/











































































Автор: Ключев В.И.
Теги: электроника электротехника электрооборудование электроснабжение госэнергоиздат серия библиотека электромонтера
Год: 1961




Текст
ЭЛЕКТРОМОНТЕРА
В.И.Ключев
Выбор электродвигателей
для ПРОИЗВОДСТВЕННЫХ
МЕХАНИЗМОВ
БИБЛИОТЕКА ЭЛЕКТРОМОНТЕРА
Выпуск 36
В. И. КЛЮЧЕВ
ВЫБОР
ЭЛЕКТРОДВИГАТЕЛЕЙ
ДЛЯ ПРОИЗВОДСТВЕННЫХ
МЕХАНИЗМОВ
ГОСУДАРСТВЕННОЕ ЭНЕРГЕТИЧЕСКОЕ ИЗДАТЕЛЬСТВО
МОСКВА I960 ЛЕНИНГРАД
РЕДАКЦИОННАЯ КОЛЛЕГИЯ:
Васильев А. А., Долгов А. Н., Ежков В. В., Смирнов А. Д.,
Устинов П. И.
ЭЭ-3-3
В брошюре приведены краткие сведения о нагреве
электродвигателей, режимах работы электроприводов
и о наиболее распространенных сериях электродвигате-
лей, выпускаемых электропромышленностью. Излагают-
ся методы выбора электродвигателей к производствен-
ным механизмам по мощности, перегрузочной способ-
ности и допустимому числу включений в час, а также
способы определения нагрузок электроприводов некото-
рых механизмов расчетным путем и по данным опытов.
Основные материалы расчетного порядка поясняются
конкретными примерами выбора электродвигателей
к наиболее распространенным производственным меха-
низмам.
Брошюра рассчитана на электромонтеров промыш-
ленных предприятий, специализирующихся по эксплуа-
тации электроприводов производственных механизмов.
Ряд сведений может представить интерес и для более
широкого круга читателей — электриков промышленных
предприятий.
Владимир Иванович Ключев
ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ДЛЯ ПРОИЗВОДСТВЕННЫХ
МЕХАНИЗМОВ
Редактор Ю- П. Шевель Техн, редактор Н. И. Борунов
Сдано в набор 8/IX 1960 г. Подписано в печать 9/XI 1960 г.
Т-13467 Бумага 84X1081/,,;, 4,1 печ. л. Уч.-изд. л. 4,6
Тираж 28 000. Цена 1 р. 60 к.(с 1/1 1961 г. цена 16 коп.) Зак. 2455
Типография Госэнергоиздата. Москва, Шлюзовая наб., 10.
1. ВВЕДЕНИЕ
Электродвигатель является основным элементом
электрического привода производственного механизма.
Соответствие его конструктивных и технических дан-
ных условиям работы механизма является необходи-
мым требованием, выполнение которого обеспечивает
минимальную стоимость электрооборудования, высо-
кую надежность работы и наименьшие потери электро-
энергии в эксплуатации.
В процессе эксплуатации электрикам промышленных
предприятий зачастую приходится решать сложную
задачу выбора электродвигателя. Такая необходимость
возникает, например, при замене установленного дви-
гателя в соответствии с графиком планово-предупреди-
тельных ремонтов либо в связи с выходом его из строя.
Выбор двигателей усложняется в тех случаях, когда
приходится заменять их в связи с обнаружившейся пе-
регрузкой. Двигатель может оказаться перегруженным,
например, вследствие повышения темпа работы или
увеличения загрузки производственного механизма в свя-
зи с совершенствованием и автоматизацией технологи-
ческого процесса.
Во всех этих случаях можно правильно выбрать
двигатель, имея необходимый минимум знаний об, ос-
новных физических закономерностях и особенностях
электрических двигателей, а также о важнейших при-
знаках, по которым их следует выбирать. Необходимо
уметь рассчитывать в несложных случаях нагрузки, со-
здаваемые производственным механизмом на валу двига-
теля, или определять загрузку двигателя опытным путем.
Изложение этих вопросов приводится в последую-
щих разделах данной брошюры в предположении, что
читатель знаком с основными сведениями из физики и
математики в объеме средней школы.
3
2. ОБЩИЕ СВЕДЕНИЯ
Известно, что существует несколько принципиально
различных видов электрических двигателей. Прежде
всего по роду тока их разделяют на двигатели постоян-
ного и переменного тока.
Двигатели постоянного тока могут иметь различ-
ный способ возбуждения: независимое, смешанное или
последовательное. Свойства двигателей независимого,
смешанного или последовательного возбуждения раз-
личны.
Двигатели с независимым возбуждением, или, как
их иногда называют, шунтовые, при изменении нагруз-
ки на валу в широких пределах мало изменяют свою
скорость вращения. Поэтому их применяют в тех слу-
чаях, когда важно, чтобй рабочая скорость механизма
оставалась примерно постоянной как при работе вхо-
лостую, так и при любой рабочей загрузке.
Важнейшим достоинством двигателя с независимым
возбуждением является также возможность плавного
регулирования скорости в широких пределах и без
больших затрат мощности. Такое регулирование осу-
ществляется путем изменения его тока возбуждения
(ослаблением поля) или путем изменения напряжения
на зажимах якоря, например, с помощью отдельного
управляемого генератора (система Г—Д). Двигатель
с независимым возбуждением находит широкое приме-
нение в наиболее ответственных случаях, когда тре-
буются высокие регулировочные свойства привода.
Двигатели с последовательным возбуждением
(сериесные) отличаются тем, что их скорость вращения
в большей степени зависит от нагрузки на валу. При
малых нагрузках скорость велика, а при увеличении
нагрузки сильно снижается. Работа такого двигателя
вхолостую недопустима, так как при этом его скорость
увеличивается до значений, при которых возможны ме-
ханические повреждения якоря (как говорят, двигатель
«идет вразнос»). Другой важной особенностью двига-
теля с последовательным возбуждением является его
способность выдерживать относительно большие пере-
грузки, чем двигатель с независимым возбуждением.
Поэтому двигатель с последовательным возбуждением
находит широкое применение на транспорте (трамвай,
троллейбус, электровозы), на подъемных механизмах
4
наиболее ответственных кранов и в других аналогич-
ных случаях.
Двигатели смешанного возбуждения (компаундные)
занимают по своим свойствам промежуточное положе-
ние между первыми двумя видами двигателей постоян-
ного тока.
Двигатели переменного тока также имеют несколько
разновидностей. Наиболее важными из них являются
двигатели трехфазного тока: асинхронные с коротко-
замкнутым или фазным ротором (с кольцами) и син-
хронные.
В сравнении с двигателями постоянного тока асин-
хронные двигатели проще, дешевле, надежнее в экс-
плуатации и не требуют преобразования трехфазного
переменного тока, получаемого непосредственно от за-
водских сетей, в постоянный ток.
Наиболее распространенным на промышленных
предприятиях является асинхронный двигатель трех-
фазного тока с короткозамкнутым ротором. Этот дви-
гатель при всей своей простоте обладает рядом специ-
фических особенностей, прежде всего в отношении усло-
вий пуска, реверса и торможения. Эти особенности
должны учитываться при выборе двигателя, поэтому им
в последующем изложении уделено особое внимание.
Асинхронный двигатель с фазным ротором также
находит широкое промышленное применение. Зажимы
роторной обмотки в этом двигателе выведены на коль-
ца, что дает возможность изменять условия пуска, ре-
верса и торможения, вводя в цепь ротора добавочные
пусковые и тормозные сопротивления.
Скорость вращения асинхронных двигателей в нор-
мальном режиме работы мало зависит от нагрузки на
валу. В этом отношении они аналогичны двигателям
постоянного тока с независимым возбуждением. Однако
возможности асинхронных двигателей в отношении ре-
гулирования скорости весьма ограничены. Поэтому
асинхронный двигатель с короткозамкнутым ротором
в нормальном исполнении, как правило, находит при-
менение в электроприводах механизмов, не требующих
регулирования скорости. В специальном многоскорост-
ном исполнении этот двигатель обеспечивает ступенча-
тое регулирование скорости (практически не больше
четырех ступеней).
5
Синхронные двигатели промышленного применения
используются в нереверсивных нерегулируемых элек-
троприводах, работающих длительно, без частых пу-
сков и остановок. Как правило, они выпускаются на
мощности выше 50 кет. Выбор столь крупных двигате-
лей в практике электриков промышленных предприя-
тий встречается весьма редко. В связи с ограниченным
объемом брошюры особенности выбора синхронных
двигателей в ней не рассматриваются.
Приведенный краткий обзор охватывает лишь ос-
новные разновидности электрических двигателей, наи-
более широко применяющиеся на промышленных пред
приятиях. Выбор электродвигателей по роду тока яв-
ляется сложной задачей, которая решается в процессе
проектирования электропривода. В условиях же экс-
плуатации выбор двигателя, как правило, связан с за-
меной двигателя, установленного на механизме. Поэто-
му в дальнейшем мы будем считать известными род
тока, способ возбуждения двигателя постоянного тока
или разновидность двигателя переменного тока. Эти
сведения указаны на заводской табличке (щитке) за-
меняемого двигателя.
В различных производственных помещениях скла-
дываются различные условия работы электродвигателей
в отношении воздействия на них окружающей среды.
В сухих помещениях с атмосферой, не загрязненной
пылью, едкими парами или газами обмотки двигателей
и коллекторы машин постоянного тока не подвергают-
ся каким-либо вредным воздействиям. Напротив, в по-
мещениях с повышенной влажностью, запыленностью и
в особенности при наличии едких паров или газов об-
мотки двигателей и их коллекторы необходимо защи-
щать от вредного воздействия окружающей среды.
Особые условия работы двигателей складываются в так
называемых взрывоопасных помещениях, где возник-
новение электрической искры может вызвать взрыв.
В этом случае нужно защищать окружающую среду от
возможного взрыва при появлении электрической искры
внутри двигателя.
Учитывая это, двигатели изготавливают в различных
исполнениях по способу защиты от воздействия окру-
жающей среды Наиботее распространены двигатели
в защищенном, закрытом и взрывонепроницаемом ис-
6
волнениях. Защищенные двигатели предназначаются
для работы в сухих, не пыльных помещениях. Закры-
тые двигатели устанавливаются в помещениях с повы
шенной влажностью, с атмосферой, загрязненной
пылью с металлическими включениями, испарениями
керосина или масла. Взрывонепроницаемые двигатели
имеют специальную конструкцию корпуса, способную
выдержать взрыв газа внутри машины и исключающую
при этом выброс пламени и раскаленных газов в окру-
жающую среду. Они предназначаются для иопользо
вания во взрывоопасных помещениях.
Эти положения необходимо иметь в виду при выбо-
ре двигателя к производственному механизму. Нежела-
тельно, а иногда и недопустимо, устанавливать взамен
закрытого двигателя защищенный и совершенно недо-
пустимо устанавливать взамен взрывонепроницаемого
двигателя закрытый или защищенный.
Наконец, при выборе двигателей следует обращать
внимание на их исполнение по способу монтажа (гори-
зонтальное, вертикальное расположение вала двигате-
ля; крепление на лапах или фланцевое и т. п.). Выби
раемый двигатель должен иметь тот же способ уста-
новки, крепления и соединения с производственным
механизмом, что и заменяемый.
Основой выбора конкретного двигателя являются
его паспортные (номинальные) данные, указываемые
заводом-изготовителем на щитке машины. Соответствие
этих данных условиям работы двигателя на производ-
ственном механизме и определяет правильность его
выбора.
На щитке указывается номинальное напря-
жен и е, на которое рассчитан двигатель. Очевидно, это
напряжение должно полностью соответствовать напря-
жению сети, от которой он будет питаться. Для асин-
хронных двигателей часто приводятся два значения на-
пряжения, соответствующие двум схемам включения об-
моток статора. Например, если на щитке машины ука-
заны напряжения 220/380 в и соединение обмотки ста-
тора Д/Y, то при напряжении между фазами питаю-
щей линии 220 в обмотка статора должна включать-
ся в треугольник (рис. 1,с), а при 380 в — в звезду
(рис. 1,6).
7
У двигателей постоянного тока с независимым или
смешанным возбуждением напряжения питания якоря
и обмотки возбуждения могут иметь различную вели-
чину, о чем имеются указания на щитке машины.
На щитке машины также указывается номиналь-
ная скорость вращения электродвигателя.
Номинальная скорость вращения является одним из
важных параметров как электродвигателя, так и про-
Рис. 1. Соединение статорной обмотки
асинхронного двигателя в треугольник
(а) и в звезду (6).
изводственного механизма. Поэтому при выборе элек-
тродвигателя обычно следует обеспечивать равенство
номинальных скоростей вращения выбираемого элек-
тродвигателя и производственного механизма.
Для двигателей переменного тока на щитке указы-
вается номинальная частота тока питающей
сети в периодах в секунду (гц). Стандартной промыш-
ленной частотой сети переменного тока в Советском
Союзе является частота /==50 гц. Поэтому подавляю-
щее большинство двигателей переменного тока, выпу-
скаемых нашей промышленностью, рассчитаны на ра-
боту от сети с частотой 50 гц.
Для асинхронных и синхронных двигателей трехфаз-
ного тока частота сети определяет скорость вращения
8
магнитного поля машины (синхронную скорость
вращения) п0:
[об/мин], (1)
г
где f — частота тока питающей сети, гц',
р — число пар полюсов двигателя.
Число полюсов 2р асинхронных машин, как правило,
указывается последней цифрой в обозначении типа ма-
шины. Поэтому синхронную скорость асинхронного дви-
гателя можно подсчитать по паспортным данным. На-
пример, синхронная скорость вращения двигателя типа
АО 51-6, / = 50 гц'.
rt^60 50 j QQQ o6fмин.
Так как число пар полюсов может выражаться толь-
ко числами натурального ряда р=1, 2, 3, 4 и т. д., то
при промышленной частоте синхронная скорость дви-
гателя может иметь лишь вполне определенные значе-
ния: 3 000, 1 500, 1 000, 750 об!мин и т. д.
Номинальная скорость вращения асинхрон-
ного двигателя, указанная на щитке, всегда несколько
меньше синхронной, так как три увеличении нагрузки
скорость вращения ротора уменьшается. Относитель-
ное снижение скорости в сравнении с синхронной ха-
рактеризуется так называемым скольжением ротора:
^/о=^ ЮО»/о,
где п — скорость вращения ротора, об/мин.
Скольжение увеличивается с возрастанием нагрузки
на валу. Номинальной скорости пн соответствует но-
минальное скольжение sH%. Для большинства
двигателей sh0/0 = (2-t-5)°/0, причем меньшие значения
соответствуют более мощным двигателям. У так назы-
ваемых двигателей с повышенным скольжением sH°/0 =
=(8^12)«/0.
Высокоскоростные двигатели специального исполне-
ния для электрошпинделей, электроинструмента, центри-
фуг, авиационные двигатели и т. п. выпускаются с но-
9
минальной частотой, в несколько раз превосходящей
промышленную (200, 400 гц}. Такие двигатели включать
непосредственно на напряжение заводской сети с часто-
той 50 гц недопустимо. Для их питания должны! уста-
навливаться специальные преобразователи частоты.
Остальные данные, указываемые на щитке двигате-
ля (мощность, ток, режим работы), характеризуют на-
грузку двигателя, на которую он рассчитан. Правильное
определение потребной мощности имеет весьма важное
значение при выборе двигателя, поэтому рассмотрим
более подробно физическую сущность этих важнейших
паспортных данных двигателя.
3. НАГРЕВАНИЕ ЭЛЕКТРИЧЕСКИХ ДВИГАТЕЛЕЙ
Приводя в движение производственный механизм,
электродвигатель совершает полезную работу по пре-
одолению сил сопротивления, обусловленных силами
трения в передачах и в движущихся частях механизма,
а также полезной нагрузкой на его рабочем органе.
Количество полезной работы, совершаемое в единицу
времени (в секунду), называется полезной мощ-
ностью Р2 или .мощностью на валу двигателя.
Энергию, необходимую для совершения механиче-
ской работы, двигатель получает из электрической се-
ти, к которой он подключен. Количество электрической
энергии, потребляемой двигателем из сети в секунду,
называется потребляемой мощностью. По-
требляемую мощность Р\ для двигателя постоянного
тока можно подсчитать по формуле
Л=10-3Пн7я [кет], (2)
где Un— напряжение на зажимах двигателя, в;
1— ток, потребляемый двигателем из сети, а.
Для асинхронного двигателя
Pt = 10~3 |/ЗТ/1л/1лсо8<р [кет], (3)
где 77] — междуфазное (линейное) напряжение на зажи-
мах двигателя, в;
7— ток, потребляемый двигателем из сети (ли-
нейный), а\
cos <р — коэффициент мощности двигателя,
10
Преобразование электрической энергии в механиче-
скую работу неизбежно сопровождается потерями ее
в двигателе. Поэтому потребляемая мощность всегда
больше, чем мощность на валу, а разность их равна
мощности потерь
ЬР = Рг- Р2 [кет].
Мощность потерь характеризует количество энергии,
которое теряется непосредственно в двигателе за
1 сек (если отсутствуют внешние добавочные сопротив-
ления).
Рассмотрим энергетическую диаграмму асинхронно-
го двигателя, приведенную на рис. 2,а..
Потребляемая из сети переменного тока мощность Pt
частично реализуется в виде полезной мощности Р2,
Рис. 2. Энергетические диаграммы асинхронного двигателя
при различных нагрузках на валу.
а частично теряется в самом двигателе в виде мощности
потерь в сопротивлениях обмоток статора ДРм1 и ро-
тора ДРм2, потерь в стали статора ^Рсг1 и ротора ЬРсгЪ
а также механических потерь ЛРМ„К, связанных с тре-
нием в подшипниках и с наличием вентилятора на валу
двигателя.
Потери в стали возникают вследствие непрерывных
периодических изменений магнитного потока машины,
обусловленных изменениями переменного тока. Для
11
уменьшения этих потерь статор и ротор асинхронного
двигателя выполняются шихтованными, т. е. набранны-
ми из тонких стальных пластин, электрически изоли-
рованных друг от друга изоляционным покрытием.
При увеличении нагрузки на валу двигателя увели-
чивается полезная мощность Р2, а следовательно, по-
требляемая из сети мощность Рх и ток двигателя. Из-
вестно, что потери в сопротивлениях зависят от квад-
рата тока. Поэтому с увеличением Нагрузки на валу
пропорционально квадрату • тока возрастают потери
в меди (в обмотках) ^Р,.\ и ДРм2, а следовательно, и
суммарные потери в двигателе ДР. Энергетическая диа-
грамма, соответствующая увеличенной в сравнении
с рис. 2,а нагрузкой, приведена на рис. 2,6.
Мы пришли к важному выводу, что потери в дви-
гателе определяются нагрузкой на его валу, увеличи-
ваясь с возрастанием нагрузки.
