Т2, если на выходе
сдвоенного компаратора логический нуль. В противном случае пе-
79
реход триггера Т2 произойдет сразу же после смены единицы ну.
лем на выходе сдвоенного компаратора. Логическая структура!
установленная на входе счетчика амплитуды, обеспечивает про.
хождение импульсов заполнения в течение только одного за врема
действия импульса дискретизации интервала Ат, когда при переход
де через нуль |u(/) | <ZE, причем этот интервал должен быть бли-
жайшим к /о и начинаться после t0 (рис. 3.22,в и 3.22,а). Счетчкя
амплитуды подсчитывает импульсы заполнения,
течение Ат (рис. 3.22,д). Из полученного таким
в
поступающие
образом числа,
пропорционального Ат, функциональный преобразователь в соот^
ветствии с выражением (3.76а) формирует цифровое значение от-
счета огибающей.
На вход счетчика фазы импульсы заполнения проходят в тече-
ние всего времени, пока на инверсном выходе триггера 73 присут-
ствует единица, т. е. с момента t0 до момента ta первого после t0
перехода u(t) через нуль (рис. 3.22,е и 3.22,ж). Счетчик фазы ра-
ботает в режиме вычитания импульсов заполнения из числа л иля
2л, записанного в счетчик с помощью шифратора перед поступле-
нием импульса дискретизации (рис. 3.22,з). Перезапись этого чис-
ла во время действия импульса дискретизации запрещена благо-
даря блокированию поступления в шифратор импульсов перехода
и(1) через нуль. После прекращения прохождения импульсов за-
полнения в счетчик фазы в нем фиксируется двоичное число, про-
порциональное фазе колебания «(/) в момент to.
В конце импульса дискретизации производится считывание зна-
чений отсчетов огибающей и фазы, а после прекращения действия
импульса дискретизации — перевод устройства в исходное состоя-
ние.
Для того, чтобы описанное устройство (см. рис. 3.21) могло
эффективно работать не только при симметричном, но и при не-
симметричном ограничении колебаний, в него введена система ав-
томатической установки нуля, которая, наряду с используемыми
при взятии отсчетов фазы компаратором, двумя СФ и логическими
элементами, содержит еще и реверсивный счетчик, регистр памя-
ти, ЦАП, фильтр-интегратор, делитель напряжения на резисторах
Ri и У?2, ЭЗ и дополнительные логические элементы. Работа этой
системы поясняется временными диаграммами (рис. 3.23). Одно-
стороннее ограничение u(t) вызывает смещение его нулевого уров-
ня относительно потенциала земляной шины на величину исм (рис.
3.23,а). В результате длительность импульсов и пауз на выходе
компаратора различна (рис. 3.23,6). Разность длительностей из-
меряется путем подсчета числа импульсов заполнения (рис. 3.23,в
и 3.23,г) реверсивным счетчиком, работающем в режиме сложения
во время импульса и вычитания во время паузы. К концу каждо-
го периода u(t) (рис. 3.23,6) в реверсивном счетчике остается чис-
ло |, пропорциональное разности длительностей положительной и
отрицательной частей периода (рис. 3.23,е). Импульсы, соответст-
вующие границам периодов (рис. 3.23,6), обеспечивают переза-
пись g из реверсивного счетчика в регистр памяти РгП, а после
80
задержки в ЭЗ и сброс реверсивного счетчика. Число | ЦАП
преобразует в аналоговое напряжение, которое усредняется фильт-
ром-интегратором за несколько периодов и через делитель напря-
жения и Т?2 поступает на входную шину в противофазе с исм,
приводя нулевой уровень u(t) к потенциалу земляной шины.
На этом же принципе легко построить и более простую анало-
говую систему автоматической установки нуля. Действительно,
если выходное напряжение компаратора преобразовать так, чтобы
положительным значениям u(t) соответствовали положительные,
а отрицательным значениям и (t) — отрицательные прямоугольные
импульсы одинаковой амплитуды, то постоянная составляющая
полученной последовательности пропорциональна разности дли-
тельностей положительной и отрицательной частей периода u(t).
Эта постоянная составляющая, выделенная фильтром-интеграто-
ром, может использоваться для приведения нулевого уровня u(t)
к потенциалу земляной шины.
В другом варианте устройства микроуровневой дискретизации
(рис. 3.24) цифровые значения отсчетов огибающей и фазы фор-
мируются путем аналогового интегрирования и последующего ана-
лого-цифрового преобразования. Временные диаграммы, поясняю-
щие процесс дискретизации узкополосного колебания u(t), пока-
81
заны на рис. 3.25 для двух случаев: ы(/с)<0 и u(io)>O. На вы]
ходе компаратора присутствует единица при u(i)>0 и нуль при
w(i)<0 (рис. 3.25,п и 3.25,6). СФ формируют короткие импульсы
из фронтов выходных напряжений компаратора и включенног<]
после него инвертора. С обоих СФ эти импульсы поступают в эле]
мент ИЛИ и, кроме того, с выхода одного из СФ в систему авто]
матической установки нулевого уровня. На выходе элемента ИЛИ
образуется последовательность коротких импульсов, которые по<
являются при каждом переходе u(t) через нуль (рис. 3.25,в). Не-
посредственно перед моментом 10 на прямых выходах триггеров 7\
и Т2 напряжение соответствует логическому нулю, а на инверс-
ных — единице.
В момент t0 в устройство поступают два прямоугольных им-
пульса с длительностями l/f0 и l/2f0 (рис. 3.25,г и 3.25,6). По
фронту любого из них СФ формирует короткий импульс (рис.
3.25,е), переводящий триггер Т\ в состояние, при котором на его
прямом выходе появляется единица. Состояние триггера Т2 этот
импульс изменяет только при u (io) >0. Единица на прямом выхо-
де триггера 7\ сохраняется до момента fn ближайшего к t0 перехо-
да u(i) через нуль (рис. 3.25,ж). В момент ta на выходе форми-
рователя интервала Ai3 появляется импульс, открывающий вход
интегратора амплитуды на время Ai3 (рис. 3.25,з). Интегратор
амплитуды выполняется таким образом, что его выходное напря-
„ '-----и и п и л ь с ы—--------—>
длительностью длительностью установки
Рис. 3.24 0о 1/Мо
82
лсение положительно вне зависимости от полярности u(t) на ин-
тервале Мз (рис. 3.25,и). Это выходное напряжение в соответст-
вии с формулой (3.75) пропорционально отсчету огибающей коле-
бания u(t).
Напряжение Ео высокостабильного источника подключается к
входу интегратора фазы сразу же после того, как в момент /п на
инверсном выходе триггера 7\ появится единица, а отключается в
момент окончания импульса длительностью l/f0 при н(/о)<0 и
импульса длительностью 1/2)0 при н(/0)>0 (рис. 3.25,к). Такой
алгоритм во .всех случаях обеспечивает к моменту /0+ l/f0 установ-
ление на выходе интегратора фазы напряжения, .пропорциональ-
ного отсчету фазы колебания н(/) (рис. 3.25,л). В течение интер-
вала дискретизации, подключаясь с помощью коммутатора к вы-
ходам интеграторов, АЦП поочередно переводит в цифровую фор-
му отсчеты огибающей и фазы. В конце интервала дискретизации
перед взятием следующего отсчета импульс установки разряжает
интеграторы и возвращает триггер Т2 в исходное состояние.
Система автоматической установки нуля позволяет реализовать
микроуровневую дискретизацию не только при симметричном, но
и при несимметричном ограничении колебаний в АЧПТ. Действо-
вать эта система может по тому же принципу, что и приведенная
в схеме на рис. 3.21. Однако для сравнения длительностей поло-
Рис. 3.25
л)
t
С
83
жительной и отрицательной частей периода колебания в данном
случае целесообразно применить не реверсивный счетчик, а анало-
говый интегратор, так как это позволяет отказаться от формиро-
вания импульсов заполнения, которые в остальной аппаратуре не
используются.
Приведенные на рис. 3.21 и 3.24 схемы устройств микроуровне-
вой дискретизации лишь иллюстрируют, но ни в .коей мере не ис-
черпывают возможных методов ее реализации.
Выше уже рассматривалось использование микроуровневой ди- '
скретизации для борьбы с нелинейными искажениями, возникаю-1
щими в АЧПТ. Очевидно, что реализуемое при этом виде дискре-
тизации представление узкополосных колебаний отсчетами оги-
бающей и фазы наиболее целесообразно, если в ЦРПУ непосред-1
ственно к выходу БДК подключаются амплитудный, частотный
или фазовый демодуляторы. Такое представление удобно и при
некоторых видах нелинейной фильтрации [И], а также при по-
давлении импульсных помех.
Некоторые методы микроуровневой дискретизации при перево-1
де отсчетов огибающей и фазы в цифровую форму могут исполь-
зоваться в качестве альтернативы неравномерного, в частности
логарифмического, квантования. Например, можно показать, что в
тех случаях, когда отсчеты огибающей определяются заполнени-
ем импульсами частоты f3.or интервала Дт, а отсчеты фазы — им-
пульсами частоты /З.ф интервала Д/ф (см. рис. 3.20,а), средняя
мощность инструментальной ошибки
Р11Н.0Ш= [2(л/о)2/3] р7(£/з.ог)2+ТТ2//2з.ф]. (3.87)I
В аппаратуре, схема которой дана на рис. 3.21, /З.ог=/Зф=/3> чт0 в
общем случае не обязательно. При подборе соотношений между I
инструментальной [см., например (3.87)] и методической (3.83),
(3.84), (3.86) ошибками, а также между составляющими этих 1
ошибок микроуровневая дискретизация позволяет наиболее просто
реализовать различные виды неравномерного квантования. В част- |
ном .случае можно получить удовлетворительное приближение к
логарифмическому квантованию. В устройстве на рис. 3.21 инте-
ресные результаты достигаются при использовании переменной
частоты заполнения.
Если непосредственно на выходе БДК выполняется линейная
цифровая фильтрация колебания, то представлять его отсчетами
огибающей и фазы неудобно. В этом случае целесообразно пе-
рейти к отсчетам квадратурных составляющих колебания. Связь
между амплитудой и фазой колебания и его квадратурными со- |
ставляющими устанавливается формулами (3.57). В настоящее
время операции определения синуса и косинуса по заданным зна-
чениям фазы хорошо отработаны программно и аппаратно (см.
§ 5.5), а цифровые быстродействующие умножители, выполненные
в виде отдельных микросхем, содержатся во многих микропроцес-
сорных комплектах. Поэтому преобразование отсчетов огибающей
84
0 фазы в отсчеты квадратурных составляющих, как правило, не
вызывает серьезных затруднений, особенно при выполнении соот-
ношения (3.59).
Микроуровневая дискретизация, предложенная в ходе работ
над ЦРПУ, по-видимому, может найти широкое применение и в
далеких от радиотехники областях, например в цифровых систе-
мах измерения параметров и защиты энергетических сетей пере-
менного тока. .
Глава 4
КВАНТОВАНИЕ В ЦРПУ
4.1. ВЫБОР МЕТОДОВ КВАНТОВАНИЯ
После дискретизации, которая в ЦРПУ производится, как пра-
вило, с помощью УВХ (см. рис. 3.5), сохраняется только счетное
множество значений (отсчетов) колебания или его комплексной
огибающей, относящихся к определенным моментам времени, но
сами значения принадлежат непрерывному интервалу. Квантова-
ние позволяет каждый непрерывный отсчет заменить цифровым
значением благодаря введению соответствия между диапазоном
возможных изменений уровня колебания и конечным числом уров-
ней квантования. Интервал между соседними уровнями квантова-
ния называют шагом квантования Если шаг квантования одина-
ков для всех уровней, то квантование — равномерное. В против-
ном случае — неравномерное. Квантование, даже при идеальной
реализации АЦП, всегда приводит к некоторой ошибке
Aw (nAt) = и (nAt) —икъ (nAt), (4.1)'
где uKn(nAt) —представленное конечным числом двоичных разря-
дов цифровое значение отсчета и(nAt). Эту ошибку обычно назы-
вают шумом квантования. Название, однако, не должно вводить
в заблуждение: помехи, вызванные конечной точностью цифрового
представления отсчетов, коррелированы с сигналом, что плохо со-
гласуется с общепринятым представлением о шумах.
Квантование чаще всего производится с округлением или усе-
чением аналоговых значений отсчетов. Округление заключается в
замене аналогового значения ближайшим уровнем квантования, а
Усечение — ближайшим меньшим уровнем квантования. Характе-
ристики АЦП, использующих округление и усечение, приведены на
Рис. 4.1,а и б соответственно. При равномерном квантовании с ша-
гом h<^a и числом уровней квантования 2N, достаточным для пе-
рекрытия динамического диапазона колебания, можно считать, что
шУмы квантования распределены равномерно на интервале h и
имеют среднее значение, равное нулю при округлении и h/2 при
Усечении. Дисперсия в обоих случаях равна h2fl2 [14, 57, 63—65,
85
0) Рис. 4.1
Иногда применяется усечение с представлением отсчетов в пря-
мом коде. Для положительных значений отсчетов этот способ сов-
падает с усечением, а для отрицательных он заключается в заме-
не аналогового значения отсчета ближайшим большим уровнем
квантования. При этом среднее значение погрешности квантова-1
ния равно нулю, а дисперсия равна й2/3. Таким образом, в ЦРПУ
при квантовании целесообразно использовать округление. Поэто-
му в гл. 3 мощность шумов квантования оценивалась по формуле
(3.17). Этой же формулой будем пользоваться и в дальнейшем.
Очевидно, спектр шумов квантования тем шире, чем менее кор-
релированы отсчеты ошибки. В свою очередь корреляция между
отсчетами ошибки тем меньше, чем менее коррелированы отсчеты
исходного колебания и больше отношение о/h. Причем если
о/й»1, (4.2)
то даже при существенной корреляции между отсчетами колеба-
ния корреляция между отсчетами ошибки может оставаться ма-
лой. Следовательно, спектр шумов квантования значительно шире
спектра исходного колебания. Поэтому при дискретизации, если
даже отображения спектра исходного колебания не перекрывают-
ся, то отображения спектра шумов квантования сильно перекры-
ваются. Иллюстрацией этого перекрытия могут служить рис. 3.10,6
и в, если считать, что на них приведены отображения спектра шу-
мов квантования, а не .исходного колебания. Как правило, в дей-
ствительности наблюдается значительно большее перекрытие ото-
бражений спектра шумов квантования, чем это показано на рис.
3.10,6 и в. Из рисунков видно, что практически независимо от ви-
да каждого из отображений результирующую спектральную плот-
ность шумов квантования дискретизированного колебания можно
считать равномерной, а всю мощность шумов квантования — со-
средоточенной в полосе частот, равной 0,5 Ц. Это с учетом (3.17)
позволяет вычислять результирующую спектральную плотность
шумов квантования по формуле
рассмотренный подход к оценке шумов квантования широко-
^пользуется при цифровой обработке случайных колебаний, к
которым относятся сигналы и помехи. В других случаях, напри-
мер в системах многоуровневого цифрового синтеза сетки частот
(см. § 5.5) и в некоторых цифровых контрольно-измерительных
системах, требуется анализ шумов квантования неслучайных пе-
риодических колебаний. При этом развитый выше подход может
оказаться или недостаточным, или вообще неприемлемым.
Равномерное квантование, будучи наиболее универсальным ме-
тодом, для перекрытия большого динамического диапазона тре-
бует использования многоразрядных АЦП. Так как в ЦРПУ мно-
горазрядность должна сочетаться с относительно высоким быстро-
действием, БДК — одна из наиболее сложных частей цифрового
приемника. Поэтому целесообразно рассмотреть возможность уп-
рощения структуры и снижения стоимости БДК за счет выбора
альтернативных методов квантования.
Для передачи речевых и некоторых других аналоговых сигна-
лов методами импульсно-кодовой модуляции широко применяется
неравномерное логарифмическое квантование. При этом методе
шаг квантования постепенно изменяется по закону, близкому к
логарифмическому, от мелкого при малых уровнях сигнала до
крупного вблизи верхней границы динамического диапазона. Су-
ществуют следующие причины применения логарифмического
квантования. Во-первых, логарифмическое квантование позволяет
приблизить к равномерному распределение кодовых слов, соответ-
ствующих различным уровням сигнала, что, как доказано в тео-
рии информации, соответствует максимальной информативности
кодированного сигнала. Во-вторых, логарифмическое квантование
обеспечивает примерно одинаковое отношение сигнал-шум кван-
тования для «громких» и «тихих» абонентов, что повышает ка-
чество связи. В телефонии применение логарифмического кванто-
вания вместо равномерного позволяет без ухудшения качества
связи в 1,5 раза сократить разрядность кодовых комбинаций и со-
ответственно повысить пропускную способность.
Однако в ЦРПУ логарифмическое квантование может найти
лишь ограниченное применение. Действительно, колебание на вы-
ходе АЧПТ представляет собой не сигнал, а аддитивную смесь
сигнала и помех. Причем в декаметровых ЦРПУ, если аналого-
цифровое преобразование производится до основной селекции сиг-
нала, уровень колебания определяется в основном помехами. По-
этому присущее логарифмическому квантованию постоянство от-
ношения мощности квантуемого колебания к мощности шумов
квантования здесь приводит к ухудшению соотношения между
сигналом и шумом квантования, если помехи возрастут при неиз-
менном уровне сигнала. Следует подчеркнуть, что это может про-
исходить и за счет помех, спектр которых не перекрывается со
спектром сигнала, но расположен в полосе пропускания АЧПТ.
Хотя такие помехи отфильтровываются в ЦЧПТ, при логарифми-
87
ческом квантовании они все же вызовут снижение отношения сиг-
нал-шум квантования.
Нежелательность применения логарифмического квантования в
декаметровых ЦРПУ можно пояснить и с несколько иной точки!
зрения. Основным видом аддитивных помех в диапазоне декамет-
ровых волн являются узкополосные станционные помехи (см.
§ 2.1). Такой вид аддитивных помех предъявляет чрезвычайно вы-
сокие требования к линейности главного приемного тракта. Ис-
пользование в этих условиях логарифмического квантования,
представляющего собой существенно нелинейную операцию, при-
водит к резкому возрастанию интермодуляционных помех, что
снижает помехоустойчивость приема (см. § 2.2 и 2.3). Кроме того,
неравномерное и, в частности, логарифмическое квантование за-
трудняет выполнение некоторых процедур, например линейную
фильтрацию в ЦЧПТ. Поэтому применение логарифмического
квантования в ЦРПУ оправдано лишь в отдельных случаях, если
аналого-цифровое преобразование выполняется после основной
селекции сигнала.
Более перспективным направлением сокращения числа уров-
ней квантования и совершенствования структуры ЦРПУ представ-
ляется использование равномерного квантования с предсказанием,
когда квантуется не действительное значение отсчета, а разность
между действительным и предсказанным его значениями. При
наличии статистической зависимости между отсчетами такой метод
квантования позволяет снизить требования к разрядности АЦП.
В соответствии с изложенным ниже рассматриваются вопросы
применения в ЦРПУ равномерного квантования и равномерного
квантования с предсказанием, а также производится сравнитель-
ный анализ этих методов.
4.2. РАВНОМЕРНОЕ КВАНТОВАНИЕ
Найдем выражения минимально необходимого коэффициента
усиления Ктр АЧПТ, числа уровней квантования 2N и разрядно-
сти п АЦП в ЦРПУ при равномерном квантовании. Поскольку в
ходе решения этой задачи необходимо учитывать условия приема,
расчет произведем для ЦРПУ декаметрового диапазона. Основ-
ные же принципы, положенные в основу расчета, применимы и
при исследовании цифровых приемников, работающих в других
диапазонах радиоволн.
Сделаем следующие допущения. Шаг квантования h будем
считать заданным, поскольку он определяется технологическим
уровнем производства АЦП. Кроме того, заданными будем счи-
тать динамический диапазон по соседнему каналу D и полосу про-
пускания АЧПТ AF.
Из § 2.2 следует, что в декаметровых ЦРПУ динамический диа-
пазон должен быть тем больше, чем шире полоса пропускания
АЧПТ и выше интенсивность узкополосных станционных помех. В
первом приближении можно считать, что аналитическая зависи-
88
0
мость между Z) = 201gZ), AF и статистическими характеристиками
помех (р, р и о) в .декаметровых ЦРПУ, предназначенных для ра-
боты на вынесенных приемных центрах, устанавливается выраже-
нием (2.33) .при подстановке в него формул (2.29) и (2.30). Если
AF>20 кГц, эту зависимость удобно аппроксимировать формулой
(2.34), которая значительно проще, и, кроме того, в ней D выра-
жен как явная функция AF, р, у, и о. При AF^40 кГц расчеты по
(2.34) и по формулам (2.29), (2.30), и (2.33) дают практически
совпадающие результаты, а при 20 кГц<АЕ<40 кГц применение
формулы (2.34) несколько ужесточает требования к динамиче-
скому диапазону приемника. Будем полагать, что значения дина-
мического диапазона и полосы пропускания заданы с учетом соот-
ношений, найденных в § 2.2. Предположим также, что АЧХ АЧПТ
прямоугольна.
Очевидно, усиление АЧПТ должно быть достаточным, чтобы
собственные шумы приемника значительно превышали шумы кван-
тования. Примем в качестве допустимого соотношение
К2трбш.с/Сш.к> 12, (4.4)
где Сш.с — спектральная плотность собственных шумов приемни-
ка. Из (4.4) с учетом (4.3) получим
КТР> V^hlVG^. (4.5)
Число уровней равномерного квантования можно найти по
формуле
2Л^р.к=2 1/2(7максКТр//г, (4.6)
где Пмакс — эффективное значение максимального синусоидально-
го колебания на входе приемника, при котором нелинейные иска-
жения не превышают допустимых. Подставив в (4.6) FTP из фор-
мулы (4.5), получаем
2Л/р.к^4б/Макс/ \ Gm.c/д- (4.7)
Из (4.5) и (4.7) следует, что, повышая /д, можно уменьшить и
Хтр, и 2Np,K. Такая возможность действительно существует, но ее
использование ограничено по следующим причинам. При повыше-
нии fR увеличивается корреляция между отсчетами колебания. Ес-
ли же повышение /д используется для уменьшения коэффициента
усиления АЧПТ, то одновременно уменьшается и отношение o/h.
В результате увеличивается корреляция между отсчетами ошибки
квантования и сужается ее спектр. Это в сочетании с увеличением
частоты дискретизации приводит к уменьшению перекрытия ото-
бражений спектра шума квантования. Вначале уменьшение пере-
крытия и обеспечивает снижение результирующей спектральной
плотности шума квантования, но, по мере того как отображения
спектра шумов все меньше перекрываются, все больше сказывает-
ся сосредоточение шума квантования в полосе частот, занимаемой
сигналом.
8&
Учитывая большой разброс статистических характеристик ад.
дитивной смеси сигнала и помех на выходе АЧПТ декаметрово.
го ЦРПУ, трудно оценить границы, в которых допустимо умень.
шение Ктр и 2N за счет повышения /д. Выполнение условия (4.2f
обеспечивает слабую корреляцию между отсчетами ошибки квад,
тования. Для декаметрового приемника при ЛА ^20 кГц уровень
внешних помех в АЧПТ многократно превышает напряжение соб-
ственных шумов. Следовательно, в этом случае условие (4.2) вьи
полняется, если
]/№трСш.сДГ>/1. (4.8).
Из (4.8) находим
Хтр>Я// Ош.сА/'. (4.9)
Результаты определения Кгр по формулам (4.5) и (4.9) совпа-
дают при /д=2ДА. Учитывая, что на практике /д>2ДА, целесооб-
разно в дальнейшем использовать формулу (4.9), так как в соот|
ветствии с ней предъявляются более жесткие требования к АТр и,’
следовательно, к числу уровней квантования. При ДА<20 кГц),
дисперсия среднего уровня внешних помех становится значитель!
ной, поэтому даже условие (4.8) оказывается недостаточным, и
коэффициент усиления АЧПТ должен выбираться больше величи-
ны, определяемой формулой (4.9).
Найдем теперь необходимое число уровней квантования, исхо-
дя из условия (4.8). Для этого перепишем его в следующем виде:
^^АтрДоУ ДА/Д/с, (4.10)
где Д/с —ширина спектра принимаемого сигнала; [70= У 6ш.сД/с—
предельная чувствительность приемника, определяемая для теле-
графных сигналов. Подставляя (4.10) в (4.6), запишем
2АГР.к>2 /2(1/макс/t/о) /Д/с/ДА. (4.11)
Учитывая, что отношение 17Макс/По представляет собой динамиче-
ский диапазон АЧПТ D, из (4.И) получаем
27VP.K^2,83D У АША. (4.12)
Здесь, как и в гл. 2, целесообразно использовать значения
t/макс и D, экспериментально определяемые двухсигнальным ме-
тодом. Чтобы исключить зависимость результатов измерения от
конкретных параметров сигнала, обычно принимают t/0= 1 мкВ,
что соответствует сигналу с тем большим значением Д/с, чем выше
чувствительность приемника. Следовательно, при заданных ДА и
D требования к коэффициенту усиления АЧПТ и числу уровней
квантования возрастают с увеличением чувствительности прием-
ника.
Изложенные выше результаты были получены в {3]. Применяя
совместно с (4.12) формулы (2.29), (2.30) и (2.33) или формулу
(2.34), удается связать необходимое число уровней квантования
so
не только с полосой пропускания АЧПТ, но и со статистическими
характеристиками узкополосных станционных помех.
Формулы (4.9) и (4.12) дают только нижнюю границу коэф-
фициента усиления АЧПТ и числа уровней квантования. Прини-
мая во внимание, что увеличение числа уровней квантования при-
водит к удорожанию аппаратуры БДК и ЦЧПТ, целесообразно
ограничиться минимально необходимым или несущественно- пре-
вышающим его значением этого числа, округленного до ближай-
шей большей степени двух, так как число разрядов АЦП должно
быть целым. Что же касается коэффициента усиления АЧПТ, то
его следует выбирать с запасом, достаточным для перекрытия
температурных, временных и вызванных разбросом параметров
элементов отклонений. Наличие в ЦРПУ автоматической регули-
ровки усиления при правильно функционирующем БРУЧ исключа-
ет клиппирование колебания на входе БДК из-за чрезмерно боль-
шого коэффициента усиления АЧПТ. Распространяя формулы
(4.9) и (4.12) на случай, когда ДА<20 кГц, можно рекомендовать
следующие выражения для определения коэффициента усиления
АЧПТ и числа уровней квантования в декаметровых ЦРПУ:
K-rpssS
при ДГ’^20 кГц,
при 20 кГц>ДА>2,2 кГц,
при ДГ'^2,2 кГц,
Л/]Л Сш.сДА
/20/Q+7У0ш.сДГ
Зй/]Л Сш.сДТ
2Урк>
30 У Д)С/ДА при ДА+=20 кГц,
3 у 20/QO У ДУ/ДА при 20 кГц>ДА>2,2
эоу ду/да при ДА^2,2 кГц,
кГц,
(4.14)
где Q — безразмерная величина, численно равная ДА, выражен-
ной в кГц.
Учитывая, что разрядность АЦП п=]Iog2 2N[, где ][ озна-
чает округление до ближайшего большего целого числа, из (4.14)
после преобразований получаем
Нр.к —
] 1,6+0,1660+0,5 log2(A/c/AA) [ при ДА^20 кГц,
= ] l,6+0,166D+0,5 logs (2ОД/с/<2ДГ) [ при 20 кГц> ДА>2,2 кГц,
] 3,2+0,1660+0,5 log2 (ДУ/ДА) [ при ДА<2,2 кГц.
(4Л5).
При определении Атр, 2Afp.K и пр.к по формулам (4.13) — (4.15) в
Условиях, когда требуется максимальная чувствительность, регу-
лировка усиления и чувствительности не приводит к увеличению
влияния шумов квантования на помехоустойчивость приема. Дей-
91
ствительно, при уменьшении дтр соотношение между шумами
квантования и собственными шумами ЦРПУ может ухудшиться
Однако, такое ухудшение происходит только в ситуациях, когда
качество приема определяется не этими видами шумов, а, напри-
мер, интермодуляционными помехами.
Условие (4.2) ограничивает возможность уменьшения АТР к
2Ур.к за счет повышения /д Ограничение можно ослабить, если
при малых уровнях выходного колебания АЧПТ добавлять к нем}
вспомогательное колебание с точно известными параметрами г
уровнем, обеспечивающим выполнение условия (4.2). На выходе
БДК вспомогательное колебание должно компенсироваться ила
подавляться.
В гл. 3 все виды погрешностей дискретизации сопоставлялись
с шумами квантования, причем сравнение производилось толькс
по средней мощности без учета законов распределения погрешно-
стей. Материал данного параграфа показывает оправданность та-
кого подхода. Действительно, в ЦРПУ /(тр и 2Л'Р.К выбираются
так, что практически любые помехи, мощность которых не превы-
шает мощности шумов квантования, не могут оказать заметногс
влияния на помехоустойчивость приема.
Для реализации динамического диапазона АЧПТ в декаметро-
вых ЦРПУ в зависимости от их назначения и параметров, а так-
же от участка приемного тракта, на котором выполняется анало-
го-цифровое преобразование, необходимое значение 2МР.К может
колебаться от нескольких сотен до десятков тысяч. Соответствен-
но Ир.к принимает значения от восьми до 16-ти. Необходимое зна-
чение /д в зависимости от тех же факторов колеблется от единиц
килогерц до нескольких мегагерц.
В тех случаях, когда необходимо сочетать большую разряд-
ность АЦП с высокой частотой дискретизации, остро встает во
прос выбора метода построения АЦП. Как известно [73, 84], наи-
большее быстродействие достигается в параллельных АЦП. В них
используют набор параллельно включенных компараторов, поро-
говые уровни которых устанавливаются с помощью делителя на-
пряжения в соответствии с принятой шкалой квантования. При
поступлении на вход такого АЦП отсчета колебания на выходе
компараторов появляется проквантованный сигнал, представлен-
ный в унитарном коде. Стоящая на выходах компараторов коди-
рующая логика преобразует унитарный код в двоичный. Так как
в параллельных АЦП число компараторов примерно удваивается
с каждым новым разрядом, их объем и стоимость быстро возрас-
тают с увеличением разрядности. Поэтому АЦП данного типа
мало перспективны в случаях, когда необходимое число уровней
квантования превышает несколько сот.
Последовательно-параллельные АЦП позволяют за счет неко-
торого снижения быстродействия по сравнению с параллельными
увеличить число разрядов. Последовательно-параллельные АЦП
разделяют на многоступенчатые и многотактные [73]. В состав
многоступенчатых АЦП входят несколько параллельных АЦП,
82
работающих последовательно во времени. В простейшем случае
первый АЦП вырабатывает группу старших разрядов, поступаю-
щих на выход и одновременно на вход ЦАП, выходное напряже-
ние которого сравнивается с входным сигналом. Разность этих
напряжений поступает на вход второго АЦП для формирования
следующей группы разрядов и т. д. В многотактных последова-
тельно-параллельных АЦП для обработки одного отсчета много-
кратно используется один и тот же параллельный АЦП, в кото-
ром на каждом такте изменяются пороги срабатывания компара-
торов. В многотактных АЦП по сравнению с многоступенчатыми
экономится число компараторов. К преимуществам многоступен-
чатых АЦП относятся более простые цепи управления и возмож-
ность за счет ряда схемных усовершенствований повысить быстро-
действие по сравнению с многотактными АЦП [73].
Одним из наиболее перспективных направлений развития по-
следовательно-параллельных многоступенчатых АЦП является со-
здание конвейерных АЦП. Известно несколько вариантов по-
строения таких АЦП [4, 73]. Кратко остановимся на одном из
них. В каждую ступень этого АЦП введены элементы цифровой
(регистр) и аналоговой (УВХ) памяти и масштабный усилитель,
коэффициент усиления которого равен 2П‘, где п\ — разрядность
параллельного АЦП, стоящего в каждой ступени. На первом
такте в первой ступени формируются и записываются в регистре
п, старших разрядов первого отсчета, а разность между напряже-
нием первого отсчета и выходным напряжением ЦАП первой сту-
пени, усиленная в 2п' раз, фиксируется в УВХ второй ступени. На
втором такте вторая ступень формирует следующие п\ разрядов
первого отсчета и записывает их в регистр, а разность между на-
пряжениями УВХ и ЦАП второй ступени, усиленная в 2"1 раз,
поступает в УВХ третьей ступени. Одновременно на втором такте
первая ступень формирует п\ ставших разрядов второго отсчета
и т. д. Масштабные усилители позволяют использовать во всех
ступенях однотипные параллельные АЦП с одинаковыми порого-
выми уровнями компараторов.
Таким образом, в АЦП данного типа благодаря введению циф-
ровой и аналоговой памяти в каждую ступень реализуется поточ-
ный (конвейерный) метод преобразования: одновременно форми-
руются «1 младших разрядов i-ro отсчета в последней ступени, щ
разрядов, предшествующих младшим, (i+l)-ro отсчета в предпо-
следней ступени и т. д. до первой ступени включительно. Следо-
вательно, в конвейерных АЦП число одновременно обрабатывае-
мых отсчетов равно числу ступеней, и на каждом такте, т. е. на
Каждом периоде дискретизации, заканчивается формирование
цифрового значения очередного отсчета. Возникающую в конвей-
ерных АЦП задержку на время n/nxfK следует учитывать только
4 случае, когда АЦП входит в состав петли обратной связи.
Поскольку в конвейерных АЦП в течение периода дискретиза-
ции 1//д необходимо сформировать не все, а только часть разря-
дов цифрового значения отсчетов, в них удается сочетать боль-
93
шую разрядность и относительно малый объем аппаратуры I
быстродействием, практически совпадающим с быстродействие»!
параллельных АЦП. Это делает заманчивым использование АЦГ[
такого типа в ЦРПУ. К сожалению, на пути создания конвейер,
ных АЦП в интегральном исполнении стоят серьезные трудности,
связанные с наличием в них большого числа сложных в изготсв-
лении аналоговых узлов. Конвейерный принцип обработки инф, р|
мации чрезвычайно эффективен не только при аналого-цифровом
преобразовании, но и на всех стадиях цифровой обработки сигна-
лов в ЦЧПТ.
Объем данной книги не позволяет подробнее остановиться на
вопросах построения АЦП и рассмотреть методы контроля их
параметров. Необходимые сведения можно почерпнуть в [57, 73,
82—87 и др.].
При разработке ЦРПУ предпочтительней использовать АЦП,
серийно выпускаемые промышленностью в виде микросхем или
функционально законченных узлов. Для устранения возможного
несоответствия параметров серийных микросхем требуемым же-
лательно изменять структуру БДК. Создание специальных АЦП
существенно удорожает ЦРПУ.
4.3. КВАНТОВАНИЕ С ПРЕДСКАЗАНИЕМ
В ЦРПУ и при обычном равномерном квантовании можно, в
известных пределах, уменьшать число уровней квантования за
счет повышения частоты дискретизации. Но такой обмен более
эффективен при квантовании с предсказанием [5—7, 89], когда
квантуется не отсчет, а разность между его действительным и
предсказанным значениями [42, 64, 69, 88, 89].
Упрощенная структурная схема одного из возможных вариан-1
тов аппаратуры, реализующей этот метод, приведена на рис. 4.2.
Здесь колебание u(t) с выхода АЧПТ поступает на аналоговом
вычитающее устройство, в котором из u(t) вычитается колебание
u(f), сформированное на основе прогноза (предсказания). Раз-
ность этих колебаний e(t), представляющая собой ошибку пред-
сказания, подвергается дискретизации
Рис. 4.2
в УВХ и квантованию в
АЦП. Цифровые значения
отсчетов этой разности
екв («ДО поступают на вы-
ход БДК и в цифровой
сумматор, где они скла-1
дываются с предсказан-
ным значением отсчета
йКв(пЫ). Поскольку
екв(пД/) можно рассмат-
ривать как цифровое зна-
чение поправки к нет»п
ному предсказанию, д.
выходе сумматора восста^
94
лавливается действительное цифровое значение отсчета, поступаю-
щее на выход БДК и одновременно на вход предсказателя. Пред-
сказатель на основании анализа предшествующих отсчетов прогно-
зирует цифровое значение следующего отсчета, которое подается на
ВХОДЫ цифрового сумматора и ЦАП. С выхода ЦАП аналоговое
колебание u(t) прогнозируемого вида поступает на аналоговое
вычитающее устройство.
Рассмотренная аппаратура имеет два цифровых выхода: отсче-
тов «кв (nAt) и их отклонений eKB(«A/) от прогнозируемых значе-
ний «кв(«АО- Это позволяет производить дальнейшую цифровую
обработку, используя любую из указанных цифровых последова-
тельностей. Заметим, что возможны и другие структуры, реали-
зующие квантование с предсказанием. В частности, предсказание
может выполняться не в цифровой, а в аналоговой форме.
Если между отсчетами колебания существует статистическая
связь, то при оптимальном прогнозировании динамический диапа-
зон возможных значений ошибки предсказания оказывается мень-
ше диапазона возможных значений исходного колебания. Это по-
зволяет снизить разрядность АЦП тем больше, чем сильнее ста-
тистическая зависимость между отсчетами. В декаметровых ЦРПУ
соседние отсчеты, как правило, сильно коррелированы, так как су-
ществует много причин, заставляющих выбирать значение /д вы-
ше минимально необходимого, а спектр выходного напряжения
АЧПТ отличается большой неравномерностью. Наличие корреля-
ции между отсчетами свидетельствует об их информационной из-
быточности. Применение квантования с предсказанием позволяет
использовать эту избыточность или для расширения динамического
диапазона ЦЧПТ при сохранении разрядности АЦП, или для сни-
жения разрядности АЦП при сохранении динамического диапазона.
Если полоса пропускания АЧПТ декаметрового ЦРПУ равна
или превышает 40 кГц, то в отсутствие помех ближней зоны рас-
пределение суммы узкополосных станционных помех и сигнала в
АЧПТ можно согласно центральной предельной теореме считать
близким к гауссовскому. Такой же характер имеет распределение
аддитивной смеси сигнала и помех при узкой (порядка сотен герц)
полосе пропускания АЧПТ. Для гауссовских случайных процессов
невозможно лучшее предсказание, чем линейное по методу наи-
меньших квадратов. Теория оптимального линейного сглаживания
и предсказания стационарных последовательностей по методу наи-
меньших квадратов была разработана А. Н. Колмогоровым в
1939 г. и несколько позднее (в 1943 г.) Н. Винером. Поясним
сущность предсказания применительно к использованию в ЦРПУ.
При линейном предсказании по т предшествующим отсчетам
прогнозируемое значение йп отсчета и(nAt), действительное значе-
ние которого равно ип, представляет собой линейную функцию
значений предшествующих т отсчетов
’ _ т
у йп= (4.16)
/ i=i
95
Среднеквадратическая ошибка с учетом (4.16)
(т \ 2
ип-- .
i=l /
Известно, что минимум этой ошибки достигается, если весовые'
коэффициенты определяются по следующим формулам: в слу-
чае предсказания по одному предшествующему отсчету (т=1)’,
когда йп = а\ип-\'.
(4.17)
а в случае предсказания по двум предшествующим отсчетам (т=1
= 2), когда Sn = aiMn-i + «2«n-2:
«1=г (1/fд) [ 1-г(2/Гд) ]/[1-г* (1/fд) ], (4.18)
а2 = [г (2/fд) —г2 (1/f д) ] / [ 1-г2 (1/f д) ]. (4.19)
В формулах (4.17) — (4.19) г(1//д) и r(2/fa) — значения г(т) —1
нормированной корреляционной функции колебания u(t) при т==1
= l/fn и т=2^д соответственно.
В ЦРПУ вид корреляционной функции квантуемого колебания
априорно неизвестен, но, как правйло, квантованию подвергаются!
относительно узкополосные колебания, для которых справедливо!
условие (3.15). Если одновременно выполняется и условие
A^<Cf«, (4.20)
то на интервалах, соизмеримых с l/f«, форму квантуемого напря-
жения можно считать близкой к синусоидальной. Это значительно!
упрощает реализацию квантования с предсказанием, поскольку!
позволяет использовать коэффициенты иг-, найденные для гармони-
ческого колебания. Так, в случае предсказания по одному пре д-1
шествующему отсчету из (4.17) получаем
ai=cos (2nf0,/fA)', (4.21)
а при прогнозировании по двум отсчетам из (4.18) и (4.19) сле-
дует
aI=2cos (2лМд), 1 (4 22)
«2 = —I- J
Чем меньше возможные изменения амплитуды и фазы квантуеч
мого колебания за время наблюдения, равное в данном случае
m/fn, тем ближе к оптимальному предсказание с использованием
приведенных выше коэффициентов.
Если выполняется соотношение (3.59), то из (4.21) получаем
«1=1, т. е. равномерное квантование с предсказанием по одному
отсчету сводится к относительному равномерному квантованию
(ОРК). При ОРК предсказанное значение отсчета равно преды-
дущему отсчету. С точки зрения реализации ОРК является одним
из наиболее простых методов квантования с предсказанием. Пр*'"
96"
стсйшеи же разновидностью ОРК является дельта-модуляция, при
которой фиксируется только знак разности между соседними от-
счетами.
Структурная схема, приведенная на рис. 4.3, иллюстрирует
один из вариантов реализации ОРК. Здесь, в отличие от схемы на
рис. 4.2, отсутствует предсказатель и цифровое значение пред-
шествующего отсчета непосредственно с выхода сумматора посту-
пает на вход ЦАП. В случае представления узкополосного коле-
бания отсчетами квадратурных составляющих, формируемыми в
аналоговой части БДК, аппаратура, осуществляющая квантование
с предсказанием (см. рис. 4.2) и ОРК (см. рис. 4.3), должна ус-
танавливаться в тракте каждой из квадратурных составляющих.
Учитывая, что наиболее перспективно формирование квадра-
турных составляющих не в аналоговой, а в цифровой части БДК
(см. § 3.4), рассмотрим возможность реализации ОРК в этом слу-
чае. Пусть дискретизации и квантованию подвергается узкополос-
ное колебание, для которого наряду с условием (3.15) выполня-
ется условие (4.20). Тогда в случае предсказания по двум отсче-
там весовые коэффициенты а.\ и а2 можно вычислять по формулам
(4.22). При формировании отсчетов квадратурных составляющих
по методу, иллюстрируемому структурной схемой, приведенной на
рис. 3.16, /д выбирается в соответствии с формулами (3.49) или
(3.49а). Подставляя найденное таким образом значение fR в
(4.22), получаем а\ =0, а2=—1, т. е. квантование с предсказанием
по двум отсчетам сводится к относительному квантованию отсче-
тов одинаковой четности. Это естественно, поскольку при указан-
ном выборе fa четные отсчеты относятся к одной, а нечетные — к
другой квадратурным составляющим (см. § 3.3). Аппаратура,
реализующая такой метод квантования, становится одноканаль-
ной (рис. 4.4), но требуемое в ней значение /д в два раза выше,
чем в аппаратуре по схеме рис. 4.3 (ДЛ = 2Д/). Замена аналогово-
го вычитания сложением и цифрового сложения вычитанием объ-
ясняется тем, что при выборе /д в соответствии с (3.49) или
(3.49а) набег фазы между соседними отсчетами одинаковой четно-
сти равен нечетному числу полупериодов центральной частоты.
p"c- 4.3
"107
Рис. 4.4
РгП
U^nAl-At)
Во всех рассмотренных вариантах реализации квантования с
предсказанием и ОРК, благодаря восстановлению значений отсче.
тов в цепи обратной связи, исключается накопление ошибок квац.
тования. Однако такое построение аппаратуры снижает быстро,
действие из-за необходимости предотвратить влияние переходных
процессов в узлах цепи обратной связи на точность квантования.
Возможно выполнение относительного квантования и без ис-
пользования обратной связи. Но в этом случае нужно ограничить
накопление ошибок квантования, например путем комбинирован-
ного применения абсолютного и относительного квантования: по-
ка отсчеты невелики по абсолютному значению, используется аб-
солютное квантование, когда же они начинают превышать некото-
рый пороговый уровень, переходят к относительному. В результа-
те квантователь попеременно работает в режимах абсолютного и
относительного квантования. В момент перехода к абсолютному
квантованию накопленная ошибка ликвидируется, не успев достиг-
нуть значительной величины.
Структурная схема аппаратуры, реализующей описанный вари-
ант ОРК при аналоговых методах формирования комплексного
колебания, приведена на рис. 4.5. Такую аппаратуру устанавли-
вают в тракте каждой квадратурной составляющей. Анализатор
уровня в зависимости от напряжения квадратурной составляю-
щей выносит решение о методе квантования. Это решение опре-
деляет состояние аналогового и цифрового коммутаторов. За-
держка в линии Л31 равна времени принятия решения в анализа-
торе. Если уровень квадратурной составляющей ниже порогового,
принимается решение об абсолютном квантовании. При этом ко-
лебание через аналоговый коммутатор поступает на УВХ непо-
средственно с выхода Л31. Далее его отсчеты квантуются в АЦП,
и через цифровой коммутатор проходят в РгП. При уровне квад-
ратурной составляющей, превышающем порог, анализатор при-
нимает решение об относительном квантовании. В этом режиме
аналоговый коммутатор отключает вход УВХ от выхода Л31 и
подключает его к выходу аналогового вычитающего устройства
98
Одновременно цифровой коммутатор отключает входы регистра
памяти от выходов АЦП и подключает их к выходам цифрового
сумматора. Так как время задержки в линии Л32 равно 1//д и
вместе с тем выполняется условие (3.59), то на вход УВХ посту-
пает приращение квадратурной составляющей за время 1//д. От-
счеты приращения квантуются в ЛЦП и складываются в цифро-
вом сумматоре со значением предшествующего отсчета, храня-
щимся в РгП. Полученное значение текущего отсчета записывает-
ся в РгП. Так как квадратурные составляющие формируются на
нулевой частоте, Л31 и Л32 можно заменить вспомогательными
УВХ, выполняющими те же функции. Недостатком рассмотренной
схемы является зависимость времени работы в режиме ОРК и,
следовательно, уровня накопленной ошибки квантования от ста-
тистических свойств исходного колебания. Существуют, однако,
методы ограничения интервала непрерывной работы в режиме
ОРК- Один из них заключается в сравнении абсолютного значе-
ния отсчета с эталонным ступенчатым пилообразным напряжени-
ем и переход от ОРК к абсолютному квантованию разности меж-
ду отсчетом и эталонным напряжением, когда она становится
меньше некоторого значения. Несложно реализовать ОРК без
использования обратной связи и при цифровых методах формиро-
вания квадратурных составляющих.
Различные варианты квантования с предсказанием могут быть
реализованы и в случае представления узкополосных колебаний
парами отсчетов огибающей и фазы. При этом предсказание, как
правило, приходится выполнять отдельно в каналах огибающей
и фазы.
Если разность между соседними отсчетами квантуемого коле-
бания распределена так же, как и сами отсчеты (что наблюдается,
например, при гауссовском законе распределения), то необходи-
мое число уровней квантования при ОРК
2Af0.p.K=2Afp.KoP/o, (4.23)
где
ор= V G^=CT2=o|/2[ 1—г(1/Д)]. (4.24)
— среднее квадратическое отклонение разности между соседними
отсчетами.
Здесь, как и ранее, полагаем квантуемое колебание и его прира-
щение за время 1/)д центрированными станционарными (по край-
ней мере локально) случайными процессами.
Из (4.23) и (4.24) следует, что только при г (1//д)>0,5 ис-
пользование ОРК позволяет или сократить число уровней без
Уменьшения динамического диапазона, или расширить динамиче-
Ский диапазон при том же числе уровней квантования. Очевидно,
что выигрыш, который обеспечивает относительное квантование,
зависит от статистических характеристик колебания. Он максима-
Лен, когда спектр колебания сосредоточен вблизи центральной
'‘астоты АЧПТ f0, и минимален при сосредоточении спектра вбли-
99
зи границы полосы пропускания АЧПТ. Это естественно, так как
переход от квантования с предсказанием по одному отсчету к от-
носительном}7 квантованию базировался на гипотезе о том, что
исходное колебание является гармоническим с частотой, равной
fo- Отсюда следует, что к числу неблагоприятных относится ситуа-»
ция, когда спектральная плотность колебания G (и) равномерна
в пределах всей полосы пропускания АЧПТ. Найдем необходимое
число уровней квантования при ОРК для этого случая. При вы-
полнении условия (4.20) приращение комплексной огибающей
квантуемого напряжения за время l/fa можно заменить дифферен-1
циалом. Тогда
( со26(о))Ао=—(4-25)
/л И (2^К) Уз /й 'I
Подставляя (4.25) в (4.23), с учетом (4.12) и (4.14) получаем
HD'/AfcAF/^ при ДО >20 кГц,
2Ао.р.к> 11]/20/Q D У AFcAA/'fд при 20 кГц>ДТ>2,2 кГц,
330]/kfcbF/fz при ДГ^2,2 кГц.
(4 26)
Аналогично тому, как из (4.14) были найдены выражения (4.15)
для определения разрядности АЦП при равномерном квантова-
нии, из (4.26) можно получить выражения для определения раз-
рядности АЦП при ОРК:
рйло, не превышает несколько десятков килогерц. Соответственно
минимальное значение оказывается около 100 кГц. В то же вре-
мя высокие требования к динамическому диапазону ЦРПУ, вы-
нуждают использовать АЦП с большим числом разрядов. В систе-
мах цифрового телевидения [д^14 МГц, а число разрядов — вось-
ми. Следовательно, если в декаметровом ЦРПУ увеличить Д и ис-
пользовать те же АЦП, что и в цифровом телевидении, то при
ОРК, как показывает расчет по формулам (4.23) и (4.25), может
быть достигнут динамический диапазон, соответствующий тринад-
цатиразрядному УВХ при равномерном квантовании. Кроме того,
квантование с предсказанием позволяет снизить требования к
УВХ и, в некоторых случаях, упростить программную и аппарат-
ную реализацию ЦЧПТ за счет выполнения фильтрации и другой
линейной обработки сигналов с использованием не абсолютных
значений отсчетов, а их отклонений от предсказанных значений.
Заканчивая сопоставительный анализ квантования с предска-
занием и абсолютного равномерного квантования, необходимо
указать, что для квантования с предсказанием характерна силь-
ная зависимость динамического диапазона ЦЧПТ от статистиче-
ских свойств квантуемого напряжения. Нельзя также не отме-
тить, что, хотя при использовании квантования с предсказанием
часто удается снизить требования к параметрам АЦП и УВХ, а
также упростить реализацию ряда операций в ЦЧПТ, структура
БДК при этом методе квантования усложняется.
^о.р.к —
] 3,5+0,1660+0,5 log2(AfcA/7f2fl) [
при ДО >20 кГц,
] 3,5+0,1660+0,5 log2 (20Д/сДО/фДл) [
при 20 кГц > ДО >2,2 кГц,
] 5+0,1660+0,5 log2 (А/сА0//2д) [
при ДО>2,2 кГц.
(4.27)
Если разрядность АЦП при относительном квантовании опре-
деляется по формулам (4.27), то в большинстве случаев ОРК бу-
дет обеспечивать более широкий динамический диапазон ЦЧПТ,
чем абсолютное равномерное квантование при определении раз-
рядности АЦП по формулам (4.15).
Выше отмечалось, что применение квантования с предсказани-
ем позволяет использовать избыточность, содержащуюся в отсче-
тах исходного колебания, или для расширения динамического ди-
апазона ЦЧПТ, или для сокращения разрядности АЦП. Но кван-
тование с предсказанием открывает и другие возможности. Так,
например, в ряде случаев удается унифицировать АЦП, применяе-
мые в декаметровых ЦРПУ и в цифровом телевидении. Действи-
тельно, полоса пропускания АЧПТ декаметрового ЦРПУ, как прз"
100
Глава 5
ЦИФРОВЫЕ ФУНКЦИОНАЛЬНЫЕ УЗЛЫ
ПРИЕМНИКА
5.1. СТРУКТУРА ЦИФРОВЫХ ДЕМОДУЛЯТОРОВ
ПРИ КВАДРАТУРНОМ ПРЕДСТАВЛЕНИИ КОЛЕБАНИЙ
Со времени создания В. А. Котельниковым теории потенциаль-
ной помехоустойчивости (1946 г.) стало ясно, что демодулятор
можно рассматривать как некоторое вычислительное устройство,
выполняющее обработку смеси сигнала и помех в соответствии с
заданным алгоритмом. Основополагающей работой В. А. Котель-
никова и последующими исследованиями многих советских и зару-
Жебных ученых была разработана теория оптимизации демодуля-
торов и предложены алгоритмы демодуляции, оптимальные или
нвазиоптимальные в смысле того или иного критерия. Однако
только в шестидесятые годы состояние элементной базы позволило
Реализовать эти алгоритмы в цифровой форме. С указанного вре-
мени цифровые демодуляторы (ЦД) все шире стали применять в
РПУ. Структура ЦД зависит от способа дискретного представле-
101
ния колебаний в приемнике. В данном параграфе рассмотрен^
методы построения ЦД при представлении колебаний парами от-
счетов квадратурных составляющих.
Демодуляция аналоговых сообщений
Детектирование AM сигнала сводится к выделению огибающей
U (/) колебания
u(t) = U (t) cos (2лМ+фо) = Vc (0 cos 2nfot—
— Vs(t) sin2nfot. (5.1)
В (5.1) и далее полагаем, что уровень помех пренебрежимо мал.
Тогда U(t) изменяется по закону передаваемого сообщения x{t).
Огибающая связана с квадратурными составляющими соотноше-
нием
+ (5-2)
Для цифровых значений отсчетов соотношение (5.2) можно запи-
сать следующим образом:
t/кв (ПМ) = кв(пД0 + У% кв(пА0. (5.3)
Структура, реализующая алгоритм амплитудного детектиро-
вания в соответствии с (5.3), приведена на рис. 5.1. Здесь,
Ускв(иД0 и У«кв(пД0 поступают с выхода ЦФОС, полоса про-
пускания которого определяется шириной спектра модулирующе-
го сигнала. Поскольку характеристики ЦФОС симметричны, его
выполняют на базе двух ЦФНЧ. Аналоговый ФНЧ предназначен
для сглаживания выходного напряжения ЦАП. В частности, он
ослабляет выбросы, возникающие в моменты смены кодовых ком-
бинаций на входе ЦАП из-за разного времени включения и вы-
ключения коммутирующих элементов.
Чтобы исключить перегрузку схем деталями, не существенными для понима-
ния алгоритма демодуляции, в данном и следующем параграфах на выходе
большинства ЦД аналоговых сигналов устанавливаются только аналоговые
ФНЧ. При практической разработке ЦД необходимо учитывать, что, как пра-
вило, наилучшее качество демодуляции достигается включением ЦФНЧ перед
ЦАП и аналогового ФНЧ после него. Кроме того, следует помнить, что все'
алгоритмы цифровой демодуляции допускают программную, аппаратную и про-
граммно-аппаратную реализацию.
102
В ЦРПУ легко выполняется и синхронное детектирование. На
рис. 5.2 показана структурная схема цифрового синхронного де-
тектора, в котором наличие двух квадратурных каналов позволи-
ло с минимальными затратами реализовать фазовое разделение и
синхронное детектирование двух разных сигналов, занимающих
одну и ту же полосу частот. Здесь отсчеты квадратурных состав-
ляющих выходного колебания АЧПТ u(t) формируются цифровым
методом, описанным в § 3.4. Стробирующие импульсы с частотой
/д подаются на УВХ с выхода цифрового синтезатора частоты ди-
скретизации ЦСЧД, входящего в состав БОЧ. Поступающие с час-
тотой 0,5/д в распределитель и с частотой 0,25 fa в Ф3н1 и Ф3н2
управляющие импульсы получают с помощью делителей частоты
ДЧ из последовательности стробирующих импульсов. Полосы про-
пускания ЦФНЧ1 и ЦФНЧ2 соответствуют ширине спектра при-
нимаемых сигналов. Узкополосный ЦФНЧЗ предназначен для вы-
деления несущего колебания (или пилот-сигнала), по которому в
ЦСЧД подстраивается фаза стробирующих импульсов. Роль фа-
зового детектора ФД в этой системе фазовой автоподстройки иг-
рают УВХ, АЦП, распределитель и Ф3н2. Функции синхронных
детекторов первого и второго каналов приема выполняют УВХ,
АЦП, распределитель, Ф3п1 и Ф3н2, ЦФНЧ1 и ЦФНЧ2. Возмож-
ность двухканального приема при синхронном детектировании ба-
зируется на том, что отстройка фазы опорного напряжения на 90°
относительно фазы несущей вызывает снижение до нуля сигнала
на выходе детектора. Поэтому если промодулировать двумя раз-
ными сообщениями несущие колебания одинаковой частоты, но
сдвинутые друг относительно друга по фазе на 90°, и перед сложе-
нием полностью подавить одну из несущих, не подавив или не
полностью подавив другую, то ЦД, схема которого изображена на
рис. 5.2, позволяет разделить принимаемые сигналы и выполнить
их синхронное детектирование путем автоподстройки фазы посту-
пающих на УВХ стробирующих импульсов. Естественно, что такой
двухканальный прием требует высокой точности фазирования
стробирующих импульсов.
Рис. 5.2
103
Представление колебаний парами отсчетов квадратурных со-
ставляющих облегчает реализацию одноканального синхронного
детектирования при полностью подавленной несущей. Один из
возможных вариантов такого детектирования иллюстрируется
приведенной на рис. 5.3 упрощенной структурной схемой, которую
можно рассматривать как цифровую модификацию схемы Коста-
са. В отсутствие помех и при точной фазировке цифровые значе-
ния сигнала на выходе ЦФНЧ1 максимальны, а на выходе
ЦФНЧ2 равны нулю. Следовательно, равны нулю и цифровые зна-
чения управляющего сигнала, формируемого фазовым детектором
ФД и ЦФНЧЗ. В результате фаза стробирующих импульсов оста-
ется неизменной. Если появляется расфазировка, то управляю-
щий сигнал с выхода ЦФНЧЗ воздействует на ЦСЧД таким обра-
зом, что последний подстраивает фазу стробирующих импульсов,
уменьшая расфазировку. Синхронное детектирование сигналов с
подавленной несущей в ЦЧПТ может выполняться и другими
структурами, значительно отличающимися от изображенной на
рис. 5.3.
Цифровые демодуляторы с автоподстройкой фазы используют
при следящем приеме ЧМ и ФМ сигналов. Так как такие цд
описаны (в частности, в [10]), то, не останавливаясь на них, рас-
смотрим цифровой частотный детектор, работающий на другом
принципе.
' При ЧМ передаваемое сообщение x(i) заложено в законе из-
менения мгновенной частоты сигнала. Поскольку в нашем случае
колебание u(t) в ЦЧПТ представляется КСкв(пД0 и l/SKB(nAZ)—1
цифровыми значениями отсчетов квадратурных составляющих,
выразим через них цифровые значения отсчетов мгновенной час-
тоты F(t) комплексной огибающей.
Как известно F(t) =cp'(t)/2n, где ф(<) = arctg[Vs(/)/Ve(OL
Отсюда
f(f)_ (54)
104
Для дискретизированного и квантованного колебания, заменив
производные первыми разностями, из (5.4) после преобразований
получаем
р (fl&l')_Ц кв (ч А /) Ц кв (ч А / A /) -Ус кн (п X t) Vs кв (ч А I А /) -3
2лЛ/[у2кв(пД/) + у2кв(пА/)]
(5.5),
Структурная схема ЦД, реализующего частотное детектирование
в соответствии с (5.5), показана на рис. 5.4. Цифровые значения
отсчетов квадратурных составляющих поступают на входы ЦД
после основной селекции, выполняемой двумя ЦФНЧ. Полоса
пропускания обоих ЦФНЧ определяется шириной спектра ЧМ сиг-
нала, а полоса пропускания аналогового ФНЧ — шириной спектра
передаваемого сообщения-j
Прием ОМ сигналов в случае представления колебаний пара-
ми отсчетов квадратурных составляющих может производиться
несколькими методами. Кратко рассмотрим два из них.
При формировании квадратурных составляющих в аналоговой
части БДК первый метод реализуется демодулятором, структур-
ная схема которого изображена на рис. 5.5,а. Здесь
(5.6)
где f-a.Ti — несущая частота сигнала, подавленная вместе со второй
боковой полосой; k — любое натуральное число. Спектральная
плотность комплексного колебания ii(t) приведена на рис. 5.6,а, а
последовательности его отсчетов на рис. 5.6,6. Выполнение (5.6)
обеспечивает совмещение одного из отображений спектра u(t) со
спектром модулирующего сигнала. Характеристики комплексного
ЦФОС (его АЧХ показана штриховой линией на рис. 5.6,6) не-
симметричны относительно /д. Такой фильтр должен содержать
перекрестные связи. Однако для речевых ОМ сигналов фазовые
соотношения между подавленной несущей и опорным колебанием
в приемнике не играют роли. Следовательно, достаточно распола-
105
106
гать только одной (действительной или мнимой) составляющей
комплексного колебания. Поэтому комплексный цифровой фильтр
с импульсной характеристикой £Кв(«Д0 состоит из двух фильтров
ЦФ1 и ЦФ2, импульсные хзрзктеристики которых gc кв («до и
gs кв (пЫ) являются косинусной и синусной составляющими
^кв(/гД0- После цифро-аналогового преобразования и сглажива-
ния на выходе однополосного детектора формируется сигнал, мо-
дуль спектральной плотности которого показан на рис. 5.6,в.
Структурная схема на рис. 5.5,6 иллюстрирует реализацию это-
го же метода для случая, когда квадратурные составляющие фор-
мируются в цифровой части БДК. Здесь /д=4/п.н/(4/г± 1). Спект-
ральная плотность дискретизированного действительного коле-
бания u(t) при таком соотношении между |д и fa.n показана на
рис. 5.6,г. Распределитель разделяет отсчеты на четные и нечет-
ные, а ФЗн инвертируют знак каждого второго отсчета в обеих
последовательностях. В результате (см. § 3.4) образуются пары
отсчетов квадратурных составляющих, следующие с интервалом
1//д1=2//д, причем в каждой паре отсчеты сдвинуты друг относи-
тельно друга на время 1//д. Поэтому фильтры ЦФ1 и ЦФ2 долж-
ны производить не только частотную селекцию, но и интерполя-
цию. Их импульсные характеристики содержат соответственно чет-
ные отсчеты косинусной и нечетные синусной составляющих им-
пульсной характеристики исходного цифрового фильтра, рассчи-
танного на частоту следования отсчетов колебания, равную fn. На
рис. 5.6,6 изображена спектральная плотность комплексного сиг-
нала на входе комплексного фильтра, АЧХ которого показана
штриховой линией. Дальнейшая обработка сигнала выполняется
так же, как в ЦД по схеме 5.5,а.