Без большой погрешности можно считать, что поте-
рн энергии целиком выделяются в двигателе в виде
тепла, что вызывает его нагревание. Рассмотрим, каки-
ми тепловыми процессами сопровождается работа
двигателя с некоторой нагрузкой на валу, если при
включении двигатель имел температуру, равную тем-
пературе окружающей среды to с .
Выделяющееся в двигателе в течение каждой секунды
количество тепла 0,24ДР ккал. вначале полностью
I сек J
идет на увеличение его температуры. Как только тем-
пература двигателя f станет больше, чем температура
окружающей среды t°o , начнется процесс отдачи тепла
в окружающую среду. Количество тепла, отдаваемое
в окружающую среду в течение каждой секунды, Qoc
увеличивается по мере роста температуры двигателя:
Q =ЛгГ-^1, (4)
о.с | сек J '
, ккал
где А — теплоотдача двигателя, О(_, —,
т = £’ — t° — превышение температуры
двигателя над температурой окружающей сре-
ды, °C.
12
В связи с увеличением количества тепла, отводимого
в окружающую среду, темп нарастания температуры
двигателя по мере его нагрева постепенно уменьшается.
При некотором превышении температуры туст все выде-
ляющееся за счет потерь тепло будет полностью отда-
ваться в окружающую среду:
Лгуст = 0,24ДР.
При этом дальнейший рост температуры двигателя
прекратится. Установившееся превышение температуры
двигателя над температурой окружающей среды будет:
1°с1* (5)
Зависимость температуры двигателя f от времени
t для случая нагрузки меньше номинальной изображе-
на графически на рис. 3,а (кривая /). Если бы двига-
тель работал с номинальной нагрузкой на валу, мощ-
ность потерь ДР и установившееся превышение темпе-
ратуры туст были- бы выше (рис. 3,а, кривая 2).
Таким образом, нагрузка на валу двигателя опре-
деляет установившееся превышение температуры дви-
гателя над температурой окружающей среды, а следо-
вательно, и абсолютное значение температуры узлов
двигателя при данной температуре окружающей сре-
ды. Отметим, что при изменении температуры окружаю-
щей среды будет изменяться и температура двигателя
при данной нагрузке.
Из формулы (5) следует, что при прочих равных
условиях температура, до которой нагревается двига-
тель, будет тем выше, чем меньше теплоотдача А. По-
этому при выборе двигателей необходимо учитывать
условия их вентиляции, так как ухудшение вентиляции
уменьшает теплоотдачу.
Указанная на рис. 3,а продолжительность нагревания
двигателя <нагр зависит от габаритов двигателя: чем
больше размеры двигателя, тем продолжительность на-
гревания больше.
Двигатели небольшой мощности (порядка несколь-
ких киловатт) нагреваются до установившейся темпе-
ратуры в течение нескольких десятков минут. Время на-
гревания мощных двигателей больше—порядка несколь-
ких часов.
13
4. НОМИНАЛЬНЫЕ РЕЖИМЫ РАБОТЫ ДВИГАТЕЛЕЙ
Изготовление двигателя требует определенных за-
трат ценных материалов и их желательно использовать
как можно полнее. Иными словами, желательно, чтобы
каждый двигатель мог работать с возможно большей
нагрузкой, развивая возможно большую полезную мощ-
ность Р2.
Однако увеличение нагрузки двигателя сопровож-
дается увеличением температуры его частей. При чрез-
мерно больших температурах нормальные условия ра-
боты двигателя нарушаются. Наиболее чувствительным
к повышению температуры элементом является изоля-
ция обмоток двигателя. Чем выше рабочая температу-
ра, тем быстрее стареет и разрушается изоляция. По-
этому для каждого изоляционного материала макси-
мальная рабочая температура строго ограничена зна-
чением, при котором обеспечивается требуемый срок
его службы.
Этим ограничивается максимально допустимая тем-
пература двигателя, которая в зависимости от вида
изоляции обычно лежит в пределах 105—125° С. Тем
самым ограничивается и максимально допустимая на-
грузка на валу по условиям нагрева двигателя.
Приведенные на щитке двигателя номинальные значе-
ния мощности Рк, тока /н и скорости вращения пн соот-
ветствуют номинальной нагрузке на валу, при
которой двигатель, работая в номинальном режиме, при
температуре окружающей среды —(—35° С имеет макси-
мально-допустимую температуру.
Рассмотрим это определение. Прежде всего в нем
оговаривается температура окружающей с р е-
д ы, которой соответствуют номинальные данные двига-
теля. Действительно, нагрузка двигателя определяет
лишь превышение температуры двигателя над температу-
рой окружающей среды. Температура же двигателя, ко-
торую и требуется ограничивать, равна сумме превыше-
ния температуры т и температуры окружающей среды
t°c- Из определения следует, что двигатель можно
нагружать указанной в паспорте номинальной нагруз-
кой, если температура окружающей среды не превосхо-
дит 35° С. При более высокой температуре окружаю-
14
щей среды во избежание недопустимого перегрева дви-
гателя нагрузку его следует снижать.
В определении упоминается указываемый на щит-
ке двигателя номинальный режим раб от ы, на
который он рассчитан. На этом важном положении
остановимся несколько подробнее
Сравним условия работы трех одинаковых электро-
двигателей, первый из которых приводит во вращение
вентилятор, осуществляющий вентиляцию цеха, второй—
механизм передвижения мостового крана и, наконец,
третий предназначается для дистанционного управле-
ния вентилем на автоматизированной насосной под-
станции.
Двигатель вентилятора, будучи включенным в начале
смены, работает длительно до конца ее, а иногда и
значительно дольше. Продолжительность работы двига-
теля в этом случае больше, чем продолжительность на-
гревания /нагр (рис. 3,а, кривая 2). Двигатедь успевает
нагреться до установившейся допустимой температуры
Стдоп = 'густ + Сс и дальнейший рост температуры
прекращается.
Такой режим работы называется длительным.
У двигателей, предназначенных для длительного
режима работы, номинальный режим на щитке обо-
значается словом «длит».
Двигатель передвижения крана включается на вре-
мя перемещения моста с грузом на крюке, затем от-
ключается от сети и в его работе наступает пауза, во
время которой груз опускается. После подъема пусто-
го крюка двигатель моста вновь включается на время
движения моста к месту загрузки. У места загрузки
он отключается и наступает пауза (спуск крюка, подъем
груза), после которой начинается новый цикл работы
механизма и его двигателя, аналогичный рассмотрен-
ному. Такие циклы могут повторяться непрерывно
в течение длительного времени.
В этом случае продолжительность работы двигате-
ля в каждом цикл'' значительно меньше, чем время /[1агр,
за которое двигатель достигает установившейся темпе-
ратуры. Поэтому за время, в течение котооого двига-
тель включен, его температура не успевает сильно' воз-
расти. Во время паузы двигатель охлаждается, и его
15
6)
Рис. 3. Зависимость температуры двигателя t° от
времени t в различных режимах работы с постоянной
нагрузкой на валу.
а — при длительном режиме; б—при повторно-кратковремен-
ном; в —при кратковременном режиме работы.
16
температура падает, стремясь сравняться с температу-
рой окружающей среды. Но по той же причине за ко-
роткий промежуток паузьи она не успевает сильно сни-
зиться и не достигает температуры окружающей среды.
Если в начале работы двигатель имел температу-
ру окружающей среды, то при таком режиме темпера-
тура его во времени будет изменяться по кривой t°=
приведенной на рис. 3,6. На этом рисунке пе-
риоды работы двигателя, когда его температура повы-
шается, обозначены /р, а периоды пауз, когда темпера-
тура снижается, — to. Из графика видно, что через не-
которое время после начала работы наступит режим, при
котором температура двигателя будет колебаться между
постоянными значениями t и t Этот режим подо-
бен режиму работы с установившейся температурой /
на графике рис. 3,о, так как дальнейший рост темпера-
туры двигателя прекращается.
Такой режим работы двигателя называется повтор-
н о-к ратковременным.
Двигатели повторно-кратковременного режима рабо-
ты рассчитываются на цикл работы, приведенный на
рис. 4. Согласно этому графику двигатель включается
1 раз за цикл и работает в течение 25% времени цикла
с постоянной нагрузкой. Время цикла не должно пре-
вышать 10 мин.
Основной характеристикой повторно-кратковремен-
ного режима работы является относительная
продолжительность включения ПВ (рис. 4):
/75 = —4^- 100%= I ООо/0.
*р “Г го гц
(6)
Следовательно, основным номинальным режимом
двигателей повторно-кратковременного режима явля-
ется режим с П5 = 25%. Кроме основного номинального
режима (775=25%), существуют номинальные режимы
775=15%, 775=40% и 775=60%, показанные на том
же графике пунктирными линиями. Номинальная мощ-
ность двигателя увеличивается при уменьшении про-
должительности включения, и наоборот.
На щитке двигателя повторно-кратковременного ре-
жима в графе «режим работы» указывается его номи-
2 В. и. Ключев 17
нальная относительная продолжительность включения,
например ПВ=25%.
Обратимся к рассмотрению условий работы двига-
теля привода механизма для дистанционного управления
вентилем. Предположим, что этот вентиль должен быть
открыт в течение дня и закрыт на несколько часов
ночью. Следовательно, его двигатель будет включаться
2 раза в течение суток: ночью на время, необходимое
Рис. 4. Номинальные графики нагрузки
двигателей повторно-кратковремен-
ного режима.
для закрытия вентиля, а утром на время, необходимое
для его открытия. Операции «открыть» и «закрыть» осу-
ществляются в течение десятков секунд каждая, а все
остальное время суток двигатель отключен от сети. Ясно,
что в течение коротких промежутков включения двига-
тель заведомо не успеет нагреться до установившейся
температуры, а продолжительности пауз достаточны
для его полного охлаждения до температуры окружаю-
щей среды (см. рис. 3,в).
Такой режим работы двигателя называется кратко-
временным. Кратковременный режим работы харак-
теризуется временем работы /р (см. рис. 3,е). Су-
ществуют следующие стандартные номинальные режимы:
/р = 15, 30, 60 и 90 мин. На щитке двигателя кратко-
lb
временного режима указывается время работы с ноМи*
нальной мощностью на валу, на которое он рассчитан,
например 15 мин.
Нетрудно видеть, что допустимая по нагреву нагруз-
ка одного и того же двигателя во всех трех рассмотрен-
ных режимах различна. В длительном режиме она
имеет наименьшее значение, так как температура дви-
гателя достигает установившегося значения, определяе-
мого нагрузкой на валу.
При повторно-кратковременных и кратковременных
режимах можно допускать большие нагрузки, учитывая,
что двигатель не достигнет установившейся темпера-
туры /уст и нагрев двигателя будет не выше допустимой
температуры Скс.доп-
Обратим внимание на то, что если при очередном
включении в момент времени tY оставить двигатель, рас-
считанный на повторно-кратковременный режим, вклю-
ченным длительно с номинальной нагрузкой, через время
^нагр ег0 температура достигнет установившегося значе-
ния £°ст, большего, чем t°MaKC,aon (см пунктирную кривую
1 на рис. 3,6) и двигатель может сгореть. Аналогичное
явление будет и при продолжительной работе двигате-
ля, рассчитанного на кратковременный режим (см. пун-
ктирную кривую 1 на рис. 3,в).
В связи с изложенным и указывается в паспорте ма-
шины режим работы, которому соответствуют номиналь-
ные величины мощности, тока и скорости вращения.
5. КРАТКИЕ СВЕДЕНИЯ ОБ ОСНОВНЫХ СЕРИЯХ
ЭЛЕКТРИЧЕСКИХ ДВИГАТЕЛЕЙ
Отечественная электропромышленность выпускает
ряд серий двигателей переменного и постоянного тока,
предназначенных для длительного режима работы.
Наибольшее распространение на промышленных
предприятиях в настоящее время получили асинхронные
двигатели единой серии А. Двигатели этой серии охва-
тывают диапазон мощностей от 0,6 до 100 кет.
Основное исполнение единой серии — защищенные
(А) и закрытые обдуваемые (АО) двигатели с коротко-
замкнутым ротором общего применения. Аналогичные
Двигатели в облегченной (алюминиевой) оболочке имеют
обозначения соответственно АЛ и АОЛ.
2*
19
Наряду с основным исполнением имеется ряд специа-
лизированных разновидностей двигателей с короткоза-
мкнутым ротором. Каждой разновидности присваивается
дополнительная буква в обозначении типа, соответствую-
щая ее особенности: П — двигатель с повышенным пус-
i ковым моментом; С — с повышенным скольжением;
Т — для текстильной промышленности с повышенными
энергетическими показателями; В — во встраиваемом
исполнении; Ш — в малошумном исполнении; Э — со
встроенным механическим тормозом.
Пример обозначения типа двигателя единой серии:
АОП 62-4 —- асинхронный закрытый обдуваемый двига-
тель с короткозамкнутым ротором, с повышенным пуско-
вым моментом, шестого габарита, второй длины, 2р=4
(четырехполюсный).
Двигатели единой серии с фазным ротором выпус
каются в защищенном исполнении и имеют буквенное
обозначение АК.
Необходимые при выборе двигателей данные, не
указываемые на щитках машин, приведены в приложе-
нии 1 и в каталогах [Л. 5 и 6].
В ближайшее время электропромышленность будет
выпускать асинхронные двигатели новых серий А2 и
АО2, которые заменят серии А и АО. Новые серии имеют
меньший габарит и вес.
Срок службы закрытых обдуваемых двигателей бо-
лее чем в 2 раза превосходит срок службы защищенных,
поэтому новые серии двигателей имеют до 6-го габарита
(до 10 кет, 1 500 обIмин) только закрытое обдуваемое
исполнение АО2, а мощностью свыше 10 кет как закры-
тое обдуваемое, так и защищенное А2.
В новых сериях шкала мощностей изменена. Табли-
ца мощностей двигателей новых серий приведена в при-
ложении 4.
Из двигателей постоянного тока длительного режима
работы наиболее распространенной является серия ПН.
Двигатели этой серии выпускаются в защищенном и за-
крытом исполнениях в диапазоне мощностей от 0,25 до
200 кет при напряжениях ПО, 220 и 440 в и скоростях
вращения от 550 до 2 870 об!мин. Двигатели серии ПН
выпускаются со смешанным возбуждением, но имеют
характеристики, близкие машинам с независимым воз-
буждением.
20
Отметим, что в ближайшее время серия ПН, равно
как и другие серии аналогичных машин, подлежит заме-
не единой серией машин постоянного тока типа П.
Для повторно-кратковременного режима работы на-
шей электропромышленностью выпускаются двигатели
краново-металлургических серий МТК, МТ (МТБ) (асин-
хронные трехфазного тока) и ДП (постоянного тока).
Двигатели постоянного тока серии ДП выпускаются
с независимым, смешанным или последовательным воз-
буждением в диапазоне мощностей 3—200 кет при ско-
ростях вращения 425—1 200 об!мин. Номинальные на-
пряжения — 220 и 440 в.
Кроме серий МТ, МТК и ДП, в эксплуатации можно
встретить крановые и краново металлургические дви-
гатели серий КТ, КТК (трехфазного переменного тока)
и МП, КПД, КПДН и т. п. (постоянного тока), выпуск
которых в настоящее время прекращен
Двигатели краново-металлургических серий выпус-
каются в закрытом исполнении. Основные каталожные
данные двигателей типов МТ (МТБ) и МТК приведены
в приложении 2.
Двигатели кратковременного режима имеют, как
правило, специализированное назначение и крупными
сериями не выпускаются.
Во всех случаях наиболее целесообразно выбирать
двигатель, паспортный режим которого полностью соот-
ветствует режиму работы производственного механизма.
Однако это удается далеко не во всех случаях либо
из-за отсутствия в резерве требуемого двигателя, либо
вследствие своеобразия режима работы производствен-
ного механизма.
Выбирая двигатель, номинальный режим которого от-
личается от режима работы производственного механиз-
ма, следует помнить, что указанные на щитке двигателя
номинальные мощность на валу и ток, строго говоря,
для этих условий недействительны. Выбор двигателя
при этом осложняется необходимостью определения до-
пустимой для двигателя нагрузки в режиме, отличаю-
щемся от паспортного.
Чтобы выяснить практическое значение правильности
выбора двигателя, рассмотрим, к каким последствиям
приводит перегрузка двигателя или его значительная
недогрузка.
21
Если нагрузить двигатель мощностью, большей, чем
указано на его щитке, он, очевидно, будет перегревать-
ся. Превышение допустимой для двигателя температуры
вызовет ускоренное старение его изоляции и быстрое со-
кращение срока службы двигателя. При значительной
перегрузке этот срок может сократиться до нескольких
часов, т. е. двигатель попросту сгорит.
Это положение известно и учитывается в эксплуата-
ции. Однако к вредным последствиям приводит и значи-
тельная недогрузка двигателя. Это положение менее
очевидно, поэтому остановимся на нем несколько по-
дробнее.
С этой целью вновь обратимся к энергетическим
диаграммам, приведенным на рис. 2,а и б. Эти диаграммы
построены для различных нагрузок на валу двигателя.
Сравнивая их, можно заключить, что при увеличении
нагрузки возрастают только потери в меди двигателя
ДРМ1 и ЬР обусловленные током нагрузки, а осталь-
ные составляющие потерь (потери в стали, механические
и т. п.) остаются практически неизменными.
Это обстоятельство дает основания разделить потери
в двигателе и а постоянные ДРпост и переменные ДРпер,
причем считать, что переменные потери пропорциональны
квадрату тока нагрузки:
др = др Ч-ДР = ДР Ч-^2ДР , (7)
пост I 1 пер пост И з пер.н’ \ /
где ДРпе н — переменные потери при номинальной на-
грузке на валу двигателя;
k3=-j-—коэффициент загрузки двигателя по току
н при данной нагрузке на валу.
Потери в двигателе можно характеризовать величи-
ной его коэффициента полезного действия (к. п. д.):
__ Р2 Рг /ох
Из формул (7) и (8) следует, что к. п. д. двигателя
зависит от нагрузки на валу. Примерная зависимость
к. п. д. асинхронных двигателей единой серии А от мощ-
ности на валу приведена на рис. 5 (кривая /).
В соответствии с этой кривой при нагрузке на валу,
составляющей 20% от номинальной, к. п. д. двигателя
ц—0,5, т. е. половина потребляемой из сети мощности
22
будет бесполезно теряться в самом двигателе. При рабо-
те вхолостую двигатель, не совершая полезной работы,
потребляет из сети мощность потерь ДДП0СТ. Поэтому
необходимо стремиться заменять недогруженные двига-
тели двигателями меньшей мощности и исключать дли-
тельную работу двигателей вхолостую.
Рис. 5. Зависимость к. п. д. и cos
асинхронного двигателя типа А 42-4
от нагрузки на валу.
та мощности двигателя (cos <р) (см. кривую 2 на рис. 5)
[Л. 4].