Структурная схема ЦД, реализующего другой метод приема
ОМ сигналов при формировании квадратурных составляющих в
аналоговой части БДК, приведена на рис. 5.7,а. Здесь
£д=/<А (5.7)
где fc — частота, соответствующая середине спектра однополосно-
го колебания (рис. 5.8,а и б). Поскольку при выполнении (5.7)’
отображения спектра исходного комплексного колебания ii(t) рас-
положены симметрично относительно fR и ее гармоник, характе-
ристики комплексного цифрового фильтра тоже симметричны (на
рис. 5.8,6 его АЧХ изображена штриховой линией). В таком
фильтре перекрестные связи отсутствуют, и он представляет со-
бой два ЦФНЧ с идентичными характеристиками. После фильтра-
ции спектр колебания переносится в область расположения спект-
ра первичного сигнала, и из колебания выделяется действительная
(или мнимая) составляющая, которая преобразуется в аналого-
вую форму (рис. 5.8,в). Поясним аналитически работу этого ЦД.
Для простоты записи операции с цифровыми значениями отсче-
тов заменим эквивалентными преобразованиями аналоговых сиг-
налов. Если первичный (модулирующий) сигнал
х(/)=Х(0со8фк(0, (5.8)
107
Рис. 5.7
Рис. 5.8
108
то ОМ сигнал примет вид
W(^)==CjX(Z) cos [2л/:п.н^Н-'фх (Q ~Ьф1] •
При выделении квадратурных составляющих с частотой дискре-
тизации, отвечающей условию (5.7), одно из отображений спект-
ра ОМ сигнала переносится на нулевую частоту. Составляющие
этого отображения, поступающие по квадратурным каналам,
c2X(t) cos [—2nfit—(/) + ф2]=С2^(0 cos
+ф*(0~ фг]
и
c2X(t) sin [—2nfit—(£) -j-cpa] =— c2X(t) sin [2лЛН~
+^x(0—фг]
умножаем соответственно на cos2nfit и sin2Kfi^ и вычитаем про-
изведения. В результате получаем
^ВЫХ (/) = c2X(t) {cos [2л/1<+фх(0—фг] cos2n;fiH-
-J-sin [2л|1^+фх(0—фз] sin 2nfit}=c2X (t) cos [фх(0—фг]. (5-9J
Сопоставление (5.8) и (5.9) показывает, что первичный сигнал и
сигнал на выходе детектора различаются лишь постоянным мно-
жителем и сдвигом фазы.
Структурная схема ЦД, реализующего этот метод при форми-
ровании квадратурных составляющих в цифровой части БДК, при-
ведена на рис. 5.7,6. Здесь импульсная характеристика ЦФНЧ1
содержит четные, и ЦФНЧ2 — нечетные отсчеты импульсной ха-
рактеристики исходного цифрового фильтра, рассчитанного на
частоту следования отсчетов колебания
Гд=4/с/(4/г±1).
Демодуляция дискретных сообщений
В принципе, прием дискретных сообщений может выполняться
теми же детекторами, что и аналоговых с соответствующими ви-
дами модуляции. Именно так производился прием телеграфных
сигналов в ЦРПУ, описанном в >[2]. Однако помехоустойчивость
приема в этом случае, как правило, далека от потенциальной.
Кроме того, однородность элементной базы и выполняемых опера-
ций позволяет даже при аппаратной реализации ЦД изменять
структуру и функции демодулятора путем сравнительно неслож-
ных переключений. Еще проще решается эта задача при програм-
мной и программно-аппаратной реализации ЦД. Поэтому в демо-
дуляторах ЦРПУ чаще всего выполняется оптимальная или ква-
зиоптимальная обработка смеси сигнала и помех. Решающие пра-
вила и соответствующие им структуры, оптимальные для 'различ-
ных условий связи, описаны в [46, 99—101, 104, 106, 1Г5, 116 и
др.]. При реализации этих решающих правил в цифровой форме
в ряде конкретных случаев появляется возможность их упроще-
109
ния путем выбора таких структуры ЦД и последовательности вы-
полнения операций, которые позволяют снизить требования к про-
изводительности цифрового оборудования без проигрыша в по-
мехоустойчивости. В рамках данного параграфа нет возможности
дать развернутый! анализ путей реализации ЦД различных ди-
скретных сигналов. Ограничимся лишь кратким рассмотрением
цифровой демодуляции ЧТ сигналов, представленных парами от-
счетов квадратурных составляющих.
Структура одного из возможных вариантов такого ЦД приве-
дена на рис. 5.9 [12]. Как уже делалось выше, для простоты по-
яснения работы демодулятора вначале рассмотрим случай, когда
помехи пренебрежимо малы, а действия над цифровыми значения-
ми отсчетов заменим эквивалентными операциями над аналоговы-
ми сигналами. В данном ЦД при приеме как единиц, так и нулей
в качестве образцового используется один и тот же комплексный
сигнал, квадратурные составляющие которого равны
Vco(t) = t/ocos (лДД+фо), Vso (t) — Uo sin (лДД+фо),
где Fc — частотный сдвиг. Квадратурные составляющие принятого
сигнала в отсутствие помех имеют вид
Vcn(0 —^ncos (n'Fc^+tpi), Vsn(0 = ^nsin (лКсЦ-ф1) (5.10)
при поступлении единицы и
Vcn(0 = ^nCOS (лКс/+ф2), Vsn(t)——Un sin (лДс/-ЬЧ>2) (5.11)
при поступлении нуля. После умножения составляющих принятого
сигнала на составляющие образцового и суммирования (вычита-
ния) произведений получим на шинах a, b, с, d соответственно:
Рис. 5.9
ПО
при поступлении единицы
иа (/) = U„U0 cos (<pi—<ро),
иь (t) = UnUo cos (2nFc<+<jpi+<jpo),
Uc(t) =—UnUQ sin (<pi—<po),
Ud(0 = {7nt/osin (2лРс*+ф1+фо);
при поступлении нуля
Ua(t) — U„U0COS (2лГс^+ф2+фо),
иь (t) == UnUo cos (ф2—фо),
uc(t) = UnUo sin (2л^с^-]_ф2_Ьфо),
Ud(t)=—UnUo sin (фг—фо)-
(5.12)
(5.13)
Составляющую с частотой Fc подавляет ЦФНЧ, выделяющий низ-
кочастотную составляющую. Следовательно, с учетом (5.12) и
(5.13) на шинах ah Ьь сь dx получаем соответственно;
при поступлении единицы
Uai = UnUo COS (ф1—фо), )
Uci=—UnUo sin (ф1—фо), } (5.14)
»bi = «di=O; J
при поступлении нуля
Wai Wcl 0, 'j
Ubi = UnUoCos (ф2—фо), j (5.15)
«di——UnUo sin (ф2—фо). J
После возведения в квадрат синусных и косинусных составляю-
щих в (5.14) и (5.15) и суммирования получим на шинах е и g:
при поступлении единицы
ue=U2nU2o, Ug=0;
при поступлении нуля
We=0, Ug—U2nU2o-
Выходной сигнал
Пвых--Не Hg. (5.16)
Знак разности (5.16) является решением о том, какая посылка
принята. В реальных условиях, т. е. при наличии шумов, абсолют-
ное значение этой разности может использоваться как численная
оценка качества приема.
Рассмотрим возможность упрощения ЦД и снижения требова-
ний к производительности цифрового оборудования при одновре-
менном сохранении помехоустойчивости приема. Уже отмечалось,
что в данном ЦД применяется один образцовый сигнал вместо
Двух. Если ЧТ сигналы ортогональны, а аддитивной помехой яв-
ляется белый гауссовский шум, то каждый из ЦФНЧ представля-
111
ет собой просто накапливающий сумматор, сбрасываемый им-
пульсами тактовой синхронизации в нуль после считывания ре-
зультата в конце элементарной посылки. При этом ЦД реализует
оптимальный некогерентный прием. Напомним, что ЧТ сигналы
можно приближенно считать ортогональными (в усиленном смыс-
ле) или при Fc—klT, или при Fc^-l/T, где Т — длительность эле-
ментарной посылки. Если же шум небелый или ЧТ сигналы нель-
зя считать ортогональными, то ЦФНЧ усложняются.
Радикальное снижение требований к производительности циф-
рового оборудования достигается исключением в ЦД операций
умножения и возведения в квадрат. При fR=2Fc (т. е. в четыре
раза превышает частоту образцового сигнала) отсчеты образцо-
вого сигнала принимают только два значения, если сдвиг фаз
между образцовым сигналом и стробирующими импульсами, сле-
дующими с частотой дискретизации, равен (2А + 1)л/4, где k=
= 0, 1, 2,... (см. рис. 5.10,а). Если же этот сдвиг фаз равен far/2,
то отсчеты образцового сигнала принимают три значения: 0, 1, —1
(см. рис. 5.10,6). В первом случае умножение входного колеба-
ния ЦД, представляющего собой смесь принятого сигнала и адди-
тивных помех, на образцовый си^ал сводится к инверсии или со-
хранению знака перед отсчетом входного колебания, а во втором,
наряду с этим, исключается каждый второй отсчет. В обоих слу-
чаях предельно упрощается формирование опорного колебания.
Поскольку при некогерентном приеме фаза образцового сигнала
может быть произвольной, для реализации этого способа сниже-
ния требований к производительности цифровой аппаратуры до-
статочно выбрать /д=2Ес.
Указанный способ приме-
ним лишь при большом
значении FCT, когда обес-
печивается достаточное
число отсчетов на элемен-
тарную посылку.
В рассмотренном алго-
ритме демодуляции ЧТ
сигналов операции возве-
дения в квадрат и после-
дующего суммирования
практически без ущерба
для помехоустойчивости
могут быть заменены бо-
лее простыми, если вос-
пользоваться предложен-
ной Робертсоном процеду-
рой приближенного вычи-
сления амплитуды U ко-
лебания по его квад-
ратурным составляющим
Vc и Vs. Эта процеду-
112
ра заключается в том, что вместо точной формулы U= 'И V2C+V2S
используется приближенная:
67«|4-ат] при g=max [Vc, Vs], i}=min [Vc, Vs]. (5.17)
Выбор а=0,5 в (5.17) обеспечивает приемлемую во многих случа-
ях точность и наиболее простые вычисления. Последнее объясня-
ется тем, что операция умножения некоторого числа на 0,5 при
использовании двоичной арифметики с фиксированной запятой
сводится к сдвигу числа на один разряд. В рассмотренном демо-
дуляторе ЧТ сигналов замена операций возведения в квадрат и
суммирования вычислениями по формуле (5.17) приводит к тому,
что на последнем этапе обработки вычитаются величины, пропор-
циональные не мощностям, а найденным с допустимой погреш-
ностью амплитудам колебаний на выходах каналов единицы и
нуля. Это не влияет на знак разности, который определяет приня-
тое решение, и может быть легко учтено при использовании абсо-
лютного значения разности для оценки качества приема.
При невысоких требованиях к качеству детектирования (5.17)
можно использовать вместо (5.3) и при реализации амплитудных
ЦД. Такая замена существенно снижает требования к производи-
тельности цифрового оборудования.
Если основным видом аддитивных помех в тракте ЦРПУ яв-
ляются импульсные, то в рассмотренном демодуляторе ЧТ сигна-
лов оправдано двухуровневое квантование и принимаемых, и об-
разцовых сигналов. Разрядность отсчетов на входе ЦД в тех слу-
чаях, когда основным видом помех являются узкополосные стан-
ционные помехи, определяется с учетом соображений и расчетных
формул, приведенных в § 2.2 и 4.2.
Представление узкополосных колебаний отсчетами квадратур-
ных составляющих позволяет легко реализовать автокорреляцион-
ный прием ЧТ сигналов при манипуляции без разрыва фазы. Дей-
ствительно, сопоставление (5.10) и (5.11) показывает, что вне
зависимости от вида принимаемой посылки (единица или нуль)'
косинусная составляющая положительна, а синусная положитель-
на при поступлении единицы и отрицательна при поступлении ну-
ля. Следовательно, перемножив квадратурные составляющие,
предварительно задержав одну из них на время 1/2 Fc, можно по
знаку произведения вынести
та^
Структурная схема од-
ного из вариантов автокор-
реляционного ЦД сигналов
ОФТ приведена на рис. 5.11
[19]. Здесь означает
задержку на время Т
=гД/, где Т — длительность
элементарной посылки, а
А/ — интервал между от-
счетами каждой из квадра-
решение о том, какая посылка приня-
Рис. 5.11
пз
турных составляющих. Роль фильтра манипуляции выполняет
ЦФНЧ.
Квадратурное представление колебаний позволяет реализовать
и цифровую демодуляцию сложных сигналов. Основная трудность
перехода от простых сигналов к сложным при сохранении скоро-
сти передачи информации состоит в том, что требования к про-
изводительности цифровой аппаратуры часто возрастают быстрее,
чем база сигнала 2t\FT. Действительно, увеличение базы за счет
расширения спектра сигнала обычно приводит к выявлению им-
пульсной природы части флуктуационных помех, проявлению не-
равномерности спектра помех и селективности замираний сигнала.
Все это, в принципе, позволяет повысить помехоустойчивость при-
ема, но одновременно усложняет оптимальную решающую проце-
дуру-
Изложенный материал не исчерпывает всех возможных мето-
дов цифровой демодуляции при представлении колебаний парами
отсчетов квадратурных составляющих. Однако он показывает, что
квадратурное представление колебаний позволяет выполнить циф-
ровую демодуляцию любых сигналов, причем алгоритмы ЦОС в
этом случае часто оказываются достаточно простыми и удобными
как при программной, так и при аппаратной реализации ЦД.
5.2. СТРУКТУРА ЦИФРОВЫХ ДЕМОДУЛЯТОРОВ
ПРИ ПРЕДСТАВЛЕНИИ КОЛЕБАНИЙ ОТСЧЕТАМИ
МГНОВЕННЫХ ЗНАЧЕНИЙ И ПАРАМИ ОТСЧЕТОВ
ОГИБАЮЩЕЙ И ФАЗЫ V*
При представлении узкополосных колебаний отсчетами мгно-
венных значений выбор метода демодуляции в ЦРПУ в общем
случае зависит от соотношения между центральной частотой ко-
лебания на выходе АЧПТ /о и Д. В описанном в [2] одноканаль-
ном ЦРПУ f0 = 528 кГц, а /д=64 кГц, т. е. соотношение между
ними определяется формулой (3.49), а в этом случае, как показа-
но в § 3.3, четные отсчеты относятся к одной, а нечетные — к
другой квадратурным составляющим колебания. Видимо, это на-
толкнуло разработчиков ЦРПУ на мысль выполнять амплитуд-
ное детектирование путем возведения в квадрат, суммирования и
извлечения корня из двух последовательных отсчетов (рис.
5.12,а). Такой метод детектирования связан со значительной по-
грешностью, так как соседние отсчеты характеризуют квадратур-
ные составляющие в разные моменты времени. Можно предполо-
жить, что именно для уменьшения искажений, вызванных сдвигом
между квадратурными составляющими, выходной сигнал ампли-
тудного детектора формировался как сумма последних четырех
оценок амплитуды, полученных указанным выше образом. Несмо-
тря на это, искажения, вносимые цифровым амплитудным детек-
тор-ом, остались довольно высокими. Их можно уменьшить, уве-
личив /д при сохранении соотношения (3.49), но это повышает
требования к производительности цифровой аппаратуры.
114
Более эффективный способ уменьшения искажений состоит н
формировании на выходе амплитудного детектора пар Т в
абсолютных значений квадратурных составляющих, относшад
ся к одному и тому же моменту времени. При выполнении со-
отношения (3.49) или (3.49а) это достигается цифровой интерпо-
ляцией (см. § 3.4). На рис. 5.12,6 изображена структурная схема
амплитудного ЦД, в котором квадрат каждого отсчета одной
четности складывается с квадратом результата линейной интер-
поляции по двум соседним отсчетам другой четности. В амплитуд-
ном ЦД, показанном на рис. 5.12,в производится встречная ли-
нейная интерполяция по двум четным и двум нечетным отсчетам.
Более высокий результирующий порядок интерполирующего
фильтра обеспечивает здесь большую точность интерполяции (см.
§ 6.2). В принципе, после интерполяции возможно снижение /д в
2 раза.
Выбор Ц в соответствии с (3.49) или (3.49а), благодаря при-
надлежности четных и нечетных отсчетов к разным квадратурным
составляющим, облегчает создание синхронных детекторов, ана-
логичных приведенным на рис. 5.2 и 5.3.
Рис. 5.12
115
турных составляющих. Роль фильтра манипуляции выполняет
ЦФНЧ.
Квадратурное представление колебаний позволяет реализовать
и цифровую демодуляцию сложных сигналов. Основная трудность
перехода от простых сигналов к сложным при сохранении скоро-
сти передачи информации состоит в том, что требования к про-
изводительности цифровой аппаратуры часто возрастают быстрее,
чем база сигнала 2biFT. Действительно, увеличение базы за счет
расширения спектра сигнала обычно приводит к выявлению им-
пульсной природы части флуктуационных помех, проявлению не-
равномерности спектра помех и селективности замираний сигнала.
Все это, в принципе, позволяет повысить помехоустойчивость при-
ема, но одновременно усложняет оптимальную решающую проце-
дуру-
Изложенный материал не исчерпывает всех возможных мето-
дов цифровой демодуляции при представлении колебаний парами
отсчетов квадратурных составляющих. Однако он показывает, что
квадратурное представление колебаний позволяет выполнить циф-
ровую демодуляцию любых сигналов, причем алгоритмы ЦОС в
этом случае часто оказываются достаточно простыми и удобными
как при программной, так и при аппаратной реализации ЦД.
5.2. СТРУКТУРА ЦИФРОВЫХ ДЕМОДУЛЯТОРОВ
ПРИ ПРЕДСТАВЛЕНИИ КОЛЕБАНИЙ ОТСЧЕТАМИ
МГНОВЕННЫХ ЗНАЧЕНИЙ И ПАРАМИ ОТСЧЕТОВ
ОГИБАЮЩЕЙ И ФАЗЫ
При представлении узкополосных колебаний отсчетами мгно-
венных значений выбор метода демодуляции в ЦРПУ в общем
случае зависит от соотношения между центральной частотой ко-
лебания на выходе АЧПТ fo и fa. В описанном в [2] одноканаль-
ном ЦРПУ f0 = 528 кГц, a /д=64 кГц, т. е. соотношение между
ними определяется формулой (3.49), а в этом случае, как показа-
но в § 3.3, четные отсчеты относятся к одной, а нечетные — к
другой квадратурным составляющим колебания. Видимо, это на-
толкнуло разработчиков ЦРПУ на мысль выполнять амплитуд-
ное детектирование путем возведения в квадрат, суммирования и
извлечения корня из двух последовательных отсчетов (рис.
5.12,а). Такой метод детектирования связан со значительной по-
грешностью, так как соседние отсчеты характеризуют квадратур-
ные составляющие в разные моменты времени. Можно предполо-
жить, что именно для уменьшения искажений, вызванных сдвигом
между квадратурными составляющими, выходной сигнал ампли-
тудного детектора формировался как сумма последних четырех
оценок амплитуды, полученных указанным выше образом. Несмо-
тря на это, искажения, вносимые цифровым амплитудным детек-
тором, остались довольно высокими. Их можно уменьшить, уве-
личив при сохранении соотношения (3.49), но это повышает
требования к производительности цифровой аппаратуры.
114
Более эффективный способ уменьшения искажений состоит в
формировании на выходе амплитудного детектора пар отсчетов
абсолютных значений квадратурных составляющих, относящих-
ся к одному и тому же моменту времени. При выполнении со-
отношения (3.49) или (3.49а) это достигается цифровой интерпо-
ляцией (см. § 3.4). На рис. 5.12,6 изображена структурная схема
амплитудного ЦД, в котором квадрат каждого отсчета одной
четности складывается с квадратом результата линейной интер-
поляции по двум соседним отсчетам другой четности. В амплитуд-
ном ЦД, показанном на рис. 5.12,в производится встречная ли-
нейная интерполяция по двум четным и двум нечетным отсчетам.
Более высокий результирующий порядок интерполирующего
фильтра обеспечивает здесь большую точность интерполяции (см.
§62). В принципе, после интерполяции возможно снижение Ц в
2 раза.
Выбор в соответствии с (3.49) или (3.49а), благодаря при-
надлежности четных и нечетных отсчетов к разным квадратурным
составляющим, облегчает создание синхронных детекторов, ана-
логичных приведенным на рис. 5.2 и 5.3.
Рис. 5.12
115
Поясним способ демодуляции ЧМ сигналов, состоящий в пе-
ремножении соседних отсчетов и последующей цифровой фильт-
рации произведений (см. рис. 5.13), приняв во внимание, что из-
менение мгновенной частоты f(t) колебания u(t) за интервал
дискретизации А/=1//д невелико. Пренебрегая изменением f(t)
за время А/ (т. е. полагая f(nAt)=f(nAt—A/) =/), а также эф-
фектами квантования и округления при вычислениях, запишем
произведение двух соседних отсчетов:
u(nAt)u(nAt—At) —U (nAt) cos (2л[пА/+ф) U (n^t—
—At) cos [2nf (nAt—At) 4-cp] =0,517 (nA/) U (nAt—
—At) (cos2nfA/-|-cos [2nf (2nA/—A/)-J-2cp]}. (5.18)
На вход частотного демодулятора колебание поступает после глу-
бокого ограничения, и, следовательно, U (nAt) = U(nAt—At). Кро-
ме того, второе слагаемое в фигурных скобках выражения (5.18)
подавляется ЦФНЧ. Поэтому из (5.18) получаем, что напряже-
ние на выходе демодулятора
Пвых (/)= Со cos 2зт/ (/) At. (5.19)
Преобразовав (5.19) с учетом того, что f(/) =fo±K(/), F(/) =
— C\x(t) и, принимая во внимание, что с учетом (3.49) А/=
— (£ + O,25)/fo, находим
ивых (/) =с0 cos [2л (£+0,25) ±2л (£+0,25) F (/)/f0] =
=+со sin[2n (£ + 0,25)F(t)/f0] ~cx(t).
Чем выше fn по сравнению с шириной спектра ЧМ сигнала, тем
точнее удается реализовать описанный алгоритм и тем меньше
искажения, вносимые демодулятором, но тем более жесткие тре-
бования предъявляются к производительности цифрового обору-
дования. Согласно приведенным в [2] результатам цифрового мо-
делирования искажения, вносимые цифровым частотным демоду-
лятором рассмотренного типа, при ^д=64 кГц, отклонениях мгно-
венной частоты до 5 кГц и ширине спектра модулирующего сиг-
нала не более 3,5 кГц достигали 6%.
Цифровая демодуляция ОМ сигналов при представлении ко-
лебаний отсчетами мгновенных значений производится простым
переносом спектра колебания в область низких частот (т. е. сдви-
гом отображений спектра колебания к гармоникам частоты дискре-
тизации). Этот перенос выполняется цифровым перемножителем
и ЦФНЧ. Именно так была реализована демодуляция ОМ сигна-
лов в ЦРПУ, рассмотренном в [2]. В отличие от алгоритмов де-
Рис. 5.13
Рис. 5.14
116
модуляции AM и ЧМ сигналов, которые по самому замыслу были
приближенными, данный алгоритм является точным. Поэтому ис-
кажения, вносимые цифровым демодулятором ОМ сигналов/ока-
зались пренебрежимо малыми (меньше 0,5%). Для обеспечения
высокой помехоустойчивости приема необходимо до переноса
спектра колебания в область низких частот выполнить фильтра-
цию (аналоговую пли цифровую) ОМ сигнала, причем полоса
пропускания фильтра, включенного на входе ЦД, должна рав-
няться ширине спектра ОМ сигнала. Поскольку соотношение ме-
жду /д и fo соответствует (3.49), то при правильном подборе фазы
опорного (гетеродинного) колебания его отсчеты принимают
только два значения, одинаковые по абсолютной величине и про-
тивоположные по знаку (см. рис. 5.10,а). Умножение входного
колебания на опорное в этом случае сводится к инверсии или со-
хранению знака в каждой паре следующих подряд отсчетов. По-
этому, если полоса пропускания ЦФОС выбрана равной ширине
спектра ОМ сигнала, то структура ЦД соответствует изображен-
ной на рис. 5.14, где ФЗн заменяет перемножитель.
Рассмотренные методы цифровой демодуляции при представ-
лении колебаний отсчетами мгновенных значений в той или иной
мере используют соответствие соотношения между fa и Д формуле
(3.49) или (3.49а), когда сдвиг фаз между соседними отсчетами
гармонического колебания с частотой f0 равен 2л(&±0,25) и, сле-
довательно, отсчеты разной четности принадлежат к разным ква-
дратурным составляющим. Более того, в цифровых амплитудных
детекторах соседние отсчеты мгновенных значений обрабатыва-
лись как пары отсчетов абсолютных значений квадратурных со-
ставляющих.
Представление колебаний отсчетами мгновенных значений поз-
воляет реализовать практически любые оптимальные и квазиопти-
мальные алгоритмы цифровой демодуляции дискретных сообще-
ний. Но при этом во многих ЦД непосредственно в процессе де-
модуляции происходит переход к квадратурному представлению ко-
лебаний. На рис. 5.15 в качестве примера показана структурная
схема ЦД, реализующего некогерентный поэлементный прием т
сигналов с равной энергией, оптимальный в канале с белым га-
уссовским шумом и неизвестной фазой сигнала. В соответствии
с основанием кода этот ЦД содержит т ветвей обработки. Каж-
дая ветвь включает в себя два коррелятора, состоящие из циф-
ровых перемножителя и интегратора ЦП. На первые входы пере-
множителей обоих корреляторов поступает нкв(лгД/)—последова-
тельность цифровых значений отсчетов входного колебания, пред-
ставляющего собой аддитивную смесь сигнала и шума. На вто-
рой вход одного из перемножителей подаются цифровые значения
отсчетов образцового сигнала UjKB(nAt), а на второй вход другого
перемножителя — сигнала й;кв(«Д/), сопряженного по Гильбер-
ту с «гкв(лД0» гДе t^[l, т1- Во всех ветвях обработки цифро-
вые значения выходных отсчетов обоих корреляторов возводятся
в квадрат и складываются. Результаты суммирования сравнива-
117
ются между собой в конце каждой элементарной посылки дли
тельностью Т, и на выходе ЦД формируется номер той ветви, в
которой максимально значение суммы. После этого производится
сброс ЦП, который реализуется в виде накапливающего суммато-
ра (рис. 5.16). Его сброс осуществляется путем установки РгП в
нулевое состояние.
Накапливающий сумматор представляет собой простейший
цифровой рекурсивный фильтр. Такой фильтр оказывается согла-
сованным с прямоугольной посылкой, если он в конце ее сбрасы-
вается. Однако если фаза посылки неизвестна, то цифровой
фильтр, согласованный с прямоугольной посылкой, усложняется.
Рис. 5.16
Рис. 5.17
На рис. 5.17 приведена структурная схема цифрового нерекурсив-
ного фильтра, у которого длина r=TAt, а все коэффициенты
равны единице. Очевидно, что импульсная характеристика этого
фильтра
р Р ПРИ «е[°> Г-П>
&kbVZLV1— <
10 при «^[0, г—1].
Следовательно, данный ЦФ согласован с прямоугольной посылкой
длительностью Т при любой фазе ее прихода. Знание фазы не-
обходимо лишь для съема информации. Вообще нерекурсивный
ЦФ подбором коэффициентов легко согласовать с произвольным
сигналом конечной длительности. Однако требования к произво-
дительности цифрового оборудования при этом не всегда оказы-
ваются минимальными. Если база сигнала ‘ZAFT велика, сниже-
ние требований достигается применением в согласованном ЦФ
быстрого преобразования Фурье [14]. Но в ряде случаев, неза-
висимо от значения 2\FT, видоизменив структуру согласованного
ЦФ, удается существенно уменьшить число операции, необходи-
мых для его реализации.
Например, приведенный на рис. 5.17 нерекурсивный согласо-
ванный ЦФ вычисляет скользящую сумму
г— 1
^вых кв (nAt) = иВх.кв(иД^ mAt),
т=0
которую можно найти и по рекурсивной формуле
^вых.Кв (ЛД^) = ^вых.кв (пМ—ДЦ + [ивх.кв (пД/)—Цвх .кв (nAt—гДД ].
Вычисления по последней формуле выполняются ЦФ, структурная
схема которого изображена на рис. 5.18 (в нем введена инверсия
знака сигнала). Следовательно, данный согласованный фильтр
может быть реализован в виде каскадного соединения нерекурсив-
ного ЦФ длины г, в котором только два ненулевых коэффициента
(+1 и —1), и накапливающего сумматора. Хотя в этом согласо-
ванном ЦФ объем оперативной памяти не уменьшается, в нем
на каждом интервале производится только два сложения в отли-
чие от (г—1)-го сложения, которые необходимо выполнять в со-
гласованном ЦФ по схеме рис. 5.17.
Представление колебаний парами отсчетов огибающей и фазы
(см. § 3.5) позволяет наиболее
и фазовое детектирование. В
этом случае необходимость в
специальном ЦД вообще от-
падает: достаточно цифровые
значения отсчетов огибаю-
щей UKB (nAt) (при демо-
дуляции AM сигналов) или
фазы <ркв(/гДО (при демодуля-
ции ФМ сигналов) подать на
просто реализовать амплитудное
Рис. 5.18
119
ЦАП, а с выхода ЦАП — на аналоговый ФНЧ, чтобы выделить
передаваемое сообщение.
Перейдем к частотному детектированию. Для ЧМ сигнала
Е(/) =ф'(/)/2л=сх(£).
При цифровом представлении ф(/) получаем
Fкв (иД/) = [фкв (лД/)-фкв (пМ—\t) ] /2лД/.
Отсюда следует, что при подаче на вход цифрового частотного
детектора отсчетов фазы достаточно вычислять в нем разность
соседних отсчетов, а затем с помощью ЦАП преобразовывать ее
в аналоговое напряжение, которое сглаживает ФНЧ. Но, посколь-
ку отсчеты фазы определялись по модулю 360°, простое вычита-
ние соседних отсчетов может привести к ошибке при переходе фа-
зы через значения, кратные 360°. Пусть, например, начальная фа-
за ф0 = 30°, а приращение фазы за время Д/ равно Дф(/)=60°.
Тогда значения отсчетов фазы на входе частотного детектора бу-
дут равны: 30, 90, 150, 210, 270, 330, 30, 90°, ... Очевидно, что при
вычитании шестого отсчета фазы из седьмого возникнет ошибка:
вместо 60°, будет получен результат —300°.
Рассмотрим возможность устранения подобных ошибок в наи-
более важном для практики случае, когда можно считать, что
|А(^)|<Д/?/2 и Е(7)= const, на интервале ДТ Тогда, учитывая,
что 1/ДА, получаем
| Дфкв(пД0 | — |фкв(яД£)—фкв(лД/—ДО | <180°.