Таким образом, правильный выбор двигателей по
мощности обеспечивает не только высокую надежность
работы электроприводов механизмов, но и наиболее эко-
номичное потребление электрической энергии. Вопросы
же экономии электроэнергии имеют для народного хо-
зяйства страны важнейшее значение.
Для асинхронных двигателей к. и. д. и cos <р для но-
минального режима работы включаются в число пас-
портных данных и указываются на щитке машины. Для
машин постоянного тока номинальный к. и. д. может
быть подсчитан с помощью формулы
23
Значения к. п. д. двигателей единой серии (А и АО)
при различных нагрузках на валу приведены в каталоге
[Л. 6]. Для двигателей других серий к. п. д. при различ-
ных нагрузках на валу можно определить но формулам
(7) и (8), как это выполнено в примере 1. С этой целью
можно приближенно принимать для двигателей длитель-
ного режима
др
ПОСТ п |-
Для двигателей повторно-кратковременного режима
эту же величину можно принимать равной 0,3.
Пример 1. Рассчитать потери в двигателе типа МТК31-6 Рн =
= 11 кет при ПВ = 25%; т;н = 0,81; при двух различных нагрузках
на валу:
Рг = Рн; Р г = 0.3Р н.
Мощность потерь при номинальной нагрузке
1—1—0,81
= рн—= 11 ““081— = 2’58 квт‘
А^ПОСТ п
Произведем разделение потерь, принимая —тр-= и,3:
плпср.н
ДЛН 2,58
АРпср.п = /дрпост Г = 03+Т = 1,98 Квт’
\Д7>пер.н ”1” J
Дрпост = - Д^пер.н = 2.58 - 1.98 = 0,6 кет.
Мощность потерь при нагрузке на валу, равной 30% от номи-
нальной:
ДРо,3 = Допоет + *>nep.H = °-6 + '-98 = °.79 КВт'
Коэффициент полезного действия при Р2=0,ЗРн
О.ЗРН 0,3-11
11о,з= 0,ЗРН + ДР013 = 0.3-11 + 0,79 =°>805-
6. НАГРУЗКИ ДВИГАТЕЛЕЙ. ПОНЯТИЕ О ПЕРЕГРУЗОЧНОЙ
СПОСОБНОСТИ
При рассмотрении вопроса о том, как может быть
нагружен электродвигатель, необходимо, помимо мощ-
ности двигателя, т. е. работы в единицу времени, ввести
понятие силы.
?4
Напомним, что работа А, совершенная 'Силой F за
время t, численно равна произведению силы .на путь S.
Следовательно, мощность Р связана с силой соотноше-
нием:
A F-S г
P = -^—r=F-v,
где v - скорость точки приложения силы.
Рассмотрим простейший механизм — лебедку (рис. 6).
На вал двигателя надет барабан диаметром D и на ба-
рабан навивается канат с грузом G.
В этом примере мы имеем силу, равную весу груза G,
и путь, равный длине каната, навившегося на барабан.
Зная вес груза и длину кана-
та, можно определить работу,
совершенную двигателем 'по
подъему груза, а зная время
равномерного движения груза,
определить и мощность как
работу, совершенную в 1 сек.
Однако таким способом
расчета пользоваться не всегда
удобно. Из рисунка замечаем,
что груз G создает на валу
двигателя момент, равный про-
изведению веса груза на пле-
чо, равное половине диаметра
барабана. Двигатель для подъе-
Рис. 6. Определение
момента двигателя.
ма груза, очевидно, должен развивать вращающий
момент противоположного направления. Таким обра-
зом, момент может полностью характеризовать силу
двигателя. Понятие момента является для вращательно-
го движения универсальным выражением силы и мьи
будем им пользоваться.
Момент двигателя связан с его мощностью соотноше-
нием
Р =
2 975
(Ю)
где М — момент, развиваемый двигателем, кГ-м\
п — скорость вращения, об[мин.
Из формулы видно, что любое изменение момента
при постоянной скорости приводит к изменению мощ-
ности.
25
Электродвигатель при работе развивает вращающий
момент, численно равный сумме противодействующих
моментов.
Противодействующие моменты изменяются в зависи-
мости от того, имеет ли место уста si овившийся или
неустановившийся режим работы.
Неустановившимся (переходным) режимом назы-
вается режим работы с изменяющейся скоростью вра-
щения двигателя. Простейшим примером неустановивше-
гося режима является пуск, в течение которого скорость
Рис. 7. Кинематическая схема механизма
передвижения тележки мостового крана.
двигателя изменяется, увеличиваясь от нуля до значения
постоянной рабочей скорости. Режим работы двигателя
с постоянной скоростью называется установившимся.
Величина развиваемого двигателем момента зависит
от того, работает ли двигатель в установившемся или
переходном режиме. Рассмотрим нагрузки на валу дви-
гателя механизма передвижения тележки мостового
крана (рис. 7). В установившемся режиме двигатель
должен развивать момент, необходимый для преодоле-
ния всех сил трения, действующих в механизме: трения
колес о рельсы, трения в цапфах колес, трения в под-
шипниках и зубчатых зацеплениях редуктора.
В переходном режиме пуска инерционные массы при-
вода 1 и механизма движутся с ускорением. При этом
в соответствии с известным законом физики возникают 1
1 Приводом .называется совокупность электродвигателя, редук-
тора, муфты, шкива тормоза и др , служащих для передачи враща-
тельного момента производственному .мехаииаму.
26
силы инерции, пропорциональные ускорению и противо-
действующие увеличению скорости. Преодолевая эти до-
полнительные силы, двигатель совершает работу, в ре-
зультате которой увеличивается запас кинетической
энергии во всех поступательно и вращательно движу-
щихся частях установки. В связи с этим в процессе пус-
ка двигатель должен развивать больший вращающий
момент, чем в установившемся режиме.
Силы трения действуют как в установившемся, так
и в переходном 'режимах. Такие силы и моменты приня-
то называть статическими. Силы инерции связаны
с изменениями скорости и возникают только в пере-
ходных процессах. Такие силы и моменты называют ди-
намическими.
Для расчета нагрузок двигателя, ускорений, време-
ни пуска и торможения привода используется следую-
щее уравнение:
GD2
ж=/ис+л(днн=уис+^о,р, (11)
где 714— момент, развиваемый двигателем, кГ-м.-,
Мс—момент на валу двигателя, обусловленный всеми
статическими силами в механизме и передачах
(статический момент нагрузки), кГ-м;
714 дии— динамический момент, кГ-м\
GD\ — суммарный маховой момент на валу дви-
гателя, характеризующий инерционность всех
вращательно и поступательно движущихся ча-
стей установки, кГ -м?-,
об/мин
авр— ускорение вала двигателя, —.
Маховой момент имеет при вращательном движении
тот же физический смысл, что масса при поступа-
тельном.
В уравнении (11) суммарный маховой момент G
является мерой инерции всех движущихся частей. Сум-
марный маховой момент подсчитывают, зная маховые
моменты или массы отдельных элементов установки,
движущихся с разными, но взаимосвязанными скоростя-
ми: маховые моменты ротора двигателя, отдельных ва-
лов редуктора с шестернями, поступательно движу-
щиеся массы установки и т. п.
27
Запас кинетической энергии в поступательно движу-
щейся массе т определяется известной формулой
[КГ'М]- (12)
То же во вращающейся массе, обладающей маховым
моментом GD2:
<13>
Как правило, из всех движущихся частей привода и
механизма наибольшим запасом кинетической энергии
обладает ротор электродвигателя. Поэтому основную
долю в суммарном маховом моменте GD\ составляет
маховой момент двигателя GD^, указываемый
в каталогах и справочниках. В практических расчетах
для определения суммарного махового момента можно
пользоваться следующей приближенной формулой:
GD' = (l,2-l,3)CD’,+ ^ir„x (кГ лП, (14)
где №кмех — суммарный запас кинетической энергии во
вращательно и поступательно движущихся
массах рабочего органа механизма, кГ-м
Величину №кмех в формуле (14) нужно учитывать
только в том случае, если рабочий орган механизма
обладает большими массами (массивные, вращающиеся
с большой скоростью барабаны, значительные поступа-
тельно движущиеся массы, маховики и т- п.). Коэффи-
циентом (1,2-4-1,3) приближенно учитываются инерцион-
ные массы соединительных муфт, тормозных шкивов,
валов и шестерен передач привода.
Пример 2. Определить статические и динамические нагрузки,
а также времена пуска и торможения двигателя, приводящего во
вращение шпиндель токарного станка.
Мощность резания при черновой обработке Pzl = 3,3 кет;
к. п. д. станка т)ст н = 0,78; то же, при чистовой Pz2 = 2,4 кет;
к. п. д станка т)ст = 0,76.
Данные двигателя: тип АО 51-4; Рн = 4,5 кет; пк = 1 440 об [мин;
маховой момент ротора GD^B = 0,2 к Г -ма; зависимость момента,
28
развиваемого двигателем, от скорости вращения (механическая ха-
рактеристика) приведена на рис. 8.
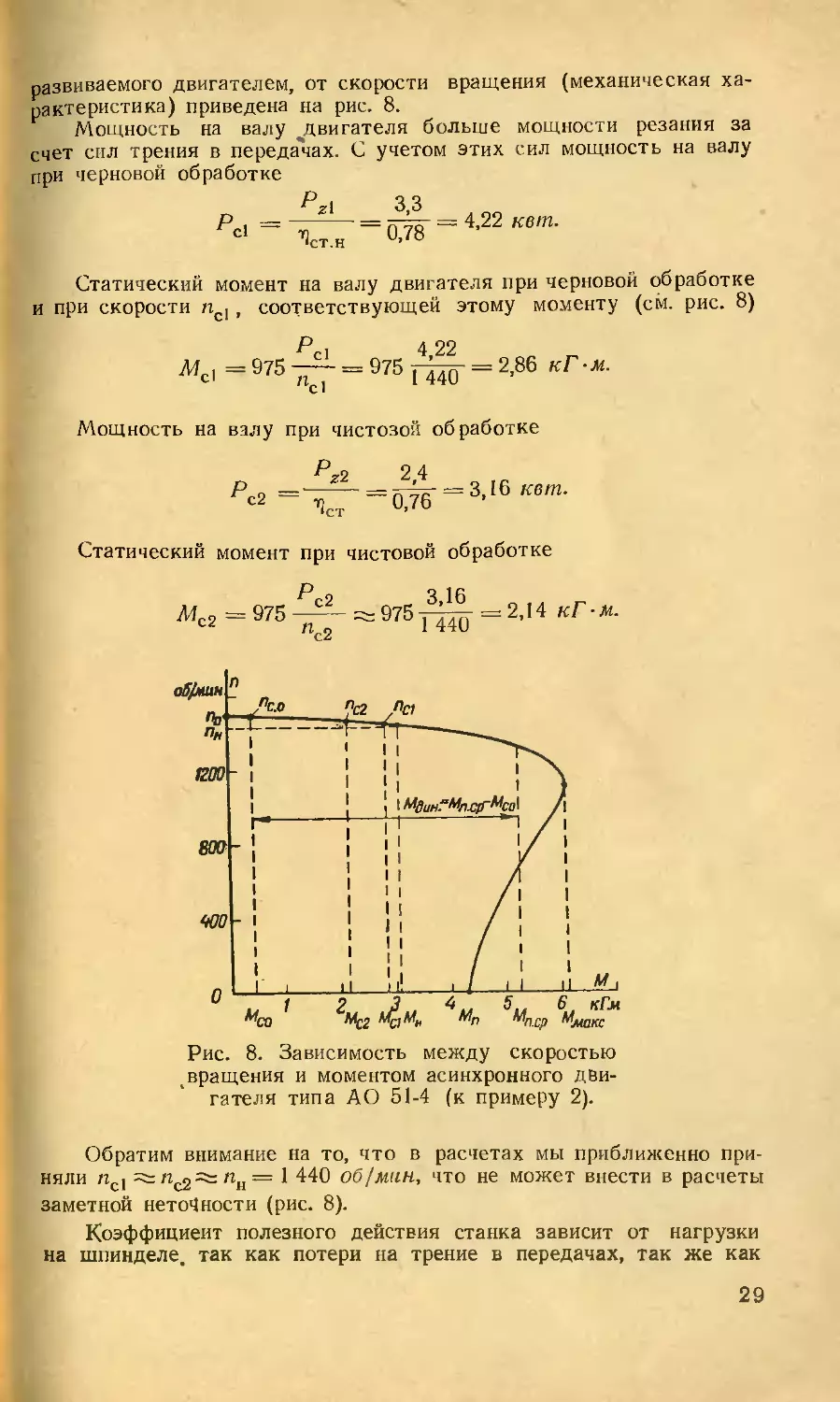
Мощность на валу ^двигателя больше мощности резания за
счет сил трения в передачах. С учетом этих сил мощность на валу
при черновой обработке
Рг1 3,3
Pcl = Чст.н = °-78 “ 4’22 Кв>П'
Статический момент на валу двигателя при черновой обработке
и при скорости пс), соответствующей этому моменту (см. рис. 8)
Pci 4,22
Л4с1 = 975 — = 975 р44(р = 2,86 кГм.
Мощность на валу при чистозой обработке
Р,2 2 4
Рс9 = ------ = = 3,16 кет.
с2 т[ст 0,76
Статический момент при чистовой обработке
Рис. 8. Зависимость между скоростью
'Вращения и моментом асинхронного дви-
гателя типа АО 51-4 (к примеру 2).
Обратим внимание на то, что в расчетах мы приближенно при-
няли пс1 =^пс2я=пн= 1 440 об/мин, что не может внести в расчеты
заметной неточности (рис. 8).
Коэффициент полезного действия станка зависит от нагрузки
на шпинделе, так как потери на трение в передачах, так же как
29
и потери в двигателе можно разделить на постоянные и перемен-
ные. При холостом ходе станка (Pz=0) имеют место только по-
стоянные потери. В .расчетах принимают,гчто мощность постоянных
потерь в станке составляет 60% от '.мощи ости потерь в стайке при
номинальной на!грузке. Номинальная .мощность станка равна Pzi.
Тогда номинальные потери
ДР = Р — Р . = 4,22 — 3,3 = 0,92 кет..
Ll.n VI «61 • '
Мощность потерь при холостом ходе станка
Р = ДР == 0,6ДРст н = 0,6-0,92 = 0,55 кет.
Статический момент при холостом ходе
„ 7с.о 0,55
Л1с0 = 975 = 975 Г~490 = 0,36 кГ'м-
Определим средний пусковой момент двигателя с короткозамк-
нутым ротором через пусковой и максимальный моменты'(см. рис. 8)
по формуле
Ч,.СР
Мл + ММакс 4,26 + 6,08
----2-----=------2------= 5,18 к Г -м.
Если для быстрой остановки шпинделя используется торможе-
ние противовключением двигателя (противотоком), то средний тор-
мозной момент для двигателя с короткозамкнутым ротором следует
определять так:
Л4т.ср = °.9^п = 0,9-4,26 = 3,84 к Г м.
Определим суммарный маховой момент на валу двигателя, пре-
небрегая запасом кинетической энергии в самом шпинделе и изделии
но формуле (14):
GDy = 1,25GZ)L = 1,25-0,2= 0,25 «Г-ж2.
Среднее ускорение при пуске (пуск осуществляется при холо-
стом ходе станка, Pz = 0) определяется с помощью формулы (11):
^п.ср -^сО 4,82 об/мин
aBD п = 375 ----------------= 375 = 7 250 —---------
ВРп 0,25 сек
Время пуска до установившейся скорости холостого хода пс(|
«со 1 490
аврп “7 250 = 0,206 сек-
Время торможения
«со __ GDi «со _0,25 1 490
/т = йвр.т~ ” 375 ’ ^т.ср -г Л,с0~ 373 ’ 3-84 + °>36 = 0,236 СвК'
30
1аким методом определения времени пуска и торможения можйо
пользоваться для всех двигателей.
При расчетах двигателей единой скорости Л и АО можно поль-
зоваться приведенными в таблице приложения 1 значениями времени
пуска /п0 и торможения Лг!) двигателя, не связанного с производ-
ственным механизмом. Пользуясь значением <п0, можно определить
время пуска двигателя, связанного с производственным механизмом,
по формуле:
GO? М„ ср
<п-Л10(?о2в [сек]- (,0)
Аналогично определяется и время торможения
GD2 Жтс„
= t-rO rrz ‘ Ж + м (16)
и/>дв 71,т.ср' с
В нашем случае для двигателя АО 51-4 в приложении 1 ука-
зана fn0=0,15 сек, Zt0 = 0,2 сек. Следовательно, в соответствии
с формулами (15) и (16)
0,25 5,18
Zn = °'l5“oX’ 5,18 — 0,36 =0>202 се/<;
0,25 3,84
*т = °’2 0,2 ’ 3,84 + 0,36 = 0,228 сек'
Нетрудно видеть, чго, пользуясь табличными значениями in0
и /т0, мы получили примерно те же времена пуска и торможения,
что и выше.
Пример 3. Определить статические и динамические нагрузки
подъемной лебедки мостового крана, кинематическая схема которой
приведена на рис. 9. Грузоподъемность лебедки — GH = 10 in; грузо-
захватывающее устройство—крюковая подвеска с подъемным элек-
тромагнитом М-41 весом Gq = 1 910 кГ; скорость подъема v —
= 0,33 м/сек; требуемое ускорение при пуске а = 0,3 м/сек2;
к. п. д. лебедки при номинальной нагрузке — цл н = 0,72, при подъеме
магнита i)q = 0,55. Двигатель: тип МТ 62-10; MH= 45 квт при
/7/1 = 25%; пн=574 об/мин; GD^n — 17,5 кГ-м2.
Мощность на валу двигателя при подъеме номинального груза
GHv
рс1- 102г)л н
10 000-0,33
102-0,72
— 44,8 квт.
Мощность на валу двигателя при спуске номинального груза
меньше, чем при подъеме, так как при этом двигателю помогают
подтормаживать опускающийся груз силы трения в передачах:
GHo
Рс2 = П02“ т'л-н =
10 000-0,33
102
0,72 = 23,3 квт.
31
Соответственно статические моменты на валу двигателя
РС1 44,8
Л4с1 = 975 — = 975 = 76,2 к Г м;
рс2 23,3
ЛС2 = 975------= 975 =39,6 кГ-м.
cz /1„ 0/4
Рис. 9. Кинематическая схема подъемной лебедки
мостового магнитного крана.
Мощность на валу двигателя при подъеме магнита
G„v 1910-0,33
Pci = Ю2т)л — 102-0,55 = 11,2 квт-
То же, при спуске магнита
. G„v 1910-0,33
Рс2— Ю2 ’Ь— 102 0’55 — 3,4/св/тг.
Соответствующие статические моменты
, 11,2 , 3,4
Л4С1 =975-g^ = 19 кГ-м; Л4с2 = 975 574-= 5,77 кГ-м.
32
Определим суммарный маховой момент на валу двигателя GD\
по формулам (12) и (14) для случая подъема номинального груза:
„ 9 7 240
GDl= 1,3GD^ + -^^к.пост = 1,3-17,5 +
пн
, 7 240 10 000-0,332
+-574 2+81 23,9 кГ'м2'
Время пуска при а = 0,3 м/сек2
v 0,33
t„ = —=-773-=1,1 сек.
п а 0,3
Ускорение вала двигателя, соответствующее требуемому линей-
ному ускорению а:
«н 574 Об/мин
авр— tn — 520 сек
Динамический момент определяется из формулы (11):
GO? 23,9
дл---------- а __,7- 520 = 33,2 к Г • м.
Л1дин~ 375 пр‘ 37а
Необходимый пусковой момент двигателя (при пуске на подъем
с грузом)
Л4п1 =4.] +Л4ДНН = 76,2+ 33,2= 109,4 кГ-м.
То же, при спуске магнита
Л4П2 = —-Мс2 + 7Идин = — 5,77 + 33,2 = 27,4 к Г -м.
Аналогичным образом можно определить пусковой момент,
обеспечивающий требуемое ускорение айв остальных случаях.
Все данные для расчетов по формулам (11) — (14)
известны из паспорта производственного механизма
либо из расчетов технологов или механиков. Если отсут-
ствуют данные о к. п. д. передач механизма, его можно
подсчитать по формуле
Vx = W3--
где •>]!, т)2, т]3—к. п. д. отдельных элементов передач.
Значения к. п. д. элементов механических передач
можно брать из таблицы, приведенной в приложении 3.
Обычно в паспорте механизма указывается к. п. д.
при номинальной нагрузке на его рабочем органе РрН1
3 В. И. Ключей 33
но не приводятся значения к. п. д. при меньших нагруз-
ках. Коэффициент полезного действия механизма при
коэффициенте загрузки по мощности (усилию или мо-
менту на рабочем органе) k3, меньшем единицы, можно
приближенно определить по формуле:
__ ____________Мн______________
0,6(1-чн) +0,6,VlH + 0.4/e3 ‘ ’
Пример 4. Рассчитать статические нагрузки на валу двигателя
механизма передвижения тележки мостового магнитного крана гру-
зоподъемностью GH = 10 т (см. пример 3). Полезный поднимаемый
груз, соответствующий номинальной грузоподъемности GH=8 090 кГ.
Вес тележки GT = 3 530 кГ; скорость передвижения v =
= 0,61 м/сек, соответствующая ей скорость вращения двигателя
пи — 910 об/мин-, номинальный к. п. д. передач г1н — 0,82; диаметр
цапфы оси колеса d = 60 мм\ диаметр колеса D = 350 мм (см.
рис. 7).
Мощность иа валу двигателей механизмов передвижения те-
лежки и моста крана следует подсчитывать по формуле:
/ d \
(^мех + Grp) (0,1 -g- + 0,08 ] v
Рс =------------------g---------------[кет],
102^
где G.„v — собственный вес тележки или моста с оборудованием,
кГ;
Go—вес захватывающего приспособления (крюковой подвески,
магнита, грейфера и т. п.), кГ;
Grp — вес полезного груза, кГ;
v — скорость передвижения, м/сек\
tq — к. п. д. передач;
k—коэффициент, учитывающий трение реборд колес
о рельсы. Для тележки k =1,5, для моста k = 2;
d, D — диаметры соответственно цапфы оси и колеса, см.
Определим мощность на валу двигателя при передвижении
тележки с грузом, соответствующим номинальной грузоподъем-
ности:
1,5(3 530+ 1 910 + 8 090)(0,1-3 + 0,08) 0,61
Рс1 — 102-17,5-0,82 —3,26 кет.
Для расчета мощности иа валу двигателя при передвижении
тележки без груза необходимо знать к. п. д. передач при умень-
шенной загрузке. Коэффициент загрузки для крановых механизмов
подсчитывается так:
k °мех+ G° + Grp
GMex +G0 +
где G'H=GH—Go.
34
При отсутствии груза (Grp =0).
3 530 + 1 910 _
ks = 3 530 + 1 910 + 8 090 —°"4’
Подсчитаем к. п. д. при такой загрузке по формуле (17):
0.4-0,82 _
Ч —0,6(1 —0,82) +0,6-0,4-0,82 +0,4-0,4 0,7L
Мощность на валу двигателя при движении без груза
1,5(3530+ 1 910) (0,1-3 + 0,08)0,61
Рс2=г 102-17,5-0,71
= 1,5 квт.
Динамические нагрузки на валу двигателя в боль-
шинстве случаев действуют кратковременно. Если дви-
гатель включается 1 раз в смену и затем работает дли-
тельно, то при его пуске возникают динамические на-
грузки, но продолжительность их действия (порядка се-
кунд) несоизмерима со всем временем работы. В при-
мере 3 время пуска составляло 1,1 сек, а время подъ-
ема груза на высоту 10 м — около 30 сек.
В том и другом случае динамические нагрузки уве-
личивают потери в двигателе, но чем они кратковремен-
ное в сравнении с продолжительностью работы в уста-
новившемся режиме, тем ничтожнее их влияние на на-
грев двигателя. Поэтому во многих случаях по условиям
нагрева можно было бы кратковременно допустить мо-
мент двигателя, много больший, чем номинальный.
Однако, кроме нагрева, существуют другие факторы,
которые ограничивают допустимую перегрузку двигате-
ля. Для каждого двигателя существует предельное зна-
чение момента, допустимого по условиям нормальной ра-
боты двигателя, превышать которое нельзя даже кратко-
временно. Отношение этого максимально-допустимого
момента к номинальному называется перегрузоч-
ной способностью двигателя.
Для двигателей постоянного тока допустимая пере-
грузка ограничивается условиями работы коллектора.
При недопустимо большой перегрузке и соответствен-
но недопустимо большом токе якоря на коллекторе воз-
никает сильное искрение и даже так называемый кру-
говой огонь, в результате которого машина выходит из
строя. Для двигателей с независимым и смешанным
3*
35
возбуждением перегрузочная способность Ж оп/^н^
= (2— 2,5). Для двигателей с последовательным воз-
буждением она выше: /Идоп/Жн = (2,5н-3,0).
Иными причинами ограничивается перегрузочная спо-
собность асинхронного двигателя. Из рис. 8 можно ви-
деть, что при увеличении нагрузки на валу асинхрон-
ного двигателя он соответственно увеличивает свой
движущий момент лишь до максимального (критического)
значения момента Жмакс. Если момент нагрузки превы-
сит максимальный момент Жмакс, двигатель останавли-
вается, так как дальнейшее снижение его скорости вы-
зывает не увеличение движущего момента, а его умень-
шение.
Перегрузочная способность асинхронного двигателя
определяется по его максимальному моменту с учетом
возможного снижения напряжения заводской сети на Ю°/о
(момент Жмакс пропорционален квадрату напряжения):
Л-1 / U \ 2М м
_^L= ) _Д^=0,81—. (18)
Л1Н (Ml Мп ' 7
Значения -Ммакс/Жн для асинхронных двигателей ука-
зываются в каталогах. Для двигателей серий МТК, МТ
(МТБ) величины Л1макс/Жн приведены в приложениях.
7. ВЫБОР ДВИГАТЕЛЕЙ ДЛЯ МЕХАНИЗМОВ
ДЛИТЕЛЬНОГО РЕЖИМА РАБОТЫ
При длительном режиме выбор электродвигателей
осуществляется достаточно просто в тех случаях, когда
нагрузку механизма можно считать постоянной. Наибо-
лее характерны в этом отношении насосы, вентиля-
торы, компрессоры, различного рода конвейеры дли-
тельного режима работы, ряд текстильных машин и
другие аналогичные механизмы.
Для этих машин условием выбора двигателя, рас-
считанного на длительный режим, является соотноше-
ние:
Р<Р,, (19)
где Рс — мощность статической нагрузки на валу;
Рн — номинальная мощность двигателя, рассчитан-
ного на длительный режим работы.
36
При выполнении условия (19) двигатель не будет
перегреваться выше допустимой температуры, если тем-
пература окружающей среды не превысит 35° С.
Для выбора двигателя нужно знать величину мощ-
ности Рс. В зависимости от конкретных условий она
может быть определена различными путями.
В ряде случаев не представляет затрудений опреде-
лить мощность нагрузки на валу двигателя расчетным
путем. Так, для центробежных вентиляторов и компрес-
соров мощность Рс можно определить по формуле
Р = [квт], (20)
с 'О^вЧп
где Q — производительность вентилятора, м31сек\
Н—напор, кГ[мР,
tj — к. п. д. вентилятора;
)jn — к. п. д. передач.
Для насосов
р [квт], (21)
с 1021]н7]п 1 j v 7
где Q — производительность насоса, дм*]сек',
Н — напор, м\
X — удельный вес жидкости, кГ]дм*-,
т]н — к. п. д. насоса.
Производительность Q и напор Н при работе венти-
лятора или насоса на определенную магистраль известны
из каталогов или по результатам замеров. Величины
к. п. д. вентилятора tj, или насоса зависят от их
условий работы и могут быть определены по каталож-
ным данным.
Пример 5. Насос типа ЯНЗ-З/25 с номинальной производитель-
ностью QH~ 12 м3/ч и скоростью вращения пнн=1 450 об/мин
устанавливается на магистрали, где он будет работать с расчетной
производительностью Q=6 м?/ч и расчетным напором //=18,5 м.
Удельный вес жидкости 7 = 1,3 кГ/дм\ По каталожным данным
при Q = 6 м?/ч к. п. д. насоса т(н = 0,15. Определить мощность на
валу двигателя.
Определим расчетную производительность Q в дм?/сек'.
1 000
Q = 6 3 6QQ = 1,67 дм?/сек.
37
Мощность Рс найдем с помощью формулы (21), учитывая, что
промежуточные передачи отсутствуют (т^ = 1):
1,3-1,67-18,5
Рс = 102-0,15--=2>6 квт-
По каталожным данным двигателей единой серии находим, что
следует выбрать двигатель типа АО 42-4; Рк = 2,8 квт-, пн =
= 1 420 об/мин, так как его мощность наиболее близка к требуе-
мой Pz и выполняется условие (19).
Отметим, что насос типа ЯНЗ-З/25 комплектуется двигателем
типа АО 51-4; Рн = 4,5 квт; пи = 1 440 об/мин. Двигатель АО 42-4
меньшего габарита и имеет другие установочные размеры, что может
несколько усложнить его установку.
Мощность на валу приводного двигателя вертикаль-
ного ковшового конвейера (элеватора) можно подсчитать
по формуле
<22>
где Q — производительность,
Н — высота подъема, м;
ijK3 — к. п. д. ковшового элеватора.
Если известно, что заменяемый двигатель при рабо-
те загружен нормально, то можно считать, что мощность
статической нагрузки Рс равна номинальной мощности
заменяемого двигателя.
Статическая нагрузка на валу двигателя для меха-
низмов с постоянной мощностью на валу может быть
определена и опытным путем. Этот путь определения
нагрузок наиболее целесообразен в случаях, когда за-
меняемый двигатель сильно недогружен либо, напро-
тив, перегружается при работе.
Пример 6. Асинхронный двигатель типа А 62-6; Рп = Ю квт;
17н = 380 в; /1н = 21,5 а; лн=970 об/мин; т01 = 0,865 установлен на
приводной станции цепного подвесного конвейера. Определить опыт-
ным путем его загрузку и рассчитать мощность на валу и стати-
ческий момент.
Для определения мощности, потребляемой двигателем из сети
при нормальных условиях работы конвейера, можно использовать
одну из схем измерения, приведенных на рис. 10. Схему рис. 10,а
можно использовать во всех случаях, но для ее осуществления
требуется двойной комплект измерительных приборов переменного
тока, например, типа КИП. Если имеется только один комплект
38
типа КИП, а обмотка статора двигателя соединена в звезду, мож-
но применить схему рис. 10,6. Полагая, что читатель практически
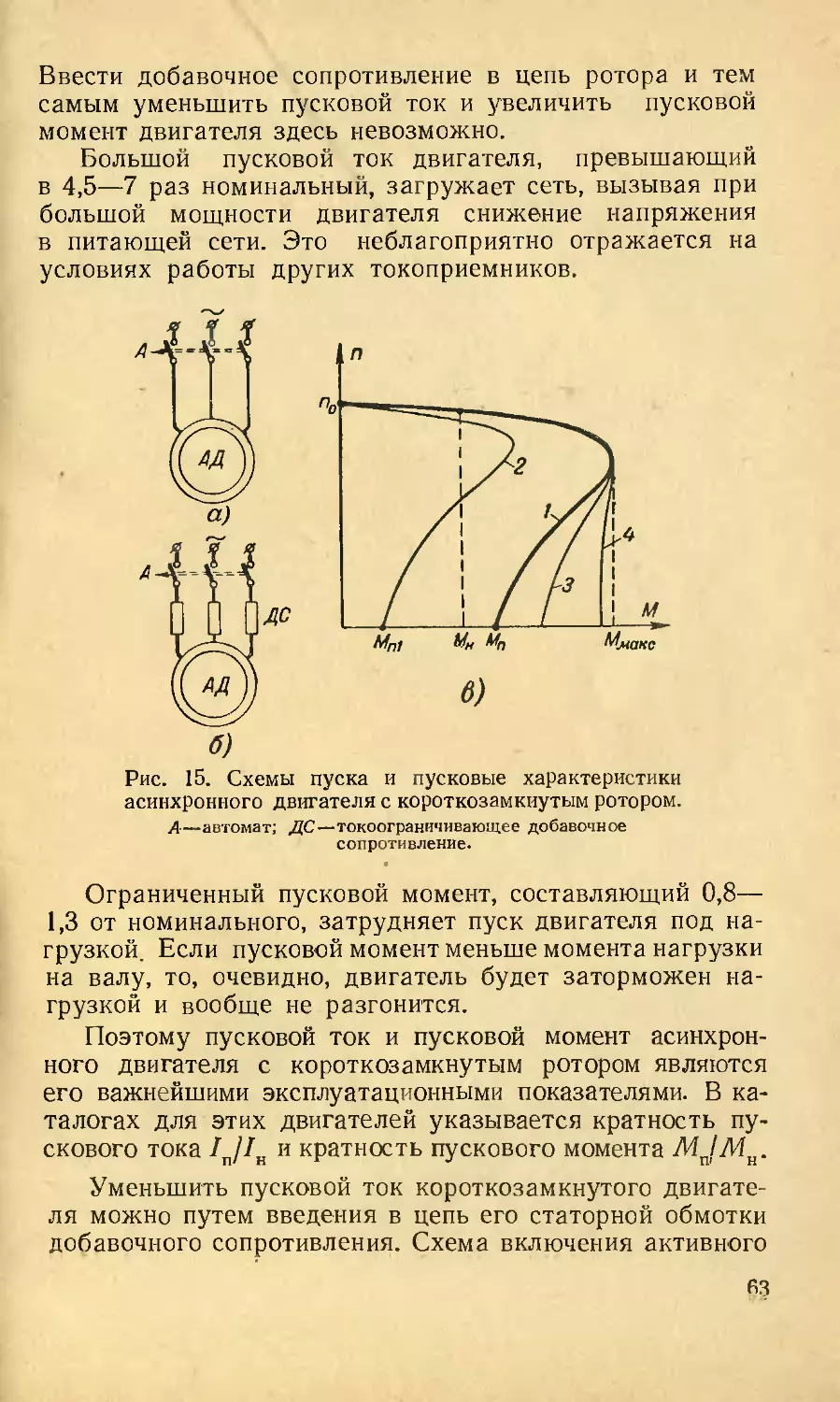
знаком с измерительной техникой, останавливаться на описании
схем измерения не будем.
При замере мощности в схеме рис. 10,а получены следующие
показания ваттметров:
P1W,= 562 вт; P2Wr = 3 938 вт.
В этом случае мощность, потребляемая двигателем, подсчиты-
вается по формуле
Pt = P1Wr+ P<2V/ = 562 + 3 938 = 4 500 em = 4,5 кет.
Рис. 10. Схемы измерения мощности, потребляемой из сети
асинхронным двигателем.
АД—асинхронный двигатель; ITT, 2ТТ—измерительные трансформаторы тока:
1W, 2W—ваттметры; 1ДС, 2ДС—добавочные сопротивления к ваттметрам
для цепи напряжения.
В схеме рис. 10,6 получено показание Р^,= 1500 вт.
При этом мощность, потребляемую двигателем из сети, под-
считываем по формуле
Рг = 3PW = 3 • 1 500 = 4 500 вт = 4,5 кет.
Приближенно подсчитаем коэффициент загрузки двигателя по
мощности:
Рс Pi4a 4,5-0,865
ka = р р ~ ю ~
н н
0,39.
При изменении нагрузки к. п. д. двигателя изменяется. Для
грубых прикидок при определении к. п. д. для асинхронных двига-
39
fp\
телей единой серии можно пользоваться зависимостью
V в/
приведенной на рис. 5 (кривая 1).
При уточненном расчете необходимо по каталожным данным
[Л. 6] построить график зависимости 1')=/(/г3) и по нему найти зна-
чение к. п. д.
На основе такого построения для двигателя типа А 62-6 най-
дено значение к. п. д. при /г3 = 0,39:
т)] = 0,83.
Уточненное значение мощности на валу двигателя
Рс =Р1т11 = 4,5-0,83= 3,73 квт.
Уточненное значение коэффициента загрузки двигателя по мощ-
ности
Рс 3,73
/г3—р JQ 0,373.
Статический момент на валу двигателя
„ „ Рс .3,73
А/С^=97э——= 97э-5=77 = 3,75 кГ-м.
с пн э/и
Можно видеть, что если в резерве имеется двигатель типа
А 52-6, Рн=4,5 квт, С/н = 380 в, /1н = 10,1 а, пн = 950 об/мин,
то им целесообразно заменить двигатель типа А 62-6.
Однако предварительно нужно проверить двигатель А 52-6 по
пусковому моменту, так как конвейеры являются механизмами
с тяжелыми условиями пуска. Такая проверка выполнена ниже
в примере 14.
У многочисленной группы производственных меха-
низмов — различных металлорежущих станков, кузнеч-
но-штамповочных машин, некоторых машин-автома-
тов в пищевой промышленности и т. п. — при длитель-
ном режиме работы нагрузка не остается постоянной,
а периодически меняется.
Например, приводной двигатель штамповочной ма-
шины имеет наибольшую нагрузку в период деформа-
ции штампуемого изделия, а наименьшую — при рабо-
те вхолостую в период замены изделия. Такой цикл ра
боты с переменной нагрузкой повторяется в течение
длительного времени.
Нетрудно видеть, что этот режим работы не соот-
ветствует номинальному длительному режиму работы
двигателя. В таких случаях применяются специальные
методы проверки по нагреву и определения потребной
по нагреву мощности двигателя.
40
Примерный график работы двигателя с переменной
циклической нагрузкой Рс на валу представлен на
рис. 11,а. В общем случае он может иметь более слож
ную форму, например, большее число участков работы
с различной нагрузкой за время цикла £ .