Нарушение этого условия свидетельствует об ошибке, для испра-
вления которой необходимо добавить к разности +360°, если она
отрицательна, и — 360°, если она положительна. Структурная схе-
ма цифрового частотного детектора, выполняющего указанную
коррекцию, приведена на рис. 5.19. Здесь при |Лфкв (nkt) | < 180°
цифровой коммутатор по команде, поступающей со схемы срав-
нения, пропускает значение Дфкв (пД/) непосредственно с выхода
первого сумматора на ЦАП. Если же | Дфкв(«Д0 |>180°, то на
ЦАП через коммутатор с выхода второго сумматора проходит
значение [Дфкв(пД/)±360°]. При этом ФЗн по команде со схемы
сравнения устанавливает перед вторым слагаемым знак плюс при
120
Дфкв (nAt) <—180° и минус — при Д(ркв(«А0 >180°. Рассмотрен-
ный частотный детектор предъявляет минимальные требования к
производительности цифровой аппаратуры, так как в нем ЦОС
ограничивается небольшим числом наиболее простых операций.
Можно показать, что представление колебаний парами отсче-
тов огибающей и фазы облегчает по сравнению с другими мето-
дами их дискретного представления не только цифровое детек-
тирование AM, ФМ и ЧМ сигналов, но и демодуляцию АТ, ЧТ и
ОФТ сигналов, а также различные виды нелинейной селекции по
амплитуде, фазе и частоте. В то же время осуществление линей-
ной частотной фильтрации и детектирования сигналов при сме-
шанных видах модуляции (например, ОМ сигналов) в этом слу-
чае усложняется.
Материал § 5.1 и 5.2 показывает, что различным видам моду-
ляции соответствуют разные способы дискретного представления
колебаний, при которых требования к производительности циф-
рового оборудования демодулятора минимальны. Поэтому выбор
способа дискретизации в ЦРПУ в значительной мере определя-
ется видом модуляции принимаемых сигналов. В тех случаях,
когда необходимо обеспечить прием широкого класса сигналов,
например, в магистральных ЦРПУ, минимальные требования к
производительности цифрового оборудования демодулятора дос-
тигаются при представлении колебаний парами отсчетов квадра-
турных составляющих.
5.3. ЦИФРОВЫЕ СИСТЕМЫ ТАКТОВОЙ СИНХРОНИЗАЦИИ
Системы тактовой синхронизации входят в число тех узлов
РПУ, которые в конце пятидесятых годов были первыми переве-
дены на цифровую обработку сигналов. Цифровыми системами
тактовой синхронизации (ЦСТС) называют системы, в которых
измеренные значение фазы принятых элементарных посылок пере-
водятся или сразу фиксируются в цифровом коде, и вся последу-
ющая обработка выполняется в цифровой форме. ЦСТС разделя-
ются на замкнутые (ЦЗСТС), разомкнутые (ЦРСТС) и гибрид-
ные (ЦГСТС).
Первыми широкое практическое применение нашли ЦЗСТС,
работающие на принципе автоподстройки. Структурная схема та-
кой ЦЗСТС приведена на рис. 5.20.
Здесь сигналы с выхода демодулятора
поступают на измеритель фазы посы-
лок ИФП, который в простейшем слу-
чае представляет собой СФ, формиру-
ющий короткие импульсы из фронтов
элементарных посылок. Выходной сиг-
нал ИФП подается на один из входов
ФД, на второй вход которого поступа-
ют синхроимпульсы. С выхода ФД сиг-
налы расстройки фазы между синхро- рис. 5.20
121
импульсами и принимаемыми посылками попадают на усредняю-
щее устройство УУ (как правило, реверсивный счетчик). УУ выпол-
няет усреднение расстройки фазы по нескольким посылкам и лишь
затем выдает сигнал на элемент управления ЭУ, который чаще
всего представляет собой схему добавления и исключения импуль-
сов. Через ЭУ последовательность импульсов с БОЧ поступает на
ДЧ. К выходу ДЧ подключен СФ, формирующий синхроимпульсы.
При расстройке фазы между синхроимпульсами и принимаемыми
посылками усредненный по нескольким посылкам сигнал расстрой-
ки воздействует на ЭУ таким образом, чтобы ЭУ, добавляя или
исключая импульсы б последовательности, поступающей на вход
ДЧ, подстраивал фазу синхроимпульсов под фазу посылок.
Благодаря таким достоинствам, как компактность, низкая сто-
имость, высокая эксплуатационная надежность, возможность обе-
спечить малую погрешность синхронизации при достаточном от-
ношении сигнал-шум в канале с постоянными параметрами,
ЦЗСТС в шестидесятые годы заняли практически монопольное
положение в аппаратуре приема дискретных сообщений. Это в со-
четании с многообразием условий приема заставило разрабаты-
вать новые модификации ЦЗСТС, приспособленные к работе в
конкретных системах связи. Анализ и синтез различных структур
ЦЗСТС освещены в книгах В. Е. Бухвинера, В. И. Шляпоберско-
го, В. В. Гинзбурга и А. А. Каяцкаса, а также в [45—47 и др.].
Не останавливаясь на этих вопросах, заметим, что в ряде случаев
очень сложно или вообще не удается модифицировать ЦЗСТС
таким образом, чтобы их параметры обеспечивали помехоустой-
чивость приема, близкую к потенциальной. Указанное обстоятель-
ство привело к созданию ЦРСТС в конце шестидесятых годов
[48], когда уровень развития цифровой элементной базы позво-
лил реализовать компактную, дешевую и надежную аппаратуру
этого типа.
Рассмотрение ЦРСТС, основанное па работах [48—53], начнем
с примера практической ситуации, в которой проявляются их пре-
имущества перед ЦЗСТС. При работе короткими сеансами в ка-
налах с замираниями сигнала, вызывающими перерывы связи,
целесообразно минимизировать время синхронизации Тс, зафикси-
ровав на необходимом уровне время поддержания синхронизма
Тп с при перерывах связи. Часто Тп.с определяют в предположении,
что при перерывах связи подстройка фазы не производится, и на
вход системы синхронизации напряжение с демодулятора не по-
ступает. Такое определение мало приемлемо, поскольку, во-пер-
вых, оно характеризует начальную расстройку частоты и неста-
бильность опорных генераторов передатчика и приемника, а не
систему синхронизации; во-вторых, успехи техники стабилизации
частоты позволяют во многих случаях пренебречь нестабильностью
и расстройкой опорных генераторов, в-третьих, во многих системах
связи при перерывах, вызванных замираниями сигнала, подстрой-
ка фазы не прекращается, и на вход системы синхронизации с
детектора поступает создаваемая помехами бинарная последова-
122
тельность. Поэтому здесь под Тпс понимается время с момента
подачи на вход демодулятора гауссовского белого шума с номи-
нальной спектральной плотностью до первого превышения допу-
стимого отклонения фазы синхроимпульсов от исходной.
При приеме коротких сеансов в каналах с замираниями, вы-
зывающими перерывы связи, наиболее существенными недостат-
ками ЦЗСТС являются: зависимость Тс от начальной расстройки
принимаемых посылок и синхроимпульсов, а также то, что в них
сокращение Тс сопровождается уменьшением Т„.с- Первое приво-
дит к неполному использованию канала связи, поскольку при фор-
мировании пусковых комбинаций приходится рассчитывать на
максимальную расстройку. Второе исключает возможность соче-
тания малых значений Тс и больших Тп.с, что необходимо в задан-
ных условиях приема. Частично указанные недостатки могут быть
ослаблены, например, введением переменного коррекционного эф-
фекта и специальной системы отключения ЦЗСТС в периоды за-
мираний. Но это усложняет аппаратуру, снижает ее универсаль-
ность и ухудшает некоторые важные характеристики. Создание
ЦРСТС обеспечило радикальный выход из этих затруднений.
Обобщенная структурная схема ЦРСТС приведена на рис.
5.21. Здесь ИФП определяет, например по положению фронтов,
значения фаз принятых элементарных посылок. Эти значения пре-
образователем фаза — код ПФК переводятся в цифровую форму
и записываются в ОЗУ в виде х-разрядных двоичных чисел: х —
= ]log2L[, где L — число дискретных значений фазы элементар-
ной посылки. Полагая, что ОЗУ рассчитано на хранение п чисел,
назовем шагом запись в ОЗУ одного значения фазы, а циклом —п
последовательных записей. Помехи маскируют и факт присутст-
вия сигнала, и действительное значение фазы посылок. Устройст-
во обработки УО, анализируя записанные в ОЗУ значения фазы,
выносит решение о наличии (или отсутствии) сигнала и выраба-
тывают оценку действительного значения фазы. Эта оценка ис-
пользуется для фазирования синхроимпульсов с принимаемыми
посылками путем сброса в определенное состояние ДЧ, из выход-
ного напряжения которого СФ формирует синхроимпульсы. Ес-
тественно, что период следования импульсов с выхода ДЧ должен
совпадать с длительностью принимаемых посылок.
По способу обновления информации в ОЗУ можно раз
делить ЦРСТС на системы с общим и поочередным стира
нием. При общем стира-
нии вся записанная в ОЗУ
информация стирается в
конце каждого цикла, а
при поочередном — на каж-
дом шаге перед записью
нового измеренного значе-
ния фазы стирается значе-
ние, записанное на п шагов
ранее.
Рис. 5.21
122
Подход к задаче синтеза оптимальной процедуры обработки
измеренных значений фазы в ЦРСТС существенно зависит от наз-
начения и условий работы приемной аппаратуры. Иногда выпол-
няют совместный синтез демодулятора и системы синхронизации.
При этом критерий оптимальности непосредственно связан с де-
модулятором, но качество синхронизации учитывается в вероятно-
стях правильной и ошибочной демодуляции. Однако из-за необхо-
димости оптимизации ряда специфических характеристик системы
синхронизации чаще приходится производить синтез ЦСТС в соот-
ветствии с критериями, лишь косвенно связанными с качеством
демодуляции сигнала. Рассмотрим один из возможных подходов к
синтезу ЦРСТС при работе короткими сеансами в канале с зами-
раниями, вызывающими перерывы связи.
В ЦРСТС за счет представления фазы посылок в цифровой
форме записанные в ОЗУ результаты измерения фазы могут при-
нимать только L различных дискретных значений. Поэтому опе-
рации обнаружения сигнала и оценки фазы сводятся к задаче
проверки статистических гипотез. Для каждого из L возможных
значений можно сформулировать две гипотезы: Но— совпадение
измеренных значений фазы с рассматриваемым вызвано воздейст-
вием шумов, Hi — совпадение измеренных значений фазы с рас-
сматриваемым вызвано тем, что с ним совпадает действительное
значение фазы элементарной посылки. Ни одна процедура выбора
гипотез не позволяет полностью исключить ошибки, которые в
данном случае могут быть двух видов: 1) правильной является
гипотеза Но, а принята гипотеза ЛД; 2) правильной является ги-
потеза /Д, а принята гипотеза Но. По аналогии с локацией ошиб-
ку первого вида будем называть «ложной синхронизацией», а
ошибку второго вида — «пропуском синхронизма». Увеличение
вероятности «пропуска синхронизма» Рп увеличивает Тс. Увеличе-
ние вероятности «ложной синхронизации» Рл уменьшает Т„.с и
увеличивает вероятность срыва синхронизма в процессе ра-
боты.
Располагая необходимым значением Тп.с, которое определяет-
ся параметрами канала связи, несложно найти максимально до-
пустимое значение Рл. Зафиксировав Рл на уровне максимально
допустимого, будем искать алгоритм, минимизирующий Рп. Та-
кую возможность предоставляет критерий Неймана — Пирсона.
Оптимальной решающей процедурой в случае применения этого
критерия является вычисление отношения правдоподобия X ги-
потезы Hi относительно гипотезы Но и сравнение его с некоторым
порогом Zo, который определяется допустимой вероятностью
«ложной синхронизации». Если при совпадении измеренного зна-
чения фазы элементарной посылки с рассматриваемым дискрет-
ным значением записывать единицу, а в противном случае —
нуль, то для каждого из L возможных значений фазы образуется
последовательность А длиной п элементов, состоящая из единиц
и нулей. Предположим, что рассматриваемому /-му значению
фазы на х-м шаге соответствует некоторая последовательность
124
дГг, содержащая а единиц и п—а нулей, занимающих вполне оп-
ределенные позиции. Тогда
Хг,х=Р(Лг,х///1)/Р(Лг,х/Яо), (5.20)
где P(Ai,x/H0) и P(Ai,x/Hl) —условные вероятности последова-
тельности Дг,х при гипотезах Но и Ну соответственно. Обозначив
вероятность совпадения измеренного значения фазы элементар-
ной посылки с рассматриваемым р, если рассматриваемое значе-
ние совпадает с действительным, и рн — если не совпадает или
сигнал отсутствует, запишем
Р(А,х/Яо) = р“н(1- Рн)п~а, (5.21)'
Р(Лг,х/Н1)=р“(1-р)п-“ (5.22)
Подставляя (5.21) и (5.22) в (5.20), получаем
h.x=Pa (1— р)п~а/рн (1— Рн) (5.23)
В соответствии с критерием Неймана — Пирсона принимаем ги-
потез}7 Н}, если
р“(1— р)эт-“/р“н'(1— Рн)’г-“>Хо, (5.24)
в противном случае — гипотезу Но. Решая (5.24) относительно а
a>lnk0 (Y’l / ln[p(l -^1 (5.25)
14 1—Р / 1/ LPh(1— p)J
и обозначая правую часть выражения (5.25) т, приходим к вы-
воду, что гипотеза Ht должна приниматься, если в последова-
тельности А а^т, а гипотеза Но — в противном случае.
Следовательно, процедура, оптимальная в смысле критерия
Неймана—Пирсона, в ЦРСТС сводится к составлению на каж-
дом шаге и для каждого возможного значения фазы последова-
тельности А и сравнению числа а единиц в ней с пороговым зна-
чением т.
На практике, как правило, порог необходимо выбирать до-
статочно высоким, так что m>0,5n. При этом гипотеза Н\ может
быть принята только для одного из L возможных дискретных
значений фазы элементарной посылки, поскольку с ним должно
совпадать больше половины записанных в ОЗУ измеренных зна-
чений фазы. В противном случае превышение порога возможно
при нескольких значениях фазы. Оценкой фазы в такой ситуации
могут служить мода, среднее значение или значение, для которо-
го порог был достигнут раньше, чем для других.
При использовании описанного алгоритма, который будем на-
зывать «алгоритмом tn из п», вероятность «ложной синхрониза-
ции» для одного значения фазы определяется выражением
Рл= 2 С%/7“н(1—Рн)п~“,
а.=т
125
а вероятность «пропуска синхронизма» — выражением
т— 1
рп= 2 р)п~а>
С==0
где Сап — число сочетаний из п по а.
Б отсутствие сигнала вероятность рн одинакова для всех воз-
можных значений фазы и равна 1/L. При наличии сигнала веро-
ятность рк различна для разных значений фазы и зависит не
только от статистических характеристик помех и отношения сиг-
нал-шум, но и от разности между рассматриваемым и действи-
тельным значениями фазы. Учитывая, что «ложная синхрониза-
ция» по значению фазы, близкому к действительному, не вызыва-
ет практически никаких негативных явлений в работе системы
связи, в ряде случаев целесообразно считать, что синхронизм до-
стигается, когда разница между оценкой фазы и ее действитель-
ным значением не превышает некоторой допустимой величины.
5.4. АНАЛИЗ И МЕТОДЫ РЕАЛИЗАЦИИ ЦРСТС
Для ЦРСТС, реализующих алгоритм «т из п» при m^0,5n,
найдем числовые характеристики измеренных в числе шагов Тс
и Тп.с- Положим, что синхронизм наступает, как только число за-
писанных в ОЗУ значений фазы, совпадающих с действительным,
достигает т, а при перерывах связи он поддерживается до тех
пор, пока ни одно значение фазы, отличающееся от действитель-
ного более чем на ±0,25£, не будет записано в ОЗУ т раз в те-
чение цикла. Вероятность совпадения измеренного значения фазы
с действительным обозначим р, а значения Тс и Тпс— соответст-
венно tc и tn,c.
Анализ ЦРСТС с общим стиранием
Представим tc=kn+i, где k — число циклов, предшествующих
последнему, i — номер шага в последнем цикле, на котором до-
стигнут синхронизм. Тогда при совпадении начала цикла с момен-
том выхода на связь распределение Тс
P(tc)—p(kn-^i) = (l—pm)kp(i), (5.26)
где
__ 10 при
| C^-llpmqi~m при q=l—p, (5.27)
(5-28>
i=>m
Зная закон распределения Тс (5.26)—(5.28), найденный при
допущении о совпадении начала сеанса связи с началом цикла,
можно определить нижнюю границу математического ожидания
ЛТ[7С] и дисперсии Di [Тс] этой случайной величины. Здесь и в
126
дальнейшем одна звездочка означает нижнюю, а две — верхнюю
границы исследуемых числовых характеристик:
оо /1 сю
2 ^Р(М = 2 3 (kn+i)p(kn+i). (5.29)
/с=1 £=1 к=0
Подставив (5 26) — (5.28) в (5.29), после преобразований полу-
чим
п
ЛР1[7’с]=п(1/рц1-1)+ 2 Ф(0/Рць (5.30)
1=т
Из (5.30) следует, что представляет собой сумму произ-
ведения числа шагов в одном цикле на среднее число циклов,
предшествующих последнему, и условного математического ожи-
дания числа шагов в последнем цикле. Аналогично
P*i[7,c]=Af*i[7’2c]_{Af*1[7’c]}2= 2 2 (kn+i)2p(kn+i)-
1=1 /г~0
-{М*,^]}2. (5.31)
После преобразований, проведенных с учетом (5.26) — (5.28) и
(5.30), из (5.31) получим
В*,[7с]=п2 1-- Рц1
₽Ц1
2
I i=>m____
I Pm
П “12\
2 ‘ р (о |
i=m______ 1
Рц1 - J
(5.32)
В (5.32) первое слагаемое является произведением квадрата чис-
ла шагов в цикле на дисперсию числа циклов, а выражение в фи-
гурных скобках равно дисперсии числа шагов в последнем цикле.
Несовпадение начала цикла с началом сеанса связи приводит к
увеличению Тс на случайную величину &ТС, не превышающую
п—1. Полагая А7’с равномерно распределенной на интервале
[0, я], запишем:
М*! [Тс] [Тс] <М**( [Тс] =№4 [Тс] +п/2, (5.33)
Р*. [Тс] [Тс] <Р**г[Тс] =Р*! [Тс] +п2/12. (5.34)
Сопоставление выражений (5.30), (5.33) и (5.32), (5.34) по-
казывает, что в подавляющем большинстве случаев формулы
(5.30) и (5.32) дают хорошую оценку Mi [Тс] и Dt[Tc].
Как указывалось выше, при больших L целесообразно приме-
нить менее жесткую трактовку понятия «достижение синхрониз-
ма». Например, можно считать, что синхронизм достигнут тогда,
когда m записанных в ОЗУ значений фазы совпадут или с дей-
ствительным, или с соседними значениями, отличающимися от
Действительного на +1 или —1 (вероятности того, что измерен-
ное значение фазы отличается от действительного на +1 и —1,
обозначим соответственно р\ и pz). При ш>0,5п события, состо-
ящие в совпадении пг измеренных значений фазы с действитель-
127
Р(0 = {
ным или с одним из соседних, несовместны. Поэтому, если сеанс
связи и цикл начинаются одновременно, получим формулу обще-
го члена ряда, полностью идентичную (5.26), в которой
О при 0<i<m, .
i—i I Q Q + Pi Q\ + P2 Qi J при
где Qi = l—pi, </2=1—рг- Следовательно, границы AfifTc] и А [Те]
в данном случае также определяются выражениями (5.30),
(5.32) — (5.34) при подстановке в них p(i) из (5.35).
Как правило, математическое ожидание времени синхрониза-
ции является основной характеристикой скорости вхождения в
синхронизм. Однако в ряде случаев удобнее в качестве такой
характеристики использовать время гарантированного достиже-
ния синхронизма, т. е. измеренное в числе шагов время /С8 , по
истечении которого с заданной вероятностью е достигается син-
хронизм. Найдем аналитическое выражение /се Представим
tC8 =kati+ie . Тогда
P(Tc>kn+i) = (l— Рщ)41 — p(v) .
L v=m
Отсюда следует
Р(7'с^А:п-Н)=П — (1— рц1)41 — j^p(v) .
L v=m
Очевидно, kE должно удовлетворять неравенствам
/>(7’с^М)^е<Р[7’с<(А!Е + 1),г].
С учетом (5.36) перепишем (5.37) следующим образом:
1 —(1—Рш)1^е<1—(1—pm)fe£ +1.
Преобразуя (5.38), получаем формулу для определения
/ге=[1п (1—e)/ln (1— pm)],
(5.36)
(5 37)
(5.38)
(5.39)
где квадратные скобки означают взятые целой части числа. Из
(5.36) следует, что iE —это минимальное число, удовлетворяю-
щее неравенству
l-(l-Pm)*8
1-3 р(о)
v=tn
(5.40)
Неравенство (5.40) удобно переписать
3 р(ц)>1-(1-8)/(1-рц1)^.
v=m
(5.41)
Следовательно, iz можно найти последовательной подстановкой в
(5.41) значений v(m^.v^.n). При несовпадении начала цикла и
начала сеанса связи tce увеличивается на случайную величину
ДТс. Учитывая, что, как правило, е.^0,9 и по этой причине Б
128
большинстве случаев zCe 3>п, можно с достаточной для практики
точностью пользоваться формулой
/С8»п[1п (1—е)/1п (1—рЦ1) + 1]. (5.42)
При определении вероятностных характеристик Тп.с с пренеб-
режимо малой погрешностью можно считать, что сигнал прекра
дается в конце цикла, так как Л11 [7'п.с] Общий член ряда рас-
пределения случайной величины Тп.с
р (/п.с) =р (rn+j) = (1— рц2)гр (j), (5.43)
где г — число циклов, предшествующих последнему; / — номер
шага в последнем цикле, на котором потерян синхронизм:
... 10 при 0</<т,
Р 1 |0,5LCfZx Ро <Jo~m при Р°’
3 р0).
j=m
Здесь p0 = l/L— вероятность того, что фаза примет определенное
значение в отсутствие сигнала. Аналогично тому, как были выве-
дены выражения (5.30) и (5.32), находим
Л41[7’п.с] =«(1/рц2—1)+ 2 /Р(/)/Рц2«П/рЦ2,
/=т
(5.44)
(5.45)
(5.46)
О1[7’п.с]=П2
1 --РЦ2
О
Рц2
/=т
PlX2
2 iP O’)
Рц2
п
Рц2
Измеренное в числе шагов время £п.сб > в течение которого
данной вероятностью 6 будет поддерживаться синхронизм
исчезновения сигнала, найдем из тех же соображений, что
(5.36) — (5.42). В результате получим
^п.с б П
(5-47)
с за-
после
и tcs
——--------1-1 I.
In (1 — род); )
Анализ ЦРСТС с поочередным стиранием
Допустим, что к моменту выхода на связь в ОЗУ не было за-
писано значений фазы, совпадающих с действительным (такое
Допущение может лишь увеличить расчетное время синхрониза-
ции). Тогда распределение Тс на первых п шагах подчинено за-
кону Паскаля. Дальнейшая статистическая динамика набора tn
значений фазы, совпадающих с действительным, из п зафиксиро-
ванных в ОЗУ может быть описана простой однородной цепью
Маркова для /г-мерного вектора. Каждому состоянию цепи со-
ответствуют определенные число а и порядок расположения в
[ иЗУ значений фазы, совпадающих с действительным. Общее чис-
1
'° Различных состояний цепи 2V=1+ S СД. В это число вхо-
i=0
М07
(5.48)
129
2
дят все состояния, в которых 0<«<т, и поглощающее состоя,
ние «конец», объединяющее все векторы с а^т. Для такой цецц
Маркова численными методами можно найти вероятностные-ха-
рактеристики Тс- Однако это приводит к большому объему вы-
числений из-за высокого порядка матрицы переходных вероятно
стей. Поэтому ниже выводятся аналитические выражения границ
М2[ТС]. Верхнюю границу Л1**^[ТС] найдем из следующих со-
ображений. Наряду с описанной выше реальной цепью Маркова
введем гипотетическую для одномерного вектора, в которой со-
стояния отличаются друг от друга лишь значением а. В такой
цепи будет гп+1 состояние, включая состояния «начало» (а=0)
и «конец» (а^гп). Обозначим совпадение записанного в ОЗУ
значения фазы с действительным единицей, а несовпадение — ну-
лем. Тогда всей последовательности измеренных значений фазы
будет соответствовать последовательность А единиц и нулей. Од-
ному состоянию гипотетической цепи соответствует Сап различных
состояний реальной цепи с а единицами каждое. Полагаем вероят-
ности того, что стираемым на ближайшем шаге элементом в гипо-
тетической цепи окажется единица или нуль, соответственно рав-
ными рс(1)=а/и, Рс(0) = (и—а)/п. Следовательно, в ней вероятно-
сти перехода за один шаг из состояния а в состояния (а—1), а и
(а-Ы) равны:
Pa(a—l)=q — , pa(a)=p — + q—^~, Ра (а+1)=р—^~ .
(5.49)
В реально?! цепи вероятности переходов для группы состояний с
а единицами совпадают с (5.49) только при неограниченных блуж-
даниях, когда все состояния, входящие в группу, равновероятны. В
действительности, из-за поглощающего состояния «конец» в реаль-
ной цепи любому состоянию могут предшествовать лишь состояния
с а<т. Поэтому в ней для группы состояний с а единицами сред-
ние значения рс(1)^а/п, а рс(0) (n—а)/п. Значит, средняя ско-
рость возрастания а в реальной цепи несколько выше, чем в гипо-
тетической, и среднее время достижения состояния «конец» в
гипотетической цепи может служить верхней границей Л12>[ТС]>
Среднее время достижения состояния «конец» для гипотетичес-
кой цепи может быть найдено стандартным методом как решение
разностного уравнения. В результате получим
п . .
М**2[ТС] = 2 tC^pmq-m +
t=m
/ tn т I \ т— 1 .
\ 1 i=i ip1 / fe=0
S*Pkqn~k 3 • (5-50)
fe=>0 i=i ip1
Можно показать, что М**2[7’С]->Л?2[7С] при р->-1 и при р->0.
130
Определим нижнюю границу Л12[ТС]. При Tc=tc необходимо,
чтобы: а) на первых (tc—п—1) позициях для любых п смежных
позиций а<т; б) на позиции с номером (/с—п) был нуль; в) а=
= т—1 на позициях с номерами от (tc—п+1) до (tc—1); г) на
позиции с номером tc была единица. Эти условия в общем случае
недостаточны, поскольку они не исключают попадания Тс на инте-
рвал [7С—n+1, t—2]. Отсюда
Р (Tc=tc) <Р (Tc>tc~n-\) q(CHi‘ Pn~l qn~m) Р- (5.51)
Изменяя tc от п+1 до оо и суммируя обе части неравенства
(5.51), с учетом Л1[ТГ]= 2 Р(ТС>/С) получаем после преоб-
'с=°
разований
Л1*2[ТС] = Р (Tc>n)ICn^pmqn~m+\ (5.52)
где Р (Тс>п) — 1— СП’pmqi~m.
i—m
При m = n и гп=1, а также при pel, условия а)—г) не только
необходимы, но и достаточны. С учетом этого из (5.52) находим:
Af2[7’c] = (l—pn)lqpn при rn=n, (5.53)
M2[Tc] = Up при rn= I,
M2[Tc]^IICn~\Pm при pel. (5.54)
Кроме этого удается показать, что
М2[7’с] = [1+1/(1—qn~l)]tp при п?=2.
Для определения нижней границы £)2[ТС] умножим обе части
неравенства (5.51) на (2tc—2п—1) и просуммируем их по tc, из-
изменяя tc от п+1 до оо. Тогда, учитывая, что Л4[7’2С] =
= 2 (2tc~pl)P(Tc>tc), после преобразований получаем
*с=°
Д*2[Т’С] =М*2[Тс] [2(Л4*2[7У|— Мо)/Р(Гс>п) —
—Л1**2[7’с]—2n—1], (5.55)
где
П 1 4
Л1°= 2 tcCic-iP qc
tc=m
Аналогично можно показать, что верхняя граница £>2[7’с]
Равна:
Z)**2[7’c]=M*2[7’c][2(Af**2[7’c]-Afo)/P(7’c>n)r-n’-
—М**2 [Тс] — (4п—2m+1) lqn~™]. (5.56)
5* 131
В двух частных случаях нижняя (5.55) и верхняя (5.56) границ^
дисперсии сходятся, давая точное значение
D2[Tc] = [l—p2n+l—(2n-[-\)qpn]lq2p2n при т=п, (5.57)
£>2[Гс] « l/(Cn-ipm)2 при р<^1. (5.58)
Однако при т^=п и больших р выражения (5.55) и (5.56) дают
лишь приблизительное представление о £>2[Гс], в то время дак
оценка М^[ГС] по формулам (5.50) и (5.52) вполне удовлетвори,
тельна во всех практически интересных случаях.
Выражения (5.54) и (5.58) могут быть использованы при оц.
ределении Af2[7’n.c] и поскольку в отсутствие сигнала ве-
роятность совпадения измеренного значения фазы с любым из £
возможных дискретных значений равна (1/L)<;1. Видоизменив
(5.54) и (5.58) с учетом данного выше определения понятия «по-
теря синхронизма», находим
м2 [ Тп.с] « vD2 [ « 2L-'/C^ (L-1)
(5.59)
На рис. 5.22 приведены рассчитанные по формулам (5.30),
(5.46), (5.50), (5.52), (5.53), (5.59) зависимости от р и
ЛТ[7’Г1С] от L при различных пг и п. На рис. 5.22,6 заштрихована
зона между верхней и нижней границами ^[Тс]. Анализ кривых
показывает, что, хотя при фиксированных т и п >ЛТ2[Т’С],
одновременно и М1[Тп.с]>М2:[7’п.с]. Следовательно, уменьшив т
при заданном п, можно в ЦРСТС с общим стиранием достичь
примерно тех же характеристик, что и в устройствах с поочеред-
ным стиранием.
Перейти от рассмотренных выше характеристик времени син-
хронизации и времени поддержания синхронизма, измеренных в
числе шагов, к характеристикам, измеренным в реальном време-
ни, несложно. Если, например, фаза посылки определяется по
положению фронтов, то указанный переход требует лишь умно-
жения характеристик, полученных по приведенным выше форму-
лам, на длительность элементарной посылки при синхронизации
по точкам и на удвоенную длительность элементарной посылки
при синхронизации по принимаемому тексту.
Рис. 5.22
132
Из выражений (5.30), (5.32), (5.42), (5.46) —(5.48), (5.50),
(5.52), (5.55), (5.56), (5.59) видно, что Гс в ЦРСТС не зависит от
начальной расстройки синхроимпульсов и принимаемых посылок,
но в них, как и в ЦЗСТС, сокращение Тс путем снижения пг вы-
зывает уменьшение Гп.с. Преодолеть этот недостаток можно вве-
дением двух порогов: сравнительно низкого предварительного гп\
и достаточно высокого основного гп2. Порог гщ позволяет быстро
войти в синхронизм при хороших условиях связи, а порог пг2 ис-
ключает ложную синхронизацию в тяжелых условиях и обеспечи-
вает заданное Гп.с. Можно показать, что такая обработка с по-
зиций математической статистики представляет собой один из ва-
риантов реализации последовательной усеченной процедуры
Вальда.