Если при таком графике работы выбрать двигатель
длительного режима с номинальной мощностью, рав-
ной наибольшей статической нагрузке Pi, то он будет
недогружен. Такой двигатель может длительно рабо-
тать с постоянной нагрузкой на валу, равной Р\, а из
графика рис. 11,а видно, что большую часть времени
цикла нагрузка двигателя значительно меньше.
Учитывая это, в период максимальной нагрузки дви-
гатель можно несколько перегрузить, т. е. выбрать дви-
гатель с номинальной мощностью, меньшей, чем Р\.
Однако перегрузка должна быть такой, чтобы в сред-
нем имели место нормальные условия нагрева двига-
теля.
При постоянной нагрузке на валу мощность потерь
остается неизменной. При изменяющейся нагрузке дви-
гателя соответственно меняется и мощность потерь АР
в двигателе (см. рис. 9,tz). Сравнивая эти два случая,
считают, что условия нагрева двигателя одинаковы,
если средняя мощность потерь за время
цикла при переменной циклической нагрузке равна
мощности потерь при постоянной нагрузке. Это спра-
ведливо, если продолжительность цикла / много меньше,
чем продолжительность нагревания двигателя /нагр.
Следовательно, для нормальных условий нагревания
двигателя при работе с переменной циклической нагруз-
кой необходимо, чтобы средняя за время цикла мощность
потерь в двигателе &Рср была равна или несколько
меньше мощности потерь в номинальном режиме &Ра-
(23).
Средние потери ДРср подсчитываются по формуле
= ДРА + ДРЛ+--- + ДЛ,^
ср С+С+--- + ^п
[кет], (24)
где APj, ДР2...ДРЛ-—мощность потерь на участках
рабочего цикла, квт-,
41
Рис. 11. Графики изменения нагрузки двигателя при работе
в длительном режиме с переменной циклической нагрузкой.
42
t2,..tn— длительность соответствующих участков
рабочего цикла, пронумерованных индек-
сами 1, 2, 3... п, сек.
Выше было отмечено, что мощность переменных по-
терь в двигателе пропорциональна квадрату тока двига-
теля. Отсюда следует другой способ проверки двигателя
по нагреву: если среднеквадратичный за время
цикла ток двигателя / кв равен номинальному
току 1К или несколько меньше его, то двигатель загружен
нормально:
ЛР.КВ<'Н- (25)
Величина среднеквадратичного тока подсчитывается
по графику I — f (/) (рис. 11,6) с помощью формулы
(26)
Формулы (25) и (26) целесообразно использовать
для проверки загрузки двигателя по опытной кривой
тока якоря, полученной с помощью самопишущего ам-
перметра.
В практике возникает необходимость не только про-
верки установленного на механизме двигателя по на-
греву, но и определения расчетным путем потребной
мощности двигателя. Получить удобные для этой цели
формулы можно, если принять, что между моментом
двигателя и его током существует пропорциональная
зависимость. При этом нагрев двигателя определяет-
ся среднеквадратичным моментом (см.
рис. 11,в):
/M?tt + M9t2 -f-. , + M2„tn
- 77^1+...+ tn [кГ‘м]- (27)
Формула (27) справедлива для двигателей постоян-
ного тока с независимым возбуждением при работе
с номинальным током возбуждения, а также для асин-
хронных двигателей при работе на устойчивой части
механической характеристики (примерно при изменении
момента от 0 до 0,8Л1макс — см. рис. 8). Для двигателей
с последовательным возбуждением пользоваться форму-
лой среднеквадратичного момента не рекомендуется.
43
По величине среднеквадратичного момента можно
определить потребную мощность двигателя, зная тре-
буемую для механизма скорость вращения
р Л^ср.КВ пн
нотр 975
Зная величину Рпот , можно подобрать двигатель дли-
тельного режима из имеющихся в резерве, для которого
Р ^Р .
н потр
Если можно приближенно считать, что мощность на
валу двигателя пропорциональна его току, то потреб-
ная мощность двигателя определяется непосредственно
по формуле (см. рис. 11,а)
P?tI + P22t2 + ... + P2n tn
tl + Ц + ‘ ’ + *П
[кет].
(28)
Этой формулой не следует пользоваться в тех слу-
чаях, когда при работе скорость двигателя изменяется
в широких пределах; при пусках, реверсах и торможе-
ниях, а также при регу-
лировании скорости дви-
гателей постоянного тока
или асинхронных с фазо-
вым ротором путем вве-
дения сопротивлений в
цепь якоря или ротора.
В остальных случаях
формула среднеквадра-
тичной мощности дает
приближенную оценку
условий нагрева двигате-
ля с приемлемой точ-
ностью.
Пример 7. На токарном
станке (см. пример 2) вследст-
вие перехода на скоростное то-
чение мощности резания воз-
вт, Рг2 = 5,4 кет. Управление
станком осуществляется таким образом, что для остановки шпинде-
ля не требуется останавливать двигатель.
Цикл обработки детали условно упростим, полагая, что деталь
обрабатывается в два приема: черновая и чистовая обточка цнлин-
кВт
/2
Рс
Pci
Рис. 12. График изменения ста-
тической нагрузки на валу двига-
теля шпинделя токарного станка.
40
*4—
Рс2
Рсо
60
___L
CJJ.’
росли соответственно до = 9,1
8
4
44
дрической поверхности. Положим, что по данном хронометража (пли
по расчетам технологов) время черновой обработки t м. = 22 сек,
чистовой fM2= 15 сек\ пауз i01 = 6 сек, f02 = 20 сек. Необходимо
определить, следует ли при таком изменении технологического про-
цесса заменить установленный на станке двигатель.
Определим мощности на валу двигателя аналогично тому, как
это выполнено в примере 2:
pz\ 9,1
- 7jCT H -0.78-11’7 квт;
Мощность на валу при холостом ходе по данным примера 2
Рс0 = 0,55 квт.
График цикла работы представлен на рис. 12.
Определим по формуле 128) среднеквадратичную мощность на-
грузки:
J Л11,72-22 + 0,552-6 + 6,952-15+ 0,552-20
/’ср.кв= V 22+6 + 15 + 20 ~7,7 кв,п'
Таким образом, установленный на станке двигатель необхо-
димо заменить, так как для него
Р =4,5 кв/п<Р„П1(в = 7,7 квт.
По данным двигателей АО (приложение 1) находим, что необходимо
установить двигатель АО 62-4, Рн = 10 квт, пн== 1 460 об/мин, так
как для него
Р =- 10 кет >Р =7,7 квт.
Определим номинальный момент двигателя- АО 62-4:
рн Ю
Л4Н = 97о“ = 975 =6’7 кГ/м.
Наибольший статический момент нагрузки
Рс1 11,7
Семаке = Л4С1 = 975 — 975 =7,8 кГ- м.
Определим перегрузочную способность двигателя АО 62-4. По
данным приложения 1 находим:
^макс
Л4Н 2-3'
45
Перегрузочная способность двигателя
^доп _^макс
'Л17_0’8'7^[“~0’8'2>3= 1>84-
Допустимый момент двигателя
Л4ДОП = 1,84. Л4н= 1,84-6,7 = 12,3 кГ-м.
Проверим двигатель по перегрузочной способности:
^смакс = 7-8 К^'М<МДОЛ = 12,3 кГ-м.
Двигатель проходит по перегрузочной способности.
Учитывая, что пуск двигателя осуществляется вхоло-
стую, проверку по пусковому моменту не производим.
В реальных условиях цикл обработки, как правило,
содержит большее число переходов, и график нагрузки
содержит большее число участков, чем в данном при-
мере, но каких-либо принципиальных изменений в рас-
четы это не вносит.
8. ВЫБОР ДВИГАТЕЛЕЙ ДЛЯ МЕХАНИЗМОВ
ПОВТОРНО-КРАТКОВРЕМЕННОГО И КРАТКОВРЕМЕННОГО
РЕЖИМОВ РАБОТЫ
Характерной особенностью повторно-кратковремен-
ного режима работы является необходимость частых
пусков и остановов электродвигателя. Как минимум,
двигатель включается и отключается 1 раз за время
цикла, но в большинстве практических случаев каждый
цикл работы механизма требует нескольких пусков и
остановов.
Выше мы установили, что в переходных режимах
пуска, реверса и торможения возникают динамические
нагрузки двигателя. Величина этих дополнительных на-
грузок при заданном ускорении в переходных процессах
тем меньше, чем меньше суммарный маховой момент на
валу двигателя GD|. Так как обычно основную долю
в суммарном маховом моменте составляет маховой момент
ротора самого двигателя, для повторно-кратковременного
режима желательно применять двигатели, которые при
требуемой мощности и скорости вращения имеют воз-
можно меньший маховой момент GD2.
Дв
46
По условиям нагрева допустимая нагрузка двига-
теля при повторно-кратковременном режиме выше, чем
при длительном. При пуске с такой повышенной стати-
ческой нагрузкой двигатель должен развивать и по-
вышенный пусковой момент, превосходящий статиче-
ский на величину требуемого динамического момента
(см. пример 3). Поэтому в повторно-кратковременном
режиме требуется более высокая перегрузочная способ-
ность двигателя, чем в длительном.
Вместе с тем, условия нагревания и охлаждения
двигателей при повторно-кратковременном режиме от-
личаются от аналогичных условий при длительном ре-
жиме.
Особенно сильно это отличие проявляется у двига-
телей с самовентиляцией, т. е у двигателей
с вентилятором, расположенным непосредственно на
валу ротора. Количество охлаждающего воздуха, пода-
ваемого таким вентилятором в машину, зависит от ско-
рости вращения двигателя.
При работе в длительном режиме скорость двигате-
ля мало отличается от номинальной и в течение всего
времени работы имеют место нормальные условия отво-
да выделяющегося в двигателе тепла в окружающую
среду. В повторно-кратковременном режиме такие усло-
вия имеются только на небольших отрезках времени
цикла. Остальное время цикла скорость либо меньше,,
чем номинальная (в переходных процессах пуска и
торможения), либо равна нулю (во время пауз). При
этом теплоотдача двигателя ухудшается, что и должно
учитываться при определении номинальной нагрузки
двигателя в этом режиме.
Все указанные особенности приводят к тому, что дви-
гатели, специально предназначенные для повторно
кратковременного режима работы, (например, краново-
металлургические), отличаются в конструктивном отно-
шении от двигателей длительного режима работы,
С целью уменьшения махового момента их якори или
роторы имеют удлиненную форму. Проектируются эти
двигатели таким образом, что имеют повышенную пере-
грузочную способность, а номинальная нагрузка опре-
деляется с учетом реальных условий охлаждения дви-
гателя при работе в паспортном режиме.
Наиболее часто в условиях эксплуатации приходится
47
заменять двигатели, о которых известно, что при рабо-
те механизма они загружены нормально. При этом сле-
дует стремиться подобрать точно такой же двигатель,
как заменяемый.
Если в резерве нет такого двигателя, а имеются дви-
гатели другого типа, рассчитанные на повторно-кратко-
временный режим с продолжительностью включения,
отличной от указанной на щитке заменяемого двигате-
ля, возникает необходимость определения допустимой
нагрузки двигателя при продолжительности включения,
отличающейся от паспортной.
При повторно-кратковременном режиме считают, что
двигатель, действительный режим работы которого от-
личается от номинального паспортного, нормально за-
гружен в том случае, если количество тепла, выделяю-
щееся в двигателе за время цикла в действительном и
в номинальном режимах, одинаково.
Этому условию соответствует следующая формула
пересчета допустимого тока двигателя с номиналь-
ной (паспортной) продолжительности включения /7Вн на
действительную продолжительность включения В1В,,
<29>
д н пер.н '-11 я ' 1 я
Формулой (29) можно пользоваться и для пересчета
момента и мощности, заменяя в ней токи /пв^, /пв^
соответствующими значениями момента или мощности.
Для двигателей типов КТК и КТ с самовентиляцией
в расчетах по формуле (29) можно приближенно принимать:
ДР
пост
ДР
1 пер.н
= (0,27-- 0,33).
Для крановых двигателей иностранных фирм, дей-
ствительные параметры которых обычно неизвестны, во
избежание ошибок в сторону перегрузок двигателя сле-
дует принимать эту же величину равной 0,3—0,33.
Для отечественных крановых двигателей постоян-
ного тока, а также для асинхронных двигателей типов
МТК, МТ (МТБ) можно полагать ДРПОСТ ~ 0. При таком
48
условии формулы пересчета тока, момента и мощности
упрощаются без большой погрешности:
(30)
Пример 8. Требугтся заменить установленный на механизме
передвижения моста подъемного крана двигатель типа МГ 22-6;
Рн = 7,5 кет-, UK = 500 в; /1н=15,9 я; пн = 945 об/мин; IIВ =
= 25%. Данные ротора: напряжение между кольцами = в;
72н = 21,6 я.
Подходящего двигателя этой же серии в резерве не имеется.
Необходимо выяснить, можно ли заменить этот двигатель импорт-
ным двигателем фирмы AEQ со следующими номинальными дан-
ными , указанными на щитке: Рк — 9PS [л. с]; 11ц — 500 в; /1и =
= 15,2 я; «н = 920 об/мин; частота 50 гц. Данные ротора: П2н—
= 162 в; /2н = 26,5 а. Продолжительность включения —40%££>
(ПВ = 40%).
В данном случае действительная продолжительность включе-
ния Р1ВЛ — 25%. Определим допустимую мощность имеющегося
двигателя при ПВЛ = 25% по формуле (29):
р 1 / А^пост \ 77
пвд = гпвн у дрперн у/7Вд - ПВЛ
То же, но в киловаттах:
РПВд== 0,736-12 = 8,8 кет.
Следовательно, по условиям иагрева двигатель обладает доста-
точной мощностью, так как выполняется условие
рпвд = 8.8 квт > Лютр = 7-5 квт-
Особую осторожность следует проявлять при выбо-
ре двигателя повторно-кратковременного режима для
механизма, работающего в длительном режиме (ПВЛ=
=100%). Выпускавшиеся ранее асинхронные крановые
4 В. И. Ключев
49
Дййгатели серий КТ и КТК были сконструированы
таким образом, что для них допустимая нагрузка при
П£д==100% весьма мала. В частности, для некоторых
габаритов этих двигателей недопустим длительный ре-
жим работы даже без нагрузки на валу, т. е. вхолостую.
Поэтому двигатели серий КТ и КТК применять для дли-
тельного режима не следует. Поясним сказанное при-
мером.
Пример 9. Определить допустимую нагрузку двигателя типа
КТ 55/1008, Ри = 5,5 квт, ПВН — 25% при длительном режиме ра-
боты (ПВ = 100%).
Возьмем среднее из рекомендованных выше значений
ЛРПОСТ
Гр------ =0,3 и с помощью формулы (29) определим искомую на-
“^пер.н
грузку: _______
‘//В=100% — 5,5
, 25
+ jpg =5,5-0,161—0,89 кет.
“* пост
Следовательно, при Тор--------=0,3 допустимая нагрузка дви-
“^пер.н
гателя в длительном режиме составляет всего около 16% от номи-
нальной при ПВ = 25%.
Если выбрать наибольшее из рекомендованных значений
ДР
-т-р----= 0,33, получим:
“^пер.н
Упв= 100% ~ 5,5
25
юо - °'
Двигатели серий МТК и МТ имеют относительно
меньшие постоянные потери. В случае необходимости
эти двигатели, равно как и краново-металлургические
двигатели постоянного тока, можно использовать и
в длительном режиме работы.
При отсутствии каталожных данных пересчет до-
пустимой нагрузки на ПВ = 100% для двигателей МТК,
МТ, МП, КПД, КПДН и ДП можно осуществлять по
приближенным формулам (30).
Пример 10. Необходимо заменить двигатель вентилятора, рабо-
тающего в длительном режиме, причем в резерве нет подходящего
двигателя длительного режима работы. Данные установленного
двигателя: тип АО 51-6; Рн = 2,8 квт', UH— 220/380 в; пи =
= 950 об/мин; коэффициент загрузки двигателя по данным опыта
Л3 = 0,8.
50
Имеется крановый двигатель типа МТК 21-6; Рн=5 квт при
77В = 25%; Uп — 220/380 в; пн = 910 об/мин. Требуется проверить,
удовлетворяет ли этот двигатель условиям работы вентилятора.
Определим номинальный момент установленного двигателя:
рк 2,8
Л^н.уст = 970 = 975 910 = 2187 кГ'м-
Статический момент нагрузки
Мс = /г3Л1нуст =0,8-2,87 = 2,3 кГ-м.
Номинальный момент двигателя МТК 21-6 при 77В = 25%:
5
( ПВ=25%) = 975 910 = 5 ’35 кГ-м.
Допустимый момент этого двигателя в длительном режиме по
формуле (30):
Мн (ПВ=10Э%) == Л1Н (ПВ=25%) 1/ 77^=
/25
100=2,67 кГ-м.
Следовательно, двигатель типа МТК 21-6 можно использовать
для замены установленного, так как для него
(ПВ=1оо%) = 2’67 «Г-Л>7ИС = 2,3 кГ-м.
В ряде случаев, например, при намечаемых измене-
ниях режима работы механизма в связи с изме-
нением технологического цикла возникает необходи-
мость определения потребной мощности двигателя пу-
тем расчета.
При этом в первую очередь необходимо выяснить,
могут ли оказать заметное влияние на нагрев двигате-
ля его динамические нагрузки. Ориентировочно судить
об этом можно по соотношению между временем пуска
и временем установившейся работы двигателя.
Если jCT <; 10, динамические нагрузки будут заметно
гп
увеличивать нагревание двигателя и при расчете потреб-
ной мощности двигателя их нужно учитывать.
Однако более часто " 10. В этих случаях можно
‘ п
считать, что нагрев двигателя определяется только его
статической нагрузкой.
4*
51
Простейшие способы определения времени пуска по-
казаны в примерах 2 и 3. Время установившейся рабо-
ты можно определить на работающем механизме с по-
мощью секундомера, а иногда и путем расчета.
Пример 11. Определить по данным примера 3 время подъема
груза с установившейся скоростью, если высота подъема груза
И — 8 м.
Высота подъема груза за время пуска и торможения (считая
ускорение при пуске и торможении численно одинаковым):
„ V 0,33
На + нт = 2Нп = 2tn -^= 2-1,1 —0,364 м.
Путь подъема груза с установившейся скоростью
Яуст = н — Нв — Н.с = 8 - 0,364 = 7,64.
Время работы с установившейся скоростью
нуст 7,64
*уст == “0^3 ~23,2 сек'
Следовательно,
fycT 23,2_
“ 1.1
Потребную мощность двигателя при этом достаточно опреде-
лять только по статическим нагрузкам.
Подобную оценку нельзя проводить в тех случаях,
когда выбирается асинхронный двигатель с коротко-
замкнутым ротором. Особенности выбора таких двига-
телей рассматриваются в следующем разделе.
Метод расчета потребной мощности двигателя при
—>10 в случае, когда известен цикл работы меха-
гп
низма, поясняется следующим примером.
Пример 12. По паспорту мостового магнитного крана грузе
пощъемностью 10 т его .механизм подъема рассчитан на средний
режим работы с продолжительностью включения ПВК =25%. Ста-
тические нагрузки механизма подъема этого крана рассчитаны
в примере 3. Кран предполагается использовать в тяжелом режиме
с большей продолжительностью включения механизма подъема
Необходимо подсчитать для этого .режима потребную мощность
двигателя подъема.
Цикл .работы механизма подъема, подъем магнита с номиналь-
ным грузом; пауза; ©пуск груза; отауэа; подъем магнита без груза:
52
пауза; спуск магнита для захвата очередного слитка; пауза. Число
циклов в час /Уц=20. Высота подъема /7=8 м.
Примем продолжительности подъема и спуска с грузом и без
него одинаковыми и равными (по данным примера 11).
1р ~ ^уст + = 1’1 "Ь 23,2 + 1,1 = 25,4 сек
Суммарное время работы в цикле
ар= 4/р = 4-25,4 =101,6 сел:.
Время цикла
3 600 3 600
/ц = -^—= -2q-=18° сек.
Действительная продолжительность включения двигателя
101,6
П В 100/о = |gQ 100% = 56,5%.
Суммарное время пауз
Х/0 = /ц — йр = 180—101,6 = 78,4 сек.
Принимая условно продолжительности всех пауз одинаковыми,
определим продолжительность одной паузы:
S/o 78,4
/0 = ~4----“ = 19.6 сек.
По этим данным м по данным примера 3 построен трафик (на-
грузки двигателя в зависимости от времени, приведенный на
рис. 13,с. Нетрудно видеть, что реальный цикл работы двигателя,
приведенный на этом рисунке, отличается от номинального цикла
при 77.8=25%, приведенного на рис. 4. Сравнивать же нагрузки
двигателя можно лишь при одинаковых условиях его работы.
Поэтому расчет погребной мощности при повторно-кратковре-
менном режиме работы сводится к приведению графика действи-
тельного режима работы (рис. 13,а) к графику номинального ре-
жима (рис. 4).
График номинального режима соответствует одному включе-
нию двигателя, а действительный график в нашем примере со-
держит четыре включения. Так как мы не учитываем динамических
нагрузок, можно считать, что двигатель включается 1 раз, работает
время S/p = 4/ с переменной нагрузкой, а затем отключается на
время 27о=4/о (рис. 13,6). Продолжительность включения двигателя
при такой перестройке графика осталась той же (ПВД =56,5%).
Затем необходимо определить среднеквадратичную мощность
нагрузки за суммарное время работы двигателя. В предыдущем
разделе мы отметили, что среднеквадратичная .нагрузка равноценна
в отношении нагрева двигателя действительной переменной нагруз-
ке за одно и то же время :
ср.кв ПВд
^pl + ^Р2 + + (^Х> г ,
---------------------------[кет].
(31)
53
f4
a)
квт
4Z7 -
30
p
20
10
£tp
Рис. 13. Цикл работы механизма подъема мостового
магнитного крана.
а—действительный; б—расчетный.
I
I____I } t
140 160 180 сек
------H
В данном’ примере (учитывая, что ?р1 = Zp2 = /р1 = /р2= ^р)
^"ср.кв (ПВ=56,5%)
26 квт.
44,8I 2 * 4 + 23,32 + 11,2г + 3,432
4
Заменив на рис. 13, б ступенчатый график нагрузки постоянной
за время работы нагрузкой Рср кв_ (пв=5б,5%)> получим расчетный
график, отличадщийся от графика номинального режима только
54
Продолжительностью включения. Пересчитаем По формуле (30)
среднеквадратичную мощность на номинальную продолжительность
включения И Вп = 25%;
л Г56,5
^ср.кв. (ПВ=25%)= 2® У 25 ~392 кет.
Величина Рсркв (ПВ=2Б%) является потребной мощностью
двигателя при /75 = 25%. Следовательно, действительная нагрузка
при заданном цикле работы является допустимой для установлен-
ного на лебедке двигателя, так как
•^ср.кв. (ПВ=25%) = К6,п < (ПВ=25%) = Квт.
Отметим, что при практических расчетах график, приведенный
на рис. 13, б, строить нет нужды. Здесь он нам потребовался
только для пояснения смысла расчетов по формулам (30) и (31).
Проверим двигатель по перегрузочной способности. По ката-
ложным данным двигателя МТ 62-10 (приложение 2) находим
А4макс/Мн = 3,2. Перегрузочная способность двигателя
Номинальный момент двигателя
45
Мн = 975 574 = 76,5 к Г м.
Максимально допустимый момент двигателя
Мдоп = 2,56-76,5 = 200 кГ-м.
Максимальный момент двигатель должен развивать при пуске
на подъем с грузом (см. пример 3)
^Макс.р.=АГп1 =109'4 “Г-м.
Двигатель имеет вполне достаточную перегрузочную способ-
ность, так как Ммакс.р. <МДОП.
Наряду с двигателями краново-металлургических
серий для привода механизмов повторно-кратковремен-
ного режима широко используются двигатели нормаль-
ного исполнения, рассчитанные на номинальный дли-
тельный режим работы.
Наиболее характерны в этом отношении металло-
режущие станки. Так, например, на токарных, фрезер-
ных, некоторых агрегатных и других станках для
55
Привода механизмов, работающих в Повторно- кратковре-
менном режиме, как правило, используются асинхрон-
ные двигатели единой серии с короткозамкнутым рото-
ром (А, АЛ, АО, АОЛ) либо с фазным ротором (АК).
На продольно-строгальных станках для главного при-
вода при повторно-кратковременном режиме применя-
ются двигатели постоянного тока серии ПН, рассчитан-
ные на длительный режим работы.
При выборе двигателя с номинальным длительным
режимом для механизма повторно-кратковременного
режима работы следует различать следующие случаи:
1. Выбирается асинхронный двигатель с коротко-
замкнутым ротором. Особенности выбора таких двига-
телей рассмотрены в следующем разделе.
2. Выбирается двигатель, охлаждаемый специаль-
ным вентилятором, который непрерывно вращается
особым двигателем небольшой мощности (двигатель
с независимой вентиляцией). В этом случае
условия охлаждения двигателя как на рабочих участках
цикла, так и во время пауз, когда двигагель стоит, при-
мерно одинаковы, так как он непрерывно продувается
независимым от него вентилятором.
При выборе двигателя с независимой вентиляцией
можно пользоваться методом расчета, изложенным
в примере 12, полагая 77Вн = 100%. Необходимо лишь
помнить, что двигатели, рассчитанные на длительный
режим, имеют меньшую перегрузочную способность,
чем двигатели повторно-кратковременного режима. По-
этому их особенно тщательно нужно проверять по пе-
регрузочной способности. Способ такой проверки так-
же показан в примере 12.
3. Выбирается двигатель с самовентиляцией. Этот
случай рассмотрим несколько подробнее.
Выше уже отмечалось, что двигатель с самовенти-
ляцией при повторно-кратковременном режиме имеет
нормальные условия охлаждения только при работе
с установившейся скоростью, а при пусках, торможе-
ниях и остановках охлаждение его сильно ухудшается.
Это обстоятельство должно учитываться в расчетах со-
ответствующим завышением потребной мощности дви-
гателя по сравнению с двигателем, имеющим независи-
мую вентиляцию. Метод учета ухудшения теплоотдачи
поясним следующим примером.
56
Пример 13. В связи с выходом из строя необходимо заменить
установленный на приводе грузового подъемника крановый двига-
тель с фазовым ротором типа МТ 31-6; номинальный режим
77В = 25%; Рн=11 квт; Ua = 220/380 в; пн = 953 об /мин; ток
статора I(н =49/28,4 а.
В резерве имеется двигатель с фазовым ротором типа ЛК 61-6
длительного режима; Рн =7,0 квт; UH =220/380 в; пн=940 об/мин;
[. =29,2/16,8; GDI,,=0,95 кГ м2; отношение максимального момента
1Н ' дв
к номинальному Л7макс /Мн = 2,0. Необходимо проверить, можно ли
заменить этим двигателем вышедший из строя двигатель.
Кинематическая схема лебедки приведена на рпс. 14, а. Техни-
ческие данные подъемника: скорость подъема v = 0,75 м/сек;
номинальная грузоподъемность GH = 1 500 кГ; вес кабины GK =я
= 3 200 кГ; вес противовеса Gnp = 3 950 кГ; к. п. д. лебедки
т)л =0,7; требуемое ускорение при пуске и торможении а =0,5 м/сек2.
Цикл работы подъемника: подъем тележки весом GT = 400 кГ
с грузом Grp = 1 100 кГ; пауза, во время которой груженая те-
лежка заменяется пустой; спуск пустой тележки; пауза, во время
которой пустая тележка заменяется груженой. Далее цикл много-
кратно повторяется. Высота подъема И = 9 м. Число циклов в час
1УЦ = 65.
Обратим внимание на то, что заменяемый двигатель имеет
закрытое исполнение, а имеющийся в резерве—защищенное. Будем
полагать такую замену возможной, так как подъемная лебедка
57
установлена в сухом не пыльном помещении над шахтой подъем-
ника.
Построим график момента двигателя в зависимости от времени
с учетом динамических нагрузок.
Время пуска (на подъем или на спуск):
v 0,75
= — = = 1.5 сек.
п а 0,5
Время торможения
tT =7П = се,{-
Путь, проходимый кабиной с установившейся скоростью (см.
пример 11):
vtn 0,75-1,5
Нуст = Н — =9-2 -----=7,88 м.
Время движения с установившейся скоростью
Время цикла
3 600 3 600
гц = -ДГ~=“б5~ = б5-5
Суммарное время пауз (см. рис. 14, б)
^oi ^02 = 2ZT 2/уСТ = 55,5 —
— 2-1,5 — 2-1,5 — 2-10,5 = 28,5 сек.
Торможение лебедки осуществляется механическим тормозом
Двигатель при этом отключается от сети.
Статическую нагрузку при подъеме определим, учитывая, что
вес противовеса уравновешивает вес кабины и часть поднимаемого
груза. Полезная мощность расходуется нт подъем неуравновешен-
ного груза:
(GK + GT + Grp — Gnp ) v
C1 “ Ю21)л
_ (3 200 -p 400 -I- 1 100 — 3 950) 0,75
102*0 7 zz= fcem
Стати 1еский момент при подъеме
Pd 7,9
Afcl =975—— = 975^=8,1 кГ-M
Мощность на валу двигателя при спуске
n (Gnp —Gk —Gt)u (3 950 — 3 200 — 400)0,75
₽с2— Ю2т]„ ~ 102-0,7 =^3,7 квт.
58
При этом двигатель совершает работу по подъему неуравнове-
шенной части противовеса (кабина с пустой тележкой легче, чем
противовес).
Статический момент при спуске
рс2 3,7
Л4с2 = 975 ---= 975 у53 = 3,8 кГ-м.
Определим динамический момент. С этой целью найдем по
формулам (12) и (14) суммарный маховой момент на валу двигателя
9 О 9 1 ? 240 GI1OCT
GDI = 1,36£)дВ + ----[кГ м2].
Здесь коэффициент 1,3 учитывает запас кинетической энергии
во всех вращающихся частях лебедки; Gn0CT — сумма весов всех
поступательно вижущихся частей:
Спост = Gnp + GK + Gt + Grp =
= 3 950 -f- 3 200 + 400 + 1 100 = 8 650 кГ;
9 7 240 8 650-0,752
GO? = 1,3 0,95 +• 2 9 81—=3,2 кГ-м2.
Нетрудно видеть, что в данном примере поступательно дви-
жущиеся массы обладают значительной инерцией. Найденное зна-
чение GD% соответствует подъему груза, а при спуске будет не-
сколько меньше.
Определим динамический момент при пуске на подъем
GDi GDI
М дин = “З75~авр ='375
пн 3,2 953
/п ' 375' 1,5 =’5,4 кГм
Требуемый пусковой момент двигателя
МП1 = Afci + Л4ДИН = 8,1 + 5,4 = 13,5 лгЛ-лг.
Будем считать, что при пуске в направлении «спуск» двигатель
развивает такой же пусковой момент. Отметим, что при этом фак-
тическое время пуска на спуск будет меньше определенного выше,
так как Л4С1 Л1с2
По полученным расчетным данным «a рис. 14,6 построен график
момента, развиваемого двигателем на различных участках рабочего
цикла. По этому графику с помощью формулы (27) подсчитаем
среднеквадратичный момент двигателя за время цикла работы. Одна-
ко при этом нужно учесть ухудшение теплоотдачи двигателя с само-
вентиляцией во время пусков, торможений и пауз и несколько
увеличить значение среднеквадратичного момента, которое дает
формула (27). По данным опытов известно, что охлаждение двига-
теля ухудшается при его полной остановке примерно в 2 раза по
сравнению с работой при установившейся скорости, а во время
59
пусков и торможений имеет место средняя интенсивность охлажде-
ния двигателя между этими двумя крайними случаями.
Учитывая это, формулу (27) для графика, приведенного на
рис. 14,6, можно записать так:
1/ ^П1^П + ^с/уст +Af„l + ^с2 ^уст
^ср.кв - У 0,5 (/01 + + 0,75 (2fn + 2/т) + 2густ
Иными словами, ухудшение теплоотдачи учитывается соот-
ветствующим умен: шением суммарного времени пауз (умножением
на коэффициент 0,5) и суммарного времени пусков и торможений
(умножением на коэффициент 0,75) в знаменателе подкоренного
выражения, определяющего гареднеквадратичную величину. Тем са-
мым среднеквадратичная нагрузка двигателя несколько увеличи-
вается:
13,52-1,5 + 8,12-10,5 + 13,52.1,5+3,82-10,5
0,5-28,5 + 0,75.4.1,5 + 2-10,5
= 5,92 кГ-м.
Номинальный момент выбираемого двигателя
* и 7
Л4н = 975— - = 975 д40 = 7,26 кГ-м.
Таким образом, двигатель АК 61-6 в отношении нагрева имеет
вполне достаточную мощность
М 0 = 5,92 кГ-м =Т,‘2& кГ-м.
VP-rtLS. 11
Необходимо проверить двигатель по перегрузочной способности
Максимально-допустимый момент двигателя
Л4макг
М= 0,8 ——Мп = 0,8.2-7,26 = 11,6 кГ-м.
Двигатель не обладает достаточной перегрузочной способно-
стью, так как
^доп = п-6 *^<Ммакс.р = Л4п1 =13,5 кГ-м.
Поэтому использовать этот двигатель в данном случае нельзя,
хотя по условиям иа1прева он и обладает достаточной мощностью.
Вновь повторять весь расчет для другого имеющегося в резерве
двигателя не требуется. Без большой погрешности можно считать,
что потребная мощность двигателя длительного режима известна:
п ^ср.кв ИН - 5,92-953 „
Лютр ~ 975 975 — 6>1 квт-
60
Следовательно, необходимо подобрать такой двигатель дли-
тельного режима, для которого выполнялись бы условия
₽н>-Рпотр = 6.1 квт<
С*
Мдоп = 0,8-д-Л!н>Л!п1 = 13,5 кГ-м.
Для подъемно-транспортных механизмов повторно-
кратковременного режима работы наиболее целесооб-
разно применять двигатели, специально рассчитанные
на повторно-кратковременный режим. Для различных
механизмов станков с повторно-кратковременным ре-
жимом работы применение двигателей длительного ре-
жима вызывает меньшие затруднения. Это объясняется
тем, что пуск таких механизмов, как правило, осущест-
вляется без нагрузки.
В заключение данного раздела кратко остановимся
на вопросах выбора двигателей для механизмов крат-
ковременного режима работы.
Двигатели кратковременного режима работы круп-
ными сериями, рассчитанными на универсальное при-
менение, не выпускаются. Поэтому замена двигателя,
номинальные данные которого соответствуют кратко-
временному режиму, просто осуществляется только
в том случае, если в резерве есть точно такой же дви-
гатель.
Если же такого двигателя нет и приходится приме-
нять двигатель с другим номинальным режимом, рас-
четным путем определить потребную мощность весьма
сложно. Поэтому здесь мы ограничимся лишь следую-
щей рекомендацией. Если продолжительность работы
двигателя в условиях работы механизма не превышает
1,5—2,5 мин, следует выбирать двигатель повторно-
кратковременного режима.
С этой целью нужно рассмотренными выше способами
подсчитать наибольшие статическую и динамическую
нагрузки и определить максимальный потребный момент
двигателя Л'1макср. Затем необходимо подобрать двига-
тель повторно-кратковременного режима, для которого
наиболее близко выполняется условие
Л1 > Л1
доп макс.р
61
Таким образом, в подобных случаях двигатель вы-
бирается только по перегрузочной способности, а про-
верка по нагреву не требуется.
Если продолжительность работы превышает 15 мин,
а выбирается небольшой по габаритам двигатель, то для
большей надежности следует выбирать двигатель дли-
тельного режима, номинальная мощность которого
близка по величине к номинальной мощности заменяе-
мого двигателя кратковременного режима.
9. ОСОБЕННОСТИ ВЫБОРА АСИНХРОННЫХ ДВИГАТЕЛЕЙ
С КОРОТКОЗАМКНУТЫМ РОТОРОМ
Асинхронный двигатель с короткозамкнутым рото-
ром имеет важные отличия как от асинхронного двига-
теля с фазным ротором, так и от двигателей постоян-
ного тока. Эти отличия обусловлены конструктивной
особенностью его ротора, исключающей возможность
введения добавочных сопротивлений в цепь роторной
обмотки.
При пуске асинхронного двигателя с фазным рото-
ром в цепь его ротора вводят добавочные сопротивле-
ния *. Подбором соответствующей величины сопротив-
ления пускового реостата можно уменьшить пусковой
ток двигателя до любой требуемой величины. В то же
время введение сопротивлений в цепь ротора позволяет
регулировать пусковой момент двигателя. При опреде-
ленной величине сопротивления пускового реостата
можно получить наибольший пусковой момент, соот-
ветствующий перегрузочной способности двигателя.
Постепенно выводя сопротивление по мере разгона, по-
лучают быстрый пуск двигателя при ограниченной ве-
личине тока.
Иначе протекает пуск двигателя с короткозамкну-
тым ротором, который осуществляется по схеме, приве-
денной на рис. 15,а. Если ротор выполнен с круглыми
пазами, то начальный пусковой момент двигателя 7ИП
невелик (характеристика 1 на рис. 15,в). В частности,
подобной механической характеристикой обладают дви-
гатели единой серии в ее основном исполнении (А, АО).
1 Вопросы пуска двигателей и расчета пусковых сопротивлений
подробно изложены в одном из предыдущих выпусков [Л. 3]
62
Ввести добавочное сопротивление в цепь ротора и тем
самым уменьшить пусковой ток и увеличить пусковой
момент двигателя здесь невозможно.
Большой пусковой ток двигателя, превышающий
в 4,5—7 раз номинальный, загружает сеть, вызывая при
большой мощности двигателя снижение напряжения
в питающей сети. Это неблагоприятно отражается на
условиях работы других токоприемников.