Примеры реализации ЦРСТС с двумя порогами
На рис. 5.23 изображена функциональная схема одного из воз-
можных вариантов ЦРСТС с поочередным стиранием [49]. Ко-
роткие импульсы, соответствующие фронтам посылок, с СФ1 посту-
пают в распределитель импульсов, представляющий собой замк-
нутый в кольцо регистр сдвига, в котором записана единица. По-
ступление каждого импульса вызывает перемещение единицы на
один разряд. При записи единицы в очередной разряд распреде-
лителя импульсов происходит фазирование путем сброса подклю-
₽ис. 5.23
Рис. 5.24
133
ным или с одним из соседних, несовместны. Поэтому, если сеанс
связи и цикл начинаются одновременно, получим формулу обще-
го члена ряда, полностью идентичную (5.26), в которой
___ |0 при
Р10 | -от—1 Г т i—m . т i—m , т i—mi ' -35)
( Ci_i I q q + pi qi Т~Р2 q% J при
где <?i = l—pt, <?2=1—Pi- Следовательно, границы AbjTc] и ^[Л-]
в данном случае также определяются выражениями (5.30),
(5.32) — (5.34) при подстановке в них p(i) из (5.35).
Как правило, математическое ожидание времени синхрониза-
ции является основной характеристикой скорости вхождения в
синхронизм. Однако в ряде случаев удобнее в качестве такой
характеристики использовать время гарантированного достиже-
ния синхронизма, т. е. измеренное в числе шагов время tCe , по
истечении которого с заданной вероятностью е достигается син-
хронизм. Найдем аналитическое выражение tQB . Представим
tCB ==kBn+ia . Тогда
Р(Л>£п+0=(1-Рц.)4 1-S P(t')
l_ v=-m
Отсюда следует
P(Tc^kn+i) = 1— (1—рц1) *
v—m
(5.36)
Очевидно, kE должно удовлетворять неравенствам
Р(Т^ken) <е<Р[7’с=С (ke +1)и].
С учетом (5.36) перепишем (5.37) следующим образом:
1-(1~Рт) *^е<1-(1-рт)*в +1.
(5.37)
(5.38)
Преобразуя (5.38), получаем формулу для определения
kB= [In (1—в),/In (1—Pm)], (5.39)
где квадратные скобки означают взятые целой части числа. Из
(5.36) следует, что ie — это минимальное число, удовлетворяю-
щее неравенству
1-(1-РтЛ
•е
!—S P(v)
v=m
Неравенство (5.40) удобно переписать
ге ь
2 P(v)>l-(l-e)/(l-pm)fte.
v =т
(5.40)
(5.41)
Следовательно, tE можно найти последовательной подстановкой в
(5.41) значений v(m^.v^.n). При несовпадении начала цикла и
начала сеанса связи /С8 увеличивается на случайную величину
АТТ. Учитывая, что, как правило, е^0,9 и по этой причине в
128
большинстве случаев tce ~^>п, можно с достаточной для практики
точностью пользоваться формулой!
/С£«п[1п (1—e)/ln (1—рщ) + 1]. (5.42)
При определении вероятностных характеристик Тп.с с пренеб-
режимо малой погрешностью можно считать, что сигнал прекра-
щается в конце цикла, так как М1 [Т’п.с] ~Э>п. Общий член ряда рас-
пределения Случайной ВеЛИЧИНЫ Т’п.с
p(<n.c)=p(rn+/)= (1—рц2)гр(/), (5.43)
где г — число циклов, предшествующих последнему; / — номер
щага в последнем цикле, на котором потерян синхронизм;
Р(/) =
О при 0</<т,
0,5 р™ qiTm при
п
р^2= 2 р№-
j=m
qo=l—po, (5.44)
(5.45)
Здесь po=\IL — вероятность того, что фаза примет определенное
значение в отсутствие сигнала. Аналогично тому, как были выве-
дены выражения (5.30) и (5.32), находим
Мх [Т’п.с] =п(1/рЦ2—1)+ 2 /Р(/)/рц2»п/рц2,
j=*n
\ J] /2 Р (/) 3 !Р (/)
А [Т’п.с] =П2 ‘V1* + I —-----------------—----------
V ₽Ц2 L Рц2
(5.46)
(5-47)
Измеренное в числе шагов время tn.c6 , в течение которого с за-
данной вероятностью б будет поддерживаться синхронизм после
исчезновения сигнала, найдем из тех же соображений, что и /СЕ
(5.36) — (5.42). В результате получим
In 6
In (I—РЦ2)(
А.с в п
(5.48)
Анализ ЦРСТС с поочередным стиранием
Допустим, что к моменту выхода на связь в ОЗУ не было за-
писано значений фазы, совпадающих с действительным (такое
Допущение может лишь увеличить расчетное время синхрониза-
ции). Тогда распределение Тс на первых п шагах подчинено за-
кону Паскаля. Дальнейшая статистическая динамика набора m
значений фазы, совпадающих с действительным, из п зафиксиро-
ванных в ОЗУ может быть описана простой однородной цепью
Маркова для n-мерного вектора. Каждому состоянию цепи со-
। .тнетствуют определенные число а и порядок расположения в
ЗУ значений фазы, совпадающих с действительным. Общее чис-
I 1 m~~ 1
0 Различных состояний цепи Af=l + S С’п. В это число вхо-
/=о
I °"107
129
дят все состояния, в которых 0^а<тп, и поглощающее состоя,
ние «конец», объединяющее все векторы с а^т. Для такой цеП1|
Маркова численными методами можно найти вероятностные-Ха
рактеристики Гс. Однако это приводит к большому объему ВЬ1
числений из-за высокого порядка матрицы переходных вероятно
стен. Поэтому ниже выводятся аналитические выражения границ
М2[Д]. Верхнюю границу найдем из следующих Со.
ображений. Наряду с описанной выше реальной цепью Маркова
введем гипотетическую для одномерного вектора, в которой! со-
стояния отличаются друг от друга лишь значением а. В такой
цепи будет wi-j-l состояние, включая состояния «начало» (а=0)
и «конец» (а^т). Обозначим совпадение записанного в ОЗУ
значения фазы с 'действительным единицей, а несовпадение — ну-
лем. Тогда всей последовательности измеренных значений фазы
будет соответствовать последовательность А единиц и нулей. Од-
ному состоянию гипотетической цепи соответствует Сап различных
состояний реальной цепи с а единицами каждое. Полагаем вероят-
ности того, что стираемым на ближайшем шаге элементом в гипо-
тетической цепи окажется единица или нуль, соответственно рав
ными рс(1)=а/п, Рс(0) = («—а)/п. Следовательно, в ней вероятно-
сти перехода за один шаг из состояния а в состояния (а—1), а и
(а+1) равны:
Ра(а—1)=<7—> РМ=р--------------Yq——, ра (а+1) = р —- .
Z2 АХ rt А1
(5.49)
В реальной цепи вероятности переходов для группы состояний с
а единицами совпадают с (5.49) только при неограниченных блуж-
даниях, когда все состояния, входящие в группу, равновероятны. В
действительности, из-за поглощающего состояния «конец» в реаль-
ной цепи любому состоянию могут предшествовать лишь состояния
с а<ш. Поэтому в ней для группы состояний с а единицами сред-
ние значения pc(l)^a/n, а рс(0) > (п—a)In. Значит, средняя ско-
рость возрастания а в реальной цепи несколько выше, чем в гипо-
тетической, и среднее время достижения состояния «конец» в
гипотетической цепи может служить верхней границей А+Пс]
Среднее время достижения состояния «конец» для гипотетичес-
кой! цепи может быть найдено стандартным методом как решение
разностного уравнения. В результате получим
ЛР%[7С]= 2 tCl^pmq-m +
t=m
/ mm 1 \ m—1 .
\ I /=!- ip1 / k=0
A
-Л 2 Pk qn-k f C"-i — • (5‘501
fe=o i=i ip1
Можно показать, что M**2'[7’c]->Af2[7’c] при р->1 и при р-^^-
130
Определим нижнюю границу Л4г[Тс]. При Tc=tc необходимо,
ч1-обы: а) на первых (tc—п—I) позициях для любых п смежных
позиций <х<+п; б) на позиции с номером (1С—п) был нуль; в) <х=
—1 на позициях с номерами от (tc—п+1) до (tc—1); г) на
позиции с номером tc была единица. Эти условия в общем случае
недостаточны, поскольку они не исключают попадания Тс на инте-
рвал [/с—п+1, 1—2]. Отсюда
Р (Тс=tc) Р (Тс> tc-n-1) q(С^Г,1 рт~' qn~m) р. (5.51)
Изменяя tQ от п+1 до оо и суммируя
(5.51), с учетом Л1[ТС] = 2 P(Tc>tc)
разований
г М*2[ГС] =P(Tc>n)IC^pmqn-^+\
где Р(7’с>п) = 1—Рт^~т-
i=m
обе части неравенства
получаем после преоб-
(5.52)
При т—п и т=1, а также при pel, условия а)—г) не только
необходимы, но и достаточны. С учетом этого из (5.52) находим:
Л12[Т’с] = (1—pn)lqpn при т=п, (5.53)
Л42[7'с] = 1/р припг=1,
Af2[7'c]»l/C”+iIp« при pel. (5.54)
Кроме этого удается показать, что
А42 [7+] = [ 11/(1—</"—*) ]/р ПРИ «==2.
Для определения нижней границы £)2[ТС] умножим обе части
Неравенства (5.51) на (2(с—2п—1) и просуммируем их по tc, из-
изменяя tc от п+1 до оо. Тогда, учитывая, что Л1[Т2С] =
== 2 (2tc+l)P(Tc>tc), после преобразований получаем
D*2[Tc]=M\[Tc][2(M\[Tc]-M0)/P(Tc>n)-
~М**2[Тс]—2п—1],
где
(5.55)
До— 2 ^с^-\рт^~,п.
tc=m
Аналогично можно показать, что верхняя граница Z)2[TC]
Равна:
D**2[Tc]=M*2[7’c][2(A1**2[7’c]—Л1о)/Д(Д>п)^-т—
—Л1**2 [Тс] — (4n—2т+1) /qn~m].
(5.56)
131
В двух частных случаях нижняя (5.55) и верхняя (5.56) границь
дисперсии сходятся, давая точное значение j!
Z>2|/c] = [1— p2n+l— {2n-\-l)qpn]lq2p2n при т—п, (5.57)
D2[Tc]^i/(Cn-i рт)2 прир<1. (5.58)
Однако при ту=п и больших р выражения (5.55) и (5.56) даюг
лишь приблизительное представление о Z^fTc], в то время как
оценка МгфЕс] по формулам (5.50) и (5.52) вполне удовлетвори,
тельна во всех практически интересных случаях.
Выражения (5.54) и (5.58) могут быть использованы при оп-
ределении MzfT’n.c] и Д2'‘[7’п.с], поскольку в отсутствие сигнала ве-
роятность совпадения измеренного значения фазы с любым из £
возможных дискретных значений равна (1/L)C1. Видоизменив
(5.54) и (5.58) с учетом данного выше определения понятия «по-
теря синхронизма», находим
Л42[7’п.с] « VD2[Tn c] ^2L^/C^' (£-!)«-»». (5.59)
На рис. 5.22 приведены рассчитанные по формулам (5.30),
(5.46), (5.50), (5.52), (5.53), (5.59) зависимости Л4[7’с] от р и
AffTn.c] от L при различных т и п. На рис. 5.22,6 заштрихована
зона между верхней и нижней границами М2[ТС]. Анализ кривых
показывает, что, хотя при фиксированных т и п Mi [Ес] >Л12[ГС],
одновременно и Mi [7’п.с] >Л42|[7’п.с]. Следовательно, уменьшив т
при заданном п, можно в ЦРСТС с общим стиранием достичь
примерно тех же характеристик, что и в устройствах с поочеред-
ным стиранием.
Перейти от рассмотренных выше характеристик времени син-
хронизации и времени поддержания синхронизма, измеренных в
числе шагов, к характеристикам, измеренным в реальном време-
ни, несложно. Если, например, фаза посылки определяется по
положению фронтов, то указанный переход требует лишь умно-
жения характеристик, полученных по приведенным выше форму-
лам, на длительность элементарной посылки при синхронизации
по точкам и на удвоенную длительность элементарной посылки
при синхронизации по принимаемому тексту.
Рис. 5.22
132
Из выражений (5.30), (5.32), (5.42), (5.46)— (5.48), (5.50),
(5.52), (5.55), (5.56), (5.59) видно, что Тс в ЦРСТС не зависит от
начальной расстройки синхроимпульсов и принимаемых посылок,
но в них, как и в ЦЗСТС, сокращение Тс путем снижения m вы-
зывает уменьшение Тпс- Преодолеть этот недостаток можно вве-
дением двух порогов: сравнительно низкого предварительного mi
и достаточно высокого основного т2. Порог гпх позволяет быстро
войти в синхронизм при хороших условиях связи, а порог т2 ис-
ключает ложную синхронизацию в тяжелых условиях и обеспечи-
вает заданное Т„.с. Можно показать, что такая обработка с по-
зиций математической статистики представляет собой один из ва-
риантов реализации последовательной усеченной! процедуры
Вальда.
Примеры реализации ЦРСТС с двумя порогами
На рис. 5.23 изображена функциональная схема одного из воз-
можных вариантов ЦРСТС с поочередным стиранием [49]. Ко-
роткие импульсы, соответствующие фронтам посылок, с СФ1 посту-
пают в распределитель импульсов, представляющий собой замк-
нутый в кольцо регистр сдвига, в котором записана единица. По-
ступление каждого импульса вызывает перемещение единицы на
один разряд. При записи единицы в очередной разряд распреде-
лителя импульсов происходит фазирование путем сброса подклю-
Рис. 5.23
Рис. 5.24
133
ценного к этому разряду запоминающего делителя частоты ЗДЧ
с фронтом принятой посылки. Период выходного напряжения
ЗДЧ равен длительности элементарной посылки Т, коэффициент
деления — L, а число разрядов распределителя и количество
ЗДЧ — п. Синфазность значительного числа ЗДЧ свидетельству-
ет о наличии сигнала на выходе демодулятора. Анализатор чис-
ла а синфазных делителей АЧСД формирует импульс на выходе
ПП, как только а достигает и на выходе ОП при достижении
т2. Оба импульса фазируют основной делитель частоты ОДЧ
сбросом его в определенное состояние. Синхроимпульсы формиру-
ет СФ2 из выходного напряжения ОДЧ. Выход ОП соединен и
с шиной сброса счетчика числа посылок СЧП, управляющего ра-
ботой двух элементов И. В исходном состоянии элемент И, под-
ключенный непосредственно к выходу СЧП, открыт, а элемент И,
подключенный через инвертор, закрыт, и сигналы с выхода ПП
могут фазировать ОДЧ. Сигнал с ОП переводит СЧП в состоя-
ние, в котором первый элемент И запирается, а второй открывает-
ся и СЧП подсчитывает импульсы, следующие с выхода ОДЧ с
периодом Т. После подсчета w импульсов СЧП возвращается в
исходное состояние, открывая первый элемент И и запирая вто-
рой. Следовательно, синхронизация по порогу гп2 запрещает
синхронизацию по порогу пц на время wT. Величина w выбира-
ется в зависимости от ожидаемой длительности перерывов свя-
зи. При правильно подобранном значении wT порог mt использу-
ется только во время вхождения в синхронизм. Заметим, что вы-
бором состояния, в которое сбрасывается ОДЧ, можно обеспечить
не только синфазность оценки положения фронтов посылок и
синхроимпульсов, но и любой необходимый сдвиг фаз между
ними.
Функциональная схема одного из возможных вариантов
ЦРСТС с общим стиранием приведена на рис. 5.23 [52]. Здесь
импульсы с выхода СФ1 проходят на общий счетчик фронтов
ОСФ и через открытый в момент прихода фронта элемент И на
соединенный с ним один из L парциальных счетчиков фронтов
ПСФ. Каждый п-й фронт возвращает ОСФ в нулевое состояние.
При этом СФ2 формирует импульс сброса, возвращающий в ну-
левое состояние все ПСФ, после чего начинается новый цикл ра-
боты ЦРСТС. Стоящие на входах ПСФ элементы И с периодич-
ностью Т поочередно открываются сигналами распределителя им-
пульсов. Каждый элемент И открывается на время, равное T/L,
благодаря перемещению единицы по ячейкам распределителя им-
пульсов под действием поступающего с БОЧ импульсного напря-
жения частоты L/Т. Таким образом, посылка оказывается разде-
ленной на L одинаковых, вплотную примыкающих друг к другу
участков, каждому из которых соответствует свой ПСФ, подсчи-
тывающий а фронтов, попадающих на данный участок. В отсут-
ствие помех фронты посылок, следуя с интервалами, кратными Т,
попадают на одиндр тот же участок, т. е. в один и тот же ПСФ-
Помехи вызывают краевые искажения и дробление посылок. В
134
результате фронты попадают в разные ПСФ, рассеиваясь тем
больше, чем меньше отношение сигнал-шум. Однако и в этом
случае наиболее вероятно попадание фронтов на участок, в пре-
делах которого находятся действительные границы посылок. Рас-
сматриваемая ЦРСТС фазирует последовательность синхроим-
пульсов по тому участку посылки, на котором число фронтов
раньше, чем на других, достигнет порогового уровня. Как только
число фРонтов. подсчитанных в текущем цикле одним из ПСФ,
станет равным на первом выходе этого ПСФ появляется на-
пряжение, которое сохраняется до конца цикла независимо от ре-
зультатов дальнейшего подсчета. Указанное напряжение через
первый элемент ИЛИ поступает на СФ4, формирующий короткий
импульс из его фронта. При достижении порога т2 на втором вы-
ходе ПСФ также появляется напряжение, которое через второй
элемент ИЛИ проходит на СФЗ, вырабатывающий короткий им-
пульс из фронта выходного напряжения второго элемента ИЛИ.
В дальнейшем короткие импульсы, сформированные по порогам
rnt и т2, используются так же, как и в схеме, приведенной на
рис. 5.23.
Возможна как программная, так и аппаратная реализация
рассмотренных ЦРСТС. Кроме независимости Тс от начальной
расстройки принятых посылок и синхроимпульсов и возможности
обеспечения больших значений Т’п.с при малых значениях Тс, рас-
смотренные ЦРСТС обладают еще рядом достоинств. Среди них
следует отметить возможность оценки качества приема информа-
ции по числу совпадающих значений фазы, записанных в ОЗУ,
функции которого выполняет набор ЗДЧ в схеме по рис. 5.23 и
набор ПСФ в схеме по рис. 5.24. Кроме этого, наличие в ЦРСТС
сигнала окончания тактовой синхронизации позволяет без задер-
жки перейти к цикловой. При приеме сложных сигналов с по-
мощью согласованных фильтров ЦРСТС позволяет выполнить од-
новременную синхронизацию по нескольким лучам и сложить
энергию этих лучей. Если прием сложных сигналов производится
в присутствии сосредоточенных по спектру помех, которые подав-
ляются специальной аппаратурой защиты [100, 104, 106], то та-
кое применение ЦРСТС требует учета влияния подавления уча-
стков спектра сигнала на вид его корреляционной функции.
Результаты первого исследования этого вопроса приведены в
[И8].
Многие преимущества ЦРСТС связаны с тем, что в них про-
цесс подстройки фазы синхроимпульсов носит скачкообразный
характер. Однако в тех случаях, когда длительность принимаемых
посылок соизмерима с временем многолучевости или меньше его,
скачкообразный сдвиг фазы синхроимпульсов в ЦРСТС при из-
менении во время замирания энергетических соотношений между
лучами, отстоящими на интервал, превышающий половину дли-
тельности посылки, может привести к сбою цикловой синхрони-
зации. В этой ситуации наиболее эффективными оказываются
ЦГСТС, в которых сочетаются скачкообразная установка фазы
135
при вхождении в синхронизм с
плавной (пошаговой) автоподст-
ройкой в процессе поддержания
синхронизма. Функциональная
схема ЦГСТС, построенная на
базе ЦРСТС с общим стиранием,
изображена на рис. 5.25 [53].
Здесь в начале сеанса связи вспо-
могательной и основной делители
частоты ВДЧ и ОДЧ скачкооб-
разно фазируются по результа-
там оценки фазы посылок, но
после первого фазирования по
верхнему порогу сброс ОДЧ за-
прещается, и дальнейшие измене-
ния фазы синхроимпульсов про-
изводятся путем автоподстройки
ОДЧ под фазу ВДЧ, скачкообраз-
ное фазирование которого про-
должается в течение всего сеан-
са связи. Таким образом, в
ЦГСТС ценой некоторого услож-
нения аппаратуры удается соче-
тать достоинства ЦРСТС и
ЦЗСТС. Возможно создание
ЦГСТС и на несколько ином
принципе, когда разомкнутая си-
стема осуществляет грубую син-
хронизацию, а замкнутая уточня-
ет положение синхроимпульсов.
5.5. СИСТЕМА ПАССИВНОГО МНОГОУРОВНЕВОГО ЦИФРОВОГО
СИНТЕЗА СЕТКИ ЧАСТОТ
Современная приемно-передающая аппаратура в большинстве
своем немыслима без использования сетки стабильных частот,
формируемых методами пассивного или активного частотного син-
теза из напряжения одного высокостабильного, как правило, квар-
цевого генератора [54]. Создание ЦРПУ мало изменяет ситуа-
цию. Действительно, хотя при дискретизации и квантовании сиг-
налов на радиочастоте необходимость в сетке частот отпадает
(см. § 1.2 и 3.3), она сохраняется при выполнении этих процедур
на промежуточной частое. Учитывая, что в настоящее время (и
в ближайшем будущем) в большинстве случаев рациональнее
производить дискретизацию и квантование на промежуточной
частоте, рассмотрим системы пассивного многоуровневого циф-
рового синтеза сетки частот (СПМЦС) [14, 54—62], в которых
частотный синтез выполняется путем арифметических и логичес-
ких операций с цифровыми значениями отсчетов. Эти системы
136
можно использовать в ЦРПУ и в качестве источников образцо-
вых сигналов при взаимнокорреляционном приеме.
Формирование отсчетов синусоидальных колебаний требуемой
частоты в СПМЦС может базироваться на двух различных прин-
ципах: рекурсивном и нерекурсивном. Рекурсивный принцип пре-
дусматривает использование предшествующих отсчетов выходного
колебания в вычислениях текущего отсчета, нерекурсивный прин-
цип при формировании цифровых значений отсчетов не учитывает
предшествующие отсчеты. Рекурсивные СПМЦС по сравнению
с нерекурсивными имеют менее чистый! спектр выходного напря-
жения и более узкий диапазон синтезируемых частот. К числу их
недостатков относится и нелинейная зависимость между синтези-
руемой частотой и установочным коэффициентом. Поэтому не-
рекурсивные СПМЦС более перспективны.
Принято считать, что реализация нерекурсивных СПМЦС воз-
можна следующими методами: табличным, использующим запи-
санную в ПЗУ таблицу синусов; вычислительным, при котором
синус рассчитывается, благодаря представлению его рядом Тей-
лора, цепными дробями или каким-либо другим способом; гиб-
ридным, тем или иным образом сочетающим использование таб-
лицы синусов с вычислениями. Однако табличный метод целесо-
образно рассматривать лишь как разновидность более общего ло-
гического метода, поскольку соответствие между множествами
кодовых слов фазы и синуса может устанавливаться не только
ПЗУ, по и другими логическими структурами. Ниже будет показа-
Требуеная частота”к”
6—Ю7
137
но, что такое обобщение расширяет возможности оптимизации
СПМЦС и позволяет ослабить их недостатки [62].
Структурная схема и временные диаграммы цифровых значе-
ний на выходах основных узлов нерекурсивной СПМЦС приведе-
ны на рис. 5.26. СПМЦС (рис. 5.26,о) содержит опорный гене-
ратор ОГ; формирователь импульсов тактовой частоты ФТЧ; на-
копитель; преобразователь фаза — синус ПФС, состоящий из до-
полнителя кода фазы ДКФ, одноквадрантного преобразователя
ОКП и дополнителя знака синуса ДЗС; ЦАП; ФНЧ. Накопитель
представляет собой накапливающий сумматор, кодовые комбина-
ции на выходе которого являются цифровыми значениями фазы
от 0 до 360°. На каждом такте накопитель формирует очередное
значение фазы путем суммирования по модулю М предыдущего
значения с числом k, соответствующим требуемой частоте fc (М —
количество дискретных значений фазы на периоде низшей час-
тоты [н синтезатора). Суммирование выполняются по модулю
благодаря тому, что накапливающий сумматор переполняется,
когда цифровое значение фазы достигает М. Переполнение нако-
пителя происходит периодически с частотой fc. Очевидно, число
разрядов на выходе накопителя
0=k>g2Af," (5.60)
а частота синтезатора
fc=kfTJM=kfT/2V, (5.61)
причем нижняя частота диапазона синтезатора
fH=fT/M==fT/2₽, (5.62)
где fT — тактовая частота. Так как k может быть только целым
числом, то минимально возможный шаг перестройки частоты с
учетом (5.60) —(5.62).
Д[=[т/.М=/т/2₽. (5.63)
Верхнюю частоту fB диапазона синтезатора обычно выбирают не
выше fT/4, чтобы требования к коэффициенту прямоугольности
ФЬЧ не были чрезмерно жесткими.
Часто в формировании отсчетов синуса участвуют не все р, а
только v старших разрядов кода фазы. Исключение младших раз-
рядов позволяет без усложнения ПФС уменьшить Af и fH, полу-
чив, таким образом, более густую сетку и более широкий диапа-
зон частот. Однако пренебрежение младшими разрядами кода
фазы ухудшает чистоту спектра выходного напряжения синтеза-
тора за счет эффекта квантования фазы.
Самый старший из v разрядов называется знаковым, посколь-
ку он равен «0» при положительных и «1» при отрицательных
значениях синуса (рис. 5.26,61). Разряд, следующий за знаковым,
называют квадрантным, так как он принимает значения «0» в не-
четных и «1» в четных квадрантах (рис. 5.26,62). В остальных
V-—2 разрядах записаны двоичные числа, соответствующие значе-
ниям фазы по модулю л/2 (рис. 5.26,63).
138
Известно, что
sin (л/2+ct) = sin (л/2—a), sin (л+а) =—sin а,
sin (Зл/2+а) =—sin (л/2—а) при 0^а^л/2. (5.64}
Из (5.64) следует, что для получения требуемого абсолютного
значения синуса необходимо в нечетных квадрантах брать значе-
ние фазы по модулю л/2, а в четных — определять дополнение до
д/2. Это иллюстрируется табл. 5.1, где для M=16(p=v = 4) при-
ведены код фазы и значения синуса при всех 16-ти дискретных
значениях фазы. При двоичном кодировании дополнение находит-
ся путем поразрядной инверсии у—2 младших разрядов кода фа-
зы (см. табл. 5.1).
Двоичное кодирование фазы упрощает накопитель, но прш
этом для получения Af=l Гц необходимо, чтобы fT равнялась,
степени двух (5.63). Такая fT или исключает использование деся-
тичного ОГ, или усложняет ФТЧ. Если это неприемлемо, можно,
например, сохранив роль знакового и квадрантного разрядов, за-
писывать значения фазы по модулю л/2 двоично-блочнодесятич-
ным самодополняющимся кодом. Двоично-блочподесятичиым на-
зывается код, в котором двоичному кодированию подвергаются
блоки из у десятичных цифр (при у=1 получаем обычный двоич-
ной-десятичный код). Использование самодополняющихся кодов
позволяет и в этом случае сформировать дополнение до л/2 пу-
тем поразрядного инвертирования. В СПМЦС удобнее применять
самодополняющиеся коды с избытком 3 при у=1; 14 при у=2;
12 при у = 3. Поэтому ДКФ в зависимости от того, «О» или «1»
на выходе квадрантного разряда, пропускает в ОКП числа, запи
санные в у—2 разрядах, или без изменений, или после поразряд-
ной инверсии (рис. 5.26,в). В ОКП формируются абсолютные зна-
чения синуса для каждого значения фазы (рис. 5.26,г), а в ДЗС
с учетом знакового разряда выполняется запись цифровых зна-
чений синуса в коде, удобном для последующей обработки (рис.
5.26,д). В системе синтеза (рис. 5.26,а) дальнейшая обработка
сводится к цифро-аналоговому преобразованию и фильтрации
(5.26,е). Но при установке СПМЦС непосредственно в ЦЧПТ вы-
Таблица 5.1
КОД ФАЗЫ И ЗНАЧЕНИЯ СИНУСА
№ пп. Квад- рант Фаза (градусы) Код фазы Синус Ne пп. Квад- рант Фаза (градусы) Код фазы Синус
1 1 11,25 0000 0,195 9 3 180 (-11,25 1000 —0,195
2 1 33,75 0001 0,556 10 3 180 1-33,75 1001 —0,556
3 1 56,25 0010 0,832 11 3 180 1-56,25 1010 —0,832
4 1 78,75 ООП 0,981 12 3 180+78,75 1011 —0,981
5 2 90+11,25 0100 0,981 13 4 2701-11,25 1100 —0,981
6 2 90+33,75 0101 0,832 14 4 270 1-33,75 1101 —0,832
7 2 90+56,25 оно 0,556 15 4 270+56,25 1110 —0,556
8 2 90+78,75 0111 0,195 16 4 270 1-78,75 1111 —0,195
6*
13»
ходное колебание синтезатора должно представляться в цифро-
вой форме. В этих двух случаях могут оказаться целесообразны-
ми разные методы кодирования.
Нерекурсивные СПМЦС в зависимости от метода формирова-
ния цифровых значений отсчетов выходного напряжения синтеза-
тора различаются прежде всего внутренней структурой своего
наиболее сложного узла — ОКП. При логическом методе преоб-
разования фаза—синус ОКП представляет собой логическую струк-
туру и каждый разряд абсолютного значения синуса на выходе
ОКП связан формулами булевой алгебры с разрядами фазы на
его входе. Частным случаем логического метода является исполь-
зование стандартного ПЗУ, в котором записана таблица синусов
для значений фазы от 0 до 90°. При вычислительном методе ис-
пользуется разложение синуса и косинуса, например, в ряд Мак-
лорена:
.sin х=х-^- +4---------... + 4 sin -т- + tins W- (5.65)
у2 у4 к tj.
cos х= 1-4- + 4--------... + 4- cos -4 +/?nc (х), (5.66)
41 ILL 4
где Rns(x) и Rnc(x) —остаточные члены разложений соответствен-
но синуса (5.65) и косинуса (5.66) в ряд Маклорена. Очевидно,
абсолютное значение ошибки при представлении синуса и коси-
нуса усеченным рядом Маклорена не превышает первого из отбро-
шенных членов ряда. Кривые, приведенные на рис. 5.27, показы-
вают, что использование трех членов ряда Маклорена дает удо-
влетворительное приближение к синусу на интервале от 0 до л/2.
К сожалению, аппаратура, производящая вычисления по форму-
лам (5.65) и (5.66), даже при сравнительно небольшом числе
членов ряда и оптимальной организации вычислительной проце-
дуры оказывается сложной и недостаточно быстродействующей.
Поэтому в настоящее время вычислительный метод не способен
конкурировать с другими методами преобразования фаза — си-
нус. Как указывалось выше, гибридный метод сочетает логичес-
кие операции (в частном
случае обращение к запи-
санной в ПЗУ таблице си-
нусов) с вычислениями.