в)
б)
Рис. 15. Схемы пуска и пусковые характеристики
асинхронного двигателя с короткозамкнутым ротором.
А—автомат; ДС—токоограничивающее добавочное
сопротивление.
Ограниченный пусковой момент, составляющий 0,8—
1,3 от номинального, затрудняет пуск двигателя под на-
грузкой. Если пусковой момент меньше момента нагрузки
на валу, то, очевидно, двигатель будет заторможен на-
грузкой и вообще не разгонится.
Поэтому пусковой ток и пусковой момент асинхрон-
ного двигателя с короткозамкнутым ротором являются
его важнейшими эксплуатационными показателями. В ка-
талогах для этих двигателей указывается кратность пу-
скового тока IJIH и кратность пускового момента MJMH.
Уменьшить пусковой ток короткозамкнутого двигате-
ля можно путем введения в цепь его статорной обмотки
добавочного сопротивления. Схема включения активного
аз
добавочного сопротивления (реостата) с целью умень-
шения пускового тока показана на рис. 15,6. Однако при
этом уменьшается перегрузочная способность двигателя
и в еще большей степени его пусковой момент (харак-
теристика 2 на рис. 15,в). Поэтому такой способ огра-
ничения тока применяется только в тех случаях, когда
двигатель пускается с небольшой нагрузкой на валу,
а его мощность соизмерима с мощностью трансформато-
ра, от которого он получает питание. По окончании пу-
ска токоограничивающие сопротивления замыкаются на-
коротко и двигатель работает по схеме рис. 15,а с ха-
рактеристикой 1.
Улучшенными пусковыми свойствами обладают дви-
гатели со специальным исполнением ротора: с глубоким
пазом или с двойной беличьей клеткой. При пуске такие
двигатели развивают повышенный пусковой момент
в сравнении с двигателями нормального исполнения (см.
характеристики 3 и 4 на рис. 15,в). Кроме того, специ-
альное исполнение короткозамкнутого ротора несколь-
ко ограничивает и пусковой ток двигателя.
В частности, повышенным пусковым моментом об-
ладают асинхронные двигатели единой серии, имею-
щие обозначение АП или АОП, а также двигатели с по-
вышенным скольжением (АС и АОС).
Большинство же двигателей с короткозамкнутым
ротором имеет пусковой момент, значительно меньший
критического. Поэтому при выборе двигателя нужно
проверять его не только по нагреву и перегрузочной
способности, но и по пусковому моменту.
Пример 14. По данным примера 6 проверить по пусковому
моменту двигатель типа А 52-6.
При проверке двигателей различных конвейеров по условиям
пуска следует учитывать, что момент сопротивления этих механиз-
мов обусловлен силами трения во всех трущихся деталях: в карет-
ках, в цепи, в направляющих роликах, в звездочках и т. п. Во
время стоянок смазка в этих деталях загустевает и силы трения
увеличиваются. За счет этого при пуске момент статического сопро-
тивления выше, чем статический момент при работе механизма,
определенный в примере 6.
В расчетах можно принимать, что при пуске статический момент
на 30% выше, чем в установившемся режиме работы. В рассматри-
ваемом случае
Afс п I ,3/МС = 1,3 3,75 = 4.9 >Г м.
Требуемый пусковой момент определяется по формуле
^п.треб * '^с.п ^дян*
64
При пуске конвейеров можно принимать
Л4дин^о,2Л4СЛ1.
Следовательно, требуемый пусковой момент
^п.треб = ’-^с.п = 1.2 - 4,9 = 5-88 кГ~м-
По данным двигателя А 52-6 в приложении 1 находим крат-
ность пускового момента
Номинальный момент
рн 4,5
Л4Н = 975 — = 975 • д^- = 4,62 к Г • м.
Пусковой момент
Мп
Л4п==-тг-Л1н = 1,5-4,62 = 6,95 кГ-м.
Определим наименьший пусковой момент двигателя с учетом
возможного снижения напряжения на Ю^. Пусковой момент про-
порционален квадрату напряжения:
/ U \2
Мп.мин = ГГп = °>92^п = °>81 Мп.
гн /
В нашем случае
мп.мин = 0,81-6,95= 5,64 кГ-м.
Таким образом, двигатель типа А 52-6 не удовлетворяет усло-
виям пуска конвейера, так как
Мп.МИн=5’64 кГ’-м<Мп.треб = 5,88 кГ-м.
Установленный на конвейере двигатель типа А 62-6 заменить
меньшим двигателем типа А 52-6 нельзя.
Второе важное отличие двигателя с короткозамкну-
тым ротором от двигателя с фазовым ротором связано
с потерями энергии, выделяющимися в двигателе во
время пусков и торможений.
Потери энергии в сопротивлениях статорной и ро-
торной цепей при пуске зависят от квадрата тока,
а также от продолжительности времени пуска. Если
сравнить потери энергии при пуске двигателя с фазо-
вым ротором с соответствующими потерями при пуске
двигателя с короткозамкнутым ротором, нетрудно заклю-
5 В. И. Ключев
65
чить, что .пусковые потери в короткозамкнутом двигателе
больше. Действительно, при одинаковой продолжитель-
ности пуска пусковой ток двигателя с короткозамкнутым
ротором в 2,5—3,5 раза больше, чем пусковой ток дви-
гателя с кольцами, который ограничивается пусковым
реостатом. Следовательно, потери энергии в обмотках
статора и ротора за время пуска для двигателя с ко-
роткозамкнутым ротором в 6—12 раз выше, чем у дви-
гателя с фазовым ротором. Аналогичные соотношения
имеют место и при торможении двигателя с коротко-
замкнутым ротором путем противовключения (противо-
током).
Большие потери при пусках и торможениях асин-
хронного двигателя с короткозамкнутым ротором вы-
зывают его дополнительный нагрев. При длительном
режиме работы, когда двигатель пускается всего не-
сколько раз в смену, этот дополнительный нагрев
в среднем невелик и практически не сказывается на до-
пустимой нагрузке.
При повторно-кратковременном режиме в зависимо-
сти от длительности и характера рабочего цикла двига-
тель должен включаться от десятков до нескольких со-
тен и даже тысяч раз в час. Очевидно в таком режиме
большие потери при пусках и торможениях будут ока-
зывать весьма существенное влияние на нагрев двигате-
ля, и не учитывать их при выборе двигателя недопу-
стимо.
Количество энергии, выделяющееся в двигателе за
время пуска с нагрузкой на валу, можно подсчитать по
приближенной формуле
2 2
*4 = 9,81 •Ю-3/гп^^ . м +*4осЛ [квт-сек],
I 2ип.ср iViC
(32)
где GD\ — суммарный маховой момент на валу двига-
теля, кГ-м*-,
п0 — синхронная скорость вращения, об] мин-,
7Ипср— средний пусковой момент (см. пример 2),кГ-м~,
Мс — статический момент нагрузки на валу, кГ-м\
Д^пост — мощность постоянных потерь, квт-,
tn — время пуска, сек-,
kn — коэффициент, зависящий От сопротивления
роторной цепи двигателя.
Для двигателей с нормальным исполнением коротко-
замкнутого ротора &п = 2, для Двигателей с повышенным
скольжением k = 1,5.
За время торможения двигателя путем противо-
включения (противотоком) количество энергии, выде-
ляющееся в двигателе, можно подсчитать по анало-
гичной формуле
ДЛт = 9,81 -10 3А’т 7240 сР + мс А^пост {квт-сек\-,
(33)
здесь Л1т ср =0,9Л1п — средний тормозной момент дви-
гателя (см» пример 2), кГ-лг,
&т = 6—для двигателей с нормальным
скольжением;
/гт = 4,5 — для двигателей с повышенным
скольжением.
В § 7 было отмечено, что нагрев двигателя опреде-
ляется величиной средних потерь, причем для нормаль-
ных условий нагрева двигателя должно выполняться
условие (23):
ДР <ДР .
ср н
Средние потери определяются отношением суммар-
ного количества энергии, выделяющегося в двигателе
в течение цикла, к продолжительности цикла:
Д^ср=^- (34)
‘ц
С увеличением числа включений двигателя в час N
(частоты включений) время цикла уменьшается:
, 3 600 г ,
= М-
При большом числе включений N основную долю в
суммарных потерях энергии ДЛцЕ составляют пусковые
и тормозные потери ДЛп и ДЛт. Поэтому с увеличением
частоты включений средние потери ДРср возрастают.
5*
67
Частота включений, при которой средние потери ДРср
равны номинальным потерям двигателя ДРН, называется
допустимой ч а ст о т о.й включений двигателя
при данной нагрузке на валу и данной продолжитель-
ности включения.
Увеличить допустимую частоту включений можно
либо путем уменьшения нагрузки на валу, либо умень-
шением продолжительности включения. Однако воз-
можности увеличения допустимой частоты включений
двигателя с короткозамкнутым ротором весьма ограни-
чены вследствие большой величины потерь энергии
ДДп и ДДт. При некоторой частоте включений двига-
тель только за счет пусковых и тормозных потерь при
/Ис=0 будет нагреваться до допустимой температуры и
полезной работы совершать не сможет. При этом любая
малая полезная нагрузка на его валу увеличит сред-
ние потери так, что они станут больше номинальных
потерь, и двигатель будет перегреваться выше допусти-
мой температуры.
Допустимая частота включений двигателя вхоло-
стую зависит, с одной стороны, от величины номиналь-
ных потерь ДРН, а с другой — от величины пусковых и
тормозных потерь. Увеличение номинальной мощности
потерь увеличивает допустимую частоту включений.
Увеличение пусковых и тормозных потерь, напротив,
вызывает уменьшение допустимой частоты включений.
Пусковые и тормозные потери с увеличением мощ-
ности двигателя при данной скорости вращения возра-
стают быстрее, чем номинальная мощность потерь.
Поэтому с возрастанием мощности двигателя допусти-
мая частота включений быстро уменьшается.
Для двигателей небольшой мощности при работе
вхолостую допустимо 500—1 500 включений в час. Для
двигателей мощностью выше 50 квт допустимое число
включений в час лежит в пределах 15—150. Большие
значения допустимой частоты включений соответствуют
тихоходным двигателям меньшей мощности и наобо-
рот. Допустимая частота включений зависит от испол-
нения двигателя: она выше у двигателей в защищен-
ном исполнении, чем в закрытом. Применение незави-
симой вентиляции двигателя увеличивает допустимую
частоту включений.
68
К выбору двигателей с короткозамкнутым ротором
для механизмов, требующих большой частоты включе-
ний двигателя, нужно подходить с особой осторож-
ностью. Снижение допустимой частоты включений
с увеличением мощности двигателя приводит к тому,
что замена перегревающегося двигателя с короткозамк-
нутым ротором таким же двигателем большей мощно-
сти зачастую не дает желаемого результата. Двигатель
большей мощности оказывается перегруженным тепло-
выми потерями еще в большей степени, чем заменяе-
мый.
В подобных случаях нужно подбирать двигатель
с большей допустимой частотой включений.
Если перегруженный двигатель имеет самовентиля-
цию, можно увеличить его допустимую частоту включе-
ний путем применения независимой вентиляции. Анало-
гичный эффект может быть достигнут заменой торможе-
ния противовключением двигателя (если оно использует-
ся) торможением с помощью механического тормоза.
Если эти меры по каким-либо соображениям не могут
быть использованы, следует искать двигатель другой
серии, обладающий при той же мощности большей до-
пустимой частотой включений.
Большей допустимой частотой включений обладают
асинхронные двигатели с короткозамкнутым ротором
краново-металлургических серий, специально предна-
значенные для повторно-кратковременного режима.
Эти двигатели имеют относительно меньший маховой
момент ротора. Поэтому потери энергии в соответствии
с формулами (32) и (33) для этих двигателей при про-
чих равных условиях меньше.
Из тех же формул можно заключить, что пусковые
и тормозные потери меньше у двигателей с повышен-
ным скольжением (АС, АОС).
Если требуемая частота включений выше, чем до-
пустимая для указанных двигателей, то следует заме-
нять асинхронный двигатель с короткозамкнутым рото-
ром асинхронным двигателем с фазовым ротором.
При большой частоте включений выбираемый дви-
гатель с короткозамкнутым ротором следует прове-
рять по формуле средних потерь. Расчет средних по-
терь при выборе двигателя повторно-кратковременно-
го режима несколько отличен от аналогичного расчета
69
для двигателя длительного режима работы. Разницу
можно уяснить из сравнения двух приведенных ниже
примеров расчета.
Пример 15. Двигатель с короткозамкнутым ротором типа
МТК 31-6 предполагается установить на механизме с высокой
частотой включений. Цикл работы механизма состоит из двух
включений двигателя и двух пауз. При первом включении двига-
тель работает с нагрузкой на валу РС = РН, при втором — Рс =
= 0,ЗРн. Число циклов в час Мц = 120. Действительная продолжи-
тельность включения 77Вд = 30/о. Торможение осуществляется ме-
ханическим тормозом при отключении двигателя. Суммарный маховой
момент на валу двигателя = 1,35 GD^B.
Данные двигателя: Рн =11 квт при Г1В = 25/о; UK = 220/380 в;
/1н = 45,6/26,4 а; пи =920 oojMUH; к. п. д при нормальной нагрузке
т)н — 0,81; Л4макс /Л4Н = 3,4; Л4П/Л4Н = 3,2; 7П//Н = 5,1; маховой мо-
мент ротора СОДВ = 1,0 кГ-м2.
Обратим внимание на то, что число включений двигателя в час
в данном случае в 2 раза больше числа циклов в час и составляет
N — 240. При таком числе включений, несмотря на то, что поло-
вину времени работы двигатель работает с небольшой нагрузкой
на валу, нагрев его может быть недопустимым за счет больших
пусковых потерь.
По данным примера 1 для двигателя МТК 31-6
ДРуст! — ЬРН — 2,58 квт; ДРуст, = &Р0 з = 0,79 квт;
ДРпост = °>6 квт-
Суммарный маховой момент на валу двигателя
GDI = 1,3oG£>2 = 1,35.1 = 1,35 кГ-м2
ь дв
Номинальный момент двигателя
₽н 11
Мн = 975 — = 975.д20=11,7 кГ-м.
Пусковой момент
ЛЦ =-—м =3,2-11,7 = 37,4 кГ-м.
п /ин н
Максимальный момент
Л4МЯКС = 3.4ЛЦ = 3,4-11,7 = 39,8 кГ-м.
lYlulVL.
Средний пусковой момент
, Н” ^макс
^п.ср — 2
37,4 + 39,8 „ „
------2------= 38,6 к Г м.
70
Время пуска двигателя при Мс1 = Л4Н
nH _ GDr пн _ 1,35-920
Znl = "ав~ ~ 375 (Мп ср— Мс1 ) ~ 375 (38,6 — 11,7) =°’123 сек'
То же при Л4с2 = 0,ЗЛ1н
1,35-980
^2 = 375 (38,6 — 0,3-11,7) = 0,1 сек'
Время цикла
3 600 3 600
^ц = —120 = 30 сек.
Суммарное время работы
Z7B _ 30_
*Р1 + Zp2 = 'ц 100“ 30’ ЮО = 9 сек-
Примем /р1 = tр2 = 4,5 сек, а время торможения механическим
тормозом ^т1 = /т2 0,1 сек, т. е. примерно равным времени пуска.
Время работы двигателя с установившейся скоростью при первом
включении
^уст1 ~ ^pi —^п1 —^т1 = 4>5 0,123 — 0,1 = 4,28 сек.
То же, при втором включении
^уст2 = ^р2 ^п2 ^т2 = 4>5_' 0,1- 0,1 = 4,3 сек.
Потери энергии за время первого пуска определим по формуле
(32), принимая /гп = 1,5, так как двигатель имеет повышенное
скольжение (sH°/o=8%):
1,35-1 0002 38,6
ДЛп1 =9’81 •10 3'1’5'' 7 240 38,6 — 11,7 +
+ 0,6-0,123 = 4,03 квт-сек.
То же при втором пуске
1,35-1 0002 38,6
дли2 = 9,81-10 3• 1,5• 38,6-0,3-11,7 +
+ 0,6-0,1 =3,05 квт-сек.
Средние за суммарное время работы потери, соответствующие
действительной продолжительности включения ПВ^ — 30°/о, под-
считываются по формуле
ДЛп1 Д^уст1 ^уст! ”Ь ДЛп2”ЬД^уст2 уст2____
:РЗО%~ *pl+*P2 =
_ 4,03 + 2,58-4,28 + 3,05 + 0,79-4,3
л ц । л г: = 2,38 /свш.
71
Номинальная мощность потерь ДРН = 2,58 квт соответствует
режиму /7ВН=25%. Чтобы получить возможность сравнивать
потери, нужно привести средние потери ДРср30% к номинальной
продолжительности включения по формуле
ПВя „ 30
Д^ср25% — Д^ср30% ПВН~ 2,38’25 = 2,86 Квт‘
Таким образом, двигатель при работе по данному циклу будет
перегреваться, так как для него
ДРСр 25% ~ 2186 квт > 25% = 2>58 квт.
Отметим, что если бы в данном случае использовалось торможение
противовключением, в числитель формулы средних потерь ДРсрз0<у
следовало прибавить потери при торможениях ДЛт1 и ДДт2,
подсчитанные по формуле (33). При этом перегрузка двигателя
по нагреву была бы еще более значительна.
Для упрощения расчетов при проверке по нагреву
наиболее распространенных короткозамкнутых двигате-
лей единой серии в 'приложении 1 приведены значения
потерь энергии в этих двигателях при пуске вхолостую
(без связи с механизмом) ДЛп0 и при торможении проти-
вовключением в таких же условиях ДЛт0.
Особенности использования этих данных и проверки
по нагреву двигателей длительного режима работы с
самовентиляцией поясняются следующим примером.
Пример 16. Требуется проверить по нагреву установленный
на приводе шпинделя токарного станка (пример 2) асинхронный
двигатель типа АО 51-4. Будем полагать, что остановка шпинделя
может быть осуществлена только путем отключения двигателя,
причем для быстрой остановки используется торможение противо-
включением двигателя.
Цикл работы механизма: пуск двигателя вхолостую; резание
с нагрузкой Рс1=4,22 квт', торможение двигателя противовклю-
чением вхолостую; пауза; второй пуск двигателя вхолостую; реза-
ние с нагрузкой Рс2 = 3,16 квт; торможение противовключением;
пауза.
По данным технологов время резания на первом участке
цикла /м| = 120 сек; на втором /м2 =95 сек- Времена пауз: =
= 6 сек; <о2=20 сек.
По данным примера 2: время пуска и торможения <п0 = 0,15 сек;
= 0,2 сек; <п1 = <п2 = 0,202 сек; <т1 = <т2 = 0,228 сек; средний
пусковой момент Мп ср= 5,18 кГ-м; средний тормозной момент
Л4тср = 3,84 кГ-м; статические моменты нагрузки А1с1 = 2,86 кГ-м;
ТИс2= 2,14 кГ-м.