Благодаря возможности
организовать эту комби-
нированную процедуру
большим числом вариан-
тов, гибридный метод яв-
ляется самым гибким.
Остановимся' подроб-
нее на логическом методе
преобразования фаза —
синус. Как правило, при
1140
этом методе удается, пренебрегая одними параметрами в пользу
других, изменять структуру ОКП так, чтобы добиться необходимо-
го сочетания характеристик синтезатора. Если, например, требует-
ся максимум быстродействия, минимизируют глубину логической
структуры ОКП, выбирают логические элементы с минимальной
задержкой, проводят различные мероприятия конструкторско-тех-
нологического плана. При умеренных требованиях к чистоте спек-
тра выходного напряжения синтезатора удается упростить ОКП
преднамеренным введением небольшой дополнительной погрешно-
сти в отдельные значения синуса. Разумеется, не исключено, что
иногда оптимальным оказывается использование стандартных ПЗУ
или ППЗУ в качестве ОКП или его составной части.
В тех случаях, когда необходимо расширить диапазон синте-
зируемых частот и одновременно обеспечить высокую чистоту
спектра выходного напряжения СПМЦС, требуется максимальное-
быстродействие ОКП. Для его достижения целесообразно накопи-
тель и ПФС выполнять в виде одной специализированной БИС,,
что позволяет сократить длину соединений, избежать дублирова-
ния операций, улучшить совмещение полупроводниковых областей
различных элементов, выбрать схемные решения с учетом реаль-
ной нагрузки, исключив лишние развязывающие и усилительные;
каскады, выполнять только входные и выходные элементы БИС
с обычным запасом помехоустойчивости, снизив его для основной
массы логических элементов, защищенных корпусом от внешних
помех. Все это не только повышает быстродействие, но и умень-
шает рассеиваемую мощность. Однако жесткие ограничения нз
рассеиваемую мощность, возникающие в случае объединения на-
копителя и ПФС в одной БИС, требуют, кроме того, и минимиза-
ции логической структуры ОКП.
Связь между входом и выходом ОКП устанавливается форму-
лами булевой алгебры, в которых каждый из б разрядов qi, ..., q&
абсолютного значения синуса выражается как функция v—2 раз-
рядов di, ..., dv-2 записи фазы по модулю л/2 (нумерация разря*-
дов начинается со старшего). Равенство v—2=6 обеспечивает бли-
зость уровней шумов квантования синуса и фазы [54]. Минималь
ная глубина логической структуры (два каскада) достигается ис-
пользованием дизъюнктивной или конъюктивной нормальной
формы (ДНФ, КНФ). Но для того, чтобы одновременно с мини-
мальной глубиной добиться наименьшей рассеиваемой мощности,
необходимо минимизировать число элементов в структуре ОКП.
Минимуму числа элементов соответствует минимум суммарного
числа входов первого и второго каскадов ДНФ или КНФ. Мини-
мальное число входов первого каскада обеспечивается применени-
ем минимальных ДНФ или КНФ (МДНФ, МКНФ), а число вхо
дов второго каскада минимально при наиболее коротких ДНФ и
КНФ. В общем случае наиболее короткие ДНФ не являются ми-
нимальными и наоборот. Как правило, предпочтение следует от-
дать МДНФ или МКНФ, так как удельный вес элементов первого
каскада в ОКП больше, чем элементов второго.
Г4В
Минимальные нормальные формы для каждой из функций qt
можно получить или с помощью карт Карно (при v—2^6), или
методом Квайна-Мак-Класки с использованием ЭВМ (при
v—2>6). Например, МДНФ для qi при v—2=6=4 имеют вид
?1=:^1 V^2^3 V^2^4>
92=^1 V didsdi\J d2d3,
Q3=dld2\/did3d4\/ did3di\/ did2d3d4\/ d2d3di\/ d2d3d/i,
9 4—‘did2di\/ diiKcU V ФсКДзДХ/ДД94\/£72ДД4.
В (5.67) подчеркнуты одинаковые конъюнкции. Приведем пример
МКНФ для тех же значений v и 6:
(5.67)
91— (^iV^2) (di\/d-,i\/d/i),
9г = (d2\/ d3\J d4) (di\/d3\/d^ (dd\/d2\/d3),
9з= (di\/d2\/d4) (diV^V^O (di\Zd3\/
\Zdi) (JzV/sV^) (diV^V^V
\/dt) (йД/d2\/d3\Jd<i),
q4=,(d2yd3\/dt) (dl\Jd2\/di) (rfiV^sV
Ш) (rfiV^V^) (diWWV^).
(5.68)
Однако в СПМЦС важна минимизация не отдельных функций
Цй Как это имело место в (5.67) и (5.68), а получение совместно
минимальных ДНФ (СМДНФ) и КНФ (СМКНФ), когда мини-
мально суммарное число Q входов обоих каскадов логической
структуры ОКП. Ниже излагается эвристический метод такой ми-
нимизации, предложенный в [62]. Метод поясняется на примере
формирования системы СМДНФ или достаточно близкой к пей.
В качестве исходной берем систему МДНФ, например систему
(5.67), которую получаем традиционными методами. В п МДНФ
q.i, входящих в систему, выделяем по одной конъюнкции К; и за-
п
меняем каждую из них конъюнкцией К = Д Kj, если для всех
7=1
•Яз реализуемые ими функции не изменяются, a Q сократится, т. е.
п
2 Г;>г, где г, и г — число букв в записи Kj и К соответствен-
/=1
но. Данную операцию (назовем ее совмещением) производим до
тех пор, пока это возможно. Признаком для выбора Kj служит
относительно большое число одинаковых букв в них. Поскольку
окончательный вид системы в общем случае зависит от выбора
исходных МДНФ и очередности' совмещений, рекомендуется опи-
санную процедуру проделать несколькими способами, а затем вы-
брать вариант с минимальным Q. Аналогично можно получить
СМКНФ. Таким образом, рассмотренный метод минимизации поз-
воляет сократить число входов первого каскада без увеличения
числа входов второго.
Совместив в (5.67) d2d3 из qi и d2d3d4 из q4, did3 из q2 11
did3d4 из <?4, получим систему СМДНФ:
142
<7i = di\/ d2d3d/i\/ d2dii,
q2=didsd.4\/ did/i\/ d2d3di\y d2dst
q з = d\d2\y dtd3di\/ didsdtS/ did2d3di\/ d2d3d4\/ d2d3d4,
q did^diSJ d\d3di\/ did2d3d4\/ d2d3d4\/ d2dsd/i.
(5.69)
В данном случае совместная минимизация позволила уменьшить
Q на 10%. Логическая структура ОКП, соответствующая (5.69),
приведена на рис. 5.28,о. Переход от универсального ПЗУ или
ППЗУ к структуре рис. 5.28,а позволяет примерно в 3 раза со-
кратить число элементов ОКП.
Если в накопителе используется двоично-десятичный самодо-
полняющийся код с избытком 3 и v—2=6 = 4, то предложенным
выше методом получаем систему СМДНФ:
q\ = di\/d2d3, q2^d\d3\Jd\di\/d2d3,
q3=d\d3\/d\d3di\/d2dnt q4=did3d4\/d2d4-
(5.70)
Соответствующая (5.70) логическая структура (рис. 5.28,6,) со-
держит примерно в 5 раз меньше элементов, чем ППЗУ с тем же
числом входов и выходов.
При гибридном методе преобразования фаза — синус логичес-
кие операции сочетаются с вычислениями, например по формуле
sin (<р4-Д<р) =sin<pcos Дф+sin Д<р cos<p«
sin ф-|-Дф sin (л/2—ф).
(5.71)
143
где <p — изменяется с грубым шагом, а Дф— с мелким. С помо-
щью логических операций определяются 5Шф и sin (л/2—ф), а ин-
терполяция значений синуса внутри грубого шага выполняется по
формуле (5.71). Очевидно, в этом случае разрядность синуса на
выходе логической структуры должна превосходить разрядность
фазы на ее входе. В качестве примера приведем СМДНФ для
v—2=4 и 6 = 6:
qi = d\\/d2didid^,
qz=d]d3\Jd\di\/ djdid^di\/ dzd3di,
qsz=didz\/ did3di\/ d\did3dii\/ d\d2d3di\/ dzd3di\/
\/dzd3di\/ d\dzd3di,
qi^=d\didi\/d\dzd3di\/ didzd3di\/ d3dn,
qi—dididzX/dzdidi^/ di,
q^—d\di\/didi\Jd3di.
(5.72 Ji
Соответствующая (5.72) логическая структура содержит пример-
но в 3 раза меньше элементов, чем универсальное ППЗУ.
Рассмотрим некоторые свойства СПМЦС и возможности, от-
крываемые их применением.
Фаза выходного сигнала СПМЦС в любой момент времени оп-
ределяется значением, записанным в этот момент в выходном ре
гистре накопителя (влиянием ФНЧ в первом приближении мож-
но пренебречь). Следовательно, если при перестройке частоты син-
тезатора меняется только код частоты «k», а накопленное значе-
ние фазы остается без изменения, смена частот происходит без
разрыва фазы. На практике во многих случаях желателен именно
такой характер перестройки частоты.
В режиме изменения частоты без разрыва фазы СПМЦС мо-
жет быть использован как частотный модулятор или манипулятор.
Например, для формирования сигналов с линейной частотной мо-
дуляцией можно в качестве источника кода частоты использо-
вать двоичный счетчик, синхронизируемый частотой ОГ. При
этом изменение тактовой частоты счетчика, а также начала и
конца счета позволяет изменять характеристики сигнала. Столы
же просто реализуется формирование сигналов прыгающей час-
тотной телеграфии при любой частотно-временной матрице. Для
организации перестройки частоты по псевдослучайному закону
можно в качестве источников кода частоты использовать генера-
торы псевдослучайных последовательностей, построенные на реги-
страх сдвига, или соответствующим образом запрограммирован-
ные ППЗУ, адресные комбинации которых формируются двоич-
ным счетчиком. Высокая линейность модуляционной характерис-
тики при частотной модуляции по любому закону в СПМЦС до-
стигается применением в качестве кода частоты кодовых комби-
144
наций с выхода АЦП. В этом случае ЛЦП должен работать син-
хронно с ОГ.
В СПМЦС легко осуществить и очень точную фазовую моду-
ляцию. Фазовый сдвиг в выходном напряжении синтезатора мож-
но получить, или стерев в накопителе прежнее значение фазы и
записав туда новое, или суммируя код фазы на выходе накопи-
теля с двоичными комбинациями, определяющими характер фа-
зовой модуляции. В последнем случае между выходом накопите-
ля и входом ПФС включается сумматор.
Амплитуда выходного сигнала СПМЦС может регулироваться
по практически любому необходимому закону с помощью умно-
жающего ЦАП или аттенюатора. При дополнении простыми логи-
ческими цепями установки начального состояния выходного реги-
стра накопителя в СПМЦС легко реализуются всевозможные виды;
импульсной модуляции.
В СПМЦС возможно формирование сигналов не только сину-
соидальной, но и любой другой формы. При этом структура син-
тезатора в ряде случаев даже упрощается. Так, если исключить
ПФС и выходной сигнал накопителя непосредственно подать на-
вход ЦАП, на выходе синтезатора формируется пилообразное на-
пряжение. Такой же результат получается, когда на вход ЦАГТ
подается сигнал не со всех, а с части следующих подряд разря-
дов накопителя (см. рис. 5.26,63). При подаче на вход ЦАП сиг-
нала с выхода Д1\Ф синтезатор формирует треугольное напряже-
ние (см. рис. 5.26,в). Сигнал прямоугольной формы получается,
если к входу ЦАП подключить только старший разряд накопите-
ля (см. рис. 5.26,61). Наконец, для получения на выходе синте-
затора сигнала произвольной формы достаточно между выходом
накопителя и входом ЦАП вместо ПФС установить ПЗУ, в кото-
ром записаны отсчеты мгновенных значений требуемого сигнала,
соответствующим всем возможным дискретным значениям фазы.
Интересно заметить, что алгоритмы преобразования фаза —
синус, используемые в СПМЦС, могут найти применение не толь-
ко при синтезе сетки частот, но и во многих других случаях. Так,
например, если после дискретизации сигнал представлен парами
отсчетов огибающей и фазы (см. § 3.5), а последующая цифровая
обработка требует представления его парами отсчетов квадратур-
ных составляющих, то в устройстве перехода от одной системы
координат к другой оказывается целесообразным использование
узлов, аналогичных ПФС.
В ЦРПУ с дискретизацией и квантованием на промежуточной
частоте СПМЦС могут найти применение в качестве датчика мел-
кой сетки частот в БОЧ. Этому способствуют следующие досто
инства СПМЦС: высокая стабильность синтезируемой частоты
полностью определяемая стабильностью ОГ; малое время пере-
стройки, составляющее несколько периодов тактовой частоты; не-
прерывность фазы выходного колебания синтезатора при пере-
ключении частоты; простота получения сколь угодно малого шага
сетки частот; высокая технологичность производства благодаря..
117.
отсутствию операции настройки и большой степени интеграции в
цифровой части синтезатора. Недостаточная чистота спектра вы-
ходного напряжения и ограниченный диапазон синтезируемых ча-
стот СПМЦС в конечном счете связаны с относительно малым
быстродействием узлов синтезатора [54—57]. Это позволяет на-
деяться, что развитие элементной базы, совершенствование схем-
ных, конструкторских и технологических решений (и, в частности,
описанная выше процедура оптимизации логической структуры
ОКП) устранят или существенно ослабят указаные недостатки.
Возможность плавного и скачкообразного изменения частоты,
фазы и амплитуды сигнала практически по любому заданному за-
кону и простота формирования сигналов самой различной формы
делают целесообразным использование СПМЦС непосредственно
в ЦЧПТ для формирования образцовых сигналов при взаимно
корреляционном приеме. Кроме того, как уже указывалось, от-
дельные узлы СПМЦС, например ПФС, могут найти самостоя-
тельное применение в ЦЧПТ.
Глава 6
МАГИСТРАЛЬНЫЕ ЦРПУ
6.1. ПРИМЕРЫ РЕАЛИЗАЦИИ МАГИСТРАЛЬНЫХ ЦРПУ
С ДИСКРЕТИЗАЦИЕЙ И КВАНТОВАНИЕМ НА
ПРОМЕЖУТОЧНОЙ ЧАСТОТЕ
Важность информации, передаваемой по магистральным лини-
ям связи, многообразие используемых в них сигналов и высокие
требования к качеству приема делают целесообразным первооче-
редной переход к ЦОС в магистральных РПУ. При современном
состоянии элементной базы наиболее реалистично создание ЦРПУ
декаметрового и более высокочастотных диапазонов с дискретиза-
цией и квантованием на промежуточной частоте. По-видимому,
такое положение сохранится и в ближайшем будущем.
Проанализируем кратко предложенные в |[2] варианты реа-
лизации ЦРПУ. Функциональная схема одноканального ЦРПУ
для диапазона частот 2... 30 МГц приведена на рис. 6.1. Прини-
маемый сигнал с антенны поступает в усилитель радиочастоты
(УРЧ), на входе которого установлен неперестраиваемый полосо-
вой фильтр, пропускающий весь диапазон частот 2 ... 30 МГц. Да-
лее с помощью смесителя сигнал переносится на первую промежу-
точную частоту 7-1*5 МГц. Первый усилитель промежуточной час-
тоты (УПЧ) содержит высокоизбирательный полосовой фильтр с
шириной полосы пропускания 16 кГц по уровню 3 дБ. Выходное
колебание первого УПЧ вторым смесителем переносится на вто-
рую промежуточную частоту 528 кГц. Здесь колебание дополни-
146
тельно усиливается и поступает на БДК. Результирующий коэф-
фициент усиления обоих УПЧ равен 125 дБ, придем усиление рав-
номерно распределено между ними. Автоматическая регулировка
усиления производится подачей регулирующего воздействия на
оба УПЧ с блока регулировки усиления БРУ. При приеме сигна-
лов с частотной модуляцией регулирующее воздействие с БРУ не
поступает, и УПЧ работают как усилители-ограничители.
Выходное колебание АЧПТ представляется в БДК отсчетами
мгновенных значений. Частота дискретизации Ц=64 кГц. Такой
выбор fa при центральной частоте колебания /о = 528 кГц соответ-
ствует (3.49) и, следовательно, обеспечивает минимум помех на-
ложения (перекрытия). Кроме того, в данном случае из каждых
двух следующих подряд отсчетов один определяется синфазной,
а другой — квадратурной составляющими колебания (см. § 3.3).
Эта особенность используется в алгоритмах цифровой демодуля-
ции (см. § 5.2). Квантование производится 12-разрядным АЦП.
В качестве ЦЧПТ в рассматриваемом ЦРПУ применен специа-
лизированный быстродействующий цифровой процессор с микро-
программным управлением, выполненный на элементах эмиттер-
но-связанной логики (ЭСЛ). В этом процессоре программно реа-
лизуются функции ЦФОС, ЦД и цифрового ФНЧ. Программы об-
работки принимаемых сигналов в ЦД и коэффициенты фильт-
ров фиксируются в ПЗУ. Полоса пропускания ЦФОС может при-
нимать значения 0,1; 1; 4; 8 и 16 кГц. В нем используется каскад-
ное включение рекурсивных звеньев второго порядка, составляю-
щих шестизвенный эллиптический полосовой фильтр и трехзвен-
ный корректор групповой задержки. В данном приемнике ЦД
рассчитан на обработку телефонных AM, ЧМ и ОМ сигналов и
также телеграфных АТ и ЧТ сигналов.
Вспомогательные операции, не требующие большого быстро-
действия, например регулировка усиления и полосы пропускания,
управление видами работы и частотой настройки, контроль ра-
ботоспособности и другие, возлагаются на отдельный микропро-
цессор.
Характеристики БДК, ЦЧПТ и ЦАП данного ЦРПУ проверя-
лись моделированием на ЭВМ. Поскольку такое моделирование
Рис. 6.1
147
точно воспроизводит процедуры цифровой обработки, включая эф-
фекты квантования и округления, результаты его оказываются аб-
солютно точными. В процессе моделирования определялись уро-
вень искажений демодулированного сигнала, чувствительность и
подавление сосредоточенных по спектру помех. При оценке чув-
ствительности к отсчетам входного сигнала добавлялись отсчеты
гауссовского шума. В качестве сосредоточенной по спектру поме
хи использовалось синусоидальное колебание с большой ампли-
тудой и частотой, лежащей в полосе пропускания 16-килогерцо-
вого аналогового фильтра, но за пределами полосы пропускания
ЦФОС. В [2] приведены характеристики ЦРПУ, полученные мо-
делированием на ЭВМ.
Анализ рассмотренного ЦРПУ показал следующее. С учетом
большой загрузки диапазона декаметровых волн неоправданы от-
каз от установки аттенюатора ла входе ЦРПУ и выбор столь ши-
рокой полосы пропускания фильтра радиочастоты (2... 30 МГц).
Действительно (см. § 2.2), при такой полосе пропускания динами-
ческий диапазон широкополосной части тракта РПУ, измеренный
двухсигнальным методом относительно 1 мкВ, должен составлять
130... 140 дБ. В современных магистральных РПУ он ниже. По-
этому на входе магистрального ЦРПУ целесообразно устанавли
вать или быстро перестраиваемый относительно узкополосный пре
селектор, или субоктавные фильтры. Коэффициент усиления
АЧПТ в данном ЦРПУ выбран с большим запасом (см. § 4.2), но
этот запас может оказаться полезным, поскольку он позволяет пе-
рекрыть температурные и временные отклонения. Работа УПЧ в.
режиме ограничения при приеме сигналов с частотной модуляци-
ей целесообразна только в случае, когда полоса пропускания пред-
шествующей части тракта равна или незначительно превосходит
ширину спектра сигнала, так как в декаметровом диапазоне поме-
хи приему на вынесенных радиоприемных центрах создаются,
прежде всего, сравнительно узкополосными сигналами посторон-
них радиостанций. Если же аддитивные помехи имеют в основном
импульсный характер, работа УПЧ в режиме усилителя-ограни-
чителя желательна и при широкой полосе пропускания предше-
ствующей части тракта. Представление колебаний не отсчетами
мгновенных значений, а парами отсчетов квадратурных составля-
ющих позволило бы повысить универсальность ЦРПУ. В рассмо-
тренном ЦРПУ возможно усовершенствование и некоторых алго-
ритмов цифровой демодуляции (см. § 5.2).
Функциональная схема 12-канального ЦРПУ декаметрового
диапазона изображена ра рис. 6.2. Здесь напряжение с УРЧ по-
ступает на 12-канальиый разветвитель, который пропускает на
свои выходы сигналы во всем диапазоне 2... 30 МГц. Каждый из
выходов разветвителя соединен с отдельными смесителем и пер-
вым УПЧ. Высокоизбирательный фильтр с центральной частотой
74,5 МГц и полосой пропускания 16 кГц по уровню 3 дЕ включен
в тракте первого УПЧ. Независимость настройки каналов приема
обеспечивается использованием индивидуальной частоты гетеро-
148
дивного напряжения в каждом канале. Выходы первых УПЧ всех
12-ти каналов с помощью КК поочередно со скоростью, в 12 раз
превышающей значение fn в каждом канале, подключаются к вхо-
ду второго смесителя. Фильтр, установленный в тракте второго
УПЧ, имеет центральную частоту 10 МГц и полосу пропускания
достаточно широкую, чтобы сделать возможной работу тракта в
режиме разделения времени. В этом же режиме работают БДК
и ЦЧПТ.
В 12-канальном ЦРПУ, так же как и в одноканальном, в
ЦФОС используется каскадное включение рекурсивных звеньев
второго порядка. Технически ЦФОС реализуется как последова-
тельность умножений и сложений с запоминанием промежуточных
результатов в ОЗУ. Аналогичным образом реализуется и ЦД. Бы-
ло подсчитано, что для выполнения цифровых фильтрации и де-
модуляции в одном канале приема необходимо произвести 44 пе-
ремножения. Отсюда следует, что для обеспечения работы ЦЧПТ
в режиме разделения времени при 12-ти каналах приема и частоте
дискретизации 64 кГц необходима скорость умножения, равная
33,8 МГц. Предполагается достичь такой скорости перемножения
с помощью коаксиального умножителя, выполненного на элемен-
тах ЭСЛ.
В режиме разделения времени работает и ряд вспомогательных
блоков, в частности БРУ. На первые УПЧ с выходов БРУ посту-
пает регулирующее воздействие, индивидуальное для каждого ка-
нала. В тракт второго УПЧ с БРУ подается уплотненное во вре-
мени регулирующее воздействие, обеспечивающее с помощью
быстродействующего аттенюатора изменение коэффициента усиле-
ния, синхронное с переключением каналов приема. В 12-каналь-
ном ЦРПУ достигается двукратное снижение стоимости оборудо-
вания на один канал приема по сравнению с одноканальным при-
емником.
Рис. 6.2
149
Возможность расширения частотного диапазона ЦРПУ до
500 МГц иллюстрируется приведенной на рис. 6.3 функциональной
схемой входной части приемного тракта 12-канального ЦРПУ. Вы-
ходное напряжение УРЧ, полоса пропускания которого 2...
... 500 МГц, поступает на разветвитель. На выходе разветвителя с
помощью полосовых фильтров производится разбивка частотного
диапазона ЦРПУ на шесть поддиапазонов, МГц: 2 ... 30, 30 ... 105,
105 ... 205, 205 ... 305, 305 ... 405, 405 ... 500.
Рис. 6.3
150
Сигналы во всех поддиапазонах кроме нижнего усиливаются,
преобразуются на более высокую частоту и разделяются на 12 ка-
налов с помощью разветвителя, установленного на выходе УПЧ
каждого из этих поддиапазонов. Перенос спектра в верхних четы-
рех поддиапазонах производится на интервал частот от 2,005 до
2,105 ГГц в соответствии с выбранными значениями частоты ге-
теродинных напряжений и границ полосы пропускания фильтров,
установленных на выходах преобразователей. Сигналы в поддиа-
пазоне 405 ... 500 МГц переносятся на интервал 2,005... 2,1 ГГц, ио
полосовой фильтр, стоящий на выходе преобразователя, с целью
унификации выбирается таким же, как и фильтры в трех других
верхних поддиапазонах. Поддиапазон 30... 105 МГц разделяется
на три парциальных полосы частот, МГц: 30... 55, 55... 80, 80...
. . 105. Сигналы в этих полосах переносятся на промежуточную
частоту 207,5 МГц, занимая интервал частот 195 ... 220 МГц. В
поддиапазоне 2 ... 30 МГц сигналы усиливаются, но преобразова-
нию частоты не подвергаются. Два нижних поддиапазона уплотня-
ются и поэтому используют общий выходной разветвитель.
Сигналы с выходных разветвителей всех поддиапазонов по-
ступают в 12 каналов коммутации, на входе каждого из которых
установлен переключатель, позволяющий подсоединить капал к
любому поддиапазону. При подключении капала к одному из верх-
них четырех поддиапазонов (для первого канала входы Дь Bt, Сь
Di) ключи Si, S2 и S3 находятся в верхнем положении, и сигнал с
входного переключателя поступает на второй смеситель, где пере-
носится на вторую промежуточную частоту 207,5 МГц. Так как
полоса пропускания фильтра второго УПЧ равна 25 МГц и, сле-
довательно, в четыре раза уже полосы пропускания фильтра пер-
вого УПЧ, то в зависимости от частоты настройки канала выбира-
ется одна из четырех частот гетеродинного напряжения второго
смесителя: 1,81; 1,835; 1,860; 1,885 ГГц. С выхода второго УПЧ
сигнал поступает на третий смеситель, который производит пере-
нос его спектра на третью промежуточную частоту, равную 74,5
МГц. Дальнейшая обработка сигнала выполняется в соответствии
с функциональной схемой, изображенной на рис. 6.2.
Если частота настройки канала лежит в пределах поддиапазо-
на 30... 105 МГц, то ключи Si и S2 переводятся в нижнее положение,
а ключ S3 остается в верхнем. При частоте настройки канала,
лежащей в пределах поддиапазона 2 ... 30 МГц, все ключи Sj, S2,
$з должны находиться в нижнем положении.
Могут быть предложены и многие другие варианты расшире-
ния диапазона частот ЦРПУ. Выбор того или иного варианта оп-
ределяется конкретными требованиями к частотному диапазону
ЦРПУ, назначением и условиями эксплуатации приемника, видом
Используемых сигналов и технологической базой, на которой про-
изводится приемная аппаратура.
Декаметровые ЦРПУ с дискретизацией и квантованием на про-
межуточной частоте могут быть построены на базе отечественных
Магистральных РПУ «Призма» и «Сибирь» [17, 94]. В реальных
151
-условиях связи эти РПУ, благодаря наличию сравнительно узко-
полосного преселектора и входного аттенюатора, а также возмож-
ности смены первой промежуточной частоты, обеспечивают более
высокую помехоустойчивость приема, чем ЦРПУ, функциональная
схема которого приведена на рис. 6.1. Однако в указанном ЦРПУ
значение последней промежуточной частоты выбрано более удач-
До с точки зрения удобства дискретизации.
6.2. ПРОЕКТИРОВАНИЕ МАГИСТРАЛЬНЫХ ЦРПУ
Общие принципы
Последовательность и сроки проектирования ЦРПУ (так же
как и другой аппаратуры) существенно зависят от новизны и
сложности решаемой задачи, характера и объема предшествую-
ацей научно-технической проработки .вопросов, уровня развития
технологической базы, квалификации разработчиков, организации
.и степени автоматизации их труда. Поэтому в общем случае мож-
но наметить лишь ориентировочный порядок проектирования
ЦРПУ, который имеет следующий вид.
1. Составление технического задания на разработку.
2. Синтез структурной схемы ЦРПУ. Выбор принципа реализа-
ции ЦЧПТ и способа цифрового представления колебаний.
3. Определение требований к основным блокам ЦРПУ. Выяс-
нение возможности использования аппаратуры, серийно выпускае-
мой промышленностью, в качестве составных частей, блоков или
«функциональных узлов ЦРПУ.
4. Предварительная проработка конструкции и технологии из-
готовления ЦРПУ.
5. Ориентировочная оценка ожидаемых показателей качества
•приема, надежности, массы, объема, потребляемой мощности и
.стоимости.
6. Корректировка структурной схемы ЦРПУ. Уточнение требо-
ваний к основным блокам приемника и определение требований
.к (вспомогательным.
7. Синтез структурных схем вновь разрабатываемых блоков и
граф-схем программно реализуемых алгоритмов обработки сиг-
налов.
8. Выбор элементной базы и разработка принципиальной схе-
мы. Составление программ обработки сигналов в машинных
командах.
9. Разработка методики проверки и регулировки блоков и
(функциональных узлов ЦРПУ. Создание или подготовка системы
отладки программ. Составление программ диагностики.
10. Макетирование и отработка принципиально новых блоков и
функциональных узлов приемника. Отладка программ.
11. Корректировка принципиальных схем. Уточненный расчет
потребляемой мощности. Комплектование программ.
!152
12. Конструкторская и технологическая проработка функцио-
нальных узлов и блоков приемника. Доработка конструкции в
целом.
13. Уточнение объема, массы, надежности и стоимости прием-
ника.
14. Выпуск технической документации на ЦРПУ, включая биб-
лиотеку программ обработки сигналов и инструкцию по эксплуа-
тации. Изготовление опытного образца.
15. Комплексные испытания опытного образца.
16. Уточнение показателей 'качества приема и корректировка
технической документации по результатам испытаний опытного
образца.
В зависимости от конкретных условий разработки возможны
отклонения от указанного порядка проектирования за счет исклю-
чения, в.ведения новых или совмещения части этапов, а также
изменения последовательности их выполнения. Особенно широко
варьируется число корректировок, требующих возврата к преды-
дущим этапам проектирования. Такой возврат может быть вызван:
невозможностью достижения требуемых параметров на основе при-
нятых технических решений или, наоборот, выявлением неисполь-
зованных резервов улучшения характеристик аппаратуры; совер-
шенствованием элементной базы или технологии производства,
происшедшим в период проектирования, и внесением изменений
в техническое задание.
Для магистральных ЦРПУ характерны высокий технический
уровень, обеспечивающий необходимое качество приема, и универ-
сальность, позволяющая использовать их в большом числе различ-
ных систем связи. Эти особенности делают проектирование маги-
стральных ЦРПУ сложной и дорогостоящей научно-технической
задачей, требующей тщательной проработки вопросов на всех эта-
пах. При составлении технического задания требования к пара-
метрам приемника необходимо определять, исходя из анализа
предполагаемых условий его работы, а не путем экстраполяции
тенденций изменения этих параметров за годы, предшествующие
разработке.