72
Определим мощность потерь при различных нагрузках. Для
этого подсчитаем коэффициент загрузки двигателя для первого и
второго рабочего участка цикла:
Рс1 4,22 „ , РС2 3,16
1гз[ — рн ~ 4,5 — ОМ *з2 — р* ~ 4 5 —0,69.
Находим соответствующие к. п. д. для двигателя АО 51-4
аналогично тому, как было сделано в примере 6:
т)! — 0,855; т)2 = 0,86.
Потери в двигателе при резании:
„ 1—’ll 0.855
APycri—РС1 ijj — 4-22- 0,855 - 0,72 кет
1 — т 1 — 0,86
Д^уст2 == Л: 2 т)2 ~ 3,16- = 0,5 квт.
Потери энергии за время каждого пуска
То же при каждом торможении
t-r 0,228
ДА = ДА 0 — = 3,7 • п 9 = 4,2 кв(п сек.
£то
Здесь значения ДАп0 и ДАт0 найдены по данным двигателя
в таблице приложения 1.
Средние потери за время цикла с учетом того, что двигатель
имеет самовентиляцию,
2Д4 + 2ДЛТ + АРУСТ| <М1 + ДРуст2 <м2
СР - о,5 (tQl + Zos) + 0,75 (2ZnI + 2/т1) + /м, +/м2 ~
2 • 2,41 + 2 • 4,2 + 0,72 • 120 + 0,5-95
=0,5 (6 4-20)+0,75(2 0,202+2-0,228) +120+95 = 0,645 квт’
Здесь уменьшение времени пауз и переходных процессов
умножением на коэффициенты соответственно 0,5 и 0,75 учитывает,
что двигатель имеет самовентиляцию (см. пример 13).
Номинальные потери двигателя АО 51-4
1 — 1 — 0,855 „ „
&Р„ = Ри -------= 4,5- n огг— = 0,762 квт.
и н т]н 0,855
Следовательно, двигатель загружен по нагреву нормально, так
как
ДРср =: 0,645 квт < ЬРК = 0,762 квт.
Проверка по перегрузочной способности и по пусковому мо-
менту в данном случае не требуется, так как а пуск
осуществляется при холостом ходе станка.
ПРИЛОЖЕНИЕ 1
Технические данные асинхронных двигателей единой
серии* (А и АО)
Тип дви- гателя ши Я ‘HJ япп/до ,н„ О к СЗ к S 5 В X 1^ GD2 , дв кГ*м* fn0> сек /тр, сек длп0- квт-сек i <1 Je
В защищенном исполнении (типа А и АЛ) 3 000 об/мин (синхр.)
31-2 1,0 2 850 2,2 1,8 0,008 0,09 0,11 0,38 0,83
32-2 1,7 2 850 2,4 2,0 0,014 6,08 0,10 0,66 1,21
41-2 2,8 2 870 2,2 1,6 0,024 0,10 0,14 1,02 1,62
42-2 4,5 2 870 2,4 1,8 0,034 0,08 0,11 1,65 2,40
51-2 7,0 2 890 2,2 1,5 0,11 0,20 0,27 2,58 3,90
52-2 10,0 2 890 2,4 1,6 0,16 0,18 0,26 2,70 7,55
61-2 14,0 2 920 2,5 1,2 0,27 0,24 0,42 5,96 12,4
62-2 20,0 2 920 2,7 1,3 0,35 0,20 0,35 8,50 19,0
71-2 28,0 2 930 2,2 1,0 0,57 0,30 0,53 12,0 25,6
1 500 об/мин (синхр.)
31-4 0,6 1 410 2,0 1,7 0,013 0,06 0,08 0,11 0,23
32-4 1,0 1 410 2,0 1,8 0,019 0,05 0,07 0,16 0,38
41-4 1,7 1 420 2,0 1,8 0,042 0,07 0,09 0,32 0,66
42-4 2,8 1 420 2,0 1,9 0,06 0,06 0,07 0,55 1,08
51-4 4,5 I 440 2,0 1,4 0,17 0,13 0,17 0,88 1,80
52-4 7,0 1 440 2,0 1,5 0,25 0,12 0,15 2,14 4,24
61-4 10,0 1 450 2,0 1,2 0,36 0,13 0,20 2,67 4,4
62-4 14,0 1 450 2,0 1,3 0,48 0,12 0,17 4,11 6,5
71-4 20,0 1 450 2,0 1,1 0,95 0,18 0,28 5,70 9,7
72-4 28,0 1 450 2,0 1,2 1,20 0,15 0,23 6,22 16,8
1 000 об/мин (синхр.)
41-6 1,0 930 1,8 1,3 0,042 0,06 0,09 0,13 0,31
42-6 1,7 930 1,8 1,4 0,06 0,05 0,07 0,23 0,59
51-6 2,8 950 1,8 1,3 0,17 0,10 0,13 0,49 1,12
52-6 4,5 950 1,8 1,5 0,25 0,08 0,10 0,86 1,94
* Полные технические данные по электродвигателям можно найти в
каталогах [Л. 5].
74
Продолжение приложения 1
Тип дви- гателя 5 СО Я нпп/до н« о| я rt д е Я 03 % О) к[ 7 S #п0- сек Си Ь; ал <1 ta hi Си я <
61-6 7,0 970 1,8 1,1 0,36 0,09 0,13 1,49 2,81
62-6 10,0 970 1,8 1,1 0,48 0,08 0,13 2,45 3,94
71-6 14,0 970 1,8 1,2 1,5 0,18 0,26 3,45 6,85
72-6 20,0 970 1,8 1,2 1,9 0,16 0,23 5,23 10,9
81-6 28,0 975 1,8 1,2 3,2 0,20 0,28 8,0 15,2
750 o6jмин (синхр.)
61 8 4,5 730 1,7 1,0 0,7 0,17 0,25 0,75 1,59
62-8 7,0 730 1,7 1,0 0,9 0,14 0,21 1,29 2,45
71-8 10,0 730 1,7 1,1 1,5 0,16 0,22 2,20 3,73
72-8 14,0 730 1,7 1,1 1,9 0,14 0,20 2,90 5,16
81-8 20,0 730 1,7 1,1 3,2 0,17 0,24 4,28 8,12
82-8 28,0 730 1,7 1,2 4,1 0,15 0,20 6,25 12,45
3 закрытом обдуваемом исполнении (типа АО и АОЛ),
3 000 об/мин (синхр.)
31-2 0,6 2 860 2,4 2,0 0,01 0,17 0,21 0,33 0,74
32-2 1,0 2860 2,6 2,2 0,016 0,15 0,19 0,54 1,18
41-2 1,7 2 880 2,4 1,8 0,03 0,19 0,25 0,95 2,10
42-2 2,8 2 880 2,5 1,9 0,04 0,15 0,19 1,45 3,30
51-2 4,5 2 900 2,4 1,6 0,12 0,31 0,43 4,4 7,95
52-2 7,0 2 900 2,5 1,7 0,17 0,27 0,37 6,9 10,2
62-2 10,0 2 930 2,5 1,3 0,41 0,50 0,83 14,7 36,3
63-2 14,0 2 930 2,9 1,5 0,50 0,37 0,63 20,9 54,1
72-2 20,0 2 940 2,9 1,2 0,76 0,40 0,83 31,0 77,5
1 500 об/мин (синхр.)
31-4 0,6 1 410 2,0 1,7 0,015 0,07 0,09 0,10 0,23
32-4 1,0 1 410 2,0 1,8 0,021 0,06 0,07 0,14 0,30
41-4 1,7 1 420 2,0 1,8 0,048 0,08 0,10 0,33 0,77
42-4 2,8 1 420 2,0 1,9 0,067 0,07 0,08 0,5 1,13
51-4 4,5 1 440 2,0 1,4 0,20 0,15 0,20 1,7 3,7
52-4 7,0 1 440 2,0 1,5 0,28 0,13 0,17 2,5 5,7
62-4 10,0 1 460 2,3 1,3 0,60 0,19 0,30 5,4 11,0
63-4 14,0 1 460 2,3 1,4 0,75 0,17 0,25 7,4 14,5
72-4 20,0 1 460 2,3 1,3 1,5 0,24 0,38 10,6 21,6
1 000 об/мин (синхр.)
41-6 1,0 930 1,8 1,3 0,048 0,07 0,10 0,12 0,3
42-6 1,7 930 1,8 1,4 0,067 0,06 0,08 0,20 0,48
51-6 2,8 950 1,8 1,3 0,20 0,11 0,16 0,62 1,50
52-6 4,5 950 1,8 1,5 0,28 0,09 0,12 1,0 2,25
62-6 7,0 980 2,2 1,4 0,60 0,12 0,18 3,6 7,1
63-6 10,0 980 2,2 1,4 0,75 0,11 0,15 5,1 9,6
72-6 14,0 980 2,2 1,4 2,3 0,24 0,34 9,4 10,5
73-6 20,0 980 2,2 1,4 3,0 0,22 0,31 10,6 18,4
75
Продолжение приложения 1
750 об/мин (синхр.)
62-8 4,5 735 2,0 1,5 1,0 0,19 0,24 1,67 3,44
63-8 7,0 735 2,0 1,5 1,3 0,16 0,20 2,54 5,18
72-8 10,0 735 2,0 1,3 2,3 0,20 0,29 3,56 7,44
73-8 14,0 735 2,0 1,3 3,0 0,20 0,27 5,3 П,1
82-8 20,0 735 2,0 1,1 4,4 0,19 0,26 7,9 17,4
ПРИЛОЖЕНИЕ 2
а) ТЕХНИЧЕСКИЕ ДАЧНЫЕ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
С ФАЗНЫМ РОТОРОМ СЕРИИ МТ (МТВ)
Тип электродви- гателя Закрытые с внешним обдувом, Z7B=25% Маховой мо- мент ротора GD2 , кГ*м* дв
Мощность на валу Рн, квт Скорость вращения пн, о$1мин Кратность мак- симального мо- мента к номи- нальному при Z7B=25% ^макс/^н
МТ 11-6 2,2 885 2,3 0,17
МТ 12-6 3,5 910 2,5 0,27
МТ 21-6 5,0 940 2,9 0,41
МТ 22-6 7,5 945 2,8 0,57
МТ 31-6 11,0 953 3,1 1,05
МТ 31-8 7,5 702 2,6 1,05
МТ 41-8 11,0 715 2,9 1,86
МТ 42-8 16 0 7’8 3,0 2,70
МТ 51-8 22,0 723 3,0 4,40
МТ 52-8 30,0 725 3,0 5,70
МТ 61-10* 30,0 574 3,3 13,0
МТ 62-10* 45,0 577 3 2 17,5
МТ 63-10* 60,0 577 2,9 22,0
МТ 71-10* 80,0 582 3,3 40,0
МТ 72-10* 100,0 584 3,3 48,0
МТ 73-10* 125 585 3,4 57,0
МТВ 611-Ю 45,0 575 3,0 17,0
МТВ 612-Ю 60,0 578 3,0 21,0
МТВ 613-10 80,0 580 3,0 25,0
МТВ 711-10 100 584 2,8 41,0
МТВ 712-10 125 587 2,8 51,0
МТВ 713-10 160 587 2,8 60,0
• В настоящее время двигатели этих типов не выпускаются.-
76
б) ТЕХНИЧЕСКИЕ ДАННЫЕ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
С КОРОТКОЗАМКНУТЫМ РОТОРОМ ТИПА МТК
Тип электро- двигателя Закрытые, с внешним обдувом, /7/3=25% Допустимое по нагреву число пусков в час при работе вхолостую Маховой момент ротора,
Мощность на ва..у квт Скорость вра- щения 72ц, об!/лин Кратности по отношению к номинальным величи- нам при 77В=25%
Ммакс Мн Мп мн
мтк п-6 2,2 883 2,6 2,6 3,3 1 600 0,16
МТК 12-6 3,5 875 2,6 2,6 3,6 1 600 0,25
МТК 21-6 5,0 910 3,1 2,9 4,3 1 100 0,39
МТК 22-6 7,5 905 3,1 3,0 4,4 900 0,55
МТК 31-6 11,0 920 3,4 3,2 5,1 750 1,00
МТК 31-8 7,5 682 3,0 2,9 4,5 1 200 1,00
МТК 41-8 11,0 685 3,2 3,0 4,5 900 1,78
МТК 42-8 16,0 685 3,3 3,1 4,8 800 2,60
МТК 51-8 22,0 692 3,1 2,8 5,0 550 4,20
МТК 52-8 28,0 395 3,2 2,8 5,2 550 5,5
ПРИЛОЖЕНИЕ 3
КОЭФФИЦИЕНТЫ ПОЛЕЗНОГО ДЕЙСТВИЯ МЕХА-
НИЧЕСКИХ ПЕРЕДАЧ И ПОДШИПНИКОВ
Цилиндрическая зубчатая передача с прямыми зубьями:
а) шлифовальные зубья.......... 0,99
б) нарезанные зубья............ 0,98
в) необработанные зубья........ 0,96
Цилиндрическая с косыми зубьями .... 0,97—0,98
Цилиндрическая с шевронными зубьями . 0,985
Коническая зубчатая передача ........ 0,97—0,98
Ременная передача....................0,94—0,98
Клиноременная передача...............0,80—0,98
Цепная передача........................ 0,98
Фрикционная передача . ...........0,70—0,80
Блоки................................0,96—0,97
Полиспасты......................... 0,92—0,98
Барабан цепной ......................... 0,97
Подшипник скольжения.................0,94—0,98
Шариковый подшипник . 0,99
77
ПРИЛОЖЕНИЕ 4
ШКАЛА МОЩНОСТЕЙ И СКОРОСТЕЙ ВРАЩЕНИЯ НОВЫХ
СЕРИЙ ЭЛЕКТРОДВИГАТЕЛЕЙ ЗАЩИЩЕННОГО ИСПОЛНЕ-
НИЯ А? И ЗАКРЫТОГО ОБДУВАЕМОГО ИСПОЛНЕНИЯ АО2
Габарит СО о К СХ а F- 2 3 000 об}мин 1 500 обjмин 1 000 об/мин 750 об}мин 600 об}мин
А2 А 02 А2 АО2 А2 | АО2 А2 А 02 А2 А 02
1-й 11 . 0,8 0,6 . 0,4 .
12 — 1,1 — 0,8 — 0,6 — — — —
2-й 21 22 — 1,5 2,2 — 1,1 1,5 — 0,8 1,1 — — — —
3-й 31 32 — 3,0 4,0 — 2,2 3,0 — 1,5 2,2 — — — —
4-й 41 — 5,5 4,0 .—. 3,0 — 2,2 —
42 — 7,5 — 5,5 — 4,0 — 3,0 — —
5-й 51 52 — 10 13 — 7,5 10 — 5,5 7,5 — 4,0 5,5 — —
6-й 61 62 17 22 17 13 17 13 17 10 13 10 13 7,5 10 7,5 10 — —
7-й 71 30 22 22 22 17 17 13 13
72 40 30 30 30 22 22 17 17 — —
8-й 81 55 40 40 40 30 30 22 22 17 17
82 75 55 55 55 40 40 30 30 22 22
9-й 91 100 75 75 75 55 55 40 40 30 30
92 125 100 100 100 75 75 55 55 40 40
ЛИТЕРАТУРА
1. Сандлер А. С., Электрооборудование производственных
механизмов, Госэнергоиздат, 1958
2. Соколов М. М., Электрооборудование общепромышленных
механизмов, Госэнергоиздат, 11959.
3. Ильинский Н. Ф., Расчет и выбор сопротивлений для
электродвигателей, Госэнергоиздат, 1959.
4. Константинов Б. А., Соколов К. И. и Шу-
лятьева Г. Н., Коэффициент мощности созф и способы его улуч-
шения на промышленных предприятиях, Госэнергоиздат, 1959.
5. Единая серия. Асинхронные электродвигатели, ЦБТИ МЭИ,
Каталог № ililiSl, 113Й.
6. Таблица цифровых данных коэффициентов полезного действия
(к. п. д.) и коэффициентов мощности .(cos <р) электродвигателей
единой серии типа А (АЛ) в зависимости от нагрузки [tl=f(P);
cos <р=/(Р)], ЦБТИ МЭГ!.
СОДЕРЖАНИЕ
Стр.
1. Введение............................................ 3
2. Общие сведения..................................... 4
3. Нагревание электрических двигателей................ 10
4. Номинальные режимы работы двигателей............... 14
5. Краткие сведения об основных сериях электрических дви-
гателей ............................................. 19
6. Нагрузки двигателей. Понятие о перегрузочной способности 24
7. Выбор двигателей для механизмов длительного режима
работы.............................................. 36
8. Выбор двигателей для механизмов повторно-кратковремен-
ного и кратковременного режимов работы ........ 46
9. Особенности выбора асинхронных двигателей с коротко-
замкнутым ротором.................................... 62
10. Приложения........................................ 74
11. Литература........................................ 79
Цена 1 р. 60 к.
С 1/1 1961 г. цена 16 коп.
❖❖❖ Ш ООО
О о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
ГОСЭНЕРГОИЗДАТ
„БИБЛИОТЕКА ЭЛЕКТРОМОНТЕРА"
ВЫШЛИ ИЗ ПЕЧАТИ
Авнновицкий И. Я, Оконцевание силовых кабелей (вы-
пуск 21).
Клюев С. А., Как рассчитать электрическое освещение
производственного помещения (выпуск 22)
Хомяков М. В. н Якобсон И. А., Термитная сварка
многопроволочных проводов (выпуск 23).
Федотов Б. Н., Схемы включения электрических счетчиков
(выпуск 24).
СтешенкоН Н., Техника безопасности при эксплуатации
электроустановок на строительстве (выпуск 25).
Жерве Г. К, Как рассчитать обмотку статора асинхронного
двигателя (выпуск 26).
Ап то в И. С. и Хомяков М. В.. Уход за изоляционным
маслом (выпуск 27).
Михалков А. В., Что нужно знать о регулировании на-
пряжения (выпуск 28).
Локшин М. В, Ремонт высоковольтных изоляторов до
35 кв (выпуск 29).
Боярченков М. А. и Шинянский А. В., Магнитные
усилители (выпуск 30).
Балуев В К., Техника безопасности при эксплуатации
переносных электротехнических средств (выпуск 31).
Дементьев В С., Как определить повреждение в силовом
кабеле (выпуск 32).
Ермолин Н. П., Как рассчитать маломощный силовой
трансформатор (выпуск 33).
Севастьянов М. И., Техника безопасности такелажных
работ при монтаже энергетических установок (выпуск 34).
Анастасиев П И., Сооружение и монтаж воздушных ли-
ний электропередачи напряжением до 1 000 е (вы-
пуск 35).
ГОТОВЯТСЯ К ПЕЧАТИ
Авнновицкий И. Я., Соединение кабелей.
Гуреев И. А. Шинопроводы напряжением до 1 000 в
Е р м о л а е в И. Н., Магнитные пускатели переменного тока.
Кожин А. Н., Релейная защита линий 3—10 кв на пере-
менном токе.
Мишустина Л. И., Воздушные автоматические устано-
вочные выключатели.
О
О
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
ООО ОООЪОООООООООООООООООООООООО ООО