Разработка структурной схемы ЦРПУ сочетает в себе элемен-
ты эвристического и математического синтеза. Как правило, вна-
чале на основании опыта и интуитивных соображений разработ-
чиков предлагается несколько наиболее перспективных вариантов
структуры приемника. Затем каждый вариант оптимизируется ме-
тодами математического синтеза в соответствии с определенным
критерием. Вообще показатели качества приемника представляют
собой многомерный вектор. Для облегчения задачи векторный
синтез сводят к скалярному одним из двух сформулированных
Л. С. Гуткиным методов: либо проводят оптимизацию только по
одному наиболее важному показателю при наложении ограниче-
ний на остальные, либо формируют результирующий скалярный
показатель качества как некоторую функцию частных показате-
лей. После оптимизации вариантов структурной схемы произво-
7—107 153
дится их сравнительный анализ и выбор наилучшего из них. Дан-
ная процедура не может гарантировать наличие среди рассмот-
ренных вариантов оптимального в смысле сформулированного
критерия. Однако при достаточной квалификации разработчиков
и большом числе рассмотренных вариантов риск пропуска опти-
мальной структуры невелик. Применение моделирования на ЭВМ
сокращает время и повышает качество синтеза структурной схемы
ЦРПУ.
Структуры ЦРПУ и ЦРПК, приведенные в § 1.2, 1.3 и 6.1, не
исчерпывают все возможные варианты построения цифровых при-
емников, но дают представление об их многообразии и могут
служить исходным материалом для разработчиков ЦРПУ. Методы
оптимизации АЧПТ по заданному критерию мало отличаются от
рассмотренных в [96, 109—111] методов оптимизации главных
трактов приема аналоговых РПУ. Вывод аналитических соотно-
шений, позволяющих определить зависимость требований к дина-
мическому диапазону по соседнему каналу от полосы пропускания
тракта и статистических характеристик помех, а также оценить
влияние интермодуляционных помех на вероятность срыва связи,
дан в § 2.2 и 2.3. Основные принципы построения ЦЧПТ и методы
кодирования в ЦРПУ излагаются в § 6.3 и 6.4. Поэтому в данном
параграфе целесообразно подробнее остановиться на вопросах
проектирования, связанных с дискретизацией и квантованием ко-
лебаний в ЦРПУ.
Выбор метода дискретизации
В каждом конкретном случае выбор -способа дискретного пред-
ставления колебаний в ЦРПУ производится разработчиками аппа-
ратуры с учетом всей совокупности факторов, определяющих при-
нимаемые технические решения. Тем не менее по данному вопросу
можно привести некоторые рекомендации, имеющие достаточно
общий характер.
Основное влияние па выбор способа дискретного представле-
ния оказывают вид принимаемых сигналов и статистические ха-
рактеристики помех ’• входе БДК, зависящие от помех на входе
приемника и параметров АЧПТ. Однако влияние здесь не прямое,
а косвенное: вид сигнала и характеристики помех обусловливают
методы цифровых фильтрации и демодуляции, а способ дискрет-
ного представления колебаний определяет сложность реализации
ЦФОС и ЦД. Так, если ЦРПУ рассчитано на прием сигналов с
угловой или амплитудной модуляцией (сигналы со смешанной,
например однополосной, модуляцией отсутствуют), а помехи носят
импульсный характер, то представление колебаний отсчетами оги-
бающей и фазы позволяет максимально упростить алгоритмы
подавления помех и цифровой демодуляции (см. § 5.2). Такое
представление колебаний оправдано и во многих других случаях,
особенно если основная фильтрация производится в аналоговой
форме. Оно наиболее эффективно при необходимости восстанов-
154
ления сигнала, ограниченного в безынерционных цепях на выходе
АЧПТ (см. § 3.5). Когда же преобладают узкополосные помехи и
основную селекцию предполагается выполнять в ЦЧПТ, то неза-
висимо от метода модуляции принимаемых сигналов представ-
ление колебаний отсчетами огибающей и фазы нежелательно.
В магистральных ЦРПУ декаметрового диапазона, рассчитан-
ных на работу в большом числе различных систем связи, можно
рекомендовать представление колебаний парами отсчетов квадра-
турных составляющих. Действительно, в этом случае при необ-
ходимости обеспечить прием широкого класса сигналов требо-
вания к производительности цифрового оборудования демодуля-
тора минимальны (см. § 5.1 и 5.2). Кроме того, квадратурное
представление колебаний облегчает реализацию ЦФ с симмет-
ричными частотными характеристиками [38], выполнение быстрого
преобразования Фурье, сдвига и инверсии спектра колебания. Ряд
алгоритмов цифровой демодуляции при квадратурном представ-
лении колебаний рассмотрен в § 5.1 .[Чтобы пояснить другие преи-
мущества квадратурной обработки, кратко остановимся на опе-
рациях перемножения и цифровой фильтрации при представлении
колебаний отсчетами квадратурных составляющих. Для простоты
записи действия с цифровыми значениями отсчетов заменим экви-
валентными преобразованиями аналоговых колебаний.
Пусть необходимо перемножить две комплексные огибающие
Ut(t) и 02(t):
U3(l) = Ot(i)U2(t), (6.1)
Ut (!) = Ц (1)еМ)= VC1 (!) +/VS1 (1), )
Д2(0 = П2(0е^<О=Ус2(0+/К2(0, ] (6.2)
173 (!) = и3 (!) е«0= ус3 (/) + jVs3 (i). J
Из (6.1) и (6.2) получаем, что
Кс3 (/) = УС1 (/) Vc2 (0—Ki (0 Vs2 (!), |
И5з (/) = VC1 (I) Vs2 (0 + Ke. (/) Vc2 (!) - J
(6.3)
Соответствующая (6.3) структура цифрового комплексного пере-
множителя приведена на рис. 6.4. Легко заметить, что если
U2 (t) =^i2nM=cos 2nfot±j sin 2nfot,
то перемножение (6.1) означает сдвиг спектра комплексной оги-
бающей t?i(0 на величину ±f0. Таким образом, сдвиг спектра
при квадратурном представлении колебаний не требует примене-
ния фильтров. Инверсия спектра 17(1) производится путем прос-
той смены знака перед синусной составляющей.
Квадратурное представление узкополосных колебаний позво-
ляет заменить полосовую фильтрацию эквивалентной процедурой
комплексной фильтрации. Если 171 (!) — комплексная огибающая
7* 155
.колебания на входе полосового фильтра, то комплексная огибаю-
щая колебания на его выходе
#г(0 = f Ui (t)g(i—rfdx, (6.4)
— со
где
g(t)=gc(t)+igs(t) (6.5)
— импульсная характеристика комплексного фильтра, представ-
ляющая собой комплексную огибающую импульсной характерис-
тики действительного полосового фильтра.
Преобразовав (6.4) с учетом (6.2) и (6.5), получаем
t?2 (/) = Vc2 (0 +/Vs2 (t) = J Vcl (r)gc (/-T) dx-
—. co
— ^'Vsi^)gs(t—x)dx +j ]Vci(r)gs{t—x)dx+
— co J L — °°
+ Jvsi(T)gc(f—t)dx
f— co
(6.6)
Следовательно, комплексный эквивалент полосового ЦФ дол-
жен содержать четыре ЦФНЧ, включенных .по схеме, показанной
на рис. 6.5. Порядок каждого из ЦФНЧ в два раза ниже порядка
полосового ЦФ, и во столько же раз ниже частота поступления
отсчетов [38]. Поэтому в общем случае оба способа цифровой
фильтрации предъявляют одинаковые требования к производи-
тельности цифровой аппаратуры. Преимущества квадратурной об-
работки проявляются при симметрии частотных характеристик
полосового ЦФ относительно центральной частоты (четная АЧХ
Рис. 6.5
Рис. 6.4
156
« нечетная ФЧХ). В этом случае gs(t)=O и g (t) =gc(t) =g(t).
Соответственно (6.6) принимает вид
и2 (0=vc2 (/) +/vs2 (О = j Vci (-t)g (t-i)dr+
— co
+ / Jvsl(T)g(/-T)dT. (6-6a)
— co
Из (6.6a) следует, что комплексный эквивалент полосового ЦФ
с симметричными частотными характеристиками состоит из двух
идентичных ЦФНЧ, один из которых включается в тракте коси-
нусной, а другой — синусной составляющих комплексного коле-
бания. Требования к производительности цифровой аппаратуры
при этом снижаются в два раза, что является одним из аргумен-
тов в пользу квадратурной обработки сигналов в ЦРПУ, так как
в большинстве случаев частотные характеристики ЦФОС должны
быть симметричны. Приведенные соображения в отдельных слу-
чаях нарушаются. Так, требования к производительности цифро-
вой аппаратуры при реализации полосовых ЦФ с симметричными
частотными характеристиками снижаются вдвое, если их цент-
ральная частота равна 0,25fA. Однако это происходит именно бла-
годаря тому, что при указанном выборе .центральной частоты чет-
ные отсчеты импульсной характеристики ЦФ относятся к одной,
а нечетные — к другой квадратурным составляющим.
Проектирование БДК
ПГак показано в § 3.4, цифровые методы обеспечивают макси-
мальные точность и стабильность формирования квадратурных
составляющих, благодаря идентичности характеристик их трактов,
исключению влияния дрейфа нуля и прямого прохождения управ-
ляющих сигналов, уменьшению нелинейных искажений и шумов.
Поэтому в магистральных ЦРПУ, в которых предъявляются вы-
сокие требования к качеству приема, целесообразно формировать
квадратурные составляющие в цифровой части БДК- Для этого
колебание представляют отсчетами мгновенных значений, причем
/д выбирают так, чтобы ни одно из отображений спектра колеба-
ния не попадало на нулевую частоту. После аналого-цифрового
преобразования отсчетов их цифровые значения поступают в два
тракта. Далее используется или цифровое преобразование Гиль-
берта в одном из трактов, или цифровое умножение отсчетов вход-
ного колебания на отсчеты косинусоидального колебания в одном
тракте и синусоидального — в другом с последующей цифровой
фильтрацией, или включение в обоих трактах ЦФ с характерис-
тиками, позволяющими сочетать частотную селекцию с формиро-
ванием сопряженных по Гильберту колебаний [8, 9]. Реализация
цифровых методов упрощается при выборе Д в соответствии с
(3.49) или (3.49а). Один из дтих методов при указанном выборе Д
иллюстрирует рис. 3.16. Здесь функции интерполяции и основной
157
.селекции совмещены, что оправдано при использовании в ЦФОС
нерекурсивных ЦФНЧ. Если же в ЦФОС применены рекурсивные
ЦФНЧ, то в большинстве случаев целесообразно разделить функ-
ции ИЦФ и ЦФОС (см. § 3.4)./При разработке БДК отдельно от
остальных блоков ЦРПУ такое разделение становится обязатель-
ным. В этом случае возникает задача проектирования ИЦФ. Наи-
более рациональная процедура проектирования состоит в выборе
исходного ЦФНЧ, обладающего требуемыми g(n&t) и H(z), с по-
следующим определением характеристик ИЦФ в трактах коси-
нусной и синусной составляющих по формулам (3.71) и (3.71а).
Исходный ЦФНЧ рассчитывают на частоту дискретизации Д,
выбранную в соответствии с (3.49) или (3.49а), а каждый из ИЦФ
на частоту /Д1 = О,5/Д. В § 3.4 отмечалось, что исходный ЦФНЧ
должен без искажений пропускать отображение спектра колеба-
ния, примыкающее к нулевой частоте, и подавлять отображение
с центральной частотой 0,5/д. Следовательно, в идеальном случае
его АЧХ должна быть прямоугольной с бесконечным затуханием
ва пределами полосы пропускания, а ФЧХ — линейной. В реаль-
ной ситуации выбором в качестве исходного нерекурсивного ЦФНЧ
с симметричной g(nht) достигается идеальная линейность ФЧХ.
Однако АЧХ исходного ЦФНЧ всегда отличается от идеальной
неравномерностью в полосе пропускания, конечным затуханием в
полосе задерживания и наличием переходной полосы. При опре-
делении характеристик ИЦФ по формулам (3.71) и (3.71а) пер-
вое приводит ж искажениям АЧХ, идентичным для ИЦФ в трак-
тах синусной и косинусной составляющих, второе — к искажениям
АЧХ и ФЧХ, в общем случае различным для этих ИЦФ, а третье
увеличивает искажения обоих видов.
Искажения второго вида объясняются наложением отображе-
ний передаточной функции Я(е>) исходного ЦФНЧ при снижении
в два раза частоты дискретизации. Если значение М — длины
импульсной характеристики исходного ЦФНЧ четно, то ампли-
тудные искажения в обоих ИЦФ одинаковы, а фазовые различны.
Если же значение М нечетно, то амплитудные искажения различ-
ны, а ФЧХ обоих ИЦФ остаются линейными, изменяется лишь их
угол наклона по сравнению с углом наклона ФЧХ исходного
ЦФНЧ. Действительно, из (3.71) следует, что при четном значе-
нии М импульсные характеристики ИЦФ несимметричны, но яв-
ляются зеркальным отображением друг друга, а при нечетном —
они симметричны, но различаются между собой. Из (3.71) также
следует, что применение ИЦФ, спроектированных в соответствии
с предложенной выше процедурой, позволяет датировать пары
отсчетов на выходе БДК только моментами времени, равноуда-
ленными от моментов поступления отсчетов квадратурных состав-
ляющих, при четном значении М и моментами поступления от-
счетов одной из них при нечетном.
Неидентичность частотных характеристик ИЦФ приводит к
погрешности формирования квадратурных составляющих, которая,
как правило, является наиболее опасным компонентом общей
158
ошибки. Одинаковые в трактах обеих квадратурных составляю-
щих искажения АЧХ в большинстве практических ситуаций пред-
ставляют меньшую опасность, так как довольно часто последую-
щая аппаратура к ним малочувствительна, а при необходимости
их легко скомпенсировать в ЦФОС. Очень часто 'целесообразно
в качестве исходных применять ЦФНЧ с гладкой АЧХ. Это ис-
ключает усиление пульсаций в результате каскадного соединения
ИЦФ и ЦФОС, и в ряде случаев уменьшает требования к произ-
водительности цифровой аппаратуры, так как простота двоичной
записи коэффициентов фильтра позволяет реализовать умножение
с помощью небольшого числа операций сложения и сдвига. У глад-
кого ЦФНЧ порядок касания прямой K(f) = 1 к его АЧХ в точке ,f= О
определяет амплитудно-частотные искажения, вносимые им в ото-
бражение спектра колебания на нулевой частоте, а порядок каса-
сания прямой A(f)=O к АЧХ в точке /=0,5Ц — степень подавле-
ния отображения спектра с центральной частотой, равной 0,5/д.
Для уменьшения помех наложения и нелинейных искажений
в ЦРПУ, как правило, выбирают /д, многократно превышающей
ДА — ширину спектра колебания на входе БДК- В такой ситуа-
ции необходимая равномерность АЧХ интерполирующих фильтров
на участке .частот, занимаемом спектром колебания, достигается
почти автоматически благодаря малости участка. Поэтому при
использовании в качестве исходного ЦФНЧ с гладкой АЧХ, для
достижения максимальной точности формирования квадратурных
составляющих при минимальном значении М необходимо обеспе-
чить максимальный порядок касания на частоте /=0,5/д. Как
показано в [9], передаточная функция такого ЦФНЧ
H(z) = (1+z-i)m-i/2m-i. (6.7)
Используя (6.7), (3.71) и (3.71а), найдем характеристики
ИЦФ для различных значений М. При 7И=3 (ИЦФ1) передаточ-
ная функция исходного ЦФНЧ
Н (z) = (1 +z-') 2/4= (l+2z~»4-c-2)/4,
а передаточные функции ИЦФ1 в каналах косинусной и синусной
составляющих соответственно
^(z) = (l+z-2)/2, |
Я2(г)=г-». J
Здесь и в дальнейшем полученные в соответствии с (3.71) и (3.71а)
выражения //i(z) и H2(z) умножены на два с целью нормировки.
Аналогично находим при М=4 (ИЦФ2)
H(z)= (H-z->)3/8= (l+3z-’4-3z-2+z~3)/8,
//1(z)-=(l+3z~2)/4, |
//2 (z) =z-1 (3 + z~2)/4; J
при Л4=5 (ИЦФЗ)
Я(г)= (l+z-1)716=(l+4z-’ + 6z-2 + 4z-3+z-4)/16,
159
селекции совмещены, что оправдано при использовании в ЦФОС
(нерекурсивных ЦФНЧ. Если же в ЦФОС применены рекурсивные
ЦФНЧ, то в большинстве случаев целесообразно разделить функ-
ции ИЦФ и ЦФОС (см. § 3.4).ДТри разработке БДК отдельно от
остальных блоков ЦРПУ такое разделение становится обязатель-
ным. В этом случае возникает задача проектирования ИЦФ. Наи-
более рациональная процедура проектирования состоит в выборе
исходного ЦФНЧ, обладающего требуемыми g(nAt) и H(z), с по-
следующим определением характеристик ИЦФ в трактах коси-
нусной и синусной составляющих по формулам (3.71) и (3.71а).
Исходный ЦФНЧ рассчитывают на частоту дискретизации [д,
выбранную в соответствии с (3.49) или (3.49а), а каждый из ИЦФ
на частоту fAi=O,5fA. В § 3.4 отмечалось, что исходный ЦФНЧ
должен без искажений пропускать отображение спектра колеба-
ния, примыкающее к нулевой частоте, и подавлять отображение
с центральной частотой 0,5fK. Следовательно, в идеальном случае
его АЧХ должна быть прямоугольной с бесконечным затуханием
за пределами полосы пропускания, а ФЧХ — линейной. В реаль-
ной ситуации выбором в качестве исходного нерекурсивного ЦФНЧ
с симметричной g(nAt) достигается идеальная линейность ФЧХ.
Однако АЧХ исходного ЦФНЧ всегда отличается от идеальной
неравномерностью в полосе пропускания, конечным затуханием в
полосе задерживания и наличием переходной полосы. При опре-
делении характеристик ИЦФ по формулам (3.71) и (3.71а) пер-
вое приводит к искажениям АЧХ, идентичным для ИЦФ в трак-
тах синусной и косинусной составляющих, второе — к искажениям
АЧХ и ФЧХ, в общем случае различным для этих ИЦФ, а третье
увеличивает искажения обоих видов.
Искажения второго вида объясняются наложением отображе-
ний передаточной функции Н(&а) исходного ЦФНЧ при снижении
в два раза частоты дискретизации. Если значение М — длины
импульсной характеристики исходного ЦФНЧ четно, то ампли-
тудные искажения в обоих ИЦФ одинаковы, а фазовые различны.
Если же значение М нечетно, то амплитудные искажения различ-
ны, а ФЧХ обоих ИЦФ остаются линейными, изменяется лишь их
угол наклона по сравнению с углом наклона ФЧХ исходного
ЦФНЧ. Действительно, из (3.71) следует, что при четном значе-
нии М импульсные характеристики ИЦФ несимметричны, но яв-
ляются зеркальным отображением друг друга, а при нечетном —
они симметричны, но различаются между собой. Из (3.71) также
следует, что применение ИЦФ, спроектированных в соответствии
с предложенной выше процедурой, позволяет датировать пары
отсчетов на выходе БДК только моментами времени, равноуда-
ленными от моментов поступления отсчетов квадратурных состав-
ляющих, при четном значении М и моментами поступления от-
счетов одной из них при нечетном.
Неидентичность частотных характеристик ИЦФ приводит к
погрешности формирования квадратурных составляющих, которая,
как правило, является наиболее опасным компонентом общей
158
ошибки. Одинаковые в трактах обеих квадратурных составляю-
щих искажения АЧХ в большинстве практических ситуаций пред-
ставляют меньшую опасность, так как довольно часто последую-
щая аппаратура к ним малочувствительна, а при необходимости
их легко скомпенсировать в ЦФОС. Очень часто целесообразно
в качестве исходных применять ЦФНЧ с гладкой АЧХ. Это ис-
ключает усиление пульсаций в результате каскадного соединения
ИЦФ и ЦФОС, и в ряде случаев уменьшает требования к произ-
водительности цифровой аппаратуры, так как простота двоичной
записи коэффициентов фильтра позволяет реализовать умножение
с помощью небольшого числа операций сложения и сдвига. У глад-
кого ЦФНЧ порядок касания прямой K(f) =1 к его АЧХ в точке f=0
определяет амплитудно-частотные искажения, вносимые им в ото-
бражение спектра колебания на нулевой частоте, а порядок каса-
сания прямой А(Ц=0 к АЧХ в точке f=0,5fa — степень подавле-
ния отображения спектра с центральной частотой, равной 0,5/д.
Для уменьшения помех наложения и нелинейных искажений
в ЦРПУ, как правило, выбирают fn, многократно превышающей
ДА — ширину спектра колебания на входе БДК. В такой ситуа-
ции необходимая равномерность АЧХ интерполирующих фильтров
на участке .частот, занимаемом спектром колебания, достигается
почти автоматически благодаря малости участка. Поэтому при
использовании в качестве исходного ЦФНЧ с гладкой АЧХ, для
достижения максимальной точности формирования квадратурных
составляющих при минимальном .значении М необходимо обеспе-
чить максимальный порядок касания на частоте /=--0,5/д. Как
показано в [9], передаточная функция такого ЦФНЧ
#(z) = (1+z-’)m-i/2^-i. (6.7)
Используя (6.7), (3.71) и (3.71а), найдем характеристики
ИЦФ для различных значений М. При 714=3 (ИЦФ1) передаточ-
ная функция исходного ЦФНЧ
H(z) = (14-г-1)2/4=((14-2г-1+2-2)/4,
а передаточные функции ИЦФ1 в каналах косинусной и синусной
составляющих соответственно
Я,(г) = (1+г-Э/2. ) (68)
Здесь и в дальнейшем полученные в соответствии с (3.71) и (3.71а)
выражения Н\ (г) и Д2(г) умножены на два с целью нормировки.
Аналогично находим при Л4=4 (ИЦФ2)
#(?)== (1+^)3/8= (1+32-’+3z-2+z-3)/8,
/7, (z) = (1+ 3z~2)/4, |
Я2(г)=2-1(3 + г-2)/4; J
при М=5 (ИЦФЗ)
^(г)= (l+z-1)716=(l+4z-, + 6z-2 + 4z-3+2-4)/16.
159
(6.10)
Я2(2)=г-*(1+г-2)/2;
при М=6 (ИЦФ4)
H(z) = (14-z-1)5/32=(1-|-5z-1+10z-2+10z-3+5z-4+z-5)/32,
/7,(2) = (Ц-10г-24-5гг-^)/16, j
H2(z)=z-1(54-10z-2+2r-4)/16. J '
Из выражений (6.8) — (6.11) видно, что двоичная запись лю-
бого из коэффициентов всех рассмотренных ИЦФ содержит не
более двух единиц. Благодаря этому умножение отсчетов колеба-
ния на коэффициенты фильтра реализуется минимальным числом
операций сдвига и суммирования. На рис. 6.6 приведены АЧХ и i
ФЧХ рассчитанных выше
ИЦФ, а на рис. 6.7 — частот-
ные зависимости относительно-
го среднеквадратического от-
клонения ба амплитуды гармо-
нического колебания на выхо-
де БДК. Здесь
ба=201g X
°} п
ИЦФ1-2, ИЦФ5-2
-2
-4
-6
-10
0J. 0.2 0,3- ОЛ ///д<
ИиФЗ-1
X
-45
40
435
-180
-225
K(f)05
® 0 0J 0,2 0.3 С4 //^1
Рис. 6.6
160
ИЦ027
\ИЦШ1
где черта означает усреднение
по времени: U и UB — соответ-
ственно фактическое и номи-
0,05
-20
-1,0
-50
-ВО
400
№
Рис. 6.7
02
нальное значения амплитуды, причем цифровые значения отсчетов
U связаны с цифровыми значениями отсчетов Vc и Vs формулой
'(5.3). Штриховой линией на рис. 6.7 показана зависимость 6a(f) в
отсутствие ИЦФ.
Легко заметить (рис. 6.6), что ИЦФ1—ИЦФ4 обеспечивают
приемлемые для большинства практических применений АЧХ и
ФЧХ, если При большей ширине спектра колебания
или при более высоких требованиях к частотным характеристи-
кам приходится повышать порядок касания в точке f—О. Как пра-
вило, в таком случае наиболее рациональным оказывается приме-
нение в качестве исходных равнополосных гладких ЦФНЧ, у ко-
торых порядок касания в точках /=0 и /=0,5/д одинаков и, сле-
довательно, АЧХ симметричны относительно точки К(0,25/д) =0,5.
Одним из достоинств равнополосных фильтров является то, что
у них все нечетные коэффициенты, кроме центрального, являются
нулевыми. Если исходный ЦФНЧ равнополосный, то интерполя-
ция осуществляется фактически только в одном из квадратурных
трактов. В другом она сводится к необходимой задержке отсче-
тов. Можно показать, что данный вариант реализации рассмот-
ренного метода полностью эквивалентен использованию цифрово-
го преобразователя Гильберта. Равнополосные фильтры возможны
только при М=4р+3, где р=0, 1, 2,-... Среди рассмотренных лишь
ЦФНЧ, исходный для ИЦФ1, является равнополооным (р = 0).
При р=1 равнополосный ЦФНЧ, исходный для ИЦФ5, имеет пе-
редаточную функцию
H(z) — (—l+Oz-’+Dz-2+1 бг-З-ГЭг-4 -f-0z~5—z~6)/32,
а интерполирующие фильтры ИЦФ5-1 и ИЦФ5-2 в каналах ко-
синусной и синусной составляющих — передаточные функции
Hi (г) = (— 1+9z-24-9z~4—г-6) /16,
Нг(г)—2~3.
По точности формирования квадратурных составляющих ИЦФ5
занимает промежуточное положение между ИЦФ2 и ИЦФЗ (рис.
€.7), но его преимуществом является большая равномерность
АЧХ (рис. 6.6,а).
При жестких требованиях к точности формирования квадра-
турных составляющих и к частотным характеристикам ИЦФ по-
рядок исходного равнополосного гладкого фильтра возрастает,
двоичная запись его коэффициентов и, следовательно, реализация
ИЦФ усложняются. В такой ситуации может оказаться целесо-
образным переход к другому типу исходного ЦФНЧ, например к
равнополооному фильтру, оптимальному в смысле критерия Че-
бышева.
Реализация БДК
На рис. 6.8 показана функциональная схема БДК, в котором
интерполяция выполняется ИЦФ2. Вычисление цифровых значений
отсчетов. Vc(t) и К(/) производится в мультиплексном режиме,
161
Рис. 6.8
т. е. четные нч(«АЛ) =’(—1)"ы(2пА/) и нечетные ит(пД^—О.5А21) = ~
=.(—1)"ц(2пА/—At) отсчеты, поступающие с выхода ФЗн, обраба-^
тываются поочередно. На выходе ИЦФ отсчеты Ус(О-и Vs(t) фор-
мируются в соответствии с разностными уравнениями:
Ус (пАЛ-0,75ДЛ) == [«ч-(пАЛ) +3ич («АЛ—АЛ) ] /4=
= ((«ч(пАЛ)гЬ«ч(лАЛ—АЛ))/24*ыч («АЛ—АЛ))/2,
УДпАЛ—0,75АЛ) = [Зинч(«АЛ—О.5ДЛ) +«нч (пАЛ—
— 0,5ДЛ—АЛ) ]/4= ((«нч (лАЛ—0.5ДЛ) +«нч (лАЛ—
— 0.5АЛ—АЛ)) /2.4-Ннч (лАЛ—0.5АЛ)) /2.
В первом сумматоре текущий отсчет с выхода ФЗн склады-
вается с отсчетом, задержанным на АЛ- Задержка производится
двумя регистрами памяти РгП. Выходная шина первого сумма-
тора подключена .к первым входам второго со сдвигом на один
разряд в сторону младших, что обеспечивает деление на два ре-' -
вультата сложения. На вторые входы второго сумматора череЯ
коммутатор поступает u4(nAti—Д^) при формировании отсчета
Ус(0 и «Нч(лАЛ—0.5АЛ) при формировании отсчета УД/). На
выходе второго сумматора последовательно появляются отсчеты
2УЦ/) и 2Ус(0-
На рис. 6.9,а приведена функциональная схема БДК с ИЦФ4.
Выполняемые здесь операции описываются разностными уравне-
ниями:
У с(пА/1—1.25ДЛ) — [цч(«А/1)4-Юпч(пА/1—A/i)4-
4-5«ч (лАЛ—2ЧЛ)]/16= ((((лч(лАЛ)4-«-*(лАЛ—
— 2Д/0 )/24-цч (лАЛ—АЛ)) /24-Ич (лАЛ—2 АЛ)) /2-|-
4-цч (лАЛ—ЛЛ))/2,
Vs(nAti—1,25АЛ) = [5ынч'(«А/1—0,5АЛ) 4-10«Нч (лАЛ—
— 0,5ДЛ—АЛ) 4-«нч («АЛ—0.5ДЛ—2ДЛ) ]/16=
= ((((Цнч (ПАЛ—0.5АЛ) 4-«нч (лАЛ—0.5АЛ—2АЛ)) /24-
- f-Цнч (и АЛ—0,5 АЛ—АЛ)) /24-Лнч (лДЛ—0,5 АЛ ))/24~
4-«нч(лАЛ—0.5ДЛ—АЛ))/2.
Временные диаграммы основных управляющих сигналов приведе-
ны на рис. 6.9,6. Каждый из отсчетов Ус(/) и Vs(t) вычисляется
за четыре такта. Соответственно тактовая частота равна 4/д.
В коммутаторах при управляющем напряжении, равном нулю, с
выходом соединяется нижняя (ом. рис. 6.9,а) входная шина. Де-
ление на два результата каждого сложения обеспечивается сдви-
гом на один разряд в сторону младшего при записи суммы .в
выходной РгП.
Реализация БДК по схеме рис. 6.8 возможна на микросхемах
серии~К564 при /д^0,3 МГц, серии К555 при /Д=С4 МГц, серии
К500 при fn^l2 МГц. Для БДК по схеме рис. 6.9,а соответст-
вующие значения /д равны примерно 0,1; 1 и 3 МГц.
На рис. 6.10,а приведен фрагмент функциональной схемы
ЦРПУ, в котором отсчеты квадратурных составляющих форми-
руются из отсчетов мгновенных значений, следующих с /д, выб-
ранной в соответствии с (3.49) или (3.49а). Такое формирование
квадратурных составляющих (см. § 3.4) автоматически устраняет
помехи, связанные с дрейфом нуля и прямым прохождением уп-
равляющих сигналов, а также влияние большей части нелинейных
продуктов четных порядков. Действительно, после дискретизации
спектр этих помех сосредоточен в окрестности нулевой частоты, а
разностные суммарные интермодуляционные помехи и гармоники
четных порядков — в окрестности нулевой частоты и частоты рав-
ной 0,5)д. Если /д в несколько раз превышает 2ДГ, то большинство
указанных помех не попадает в занимаемую спектром колебания
полосу с центральной частотой /] = 0,25/д. В частности, для устра-
нения искажений, вызванных нелинейными продуктами второго
163
Таблица 6.1
ЗАВИСИМОСТЬ D, 2Ар„ И п „ ОТ ЬЕ
AF, кГц 1000 500 300 200 100 50 40 30 20 10
Di, дБ 143 136 131 127 I 19 111 109 106 99 88
2,3-10® 1.5.10® 1.1-10® 8-10® 4,6-10® 2,6-10® 2,3-10® 1,9-10® 10» 5,8-10®
ПР.Ш 22 21 21 20 19 18 18 18 17 16
ж дБ 111 106 103 99 93 88 86 83 78 69
2^р.к2 5.8-10® 4,6-10® 4,2-10® 3.27-10® 2,3-10® 1,8-10® 1,6-10® 1,2-10® 9,2-I08 6,5-10»
Пр.к2 16 16 16 15 15 15 14 14 14 13
-Оз» дБ 82 79 76 73 69 64 62 б'о 57 50
^Р-кз 2-10® 1,9-10» 1,9-10® 1,6-10® 1,5-10® 1,210s 10® 9,5-10® 8,2-10® 7,3-Ю«
ПРкЗ И 11 11 11 11 11 10 -10 10 10
Рис. 6.11
166
повышением быстродействия
стробирующего ключа и увели-
чением времени стробирования
Д/с. В § 3.2 отмечалось, что
коррекция АЧХ позволяет уве-
личить А/с по сравнению со
значением, найденным по фор- '
муле (3.44) или (3.45). Так, •'
при прямоугольном стробирую-
щем импульсе АЧХ интегрирую-
щего УВХ описывается форму-
лой (3.72) и имеет вид, пока-
занный на рис. 6.11,а. Даже при
компенсации только гиперболи-
ческого множителя (рис. 6.11,6)
значительно повышается равно-
мерность АЧХ в пределах полосы
частот, занимаемой спектром ко-
лебания. Однако частотную кор-
рекцию желательно производить так, чтобы не ухудшалась вы-
полняемая интегрирующим УВХ фильтрация. Это несколько ус-
ложняет, но не исключает применение коррекции, которая и при
существенном нарушении первого из условий в (3.44) позволяет
довести АС до l/3f0 или l/2f0, а при использовании принципов
построения УВХ по схеме рис. 3.8 и до больших значений.
6.3. ОСНОВНЫЕ ПРИНЦИПЫ ПОСТРОЕНИЯ ЦЧПТ
Реализация ЦЧПТ возможна или в виде узкоспециализирован-
ного цифрового устройства, рассчитанного на ограниченный класс
сигналов, или в виде процессора, ориентированного на ЦОС и
обладающего возможностью оперативной смены алгоритмов об-
работки, или в виде программы универсальной ЭВМ. Используют
также комбинированные варианты построения ЦЧПТ, например
аппаратная реализация ЦФОС может сочетаться с программной
реализацией ЦД и узлов, осуществляющих последующую ЦОС.
Обработка принимаемого сигнала в ЦЧПТ и операции контроля,
управления, автоматической регулировки характеристик ЦРПУ
могут выполняться как в одном и том же, так и в разных про-
цессорах.
В тех случаях, когда ЦРПУ рассчитано на прием низкоско-
ростных видов работ и полоса пропускания АЧПТ сравнительно
узка, требования к быстродействию ЦЧПТ оказываются невысо-
кими. Если при этом число видов принимаемых сигналов и ме-
тодов приема велико, чаще всего целесообразно использовать г
качестве ЦЧПТ универсальную микро-ЭВМ, выпускаемую промыш-
ленностью. Такое решение позволяет ограничить сроки разработка
временем, необходимым для программирования и сопряжений
микро-ЭВМ с остальной радиоприемной аппаратурой. Кроме то-го
оно обеспечивает и низкую стоимость оборудования, поскольку
даже сложная, но производимая крупными сериями микро-ЭВМ,
как правило, оказывается значительно дешевле менее сложной
специализированного вычислителя, выпускаемого милыми пар-
тиями.
Другая крайняя ситуация имеет место, когда высокие требе'
ванпя к быстродействию заставляют разрабатывать узкоспециа'
лизированную аппаратуру ЦЧПТ, >в которой характер и последе'
вательность ЦОС полностью определяются 'видом соединений
функциональных узлов и их составных частей, реализуемых в вид*
ИС или БИС. В некоторых случаях вся ЦЧПТ может выполнят»’
ся в виде одной или нескольких специализированных сверхболг
ших ИС (СБИС). Жесткая логическая структура ЦЧПТ огранй
вает класс принимаемых сигналов и способность ЦРПУ к адап-
тации. В то же время, в таких ЦЧПТ выбор архитектуры, на1(
более подходящей для используемых алгоритмов приема, умен}’
шение разрядности и оптимизация структуры цифрового представ
ления отсчетов в сочетании с рациональным масштабирование»1
выполняемым в процессе цифровой обработки, позволяют на дв^
три порядка повысить быстродействие при одновременном сниже-
нии потребляемой мощности и массогабаритных показателей по
сравнеНИЮ с универсальной ЭВМ, построенной по той же техно-
логии. Если же ЦЧПТ реализуется в виде СБИС, то достигается
дополнительное улучшение указанных характеристик за счет сок-
ращения длины соединений, совмещения полупроводниковых об-
ластей различных элементов, исключения лишних каскадов, неиз-
бежных при выполнении каждого узла в виде функционально
законченной ИС, снижения запаса помехоустойчивости для логи-
ческих элементов, расположенных внутри структуры и поэтому
защищенных от внешних помех. Однако сроки и сложность раз-
работки узкоспециализированной аппаратуры велики, что в соче-
тании с мелкосерийностью производства значительно повышает ее
стоимость. Поэтому такую аппаратуру применяют там, где опре-
деляющими параметрами являются быстродействие и плотность
упаковки, например в бортовом оборудовании космических систем
связи. Для повышения технико-экономической эффективности спе-
циализированных вычислителей решающее значение имеют авто-
матизация процесса проектирования, квалификация и рациональ-
ная организация труда разработчиков, технологический уровень
производства.
Между рассмотренными двумя крайними ситуациями на прак-
тике существует множество промежуточных, когда целесообразно
применение программируемого цифрового процессора, ориентиро-
ванного на ЦОС. Ориентация на однородные задачи позволяет
оптимизировать архитектуру, представление данных и методы про-
граммирования. Как правило, основной целью оптимизации яв-
ляется обеспечение требуемых быстродействия и функциональных
возможностей аппаратуры при минимальных стоимости, объеме,
массе, потребляемой мощности. Учитываются также сроки разра-
ботки аппаратуры. В процессорах, ориентированных на ЦОС, при
той же элементной, базе достигается более высокое быстродейст-
вие, чем в ЭВМ общего назначения, и одновременно сохраняются
необходимые гибкость и универсальность в рамках заданной спе-
циализации. В результате замедляется моральное старение, обес-
печивается высокая серийность производства и, как следствие это-
го, приемлемая стоимость аппаратуры.
Изложенное показывает, что в магистральных ЦРПУ в боль-
шинстве случаев наиболее рациональна реализация ЦЧПТ в виде
программируемого процессора, ориентированного на ЦОС.
Скорость работы всех цифровых вычислительных систем — уни-
версальных, ориентированных на определенный круг задач и узко-
специализированных — определяется, прежде всего, двумя фун-
даментальными факторами: быстродействием элементной базы и
степенью распараллеливания операций. Быстры?! рост плотности
упаковки цифровых элементов способствовал тому, что по мере
развития вычислительной техники возрастала степень паралле-
лизма. Вначале произошел переход от поразрядных операций к
операциям над словами, затем было достигнуто параллельное вы-
168
волнение ввода-вывода и арифметических операций, а на совре-
менном этапе все шире используется параллельное проведение
арифметических операций [14, 23—31]. При распараллеливании
повышение быстродействия достигается за счет увеличения объема
оборудования. Однако обеспечить эффективность такого обмена
достаточно сложно, в частности из-за роста числа связей при уве-
личении объема оборудования. Тем не менее повышение быстро-
действия вычислительных систем за последнее десятилетие проис-
ходило в основном благодаря широкому внедрению различных
видов параллельной обработки.
Число видов распараллеливания чрезвычайно велико. В нас-
тоящее время широкое распространение получило использование
в одной вычислительной системе нескольких процессоров (микро-
процессоров) и нескольких запоминающих устройств, связанных
между собой совокупностью шин [14, 27, 30, 31]. При соответ-
ствующей организации в такой системе удается повысить не толь-
ко быстродействие, но и надежность, ремонтопригодность, способ-
ность к адаптации. Распараллеливание достаточно давно приме-
няется и внутри процессоров. Например, байтовая структура ре-
гистров и арифметического устройства позволяет по одной коман-
де производить или одну операцию с многоразрядными числами
или несколько параллельных с малоразрядными [14]. Как один
из видов параллелизма можно рассматривать использование в
микропроцессорах нескольких шин. В частности, в трехшинном
микропроцессоре удается арифметические и логические операции,
включая выборку операндов и запись результата, выполнять за
один такт [27]. Кроме того, такая архитектура позволяет отка-
заться от буферных регистров. Следует, однако, учитывать, что
увеличение числа шин сокращает площадь кристалла, отводимую
под функциональные элементы, и тем самым при прочих равных
условиях сужает функциональные возможности микропроцессора.
Еще одним примером распараллеливания могут служить много-
портовые ОЗУ, в которых осуществимы одновременные запись
чисел ио одним адресам и считывание по другим [31].
В зависимости от назначения, условий работы и элементной
базы вычислительной системы оптимальны различные .виды обес-
печения параллельной работы. Во многих случаях наиболее це-
лесообразным методом распараллеливания оказывается поточная
или конвейерная обработка. В § 4.2 уже рассматривалось приме-
нение этого метода -в АЦП, но он эффективен и при обработке
сигналов в ЦЧПТ. При конвейерной обработке сигналов алгоритм
разбивается, например, на k последовательных процедур, причем
каждый новый отсчет начинает обрабатываться сразу же после
окончания первой процедуры над предыдущим отсчетом, который
подается на выполнение второй процедуры, в то время как более
ранние отсчеты поступают на выполнение третьей, четвертой, ..., /г-й
процедур соответственно. Таким образом, разным фазам обработ-
ки параллельно подвергаются k отсчетов. Это делает данный метод
похожим на работу сборочного конвейера. Отсюда и его название.
169
Если при других методах обработки сигналов время выполнения
всего алгоритма не должно превышать периода дискретизации
= то при конвейерной обработке достаточно, чтобы за вре-
мя А/ выполнялся не весь алгоритм, а лишь любая из процедур,
его составляющих. Это позволяет в k раз повысить скорость об-
работки сигналов при том же времени выполнения каждой ив
процедур. Одновременно конвейерная обработка исключает прос-
тои оборудования. Поэтому она обеспечивает оптимальное соот-
ношение между быстродействием и объемом аппаратуры. Время
задержки от момента поступления сигнала до его появления на
выходе устройства обработки при конвейерном методе равно /гД/.
Указанную задержку необходимо учитывать лишь в случае, если
конвейерная обработка производится в цепи, охваченной петлей
обратной связи.
Наряду с распараллеливанием для повышения скорости вычис-
лений применяют ОЗУ максимального быстродействия, но малой
емкости в сочетании с ОЗУ и ПЗУ умеренного быстродействия,
но большой емкости, а также вводят в арифметическое устройство
специализированные функциональные узлы (расширители) для
выполнения наиболее сложных из часто встречающихся операций.
На первый взгляд введение расширителей должно приводить к
существенному увеличению объема аппаратуры. В действитель-
ности дело обстоит иначе, поскольку при этом упрощаются цепи
управления и коммутации, а современный уровень развития мик-
роэлектроники позволяет выполнять расширители в виде БИС или
даже составной части СБИС. Как правило, в расширителях ис-
пользуют различные виды распараллеливания операций. Приме-
нение расширителей в программируемых процессорах ЦЧПТ эф-
фективно потому, что в ЦРПУ для ЦОС характерен сравнительно
небольшой набор часто встречающихся операций и процедур, ско-
рость выполнения которых практически полностью определяет
производительность процессора. Широко используют в ЦЧПТ
встроенные быстродействующие перемножители, имеющие, напри-
мер, матричную структуру. Довольно часто применяют модули,
осуществляющие операции вида XY + Z, а также различные функ-
циональные преобразователи, выполненные на логических струк-
турах, например ПФС. В программируемых ЦЧПТ возможна ап-
паратная реализация и таких крупных функциональных узлов,
как ЦФОС, корреляторы или устройства быстрого преобразования
Фурье. Например, аппаратная реализация ЦФОС и программная
всех дальнейших процедур целесообразна при широкой полосе
пропускания АЧПТ и узкой полосе пропускания ЦФОС. В этом
случае значение /д на выходе БДК должно быть велико, что вы-
нуждает максимально повышать быстродействие ЦФОС. В то же
время узкая полоса пропускания ЦФОС позволяет снизить /д на
его выходе и, благодаря этому, использовать менее быстродейст-
вующее, но более универсальное оборудование для последующей
ЦОС.
Применяемые в универсальных ЭВМ языки программирования
170
сигналов в несимметричных и особенно в несимметричных, но
симметричных в среднем дискретных каналах. Простота реализа-
ции в ЦРПУ приема в целом и приема с оценкой параметров, а
также внедрение каскадных кодов [123] и применение каналов
обратной связи [90—93] возродили интерес к сравнительно корот-
ким блочным кодам, сочетающим простоту декодирующих про-
цедур с помехоустойчивостью, достаточной для указанных слу-
чаев. Весьма перспективным классом таких кодов являются обоб-
щенные коды с постоянным весом (ОКПВ). В этот класс входят
многие уже известные коды, в том числе широко применяемые
равновесные коды, коды Варшамова—Тененгольца, коды Бергера
и некоторые другие. Обобщение позволило не только системати-
зировать известные, но и синтезировать ряд новых кодов, обла-
дающих заданными свойствами [124 -126]. Поскольку ОКПВ в
первую очередь предполагается использовать в системах связи с
переспросом, в системах с логическим сложением разнесенных
сигналов, а’также в качестве внутреннего кода при каскадном
кодировании, основное внимание уделялось способности кодов
этого класса обнаруживать ошибки и исправлять одиночные
ошибки.
К классу ОКПВ отнесем коды, у которых значения обобщен-
ного веса, взятые по некоторому модулю, одинаковы для всех
—>
кодовых комбинаций. Пусть a=(ai, а2, ..., ап)—двоичный набор
длины п, а<=0 или 1, ie[l, п], a v=(vi, v2, ..., vn) — вектор с
натуральными координатами (весовой вектор). Обобщенным ве-
—> ->
сом набора назовем скалярное произведение векторов а и v.
^(а) = S aiVi-
i=i
При V{= 1 для всех I обобщенный вес совпадает с хэмминговым.
—У’
Если кроме v фиксированы целые числа К>0 и ge[0, L—1], то
код, состоящий из всех двоичных наборов а, удовлетворяющих
условию
П7(е) =£ (mod L),
назовем ОКПВ с параметрами п, v, L, g.
Было доказано, что при фиксированном весовом векторе v
максимальная по всем возможным значениям £ мощность (число
комбинаций) ОКПВ
Аймаке >2"/L.
Описана структура разделимого ОКПВ с минимальным хэм-
минговым расстоянием d=3 [126]. Показано, что число прове-
рочных разрядов такого кода
r=l+] iog2 (п-1) [=14-] iog2 {(А>4-1)4-] log2 (Ч-1)[}[,
где k — числю информационных разрядов.
177
Доказано существование и приведена структура разделимого
в узком смысле ОКПВ с числом проверочных разрядов г=1, об-
наруживающего любые пакеты ошибок длины I и менее.
Доказано, что в полностью несимметричном канале (т. е. в
канале, в котором возможны ошибки только одной полярности)
коды, входящие в класс ОКПВ, являются наиболее мощными (при
заданной значности) среди кодов, обнаруживающих все ошибки
и исправляющих одиночные ошибки [124, 126]. В частности, было
показано, что максимальная мощность бинарного кода, обнару-
живающего все ошибки в полностью несимметричном канале, не
превышают Cnln/Zi, а у разделимого кода, обладающего теми же
свойствами, минимальное число проверочных разрядов равно
]log2(&+1) [. Для ОДПВ, исправляющих все одиночные ошибки в
полностью несимметричном канале, определены нижняя и верхняя
границы мощности:
2’7 («+1) С N С 2 (2П—1) / (n+1).
Предложены коды, относящиеся к классу ОКПВ, эффективные
в несимметричных, но симметричных в среднем дискретных ка-
налах [125]. Для этих кодов, названных усеченными кодами Бер-
гера, выведены выражения вероятности необнаружимого искаже-
ния кодовой комбинации и произведено 'сравнение их помехо-
устойчивости с помехоустойчивостью кодов Бергера и равновесных
кодов.
К числу достоинств ОК.ПВ относится возможность оптимиза-
ции параметров ОК.ПВ применительно к конкретным условиям
связи. Если, например, /гиг заданы так, что обнаружение всех
двойных ошибок невозможно, для обнаружения максимального
числа этих ошибок необходимо в качестве щ- выбирать числа
1, 2, ..., 2Г—1, повторяя каждое из них [п/(2’’—1)] или ]п/(2г—1)[
раз [126]. Некоторые коды, входящие в класс ОКПВ, позволяют
обнаруживать сбои цикловой синхронизации.
В рассмотренном классе ОКПВ декодирование сводилось к од-
ной проверке обобщенного веса. Именно поэтому коды данного
класса оказывались эффективными только при обнаружении оши-
бок и исправлении одиночных ошибок, т. е. при сравнительно
малом d. Введя несколько весовых векторов и соответственно не-
сколько проверок обобщенного веса, можно добиться повышения
эффективности ОКПВ и при весьма значительном хэмминговом
расстоянии. В кодах данного класса возможна реализация нерав-
номерной защиты информационных символов. Это весьма важно
в ЦРПУ, где ошибки в старших разрядах отсчетов более опасны,
чем в, младших. Проверки по обобщенному весу могут быть ис-
польЗЬваны не только в блочных, но и в сверхточных кодах.
СПИСОК ЛИТЕРАТУРЫ
1. Стивенсон. Многоканальный цифровой коротковолновый приемник//Электро-
ника, 1972. — Т. 45, № 7. — С. 35—41.
2. Chiffy F. Р., Bjerede В. Е. Communication receivers of the future.//Signal,
1975, —V. 30, № 3,—P. 16—21.
3. Побережский E. С. Цифровые коротковолновые радиоприемные устрой-
ства//? адиотехника, 1978. — Т. 33, № 5. — С. 16—24.
» 4. Бош Б. Г. Гигабитная электроника: Обзор//ТИИЭР, 1979, т. 67, № 3.
► С- 5-51' Л> ” А «
' 5. Побережский Е. С. Проблемы и перспективы внедрения цифровой обработ-
ки сигналов в технику радиоприема//Развитие и внедрение новой техники
радиоприемных устройств: Тез. докл. Всесоюз. научно-техн. конф. Моск-
ва—Горький, 1981. — С. 6—8.
6. Побережский Е. С. Устройства на поверхностных волнах в цифровых ра-
диоприемниках//Пьезо- и акустоэлектронные устройства. • Омск, ОмПИ,
1981. — С. 55—58.
7. Побережский Е. С. Цифровые радиоприемные устройства и проблема ана-
лого-цифрового преобразования узкополосных сигналов//Радиотехника, 1984,
№ 3. — С. 56—63. „ „ л
8. Зарубинский М. В., Побережский Е. С. Формирование отсчетов квадратур-
' ных составляющих в цифровых радиоприемных устройствах//Радиотехника,
1986, № 1. — С. 59—63.
9. Побережский Е. С., Зарубинский М. В. Сравнительный анализ методов дис-
кретизации в цифровых радиоприемных устройствах//Тез. докл. 40 Всесоюз.
научной сессии НТОРЭС им. А. С. Попова, посвященной Дню радио.
Ч. 1. —• М.: Радио и связь, 1985. — С. 78—79.
10. Радиоприемные устройства/В. Н. Банков, Л. Г. Барулин, М. И. Жодзиш-
ский и др.; Под ред. Л. Г. Барулина. — М.: Радио и связь, 1984. — 272 с.
11. Машбиц Л. М. Цифровая обработка сигналов в радиотелеграфной свя-
зи. —• М.: Связь, 1974. — 192 с.
12. Побережский Е. С. Некоторые вопросы синтеза цифровых демодуляторов//
Радиоприборостроение. Новосибирск, 1977. — С. 106—109.
13. А.с. 559439 (СССР). Дискретный демодулятор разнесенных сигналов час-
тотной телеграфии/Е. С. Побережский, Н. П. Хмырова.
14. Рабинер Л., Гоулд Б. Теория и применение цифровой обработки сигналов:
Пер. с англ./Под ред. Ю. Н. Александрова. — М.: Мир, 1978. — 848 с.
15. Роча Л. Ф., Черноуски-Фриас Б., Орда К. Вычисление свертки и корреля-
ции при помощи дельта-модуляторов. — ТИИЭР, 1980. — Т. 68, № 8. —
С. 90—92.
16. Применение цифровой обработки сигналов/Под ред. Э. Оппенгейма: Пер.
с англ./Под ред. А. М. Рязанцева. — М.: Мир, 1980. — 552 с.
17. Павлов К. М. Радиоприемные, устройства магистральной КВ связи. — М.:
Связь, 1980. — 145 с.
18. Куликовский А. В. Цифровая обработка дискретных сигналов. — Влади-
мир: ВПИ, 1981. — 92 с.
19. Сосновский Н. С. Некоторые вопросы построения демодуляторов радио-
телеграфной связи с использованием методов цифровой обработки сигна-
лов//Техника средств связи. Сер. ТРС. — 1982. — вып. 10 (30). — С. 29—36.
20. Сикарев А. А., Лебедев О. Н. Микроэлектронные устройства формирования
и обработки сложных сигналов. — М.: Радио и связь, 1983.— 216 с.
21. Микропроцессорная реализация алгоритмов нелинейной фильтрации/В. Н.
Харисов, Ю. Н. Кириленко, М. И. Маклюков, А. И. Федоров//Радиотех-
ника. — 1984. — № 3. — С. 20—24.
22. Акчурин Э. А. Цифровые демодуляторы сигналов с одной боковой поло-
сой//Радиотехника. — 1984. — № 6. — С. 3—9.
23. Хофф, Таунсенд. Однокристальный микрокомпьютер для обработки сигна-
лов в реальном времени//Электроника. — 1979. — Т. 52, № 5. — С. 23—30.
24. Бласко Р. V-МОП-прибор, подключаемый к микропроцессору для обработ-
ки сигналов в реальном времени//Электроника. — 1979. — Т. 52, № 18. —
С. 38—50.
179
«к Поса Дж. Цифровые процессоры аналоговых сигналов — новое направле-
ние интегральной техники//Электроника. — 1980.—'Т. 53, № 4. С. 93 96.
26. Микрокомпьютер с 32-разрядным арифметическим устройством для выпол-
нения вычислений с высокой точностью//К. Макдоноу, Э. Кодел, С. Мейгар.
А. Лей//Электроника. — 1982. Т. 55, № 4. — С. 25—32.
27. Балашов Е. П., Пузанков Д. В. Микропроцессоры и микропроцессорные
системы/Под ред. В. Б. Смолова. — М ' Радио и связь, 1981. 328 с.
28. Гришин Ю. П„ Казаринов Ю. М., Катиков В. М. Микропроцессоры в ра-
диотехнических системах/Под ред. Ю. М. Казаринова. — М.: Радио и связь,
982. — 280 с. ,1гл /
29. Ламекин В. Ф. Аналоговые микропроцессоры для систем связи//Радиотех-’Э *
инка. —- 1983. — № 1. — С. 40—43. у
30 Джордан X. Ф. Конвейерная ЭВМ с несколькими потоками команд//
ТИИЭР. — 1984 — Т. 72, № 1. — С. 135—147.
31. Бахтиаров Г. Д. Цифровая обработка сигналов: проблемы и основные
направления повышения эффективностн//3арубежная радиоэлектроника. —
1984. — № 12. — С. 48—66.
32. Цифровые фильтры и устройства обработки сигналов на интегральных мик-
росхемах/® Б. Высоцкий, В. И. Алексеев, В. Н. Пачин и др.; Под ред.
Б. Ф. Высоцкого — М.: Радио и связь, 1984. — 216 с.
33 Коча В. М„ Ланнэ А. А. Аппаратурная реализация цифровых фильтров//
Зарубежная радиоэлектроника. — 1979. — № 9. — С. 49—67.
34. Хэмминг Р. В. Цифровые фильтры: Пер. с аигл./Под ред. А. М. Трахтма-
на. — М.: Сов. радио, 1980. — 224 с.
35. Карташов В. Г. Основы теории дискретных сигналов и цифровых фильт-
ров. — М.: Высшая школа, 1982. — 109 с.
36. Цифровые фильтры в электросвязи и радиотехиике/А. В. Брунчепко, Ю. Т.
Бутыльский, Л. М. Гольденберг н др.; Под ред. Л. М. Гольденберга. —
М.: Радио и связь, 1982. — 224 с.
37. Лэм Г. Аналоговые и цифровые фильтры. Расчет и реализация: Пер. с
англ./Под ред. И. Н. Теплюка. — М.: Мир, 1982. — 592 с.
38. Гребенников А. И. Блок цифровых фильтров основной селекции для много-
канального устройства обработки сигнала//Техника средств связи. Сер.
ТРС. — 1982. — Вып. 10 (30). — С. 44—49.
39. Каппелини В., Константинидис А. Дж. Эмилиани П. Цифровые фильтры и
их применение: Пер. с англ./Под ред. Н. Н. Слепова. — М.: Энергоатом-
издат, 1983. — 360 с.
40. Остапенко А. Г. Синтез перестраиваемых цифровых фильтров//Радиотехни-
ка. — 1983. — № 2. — С. 31—33.
41. Гребенко Ю. А., Семкин А. А. Цифровые фильтры с перестраиваемыми па-
паметрами//Радиотехника. — 1984. — № 3. — С. 92—93.
42. Стил Р. Принципы дельта-модуляции: Пер. с англ./Под ред. В. В. Марко-
ва. — М.: Связь, 1979. — 368 с.
43. Кузькин В. С. Разностная цифровая фильтрация//Радиотехника. — 1983. —
№ 1.- 6. 52—54.
44. Погрибной В. А. Цифровые фильтры последовательного действия с им-
пульсно-кодовой и дельта-модуляцией//Радиотехника. 1984. — № 4. —
С. 30—37.
45. Цифровые системы фазовой синхронизацни/М. И. Жодзишский, С. Ю. Сила-
Новицкий, В. А. Прасолов н др.; Под ред. М. И. Жодзншского. — Сов.
радио, 1980. — 208 с.
46. Немировский М. С. Цифровая передача информации в радиосвязи. — М.:
Связь, 1980. — 256 с.
47. Емельянов Г. А., Шварцман В. О. Передача дискретной информации. —
М.: Радио и связь, 1982 — 240 с.
48. Побережский Е. С. Синтез цифровых разомкнутых устройств синхрониза-
ции//Электрониая и электромагнитная техника. — Омск. 1979. — С. 72—76.
49. Побережский Е. С., Соколовский М. Н. Цифровые разомкнутые системы
тактовой синхронизации в приемных устройствах//Радиотехника. — 1981. —
Т. 36, № 2. — С. 65—68.
180
50. Побережский Е. С., Соколовский М. Н. Оценка времени достижения порога
в дискретных накопителях при алгоритме «скользящего окна». — Изв. ву-
зов СССР//Радиоэлектроника. — 1981. — Т. 24, № 7. — С. 84—86.
51. Побережский Е. С., Соколовский М. Н. Об одном дискретном распределе-
нии, часто возникающем в радиотехнических задачах//?адиотехиика. —
1981. — Т. 36, № 9. — С. 65—68.
52. А.с. 987834 (СССР). Устройство поэлементной синхронизации/Е. С. Побе-
режский.
.,53. А. с. 1146814 (СССР). Устройство поэлементной синхронизации/Е. С. Побе-
i режский, А. Н. Бартышев.
1 54. Шапиро Д. Н., Пайн А. А. Основы теории синтеза частот. — М.: Радио
1’ и связь, 1981. — 264 с.
55. Тирней, Рэйдер, Голд. Цифровые синтезаторы частоты//3арубежиая радио-
электроника. — 1972. — № 3. — С. 57—74.
56. Глускина В. И. Метод прямого цифрового синтеза в измерительном гене-
раторе//Техника средств связи. Сер. ТРС. — 1981. — Вып. 8. — С. 106—
110.
57. Гнатек Ю. Р. Справочник по цифро-аналоговым и аналого-цифровым пре-
образователям; Пер. с англ./Под ред. Ю. А. Рюжина. — М.: Радио и связь,
1982. — 552 с.
58. Шахгильдян В. В., Лучков В. Г. Цифровой синтезатор частот с микропро-
цессором//Радиотехпика. — 1983. — № 1. — С. 62—64.
59. Шахгильдян В. В., Лучков В. Г. Спектральные характеристики цифровых
синтезаторов частот//Радиотехника.— 1984. — № 3. — С. 69—74.
60. Шишов С. Я., Ямпурин Н. П. Спектральные характеристики цифровых син-
тезаторов многоуровневых сигналов//Радиотехника. —• 1984. — № 3. —
С. 74—76.
61. Бескин Л. Н. Цифровой синтезатор частоты//Радиотехника. — 1984. —
№ 4. — С. 63—65.
62. Побережский Е. С., Соколовский М. Н. О логическом методе преобразова-
ния фаза—синус в цифровых синтезаторах частоты//Радиотехника. —
1984. — № 2. — С. 50—54.
63. Гуревич В. Э., Лопушнян Ю. Г., Рабинович Г. В. Импульсно-кодовая мо-
дуляция в многоканальной телефонной связи. — М.: Связь, 1973. — 336 с.
64. Кэтермоул К. В. Принципы импульсно-кодовой модуляции; Пер. с англ./
Под ред. В. В. Маркова. — М.: Связь, 1974. — 408 с.
65. Левин Б. Р. Теоретические основы статистической радиотехники. В 3-х кн.
Кн. 1. — М.: Сов. радио, 1974. — 552 с.
66. Джери А. Дж. Теорема отсчетов Шеннона, ее различные обобщения и при-
ложения. Обзор//ТИИЭР. — 1977. — Т. 65, № И, —С. 53—89.
67. Финк Л. М. Сигналы, помехи, ошибки... — М.: Связь, 1978. — 272 с.
68. Игнатьев Н. К. Дискретизация и ее приложения. — М.: Связь, 1980. —
264 с.
69. Цифровое кодирование телевизионных изображений/И. И. Цуккермаи, Б. М.
Кац, Д. С. Лебедев и др.; Под. ред. И. И. Цуккермана. — М.: Радио и
связь, 1981. — 240 с.
70. Цикин И. А. Дискретно-аналоговая обработка сигналов. — М.: Радио и
связь, 1982. — 160 с.
71. Величкин А. И. Передача аналоговых сообщений по цифровым каналам
связи. — М.: Радио и связь, 1983. — 240 с.
72. Тихонов В. И. Статистическая радиотехника. — М.; Радио и связь, 1984. —
624 с.
73. Бахтиаров Г. Д., Малинин В. В., Школин В. П. Аналого-цифровые преоб-
разователи/Под ред. Г. Д. Бахтиарова. — М.: Сов. радио, 1980. — 280 с.
74. Побережский Е. С. Бремя стробирования при аналого-цифровом преобра-
зовании в цифровых радиоприемных устройствах//Радиотехника. — 1983.—
№ 10. — С. 29—32.
75. Побережский Е. С. Особенности импульсно-кодовой модуляции узкополос-
ных колебаний. — Омск, ОмПИ, 1984. — 76 с.
вм-
(ИЯ
>сы
ст-
;иг-
уб-
;. С.
Гех-
не-
в. —
а. —
рой-
на-
'. К.
С.—
по-
; ис-
сим-
аниа
> ра-
J. —
щон-
ехии-
ства:
вязь,
И.—
тель-
з ли-
сиг-
гской
./Под
1 с.
Пео.
178.—
181.—
183
181